
















































































































Author: Стесин С.П. Яковенко Е.А.
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика общее машиностроение машиноведение гидродинамика лопастные машины гидродинамическая передача
ISBN: 5-217-00864-4
Year: 1990




ДЛЯ ЗУЗЭВ
С.П Стесин
Е. А. Яковенко
ЛОПАСТНЫЕ
И ГИДРО-
ДИНАМИЧЕСКИЕ
ПЕРЕДАЧИ
МАШИНИСТ И >ЕНИЕ
ДЛЯ ВУЗОВ
С.П.Стесин
Е. А. Яковенко
ЛОПАСТНЫЕ
МАШИНЫ
И ГИДРО-
ДИНАМИЧЕСКИЕ
ПЕРЕДАЧИ
Допущено
Государственным комитетом СССР
по народному образованию
в качестве учебника для студентов вузов,
обучающихся по специальности
"Гидравлические машины,
гидроприводы и гидропневмоавтоматика
Библиотека
Набережночелнинского
института КФ У
EIIIIIIIIIIIMIIIIIIIII
•МееМ57в47
Москва
Машиностроение •
1990
ББК 34.447я73
С79
УДК 681.587’54 | 681.3 (075.8)
Рецензенты: кафедра «Гидропривод и гидропневмоавтоматика»
ЧПИ и кафедра «Гидравлика и гидропривод» В ПИ
I библиотека
раненого полете::: такого
И ЗИТУТА
Стесин С. П.» Яковенко Е. А.
С79 Лопастные машины и гидродинамические передачи: Учеб-
ник для студентов вузов по специальности «Гидравлические
машины, гидроприводы и гидропневмоавтоматика». М.:
Машиностроение, 1990. —240 с.: ил.
ISBN 5-217-00864-4
Изложены основы теории лопастных машин и гидродинамических
передач. Описаиы устройство, принцип действия, характеристики лопа-
стных иасосов и гидродвигателей, гидродинамических муфт и гидротранс-
форматоров с учетом установившихся и неуствиовившихся режимов их
работы. Рассмотрена совместная работа гидродинамических передач с дви-
гателями. Изложены вопросы оптимального проектировании гидродинами-
ческих передач с применением ЭВМ, даны рекомендации по применению
их в приводах строительных, дорожных и транспортных машин.
_ 2702000000—197
с -омсов-яо ,в7-»° ББК 34 447я73
ISBN 5-217-00864-4
© С. П. Стесин, Е. А. Яковенко, 1990
ВВЕДЕНИЕ
Развитие целого ряда отраслей народного хозяйства
(химической, нефтяной, угольной промышленности, энергетики,
сельского хозяйства) требует развития машиностроения и его
составной части — насосостроения. В связи с этим дисциплина
«Лопастные машины и гидродинамические передачи» кроме из-
ложения общей теории лопастных машин предполагает более
подробное изучение насосов, их характеристик и некоторых во-
просов эксплуатации.
Материалы по гидравлическим турбинам как энергетическим
установкам представлены в небольшом объеме. В основном же рас-
смотрение насосов и гидротурбин в учебнике подводит студента
к изучению и исследованию гидродинамических передач, в которых
лопастные насосы и гидротурбины являются преобразователями
энергии.
Идея создания лопастного центробежного насоса принадлежит
Леонардо да Винчи (1452—1519 гг.), а первую удачную конструк-
цию разработал французский физик Папен (1689 г.). Основы
теории лопастных гидравлических машин (турбин и насосов)
были заложены Л. Эйлером в XVIII в., однако их практическое
применение стало возможным лишь в конце XIX в. после создания
высокооборотных электродвигателей и паровых турбины. В на-
стоящее время лопастные насосы широко применяют в различных
отраслях народного хозяйства, в технике. Высокий уровень сов-
ременного отечественного гидрома щнностроення обусловлен мно-
гочисленными исследованиями советских ученых (проф И. И. Ку-
колевского, С. С. Руднева, В. В. Мишке, А. В. Караваева,
акад. Г. Ф. Проскуры, проф. И. П. Вознесенского, В. С. Квят-
ковского и др.), а также творческими достижениями ведущих
научно-исследовательских институтов и заводов.
Создание и развитие гидродинамических передач относится
к началу XX в. В 1902 г. Г. Феттингер предложил объединить
в одном корпусе два основных элемента •— насосное и турбинное
колеса (без использования подводящих н отводящих трубопро-
водов), т. е. направить поток жидкости непосредственно нз одного
колеса в другое, что приведет к уменьшению потерь и повышению
КПД. Передачу, в которой насосное, турбинное колеса и непо-
движный направляющий аппарат (реактор) объединены в одной
корпусе, назвали гидротрансформатором. Впервые он был при-
менен (по патенту Г. Феттннгера) в 1907 г. на морских судах и
имел КПД ц = 85 %. Гидродинамическая передача без реактора
также была запатентована Г. Феттингером и получила название
гидродинамической муфты.
Гидродинамические передачи применяют о двигателями вну-
треннего сгорания, электродвигателями н т. д. Идеальная ха-
рактеристика двигателя должна обеспечивать максимальную мощ-
ность во всем диапазоне изменения его частоты вращения. Фак-
тически двигатели внутреннего сгорания имеют одну точку с мак-
симальной мощностью Л^двшдх, а приближение характеристики
привода к идеальной характеристике двигателя достигается сту-
пенчато с помощью механической коробки передач. В гидродина-
мических передачах отсутствует жесткая связь двигателя с на-
грузкой, так как энергия передается через поток жидкости.
Гидродинамические передачи существенно улучшают харак-
теристики двигателей, обеспечивая бесступенчатое регулирование
скорости в широком диапазоне; позволяют получить малые («пол-
зучие») скорости движения; облегчают пуск двигателей под на-
грузкой; повышают надежность машин; предохраняют их узлы
от перегрузок.
С применением гидродинамической передачи облегчается труд
водителя благодаря автоматичности изменения скорости механиз-
мов.
Преимущества гидродинамических передач способствовали нх
широкому применению в различных областях техники.
В 1928 г. фирмой «Лисхольм—Смит» в Швеции был создан пер-
вый гидротрансформатор для автобуса. С 1947 г. стали устанавли-
вать гидротрансформаторы в сочетании с механическими переда-
чами на серийных легковых автомобилях (фирмы «Дайнафлоу»,
«Бьюик» и др.).
В СССР первая гидромуфта была создана в 1929 г. проф.
А. П. Кудрявцевым, первый гидротрансформатор — в 1932—
1934 гг. в МВТУ им. Н. Э. Баумана.
В настоящее время гидродинамические передачи применяются
в приводах транспортных, строительных, дорожных, горных и
Других машин, имеющих переменные нагрузки на рабочих органах.
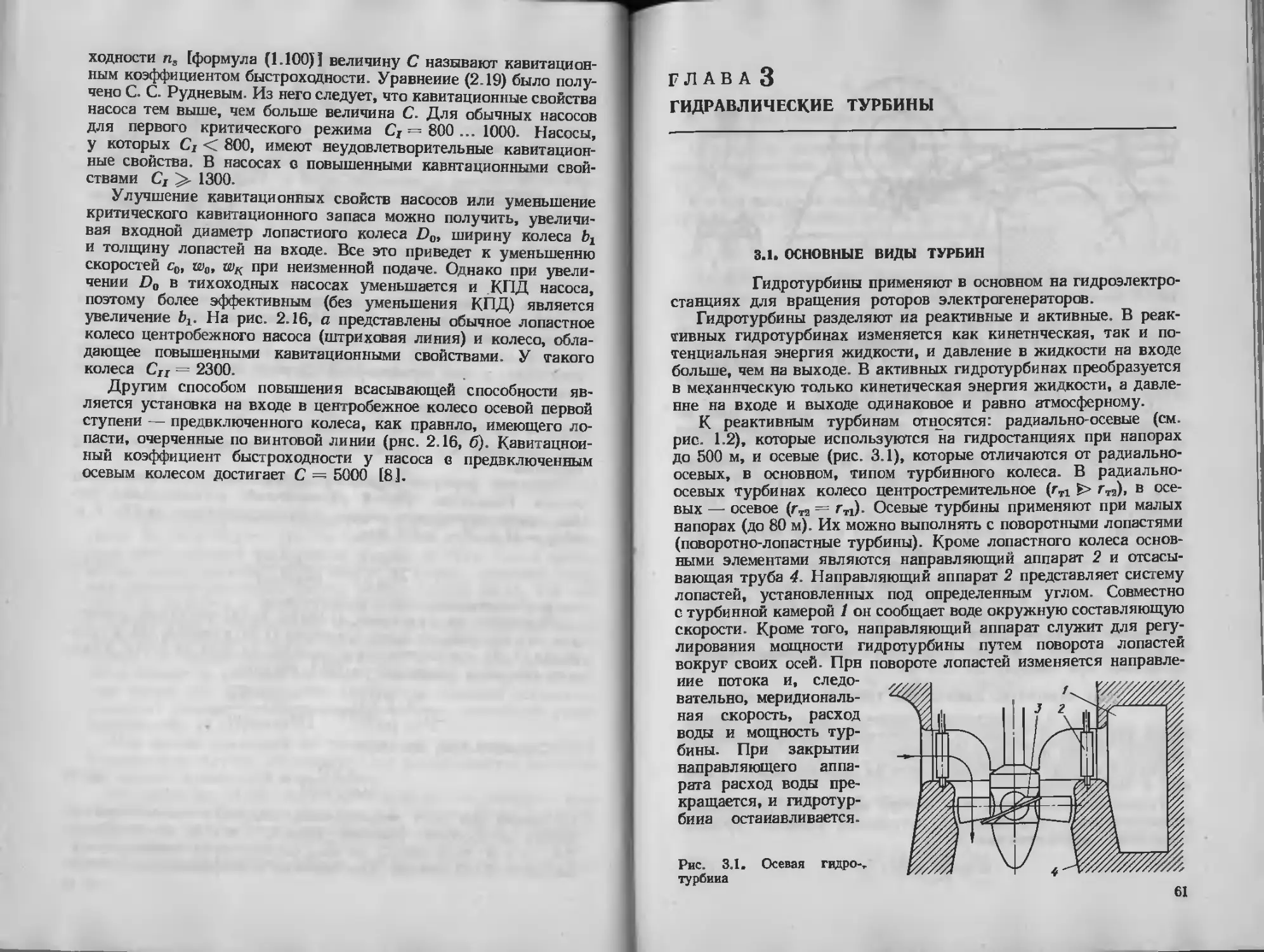
ГЛАВА1
ОСНОВЫ ТЕОРИИ ЛОПАСТНЫХ ГИДРОМАШИН
1.1. ПРИНЦИП ДЕЙСТВИЯ ЛОПАСТНЫХ ГИДРОМАШИН
И ГИДРОДИНАМИЧЕСКИХ ПЕРЕДАЧ
Гидравлическими называют машины, в которых проис-
ходит изменение энергии протекающей жидкости. Если энергия
изменяется в результате динамического взаимодействия лопастей
рабочего органа (колеса) с обтекающей их жидкостью, то гидро-
машииы называются лопастными.
Гидромашины, в которых механическая энергия, подведенная
к лопастному колесу, преобразуется в энергию потока жидкости,
увеличивая ее, называют лопастными насосами. Гидромашины,
в которых жидкость отдает энергию лопастному колесу и энергия
потока переходит в механическую энергию на валу, называют
лопастными гидродвигателями или гидравлическими турбинами
(гидротурбинами).
Рассмотрим механизм передачи энергии в лопастном колесе,
содержащем z лопастей, закрепленных на диске или втулке,
на примере отдельного крылового профиля. При натекании на
лопасть образуется перепад давлений на верхней и нижней по-
верхностях профиля и возникает подъемная сила, направление
которой зависит от формы лопасти. Если момент от подъемных сил
совпадает с возможным направлением вращения лопастного ко-
леса, то жидкость, действуя на лопастн, приводит колесо во
вращение, передавая ему энергию. По этому принципу работает
турбина. Если же лопастное колесо приводится во вращение от
двигателя, а момент подъемных сил на лопастях противодействует
вращению, то энергия от лопастей передается жидкости. По этому
принципу работает лопастной насос.
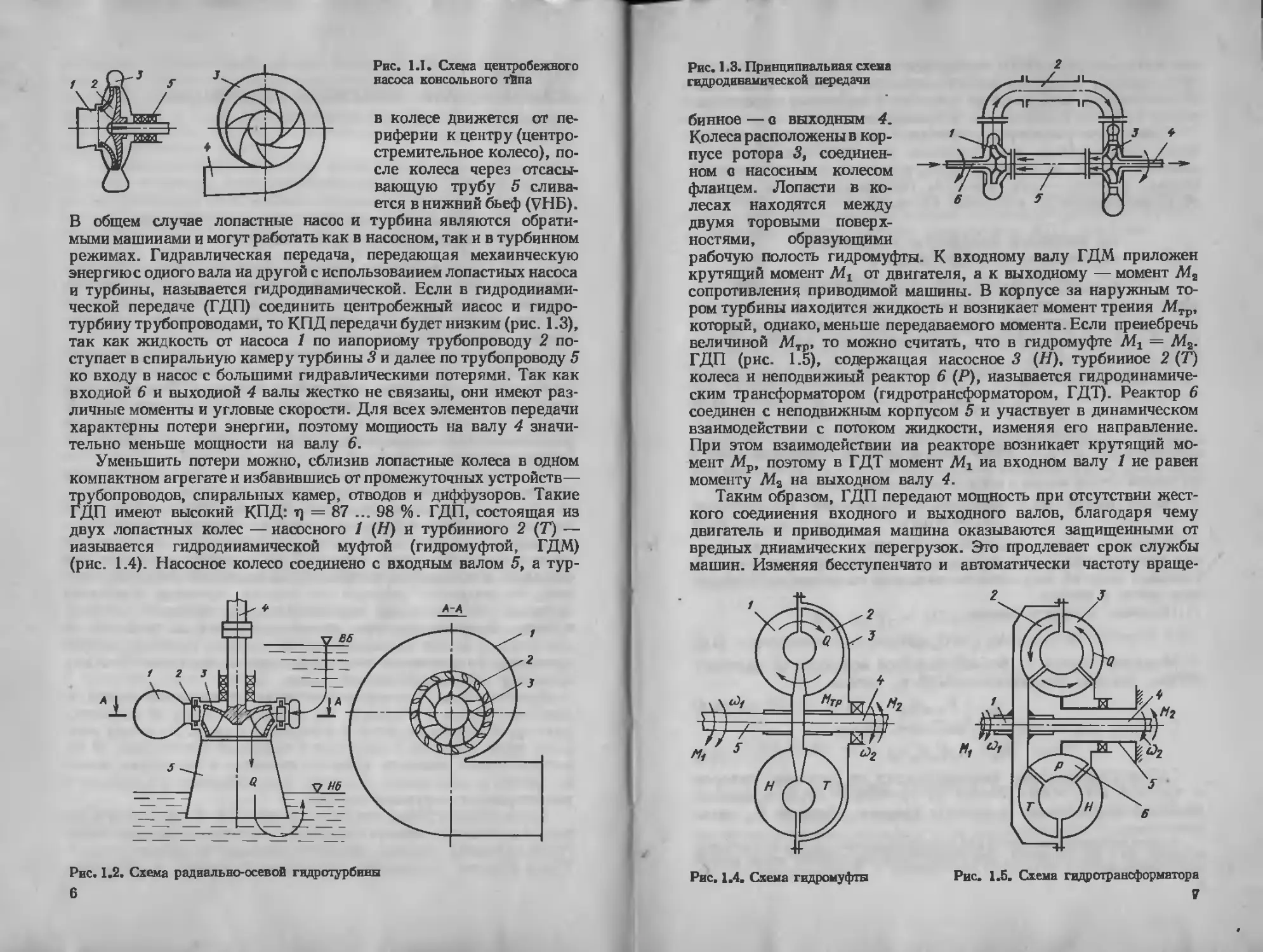
В насосе (рио. 1.1) основными деталями являются подвод /,
лопастное колесо 2 и отвод 3. По подводу жидкость от всасываю-
щего трубопровода подается к лопастному колесу. Из отвода жид-
кость через диффузор 4 поступает в напорный трубопровод. В ло-
пастном колесе жидкость движется от центра к периферии, поэто-
му колесо (и весь насос) называют центробежным. Уплотнение 5
предотвращает наружные утечкн.
Схема гидротурбины показана на рио. 1.2. В спиральную ка-
меру 1 и лопастное колесо 3 жидкость поступает с верхнего бьефа
(VBB). Отдавая энергию, жидкость приводит во вращение вал 4.
Перед колесом установлен неподвижный аппарат 2. Жидкость
Б
Рис. 1Л. Схема центробежного
насоса консольного тйпа
в колесе движется от пе-
риферии к центру (центро-
стремительное колесо), по-
сле колеса через отсасы-
вающую трубу 5 слива-
ется в нижний бьеф (?НБ).
В общем случае лопастные насос и турбина являются обрати-
мыми машинами и могут работать как в насосном, так и в турбинном
режимах. Гидравлическая передача, передающая механическую
энергиюс одного вала иа другой с использованием лопастных насоса
и турбины, называется гидродинамической. Если в гидродинами-
ческой передаче (ГДП) соединить центробежный насос и гидро-
турбину трубопроводами, то КПД передачи будет низким (рис. 1.3),
так как жидкость от насоса 1 по напорному трубопроводу 2 по-
ступает в спиральную камеру турбины 3 и далее по трубопроводу 5
ко входу в насос с большими гидравлическими потерями. Так как
входной 6 и выходной 4 валы жестко не связаны, они имеют раз-
личные моменты и угловые скорости. Для всех элементов передачи
характерны потери энергии, поэтому мощность на валу 4 значи-
тельно меньше мощности на валу 6.
Уменьшить потери можно, сблизив лопастные колеса в одном
компактном агрегате и избавившись от промежуточных устройств—
трубопроводов, спиральных камер, отводов и диффузоров. Такие
ГДП имеют высокий КПД: т] = 87 ... 98 %. ГДП, состоящая из
двух лопастных колес — насосного 1 (Н) и турбинного 2 (Т) —
называется гидродинамической муфтой (гидромуфтой, ГДМ)
(рис. 1.4). Насосное колесо соединено с входным валом 5, а тур-
Рис. 1.2. Схема радиально-осевой гидротурбины
6
Рис. 1.3. Принципиальная схема
гидродинамической передачи
2
бинное — с выходным 4. тгТ
Колеса расположены в кор- 1 '-Jml ljnLJ *
пусе ротора 3, соединен- \ /
ном с насосным колесом * * //~Т]>Ц|п /
фланцем. Лопасти в ко- / / Гы
лесах находятся между 6 * (J
двумя торовыми поверх-
ностями, образующими
рабочую полость гидромуфты. К входному валу ГДМ приложен
крутящий момент от двигателя, а к выходному — момент Л12
сопротивления приводимой машины. В корпусе за наружным то-
ром турбины находится жидкость и возникает момент трения ЛТтр,
который, однако, меньше передаваемого момента. Если пренебречь
величиной Мгр, то можно считать, что в гидромуфте Мг = Л12-
ГДП (рис. 1.5), содержащая насосное 3 (Я), турбинное 2 (Т)
колеса и неподвижный реактор 6 (Р), называется гидродинамиче-
ским трансформатором (гидротрансформатором, ГДТ). Реактор 6
соединен с неподвижным корпусом 5 и участвует в динамическом
взаимодействии с потоком жидкости, изменяя его направление.
При этом взаимодействии на реакторе возникает крутящий мо-
мент Мр, поэтому в ГДТ момент иа входном валу 1 не равен
моменту М2 на выходном валу 4.
Таким образом, ГДП передают мощность при отсутствии жест-
кого соединения входного и выходного валов, благодаря чему
двигатель и приводимая машина оказываются защищенными от
вредных динамических перегрузок. Это продлевает срок службы
машин. Изменяя бесступенчато и автоматически частоту враще-
Рис. 1.4. Схема гидромуфта
Рис. 1.5. Схема гидротрансформатора
7
ния выходного вала, ГДП выполняют функцию редуктора (муль-
типликатора), упрощают работу оператора приводимой машины.
Перечисленные преимущества привели к широкому распростра-
нению ГДП на транспорте и в промышленности.
Ниже будут рассмотрены лопастные насосы и, в меньшей сте-
пени, гидротурбины как отдельные агрегаты, поскольку они
являются одной из наиболее распространенных разновидностей
машин, а также — как элементы гидродинамических передач,
обусловливающие те или иные их свойства.
1.2. ОСНОВНЫЕ ПАРАМЕТРЫ ЛОПАСТНЫХ
ГИДРОМАШИН И ГИДРОПЕРЕДАЧ
Основными параметрами насоса являются подача, дав-
ление (напор) и мощность. Объемная подача насоса (или подача)
QH — это объем жидкости, перемещаемой насосом через выходной
патрубок в единицу времени. Единицей подачи является 1 м3/с
(или 1 л/с; 1 м* * * 8/ч).
Давление иасоса р — величина, определяемая зависимостью
Р = Р« — Р. + Р 01 2 + Pgfa - Zj,
где Рк и рв — давление иа выходе из насоса и на входе в него, Па; р — плотность
жидкости, кг/м3; ов и ин—средняя скорость жидкости иа выходе из насоса и
входе в него, м/с;#—ускорение свободного падения, м/с’; гк и ги — высоты цен-
тра тяжести сечения выхода и входа от выбранной плоскости, м. ’
Напор насоса Нв — величина, определяемая зависимостью
Нн = p/(pg). (1.2)
Физически напор насоса — это энергия, сообщаемая насо-
сом единице веса (1 Н) перемещаемой жидкости, или разность
удельных энергий жидкости на выходе и входе насоса. Измеря-
ется напор в метрах.
Полезная мощность насоса
Nn.a = QBpgHB. (1.3)
Мощность иасоса NH больше полезной мощности на величину
потерь, которые оцениваются КПД т]н насоса!
Лн = Мп.н/^. (1.4)
С учетом выражения (1.3) мощность иасоса
й/н — P^Qh//h/'4h. (1.5)
Работа гидротурбины характеризуется ее расходом, напором
и полезной мощностью. Расход QT турбины — объем жидкости,
протекающий через нее в единицу времени. Напором И, назы-
• Если рассматривается насос или гидротурбина в ицце отдельного агрегата,
то индекс <н> и <т> опускается. При рассмотрении гидропередач индекс необхо-
димо указывать.
8
вается энергия, отбираемая турбиной от единицы веса (1 Н) жид-
кости, протекающей через нее. Если использовать определение
напора по разности удельных энергий иа выходе из турбинного
колеса и входе в него, то величина Нт будет меньше нуля. За-
траченная (располагаемая) мощность потока (мощность потока
на входе в турбину)
ЛГр.т = Р^тЯт. (1.6)
Полезная мощность 2VT — это мощность, отдаваемая турбиной
приводимой ею машине, она меньше затраченной мощности потока
на величину потерь. Потери оцениваются КПД турбины
Ъ=Л^Р.Т- (1.7)
С учетом выражения (1.6) полезная мощность турбины
Nt = Np. Л = PgQiN.T],. (1.8)
ГДП имеют внутренние и внешние параметры. К внутренним
относятся параметры, характеризующие поток жидкости, про-
текающий в рабочей полости. Это подача (расход) <2Н насосного
и QT турбинного колес; напоры На и Нт; мощность потока жид
кости — полезная насосного колеса Nn, н и располагаемая на
турбинном колесе Л/р-т.
Внешними являются параметры, относящиеся к входному
и выходному звеньям (валам) и реактору (Л\, 2Va, Л1а, Мр,
“1, ш2, “₽)
Мощность на входном звене ГДП
Mt = MiOi, (1.9)
а на выходном звеие
М, = М2ш2, (1.10)
где Мг и Л1а, (Dj и Oj — соответственно моменты на входном (индекс 1) и выход-
ном (индекс 2) звене и их угловые скорости.
КПД ГДП
я = NJNt = = Ki, (111)
где К—коэффициент трансформации ГДП: I — передаточное отношение ГДП;
K = (1.12)
I = (^1(01. (1-13)
Скольжение (%) ГДМ
S = (©! — С02) 100/ (0i.
Для ГДМ Мъ = М, (К = 1) и КПД Пгдм =
1.8. ДВИЖЕНИЕ ЖИДКОСТИ В ЛОПАСТНЫХ КОЛЕСАХ
Предметом теории лопастных гидромашин является
изучение движения жидкости и ее взаимодействия с элементами
лопастных машии. Гидродинамические, свойства машин опреде-
ляются направлением и значениями скоростей потока жидкости.
9
Рис. 1.6. Построение плана скоростей потока в произвольной точке лопастного
колеса
Скорости потока относительно неподвижных корпусных деталей
являются скоростями абсолютного движения. Вектор абсолютной
скорости обозначим через с.
Вращение лопастного колеса с угловой скоростью со относи-
тельно неподвижной оси является переносным движением. Жид-
кость в лопастном колесе также участвует в переносном движении.
Если расстояние от рассматриваемой частицы жидкости до осн
насоса равно rt то переносная скорость равна окружной!
и = tor, (1.14)
а вектор й направлен по касательной к окружности в данной
точке.
Движение жидкости относительно лопастного колеса назы-
вается относительным^ Вектор относительной скорости w направ-
лен по касательной к лопасти.
Абсолютную скорость с в области лопастного колеса можно
получить по правилу сложения векторов!
с = й + й>. (1.15)
Положим, что заданы геометрические размеры колеса, подача
жидкости через колесо QK и угловая скорость со (рис. 1.6). Пусть
число лопастей достаточно большое (стремится к бесконечному),
а толщина их — бесконечно мала. Тогда течение жидкости в ко-
лесе является струйным, а относительную скорость для всех
линий тока на данном радиусе можно считать одинаковой. Такой
поток называется осесимметричным.
Введем обозначения!
вт — проекция абсолютной скорости на плоскость, проходящую
через ось колеса и рассматриваемую точку; эта плоскость назы-
вается меридиональной и ст называют меридиональной скоростью
или меридиональной составляющей;
10
ов — окружная составляющая абсолютной скорости!
с = са + ст или е2 = й + (1.16)
Р' — угол между направлением относительной скорости w и
касательной к окружности (или направлением касательной в сто-
рону, обратную окружной скорости);
р — угол между касательной к лопасти и касательной к окруж-
ности.
В рассматриваемом случае pr = Р- Построим план скоростей
для точки А на входной кромке лопасти (для обозначения скоро-
стей и размеров на входе введем индекс «1»). Изменением относи-
тельной и меридиональной скорости вдоль кромки пренебрегаем
(равноскоростной меридиональный поток). Точка А лежит на сред-
ней линии тока. Меридиональную составляющую ст1 определим
из уравнения неразрывности. Живое сечение меридионального
потока — это поверхность, образованная вращением линии ВС,
перпендикулярной меридиональному потоку (это может быть и
входная кромка), вокруг оси колеса. Площадь этой поверхности
вращения (по теореме Гюльдена) равна произведению длины
образующей ВС на длину окружности, описываемой центром
тяжести линии ВС:
F'm =2nrtb,,
где п — радиус расположения центра масс линии ВС (или приближенно расстоя-
ние от оси до середины линии ВС).
Часть поверхности вращения занята телом лопастей. Поэтому
искомая площадь живого сечения меридионального потока
Fml — (1.17)
где Ох — толщина лопасти, измеренная в направлении окружности входа; г —
число лопастей.
Из треугольника DEF
°i — 6i/sin Рх, (1-18)
где Cf — толщина лопасти, измеренная по нормали к ее поверхности.
Преобразуем выражение для площади!
Fnl = toirJb (1 - = Яяг&ъ, (1.19)
где
9<l = 1 — Ciz/(sin Pi-2jvi) (1-20)
— коэффициент, характеризующий степень стеснении потока лопастями (0,7
14^0,9 в зависимости от конструкции лопастного колеса).
Тогда меридиональная составляющая абсолютной скорости
о учетом стеснения потока лопастями
Cml = Qk/F (1*21)
а без учета стеснения потока лопастями
cml = Qk/ F mi-
ll
Рис. 1.7. План скоростей потока на входе в колесо:
а — при вакрутке потока иа входе (сы1 * 0); б — при отсутствии внкруткж иа входе
(с«1 “ °)
Окружная скорость потока на входе
Ui = сог4 = (лп/30) rt.
Зная величины cmX, Ui и угол plf можно построить треуголь-
ник (план) скоростей на входе в колесо (рис. 1.7). Окружная со-
ставляющая скорости cuii
= “I — ctg Pt. (1.22)
Направление потока на входе в лопастное колесо зависит
от элементов конструкции, расположенных перед колесом; в на-
сосах — от формы подвода, в гидропередачах — от формы лопасти
и направления потока на выходе нз предыдущего колеса. Поэтому
в общем случае угол PJ не равен углу установки лопасти рх.
Угол между направлениями относительной скорости и входного
элемента называют углом атаки ДРуд (рнс. 1.8). Входная кромка
должна быть скруглена, что уменьшает потери и срыв потока с ло-
пасти при его натекании на входе с некоторым углом атаки.
Если подвод в насосе выполнен в виде патрубка (см. рис. 1.1),
то поток на входе в насосное колесо не закручен, т. е. составляющая
скорости сиг — 0 и треугольник скоростей на входе имеет вид,
показанный на рис. 1.7, б. Как правило, угол установки лопастей
на входе в насосное колесо PJ выбирают равным углу потока PJ
Рис. 1.8. Иаменение направления потом на входе в лопастное колесо при изме-
нении режима работы
12
Рис. 1.9. План скоростей потока на
выходе ив лопастного колеса
Рис. 1.10. Изменение плана скоростей
потока на выходе из лопастного хо-
леса при изменении режима работы
(0в« <<?«. рас? < Овд)
ий расчетном режиме (QK.paC4 при максимальном КПД) или
задаются небольшим (3 ... г) углом атаки ЛРУД1. При изменении
подачи < QK. расч < QKI/ изменяется скорость ст1 и, как
следствие, направление скорости (см. скорости ст1а, ст1расч,
cmiv и “’ix» “^расч» на Рис- 1-8), возникает «мертвая» (вихре-
вая) зона при обтекании, что вызывает появление дополнительных
гидравлических «ударных» потерь.
На выходе из лопастного колеса площадь живого сечения ме-
ридионального потока (рис. 1.6 и 1.9) без учета стеснения его
лопастями
Fm2 = 2яГ2Й2»
с учетом стеснения
— 2пгф^,
где хя = 1 — 6az/(sin ₽а-2JVj) = 0,9 ... 0,98 — коэффициент стеснения потока
на выходе; индексом «2> обозначены параметры потока на выходе.
Рнс. 1.11. Схема течения жидкости
колесах ГДТ
н треугольияия скоростей в лопастных
13
Меридиональная составляющая
— Ск/^1 ml*
Окружная скорость = юга, окружная составляющая аб-
солютной скорости cui = щ — cma ctg 0„ а относительная ско-
рость w3 направлена по касательной к лопастн и угол 0а потока
равен углу установки лопасти на выходе 0а. При изменении ре-
жима работы, т. е. для < Qj<. расч < QKJ/, направление
потока в относительном движении сохраняется (0, = const), а
изменяются составляющие стоа н си1 (рис. 1.10).
Аналогично строим планы скоростей в турбинном колесе и
реакторе ГДТ (рис. 1.11). На рисунке турбинное колесо — центро-
стремительное (гта < гт1 и ита < цт1) и на выходе турбинного
колеса скорость сита мала или обращается в нуль. Реактор непод-
вижен (top = 0) и Ср = wp.
1.4. УЧЕТ ВЛИЯНИЯ КОНЕЧНОГО ЧИСЛА ЛОПАСТЕЙ
В реальных колесах число лопастей конечное, и угол
осредненного потока на выходе 02 отличается от угла наклона
лопастн 0а. Это связано, в частности, с возникновением во враща-
ющихся колесах относительного вихря, а также с наличием сило-
вого взаимодействия потока и лопасти.
Относительный внхрь возникает в замкнутом межлопастном
канале вследствие инерции частиц жидкости и направлен на боль-
шем радиусе в сторону, противоположную вращению лопастного
колеса (рис. 1.12, а). Эпюра скоростей Aw в относительном вихре
показана в соседнем канале. В среднем сечен ни канала эпюра Aw
суммируется с равноскоростной эпюрой wm (рис. 1.12, б), соот-
ветствующей гипотезе бесконечно большого числа лопастей в ко-
лесе. На выходе из колеса составляющая относительного вихря Aw
суммируется с вектором w2oo н отклоняет относительный поток
в сторону, противоположную вращению колеса (рис. 1.12, в).
Результирующая эпюра представлена на рис. 1.12, в, а, е для
различных лопастных колес.
Наличие силового взаимодействия потока и лопасти обозна-
чает неравенство давлений на выпуклой н вогнутой (или на рабо-
чей и тыльной) сторонах лопасти, а это приводит к появлению
дополнительной циркуляции жидкости в межлопастном канале и
к неравномерному распределению скорости w в канале — умень-
шению ее на рабочей стороне лопасти и увеличению на тыльной.
На рис. 1.12 точка А в каналах принадлежит рабочей стороне
лопасти, а точка В—тыльной. В турбинных колесах рабочей
является вогнутая сторона лопастн, а в насосных — выпуклая.
Как видно из представленных схем, в насосном и центробежном
турбинном колесах поток на выходе отклоняется в стороиу,
противоположную вращению колеса, а в центростремительном
турбинном колесе — по направлению вращения, если учитывать
14
Рис. 1.12. Распределение скоростей в межлопастныи каналая и отклонение по-
тока иа выходе иэ колеса:
а — относительней вихрь в вскрытом канале; б — распределение «транзитной* скорости
в центробежном колесе при бесконечном числе лопастей; в — суммарная эпюра относи-
тельной скорости н отклонение потока в аентробежном насосе; е — суммарная эпюра ско-
ростей н отклонение потока в центростремительной турбине; д — относительный вихрь
и эпюра скоростей с учетом вихря в центробежной турбине; е — действительная суммар-
ная эпюра скоростей и отклонение потока на выходе в центробежной турбине
только влияние относительного вихря (рнс. 1.12, д). Дополни-
тельная циркуляция вокруг лопастей насосного и центростреми-
тельного турбинного колес увеличивает отклонение скорости w
от относительного внхря. В центробежном турбинном колесе
циркуляция увеличивает скорость w на тыльной стороне лопасти
н уменьшает на рабочей. Циркуляция является определяющей, и
поэтому отклонение потока в центробежном турбинном колесе
на выходе совпадает с направлением вращения колеса
(рис. 1.12, е). На угол отклонения потока при выходе оказы-
вает влияние и кривизна лопастн, так как по инерции жидкость
стремится сохранить прежнее направление, а изогнутая лопасть
заставляет ее изменить направление.
Угол отклонения потока от лопастей зависит, таким образом,
от числа лопастей, их формы, углов 01 и 09, радиусов входа и
выхода.
Как показали экспериментальные исследования потока в ло-
пастных колесах, наибольшее отклонение потока на выходе имеет
место в насосных колесах (60^ = 3 ... 10°). В центростремитель-
ных турбинных колесах 60т1 = 1 ... 7°. а в центробежных —
6₽тя = 1 ... 2,5° [24].
В неподвижных реакторах отклонение потока определяется
только наличием циркуляции. Так как при работе обычно меня-
1Б
Рис. 1.13. Треугольники скоростей на выходе потока с учетом конечного числа
лопастей:
а — в реакторе; б — в насосном колесе; в •=• в нурбннном колеса
ются местами тыльная и рабочая стороны лопасти в реакторе,
что приводит к изменению направления циркуляции, поток мо-
жет отклоняться в любую сторону от направления лопасти на
выходе. Обычно 6ppS = 1 ... 3°: Как следует из треугольников
скоростей на выходе из лопастных колес с отклонением потока
при конечном числе лопастей (рис. 1.13), составляющая си2 умень-
шается в насосном колесе и возрастает в турбинном (сан1 <
< Си Н2со» Cv т2 > Си Т2оэ)'
Существует ряд формул для учета влияния конечного числа
лопастей. Так, поправку можно выразить в виде коэффициента
(4, 7] учета влияния конечного числа лопастей
Ц ~ Си2!Сц2оо (1.23)
или
р = (1-24)
где wut н mU2co — проекции относительной скорости на выходе из колеса при
конечном и бесконечном числе лопастей соответственно.
Для гидродинамических передач не имеется универсальной
формулы для определения коэффициента р, так как он зависит
от многих факторов (быстроходности колеса, расположения ко1
лес, режима работы и т. д.). В связи с этим часто пользуются ме-
тодикой расчета центробежных насосов и турбин. Так, можно
применять график Кухарского [7 ], который составлен для центро-
бежных насосов с радиальным входом (сав1 = 0), или формулу
Пфлейдерера [2], согласно которой
р = 1/(1 + р), (1.25)
Где ₽ = 4’4“: (1-26)
здесь ф — опытный коэффициент [7]:
ф = (0.55 ... 0,65) + 0,6 sin ₽2j (1.27)
s — статический момент линии тока:
2 *
(1-28)
1т — длина линии тока в меридиональном сечении.
• Формула (1 24) рекомендуется для гидротурбин, где сыт1 может быть равна
нулю.
16
Опыт подтверждает справедливость формулы (1.27) для насос-
ных колес с лопастями, загнутыми назад. Стоящее впереди сла-
гаемое в формуле зависит от шероховатости поверхности проточ-
ной части колеса. Для тщательно обработанных колес можно
принимать нижннй предел.
Академик Г. Ф. Проскура рекомендует для насосов формулу
ф = (п/2) [sin 0 + (г^)2 sin 0Х]. (1-29)
По методу Стодола [5] для учета влияния конечного числа ло-
пастей рекомендуются следующие зависимости-
Дс«2. = св2со — СВ2 = «2 (Л/z) Sin 0j (1.30)
или после соответствующих преобразований
Ctfi = kzll2 Ст2 ctg ра, (1.31)
где kz = 1 — (л/z) sin РЕ — для центробежного колеса н kx — 1 + (л/z) sin Р, —
для центростремительного турбинного колеса. I
Для любого колеса ГДП Е. Шпанхаке рекомендует формулу
sin₽,=-------------------г 2Ст’ (1.32)
где <b33)
т = 0,6 .. 0,8 — опытный коэффициент! <L34>
Из формулы (1.32) с учетом выражений (1.33) и (1.34) получим
зависимость для угла потока на выходе;
sin р; =--------. (1.35)
I I (CU2r2 Си1Г1) Sm2 Ps
Для насосного колеса — сын1гн1) > 0 и поэтому 02 <
< Р2; ДЛЯ ТурбиННЫХ КОЛес (СитаГта —СицГт1) < 0 и рг > Рг-
Чаще всего для учета отклонения в лопастных насосах и на-
сосных колесах ГДП рекомендуется использовать формулу (1.25),
а формулы (1.32) и (1.35)—для турбинных колес и реакторов.
Прн этом величину cuZr2 надо брать с учетом отклонения потока.
В правом приближении можно подставить си2аогл, а затем сделать
второе приближение для уточнения sin 0а.
2 ннБИБЛИОТЕКН 17
КАМОНОГО ПОЛИТЕХНИЧЕСКОГО
ИНСТИТУТА
1.5. ВИДЫ ПОТЕРЬ В ЛОПАСТНЫХ ГИДРОМАШИНАХ
И ИХ ОПРЕДЕЛЕНИЕ
В лопастных гидромашииах процесс преобразования
энергии (механической в энергию потока или гидравлической
в механическую) сопровождается потерями, которые можно раз-
делить иа механические, объемные и гидравлические.
Механические потери обусловлены трением в подшипниках и
уплотнениях иа валах (АМме1), трением наружной поверхности ло-
пастных колес о жидкость (дисковое треине; ДГдк).
В центробежных насосах на валу установлено сальниковое
уплотнение (рис. 1.1, поз. 5), которое работает в смоченном состоя-
нии, и мощность трения зависит от вида набивки, числа колец,
давления в корпусе.
В ГДП уплотнения иа валах разнообразны — манжеты, уплот-
нительные кольца, лабиринты, вследствие чего моменты потерь
и мощность АДГмех как правило, определяют опытным путем.
Мощность трения наружных поверхностей колес о жидкость
складывается из мощности трения боковых поверхностей и ци-
линдрических частей, ободов. При вращении диска в замкнутом
пространстве (рис. 1.14, а) жидкость, находящаяся между дис-
ком и стенкой корпуса, вращается с угловой скоростью, равной
половине угловой скорости диска. В насосе лопастное колесо
вращается в корпусе, заполненном жидкостью, и ее угловая ско-
рость к»жидк = О.бши. Поверхностями дискового трения являются
боковые наружные поверхности лопастного колеса, цилиндриче-
ские поверхности обода иа выходе и в лабиринтном уплотнении.
В ГДТ (рис. 1.14, б), например, насосное колесо с замыкающим
кожухом может охватывать турбинное колесо и вал турбивного
колеса может проходить внутри ступицы реактора. В отличие от
Рис. 1.14. К определению моментов дискового трении в лопастных гидромаши-
нах:
а — расчетная схема; б — области дискового грення в ГДТ
18
насосов и гидротурбин, где один из смежных элементов вращается,
а другой неподвижен, в ГДП такой случай является частным.
Например, угловая скорость жидкости в зазорах между турбин-
ными элементами и реактором
шдк. »-р = (1.36)
между насосными элементами и реактором
^дк. в-p ~ (1.37)
При вращении смежных элементов в одну сторону относитель-
ная угловая скорость будет равна разности угловых скоростей на-
сосного и турбинного колеса
^дк. ~ (1.38)
При вращении смежных элементов в разные стороны
Идк. и-w = Ни -j- (0». (1.39)
Смежные поверхности могут иметь разные конфигурации
(криволинейные, конические, цилиндрические, плоские). Поэтому
дисковые потери в ГДП необходимо определять для каждого
отдельного участка, причем поверхности сложных форм надо за-
менять более простыми эквивалентными по размерам, параллель-
ными или перпендикулярными оси вращения.
В общем случае сопротивление трения тдн поверхности диска,
который движется с окружной скоростью и = (одкг в неподвижной
жидкости плотностью ps
«дк = *дк (р/2)и’, (1 40)
где fenK — коэффициент дискового трения.
Для одной стороны вращающегося диска площадью dF =
= 2ardr момент сопротивления дискового трения
сШдя = rk№ (p!2)u*2ardr
или
/?
Л1дк = л^дкР J ^дкГ* dr. (1.41)
гв
Проинтегрировав выражение (1.41) и приняв йдк-0,628 = с/д,
получим
Мд. = с,д1®«(Л5-гЭ- (1-12)
Момент трения цилиндрической поверхности радиусом R и
шириной /
Л4дК. цнл = я^дк. цнлРадк^? / ~ Cfa- ЦВлР^ДкА* / (1.43)
Коэффициенты сопротивления при дисковом трении зависят
от числа Рейнольдса, шероховатости дисков и расстояния между
поверхностями в осевом и радиальном направлениях [3, 8, 11].
2« 19
Рис. 1.15. Утечки в центробежном на-
сосе
Коэффициент дискового тре-
ния Суд для гладких дисков
определять рекомендуется по
выражению [5, 11]
(1.44)
где Re = <йдкК*/у (здесь v — кинема-
тическая вязкость); s — зазор между
дисками.
При Re=(2... 3,5) 10е обычно
принимают с/д = 0,0023 [11].
Одиако, как правило, поверхности дисков шероховатые, с вы-
ступающими головками болтов и т. п. В таком случае рекоменду-
ется выбирать С/д = 0,0028 ... 0,03 [11].
В работе [11] для определения дискового треиия вводится
коэффициент момента дискового трения Хдн и приводятся значения
этого коэффициента для наиболее распространенных конструктив-
ных схем ГДТ, что позволяет приблизительно определить моменты
дискового треиия в аналогичных конструкциях. В ГДТ дисковое
трение может выполнять и полезную работу иа тяговых режимах,
передавая энергию от насосного колеса турбиииому, если Ыд > сот.
Механические потери и дисковое трение учитываются механи-
ческим КПД;
N — Д^мех — У;
Пмех = д)
(1.45)
где — затраченная мощность.
Для уменьшения дисковых потерь иужио стремиться обеспе-
чить оптимальные зазоры между дисками (s/(2R) та 0,01 — из
опыта проектирования ГДТ), уменьшать радиусы лопастных ко-
лес (при увеличении энергоемкости), устранять в полостях высту-
пающие части, повышать чистоту поверхностей.
Объемные потери обусловлены перетечками жидкости из обла-
сти высокого давления в область с пониженным давлением и про-
течками наружу через уплотнения на валах.
Утечки в лопастном насосе уменьшают его полезную подачу
QH (см. рис. 1.15):
Qh ~ Q« ~~ QyTl-- Фут2» (1 -46)
где QK — расход жидкости через колесо; Рут1 — утечка через переднее щелевое
или лабиринтное уплотнение иа колесе; — наружная утечка через уплот-
нение на валу.
Оцениваются утечки объемным КПД
Ho = QH/QK- (1-47)
20
4
Рис. 1.16. Утечки в ГДТ:
а — без разделительного диска; б —* с разделительным диском в центростремительным
турбинным колесом; в — то же, о осевым турбинным колесом
В ГДТ объемные потери характеризуются разностью расходов
жидкости, протекающей через иасосиое QH и турбинное QT колеса
(рис. 1.16):
и также объемным КПД
tk^Qr/Ов. (1-48)
Утечки через уплотнения валов ГДП обычно ие допускаются.
Поэтому определяют только утечки через внутренний тор ГДП
и межколесные зазоры. Направление утечки — от выхода из
насосного колеса ко входу в него и к выходу из турбинного колеса
и реактора. Жидкость в количестве QyT, проходя через насосное
колесо, получает запас энергии со всем потоком, однако не по-
ступает в турбинное колесо и, следовательно, не отдает эту энер-
гию иа выходное звено, уменьшая КПД гидропередачи. В не-
которых конструкциях ГДТ во внутреннем торе выполнен раз-
делительный диск и уплотнения в виде щелей и лабиринтов между
лопастными колесами. Исследования А. Я- Кочкарева, А. Н. Нар-
бута и др. показали целесообразность установки уплотнений во
внутреннем торе для различных ГДТ.
В общем случае утечку определяют как расход через кольце-
вое отверстие
Qyr = у пл У^ЗРупл/Р» О
где — коэффициент расхода, который учитывает потери напора жидкости
в уплотнении; Гупл = nDb — площадь кольцевого зазора в уплотнении
(здесь D — диаметр щели; Ь — радиальный зазор); руПЛ — перепад давлений
на уплотнении.
Если уплотнение имеет вид щели длиной I (рис. 1.17, а), то
потери напора складываются из потерь на входе вследствие су-
жения потока (коэффициент сопротивления £В1 = 0,5), потерь
21
Рис. 1.17. Уплотнения:
а — щелевое; б — лаби-
ринтное
Рис. 1.18. Графическое определение
утечек для ГДТ с осевым турбинным
колесом:
Pi, ...» pi — давления в гонках I, ...» 4
(см. рис. 1.16, в); 1—2, 2—3 и т. д. — гра-
фики, характеризующие потери на участ-
ках между точками 1 в !, 2 в 3 и в. д.
на выходе вследствие
внезапного расширении
(коэффициент сопротивления
Свых = 1), потерн по длине щели
Ли.1 - ?"Tt! 4/?г 2g"’
где Хтр — коэффициент сопротивления, который зависит от числа Re и шерохо-
ватости стенок щели; иуол — скорость жидкости в уплотнении; = 6/2 — ги-
дравлический радиус канала.
Тогда коэффициент расхода
= (1-50)
Если уплотнение имеет более сложную конфигурацию
(рис. 1.17, б), то коэффициент pQ учитывает потери на всех участ-
ках аналогично рассмотренному случаю [7].
В ГДТ во внутреннем торе поток утечек разветвляется. При
изменении режимов работы может изменяться распределение
давлений и, следовательно, направление утечек. Давление в точке
разветвления утечек неизвестно, поэтому для их расчета рекомен-
дуется графоаналитический способ как в задаче гидравлики о трех
резервуарах [4].
На рис. 1.18 представлен графоаналитический метод опреде-
ления утечек в рабочей полости ГДТ, показанного на рис. 1.16, в.
При расчете числа Рейнольдса для движения жидкости в за-
зорах уплотнения необходимо учитывать окружную составляю-
щую скорости vu, в радиальных зазорах ориентировочно равную
22
где «д1 и «д, — окружные скорости смежных элементов в уплотнении.
Для лопастного насоса fu = и'2. Скорость жидкости в уплот-
нении
Пупл ~ ^П» ^U9
ГДВ Vm = ФутД”уПД-
Число Рейнольдса
Re == Пупл-26/v.
Зиая утечкн, можно определить объемный КПД. В прибли-
женных расчетах рекомендуется пренебрегать механическими н
объемными потерями и принимать Пмех'По = 1 14].
Гидравлические потери в лопастных гидромашииах связаны
о течением реальной вязкой жидкости и определяются как по-
тери напора. Ввиду сложности происходящих физических про-
цессов все методики расчета гидравлических потерь являются при-
ближенными. В общем случае структура потока в лопастной ма-
шине зависит не только от формы н размеров каждого элемента
проточной части в отдельности, ио и от их сочетания, или пред-
шествующее состояние потока оказывает существенное влияние
иа форму движения в последующих элементах. Наибольшее рас-
пространение получил интегральный метод определения гидрав-
лических потерь, при котором выделяют потери двух основных
видов: потери на трение, зависящие от относительной скорости
и пропорциональные расходу во второй степени; потери на удар,
зависящие от угла атаки и пропорциональные потерянной ско-
рости во второй степени.
К потерям первого вида относят ие только потери по длине ка-
нала в лопастном колесе или в неподвижных элементах (подвод,
отвод в иасосе), ио и потери от сужения и расширения, поворота
потока. Для расчета используют известную формулу [2, 4, 7]
. -1 1
«тр - л»р 4/?r ср 2g
где 10ср — средняя относительная скорость в канале; /?г. Ср — средний гидравли-
ческий радиус межлопастного канала.
Величина Хтр в данном случае является некоторым обобщен-
ным коэффициентом, зависящим от шероховатости стеиок каналов,
числа Рейнольдса, количества и вида местных потерь в канале.
Кроме того, так как межлопастные каналы в колесе (насосном,
турбинном) вращаются с угловой скоростью со, величина Хтр|
как показали опыты по определению потерь по длине во вращаю-
щихся трубках, должна быть увеличена в 3 ... 4 раза по сравнению
с табличными или опытными значениями Хтр для трубопроводов.
Преобразуем выражение для потерь на трение, подставив
вначение wcv = QJFWCV, где Fwcp —средняя площадь живого
23
сечения межлопастных каналов в колесе, нормальная направле-
нию относительной скорости. Получим
h -ъ 1 1 Q* д. <?я п
Стр— Лтр 4/?г ср 2g ~K2gJ I1
где
t = ''J-
4«r.op F^op
— коэффициент сопротивлении лопастного колеса.
Потери второго вида возникают при несовпадении направления
скорости потока на выходе из предыдущего элемента (колеса,
подвода) с направлением осевой линии лопасти рассматриваемого
элемента гндромашины. Возникает обтекание с углом атаки и
вихревая зона на лопасти. Разность векторов фактической аб-
солютной скорости на выходе из предыдущего колеса с211ред
и скорости, соответствующей обтеканию без угла атаки, Сцшсч =
= с* называется потерянной скоростью ся.
Угол атаки будем считать положительным, если поток набе-
гает на лопасть с рабочей стороны, т. е. со стороны высокого дав-
ления, и отрицательным — прн натекании потока с тыльной сто-
роны лопастн (со стороны меньшего давления). Как показали
исследования 14], при положительных углах атаки происходит
более интенсивный отрыв потока от лопасти, а следовательно,
потеря напора возрастает. Наличие вихревой зоны в межлопаст-
ном канале вызывает дополнительные потери, связанные с суже-
нием потока. Потери на удар определяют по формуле Карно—«
Борда:
&уд = Фуд6»/(2g)» (1.53)
где <руД— коэффициент потерь иа удар, который зависит от значения и знака
угла атаки, формы входной кромки лопасти; при малых н отрицательных углах
атаки рекомендуется принимать <рул — 0,6 ... 0,8, при положительных углах
атаки фуД = 1,2 ... 1,6 [4, 11]; cfi = (csnpeB — cj)— потерянная скорость-
Однако при проектировании отсутствуют, как правило, све-
дения об углах атаки, поэтому в предварительных расчетах при-
нимают <рул = 1 ]4, 11 ].
В лопастных насосах потери на трение определяют для
лопастного колеса (при этом I — длина лопасти), а также для под-
вода н отвода, для которых расчет ведут по средней абсолютной
скорости (прн этом I — длина подвода или отвода). Для отвода
учитывают также диффузорные потери на расширение потока
^диф = фдиф (^ВХ ®ВЫх)а/(2^),
где оВ1 и овых — скорости потока на входе в отвод н выходе из него.
Потери на удар возникают при входе в лопастное колесо из
подвода и при выходе из колеса в отвод. При расчетном значении
подачи направление входного элемента лопасти совпадает с на-
24
правлением относительной скорости потока на входе. При изме-
нении подачи изменяется меридиональная составляющая скоро-
сти ст1. Окружная составляющая си1 на входе зависит от формы
подвода и остается неизменной. Поэтому потерянная скорость
при входе в насосное колесо
Ся = СШ1 расе = СШ1 Cnii*
Форму отвода проектируют такой, чтобы на расчетном режиме
скорость жидкости в отводе соответствовала скорости на выходе
из насосного колеса. При изменении подачи угол потока на выходе
нз колеса остается неизменным, а значение и направление аб-
солютной скорости изменяются. Поэтому
Ся = ^2 ©отв. б/у = С2 С2»
где vOTB — скорость жидкости в отводе при расчетной подаче.
Потери на удар в отводе при подаче, отличной от расчетной,
значительны и превышают потери при входе в лопастное колесо.
В ГДТ потерн на тренне определяют в каждом колесе, а сум-
марная потеря
Ьтр = i w/(2g),
где f — ивдекс лопастного колеса (и, т, р).
Коэффициент 1тр в формуле (1.52) рекомендуется при проекти-
ровании принимать в пределах 0,06 ... 0,08 для каждого колеса.
Потери на удар в ГДП имеют место при входе на каждое ло-
пастное колесо. Меридиональную составляющую скорости ст
можно считать неизменной на выходе из одного колеса и на входе
в следующее. Поэтому потерянная скорость определяется как
разность окружных составляющих
Csl = CU2 (2=1) — СиЦ.
Рассмотренные потери относятся к установившемуся движению
жидкости в лопастных гидромашинах.
Однако фактически абсолютная скорость жидкости на выходе
из лопастного колеса изменяется циклически при его вращении,
так как скорость и давление на рабочей и тыльной стороне лопасти
различны. Эпюра распределения давления на выходе из лопастного
колеса насоса показана на рис. 1.19. Неравномерность распреде-
ления скорости и давления на выходе из колеса вызывает допол-
нительное вихреобразование на входе в последующее колесо или
в отводе, а следовательно, дополнительные гидравлические по-
тери. Для уменьшения этих потерь необходимо предельно умень-
шать (сводить к нулю) толщину лопасти на выходе из колеса.
При малых расходах через колеса возникают противотоки
как на входе в колесо (рис. 1.20, а), так и на выходе (рис. 1:20, б),
25
Рис. 1.19. Эпюра распределения дав-
лений иа выходе из насосного колеса
Рис. 1.20. Схемы потока жидкости н ко-
лесе на нерасчетных режимах
которые приводят к гидравлическому торможению колес, вызы-
вают дополнительные потери.
В лопастных насосах гидравлический КПД
(7Л АгаДр)//7* = H/Hff (1-54)
потери напо^ФаКТИЧеСКИЙ ” Теоретический иапоры^ ^гидр ~ гидравлические
В ГДП гидравлический КПД
= (1.55)
где Н|н, HtT — теоретические напоры насосного в турбинного колес.
1 идравлнческие потери в ГДП значительно выше, чем потери
'?к^о/ИХ Видов» н составляют даже на расчетных режимах 10 ...
10 70 .
Полный КПД лопастных машин и ГДП
И == ЯгМоИмех* (1.56)
Расходуемая энергия переходит в тепло, поэтому при работе
температура жидкости повышается.
1.8. ОСНОВНОЕ УРАВНЕНИЕ ЛОПАСТНЫХ
ГИДРОМАШИН
Основное уравнение лопастных машин определяет при-
ращение удельной энергии жидкости в области лопастного колеса
по величине возмущения, вызываемого колесом в поле скоростей.
По принципу сохранения энергии работа, развиваемая ло-
пастным колесом, расходуется на приращение энергии протекаю-
щей жидкости. Гидравлическую мощность лопастного колеса Nr
можно получить, зная гидравлический момент взаимодействия
колеса с потоком и угловую скорость:
Nv ==
26
Рис. 1.22. Схема для вывода основного
уравнения лопастных гидромашии (coj
я си2 направлены перпендикулярно
плоскости чертежа)
Рис. 1.21. Схема для определения мо-
мента количества движения
Вес жидкости, подаваемой
колесом в секунду, G ~ pgQK
(Н/с). Тогда удельная работа (м)', приходящаяся в единицу вре-
мени на 1 Н веса жидкости, равна
E=tfr/G = Afrw7(pgQ«)
(1-57)
и соответствует полному приращению энергии единицы веса жид-
кости, называемому теоретическим напором лопастного колеса nt.
