/























































































































































































Author: Иванов А.С.
Tags: общее машиностроение технология машиностроения организация производственного процесса производственное планирование управление качеством машиноведение машины
ISBN: 5-7038-2097-9
Year: 2000



Text
УДК 621:658.512.2
ББК 34.42
И20
Федеральная целевая nрО2рамма «Культура России»
(подпРОерамма «Поддержка полиерафии и ЮШ20изданuя России»)
Рецензенты: Л.В. Коновалов, с.А. Шувалов
Иванов А.С.
И20 Конструируем машины шаr за шаrом: В 2 ч.
М.:
Изд
во MrTY им. Н.Э. Баумана, 2003.
Ч. 2.
392 с.: ил.
ISBN 5
7038
2097
9
Во второй части книrи (шаrи 1 o
17) доступным языком изложена Me
тодика расчета и конструирования деталей, узлов, машин. Большое вни
мание уделено учету контактной жесткости при выполнении проектных
расчетов. Приведены необходимые для конструирования справочные
данные по материалам, полуфабрикатам, допускам, шероховатостям по
верхностей, коэффициентам контактной податливости стыков и т. п.
Проанализированы некоторые новые тенденции в развитии мировоrо
машиностроения и на основе этоrо предложены новые расчеты и KOHCT
руктивные исполнения узлов машин. Приведены примеры расчетов. При
написании книrи автор использовал материалы лекuий по курсам «OCHO
вы конструирования машин» и «Транспортно
накопитепьные устройст
ва», читаемым им в МПУ им. Н.Э. Баумана.
Для широкоrо Kpyra читателей, желающих научиться конструирова
нию. Может быть полезна в качестве учебноrо пособия для студентов и
преподавателей, а также в качестве справочноrо пособия инженерам
конструкторам.
УДК 621:658.512.2
ББК 34.42
ISBN 5
7038
2097
9
@ А.с. Иванов, 2003
@ Издательство МПУ
им. Н.Э. Баумана, 2003
ОfЛАВЛЕНИЕ
Предисловие. . . . . . . . . . . . . . . . . . . . . . . . .
Ша2 10. Конструирование зубчатых, червячных и фрикционных
передач. . . . . . . . . . . . . . . . . . . . . . . .
10.1. Зубчатые цилиндрические передачи . . . . . . . . .
10.1.1. rеометрические параметры прямозубых колес.
10.1.2. rеометрические параметры косозубых колес. .
10.1.3. Смещение исходноrо контура . . . . . .
10.1.4. rеометрические параметры передачи. Корриrирование
10.1.5. Точность зубчатых передач . . . . . . . . . . .
10.1.6. Критерии работоспособности зубчатых передач.
Материалы . . . . . . . . . . . . . . . . . . .
1 О .1. 7. Расчет рабочих поверхностей зубьев на контактную
выносливость. . . . . . . . . . . . . . .
10.1.8. Расчет зубьев на выносливость при изrибе
10.1.9. Силы в зацеплении . . . . . . . . . . . .
10.1.10. Общие сведения о планетарных передачах
10.1.11. Зубчатые планетарные передачи . . .
1 0.1.12. Оформление чертежа зубчатоrо колеса
10.1.13. Волновые передачи
10.2. Зубчатые конические передачи
10.2.1. Общие сведения. . . . .
10.2.2. Силы, действующие в зацеплении.
10.3. Червячные передачи. . . . . . . . . . .
10.3.1. Общие сведения. . . . . . . . . .
10.3.2. [еометрические параметры червяка
10.3.3. Параметры червячной передачи и червячноro колеса
10.3.4. кпд передачи и силы в зацеплении
10.3.5. Расчеты на выносливость и допускаемые
напряжения. . . . . . . . . . . . . . .
10.3.6. Тепловой расчет. . . . . . . . . .
10.3.7. Оформление чертежей червяка и червячноrо колеса.
10.4. Фрикционные планетарные передачи . . . . . . . . . .
10.5. Практика конструирования. Червячная передача привода
ленточноrо конвейера . . . . .
10.5.1. Постановка задачи . . .
10.5.2. Выбор электродвиrателя
. 9
11
12
12
14
15
16
21
21
23
26
29
34
36
37
38
41
41
44
47
47
48
51
52
54
57
58
58
59
59
61
3
10.5.3. Разбивка передаточнorо числа привода 61
10.5.4. Расчет червячной передачи 61
Приложения П.l О. . . . . . . . . . . 68
Список литературы . . . . . . 71
Ш02 11. Конструирование ременных и цепных передач 73
11.1. Ременные передачи . . . 74
11.1.1. История развития. 74
11.1.2. Конструкция передачи 74
11.1.3. Силы в передаче. Формула Эйлера 74
11.1.4. Силы в ветвях ленточною конвейера 79
11.1.5. Ремни ременной передачи ..... 84
11.1.6. Работа ремня на шкивах ..... 87
11.1.7. Расчет ремней по несущей способности 89
11.1.8. Шкивы ременных передач 91
11.2. Цепные передачи . . . . 92
11.2.1. Параметры передач 92
11.2.2. Цепи . 94
11.2.3. Звездочки. 95
11.3. Зубчатоременная и шарикоременная передач:и 97
11.4. Практика конструирования. Клиноременная передача 99
11.4.1. Постановка задачи 99
11.4.2. Расчет клиноременной передачи. Чертеж BenoMoro
шкива . . . . . .. .............. 100
11.5. Практика конструирования. Оценка необходимой силы
наТЯЖения ленты конвейера 102
11.5.1. Постановка задачи 102
11.5.2. Расчет 104
Приложения П.11 . . . . 105
Список литературы 108
Ша2 12. КонструироваtlИе опор 109
12.1. Подшипники скольжения 110
12.1.1. Режимы трения и типы подшипников 110
12.1.2. Режимы работы и расчет rидродинамическоrо
подшипника . .. ....... 111
12.1.3. Расчет подшипника cyxoro трения 116
12.1.4. Области применения. . . 116
12.2. Подшипники качения. . . . . 116
12.2.1. Классификация подшипников 116
12.2.2. МатеРИ<LJI подшипников качения 122
12.2.3. Выбор подшипников. . . . . . 122
12.2.4. Значения коэффициентов Х и У 127
12.2.5. Основные типы осевой фиксаuии валов 128
12.2.6. Реакции в опорах с подшипниками
нереryлируеlvfыIx типов. . . . . . . . . . . . . . . . . . 132
4
12.2.7. Реакции в опорах с подшипниками реrулируемых
типов . . . . . . 135
12.2.8. Опора вала в виде опорно поворотноrо подшипника 138
12.2.9. Использование для передачи осевых сил от вала
на корпус пружинных упорных колеu вместо крышек
подшипников . . . . . .. 140
12.2.10. Рекомендации по конструированию подшипниковых
узлов. . . . . . . . . . . . . . . . . . 142
12.3. Практика конструирования. Выбор радиально упорных
роликоподшипников для вала червяка 143
12.3.1. Постановка задачи. . . . 143
12.3.2. Выбор радиально упорных роликоподшипников для
вала червяка при установке подшипников враспор . 144
12.3.3. Выбор подшипников для вала червяка с одной
Iшавающей и друrой фиксирующей в двух осевых
направлениях опорами 146
Приложения П.12 149
Список литературы 161
Ш02 13. Конструирование резьбовых и заклепочных соединений. 162
13.1. Резьбовые соединения . . . . . . . . . . 163
13.1.1. Классификаuия резьб. Момент завинчивания 163
13.1.2. Передача винт rайка .. ........ 167
13.1.3. МеТРИ'Iеская резьба . . . . . . . 171
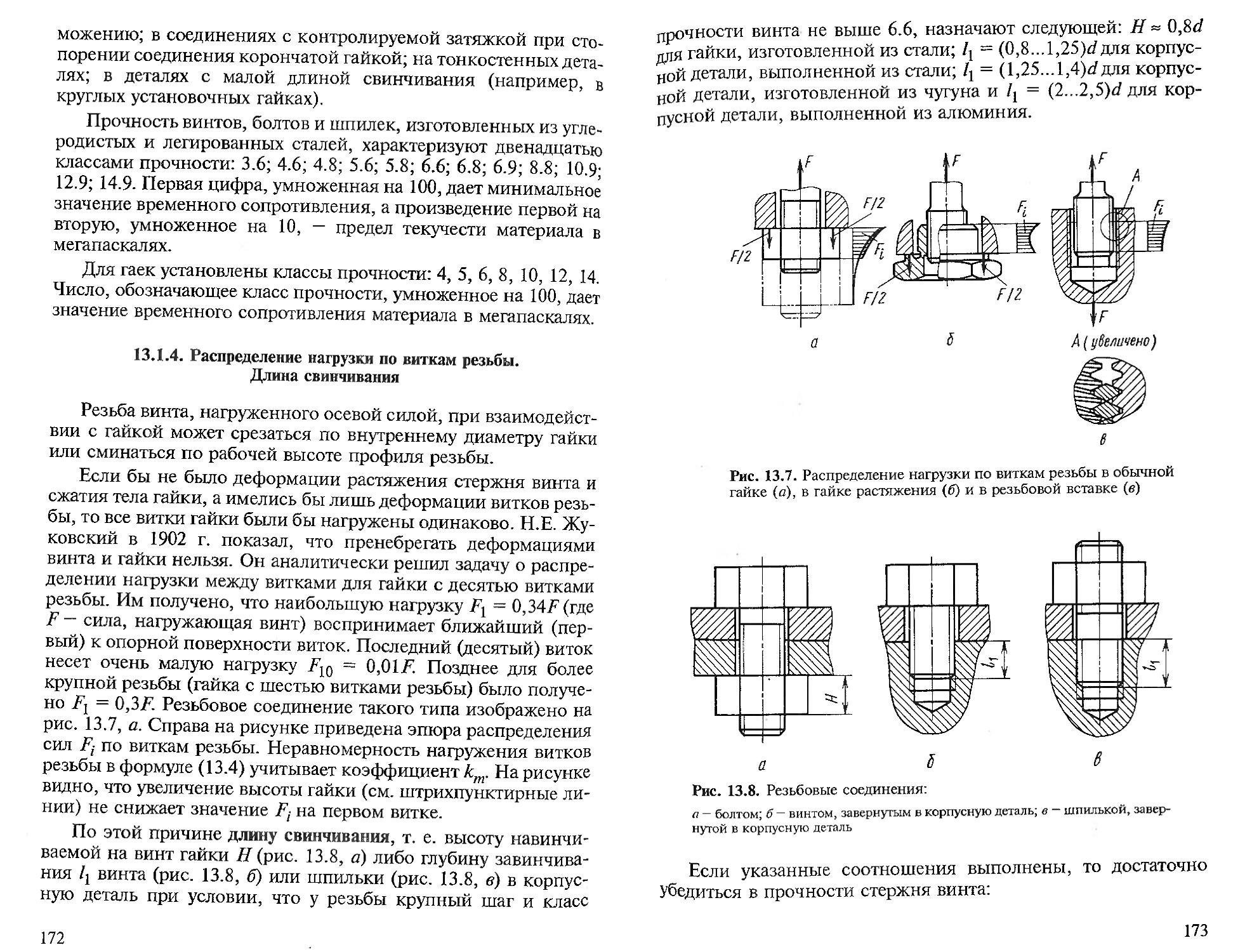
13.1.4. Распределение наrрузки по виткам резьбы. Длина
свинчивания. . . . . . . . . . . . . 172
13.1.5. Определение необходимоrо диаметра болта при
наrружении резьбовоrо соединения в плоскости стыка . 175
13.1.6. Определение необходимою диаметра болта
при наrружении резьБОБоrо соединения отрывающей
силой и опрокидывающим МО\1СНТОМ . . . . . 181
13.1.7. Винты, подверженные действию переменной наrрузки 191
13.1.8. Винты самонарезающие и самосвеРJlящие 193
13.1.9. Конструктивные рекомендаuии по изrотовлению,
затяжке и стопорению резьбовых соединений 194
13.2. Заклепочные соединения 200
13.2.1. Конструктивные рекомендаuии 200
13.2.2. Расчет на прочность . . . . . 201
13.3. Практика конструирования. Выбор боmов ДJlЯ крепления
опор приводноrо барабана к раме 202
13.3.1. Постановка задачи. . 202
13.3.2. Составление расчетной схемы 203
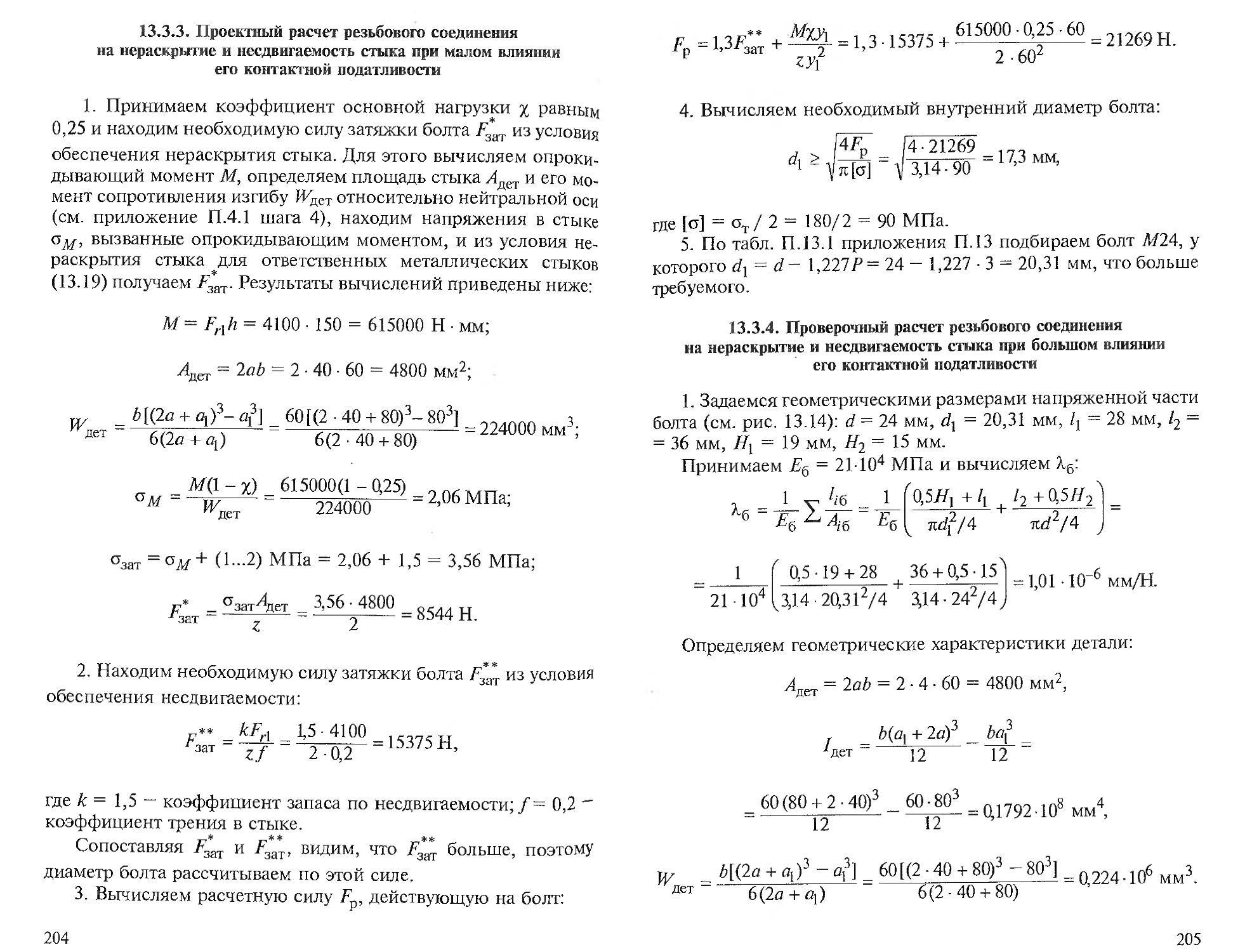
13.3.3. Проектный расч.ет резьбовоro соединения
на нераскрьпие и несдвиrаемость стыка
при малом влиянии ero контактной податливости . 204
13.3.4. Лроверочный расчет резьбовоrо соединения
на нераскрьпие и несдвиrаемость стыка
при большом влиянии ею контактной податливости 205
5
Приложения П.13 . . . . . . . . . . . . .
Список литературы . . . . . . . . . . . .
Ш02 14. Конструирование соединений шпоночных, шлицевых и с натяrом.
14.1. Шпоночные соединения . . . . . . . . . .
14.1.1. Конструкция шпоночных соединений
14.1.2. Расчет шпоночных соединений. . .
14.2. Шлицевые соединения. . . . . . . . . .
14.2.1. Конструкция шлицевых соединений
14.2.2. Расчет шлицевых соединений
14.3. Соединения с натяrом . .
14.3.1. Конструкции. . . .
14.3.2. Прочность соединения.
14.3.3. Запрессовка зубчатоrо колеса винтом,
завинчиваемым в торец вала . . . . . . . . . . .
14.3.4. Использование винтов для сборки зубчатых колес
с валами внутри редуктора и переноса плоскостей
разъема редуктора в ero ненаrруженные зоны
14.4. Практика конструирования. Соединение с натяrом .
14.4.1. Постановка задачи
14.4.2. Решение задачи
Приложения П.14 . . . . . .
Список литературы . . . . .
Ша2 15. Конструирование литых, сварных и штампованных деталей.
15.1. Литые детали. . .. .............
15.1.1. Исторические сведения о сталях И чуryнах
15.1.2. Способы литья. . . . . .
15.1.3. Классы точности отливок . . . .
15.1.4. Толщина стенок отливок. . . . .
15.1.5. Конструирование внешнеrо контура отливок.
15.1.6. Конструирование сопряжений стенок и ребер
15.1.7. Нанесение размеров на чертежах литых деталей
15.2. Сварные детали. . . . . . . . . . . . . . . . . .
15.2.1. Изобретение дуroвой электрической сварки
15.2.2. Свариваемые материалы и ВИДЫ сварки
15.2.3. Виды сварных соединений. . .
15.2.4. Расчет ПрО'lliости сварных швов
при статической наrрузке . . .
15.2.5. Расчет ПрО'll-lости сварных ШВОВ
при переменной наrрузке . . .
15.2.6. Оформление чертежа сварной детали.
15.3. Штампованные детали . .
15.3.1. Общие свеДения . .
15.3.2. Вырубка отверстий.
15.3.3. Радиусы rибки
15.4. Прокат . . . . . . . . . .
6
209
210
211
211
211
214
216
216
219
220
220
221
224
227
228
228
230
233
235
236
236
236
237
239
239
240
241
243
244
244
244
245
248
255
256
257
257
258
258
259
15.4.1. История создания Эйфелевой башни.
15.4.2. Сортамент проката . .
15.5. Практика конструирования. Сварной шкив.
15.5.1. Постановка задачи. . . . . . . . . .
15.5.2. Оценка степени наrруженности сварных швов
15.5.3. Выбор высоты катета cBapHoro шва И расчет
сварных швов на прочность . . . .
15.5.4. Разработка рабочеrо чертежа шкива
Приложения П.15 . . . . . . . . .
Список литературы
Ша2 ]6. Конструирование валов, оружин, муфт и тормозов. Выбор
соединений сборочных единиц . .
16.1. Валы . . . . . . . . .
16.1.1. Особенности конструкuии
16.1.2. Материалы. . . . . . . .
16.1.3. Проектные расчеты
16.1.4. Проверочные расчеты на прочность
16.1.5. Проверочный расчет на жесткость.
16.2. Пружины. . . . . . .
16.2.1. Витые пружины растяжения сжатия
16.2.2. Тарельчатые пружины . .
16.3. Соединения сборочных единиц.
16.3.1. Соединения муфтами
16.3.2. Соединения «вал в вал» .
16.3.3. Навесное ИСПОШIение сборочных единиц.
16.3.4. Оптимизация соединений
16.4. Тормоза. . . .
16.4.1. Ленточные тормоза .. . . .
16.4.2. Дисковый тормоз .....
16.5. Практика конструирования. Червяк
16.5.1. Постановка задачи. . . . . .
16.5.2. Проектные расчеты и чертеж червяка
16.5.3. Проверочные расчеты прочности червяка
Приложения П .16 . . . . . . . . . . . . . .
Список литературы . . . . . . . . . . . . . . . . .
Ша2 ]7 Конструирование как объект деятельности. . . .
17.1. Конструирование как один из видов творческой деятельности
17.1.1. Выбор профессии ..............
17.1.2. Деятельность конструктора при проектирован'ии
машины . . . . . .. .......
17.1.3. Связь между уровнем интеллекта и способностью
к конструкторской деятельности .......
17.1.4. Качества, которыми желательно обладать ЛЮдЯм
творческих профессий .
17.1.5. Типолоrия индивидуальных различий
259
260
261
261
262
263
264
266
289
290
291
291
293
293
293
298
299
299
301
302
302
312
320
331
341
341
342
343
343
344
346
350
351
352
353
353
354
356
359
360
7
17.1.6. Качества, которыми желательно обладать
конструктору. . . .. .........
17.2. Психолоrические и педаrоrические аспекты обучения
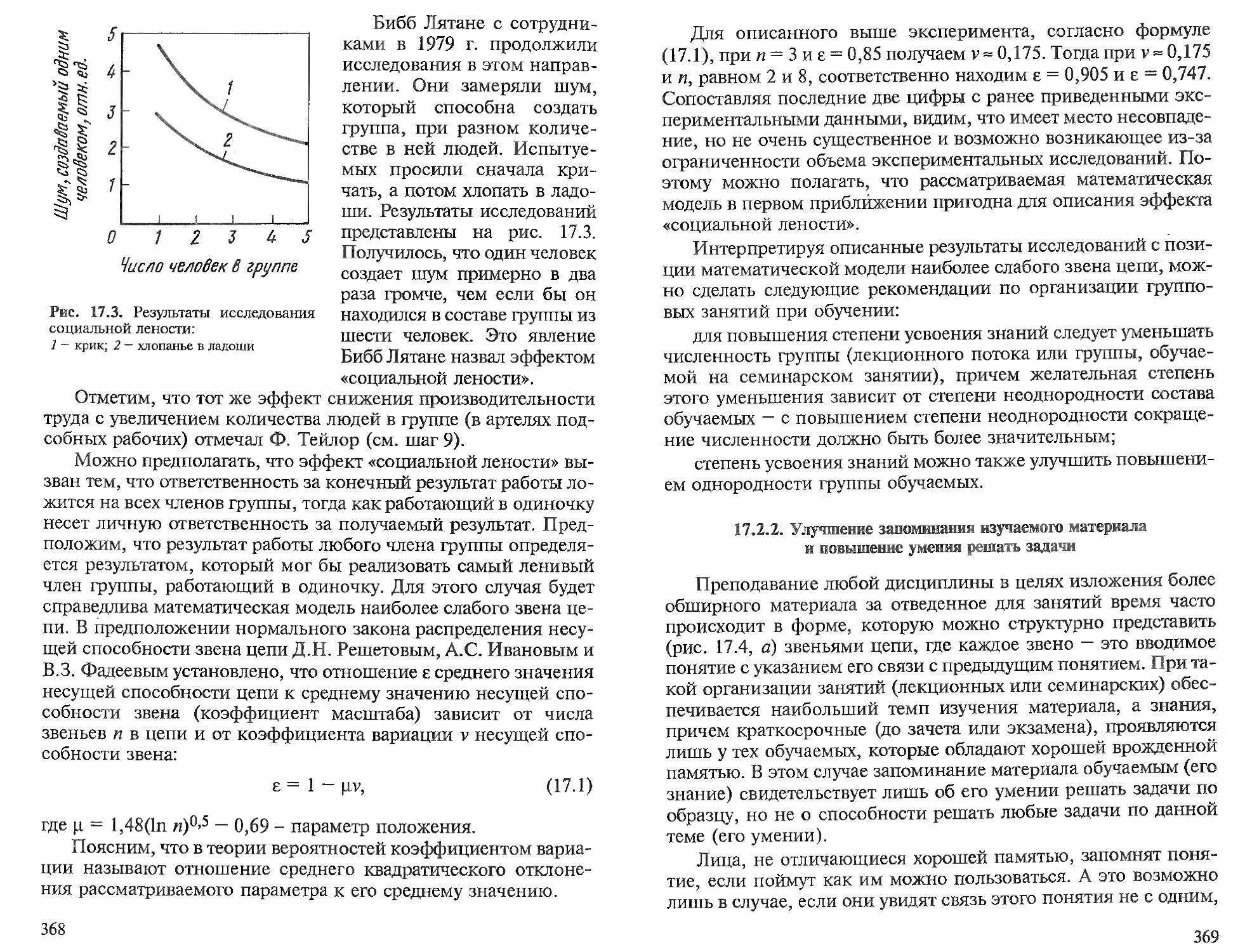
17.2.1. Численность rруппы обучаемых . . . . . . .
17.2.2. Улучшение запоминания изучаемоrо материала
и повышение умения решать задачи . . . . . .
17.2.3. Развитие умения думать на ранней стадии обучения
17.2.4. Методика проведения занятий. . . . . . . .
17.2.5. Необходимые условия для развития творческих
способностей . . . . . . . . . . . . . . . . .
17.3. Повышение качества обучения конструированию машин
17.3 .1. Анализ традиционноro обучения .
17.3.2. Мероприятия, способные повысить качество
обучения конструированию машин.
17.4. Практика конструирования. Выбор оптимальноro
конструктивноrо исполнения привода транспортера
17.4. 1. Постановка задачи
17.4.2. Решение задачи
Приложения П.17 .
Список литературы . . . . . . . . . . . . . . .. ......
365
367
367
369
371
371
372
374
374
375
379
379
379
382
388
175 летию
MfTY им. Н.Э. Баумана
посвящается
Предисловие
Первая часть (шаrи 1 9) предлаrаемоrо издания была посвя
щена общим вопросам конструирования. Во второй (шаrи
1 o 17) рассмотрены вопросы конструирования отдельных
rpупп деталей машин и передач, а таюке машин в целом; дан
анализ места творчества в деятельности конструктора.
При этом автор стремился изложить сложные проблемы
простым и доступным языком с привлечением большоrо коли
чества рисунков, поясняющих текст.
Расчеты при конструировании обычно выполняют по упро
щенным схемам и формулам, так как сначала путем про ведения
большоrо количества разнотипных расчетов конструктор cтpe
мится сформировать у себя мноrосторонний взrляд на разраба
тываемую им конструкuию, чтобы потом отобрать наиболее оп
тимальный вариант конструктивноrо исполнения машины, ее
узлов и деталей. Расчеты, как правило, проводят для установив
шеrося режима движения. Книrа позволяет не только обучить
этим действиям, но и выполнить их. Приведенноrо в ней спра
вочноrо материала достаточно, чтобы начать конструировать.
Коrда машина сконструирована и разработаны ее чертежи,
приближенные расчетные схемы заменяют более точными, учи
тывающими реальный закон распределения наrрузки. Для про
ведения уточненных расчетов необходимо знание дифференuи
альноrо и интеrральноrо исчислений, теоретической механики
и теории механизмов и машин, сопротивления материалов, Teo
рии колебаний, компьютерных расчетов и компьютерной rpa
фики, rидравлики и т. д. Поэтому 17 шаrов можно рассматри
вать как основной модуль обучения конструированию для
студентов младших курсов.
Автор блаrодарен ректору МПУ им. Н.Э. Баумана профес
сору И.Б. Федорову за постоянное внимание к этой работе и
поддержку.
9
Автор выражает свою признательность профессору кафедры
«ОСНОВЫ конструирования машин» е.А. Шувалову за ценные pe
комендации по уточнению вопросов расчетов и конструирования
передач, а также доценту этой кафедры И.К. rануличу за советы
по оформлению конструкторской документации.
Автор блаrодарит Е.Н. етавицкую и Л.М. Элькинд за по
мощь на завершающих стадиях работы над книrой.
Автор признателен участникам (преподавателям, KOHCТPYK
торам предприятий, студентам) научно технических семинаров
«Конструирование конкурентоспособных машин» и сотрудни
кам редакции журнала «Вестник машиностроения» за обсужде
ние ряда проблем, поднятых в книrе.
Автор блаrодарен студентам, которые ПОД ero руководством
разработали мноrие перспективные конструктивные решения,
приведенные в книrе, и доложили о них на студенческих науч
но технических конференциях.
Если после прочтения книrи читатель разобрался в пробле
ме конструирования машин в целом, у Hero появился интерес к
конструированию, а полученные навыки ПОЗВОЛИЛИ ему начать
проектирование машин, хотя и не очень сложных, то автор MO
жет считать свою задачу выполненной.
Шаr 10. КОНСТРУИРОВАНИЕ ЗУБЧАТЫХ,
ЧЕРВЯЧНЫХ И ФРИЩИОННЫХ ПЕРЕДАЧ
. Применение каКО20 зацепления предшествовало эвольвентному?
. Что такое эвольвентный профиль зуба и кто ezo предложил?
. Какие окружные скорости достиzнуты для цилиндрических зубчатых колес?
. Что такое высотная и У2/lOвая коррекции цилиндрической зубчатой передачи
и зачем их прuменяют?
. Как рассчитать на контактную и UЗ2ибную выносливости цилиндрическую
зубчатую передачу?
. Что представляет собой планетарная передача?
. Как найти передаточное число планетарной передачи?
. Как определить окружные силы, действующие в контакте солнеЧНО20 колеса
с сателлитом, сателлита с эпициклом и сателлита с водилом планетарной
передачи?
. Что представляет собой волновая передача с коротким 2ибкuм колесом?
. Что такое архимедов, эвольвентный, конволютный и нелинейчатый червяки?
. Как рассчитать на контактную выносливость червячную передачу?
. Почему не проводят теnловО20 расчета цилиндрической передачи?
. Как провести тепловой расчет червячной передачи?
. Как определить силы, действующие в цилиндрической зубчатой, конической
зубчатой, червячной передачах?
. Чем отличаются конструкции фрикционной и зубчатой планетарных передач?
. Каковы сравнительные показатели фрикционной и зубчатой планетарНЫХ
передач?
. Как оформляют чертежи (рабочие) зубчатых и червячных колес?
Ответы на эти вопросы и не только на них ВЫ найдете в 10 M
Шаrе.
в первых девяти шаrах были рассмотрены общие ВОПРОСЫ
конструирования машин и механизмов. С данноrо шаrа будут
изложены вопросы конструирования конкретных видов деталей
машин и передач.
Сначала остановимся на передачах. Это позволит определить
действующие в машине силы, рассчитать все ее детали и соеди
нения и по результатам расчета начать конструировать.
11
Расчеты передач будем про водить в' форме проверочных.
Проектные расчеты предлаrается выIолнятьь методом последо
вательных приближений по формулам, полученным дЛЯ прове
рочных расчетов. Такая форма более понятна читателю, так как
расчетные формулы в этом случае обычно сравнительно просты
и имеют достаточно ясный физический смысл, связанный с He
допущением в конструкции повреждений определенных видов,
и, кроме Toro, она более приспособлена к проведению расчетов
на ЭВМ.
10.1. Зубчатые цилиндрические передачи
10.1.1. fеометрические параметры прямозубых колес
Зубья зубчатых колес имеют эвольвентный профиль, предЛО
женный Л. Эйлером в 1760 r.
Применению эвольвентноrо зацепления предшествовало
циклоидальное. Часовое зацепление, реализуемое в механиче
ских часах, является разновидностью ЦИКЛОIЩальноrо зацепле
ния. Отказываться от этоrо зацепления в часовых механизмах,
по видимому, не будут, так как в них при меняются ускоритель
ные передачи, а циклоидальное зацепление в этом случае эко
номичнее эвольвентноrо.
В машиностроении эвольвентное зацепление нашло широ
кое применение. Это объясняется простотой формы зуборезно
[о инструмента, постоянством MrHOBeHHoro передаточноrо чис
л?- по уrлу поворота зубчатоrо колеса, малой скоростью
относительноrо скольжения контактирующих профилей, что
обеспечивает высокий КПД передачи, и сохранением переда
точноrо числа передачи при изменении межосевоrо расстояния,
возникающеrо вследствие поrрешностей монтажа.
Эвольвентная кривая получается как перемещение точки Р
(рис. 10.1), находящейся на прямой АС, при перекатывании
прямой по окружности, называемой основной. Диаметр OCHOB
ной окружности обозначают d b . Отрезок РВ, rде В точка Kaca
ния прямоЙ АС с основной окружностью, является радиусом
кривизны р эвольвенты в точке Р:
р == ОР sina x .
(10.1)
12
в приложении П.I0.1 приведен
rpафик зависимости inva x от ах.
Эвольвентный профиль можно
нарезать с помощью инструменталь
ной рейки, совпадающей с профилем
исходноrо контура зубьев цилиндр и
ческоrо зубчатоrо колеса (рис. 10.2)
по rOCT 13755 81. На рис. 10.2
штрихпунктиром изображена дели
тельная прямая линия, на которой ширина зуба равна ширине
впадины. Через Робозначен шаr инструментальной рейки. Be
личина т == Pjп называется модулем зацепления. Модуль CTaH
дартизирован (rOCT 9563 80*). Ero предпочтительные значе
ния в наиболее употребительном диапазоне составляют: 1,0;
1,25; 1,5; 2,0; 2,5; 3,0; 3,5; 4,0; 5,0; 6,0; 8,0; 10 мм. В машино
строении обычно имеется инструмент для нарезания зубчатых
колес с модулем т 2 мм. Уrол апрофиля рейки принят равным
200. Размер с (см. рис. 10.2) обеспечивает у колес, нарезанных с
помощью инструментальной рейки, наличие радиальноrо зазора
в зубчатом зацеплении. Радиальный зазор между зубьями обыч
но равен с == 0,25т. Если зуб нарезают долбяком, то С == 0,35т.
Окружность колеса, по которой шаr равен Р, называют дели..
тельной. Ее диаметр обозначают через d. Так как пd == pz == птz,
rде Z число зубьев колеса, то
d == mz. (10.3)
Уrол 8х, образованный началь..
ным радиус вектором (прямая ОР о ) и
текущим ero значением (прямая ОР),
называют эвольвентным yrлом (инво
лютой уrла ах) и обозначают inv ах:
8х == inv ах == tg ах ах .
(10.2)
На делительной окружности
прямозубоrо колеса (рис. 10.3)
уrол профиля зуба (острый уrол
между касательной к профилю
зуба на этой окружности и ради
YC BeктopOM) равен yrлу профи
ля рейки а == 200.
Рис. 10.1. Эвольвентная
кривая
р
"-о
Рис. 10.2. ИСХОДНЫЙ КОНТУР зубьев
ДJШ цилиндрических зубчатых колес
13
В случае отсутствия смещения исходноrо контура при Hape
зании зубчатоrо колеса толщина зуба на делительной окружно
сти колеса равна ширине впадины и диаметры d Q , d f
окружностей вершин и впадин
зубьев колеса с наружными
зубьями соответственно равны
d a == d + 2т;
d f == d 2,5т,
(10.4)
(10.5)
что следует из соотношения раз
меров инструментальной рейки
(см. рис. 10.2).
Рис. 10.3. Зубчатое колесо
10.1.2. rеометрические параметры косозубых колес
Для косозубых колес стандартизирован модуль m в HOp
мальном сечении зуба, так как косозубые колеса можно Hape
зать предназначенной для изrотовления прямозубых колес ин
струментальной рейкой, развернув
ее на уrол р наклона зуба. Уrол Ha
клона р измеряют на делительном
диаметре колеса. Обычно он COCTaB
ляет в косозубых колесах 8...220.
Верхнее значение р оrpаничено Be
личиной допустимых осевых сил на
опоры вала. На рис. 10.4 изображено
зубчатое колесо с левым направле
нием зуба. Правое направление зуба
совпадает с направлением винтовой
линии резьбы у винтов (обычно У
них правое направление винтовой
линии резьбы).
В шевронных колесах р == 25...400
в связи с тем, что в них осевые силы
от полушевронов взаимно уравновешены и поэтому на опоры не
передаются, а чем больше Р, тем плавнее работает передача. В
торцовой плоскости косозубое колесо можно рассматривать как
прямозубое с торцовым модулем mt. Так как торцовый шаr Pt ==
== Р / cos р (см. рис. 10.4), rде Р! == пm t , Р == пт, то т t == т/ cos р. Oт
сюда диаметр делительной окружности
Р.х
Pt
"'t:j
h
Рис. 10.4. Косозубое
зубчатое колесо
14
mz
d= тtZ = .
cosp
(10.6)
Высоты rоловки и ножки зуба, соrласно рис. 10.2, пропор
циональны модулю т. Поэтому при отсутствии смещения ис
ходноrо контура формулы дЛя вычисления d a и dfколеса с Ha
ружными зубьями остаются теми же, что и для прямозубых
колес (см. (10.4), (10.5».
10.1.3. Смещение исходноrо контура
Начальной прямой инструментальной рейки является пря..
мая, которая обкатывается без скольжения по нарезаемому ею
зубчатому колесу. При отсутствии смещения исходноrо контура
начальная прямая совпадает с делительной. Расстояние от дели
тельной прямой до оси зубчатоrо колеса составляет (рис. 10.5, а)
Е == 0,5 mt Z .
о
о
Рис. 10.5. Нарезание инструментальной рейкой зубчатorо колеса
при коэффициенте смещения х, равном О (а) и 0,67 (6)
Если при нарезании зубчатоrо колеса вводится смещение
исходноrо контура, то появляется смещение делительной пря..
мой инструментальной рейки относительно начальной. Смеще..
ние, направленное от оси колеса, называют положительным, а к
15
ero оси отрицательным. Коэффициент смещения х это OTHO
шение смещения к модулю (рис. 10.5, 6):
х = Е 0,5mtZ .
т
(10.7)
При положительном смещении инструмента толщина зуба в
основании, а также радиус кривизны ero активной поверхности
профиля увеличиваются, но несколько уменьшается радиус вы
кружки зуба у основания.
При смещении инструмента делительный диаметр, т. е. диа
метр, на котором шаr зубьев равен Р, вычисляют по формуле
(10.6). Диаметры окружностей вершин и впадин зубьев дЛЯ KO
лес с внешними зубьями рассчитывают по формулам
d a := d + 2m(l + х БУ);
(10.8)
d f == d 2,5т(1 0,8х),
(10.9)
а для колес с внутренними зубьями (эти колеса в передаче обыч
но ведомые и, как будет пояснено в 10.1.4, им присваивают ин
декс «2») с помощью выражений
d a2 :::::: d 2 2m(l Х2 + ДУ);
(10.10)
d f2 2a w + d al + 0,5т.
(10.11)
Здесь ду коэффициент уравнительноrо смещения (см. 10.1.4);
a w межосевое расстояние передачи (см. 10.1.4); d al диаметр
окружности ВЫСТУПОВ ведущеrо зубчатоrо колеса, зацепляюще
rося с рассматриваемым.
Формулы (lO.6) (10.11) имеют общий характер, поэтому
они справедЛИВЫ и для прямозубых, и дЛя косозубых колес,
причем как без смещения, так и со смещением исходноrо KOH
тура.
10.1.4. fеометрические параметры передачи.
КОРРИI'ирование
Начальными называют воображаемые окружности сопря
женных колес, которые катятся без скольжения одно относи
тельно друrоrо. Отдельно взятое цилиндрическое зубчатое коле
со не имеет начальной окружности.
16
Передача может быть с внешним и внутренним зацеплением
(рис. 10.6). На рисунке межосевое расстояние по начальным OK
ружностям, называемое далее просто межосевым расстоянием,
обозначено a w и равно
a w ::= 0,5(d w2 :t d wl )'
(10.12)
[де d w2 ' d w1 диаметры начальных окружностей большеrо зуб
чатоrо колеса, обычно являющеrося ведомым и называемоrо
далее колесом, и меньшеrо зубчатоrо колеса, обычно являюще
rося ведущим и называемоrо далее шестерней. Здесь и далее
знак «+» относится к внешнему, а знак « » к внутреннему
зацеплению.
о
ь
Рис. 10.6. Передача с внешним (а) И внутренним (5) зацеплением
Так как начальные окружности катятся, не проскальзывая
одна по дрyrой, то окружные скорости их одинаковы, т. е.
лd wl пl лd w2 п 2
60 . 1000 60.1000
елева и справа в этой формуле приведены выражения для вы
числения линейных скоростей соответственно шестерни и KO
Леса. Принято, что единицы измерения параметров здесь сле
дующие: скорости м/с; d w1 , d w2 мм; пl' п2 мин l.
Отсюда
пl d w2
и
d w1 '
(10.13)
или
d w2 == d w1 и;
(10.14)
17
d 2a w .
wl u:tl '
(10.15)
d 2a w u
w2 u :t 1 '
(10.16)
[де u передаточное число передачи; пl' п2 частоты вращения
шестерни и колеса.
Если известно суммарное число зубьев ZI; шестерни и коле
са, то каждое из этих чисел зубьев ZI и Z2 находят по формулам
Z ZI; .
1 и:!:1 '
ZI;U
Z2 = .
и:!: 1
(10.17)
Передачи с зубьями зубчатых колес, нарезанными инстру
ментом при смещениях исходноrо контура, называются корри
mрованными. С помощью корриrирования можно снизить ми
нимально допускаемое число зубьев шестерни, повысить
прочность зубьев и увеличить их износостойкость. Различают
высотную и уrловую коррекцию передачи.
При высотной коррекции положительное смещение для
шестерни равно отрицательному смещению дЛя колеса:
Хl == X2'
(10.18)
[де Х1' Х2 коэффициенты смещения шестерни и колеса COOT
ветственно.
Для передач без смещения исходноrо контура и с высотной
коррекцией суммарное число зубьев составляет
2a w cos [3
ZI;=Z 2 :tZ 1 = .
т
(10.19)
Начальные окружности совпадают с делиТельными: d l ==
== d w1 , d 2 == d w2 ; уравнительное смещение ду == о; нет необходи
мости в изменении межосевоrо расстояния: a w == а == 0,5 (d 2 :!:
:t d 1 ), rде а межосевое расстояние по делительным окружно
стям.
При yrловой коррекции сумма коэффициентов смещения не
равна нулю:
Хl + Х2 -=F- О.
(10.20)
18
При этом a w -=F- а, d 1 :f:. d w1 и d 2 :f:. d w2 ' а уравнительное смещение
ду вычисляют по формуле
ду == (Х2 :!: Хl) у, (10.21)
rде у коэффициент воспринимаемоrо смещения,
( cos а J
O,5(Zl :t Z2) t 1
cos (J. tw
у=
cos
(10.22)
a t , (J.tw уrлы профиля (см. рис. 10.5) и зацепления (рис. 10.7) в
торцовом сечении,
tg 200
а ! = arctg ,
cosp
(10.23)
. 2(Хl + x2)tga t
lnva tw = + inva t .
(ZI :!: Z 2)
(10.24)
Как при высотной, так и при уrловой коррекции
0,5(Zl :t Z2)тcosa t
а = .
w cos [3 cosa tw
(10.25)
При работе передачи каждая пара сопряженных зубьев шес
терни и колеса (см. рис. 10.7) вступает в зацепление в точке А и
выходит из зацепления в точке В, совершая при этом поворот на
определенный yrол. Отношение этоrо yrла поворот к уrловому
шаry 2п/ Z называют коэффициентом торцовосо перекрытия и обо
значают €O;' Для прямозубой передачи
€a. oz:; 1,6,
(10.26)
для косозубой
Е а [ 0,95 1,6 (:1 :t zl JJ cos 13 (1 +cos 13),
(10.27)
ЧТО обычно больше 1,6.
19
Рис. 10.7. ЛИНИЯ зацепления АВ и полюс зацепления Р
в цилиндрической передаче
При расчетах прочности зубчатых колес также используют
коэффициент oceBoro перекрытия
tp == ь / Р х ,
(10.28)
[де РХ осевой mar,
пт
РХ sil1p ,
(10.29)
ь ширина зубчатоI'О венца колеса (см. рис. 10.4).
Ширина зубчатоrо венца связана с межосевым расстоянием
через коэффициент ширины зуба 0/ Ьа :
ь == о/Ьа a w .
(10.30)
Коэффициент ширины обычно назначают в зависимости от
положения зубчатых колес относительно опор: 'l'ba == 0,315...0,5
при симметричном положении колес; 0,25...0,4 при несим
20
метричном положении и 0,2...0,25 при консольном положе
НИИ хотя бы одноrо из колес. Меньшие значения о/Ьа из диапа
зонов рекомендуются для передач с повышенной твердостью
поверхностей зубьев.
10.1.5. Точность зубчатых передач
По roeT 1643 81 различают 12 степеней точности зубчатых
передач: от первой до двенадцатой. Из них наиболее распро
страненными являются шестая для передач повышенной точ
ности при линейных скоростях прямозубых колес до 20 м/с и
косозубых колес до 31,5 м/с, седьмая для передач нормальной
точности при скоростях соответствующих колес до 12 и 20 м/с, а
также восьмая для передач пониженной точности при CKOpO
стях тех же колес до 6 и 10 м/с соответственно. Вместе с тем в
авиации и судостроении изrотавливают передачи, имеющие
четвертую и пятую степени точности при скорости колес до
100 м/с (и даже до 275 м/с на стенде).
Также ста'ндартизированы следующие виды сопряжений
зубьев в порядке увеличения боковоrо зазора между их нерабо
тающими поверхностями: Н, Е, п, С, В, А. В сопряжении Н ми
нимальный зазор равен нулю. Обычно пользуются сопряжени
ем В. В реверсируемых передачах зазор уменьшают.
Точность обозначают указанием степени точности и вида
сопряжения, например: 8 В зубчатая передача восьмой степе
ни точности и вида В сопряжения зубьев.
10.1.6. Критерии работоспособности зубчатых передач. Материалы
Зубчатые передачи выходят из строя чаще Bcero в результате
выкрашивания рабочей поверхности зубьев, которое обычно
возникает вблизи начальной окружности колеса на ножке зуба,
или излома зуба по ero корню. В СВЯЗИ С этим зубчатые передачи
рассчитывают на ВЫНОСЛИВОСТЬ контактную и при изrибе. Ec
ли в передаче возникает пиковая наrpузка, то про водят расчет
на прочность при действии пиковой наrрузки (см. приложение
П.IО.2).
КонтаКПIая выносливость способность рабочих поверхно
стей зубьев обеспечивать отсутствие проrрессирующеrо устало
CTHoro выкрашивания.
ВЫНОСЛИВОСТЬ при изrnбе способность зубьев обеспечивать
отсутствие усталостноrо излома зуба.
21
Контактная прочность при действии пnковой наrpузки спо..
собность предотвращения остаточной деформации или хрупко
ro разрушения поверхностноrо слоя зуба.
Изmбная прочность при действии пиковой наrpузки спо..
собность предотвращения остаточной деформации или хрупко
ro излома зуба.
В качестве материала для высоконапряженных зубчатых ко..
лес выбирают сталь, допускающую термическое или хими..
ко термическое упрочнение (см. шаr 4). Для сталей 40Х, 40ХН
применяют поверхностную закалку с HarpeBoM токами высокой
частоты (ТВЧ). При этом обеспечивается твердость поверхно
сти зубьев 50...55 НRС э . Стали 20Х, 12ХН3А, 20ХНМ,
18Х2Н4МА, 20Х2Н4А, 18XrT, 25Xrт, 15ХФ подверrают rазо..
вой цементации, что дает твердость поверхности 56...63 НRС э .
Менее леrированные стали 18Xrт, 25XrT, 40Х можно подвер"
raTb нитроцементации с получением твердости 56...63 НRС э .
Молибденовая сталь 38Х2МЮА допускает азотирование. При
этом в тонком поверхностном слое детали удается получить
твердость 550...750 НУ.
ДЛЯ изrотовления зубчатых колес при отсутствии жестких
требований к их rабаритным размерам применяют качествен
ные стали 35, 40, 45, 50r после нормализации или улучшения,
обеспечивающие твердость как внyrpи зуба, так и на ero поверх..
ности в первом случае 163...207 НВ, во втором 235...302 НВ.
В слабо наrpуженных передачах для обеспечения их бесшум
ности, самосмазываемости или химической стойкости чаще Bce
ro применяют пластмассовые колеса из текстолита марки ПТ или
ПТК в паре с металлическими. Наиболее перспективными счи
таются колеса из капролона, полиформальдеrида и фенилона.
Контактная выносливость рабочих поверхностей зубьев и
выносливость зубьев при изrибе зависят от числа циклов Harpy..
жения. Числа циклов наrpужения N 1 и N 2 зубьев шестерни и ко..
леса вычисляют по формулам
N 1 == 60tuп2 п з lJ.l;
(10.31)
N 2 == 60tп2 пз2 '
(10.32)
rде t ресурс передачи, ч; п з l, п з 2 соответственно число вхож..
дений зуба шестерни и колеса в зацепление за один свой обо
рот; коэффициент эквивалентности по циклам переменноrо
22
режима наrpужения постоянному максимальному (приложение
П.10.3); при постоянном режиме наrpужения 11 == 1.
10.1.7. Расчет рабочих поверхностей зубьев
на контактную выносливость
За исходную взята формула rерца (см. 7.1.1) для наибольших
контактных напряжений (j н при линейном контакте 1 :
Ш 'Е
(j н = 0,418 ,
/R
(10.33)
rде F нормальная сила в контак
те Н; Е = 2Е I Е 2 приведенный
, Е 1 + Е 2
модуль упруroсти материалов кон..
тактирующих деталей; Е l , Е 2 MO
дули упрyrости материалов шестер
ни и колеса, МПа; / длина линии
контакта, мм; R = Р1Р2 приве
Р2 :!: Р1
денный радиус кривизны; Рl, Р2
радиусы кривизны зубьев шестер"
ни и колеса, мм.
Расчет контактных напряже
ний в зубе зубчатой передачи про
водят для полюса зацепления Р
Точки пересечения линией зацеп
ления осевой линии, соединяю
щей центры шестерни и колеса
(см. рис. 10.7). Нормальная сила в контакте (рис. 10.8) с учетом
коэффициента наrpузки k составляет
Рис. 10.8. Параметры, опреде
ляющие значения контактных
напряжений в зубьях прямозу
бой передачи
F ;::: kFt ,
cos 20°. cos
(10.34 )
rде Р! == 2T 1 /d w1 окружная сила в контакте на начальном диа
Метре d w1 шестерни, создаваемая моментом на шестерне Т l при
уrле наклона зуба .
1 Формула в данном варианте написания предполаrает коэффициенты Пуас
сона контактирующих материалов одинаковыми и равными 0,3.
23
Коэффициент наrрузки учитывает, во первых, HepaBHOMep
ность распределения наrрузки по длине контактной линии,
которая зависит от перекосов колес, вызываемых деформация
ми валов, и, BO BTOpЫX, внутреннюю динамическую наrpузку,
возникающую из за изменения боковоrо зазора в передаче по
уrлу поворота колеса и зависящую от скорости и степени точно
сти передачи. Значение k приближенно равно: 1, 1 для шестой
и седьмой степеней точности при скорости до 5 м/с и симмет
ричном расположении колес относительно опор; 1,2 для шес
той и седьмой степеней точности при скорости 5...10 м/с или
для восьмой степени точности при скорости до 5 м/с для несим
метричноrо расположения колес относительно опор; 1,3 для
восьмой степени точности и скорости 5...1 О м/с или для девятой
степени точности при скорости до 5 м/с и несимметричном pac
положении колес относительно опор; 1,4 для девятой степени
точности при скорости до 5 м/с и консольном расположении
хотя бы одноrо из колес.
Длину линии контакта определяют по формуле
l Ь
(4 Ео)/3
(10.35)
для прямозубых передач и
1 :=:: Ь Ео;
(10.36)
ДЛЯ косозубых передач, [де Ь ширина венца колеса' Е KO
'эффициент торцовоrо перекрытия, вЫЧисляемый по фо;мулам
(10.26), (10.27).
Радиусы кривизны профилей зубьев шестерни и колеса на
их начальных диаметрах соответственно равны
O,5d wl sin<x tw .
Рl R'
cos!--,
O,5d w2 sina tw
Р2 R'
cos!--,
(10.37)
rде a tw уrол заuепления косозубой зубчатой передачи; Р уrол
накло а уба (точнее было бы вместо Р подставлять РЬ ==
== аrсsш (sш р. cos 200) основной уrол наклона, но так как для
большинства возможных значений Р поrpешность расчета b не
превышает 1 %, то здесь и далее считаем рь),
24
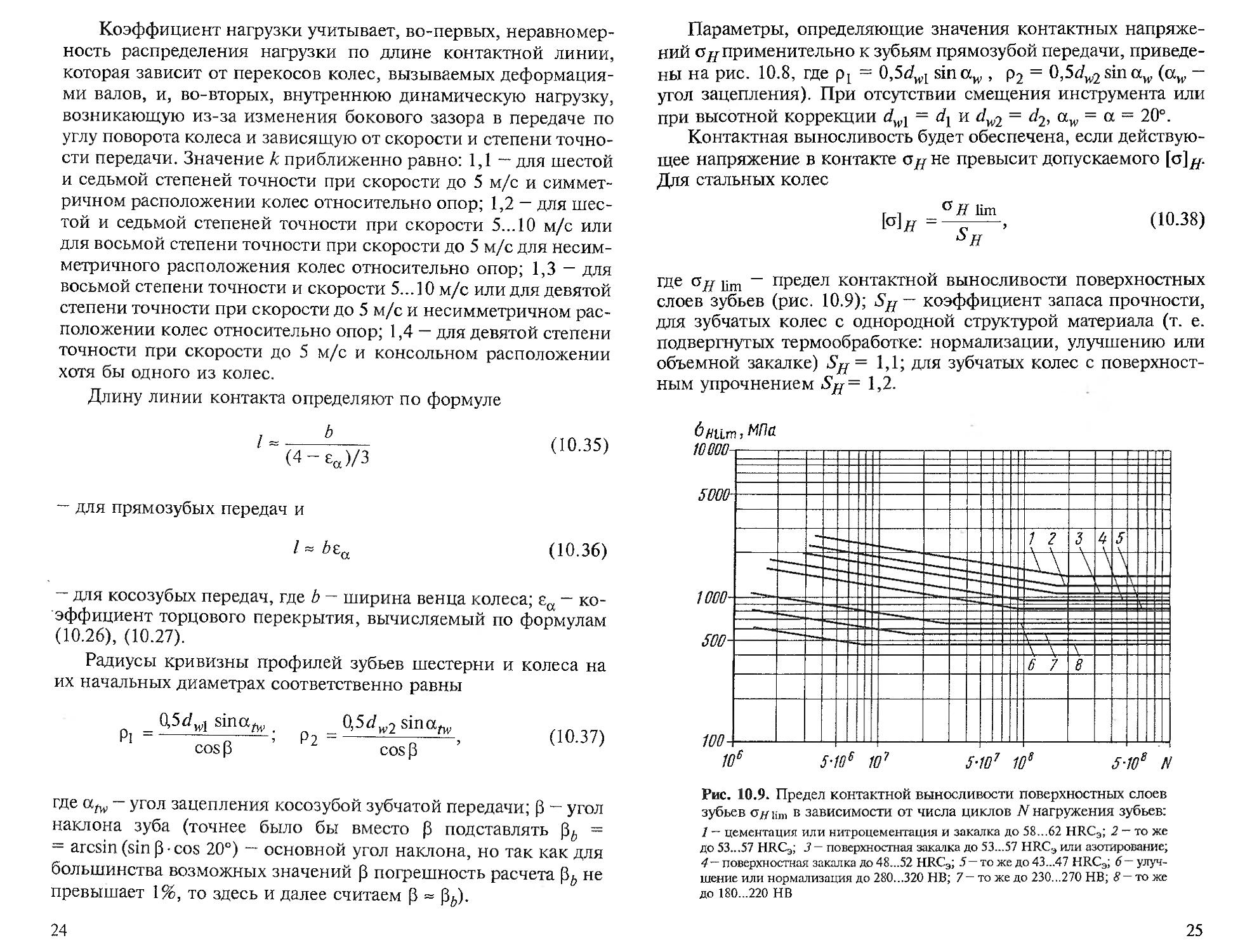
Параметры, определяющие значения контактных напряже
ний (j н применительно к зубьям прямозубой передачи, приведе
нЫ на рис. 10.8, [де Рl == 0,5d w1 sin a w , Р2 == 0,5d w2 sin a w (a w
yroл зацепления). При отсутствии смещения инструмента или
при высотной коррекции d wl == d l и d w2 == d 2 , a w == а ::::: 200.
Контактная выносливость будет обеспечена, если действую
щее напряжение в контакте (j Н не превысит допускаемоrо [а]н,
Для стальных колес
[а]н =
(j н Нт
SH
(10.38)
[де (j Н lim предел контактной выносливости поверхностных
слоев зубьев (рис. 10.9); SH коэффициент запаса прочности,
для зубчатых колес с однородной структурой материала (т. е.
подверrнутых термообработке: нормализации, улучшению или
объемной закалке) S н == 1,1; для зубчатых колес с поверхност
ным упрочнением SH== 1,2.
6ЩLm, МПа
10 000
soa
,"
и
...... J 2 J 4 5
1...... ...... ............... , , \
:::: ...... :::::::: ........ ....... ......... \ \ \
... ...... :::: ......
........... ::::::::: ....... ..........
......... ........
...... ...... .......... ......
......... ...........
...
................
\ \ \
б 7 8
1000
soo
100
!Об
S.10 6 107
S.fO' 108
5'/08 N
Рис. 10.9. Предел контактной выносливости поверхностных слоев
зубьев (J н liш В зависимости от числа циклов N наrружения зубьев:
1 цементация или нитроцементация и закалка ДО 58...62 НRС э ; 2 то же
ДО 53...57 НRС э ; 3 поверхностная закалка ДО 53...57 НRС э IOIи азотирование;
4 поверхностная зак::шка ДО 48...52 НRС э ; 5 то же ДО 43...47 НRС э ; 6 улуч
шение или нормализация ДО 280...320 НВ; 7 то же до 230...270 НВ; 8 то же
до 180...220 нв
25
Допускаемое напряжение [О']н для чуrуна и текстолита Map
ки ПТ или ПТК составляет соответственно 2НВ/l,! и 200 МПа.
В качестве допускаемоrо KOHTaKTHoro напряжения [а]н для
передачи в целом принимают:
для прямозубых передач минимальное из допускаемых на
пряжений для зуба колеса и зуба шестерни;
для косозубых передач, если зуб шестерни закален, а зуб KO
леса подверrнут улучшению, минимальное из следующих
двух:
(10.39)
[а]н == 0,45([О']Нl + [cr]H2),
[О']н == 1,25[а]Н2;
(10.40)
для косозубых передач в остальных случаях минимальное
из допускаемых напряжений для зуба колеса и зуба шестерни.
10.1.8. Расчет зубьев на выносливость при изrибе
Расчет проводят, рассматривая зуб как консольную балку.
Считают, что сила взаимодействия зубьев направлена по линии
зацепления, касательной к основным окружностям, и при оди
нарном зацеплении определяют по формуле (10.34). Пусть зуб
наrpужен в вершине (рис. 10.10) и уrол, образованный силой F с
осью симметрии зуба (уrол давления), равен у (1' > a w ) (наиболее
опасный случай). Наrpузка
q на единицу длины кон
тактных линий составляет
Рис. 10.10. Случай наrpужения зуба зубча
Toro колеса в ero вершине
26
q == F/l.
(10.41)
Расчетная схема зуба KO
леса прямозубой передачи
и эпюра напряжений в
опасном сечении по ero
корню представлены на
рис. 10.11. Так как практи
кой установлено, что разру
шения начинаются на pac
тянутой стороне зуба, то
суммарные напряжения а F
в корне зуба вычисляют на
этой стороне:
= ( qh COs l' q sin 1' ) а
о' F = о' и а сж W А <Р
(10.42)
[де О'и' О' сж напряжения изrиба и сжатия; W == I.S 2 /6 MO
мент сопротивления изrибу опасноro сечения единичной шири..
ны; А == 1 . S площадь опасноrо сечения единичной ширины.
В общем случае для зубьев колес как прямозубых, так и ко..
созубых передач
kFt Y FS У р У е
O'F= ,
Ьт
(10.43)
[де Р! == 2Tl/dw1 окружная сила в контакте на начальном диа
d У ао (6тh cos 1'/S2 т sin y/S) Ф
метре wl шестерни; FS = коэ
cos а w
фициент формы зуба; У р 1 РО/I00 0 коэффициент, учиты
вающий наклон зуба; коэффициент, учитывающий пере
крытие зубьев.
Коэффициент формы зуба Y FS , полученный методами Teo
рии упруrости для колес с наружными зубьями, рассчитывают
по формуле
У FS = 3,47 + 13,2 27,9х + о,092х 2 ,
Zv Zv
(10.44)
rде х коэффициент смещения (при
отсутствии смещения х == О); ZV экви
валентное число зубьев,
Z = .
v 3'
cos Р
(10.45)
-.1:::
для колес с внутренними зубьями ero
значение выбирают в зависимости от Z:
z .......... 40 50 60 70
Y FS .......... 4,02 3,88 3,80 3,75
'"'-
Понятие эквивалентноrо числа
зубьев вводят в связи с тем, что расче
ты изrибной прочности зубьев прямо..
зубых колес распр страняют на зубья
Рис. 10.11. Расчетная схема
зуба в случае ero расчета на
выносливость при изrибе
27
косозубых колес. Косозубое колесо заменяют эквивалентным
прямозубым. Эквивалентное число зубьев Zv это такое число
зубьев прямозубоrо колеса, большее Z, при котором форма зуба
прямозубоrо колеса практически совпадает с формой зуба в
нормальном сечении рассматриваемоrо косозубоrо колеса с
числом зубьев z.
Чтобы получить формулу, СВЯЗЫВЩОЩУЮ Z И Zv , рассекают
колесо нормальной к зубу плоскостью, подобной изображенной
на рис. 10.4. еечение представляет собой эллипс с малой полу
0,5d 3
осью с == 0,5d и большой полуосью е == . ацепление проис
cos
ходит по малой оси эллипса. Поэтому по малой оси находят pa
е 2 G,5d
диус кривизны эллипса rv == == . В соответствии с этим
с cos 2
радиусом кривизны форма зуба косозубоrо колеса в нормаль
ном сечении определяется эквивалентным прямозубым колесом
d d v
диаметром d v == . Но у TaKoro колеса число зубьев Z v == ,
cos 2 т
d
а у косозубоrо колеса Z == . Отсюда следует формула
т / cos
(10.45).
Коэффициент У Е , учитывающий перекрытие зубьев, для
прямозубых и узких (€p < 1) косозубых передач определяют по
формуле
== 0,2 + 0,8/€a'
(10.46)
для косозубых передач
У Е == l/€a'
(10.47)
Известно, что при стремлении снизить массу передачи зубья
зубчатых колес закаливают. В этом случае rабаритные размеры
передачи определяются выносливостью зубьев при изrибе, и,
чтобы добиться одинаковой выносливости зубьев шестерни и
колеса, в них выравнивают напряжения изrиба: о' р 1 == о' Р2 . Для
этоrо обеспечивают равенство коэффициентов формы зуба шес
терни и колеса: Y pS 1 == Y pS 2 .
Для косозубых передач при их высотной коррекции, т. е.
при Хl == Х2, этоrо можно достиrнуть, если, соrласно peKO
28
мендациям В.Н. Кудрявцева, принять равными коэффициенты
смещения:
Xl == X2 == (0,015Z 1 0,04).JU=1.
(10.48)
При ZI > 18 в формулу (10.48) подставляют Zl == 18, при и> 6
принимают u == 6. Если Х} окажется меньше значения Х miп' при
котором отсутствует подрезание, то рекомендуется принимать
Xl == Х miп' [де
Xmin =
1 Z sin 2а
1 t
2 cosp
(10.49)
Б прямозубой передаче Zl == 13 и Z2 == 70 равенства о' р 1 == о' Р2
можно достиrнуть при Хl == Х2 == 0,35. В этом случае Y pS1 ==
== Y pS2 3,75.
Выносливость зубьев при изrибе будет обеспечена, если дей
ствующие напряжения арв зубьях шестерни и колеса не превы
сят соответствующие допускаемые [<J]F'
Допускаемое напряжение для стальных колес
[ О' ] == о' F lim
F SF'
(10.50)
[де <JPlim предел изrибной выносливости зубьев (рис. 10.12);
S р коэффициент запаса прочности (в большинстве случаев
SF== 1,7, а в случае упрочнения нитроцементацией или цeMeHTa
цией с автоматическим реrулированием этих процессов COOT
ветственно 1,55 и 1,65).
Допускаемое напряжение [О']р для чуrуна и текстолита
марок ПТ, ПТК соответственно равно 70 МПа и 35 МПа.
10.1.9. Силы в зацеплении
Если передача прямозубая, то в зацеплении возникают две
составляющие силы (рис. 10.13, а):
окружная Ft,
2Т l
Ftl == F t2 == ,
d w1
(10.51)
и радиальная F R (в прямозубой передаче == О),
29
F Ft tg 200
F Rl R2 .
cos
(10.52)
в косозубой передаче (рис. 10.13, б) к ним добавляется oce
вал составляющая Р А ,
Р А1 == Р А2 == Ft tg .
(10.53)
6fLi,т1 ИЛа
fO 000
soo
{ { 1 tl
......J, ........... .......
......... ....
..... .......
........ ......... ........
4......... ......
7 8
sooo
1000
100 4-
10
.5 '104 !Од
5"'105 100
rf.ш 5 N
Рис. 10.12. Предел изrибной ВЫНОСЛИВОСТИ зубьев CfFlilll в зависимости
от числа циклов N их наrpужения:
1 нитроцементация стали 25XrM с автоматической реrулировкой процесс а; 2
цементация с автоматической реrулировкой процесса, поверхностная закалка
твч сталей 58, 45РП, У6; 3 цементация и нитроцементация без автоматиче
ской реryлировки процесса; 4 азотирование; 5 поверхностная закалка ТВЧ cтa
лей 40Х, 40ХИ, 35ХМ; 6 улучшение или нормализация до 280...320 НВ; 7 то же
до 230...270 НВ; 8 то же до 180...220 ив
При необходимости указания направлений сил на расчетной
схеме удобно условно раздвинуть валы шестерни и колеса
(рис. 10.14).
Сила Ft1 это сила, приложенная от зуба колеса к зубу Шес
терни и создающая момент сопротивления вращению шестерни.
Если подводимый к шестерне момент Т l (совпадает с направле
нием вращения шестерни пl) направлен по часовой стрелке, то
сила 1 создает момент, направленный в противоположную CTO
рону. Наоборот, сила Ft2, прикладываемая от зуба шестерни к
30
зубу колеса, является движущей. Она обеспечивает вращение
колеса против часовой стрелки, а момент Т 2 на валу колеса
оказывает сопротивление вращению и направлен против Ha
правления вращения колеса.
(
FA
d
A A
fJ
f3
А
tf
Рис. 10.13. Силы в зацеплении прямозубой (о) И косозубой передачи (6)
Направление осевой состав..
ляющей зависит от направления
зуба. Так, колесо на. рис. 1 О .14 изо..
бражено с правым направлением
зуба, а зацеnляющаяся с колесом
шестерня имеет противоположное
направление зуба левое.
Пример 10.1. Момент на колесе cocтaB
ляет Т 2 == 485 Н,м, частоты вращения коле
са и шестерни равны п2 == 1 00 мин 1 И п} ==
== 360 мин l. Материал колеса и шестер
НИ сталь 35ХМ, т. е. Е} == Е 2 == Е ==
== 21-104 МПа. Термообработка колеса
улучшение (твердость сердцевины и по
верхности зубьев 235...262 ИВ), термообра
ботка шестерни поверхностная закалка с
ОХВатом впадины (твердость поверхности
зубьев 48...53 ИRС э ). Ресурс передачи t ==
== 40000 ч. Режим работы постоянный.
Смещение исходноro КОН1УРа при нареза
НИИ зубьев колеса и шестерни отсутствует.
ft1
Л2
Рис. 10.14. Направления сил,
действующих в зацеплении
31
Определить размеры ЦИЛИlщрической косозубой передачи и найти силы в ее
зацеплении.
1. Находим передаточное число и момент На шестерне:
и = !1. = 360 = 3 6 .
п 2 100 "
Tl = Т 2 = 485 = 138,9 Н . м,
И11 3,6 . 0,97
rдe 11 == 0,97 КПД зубчатой цюm:ндрической закрытой передачи (см. приложе
ние П.1.3 шаrа 1).
2. СреДIШе твердости поверхностей зубьев шестерни и колеса составляют
50 НRС э и 248 НЕ соответственно.
3. По формулам (10.31), (10.32) вычисляем число циклов наrружения зубьев
шестерни и колеса: N, == 8,64.108, N 2 == 2,4 .108, и по rpафикам, приведенным на
рис. 10.9 и 10.12, находим пределы контактной и изrибной Выносливости зубь
ев шестерни и колеса: crНliшI == 970 МПа, crНliш2 == 560 МПа, crЛiшI == 640 МПа,
cr F Iiш2 == 430 МПа.
По формулам (10.38) (10.40) и (10.50) вычисляем допускаемые напряжения
по контактной и изrибной ВЫНосливостям зубьев: [a]НI == 808 МПа, [СУ]Н2 =
== 509 МПа, [а]н == 593 МПа, [СУ]Л == 376 МПа, [а]п = 253 МПа.
4. Задаем коэффициенты наrpузки k== 1,2 и ширины 'Jfba == 0,315 и методом
последовательных приближений определяем rеометрические параметры переда
чи, удометворяющие требованиям контактной и изrибной ВЫНосливости зубьев.
Результаты расчетов приведены в табл. 10.1.
Таблица 10.1
Параметр, Номер Номер приближения
еДиница формулы
измерения 1 2 3 4
a w , мм 100,000* 115,000 125,000 125,000
Ь, мм (10.30) 32,000 36,000 40,000 40,000
, rрад (10.19) 8,000* 8,000* 8,000* 10,263
Ео: (10.27) 1,600 * 1,600* 1,600* 1,706
1, мм (10.36) 51 ,200 57,600 64,000 68,200
d wI , мм (10.15) 43,480 50,000 54,350 54,350
d w2 , мм (10.16) 156,520 180,000 195,650 195,650
(1." [рад (10.23) 20,181 20, 181 20,181 20,299
(Xtw, rpад (10.24) 20,181 20,181 20,181 20,299
PI, мм (10.37) 7,570 8,700 9,460 9,580
32
ОКОliЧOJше табл. 10.1
,.....
Номер приближения
Параметр, Номер
единица формулы 4
измеренИЯ 1 2 3
1------- 27,260 31,350 34,080 34,490
Р2, мм (10.37)
R, lo.IM (10.33) 10,480 12,040 13,100 13,260
Р", Н (10.51) 6389,000 5556,000 5111,000 5111,000
Р, Н (10.34) 8239,000 7165,000 6592,000 6633,000
cr Н, МПа (10.33) 751,000 615,000 537,000 519,000
т,ММ 2,000* 2,000
ZE (10.19) 123,000 123,000
Z, (10.17) 27 ,000 27,000
Z2 (10.17) 96,000 96,000
(10.45) 28,000
Zv!
(10.45) 101,000
Zv2
Y FS1 (10.44) 3,940
Y FS2 (10.44) 3,600
Y (10.43) 0,897
Р..х, мм (10.29) 35,200
(10.28) 1,130
e
(10.47) 0,586
ар 1, МПа (10.43) 158,000
аръ МПа (10.43) 145,000
* Первоначально заданные значеюш.
Сопоставляя действующие контактные (311 == 519 МПа и изrnбные ап =
= 158 МПа, cr F2 == 145 МПа напряжения с допускаемыми [а]н == 593 МПа, [СУ]Е 1 ==
= 376 МПа, [а]п == 253 МПа, видим, что первые меньше. Следовательно, KOH
тактная и изrибная 13ыноеJШВОСТИ обеспечены.
5. Подста13ЛЯЯ значения делительных диаметров d, == 54,35 мм, d 2 == 195,65 мм
в формулы (10.4), (10.5), вычисляем диаметры окружностей вершин d aj ==
== 58,35 мм, d a2 == 199,65 мм и впадин dfl == 49,35 мм, df2 == 190,65 МJ\.1 зубьев.
6. Для окружной составляющей силы F, == Р'2 == Р'l == 5111 Н по формула
(10.52) (10.53) вычисляем радиальную Р Л == FRI == F ю ==1890 Н и осе13УЮ Р А
== Р А1 Р А2 == 925 Н составляющие силы, действующей в зацеплении.
2 8640
33
10.1.10. Общие сведения о планетарllЫХ передачах
Планетарными называются передачи, имеющие колеса с пе
ремещающимися осями (рис. 10.15). Движение этих колес 1, Ha
зываемых сателлитами, подобно движению планет вокрут Солн
ца. Звено 2, на котором установлены опоры сателлитов, Ha
зывают RОДИЛОМ. В планетарной передаче обычно имеется три
соосных вала, один из которых закреплен неподвижно. ЦeH
тральные колеса 3 и 4 называют соответственно солнечным и
ЭПlЩиклом.
"'"
ПС те
Рис. 10.15. Планетарная передача:
J сателлит; 2 водило; 3 солнечное колесо; 4 ЭПИЦИЮI
Число сателлитов i CaT может составлять от 3 до 6.
Оценим передаточное число и == п с /п в рассматриваемой пла
нетарной передачи, rде п с , п в частоты вращения солнечноrо
колеса и водила. Пусть известны диаметры солнечноrо колеса d c
и эпицикла d эп (естественно, что диаметры сателлита и води
ла при этом d CaT == (d эп d c )/2, d n == (d эп + d c )/2). еолнечное
колесо имеет линейную окружную скорость V, пропорцио
нальную частоте врашения колеса п с и ero диаметру d c : V ==
== ndcп c / (60.1000). Если отсутствует проскальзывание, то эту же
линейную скорость имеет сателлит в точке с: Vc == V. Учиты
вая, что эпицикл неподвижен, линейная скорость сателлита в
точке А равна О. Поэтому линейная скорость водила на диамет
ре d B равна линейной скорости сателлита в точке В: vB == v/2. OT
сюда
34
u п с (60. 1000) v / nd с == 2 d в == 1 + d эп .
п в (60 . 1000) v В / nd в d с d с
(10.54)
Вычислим окружные силы, возникающие в передаче. Поте
рями в передаче пренебреraем. К солнечному колесу (рис. 10.16)
подводится вращающий момент ТС, Если число сателлитов i cap
то окружная сила F в контакте солнечноrо колеса с каждым из
сателлитов составит
F == Тс
0,5d c i caT
(10.55)
Каждый сателлит совершает равномерное вращение. Поэто
му сумма моментов сил, действующих на Hero со стороны сол
нечноrо колеса, эпицикла и водила, относительно любой точки
должна быть равна нулю. Отсюда окружная сила в контакте ca
теллита с эпициклом F эп == F и в контакте сателлита сводилом
F B == 2F. Вращающий момент на водиле равен
ТВ == 2Fi caT 0,5d B . (10.56)
Если в передаче вращались бы все три вала, то механизм Ha
зывали бы дифференциалом. Используют такой механизм
обычно для сложения и разложения движений.
-тв
те
Рис. 10.16. Окружные силы в планетарной передаче
2*
15
10.1.11. Зубчатые планетарные передачи
Если в планетарной передаче колеса (солнечное колесо,
эпицикл и сателлиты) зубчатые, то планетарная передача назы
вается зубчатой. Для передачи, изображенной на рис. 10.15, пе..
редаточное число составляет
п d z
и= =1+ =1+
п в d c Zc '
(10.57)
[де ZЭП' Zc число зубьев эпицикла и солнечноrо колеса.
Расчет передач ведут на контактную и изrибную выносливо
сти по формулам, приведенным в 10.1.7, 10.1.8. При этом силу
Е, вычисленную по выражению (10.34), необходимо умножить
на коэффициент ko. Если в конструкции передачи не преду
смотрено устранение избыточных связей путем обеспечения
плавания одноrо из колес, то принимают ko == 2, если же избы..
точные связи устранены, то считают ko == 1, 15...1 ,2.
Число зубьев колес должно удовлетворять следующим усло..
виям:
соосности
ZcaT == 0,5 (ZЭП Zc),
(10.58)
собираемости
(ZЭП + Zc)/i caT == целое число,
(10.59)
соседства
ZcaT + 2 < (ZЭП + zc)п/i caT '
(10.60)
[де ZcaT число зубьев сателлита.
Сочетание мноrопоточности с рациональным использова
нием BHYTpeHHero зацепления, обладающеrо, как известно,
большей прочностью по сравнению с внешним зацеплением,
ведет к снижению rабаритных размеров и массы зубчатых nла
нетарных передач по сравнению с обычными зубчатыми переда
чами. Повышенная плавность внутреннето зацепления, замыка
ние сил в механизме и как следствие передача меньших сил на
корпус делают планетарную передачу менее шумной по cpaBHe
нию с обычной.
36
10.1.12. Оформление чертежа зубчатоrо колеса
Чертеж (рабочий) зубчатоrо колеса (рис. 10.17) обычно
представляют в одной проекции с приведением вида на OTBep
стие со шпоночным пазом. В правом верхнем уrлу чертежа, OT
ступив от ero верхней кромки 20 мм, размещают таблицу шири
ной 110 мм, в которой приводят данные, необходимые: 1) для
нарезания колеса; 2) для контроля (заполняют обычно на заво
де изrотовителе); 3) как справочные.
ь
х
МоiJуль
'IUCI!O зуЕЬеВ
УZОЛ ноклона
Нопро8ление лиНЩj зуоа
НОРМОЛЬНbli!
ucxoiJHbIil контур
Коэффициент смещеНlIЯ
Степень точности
т
z
j3
{ОСТ
IJ755 81
Де;штельныiJ оиаметр
оtJозночение l/ертежа
сопряжеННО20 колеса
d
Рис. 10.17. Оформление чертежа зубчатоrо колеса
Кроме Toro, на чертеже следует указывать размеры OTBep
СТИЯ и шпоночноrо паза, требования по шероховатости, допус
}(и на размеры, а также допуски на отклонения формы и распо
Ложения поверхностей. Над основной надписью чертежа приво
дят информацию о твердости детали, а в основной надписи по
мещают сведения о материале.
37
10.1.13. Волновые передачи
Волновая передача механизм, в котором движение между
звеньями передается перемещением волны деформаций rибкоrо
колеса.
Мноrопарность зацепления (в зацеплении находится до 40 %
всех зубьев) определяет положительные качества этой передачи:
компактность, малую массу, высокую кинематическую точ
ность, малый шум.
Чтобы понять принцип работы, рассмотрим сначала фрик
ционную волновую передачу (рис. 10.18), состоящую из rибко
[о rладкоrо кол са 1 диаметром d l , жесткоrо rладкоrо колеса 2
диаметром d 2 , большим диаметра d l на величину 2wo, и [eHepa
тора волн 3, обеспечивающеrо
путем радиальноrо деформиро
вания rибкоrо колеса на вели
чину Wo плотный контакт rиб
Koro и жесткоrо колес в двух
диаметрально противополож
ных точках. Пусть жесткое коле
со закреплено, а rибкое приво
дится во вращение reHepaTopoM
волн. При вращении [енератора
две волны деформации беrут по
окружности rибкоrо колеса.
Поэтому изображенный на ри
Рис. 10.18. Фрикционная волновая
передача: сунке reHepaTop волн называют
J rибкое колесо; 2 жесткое колесо; двухволновым (также встреча
3 rеператор волн ются трехволновые [eHepaTO
ры). За один оборот reHepaTopa
волн (при отсутствии проскальзывания в точках контакта меж
ду жестким и rибким колесами) rибкое колесо поворачивается
на уrол 'У, определяемый разностью длин окружностей жесткоrо
и rибкоrо колес: 'У == 2п(d 2 d l )/ d l == 4пwo/ d 1, в направлении,
противоположном вращению [енератора волн, и не зависит от
числа волн деформации, создаваемых [енератором. Тоrда пере
даточное число передачи составит
2 п d l
и .
'У 2wo
2
1
d 1
3
Так как напряжения в rибком колесе пропорциональны Wo, из
формулы следует, что минимально возможное передаточное чис
ло волновой передачи определяется прочностью rибкоrо колеса.
38
Зубчатая волновая передача отличается от фрикционной
тем, что d l и d 2 это диаметры не rладких, а делительных OK
ружностей зубчатых колес. В такой передаче число зубьев у rиб
Koro колеса меньше, чем у жесткоrо обычно на пwK z , [де nw
число волн; Kz коэффициент кратности зубьев (целое число).
Поэтому радиальная деформация rибкоrо колеса равна
Wo ==0,5(d 2 dl)<=;:0,5т(Z2 ZI)=0,5тпwKz'
Из формулы следует, что при двухволновом [енераторе волн
(п w == 2) минимально возможная деформация (при Kz == 1) co
ставляет Wo == т. Минимально возможная деформация опреде..
ляет максимально возможное передаточное число передачи
И таХ ' При минимальных значениях т == 0,2...0,15 мм, применяе
мых в волновых передачах, и тах == 300.
На рис. 10.19, а представлена кинематическая схема волно..
вой зубчатой передачи, состоящей из выполненноrо в виде TOH
KocTeHHoro цилиндра и соединенноrо с тихоходным валом rиб
Koro колеса с числом внешних зубьев Zl, жесткоrо колеса с
числом внутренних зубьев Z2, соединенных с корпусом, и ДBYX
волновоrо [енератора волн. reHepaTop волн делает форму венца
rибкоrо колеса овальной. Это влечет зацепление зубьев жесткоrо
и rибкоrо колес только в двух противоположных точках. Так как
число зубьев rибкоrо колеса меньше числа зубьев жесткоrо коле
са, то один оборот [енератора волн вызывает смещение первоrо
относительно BToporo на (Z2 ZI) зубьев. Причем это смещение
всеrда противоположно направлению вращения [енератора волн.
Поэтому [енератор волн и тихоходный вал вращаются в разные
стороны и передаточное число передачи составляет
22
21 Z2 z; 22
21
z,
Z2
П r
пr
а
о
8
Рис. 10.19. Кинематические схемы волновых зубчатых передач
39
п r d l тZl
и
п т 2wO 2. 0,5т(Z2 Zl)
Zl
Z 2 Zl
rде пр п т частота вращения [енератора волн и тихоходноrо ва
ла соответственно.
На рис. 10.19, б изображена кинематическая схема волновой
зубчатой передачи, отличающаяся от ранее рассмотренной тем,
что rибкое колесо соединено с корпусом, а жесткое с тихоход
ным валом. В этом случае направления вращения [енератора
волн и тихоходноrо вала совпадают, а передаточное число BЫ
числяют по той же формуле.
На рис. 10.19,6 представлена кинематическая схема волновой
зубч той передачи с коротким rибким колесом, представляющим
собои кольцо с двумя зубчатыми венцами с числом зубьев Zl и zi.
Венец с числом зубьев ZI зацепляется с жестким колесом, имею
щим число зубьев Z2 и соединенным с корпусом, а венец с чис
лом зубьев zi с жестким колесом, имеющим число зубьев Z2 и
соединенным с тихоходным валом. Первая ступень этой переда
чи (колеса ZI и Z2) работает как обычная волновая передача. Если
передаточное число второй ступени равно единице (zi == Z2)' то
передаточное число двух ступеней вычисляют по приведенной
выше формуле. Если же передаточное число второй ступени cдe
лать отличным от единицы, то передаточное число двух ступеней
в общем случае составит
и = Zl Z2
, .
Z1 Z 2 ZiZ2
Направления вращения [енератора волн и тихоходноrо вала
MorYT совпадать или быть противоположными в зависимости от
сочетаний чисел зубьев Z2, Z2, Zl, Zi.
Отдел технолоrическоrо оборудования АвтоВАЗа выпускает
волновые передачи с коротким rибким колесом, в которых Z ==
== zi == Z2, с передаточными числами 80, 100 и 160 и моментом l на
выходе до 290 Н . м.
Передаточные числа и КПД волновых передач, выполнен
ных по приведенным на рис. 10.19, а и бсхемам, составляют co
ответственно и == 80...300 и 11 == 0,8...0,9, а передач, схема KOTO
рых показана на рис. 10.19, 6, и == 80...6000 и 11 == 0,5...0,7.
Расчет волновых зубчатых передач можно проводить по Ha
пряжениям смятия
40
[ ] > тк
а см ,
d l 'v d
rде т вращающий момент на тихоходном валу; К коэффи
uиент, зависящий от режима работы передачи и равный 1 при
спокойной наrpузке (Тшах/Т < 1,2), 1,25 при умеренной ди
намической наrрузке (Т шах/ т < 1,6), 1, 75 при резко дина
мической наrрузке ('Тr.пах/ т < 2,5); d 1 диаметр делительной
окружности rибкоrо зубчатоrо колеса; 'Vd коэффициент ши
рины зубчатоrо венца, 'l'd::::: b/d l == 0,18...0,20.
Приближенно [cr]CM можно принимать равным 10...20 МПа
для стальных колес, 3...15 МПа для пластмассовых колес. При
малых скоростях вращения reHepaTopa волн эти значения Moryт
возрастать в 5 1 О раз.
Подробнее о расчете и конструировании волновых передач
можно прочитать в изданиях, приведенных в списке литературы.
10.2. Зубчатые конические передачи
10.2.1. Общие сведения
Зубья конических зубчатых колес получают обкатыванием
по плоскому колесу аналоrично зубьям цилиндрических колес,
которые образуются обкатыванием по рейке. Вместо начальных
и делительных окружностей у них рассматривают начальные и
делительные конусы, а в качестве TopuoBoro сечения сечение
поверхностью внешнеrо или среднеrо дополнительноrо конуса.
Делительные и начальные конусы, как правило, совпадают, так
как в этих передачах применяется танrенциальная, а не уrловая
коррекция. Танrенциальная коррекция заключается в утолще
нии зуба шестерни при соответственном утонении зуба колеса.
Коническая передача не требует специальноrо инструмента, так
как ее получают блаrодаря разведению резцов, обрабатывающих
противоположные стороны зубьев. .
Основные rеометрические параметры ортоrональной (оси
шестерни и колеса образуют между собой уrол 900) конической
зубчатой передачи представлены на рис. 10.20. Здесь R m и Re
среднее и внешнее конусные расстояния; d т1 , d e1 , d т2 , d e2 co
ответственно средний и внешний делительные диаметры шес
терни и колеса; d ae1 , d ae2 внешние диаметры вершин зубьев
шестерни и колеса; Ь ширина зубчатоrо венца (обычно Ь
41
0,285 Re); 01, 02 уrлы делительных конусов шестерни и коле
са (02 == 900 (1)'
K- -
\,
d oez
d e2
Рис. 10.20. Коническая передача
Передаточное число конической передачи зависит от уrла
делительноrо конуса шестерни (колеса):
u == d e2 / d el == ctg 01 == tg 02'
Так как 01 и 02 уrлы, учитываемые при изrотовлении, то их
вычисляют с высокой точностью (до четвертоrо знака после за
пятой). С той же точностью следует определять и, и поэтому при
последующих расчетах rеометрии конических колес значение и
не окруrляют.
42
Основное распространение получили конические колеса с
прямыми ([ОСТ 19624 74) и круrовыми (rOCT 19326 73) зубь
яМИ. Конические колеса с прямыми зубьями обычно применя
ЮТ при невысоких окружных скоростях (до 8 м/с). При более
высоких скоростях целесообразно использовать зубчатые коле
са с круrовыми зубьями, так как они обеспечивают более плав
ное зацепление, меньший шум, хорошо прирабатываются
вследствие точечноrо контакта и HaMHoro прочнее.
В связи с переменной высотой зуба модуль зацепления из
меняется по длине зуба.
[еометрия KpyroBbIx зубьев конических колес характеризует
ся уrлом наклона линии зуба, который по дЛине зуба уменьша
ется к внутреннему торцу колеса. При расчете rеометрических
параметров ориентируются на средний уrол наклона линии зуба
Р т , соответствующий середине ширины зубчатоrо венца Ь.
Обычно Р т == 350.
Чтобы обеспечить достаточную площадь пятна контакта, в
передаче реrулируют осевые положения колес до совпадения
вершин начальных конусов шестерни и колеса.
[ОСТ 19326 73 реrламентирует три основные формы KO
нусности зуба.
1. Пропорционально понижающаяся осевая форма зуба
(рис. 10.21, а). Она характеризуется совпадением вершины дe
лительноrо конуса и конуса впадин зубьев. Образующая конуса
вершин зубьев проходит параллельно образующей конуса впа
дин зубьев сопряженноrо колеса, блаrодаря чему обеспечивает
ся постоянство радиальноrо зазора на всей длине зуба. Это по
зволяет увеличить радиус закруrления у корня зуба и повысить
ero изrибную прочность. Такая форма зуба применяется для
прямозубых колес, а также
для колес с кр уrовыми зубь
ями при ZE = J z? + z1 25.
2. Понижающаяся осевая
форма зуба (рис. 10.21, 6).
Она находит преимущест
венное распространение для
конических колес с KpYТO
Выми зубьями. При такой форме зуба вершины делительноrо
Конуса и конуса впадин зубьев не совпадают, что создает воз
Можность обеспечения одинаковой ширины впадин на всей дли
Не зуба. Эта особенность формы зуба способствует повышению
Производительности при нарезании колес, так как позволяет oд
AA
/' ,
,#' . h: .
L 'n ' . _
а
о
IJ
Рис. 10.21. Формы зубьев
конических колес
43
ним инструментом (наборной фрезой) обрабатывать сразу ДВе
поверхности зубьев.
3. РавНО6blСОКQЯ осевая форма зуба (рис. 10.21, в). Отличи
тельной особенностью этой формы является то, что образующие
делительноrо конуса, конусов вершин и впадин зубьев парал
лельны. Равновысокие зубья имеют оrpаниченное применение,
их нарезают в колесах с крyrовыми зубьями при ZL 100.
Про фили зубьев конических колес близки к профилям вооб
ражаемых эквивалентных цилиндрических колес с диаметрами
делительных окружностей d v1 и d v2 ' Радиусы этих окружностей
равны длинам образующих средних дополнительных конусов
(см. рис. 10.20). Расчеты контактной и изrибной выносливости
зубьев конических колес заменяют соответствующими расчета
ми для зубьев эквивалентных цилиндрических зубчатых колес
(см. 10.1.7 и 10.1.8). При этом расчетную наrрузку принимают
равной силе, отнесенной к средней по ширине венца делитель..
ной окружности конических колес, но вводят установленный
опытным путем коэффициент понижения несущей способности
конической передачи по сравнению с эквивалентной цилинд"
рической. Обычно этот коэффициент принимают равным 0,85.
Одной из причин несколько меньшей несущей способности
зубьев конической передачи по сравнению с зубьями эквива
лентной цилиндрической передачи является стремление при pe
rулировании пятна контакта конических колес сместить ero к
вершине делительноrо конуса относительно середины ширины
зуба. Такое смещение увеличивает окружную силу, действую..
щую в зацеплении.
Подробнее о расчетах выносливости конических передач
можно про читать в изданиях, приведенных в списке литературы.
10.2.2. Силы, действующие в зацеплении
При необходимости указания направлений сил на расчетной
схеме удобно условно раздвинуть валы шестерни и колеса. В за..
цеплении возникают следующие силы (рис. 10.22):
1) окружные на шестерне l и на колесе F t2 , равные по
модулю и противоположные по направлению,
211
1 = Ft2 = ;
d wl
2) радиальная на шестерне F Rl и осевая на колесе F A2 , paB
ные по модулю и противоположные по направлению;
44
xh
I fЯ:2 А fi1
4 1.41
Fr<1
П 1
А
15
A A
Б Б
ifl
4 I
а
!jz xh
I fR2 Ft1
1.41
ftz
Fя1
П1
tr
B B
r r fi, siп01
Fasiп fu о;
01
4 fit.cosJ 1 fi, о;
б
Рис. 10.22. Силы, действующие в конической передаче:
а прnмозубой; б с круroвым зубом
3) осевая на шестерне Р А 1 и радиальная на колесе F Я2, paB
ные по модулю и противоположные по направлению.