Определение результирующего момента сил взаимодействия
лопастного колеса с потоком жидкости представляет собой задачу
гидродинамики. Ее решение можно получить с помощью закона
о моменте количества движения, предполагая струйный и осесим-
метричный поток в лопастном колесе. В соответствии с этим произ-
водная по времени от момента количества движения системы ма-
териальных точек относительно какой-либо оси равна сумме мо-
ментов всех внешних сил, действующих на систему.
Пусть тело М массой т движется со скоростью v (рис„ 1.21).
Спроектировав количество движения mv на направление, перпен-
дикулярное к лучу, проведенному к телу Л4 из точки О, и умно-
жив полученную проекцию на расстояние ОМ = R, получим мо-
мент количества движения тела относительно точки О: L = mRv X
X cos а. Если на тело действует сила, то за счет изменения его
скорости количество даижения, а следовательно, и момент коли-
чества движения изменяются:
dL/dt = М - d (mRv cos a)ldt.
Применим уравнение моментов количества движения к потоку
жидкости в лопастном колесе. На поток жидкости в колесе деи-
27
ствуют силы давления, направленные по нормали к входному н
выходному сечениям; силы трення по поверхностям на входе и
выходе и внутри потока, вызванные вязкостью жидкости; сила
тяжести; сила взаимодействия потока с лопастным колесом. Од-
нако результирующие от снл давления н тяжести проходят через
ось колеса и не создают момента. Силами трення пренебрегаем,
иными словами, рассматриваем течение жидкости без сил вяз-
кости (идеальная жидкость). Тогда уравнение (1.58) для лопаст-
ного колеса запишем в виде
dL'Ldt — = (mrc cos a). (1.58)
Выделим из потока (рис. 1.22)' в межлопастном пространстве
элементарную струйку жидкости и выберем до лопасти и за ло-
пастью сечения 1 и 2. За бесконечно малый промежуток времени
dt выделенный объем струйки переместится в положения Г и 2',
при этом сечення пройдут пути dlml и dlmt.
Для выделенного объема элементарной струйки жидкости
длиной dlm н массой dm уравнение (1.58) можно записать в виде
= dMp = (dmrc cos a),
где dMr — момент взаимодействия объема элементарной струйки с лопастным
колесом: dm = pfdlm — масса выбранного объема; / — площадь сечення элемен-
тарной струйки; ccosa = cu — окружная составляющая скорости жидкости
в элементарной струйке.
Момент
dM-r=t^Ldm+i<p.Cur.
Так как объем жидкости в лопастной системе с течением вре-
мени не изменяется, а жидкость можно считать несжимаемой,
d (dm)ldt = 0. Величина сиг зависит в общем виде от времени t
н длины струйки Zm:
dM', = dm = гам + ^>1 dm.
di L от д!т dt J
Так как си = и — ст ctg р', dlm]dt — ст = q!f (где q — объ-
емный расход жидкости в элементарной струйке), получим
= + (1.59)
При установившемся движении жидкости в лопастном колесе
угловая скорость to, расходы жидкости в элементарной струйке q
28
и в колесе в целом Q„ являются постоянными и, следовательно,
д&1д1 = 0 и dq/dt = 0, а уравнение (1.59) принимает вид
<ш;=^9Р<ат. (1.60)
Поннтегрнровав уравнение (1.60)' по длине элементарной
струйки от входного сечения 1 до выходного 2, получим момент M'F
взаимодействия всей струйки с лопастью:
2
f чр = р? *c“2f2 — С”,Г1) ~ М‘г'
1 m
Переходя от элементарной струйки к лопастному колесу в це-
лом, необходимо проинтегрировать полученное уравнение по
сечению колеса. Если допустить, что поток в колесе на входе и
выходе является равноскоростным, а составляющие скорости
сы1 и сы2 одинаковы для всех струек тока и равны средним зна-
чениям си1 и си2, то при интегрировании q по площади получим
расход через колесо QK, а при интегрировании Л4г — момент
воздействия всего лопастного колеса на жидкость 2ИГ= i\ и гя —
радиусы центра тяжести входного и выходного сеченнй.
Таким образом,
Л1г = рС«(ё.Л — ёи1гг). (1.61)
Подставив выражение для Мг в уравнение (1.57), получим
(в дальнейшем в обозначениях сиа н си1 черту опускаем, считая
скорости осредненными по площади)
Е = Ht = со (Cu^ — culf\)/g илн Ht = (Сияца — C^u^lg. (1.62)
Уравнение (1.62) является основным уравнением лопастных
гидромашин. В насосных колесах величина Hta положительна.
В турбинных колесах энергия жидкости уменьшается, приложен-
ный к лопастному колесу момент Мт отрицателен, т. е. является
моментом сопротивления. Поэтому принято записывать основное
уравнение для турбинных колес в виде
= (Сцт1^т1 Сцт1^тз)/£5 (1.63)
где > 0 и представляет полное уменьшение энергии единицы
веса жидкости в турбинном колесе.
Получим основное уравнение лопастных гидромашин прн
неустановившемся движении для одномерного осесимметричного
потока в лопастном колесе, также используя уравнение (1.58).
Так как расход жидкости элементарной струйки (н всего колеса)
и угловая скорость вала являются функцией только одной пере-
менной — времени /, частные производные от этих величин по
времени можно заменить на полные производные:
dM; =P^-rdgp'^ + q^dlm. (1.64)
29
Уравнение (1.64J относится и отрезку элементарной струйки
dljn. Проинтегрировав его по dlm от входного сечения 1 до выход-
ного 2, получим выражение для гидравлического момента взаимо-
действия всей струйки с колесом. При этом
2
Р J 9-^- dlm = W (с«Л — = X.
I т
что совпадает с результатом, полученным при установившемся
движении.
Тогда
2
дин — Р9 (Pu2^2 ^oin) + Р J dim —
I
2
-p^-Jrctgp'dlm.
I
Переходя от элементарной струйки к лопастному колесу,
необходимо провести интегрирование по площади проходного се-
чения и принять равноскоростной поток на входе и выходе. Тогда
момент взаимодействия потока и лопастного колеса при неуста-
новившемся движении
2
^Г. ДИН = PQh (^U2^8 "1“ Р ТП dljn “
2
-P^jrctgp'dl". (1.65)
I
Введем обозначения:
₽«=- frctgp'dt»- (1.66)
конфигурационный фактор, характеризующий геометрические па-
раметры межлопастных каналов лопастных колес, м2;
jVC- (1.67)
полярный момент инерции рабочей жидкости, заполняющей ло-
пастное колесо, мБ.
Тогда
мс.т = М, + р^-7я + р^Ря. (1.68)
30
Теоретический напор в лопастном колесе при неустановнв-
шемся движении жидкости
Н П = + “ “ "0^. (1.69)
дин pgQK 1 Q^g dt ж Qk£ dt л v '
Формулы (1.68) и (1.69) можно использовать для определения
гидравлических моментов и теоретических напоров в любом ло-
пастном колесе при неустановнвшихся режимах работы. Полу-
ченные уравнения применяют как для насосного, так и для тур-
бинного колес гидропередач, а уравнение моментов — и для
реактора. Дополнительные инерционные члены зависят во мно-
гом от характера неустаиовившегося движения, например, от
ускорения dw/dt при разгоне и торможении системы. При малых
ускорениях инерционные члены можно не учитывать.
Уравнение (1-61) впервые было предложено Леонардом Эй-
лером и положено в основу расчета лопастных систем.
В формулы (1.60), (1.61), (1.68) и (1-69) входят скорости
и углы 0 потока жидкости в лопастном колесе. Однако при рас-
четах, как правило, направление потока и скорость его неизвест-
ны. Если же принять гипотезу бесконечно большого числа лопас-
тей, то направление потока совпадает с направлением лопасти и
скорость сысо, интегралы Ел и можно определить. В этом
случае момент взаимодействия колес и потока жидкости и теоре-
тические напоры получат дополнительный индекс А4ГОО и Htoo
и в формулах 0' = 0 и си = сиоо.
1.7. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА В ГДП
Баланс моментов в ГДП. Принципиальное отличие ГДП
от обычных гндромашии заключается в том, что лопастные колеса
в них расположены так, что рабочая жидкость течет последова-
тельно по замкнутому контуру, лопастные колеса находятся в
непосредственной близости друг от друга, длинные промежуточные
каналы отсутствуют.
В межколесных зазорах отсутствуют внешние силы воздейст-
вия на поток жидкости, и момент количества движения жидкости
остается неизменным. Поэтому для ГДМ (см. рис. 1.4) можно
записать соотношения:
~ CUT2^ffSj ^иЛгт! = ^иязГвЪ- (1.70)
Для ГДТ (см. рис. 1.5}
в! = рЭ» Сит1Гт! = н2> Cupl/pi : (1 -71)
Следовательно, при протекании потока в ГДП входные условия
каждого лопастного колеса определяются условиями выхода потока
из предыдущего колеса.
Запишем уравнения моментов взаимодействия между потоком
жидкости и лопастными колесами ГДП в соответствии с уравнением
(1.61) для установившегося движения;
31
на насосном колесе
= PQh (^ииЗ^НЗ Сав1ГHl)i (1 • 72)
на турбинном колесе
— Л40 = pQt (Сет2^та ^ат1^т1)» (1 -73)
на реакторе
Af р = pQp (Скрэ^рз cuplrр1). (1.74)
Момент на насосном кол есе положительный, на турбинном —
отрицательный. Момент на реа кторе может быть любого знака при
различных режимах ГДТ.
Пренебрегая утечками в ГДП, можно записать
Qh = Qt = Qp = Q. (1.75)
С учетом выражений (1.70)' запишем для ГДМ
~ PQ (^«н2гнЗ тй)»
““ Л4Г = pQ (СЫТ2ГТ2 ^ин2^нз)-
Просуммировав левые и правые части уравнений, получим
баланс моментов в ГДМ
Л1Н— М„ = 0 или Л4Н = Л1Ц.. (1-76)
С учетом выражений (1.71) для ГДТ имеем
= Р<2 (^ин2ГИЭ ‘ рй)»
= pQ (CUT2^r2 — ^ин2^нз)>
Л^р = PQ (^врз^рз ^итэ^та)»
а после сложения левых и правых частей уравнений
Л4Н —Л4Т-ЬЛ4Р = О. (1.77)
Это уравнение баланса моментов на колесах в ГДТ.
Уравнение баланса удельных энергий (напоров) в ГДП при
установившихся режимах. Энергия, которую жидкость приобре-
тает в насосном колесе ГДП, в турбинном колесе преобразуется
в механическую энергию, а часть энергии затрачивается на гид-
равлические потерн в лопастных колесах и в межколесных ка-
налах.
Действительный напор насосного колеса
= ^пот. в»
где Лцот. и “ гидравлические потери в насосном колесе.
Напор турбинного колеса
~ + Лпот. TJ
где Лпот. т ” гидравлические потери В турбинном колесе,
82
В реакторе удельная энергия жидкости не изменяется (Нр =
= 0), но имеют место гидравлические потери йпо».р- Гидравли-
ческие потери в зазорах — йцОТ. Тогда
//fa = //fw + ^по». н + ^пот. w + р 4“ ^поп
ИЛИ
//*н = //«т 4“ (Г78)
Формула (1.78)' выражает баланс удельных энергий в ГДП
и является одним из основных расчетных уравнений.
1.8. ТЕОРЕТИЧЕСКИЕ НАПОРНЫЕ ХАРАКТЕРИСТИКИ
ЛОПАСТНЫХ КОЛЕС.
КОЭФФИЦИЕНТ РЕАКЦИИ ЛОПАСТНОГО КОЛЕСА
При прохождении жидкости через лопастное колесо
изменяется как кинетическая, так и потенциальная ее энергия.
Изменение кинетической энергии или динамический напор можно
выразить через изменение абсолютной скорости потока в колесе:
W„» = (£?-c?)/(2g). (1-79)
Выразим абсолютную скорость через ее составляющие си
И Cjn. Получим
//дин = (с«2 — cul)/(2^) “Ь (Ст2— cml)/(2g).
Меридиональные составляющие скорости мало изменяются
в лопастных колесах н разностью их квадратов можно пренебречь!
тогда
Hm=(&—‘ii)/(2g).
Изменение потенциальной энергии (или изменение давления)
можно выразить как
//ст = (ря — pM>g) =Ht—
Соотношение
Рк = (Я, - //даи)///, = HCT/Ht (1.80)
называют коэффициентом реакции колеса.
Полученные уравнения позволяют построить теоретические
напорные характеристики лопастных колес в виде зависимостей
Ht (Q) при установившихся режимах работы (<и = const).
Для насосных колес рассмотрим простейший случай, когда
скорость си1 = 0. Тогда основное уравнение с учетом бесконечного
числа лопастей в колесе запишем в виде
=cui„u2lg. (1.81)
3 Стесни С. П. s др. 33
Рис. 1.23. Формы лопастей центробежного иасоса:
а — лопасти загнуты назад; б — радиальные лопасти на выходе; в — лопасти загнуты
вперед; г — треугольники скоростей ва выходе для различных лопастей
Преобразуем это уравнение о учетом известных зависимостей:
си = и — ст ctg р и ст = Q/F. Получим
= или =
к £<тя
где А = u|/g; В = и2 ctg ₽2/(gFm2).
Зависимость HtCD (QK) — линейная, а характер ее определя-
ется знаком коэффициента В.
Рассмотрим возможные варианты лопастных колес, отличаю-
щиеся углом установки лопасти на выходе р2 (рнс. 1.23), и тре-
угольники скоростей для тех же вариантов. При лопастях, заг-
нутых назад, против направления вращения, угол р2 < 90°,
скорости «2, с2, с^2т» w'2a> и соответственно коэффициент В боль-
ше 0. При лопастном колесе с радиальными лопастями на выходе
угол §2 = 90°, скорости и2, C2t с«2<», м2ю и В = 0. Для лопаст-
ного колеса с углом р2 *> 90° (лопасти загнуты вперед по направ-
лению вращения) скорости u2t cu2tDt w2rct с2 и коэффициент В < 0.
Теоретические характеристики для центробежного насоса при
различных углах ря показаны на рис. 1.24. Гидравлическая мощ-
ность Nr = pgHt(DQK нанесена на рнс. 1.24 штриховыми линиями.
Найдем соотношение статического напора Нсг и теоретиче-
ского в центробежном насосе прн различных углах ря:
= = (1.82)
сичти2/е 2и* к 7
34
Рис. 1.24- Характеристики центро-
бежного насоса при различных фор-
мах лопастей
Из уравнения видно, что
чем больше угол р2 и состав-
ляющая си2т, тем меньше
коэффициент реакции колеса.
При ₽а > 90° большая
доля напора создается в виде
кинетической энергии или
скоростного напора. В ло-
пастных насосах недопустимы
большие скорости на выходе из иасоса в трубопровод,
поэтому требуется преобразование кинетической энергии в по-
тенциальную в отводе, что приводит к снижению КПД насоса из-за
гидравлических потерь в отводе. Кроме того, форма межлопаст-
ного канала при радиальных и загнутых вперед лопастях оказы-
вается расширяющейся, что увеличивает потери в самом колесе
(см. рнс. 1.23). При увеличении подачи в лопастных колесах этих
вариантов возрастает гидравлическая, а следовательно, и потреб-
ляемая мощность. В связи с изложенным, в насосостроенин ре-
комендуются углы на выходе из колеса в пределах ₽2 = 16 ... 40°.
В ГДП увеличение угла выхода из насосного колеса приводит
к увеличению передаваемой мощности. Поскольку поток жидкости
из насосного колеса поступает в следующее колесо (турбинное нли
реактор), то преобразование кинетической энергии в потенциаль-
ную не нужно. Рекомендуемые пределы изменения угла в насос-
ном колесе значительно шире 0Н2 = 35... 100°. Как бу-
дет показано ниже, на характеристику насосного колеса
в ГДТ влияет и угол лопастей иа выходе из предыдущего
колеса.
Для турбинных колес наиболее характерным является отсут-
ствие закрутки на выходе, т. е. сит2 = 0. Основное уравнение
_ СЦ1оо“т1
g
^-^ctgf,n = D^-GQ^>, (1.83)
при ©т = const представляется прямой линией, вид которой также
зависит от выбранного угла £т1. Угловая скорость сот турбинного
колеса в ГДТ является переменной, так как изменяется режим
работы ГДТ (передаточное отношение i = var).
В функции же от ют напорная характеристика турбинного
колеса — это квадратичная парабола при заданном значении QT.
Характеристики Htut HtTt £hn0T = f (Q. 0 при oe = const для
ГДМ и ГДТ будут приведены в гл. 4 и 5.
3« 35
1.8. ОСНОВЫ ТЕОРИИ ПОДОБИЯ ЛОПАСТНЫХ
ГИДРОМАШИН
Сложность рабочего процесса в лопастных гидромаши-
нах н, тем более, в ГДП затрудняет расчет их характеристик,
ставит неразрешимые проблемы при их проектировании. В связи
с этим большое значение приобретает опыт и его обобщение. На-
учно обоснованным обобщением результатов опыта является при-
менение теории подобия.
Теория подобия позволяет по выбранной модели получить
размеры натурной проектируемой машины нлн гидропередачи,
пересчитать нх характеристики с модельного образца; при доводке
новых конструкций использовать опытные данные испытания мо-
дели; пересчитать характеристики гидромашины и гидропередачи
прн изменении условий работы,например, частоты вращения валов.
Теория подобия, основываясь и а методах размерностей, уста-
навливает закономерности нзменення основных показателей гнд-
ромашин прн соблюдении условий подобия. Условиями подобия
являются:
геометрическое подобие линейных размеров, шероховатостей,
равенство сходственных углов модели н натуры;
кинематическое подобие потоков: в сходственных точках по-
тока модели и натуры соответствующие скорости должны быть
пропорциональны н одинаково направлены;
динамическое подобие, т. е. пропорциональность снл, действую-
щих на сходственные элементы натуры и модели.
Для соблюдения геометрического подобия необходимо, чтобы
прн изменении некоторого характерного линейного размера все
другие размеры изменились во столько же раз. Однако прн изме-
нении размеров, как правило, не удается соблюсти пропорцио-
нальность выступов шероховатостей, зазоров в уплотнениях, и
геометрическое подобие выполняется, следовательно, только для
макроразмеров. Но если асболютные размеры натуры больше раз-
меров модели, то такое нарушение подобия приводит к улучше-
нию характеристик натуры по сравнению с характеристиками
модели, так как удается уменьшить относительные параметры ше-
роховатостей в каналах и зазоров в уплотнениях, что приводит
к уменьшению гидравлических потерь и утечек. В ГДП в ка-
честве характерного линейного размера выбирают активный диа-
метр Da — наибольший диаметр рабочей полости.
Кинематическое подобие обеспечивается при подобии треу-
гольников скоростей в сходственных точках, в частности, иа входе
н выходе нз лопастных колес. Для модели (индекс <(м)») и на-
туры (индекс «(и)») можно записать
Ст2 (и) _ cmt (м) _ С1 (к) W2 (ы)
Ст2 (в) Ст1 (в) С1 (в) w2 (в)
36
“2(м) _ _ И1 (м) _ °>М*1 (м)
“2 (в) “ ” “ “l (в) “(B)^l (в)
_ яя(м)Ра(м) п(м/\(ы)
ял(в)Ра(в) n(H)Da(H)
Для гидропередач частоты вращения валов также пропорцио-
нальны лн(Ы)/пЯ(н) — Пт{ы)/Пт(в), что означает равенство переда-
точных отношений для подобных режимов; ia = iM. Такие режимы
называются изогональными.
Для выполнения динамического подобия пользуются крите-
риями, полученными в гидравлике. Определяющими при движении
жидкости в лопастных гидромашинах являются силы вязкости.
Поэтому динамическое подобие потоков требует равенства чисел
Рейнольдса Re<B, = Re(l4). При увеличении числа Re в натуре н
модели (Re 10е) наступает автомодельность, прн которой гид-
равлические потери ие зависят от вязкости. В этом случае для
подобия натуры и модели достаточно выполнения только первых
двух условий — геометрического и кинематического.
Законами подобия называют формулы для пересчета подачи
(расхода) Q, напора Я, момента М и мощности N в гидромашинах
и передачах при переходе от модели к натуре с соблюдением усло-
вий подобия.
Подачу (расход) можно определить по формуле
Q„ = cmF„ = 2nrfccm ~ qR'n ~
Для подобных лопастных колес коэффициенты пропорциональ-
ности ? (q") одинаковы, поэтому
<«> _ ,
Ск (к) ^(н)п(м)
а для действительных подач (расходов) необходимо учесть объем-
ный КПД
(1.84)
(1.85)
С<.| /?<«)П(8) Чо<.)
^(«)"(«) чо<«>
С точностью до объемного КПД
g<"> _ ^<“) _
где q — коэффициент расхода — величина одинаковая для подобных гидромашнн
и передач.
Напор в лопастном колесе
н< = ~ - сиИ1) = (1 - ~ hR'r? ~ л'яад,
где ft (ft') — коэффициент напора.
37
Для действительных напоров учтем еще гидравлический КПД.
Запишем
^(Н) _ ^(н)^г(в) __ ^(н)л(н) *1г(я) QC4
Я(М) й/(М)Чг(11) #(м)л(м) ^(м)
или с точностью до гидравлических потерь
*(«) _ h
п2 „2 ~ п2 п2 ~П*
(1.87)
где h — коэффициент напора; не изменяет значения в подобных лопастных ко-
лесах.
Потребляемая мощность N = pgQ7//rj ~ рХ.^2?6пэ/з или о учетом
потерь И = ЯоВДмех
"(н) ___ Р(е) ^(н) л(я) ^мех (ы)
ЛГ(«) Р(м) Л(Ы) ’k» (“)
С точностью до механического КПД
Р(а)^(н)л(н) Р(М)^(М)П(М)
где Хд- — коэффициент мощности.
Момент М = Л7ш ~ рХмК!’п*/?|»«>
^<Н) Р(В) ^(н|л(н| Чме* (м)
М(и) Р(ы) л|м,П(И) Чмех(в)
(1-88)
(1.89)
(1.90)
С точностью до механических потерь
—0-91)
Р<и)^(м)я(м)
где км — коэффициент момента (не изменяется дли подобных гидромашии и
гидропередач).
На практике используют формулы (1.84), (1.86), (1.88), (1.90),
принимая приближенно равенство КПД натуры и модели:
Цо (М) = Т]о(М); Чг (Н) = T]r(M)j ‘Пыех (н) =т]мех(м)-
Формулы (1.85), (1.87), (1.89), (1.91) дают значения коэффи-
циентов, по которым удобно сравнивать между собой различные
типы насосов и ГДП. В ГДП коэффициенты момента записывают
для каждого вала (колеса) в виде:
для входного вала
JvjMl = А (192>
для выходного вала
^М2 — А <19з>
38
Безразмерный коэффициент мощности на входном валу
= = -94)
Для одной и той же гидромашины, но работающей при разных
частотах вращения вала, формулы пересчета называются форму-
лами пропорциональности и имеют вид:
Q7Q = л 7л; (1.95)
Н’/Н = (л7п)"> (1.96)
N4N = (л7л)8; (1.97)
М'/М = (п'/п)г. (1.98)
При этом принимаем т/ = т] в сходственных режимах.
Для использования законов подобия при определении разме-
ров вновь проектируемой гидромашииы важно правильно выб-
рать прототип (модель), обладающий высокими технико-эконо-
мическими показателями иа режимах, подобных заданному ре-
жиму работы проектируемой машины. Для этого надо найти пара-
метр, который служил бы критерием подобия и был бы одинаков
для подобных гидромашин. Формулы (1.85), (1.87), (1.91) дают
такие критерии, ио они не могут быть использованы при проекти-
ровании, так как содержат неизвестные проектируемые размеры.
Воспользуемся формулами (1.85) и (1.87) в виде q = Q/(nR9)
и h = /7/(л2/?2) и исключим из иих линейные размеры R- Для
этого возведем левую и правую части уравнения (1.85) во вторую
степень, а уравнения (1.87) — в третью и разделим уравнения одно
иа другое:
(2алв/?в/(Я3п2/?в) = пЧ?Щ9 = q9!h9
или
п -/Q/H3* = V~qlk'n =п,. (1.99)
Так как параметры q и h постоянны для всех подобных гидро-
машин на подобных режимах, то и пу тоже для иих одинаков.
Следовательно, — удельная частота вращения, является кри-
терием подобия.
В насосостроении и в теории ГДП большее распространение
получил параметр п8, называемый коэффициентом быстроходности
и равный [9]
л. - 3,65 л, = 3,65л /Q/№'‘, (1.100)
где Q — в ма/с; Н — вы; п — в об/мии.
Эго также критерий подобия.
39
Если насос, геометрически подобный данному, при подаче
Q = 0,075 м’/с имеет напор 1 м, то по формуле (1.100) его коэф-
фициент быстроходности равен частоте вращения п, =
3.65л V0,075 „ , ,
=------рд----= п. На этом основании коэффициентом быстро-
ходности называют частоту вращения насоса, геометрически по-
добного данному, который при напоре 1 м подает 0,075 м’/с жид-
кости.
Коэффициент быстроходности насоса надо определять по его
характеристике на режиме максимального КПД. Практикой
установлены в насосостроен ни, турби построении н в проектиро-
вании ГДП для каждого коэффициента быстроходности соотно-
шения размеров, обеспечивающие оптимальные технико-экономи-
ческие показатели 19]. Равенство коэффициентов быстроходности
модели и проектируемой машины является признаком (критерием)
нх геометрического подобия.
ГЛАВА 2
ЛОПАСТНЫЕ НАСОСЫ
2.1. ХАРАКТЕРИСТИКИ НАСОСОВ
Характеристикой лопастного насоса называется графи-
чески выраженная зависимость напора, мощности и КПД насоса от
его подачи при постоянной частоте вращения. Ранее была полу-
чена теоретическая напорная характеристика Htco = f (QK) при
со = const для центробежного насоса (см. рис. 1.24). Так как
в рассматриваемых лопастных насосах угол лопасти на выходе
ра = 16 ... 40°, в дальнейшем будем пользоваться лишь характери-
стикой на рнс. 1.24 при р2 < 90°.
Для построения действительной напорной характеристики
иасоса Н (Q) необходимо последовательно учесть следующие фак-
торы: сделать поправку на конечное число лопастей, вычесть из
Ht гидравлические потери иа тренне ftTp и потери при ударе Луд
(на рис. 2.1 ftTp и hyR в функции подачи QK условно отложены
ниже оси координат); учесть объемные потери.
Для лопастного насоса с конечным числом лопастей са2 =
— V^uaco 1см. формулу (1.23) ], р <1 и тогда напор Ht = /g <
< Hta). Зависимость Ht(QK) также линейная. Воспользовавшись
формулами (1.25), (1.26) н др., определим Ht (QH).
Потери на трение /1тр возрастают по параболическому закону
с увеличением QK= потери иа удар обращаются в нуль при неко-
торой расчетной подач <2к.РаСч-
Действительный напор насоса
H = Ht-hTp-b7a.
Подача насоса отличается от расхода через колесо на величину
утечек: Q — QK — QyT. Утечки QyT являются функцией теорети-
ческого напора Ht и возрастают с увеличением напора. Учет
объемных потерь приводит к сдвигу кривой Н влево иа величину
утечек. Полученная таким образом линия Н (Q) является напор-
ной характеристикой насоса.
Из уравнения (1.62) следует, что теоретический напор от вида
жидкости не зависит (в уравнении отсутствуют члены, характери-
зующие физические свойства жидкости). Гидравлические же по-
тери являются функцией числа Re и зависят от вязкости жидкости
при всех режимах в потоке, кроме автомодельной области при
значительных Re. Поэтому, если насос работает при турбулент-
41
Рис. 2.1. Построение напорной харак-
теристики центробежного насоса из
его теоретической характеристики
Рис. 2.2. Построение мощностной ха-
рактеристики центробежного насоса
ной автомодельности потоков в рабочей полости, то его напор и,
следовательно, напорная характеристика будут одинаковы для
разных жидкостей.
Построим кривую потребляемой мощности N (Q). Для этого
воспользуемся формулой гидравлической мощности Nr =
= P^*ooQk> т- е- мощности, сообщаемой жидкости в колесе.
Подставив выражение для напора Htoo центробежного насоса
в виде зависимости = А — BQKt получим уравнение параболы
Nr — pg(AQK-~ BQk), которая пересекает ось абсцисс в точках
QK = 0 и QK = A/В (рис. 2.2).
Потребляемая мощность N отличается от гидравлической иа
величину механических и дисковых потерь, которые практически
ие зависят от напора и подачи. Прибавив эти потери к Nri полу-
чим W (Q,(). Для учета объемных потерь кривую N (QK) надо
сместить влево на величину утечек QyT. Имея кривые N (Q)
и И (Q), можно построить зависимость КПД т] = f (Q), которая
обращается в нуль при Q = 0 и при Н = 0.
2.2. ПЕРЕСЧЕТ ХАРАКТЕРИСТИК НАСОСОВ
ПРИ ИЗМЕНЕНИИ ЧАСТОТЫ ВРАЩЕНИЯ
Такая задача возникает при работе лопастного насоса
с различными двигателями, а следовательно, и с частотой враще-
ния л', отличной от указанной в каталоге п. Пересчет проводят
по формулам (1.95)—(1.98). Подставив в иих значения Q и И
в точке А на характеристике (рис. 2.3), получим новые значения
Qb и Qcf Нв и Де при п" и п' соответственно, а значения т]в
и т)с приравняем т]А. Выбрав иа заданной характеристике ряд
42
Q
Рис. 2.3. Пересчет карактеристин
насоса прн изменении частоты вра-
щения
Рис. 2.4. Универсальная каракте-
ристика насоса
Точек и пересчитав их, на-
носим новые значения на
график и соединяем плав-
ными линиями.
Найдем в координатах
И — Q геометрическое ме-
Q сто точек режимов, подоб-
ных режиму в точке А. Подставим координаты этой точки
в уравнения (1.95) и (1.96) и исключим из них частоту вращения.
Получим
Уд
(2-1)
т. е. уравнение параболы, проходящей через точку А.
Все точки, лежащие на параболе, соответствуют точкам ре-
жимов подобных А, в том числе при частоте п” и п на параболе
определятся точки В и С, полученные ранее. КПД всех этих
точек имеет одинаковое значение и, следовательно, эта линия
является параболой равных КПД. Аналогично можно построить
параболы подобных режимов для любых точек характеристики
(иапример, точки Аи Blt Сх иа рис. 2.3).
Универсальная характеристика лопастного насоса содержит
кривые напора и мощности, построенные для разных частот вра-
щения с нанесенными линиями равных КПД (рис. 2.4). Универ-
сальная характеристика дает исчерпывающие данные о работе
насоса при любой подаче для всех возможных частот вра-
щения.
43
Следует иметь в виду, что при изменении частоты вращения
в значительных пределах (больше, чем в 2 раза) только гидравли-
ческий и объемный КПД можно считать неизменными. Механиче-
ские же потери в подшипниках и уплотнениях изменяются не про-
порционально с изменением гидравлической мощности. С ростом
частоты вращения доля потерь иа механическое трение умень-
шается, а при уменьшении частоты вращения возрастает. Поэтому
общий КПД насоса не остается постоянным. Построенные пара-
болы более точно следует называть параболами постоянных
гидравлических и объемных КПД.
2.3. КЛАССИФИКАЦИЯ НАСОСОВ ПО КОЭФФИЦИЕНТУ
БЫСТРОХОДНОСТИ
Выше установлено, что у геометрически подобных гид-
ромашии коэффициенты быстроходности одинаковы. Коэффициент
быстроходности рекомендуется определять на режиме максималь-
ного КПД. Для заданных значений л, Qpac4 и Нрасч можно
сконструировать насосы с разными геометрическими размерами.
Однако практикой установлены соотношения размеров, которые
обеспечивают наиболее высокие технико-экономические показа-
тели для данного соотношения л, QPBC4 и Ярасч, а следовательно,
и для заданного лв. Если ограничиться в иасосостроении рекомен-
дованными соотношениями размеров, то коэффициент быстро-
ходности становится достаточным признаком геометрического
подобия.
В зависимости от коэффициента быстроходности лопастные
иасосы разделяют на несколько основных групп (табл. 2.1).
С ростом лв отношение диаметров Dt/D0 уменьшается, а от- ♦
носительная ширина колеса увеличивается. Внутренний
диаметр лопастного колеса, отсчитанный для средней линии
тока иа входной кромке, равен диаметру Do при входе в колесо
при малой быстроходности, а о ростом л, Do > Dt.
Форма лопасти изменяется от простейшей цилиндрической
до простраиствеииой (лопасть двойной кривизны). Характери-
стики насосов также существенно изменяются при увеличении лв.
Прн данной частоте вращения увеличению коэффициента быстро-
ходности соответствует увеличение подачи Q и уменьшение на-
пора Н. Колеса малой быстроходности (центробежные) применя-
ются при большом напоре и малой подаче, а колеса большой
быстроходности (диагональные, осевые) —- при большой подаче
и малом напоре.
С увеличением лв увеличиваются крутизна характеристик
Н (Q), мощность холостого хода и сокращается зона высоких
КПД с изменением подачи. Для тихоходных центробежных насо-
сов характерна «западающая» ветвь на характеристике Н при
синженни Q. Для осевых иасосов на характеристиках есть точка
перегиба.
44
. 1 Раавовидвости лопастных
Центробежные
Параметры. — — Пол у осевые Осевые
рактермстикн I (диагональные) (пропеллерные)
45
Продолжение табл. 2.1
У полуосевых и осевых насосов D,
2.4. НАСОСНАЯ УСТАНОВКА.
РАБОТА НАСОСА НА СЕТЬ
Условия эксплуатации на-
соса определяются гидравлически-
ми особенностями насосной уста-
новки, на которой он работает.
В общем случае насос включается
в систему трубопроводов, соеди-
няющих приемный резервуар 9
(рис. 2.5), откуда жидкость за-
бирается, с входным патрубком
насоса 6, а выходной патрубок
с напорным резервуаром /, в ко-
торый жидкость подаетсн. Насос
приводится ОТ двигателя 7. Вса- Рис. 2.5, Схема насосной установки
сывающий трубопровод 10, на-
порный 2, регулирующая 5 и монтажная И задвижка, прием-
ный (обратный) клапан 8, манометр 4, мановакуумметр 12 яв-
ляются обязательными элементами насосной установки- За-
движка 5 предназначена для регулирования подачи, а задвижка 11
предусмотрена для ремонтных работ. Приемный клапан 8 чаще
всего совмещается с защитной сеткой (фильтром), предохраняю-
щей насос от попадания твердых тел, и служит для заполнеиня
иасоса и всасывающей линии жидкостью перед пуском.
Разность уровней свободной поверхности жидкости в резер-
вуарах называется геометрическим напором hr. Если над уров-
нями жидкости имеется давление, отличное от атмосферного,
то определяют приведенный геометрический напор насосной
установки
нг = hr + (р" — p'Mpg),
(2.2)
где р' и р' — избыточные давления в напорном и приемном резервуарах.
Для перемещения жидкости из приемного резервуара в на-
порный необходимо затрачивать энергию на подъем жидкости иа
высоту Лг, преодоление разности давлений (р* — р') в резервуарах
и преодоление суммарного гидравлического сопротивления, кото-
рое складывается из потерь по длине и на местные сопротивления
в трубопроводах- Сопротивления можно выразить по формулам
гидравлики и представить после суммирования в виде =
= KcQ2, где jKc — коэффициент сопротивления трубопроводов
насосной установки. Таким образом, энергия, необходимая для
перемещения единицы веса жидкости из приемного в напорный
резервуар, или потребный напор насосной установки:
=hr + -^^+T.h„ = Hr + K,Q2. (2.3)
Зависимость потребного напора от расхода в трубопроводе
называется характеристикой насосной установки или сети. При
47
Рис. 2.6. Определение режима работы насоса на насосную установку прн раз-
личном геометрическом напоре:
а — Лг> 0; б — йг = О; ft — hp < 0
турбулентном режиме течения в трубах коэффициент Кс не за-
висит от Re и Q и, следовательно, характеристика установки пред-
ставляет квадратичную параболу (рнс. 2.6).
Насос данной насосной установки работает на таком режиме,
при котором потребный напор установки равен напору насоса.
Для определения режима работы следует на одном и том же
графике в одинаковых масштабах построить характеристику
насосной установки и напорную характеристику насоса (см.
рис. 2.6). Пересечение характеристик в точке А определит напор
и подачу насоса, при этом точку А называют рабочей. Возможны
различные характеристики насосных установок: hr >0; hr = 0,
т. е. весь напор насоса расходуется иа преодоление гидравличе-
ских сопротивлений; hr < 0, при этом пересечение характеристики
установки с осью абсцисс дает значение подачи Qo — это расход
жидкости из верхнего резервуара в нижний самотеком. В послед-
нем случае в рабочей точке А подача QA > Qo за счет дополнитель-
ной энергии, получаемой жидкостью от насоса.
Для обеспечения экономичности насосной установки рабочая
точка должна лежать в области высоких КПД. Для каждого
насоса на его характеристике можно выделить область со значе-
ниями КПД ниже максимального на 5 ... 10 %, которая назы-
вается рабочей зоной насоса. Для выбора насоса рассчитываем
или задаем значения подачи QA — QTpy6 и напора ИА — ЯтруС,
наносим на сводный график точку А н определяем марку насоса
по каталогу [121.
48
2.5. НЕУСТОЙЧИВАЯ РАБОТА НАСОСНОЙ УСТАНОВКИ
(ПОМПАЖ)
При работе в насосной установке может произойти
изменение, например, геометрической разности высот между
резервуарами, давления в одном из резервуаров. При этом изме-
нится напор Нг и рабочая точка иа характеристике насоса Н (Q) пе-
реместится. Работа иасоса остается устойчивой во всем диапазоне
изменения Q (см. рис. 2.6). Однако характеристики иасоса H(Q)
могут иметь вид, представленный в табл. 2.1 для насосов малой
быстроходности. Особенность этой характеристики — максималь-
ный напор при Q>0. Рассмотрим работу такого насоса при пере-
менной величине Нг. Насос 1 (рис. 2.7) подает жидкость по трубо-
проводу 3 с задвижкой 2 в резервуар 5, откуда жидкость поступает
потребителю через задвижку 4. При частичном закрытии задвижки
4 уровень жидкости в напорном резервуаре возрастает, следова-
тельно, увеличивается Нг. Характеристики насосной установки пе-
ресекают характеристику насоса в точках А, В, С, М. Подача иа-
соса уменьшается, но уровень жидкости продолжает возрастать.
Прн превышении уровня Ном характеристика установки прохо-
дит выше характеристики насоса (Ятруб К> Н). Происходит срыв
подачи. Насос будет работать при подаче Q — 0 и напоре Но.
Из-за отсутствия притока жидкости в резервуаре 5 уровень пони-
зится. Когда уровень достигнет высоты, соответствующей Но,
насос снова вступит в работу, подача мгновенно возрастет до QB,
уровень в резервуаре 5 начнет повышаться, и весь процесс повто-
рится в описанной выше последовательности. Таким образом,
насос работает неустойчиво в области подач 0 Q QB, работа
сопровождается гидравлическими ударами, шумом, сотрясением
машины и трубопроводов. Это явление называется помпажем [9].
Явление помпажа в тихоходных насосах может возникнуть
при неизменной характеристике установки, ио при снижении
частоты вращения вала двигателя, если характеристики уста-
новки и насоса имеют две общие точки (например, С и D на рис. 2.7).
Часть характеристики насоса от QM до Q — 0 является не-
устойчивой. Действительно, если
подача насоса, работающего в
точке D, несколько возросла до
Qe, то в жидкости возникает из-
быток энергии — иапор насоса
больше потребного напора
НЕ труб- Этот избыток энергии мо-
жет быть израсходован на уве-
личение кинетической энергии
жидкости, т. е. на увеличение
Рис. 2.7. Схема для пояснения неустой-
чивой работы насосной установки
4 Стесан С. П. н др.
49
подачи Таким образом, система насос—установка при возму-
щении не возвращается к исходному режиму (Qv). С учетом воз-
можности помпажа за границу устойчивой работы принимают
точку В (н подачу Q > QB).
Характеристики насосов, ие имеющие неустойчивой области,
называются стабильными. При работе иа переменных режимах
рекомендуется использовать только насосы со стабильной харак-
теристикой.
2.6. РЕГУЛИРОВАНИЕ РЕЖИМА НАСОСА
И НАСОСНОЙ УСТАНОВКИ
Если фактические подача QA и напор НА иасосной
установки, определяемые в рабочей точке Л, не удовлетворяют
заданным условиям, необходимо изменить режим работы уста-
новки следующими способами.
1. Изменением характеристики насосной установки дроссе-
лированием с помощью регулирующего устройства (задвижки,
вентиля). При его частичном закрытии увеличиваются гидравли-
ческие потери в трубопроводе иа величину Адр. Потребный напор
насосной установки возрастает (рис. 2.8, а):
Z/труб = KcQ 4~ Лдр = Нг 4- KCQ а
где Ас — коэффициент сопротивления сети с дополнительным дросселированием.
Рабочая точка переместится в точку В- Подача насоса умень-
шится. Способ прост в исполнении, но сопровождается потерями
мощности:
^пот == Р^дрСв/Ив* (2-4)
2. Перепуском части жидкости (Qnep) из напорного трубопро-
вода во всасывающий (или в бак) по обводному трубопроводу.
Рис. 2.8. Изменение положения рабочей точки:
° — дросселированием; б — изменением частоты вращения
50
Рис. 2.9. Сравнение способов регули-
рования по потребляемой мощности
Рис. 2.10. Изменение характеристики
осевого насоса при повороте лопастей
На обводном трубопроводе устанавливают дроссель (задвижку)
для изменения расхода перепускаемой жидкости. Энергия жид-
кости, проходящей по обводному трубопроводу, не используется,
поэтому этот способ также ие экономичен.
3. Изменением характеристики самого насоса, например, из-
менением частоты вращения его вала. Пересчитывают характе-
ристики по формулам (1.95)—(1.97). Способ позволяет как уве-
личивать подачу IQC > Qa (п' > л)], так и уменьшать ее [QD <
< Qa (п* < п)1 без существенного снижения КПД (рис. 2.8, б).
Регулирование частоты вращения можно достичь при использо-
вании двигателя постоянного тока, двигателя внутреннего сгора-
ния или турбин.
4. Изменением характеристик самого насоса обточкой ло-
пастного колеса, т. е. уменьшением диаметра на выходе (£>2 <
< £)2). Строго говоря, этот способ изменения характеристики
нельзя назвать регулированием, так как изменение характеристики
разовое, без возможности возврата к прежнему режиму. Геоме-
трическое подобие колес нарушается, формулы пересчета — по-
луэмпирические:
Q/Q' = (d2/d'2Y; н/н' = (d2'd2Y\
N/N" = (D2/D'2y, (2.5)
где Q’, Н', N,' — параметры насоса после обточки.
Чтобы не вызвать чрезмерного снижения КПД, величина об-
точки не должна превышать 7 ... 20 % диаметра нормального
колеса. Большая обточка (до 20 %) допускается прн п, = 60;
меньшая при па = 350.
Сравнить экономичность регулирования режима насоса раз-
личными способами проще всего по его потребляемой мощности.
На рис. 2.9 представлены характеристики насоса Н (Q) и N (Q)
4« 51
при различной частоте вращения вала и характеристики насосной
установки без дросселирования (ОЛ) и с дросселированием (0Вт)
Рабочие точки насоса: при регулировании дросселированием —
-оп” перепуском ДПВр; изменением частоты вращения _______В
Соответственно, потребляемая мощность на валу Nn < N <
< пер- Д
Таким образом, перепуск жидкости требует максимальных
затрат мощности.
Для осевых насосов применяется регулирование подачи пово-
ротом лопастей, при этом изменяется характеристика самого
иасоса и рабочая точка перемещается из Я в В, С (рис. 2.10, у_
угол установки лопасти). КПД насоса изменяется незначительно,
т. е. способ экономичный. Однако конструкция насоса с поворот-
ными лопастями очень сложная.
2.7. СОВМЕСТНАЯ РАБОТА НАСОСОВ
Параллельную работу нескольких насосов применяют
в тех случаях, когда один иасос не обеспечивает заданную подачу.
На рнс. 2.11, а представлены схема параллельного соедине-
ния — двух разных насосов, их характеристики (I и II) и харак-
теристика насосной установки (IV). Насосы расположены неда-
леко друг от друга (в пределах одного машинного зала). Для по-
лучения рабочей точки строят суммарную кривую Н (Q) — кри-
вую III, для чего складывают абсциссы Q, и точек при одина-
ковых ординатах (Ht = Нп = Н1П\. Точка А пересечения кри-
вых Ill и IV будет рабочей точкой насосной установки, в этой
точке определяют суммарную подачу насосов
и иапор Ht = Ни = Нл. В точках В в С определяют подачу
каждого из насосов. Если насосы имеют одинаковые характери-
стики, то суммарная Н (Q) получается удвоением абсцисс в каж-
дой точке при заданном Н. Суммарная подача QA меньше удвоен-
ной подачи QB = Q, одного насоса (<2Л < 2Q„). Приращение
подачи тем меньше, чем круче характеристика насосной установки.
Рнс. 2.11. Характеристики насосной уст новкн при работе двух насосов:
а — параллельной; б = последовательной
52
Таким образом, параллельное включение целесообразно только
при пологой характеристике WTpJp (Q)-
Последовательная работа применяется в тех случаях, когда
один насос не обеспечивает потребного напора. При этом подача
насосов одинакова, а общий напор равен сумме напоров обоих
насосов, взятых при одной и той же подаче. КПД насосной уста-
новки при последовательном соединении равен произведению
КПД насосов. На рис. 2.11, б приведена схема последовательного
соединения двух разных насосов, характеристики которых соот-
ветствуют кривым I и II. Кривая III получена суммированием
напоров прн одинаковой подаче, а IV — характеристика насосной
установки. Точка А — рабочая точка насосной установки, а В и
С — отдельных насосов. При возможности экономичнее использо-
вать многоступенчатый высоконапорный насос, а не последова-
тельную работу низконапорных насосов.
2.8. КАВИТАЦИЯ В ЛОПАСТНЫХ НАСОСАХ
Сущность кавитационных явлений. Рассмотрим
насосную установку, в которой насос расположен на высоте ивс
от свободной поверхности жидкости (рис. 2.12). Составим уравне-
ние Бернулли для свободной поверхности а—а и входного па-
трубка насоса б—б, приняв за плоскость сравнения свободную
поверхность жидкости в резервуаре:
2
р' i. । Рве । в0 I I,
+"“вс’
(2.6)
где р' — давление иад уровнем жидкости в приемном резервуаре; рв0, овс— Дав-
ление и скорость жидкости во входном патрубке иасоса; Кшвс— гидравличе-
ские потери во всасывающем трубопроводе.
Иначе 2
Рве _р'в „ (2.7)
7г - pg йв° 2г
Таким образом, давление во входном патрубке уменьшается
с увеличением высоты всасывания /1ВС и гидравлического сопротив-
ления трубопровода. Как будет показано ниже, одновременно
уменьшается давление на входе в лопастное колесо. Если давле-
ние снизится до давления насыщенных паров жидкости, наступит
кавитация — явление парообразования (холодного кипения) в дви-
жущейся жидкости вследствие местного понижения давления до
давления насыщенных паров. Давление насыщенных паров зави-
сит от вида жидкости н температуры 121- При кавитации проис-
ходит выделение пара и растворенных газов, в том числе воздуха
из жидкости в месте пониженного давления.
При кавитации имеют место следующие явления:
1. Падение подачи, напора, КПД и мощности, так как часть
полости колеса заполняется пузырьками пара.
53
б
б
повышается.
Рис. 2.12. Схема для определения геометри-
ческой высоты всасывания
2. Эрозия (механическое разруше-
ние) материала стенок колеса, кор-
пуса. Выделившиеся пузырьки пара
потоком жидкости переносятся в об-
ласть повышенного давления, где кон-
денсируются. Давление при конденса-
ции внутри пузырька остается пони-
женным, а давление в окружающей
Под действием разности давлений ча-
стицы жидкости ускоренно движутся к центру пузырька. Прн
полной конденсации происходит столкновение частиц жид-
кости, сопровождающееся местным мгновенным повышением
давления. Если это столкновение происходит на поверх-
ности деталей насоса, то оно сопровождается выщербливаиием
материала стенок и их разрушением. Эрозия является наиболее
опасным следствием кавитации.
3. Коррозия (химическое разрушение) металла в зоне кави-
тации кислородом воздуха, выделяющимся из жидкости при про-
хождении зоны вакуума. Коррозия поверхности металла усили-
вается из-за механического разрушения защитной пленки окислов,
покрывающих металл.
4. Местное повышение температуры при сжатии пузырьков
(при сжатии газов, как известно, температура повышается),
а также из-за ударов и деформации стенок и жидкости.
5. Электрические явления, связанные с окислением металла
и с местным повышением температуры (образование термопар
между холодными и нагретыми стенками).
6. Конденсация пара н удары в жидкости вызывают шум,
треск, вибрацию насоса.
Таким образом, кавитация ведет к разрушению рабочих орга-
нов насосов, ухудшению характеристик н потому длительная
работа на режимах кавитации не допускается.
Кавитационные характеристики иасосов. Условия бескавита-
циоиной работы. Кавитационный запас. Для предотвращения
кавитации в насосе высота всасывания hBC не должна превышать
некоторую критическую высоту Лвс.нр, при которой давление
на входе равно давлению насыщенных паров, т. е. hBC < hBC. кр-
Иными словами, всасывающая способность иасоса ограничена
явлением кавитации на входе. При атмосферном давлении над
уровнем жидкости в резервуаре из уравнения (2.6) определим
вакуумметрическую высоту всасывания
Н..« = ^^ = Л.«+^- + Л..е> (2.8)
где ра — атмосферное давление,
54
Рис. 2.13. Распределение давления по лопасти в центробежном насосе
Величину Нвак при испытаниях н эксплуатации иасоса можно
измерить по показаниям вакуумметра, установленного на вход-
ном патрубке. Если будет известна критическая вакуумметрн-
ческая высота всасывания Яийк.кр на входе, прн которой на-
ступает кавитация, то легко контролировать бескавитациоиную
работу насоса по соотношению Нвак < Нван. кр. Для каждого
насоса величина //Вйк.кр будет определенной, зависящей от
его подачи и одновременно от внешних факторов": атмосферного
давления, температуры жидкости. Так как величину Нвак удобно
контролировать на входе в насос, в каталогах иа характеристики
насосов наносят зависимость
где Н^к = ^^вяк кр — допустимая вакуумметрическая высота всасывании
иасоса при нормальном атмосферном давлении ра = 10ь Па и температуре жид-
кости t=20°C; Л — коэффициент запаса (k < 1).
Условие бескавнтационной работы насоса имеет вид
(2.9)
Рассмотрим распределение давления в проточной полости
насоса на входе и на лопасти (см. рис. 2.13). Давление р0 перед
входом иа лопасть меньше, чем давление р2 на выходе из колеса.
Жидкость натекает на лопасть с относительной скоростью ш0.
В точке А разветвления потока скорость равна нулю, поэтому
давление рА больше р0 из-за преобразования кинетической энер-
гии в потенциальную. При обтекании входного элемента лопасти
струйкн изгибаются, появляются центробежные силы, стремя-
щиеся оторвать жидкость от лопасти, что ведет к понижению
давления (точки М и N). Но зона пониженного давления в точке М
иа тыльной стороне лопастн мала, а в точке /С, расположенной
также иа тыльной стороне лопасти вблизи входного элемента
вслед за точкой Л4, зона пониженного давления значительна
55
Рис. 2.14. Кавитационные карактеристики
насоса
(здесь потенциальная энергия пе-
решла частично в кинетическую).
Как показали эксперименты, имен-
но в точке К возможно начало
кавитации при рк = рш1п = ри.п
(здесь рн. п — давление насыщен-
ных паров). Таким образом,
условием бескавитационной ра-
боты будет соотношение рк >» рн. п.
Однако контроль этого соотноше-
ния в условиях эксплуатации и экс-
перимента затруднен, так как
требует дренирования лопасти и измерения давления на враща-
ющемся колесе. Энергия жидкости на входном патрубке насоса,
где обычно измеряют давления, всегда больше, чем в точке на-
чала кавитации. Введем понятие кавитационного запаса ДА как
превышения удельной энергии жидкости во входном патрубке
насоса над удельной энергией насыщенных паров:
At РвС | °ВС Рн.П
Pg 2g pg
(2.Ю)
Величина Д/гкр — критический кавитационный запас в момент
наступления кавитации в точке К на лопасти. Его можно опре-
делить экспериментально при кавитационных испытаниях. Кави-
тационные характеристики насоса представляют зависимость
напора Н и мощности N от кавитационного запаса Д/г при по-
стоянных подаче Q и частоте вращения п (рис. 2.14). При больших
Д/г кавитационные явления отсутствуют и показатели Н, N
остаются неизменными — область бескавитационной работы на
характеристике. Режим, при котором начинается падение напора
и мощности насоса, называют первым критическим режимом
н ему соответствует Д/г1р. В начальной стадии при Д/iip > Д/i >
> ДЛкр кавитация является местной, охватывает незначитель-
ную зону иа входе в колесо. При дальнейшем уменьшении кави-
тационного запаса кавитационная область постепенно расши-
ряется, происходит медленное падение напора и мощности. При
Д/iip резко увеличивается количество паров в жидкости, поток
отрывается от лопасти. Эго вызывает резкое уменьшение напора
и мощности, а затем и полный срыв работы насоса.
Характер возникновения и распространения кавитации за-
висит от типа насоса. В насосах с малыми пв (тихоходных) пер-
вый критический режим на характеристике не обнаруживается.
Для того чтобы насос не работал в зоне кавитации, назна-
чают некоторое превышение допустимого кавитационного запаса
56
Рис. 2.15. Расчетные точки для вывода
основного уравнении кавитации
над критическим (на 20 ... 30 %}.
Следовательно, ДЛдоп = (1,2 ...
1,3) М1р и условие бескавитаци-
онной работы имеет вид
ДЯ>ДЙДОП. (2.11):
Из уравнений (2.8) и (2.10)
получим выражение, связыва-
ющее вакуумметрическую вы-
соту всасывания с кавитационным запасом:
л/ ^я.и 1 °во л ь
Явак = —— +
или
2
ггдоп Ра Рн. п 1 °ва * »
Пвик---------Pg 2g алдоп-
(2-12)
Таким образом, и допустимую вакуумметрическую высоту при
наступлении кавитации можно определить по результатам кави-
тационных испытаний насоса через ДЯдоп.
Основное уравнение кавитации. Определим минимальное давле-
ние на входе в лопастное колесо и выразим его через известное
давление во входном патрубке. Для этого составим два уравнения
Бернулли для средних струек — во входном, патрубке (сечение
б—б) и в сечении О—О перед входом на колесо (рис. 2.15):
2 22
с213)
перед входом на колесо в точке О н в сечении в точкой К минималь-
ного давления в относительном движении
Ро , РК , -“К , Л ,9
и+—= й + —2Г- + л-о-8- (2-14)
Гидравлическими потерями пренебрегаем, т. е. Л^вс-о *= 0»
о-к ~~ 0-
Так как рассматриваемые сечения струйки находятся близко
друг к другу, то г0 = zK = zBC, щ « ик.
Из уравнения (2.14)
Pmln = Ро_______“'к юо = Ро ГО0 Г|1 _
pg pg pg 2g 2g pg 2£ L \ w0 J J
(2-i5)
где Чр = (юЛУ-1-
57
При наступлении кавитации
2
Pmm __Ря. п _ Ро ч _____0 /л I с\
Р£ ~ Pg ~~ Pg кр 2g '
Коэффициент 1кр называется критическим числом кавитации.
Для кинематически подобных потоков отношение скоростей
а следовательно, Х,кр одинаковы. Критическое число ка-
витации мало зависит от вида жидкости и температуры, если
числа Re потоков мало отличаются или если течение жидкости
происходит в области турбулентной автомодельности. При су-
щественном различии Re за пределами’ области автомодельности
Хир будет различно из-за разного распределения скоростей при
входе на лопасть. Как следует из формулы (2.15), 1кр зависит
только от формы проточной части входных элементов лопастного
колеса и от направления потока на входе в него. Для равенства
критических чисел кавитации требуется подобие только входных
элементов, а различие в выходных размерах не илияет иа вели-
чину
Из уравнений (2.13) и (2.16) получим
Рве I РВС Рн. П _ ^0 п ^0
pg ' 2g pg 2g ' 2g
или согласно уравнению (2.10)
c2 w2
ДЛКР = ^- + Х„Р^. (2.17)
Полученное уравнение называют основным уравнением кави-
тации. Из него следует, что при наступлении кавитации критиче-
ский кавитационный запас всегда отличен от нуля. Как и крити-
ческое число кавитации, ДЛкр зависит от формы, размеров вход-
ных элементов лопастного колеса, режима работы (от QK, так как
скорость жидкости с0 = QJF0) и мало зависит от вида жидкости
и температуры. Следовательно, критический кавитационный запас
является характеристическим показателем данного насоса или по-
добных на входе насосов, работающих в подобных режимах;
он не зависит от внешних условий. Сравнение с ним кавитапион-
ного запаса Aft, определенного для данной насосной установки,
определит условие бескавитацнонной работы, записанное ранее
[неравенство (2.11)1.