еила 1' приложенная от зуба колеса к зубу шестерни, соз
дает момент сопротивления вращению шестерни. Направление
Подводимоrо к шестерне МОМЩ:IТа Т l совпадает с направлением
45
вращения шестерни. еила Ft1 создает момент, действующий в
обратном направлении. Наоборот, сила Ft2, прикладываемая от
зуба шестерни к зубу колеса, является движущей.
В прямозубой конической передаче (см. рис. 10.22, а) наряду
с составляющей Ft1 возникает раздвиrающая колеса сила Fv
(см. сечение A A), равная
Fv == Ft1 tg сх ,
rде сх == 200 уrол зацепления.
Радиальная и осевая составляющие силы Fv, возникающей в
зацеплении (см. сечение Б Б), соответственно равны
Е Я1 == Fv cos 01 == Ftl tg сх cos 01;
Р Аl == Fv s in ь 1 == Ен tg сх sin ь 1 .
в конической передаче с крyroвыми зубьями (см. рис. 10.22, 6)
в плоскости, касательной к поверхности делительноrо конуса,
вследствие наклона зуба на уrол Р т действует составляющая F N
силы в зацеплении, которая в этой плоскости раскладывается на
1 и F и :
F N :::::: Ft1 / cos f3 т ;
, == Ft1 tg f3 т'
Наряду с F N возникает раздвиrающая колеса сила Fv (см. ce
чение B В), равная
Fv == F N tg сх п == Ftl tg сх п / cos f3 т ,
rде СХ п == 200 уrол зацепления в нормальном сечении зуба.
Разность составляющих FvCOSb 1 и F u sinb 1 сил Fv и ,(CM. ce
чение r r) есть радиальная реакция Р я1 , а сумма составляю
щих Fv sin 81 и Ри cos 81 этих сил осевая реакция Е А1 :
F Р . F tl (tgCX n cos8 1 sinp т sin( 1 ) .
F R1 == vCOS u l u slnul == ,
cos Р т
F F . F Ft1 (tgcx n sin8 1 + sinf3 т cos( 1 )
Аl == v Sln ul + u cos иl == .
cos f3 т
46
Направление осевой составляющей Р Аl к вершине конуса
нежелательно в связи с возможностью заклинивания передачи
при значительных осевых зазорах в подшипниках. еоставляю
щая Е Аl будет направлена от вершины делительноrо конуса,
коrда направление вращения шестерни (если смотреть на нее со
стороны вершины конуса) и ее зуба будут одинаковыми (как
изображено на рис. 10.22, 6).
Следует отметить, что за рубежом, например на фирме SEW
(fермания), начато производство конических редукторов, в KO
торых В процесс е эксплуатации не предусмотрена реrулировка
подшипников и конической передачи. Следовательно, в этих
редукторах со временем возрастут зазоры в подшипниках. По
этому высказанное выше замечание о направлении осевой co
ставляющей Р А1 прежде Bcero относится к таким редукторам.
10.3. Червячные передачи
10.3.1. Общие еведеllИЯ
Червячная передача состоит (рис. 10.23, а) из червяка, т. е.
винта с трапецеидальной ШIИ близкой к ней резьбой, и червяч
Horo колеса зубчатоrо колеса с зубьями особой формы, полу
чаемой в результате их оrибания витками червяка.
Червяки, в большинстве случаев, изrотавливаlOТ с правым
(как изображено на рис. 10.23, а) направлением линии заходов
(витков) червяка. [оет 2144 76 рекомендует число заходов
червяка ZI' равное 1, 2 или 4. Для специальных видов передач
возможно Zl == 3...8.
Число зубьев колеса Z2 в стандартных редукторах изменяется
от 31 до 84. В нестандартных передачах этот диапазон шире: Z2 ==
== 26...125 (до 1000). Если передача не силовая, то минимальное
число зубьев может быть снижено до 17.
Передаточное число червячной передачи можно установить
Из следующих соображений: за один оборот червяка колесо по
Ворачивается на число зубьев, равное числу заходов червяка;
Чтобы колесо повернулось на один оборот, необходимо Z2/ Z 1
оборотов червяка, а если колесо делает в минуту п2 оборотов, то
Червяку необходимо сделать за это же время пl == п2 Z2/ ZI оборо
Тов. Отсюда
и == пl/ п 2 == Z2/ Z 1'
(10.61)
47
р А
(
П1
t A
а
2
о
8
3
Рис. 10.23. Червячная передача (а) и типы червяков (б 2)
Таким образом, передаточное число определяется отноше
нием числа зубьев колеса к числу заходов червяка и не зависит
от соотношения диаметров колеса и червяка.
Передачу отличает возможность получения большоrо пере
даточноrо числа при малых rабаритных размерах, плавность и
бесшумность работы, возможность обеспечения самоторможе
НИЯ. Вместе с тем она имеет низкий кпд (0,6...0,9) и требует
применения для колес дороrих антифрикционных материалов.
10.3.2. rеометрические параметры червяка
Червячные колеса изrотавливают инструментом, имеющим
форму и размеры червяка (кроме высоты rоловки зуба, которая
больше на 0,2т rоловки зуба червяка, [де т осевой модуль).
Поэтому, чтобы стандартизировать инструмент, стандартизи
руют параметры, определяющие делительный диаметр d l червя
48
ка: осевой модуль т и коэффициент диаметра червяка q, связан
I-Iые с d 1 соотношением
d l == тq.
(10.62)
Отметим, что в червячных передачах, [де одна начальная OK
ружность не катится, а проскальзывает по дрyrой, использовав..
шаяся ранее для вычисления делительноrо диаметра шестерни
цилиндрической зубчатой передачи формула d 1 == тZl неправо
мерна, так как величина тZ 1 является кратной осевому шаry Р,
НО не диаметральным размерам. Поэтому для вычисления дели
тельноrо диаметра червяка ввели новый параметр q.
Стандартными служат (rOeT 2144 76*) следующие значе
иия параметров:
т, мм: 1,6; 2; 2,5; (3); 3,15; (3,5); 4; 5; (6); 6,3; (7); 8; 10; (12);
12,5; (14); 16; 20;
q: 8; 10; (12); 12,5; 14; 16; 20.
Здесь без скобок приведены предпочтительные значения па
раметров.
Различают два вида рабочих поверхностей червяков: линей..
чатые, получаемые винтовым движением прямой линии, и He
линейчатые, образуемые винтовым движением любой заданной
кривой.
Линейчатые червяки в зависимости от профиля витков в
плоскости, перпендикулярной оси червяка, подразделяются на
архимедовЫ 7 эвольвентные и конволютные. [оет 18498 73 YCTa
навливает следующие условные обозначения для этих червяков:
z4 архимедов червяк (рис. 10.23, 6), представляющий со..
бой винт с трапецеидальной резьбой, у KOToporo в осевом сече
нии профиль зуба прямолинеен, а yrол профиля равен 200. Teo
ретически торцовый профиль витков червяка представляет
собой архимедову спираль, поэтому ero зубья обычно не шли
Фуют, так как для этоrо нужен специальный про филь шлифо
вальноrо Kpyra. Такой червяк, как правило, не закаливают, он
имеет низкую твердость. Для Hero характерен невысокий кпд
передачи. Применяют ero в тихоходных передачах при индиви
дуальном и мелкосерийном производстве;
ZI эвольвентный червяк (рис. 10.23, в). Ero теоретический
Торцовый про филь витков очерчивается эвольвентой;
ZN конволютный червяк (рис. 10.23,2). Ero теоретический
торцовый про филь витков является УдЛиненной или укорочен..
Ной эвольвентой. В зависимости от Toro, в какой плоскости
49
al == d 1 + 2т; (10.64) h
I
* (10.65)
d /1 == d l 2h f1 т; х
ы 1 (14 + 0,lZ2)m, (10.66)
конвоЛЮтные червяки имеют прямолинейный профиль, преду
сматриваются три их вида: ZN 1 , ZN 2 , ZN з (например, червяк
ZN l имеет прямолинейный профиль витка в плоскости, HOp
мальной к винтовой линии и равноотстоящей от боковых по
верхностей впадин).
Нелинейчатые червяки имеют нелинейчатую винтовую По
верхность. Червяки ZK 1 , ZK 2 , ZK3 образуются инструментом KO
нической формы, а червяки ZT l и ZT 2 инструментом торои
даль ной формы. Червяки zr, обычно имеющие воrнутую форму
зуба, повышают на 20...40 % несущую способность передачи
вследствие увеличенноrо пятна контакта с зубьями червячноrо
колеса.
Число заходов червяка ZI для червячных редукторов peKO
мендуется назначать в зависимости от передаточноrо числа: при
8 < и 14 ZI == 4, при 14 < u 30 ZI == 2 и при u > 30 ZI == 1.
Уrол подъема 'У линии витка червяка на делительном цилин
дре определяют из соотношения
PZ 1 nmZl ZI
tg'Y== == == .
nd 1 nmq q
(10.63)
Диаметры вершин d al и впадин d/ 1 витков червяка, а также
длину ero нарезанной части ы 1 находят из выражений
*
rде h f1 == 1,2 для архимедовых, конволютных и нели ейчатых
*
червяков и h f1 == 1 + 0,2 cos 'У для эвольвентных червяков.
При контроле изrотовления червяка обычно измеряют дели
тельную толщину по хорде витка
Sa 1 == О, 5пт cos "(
(10.67)
и высоту до хорды витка
50
( S . 2 J
аl Sln "{
h a1 == т + 0,5S а1 tg 0,5 arcsin d l .
(10.68)
10.3.3. Параметры червячной передачи и червячноrо колеса
В передачах без смещения червяка межосевое расстояние о
равно (рис. 10.24, а) полусумме делительных диаметров червя
ка d l и колеса d 2 :
а == 0,5(d} + d 2 ) == 0,5m(q + Z2)'
[де
d 2 == тZ2'
(10.69)
в передачах со смещением червяка межосевое расстояние 0w
учитывает коэффициент х смещения червяка (и инструмента
при нарезании колеса):
a w == а + тх == 0,5m(q + Z2 + 2х). (10.70)
Смещение обычно вводят с целью вписывания передачи в за
данное межосевое расстояние и х оrраничивают пределами :t 1.
а
о
Рис. 10.24. Параметры чсрвячных передач:
а rеометрические; б силовые
Формулы для вычисления начальноrо диаметра d wl червяка,
диаметров вершин d a2 , впадин d f2 и начальноrо d v2 зубьев коле
51
са, а также уrла подъема Yw лиНии витка на начальном цилинд
ре червяка и хода Pzl ero витка имеют вид
d w1 == т (q + 2х);
d a2 == т(Z2 + 2 + 2х);
d f2 ::: т(Z2 2hjl + 2х);
(10.71)
(10.72)
(10.73)
d w2 == d 2 ;
tgyw ::: ;
q+2x
(10.74)
(10.75)
PZl == птz1,
*
[де значения h [1 сохраняются теми же, что и в формуле (10.65).
Наибольший диаметр d a2M , ширину Ь 2 и радиус R выемки
поверхности вершин зубьев червячноrо колеса вычисляют по
формулам
d < d 6т.
а2М a2+ ,
ZI +2
(10.76)
Ь 2 0,75d a1
(10.77)
при ZI == 1; 2 и
Ь 2 0,67 d a1
(10.78)
при ZI === 4;
*
R ::: 0,5d 1 (h a + х)т.
10.3.4. кпд передачи и силы в зацеплении
Передача работает с большим проскальзыванием рабочих
поверхностей зубьев колеса относительно витков червяка. На
рис. 10.23, а в координатах х, у, Z через вектор V CK обозначена
скорость скольжения. Она определяется линейной скоростью
червяка v v1 (м/с) на ero начальном цилиндре, равной
nd w1 пl
V w l 60.1000 ' (10.79)
52
11 yrлом подъема 'Yw линии витка червяка на этом цилиндре:
V w l
V CK =
cos 'у w
(10.80)
в свою очередь, V CK существенно влияет на КПД передачи.
Как и для резьбовых соединений,
tg 'у w
11= ,
tg ( 'У w + ер')
(10.81)
rде 'Р' приведенный уrол трения.
Приведенный уrол трения зависит от материалов контакти
рующей пары и скорости скольжения. Для стальноrо закален
HOro червяка и колеса из оловянистой бронзы при изменении
V CK от 0,01 до 5 м/с qf уменьшается от 50 43' до 1009'. Для неза
каленноrо стальноrо червяка и колеса из ceporo чуryна при YBe
личении скорости V CK от 0,01 до 1,5 м/с 'Р' уменьшается от
11 о 29' до 30 43'.
Чтобы поднять КПД, необходимо увеличивать 'Yw' уменьшая
q либо увеличивая Zl, и уменьшать <р' путем применения более
качественных антифрикционных материалов. Наоборот, дос..
тиrнуть самоторможения в передаче можно, увеличивая q и
уменьшая Z 1 .
Направление составляющих силы в зацеплении удобно YKa
зывать, условно раздвинув оси червяка и червячноrо колеса. На
рис. 10.24, б изображен червяк с правым направлением линии
Витка. Если к нему подводится момент Тl' вращающий червяк
против часовой стрелки, то витки червяка будут заставлять вра..
щаться червячное колесо также против часовой стрелки. Чер
Вячное колесо создает сопротивление вращению червяка. По
этому окружная составляющая Ft1 силы, приложенная от колеса
к червяку, направлена против направления вращения червяка.
Ей равна по модулю и противоположна по направлению (по
третьему закону Ньютона) прикладываемая к червячному коле..
су от червяка осевая составляющая Е А2 силы.
Червячное колесо заставляет вращаться окружная состав..
ляющая Еа силы. еледовательно, ее направление совпадает с
направлением вращения. еоставляющая Е А1 , действующая на
червяк, равна по модулю и противоположна Еа.
53
Радиальные составляющие F Rl и F R2 равны и противопо
ложны одна друrой.
Таким образом,
2Т 2 .
Pп PAl '
d w2
(10.82)
2Tl 2Т 2
F tl :::::ЕА2 ::::: ::::: ;
d wl d wl u 11
(10.83)
Ею ::::: F R2 ::::: F t2 tga::::: F t2 tg200.
(10.84)
10.3.5. Расчеты на ВЫносливость
и допускаемые llaпряжения
Основными причинами выхода из строя червячных передач
являются износ, заедание или поверхностное разрушение зубь
ев червячноrо колеса и реже излом зуба червячноrо колеса по
ero корню. В соответствии с этими видами возможных отказов
считается, что передача работоспособна, если обеспечена KOH
тактная и изrибная выносливость зубьев червячноrо колеса.
Контактную ВЫНосливость оценивают так же, как и для цилин
дрических зубчатых колес, по формуле [ерца для линейноrо
контакта
Ш 'В
а н ==0418
, /R '
(10.85)
rде а Н контактное напряжение, МПа; F нормальная си
2Е 1 Е 2
ла, Н; Е::::: (Е l + Е 2 ) приведенный модуль упруrости, МПа;
Еl' Е 2 модули упруrости материалов червяка и венца колеса;
/ длина линии контакта, мм; R ::::: PIP2 приведенный pa
(Рl + Р2)
диус кривизны, мм; Pl, Р2 радиусы кривизны витка червяка и
зуба Колеса.
Для червячной передачи в формулу (10.85) подставляют
/ :::::: 1,3d w1 ' Рl :::::: 00 (предполаrается, что червяк архимедов),
0,5d 2 sin20° kF t2
Р2 == 2 ' F "'" 200 , [де k коэффициент Ha
cos 'у w cos cos 'у w
54
rpузки, который учитывает как неравномерность распределения
наrpузкИ по длине контактной линии и зависит от деформации
qервяка, так и внyrpеннюю динамическую наrрузку, возникаю
щую из за изменения боковоrо зазора в передаче по уrлу пово
рота колеса и зависящую от скорости и степени точности пере
дачи.
Расчеты зубьев на выносливость при изrибе для червячных
колес менее актуальны, чем дЛЯ зубьев цилиндрических зубча
Tыx колес в связи с более приспособленной у них к восприятию
изrибающей наrрузки формой зуба. Расчетная формула подобна
формуле для цилиндрических колес и имеет вид
kF t2 Y F COS)' И'
(j F ::::: ,
lm
[де У коэффициент, учитывающий форму зуба и зависящий от
F Z2
эквивалентноrо числа зубьев червячноrо колеса Zv = 3
COS 'у w
Значения Y F в зависимости от Zv приведены ниже:
уЕ..... 1,85 1,80 1,76 1,64 1,55 1,48 1,45 1,40 1,34 1,30 1,27 1,24
Zv..... 26 28 30 35 40 45 50 60 80 100 150 300
в случае возникновения в передаче пиковых наrрузок про
водят проверку контактной прочности рабочей поверхности зу
ба червячноrо колеса (см. прило:жение П.I0.2).
Червяки в силовых червячных передачах, как правило, BЫ
полняют из сталей, термически обработанных до значительнои
твердости. Наилучшую стойкость передач обеспечивают червя
ки из цементуемых сталей, имеющих твердость после закалки
56...63 НRС э . Рабочую поверхность червяков обычно шлифуют,
а иноrда полируют. Улучшенные червяки, вместо закаленных,
применяют лишь при оrpаниченных технолоrических возмож
Ностях.
Венцы червячных колес при скорости скольжения более
5 м/с изrотавливают из оловянистых бронз. Если скорость
СКольжения ниже 5 м/с, то можно применять алюминиево же
лезистые безоловянистые бронзы, при скорости скольжения
НИЖе 2 м/с допустимо использовать серые чуrуны марок еч 15,
СЧ20.
55
Для червячных колес применяют также неметаллические
материалы, такие, как текстолит, капрон, капролон В, дpeBec
но слоистый пластик ДСП Т, полиамидная смола П 68.
Допускаемые напряжения по контактной [а]н и изrибной
[O]F выносливости вычисляют по эмпирическим формулам в
зависимости от материала венца червячноrо колеса. Так, для
колеса из оловянистой бронзы
[О]н "'"" (0,75.. .0,9)0- в (1,33 0,066v ск)(10 7 / N к)I/8; (10.86)
из алюминиево железистой бронзы
[а] Н"'"" (275...300) 25v CK ;
(10.87)
из чуrуна
[а]н"'"" (175...200) 35v cK ;
(10.88)
из неметаллических материалов
[О]н Z 200;
из оловянистой или из алюминиево железистой бронзы
[о] == (0,440 т +0,140 B )(10 6 /N K )I/9
F 175
,
из чуrуна
[cr]F== 0,2150 B (106/N K )1/9;
из неметаллических материалов
[0]F z3 5,
rде [a]H в МПа; [O-]F в МПа; N K число циклов наrруже
ния зуба колеса за срок службы t, ч,
N K == 60tп21l;
(10.89)
11 коэффициент эквивалентности по циклам переменноrо pe
жима наrружения максимальному постоянному наrружению
(см. приложение П.I0.3); при постоянном режиме наrружения
11 == 1 (значения Ов и а т см. В приложении П.4.2 шаrа 4). Здесь
большие значения из диапазона принимают для червяка, у KO
Toporo поверхность зуба закаливается, а затем шлифуется или
56
полируется, меньшие для червяка, не подверrающеrося закал
ке (архимедов червяк). Для передач с расположением червяка
над масляной ванной [о]нследует уменьшить на 15 %.
ИЗ условия обеспечения жесткости червяка желательно,
-чтобы ero делительный диаметр удовлетворял условию d l
0,35 a w . Из этоrо неравенства следует, что
q 0,212z 2 .
(10.90)
Анализ результатов расчетов на контактную выносливость
показывает, что, если выбрать q::::: 0,212 Z2, то коэффициент Ha
rpузки не будет превышать k == 1,1, а rабаритные размеры пере
дачи будут близки к минимальным из за небольшой скорости
скольжения и, как следствие, достаточно высоких значений дo
пускаемых напряжений.
10.3.6. Тепловой расчет
Червячная передача вследствие низкоrо КПД имеет значи
тельное тепловыделение. Если передача работает в непрерыв
ном режиме, то тепловьщеление
w== 103(1 ll)Pl,
[де W в Вт; Р 1 подводимая к червяку мощность, кВт.
Количество отводимой от передачи теплоты W отв пропорцио
нально площади внешней поверхности А редуктора, а также раз
насти температур масла в редукторе ( м и окружающей среды t o :
W arB == k T им to)A (1 + 'V),
[де коэффициент конвективноrо теплообмена, равный
12...16 Вт/(м 2 . 0 е) при естественном охлаждении корпуса воз
духом, 20...30 Вт/(м 2 . ОС) при обдуве корпуса вентилятором и
100...200 Вт/(м 2 . О С) при охлаждении жидкостью; 'V коэффи
циент, учитывающий теплоотвод теплопроводностью и равный
0,3, если редуктор стоит на металлической раме, и нулю если
на бетонном основании.
Площадь внешней поверхности редуктора можно оцени
вать по эмпирической формуле А == 20 (aHJ 1000)1,7, [де А
в м 2 ; a w в мм.
В установившемся режиме работы
w== w oТE ,
57
Подставив в это равенство вышеприведенные формулы,
можно оценить температуру масла:
103(1 l1)lj
( м = k T A(1 + \jf) + {о. (10.91)
Считается, что 'м не должна превышать 95 ОС. Повторно KpaTKO
временный режим работы снижает температуру масла.
10.3.7. Оформление чертежей червяка и червячноrо колеса
Чертежи (рабочие) червячноrо колеса и червяка включают в
себя изображение детали в одной проекции с необходимыми ее
сечениями и выносками, а также таблицу параметров YCTaHOB
ленной формы, отстоящую от верхней кромки чертежа на 20 мм.
Таблица имеет ширину 11 О мм и состоит из трех частей: первая
часть содержит основные данные, вторая данные для KOHTpO
ля при изrотовлении, третья справочные данные. На чертеже
проставляют размеры с допусками, шероховатости поверхно
стей, требования по термообработке червяка и др.
Чертеж червячноrо колеса будет разработан в 10.5.4, а чер
теж червяка в 16 м шаrе.
10.4. Фрикционные планетарные передачи
к достоинствам фрикционных передач относят простоту
формы рабочих тел (цилиндрическая), плавность и бесшум
ность работы. Недостатком, оrраничивающим область приме
нения и сдерживающим развитие фрикционных передач, явля
ется необходимость взаимноrо при жат ия рабочих тел большими
силами. Вращающий момент передается силами 'rpения, разви
вающимися на площадке соприкосновения рабочих тел. еилы
прижатия должны быть в l/fраз больше реализуемой силы тpe
нмя, [де f коэффициент трения скольжения. Этот коэффици
ент изменяется от 0,04 до 0,3 в зависимости от материалов KaT
ков и условий трения (см. приложение П.3.l шаrа 3). Следова
тельно, сила прижатия должна превосходить передаваемую силу
не менее чем в 3 25 раз. С учетом необходимоrо запаса сцепле
ния требуемая сила прижатия еще более возрастет.
Рациональным конструктивным решением фрикционной
передачи является передача с валами, разrруженными от сил
прижатия рабочих тел. Такую передачу в виде фрикционной
планетарной предложил в 1954 ['. В.А. Чесноков. На рис. 10.25
58
представлено одно из конструктивных исполнений этой пе
редачи. Для выравнивания наrрузки по сателлитам обеспечена
свобода радиальноrо перемещения опор сателлитов в водиле.
Прижатие рабочих тел осуществлено специальным нажим
ным устройством, деформирующим эпицикл. Нажимное YCT
ройство включает в себя два конических кольца, разрезное KO
ническое кольцо и нажимную rайку, заворачиваемую в .корпус.
А
J
4
А (уlJелuчено)
S б 7
4- 1
Рис. 10.25. Фрикционная планетарная передача:
1 сателлит; 2 водило; 3 солнечное колесо; 4 эпицикл; 5 конические
кольца; 6 разрезное коническое кольцо; 7 нажимная rайка
Расчет на контактную выносливость передачи проводят по
формуле [ерца (см. шаr 7), предварительно определив силу при
жатия сателлита к солнечному колесу. Коэффициент запаса
сцепления принима,ют равным 1,2...1,4 при спокойной Ha
rpузке и 1,5...1,7 при значительных толчках и вибрациях. При
коэффициенте трения выше 0,25 передача по rабаритным
размерам получается меньше зубчатой планетарной.
Фрикционная планетарная передача практически бесшумна
(по шуму на порядок лучше зубчатой), имеет высокий КПД,. уп
pyroe относительное скольжение составляет 0,002...0,004 (боль
lIIая цифра соответствует большей наrрузке).
10.5. Практика конструирования. Червячная передача
привода ленточноrо конвейера
10.5.1. Постановка задачи
Кинематическая схема привода ленточноrо конвейера изо
бражена на рис. 10.26. Задано: диаметр приводноrо барабана
59
D == 300 мм, частота ero вращения п т == 50 мин 1, вращающий
момент на приводном валу Тт == 380 Н . м, высота оси вращения
приводноrо барабана над при соединительной поверхностью лап
корпусов ero подшипников h == 150 мм. Суммарное время рабо
ты привода tr.. == 10000 ч, режим работы привода Постоянный.
Требуется: 1) подобрать электродвиrатель; 2) провести раз
бивку передаточноrо числа привода; 3) рассчитать червячную
передачу и по результатам расчета разработать чертеж червяч
Horo колеса; 4) рассчитать клиноременную передачу и по pe
зультатам расчета подобрать ремень, а также разработать чер
теж ведомоrо шкива; 5) определить необходимую силу
натяжения ленты конвейера; 6) заменить ведомый шкив, изrо
тавливаемый из поковки, сварным шкивом, рассчитать ero
сварные швы и предложить чертеж cBapHoro шкива; 7) дЛЯ co
единения ведомоrо шкива с валом червяка подобрать призма
тическую шпонку, а также предложить вариант соединения
прямобочными шлицами; 8) выбрать посадку обода червячно
ro колеса на колесный центр; 9) выбрать подшипники червяка;
10) рассчитать вал червяка и разработать ero чертеж: 11) выбрать
болты крепления корпусов подшипников вала приводноrо бара
бана к раме.
Решение задачи для пп. 1 3 приведено ниже, а для пп. 4 10
в последующих шаrах.
i
J
J
/ ,
+
I
1
4
Рис. 10.26. Кинематическая схема при вода ленточноrо конвейера:
1 электродвиrатель; 2 клин:оременная передача; 3 червячная передача; 4 привод
ной барабан
60
10.5.2. Выбор электродвиrателя
1. Соrласно формуле (1.2) (см. шаr 1), требуемая мощность
Р Т на при водном валу
р == т п / 9550 == 380.50/9550 == 2,0 кВт.
т т т
2. Требуемая мощность Рэ электродвиrателя
Р Э == Р т / (ll ч ервll р ем) == 2,0/(0,75.0,95) == 2,8 кВт,
[д е 11 == О 75 среднее значение КПД червячной передачи,
'(черв '
11 == О 95 С р еднее значение КПД клиноременнои передачи
рем '
(см. приложение П.l.2 шаrа 1).
3. По каталоrам электродвиrателей выбираем асинхронныи
электродвиrатель, обладающий мощностью не менее требуемой
и имеющий наименьшую массу. Таким двиrателем является
электродвиrатель 4A90L2 с номинальной частотой вращения
п == 2840 мин 1 и мощностью 3 кВт.
дв
10.5.3. Разбивка передаточноrо числа привода
Принимаем передаточное число ременной передачи И рем == 2
(см. шаr 1, приложение П.l.З). Тоrда, соrласно формулам (1.5) и
(1.7) (см. шаr 1), передаточное число червячной передачи U'lepB
будет равно
и == п / (п и ) == 2840/(50.2) == 28,4.
черв дв т рем
При этом частота вращения червяка пl составит
п l == п / и == 2840/2 == 1420 мин l.
дв рем
10.5.4. Расчет червячной передачи
Известно, что червяк и червячное колесо вращаются с час
тотами п1 == 1420 мин l и п2 == n т == 50 мин l. Момент на чер
вячном колесе равен Т 2 == Тт == 380 Н'М. Передаточное число
червячной передачи И черв == 28,4.
1. Принимаем, что червяк стальной (Е 1 == 21.104 МПа),
Эвольвентный, поверхность ero витков закаленная и шлифован
иая, число заходов червяка Zl == 2. Тоrда, соrласно формулам
(10.61), (10.90), Z2 == ZI U черв == 2.28,4 := 57 и q;;::: 0,212Z 2 == 0,21.57 ==
== 12,08. Отсюда q == 12,5. В качестве материала червячноrо коле
61
са принимаем оловянистую бронзу БрОФIО I, отлитую в землю.
Для нее (приложения П.4.2, П.5.1, см. шаrи 4 и 5) а в == 230 МПа,
а т == 140 МПа, Е 2 =:: 7,5.104 МПа.
Вычисляем приведенный модуль упруrости
Е= 2Е I Е 2 = 2.21.104.7,5.104 =11,05.104 МПа.
Е l + Е 2 21.104 + 7,5.104
2. Для расчета передачи воспользуемся методом последова
тельных приближений. Пусть a w == 160 мм. Тоrда, соrласно фор
муле (10.70), осевой модуль
2a w 2.160
т:,=;; = =4,6 мм.
q + Z2 12,5 + 57
При m == 4 мм
х = G-.,v 0,5m(q + Z2) = 160 0,5.4(12,5 + 57) = 5 25'
m 4' ,
при m :=:; 5 мм
х = G w 0,5m(q + Z2) = 160 0,5.5(12,5 + 57) := 2,75.
т 5
Так как условие 1 х + 1 не выполняется, то изменяем Z2'
При m == 5 мм требуется меньшее изменение Z2' чем при m ==
== 4 мм. Принимаем m == 5 мм, Z2 == 53. Тоrда х == 0,75. Но при
этом передаточное число изменяется на 100(57 53)/57 == 7 %,
что недопустимо, так как заказчик обычно считает приемлемым
отклонение от заданноrо передаточноrо числа не более :t 2%.
Поэтому при m == 4 мм увеличиваем коэффициент диаметра чер
вяка до q:::; 20 и число зубьев колеса до Z2 == 58. Тоrда получаем
х == 1,0 и отклонение от заданноrо передаточноrо числа COCTaB
ляет 1,75 %, что приемлемо.
Итак, расчет передачи ведем при G w == 160 мм, Zl == 2, Z2 == 58,
q == 20, m == 4 мм, х == 1, О.
По формулам (10.71), (10.75), (10.79), (10.80) ВЫЧИсляем Ha
чальный диаметр d wl червяка, уrол 'Yw подъема витка червяка по
начальному диаметру, линейную скорость V w l червяка на этом
диаметре и скорость скольжения V CK :
62
d-.,vl == m (q + 2х) == 4(20 + 2.1) == 88 мм;
Zl 2 5 190.
'У w = arctg q + 2х = arctg 20 + 2 . 1 =, ,
:= nd-.,v1 n 1 = 3,14.88.1420 = 6,54 м/с;
V -.,vl 60 . 1000 60 . 1000
V w l
V =
СК cos 'у w
6,54 = 6 57 м/с.
cos 5,190 '
По формулам (10.89), (10.86) определяем число ЦИКJIОВ Ha
rpужения зуба червячноrо колеса N K и допускаемое напряжение
по контактной выносливости [а]н:
N K == 60tп2J.l == 60.10000.50.1 == 6.107;
[а]н:::< О,9а в (1,33 0,066v cK )(10 7 / N K )1/8 ==
== 0,9.230. (1,33 0,066.6,57)[107/(6.107)]1/8 == 148,3 МПа.
По формулам (10.69), (10.85), (10.82) находим делительный
диаметр d 2 червячноrо колеса, радиусы крив зны Рl, Р2' зуба
червяка и колеса соответственно, приведенныи радиус кривиз
ны R в контакте, длину Z линии контакта, окружную силу Ft2 на
червячном колесе и нормальную силу F в контакте, а по ним
контактное напряжение а н:
d 2 == mZ2 == 4.58 == 232 мм;
Рl :::< 00 (считая профиль витка трапецеидальным,
как в архимедовом червяке);
0,5d 2 sin20° 0,5.232 sin20° = 4000 мм'
Р2 2 "
cos 2'У w cos 5,190
R = Рl Р 2 = Р 2 = 40 мм;
Pl + Р2
z =:: 1,3 d wl = 1,3 . 88 = 114,4 мм;
63
F = 2Т 2 1000 = 2 .380.1000 = 3276 Н'
12 d 232 '
w2
F :== kFt2
cos 20° cos У w
1,1 . 3276 :;:: 3850 Н'
cos20°. cos 19° '
cr Н = О 418 FE = 0418 3850 -11,05 _104 = 127 МПа
, /R' 114,4.40,0
еопоставляя полученное значение о' Н == 127 МПа с допускае
мым [О']н== 148,3 МПа, отмечаем, что запас прочности ДOCTaTO
чен. Допускаемое напряжение можно было бы существенно по
высить, если уменьшить скорость скольжения, которая в значи
тельной степени зависит от коэффициента диаметра червяка.
Поэтому, задаваясь q == 12,5 и меньшим значением межосевоrо
расстояния a w == 140 мм, повторяем расчет по п. 2.
3. В результате получаем ZI == 2; Z2 == 57; q == 12,5; m == 4 мм;
х == +0,25; 'Yw == 8,750; d w1 == 52 мм; v w l == 3,86 м/с; V CK == 3,9 м/с;
[а]н == 208 МПа; d 2 == 228 мм; R == 39,9 мм; / == 67,6 мм; Ff2 ==
== 3333 Н; F == 3947 Н; cr н == 168 МПа.
Сопоставляя значение о' Н == 168 МПа с допускаемым [О']н ==
== 204,8 МПа, отмечаем, что запас прочности достаточен. OCTa
навливаеМСЯ на межосевом расстоянии червячной передачи a w ==
== 140 мм.
4." Вычисляем недостающие rеометрические размеры:
d l == mq == 4 . 12,5 == 50 мм;
Z I 2
'У :;:: arct g :;:: arct g :;:: 9090.
12 5 ' ,
q ,
d al == d l + 2т == 50 + 2 . 4 == 58 мм;
d л == d 1 2(1 + 0,2 cos 'У) m ==
== 50 2(1 + 0,2 cos 9,090) 4 == 40,42 мм;
Ь 1 === (14 + 0,lz 2 )т == (14 + 0,1.57)4 == 78,8 мм;
64
Sol == О,5тст COS'Y == 0,5.3,14.4. cos 9,090 == 6,20 мм
( S . 2 J
. 01 Sln 'у
h a1 = т + 0,5 S 01 tg 0,5 arcSln d 1 =
( . 6 20 sin 2 9 090 J
= 4 + 0,5 . 6,20 tg 0,5 arcS1n ' 50' :;:: 4,0048 мм.
d 02 == m (Z2 + 2 + 2х) == 4(57 + 2 + 2 . 0,25) ==238 ММ;
dj2 == т[Z2 2(1 + 0,2cos'Y) + 2х] ==
== 4 [57 2(1 + 0,2 cos 9,090) + 2 .0,25] == 220,42 мм;
6т 6.4
d 02M :::;; d 02 + =238 + =244 мм;
<:1 + 2 2 + 2
Ь 2 :::;; 0,75d ol == 0,75.58 == 43,5 мм.
5. Определяем уточненное значение КПД, приближенно
приняв приведенный уrол трения <р' == 20, и СИЛЫ в зацеплении:
11 :;:: tgy 1V
tg ('У w + <р')
:;:: tg 8,750 О 811 .
tg(8,75° + 20) , ,
Р Аl == Ра == 3333 Н;
Ft1 == Р А2 == 2T 1 1000/d wl == 2T 2 1000/(d w1 ичерв11) ==
== 2. 380 . 1000/(52 . 28,4 . 0,827) == 622 Н;
F R1 == F R2 == Ра tg а == 3333tg 200 == 1083 Н.
6. Оцениваем изrибную выносливость зубьев колеса. Для
ЭТоrо вычисляем эквивалентное число зубьев
3 8640
65
Z2
Z
v cos 3 У w
57
3 = 59,06;
cos 8,750
напряжение изrиба
kF t2 Y р cos у w
ар= =
lm
1,1 .3333.1,40 cos 8,750 = 18 8 МПа'
6 6.4 "
допускаемое напряжение
[а] = (0,44а т + 0,140' в)(10 6 / N Ki/ 9 =
Р 175
,
6 / 6 0 7 1/9
= (0,44.140 + 0,14.230)[10 (.1 )] = 34 О МПа.
1,75 '
Так как допускаемое напряжение превышает действующее,
то считаем изrибную выносливость обеспеченной.
7. Оцениваем площадь наружной поверхности редуктора А и
по формуле (10.91) находим температуру масла в редукторе 1м,
При этом предполаrаем, что редуктор не имеет вентилятора, т. е.
"т == 12...16 Вт/(м 2 . ОС), установлен на металлической раме, TeM
пература окружающеrо воздуха 10 == 20 ОС, мощность на червяке
составляет Рl == Р т / тj == 2,0/0,811 == 2,466 кВт. Тоrда
А == 20 a w 1 ,7 == 20. (140/1000)1,7 == 0,7 м 2 ;
1м
103(1 Тj)P1 +/0 = 103(1 0,811).2,466 +20= 56,7 °е.
k T A(l + '1') 14.0,7(1 + 0,3)
Температура масла меньше 90 ОС. Поэтому дополнительноrо
охлаждения редуктора не требуется.
8. По результатам расчета разрабатываем чертеж (рабочий)
червячноrо колеса (рис. 10.27). Диаметр отверстия в колесе из
условия обеспечения жесткости вала червячноrо колеса прини
маем равным d 0,4 a w 50 мм. (Чертеж червяка будет разрабо
тан на шаrе 16 после прочностноrо расчета вала червяка.)
66
'>
-..J
<.с:>
q;
"J! ... t:; J. Q:I ,
...,. "" <\j J:::.'"
с::> ,
t::;'\j
I ;::j
s
.J
Е: .:;
о. t:;;"<:> <:)]
'<:. 10-) i 1
.... <1> ::t'""... ...
1;..... +t
1:>...... <:o. " 1
1::1.. I;:: 't> 1>
I
1
..., .....
+'i
.....: '":i
1 х.
I
""
'i "" :::!
'" &
'" "..
'IC> > '?
'" '" ::r <:o.
:; '''' E:IQ
... ;:З ":.
-f:i.. ,g t;
"" 15 "" ;t ::i R 1:::
:::I;: \C..., r;::<...;
"::i 1::!
'"
i"" "" E:
'i;i '"
. it
з
<.:> ;:;;!!: ... ""it "'
"" t::: <::!:::
"'(!#
CIQ -::t
<:::. ...,;
"?
I.Q
"'-1
""
<:oi
"
"..,.
<:;;'
..,
3*
о..:
.. ;.: I
QJ
:)-
::r-
!i.
'"
u
Q)
t::::
О
О
1--4
О
:х::
:r
t!:
О.
Q)
:r
S.
Q)
:::r
r..:
N
е
.....
u
==
с..
67
ПРИЛОЖЕНИЯ п.lО
П.IО.l. Зависимость iпv ах от ах
iпv d x
0,06
0,04
0,03
0,02
0,01
и
15
20
25 (/.х, цйд
П.IО.2. Проверка прочности под действием пиковой наI]JУЗКИ
В целях предотвращения остаточных деформаций или хруп
Koro разрушения поверхностноrо слоя зуба контактное напря
жение аНта х при действии пиковоrо момента Т. не Д олжно
пик
превышать допускаемоrо [а]Нтах:
а Н тах = а Н -J k пик [а]н тах'
[де k пик == Т пик /T коэффициент переrpузки; aH контактное
напряжение, возникающее при действии максимальноrо дли
тельно действующеrо момента т.
Для предотвращения остаточных деформаций и хрупкоrо
разрушения зубьев напряжение изrиба ар тах при действии пи
KOBoro момента не должно превышать допускаемоrо [а]р тах:
ар тах == арk пик [а]р тах'
rде ар напряжение изrиба, возникающее при действии макси
мальноrо длительно действующеrо момента т.
68
Пиковая наrрузка может возникнуть, например, при пуске
асинхронноrо двиrателя, приводящеrо передачу. В этом случае
k пик есть отношение максимальноrо момента электродвиrателя
к номинальному, указываемому в каталоrах электродвиrателей.
Для зубчатых колес цилиндрических передач соотношения,
ПО которым можно определить допускаемые напряжения, при
ведены в табл. П.I0.2.1.
Таблица Пl0.2.1
Допускаемые напряжеlШЯ для зубчатых колес цитшдрических передач
Термообработка [0-]/1 IШIХ, МПа [а]р Ш Х, МПа
Нормализация, улучшение, сквозная 2,8 НВ 4,8 НВ
закалка
Цементация, контурная закалка 40 НRС э 2100
Азотирование 35 НRС э 1750
Для колес червячных передач, если зубчатый венец изrотов
лен из оловянистой бронзы, то
[а]н тах == 4 а т ;
если зубчатый венец изrотовлен из безоловянистой бронзы, то
[а]н тах == 2 ар
и, наконец, если зубчатый венец изrотовлен из чуryна, то
[а]н тах == 1,65 а в ,
rДе а в временное сопротивление при изrибе, МПа (см. при
ЛОжение П.4.2 шаrа 4).
П.IО.3. Учет перемеJllIOСТИ режима наrружения
в расчетах на выносливость
Ста1Истический анализ наrpуженности машин различных типов
f!Оказал, что все мноrообразие циклоrpамм моментов (рис. П.I0.3.1)
Можно свести к нескольким типовым (рис. П.I0.3.2), если при по
Строении циклоrpамм использовать относительные координаты
69
т
Ni N
Рис. П.I0.З.l. Циклоrрамма
моментов
Tl / Т тах
1,0
O,S
о OJS Ni/N
Рис. П.I0.З.2. Тшювые режимы
наrружения:
О постоянный; 1 тяжелый' 11
равновероятный; 111 нормал ный;
IV леrкий; V особо леrкий
ь
ы I
Ni разр
Ь.
L
b z
о
Рис. П.I0.З.з. Кривая
ВЫносливости Белера
70
Т; N j
и N ' rде 1j текущий
Ттах
момент; Т тах максимальный
момент из всех длительно дей
ствующих; число циклов
действия моментов, не меньших
1j; N общее число циклов Ha
rpужения.
Приведенные в табл. П.I0.З.1
коэффициенты приведения 1..1.
получены с помощью ypaBHe
ния кривой Велера (JmN
== const (рис. П.I0.З.З) и линей
ной rипотезы суммирования yc
талостных повреждений
i=z
" п;
L..i ==1,
i=l N j разр
N
rде п; число циклов действия
напряжений 0".' N. число
1 , 1 разр
циклов до разрушения при на..
пряжении о" ,; z число ступе
ней наrpужения.
rипотеза П р едполаrает что
, ,
если деталь работала при на..
пряжении 0'1 в течение относи..
тельноrо периода времени
пl
N и при напряжениях 0"2,
1 разр
..., O"j, н., O'z соответственно в Te
чение относительных периодов
времени n2 n;
N ' ..., , ...,
2 разр N j разр
n z
, то в ней возникнут
N z разр
повреждения, если сумма OTHO
сительных периодов превысит
единицу.
Таблица ПI0.З.l
Значения коэффициента приведения Jl
по циклам наrpужения
.----
Значение т jl для режима наrружения
выносли в уравнении (см. рис. П.IО.З.2)
вость Материал колеса кривой
Велера О 1 11 III IV V
Сталь 6 1,0 0,500 0,250 0,180 0,125 0,063
Контактная
Бронза 8 1,0 0,416 0,200 0,171 0,081 0,034
Сталь после
улучшения и 6 1,0 0,300 0,143 0,065 0,038 0,013
нормализации
При изrибе Сталь после
закалки и по
BepXHOCTHoro 9 1,0 0,200 0,100 0,036 0,016 0,004
упрочнения,
бронза
Список литературы
Авиационные зубчатые передачи и редукторы: Справочник / Под ред.
З.Б. Булraкова. М.: Машиностроение, 1981. 374 с.
Буланже А.в., Палочкина НВ., Фадеев в.з. Методические указания по расчС1)'
на прочность цилиндрических И конических зубчатых передач. М.: Изд во
мпу им. н.э. Баумана, 1990. 76 с.
Волновые передачи (рекомендации по инженерным расчетам) / М.Н. Иванов,
В.А. Финоrенов, Л.с. Бойко и др. М.: БНИИТЭМР, 1986. 72 с.
Дмитриев в.А. Детали машин. Учеб. для вузов. П.: Судостроение, 1970.
792 с.
Дунаев ПФ., Леликов О.Л Основы конструирования узлов и деталей машин:
Учеб. пособие для вузов. М.: Бысш. шк., 1985. 416 с.
3аплетоxuн Е.А. Конструирование деталей механических устройств: Спра
Вочник. П.: Машиностроение, 1990. 669 с.
Иванов МН Детали машин: Учеб. для вузов. М.: Бысш. шк., 1991. 383 с.
Кинематическая точность приборных волновых передач / с.н. Никитин,
с.А. Шувалов, П.к. Попов и др.; Под ред. с.н. Истомина, с.А. Шувалова. М.:
Машиностроение, 1987. 160 с.
Кудрявцев В.Н. Детали машин: Учеб. для вузоВ. п.: МаlШ1ностроение. Ле
НИlirp. отд ние, 1980. 464 с. .
Литвин Ф.л. Проектирование механизмов и деталей приборов. п.: Маши
НОСтроение, 1973. 696 с.
Планетарные передачи: Справочник / Под ред. в.н. Кудрявцева, Ю.Н. Кир
дЯшева. п.: Машиностроение, Ленинrр. отд ние, 1977. 536 с.
71
Решетов д.Н Детали машин: Учеб. ДJШ вузов. М.: Мапrnнос тро ение 198 9
496 с. ' .
Часовников яд Методические указания по расчету червячной передачи.
М.: МВТУ, 1979. 36 с.
Часовников яд Передачи зацеплением. М.: Машиност р оение 196 9
340 с. ' .
Червячные редукторы: Справочник / Ю.В. Левитан, В.П. Обморнов, В.И. Ba
сильев. Л.: Машиностроение, Ленинrp. отд ние, 1985. 168 с.
Чесноков В.А. Основы конструирования деталей и узлов машин / Под ред.
О.П. Леликова. М.: МПУ им. Н.Э. Баумана, 1989. С. 33 42.
Шаr 11. КОНСТРУИРОВАНИЕ РЕМЕННЫХ
И ЦЕПНЫХ ПЕРЕДАЧ
. Как осуществлялся привод станков, установленных в заводских или фабрич
ных помещениях, во времена} КО2да не существовало электропривода? Какая
передача и КО2да 1l0ЛУЧШ1а первой nрактическое nрименение?
. Что nрименяли вместо ремuя и из каКО20 материала ИЗ20тавливали шкивы в
первых ремеииых передачах? С какой лиuейной скоростью работали эти nepe
дачи?
. Какую МOlциость и иа какое расстояние умели передавать с помощью peмeH
ной передачи в середиие позаnРОИLЛО20 века?
. Как с помощью уравнения Эйлера вычислить силу nредварителЬНО20 натяже
uия ре'1НЯ и силы, Н02ружающие ветви ремеuной передачи?
. Как рассчитать число витков каната, которое необходимо навить на шпиль}
чтобы рабочий, тянущий канат} МО2 удержать судно около пристани?
. Как методом обхода по контуру оценить силы в ветвях ленты лентОЧНО20
конвейера?
. Если приводной барабан раз.местить с противоположuой стороны лентОЧUО20
конвейера, изменится Ли необходимая мощность привода?
. Почему в ремеuной передаче передаточное число увеличивается с возрастани
ем рабочей на2РУЗКИ?
. Как подобрать плоский, клиновой UЛll поликлиновой ремень в ременную пepe
дачу?
. Как оформить ч ртеж шкива ременной передачи?
. Как отРе2улировать силу nредварителЬНО20 натяжения ременной передачи?
. Какие У2ЛЫ разворота звена цепи допустимы для нормальной работы втУflOЧ
ных и роликовых цепей?
. Как подобрать втулочную или роликовую цепь в цепную передачу?
. Как оформить чертеж звездочки цепной передачи?
. Каковы преимущества зубчато ременной передачи по сравнению с ременной?
. Каковы преимущества зубчатоременной передачи по сравнению с цепной?
. Что представляет собой шарикоременная передача и каковы ее nреимущест
ва по сравнению с зубчатоременной ?
Ответы на эти вопросы и не только на них Вы найдете в 11 м
lIIare.
На данном шаrе будет продолжено рассмотрение передач.
Внимание будет обращено на различные формы применения
уравнения Эйлера, полученноrо при трении нити о цилиндр; на
73
конструкции и особенности эксплуатации передач с rибкой
связью, подбор ремней и цепей, а также на разработку чертежей
шкивов и звездочек
11.1. Ременные передачи
11.1.1. История развития
Ременная передача первой из передач получила промыш
ленное применение. Передачу энерrии на средние и большие
расстояния в XIX веке стали осуществлять металлической лен
той, а затем тросом.
В 1850 т. в fермании построена передача, передающая энер
rию на расстояние порядка 160 м. Передача состояла из сталь
ной ленты толщиной 1,1 мм и шириной 50 мм, а также деревян
ных шкивов диаметром около 2 м, вращающихся с частотой
120 мин l (скорость ленты составляла 12,28 м/с). Оказалось, что
заютепки, соединяющие концы ленты, и шкив быстро изнаши
ваются. Передачу эксплуатировали 1,5 [ода. Затем ленту заме
нили проволочным канатом диаметром 6,35 мм. Шкивы, не Me
няя их диаметра, снабдили канавкой rлубиной 12,7 мм. Переда
ваемая мощность составила 31 кВт. Передача распределяла
энерrию rpуппам станков, установленным в разных зданиях.
К 1861 [. было построено 274 проволочно канатных переда
чи. Одна из них на реке Рейн работала от трех rидротурбин
мощностью 184 кВт каждая.
При дальности передачи более 100 м последовательно соеди
няли несколько канатных передач. екорость каната назначали
6...25 м/с.
Привод каждоrо станка в помещении осуществлялся от раз
даточноrо вала с помощью плоско ременных передач.
11.1.2. Конструкция передачи
Ременная передача состоит (рис. 11.1) из ведущеrо и BeДOMO
[о шкивов, а также ремня, надетоrо на шкивы с натяжением и
передающеrо окружную силу с помощью сил трения. На рисун
ке предварительное натяжение ремня силой 2Ро обеспечивает
rpуз.
11.1.3. Силы в передаче. Формула Эйлера
Пусть в ременной передаче (см. рис. 11.1) натяжное устрой
ство создает силу предварительноrо натяжения 2Ро. Если пере
74
ача не наrpужена полезной наrpузкой (передача неподвижна
и работает вхолостую), то будут действовать силы РО как в
верхней, так и в нижней ветвях ремня.
Рис. 11.1. Ременная передача:
1 ведущий шкив; 2 ведомый шкив; 3 ремень; 4 rруз
Затормозим шкив 2 и приложим К шкиву 1 вращающий MO
мент Tl' Тоrда ведущая ветвь ремня (на рисунке нижняя) натя
нется и в ней возникнет сила Fl > РО, а ведомая ветвь (на рисун
ке верхняя) ослабнет и в ней возникнет сила Р 2 < РО' Если
ведомая ветвь не провисает, то, поскольку общая длина ремня
не меняется, на сколько удлинится ведущая, на столько же YKO
ротится ведомая ветвь.
Такое же явление имеет место в работающей передаче: Е l ==
== РО + ДР; Е 2 == Ео дР. Из последних двух выражений получа
ем формулу Понселе:
Е l + Е 2 ::::: 2Ро.
(11.1)
Знак приближения здесь стоит потому, что при выводе фор
мулы пренебреrли влиянием некоторых явлений на силы в BeT
вях передачи: заклиниванием ремня при выходе ero из канавки
шкива в клиноременной передаче; аэродинамическими силами,
возникающими вследствие клиновоrо эффекта в случае BЫCO
ких скоростей движения ремня при ero набеrании на шкив или
сбеrании со шкива и др.
Уравнение равновесия для шкива 1 имеет вид
(F 1 F 2 )O,5d 1 == Tl'
75
Если f означить окружную силу, передаваемую ремнем, че
рез Ft = Т' то из уравнения равновесия следует
1
Р 1 Р 2 == Ft .
(11.2)
Получаем систему из двух уравнений (11.1), (11.2) с тремя
неизвестными Р 1 , Р 2 , 2Ро (Р ! обычно задано). Видим, что число
неизвестных больше числа уравнений. Чтобы определить силы
к системе следует добавить еще уравнение Эйлера. '
f2
о
dN .х
Fr
Рис. 11.2. Нерастяжимая нить, скользящая по цилиндру:
а вся нить; б элементарный участок нити
Рассмотрим условия равновесия нерастяжимой нити
(p c. 11.2, а), скользящей по цилиндру. Аналоrом такой расчет
HO модели служит :аторможенный ведомый шкив рассмотрен
нои выше ременнои передачи. Выделим на цилиндре элемент
нити с центральным уrлом da (рис. 11.2, б) и составим условия
равновесия этоrо элемента по осям х и у:
. dN F sin (0,5da) (Р + dF) sin (0,5da) == о;
F cos (0,5da) (Р + dF) cos (0,5da) + fdN == О,
rде dN, F, F+dF, fdN силы, действующие на элемент f KO
эффициент трения нити о ЦИлиндр. '
76
Вследствие малости как yrла da, так и приращения силы dF,
nринимаем sin (0,5da) = 0,5da, cos (0,5da) = 1, dFO,5da = О. To
rда из двух уравнений следует, что
dF
= fda.
F
Но дуrа обхвата цилиндра нитью значительно больше уrла
da (см. рис. 11.2, а). Чтобы перейти от элементарноrо yrла ко
всему уrлу, проводят интеrрирование левой и правой частей
уравнения соответственно от Р 1 дО Р 2 и от О до , [де уrол,
соответствующий дyrе скольжения (этот параметр будет пояс
иен ниже).
После интеrрирования получаем уравнение Эйлера:
Р 1 IP
e
Р 2 '
(11.3)
[де е основание натуральных лоrарифмов.
Подставляя в это уравнение выражения (11.1) и (11.2), полу
чаем
F. e lP
Fi = )Р ;
е 1
Ft .
Р 2 IP ,
е 1
2Ро = Ft (e lP + 1)
e lP 1
(11.4)
(11.5)
(11.6)
Формулы (11.4) (11.6) позволяют найти силы Р l , Е 2 и 2Ро по
известным коэффициенту трения f между ремнем и шкивом
(обычно f == 0,2...0,4 в зависимости от материала ремня), дyrе
скольжения и рабочей наrрузке Ft, передаваемой ремнем.
Сила предварительноrо натяжения ремней в большинстве pe
менных передач обеспечивается без использования rруза (см. 4
на рис. 11.1). Для натяжения применяют винты, пружины и т. д.
Возникает вопрос, как отреrулировать силу предварительноrо
.н:атяжения в этом случае?
77
о силе предварительноrо натяжения Ео можно судить по Пе
ремещению д ремня под наrpузкой Q, прикладываемой посере
дине базы а. Базой может служить межосевое расстояние между
шкивами или расстояние между поддерживающими роликами.
Из рассмотрения условия равновесия проволоки, представлен
Horo на рис. 2.9, и формулы, выведенной в примере 2.2 (см.
шаr 2), для данноrо случая получаем
д 0,50 tg а 0,50 t g ( arcsin o.:oQ J
(11.7)
rде а yrол отклонения ремня.
Мысленно проведем такой опыт С опыт Жуковскоrо). Через
заторможенный шкив (аналоr ведомоrо шкива передачи) пере
кинем кусок ремня и к обоим ero концам (ветви а и Ь) подвесим
одинаковые rpузы Q (рис. 11.3). На
ремень равномерно по длине HaHe
сем метки и rрузы выставим на oд
ной высоте. Наrрузим ветвь Ь дo
полнительным rpузом dQ. Тоrда
заметим смещение конца ремня из
за ero растяжения на длине от конца
ремня до точки С. еледовательно,
на дуre ЕС будет иметь место дyrз
упруrоrо сколъжеlПlЯ ремня, а на дy
а Q re сп дyra покоя. е увеличением
массы rpуза дуrа скольжения увели
чится. Коrда дуrа скольжения ЕС
Рис. 11.3. Опыт Жуковскоrо станет равной дyrе обхвата а шкива
ремнем, начнется буксование.
Считается, что сила трения между ремнем и шкивом переда
ется в основном на дуrе скольжения Р, меньшей дуrи обхвата а.
Работа упруrоrо ремня связана с упруrим скольжением ремня
по шкивам. Неизбежность возникновения скольжения следует
из oro, что с лы натяжения и, следовательно, удлинени Beдy
щеи и ведомои ветвей различны. При обеrании ремнем ведуще
ro шкива сила натяжения ремня падает, он укорачивается и
проскальзывает, отставая от шкива. При обеrании ведомоrо
шкива ремень удлиняется и проскальзывает, обrоняя ведомый
шкив. Обычно со стороны сбеrания ремня р дyrа скольжения,
а со стороны набеrания Са Р) дуrа покоя (см. уrлы Рl, Р2' аl'
а2 на рис. 11.1).
78
Во избежание буксования необходимо, чтобы выполнялось
условие Р < а. При конструировании ременных передач обычно
назначают 1 ;::: О, 7а l'
Формулу Эйлера можно
применять не только при расче
те ременных передач, но и при
расчете устройства крепления
каната к барабану механизма
подъема rpузоподъемных Ma
шин, при проектировании шпи
лей, устанавливаемых на при
станях, при конструировании
ленточных конвейеров, при
проектировании тормоза лен
точноrо типа.
Пример 11.1. Определить число
И Ь Рис. 11.4. Шпиль, удерживающий
ВИТКОВ каната Z, которое следует нав т
на шпиль, чтобы удержать силой рабо судно
чеrо F2 == 100 Н судно (рис. 11.4), на KO
торое действует сила FI == 1000 Н. Принять коэффициент трения каната о
шпиль f== 0,1 и дyrу обхвата равной дyrе скольжения.
Соrласно формуле (11.3), lп Fi :::: fP :::: fa. Отсюда
Р 2
Z :::: :::: ln (F;/F 2 )/ f :::: 1п (1000/100)/0,1 :::: 3,7.
2п 2п 2.3)4
11.1.4. Силы в ветвях ленточноro конвейера
Полное сопротивление движению конвейера Е! и натяжение
ленты конвейера в различных ее точках находят методом обхода
ПО контуру:
1) обход начинают с ветви, сбеraющей с приводноrо бараба
на, принимая натяжение в этом месте ленты равным F сб ;
2) полаrают, что натяжение в каждой последующей точке
контура равно натяжению в предыдущей точке плюс силы co
противления на участке между рассматриваемыми точками;
3) принимают, что натяжения набеrающей на приводной ба
рабан ленты F наб И сбеrающей с Hero F сб связаны уравнением
Эйлера:
F F О,7а}!
наб сб е ,
(11.8)
79
[де О, 7аl уrол скольжения ленты на ведущем барабане.
Пусть q == масса rpуза, Приходящаяся на единицу
3,6v
длины конвейера, [де Q производительность конвейера по
массе, т/ч; v скорость ленты, м/с. Тоrда сопротивление дви
жению ленты по ролику на rоризонтальном участке конвейера
составит FТЕРОЛ 1 == cG== cqgP, rде с::; 0,06 коэффициент сопро
тивления; (j наrрузка на ролик; Р шаr между роликами. Co
противление движению ленты для rpуппы роликов, располо
женных на rоризонтальном участке 1, будет равно
cqgPI
Fтррол == == cqgl.
(11.9)
Сопротивление движению ленты по наклонному участку
р н == ртр рол + G H . (11.10)
Здесь
Fтррол == cqg Jh + '? . coso == cqg/l'
(11.11)
G H == qgh p '
(11.12)
hp высота подъема; 11 размер в плане наклонноrо участка
конвейера; о уroл наклона наклонноrо участка конвейера.
еопротивление на барабане
ртр бар z 0,06F l >
(11.13)
rде Р Е rеометрическая сумма натяжения ветвей ленты, оrи
бающих барабан
При этом уrол 1, на который бара
бан отклоняет ленту, и yrол а обхвата
ero лентой (рис. 11.5) связаны Bыpa
жением
'у == 1800 а.
(11.14)
Рис. 11.5. Связь yrла обхва
Та о; и yrла отклонения 'у
ленты
На рис. 11.6 изображен ленточ
ный конвейер и эпюра сил натяже
ния ленты.
80
!Нао S
l
Рис. 11.6. Ленточный конвейер:
1 ПРИБОДНОЙ барабан; 2 натяжной барабан; 3, 4 отклоняющие барабаны;
5 поддерживающие ролики
При обходе по контуру имеем
Fl == F сб ;
F 2 == Еl + Fтp бар3 == F сб + 0,06 F с 2 б + F с 2 б + 2F соs'Уз
== F сб (1 + 0,06 2 + 2 cos 'у з);
Р3 == Р 2 ;
Е4 == Р3 + F тр бар 2 ==
== F сб (1 + 0,06 2 + 2 cos 'у з)(1 + 0,06 2 + 2 cos 'у 2);
Р5 == Р4 + F трр ол + qgh p ==
:::::F сб (1 +0,06 2 +2 cos 'Уз)(1 +0,06 2+2 cos 'У2) +0,06qgll +qgh p ;
81
Е6 = Е5 + Ртр бар 4 =
= [F сб (1 + 0,06 .J2 + 2 cos l' з)(1 + 0,06.J2 + 2 c os l' 2) +
+0,06qg/l + qgh p ](1 + 0,06 .J2 + 2 cos l' 4);
F наб = Е6 + Ртр рол =
= [F сб (1 + 0,06 .J2 + 2 cos l' з )(1 + 0,06.J2 + 2 cos l' 2) +
+0,06qgZl + qgh p ](l + 0,06 .J2 + 2 cos l' 4) + 0,06qgZ.
Решая систему, образованную последним уравнением и
уравнением (11.8), находим
F сб =
(O,06qgZl + qgh p )(1 + O,06.J2+2 cos l' 4) + 0,06qg/
07 f '
е ' a 1 (1 +O,06 .J2 +2 cos l' 3 )(1 +O,06 .J2 +2 cos l' 2)(1 +O,06 .J2 +2 cos l' 4)
Пример 11.2. Оценить F сб , F наб , 1; ленточноro конвейера, изображенноrо на
рис. 11.6, если Q == 100 т/ч, v == 1 м/с, f == 0,4, / == 3000 мм, /1 == 4000 мм, hp ==
== 2300 мм, al == 180", а2 == 180", аз == 30", а4 ==30".
Соrласно формуле (11.14), 'У2 == о", 'Уз == 150", 'У4 ==150".
Вычисляем q:
Q 100
q == == == 27,8 кr/M.
3,6v 3,6 . 1
Подставляем В полученное ранее выражение для F сб значения apryMeHТOB. В
результате получаем
F'cб == 629 Н.
Соrласно формуле (11.8),
F Наб == F сб еО,7а ,1 == 629е О ,7.З,14.0,4 == 1509 Н.
По формуле (11.2) находим
F, == F наб F сб == 1509 629 == 880 Н.
Следует отметить, что не всеrда набеrающую на приводной
барабан ветвь конвейера располаraют сверху, как изображено на
рис. 11.7, а. Если, например, конструируют конвейер модульно
ro типа, допускающий изменение длины путем изменения чис
82
ла модулей, то часто, для Toro чтобы rpуз с одноrо модуля падал
на ленту друrоrо, приходится набеrающую на приводной бара
бан ветвь располаrать снизу (рис. 11.7, 6). в этом случае требует..
ся большая мощность привода. Покажем это на примере.
Л I (h
и и
1
а
о
Рис. 11.7. Ленточный конвейер:
о традиционное исполнение; б модульное исполнение. допускающее
изменение длины перемещения rруза
Пример 11.3. Для конвейера, изображенноro на рис.l1.6, принять значения
параметров и направление движения ленты теми же, что и в примере 11.2, а по
ложения приводноrо и натяжноrо барабанов поменять местами. Оценить F сб ,
F наб , 1; И степень необходимоrо повышения мощности ПрИВОДа.
Учитывая, что сбеrающая с приводноrо барабана ветвь ленты располаrается
сверху, в результате обхода по контуру получаем
F наб == [(F сб + O, 06qg/} + qgh p )(1 + 0,06 2 + 2 cos 'у 4) + 0,06qg/] х
х(l + 0,06 2+ 2cOSY2)(1 + 0,06 2 + 2соsуз).
Решая это уравнение совместно с (11.8), имеем
F сб == [(О, 06qg/l + qgh p )(1 + 0,06 .J 2 + 2 cos у 4 ) + . O,06qg/] х
(1 + 0,06 .J 2 + 2 cos У2)(1 + 0,06 2 + 2 cos 'Уз)
х
eO, 7a ll (1+ 0,06 .J 2+ 2 cos У4 )(1+0,06 .J 2+ 2 сos У2 )(1+ 0,06 2+ 2cos УЗ)
== [(0,06 - 27,8.9,8.4 + 27,8.9,8.2,3)(1 + 0,06 ,/ 2 + 2cosI50") + 0,06.27,8.9,8. 3]х
х (1 + 0,06-J2 + 2cos 0")(1 + 0,06-J2 + 2 cosI50")
еО,7. 3,14-0,4 (1 + 0,06 2+ 2 cos 150" )(1 + 0,06 -J 2 + 2 cos 0")(1 + 0,06 2+ 2 cos 150")
== 725,6 Н.
Соrласно формуле (11.8),
F наб == F сб eO,7aJ == 725, 6е О ' 7.3,14.0,4 == 1741. 5 Н.
83
Соrпасно формуле (11.2),
F; = F наб F сб = 1741,5 725,6 = 1015 Н.
Степень п необходимоro повышения мощности привода есть отношение
значений сил Fr, полученных в примерах 11.3 и 11.2:
п == 1015/880 == 1,15.
11.1.5. Ремни ременной передачи
Ремни ременной передачи выполняют плоскими, клиновы
ми, поликлиновыми, круrлыми (рис. 11.8). Ремни также бывают
зубчатые, но их мы будем рассматривать отдельно, так как они
передают окружную силу не с помощью сил трения, а путем за
цепления, подобно зубчатым передачам.
A A
б
400
&6
h ==pz
а
2
а
4О"!.1" . д
Рис. 11.8. Ременная переДача (о) с плоским (6), клиновым (в), поликпино
вым (2) И круrлым (д) ремнем
Для всех передач rибкой связью серьезным фактором, orpa
ничивающим скорость ремня, являются центробежные силы,
дополнительно наrpужающие ремень при больших скоростях
ero движения и уменьшающие полезное натяжение ремня.
В передачах клиновыми ремнями скорость ремня оrpаничи
вает повышение ero температуры вследствие упруrой цикличе
ской деформации, сопровождающейся rистерезисными явле
84
lIйЯМИ В резине. Температура ремня возрастает с увеличением
числа переrибов ремня в единицу времени.
Плоские ремни (см. рис. 11.8, б) обычно бывают синтетиче
ские или тканевые. Они допускают линейную скорость
40...75 м/с (до 100 м/с). в некоторых случаях в качестве ремня
используют металлическую закаленную ленту толщиной около
0,5 мм.
Клиновые ремни (см. рис. 11.8, в) выпускают нормальных сече
ний по СТ еэв 4952 85 (rOCT 1284.1 80* rOCT 1284.3 80*),
обозначаемые в международной системе Z, А, В, С, п, Е, во (у
нас в стране О, А, Б, В, [, Д, Е), и узкие по TY38 40534 75 и
TY38 105161 84, имеющие отечественное обозначение УО,
УА, УБ, УВ. Ремни нормальных сечений Z, А, В, С допускают
скорости 25 м/с, а сечений п, Е, ЕО скорость 30 м/с; дЛя уз
ких ремней скорость оrраничена значением 40 м/с. Передаточ
ное число клиноременной передачи доходит до 10.
Боковые стороны клиновоrо ремня являются рабочими.
Расчетные длины ремней измеряют по нейтральному слою в Ha
тянутом состоянии. Ряд длин подчиняется предпочтительному
ряду чисел R20. Расчетная ширина ремня (ширина ремня по
нейтральному слою) Ь р и площадь сечения ремня А у клиновых
ремней разных сечений составляют, соответственно, мм и мм 2 :
8,5 и 4 7 дЛЯ Z; 11 и 81 для А; 14 и 138 дЛЯ В; 19 и 230
для с; 27 и 476 для п; 32 и 692 дЛЯ Е; 42 и 1170 для ЕО;
8,5 и 56 дЛЯ УО; 11 и 93 дЛЯ УА; 14 и 159 дЛЯ УБ; 19 и 278
дЛЯ УВ.
Ремни, блаrодаря клиновому эффекту, отличаются повы
шенными силами сцепления со шкивами. Трапециевидная фор
ма сечения ремня из за ero большой высоты неблаrоприятна
вследствие больших деформаций при изrибе на шкивах, YMeHЬ
Шающих усталостную прочность ремня и КПД. ЭТО компенси
Руют тем, что ремень изrотавливают из материала с малым м:o
дулем упруrости, кроме OCHoBHoro несущеrо слоя, имеющеrо
малую толщину и расположенноro по нейтральному слою peM
Rя. В узких клиновых ремнях несущий слой образован стальны
ми жryтами.
Клиновые ремни бывают кордтканевые К, применяемые при
Вестесненных rабаритных размерах передачи, и кордшнуровые
1lI, используемые при наличии оrpаничений на ее размеры.
Клиновой ремень считается подобранным, если, задавшись
типом ремня и размером ero сечения, определили необходимое
85
количество ремней в передаче, их длину, а также требуемое
предварительное натяжение ремня.
Пример обозначения ремня сечением Z с расчетной длиной
2500 мм и кордшнуром В несущем слое:
Ремень Z 2500Ш СТ СЭВ 4952 85.
Поликлиновые ремни (см. рис. 11.8, 2) сочетают rибкость
плоских и повышенную силу сцепления клиновых ремней. ИХ
выпускают для станкостроительной промышленности по ТУ
38 105763 84. етандартизировано три сечения К, Л, М. Они
допускают скорость до 40 м/с и обеспечивают передаточное
число до 10...15.
круrлыIe ремни (см. рис. 11.8, д) делают из кожи, капрона
или хлопчатобумажноro шнура, иноrда прорезиненноrо. Их
диаметр лежит в пределах 3...12 мм. Круrлые ремни целесооб
разно использовать, если ремень в передаче изrибается в He
скольких плоскостях.
Необходимая расчетная ДЛИIIа ремня Lp зависит от межосе
Boro расстояния а ременной передачи (см. рис. 11.8, а), а также
диаметров d 1 и d 2 ведущеrо и ведомоrо шкивов (в клиноремен
ной и поликлиновой передачах через d 1 и d 2 будем обозначать
соответствующие расчетные диаметры):
(d d )2
Lp == 2а +0,5n(d 2 + d l ) + 2 1
4а
(11.15)
Эту длину для клиновых и поликлиновых ремней окрyrляют
до стандартной (приложение П.l1.1) и затем уточняют значение
межосевоrо расстояния по формуле
а == 0,25 х
[L n(d2+dl)
х +
р 2
( Lp 1t(d 22 + d J ) У 2(d2 d J )2 J (11.16)
Конструкция передачи должна допускать надевание ремнЯ
на шкивы и компенсацию вытяrивания ремней, происходящеrо
со временем. для этоrо в клиноременной передаче предусмат
ривают возможность уменьшения межосевоrо расстояния на
2 % и увеличения ero на 5 %.
86
Диаметры ведущих шкивов назначают с учетом следующих
оrpаничений:
в плоскоременной передаче минимальное отношение
d l / Б == 50...100, rде Б толщина ремня;
в клиноременной и поликлиновой передачах мицимальныи
расчетный диаметр шкива составляет, мм: 63 для ремня сече
нИЛ Z, 90 дЛя А, 125 для В, 200 для С, 315 для п, 500
для Е, 800 для ЕО, 63 для УО, 90 для УА, 140 для УБ, 224
для УВ, 40 для К, 80 для Л, 180 для М.
11.1.6. Работа ремня на шкивах
еила трения между ремнем и шкивом передается в OCHOB
ном на дyre скольжения (см. рис. 11.1). Окружные скорости Be
дущеrо Vl == 1td l пl/6О и ведомоro V2 == 1td2п2/60 шкивов !'авны
скоростям набеrающих на соответствующие шкивы ветвеи peM
ия. Из за неизбежноrо скольжения ремня скорость ведомоrо
шкива меньше скорости ведущеrо: V2 == vl (1 ), rде коэф
фициент скольжения,
== Vl V2 .
Vl
( 11.1 7)
(1 )1tdl пl
Учитывая, что 60
ременной передачи
1t d2п2
60
передаточное число
пl d 2
и
п 2 d l (1 )
(11.18)
еоrласно условию постоянства массы ремня, пробеrающеrо
в единицу времени через данное неподвижное се ение, коэф
фициент скольжения пропорционален разности относительных
Удлинений ведущей Еl и ведомой Е2 ветвей ремня:
li Р 2 Ft ( 1 19 )
== Еl Е2 == БА БА == БА ' 1 .
rДе Е модуль упруrости ремня.
Анализ формул (11.18) и (11.19) показывает, что п:редаточ
lIoe число передачи возрастает с увеличением рабочеи наrруз
ки, передаваемой ремнем.
87
Пропорциональность коэффициента скольжения рабочей
наrpузке Ff отражает кривая скольжения (рис. 11.9) на интерва
ле оси абсцисс от G' == О до G' == <Ркр По оси абсцисс отложен KO
F
эффициент тяrи <Р = , rде 2Ро сила предварительноrо натя
2Ро
жения ремней, а по оси ординат коэффициент скольжения
и КПД передачи 11
s,%
'1
0,04
0,8
0,03
0,5
0.02
4
0,01
0,2
о
0,5 СРтах ер
о
0,1 0,2
0,3
Рис. 11.9. Кривая скольжения ременной передачи
Кривую скольжения строят по экспериментальным дaH
ным, оставляя силу предварительноrо натяжения ремней Посто
янной и постепенно повышая рабочую наrpузку. При <р> <РКР
возникает дополнительное проскальзывание, при водящее к TO
му, что суммарное скольжение возрастает быстрее, чем рабочая
наrpузка. При предельном значении <Ртах коэффициента тяrи
имеет место полное буксование.
КПД передачи достиrает максимума при G' <Ркр' Поэтому
оптимальной считают рабочую наrрузку передачи, при которой
коэффициент тяrи близок <РКР' ДЛЯ ременной передачи с пло
ским ремнем обычно <Ркр == 0,5...0,6.
Диаметры ведомых шкивов d 2 зависят от передаточноrо чис
ла u и коэффициента относительноrо скольжения :
d 2 = d 1 u(1 ), (11.20)
88
rде := 0,01 для плоских, а также клиновых кордшнуровых
ремней и == 0,02 дЛя клиновых кордтканевых ремней.
11.1.7. Расчет ремней по несущей способности
Наибольшее напряжение О"тах (рис. 11.1 О) в ремне возникает
на ero ведущей ветви у ведущеrо шкива:
О'тах == 0'1 + О"иl + о"ц'
(11.21)
rде а 1 = Fl / А напряжение растяжения от силы натяжения
ведущей ветви ремня Р l , связанной, соrласно решению Эйле
ра, с передаваемым окружным усилием выражением (11.4);
а и1 = Еь / d l напряжение изrиба ремня на ведущем шкиве
(для синтетических ремней Е == 1500 МПа, для клиновых Е:=
== 400 МПа); а ц == 10 6'}'v2 напряжение в ремне от центробеж..
ной силы ('}' == 900...1200 Kr/M 3 плотность материала ремня).
Уrол обхвата ремнем ведущеrо шкива в rpaдycax составляет
d 2 d l
al = 180 57. (11.22)
а
Для плоских ремней, оrpаничив значение a ax величиной
[а], с помощью выражения (11.21) можно оценить требуемую
ширину . ремня Ь. ДЛЯ синтетических ремней принимают
[а] == 10...15 МПа, для стальной ленты [а] == a 1/2, rде () 1 пре
дел выносливости материала ленты на растяжение.
Рис. 11.10. Эпюра
СуМмарных наПрЯ
Жений в ремне:
(jl, 02 напряжения от
сил Fl И Р2; 0Hl, 0н2
наПряжения изrиба на
диаметрах шкивов d 1 и
d 2 ; ац напряжение от
центробежной силы
Для клиновых ремней расчет ведут в следующей последова..
тельности.
89
1. По rpафикам, приведенным на рис. 11.11, определяют
мощность РО, которую может передавать один ремень при дан..
ной скорости и данном расчетном диаметре малоrо шкива, если
и == 1, а == 1800, расчетная длина ремня Lo, режим работы спо
койный.
Ро,к8т
4,В d,=450MM
12
3,2 16 8
1,5 {J "
о °з
3 10 20 U,Mjc 10 20 у'М/С 10 20 301l,MjC
а 5 8
Рис. 11.11. Значения ро для клиновых ремней с различными сечениями:
а Z при Lo == 1320 мм и А при Lo == 1700 мм; б В при Lo == 2240 мм и С при Lo ==
== 3750 мм; в УО при Lo == 1600 мм и УА при Lo == 2500 ММ. Сплошные линии для peM
ней сечений Z, В, УО, штриховые для ремней сечений А, С. УА
2. Вычисляют мощность [Р 1 ], которую может передать pe
мень в реальных условиях:
[P 1 ] == POCaCpC L С ш
(11.23)
rде Са == 1,24(1 e a/ll0) коэффициент уrла обхвата ведущеrо
шкива; а, rpaд; С р коэффициент режима, зависящий от смен
ности работы и равный 1, 0,87 и 0,72 при односмен ной, ДB YX
сменной и трехсменной работе соответственно; С L = Lp / Lo
коэффициент длины ремня; Си коэффициент передаточноrо
числа, принимающий следующие значения:
и .......... 1
Си .........1
1,10
1,04
1,20
1,07
90
1,4
1,1
1,80
1,12
2,50
,14
3. Вычисляют необходимое число ремней:
P 1 k p
Z=[P 1 ]C z '
(Il.24)
rде Р 1 мощность на ведущем валу, которую следует передать,
квт; k p == 1,0...1,6 коэффициент динамичности наrpузки и pe
жима работы (большие значения при ударном или резко He
равномерном наrpужении и пусковой наrpузке, составляющей
ДО 300 % от номинальной); C z коэффициент, учитывающий
число ремней в передаче и принимающий следующие значения:
z . . . . .. 2...3 4...6 7; 8
C z . . . .. 0,95 0,9 0,85
4. Находят силу 2Fo предварительноro натяжения ветвей
ремня из условия
Fo == Аао,
(11.25)
rде 0"0 == 1,2...1,6 МПа начальное напряжение в ремне.
Для поликлиновых ремней вычисляют необходимое число
ребер ремня и силу начальноrо натяжения по формулам
F
z= ;
FiиСаСvСd С L
(11.26)
17 0,78F 2
то = +qzv
Са
(11.27)
[де F окружная сила, передаваемая ремнем, Н; F 1и расчет..
Ная сила, передаваемая одним ребром в условиях испытаний
(приложение П .11.2); Са == 1,37 (1 e a/l35) коэффициент уrла
обхвата; C v коэффициент скорости ( см. П.ll .2); 'Cd коэффи"
Циент диаметра (см. П.l1.2); С L = Lp / Lo коэффициент
длины ремня; Lo базовая длина ремня (см. П.l1.2); q поrон
иая Масса одноrо ребра (см. П.l1.2); v скорость ремня, м/с.
11.1.8. ШКИВhI ременных передач'
Для передачи с плоским ремнем ширину шкивов В выбирают
в зависимости от ширины ремня Ь. Рабочую поверхность одноrо
Из Шкивов (обычно большеrо) для предотвращения сползания
91
ремня делают выпуклой со стрелой выпуклости h, имеющей в
зависимости от Ь и В следующие значения, мм:
Ь 10,0 20,0 40,0 63,0 80,0
В . . . . . 16,0 25,0 50,0 71,0 90,0
h . . . . . 0,3 0,3 0,6 1,0 1,0
Во избежание повышенноrо изнашивания ремня шерохова
тость поверхности шкива оrpаничивают значением Rz == 1 О мкм.
В клиноременной передаче при оrибании ремнем шкива Ha
ружные растяrиваемые слои ремня в поперечном направлении
сужаются, а внутренние сжимаемые раздаются вширь. Чтобы
скомпенсировать эти деформации, уrол канавок шкивов yмeHЬ
шают с уменьшением их диаметра. Размеры профилей канавок
(рис. 11.12) по [оет 20889 80 приведены в приложении П.l1.3.
В передаче с поликлиновыM ремнем расчетный диаметр шки
. ва d, по которому располаrается нейтральный слой ремня, пре
вышает наружный диаметр шкива на 28 (рис. 11.13). rлубина Ka
навок шкива h и их шаr Р (приложение П.l1.4) совпадают с
высотой и шаrом ребер ремня, уrол профиля канавки составля
ет 40°1:30'.
В передаче с крyrлым ремнем профиль канавок делают или
полукруrлым с радиусом, равным радиусу ремня, или трапецие
видным с утлом профиля 40°.
...с.
НеiJтрольныи спой
"
r2 Т,
r
d
f е
В== (z 1)e+2f
]) == (z I)P+2l
Рис. 11.12. ШКИВ клиноременной
переда чи
Рис. 11.13. Шкив передачи
с поликлиновым ремнем
11..2. Цепные передачи
11.2.1. Параметры передач
Цепные передачи это передачи с rибкой связью, в которых
рабочая наrрузка передается от ведущей звездочки к цепи и 01
цепи к ведомой или ведомым звездочкам путем зацепления. Пе
92
редача может осуществляться на расстояние до 8 м при скорости
движения цепи до 35 м/с и КПД от 0,92 до 0,97 с передаточным
q:иСЛОМ до 10. Скорость цепи оrраничена силой удара звеньев,
вХОДЯЩИХ в зацепление со звездочкой.
Число звеньев цепи W связано с межосевым расстоянием а
цепноЙ передачи, если в передаче две звездочки ведущая с
qиСЛОМ зубьев ZI и ведомая с числом зубьев Z2' соотношением
W == Z 1 + Z 2 + 2а + Р( z 2 Z 1 ) ,
2 Р 21Ш
(11.28)
rде Р шаr цепи.
Стремятся W сделать четным, чтобы избежать необходимо
СТИ постановки в цепь менее прочноrо переходноrо звена.
После выбора числа звеньев уточненное межосевое расстоя ..
иие составит
а (w Z] ; Z2 + J (w Zl ; Z2 У 2 ( Z2 : Z] )2]- (11.29)
Допуск на значение межосевоrо расстояния назначают с
учетом рекомендаций, приведенных в приложении П.ll.5.
Для нормальной работы цепи необходимо (рис. 11.14), что
бы поrрешности монтажа, характеризуемые уrлами '(1, '(2, уз, '(4,
Не вышли за пределы допуска [у], приведенноrо для втулочных и
роликовых цепей в приложении П.l1.6.
%:1
.=F
r2
Рис. 11.14. Поrpешности монтажа цепной передачи
93
екорость цепи v находят по частоте вращения п1 ведущей
звездочки Z 1 :
nd дl пl
v==
6 . 104 '
(11.30)
р
rде d дl == делительный диаметр ведущей звездоч
sin(7t/ Zl)
ки, мм.
Передаточное число цепной передачи составляет
U==Z2/ Z 1'
11.2.2. Цепи
в основном в качестве приводных цепей используют роли
ковые цепи типа ПР (рис. 11.15). Они выполнены из наружных
и внутренних звеньев. Наружное звено цепи это две наружные
пластины, напрессованные на два валика. Внутреннее звено цe
пи это две внутренние пластины, напрессованные на две
втулки. Сопряжения валиков и втулок образуют подвижные
шарниры. На втулки надеты ролики. Блаrодаря им трение
скольжения между зубьями звездочки и цепью заменено трени
ем качения, что уменьшает износ зубьев.
A A
Ai.
Рис. 11.15. Приводная роликовая цепь
в условном обозначении цепи указывают тип, шаr в
миллиметрах и разрушающую наrpузку в деканьютонах* (прило
жение П.ll.7).
При малых скоростях движения цепь можно приближенно
подбирать по разрушающей наrрузке, стремясь, чтобы она пре
* 1 даН == 10 Н
94
выIалаa не менее чем в 5...6 раз рабочую наrpузку, передаваемую
цеПЬЮ.
При средних и высоких скоростях необходима проверка цe
nl1 на износостойкость. Напряжения смятия в шарнире при
этОМ оrpаничивают значениями [а]см ;::: 1,5...3,5 МПа (при Ma
дОМ шаrе цепи и малой частоте вращения задаются большими
значениями из указанноro диапазона). Для вычисления [О]СМ
используют формулу
[о ]см ==
kF
d(BBH + 2S)
А оп '
kF
(11.31)
==
rде k ;:::1...2 коэффициент эксплуатации, зависящий от степени
динамичности наrpузки, длины цепи, наклона передачи к rори
зонту, степени предусмотренности реryлировок в процессе экс
rшyатации, характера смазывания, сменности работы, темпера
туры окружающей среды; p рабочая наrрузка; d диаметр Ba
лика; Ввн расстояние между внутренними пластинами; S
толщина пластины; Асп проекция опорной поверхности цепи,
мм 2 (см. П.!1.?).
Подробнее о проверке цепи на износостойкость см. в изда
ниях, приведенных в списке литературы.
11.2.3. Звездочки
Звездочки изrотавливают из сталей марок 45, 45r, 50, 50r,
15Х, 20Х. В случае Z < 25 допустимо использовать стали марки
15 и 20. При малых и средних наrрузках звездочки MOryт быть
Выполнены из пластмассы: полиэтилена, полипропилена, поли
амидов П 68Н, П 68С, капролона В, текстолита пт.
Размеры зубьев звездочек дЛя роликовых цепей рассчитыва
ЮТ по [оет 591 69* (ет еэв 2641 80). Если скорость цепи не
ВЫШе 5 м/с, профиль зуба можно упростить и ero размеры pac
СЧитывать по [ОСТ 592 81* (СТ СЭВ 2643 80).
Ниже приводятся данные, необходимые дЛя разработки чер
тежа звездочки (рис. 11.16) с профилем зуба по [оет 591 69*.
ПроФиль зуба может быть выполнен без смещения дyr впадин и
СО смещением. Первое исполнение рекомендуется применять в
ОСобо точных кинематических реверсивных передачах, второе
ВО Всех друrих случаях. Смещение е устанавливают в зависимо
СТИ от шаrа цепи Р: е == 0,О3Р.
95
/;,
$
!2(; ( v)
'Iисло зуоьс8 z
Сопрнzoе Шaz р
мая цепь Диаметр ролика d 1
ПРОФl/ЛЬ зуоа поС1СЭ8 2б4! 80 Со смещенисм
Класс fflOI/HOCти ПО
С1 CJB 2б4f 80
*
ДОПУСК ни разность ШОёо8 d'
РООlШllьное оиенuе
ОКР!Jжности 8паиин
ТорцоВое Оиение
зу3чатоzо иенца
Дrшметр iJелительноiJ d д
окружности
Шlll!UНО 8H!/тpeH h
Сопряzае неи ЛI/Остины
мая цепь Расстояние В
межifу8Н!lтрен вн
НШ1U ЛllfJстинимu
Ео
[т
*
ДIlЯ з8еJООlffl< С IIcтHbI/1! О{/ОМШРР окружности 8ЛООllН Ц, и преiJельные
отклонеНlIЯ, с lfelfeтHbI!1 Z размер НОl1lJольшеи хороь/ [.х и лреiJельные отклонения
Рис. 11.16. Оформление чертежа звездочки
Диаметр делительной окружности звездочки
d = Р
д sin (180/ z)
(11.32)
Диаметр окружности выступов
пе == P[k + ctg (180/z)],
(11.33)
rде k коэффициент, выбираемый с учетом rеометрической ха-
Р
рактеристики зацепления А == (rде d l диаметр ролика):
d l
96
л .... 1,4...1,5 1,5...1,7 1,7...1,8 1,8...2,0
k ..... 0,480 0,555 0,575 0,565
Диаметр окружности впадин и наибольшая хорда (при нали
чИИ смещения дуr впадин) соответственно равны
п; == d д 2rl;
(11.34)
Lx == d д cos (95/z) 2r,
(11.35)
rде r == 0,5025d l + 0,05 радиус впадины, мм.
В таблице на рис. 11.16 при четном Z указывают диаметр OK
ружности впадин п;, а при нечетном наибольшую хорду Lx
Расстояние ho от вершины зуба до линиu центров закруrле
ний принимают равным ho == 0,8 d 1 .
Диаметр обода пс при d д < 150 мм вычисляют по формуле
пс == Pctg (180/z) 1,2h o ,
(11.36)
а при d д 150 мм соrласно выражению
пс == Pctg (180/z) 1, 3h o.
(11.37)
Радиус закруrления зуба r з == 1,7d l , а ширина зуба звездочки
ы 1 == 0,93В вн 0,15.
(11.38)
По [ОСТ 591 69* установлено три класса точности для
звездочек: А, В и С. в зависимости от класса точности назнача
ют поля допусков на размеры зубчатых венцов (приложение
П.11.8) и допуски на разность шаrов 8, радиальное биение OK
РУЖности впадин Ео и торцовое биение венца Е т (приложение
П.ll.9).
11.3. 3убчатоременная и mарикоременная передачи
Зубчатоременная и шарикоременная передачи это переда
ч:и зацеплением, а не трением. Поэтому по сравнению с peMeH
liыми передачами они имеют следующие преимущества: OTCYT
СТВИе проскальзывания ремня на шкивах, возможность
Получения больших передаточных чисел (до 12), высокий КПД
(0,92...0,98), малые силы, действующие на валы и опоры. От
ЗУбч:атых цилиндрических эти передачи отличаются мноrопар
4 8640
97
ностью зацепления зубьев ремня и шкивов, а от цепных ОТ-
сутствием шарнирных соединений в rибкой связи передачи. ОТ-
сюда следуют такие их преимущества, как практичеСКое
отсутствие зазоров, а значит, способность обеспечивать высо-
кую точность позиционирования на выходе и малошумность.
В зубчатоременной передаче используют плоский ремень,
на внутренней стороне KOToporo имеются выступы (зубья) тра-
пециевидной (рис. 11.17, а) или полукруrлой (рис. 11.17, б) фор-
мы, а на шкивах соответствующие им впадины.
А А А
r
А А
A A A A A A
ф
а о 8
Рис. 11.17. Ремень:
а зубчатый с трапециевидной формой выступа; б зубчатый с полукрyrлой
формой выступа; в шариковый
Ремень выполняют из особоrо вида пластмассы, а несущий
слой из стальноrо троса или троса из стекловолокна. Ремень
может изrибаться в одной плоскости. Поэтому шкивы зубчато
ременной передачи должны находиться в одной плоскости.
Правила конструирования таких передач содержатся в издани
ях, приведенных в списке литературы.
Блаrодаря отмеченным преимуществам зубчатоременные
передачи находят применение в приводах станков, роботов, aB
томобилей и Т.д.
В шарикоременной передаче ремень имеет форму шариков
(рис. 1] .17, в), раздвинутых между собой на величину шаrа зубь
ев и соединенных между собой rибким тросом. Ремень можеТ
изrибаться во всех плоскостях. Поэтому допускается простран
ственное расположение шкивов такой передачи.
Шарикоременные передачи до последнеrо времени исполь'
зовали внесиловом приводе (привод жалюзи и штор на окнаХ
98
офисов). С появлением новых видов пластмасс диапазон при
ме:нения этой передачи должен расшириться.
Например, при конструировании робота с тремя степенями
подвижности линейноrо перемещения, если не предполаrается
использование зубчато ременных и шарикоременных передач,
каЖдЫЙ из приводов линейноrо перемещения располаrают на
соответствующем звене робота и при перемещении схвата робо
та из одноrо положения в дрyrое будут перемещаться три звена
робота, а вместе с ними и три привода. Но ПРИВОДЫ имеют зна
чительную массу. Кроме Toro, следует обеспечить подвод элек
тропитания к подвижным звеньям. Следовательно, робот будет
отличаться существенной инерционностью.
Применим теперь в приводах зубчатоременную передачу.
Тоrда для линейноrо перемещения звена робота привод переме
щения можно расположить не на этом звене, а на предыдущем.
При этом инерционность робота снизится, так как вместе со
звеньями робота будут перемещаться лишь два привода из трех.
Если во всех при водах применить шарикоременную переда
чу, то все три привода можно установить на неподвижном звене
робота, что резко снизит ero инерционность. еледует лишь OT
метить, что в последнем случае существенно увеличиваются
длина ремней и число отклоняющих блоков в передаче, пони
жающих точность работы робота.
11.4. Практика конструирования.
I(линоременная передача
11.4.1. Постановка задачи
Кинематическая схема привода ленточноrо конвейера изо
бражена на рис. 10.26 (см. шаr 10). В 10.5.1 заданы численные
значения параметров этоrо привода. Клиноременная передача в
Нем соединяет валы двиrателя и червяка. Обозначим ведущий
Вал (вал двиrателя) цифрой 1, а ведомый вал (вал червяка) циф
рой 2. Вал двиrателя имеет частоту вращения пl == п дв ==
=: 2840 мин 1, а вал червяка частоту п2 == 1420 мин 1. Требуе..
Мая мощность на валу двиrателя составляет Рl == 2,8 кВт. Марка
элеI<тродвиrателя 4A90L2 (высота оси вращения вала над при
соединительной поверхностью лап h дв == 90 мм), начальный диа
Метр червяка d w1 == 52 мм, наибольший диаметр червячноrо KO
песа d a2 == 244 мм.
4*
99
Требуется рассчитать клиноременную передачу, т. е. по ре,
зультатам вычислений подобрать ремни и определить необходи,
мую силу их предварительноrо натяжения, разработать рабочий
чертеж ведомоrо шкива передачи.
11.4.2. Расчет клиноременной передачи.
Чертеж ведомоrо шкива
1. Задаем межосевое расстояние а ременной передачи, учи,
тывая, что электродвиrатель установлен на корпусе червячноrо
редуктора, и предполаrая расстояние между червячным колесом
и электродвиrателем (зазор) 1 == 60 мм:
а == h дв + d a2 + d wl /2 + 1 == 90 + 244 + 52/2 + 60 == 420 мм.
2. Выбираем самый тонкий типоразмер ремня Z и принима-
ем, что он будет кордшнуровой. По rpафику, приведенному на
рис. 11.11, а, находим, что рекомендуемый расчетный диаметр
ведущеrо шкива d 1 для TaKoro ремня равен 63, 90 или 100 мм.
Чтобы передача позволяла передавать достаточно большую
мощность и при этом не выходила бы за rабаритные размеры
червячноrо редуктора, принимаем d l == 90 мм. Тоrда расчетный
диаметр ведомоrо шкива составит
d 2 == d l u(1 ) == 90. 2(1 0,01) :::: 180 ММ,
rде == 0,01 относительное проскальзывание для кордшнуро
Boro ремня.
3. Вычисляем окружную скорость ремня:
лd l п l 3,14.90. 2840 13 4 I
v мс
60.1000 60.1000 '
и по rрафику, представленному на рис. 11.11, а 7 определяеМ
мощность РО == 1,4 кВт, которую может передавать один ремень
при данной скорости и данном расчетном диаметре малоrо
шкива, если u == 1, а а == 1800 при расчетной длине ремня Lo :;;::
== 1320 мм и спокойном режиме работы.
4. Находим уrол обхвата ремнем ведущеrо шкива:
аl =180o 57o d2 dl =1800 570 180 90 =1680.
а 420
100
5. Оцениваем необходимую длину ремня:
(d 2 d 1 )2
Lp = 2а + 0,5л(d 2 + d 1 ) + 4а
= 2 . 420 + 3 14 180 + 90 + (180 90) 2 = 1268 мм.
, 2 4 . 420
ПО приложению П.11.1 принимаем стандартное значение
расчетной длины ремня Lp == 1250 мм и выбираем нужный нам
ремень:
Ремень Z 1250Ш СТ СЭВ 4952 85.
6. Задаемся коэффициентом режима С р == 0,87 (двухсменная
работа) и коэффициентом передаточноrо числа Си == 1,13, COOT
ветствующим значению u == 2. Вычисляем коэффициент уrла
обхвата ведущеrо шкива Со;, коэффициент длины ремня C L и
мощность [P 1 ], которую может передать один ремень в реаль
HbIX условиях,
Со; == 1,24 (1 е о;jll0 ) == 1,24 (1 е 168/l10 ) == 0,97;
С Lp 1250 О 99'
L Lo 1320 ' ,
[P 1 ] == РоСо;СрСLС и == 1,4.0,97.0,87.0,99.1,13 == 1,32 кВт.
7. Определяем необходимое число ремней, считая коэффи
циент динамичности наrрузки и режима работы k F == 1,1 и коэф
фициент неравномерности наrpузки между ремнями C z == 0,95,
что справедливо при Z == 2...3 :
z = Рl k F = 2,8. 1,1 = 2,46.
[Р l ]С z 1,32 .0,95
Принимаем Z == 3.
8. Ремень Zимеет площадь сечения А == 47 мм 2 . Находим си
лу 2Ро предварительноrо натяжения ветвей ремня, полаrая <J'o ==
::::: 1,6 МПа:
ро == Ао о == 47 . 1,6 == 75,2 Н.
101
9. Уточняем межосевое расстояние передачи:
0 0'25( Lp 1C d2 ;d[ + (L p 1Cd2 ;d[)2 2(d2 d[)2 J
0,25 (1250 з,14 180; 90 + (1250 3,14180; 90) 2 2(180 90)2 J
== 410,58 мм.
Это значение (без окруrления чисел) с допусками +20,5 и
8,2 (соответственно 5 и 2 % межосевоrо расстояния) следует
указать на сборочном чертеже привода.
10. Назначаем метод контроля силы предварительноrо Ha
тяжения и вычисляем значение контролируемоrо параметра.
Принимаем, что силу ро будем контролировать путем замера
отклонения ремня Д. под действием наrpузки Q == 10 Н, прикла
дываемой посередине а. Тоrда
А 0,5018 а 0,5 018 ( arcsin D.],; )
== 0,5 . 410,58 tg ( arcSin 0,5 . 10 ) == 13,7 мм.
75,2
Наrрузку Q и полученное значение контролируемоrо пара
метра Д. следует указать в технических требованиях сборочноro
чертежа ременной передачи.
По результатам расчета передачи на рис. 11.18 представлен
чертеж ведомоrо шкива.
11.5. Практика конструирования. Оценка необходимой
силы натяжения ленты конвейера
11.5.1. Постановка задачи
Известно, что диаметр барабана D == 300 мм, вращающиЙ
момент на приводном валу ТТ == 380 Н . м, аl == 225°,f== 0,4. Tpe
102
'>
..../
}
I
'"
>< ..
'"
Е ". '-> '"
:Е <:::. ""
'" I """
C "...: с:::. J t)
" ".. ,<:> t::",
""' :;?
f.-. +I
"" "" "',," '" I
t:>... :::. D 9-
"" ' '
.., ,Q t:: Е:: ;t: .
""" ,-><t:><..;:::'
:<> К s
1:::< ;t: ,. CU "< "<
$; :;-: I::
.....: '" ...;
"0+ f1'f
"'" -q:
<:::. <::)
::::::;111
""" """
"ос(
..., с:::.
... '<:2-
"'( 1. Оfф
...,. 991Ф
<:::.
<:::.
ошф
S8lФ
1
......
::r
с:::
ч-;, t:::[
'"'- Q.)
с; cl.
Q.)
t::
':s::
о
'" :з::
:з::
Q.)
Q.)
. о-
о
:r:
с:::
е;с,
:s::
:о.:
S
;.;
Q.)
Е--
cl.
Q.)
:r
OCi
J
=:
.
103
буется оценить силу предварительноrо натяжения ленты KOH
вейера 2Ео, задать метод контроля этоro натяжения и значеНие
контролируемоrо параметра, если расстояние между поддержи:
вающими роликами а == 1000 мм.
11.5.2. Расчет
1. Определяем окружную силу на приводном барабане
F = 1000 ТТ = 1000 380 = 2533 Н.
t О,5п 0,5.300
2. Вычисляем р == 0,7 аl == 0,7 .225 . п/180 == 2,75 и находим
силу предварительноrо натяжения ленты
efP+ l е 0,4. 2,75 +1
2Ро = Ft = 2533 ;:;: 5000 Н.
ef 1 е о ,4. 2, 75 1
3. Принимаем, что силу будем контролировать по отклоне
нию 11 ленты конвейера под действием наrpузки Q == 500 Н, при
кладываемой посередине расстояния между роликами. Тоrда
значение контролируемоrо параметра составит
f.. 0,50 tga 0,5 о tg ( arcsin 0.:; )
= 0,5 . 1000 tg ( arCSin 0,5 . 500 ] = 50 25 мм.
2500 '
ПРИЛОЖЕНИЯ П.1]
П.ll.l. Расчетные длины 4> клиновых ремней
РЯД длин: 400, (425), 450, (475), 500, (530), 560, (600), 630,
(670),710, (750), 800(850),900, (950), 1000, (1060), 1120, (1180),
1250, (1320),1400, (1500), 1600, (1700),1800, (1900), 2000, (2120),
2240, (2360), 2500, (2650),2800, (3000),3150, (3350), 3550, (3750),
4000, (4250), 4500, (4750), 5000 и т. д. Указанные в скобках pac
четные длины ремней следует применять лишь в технически
обоснованных случаях.
Диапазоны длин Lp, мм: 400...2500 для ремня сечением Z,
560...4000 дЛЯ А, 800...6300 дЛЯ В, 1800...10600 дЛя С,
3150...15000 для п, 4500...1800 для Еи 6300...18000 для ЕО.
П.ll.2. Параметры, применяемые для расчета
необходимоrо числа ребер ПОЛИКJШновоrо ремня
Сечение F\и, Н С" C d Lo, м q, Kr/M
ремня
К 23 1,086 0,013v 2,38 55/d l 750 0,09
Л 8з 0,908 0,0155v 2,95 155/d l 1500 0,45
М 285 0,910 O,OI67v 3,04 328/d 1 2000 1,60
П.ll.3. Размеры ШКИВОВ КJШноремешlOЙ передачи, мм
СеЧе h, d при а, [рад
нне Ь р Ь не f
peM е r
Me
ия нее 34 36 38 40
Z 8,5 2,5 7,0 12,0:t0,3 8,0::1:1 0,5 63...71 80...100 112...160 180
А 11,0 3,3 8,7 15,0::1:0,3 1 О 0+2 1,0 90. ..112 125...160 180...400 450
, l
В 14,0 4,2 10,8 19,0::!:0,4 12 5+2 1,0 125...160 180...224 250...500 560
, l
С 19,0 5,7 14,3 25,5::!:0,5 17 0+2 1,5 224...315 355...630 710
, l
D 27,0 8,1 19,9 37,0::!:0,6 24 0+3 2,0 315...450 500...900 1000
, l
105
Окончание Л 11.з
Сече h, d при а, rpад
иие Ь р Ь не f
е r
peM Me
ня нее 34 36 38 40
Е 32,0 9,6 32,4 44,5:t0,7 29,0 2,0 500...560 630...1120 1250
ЕО 42,0 12,5 30,5 58,0:t0,8 38 0+5 2,5 800...1400 1600
, 1
При м е ч а н и е. Предельные ОТКi10нения yrла канавки для сечений ремня
Z, А, Всоставпяют:!:l,ОО, для сечений С, D, Ем ЕО равны:!:30'.
П.l1.4. Размеры профилей канавок шкивов передачи
с поликлиновым ремнем, мм
Сечение р h ho Б 1, ие
рем ия r! r2 менее
К 2,4:!:0,03 2,15+0,38 3,30 0,2+0,1 0,2+0,1 0,95 3,5
Л 4,8:tO,04 4,68+0,38 6,60 0,4+0,1 0,4+0,1 2,40 5,5
М 9,5:t0,05 9,60+0,77 13,05 0,8+0,2 0,6+0,2 3,55 10,0
П.Н.5. Допустимые отклонения межосевоrо расстояния а
нереryлируемой цепной передачи, мм
Уrол наклона оси передачи к rоризоиту
а, мм I
00 :о; \jf <300 300 :о; 'JI <600 600 :о; 'JI <800
300 + 0,17 / 0,28 + 0,25 / 0,15 + 0,51 / 0,035
500 + 0,22 / 0,50 + 0,33 / 0,25 + 0,66 / 0,060
700 + 0,27 / 0,70 + 0,40 / 0,35 + 0,81 / 0,080
1000 + 0,31 / 0,95 + 0,46 / 0,50 + 0,93 / 0,120
1500 + 0,40 / 1,40 + 0,63 / 0,75 + 1,20 / 0,170
При м с ч а н и я: 1. В ЧИСтIтеле приведено значение Bepxнero отклоненИЯ,
В знаменателе нижнеrо. 2. Передачи с 'Jf 800 применяют с натяжными усТ-
рОЙСТВами.
106
П.ll.6. Допустимые для ВТУЛОЧНЫХ и рОЛИКОВЫХ цепей
yrлы разворота звена цепи, rpaд
[у] Д.1IЯ машин
У, м/с
стационарных нестациоиарных
<3 0,100...0,150 0,200...0,300
3...8 0,075...0,105 0,150...0,210
>8 0,038...0,060 0,075...0,100
П.l1.7. Приводные роликовые цепи
Ввн, мм, 11, мм, Масса
Обозначение цепи п, мм п!, мм Аоп, мм 2 цепи,
не менее не более Kr/M
ПР 8 460 3,00 2,31 5,00 7,5 11,0 0,2
ПР 9,525 910 5,72 3,28 6,35 8,5 28,0 0,45
ПР 12,7 1000 1 2,40 3,66 7,75 10,0 16,8 0,30
ПР 12,7 900 2* 3,30 3,66 7,75 10,0 20,1 0,35
ПР 12,7 1820 1 5,40 4,45 8,51 11,8 39,6 0,65
ПР 12,7 1820 2 7,75 4,45 8,51 11,8 50,3 0,75
ПР 15,875 2300 1 6,48 5,08 10,16 14,8 54,8 0,8
ПР 15,875 2300 2 9,65 5,08 10,16 14,8 70,9 1,0
* Цепь, применяемая в велосипедах.
П.ll.8. Поля допусков на размеры зубчатых венцов звездочек
Класс точности
Размер
А В С
De, Ь 1 1111 1112 hJ4
п; 1110 1111 1112
107
П.l1.9. Допуски на разность шаroв,
радиальное и торцовое биение звездочек, мкм
Диаметр звездочки, мм
Пара
метр, Р, мм
МКМ ДО 120 Св. 120 Св. 260 Св. 500 Св. 800
до 260 до 500 до 800 до 1250
Класс точности А
До 20 25 32 40 50 60
8
Св. 20 до 35 32 40 50 60 80
Ба == Б т 80 100 120 160 200
Класс точности В
До 20 60 80 100 120 160
8
Св. 20 До 35 80 100 120 160 200
Ба == Е т 200 250 320 400 500
Класс точности С
До 20 160 200 250 320 400
8 Св. 20 до
35 200 250 320 400 500
Ба == Е т 500 630 800 1000 1250
Список литературы
Анурьев В.И Справочник конструктора машиностроителя: В 3 т. Т. 2. М.:
Машиностроение, 1992. 784 с.
Fотовцев А.А., Котенок ил Проектирование цепных передач: Справочник.
М.: Машиностроение, 1982. 336 с.
Дмитриев В.А. Детали машин: Учеб. для вузов. Л.: Судостроение, 1970.
792 с.
Заплетохиu В.А. Конструирование деталей механических устройств: Спра
вочник. Л.: Машиностроение, 1990. 669 с.
Рететовд.н- Детали машин. Учеб. для вузов. М.: Машиностроение, 1989.
496 с.
Спиваковский А. 0., Дьячков В.К Транспортирующие машины. М.: Maurn:
ностроение, 1983. 487 с.
Уварова ЛИ. Передача механической энерrии На расстояние /Труды инсти
тута истории, естествознания и техники. М.: Изд во АН СССР, 1956. т.l3.
C.153 174.
108
Шаr 12. КОНСТРУИРОВАНИЕ ОПОР
. Что такое 2идродинамический} 2идростатический, 2азодинамический,
2азостатический и ма2нитный подтипники скольжения, а также пoд
типuик скольжения СУХО20 трения?
. КО2да предложены первые расчеты ресурса изделий в вероятностном ac
пекте (дата зарождения теории надежности)? для каких изделий они
предложеиы и почему именно для них? Какие заслу2U по решению этой
проблемы при надлежат Арвиду ПаЛЬМ2рену?
. Как меняются во времеliИ напряжения в наиболее uа2руженных зоuах
2идродинамичеСКО20 подтипника скольжения и подтипника качения? Ka
кой из подшипников при длительной работе в номинальuом режиме более
дОЛ20вечен?
. Какие типы подшипuиков качения выпускаются крупносерийuо пpo
мышленностью и чем они отличаются дРУ2 от дРУ2а?
. Каков физический смысл коэффициента осевО20 на2ружения и как ею
вычисляют для разных типов подтипников качения?
. Что такое эквивалентная на2рузка подшипника, каКО20 она направления
и почему на2рУЗКУ на подшипник приводят к этому направлению? Как
вычислить эквивалентную на2рУЗКу для разных типов nодишnников?
. Как подбирают подшипники качения, если они вращаются с частотой
10 мин J и более, и как в случае, если частота вращения их меньте?
. От чею и почему зависит величина коэффициента вращения, вводимая в
формулы для расчета эквивалентной на2РУЖИ?
. Какие u КО2да прuменяются схемы осевой фиксации валов?
. Как называют подшипник} позволяющий устаuовить вал на одной опоре?
Как такой подшипник сконструировать? В каких машинах ею nрименя
ют?
. Как можно сократить осевой размер привода?
. Как осуществляют передачу осевых сllЛ от подшипников liO корпус пpy
жинными упорными кольцами?
Ответы на эти вопросы и не только на них Вы найдете в 12 M
llIare.
Опорами вращающихся деталей служат подшипники сколь
Жения ИЛИ качения. Первые имеют меньший raбаритный размер
Оо диаметру, вторые меньший rабаритный размер по длине.
109
Ниже будут рассмотрены вопросы расчета и подбора как тех, так
и друrих подшипников, а также конструирования опор в целом.
При необходимости существенноrо снижения oceBofo rаба
ритноrо размера в машину устанавливают ОПОрНО ПОВОрОТНЫе
подшипники. Рекомендации по их конструированию также pac
смотрены в данном шаrе.
12.1. ПОДШИПНИКИ скольжения
12.1.1. Режимы трения и типы подшипников
Подшипники скольжения это опоры вращающихся дeTa
лей, работающие в условиях относительноrо скольжения по
верхности шейки вала, часто называемой цапфой, и поверхно
сти подшипника.
Как отмечалось в шаrе 8, различают следующие режимы Tpe
ния скольжения: сухое, полусухое, rраничное, полужидкостное
и жидкостное. При сухом трении контактирующие поверхности
соприкасаются микронеровностями, их относительное переме
щение сопряжено с интенсивным износом и возможностью
схватывания. rраничное трение характеризуется наличием на
поверхностях трения тонких адсорбированных пленок смазки.
При жидкостном трении слой смазки, разделяющий рабочие По
верхности, превышает суммарную высоту микронеровностей
вместе с размером твердых частиц, которые MOryт попасть в за
зор. Полусухое и полужидкостное трение это промежуточные
режимы между сухим и rраничным, а также rpаничным и жид
костным трением.
Жидкостное трение можно осуществить, обеспечив ДOCTa
точно :Высокое давление в среде, разделяющей поверхности
шейки вала и подшипника. Если разделяющей средой служит
жидкая смазка, а давление создается масляным насосом, HarHe
тающим ее в клиновой зазор между поверхностями, то получаем
rидростатический подшипник. Давление может быть получено
также в результате самозатяrивания жидкой смазки в клиновой
зазор между поверхностями. В этом случае имеем rидродинами-
ческий подшипник. Если разделяющей средой служит воздух, то
опора будет rазостатическая или rазодинамическая. Зазор между
рабочими поверхностями шейки вала и подшипником может
обеспечивать электромаrнитное поле. Подшипник, в котороМ
зазор обеспечен указанным образом, называют маrнитным.
110
Если в номинальном режиме работы не удается или нецеле
сообразно обеспечивать зазор, достаточный для получения жид
J(OCTHoro трения, подшипник называют подшипником cyxoro
треНИЯ.
Ниже будут рассмотрены подшипники rидродинамические и
cyxoro трения как наиболее распространенные.
12.1.2. Режимы работы и расчет rидродннамическоro подшипника
При отсутствии вращения шейка вала r:идродинамическоrо
подшипника занимает (рис. 12.1, а) нижнее положение в расточ
ке под подшипник. При разrоне (рис. 12.1, б) она как бы BKaTЫ
вается в [орку, образованную поверхностью ПОДШИПI?ика. В
этом случае реализуется rpаничное трение. Центральны уrол <р
отклонения оси вала от вертикальной оси, проходящеи через
центр подшипника, равен уrлу трения. При установившемся
движении (рис. 12.1, в), если частота вра щения достаточна для
создания подъемной силы, превышающеи радиальную наrpузку
на опору, шейка вала всплывает и смещается в друryю сторону.
D
d
а
о-
8
6 н
r
\ f\r
t
z
Рис. 12.1. [идродинамический поДШИПНИК:
а при отсутствии вращения вала; б при разrоне вала; в при вр щении вала
с номинальной скоростью; i? изменение контактных напряжении в подшип
нике во времени
111
в связи со сказанным контактные напряжения в наиболее
наrpуженной точке рабочей поверхности подшипника (точка А
на рис. 12.1, в) будут изменяться во времени в соответствии с
rpафиком, приведенным на рис. 12.1, 2, [де периодичность ЦИК..
ла определяется периодичностью пусков и остановок машины.
При редких включениях напряжение Q' Н можно принимать CTa
тическим. Поэтому в стационарных машинах ресурс подшипни..
ков не оrpаничен их усталостной прочностью.
Пусть 11 == D d, ё == 11/2 и ч1 == l1/d соответственно диамет
ральный, радиальный и относительный зазоры в Подшипнике, а
Х == е/ё и h min == ё е == ё(1 е/ё) == ё(1 х) относительный экс
центриситет и минимальный зазор в Подшипнике, [де (см.
рис. 12.1, в) п, d диаметры подшипника и шейки вала' е экс
центриситет. Тоrда, соrласно условию обеспечения ж костно
ro трения,
h mil1 2(R z1 + R z2 ),
(12.1 )
[де R z1 , Rz2 высоты микронеровностей поверхностей шейки Ba
ла и ПОДШипника, можно оценить, какой Р адиальной силой F
r'
Fr == IdСрТ)(j)/ЧJ2,
(12.2)
можно наrружать подшипник. Здесь Fr в Н; Z длина под
шипника, мм (обычно l/d == 0,6...1,0); CpZ x/(l х) коэф
фициент наrpуженности подшипника (приближенная оценка);
т) динамическая вязкость масла при рабочей температуре, Па.с;
(j) == пп/30 уrловая скорость вала, c 1;
Динамическая вязкость характеризует внутреннее трение в
масле, т. е. свойство сопротивляться сдвиrу одноrо ero слоя OT
носительно друrоrо, и, соrласно закону Ньютона,
't
т) = dv / dh '
(12.3)
dv
rде't напряжение сдвиrа в слое, dh rpадиент изменения CKO
рости v по толщине h масляноrо слоя.
у масла динамическая вязкость т) пропорциональна кинема
тической вязкости У, обычно указываемой в ero обозначении, 11
плотности р:
112
11 == 10 6yp,
( 12.4)
rде 1 0 6 переводной коэффициент, увязывающий единицы из
мерения т) (Па.с), v (мм 2 /с) и р (кr/M 3 ).
Плотность большинства масел составляет р z 900 кr /м 3 .
Динамическая вязкость масла снижается с ростом темпера
турье
1] = 1]o( t )т,
(12.5)
rде 11, 110 динамическая вязкость масла при температурах t и 'о
соответственно; т :=: 3 показатель степени.
Формула (12.2) получена на основе решения уравнения
Рейнольдса для изменения давления по длине клина в жидко
сти, которая находится в клиновом зазоре между двумя Ha
клонными плоскостями, перемещающимися одна относитель
но друrой. Формула подобна формуле для подъемной силы
крьша самолета.
Отметим, что дЛЯ обеспечения динамической устойчивости
подшипника ero относительный эксцентриситет Х должен быть
не менее 0,5. Иначе в подшипнике MOryт возникнуть автоколе
бания.
При пуске и остановке жидкостное трение отсутствует. Что
бы снизить износ и тепловыделение в эти периоды времени,
среднее давление и произведение среднеrо давления на CKO
рость скольжения оrpаничивают допустимыми [р] и [pv]:
F
[р] р = d; ;
(12.6)
[pv] pv.
(12.7)
Значения [р] и [pv] приведены в приложении П.12.1.
В случае, если d задано в миллиметрах, а п в минутах в ми
нус первой степени, то при вычислении по формуле
ndп
v=
60.1000
v будет выражена в метрах в секунду.
113
Пример 12.1. Радиальная наrрузка на ПОДIIПШНИ}(
(рис. 12.2) Fr == 20000 Н, диаметр ПОДllпшника d :::::
== 80 мм, температура подшипника 1 == 45 ос, чаСТОТа
вращения вала п == 1000 мин l, выста МИкронеровно
стей вала и подnш:пника Rzt == 0,8 мкм и Rz2 == 3,2 Мкм
сотвстственно. В подnш:пнике используется масло
и r А 68 с кинематической ВЯЗКОСТЬЮ уо == 68 мм 2 /с,
полученной при 10 == 40 ОС. Определить необходимую
длину подшипника 1, подобрать ero материал, выбрать
посадку.
1. Определяем 1. Так как обычно I/d == 0,6...1,0, то
принимаем
Рис. 12.2. Расчетная
схема подnш:пника
скольжения
1 == 0,9d == 0,9.80 == 72 мм.
2. Вычисляем среднее давление и произведение давления на скорость:
р = Fr = 20000 = 3 47 МПа
dl 80. 72' ,
v = = 3,14.80.1000 = 4 2 м/с
60 . 1000 60 . 1000 ' ,
ру == 3,47.4,2 == 14,6 МПа. м/с.
Сопоставляя полученные значения р и ру с допускаемыми [р] и [pv], указан
ными в приложении П.12.l, заключаем, что в качестве материала подшипника
приrоден оловянно свинцовый баббит Б16, у KOTOporo [р] == 15 МПа и [pv] =
== 50 МПа . м/с.
3. Оцениваем динаМИ'fескую вязкость масла при t == 45 ос
( to ) т ( 40 ) 3
11 =10 РУО t =10 .900.68 45 = 0,04Па. с.
4. Вычисляем уrловую скорость вала
w = 2у = 2. 4,2.103 = 105 с l
d 80
5. Используя приложения П.6.2, П.6.4 и П.6.5 (см. шаr 6), подбираем посад
КУ. Соrласно приложению П.6.5, в случае изrотовления отверстия по 7 мy КБалИ
тету для соединений с зазором рекомендуются следующие посадки: H7/d8,
Н7/е8, Н7/п, H7/g6. Значения допусков приведены в прююжении n .6.2, а зна
чения основных отклонений валов в приложении П.6.4.
Верхнее и нижНее отклонения диаметра отверстия 80Н7 состаБ1IЯЮТ ES ;::::
== 30 мкм, EI ==0.
Дальнейшее решение задачи приведено ниже:
114
H7/d8 Н7/е8 Н7/п H7/g6
Верхнее и нижнее отклонения
диаметра вала, мкм:
es 100 60 30 10
ei 146 106 60 29
Измеренный зазор ДI1З, мкм:
тах 176 136 90 59
min 100 60 30 10
Расчетный зазор д"l, мкм:
тах 181 141 95 64
min 105 65 35 15
Относительный расчетный зазор 'Р.l0 4 :
тах 22,6 17,6 11,9 8
min 13,1 8,1 4,3 1,9
Коэффициент наrруженности ср"'2:
тах 4,22 2,56 1,17 0,53
min 1,42 0,54 0,153 0,03
Относительный эксцентриситет х"3:
тах 0,808 0,719 0,539 0,346
шiп 0,587 0,331 0,133 0,029
Минимальный зазор h шill *4, мкм:
тах 17,4 19,8 21,9 20,9
min 20,65 21,7 15,2 7,3
"1
д. == диз+l,2(Rz1 + R;).).
"2 106 Pr'P2
cF
/d11 W
"3 x= .
1 + CF
"4
h шiп == 0(1 х).
Условию h Шill 2(R z1 + R z2 ) = 2(0,8 + 3,2) = 8 мкм не удовлетворяет посадка
H7/g6, а условию Х > 0,5 (отсутствие автоколебаний) кроме TOro, посадки
H7/f7 и Н7/е8.
Таким образом, для ПОДllпшника приемлема посадка H7/d8.
Для более точных расчетов в специальной литературе приво
дятся таблицы зависимости СрОТ Х и l/d. Эти расчеты проводят с
учетом зависимости вязкости масла от температуры подшипни
ка) которую, в свою очередь, вычисляют с учетом тепловьщеле..
И:ИЯ в подшипнике и теплоотвода от Hero. Теnловьщеление pac
считывают по моменту трения в подшипнике) а теплоотвод,
необходимый для обеспечения заданной температуры подшип
НИка, по количеству прокачиваемоrо через подшипник масла.
Момент трения в подшипнике может быть оценен (в пред
ПОложении е == О, т. е. Fr О) по формуле
115
Т d l T17 rd1v
1[(['
8 '
вытекающей из (12.3).
12.1.3. Расчет ПОДппшника cyxoro трения
Чтобы оrpаничить износ и тепловьщеление в ПОДшипнике,
сначала определяют среднее давление и ero про изведение на ли
нейную скорость, а затем сопоставляют их значения со значе
ниями, приведенными в приложении П.8.2. Если необходимо
приближенно рассчитать ресурс подшипника, используют фор
мулы (8.2), (8.3) (см. шаr 8).
Значения [р] и [pv], приведенные в приложении П.8.2, He
сколько ниже значений, указанных в приложении П.12.1, в свя
зи С длительным временем работы рассматриваемоrо типа ПОД
шип ника при сухом или rраничном трении.
12.1.4. Области "рименения
Подшипники скольжения применяют в T X случаях, коrда
нужны: особо быстроходные опоры валов, для которых ресурс
подшипников качения был бы недостаточным из за большоrо
числа циклов наrpужения опасной зоны, особо крупные опоры
индивидуальноrо производства, особо точные опоры, опоры,
работающие в условиях вибрации и удара, разъемные опо
ры, опоры, работающие в аrрессивной среде или воде, HeOTBeT
ственные тихоходные опоры.
12.2. ПОДШИПНИКИ качения
12.2.1. Классификация подшипников
Подшипники качения подразделяют по следующим призна
кам:
1) по направлению воспринимаемой наrpузки: радиальные
(предназначены для восприятия в основном радиальной наrруз
ки, некоторые из них Moryт воспринимать и осевую наrpузку);
радиально"упорные (воспринимают комбинированную радиаль
ную и осевую наrрузки); упорные (служат для восприятия чисто
осевой наrрузки) и упорно радиальные (допускают комбиниро
ванную наrpузку с преобладанием осевой);
116
2) по форме тел качения (рис. 12.3): шариковые; с короткими
ЦIfЛlfндрическими роликами; с длинными цилиндрическими роли..
ками, или иrольчатые, у которых длина больше диаметра тел Ka
qенИЯ в 4 10 раз; с конически..
ми роликами; с бочкообразны"
ми роликами; с витыми ролика..
МИ (при меняют в опорах
прокатных станов для смяrче
НИЯ ударов, возникающих при
прокатке металла);
3) по числу рядов качения:
однорядные, двухрядные, четы
рехрядные (применяют в опо
рах прокатных станов дЛЯ BOC
приятия больших радиальных
наrpузок);
4) по степени caMOYCTaHaB
ливаемости: несамоустанавли
вающиеся, допускающие He
большой перекос (1...8'), и
самоустанавливающиеся, допус.. Рис. 12.3. Тела качения:
кающие перекос колец под
шипника 3...40.
Полное условное обозначе
ние подшипника по [оет
520 89 приведено на рис. 12.4.
Основное обозначение подшипника состоит из семи цифр,
ero расшифровку начинают справа налево (см. рис. 12.4). Для
внутренних диаметров подшипника d от 20 до 495 мм число в
обозначении, стоящее в первых двух клетках (справа налево), yм
ноженное на пять, указывает
значение d в миллиметрах. Сле
довательно, в этом диапазоне
значение диаметра должно
оканчиваться на О или 5.
В третьей клетке указывает
ел серия подшипника по ero на
РуЖному диаметру п. Различа
Ют серии в порядке увеличения
D и rpузоподъемности подшип
l:Iика: 1 особолеrкая, 2 леr Рис. 12.4. Пояснение обозначения
кал, 3 средняя, 4 тяжелая. ПОДlШIпников качения
$
fl
а
о
B
8
z
8.вз&
f}
е
а шарики; б короткие цилиндриче
скис ролики; в длинные цилиндриче
ские ролики (иrолки); l конические
ролики; д бочкообразные ролики; е
витые ролики
ОсноВное ОООJНОЧСНl1С
D D DDODDDD[]
"1::)
!!:1
:...: cj
с::, t:::, c::,
St: .
1:::1 :::t:: с::, S
1-.:::
:
11'"
t:..1 .....
117
Кроме Toro, имеются сверхлеrкие серии подшипников, обозна
чаемые цифрами 8 и 9. Цифры 5 7 в третьей клетке вместе с
цифрой в седьмой клетке указывают одновременно серию ПО
диаметру и ширине подшипника.
В четвертой клетке зашифрован тип подшипника: О шари
ковый радиальный однорядный; 1 шариковый радиальный
сферический; 2 роликовый радиальный однорядный с KOpOT
кими цилиндрическими роликами; 3 роликовый радиальный
сферический; 4 роликовый радиальный с длинными цилинд
рическими роликами (иrольчатый); 5 роликовый радиальный
с витыми роликами; 6 шариковый радиально упорный; 7
роликовый конический; 8 шариковый упорный и шариковый
упорно радиальный; 9 роликовый упорный и роликовый
упорно радиальный.
В пятой и шестой клетках указывается конструктивная раз
новидность подшипника.
В седьмой клетке зашифрована серия подшипника по ero
ширине В: узкая, нормальная, широкая, особоширокая.
Перед основным обозначением (справа налево) указывают
класс точности подшипника, rруппу радиальноrо зазора, шифр
момента трения, катеrорию (А, В, С).
Класс точности подшипника маркируется цифрой или зна
ком. roeT 520 89 предусматривает следующие классы точно
сти подшипников В порядке повышения точности: 8, 7, О, 6Х, 6,
5,4, 2, Т. Класс точности 6Х обозначается знаком Х.
В обозначении подшипника нули, стоящие левее последней
цифры, опускаются. Поэтому наиболее распространенный ша
риковый радиальный однорядный подшипник может иметь
обозначение, состоящее Bcero из трех цифр. Например, под
шипник 204 это шариковый радиальный однорядный под
ШИП ник С внyrpенним диаметром 20 мм, леrкой узкой серии,
без конструктивных особенностей, нулевоrо класса точности.
После OCHoBHoro обозначения Moryт стоять (слева направо)
буквы, характеризующие повышенную rpузоподъемность (А);
материал, отличный от подшипниковой стали; конструктивные
изменения; модифицированный контакт; специальные техни
ческие требования; температуру отпуска; пластичный смазоч
ный материал; уровень вибрации. Например, Б сепаратор из
бронзы, Е сепаратор из текстолита, Л сецаратор из латуни,
Сl...еI8 в подшипник заложена смазка определенноrо (см.
шаr 8) типа (смазку закладывают в подшипники со BcтpoeHHЫ
ми в НИХ двухсторонними защитными шайбами).
118
Шариковые радиальные однорядные подшипники (рис. 12.5, а)
типа 0000 (в четвертой справа клетке OCHoBHoro обозначения
стоит «О») предназначены для восприятия радиальной и ДBYXCTO
ронних осевых наrрузок (допускаемое направление наrpузок на
рисунке условно показано стрелками). Допустимый уrол взаим
Horo перекоса колец равен 8'. Диаметр тела качения Dw обычно
составляет О,з(п d). Радиус желоба r ж (рис. 12.5, б) BHyтpeHHe
ro кольца, как правило, равен 0,52D w , наружноrо 0,53Dw' Если
нужен подшипник с уменьшенным моментом трения, то назна
чают УЖ == 0, 54D w' Сепаратор (рис. 12.5, в), как правило, змейко
вый, изrотовляемый из мяrкой стали. Если бы не было сепара
тора, то вследствие разброса значений Dw шарики катались бы с
различными скоростями, один из них доrонял бы дрyrой, и их
относительная скорость при касании составляла бы двойную
окружную скорость шарика, что моrло бы привести к задирам.
Подшипник типа 0000 наиболее дешев, а поэтому наиболее pac
пространен.
Шариковые радиальные двухрядные сферические подшип
ники типа 1000 (рис. 12.5, 2) предназначены для восприятия pa
диальной и оrpаниченных осевых наrpузок любоrо направления.
Вследствие Toro, что дорожка качения наружноrо кольца полу
чена расточкой по сфере, подшипники допускают значительные
(ДО 40) перекосы колец. Применяются такие подшипники в уз
лах с нежесткими валами и в конструкциях, rде в корпусах не
может быть обеспечена НадЛежащая соосность отверстий, пред
назначенных для установки наружных колец подшипников (Ha
пример, две опоры вала, установленные в разных корпусах).
Роликовые радиальные подшипники с короткими цилинд
рическими роликами типов 2000 и 32000 (рис. 12.5, д, ж) пред
назначены для восприятия чисто радиальной наrpузки. Под
llIИпники типов 12000 и 42000 (рис. 12.5, е, з), кроме тoro, допус
кают одностороннюю осевую наrpузку. Допустимый уrол пере
Коса колец 2'.
Роликоподшипники иrольчатые типов 74000, 24000, 464000
(рис. 12.5, и л) отличаются большой радиальной rрузоподъем
Ностью при малых радиальных rабаритных размерах, но допус
Кают очень малые перекосы колец (до 1').
Шариковые радиально упорные подшипники типов 6000
(рис. 12.5, м), 36000, 46000, 66000 (рис. 12.5, н) предназначены
для восприятия радиальной и односторонней осевой наrpузок.
Без осевой наrpузки подшипники работать не MOryт. Тип 6000
разъемный, называемый маrнетным, типы 36000, 46000, 66000
119
неразъемные. Неразъемность обеспечена наличием небольшоrо
буртика сбоку дорожки качения наружноrо кольца. Небольшой
буртик не мешает надеть при сборке подшипника HarpeToe в
масле наружное кольцо на тела качения, контактирующие с
внутренним кольцом и размещенные в сепараторе, однако он не
предназначен дЛЯ передачи осевых сил. Номинальный уrол KOH
такта а у подшипников типов 6000 и 36000 равен 120, а у под
шипников типов 46000 и 66000 соответственно 260 и 360. Чем
больше yrол контакта, тем больше допустимая осевая и меньше
допустимая радиальная НaI"рУЗКИ на подшипник. Для этих под
шип ников при монтаже необходима реrулировка oceBoro зазо
ра. Допустимый взаимный перекос колец составляет 4...6'.
а
е
O ]
I I
I I
л
rж
m
о
ж
м
8
J
н
z
iJ
t:1
11
роликовые конические подшипники типов 7000 и 27000
(рис. 12.5, о) воспринимают радиальную и одностороннюю oce
вую наrpузки. Без осевой наrрузки они неработоспособны, так
каК радиальная нarрузка создает осевую составляющую, BыдaB
БающуЮ одно кольцо подшипника из под друrоrо. Тип 7000
:еет уrол контакта а == 10...180, а тип 27000 а == 20...300. Под
шипники нуждаются в реryлировке и допускают уrол перекоса
колец до 2'.
Шариковые упорные подшипники типа 8000 (рис. 12.5, п)
предназначены для восприятия односторонней осевой наrруз
ки, они не центрируют вал в радиальном направлении и допус
кают перекос колец до 2'. Одно кольцо подшипника, называе
мое туrим, имеет внутренний диаметр обычно на 0,2 мм
меньше, чем у друrоrо кольца, называемоrо свободным. Туrим
кольцом подшипник одевают на вал, свободное кольцо YCTaHaB
ливают в корпус.
Таким образом, радиально упорный шариковый подшип
ник с диаметром посадочноrо отверстия на вал 20 мм, уrлом
контакта 120, неразъемный, класса точности 6, леrкой узкой
серии, с сепаратором из латуни будет иметь следующее обозна
чение:
6 36204 л.
rабаритные размеры подшипников при фиксированном их
внутреннем диаметре зависят от серий по диаметру и ширине
(рис. 12.6).
к
!t
а б 8 ;; iI е IК J
п
о
Рис. 12.5. Некоторые типы подшипников и воспринимаемая ими наrрузка:
а шариковый радиальный однорядный (0000); б, в внутреннее кольцо и сепаратор co
ответственно; z шариковый радиальный двухрядный сферический (1000); д роликовыЙ
радиальный с короткими цилиндрическими роликами (2000); е то же (12000); ж то же
(32000), з то же (42000); li роликовый радиальный иroльчатый (74000); к то же
(24000); л то же (464000); м шариковый радиалЫlО УПОРНЫЙ (6000); н то же (36000,
46000, 66000); о роликовый радиально упорный конический (7000, 27000); п шарикО
вый упорный (8000)
120
Рис. 12.6. Серии шариковоrо радиальноrо однорядноrо подшипника
с диаметром BHyтpeHHero кольца 60 мм по ширине (а, б) и по наруж
ному диаметру (в з):
а оеоболеrкая узкая (7000112); б осоБОJlеrкая нор шльная (112); в CBepx
леrкая (1000812); z то же (1000912); д особолсrкая (112); е леrкая (212),
;ж: средняя (312); з тяжелая (412)
121
Тип, а также серия подшипника определяют ero rрузоподъ
емность, предельную частоту вращения и массу (рис. 12.7).
П. JO /JMl1H 1
C'IO iJ 2 Щ КЕ
Z 0,2
0,1
а
о
8
ж
J
8
е
z
Рис. 12.7. Сравнительная характеристика разных типов подшипников по ДИна
мической rрузоподъемности С, предельной частоте вращения п и массе т:
а 205; б 305; 6 32205; е 2305; д 36205; е 36305; ж 7205; з 7305
12.2.2. Материал ПОДШипников качения
Материалом шариков и роликов с диаметром Dw до 20 мм, а
также колец подшипников с толщиной стенки до 12 мм обычно
является хромистая высокоуrлеродистая сталь марки ШХI5.
Предел текучести при испытании на растяжение закаленных об
разцов из этой стали а т == 2200...2600 МПа. Для изrотовления
роликов и колец больших размеров используют стали с повы
шенным уровнем леrирования ШХ15еr и ШХ20еr так как
более высокое содержание кремния и MapraHua пониж ет у них
скорость охлаждения металла и позволяет закалить детали на
большую rлубину. Кольца подшипников MOryт быть выполненЫ
и из друrих сталей (например, предназначенных для поверхно
cTHoro упрочнения).
12.2.3. Выбор ПОДШИпников
Основным видом повреждения считают выкрашивание дo
рожек качения и тел качения подшипников под действием по
вышенных контактных напряжений. Поэтому зависимости, на
которых основан выбор подшипников, это формулы [ерца
122
Беляева (см. 7.1.1 шаrа 7) для точечноro (при подборе шарико
БыIx подшипников) и линейноrо (при подборе роликовых под
шипников ) контактов. Причем в этих зависимостях напряже
КИЯ выражены через силы, наrружающие подшипник (см. 7.1.3
шаrа 7).
Подшипники качения явились первыми объектами в маши
настроении, для которых были предложены вероятностные
оuенки ресурса. В 1918 r. технический директор фирмы еКФ
(Швеция) Арвид Пальмrpен орrанизовал ресурсные испытания
подшипников и в 1924 r. опубликовал первые материалы по их
результатам. Отношение ресурсов наиболее долrовечноrо под
шипника к наименее долrовечному в 1918 r. составляло 1000: 1,
а в 1937 [. оно стало 40 : 1. Анализ результатов позволил
А. Пальмrрену предложить вероятностные расчеты ресурса под
шипников по контактной выносливости. Эти расчеты практи
ческИ не изменились и к настоящему времени.
При частоте вращения до 1 мин 1 подшипники выбирают
по статической rрузоподъемности Со' указанной в каталоrе.
Статической rpузоподъемностью радиальных и радиаль
но упорных (упорных и упорно радиальных) подшипников Ha
зыаютT такую радиальную (осевую) наrpузку, которая вызывает
общую остаточную деформацию тел качения и дорожки каче
НИЯ, равную 0,0001 диаметра тела качения. Взаимосвязь СО с
ЧИСЛОМ рядов тел качения i, числом тел качения в одном ряду Z,
диаметром тела качения Dw, длиной тела качения (для ролико
BblX подшипников) 1 и уrлом контакта а описывается формула
ми, полученными на основе формул (7.1), (7.2) [ерца Беляева
и формул (7 .7) (7.9) для распределения наrpузки по телам каче
иия: Со == 12,3izD cosa для радиальных и радиально упорных
llIариковых подшипников (кроме самоустанавливающихся),
СО == 21,6iz/Dw cosa для радиальных и конических роликовых
Подшипников; Со == 49izD; cosa для упорных и упорно ради"
альиых шариковых подшипников. Эти формулы используют
При определении статической rpузоподъемности HOBoro типо
размера подшипника по результатам испытаний уже применяе
Moro типоразмера.
При выборе подшипников в конструируемую машинутребу
ется, чтобы выполнялось условие
Со > /ЗР О ,
(12.8)
123
rде fз коэффициент надежности, равный 1,2...2,5; 0,8...1,2 и
0,5...0,8 при высоких, нормальных и пониженных требованиях I<
леrкости вращения соответственно; РО эквивалентная стати
ческая наrpузка на подшипник, Н.
ДЛЯ радиальных и радиально упорных подшипников экви
валентной статической наrpузкой является наибольшая из двух
РО == XOFr + УОРа' РО == Fr;
(12.9)
для упорных подшипников
РО == Р т
(12.10)
rде Х о , JQ коэффициенты радиальной и осевой статических
наrрузок, определяемые по приложению П.12.2 или по каталоrу
для подшипников; Fr, Ра радиальная и осевая наrpузки на
подшипник.
При частоте вращения от 1 до 1 О мин 1 ее принимают paB
ной 10 мин l.
При частоте вращения, равной ИЛИ большей 10 мин l, под
шипники подбирают по динамической rpузоподъемности С,
указанной в каталоrе.
Динамической rpузоподъемностью радиальных и радиаль
но"упорных подшипников называют такую радиальную наrpузку
Fr (рис. 12.8, а), которую с 90 % ной вероятностью может BЫ
держать подшипник без повреждений в течение одноrо миллио
на оборотов BHyтpeHHero кольца. Динамической rрузоподъемно
стью упорных и упорно..радиальных подшипников называют
такую осевую наrpузку Ра (рис. 12.8,6), которую с 90 % ной Be
роятностью может BЫ
держать подшипник без
повреждений в течение
одноrо миллиона оборо
тов. На рис. 12.8 по оси
абсцисс отложена велИ
чина L I0 ресурс под
L 10 шипника в миллионах
оборотов. Индекс «10»
обозначает, что ресурс
оценивается для Bepo
ятности отказа подшиn
ников 10 %.
r,.
та
с сопБ!
I
с сопБ!
I
L10
о
о
Рис. 12.8. Зависимость ресурса от наrрузки
на подшипник ДЛЯ радиальных и радиаль
но упорных подшипников (а), для упорных
и упорно радиальных подшипников (б)
124
Динш..1ическая rрузоподъемность нелинейно связана с пара
метрами i, Z, Dw, 1 и а подшипника: С = 10(icosa)0,7 Z2/3 п 8
для шариковых подшипников с Dw 25,4 мм; С = 3,6510 х
х (i cosa)0,7 Z 2/3 D 4 для шариковых подшипников с Dw >
> 25,4 мм; С = 10 иl cos а) 7/9 Z 3/4 D ;9/27 для роликовых под
IlIИПНИКОВ. Здесь fo коэффициент пропорциональности. He
линейность связей динамической rрузоподъемности с парамет
рами подшипника объясняется учетом как масштабноrо эф
фекта, так и влияния на величину С изменения числа циклов
наrружения опасной зоны подшипника. Эти формулы также ис
пользуют в промышленности при определении динамической
rpузоподъемности HOBoro типоразмера подшипника по резуль
татам испытаний уже применяемоrо типоразмера.
Ресурс подшипника в часах L IOh (индекс h указывает, что
ресурс рассматривается в часах) вычисляют по формуле
L а2З(с/р)т.l06
10h 60п
(12.11)
rде а23 коэффициент, учитываюшиц влияние материала дeTa
лей подшипника и условий эксплуатации (приложение П.12.3);
р эквивалентная наrрузка подшипника, Н; т показатель
степени, равный 3 для шариковых и 3,33 для роликовых
подшипников; п частота вращения подшипника, мин 1.
Эквивалентную наrpузку вычисляют по формуле
Р == (XVF r + УFа)kб
(12.12)
для радиальных и радиально упорных подшипников и
Р == Fаkб
(12.13)
ДЛЯ упорных подшипников.
Здесь А:: У коэффициенты радиальной и осевой динамиче
СКих наrрузок, определяемые по формулам, приведенным в
ПРИложении П.12.4, или по каталоrу для подшипников; V KO
ЭФФициент вращения, принимаемый для радиальных одноряд
l:IЫх, радиально упорных и упорно радиальных подшипников
paBHbIM 1 при вращении BHyrpeHHero кольца относительно pa
Диальной наrpузки, 1,2 при вращении наружноrо кольца OT
l:IОСИ:тельно радиальной наrрузки; кроме Toro, V == 1 для сфе
125
рических (и MarHeTHbIx) подшипников вне зависимости от Toro)
какое кольцо вращается; k б коэффициент безопасности, учи
тывающий динамику работы и степень опасности разрушения и
равный 1 для механизмов с ручным приводом, 1)0...1,2 для
механизмов металлорежущих станков (кроме строrальных, дол
бежных и llVIифовальных) и 1,3...1,5 для шпинделей шлифо
вальных станков и редукторов; k T температурный коэффици
ент, равный 1 при температуре подшипника до 100 ое.
[рафики, приведенные на рис. 12.9, поясняют причину Из
менения коэффициента вращения. Известно, что в радиаль
ных, радиально упорных и упорно радиальных подшипниках
наибольшие напряжения возникают на внутреннем кольце,
которое поэтому разрушается в первую очередь. Если BHYTpeH
нее кольцо вращается относительно радиальной наrpузки, То
rрафик изменения контактных напряжений в наиболее опас
ной точке BHyтpeHHero кольца имеет вид, представленный на
рис. 12.9, а. Если же внутреннее кольцо относительно радиаль
ной наrpузки не вращается, то rpафик приобретает вид, изобра
женный на рис. 12.9, б. Из сопоставления rрафиков следует, что
изменение контактных напряжений, представленное на
рис. 12.9, б, более опасно, и поэтому значение коэффициента
вращения в этом случае должно быть больше, чем для случая,
представленноrо на рис. 12.9, а.
При вычислении эквивалентной наrpузки радиальноro и pa
6 н
t
t
а
о
Рис. 12.9. Изменение контактных напряжений во времени
в наиболее наrруженной точке BHyтpeHHero кольца ради
апьно упорноrо подшипника:
(f BHyrpeHHee кольцо вращается относительно наrрузки; 6 BHyr
реннее кольцо неподвижно относительно наrрузки
диально упорноrо подшипников комбинированное наrpужение
радиальной и осевой силами заменяют эквивалентной наrpузкой
радиальноrо направления, а упорноrо и упорно радиальноrо
подшипников, наоборот, эквивалентной наrpузкой oceBoro Ha
126
rrpавления. Это делают для Toro, чтобы отношение С! Р в форму..
лаХ (12.12), (12.13) вычисляли для одинаково напраменных сил С
йР.
Если необходимо обеспечить подшипнику более высокую
вероятность S безотказной работы, то в формулу для вычисле
flия ресурса вводят параметр аl' т. е.
L nh == аl L 10h ,
Значения параметра а1 приведены ниже:
S . . . . . . . . . . 0,9 0,95 0,98 0,99
L nh . . . . . . . . . LlOh L 5h L 2h Llh
Gl . . . . . . .. . 1,0 0,62 0,33 0,21
Здесь п == 1 00(1 s) вероятность отказа в процентах, а значе..
нмя параметра аl вычислены в предполож нии справедЛИВОСТИ
распределения Вейбулла для описания рассеяния ресурса под
шипников, т. е.
а = ( 19 S ) 1/ k
1 19O,9 '
rде k ==1,5 параметр формы распределения Вейбулла, peKO
мендованный иео для роликовых и шариковых подшипников.
12.2.4. Значения коэффициентов Х и У
Рассмотрим, чем можно объяснить наличие двух возмож"
НЫХ значений каждоrо из коэффициентов Х и У (см. приложе
НИе П.12.4).
При приложении к подшипнику, имеющему нулевой ради
алЬНый зазор радиальной силы Fr (рис. 12.10, а), под наrpузкой
будет находиться приблизительно половина ето тел качения. С
Увеличением радиальноrо зазора (рис. 12.10, 6)- число наrpужен
HbIX тел качения сокращается и в результате сила, приходящаяся
На наиболее наrpуженное тело качения, возрастает. При осевом
наrpужении (рис. 12.10, в) радиальный зазор между телами каче
l-Iия и дорожками качения уменьшается и происходит некоторое
Выравнивание сил по телам качения, создаваемых наrрузкой Fr'
ЭТа особенность работы подшипника приводит к тому, что оп..
ределенное дополнительное осевое наrpужение однорядноrо
UОДlIIипника не снижает ресурса ero работы. Чтобы ее учесть, в
paCCMOTpeH e вводят коэффициент oceBoro наrpужения е пре
127
(о
.
а
о"
8
Рис. 12.10. Распределение наrрузки по Te
лам качения:
а на подшипник с нулевым радиальным зазо
ром действует радиальная сила; б На подшип
ник с радиальным зазором нормальной величи
ны действует радиальная сила; в на подшипник
с таким же зазором действуют как радиальная,
так и осевая силы
F
дельное отношение , до
VF r
достижения Koтoporo oce
вал наrpузка не снижает
ресурса подшипника с oд
НИМ рядом тел качения. Из
определения коэффициен
та oceBoro наrружения СЛе
дует, что, если в таком под
F
шипнике :::;; е, то х== 1,
VF r
F
у == О, а при > е Х < 1,
VF r
У> О.
12.2.5. Основные типы осевой фиксации валов
Различают три схемы осевой фиксации валов:
1) враспор;
2) с одной плавающей и
друrой фиксирующей в двух
осевых направлениях опорами;
3) с обеими плавающими в
осевом направлении опорами.
В схеме враспор каждый
подшипник фиксирует вал в
одном осевом направлении
(рис. 12.11, а), она наиболее
проста и технолоrична. Схема
применяется, если опоры распо
ложены в одном корпусе и вал
относительно короткий. Вал
считается относительно KOpOT
ким при ljd < .10, [де 1 pac
стояние между точками прило
В жения радиальных реакций в
Рис. 12.11. Основные схемы осевой опорах, d внутренний диа
фиксации валов: метр подшипника. Следует oT
а враспор; б с одной плавающей и метить, что, если в сборочноЙ
дрyrой фиксирующей в двух осевых Ha единице имеет место повышен
правлениях опорами; в с двумя плаваю
щими опорами ное тепловыделение, как, Ha
о
ti
128
прймер, в червячной переда..
Qe, то, чтобы не возникло
защемления подшипников в
переходный период разоrpе..
ва сборочной единицы, pac
стояние между реакциями в
опорах червяка должно быть
меньше указанноrо. Лучше
Bcero принять ljd < 8.
Схема с одной плаваю
щей и друrой фиксирующей
в двух осевых направлениях
опорами (рис. 12.11, б) менее
технолоrична и повышает
стоимость машины из за не..
обходимости как большеrо
количества операций обра
ботки посадочных мест под
подшипники, так и большеrо
количества деталей, образую
щих подшипниковые узлы.
Ее применяют в случае, если
подшипники установлены в
разных корпусах, или при бо
лее длинных валах (ljd 10).
Обе плавающие опоры
(рис. 12.11, в) используют, KO
rдa осевую фиксацию вала
обеспечивают иные детали,
например шевронное колесо
(на рисунке не показано).
Если вал наrpужен силой
F R консольно (рис. 12.12, а),
то дЛЯ снижения проrибов
Вала в точке приложения на
rpУзки до приемлемых значе
Rий консоль а стремятся
Уменьшить, накладывая or
раНичение на соотношение
1/ а. Часто выдвиrают условие
5 8640
2
а
/R
о
8
2
Fr2
Рис. 12.12. Схема действия сил на вал,
наrруженный консольно и YCTaHOB
ленный На подшипниках:
а радиальных; б радиалыю упорных
врастяжку; в раlUШЛЬНО УПОРНЫХ разною
диаметра врастяжку; 2 соединенных вместе
радиально упорных большою диаметра Bpac
тяжку (опорно поворотный подшипник)
129
[/ а 2.
(12.14)
Чтобы ero выполнить и при этом обеспечить минимальные Oce
вые rабаритные размеры Bcero привода, можно воспользоваться
радиально упорными подшипниками, установленными Bpac
тяжку (рис. 12.12, б) (разновидность схемы враспор, при KOTO
рой часть вала, находящаяся между опорами, растяrивается Oce
вой силой, а не сжимается, как при схеме враспор). Осевой
rабаритный размер привода (размер L на рисунке) снижается
блаrодаря тому, что при расчете наrpузок, действующих на опо
ры, радиальные реакции F rl и F r2 к радиально упорным под-
шипникам прикладывают в местах пересечений с осью вала
нормалей, проведенных к серединам дорожек качения наруж
ных колец подшипников. При этом смещение [о реакции можно
оценить по формуле
[о O,25(d + п) tg а,
(12.15)
[де D наружный диаметр подшипника; а уrол контакта.
Из формулы следует, что с увеличением среднеrо диаметра
подшипника будет возрастать и [о. еледовательно, при схеме
врастяжку, увеличивая диаметральные размеры d и D подшип
ника хотя бы одной из двух опор, можно сокращать
(рис. 12.12, в) осевой rабаритный размер L привода.
Если одновре?\:1енно увеличивать диаметральные размеры dи
D сразу двух подшипников, то в пределе получим rеометриче-
ское совпадение положений двух подшипников и две опоры бу
дут заменены одним опорно поворотным подшипникоМ
(рис. 12.12, 2).
На рис. 12.13 изображен чертеж привода ленточноrо тpaHC
портера. Привод осуществляется одноступенчатым цилиндриче-
ским MOTop peдyктopOM с внутренним зацеплением. Представле
но два варианта опор тихоходноrо вала этоrо редуктора. опорыI
выполнены в виде конических роликовых подшипников, уста-
новленных врастяжку, и имеют в первом варианте одинаковЫЙ
диаметр обоих подшипников, а во втором разный. РеryлироВJ(а
oceBoro зазора в подшипниках осуществляется rайкой. БлаrодарЯ
размещению одноrо подшипника над друrим второй вариант по-
лучился более компактным в осевом направлении.
Радиально упорные подшипники с большим yrлом контакта
чувствительны к изменениям oceBoro зазора в них. Поэтому та-
130
кие подшипники целесообразно сдваивать, применяя сдвоенный
подшипник в фиксирующей в двух осевых направлениях опоре.
А
А (уВеличено)
Вариант 1
А (уВеличено)
6арионт2
Рис. 12.13. Привод барабана ленточноrо транспортера от одноступенчатоrо ци
ЛI1:НДрическоrо MOTop peдyктopa с внутренним зацеплением, а также два вари
анта I<онструктивноrо исполнения опор выходноro вала MOTop peДYKтopa
5*
131
Для сдвоенноrо шариковоrо и роликовоrо подшипников ди-
намическая rpузоподъемность С сдв считается соответственн()
равной
с == 20,7 С.
сдв '
(12.16)
С == 2 7/9 С
СДВ .
(12.17)
12.2.6. Реакции в опорах с подшипниками нереryлируемыx типов
в подшипниках нереrулируемых типов (радиальные ша.
риковые (приложения П.12.5, П.12.6) и роликовые (приложе-
ние П.12.7» радиальные реакции
(рис. 12.14) прикладывают посереди-
не их ширины. Находят их из усло
о вия равновесия вала, приравнивая
о Fr2 нулю сумму моментов сначала ОТ-
носительно точки А, затем относи
тельно точки В. Причем реакции
находят отдельно в вертикальной и
rоризонтальной плоскостях. Далее
их rеометрически складывают и оп-
ределяют результирующие F rl и F r2 .
Осевая сила Р А , приложенная к
Рис. 12.14. Определение peaK валу, уравновешивается осевой peaK
ций в опорах с подшипниками цией, возникающей в одной из опор.
нереryлируемых типов Осевая реакция в друrой опоре равна
нулю. Для схемы наrpужения, приведенной на рис. 12.14, наи-
большие радиальная F r2 и осевая Р а2 == Р А реакции возникают во
второй опоре.
2
fA
о
о
Пример 12.2. Подобрать подшипники быстроходноrо вала ЦИЛlшдрическоro
одноступенчатоrо редуктора с шевронными колесами (рис. 12.15), если окруж-
ная и радиальная силы в зацеплении состаВЛЯ'
ют F f == 1000 Н, F R == 400 Н, посадочный ди а -
FM ме1р вала под подшипники d == 40 мм, рас-
стояние между опорами I == 200 ММ, консоЛЬ
а == 100 мм, частота вращения вала п.
== 1445 мин l, смазка жидкая, ресурс LlOh
== 10000 ч. Радиальную силу неопределенноr о
направления, приложенную на конце консо-
ли, создаваемую муфтой и вызванную несо ОС '
Рис. 12.15. Входной вал с шев ностью валов редуктора и двиrателя, приНЯ'l'b
ронной шестерней цилиндри равной Ем == 0,2Е окр ' (Окружную силу F OKP 1I8
ческorо редуктора диаметре пм расположения упрyrих элемеll'
2
i5
о
i5
t::I
tt
FR
l
а
132
тоВ муфты можно оuенить по передаваемому моменту Т, задавшись D M ; принять
Т:; 35 Н . м, DM == 100 мм.)
1. Выбираем тип подшипника. Быстроходный вал в осевом направлении бу
деТ устанавливаться шевронным колесом тихоходноrо вала. Поэтому обе опоры
быстроходноrо ва}IЗ делаем плавающими и в качестве опор выбираем одноряд
ные радиальные без буртов на наружном кольце роликовые подшипники. Про
веряем приrодность подшипника леrкой узкой серии. Соrпасно приложению
Л.12.7, подшипник имеет обозначение 2208, ero динамическая и статическая
rpузоподъемности составляют соответственно СО= 41800 Н, СО == 43000 Н, а пре
делЬНО допустимая частота вращения при жидкой смазке равна 10000 мин l.
2. Определяем радиальные rоризонтальную F rrl , Е п2 и вертикальную F rB1 ,
Р, в2 реакиии в первой и второй опорах:
Fr rl == Е, r2 == /2 == 1000/2 0= 500 Н;
Е, 51 == F, 82 == F R /2 ==400/2 == 200 Н.
3. ВЫЧllсляем радиальные реакиии, создаваемые муфтой, в первой Fr мI И
второй Fr м2 опорах:
F ::: О 2F == 0,2Т = 0,2 - 35000 = 140 Н'
м ' окр 0,5D M 0,5.100 '
F = FMa = 140 -100 = 70 Н-
rM1 1 200 '
F ::: Ем (а + 1) = 140(100 + 200) ::: 210 Н.
rM2 1 200
4. Находим суммарные радиальные реакиии в первой Frl и во второй F r2
опорах, предполаrая для худшеrо случая, что направление радиальной реакиии,
Создаваемой муфтой, совпадает для каЖдОЙ из них с направлением суммарной
радиальной реакции, вызванной силами в зацеплении:
Е 1 == E2 + F 2 + F rM1 = 5002 + 2002 + 70 = 608,5 Н;
r rrl rBI
F 2 = F2 + Е 2 2 + E rM2 :::: 5002 + 2002 + 210 = 748,5 Н.
r rr2 rB .
Делаем вывод, что наиболее нt1rруженной является вторая опора и для нее
Следует подбирать подшипник.
5. Вычисляем эквивалентную наrрузку 130 второй опоре, считая Х == 1; У 0= о;
V:::O:I; k б == 1,3; 4 == 1, и находим ресурс в часах, полarая а23 == 0,5 (см. приложения
n.12.3, П.12.4):
P:::(XVF r2 + YFа)kбk т =(1-1 748,5+ 0.0).1,3.1 =973Н;
L а23(С/Р)ПI .106
1011 60п
0,5(41800/973)3'33.106 "" 107 ч .
60.1445
133
Полученный ресурс превышает задаНный. Поэтому подшипники считаем
подобранными.
(5
о
FR1
FAz
lz
[1
l
Рис. 12.16. Промежуточный
вал цилиндрическоrо редук
тора
F = Р'2и 12) + Ftl / l = 7000(300 100) + 14000 .100 9333 Н'
rr 1 300 '
d
P R2 (/ 12) + Е А2 Е ю / 1
2
1
2550. (300 100) + 2500. 200 5100.100
2 =833Н'
300 '
F rB =
Pr = p2 2 + р2 2 = 9 ззз2 + 8332 = 9370 Н.
rr rn
2. По приложению П.l2.5 выбираем подшипник 212 леrкой узкой серии. Ero
размеры d == 60 мм, D == 11 О мм, В == 22 м:м:; динамическая и статическая rpузо
подъемности С == 52000 Н и СО == 32500 Н; предельно допустимая частота враш:е
пия при жидкой смазке 7000 мин l.
3. Соrласно приложению П.12.4, определяем коэффициенты е, Х; .У, а затеМ
эквивалентную наrрузку Р на подшипник. Относительно наrрузки вращаетсЯ
внутреннее кольцо подшипника, поэтому v== 1. Для радиальноro подшипнИка
осевая сила, нarружающая ero, равна равнодействующей осевых сил, действую
щих на вал: Еа == Е А2 . ПОДШШIНик устанавливается в редуктор, поэтому k6 == 1,3.
Температура подшипника ожидается не выше 100 ос, поэтому kr == 1. ВычисляеМ
0,21 Q 21
е=0518 ( Ра ) =0518 ( 2500 ) ' =0302.
, СО ' 32500 '
134
ТаК как значение = 2500 :::: 0,266 меньше е ==0,302, то принимаем х==
VF r 1 .9370
:::: 1, У == о. Эквивалентная наrpузка на подшипник
Р == (XVF r + YF a )k 6 kr == (1 . 1 .9370 + О . 2500) . 1,3 . 1 == 12180 Н.
4. Оцениваем 90 % ный ресурс подшипника, приняв, сorласно приложению
П.12.3, а23 == 0,75 и считая т == 3, так как ПОДIШШНИК шариковый:
= а2з(с/р)т .106 = 0,75(52000/12180)3.106 = 3890ч.
oh 60п 60 . 250
Выбранный подшипник обеспечивает требуемый ресурс.
12.2.7. Реакции в опорах с подшипниками реryлируемых типов
к реryлируемым подшипникам относят подшипники типов
6000 (приложение П.12.8) и 7000 (приложение П.12.9). В таких
подшипниках образуется внутренняя осевая сила S, пропорцио
нальная радиальной наrpузке FrHa подшипник. Внутренние си
ЛЫ, возникающие в двух опорах вала, взаимно влияют на oce
вые реакции в опорах.
Выясним природу и опре
делим значения внутренних
осевых сил S. Пусть роликовый
конический подшипник соб
ран с большим осевым, а сле
довательно, и с большим ради
альным зазором (рис. 12.17, а).
При действии на Hero радиаль
ной силы Fr она полностью бу
дет передаваться через один
Ролик. Наrрузка на ролик
Qo =: Fr' Под действием ради
альной силы возникает осевая
СИЛа S =: Fr tg С1... Если Е й ока
Жется меньше S, то внутреннее
КОЛьцо вытолкнется из под на
РуЖ:ноrо и подшипник окажет
СЯ неработоспособным.
Передача наrpузки только
одним телом качения крайне
lIеблаrоприятна. Поэтому под
II.Il1аник собирают обычно так,
ЧТобы в нем практически OT
Fr
(}о
r,.
40
tEl
t9"
Fr
а
0.1
Fa
ot9"
Qo
Пример 12.3. Подобрать радиальный шариковый подшипник правой опорыI
промежуточноro вала редуктора (рис. 12.16), выполненноrо по развернутой схе.
ме (одна ступень редуктора расположена за
дрyrой), если известно, что посадочный Диа
метр подшиrrn:ика на вал должен составлять
d == 60 мм, делительные диаметры располо-
женных на валу прямозубой шестерни и косо.
зубоrо колеса d w1 == 100 мм и d w2 == 200 мм,
расстояние между опорами 1 == 300 мм, pac
стояния от шестерни и колеса До левой и пра
вой опор равны и составляют 11 == '2 == 100 мм.
Силы в зацеплении принять равными Frl ::=:
== 14000 Н, F ю == 5100 Н, Fr2 == 7000 Н, Е ю ::=:
== 2550 Н, Е А2 == 2500 Н; ресурс при вероятно
сти безотказной раб()ты 0,9 обеспечить не Me
нее L 10 / 1 == 2000 ч при частоте вращения вала
п == 250 мин l; смазка подшипника жидкая.
1. Вычисляем rоризонтальную Err и верти
кальную F rB состаВЛЯЮJ.Щ1е радиальной peaк
ции в правой опоре, а затем саму реакцию F,
о
Рис. 12.17. Внутренняя осевая сила в
роликовом коническом подшипнике,
наrруженном радиальной силой:
а ПОДШИПНИК с большим осевым зазором;
б то же с нулевым осевым зазором
135
сутствовали зазоры. При радиальном наrружении ПОДШИПНИКа
с нулевым осевым зазором наrружается не менее половины всех
тел качения (рис. 12.17, 6). Обозначим через п число тел каЧе
ния, находящихся в половине зоны наrpужения. Под действием
радиальных СЮl на телах качения возникнет внутренняя осевая
сила
S == Qo tga + 2Q1 tga+...+ 2Qn tga == (Qo + 2Ql +...+ 2Qn) tga,
б6льшая, чем в рассмотренном выше случае, так как Qo + 2Ql +
+...+ 2Qn > Fr' Расчеты показывают, что ее можно оценить По
формуле
S ==1,24 Fr tg а.
в приложении П.12.4 дЛЯ коническоrо роликовоrо подшип
ника указано, что е == 1,5 tga. Это позволяет выразить Sчерез е:
е
S == 1,24F r tga == 1,24F r 15 == 0,843eF r .
,
Подобным образом можно было бы получить формулы Ha
хождения S для друrих типов подшипников.
Итак, если подшипник отреryлирован на нулевой зазор, то
для радиально упорных роликовых подшипников
S == 0,843 eF r ;
(12.18)
для шариковых подшипников при <х, равном 260 и 360,
S == eFr,
(12.19)
а при а, равном 12, 15 и 180, соответственно
( 0,195
S 0,563 J Fr,
(12.20)
( Е J O,136
S == 0,579 c Fr'
(12.21)
136
S == 0,57 Fr'
(12.22)
При действующей со стороны вала на подшипник внешней
силе РО' меньшей S, зазор в подшипнике окажется больше нуля,
что крайне неблаrоприятно. Поэтому условие работоспособно..
сти подшипника примет следующий ВlЩ:
Ра;;:: S.
(12.23)
Таким образом, реакции в
опорах подшипников реrули
руемых типов (рис. 12.18, а) на..
ходят в следующей последова
тельности.
1. Приравнивая нулю суммы
моментов относительно точки
А, а затем точки В в вертикаль
ной и rоризонтальной плоско
стях (рис. 12.18, 6), вычисляют
вертикальные и rоризонталь
ные составляющие радиальной
реакции в каждой опоре. После
их rеометрическоrо сложения
определяют полные радиальные Рис. 12.18. Определение реакций в
реакции F r1 и F r2 в опорах. опорах с подшипниками реryлируе
2. Находят направление oce мых типов:
В F F а расчетная схема; б реакции Б опорах
ЫХ реакции аl и а2' с KOTO
рыми подшипники действуют на вал. С учетом направления pe
акций составляют условие равновесия вала
а
о
FR
Fa1
<
[ а 2
Е аl + Е А == Е а2
(12.24)
и записывают условия работоспособности п<?дшипников
F a1 81;
(12.25)
Е о2 ;;:: S2'
(12.26)
3. Предполаrая, что в одной из опор будет обеспечено paBeH
СТВо осевой реакции и внутренней силы, что указывало бы на
Р ( аботу подшипника с нулевым зазором, решают систему
12.24) (12.26).
137
Для приведенноrо на рис. 12.18 примера предположим, что в
условии (12.25) обеспечено равенство F a1 == 81' Тоrда, подстаБ
ляя в выражение (12.24) вместо F al силу 81 и накладывая на Hero
условие (12.26), имеем 81 + F A == Е а2 82' Последнее HepaBeHCT
во выполняется, так как в червячном зацеплении осевая сила
F A , действующая на червяк, велика. Поэтому окончательно по
лучаем: в первой опоре реакции радиальная F r1 , осевая Е аl
== 81 == 0,843 eF r1 ; во второй опоре радиальная Fr2' осевая Е а2
== 0,843 eF r1 + F A .
12.2.8. Опора вала в виде опорно поворотноrо подшипника
В 12.2.5 отмечалось, что для уменьшения расстояния между
двумя опорами консольно наrpуженноrо вала в опорах приме
няют радиально упорные подшипники, установленные Bpac
тяжку (см. рис. 12.12,6). Из формул (12.14), (12.15) следует, что
чем больше средний диаметр подшипника, тем меньше может
быть это расстояние. Таким образом, увеличивая средний диа
метр, можно указанное расстояние приблизить к нулю. В этом
случае одна опора окажется на месте друrой, т. е. они совпадут.
Конструктивно две совмещенные друr с дpyroM опоры из радй
ально упорных подшипников, установленных врастяжку, обра
зуют так называемый опорно поворотный подшипник.
В отличие от обычных подшипников опорно поворотные
подшипники позволяют реализовать ДЛЯ валов одноопорное за
крепление блаrодаря тому, что MOryт воспринимать осевую И
радиальную силы, а также опрокидывающий момент. В РОССИИ
такие подшипники выпускают индивидуально или мелкосерий
но, они не вошли пока в отечественные каталоrи, хотя во всем
мире их применение неуклонно растет. Их используют в робо
тах, станках и друrих машинах, в которых важно снижение oce
Boro rабаритноrо размера машины.
Возможные конструктивные исполнения опорно поворот-
ных подшипников И их расчет рассмотрены в шаrе 7.
На рис. 12.19 изображен чертеж при вода ленточноrо транс-
портера. Привод осуществляется с помощью paccMoтpeHHoro
ранее (см. рис. 12.13) одноступенчатоrо цилиндрическоrо мо-
Top peдyктopa с внутренним зацеплением. В качестве опоры ко-
леса с внутренним зубом применен опорно поворотный под-
шипник. В связи С тем, что это колесо имеет достаточно БОЛЫlIО Й
диаметр, оказалось удобным использовать подшипник с боЛЬ-
шим средним диаметром. При этом, учитывая, что подшиПI-lJlJ{
допускает наrружение значительным опрокидывающим момев-
138
том, на этом же подшипнике
закреплен и барабан ленточ
lIO ro транспортера. На черте
же видно, что тихоходный вал
отсутствует. Таким образом,
блarодаря замене двух радиаль
I-IО УПОРНЫХ подшипников oд
I-IИМ опорно поворотным yдa
лось снизить не только осевой
rабаритный размер, но и массу
привода.
А
А (уВеличено)
Пример 12.4. Вычислить наиболь
шие контактные напряжения в KOH
такте тела качения с дорожкой каче
НИЯ опорно поворотноrо подшипника
робота. Робот (начало задачи см. в
7.3.1 шаrа 7) rрузоподъемностью
600 Н имеет длину локтевоrо сустава
lл:= 1000 мм и поэтому наrpужает под
шипник осевой силой 600 Н и MOMeH
том 6.105 Н . мм. Известны параметры
подшипника: d o == 550 мм, Dw:= 12 мм,
z == 80. Рассмотреть следующие вари
анты конструктивноrо исполнения
ПОДШИПНИКа И варианты контакта (см.
7.1.4 шаrа 7): 1) с четырехточечным
контактом, 2) сдвоенный радиально упорный подшипник; 3) проволочный под
шипник, проволока не обработана; 4) то же, с проволоки снята фаска; 5) то же,
Проволока не обработана, контакт тела качения с наружной дорожкой качения;
6) то Же, с проволоки снята фаска, контакт тела качения с наружной дорожкой
качения; 7) то же, на проволоке проптифована выкружка, контакт тела качения
с наружной дорожкой качения; 8) подшипник с перекрестным расположением
роликов; 9) то же, контакт тела качения с наружной дорожкой качения; 10) тpex
рядный подшипник. для соответствующих конструктивных исполнений под
Шипника принять lw == Dw, Р == 0,52 Dw, d пр == 4 мм, о; == 450.
Для вычислений воспользуемся формулами (7.1), (7.2), (7.10) (7.13) шаrа 7.
Результаты вычислений приведены в табл. 12.1.
Рис. 12.19. Привод барабана ленточ
Horo транспортера от одноступенчато
ro цилиндрическоrо MOTop peдyктopa
с внyrpенним зацеплением. Зубчатое
колесо с внутренним зубом и барабан
транспортера установлены на опорно
поворотном подшипнике
Таблица 12.1
Вари F 1a FIM F R 2 R3 14 R
ант
ис «, k 1 k3 А/В ан,
rрад т МПа
nOJI
Нения Н мм
...............
1 45 1,0 4,37 10,6 84,3 94,9 6,0 382,9 6,24 156,0 0,0379 1,50 834,1
2 45 1,0 4,37 10,6 84,3 94,9 6,0 382,9 6,24 156,0 0,0379 1,50 834,1
45 1,0 4,37 10,6 84,3 94,9 6,0 2,0 382,9 5,9 0,2540 0,66 3257,0
139
ОКОliчание табл. 12.1
Вари Fl a FlМ F R2 R3 14 R
ант
ис 0:, k 1 k3 А/В т Он,
пол rpад МПа
нения Н мм
4 45 1,0 4,37 10,6 84,3 94,9 6,0 382,9 со 6,00 0,985 0,39 1903
5 45 1,0 4,37 10,6 84,3 94,9 6,0 2,0 394,90 6,09 0,246 0,31 1500
6 45 1,0 4,37 10,6 84,3 94,9 6,0 <х> 394,90 6,06 0,990 0,29 1406
7 45 1,0 4,37 10,6 84,3 94,9 6,0 394,9 6,24 156,00 0,039 1,45 806,3
8 45 2,0 8,00 21,2 154,2 175,4 382,9 5,90 301,5
9 45 2,0 8,00 21,2 154,2 175,4 394,9 6,09 296,7
10 90 1,0 4,00 10,6 77,1 87,7 00 6,00 211,4
При м е ч а н и е. Для всех вариантов исполнения Rl == 6,0 мм.
Анализ результатов расчета подтверждает известные факты: 1) для тел каче
ния одинаковоrо диаметра при линейном контакте возникают меньшие KOHTaKT
ные напряжения, чем при точечном; 2) напряжения на дорожке качения Bнyr
реннеro кольца ВЫШе, чем наружноrо. Вместе с тем по результатам расчета мож-
но сформулировать предложения по оптимизации конструкции подшипника.
Например, чтобы повысить наrpузочную способность проволочноrо подllШП
ника, может оказаться достаточным снять плоские фаски с проволок, образую
щих внутреннее кольцо подшипника, и не обрабатывать проволоку, образую
щую ero наружные кольца. При этом на внутреннем кольце напряжения снизят
ся с 3257 МПа до 1500 МПа, а на наружном составят 1903 МПа, т. е. ОlШ практи
чески станут равными.
12.2.9. Использование для передачи осевых сил от вала на корпус
пружинных упорных колец вместо КРЬШIск подшипников
в традиционных исполнениях подшипниковых узлов oce
вые силы с вала на корпус передаются блаrодаря упору наруж
Horo кольца подшипника в крышку, которая по своему испол
нению может быть либо привертной (рис. 12.20, а), либо заклад
ной. Закладную крышку можно установить только при наличи:И
плоскости разъема. И в случае привертной крышки, и в случае
закладной бобышку, в которой растачивают отверстие диамет
ром D под наружное кольцо подшипника, делают массивноЙ.
Обычно диаметр бобышки назначают равным D б 1,2 D + 10 мм.
Массивность бобышки в первом случае объясняется необход:и
мостью размещения в ней отверстий под винты привертноЙ
крышки, а во втором случае наличием силовоrо резьбовоr о
стыка в корпусе.
Масса подшипниковых узлов может быть значительНU
уменьшена, если для передачи осевых сил от вала на корпУС
140
вместо крышек использовать пружинные упорные кольца
(рис. 12.21, 6). Такой способ передачи реализован в редукторах
фирм SFW, Бауэр и Ленце (rермания).
(J
о
Рис. 12.20. Передача осевых сил от подшипников на корпус крышками
подшипников (а) и пружинными упорными кольцами (6)
Концентрические (rOeT 13940 86) и эксцентрические
(rOCT 13942 86) пружинные упорные плоские наружные коль
ца допускают осевое наrружение, но требуют, чтобы, BO пер
вых, yrлы у основания и наружной кромки канавки, предназна
ченной для установки кольца, не имели бы скруrлений и фасок,
BO BTOpЫX, поверхность упирающейся в кольцо детали, т. е. pac
UОрной втулки, устанавливаемой между подшипником и коль
цом, также не имела бы скруrлений и фасок и, в третьих, если
СlIЛы близки к предельным значениям, oroBopeHHbIM в CTaHдap
тах на упорные пружинные кольца, то о"в материала корпуса бьш
БыI не менее 300 МПа.
Отверстие с одной стороны корпуса удобно закрывать nла
СТмассовой крышкой. С друrой стороны корпуса расположен
141
выходной конец вала. Чтобы вал вывести наружу, в КОРПУсе
предусматривают уплотнение. Обычно для уплотнения валов
применяют резиновые армированные манжеты для валов
(rOCT 8752 79). Чтобы избежать для установки манжеты при
менения крышки подшипника, следовало бы брать манжету с
наружным диаметром, равным расточке под подшипник. He
мецкие стандарты и стандарты ИСО предусматривают налИчие
манжет с наружным диаметром, равным наружному диаметру
подшипников леrкой серии. В России вопрос о серийном BЫ
пуске таких манжет пока не решен (серийно выпускают MaH
жеты с наружным диаметром, соответствующим лишь наруж
ному диаметру подшипников особолеrкой серии). Из СОПос
тавления конструктивных исполнений, приведенных на
рис. 12.20, а и б, следует целесообразность налаживания на
отечественных заводах выпуска манжет с увеличенным наруж
ным диаметром.
12.2.10. РекомеJЩации по конструированию подшипниковых узлов
При конструировании подшипниковых узлов необходимо
учитывать следующее.
1. Если кольцо подшипника вращается относительно Ha
rрузки (циркуляционное наrружение), то ero следует YCTaHaB
ливать на сопряженную поверхность по переходной посадке
или посадке снебольшим натяrом. Если кольцо подшипника
относительно наrрузки не вращается, то ero нужно устанавли
вать на сопряженную поверхность по посадке скольжения.
2. Целесообразно уменьшать число стыков в элементах под
шипниковоrо узла, по возможности исключая использование
стаканов и переходных втулок, в которые монтируют подшип
ники. Это повысит соосность опор И улучшит теплоотвод оТ
подшипника.
3. В схеме осевой фиксации вала с использованием одной
фиксирующей в двух осевых направлениях и друrой плавающей
опор следует закреплять в осевом направлении более наrружен
ную опору. В этом случае облеrчится перемещение менее Harpy.
женной плавающей опоры.
4. Использование упорных подшипников для rоризонтальнО
устанавливаемых валов нежелательно, а при повышенных час.
тотах вращения недопустимо из за возможности смещениЯ
комплекта шариков с сепаратором относительно колец при сИЯ.
142
ТиИ oceBoro наrpужения, а также вследствие rироскопических
эффектов. В этих случаях лучше применять упорно радиальные
или: радиально"упорные подшипники.
5. Закладываемые в корпус подшипника пластичные смазоч
«ые материалы должны занимать не более 1/3 ero свободноrо
пространства. Жидкие масла необходимо заливать до уровня
цевтра нижнеrо тела качения подшипника.
6. Манжетные уплотнения можно применять при окружных
скоростях вала 7...15 м/с как для пластичных, так и для жидких
смазочных материалов. Если манжета предназначена для пре
дотвращения утечки масла из подшипника, ее нужно устанавли
вать уплотняющей кромкой внутрь подшипника, а если она за
щищает подшипник от заrpязнений извне, то кромкой наружу.
Если необходимо и то и друrое, следует применять сдвоенные
уплотнения. В случае большоrо перепада давлений в корпусе
подшипника и снаружи необходимо дополнительно устанавли
вать поддерживающие металлические кольца r образноrо сече
НИЯ.
7. Поверхность вала, контактирующая с уплотняющей
кромкой манжетноrо уплотнения, должна быть подверrнута
тонкому шлифованию или полированию, не иметь существен
Horo радиальноrо биения и не создавать повышенноrо натяrа в
контакте. Если эти условия выполнены, то манжета будет дол
rовечной. Для предотвращения изнашивания поверхность вала
должна иметь повышенную твердость.
12.3. Практика конструирования.
Выбор радиально упорных роликоподшипников
ДЛЯ вала червяка
12.3.1. Постановка задачи
в шаrе 10 была сформулирована задача по конструированию
ПРИвода ленточноrо транспортера. Решено осуществлять при
Вод от электродвиrателя через клиноременную передачу и чер
ВЯчный редуктор. Червячный редуктор и клиноременная пере
дача были рассчитаны в 10.3 и 11.4 (см. шаrи 10 и 11).
В данной задаче требуется выбрать радиально упорные po
JlИКоподшипники для червяка конструируемоrо червячноrо pe
ДУКТора, если заданы (рис. 12.21, а): расстояние между опорами
143
FA 2
2Fo
2FQ
о
Q
2Fo 8
fR
Рис. 12.21. Вал червяка:
а схема наrpужения; б осевая фиксация
вала враспор; в осевая фиксация вала с oд
ной плавающей и дрyrой фиксирующеЙ в
двух осевых направлениях опорами
а
1 == 300 мм (несколько
большее диаметра червяq
Horo колеса); длина KOH
соли, на которой прило
жена направленная верти
кально вверх сила 2Ео ::::::
== 150,4 Н предваритель
Horo натяжения ЮIиноре
менной передачи, а ::::::
== 40 мм; начальный диа
метр червяка d w == 52 мм;
силы в зацеплении червяка
с червячным колесом Fr ::::::
== 618 Н, Е А == 3333 Н, F R ::::
== 1083 Н; посадочный диа
метр вала червяка под под
шипники d == 35 мм; смаз
ка жидкая; частота враще
ния вала п == 1420 мин l;
требуемый 90 % ный pe
сурс L IOh == 10000 ч.
д
12.3.2. Выбор радиалъво упорпыx РОЛИКОПОДIШlпвиков
ДЛЯ вала червяка при установке подшипников враспор
1. Выбираем схему осевой фиксации вала и типоразмер под
шип ника.
Поскольку отношение 1/ d == 300/35 == 8,57 лишь немноrим
превышает допустимое для червяков отношение I/d == 8, То про
веряем применимость более простой схемы схемы враспор
(рис. 12.21, 6). Задаемся подшипниками типа 7000 леrкой серии.
Посадочному диаметру вала червяка под подшипник d == 35 ММ
соответствует, соrласно приложению П.12.9, подшипник 7207,
имеющий D =:: 72 мм, Т=:: 18,25 мм, динамическую и статиче
скую rpузоподъемности С=:: 38500 Н и СО =:: 26000 Н, коэффици
ент oceBoro наrpужения е == 0,37, предельную частоту вращенИЯ
при жидкой смазке 7000 мин l, yrол контакта а =:: 12...180.
2. По приложению П.12.4 уточняем уrол контакта, ОПредеЛЯ
ем расстояния L l и аl между точками приложения радиальных
реакций к подшипникам и между силой 2Ро и первой опорой:
е 037
а = arctg = arct g = 1390.
1,5 1,5"
144
L 1 z 1 2. О,25(п + d)tga ==
=:: 300 2 .0,25(35 + 72) tg 13,90 == 286,8 мм;
аl z а + 0,25(D + d) tga == 40 + 0,25(35 + 72) tg 13,90 ==
== 46,6 мм.
3. Вычисляем rоризонтальные F rr1 , F rr2 и вертикальные
F rB l' F rB 2 составляющие радиальных реакций в первой и BTO
рой опорах, а затем и сами реакции F rl , F r2 :
F rrl == F rr2 == Ftl2 == 618/2 == 309 Н;
F R L l FAd w 2 v
+ J'Oal
2 2
F rBl = L l
=
1083. 286,8 3333 .52 + 150,4. 46,6
2 2 2638 Н'
286,8 ' ,
FRL1 FAd w
+ 2Fo(a1 +L l )
2 2
F rB2 = L1
=
1083.286,8 + 3333. 52 150,4 . (46,6 + 286,8)
2 2 = 668 8 Н'
286,8 ' ,
F rl := F;rl + Е;вl := 3092 + 263,82 = 406,3 Н;
F r2 := F,2r2 + Р}В2 = J 309 2 + 668,82 = 736,7 Н.
4. Определяем коэффициент oceBoro наrружения е и осевые
реакции в первом Р а1 и втором Е а2 подшипниках.
Условие равновесия вала с учетом направления реакциц Р а1
и Е а2 имеет вид Р а2 == Р а1 + F A . К этому условию добавим два yc
ЛОВИя работоспособноrо состояния первоrо и BToporo подшип
145
ников Р аl ;::: 81' Р а2 ;::: 82' еовместно решая систему, состоящую
из трех условий, находим
Раl == 81 == 0,843eF rl == 0,843 . 0,37 . 406,3 == 126,7 Н;
Р а2 == 81 + Р А == 0,843eF r1 + Р А ==
== 0,843.0,37 . 406,3 + 3333 == 3459,7 Н.
5. Наиболее нarружена вторая опора. Для нее, используя
приложение П.12.4, вычисляем коэффициенты 1: В приложе
нии П.12.3 дЛЯ коническоrо роликовоrо подшипника находим
а23 == 0,65. Затем определяем эквивалентную наrpузку Р, считая
V== 1, k б == 1,3, k T == 1, а по ней 90 % ный ресурс L 10h .
F 2 3459 7
Так как = = 4,70, что больше е == 0,37, то Х == 0,4
VF r2 1 . 73 7
и у== 0,4ctga == 0,4 ctgI3,9° == 1,616. Учитывая, что для ролико
вых подшипников т ==3,33, имеем
р == (XVF r2 + YFa2) ky ==
== (0,4.1.736,7 + 1,616.3459,7).1,3.1 == 7652,7 Н;
0,65 ( 38500 J 3 '33, 106
7652,7) = 1655 6
60 . 1420 ' ч.
a23( ( 106
40h = 60п
Поскольку 90 % ный ресурс меньше заданноrо, то подшип
ники 7207 считаем не приrодными для вала червяка; их малый
ресурс получен из за Toro, что эти подшипники в меньшей CTe
пени приспособлены (сопоставьте коэффициенты У и Х) к BOC
приятию осевых сил ( У == 1,621) и в большеti к восприятию pa
диальных (Х == 0,4).