При выводе уравнений мы указали, что речь идет о средней
элементарной струйке. Рассмотрим, как распределяется давление
на входной кромке для всех струек.
Из уравнения (2.16) следует, что минимальное давление pmin
тем меньше, чем больше скорости и с0. Максимальное значение
скорость к»0 принимает на периферийной линии тока в полости,
заштрихованной на рис. 2.15. Точка расположена на максималь-
ном радиусе на входной кромке, следовательно, и переносная
Б8
Ряс. 2.16. Способы повы-
шения кавитационных
свойств иасосов:
а увеличение ширина
колеса ва входе; б — уста-
вовка предвключенного ко-
леса перед входом
скорость Ui в ней максимальна. Значит именно в этой волости и
начинается местная кавитация. Но проявится кавитация лишь
тогда, когда захватит достаточно большую область колеса, по-
этому уравнение (2.16) для средней струйки соответствует началу
кавитации, а для периферийной струйки писать это уравнение
нецелесообразно.
Величину А,ир можно определить из уравнения (2.15) и для
первого н для второго критического режимов, причем А,"р меньше
Л,1Р. Значение определяют по эмпирическим формулам и
таблицам.
Выведем формулы пересчета критического кавитационного
запаса. Пользуясь теорией размерностей, устанавливаем, что
Дйир имеет размерность напора н пропорционально (п/?)2, т. е.
АЛК<Р ~ Н ~ иа ~ (п/?)а или
А^кр(н) __ [П(Н|Я(В)Г
А^кр (м) [п(м)Я(м)]а
(2.18)
где R — характерный линейный размер иа входе.
Исключим из уравнений (1.84) и (2.18)' линейный размер,
для чего возведем обе части уравнения (1.84) в степень 1/2, а урав-
нения (2.18) — в степень 3/4 и разделим их друг на друга. Умно-
жим обе части уравнения на 103/4, получим
”(н) _ ”(м) VQ(M)
[А'-чх.,/10!3'4 [“«pw/10]3'4.’
Следовательно, величина
nVQ
(ДЛ„р/10)зд
(2.19)
одинакова для всех геометрически подобных иасосов при их
работе иа подобных режимах (здесь Q — в м®/с; п—в об/мин;
&hKp — в м; величины Q, пу Дйкр соответствуют режиму макси-
мального КПД иасоса). По аналогии с коэффициентом быстро-
59
ходности ns [формула (1.100)] величину С называют кавитацион-
ным коэффициентом быстроходности. Уравнение (2.19) было полу-
чено С. С. Рудневым. Из него следует, что кавитационные свойства
насоса тем выше, чем больше величина С. Для обычных насосов
для первого критического режима Ct = 800 ... 1000. Насосы,
у которых Cj < 800, имеют неудовлетворительные кавитацион-
ные свойства. В насосах о повышенными кавитационными свой-
ствами С/ 1300.
Улучшение кавитационных свойств насосов или уменьшение
критического кавитационного запаса можно получить, увеличи-
вая входной диаметр лопастного колеса DOi ширину колеса bj
и толщину лопастей на входе. Все это приведет к уменьшению
скоростей с0, йу0, при неизменной подаче. Однако при увели-
чении Do в тихоходных насосах уменьшается и КПД насоса,
поэтому более эффективным (без уменьшения КПД) является
увеличение Ьг. На рис. 2.16, а представлены обычное лопастное
колесо центробежного насоса (штриховая линия) и колесо, обла-
дающее повышенными кавитационными свойствами. У такого
колеса CIt = 2300.
Другим способом повышения всасывающей способности яв-
ляется установка на входе в центробежное колесо осевой первой
ступени — предвключенного колеса, как правило, имеющего ло-
пасти, очерченные по винтовой линии (рнс. 2.16, б). Кавитацион-
ный коэффициент быстроходности у насоса с предвключенным
осевым колесом достигает С — 5000 [8].
F Л А В A 3
ГИДРАВЛИЧЕСКИЕ ТУРБИНЫ
3.1. ОСНОВНЫЕ ВИДЫ ТУРБИН
Гидротурбины применяют в основном на гидроэлектро-
станциях для вращения роторов электрогенераторов.
Гидротурбины разделяют иа реактивные и активные. В реак-
тивных гидротурбинах изменяется как кинетическая, так и по-
тенциальная энергия жидкости, и давление в жидкости на входе
больше, чем на выходе. В активных гидротурбинах преобразуется
в механическую только кинетическая энергия жидкости, а давле-
ние на входе и выходе одинаковое и равно атмосферному.
К реактивным турбинам относятся: радиально-осевые (см.
рис. 1.2), которые используются на гидростанциях при напорах
до 500 м, и осевые (рис. 3.1), которые отличаются от радиально-
осевых, в основном, типом турбинного колеса. В радиально-
осевых турбинах колесо центростремительное (гп В> гт2), в осе-
вых — осевое (гт2 == гт1). Осевые турбины применяют при малых
напорах (до 80 м). Их можно выполнять с поворотными лопастями
(поворотно-лопастные турбины). Кроме лопастного колеса основ-
ными элементами являются направляющий аппарат 2 и отсасы-
вающая труба 4. Направляющий аппарат 2 представляет систему
лопастей, установленных под определенным углом. Совместно
с турбинной камерой 1 он сообщает воде окружную составляющую
скорости. Кроме того, направляющий аппарат служит для регу-
лирования мощности гидротурбины путем поворота лопастей
вокруг своих осей. Прн повороте лопастей изменяется направле-
ние потока и, следо-
вательно, меридиональ-
ная скорость, расход
воды и мощность тур-
бины. При закрытии
направляющего аппа-
рата расход воды пре-
кращается, и гидротур-
бина останавливается.
Рис. 3.1, Осевая гидро-,
турбина
61
Ряс. 3.2. Активная ковшовая гидротурбина
От рабочего колеса 3 вода отводится по отсасывающей трубе 4,
имеющей диффузорную форму. Отсасывающая труба служит
для использования части кинетической энергии воды, выходящей
из рабочего колеса, н использования напора HBt равного высоте
отсасывающей трубы от уровня нижнего бьефа.
Использование напора Нв н кинетической энергии воды на
выходе из колеса происходит за счет вакуума, возникающего
за лопастным колесом.
Активные турбины выполняют в основном ковшовыми
(рис. 3.2). Колесо 1 представляет собой диск, на окружности кото-
рого закреплены ковши. Вода подводится по напорному трубо-
проводу 3 к соплу 2, представляющему собой сходящийся насадок,
и выходит из него с большой скоростью в виде струн. Струя
натекает на ковши колеса н приводит его во вращение. Мощность
турбины регулируется иглой 4, перемещающейся внутри сопла
в осевом направлении. При перемещении иглы изменяется расход
воды- Как правило, ковш состоит из двух чаш (с н б), разделен-
ных средним заостренным ребром б, на которое и поступает струя.
Растекаясь по чашам, струя поворачивает почти на 180°, и сила
ее взаимодействия с ковшом максимальная. Ковшовые турбины
применяют при напорах до 1700 м.
3.2. ОСНОВНЫЕ ПАРАМЕТРЫ ТУРБИН. ВИДЫ ПОТЕРЬ
В п. 1.6 определены основные параметры турбин,
такие, как напор Я, расход Q, располагаемая или затрачиваемая
мощность потока Npt полезная мощность N н КПД ц.
Потерн мощности в турбине делятся на гидравлические, объем-
ные н механические.
Гидравлические потерн, т. е. потери энергии на преодоление
гидравлического сопротивления внутренних каналов турбины,
оценивают гидравлическим КПД
= = Ъ
1г // // •
(3.1)
62
где
= (3-2)
— полезней напор турбины или часть располагаемого напора жидкости, отдавае-
мая лопастному колесу.
Объемными потерями называют потери энергии с потоком
воды, проходящим мимо лопастного колеса через уплотнения
турбины. Объемные потери оценивают объемным КПД — t]o.
Расход жидкости через турбинное колесо QK меньше расхода
турбины Q на величину утечек и q2‘
Qh Q —Qi <h- (3-3)
Каждая единица веса передает лопастному колесу энергию,
равную полезному напору Ни (Ht). Следовательно, полезная
мощность потока, используемая в турбинном колесе:
Nv = pg (Q — ft — <?2) fin, (3-4)
а объемный КПД
_ Q — Qi — Qt ____Qk /п п\
•По = -----Q-- - -Q--
Механические потери — это потери на трение в подшипниках,
в уплотнениях на валу и наружной поверхности колеса о воду
(дисковые потери). Оценивают их механическим КПД
Чме, = NINB. (3.6)
КПД турбины
т) == ПгПоЛмех- (3-7)
3.3. ОСНОВНЫЕ РАСЧЕТНЫЕ ЗАВИСИМОСТИ
ДЛЯ ТУРБИН
Основным для турбины является уравнение (1.63).
Действительный напор
гг _ __ СиТ1иП СКТ2ЫТ8 /О О\
Чр Р1г ’ К 1
Формулы подобия для лопастных гидромашин получены ранее
1(1.84)—(1.91)]. Однако режим работы гидротурбины определяется
ее расходом и напором, а частота вращения п является величиной
зависимой. Поэтому принято формулы подобия представлять как
зависимости и, Q и N от напора Н.
Из уравнения (1.87)
"(в) _ |?(м)УГ//(и)
"<«> ^(„)/«(U,
(3-9)
63
(З-Ю)
(З.П)
величина
линейного
После подстановки п(Е)/п(М) в уравнение (1.88) и (1.84) получим
^(н)_^(н) #(н) .
У^ы)
__ ^(н)^(н) У^н) Р(н)
^(м) ^(м)^(м) Р(м)
При работе иа воде натуры и модели ptBj ~ р(ы).
Уравнение (3.9) можно записать иначе:
п(н)^(н) _ П(М)^(М)
Следовательно, для всех подобных гидротурбин
nRlYH одинакова. Принято в качестве характерного
размера R выбирать D\ — наибольший диаметр входной кромки
лопасти. Введем обозначение
= (3.12)
Аналогично:
= (ЛГ/77 ’ (313)
<314>
Величины п/, Q/, N'j называются приведенными частотой
вращения, расходом и мощностью. Если турбина подобна данной,
имеет D{ = 1 м, работает прн Н = 1 м, то n) = л; Qj = Q; ДГ} =
= Af, т. е. приведенные величины есть частота вращения, расход
и мощность турбины, подобной данной, имеющей диаметр D\s =
= 1 м и работающей при напоре Н5 = 1м. Исключив Di из формул
(3.12) и (3.14), получим выражение для коэффициента быстроход-
ности
где п — в об/мищ Н — в hj N — в кВт.
Так же, как в насосах, равенство пв является необходимым и
достаточным признаком геометрического подобия. По коэффици-
енту п„ гидротурбины разделяют на ковшовые (п, — 4 .. 50),
радиальио-осевые; тихоходные (п„ ~ 40 ... 150, DrID2 — 1,65 ...
1,1), нормальные (лв = 150 ... 250, DiID2 — 1,1 ... 0,9), быстро-
ходные (ла = 250 ... 400, DJD2 0,9 ... 0,65), осевые (ла »
= 400 ... 1100).
64
В.4. ХАРАКТЕРИСТИКИ ТУРБИН
Характеристики турбин получают в основном опытным
путем. Вместо натуры, как правило, испытывают модельную
турбниу, поэтому характеристики строят для приведенных вели-
чин. Зависимость n'i от Qj с линиями равных КПД и равных от-
крытий направляющего аппарата называют универсальной
характеристикой гидротурбины (рис. 3.3).
Открытие направляющего аппарата — ширина прохода
между соседними лопастями на выходе. Линия 5 %-иого запаса
мощности соответствует таким открытиям направляющего аппа-
рата, при которых мощность на 5 % меньше максимальной. При
увеличении за пределами указанной линии (вправо от иее)
падение мощности становится значительным нз-за увеличения
гидравлических потерь. Рабочая точка турбины должна лежать
влево от линии 5 %-иого запаса мощности.
На универсальной характеристике нанесены также штрихо-
вые линии равных коэффициентов кавитации (о = const). В гидро-
турбине точки минимального давления находятся иа тыльной
стороне лопасти при выходе. Абсолютное давление ры в иих ниже
атмосферного давления на сумму величины pgffe, скоростной
энергии рпг/2 и гидравлических потерь в отсасывающей трубе pgft,
или
----------(н. + 4- + /!,) =-£----Н.-аН, (3.16)
pg pg \ * 2g eJ pg
где о — коэффициент кавитации, который выражает долю скоростного напора
на выходе из колеса и потерь в трубе от напора турбины Н.
Рис. 3.3. Универсальная карактеристика ради-
ально-осевой гидротурбины
5 Gveeu G. П. Др.
Коэффициент а одинаков для геометрически подобных тур-
бин, работающих на подобных режимах.
С увеличением высоты отсасывания Нв минимальное давление
падает и достигает давления насыщенных паров рн. п, что соответ-
ствует началу кавитации. Высота НЙ1 при которой наступает ка-
витация, называется критической:
Н.„. ---ОН.
Допустимую высоту на которой можно устанавливать
турбину над уровнем нижнего бьефа, выбирают ниже критиче-
ской:
нлоп = P.-Pg-., _ (1,05... 1,1) аН.
р£ '
Значение о для рабочей точки можно взять с универсальной
характеристики.
ГЛАВ A 4
ГИДРОДИНАМИЧЕСКИЕ МУФТЫ
4.1. УСТРОЙСТВО И КЛАССИФИКАЦИЯ
Гидромуфтой называют гидродинамическую передачу,
не преобразующую крутящий момент (рис. 4.1). Наибольший диа-
метр рабочей полости называется активным диаметром Z)a, а наи-
меньший — втулочным Do. Гидромуфты могут быть как с внутрен-
ним тором (рис. 4.1, б), так и без него (рис. 4.1, а), различаться
формами рабочих полостей (рис. 4.1, в) и иметь несимметричные
лопастные колеса (рнс. 4.1, г). Классификация ГДМ приведена
на рис. 4.2.
4.2. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА ГДМ
Вывод зависимости cm(Q) = /(О- Рабочий процесс
в ГДМ определяется балансом энергии. Рассмотрим ГДМ с про-
извольной рабочей полостью (рис. 4.3). Разобьем последнюю
на отдельные участки из условия равенства площадей и представим
себе, что это и есть отдельные ГДМ. Для каждого из этих участков
осредиим поток и для средней линии тока напишем уравнение
баланса энергии (1.78):
Я1н = Я|, + 2Ллм. (4.1)
Если учесть, что входные условия последующего элемента
определяются выходными условиями предыдущего, радиусы гн1 —
= гт2 и гЕ2 — гт1, а проекция абсолютной скорости на окружную
с учетом влияния конечного числа лопастей си2 = (и2 — ст ctg р2) Р»
то для насосного колеса при установившемся режиме работы
можем записать
W(B = (р„ - ia'p, - —-------ctg ₽и +
g \ шн'и1г mm
4- ц гРт5 - Ctg₽„) (4.2)
где а = гш/гН1.
Напор турбинного колеса
(4.3)
5« 67
Рис. 4.1. Схемы ГДМ
Гидравлические потери £ Лпот в ГДМ представим в виде
суммы потерь на трение, зависящих от квадрата относительной
скорости (или, что то же, от квадрата объемной подачи рабочей
жидкости) н потерь иа удар, зависящих от углов атаки при входе
на лопастное колесо, т. е.
£ Л'ПОТ Лтр 4“ ^уд* (^-4)
Потерн на трение
Лтр = £Q2/(2g), (4.5):
где £ — коэффициент сопротивления криволинейного вращающегося канала.
Ряс. 4.2» Классификация ГДМ
68
Рис. 4.3. Расчетная схема (а) и треугольники скоростей (б) для ГДМ
По данным работы [3 ] коэффициент С зависит от передаточного
отношения i и от конструктивной формы рабочей полости ГДМ.
При незначительных колебаниях скольжения в пределах i =
= 0,8 ... 0,98 коэффициент С резко изменяется, достигая наиболь-
ших значений при минимальном скольжении (рис. 4.4).
Потери на удар определим по выражению (1.53):
ЛУД = <Рудс’/(2Й> (4-6)
где фуд — коэффициент потерь иа удар; сл = са ij — cu Лся — поте-
рянная скорость на входе в лопастное колесо.
Так, на входе в насосное колесо
~ ^нт т? ctg Phi ~Ь Щ "г ctg Рта» 0-7)
* тн1 1 mu
на входе в турбинное колесо
= Ои — тг—ctg ₽TI- имрн + ря —ctg Рм. (4.8)
* тт1 1 тн1
Подставив выражения (4.2)—(4.8) в уравнение (4.1) и решив
его относительно объемной подачи Q или меридиональной ско-
рости, получим зависимость нх
от передаточного отношения i
(или КПД — и) и относительного
радиуса а.
Для ГДМ о радиальными ло-
пастями симметричных насосного
н турбинного колес углы лопа-
стей РИ1 = ₽„, = Рн = Рта = S0°
и, как следствие этого, скорости
си = и н Cjn = w. Приняв в пер-
Рис. 4.4. Зависимость коэффициента со-
противления от передаточного отноше-
ния ГДМ (Da — 0,533 м, ил = 52,5 с-1)
///?
Рис. 4.5. Зависимость меридиональной скорости потока от режима работы ги-
дромуфты:
а — а = const; б — о = ver
вом приближении Рд = рт = 1,0 и <руд. н = <ру„. , = 1,0, что
для качественного анализа будет достаточным [4, 51, для подобных
ГДМ выражения (4.2)—(4.8) упростятся [22] и после их подста-
новки в выражение (4.1) получим уравнение
<4^ (1 - «2) “ ‘ (1 - ‘°2) + ^Г~ (1 - 02(1 + а2) + С
которое решим относительно скорости
ст = (4-9)
Выражение (4.9) позволяет для каждого режима работы при
заданной форме рабочей полости и значениях а определить ско-
рость ст или объемную подачу Q.
Исследование общих закономерностей функции ст =
Уравнение второй степени в общем виде можно представить так:
Ахя + 2Вху + Cy* + Dx + Еу + F = Ъ. (4.10)
Для сравнения уравнений (4.9) и (4.10) уравнение (4.9) за-
пишем в виде
-^-^+i2(l-a2)-(l-a2) = 0. (4П)
Особенностью уравнения (4.11) по сравнению с уравнением
(4.10) является равенство коэффициентов В, D, Е нулю. Для
определения типа кривой, выраженной уравнением (4.11), вос-
пользуемся его детерминантом:
6 = АС - В' = —(1 - а”),
®ягн2
который всегда будет больше нуля, так как а =
Следовательно, уравнение (4.11) представляет собой эллипс.
70
Рнс. 4.6. Распределение относительныя скоростей поперек межлопастного ка-
нала колеса:
а — расчетная схема; б —• втора окоростеЯ
»^(1-
Преобразуя это уравнение, приведем его к каноническому виду
с21 + ,-2(1-а2) = (1-а2).
WHrH2
Разделив вое члены уравнения на (1 — я’)', получим
^- + <* = 1. (4-12)
На рио. 4.5, а показана кривая (Q) = f (<), построенная
по уравнению (4.12) для а = const, а на рио, 4.5, б — кривые
Cm (Q) = f (а) для i = const.
Из рио. 4.5, а видно, что о уменьшением f скорость ст сначала
резко увеличивается, затем рост ее замедляется, и при i = О
скорость ст достигает своего максимального значения при а =
= const I __________
шс = ШаГи (1 — □’)/£•
Из рис. 4.5, б следует, что с уменьшением значения а ско-
рость ст увеличивается, причем это увеличение происходит
также за счет возрастания радиуса rB а. С уменьшением I неравно-
мерность потока увеличивается, причем последний не является
потенциальным или равноскоростным. Скорости увеличиваются
от мгновенного центра вращения О к наружным торам лопастных
колес. При больших £ неравномерность потока мала, так как
объемная подача Q незначительна.
Распределение скоростей потока в межлопастном канале. В меж-
лопастном канале и а соси ого (турбинного) колеса выделим эле-
ментарную частицу жидкости о размерами dn, dh и dl (рио. 4.6, а).
Рассмотрим динамическое равновесие частицы в направлении
71
оси п. Угловую скорость примем постоянной: и = const. Будем
учитывать действие следующих сил:
а) силы давления на грань I
р.=(₽+-!-4-*><«;
б] силы давления на грань II
Pi-tp-^^dnjdhdl,
в) силы Кориолиса, возникающей вследствие вращательного
движения частицы вместе с колесом н движения ее вдоль радиуса
по каналу н направленной перпендикулярно вектору относи-
тельной скорости в сторону, противоположную направлению
вращения:
Рк = 2<DwpV = 2смцр dn dh dl,
где V — объем элементарной частицы.
Спроектируем силы на ось п:
-(р +-Z -^dn-)dhdl +(Р--^ -Ldn^dhdl-
— 2cottJp dndhdl — О,
откуда
—аг = 2<<,“’₽- <413)
Найдем соотношение между давлением н относительной ско-
ростью. Для этого воспользуемся уравнением Бернулли для
относительного движения:
•^+-S--TF = const (414)
Продифференцируем уравнение (4.14) по дп:
1 др , 2ct> dw 2u ди __~
pg dn ‘ 2g dn 2g dn
ИЛИ
Заменим скорость а через cor и получим
_^Е_ = рГи,_^._шг±Ы_1
дп r L дп да J
Примем г = const, тогда
др dw
(415>
72
Приравняем правые части уравнений (4.13) и (4.15):
р-2сош = pw dwldn,
откуда
dwldn = 2га.
Перейдя к конечным приращениям, найдем
dw — 2га dn.
Заменим dn — г dtp (ом. рио. 4.6, а], получим выражение
dw = 2<ог d<pf
интегрируя которое, найдем скорость wi
w = 2галр 4- Cj.
Определим коэффициент Q из граничных условий: при <р = О
Cj = wcp = Q/В. Тогда окончательно будем иметь
w == и>ср ± 2гагср. (4.16)
Из уравнения (4.16) следует, что изменение скорости w попе-
рек межлопастного канала линейное (см. рис. 4.6, б). Минималь-
ная скорость в канале у лицевой стороны лопасти
= O’er — 2(дгя/г, (4.17)
где — 2л/(2г) = — а/г = <р.
Максимальная скорость в канале у тыльной стороны лопасти
wx = tt»cp + 2rarn/z. (4.18)
Когда 2гагл/г >• к»ср, на лопасти создается обратное течение,
что приводит к появлению застойной зоны —• источнику вихре-
образования. Обратные течения могут возникнуть при малых Q,
когда скорость wcp мала. На создание застойных областей суще-
ственное влияние оказывает число лопастей: чем больше Z, тем
меньше неравномерность скорости. Этим объясняется существенно
большее (в 4 и более раз) число лопастей в насосном и турбинном
колесах ГДМ по сравнению с числом лопастей колеса центробеж-
ного насоса.
Следует также отметить, что уравнения (4.17)’ и (4.18) отно-
сятся к той части рабочей полости, где поток движется перпен-
дикулярно оси вращения ГДМ. На входе и выходе из лопастного
колеса поток часто движется практически параллельно оси вра-
щения, в результате чего сила Кориолиса обращается в нуль
н уравнения (4.17) н (4.18) неприменимы. Наличие вязкости
рабочей жидкости также значительно влияет на описанную выше
картину явления, и отрывы потока наблюдаются как на лицевой,
так н на тыльной сторонах лопасти.
4.3. ХАРАКТЕРИСТИКИ ГДМ
Различают внешние и внутренние характеристики ГДМ.
Внешней характеристикой называют зависимости внешних
параметров (КПД, момента, мощности] от передаточного отно-
73
Рис. 4.7. Внешняя карактерк-
стика ГДМ:
I режим холостого кода: 2 •—
оптимальный режим; 3 — стоповый
режим
шения ГДМ при постоян-
ных вязкости и плотности
рабочей жидкости, частоте
вращения (или угловой
скорости) входного звена.
Внутренней характе-
ристикой ГДМ называются
зависимости между вну-
тренними параметрами потока жидкости в ее рабочей полости,
к которым относятся: напор, объемная подача, скорость, давление,
потери энергии. Внешнюю характеристику ГДМ (рис. 4.7) строят
о учетом уравнений (1.72); (1.73). Зависимость момента при
изменении масштаба может быть представлена как график
мощности Nlt так как = M&i. ГДМ могут работать в тя-
говом, тормозном и обратимом режимах.
Тяговый режим — режим работы, при котором мощность пере-
дается через ГДМ от входного к выходному звену (рис. 4.8, а).
Характерными точками внешней характеристики ГДМ на этом
режиме (см. рис. 4.7) являются точка 1 — режим холостого
хода, когда внешняя нагрузка отсутствует (показатели М-; ЛГ|
Л; s; Q (сго) = 0; = <оа и i = 1); точка 2 — оптимальный ре-
жим, когда КПД максимальный, имеет место при 2* = 0,95 ... 0,98
в зависимости от конструкции ГДМ (показатели сог = «12*1
s* = 1 — 2'j N* = Q*f Hh? #2 = Hh!]7)j точка 3 —•
стоповый режим, когда выходное звено остановлено (показатели
<о2; 2; Na; т] = 0; М; Q max; s — 1), режим является напря-
женным в тепловом отношении, так как вся мощность, подводимая
от двигателя к входному звену ГДМ, преобразуется в тепло.
°)
в)
<9
Рис. 4.8. Структурные схемы ра-
боты гидромуфты н передаче:
а на еяговом режиме; б —- ва об-
генном режиме; в ~~ на режиме про-
вивовращевия (Д — двигатель; РО —
рабочий орган)
74
Проследим связь режимов работа ГДМ с условиями движения
машины. В качестве примера рассмотрим движение автомобиля,
в приводе которого установлена ГДМ:
а) автомобиль не движется, двигатель работает, сцепление
выключено — холостой ход ГДМ}
б) автомобиль движется с максимальной скоростью по ровной
дороге — оптимальный режим ГДМ}
в) автомобиль ие движется из-за непреодолимого препят-
ствия, его колеса ие вращаются, двигатель развивает максималь-
ный момент —• стоповый режим ГДМ.
Тормозной режим — режим работы, при котором мощность
подводится к ГДМ как со стороны входного, так и со стороны
выходного звеньев или со стороны одного из звеньев при оста-
новленном втором звене. Во всех этих случаях происходит за-
медление (торможение) рабочего органа РО машины. Различают
два вида тормозных режимов; обгонный и режим прогивовра-
щеиия.
При обгонном режиме на выходном звене ГДМ знак крутящего
момента изменяется на противоположный, а направление его
вращения соответствует тяговому режиму работы; частота враще-
ния турбинного колеса больше частоты вращения насосного ко-
леса (показатели: «2 В> I £> 1; s; Q; M-t N <3 0). На обгонном
режиме ГДМ, установленная в приводе автомобиля, работает
при его движении под гору на прямой передаче или при включении
понижающей передачи во время движения по ровной дороге.
На обгонном режиме поток движется от турбинного колеса к на-
сосному, т. е. турбинное колесо выполняет функции насосного,
а насосное работает в режиме турбинного. Обратное движение
потока в рабочей полости называется обратным циклом, а явле-
ние, при котором происходит изменение направления передачи
энергии, называется обратимостью. В общем случае обратимым
режимом работы ГДП называют режим, при котором мощность
передается от ее выходного звена к входному звену (рио. 4.8, б).
ГДМ эффективно передает мощность как на тяговом, так и на
обгонном режиме. Работа ГДМ иа обгонном режиме характе-
ризуется уравнением баланса энергии в виде
-Н1в + я„-Еьпо1 = 0. (4.19)
Из уравнения (4.19) можно получить выражение для определе-
ния зависимости Q (ст) = f (i) иа обгонном режиме работы.
Зависимости М, Q ~ f (i) при = const приведены на рис. 4.9.
Из рис. 4.9 видно, что жесткость характеристики ГДМ (Ж =®
~ dM/di) на обгонном режиме несколько больше, чем на тяго-
вом, что можно объяснить работой насосного колеса в режиме
турбинного (насосное колесо, получая энергию от двигателя, пре-
пятствует увеличению частоты вращения турбиииого колеса и
тормозит движение связанного с иим рабочего органа).
7Б
Рис. 4.9. Характеристика ГДМ на
тяговом и обгонном режимах работы
м
Рис. 4.10. Внешняя карактеристикя
ГДМ на режиме динамического тормо-
жения
Предельным случаем обгонного режима является режим ди-
намического торможения, или, как его называют, гидротормоз-
ной режим. На этом режиме иаоосиое колесо заторможено ~
= 0), и ГДМ работает как лопастной гидротормоз. Ее внешняя
характеристика М ~ f (<о2) представляет собой квадратичную
параболу, наклон которой зависит от конструкции лопастной
системы ГДМ и свойств рабочей жидкости (рис. 4.10). На этом
режиме ГДМ работает в приводе автомобиля при спуске его в тя-
желых горных условиях, когда с помощью специального устрой-
ства ее насосное колесо затормаживается.
Режим противовращения — тормозной режим, при котором
входные и выходные звенья вращаются в разные стороны (показа-
тели: (й2- t < 0; s > 1). На режиме противовращения ГДМ в при-
воде автомобиля работает прн его движении задним ходом прн
включенной прямой передаче (автомобиль не может преодолеть
крутой подъем). На режиме противовращения мощность к ГДМ
подводится как от двигателя, так и от рабочего органа (см.
рис. 4.8, в). Насосное колесо работает в насосном режиме, а тур-
бинное — в тормозном, при котором подводимая к нему от рабо-
чего органа энергия затрачивается на торможение потока жид-
кости в рабочей полости, т. е. иа режиме противовращения объ-
емная подача ГДМ Q = QH — QT, где QH, QT — части подачи,
приходящиеся соответственно иа долю насосного и турбинного
колес.
На рио. 4.11, а приведены зависимости Л4, Q = f (*') иа ре-
жиме противовращения. Из графика видно, что момент ГДМ на
режиме противовращения при увеличении частоты вращения тур-
бинного колеса резко падает, что объясняется интенсивным
уменьшением подачи Q при росте составляющей (Qa« const).
76
Рис. 4.11. Характеристики:
а — ГДМ на тяговом режиме и режиме противовращения; б — совместная гидротормоза
и ГДМ на режиме противовращения; 1 — характеристика ГДМ; S характеристика ги-
дротормоза; 3 л- суммарная характеристика
При некотором передаточном отношении 2НГ, которое называют
критическим, составляющие подачи Qa = QT и подача Q = 0.
Одаако при £ир, несмотря на то, что Q = 0, момент, как показали
экспериментальные исследования, не равен нулю, а имеет мини-
мальное значение Л4тш, обусловленное вихревыми обменными
течениями в зазорах между лопастными колесами при отсутствии
основной объемной подачи в рабочей полости. При дальнейшем
увеличении частоты со2 (до i > ^р) знак подачи Q изменяется на
противоположный, ГДМ переходит иа обратный цикл, при котором
уже насосное колесо тормозит основной поток. Момент вновь
начинает расти.
Таким образом, ГДМ на режиме противовращения имеет не-
устойчивую АВ и устойчивую CD ветви внешней характеристики.
Таким образом, недостатком внешней характеристики ГДМ на
режиме противовращения является наличие неустойчивой ветви
ДВ, на которой скорость турбинного колеса резко возрастает
из-за перехода рабочей точки на устойчивую ветвь CD. В прак-
тике нежелательный «провал» характеристики устраняется по-
следовательным включением гидротормоза, причем его подбирают
так, чтобы совместная характеристика гидротормоза и ГДМ
не имела отрицательного градиента момента (рио. 4.11, б). Работа
ГДМ на режиме противовращения характеризуется уравнением
баланса энергии в виде
+ = (4.20)
Полная внешняя характеристика ГДМ на тяговом, тормозном
и обратимом режимах работы представлена на рио. 4.12.
При построении внешней характеристики ГДМ ее активный
диаметр Па, частота вращения входного звена и плотность
рабочей жидкости р принимают постоянными. Одиако на практике
эти параметры могут изменяться как в процессе проектирования
77
Рнс. 4.12. Полная карактеристика ГДМ
передачи, так и при ее эксплуатации. Уравнения связи, раскры-
вающие зависимости внешней и внутренней характеристик ГДМ
от значений colf р и D&, выводят на основании законов подобия
(см. п. 1.9).
Графические зависимости коэффициентов Хм, и ц от (i)
при постоянных р и <0! называют приведенной характеристикой
ГДМ (рис. 4.13). В уравнениях (1.92) и (1.94) коэффициенты
и Кл/, безразмерные и поэтому в технической литературе ха-
рактеристику л = f (t) часто называют безразмерной.
Если вместо плотности р и угловой скорости <0j в формулах (1.92)
и (1.94) использовать соответственно удельный вес у и частоту
вращения nit то эти выражения примут, вид
= <4'21> = <422>
В выражениях (4.21)' и (4.22)' коэффициенты и KNt имеют
размерность с2/м. Для увеличения численного значения ординат
приведенной характеристики делают иногда приведение к Da =
— 1 м, (Qi = 10 с”1 н р = 100 кг/м3. В этом случае коэффициент
момента
1.L = ьм-loo-io’. 1,о’ = ?.ы.ю*
и момент
ai = xL-io_‘p<oM.
При помощи приведенных характеристик целесообразно срав-
нивать, например, нагружающие, регулирующие, предохрани-
тельные и другие свойства различных ГДМ, отличающихся фор-
мами, числами и углами лопастей иасосиого, турбинного колес и
другими геометрическими элементами рабочей полости.
78
Рис. 4.13. Приведенная карактернсти-
ка ГДМ
Относительная внешняя ха-
рактеристика ГДМ представляет
собой зависимость относитель-
ных крутящих моментов от
передаточного отношения: М —
= f (i). Под относительным кру-
тящим моментом понимают от-
ношение текущего крутящего
момента к моменту на рас-
четном режиме. На рис. 4.14
приведена относительная харак-
теристика ГДМ, при построении которой в качестве расчет-
ного момента был принят ее оптимальный момент. Из графика
следует, что при уменьшении передаточного отношения (i 0,9)
момент Л4 резко возрастает, изменяясь сначала почти по прямой.
С дальнейшим уменьшением £ увеличение М замедляется и при
1 = 0 момент М ~ Mm„. При этом величина М может быть
в 20 ... 25 раз выше оптимального момента при £* ~ 0,97.
Универсальная внешняя характеристика ГДМ представляет
собой совокупность внешних характеристик ГДМ при различных
частотах вращения входного звена (рис. 4.15). Показатели внеш-
ней характеристики при изменении угловой скорости cot пере-
считывают по уравнениям подобия. Например,
^г = (-£)’’ откуда м'= м (^г)2- (4 23)
На универсальную характеристику часто наносят также за-
висимости моментов М от угловой скорости со, выходного звена
Рис. 4.14. Относительная внешняя ка-
рахтеристика ГДМ
Рис. 4.15. Универсальная внешняя
карактеристика ГДМ
79
ГДМ при одинаковых т| = I = 0,1 > 0,2, ... и т. д. Определим за-
висимость М = / (©а) при т) = £ = const. Для этого в уравнении
(1.92) частоту сох выразим через ©а/£. Тогда получим
Af = XMp-^D‘. (4.24)
Для любого i = т) = const уравнение (4.24) можно предста-
вить в виде
М = Л©|, (4.25)
гдо Л =LMpD®/>5.
Уравнение (4.25) представляет собой квадратичную пара-
болу, проходящую через начало координат. Задаваясь текущими
значениями £ = И, через любую точку внешней характеристики
ГДМ можно провести кривую равного КПД для подобных ре-
жимов, отличающихся ©j.
4.4. СОВМЕСТНАЯ РАБОТА ДВИГАТЕЛЯ И ГДМ
Характеристика привода, который представляет собой
комплекс двигатель — ГДМ, определяется их совместными пара-
метрами. На большинстве транспортных, строительных и дорож-
ных машин применяют двигатели внутреннего сгорания (дизели
и карбюраторные двигатели), а иа подъемио-траиспортных и гор-
ных машинах — электродвигатели. В настоящее время изучается
вопрос целесообразности использования в приводах ряда машин
паровых и газовых турбин. На рис. 4.16, а представлены типовые
характеристики паровых и газовых турбин (кривая 1, гипербола,
по внешнему виду также напоми-
нающая характеристику электро-
двигателя постоянного тока) и
двигателя виутреинего сгорания
(кривая 2), на рнс. 4.16, б —
характеристики асинхронных элек-
тродвигателей нормального ис-
полнения (кривая 5), с повы-
шенным моментом (кривая 4),
0л
Рнс, 4.16. Типовые характеристики двигателей
80
0,в ю
ид1иА стар
Рис. 4.17. Характеристики совместной работы ГДМ с двигателем внутреннего
сгорания
с повышенным скольжением (кривая 5). Рассмотрим совмест-
ную работу ГДМ с двигателем внутреннего сгорания и асин-
хронным электродвигателем нормального исполнения.
Работа ГДМ с двигателем внутреннего сгорания. При рас-
смотрении особенностей совместной работы двигателя и ГДМ
считаем заданными характеристику двигателя — зависимости мо-
мента и мощности от угловой скорости вала: Л4Д и от (од
(рис. 4.17, а), и внешнюю характеристику ГДМ — зависимости
Л/, т) от i при постоянных р, (рис. 4.17, б). При этом считаем,
что коленчатый вал двигателя жестко соедвнен с входвым валом
ГДМ, а выходной вал ГДМ является выходвым валом привода.
Требуется определить зону иагружеиия двигателя ГДМ и
построить выходную характеристику приводв — зависимость мо-
мента на выходвом валу привода от его угловой скорости: М =
= f (<“2)
Поставленную задачу будем решать графоаналитическим ме-
тодом. Отдельные этапы решения представлены иа рис. 4.17,в,
а, 5, е.
На первом этапе строим входную (нагрузочную) характери-
стику ГДМ (рис. 4.17, в) — зависимость момента на входвом
валу от его угловой скорости при i = const. Характеристику
Л/ = f (iox) строим для i = 0; 0,1, 0,2; ... и т. д. до i — i* по
уравнению (1.92). Прн этом значения для расчетных режимов
определяем как Ъ.м — М (pcolD.), используя внешнюю харак-
6 CveciH в. П. др. 81
герметику (рио. 4.17, б). Например, для t == 0 характеристику
входа строим следующим образом: используя данные характери-
стики на рио. 4.17, б по Л4, р, и известное значение диаметра Ьа,
определяем коэффициент XM(/==0)j затем в выражении (1-92) на-
ходим значение постоянного коэффициента А=о = ^«(/=о)РГ>а
и по уравнению Л4«=о) = Л(*=о)®1 строим параболу ЛТ<^=в0, =
= f задаваясь произвольными значениями ©>. Аналогично
строим параболы для других расчетных значений i (рис. 4.17, в).
Таким образом, входная (или нагрузочная) характеристика ГДМ
представляет собой семейство парабол, выходящих из начала коор-
динат. Очевидно, что изменением любого сомножителя уравнения
(1.92) можно изменить положение семейства парабол (а не какую-то
одну из них) в координатах М — (i)x.
Совместив на одном графике (рис. 4.17, г) (в одинаковом мас-
штабе) характеристику двигателя (см. рис. 4.17, а) с характери-
стикой входа ГДМ (см. рис. 4.17, в), получим точки пересечения
О, /, 2 и т. д. характеристик, являющиеся точками совместной
работы диигателя и ГДМ. Точки б, 1, 2 н т. д. характеризуют уста-
новившиеся режимы работы привода, состоящего из двигателя
н ГДМ. Для этих режимов справедливо равенство Ад = Л\ илн
Л4д«0д = Afcoj. В рассматриваемом приводе а»д = <о1 н поэтому
Мд = Мг, т. е. только точки б, /, 2 и т. д. являются точками
совместной работы данного двигателя и ГДМ. Зона режимов
работы двигателя на рис. 4.17, гот <вд при i = 0 до соц при i — iBt
является зоной нагружения данного двигателя данной ГДМ.
Выходную характеристику строим в координатах М — соа
(рис. 4.17, д) следующим образом. Для каждого расчетного уста-
новившегося режима работы привода определяем значения мо-
мента М по ординатам точек б, /, 2 и т. д. графика рис. 4.17, г,
а значения абсцисс со2, соответствующие этим расчетным режи-
мам, определяем как юВр = <olpip, где и L — абсциссы то-
чек 0, /, 2 и т. д. на рис. 4.17, г. Зависимость М = f (сов) иногда
называют деформированной характеристикой двигателя, так как,
если построить в одинаковом масштабе и совместить на одном гра-
фике характеристики, изображенные иа рис. 4.17, г и б, можно
видеть, что все значения моментов (точки б, 1, 2 и т. д.) сдвинутся
влево по горизонтали, так как по оси абсцисс отложена ско-
рость = coxi, где i < 1 •
Особенностью выходной характеристики привода (см.
рис. 4.17, д) по сравнению с характеристикой двигателя (см.
рис. 4.17, с) является то, что она имеет начало на оси ординат,
т. е. привод с ГДМ позволяет получить любую угловую скорость соа
выходного вала вплоть до нуля. При наличии ГДМ момент на
валу двигателя прн <в8, близких к нулю, больше, чем момент без
ГДМ. Это объясняется тем, что прн наличии ГДМ двигатель раз-
вивает большую скорость и работает иа режиме большего кру-
тящего момента (см. рис. 4.17, г, точка О). Однако, если двигатель
82
может работать при соа = 0, этого еще недостаточно для его
нормальной эксплуатации. Необходимо, чтобы двигатель с ГДМ
работал устойчиво прн всех изменениях нагрузки.
Для решения этого вопроса рассмотрим условие устойчивой
работы привода (рис. 4.17, е). Из рис. 4.17, е видно, что если при
работе двигателя с ГДМ при любом i > 0 по какой-либо причине
возрастает нагрузка на выходном валу привода вплоть до его
остановки, двигатель не заглохнет, а будет работать иа режиме,
определяемом точкой А характеристики при угловой скорости
соответствующей i = 0. Если при этом крутящий момент двига-
теля почему-либо (например, вследствие падения давления при
всасывании) уменьшится до значения, соответствующего точке Б,
то угловая скорость соц также уменьшится и в связи с этим умень-
шится момент, нагружающий двигатель до значения, определяе-
мого точкой В. При этом нагружающий момент уменьшается
быстрее, чем момент двигателя, и вал двигателя начнет разго-
няться до тех пор, пока ие установится новый равновесный ре-
жим работы. Таким образом, работа двигателя с ГДМ будет устой-
чивой при условии
I tg S’lA | > | *g <РдЛ I-
Требования, предъявляемые к внешней характеристике ГДМ,
предназначенной для работы в приводе машины с двигателем
внутреииего сгорания, следующие.
1. Для использования максимальной мощности двигателя при
максимальном КПД ГДМ ее входная характеристика при i*
должна пересекать характеристику Мд = f (шд) в точке, соответ-
ствующей Л^дгпах-
2. При минимально устойчивой угловой скорости вала дви-
гателя ГДМ должна нагружать двигатель моментом, ие превышаю-
щим Мд при <0дш1п- Это требование необходимо для того, чтобы
при остановке транспортной машины ее не «вело» при включенном
сцеплении, т. е. момент сопротивления передвижению машины
должен быть больше момента, развиваемого ГДМ-
S. Для использования максимального момента двигателя на
режиме трогания транспортной машины входная характеристика
ГДМ при i — 0 должна пересекать характеристику ЛТД = f (шд)
в точке, соответствующей Л4Д1П11Х.
Известно, что двигатели внутреииего сгорания запускают
вспомогательным оборудованием (например, стартером), и они
не могут работать при юд < <одт111. ГДМ позволяют осуществить
разгон выходного вала привода с места под нагрузкой, не перегру-
жая двигатель, и обеспечить его устойчивую работу во всем диа-
пазоне скоростей выходного вала. Одновременно с этим ГДМ
выполняет функции демпфера и фильтра крутильных колебаний,
источниками которых являются двигатель внутреииего сгорания
и случайная нагрузка, действующая иа выходной вал привода со
стороны рабочего органа машины, т. е. ГДМ снижает уровень
6“ 83
Рис. 4.18. Характеристики совместной работы ГДМ с асинхронным электродви-
гателем
динамических нагрузок в приводе и трансмиссии машины и повы-
шает надежность ее работы. ГДМ также позволяет равномерно
распределить нагрузку в многодвигательном приводе, который
применяют на некоторых машинах.
Работа ГДМ с асинхронным электродвигателем переменного
тока. Асинхронные электродвигатели с короткозамкнутым рото-
ром являются наиболее надежными и дешевыми. К недостаткам
их характеристики относится малый пусковой момент, что тре-
бует применения специальных устройств для пуска их под на-
грузкой, и узкий диапазон изменения рабочей угловой скорости
ротора и крутящего момента (см. рис. 4.16, б). Существенного
улучшения характеристик привода с упомянутым электродвига-
телем можно достигнуть применением ограничивающей ГДМ
(ГДМ, предназначенной для ограничения передаваемого крутя-
щего момента). Критерием ограничивающего свойства ГДМ яв-
ляется коэффициент перегрузки, представляющий собой в общем
случае отношение максимального крутящего момента к расчет-
ному. На практике чаще всего коэффициент перегрузки ГДМ
определяют как
Апер = Л4СТ/Л1*,
где Мст — крутящий момент ГДМ на стоповом режиме.
Для обычных ГДМ коэффициент /Спер может достигать зна-
чений 10 ... 12, для ограничивающих Кпвр = 1,5 ... 5 в зависи-
мости от конструкций ГДМ, особенности и принцип действия
которых будут рассмотрены далее.
При использовании в приводе с электродвигателем перемен-
ного тока ограничивающей ГДМ решается, иапример, проблема
84
привода больших инерционных масс, для разгона которых без
ГДМ требуется глубокое и длительное по времени регулирование
скольжения двигателя.
На рио. 4.18, а, б приведены характеристики асинхронного
электродвигателя переменного тока с короткозамкнутым ротором
типа АП и ограничивающей ГДМ с коэффициентом перегрузки
Апер = 2. На рис. 4.18, а показана также зависимость силы
тока /д = / ((Од) и входные характеристики ГДМ при £ = 0 и
£ = i*. Для работы с данным двигателем ГДМ подбирают таким
образом, чтобы ее входная характеристика при i = 0 пересекала
характеристику двигателя в точке 2, соответствующей Л4дшах,
благодаря чему появляется возможность при пуске использовать
этот момент, а не пусковой момент днигателя (точка /), который
примерно в 2 раза меньше. Соответствующая сила тока при пуске
(точка 2') будет также значительно меньше пускового тока (точ-
ка Г). Входная характеристика ГДМ для i = i* должна пересе-
кать характеристики Л1д и соответственно в точках 3 н 3',
где момент соответствует М*.
На рис. 4.18, а видно, что скорость юд может быстро увеличи-
ваться, так как электродвигатель нагружается в области сравни-
тельно высоких скоростей (од. Благодаря этому существенно
сокращается время потребления двигателем большого пускового
тока, а следовательно, улучшается его тепловой режим. Кроме
того, для пуска машины используется момент Л4ДПМХ» развивае-
мый при уже уменьшившемся потреблении тока и интенсивном
охлаждении из-за высокой скорости сод. В связи с этим привод,
состоящий из электродвигателя с короткозамкнутым ротором и
ограничивающей ГДМ, по пусковым качествам не только не усту-
пает, но и превосходит асинхронный электродвигатель с контакт-
ными кольцами и пусковым реостатом. Так как мощность электро-
двигателя для пуска под нагрузкой выбирают по пусковому мо-
менту двигателя, то ограничивающие ГДМ позволяют снизить
установочную мощность двигателей и при самых сложных усло-
виях пуска применять асинхронные электродвигатели с коротко-
замкнутыми роторами. Выходная характеристика привода, со-
держащего асинхронный электродвигатель и ограничивающую
ГДМ, имеет такой же вид, как и выходная характеристика иа
рис. 4.17, д.
4.5. РЕГУЛИРОВАНИЕ ГДМ
При работе различных машин необходимо обеспечить
их регулирование, т. е. согласовать характеристики машин с ха-
рактеристикой потребителя. Например, для насоса часто требуется
изменять характеристику с целью получения заданной подачи,
которая пропорциональна угловой скорости его вала. Регулиро-
вание может осуществляться с помощью как двигателя и самой
машины, так и ГДМ.
85
Регулировать частоту вращения выходного вала привода,
содержащего, например, нерегулируемый двигатель (электродви-
гатель с короткозамкнутым ротором) и регулируемую ГДМ,
можно изменением степени наполнения и формы ее рабочей полости
и изменением свойств (плотности, вязкости) рабочей жидкости.
Таким образом, под регулированием ГДМ следует понимать
управляемое изменение угловой скорости выходного вала или его
крутящего момента. Основными параметрами регулирования яв-
ляются глубина, быстрота и устойчивость регулирования.
Глубина регулирования определяет диапазон изменения угло-
вой скорости выходного вала по сравнению с его скоростью на
оптимальном режиме, который может обеспечить ГДМ в про-
цессе регули рования:
^рег —
J2p _ | _ G>tp
где сй2р — текущая скорость выходного вала привода.
Глубина регулирования определяется остаточным моментом
или устойчивостью работы ГДМ. Остаточный момент зависит от
конструктивного исполнения регулируемой ГДМ и способа регу-
лирования. Минимальный остаточный момент может быть равен
моменту дискового трения илн вентиляционному моменту (мо-
менту при работе ГДМ на воздухе). Устойчивость предопределяет
работу ГДМ и соответственно всей механической системы машины
без колебаний. Быстрота регулирования или быстродействие —
это скорость (время), с которым выполняется команда н осуще-
ствляется смена режимов работы. Она зависит от конструктивного
исполнения ГДМ и способа регулирования. При регулировании
быстродействие тем выше, чем больше жесткость внешней харак-
теристики ГДМ.
Регулирование ГДМ изменением степени наполнения рабочей
полости. Под степенью наполнения рабочей полости q0 понимают
отношение объема рабочей жидкости в рабочей полости ГДМ
к объему рабочей полости. Изменять д0 можно путем регулирова-
ния потока жидкости на входе в рабочую полость, иа выходе из
иее или на входе и иа выходе одновременно.
Системы управления, относящиеся к одному способу регули-
рования потока, существенно отличаются друг от друга как
отдельными узлами, так и компоновкой в целом. При этом кон-
структивно ГДМ могут быть проточными (во внутренних полостях
есть проток рабочей жидкости за счет внешней системы пита и ня),
и непроточными (во внутренних полостях находится несменяемое
в процессе работы количество рабочей жидкости).
Регулирование изменением степени наполнения приводит
как бы к различным очертаниям рабочей полости с размерами,
отличающимися друг от друга, и, следовательно, к различным
характеристикам ГДМ. Если при полном наполнении (^0 = 1)
86
Рис. 4.19. Движение жидкости в ГДМ при q0 50 % :
а — при а =» 0: б — при а = б ... Х0 %; в — при а — 30 ... 35 %; S“ при а > 46%
форма потока целиком определяется границами рабочей полости,
то при частичном наполнении (<?0 < 1) жидкость может принимать
очертания в зависимости от действующих в потоке сил, обуслов-
ленных режимами работы. При прочих равных условиях чем
меньше q0, тем меньше момент, передаваемый ГДМ при данном i,
при д0 = 0 момент М практически равен нулю, так как обуслов-
ливается только механическими и вентиляционными потерями,
и Арег = 0- В то же время при эксплуатации частично заполнен-
ных ГДМ было обнаружено отрицательное явление: муфта при
определенной нагрузке начала работать неустойчиво, наблюдался
колебательный процесс и неоднократно машина попадала в ре-
зонанс. Как показали исследования ИГД им. А. А. Скочинского,
это явление было тесно связано с процессом регулирования ГДМ
изменением степени нх наполнения.
Рассмотрим особенности рабочего процесса в ГДМ при изме-
нении q0 и скольжения s (рис. 4.19). По данным В. М. Бермана
степень q0 0,5 является наиболее опасной с точки зрения не-
устойчивой работы привода.
На режиме холостого хода (рис. 4.19, а) жидкость в рабочей
полости располагается иа одном уровне, скорость ст = 0, сколь-
жение s — 0/Жидкость одинаковыми центробежными силами (от
действия угловой скорости coj = соа) прижимается к периферий-
ным частям торов лопастных колес и замыкающего кожуха.
С появлением скольжения (s > 0) начинается циркуля-
ция жидкости в рабочей полости и взаимодействие ее с насосным
и турбинным колесами. При этом возникают дополнительные
центробежные силы относительно мгновенного центра О враще-
ния потока. Так как одновременно с этим угловая скорость со2
уменьшается и действие центробежных сил, обусловленных этой
скоростью, ослабевает, рабочая жидкость принимает форму, по-
казанную на рис. 4.19, б. При дальнейшем увеличении скольже-
ния рабочая жидкость еще больше заполняет турбнниое колесо,
в то время как радиус rBi практически не изменяется (рис. 4.19, в).
При скольжении s > 40 ... 45 % происходит скачкообразная
перестройка потока в кольцевой (рис. 4.19, г). Для участка работы
ГДМ со скольжением s > 40 ... 45 % (малый контур циркуля-
87
Рис. 4-20. Внешняя характеристика
ГДМ при степени заполнения — 0,5
Рис. 4.21. Относительная внешняя ха-
рактеристика ГДМ с областью переход-
ных процессов
ции жидкости—МКЦ) момент 7ИМ1Щ = pQ (cUH2rH8 — cBTjrH1),
где rB2/rBl = const. Объемная подача Q = const для определенного
s = const. При регулировании ГДМ по мере увеличения скольже-
ния поток в турбинном колесе опускается к оси вращения ГДМ и
при скольжении s > 35 ... 40 % (в зависимости от наполнения д0)
отдельные частицы жидкости начинают попадать на лопасти
насосного колеса. Прн дальнейшем увеличении s > 45 % воз-
никает большой контур циркуляции (БКЦ) и происходит резкое
увеличение момента за счет существенного уменьшения радиуса
Гн1 до Гв1 (см. рис. 4.19, г). Момент Л1бкц = pQ (си„2гя2 —сит2гя1).
Таким образом, для определенного i Мбкц AlMKq, так как
Гнт Гнь Каждый из контуров движения (см. рис. 4.19) является
устойчивым в определенной зоне s, и только в момент перестрое-
ния потока имеет место неустойчивый режим работы частично
наполненной ГДМ.
На рис. 4.20 показана внешняя характеристика ГДМ со сте-
пенью наполнения q0 = 0,5. Из рисунка видно, что в общем слу-
чае переходные процессы, обусловленные перестроением потока
в рабочей полости, могут протекать устойчиво при наличии
определенной жесткости характеристики переходного процесса
(участок а—б', жесткость М -= dMtdi > 0) и неустойчиво (уча-
сток а—б, величина 1/Ж = 0). При неустойчивой работе пере-
строение потока сопровождается колебательным процессом.
В этом случае под действием разности моментов в точках б и а
происходит ускорение выходного вала до точки в, центробежные
силы в турбинном колесе увеличиваются и момент ГДМ падает
до значения в точке г, но момент сопротивления заставляет за-
медлиться выходной вал (точка а). Затем процесс повторяется
88
a)
б) в)
Рнс. 4.22. Управление переходным процессом в ГДМ:
а — О увеличенным внутренним горем в турбинном колесе орофвлированвнв " в на-
сосном; б ~ с двумя рабочими полостями; • — о порогом
по аналогичному циклу. Получаем колебательный контур абвга,
для устранения которого нужно либо изменить момент сопротив-
ления (увеличить или уменьшить), либо увеличить q0.
На рнс. 4.21 показана относительная внешняя характеристика
ГДМ, регулируемой наполнением. На характеристике заштри-
хована область переходных процессов, вызванных перестроением
потока при уменьшении q0. Очевидно, что области с колебательным
процессом оказывают отрицательное влияние иа характеристики
ГДМ и машины в целом. Известны и применяются следующие
способы уменьшения колебательных процессов в гидромуфтах
с q0 < 1: а) смещение зоны перестроения потока в область боль-
ших скольжений; б) увеличение жесткости переходного процесса
при перестроении потока; в) обеспечение работы ГДМ при не-
изменном контуре движения.
Смещение зоны перестроения потока в область больших сколь-
жений (s> 60 %) можно получить, например, для ГДМ со спе-
циально спрофилированными внутренними торами лопастных
колес и зауженной рабочей полостью (рис. 4.22, а). Увеличение
жесткости переходного процесса при перестроении потока можно
получить, например, в ГДМ с дополнительной рабочей полостью
на периферии (рис. 4.22, б). Действие этой ГДМ аналогично
действию ГДМ с увеличенным активным диаметром. Дополни-
тельная рабочая полость всегда имеет q0 = 1 и, следовательно,
плавно изменяющийся момент при s = 0 ... 100 %; перестроение
потока в основной рабочей полости при q0 < 1 происходит при
резком изменении момента, следовательно, и суммарный момент
будет также резко изменяться. Таким образом, упомянутые кон-
струкции ие устраняют перестроения потока и поэтому при работе
в приводе машины не исключают колебательного процесса. Но
вследствие некоторого смещения характеристик несколько уве-
личивается глубина регулирования.