12.3.3. Выбор ПОДШИПНИКОВ для вала червяка с одной плавающей
и дрyrой фиксирующей в двух осевых направлениях опорами
1. Выбираем подшипник 27307 с большим уrлом наклона
контактной линии (см. приложение П.12.9). Этот подшипник
имеет размеры d == 35 мм, D == 80 мм, Т == 22,75 мм, динамиче-
скую и статическую rрузоподъемности С == 45000 Н и Со ::=;
== 29000 Н, коэффициент oceBoro наrpужения е == 0,79, предель-
146
1-10 допустимую частоту вращения при жидкой смазке
5600 мин l, уrол контакта а == 2 ...300.
Учитывая, что радиально упорные подшипники с большим
уrлом наклона контактной линии лучше сдваивать, применяя
схему установки с одной плавающей и дрyrой фиксирующей в
двух осевых направлениях опорами, принимаем первую опору
плавающей, а вторую фиксирующей. В первой опоре YCTaHaB
ливаем (рис. 12.21, в) радиальный шариковый подшипник 207
(см. приложение П.12.5) леrкой серии (d == 35 мм, D == 72 мм,
В == 17 мм, С 1 == 25500 Н, С 01 == 15300 Н, п == 11000 мин 1 при
жидкой смазке), а во второй сдвоенные радиально упорные
подшипники 27307. Для второй опоры С 2 == С сдв == 27/9 С ==
::=; 27/9.45000 == 77152 Н.
2. Определяем радиальные реакции в опорах:
F rr1 == F rr2 == Ft/2 == 618/2 == 309 Н;
F R ! FAd w 2Е
2 + оаl
F rBl =
!
1083 . 300 3333 . 52 + 150 4 . 40
2 2 ' = 272 7 Н'
300 ' ,
F R ! FAd w 2Е; ( 1 )
2+ о а+
F rB2 = =
!
1083.300 + 3333. 52 150,4. (40 + 300)
2 2 = 660 Н'
300 '
Frl = F?rl + Р;Вl = 3092 + 272,72 = 412,1 Н;
F r2 = F}r2 + Р?В2 = .J 309 2 + 6602 = 728,7 Н.
З. Рассчитываем первую (плавающую) опору. для нее х== 1,
У::::: О, V == 1, k б == 1,3, "т == 1, а23 == 0,75, т == 3. Подставляя значе
IIИЯ, получаем
147
Р1 == (XVF r1 + УF аl )k б k т == (1 . 1 .412,1 + О. О) . 1,3 . 1 == 535,7 Н;
( J т
С 1 6
а 23 Рl . 1 О
L IOh ==
60п
075 ( 25500 J 3 '10 6
, 535,7
6 == 950000 ч.
0.1420
4. Рассчитываем вторую (фиксирующую) опору. Для нее а ==
е 0,79 27 77 0 F F
== arctg == arctg == , , а2 == А, v== 1, т == 3,33, k б ==
1,5 1,5
F 2 3333
== 1,3, "т == 1, а23 == 0,65. При == == 4,58, что больше
VF r2 1.727,7
е == 0,79, коэффициенты Х и У составляют: Х ==0,67, У ==
== 0,67 ctg а == 0,67 ctg 27,770 == 1,272. Тоrда
Р2 === (XVF r2 + УF а2 )k б "т ==
== (0,67. 1 .727,7 + 1,272.3333). 1,3. 1 == 6145 Н;
( J т
С 2 6
а23 Р2 .10
Oh == 60п
0,65 ( 77152 J 3 '33, 106
6145 == 34800 ч.
60.1420
Таким образом, подшипники первой и второй опор можно
считать выбранными, так как они обеспечивают 90 % ный pe
сурс, больший требуемоrо.
ПРИЛОЖЕНИЯ П 12
П.12.1. Допускаемые значения [р] и [Pv]
ДЛЯ подшипников скольжения
Материал ПОДШИПНИК<:I [р], [pvJ,
МПа МПа . r..!jc
Оловянно свинцовый баббит Б 16 15 50
Высокооловянный баббит Б83 20 100
Бронзы 30 40
Капрон 10 12
П.12.2. Значения коэффициентов хо и IO
ДЛЯ подшипников качеilИЯ
ТИП ПОДШИПНИКОВ а, Ха Уа
rр<:lД
Радиальные однорядные шариковые О 0,6 0,5
12 0,5 0,47
Радиально упорные шариковые 26 0,5 0,37
36 0,5 0,28
12 1,0 0,94
Радиально упорные двухрядные" шариковые 26 1,0 0,74
36 1,0 0,56
Радиально упорные однорядные роликовые 0,5 0,22 ctg а
Радиа.ilьные сферические двухрядные шариковые 1,0 0,44 ctg а
й радиально упорные двухрядные" роликовые
* Установленные либо узкими, либо широкими торцами один к друrому.
149
П.12.З. Значение коэффициента аzз для подшипников качения
023
Тип ПОДшипн икав При наличии rид При наличии rидродина
В обычных родинамической мической пленки смазки
условиях пленки смазки в и изrотовлении подшип
контактной зоне'" ников из высококачест
венных сталей
Шариковые 0,7.. .0,8 1,0 1,2...1,4
(кроме сферических)
Роликовые с цилиндри
ческими роликами, 0,5...0,6 0,8 1,0...1,2
шариковые сферические
Роликовые конические 0,6.. .0,7 0,9 1,1...1,3
.. Имеет Место при жидкой смазке и значительной частоте вращения.
П.12.4. Значения коэффициеllТОВ Х и У для ПОДШипников качения
!g $е Fa
> е
Тип а, VF r VF r
е
подшипников rрад
Х у Х у
Радиальные ( J421 I X
однорядные О 0,518 1 О 0,56
шариковые е
Радиальные
сферические 1,5 tg а 1 0,42 ctg а 0,65 0,65 ctg а
ДВУХрЯДНые
шариковые
( F J 416J l X
12 0,618 1 О 0,45
СО
е
Радиально
упорные (F J4I2 l X
ОДНОрЯДНые 15 0,618 c 1 О 0,44
шариковые е
26 0,68 1 О 0,41 0,87
36 0,95 1 О 0,37 0,66
150
Окоuчаuие П 12.4
Fa $е Fa >е
Тип а, VF r VF r
е
подшипников rрад
Х у Х у
Радиально 26 0,68 1 0,92 0,67 1,44
упорные
двухрядные * 36 0,95 1 0,66 0,60 1,07
шариковые
Радиально
упорные 1,5 tg а 1 О 0,40 0,4 ctg а
однорядные
роликовые
Радиально
упорные 1,5 tg а 1 0,45 ctg а 0,67 0,67 ctg а
двухрядные *
роликовые
'" Установленные либо узкими, либо широкими торцами одШI к друтому.
П.12.5. Размеры, динамическая и статическая rpузоподъемности,
а также предельная частота вращения радиальных
ОДllOрядных шариковых подшипников
Условное d D В r'" п, мин l, при смазке
обозначение С,Н Со" Н
Подшипника пластичной жидкой
мм
Сверхле2кая серия диаметров 8
1000844 220 270 24 2,5 78000 110000 1900 2400
1000856 280 350 33 3,0 138000 200000 1600 1900
1000864 320 400 38 3,5 174000 255000 1300 1600
1000868 340 420 38 3,5 178000 275000 1200 1500
1000892 460 580 56 4,0 319000 570000 900 1100
1000896 480 600 56 4,0 325000 600000 850 1000
151
Продолжение п.12.5
Условное d I D I в I r* п, мин l, при смазке
обозначение С,Н Со, Н
подшипника пластичной I
мм жидкой
I I Особоле2Кая нормальная серия
104 20 I
42 12 1,0 9360 5000 17000 20000
105 25 47 12 1,0 11200 6500 15000 18000
106 30 55 13 1,5 13300 8300 12000 15000
107 35 62 14 1,5 15900 10300 10000 13000
108 40 68 15 1,5 16800 11600 9500 12000
109 45 75 16 1,5 20800 14600 9000 11000
110 50 80 16 1,5 21600 16000 8500 10000
111 55 90 18 2,0 28100 21200 7500 9000
112 60 95 18 2,0 29600 23200 6700 8000
113 65 100 18 2,0 30700 25000 6300 7500
114 70 110 20 2,0 37700 31000 6000 7000
115 75 115 20 2,0 39700 33500 5600 6700
Ле2кая узкая серия
202 15 35 11 II.c 7800 3750 19000 24000
203 17 40 12 1,0 9560 4750 17000 20000
204 20 47 14 1,5 12700 6550 15000 18000
205 25 52 15 1,5 14000 7800 12000 15000
206 30 62 16 1,5 19500 11200 10000 13000
207 35 72 17 2,0 25500 15300 9000 11 000
208 40 80 18 '2,0 32000 ] 9000 8500 10000
209 45 85 19 2,0 33200 21600 7500 9000
210 50 90 20 2,0 35100 23500 7000 8500
152
Окончание п.12,5
I d I D I в
Условное r* п, мин l, при смазке
обозначение С,Н Со, Н
подшипника
мм пластичной жидкой
211 55 100 21 2,5 43600 29000 6300 7500
212 60 110 22 2,5 52000 32500 6000 7000
213 65 120 23 2,5 56000 40500 5300 6300
214 70 125 24 2,5 61800 45000 5000 6000
215 75 130 25 2,5 66300 49000 4800 5600
Средняя узкая серия
302 15 42 15 1,5 11400 5400 17000 20000
303 17 47 14 1,5 13500 6650 16000 19000
304** 20 52 15 2,0 15900 7800 13000 16000
305 25 62 17 2,0 22500 11600 11000 14000
306 30 72 19 2,0 28100 16000 9000 11000
307 35 80 21 2,5 33200 19000 8500 10000
308 40 90 23 2,5 41000 24000 7500 9000
309 45 100 25 2,5 52700 31500 6700 8000
310 50 110 27 3,0 61800 38000 6300 7500
311 50 120 29 3,0 71500 45000 5600 6700
312 60 130 31 3,5 81900 52000 5000 6000
313 65 140 33 3,5 92300 60000 4800 5600
314 70 150 35 3,5 104000 68000 4500 5300
315 75 160 37 3,5 112000 76500 4300 5000
316 80 170 39 3,5 124000 86500 3800 4500
.. Фаска на посадочных поверхностях.
.... Изrотавливают лишь конструктивные исполнения 60304 и 80304.
153
П.12.6. Размеры, динамическая и статическая rpузоподъемности,
а также предельная частота вращения радиальных сферических
двухрядных шариковых подшипников
Условное d D В r* n, мин l, при смазке
обозначение С,Н Со, Н
подшипника мм пластичной жидкой
Ле2Кая узкая серия
1204 20 47 14 1,5 9950 2600 15000 18000
1205 25 52 15 1,5 21100 3300 13000 16000
1206 30 62 16 1,5 15600 4700 10000 13000
1207 35 72 17 2,0 15900 5200 9000 11000
1208 40 80 18 2,0 19000 6600 8500 10000
1209 45 85 19 2,0 21600 7500 7500 9000
1210 50 90 20 2,0 22900 8300 6300 8500
1211 55 100 21 2,5 26500 10300 5600 7500
1212 60 110 22 2,5 30200 12000 5600 6700
1213 65 120 23 2,5 31200 13000 5300 6300
1214 70 125 24 2,5 34500 24300 5000 6000
Средняя узкая серия
1304 20 52 15 2,0 12500 3300 12000 15000
1305 25 62 17 2,0 17800 5000 9500 13000
1306 30 72 19 2,0 21200 6400 9000 11000
1307 35 80 21 2,5 25100 8000 7500 9000
1308 40 90 23 2,5 29600 9700 6700 8000
1309 45 100 25 2,5 37700 12800 6300 7500
1310 50 110 27 3,0 43600 14500 5600 6700
1311 50 120 29 3,0 50700 18000 5000 6000
1312 60 130 31 3,5 57200 21000 4500 5300
154
Окончание п.12.6
d D В r* п, мин ', при смазке
Условное Со, Н
обозначение С, Н
подшипника мм пластичной жидкой
1313 65 140 33 3,5 61800 23300 4300 5000
1314 70 150 35 3,5 74100 28100 4000 4800
* Фаска на посадо'lliЫХ поверхностях.
П.12. 7. Размеры, динамическая и статическая rрузоподъемности,
а также предельная частота вращения
радиальных роликовых подшипников
с короткими цилиндрическими роликами
Условное d D В r*; r,* n, мин ', при смазке
обозначение С, Н Со, Н
подшипника мм пластичной жидкой
Ле2Кая узкая серия
2204 20 47 14 1,5; 1,0 14700 13350 15000 18000
2205 25 52 15 1,5; 1,0 16800 15500 12000 15000
2206 30 62 16 1,5; 1,0 22400 21500 10000 13000
2207 35 72 17 2,0; 1,0 31900 31500 9000 11 000
2208 40 80 18 2,0; 2,0 41800 43000 8500 10000
2209 45 85 19 2,0; 2,0 44000 46000 7500 9000
2210 50 90 20 2,0; 2,0 45700 49500 6300 8500
2211 55 100 21 2,5; 2,0 56100 61500 5600 7500
2212 60 110 22 2,5; 2,5 64400 77 500 5600 6700
2213 65 120 23 2,5; 2,5 76500 86000 5300 6300
2214 70 125 24 2,5; 2,5 79200 92000 5000 6000
2215 75 130 25 2,5; 2,5 91300 114000 4800 5600
2216 80 140 26 3,0; 3,0 106000 123000 4500 5300
155
Продолжение П 12. 7
Условное d D В r*; rl* n, мин l. при смазке
обозначение С. Н Со, Н
подшипника мм пластичной жидкой
СредllЯЯ узкая серия
2305 25 62117 2,0; 2,0 28600 24600 9500 13000
2306 30 72 19 2,0; 2,0 36900 32500 9000 11 00-0
2307 35 80 21 2,5; 2,0 44600 44600 7500 9000
2308 40 90 23 2,5; 2,5 56100 53000 6700 8000
2309 45 100 25 2,5; 2,5 72100 68000 6300 7500
2310 50 110 27 3,0; 3,0 88000 85000 5600 6700
2311 50 120 29 3,0; 3,0 102000 109500 5000 6000
2312 60 130 31 3,5; 3,5 123000 125000 4500 5300
2313 65 140 33 3,5; 3,5 138000 139000 4300 5000
2314 70 150 35 3,5; 3,5 151000 167000 4000 4800
2315 75 160 37 3,5; 3,5 183000 182000 3800 4500
2316 80 170 39 3,5; 3,5 190000 205000 3600 4300
* Фаски на широкой и узкой (если ссть) посадочных поверхностях.
П.I2.8. Размеры, динамическая и статическая I'рузоподъемности,
а также предельная частота вращени
радиально упорныx шариковых подшипников
Условное
обозначение
подшипника
d
С, Н
Со. Н
r*; rl*
N, мин l, при смазке
мм
пластичной жидкой
361 04 20 42 12
36105 25 47 12
156
Осо60ле2Кая нормальная серия, а == 120
1; 0,5 10600 5320 I 22000 30000
1; 0,5 11800 6290
19000
24000
Продолжение П.l2. 8
условное d D В r*; rl * n, мин l, при смазке
обозначение С, Н Со, Н
подшипника мм пластичной ЖIЩкой
36106 30 55 13 1,5; 0,5 15300 8570 17000 22000
37107 35 62 14 1,5; 0,5 19100 11300 16000 20000
Ле2кая узкая серия, а == 12°
36202 15 35 11 1,0; 0,3 8150 3830 24000 32000
36203 17 40 12 1,0; 0,3 12000 6120 18000 24000
36204 20 47 14 1,5; 0,5 15700 8310 16000 20000
36205 25 52 15 1,5; 0,5 16700 9100 13000 17000
36206 30 62 16 1,5; 0,5 22000 12000 11000 16000
36207 35 72 17 2,0; 1,0 30800 17800 10000 12000
36208 40 80 18 2,0; 1.0 38900 23200 9500 13000
36209 45 85 19 2,0; 1,0 41200 25100 9000 12000
36210 50 90 20 2,0; 1,0 43200 27000 8000 11000
36211 55 100 21 2,5; 1,2 58400 34200 7000 9500
36212 60 110 22 2,5; 1,2 61500 39300 6300 8500
36214 70 125 24 2,5; 1,2 80200 54800 6000 8000
Средняя узкая серия, а == 12°
36302 15 42 13 1,5; 0,5 13600 6800 16000 20000
36303 17 47 14 1,5; 0,5 17200 8700 13000 17000
36308 40 90 23 2,5; 1,2 53900 32800 7000 9500
36318 90 190 43 4,0; 2,0 189000 145000 2800 3600
Ле2Кая узкая серlЩ а == 26 о
46204 20 47 14 1,5; 0,5 14800 7640 15000 20000
46205 25 52 15 1,5; 0,5 15700 8340 11000 15000
46206 30 62 16 1,5; 0,5 21900 12000 10000 13000
46207 35 72 17 2,0; 1,0 29000 16400 9000 11000
157
Окончание л 12.8
Условное d D В r* ; rl* п, мин l, при смазке
обозначение С, Н СО, Н
подшипника мм пластичной жидкой
46208 40 80 18 2,0; 1,0 36800 21300 8000 9000
46209 45 85 19 2,0; 1,0 38700 23100 7000 8500
46210 50 90 20 2,0; 1,0 40600 24900 6300 8000
46211 55 100 21 2,5; 1,2 50300 31500 6300 8000
Средняя узкая серия, а == 260
46304 20 52 15 2,0; 1,0 17800 9000 12000 16000
46305 25 62 17 2,0; 1,0 26900 14600 9000 12000
46306 30 72 19 2,0; 1,0 32600 18300 9000 10000
46307 з5 80 21 2,5; 1,2 42600 24700 7000 9500
46308 40 90 23 2,5; 1,2 50800 30100 6300 8500
46309 45 100 25 2,5; 1,2 61400 37000 5600 7500
46310 50 110 27 3,0; 1,5 71800 44000 5000 6700
46312 60 130 31 3,5; 2,0 100000 65300 4300 5600
.. Фаски на широкой и узкой посадочных поверхностях.
П.12.9. Размеры, динамическая и статическая rpузоподъемности,
коэффициент oceBoro наrpужения, а также предельная частота
вращения роликовых конических однорядных ПОДIIIИпников
d D Т r* ; rl* n, мин l,
У словное обо при смазке
значение под С,Н СО, Н е
шипника nла жид
мм стич кой
ной
Ле2Кая узкая серия, а: ==12...180
7205 25 52 16,25 1,5; 0,5 24000 17500 0,36 7500 10000
7206 30 62 17,25 1,5; 0,5 31000 22000 0,36 6300 8500
7207 35 72 18,25 2; 0,8 38500 26000 0,37 5300 7000
158
Продолжеuие п.12. 9
d D Т r* ; rl* п, мин l,
у словное обо при смазке
значение под С, Н Со, Н е
шипника пла
жид
мм стич кой
ной
7208 40 80 19,75 2,0; 0,8 46500 32600 0,38 4800 6300
7209 45 85 20,75 2,0; 0,8 50000 33000 0,41 4500 6000
7210 50 90 21,75 2,0; 0,8 56000 40000 0,37 4300 5600
7211 55 100 22,75 2,5; 0,8 65000 46000 0,41 3800 5000
7212 60 110 23,75 2,5; 0,8 78000 58000 0,35 3400 4500
7214 70 125 24,00 2,5; 0,8 96000 82000 0,37 3000 4000
7215 75 130 25,00 2,5; 0,8 107000 84000 0,39 2800 3800
7216 80 140 28,25 3,0; 1,0 112000 95200 0,42 2400 3400
Ле2кая широкая серия, а: ==12...160
7506 30 62 21,25 1,5; 0,5 36000 27000 0,37 6300 8500
7507 35 72 24,25 2,0; 0,8 53000 40000 0,35 5300 7000
7508 40 80 24,75 2,0; 0,8 56000 44000 0,38 4800 6300
7509 45 85 24,75 2,0; 0,8 60000 46000 0,42 4500 6000
7510 50 90 24,75 2,0; 0,8 62000 54000 0,42 4300 5600
7511 55 100 26,75 2,5; 0,8 80000 61000 0,36 3800 5000
7512 60 110 29,75 2,5; 0,8 94000 75000 0,39 3400 4500
7513 65 120 32,75 2,5; 0,8 119000 98000 0,37 3000 4000
7514 70 125 33,25 2,5; 0,8 125000 101000 0,39 2800 3800
7515 75 130 33,25 2,5; 0,8 130000 108000 0,41 2600 3600
Средняя узкая серия, а ==10...140
7305 25 62 18,25 2,0; 0,8 33000 23200 0,36 6700 9000
7306 30 72 20,75 2,0; 0,8 43000 29500 0,34 5600 7500
7307 35 80 22,75 2,5; 0,8 54000 38000 0,32 5000 6700
7308 40 90 25,25 2,5; 0,8 66000 47500 0,28 4500 6000
............... 7309 45 100 27,25 2,5; 0,8 83000 60000 0,29 4000 5300
159
Окончание fl.12.9
d D Т r* ; rl* п, мин l,
Условное обо при смазке
значение под С,Н Со, Н е
шипника rmа
жид
мм сmч кой
ной
7310 50 110 29,25 3,0; 1,0 100000 75500 0,31 3600 4800
7311 55 120 31,50 3,0; 1,0 107000 81500 0,33 3200 4300
7312 60 130 33,50 3,5; 1,2 128000 96500 0,30 3000 4000
7313 65 140 36,00 3,5; 1,2 146000 112000 0,30 2600 3600
7314 70 150 38,00 3,5; 1,2 170000 137000 0,31 2400 3400
7315 75 160 40,00 3,5; 1,2 180QOO 148000 0,33 2200 3200
Средняя широкая серия, а: ==11...150
7606 30 72 28,75 2,0; 0,8 63000 51000 0,32 5300 7000
7607 35 80 32,75 2,5; 0,8 76000 61000 0,30 4800 6300
7608 40 90 35,25 2,5; 0,8 90000 67500 0,30 4000 5300
7609 45 100 38,25 2,5; 0,8 114000 90500 0,29 3600 4800
7611 55 120 45,50 3,0; 1,0 160000 140000 0,32 3000 4000
7612 60 130 48,50 3,5; 1,2 186000 157000 0,30 2600 3600
7613 65 140 51,00 3,5; 1,2 210000 168000 0,33 2400 3400
7614 70 150 54,00 3,5; 1,2 240000 186000 0,35 2200 3200
7615 75 160 58,00 3,5; 1,2 280000 235РОО 0,30 2000 3000
Средняя узкая серия, а: ==20...300
27307 35 80 22,75 2,5; 0,8 45000 29000 0,79 4500 5600
27308 40 90 25,25 2,5; 0,8 56000 37000 0,79 4000 5000
27310 50 110 29,25 3,0; 1,0 80000 53000 0,80 3200 4300
27311 55 120 31,50 3,0; 1,0 92000 58000 0,81 2800 3800
27312 60 130 33,50 3,5; 1,2 105000 61000 0,70 2600 3600
27313 65 140 36,00 3,5; 1,2 120000 70000 0,75 2200 3200
27315 75 160 40,00 3,5; 1,2 150000 93500 0,83 1800 2600
.. Фаски на широкой и узкой посадочных поверхностях.
160
Список литературы
Иванов А.С Расчет и конструирование опорно поворотных подшипников
jjВестнИК машиностроения 2000. NQ 4. С. 23 27.
Иванов А.С Соотношение размеров опорно поворотноrо подшипника с пе
рекрестным расположением роликов, найденное из условия минимизации стои
МОСТИ ero материала //Бестник машиностроения 2000. NQ 6. С. 34 37.
Иванов В.Н., Баринова В. С Выбор и расчеты подшипников качения: MeTO
дические указания по курсовому проектированию / Под ред. Д.Н. Решетова. М.:
ИзД ВО MrтY им. Н.Э. Баумана, 1988. 34 с.
Подшипники качения: Справочник каталоr /Л.В. Черневский, Р.Б. KopOCTa
IllевскИЙ, Б.Ф. Яхин и др.; Под общ. ред. Л.В. Черневскоrо и Р.В. Коросташев
CKoro: М.: Машиностроение, 1997. 896 с.
Решетов д.и Детали мanrnн: Учеб. для вузов М.: МШШiНостроение, 1989.
496 с.
Фомин М.в. Основы конструирования деталей и узлов машин /Под ред.
аЛ. Леликова. M.: Изд во MrтY им. Н.Э. Баумана, 1989. С. 50 53.
6 8640
Шат 13. КОНСТРУИРОВАНИЕ рЕзьБовыIx
И ЗАКЛЕПОЧНЫХ СОЕДИНЕНИЙ
. Что явилось первым обоекто.М стандартизацuи в машuностроении} кто ее
провел?
Если при //юркиРО6ке винта направление резьбы не указано, то какое Ha
правление подразумевается?
. Как расишфровать резьбу Tr 20 х 8(Р 4) LH 8е 120?
Что представляет собой винт с дифференциальноЙ резьбой?
. Ходовые винты} как известно, работают на с:нсатие и поэтому, если виH
ты длинные, и;"( диаметр увеличивают во избежание потери и.лш устойчu
вости. При этом приводы подач станков с таКШl1и винmа.!..tИ стOlювятся
СЛИUIКOiI1 инерциОННbl.)ии. Какой способ фиксации винта в осевом наnравле
lШ МОЖНО предложить, Ilтобы получить вО31vt.ОЖliость использования в
конструкции передачи винт 2аЙка тонких длинных винтов?
Что представ.ляет собоЙ 2айка растяж:енuя и для каких целей ее npU},fe
няют?
. Ка,КУЮ резьбу (крупную или мелкую) и почему шtеЮт КРУ2Лые шлuцевые
2аики, устанавливае.мые на валах и nрuмеНЯб\1ые для ре2улировки зазоров
в подшипниках?
. ПО 1 lб\1У при расчете резьбовых соедиuений, на2руженных отрывающими
сила/иu u оnрокидывающшш моментами} не срабатывает nрU1lцип «2де
тонко) там и рветея»?
. Как рассчитать На нераскрытие стыка резьбовое соединеliие} имеющее
податливость контактирующих поверхностей: 1) малую (поверхности
стыка притерты или шабрены); 2) большую (поверхности стыка получены
шлифованием, стРО2анием ll./lИ фрезеровани€.iИ)?
. Если для резьбовО20 соединения используются винты вЫСОКО20 класса проч
ности, то какую следует сделать запись в технuчеСКlL'{ требованиях на
сборку в сБОрОILНОil1 чертеже?
. Как лучше расnола2ать отверстlLЯ в вешалке при ее креплении двумя виH
тами к стене: 20ризонтально или вертикалЬ/ю?
. Что такое винты самонарезающие и са/иосверлящие?
. Что представляет собоЙ 2айка с фартуком, пршtеняемая в' автомобилях и
позволяющая стопорить резьбу за счет деформации фартука? .
Поч у ось левой велосип дной педали завинчивается в шатун с помоЩЬЮ
левоu резьбы, а ось nравои педали с помощью правоЙ резьбы?
Ответы на эти вопросы и не только на них Вы найдете в 13 M
шаrе.
Резьбовые соединения разъемны, поэтому их использование
ПОЗволяет сделать машину приrодной для ремонта, а таlCJ"'Ке для
162
СБОРКИ на месте ее предполаrаемой эксплуатации. Последнее
особенно удобно для машин больших rабаритных размеров, пе
реБозка которых в сборе затруднительна (например, башенные
подъемные краны). В современных машинах детали, имеющие
резьбу, составляют свыше 60 % от общеro количества деталей.
Заклепочные соединения, хотя и вытеснены в большинстве
типов машин сварными соединениями, все же имеют значи
тельное распространение в авиации и друrих областях. Их при
меНЯЮТ там, [де требуется повышенная живучесть конструкции,
замедление развития трещины (в случае ее возникновения) и
сохранение термообработанных состояний соединяемых дeTa
лей. В современном пассажирском самолете устанавливают до
2,5 млн заклепок.
1301. Резьбовые соединения
13.1.1. Классификация резьб. Момент завинчивания
Резьбовое соединение (рис. 13.1, а) это разъемное соедине
иие, образованное винтом или шпилькой, завинчиваемыми в
rайку или корпусную деталь. Винт, свинчиваемый с rайкой, Ha
зывают болтом. В резьбовом соединении вследствие использо
вания клиновоrо эффекта удается получить большую осевую
силу Ра при оrpаниченной силе рабочеrо F раб на ключе.
Fa
А (уменьшено)
t
а
Fa
о
8
Рис. 13.1. Резьбовое соединение и ero аналоrи:
а резьбовое соединение БОJlТОМ; б аналоr в виде соединения, осуществляемorо
стержнем с клином; в аналоr в виде соединения, осущеСТВJIясмоrо тросом с клином
6*
163
Введем следующие rеометрические параметры резьбовоrо
соединения (рис. 13.2):
h
d наружный диаметр
резьбы винта, принимаемыIй
за номинальный диаметр
резьбы;
Р шar резьбы;
d 1 внутренний диаметр
резьбы винта;
d 2 средний диаметр
резьбы;
п 1 внyrpенний диаметр
резьбы rайки;
Н высота rайки;
Z число витков резьбы
rайки, Z == Н! Р;
d
::t:<::I...
Рис. 13.2. [еометрические параметры
резьбовоrо соединения
а уrол профиля резьбы;
у yrол наклона рабочей rрани (rpани, подверrаемой смя
тию при действии осевой силы Fa ) профиля;
h рабочая высота профиля;
0/ уrол наклона винтовой линии по среднему диаметру
Р
резьбы, 0/ :::; arctg d ;
1t 2
а ширина поверхности витка резьбы винта на диаметре п 1
raйки.
Резьбу можно представить в виде клина (или наклонной
плоскости), HaBepHyтoro на цилиндр, а rайку в виде ползуна,
который перемещается вверх по наклонной плоскости под дей
ствием rоризонтальной силы Fp (см. рис. 3.14 шаrа 3). В этом
случае
F pyк [рук == Т зав == Тр + Тр
[де [рук дЛина рукоятки Ключа; Т зав ' Тр, ТТ моменты завиf{
чивания, в резьбе и трения на торце, Тр == O,5F p d 2 , ТТ == O,5FafTdr;
fr коэффициент трения на торце; t4 средний диаметр торца.
Момент в резьбе Тр связан с уrлом 'у следующим образоМ
(вывод формулы см. 3.6 шаrа 3):
Тр ::::: O,5F a d 2 tg (0/ + <р'),
(13.1)
rде <р' приведенный уrол трения,
164
J;
<р' = arctg.......L..
cosy'
(13.2)
fP коэффициент трения в резьбе (обоснование формулы см. 3.6
шаrа 3).
При затяжке резьБОБоrо соединения момент завинчивания
'т' складывается из момента в резьбе Т. Р и момента трения на
1 зав
торце rайки:
т. tg(o/ + <p')d 2 FafTd T
зав 2 + 2 .
(13.3)
ИЗ приведенных выше формул следует, что если уrол 0/
наклона винтовой линии мал, то сила Fa может в десятки раз
превысить силу F раб ' Поэтому аналоrом резьбовоrо соедине
ния может служить стержень и клин (рис. 13.1, 6), стяrиваю
щие две детали. Так как стержень работает на растяжение, то
ero можно заменить тросом (рис. 13.1, в). Не случайно, OCTaH
кинская телебашня (см. рис. 5.25 шаra 5) притянута к ее фунда
менту тросами.
По назначению резьбы разделяют на три rруппы: крепеж
ные, крепежно уплотняющие и резьбы, предназначенные для
передачи движения (передача винт rайка).
Крепежные резьбы служат для скрепления деталей. ИХ BЫ
полняют обычно треyrольноrо профиля, так как такой профиль
отличается повышенными значениями 'у и а. Повышенные зна
чения этих параметров снижают вероятность самоотвинчивания
и увеличивают прочность резьбы. Поясним эту мысль.
Условие самоторможения в резьбе (отсутствие самоотвинчи
вания) имеет вид
'v <р'.
Поэтому чем больше 'У, тем больше запас по самоторможению в
резьбе.
Напряжение среза 't в резьбе винта обратно пропорциональ..
liо размеру а, так как
F
,.,. а
,, ,
пп 1 kНk т
(13.4)
165
rде k коэффициент полноты резьбы, k == а! Р; k m == 0,55...0,75 .....
коэффициент неравномерности наrрузки по виткам реЗьбы
(приведенные значения k m справедливы, если болт свинчивается
с обычной rайкой нормальной высоты, работающей на сжаТие
если же болт свинчивать с rайкой специальной конструкции, pa
ботающей на растяжение, то значение k m близко к единице).
еледовательно, с увеличением а прочность резьбы на срез
возрастает.
Крепежно"уплотняюnще резьбы служат как для скрепления
деталей, так и для предохранения от вытекания жидкости (В
трубопроводах). Эти резьбы также выполняют треуrольноrо
профиля, но без радиальных зазоров.
Резьбы, предназначенные для передачи движения, имеют
обычно профиль резьбы с малым уrлом У, что объясняется
стремлением к снижению потерь в передаче.
По типам резьбы разделяют на следующие (рис. 13.3): а) мет.
рическая (а == 600; у == 300; относительная рабочая высота про
филя 'Vh == hj Р== 0,54; k == 0,87); б) прямоуrольная (а == 00; у == 00;
'Vh == 0,50; k == 0,40); в) упорная (а == 330; 'у == 30; 'Vh == 0,75; k =
== 0,73); r) трапецеидальная (а == 300; у== 150; 'Vh == 0,50; k== 0,65).
Кроме Toro, в старых машинах,
выпущенных в Великобритании
и США, применялась дюймовая
резьба с а == 550, или резьба
Витворта, первый объект CTaH
дартизации, позволивший начать
эпоху обеспечения взаимоза
меняемости, (о Д. Витворте см.
шаr 6). Для соединения труб ис
пользуется трубная резьба, npek
ставляющая собой дюймовую с малым шаrом. Для улучшенИЯ
уплотнения ее выполняют без зазоров по выступам и впадинам.
Резьбы обычно изrотавливают с правым направлением вин
товой линии (при вращении по часовой стрелке винт завинчй
вается). Они MOryт иметь крупный или мелкий шаr. Резьбы с
крупными и мелкими шаraми rеометрически подобны. В услов
ных обозначениях резьб на чертежах указывают: тип резьбы (М
метрическая; Tr трапецеидальная; S упорная; дЛя прямо
уrольной резьбы нет условноrо обозначения, так как она не
стандартизирована Из за сЛожности ее шлифования) и ее номй
нальный диаметр. Далее, если резьба Мелкая или мноrоходовая,
то через знак умножения ПРИВОдЯт значение шаrа или хода (в
а
д
z
8
Рис. 13.3. Типы резьб:
а метрическая; б прямоуrольшш;
в упорная; е трапецеидальная
166
последнем случае за этим числом в скобках помещают букву Р и
после нее шаr); если резьба левая, то пишут буквы LH Наконец,
qерез тире указывают поле допуска и, если дЛина свинчивания
(о ней см. ниже) не нормальная, то через тире длину свинчи
ВаНИЯ.
Например, наружная трапецеидальная резьба диаметром
20 мм, двухзаходная с шаrом 4 мм, левая, с полем допуска по
среднему и наружному диаметрам 8е и длиной свинчивания
120 мм будет иметь следующее обозначение:
Tr 20 х 8 (Р 4) LH 8е 120.
13.1.2. Передача ВИНТ l'айка
Передача винт rайка преобразует вращательное движение в
поступательное. Она может быть выполнена: с вращающимся
винтом и поступательно перемещающейся rайкой, с вращаю
щимся и одновременно поступательно перемещаемым винтом
при неподвижной rайке, с вращающейся rайкой и поступатель
но перемещаемым винтом. Для увеличения хода применяют Te
лескопические конструкции с двумя винтовыми парами. Для
очень медЛенных перемещений используют винты с дифферен
циальной резьбой, Т.е. с двумя резьбами одноrо направления,
Но с разными шаrами.
Передачи винт rайка делятся;. на передачи скольжения и Ka
чения.
Передача ВИНТ I'айка скольжения проста в изrотовлении.
Чтобы снизить трение в резьбе, применяют резьбы с малым yr
лом профиля: трапецеидальную, упорную или прямоуrольную.
:КПД передачи 11 обычно мал (11 == 0,3...0,5) и зависит от уrла
'Vнаклона винтовой линии по среднему диаметру резьбы и при
веденноrо уrла трения <р', оцениваемоrо по формуле (13.2). Ero
ВЫЧисляют по формуле
А пол tg'V
11 aтp tg ('V + <р')'
(13.5)
rДе А пол , А затр полезная и затраченная работы, совершаемые
за Один оборот rайки, А пол == Ра Р == Ра nd 2 tg'V, А затр == Тр 2п ==
::::: 0,5 Ра d 2 tg ('V + <р') 2п.
Для обеспечения износостойкости передачи необходимо or
раfIичивать среднее давление р в резьбе (рис. 13.4) допускаемым
167
значением [р]. ечитается, что
для разных пар трения [р] со-
ставляет: 10...15 МПа зака-
ленная сталь бронза, 7...8 МПа
незакаленная сталь бронза
5 МПа незакаленная сталь
чуrун. При редкой работе Пе
редач, а также для [аек малой
Рис. 13.4. Давление в витках резьбы высоты давление в резьбе Мо-
жет быть повышено на 20 %. В ручных механизмах, работающих
с малой скоростью относительных перемещений, допустимо ис
пользовать пару трения сталь сталь с [р] == 15 МПа.
Из условия обеспечения износостойкости
Fa/2 с:
'l IJ>'
I
,
Fu/2
]!т'
g.>
t:I..
t '/
/'
......
I
d z
.LJ
I
р
[P] p= Fa =
nd 2 hz
Fa
nd 2 h( Н / Р)
находят средний диаметр винта
d > Fa
2 1t 'v h 'v Н [р] ,
(13.6)
[де 'Vh == h/P относительная высота рабочеrо профиля; 'VH=
== H/d 2 == 1,2...2,5 относительная высота rайки.
Если винт работает на сжатие, то ero следует проверять на
прочность и устойчивость (см. 5.4.5 шаrа 5). При этом расчеты
прочности осуществляют по внутреннему диаметру резьбы
винта.
При мер 13.1. Требуется рассчитать винтовой домкрат (см. рис. 3.14 шаrа
3), если ero rрузоподъемность F =:: 10000 Н, высота подъема rруза L == 500 ММ,
резьба трапецеидальная, винт изrотовлен из стали 45, закалка отсутствует
(о"т == 360 МПа, см. П.4.2 шаrа 4), материал rайки чуrун СЧ 12 (О'В ==
== 120 МПа, см. П.4.2 шаrа 4), коэффициент трения в резьбе /р == 0,1 (резьба
смазана), коэффициент трения на торцеА == 0,2 (в контакте торец ВИlfТа oc
нование домкрата смазка отсутствует). Принять диаметр торца винта dr =" 0,9d.
Рукоятка домкрата выполнена из стали Ст3 (о"т == 220 МПа, см. П.4.2 шаrа 4).
Рабочий может длительное время работать, прикладывая к рукоятке силу
F раб =::100 Н.
1. Осевая сила, действующая на винт, Ра == р== 10 кН. ЗадавIIШСЬ значениеМ
коэффициента относительной высоты rайки 'JfH == 2, находим среДНИЙ диамеТР
резьбы
d 2
10000 25 2
, мм,
3,14 . 0,5 . 2 . 5
168
rде [р] == 5 МПа J1)IЯ пары трения незакаленная сталь чyryн; 't'h == 0,50 J1)IЯ
1Рапецеидальной резьбы.
Соrласно [ОСТ 9484 81 и [ОСТ 247З7 81, для трапецеидальной резь
бы выбираем резьбу Т, 28 х 5, имеющую d 2 == 25,5 мм, d == 28 мм, р:;; 5 мм, d} ==
:;::: 22,5 мм. При этом высота rайки составит Н== 'VHd 2 == 2 . 25,5 == 51 мм.
2. Так как материал rайки менее прочен, чем материал винта, проверяем
прочность витков rайки, принимая, что опасным сечением rайки является ce
чение по диаметру d:
F
't'= а
1tdНkk m
10000 = 6,5 МПа,
3,14.28.51.0,65.0,5
rде k:::: 0,65 коэффициент полноты для трапецеидальной резьбы; k m == 0,55
коэффициент неравномерности нш-ружения витков.
Допускаемое напряжение для чуrуна на срез (см. 4.3 шаrа 4) составляет
['t] = (0,6.. .0,7) [О"] = (0,6.. .0,7) о" в = (0,2.. .0,3) о' в = 0,2 .120 = 24 МПа. Сопостав
(2,5.. .3,0)
ляя действующее и допускаемое напряжения, видим, что первое меньше BTOpO
ro, что свидетельствует о прочности витков rайки.
3. Проверяем выполнение условия самоторможения ('Jf S: <р'):
р 5 36 0
'v = afctg = afctg , ;
1td 2 3,14.25,5
j, 01
<р' = arctg = afctg = 5,90 ,
cos 'у cos 150
rдe 'у == 150 yrол наклона рабочей rрани профиля для трапецеидальной резьбы.
Уrол 'V наклона ВИНТОВОЙ линии меньше приведенноro yrла трения <р', по
этому самоопускания домкрата под действием rруза не произойдет.
4. По методике, приведенной в 5.4.5 шаrа 5, оцениваем прочность и устой
ЧИВость тела винта. Условие обеспечения прочности и устойчивости имеет вид
о" = Ра < <р[0"],
А
rДе [0"] допускаемое напряжение для материала винта на растяжение сжатие;
q> коэффициент понижения допускаемых напряжений, зависящий от rибкости
Л:::: V винта; v коэффициент приведения, зависящий от способа закрепления
1
g 1td 4 /64 d
ВИНТа в опорах; i = = ........L...... = ....l радиус инерции поперечноrо сечения
А 1td 2 /4 4
1
ВИНта (I момент инерции поперечноro сечения винта; А ero площадь).
Допускаемое напряжение для незакаленной стали 45 равно [0'] =
== T = 3 0 = 180 МПа. Радиус инерции составляет i== d 1 /4::::: 22,5/4::::: 5,88 мм.
КОЭффициент приведения принимаем v == 1, так как нижнюю и верхнюю опоры
ВИнта Можно считать шарнирными (нижнюю в связи с малой площадью KOH
ТаКТа торца винта и основания, верхнюю по причине относительно малой BЫ
169
v L 1. 500
соты rайки). Поэтому rибкость винта составит А = -----;--- = = 85, что cooт
1 5,88
ветствует, соrласно приложению П.5.4, значению коэффициента пониженlIя:
допускаемых напряжений q> == 0,6.
Левая часть приведенноro выше условия будет равна а = Ра = 4.10000 :::
А 3,14. 22,52
= 25,16 МПа, правая q>[aJ == 0,6.360 == 216 МПа. Сопоставляя эти значения, Дe
лаем вывод, что прочность И устойчивость тела винта обеспечены
5. Определяем необходимую длину рукоятки [РУК<
Сопротивление вращению винта создает момент завинчивания Т зав :
т F'a tg (", + q>')d 2 FafTd T 10000tg(3,6°+ 5,90). 25,5
зав 2 + 2 +
+ 10000. 0,24' 0,9. 22,5 31460Н.мм.
Отсюда
[ = Т зав = 31460 = 314 мм.
рук F Раб 100
Принимаем [рук == 315 мм.
6. Находим необходимый диаметр рукоятки.
Принимаем, что если, например, стружка попадет в резьбу, то KpaTKOBpe
менно момент сопротивления вращению может увеличиться в три раза по сраБ
нению с ero номинальным значением. В этом случае рабочий, по видимому,
возьмет трубу и, надев ее на КТIЮЧ, удrпrnит плечо припожения своей силы и тем
CaМbThl преодолеет повышенный момент завинчивания. Чтобы при этом рукоят
ка не сломалась, необходимо вьmолнить условие прочности: о" М изr/Wизr =
3Т
= . Отсюда
O,ld YK
d pYK з 3Т зав = з3.31460 = 196 мм
O,l[cr] 0,1.110 ' ,
rде [О'] == о"т/ s== 220/2 == 110 МПа для стали Ст3 при значении коэффициента за
паса S == 2.
Принимаем d pyк == 20 мм.
Передача ВИНТ I'айка качения. На винте и rайке ВЫПОЛНЯЮТ
винтовые канавки, которые служат дорожками качения для тa
риков. Наиболее распространен полукруrлый профиль канавоК
с радиусом, на 3...5 % превышающим радиус шариков и с yrлоМ
контакта шариков а::::: 450 (рис. 13.5). Диаметр шариков обыч:н:О
составляет 0,6 шаrа винта.
Если точность работы передачи не реrламентируется, ТО Б
ней предварительный натяr не предусматривают. КПД такоЙ
170
передачи доходит до 0,9. Для исключения зазоров в передаче, в
целяХ повышения ее точности, вводят преднатяr путем исполь
зования сдвоенных [аек (рис. 13.6).
-
Рис. 13.5. Передача винт rайка
качения
Рис. 13.6. Сдвоенная rайка в
передаче винт rайка качения
в большинстве конструкций шарики перемеlцаются по
замкнутой траектории в rайке блаrодаря наличию в ней обвод
ных ИЛИ перепускных каналов.
Рабочие поверхности винта и rайки закаливают до твердости
60 НRС э и выше. В этом случае допустимую наrрузку на шарик
принимают li ::::: 20D;, [де D}v диаметр шарика, мм.
Общая допустимая осевая нarрузка на винт составляет
Fa ::::: O,7zF 1 sina COS'jf,
rде Z число шариков, находящихся в контакте; а уrол KOH
такта (обычно а ::::: 450).
Если винт работает на сжатие, ero также следует проверять
на устойчивость.
Иноrда, чтобы получить возможность использования в KOH
струкции передачи винт rайка тонких длинных винтов, по
следние устанавливают (см. рис. 5.22 шаrа 5) в корпусе врастяж
ку (см. шаr 12), наrружая ИХ предварительно силой растяжения,
большей Ра'
13.1.3. Метрическая резьба
Метрическая резьба используется rлавным образом как Kpe
пежная. Резьба бывает с крупным (например, М 8) и мелким
(например, М8 х 0,5) шаrами (табл. П.13.1 приложения П.13).
Резьбу с мелким шаrом применяют для реrулировки зазоров в
Подшипниках и т. Д.; для создания большоrо запаса по caMOTOp
171
можению; в соединениях с контролируемой затяжкой при CTo
порении соединения корончатой rайкой; на тонкостенных дeTa
лях; в деталях с малой длиной свинчивания (например, в
круrлых установочных rайках).
Прочность винтов, болтов и шпилек, изrотовленных из уrЛе
родистых и леrированных сталей, характеризуют двенадцатью
классами прочности: 3.6; 4.6; 4.8; 5.6; 5.8; 6.6; 6.8; 6.9; 8.8; 10.9;
12.9; 14.9. Первая цифра, умноженная на 100, дает минималЬНое
значение BpeMeHHoro сопротивления, а произведение первой На
вторую, умноженное на 1 О, предел текучести материала в
меrапаскалях.
Для шек установлены классы прочности: 4, 5, 6, 8, 10, 12, 14.
Число, обозначающее класс прочности, умноженное на 100, дает
значение BpeMeHHoro сопротивления материала в меrапаскалях.
13.1.4. Распределение наrрузки по виткам резьбь..
Длина свинчивания
Резьба винта, наrpуженноrо осевой силой, при взаимодейст
вии с rайкай может срезаться по внутреннему диаметру rайки
или сминаться по рабочей высоте профиля резьбы.
Если бы не было деформации растяжения стержня винта и
сжатия тела rайки, а имелись бы лишь деформаuии витков резь
бы, то все витки raйки бьmи бы наrружены одинаково. Н.Е. Жу
КОВский в 1902 [. показал, что пренебреrать деформаuиями
винта и rайки нельзя. Он аналитически решил задачу о распре
делении наrрузки между витками для rайки с десятью витками
резьбы. Им получено, что наибольшую наrpузку Е 1 == О,34Е (rде
F сила, наrpужающая винт) воспринимает ближайший (пер
вый) к опорной поверхности виток. Последний (десятый) виток
несет очень малую наrрузку Е 1о == О,О1Е: Позднее для более
крупной резьбы (rайка с шестью витками резьбы) было получе
но Е 1 == О,3Е: Резьбовое соединение TaKoro типа изображено на
рис. 13.7, а. еправа на рисунке приведена эпюра распределения
сил Fj по виткам резьбы. Неравномерность наrpужения ВИТКОВ
резьбы в формуле (13.4) учитывает коэффициент k т . На рисунке
видно, что увеличение высоты rайки (см. штрихпун:ктирные ли
нии) не снижает значение Fj на первом ВИТКе.
По эТой причине длину свинчивания, т. е. высоту навинчи
ваемой на ВИНТ rайки Н (рис. 13.8, а) либо rлубину завинчива
ния [1 винта (рис. 13.8, б) или шпильки (рис. 13.8, в) в корпус
ную деталь при условии, что у резьбы крупный шаr и класс
172
очности винта не выше 6.6, назначают следующей: Н = O,8d
пр айки изrотовленной из стали; [1 == (O,8...1,25)d для корпус
'::Й етал , выполненной з стали; [1 == (1,2 ...I,4)d дЛя корпус=
ноЙ детали, изrотовленнои из чyrуна и /1 (2...2,5)d для кор
nусной детали, выполненной из алюминия.
F
r
а 6 А ( уВеличено)
8
8
Рис. 13.7. Распределение наrрузки по виткам рvезьбы в обычной
rайке (а), в rайке растяжения (6) и в резьбовои вставке (в)
а
о
8
Рис. 13.8. Резьбовые соединения:
таль' в ШПИЛЬКОЙ завер
а болтом; б винтом, завернутым в корпусную де, ,
нутой В корпусную деталь
Если указанные соотношения выполнены, то достаточно
убедиться в прочности стержня винта:
173
[ _ } > <=:; 1,3F зат . 4
<J G э 2 .
nd l
(13.7)
Здесь <J з эквивалентное напряжение (см. 4.3, шаr 4),
( ) 2 ( Т. ) 2
F зат 3 р
тсд? /4 + O,2d?
а == .J<J 2 + 3-r 2 ==
э
. 1,3 коэффициент, учитывающий возникновение в винте, Ha
ряду с нормальными напряжениями растяжения о, касательных
напряжений 1: от закручивания винта моментом в резьбе Тр при
затяжке rайки rаечным ключом; d 1 внутренний диаме1р резь
бы винта.
Часто долrовечность машины определяется усталостной
прочностью винтов, которая, в свою очередь, зависит от наrруз
ки, передаваемой первым витком резьбовоrо соединения. В ПО
следнее время получают распространение резьбовые соедине
ния с применением высокопрочных винтов и возникает вопрос,
как завертывать такие винты в корпусную деталь, изrотовлен
ную из обычных конструкционных материалов. В обоих случаях
как для повышения усталостной прочности винтов, так и для
обеспечения работоспособности резьбовоrо соединения, обра
зованноrо высокопрочным винтом, требуется решать проблему
выравнивания наrрузки по виткам резьбы.
Один из способов выравнивания наrрузки заставить тело
rайки деформироваться в том же направлении, что и стержень
Винта. Этоrо можно достиrнуть переносом опорной поверхно
с'Т: и rайки выше последнеrо витка. Подобные rайки получили
название ['аек растяжения (рис. 13.7, 6).
Друrой способ выравнивания наrрузки применение для
увеличения податливости резьбы резьбовой вставки: витой пру
жины ромбическоrо профиля, изrотовленной из леrированной
стали или бронзы (рис. 13.7, в). ечитается, что резьбовая BCTaB
ка может увеличить коэффициент k т в формуле (13.4) практиче
ски до единицы.
В некоторых случаях для повышения несущей способностй
резьбовоrо соединения допустимо увеличивать длину свинчи
вания.
174
13.1.5. Определение необходимоrо диаметра болта
при ИaI'ружении резьб080rо соединения в плоскости стыка
Резьбовые соединения, наrруженные в плоскости стыка, BЫ
полняют либо С применением болта или Бинта, устанавливаемо
[О С зазором, либо с применением болта, устанавливаемоrо без
зазора.
При наrружеиии соединения СДВИl'ающей силой F, если болт
установлен с зазором (рис. 13.9, а), неСДВИl аемость соединяе
мых деталей обеспечивается силами трения в стыках и болт pa
ботает на растяжение. На рис. 13.9, а число стыков i равно двум.
f
F
t1
о
Рис. 13.9. Резьбовое соединение, наrpуженное сДвиrающей силой:
а болт установлен с заЗОрО:--1; б болт установлен без зазора
Из условия несдвиrаемости находят необходимую силу за
тяжки болта
kF
F зат == f i '
(13.8)
rде k:= 1,5 коэффициент запаса по несдвиrаемости; f коэф
фициент трения в стыке, равный 0,2 Б стыке сталь сталь и 0,4 в
СТЫКе сталь бетон.
По силе затяжки определяют необходимый внутренний диа
метр болта
d 1,3Fзат . 4
1 п[а] ,
(13.9)
rде [а] == а т / (1,5...3).
175
По значению d 1 подбирают номинальный диаметр болта d
учитывая, что из rеометрических соотношений для метрической
резьбы справедливо соотношение
d 1 == d 1,227 Р.
Если болт установлен без зазора (рис. 13.9, 6), то он работает
на срез и смятие (на рисунке напряжения смятия обозначены
через G CM )' Чтобы обеспечить работоспособность болта, следует
выполнить два условия:
d > пР.
о V 1tN! '
h"C. 'd {] ,
1 О а см
(13.10)
(13.11)
[де i число поверхностей среза; ['t] == (0,2...0,3) а т ; [а]см === О,4а т ,
причем в последней формуле в качестве О'т следует взять MeHЬ
шее из пределов текучести болта и соединяемых им деталей. Фи
зический смысл формулы (13.11) поясняет рис. 4.5 (см. шаr 4).
При наrpужении соединения моментом Т в плоскости стыка
(рис. 13.10) независимо от Toro, стоят ли болты с зазором или
без Hero, полаraют сдвиrающие силы, прикладываемые в зонах
нахождения каждоrо болта, пропорциональными расстоянию
болта до центра масс стыка (до точки О). Вычисляют их по
формуле
F==
- 1
Tlj
2 2
Zl'i + Z2 r 2 +...
==
Tlj
i=п
L Zi'i 2
i=1
(13.12)
[де п число rpупп болтов, yдa
ленных на одинаковое расстоя
ние от точки о; Zi число бол
тов В i й rpуппе, удаленных на
расстояние ri от точки О.
Формула (13.12) дЛя частно
ro случая трех rрупп болтов, об
разующих представленное на
рисунке резьбовое соединение,
может быть получена следую
f1
1\1
Рис. 13.10. Резьбовое соединение,
наrруженное приложенным в плос
кости стыка моментом
176
I.ЦИМ образом. Уравнение равновесия имеет вид Т == ZIFlrl +
+ Z2F2r2 + Z3F3r3 (для соединения, представленноrо на рисунке,
Zl == 4, Z2 == 4, Zз == 2) и содержит три неизвестные величины Р 1 ,
Е 2 и Ез. Если число уравнений равновесия меньше числа неиз
БестНЫХ, то, следовательно, задача статически неопределима.
Чтобы найти неизвестные, следует к условию равновесия доба
БИТЬ условие совместности деформациЙ, которое имеет вид
F1 Р, Р,
== == и для болтов, установленных с зазором, из за Ka
'i '2 rз
сательной податливости стыка, и для болтов, установленных без
зазора, вследствие их деформаций и пропорциональности сил
ЭТИМ деформациям. Таким образом, получили систему, состоя..
щую из трех уравнений: уравнения равновесия и уравнений,
связывающих между собой силы, Е 2 == 1) r 2 ; Ез == .FJ.r3 . Решая эту
'i 'i
систему, можно сначала найти Е l , а затем Е 2 и Ез.
По наибольшей из сил F i при 1 :$; i:$; п определяют необходи
мый диаметр болта. При этом, если болты установлены с зазо
ром, пользуются формулой (13.9), если без зазора формулой
(13.10).
При наrружении соединения в плоскости стыка произволь..
НО направленной силой F (рис. 13.11, а) задачу сводят к ранее
рассмотренным расчетным схемам, определяя наибольшую
сДвиrающую силу в зоне установки болта. Для этоrо в центре
масс стыка (точка О) прикладывают две равные и противо
положно направленные силы Е, параллельные заданной силе
(рис. 13.11, 6). еилы, отмеченные на рисунке засечками, образу
ют пару сил и поэтому MOryт быть заменены моментом Т == Е/.
После такой замены получается расчетная схема (рис. 13.11, в),
которую изложенным выше способом можно свести к расчет
НЫМ схемам, представленным на рис. 13.10.
о
l F
а
о
8
Рис. 13.11. Резьбовое соединение, наrруженное приложенной в плоскости
сТЫка силой:
а реалЬНое наrружение; б расчетная схема (промежуточный вариант); в расчетная
СХеМа (окончательный вариант)
177
Пример 13.2. Кронштейн притянут к основанию болтами (рис. 13.12, а) 11
наrружен сдвиrающей силой Р, приложенной на расстоянии 1 от центра Масс
стыка. Расстояния между крайними болтами по вертикали и rоризонтали равиыl
а и Ь соответственно. Определить необходимый диаметр болтов для двух СЛУЧа-
ев: 1) болты установлены с зазором, 2) болты поставлены без зазора (для ЭТОfо
случая подобрать и ДЛИНУ болта). Материал кронштейна и основания СтЗ'
класс прочности болтов 5.6, коэффициент трения в стыке!== 0,2, тоЛЩИна oc
нования 81 == 25 мм, толщина кронштейна 82 == 20 мм, р== 10000 Н, 1 == 500 мм
а == 400 мм, Ь == 200 мм, z == 6. '
h
б
i o'
4
f6
fбт
l
о
I i i \
.)
а
Рис. 13.12. Кронштейн, наrруженный сдвиrающей силой:
а реальное нщ'ружение; б расчетная схема
1. Соrласно расчетной схеме соединения (рис. 13.12, 6),
Т== РI == 10000.500 == 5.106 Н. ММ.
2. Выясняем, в зоне KaKoro болта действует наибольшая сдпиrающая стык
наrрузка И определяем се значение.
Сила F, приложенная в центре масс стыка, создает в зонах каждоrо из бол-
тов одинаковые вертикально направленные силы
F 10000
Р! F = F 2F = ... = = = 1670 Н.
z 6
Момент Т, приложенный в плоскости стыка, создает в зоне расположеНШ 1
каждоrо из болrов сдпиrающую силу, перпендикулярную радиус вектору ri, co
единяющему точку О и ТОЧКУ расположения i ro болта. Значения сил составляюТ:
178
v p F E, Т'1
Чт ЗТ 4Т 6Т 2 2
Z1'1 + Z2'2
5.106. 224 5074Н'
4 . 2242+ 2. 1002 ·
Tr2
Р 2Т = Fs т == 2 2
Z1'1 + Z2'2
5.106.100 = 2265 Н,
4.2242+ 2.1002
2 2 2 ( ) 2
( а ) ( Ь ) ( 400 ) + 200 224 ММ' l' :::::: b l 2 == 200 / 2 == 100 мм
[Де'1 == "2 + "2 2 Т , 2 I .
Определяем суммарные сдвиrающие силы в зонах расположения болтов
как векторные суммы
2 2 v Р, '2
Р! == F з == F 1F + Р 1Т + 2чр 1Т
'1
6702 + 50742 + 2.1670.5074. 100 == 6005 н;
224
Р 2 == Р2Р + Е 2Т == 1670 + 2265 == 3935 Н;
. 2 2 р, '2
Р4 == Р6 == F P + T 2FiF 1Т ==
1
16702 + 50742 2.1670.5074. 100 = 4579 Н;
224
Е5 == F2F+ Е 2 Т == 1670 + 2265 == 595 Н.
Видим, что наибольшая сдвиrающая сила приложена в зонах расположе
иия первorо и TpeTbero болтов и составляет Fl == 6005 Н.
3. Находим необходимый диаметр болта, устанавливаемоrо с зазором
(рис. 13.13, а).
Из условия несдвиrаемости, считая число стыков i == 1 и k == 1,5, находим
необходимую силу затяжки болта:
F == kFi = 1,5.6005 = 45038 Н.
зат fi 0,2 . 1
Приняв S == 2, вычисляем необходимый внутренний диаметр болта
d 1 < 1 3Е = 1,3.45038 4 = 22,30 мм,
, зат 1t [0'] 3,14.150
rдс [О'] = О'т = 5.6.10 =150МПа.
S 2
Зная внутренний диаметр резьбы, по приложению П.13.1 выбираем наруж:
Rый диаметр резьбы, учитывая, что d J == d 1,227 Р. Резьба М24 не rодкrся, так
l\:al\: у Нее шаr равен 3 мм. Резьбы М25 и М27 мало употребкrельны. Поэтому
ОСтанавливаем свой выбор на резьбе М30 с шаroм 3,5 мм и внутреннимдиамет
179
ром d 1 == d 1,227Р == 30 1,227 . 3,-5 == 25,7 мм. По [ОСТ 7798 70 выбираем
болт М30 с полем допуска 6g, длиной 60 мм и классом прочности 5.6:
Болт М30 6g х 60.56 rOCT 7798 70.
--.::.
d
а
tJ
Рис. 13.13. Болт, установленный с зазором (а) и без зазора (6)
4. Определяем диаметр и длину болта, устанавливаемоro без зазора
(рис. 13.13,6).
['t]i1td 2
Из условия несдвиrаемости F 1 ::;; находим диаметр rладкой час
4
ти болта d o , учитывая, что ['t] == (0,2...0,3) СУ Т == 0,2 . 300 == 60 МПа:
d > / 4fi . d = 4.6005 = 11 30 мм.
O 1t['t]i' о 3,14.60.1 '
По [ОСТ 7817 80 выбираем болт М12 с d o == 13 мм, удовлетворяющий это
му условию.
Из условия несминаемости, учитывая, что [СУ]СМ == О,4а т == 0,4.220 == 88 МПа
(взят меньший из двух пределов текучести кронштейна и болта), вычисляем
минимально допустимое значение h :
h> Fi .
ido[cr]CM '
6005
h= =520MM
1 . 13 . 88' .
Следовательно, дЛина rладкой части болта '2 допжн удовлетворять условию
'2 О) + h; '2 == 25 + 5,2 == 30,2 мм.
Кроме Toro, чтобы обеспечить возможность затяжки соединения, необхо.
димо выполнение условия
'2 ::;; О) + 02; [2 == 25 + 20 == 45 мм.
Этим условиям, соrласно [ОСТ 7817 80, удовлетворяет болт с общей дЛиной 1::::
== 60 мм :
180
Болт М12 6gx 60.56 rOCT 7817 80.
Таким образом, во втором случае требуется диаметр болта значительно
меНЬШИЙ, чем в первом. В то же время при использовании болта, устанавливае
Mor o с зазором, предъявляются пониженные требования к точности изrотовле
ния как отверстий -в соединяемых деталях, так и боковой поверхности болта.
Если же болт устанавливается без зазора, то отверстия должны бьпь развернуты
при совместной обработке двух соединяемых детаJIей (т. е. отверстия требуют
точноrо изrотовления с применением режущеrо инструмента, называемоrо раз
верткой) и болт по поверхности do точно обработан. Отсюда следует, что второй
вИд соединения дороже, но он все таки находит распространение блаrодаря
меньшему диаметру болта, требуемому для обеспечения прочности соединения.
Меньший диаметр болта влечет за собой меньшую ширину фланцев притяrи
ваемЫХ деталей.
13.1.6. Определение необходимоrо диаметра болта
при наrружении резьбовоrо соединения отрывающей силой
и опрокидывающим моментом
Задача первоначально возникла для резьбовых соединений
двиrателей BHyтpeHHero сrорания. Шатунные болты часто обры
вались, и в результате шатунные крышки пробивали картер дви
raтеля, что иноrда приводило к авариям с человеческими жерт
вами. Увеличение диаметра болтов не давало эффекта, т. е. здесь
не срабатывал принцип «rде тонко, там и рвется».
Если действуют отрывающая СИJIa и опрокидывающий (из
rибающий) момент, резьбовое соединение затяrивают так, что
бы внешние наrpузки не раскрывали стык, т. е. чтобы между по
верхностями стяrиваемых деталей везде существовали бы cyм
марные напряжения сжатия 0"1: > О (плюс взят для напряжения
сжатия в стыке). Тоrда, во первых, жесткость стыка будет BЫCO
кой (в стыке не будут возбуждаться вибрация и шум), BO BTO
рых' не возникнет контактная коррозия (фреттинr коррозия)
Из за микросмещений в стыке и, в третьих, болты окажутся Ha
rpуженными сравнительно малой долей внешней наrрузки, что
ПОВЫСИТ их прочность при переменном наrpужении. Задачи Ta
I<oro типа называют задачами на нераскрытие стыка.
При приложении к затянутому соединению внешней силы F
(рис. 13.14) часть ее Р дет наrpужает стык, а друrая часть F б
болты. Условие равновесия имеет вид F == Е дет -+ F б . Получено
одно уравнение с двумя неизвестными Р дет и F б . Такая задача
Статически неопределима, поэтому, чтобы найти неизвестные,
Следует к условию равновесия добавить условие совместности
181
"':::::]
деформаций. В результаТе
получаем систему из ДВУХ
уравнений с двумя неизвест
ными:
""
.....,
F == Р дет + F б ;
.6. дст == .6.. б ,
<t:>
'<::::]
rде D.ДеТ' D.б соответственно
деформации детали и болта
под действием силы F, при
ложенной к предварительно
затян:тому ( krn соеД :НИЮ J '
.6.. дет Р дет + Е А '
дет дет дет
F. ['б
.6.. б ::= Е б L A I ; kFЛ коэффициент контактной податливости
б iб
стыка детали; АдеТ' [дер Едет площадь поперечноrо сечения и
длина детали, а также модуль упруrости ее материала; Е б MO
['б
дуль упрyrости материала болта; L A l сумма отношений длин
iб
наrpуженных участков болта к площадям поперечноrо сечения
болта на этих участках.
При вычислении деформации болта .6.. б контактные дефор
мации в резьбе и на торцах rоловки болта и rайки отдельныМ
слаrаемым в формулу не вошли, так как из за относительной
малости их, как правило, учитывают в расчете, HeMHoro увели
чивая длину наrруженной части болта по сравнению с реаль
ной. Например, для болта, изображенноrо на рис. 13.14, обыч
,,[iб О,5Н 1 + [1 [2 + О,5Н 2
Но полаrают L..J == 2 + 2 ' а для TaKoro же
пiб те d l /4 d /4
болта, завинчиваемоrо в корпусную деталь (ero называют ВИН
том), под величиной Н l в этой формуле понимают rлубину за
винчивания.
Будем называть коэффициентом основной наrрузlШ Х доЛЮ
внешней отрьmающей СЮIы, приходящуюся на болты. РеШая
приведенную выше систему уравнений и применяя подстаноВ
ку Х == F б / F, получаем выражение, связывающее коэффициенТ
основной наrpузки и конструктивные параметры соединениЯ:
"..:;-
F/2
Рис. 13.14. Резьбовое соединение,
наrpуженное отрывающей силой
182
Л К + А д ет
x
А к + А дет + Аб'
А == kКд А [дет А 1 L [iб соответствен
rде КАдет' дет ЕдетАдет' б Е б 4б
но податливости стыка, детали и болта, т. е. их деформации под
действием единичной наrpузки.
Значения коэффициента контактной податливости k K базо
Boro стыка крyrлых (диаметр кpyra 53 мм) стальных или чуryн"
ных поверхностей с шероховатостью Rz при их площади около
2200 мм 2 и суммарных напряжениях в стыке 0'1; приведен в
табл. 13.1.
(13.13)
Таблица JЗ.J
k K , ммЗjН, при (УЕ, МПа, равном
Rz, мкм
0,5 1,0 2,0 5,0 7,0
0,32 0,000156 0,000110 0,000078 0,000049 0,000042
0,63 0,000332 0,000235 0,000166 0,000105 0,000089
1,25 0,000707 0,000500 0,000354 0,000225 0,000189
3,2 0,000884 0,000625 0,000442 0,000279 0,000236
6,3 0,001770 0,001250 0,000884 0,000559 0,000472
1 o 18 0,003530 0,002500 0,001760 0,001120 0,000945
27 0,003950 0,002800 0,001980 0,001250 0,001060
55 0,004600 0,003250 0,002300 0,001450 0,001230
Коэффициент контактной податливости рассматриваемоrо
СТыка (см. 7.2 шаrа 7) равен
kxд == Е"к,
(13.14)
R + 0,27.6.. + 0,0 16 д 2
rДе Е коэффициент влияния масштаба, Е == а 2 ;
Ra+ Q27.6.. 0 + О, О16д о
L\, L\O допуски плоскостности поверхностей рассматриваемой и
базовой (диаметром 53 мм) соответственно.
183
Из анализа формул (13.13), (13.14) следует, что для сниже
ния доли внешней наrрузки, приходящейся на болты, надо дe
лать стык жестким, а болты податливыми, причем для увели
чения жесткости стыка необходимо повышать чистоту
обработки ero поверхностей и силу затяжки болтов, а также
уменьшать длину стыка.
Сопоставление контактной податливости стыка Л-К с подат
ливостью детали Л дет ПОЗВОЛИЛО вьщелить два расчетных случая
задач на нераскрытие стыка. Рассмотрим их.
Случай малоrо влияния контактной податJПlВОСТИ стыка.. Ec
ли поверхности стыка притерты, шабрены или малы и получены
шлифованием, а также если стык неметаллический (например,
стык сталь бетон), то влияние контактной податливости мало и
формула (13.13) для коэффициента основной наrpузки прини
мает вид
Рис. 13.15. КРОНllПейн, наrРУЖеН
ный отрывающей силой и опроки
дывающим момен!ом
184
Л дет
х= .
Л дет + Лб
(13.15)
/,
На стадии проведения про
ектных расчетов, коrда еще
неизвестны конструктивные
параметры соединения, коэф
фициент основной наrpузки в
затянутом соединении, как по
казывает опыт, можно принИ
мать равным 0,2...0,3 для CTЫ
ков сталь сталь и сталь чуryн,
0,75 для стыка сталь бетон
и 1,0 для стыка с использо
ванием резиновой прокладки.
В общем случае резьбовое
соединение может быть Harpy
жено отрывающей силой F и
опрокидывающим моментом .м
(рис. 13.15). Изложим метоДИКУ
проектноrо. расчета TaKoro co
единения.
1. Задаются значением Х.
2. Вычисляют напряженИЯ Б
стыке о' F и О'м от внешних с:И
. ловых факторов F и М:
Р(1 х) .
O'F= А '
д::т
(13.16)
М(1 х)
О'м= w '
дет
(13.17)
rде А дер W дет площадь и момент сопротивления стыка изrи
бу (см. приложение ПА.l шаrа 4) относительно оси, остаю
щейся нейтральной при изrибе. В рассматриваемом примере
Ьа 2
А дет == аЬ, W дет = Ь (см. рис. 13.15). Заметим, что при выводе
формулы (13.17) сделано предположение о распределении опро
кидывающеrо момента между болтами и стыком аналоrично
распределению отрывающей силы.
3. Из условия нераскрытия стыка находят необходимое Ha
пряжение О'зат В стыке от затяжки ero болтами:
О'зат == k l «J F + (J м),
(13.18)
rде k l коэффициент запаса по нераскрытию стыка, равный 1,5
при статической и 3...4 при динамической наrpузках.
Для ответственных металлических стыков формула (13.18)
имеет вид
(Jзат == (JF + (JM + (1...2) МПа.
(13.19)
Отметим, что для стыка сталь бетон максимальные напря
жения следует оrраничивать, принимая [а] :$ 2 МПа. В против
НОМ случае возможно разрушение бетона.
4. Оценивают потребную силу затяжки болта
(J зат А дет
F зат = Z ' (13.20)
rде Z число болтов, стяrивающих стык.
5. е учетом силы затяжки и внешних наrpузок, наrружаю
щих болт, вычисляют расчетную силу Рр, приходящуюся на наи
более наrpуженный болт:
х м ХУl
Рр = 1,3F зат + F бl = l,3F зат + F z + i=п '
L (ZiY?)
i=1
(13.21)
185
rде F бl сила от внешних наrрузок Fи М, приходящаяся на наи
более наrpуженный болт, удаленный на" расстояние У1 от ней
тральной оси (см. рис. 13.15); п число rрупп болтов, удаленных
на одинаковое расстояние от этой оси (на рис. 13.15 п == 4); Zi
число болтов, удаленных от этой оси на расстояние Yj_ В pac
сматриваем ом случае
У1
i=л
I,(Zjyl)
[=1
Уl
4у? + 4y + 4yr + 4y .
6. Вычисляют необходимый внутренний диаметр болта
[F;
d l ::; 4 $1 '
(13.22)
Проверочный расчет соединения вызывает некоторые слож
ности в связи С необходимостью вычисления уточненноrо зна
чения податливости детали, что предполаrает рассмотрение
«конусов давления» и друrоrо способа вычисления W дет '
Случай болъшоrо влияния контактной податливости стыка.
Для общеrо машиностроения наиболее характерна обработка
плоскостей стыка шлифованием, строrанием или точением
(стыки разъемноrо корпуса машины, стык корпуса машины с
рамой и др.). В этом случае, при условии, что детали стыка Me
таллические, первые слаrаемые в числителе и знаменателе фор
мулы (13.13) будут значительно превышать вторые. Пренебреrая
последними, получаем
л
x к
А к + Аб .
(13.23)
Изложим методику проведения проверочноrо расчета соеДИ
нения, представленноrо на рис. 13.15, предполаrая, что reoMeT
рические размеры деталей соединения и материалы деталей
заданы.
1. Выбирают rеометрические размеры напряженной частИ
болта, вычисляют податливость болта
1 ljб
Аб== L
Е б 4б
(13.24)
186
и определяют rеометрические характеристики детали А дет , I дет ,
eT' Заметим, что их следует вычислять для всей площади CTЫ
ка (без учета «конусов давления»), так как экспериментально yc
тановлено, что с повышением контактной податливости стыка
«конусы давления» размываются.
2. Задают либо напряжения предварительной затяжки стыка
О'заТ' либо силу затяжки болта F зат , по которой, соrласно (13.20),
вычисляют G зат . После этоrо, приняв О"Е.. == О"зат' по формуле
(13.14) находят первое приближение коэффициента контактной
податливости стыка k _
3 _ П ринимают равными деформации детали и болта при на
rpужении стыка отрывающей силой Fи по формулам (13.23),
Едет == (1 X)F
(13.25)
вычисляют первые приближения коэффициента основной Ha
rpузки х(1) и силы p , приходящейся на деталь.
4. По формулам (13.16),
О"Е.. == о" зат :t о" F,
(13.26)
(13.14), (13.23), (13.25) методом последовательных приближений
находят уrочненные значения о" р, 0"1) kM' Х, рдет-
5. Методом последовательных приближений вычисляют Ha
rружающий стык момента М дет :
M (i l) 2 2
М == М М == М k дет ZIYl + Z2Y2 +...
дет б кд 1 А б
дет
(13.27)
при первом приближении (i == 1), принимая мit T == М. Здесь
Мб момент, наrружающий болты.
6. Вычисляют напряжения в CTЫKe создаваемые опрокиды
ваlOЩим моментом,
м дет
O"M .
дет
(13.28)
7. Вычисляют минимальное напряжение в стыке
0"Е.. min == О"зат :t о" F cr м'
(13.29)
187
и, если оно выше 1...2 МПа, то переходят к п. 8, если нет, то за
даются повышенными значениями Озат И повторяют расчет по
п.ll. 2 7.
8. По формуле (13.20) вычисляют F зат (если она не задана),
определяют силу F б , действующую от внешних наrрузок на наи
более наrpуЖенный, т. е. наиболее удаленный от нейтральной
оси болт (на рис. 13.15 на расстояние У1)' а также расчетную си
лу Рр, приходящуюся на болт,
F б = РХ + kкд МдетУl . (13.30)
z IдетАб'
Рр == 1,3F зат + F б .
(13.31)
9. По формуле (13.32) проверяют выполнение условия проч
ности болта:
F
[о] cr = .
1td? /4
(13.32)
10. По формуле (13.3), принимая Ра == FзаТ' определяют MO
мент завинчивания Т зав ' соответствующий F зат
Пример 13.3. Для редуктора Ц2Y 125 (рис. 13.16, а) проверить приrод
ность: 1) винтов d == M12, притяmвающих крышку к корпусу и завертываемых в
корпус, если d 1 == 9,853 м:м:, 11 "'" 5 мм, '2 "'" 40 мм, Н 1 == l,4d, Н 2 == 8 мм, Р =
== 1,75 мм; 2) фундаментных болтов d ф == М16 крепления редуктора к раме, если
d 1 == 13,546 мм, 11 "'" 5 мм, /2"'" 30 мм, Н 1 == 13 мм, Н 2 == 10 мм, Р == 2,0 м:м:. При
нять, что высота осей врашения валов над присоединительной поверхностьЮ
лап h "'" 140 мм, поверхности стыка обработаны фрезерованием, стык, резьба и
торцы raeK не смазаны, т. е. f== fP ==А == 0,2.
Известно, что для редуктора Ц2У 125 вращающие моменты на выходном
и входном валах составляют ТТ == 500 Н. м, Т б == 18,4 Н. м (при передаточ
ном числе редуктора, равном 28); допускаемые радиальные наrрузки на KoH
цы этих валов Е т == 5600 Н, Fб == 500 Н. Число винтов, соединЯЮЩИХ крышку
с корпусом (рис. 13.16,6), Z == 10; расстояния от этих винтов до нейтральной
оси Хl == 200 мм (ZI == 4), Х2 == 150 мм (Z2 == 2), ХЗ == 115 мм (Zз == 2), Х4::= О
(Z4 == 2); rеометрические характеристики стыка 0== 450 мм, А дет == 36725 мм 2 ,
lдет == 8,2 . 108 мм 4 , eт == 3,6 . 106 м:м: З . Число болтов, соединяющих корпус с
рамой (рис. 13.16, в), Zф == 4, расстояния этих БИНТОВ до нейтральной ося
хо == 167 мм, rеометрические характеристики стыка 00 == 375 мм, а2 == 250 мм,
Адстф == 22500 мм 2 , lдетф == 5,56.108 мм 4 , Wдетф == 2,97 .106 ММ З .
При определении опрокидывающеrо момента М, действующеrо на резьбо
вое соединение, следует учитывать, что вращающий момент на быстроходнОМ
валу редуктора Т б совпадает с направлением вращения быстроходноrо вала, а
вращающий момент на тихоходном валу ТТ противоположен направлению .вpa
188
шения тихоходноro вала. Поэтому для одноступенчатоrо ЦИЛИlщрическоrо pe
дyкropa М == Тт + Т б , а для двухступенчатоro цилиндрическоrо реДУКтора, как в
нашем случае (см. рис. 13.16, 6), М == тт Тб == 481,6 Н . м. Принимаем, ЧТО
входной вал вращается противоположно направлению движения часовой
стрелки. Рассматриваем один из наиболее опасных случаев нarружения: обе
силы Fт и F б направлены rоризонтально и в сумме составляют F == р т + F б ==
::= 6100 Н. В этом случае в стыке peДYКTop paMa М == ТТ Т б + Fh == 1335,6 Н . м
(см. рис. 13.16, в).
-..t:::
о
8
Рис. 13.16. Редуктор Ц2Y 125:
а расчетная схема для расчета резьбовых соединений; б, в эпюры напряжений
в стыках крышка корпус и peДYКTop paMa соответственно
1. При:нимаем класс прочности винтов 6.6 и считаем затяжку винтов KOH
Тролируемой (допускаемое напряжение [0"] == 180 МПа). Определяем из условия
kF
обеспечения несдвиrаемости F зат = , rдe k == 1,5, силы затяжки винтов стыка
Jz
I<рышка корпус Fэат == 4555 Н и фундаментных болтов стыка peДYКTop paMa
f;атф == 11478 Н (в целях упрощения расчета на несдвиrаемость не учтен крутя
щий момент, создаваемый сипами Ее, F б И действующий в плоскости стыка).
2. Для соединения КрЫШКа КОрПУС по формулам (13.24), (13.20) вычис
JIяем ПОДатливость болта и напряжение в стыке от затяжки ботов л-б ==
== 2,7. 10 6 м:м:/Н, О"зат == 1,24 МПа. По значению О"зат из табл. 13.1 находим k K и
lIO формуле (13.14) определяем kКД, '== 0,003 мм 3 /Н. Так как отрывающей силы
Нет, то коэффициент основной наrрузки не вычисляем и найденное значение
kкд, СЧИтаем окончательным.
189
3. Методом последовательных приближений, соrласно (13.27), вычисляем
момент, наrружающий стык: M1 : = 330561 Н. мм, M1 = 378000 Н. Мм,
M1 = 363000 Н. мм, M1 f = 367000 Н . мм. Последнее приближеIOIе считаем
окончательным: М дет = M1 :.
4. По формулам (13.28), (13.29) находим напряжение в стыке, создаваеМое
опрокидывающим моментом ам == 0,10 МПа, и 1IШнимальное напряжеНие В
стыке О[ шill == 1,14 МПа. Так как минимальное напряжение в стыке укладЫвает
ся в допускаемый диапазон, равный 1...2 МПа, то расчет продолжаем.
5. По формулам (13.30), (13.31), (13.32) и (13.3) вычисляем силу, ПриходЯ
щуюся от внешних наrрузок на наиболее наrруженный болт, F б == 100 Н, pac
четную сипу Рр == 6941 Н, напряжение в боте (J == 91 МПа и момент заВИНЧИва
ния 7;ав == 14200 Н . ММ. Поскольку полученное значение (J меНЬШе
допускаемоrо, то прочность винта считаем обеспеченной.
6. Для соединения peДYKтop paмa по формулам (13.24), (13.20) определяем
At3 ф == 1,21 . 10 6 мм/Н, Озат Ф == 2,04 МПа. По значению (Jзат из табл. 13.1 Haxo
дим k K и по формуле (13.14) получаем kкд == 0,0025 мм 3 /Н. Так как отрывающей
силы нет, то коэффициент основной наrрузки не вычисляем и найденное зна
чение kK считаем окончательным.
7. Методом последовательных приближений по формуле (13.27) вычисля
ем м(2) ф = 782000Н.мм, м(3) =1011000H. мм, м(4) =916000Н,мм
дет дет Ф дет Ф ,
м(5) Ф = 956000 Н . мм. Последнее приближение считаем окончательным pe
дет
М М (5)
зультатом, т. е. дет Ф = дет ф.
8. По формулам (13.28), (13.29) находим напряжение в стыке, создаваемое
опрокидывающим моментом, ам Ф == 0,32 МПа и минимальное напряжение
О[ l1lill Ф == 1,72 МПа. Так как минимальное напряжение В стыке укладывается в
допускаемый диапазон, равный 1...2 МПа, то расчет продолжаем.
9. По формулам (13.30), (13.31), (13.32) и (13.3) определяем силу, прихо
дящуюся от внешних наrpузок на наиболее наrpуженный болт, F б Ф == 587 Н,
расчетную силу Рр Ф == 15456 Н, напряжение в боте (Jф == 107 МПа и момент за
винчивания Т:roв Ф == 42000 Н. мм. ПОСКОЛЬКУ полученное значение (Jф меньше
допускаемоrо, то прочность винта считаем обеспеченной.
Методика расчета, учитывающая нелинейность зависимости
деформаций в стыке от напряжений в нем, приведена в П.13.2.
На основе рассмотренной выше задачи MorYT быть проведе
ны расчеты необходимоrо диаметра болтов и силы предварИ
тельноrо натяжения металлическоrо тросика радиоантенны aB
томобиля или допустимой скорости ветра для Останкинской.
телебашни и т. п. Отметим, что в примере 5.5 шаrа 5 допустимую
скорость ветра для Останкинской телебашни оценивали в преД
положении малоrо влияния контактной податливости стыка по
изложенной выше методике, приняв Х == о. Последнее допуще
ние близко к истине, так как стальные тросы, притяrивающие
башню к основанию, относительно тонкие и длинные (почти в
высоту телебашни).
190
Теперь можно ответить на вопрос, как лучше располаrать
отверстия при креплении предметов двумя винтами к стене
rоризонтально или вертикально? Если мы стремимся обеспе
tJИТЬ нераскрытие стыка, то наименьший диаметр болтов потре
буется при rоризонтальном расположении отверстий; если же
винты не предполаrается затяrивать так сильно, что будет обес
печено нераскрытие стыка, то меньший диаметр винта будет
иметь место при вертикальном расположении отверстий. Пер
вЫЙ вариант крепления целесообразен, коrда внешняя наrpузка
переменна во времени. В этом случае переменная составляющая
н:аrpузки на винт окажется существенно сниженной по cpaBHe
н:ию со вторым вариантом. Второй вариант крепления более
распространен в быту, так как внешняя наrрузка обычно посто
янна во времени.
13.1.7. ВИНТЫ, подверженные действию Ilсременной Iшrрузки
Рассмотрим шатунный болт (рис. 13.17) двиrателя внутрен
aero сrорания. Отрывающая внешняя сила, наrpужающая
крышку шатуна двиrателя, изменяется во времени по отнулево
му циклу (см. рис. 4.8, а шаrа 4).
В предыдущем параrpафе отмечалось,
что, если обеспечить нераскрытие стыка,
то болты окажутся наrруженными cpaB
нительно малой долей внешней наrpузки
и это повысит их прочность при перемен
НОМ наrpужении внешней отрывающей
СМой (lШи опрокидывающим моментом).
Силу F б , приходящуюся от внешней Ha
rpузки на- болт, вычисляют по формуле
(13.21) или (13.30). Амплитуда напряже
Ний в болте составляет
0,5 F б
аа nd 1 /4 '
(13.33)
а среднее напряжение цикла равно
F зат + 0,5F б
а т :::; nd 1 / 4
(13.34)
rрафик изменения напряжений во
Времени совпадает с rрафиком, приведен
Рис. 13.17. Шатунный
болт
191
ным на рис. 4.9, а шаrа 4. Опасным сечением болта является се-
чение в ero резьбовой части в районе расположения nepBOfo
витка резьбы. Запас усталостной прочности болта вычисляют по
формуле (4.10) шаrа 4. В этой формуле коэффициент YMeHbliIe_
ния предела выносливости К ап находят по выражению (4.12), в
котором эффективный коэффициент концентрации наПРяже-
ний Ка для метрической резьбы с плоскосрезной формой впа-
дины (рис. 13.18, а) принимают в зависимости от времениоrо
сопротивления ав материала винта:
а в , МПа . . . . . . 400 600
Ка' . . . . . . . . 3,0 3,9
800 1000
4,8 5,2
Для повышения усталостной прочности болта вместо плос
косрезной формы впадины резьбы применяют закруrленную
форму впадины (рис. 13.18, 6) с R
О,1Р, а в наиболее ответственных
случаях с R 0,125Р. В этом случае
эффективный коэФФИIlиент KOHцeH
трации напряжений Ка определяют
по теоретическому коэффициенту
концентрации напряжений (Ха' KOTO
а о рый вычисляют по формуле
Рис. 13.18. Плоскосрезная (а)
и закруrленная (6) формы Бпа
дины метрической резьбы
<Ха = 1 + 1,l g .
(13.35)
Для определения Ка используют формулу (4.14), а также rpa
фики рис. 4.14 шаrа 4.
Прочность болта зависит от амплитуды напряжений (j а' вычис
ляемых по формуле (13.33). В свою очередь (j а определяется коэф
фициентом основной наrpузки Х, который, соrласно формуле
(13.13), в значительной степени связан с податливостью болта.
Отсюда следует, что повышение усталостной прочности болта
вследствие увеличения ero диаметра не всеrда приводит к цели,
так как при этом повышается доля наrpузки, приходящаяся на
болт. Таким образом, известный принцип «rде тонко, таМ 11
рвется» здесь часто не срабатывает.
Чтобы снизить приходящуюся на болт внешнюю наrpузку 11
повысить ero усталостную прочность, добиваются равнопроq
ности болта по длине, уменьшая диаметр rладкой части и yДJIM
няя болт (см. рис. 13.17).
192
13.1.8. ВИНТЫ самонарезающие и самосвеРЛЯЩIiС
Самонарезающие винты (рис. 13.19, а) сами нарезают резьбу
в отверстии при их завинчивании. Наибольшее распростране
I-lяе они получили в автомобилестроении для крепления листо
BblX материалов и пластмасс, их также используют в строитель
стве, товарах народноrо потребления и в соединениях KOHCTPYK
uиЙ из дерева. Винты изrотавливают из калиброванной стали
марки 30 с фосфатированным покрытием.
2,5
1,75
0,18
1,75
40
б
1.<::"
\9.
о)
\9..
(J
\9.
о
8
Рис. 13.19. Самонарезающий винт:
а винт; б резьба с крупным Ш<Jrом; в резьб<J с мелким Шal'ОМ
Самонарезающие винты оrраниченно применяют в маши
настроении и электротехнике из за образования стружки при
их установке и недостаточной прочности соединений в случае,
если резьба имеет крупный шаr (рис. 13.19, 6). Общая толщина
соединяемых металлических пакетов колеблется в интервале
4,5...13 мм. Для получения более прочноrо соединения исполь
ЗУют резьбу с мелким шаrом (рис. 13.19, в).
Соrласно [ОСТ 10618 80, винты должны подверrаться Tep
Мической или химико термической обработке с целью получе
I{Ия твердости 57...63 НRС э и 37...47 НRС э соответственно для
ВИНтов с крупным и мелким шаrами. Диаметры rладких OTBep
СТИЙ, предназначенные для завертывания в них винтов, должны
быть больше BHyтpeHHero диаметра резьбы винта на 0,1 или
0,3 мм для винта с наружным диаметром 2,5 мм и на 1,3 или
1,4 ММ для винта с наружным диаметром 8 мм (первые цифры
ОТНосятся к мелкой, а вторые к крупной резьбе).
Винты самосверлящие самонарезающие являются дальней
lIrи:м совершенствованием конструкции самонарезающих вин
7 8640
193
тов. Они имеют комбиниро
ванную рабочую поверх
ность, состоящую из учаСТl<а
с режущей резьбой и KOHЦe
Boro участка в виде свеРла
(рис. 13.20). Сверло обеспе
чивает в процессе заВИНЧlf
вания винта сверление отверстия в соединяемых деталях. За
тем детали соединяются режущей резьбой. Наибольщее
применение самосверлящие самонарезающие винты нашли в
промышленности еША и rермании.
{Ф)
Рис. 13.20. Самосверляший caMOHa
резающий винт
13.1.9. Конструктивные рекомендации по изrотовлению,
затяжке и стопорению резьбовых соединений
Для резьбовых соединений со значительной силой затяжки
рекомендуется брать винты с наружным или внутренним Шес
тиrpанником под ЮIюч и избеrать использования винтов со
шлицем под отвертку, как не обеспечивающих создания боль
ших сил затяжки.
Во фланцевых соединениях расстояние ме.жду винтами по
пери метру фланца, необходимое для rерметизации стыков, сле
дует назначать: (l5...20)d при отсутствии избыточноrо давле
ния в rерметизируемой полости, отрывающих сил и опрокиды
вающих моментов, наrружающих соединение; (10...12)d при
отсутствии избыточноrо давления в rерметизируемой полости;
(3...6)d при давлении в rерметизируемой полости
0,2...1,0 МПа; (3...4)d при давлении в rерметизируемой полос
ти 10...15 МПа. При этом толщина фланца обычно составляет
(1,25...1,4)d.
еледует избеrать применения сквозных резьбовых OTBep
стий в местах расположения масляной BaHHЫ C использованиеМ
уплотняющей мази, лака или краски для rерметизации резьбо
Boro соединения. Резьбовые соединения обычной точности He
rерметичны. Если требования по нанесению reрметика на резЬ
бовое соединение записать в технические требованиЯ
сборочноrо чертежа, то при сборке на заводе изrотовителе [ep
метичность соединения будет обеспечена, но в процессе ЭКС
плуатации рабочие, не имея перед собой сборочноrо чертежа,
MorYT собрать резьбовое соединение без rерметика.
Винты с потайной и полупотайной rоловками центрирую тСЯ
по конусным отверстиям притяrиваемой детали. Поэтому следУ
ет избеrать их завинчивания в к'орпусную деталь (рис. 13.21, а), а
194
дучше их устанавливать в виде
болтовых соединений (с rай
каМИ). При необходимости
скрЫТЬ от rлаз выступающие
roловки винтов, завинчиваемых
J3 корпусную деталь, их следует
устанавливать с полукрyrлой
rоЛОВКОЙ (рис. 13.21, 6). В край Рис. 13.21. Деталь, притяrиваемая к
нем случае может быть реализо корпусу винтами с потайной roлов
ваН и вариант конструктивноrо кой (о) и с полукрyrлой rоловкой (6)
исполнения, приведенный на
рис. 13.21, а, но со сверлением отверстий под резьбу по KOHДYK
тору (приспособлению, позволяющему более точно выдержать
расстояния между отверстиями).
При соединении стальными болтами алюминиевых деталей
во избежание контактной коррозии болты следует кадмировать
или оцинковывать.
Винты с крестообразным шлицем удобно применять при Me
ханизированном процессе завинчивания, так как шлиц хорошо
центрируется по инструменту. Но следует учитывать, что такие
винты, как правило, изroтавливают из качественных сталей и их
roловки для повышения твердости и износостойкости шлицев
азотируют. Если твердость шлицев мала, то они срезаются при
незначительных моментах завинчивания и в этом случае такие
винты лучше в конструкции не применять.
Если в резьбовом соединении используются высокопрочные
винты, то в технических требованиях сборочноrо чертежа следу
ет указывать момент завинчивания высокопрочных болтов, He
обходимый для обеспечения работоспособности сборочной
единицы. Если же этот момент не будет указан, то рабочий затя
нет резьбовое соединение обычным rаечным ЮIючом а так как
длина ключа невелика и составляет обычно I4d (d диаметр
Винта), ТО момент завинчивания, а следовательно, и сюrа затяж
1<и винта будут недостаточными.
При завинчивании высокопрочных винтов в корпусную дe
таль, выполненную из обычных материалов, следует увеличи
вать rлубину завинчивания. Кроме Toro, нужно стремиться к
выIавниваниюю наrpузки по виткам резьбы.
Примером сборочной единицы, в которой предусмотрена
Установка высокопрочных винтов, является привод ленточноrо
aHcnoPTepa, представленный на рис. 12.19 (см. шаr 12). В нем
ЫСОкопрочные винты обеспечивают как нераскрытие стыка
а
о
7*
195
между опорно поворотным подшипником и притянутыми к He
му деталями, так и несдвиraемость при передаче вращающеro
момента с зубчатоrо колеса на барабан.
На рис. 13.22 приведены конструктивные решения, ПоЗво
ляющие выравнять наrрузку по виткам резьбы этой сборочной
единицы с помощью бобышек, работающих на растяжение, и в
результате использования завертываемой в резьбовое отвеРстие
спиральной вставки ромбическоrо профиля.
а
о
Рис. 13.22. Высокопрочные винты, завертываемые в корпусную деталь, в KO
торой предусмотрены бобьШIКИ с работающей на растяжение резьбой (а) и
спиральные вставки (б)
етопорение можно обеспечить созданием повышенноro
трения между стопоримой и стопорящей деталями и пластиче
ским деформированием стопоряшей детали. В первом случае
стопорение осуществляется пружинными шайбами, контрrайкоЙ
и т. Д., во втором шплинтом, мноroлапчатой шайбой (прим:е
нительно к крyrлой шлицевой rайке), деформацией фартука rаЙ
ки, проволокой И др. Второй способ более надежен, чем первыЙ.
Для некоторых осей подшипников применяют также стоI10
рение «на резьбе».
Пружинные шайбы (шайбы [ровера) можно использовать дЛЯ
стопорения резьбовых соединений, если соединение наrpуЖеlI О
статически и допускает систематическую проверку степени ero
затянутости. Шайба, деформируясь, создает вследствие своей yI1
196
руrости нормальную силу, не исчезаю
ШУЮ при вибрации соединения, что Be
деТ к сохранению сил трения в резьбе и
ка торце. Пружинную шайбу подклады
Бают под завинчиваемую деталь: винт
(рис. 13.23, а) или raйку (рис. 13.23, 6).
При вращении по часовой стрелке эта
деталь, если у нее правая резьба, затяrи
вает соединение. При этом кромка пру
жинной шайбы, имеющей косой разрез
левоrо направления, скользит по дeTa
ЛИ. При повороте детали против часо
вой стрелки кромка шайбы впивается в
деталь, препятствуя ее самоотвинчива
НИЮ. В случае использования в KOHCT
рукции таких шайб в инструкции по
эксплуатации машины следует преду
смотреть запись о необходимости систе
матической проверки затяжки резьбо
вых соединений.
КОНТРI'айки для стопорения приме
няют редко, так как они существенно
увеличивают массу машины. Контрrай
ки незаменимы в случаях, коrда требу
ется бесступенчатая фиксация положе
ния rайки по длине болта, особенно
при значительном ее перемещении.
Например, натяжение ремня, передаю
щеrо движение от установленноrо на
редукторе электродвиrателя к входному
валу этоrо редуктора (см. рис. 10.16 ша
ra 10), удобно осуществлять поворотом
качающейся плиты, на которой закре
I1лен электродвиrатель. Поворот обес
I1ечивается с помощью raeK, переме
Щаемых вдоль отжимноrо болта. После
fIеремещения rайки стопорятся KOHтp
rаИI<ОЙ (рис. 13.24).
.. Шплинты с использованием прорез
Olf IfЛИ корончатой I'айки (рис. 13.25)
РИМеНЯЮТ для стопорения в наиболее
ответ
11 ственных случаях. Шплинт, BЫ
ОlIlIенный из проволоки полукруrлоrо
а
ff
Рис. 13.23. Пружинная
шайба Б резьбовом co
единении винтом (а) и
болтом (6)
Рис. 13.24. Натяжение
кпиноременной переда
чи rайками с последую
ЩИМ их стопорением
контрrайкой
.
Рис. 13.25. Стопорение с
использованием шппин
та с корончатой rайкой
197
сечения, вводят в один из пазов raйки и просовывают через По
перечное отверстие болта. Концы шплинта отrибают на rpани
rайки. Уrловое положение rайки можно зафиксировать шплин
том только через одну шестую часть оборота. Чтобы при этом
существенно не изменялась сила затяжки болта, в резьбовом co
единении желательно предусматривать мелкую резьбу.
Мноrолапчатые шайбы применяют для стопорения круrльrx.
шлицевых [аек. Шайбу устанавливают между закрепляемой на
валу деталью и rайкой. Одну из лапок шайбы, предупреждаю
щую проворачивание шайбы на валу, обычно заводят в паз Ба
ла, друrую отrибают в паз rайки. Остальные лапки контактиру
ют с конической поверхностью rайки. На рис. 13.26 показано
четыре варианта фиксации шайбы относительно вала: BHyтpeH
ней лапкой, отоrнутой от raйки (а); внутренней лапкой, oTorHY
той под rайку (6); прямой внутренней лапкой (6); обрубленной
внутренней лапкой и введением наружной лапки в прорезь на
торце притяrиваемой детали (предполаrается, что та зафиксиро
вана от про ворота относительно вала) (2). В первом варианте паз
на валу требуется менее rлубоким, чем во втором, а во втором
менее rлубоким, чем в третьем. Четвертый вариант не требует
фрезерования на валу канавки под лапку. Он, как и три преды
дущих варианта, считается технолоrичным и вполне надежныМ
(на рис. 13.26, 2 условно показан не диаметральный, а ломаный
разрез шайбы и притяrиваемой детали).
а
а
8
3
Рис. 13.26. Четыре варианта фиксации вала мноrолапчатой шайбой
Деформацию фартука rайки (рис. 13.27) применяют для cTO
порения специально выточенной rайки с фартуком, навинчеlI
ной на вал. Фартук rайки для удобства ero деформированJfЯ
имеет толщину 0,5...0,7 мм. Он расположен на диаметре, HeMIIO
198
ro превышающе м диаметр впа
дин резьбы rайки. Фартук дe
формируют в предусмотренный
ДЛЯ этоrо на валу шпоночный
паз, засверловку или шлиц. При
необходимости ремонта или pe
rуЛИРОВКИ фартук освобождают
из паза отверткой и rайку отвин
чивают, а после окончания pe
монтных работ rайку устанавли
ваюТ на то же место и фартук
повторно деформируют в паз.
Такой метод стопорения широ
ко распространен в автомоби
лях.
Стопорение проволокой при
меняют для стопорения близко
расположенных крепежных дe
талей (рис. 13.28). Если крепеж
ные детали находятся на значи
тельном расстоянии одна от
дрyrой, !о этот метод стопоре
ния становится ненадежным
Из за возможноrо удлинения
проволоки со временем. При Рис. 13.28. Стопорение проволокой
СТО rруппы деталей
порении проволокой следует
соблюдать правило: при затяжке проволоки скручиванием ее
Концов проволока должна создавать вращающий момент Ha
правленный в сторону завертывания крепежной детали. '
Стопорение «на резьбе» оси подшипника возможно при Bpa
Щении детали, установленной на подшипнике 'только в одн у
Сторон у П р и '
. этом момент трения в подшипнике способствует
за1Яrиванию резьбовоrо соединения. Поэтому направление
резьбы у оси подшипника скольжения должно совпадать а Ha
правление резьбы у оси подшипника качения быть пр тиво
поло)кн ыlM Н
РИс аправлению вращения подвижной детали. На
. 13.29 представлен чертеж крепления оси левой велосипед
Iiои пе д али К Ш
( шатуну. атун вращается против часовой стрелки
fIнаправление вращения деталей указано стрелками) а педаль
с о часовой. Момент трения Т тр в подшипнике качен я стремит
я: пове р н у ть
:в ось подшипника против часовой стрелки. еледо
аТельно '( б
, по ы исключить возможность вывинчивания под
Рис. 13.27. rайка с фартуком
199
А А ( у8еличено)
М14х 1,25LH
б б ( уf}еличено)
ЛеiJаль
фШGРl!К
1Тр
A i..& ' ,
Бt
л ь
Шатун
Рис. 13.29. Крепление оси левой велосипедной педали к шатуну
действием момента трения оси из шатуна, ее резьбовой конец
должен иметь левую резьбу (правая педаль относительно своей
оси вращается, наоборот, против часовой стрелки; поэтому
резьба, предназначенная ДЛЯ крепления оси правой педали в
шатуне, должна быть правой).
13.2. Заклепочные соединения
13.2.1. Конструктивные рекомендации
Заклепочные соединения это неразъемные соединения, об
разуемые вследствие пластических деформаций заклепок. Они в
основном бывают трех типов (рис. 13.30): внахлестку, с одной
накладкой, с двумя накладками. В каждом соединении для пре
дотвращения поворота должно быть не менее двух заклепок.
Форма закладной rоловки заклепки может быть полукруr
лой, полукруrлой низкой, потайной, полупотайной, плоскоЙ.
Необходимую длину заклепки 1 рассчитывают из условия обес
печения получения замыкающей rоловки по формуле
1 d + ( )2 SI:, (13.36)
[де d номинальный диаметр заклепки; d o диаметр отверстйЯ;
S Е суммарная толщина па кета соединяемых деталей.
Для заклепок повышенноrо качества диаметром d
== 2...10 мм принимают d o == d + 0,1 с допуском в плюсовую cТO
рону 0,12...0,20 мм в зависимости от d.
200
F
F
F
F
........
а
о
F
ct::>
8
Рис. 13.30. Заклепочные соединения:
а внахлестку; б с одной накладкой; в с двумя накладками
Соединения Moryт быть образованы OДHO и МНОI'ОрЯДНЫМИ
заклепочными швами. В мноrорядных швах заклепки для MeHЬ
шеrо ослабления соединяемых листов располаrают в шахмат
НОМ порядке. Диаметр заклепки, а также минимальный шаr Me
жду заклепками и швами назначают с учетом прочности
соединяемых листов.
13.2.2. Расчет на прочность
При наrружении соединения сдвиrающей силой стержень
заклепки работает на срез и смятие.
Диаметр односрезной заклепки (см. рис. 13.30, а, б) из усло
вия ее равнопрочности равен
d > 4[a]CM S
п[ '"С]ср ,
(13.37)
rДе S толщина каждоrо из соединяемых листов.
Диаметр двухсрезной заклепки (см. рис. 13.30, в) при S ==
::::: 2S H (rде SH толщина накладки) СОСТdвляет
d> 2[a]CM S
n[-r]cp .
(13.38)
201
Из приведенных формул следует, что диаметр односрезной
заклепки можно рекомендовать равным 28, а двухсрезной .......
1,58.
Необходимое число заклепок Z определяют из условия Проч
ности на смятие
> F
z Sd[a]CM
(13.39)
и из условия прочности на срез, которое для соединения внахле
СТКУ и для соединения с одной накладкой (см. рис. 13.30, а, б)
имеет вид
> 4F
z 2 '
nd ['r]cp
(13.40)
а дЛЯ соединения с двумя накладками (см. рис. 13.30, в)
2F
z 2
nd [Т]ср
(13.41)
13.3. Практика конструирования. Выбор болтов
для крепления опор приводноrо барабана к раме
13.3.1. Постановка задачи
Для конструируемоrо привода ленточноrо транспортера (см.
10.4 шаrа 1 О) требуется выбрать болты крепления корпусов под
шипников приводноrо барабана (рис. 13.31) к металлической
раме. Известно, что каждый из корпусов притянут к раме двумя
болтами (z ::::о 2), установленны
ми с зазором. Высота оси Bpa
щения барабана над присоеди
нительной поверхностью лап
корпусов подшипников COCTaB
ляет h ::;:;: 150 мм. ВращающиЙ
момент на приводном барабане
ТТ ::;:;: 380 Н . м. В месте посадКИ
на приводной вал компенсИ
рующей муфты возникает (см.
шаr 16) радиальная сила FM ===
::::: 1200 Н неопределенноrо Ha
fм
;7
-.t:;:
Рис. 13.31. Приводной барабан
ленточноrо конвейера
202
} r ' I
1 tA
А 2У1
Ilравления, вызванная Hecooc
J-{ОСТЬЮ соединяемых валов.
сила предварительноrо натя
)l(енИЯ ленты конвейера равна
2 F o == 5000 Н. Расстояние от
точки приложения силы Рм до
ближайшей опоры составляет
Ll == 200 мм, а расстояние меж
ду опорами равно L == 600 мм.
опорная поверхность корпуса
подшипника (рис. 13.32) пред
ставляет собой два прямоуrоль
ника с размерами сторон
а == 40 мм и Ь == 60 мм, раздви
нутыми на расстояние аl ==
== 80 мм. Расстояние между
болтами 2Уl == 120 мм. Класс
прочности болтов ПРИНЯТЬ 3.6
(а т == 3 . 6 . 1 О == 180 МПа). Зада Рис. 13.32. Корпус подшипника
приводноrо барабана, закрепленный
чу решить для двух случаев:
б на раме
1) поверхности стыка ша рены
(малое влияние контактной податливости стыка); 2) п верхно
сти стыка фрезерованы (большое влияние контактнои подат
ливости стыка).
а
Gf
6 м
6 зат
61
13.3.2. Составление расчетной схемы
Вычисляем реакции в первой F rl и второй F r2 опорах при
водноrо вала. Полаrая, что направления силы от муфты Рм И си
ЛЫ предварительноrо натяжения ленты конвейера 2Ро совпада
ют (наиболее опасный случай), находим
F M (L l + L) + 2F o O,5L
Fr 1 == L
1200(200 + 600) + 5000.0,5.600 == 4100 Н'
WO . ,
2Fo 0,5 L FMLl 5000.0,5 . 600 1200 .200 == 2100 Н.
F r2 == L 600
Далее ведем расчет ре ьбовых соединений корпус а подшип
Ника первой опоры (как более наrруженной) с рамои.
203
13.3.3. ПроеКТllЫЙ pacqeт резьбовоrо соеДинения
на нераскрытие и несдвиrаемость стыка при малом влиянии
ero контактной податливости
1. Принимаем коэффициент основной наrрузки Х равным
*
0,25 и находим необходимую силу затяжки болта F;aT из условия
обеспечения нераскрытия стыка. Для этоrо вычисляем опроки
дывающий момент М, определяем площадь стыка А дет и ero Mo
мент сопротивления изrибу W дет относительно нейтральной оси
(см. приложение ПА.1 шаrа 4), находим напряжения в стыке
<J М' вызванные опрокидывающим моментом, и из условия He
раскрытия стыка для ответственных металлических стыков
*
(13.19) получаем F зат . Результаты вычислений приведены ниже:
м == Р"1 h == 4100. 150 == 615000 Н. мм;
А == 2аЬ == 2.40.60 == 4800 мм 2 .
Дcr ,
w = Ь[(2а + al)3 а?] = 60[(2 .40 + 80)3 803] = 224000 3.
Дет 6(2а + a r ) 6(2 . 40 + 80) мм ,
= М(1 х) = 615000(1 0,25) = 206 МП .
<J М W 2 24000 ' а,
дст
<J зат == ам + (1...2) МПа == 2,06 + 1,5 == 3,56 МПа;
р* = <JзатАдет 3,56. 4800 8544 Н
зат Z 2 .
2. Находим необходимую силу затяжки болта F з :; из условия
обеспечения неСДвиraемости:
р** = kF rl = 1,5.4100 = 15375 Н
зат zf 2 .0,2 '
[де k == 1,5 коэффициент запаса по несдвиrаемости; f== 0,2
коэффициент трения в стыке.
* * * **
Сопоставляя F зат и FзаТ' видим, что F зат больше, поэтоМУ
диаметр болта рассчитываем по этой силе.
3. Вычисляем расчетную силу Рр, действующую на болт:
204
** МХУl = 1 3.15375 + 615000.0,25.60 = 2]269 Н.
Fp 1,3F зат + zy?' 2 . 602
4. Вычисляем необходимый внутренний диаметр болта:
J4Fp 4. 21269
d} те [а] 3,14 . 90 17,3 мм,
rде [а] == а т / 2 == 180/2 == 90 МПа.
5. По табл. П.13.1 приложения П.13 подбираем болт М24, у
KOToporo d} == d 1,227Р== 24 1,227.3 == 20,31 мм, что больше
требуемоrо.
13.3.4. Провероqный paCQeT резьбовоrо соединения
на нераскрытие и несдвиrаемость стыка при большом влиянии
. ero контактной податливости
1. Задаемся rеометрическими размерами напряженной части
болта (см. рис. 13.14): d == 24 мм, d 1 == 20,31 мм, /1 == 28 мм, '2 ==
== 36 мм, Н 1 == 19 мм, Н 2 == 15 мм.
Принимаем Е б == 21.104 МПа и вычисляем л'б:
1 ,,'iб 1 ( 0,5Н} +/1 '2 +0,5H2 J
л, L.J +
б Е б А iб Е б тed? /4 тcd 2 /4
= 1 [ 0,5.19 + 28 + 36 + 0,5. 15 ] = 1,01 . 10 6 мм/Н.
21.1043,14.20,312/4 3,14.242/4
Определяем rеометрические характеристики детали:
А == 2аЬ == 2.4.60 == 4800 мм 2 ,
дет
J Ь(аl + 2а)3 Ьа?
дет 12 12
60 (80 + 2. 40)3 60.803 = 01792.108 мм4
12 12' ,
'У Ь[(2а + al)3 а?] = 60[(2.40 + 80)3 803] = 0,224.106 мм3.
дет 6(20 + аl) 6(2.40 + 80)
205
2. Из условия несдвиrаемости, принимая k == 1,5 и f== 0,2
(стык не смазан), находим требуемую силу затяжки болта
F kF rl = 1,5.4100 = 15375 Н
зат z f 2 . 0,2 .
Вычисляем О'зат:
z F зат 2 .15375
О'зат = = 4800 = 6,4 МПа.
дет
По приложению П.6.7 (см. шаr 6) для чистовоrо фрезерова
нил находим шероховатость Ra :::::: 1,6 мкм, Rz :::::: 5Ra ==5 . 1,6 ==
== 8 мкм. По этой шероховатости для О'Е. == О'зат == 6,4 МПа По
табл. 13.1 методом интерполяции определяем k KO =
== 0,0008 мм 3 /Н. По приложению П.6.6 дЛя 8 й степени Точно
сти обработки поверхностей находим, что отклонения от пло
скостности составляют 1::1 == 25 мкм и 1::10 == 16 мкм. Вычисляем
+ 0,271::1+ 0,0161::12 1,6 + 0,27.25 + 0,016.252
€ = = 1 83 а за
Ra + 0,27 До + 0,016д 1,6 + 0,27.16 + 0,016.162 "
тем == €k K == 1,83.0,0008 :::::: 0,0015 MM 3 jH. Так как соединение
не наrружено отрывающей силой, то найденное значение kкд.
считаем окончательным.
3. Вычисляем х:
kкд 0,0015
Х ( k J ( О 0015 J = 0,236.
А дет А: + Аб 4800 4800 + 0,00000101
4. Методом последовательных приближений находим М дет :
мЯ т = М = 615000 Н. мм,
м(!) 2
м(2) =M /r z Д
дет ' 1 1 А
дет б
615000 602
= 615000 0,0015 .2 = 248000 Н . мм
01792 .108 1,01 .10 6 '
206
м( 2) 2
..АЗ) M k lL=
М дет кдZl 1 л
дет б
= 615000 О 0015.2 248000 8 602 6 = 467000 Н . мм.
, 0,1792 .10 1,01 .10
Повторяя расчет, получаем M1 = 336000 Н. мм, A4 =
::: 414000 Н . мм, M1 T = 368000 Н . мм.
Принимаем
M1 + M1 368000 + 414000 = 391000 Н . мм.
Mдeт 2 2
5. Вычисляем минимальные напряжения в стыке:
+ = о' + F 1 Х м дет =
а r. min а зат а F а М зат А W:
дет дет
6,4 + О. 1 0,236 391000 = 4,7 МПа.
4800 0224.106
,
Поскольку ar.min> 1...2 МПа, то нераскрытие стыка полаrа
ем обеспеченным.
6. Вычисляем F б и Рр:
F. Ех kкдМ детУl
б = Z + 1 дет /Аб
0.0,236 + 0,0015.391000.60 = 1930 Н;
2 (0,1792 .1(8)/(1,01 .10 6)
Рр == 1,3F зат + F б == 1,3 .15375 + 1930 == 21900 Н.
7. Проверяем выполнение условия прочности болта
а = l = 21900 = 67,6 МПа.
пd[/4 3,14.20,312/4
Так как а < (а] == (}т /2 == 180/2 == 90 МПа, то полаrаем проч
I-Iость болта обеспеченной.
207
8. Определяем момент завинчивания, соответствующий F
зат
(резьба метрическая 'у == 300, шаr резьбы Р == 3 мм, d 2 :::::
== 22,051 мм, d T == 30 мм, резьба и торец rайки не смазаны, т. е.
fp == h == 0,2):
Т зав == 0,5F зат tg(Ч'+ q>')d 2 + 0,5F зат h ==
== 0,5 . 15375 tg (2,480 + 130) . 22,051 + 0,5 . 15375 .0,2 . 30 ==
== 93000 Н . мм,
rде Ч' == arctg 1C 2 == arctg 3,14. 2,051 = 2,480,
0,2 13 0
= arctg 300 ==
cos
/,
<р' == arctg ::::
cos 'у
ПРИЛОЖЕНИЯ П 13
Л.13.1. Диаметры и шаrи метрической резьбы по rOCT 8724 81
Р, fM 11 P, MM
d, мм 1I (J, мм
крУП мелкий круп мелкий
ный ный
1; 1,1*; 1,2 0,25 0,2 17** 1,5; 1
1,4* 0,30 0,2 18*; 20; 22* 2,5 2; 1,5; 1; 0,75;
0,5
1,6; 1,8* 0,35 0,2 24 3 2; 1,5; 1; 0,75
2 0,40 0,25 25** 2; 1,5; (1)
2,2* 0,45 0,25 27** 3 2; 1,5; 1; 0,75
2,5 0,45 0,35 30 3,5 (3); 2; 1,5; 1;
0,75
3 0,50 0,35 33** 3,5 (3); 2; 1,5; 1;
0,75
3,5* (0,60) 0,35 35** 1,5
4 0,70 0,5 36 4 3; 2; 1,5; 1
4,5* (0,75) 0,5 39** 4 3; 2; 1,5; 1
5 0,80 0,5 40** (3); (2); 1,5
6; 7** 1 0,75; 0,5 42 4,5 (4); 3; 2; 1,5; 1
8 1,25 1; 0,75; 0,5 45* 4,5 (4); 3; 2; 1,5; 1
9** (1,25) 1; 0,75; 0,5 48 5 (4); 3; 2; 1,5; 1
10 1,5 1,25; 1; 0,75; 0,5 50** (3); (2); 1,5
11 ** (1,5) 1; 0,75; 0,5 52* 5 (4); 3; 2; 1,5; 1
12 1,75 1,5; 1,25; 1; 0,75; 0,5 55** (4); (3); 2; 1,5;
1
I
14* 2 1,5; 1,25; 1; 0,75; 0,5 56 5,5 4; 3; 2; 1,5; 1
15** 1,5; (1) 58* (4); (3); 2; 1,5
16 2 1,5; 1,25; 1; 0,75; 0,5 60* (5,5) 4; 3; 2; 1,5; 1
При м е ч а н и я: 1. Значение диаметра без звезДОЧКИ следует предпочи
Тать значению с одной звездочкой и т.Д. 2. Значение шаrа резьбы, заключенное
в СКобки, по возможности, не применять.
209
П.lЗ.2. Задача на нераскрытие стыка для случая, коrда контактные
деформации стыка превышают собственные деформации деталей
и нелинейно связаны с напряжениями в нем
Если детали соединены между собой z болтами, расположенными
на расстояниях Yl, ..., Yi, ..., Yz от начала координат (см. рис. 13.15), и:
стык имеет форму, аналоrичную приведенной на рис. 13.32, причем
деформации стыка нелинейно зависят от напряжений в нем (см. шаr 7
выражение (7.14», то решение задачи имеет ВИД ,
( i Z )
6 М !t. t У; (Ес)2
л'б ' l
t = I
Ь<р2[ (20 + a l )3 аl]
r:' { ЕС
'. +
зат 2л'б.J5дБ
+
2 } 2
ЕС F tq> bq>2 2 (20 + a l )3 аЗ
+ + + t2a+ J.
(2).6'&ь) Z ).6 '(Ее)' [ 12 J'
161 = (уо + Уl) q> / л'б'
rде t расстояние от оси симметрии стыка до оси ero поворота под действием
сил F зат , F и момента М, мм; q> yrловая контактная деформация стыка, рад;
л'6 податливость болта; Уо расстояние от оси симметрии стыка до оси ero
поворота под действием силы Fи момента М, мм, Уо == Ес(zF зат /А)о,5/q> t. для
вычисления t, F зат , Уа, F бl предварительно задают уrол q>.
Список литературы
Анурьев В.И. Справочник конструктора машиностроителя: В 3 т. М.: Ma
шиностроение, 1992. Т. 1. 816 с.
Fuммельфарб А.л. Основы конструирования в самолетостроении: Учеб. по
собие. М.: Машиностроение, 1980. 367 с.
Детали машин. Расчет и конструирование: Справочник / Под ред.
Н.с. Ачеркана: В 3 т. М.: Машиностроение, 1968. Т. 1 440 с.
Иванов А. с., Решетов Д.Н Совершенствование методики расчета и KOHCT
руирования резьбовых соединений, наrруженных отрывающей силой и опро
Кидывающим моментом / / Вестник машиностроения. 200 1. NQ 4.
С. 30 36.
Решетов д.к Детали машин: Учеб. для вузов. М.: Машиностроение,
1989. 496 с.
2)0
Шаr 14. КОНСТРУИРОВАНИЕ СОЕДИНЕНИЙ
ШПОНОЧНЫХ, ПШИЦЕВЫХ И С НАтяrом
. Что представляют собой призматическая, се2Ментная и цилиндрическая
шпонки?
Зачем НУЖliЫ направляющие и скользящие nрuзматические шпОliКИ?
. Зачем у направляющей призматической шпонки имеются резьбовое oтвep
стие по середине и два 2Ладкux отверстия по концам?
. Какой способ центрирования по наружному или по внутреннему диа
метру шлицев более целесообразен для шлицевО20 прямоБОЧНО20 подвиж
НО20 соединеиuя?
. Какое шлицевое соединение nрямобочное или эвольвент ное имеет бо
лее высокую несущую способность и почему?
. В каких случаях целесообразно nрименять соединение треУ2ОЛЬНЫМИ Ulли
ца.Мll ?
. Как подобрать посадку для соединения с натя20М, обеспечивающую пepe
дачу задаННО20 крутЯЩе20 момента и осевой силы?
Что представляет собой термомехаllическое соединение с натЯ2ОМ?
. Какие КОllструктивные особеНliости имеет редуктор, сборка колес с вала
ми котОРО20 проводится внутри корпуса, и каковы преимущества этО20
КОliструктивНО20 испОЛllеliUЯ в сравнении с традиционными, реалuзующи
ми радиальный или осевой метод сборки?
. Как определить диаметр винта., с помощью котОРО20 проводят запрессов
ку зубчатО20 колеса llа вол, завинчивая винт в торец вала?
Ответы на эти вопросы и не тqлько на них Вы найдете в 14 м шаrе.
Рассмотрим методы расчета и конструирования соединений
валов со ступицами, причем особое внимание уделим запрес
СОВКе ступицы на вал с помощью винта, завинчиваемоrо в торец
вала. Такой метод соединения позволяет избежать разъема KOp
Пуса в ero наrpуженной области, что способствует уменьшению
массы машины.
14.1. Шпоночные соединения
14.1.1. Конструкция шпоночных соединений
Шпонка это деталь, устанавливаемая в пазах вала и ступи
цьr Колеса, предназначенная для передачи крутящеro момента.
211
Шпонки изrотавливают из уrлеродистых сталей с временным
сопротивлением не менее 590 МПа. Обычно пользуются ПРИз
матическими, сеrментными или ЦИЛИIЩрическими шпонками.
Призматическ:ие ШПШIКИ применяют для неподвижных и
подвижных соединений. В первом случае имеют дело с ПрИз
матической шпонкой, изображенной на рис. 14.1, во втором
используют направляющие или скользящие призматичеСКие
шпонки (рис. 14.2). Размеры соединений призматической
шпонкой по roeT 23360 78, изображенной на рис. 14.1, приве
дены в приложении П.14.1.
ь
k
t
I
1JE:r
пg
Ш
Рис. 14.1. Неподвижное соединение призматической шпонкой и три
варианта ее исполнения (I III) (на осевом сечении соединения пока
зана шпонка исполнения 1)
-.;:
:;о.
о
..
;..
tJ
Рис. 14.2. Подвижные соединения направляющей (а) и СКоЛьзЯ
щей (6) призматическими шпонками
Шпоночные пазы на валу изrотавливают пальцевой или дис
I<ОВОЙ фрезой, в ступице протяжкой или долбяком.
В условном обозначении призматической шпонки указыва
ЮТ номер исполнения (кроме исполнения 1), размеры попереч
f{oro сечения bxh, длину 1 и номер стандарта.
Например, призматическая шпонка исполнения 1 с разме
рами Ь == 8 мм, h == 7 мм, 1 == 40 мм обозначается так:
Шпонка 8х 7х 40 rOCT 23360 78.
CerMeHTHbIe шпонки (рис. 14.3) рекомендуются только для
неподвижных соединений. Размеры соединений этими шпонка
ми по [оет 24071 80 приведены в приложении П.14.2.
lp
d
ь
k
212
Рис. 14.3. Соединение сеrментной шпонкой
в условном обозначении сеrментной шпонки указывают
размеры ее поперечноrо сечения и номер стандарта.
Например, сеrментная шпонка с размерами Ь == 3 мм, h ==
== 6,5 мм имеет следующее обозначение:
IПпонка 3 х 6 J 5 rOCT 2407J 80.
Цилиндрические шпонки (рис. 14.4) обычно изrотавливают
Из цили!Щрическоrо прутка. Их вставляют в отверстия, которые
засверливают параллельно оси вала в собранном соединении.
Ось отверстия располаrают на стыке по ерхностей вала и cтy
nицы. Чтобы при сверлении ось отверстия не ушла в сторону,
Требуется обеспечить расположение засверливаемых торцовых
Поверхностей вала и СТУПИЦЫ в одной плоскости, при этом
Твердости материалов должны быть близкими.
213
14.1.2. Расчет шпоночных соединений
Расчетную длину шпонок /р призматических (см. рис. 14.1
14.2 и 14.5), cerMeHTHbIX (см. рис. 14.3) и. цилиндрических (см:
рис. 14.4) определяют из условия прочности на смятие:
/р ;?: 2 Т / (kD [о ]см ),
(14.1)
rде Т передаваемый шпонкой крутящий момент; k размер
выступающей из вала части шпонки, k == h t l ДЛЯ призмати
ческой и сеrментной шпонок, и 0,5d для круrлой шпонки. Дo
пускаемое напряжение смятия [о' ]см == (0,3.. .0,5)О'т для
t
Рис. 14.4. Соединение круrлой шпонкой
[р
[р
о
lp
8
о
Рис. 14.5. Положение призматической шпонки на валу:
а шпонка исполнения 1, шпоночный паз фрезерован пальцевой фрезой;
б шпонка исполнения /1, шпоночный паз фрезерован пальцевой фрезой;
в шпонка исполнения /1, шпоночный паз фрезерован дисковой фрезой
214
flепоДВИЖНЫХ и (О, 1...0,2)О'т для ПОДВИЖНЫХ соединений; Б Ka
qecTBe а т в выражения подставляют минимальное значение оТ
ИЗ О'т материала вала, О'т материала ступицы и а т материала
шпонки.
Расчетную длину призматических шпонок принимают в
зависимости от их исполнения: /р == / Ь для исполнения 1,
lр::::: 1 дЛЯ исполнения 11 и lp == 1 0,5Ь для исполнения lIL
Для cerMeHTHbIx шпонок Zp :z d.
На срез шпонки не проверяют, так как их форма обеспечи..
Бает большую прочность на срез по сравнению с прочностью на
смятие.
Пример 14.1. Выбрать призматическую шпонку исполнения 1 (см.
рис. 14.1, а) для неподвижноrо соединения вала диаметром D == 36 мм со ступи
ией зубчатоrо колеса, если момент на колесе Т== 100 Н. м. Принять материалы
вала и шпонки сталь 45 (о"т == 320 МПа), материал колеса сталь 40Х (о"т ==
== 350 МПа).
1. Из припожения П.] 4.1 находим для диаметра вала D == 36 мм размеры co
единения: Ь == 10 мм, h == 8 мм, 1) == 5 мм. По этим размерам вычисляем k:
k == h 1) == 8 5 == 3 мм.
2. Определяем допускаемое напряжение смятия. Так как минимальное из
трех пределов текучести сопряrаемых деталей о"т == 320 МПа, то
[crJCM == (0,3...0,5)О"т == 0,4 . 320 == 128 МПа.
3. Вычисляем расчетную и полную длины шпонки:
lp 2T/(kD[crJCM) == 2 . 100 . 1000/(3 .36 . 128) == 14,5 мм,
1 == 'р + Ь == 14,5 + 10 == 24,5 мм.
4. По приложению П.14.1 назначаем длину шпонки стандартной и равной
25 мм.
5. Делаем вывод, что приroдна
Шпонка 10 х 8 х 25 rOCT 2ЗЗ60 78.
Пример 14.2. Выбрать сеrментную шпонку (см. рис. 14.3) для соединения,
paCCMoTpeHHoro в примере 14.1.
1. Из приложения П.14.2 находим для диаметра ван:а D == 36 мм размеры co
едИнения: Ь == 10 мм, h == 13 .м:м, d ==32 мм, 1) == 10 мм. По этим размерам вычис
1Iяем k:
k == h 1) == 13 10 == 3 мм.
2. Определяем расчетную длину шпонки:
'р 2T/(kD[cr]CM) == 2. 100.1000/(3.36.128) == 14,5 мм.
215
3. Оцениваем приrодность сеrментной шпонки. Так как /р < d, то ШПОНI<а
указанных размеров способна передать вращающий момент.
4. Делаем вывод, что приrодна
Шпонка 10х 13 ТОСТ 24071 80.
Пример 14.3. Выбрать крyrлую шпонку (см. рис. 14.4) для соединения, pac
CMoTpeHHoro в примере 14.1.
1. 3адаемся диаметром цилиндрической шпонки d == 8 мм, ориентируясь На
то, что в качестве нее можно использовать цилиндрический штифт по rOCT
3128 70.
2. Вычисляем необходимую длину шпонки
/ == /р 2T/(0,5dD[cr]cM) == 2.100.1000/(0,5.8.36.128) == 10,9 мм.
3. Принимаем длину шпонки равной 12 мм.
4. Делаем ВЫВОД, что приrоден
Штифт 8 х 12 ТОСТ З128 70.
14.2. Шлицевые соединения
14.2.1. Конструкция шлицевых соединений
Шлицевые соединения образуются зубьями выступами Ba
ла, входящими в соответствующей формы впадины отверстия
ступицы. Их разделяют на прямобочные, эвольвентные и Tpe
уrольные. Наиболее распространены соединения прямобочныии
шлицами с центрированием по наружному D (рис. 14.6, а) или
внутреннему d (рис. 14.6, 6) диаметру. Первый вид центрирова
ния обычно применяют при твердости ступицы менее 350 НВ. В
этом случае отверстие обрабатывают режущим инструментом
протяжкой. Второй вид центрирования, как правило, применя
ют, если ступицу закаливают (твердость выше 350 НВ). при
этом центрирующую поверхность ступицы обрабатывают Kpyr
лым шлифованием. Высокие твердости вала и ступицы обычно
требуются, если шлицевое соединение подвижно (во избежание
износа контактирующих поверхностей). При центрировании по
внутреннему диаметру по центрирующей поверхности вала пре
дусматривают продольные канавки (см. рис. 14.6, б) для Toro,
чтобы обработать центрирующую поверхность вала плоскиМ
шлифованием, не предъявшLЯ жестких требований к радиусу за
круrления шлифовальноro Kpyra.
При повышенных требованиях к наrрузочной способносТИ
соединения и пониженных требованиях к точности радиальноr о
центрирования соединяемых деталей иноrда используют цeH
216
трирование по боковым rраням шлицев, или центрирование по
Ь, [де Ь ширина зуба.
[ОСТ 1139 80 предусматривает прямобочные шлицевые co
единения трех серий: леrкой, средней и тяжелой, отличающиеся
при одинаковом внутреннем диаметре d наружным диаметром D
и числом зубьев Z. Максимальное число зубъев равно 10. В при
JIожении П.14.3 приведены размеры прямобочных шлицевых
соединений.
А
4
A A
б
ь
YI
Б (уВеличено)
ь
Б (у8еличено)
а
о
Рис. 14.6. Шлице вое соединение прямобочными шлицами с центри
рованием по наружному (о) и по внутреннему (6) диаметрам
Обозначение шлицевоrо соединения, IlШицевоrо вала и
Il1Лицевой ступицы должно содержать: букву, обозначающую
поверхность центрирования; число зубьев z и номинальные раз
Меры d, п, Ь; обозначение посадок (для соединения) или полей
Допусков (дЛя шлицевоrо вала и шлицевой ступицы) по центри
РУЮщему диаметру и размеру Ь. Например, прямобочное llШи
Цевое соединение подвижное с центрированием по d при z ::::: 8,
d :::::: 36 мм, D ::::: 4О мм имеет следующее обозначение:
217
d 8х 36 Н7//7х 40х 7 Р8//8 rOCT 1139 80,
а неподвижное соединение с центрированием по D при тех Же
параметрах будет обозначаться так:
D 8х 36х 40 Н7/п6х 7 F8/j s 7 rOCT 1139 80.
Шлицевое эволъвентное соединение по [оет 6033 80 имеет
yrол профиля зуба 300 и в большинстве случаев центрируется По
боковым поверхностям зубьев (рис. 14.7). Оно характеризуется
наружным диаметром п, модулем т и числом зубьев z. Зная т и
Z, можно определить делительный диаметр d m == mz. В связи с
большим числом зубьев (z == 11...50) и большей шириной OCHo
вания зуба соединение допускает передачу значительно больше
ro крутящеrо момента, чем прямобочными шлицами. В прило
жении П.14.4 даны наиболее употребительные параметры
соединения.
A A
Б (уВеличено)
б
А'
Рис. 14.7. Шлицевое соединение эвольвентными шлицами с центри
рованием по боковой поверхности зубьев
Приведем примеры обозначений:
1) неподвижное соединение D == 50 мм, m == 2 мм с центриро
ванием по боковым поверхностям зубьев (поле допуска ширинЫ
впадины втулки 7Н, поле допуска толщины зуба вала 7n):
50 х 2 х 7Н/7п rOCT 6033 80 ;
2) подвижное соединение с теми же параметрами и полямl1
допусков 9Н и 9g соответственно:
50 х 2 х 9H/9g ТОСТ 6033 80 .
218
Шлицевое треyrольное соединение применяют при оrpани
ченных радиальных rабаритных размерах и для реrулировки yr
довоrо положения соединяемых деталей. Оно может иметь MO
дуль т == 0,2...1,6 мм, число зубьев z == 20...70 и уrол профиля
зуба 30, 36 или 450. Делительный диаметр d m == mZ. [ocyдapCT
BeHHoro стандарта на соединение не имеется.
14.2.2. Расчет шлицевыx соединений
Необходимую дЛину шлицев 1 можно определить из прибли
женноro расчета зубьев на смятие и изнашивание:
[ а ] >
см d l1A'
ср Z fl
(14.2)
[де Т крутящий момент, передаваемый соединением; d cp
средний диаметр шлицев: d cp == О,5(п + d) для прямобочных И
d cp == d т дЛя эвольвентных и треуrольных птицев; h рабочая
высота зуба: h == О,5(п d) 2/ дЛЯ прямобочноrо, h == О,8т
ДЛЯ ЭБольвентноrо, h == О,5(п d) для треyrольноrо зуба (d
диаметр впадин зубьев ступицы, D диаметр выступов зубьев
вала) .
Допускаемое напряжение смятия [а]см == 60...90 (90...150)
Д)IЯ неподвижноrо соединения, [а]см == 18...30 (30...55) дЛя под
вижных соединений без наrpузки, [О]см == (7,5...15) для подвиж
Hыx соединений под наrpузкой (здесь без скобок приведены
данные в случае твердости поверхностей менее 350 НВ, в скоб
Ках при твердости более 350 НЕ); если работа соединения
происходит в условиях ударной наrpузки, то допускаемые Ha
пряжения понижают в 2...3 раза.
Пример 14.4. Выбрать прямобочные шлицы леrкой серии (см. рис. 14.6, а)
для соединения, рассмотренною в примере 14.1.
1. По прююжению П.14.3 определяем размеры соединения: z == 8 мм, d ==
== 32 мм, D == 36 мм, Ь == 7,/== 0,4 мм.
2. Вычисляем средний диаметр соединения и рабочую высоту зуба:
d cp == О,5(п + d) == 0,5(36 + 32) == 34 мм;
h == О,5(п d) 2/ == 0,5(36 32) 2.0,4 == 1,2 мм.
3. По ранее приведенным рекомендациям назначаем допускаемое напря
ЖеНие смятия [а]см == 75 МПа.
4. Определяем необходимую длину шлицевOfО соединения:
219
1 2T/(dcpZh [а]см) == 2 . 100 . 1000/(34.8 . 1,2.75) == 8,2 мм.
5. Делаем вывод, что приroдно соединение
D 8 х 32 х 36 Н7/п6 х 7 F8/js 7 rOCT 1139 80
длиной не менее 8,2 мм.
Пример 14.5. Выбрать эвольвентные штшы (см. рис. 14.7) для соединения,
paCCMoTpeHHoro в примере 14.1.
1. По приложению П.14.4 определяем размеры соединения. Так как CTaH
дартом не предусмотрен диаметр вала 36 мм, то принимаем D == 35 мм. Чтобы
не очень сильно снижать ПрО'-IНость caMoro вала, задаемся меньшим из двух
значений модуля т == 1,25 мм. При этом чис;ю зубьев составит z == 26.
2. Вычисляем средний диаметр соединения и рабочую высоту зуба:
d cp == d m == mz == 1,25.26 == 32,5 мм;
h == 0,8т == 0,8.1,25 == 1 мм.
3. Определяем необходимую длину шлиuевоrо соединения:
1 > 2Т = 2. 100 . 1 000 3 2
, мм.
dcpzh [а]см 32,5. 26.1 . 75
4. Делаем вывод, что приrодно соединение
35 х 1,25 х 7Н/7п rOCT 60ЗЗ 80
длиной не менее 3,2 мм.
14.3. Соединения с натяrом
14.3.1. Конструкции
В соединениях с натяrом несдвиrаемость обеспечивается
силами упрyrоrо деформирования охватываемой (вал) и OXBaTЫ
вающей (детали с отверстием) деталей. еоединения Moryт BOC
принимать произвольно направленные силы и моменты. Они не
боятся динамических наrpузок, не имеют люфтов, обеспечива
ют хорошее центрирование.
Перед сборкой диаметр охватываемой детали больше диа
метра охватывающей. Поэтому поле допуска вала (подробнее о
полях допусков см. шаr 6) расположено над полем допуска oT
верстия (рис. 14.8). Разность размеров вала и отверстия опреде
ляет натяr Н. Нижнее НrШп т и верхнее Н тах т табличные знаqе
ния натяrа определяют по формулам
220
N min т == ei ES, l1ax т == es EI,
( 14.3)
rде ei, EI и es, ES нижние и верхние отклонения размеров вала
и: отверстия приведены в приложениях П.6.2 и П.6.4 шаrа 6.
Для сборки соединения с натяrом используют либо запрес
совку, либо HarpeB охватывающей детали, либо охлаждение ox
ватываемой детали (обычно жидким азотом или твердой уrлеки
слотой).
В последнее время стали встречаться так называемые TepMOMe
ханические соединения, в которых натяr получают применени
еМ конструкционных элементов, обладающих «памятью формы}).
Это свойство характерно, например, для никель титановоrо
сплава, имеюwеrо обратимое мартенситное превраwение при
60... 160 ОС. Детали из этоrо сплава деформируют в радиаль
НАМ направлении (втулку дор НО М, вал фильерой) при охла
ждении в жидком азоте ( 196 ое) в мартенситном состоянии.
Затем сразу же, пока детали не изменили своей температуры,
ступицу надевают на вал (соединение с зазором). Коrда детали
наrpеются до температуры окружающей среды, они BOCCTaHaB
ливают свои прежние размеры, а в соединении возJ.Iикает натяr.
При соединении запрессовкой, чтобы предотвратить срез
материалов соединяемых деталей, вал и втулка должны иметь
входные фаски (рис. 14.9). Рекомендуемые размеры а и Ь дoxo
дят соответственно до 6 и 8 мм при диаметрах вала до 500 мм.
Nmi.пr
d
200
200
....:1
CI.)
u)
аз
11
......
х
tj
Е
't:I
ь
Рис. 14.8. Поля допусков в системе
ОТверстия для соединения с натяrом
Рис. 14.9. Форма входных фасок
у соединяемых деталей
14.3.2. Прочность соединения
Из условия несдвиrаемости, заключающеroся в том, что си
JIa Трения должна быть не меньше сдвиrающей силы, находят
221
минимально допустимое значение давления р в сопряжении
двух деталей (рис. 14.10):
k Fa2 + (2Т /d)2
р == nd/f '
(14.4)
[де k == 1, 5 коэффициент запаса по
несдвиrаемости; Fa' т осевая сила и
крутящий момент, передаваеМые co
единением; d, Z диаметр и длина co .
пряrаемых поверхностей; f мини
мальный коэффициент трения в
соединении.
Выполнение условия HepaCKpы
тия стыка проверяют, если к соеДине
нию приложен изrибающий момент
М. В частности, изrибающий момент
М == FadK /2 возникает вследствие при
Рис. 14.10. Расчетная схема ложения осевой силы Ра К зубу зубча
соединения с натяrом Toro колеса на плече d K /2. Из условия
нераскрытия стыка находят мини
мально необходимое давление р, превышающее раскрывающее
стык давление Р(
l
р 1,3 PJ. == 1,3( 4/п)М ::= 5М ,
2(dZ 2 /6) dZ 2
(14.5)
[де коэффициент 4/n учитывает лунообразность эпюры давле
ний р}, а двойка в знаменателе наличие двух (сверху и снизу)
таких эпюр.
Большее из двух минимально допустимых давлений, вычИС
ленных по формулам (14.4) и (14.5), подставляют в формулу Ля
Ме. По этой формуле определяют значение расчетноrо мИНИ
мальноrо натяrа ():
() == pd( С l / Е 1 + C21 Е 2 ) .103,
(14.6)
[де С l , С 2 коэффициенты для вала и отверстия соответствеННО,
2
С = 1+(d 1 /d) 1.1'
1 1 (d 1 / d) 2 1 ,
с = 1+(d/d 2 )2 +1.1 .
2 1 (d/d 2 )2 2,
222
d 1 ...... диаметр отверстия (если оно есть) в охватываемой детали;
d2...... наружный диаметр охватывающей детали; 1.11, 1.12 и Е 1 , Е 2
коэффициенты Пуассона и модули упрyrости материалов OXBa
тываемой и охватывающей деталеЙ соответственно. Значения 1.1
и Е для различных материалов приведены в приложении П.5.1
шаrа 5.
Для выбранной технолоrии обработки определяют шерохо
ватосТЬ Ra сопряrаемых поверхностей охватываемой и OXBaTЫ
вающей деталей (СМ. приложения П.6.7, П.6.8 шаrа 6). Принимая
Rz = 5Ra, вычисляют значения Rz1 и Rz2 и требуемый натяr N:
N == () + 1,2(R z1 + R z2 )' (14.7)
Однако требуемый натяr можно определить точнее, если
представить ero в виде суммы натяrа () rладких деталей, вычис
ленноrо по формуле Ляме, и удвоенной деформации ()1 микро
неровностей контактирующих поверхностей:
N == () + 201 == pd( С 1 / Е} + C2I Е 2 ) + 2 Еср о,5,
rдeE масштабный фактор, определяемый по формуле (13.14) с
заменой допуска плоскостности допуском цилиндричности; с
коэффициент, зависящий от качества обработки поверхности
(см. 7.2, шаr 7). Это особенно важно для деталей, насаживаемых
на вал с малым натяrом, например подшипников.
Предельно допустимый натяr N max находят из условия от..
СУТСтвия пластических деформаций охватывающей детали, co
Поставляя максимально возможные действующие напряжения в
этой детали с пределом текучести материала, из KOTOpOro она
изrОТОвлена. Напомним (см. формулу (4.8) шаrа 4), что, если
- наПряженное состояние в точке характеризуется действием Ha
ПРяжений al' а2' аз по трем взаимно перпендикулярным осям (в
частном случае одно из напряжений может оказаться равным
I-Iyлю) и а 1 а2 аз, то, соrласно теории наибольших касатель
ных напряжений, сопоставляемое с пределом текучести мате..
Риала эквивалентное напряжение а э == аl аз (при вычислении
по этой формуле следует учитывать знаки напряжений).
Наибольшие напряжения от натяrа возникают (рис. 14.11)
Iia ВНуТренней поверхности охватывающей детали. Здесь напря
}f(eli 1 + (d / d 2 )2
Ие в окружном направлении составляет (J' t == Р , а
1 (d/d 2 )2
223
в радиальном о r == р. Напряжение в продольном направлеНlI й
отсутствует. Поэтому
1 + (d/d 2 )2 2р
Оэ ==01 оз ==(Jt Or ==P1 (d/d2)2 +р== 1 (djd2)2'
А
b t
b t
Рис. 14.11. Напряжения (Jt И (Jп возникающие в охватываемой
и охватывающей деталях при их соединении с натяroм
Отсюда давление в сопряжении, приводящее к возникновению
текучести материала охватывающей детали, равно
1 (d/d2)2
Ртах == о т 2
(14.8)
и соответствующий ему предельно допустимый натяr составляет
N max ::; ЬР тах jp + 1,2(R z1 + R z2 )' (14.9)
Посадку в .-:;оединении (см. приложения П.6.2, П.6.4 и П.6.5
шаrа 6) подбирают из условия
N min т ::; N::; N max т'
[де N max т ::; N max '
(14.10)
14.3.3. Запрессовка зубчатоrо колеса ВИIffОМ,
завинчиваемым в торец вала
На рис. 14.12 изображена запрессовка зубчатоrо колеса, по
лучаемая с помощью завинчивания винта диаметром d B в резЬ
224
fЗат
<..о
Q..
:х:
Рис. 14.12. Запрессовка зубчатоrо колеса на вал винтом,
завинчиваемым в торец вала
бовое отверстие, нарезанное в торце вала. При передаче Bpa
щающеro момента с зубчатоrо колеса на вал с помощью шпонок
обычно обеспечивают посадку Н7 jp6. Для такой посадки значе
НИЯ максимальноrо табличноrо наТЯrа N max р определенноrо по
формуле (14.3), при разных диаметрах d валов представлены на
рис. 14.13. Здесь же приведены значения максимальноrо натяrа
8 тах , вычисленноrо с использованием формулы (14.7) в предпо
ложе ни и, что высоты микронеровностей вала и отверстия co
ставляют Ral == R a2 == 0,8 мкм (такая шероховатость поверхно
стей близка к рекомендуемой). Значения ь тах ' подставленные
L Ртах,МПа Fзаr 1 к Н
1:
70 В 60
.=
50 IJ 45
-:l
50 4. 30
40 2 15
30 О О 40 160 с/,мм
80 120
Рис. 14.13. Измеренный пах И расчетный (JlIlax натяrи, MaK
симальное давление Рlllах В сопряженI01 СТУШ1ца вал и сила
затяжки винта F;aT при разных диаметрах d вала
8 8640
225
в формулу Ляме (14.6), позволили найти и представить на ЭТОМ
же рисунке максимальные давления Ртах в сопряжении
вал колесо в предположении, что колесо стальное (модули YIl
руrости материалов вала и колеса Е l == Е 2 == 21 . 104 МПа) IIри
двух значениях ero наружноrо диаметра: d 2 == 3d (ртах 1) и d 2 :::
== 1,5d (ртах 2)' Причем первое значение соответствует случаю
коrда колесо выполнено в форме диска, второе если в ие
предусмотрена ступичная часть. По значениям РтаХ' преДПОЛа
rая длину 1 посадочной поверхности равной диаметру d вала, с
использованием формулы
F зат == Ртах пdlf (14.11)
рассчитаны и приведены на том же рисунке необходимые силы
затяжки винта F зат для трех возможных сочетаний параметров:
1) d 2 == 3d, f== 0,2 (F зат 1); 2) d 2 == 1,5d, f== 0,2 (F зат 2) и 3) d 2 ==
== 1,5d, f== 0,1 (F затз ). Здесьf максимальное значение коэффи
циента трения в сопряжении, равное 0,2 при сборке без смазки и
О, 1 при наличии смазки.
На рис. 14.14 значению силы затяжки поставлен в COOTBeTCT
вие требуемый диаметр винта. Вычисления проведены по фор
муле (13.9) (см. шаr 13) при запасе прочности винта S == 2 для
трех классов ero прочности: 4.6; 6.6 и 8.8.
d B
Мlб
Mf4
М12
J
М!О
О
10
20
30
fЗат,КН
Рис. 14.14. Диаметр резьбы в зависимости от силы затяжки Бинта
при классе ero прочности, равном 4.6 и), 6.6 (2), 8.8 (З), и s== 2
rрафики, представленные на рис. 14.13 и 14.14, позволяют
при конструировании определять диаметр винта d B , необхоДI1
мый для запрессовки зубчатоrо колеса на вал диаметром d.
226
14.3.4. Использование винтов ДЛЯ сборки зубчатых колес
с валами внутри редуктора и nepellOca плоскостей разъема
редуктора в ero ненаrружен:ные зоны
Традиционно в промышленности используют радиальный
иЛИ осевой метод сборки редукторов. Радиальный MeTO пред
I10даrает наличие разъемов корпуса по ОСЯМ..,валов, осевои Ha
J1I{Чие поперечноrо разъема по наrруженнои зоне корпуса.
Запрессовка зубчатых от а лр Об
колес на валы с помощью
завинчивания винтов в
резьбовые отверстия, Hape
занные в торцах валов, по
зволяет осуществить пере
ход от запрессовки зубчатых
и червячных колес на валы
вне корпуса редуктора к их
запрессовке на валы внутри
этоrо корпуса. Это дает воз
можность, во первых, OTKa
заться от размещения плос
кости разъема редуктора в
нarруженной зоне корпуса и
перенести ее в ненаrружен
ную зону, что существенно
уменьшит массу корпуса, так
Как сделает ненужными си
Ловые фланцы и, BO BTOpЫX,
отказаться от расположения
осей валов в одной плоско
сти, являющейся плоскостью
разъема, и перейти к про
странственному размещению
осей валов, что также YMeHЬ
lUйТ относительную массу pe
дy!cropa.
На рис. 14.15, а представ
лен чертеж трехступенчатоrо
ЦИЛИндрическоrо редуктора,
выlIлненноrоo по разверну
Той схеме. Здесь реализован
Радиальный метод сборки
реДуктора. Межосевые pac
8*
"
(]
L 2
о
8
Рис. 14.15. Конструктивные исполнения
трехступенчатоro зубчатоro цилиндриче
cKoro редуктора Б зависимостИ от метода
сборки:
а радиальный; б осевой; в с запрессов
кой зубчатых колес на валы БНyrрИ редуктора
227
стояния тихоходной, промежуточной и быстроходной ступеней
редуктора составляют соответственно ар а пр и аб' fабаРИТНЫе
размеры редуктора по длине и высоте обозначены L l и Н l . ЕСJIИ
радиальный способ сборки заменить осевым (рис. 14.15, 6), lIе
предусматривая запрессовку зубчатых колес на валы внутри pe
дуктора, то существенноrо уменьшения rабаритных размеров
(L 2 и Н 2 ) и массы редуктора не произойдет, хотя пространст,
венное расположение осей валов и будет реализовано. Если Же
запрессовку колес на валы осуществить внутри редуктора, Пе,
ренеся разъем корпуса в ero ненаrруженную область, и про,
странственно разместить оси валов (рис. 14.15, в), то можно cy
щественно уменьшить ero rабаритные размеры (L з и нз) и
массу.
На рис. 14.16 представлен чертеж coocHoro редуктора с за,
прессовкой зубчатых колес на валы внутри корпуса с помощью
винтов. В этом случае сборку осуществляют через верхнюю
крышку. Чтобы обеспечить собираемост редуктора, следует
обеспечить для размеров 11, 12, L l и L 2 выполнение следующих
неравенств: 11 < L l и 12 < L 2 . еиловых фланцев этот редуктор не
имеет, что снижает ero массу. Если предусматривать возмож
ность последующей распрессовки соединений зубчатых и чер
вячных колес с валами, то внутри корпуса TaKoro редуктора и
на колесах необходимы обрабатываемые плоскости, перпенди
кулярные осям валов (см. А, Б, В, F, Д и Е на рис. 14.16).
14.4. Практика конструирования.
Соединение с натяroм
14.4.1. Постановка задачи
На предьщущих шаrах решалась задача разработки привода
ленточноrо транспортера, сформулированная в 10.4.1. Бьши по-
лучены размеры червячноrо колеса (ширина колеса 42 мм) и си-
лы, действующие в зацеплении колеса с червяком (СМ. 10.4.4).
t::.
На данном шаrе для этоrо червячноrо колеса требуется подоо-
рать посадку венца колеса на колесный центр, учитывая, чТО
масло в редукторе, а следовательно, и червячное колесо при ра-
боте привода наrреваются до 'м == 52 ое, а запрессовывать веи еI1
на колесный центр будем при 'о == 20 ос.
Из предыдущих расчетов известны размеры червячноrо :ко-
леса и силы в зацеплении (рис. 14.17): d K == 228 мм, d 2 ::::
228
L 1
&2
Рис. ]4.16. Двухступенчатый соосныIй цилиндрический зубчатый
редуктор с запрессовкой зубчатых колес на валы внутри редуктора
== 220,42 мм, Ра == 3333 Н, Р А2 == 618 Н, F R2 == 1083 Н. При pac
Чете принять: материал колеса сталь 35Л; материал венца
БрОФI0 1, отливка в металлическую форму; размеры соеди
Iiения 1 == 37 мм, d == 190 мм, d l == 160 мм; модули упруrости
И коэффициенты Пуассона литейной стали и бронзы Е l ==
:::: 17,5.104 МПа, Jll == 0,3 и Е 2 == 10.104 МПа, М2 == 0,33 (см. при
JIОжение П.5.1 шаrа 5); предел текучести материала ОХБатываю
щей детали ат == 200 МПа (см. приложение П.4.1 шаrа 4 для
бронзы); температурные коэффициенты линейноrо расшире
IiИя: стали и бронзы а ст == 12 . 1 0 6 oc 1 и абр == 17 . 1 0 6 oc 1.
IIредполаrаем, что посадочные поверхности колеса и венца по
229
1
fA
I
лучены тонким обтачиванием 11
тонким растачиванием, ПОЭТому ИХ
шероховатости соответственно рав-
ны R al :::::: 0,4 мкм И R a2 :::::: 1,6 МКМ
(см. приложение П.6.7 lIlara 6). КО-
эффициент трения скольжения СТа-
ли по бронзе составляет 0,18 (см.
приложение П.3.1 шаrа 3). Учитывая
Возможное замасливание повеРХRо_
стей скольжения, полаrаем f ::::
== 0,10...0,18.
14.4.2. Решение задачи
1. Вычисляем крутящий момент
Т, передаваемый соединением, и ПО
формуле (14.4) определяем давление
р соединения, обеспечивающее He
сдвиrаемость, при минимально Воз-
можном коэффициенте трения
скольжения:
[/2
L
Рис. 14.17. Расчетная схема для
выбора Посадки венца червяч
Horo колеса на колесный центр
т == Ft2 d K / 2 == 33 33.228/2 :::::: 379960 Н . мм;
k F12 + (2Т /d)2 1,5 6182 + (2.379960/190)2
Р пdlf == 3,14. 190.3 .0,1 == 2,75 МПа,
[де k:::::: 1,5.
2. По формуле (14.5) определяем давление р, обеспечиваю
щее нераскрытие стыка:
м == F A2 d K /2 == 618 .228/2 == 70452 Н . мм;
р 5М == 5 .70452 == 1,35 МПа.
dZ 2 190 . 372
Заметим, что, если бы мы рассчитывали соединение червяЧ
Horo колеса с валом, то при определении давления, обеспеqJ1
вающеrо нераскрытие стыка, следовало бы учитывать также из
rибающий момент в соединении, возникающий от радиальнОЙ
силы в зацеплении: М == Р А 2 d K / 2 + F R2 е, rде е эксцентриситет
силы F R2 относительно середины посадочной поверхности CTY
пицы длиной L.
230
3. По большему из двух минимально допустимых даБ.,1Jений
(р == 2,75 МПа), используя формулу Ляме, вычисляем требуемое
Зf{аqение минимальноrо натяrа 8:
8 == pd ( + С 2 J . 103 ==
Е 1 Е 2
== 2,75 .190 ( 5,576 + 7,113 J .103 == 53,8 мкм,
17,5 . 1 04 1 О . 1 04
С 1 + (d 1 /d)2 J.1 1 + (160/190)2 О 3 == 5576' С 2
rде 1 1 (d l /d)2 1 1 (160/190)2 ' "
:= 1 + (d/d 2 )2 + J.1 == 1 + (190/220,42)2 + 0,33 == 7,113.
1 (d/d 2 )2 2 1 (190/220,42)2
4. С учетом формулы (14.7) находим требуемый натяr при
{о == 20 ос, который обеспечил бы расчетный натяr 8 при темпе
ратуре t M == 52 ое червячноrо колеса:
N == 8 + 1,2 (Rzl + R z2 ) + (tM to) d(<Хбр <Х ст ) ==
== 53,8 +1,2(5 . 0,4 + 5 . 1,6) +
+ (52 20) . 190 . (17,5 . 10 6 12. 10 6) :;:: 95,4 мкм.
5. По формулам (14.8) и (14.9) определяем давление в сопря
жении, соответствующее максимальному натяrу, и предельно
допустимый натяr:
2 2
== а т [1 (d/d 2 ) ] == 200[1 (190/220,42) ] == 12,85 МПа;
P x 2 2
8Ртах 12(R R ) 53.12,85
N шах ::; +, -,1 + z2 i5 +
р 2,
+ 1,2 (5 .0,4 + 5 . 1,6) == 252,6 мкм.
6. Подбираем посадку в системе отверстия для соединения с
liОМИНальным диаметром 190 мм. Для этоrо из приложения
П.6.5 шаrа 6 выписываем рекомендуемые посадки с натяrом для
7 ro и 8 ro квалитетов точности изrотовления отверстия: Н7/р6;
I-l7/r6; H7/s6; H7/s7; H7/t6; Н7/\.17; H8/s7; Н8/и8; H8jx8; H8/z8.
231
Затем для допусков и основных отклонений валов, образующих
эти посадки, по приложениям П.6.2 и П.6.4 шаrа 6 находим чи
словые значения верхних и нижних ОТЮIонений размеров OXBa
тываемой и охватывающей деталей. Далее в масштабе строим
поля допусков и на них наносим оrраничительные линии, COOT
ветствующие размерам Nи N max (рис. 14.18). После этоrо aН:a
лизируем выполнение условия (14.10) для каждой посадки. По
результатам анализа делаем вывод, что условию (14.1 О) УДовле
творяет посадка H7/t6.
+S92
В
+S20
+422
EJ
+308 +JSO
+194-
+151 +158 Itб I
+ lб5
i :1 +122 +122 I
+77
><
t:::I
о
"s.
Рис. 14.18. Поля допусков ДЛЯ соединения с натяrом венца червячноrо колеса
и колесноrо центра
232
ПРИЛОЖЕНИЯ П.14
П.14.1. Размеры соединений призматическими шпонками
по rOCT 2ЗЗ60 78, мм
,.....
D bxh 1{ 12 1
от 6 до 8 2х2 1,2 1,0 От6 до 20
Св. 8 до 1 О 3 х3 1,8 1,4 Св. 6 до 36
» 10 » 12 4 х4 2,5 1,8 » 8 ,) 45
» 12 » 17 5 х5 3,0 2,3 » 10 » 56
» 17 » 22 6 х6 3,5 2,8 » 14 » 70
» 22 » 30 8х7 4,0 3,3 » 18 » 90
» 30 » 38 10 х 8 5,0 3,3 » 22 » 110
» 38 » 44 12 х 8 5,0 3,3 » 28 » 140
» 44 » 50 14 х 9 5,5 3,8 » 36 » 160
При м е ч а н и я: 1. Предельные отклонения rлубин шпоночных пазов t} и
12 составляют: +0,1 мм при D < 22 мм; + 0,2 мм при D == 22.. .130 мм. 2. Ряд стан
дартных длин шпонок 1, мм: 6, 8, 10, 12, 14, 16, 18, 20, 22, 25, 28, 32, 36, 40, 45,
50, 56, 63, 70, 80, 90, 100, 110, 125, 140, 160 и более.
П.14.2. Размеры соеДИllеIШЙ сеrментными шпонками
по ТОСТ 24071 80, мм
о
D bxhxd 1{ 12
От 3до 4 lхl,4х4 1,0 0,6
Св. 4 до 5 1,5 х 2,6 х 7 2,0 0,8
.) 5 » 6 2 х 2,6 х 7 1,8 1,0
.> 6 » 7 2х 3,7х 10 2,9 1,0
» 7 » 8 2,5 х 3,7 х 10 2,7 1,2
» 8 » 10 3 х 5 х 13 3,8 1,4
» 10 » 12 3 х 6,5 х 16 5,3 1,4
.> 12 » 14 4 х 6,5 х 16 5,0 1,8
.> 14 » 16 4 х 7,5 х 19 6,0 1,8
233
Основные
размеры
Ь, мм
j, мм
234
Окончание П.14.2
D bxJlxd '. 12
От 16 до 18 5 х 6,5 х 16 4,5 2,3
» 18 » 20 5 х 7,5 х 19 5,5 2,3
» 20 » 22 5 х 9х 22 7,0 2,3
» 22 » 25 6 х 9 х 22 6,5 2,8
» 25 » 28 6 х 10 х 25 7,5 28
» 28 » 32 8 х 11 х 28 8,0 3,3
» 32 » 38 10х 13х 32 10,0 3,3
П.14.3. Размеры прямобочн:ых шлицевых соеДИllений
по rOCT l139 80
d, мм
11
Ле2кая серия
D,MM
26 30 32 36
6 6 6 8
6 6 7 6
0,3 0,3 0,4 0,4
Средняя серия
40 46 50
8 8 8
7 8 9
0,4 0,4 0,4
z
Ь, мм
j, мм
D, мм
I :0
3,5 1 4
0,3 0,3
0,4
14
6
3
0,3
22
6
5
0,3
25
6
5
28
6
5
0,3
32
6
5
0,4
42
8
7
48 54
8 8
8 9
0,4 0,4
34
6
7
38
8
6
0,4
z
Ь, мм
j, IM
0,3
0,4
Тяжелая серия
D,MM
20 23 26 29 32 35 40 45 52 56
10 10 10 10 10 10 10 10 10 10
2,5 3 3 4 4 4 5 5 6 7
0,3 0,3 0,3 0,3 0,4 0,4 0,4 0,4 0,4 0,4
z
П.14.4. Числа зубьев эвольвентных ШЛИI евых соединений
по rOCT 6033 80
z IIРИ D, мм
т, мм j j I
20 25 30 35 40 45 50 55 60 65 i
I
.......... I
0,80 23 30 36
1,25 14 18 22 26 30 34 38 I
2,00 16 18 21 24 26 28 31
3,00 17 18 20
Список литературы
46
Анурьев В.и. Справочник конструктора шшиностроителя: В 3 т. Тl М.:
Машиностроение, 1992. 816 с.
Анурьев В.И Справочник конструктора машиностроителя: В 3 т. Т2 М.:
Машиностроение, 1992. 784 с.
Иванов А. С. Конструирование приводов BbICOKoro техническоrо уровня / /
Вестник машиностроения. 2001. NQ 6. С. 27 30.
Иванов А. с., Воронцов А.в., Терехин СА. Расчет соединения с натяrом на He
СДБиrаемость с учетом контактной жссткости сопряrаемых поверхностей / / BeCT
ник машиностроения. 2003, N! 2. С. 19 22.
Иосилевuч r.Е.Детали машин: Учебник. М.: Машиностроение, 1988. 368 с.
Левина 3.М., Решетов Д.Н Контактная жесткость машин. М.:
Машиностроение, 1971. 264 с. "
Решетовд.н Детали машин: Учебник. М.: Машиностроение, 1989. 496 с.
Шаr 15. КОНСТРУИРОВАНИЕ ЛИТЫХ, СВАРНЫХ
И ШТАМПОВАННЫХ ДЕТАЛЕЙ
. Какую сталь называли самокалкой? КО2да эта сталь появилась и для че20
ее использовали?
. Чем знаменита сталь Iатфuльда?
. Каковы точность размеров и шероховатость поверхности при литье в
песчаные формы, в оболочковые формы, в КОКШ1Ь и т. д.?
. Как назначить толщину стенки литой детали?
. IраждаllШ,1 какой страны принадлежит приоритет в изобретении дY20
вой электрическоЙ сварки?
. Как сконструировать и рассчитать на прочность ceap/loe соединение?
. КонструируемыЙ сварноЙ шкив состоит из ступицы, диска и обода. Диск
надевается на ступицу u вставляется в обод до упоров в буртики, а заmе\t
прuваривается дву,ия швами к ступице и двумя швШ,1U к ободу. В каком из
четырех швов шкива (швы расположены JtQ раЗJiЫХ диа.метрах) возникнут
в процессе эксrиzуатациl1 наибольише напряжения?
. Какой радиус 2иба допустим для металлической полосы, цuлиндричеСКО20 u
квадратJЮ20 прутка, трубы и У20лка?
. Какие типораЗ/'rtеры проката выпускаются в России?
. Сколько времени строили ЭЙфелеву баиJJiЮ, что она символизирует и из
каких l'rютериалов иЗ20тО6лена?
. Поче,".1У строительство ЭйфелевоЙ башни происходило под охраноЙ пo
лиции?
. Как скоро Эйфелева башня себя окупила?
Ответы на эти вопросы и не только на них Вы найдете в 15 M
шаrе.
Рассмотрим методы расчета на прочность сварных швов, а
также методы конструирования и оформленин чертежей литыХ,
сварных и штампованных деталей. Укажем сортамент стальноrо
проката, выпускаемоrо в стране, и ero обозначение на чертежах.
15..1.. Литые детали
15.1.1. Исторические сведения о сталях и чyтy:JIaХ
В 1722 r. Ренэ Антуан ФерIllО де Реомюр (Франция) BыcKa
зал мысль, что железо и сталь отличаются в химическом OTHO
шении только присутствием какой то примеси. В 1737 [. хим:йI<
236
БазеН в одной из своих статей об эльзасской стали заявил, что
она является чем то средним между чуryном и железом. В
1814 r. К. Карстен (rермания) указал, что примесь, отличающая
сталь от железа, представляет собой yrлерод.
В 1861 [. анrлийсКИЙ металлурr Р. Мюшетт получил сталь,
названную самокалкой, которая содержит 5,44 % вольфрама, а
также добавки марrанца и хрома. Из нее изrотавливали режу
IUИЙ инструмент, не теряющий режущей способности доJОО ОС.
В 1878 [. анrлийский металлурr Роберт Эббот rатфильд Ha
чал исследования сплавов железа с разными элементами. Через
четыре rода он открыл марrанцовистую сталь (содержание
марrанца 12 14 %), названную в ero честь и применяемую бла
rадаря своим высоким износоустойчивости и прочности при
ударных наrрузках: для изrотовления железнодорожных CTpe
лак, камнедробильных машин, шаровых мельниц, драr и т. д.
Сталь rатфильда первая леrированная сталь MaccoBoro про
изводства.
15.1.2. Способы литья
Литейный процесс производителен и недороr. Для литых дe
талей характерны пониженная прочность по сравнению с дeTa
лями, полученными иными способами, например ковкой; раз
ные значения механических показателей в разных участках OT
ливки; склонность к образованию пустот и внутренних напря
жений.
Качество отливки зависит от способа литья. Выбор способа
литья определяется реальными возможностями производства и
наличием оборудования, необходимым объемом производства,
сложностью конфиrурации и rабаритными размерами детали,
свойствами литейноrо сплава, необходимой точностью отливки
(приложение П.15.1).
Литье в песчаные (земляные) формы наиболее распростра
венный способ литья. Формовку проводят по деревянным или
Металлическим моделям в опоках, набиваемых песчано rлини
СТыми смесями. Внутренние полости образуются стержнями,
Формуемыми в стержневых ящиках из Песчаных смесей с Kpe
ПИтелями. Точность размеров отливки зависит ОТ качества изrо
ТОвления формы и свойств литейноrо сплава (отклонение от HO
МИнальных размеров в среднем -1:.7 %). Шероховатость поверх
IiОСТИ Rz == 10...40 мкм.
237
Литье в оболочковые формы осуществляют по металЛИЧ:е
ским моделям в виде оболочек толщиной 6 15 ММ из песчаl:IыIx
смесей с термореактивной смолой (бакелит) и отверждают Ha
тревом до 150 350 ОС. Применяют преимущественно для отлив
ки открытых (корытных, чашечных) деталей размером до
1000 мм. Точность размеров +5 %, шероховатость поверхности
Rz == 10...20 мкм.
кокилыIмM lIазьшают JШтье, при котором металл, обычно
цветные сплавы, заливают в постоянные чуryнные или сталЬНые
формы (ко кили). Внутренние полости образуют либо металличе
скими стержнями (при отливке дета.тrей малых размеров), либо
песчаными (при отливке средних и крупных деталей). Точность
отливок:t4 %, шероховатость поверхности Rz == 10...20 мкм.
Центробежное литье применяют для получения цилиндриче
ских полых деталей типа труб. Металл заливают во вращающие
ся чуrунные ИЛИ стальные барабаны, [де он уплотняется под
действием центробежных сил. Точность размера толщины CTeH
ки зависит от точности дозировки подачи металла. ШеРОХОБа
тость поверхности отливки Rz == 10...40 мкм.
Литье ПОД давлением обеспечивает высокую точность разме
ров (:tl %), малую шероховатость поверхности и наименьшую
толщину стенки отливки при высокой производительности.
Металл (преимущественно леl'кие сплавы) заливают в ПОСТОЯН
ные стальные формы под давлением 3 5 МПа. Для отливки
стальных и чyrунных деталей пресс формы необходимо изro
тавливать из жаропрочных сталей. Шероховатость поверхности
отливки Rz == 2,5...10 мкм.
Литье по выплавляемым моделям также отличается высокой
точностью размеров (:t2 %) и малой шероховатостью. Модели
изrотавливают из парафина, стеарина или воска, заливая по
следние под давлением в металлическую форму. Модели соедИ
няют в блоки, покрывают тонким слоем оrнеупорноrо состава,
заформовывают в неразъемные песчаные формы и прокаливаюТ
до выплавления моделей. В образовавшиеся полости заливаюТ
металл. Шероховатость поверхности отливки Rz == 6,3...10 мкм.
Литье по rазифицируемым моделям позволяет получить ТОЧ
ные отливки практически без оrраничений по конфиrурациИ:
(вплоть до цельнолитых круrлозвенных цепей с сомкнутыМИ:
звеньями). В неразъемные песчаные формы заформовываlO Т
модели из пенополистирола, которые при заливке металла rазИ:
фицируются; при этом пары и rазы уходят через поры и вент:И:
ляционные отверстия.
238
15.1.3. Классы точности отливок
Точность изrотовления отливок характеризуют отклонения
И:Х rеометрических размеров и массы от номинальных значений.
Требования по точности отливок для всех видов сплавов per
J1аментирует [оет 26645 85. Классы точности размеров и масс
в порядке понижения точности бывают: 1, 2, 3т, 3, 4, 5т, 5, 6, 7т,
7,8, 9т, 9, 10, l1т, 11, 12 и определяются способом литья, типом
металла или сплава и наибольшим rабаритным размером отлив
КИ (табл. 15.1.1 приложения П.15.1). Класс размерной точности
и наибольший rабаритный размер обусловливают допуск на
размер (рис. П.15.1.1 приложения П.15.1).
Предельные отклонения коробления зависят от наибольшеrо
rабаритноrо размера отливки (табл. 15.1.2 приложения П.15.1).
Припуски (на сторону) на механическую обработку YCTaнaB
пивают в зависимости от допусков на размер отливки, задав
шись рядом при пуска (рис. П.15.1.2).
Точность отливки указывают на чертеже отливки. Ее указы
вают также на чертеже детали в случае, если на этом же чертеже
нанесены размеры отливки.
Точность отливки характеризуют класс точности размеров,
степень коробления, степень точности поверхности и класс точ
насти массы.
Например, отливку 8 ro класса точности размеров и 7 ro
класса точности массы, 5 й степени коробления и 5 ro разряда
припусков на обработку обозначают так:
Точность отливки 8 7 5 5 rOCT 26645 85.
Точность отливки определяет минимально допустимые тол
щины ее стенки, фланцев и бобышек.
15.1.4. ТОЛЩИIIa стенок отливок
Чем толще стенка, тем больше разница между прочностью
сердцевины и прочностью поверхностных слоев металла. По
ЭТому увеличение толщины стенок не сопровождается пропор
ЦИональным увеличением прочности отливки. Отсюда следует
l:Iецелесообразность увеличения прочности путем повышения
ТОлщины стенки. Меньшую массу отливки при требуемых проч
liОСТИ И жесткости можно обеспечивать, выполняя ст нки МИ
liймально допустимой толщины и вводя их оребрение.
239
S,MM
20
15
10
J"
о
2000
LJMM
Рис. 15.1. Минимальная тоЛ
щина стенки при литье в Пес
чаные формы отливок из стали
и) , ссрото чyrуна (2) , бронзы
(3) , а.i1юминиевых сплавов (4)
1000
Рекомендуемая минималЬНая
толщина стенок S при литье в пес
чаные формы для различных ЛII
тейных сплавов в зависимости 01'
приведенноrо rабаритноrо размера
детали L представлена на рис. 15.1.
Размер L вычисляют по формуле
L == (2/ + Ь + h) j 3,
rде /, Ь, h длина, ширина и Высота
детали.
При литье в оболочковые фор
мы можно получить толщину CTeH
ки 2,5...10 мм, при литье в кокиль
2...12 мм, при центробежном литье
2...20 мм, при литье под давлени
ем 0,5...10 мм, при литье по BЫ
плавляемым моделям 0,5...20 мм.
15.1.5. Конструирование внешнеrо КШIТYlJa отливок
Конфиrурация деталей должна обеспечивать свободное из
влечение rотовой отливки из литейной формы. Поднутрения на
внешних и внутренних контурах, препятствующие удалению дe
тали из формы, можно обнаружить методом световых теней (рис.
15.2, а). Теневые зоны будут отсутствовать (рис. 15.2, 6), если
плоскости выступающих частей детали расположить перпеIЩИКУ
лярно к плоскости разъема формы.
Литейная форма будет иметь один простой разъем, если нет
теневых участков. В этом случае стоимость изrотовления ОТЛИБ
ки получается наименьшей, а точность отливки высокой.
Для облеrчения yдa
ления rотовой детали из
формы предусматрива
ют формовочные укло
ны (конусность на по
верхностях вращения) на
необрабатываемых по
верхностях, расположен:
ных перпендикулярно J{
плоскости разъема фор
мы. Уклоны выполняют
в зависимости от ТОЛЩJI
а
о
Рис. 15.2. Отливка, у которой теневые зо
ны (стрелками обозначен световой поток)
имеются (а) (они заштрихованы) И OTCYТ
ствуют (б)
240
ВЫ стенки S в сторону ее уменьшения или увеличения. Так, если
S < 8 мм, то уклон (а : Н) делают в сторону увеличения толщи
НЫ (рис. 15.3, а). При S == 8...12 мм, а также при Н> 100 мм тол
Iдину уменьшают и увеличивают на участках, равных Hj2
(рис. 15.3, б). При S> 12 мм и Н < 100 мм уклон получают за
счет уменьшения толщины (рис. 15.3, в).
а
о
8
Рис. 15.3. Способы обеспечения формовочных уклонов при
S < 8 мм (а), S == 8...12 мм и Н> 100 мм (б), а также при
S > 12 мм и Н < 100 мм (в)
Значения формовочных уклонов зависят от высоты Н и спо
соба литья (табл_ 15.1.3 приложения П.15.1).
15.1.6. Конструирование сопряжений стенок и ребер
Уrловые и тавровые соединения стенок одинаковой толщи
НЫ S обычно выполняют с радиусом сопряжения внутренних
поверхностей r == (0,5...1)S (рис. 15.4).
s
Рис. 15.4. Уrповые и тавровые сопряжения стенок одинаковоЙ толщины
Две стенки разной толщины S и SI В местах их сопряжения
Во избежание появления коробления, трещин и внутренних
l:Iапряжений в металле должны иметь плавные переходы. При
81
S ::; 1,8 плавный переход может быть выполнен в виде радиуса
241
8+
r == (0,5. ..1) (см. рис. 15.5, а), а при > 1,8 В ВИДе
2 8
клина (см. рис. 15.5,6) с длиной клиновоrо участка 1 4(81 ......
s) для чуrунных ОТЛИВОК и 1 5(81 s) ДЛЯ стальных ОТЛИ
вок. При этом радиус рекомендуется также принимать равным
S +81
r==(0,5...1) .
2
r
е,;-
а
t t i # I
s
v;-
с.;-
s
r5
Рис. 15.5. Сопряжения стенок разной толщины:
а по радиусам; б в форме клипа
Толщины внутренних стенок, переrородок и ребер жестко
сти уменьшают на 20 %. Ребра жесткости способствуют сниже
нию массы детали при сохранении ее высокой прочности И же
сткости. Их можно располаrать на наружных и внутренниХ
стенках конструкции. Ребра жесткости обычно выполняют BbI
сотой h:-::; 58 и радиусом переходной кривой r == 0,58 (рис. 15.6, а).
242
c.(,,2S
то == D,2fiS
vj
-
t.-;)
а
о
Рис. 15.6. Ребра:
а разr-.'IСРЫ; б шахматное расположение
Они должны иметь уклоны 1:5 и более. К существенному повы
шению прочности и жесткости ведет шахматное расположение
переrородок (рис. 15.6, 6).
15.1.7. Наllесеlше размеров IIa чертежах литых деталей
Расстановку размеров следует про водить в соответствии с
расположением литейных (черновых) баз и баз обработки реза
ни ем (чистовых). Литейной базой называют необрабатываемуlO
поверхность или ось, ПО которой выполняют первую операцию
механической обработки. В общем случае литейных баз должно
быть три ПО одной для каждой из осей пространственной сис
темы координат.
Размеры механически необрабатываемых поверхностей сле
дует привязывать к литейной базе непосредственно или через
друrие размеры. Базу обработки резанием связывают с литей
ной базой. Все остальные размеры механически обрабатывае
MblX поверхностей необходимо задавать от базы обработки реза
Нием непосредственно или через систему размеров.
Недопустимо привязывать литейные размеры к размерам по
верхностей, обрабатываемых резанием и наоборот (рис. 15.7, а)
-(Исключение составляет случай, коrда литейная база и база об
работки резанием совпадают).
На рис. 15.7, б размеры нанесены правильно. Здесь в качест
ве литейной базы выбрана верхняя необрабатываемая поверх
Ность фланца. К ней размером 15 мм привязана база обработки
резанием нижняя поверхность фланца, с которой в свою оче
редь соединена размером 200 мм обрабатываемая верхняя пло
Сkая поверхность. Верхняя необрабатываемая поверхность KO
243
t\J
а
о
Рис. 15.7. Расстановка размеров на чертеже литой детали:
а неПравильная; б правильная
ординируется от литейной базы (размер 175 мм), а от нее
толщина верхней стенки (размер 5 мм).
15.2. Сварные детали
15.2.1. Изобретение дуrовой электрической сварки
Дуrовая электрическая сварка является крупным русским
изобретением. Н.Н. Бенардос, окончивший Киевский универ
ситет, а также Петровскую земледельческую и лесную академию
в Москве, предложил в 1882 r. сварку дyrой, образованной меЖ
ду уrольным электродом и электродом из дрyrоrо ПРОВОдЯщеrо
ток вещества. H.r. елавянов выпускник rOpHoro института в
Петербурrе, работавший на Пермских пушечных заводах в
1888 r. разработал метод сварки металлическим электрод м.
Н.Н. Бенардос и H.r. Славянов первыми начали применять TaK
же сварку в защитном rазе и сварку под флюсом. Флюсом в то
время служили осколки битоrо стекла.
15.2.2. Свариваемые материалы и виды сварки
Хорошо свариваются малоyrлеродистые (до 0,25 % е), низко
леrированные малоyrлеродистые и никелевые стали (табл. 15.2.1
приложения П.15.2). Сварку цветных металлов (медные и алю
миниевые сплавы) вследствие их леrкой окисляемости проводЯТ
в среде защитноrо rаза (aproH, rелий, yrлекислый rаз) или поД
слоем флюса.
Наиболее распространена дуrовая электрическая сварка.
244
Электрошлаковая сварка является одной из наиболее про
rpессивных. Она обеспечила создание комбинированных изде
лИЙ больших сечений, полученных про каткой, ковкой и штам
I10ВКОЙ. Так как площадь cBapHoro шва равна площади
стыкуемых поверхностей, то прочность соединения обычно
BblcoKa.
Пробочные проrmавные соединения получают при наХЛе
сточном расположении свариваемых поверхностей, проплавляя
верхнюю более тонкую деталь в некоторых ее точках и образуя
соединительные пробки. Такие соединения рациональны при
толщине верхней детали до 5 мм.
Точечную контактную сварку используют для соединения
элементов малых толщин. Электроды располаraют обычно с
двух сторон. Весьма целесообразны для точечной сварки заrо
товки, имеющие открытые профили или выполненные с отбор
товкой кромок.
rазовой сваркой пользуются при толщине свариваемых Me
таллических деталей до 8 мм. При этом обеспечивается большая
плотность, но меньшая прочность соединения, чем в случае
применения дуrовой электрической сварки.
rорячими rазами также сваривают термопластичные пласт
массы. При температуре 200 220 се струи воздуха сваривают
орrаническое стекло и виниnласт, с помощью струи азота при
ТОЙ же температуре сваривают полиэтилен. Полиамиды свари
вают струей азота, температура сварки при этом возрастает на
30 45 % по сравнению с ранее указанной.
15.2.3. Виды сварных соединений
Различают четыре вида сварных соединений, 'выполняемых
дуrовой сваркой (рис. 15.8): 1) стыковое (a 2); 2) тавровое (д, е);
3) нахлесточное (ж и); 4) yrловое (K M). еоединения, выпол
Ненные электрошлаковой сваркой, бывают стыковыми и TaBpo
выми, проплавные пробочные соединения на:хлесточными,
соединения, осуществляемые контактной сваркой, CTЫKOBЫ
МИ инахлесточными.
еоединения Moryт быть выполнены непрерывнымИ и пре
рывистыми сварными швами с промежутками по длине. При
сварке только с лицевой стороны деталей получают OДHOCTO
ронний шов. Шов является двусторонним, если сварку осущест
ВЛЯют с лицевой и оборотной сторон деталей.
В стандартах для разных видов сварных соединений с различ
Ными вариантами их исполнения (см. рис. 15.8) введены буквен
245
но цифровые обозначения, приведенные в табл. П.15.2.2 прило
же ия П.15.2. Приняты следующие обозначения способовдyrо
вои сварки:
р ручная, А автоматическая, П полуавтоматическая'
И в инертных rазах: ИН неплавящимся электродом, ин
с присадочным материа.лом, РИНп ручная, АИНп aBTOMa
тическая, АИНп 3 трехфазная, ИП плавящимся электродом
АИП автоматическая, ПИП полуавтоматическая; ,
у в уrлекислом rазе: УН неплавящимся электродом, УП
IUIaВЯЩИМСЯ электродом;
З в защитном rазе: ЗН неплавящимся электродом, ЗП
плавящимся электродом, ЗНjЗП комбинированная, при KO
торой для первоrо прохода применяют сварку ЗН, дЛЯ после
дующих ЗП;
O O
8 2
AM
е
rJ
F F
q(((:{::
F
F IIII'IIIIIIIIIIIIIIII
0/ :tL
rr==m
ж
з
11
r
1<
л
м
Рис. 15.8. Виды сварных соединений:
а, 6 Стыковое без скоса кромок односторонним и двусторонним швом соответственнО.
е то же со KOCOM одной кромки односторонниto..j швом; i! то же со скосом двух крама;
и r ДКJтадкои ОДНОСТОРОННИМ швом; д, е тавровое без скоса кромок односторонниМ И
ВjСТОРОННИМ llBOM cooTBeTCT13eHHO; ж нахлесточное лобовыми JJ'Jвами; з то же флан
IОВЫМИ швами, II то же косы fИ швами; к jтловое с отбортовкой кромок односторон-
НИМ швом; ;1, .м то же без скоса КРОМОК односторонним и дВусторонним швоМ
соответственно
246
ф под флюсом: АФ автоматическая, АФш с предва
рйтельным наложением подварочноrо шва, ПФ полуавтома
тйческая.
Полуавтоматическая дyrовая сварка в инертных rазах в He
сколько раз производительнее и обеспечивает более rлубокое
проплавление по сравнению с ручной дуrовой сваркой. Вслед
ствие этих причин ручная дуrовая сварка все более вытесняется
дуrовой сваркой в инертных rазах.
В стыковых соединениях детали сваривают односторонним
(см. рис. 15.8, а, 8, 2) ИЛИ двусторонним (см. рис. 15.8, б) швом.