89
Рис. 4.23. Схема ГДМ с поворотной черпаковой трубкой и вращающимся резер-
вуаром
Обеспечить работу ГДМ при неизменном контуре движения
можно, например, с помощью так называемого порога, устанавли-
ваемого в рабочей полости (рис. 4.22, б). Наружный диаметр по-
рога Du = (0,5 ... 0,55) Da. Из-за незначительной разницы ра-
диусов гв1 и r'Bi характеристики таких ГДМ практически не
имеют области переходных процессов, но их жесткость несколько
больше, чем у ГДМ, описанных выше. Порог препятствует про-
теканию колебательного процесса, так как он увеличивает радиус
гН1, заставляя поток перемещаться по МКЦ- Прн работе таких
ГДМ на больших скольжениях имеют место гидравлические по-
тери иа пороге, что относится к недостатку ГДМ с порогом. Но
с другой стороны порог является сравнительно простым усовер-
шенствованием и поэтому часто используется в конструкциях
передач. Для иллюстрации принципа действия регулируемых
наполнением ГДМ разберем некоторые нх конструктивные схемы
и способы управления нми.
ГДМ. с поворотной черпаковой трубкой и вращающимся ре-
зервуаром (регулирование потока на входе в рабочую полость)
показана на рис. 4.23. На периферии насосного колеса установлен
жестко связанный с ним замыкающий кожух, образующий допол-
нительный вращающийся резервуар /, объем которого должен
быть несколько больше объема жидкости в рабочей полости пол-
ностью заполненной ГДМ. На оси, отстоящей с эксцентриситетом е
от оси вращения ГДМ, расположена поворотная изогнутая н
развернутая входным и выходным сечениями на 90° черпаковая
трубка 2. Трубка неподвижна при данном установившемся режиме
работы ГДМ и может поворачиваться под действием рычага управ-
ления 3 на угол до 90°. Рабочая полость ГДМ н вращающийся
90
резервуар связаны жиклером (калиброванным, постоянно откры-
тым отверстием). При работе ГДМ весь объем рабочей жидкости
делится на два объема!
и= Vp.„+ V».p,
гДе Vp. п н Ув. р — объемы жидкости в рабочей полости и вращающемся резер-
вуаре.
Если Ур. п — 0, то Ув. р = V н ГДМ отключена, передает
минимальный момент, обусловленный механическими и вентиля-
ционными потерями. Если VB. р = 0, то V — Ур. D и ГДМ пере-
дает максимальный момент. Роль устройства для перераспределе-
ния объемов Ур. п и Ув р играет поворотная черпаковая трубка.
Так, если она выведена из потока, вращающегося вместе с ре-
зервуаром, то вся рабочая жидкость через жиклер вытечет в ре-
зервуар, т. е. Ур. и = 0 н момент М = Afmm = 0. При введении
трубки в поток рабочая жидкость под действием скоростного
напора «ж/(2g) потечет в рабочую полость. А так как диаметр
трубки значительно больше диаметра жиклера, каждое фикси-
рованное положение ее при повороте однозначно определяет на-
полнение рабочей полости. При повороте, обеспечивающем взаимо-
действие полного сечення трубки с потоком жидкости в резер-
вуаре, объем Ув. р ~ 0 и момент М = 7Итят. Подобная ГДМ
проста по конструкции и надежна в работе; она не проточная,
обладает большой глубиной регулирования, так как остаточный
момент AfOCT « 0; благодаря порогу исключается колебательный
режим работы. Однако эта ГДМ имеет недостатки; невысокое бы-
стродействие, так как диаметры жиклера и черпаковой трубки
малы и перераспределение объемов Ур и и VB. р происходит срав-
нительно медленно (в течение нескольких секунд, а не долей
секунд, как было бы желательно); из-за вращающегося резер-
вуара увеличены габаритные размеры ГДМ н ее инерцнониость,
что отрицательно сказывается на динамических характеристиках
привода.
ГДМ. со скользящей черпаковой трубкой и вращающимся ре-
зервуаром (регулирование потока на выходе из рабочей полости)
показана иа рис. 4.24. Ее схема н принцип действия во многом
напоминают предыдущую. ГДМ проточная. Регулирование осу-
ществляется перераспределением объемов жидкости в рабочей
полости и в баке. Общий объем V = Ур.п + Vc, где Vc — объем
жидкости в баке. Насос питания 4 подает из бака постоянное
количество жидкости в рабочую полость /, которая жиклером
связана с небольшим вращающимся резервуаром 2, сообщающимся
с баком с помощью скользящей черпаковой трубки 3. При выводе
приемного сечения трубки во вращающийся резервуар объем
Ур. п = Ушах и момент М = М^. Промежуточные положения
черпаковой трубки обеспечивают промежуточные значения мо-
мента. ГДМ имеет те же преимущества и недостатки, что и преды-
дущая конструкция. В то же время использование скользящей
91
Рис. 4.26. Схема ГДМ с неподвижной
черпаковой трубкой
черпаковой трубки позволяет несколько уменьшить радиальный
размер ГДМ и снизить ее инерционность.
ГДМ с неподвижной черпаковой трубкой (регулирование потока
на входе и выходе из рабочей полости) показана на рис. 4.25.
Муфта проточная, сравнительно проста по конструкции и удобна
в эксплуатации. Так как черпаковая трубка 2 неподвижна, ее
приемное отверстие все время находится под напором. Жидкость
посредством черпаковой трубки поступает в коллектор 3 и затем
в рабочую полость 1. При установившемся режиме работы коли-
чество жидкости, отведенное трубкой, равно количеству жидко-
сти, поступившей в рабочую полость. Процесс регулирования за-
ключается в том, что при уменьшении наполнения часть жидкости
отсасывается насосом 4 из коллектора в бак 5, а при увеличении
наполнения — нагнетается через коллектор в рабочую полость.
Таким образом, насос работает только в период изменения напол-
нения рабочей полости ГДМ. При частичном наполнении и устано-
вившемся режиме насос не работает, т. е. быстродействие ГДМ в
основном определяется подачей насоса. Эта схема управления легко
автоматизируется, так как насос может работать по любой, заранее
разработанной программе.
Известны другие принципиально похожие схемы ГДМ, регули-
руемых изменением наполнения [31-К их преимуществам следует
отнести простоту и надежность конструкции, большую глубину
регулирования, достаточно высокую жесткость характеристик прн
92
Рис. 4.26. Характеристики ГДМ с пово-
ротными лопастями:
1 — открытыми; 3 “ вакриТЕша
переходных процессах, а к недо-
статкам несколько увеличенные
габаритные размеры, большую
инерционность и низкое быстро-
действие.
Регулирование ГДМ измене-
нием формы рабочей полости.
Создание подобных конструкций
обусловлено стремлением повы-
сить быстродействие регулируе-
мых ГДМ. Рассмотрим некоторые
принципиальные конструктивные
схемы, в которых форма рабочей
полости изменяется при пово-
роте, складывании и выводе
лопастей из круга циркуляции. Поворот лопастей колес
может осуществляться вокруг радиальных осей или осей,
параллельных оси вращения ГДМ. Регулирование пово-
ротом лопастей происходит при полностью заполненной
ГДМ, т. е. нарушение устойчивости из-за перестроения по-
тока жидкости исключается. Предельные характеристики опреде-
ляются предельными углами поворота лопастей (рис. 4.26), про-
межуточные находятся между ними. При повороте лопастей изме-
няется жесткость характеристики. При малой жесткости (кривая 2
на рис. 4.26), когда малому приращению момента соответствует
большое приращение угловой скорости, и при изменяющейся на-
грузке на рабочем органе машины скорость системы может быть
нестабильной.
Рис. 4.27. ГДМ с поворотными полулопастями насосного колеса:
а —схема; б — характеристика
93
Рис. 4.28. Схемы регулируемых ГДМ:
с “• со складывающимися лопастями; б » о убирающимися лопастями
ГДМ с поворотными полулопастями насосного колеса (конструк-
ция лаборатории гидравлических машин АН УССР) и ее характе-
ристики показаны на рис. 4.27, а, б. Когда направление поворот-
ных лопастей совпадает с направлеинем иеповоротных, ГДМ пере-
дает максимальный момент. При повороте лопастей на 90° закры-
ваются межлопастные каналы в рабочей полости, преграждая
путь движению потока, в этом случае момент М = Mmin- Про-
межуточные положения поворотных лопастей определяют проме-
жуточные значения моментов. ГДМ обладает высоким быстродей-
ствием, ио сложна по конструкции, так как приходится повора-
чивать лопасти вращающегося колеса. Глубина регулирования обу-
словлена остаточным моментом Afmln при положении лопастей
перпендикулярно потоку жидкости. Экспериментальные исследо-
вания показали, что даже при использовании специальных замко-
вых устройств по торцам поворотных лопастей не удается полно-
стью исключить местную циркуляцию жидкости вокруг лопастей
н дисковое треиие, и остаточный момент в этом случае Afra)n =
= 0,4 М*. При отсутствии замковых устройств М^— 0,75 М*
(см. рис. 4.27, б).
Исследования показали, что для реализации большой глубины
регулирования лопасти при повороте должны полностью выво-
диться из активной зоны действия потока (рис. 4.28, а, б).
В ГДМ со складывающимися лопастями (конструкция НПО
ВНИИМетмаш) лопасти турбинного колеса поворачиваются отно-
сительно осей, параллельных оси вращения ГДМ (рис. 4.28, а).
Прн передаче ГДМ минимального момента Л1Ш1О л; 0 лопасти рас-
полагаются в центральной части вокруг выходного вала и ие взаи-
модействуют с потоком жидкости, который образует вращаю-
94
щееся на периферии рабочей полости кольцо. Остаточный момент
51^ обусловливается только трением в подшипниках и в меха-
низме поворота лопастей и составляет (0,02 ... 0,005) М*, т. е.
ГДМ обладает высокой глубиной регулирования при почти мгно-
венном быстродействии. Недостатком ГДМ является сложность
конструкции (и особенно сложность механизма поворота лопастей
на вращающемся валу) и повышенные гидравлические потери (ло-
пасти турбинного колеса не имеют наружных торов), поэтому нх
целесообразно применять только в специальных установках, где
требуется особая глубина регулирования и высокое быстродей-
ствие.
В ГДМ с убирающимися лопастями (конструкция НПО В НИИ-
Строй дормаш) лопасти турбинного колеса поворачиваются отно-
сительно осей, перпендикулярных оси вращения ГДМ, и одновре-
менно могут смещаться вместе со своими осями вдоль оси враще-
ния ГДМ (рис. 4.28, б). В «убранном» состоянии (штриховая ли-
ния) лопасти турбинного колеса полностью выведены из зоны взаи-
модействия с потоком жидкости и ГДМ передает минимальный
момент (0,02 ... 0,005) М*. ГДМ имеет те же преимущества и недо-
статки, какие и предыдущая. Число лопастей турбинного колеса
в обеих конструкциях меньше оптимального. Это объясняется
сложностью их изготовления, поэтому ГДМ менее энергоемки, чем
обычные. Кроме того, внутренние кромки поворотных лопастей,
соприкасающихся с торовыми поверхностями, подвержены ин-
тенсивному изнашиванию и требуют специальной упрочняющей
обработки (например, термической), что дополнительно увеличи-
вает себестоимость изготовления подобных ГДМ.
Из технической и патентной литературы известны также кон-
струкции регулируемых ГДМ, в которых форма рабочей полости
изменяется с помощью управляемого шибера, изменения зазора
между лопастными колесами, изменения ширины лопастей одного
нз колес и др. 125].
Регулирование ГДМ изменением свойств рабочей жидкости.
Из выражения (1.92) следует, что при работе ГДМ на жидкостях,
отличающихся вязкостью и плотностью, прн определенных зна-
чениях а>ь I = const отношение моментов
ЛТ/М=(р7р)/С/Г. (4.26)
где параметры со штрихом обозначают изменение свойств рабочей
жидкости.
Если учесть, что коэффициент £ в основном определяется вяз-
костью v рабочей жидкости, то с достаточной степенью точности
выражение (4.26) можно записать в виде
МЧМ = (р7р) /W- (4-27)
Выражение (4.27) позволяет оценить параметры регулирова-
ния ГДМ при изменении вязкости и плотности рабочей жидкости.
Следует отметить, что рабочие жидкости, используемые в совре-
95
4.1. Значения плотности и визжости рабочих жидкостей
Рабочая жидкость Плотность, и г/м" Вязкость при БО ”(1
условная. ВУ«
Турбнивое масло 22 (Л) 919,4 (20 ... 23) 10-« 2,9... 3,2
АУ 906 ... 914 (12 ... 14) 10-* 2,05 ... 2,26
АМГ-10 867 10- ю-« 1.9
И-12 894 ... 909 (10... 14) 10-* 1,86 ... 2,26
И-20 899 ... 919 (17... 23) 10-« 2,6 ... 3,31
И-30 904 ... 935 (27 ... 33) 10-« 3,81 ... 4,95
И-45 904 ... 945 (38 ... 52) IO"* 5,74 ... 7,07
Соляровое масло 862 ... 903 (4.6 ... 8,8) Ю-* 1,39 ... 1,76
Трансформаторное масло 913 9,3-10-* 1,82
Велосит 883... 904 (4... 5,1) 10-« 1,29 ... 1,4
ВНИИНП-1 878 24-10-« 3,39
МС-14 908 14-10“* 2.26
МС-20 939 147,7» 10 20
менных гидроприводах, при Одинаковых режимах их эксплуата-
ции существенно отличаются как по вязкости, так н по плотности
(табл. 4.1).
Кроме того, известны так называемые синтетические жидкости,
плотность которых около 2000 кг/м8. Если применять вместо жид-
костей ртуть, жидкие металлы, твердые вещества (например,
свиицовую дробь), плотность которых существенно отличается от
плотности масел, представленных в табл. 4.1, можно добиться
существенного увеличения передаваемого ГДМ момента при по-
стоянном активном диаметре.
В качестве ограничений использования рассматриваемого спо-
соба регулирования ГДМ следует отметить, что увеличение вязко-
сти жидкости с уменьшением передаваемого момента [согласно
выражению (4.27)1 приводит к повышению потерь на трение и,
как следствие, к понижению КПД. В то же время существенное
понижение вязкости ведет к увеличению утечек и требует услож-
нения конструирования уплотнений Увеличение плотности ра-
бочего тела может привести к существенному возрастанию массы
гидропривода. В ряде случаев увеличение плотности жидкости
сопровождается н увеличением ее вязкости (например, масла
И-45, МС-20 в табл. 4.1). В этом случае глубина регулирования
будет несколько уменьшаться. Известны способы изменения вяз-
кости рабочей жидкости путем изменения температуры, ввода в
жидкость специальных присадок [3, 41. Из патентной литературы
известна конструкция ГДМ, в которой используется специальная
магнитная жидкость и, помещая муфту в переменное магнитное
поле, удается изменять вязкость рабочей жидкости. Зависимость
кинематической вязкости от температуры для минеральных масел
96
Рис. 4.29. Внешняя характеристика ГДМ при работе на минеральных маслах
с различной вязкостью:
1 — V = 36-10 '" м’/с; 7 — v — 3,72- 10" ы'/а
с условной вязкостью до 60° ВУБ0 при температуре 30 ... 150 °C
определяется соотношением
= (4.28)
где п — показатель, зависящий от условного коэффициента вязкости:
ВУМ ...... 1,2 1.5 1.8 2.0 3,0 4,0 5,0 6,0
п................ 1,39 1,59 1,72 1,79 1,9 2,24 2,24 2,32
Эффективность регулирования ГДМ изменением вязкости ра-
бочей жидкости можно оценить по характеристике (рис. 4.29) (31.
Из рисунка следует, что при увеличении вязкости в 9,68 раза мо-
мент ГДМ на стоповом режиме уменьшается в 1,6 раза и на опти-
мальном режиме в 2,1 раза.
Плотность рабочей жидкости можно также изменять путем из-
менения ее температуры, используя в системе питания специаль-
ный теплообмениик. Зависимость плотности рабочей жидкости от
температуры определяется соотношением
р<=-т+^г- <4-29>
где pf, р — плотности жидкости при разных температурах; А/ — приращение
температуры; а — коэффициент температурного объемного расширения жидко-
сти; рекомендуется , принимать а « 8-10-4 1/°С [4].
ГДМ можно применять, например, для регулирования угловых
скоростей валов объемных и лопастных гидромашин. Поэтому
целесообразно рассмотреть, при каком сочетании будет обеспечена
наибольшая экономичность работы системы. ГДМ устанавливают
между двигателем, имеющим угловую скорость <од = const, и ма-
шиной, угловая скорость которой регулируется (соа = <ор #=
7 Стесва G. П. ДР- 97
const). Общее уравнение зависимости мощности машины от уг-
ловой скорости ее вала имеет вид
= № (иРЮ“р, (4.30)
где ctp — любое положительное число.
Мощность и угловая скорость турбиииого колеса без учета ме-
ханических потерь равны соответствующим параметрам машины.
Следовательно|
лг2 = Ni (<м<о;)“р. (4 31)
Мощность насосного колеса
Mi = М27П = (ЛВД (<о27йЗ)“р. (4.32)
Потерн мощности в ГДМ
NB = Nt - (17!) - О- (4.33)
Разделим и. умножим выражение (4.37) на a“pt
« (-S- № (т - *) = -$7а“Р"(1 - в)-(4 34)
Из выражения (4.34) следует, что Na = 0 в двух случаях!
1) при ц = 1, т. е. когда ©! = соа; практического интереса
такой случай не представляет, так как момент и мощность равны
нулю;
2) при т]ар -| = 0 или, что то же, ц = 0; такой случай при регу-
лировании иаполиеиием будет при полном опорожнении рабочей
полости, а при повороте лопастей — при полном закрытии. Если
исключить механические и вентиляционные потери в ГДМ, мо-
мент и мощность будут равны нулю. Таким образом, в случае регу-
лирования ГДМ наибольшие потери будут при 0 < т] < 1 или
0 < s < 1.
Для нахождения режима с наибольшим значением потерь про-
дифференцируем выражение (4.34) по КПД и приравняем произ-
водную нулю, считая, что КПД двигателя не изменяется!
1(<Хр - 1) l№ - ар!)^1] = о (4.35)
' ОТ) р
Производная dNJd^ = 0, когда выражение в квадратных скоб-
ках равно нулю. При этом (ар — 1)/ар = ввр_1/ц“р-2 и оконча-
тельно
В = 1 — 1/ар. (4.36)
Подставив выражение (4.36) в формулу (4.34), получим
(1----(4.37)
fa*) Р Ор / Op v
98
На практике используют машины с различными показателями
сср. В частности, для объемной машины ар = 1; для лопастной ар =
= 3,0.
При ctp = 1 имеем неопределенность!
Раскроем неопределенность!
для чего прологарифмируем это выражение!
1пВ« = (ар-1)1п(1—1-),
а затем перейдем к пределу и возьмем производные в числителе
и знаменателе!
lim In В0 = lim (ар — 1) In (1-) =
= lim J - = lim (J-----Н,
(^ft)
т. е. Ва --- при ар = 1 В0 = еп — 1. Для ар = 1 В = 1;
при «р = 3 В = 0,148.
Следовательно, наибольшие потери будут равны)
при ар = 1 Nama = Nz/rf при j] « 0; (4.38)
при ар — 3 Лептах = 0,148^/(Ч*)3 лРи Т1 — 0-66. (4.39)
Из выражений (4.38) и (4.39) следует, что чем больше показа-
тель ар, тем меньше /Уи, т. е. при этом выгоднее применять ГДМ
в качестве регулирующего органа. Наглядно это видно из рис.
4.30, иа котором приведены зависимости N = f (tj) трех гидрома-
шин с показателями ар, равными 1, 2 и 3. Пусть все оии при пол-
ном наполнении имеют мощность N = 1. При этом КПД ГДМ
Я = 0,98, а скольжение s = 0,02.
Регулируя угловую скорость сор
каждой из машин, получим ха-
рактеристики для ар = 1 (прямая),
сср = 2 (квадратичная парабола)
иар = 3 (кубическая парабола).
Зададимся сор = const для трех
машин, для чего иа графике про-
ведем вертикальную линию в
точке а = i = 0,4. Из рисунка
Рис. 4.30. Изменение мощности различ-
ных гндромашии в зависимости от КПД
7*
99
видно, что наибольшую мощность потребляет объемная машина и
наименьшую — лопастная. Если КПД всех машин одинаков, то
двигатель должен разаивать большую мощность при работе с объ-
емной машиной и наименьшую—с лопастной.
4.6. ОГРАНИЧИВАЮЩИЕ ГДМ
Ограничивающие ГДМ предназначены для ограниче-
ния передаваемого крутящего момента. К ним относятся предохра-
нительные ГДМ для защиты двигателя на установившихся режи-
мах работы от внезапных перегрузок; пусковые ГДМ для защиты
двигателя от перегрузок в процессе пуска машин с большими мо-
ментами инерции вращающихся частей (к ним также относятся
муфты свободного хода и гидромеханические муфты); пускотор-
мозные ГДМ — реверсируемые передачи, предназначенные для
пуска и торможения.
Эти ГДМ имеют мягкую внешнюю характеристику и уменьшен-
ный коэффициент перегрузки за счет применения в конструкциях
специальных устройств для уменьшения момента при больших
скольжениях. В ограничивающих ГДМ снижения моментов прн
больших скольжениях (рис. 4.31) добиваются уменьшением коли-
чества жидкости в рабочей полости путем сброса ее в какую-то
дополнительную полость или установкой на пути потока дроссе-
лирующего устройства, участвующего в работе при больших
скольжениях. При этом сброс жидкости в дополнительную полость
и включение в работу дросселирующего устройства должны про-
исходить автоматически в зависимости от режимов работы ГДМ.
В работе [25] подробно изложены принципы действия, особенно-
сти конструкции и характеристики ограничивающих ГДМ. Рас-
смотрим некоторые их принципиальные конструктивные
схемы.
Предохранительные ГДМ. ГДМ с отнесенной рабочей полостью
(рис. 4.32, а, б) была разработана в 1967 г. в ИГД им. А. А. Ско-
чииского. В основу ее конструирования было положено то явле-
ние, что в частично заполненной муфте часть пространства рабо-
чей полости занята жидко-
стью, а часть — воздухом.
Очертания границы между
жидкостью и воздухом зависят
от передаточного отношения
(скольжения). Рабочей полости
можно придать очертания, оп-
тимальные только для высо-
ких передаточных отношений.
Рис. 4.31. Относительные внешние иа-
рактер метики ГДМ:
1 — обычной; 2 — ограничивающей
Рис. 4.32. ГДМ с отнесен-
ной рабочей полостью:
а — схема; б — приведен-
ная характернаснка
При уменьшении i форма рабочей полости препятствует уве-
личению скорости потока ст и, следовательно, крутящего мо-
мента. В показанной на рнс. 4,32, а схеме ГДМ рабочая полость
отнесена (удалена) от оси вращения: отношение активного диа-
метра к втулочному приблизительно равно 1,5 (обычно оио со-
ставляет 2 ... 3). Ширина рабочей полости превышает ее радиаль-
ный размер. В рабочую полость несколько выступает порог 2.
ГДМ заполняется почти полностью, причем она очень чувствитель-
на к заполнению (незначительное уменьшение заполнения
существенно ухудшает внешнюю характеристику ГДМ).
Для согласования и улучшения характеристик ГДМ и двига-
теля при пуске в турбинном колесе имеется полость, в которой уста-
новлены с возможностью радиального перемещения диски 1, вы-
тесняющие жидкость в рабочую полость при разгоне турбинного
колеса. Из характеристики (рис. 4.32, б) следует, что Кпер =
— 2,45. Рассмотренный принцип конструкции лег в основу созда-
ния н внедрения ряда модификаций ограничивающих гидромуфт,
успешно используемых в настоящее время в горной промышлен-
ности. Некоторые конструкции этих муфт приведены в работах
[3, 25].
ГДМ со статическим самоопоражниванием рабочей полости
впервые предложена английским исследователем Г. Синклером
в 1926 г. Рассмотрим принципиальную конструктивную схему и
особенности рабочего процесса такой ГДМ (рнс. 4.33). В ГДМ
имеются симметричные насосное и турбинное колеса, дополни-
тельная полость, образованная наружной поверхностью турбин-
ного колеса и внутренней поверхностью замыкающего кожуха, и
порог. На режимах работы, близких к оптимальному (s -► О,
£->/*->!), в рабочей полости возникает циркуляция потока
вокруг мгновенного центра О. На частицу жидкости М постоянно
действуют две противоположно направленные силы Рг и Ра. Сила
Рг обусловлена относительным движением жидкости вокруг точки
О и зависит от скорости ст, которая, в свою очередь, определяется
режимом работы (чем меньше i, тем больше ст и сила Ри и иаобо-
101
и под действием разности
ствующих
Рис. 4.33. Схема ГДМ со статическим
самоопоражниваннем
рот). Сила Ра обусловлена пере-
носным движением жидкости
вместе о дополнительной поло-
стью с угловой скоростью
(0и — (401+<*>2)^2 (при U)j/-const
чем больше со2, тем больше сош
и сила Р2, и наоборот).
При больших скольжениях,
когда s -* 1 и i -> 0, сила
становится больше силы Р8,
напоров, дей-
полостях, жидкость
гидр остатически х
в рабочей н дополнительной
начинает перетекать в дополнительную полость до тех пор,
пока не установится равновесное состояние, определяю-
щее момент, передаваемый ГДМ. При уменьшении скольжения
процесс идет в обратном направлении. Порог, установленный в ра-
бочей полости ГДМ, уменьшает скоростной напор жидкости, «за-
брасываемой» насосным колесом к порогу при больших скольже-
ниях, и момент также уменьшается. На этих режимах работы ки-
нетическая энергия жидкости превращается в тепловую. Допол-
нительная полость и порог способствуют уменьшению коэффициен-
та /Спер До 3,5 ... 5.
Многочисленные исследования ограничивающих ГДМ со стати-
ческим самоопоражниваннем показали, что они имеют хорошую
характеристику только при определенной степени наполнения.
Уменьшение или увеличение степени наполнения по сравнению о
оптимальной приводит к увеличению Кпер, и затрудняетси исполь-
зование ГДМ с двигателями различной мощности. ГДМ со стати-
ческим самоопоражниваннем обладают низким быстродействием
при переходных режимах работы. Жидкость из рабочей полости
в дополнительную и обратно перетекает при небольшом перепаде
напоров, и поэтому скорость перетекания невысокая. Это явление
приводит к резкому возрастанию коэффициента перегрузки (/Спер =
= 10 ... 12), например, при резком торможении выходного вала
и отсутствии ограничения действующего в системе машины мо-
мента.
Для улучшении характеристики ГДМ были выполнены всесто-
ронние и глубокие исследования оптимальных форм и соотноше-
ний объемов рабочей и дополнительной полостей. В результате
получено, что улучшению характеристик ГДМ способствует под-
резка лопастей на входе в насосное колесо и иа выходе из тур-
бинного колеса (штриховые линии на рис. 4.33) с целью образова-
ния центральной безлопастной полости. При малых скольжениях
центральная полость не заполнена жидкостью. При больших сколь-
жениях после перестроения поток проходит через свободное про-
102
Рис. 4.34. Ограничивающая ГДМ ТМ-100 со статический самоопоражниваннем
(Da = 0,5 м):
а — принципиальная схема; б « приведенная характеристика при различной степени
наполнения рабочей полости; 1 ы канал для подачи воздуха; 3 « жиклер; 3 — порог;
4 — дополнительная полость
странство, не взаимодействуя с лопастями, т. е. момент количества
движения потока не изменяется. Поэтому резкое изменение формы
потока не вызовет значительного увеличения передвваемого мо-
мента, как в ГДМ без свободного пространства.
Объем дополнительной полости надо выбирать достаточным,
для того чтобы вместилась жидкость, вытекающая из рабочей по-
лости при больших скольжениях. В работе [25] рекомендуется
выбирать отношение объема дополнительной полости к полному
объему ГДМ в пределах 1 ... 3, а отношение объема оставшегося
в ГДМ воздуха к полному объему рабочей полости не должно
быть меньше 1/8 во избежание опасного увеличения давления
внутри ГДМ при температурном расширении. В ГДМ со статиче-
ским самоопоражниваннем дополнительная полость должна соеди-
няться хотя бы небольшими отверстиями с центром рабочей поло-
сти для переливания жидкости. На рнс. 4.34, а в качестве примера
показана схема отечественной ограничивающей ГДМ ТМ-100, а
на рис. 4.34,6—ее приведенная характеристика, из которой
видно, что коэффициент перегрузки в зависимости от наполне-
ния V Кпер = 2,1 2,5.
Хотя созданные в настоящее время ограничивающие ГДМ со
статическим самоопоражниваннем имеют сравнительно неплохие
характеристики при установившихся режимах работы, однако их
быстродействие при внезапных перегрузках недостаточно, и поэ-
тому такие ГДМ можно использовать только в приводах с плав-
ным изменением нагрузки, например, в приводах конвейеров, эс-
калаторов, металлургических станов.
ГДМ с динамическим самоопоражниванием — это ограничива-
ющая ГДМ с уменьшенным коэффициентом перегрузки и высоким
быстродействием (рис. 4.35). ГДМ имеет обычное насосное колесо,
посредством жиклеров сообщающееся с дополнительной полостью
103
Рис. 4.35. ГДМ с динамическим самоопоражниванием:
а — схема; б — внешние характеристики; А —< обычная ГДМ; Б и ГДМ без предвари-
гельвой камеры; В ГДМ о предварительной камерой
Z, турбинное колесо, несимметричное насосному, со скошенными
выходными кромками лопастей, сбросную полость 2, расположен-
ную в центральной части. При работе ГДМ заполняют не полностью.
На режиме холостого хода жидкость располагается концентрично
оси вращения ГДМ, например, по линии АВ. При наличии сколь-
жения в рабочей полости ГДМ возникает циркуляция жидкости
вокруг мгновенного центра вращения О.
Рабочий процесс на режимах, близких к оптимальным (i =
= г* и s = s*), не отличается от рабочего процесса ГДМ со стати-
ческим самоопоражниванием, и, характеристики ГДМ иа этих ре-
жимах работы совпадают (рис. 4.35, б). При повышении нагрузки
(i < £*) увеличивается скольжение, и под действием скоростного
напора жидкость в турбинном колесе опускается все ниже, проис-
ходит перестроение формы потока, скорость ст возрастает. Путь,
пройденный частицами жидкости, зависит от сил, обусловленных
относительным и переносным движениями. В процессе движения
частиц жидкости в направлении выходных кромок лопастей тур-
бинного колеса их энергия уменьшается и на какой-то линии ОС
становится равной нулю. При дальнейшем увеличении скольже-
ния частицы жидкости опускаются ниже линии ОС, попадают на
скошенные части лопастей, которые сбрасывают жидкость в цен-
тральную сбросную полость. Таким образом, происходит динами-
ческое (под действием динамического скоростного напора) само-
опоражнивание рабочей полости.
Передаточное отношение, при котором начинается сброс жид-
кости, называют критическим (t = iKP). При гкр = 0,85 ... 0,8
(s = 0,15 ... 0,2) из-за резкого сброса жидкости во внешней харак-
теристике ГДМ наблюдается провал (см. рис. 4.35, б, кривая Б),
что приводит к неустойчивой работе привода. Заметим, что поверх-
ность лопасти турбинного колеса выше линии ОС воспринимает
давление потока и работает в режиме обычного турбинного ко-
леса, а скошенная часть лопасти (ниже линии ОС) сообщает энер-
104
Рис. 4.36. Ограничивающая ГДМ ТМ-25 с динамический сомоопоражниванием
(Da = 0,37 м):
а — схема; б •— приведенная характеристика при разадчпнх наполнениях рабочей
полости
гию жидкости и работает как бы в режиме насосного колеса, уско-
ряя переход жидкости в сбросную камеру. Для устранения неже-
лательного провала в характеристике ГДМ необходимо замедлить
сброс жидкости, затормозить поток при выходе из турбинного ко-
леса. Для этого используют различные способы, определяющие
многообразие конструкций ГДМ с динамическим самоопоражни-
ванием [25].
Наиболее часто для получения требуемой характеристики уста-
навливают предварительную камеру или порог. Предварительная
камера представляет собой колесо с небольшим числом лопастей,
расположенное перед выходом из турбинного колеса и жестко свя-
занное с иасосиым колесом (см. рис. 4.35, а). В ней возникают
обратные течения и поэтому она служит дополнительным сопро-
тивлением потоку, выходящему из турбиииого колеса, что приво-
дит к уменьшению провала в характеристике. Те же функции вы-
полняет и порог, применяемый в некоторых конструкциях ГДМ.
На рис. 4.36, а в качестве примера представлена схема ГДМ с ди-
намическим самоопоражниванием с порогом 1 (Da = 0,37 м),
разработанной в ИГД им. А. А. Скочинекого, а на рис. 4.36, б —
ее приведенная характеристика, из которой видно, что коэффициент
перегрузки при изменении наполнения не превышает 2,3 и имеет
место несущественный провал. Таким образом, использование
эффекта динамического самоопоражнивания позволяет существен-
но повысить быстродействие ограничивающей ГДМ и сохранить
приемлемые значения коэффициента перегрузки как иа устано-
вившихся, так и на переходных режимах работы машины.
Пусковые ГДМ. Пусковая ГДМ позволяет снизить момент,
передаваемый при пуске и разгоне системы. Наиболее часто для
этой цели используют ограничивающие ГДМ с дополнительной по-
лостью 1 облегчения пуска, которая сообщается с рабочей поло-
105
Рис. 4.37. Схемы пусковая ГДМз
а =• с полостью облегчения пуска в насосной колесе; б — о полостью облегчения пуска
в •гурбинном колесе; а “ о разделнтельнвм севканон между сбросной полостью в полостью
облегчения пуска
стыо отверстиями или каналами небольшого сечения (рис. 4.37).
При неподвижной ГДМ полость облегчения пуска заполнена жид-
костью. При пуске жидкость, находящаяся в этой полости, не
участвует в процессе передачи энергии, затем под действием цен-
тробежной силы оиа начинает постепенно перетекать в рабочую
полость, увеличивая момент н передаточное отношение ГДМ.
В схеме, на рис. 4.37, а полость облегчения пуска расположена в
насосном колесе. При вытекании жидкости из полости пуска в нее
поступает воздух из сбросной полости 2. При малых i сбросная
полость заполнена жидкостью, следовательно, воздух ие может
попасть в полость пуска и оиа остается заполиеииой до тех пор,
пока не произойдет перестроение потока и в сбросную полость ие
поступит воздух. Эго важно, потому что при большой инерцион-
ной нагрузке не будет происходить преждевременного опораж-
нивания камеры пуска и, следовательно, перегрузки двигателя.
В схеме на рис. 4.37, б полость 1 облегчения пуска расположена
в турбинном колесе, поэтому центробежная сила, действующая
иа жидкость, определяется скоростью со2. Чтобы опоражнивание
полости пуска не произошло преждевременно, в ГДМ имеется
клапан, открывающийся под действием разряжения в полости
пуска только при достижении турбинным колесом заданной угло-
вой скорости <о2. После этого жидкость через отверстия может
выйти из полости пуска н по зазору между турбинным колесом
н кожухом попасть в рабочую полость.
Отличительной особенностью ГДМ ТЛ-32 (рис. 4.37, в) явля-
ется наличие разделительного стакана 3 между сбросной полостью
и полостью облегчения пуска. Стакан препятствует заполнению
полости пуска при кратковременных перегрузках, т. е. для прео-
доления причин, вызвавших кратковременную перегрузку, ис-
пользуется полный момент двигателя. Полость облегчения пуска
снижает наполнение рабочей полости прн разгоне. Замедлению
опоражнивания пусковой полости при разгоне способствует то, что
106
Рис» 4.38. Схема пусковой РДИ с ша-
риковым клапаном
жидкость в полости увлекается
за насосным колесом только
трением о его стенки, и при
ускоренном вращении колеса
жидкость сначала отстает от
него. Эго относится также и к
жидкости, находящейся в сбро-
сной полости. Однако по мере
разгона системы жидкость в
сбросной полости насосного ко-
леса приобретает значительную
угловую скорость и стремится г
действием центробежной силы
попасть в рабочую Полость, увеличивая тем самым передаваемый
момент. В последние года в СССР и за рубежом были созданы ориги-
нальные конструкции ограничивающих ГДМ без дополнительных
полостей, но с порогами, имеющими различную форму: плоскую,
коническую, цилиндрическую, стаканообразиую или шляпообраз-
иую. В плайе порог выполняется иесплошиым в виде решета с круг-
лыми отверстиями разного диаметра, круглой гребенки, креста,
треугольника, диска с короткими лопастями и т. д. [25]. Несплош-
иой порог обеспечивает прогрессивное увеличение сопротивления
потоку по мере увеличения скольжения или препятствует полному
заполнению сбросной полости сразу после перестроения потока.
В пусковых ГДМ применяют также клапаны, золотники для огра-
ничения момента при уменьшении угловой скорости одного из колес.
На рис. 4.38 в качестве примера приведена схема такой ГДМ.
Центробежный шариковый клапан 1, установленный в насосном
колесе между сбросной 2 н рабочей полостями, открывается при
определенной угловой скорости со1. Он служит для уменьшения
стопового момента при холостом ходе двигателя внутреннего сго-
рания. В этом случае насосное колесо вращается с малой угловой
скоростью, турбиииое колесо неподвижно, клапан закрыт, жид-
кость полностью заполняет сбросную полость, и ГДМ передает
небольшой момент. При увеличении «>х клапан открывается, жид-
кость из сбросной полости под действием центробежной силы пе-
ретекает в рабочую полость, и момент увеличивается. При пере-
грузке ГДМ работает как обычная самоопоражиивающаяся. Для
ограничения передаваемого момента при пуске инерционного аг-
регата можно использовать любую регулируемую ГДМ. В этом
случае при пуске двигателя органы управления ГДМ находятся
в положении «Выключено» и затем, по мере разгона, их постепенно
переводят в положение «Включено», так чтобы передаваемый мо-
мент соответствовал моменту двигателя. Управление может осу-
ществляться как вручную, так и автоматически по любому задан-
ному закону. Известны пусковые муфты, принудительно опораж-
107
Рнс. 4.39, Схема обгонной ГДМ
ниваемые при пуске двигателя и заполняемые после окончания
процесса разгона [25].
ГДМ свободного хода применяются в некоторых машинах и
агрегатах с реверсивным движением рабочего органа для передачи
крутящего момента только в одном направлении [25]. В качестве
примера на рис. 4.39 показана схема обгонной муфты, в которой
одно из лопастных колес (например, насосное 1) выполнено с жест-
кими радиальными лопастями, а другое (например, турбинное 2) —
с лопастями 3, которые могут поворачиваться вокруг осей под
действием потока.
При вращении ГДМ в одном направлении лопасти турбинного
колеса располагаются под действием потока в радиальных плоско-
стях, упираясь в специальные выступы, выполненные на поверх-
ности наружного тора колеса, и ГДМ работает как обычная с ра-
диальными лопастями. При обгонном режиме или реверсировании
двигателя направление усилия, действующего на каждую лопасть
от потока жидкости, изменяется, и лопасти складываются. ГДМ
при этом передает Лишь незначительный момент, обусловленный
дисковым трением.
Гидромеханические муфты обеспечивают повышение передаточ-
ного отношения при работе на установившемся режиме или позво-
ляют получить в заданном интервале скольжения постоянные
момент или мощность. Муфта представляет собой сочетание гид-
равлических и механических элементов, которые оказывают не-
посредственное влияние на процесс передачи энергии жидкостью
[25 ] (рис. 4.40), имеет устойчивую характеристику во всем диапа-
зоне передаточных отношений. Коэффициент ее перегрузки может
быть близким к единице, а передача оптимального момента проис-
ходит без скольжения, т. е. по своим внешним свойствам гидро-
муфта близка к идеальной, так как в ней нет выделения теплоты и,
108
Рис. 4.40. Гидромеханическая муфта:
а — принципиальная схема; б — относительная внешняя характеристика
следовательно, ограничений, связанных с необходимостью его
отвода. Выделение теплоты при разгоне и перегрузках такое же,
как и у обычной ГДМ.
При пуске двигателя начинает вращаться корпус 1 муфты,
и через некоторое время жидкость внутри его под действием цен-
тробежной силы образует вращающееся жидкостное кольцо.
Ковшовые венцы 2 в это время вращаются навстречу жидкостному
кольцу. Жидкость захватывается ковшами и перемещается к цен-
тру муфты. При этом на каждом ковшовом венце возникает момент
из-за действия скоростного напора на ковш и центробежной силы
на жидкость, находящуюся в ковшах. Моменты всех ковшовых
веицов через шестерни 3 и 4 суммируются на солнечной шестерне 5,
приводящей выходной вал 6. По мере разгона увеличивается пере-
даточное отношение и уменьшается относительная угловая ско-
рость ковшовых венцов. При этом динамическое воздействие на
ковшовые венцы тоже уменьшается, а центробежная сила на
жидкость в ковшах действует по-прежиему. При равенстве момента
сопротивления машины суммарному моменту только от центробеж-
ных сил муфта начинает вращаться без скольжения. Если момент
нагрузки превысит максимальный момент, который при данной
угловой скорости может быть уравновешен моментом от центро-
бежных сил, то начинается относительное вращение ковшовых
венцов, что приводит к ограничению момента. Передаваемый муф-
той момент зависит от формы и углов установки ковшей, а также
от соотношения параметров элементов планетарного ряда. Гидро-
механическая муфта, аиалогичиая рассмотренной, была создана
и испытана в ИГД им. А. А. Скочииского.
Пускотормозные ГДМ. В пускотормозиых ГДМ обычно ис-
пользуют колеса с наклонными лопастями, плоскости которых
109
Рис. 4,41. Схемы ГДМ с лопастями:
а — радиальными; б — наклоненными назад; в — наклоненными вперед; е —• внешние
характеристики ГДМ, показанных на рнс. а, б, в
расположены под углом к плоскостям меридиональных сечений, а
кромки сохраняют радиальное положение. На рис. 4.41, а—в
показаны схемы ГДМ с наклонными лопастями, а на рис. 4.41, г —
нх внешние характеристики (кривые е, б — для лопастей, наклон-
ных соответственно вперед и назад, кривая а — для радиальных
лопастей). При расположении кромок лопастей насосного колеса
сзади линий соединения их с наружным тором (по отношению к
направлению вращения) лопасти называют наклоненными назад
(рис. 4.41, б). Если кромки лопастей располагаются впереди линий
соединения нх с наружным тором колеса, лопасти называют накло-
ненными вперед (рис. 4.41, б). Часто наклон лопастей у иасосиого
и турбиииого колес выполняют одинаковым для получения подоб-
ных треугольников скоростей. Изменение момента ГДМ при накло-
не лопастей обусловлено изменением направления относительной
скорости, что приводит к изменению значения н направления аб-
солютной скорости н, как следствие, — ее окружной составляю-
щей входящей в уравнение момента ГДМ. Из рис. 4.41, г
следует, как наклон лопастей влияет на характеристики ГДМ н ее
размеры. Фундаментальные исследования конструкций и харак-
теристик подобных ГДМ были выполнены во ВНИИгидромаше
[25]. Использование в приводах машин ГДМ с лопастями, на-
клоненными вперед, позволяет существенно увеличить энергоем-
кость (см. рио. 4.41, г, кривая в).
ПО
Рис. 4.42. Схемы пускотормозных ГДМ с наклонными лопастями для привода
с реверсивным двигателем:
а однопопостной о муфтами свободного жода; б ~ двухполостной в муфтами свобод»
него хода; в —• с промежуточным свободно вращающимся колесом; « — о промежуточ-
ным звеном на муфте свободного кода; 1 н 2 •— муфта правого и левого вращения соответ-
ственно
ГДМ о лопастями, наклоненными назад, успешно ограничивают
моменты как на тяговом режиме работы, так и на режиме противо-
вращения (кривая б на рис. 4.41, г не имеет провала на режиме
противовращения), что обусловливает их применение в реверсив-
ных приводах и в приводах грузоподъемных механизмов, работаю-
щих с малыми «ползучими» скоростями. Основными преимуще-
ствами ГДМ с наклонными лопастями являются высокое быстро-
действие и стабильность характеристик, так как ГДМ работают
при полном наполнении (под стабильностью характеристик ГДМ
следует понимать нх независимость от эксплуатационных условий,
недоливов или переливов рабочей жидкости и других субъектив-
ных причин). Положительные качества ГДМ с наклонными лопа-
стями позволили использовать их в качестве пускотормозных для
работы в приводе с реверсивным двигателем. На рис. 4.42, а—г
приведены некоторые схемы этих ГДМ, разработанные во ВНИИ-
гндромаше.
В схеме на рис. 4.42, а при нзмененнн направления скорости со£
благодаря муфте свободного хода насосное колесо становятся тур-
бинным, и наоборот. При любом иаправлеиин вращения наклон
лопастей назад обеспечивает ограничивающую характеристику.
В схеме на рнс. 4.42, б при изменении направления скорости
одна полость начинает передавать момент, а вторая выключается
нз работы. Момент ограничивается для любого направления вра-
щения.
В схеме на рис. 4.42, в с входным валом связано насосное ко-
лесо. Промежуточное колесо установлено свободно иа подшипни-
ках. Правая половина этого колеса играет роль турбинного, ле-
вая — насосного. Полости ГДМ работают последовательно. При
одном направлении вращения роль ограничивающей играет пер-
вая полость, при этом вторая — имеет жесткую характеристику я
работает с высоким передаточным отношением (за исключением
стопового режима). При изменения направления скорости (Од
вторая полость играет роль ограничивающей, а первая — имеет
жесткую характеристику. В этом случае первая полость при всех
111
режимах (включая и стоповый) работает с высоким передаточным
отношением. Внешние характеристики ГДМ при изменении на-
правления отличаются не более чем на 10 %.
В схеме на рис. 4.42, г промежуточное колесо установлено на
муфте свободного хода и одновременно уменьшена энергоемкость
одной полости. При прямом вращении это позволяет уменьшить
скольжение s*, так как муфта свободного хода блокирует полость,
имеющую жесткую характеристику. Снижение энергоемкости вто-
рой полости обеспечивает реверсирование асинхронного электро-
двигателя при торможении инерционного агрегата противовключе-
нием.
Во ВНИИГИДРОМАШе была также разработана пускотормоз-
ная ограничивающая ГДМс наклонными лопастями, установленны-
ми на шарнирах. При реверсе лопасти поворачиваются н занимают
одно из двух крайних положений, обеспечивая расчетный ограни-
чивающий момент для любого направления вращения.
4.7. МЕТОДЫ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ
ПАРАМЕТРОВ ГДМ
Техническое задание на проектирование ГДМ состав-
ляют на основании анализа ее работы в приводе конкретной ма-
шины. В результате проектирования выполняют анализ и синтез
геометрических параметров лопастных колес, полостей, порогов и
других элементов ГДМ, обеспечивающих заданные показатели ка-
чества. Техническое задание обычно содержит следующие данные:
характеристику двигателя [Мд, Л4Д = f (сод)1; вид рабочей жид-
кости (v, р); технические требования к оптимальному КПД (?]*);
к коэффициенту перегрузки (Кпер); к массе и габаритным размерам;
к регулировочным свойствам (глубина регулирования, быстродей-
ствие); к надежности (долговечности и безотказности работы) и
другим показателям качества. ГДМ должна быть рассчитана и спро-
ектирована таким образом, чтобы внутренние процессы обеспечи-
вали требуемую внешнюю характеристику. При проектировании
в первую очередь следует ориентироваться на уже созданные н ис-
пытанные конструкции ГДМ, т. е. всегда первым этапом проектиро-
вания должен являться этап анализа технической и патентной
литературы с целью выбора аналога разрабатываемой конструкции.
Такой подход позволит существенно сократить временные и ма-
териальные затраты по созданию и внедрению разрабатываемой
ГДМ.
В настоящее время известно много методов расчета полностью
заполненных ГДМ с различными формами рабочих полостей. Но
единого метода, позволяющего выбрать оптимальные параметры
ГДМ для любой формы ее рабочей полости, ие существует. Это
объясняется тем, что несмотря на конструктивную простоту ГДМ.
рабочий процесс в ней еще недостаточно изучен, что затрудняет
создание обобщенной математической модели течения жидкости.
112
Известны и используются следующие частные методы анализа и
расчета ГДМ.
1. Метод расчета по струйной теории, использующий эмпири-
ческие коэффициенты гидравлических потерь в рабочих полостях
лопастных гидромашин (насосов и турбин). В основу метода по-
ложено рассмотрение баланса энергии жидкости, совершающей
замкнутое движение в рабочей полости [3, 4, 16, 25 и др.]. Со-
ставив баланс энергий для различных передаточных отношений,
можно найти объемную подачу и момент, передаваемый ГДМ.
Метод дает удовлетворительные результаты при расчете полностью
заполненных ГДМ, лопастные колеса которых имеют внутренние
торы. Расчет ведется по средней линии тока или, более того, по
трем линиям (средней и прилегающим к внутреннему и наружному
торам).
2. Метод расчета с использованием изученной модели рабочего
процесса ГДМ. В качестве примеров можно привести расчет по
«характеристике потока», предложенный М. Н. Этингофом [31,
в основу которого положено изучение явления сверхтурбулент-
ности. На основании экспериментов М. Н. Этингоф получил зави-
симость суммарного коэффициента потерь от отношения окружной
скорости потока к относительной, и эту зависимость использовал
при расчете В. М. Берман. Он изучил явление перестроения потока
в рабочей полости частично заполненной ГДМ при измеиенни ре-
жимов работы, экспериментально определил показатели и границы
переходного процесса, геометрические параметры контуров цир-
куляции и использовал эти данные при расчете ограничивающих
ГДМ с самоопоражниванием рабочей полости. Этот метод приме-
ним для расчета ГДМ, для которых было изучено данное явление,
и его нельзя распространить иа ГДМ, отличающиеся, например,
формой рабочей полости, числом лопастей колес и другими пара-
метрами. Он целесообразен для анализа (познании) какого-то яв-
ления или рабочего процесса в ГДМ.
3. Метод, базирующийся на материалах, полученных в резуль-
тате систематизации и обработки расчетных и экспериментальных
данных определенного класса ГДМ, отличающихся, например,
формой рабочей полости, числом, углами, шириной, толщиной
лопастей и другими параметрами. На основании этих исследований
строят обобщенные графики, номограммы, позволяющие выби-
рать оптимальные параметры данного типа ГДМ в соответствии
С данными технического задания [3, 25]. Одиако полученные гра-
фики и номограммы справедливы только для ГДМ с формой рабо-
чей полости, близкой к форме испытанных, что существенно сужа-
ет границы применения данного метода.
4. Метод расчета с использованием теории подобия лопастных
гидромашин. Этот метод является наиболее надежным и всеобъ-
емлющим для расчета и выбора параметров подобных ГДМ. Но
и теория подобия ие может быть использована, если ие соблю-
дается условие автомодельности или равенства чисел Рейнольдса,
8 Сгесин В. П. я др. 113
а также в случае расчета ГДМ с трансформируемыми формами ра-
бочих полостей с помощью специальных устройств (например, пру-
жин).
Рассмотрим в качестве иллюстрации изложенного несколько
частных методов расчета параметров и показателей ГДМ.
Расчет ГДМ методом подобия. Этот расчет основывается на
идентификации приведенных характеристик рассчитываемого на-
турного и известного модельного образцов. Используя приведен-
ную характеристику модели, по уравнению (1.94) определяют ак-
тивный диаметр натуры
где — мощность на входном валу ГДМ на расчетном режиме; Nlp = р —
— Л^пот. р (здесь #д. р и Na0T. р — мощности двигателя и потерь на расчетном
режиме).
Мощность Л^пот.р определяется потерями мощности на привод
вспомогательного оборудования (вентилятора, насоса подпитки,
компрессора и т. д.). Если в техническом задании отсутствуют
данные о Л\ют.р» 70 можно в первом приближении принять
пот. р = 9,1Л^д>р.
Определив размер Da (н), рассчитывают коэффициент пропор-
циональности £ПОд ~ Da iB}/Da (ы) и с помощью его пересчиты-
вают остальные размеры ГДМ. При пересчете скоростей потока,
напоров лопастных колес, объемной подачи модели и натуры ис-
пользуют законы пропорциональности [см. формулы (1.95),
(1.98)1. В настоящее время для ограничивающих ГДМ с динамиче-
ским самоопоражниваннем, применяемых в горной промышлен*
ности, для ГДМ с наклонными лопастями [3, 25] имеются так на-
зываемые графики подбора — зависимости активного диаметра
Da = f (coi, NJ, позволяющие для заданных значений со, и N}
выбрать активный диаметр. Ограничивают использование расчета
ГДМ методом подобия влияния режима течения при определении
области автомодельности и масштабного фактора. Кинематическое
подобие в ГДМ определяется геометрическим подобием, постоян-
ством передаточных отношений н относительного наполнения в слу-
чае частично заполненных муфт, постоянством числа Рейнольдса.
Выше определенного значения числа Re наступает автомодель-
ность, прн которой режимы течения приблизительно подобны не-
зависимо от числа Рейнольдса. Число Рейнольдса для ГДМ без
внутреннего тора рассчитать практически невозможно, так как
неизвестны массовый расход, распределение скоростей в рабочей
полости и трудно выбрать характерное сеченне. Поэтому для уста-
новления подобия в работе [25] предлагается воспользоваться
«условным критерием подобия»
Rey = toiDa/v.
114
Если для геометрически подобных ГДМ при одинаковом пере-
даточном отношении Rey (н) = Rey (11), то режимы течения ока-
жутся подобными. На основании результатов экспериментальных
исследований в работе [25] предлагаются значения Re, = 10®
при i = 0,95 для ГДМ с наклонными лопастями н Re, ~ 1,1.109
при i = 0,95 для ГДМ с радиальными лопастями. На стоповом
режиме автомодельность наступает при меньших значениях Re,.
При существенном уменьшении диаметра D& (н) по сравнению
с диаметром £)а (ы) (в 2 и более раз) на характеристику натурного
образца также оказывает отрицательное влияние так называемый
«масштабный фактор», обусловливающий снижение коэффициента
момента, и некоторый рост коэффициента перегрузки. Подобное
ухудшение характеристики ГДМ можно объяснить несоблюдением
геометрического подобия, различной относительной шероховато-
стью межлопастных каналов и иеидентичностью геометрии рабо-
чих органов ГДМ (в частности, различным коэффициентом стесне-
ния потока). Это необходимо учитывать при проектировании по
подобию ГДМ с малым активным диаметром.
Расчет ГДМ по методике И. Ф. Семичастнова и А. П. Кудряв-
цева [3]. Этот расчет относится к третьей группе методов расчетов
и начинается с задания коэффициента быстроходности насосного
колеса пвн = 50 ... 70 об/мин. Затем, пользуясь формулой для
определения коэффициента быстроходности в виде
» — я 1/"р(м)
пая — у Щ
р
н задавшись плотностью р(и) — 1000 кг/м8, определяют напор
насосного колеса на расчетном режиме
_ ( ЮОО^рП? Х”-4
“* ₽ \ Р«8В /
При этом параметры Л^р, и р считают заданными (извест-
ными, например, из технического задания). Далее определяют
объемную подачу
0р = ^1р/(РЯ^н. р)-
Задают втулочный диаметр Do — l,5di, где di — диаметр вход-
ного вала. Эта зависимость экспериментальная и хорошо согласу-
ется с опытом для ГДМ со статическим самоопоражниваннем.
Для ГДМ с динамическим самоопоражниваннем дАаметр Do опре-
деляют с учетом размеров и объема сбросной полости.
Зная Qp, вычисляют меридиональную скорость
cmp = а V^gH^ рГ
где а — коэффициент скорости на входе, определяемый по графику проф.
И. И. Куколевского (рнс. 4.43); ₽ работе 122] показано, что по физической сущ-
ности а — величина, эквивалентная коэффициенту сопротивления
8« 116
Рис» 4,43. Зависимость коэффициента а Рис. 4»44» Зависимость числа лопа-
ет коэффициента быстроходности стей от активного диаметра
Определяют площадь межлопастных каналов на входе УЕХ
в лопастное колесо н на выходе Faai из него:
^вх = F вых = Qp/^mp-
Находят радиус
Г — п Л Р
““У <4(1—Л)
и определяют число лопастей в насосном колесе, используя экспе-
риментальные (например, гв = 8,652С2’279» где DB — в мм;
рис. 4.44) и теоретические зависимости [3, 4]. Число лопастей
в турбинном колесе должно быть на 1—3 меньше, что исключает
периодическую установку всех лопастей друг против друга, а
следовательно, и колебательные импульсы, которые создают вибра-
цию лопастей.
При расчете ГДМ необходимо отличать эффективные показа-
тели характеристик, относящиеся к входному и выходному валам •
ГДМ, а не к ее лопастным колесам. Так, для ГДМ, схема которой
показана на рис. 4.45:
Afi = Л4„ + Л4Д„ + М
мех1 Д' Л^черп!
= Л4Т -|~ Л4ДК Л1ме12,
где Мт — момент дискового трения между входным и выходным звеньями
ГДМ; /Име11 и Мыехв — моменты механического трения в опорах и уплотнениях
входного и выходного звеньев; Л4черп — момент сопротивления, возникающий
при движении черпаковой трубки в потоке жидкости.
Тогда эффективный коэффициент трансформации
К . — _ Мт У Мдк —- 7Имех 2 .