При сварке деталей малой толщины односторонними швами,
чтобы избежать стекания металла, часто применяют съемные
флюсомедные или остающиеся после сварки стальные (см.
рис. 15.8,2) подкладки. В зависимости от толщины деталей при
меняют различные формы подrотовки кромок перед сваркой
(рис. 15.9).
gд
о
о
iJ
е
ж
8
z
Рис. 15.9. Формы подrотовки кромок при сварке встык:
а с отбортовкой; б СО скосом; в с криволинейным скосом; i! С ломаньп.! скосом;
д с двумя скосами; е с двумя симметричными криволинейными скосами; ж с
двумя несиммстричными скосами
евариваемые детали MorYT иметь либо одинаковые, либо
разные формы подrотовленных к сварке кромок. В случае, изо
браженном на рис. 15.8, в, одна из деталей выполнена без скоса
кромок.
В тавровых соединениях встречаются как односторонние
(см. рис. 15.8, д), так и двусторонние (см. рис. 15.8, е) швы.
Прерывистые швы Moryт быть двусторонними шахматными,
если промежутки по одной стороне стенки расположены против
сваренных участков шва ее друrой стороны, и цепными, коrда
сваренные участки расположены по обеим сторонам стенки
Один против друrоrо.
В нахлесточныХ соединениях различают лобовые швы, пер
аендикулярные направлению действующей силы (см.
РИс. 15.8, ж); фланrовые швы, параллельные действующей силе
(см. рис. 15.8, з), и косые швы (см. рис. 15.8, и).
В уrловых соединениях применяют односторонние (см.
рис. 15.8, к, л) и двусторонние (см. рис. 15.8, .м) швы. еледует
247
учитывать, что уrловые швы не предназначены для передаЧЕ
больших наrpузок.
В местах зажиrания и обрыва электрической дуrи механИЧе
ские свойства шва ухудшаются. Поэтому минимальную длину
швов в случае, если они передают наrрузку, назначают не менее
30 мм.
Примеры условных обозначений сварных соединений пере
числены в табл. П.15.2.3.
15.2.4. Расчет прочности сварных швов при статической наrрузке
Для чеТ Iрех ВIЩов сварных соединений, выполненных дyrо
вои сваркои, используют два вида сварных швов: стыковой и yr
ловой. В стыковых соединениях применяют стыковые ШВЫ
(рис. 15. 10, а), в нахлесточных yrловые (рис. 15. 10, 6), в TaB
ровых и уrловых либо стыковые, либо уrловые швы. В TaBpo
вом соединении получается стыковой шов (см. рис. 15.10, а), ec
ли :rмела место предварительная разделка кромок приваривае
мои детали или сварка велась с rлубоким проплавлением метал
ла, что характерно ДЛЯ автоматической сварки, сварки под сло
ем флюса или элеК1родами повышенноrо качества. Во всех oc
тальных вариантах сварки TaBpoBoro соединения имеет место
уrловой шов (см. рис. 15.8, е).
(/
о
Рис. 15.10. Сварные соединения, выполненные СТЫКОВЫМИ (а)
и yrловыми (б) швами
Стыковые швы, выполненные дyrовой сваркой, рассчитывают
по формулам, применяемым для расчета прочности OCHOBHoro
металла, так как в данном случае опасное сечение околошоВ
ная зона (отмечена тонкой волнистой линией). Именно в этой
зоне, как показывает практика, возможно разрушение сваривае
мых деталей, потому что прочность металла здесь ниже из за
выжиraния yrлерода при сварке. В опасном сечении вычисляют
нормальное эквивалентное напряжение О'з И сопоставляют ero с
допускаемым нормальным напряжением в сварном шве [а']. У c
ловие прочности ИМеет вид О'э [0"].
248
Пример 15.1. Оценить эквивалентное напряжение о"э В выполненном CTЫKO
Bым ШВОМ (рис. 15.11, а) соединении, наrруженном нормальной силой Р, перере
зывающей силой Q и изrибающим моментом М. Свариваемые детaJШ имеют ши
рину Ь и толщину S.
V/Ш/ф"""'-'1 ""t
t
1l»»>>»
L
M tr
а
Рис. 15.11. Сварные соединения:
G стыковое, выполненное стыковым швом; б внахлестку,
выполненное уrловыми швами
Вьrnисав из приложения П.4.2 формулу для вычисления oceBOro момента co
противления сечения для изrиба, в результате имеем
"э = ("P + "м)2 + з, = ( + )2 + з( )2
( F М ) 2 ( Q ) 2
+6 +3 ,
Sb Sb 2 Sb
rДе О"р, О" м, 'tQ нормальные и касательное напряжения, создаваемые силой F,
МОментом М и силой Q.
Уrловые швы, выполненные дyrО80Й сваркой, рассчитывают с
УЧетом Toro, что опасным сечением является биссектриса а пря
Moro уrла прямоуrольноrо треуroльника, так как по ней пло
щадь сечения минимальна. Если катет шва равен k (он, eCTeCT
Венно, не может быть больше толщины привариваемоrо листа),
ТО а 0,7 k. При рассмотрении лобовоrо шва нахлесточноrо co
единения в ero опасном сечении возникают нормальные и каса
Тельные напряжения. Для обеспечения однотипности прочно
СТНых расчетов лобовых и фланrовых швов при расчете ло
60Boro шва делают допущение, что в опасном сечении действует
.JIИшь касательное напряжение, вычисляемое как частное от дe
.JIения силы на площадь. При этом опасное сечение как бы раз
249
ворачивают в rоризонтальную плоскость и там вычисляют дей
ствующее напряжение. Поэтому при расчете уrловых швов В
общем случае рекомендуется вести расчет по касательным Ha
пряжениям, развертывая опасное сечение, которым является
биссектриса прямоrо уrла сечения шва, в плоскость действия Сl1
ловоrо фактора. Условие прочности ИМеет ВИД 1: :$ [1:'J, [де [1:']
допускаемое касательное напряжение в сварном ШВе.
Пример 15.2. Оценить касательное напряжение в наиболее наrpуженной точ
ке нахдссточноrо соединения (см. рис. 15.11, 6), наrpуженноrо поперечной си-
лой F, если длина нахлестки /, ширина листа Ь, высота катета CBapHOro ШВа k
расстояние L от точки приложения силы до центра масс сечения швов; наложен
два лобовых и два фланrовых шва.
Наиболышrе суммарные касательные напряжения ТЕ возникают в точках 1 и
2 и определяются как векторная сумма
, .
Т1:1 = Т1:2 = тт + Тр.
Сorласно приложению П.5.2 шаfа 5,
т ТРшах
Т]'
W p Iр
(обоснование TOro, что в формулу подставляют полярный мом:ент сопротивления
, а не момент сопротивления кручению W K , см. в КОIЩе прююжения П.5.2);
F
ТР=А'
Здесь Т == FL;
Рпmx ( + })'+ (%+ })',
J = J + J = [ <Ь + 2. 0,7k)\/ + 2. 0,7k) Ь\/ + 2. 0 ,7k) ] +
р х у 12 12
+ [ (/ + 2. 0,7k)\b + 2. O,7k) /\Ь + 2. 0 ,7k) ]
12 12'
А == 0,7k (2Ь + 2/).
Соединения электрошлаковой сваркой в большинстве слуqа
ев обеспечивают равнопрочность с соединяемыми металлами.
Поэтому считается достаточныIM про верить прочность самих co
единяемых элементов.
250
Соединения точечной контактной сваркой следует конструи
ровать таким образом, чтобы сварные точки воспринимали пре
й:МYllXественно усилия среза, а не отрыва. В соединении внахле
ст1<У сварная точка работает на срез. Если же сварная точка pa
ботает на отрыв, то допускаемое напряжение при отрыве следу
ет принимать ниже допускаемоrо напряжения [1:'] в сварной
точке на срез.
На рис. 15.12 изображено
соединение внахлестку, полу
чаемое при то ечной сварке.
Здесь d диаметр точки, t
rnar точек, S толщина листа.
ШаТ точек должен быть не Me
нее HeKoToporo предельноrо d
размера во избежание шунтиро
вани я тока через ранее сварен
ную точку. Чем больше pac
стояние между точками, тем
меньше шунтируется ток, а сле
довательно, стабильнее и лучше результаты сварки. Часто поль
зуются следующей эмпирической формулой, связывающей KOH
структивные параметры со единения:
d 1,4( Jo, 0112 + IS 0,11).
f '{iф»j*)i;';;%i )j:S,*):}'
-;...:,
Рис. 15.12. Точечное сварное
соединение
При этом условие прочности на срез сварной точки имеет вид
1: = 4 F s ["('] ,
ind 2
rде i общее число плоскостей среза в соединении; коэффи
циент понижения допускаемых напряжений, :::= 1 если сварка
ВЫполнена по одному и O,8 O,9 по более чем одному попе
речному ряду точек.
Пробочные проплавные соеДШIения в большинстве случаев
ЯВляются связующими и не передают рабочих усилий. Расчет
IIрочности соединений, участвующих в передаче усилий, прово
Дят аналоrично расчету прочности точечных соединений, полу
Ченных контактной сваркой.
В сварной детали Moryт возникнуть остаточные напряжения,
3Rачерие которых зависит от порядка наложения сварных швов.
251
Поясним эту мысль на примере двух возможных вариантов
(рис. 15.13) сварки двух пластин общей длиной 1.
[ Д
f
2
ь
J
h
а
о
Рис. 15.13. Варианты сварки двух пластин в один
этап (а) и в три этапа (6)
в первом варианте (см. рис. 15.13, а) сварной шов наЮIады
вают по стыку пластин в направлении от их верхних краев к
нижним. еварку проводят за один проход. В этом случае после
застывания шва расстояние между левой и правой кромками
сварной детали сократится на величину б усадки шва. При этом
внутренние напряжения от температурных деформаций в CBap
ных деталях не возникают. Усадка составляет б abt ::::
0,012...0,060 мм, [де а == 12 . 10 6 oc l коэффициент линей
Horo расширения стали; Ь == 2...10 мм ширина зоны проплав
ления; t:=;: 500 ос температура. В расчете условно принято, что
при температуре от О до 500 ое предел текучести стали сохраня
ется постоянным, а затем с повышением температуры до 600 ос
уменьшается до нуля.
Во втором варианте (см. рис. 15.13, б) те же две детали CBa
ривают в три этапа. еначала вверху накладывают шов J, затем
внизу шов 2, а далее после их застывания щель заваривают по
средине швом З. После первых двух этапов внутренние напря
жения в сварной детали не возникают. Но после нанесения и за
стывания cBapHoro шва 3 в нем возникнут внутренние напряже
нил О'вн растяжения, а в швах .l и 2 близкие к ним напряжениЯ
сжатия. Напряжения О'вн пропорциональны относительной дe
формации шва при ero застывании: а вн = Е б I Ь, [де Е
== 21 . 104 МПа модуль упруrости стали, и Moryт превыситЬ
предел текучести стали. Чтобы уменьшить коробление и сни
зить внутренние напряжения в сварных деталях, в техническиХ
252
тРебованиях к чертежу следует указывать последовательность
JIаложения сварных швов.
Поскольку внутренние напряжения в сварных деталях MOryT
возрастать до предела текучести, а без специальных методов ис
следования (например, просвечивания рентrеновскими лучами)
йХ невозможно обнаружить, то расчеты прочности сварнь!х дe
талеЙ носят условный характер. Компенсацию условно теи pac
чета осуществляют выбором допускаемых напряжении, отлич
НЫМ от способа их определения у друrих деталей машин.
Допускаемые напряжения в сварном шве [0"], [1:'] И сварной
точке [1:'] принимают в долях от допускаемоrо напряжения [О']
OCHoBHoro металла. Соотношения между их значениями Б зави
симости от метода сварки приведены ниже:
[ а'] [ 't']
Автоматическая или полуавтоматическая сварка
под слоем флюса, сварка электродами повышен
Horo качества или в среде защитнЫХ raзов. . . . . . . . [а] О,65[а]
Ручная дуrовая сварка электродами обычноrо
качества . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Контактная точечная сварка. . . .. .........
О,9[а] О,6[а]
О,5[а]
Значение [о] оценивают по пределу текучести от материала:
от
[а] =
(1,35...1,7)
Пример 15.3. Проверить прочность вертикальных сварных швов КРОНIIПейна
(рис. 15.14) в двух вариантах исполнения сварных швов: 1) тавровое соединение,
полученное с помощью yrловых швов (сварка ручная дyrовая электродами обыч
HOro качества), катет шва k == 5:мм; 2) тавровое соединеIOIе, полученное с помо
щью стыковых швов (сварка автоматическая с rлубоким проплавлением металла
и с предварительной разделкой кромок). Кронштейн изrотовлен из стали Ст3
(а т == 220 МПа). Принять Е== 10000 Н, 1 == 500 ММ, h == 200 мм, S==10 :мм.
1. уточняя расчетную схему, получаем, что наrружают сварные швы изrи
бающий момент М == R == 10000 . 500 == 5 . 106 Н . М И сила F == 10000 Н.
2. Определяем эквивалентные напряжения для первorо варианта (см.
рис. 15.14, 6):
м м
't М = W = О 7 kh 2
2
6
6
5 . 1 О = 107 МПа;
2 0,7 5.2002
6
F F
't F = А = 2 . 0,7 kh
10000 == 7 МПа;
2 . 0,7 . 5 . 200
253
Ai..
A A A A
F"t
в1 А
{j
о
8
Рис. 15.14. Тавровое соединение КрОНlIIтейна (а), полученное yrЛовыми
швами (6) и стыковым швом (в)
I:э== I:;w + 1: == 1072 + 72 == 107,2 МПа.
3. НахОДИМ эквивалеН1Ные напряжения для вто)х>ю варианта (см. рис. 15.14, в):
М М 5.106
O-M == ==75МПа'
W Sh 2 /6 10.2002/6 '
F F 10000
I:F == = == ==5МПа'
А Sh 1 О. 200 '
1:э= а + 3 == 752 + = 75,5 МПа.
4. Определяем допускаемые напряжения для разных вариантов:
для первorо варианта
[1:'] = 0,6[а] == 0,6 а т = 0,6. 220 = 88 МПа
1,5 1,5 '
для BТOporo варианта
[а'] == [о-] == а т == 220 = 147 МПа
1,5 1,5 .
5. Оцениваем прочность сварною соединения. В первом варианте 1: > [i],
поэтому прочность соединения уrловыми швами считаем недостаточной ВО BTO
ром варианте аз < [а'], а следовательно, делаем заКJllOчение о достаточн й проч
насти CTbIKoBoro шва.
Результаты расчетов paccMoTpeHHoro примера позволяют за
метить, что переходы как от ручной сварки к автоматической с
254
rлубоким проплавлением металла, так и от соединения без раз
дедКИ кромок к соединению с разделкой кромок повышают
rIРОЧНОСТЬ cBapHoro соединения.
15.2.5. Расчет прочвости сварных швов при перемеllНОЙ :наrpузке
Расчеты при переменной наrpузке J?едут по нормальным Ha
пряжениям, так как в этом случае разрушения обычно происхо
дят ПО основному металлу вблизи cBapHoro шва. Для экипажной
части локомотивов, например, оценивают запас прочности по
пределу выносливости с помощью уравнения, близкоrо к ypaB
нению (4.10) (см. шаr 4). При этом приемлемым считается зна
чение [s] 2.
При расчетах значения эффективноrо коэффициента KOH
центрации. напряжении Ка для уrлеродистой стали можно при
нимать следующими:
в стыковом соединении без неп)Х>варов:
при автоматической сварке и отсутствии усиления шва
при автоматической сварке и наличии усиления шва
при ручной сварке И Н3.iIИЧИИ усиления шва
1,0
1,2
1,4
в стыковом соединении с непроваромв корне шва . 2,5 3,2
в соединении внахлестку:
лобовыми швами с отношением катетов 1:1. . 2,5
то же с отношением катетов 1: 1,5 после механической
обработки . . . . . . . . . . . . . . . . . . . . . .. 2,0
Фланrо13ЫМИ швами вне зависимости от механической
обработки ...... . . . . . . . . . 3, О
в тавровом соединении:
при отсутствии разделки кромок И неrлубоком
пропл:авлении (возможен непровар) . . . . . . . . . . 2,0 4,3
с разделкой кромок и при rпубоком проплавлеIOIИ . . . 1, o 1,7
Отсутствие непроваров в стыковом соединении при толщи
не листа 16 мм и более rарантировано обеспечивается предвари
тельной двухсторонней разделкой кромок и зазором при сварке
между соединяемыми листами около 1 мм. .
В тавровом соединении при отсутствии разделки кромок и
l-Iеrлубоком проплавлении концентрация напряжений возника
ет фактически из за непровара. Следует иметь ввиду, что увели
Чеl-:[ие катета. шва не повысит прочности соединения при пере
меl-:[НОЙ наrpузке. Прочность может быть повышена лишь
I1СkЛючением непровара путем предварительной разделки KpO
МОК И rлубокоrо проплавления, а также применением контроля
КаЧества шва, например с помощью ультразвука.
255
15.2.6. Оформление чертежа сварной детали
На рабочем чертеже сварной детали сварной шов изображают
сплошной линией, а сварную точку знаком «+». евариваемыIe
элементы штрихуют в разные стороны (не путать со сБорочIiыIM
чертежом изделия, rде сварные швы также изображают СПЛОIl1
ными линиями, но все элементы сварной детали штрихуют в oд
ну сторону). От изображения шва или точки проводят ЛИНию
выноску С односторонней стрелкой. На изломе линии выноски
MorYT быть даны указания о выполнении шва при монтаже ИЗДе
лия или о выполнении шва по замкнутой линии. На полке вы
носке наносят условное обозначение cBapHoro шва, которое
включает: номер стандарта на тип соединения, буквенно циф
ровое обозначение типа соединения, способ сварки (допускает
СЯ не указывать), дЛЯ уrловых швов также знак в виде треуrоль
ника, размер катета шва, длина привариваемоrо участка
прерывистоrо шва и ero шаr (для сварной точки указывают ее
диаметр), а затем вспомоrательные знаки, характеризующие об
работку шва после сварки (табл. П.15.2.4 приложения П.15.2).
Условные обозначения сварных швов и примеры их обозначе
ний на чертежах приведены в табл. П.15.2.5 приложения П.15.2.
При наличии на чертеже одинаковых швов обозначение Ha
носят у одноrо из изображений (рис. 15.15, а) и ero нумеруют,
а от изображений остальных одинаковых швов (рис. 15.15, б)
проводят линии выноски С полками, на которых указывают
тот же порядковый номер. Количество одинаковых ШВОБ
(пусть их число, например, равно 26) допускается указывать на
ЛИНИИ выноске, имеющей полку с нанесенным обозначением
(см. рис. 15.15, а). При наличии на чертеже швов, выполняемых
по одному и тому же стандарту, обозначение стандарта указыва
ют в технических требованиях чертежа (еварные швы по
[оет...).
.Усло!JI!Ое одОЗН(Jченuе
J&
?d ?i
I I #°1
а
о
Рис. 15.15. Обозначения На чертеже одинаковых швов
256
Допускается не присваивать порядковый номер одинако
БЫМ швам, если на чертеже они изображены с одной стороны
(лицевой или оборотной). При этом швы, не имеющие обозна
qеflИЯ, отмечают линиями выносками без полок
Допускается не отмечать на чертеже швы линиями выноска
МИ, а приводить указания по сварке записью в технических Tpe
бованиях чертежа, если эта запись однозначно определяет места
Jf способы сварки, типы сварных соединений и размеры их KOH
структивных элементов в поперечном сечении, а также распо..
дожение швов.
15.3. Штампованные детали
15.3.1. Общие сведения
енизить массу машины можно, применяя листовые штам
пованные конструкции. Пониженную прочность и жесткость
тонколистовых конструкций компенсируют приданием CKOp
лупчатых и сводчатых форм, вьщавливанием рельефов (вьща..
БОК), отбортовкой, введением связей, приваркой профилей же
СТКОСТИ. Вьщавки имеют форму yrлублений. Пни бывают в виде
rлухой сферической отбортовки, конической и цилиндрической
Быдавки, кольцевой выдавки, рифтов, которые MOryт быть раз..
мещены параллельно или крестообразно (рис. 15.16). Рекомен..
дации по конструированию отбортовок следующие: R == 1,58 +
+ 1 мм; H 1,5R (рис. 15.17). Детали из пластичных материалов
(низкоуrлеродистые стали, дюралюмины) при толщине листов
Не более 3 4 мм изrотавливают холодной штамповкой; при тол
щине листов более 4 мм используют rорячую штамповку. Для
операций вырубки, пробивки и отрезки при холодной штам
Повке требуются малопластичные материалы с отношением
:t:
о 8
z
Рис. 15.16. Типы выдавок:
а rлухая сферическая отбортовка; 6 цилиндрическая выдавка; в кольцевая
ВЫдавка; l рифты параллельные и крестообразные
9 8640
257
t
Рис. 15.17. Размеры отбортовок
О'т > 0,8. Для операций rибки 11:
О'в
вытяжки необходимы плаСТиq
ные материалы с указанным
о'
отношением ::; 0,65.
О'в
15.3.2. Вырубка отверстий
Детали из малоуrлеродистой стали MoryT быть изrотовлены
вырубкой при толщине S ::; 25 мм и пробивкой при S::; 35 мм.
Неметаллические материалы (текстолит, reтинакс, орrаниче
ское стекло) хорошо вырубаются при S::; 1,5 мм.
При вырубке в штампах допуск на ширину полос и размеры
отверстий назначают не выше 12 13 ro квалитета точности при
S::; 3 мм, 14 ro квалитета при S == 3...5 мм и 14 16 ro квалитета
при S > 5 мм.
15.3.3. Радиусы rибки
Минимальный внутренний радиус rибки R nйn для стальных
листов из стали ет3 составляет (0,1...0,5 )S в отожженном или
нормализованном состоянии и (0,5...1,0)S в наклепанном co
стоянии, rде S толщина листа. Первая цифра в скобках COOT
ветствует сrибу поперек волокон, вторая вдоль волокон MaTe
риала. Для алюминиевых сплавов AMr3, AК4 1, Дl, Д16 и
бронзы БрБ2 (мяrкая) R min ::::; O,35S, дЛЯ латуни Л 90 (мяrкая), а
также меди марок Мl, М2, М3 R min ::::; 0,35S. Минимальный pa
диус rибки полуфабрикатов крyrлоrо и KBaдpaTHoro сечений
приведен в табл. П.15.3.1 прИ
ложения П.15.3. Минималь-
ный радиус R rибки труб BЫ
числяют по формуле R == 2(D +
+ d)kc, [де п, d наружный II
внутренний диаметры труБыI;
kc коэффициент, определяе
мый по табл. П.15.3.2 прил О -
жения П.15.3.
а о Минимальный внутреНfl йЙ
Рис. 15.18. Минимальные радиусы радиус R nйn (рис. 15.18) прJl
rибки yrолков с внутренним (а) и Ha rибке на ребро уrолков из ста-
ружным (6) расположением полки ли И алюминиевых сплавов I3
258
холодном состоянии зависит от расположения полок Так, если
[(олка выполнена внутри yroлка, R nйn == 10Ь, если снаружи, то
Rmin == 8Ь.
15.4. Прокат
15.4.1. История создания Эйфелевой башни
Для изrотовления металлоконструкций применяют в OCHOB
НОМ прокат. Одной из первых изrотовленных из проката конст
рукций является Эйфелева башня. Орrанизаторы Всемирной
выставки в Париже 1889 rода, как известно, посвятили ее столе..
тию французской революции. В 1885 т. они объявили конкурс
на лучший проект сооружения, которое явилось бы эмблемой
выставки. Отобран самый смелый проект, представленный ин..
женером [уставом Эйфелем (1832 1923). К тому времени Эй..
фель построил ряд мостов, виадуков и друrих сооружений, ши
роко используя при этом металлические конструкции. Над про
ектом работало 400 инженеров.
В конце января 1887 [. на Марсовом поле начались земля
ные работы по устройству основания башни. етроительство
велось ПОД охраной полиции, так как сорок видных представи"
телей французской интеллиrенции выступили в прессе спись..
мом.. протестом против сооружения «в самом центре столицы
бесполезной и чудовищной Эйфелевой башни». Среди подпи
савших письмо были композитор Шарль [уно, писатели rи де
Мопассан и Александр Дюма. Однако у Эйфеля были и CTO
ронники, например писатель Эмиль Золя одобрял это строи
тельство.
Башня выполнена из TaBpoBoro и двутавровоrо проката.
Большие детали изrотавливали на заводе и собирали на стройке
при помощи паровых кранов, расположенных на разных уров"
Иях башни. Детали передавали наверх от крана к крану. При
сборке использовали паровые дыропробивальные и клепальные
машины. Строительство продолжалось два [ода, два месяца и
два ДНЯ.
В законченном виде башня имела высоту 300 м (в настоящее
время высота башни с надстройками составляет 326,75 м) и до
1931 r. оставалась самым высоким сооружением в мире. Она
ОПирается на четыре мощных фундамента, которые образуют
{(вадрат со стороной 123,4 м. Ее масса составляет 7500 т.
9*
259
При изучении влияния ветровой наrрузки [. Эйфель сдел3..JI
ряд интересных опытов, которые послужили ему толчком для
проведения исследований в области аэродинамики. К числу
важнейших изобретений [. Эйфеля следует отнести аЭрОДИна
мическую трубу.
Со смотровых площадок башни открывался вид на Париж.
Она как символ Франции стала украшать обложки путеВОДИте
лей, официальные документы, почтовые марки и открытки.
К концу выставки сбор от входной платы на башню пере
крыл все расходы на ее постройку, достиrавшие 5 млн франков.
В первые rоды cBoero существования башня не имела прак
тическоrо применения и в 1909 r. делалась попытка ее дeMOHTa
жа. Теперь на ее вершине размещаются радио и телеантенны
прожектор, измерители радиоактивности, приборы для опреде
ления заrpязнения атмосферы.
15.4.2. Сортамент проката
Прокат разделяют на rруппы: листовой, сортовой, фасон
ный и периодический.
Листовой прокат получают про каткой между валками. Тол
щина листов rорячекатаной стали составляет от 0,5 до 160 мм
(fOeT 19903 74), холоднотянутой стали от 0,5 до 5,0 мм (fOCT
19904 90) .
К сортовому прокату относят крyrлый, квадратный, шести
rpанный и прямоуrольный (полоса с небольшим отношением
ширины к высоте) прутки. В частности, поставляют rорячеката
ные, крyrлые (fOeT 2590 88), шестиrpанные (тоет 2879 69),
полосовые (fOeT 103 76) стальные полуфабрикаты.
Фасонные профили общеrо назначения это трубы крyrлые,
квадратные и прямоуrольные; уrолки стальные; уrолки, прессо
ванные из алюминия и ero сплавов; швеллеры, двутавровые
балки (двутавры).
Для машиностроительных конструкций в основном приме
няют трубы крyrлые стальные бесшовные холоднодеформируе
мые (fOCT 87З4 75), круrлые стальные прецизионные (fOCT
9567 75), а также трубы стальные прямоуrольные (fOCT
8645 68).
Уrолки прокатные стальные состоят из двух полок равноЙ
(fOeT 8509 86) или неравной (rOeT 851 0 86) ширины. кроме
прокатньrx имеются [нутые равнополочные (rOCT 19771 74) JI
неравнополочные (rOeT 19772 74) yrолки.
260
Швеллеры бывают rорячекатаные (fOeT 8240 89) и [нутые
([ОСТ 8278 83).
Двутавровые балки профильные элементы с большими
моментами инерции при относительно небольших площадях
J10перечноrо сечения. Начиная с номера 18 (высота профиля
численно равна в сантиметрах ero номеру), двутавры прокаты
БаюТ с различной площадью поперечноrо сечения при одной и
той же высоте профиля (rOCT 8239 89). Более экономично
применение двутавров с параллельными rранями полок (так на..
зываемые широкополочные двутавры), широко используемых
за рубежом. е 1978 [. такие двутавры изrотавливают в России
(Нижний Таrил) по ту 14 2 2 72.
Периодический прокат отличается переменным поперечным
сечением ПО дЛине, что уменьшает расход металла и объем обра
ботки деталей резанием.
Часто употребляемые в маШИНОС1роении сортаменты листо
80ro, CopToBoro и фасонноrо проката приведены в приложениях
П.15.4 П.15.6.
15.5. Практика конструирования. Сварной шкив
15.5.1. Постановка задачи
Сварной шкив плоскоременной передачи (рис. 15.19) COCTO
ит из ступицы, диска и обода. Диск надет на ступицу и вставлен
8 обод до упоров в буртики, а затем приварен как к ступице, так
и к ободу двумя швами. Известно, что силы натяжения ведущей
и ведомой ветвей ременной передачи составляют Еl == 2000 Н,
Р 2 == 1000 Н; наружный диаметр шкива D == 315 мм; ширина
llIКива В == 100 мм. Принять посадочный диаметр отверстия d ==
:::: 70 мм и линейную скорость ремня менее 5 м/с.
А (уменьшено)
А
4
2 ...:о::
1
'/// '//'/,
fi
Fz
Рис. 15.19. Сварной ШКИВ
261
Оценить, в каком из четырех швов шкива (швы раСПОЛОЖе
ны на разных диаметрах) возникнут в эксплуатации наиБОJIЬ
шие напряжения и разработать рабочий чертеж шкива.
15.5.2. Оценка степени наrpужениости сварных ШВОВ
1. Уточняем расчетную схему. Сварные швы испытывают
действие двух силовых факторов радиальной силы F и КРутя
щеrо момента Т:
р== Рl + р 2 ;
D
Т = (1) P2) '
2
2. Сравниваем возникающие напряжения в швах 1,2 и 3,4.
еила F и момент Т последовательно передаются со ступицы на
диск через швы 1, 2, а затем с диска на обод шкива через швы
3, 4. Следовательно, и те и друrие швы испытывают действие
одних и тех же силовых факторов. Но швы 1, 2 короче, чем
швы 3, 4, а кроме Toro, они расположены на меньшем радиусе.
Поэтому окружная сила, наrружающая швы при передаче KPY
тящеrо момента, в швах 1, 2 будет большей, чем в 3, 4. Указан
ные причины позволяют заключить, что в швах 1, 2 возникнут
большие напряжения, чем в швах 3, 4.
3. Сравним возникающие напряжения в швах 1 и 2. Очевид
но, что от передаваемой силы рв НИХ возникнут одинаковые Ha
пряжения, так как эти напряжения вычисляются как частное от
деления силы на площадь опасноrо сечения, а эта площадь естЬ
сумма площадей опасных сечений швов 1 и 2.
Швы 1 и 2 работают параллельно при передаче крутящеrо
момента т. Условия равновесия не позволяют выяснить, какие
доли момента передают первый и второй швы. Следовательно,
задача статически неопределима и, чтобы ее решить, к условияМ
равновесия следует добавить условие совместности деформа
ций: например, считать ступицу и диск абсолютно жесткими,
т. е. недеформируемыми, а сварные швы податливыми. Тоrда
при наrpужении шкива крутящим моментом диск повернетсЯ
относительно ступицы за счет податливости сварных швов. ПРI1
этом линейные деформации сварных швов будут пропорцио
нальны радиусам, на которых они расположены. Если вспоМ
262
НI1ТЬ' что, соrласно закону [ука, напряжения пропорциональны
деформациям, то из приведенноrо рассмотрения можно заклю..
qI1Tb, что в шве 2 возникнут большие суммарные напряжения,
qeM в шве 1.
15.5.3. Выбор высоты катета cBapHoro шва и расчет
сварных швов на прочность
1. Вычисляем значения силовых факторов:
F == Р 1 + Р 2 == 2000 + 1 000 == 3000 Н;
D 315
Т = (Jii P2) = (2000 1000) = 157500 Н. мм.
2 2
2. Принимаем, что сварка ручная и выполнена yrловыми
швами с высотой катета k == 5 мм; наружные диаметры ступицы
назначаем равными d 1 == 1,5d:::: 100 мм и d 2 == 120 мм. Находим
напряжения 1: р И 1: Т соответственно от силы F и моменп Т в
швах 1 и 2, а также эквивалентное напряжение 't э :
F
1:р =
А 1 + А 2
F
=
1t.o,7k(d! + +d 2 + )
= 3000 = 1,20 МПа;
3,14.0,7.5(100 + + 120 + )
ТРтах
'ст == =
Iр
т( 2 + J
=
п( d! + Ю. 0,7k( d! +2 k /2 J2 + п( d 2 + Ю. O,7k( d 2 + 2 k/2 J2
=
263
157500(60 + 2,5)
2 2
3,14(100+ 2,5)-0,7-5 С ОО ;2,5 ) + 3,14(120+ 2,5)-0, 7-5 С 20;2,5 )
б.J
'\/ ( V)
= 1,1 О МПа;
'С э == 'СЕ + 'Ст == 1,20 + 1,10 == 2,30 МПа.
«::,
"""
t-.,.
э.
<::1'>
c'\.i C'",J
Э. "э.
t-.,. ....
.+. t'--.. ""
+
э. о::..,
:::t:
r-..;.
"&
"s.
Заметим, что напряжение 1: т найдено для точек cBapHOro
-шва, удаленных от оси на радиус РтаХ' т. е. для шва 2. Точки
шва 1 удалены от оси на меньшее расстояние, поэтому там на.
пряжения 'с т будут меньшими.
3. Находим допускаемое напряжение в сварном шве:
[1:'] == 0,6[0] == 0,60 т /l,5 == 0,6.220/1,5 == 88 МПа.
4. Делаем заключение, что в наиболее наrpуженных сварных
швах 1 и 2 'С э < ['С']. Поэтому считаем прочность сварных швов
обеспеченной.
15.5.4. Разработка рабочеrо чертежа шкива
1. Материалы ступицы. оиска и ооооа:
125 8 rOCT 85БО 18 .
Круа 20 В (ОСТ 1051 lJ )
б 1Ох400х400 [ОСТ 1990З 74
Лист
20 {ОСТ 1OS0 14
П5х24 х1О0 {ОСТ 81З2 78
Труоа В 20 rOCT 87ЗJ 74
2. Все ш8ы по rocт J2б4 80.
J. Неуказанные преiJельные отклонения розмеро8:
отиерстиu +t, Ооло8 t, остальных "!:.tj2
среiJнезо класса точности по rOCT 25б70 В3.
Принимаем, что обод шкива выточен из roрячекатаной Tpy
бы диаметром 325 мм и толщиной 24 мм, а диск ИЗ листовой
стали Толщиной 1 О M , ступица выточена из крyrлой стали диа
метром 125 мм (см. приложения П.15.4 и П.15.5). Материал
шкива сталь 20.
Выпуклость шкива, необходимую дЛЯ предотвращения co
скакивания ремня, назначаем 1,0 мм.
Линейная скорость шкива мала, поэтому статическую ба
лансировку шкива не предусматриваем.
Допуск радиальноrо биения поверхности наружноrо диамет
ра относительно оси посадочноro отверстия принимаем 7 й cTe
пени точности (0,05 мм), а допуск торцовоrо биения 10 й сте-
пени точности (0,1 мм)(см. табл. 7.6.2 шаra 7).
Полаrаем, что сварные швы выполнены по замкнутым ли-
ниям в тавр без предварительной разделки кромок с OДHOCTO
ронним наложением шва. Катет шва, соrласно расчету, приНИ-
маем равным 5 мм.
Фраrмент рабочеro чертежа ШКИва представлен на рис. 15.20.
Рис. 15.20. Фраrмент рабочеrо чертежа сварното шкива
264
265
ПРИЛОЖЕНИЯ 0.15
П.lS.l. Точность отливок
Таблица л 15. 1.1
Классы точносПf размеров и масс, а также ряды приnyсков
на механическую обработку отливок по rocт 26645 85
для разных способов ЛИТЬЯ
..........
Тип металла и сплава
Наиболь
ший цветной
Способ литья rабарm цветной с температурой ковкий,
ный с температурой плавления высокопрочный
размер плавления выше 700 'С, и леrированный,
ниже 700 .С чyryн, сталь
серыи чyryн
До 100 3т 5 3 6 4 7т
Литье ПОД давлением 1 1 1
в меТaJVIические
формы Св. 100 3 6 4 .7T 5т 7
1 1 1
Литье в керамиче До 100 3 6 4 7т 5т 7
ские формы, а также
1 1 2 1 2
ПО выплавляемым
или выжиrаемым Св. 100 4 7 5T 7 5 8
МОДелям 1 2 1 2 1 2
Литье в кокиль ИЛИ ДО 100 4 9 5т 1 О 5 llT
ПОД низким давлен и 1 2 1 3 1 3
ем в металлические
формы с песчаными Св. 100 5т 1 О 5 llT 6 ll
стержнями и без них; до 630 1 3 1 3 2 4
литье в песчаные
формы, отверждае Св. 630 5 llT 6 ll 7т 12
мые в контакте 1 3
с оснасткой 2 4 2 5
Литье в песчаные До 630 6 11 7т 12 7 13
формы, отверждае 2 4 2 4 2 5
мые вне контакта с Св. 630 7 12 8 Вт 9т 13
оснасткой, или ЦeH до 4000 2 4 3 5 3 6
тробежное, или в
песчано rЛИIШстые Св. 8 Вт 9т 13 9 14
формы 4000 3 5 3 6 4 6
----
При м е ч а н и я: 1. В числителе указаны классы точности размеров, в знаменателе
ряды припусков (меньшие значения относятся к простым отливкам и условиям MaCCOBOfO
производства, большие к сложным, мелкосерийно и индивидуально изrотавливаемЫМ оТ-
ливкам). 2. КJIaССЫ точности масс следует приНимать соответствующими классам точноСТИ
размеров.
266
10
:::Е
:::Е
1.0
41
Рис. П.15.1.1. Допуск на размер
литой заrотовки в зависимости
от класса точности и размера OT
ливки
10 100 1000
Наиоольший paJMep от/!иDки, мм
Таблица П15.1.2
Предельные отклонения д коробления отливок
Наибольший ::!: 11, мм, для степени коробления
rабаритный размер
отливки, мм 1 2 3 4 5 6 7 8 9 10
До 100 0,10 0,16 0,24 0,40 0,60
Св. 100 до 160 0,10 0,16 0,24 0,40 0,60 1,00
» 160 » 240 0,10 0,16 0,24 0,40 0,60 1,00 1,60
» 240 » 400 0,10 0,16 0,24 0,40 0,60 1,00 1,60 2,40
» 400 » 630 0,10 0,16 0,24 0,40 0,60 1,00 1,60 2,40 4,00
» 630 »1000 0,10 0,16 0,24 0,40 0,60 1,00 1,60 2,40 4,00 6,00
» 1000 » 1600 0,16 0,24 0,40 0,60 1,00 1,60 2,40 4,00 6,00 10,00
» 1600 » 2400 0,24 0,40 0,60 1,00 1,60 2,40 4,00 6,00 1 0,00 16,00
» 2400 » 4000 0,60 1,00 1,60 2,40 4,00 6,00 10,00 16,00 24,00
267
Окончание табл. п.15.1.2
.........
Наибольший :!: д, мм, для степени коробления
rабаритный размер ...........
отливки, мм 1 2 3 4 5 6 7 8 9 10
...........
Св. 4000 до 6300 1,60 2,40 4,00 6,00 10,00 16,00 24.00 40,00
» 6300 » 10000 4.00 6,00 10,0 16,00 24,00 40,00 60,00
О
10
:::!;
::Е
1
:::;
0,1
0,1
f 10
Допуск pOJMepU отlJи8хtl, ММ
Рис. П.lS.l.2. Припуски
на механическую обработ
ку литой заroтовки
Таблица п 15. J.З
Значения формовочных уклонов (конусности)
Способ литья
Высота
поверхности Н,
мм В песчаные В оболо'IКО В кокиль Под давле По выплавляе
формы вые формы нием МЫМ моделяМ
До 20 1:5 1:20 1:12 1:50 1:100
Св. 20 До 50 1:7 1:20 1 :15 1:100 1:200
» 50 » 200 1:12 1:30 1:20 1:100 1:200
» 200 » 500 1:12 1:30 1:30 1:200 1:200
268
П.15.2. Сварные соединения
Таблица П15.2.1
rруппы свариваеМОС11f сталей
[руппа Сваривае Марка стали rOCT
мость
БСтl БСт4 380 71
08; 10; 15; 20; 25 1050 74
1 Xopo 15Л; 20Л 977 75
тая
15[; 20[; 15Х; 20Х; 20Х[СА; 12ХН2 4543 71
12Х18Н9Т; 08Х18НI0; 20Х23Н18 5632 72
БСт5пс; БСт5сп 380 71
Удовле 30; 35 1050 74
2 ТБОрИ 977 75
тельная зол; 35Л
20ХН3А; 12Х2Н4А 4543 71
Ст6пс; Ст6сп; БСт6пс; БСт6сп 380 71
40; 45; 50 1050 74
3 ' Оrрани
ченная З0ХМ; 30Х[С; 33ХС; 20Х2Н4А 4543 71
17Х18Н9; 12Х18Н9 5632 72
40r; 45[; 50[; 50Х 4543 71
55Л 977 75
У7; У8; У8А; У8[; У9; УI0; Уll; У12 1435 71
4 ПЛохая 65; 75; 85; 60[; 65r; 70r; 50ХТ; 50Х[А; 55С2;
14959 79
55С2А; 60С2; 60С2А
Х12; Х12М; 7Х3; 8Х3; XrB; ХВ4; 5Х[М; 6Х[В 5950 73
........
269
Виды сварных соеДlПlении
Таблица л 15.2.2
..........
Материалы Вид Пределы УСЛОВНые
rOCT Вид толщины
деталей сварки соединения свариваемых обозначения
деталей, мм типов ШВоВ
Стыковое
1 1 00 Сl C25
Ручная Тавровое 2 1 00 Tl Tll
дуroвая 5264 80 Нахлесточ
Стали, ное 2 60 Hl H3
сплавы
на железо Уrловое 1 50 Yl YI0
никелевой Стыковое
и никеле Автомати 1,5 160 Cl C40
вой основах ческая и Тавровое 3 60 Tl T5
полуавто 8713 79
матическая Нахлесточ
ПОД флю ное 1 40 Нl H2
сом
Уrловое 1,5 40 Yl YlO
Стыковое 0,5 120 Сl C28
Дyrовая Тавровое 0,8 100 Tl T9
Тоже в защитных 14771 76 Нахлесточ
rазах 0,8 60 Hl H2
ное
У rловое 0,5 100 Yl YlO
Стыковое 0.8 60 С 1 C28
Алюминий Дyrовая Тавровое 1 60 Tl TI0
и алюми
ниевые в инертных 14806 80 Нахлесточ
rазах 1 60 Н 1 H2
сплавы ное
Уrловое 1 20 Yl YI0
Стали, чу Электро Стыковое 16 800 Сl сз
15164 69
rуны и др. шлаковая Тавровое 16 500 Tl Т3
Стали, П роплав Нахлесточ
ная про 14766 79 O,5 22 Hl H6
медные, бочная ное
I алюминие
вые и ни Стыковое С 1 C4
келевые Контактная
15878 70 Нахлесточ
сплавы 0.3 6 Нl H8
ное
270
Таблица П15.2.3
Примеры условных обозначении сварных соединении
на рабочих чертежах сварных деталей
Вид Условное Форма кромок, Вариант Эскиз соединения
обозначе подrотовленных исполнения рассматриваемоrо
соединения иие для сварки cBapHoro шва типа
Сl Отбортовка Односторонний
двух кромок
С2 Без скоса
»
кромок
Стыковое С7 Тоже Двусторонний
С8 Скос одной Односторонний
кромки
C17 Скос двух »
кромок
Тl Без скоса
»
кромок
Тавровое Т3 Тоже Двусторонний
Т6 Скос одной Односторонний
кромки
Нl Без скоса v/ ):»»»J>Z5"""
»
Нахлесточ кромок
Ное
Н2 Тоже Двусторонний v »»»» """
У4 Без скоса Односторонний r
кромок
Уrловое
У5 Тоже Двусторонний
271
Таблица П15.2.4
Вспомоrательные знаки, используемые ДЛЯ обозначения сварных швов
на рабочих чертежах сварных деталей
........
Расположение знака относительно
полки ЛИНИи выноски, проведенной
Изображение Назначение от изображения ШВа
знака
с лицевой с оборотной
стороны стороны
о- Снять усиление шва .Q V Q
{
Обработать наплывы
и неровности шва i
с плавным переходом {
к основному металлу
Выполнить шов при
Монтаже изделия, т. е. l
l при устаНовке ero
ПО монтажному чертежу r
на месте применения
изделия
/ Выполнить шов преры / { I
вистым или точечным с {
цепным расположением
Z То же с шахматным Z' у Z
раСПоложением {
О Выполнить шов r
по замкнутой линии ..
:J Выполнить шов =:1 I :=J
по незамкнутой линии ** {
:.. Диаметр знака составляет 3...5 мм.
Знак применяют, если раСПоложение шва ясно из чертежа.
272
Таблица Л15.2.5
Примеры условных обозначений сварных соединений
на рабочем чертеже сварной детали
Условное обозначение шва, изображенноrо
на чертеже
с лицевой стороны
l [ОСТ S2б4 80 СI7 Q R z 20
"о Rz80
I
с оборотной стороны
Q Rz20
[ОСТ J2б4 80 Сf7 О Rz80
I
[ОСТ 14t50б 80 Н1 3П SJ
Характеристика шва
Шов CTbIKoBoro co
единения со скосом
кромок, OДHOCТO
ронний, выполняе
мый дуroвой руч
ной сваркой при
монтаже издешrn.
Усиление снято с
обеих сторон. Па
раметры шерохова
тости поверхности
шва с лицевой CTO
роны Rz == 20 мкм,
С оборотной CTOpO
ны Rz == 80 мкм
Шов TaBpoBoro co
единения без скоса
KpOMOK,ДBYCTOPOH
ний, вьшолняемый
ручной дyrовой
сваркой
Шов соединения
внахлестку без CKO
са кромок, ОДI:IО
сторонний, выпол
няемый дyrовой
полуавтоматиче
ской сваркой в за
щитных [азах пла
вящимся электро
дом, по незамкну
той линии. Катет
шва 5 м1'vf
273
П.15.З. Штампованные детали из стали
Таблица п.Z5.З.l
Минимальный радиус rибки прутков круrлоrо и квадрЗ11lоrо сечений
A A t:I 5 б
(II,O O,9}d и ;;;;--
о,. (l,l 2)a
....
1/, I
' <:>.,
@ ...::..
' '
(1,1 1,2)d f48 D,9)a
А Б
Диаметр d СтЗ Ст5 Сталь 20 Ml,
Kpyra или Сталь 45 12Xl8HIOT
сторона (J М2
квадрата,
мм RI R2 RI RJ R 2 R. R 2 RI R 2 RJ
5 2
6 2 2 2
8 3 3 5 7 2 2
10 8 10 8 10 10 8 6 6
12 10 12 13 10 12 13 10 6 6
14 10 14 14 10 14 16 11
16 13 16 16 13 16 16 16 13 10 10
18 16 18 18 14 10
20 16 20 20 16 20 20 20 16 13 13
Таблица П 15.3.2
Значения коэффициенrа kr, учитъmающеrо материал труб и условия rибки
rибка в ХОЛОДном состоянии
Материал труб rиБКа в HarpeTOM
без песка состояниИ
с песком
АлЮМИНИЙ мяrкий 0,8 0,6 0,5
» твеРДЫЙ 1,0 0,8 0,6
274
Окончание табл. п.15.З.2
........
rибка в холодном состоянии
Материал труб rибка в HarpeToM
состоянии
без песка с песком
,......
ДюралЮМИН мяrкий 1,0 0,8 0.6
,> твердый 1,4 1,2 0,8
СтаЛь мяrкая 0,8 0,6 0,5
» твердая 1,5 1,2 0,9
Медь мяrкая 0.8 0,6 0,5
Латунь мяrкая 1,0 0,8 0,6
» твердая 1,3 1,1 0,7
П.lS.4. Листовой стальной прокат
Холоднокатаный листовой прокат (fOCT 19904 90) подраз
деля ют:
по точности прокатки по толщине: АТ повышенной ТОЧ
насти, БТ нормальной точности, ВТ высокой точности;
ПО точности прокатки по ширине: АШ повышенной ТОЧ
ности, БШ нормальной ТОЧНОСТИ, ВШ высокой точности;
по точности про катки по длине: АД повышенной точно
сти, БД нормальной точности, ВД ВЫСОКОЙ точности;
по плоскостности: ПО особо высокой плоскостности, вп
Высокой плоскостности, ПУ улучшенной ПЛОСКОСТНОСТИ, ПН
нормальной плоскостности;
по характеру кромки: НО с нормальной кромкой, О с
обрезной кромкой.
Толщина ЛИСТОВ, мм: 0,35; 0,5; 0,55; 0,6; 0,65; 0,7; 0,75; 0,8;
0,9; 1,0; 1,2; 1,3; 1,4; 1,5; 1,6; 1,7; 1,8; 2,0; 2,2; 2,5; 2,8; 3,0; 3,2;
3,5; 3,8; 3,9; 4,0; 4,2; 4,5; 4,8; 5.
Ширина листов, мм: 500; 700; 800; 900; 1000; 1250; 1400;
1500; 1800; 2000; 3000.
Длина листов, мм: от 1000 до 2300 в зависимости от толщиЕыI.
Тонколистовой из yrлеродистой стали качественной и обык"
IIOBeHHoro качества общеrо назначения (fOCT 16523 89). rоря
чекатаную и холоднокатаную уrлеродистую сталь качественную
11 обыкновенноrо качества толщиной до 3,9 мм включительно и
275
шириной не менее 500 мм поставляют в листах и рулонах. Лl1с
товой прокат подразделяют:
по видам продукции при поставке на ЛИСТЫ и рулоны;
по минимальному значению BpeMeHHoro сопротивления (В)
на труппы прочности: К260В, К270В, ОК300В, К310В, К3ЗQВ
К350В, ОК360В, К390В, ОК400В, К490В (цифра указывает МI1:
нимальное значение BpeMeHHoro сопротивления разрыву
Ila); ,
по нормируемым характеристикам на катеrории: 1 без
нормирования BpeMeHHoro сопротивления и химическоrо COCTa
ва, 2 с нормированием химическоrо состава, 3 с НОРМИРова
нием BpeMeHHoro сопротивления, 4, 5 и 6 с нормированием
BpeMeHHoro сопротивления и химическоrо состава;
по качеству отделки поверхности на rруппы: 1 особо BЫCO
кой отделки, 11 высокой отделки, 111 повышенной отделки
IV обычной отделки; ,
по способности к вытяжке: r rлубокая, Н нормальная.
Листы и рулоны изrотавливают из уrлеродистой качествен
ной стали марок 08кп, 08, 08пс, 10кп, 10пс, 10, 15кп, 15пс, 15,
20кп, 20пс, 20, 25, 30, 35, 40, 45 и 50, а также из уrлеродистой
стали обыкновенноrо качества марок ет1, Ст2, ет3, Ст4.
Например, прокат холоднокатаный листовой высокой точно
сти по толщине (ВТ), повышенной Точности по ширине (АШ),
нормальной точности по длине (БД), улучшенной плоскостно
сти (IlY) , с обрезной кромкой (О), размером lх1000х2000 мм
(rOeT 19904 90), rpуппы прочности К270В, катеrории 6, BЫCO
кой отделки поверхности (11), rлубокой вытяжки (r) имеет сле
дующее обозначение:
rт ВТ АШ БД ПУ O 1 х 1000 х 2000 ТОСТ 19904 90
./1 ист
K270B6 II T ТОСТ 1652З 89
Толстолистовой I'орячекатаный из качественной yrлеродистой
и леrированной КОНСтрукционной стали (rOCT 1577 81). ЛИСТЫ
изrотавливают из стали марок 08пс, 08кп, 08, 10кп,10пс, 10,
15кп, 15пс, 15,20кп,20пс, 20, 25, 30, 35,40,45, 50,55,60,65,70,
15r, 20r, зоr,40r, 50r, 60r, 65r, 70r, 10r2, 35r2, 20Х, 40Х.
Листы из стали 08кп, 08пс, 08, 10кп, 10пс, 10, 15кп, 15пс, 15,
20пк, 20пс, 20 поставляют ТОЛЩИной от 4 до 160 мм включитель
но, из стали марок 20Х, 40Х тоЛщиной от 4 до 80 мм включИ
276
rелЬНО, а из стали всех остальных марок толщиной от 6 до
60 ММ включительно.
Листы толщиной до 60 мм включительно поставляют в Tep
Мl1чески обработанном состоянии: отожженными, нормализо
БаННЫМИ, высокоотпущенными или без термической обработки
Б соответствии с заказом.
П.15.5. Прокат сортовой стальной
Сортовой из yrлеродистой стали обыкновенноrо качества
(fOCT 5З5 88). Стандарт распространяется на rорячекатаный
сортовой и фасонный прокат из уrлеродистой стали обыкновен
Horo качества.
Сортамент про ката должен соответствовать требованиям:
roeT 2590 88 rорячекатаный круrлый; [ост 2591 88 [o
рячекатаный квадратный; [ост 103 76 rорячекатаный поло
СОВОЙ' [оет 2879 88 rорячекатаный шестиrранный, [ОСТ
8509 86 уrловой равнополочный; [оет 851 0 86 уrловой
неравнополочный; [оет 8239 89 балки двутавровые; rOCT
8240 89 швеллеры.
Марка стали, ее химический состав, механические и TeXHO
лоrические свойства должны соответствовать [оет 380 88.
В зависимости от назначения сортовой про кат делят на под
rpуппы: 1 для применения без обработки поверхности; II
для холодной механической обработки резанием; III для [o
рячей обработки давлением.
Например, Kpyr обычной точности прокатки В, диаметром
ЗА мм из стали марки ет5пс, катеrории 1, rpуппы II имеет сле
дующее обозначение:
ЗО В ТОСТ 2590 88
КРУ2
Cm5пc I II ТОСТ 5З5 88
Калиброванный из качественной стали (fOCT 1051 73).
Круrлый квадратный, шестиrранный и полосовой калиброван
,
l1ый прокат изrотавливают из уrлеродистой и леrированнои Ka
ч:ественной конструкционной, автоматной, yrлеродистой инст"
РУментальной, коррозионно"стойкой, жаростойкой, тепло
УСтойчивой и жаропрочной сталей.
В соответствии с заказом прокат поставляют в HarapToBaH
110М или термически обработанном состоянии (отожженном,
Высокоотпущенном, нормализованном с отпуском, закаленном
с отпуском, закаленном).
277
Различают rpуппы качества поверхности: А с классом Точ.
ности 3 и 3а; Б, В с классом точности 3а, 4 и 5.
rруппу качества поверхности проката и класс точности YKa
зыаютT в заказе.
Сортамент крyrлоro проката от 5 до 100 мм (rOeT 7 417 75).
Крyrлый и квадратный rорячекатаный, а также шестиrраllный
калиброванный (rOCT 2590 88, rOCT 2591 88, rOCT
8560 78). еортамент проката (диаметр круrлоrо проката, раз
мер стороны квадратното проката, размер «под ключ» шести
rpaHHoro проката), мм: 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17
18, 19, 20, 21, 22, 24, 25, 26, 27, 28, 30, 32, 34, 36, 38, 40, 41,42 45'
46,48, 50, 53, 55, 58, 60, 63, 65, 70, 75, 80, 85, 90, 95, 100, 105, i 10'
120, 125, 130, 140, 150, 160, 170, 180, 190, 200. '
Крyrлый прокат изrотавливают: А высокой точности, Б
повышенной точности, В обычной точности. Квадратный
прокат выпускают: Б повышенной точности, В обычной
Точности.
rOeT 8560 78 предусматривает размер шестиrpанника «под
ключ» от 3 до 100 мм; шестиrранники изrотавливают с предель
ными отклонениями по h10, h11, h12. Шестиrpанные калибро
ванные прутки поставляют из сталей по [ОСТ 1051 73.
Например, шестиrранный калиброванный пруток из стали
45 размером 25 мм, с предельным отклонением по h12, термооб
работанный (Т), с качеством поверхности труппы В имеет сле
дующее обозначение:
ттт 25 h12 ТОСТ 8560 78
.LLleCтUepaHHuK
45 T B ТОСТ 1051 7З
П.15.6. Прокат фасонный стальной
Таблица П15.61
Основной сортамент труб
Ниружный Т ОJIщина
Наименование трубы стенки, Длина, м [ОСТ
диаметр, ММ мм
Труба малых размеров 0,32 4,80 0,1 1,6 0,3 7,0 14162 79
Трубы преI изионные:
rорячекатаные 25,0 325,0 2,5 50,0 4,0 .I2,0 9567 75
калиброванные 5,0 710,0 0,2 32,0 1,0 11,5 9567 75
278
Окончание табл. П. 15.6. 1
Ни РУЖНЫЙ Толщина
Наименование трубы стенки, Длина, м [ОСТ
диаметр, мм мм
f--"'" 0,2 1,0 0,5 8>O 1 0498 82
Трубы особотонкостенные 4,0 120,0
коррозионно стойкие
бесшовные холоднотянутые
и катаные
Трубы общеro назначения: 8734 75
бесшовные холоднотяну 5,0 250,0 0,3 24,0 1,5 12,5
тые и катаные 4,0 12,5 87З2 78
бесшовные rорячеката 20,0 820,0 2,5 75,0
ные
Трубы сварные ХОЛОДнока 5,0 110,0 0,5 5 ,0 1,5 9,0 1 0707 80
таные и тянутые
Трубы общеrо назначения 8,0 162,0 1,0 16,O 2,0 10,0 10704 76
сварные с прямым ШВОМ
Трубы коррозионно стой
кие:
бесшовные, roрячеде 57,0 325,O 3,5 32,O 1,5 10,0 9940 81
формированные 9941 81
бесшовные ХОЛОДНО 5,0 273,0 0,2 22,0 1,5 9,O
и теплодеформирован
ные
Трубы для велопромыш
ленности:
бесшовные волоченые и 6,0 102,0 0,8 7,5 1,5 9,0 12132 66
неволоченые
6,O 102,0 0,8 7 ,5 1,5 9,0 12132 66
сварные
Трубы стальные бесшовные холоднодеформированные (fOCT
8734 75*). Трубы выпускают наружным диаметром, мм: 5, 6, 7,
8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24, 25, 26,
27,28,30,32,34,35,36,38,40,42,45,48,50,51, 53,54, 56,57,60,
63, 65, 68, 70, 73, 75, 76, 80, 83, 85, 89, 90, 95, 100, 102, 108, 110,
120, 130, 140, 150, 160, 170, 180, 190, 200, 210, 220, 240, 250, и
Толщиной стенки, мм: 0,3; 0,4; 0,5; 0,6; 0,8; 1,0; 1,2; 1,4; 1,5; 1,6;
1 8 . 2 О . 2 2 . 2 5' 2 8' 3 О. 3 2' 3 5; 4,0; 4,5; 5,0; 5,5; 6,0; 6,5; 7,0;
""""""" ,
7 5' 8 О . 8 5' 9 О. 10' 11' 12 , ' 14; 16; 18; 20; 22; 24.
"""'" ,
279
Ниже приведены соотношения между наружным диаметром
и толщиной стенки трубы:
Наружный
диаметр
трубы,
мм . . . . яо 42 45 48 50 51 76 80 95 lOО 190 200 220 240 250
Толщина
стенки,
мм . . . 0,4 9,0 1,0 9,0 1,0 10,0 1,0 12,0 1,2 12,0 1,5 18,0 2,8 24,0 4,0 24,o
Например, труба с наружным диаметром 70 мм, толщиной
стенки 2,0 мм и длиной 6000 мм из стали марки 20 с поставкой
по механическим свойствам и химическому составу (rpуппа В)
по [ОСТ 8733 74 ИМеет следующее обозначение:
ТJ 6 70 х 2 х 6000 rOCT 87З4 75
ру а В 20 rOCT 87ЗЗ 74
Трубы стальные прецизионные (по rOCT 9567 75). етандарт
распространяется на rорячекатаные и холоднодеформирован
ные трубы повышенной точности изrотовления.
fорячекатаные MorYT иметь наружный диаметр п, мм: 25, 28,
32, 38, 42, 45, 50, 54, 57, 60, 63,3, 68, 70, 73, 76, 83, 89, 95, 102,
108,114,121,127,133,140,146,152,159, 168,180,203,219,245,
273, 299, 325 и толщину стенки S, мм: 2,5; 2,8; 3,0; 3,5; 4,0; 4,5;
5,0; 5,5; 6,0; 6,5; 7,0; (7,5); 8,0; (8,5); 9,0; (9,5); (10,0); 11,0; 12,0;
13,0; 14,0; 15,0; 16,0; 17,0; 18,0; (19,0); 20,0; 22,0; (24,0); 25,0;
(26,0); 28,0; 30,0; 32,0; (34,0); (35,0); (36,0); (38,0); (40,0); (42,0);
45,0; (48,0); 50,0. Размеры, указанные без скобок, более преk
почтительны.
Предельные отклонения размеров труб не должны превЫ
шать допуски, приведенные ниже:
rорячекатаные трубы
п, мм . <50 50 219 219 68 194**
Допуск на D, % :i0,35* :t0,8 :tl,O :t0,5
S,MM <15 15 7 45**
Допуск на S, % :il0 :t8 :t6
* в миллиметрах. ** При D/S == 4...10.
280
Холоднодеформuрованные трубы
D. мм. . . <30 32 40 42 50 51 60 63 70 73 80 83 90 95 108 llO 120 130
Допуск
: Д. . . :1::0,10 :1::0,15 :t0,20 :t0,25 :t0,30 :t0,35 :t0,40 :t0,45 :t0,50 :t0,8*1
*1 В процентах.
S,MM .
Допуск
на S, %
. 0,2 0,8*1 0,8 5,0*1 5,0*1 < 2,5*2 2,5 5,0*2 5,0*2
. :t0,05*3 :t7,5 :t6,0 :tl0 +10Л 7,5) :t7,5
*1 При D == 5...108 мм. *2 При D == 110...250 мм. *3 В МШIЛиметрах.
Например, труба rорячекатаная немерной длины с аруж
ным диаметром 60 мм повышенной точности и толщин<:,и стен
ки 4 мм обычной точности из стали марки 20 с поставкои по хи
мическому составу и механическим свойствам (rруппа В) по
[ОСТ 8733 74 имеет следующее обозначение:
6Оп х 4 rOCT 9567 75
Труба В 20 rOCT 87ЗЗ 74 .
Трубы прямоyrольные (fOCT 8645 68). етандарт распро
страняется на стальные бесшовные rорячекатаные, холоднотя
нутые и элеКТРОСБарные прямоуrольные трубы. В табл. П.15. 6.2
указаны размеры труб.
Таблица п 15. 6.2
Высота а, ширина Ь и ТОJDЦИна стенки S ",юфиля труб
п, Ь, а, Ь, S,MM а, Ь, S,MM
S, ММ ММ ММ
ММ ММ ММ ММ
f.......
15 10 1; 1,5; 2 50 25 2; 2,5; 3; 3,5; 4 100 70 4; 5; 6; 7
20 10 1; 1,5; 2; 50 30 2; 2,5; 3; 3,5; 4 llO 40 4; 5; 6; 7
20 15 1; 1,5; 2; 2,5 50 35 2; 2,5; 3; 3,5; 4 110 50 4; 5; 6; 7
25 10 1; 1,5; 2; 2,5 50 40 2; 2,5; 3; 3,5; 4 llO 60 4; 5; 6; 7
281
ОКOIiчание табл_ Пl5.62
Ь, ........
а, S, мм а, Ь, Ь,
S, мм а,
ММ ММ ММ ММ S,MM
ММ ММ
25 15 1; 1,5; 2; 2,5 60 25 2,5; 3; 3,5; 4; 5 .........
120 40 5; 6; 7; 8
30 10 1; 1,5; 2; 2,5; 3 60 30 2,5; 3; 3,5; 4; 5 120 60
5; 6; 7; 8
30 15 1; 1,5; 2; 2,5;3 60 40 3; 3,5; 4; 5 120
80 5; 6; 7; 8
зо 20 1; 1,5; 2; 2,5; 3 70 30 3; 3,5; 4; 5; 6 140 60
5; 6; 7; 8
35 15 1,5; 2; 2,5; 3; 3,5 70 40 3; 3,5; 4; 5; 6 140
80 5; 6; 7; 8
35 20 1,5; 2; 2,5; 3; 3,5 70 50 3; 3,5; 4; 5; 6 140
120 5; 6; 7; 8
35 25 1,5; 2; 2,5; 3; 3,5 80 40 3; 3,5; 4; 5; 6; 7 150
80 6; 7; 8; 9; 10
40 15 2; 2,5; 3; 3,5; 4 80 50 3; 3,5; 4 150
100 6; 7; 8; 9; 10
40 20 2; 2,5; 3; 3,5; 4 80 60 3,5; 4; 5; 6; 7 180
80 7; 8; 9; 10; 12
40 25 2; 2,5; 3; 3,5; 4 90 40 3,5; 4; 5; 6; 7 180
100 8; 9; 1 о; 12
40 30 2; 2,5; 3; 3,5; 4 90 60 4; 5; 6; 7 180
150 8; 9; 10; 12
45 20 2; 2,5; 3; 3,5; 4 100 40 4; 5; 6; 7
45 30 2; 2,5; 3; 3,5; 4 100 50 4; 5; 6; 7
Например, труба высотой 40 мм, шириной 25 мм, толщиной
стенки профиля 3 мм и длиной, кратной 1250 мм из стали 10
rруппы В по rOeT 13663 86.имеет следующее об значение:
Труба 40 х 25 х 3 х 1250кр. rOCT 8645 68
в 10 rOCT 1З66З 86
Прокат yrловой равнополочный (rOCT 8509 86). По точно
сти про кат изrотавливают: А высокой тоЧности Б обычной
ТОчности. '
ирина полки в сантиметрах соответствует номеру профи
ля. табл. П.15.6.3 приведены номера профилей с указанием
их толщины стенки S, площади поперечноrо сечения А MO
мента инерции J и Момента сопротивления W про ф иля THO
сительно оси П р охо дя
' щеи через центр масс сечения и па р ал
лельнои полкам.
282
Таблица П.15.6.3
Параметры yrловоrо раВНОПОЛОЧllоrо проката
Ho Ho
мер S, А, мм 2 1, мм 4 W, мм З мер S, А, мм 2 1, мм 4 w; мм З
11 po мм про мм
филя филя
1---'"
2,5 3 1,43-102 0,81.104 0,46.103 6,3 6 7,28.102 2,71.105 5,98.103
2,5 4 1,86.102 1,03.104 0,59.103 6,5 (; 7,52.102 2,98-105 6,39.103
2,8 3 1,62.102 1,16.104 0,58.103 7 4,5 6,20.102 2,90.105 5,67.103
3,5 4 2,17.102 3,01.104 1,21.103 7 5 6,86-102 3,19.105 6,27.103
3,5 5 3,28.102 3,61.104 1,47-103 7 6 8,15.102 3,76.105 7,43.103
3 3 1,74.102 1,45.104 0,67.103 7 7 9,42.102 4,30.105 8,57.103
3 4 2,27.102 1,84.104 0,87.103 7 8 1,06.103 4,82.105 9,68.103
3,2 3 1,86.102 1,77.104 0,77.103 7,5 5 0,74.103 3,95.105 7,21.103
3,2 4 2,43.102 2,26.104 1,00.103 7,5 6 0,88.103 4,66.105 8,57.103
3,5 3 2,04.102 2,35.104 0,93.103 7,5 7 1,01.103 5,33.105 9,89.103
4 3 2,35.102 3,55.104 1,22.103 7,5 8 1,15.103 5,98.105 1,12.104
4 4 3,08.102 4,58.104 1,60.103 7,5 9 1,28.103 6,61.105 1,24-104
4 5 3,79.102 5,53.104 1,95-103 8 5,5 0,86.103 5,27.105 0,90.104
4,5 3 2,65.102 5,13.104 1,56.103 8 6 0,94.103 5,70.105 0,98.104
4,5 4 3,48.102 6,63.104 2,04.103 8 7 1,08.103 6,53.105 1,13.104
4,5 5 4,29.102 8,03.104 2,51.103 8 8 1,23.103 7,34.105 1,28.104
5 3 2,96.102 7,11.104 1,94.103 9 6 1,06.103 8,21.105 1,25-104
5 4 3,89.102 9,21.104 2,54.103 9 7 1,23.103 9,43.105 1,44.104
5 5 4,80.102 1,12.105 3,13.103 9 8 1,39.103 1,06.106 1,64.104
5 6 5,69.102 1,31.105 3,69.103 9 9 1,56.103 1,18.106 1,83.104
5,6 4 4,3.102 1,31.105 3,21.103 10 6,5 1,28.103 1,22.106 1,67.104
5,6 5 5,41.102 1,60.105 3,96.103 10 7 1,37.103 1,30.106 1,79.104
283
Окончание табл. П15.6.з
............
Ho Ho
мер S, А, мм 2 J, мм 4 W, мм 3 мер S, А, мм 2 1, мм4 w; мм3
про мм про мм
филя филя
10 8 1,56-103 1,47.106 2,03.104 12,5 9 2,20.103 3,27.106 3,60.104
10 10 1,92.103 1,79.106 2,50.104 12,5 10 2,43.103 3,60.106 3,97.104
10 12 2,28.103 2,09.106 2,95.104 12,5 12 2,89.103 4,22.106 4,71.104
10 14 2,63-103 2,37.106 3,38.104 12,5 14 3,34.103 4,82.106 5,42-104
10 16 2,97.103 2,64.106 3,80.104 12,5 16 3,78-103 5,59.106 6,11.104
11 7 1,51.103 1,76.106 2,18.104 14 9 2,47.103 4,66-106 4,55.104
1l 8 1,72.103 1,98.106 2,48.104 14 10 2,73-103 5,12.106 5,03.104
12,5 8 1,97.103 2,94.106 3,22.104 14 12 3,25.103 6,02.106 5,97.104
Прокат yrЛОВОЙ неравнополочный (fOCT 8510 86). Числи
тель и знаменатель номера уrолка численно равны ширине
большой и малой полок в сантиметрах. В табл. П.15.6.4 приведе
ны толщины полок S, мм; площадь поперечноrо сечения А, MO
менты ине ции Ix, Iy и моменты сопротивления Ui:, uj, относи
тельно осеи, проходящих через центр масс уrолка, при этом ось
х параллельна полке малой ширины.
Таблица П15.6.4
Параметры yrЛовоrо проката
Номер S, А, мм 2 Ix, мм 4 , мм З Iy, мм4 u-;" мм 3
профиля мм
2,5/1,6 3 1,16.102 0,70.104 0,43.103 0,22.104 0,19.103
3,2/2 3 1,43.102 1,27.104 0,62.103 0,45.104 0,30.103
3,2/2 4 1,86-102 1 ,61.104 0,82.103 0,56.104 0,39.103
4/2,5 3 1,89.102 3,06.104 1,14.103 0,93.104 0,49.103
4/2,5 4 2,47.102 3,93.104 1,49-103 1,18.104 0,63.103
4/2,5 5 3,03.102 4,37.104 1,82.103 1,41.104 0,77-103
4,5/2,8 3 2,14.102 4,41.104 1,45.103 1,32-104 061.103
,
284
Продолжение табл. П 15.6.4
Номер S, А, мм 2 [х, мм 4 ,ммЗ [у, мм 4 u-;" мм 3
лрофиля мм
4,5/2,8 4 2,80-102 5,68.104 1,90.103 1,69.104 0,80-103
5/3,2 3 2,42.102 6,18.104 1,82.103 1,99.104 0,81.103
5/3,2 4 3,17.102 7,98.104 2,38.103 2,56.104 1,05.103
5,6/3,6 4 3,58.102 11,37.104 3,01.103 3.70.104 1,34- 103
5,6/3,6 5 4,41.102 13,82.104 3,70.103 4,48.104 1,65.103
6,3/4 4 4,04.102 16,33-104 3,83.103 5,16.104 1,67.103
6,3/4 5 4,98.102 19,91.104 4,72.103 6,26.104 2,05.103
6,3/4 6 5,90.102 23,31.104 5,58.103 7,29.104 2,42.103
6,3/4 8 7,68.102 29,60.104 7,22.103 9,15.104 3,12.103
7/4,5 5 5,59.102 27,76.104 5,88-103 9,05.104 2,62.103
7,5/5 5 6,11.102 34,81.104 6,81.103 12,47.104 3,25.103
7,5/5 6 7,25-102 40,92.104 8,08-103 14,60.104 3,85.103
7,5/5 8 9,47.102 52,38-104 10,52.103 18,52.104 4,88.103
8/5 5 6,36.102 41,64.104 7,71.103 12,68.104 3,28.103
8/5 6 7,55.102 48,98-104 9,15.103 14,85.104 3,88.103
9/5,6 5,5 7,86-102 65,28.104 10,74.103 19,67.104 4,53.103
9/5,6 6 8,54.102 70,58.104 11,66.103 21,22.104 4,91.103
9/5,6 8 1l,18.10 2 90,87-104 15,24.103 27,08.104 6,39.103
10/6,3 6 9,58-102 98,29.104 14,52.103 30,58-104 6,27-103
10/6,3 7 11,09.102 112,86-104 16,78.103 34,99.104 7,23.103
10/6,3 8 12,57.102 126,96.104 19,01.103 39,21.104 8,17.103
10/6,3 10 15,47.102 153,95.104 23,32.103 47,18.1()4 9,99.103
11/7 6,5 11,45.102 142,42.104 19,11.103 45,61.104 8,42.103
11/7 8 13,93.102 1 71, 54.104 23,22-103 54,64.104 10,20.103
12,5/8 7 14,06.102 226,53.104 26,67.103 73,73.104 11 ,89-1 03
12,5/8 8 15,98.102 255,62.104 30,26.103 80,95.104 13,47.103
12,5/8 10 19,70.102 311,61.104 37,27.103 100,47.104 16,52.103
J2,5/8 12 23,36.102 364,79.104 44,07.103 116,84.104 19,46.103
285
Окончание табл. П15.6.4.
..............
Номер S, А, мм2 Ix, мм 4 ,MM3 Iу. мм 4 rJj, ММЗ
профиля ММ
14/9 8 18,00.102 363,68.104 38,25.103 ...............
119,79-104 17,19'103
14/9 10 22,24.102 444,45.104 47,19.103 145,54.104 21,14.103
16/10 9 22,87-102 605,97.104 56,04.103 186,03.104 23,96.103
16/10 10 25,28.102 666,59.104 61,91.103 204,09.104 26,42.103
16/10 12 30,04.102 784,22.104 73,42-103 238,75.104 31,23-103
16/10 14 34,72.102 897,19.104 84,65.103 271,60-104 35,89.103
18/11 10 28,33.102 952,28.104 78,59.103 276,37-104 32,27.103
18/11 12 33,69.102 1122,.56.104 93,33.103 324,09.104 38,20.103
20/12,5 11 34,87.102 1449,02.104 107,31.103 446,36.104 45,98.103
Швеллеры rорячекатаные (fOCT 8240 89). Швеллеры Изrо
тавливают как с уклоном внутренних rpаней полок (уклон до
10 %), так и с параллельными rранями полок. Высота профиляв
сантиметрах равна численному значению номера швеллера.
В табл. П.15.6.5 приведены: ширина полки ь, площадь попе
речноrо сечения А, моменты инерции 1 1 и соп р отивле н ия W
W Х'у Х'
у профиля относительно осей, проходящих через центр масс
сечения.
Таблица Л15.6.5
Параме1]JЫ швеллеров
Номер Ь, мм А, мм 2 Ix, мм 4 W X , ММ З Iy, мм 4 rJj, мм 3
профиля
5П 32 6,16.102 22,8.104 9,1.103 5,61.104 2,75.103
6,5П 36 7,51.102 48,6.104 15,0.103 8,7.104 3,68.103
8П 40 8,98.102 89,4.104 22 4.103 12,8.104 4,75.103
10П 46 10,9.102 174.104 34,8.103 20,4.104 6,46.103
12П 52 13,3.102 304.104 50,6-103 31,2.104 8,52.103
14П 58 15,6.102 491.104 70,2.103 45,4.104 11,0.103
16П 64 18,1.102 747.104 93,4.103 63,3.104 13,8.10
286
Окончание табл П15.6.5
Номер Ь, мм А, мм 2 Ix, мм 4 W x , мм 3 Iу, мм 4 fVy, мм 3
профиля
103.103 16,4.103
16аП 68 19,5.102 823.104 78,8.104
18П 70 20,7.102 1090.104 121.103 86- 104 17, О. 103
18аП 74 22,2.102 1190.104 132.103 105.104 20,0.103
20П 76 23,4.102 1520.104 152.103 113.104 20,5.103
22П 82 26,7.102 2110.104 192.103 151.1 04 25,1.103
24П 90 30,6.102 2900.104 242.103 208.104 31,6-103
27П 95 35,2.102 4160.104 308.103 262.104 37,3.103
зоп 100 40,5.102 5810.104 387.103 327-104 43,6.103
ззп 105 46,5.102 7980.104 484.103 410.104 51,8.103
36П 110 53,4.102 10820.104 601.103 513.104 61 ,7. 103
40П 115 61,5.102 15220.104 761.103 642.104 73,4.103
Швеллеры rнутые равнополочные (fOCT 8278 83). Швелле
ры изrотавливают из холодно катаной и rорячекатаной стали
обыкновенноrо качества из уrлеродистой качественной KOHCT
рукционной и низколеrированной сталей.
В табл. П.15.6.6 приведены высота профиля h, ширина Ь и
толщина полки S, площадь поперечноrо сечения А, моменты
инерции lх, Iy и сопротивления W x ' про филя относительно
осей, проходящих через ero центр масс.
Таблица П15.6.6
Параме1]JЫ швеллеров
h* Ь S Iy, мм 4 f-Y", мм З
А, мм 2 Ix, мм 4 , мм 3
мм
80 25 4 4,61.102 37,07.104 9,27.103 2,29-104 1,25.103
80 32 4 5,16.102 45,16-104 11,29.103 4,70.104 2,04.103
80 35 4 5,41.102 48,63.104 12,16.103 6,08.104 2,44.103
80 40 2,5 3,78.102 37,40.104 9,35-103 5,98.104 2,07.103
80 40 3 4,48.102 43,51.104 10,88.103 7,00.104 2,45.103
80 50 4 6,60.102 65,98.104 16,50.103 16,60.104 4,48.103
287
Окончание табл. П15.6.6
h* I I ............
ь s
А, мм 2 Ix, мм 4 , мм 3 Iy, мм 4 u.j, мм3
мм
80 60 .............
3 5,68.102 61,30104 15,32.103 21,46.104 5,31.103
80 60 4 7,40.102 77 ,54.104 19,38.103 27 ,53.104 6,92.103
80 60 6 10,66.102 105,03.104 26.26.103 38,27.104 9,91.103
80 80 3 6,88.102 79,10-104 19,77.103 47,03.104 9, 11.103
80 80 4 9,00-102 100,66.104 25, 17.1 О 3 60,69.104 11,9] .103
80 100 6 15,46.102 170,88-104 42,72.103 158,47.104 26,22.103
110 50 4 7,80.102 139,63-104 25.39.103 18,61.104 5,15.103
110 50 5 9,59.102 167,57.104 30,47.103 22,47-104 6,29.103
110 100 4 11,81.102 252,05.104 45,83.103 125,87.104 19,23.103
120 20 4 6,20-102 104,42.104 17,40.103 2,57.104 1 , 31.1 03
120 40 4 7,41.102 144,80.104 24,13.103 10.15.104 3,37.103
120 50 3 6,25.102 133,77-104 22,29-103 14,85.104 3,99.103
120 50 4 8,20.102 171,72.104 28,62.103 19,15-104 5,21.103
120 50 6 11,86.102 236,44.104 39,41.103 26,75.104 7,48.103
120 60 4 9,00.102 198,65-104 33,11.103 31,91.104 7,42.103
120 60 5 11,09.102 239,63.104 39,94-103 38,73.104 9, 10.103
120 60 6 13,06-102 275,47-104 45,91.103 44,95-104 10,70.103
120 70 5 12,09.102 272,71.104 45,45.103 59,56.104 12,25.103
120 80 4 10,60-102 252,49-104 42,08.103 70,65.104 12,84.103
120 80 5 13,09.102 305,80.104 50,97.103 86,20-104 15,81.103
140 40 3 6,25.102 164,66.104 23,52.103 8,26-104 2,63.103
140 60 3 7,45-102 20,97.104 31,57.103 25,89.104 5,79.103
140 60 4 9,80-102 285,44.104 40,77-103 33,57-104 7,59.103
140 60 5 12,09-102 345,47-104 49,35.103 40,80.104 9,32.103
140 60 6 14,26.102 398,68.104 66,95.103 47,46.104 10,97-103
140 80 4 11 ,40.1 02 359,42-104 51,35.103 74,59.104 13,17-103
140 80 5 14,09.102 436,63.104 62,38.103 91 , 1 J 104 16,23.103
* [ОСТ предусматривает также BbICO'I)' профюrя 28, 32,40,42,43,45, 50,65,
68, 70 мм.
288
Балки двутавровыe (rOCT 8239 89). Высота сечения ДBY
тавра в сантиметрах численно равна номеру балки. В
табл. П.15.6.7 приведены ширина полки Ь, площадь попереч
f{oro сечения А, моменты инерции Ix, Iу и сопротивления W x ,
профиля относительно осей, проходящих через центр масс
у
сечения.
Таблица п 15. 6. 7
Параметры двyrавров
Номер Ь, мм А, мм 2 Ix, мм 4 , мм 3 ly, мм 4 , мм 3
лрофиля
10 55 12,0.102 198.104 39,7.103 17,9.104 6,49.103
12 64 14,7-102 350.104 58,4.103 27,9.104 8,72.103
14 73 17,4.102 572.104 81 ,7.103 41,9.104 11 ,5.103
16 81 20,2-102 873.104 109.103 58,6.104 14,5.103
18 90 23,4.102 1290.104 143.103 82,6.104 18,4.103
20 100 26,8.102 1840-104 184. 1 03 115.104 23,1.103
22 110 30,6.102 2550.104 232.103 157.104 28,6.103
Список литературы
Абрамов r.r., ПаJlчеJlКО Б.С Справочник молодоrо литейщика. М.: Бысш.
ШК., 1991. 319 с.
Анурьев Е.и. Справочник конструктора машиностроителя: Б 3 т. М.: Ma
шиностроение, 1992. Т. 1. 816 с. Т2. 784 с.
БИО2рафический словарь деятелей естествознания и техники: В 2 т. jПод ред.
А.А. Зворыкина. М.: Изд во БСЗ, 1958. Т. 1. 548 с. т.2. 467 с.
Детали машин: Атлас конструкций: Б 2 ч. jБ.А. Байков, В.Н. Боrачев,
А.В. Буланже и др.; Под ред. Д.Н. Решетова. М.: Машиностроение, 1992. Ч. 2.
296 с.
Заплетохин Е.А. Конструирование деталей механических устройств: Спра
ВоЧник. Л.: Машиностроение, Ленинrр. отд ние, 1990. 669 с.
Краткий справочник конструктора нестандартноrо оборудования: В 2 т.
/В.И. Бакуленко, В.А. Бондаренко, с.Н. Косоруков и др.; Под общ. ред.
В.И. Бакуленко. М.: Машиностроение, 1997. Т. 1. 543 с. т.2. 524 с.
МезеНИJl Н.А. Занимательное о железе. М.: МетaJUIурrия, 1972. 200 с.
Николаев ТА, Куркин с.А, Винокуров Е.А. Сварные-конструкции. Прочность
сварных соединений и деформации конструкций: Учеб. пособие. М.: Высш.
1111<., 1982. 272 с.
Орлов П.И. Основы конструирования: Справочн:о методическое пособие:
В 2 кн. jПод ред. П. Н. Усачева. М.: Машиностроение, 1988. Кн. 1. 560 с.
Кн. 2. 544 с.
Орловский Б. Шеренra великих инженеров строителей и rидростроителеи:
Оер. с польскоrо. Варшава: Наша Ксенrарня, 1980. 175 с.
Решетов д.И Детали машин: Учсб. для вузов. М.: Машиностроение, 1989.
496 с.
10 8640
289
Шаr 16. КОНСТРУИРОВАНИЕ ВАЛОВ, ПРУЖИ!l,
МУФТ И ТОРМОЗОВ. ВЫБОР СОЕДИНЕНИИ
СБОРОЧНЫХ ЕДИНИЦ
. Как рассчитать вал на статическую и усталостную прочность?
. Как рассчитать вал liO жесткость?
. Как оформить рабочий чертеж вала?
. Пусть на валу с противоположных е20 сторон установлены шкив peмeH
ной передачи и прямозубое колесо. Диски шкива и колеса вЫ2Нуты таким
образом, чтобы обод шкива и обод колеса были расположены иад опорами
вала. Какова будет эпюра ИЗ2ибающе20 момента от рабочих на2рУЗОК по
длине вала?
. Как рассчитать витую и тарельчатую пружины?
. Как рассчитать 2!lУХУЮ, компенсирующую жесткую и компенсирующую
упру2УЮ муфты?
. Как рассчитать предохранительную дисковую фрикционную муфту и
предохранительную муфту со срезным штифтом?
. Как рассчитать об20ННУЮ муфту?
. Как связаны реакции в опорах с пО2решностями располож:енuя пoвepXHO
стей и жесткостью подшипников при соединении валов «вал в вал» ?
. Как рассчитать реакции в опорах и реактивиой тя2е для навеСНО20 иc
полнения Moтop peдYKтopa?
. Какие конструктивные исполнения соединеuий сборочных единиц явля
ются более предпочтительными?
. Как рассчитать дисковый тормоз?
Ответы на эти вопросы и не только на них Вы найдете в 16 M
шаre.
В предыдущих шаrах изложены методы конструировани n
отдельности передач, опор, соединений и корпусных деталеи. а
данном шаrе будут рассмотрены валы, муфты и тормоза, что 3
вершит изучение комплекса деталей машин, а также некоторые
вопросы взаимодействия разных деталей в машине и позвоЛII'f
решать некоторые задачи оптимизации конструктивноrо иСIlОЛ
нения приводов.
290
16.1. Валы
16.1.1. Особенности конструкции
Вращающиеся детали машин устанавливают на валах или
осЯХ.
Валы детали, предназначенные как для передачи вращаю
rдero момента вдоль своей оси, так и для поддержания вращаю
щихся деталей. Оси отличаются от валов тем, что не передают
вращающеrо момента. Так как передача вращающеrо момента
связана с возникновением сил (в зацеплении, от натяжения pe
менной передачи и т.д.), то валы обычно наrpужаются не только
крутящим, но и изrибающими моментами.
Форма вала по длине зависит от действующих наrpузок, а
также от технолоrии ero сборки с дрyrими деталями. Изrибаю
щие моменты определяют прочность вала. Эпюры изrибающих
моментов по длине валов, как правило, имеют треyrольную или
трапецеидальную форму и обычно СХОдЯт к нулю по концам Ba
лов или под их опорами (опорные части валов и осей называют
цапфами или шейками). Поэтому для обеспечения приблизи
тельно равной прочности в разных поперечных сечениях вала
ero целесообразно делать ступенчатой формы, предусматривая
уменьшение диаметр на концах (рис. 16.1).
ФJJd9
Ф48 Н7/kб
А (у8еЛl1чено)
i&
ФSSН8jkб
ФSSkб
ф 55kб
ФSБН7/рБ
Рис. 16.1. Выходной вал редуктора
Ступенчатая форма вала облеrчает сборку, так как в этом
СJIучае каждая насаживаемая деталь может пройти по валу до
10*
291
своей посадочной поверхности свободно, без натяrа. В ПРОТI1В
ном случае было бы возможно повреждение поверхностей BClJIa
и ослабление посадок.
Диаметры посадочных поверхностей вала (под ступицы зуб
чатых колес, шкивов, звездочек и т.д.) выбирают из рядов HOp
мальных линейных размеров (см. приложение П.6.1 шаrа 6), ДI1а
метры цапф под подшипники качения из стандартноrо РЯДа
внутренних диаметров подшипников качения (см. приложения:
П.12.5 П.12.9 шаrа 12). Перепад диаметров ступеней определя
ется стандартными диаметрами посадочных поверхностей ПОД
ступицы и подшипники; необходимой высотой буртиков на валу,
достаточной для восприятия осевых сlШ при заданных радИусах
закруrления кромок и размерах фасок; условиями сборки.
Переходные участки вала, расположенные между двумя CTY
пенями разных диаметров, [де заплечики используются для упо
ра ПОДU1ИПНИКОВ качения или иных деталей, выполняют в боль
шинстве случаев двух типов. Первый тип характеризуется
канавкой для выхода шлифовальных KpyroB. Если шлифованию
подверrается лишь цилиндрическая поверхность, то применяют
цилиндрические канавки (см. А на рис. 16.1). Канавки на валах
диаметром 10...50 мм обычно ВЫПолняют шириной 3 мм и rлу
биной 0,25 мм, а на валах диаметром 50...100 мм шириной
5 мм и rлубиной 0,5 мм. Если подверrается шлифованию и ци
линдрическая поверхность, и торец вала, то применяют диаro
нальные канавки той же ширины и rлубины. Канавки повыша
ют стойкость llШифовальных KpyroB при обработке, но в то же
время вызывают значительную концентрацию напряжений,
снижающую прочность вала в зоне расположения переходНЫХ
участков. Переходные участки BToporo типа в целях снижения
концентрации напряжений должны иметь rалтель постоянноrо
радиуса. Радиус rалтели должен быть меньше радиуса закруrле
ния или радиальноrо размера фаски насаживаемой детали.
Если вал имеет несколько шпоночных пазов по длине, то во
избежание перестановки вала при фрезеровании пазов послед
ние целесообразно размещать с одной стороны вала. Перепад
диаметров ступеней вала при наличии призматических шпоНОК
желательно выбирать так, чтобы имелась воЗМожность разборкИ
машины без удаления шпонок из вала.
Участки выходных концов вала по поверхностям трениЯ с
контактными уплотнениями (манжетными, фетровыми И т.д.)
обычно закаливают во избежание износа. Эти поверхностИ час
то полируют, чтобы снизить Износ уплотнений. Для сниженИЯ
292
износа также закаливают шлицевые поверхности валов подвиж
Hыx шлицевых соединений коробок передач.
16.1.2. Материалы
Валы обычно изrотавливают из качественных yrлеродистых
ИЛИ леr"ированных сталей. Эти материалы обеспечивают ДOCTa
точную прочность И MorYT быть закалены для повышения изно
состойкости. Чаще применяют сталь 45 и сталь 40Х. Если необ
ходима более высокая твердость поверхности по сравнению с
твердостью, обеспечиваемой закалкой, то в качестве материала
берут малоуrлеродистую сталь, например 20 юrи 20Х, допускаю
щую цементацию поверхности вала.
16.1.3. Проектные расчеты
При предварительных проектных расчетах, коrда еще неиз
вестны расстояния по длине вала между точками приложения к
нему сил, а поэтому остаются неизвестными изrибающие MO
менты в ero опасных сечениях, средний диаметр вала d оценива
ют по формуле
d цJr 'С] ,
(16.1)
rдe Т крутящий момент на валу; ["С] допускаемое касатель
ное напряжение, которое принимают заниженным (чтобы обес
печить жесткость и прочность вала при ero наrpужении всем
Комплексом наrрузок) и равным 12...15 МПа для валов peДYK
торов и 20...30 МПа для трансмиссионных валов.
Диаметр ведомоrо вала каждой ступени цилиндрическоrо
ИЛИ червячноrо редуктора можно также ориентировочно опре
делять по формуле
d <= (0,35...0,4)a w ,
(16.2)
rДе a w межосевое расстояние соответствующей ступени.
16.1.4. Проверочные расчеты на прочность
еначала для рассматриваемоrо вала следует построить (см.
llrar 2) эпюры изrибающих моментов в двух ero взаимно перпен
ДИI<yлярных плоскостях и крутящеrо момента т
293
700
Пример 16.1. Построить эпюры
изrибающих и крутящеrо MOMeR10t
для промежуточноrо вала реДУКТОРа
(рис. 16.2), ВЫполненноrо по развеРliу_
той схеме (одна ступень редуктора рас-
положена за друrой), и ВЫчислить Зliа_
чения силовых факторов, наrружающuх
опасное сечение вала, если извеСТliо
что делительные диаметры раСПОложен
ных на валу прямозубой шестерни и КО-
созубоrо колеса соответственно равны
d w1 == 100 мм и d w2 == 200 мм, раССТОЯНие
между опорами / == 300 мм, а расстояния
шестерни и колеса относительно левой
и правой опор /1 == /2 == 100 мм. Силы в
зацеплении принять равными Еtl ==
== 14000 Н, FRl == 5100 Н, F't2 == 7000 Н
Р Ш == 2550 Н, Е А2 == 2500 Н. '
1. Для этоrо вала в примере 12.3 ша.
ra 12 были Вычислены rоризонтальная
Frr и вертикальная F rB составляющие
радиальной реакции в правой опоре,
значения которых составили РН ==
== 9333 Н, F rB == 833 Н. Знание реакций
позволяет построить эпюры изrибаю-
щих моментов в вертикальной Мх и ro-
ризонтальной Му плоскостях.
2. Крутящий момент, наrружаю-
щий вал, составляет т == 0,5F f1 d w1 =
== 0,5 . 14000.100 == 7 .105 Н. мм. Знание
крутящеrо момента также позволяет по-
строить ero эпюру.
3. Можно полаrать, что опасным
сечением вала будет сечение, располо-
женное под шестерней. В этом сечении
крутящий момент Т == 7 . 105 Н . ММ, а
суммарный и зrибающий момент
М = M; + М; = (338,з .103)2 + (1167.103)2 = 1214 .103 Н . мм.
т
, Рис. 16.2. Расчетная схема Проме
жуточноrо вала редуктора и эпюры
моментов (значения моментов даны
в ньютон метрах)
Если направление какой либо наrpузки неизвестно, рассчи-
тывают наиболее опасный случай наrpужения. Например, на
входном (рис. 16.3) и выходном валах редуктора возникает на-
rpузка радиальноrо направления от муфты, вызванная несооС-
ностью соединяемых муфтой валов. Направление этой наrpузКJ1
зависит от направления смещения валов, которое ПОЛУЧИТСЯ
при сборке привода, и следовательно, может быть любым. при
построении эпюр эпюру изrибающеrо момента от радиальноЙ
наrpузки на вал от муфты Мм строят отдельно, а затем при Bbr-
числении CYMMapHoro изrибающеrо момента в опасном'сечеН-III1
294
вала момент, создаваемый Ha
rpузкой от муфты, арифметиче
ски складывают с векторной
суммой моментов, действую
1дих в двух взаимно перпенди
кулярных плоскостях:
м == M; + м; + ММ' (16.3)
Физический смысл Форму
ЛЬ! заключается в том, что Heco
осность соединяемых !vIуфтой
валов предполаrается в направ
лении, совпадающем с плоско
СТЬЮ, В которой действует BeK
торная сумма моментов Мх и
Му
Если вал имеет несколько
опасных сечений, то вычисле
имя по приведенной формуле
про водят для каждоrо из них.
о
о
2 [м
D
D
а
Fм
It
l
Рис. 16.3. Расчетная схема BXoЩIOro
вала редуктора с шевронными коле
сами и эпюры моментов (значения
моментов даны D ньютон метрах)
Пример 16.2. Построить эпюры из
rибающих и крутящеrо моментов для
входноrо вала цилиндрическоrо OДHO
сryпенчатоrо реДуктора с шевронными
Колесами (см. рис. 16.3) и Вычислить
значения силовых факторов, наrpужающих опасное сечение вала, если окружная
и радиальная силы в зацеплении F't == 1000 Н, F R == 400 Н, расстояние между опо
рами / == 200 мм, консоль а == 100 мм. Радиальную силу неопределенноrо направ
Ления, приложенную на консоли и возникающую в упрyrокомпенсирующей
муфте вследствие несоосности валов редуктора и двиrателя, принять равной Ем ==
::: О,2Р окр , rдe Е окр окружная сила на диаметре расположения упрyrих элемен
тов муфты (п м == 100 мм); крутящий момент принять равным Т == 35 Н . мм.
1. Для TaKoro вала в примере 12.2 шаra 12 были вычислены rоризонтальные
и вертикальные радиальные реакции в первой. и второй опорах: Frr 1 == Е п2 ==
::: F't (2 == 500 Н, F rn1 == F rB2 == Ея j 2 == 200 Н, а также радиальные реакции, созда
ваемые силой от муфты Ем == 140 Н в первой и второй опорах: F rM1 == Ема j 1 ==
::::: 70 Н, F rM2 == Ем (а + 1 )jl == 210 Н.
Эти реакции позволяют построить эпюры изrибающих моментов в верти
I<альной Мх и rоризонтальной Му плоскостях, а также отдельно эпюру изrибаю
lЦero момента ММ от муФты силой неопределенноrо направления.
2. Знание крутящеrо момента позволяет ПОСТРОIffЬ ero эпюру.
3. Можно полаrать, что опасное сечение вала находится под шевронным KO
Лесом. В этом сечении крутящий момент T 35.103 Н . мм, а суммарн:ый изrи
бающий момент
295
м = M1 + М} + М м = (20 -103)2 + (50.103)2 + 7.103 = 60,8 .10 3 .Н . мм.
Пример 16.3. Пусть на валу с ПРОТИВоположных ero сторон устаНОВЛень
прямозубое зубчатое колесо (длина консоли а) и ШКиВ ременной передачи (д.ли
на консоли Ь). С цe ыo снижения Нор,
мальных напряжении в опасных сечени_
ях вала диски шкива и колеса вышyrыI
таким образом, что их ободья располо_
жены над опорами вала (рис. 16.4). На
зубчатое колесо и шкив действуют соот,
ветственно силы F't, F R И 2Fo. Будут ли
возникать в сечениях консольных час,
тей вала изrибающие моменты?
1. Отметим, что при построении
эпюр изrибающих моментов нельзя Пе
реносить силы, наrpужающие вал, по на-
правлению их действия. Такой перенос
разреШается только при составлении ус-
ловий равновесия внешних сил, дейст-
вующих на твердое тело (см. шаr 2), Но
не допустим при рассмотрении напря-
женноrо состояния внутри тела.
2. Вал вместе с зубчатым колесом и
ШКИВОМ образуют пространственно изо-
rнyryю раму. Поэтому эпюры изrибаю
щих и крутящих моментов будут иметь
вид, представленный на рис. 16.4. Зна
ние зна<IСНИЙ изrибающеrо и крутящеrо
моментов на консольных участках вала
необходимо для правильноrо выбора
диаметров этих участков вала.
Рис. 16.4. Расчетная схема BbIxok
Horo вала редуктора (на валу KOH
сольно расположены зубчатое коле
со и шкив клиноре:менной передачи)
т
в целях предупреждения пластических деформаций и разру
шений вала из за переrpузок, возникающих, например, при
пуске двиrателя, проводят проверку статической прочности.
Наибольшее эквивалентное напряжение в опасном сечении О'э
не должно превышать допускаемоrо [о], т. е.
[о] а э :::: -J о 2 + 3'r 2 , (16.4)
rде
М (16.5)
a::::
W из '
т (16.6)
'r ==. шах
W KP
296
в формулах (16.5), (16.6) о нормальное напряжение, BЫ
званное действием cYMMapHoro изrибающеrо момента М шах при
I1ереrрузке в опасном сечении вала с моментом сопротивления
Iiзrибу w из ; 't касательное напряжение, вызванное действием
к:рутящеrо момента Т шах при переrpузке в опасном сечении вала
с моментом сопротивления кручению W Kp '
Расчет на сопротивление усталости проводят соrласно YCTa
f{овленным циклам изменения напряжений G и '[. Обычно силы,
наrpужающие вал, не изменяют направлений cBoero действия.
Поэтому нормальные напряжения в любой точке, находящейся
f{a поверхности вращающеrося вала, считают изменяющимися
ПО симметричному знакопеременному циклу (рис. 16.5, а). И
наоборот, касательные напряжения, вызванные действием KPy
тящеrо момента, в любой точке постоянны при вращении вала.
Чтобы учесть, что при пуске и остановке привода касательные
напряжения изменяются от нуля до cBoero номинальноrо значе
ния, а затем опять до нуля (рис. 16.5, 6), при проведении расчетов
условно полаrают изменение касательноrо напряжения происхо
дящим по отнулевому (пульсирующему) циклу (см. штриховую
линию).
6
Ь а
i
о
о
t
t
о
о
Рис. 16.5. Изменение нормальных (а) И касательных (6) напряженпй
во времени в поперечном сечении вала
Запас прочности S по пределу выносливости рассматривае
Moro опасноrо сечения вала вычисляют по формуле (4.15) (см.
l11ar 4), предварительно определив по формулам (4.10) и (4.11)
заПас прочности Scr при изrибе по нормальным напряжениям и
запас прочности S'[ при кручении по касательным напряжени
ям. При расчете полаrают а а ::::: О, а т ::::: О, '[ а ::::: '[/2, 't m == 't/2, [де о
И t Вычисляют по формулам (16.5) и (16.6), подразумевая ПОД
М rnах и l1ax суммарный изrибающий Ми крутящий Тмоменты,
:ВОЗникающие в номинальном режиме работы ПрИI30да.
297
16.1.5. Проверочный расчет на жесткость
Так как валы должны обеспечивать нормальную работу Под-
шипников и деталей передач, то возникает необходимость в
обеспечении жесткости валов.
еуществуют эмпирические зависимости для определенИя
допустимоrо уrла наклона упруrой линии вала, соrласно КОТо-
рым в радиальном подшипнике из условия отсутствия защеМле-
ния шариков в результате перекоса колец шариковоrо ПОДШИfI
ника этот yrол составляет 8' (0,0024 рад), в роликовом подшип
нике с цилиндрическими роликами из условия paBHoMepHoro
распределения давления по длине роликов 2' (0,0006 рад), а
под зубчатыми колесами из условия оrpаничения концентрации
наrрузки по длине зубьев 0,001 рад.
Условие обеспечения жесткости имеет вид
[<р] <р,
(16.7)
[де <р, [<р] действительный и допустимый yrлы пере коса COOT
ветственно.
Действительный уrол перекоса в различных сечениях вала
можно вычислить по формулам, приведенным в приложении
П.5.З шаrа 5.
Пример 16.4. Для вала, paccMoтpeHHoro в примере 16.2, определить уroл Ha
клона ero упрyrой линии в левой опоре и сопоставить с допустимым. Диаметр
вала принять постоянным и равным d == 50 мм, опоры вала радиальные шарИ
ковые подшипники, материал вала сталь (Е == 21 . 104 МПа).
1. По формуле, приведенной в приложении П.5.3 шаra 5 и связывающей
yrол наклона упрyrой линии балки в левой опоре с наrpужающей балку cocpeдo
точенной силой, Вычисляем составляющие этоrо yrла для левой опоры вала Б
вертикальной плоскости от наrружения силами Р Ю и Р т и В roризонтальной
плоскости от наrружения силами F'tl и 2:
FRlI2 l r (z 11) (Z /1)3 J l
1 ,3
<РВЮ = 6Е/ =
5100. 3002. [ (300 100) (300 100)3 ]
300 3003
0,00044 рад;
6. 21.104.30,66.104
FR2'2 [ 'i J 2550.3002 . ( 100 100 3 ]
1 1 300 3003
<РвЯl = 0,000176 рад;
6Е/ 6.21 .104, 30,66.104
298
F [ 2r (Z [1) (l /1)3 ]
111 L [ [3
tprtl = 6Е/
14000. 3002. [ (300 100) (300 100)3 ]
300 3003
= 0,00121 рад;
6. 21 -104, 30,66.104
F. 12 [ 12 1; J
t2 [ [3
tprt2 = 6Е/
7000.3002 . ( 100 1003 J
300 3003
= 0,000483 рад,
6.21.104. 30,66.104
1td 4 314.504
rде 1 осевой момент инерции поперечноrо сечения вала, / = 64 = ' 64
= 30,66.104 мм 4 .
2. По формуле, приведенной в приложении П.5.3 и связывающей yrол Ha
клона упрyrой линии балки в левой опоре с наrружающим балку изrn:бающим
моментом, вычисляем yrол <Рм:
М [ [ 2 6[1 + 3/12 J 250 ' 103 . 300 . ( 2 6 . 100 + 3. 1002 J
1 [2 300 3002
q> = 0,0000647 рад,
м 6Е/ 6.21.104.30,66.104
rдe M изrибающий момент, М== F A2 0,5d w2 == 2500.0,5.200 == 250 .103 Н 'мм.
3. С учетом напрамений отдельных составляющих вычисляем суммарный
yrол наклона <РЕ :
<РЕ = (tpBRl <РвЮ + <рм)2 + (tprtl + tprt2)2 =
= (0,00044 0,000176 + 0,0000647)2 + (0,00121 + 0,00048з)2 = 0,00172 рад.
Учитьmая, что для радиальнorо шариковоrо подшипника допустимый yrол
перекоса ero колец составляет [<р] == 0,0024 рад, считаем жесткость вала дocтa
Точной.
16.2. Пр ужины
16.2.1. Витые пружины растяжения сжатия
Наибольшее распространение вследствие высокой техноло
rичности и прочности получили витые пружины сжатия из
l<руrлой проволоки. Пружины растяжения используют меньше,
299
так как для них необходимы прицепы в виде oTorHYТbIx витков,
снижающих прочность пружины.
JJ np
в любом сечении ПРуЖиIf
растяжения сжатия деЙСТВует
(рис. 16.6) крутящий момент Т:::::.
=:: 0,5FD пр , rде F осевая сила,
D пр средний диаметр пружи
ны. Поэтому В качестве аналоrа
пружины можно рассматривать
круrлый стержень (см. рис. 5.5
шаrа 5) диаметром d пр ' [де d пр
диаметр проволоки пружины, 11
длиной! =:: iпD пр , [де i число
ее рабочих витков. В пружине,
как и в стержне, под действием
крутящеrо момента возникают
касательные напряжения, зна
чения которых несколько выше
Поэтому условие прочности ПРУЖИНЫ
Рис. 16.6. Витая пружина
из за кривизны ВИТКоВ.
имеет вид
тk О,5Р Dпрk
[-rJ ::::: 3 '
W p 0,2d пр
(16.8)
rде k =:: 1 + 1,45d пр / D пр коэффициент, учитывающий кривиз
ну витков; полярный момент сопротивления сечения витка.
Допускаемое касатt(льное напряжение [-r] для пружины в зави
симости от ее материала составляет 700...900 МПа для XpOMO
ванадиевой проволоки, 650...800 МПа для уrлеродистой ПрО
волоки, закаленной в масле, и 750...400 МПа для уrлероди
стой холоднотянутой проволоки (большее значение дЛя MeHЬ
ших диаметров).
Деформация ПРУЖИНЫ /, как и дуrа перемещения конца абсо
лютно жесткой балки длиной О,5п пр , закрепленной на круrлом
стержне длиной 1 =:: iпD пр , при кручении последнеrо. (см. рис.5.5
шаrа 5) составляет
О,5п пр т!
f ::::: 0,5D пр q> :::::
Glp
8FiD;'p
4 '
Gd пр
( 16.9)
rде q> уrол закручивания стержня, рад; G =:: 0,5Е( 1 + J.l) MO
дуль упруrости при сдвиrе (J.l коэффициент Пуассона); Ip
полярный момент инерции сечения витка.
300
16.2.2. Тарельчатые пружины
Тарельчатые пружины (рис. 16.7) обычно штампуют из лис
ТОБОЙ стали 60е2А. Их подбирают по таблицам (rOeT 3057 90)
иЛИ рассчитывают по следующим формулам (при статическом
lIаrpужении) :
4Еf[Uз Л(f з ; } + sз]
p
(1 J.l 2 )Уп 2
4Ef[( ; fз)С\ C2S]
(}:::::
(1 J.l2)YD 2
(16.10)
(16.11)
rде 13 максимально возможная деформация пружины, мм;
[ деформация пружины под наrрузкой, мм (обычно 1/1з ""
z 0,3.. .0,4); s, D толщина и наружный диаметр пружины, мм;
С l , С 2 коэффициенты, зависящие от отношения А == п/п!
(rде п 1 внутренний диаметр пружины),
у 6[(А l)Y
пlnA
(16.12)
6[ (А 1) 1]
С l lnA (16.13)
пlnA
С 3(А 1) (16.14)
2 п lnA .
Для пружин из стали 60е2А допускаемое напряжение сжа
ТИЯ составляет 2940 МПа.
J)
Рис. 16.7. Тарельчатая пружина
301
16.3. Соединения сборочных единиц
16.3.1. Соединения муфтами
Классификация муфт
Механические муфты, применяемые для соединения валОВ
бывают неуправляемые, управляемые и самоуправляемые. '
Неynравляемые муфты разделяют на rлухие, компенсирую.
щие жесткие и компенсирующие упруrие. fлухие муфты требу.
ют строrой соосности валов. Компенсирующие жесткие МУфты
MorYT компенсировать несоосность и перекос соединяемых Ба.
лов, а также их продольное смещение. Компенсирующие упру
rие муфты вдобавок к этому способны снижать ударные пере.
rpузки и устранять резонансные крутильные колебания системы
привода.
При конструировании муфт их работоспособность проверя.
ют расчетами при передаче ими крутящеrо момента кт, rде К
коэффициент динамичности наrpузки; Т номинальный кру.
тящий момент. Для машин снебольшими разrоняемыми Macca
ми К == 1...1,5. Для машин со средними массами и переменной
наrpузкой (поршневые компрессоры, строrальные станки,
мельницы, машины с приводом от двиrателей BHYTpeHHero cro.
рани я) К == 1,5...2. Для машин с большими массами и yдapHЫ
ми наrрузками (молоты, прокатные станы, шаровые мельни
цы) К == 2...3 и более.
Управляемые муфты бывают как фрикционными, так и кy
лачковыми или зубчатыми. Они позволяют соединять и разъе.
динять валы с помощью механизма управления.
Самоуправляемые муфты предназначены для автоматическо
ro разъединения валов в случаях, коrда параметры работы ма.
шины становятся недопустимыми. Их разделяют на предохра
нительные муфты (самоуправляемые по величине момента),
муфты свободноrо хода (самоуправляемые по Iiаправлению Bpa
щения) и центробежные муфты (самоуправляемые по частоте
вращения).
Ниже рассмотрены некоторые конструктивные исполненИЯ
муфт.
Fлухая втулочная муфта
fлухие муфты бывают втулочные и фланцевые. РассмотрИ:М
особенности конструкции и расчета одноrо из видов втулочной
муфты. Эта муфта (рис. 16.8) не способна компенсировать HecO
302
осность И перекос валов, но отличается компактностью и про
стотой изrотовления. Основные области ее применения длин
J{ые валопроводы, которые из соображений Возможности их
йзrотовления и транспортиров
1<И сделаны составными, а TaK
же соединения валов при CTec
венных радиальных rабаритных
размерах. В связи с тем, что эти
муфты передают кроме крутя
щеrо момента изrибающий MO
мент и перерезывающую силу, Рис. 16.8. Втулочная муфта
ИХ следует располаrать возмож
J{o ближе к опорам или к поперечным сечениям вала, в которых
эпюра изrибающих моментов переходит через нуль.
При конструировании этой муфты необходим расчет на
прочность шпоночноrо соединения при передаче им крутящеrо
момента кт
Компенсирующая жесткая кулачково дисковая муфта
Наибольшее распространение среди компенсирующих жест
ких муфт получили кулачково дисковая, зубчатая и KpeCTO
во шарнирная (шарнир [ука) муфты. Рассмотрим особенности
конструкции, компенсирующую способность и расчет кулачко
во дисковой муфты.
Муфта состоит (рис. 16.9) из двух полумуфт 1, 2 и промежу
точноrо диска З. На полумуфтах предусмотрено по одному диа
етральному пазу, а на диске по одному диаметральному вы
ступу с каждой стороны, которые расположены крестообразно,
т. е. под уrлом 900 один к друrому. Пазы образуют направляю
Щие для выступов, обеспечивая передачу крутящеrо момента и
допуская вместе с тем возможность относительных радиальных
смещений полумуфт. Муфта способна компенсировать радиаль
Ное смещение валов, равное 0,04 их диаметров, и уrлы пере коса
ДО 30'.
Муфты для валов диаметрами 16...150 мм стандартизованы
(rOCT 20720 81 *). Они допускают частоты вращения до
250 мин l.
Муфты вследствие возникновения сил трения на их рабочих
Поверхностях передают на валы значительныIe радиальные силы
11 работают с износом. Чтобы оrраничить износ, рекомендуется
lIe реже одноrо раза в смену добавлять в зону трения пластич
l:Iую смазку с противозадирными присадками.
303
!
А
2
J
А
т
Рис. 16.9. Жесткая кулачково дисковая муфта
Размеры выступов муфты выбирают из условия обеспечения
износостойкости:
[О]см кт ,
W из
(16.15)
rде [О]см допускаемое напряжение смятия в контакте' W
, из
момент сопротивления изrибу рабочей поверхности выступов
h(D 3 d 3)
относительно оси муфты, W == 1 . h Р абочая высота
из 6п'
выступов; п, d l наружный и внутренний диаметры кольца.
Если рабочие поверхности деталей муфты изrотовленЫ из
стали, закаленной до высокой твердости, то [а]см принимают
равным 25 МПа.
Компенсирующая упРУ2ая втулочно пальцевая муфта
Из Bcero мноrообразия компенсирующих упруrих муфт pac
смотрим конструкцию, компенсирующую способность и расчет
304
ynруrой втулочно пальцевой муфты. В ЭТОЙ муфте крутящий
момент передается пальцами и сидящими на них резиновыми
элементами, выполненны
МИ в форме [о фриро ван
ных втулок (рис. 16.10).
I1альцы закреплены свои
МИ коническими концами
:в одной полумуфте и BXO
дят В цилиндрические OT
версТИЯ дрyrой полумуф"
ТЫ. В диапазоне диаметров
вала d == 10...160 мм муфты
стандартизованы (rOeT
21424 75*).
Они допускают ради
альные смещения валов не
более 0,1 мм на каждые
100 мм наружно ro диамет
ра D муфты, rде D (3,5. ..4)d; уrловой перекос валов до 10 и oce
вые смещения валов в пределах oceBoro монтажноrо зазора,
paBHoro 1...5 мм.
При радиальном смещении валов радиальная наrрузка
муфты на них составляет около 0,2 суммарной окружной силы
на ее пальцах.
Муфту рассчитывают по напряжениям смятия, возникаю
щим на поверхност:и контакта пальца с резиновой втулкой:
l
])ер
Рис. 16.10. Упруrая втулочно пальцевая
муфта
> 2КТ
[о ]СМ D d z'
cpZ п
(16.16)
rде пср диаметр муфты, на котором расположены пальцы;
Z количество пальцев; d п диаметр пальца под упруrим эле
ментом; Z длина упрyrоrо элемента.
Допускаемое напряжение смятия для резины составляет
2...4 МПа.
Предохранитe[lьная дисковая фрикционная муфта
Дисковые фрикционные муфты (рис. 16.11) применяют для
защиты двиrателя или привода в целом при частых KpaTKOBpe
Менных переrpузках, возникающих на приводимом механизме.
После переrрузки муфта автоматически восстанавливает свою
работоспособность. Необходимо обеспечение полной COOCHO
305
сти обеих пол у м уфт В а ...,
. Д ннои конструкции это достиrнуто
мещением полумуфт на одном валу. раз
в-
Рис. 16.11. Дисковая фрикционная муфта
Муфту обычно выполняют мноrодисковой Наибольшее
распространение находит такое конструктивно'е исполнение
:::ты, в котором диски трутся один о друrой без смазки. В
м случае пару трения целесообразно изrотавливать из разно
родных несхватывающихся между собой материалов: закален
ная..., сталь металлокерамика, закаленная сталь фрикцион
ныи материал на асбестовой основе, закаленная сталь
ретинакс. Значения допускаемоrо давления [р] и коэффициента
трения f перечисленных пар трения приведеН I ниже:
[р], МПа f
Закаленная сталь металлокерамика.
Закаленная сталь фрикционный
материал на асбестовой основе. . .
Закаленная стал:ь ретинакс. . . . .
0,8...1,2
0,20
0,3...0,4 0,30
1,0...1,5 0,25
Силу нажатия на диски определяют, задавшись материалоМ
пары трен.. IЯ, а также наружным и внутренним диаметрами по
верхностеи трения:
F ::; [р]пп ср (п н п в ),
(J6J 7)
rде D == О 5 ( п + D ) ...,
ср , н в среднии диаметр поверхностей трения.
306
Силу нажатия на диски обычно создают пружиной. Зная си
ЛУ F, по формулам (16.8) или (16.10), (16.11) вычисляют диамет"
pы D пр ' d пр или п, п 1 соответственно витой и тарельчатой пру..
:ясины. Чтобы обеспечить точность срабатывания по значению
момента переrpузки, муфта должна обеспечивать реrулировку
силы нажатия пружины.
ео временем сила нажатия уменьшается из..за износа дис..
{(ов. Для увеличения времени работы муфты без реryлировки
повышают податливость пружины за счет увеличения ее длины.
расчет необходимоrо числа витков витой пружины выполняют
по формуле (16.9). Для тарельчатых пружин повышение подат
ливости обеспечивают установкой нескольких таких пружин
последовательно одна за друrой.
Во избежание случайных выключений предельный момент
муфты назначают равным
Т пр == 1,25Т та Х' (16.18)
rде Т тах максимальный (с учетом переrpузки при пуске) пере..
даваемый муфтой момент.
Необходимое число пар трения i при заданном предельном
моменте муфты Т пр и известной силе F нажатия на диски опре
деляют по формуле
. Т пр
1=
О,5п ср fF
(16.19)
При срабатывании муфты одна из полумуфт будет вращать..
ея относительно друrой. Чтобы обеспечить возможность TaKoro
вращения, в муфте следует предусматривать наличие подшип
ника (см. размер d с посадкой Н7 jd6 на рис. 16.11).
Трущиеся диски передают момент с одной полумуфты на
дрyrую IIШицевыми соединениями. Так как диски при срабаты"
вании муфты перемещаются по шлицам, то допускаемые напря
жения при расчете шлицевых соединений надо брать уменьшен
ными. Шлицы, расположенные на меньшем диаметре, будут
более нarруженными. Чтобы поднять несушую способность
Этоrо шлицевоrо соединения, ero лучше выполнять с эвольвент..
НЫми шлицами. Рабочей длиной этоrо шлицевоrо соединения
Является сумма толщин дисков, имеющих внутренние зубья.
При конструировании следует предусматривать замыкание
осевых сил внутри муфты. В противном случае вал и ero опоры
будут наrpужены осевыМИ силами.
307
Предохранительная муфта со срезным штифтом
Муфту этоrо типа применяют при редких переrрузках. He
достатком муфты является необходимость выключения привода
после срабатывания муфты для замены срезанноrо штифта.
Штифты обычно выполняют из среднеyrлеродистой улуч
шенной стали. Если заrотовкой штифта служит калиброванный
пруток, то штифт снабжают кольцевой канавкой, раСПОложен
ной в месте ero предполаrаемоrо среза. Диаметр сечения dшТ' ПО
которому будет проходить срез, определяют по формуле
4Т пр k
d ==
lШ 1tZ'tBR'
( 16.20)
rде k коэффициент неравномерности распределения наrрузки
по штифтам, равный 1 при z == 1 и 1,2...1,3 при z == 2...3; z чис
ло штифтов; R радиус окружности расположения сечений
среза. Предел прочности штифта на срез 't B == са в , тде для rлад
ких штифтов с == 0,7...0,8, а для штифтов с кольцевой канавкой
с == 0,9...1. Вычисленный по формуле (16.20) диаметр d шт не OK
руrляют. Штифты устанавливают во втулки, закаленные дО BЫ
сокой твердости во избежание их повреждений при срезании
штифтов. Штифты в муфте следует располаrать так, чтобы бы
ло удобно их заменять после повреждения.
Как уже отмечалось, необходимо обеспечение полной cooc
ности полумуфт предохранительной муфты. еоосность может
быть реализована добавлением к предохранительной муфте
компенсирующей, т. е. применением комбинированной Предо
хранительной муфты (рис. 16.12).
Комбинированная упРУ20предохранительная муфта
На рис. 16.12 пред ставлена комбинированная упруrопредо
хранительная муфта. Ее компеНсирующая часть выполнена в
виде комплекта из <Ст упруrих стержней диаметром d CT и длиной
L CT ' расположенных на диаметре DCT етержни предназначены
для компенсации радиальных, yrловых и осевых смещений co
единяемых муфтой валов. Расчет необходимоrо для передачи
вращающеrо момента Т пр числа упруrих стержней проводят ПО
формуле
т пр L CT
Z СТ ;?: 3 ' (16.21)
0,1 [aJDcтd cT
rде [а J допускаемое напряжение для материала стержня.
308
d шт
,.....
[ СТ
о:::::
""о
::r::
...,g.
l
t л
Рис. 16.12. Комбинированная упруroпредохранительная муфта
со срезным штифтом
пол ена из следующих соображений. Счи ают,
что r;::ь с д yx сторон заделан. При передач':, муФтои и
дна за д елка смещается относительно друrои, что пр
Мента о б й линии на поло
дит к изrибу стержня с точкои переrи а упруro. ид
Бине ero длины. Поэтому условие прочности стержня имеет в
[ т пр ] 0,5LcT
М 0,5FL cT == 0,5D cт z CT
[uJ;?: == d 3
W из W из 0,1 ст
rде М и W из изrибающий момент в заделке стержня .и ; M
Сопротивления поперечноrо сечения стержня изrибу,
Р уЖ ная сила приходящаяся на один стержень. Ф
, уж ат С р езные шти ты с
П р едохранительными элементами сл R
d Р асположенные на радиусе .
диаметром опасноrо сечения ШТ'
309
Диаметр штифта d шт , по которому будет проходить срез, ОПре
деляют по формуле (16.20).
Об20нные муфты
Обrонные муфты передают момент в одном направлении 11
допускают свободное относительное вращение в обратном. ИХ
также называют муфтами свободноrо хода. Они бывают Храпо
выми и фРИКЦИОННЫМИ. Фрикционные муфты Moryт быть Роли
ковыми, С распорными эксцентриками и пружинными. муфтыI
. С распорными эксцентриками в связи с их более сложным Изrо
товлением и расчетом мы не рассматриваем, хотя они имеют бо
лее высокую несущую способность, чем роликовые.
Роликовая обrонная муфта (рис. 16.13, а) состоит из звездоч
ки 1, роликов 2 и обоймы З. Диаметр рабочей поверхности
обоймы D основной rеометрический параметр муфты; диа
метр d и длина 1 роликов обычно составляют d п/8; 1 :::
== (1,5...2,0)d.
а
о
Рис. 16.13. РОJlliковая обrонная муфта
Детали муфты должны иметь повышенную поверхностную
твердость во избежание ВОЗникновения лунок на их поверхно
сти. Поэтому обычно детали делают из шарикоподшипниковой
стали ШХI5, цементуемых или высокоyrлеродистых инстру
ментальных сталей.
Звездочка и обойма образуют сужающиеся в одном направ
лении полости, в которых располаrаются ролики. еужение xa
рактеризуется уrлом а. Чтобы Не происходило выдавливание
ролика в более широкую полость, необходимо выполнение yc
ловия 0,5а Р, [де p уrол трения. Поэтому обычно а 70. Муф
ты изrотавливают, как правило, с числом роликов Z == 3, а при
310
Х D С Z == 5 Но можно П р именять и увеличенное число
больши .
роликов. Каждый ролик отжимается пружинками в суживаю..
J1IYIOся часть полости.
Если обойма ведущая, то муфта, изображенная на рис. 16.13, а,
б дет передавать момент при вращении против часовои стрел
Если же ведущей является звездочка, то передача момента
y eT происходить при вращении по часовой стрелке. Муфта
обеспечивает почти полное отсутствие мертвых ходов и практи
чески бесшумна в работе.
Муфта передает вращающий момент Т путем создания MO
мента от нормальных сил F, возникающих в контакте роликов с
обоймой на мече а;:::: О,5п sin(a/2) (рис. 16.13, б).
Если'воспользоваться формулой [ерца Д)IЯ линеиноrо KOHтaк
[ ] > О 418 FE rдe R O,5d приведенный радиус кривизны
та v Н , RZ '
в контакте ролика со звездочкой, и под ставить в нее значение
F == , то при допускаемом контактном напряжении [а]н ==
az
== 1500 МПа, что характерно
для сталей при их твердости
не ниже 60 НRС э , момент Т,
который может передать
муфта, составит
т == O,936IdzD,
(16.22)
2
J
rде T в Н'мм; 1, d, п в мм.
Пр ужинная обrOlшая муф
Та (рис. 16.14) передает рабо
чий момент Т от вала 1 к си
дящей на нем свободно дeTa
ЛИ 2 с помощью пружин 3
Рис. 16.14. Пружинная обrонная муфта
(одной ИЛИ двух) при враще
нии вала против часовой == е d
стрелки. Пружины обжимают вал с натяrом 8 d B d o , [Д в
диаметр вала, d o внутренний диаметр пружины в свободном
состоянии. Момент Т рассчитывают по формуле
т == Toze 21t if, (16.23)
т 2EI8 момен т холостоrо хода передаваемый при Bpa
rДе .1. О ,
d 2
в
Щении вала в обратном направлении; Е модуль упруrости пру
311
жины; 1 момент инерции поперечноrо сечения пружины; i......
ЧИСЛО ВИтков пружины; f коэффициент трения между ПРУЖI1
ной и валом; Z ЧИСЛО пружин.
16.3.2. Соединения «вал в вал»
Как известно, если число опор вала больше двух, то в опорах
MorYT возникнуть реакции, вызванные поrрешностями изrотов
ления. Соединение «вал В вал» эквивалентно соединению валОВ
rлухой муфтой, а rлухие муфты, как ранее отмечалось, требуют
строrой соосности валов, осуществить которую сложно. Поэто
му опоры валов, расположенные вблизи соединения «вал В вал»,
часто выходят из строя.
Рассмотрим взаимосвязь реакций в опорах, возникающих
при монтаже тaKoro соединения, с поrpешностями расположе
ния поверхностей деталей. Задачу будем решать в предположе
нии предельноrо сочетания допусков и зазоров в подШипниках.
Одну сборочную единицу условно назовем рабочим ортном,
дрyrую двиrателем, хотя изложенное ниже справедливо для co
единения «вал В вал>} и друrих сборочных единиц (например, pe
дуктора и приводноrо вала или двиraтеля и привода подач станка).
На рис. 16.15 изображены соединенные вместе рабочий op
raH и двиraтель с наружными диаметрами фланца D ф и корпуса
п к двиraтеля, а также детали рабочеrо opraHa и двиrателя с Ha
несенными допусками расположения соосности, перпенди
кулярности и радиальноrо биения (последняя буква в обозначе
нии допуска ДЮI деталей рабочеrо opraHa R, а для деталей дви
rателя п):
SKR, SKD допуски соосности отверстия в выходном конце
вала рабочеrо opraHa относительно оси АБ и выходноrо конца
вала двиrателя относительно оси Br;
SFR, SFD допуски соосности расточки во фланце рабочеrо
opraHa относительно оси ДЕ и центрирующеrо пояска двиrателя
относительно базы Ж;
TFR, трп, TSD, тп допуски перпендикулярности фланца
рабочеrо opraHa относительно оси ДЕ, фланца двиrателя OTHO
сительно базы Ж, фланца подшипниковоrо щита двиraтеля OT
носительно базы Ж, фланца корпуса двиrателя относительно
оси ЗИ;
SWR1, SWR2, SWD1, SWD2, SND1, SND2 допуски cooc
ности посадочных поверхностей под подшипники первой и BTO
рой опор рабочеrо opraHa относительно оси АБ и двиrателя OT
Носительно оси Br, а также центрирующеro пояска фланца
подшипниковоrо щита относительно базы Ж и центрирующеr о
312
I10яска заднеrо подшипниковоrо щита двиrателя относительно
базЫ К (на чертеже индексы 1 и 2 в обозначении допусков не
I1роставлены для экономии места);
<&
Q
Q
жения поверхностей
Рис.16.15. Сборочный чертеж и допуски располо
рабочеrо opraHa и двиrателя
313
SPR1, SPNR1, SPR2, SPNR2, SPDl, SPND1, SPD2, SPND2.....
радиальные биения дорожек качения BHYTpeHHero и наРУЖНоrо
колец подшипников первой и второй опор рабочеrо орrаяа l:I:
двиrателя (на чертеже индексы 1 и 2 в обозначении допусков Не
проставлены дЛя экономии места).
Указанные допуски расположения, а также радиальНые за
зоры (точнее их инималь ные размеры) J p l' J д l' J p 2, J д 2 в под
шипниках первои и второи опор рабочеrо optaHa и двиrатеЛя
позволяют оценить MOfl
'о тажное смещение ()
к
осеи валов, монтажный
пере кос 'У осей этих Ba
лов и монтажные CMe
lp lд щения Дрl' Др2' Ддl, Д 2
.... д
о первои и второи опор
Д] рабочеrо opraHa и двиrа
F:o.z теля (рис. 16.16, а). При
задании на рабочих черте
жах деталей допусков co
о осности В диаметральном
выражении формулы для
Рис. 16.16. Упруrие ЛИlШИ валОВ рабочеrо вычисления монтажных
opraHa И ДБиrателя: смещений и переКОСОБ
о валы не соединены; б валы соединены ИМеют следующий вид:
Ок == 0,5(SKR + SKD + SFD + SFR);
tg'Y == TFR + трп + TSD + тп .
D п'
Ф к
(16.24)
( 16.25)
Др! == 0,5(SWR1 + SPRl + SPNR1) Jpl;
Др2 == 0,5(SWR2 + SPR2 + SPNR2) J p 2;
Ддl == 0,5(SWDl + SPDl + SPNDl + SND1 ) J . .
дl,
Дд2 == 0,5(SWD2 + SPD2 + SPND2 + SND2 ) J .
д2'
(16.26)
(16.27)
(16.28)
(16.29)
Обозначим расстояния (см. рис. 16.15 и 16.16, а) между оПО
рами Р l , Р 2 через 'р; между опорами Дl' Д2 через lд; между оПО
рами Рl, Д1 через 'рд; от опоры Р l до фланца двиrателя через 'ФР'
314
'fоrда упруrие смещения и р 1, и р 2 опор Рl' Р2 относительно oc ,
I1роходящей через друrие опоры Дl, Д2' можно найти из reoMeT
рических соображений (рис. 16.16, 6):
[(ДД1 ОЕдl) + (д д2 ОРд2)] 1 рд
Ирl == ОК + (Ддl ОРдl) +
lд
(16.30)
( kKM J ) .
'фр tg 'у + (Llpl о Ер1 '
[(ддl Ордl) + (Дд2 ОРд2)]ирд + /р)
И р 2 = ОК + (Дд1 Ордl) +
,д
(16.31)
(lфр + lр{ щ'У kK[M J (t. p 2 1) Рр2),
rде ОРр 1, ОРр 2, ОРдl, ОРд2 деформации первой и второй опор
рабочеrо opraHa и двиrателя; k K коэффициент контактной по
датливости плоскоrо стыка резьбовоrо соединения фланцев pa
бочеrо opraHa и двиrателя (если поверхности получены фрезе
рованием и напряжения затяжки в стыке составляют около
2 МПа, то k K z 2,0 . 10 3 мм 3 jH, см. шаr 13); М == (1 х) х
х [Р дl (Zрд 'фр) F д2 (Zрд 'фр + lд)] опрокидывающий момент,
наrpужающий стык; Х :=:: 0,25 коэффициент основной наrpуз
п(п 4 п 4 )
ки; J == Ф цф момент инерции стыка, [де D цФ диа
64
меТр центрирующеrо буртика фланца двиrателя (см. рис. 16.15).
Каждая Ьр из деформаций 0ppl' ЬР р 2' Ьрдl' ОЕд2 складыва
ется из упрyrоrо сближения Ь у тел каченИЯ с кольцами подшип
Ников и двух контактных деформаций в посадочных местах
виутреннеrо кольца подшипника на вал и наружноrо кольца
подшипника в корпус, в сумме составляющих ь к :
Ьр== 8у + Ок,
(16.32)
Значения Ор, Ь у и ОК зависят от внутренних диаметров d p1 ,
d дl , d p2 , d д2 ' ширин В рl , В д1 ' ВР2' В д2 , используемых в опорах
подшипников, а также радиальных наrpузок F p1 ' F д1 ' Р р2 , Р д2 на
Опоры.
315
Упрyrие сближения Оу' мм, тел качения с кольцами в зав
симости ф от типа и серии подшипников вычисляют по эмпи р l1
ческим ормулам, приведенным ниже: I:I
Шариковый:
радиальный .
б V ( Е ) 2 о, 7 O,O O2d
у 10 10 00
Ш
Оу = з F 0,7 О,ООи
(1,5;)2 (10) 1000
радиально упорный 6100 .
Роликовый:
радиальный 2100
. . . . . . . . . . . . . . . . . . . . Оу = 12 .10 5 !...
d
. . . . . . . . . . . . . . . о = 4 5 . 1O 5 F
у' d
О = 7 .10 5;0,8 F
у d
о = 8 .10 5;0,8 F
у d
. Оу = 6 . 10 5 ;0,8 !..
d
Зд сь Оу в мм; F наrpузка на подшипник, Н; d вн
реннии диаметр подшипника, мм; i число рядов тел качени;:Тв
опоре.
Контактную деформацию Ок в посадочных местах колец
подшипников на вал и в корпус оценивают по формуле
О = kKF
к idB'
иrольчатый 4800 .
Конический 7100
конический 7200
конический 7500
(16.33)
тде k коэф ф ицие v
1 75 . 10 3 3. нт контактно и податливости, равный
, П мм /Н, В ширина ПОДШипника.
имем ДЛЯ расчетной схемы четырехопорноrо вала приве
деннои на рис. 16.16, б, диаметр вала равным d на длин 1 и l
и диаметр d на Длине 1 Д v Р рд
В Д Д' ля та ко и схемы наиденная метоДОМ
ерещаrина связь смещений и 1 == f1 (Е Р ) и == f' (Е F. )
Р Р р 1 pl' р2, р2 J2 pl, р2
опор 1, 2 относительно оси, проходящей че р ез опо р ы Д Д с
реакциями F F 1, 2'
рl, р2 в опорах Рl' Р2 ИМеет вид
и р l == Р рl 811 Р р2 812;
(16.34)
и р 2 == Fp1812 Р р2 О 22 ,
(16.35)
316
[ 2l д 21 дZ д J 32
rд еО ll = + ;
d 4 d 4 3лЕ
р д
[ 31 д(Zр +О,66Zрд) 2l рд l д (Zр +lрд) J 32 .
012 4 + 4 ,
d d E
р д
[ 2(zp + lрд)3 2(lp + 'рд)2 Z д J 32
822 4 + 4 .
d d 3лЕ
р д
Два уравнения совместности деформаций (16.34), (16.35)
MorYT быть дополнены двумя уравнениями равновесия. Ими
MorYT быть, например, условия ЕМ д2 == О и ЕМ дl == О, из которых
следует
Р дl
Р р1 и рд + lд) р р2 ир + Zрд + Zд) .
lд
(16.36)
F рl 1 рд Р р2 (/р + lрд)
F д2 = Z
Д
(16.37)
Полученная система уравнений (16.34) (16.37) при подста
новке в нее выражений (16.30), (16.31) позволяет вычислить
неизвестные силы Р рl , Р р2 , Р дl ' Р д2 '
Пример 16.5. Сосдинение валов рабочеrо opraHa и двиrателя характеризует
ся следующими размерами. Расстояние между опорами вала рабочеrо opraHa /р == .
== 300 мм, диаметр вала рабочеrо opraHa под первый подшипник d p . == 50 мм,
под второй подшипник d p 2 == 40 мм. Диаметр выходноrо конца вала двиrателя
dкд == 28 мм, диаметр центрирующеrо буртика фланца двиrателя D цф == 180 мм,
диаметр фланца двиrателя D ф == 250 мм, расстояние между опорами двиraтеля lд ==
== 250 мм, диаметр вала двиrателя ПОД первую и вторую подшипниковые опоры
d AI == d A 2 == 35 мм. В расчетной схеме принимаем d p == 55 мм, d д == 40 мм, lрд ==
== 60 мм, lфр ==20 мм. Модуль упрyrости Е == 21 .104 МПа.
Найти реакции в опорах, вызываемые нето'lliОСТЬЮ обработки деталей. При
Нять, ЧТО ПОДlшшники опор Дl И Д2 раДиальные шариковые леrкой серии oд
Норядные. Расчет вьmолнить дЛЯ ВОСЬМИ возможных конструктивных исполне
НИЙ соединения (рис. 16.17):
1) пятая степень ТОЧНОСТИ (см. шаr 7) допусков расположения поверхностей
деталей рабочеrо opraHa и двиrателя и шестой класс точности ПОДIIШпников,
подшипники опор P 1 И Р2 конические леrкой серии однорядные;
2) седьмая степень точности допусков расположения поверхностей деталей
рабочсrо opraHa и ДВИfателя и нулевой класс точности подшипников, ПОДIIШп
НИКи опоры Р. и Р 2 конические леrкой серии однорядные;
317
3) то Же, в опоре P 1 Два Конических ПОДШипника леrкой серии, ПОДЩИII_
ник опоры Р 2 радиальный шариковый леrкой серии однорядный;
4) то Же, ПОДШИпник опоры P 1 радиальный шариковый леrкой серии од_
норядный, в опоре Р 2 два КОНических ПОДШИПНика леrкой серии;
5) то же, Подшипники опор P 1 И Р 2 радиалЬные шариковые леrкой серии
однорядные;
6) то же, ПОДШипники опор Р, и Р 2 радиальные РОЛИковые леrкой серии
однорядные;
7) то же, подшипники опор P 1 И Р2 радиально упорные шариковые леrкой
серии однорядные;
8) то Же, ПОДШипники опор P 1 И Р 2 Конические леrкой серии ОДНОРЯДНые
центрирующий буртик фланца двиrателя установлен с зазором в раСТочке Флан:
ца рабочеrо opraHa.
Варианты 1ц2
Вириант J
Вариант 4
Рис. 16.17. Варианты конструктивных исполнений соеДинения «вал В вал»
(начало)
318
Варионт S
Вориант б
Варионт 7
80рионт {j
единения «вал В вал»
Рис. 16.17. Варианты конструктивных исполнении со
(окончание)
319
Была разработана проrpамма в Mathcad с привлечением интеrpаТОРа
МаН1Соппех, которая Позволила решить на ЭВМ эту задачу". Анализ результатов
позволяет сделать следующие выводы.
1. В опорах Возникают значительные радиальные силы (ДО 10300 Н в ваРИЩf_
те 2), вызванные поrрешностями расположения поверхностей. Эти силы СПОСОб_
НЫ снизить ресурс ПОдшипников.
2. наиБолыш1e силы создаются в опорах, расположенных вблизи соеДИНе_
ния валов (в опоре Рl до 10300 Н и в опоре Д} дО 900 Н).
2. Если отказаться от центрирования двиrателя относительно рабочеrо opra-
на центрирующим буртиком флщща двиrателя (см. варианты 2 и 8), то наrpузки
на подшипники несколько снизятся ( Ha 15 %).
3. Если на вал рабочеrо opraHa действует значительная осевая сила, то Наи-
более рациональным из 2, 3 и 4 ro возможных вариантов конструктивноrо ИС-
полнения опор вала рабочеrо opraHa является последний вариант. При этом си-
лы, возникающие в опорах, уменьшаются более чем на треть по сравнению с
вариантом 2.
4. Замена конических ПОдшипников (вариант 2) радиально упорными Ша
риковыми (вариант 7) уменьшает наrрузки на опоры почти на четверть.
5. Если вал рабочеrо opraHa не наrружен осевой силой (варианты 5 и 6),10
радиалЬные наrрузки в опорах будут наименьшими (уменьшатся на 25 %) в слу
чае применения радиальных шариковых ПОДlШ1пников (вариант 5).
6. Повышение точности изrотовлсния (например, снижение допусков рас-
положения с 7 й до 5 й степени точности) и класса точности подшипников (на-
пример, с нулевorо до шестоro) способны уменьurn:ть радиальные наrpузки на
опоры ( в 3 раза). .
16.3.3. НавеСlIое ИСПOJшепие сборочных едиНJЩ
При конструировании привода (рис. 16.18, а) навесное ис
полнение MOTop peДYКTopa широко распространено. Оно бывает
в основном с передачами (рис. 16.18, б ll): цилиндрической
(схемы б, в); коническо цилиндрической (схемы 2 e); червяч
ной (схемы ж и). Также встречается навесное исполнение ци
линдрическоrо редуктора, приводимоrо в движение ременной
передачей от установленноrо на раме электродвиrателя. Реактив
ная тяrа в этом случае обычно выполнена в виде резьбовой сТЯЖ
Ю1 и служит не только для восприятия реактивноrо момента, но и
для реryлировки силы предварительноro натяжения ремня.
Навесное исполнение сборочной единицы позволяет COKpa
тить осевой rабаритный размер при вода, не опасаясь появленИЯ
дополнительных реакций в опорах вследствие неточности MOH
тажа. Дополнительные реакции Не возникают, потому что при
навешивании сборочной единицы на приводной ваЛ не образу
ется четырехопорное закрепление вала, как в рассмотренном в
16.3.2 случае (и тихоходный вал сборочной единицы, и привоД
ной вал остаются установленными на двух опорах).
* Иванов А. с., Пулькач с.ю. КОНС'Ipуирование соединения «вал В вал» и peaK
ции в опорах jj Вестник машиностроения, 2001. NQ 10.
320
ь k [ п
Lб
2
C ti 1 1
а
ytc [9 +] [ ) т.
.I
tJ 8
ЦС3 q \d + ]
z iJ е
dj +
ж J (j
Рис. 16.18. Схема лривода ленточноrо конвейера (а) и различные варианты ис
f10лнения навесных MOTop peДYКTopOB (б u): двухступенчатый цилиндрически
с Консольным закреплением шестерни на валу двиrателя (б), двухступенчаты и
Цилиндрический с приводом быстроходноro вала от двиrатеJUI через ременную
Передачу (в), uилиндроконическо цилиндрический с консолы-:.ым закреплени
ем шестерни на валу двиrателя (2), коническо цилиндрическии с соединением
ДВИrателя и редуктора «Бал в Бал» (д), коническо цилиндрический с привод.?м
БыIтроходноrоo вала от двиrателя через ременную передачу (е), червячны с
Соединением двиrателя и редуктора «вал В вал» (ж), цилиндрочервячныи с
I<онсольным закреплением шестерни на валу двиrателя (3), червячный с при
ВОДОМ червяка от двиrателя через ременную передачу (и)
11 8640
321
Особенностью навесных исполнений рассматриваемых сбо
рочных единиц является то, что их зубчатое колесо ТИХОХОдной
ступени жестко закреплено на приводном валу, образуя с ним
единое целое. Поэтому силы, возникающие в зацеплении ТИХо
ходной ступени и наrpужающие зуб колеса, передаются Heno
средственно на приводной вал. Зубчатое колесо тихоходной CTY
пени с приводным валом далее будем называть системой
приводноrо вала. Все остальное в приводе будем относить к сис
теме навесной сборочной единицы.
Реакции в опорах навесной сборочной единицы это силы,
передаваемые ее корпусом на приводной вал. Эти силы являют
ся результирующими от наrрузки, действующей в зацеплении
тихоходной ступени на зуб шестерни (или червяка для передач,
приведенных на рис. 16.18, ж u), силы тяжести сборочной еди
ницы, а также от реакции, возникающей в реактивной тяre. для
навесн oro цилиндрическоrо реДуктора, ПрИВОДимоrо ременной
передачей, при определении реакций в ero опорах следует также
учитывать подводимый к быстроходному валу редуктора Bpa
щающий момент. Таким образом, реакции в опорах MOryт быть
найдены из рассмотрения условий равновесия системы HaBec
ной сборочной единицы.
Получим в алrоритмическом виде (удобном для автоматиза
ции расчета на компьютере) формулы дЛЯ определения реакций
в реактивной тяrе, а также в опорах навесной сборочной едини
цы и приводноro вала.
Рассмотрим привод на основе HaBecHoro мотор"редуктора.
Расчетная схема привода ленточноrо конвейера представлена на
рис. 16.19. На ней MOTop peДYКTOp расположен слева от бараба
на. За начало координат взято место расположения первой опо
ры MOTop peдyктopa. Ось Z направлена вдоль оси приводноrо Ba
ла, ось у вверх, а ось х перпендикулярно плоскости чертежа.
На расчетной схеме проставлены размеры, позволяющие по
лучить координаты точек приложения сил. Введены следующие
обозначения: D б , L б диаметр и Длина барабана; Ln расстоЯ
ние между опорами приводноrо вала; k расстояние от второй
опоры мотор"редуктора до ближайшей опоры приводноrо вала;
с расстояние от начала координат до колеса тихоходной CTY
пени; d w2 делительный диаметр колеса тихоходной ступени;
lG, CG расстояния по осям х и z от начала координат до центра
масс (ЦМ) системы навесной сборочной единицы; Ь расстоя
ние между двумя опорами мотор"редуктора; lpf' lpB' С р pac
стояния по осям х, у и Z от начала координат до места креIDIенI1Я
322
1< М:OTop peДYКTOpy реактивной тяrи; 'у уrол между направлени
еМ действия реакции Рр реактивной тяrи и положительным на..
rrравлением оси х; F окружная сила, создаваемая Moтop pe
дуктором на приводном барабане.
Рис. 16.19. Расчетная схема привода ленточноrо конвейера
При определении реакций в опорах мотор"редуктора необхо
ДИМО составить расчетную схему системы навесной сборочной
единицы. Расчетная схема на рис. 16.20, а относится к цилиндри
ческьму и коническо"цилиндрическому, а на рис.16.20, б к
червячному MOTop peдyктopaM.
Рассмотрим расчетную схему навесной сборочной единицы,
Представляющей собой цилиндрический или коническо"цилинд"
Рический мотор..редуктор (см. рис. 16.20, а). Из условия paBeHCT
Ва суммы моментов относительно оси Z EM z :::: О для системы
Uриводноrо вала находим окружную силу Ff2' действующую на
зуб колеса тихоходной ступени,
F О,5FD б ( 16.38 )
(2 1 '
w
rДе lw == 0,5d w2 расстояние от начала координат до зацепления
ЗУбьев тихоходной ступени.
11*
323
f r l в , frz в
r o5 p
rt2
FrI r ,F;'2 r
5
А
; Cl a2
т ff1 P
о
а
Рис. 16.20. Расчетные схемы системы навесной сбороч
ной единицы для цилиндрическоrо и коническо ци
линдрическоrо (а), червячноro (6) MOTop peДYКTopa
Отметим, что здесь и далее размеры /с, Р /рв' /w, опреде
ляющие координаты точек приложения сил, а также все силы
берут со знаком «+» или « » в зависимости от расположения
размеров относительно начала координат и реальноrо направле
ния сил по отношению к направлениям, указанным на расчет
HbIX схемах (при совпадении направлений знак «+», при He
совпадении знак « »).
Радиальную F R2 и осевую Р А2 силы, возникающие в зацепле
нии и действующие на колесо, в случае, если тихоходная пере
дача зубчатая косозубая с yrлом наклона зуба р, вычисляют по
формулам
F I / I Ft2tg20°
R2 sgn w
cosp
(16.39)
(запись 1 sgn /w 1, как известно, указывает на то, что перед выраже
нием Ft2 tg20° следует ставить знак «+» или « » в зависимост:Й:
cosp
от Toro, какой знак имеет численное значение размера /w),
Р А2 == :t Ff2 tg р, (16.40)
324
rде знак «+» ставят при левом направлении зуба колеса, а « »
прИ правом.
rоризонтальную Рр r и вертикальную Рр в составляющие pe
акцИИ Рр, возникающей в реактивной тяrе, rоризонтальную
Frl r' F r2 r и вертикальную Frl В' F r2 в составляющие радиаль"
IIЫХ реакций в первой и второй опорах MOTop peДYKTopa, а так..
же осевую составляющую Р а2 находим с помощью уравнений
равенства моментов относительно трех осей и равновесия сил
по трем координатам, составленных дЛя системы навесной сбо
рочной единицы. При этом полаrаем, что со стороны колеса ти"
хоходной ступени на зуб шестерни действуют в общем случае
следующие силы: обратная окружной на колесе Ft бр, обратная
радиальной на колесе F gP, обратная осевой на колесе F JgP
(здесь не используем общепринятые индексы ДЛЯ сил в зацеnле..
нии в виде F t1 , F Rl , F A1 , чтобы формулы, выведенные для зубча..
той цилиндрической передачи, оказались приrодными и для
червячной передачи).
Накладывая условие EM z == О, получаем
G/G + Ft бр / w
F == (16.41)
р r / р r tg 'У 1 р в
Учитывая, что реактивная тяrа расположена к rоризонту под
уrлом 'У, имеем
Р рв ::::: F pr tg'Y.
(16.42)
Следовательно,
рр == F;r + р;в'
(16.43)
Из условий ЕМу::::: О, ЕМх == О следует
F обр F F обр /
R2 С + Р rCp А2 w
F r2r == ь
(16.44)
Р рв С р + GCG + Ft брс
Р"2В ==
ь
(16.45)
325
Накладывая условия .ЕХ == О, .ЕУ == О, .EZ == О, cooTBeTcTBeHlIo
получаем
Р У1 r = (Pp r + F;GP + F r2r );
F r1B = (PpB + G + Ft бр + Р У2В );
F F обр
02 А2'
(16.46)
(16.47)
(16.48)
Определим реакции в опорах приводноrо вала. Для этоrо
рассмотрим систему приводноrо вала (рис. 16.21). На зуб зубча
Toro колеса действуют силы Е п , FR2' Е А2 , вычисленные По
формулам (16.38) (16.41). От корпуса MOTop peДYКTopa на при
водной вал пе р едаются силы Fобр Fобр Fобр Fобр об р атные
тl r' r 2 r ' r 1 в ' r 2 В '
силам Р Т1 р Е т2р РТ} В' Р У2В ' определяемым соотношениями
(16.44) (16.47). Лента конвейера наrpужает приводной вал в
rоризонтальном направлении силой предварительноrо натяже
ния 2Ро, вычисляемой по формуле Эйлера (см. шаr 11):
е О, 7 f а + 1
2Ро = F 07/ ' (16.49)
е' а 1
rде 0,7 а уrол дуrи скольжения ленты конвейера по ведущему
шкиву при yrле обхвата шкива лентой а (чаще Bcero а == п);f
коэффициент трения ленты конвейера о барабан.
Из условий .ЕМх == О, .ЕМу == О находим rоризонтальную F 1rпр
И вертикальную Е}в пр составляющие реакции в первой опоре
приводноrо вала, а затем из условий .ЕХ== О, .Еу== о rоризонталь
ную F 2r пр и вертикальную р 2в пр составляющие реащии во BTO
рой опоре приводноrо вала:
Fr бi (Ь + k + L п ) + F R2 [( Ь с) + k + L п ]
.fir пр = +
L п
FA2 1 w + Fr i(k + L п ) + Fо[L б + 0,5(L п L б )]
+ +
L п
+ Е о О,5 (L п L б ) . ( 16.50)
L '
п
326
Fr БI(Ь+k + L п )+ Ft2[(b c)+k + L п ]
Е 1в пр = L +
п
FоБР ( k + L )
т2в п
+ (16.51)
L п
F 2r пр = (Fr бi + F R2 + ET + F 1r пр + 2Ео);
(16.52 )
F 2впр = (E;{': + F t2 + FrО2б + Fiвпр)'
(16.53)
соnр
'rl В
fAz 1
[, оор
rZB
соnр
'а2
f1B пр
Fzs пр
2
соор
rrlr
fo
f2rпp
т
ИХ
Му
g2J9
Рис. 16.21. Расчетная схема системы приводноrо Вала
и эпюры моментов ДЛЯ приводноrо вала
327
Рассмотрим расчетную схему навесной сборочной еДИНI1:
цы, представляющей собой червячный мотор"редуктор (см
рис. 16.20, 6). В связи с дрyrими, чем на рис. 16.20, а, точкой
приложения и направлением сил, возникающих в зацеплении
выражения для нахождения реакций будут несколько отличать
ся от формул (16.44) (l6.47), (l6.50) (l6.53):
F О,5FD б .
t2 1 '
w
F R2 = I sgnl wl rt2tg200;
Е А2 =:t FD б ;
d w2 u 11
F F обр
F 2 = Р rCp + t2 С .
r r Ь
F F;gP c + GCG + РрвС р FJ. Plw
r2B .
ь
F r1r = (Fpr + Ft БР + F r2r ); F r1B = (PpB + G + E; P + F r2B );
р, Fr бi (Ь + k + L п ) + Ft2 [( ь с) + k + L п ]
1r пр L +
п
F;2 б i(k + L п ) + Fо[L б +0,5(L п L б )]
+ +
L п
+ F о О,5(L п L б ) .
L '
п
(16.54)
р, Fr б:(ь+ k + L п ) + FR2[(b с) +k + L п ] + FA2 l w
lв пр +
L п
FоБР ( k + L )
r2B п
+ (16.55)
L п
F 2r пр = (Fr бr + F t2 + Fr i + 1irпрв + 2Ро);
(16.56)
328
F ( Fобр F Fобр R )
2в пр r1 в + R2 + r 2 в + 1в пр в ,
(16.57)
rде и, 11 передаточное число и кпд червячной передачи; знак
«+» или « » ставят соответственно при правом или левом Ha
nравлении зуба червяка.
Рассмотрим теперь привод на основе HaBeCHoro ЦИЛИlЩриче..
CKoro редуктора (рис. 16.22). На рис. 16.22, б приведена расчет
ная схема системы навесной сборочной единицы с указанием
положительных направлений сил и вращающеrо момента Т б
на быстроходном валу. Здесь 2Рор сила предварительноrо Ha
тяжения ремня; С ШК расстояние от оси Z до середины шкива;
QwI: суммарное межосевое расстояние двух ступеней peДYКTO
ра (остальные аналоrичны приведенным на рис. 16.18 16.21).
еоставляя уравнения равновесия, получаем
F = F = Ft бр/w + 2F Op a W I: Т б
Р pr 1
рв
РрС р + Ft брс + 2 FорС шк .
F r2r
Ь
Fобрс + Gc Fобр/
F R2 G А2 w .
r2B Ь
F r1 r = (Pp + БР + 2Рор + F r2r );
F r1 в = (G + E; P + F r2 в),
Для реакций в опорах приводноrо вала остаются справедли
выми формулы (l6.54) (l6.57).
Пример 16.6. Для привода ленточною конвейера с навесным двухступен
Чатым цилиндрическим MOTop peДYKTopOM (см. рис. 16.18, а; 16.19, а) задано:
р== 2000 Н, п6 == 500 мм, d w2 == 200 мм, lw == 100 мм, Р == 150, направление зу
ба колеса правое, С == 100 мм, G == 700 Н, IG == 100 мм, cG== 50 ММ, lр r ==
== 300 мм, 'р в == 200 мм, С р == 100 мм, 'у == 1350, Ь == 200 мм, k == 100 мм, 4 ==
== 600 мм, Ln == 800 мм, а == п, f == 0,4. Вычислить реакции и построить эпюры
крутящих и изrибающих моментов по длине приводноro вала.
Результаты вычисления реакций с указанием номеров qюрмул, по которым
ИХ рассчитывали, приведены в табл. 16.1.
329
!i::
L:\j'to..;)
се t;:,
Q.
.
о
А
h
А
С ШК
о
Рис. 16.22. ПРИВОД ленточною конвейера с навесным двухступенчатым peДYК
тором, приводимым через реМенную передачу от электродвиrателя закреПJ1еlI
Horo на раме: '
а расчетная схема ПРИБода; б расчетн<ш схема системы навесной сборочной единицы
330
Таблица 16.1
Реакция Форму Реакция Форму Реакция Форму
ла ла ла
Рй == 5000 Н (16.38) Ер == 1216 Н (16.43) робр = 158 Н (16.46)
rl r
F R2 == 1879 Н (16.39) F r2 r == 1177 Н (16.44) Fобр = 1545 Н (16.47)
rl в
Р А2 == 1335 Н (16.40) F r2 в == 1895 Н (16.45) 2Ро == 4820 Н (16.49)
Fобр = 5000 Н (16.38) Frl r == 158 Н (16.46) F 1r пр == 3485 Н . (16.50)
12
F обр = 1879 Н (16.39) Frl в == 1545 Н (16.47) F 1B пр == 1994 Н (16.51)
R2
Fобр = 1335 Н (16.40) Р(l2 == 1335 Н (16.48) F 2r пр == 2195 Н (16.52)
А2
Рр r == 860 Н (16.41) робр = 1177 Н (16.44) F2B пр == 434 Н (16.53)
r2r
Рр в == 860 Н (16.42) робр = 1895 Н (16.45)
r2B
Эпюры крутящеrо момента Т(Т== р. 0,5D б == 2000.0,5.500 ==
== 500000 Н . мм) и изrибающих моментов на приводном валу в
двух плоскостях представлены на рис. 16.21.
16.3.4. Оптимизация соединений
Чтобы правильно выбрать соединения сборочных единиц
привода, нужно провести сравнение возможных вариантов ero
конструктивноrо исполнения по raбаритным размерам, стоимо..
сти и массе. Учитывая, что стоимость различных конструктив..
ных исполнений привода в значительной степени определяется
допустимыми поrрешностями изrотовления и сборки, а их Mac
са силами и изrибающими моментами, возникающими в co
единениях как валов двиrателя и редуктора, так и валов peДYK
тора и рабочеrо opraHa, то достаточно сопоставить различные
варианты по rабаритным размерам, допустимым поrpешностям
изroтовления и сборки, а также по силам и изrибающим MOMeH
там, возникающим в соединениях.
Возможные варианты соединений двиrателя и редуктора, а
также редуктора и рабочеrо opraHa, нашедшие широкое распро
странение в приводах, представлены на рис. 16.23 и 16.24. В Ka
честве рабочеrо opraHa для определенности выбран один из ши..
роко распространенных ero видов барабан ленточноrо тpaHC
портера.
331
Соединение «вал В Ba » (см. рис. 16.23, a д, и; рис. 16.24, а)
компактно, но чрезвычаино чувствительно к поrpешностям Из
rотовления деталей и сборки привода. Если при изrотовлении
деталей соблюдена пятая степень точности для поrреШНОСтей
расположения (допустимый уrол перекоса валов [у] == 20") и в
подшипниках их реryлировкой устранен радиальный зазор то
соrласно полученным в примере 16.5 результатам (предп ло
жив, Что вал рабочеrо opraHa это червяк червячноrо peДYKTO
ра), радиальная сила в соединении может превысить возникаю
щие в процессе работы силы приблизительно вдвое, а если
седьмая степень точности ([у] == 1') то почти в четыре раза. При
этом в соединении действует еще и изrибающий момент М К ' KO
торый приближенно можно принять равным соответственно 2Т
и 4Т, [де T вращающий момент, передаваемый соединением.
[!
1 1
CtEI 1 1
J 1,
а ff 8 z
l CjI
а е )j( J
cm rJUl m
х
и
1( I!
Рис. 16.23. Кинематические схемы мотор реДУКТОРОБ:
а двухступенчатый цИЛИндрический с соединением двиrателя и редуктора «вал В ваn»;
б то же с соединением двиraтеля и редуктора с Помощью муфты; в то же с консольнЫМ
закреплением шестерни на валу двиrателя; 2 то же с приводом быстроходноrо вала от
двиrателя через ременную передачу; д коническо цилиндрический с соединением двиrа
теля и редуктора «вал В вал»; е то же с соединением двиrателя и редуктора с помощью
муфты; ж цилиндроконическо цилиндрический; з коническо цилиндрический с при
водом быстроходноro вала от двиrателя через ременную Передачу; 11 червячный с соеди
нением двиrателя и редуктора «вал В вал»; к то же с соединением щзиrателя и редуктора с
помощью муфты; л цилиндрочервячный; ..М червячный с приводом червяка от двиrате
ля через ременную передачу
м
332
Соединение компенсирую
щей муфтой (см. рис. 16.23, б, а
е, к; рис. 16.24, б) отличается
увеличенным rабаритным раз
мером по длине и способно
стью компенсировать до ста
точно большие поrpешности о
сборки привода. Допустимые
уrол перекоса и радиальное
смещение валов для разных
видов муфт составляют: [у] ==
== 30', [or] == 0,04d для кулач D
ково дисковой муфты, rде d
диаметр вала под муфтой;
[у] == 10, [or] == О,ООlп м для
втулочно пальцевой муфты,
rде пм диаметр муфты, на
котором расположены эле
менты, передающие вращаю z
щий момент; [у] == 20, [or] ==
== 2 мм для муфты с торооб..
разной оболочкой. Предпола
rают, что в соединении возни..
кает радиальная сила р к ==
== 0,2Т
О,5п м .
Соединение сиспользова..
нием зубчатой передачи (см.
рис. 16.23, в, ж, л) незначительно увеличивает rабаритный размер
MOTop peдyктopa по Д)Iине, а иноrда (сравните рис. 16.23, д, ж) и
сокращает ero. При этом rабаритный размер по высоте или He
значительно растет, или (предположите, что фланец двиrателя
имеет достаточно большой диаметр, и сравните рис. 16.23, и, л)
снижается. Допустимый уrол [у] перекоса валов в зубчатой
передаче составляет около 4', а допустимая поrрешность ради
альноrо смещения валов (точнее, предельное отклонение меж..
oceBoro расстояния) [or] == 0,06...0,09 мм при межосевых pac
стояниях a w == 63...250 мм (большие поrpешности имеют место
при больших межосевых расстояниях). Радиальная наrpузка на
валы передачи
JJrt 1т
;1'//""'-//""-/////1'//.0
1
1
tт
djl 1
дfl I +r
вO l 1
Рис. 16.24. Кинематические схемы
ПрИВОДОБ с соединением редуктора и
ПРИБодноrо вала:
а «вал В вал»; б с помощью муфты; в с
помощью цепной передачи; 2 С навесным
исполнениеммотор редуктора
333
Е к = J Р/ + F i = Ff 1 + ( tga J 2
CoS
Т б 1 + ( tga J 2
= CoS
0,5D 16
Кроме TOTO если передача косозубая, то вал двиrателя И
промежуточныи вал реДуктора наrpужаются изrибающими м
ментами соответственно М и М . o
к дв К пром'
м о 5п F Т6 tg
кдв , 16 А = 0,5D 16 = Т6 tg ,
D,5D 1б
Мкпром = D,5D 2Б F А == T6D26tg .
п 16
Здесь F F F ок р
. t, R, А ужная, радиальная и осевая силы в зацеп
ении, , уrлы профиля (обычно а == 200) и наклона (р ==
8....18) зуба; D 1б , п 26 делительные диаметры шестерни и
колеса быстроходной ступени; Т6 вращающий момент на вал у
двиrателя.
Соединение с использованием цепной передачи (см.
рис. 16.24, в) увеличивает raбаритный размер привода по шири
не. Для Hero принимают допустимыми yrол перекоса валов в co
единении [ 'V 1 == 6 9 ,
.J ... И предельное отклонение межосевоrо P ac
стояния [ 8 ] == о 4 1 4
r" ..., мм при межосевых расстояниях а ==
300...1500 мм (большие значения соответствуют большим a
чениям a w ) (см. шаr 11). Валы передачи наrpужаются радиаль
ной силой F == (11 1 2 ) ТТ Т.
К , ..., о 5п ,rде т вращающий момент на
, lзв
тихоходном валу Р ед у кт D
" ора, lзв делительныи диаметр BeДY
щеи звездочки.
Соединение с использованием клиноременной передачи (см.
рис. 16.23,2, 3, м) увеличивает rабаритный размер MOTop peДYK
тора и привода в целом по высоте. По видимому для нето мож
но считать доп у стимы м ( ,
н " по аналоrии с канатом, наматываемыМ
а нарезнои барабан механизма подъема rpузоподъемной маши
ны) 1'] == 20. Передача может работать лишь с rарантированной
силои предварительноrо натяжения ремня 2Ео. Поэтому межосе
вое расстояние должно допускать реrулировку, а ero предельное
334
отклонение не реrламентируют. На валы передачи действует pa
диальная сила р к приблизительно равная силе 2Ро, создаваемой
предварительным натяжением ремня, причем 2Ро == Р 1 + Р 2 ==
ef + 1 . ef + 1
:::: F f == Т б sln(O,5y) f (см. шаr 11). Здесь F
. е 1 О,5п 1 (е 1)
рабочая наrpузка, передаваемая ремнем, f == 0,4 коэффициент
трения ремня о шкив; р ;::: 1200 дуrа скольжения ремня на Beдy
щем шкиве; l' == 400 уrол профиля канавки шкива; п 1 диа
метр ведущеrо шкива.
Навесное исполнение редуктора (см. рис. 16.24, 2) обеспечи
вает компактность привода и не предъявляет особых требова..
ний к точности монтажа. Для Toro чтобы оценивать силы и из
rибающий момент, создаваемые на валу рабочеrо opraHa HaBe
шиваемым на Hero мотор"редуктором, следует учитывать oco
бенности конструкции HaBecHoro исполнения (см. 16.3.3).
Особенностью привода с использованием HaBecHoro MOTop pe
дуктора является то, что тихоходное колесо жестко закреплено
на приводном валу, образуя с ним единое целое. Поэтому силы,
возникающие в зацеплении тихоходной ступени и наrpужаю..
щие зуб колеса, передаются непосредственно на приводной вал.
Реакции в опорах MOTop peДYKTopa это силы, передаваемые
корпусом редуктора на приводной вал. Эти силы являются pe
зультирующими от на.rрузки, действующей в зацеплении тихо..
ходной ступени на зуб шестерни, от силы тяжести MOTop peДYK
тора и от реакции, возникающей в реактивной тяrе. Они MOryт
быть наЙдены из рассмотрения условий равновесия системы,
образованной MOTop peДYKTopOM с отсутствующим в нем зубча
тым колесом тихоходной ступени.
Проведенный анализ позволил установить взаимосвязь воз
можных конструктивных исполнений соединений сборочных
единиц привода с ero rабаритными размерами, с требуемой для
нормальноrо функционирования привода точностью изrотовле
ния деталей и их сборки, а также с силами и изrибающими MO
ментами, возникающими в соединении. При заданных зак зчи
ком значениях технических параметров привода эта взаимосвязь
дает возможность выбрать оптимальное по ero размерам, стои
мости И массе конструктивное исполнение. Сопоставление
удобно проводить в табличной форме, составляя так называе
мую матрицу качества.
335
Пример 16.7. Выбрать БJПIЗКИЙ к оrrrимальному вариант КОНСТРУКТИвноrо
исполнения привода ленточноrо транспортера, если диаметр приводнorо бараба
на D == 300 мм, расстояние между ero опорами L == 800 ММ, скорость двюкенИSI
ленты транспортера v == 0,8 Mjc, окружная сила на барабане F == 2500 Н.
Сопоставление различных вариантов при вода проведем для пяти вариантов
из совокупности возможных исполнений MOTop peдyктopa, в четырех из которых
рассматриваются исполнения на основе червячной передачи и в одном цилинд
роконическо цилиндрическое исполнение. ЦитIНдроконическо цилиндРиче
ский Moтop peдyктop будем рассматривать потому, что он может быть изrотов
лен с rабаритными размерами и передаточным числом цилиндрочервячноrо pe
дуктора, но иметь при этом более высокий кпд. Результаты расчетов приведены
в табл. 16.2.
Анализ вариантов показывает следующее:
1) наименьшие rабаритные размеры обеспечивают варианты 1, 3, 4, 16, 18, 19;
2) наименее требовательными к точности являются варианты 7,20, 17, 10,
18, 19, 8, 9, 12, 15, 13, 14 (расположены в порядке повышения требований к точ
ности);
3) наименьшие силы и моменты в соединениях имеют место в вариантах 7,
10, 8, 9, 17, 20, 18, 19, 12, 15, 14, 13 (варианты перечислены в порядке возраста
ния силовых факторов);
4) наименыш1e потери обеспечивают варианты 4,9, 19, в связи с чем в э11lX
случаях использован электродвиrатель небольшой мощности и rабаритных раз
меров (с высотой оси вращения над присоединительной поверхностью лап 80 мм
вместо 90 мм).
Из анализа следует, что вариантом, близким к оrrrимальному по размерам,
стоимости (стоимость изrотовления и эксплуатации привода зависит не только
от точности ero сборочных единиц, но и от экономичности работы привода) и
Массе, будет в зависимости от приоритета этих трех показателей один из следую
щих вариантов: 19, 18, 9 ИJПI 7.
Таким образом, на основании вышеизложенноrо можно cдe
лать следующие выводы.
1. еоединение двиrателя и редуктора, а также редуктора и
рабочеrо opraHa компенсирующими муфтами существенно YBe
личивает продольный rабаритный размер привода.
2. еоединение «вал В вал» делает привод более компактным,
но при этом в соединении возникают значительные поперечные
силы и изrибающие моменты.
3. Способом соединения двиrателя и редуктора, обеспечи
вающим компактность привода и не приводящим к появлению
в соединении существенных сил и изrибающих моментов, явля
ется применение цилиндрической зубчатой передачи. В значИ
тельной степени по этой причине цилиндрочервячный MO
Top peдy:ктop находит большее применение по сравнению с
червячным MOTop peДYKTopOM.
4. Соединение двиrателя и редуктора цилиндрической зуб
чатой передачей перспективно и для коническо цилиндриче
cKoro редуктора. Цилиндроконическо цилиндрический MO
336
N
\ci
......
о о о о о о о о
Q) ::;: о \D О О \D О
:д:д::;: o.n If) If) м If) If) If) м
Х Х Х Х Х Х Х Х
:r: о- о о о о о о о о
!--< Q) t;1:j 0\ 0\ 0\ \D 0\ 0\ 0\ \D
::S:: t::t м м м \D М М М \D
O-мО Х Х Х Х Х Х Х Х
t;1:jt;1:j о о о о о о о о
о. а о s о S If) If) If) If)
..... ...... N N N
J;..... ..... ......1 ..... ..... ..... ..... .....
;:,
::;: о I
* ::t If)
r--
i
t-<
:r: t;1:j
Q) :r: ti
::;: t;1:j &::;: о
о 1.... I
::;:. о. If)
о ("--
::s:: о
:д 1....
Q)
@ ::r
о :r: о
с,) Ф о о
Q) t;1:j о If)
о- о r--
:S: .....
t;1:j t;1:j
t-< о-
t;1:j;>< О ::;:
::;:
:S:::t:: о N
Q) 1::1 o
о.;х:: Q)
О :s: о.
Фt::t
с,) Q)
:S: о ::: о
с,)
:Е о N
N
::t:: Q)
Q) :S:
a N О
09 &::;: о N С О
ё I OO I If) I .n I
If) If) ..... If)
м::;:
::s:::r:
cry
::s:: о t;1:j ::;: о ..... If) с ..... If)
t-< о- If) I 0\ M I If) I о;, M I
с,) о :i N .....
О t-< ..... N
:z:
:3
Q) :r: о о r-- м If)
о- r-- м If) о N
о- с N If) 0\ 0\ If) 0\ 0\
О с м м N О М М N
:S: N N
Q) t:I::
r:::
:д Q) ::;:
::;: ::;: м \D \D М \D \D
:S: 1.... с ..... о с I с ..... C о I
t :S: а о о о о о о
>. 1::1 <-о
О
r::::[ ::: о о о о
:Е о о N N N
N N N
N N N fQ N N N N N
I О. I Ч Ч Ч Ч Ч Ч Ч Ч
о Q) t;1:j о о о о о о о о о о
::;: Q) 0\ 0\ 0\ 00 < 0\ 0\ 00 0\
:s:cry t-< -< -< -< -< -< -<
ь 8. t::t "<:t "<:t
I I I '\7Z'91 ";)иd lШ I;;j I;;j I;;j I;;j I;;j \о \с \0 \о \с
:S:t-< :S:
o.:r: 11) :r: r fT91 ';)иd lШ :ос: <::: ::;,: :J:: :ос: <:::
t;1:j t;1:j о 11) :::::
C,)::t::
с. r-- 00 0\ О
Z ........ N М "<:t If) \D .......
337
\Q v ::Е а Top peДYКTOp, получаемый в этом случае, будет обладать
..... а а а а а
::Q::Q::E а а а \D а
0'\ 0'1 o.n "<:t высоким КПД И может быть изrотовлен с rабаритными разме
i5 g. rn Х Х o.n o.n м
х х х х
t:\ а а а а а
:S:::Er::t 0'\ а
i:: \D 0'1 0'\ 0'1 \D рами и передаточным числом цилиндрочервячноrо MOTop pe
g м \D М М t"') \"с
Х Х Х Х Х 8
:::! tgc' а а а а а дуктора.
::t а S а а а S
t::: ...... ....... ...... ....... Остановимся на особенностях конструирования цилиндро
:s- ..... ...... ...... ...... ...... .....
:t:
<:::1 .;; ......:.. коническо цили ндрическоrо MOTOp редуктора, который широ
а Q. 10(
I::::E ко распространен за рубежом, но у нас в стране пока не выпус
* :.: ::с: I "<:t
:i 1:--
t-< кается.
:r; rn ':s:: Ero кпд выше, чем у червячноrо и цилиндрочервячноrо
v :r: <:i:
::Е t;\j
о 1... ::E :t MOTop peДYКTopOB, так как в отличие от червячной передачи и в
::Е о. :.: . I "<:t
О rn
:S: 1:-- о. цилиндрической, и в конической ступенях контактирующие по
о
::Q "::
<u верхности зубьев работают в условиях, коrда одна делительная
r::: ::r м
::s:: о
u tO N окружность обкатывается, а не скользит по друrой. Достаточно
Q) t;\j а а .,о
о. а а ......
:s:: t"') 0'\ плотное заполнение корпуса зубчатыми колесами позволяет BЫ
t"') ....... t5
t1;I
t-< t;\j :s:: полнить MOTop peДYKTOp с rабаритными размерами, не превы
rn О. о..
о;: о ::Е rn
::;:: ::r: шающими размеры червячноrо и цилиндрочервячноrо MOTOp
:S::r: ::Е \D
:><: Q) 1:::[ а rn редукторов, имеющих подобные технические характеристики
o..:z:: Q) "'""i:: о I t-<
О :s: с. :r:
tOt:::[ t;\j на выходе. По данным фирмы SEW ([ермания), ero можно из
о d) :s:
:s:: о rотовить с передаточным числом от 8 до 250.
u
:Е r-.. I ! На рис. 16.25 представлен чертеж цилиндроконическо ци
:r:v
Q):S:
a' .;;: rn линдрическоrо MOTop peДYКTopa, разработанный по сформули
0$2 с.
t-< rn ::E 1:-- ..... "<:t а N [ рованному в примере 16.7 заданию. При этом скорость конвейе
о :!:: o.n I ...... N I с;,
J.-. :s: o.n I 00 I
;; ...... \"с o.n ..... o.n o.n ра уменьшена в 4 раза, чтобы реализовать в достаточной степе
:S: о rn ::E р.. ни возможности TaKoro MOTop peдyктopa по получаемому в нем
t-<
Q С, r:--- o.n N Ь ..... t;\j
о о ::{:!:: o.n I а \D o.n Ш передаточному числу.
t-< I o.n I 0'1 I
:r: ...... м N ..... N N
S >. Передаточное число разработанноrо MOTop peдyктopa 100; MO
Q) r::t d)
е- Q) ::з::: ;:r
о. а а а :r: мент на тихоходном валу 774 Н. м; мощность двиrателя 1,1 кВт;
о а N t"') а а r:--- м o.n S
t::: :S: ....... м 00 ..... ...... N
"<:t v м а м o.n 0'\ 0'1 КПД 0,89, межосевые расстояния тихоходной и быстроходной
d) N N v М N ..;
:J:1 ступеней 100 и 75 мм соответственно.
::Е t-< ::Е Ш
:S: r: ::Е м \D \D Для повышения передаточноrо числа быстроходной ступе
t-< :s: а ...... а а м \D '-с О
.t::I О I а ..... а а I
r::t .... a a a о a ,Q ни уменьшен диаметр шестерни 2. Это стало возможно в pe
1:: I:Q О
О C;S
:с о зультате использования асинхронноrо электродвиrателя 1 мар..
!--<
:Е с о о Ь о о :r::S: КИ АИР80АРЗ с тонким (диаметр 14 мм) выходным концом
N N N N Q) Q.
N N ::Е i::
о d) вала, отказа от шпонки и передачи вращающеrо момента от Ba
I о. I N N N N N N ::E::t ла двиrателя к шестерне путем создания натяrа в соединении.
g r: ч N N N ':>: :r:
ч ч ч
а а а а :s: S
:S: :S:Q) 0'1 0'\ а а а а а а Для уменьшения массЫ корпуса исключены ero разъемы в наи..
f--. 1:Qt-< :$ 0'\ 0'\ 0'1 $ 0'\ 00 ::!С;!
0.1:::[ < < :$ :$ :$ :$ :r: более наrруженных местах, запрессовку колес 9, 11 про водят
v v v v r
I I '\7Z'9I "зиd tш
:S: Е--< :S: :s: (х) (х) (х) (х) (х) 1\,\ 1\,\ 1\,\ внутри редуктора с помощью завертываемых в торцы валов 10
@ z 1\,\ 1\,\ !;; о
р=1 8:r: I tT9I 'зиd UH :::! ":: ::'i; :::! r::: ::'i; ::S:: и 12 винтов (см. шаr 13), а колеса 4 длинным, вставляемым в
* *
z;t:: ...... * сквозное отверстие вала 3 винтом, упирающимся rоловкой в
? N М v o.n \D r:--- 00 0'\
...... ....... а
...... ...... ...... ....... ...... ..... ...... N торец конической шестерни и завертываемым в фасонный
338 339
диск (на чертеже не показан), торец .KoToporo нажимает на TO
рец колеса.
ПОДШИПНИКИ вала 3 реryлируют rайкой 5, а смещение пятна
контакта конической передачи винтами 7 и 8, передвиrающи
МИ вдоль оси стакан 6.
2
16.4. Тормоза
16.4.1. Ленточные тормоза
Наиболее компактны и просты ПО конструкции ленточные и
дисковые тормоза.
Ленточные тормоза бывают простоrо и суммирующеrо дей
ствия (рис. 16.26).
J
5
а
l
а
fЗам
!Зам
l
о
Рис. 16.26. Ленточные тормоза npOCToro (а) и суммирующеro (6)
действия
Тормоз npoCToro действия обеспечивает торможение вра
щающеrося шкива лишь в одну сторону (на рис. 16.26, а шкив
вращается по часовой стрелке). В набеrающей ветви ленты (ле
вая ветвь) сила натяжения составляет
о 5Т е а !
р, == ' т
1 D (е а! 1)'
Рис. 16.25. ЦlUIИндроконическо цилиндрический MOTop peдyктop
а в сбеrающей (правая ветвь)
340
(16.58)
341
F 0,5Т т
2
D (е а! 1)'
(16.59)
rде ТТ тормозной момент; п диаметр шкива; а уrол обхва
та шкива лентой;f коэффициент трения ленты о шкив.
Замыкающая сила F зам , прикладываемая к рычаrу при созда
нии тормозноrо момента, равна
Е 2 а
F зам == /'
(16.60)
[де а и 1 длины плеч KopoTKoro и длинноrо рычаrов.
При торможении в обратном направлении тормозной MO
мент при той же силе F зам уменьшается в еа! раз.
Тормоз суммирующеrо действия при длинах плеч 01 == а2 pы
чаrа обеспечивает одинаковый тормозной момент в двух проти
воположных направлениях, но замыкающее усилие F;aM требу
ется в (еа! + 1) раз большее, чем в простом тормозе.
16.4.2. Дисковый тормоз
Дисковый тормоз обычно конструируют нормально замкну
тым, т. е. тормозной момент ТТ создает замыкающая сила F Ha
жатия пружины, а размыкание тормоза осуществляет, как пра
вило, электромаrнит. Расчет размеров электромаrнита тормоза,
предложенный А.В. Буланже, приведен в приложении П.16.1.
Тормоз выполняют с одним или несколькими дисками. Ma
териалы пары трения, коэффициенты трения и допускаемое
удельное давление в паре трения принимают по рекомендаци
ям, сформулированным в 16.3.1. Осевую силу Fнажатия на дис
ки вычисляют по формуле (16.17). Число пар трения i оценива
ют, задавшись тормозным моментом Тт:
i == Тт
О,5п ср ! р'
(16.61)
rде пср средний диаметр поверхностей трения.
Тормоз должен допускать реrулировку как силы нажатия
пружины на диски, так и зазора Е между корпусом электромаr
нита и ero якорем. Сила нажатия и зазор изменяются в процессе
работы тормоза из за износа дисков трения.
342
t
2 3
Е
\ / / 4-
\ S
7 r>\v/
""' /
T .""yV
I'<m: с [7"":
,,,-и77//// ,/
::t: (ю I
.......... ,, . ......
'"'"'"1 r / :-":т т\ "'-1
'"""" \ l r lX WД/// , \ \
н с 7 .'-J
/ I"''' ,/V
\ V 1"- \
\/ 1'--
f'.. "Lo. .......1'<'''''< h \
9 I---:::r--- -j....... б
,",,и,, ,,"" '" 4-- 7
8 I
[к
Рис. 16.27. Дисковый тормоз
На рис. 16.27 представлен чертеж одноrо из конструктивных
исполнений дисковоrо тормоза, состоящеrо из дисков трения 1;
пальцев 2, удерживающих от вращения якорь электромаrнита 3;
катушки электромаrнита 4 кольцевоrо типа; тарельчатой пружи
ны 5, создающей замыкающую силу нажатия на диски; винта 6,
реryлирующеrо силу нажатия пружины; rайки 7, реryлирующей
зазор между корпусом электромаrнита и ero якорем; пружины 8,
обеспечивающей осевую фиксацию электромаrнита и стопоре
ние rайки 7; заклепок 9, скрепляющих фрикционный материал
с дисками.
16.5. Практика конструирования. Червяк
16.5.1. Постановка задачи
Ранее (см. 10.3, 11.4 и 12.3) был проведен расчет червячноro
редуктора, приводящеrося в движение через клиноременную
передачу от установленноro на нем электродвиrателя, разрабо
343
таны чертежи червячноrо колеса, а также ведомоrо шкива ЮIй
ноременной передачи, подобраны подшипники червяка. На Oc
новании этих расчетов принимаем: ресурс реДуктора
(1:. == 10000 ч; частота вращения червяка пl == 1420 мин l; про
филь зуба червяка эвольвентный; поверхность витков червяка
закалена и отшлифована; число заходов червяка ZI == 2; направ
ление Витков правое; коэффициент диаметра червяка q == 12,5;
модуль зацепления т == 4 мм; коэффициент смещения инстру
мента х == + 0,25; делительный диаметр червяка d 1 == 50 мм; диа
метр окружности вершин ':Iервяка d a1 == 58 мм; диаметр окруж
ности впадин d л == 40,42 мм; делительный уrол подъема витка
червяка r == 10,10; дЛина нарезанной части червяка Ь 1 ?: 78,8 мм;
начальный диаметр червяка d w1 == 52 мм; делительная ТОЛЩина
по хорде витка червяка Sal == 6,20 мм; высота до хорды h a1 ==
== 4,0048 мм; ход витка Pzl == 25,12 мм; делительный диаметр чер
вячноrо колеса d 2 == 228 мм; силы в зацеплении Е А1 == 3333 Н,
Ffl == 618 Н, F R1 == 1083 Н; сила предварительноrо натяжения
клиноременной передачи 2Ро == 150,4 Н. При пуске двиraтель
развивает момент, в 2,5 раза превышающий номинальный.
Требуется разработать чертеж червяка и провести ero прове
рочный расчет на прочность.