“* Mt Мп + ЛГД„ + ! + ЛГ,врп 1
отличается от коэффициента трансформации Д’ = Л4Т/Л1Н= 1. Со-
ответственно эффективный КПД т]8ф = Лйф£ также будет иметь
меньшее значение.
Рассмотрим конкретно влияние некоторых параметров на ха-
рактеристики ГДМ. На рис. 4.46 показаны характеристики для
трех вариантов рабочих полостей ГДМ прн различном числе ло-
116
Рис. 4.45. Моменты, действующие
в ГДМ
пастей их колес [41. Из ри-
сунка следует, что при малых
скольжениях коэффициент
тем меньше, чем меньше число
лопастей. С увеличением сколь-
жения коэффициент у ГДМ
с меньшим числом лопастей
становится больше. Это положение объясняется тем, что чем
меньше число лопастей, тем больше гидравлический радиус
канала и соответственно больше потери, меньше Q и 1м.
Кроме того, при малых Q возрастает отклонение потока из-за
влияния конечного числа лопастей, что также ведет к уменьше-
нию 1м. С увеличением s растет Q, уменьшается влияние сверх-
турбулентности и преобладающими будут потери на трение. Со-
ответственно у ГДМ с большим числом лопастей меньше,
чем у ГДМ с малым числом лопастей.
На рис. 4.47 приведены экспериментальные данные ВНИИ-
ГИДРОМАШа (251, показывающие влияние числа лопастей в на-
сосном колесе на коэффициент момента и коэффициент пере-
грузки Кпер для ГДМ с наклонными лопастями и диаметрами
Da = 0,2 ... 0,5 м. Из рисунка видно, что число лопастей, близкое
к оптимальному, лежит в пределах 24 ... 32 в каждом лопастном
колесе.
На рис. 4 48 показано влияние отношения диаметров DJDa
на относительную характеристику ГДМ с радиальными лопастями
Рис. 4,47. Зависимости Лпер и ij от
числа лопастей
Рис. 4.48. Зависимость относительного
момента от радиальных размеров рабочей
полости при разных скольжениях
[4]. Из рисунка следует, что изменение крутящего момента при
изменении D0/Da практически мало зависит от скольжения s =>
— 20 ... 100 %. За исходную ГДМ была принята ГДМ с D0/DR ==»
= 0,25.
На рис. 4.49, а показано влияние ширины лопастного колеса
на относительную характеристику ГДМ с радиальными лопастями
14], а на рис. 4.49, б — влияние зазора 6 между лопастными
колесами на приведенную характеристику ГДМ с наклонными ло-
пастями 1251. На рис. 4.49, а за исходную принята ГДМ с шири-
ной колеса Ьо = 0,16 м и D0!D& = 0,28. Относительная характери-
стика ГДМ изменяется в зависимости от скольжения при b
О,513Ьо, увеличение зазора между лопастными колесами от 2
до 12 мм практически не влияет на приведенную характеристику
ГДТ с наклонными лопастями.
На рис. 4.50, а, б показаны экспериментальные зависимости
Рис. 4.49. Характеристики ГДМ при изменения:
а — ширины лопастн: б — вааора между лопастными колесами
118
Рис. 4.50. Приведенные
характеристики ГДМ:
а — зависимость «
= f (i) при 0 = const; б —
вавнснмостн Кпер и
от g
20 ЬО Ы ВО ft
б)
тел и характеристик ГДМ с лопастями, наклоненными назад. Ко-
эффициент XJw растет с увеличением угла лопасти, а коэффициент
перегрузки принимает оптимальное значение при 0 л? 50°. На
практике чаще всего принимают 0 = 60°, так как в этом случае
достигается требуемое значение н близкое к оптимальному зна-
чение Кпер.
На рнс. 4.51 показаны экспериментальные зависимости [251,
отражающие влияние диаметра порога £)п на основные показатели
характеристики ГДМ с наклонными лопастями со степенью запол-
нения около 95 %. Из графиков видно, что при почти полностью
наполненной ГДМ увеличение диаметра порога несколько повы-
шает коэффициент перегрузки и снижает коэффициенты XJw и ст.
Расчет осевых сил. Надежность ГДМ во многом зависит от
учета осевых сил, которые могут привести к сдвигу лопастных
колес, выходу из строя подшипников и деталей их крепления и в
итоге к аварии машины. Приведем в качестве примера расчет осе-
вых снл для ГДМ, показанной на рис. 4.52, а.
Результирующая осевая сила в общем случае состоит из двух
составляющих:
= -^Хдин ~Ь ^стат>
где дцд — результирующая осевая сила, обусловленная гидродинамический
давлением и поворотом потока при движении его в рабочей полости; Астат —*
статическая составляющая осевой силы, обусловленная давлением ра питания,
действующим иа неуравновешенную площадь fHeyp рабочей полости; Астат =
= Рп /неур (пря непроточной ГДМ Астат = 0).
Из рис. 4.52, а видно, что
турбинного колес
сосного и
Рп = 0):
^1В
= Aj + Л, — Д5;
результирующие осевые силы на-
(при
(4.40)
Zj 4- Д2 — А81
где At — результирующая осевая
действующая яа наружные торы
Рис. 4.51. Влияние порога иа характеристику
ГДМ с наклоияымя лопастями (Лд1 ст— коэф-
фициент момента иа стоповом режиме работы)
сила,
иасос-
119
Рис. 4.52. Определение осевых сил в ГДМ:
а — расчетная схема действующих сил; б =• зависимость результирующей осевой силы
от передаточного отношения
иого и турбинного колес со стороны рабочей полости; — сила, возникающая
во время работы ГДМ, как следствие изменения направления движения потока
рабочей жидкости на 180°; Ла — сила, действующая иа наружный тор турбин-
ного колеса и замыкающий кожух со стороны дополнительной полости.
Согласно третьему закону Ньютона
= Ат.? или Лхн — Д£т = 0,
т. е. результирующие осевые силы насосного и турбинного колес
равны и направлены в противоположные стороны. Следовательно,
колеса ГДМ могли бы либо сдвигаться, либо раздвигаться под
действием осевых сил. Определим силы Aj, Д2 н А3 для характер-
ных режимов работы ГДМ.
1. Режим холостого хода (i ~ 1). Жидкость в рабочей полости
находится в относительном покое, при этом все составляющие осе-
вой силы -= А2 = Ля = 0.
2. Тяговый режим работы (i < 1; s >0). Жидкость начинает
циркулировать в относительном движении, турбинное колесо под
действием нагрузки затормаживается и появляются силы, дей-
ствующие по оси ГДМ. При этом
«а
At = J pt2nr dr,
К»
где Pi — давление от центробежных сил,действующих иа наружные торы лопа-
стных колес со стороны рабочей полости; рг = pci>2 (г2 — /?ц)/2;г—текущий ра-
диус, на котором находится жидкость и полости ГДМ.
Тогда
Ai = J pcoi (- ) 2яг dr = р («2. - Й)2. (4.41)
Аналогично находим
Л8 = J рд. п2лг dr,
и.
120
где Рд. п *— давление от действия центробежных сил в дополнительной полости}
р„ п= Ршд. — ^о)/2 (ЭД6011 ыд. п~ угловая скорость жидкости в дополни-
тельной полости).
Окончательно
Дз=-£ра4„(Я1-ЯЭ!- (4.42)
Силу А2 найдем из уравнения изменения количества движения.
При этом полагаем, что ст1 — ст2 = ст. Тогда
А2 = pQc„2 — р<? (—cai) = 2pQcm = 2pcS,F, (4.43)
где F — площадь каналов колеса.
Для ГДМ с радиальными лопастями без учета влияния конеч-
ного числа лопастей теоретический напор насосного колеса можно
получить из выражения (4.2):
Я*и = со^ (1 — fa2)/g, (4.44)
а момент
(4.45)
Выразив из формулы (4.45) скорость ст и подставив получен-
ное выражение в формулу (4.43) с учетом зависимости (4.44),
окончательно получим
А _
3 pF^d-to2) ’
(4.46)
Так как в формуле (4.46) переменными являются момент Л4
и передаточное отношение i, можно записать
где c^pFcoJrJg-
Подставим в выражение (4.40) результирующей осевой силы
значения ее составляющих из формул (4.41), (4.42) н (4.47) и
сгруппируем отдельные слагаемые. После преобразований получим
Л1==Л[ + Л + Лз = р^(^-^)2^-^.„) +
(4.48)
Знак (направление) силы Az зависит от знака выражения
(со| — сод. и). Раскроем этот двучлен, считая в первом приближе-
нии, что сод п есть среднее арифметическое угловых скоростей coj
и со2- Тогда
- (-^Чг25-)’ = “? [»’ - (-^Л • <4 49>
При ( = 0 (столовый режим) выражение (4.49) равно — <о?/4,
т. е. первое слагаемое в выражении (4.48) отрицательно. Опыт по-
казывает, что первое слагаемое в выражении (4.48) по абсолют-
121
ному значению намного больше второго, поэтому на стоповом
режиме работы осевая сила старается «стянуть» лопастные колеса
с валов муфты.
При 1 = 1 (холостой ход) первое н второе слагаемые выраже-
ния (4.48) равны нулю [выражение (4.49) и момент М равны нулю].
На основании проведенного расчета можно построить зависи-
мость Л2 = f (i) (см. рнс. 4.52, б). Анализируя изложенное, можно
сделать следующие основные выводы:
1) осевая сила сближает (стягивает) лопастные колеса;
2) на оптимальном режиме работы осевая сила незначительна
и рассчитывать подшипники не следует;
3) максимального значения осевая сила достигает на стоповом
режиме и режиме противовращения;
4) в проточной ГДМ необходимо учитывать статическую со-
ставляющую осевой силы;
5) осевые силы полностью уравновешиваются у двухполостной
ГДМ с симметричным расположением одноименных колес.
4.8. РАБОТА ГДМ НА ПЕРЕХОДНЫХ РЕЖИМАХ
Переходным называют режим работы ГДМ при изме-
няющихся во времеви частотах вращения и крутящих моментах
на выходном или входном и выходном звеньях. К таким режимам
работы относятся разгон н торможение машины (включая стопоре-
ние ее рабочего органа).
Динамический момент взаимодействия циркулирующей жидко-
сти и лопастного колеса получен ранее [см. формулу (1.68)].
В уравнении (1.68) момент Л1г можно представить в виде Мг =
= Хмрш^Па. Тогда движение системы с однополостной ГДМ можно
описать двумя дифференциальными уравнениями, составленными
для входного (момент инерции Л) и выходного (J2) звеньев:
Alj = [(Jj -Ь /ял) -J- pFaj dQ]; (4.50)
== [(Л — Jk2) dto2 — рГЯ2 dQ] + (4.51)
Из уравнений (4.50) и (4.51) следует, что для ГДМ с радиаль-
ными лопастями величина dQ/dt не влияет на момент, так как
ctg р = 0 и Fnl = F„a = 0. Эго означает, что для такой полностью
заполненной ГДМ при условии соблюдевия гидродинамического
подобия динамическая характеристика не отличается от статиче-
ской. В ГДМ с наклонными лопастями такое расхождение теоре-
тически должно наблюдаться, однако в реальных системах из-за
малого значения члена, содержащего Q, по сравнению с другими
членами уравнений (4.50) и (4.51) это расхождение мало и им часто
пренебрегают. Указанное относится к ГДМ, полностью заполнен-
ным.
Динамическая характеристика самоопоражнивающихся ГДМ
в основном определяется скоростью изменения заполнения рабочей
122
Рис. 4.53. Схема ГДМ ГМП-700 и карактеристика привода с ГДМ:
/иЗ — при разгоне системы вхолостую и наполнении соответственно 65 н 70 л; 2 и 4 —•
при вастопоренном турбинном колесе и наполнении соответственно 65 и 70 а
полости, а этот процесс протекает во много раз медленее, чем про-
цесс ускорения или замедления жидкости в полностью заполнен-
ной ГДМ. Методики расчета разгона и торможения системы
с ГДМ изложены в работе [25]. На рис. 4.53 приведены схема
и экспериментальные динамические характеристики разгона си-
стемы с ограничивающей гидромуфтой ГМП-700. Из рисунка
видно, что момент инерции потребителя существенно влияет на на-
грузку двигателя прн разгоне (сравним кривые 3 и 4). Если бы
ГДМ не имела полости облегчения пуска, то она перегружала бы
двигатель при разгоне, так как кривая 4 пересекается с реактив-
ной ветвью характеристики двигателя. При наличии полости облег-
чения пуска рабочая полость заполняется постепенно, и ГДМ не
успевает достигнуть характеристики 4. Однако при перегрузках,
Рис. 4.54. Динамические характеристики ограничивающих ГДМ с наклонными
лопастями при различном времени t торможения привода
123
возникающих во время работы при заполнении 70 л (кривая 4$,
ГДМ не защищает двигатель.
На рис. 4.54 приведены схемы и экспериментальные динамиче-
ские характеристики торможения системы с ограничивающими
ГДМ с наклонными лопастями [25]. Из рисунка следует, что мо-
мент ГДМ с порогом на турбинном колесе имеет небольшую ди-
намическую надбавку, так как в ГДМ затруднено перетекание
жидкости в сбросную полость.
Анализ работы системы с пуокотормозной ГДМ приведен в
работе [251.
4.0. ТИПИЗАЦИЯ И УНИФИКАЦИЯ ГДМ.
ИХ ПРЕИМУЩЕСТВА И НЕДОСТАТКИ
Номенклатура машин н механизмов, в которых целе-
сообразно устанавливать ГДМ, составляет десятки наименований
н типоразмеров. Поэтому, если бы для каждой машины была из-
готовлена своя, индивидуальная ГДМ, то это в большинстве слу-
чаев оказалось бы экономически нецелесообразным. Крупносерий-
ное и массовое производство ГДМ в целях снижения их себестои-
мости требует широкой унификации отдельных узлов и деталей и
разработки иа них типажа. Типажи ГДМ создают в основном по
назначению с отражением основных показателей качества, требуе-
мых для данной машины.
Так, для транспортных, строительных, дорожных и горных ма-
шин к основным показателям качества относят коэффициент пере-
грузки, глубину регулирования, оптимальный КПД, энергоем-
кость. Учитывая их, можно для упомянутых выше машин отобрать
ограниченное число конструктивных типов ГДМ и затем каждый
тип представить, например, параметрическим рядом, охватываю-
щим заданный диапазон передаваемых мощностей и создаваемым
с учетом рядов предпочтительных чисел. Ограничение числа типов
ГДМ существенно облегчает и удешевляет научно-исследователь-
ские и доводочные работы при их создании и внедрении. Исполь-
зование теории подобия позволяет распространить оптимальные
показатели, достигнутые для муфт одного базового типоразмера,
на весь ряд ГДМ.
Проведенные исследования показали, что применение одного
типоразмера ГДМ в возможно большем диапазоне мощностей дает
существенный экономический эффект. В связи с этим возникает
задача разработки оптимального параметрического ряда ГДМ,
т. е. определение минимального числа типоразмеров ГДМ, охва-
тывающего заданный диапазон мощностей, при выполнении тре-
бований, предъявляемых к их показателям качества при приме-
нении в приводах конкретных машин. При построении параметри-
ческого ряда в качестве основного параметра принимают активный
диаметр ГДМ, так как показатели качества, технологичность,
стоимость оснастки н др. в основном определяются этим параме-
124
Рис. 4.55. Изменение мощностей пара-
метрического ряда гидромуфт
тром. ГДМ с определенным ак-
тивным диаметром может иметь
различный коэффициент мощ-
ности на расчетном режиме
при заданной угловой скорости
col = const из-за изменения,
например, углов и числа ло-
пастей, втулочного диаметра,
наполнения, свойств жидко-
сти и других конструктивных параметров. При изменении
параметров муфты изменяются показатели ее качества.
Задачей исследователя является выявление таких рас-
четных значений Х^-пих-р и р» при которых показатели
качества отвечают предъявляемым требованиям. После выявления
этих показателей коэффициент параметрического ряда определяют
по выражению
<?Д=Г/Г (4.52)
» ЛМ mln р
и округляют до ближайшего значения, соответствующего опреде-
ленному ряду предпочтительных чисел. С учетом определенного
значения qn строят график изменения мощностей параметрического
ряда ГДМ с указанием значений активных диаметров н диапазо-
нов мощностей для каждого типоразмера (рис. 4.55). Подобные
параметрические ряды на различные конструкции ГДМ представ-
лены в работах [3, 4 ].
Кроме того, расширение используемого мощностного диапа-
зона каждой конкретной ГДМ можно получить за счет выбора
оптимального момента при большем скольжении, что приведет к
некоторому снижению коэффициента перегрузки ГДМ. Диапазон
перекрытия мощности в данном случае зависит от типа двигателя.
Рассмотрим этот вопрос подробнее для случая работы ГДМ с асин-
хронным электродвигателем, имеющим коэффициент перегрузки
1,8. Определим, в каком диапазоне мощности возможно применять
один и тот же типоразмер ГДМ при приемлемых изменениях вы-
ходной характеристики привода. Пусть у какой-то ГДМ оптималь-
ный момент М* при i* = од* = 0,97 и при этом коэффициент Кпер =
= 2,5.
Используем эту ГДМ с электродвигателем, имеющим мощ-
ность в 1,5 раза большую, чем в первом случае. Тогда изменен-
ный оптимальный момент ГДМ будет равен 1,5 М*, скольжение
s* = 0.03-1,5 = 0,045 и КПД од* снизится приблизительно до
0,95. Коэффициент перегрузки уменьшится до Каср = 2,5/1,5 =
125
Рассмотрим выходные характеристики приводов в обоих слу-
чаях. В первом случае ГДМ будет перегружать двигатель, что
приведет к снижению частоты его вращения. Пусть при этом ча-
стота вращения уменьшится на 12 %, тогда столовый момент ГДМ
уменьшится до (0,97 ... 0,12)2 AfCT или до 0,85а Л4СТ. Коэффициент
перегрузки станет Кпер = 2,5-0,85® = 1,95. Во втором случае
ГДМ не перегружает двигатель, и частота вращения его вала не
снижается. Муфта работает при ,ц* = 0,95 и Кпер = 1,7. Таким
образом, одна и та же ГДМ передает мощность в диапазоне (1 ...
1,5) 7V*.
При инжнем значении мощности ц* = 0,97 н Кпер =
= 1,95; при верхнем д* = 0,95 и КпеР = 1,7. В этом случае коэф-
фициент параметрического ряда qn = i/ТДэ.
Главными факторами, обусловливающими преимущества ГДМ,
являются: отсутствие жесткой связи между входным и выходным
валами, так как передача мощности осуществляется через допол-
нительное, например жидкостное, звено; возможность получения
желаемых характеристик ГДМ вследствие сравнительной простоты
управления их рабочим процессом.
Основные преимущества ГДМ, благодаря Которым повышаются
производительность и надежность машин, следующие:
1) предохранение двигателей от перегрузки?
2) обеспечение работы двигателя в оптимальных режимах (на-
пример, предотвращение работы двигателя при малой частоте
вращения вала с высокой нагрузкой и т. д.)?
3) возможность пуска двигателя под нагрузкой (например,
с включенной трансмиссией);
4) возможность остановки (стопорения) рабочего органа ма-
шины под нагрузкой при работающем двигателе и включенной
передаче;
5) возможность быстрого разгона любых маховых масс при
любой передаче;
6) плавное трогание с места и повышение проходимости машин
вследствие плавного приложения момента и колесам авто-
мобиля;
7) ограничение динамических перегрузок и крутильных коле-
баний;
8) возможность глубокого бесступенчатого регулирова-
ния скоростей исполнительных механизмов вплоть до отрица-
тельных?
9) хорошие тормозные характеристики при торможении дви-
гателем?
10) возможность работы нескольких двигателей для привода
одного механизма;
11) высокий КПД на оптимальном режиме^
12) высокая энергоемкость (коэффициент мощности) при до-
статочно большой частоте вращения;
126
13) относительная простота изготовления и малая стоимость}
14) возможность обеспечения ряда специальных требований
в соответствии с определенным технологическим процессом (регу-
лировочные свойства, возможность реверсирования рабочего ор-
гана, перегрузочная способность и т. д.)*
15) улучшение условий работы оператора и повышение произ-
водительности его труда.
К недостаткам ГДМ следует отнести переменный КПД в зави-
симости от режима работы и уменьшение его при отклонении от
оптимального режима (при сравнении с механической передачей),
а для проточных ГДМ также необходимость применения систем пи-
тания и охлаждения рабочей жидкости.
ГЛABA 5
ГИДРОДИНАМИЧЕСКИЕ ТРАНСФОРМАТОРЫ
5.1. КЛАССИФИКАЦИЯ ГДТ
Гидротрансформатором называется гидродинамическая
передача, преобразующая передаваемый крутящий момент.
На рис. 5.1 дана классификация ГДТ.
ГДТ, у которого на тяговых режимах работы входное н выход-
ное звенья вращаются в одном направлении, называется ГДТ
прямого хода, а ГДТ, у которого на тяговых режимах работы вы-
ходное звено вращается в направлении, обратном направлению
вращения входного звена, называется ГДТ обратного хода. ГДТ,
позволяющий осуществлять реверс выходного звена без реверса
входного звена, называется реверсирующим, а ГДТ, позволяющий
осуществлять реверс выходного звена с реверсом входного звена,
называется реверсируемым. ГДТ, у которого на расчетном ре-
жиме частота вращения выходного звена больше частоты вращения
входного звена, называется гидротрансформатором-мультиплика-
тором.
Момент в ГДТ преобразуется благодаря наличию третьего эле-
мента — реактора. Следовательно, для ГДТ 7ИТ/7ИП =/= 1. По числу
турбинных колес ГДТ разделяют на одноступенчатые (с односту-
пенчатым турбинным колесом) и многоступенчатые (с многоступен-
чатым турбинным колесом). Известны также m-насосный гидро-
трансформатор (с т насосными колесами), гс-турбинный (с п тур-
бинными колесами) и /-реакторный (с I реакторами).
На рис. 5.2 показаны схемы одноступенчатых ГДТ е различ-
ным расположением лопастных колес в рабочей полости. Тип тур-
бинного колеса определяется по протекающему в нем потоку ра-
бочей жидкости. При этом необходимо помнить, что рабочая жид-
кость, в основном, перемещается от центробежного насосного ко-
леса к турбинному и далее. Поэтому, например, ГДТ, показанные
на рис. 5.2, а и г, имеют центробежное турбинное колесо, на рис.
5.2, б, е — осевое, а иа рис. 5.2, в, д и ж — центростремительное.
Двухступенчатые ГДТ (рис. 5.3, а—5) состоят из одного
насосного колеса, двухступенчатого турбинного колеса при одном
или двух реакторах. Трехступенчатые ГДТ (рис. 5.3, е, ж) со-
стоят из одного насосного колеса, трехступенчатого турбинного
колеса и двух-трех реакторов. ГДТ с большим числом ступеней
турбинного колеса, как правило, не изготовляют. ГДТ, показан-
ие
Ло возможности работы на режимах с
передаточным отношением, большим единицы
Рис. 5.1. Классификация ГДТ
ные на рио. 5.2, а—г, относятся к ГДТ прямого хода, а показанные
на рис. 5.2, д—ж — к ГДТ обратного хода. Из рисунков видно,
что возможность получения вращения входного и выходного звень-
ев ГДТ в разные стороны конструктивно обеспечивается установ-
кой реактора после насосного колеса. В ГДТ прямого хода, как
правило, за насосвым колесом устанавливают турбинное.
ГДТ приведенных выше схем являются одноциркуляционными,
так как все лопастные колеса расположены в одной рабочей полости.
В многоциркуляционных ГДТ (рис. 5.4) лопастные колеса распо-
ложены в двух и более рабочих полостях. Многоциркуляционные
ГДТ служат для обеспечения реверса илн для переключения ско-
ростей в трансмиссии с целью получения ее необходимых характе-
ристик, а также для параллельной работы на одного потребителя.
Реверс или переключение скоростей осуществляется путем пооче-
редного заполнения и опоражнивания рабочих полостей.
О Стесан С. П. я др. 129
a) S) 8) г)
Рис. 5.2. Схемы одноступенчатых ГДТ
в) е) ж)
Рис. 5.3. Схема многоступенчатых ГДТ
130
ГДТ являются насосное
колесо, крепящееся к
входному валу, турбинное колесо, связанное с выходным
валом, и реактор, жестко связанный с корпусом ГДТ.
Б.2. ОСОБЕННОСТИ РАБОЧЕГО ПРОЦЕССА ГДТ
5.2.1. Моменты лопастных колес
Основой расчета ГДТ является одномерная струйная
теория Л. Эйлера, главные положения которой сформулированы
в п. 1.3. В дополнение к принятым допущениям следует указать,
что рабочая полость ГДТ находится под избыточным давлением
(в то время как в большинстве ранее рассмотренных случаев
в ГДМ на свободной поверхности давление атмосферное). Повышен-
ное давление гарантирует формирование потока лопастями, что
обеспечивает достаточно высокие экономические показатели.
Прн протекании жидкости через лопастное колесо в результате
взаимодействия между потоком и лопастями на колесе создается
крутящий момент, который можно найти по уравнению (1.61):
= PQ (^ин 2^н1 Сир агра)»
AfT — pQ (Сит т1 Сцн а^на)» (5- О
Л1р = pQ (pup a^ps А» аГц)»
Сложив левые и правые части записанных выражений, получим
основное уравнение баланса моментов ГДТ
Мн-Л1, + Л1р = 0
или
М, = МН + Л1Р.
Учитывая, что коэффициент трансформации ГДТ
К = М,/Мя = (Мв + Мр)/Мн = 1 + Мр/Мв1 (5.2)
наличие момента Мр на реакторе обусловливает разнмпу момен-
тов на насосном и турбинном колесах. При этом момент Л1Я при-
е- 131
нимают положительным, если он направлен в сторону вращения
выходного вала, и отрицательным, если он направлен в противо-
положную сторону. Уравнение моментов не зависит от потерь на
трение и справедливо как для идеальной, так и для реальной жид-
кости.
Из уравнений (5.1) следует, что момент 7ИН будет тем больше,
чем больше радиус rBZ и чем меньше радиус гра = гн1. Из треу-
гольника скоростей для насосного колеса (см. рис. 1.11) следует,
что при уменьшении угла рн2 уменьшается скорость н2, что при-
водит к уменьшению момента 7ИН согласно уравнению (5.1); при
увеличении угла рн2 увеличиваются скорость сина и момент Л4Н.
Момент Л1н также определяется направлением потока, выходя-
щего из реактора. При увеличении угла ₽р2 скорость сир2 увеличи-
вается, а момент Ми уменьшается; при уменьшении угла Рр2 из-за
уменьшения скорости сйр2 момент Л1н возрастает.
Прн осевом турбинном колесе гт2 л* гт1 и при условии близкого
расположения колес в рабочей полости можно считать, что гта =
— гт1 = гн2. У турбинного колеса поток на входе всегда на-
правлен по направлению вращения насосного колеса. Момент 74,
осевого турбинного колеса зависит в основном от скоростей сыта
И Сина» так как радиусы гта гн2 [см. уравнения (5.1)]. Чем
меньше угол рт2, тем меньше скорость сит2 и тем больше момент 7ИТ.
При отрицательной скорости сит2 момент Мт также возрастает.
Предельно возможное уменьшение скорости ситЯ определяется
минимально возможным углом рт2, который ограничивается ми-
нимально допустимым коэффициентом хта стеснения потока. Прн
центробежном и центростремительном турбинных колесах измене-
ние угла рт2 будет приводить к более интенсивному изменению
скоростн с„та и момента 7ИТ из-за влияния отношения радиусов
гн2/гта 1см. уравнение (5.1)]. Так, при одинаковых углах рт2и при
прочих равных условиях момент 74 т на центробежном турбинном
колесе будет больше, чем на центростремительном, для которого
гн.^гти В> 1- Для центробежного турбинного колеса можно до-
пустить меиьшее значение угла ₽та, так как стеснение потока ло-
пастями для него оказывает меньшее влияние на рабочий процесс,
чем при осевом или центростремительном турбинном колесе.
Момент на реакторе Л1р также зависит, в основном, от угла
Рра и от соотношения радиусов гр2 и гр1 « гт2. Прн прочих рав-
ных условиях при увеличении угла Рр2 увеличивается скорость
сыр2, что приводит к увеличению момента 74р. Необходимо отме-
тить, что на момент 74р существенно влияет отношение гр2/аР1.
Из рис. 5.2 — 5.4 видно, что в реальных конструкциях наиболее
часто используют осевые и центростремительные реакторы. При осе-
вых реакторах гра ~ гр1« гта и момент 74р в основном зависит
от скоростей сир2и сдтЯ; при центростремительном реакторе на
момент 74р дополнительное влияние оказывает отношение rpa/rTa,
которое меньше единицы и поэтому приводит к некоторому ос-
лаблению влияния угла рра на момент 74р. Из выражения (5.2)
132
следует, что чем больше момент Л1Р, тем выше коэффициент транс-
формации ГДТ. В то же время с ростом коэффициента трансфор-
мации, как правило, уменьшается момент Мв из-за увеличения
скорости сир2 [см. выражение (5.1)1.
5.2.2. Автоматичность работы ГДТ
Прн работе ГДТ в приводе машины непрерывно изме-
няется скорость ее рабочего органа под действием нагрузки, что
приводит к изменению скорости выходного вала ГДТ. При этом
чем больше нагрузка на рабочем органе, тем меньше его скорость,
и наоборот. Выясним, как изменяется момент М? при изменении
угловой скорости турбинного колеса, связанного с выходным ва-
лом. Из треугольника скоростей для турбинного колеса следует,
что при изменении скорости нТ2 изменяется скорость сыт2 и, как
следствие, момент Л1Т [см. выражение (5.1)1. Так. при умень-
шении скорости нтя уменьшается скорость си та и увеличивается
момент Л1т, что и требуется по условиям работы привода в машине.
При уменьшении нагрузки на рабочем органе скорость его воз-
растает, что приводит к увеличению скорости выходного вала
ГДТ и, следовательно, скоростей ыт2 и си т2, обусловливающих
снижение момента Мт. Таким образом, ГДТ является устройством,
автоматически изменяющим момент в соответствии с изменением
нагрузки, действующей на его выходной вал со стороны рабочего
органа. Способность ГДТ непрерывно изменять момент Л4Т в за-
висимости от нагрузки называется автоматичностью.
5.2.3. Внутренняя характеристика ГДТ
Внутренней характеристикой ГДТ называют зависимо-
сти между внутренними параметрами потока жидкости в рабочей
полости. К этим зависимостям относятся, иапрнмер, характери-
стики Н, Q, £Лаот = f (<о2> О при toj = const; характеристика
Н = f(Q) при (01 = const и др. При этом каждой точке внеш-
ней характеристики ГДТ соответствует точка внутренней харак-
теристики. Это взаимоотношение однозначно и позволяет рассма-
тривать внешнюю характеристику ГДТ в зависимости от его вну-
тренних параметров. Рассмотрим основные внутренние характери-
стики ГДТ. Зависимость = при (Oj, = const показана
иа рис. 1.21.
Зависимости — f (Q) при «и = const, приведенные на
рис. 5.5, построены по уравнению (1.63), которое можно предста-
вить в виде
= А3Ш2 — А4О2 (5 3)
где Ля» Л^, Лв — постоянные коэффициенты, зависящие в основном от заданных
геометрических параметров лопастных колес.
133
Рис. 5.5. Зависимости теоретического
напора турбинного колеса от его рас-
кола:
I — при t = 0; 2, з — при t < i*-, 4 —
при /•; 5, 6, 7- при t> i*
Рис. 5.6. Зависимости теоретического
напора от угловой скорости выход-
ного звена дли турбинного и насосного
колес
Так как со^ = const, характеристика HtT = f (Q) представляет
собой семейство линий, каждая из которых определяется текущим
значением скорости о>2, при этом наклон характеристик зависит
от угла ртя.
Зависимости Яен, HlT = f (соя) при постоянных ©! и Q, пока-
занные на рис. 5.6, построены с учетом выражений (1.62) и (5.3).
Так, из выражения (1.62) следует, что при выполнении условия
cot = const и Q — const напор HtH в явной форме не зависит от со,,
поэтому графически эта характеристика — прямая линия, парал-
лельная оси абсцисс.
Выражение (5.3) при условии соЛ = const и Q = const можно
представить в виде
Я1Т — Л6и2 — Л4Ш21 (5.4)
где At = Аа + Ав<2-
Кривая, построенная по уравнению (5.4), представляет собой
квадратичную параболу. При со, = 0 и и со2 — Ав/А4 напор
/Лт 0. Наибольший иапор HtT ша1 имеет место при (о2 ~
аг 0,5Ла/Л4. На некоторых режимах (со* <0f и со2 co2) полез-
ная мощность ГДТ, определяемая напором HtTt невысока. Поло-
жение кривой Hf? = f (соа) при <01 = const и Q = const зависит
от геометрических параметров турбинного и насосного колес. При
изменении этих параметров изменяется значение коэффициентов
Л8 ... Лв, и максимум кривой можно сместить в любую сторону
(см. штриховые линии на рис. 5.6). Но прн этом увеличение на-
пора HtT при одной скорости оа вызовет его уменьшение при дру-
гой скорости о>2.
В реальных условиях объемная подача Q зависит от скорости сОз,
ио параболический характер кривой HtT = f (со2) остается неиз-
менным, т. е. кривая имеет точку с ординатой Htll шах и две точки
о ординатой Htl = 0.
134
Рис. 5.7. Зависимость гидравлическою
КПД ГДТ от угловой скорости выход-
ного звена
На рио. 5.7 показана зависи-
мость гидравлического КПД ГДТ
= f (соа) при (Of = const и Q =
<= const. Гидравлический КПД
PgQ^tt Ptr S | knot
~ PgQHlB ~ ll,~ H,„ •
t. e. кривая = f (co2) также представляет собой параболу.
Зависимость Q = f (i) при (ot = const для ГДТ так же, как и
для ГДМ, получим из уравнения баланса удельных энергий, для
чего значения HtB, Htrt £ЛПОт выразим в функции от геометриче-
ских параметров лопастных колес, режима работы ГДТ, коэф-
фициентов стеснения потока лопастями, учета влияния конечного
числа лопастей, отдельных видов гидравлических потерь и решим
полученное уравнение относительно значений Q и со2.
Так, для обычного одноступенчатого ГДТ, содержащего три
лопастных колеса, расположенных в рабочей полости в последова-
тельности Н — Т — Р (по направлению движения рабочей жид-
кости), представим выражения для напоров и HtT в следую-
щем развернутом виде, используя зависимости (1.62) и (1.63):
=4 (5-5)
н., =4
(5-6)
Гидравлическве потери разобьем иа две группы: потери на тре-
ние и потери, зависящие от угла атаки на входе в лопастное ко-
лесо. Потери на трение
Ь,р = ft,p. в + Ьтр., + Лтр.р = +-^-’ (5-7)
где k —• коэффициент сопротивлении соответствующего колеса!
^ЧР1/(4₽Г.СР^СР).
Потери, зависящие от угла атаки в каждом колесе:
^уд = Фуд^з/(2g)»
где г2 = (emz пред- cml)2 + (сц2 „рвд- с,,)2 (здесь е„2 „„„ в са2 пр„ -состав-
ляющие абсолютной скорости иа выходе из предыдущего лопастного колеса).
Как правило, допускают, что ст2 пред = тогда
= Сц 1предгЯпр«д/Г1 ^ul*
135
Из треугольников скоростей с учетом известных соотношений
преобразуем выражение для скорости с9 н получим выражения для
потерь на каждом колесе:
+ (5.8)
Лтд. •> = -™g— [(“bWb — ‘“Л1) —
<5-9>
и _ Фул- Р Г.-щ . „ 'т. _ Q ( ct8 Рч „ Ут» ctR Ppi AT
Лу« Р 2g ,р1 V I F„ »» rpl Fpl J J -
(5.10)
Значения коэффициентов krp, p и <руд для различных ГДТ
приведены в работах [5, 11, 24 J. В первом приближении обычно
принимают ктр = 0,045 ... 0,075; а рт, рр, <рта.и, ф-д.„ <pTO.p
равными 1. После подстаиовки выражений (5.5) ... (5.10) в урав-
нение баланса удельных энергий получим
Гг2 .1 Q ( ctg₽H2 г и ctg₽P* Г .1 М
V 1/“фи шГ нГ"Гв2|Ав - ТрГ“ рзМ1’)J ~
+^[«(-^^р+^)-“р<Г+
+-V- -Q £> - -ВДТ+
—Q Pr^PT-rL--£Ffi!-)T +
zs L. Гр1 \ *та гр1 гр1 /j
Разделим все члены уравнения на с0н/(2£) и сгруппируем их
по степеням Q и f. Получим уравнение второй степени относи-
тельно Q и it которое запишем в общем виде:
-^~a+-^-(6 + fc) + (d + m‘, + 2lFi)=°. (5-11)
где *
f ctgPpa гр, м ctg ₽hi Х2 f ctg РП1 гна
а — Фуд.и ( Г----— Рр--р---I + «Руд. Т ( —р-ри —-
V гр> гш Гн1 / \ Гн» Гт1
__ ctg Pti X2 / ctgP-га rTS ^SPpiVib । ь । t. .
136
. / cte₽n,.. ctg₽p, „ ги
t = r« -----F^T^^)~
___w fH> / _c*g Pm rua ctg Рт1 Л I
—<Руд. т — Рнгн1 I "p--------- Ph---p I Г
ЛТ1 V Г Hl ГТ1 Г T1 i
_Lr <n, ( ctSPp* n rP> etgPmV
+ Пифуд. н I j----Рр— г I»
\ ‘ pi 'Hl 1 Hl /
I cIrPti rTt CtgPm .
C — Gn I —p---------— Pt-----p---Ри I -Г
\ rn rai r bi /
, „ , / c>ePa, a r„ ctgfiTIA
+ Фуд. Л ----ЛГ)
4s ( Ctg pT, _ Г*ГЯ . Ctg ₽P! tl .
—Фуд. P ~Z— I p--------Rt ~--r--------- I »
rpi \ • Ti ^pl “pl '
d=“2^2Ph+фуд. h^i + фуд. Лрн;
^?2
® Фуд. п,/»! 2z®2Pt “Ь Фуд. p^w2 _2 P®>
Pl
f = ^BSpH Фуд. н^н2рнг®1"
Решение уравнения (5.11) дает значение Q при различных I:
Q -2 (6 + ic) ± 1/4 (1> + i<y -4a(d + mi‘ + 2fi) f5 12)
<i)H 2a • \ /
Аналогично можно составить и решить уравнения для ГДТ
с любыми расположением и числом лопастных колес. Например,
для четырехколесного ГДТ (см. рис. 5.2, г) напор на насосном
колесе
Н ®" ГАп Q / ctgfWm _ ctgPpniPpIT >1.
я,в —г 1/я2₽в —ST V Fm Ри-----------------------F^T~ r* nvJ ’
(5.13)
вдесь и далее индексы I и II означают номер реактора.
Напор на турбинном колесе определяют по уравнению (5.6);
потери на трение
«, kaQ3 , ftTQa , ftpiQ1 , ftpnQ* , ^CnQ’
nTV ~ ~2g~ + + ~2T^ + ^F~ + ’
где Лрл —• коэффициент сопротивления безлопастного пространства рабочей по-
лости;
*С'° «sinPita ( Vi fta sin‘₽l6j> М2.а>“‘п2₽2в4 )’
(5-14)
вдесь £т. бл — дл ина средней линии тока в меридиональном сечении безлопаст-
ного пространства рабочей полости.
137
В выражении (5.14) индексы 1 и 2 соответственно обозначают
начальное и конечное сечения безлопастного участка, причем
направление потока в начальном сечении соответствует направ-
лению потока на выходе из предыдущего колеса (р1бл — ₽1ПреД),
а направление в конечном сечении определяют из условия сиг ==?
«= const в безлопастном пространстве:
ctg₽>On=-^4Tets₽^-
г1бл г1вл
Потери, зависящие от угла атаки:
Фуд-Н Гд ( GtgPni 'pill , CtgPnl A rn г
4,“ L4 f, п." ₽111 + ~ J ’
(5.15)
* т_ Ч’УЯ.Д Г;„ ^2 0( 'Mr. r„ CtgPpi. \П2.
2g 1,<0=,р11ЕЬ Ч F„ ----------------------
(5.16)
Л- т. — ^УД.рП Г О ( rtSPpI» ГР!» п - ctePpiH \12. /к 17\
йуд.рп-------L Q ^Грр1-----------------*ЪПГ“Л1 ’ (5Л7)
потери Луд т определяют по уравнению (5.9).
В уравнении (5.12) для большинства ГДТ коэффициент f
о достаточной точностью можно считать равным нулю, так как
Гия = М, а фуд. т “ 1. Коэффициент а всегда больше нуля,
так как всегда существуют потери на трение, и коэффициенты Лн,
Лт, kp тоже больше О. Свободный член d < О, так как рн < 1,
а гта М- Таким образом, зависимость Q — f (г) может пред-
ставлять собой уравнение окружности, параболы, гиперболы или
эллипса. Для определения типа кривой [уравнение (5.11)1 запи-
шем инварианты кривой второго порядка:
I
ь
d
т
с
I
с
а
b
Д =
= —т (Ьа — a3d) — de1 = —mb*4- d6,
_ I m c |
где о — I I = ma — c3.
I c a]
Известно, что все кривые второго порядка разделяются на
параболические (б - 0) н центральные (б О). Если 6 > 0,
то зависимость Q == f (i) будет уравнением эллипса, если б < О —*
гиперболы. Как видно нз выражений для коэффициентов т, а
и с, знак б зависит от знака т(а > О и с“ >0). Коэффициент т
в основном учитывает радиусы rTj, rri и rpj. Если гт; > гт2 (цен-
тростремительное турбинное колесо), то m >0 и б > О. В наи-
более распространенных ГДТ соотношение радиусов и углов
лопастей таково, что выполняется условие т > с* 1а [11. Если
rn > М (центробежное турбинное колесо), то т < 0 и б <0,
138
Рнс. 5.8. Зависимость
расхода от передаточ-
ного отношения ГДТ
так как рт 1. Таким образом, коэффициент т учитывает влия-
ние типа турбинного колеса на функцию Q — f (0.
С увеличением частоты вращения турбинного колеса усили-
вается действие центробежных сил на рабочую жидкость; если
нх направление совпадает с направлением движения жидкости
в рабочей полости (турбинное колесо центробежное), то значе-
ние Q увеличивается, а если не совпадает (турбинное колесо цен-
тростремительное), то Q уменьшается. В последнем случае может
возникнуть обратное движение жидкости — от турбинного колеса
к насосному, что будет характеризоваться кривой Q = f (0 для
О
Рис. 5.9. Зависимости Q = f (i) для ГДТ различный видов
139
обратного цикла. На рис. 5.8 эллипс А соответствует прямому
движению жидкости, а эллипс В — обратному. До значения inp
происходит прямое движение жидкости, а от точки С — обратное.
Направление движения потока изменяется при Iq=q и далее
в точке D. Участок работы ГДТ от Iq^j до iap является неустой-
чивым. Здесь возможны разные изменения Q по значению н на-
правлению н соответствующие изменения моментов AfH и Мг.
Для ГДТ с осевым турбинным колесом гт2 « гт£ и коэффициент
т ж 0. Если прн этом с = 0, что возможно при равенстве углов
лопастей 0Tj = ppj, то коэффициент б = 0 и зависимость Q =а
f (*) будет прямой линией, параллельной осн I.
Возможные варианты изменения Q = f (t) показаны на рис. 5.9.
Координаты центров кривых второго порядка и углы наклона
их осей по отношению к осям координат в общем случае можно
определить по формулам для эллипса и гиперболы (см. рнс. 5.8)
г _ cb — aj , cf — mb . 2с
—g—. Qn-—g—» tg2a = -^-T,
где a — угол между осью I' кривой и осью Z.
Таким образом, анализ зависимости Q — f (£) показывает, что
на вид кривой Q = f («) влияет прежде всего тип турбинного
колеса, а также соотношения радиусов лопастных колес и зна-
чения углов установки их лопастей.
5.2.4. Расчет поля скоростей и давлений
в рабочей полости ГДТ
Рассчитывают н проектируют лопастные машины и
ГДП по средней линии тока в рамках одномерной струйной теории
Эйлера. Основное допущение этой теории, что движение потока по
любой струйке лопастного колеса аналогично движению по сред-
ней струйке, является лишь грубым приближением. Для внесения
обоснованных изменений в лопастную систему необходимо знать
влияние основных конструктивных параметров на особенности
структуры потока в лопастных колесах. В связи с этим ставится
задача аналитического определения поля скоростей в колесе,
которую можно решить приближенно с учетом следующих допу-
щений.
1. Число лопастей во всех лопастных колесах бесконечно
большое. Эго позволяет пренебречь неравномерностью поля ско-
ростей идоль любой окружности с центром на осн и в цлоскостн,
перпендикулярной к осн. С учетом этого допущения определено
осредненное поле скоростей, а на выходных участках учтено от-
клонение потока по известной методике [7].
2. Гидравлические потерн поперек канала, т. е. в направлении
ортогонали h (рнс. 5.10), не изменяются. Это допущение связано
с отсутствием каких-либо данных по распределению потерь.
140
Рис. 5.10. Ске ма для расчета поля скоростей и давлений в ГДТ
3. Линнн (поверхности) тока 1 в меридиональном сечении опре-
деляют методом последовательных приближений, считая, что
входные н выходные кромки лопастей совпадают с ортогоналями
к линиям тока.
Проводим ортогонали 2, нормальные к стенкам, и делим их
на участки с учетом уравнения неразрывности, принимая ст «а
const поперек канала (определив действительное распределе-
ние ст, необходимо сделать уточнение положения лнннй тока
и повторить расчет).
Для определения поля меридиональных скоростей запишем
условие отсутствия движения жидкости в направленнн ортого-
нали h. Для этого выделим элементарный объем жидкости, огра-
ниченный смежными ортогоналями длиной dh и смежными ли-
ниями тока длиной ds [22, 241. Размер в направленнн, перпенди-
кулярном плоскости чертежа, обозначим через dq.
На выделенный элемент действуют следующие силы:
сила, создаваемая разностью давлений dp по обе стороны
элемента:
dFv = — -^-dhdsdq =-----^-dV, (5.18)
v on on
tj& dV — dhdsdq-, знак «минус» обозначает, что при положительном градиенте
давления направление силы совпадает с отрицательным направлением h, а поло-
жительное направление Л отсчитываем от внутреннего тора;
центробежная сила вследствие криволинейной траектории
движения (в меридиональной плоскости):
dF^^pdVc^ (5.19)
141
центробежная сила, вызванная вращением элемента относи-
тельно оси»
арцц = р dVclir, (5.20)
где г — расстояние от элемента объемом dV до оси вращения; гт — радиус кри-
визны линии тока в меридиональном сечении]
массовая сила dF, эквивалентная воздействию бесконечно
большого числа лопастей на жидкость н направленная нормально
к поверхности лопасти; сила dF имеет составляющие dFut dFb
и dFj
dF„ = pdV^- ; (5.21)
dFb = dFa tg 6; (5.22)
dF. = — dF„ctg₽. (5.23)
Условие отсутствия движения в направленин h требует, чтобы
сумма проекций всех сил в этом направлении равнялась нулю,
v. е.
dF^ 4- dPv — dF^ cos T + dFh = О,
где у — угол между направлением h и вертииальноб осью машины (см.
рис. 5.10),
После подстановки получим дифференциальное уравнение рав-
новесия
4 -И -4- ? + 6 = 0. (5.24)
которое н будет положено в основу расчета поля скоростей в ло-
пастных колесах.
Как указывалось выше, ГДТ представляет замкнутую систему
лопастных колес, условия входа на которые определяются усло-
виями выхода с предыдущего колеса. Поле скоростей в ГДТ
можно рассчитать с помощью системы дифференциальных уравне-
ний, число которых соответствует числу лопастных колес.
Выведем основные расчетные уравнения для одноступенчатого
трехколесного ГДТ с заданными геометрическими размерами.
Для течения в полостях, свободных от лопастей, cur = const
и d (rcu)/ds = 0.
Для сечення на выходе нз насосного колеса (в межколесном
зазоре) уравнение (5.24) имеет вид
СтнД скя2 cos ?и2 1 0Ряа __ п «кх
Гщю р dhBt °'
Для сечения на выходе нз турбинного колеса
_J_^ac0. (5.26)
^тт» Г„ p dhri v *
U2
Для сечення на выходе нз реактора
&р2__ ^ргс°*У._1^а_ = 0- (5.27)
Гmpi rpi Р ©"р.
Для определения величина воспользуемся уравне-
ниями энергии в соответствующих колесах.
Уравнение энергии в реакторе
= ЙПО7. р» (5,28)
где Ер2 = pp27(pg) + c®2/(2g)—удельная энергия жидкости на выходе из ре-
актора; Ет2 = p,.2/(pg) + c^2/(2g) — удельная ввергни жидкости на выходе из
турбинного колеса; Апот. р — гидравлические потери энергии в реакторе.
Уравнение энергии в турбинном колесе
== ^нТ — Hi-s — &пот. w> (5.29)
гдеЕв2 = рн2^(р£)+ с|2/(2£) — удельная энергия жидкости на выходе нз на-
сосного колеса; Htr = (Сцд^и^ — cunun)/g — напор жидкости, срабатываемый
на турбинном колесе; Апот. v — гидравлические потерн энергии в турбинном ко-
лесе.
Уравнение энергии в насосном колесе
Евл — ^pi “Ь Htn — hnoT.Hi (5.30)
__ синзИн1 сирзква
где Н(в =------------------ —
теоретический напор насосного колеса] Апот. в — гидравлические потерн в на-
сосе.
Рассмотрим подробно выход из насосного колеса.
В развернутом виде уравнение (5.30) имеет вид
-2 /5
Рна f сн2 ___ Рщ I СР2 » сч h^hi си рзая1 ____д
pg + 2g ~~ pg + 2g + g йпот.в.
Выразим -F oj н продифференцируем ураненне по hH1:
I ©Рнз । у, ©стпн1 । _ &синг ___ 1 ©Ppi д/ip» .
р ©АЯ1‘ГЧша dhBt dhat ~ р аьЯ1 ЙЛР1
, 0Стрз 0Лр, f асир1 0Лр, t ©(АлкИн,)
+ Стр1 ©Ар. +ѓЫ дЬы dhpt ** бЛи
© (Caps“si) ©Ар, ©Адот, я
©Ад, ©Ар, ©Ад,
где ©Апот. В/©АН1 = 0 (см. второе допущение).
143
Подставим в уравнение (5.31) выражение для dpBJdhBi н для
dp^dh^ из уравнений (5.25) и (5.27). Получим уравнение для
выхода из насосного колеса
ств2 син2cos Уя2 , „ Л ^uhs „ дияя
7^7 +Стн2 ма2 + Син2 diHa
.. йсит ( £р2 C„p2C°STp2 , _ 8c"M ,
-°“аС=а5Г^----------------— + с“” 0АР. +
бСцра ®сярз 5ин1 \
+ С“₽2-0Л^ “-1 “ал^ с“ ₽а АГ) •
Проводя аналогичные преобразования и учитывая, что ит1 —
— uB2i; т. е. д (uT1cUB3)/dhB2 = id (u^c^/dh^ получим диффе-
ренциальные уравнения на выходе для турбинного колеса:
0ЛГ1 ( стт2 ^т2 cos Тт2 ( „ ®<7ПТВ I „ дсип
dh^ \rm„ —7~ +Cmrt dh„ +C“« dhxt
„ &итг „ 0CUT2 \ __________ стн2 син2 cos TH2 ,
UT® dhT2 тЯ dhn j гтва гн2
+ cma + С и - i + «ш ^-);
для реактора
Cmp2 p2 C0SVp2 . fompl 6cupt _
rmpi dfcp, +c“₽2 dfcp, “
| ^mt2 ___ СЫТ2 C0STt1 I _ 0£п1ТЯ I Л |
X'mTi ГТ1 +СттЯ dhn dhTt J'
Для решения полученной системы дифференциальных уравне-
ний необходимо произвести подстановку си = и — ст ctg 0.
Окружная скорость и = ©г, где г — радиус данной линии
тока на входной или выходной кромке.
Если известен радиус R линии тока на торовой поверхности,
то приближенно г — R—hcos у (см. рис. 5.10) н, следовательно,
дса ди в ctg В , о дс^ оо.
^- = _a>cosV; -gf =а—ctg₽-^-- (5.32)
Введем обозначения:
д ctg 0/дЛ = В\ cos у/(7? — h cos у) = а\
l/rm + Bctgp — a ctg2 р =Л; l+ctg2p=D.
После подстановок и преобразований получим систему уравне-
ний:
144
Стн2 ^н2 4“ Cfne2 * ^н2 4“ ^тн2 2wH2 ctg Рн2^н2 =
= дйнв [^Р2 ^₽2 4“ с«р2 ^р2 — стр2 (®в ctg Рр2 COS Y₽2
— ^Hi^pa) 4—Qhp* ctg Ppa^Hi j»
С2тн2 Лв2 + cmH2 -^- £)h2 + (1 + i) uH2 ctg pB2 +
+ Стнг {«H2 [Виз (1 4- i) 4- 2 ctg РнгАнз] + C0H ctg Рна COS Yh2 (1 — 01 4-
4- «н2 [G>n COS Yh2 (2i — 1) — aH2UH2] = [cm T2^T2 4~
4- cmib dh™ ^тЯ Стт?2итЪ ctg Рт2°т2 J »
„2 л ! ^cmpi dhTt Г 9 л
cm p2Ap2 4- Cmp2 ~dh— DP2 - |_Стт2 Лт2 4~
+ Cjnrt +Cm T2 (ctg ртясот cos Yrt—«Л 4- 2artctg ₽таат8) —
— uT2 ctg ртя — 2urtcoT cos Yia]. (5.33)
Определяем скорость cm = f (й) по уравнениям (5.33) в следу-
ющей последовательности.
1. Выбираем начальные условия так, чтобы выполнялось
уравнение неразрывности Q = cmFm. Считаем, что скорость для
средней линии тока равна СтСр = Q/Fmi где Fm — площадь про-
ходного сечения на выходе из соответствующего колеса.
2. Принимаем в первом приближении, что
^йТ2/^Лря = Лтз/Лрз! dh^/dhtt^ = /^та/йи*, dhpz/dh^ = hp^lh^,
где йтв, Лр8, йпя — длины ортогоиалей в соответствующих сечениях.
3. Подставляем в дифференциальные уравнения выражения
для известных величин и определяем неизвестные
^ЛтЯ; dcmvi/dhpt.
4. Вычисляем приращения Дст меридиональных скоростей
между двумя линиями тока:
Дст=^АЛ,
где АЛ — расстояние по ортогоиали между соседними линиями тока.
5. Определяем значения ст на соседних линиях тока:
ст = стср ± Аст.
После вычислений строят графики зависимости Ст = / (й)
Зная Cjn в выходных сечениях, можно определить закон измене-
ния ст (й) в любом сечении колеса, а также зависимость си =>
/ (А).
10 Cvcqhb С. П. др. 1^6
Из уравнения (5.24) путем интегрирования находим зависи-
мость р = f (h):
cosy ей + р0,
где р0 — избыточное давление, создаваемое подпиточным насосом в исходной
расчетной точке.
При проектировании нового ГДТ определение зависимостей
ст = f (Л) и cu — f (Л) должно соответствовать наиболее правиль-
ному выбору углов Р на разных линиях тока, при которых обе-
спечивается безударный вход не только по средней линии тока,
ио н по всей выходной кромке лопасти.
5.2.5. Внешняя характеристика ГДТ
Внешней характеристикой ГДТ называют зависимость
внешних показателей от передаточного отношения при постоян-
ных вязкости и плотности рабочей жидкости, частоте вращения
или крутящем моменте входного звена. При этом полной внешней
характеристикой ГДТ называют его внешнюю характеристику на
тяговом, обгонном режимах и на режиме противовращения
(рис. 5.11). Чаще всего внешнюю характеристику представляют
в виде зависимостей Л4Х, Л12, т] от i и со, при постоянных colt р,
где моменты и Мя относятся к входному и выходному валам
ГДТ. Моменты и отличаются от моментов на лопастных
колесах Л4И и МТ на величину потерь моментов от дискового
трения и механического сопротивления в уплотнениях, подшип-
никах, механизмах свободного хода и других узлах ГДТ. Учиты-
вая, что значение и характер зависимостей и Л4В от i и со,
в основном определяются характером зависимостей Мн и МТ от
i и соа, для простоты будем использовать значения моментов на
лопастных колесах. Рассмотрим указанные выше зависимости для
насосного и турбинного колес ГДТ. Для насосного колеса с уче-
том треугольников скоростей
= PQ (СынЗ^нй ^ups^pi) = Р<2 [fнз (ин1 £-тпнз ctg Рн1)
Трв (ирЗ ^mp3 Ctg Ppi)],
где cu = u~ ст ctgр.
Скорость ирг = 0, так как реактор неподвижен. Допустим,
ЧТО Стл = Cmp3 = Cmt Т0ГДЗ
Л4Н = pQ + cm (ctg Pp2rp2 — ctg рн2гн2)]
или
M. = pQ [з>Лз + Q ( r„2 - (5.34)
146
Рис. 5.11. Теоретическая полная
внешняя характеристика ГДТ при
ПОСТОЯННЫХ (01, р, Q
Анализируя уравнение
(5.34), можно заключить, что
момент Мв явно не зависит
от является квадратичной
функцией величины Q, кото-
рая для различных типов
ГДТ по-разному изменяется
в зависимости от поэтому можно предположить, что в общем слу-
чае момент будет изменяться при изменении I. Если предпо-
ложить, что Q не зависит от i (что справедливо, например, для
ГДТ с осевым турбинным колесом), то в этом случае Л4В = const
и также не зависит от i (см. рис. 5.11) при данной сон — const.
Таким образом, если необходимо создать ГДТ с постоянным (или
мало изменяющимся) моментом Л4Н, величина Q должна быть
постоянной для любых режимов его работы.
Для турбинного колеса аналогично получаем выражение для
момента исключая из него скорость с„, производя замену
«тя = <отгт> = (Он/Гтя и = (ОнГи,:
М, = pQ [<o.r?2i - + <2 (-7^ г.2 - ~/7~ J • (5-35)
Анзлизнруя уравнение (5.35), можно заключить, что момент Л4Т
явно зависит от i и является квадратичной функцией величины Q.
Если предположить, что Q = const для всех i и учесть знак ctg 0та,
прямая линия момента Мт пойдет так, как показано на рис. 5.11.
Рассмотрим подробнее режимы работы ГДТ.
На тяговом режиме обеспечивается основное движение рабочих
органов машины. Мощность, затрачиваемая на теплозые потери:
тепл — ^1 *я -
Тяговый режим характеризуется зависимостями
Nt = Л1аС1)а и М1впл > 0.
При этом линию момента Л4Я на графике для удобства изобра-
жения строят в зоне положительных моментов, хотя по существу
знаки моментов Мг и Л12 (Мв и Л1т) противоположны.
Тормозными называют режимы, на которых происходит за-
медление (торможение) рабочих органов машины, т. е. Л\ < 0,
и мощность к ГДТ подводится со стороны рабочего органа. Работа
совершается рабочими органами, и активными силами являются
силы тяжести и инерции. В общем случае для тормозных режимов
можно записать — Аа = Л11(оа. Если отрицательный знак имеет
момент Mt (Л4Я < 0) прн > 0 и <оя > 0, режим называют
10* 147
обгонным, если отрицательной является скорость со, (со, < 0)
при coj > 0 и > 0, режим называют режимом противовра-
щения.
Баланс мощностей иа обгонном режиме можно записать в виде
Nt = + N,ewi, а на режиме противовращения 7УВ + Л\ — ,
— #тепл = 0. В общем случае для ГДТ передаточное отношение,
при котором обгонный режим переходит в тяговый, хобг 1,
т. е. на обгонном режиме может быть случай, когда турбинное
колесо не обгоняет насосное, и, наоборот, иа тяговом режиме
турбинное колесо может вращаться быстрее насосного.
Тяговый режим характеризуется передачей потока мощности
на выходной вал при определенном значении КПД для каждого
режима работы ГДТ. О характере кривой КПД можно получить
представление, составив выражение для КПД с учетом выраже-
ний (5.34) и (5.35):
я = = = 1 ₽£_ (а1 + Ь) = сР +di,
где a=m„rj2; Ь = —+ Q (ctg ₽b2tb2/Fb2 — ctgP./.j/F.j); c=opQ/AfB;
d = bpQ/MH.
Таким образом, зависимость КПД ГДТ является параболой
со значениями т] = 0 при I = 0 и I = c!d и Т] = Т]* при каком-то
£ = I*.
Рассмотрим характерные точки внешней характеристики ГДТ
иа тяговом режиме работы.
Точка 1 — режим холостого хода, в которой отсутствует на-
грузка на выходном валу (7УТ = 0, Мт =0): т] = 0; NB =
= Л^пот ¥= 0- Из выражения (5.35) получим значение /х.х,
приравняв Л1т = 0:
_ Г2 — О ( CtgP”« г — _ctgPTa г А
mHrH2 VI р ' н2 р гт2 I
1Х, х =---------4 на 2--------. (5.36)
Анализ выражения (5.36) показывает, что в общем случае
Ix.x S 1- Для современных ГДТ /х.х = 0,6 ... 1,7 в отличие
от ГДМ, для которых «ж. х = 1.
Из уравнений (5.30) для точки 1 также следует, что момент
Л4Т «= 0 при сит,гта — Сцн^Ги,, т. е.
СИТ2/Сина = Г »!•
Для осевого турбинного колеса гн, » гт2 и сытЯ « син„ т. е.
вектор скорости не меняет своего направления на режиме холо- *
стого хода и отсутствует результирующее воздействие потока на
турбинное колесо ГДТ.
Для центробежного и центростремительного турбинных колес
скорость си иа режиме холостого хода должна изменяться. Изме-
нение происходит по закону свободного течения. Линии тока при
148
Рис. 5.12. Изменение внака мо-
мента иа реакторе
свободном движении между
параллельными стенками
представляют собой логариф-
мические спирали.
Точка 2 — режим равен-
ства моментов Л1Н = Л1Т
[i = Afp = 0 и
^upa^ps — т2» см. выра-
жение (5.1)]. В ГДТ, как
правило, гр2 гт2, следова-
тельно, векторы скоростей
Ср2 и Ср! всегда будут раз-
личны. Рассмотрим подроб-
нее зону точки 2. Сила Р
(рис. 5.12) является равнодействующей пары сил, действу-
ющих на реактор со стороны потока на режимах левее точки 2
(А > 1) и правее точки 2 (А < 1). В точке 2 изменяется знак
момента на реакторе, правее ее Л1Т < Л1Н и уравнение баланса
моментов имеет вид Мт = МЕ — Mv. Это можно использовать
для автоматического перевода ГДТ на режим ГДМ, определенным
образом воздействуя на реактор (освобождая его от жесткой
связи с корпусом), что используется в комплексных ГДТ.
Точка 3 — режим синхронного вращения насосного и турбин-
ного колес: ют = сон, 1=1. Этот режим имеет место для ГДТ
с ix.x>l. Режим имеет большое практическое значение для
блокировки насосного и турбинного колес, так как при равенстве
их скоростей обеспечивается плавное соединение входного и вы-
ходного валов ГДТ (двигателя и рабочего органа).
Точка 4 — оптимальный режим работы, характеризуется ма-
ксимальным КПД т]* и минимальными гидравлическими поте-
рями. Иногда оптимальный режим совпадает с режимом безудар-
ного входа в венец лопастей одного из колес, когда угол атаки
при входе потока на колесо равен нулю.
Точка 5 — стоповый режим; i = 0, д = 0, Мв у= 0, Nr = 0,
N = N
"н тепл-
Момент на турбинном колесе согласно уравнению (5.35)
Мй = р(?[-«>^ + 0(-^-г.г—(5-37)
максимальный на тяговом режиме работы. Стоповый режим,
например, соответствует троганию автомобиля с места и является
напряженным в тепловом отношении.
Полную внешнюю характеристику ГДТ, представленную и а
рис. 5.11, можно считать теоретической, так как она построена
149
Рис. 5.13. Приведенная характеристика ГДП
Хщ.Ли,
при допущении Q => const. На прак-
тике зависимость Q = f (i) опреде-
ляется не только режимом работы
ГДТ, ио и его типом (конструкцией
лопастных колес), и реальные пол-
ные внешние характеристики для
наиболее часто применяющихся
одноступенчатых ГДТ отличаются
от теоретических.
5.2.6. Приведенная характеристика ГДТ
Приведенная характеристика ГДТ представляет за-
висимость коэффициентов момента входного звена, трансформации
момента и полного КПД от передаточного отношения при постоян-
ных вязкости и плотности рабочей жидкости, частоте вращения
или крутящем моменте входного звена (рис. 5.13).
Коэффициенты моментов входного и выходного звеньев ГДТ:
1 о Ч -
"Mi о с И "М 2г>5 *
PwlDa PwiDa
Коэффициент трансформации К = а полный КПД
Ч = ФмДм,) (Wch) = Ki.
Приведенные характеристики ряда ГДТ позволяют сравнивать
их по удельным и экономическим показателям. Приведенная
характеристика ГДТ относится и ко всем геометрически подобным
ему образцам.
5.S. СВОЙСТВА ГДТ И ПОКАЗАТЕЛИ ИХ ОЦЕНКИ
5.3.1. Прозрачность внешнем характеристики ГДТ
Прозрачность • ГДТ — свойство изменять крутящий
момент иа входном звене при изменении крутящего момента иа
выходном звене. ГДТ, обеспечивающие постоянный режим работы
двигателя (п^ = const и = const) при изменении сопротивле-
ния движению (<оя = var и = var), принято называть непро-
зрачными. Нагрузочная характеристика непрозрачного ГДТ изоб-
ражается одной квадратичной параболой (рис. 5.14, а). Принци-
пиальная особенность прозрачного ГДТ состоит в том, что угло-
вая скорость вала двигателя, работающего совместно с ГДТ,
устанавливается не только в зависимости от положения органа
управления угловой скоростью двигателя, но и в зависимости от
• В дальнейшем под прозрачностью гидротрансформатора будем подразу-
мевать прозрачность его внешней карактернстики.
150
Рис. 5.14. Характери-
стики:
а — совместней работм
двигателя и ГДТ о не-
прозрачной характери-
стикой; б —- совместной
работы двигателя и ГДТ
о прозрачной характери-
стикой; a — внешняя
ГДТ; / — о примой про-
зрачностью; 2 — о уче-
том характеристики о об-
ратной прозрачностью
передаточного отношения ГДТ. Таким образом, нагрузочная
характеристика прозрачного ГДТ представляет собой семейство
квадратичных парабол (так же, как я для ГДМ), соответствующих
различным значениям i (рис. 5.14,6). При постоянной угловой
скорости oii = const прозрачность ГДТ проявляется в изменении
момента Мх.
Введем понятие о коэффициенте прозрачности:
где — коэффициент момента при ш2 - - 0 и i = 0; — коэффициент мо-
мента при К = I -
Коэффициент П для ГДТ данного типа постоянный и опреде-
ляется только геометрическими параметрами его лопастной си-
стемы. Таким образом, теоретически для непрозрачного ГДТ П —
= 1. ГДТ считают практически непрозрачным, если /7=1 ...
1,2. Прозрачные ГДТ могут иметь прямую (П > 1,2); обратную
(П < 1) и смешанную прозрачности (рис. 5.14, в). Коэффициент
прозрачности используется при анализе внешних характеристик
ГДТ и подборе их к двигателю.
5.3.2. Нагружающее свойство ГДТ
Нагружающее свойство ГДТ — это свойство его на-
гружать приводящий двигатель. Наиболее полно оио характери-
зуется зависимостью = f (/), т. е. одной из внешних характе-
ристик. Дискретные значения й-м, и характер зависимости
= f (0. в свою очередь, определяются типом ГДТ и значе-
ниями р, ц и£)а. Момент Mt в основном зависит от момента
Л4Н на насосном колесе, который является функцией подачи Q
и геометрических параметров колеса. Исходя из формулы (5.34)
для случая, когда перед насосным колесом расположен реактор,
следует, что вид характеристики 7ИН = f (Q) определяется зна-
ком величины, стоящей в скобках:
ctgPpi ctgp„
F..
151
Рис. 5.15. Зависимость момента на насосном ко-
лесе от подачн
Если принять допущение, что
= (что справедливо для
большинства ГДТ), то зависимость
Мв ~ f (Q) будет определяться углами
₽В2 и ₽рз (рис. 5.15).
Продифференцируем выражение
(5.34) по Q:
= Р + 2 -р- (ctg ₽р2Гр2 - Ctg рв2Г,2)] .
Введем обозначение (ctg рр2грз — ctg рн2гвг) = q. Если q > О,
то dMJdQ с увеличением Q всегда больше нуля. Если q < О,
то момент Л4Н при Q = <oHrH2F2/(29) будет иметь максимум; следо-
вательно, до этой подачи dMaldQ > 0, при этой подаче dMB!dQ =
= 0 и при большей подаче dMjdQ < 0. Для ГДТ зависимость
Q = f (0 может иметь различный характер (см. рис. 5.9). Напри-
мер, в ГДТ с центростремительным турбинным колесом с ростом I
подача Q уменьшается. В связи с этим ГДТ с радиальными и
загнутыми вперед лопастями будет иметь всегда прямую прозрач-
ность, так как dMjdQ > 0. ГДТ с лопастями, загнутыми назад,
могут иметь любую прозрачность в зависимости от знака произ-
водной dMjdQ: при dMjdQ >0 — прямая прозрачность; при
dMjdQ = 0 — характеристика непрозрачная; прн dMjdQ < 0 —
обратная прозрачность.
С нагружающим свойством ГДТ тесно связано понятие о его
энергоемкости (мощности), которую он способен передать от вход-
ного вала к выходному. Из двух ГДТ с одинаковыми габаритными
размерами (или Da = const) более энергоемким считается тот,
который может передать большую мощность. Энергоемкость
оценивают коэффициентом мощности ГДТ
Хл, = 7V,/(p<»M).
Учитывая, что #£ — М^^ получаем
Xw = M/(po>M). (5 38)
Сравнивая выражение (1-94) н (5.38), видим, что
Таким образом, энергоемкость ГДТ можно оценить по значению
коэффициента момента XMl. Чем больше при DB = const,
тем выше энергоемкость ГДТ, Кроме коэффициента момента вход-
ного вала кМ1 существует коэффициент момента насосного колеса
Ьм* = Л1„/(ри?оу. (5.39)
Как видно из рис. 5.15, с ростом энергоемкости насосного
колеса угол увеличивается. Одновременно увеличивается
152
напор Нв. В общем случае напор На зависит от коэффициента
момента ^ма и коэффициента быстроходности насосного колеса
па Эту зависимость можно получить нз уравнений дли коэффи-
циентов момента и быстроходности. Для большинства ГДТ =
= 35 ... 90° и определяется соотношением [41
= 0,00025 ... 0,0008.
При этом бдльшим значениям I* соответствуют большие
значения ^ма/п1а и ₽н2. Для большинства ГДТ Хм, = 1»2 ...4,6,
а ам = 2 ... 12. ГДТ с Хми = 2 .. 4 проектируют для переда-
точных отношений i* = 0,6 ... 0,8; они имеют значение пвв =
= 80 ... 100 и центростремительное турбинное колесо. ГДТ
с Хм = 10 ... 12 проектируют для I* = 0,2 ... 0,45; они имеют
ntB = 250 и центробежное или многоступенчатое турбинное ко-
лесо. При заданном коэффициенте мощности (момента) можно
определить активный диаметр ГДТ
С. = у'м/О^рш?).
Для уменьшения габаритных размеров привода выбирают
большие значения Однако с увеличением kNt как показали
исследования [5, 11, 16, 24), уменьшается КПД ГДТ, что
связано с чрезмерной нагрузкой лопастной системы, отрывом
потока от сильно искривленных лопастей и интенсивным вихре-
образоваиием. Подробно влияние различных факторов, в том
числе параметров лопастной системы на нагружающее свойство
(энергоемкость) ГДТ, рассмотрено в работах [3, 4, 5, 11, 24].
5.3.3. Преобразующее свойство ГДТ
Преобразующее свойство ГДТ — это свойство его пре-
образовывать значение крутящего момента. Оно характеризуется
зависимостью/С = f (i). Чаще всего преобразующее свойство ГДТ
оценивают коэффициентом трансформации (на стоповом ре-
жиме, со, = 0) н К* (на оптимальном режиме, т] = Т]*). Так как
КПД т] = Xi, то между преобразующим свойством и экономич-
ностью ГДТ, оцениваемой зависимостью т] = f (i), имеется одно-
значная связь. Так, зная зависимость т] = f (i), можно построить
график К = f (i) или, наоборот. Таким образом, о преобразующем
свойстве ГДТ можно судить как по зависимости К = f («)» так
и по зависимости т] = f (i), однако первая зависимость более
удобная, так как оиа более наглядна.
На рис. 5.16 показаны характеристики трех ГДТ, обладающих
различными преобразующими свойствами. С увеличением Ко
уменьшаются т]* н /•, т. е. кривая К = f (i) становится более
крутой. Увеличение коэффициента Ко приводит к более быстрому
153
к
ь
2
О
Рис. 6.16. Характеристики
ГДТ с различными преоб-
разующими свойствами
росту КПД прн малых I и снижению КПД при больших I. Прак-
тика применения ГДТ в приводах многих самоходных машин
показала, что оценивать экономичность (а следовательно, и пре-
образующее свойство) ГДТ только по максимальному КПД не
совсем правильно. Высокое значение т]* в одной точке характе-
ристики т) = f (i) еще не означает высокой экономичности ГДТ
в целом, в приводе машины ои работает во всем диапазоне переда-
точных отношений на тяговом, а в риде машин и тормозном ре-
жиме. Поэтому для оценки применения ГДТ часто используют
дополнительные показатели его экономичности — диапазон эко-
номичной работы
^чр = Пр/^пяп *1р (5.40)
и коэффициент потерь холостого хода при — 0
s Л-Мм ж. жАм.» (5.41)
где /щдх Чр и 1mm ч — максимальное и минимальное передаточные отношения
при расчетном КПД Т)р (см. рис. 6.16); ^^х.ж— коэффициент момента входного
вала иа режиме холостого ходи.
Расчетный КПД т]р принимают различным для ГДТ разных
типов машин. Так, для ГДТ автомобилей = 80 %; для ГДТ
строительных и дорожных машин т]р = 75 % н т. д. Основным
недостатком ГДТ является параболический характер изменения
КПД. При всех режимах работы, находящихся за пределами
зоны /щи < ( < inMx п . в ГДТ теряется значительная часть
мощности, что снижает КПД привода машины. Для современных
одноступенчатых ГДТ Ко « 1,5 ... 5,5, оптимальный КПД i]* =
= 0,8 ... 0,91 при передаточном отношении I* = 0,45 ... 0,9 (боль-
шие значения i* соответствуют меньшим зиаченням Ко)-
В заключение следует отметить,что нагружающее, преобразу-
ющее свойства ГДТ, а также его экономичность взаимосвязаны
и поэтому их следует анализировать и оценивать совместно. Так,
при увеличении коэффициентов трансформации, как правило,
снижается энергоемкость ГДТ, изменяются КПД н конструктору
прн выборе оптимальных параметров передачи приходится при-
нимать компромиссное решение.
154
6.3.4. Предохранительное свойство ГДТ
Предохранительное свойство ГДТ — это свойство его
ограничивать крутящие моменты и скорости отдельных звеньев.
К показателям предохранительного свойства можно отнести коэф-
фициенты ограничения по моменту [11
км ~ b-Mtof^Mt (5.42)
н по скорости
= (5.43)
где А, м 0— коэффициент момента выходного вала при a>i = 0; к— передаточ-
ное отношение при холостом ходе.
Коэффициенты ku и kt также являются функциями геометри-
ческих параметров лопастной системы ГДТ и введены для оценки
эффективности его предохранительного свойства при применении
в приводе конкретной машины. Например, если применять для
привода экскаватора ГДТ с недопустимо большим значением kM
[с крутой характеристикой К = f (i) 1, то либо будут разрушаться
отдельные узлы и детали машины из-за действия высоких динами-
ческих нагрузок, либо придется увеличить прочность этих узлов
и деталей, что приведет к увеличению металлоемкости и себестои-
мости изготовления изделия. Увеличение выше допустимых пре-
делов коэффициента kt для экскаваторного ГДТ приведет к уве-
личению скорости coSx.x = и» как следствие, к увеличе-
нию скорости движения рабочего органа, что отрицательно ска-
жется на устойчивости экскаватора, а также может привести
к поломкам зубьев ковша при подводе его с повышенной скоростью
к забою. Таким образом, коэффициенты и kt позволяют оценить
динамические свойства машины с ГДТ.
Б. 8.5. Тормозное свойство ГДТ
Тормозное свойство ГДТ — это свойство его передавать
крутящий момент Л4Я на режиме противовращения и на обгонном
режиме. Показателями тормозного свойства ГДТ являются же-
сткость характеристики = / (t):
Ж=МИ (5.44)
и критическое передаточное отношение iHp, соответствующее
точке перегиба графика функции = f (j), т. е. = 0
что, например, имеет место для ГДМ н ГДТ с центростремитель-
ными турбинными колесами на режимах противовращения (см.
рис. 4.11, а). Часто для условий эксплуатации ГДТ в приводах
монтажных кранов илч автомобилей, работающих в горах, тре-
буется устойчивая работа ГДТ на тормозном режиме, что имеет
место при жесткости X = (&м№ > 0. Поэтому ГДМ илн ГДТ
с центростремительным турбинным колесом не применяют в при-
воде монтажного крана, так как на режиме противовращения
1Б5
при —I > — iKV жесткость характеристики Ж < 0, и при спуске
груза на этом режиме произойдет его резкое падение (—<оа резко
возрастет), что может привести к аварии или несчастному случаю
на строительной площадке.
Жесткость характеристики также является функцией геоме-
трии лопастной системы ГДТ н зависит от компоновки его узлов,
рпределяющей значение и характер изменения потерь дискового
трения при работе передачи на тормозных режимах.
5.3.6. Демпфирующее свойство ГДТ
Демпфирующее свойство ГДТ — это свойство его га-
сить крутильные колебания, возникающие на одном из валов.
Ойо оценивается по коэффициентам демпфирования насосного
и турбинного колес, которые предложил и обосновал канд. техн,
наук Б. М. Бим-Бад. Демпфирующее свойство определяется
способностью ГДТ рассеивать энергию. Рассеяние (диссипация)
энергии происходит в основном в потоке рабочей жидкости и обус-
ловлено наличием потерь. Моменты от диссипативных сил, при-
ложенных к насосному и турбинному колесам:
Мд.н = м;-Мв; Мд.» = Л1;-Мт, (5.45)
где Л!' и М' — теоретические гидравлические моменты насосного и турбинного
колес без учета вязкого трения.
Из теории колебаний известно, что при наличии в системе
нелинейных сил трения момент от действия диссипативных
сил можно представить нелинейной функцией скорости движения,
т. е.
<5-46)
где — коэффициент демпфирования; п — фактор затухания; dqldt — относи-
тельная скорость поверхностей трения.
Выражение (5.46) предполагает, что диссипация происходит
при сосредоточении сил демпфирования по какой-то одной по-
верхности. В ГДТ таких поверхностей множество. Относительные
скорости их движения определяются распределением полей ско-
ростей и давлений в рабочей полости, которые, в свою очередь,
являются функциями угловых скоростей сон и сот, а также гео-
метрических параметров лопастной системы. Учитывая, что для
конкретного ГДТ эти параметры постоянны, запишем выражение
для момента диссипативных сил, приложенных к 'насосному
колесу, в виде суммы N функций демпфирования (поверхностей
трения)!
!=JV
Мд.н= Е |(*д)ДМг- <o.)psign[Oj(i, (5.47)
где Vj (i, Юн) — относительная скорость движения рассматриваемых поверхно-
стей насосного колеса.
166
Вблизи каждого фиксированного значения I изменение отно-
сительных скоростей будет зависеть только от аргумента юн.
Тогда
(Ад)/ Ю/ (ия)]л = (Лд)/ < (5.48)
где Vj (сон) и — относительная скорость движения рассматриваемых поверх-
ностей и некоторая функция угловой скорости насосного колеса ГДТ вблизи фик-
сированного значения I.
Уравнение (5.47) приведем к виду
f n Мл. = Ад. в“н sign <оя, (5.49)
где Ад.н— J] (£д)>— коэффициент демпфировании насосного колеса вблизи
1=1
фиксированного значения I.
Приравнивая правые части уравнений (5.45) и (5.49) и учиты-
вая, что при турбулентном характере потока фактор затухания
может быть принят равным двум, определим коэффициент демпфи-
рования насосного колеса!
Аналогично для турбинного колеса получим
Н^|-
Как следует из зависимостей (5.50) и (5.51), абсолютные зна-
чения коэффициентов демпфирования явно не зависят от пара-
метров механической части крутильной системы, а определяются
геометрическими параметрами лопастной системы, режимом ра-
боты ГДТ, вязкостью рабочей жидкости и, таким образом, яв-
ляются объективными показателями качества самого ГДТ, опре-
деляющими его демпфирующее свойство. Взаимосвязь коэффи-
циентов демпфирования с основными показателями внешней ха-
рактеристики ГДТ и параметрами его лопастной системы можно
проследить, приводя выражения (5.50) и (5.51) к виду
Ад.»=*д. ,<" - Л- (1 - а); (5-52)
он
(5.53)
/св.
При анализе выражений (5.52) и (5.53) было установлено, что
минимальное демпфирующее свойство ГДТ проявляется при пере-
даточных отношениях, близких к отношениям на оптимальном
режиме работы.
В безразмерном виде коэффициенты демпфирования
«...=14-41 и ^--1 <5-54>
167
На рис. 5.17 показаны зависимости Ад.й, Ад. т и т] от i для
одноступенчатых ГДТ наиболее распространенных типов. Из
приведенных графиков видно, что диапазон изменения коэффи-
циентов Ад. я и Ад. т для ГДТ с центростремительным турбинным
колесом значительно выше, чем для ГДТ с осевым и центробеж-
ным турбинным колесами, а диапазон изменения этих коэффициен-
тов для насосных колес более чем в 2 раза превышает диапазон
изменения для турбинных колес. В рабочей зоне передаточных
отношений (в окрестностях максимального КПД) демпфирующие
свойства ГДТ с осевым и центробежным турбинными колесами
выше демпфирующих свойств ГДТ с центростремительным турбин-
ным колесом. Результаты по исследованию влияния отдельных
геометрических параметров лопастной системы ряда гидротранс-
форматоров иа коэффициенты демпфирования изложены в ра-
боте [161.
5.3.7. Кавитационное свойство ГДТ
Кавитационное свойство ГДТ —‘это свойство его из-
менять показатели внешней характеристики при работе на кави-
тационном режиме, характеризуемом кавитацией в рабочей по-
лости.
Особенностью работы ГДТ в приводах машин является измене-
158
ние в широких пределах (не только по значению, но и по знаку)
углов атаки при входе потока в лопастные колеса, что приводит
к отрывному течению, уменьшению площади проходного сечеиия
в каналах колес и, как следствие, к увеличению скорости движения
потока и местному понижению давления. При работе ГДТ в ре-
жиме кавитации снижаются тяговые свойства машины, чему спо-
собствует энергичное эмульгирование рабочей жидкости возду-
хом, возникает шум, сопровождающийся вибрацией корпуса,
происходит пульсация кавитационной каверны, что приводит
к неустойчивой работе передачи. Для нормальной, бескавитацион-
иой работы ГДТ необходимыми условиями являются полное за-
полнение рабочей полости жидкостью; отсутствие зон с давлением,
равным давлению парообразования рабочей жидкости при дайной
температуре; поддержание температуры рабочей жидкости ниже
допускаемой как по условиям вспышки и разложения, так и по
обеспечению смазывающих свойств.
Эти условия работы ГДТ обеспечиваются автономной прину-
дительной системой питания, которая служит для охлаждения
рабочей жидкости, восполнения объемных утечек и поддержания
давления в рабочей полости в пределах, обеспечивающих бескави-
тациоииую работу. Если давление во всех точках рабочей полости
выше давления парообразования жидкости при данной темпера-
туре без подвода давления со стороны и обеспечивается охлажде-
ние рабочей жидкости внутри рабочей полости за счет естествен-
ного теплообмена с корпусом ГДТ охлажденным воздухом (как
у непроточных ГДМ), то такой ГДТ можно выполнять без системы
питания. При этом устанавливают надежные уплотнения для
уменьшения протечек и периодически пополняют рабочую полость
рабочей жидкостью.
При неправильно спроектированной системе питания возможно
ухудшение преобразующего свойства ГДТ на некоторых режимах
работы, наиболее опасных в кавитационном отношении. Ухуд-
шение характеристики ГДТ можно объяснить снижением давления
питания рп (давления на входе в насосное колесо) до критиче-
ского рп.кр. На других режимах работы давление рп может
достигать высокого значения, что приводит к увеличению затрат
мощности на привод иасоса системы питания и осевых нагрузок,
действующих на опорные и уплотнительные узлы ГДТ. Исходя
из этого, при проектировании системы питания необходимо стре-
миться получить стабильное и одновременно минимально допу-
стимое значение рп на всех режимах работы ГДТ.
На рис. 5.18 показана схема системы питания с возможным
расположением точек подвода и отвода из рабочей полости подачи
питания Qn. Определим влияние мест подвода и отвода жидкости
на зависимость рп = f (i). Для этого иа основе уравнения Бер-
нулли проанализируем движение рабочей жидкости питания от
точки А (вход в ГДТ) до точки D (слив рабочей жидкости в бак).
Примем следующие допущения! 1) наружные утечки жидкости
1Б9
a)
Рис. 5.18. Системы питания ГДТ при различном расположении точек отвода и
подвода рабочей жидкости:
а — схема: б — с подводом перед насосным колесом и отводом за турбянным колесом*
а — с подводом за турбинным колесом и отводом перед насосным колесом; а — с подводом
в отводом перед насосным колесом
из рабочей полости достаточно малы по сравнению с подачей Qn;
2) влияние подачи Qn на поле скоростей в рабочей полости ГДТ
не учитывается, так как Qn <£ Q-
Тогда при равных диаметрах трубопроводов в точках А и D
давление на входе в ГДТ в точке А
Pbz. — Рё (^вх -Ь йвс -Н ^вых)» (5.55)
где hBX — гидравлические потери на участке АВ, где точка В соответствует входу
в насосное колесо (в точке В действует давление питакик рп); Лвс — разность
напоров жидкости в рабочей полости между точками В и С, где точка С соответ-
ствует выходу жидкости питания из рабочей полости; ЛВых— гидравлические по-
тери иа участке CD.
Если подача Qn и температура рабочей жидкости постоянны,
то независимо от режима работы ГДТ Лвх > Лвых « const. Ве-
личина hBC в общем случае будет переменной, так как она опре-
деляется внутренней характеристикой ГДТ, которая зависит от
режима его работы. Учитывая, что Лвых = const, статическое дав-
ление в точке отвода жидкости питания рс можно считать прибли-
зительно постоянным и независимым от i. Действительно, если
предположить, что на некотором режиме работы статическое дав-
ление рс возросло, то это должно привести к увеличению подачи
жидкости, проходящей через сливной трубопровод,что невозможно,
так как подача Qn> определяемая подачей насоса системы питания,
приводимого от двигателя, практически не зависит от i (сон =
= const). Рассмотрим наиболее распространенные способы подвода
и отвода рабочей жидкости.
1. Для схемы, показанной на рис. 5.18, б (подвод перед на-
сосным колесом, отвод за турбинным), hBC + hCB = 0, где
160
hCB — разность напоров между точками С и В. Поскольку Лсв =
= ftp, где ftp — гидравлические потери напора в реакторе, по-
лучим
/1ве = —hp и PBx = pg(hB1 + hBM — h„). (5.56)
Принимая во внимание, что рв = рвх — pgftBXj находим
Рп “ Рё (^вых ftp)* (5.57)
2. Для схемы, показанной на рис. 5.18, в (подвод за турбин-
ным колесом, отвод перед насосным), имеем
РвХ = Рё (^ВХ ^ВЫХ + ftp)* (5.58)
Принимая во внимание, что рв = рвя — pg (ftBX + ftp), полу-
чим
Рп = Рс = pgftflbix ~ const. (5.59)
3. Для схемы, показанной на рис. 5.18, г (подвод и отвод перед
насосным колесом),
= Oj Рвх = Рё (/^вх "4“ Лвых) Const; Рп - pgftBHx ~ COHst.
Таким образом, характер изменения зависимостей pBI = f (i)
и ра = f (i) для первых двух схем питания определяется харак-
тером зависимости йр = f (i). Известно, что потери Лр = h^Tp +
+ ftp. уД (где ftp. тр — потери на трение в реакторе; Лр. уд —
потери, зависящие от угла атаки потока на входе в реактор).
Прн этом основная доля потерь приходится на потери йр. уд-
Минимальное значение Лр.уД (а следовательно, и Лр) имеет место
в оптимальном режиме (/*) и в режиме, при котором Q = О,
максимального значения йр. уд (и Лр) достигает на режимах,
близких к стоповому, и на режимах противовращения.
На рис. 5.19 показаны зависимости рвх и рп от i, полученные
аналитически и проверенные экспериментально, для ГДТ с цен-
тростремительным турбинным колесом (Da = 0,34 м) и осевым
(Оа = 0,325 м) при различных схемах подвода и отвода жидкости
питания их рабочей полости.
Из рис. 5.19, а следует, что прн подводе жидкости перед на-
сосным колесом и отводе за турбинным давления рВ1 и рп к сто-
повому режиму существенно падают, что делает этот режим осо-
бенно опасным в кавитационном отношении. Причем давление рл
падает тем резче, чем больше увеличивается угловая скорость coj.
Если давление рп окажется недостаточным, то на режимах, близ-
ких к стоповому (и особенно на режимах противовращения), будет
наблюдаться уменьшение коэффициента трансформации Ко вслед-
ствие кавитации. С другой стороны, на режимах, близких к опти-
мальному, давление рв имеет завышенное значение, что приводит
к недостаткам, отмеченным ранее.
При подходе жидкости за турбинным колесом и отводе перед на-
сосным (рис. 5.19, б) давление рв не зависит от режима работы, в то
11 Стесжв О. П. в др. 161
Рис. 5.19. Зависимости девления питании и давления иа входе в ГДТ:
а — при подводе жидкости перед насосным колесом и отводе за турбинным; б — при под-
воде жидкости sa турбинным колесом и отводе перед насосным: в — при подводе и отводе
жидкости из одного зазора
время как давление рВ1 падает при переходе от стопового режима
к оптимальному. Наиболее целесообразной следует считать схему
с подводом и отводом жидкости из зазора между реактором и на-
сосным колесом (см. рис. 5.19, в), так как в этом случае давле-
ния рвх и рд от режима работы не зависят. Такая схема обеспечи-
вает наиболее экономичное питание и его стабильность. Одкако
в этом случае, чтобы не нарушалась эффективность охлаждения
рабочей жидкости, рекомендуется смещать точки подвода и отвода
одну относительно другой по окружности на 90 ... 180°, а при
наличии боковой полости между насосным колесом и реактором
делать ее по возможности короче в радиальном направлении (для
уменьшения величины Лр).
Подобная схема подвода и отвода жидкости использована в се-
рийном ГДТ У358011, выпускаемом ПО «ММ3 им. М. И. Кали-
нина», и хорошо себя зарекомендовала в процессе эксплуатации
ГДТ. При выборе мест расположения точек подвода и отвода
рабочей жидкости необходимо учитывать еще один фактор. В про-
цессе длительной эксплуатации ГДТ изнашиваются контактные
уплотнения рабочей полости и детали насоса системы питания,
в результате чего увеличиваются утечки жидкости из системы.
Эго приводит к уменьшению подачи Qn, проходящей через от-
водной трубопровод, гидравлические потери в котором, как было
показано ~выше, фактически и определяют избыточное давление
в рабочей полости. Важно установить, насколько давление рп
чувствительно к изменению подачи Qn и как это связано с располо-
жением точек подвода и отвода рабочей жидкости.
Если предположить, что движение жидкости в подводящем
и отводящем трубопроводах происходит в зоне автомодельности,
где гидравлические потери пропорциональны подаче Q2, то при
отводе рабочей жидкости перед насосным колесом для некоторого
определенного режима рп = kiQn, где k\ — коэффициент пропор-
циональности.
162
Для расчетных значений р'п и
Рп = М<2п)2-
При отводе рабочей жидкости из зоны повышенного давления
Pn + Ap = fe<?o; Pn + Ap = fa(Qn)2, (5.60)
где — коэффициент пропорциональности; Ар — разность между давлением
в точке отвода рабочей жидкости и давлением питания.
Из уравнений (5.60) после преобразований получаем зависи-
мость рп = f (<2П) Для общего случая:
t=(1+<) (»’-< (5-61)
Дифференцируя уравнения (5.61) н переходя к конечным
приращениям, получаем
^=2w(1+OCn- (562)
♦ Из уравнений (5.61) и (5.62) следует, что при прочих равных
условиях с увеличением Др, т. е. с удалением точки отвода рабо-
чей жидкости из зоны минимального давления, величина рп
становится более чувствительной к изменению подачи Qn. В таких
случаях необходимо назначать относительно больший запас давле-
ния рп или вводить в систему питания дополнительные устрой-
ства, стабилизирующие это давление, что нежелательно. В отли-
чие от лопастных гидромашин, рабочей жидкостью которых часто
является вода, ГДП (в том числе и ГДТ) работают в подавляющем
большинстве случаев на минеральных маслах, которые по сравне-
нию с водой имеют более низкое давление упругости насыщенных
паров Рн.п» содержат относительно большее количество раство-
ренного воздуха и обладают большей вязкостью. Эти факторы
оказывают существенное влияние на процесс кавитации в ГДТ,
а давление начала кавитации рн к может значительно отли-
чаться от давления рн п, причем обычно рн. к > рн. п- Запишем
коэффициент минимального давления в рабочей полости ГДТ
в виде [22]
= О’» — Pmin)/(0.5p41)- (5.63)
Кавитация имеет место при рт}„ — р^.и В этом случае кри-
тический коэффициент кавитации кр, полученный иа основе
кавитационного критерия Эйлера, Дц. кр = cPmln-
Умножим и разделим числитель и знаменатель выражения
(5.63) иа величину и скорость сн1 выразим через меридио-
нальную составляющую и выходной угол потока реактора ара-
После преобразований получим выражение для коэффициента k*
в виде
сн 2sinaapi ,5 64)
11«
163
где c„ = (рп —- рв n)/(paHz) — коэффициент располагаемого напора питания;
Фн = FbJf^g q = cmH2/uBt — коэффициент подачи.
Обозначим через агат «= cB/q* — показатель кавитационных
свойств ГДТ. Тогда из выражения (5.64) получим
= We/(2 sin2 ар2). (5.65)
Для условий начала кавитации показатель ат, принимает
критическое значение 0гдТ. нр = Сн. ир/<А где Сн.щ, = (рп.кр —
— Рн.п)/(р«в2) — критический коэффициент располагаемого на-
пора.
Критическое давление питания
Ри. вр = крр^в2? 4“ рн. п- (5.66)
Показатель является функцией показателей кави-
тационных свойств каждого лопастного колеса ГДТ, т. е.
^гдт. кр = f (°н. ир» кР> °р. кр)» (5.67)
так как теоретически кавитация может возникнуть в каждом лопа-
стном колесе ГДТ при определенных условиях его работы в зави-
симости от особенностей конструкции лопастной системы.
Значения критических показателей кавитационных свойств
лопастных колес ГДТ наиболее распространенных типов даны в ра-
ботах [20, 22]. Так, для одноступенчатых ГДТ
ав.=4? 4 [(т- - ctg + 4: <Б-68>
0,5фуд. т42 (ctg «та 4- ctg fipi) — Sjn» рр1— 0,5* ipH; (5.69)
«р. и> = 0,62 + 0,905 /фуд.р (ctg а„ + ctg ₽Р1) - —0,5*’,
(5.70)
где X = 0,1 ... 0,6 — опытный коэффициент, характеризующий входную кромку
лопасти насосного колеса; ?в = гя11гы1 q' — расчетный коэффициент подачи;
ф = Fнх/fтя; А»' — коэффициент трения в межлопастных каналах реактора.
Зависимости показателей пн кр, от. кр и пр кр от геометри-
ческих параметров лопастных колес и режима работы ГДТ при-
ведены в работе [201. Определив значение игдт. кр по получен-
ному значению Oj вр (где индекс j указывает на наименован ие ло-
пастного колеса, наиболее опасного в кавитационном отношении),
определяют по выражению (5.66) давление Рп.кр- При прочих
равных условиях бескавитациоиная работа ГДТ обеспечивается
при
Рп = Рп. кр + ДРп» (5‘71)
где Дрк — вадас по давлению питания.
164
Для предварительных расчетов можно принимать Дрп =
= 0,02 ... 0,04 МПа в зависимости от условий эксплуатации ГДТ
и расположения точек подвода и отвода жидкости.
На рис. 5.20 в качестве примера показаны зависимости коэф-
фициентов огдт цр и П/кр от угла ат2. Из графиков видно, что
для ГДТ рассматриваемых типов на режимах, близких к опти-
мальному (t « I*), зона минимального давления находится в на-
сосном колесе (ов.кр > ор.ир и пЕ кр ит. ир), а иа режимах,
близких к стоповому (i« 0), и на режимах противовращения
(i < 0) зона минимального давления перемещается в реактор
(°р.кр > °и.кр и fp. кр » О,, кр). На режимах, близких
к обгонному (i 0), зона минимального давления перемещается
в турбинное колесо (пт. кр > ои. кр и от. кр ор. вр). Резуль-
таты исследований по определению статических давлений в рабо-
чих полостях ГДТ приведены в работах [4, 22].
На рис. 5.21 в качестве примера показана кавитационная
характеристика ГДТ с размером DB = 0,34 м, снятая на стоповом
режиме (t = 0) при угловой скорости = 187 с-1. Из рисунка
видно, что скрытая кавитация начинается при давлении рп =
= 0,02 МПа (начинает падать коэффициент трансформации иа
стоповом режиме Хо). Развитая кавитация (резкое падение Ко)
начинается при более глубоком понижении давления рп =
= —0,02 МПа. Кавитация происходит в тот момент, когда кри-
тического значения достигнет минимальное статическое давление
по средней линии лопасти реактора (рр „м = 0,09 МПа). Из
литературных источников [3 J известны кавитационные характе-
165
ристики различных ГДТ. При этом часто авторы рекомендуют
искусственно увеличивать давление рп, объясняя эту необхо-
димость опасностью возникновения кавитации. Экспериментальные
исследования, выполненные в МАДИ (19), позволили сделать
вывод, что в большинстве случаев (в том числе и для ГДТ с цен-
тростремительным турбинным колесом) уменьшение моментов
на валах при уменьшении давления ра связано с подсосом воз-
духа через уплотнение рабочей полости, а не с началом кавитации.
Поэтому конструкция уплотнений рабочей полости ГДТ должна
быть выполнена таким образом, чтобы исключить возможность
подсоса воздуха.
Б.4. ВЛИЯНИЕ НЕУСТАНОВИВШИХСЯ РЕЖИМОВ РАБОТЫ
НА ХАРАКТЕРИСТИКИ ГДТ
ГДП в приводах различных машин и механизмов ра-
ботают на установившихся и неустановившихся режимах работы.
Установившийся режим работы имеет место при постоянных ча-
стотах вращения и крутящих моментах входного и выходного
звеньев; неустановившийся режим — при периодических изме-
нениях частот вращения и крутящих моментов входного и вы-
ходного звеньев.
5.4.1. Уравнения динамики ГДТ
Получив уравнение (1.68) момента в лопастных колесах
при неустановившихся режимах и воспользовавшись соотноше-
ниями (1.71), (1.72)—(1.74), запишем уравнения для колес
ГДТ при неустановившемся режиме:
А1Н. дин = pQ (сиН2^н2 ра) 4- Р “ 'Лк. н 4~ р Fп. и» (5.72)
А1». дин = Р<2 (сит2гт* — сын2гна) 4" Р ч 4" P ?п.ч‘г (5.73)
Alp. дин = pQ (СирЗГр2 Сит2Гта) 4“ Р Fл. Р’ (5-74)
С учетом момента дискового трения и моментов трения
в опорах и уплотнениях 7Имет выражаем моменты на валах при
неустановившемся режиме!
All двн в А1н. див 4“ А1 ди. и-w 4" А1дм. и-р + All мех 4“ ^в (5.75)
А12 дин = А1я. дин 4“ А!ди. и-» — А!ди. и-р — Ala мех — А > (5.76)
где JB и —моменты ннерцнн собственно насосного и турбинного колес, их
налов н промежуточных деталей; dutjldt н diajdt — ускорения соответствующих
валов.
166
В настоящее время отсутствуют аналитические зависимости
для определения моментов дискового трения и механических
потерь на неустановившихся режимах, поэтому моменты ЛГдк.и-т,
ЛТдк-н-р, Л1дк. т-р вычисляют по формулам для установив-
шихся режимов работы, a Л11ме1 и Л12ыв1 получают опытным пу-
тем [6].
Сравнение моментов на валах при неустановившихся и уста-
новившихся режимах работы показывает, что они отличаются
на значение динамической надбавки
М1ди = М1-|-ДЛ11д1и; (5.77)
Мгда = Mt — лма
ДИВ» (5.78)
где ДМ1ши = р8л.а-^- + Л^-; ДМ,ии = рГ„.1^- + /1^-;71 =
— JB + pJw. я и 4- р/ж. т — моменты инерции лопастных колес и на-
ходящейся в них жидкости.
Коэффициент момента на входном валу
ТУ™ = №В /(р^М), (5.79)
а коэффициент трансформации
^ДИН = ^2 дин/Ml дин- (5.80)
Если неустановившийся режим работы вызван изменением
нагрузки на выходном валу, то частота вращения входного вала
практически не изменяется (dtojdt = 0) и формула для Л11дия
упрощается. При малых ускорениях входного звена (darjdt = 0)
статические и динамические моменты совпадают.
Баланс удельных энергий в ГДТ при неустановившемся ре-
жиме работы. Принимая во внимание зависимость (1.69), находим
теоретические напоры колес ГДТ при неустановившемся режиме
работы:
на насосном колесе
fj 01 / — Сир2вн1 ; Лк. в ^М1 i Гп.н dQ Ч /к oi\
на турбинном колесе
rr ( CUHtfivl-Cui2BTl ^Ж.Т Лп. /К oo\
й«..дин—---------------------------Q----at----QdF~)‘ (5-b2)
Уравнение баланса удельной энергии жидкости в ГДТ на
неустановившемся режиме имеет вид 16, 13, 14 J
^1в. див — Ht Т. Дин + ^ин + Лдот> (5.83)
где йпот — суммарные гидравлические потери в рабочей полости (определяются
по тем же вависимостям, что и при установившихся режимах); Нт — суммарный
167
инерционный напор (или изменение удельной энергии жидкости, вызванное ее
ускорением или торможением в рабочей полости ГДТ)}
Янн = у J ds; (5.84)
I
едесь ds — бесконечно малое изменение фактической длины линии тока} с —
абсолютная скорость движения.
Заменив переменные под знаком интеграла, получим
с = ds/dt; ст = dlrjdf, clcm = ds/dlm
или ds = dlmc/cm. Тогда
где dlm — бесконечно малое изменение длины проекции линии тока на меридио-
нальную плоскость.
Подставив известное выражение o2 = cj1 + cj = c2z + (и —
'— Ст Ctg 0)Bj ПОЛуЧИМ
ж/ _ 1 I dQ С 1 +ctg’₽ и, , W do Jt
g\dt J Fm dlm +V лГ т11,"_
rctg₽<Um) =
I 1 /
_ 1 dQ Г l-f-ctg^p 4 w dco / co dQ dco \ I
s_j—к;—dlm+-Q-dri!‘'+(-Q-dr+-drF-) •
75.85)
После подстановки выражений (5.81), (5.82) и (5.85) в уравне-
ние (5.83) получим в развернутом виде уравнение баланса удель-
ных энергий при неустановившемся режиме работы:
Н<в = н,т + ЛПО1 + -1JQ ± F„. „ + ± F„., ; (5.86)
Ja=f (5.87)
J гт н> J *тт« J f тр»
Уравнение (5.86) позволяет определить расход QOTH в рабочей
полости ГДТ при известных угловых скоростях и ускорениях
лопастных колес.
Инерционный напор Наа не относится к потерям, так как- он
не теряется безвозвратно, а аккумулируется рабочей жидкостью
и может быть использован при торможении колес, когда разгон
завершен (6].
168
Используя выражения (5.5) ... (5.10) для напоров и гидравли-
ческих потерь в развернутом виде, после подстановки их в фор-
мулу (5.86) получим уравнение баланса удельных энергий в ГДТ
на неустановившемся режиме работы:
а +V+<d+™'*+2^ +
+ + + (5.88)
где коэффициенты a, b, с, d, m,f определяются в выражении (5.11); Jq,
Fn.T—см. выражения (5.87) я (1.66).
Таким образом, получено нелинейное дифференциальное урав-
нение, которое описывает внутренние процессы в ГДТ при не-
установившихся режимах.
Задаваясь значениями передаточного отношения i, найдем
расход жидкости в окрестности выбранного режима при неуста-
новившемся режиме работы:
СдиН = <2 + А<2диН. (5-89)
Динамическая надбавка ДфдиН зависит от значения и знака
ускорений на валах, от инерции жидкости в колесах ГДТ и от его
геометрических параметров.
При выводе уравнений работы ГДТ на неустановившемся
режиме приняты допущения о том, что отклонение потока за
лопастными колесами определяется по зависимостям, установлен-
ным для установившегося режима. В настоящее время разрабо-
таны рекомендации, позволяющие уточнить угол 60а отклонения
потока на выходе из колес при неустановившемся режиме [6].
5.4.2. Характеристики ГДТ при переходном
и неустановившемся режимах работы
Колебания момента и угловой скорости на входном
валу ГДТ возникают, например, из-за иеравиомериости рабочего
процесса и динамической неуравновешенности двигателя вну-
треннего сгорания. Изменения сопротивления движению рабочего
органа машины из-за переменного микрорельефа местности, не-
равномерность вращения зубчатых и карданных передач в транс-
миссии, звенчатость гусеничной цепи и т. д. вызывают колебания
момента и угловой скорости на выходном валу ГДТ. Интенсив-
ность изменения нагрузки на валах ГДТ чаще всего оценивают
коэффициентами ее вариации (соответственно и ря) и частотой
(соответственно и fa). Из сравнения функциональных зависимо-
стей рабочего процесса ГДТ при установившемся и неустановив-
шемся режимах следует, что различие состоит в величинах dQjdt,
da^/dt и d(n2/dt, характеризующих неустановившийся режим
работы [см. выражения (5.85), (5.86) и (5.88)]. Изменение во
времени объемной подачи Q н ее производной, вызванное нзме-
169
Рис. Б.22. Изменение параметров I, da^ldt, Q и dQldt, в зависимости от вре-
меня при разгоне турбинного колеса с Da = 0,316 м
пением скоростей <ох и ©а, приводит к изменению давлений жидко-
сти в рабочей полости, моментов на валах, усилий на опорах и
в уплотнениях, т. е. всех показателей качества передачи.
Влияние неустановившихся и переходных режимов на показа-
тели различных свойств ГДТ рассмотрено в работах [1, 3, 6,
13, 14, 211 и многих других. В этих работах отмечается, что
степень влияния переходных и неустановившихся режимов на
показатели свойств ГДТ определяется интенсивностью протека-
ния переходных процессов. На основе теории размерностей в ра-
боте [61 получены дополнительные критерии подобия, характе-
ризующие интенсивность переходных режимов ГДТ’
1 dQ 9 л
eQ =—критерии подобия ускорения потока жидкости
в относительном движении (безразмерное ускорение потока);
с“ = "ь?—— критерий подобия угловых ускорений на-
сосного и турбинного колес (безразмерное угловое ускорение).
При малой интенсивности переходного режима статические
и динамические характеристики ГДТ практически не отличаются.
Рис. 6.23. Изменение параметров g>j, o>g, dco^/df, datjdi, Q и dQldt в вависимости
от времени при разгоне насосного и турбинного колес
170
Рис. 6.24. Зависимости Q, dQ /dt
от передаточного отношения:
/ — при установившемся режиме; 2 и 3 —
соответственно при разгоне и торможении
турбинного колеса; 4 и 5 — соответствен но
прн разгоне и торможении турбинного ко-
леса
что дает возможность иссле-
дователю существенно упрос-
тить процесс расчета и проек-
тирования ГДТ. Рассмотрим,
в качестве примеров, как влияют
основные параметры переходных
и неустановившихся режимов
работы на показатели Q, dQldt,
Рп, Рв2, Рта одноступенчатых ГДТ с центростремительным турбин-
ным колесом и активными диаметрами Da, равными 0,316, 0,34 и
0,53 м (рис. 5.22—5.25). Анализ зависимостей позволяет заключить,
что при интенсивных переходных процессах подача Q может
заметно <отставать> от передаточного отношения i (рис. 5.24),
причем подача Qa„H может быть как меньше, так и больше по-
дачи Q (различие в подачах достигает 12 %). Из рис. 5.25,
видно, что при интенсивном разгоне турбинного колеса динами-
ческий момент 2Иадин на 12 % превышает статический момент.
При торможении турбинного колеса динамический момент Л12дан
при i = 0,4 ... 0,9 несколько меньше статического. Аналогичен
характер изменения динамического момента Л11дин при разгоне
и торможении турбинного колеса.
На рис. 5.26 и 5.27 для ГДТ с диаметрами D&, равными 0,53
и 0,34 м, показаны расчетные зависимости, Q, dQldt от частоты
нагрузки /2 и коэффициента ее вариации — ра; приведенных мо-
ментов инерции входного и выходного звеньев ГДТ — Л и Js.
На графиках подача Q = AQ/Q,, где AQ — амплитуда колебания
подачи, a Q{ — ее текущее значение на рассматриваемом устано-
вившемся режиме работы ГДТ. С увеличением передаточного
отношения i, коэффициента щ и с уменьшением частоты fa подача Q
увеличивается (рис. 5.26, а). Так, при i = 0,3 и f2 = 1 Гц и
увеличении р2 от 0,2 до 0,3 колебания подачи увеличиваются
более чем в 2 раза. Для ра 0,3 и 0,7 при частоте f2 = 12 Гц
колебаний расхода практически не возникает, что дает основание
предполагать, что колебания момента сопротивления на рабочем
органе машины с частотой > 12 Гц практически полностью демп-
фируются ГДТ.
Подача Q практически прямо пропорциональна коэффициенту
р8 (рис. 5.26, б). Колебания подачи существенно возрастают при
уменьшении моментов инерции (рис. 5.26, в). Так, при умень-
шении Ja в 9 раз на режиме i = 0,7 значения Q возрастают почти
в 2 раза. В то же время при аналитических исследованиях было
171
Рнс. 5.25. Зависимости моментов Л!>, Mi от передаточного отношения:
/ — при установившемся режиме; S — при равговя турбинного иолеса; 3 — при тормо-
жении турбинного иолеоа
Рис. 5.26. Зависимости относительной подачи Q для ГДТ с Da = 0,53 м:
а •— от частоты колебание выходного ввела; б » от коэффициента вариации нагрузки:
в “ от момента инерции выходного ввела
Рис. 5.27. Зависимости dQldt для ГДТ с DB = 0,34 м:
а —. от частоты нагрувпи; б — от момента ннерцнн выходного авена; в — от момента инер-
ции входного ввела
172
Рис. 5.28. Зависимость изме-
нения давления питания от
передаточного отношения
ГДТ с £)а = 0,34 м при раз-
личных ускорениях турбин-
ного колеса
Рис. 5.29. Зависимости относительного дав-
ления питания для ГДТ с Ов = 0,53 м:
а — от частота нагрузки; б — от коэффициента Pi;
е — от момента инерция входного ввела; а “ от
момента инерции выходного авена
установлено, что подача Q практически не зависит от приведенного
момента ииерцни при 0,1 и f <50 Гц.
Значения dQldt существенно возрастают при увеличении ча-
стоты f2 (см. рис. 5.27, а). Так, при I = 0,7 при увеличении ча-
стоты /2 от 0,5 до 5 Гц значение dQldt увеличивается почти в 3 раза,
а при уменьшении передаточного отношения / темп роста dQldt
уменьшается. Наибольшее изменение dQldt происходит в диапазоне
частот /2 = (0,5 ... 4) Гц, а при дальнейшем увеличении f^dQldt
возрастает несущественно. Этим обстоятельством можно объяс-
нить, например, слабое демпфирование гидротрансформатором
колебаний нагрузки при низких частотах fs < 5 Гц.
При уменьшении параметров Ja и Ji на одно и то же значение
диапазон изменения dQldt для параметра почти в 2 раза больше
(см. рис. 5.27, б, в).
При переходных режимах работы ГДТ (например, разгон,
торможение приводимой машины) давление питания в случае
расположения точек подвода и отвода жидкости в различных се-
чениях рабочей полости (в частности, при подводе перед насосным
колесом и при отводе за турбинным колесом) изменяется по от-
ношению к давлению питания иа установившемся режиме работы.
С увеличением ускорения выходного звена приращения давления
питания для всех режимов работы возрастают (рис. 5.28). В диа-
пазоне частот 4 Гц относительное давление рп (рп — Pnlpn,
173
Рис. 5.30. Зависимость относительного
давления на выходе из насосного колеса
от передаточного отношения ГДТ с £> =
= 0,34 м
где рп — амплитуда колебаний
давления питания, ра — статиче-
ская составляющая давления
питания) возрастает приблизи-
тельно пропорционально увеличению частоты и при значениях
/а > 8 Гц его увеличение на порядок меньше (рис. 5.29, а).
Давление рП возрастает прямо пропорционально коэффици-
енту р,а (рис. 5.29, б). Исследованиями было также установлено,
что с увеличением моментов инерции и Ja давление рл умень-
шается, что следует из рис.5.29, в, г (прн увеличении приведенных
моментов инерции в 12 раз давление рп ГДТ с Da = 0,53 м умень-
шается в 5 раз).