16.5.2. Проектные расчеты и чертеж червяка
1. Так как требуется повышенная твердость рабочей поверх
ности' витка червяка и поверхности, которая будет контактиро
вать с манжетным уплотнением, то в качестве материала прини
маем сталь 20Х, подверrнутую нормализации, а в местах, [де
требуется повышенная твердость, последующей цементации.
Для этой стали, соrласно приложению П.4.2, а т == 400 МПа, ОВ ==
== 650 МПа.
2. Опоры червяка в червячном реДукторе должны находить
ся на расстоянии, большем делительноrо диаметра червячноrо
колеса, который составляет d 2 == 228 мм. Поэтому принимаем
расстояние между опорами червяка 1 ::::: 300 мм.
3. В ранее проведенном расчете червячной передачи (см.
10.3) при определении параметров червяка для обеспечения ero
жесткости принимали d 1 == (0,35...0,4)a w ' Поэтому расчет на
жесткость не нужен.
4. Посадочные диаметры вала червяка под Подшипники Ha
значаем меньшими диаметра впадин витка червяка.
5. С учетом изложенноrо на рис. 16.28 представлен чертеЖ
червяка.
344
<;: <\,j
Е: N I
CCI
s' "g 1
<Q
I I
t;
,)::+1 f3
1
t::
i }
.i1:r;; ;Q {;;)
....... {;;).., ::t::t ':..::
<1.51
}:
: <..>
....-.: t...;
'<:> ",,' ""
"'
<g t1>
>C: .., f3
i
.<><1:> E:t:: ::::,:t
<:::. :>- :::,,, :::, '%
f5 t;
$:!I:Q":::t ::r::;",,
:::,
s
"" .
t1 <::. "" ::::
t.:: :% ",
t1
%;r t;..,
<"<;:,
.з <:::t
'-')
...:-
"<
L...
I
......
с\!
D..
ol)
::r
ol)
1--<
р..
ol)
:т
аО
N
и
=
I
I.Q
U
'
345
16.5.3. Проверочные расчеты прочности червяка
1. Составляем расчетную схему червяка (рис. 16.29).
2. Зная силы в зацеплении и силу предварительноrо натяже
ния клиноременной передачи, вычисляем радиальные реакции
в первой F rB1 , Frrl и второй F rвЪ F rr2 опорах, возникающие co
ответственно в вертикальной и rоризонтальной плоскостях:
F 1 F dw
R А +2Fo(a+l)
F 2 2
r вl Z
1083. 300 3333 . 52 + 150 4 ( 40 + 300\
2 2'
300 == 423 Н;
==
F 1 F dw
R + А 2Foal
F 2 2
rB2 Z
300 52
1083. + 3333. 1504.40
22'
300 == 810 Н;
==
==
Ft 618
Frrl == F rr2 == == == 309 Н
2 2 .
lJO
4,,"
45
1,2
4б
14
15
Рис. 16.29. Расчетная схема червя
ка и эпюры моментов (значения
моментов даны В ньютон метрах)
346
2Fo
3. Строим эпюры изrибаю
щеrо момента в вертикальной
Мх и roризонтальной Му плос
костях и крутящеrо момента т
(см. рис. 16.29).
4. Определяем положение
опасноrо сечения. Им являет
ся проточка, которая располо
жена на поверхности червяка,
предназначенной для посадки
подшипника второй опоры.
rеометрические размеры, xa
рактеризующие опасное ce
чение, следующие: диаметр
опасноrо сечения d == 35 мм;
диаметр заплечика, в который
упирается подшипник, D ::::::
ИХ
== 40 мм; радиус rалтели, расположенной в проточке, r ==
== 1 мм. Для этоrо сечения моменты сопротивления изrибу и
кручению составляют W из == O,ld 3 == 0,1 .353 == 4287,5 мм 3 и
w: == о 2d 3 == О 2 . 353 == 8575 мм 3
кр" .
5. При работе передачи в номинальном режиме в опасном се..
чении действует крутящий момент Т== Ft1 0,5 d w1 == 618 .0,5 .52 ==
:::::: 16000 Н . м м и сумм арн ый изrибающий момент
М == {М; + М; == .J 44592 2 + 139052 == 46710 Н. мм.
6. Про водим расчет на статическую прочность. Для этоrо по
формулам (l6.4) (l6.6) оцениваем эквивалентное напряжение
о"э В опасном сечении при пусковых переrpузках, превышающих
номинальную наrpузку в 2,5 раза:
о" == М тах == 2,5.46710 == 272 МПа'
W из 4287,5 ' ,
't == Т тах == 2,5 . 16000 == 4 7 МПа'
W 857 5 '
кр
о" э == .Ja 2 + 3't 2 == 2 7,2 2 + 3 . 4,72 == 28,4 МПа.
Это напряжение сопоставляем с допускаемым, равным, co
а 400
rласно 4.3, [а] == т == == 267 МПа. Так как получено
(1,3.. .1,5) 1,5
[а] > а э , то статическую прочность считаем обеспеченной.
7. По формуле (4.9) оцениваем предел выносливости MaTe
риала
a 1 == (0,55 О,ОООlа в ) а в == (0,55 0,0001 .650) . 650 == 315 МПа.
8. Вычисляем амплитуды аа , 't a И средние значения а т ' 't т
нормальных и касательных напряжений в опасном сечении чер
Вяка при работе привода в номинальном режиме
М 46710
а == == ==109МПа;
а W 42875 '
из ,
а т == о;
347
1: = 1: = 0,5Т = 0,5 .16000 = 094 МПа.
а т W 8575 '
кр
9. По приложению ПА.3 определяем эффективные коэффй
циенты концентрации напряжений при изrибе Ка и кручении
Кт.' Концентратором напряжений дЛЯ вала диаметром d == 35 мм
служит rалтель радиусом r == 1 мм в месте расположения запле
чика диаметром D == 40 мм. Для TaKoro случая при r/ d == 1/35 ==:
== 0,02 по rрафикам ПА.3 находим КаО == 2,3 и o == 1,9, а затем
по формулам вычисляем
Ка == 1 + a(K CiO 1) == 1 + 0,2(2,3 1) == 1,26;
== 1 + b( o 1) == 1 + 0,4(1,9 1) == 1,36,
[де а, Ь коэффициенты, зависящие от отношения D/d, при
D/d == 40/35 ==1,14 по rрафикам ПА.3 находим а == 0,2 и Ь == 0,4.
10. По формулам (4.12), (4.13) вычисляем коэффициенты
уменьшения предела выносливости детали при изrибе и круче
нии:
к
+ Кр 1
К Е
ап
1,26 + 115 1
0,865' = 161'
1,0 ' ,
Kv
К",
+KF 1
К т.п = Е
Kv
1,36 + 115 1
= 0,865' = 1 72
1,0 ' ,
rде Е коэффициент влияния абсолютных размеров поперечно
ro сечения, учитывающий уменьшение сопротивления устало
сти с увеличением размеров; при размере onacHoro сечения d:::::
== 35 мм Е == 0,865; K F коэффициент влияния шероховатости,
учитывающий уменьшение усталостной прочности с увеличе
нием высоты микронеровностей поверхностей; для материала с
О"В == 650 МПа и поверхности, полученной точением, K F == 1,15;
Kv коэффициент влияния упрочнения; при отсутствии упроЧ
нения Kv == 1,0.
11. По формулам (4.10) и (4.11) (см. шаr 4) вычисляем запас
прочности при изrибе Sa и запас прочности при кручении S",;
348
S = о" 1 = 315 = 17,9;
(J КапО"а +'Раа т 1,61-10,9
S = 1: 1 = 189 = 112,
't K-r;D't а + 'Р",1: т 1,72 - 0,94 + 0,075.0,94
[ д е 'Р 'Р коэффициенты, характеризующие чувствитель
Ci' -r; \ТI О 02 +
ность материала к асимметрии цикла: для сталеи т ci ,
+ О 00 020- == 002 + 00002 .650 == 0,15; 'P-r; == 0,5'Р с; == 0,5 .0,15 ==
, в' ,
== 0,075; 1: 1 == O,6a 1 == 0,6 . 315 == 189 МПа.
12. По формуле (4.15) (см. шаr 4) находим запас прочности S
по пределу выносливости рассматриваемоrо опасноrо сечения
вала. Так как
= + = + = 0,0032,
S 2 S 2 S2 1792 1122
ci 't '
то S == 17,68. u
13. Прочность детали считается обеспеченнои, если запас
по пределу выносливости получен не мен:е допустимоrо [51,
[де [s] == 1,5...2,5. еопоставляя полученныи запас S допусти
мым, делаем заключение о достаточной усталостнои прочно
сти червяка.
ПРИЛОЖЕНИЯ 0.16
П.16.1. Расчет электомаrнита постоянноro тока
ДЛЯ дисковоrо тормоза
Площадь воздушноrо зазора между корпусом электромаrни
та и якорем (обозначения размеров приведены на рис. 16.27)
А = n(d d?) + n(dl d )
вз 4 4'
[де А вз В м 2 .
Индукция электромаrнитноrо поля в воздушном зазоре
ВО = FI!O ,
А вз
[де Во в Тл; F осевая сила нажатия, Н; O == 4nlO 7, [н/м,
маrнитная постоянная.
Напряженность маrнитноrо поля в воздушном зазоре
Во
Но = ,
O
rде Но в А/м.
Необходимое для создания маrнитноrо потока число aM
пер витков
Iw == 2 . 10 3 Но етаХ'
rде Iw в А; €шах == 1,6 f: нач наибольший зазор, при достиже
ни KOToporo тр буется реrулировка зазора Е, мм; Е нач == 0,3 +
0,11 начальныи зазор, мм; i число пар трения.
Площадь поперечноrо сечения катушки электромаrнита
А = Iw
к 8k'
[де А к В мм 2 ; 8 == 2 AjMM 2 допустимая плотность тока в элек
тропроводе; k 0,5 коэффициент, учитывающий заполнение
электропроводом поперечноrо сечения катушки.
Необходимая длина катушки
Z = 2А к
К d з d 2 '
rде ZK в мм.
350
Список литературы
Анурьев В.И Справочник конструктора машиностроитепя: Б 3 т. М.: Ma
Illиностроение, 1992. Т. 2. 784 с.; Т. 3. 720 с.
Иванов М.Н Детали машин. Учеб. ДЛЯ,вузов. М.: Бысш. ШК., 1991. 383 с.
Подuщпникu качения: Справочник каталоr jЛ.Б. Черневский, Р.Б. Kopocтa
шеВСКИЙ, Б.Ф. Яхин и др.; Под общ. ред. Л.Б. Черневскоrо и Р.В. Коросташев
cKoro. М.: Машиностроение, 1997. 896 с.
Решетов д.н. Детали машин. Учеб. для вузов. М.: МаlШlностроение, 1989.
496 с.
Ряховский О.А., Иванов с.с. Справочник по муфтам. Л.: Политехника.
1991. 384 с. .
Тор.мозные устройства: Справочник jМ.П. Александров, A.r. Лысяков,
В.Н. Федосеев, М.В. Новожилов. М.: МаlШlностроение, 1985. 312 с.
Шаr 17. КОНСТРУИРОВАНИЕ КАК ОБЪЕКТ
ДЕЯТЕЛЬНОСТИ
. Какие nрофессиональные навыки наиболее nрестuжны в мире?
. В чем отличие профессии конструктора от дРУ2их творческих nрофес
сий?
. Каково соотliошение между прошедшим, настоящим и будущим вpeмe
нем у конструктора, учеНО20 исследователя, художника и математика?
. Какие черты личности являются общю.1U у конструктора с ученым ис
следователем, художником, математиком?
. Имеется ли связь между уровнем интeшzекта и способностью к деятель
ности математика?
. Имеется ли связь между уровнем интeшzекта и способностью к KOHcт
рукторской деятельности?
. Какие типы людей выделил швейцарский пСИХОЛО2 Карл [устав ЮН2
(J875 1961)?
. Какие типы людей выделены в американской типОЛО2ИИ Майерс БРИ22С?
. Какие тuпылюдей по тИnОЛО2UU МаЙерс БРИ22С МО2ут шtеть задатки к
конструированию?
. Какими чертами характера обладали Леонардо да Винчи, Ф. Шопен,
П.И Чайковский, А. С. Пушкин, с.А. Есенин, В.Т Шухов, д.н Решетов
и т Форд?
. Как соотносятся у человека е20 первичные потребности (сон, еда и т. д.)
с потребностями в защищенности, в дружеских отltошенuяx или любви,
а также с потребностями е20 саморазвития?
. Люди каКО20 типа лучше работают утром, а каКО20 после обеда?
. Какое из конструктивных исполнений привода лентОЧНО20 транспортера
близко к оптимальному?
. Какой червячныЙ редуктор имеет меньшую массу: с радиальной сборкой,
с осевой сборкой или с запрессовкой червЯЧНО20 колеса внутри корпуса?
. Как научить принимать оптимальное конструктивное решение?
Ответы на эти вопросы и не только на них Вы найдете в 17 M
шаre.
На этом шаrе мы проанализируем, какие черты личности
свойственны лицам творческих профессий, выясним место KoH
структора среди них и на основании результатов психолоrо пе
даrоrическоrо исследования в области повышения эффективно
352
сти обучения сформулируем предЛожения по совершенствова
нию методики обучения вопросам конструирования.
Надеемся, что этот материал поможет читателю уточнить
свое призвание, а если читателем является преподаватель, то
найти контакт с аудиторией и скорректировать методику обуче
ния таким образом, чтобы за отведенное время добиться макси
мальнЬrо эффекта.
17.1. Конструирование как один из видов
творческой деятельности
17.1.1. Выбор профессии
В развитых странах выделяют три rpуппы профессий: 1) имею
щие дело с информацией (в том числе и rpафической); 2) имею
щие дело с людьми; 3) связанные с производством. На рис. 17.1
для каждой rpуппы профессий перечислены профессиональные
навыки в порядке понижения (сверху вниз) их уровня.
Профессионапьные навыки людей, профессия которых связана
с информацией I с ЛЮДЬМИ I с ПРОИЗВОДСТБОМ
! ! !
Синтез I Воспитание Монтаж
! ! !
I I Переroворы I Решение точных
Соrласование задач
! ! !
Анализ 1 I Инструктаж I I Контроль
! ! !
Накоrшение I I РукОВОДСТВО I I Управление
J, J, J.
Вы шсление I I Увеселение I I Обработка
,
J. ! J.
Копирование I I Общение I I Обслуживание
! ! !
Сравнение I I Обслуживание I I СнабжеIШе
Рис. 17.1. Профессиональные навыки людей различных профессий
353
12 8640
Видно, что наиболее сложными, а поэтому наиболее пре
стижными и оплачиваемыми в мире при работе с информацией
являются профессии, связанные с синтезом, соrласованием и
анализом; при работе с людьми с воспитанием, переrоворами
и инструктажем; на производстве с монтажом, решением точ
ных задач и контролем.
В нашей стране пока все несколько не так. Наиболее опла
чиваемыми в большинстве случаев являются специалисты с
низким уровнем профессиональных навыков: при работе с ИН
формацией люди, занимающиеся сравнением, копированием,
вычислением и накоплением; при работе с людьми те, кто за
нимаются обслуживанием, общением или увеселением, а на
производстве специалисты, деятельность которых связана со
снабжением, обслуживанием или обработкой материалов (Ma
ляры, штукатуры, слесари и т. д.).
еледует надеяться, что у нас все же произойдет переориен
тация взrлядов, поэтому далее будем полаrать приведенную на
рис. 17.1 закономерность справедливой.
17.1.2. Деятельность конструктора при проектировании машины
Проектирование машины начинают с составления и YTBep
ждения техническоrо задания (стадии разработки бьши pac
смотрены в шаrе 7). Оно должно содержать необходимые и дoc
таточные данные для возможных решений.
!lроектирование это трехступенчатый процесс, включаю
щии анализ, синтез и оценку результатов.
На первой ступени (при подrотовке техническоrо предложе
ния) конструктор расчленяет задачу на части. Он сознательно
завышает свою неуверенность, про водя поиск аналоrов, прото
типов, патентов, каталоrов выставок и литературы на данную
тему. Ero цель в кратчайший срок и с минимальными затрата
ми изучить отобранный материал для Toro, чтобы не совершить
ошибки. Это достаточно трудоемкий этап.
На второй ступени (на этапах техническоrо предложения, эс
кизноrо и техническоrо проектов) конструктор соединяет частИ
задачи по новому. Синтез это наиболее ответственная стадия,
на которой необходим и большой опыт, и здравомыслие (чтобы
не оrорчить мир дороrостоящими, бесполезными или даже
вредными результатами больших, но неверно направленных за
трат человеческоrо труда). На этой стадии конструктор предла
raeT новые принципы и концепции, превращая процесс KOHCT
руирования в творчество.
354
Деятельность конструктора постоянно требует взвешивания,
подтверждения или отклонения решений. В основе каждоrо из
них должна лежать сравнительная оценка. Каждое решение
имеет недостатки. Решение с минимальным числом HeДOCTaT
ков является оптимальным. На практике сравнительная оценка
в большинстве случаев полностью удается лишь при большом
количестве проб. И все же следует стремиться принять решение
прежде, чем будут произведены затраты на изrотовление маши
ны. Правильность функционирования машины, расход Maтe
риалов и трудоемкость ее изrотовления в большой степени оп..
ределяются работой конструктора. Принято е им техническое
решение определяет экономичность производства и эксплуата..
ции машины.
Третья ступень (реализуется на стадиях рабочеrо проектиро
вания и изrотовления опытных образцов или опытной партии)
связана с изrотовлением новой машины и изучением последст
вий от ее практическоrо внедрения. На этой стадии задачи оп
ределены, переменные найдены, цели установлены и достоин
ствами конструктора становятся ero настойчивость, жесткость
мышления и умение требовать выполнения необходимоrо объе
ма и последовательности работ по разработке чертежей сбороч
НЫХ единиц машины и деталей, по изrотовлению, сборке, испы
таниям и обслуживанию ROBoro изделия.
Новые идеи надо уметь не только предлаrать, но и отстаивать.
В приложении П. 17.1 приведены заимствованные у И. Мюллера
высказывания, на которые у конструкторов должны быть roTOBbI
ответы при обсуждении HOBoro проекта машины.
Рассмотрим, какие качества нужны конструктору, чтобы не
только предЛаrать и отстаивать, но и реализовывать новые идеи.
По видимому, любую творческую деятельность можно опре..
делить как деятельность, ведущую к созданию нечто HOBoro, чеrо
ранее не существовало. Творческие профессии это компози..
тор, художник, поэт, писатель, скульптор, архитектор, MaTeMa
тик, физик, изобретатель, конструктор. Деятельность KOHCTPYК
тора e полностью совпадает с данным: определением творче..
ской деятельности. Конструированием следует считать создание
не просто любоrо HOBoro, а HOBoro, которое сулит экономический
или какой либо иной эффект.
Деятели искусства и науки имеют дело с реальным или сим
волическим миром в том виде, в котором он существует в настоя
щее время (ученые в некоторых исследованиях используют также
результаты, полученные в прошедшее время), а математики опе
рируют с абстрактными отношениями, не зависящими от кален
12*
355
дарноrо времени. Конструкторы же всеrда вынуждены считать
реальным то, что существует лишь в воображаемом будущем.
Художники, живописцы, скульпторы культивируют в себе
уверенность, штовность действовать часто при отсутствии HaTY
ры, которая моrла бы активизировать их воображение. Они
работают, используя высокоразвитую способность своей HepB
ной системы остро реаrировать на интуитивно схваченную Kap
тину реальноrо мира. Цель ученоrо исследователя точно опи
сать и объяснить наблюдаемое явление. Для ero подхода
характерны профессиональный скептицизм и сомнения. MaTe
матик рассматривает не физический мир, а мир отношений чи
сел, параметров и множеств, т. е. точный и вневременной.
Конструктор же, прежде чем предсказать будущее, должен Б
достаточной мере знать настоящее и прошлое (первая ступень
проектирования), а для этоrо он должен обладать свойствами
ученоrо исследователя: скептицизмом, умением поставить экс
перимент и проанализировать ero результаты. Однако, коrда
конструктор переходит от настоящеrо к будущему (вторая CTY
пень проектирования), позиция сомневающеrося ученоrо ис
следователя становится для Hero бесполезной и ей на смену
должно придти нечто друrое, похожее скорее на подсознатель
ную веру. Подход художника необходим конструктору на том
этапе работы, коrда в лабиринте вариантов приходится отыски
вать тропинку, ведущую к новому и непротиворечивому по
строению, которое моrло бы лечь в основу решения. Это самая
интересная и сложная часть разработки. Приемы работы MaTe
матика, выражающеrо исходные предположения через абст
рактные символы, а затем преобразующеrо эти символы по co
ответствующим алrоритмам, приmдны конструктору на заклю
чительной третьей ступени проектирования, коrда задача стаби
лизировалась и отыскивается оптимальное решение.
Из сопоставления сказанноrо с данными, приведенными на
рис. 17.1, следует, что профессия конструктора является одной
из престижных в мире, так как конструктор это специалист
наиболее BbIcoKoro уровня профессиональных навыков при pa
боте с информацией, людьми и на производстве.
17.1.3. Связь между уровнем интеллекта и способностью
к конструкторской деятелыlOСТИ
в 1950 60 x [одах социолоr Маккиннон из Калифорнии об
следовал людей, которые в своем деле характеризовались OKPy
жающими как исключительно творческие и в профессиональном
356
смысле преуспевающие личности. Он изучал профессиональ..
ные rpуппы архитекторов, м тематиков, писателей, физиков и
инженеров.
Например, подбор архитекторов для данноrо исследования
осушествлялся следующим образом: пятерых американских
университетских профессоров архитектуры попросили о том,
чтобы каждый в отдельности составил список 40 наиболее TBOp
ческих американских архитекторов. Так было найдено 68 чело
век. Их алфавитный именной список был предложен 11 peдaK
торам известных специальных журналов по архитектуре с тем,
чтобы они провели дальней корректировку очередности.
Затем первые 64 человека из списка бьши приrлашены для их
тестирования. Приrлашение приняло сорок человек.
Подобный подход бьш применен и в отношении дрyrих про
фессиональных rрупп.
Тестирование проводилось как на определение уровня ин..
теллекта (известноrо коэффициента IQ), так и по личностным
тестам. Для математиков бьшо установлено, что существует пря
мая связь между уровнем их интеллекта и творческими силами
(профессиональной продуктивностью). Для дрyrих профессий
такая связь не обнаружена.
Исследователь использовал подобный арсенал тестов и в OT
ношении rрупп лиц «нетворческих» профессий. Из результатов
исследований следует, что творческие личности пользуются ин
туицией в З 4 раза чаще, нежели «нетворческие». Оказалось
сенсацией, что чувственное восприятие у лиц большинства
творческих профессий цреобладает над рассудочным.
еоциолоr Кокс в 1926 т. предпринял попытку оценить IQ
знаменитых людей, коrда они бьши в школьном возрасте, а так..
же коrда бьши в возрасте молодоrо специалиста. Результаты ис
следования пр ведены на рис. 17.2.
В работе Ж. r одфруа отмечается, что мноrие исследователи
пьrrались выявить личностные особенности творческих людей.
По их данным, наиболее типичные из этих особенностей aH
тиконформизмl, интерес ко всему сложному и новому, а также
способность удивляться и восхищаться.
Из сказанноrо можно сделать следующие выводы:
1) математики и ученые исследователи (возможно и шахма
тисты) доверяют лишь тому, что лоrично и научно обосновано;
} Конформизм это пассивное принятие существующеrо порядка вещей.
357
[ёте I
I
Вольтер 1
Декарт
Диккенс I
ФранКJШН I
rюrо
Моцарт I
Леонардо да Винчи
Дарвин
Бетховен
Ньютон
Линкольн I
Лютер I
Наполеон I
Вашинrтон т
Рембрандт т
т
Рис. 17.2. Уровень интеллекта знаменитых людей (темные линии в 17 лет,
светлые в 26 лет)
2) ХУДОЖНИКИ, архитекторы, скульmоры и писатели счита
ют, что решение проблемы должно быть прежде Bcero [apMO
ничным.
В работе Роберта Дж. Ш тернберrа, профессора Йельскоrо
университета (США), выдвиrается мысль, что творчество, иначе
интеллект успеха (новое по нятие , введенное этим автором),
358
объединяет в себе аналитический, творческий и практический
интеллекты, [де центральным является творческий интеллект.
Человек, обладающий одним лишь творческим интеллектом,
может предлаraть одну за друrой НОБые идеи, но обычно оказы
вается не в состоянии отделить стоящие идеи от бесперспектив
ных, не rоворя уже о том, чтобы успешно их реализовать. MHO
rие идеи TaKoro человека можно назвать творческими, но для
общества они бесполезны. Обладатели лишь аналитическоrо ин
теллекта, как правило, являются блестящими критиками чужих
идей, но сами оказываются неспособными предложить что либо
новое и интересное. И, наконец, если человек имеет высокий
уровень одноrо лишь практическоro интеллекта, он может BO
плотить В жизнь какую yrодно идею, зачастую не представляя ее
истинной цены. Таким образом, у творческой натуры должны
быть сбалансированы все три составляющие интеллекта.
Роберт Дж. Ш тернберr отмечает, что тестирование по коэф
фициенту IQ направлено на оценку аналитическоrо интеллекта
и притом только ето малой части. Оценку успеваемости учащих
ся следует проводить по четырем катеrориям: способностям к
запоминанию, к аналитическому, творческому и практическому
мышлению.
17.1.4. Качества, которыми желательно обладать JПOДЯМ
творческих пр ессий
Чтобы представить, какими качествами должны обладать
люди творческих профессий, проанализируем характерные чер
ты известных художников, композиторов, поэтов, KOHCTPYКТO
ров И крупных ученых машиностроителей. Кроме тoro, учиты
вая, что в настоящее время, в связи с переходом на рыночную
экономику, актуальна разработка конкурентоспособных на ми
ровом рынке машин, рассмотрим также характерные черты лич
ности rенри Форда одноrо из выдающихся производителей
таких машин (приложение П.17.2).
Леонардо да Винчи отличался стремлением работать в оди
ночестве, исследовать все, на что наталкивала ero интуиция,
тщательно анализируя всю информацию. Эта черта еro xapaктe
ра вместе с непредвзятостью и подвижностью мышления приве
ла ero к постановке парадоксальной цели собрать воедино
имеющуюся в мире информацию, которая увеличивалась как
«снежный ком».
359
Ф. Шопена и П.И. Чайковското по характеру можно отнести
к идеалистам, которые выработали свои идеалы путем rлубоко
ro субъективноrо взrляда на мир и стремились к самопознанию,
самоопределению и соrласию с самими собой; высший судья
качества их работ они сами. У них возникало HaMHoro БОльще
вопросов к жизни, чем ответов на них. Хотя они выrлядели Доб
родушными, их движущей силой была страсть.
А. е. Пушкин обладал быстротой ума, импульсивностью,
любовью к испытаниям, бесстрашием, леrко увлекался новыми
идеями и терял интерес к старым. На любую проблему он CMOT
рел, как и [ёте, с самой общей точки зрения. еостояние, в KOTO
ром он отдавался полету фантазии источнику своей творче
ской активности, бьшо для Hero отдыхом.
Общительность, желание нравиться и доставлять радость
друrим, интуиция, чувственность и понимание красоты приро
ды, неуправляемость бьши характерными чертами е.А. Есени
на. Он поддерживал впечатление о себе как о драчуне и спор..
щике, хотя по складу характера бьш друrим.
B.f. Шухов бьш орrанизован, умел взrлянуть на проблему с
разных точек зрения, отличался независимостью суждений и не
боялся идти непроторенным путем.
Д.Н. Решетов бьш ученым с большой эрудицией и развитой
интуицией, в ряде случаев позволивших предсказать ответы на
задачи за MHoro лет до их решения теоретическим или экспери
ментальным путем. Во взаимоотношениях с окружающими и
подчиненными всеrда воздерживался от слов, способных оскор"
бить собеседника. При обсуждении сложных вопросов разrовор
заканчивал фразой: «Я подумаю об этом», но не с целью OTKa
заться от решения проблемы, а чтобы вернуться к ее решению
через некоторое время.
[. Форд обладал высоким чувством ответственности (слово
«надо» бьшо одним из основных в ето лексиконе) и ориентиро
ванностью на получение результата; для Hero труд являлся ле
карством от всех болезней. Всему, с чем он сталкивался, он He
медЛенно придавал определенный порядок. Естественно, Форд
требовал TaKoro же поведения и от окружаюlЦИХ. Ero отличали
нетерпеливость, всепоrлощающее рвение и настойчивость.
17.1.5. ТИПОЛОI'ИЯ ИНДИВИДУальных различий
Известный швейцарский психолоr Карл [устав Юнт (1875
1961) полаrал, что каждый из нас рождается с предрасположен
360
ностью К определенным личностным качествам. В своей работе
«Психолоrические типы», опубликованной в 1923 Т., он ввел
представление о двух универсальных психических фунщиях
личности: экстраверmой и интровертной.
Судьба личности с экстравертной функцией обусловливает
ся преимущественно объектами ее интересов, обращенностью
во вне, в то время как судьба личности с интровертной Функци"
ей определяется прежде Bcero ее внутренней жизнью, обращен
ностью внутрь, на себя. Кроме Toro, Карл Юнr заметил, что лю..
ди различаются по друrим психическим функциям: МЫIIШению
и чувствованию, ощущению и интуиции. Таким образом,
К. Юнт выделил восемь психических функций личности: мыс..
лительную (лоrическую) и чувствующую, сенсорную и интуитив"
ную, каждая из которых, кроме Toro, моrла быть экстравертной
и интровертной.
В конце 50 x тодов Катарина Бриrrс и Изабель Майерс (мать
и дочь) на основе идей К. Юнта разработали в США индикатор
типов Майерс Бриrrс МВТI (Myers..Briggs Туре Iпdicator).
МВТI предполаrает наличие шестнадцати типов людей и oc
нован на выявлении двух различных способов пополнения запа
са энерrии и сосредоточения внимания (шкала экстраверсия Е
интроверсия 1), двух противоположных способов сбора информа
ции (шкала сенсорнOCTh S интуиция N), двух различных спосо..
бов принятия решений (шкала мышление Т чувствование F) и
двух различных способов орrанизации cBoero взаимодействия с
внешним миром (шкала решение J восприятие Р). Три шкалы
заимствованы у К. Юнrа, а четвертая добавлена на основе иссле
дований Изабель Майерс. Таким образом, каждый из нас:
экстраверт Е или интроверт 1;
сенсорик S или интуит N;
лоrик Т или чувствующий F;
решающий J или воспринимающий Р.
В настоящее время только в США свой личностный тип оп
ределило свыше 3 млн человек.
Рассмотрим особенности четырех пар психических функ..
ций, комбинации которых образуют шестнадцать личностных
типов.
Экстраверт rоворит, а затем думает. Он не знает, что именно
скажет до тех пор, пока не услышит звук собственноrо rолоса,
имеет MHoro знакомых и мноrих из них считает ближайшими
друзьями. Чем больше встреч с людьми, тем ему лучше. ОН MO
жет вести беседу при включенном телевизоре; доступен для дpy
13 . 8640
361
зей; не уклоняется от общения с посторонними, хотя стремится
при этом иrpать в разrоворе центральную роль; охотно прерыва..
ет занятия, чтобы поrоворить по телефону; с удовольствием по
сещает вечеринки; предпочитает разrовор с больпrn:м числом
собеседников беседе в узком кpyry; нередко сообщает сведения
весьма личноrо свойства посторонним; предпочитает обдумы"
вать нерешенные проблемы в обществе, а не в одиночестве; слу
шает с большим усилием, чем rоворит сам; очень нуждается в
поддержке и одобрении со стороны друзей и сослуживцев. Ему
характерны общительность, взаимодействие, социальность, ши..
рота мысли, забота о внешнем облике.
Интроверт предварительно обдумывает то, что собирается
сказать; часто употребляет выражения типа: «Я подумаю об
этом», «Я скажу всем о своем решении позже»; любит тишину и
уединение; старается не допустить, чтобы рядом оказался рабо
тающий телевизор; считается умеющим слушать; имеет репута..
цию робкоrо человека; сдержан; задумчив; предпочитает OTMe
чать события с ближайшими друзьями; хотел, чтобы давали
высказываться до конца и не прерывали на полуслове; сам ни..
коrда не прерывает друrих и ждет от них TOro же; чувствует He
обходимость подзарядиться в одиночестве после Toro, как при
шлось побывать на людях; употребляет слова в их буквальном
смысле; уверен, что «слова стоят дешево»; делается подозри
тельным, если ero слишком хвалят; раздражается, если КТo либо
повторяет слова, которые ранее уже бьVIИ сказаны. Ему харак"
терны задумчивость, приоритет внутренних ero свойств, чувство
территории, rдубина мысли, сосредоточенность.
Сенсорик предпочитает конкретные ответы на конкретные
вопросы; rораздо охотнее делает что то, нежели раздумывает об
этом; находит более привлекательной работу, приносящую ося
заемые результаты; охотнее имеет дело с фактами и цифрами, а
не с теориями и идеями; удивляется людям, тратящим массу
времени на «иrpу воображения»; читает журналы с первой cтpa
ницы; расстраивается, если начальник не дает точных указаний
о работе; употребляет слова в их буквальном значении; в первую
очередь видит деревья, а не лес; на работе предпочитает занИ"
маться своим делом, не беспокоясь о том, какое значение оно
имеет для Bcero проекта; соrласен с утверждением, что <<лучше
один раз увидеть, чем сто раз услышать».
Интуит спокойно размышляет о нескольких вещах одновре"
менно; друзья часто упрекают ero в рассеянности; обычно инте
ресуется не тем, [де находится в данный момент, а rде будет Ha
362
ходиться позже; считает скучные подробности ненужными;
любит размышлять о различных предметах ради чистоrо насла
ждения процессом мышления; ценитель каламбуров и словес
ных иrp; склонен к поиску взаимосвязей между явлениями, не
довольствуясь фактом их восприятия, и всеrда задает вопрос:
«Что бы это значило?»; дает самые общие ответы на большинст
во вопросов И раздражается, если при стают с частностями;
охотнее планирует, на что потратить следующую зарплату, He
жели анализирует, как была использована предыдущая.
Лоrик способен оставаться спокойным тоrда, коrда OKPy
жающие теряют самообладание; в споре поддерживает ту CTOpO
ну, которая заботится об истине, а не о всеобщем счастье; лю
бит все доводить до полной ясности; более заслуживает
названия «человек, В предначертаниях твердый», нежели «доб..
рое сердце»; rордится преданностью объективной стороне дела,
хотя окружающие упрекают в равнодушии и нечуткости; не бо..
ится никаких трудностей; считает, что важнее быть правым, чем
приятным; не соrласен с тем, что в интересах общеrо дела сле
дует хорошо относиться к людям; больше доверяет тому, что ло
rично обосновано; лучше запоминает числа и количества, чем
лица и имена.
ЧУВСТВУЮЩИЙ считает решение проблемы приемлемым толь
ко в случае, если оно объемлет интересы друrих людей и поэто
му обычно мало зарабатывает; чувствует, что понятие «любовь»
определить нельзя; способен на все, чтобы помочь друrому, хо..
тя, возможно, ему самому от этоrо будет хуже; всеrда ставит ce
бя на место друrоrо; воздерживается от слов, которые MOryт oc
корбить собеседника; предпочитает rармонию порядку; orop
чается межличностным столкновениям в обществе и семье; ero
упрекают в том, что он принимает все близко к сердцу.
Решающий всеrда ждет тех, кто не способен прийти вовремя,
умеет все разложить по полочкам и не может успокоиться, пока
этоrо не сделает; знает, что, если бы каждый просто делал свое
дело, нам бы не о чем было мечтать; просыпаясь утром, знает,
как пройдет день; составляет перечень дел и действует соrласно
ему; одержим идеей порядка; часто убеждает собеседника, что
не сердится, а просто высказывает свое мнение; не любит не..
ожиданностей и доносит это до сведения окружающих; любит
доводить все до конца, не откладывая на потом.
Воспринимающий леrко сбивается с заданноrо пути и может
буквально «заблудиться в трех соснах»; любит ходить непрото
ренными тропами; не рассчитывает заранее объем работы; ero
13*
363
часто обвиняют в неорrанизованности; обычно заканчивает pa
боту в срок, но для этоrо ему часто необходим взрьm активно
сти; для Hero в большей степени ИМеет ценность творческий по
рыв и непредсказуемость, а в меньшей аккуратность и поря
док; стремится превратить работу в иrpу; в разrоворе часто пере
скакивает с одноrо на друrое; неожиданное соображение может
придать новое направление ero мыслям; не любит связывать ce
бя обязательствами; предпочитает свободу выбора.
Естественно, среди окружающих нас людей мало ярко Bыpa
женных экстравертов, интровертов, сенсориков и Т.д. В OCHOB
ном, на любой из шкал психическая функция рассматриваемоrо
человека занимает положение, близкое к среднему и ее можно
пр ближенно оценить, подсчитав по каждому из восьми переч
неи качеств процентное соотношение числа качеств, которые
есть у этоrо человека из перечисленных в списке, к 'их полному
числу. При этом приближенно должно получиться что по каж
'
дои из шкал дЛЯ противоположных психических функций будут
иметь место процентные соотношения х и (100 х). Большее из
процентных соотношений укажет психическую функцию лич
ности.
Типолоrия К. Юнта получила развитие в 80 x rодах также в
соционике литовской исследовательницы Аушры Аyryстинави
чюте. ечитается, что работы в этом направлении способны при
вести к прорыву в психолотии.
В соционике выстроена вертикальная иерархия восьми пси
хических функций индивида и получено 16 психолоrических
типов личности, несколько отличающихся от выделенных в ти
полоrии MBTI. Функция, занимающая верхнюю позицию ca
мая rлавная, проrpаммная. Индивид ее использует охотнее Bce
ro. Функция на втором сверху месте рабочая. Проrраммная и
рабочая фунщии наиболее важны для определения особенно
стей личности. На третьем месте расположена слаборазвитая и
быстро истоIi.щемая функция, называемая каналом наименьше
ro сопротивления. Этот канал служит источником конфликтов
между пред стави теJlЯ1vf и разных психолоrических типов.
Результаты исследований по соционике используются у нас
в стране дЛя проrноза поведения и налаживания общения в раз
ных сферах деятельности: при составлении психолоrическоrо
портрета личности на основе анализа публикаций в СМИ, при
подборе кадров, проведении neperoBopoB, орrанизации избира
тельной кампании и Т.д.
Таким образом, типы людей можно анализировать на основе
как типолоrии MBTI, так и соционики. Но по практике приме
нения типолоrии МВТI накоплен большой статистический Ma
364
териал, поэтому воспользуемся ею дЛя выявления психолоrиче
ских качеств, необходимых конструктору.
В табл. 17.1 построена матрица типов MBTI, состоящая из
четырех строк и четырех столбцов, и в ней представлены стати
стические данные о типичных профессиях 16 возможных типов
личности. етатистические данные получены Центром по при
менению психолоrических типов путем обобщения мноrолет
них наблюдений, проведенных веША.
еопоставление черт характера известных творческиХ лично..
стей и ученых (см. в 17.1.4) с психическими функциями типоло"
тии MBTI позволило предположить, что художник и исследова
тель Леонардо да Винчи принадлежал к типу личности INTP,
композиторы Ф. Шопен и П.И. Чайковский к типу INFP, по..
эт А.е. Пушкин к типу ENTJ, поэт С.А. Есенин к типу
ENFP, конструктор B.r. Шухов к типу INTJ, ученый"машино
строитель Д.Н. Решетов к типу INFJ, а производитель машин
[. Форд к типу ISTJ. Видно, что установленные нами типы
личностей соrласуются СО статистическими данными, приве
денными в матрице типов (см. табл. 17.1).
17.1.6. Качества, которыми желательно обладать конструктору
Конструктор это, как ранее бьшо сказано, и творческая
личность, и ученый исследователь, и математик. Но в одном
лице это сложно совместить. Даже Леонардо да Винчи, [. Форд
и В. r. Шухов, которые являлись выдающимися инженерами,
внесшими большой вклад в развитие конструирования и изrо
товления машин, не отличались таким универсализмом. Так,
Леонардо да Винчи можно считать художником и ученым"ис"
следователем, B.r. Шухова ученым исследователем и мате..
матиком, [. Форда практиком, остро чувствующим потреб
ности реальной жизни. Следовательно, хороший конструктор
может получиться при комбинациях черт ero личности, xapaK
терных дЛя ученых исследователей, математиков и творческих
личностей, а также практиков, остро чувствующих потребно..
сти жизни.
Наш опыт обучения студентов в значительной степени под
тверждает эти выводы.
Люди, умеющие нетрадиционно смотреть на вещи и любя
щие «ходить непроторенным путем», предпочитаюrцие свободу
выбора (личность с воспринимающей психической функцией),
способны предЛаrать конструктивные решения, отличающиеся
новизной.
365
Таблица 17.1
ESTJ ESFJ ENТJ ENFJ
Адвокаты Духовные лица Адвокаты Артисты
Администрато Медицинские Адмшшстраторы и конферансье
ры школы сестры (компьютерные Духовные лица
Управляющие Пари:кмахеры системы Консультанты
предприятиями и косметолоrи и образование) Писатели
Учителя Санитарные врачи Брокеры и художники
Хирурrи Специалисты Менеджеры Учителя
по домоводству Ученые
ESTP ESFP ENТP ENFP
Администрато Воспитатели дeT Журналисты Адвокаты
ры ских учреждений Продавцы Духовные лица
Менеджеры Духовные лица Специалисты Писатели
Полицейские Продавцы по компьютерам и художники
Продавцы Учителя репетито Специалисты Конферансье
Ревизоры ры по маркетиту Психолоrи
Следователи Фотоrрафы Учителя
Специалисты (изобразительное
по маркетинrу И драматическое
искусство)
ISTJ ISFJ INTJ INFJ
Администрато Библиотекари Адвокаты Врачи
ры Воспитатели дeT Инженеры хим:и Духовные лица
Военные ских учреЖДений ки Консультанты
Дантисты Заведующие Преподаватели по вопросам
Менеджеры канцеляриями университетов образования
Полицейские Санитарные врачи Специалисты Специалисты по
Следователи по компьютерам средствам Macco
Фининспекто Ученые в области вой информauии
ры естествознания Учителя
Юристы (анrлийский
Хирурrи язык, изобрази
тельное
и драматическое
искусство)
ISTP ISFP INТP INFP
Дантисты Бyxrалтеры Адвокаты Воспитатели дeT
Инженеры Кладовщики Конферансье ских учреждений
Механики Медицинские Писатели Музыканты
ремонтники сестры и художники и композиторы
Фермеры Механики peMOHT Проrpаммисты ПИсатели,
Электрики ники Ученые в области художники
Санитарные врачи обществоведения и редакторы
Психолоrи
и психиатры
У'П:[теля
366
Если человек в диалоrе может принять точку зрения собе..
седника, то он способен решить, какИе новые типы машин нуж"
ны обществу и как будут они работать в новых условиях. Если у
этоrо человека есть стремление к тармоничному решению, увя
зывающему между собой большое количество противоречивых
показателей, то он сможет предложить оптимальное конструк..
тивное исполнение машины. Указанные черты свойственны
личности с чувствующей психической функцией. Если же у че
ловека лоrика заменяет интуицию, то он, стремясь к объектив
ности (лоrик), до бьется оценки и обеспечения работоспособно
сти конструкции.
Люди, одержимые идеей порядка (личность с решающей
психической функцией) cMoryт провести поиск и перебор боль..
шоrо количества известных вариантов конструктивных испол
нений изделия, а также добиться соблюдения технолотической
дисциплины при изrотовлении изделия и ero испьпаниях.
Склонность к поиску взаимосвязей между явлениями, не дo
вольствуясь фактом их восприятия, и постоянное стремление
ставить перед собой вопрос: «Что бы это значило?» (интуит) по
зволяют ожидать от человека продуманных и часто нетрадици"
онных конструктивных решений.
17.2. Психолоrические и педarоrические
аспекты оБУчения
17.2.1. Численпость rpуппы обучаемых
Уолтер Мод в 1927 [. экспериментально установил, что лю
ди в rpуппе работают не так упорно, как поодиночке. Экспери..
мент заключался в том, что разные rруппы людей по очереди
тянули канат. Было обнаружено, что один человек тянул верев..
ку сильней, чем коrда людей объединяли в rpуппы по два, три
или восемь человек. В среднем отдельные испытуемые вдвоем
тянули каждый лишь на 93 % силы одноrо человека, втроем
на 85 %, в восьмером на 45 %. Этот эксперимент бьm повто"
рен в 1974 т. Аланом Инrемом и друrими. Получены сходные
результаты даже в случае, коrда люди тянули канат в одиночку,
но у них бьUIИ завязаны rлаза и они думали, что вместе с ними
тянут и остальные.
367
Бибб Лятане с сотрудни
ками в 1979 r. продолжили
исследования в этом направ
лении. Они замеряли шум,
который способна создать
rpуппа, при разном количе
стве в ней людей. Испытуе
мых просили сначала кри
чать, а потом хлопать в ладо
ши. Результаты исследований
представлены на рис. 17.3.
Получилось, что один человек
создает шум примерно в два
раза rромче, чем если бы он
Рис. 17.3. Результаты исследования находился в составе rpуппы из
социальной лености:
1 крик; 2 хлопанье в ладоши шести человек Это явление
Бибб Лятане назвал эффектом
«социальной лености».
Отметим, что тот же эффект снижения производительности
труда с увеличением количества людей в rpуппе (в артелях под
собных рабочих) отмечал Ф. Тейлор (см. шаr 9).
Можно предполаrать, что эффект «социальной лености» BЫ
зван тем, что ответственность за конечный результат работы ло
жится на всех членов rpуппы, тоrда как работающий в одиночку
несет личную ответственность за получаемый результат. Пред
положим, что результат работы любоrо члена rpуппы определя
ется результатом, который Mor бы реализовать самый ленивый
член rpуппы, работающий в одиночку. Для этоrо случая будет
справедлива математическая модель наиболее слабоrо звена цe
пи. В предположении нормальноro закона распределения Hecy
щей способности звена цепи Д.Н. Решетовым, А.С. Ивановым и
В.З. Фадеевым установлено, что отношение Е среднеrо значения
несущей способности цепи к среднему значению несущей спо
собности звена (коэффициент масштаба) зависит от числа
звеньев п в цепи и от коэффициента вариации V несущей спо..
собности звена:
.
)
Q;j
"'
...
g::
5
4
J
2
1
о
2 3
Lfuсло чело8ск 8 ZР!Jлпе
J
1
4
Е == 1 I.lv,
(17.1)
[де I.l == 1,48(ln п)о,5 0,69 параметр положения.
Поясним, что в теории вероятностей коэффициентом вариа
ции называют отношение среднеrо квадратическоrо отклоне
ния рассматриваемоrо параметра к ero среднему значению.
368
Для описанноrо выше эксперимента, соrласно формуле
(17.1), при п == 3 и Е == 0,85 получаем v == 0,175. Тотда при V;= 0,175
и п, равном 2 и 8, соответственно находим Е == 0,905 и Е == 0,747.
Сопоставляя последние две цифры с ранее приведенными экс
периментальными данными, видим, что имеет место несовпаде
ние, но не очень существенное и возможно возникающее из за
оrраниченности объема экспериментальных исследований. По..
этому можно полаrать, что рассматриваемая математическая
модель в первом приблИжении приrодна дЛя описания эффекта
«социальной лености».
Интерпретируя описанные результаты исследований с пози..
ции математической модели наиболее слабоrо звена цепи, мож
но сделать следующие рекомендации по орraнизации rpуппо
вых занятий при обучении:
для повышения степени усвоения знаний следует уменьшать
численность rpуппы (лекционноrо потока или rpуппы, обучае
мой на семинарском занятии), причем желательная степень
этоrо уменьшения зависит от степени неоднородности состава
обучаемых с повышением степени неоднородности сокраще..
ние численности должно быть более значительным;
степень усвоения знаний можно также улучшить повышени
ем однородности rpуппы обучаемых.
17.2.2. У лyчmение запоминания изучаемоro материма
и повышение умения решать задачи
Преподавание любой дисциплины в целях изложения более
обширноrо материала за отведенное для занятий время часто
происходит в форме, которую можно структурно представить
(рис. 17.4, а) звеньями цепи, [де каждое звено это вводимое
понятие с указанием ero связи с предыдущим понятием. При та..
кой орrанизации занятий (лекционных или семинарских) обес..
печивается наибольший темп изучения материала, а знания,
причем краткосрочные (до зачета или экзамена), проявляются
лишь у тех обучаемых, которые обладают хорошей врожденной
памятью. В этом случае запоминание материала обучаемым (ero
знание) свидетельствует лишь об ero умении решать задачи по
образцу, но не о способности решать любые задачи по данной
теме (ero умении).
Лица, не отличающиеся хорошей памятью, запомнят поня"
тие, если поймут как им можно пользоваться. А это возможно
лишь в случае, если они увидят связь этоrо понятия не с одним,
369
а со мноrими друrими понятиями. Таким образом, для лучшеrо
запоминания материала изложение должно про исходить в фор
ме, которую можно представить в виде пространственной струк
туры (рис. 17 А, 6).
Рис. 17.4. Структурная форма изложения дисциплины:
о линейная цепь; б пространственная структура
Но известно, что, если человек понял все взаимосвязи pac
сматриваемоrо понятия с друrими, он сможет решать любые
задачи ,на данную тему. Поэтому пространственная структура
изложения материала приведет не только к лучшему ero запо
минанию, но и к умению думать, а также решать любые задачи.
Например, анализ ошибок, которые делают студенты при
выполнении ими курсовых проектов по основам конструирова
ния машин и транспортно"накопительным устройствам, пока
зывает, что мноrие студенты плохо находят реакции в опорах,
т. е. не умеют составлять и использовать условия равновесия;
ошибаются в вычислении моментов сопротивления некоторых
сечений (кольца, поперечноrо сечения прямоуrольной трубы и
т. д.), не умеют решать статически неопределимые системы
(применительно к задачам на нераскрытие стыка и др.). Чтобы
устранить у обучаемых эти ошибки, в данной книrе с целью по
370
лучения пространственной структуры изложения материала
MHoroKpaTHo с разных позиций (в том числе и решая задачи)
возвращались к понятиям «условие равновесия» (см. 1.2; 1.3;
2.1; 2.2; 2.4; 2.5; 3.3 3.6; 3.8; 4.6), «момент сопротивления сече
ния» (см. 4.2; 4.3; 4.6; ПА.!; 5.5; 5.6; 5.9; 13.1; 15.2; 16.1), «стати
чески неопределимая система» (см. 5.7; 6.1; 13.1; 15.2).
17.2.3. Развитие умения думать на ранней стадии обучения
Умение думать, т. е. использовать теоретические знания в
решении практических задач, это одно из rлавных составляю
ших творческой способности личности.
Во введении отмечалось, что чем раньше начнется развитие
творческих способностей личности, тем больших творческих
результатов можно ожидать от нее в будущем. Но преподаватели
вузов замечают, что мноrие выпускники школ не приучены дy
мать. На экзаменах некоторые из них (в том числе окончившие
lLIКОЛУ с медалью) хотя и способны дословно воспроизвести
лекционный материал, излаrавшийся в семестре, не умеют им
воспользоваться для решения задач.
Чтобы творческих людей в стране стало больше, а их дости
жения были более значимыми, следовало бы уже на ранней
стадии обучения приучать школьников думать; при этом изу
чаемЫЙ материал следует представлять в форме, которая CTPYK
турно приведена на рис. 17А, б.
17.2.4. Методика проведения занятий
Следует отметить, что люди с разными психическими функ
циями по разному воспринимают материал, предлаraемый на
лекциях и семинарских занятиях. Экстраверту необходимо обсу
дить ero с окружающими. Интроверту же требуется некоторое
время, чтобы осмыслить и переработать информаuию. Поэтому
экстраверт на занятиях будет выrлядеть более расторопным и
смышленым, хотя через определенное время знания интроверта
MorYT оказаться более rлубокими. Изучаемый материал в аудито
рии, преимущественно состоятдей из интровертов, следует изла
raTb медленнее, чем в аудитории, заполненной экстравертами.
Немецкий психолоr [анс Юрrен Айзенк (род. 1916) выяс
нил, что интроверты чрезвычайно возбудимы и по этой причине
они избеrают ситуаций, чрезмерно сильно действующих на них.
Наоборот, экстраверты недостаточно возбудимы, и поэтому они
371
постоянно выискивают ситуации, которые Moryт их возбудить.
Интроверты чувствуют себя более бодрыми по утрам, экстра..
верты по вечерам. Интроверты лучше работают утром, а экст
раверты во второй половине дня. Экстраверты делают MHoro
перерывов в работе, чтобы поболтать и попить кофе; возбужде..
ние повышает эффективность их поступков и действий, в то
время как интровертам оно лишь мешает. Следовательно, выбор
времени занятий в утренние или вечерние часы будет по"разно
му влиять на степень усвоения знаний экстравертами и интро
вертами.
Личности с решающей психической функцией хорошо ус..
ваивают материал, коrда он изложен в cтporo определенной
последовательности. Для личностей с воспринимающей психи..
ческой функцией, наоборот, наличие плана и отсутствие не..
ожиданных и волнующих моментов при изложении материала
тормозят их творческую активность.
Сенсорики считают, что учит тот, кто не умеет ничеrо делать
руками. Они видят в обучении смысл только в том случае, если
овладевают при этом практическими навыками. Интуиты, в
свою очередь, хорошо воспринимают теоретические аспекты и
склонны к умственной работе. К слову сказать, в США около
70 % преподавателей в колледжах и 77 % преподавателей в аспи..
рантуре интуиты, хотя во всем обществе их 30 %.
Таким образом, преподаватель путем предварительноrо вы..
яснения (например, с помощью опросных листков) состава ay
дитории и соответствующей этому составу перестройки плана
проведения занятий может улучшить степень усвоения изучае
Moro материала учащимися. Степень усвоения материала uеле
сообразно контролировать не только на экзаменах или зачетах,
но и в процессе обучения, для чеrо удобен метод дифференци"
альной оценки знаний (об этом подробнее см. работы Н.Д. Ива
новой в списке литературы), который позволяет проверять не
запоминание лекционноrо материала, а ero усвоение.
17.2.5. Необходимые условия для развития
творческих способностей
в теории психоанализа Зиrмунда Фрейда (l856 1939) уже
бьши заложены идеи о последовательности возникновения
внутренних потребностей человека. В статье «Теория человече..
ской мотивации» (1943 [.) один из основателей ryманистиче
372
ской психолоrии Абрахам Маслоу (1908 1970) сформулировал
и уточнил эти потребности.
Физиолоrические потребности (еда, питье, сон и т. д.), без
удовлетворения которых ничто друrое невозможно, всеrда вы
ступают на первый план. За ними следует потребность в защи..
щенности (укрыться в убежище, избежать опасности, обеспе
чить завтрашний день и т. п.). Ее удовлетворение создает воз
можность для развития потребности в хорошем отношении (быть
любимым, быть принятым в определенном обществе, принадле
жать к rpуппе, в которой с тобой считаются, и т. д.).
Только при удовлетворении трех перечисленных выше Ka
теrорий потребностей в поведении человека (рис. 17.5) MoryT
возникнуть новые черты, невозможные прежде. Так, вместо
Toro чтобы систематически подчиняться мнению большинства
или властей, индивидуум будет все больше прислушиваться к
собственным чувствам. У Hero будет возникать все большее же
лание отказаться от рутины; испробовать что то новое; обра
титься к новым целям, соrлашаясь усердно работать, если эта
работа является той, которую он выбрал сам. rотовый к тому,
чтобы стать непопулярным, если ero взrляды не совпадут со
взrлядами большинства, он будет оценивать факты как можно
более объективно.
Потребности
самоуважения
Потребности в хорошем
отношении
Потребности 13 безопасности
Физиолorические потребности
Рис. 17.5. Иерархия потребностей по Маслоу
Все эти действия способствуют развитию у индивидуума са..
моуважения и, что самое rлавное, постепенно превращают ero в
творческую личность, интенсивно живущую тем, что преподно
373
сит жизнь; в личность, способную заботится о дрyrих ЛЮДЯХ и о
блаrополучии человечества. Человек достиrает таким образом
стадии самореализадии.
Творческий человек с трудом входит в жизнь социальной
rpynnbI, хотя он и открыт для окружающих и пользуется опреде
ленной популярностью. Он подчиняется общепринятым цен..
ностям только в том случае, если они совпадают с ето собствен..
ными. В то же время он мало доrматичен; ето представления о
жизни и обществе, а также о смысле собственных поступков MO
ryт быть весьма неоднозначными.
Все это, разумеется, путь, который может пройти лишь Ma
лая часть индивидуумов. По мнению А. Маслоу, более 90 % лю..
дей останавливаются на уровне поиска защищенности и xopo
шеrо отношения, поrлощающеrо всю их энерrию.
Итак, на основе работ ryманистической школы психолоrии
можно сформулировать требования, которые обязательно сле
дует выполнять для успешноrо обучения конструированию:
удовлетворение физиолоrических потребностей, потребности в
защищенности и в хорошем отношении.
Если человек живет впроrолодь или не знает, что ero ждет
завтра, то у Hero не приходится ожидать развития творческих
способностей.
17.3. Повышение качества обучения
конструированию машин
17.3.1. Анализ традициовноro обучения
При традиционном обучении курс «Основы проектирования
машин» начинают изучать с соединений деталей, а затем пере..
ХОдЯт к рассмотрению передач, подшипников, муфт и валов. Та..
кал последовательность изложения материала это переход от
простоrо к сложному. Лекционный материал излаrают в тече
ние одноrо семестра. В этом же семестре проводят семинары и
лабораторные работы по изучаемой дисциплине; студенты вы..
полняют два домашних задания, а в следующем семестре Kyp
совой проект.
При традиционном обучении все проектные расчеты OKaH
чиваются выбором размеров, а проверочные оценкой запасов
прочности. Конструктор же должен все расчеты доводить до
разработки и оформления чертежей. Например, при расчете
374
резьбовых соединений при традиционном обучении задачу
обычно считают решенной, если, задавшись классом прочности
винта, подобрали ето размеры. Но в эксплуатации такое соеди
нение может отказать, если оно недостаточно затянуто. Чтобы
этоrо не случилось, при оформлении сборочноrо чертежа резь..
бовоrо соединения конструктор должен указать в технических
требованиях момент завинчивания соединения. Следовательно,
с точки зрения конструктора, эта задача будет решенной, если
не только подобран стандартный винт, но и вычислен ero MO
мент завинчивания. Рассмотрим друrой пример. Пусть требует
ся рассчитать фрикционную дисковую муфту. Обычно расчет
заканчивают определением числа и размеров фрикционных
дисков, а также подбором стандартной нажимной пружины. Но
если в технических требованиях сборочноrо чертежа этой муф
ты не указать, как реryлировкой обеспечить необходимую силу
нажатия пружины, то при изrотовлении муфты рабочий не CMO
жет обеспечить требуемый момент срабатывания муфты. Следо
вательно, с точки зрения конструктора, эту задачу можно
считать решенной, если дополнительно к проведенному расчету
будет определена необходимая деформация нажимной пружины
(или момент завинчивания винта, реryлирующеrо это нажатие).
Как отмечал ось в 17.1.2, выбор оптимальноrо конструктив
Horo исполнения детали, сборочной единицы и машины в це..
лом это наиболее ответственная стадия деятельности конст..
руктора стадия синтеза. При традиционном обучении в
:курсовом проекте проводят оптимизацию только редуктора по
массе, варьируя разбивку передаточных чисел по ero ступеням,
твердость и относительную ширину зубчатых колес. Оптимиза
цией конструктивноrо исполнения привода не занимаются.
17.3.2. Мероприятия, способные повысить качество обучения
:конструированию машин
Если параметр оптимизации один (масса детали или стои
мость), то оптимальное решение может быть найдено математи..
ческим путем (см. статью А.С. Иванова в списке литературы).
При наличии нескольких параметров оптимизации (стоимость,
масса и др.) поиск оптимальноrо исполнения привода может
быть представлен в виде матрицы качества, в каждой ячейке KO
торой приведено соответствующее конструктивное решение
(см. 6.4, 16.3.4 и 17.4). В этом случае вариант конструктивноrо
решения, по которому будет изrотовлено изделие, отбирает экс"
375
пертная комиссия, состоящая из конструктора, технолоrа и
представителя службы маркетинrа или эксплуатации.
Надежность одно из rлавных качеств, характеризующих
конкурентоспособность продукции. Она определяется рассея
нием параметров материалов и размеров деталей, а также мик
ронеровностями, поrpешностями формы и расположения по
верхностей. Естественно, курс «Основы проектирования
машин» следует излаrать с учетом возможноrо рассеяния значе
ний этих параметров и размеров. Допуски на размеры при тpa
диционном изложении курса учитывают там, rде их влияние на
работоспособность велико, например при конструировании
подшипников скольжения и соединений с натяrом (см. шаrи 12
и 14). Этот курс целесообразно дополнить расчетами, в которых
учитывается комплекс параметров, имеющих рассеяние,
например расчетами реакций в опорах, возникающих при со..
единении валов сборочных единиц «вал В вал» (см. 16.3.3).
Проблема оценки и обеспечения надежности машин ДOCTa
точно сложна (см. шаr 8). По некоторым возможным видам OT
казов нет достаточно точных методов расчета ресурса или oцeH
ки запасов работоспособности (ресурса до предельноrо износа,
возможности заклинивания подшипников в'результате возник..
новения фреттинr"коррозии в плавающей опоре). Поэтому для
оценки и обеспечения надежности требуются испьпания опыт..
ных образцов. Кроме Toro, на надежность влияют не только дo
пуски, указанные в чертежах, но и возможности технолоrиче
cKoro оборудования, а также качество рабочей силы и
количество контролирующих изrотовление изделия операций,
их расположение по технолоrическому процессу. Поэтому в
полном объеме вопросы оценки и обеспечения надежности сле
дует излаrать студентам после изучения ими курсов технолоrии
изrотовления и экономики ПРОМЬШIленности. При этом следует
отметить, что вопрос обеспечения надежности все"таки сфера
деятельности конструктора (см. шаr 8).
Алrоритмы некоторых расчетов (например, зубчатых и чер
вячных передач) до последнеrо времени оставались недостаточ
но приспособленными к использованию компьютеров, так как
бьши изложены в форме проектных, а не про верочных. Такая
форма обычно усложняет алrоритм и затрудняет ero быструю
модернизацию при появлении новой научно..исследователъской
информации по рассматриваемой проблеме.
Таким образом, дЛя улучшения обучения конструированию
машин желательно излаrать методы расчета деталей машин в
376
форме, удобной для проведения как компьюторных расчетов,
так и дальнейш:их научных исследований (см. шаr 10). Кроме
TOro, в учебный процесс следует включить:
практику доведения всех расчетов до оформления чертежей
как отдельных деталей, так и сборочных;
выбор оптимальноro конструктивноrо исполнения детали,
сборочной единицы и маш:ины в целом математическим путем
(если параметр оптимизации один) или составлением и анали
зом матрицы качества (при наличии нескольких параметров оп
тимизации); для этоrо курс следует дополнить расчетом, peKO
мендациями по конструированию (см. шаr 6) и оmимизацией
опорно поворотных подшипников, а также сопоставлением
разных способов соединения валов двиrателя и редуктора, ре..
дуктора и рабочеrо opraHa и, кроме Toro, особенностями расчета
навесных редукторов (см. 16.3);
изложение расчета реакций в опорах, возникающих при co
еДillIении валов двиrателя и редуктора «вал В вал» (см. 16.3.3).
Н.Д. Иванова и В.Л. Попов предложили изменить последо..
вательность изучения видов деталей маlllИН, их соединений и
передач по сравнению с традиционной: начинать курс с pac
смотрения привода в целом (ero состава, двиrателей, возмож
HbIX передаточных чисел и КПД различных передач, мощности,
вращающеrо момента и частоты вращения на каждой ступени
передач), а после этоrо переходить к отдельным видам передач,
валам, подшипникам, соединениям деталей и муфтам. В этом
случае обучаемому сразу становится известно, как распределя ..
ется по деталям силовой поток в приводе, а преподавателю не
нужно искусственно придумывать задачи, решение которых
способствовало бы закреплению изучаемоro материала. Такая
последовательность изложения ведет к экономии времени ауди..
торных занятий. Отметим, что приблизительно в той же после..
доваТЕШЬНОСТИ расположен материал в шаrах 1, 10 16 данной
книrи.
Если вьщавать задание на проект в начале изучения курса
«Основы проектирования машин», то уже после первых лекций
возможно обсуждение оптимальноrо выбора кинематической
схемы проектируемоrо привода. При этом домашние задания
можно связать с тематикой проекта. Подобную мысль в 1984 r.
высказывал и П.Ф. Дунаев.
Из сказанноrо следует, что переход от последовательности
изложения курса по принципу «от простоrо к сложному к после..
довательности, совпадающей с очередностью реmения задачи
конструктором при конструировании им HOBoro изделия, способен
интенсифицировать процесс обучения.
377
Формированию умения находить оптималЬНЫЙ вариант
конструктивноrо исполнения способствовала бы выдача для He
скольких человек одноrо задания на курсовой прое:кт по основам
конструирования машин, причем с целью создания предпосы
лок для обсуждения в труппе студентов достоинств и HeДOCTaT
ков всех возможных вариантов каждому обучаемому давался бы
свой вариант конструктивноrо исполнения. Пример двенадца..
ти вариантов заданий на разработку привода с использованием
червячной передачи (четыре конструктивных исполнения мо"
Top peдyктopa с тремя вариантами разъема корпуса) приведен
на рис. 17.6 и 17.7.
а
б
в 2
Рис. 17.6. Возможные конструктивные схемы червячноrо Moтop peдyктopa:
й червячный редуктор, соединенный с двиrателем через муфту; б червячный редуктор
и фланцевый двиrатель, валЫ которых соещшены «вал В вал.; в цилиндрочервячный pe
дуктор с фланцевым двиrателем; z червячный редуктор, приводимый в движение от дви
rателя через клиноременную передачу
17.4. Практика конструирования. Выбор оптимальиоrо
конструктивноrо исполнения привода транспортера
17.4.1. Постановка задачи
Известна частота вращения приводноrо вала транспортера
n т == 50 мин l. Требуется выбрать из совокупности возможных
вариантов, использующих червячную передачу, оптимальное
конструктивное исполнение при ода.
378
а
б
в
Рис. 17.7. Варианты сборки Moтop peдyкт?pa: .
а с радиальной сборкой редуктора; б с осевои сборкои редуктора,
в с запрессовКОЙ червячноrо колеса внутри корпуса
17.4.2. Решение задачи
1 Нахо д им передаточное число привода. Принимаем, что
. rателя с час
П р ивод будет осуществляться от асинхронноro дви 1 (
== 3000 мин Ta
тотой вращения маrнитноrо поля статора n ДВ О
кал частота вращения обеспечивает двиrателю наибольшую
компактность). Тоrда передаточное число передачи составит
u nдвО = 3000 = 60.
n т 50
379
2. Рассматриваем возможные конструктивные исполнения
привода. Соrласно приложению П.l.2 шаrа 1, требуемое переда
точное число может обеспечить червячная передача (см.
рис. 17.6, а, 6), цилиндрочервячная передача (см. рис. 17.6, в) с
передаточным числом в цилиндрической ступени U цил == 1...2
или клиноременно червячная передача (см. рис. 17.6, 2) с пере
даточным числом в клиноременной ступени Ирем == 1,5...3.
3. еопоставляем варианты. Вариант с использованием дви
rателя на лапах, компенсирующей муфты и червячноrо peДYKTO
ра (см. рис. 17.6, а) наиболее дешевый, так как предполаrает ис
пользование сборочных единиц, выпускаемых серийно, а также
не требует высокой точности монтажа. Ero недостаток боль
шой rабаритный размер по длине. Вариант с использованием
фланцевоrо двиrателя и червячноrо редуктора (см. рис. 17.6, 6)
более компактен по длине, но требует высокой точности соеди
нения «вал В вал» и, следовательно, более дороr. При невысокой
точности изrотовления TaKoro соединения реакции в опорах
двиrателя и червяка MOryт значительно превысить наrpузки,
возникающие в опорах от сил зацепления в червячной передаче
(см. 16.3.3), ибо возникает статически неопределимая система
вал, установленный на четырех опорах. Вариант с Использова
нием фланцевоrо двиrателя и цилиндрочервячноrо редуктора
(см. рис. 17.6, в) по сравнению с предыдущим имеет HeMHoro
больший rабаритный размер по длине и меньший по высоте.
Валы двиrателя и червяка между собой развязаны. Поэтому точ
ности изrотовления деталей двиrателя и редуктора MorYT быть
назначены общепринятыми. Вариант с использованием двиra
теля на лапах, IOlиноременной передачи и червячноrо редуктора
(см. рис. 17.6, 2) имеет наименьший из сравниваемых rабарит
ный размер по длине, но значительный rабаритный размер по
высоте. Клиноременная передача развязывает валы двиrателя и
червяка, поэтому точности изrотовления деталей двиrателя и
редуктора, как и в предыдущем варианте, MorYT быть общепри
нятыми.
4. Выбираем оптимальный вариант конструктивноrо испол
нения привода. Сопоставление вариантов показывает, что опти
мальными по rабаритным размерам и стоимости изrотовления
являются приводы на основе цилиндрочервячной и клиноре
менно червячной передач. Не случайно, что в большинстве за
рубежных приводов применяются указанные варианты KOHCT
руктивноrо исполнения. Для определенности останавливаем
свой выбор на клиноременно червячной передаче.
380
5. Определяем способ сборки редуктора и конструкцию KOp
пуса. Известно, что MOTop peдyктop может быть выполнен с ра..
диальной сборкой редуктора, с осевой сборкой редуктора и с за
прессовкой червячноrо колеса внутри корпуса (см. рис. 17.7).
Про анализируем эти варианты. В первом и во втором случаях
запрессовка червячноrо колеса и внутренних колец конических
подшипников на выходной вал предполаrается вне корпуса pe
дуктора. В первом случае эта сборочная единица закладывается
в корпус ее радиальным перемещением. Для сборки предусмат"
ривают разъем корпуса по оси вала червячноrо колеса (выход
Horo вала редуктора). При этом плоскость разъема должна быть
стянута винтами, диаметр которых вычисляют из условия обе с..
печения нераскрытия стыка. В стыке предусматривают также
установку штифтов, обеспечивающих как взаимное центриро
вани е двух половин корпуса, так и их несдвиrаемость. При pea
лизации BToporo способа сборки вал вместе с червячным коле
сом устанавливают в корпус осевым перемещением. Для сборки
предусматривают отъемные подшипниковые щиты, которые
крепят к корпусу винтами, обеспечивающими нераскрытие
стыка. При реализации тpeTbero способа сборки запрессовку
червячноrо колеса и одноrо из внутренних колец конических
подшипников на вал проводят внутри корпуса. Запрессовку
обычно выполняют с помощью винта, завинчиваемоrо в торец
вала. Для этоrо в последнем высверливают отверстие достаточ
но большой rлубины и диаметра, а затем нарезают в нем резьбу.
Корпус должен иметь окно, через которое в ero помещают ч ер"
вячное колесо. Окно закрывают крышкои, притяrиваемои к
корпусу винтами, которые не передают никакой наrpузки.
6. Принимаем техническое решение. Останавливаем свои
выбор на третьем способе сборки в связи с тем, что в этом слу
чае масса корпуса получается наименьшей из..за отсутствия на
нем силовых фланцевых резьбовых соединений, наrруженных
раскрывающими стык большими силами. Считаем, что крышку
рационально расположить в дне корпуса.
Отметим, что при решении этой задачи матрица качества
представлена в текстовой, а не в табличной, как в шаrе 16,
форме.
381
ПРИЛОЖЕНИЯ п.17
П.17.1. Способы «похоронитъ идею
При обсуждении предлаrаемой Вами идеи будьте rотовы ус..
лышать следующие фразы:
Хороша идея, но...
Пришло ли уже время для этоrо? Не слишком ли рано?
Не поздно ли?
Не противоречит ли опыту (традиции, природе человека)?
KTO TO уже сделал или попытался сделать подобное? Не старо..
модно ли это? Неужели нет ничеrо лучшеrо?
Теоретически да, ...но! Слишком MHoro академическоrо. Это
воздушные замки!
Неужели у Вас больше Не хватает фантазии?
Можно ли это финансировать? Не будет ли это чересчур дo
poro? для этоrо мы слишком малы! Мы еще не доросли до это..
[о! Так дешево и так хорошо?
Вы это правильно придумали. Но я хотел бы добавить!
Едва ли это можно будет выполнить!
Это вообще не может функционировать. Кто такое приду"
мал? Если это так хорошо, почему же до сих пор еще никто не
пришел к этому?
Мы и без Toro всеrда так делали!
Так мы еще никоrда не делали, и всеrда все было хорошо!
Это нужно бы основательно обдумать. Оставим это пока в
покое. В дрyrой раз! Переждем это еще раз. Орrанизуем комис..
сию. Только Вы ничеrо Не предпринимайте.
Но это ведь не запланировано! У нас уже слишком MHoro
проектов. Нет времени! Нет людей! Это не наше дело!
Вы знаете это лучше нас? Как Вы думаете, кто Вы? Компе..
тентные эксперты имеют об этом совершенно друтое мнение!
Шеф не захочет ничеrо знать об этом. Воодушевлены ли
коллеrи этим?
Попросите об этом высказаться изrотовителя, пользователя,
промышленность, покупателя.
Касается ли это молодых людей?
Поймут ли еще это наши старики?
П.17.2. Биоrpафические данные выдающихся личностей
Леонардо да Винчи (1452 1519) не только великий худож
ник и архитектор, но и изобретательный инженер, страстный
исследователь, философ.
382
Леонардо родился в деревне Винчи. Он был незаконнорож
денным сыном нотариуса и значительную часть детства BOC
питывлсяя у cBoero дяди Франческо. Ему не пришлось изучать
латинский язык, который тоrда являлся обязательным фунда
ментом для хорошеrо школьноrо образования. Частично это
бьто связано с тем, что он обучался в деревенской школе и
снисходительные родители не требовали от Hero ДИСЦИIUIины,
поэтому, как и друrие дети из деревни, пребывая в радости и Be
селье, Леонардо слонялся по холмам и полям. ДЯдЯ ФраНческо
сопровождал ero во всех рейдах по окрестным землям и воспи
тывал любовь к природе и животным.
В 12 лет Леонардо покинул деревню, переехал с отцом во
Флоренцию и был принят для обучения в мастерскую художни
ка. К 33 rодам он создал такие шедевры, как «Дама С ropHocTa
ем», «Мадонна Литта», «Мадонна В rpoTe». На вершине зрело
сти он возвращается к изображению на картинах улыбающихся
женщин (<<Мона Лиза», около 1503 [.), получая вдохновение от
их заrадочности.
Прежде чем приступить к созданию картины, Леонардо
обычно делал десятки композиционных набросков, в которых
он ставил своей задачей уточнение окончательноro варианта бу
дущеrо про изведения. Принимался тот вариант, в котором бьши
достиrнуты наибольшие ясность и цельность. Затем мастер при
ступал к уточнению деталей найденной им композиции. Он дe
лал мноrочисленные зарисовки и этюды с натуры. Эти зарисов
ки отличались несоизмеримо большей законченностью, нежели
композиционные наброски. Затем Леонардо приступал к рисо
ванию на картоне и лишь после этоrо переходил к письму на
холсте. Вот почему мы воспринимаем произведения Леонардо
как классически законченные, хотя он мноrие из них считал He
законченными.
Особенностями личности Леонардо бьти любознатель
ность, а в зрелые [оды стремление к одиночеству. У Hero ярко
проявились неактивность и отсутствие аrрессивности: он счи..
тал, что человек не имеет права что либо любить или ненави
деть, если не составил себе ясноrо представления об этом. Лео
нардо постоянно пребывал в спокойном, уравновешенном
состоянии духа и стремился избеraть споров и враждебных от..
ношений. Он любил животных (их жизнь ему казалась святой),
осуждал войну и кровопролитие и считал человека не столько
царем животноrо царства, сколько худшим ИЗ диких зверей. Ле
онардо не был бесстрастным. Он превратил страсть в стремле
383
ние к познанию и отдавался исследованиям с той настойчиво
стью и rлубиной, которые может породить только страсть. По
мнению З. Фрейда, нельзя настоящим образом любить или He
навидеть; коrда преисполнен стремлением к познанию, OCTa
ешься по ту сторону любви и ненависти, исследуешь, вместо TO
[о чтобы любить. Может быть поэтому жизнь Леонардо бьша
беднее любовью, нежели жизнь друrих великих людей и худож
ников. Леонардо за ero HeHacbITfIoe и неутомимое стремление к
познанию называли итальянским Фаустом. При проведении
исследований ему были свойственны ненасытность, не счи
тающееся ни с чем упрямство, нежелание приспосабливаться к
обстоятельствам. Под конец жизни, коrда у Леонардо парали
зовало правую руку (он был левшой, причем обычно писал
справа налево), он писал: «Железо ржавеет, если ero не исполь
зуют, а стоячая вода станет нечистой и от холода превратится в
лед. Аналоrичным образом безделье ослабляет силу духа».
Леонардо занялся исследованиями, вероятно, в интересах
cBoero искусства. Он старался изучить свойства света, цветов,
теней и перспективы, чтобы самому усовершенствоваться в
подражании природе и друrим указать этот путь. Затем ero потя
нуло К исследованию объектов живописи: животных, растений,
пропорций человеческоrо тела. От последнеrо он перешел к
изучению BHyтpeHHero строения и жизненных функций челове
ка. Под конец это ero так увлекло, что заслонило тяry к искусст
ву. Леонардо открьш общие законы rидростатики, историю OKa
менелостей, проявил интерес к инженерной деятельности
(разработал проекты ткацких, дepeBO и металлообрабатываю '
щих, печатающих станков, а также устройств, напоминающих
reликоптер, парашют, ryсеницу танка). Коrда же он попробовал
от научных исследований снова вернуться к занятию искусст
вом, то испытал большие трудности. Он уже не Mor заставить
себя вырвать произведение искусства из бесконечной цепи при
чин, которые как снежный ком росли в процессе работы над
картиной и бьши вызваны исследовательским складом ero xa
рактера. Поражала медлительность, с которой работал живопи
сец. Над картиной «Тайная вечеря» он трудился три, а над Kap
тиной «Мона Лиза» четыре rода. После OrpOMHbIX усилий
выразить в произведении все, что было в мыслях, он оставлял
картину незаконченной или признавал ее незавершенной. По
словам З. Фрейда, в свое время художник взял себе в подмоry
исследователя, а тот, в свою очередь, сделался сильнее хозяина
и поработил ero.
384
Ф. Шопен (1810 1848) обладал фортепьянным стилем, KO
торый характеризовался широтой и красотой мелодических ли..
ний новыми формами raрмоническоrо аккомпанемента (на..
при ер, ПОдЧеркивание выразительных мест левой рукой)..:
единством меланхолии и демонической страсти. Фортепьянныи
стиль ДОПОЛНJШСЯ исполнительским мастерством музыканта,
которому свойственны напевность и выразительность вплоть до
мельчайших оттенков, точно выверенная динамика, элеrантная
манера исполнения с необычайно насыщенным, исполненным
красоты звучанием. Роберт Шуман писал о Ф. Шопене: «Шля
пы долой, rоспода, это rений».
До двенадцати лет Фредерик не посещал школу, единствен:
ным ero учителем бьш отец. В 13 лет он поступил в Варшавскии
лицей. Французскому языку ero научил отец. Кроме Toro, в и..
цее Шопен изучал латынь, rpеческий, немецкий, итальянскии и
анrлийский языки. Подобно Мендельсону, он обладал необы
чайным талантом рисовальщика, а с Робертом Шуманом ero
роднила боrатая фантазия, поэтические способности и aктep
ский дар.
Ф. Шопен с детства отличался повышенной чувствительно..
стью, стремлением скрыть свой внутренний мир. По словам
Листа, Ф. Шопен никоrда не позволял себе ни единЫМ словом
выдать то, что происходило у Hero внутри. ....
п.и. Чайковский (1840 189З) был крайне замкнуто и лич..
ностью с rипертрофированной чувствительностью. Причем
свою сверхчувствительность он скрывал от окружающих, чтобы
не прослыть изнеженным и слабонервным мечтателем. Тем не
менее при звуках музыки Моцарта он был не в состоянии сдер"
живать слезы. Даже занятия музыкой в консерватории, в осо..
бенности ero собственная композиторская работа, приводили
ero в странное возбуждение, которое он сам называл «шоком)}.
Особенно тяжелое нервное напряжение у Hero бьmо во Bpe
сочинения Первой симфонии. Творческая продуктивность Чаи
KOBcKoro во MHoroM объясняется, по видимому, тем, что, рабо..
тая в изнуряющем режиме, он сознательно ставил себя как бы
под давление постоянной необходимости создавать что"то, и
тем самым уравновешивал ненасытные инеудовлетворенные
страсти.
А.С. Пушкин (1799 1837) принадлежал к числу тех великих
rениев, которые открыли духовный мир человека XIX века. Как
[ёте, Байрон, Шиллер, rюrо и Мицкевич, Пушкин являлся за
чинателем HOBoro направления в поэзии, прокладывая пути в
385
будущее и выражая в творчестве особенности своей националь
ной культуры. Поэзия Пушкина близка поэзии [ёте, но более
эмоциональна и в большей степени проникнута выражением
личности автора. Лирику Пушкина и [ёте сближают поэтиче..
ские обобщения как явлений действительности, так и личных
переживаний и чувств.
А. С. Пушкин умел очень хорошо rоворить, ero пьшкий и
проницательный ум был быстр, но это же самое качество иноrда
делало' ero суждения односторонними и поверхностными. Он
моментально определял нравы людей, с которыми встречался;
бьш неровен в обращении и нельзя было yraдaTb, в каком он бу
дет расположении духа через минуту. Вообще же он не умел
скрывать своих чувств, выражал их всеrда искренне и
становился неописуемо хорош, коrда что либо приятно волно
вало ero. В женщинах А.С. Пушкина очаровывало остроумие,
блеск и внешняя красота; он бьVI ревнив, и ревнивость увеличи..
валась с rодами.
С.А. Есенин (1895 1925). Лексическое боrатство Есенина
изумляет, у Hero в стихах встречается сто десять тысяч разных
словоупотреблений. По мнению А. еерафимовича, это поэт с
оrpомной интуицией; такой чудовищной способности изобра
жения тончайших переживаний, самых нежнейших самых ин
тимнейших нет ни у Koro из современников; у Hero оrpомная,
все ломающая смелость эпитетов, сравнений, выражений и по
этических построений.
С.А. Есенин в молодости любил быть на виду и сльVI драчу"
ном. Эти качества сочетались с ero исключительной впечатли..
тельностью. Красивое, как и вся жизнь, по Есенину, CKOpO
течно инепрочно.
B.f. Шухов (185З 1939) был одним из замечательных кон..
структоров конца XIX начала хх столетий и входит в IUIеяду
вьщающихся инженеров России. Наряду с [. Эйфелем, ero мож"
но считать основоположником современных строительных кон..
струкций, стремившимся к синтезу инженерии и архитектуры.
B.f. Шухов бьVI мастером, овладевшим искусством конструиро
вания с минимальными затратами на материалы, изrотовление
и монтаж. Ero висячие покрытия (см. шаr 5), сетчатые оболочки
и башни в форме rиперболоида (Шуховская телебашня) были
решениями HOBoro типа, которые блаrодаря леrкости, удиви..
тельной простоте и элеrантности конструкций, а таюке необыч..
ным и смелым формам произвели в свое время сенсацию.
Метод решения им любой проблемы заключался в соединении
386
теории с практикой, конструирования с расчетом, проектирова
ния с изrотовлением, техническоrо совершенства с экономиче..
ской целесообразностью.
Постоянным источником информации для B.f. Шухова бы
ли научно технические журналы на анrлийском, немецком и
французском языках.
B.r. Шухов бьш образцом орrанизованности и систематич
ности, умел четко вьщелять rлавные вопросы, но никоrда не
упускал никаких деталей. Ero ценным качеством бьVIИ тpyдo
способность по 12 часов в сутки и умение быстро перекточать
свое внимание на решение новой технической задачи.
Высказываясь о профессии инженера, B.r. Шухов отмечал:
«Надо думать, все время думать, днем и ночью, и все время при
думывать новое, иначе тебя жизнь отбросит. Профессия ииже..
нера тем неблаrодарна, что для понимания ее красоты нужно
иметь знания, а красота произведений искусства воспринимает..
ся чувствами».
Д.Н. Решетов (1908 2000) крупный ученый в области ма..
шиностроения, отличавшийся энциклопедичностью знаний и
создаВII1ИЙ научные школы исследования и обеспечения рабо
тоспособности деталей машин, учета контактной жесткости при
конструировании, учета переменности режимов наrpужения
при оценке ресурса, учета жесткости деталей И их сопряжений
при обеспечении точности и надежности машин. Ero учебник
по деталям машин был основным дЛя машиностроительных
специальностей вузов в течение 40 лет, а книrи по контактной
жесткости и по станкам одними из наиболее используемых
конструкторами точных машин.
Автор этой книrи защищал диссертацию и затем 30 лет ра..
ботал под руководством Д.Н. Решетова, был соавтором не..
скольких статей, а также книrи «Надежность машин», а в на..
стоящее время по просьбе ero вдовы помоrает разбирать
личный архив ученоrо. Мноrолетнее сотрудничество и анализ
архива позволяют сформулировать личные впечатления о ра..
боте cBoero учителя.
Д.Н. Решетов при решении научных и прикладных задач во
мноrих случаях ответ находил сначала интуитивным путем (см.
расчет резьбовых соединений, наrpуженны:х отрывающей силой
и опрокидывающим моментом, или учет касательной податли..
вости стыка в шаrе 13), а затем математически или эксперимен"
тально, чему способствовало rлубокое понимание им физики
процессов, происходящих в сс:>пряжения:х деталей.
387
Интересно, что все книrи Д.Н. Решетова, написанные в пер
вой половине жизни (их около десяти), не имеют соавторов. Во
второй половине жизни им опубликовано около 25 книr и 5 aT
ласов по конструированию, из них две трети с соавторами.
f. Форд (1863 1947) не просто автомобильный король
Америки и зримое воплощение «американской мечты». Он
символ орrанизационноrо и техническоrо проrресса, сознатель
ный созидатель общества MaccoBoro потребления и социальных
raрантий, т. е. Bcero Toro, что составляет «лицо» cOBpeMeHHoro
капитализма. Форд первым в 1914 [. установил на своих пред
приятиях минимальный уровень заработной платы (5 ДOJшаров
в деliЬ) и восьмичасовой рабочий день. [. Форд считал, что pa
бота это тот краеуroльный камень, на котором покоится мир.
е пятнадцати лет [. Форд Mor чинить любые часы. По ero
словам, из книr нельзя научиться ничему практическому, прак
тическому можно научиться непосредственно лишь разобрав,
починив и собрав машину. Ero теоретические взrляды проявля
ются в высказывании, что он смотрит на автомобиль, который
носит ero имя, как на наrлядное доказательство своей теории,
цель которой создать из мира источник радостей.
Список литературы
Ау2устинавичюте А. Соционика: Введение /Сост. Л. Филиппов. М.: 000
«Издательство ЛСТ»; СПб.: Тепа Fantastika, 1998. 444 с.
rодфруа ж Что такое психолоrия: В 2 т.: Пер. с франц. М.: Мир, 1992.
Т. 1. 496 С.; Т. 2. 376 с.
ДжонсДж.к. Методы проектирования: Пер. с анrл. М.: Мир, 1986. 326 с.
ИвО/юв А.с. Соотношение раЗМеров ОПОРI-:IO поворотноrо подшипника с пе
рекрестным: расположением роликов, найденное из условия минимизации стои
мости ею материала / /Вестник машиностроения. 2000. NQ 6. С. 3 37.
Иванова ид. Метод дифференциальной оценки знаний студентов по курсу
«Детали машин» / / Сборник научно методических статей по деталям машин.
М.: Высш. шк., 1981. Вьш. 4. С. 122 124.
ИвО/юва ид Изучение взаимодействия деталей сборочной еДИНИЦЫ в курсе
«Детали машин» / / Сборник научно методических статей по дсталям машин.
М.: Высш. шк., 1983. Вьш. 5. С. 129 135.
Ноймайр А. Музыканты в зеркале медицины. Ростов н/Д: Феникс, 1997.
448 с.
MaCJIOY А. Психолоrия бьпия. М.: Рефл бук: Ваклер, 1997. 304 с.
Мюллер И. Эвристические методы в инженерных разработках: Пер. с нем.
М.: Радио и связь, 1984. 144 с.
Кре2ер О., Тьюсон Дж.М. Типы людей. М.: Персей: Вече, 1995. 544 с.
Плаус Скотт. Психолоrия оценки и принятия решений: Пер. с анrл. М.:
Информ. издат. дом «ФиJПШЪ», 1998. 368 с.
388
Попов В.л. О календарном IШанировании преподавания курса «Детали Ma
шин» // Сборник научно метод:ических статей по деталям машин. М.: Бысш.
шк., 1981. Бьт. 4. С. 51 53.
Решетов Д.Н, Иванов А.С, Фадеев в.з. Надежность машин: Учебное посо
бие для вузов. М.: Бысш. шк-, 1988. 238 с.
Филатова Е. С Соционика для всех. Наука обшения, понимания и соrласия.
СПб.: Б&К, 1999.
Форд r. Моя жизнь, мои достижения: Пер. с анrл. М.: Финансы и стати
стика, 1989. 206 с.
Фрейд З. Леонардо да Винчи: Пер. с нем. Л.: Аврора, 1991. 119 с.
Ханзен Ф. Основы общей методики конструирования. Л.: Машино
строение, 1969. 164 с.
Хьелл д" ЗИ2Лер Д. Теория Шlчности: Пер. с анrл. СПб.: Питер Пресс, 1997.
608 с.
Штернберz Р.Дж. Интеллект, при носящий успех: Пер. с ашл. Минск,
000 «Попури», 2000. 368 с.
Шухов B.r. (1853 1939). Искусство конструкции: Пер. с нем. / Под ред.
Р. [рефе, М. [arrnоева, О. Перчи. М.: Мир, 1995. 192 с.
Юшин ПФ. Серrей Есенин. Поэзия. М.: ИЗkВО Моск YН Ta, 1969. 477 с.
Содержание Кllиrи
Часть 1
Шае 1. ПОНЯТИЯ машины, передачи, привода
Шае 2. Силы и связи
Шае З. Простые машины
Шае 4. Прочность деталей
Шае 5. Жесткость деталей
Шае 6. Точность деталей
Шае 7. Контактные прочность и жесткость
Шае 8. Износостойкость. Надежность
Шае 9. Дизайн. Качество. Экономическая эффективность
Научно популярное издание
Александр Серrеевич Иванов
Часть 11
КОНСТРУИРУЕМ МАШИНЫ ШAf ЗА ШАfОМ
Ч.II
Шае 10. Конструирование зубчатых, червячных и фрикционных
передач
Шае 11. Конструирование ременных и uепных передач
Ша2 12. Конструирование опор
Шае 13. Конструирование резьбовых и заклепочных
соединений
Шае 14. Конструирование соединений шпоночных, шлицевых и
с натяrом
Шае 15. Конструирование литых, сварных и штампованных
деталей
Шае 16. Конструирование валов, пружин, муфт и тормозов. Выбор
соединений сборочных единиц
Шае 17. Конструирование как объект деятельности
Редактор Е.Н Ставицкая
Корректоры О.Ю. Соколова, О.В. Калашникова
Компьютерная верстка М.В. СамОХИliОЙ
ПОДШ1сано n печать 26.03.03. Формат 60x90j16. Печать офсетная.
Бумаrа офсетная. Уел. печ. л. 24,5. УЧ. изД. л. 24,55. Тираж 2000 экз.
Заказ 8640
Издательство МПУ ИМ. Н.Э. Баумана, 5.
105005, Москва, 2 я Бауманская, 5.
Отпечатано с ориrинал макета в rуп ппп «Типоrрафия «Наука,>.
121099, Москва, Шубинский пер., 6.