Изменение давления рн2 на выходе из насосного колеса при
неустановившемся режиме работы привода с параметрами колеба-
ний нагрузки = 0,4 н = 0,5 Гц для ГДТ с Da = 0,34 м
показано на рис. 5.30. Давление рв2 определялось как рн2 =
= где Дрв2 — приращение давления при неустано-
вившемся режиме работы, а рна — текущее установившееся
значение давления на выходе из насосного колеса. Анализируя
данные рис. 5.30, можно заключить, что прн существенных колеба-
ниях параметров нагрузки приращения давления Дрн2 практи-
чески несущественны во всем диапазоне передаточных отношений
ГДТ.
На рис. 5.31 показаны зависимости относительного давления
рт2 от основных параметров привода для ГДТ с Da — 0,34 м
(где рт2 = ^PrJpn и Дрт2 — приращения давления на выходе
из турбинного колеса прн неустановившемся режиме работы при-
вода, рт2—текущее установившееся значение давления). При-
ращение давления за турбинным колесом при прочих равных ус-
ловиях возрастает с ростом р2 и с уменьшением /а и I. Причем
наиболее существенное увеличение давления рт2 соответствует
Рис. 5.31. Зависимости относительного давления на выходе из турбинного ко-
леса для ГДТ с Ра = 0,34 м:
а — от коэффициента Д,; б — от частоты /«; в — от момента инерции
174
малым частотам (f а < 2 Гц). Однако влияние иа давление р91
коэффициента ра более существенно, что необходимо учитывать
при расчете критического коэффициента кавитации ГДТ.
При прочих равных условиях приведенные моменты инерции
оказывают ие столь существенное влияние на давления pv„
как параметры рй и f (рис. 5.31, в).
Колебания давлений рт2 при неустановившемся режиме работы
привода ухудшают кавитационные свойства ГДТ и на отдельных
режимах могут привести к неустойчивой работе передачи.
Таким образом, режимы работы и параметры привода влияют
на подачу и давления в рабочей полости ГДТ, и это обстоятельство
надо учитывать при расчетах показателей его качества.
Б.Б. КОМПЛЕКСНЫЕ ГДТ
Комплексным называют ГДТ, который на некоторых
передаточных отношениях может работать как ГДМ. ГДТ имеет
максимальное значение КПД только иа одном режиме. Если умень-
шение КПД в зоне малых i допустимо, так как на этих режимах
коэффициент трансформации К > 1, и улучшаются тяговые ка-
чества машины, то уменьшение КПД в зоне больших i (i > i*)
является неоправданным и нежелательным, потому что на этих
режимах ГДТ работает в благоприятных условиях благодаря
низким значениям сопротивления (нагрузки). В комплексном
ГДТ увеличить КПД прн i > i* можно путем разблокирования
жесткой связи реактора с корпусом. Реактор начинает свободно
вращаться в потоке жидкости, не воспринимая реактивный мо-
мент, и ГДТ работает как ГДМ, КПД которой достаточно высок
при больших передаточных отношениях.
В большинстве комплексных ГДТ смена режимов ГДТ и ГДМ
осуществляется автоматически в зависимости от условий работы
передачи, при этом используется естественное свойство ГДТ
изменять знак момента на реакторе при t>=i (AfH — AfT). Для
ГДТ момент А1т = Мв ± Мр. В точке А (рис. 5.32, а) момент
Afp = 0, левее точки А — Mv > 0, правее — Л4р < 0. Если реак-
тор освободить от жесткой связи с корпусом, то при i <
он будет вращаться в направлении, противоположном направле-
нию вращения турбинного и насосного колес, а при I > t>=i —
в том же направлении, что насосное и турбинное колеса. Слева от
точки А КПД ГДМ меньше КПД ГДТ, а момент Л1П = А1т =
= Л4ГДМ ГДМ больше момента Мнгдт ГДТ, что при том же моменте
сопротивления (для данного i — const) потребует больших за-
трат мощности двигателя. Поэтому предпочтительно и желательно,
чтобы при I < ГДТ работал на режиме трансформации мо-
мента (Мв < 2ИТ и К > 1) и реактор был бы жестко связан
с корпусом передачи. Справа от точки А КПД ГДМ больше КПД
ГДТ, а момент Ми = Мт = 2ИГДМ меньше момента На
этих режимах освобождение реактора и обеспечение его свободного
176
Рис. 5.32. Комплексный однореакторный ГДТ:
а — характеристики ГДТ ГДМ; б « схема
вращения в потоке жидкости является желательным, так как от
двигателя отбирается малая мощность и в то же время увели-
чивается КПД передачи.
Таким образом, при i > желательно, чтобы ГДТ работал
без трансформации момента (Л1н = Л1т и К == 1) как ГДМ.
На практике для обеспечения автоматического заклинивания реак-
тора относительно неподвижного корпуса при i < tK==i и его
освобождения применяют различные конструкции муфт свобод-
ного хода (МСХ) (см. рис. 5.40, б). Неподвижный, жестко за-
крепленный полый реакторный вал 1 охватывается обоймой 2,
жестко связанной с реактором. Обойма 2 имеет фигурные внутрен-
ние пазы с наклонными плоскостями, взаимодействующими с ро-
ликами 3, которые поджимаются к наклонным плоскостям обоймы
пружинами 4.
При действии на реактор положительного момента +Л1р
он с обоймой 2 стремится вращаться по часовой стрелке, и на-
клонные плоскости обоймы находят иа ролики 3. Так как угол
наклона плоскости меньше угла трения, происходит заклинивание
ролика между обоймой и валом, и обойма с реактором не враща-
ется., При этом ГДТ работает иа режиме трансформации момента.
При действии на реактор отрицательного момента (—Мр) он
с обоймой стремится вращаться против часовой стрелки и этому
ничто не препятствует, так как наклонные плоскости обоймы
стремятся отойти от роликов, и реактор вместе с обоймой может
свободно вращаться. При этом ГДТ работает без трансформации
момента (как ГДМ). На рис. 5.33, а, б показаны внешние ха-
рактеристики такого комплексного ГДТ. Идеальная характери-
стика построена в предположении, что момент сопротивления при
вращении реактора равен нулю, и при ix=i < * < 1 Л1Н = Л1Т.
В реальных условиях имеют место потери при вращении реактора
(в МСХ, на дисковое трение, в подшипниках реактора и т. д.),
и действительная характеристика комплексного ГДТ имеет вид,
176
Рис. 5.33. Внешние характеристики комплексного однореакторного ГДТ:
а — идеальная; б — реальная
показанный на рис. 5.32, б (иа участке iK=l < х <1 момент
Мт < Л1н на величину потерь).
Момент сопротивления при вращении реактора определяется
в зависимости от режима работы и находится в заштрихованной
области. Вследствие этого КПД комплексного ГДТ на режимах
ГДМ будет несколько меньше КПД «чистой» ГДМ.
Для уменьшения потерь при работе ГДТ на режиме ГДМ иногда
удаляют реактор из рабочей полости, устанавливают подшипники
между обоймой и втулкой и проводят другие конструктивные ме-
роприятия [24]. Кроме отмеченного имеется еще один недостаток,
свойственный как реальной, так и идеальной характеристике, —
существенное уменьшение КПД в точке i = 1^=1- Для устранения
этого недостатка используют два принципиально отличных метода.
1. Изменяют геометрические параметры лопастной системы
ГДТ таким образом, чтобы увеличить значение i = x\=i путем
изменения наклона характеристики Mt= f (i), — f (i). В этом
случае переход на режим работы ГДМ произойдет при большем
значении iK=i. и КПД иа этом режиме t]k=i = = *к=1
увеличится. Этот метод требует выполнения существенного объема
расчетных и экспериментальных опытно-конструкторских работ
и не универсален, так как положительные результаты исследова-
ния, выполненного для какого-то конкретного ГДТ, нельзя
распространить без соответствующих уточнений на другие типы
и конструкции комплексных передач.
2. Реактор комплексного ГДТ разделяют на два колеса, каж-
дое из которых устанавливают иа свою МСХ (рис. 5.34, а), что
позволяет уменьшить «провал» КПД в точке (Рис- 5.34, 6).
Этот метод находит наибольшее распространение в практике ис-
пользования комплексных ГДТ; он универсален, так как применим
для расширения зоны высоких КПД для любых типов и конструк-
12 Стесвн С. П. др ^7
Рис. 5.34. Комплексный двухреакторный ГДТ:
а»-схема: б —внешняя характеристика
ций комплексных ГДТ. Недостатком его по сравнению с первым
методом можно считать усложнение конструкции комплексного
ГДТ (добавление еще одной МСХ) н, как следствие этого, увели-
чение себестоимости его изготовления и снижение уровня надеж-
ности.
Для более наглядного представления работы комплексного
ГДТ с одним и двумя реакторами рассмотрим треугольники ско-
ростей иа входных и выходных кромках лопастей реакторов.
Лопасть неразрезного реактора показана на рис. 5.35, а. Для
простоты полагаем, что подача Q не зависит от режима работы,
и оптимальный режим совпадает с безударным входом в реактор.
При уменьшении i жидкость подходит к реактору с положитель-
ным углом атаки, скорость си будет отрицательная. При увели-
чении i угол атаки уменьшается до нуля и затем становится отри-
цательным, а скорость си — положительной. Учитывая, что
момент Л4р = pQ (сирВгрЯ — свр1гр1), можно определить, что при
c«pirpi = 0 момент Мр =0, при сир/рВ — сир1гр1 >0
момент Мр > 0, а прн си — Cupifpj. < 0 момент Мр < 0.
Следовательно, начиная с i = 1Л = ix=i, при котором cupBrpg —
— £uprpi = 0, с увеличением i > реактор, установленный от-
носительно неподвижного корпуса ГДТ на МСХ, будет вращаться.
Последовательность расположения лопастей разрезного реак-
тора и треугольники скоростей показаны на рнс. 5.35, б. Когда иа
обе части реактора действует положительный момент (Мр > 0),
они неподвижны, и ГДТ работает на режимах трансформации
момента (УИТ > Мв и К > 1) как бы с одним реактором обычного
размера, у которого лопасти сильно изогнуты от входа к выходу.
На характеристике (рис. 5.34, б) эти режимы соответствуют
0 •< I < t£. Если выходной угол лопасти первого реактора
Рр н = 90° или близок к нему, скорость сир11 « 0. В точке Б
178
Рнс. 5.35. Схемы обтекания лопастей реактора:
а — кераэреэвого; б — разрезного
(см. рис. 5.34, б) характеристики угол атаки на входе в первый
реактор становится равным нулю, скорость сир11 « 0 и момент
Л4р i = 0. При дальнейшем увеличении I угол атаки уменьшается,
скорость cupI1 < 0, момент Л4Р1 < 0, и первый реактор начинает
вращаться, не передавая иа корпус реактивный момент и ие участ-
вуя в преобразовании момента. ГДТ работет с новой лопастной
системой (насосное, турбинное колеса и второй реактор, который
приблизительно в 2 раза короче сдвоенного и по сравнению с ним
мало изогнут), обеспечивающей меньшую трансформацию мо-
мента за счет уменьшения наклона характеристики Мт = f (i)
на участке Б—А. В этом случае суммарные ударные потери на
режимах с большими i уменьшаются и КПД возрастает. Для
увеличения КПД ГДТ угол 0р m делают несколько большим, чем
90°. В точке A (lA = i>=i) момент Л!рП= 0, и при i >
второй реактор также начинает вращаться под действием момента
Л1р и < 0- На участке характеристики А — 1 ГДТ работает
как ГДМ. Таким образом, характеристика комплексного ГДТ
с разрезным реактором как бы составлена нз характеристик
двух ГДТ и одной ГДМ, причем переключение с одного режима
иа другой происходит автоматически. Для определения угловой
скорости реактора сар в трехколесиом комплексном ГДТ также
используют уравнение сирЯгр2 = cupirPi- Заменив сыр1гр1 через
сит2гт2, получим Сир2гр2 = сит2гт2. Так как си = и —ст ctg р,
запишем
(«Р> — Сп р, ctg ₽р2) гр> = (u„ — ст „ ctg ₽„) ги. (5.90)
Из уравнения (5.90) определим <ор, учитывая, что =
= ®ргра:
__ (сита — стпти ctg Pti) Гт1 “I" стрт ctg Pp»rpt (5 91)
Гр2
12*
179
Для комплексного ГДТ с двумя реакторами угловая скорость
первого реактора
(“и — Gnri ctg рта) rTt + cmpii ctg PpiBrpi>
mpl-------------------2 (O.yz)
rpI2
и угловая скорость второго реактора
(ит1 — Cmr> Ctg 0TS) ГТ1 + Стр и, ctg Рр щ'р Ц1 - _
<0pH -------------------2-------------------• (О. Уб)
Гр 112
Комплексные ГДТ (с одним и двумя реакторами) применяют
в приводах автомобилей, тракторов, тепловозов, судов, строитель-
ных, дорожных, буровых, горных и других машин и механизмов.
В подавляющем большинстве случаев это одноступенчатые ГДТ
с центростремительным турбинным колесом. Подобные современные
передачи обладают высокой экономичностью как на режиме ГДТ
(Лгдт ~ 0,9 ... 0,91), так и на режиме ГДМ (п'ды = 0,95 ... 0,96).
Высокие значения т)?д1| у этих ГДТ объясняются близостью формы
их лопастных систем насосного и турбинного колес формам анало-
гичных лопастных колес обычных ГДМ. В практике создания
комплексных ГДТ были изготовлены и испытаны образцы с осе-
вым н центробежным турбинными колесами. Исследования пока-
зали невозможность добиться для указанных типов ГДТ высоких
значений т£дм (т]гДИ < 0,9). Методы и результаты расчета, про-
ектирования и доводки комплексных ГДТ различных типов до-
статочно полно н глубоко изложены, например, в работах [3,
4, 5, 241.
5.6. БЛОКИРУЕМЫЕ ГДТ
Блокируемым называют ГДТ, у которого на заданном
режиме работы блокируются насосное и турбинное колеса. Ранее
отмечалось, что увеличение КПД ГДТ при i > путем пере-
вода его на режим работы ГДМ целесообразно осуществлять в
ГДП с центростремительным турбниным колесом. В то же время
ГДТ с осевым и центробежным турбинным колесами применяют
в приводах монтажных кранов, тепловозов и других машин и
для повышения экономичности этих ГДТ при i > целесо-
образно соединять (блокировать) насосное и турбинное колеса,
превращая ГДТ в механическую передачу с одним жестким валом,
передающим мощность от двигателя к рабочему органу машины.
Известно, что КПД механической передачи при прочих равных
условиях выше, чем КПД гидравлической передачи. Однако
в блокируемом ГДТ на режиме блокировки мощность расходуется
не только на преодоление механических сопротивлений в подшип-
никах н уплотнениях жесткого валопровода, но и на дисковое
трение, на циркуляцию рабочей жидкости в лопастной системе,
которая состоит как бы нз одного двухступенчатого насосного ко-
180
6 12
Рис. 5.36. ГДТ, блокируемый МСХ:
а — схема; б — внешняя характеристика
леса (насосное плюс турбинное колеса) и неподвижного реактора,
который тормозит движение сблокированных колес.
Для уменьшения потерь в сблокированном ГДТ на режимах
блокировки удаляют жидкость из рабочей полости, исключая
дисковые и циркуляционные потери; устанавливают между реак-
тором и корпусом МСХ, заставляя реактор прн i = 1к=я свободно
вращаться, и уже производят блокировку насосного и турбинного
колес при вращающемся реакторе, что также позволяет снизить
циркуляционные потери. Последние ГДТ называются комплекс-
ными и блокируемыми. На практике блокировку насосного н тур-
бинного колес ГДТ осуществляют либо МСХ, либо фрикционным
механизмом. На рис. 5.36 показана схема блокируемого с помощью
МСХ ГДТ и его внешняя характеристика. МСХ блокируемого
ГДТ срабатывает (заклинивает насосное н турбинное колеса)
автоматически при i = 1 (когда юн = сот), не позволяя турбин-
ному колесу обогнать насосное. При этом на характеристике
(на рис. 5.36, б штриховые линии) как бы отсекается зона с низ-
кими значениями УИТ н ц.
МСХ блокируемого ГДТ состоит из обоймы 1 (рис. 5.36, с),
жестко связанной с насосным колесом 4, звездочки 2, насаженной
на выходном валу 5, роликов 3 с пружинами 6. При работе ГДТ
на тяговых режимах обойма и звездочка вращаются против ча-
совой стрелки, при этом звездочка отстает от обоймы (сот < <он).
Ролики внутренней цилиндрической поверхностью обоймы сжи-
мают пружины; при этом оии находятся в широкой части клина,
образованного плоской поверхностью звездочки и внутренней ци-
линдрической поверхностью обоймы, позволяя обойме свободно
вращаться относительно звездочки. При уменьшении нагрузки на
выходном валу ГДТ угловая скорость турбинного колеса (и звез-
дочки) возрастает н при toT = tuB (i = 1), когда обойма и звездбчка
181
Рис. 5.37. ГДТ, блокируемый фрикционным механизмом:
а — схема; б —~ внешняя характеристика; Ф — фрикционный механизм
вращаются как одно целое и отсутствует прижимающее воздей-
ствие внутренней поверхности обоймы на ролики, последние под
действием пружин перемещаются в узкую часть клина и закли-
нивают звездочку и обойму, объединяя в одни жесткий валопровод
входное и выходное звено ГДТ. При увеличении нагрузки иа вы-
ходном валу ГДТ до t < ic (включая режимы i < 0; здесь ic —
передаточное отношение при блокировании) угловая скорость шт
уменьшается (вплоть до со, = 0 и далее при ыт < 0), и МСХ автома-
тически расклинивается, позволяя турбинному колесу отставать
от насосного или вращаться в противоположном направлении.
На режимах противовращения звездочка вращается по часовой
стрелке (обойма — против часовой стрелки). Ролики под дейст-
вием прижимающего усилия внутренней поверхности обоймы по-
стоянно находятся в широкой части клииа, сжимая пружины и
допуская относительное движение в противоположные стороны
насосного и турбинного колес ГДТ, который работает с трансфор-
мацией момента (К >1).
На рис. 5.37 показаны схема и внешняя характеристика блоки-
руемого с помощью фрикционного механизма ГДТ. Блокирование
насосного и турбинного колес производят" при > iKs=i (i6 =
~ 0,82 ... 0,9) в зоне малых нагрузок во избежание резких толч-
ков и ударов вследствие мгновенного возрастания момента. Бло-
кирование фрикционным механизмом может производиться либо
по сигналу оператора машины, либо автоматически, например,
от сигнала центробежного регулятора, установленного на вы-
ходном валу ГДТ.
На рис. 5.38 показаны схема и внешняя характеристика комп-
лексного и блокируемого с помощью фрикционного механизма
ГДТ. Из характеристики (рис. 5.38, б) видно, что при 0 < I <
< ГДТ работает с трансформацией момента (К > 1); прн
Qc=i < i < ic — на режимах ГДМ (К = 1) и при ie — иа режиме
блокировки насосного и турбинного колес (с одновременным вра-
щением реактора). Применение блокировки насосного и турбин-
ного колес существенно снижает потери мощности на режимах,
182
Рис. 5.38. Комплексный ГДТ с блокировкой фрикционным механизмом насос-
ного н турбинного колес;
а — схема; б — внешняя характеристика
близких к холостому ходу, что, в свою очередь, позволяет иа
машинах использовать менее емкие теплообменники. Блокируе-
мые МСХ ГДТ не имеют обгонного режима, так как иа режимах
блокировки сон = сот, и нагрузка через МСХ жестко передается
на двигатель. В то же время наличие МСХ между насосным и
турбинным колесами позволяет осуществлять запуск двигателя
внутреииего сгорания машины «с буксира», что бывает важно для
работы машин в зимнее время или в условиях Крайнего Севера.
Б. 7. РЕВЕРСИРУЮЩИЕ ГДТ
Реверсирующим называют ГДТ, позволяющий осуще-
ствлять реверс выходного звена без реверса входного звена. Из-
вестные реверсирующие ГДТ можно разделить на две группы:
ГДТ, в которых направление вращения выходного вала изменяется
путем замены лопастных колес в рабочей полости (рис. 5.39) и
путем изменения соединения лопастных колес с выходными валами
(рис. 5.40). При замене в рабочей полости ГДТ реактора имеем
для прямого и обратного ходв ГДТ обратного ходв с расположе-
нием лопастных колес по направлению движения жидкости в ра-
бочей полости «насосное колесо—реактор—турбинное колесо»
Ряс. 5.39. ГДТ, в которых
направление вращения
выходного звена изме-
няется путем замены в
рабочей полости:
о — реактора; б — турбин-
ного колеса; Р, Г. — со-
ответственно обозначают
реактор и турбинное колесо
обратного хода; «₽. s*
перемещения колес
183
Рис. 5.40. ГДП, в которой направление вращения вымдного звена изменяется
путем изменении соединения лопастных колес с выходными валами:
«7.т“™’кодеГ <-------В- прямом ходк-------пр.
(НРТ). Развертки лопастей колес для этого ГДТ и треугольники
скоростей показаны на рис. 5.41. Расчетные уравнения и внешние
характеристики ГДТ обратного хода подробно изложены в работах
13, 4, 22 J. Прн замене турбинного колеса (см. рис. 5.39, б)
для прямого и обратного хода имеем ГДТ прямого хода с распо-
ложением лопастных колес в рабочей полости НТР. В этих схемах
заменяющие лопастные колеса (реактор н турбинное колесо) имеют
противоположные изгибы и углы лопастей по сравнению с заме-
няемыми колесами, обеспечивающими прямой ход выходного вала
ГДТ. Исследованиями-установлено, что КПД ГДТ обратного
хода при последовательности лопастных колес НТР значительно
ниже, чем прн последовательности НРТ, а для прямого хода КПД
1ДТ при последовательности НТР выше, чем прн последователь-
ности НРТ. Эго ухудшение КПД объясняется тем, что при ревер-
сировании выходного вала надо иметь малые углы лопастей рм <
<.15 или Др2 > 165 . Поэтому невозможно добиться высоких
значений КПД прн замене лопастных колес в рабочей полости
Рассмотрим схему реверсирования с помощью замены соедине-
ния лопастных колес с выходными валами ГДТ (см. рис. 5.40, а).
Прн прямом ходе турбинное колесо 3 ГДТ прямого хода типа НТР
соединено с выходным валом 6 передачи через промежуточные
шестерни 5 и муфту свободного хода 7. Прн этом реактор 2 затор-
можен тормозом 1. Для обеспечения обратного хода вала 6 тур-
184
Рис. 5.41. Треугольники скоростей и развертки лопастей колес ГДТ обратного
кода:
а “ пурбинного колеса; б “ реактора; в “ насосного колеса
бинное колесо 3 затормаживается тормозом 4 и становится реак-
тором ГДТ обратного хода типа НРТ. Прн этом тормоз i рас-
тормаживается, и реактор 2 становится центростремительным
турбинным колесом ГДТ обратного хода и с валом 6 соединяется
через промежуточную шестерню и МСХ, повернутый относительно
первого МСХ на 180°. Конструкция подобного оригинального ре-
версирующего ГДТ была разработана в МАДИ. В ней при прямом
и обратном ходе используется наиболее целесообразная последо-
вательность расположения лопастных колес в рабочей полости:
для прямого хода — последовательность НТР и для обратного —
НРТ. Из внешней характеристики (см. рис. 5.40, б) этого ГДТ
видно, что максимальный КПД при обратном ходе достигает до-
статочно высокого значения т]* = 70 %, чего удалось добиться
подбором оптимального сочетания углов лопастных колес при
некотором снижении максимального КПД прямого хода от зна-
чения т]* = 83 ... 84 % до 81 ... 82 %. Для подобных схем коэф-
фициент трансформации на стоповом режиме К0об = Ко 1»
и в характеристике Мг = f (0 появляется обратная прозрачность.
Из технической и патентной литературы известны также ревер-
сируемые гидродинамические передачи — это ГДП, осуществляю-
щие реверс выходного звена одновременно и путем реверса входного
звена. В качестве примера такой передачи можегт служить ГДМ
с симметрично расположенными в рабочей полости насосным н
н турбинным колесами, в которых установлены радиальные ло-
пасти (рнс. 5.42, а). При реверсе входного вала (например, с по-
мощью реверсирования вала приводящего электродвигателя)
выходной вала также реверсируется. При этом получаются со-
вершенно одинаковые внешние характеристики ГДМ как при пря-
мом, так н прн обратном вращении. ОгтТлтл
На рнс. 5.42, б показана схема разработанного в НПО <ВНИИ-
Стройдормапг» оригинального реверсируемого ГДТ. Выполнен-
ные исследования позволили установить условия получения
185
Рис. 5.42. Реверсируемые ГДП:
а ~ ГДМ о свмметричанми лопастями радввльния колеа; б » ГДТ в поворачивающи-
мися на угол фр •= л лопастями реактора
одинаковых характеристик при прямом и обратном вращениях
выходного вала (11]. Было установлено, что полная идентичность
характеристик т] = f (i) и XMt = f (i) на тяговых режимах при
<0j > 0 и <л>х < 0 обеспечивается при равенстве геометрических
параметров лопастей колес при g>i > 0 и со1 < 0. Этим обстоятель-
ством объясняется необходимость поворота лопастей реактора
(рис. 5.42, б) при реверсировании входного вала на 180° и выпол-
нения радиальными лопастей насосного и турбинного колес ре-
версируемого ГДТ. Эго ограничение существенно снижает пре-
образующее и нагружающее свойства ГДТ, приближая его внеш-
нюю характеристику к характеристике гидромуфты. Можно
несколько улучшить внешнюю характеристику реверсируемого
ГДТ при работе иа прямом ходу, однако показатели качества та-
кого ГДТ будут существенно ниже показателей качества обычных
ГДТ прямого хода.
В то же время необходимо отметить, что применение реверсиру-
ющих ГДТ позволяет существенно улучшить технологические свой-
ства машин челночного действия, так как при прямом и обратном
ходах осуществляется бесступенчатое, автоматическое изменение
скорости рабочего органа в зависимости от нагрузки иа ием,
отпадает необходимость применения малонадежных и дорогостоя-
щих механических дифференциалов и других механических
устройств для осуществления реверсирования рабочего органа.
Поэтому реверсирующие и реверсируемые ГДТ можно считать
перспективным приводом для машин челночного действия, и
решение о целесообразности их применения в каждом конкретном
случае требует глубокого и всестороннего учета всех преимуществ
и недостатков их использования.
Б. а. РЕГУЛИРУЕМЫЕ ГДТ
Регулируемым называется ГДТ, имеющий органы уп-
равления для изменения его внешних характеристик. Для ГДТ
единственным параметром, определяющим угловую скорость со,
1Я6
объемном регулировании:
б — установкой дроссельной ва-
Рис. 5.43. Характеристики ГДТ при
а — дросселированием жидкости в системе питания; б — установкой дроссельной sa-
слоаки в рабочей полости;---• =- прн положении регулирующего органа, обеспечи-
вающего минимальное наполнение
при <оя ph const, является момент М2 на выходном валу. По мере
увеличения момента М2 угловая скорость ©т автоматически умень-
шается до нуля. Однако в некоторых случаях необходимо изменять
скорость й2 при М2 — const и сон = const, например, при работе
ГДТ с электродвигателем переменного тока или при групповом
приводе от двигателя, когда требуется независимое регулирование
частоты вращения отдельных выходных валов, приводимых в дви-
жение через ГДТ. Учитывая, что для ГДТ справедливо равенство
ЛТ, = Мв ± Л1р, для изменения его внешней характеристики
достаточно изменить любой из трех моментов или два из них.
Изменить момент можно согласно уравнению М = pQ (сц2г2 —
— cuiri) путем изменения плотности р рабочего тела, подачи Q,
геометрических параметров лопастной системы (радиусов, углов,
числа, толщины, ширины лопастей колес).
Наиболее распространенным является регулирование путем
измеиеиия наполнения рабочей полости (объемное регулирование)
при помощи дросселирования жидкости на выходе из рабочей по-
лости ГДТ или установки в рабочей полости ГДТ перемещаю-
щейся заслонки. При этом уменьшение степени наполнения рабо-
чей полости сопровождается уменьшением КПД ГДТ. Было уста-
новлено, что любой режим работы при объемном регулировании
тем меиее экономичен, чем больше момент иа этом режиме при
данном наполнении отличается от момента Мг при полном запол-
нении рабочей полости.
Характеристики ГДТ при объемном регулировании, получен-
ные в МВТУ им. Н. Э. Баумана, показаны иа рис. 5.43. Жест-
кость характеристик (dMlda2) ГДТ остается для всех величии
заполнения примерно одинаковой. Эго обеспечивает возможность
устойчивого регулирования по угловой скорости (оа при постоян-
ном моменте Л4а в диапазоне <о2гаах/«о21п1п == 5 ... 6. Из всех спо-
собов объемное регулирование характеризуется наименьшим бы-
187
стродействием и наихудшими следящими свойствами, поэтому
оно мало применяется даже в тех случаях, когда можно было пре-
небречь уменьшением КПД. Его используют, например, в судовых
установках с дизелями, где ГДП, как правило, должна включать
и выключать установку, т. е. ГДТ будет работать либо при полном,
либо при минимальном наполнении рабочей полости.
Объемное регулирование с помощью различных шиберных
устройств, изменяющих сечения рабочей полости, по своим харак-
теристикам напоминает регулирование изменением наполнения
(рис. 5.43, б), ио в отличие от последнего обладает более высокой •
маневренностью. Однако прн таком способе регулирования полно-
стью отключить двигатель от приводимой машины не удается
даже при полностью перекрытой рабочей полости, так как имеют
место утечки через шиберы и заслонки, н рабочую машину «ведет».
Механическое регулирование является более экономичным
и обладает высокой маневренностью. Из технической и патентной
литературы наиболее известны регулируемые ГДТ, в которых
изменяются радиусы, число и углы лопастей колес. При этом наи-
более экономичным способом механического регулирования, осо-
бенно если речь идет о стационарных машинах, т. е. машинах,
работающих с нерегулируемыми по частоте вращения вала двига-
телями, является регулирование поворотом лопастей колес.
Этот способ первоначально был предложен применительно к по-
воротно-лопастным гидравлическим турбинам и хорошо зареко-
мендовал себя в практике турбостроения. По сравнению с при-
водами постоянного тока приводы с таким регулированием не
только более дешевы, но, что самое главное, требуют меньших
производственных площадей, так как имеют вспомогательное
оборудование небольших габаритных размеров и могут изготов-
188
Рис. 5.45. Внешние характеристики гидротрансформаторов, регулируемых по-
воротом вокруг поперечных осей лопастей:
а — иасосвого колеса; б — реактора: обозначения . =• —• • ------— со-
ответствуют промежуточным положениям (по мере уменьшения) углов установки лона*
стей насосного колеса в реактора
литься любой мощности при любой частоте вращения. Например,
если выполнение привода постоянного тока мощностью 5000 кВт
с угловой скоростью сйх = 156 с-1 является серьезной проблемой,
то привод, состоящий из синхронного двигателя и регулируемого
ГДТ большей мощности, можно изготовить сравнительно просто.
На рис. 5.44 показаны некоторые известные схемы поворота
лопастей колес различных ГДТ. Наиболее просто осуществлять
поворот лопастей неподвижного реактора, при этом оси поворота
лопастей чаще всего располагаются поперек потока жидкости
(рис. 5.44, а). Более сложно осуществлять поворот лопастей
вращающегося колеса. В качестве примера иа рис. 5.44, б, в
показаны схемы регулируемых ГДТ, в которых поворот лопастей
насосного колеса осуществляется вокруг поперечных осей
(рис. 5.44, 6) либо вокруг продольных (рис. 5.44, в).
На рнс. 5.45, а, б приведены характеристики регулируемых
ГДТ с поворотными вокруг поперечных осей лопастями насос-
ного колеса и реактора. Для получения высоких значений коэф-
фициентов Ко, т]* лопастн турбинного колеса должны иметь при
углах рта < 45° максимальную изогнутость, т. е. разницу между
углами РТ1 и Рт1. Поэтому поворот лопастей турбинного колеса
нерационален н затруднителен. Кроме того, изменение углов
практически не влияет иа прозрачность характеристики.
Лопасти реактора должны иметь максимальную изогнутость
для получения большой прозрачности и коэффициента Ко и ма-
лую изогнутость — для получения высоких значений КПД т]*.
Прн прочих равных условиях менее изогнутые лопастн можно
повернуть на больший угол. Оптимальная изогнутость для по-
воротных лопастей реактора получается прн угле рр = 30 ... 40°,
но при этом трудно обеспечить значение Ко > 2.
При повороте лопастей насосного колеса вокруг поперечной
осн удается получить достаточно высокие значения КПД в широ-
189
кой зоне регулирования. Показатели ГДТ с центростремительным
турбинным колесом существенно изменяются даже прн малом угле
поворота лопастей насосного колеса вокруг продольных осей 111].
Следует отметить, что при повороте лопастей, расположенных
между двумя криволинейными поверхностями вращения, воз-
можна разная интенсивность изменения углов fJx и ра при одном
н том же изменении угла осн поворота лопасти. Изменение углов
входа и выхода и £а равно изменению угла а оси поворота,
умноженному иа коэффициент пропорциональности т = 0 ... 1.
Если осн поворота лопастей направлены не поперек, а вдоль
потока, в средней части лопасти при расположении входной н вы-
ходной кромок в рабочей полости по одну, а ие по обе стороны от
оси поворота (рис. 5.44, е), то изменение углов рх и ра будет
различно по знаку. Следовательно, в этом случае прн повороте
лопастей изменяются не только углы fJj и р8, но и кривизна раз-
вертки лопастей, хотя лопасти при этом не изменяют своей формы.
Отметим некоторые ограничения для расчетов и проектирования,
неизбежные при повороте лопастей.
1. Угол поворота ограничен из-за увеличения зазоров между
боковыми кромками лопастей и корпусом колеса прн повороте
лопастей между цилиндрическими, тороидальными и другими
поверхностями.
2. При любой схеме поворота лопастей можно получить опре-
деленное и ограниченное изменение характеристик ГДТ; при этом
для каждой лопастной системы можно определить пределы изме-
нения характеристик.
3. Для схемы поворота лопастей насосного колеса вокруг про-
дольных осей углы их поворота а = 40 ... 50° можно считать
допустимыми о учетом первых двух ограничений. При этом угол
Риг = 44 ... 136° [111. Прн повороте лопастей реактора имеется
единственное оптимальное значение углов 0р1 и рра, при этом
коэффициент Хм, может существенно изменяться при изменении
коэффициента Ко в допустимых пределах.
Поворот лопастей насосного колеса не требует таких жестких
ограничений в получаемых показателях характеристики ГДТ,
как поворот лопастей реактора, и, в частности, можно получить
очень высокие значения коэффициента Ко, обеспечивая более ин-
тенсивное изменение характеристик н большую экономичность,
чем при повороте лопастей реактора.
На рис. 5.46 показана оригинальная схема устройства, раз-
работанная в МАДИ, для регулирования внешней характеристики
ГДТ путем изменения плотности рабочего тела. Устройство со-
держит регулируемый насос /5, подключаемый всасывающей 13
и напорной 16 гидролиннями соответственно к нижней части бака
10 и рабочей полости 1 ГДТ /9; теплообменник 7, установленный
в сливной гидролинии 3; регулируемый насос 6 о всасывающей
гидролинией 9, подключенный к верхней части бака 10; вибратор
/2, соединенный с баком, в котором установлена перегородка 11
190
Рис. 5.46. Устройство для регулирования характеристики ГДТ путем измене-
ния плотности рабочего тела
о отверстиями, разделяющая его иа две полости, заполненные
рабочими жидкостями с плотностями pi и ра. Во всасывающих
гидролиниях 13 и 9 установлены фильтры 14 и 8. В гидроли-
нии 16 установлены предохранительный 18 и обратный 2 клапаны.
В напорной гидролинии 5 насоса 6, подключенной к гидролинии 2,
также установлены предохранительный 17 и обратный 4 клапаны.
Характеристика ГДТ может изменяться ступенчато, если пода-
вать жидкость в рабочую полость попеременно с плотностью
(только от насоса 15) нлн о плотностью рв (только от насоса 6),
или бесступенчато — если изменение плотности производить сме-
шиванием двух жидкостей перед подвчей в рабочую полость.
Для бесступенчатого регулирования производвт изменение рабо-
чих объемов иасосов 15 и б до получения такого соотношения их
подач, при котором смесь рабочих жидкостей имеет заданную
плотность. Сливаясь из ГДТ 19, смесь попадает в бак 10, где из-за
различия в плотностях и колебаний бака происходит расслоение
жидкостей, и более тяжелая (например, с плотностью р2) опуска-
ется в нижнюю часть бака, в то время как более легкая — со-
средотачивается вверху.
Устройство для регулирования плотности можно выполнить
и по другой схеме, например, с использованием миогосекционного
бака, в каждой секции которого помещено рабочее тело с опреде-
ленной плотностью. Насос питания может быть нерегулируемый
и через многосекционный золотниковый распределитель его вса-
сывающая гидролиния может быть связана с нужной секцией
бака. На сливной гидролинин можно разместить сепаратор для
сортирования жидкостей с определенной плотностью и еще один
многосекционный золотниковый распределитель, который будет
направлять отсортированную жидкость в свою секцию бака. Для
ускорения замены жидкости с требуемой плотностью в ГДТ
в его рабочую полость можно подавать сжатый воздух от компрес-
191
сора, который применяют практически на всех самоходных ма-
шинах. Этот способ регулирования достаточно экономичен, так
как КПД ГДТ прн работе его на жидкостях с различными плот-
ностями изменяется не существенно. В то же время момент ГДТ,
прямо пропорциональный плотности, можно изменять значитель-
но, так как плотность известных рабочих тел изменяется от р =
= 805 кг/м3 (трансформаторное масло) до р = 13 600 кг/м3 (ртуть),
т. е. приблизительно в 16 раз.
Таким образом, принципиально возможно создать ГДП, состоя-
щую из ГДТ и устройства для подачи в его рабочую полость жид-
костей с различными плотностями, которая успешно может кон-
курировать по стоимости, надежности, компактности и основным
характеристикам с гидромеханическими передачами, состоящими
нз ГДТ н механической коробки передач, широко применяемыми
в приводах автомобилей, тракторов, тепловозов, строительных
и дорожных и других машин.
На практике сравнительную оценку способов регулирования
проводят по регулировочным характеристикам, учитывая допол-
нительные требования. Например, уменьшить момент Мг в 2 раза
можно для регулирования наполнением при уменьшении КПД
т]* в 3 раза, при повороте лопастей — в 1,5 раза и при уменьшении
плотности — на 1 ...2%. Выбор способа регулирования опре-
деляется типом машины и задачами, которые необходимо решить
при помощи регулирования гидротрансформатора. Исследование
особенностей и пределов изменения характеристик при регулиро-
вании производится обычно после выбора типа и оптимальных гео-
метрических параметров ГДТ в нерегулируемом исполнении.
Б. е. СОВМЕСТНАЯ РАБОТА ДВИГАТЕЛЯ И ГДТ
Из уравнения для определения момента, действующего
на входной вал ГДТ: Mi = Хл.рсоК следует, что согласование
работы двигателя и ГДТ может осуществляться при помощи
редуктора или мультипликатора (с^ = var) путем изменения
геометрических параметров лопастной системы (Х^, Da = var),
плотности рабочей жидкости (р == var). Двигатель и ГДТ в при-
воде машины образуют единую систему,, равновесное состояние
которой определяется энергетическим балансом т. е.
равенством мощности двигателя (с учетом мощности, отводимой
на вспомогательные нужды) и мощности на входном валу ГДТ.
Если между валом двигателя и входным валом ГДТ стоит какая-
либо передача, то момент двигателя, приведенный ко входному
валу ГДТ:
М*а = М\ — Мл (<0д/<01) т]п = /Идт]п/«п» (5.94)
где Чп и in — КПД в передаточное отношение промежуточной передачи.
192
гателя внутреннего сгорания и ГДТ с непрозрачной характеристикой
С учетом уравнения подобия для момента для заданных
(или выбранных) значений Мд, <од, Цп, р, и Da опреде-
лим передаточное отношение
‘-/is- 154
где о)д = СВ1//П-
Уравнение (5.95) позволяет аналитически согласовать работу
двигателя и ГДТ путем выбора параметров промежуточной пере-
дачи, обеспечивающей требуемое значение ia.
Рассмотрим конкретные примеры совместной работы некоторых
двигателей и ГДТ с непрозрачной и прозрачной характеристиками.
Работа двигателя внутреииего сгорания (дизеля) с ГДТ, име-
ющим непрозрачную характеристику. Известна внешняя характе-
ристика дизеля в виде Мп = f (<од), = f (шд) (рис. 5.47, а)
и внешняя характеристика непрозрачного ГДТ в виде Mt = f (t).
= f (i), T] = f (i) при (Di = const, p = const (рис. 5.47, 6).
Требуется определить зону (точку) совместной работы данных
двигателя и ГДТ и построить выходную характеристику привода
в виде Л1> = f (соц), где М9 и соа — соответственно крутящий
момент и угловая скорость выходного вала привода (выходного
вала ГДТ).
13 Стесав О. П др. ^93
Для решения поставленной задачи строим нагрузочную (вход-
ную) характеристику ГДТ по уравнению MJ = Mi (©д/<й1)а, опре-
деляющему зависимость момента на входном валу ГДТ от угловой
скорости вала двигателя (рнс. 5.47, в). Значения н берем
из характеристики ГДТ, представленной на рис. 5.47, б. Далее
совмещаем на одном графике (в одном масштабе) характеристику
двигателя н нагрузочную характеристику ГДТ (рнс. 5.47, г).
Точка А пересечения характеристик Мд = f (сод) н Mj = f (oR)
определяет режим совместной работы двигателя и ГДТ, так как
только в ней Мд = Мх Находим по графику на рис. 5.47, г
координаты точки A (Miа и Oia). С учетом значений
и сом строим выходную характеристику привода М2 = f (<о2)
(рис. 5.47, д) по уравнению ц = Мя^ЦМ^х), из которого полу-
чаем зависимость
М2 = MiAtoIAT]/tO2.
В уравнении значения М{А и <0]д берем из рнс. 5.47, а,
а значения т] = f (<оа) — нз рнс. 5.47, б, пользуясь зависимостью
<оя = ий1Л (т. е. предполагаем, что прн изменении угловой скорости
от (ох до со1Л КПД ГДТ остается постоянным, что можно принять
для области автомодельности). На рнс. 5.47, д значение момента М2
при скорости соа = 0 получаем по зависимости Ма = МУК = М1АЙСО,
где значение коэффициента трансформации Ко (прн i ~ 0) опреде-
ляем из характеристики ГДТ (рис. 5.47, б) как 7<0 = М80/М10
(прн 1 = 0).
Если полученная точка А совместной работы не удовлетворяет
условиям работы н ее желательно перенести, например, на режим
NR max нли MR 1лах, то это можно сделать путем изменения величины
Я-м,, Р> e>i и D& в любой нх комбинации. Из уравнения подобия
видно, что при увеличении этих показателей (и параметров)
парабола М\ = f (wj) пойдет круче (выше), а прн уменьшении —
более полого (ниже).
Работа карбюраторного двигателя с ГДТ, имеющим прозрач-
ную характеристику. Известна внешняя характеристика двига-
теля: Мд = f (юд) (рис. 5.48, а) н КД = f ((Op) и внешняя ха-
рактеристика прозрачного ГДТ: Мъ Ма, т] = f (t) при (Oj = const
и р = const (рис. 5.48, б).
Требуется определить зону совместной работы двигателя и
ГДТ и построить выходную характеристику привода Ма = f (<о2).
При построении нагрузочной характеристики ГДТ М{ =
= /(®д) (рис. 5.48, в) необходимо помнить, что для ГДТ с про-
зрачной характеристикой момент Afi зависит от I н, следовательно,
для каждого из его режимов работы, обозначенных на рнс. 5.48, б,
например, точками О, А, Б, В, будет существовать своя пара-
бола, построенная по уравнению AfJ = Mi (юд/coi)2, в котором
значения Afj берут по графику Mt = / (i) для точек О, А, Б, В
н др. (рио. 5.48, б), а угловой скорости &х — из технического за-
194
Рис. 5.48. Зависимости для определения зоны совместной работы в приводе дви-
гателя внутреннего сгорания и ГДТ с прозрачной характеристикой
Дания и внешней характеристики ГДТ. Например, для стопового
режима работы параболу строят по уравнению Л4ю = Мю (<од/<й1)2
и т. д. Таким образом, нагрузочная характеристика прозрачного
ГДТ представляет собой пучок квадратичных парабол, наклон
которого (положение в системе координат AfJ — Oi) зависит
от вида характеристики ~ f (i) и значения — const.
Совмещая на одном графике (в одном масштабе) характери-
стику двигателя и нагрузочную характеристику ГДТ (рис. 5.48, а),
определим зону О — е совместной работы данных двигателя
и ГДТ. Из характеристики (рис. 5.48, г) видно, что двигатель
при работе с прозрачным ГДТ будет загружен на определенном
участке, а не в какой-то одной точке. Причем величина этого уча-
стка зависит от прозрачности характеристики ГДТ (чем больше
прозрачность, тем шире границы участка совместной работы).
Если полученный участок совместной работы не удовлетворяет
условиям работы привода, его можно сдвинуть вправо или влево
по характеристике двигателя за счет изменения значений Хдц»
р, Ох и DB.
С учетом характеристики ГДТ (рис. 5.48, б) и характеристики
совместной работы (рис. 5.48, г) строим выходную характеристику
13* 195
Рнс. 5.49. Зависимости для определения зоны совместной работы в приводе
асинхронного короткозамкнутого электродвигателя переменного тока и ГДТ
с прозрачной характеристикой
привода Мя — f (соа) по уравнению Мя = М1ш1,п/<о1, в котором
значения Afi и берем из графика на рис. 5.48, г как коорди-
наты точек О, с, б, в, а значения л = / (“я) — нз рнс. 5.48, б,
пользуясь зависимостью ©я = i<olf причем значения coj по-преж-
нему определим из рис. 5.48, г для рассматриваемого режима ра-
боты. Например, для режима iA момент МЯА = Мю^аЧл/^жл
и т. д. Момент Л1а в точке О (прн i = 0) определяем так же, как
и для случая работы дизеля с непрозрачным ГДТ по формуле Мзд=
= Л410К0. Для удобства построения выходной характеристики
привода и ее наглядности целесообразно перед построением через
определенные в точках О, Д, Б, В и т. д. значения скорости
<оя = ©!« (по оси абсцисс, рис. 5.48, д) провести вертикальные
линии (сою, ©ад, <оя5, ©as и др.) и на них в соответствующих
масштабах откладывать значения Л41о, .... Af1B, со1о, .... со1В,
По» •••» Чв и Л4>о, ..., Mis-
Известно, что дизели имеют жесткую характеристику: частота
вращения вала при холостом ходу отличается от частоты вала
при максимальной мощности приблизительно на 10 %, а момент
106
Мд ши превышает момент двигателя М* (при ЛГдгпях) —на 10 ...
20 %. У карбюраторного двигателя момент изменяется в большем
диапазоне, поэтому с карбюраторным двигателем целесообразно
применять гидротрансформатор с большой прозрачностью харак-
теристики, а с дизелем — с малой прозрачностью илн с непро-
зрачной характеристикой.
Работа асинхронного электродвигателя переменного тока
с ГДТ, имеющим прозрачную характеристику. Известна внешняя
характеристика двигателя Мд = f (<од) (рис. 5.49, а) и внешняя
характеристика ГДТ с прозрачной характеристикой М, = f (i),
Mi = f (i), t) = f (i) при ©i = const, p = const (рис. 5.49, 6).
На рис. 5.49, в показана характеристика совместной работы
данных двигателя н ГДТ, а на рнс. 5.49, г—выходная характери-
стика привода. Из рнс. 5.49, г видно, что привод может устойчиво
работать прн ©> = 0, а характеристика асинхронного электро-
двигателя при совместной работе с ГДТ напоминает по внешнему
виду сериесную, что электротехническими средствами достига-
ется при помощи двух электрических машин постоянного тока,
равноценных по мощности асинхронному двигателю. Таким об-
разом, наличие ГДТ позволяет использовать короткозамкнутый
электродвигатель для тяговых целей. Если по условиям работы
привода неизбежна длительная работа в зоне Mi > Мд, то это
может привести к перегреву двигателя, в этом случае целесооб-
разно применять ГДТ с непрозрачной характеристикой.
Б. 10. ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ ГДТ
5.10.1. Техническое задание иа расчет
и особенности методологии проектирования ГДТ
Для расчета и проектирования ГДТ задают нагрузки,
действующие на его входной и выходной валы в виде характери-
стик двигателя Мд = f (од), = f (од) и характеристик со-
противления на рабочем органе в виде зависимости Мо = f (©а),
мощность NBCa двигателя, отбираемую на вспомогательные нужды
(на привод вентилятора, компрессора, насосов питания н управ-
ления и т. д.). Обычно оговаривают максимально допустимые массу
и габариты ГДТ, а также требования ко всем показателям его
качества (КПД, максимальному коэффициенту трансформации,
прозрачности, диапазону экономичной работы, энергоемкости,
долговечности н т. д.). При необходимости задают жесткость
характеристики при работе ГДТ на тормозном режиме и показа-
тели, характеризующие его регулирующее, предохранительное,
кавитационное свойства. На стадии задания решается вопрос
о необходимости использования режимов ГДМ, блокировки, ре-
версирования, т. е. конструктор совместно с заказчиком анализи-
рует весь комплекс вопросов, позволяющих ему в процессе рас-
чета и на стадии проектирования выбрать оптимальные параметры
ГДТ для заданных условий его применения.
197
Б.1. Свойства и показатели качества ГДТ
Свойство Показатель Расчетная формула для показателя
Нагружа- ющее Преобразу- ющее Демпфиру- ющее Прозрач- ность Кавитаци- онное Экономич- ность Предохра- нительное Тормозное Надежность Металлоем- кость Себестои- мость изго- товления Регулирова- ние Коэффициент момента Коэффициент осевой силы Коэффициент трансфор- мации момента Коэффициент демпфиро- вания лопастного ко- леса Коэффициент (степень) прозрачности Давление питания КПД Диапазон экономичной работы Потери холостого хода Коэффициент ограниче- ния по моменту Коэффициент ограниче- ния по скорости Жесткость характери- стики Расчетная долговечность Коэффициент металлоем- кости Себестоимость узла, эле- мента Себестоимость ГДТ Коэффициент глубины регулирования по /-му показателю Й Яг II _ Й. 3 со - * 11 II + * * я 11 || ы II * £ 11 II 11 II _ 11 II 11 11 „ II « - ” а — И S J? « ? ® -в’ О*У 5 1 + 5 5 "f Т / ISii § t- ч i
В таблице использованы следующие дополнительные обозначения: —
наружный диаметр 1-го лопастного колеса; А{ —осевая сила иа i-ы лопастном
колесе; Т — среднее число лет работы ГДТ до разрушения какого-либо звена;
G — масса ГДТ; Oi — стоимость материала дли 1-го элемента ГДТ; и ац —
процент начислений иа расходы по заработной плате и процент накладных рас-
ходов при изготовлении 1-го элемента; — расходы иа заработную плату при
изготовлении 1-го элемента; 5Сб — себестоимость сборочных операций; t/jmax
и Uj mm — максимальное и минимальное значения /-го показателя качества.
198
Рис. 5.50. Структурная схема методики проектирования ГДТ
199
В основу методологии проектирования ГДТ должны быть за-
ложены системный и комплексный подходы. Системность подхода
заключается в том, что при расчете (анализе) и синтезе (проекти-
ровании) ГДТ рассматривают как сложную систему, состоящую
из подсистем, взаимодействующих друг с другом. Каждая из
подсистем (например, входное, выходное звенья, реактор, корпус,
МСХ и т. д.) является составной частью системы и не должна рас-
сматриваться без взаимного влияния подсистем на общую систему.
В то же время сам ГДТ рассматривают как подсистему более слож-
ной системы привода, который, в свою очередь, является под-
системой еще более сложной системы машины в целом. Комплекс-
ность подхода заключается в том, что при оценке качества и про-
ектировании ГДТ рассматривают не какие-то изолированные его
свойства (например, нагружающее и преобразующее, или проз-
рачность, нли долговечность и т. д.), а взаимодействие различных
свойств и процессов, происходящих в рабочей полости и отдельных
узлах ГДТ, и взаимное влияние их друг на друга. При этом анали-
зируют механические, гидравлические, тепловые и другие явления
и процессы, оказывающие влияние на показатели качества ГДТ.
В табл. 5.1 обобщены свойства и показатели ГДТ, наиболее
часто рассматриваемые и задаваемые в техническом задании на
проектирование.
Перечисленные в табл. 5.1 показатели свойств зависят в ос-
новном от геометрических параметров ГДТ, от вида рабочей жид-
кости (рабочего тела) и от законов движения его лопастных колес.
При Ох = const и установившемся движении выходного звена эти
показатели являются неизменными для определенного типа ГДТ
и в совокупности однозначно определяют его качество.
На рис. 5.50 представлена структурная схема принятой ме>
толики проектирования ГДТ, которую укрупненно можно пред-
ставить состоящей из двух крупных этапов проектирования: ана-
лиза и синтеза.
5.10.2. Этапы анализа
На этапе анализа совместно рассматривают данные
технического задания (требования, предъявляемые к отдельным
показателям качества), характеристики и конструкции известных
ГДТ. На основании этого выбирают исходную рабочую полость
проектируемого ГДТ, устанавливают число лопастных колес и
их взаимное расположение. Рабочую полость, как правило, вы-
бирают на основе имеющихся образцов (4, 22, 24]. Если по
заданию необходимо иметь оптимальный режим (£• = 0,5 ... 0,8),
то ГДТ должен быть одноступенчатым, при i* = 0,2 ... 0,3 —
двухступенчатым и при i* <Z 0,2 — трехступенчатым. При вы-
боре принципиально новой формы рабочей полости ее приходится
доводить до требуемых показателей экспериментально. При выборе
формы при прочих равных условиях надо стремиться к увеличению
200
диаметра Da и уменьшению Do, так как в этом случае будет более
широкий диапазон высоких значений КПД.
Ширину лопастного колеса в меридиональном сечении можно
предварительно определить, пользуясь соотношением ст =
= (0,14 ... 0,25) Ufnax 14]. При расчете скорости ст предваритель-
ные значения напора Н и подачи Q можно вычислить по мощности
Nn из соотношения между коэффициентом быстроходности, напо-
ром и мощностью [3]. А. Я- Кочкарев рекомендует коэффициент
быстроходности задавать по формуле
1 1,87
to"- - +
где а — поправка, зависящая от расположения лопастных колес в рабочей по-
лости и величины i* (обычно а — 0,02 ... 0,4, причем большие значения а соответ-
ствуют многоступенчатым ГДТ к малым значениям /*).
При известном напоре Я«н подача
Q = Nj(pSHtu),
где NH = N„— tfBCn (если мощность Л/ВСп не задана, то принимают Ыъса =
= (8 ... 10 %) Л^д)-
В ГДТ насосное колесо, как правило, одно, а турбинных ко-
лес и реакторов может быть несколько. Число турбинных колес
определяется их коэффициентом быстроходности nST. Если при-
нять напоры и подачи на насосном и турбинном колесах одинако-
выми (с точностью до КПД), то коэффициент пат будет меньше
коэффициента пви вследствие того, что частота вращения турбин-
ного колеса на режиме максимального КПД п* <2 п*. Можно
считать, что лвт = neHi*. С уменьшением (*, заданного заказчи-
ком, коэффициент пвт уменьшается. Это происходит при той же
подаче Q из-за увеличения напора HtT. Увеличение напора Htv
приводит к увеличению нагрузки на отдельные лопасти турбин-
ного колеса. Их приходится выполнять сильно изогнутыми, про-
филированными; при этом возрастают диффузорность межло-
пастных каналов и гидравлические потери.
Для получения более высоких экономических показателей тур-
бинное колесо выполняют из двух-трех ступеней, уменьшая таким
образом напор на каждой ступени. Поэтому рекомендуется при
«* < 0,4 выбирать число турбинных колес более одного. Число
реакторов в большинстве случаев выбирают в зависимости от числа
турбинных колес. В одноступенчатых ГДТ чаще всего устанавли-
вают один реактор. При прямоугольной форме рабочей полости
с центробежным турбинным колесом, как правило, применяют
два реактора. В многоступенчатых ГДТ число реакторов равно
числу ступеней или меньше его на единицу. Реакторы устанавли-
вают после каждой ступени турбинного колеса.
Насосное колесо у ГДТ обычно центробежное (лзн
300 об/мин), однако у многоступенчатых ГДТ для увеличения
подачи используют диагональные и даже осевые насосные колеса
(п,н > 300 об/мин до 600 об/мии). Исследования показали, что
201
при использовании осевых и диагональных насосиых колес одно-
временно о увеличением энергоемкости ГДТ несколько снижается
его КПД, так как растут гидравлические потерн, пропорциональ-
ные подаче Q. Ранее было показано, что тип турбинного колеса
(центробежное, осевое, центростремительное) существенно влияет
на характер зависимости Q = f (i) и, следовательно, на внешнюю
характеристику ГДТ. Принципиально могут быть получены
ГДТ прямого и обратного хода прн любой последовательности
лопастных колес: Н—Т—Р или Н-^Р—Т. Однако для получения
высоких КПД рекомендуется последовательность Н—Т—Р для
ГДТ прямого хода и последовательность Н—Р—Т для ГДТ
обратного хода. В этом случае реактор обеспечивает поворот по-
тока н изменение знака циркуляции жидкости при обратном ходе.
Как правило, ГДТ обратного хода выполняют с двумя реакто-
рами —- после насосного и турбинного колес.
Далее анализируют функциональную структуру проектируе-
мого ГДТ, выявляя отдельные его подсистемы, основные детали н
параметры, определяющие положение ГДТ в системе привода
машины. От совокупности выявленных параметров и заданных
показателей качества ГДТ в каждый момент времени зависит его
состояние в системе привода машины. На рис. 5.51 в качестве при-
мера представлена структурная схема подсистем и основных эле-
ментов одноступенчатого ГДТ, наиболее часто применяемого в оте-
чественной и зарубежной промышленности. При этом подсистемы
(узлы) и элементы узлов ГДТ представлены как сборочные оамо-
202
стоятельные единицы. Показанный иа структурной схеме односту-
пенчатый ГДТ состоит из восьми основных узлов.
Каждый из узлов лопастных колес состоит, как минимум, из
двух элементов: лопастного колеса и вала, взаимодействующего
с иим. Узел лопастного колеса (как сборочная единица) имеет
определенные моменты инерции Jt и жесткость валопровода
Ci на участке между сосредоточенными массами i-ro узла. Основные
параметры лопастного колеса: момент инерции JKi; число лопа-
стей zt; входные ри и выходные углы лопастей pia и радиусы rilt
Гц- толщины лопастей на входе оп и выходе 6i8; ширина межло-
пастных каналов на входе Ьи и выходе tia; длина линии тока
в меридиональном сечении. Вал лопастного колеса характери-
зуется моментом инерции JBt!, расчетным диаметром dpi и длиной
Lpi соединения, участвующего в передаче усилия [чаще всего
под параметрами dpi и Lpl понимают диаметр и длину шлиц
(или шпоночного паза) хвостовиков валов, передающих усилия от
двигателя к иасосиому колесу, от турбинного колеса к выходному
валу н от реактора — к корпусному узлу ГДТ 1.
Таким образом, узел каждого лопастного колеса имеет, как
минимум, 16 параметров.
Узел питания ГДТ включает каналы подвода и отвода рабочей
жидкости, а также насос питания с приводом. Положение этого
узла в ГДТ определяется площадями каналов подвода ГПодв
н отвода FOTB и углом ссп их взаимного положения. Под каналами
подвода и отвода рабочей жидкости понимают каналы (различной
формы), выполненные в узлах ГДТ. Насос питания с приводом
имеет два основных параметра: момент инерции /п.н привода на-
соса, приведенный к валу насосного колеса, и рабочий объем
иасоса Vn.H. Таким образом, положение узла питания определя-
ется в ГДТ пятью параметрами, если насос питания встроен в ГДТ
н приводится непосредственно от вала насосного колеса, и тремя
параметрами — если насос питания установлен автономно от
ГДТ.
Опорные узлы валов лопастных колес укрупненно можно
представить в виде подшипников и устройств для разгрузки опор
от осевых усилий, действующих со стороны лопастных колес.
Состояние опорных узлов в основном определяется коэффициентом
работоспособности ПОДШИПНИКОВ Спод. ЧИСЛОМ 2П0Д. i подшип-
ников, а также расчетным диаметром dpa3i разгрузочного уст-
ройства (в качестве параметра dpa3i может, иапрнмер, служить
диаметр разгрузочного диска или специальной пяты) или пло-
щадью Fpasi разгрузочных отверстий, выполненных, например,
в ступицах i-x лопастных колес.
Корпусной узел ГДТ чаще всего выполняют разъемным, состоя-
щим из собственно корпуса и крышки и жестко прикрепленным
к лодмоторной раме, либо к трансмиссии машины, либо к картеру
маховика двигателя. Его можно характеризовать тремя основными
параметрами: внутренним диаметром dBB.и, под которым пони-
203
мается внутренний диаметр цилиндрической части корпуса, кон-
центричной охватывающему узлу лопастного колеса; расчетным
диаметром dp. р (К) и длиной Lp. р (К) крепления вала реактора
в корпусном узле. Уплотнения ГДТ укрупненно можно разделить
и а концевые уплотнения входного и выходного валов и на уплот-
нения рабочей полости. Уплотнения могут быть как щелевыми
(лабиринтными), так и контактными (при использовании манжет,
чугунных, резиновых или пластмассовых колец и т. д.). Их основ-
ными параметрами являются расчетный диаметр dp.rt уплотне-
ния; зазор Ayi в щелевом (лабиринтном) уплотнении; число ZHac t
каскадов щелевого (лабиринтного) уплотнения или число ZyJ
уплотняющих элементов в одном контактном уплотнении.
Механизм блокировки ГДТ выполняют в виде муфты свободного
хода (МСХ) или в виде фрикционной муфты (МФ). МСХ можно
разделить на четыре элемента: ролики, прижимные устройства,
звездочка и обойма (или втулка в комплексном ГДТ). Основными
параметрами являются: диаметр dpon, длина Lpojl и число 7рол
роликов; жесткость пружин спр прижимного устройства; расчет-
ные размеры ftp. мех t и момент ниерцин JMeI г звездочки и обоймы.
Под расчетным размером ftp.Maxl понимают размер от оси звез-
дочки (обоймы) до площадки, с которой взаимодействует ролик.
Параметры dpOJ1 и йр. MeI t оказывают решающее влияние на глав-
ный обобщенный параметр МСХ — угол заклинивания Оцакл,
определяющий ее надежность.
Фрикционная муфта состоит из ведущих, ведомых дисков и
прижимных устройств, основными параметрами которых являются:
расчетный диаметр dp. ыф муфты; жесткость спр.мф пружин при-
жимного устройства; число 7Мф1 фрикционных дисков.
Анализируя структурные схемы известных ГДТ и их под-
систем в соответствии с представленной методологией, можно уста-
новить, что даже трехколесные ГДТ иеблокируемые, некомплекс-
ные с автономным насосом питания состоят, как минимум, из 16
конструктивных элементов (валы насосного, турбинного колес,
реактора; три лопастных колеса; каналы подаода и отвода рабочей
жидкости; подшипники валов иасосяого и турбинного колес?
разгрузочные устройства опор насосного и турбинного колес;
корпус и крышка; уплотнения валов и рабочей полости), положе-
ние которых в ГДТ определяется, как минимум, 76 основными
параметрами. При усложнении конструкции ГДТ (например,
многоступенчатые, блокируемые, комплексные, с встроенным на-
сосом питания) число конструктивных элементов и определяющих
их параметров существенно возрастает.
Учитывая, что состояние ГДТ в процессе его функционирования
в приводе машины в каждый момент временя зависят от взаим-
ного влияния большого числа параметров и показателей качества
(см. табл. 5.1), задача расчета и выбора оптимальных параметров
ГДТ становится для конструктора миоговариантной и достаточно
204
сложной даже с учетов использования современных ЭВМ. В этих
условиях для сокращения времени и упорядочения выбора опти-
мальных параметров целесообразно произвести ранжировку пара-
метров ГДТ по степени их влияния иа заданные показатели ка-
чества и выявить обобщенные показатели качества ГДТ, т. е.
такие, которые функционально связаны с наибольшим числом
параметров. Эго можно сделать только на основании глубокого и
всестороннего изучения результатов аналитического и экспери-
ментального исследования взаимного влияния параметров и по-
казателей качества различных типов ГДТ, работающих в различ-
ных условиях. Аналитическое исследование выполняют с по-
мощью математической модели ГДТ с использованием ЭВМ.
При разработке математической модели применяют общеизвест-
ные законы механики, гидравлики и гидродинамики. Математиче-
ская модель определенного типа ГДТ с совокупностью конкретных
геометрических параметров представляет систему уравнений, опи-
сывающих (моделирующих) внутренние процессы, протекающие
в его рабочей полости, и законы движения его отдельных звеньев.
Учитывая, что значения большинства показателей качества ГДТ
определяются его внешней характеристикой (XWf, К, Л, Л, dnp,
/Дх.х» fa, Ж— см. табл. 5.1), математическую модель ГДТ
целесообразно представить в виде следующей системы уравнений!
Mi (0 = Мн (0 + Мд , и (0 4- Ммех! (0;
М, (0 = М, (0 (I) - Мт1, (0; (5.96)
Л^(1)|-Л11(<) + Л1р(0 = 0;
<2(0 =/(Л р, Х„ ...Х„);
Ш (0 = IM, (V)/Mj (0] i = К (0 I = Яг (0 Поо (0 (0.
где Мдн 21 и Мдк и — результирующие моменты дискового трения дли входного
и выходного звеньев; МMexi и Л4ыех1 — моменты механического трения для вход-
ного н выходного звеньев; ..Хп — совокупность геометрических параме-
тров.
Решение системы уравнений (5.96) с добавлением соответ-
ствующих математических выражений (см. табл. 5.1) позволяет
для любого типа ГДТ установить аналитическую зависимость пока-
зателей его качества и геометрических параметров. Система урав-
нений (5.96) справедлива для одномер ной, двухмерной и даже трех-
мерной теории расчета параметров Q (i), Mr (1) и Л1я (j). Однако,
учитывая несовершенство любой из указанных теорий расчета
показателей ГДТ, решающее значение при оценке полученных
результатов аналитического исследования принадлежит экспе-
рименту, который помогает установить степень адекватности ис-
пользуемой математической модели реальным процессам, проис-
ходящим в ГДТ.
В настоящее время в отечественной и зарубежной технической
литературе широко представлены результаты аналитического в
205
экспериментального исследований по взаимному влиянию пара-
метров и показателей качества различных типов одноступенчатых
и многоступенчатых ГДТ.
На основании обобщения этих результатов в МАДИ получены
ранжированные по степени важности ряды параметров и показа-
телей качества ГДТ [17, 18, 21 1. При этом выявлено, что наи-
большее влияние иа показатели качества ГДТ оказывают пара-
метры узлов лопастных колес. Параметры узла питания влияют
в основном на давление ра и в меньшей степени — на показатели
^•а., g и S£. Практически ие влияют эти параметры на показа-
тели Хр, М, kM, kit тх.х.
В то же время давление ра зависит также от параметров ло-
пастной системы и режимов работы ГДТ, поэтому параметры узла
питания целесообразно выбирать для принятой его конструкции
таким образом, чтобы обеспечить давление рп, минимально воз-
можное для данных параметров лопастной системы и режимов
работы ГДТ в приводе конкретной машины. Параметры опорных
узлов ГДТ влияют на показатели Хр, Ъ,А , в меиьшей степени на
показатели ц* и d^, а также в локальных пределах на показа-
тели g и Sz.
Параметры корпусного узла dp. р (К) и £р. р (К) влияют на
долговечность 1р, нх надо выбирать совместно с параметрами ре-
актора dp. р и Lp. р. Диаметр dBH.K при наличии рабочей жидкости
в корпусе передачи-влияет (в пределах до 5 %) на основные пока-
затели \мж, Л* н ^»1р- Так, уменьшение диаметра dBH. к приводит
к ухудшению перечисленных показателей из-за дискового трения
в переполненном корпусе ГДТ, но одновременно с уменьшением
dBH. к более существенно (до 10 %) уменьшается металлоемкость
ГДТ, что является положительным фактором. Поэтому при про-
ектировании ГДТ с «мокрым» корпусом параметр dBH. к выбирают
минимальным из условия обеспечеиня заданных показателей
П* и dv
Параметры уплотнений в основном влияют на давление пита-
ния и себестоимость изготовления уплотнений. В меньшей степени
от них зависят показатели i]*, d^p. Выбирать эти
параметры необходимо совместно с параметрами узла питания,
руководствуясь требованиями достижения заданного давления
питания, снижения себестоимости уплотнений н выдерживания
в заданных пределах регламентируемых показателей ХМ1, ц* и dr] .
Параметры МСХ и МФ существенно влияют иа долговечность,
металлоемкость и себестоимость ГДТ. В меньшей степени они
влияют на показатели кме т]* и d4p вследствие изменения меха-
нических (в том числе дисковых) потерь в МСХ и МФ. Очевидно,
что все параметры, которые влияют в той или иной степени иа
долговечность Хр, следует выбирать с учетом реальных условий
нагружения на входном и выходном валах ГДТ.
206
Таким образом, приведенные данные показывают, что парамет-
ры различных узлов ГДТ оказывают влияние на различные пока-
затели их качества. Ранжирование показателей по степени нх
значимости позволило выявить обобщенные (с большим числом
связей) показатели качества ГДТ, к которым можно отнести диа-
пазон d-ц , максимальный КПД Т]*, долговечность Хр н энерго-
емкость Обобщенные показатели можно выявить в процессе
обработки экспериментальных данных об отказах ГДТ в эксплу-
атационных условиях по отдельным показателям качества путем
определения нх диагностической ценности и информации. Об-
работку целесообразно вести по методике, изложенной в работе [23].
Выявлением и ранжировкой параметров и показателей ка-
чества заканчиваются этапы анализа при проектировании ГДТ.
5.10.3. Постановка задачи и синтез
параметров ГДТ
Из анализа современных методов расчета и проекти-
рования механизмов и машин следует, что синтез их параметров
в большинстве случаев сводится к поиску наилучшей многопара-
метрической системы, обеспечивающей минимум илн максимум
некоторой целевой функции, являющейся обобщенным критерием
качества механизма (системы). Прн этом каждому состоянию ме-
ханизма (системы) соответствует некоторое число, являющееся
конкретным значением целевой функции. Таким образом, задача
синтеза механизмов (системы) предполагает решение оптимиза-
ционной задачи.
Ранее было установлено, что показатели качества ГДТ и его
внешняя характеристика определяются в основном параметрами
Xf, которые являются исходными и одновременно оптимизируе-
емыми. Прн этом известно, что рациональная область изменения
каждого параметра Xf лежит в диапазоне Ximln<^Xi Ximax-
Состояние ГДТ будем считать известным, если известны его пара-
метры <j)lf соа н Q, характеризующие режим работы и состояние
гидродинамической связи между входным и выходным звеньями.
Связь между исходными параметрами ГДТ и параметрами <оь
(оа и Q устанавливается системой уравнений (5.96), представляю-
щих собой математическую модель ГДТ. После того, как выбраны
исходные Xi и оптимизируемые Х|ОПТ параметры и математиче-
ская модель ГД Т, задачу синтеза целесообразно решать в следую-
щей постановке:
целевая функция должна наиболее полно характеризовать
качество ГДТ и определяющим образом зависеть от параметров
Xtf XfonT, o>i, со2 и Q;
при оптимизации основные показатели качества ГДТ Yj
(Y = 1, ...» m) должны отвечать определенным техническим тре-
бованиям задания иа проектирование, техническим условиям и
другой нормативной конструкторской документации и находиться
207
в установленных пределах; причем показатели Yj также явля-
ются функциями параметров Х< и Xt опт и <оа и Q и связаны
с последними известными аналитическими зависимостями;
метод решения оптимизационной задачи должен предусматри-
вать возможность задания условий реализуемости целевой функ-
ции (ограничений) в виде неравенств.
Таким образом, целью решаемой оптимизационной задачи
является выбор оптимальных значений сочетаний параметров
Хюпт ПРИ заданных значениях параметров Х|, обеспечивающих
минимальное или максимальное значения целевой функции при
условии, что показатели качества ГДТ (ограничения целевой
функции) будут находиться в установленных техническими тре-
бованиями пределах.
С учетом постановки задачи синтеза и математической модели
(5.96) предлагается метод синтеза параметров ГДТ, включающий
следующие этапы:
1. Выбор математического метода оптимизации. Выбор ме-
тода оптимизации зависит от постановки оптимизационной задачи
и от того, является ли решаемая задача много- или однокритери-
альиой. Практика синтеза ГДТ показала, что оптимизацию его
параметров в подавляющем большинстве случаев можно свести
к однокритериальной задаче, с одной целевой функцией и ограни-
чениями в виде неравенств. В этом случае, как отмечалось ранее,
с учетом достаточной сложности математической модели ГДТ,
содержащей большое число оптимизируемых параметров и связей,
ее нелинейности, а также того обстоятельства, что в настоящее
время накоплена большая информация о взаимном влиянии пара-
метров и показателей качества ГДТ, для решения оптимизацион-
ной задачи целесообразно использовать случайный эвристичес-
ский комбинаторный метод Линя [15], хорошо зарекомендовавший
себя при оптимизации параметров сложных машин и механизмов.
2. Выбор целевой функции. В качестве целевой функции при
оптимизации параметров ГДТ наиболее целесообразно использо-
вать обобщенные показатели его качества, к которым относятся
диапазон экономичной работы d^; максимальный КПД т]*;
долговечность и энергоемкость Однако для каких-то
конкретных целей (например, при доводке определенных показа-
телей качества ГДТ) в качестве целевой функции можно исполь-
зовать любой показатель качества (Sx, g, kRit П и др.). В любом
случае выбранный обобщенный показатель (например 77) будет
являться целевой функцией, а остальные показатели качества
(т]*, dnp, 1р, Хд,., Sz, gt kal н др.) будут играть роль ограничений
целевой функции, образуя в совокупности заданную область
работоспособности ГДТ. Преимуществом метода Линя является
возможность сравнительно легкой перестройки программы опти-
мизации на ЭВМ при смене целевой функции, а также ограничений
и оптимизируемых параметров.
208
3. Выбор оптимизируемых параметров. Выбор параметров
Xt опт из числа исходных Xi должен производиться на основании
анализа нх влияния на целевую функцию. Степень этого влияния
можно установить с помощью интегральной оценки по имеющимся
в распоряжении конструктора соответствующим материалам или
путем дополнительных аналитического и экспериментального ис-
следований влияния неизученных параметров ГДТ на целевую
функцию, в результате которых будет определено их место в об-
щем ранжированном ряду параметров ГДТ.
При выборе оптимальных параметров при прочих равных ус-
ловиях необходимо стремиться к уменьшению их числа и изыска-
нию возможностей перевода большего числа оптимизируемых пара-
метров в исходные, так как в этом случае удается сократить ма-
шинное время счета и повысить в некоторых случаях точность
исследования. Поэтому этап выбора параметров Х|0ПТ является
очень важным и трудоемким. Ои требует от конструктора глубоких
профессиональных знаний и умения ориентироваться в имею-
щейся по данному вопросу информации.
4. Назначение диапазонов изменения оптимизируемых пара-
метров. Диапазон изменения параметров Х*Опт выбирают также
на основании анализа материалов по влиянияю этих параметров
на целевую функцию. При отсутствии таких материалов или при
их недостаточности конструктор должен выполнить дополни-
тельные исследования в этом направлении, используя известные
методы аналитического (или экспериментального) анализа. Необ-
ходимо отметить, что применение в качестве математического ап-
парата оптимизации метода Линя существенно упрощает задачу
конструктора по назначению диапазонов изменения параметров,
так как в этом случае диапазоны могут быть назначены априорно
большими и впоследствии при исследованиях скорректированы
на любом этапе исследования. В то же время очевидно, что вся-
кое неоправданное расширение области поиска приведет к по-
вышенным временным и материальным затратам, что нежела-
тельно. Поэтому при назначении диапазонов должны быть при-
няты во внимание специфические особенности конструирования
и технологии изготовления различных типов ГДТ и их отдельных
звеньев. Например, технологические методы изготовления ло-
пастных колес в рабочей полости ГДТ влияют на параметры опор-
ных узлов, узла питания, МСХ, корпусного узла и т. д.
5. Установление условий реализуемости. Условия реализуе-
мости оптимального (или субоптимального) значения целевой
функции зависят от ограничений на показатели качества ГДТ,
которые в совокупности с оптимизируемыми и исходными пара-
метрами определяют его состояние. Ограничения иа отдельные
показатели качества ГДТ задаются в виде неравенств, например,
yjmin < Yj < где Yj—заданный техническими требо-
ваниями j-й показатель качества, являющийся функцией оптими-
зируемых и исходных параметров. В зависимости от цели и по-
14 Стесан С. П. др. 209
становии решения оптимизационной задачи условия реализуе-
мости могут быть использованы в различных сочетаниях.
6. Решение оптимизационной задачи. Прн оптимизации це-
левой функции с использованием метода Линя определяют ряд
сочетаний оптимальных (субоптимальных) параметров Хгопт,
обеспечивающих оптимальное (субоптнмальное) значение целе-
вой функции прн выполнении требований ограничений на регла-
ментируемые показатели качества Y]. Прн оптимизации рекомен-
дуется выполнять следующее:
определять сочетания XionT, обеспечивающие локальные эк-
стремумы целевой функции без ограничений, поскольку для вы-
бора оптимального варианта полезно знать экстремальные зна-
чения целевой функции)
определять сочетания XionT, обеспечивающие оптимальные
(субоптнмальные) значения целевой функции прн выполнении
всех ограничений;
прн необходимости исследовать влияние каждого или любого
из ограничений Y] иа значение целевой функции путем изменения
илн исключения этого ограничения.
На основании анализа результатов выполненного прн оптими-
зации исследования выбирают сочетание (или ряд сочетаний)
параметров XfonT, обеспечивающее оптимальное (или субоптн-
мальное) значение целевой функции.
7. Предварительный расчет характеристик ГДТ. С учетом
найденных оптимальных и заданных исходных параметров с по-
мощью математической модели (5.96) предварительно рассчиты-
вают внутренние и внешние характеристики ГДТ. В результате
уточняют оптимальность целевой функции, определяют значения
®1» “г. Q = f (0» 07 которых зависят основные показатели ка-
чества ГДТ. Таким образом, конструктор получает все необходи-
мые данные для расчета и синтеза параметров всех узлов ГДТ,
в том числе параметров, не оказывающих существенного влияния
иа выбранную целевую функцию.
8. Выбор параметров Xit не оказывающих существенного влия-
ния на целевую функцию. Если в качестве целевой функции ис-
пользуется диапазон dnp или энергоемкость то параметры
опорных, корпусных узлов, а также МСХ очень мало влияют на
указанные выше показатели. Но в то же время они значительно
влияют на долговечность, металлоемкость, себестоимость изго-
товления ГДТ.
На этом этапе, пользуясь полученными зависимостями па-
раметров ©!, со2, Q, ЛД, Л1а от i, выбирают геометрические раз-
меры отдельных элементов; число и тип деталей крепления и сое-
динения различных элементов в узлы; конструкционные мате-
риалы; методы упрочнения поверхностей отдельных деталей и
т. д. При этом указанные параметры выбирают из условия обе-
спечения требований ограничений и в том числе требования обе-
спечения заданной долговечности с учетом технологии производ-
210
сгва. На этом этапе принимают решение о целесообразности ис-
пользования разгрузочных устройств (от осевых сил); о возмож-
ности применения щелевых или лабиринтных уплотнений в ка-
честве уплотнений рабочей полости и уплотнений входного н вы-
ходного валов ГДТ н рассчитывают соответствующие параметры
этих узлов.
Таким образом, в процессе этапов 6, 7 н 8 синтеза определяют
и уточняют параметры всех узлов ГДТ и с учетом полученных
данных выполняют его проектирование.
9. Проектирование ГДТ. При проектировании окончательно
уточняют формы, материалы н размеры отдельных деталей ГДТ,
выполняют сборочные чертежи, составляют необходимую проект-
но-конструкторскую документацию. Особое внимание следует
обратить на профилирование лопастей колес, так как онн опре-
деляют качество его внешней характеристики. Параллельно с
проектированием/опытного образца выполняют проверочный рас-
чет регламентированных показателей качества ГДТ н прн необ-
ходимости корректируют отдельные чертежи.
Целесообразность использования предлагаемого метода син-
теза параметров реальных гидротрансформаторов рассмотрена
в работах [17, 18].
В последние годы ряд иаучно-нсследовательских институтов
и вузов активно работает иад созданием САПР ГДТ и это направ-
ление следует признать очень актуальным, так как внедрение
САПР позволит существенно сократить материальные н времен-
ные затраты по созданию н доводке ГДТ.
5.11. ОСОБЕННОСТИ РАСЧЕТА И ПРОЕКТИРОВАНИЯ
ОТДЕЛЬНЫХ СБОРОЧНЫХ ЕДИНИЦ И ДЕТАЛЕЙ ГДТ
5.11.1. Построение меридионального сечеиия
и профилирование лопастей колес
Особое место в расчете н проектировании лопастных
колес занимает разработка формы проточной части колес, формы
лопастн. При этом основные размеры колес н лопастей являются
заданными (илн рассчитанными в соответствии с заданием) Это
радиусы колес по средней линии тока на входе и выходе г2,
ширина колеса Ь± и Ь2, углы установки лопастей для средней
линнн тока 0! н ра. При проектировании ГДТ заданы (нлн вы-
браны) взаимное расположение колес, тип и число турбинных
колес. Меридиональное сечение отдельного лопастного колеса
нлн рабочей полости ГДТ должно быть очерчено плавными кри-
выми, сопрягающимися друг с другом нлн с прямолинейными
отрезками.
Площади поперечного сечения в первом приближении должны
быть одинаковыми на зходе и выходе Fma и в любых проме-
жуточных сечениях Fmj. Как известно, FmJ = 2этг^, где гл —
14- 211
Рис. 5.52. Построение средней линии тока в лопастных гидромашннах:
а — в центробежной насосе я» условия F^j •= F^j- б — в ГДТ
радиус центра тяжести нормали к линиям тока; bj — ширина
канала по нормали. Следовательно, в меридиональном сечеиии
должны быть построены средняя линия тока и нормали (эквн-
потенциали) в нескольких выбранных точках / (рис. 5.52). Обычно
предполагают, что скорости в сечениях лопастных колес распре-
делены равномерно (с'т = ст = ст). Средняя линия тока в этом
случае должна при вращении вокруг оси образовать поверхность,
которая разделит лопастное колесо иа два равновеликих (т. е.
имеющих одинаковую площадь F'mi — Fmi = Fmj/2) колеса с оди-
наковыми расходами Q' = Q" — QJ2 (рис. 5.52, а).
Приближенно за среднюю линию тока в ГДТ иногда прини-
мают линию, соединяющую центры окружностей, вписанных
в меридиональное сечение ГДТ (рис. 5.52, б). Построив одним из
способов среднюю линию тока, проверяют плавность формы
меридионального сечения путем построения зависимости FmJ —
= f Gm). добиваясь выполнения требования Fmj = const для
всех ортогонален.
При построении меридионального сечения необходимо учиты-
вать рекомендации по существующим конструкциям ГДТ [4, 241.
При профилировании лопастей центробежного насосного колеса
малой быстроходности (пя = 60 ... 80) его передняя и задняя
стенки почти перпендикулярны оси (рис. 5.53, а). При сечении
колеса плоскостями, перпендикулярными оси, форма лопасти
будет оставаться неизменной для всех сечений. Незначительные
212
Секущий цилиндр
РвзВертка
Рис. 5.53. Варианты лопастных систем в передачах:
а — круговая плоская решетка в центробежном насосе: б — прямая решетка профилей
в осевом насосе; 0 — решетки профилей в ГДТ
отклонения будут иметь место на входе в колесо, если входная
кромка непараллельна оси или колесо расширяется на входе.
Таким образом течение жидкости сводится к плоскому, а решетка
профилей такого типа называется круговой.
Если линии тока лежат на поверхностях, близких к кониче-
ским или цилиндрическим, как, например, в осевых насосных,
турбинных колесах н реакторе ГДТ (рис. 5.53, б, в), то прн сече-
иии лопастного колеса соответственно коническими или цилиндри-
ческими поверхностями и развертке сечений на плоскость полу-
чим плоскую прямую решетку. Значит, и в этом случае течение
жидкости в колесе сводится к плоскому иа нескольких цилиндри-
ческих поверхностях. Профилирование в описанных случаях
возможно по одной поверхности (по одной линии тока).
Увеличение коэффициента быстроходности пв > 80 об/мии
приводит к уменьшению относительных размеров колеса в ме-
ридиональной плоскости (уменьшению соотношения П2/О0), что
вызывает повышение нагрузки на лопасть. Для увеличения по-
верхности лопасти и снижения удельной нагрузки на нее пере-
ходят к пространственным формам, поверхностям двойной кри-
визны. Профилирование в этом случае выполняют, как минимум,
по трем линиям тока — по пересечению лопасти с поверхностями
внутреннего и наружного торов и по средней линии тока.
В большинстве ГДТ лопастные колеса ограничены сильно
искривленными торовыми поверхностями, причем длины лопасти
213
Рис. 5.54. Поверхности:
а — отображаемая; б — отображающая
на внутреннем и наружном торах существенно отличаются, кромки
лопастей не параллельны оси. Поэтому лопасти, как правило,
пространственные и профилирование ведется по трем—пяти ли-
ниям тока. Прн профилировании пространственных лопастей ча-
сто используют метод конформных отображений.
Впервые метод был разработан и применен для насосных
колес акад. Г. Ф. Проскурой. Рассмотрим его сущность.
Конформными преобразованиями или отображениями в общем
случае называются геометрические преобразоваиня, прн которых
углы между линиями, содержащимися в преобразуемой фигуре,
не изменяются.
Пусть имеются две поверхности вращения (рис. 5.54) н кри-
вую АВ на одной поверхности вращения (рис. 5.54, а) надо кон-
формно отобразить на другую поверхность (рис. 5.54, б). Чтобы
кривую А'В' можно было назвать конформным отображением
кривой АВ, углы наклона этой кривой к окружностям (а и а')
должны сохраниться неизменными. Поверхность с осью враще-
ния О—О назовем отображаемой, с осью О’—О' — отобража-
ющей. Рассмотрим криволинейные треугольники 1-2-3 и Г-2'-3'.
Для равенства углов а — а* необходимо выдержать соотношения,
вытекающие нз подобия треугольников (/? и г — текущие радиусы
отображающей и отображаемой поверхностей соответственно;
центральный угол Дер выбран одни н тот же для обеих поверх-
ностей; AL и Д/ — расстояния между секущими плоскостями,
перпендикулярными оси, для отображающей и отображаемой
поверхностей).
Из подобия треугольников следует
МЦМ =s 7? Д<р/(г Д<р); се =: сс',
откуда
Mir LLIR. (5.97)
214
Рис. 5.55. Профилирование лопастей методом конформных отображений на ци-
линдр радиусом jR:
а — меридиональное сечение и деление линий тока аа', бб', вв' на отрезки Д/; б — кон-
формная диаграмма; a — вид лопасти в плане (--------линии модельных срезов):
г — определение углов входа для трех линий тока; д — радиальные срезы и плоскости
модельных срезов
Это уравнение назовем условием конформности отображения
кривой АВ на А'В'. В качестве отображающей поверхности целе-
сообразно выбирать цилиндр или конус, поверхности которых
развертываются на плоскость без искажений.
Профилирование лопастей методом конформных отображений
иа одни цилиндр. Практически при профилировании строят
линию пересечения лопасти с боковыми ограничивающимися по-
верхностями вращения.
В качестве отображаемых выбираем поверхности вращения,
образующие которых являются линиями тока меридионального
сечения (аа1, бб\ вв' на рис. 5.55, а). Так как мы приняли равно-
мерный закон распределения скоростей поперек потока, то ли-
нии аа’, бб\ вв' должны делить рабочее колесо на несколько
элементарных колес с одинаковыми расходами и с равными пло-
216
щадями проходного сечения. Допускаем также, что эти поверх-
ности есть поверхности тока. Прн цилиндрическом колесе все
построения будут проведены лишь для средней линии тока бб'.
В качестве отображающей поверхности выбираем цилиндр.
Как правило, его радиус R равен максимальному радиусу колеса.
Целесообразно при R = const выбрать AL = const. Выбираем
AL = 5 ... 10 мм.
Для удобства профилирования наносим на обе поверхности
ортогональную сетку с помощью следов плоскостей, перпендику-
лярных оси вращения (точки /, 2 и т. д.), и следов радиальных
плоскостей (точки I, II и т. д ).
Расстояние между плоскостями, перпендикулярными оси, AL
на цилиндре н А/ на линиях тока. Между радиальными плоско-
стями угол Д<р = const. Развернув цилиндр на плоскость, полу-
чим конформную диаграмму с ортогональной сеткой (рис. 5 55, б).
Расстояние А/ будет изменяться с изменением радиуса г (г —
радиус середины отрезков на линиях тока) по условию конформ-
ности (5.97). Обозначим на меридиональном сечении точки деле-
ний /, 2, 3 ... на всех линиях тока. Им будут соответствовать
точки /, 2, 3 ... на конформной диаграмме. Расстояние между
точками I, II, III, ... на конформной диаграмме равно Д<р/? и
этим точкам соответствуют точки I, II, III, ... на виде лопасти
в плане (рис. 5.55, в).
Необходимо построить плавную поверхность лопасти (или
плавные линии тока) по заданным углам на входе и выходе. Если
заданы (получены ранее) углы только по средней линии тока, то
углы для прочих линий тока в насосах определяем из треугольников
скоростей (рис. 5.55, г}. Проводим на конформной диаграмме
прямые линии под углом рг и ра для всех линий тока из соответ-
ствующих горизонталей. Угол охвата каждой лопасти в плане (0)
задаем в пределах 120 ... 80° (большее значение соответствует
меньшим значениям пв и меньшему числу лопастей). Прямые ли-
нии на конформной диаграмме плавно сопрягаем в средней части
с помощью кривых, оставляя на входе и на выходе прямолиней-
ные участки. Чтобы добиться плавности сопряжения, можно
углы охвата для разных линий тока (меньшие для внутренней
торовой поверхности и большие для наружной) задать различные;
входную и выходную кромки отклонить от радиального положе-
ния, что будет соответствовать смещению линий тока иа входной
и выходной кромках на различные вертикали.
На рис. 5.55, б штриховыми линиями показаны конформные
отображения линий тока при положении входной и выходной
кромок в радиальной плоскости. Угол охвата 0б одинаков для
всех линий тока, а длина линий тока различна. Сплошными ли-
ниями на рис. 5.55, б изображены конформные отображения
линий тока для случая, когда входная кромка не лежит в ра-
диальной плоскости, а выходная кромка смещена от осевого
направления.
216
Указанные изменения позволяют получить более плавную
лопасть, по всем линиям тока имеющую равную протяженность.
Для построения вида лопасти в плане находим* на конформной
диаграмме горизонтали, соответствующие точкам пересечения
вертикальных прямых /, 7/, ... и т. д. с конформными отображе-
ниями линий тока (например, Л, L, М на рис. 5.55, б). Опреде-
ляем радиусы расположения этих точек по меридиональному
сечению (рис. 5.55, а) и делаем засечки этими радиусами на соот-
ветствующих линиях I, //, ///, ... на виде лопасти в плайе
(рис. 5.55, в). Таким образом переносим и точки пересечения дру-
гих вертикальных линий с отображениями линий тока.
Для изготовления колеса в отливке предварительно надо
изготовить модель. Возможны различные способы выполнения
чертежа лопасти и колеса для изготовления литейной модели.
В насосостроении принято выполнять дополнительные срезы:
радиальные (радиальными плоскостями /, II, ... на меридиональ-
ном сечении), модельные — плоскостями, перпендикулярными оси
(рис. 5.55, д).
Для построения модельных срезов проводим на меридиональном
сеченин следы плоскостей А, В, С, D, .... перпендикулярных оси
колеса (рис. 5.55, б). Расстояние между плоскостями выбирается
произвольно; минимальное расстояние — в области двойной кри-
визны лопасти. На меридиональном сечении находим точки пере-
сечения следов плоскостей А, В, С, D, ... с линиями тока аа',
бб', вв' и кромками; переносим эти точки на вид лопасти в плане
и соединяем линиями (рис. 5.55, в). Линии ВВ, DD и т. д. и назы-
вают модельными срезами. По ним изготавливают деревянную
или металлическую модель профиля лопасти.
Как правило, полученную при профилировании поверхность
лопасти принимают за рабочую сторону, а тыльную сторону
получают соответствующим смещением всех точек поверхности на
ее толщину. Модельные или радиальные срезы для тыльной сто-
роны вычерчивают отдельно аналогично соответствующим срезам
для рабочей стороны.
Профилирование лопастей методом конформного отображения
иа плоскость (на цилиндры различных радиусов). Этот метод
профилирования предложен проф. А. П. Кудрявцевым для колес
ГДТ. Метод состоит в следующем. Разбиваем линию тока в ме-
ридиональном сечении по длине на отрезки Д/ = Ah. Тогда из
условия конформности (5.97) R = г, т. е. каждый элементарный
отрезок линии тока отображается на цилиндр в натуральную
величину, но для каждого отрезка выбирается отображающий
цилиндр своего радиуса, например = rt. При развертке кон-
формных цилиндров на плоскость на конформную диаграмму
наносим только их горизонтальные сечения на расстоянии Д/ —
— AL. Расстояние между радиальными сечениями будут раз-
личны для разных отрезков линии тока и их на диаграмму не
наносим.
217
Рис. 5.Б6. Профилирова-
ние лопастн методом кон-
формных отображений
на цилиндры переменных
радиусов:
а — меридиональное сече*
ние; б — конформная диа-
грамма; в — вид лопаохи
в плане
Практически лопасть по этому методу строим следующим
образом. Откладываем на меридиональной проекции по линиям
тока (например, по внутреннему и наружному торам) отрезки
0-/, 1-2, 2-3 и т- д., равные Д£ = Д/ (рис. 5.56, а).
Конформную диаграмму вычерчиваем в виде горизонтальных
прямых с расстоянием между ними Д£ = Д/ и нумеруем соответ-
ственно 0, /, 2, ... по числу отрезков на меридиональной проекции
(рис. 5.56, б). Под известными из расчета углами 0Г и 02 проводим
линии из горизонталей с номером, соответствующим выходной
и входной кромкам меридионального сечения (в рассматриваемом
случае 0 и 6). Полученную ломаную линию заменяем плавной
кривой. Смещение точки а относительно точки g по горизонтали
выбираем так, чтобы линия ag получилась плавной, а на входе и
выходе отображенной линии были бы прямолинейные отрезки
достаточной длины. Из точек а, Ь и т. д. на конформной диаграмме
опускаем перпендикуляры на горизонтальные прямые и полу-
чаем на них отрезки Д/ь, и т. д., которые соответствуют
отрезкам R Д<р при R = var.
Для построения проекции лопасти в плане проводим окруж-
ности радиусами, равными расстоянию от оси вращения до то-
218
Рве. 5.57. К построению
профиля лопасти на кон-
формной диаграмме:
а —• построение ковформ.
него отображения линии
тока в виде квадратичной
парабола; б — профиль ло-
пасти насосного колеса
чек 0, 1, 2, ... на меридиональном сечении (см. рис. 5.56, в).
Соединяем точку а с центром окружностей, откладываем по дуге
следующего радиуса отрезок A/ij, получаем точку Ъ и т. д. Соеди-
няем полученные точки плавными кривыми, которые представляют
собой проекции линий тока в плайе. Далее следует, как и в пре-
дыдущем случае, построить тыльную сторону лопасти, задав-
шись ее толщиной 6, или «одеть» полученные проекции известным
профилем.
При построении линии ag на конформной диаграмме для полу-
чения контура с плавно изменяющейся кривизной можно исполь-
зовать известный способ построения квадратичной параболы
(рис. 5.57, а). Проводим линии из точек а и g под заданными
углами и р2 так, чтобы пересечение этих линий (точка С) ока-
залось иа середине конформной диаграммы или имело смещение
ко входу не более чем на 0,1 ... 0,2 от длины отрезков аС н Cg.
После этого, отступив вдоль линий аС и Cg на 0,5 ... 1 деления АЛ,
делим оставшиеся части fljC и Cgt на равное число отрезков (на-
пример, пять) и точки деления последовательно попарно соеди-
няем, как показано на рис. 5.57, а. Парабола является оги-
бающей проведенных прямых.
Задаваясь толщиной лопасти, необходимо помнить, что при
больших углах атаки увеличение толщины лопасти на входе 6j
(2г' на рис. 5.57, б) приведет к уменьшению ударных потерь, но
иа расчетных режимах (при малых углах атаки) потери несколько
возрастут [как правило, г' = 6/2 = (0,02 ... 0,06) S, где S —
длина хорды профиля].
219
Толщину на выходе ба « 2г* необходимо уменьшать, но пре-
дельные минимальные размеры ба ограничены технологическими
соображениями. Как правило, ба = 0,8 ... 2 мм (большее значе-
ние соответствует Da 0,5 м).
Максимальная толщина профиля лопасти насосного колеса,
как правило, не превышает 3 ... 4 % его длины и незначительно
изменяется в основной его части.
Прн построении сильно изогнутых лопастей турбинного ко-
леса н реактора целесообразно проверять изменение площади
проходного сечения между двумя лопастями /ш = Ьа, где b —
ширина канала в меридиональной плоскости; а = [2wjz — 6) —
ширина межлопастного канала по нормали к поверхности лопасти
в данной точке. Для получения плавного изменения fw от длины
профилей I варьируют толщину 6, так что максимальная толщина
лопасти смещается от входа к точкам с максимальным прогибом
профиля.
Для получения чертежа всей лопастн в целом необходимо за-
дать так называемые углы кручения [24 ], т. е. отличие углов
на крайних линиях тока, н углы взаимного расположения линий
тока в лопастн. Если применяются относительно низкне лопасти
(b/Dcp< 1/12 ... 1/14, где Dcp — диаметр расположения средней
линии тока), то онн могут быть незакрученными, т. е. угол
наклона лопастн по ширине колеса неизменный. Но, как пра-
вило, в насосных колесах указанное соотношение выполняется
только на выходе. На входе в насосное колесо, на выходе из
центростремительного турбинного колеса в осевом реакторе
b/DCp = 1/4 ... 1/5. Кроме того, для ГДТ следует учитывать
различия в длине лопасти по внутреннему и наружному торам
и, выбирая углы для линий тока по внутреннему тору, надо
стремиться к увеличению длины лопасти на этой линии тока.
В насосостроеннн углы на входе для различных линий тока
определяют нз плана скоростей, принимая, что cmla = Стюр =*
== CmiB, Uia > «1ср > “1в (см. рис. 5.55, г).
Для ГДТ рекомендуется принимать линейные зависимости
угла р от ширины b [24]. Если известны углы наклона по средней
линии тока, то для крайних линий тока углы ра н рв (внутреннего
н наружного торов соответственно) определяют по формулам:
Ра = Рср + Рк/2; рв = рср - ри/2, (5.98)
где Рк — угол кручения (табл. 5.2).
Угол кручения считают положительным, если угол наклона
лопасти увеличивается от наружного тора к внутреннему, н от-
рицательным — прн увеличении угла наклона от внутреннего
тора к наружному.
Получив углы лопастей по крайним линиям тока, строим кон-
формные отображения для этих линий тока, как было описано
выше, а затем переносим эти линии тока на вид лопасти в плане.
220
6.2. Углы ₽н (°) крученая в ГДТ
ГДТ Насосное колесо Турбинное колесо Реактор
Вход Выход Вход Выход Вход Выход
С центростреми- тельным турбин- ным колесом (типа ЛГ) [24] —(25...30) —(0—6) 8...25 —(6—10) 0 4...10
С осевым турбин- ным колесом (типа У358011) 122) 10...12 —(0...6) 8... 12 0 20...25 -(6... 14)
Угол охвата 0е лопастн по наружному тору, как правило.
больше угла охвата 0а по внутреннему тору. Смещение профилей
характеризуется углом 6И, образованным лучами, проходящими
через крайние точки кромки лопастей (рис. 5.58). Углы 6К на
входе и выходе взаимосвязаны. Рекомендуются следующие зна-
чения углов 0К в лопастных колесах ГДТ типа ЛГ: 6К. н* =
= —2 ... 6°; 6К.Т1 = 2 ... 5°; 0«.р1 = 3 ... 9°.
В насосостроении угол охвата лопастей принимается в зави-
симости от коэффициента быстроходности па:
пв, об/мин
80 90 100 110
120 115 100 100
115 110 100 95
Для реализации высоких показателей лопастной системы
необходимо поверхность лопасти уменьшить, что уменьшит по-
тери на трение. Минимальная поверхность лопасти получается,
если лопасть перпендикулярна к наружному и внутреннему торам,
а поверхность ее линейчатая. Линейчатая поверхность образуется
при движении прямой линии (образующей) по контурам профилей
лопасти, построенных иа наружном и внутреннем торах.
Разделив длину каждого контура на одинаковое число частей
(точки Л, Б ... на рис. 5.59) и определив координаты этих точек
в плане, соединяем их прямыми линиями А-А, Б-Б, В-В, Г-Г ...
Таким образом, для построения линейчатой поверхности лопасти
достаточно построить профили для двух крайних линий тока
(на внутреннем и наружном торах).
Оформление чертежей лопасти. В настоящее время в ГДТ
часто точки поверхности лопасти задают в виде координат х,
у, z на координатных плоскостях. Координаты точек можно
измерить после построения лопасти в плане (плоскость ух) и
меридионального сечення (плоскость zr). По методике, разрабо-
танной на ПО «ММ3 им. М. И. Калинина», после построения
конформной диаграммы аналитически рассчитывают полярные
координаты точек лопасти на плоскости ух (табл. 5.3).
221
5.3. Расчет координат точек иа поверхности лопасти
Рис. 5.60. Параметры для расчета координат профиля лопасти в плоскости
У—х
ctg₽j Py+py-i
У, ctg ₽ i
1
В таблице введены следующие обозначения (рис. 5.60):
Р/ = Яц + г cos а,- — полярный радиус j-й точки (здесь Яц —
радиус центра кривизны линии тока; г — радиус кривизны линии
тока в меридиональном сечении; а} — центральный угол, соот-
ветствующий j-й точке; а,- = а0 + daj, где а0 — центральный
угол, соответствующий 0-й точке деления; da = dlm- 180/(лг)1;
d.lm = InJn — длина элементарного отрезка линии тока:
е [fctgpJe
-j- = — рJ----------половина угла охвата участка
линии тока в плане для j-й точки;
1Р/ = 2р/ sin (0//2) — длина хорды до j-й точки от начала
отсчета;
= fi?7(sin Р/ sin у;) — толщина лопасти по хорде в j-й точке
(здесь 6,- — толщина лопасти по нормали; у,- — телесный угол
между поверхностью лопасти и торовой поверхностью в j-й точке;
(как правило, у,- = л/2)1;
/р/тыл = Ч- Oj — длина хорды для тыльной стороны ло-
пасти в j-й точке.
Таким образом, на чертеже будут представлены меридиональ-
ное сечение, вид лопасти в плане с необходимыми размерами и
таблица с координатами 1е и /р тыл — хордами рабочей и тыльной
сторон лопастей.
Расчет коэффициентов сопротивления лопастного колеса.
Внешнюю характеристику ГДТ рассчитывают с помощью ЭВМ.
223
Рис. 5.61. Расчет коэффициента сопротивления колеса (точки 1—7 соответствуют
рассматриваемым сечениям лопасти)
Схема и программа расчета внешней характеристики ГДТ по
одномерной теории приведены в работах [5, 22], по двухмерной
теории — в работе [24].
При использовании одномерной теории определяют коэффи-
циенты сопротивления колес по формуле (1.52).
Осредиенные величины ₽г. ср и Fw ср можно определить по
известным размерам лопастного колеса на входе и выходе. Однако
более точные их значения получают, если на средней лииин тока
в меридиональном сечении выбирают «л» точек как иа рис. 5.61.
Здесь: Д/Го — расстояние между выбранными точками, г — ра-
диус расположения точки, b — ширина меридионального сечения
в данной точке, 6 —толщина лопасти по нормали. Для каждого
сечения рассчитывают Д/ = — действительное расстояние
вдоль средней линии между выбранными точками (р — угол
наклона лопасти в точке замеряется на конформной диаграмме);
t = 2nrfz — шаг лопастей иа данном радиусе г; а = t sin р — 6 —
ширина межлопастного канала; fw = ab — площадь межлопаст-
ного канала, нормальная вектору относительной скорости; 4/?г =
2а& - л г»
= ~^~ь----учетверенный гидравлический радиус канала. Расчет
осреднеиных величин выполняют по формулам: fwcp=
1/п
= —7======— средняя площадь межлопастного ка-
/1/£,++1/Я
нала (п —число выбранных расчетных точек); Frocp =» fw ср г
— средняя площадь межлопастиых каналов колеса, нор-
мальная вектору w\ 4/?гср = 4-Г1-+- - 4/?| л — среднее значе-
ние учетверенного гидравлического радиуса. Длина средней
линии профиля лопасти I = У Д/.
При уточненных проверочных расчетах, которые часто вы-
полняют вручную, расчет коэффициентов k целесообразно вести
в табличной форме.
224
5.11.2. Выбор размеров валов лопастных колес
В большинстве конструкций современных ГДТ входной
и выходной валы практически полностью разгружены от ра-
диальных усилий, так как мощность подводится и снимается
с валов соосно. В таких ГДТ на валах действуют только крутя-
щие моменты. Возникающие при работе ГДТ осевые усилия, сжи-
мающие (растягивающие) вал, воспринимаются подшипниками
и передаются на корпус. Радиальные усилия, возникающие от
действия рабочей жидкости иа лопасти, взаимно ураиовеши-
ваются, а силы, обусловленные массами вращающихся деталей,
установленных иа валу, незначительны и ими можно пренебречь.
В то же время в отдельных ГДТ съем мощности с выходного вала
осуществляется консольно (например, с помощью цепной или
зубчатой передачи), и выходные валы таких ГДТ нагружены
значительными изгибающими моментами.
Предварительный расчет вала для наиболее опасного случая
нагружения крутящим 7Икр и изгибающим МИ8Г моментами про-
изводится по известным соотношениям. Так, суммарный момент
в опасном сечении
Л10ум = у.Миг + МкР.
Момент сопротивления в опасном сечении W = Jidl/32 (где
dB — диаметр вала) и напряжение о = McyjJW. После предва-
рительного расчета в процессе проектирования остальных узлов
ГДТ необходимо выполнить уточненный расчет вала иа усталость.
В этом случае общий коэффициент п запаса прочности определяют
из соотношения
l/n2 = l/n?+l/nj,
где n-t и па — коэффициенты запаса прочности по касательным и нормальным
напряжениям.
Амплитуда нормальных напряжений изгиба
= Ощах = AfHar/lF я>
где 1ГН — момент сопротивлении сечения нетто.
Коэффициент
_____ _____0-1______
"° ~ (V«o) о» + 'taOm ’
где<т_1— предел прочности при изгибе; Ло/ео = 1; — 0,2; ага=Лос7(л^в74) —
напряжение растяжения или сжатия (здесь ЛоС — осевая сила).
Амплитуда касательных напряжений от кручения
Ь = Тт = Тидх/2 = Мнр/№р,
где Wp = 0,2d® —• полярный момент сопротивлении кручению.
16 Стесни С. П. др. 225
Коэффициент запаса прочности по касательным напряжениям
1 т0 + ф?тт ’
где — предел прочности прн кручении; -2-= 1; ф, = 0,1.
вт
В большинстве конструкций современных ГДТ крутящие
моменты передаются от ступиц лопастных колес и полумуфт
к валам (и наоборот) с помощью шлицевых соединений, обеспе-
чивающих взаимозаменяемость, простоту демонтажа н переда-
ющих значительный знакопеременный момент. Наибольшее рас-
пространение получили эвольвентные и прямобочные шлицы с цен-
трированием по наружной поверхности. Причем эвольвентные
шлицы о модулем 0,0035 ... 0,005 м рекомендуется ставить иа
наиболее нагруженные детали.
Шлицы рассчитывают на смятие
_____________Р__________
с““ ф[(Г-dp)/2-(/ + г)£р] ’
МКт>
где Р — окружное усилие, действующее иа один шлиц; Р = —. -
, „ 2 (D + “р)/4
(здесь 2 — число шлнпев; D — наружный диаметр; dp — расчетный внутренний
диаметр); ф = 0,75 — коэффициент неравномерности работы шлицев; / — длниа
фаски по наружному диаметру; г — радиальный зазор в шлицевом соединении;
Lp — рабочая длина шлицев.
В узлах лопастных колес имеются н другие соединения (за-
клепочные, шпоночные, резьбовые), которые также рассчиты-
вают иа прочность (илн усталость) по общеизвестным формулам,
приведенным в специальной литературе. При расчетах конструк-
тор должен правильно определить расчетную нагрузку, что про-
изводится после выбора схемы действующих усилий н анализа
характера нагрузки; учесть, что в зависимости от нагрузки,
действующей на выходной вал ГДТ, изменяются условия во всех
его узлах и деталях, поэтому, напрнмер, при расчете опорного
узла целесообразно учитывать нагрузки на оптимальном режиме,
а при расчете валов (нли других деталей) на прочность — на-
грузки на режиме противовращения нли на стоповом режиме
и т. д. В любом случае при предварительных расчетах иа проч-
ность узлов н деталей, работающих в ГДТ длительно (или перио-
дически) при неустановившнхся и переходных режимах, необ-
ходимо учитывать поправочный коэффициент k^n = 1,5 ... 2,
увеличивающий значение расчетной нагрузки.
Б. 11.3. Опорные узлы ГДТ
Опорные'узлы ГДТ включают подшипники, устройства
для фиксации их внутреннего и наружного колец, устройства для
разгрузки опор от осевых усилий, возникающих на лопастных
колесах. Как правило, при проектировании ГДТ его входной
226
и выходной валы устанавливают каждый на два подшипника.
При этом один нз двух подшипников на каждом из валов выпол-
няют плавающим, а второй, имеющий больший коэффициент
работоспособности СПОд> фиксируется по наружному н внутрен-
нему кольцам н воспринимает осевое усилие. Опорный узел
рассчитывают для режимов, соответствующих диапазону d4
данного ГДТ. При этом учитывают радиальные и осевые нагрузки.
Осевые силы, действующие на опоры, обусловливаются силами,
возникающими вследствие воздействия рабочей жидкости на
колесо. Если эти силы спроектировать иа ось вращения ГДТ,
то их можно разделить на силы, действующие иа наружную и
внутреннюю поверхности колеса. Составляющую осевой силы
в первом случае можно определить интегрированием по отдельным
участкам:
-4ва1>( = jpd} cos а,
где Лвар i — составляющая наружной силы на i-ы участке поверхности колеса;
р •— текущее давление, действующее на элементарную площадку df; а. — угол
между внешней нормалью к площадке df в осью вращения ГДТ; ft — площадь
участка, на котором определяется составляющая осевой силы.
Составляющая ЛнарП в свою очередь, складывается из двух
сил. Одна нз них зависит от гидродинамического давления и его
распределения:
Л нар I = J Р df cos а == J 2nrp drt
Iнар I Г1
где г — текущий радиус.
Вторая сила определяется давлением питания рп и неуравно-
вешенной площадью f0 поверхности, только с одной стороны
омываемой рабочей жидкостью, на которую действует давление рп.
Так как эта поверхность всегда перпендикулярна оси вра-
щения,
^нар я ~ pja-
Тогда полная осевая сила, действующая на наружную по-
верхность лопастного колеса:
^нар = ^нар! “Ь ^нарЯ = У J 2пгр(1г Рп/о-
г»
Знак суммы перед знаком интеграла означает, что необходимо
суммировать значение интегралов по отдельным поверхностям
колеса.
Составляющую осевой силы, действующей на внутреннюю
поверхность колеса, можно получить также интегрированием,
если известен закон распределения давлений в рабочей полости.
15- 227
Для предварительных расчетов ее определяют, используя закон
о моменте количества движения, по формуле
л вн = Р<2 cos ctj — ст1 cos ах),
или
X»a = PQa(^--^'),
X г ml г ml /
где а — угол между осью вращения и направлением меридиональных скоростей
cmi и стг по средней линии тока.
Таким образом, суммарная осевая сила, действующая на
колесо:
д=2 ? (^г -
Выразив давление через статический напор, получим
Д = 2лрд ( ffeIrdr + pgHJc + pQ’ -
G
В выражении для осевой силы член pgHnf0 пропорционален
квадрату линейных размеров н заданному давлению рп, другие
члены — пропорциональны p(o|D|. Следовательно, исключив со-
ставляющую осевой силы, обусловленную давлением рш можем
записать
Ддин =
где KAi — постоянный коэффициент пропорциональности, коэффициент осевой
силы.
Из изложенного можно заключить, что осевая сила на колесах
ГДТ зависит от давления питания, неуравновешенной площадв,
распределения давлений в полости ГДТ, площадей, на которые
действуют эти давления, и объемной подачи в рабочей полости.
Распределение давлений и объемная подача зависят от типа ГДТ
и режима его работы, следовательно, это же относится к осевым
силам. Конкретные примеры расчета осевых сил для различных
типов ГДТ И]способы разгрузки от них приведены в работах
S.11.4. Узлы питания и уплотнения в ГДТ
Узел питания ГДТ включает каналы подвода и отвода
жидкости из рабочей полости. Каналы, как правило, стараются
выполнять в неподаижных деталях (в крышке, корпусе, валу
реактора или в самом реакторе). Площади поперечных сечений
каналов подвода Гподв и отвода FOTB определяют с учетом по-
дачи Qn насоса питания и регламентированного давления ра
из расчета получения рациональных скоростей движения жидко-
сти в каналах подвода иподв = (1,5 ... 3) м/с. Подачу Qa выби-
228
рают из условий обеспечения регламентированного техническими
условиями рабочего диапазона температур жидкости Т — (70 ...
90) °C и давления рв.
Практика создания и эксплуатации ГДТ в приводах различ-
ных машин показала, что с достаточной для предварительных
расчетов точностью можно принимать Q„ — (1 .. 1,5) 10-4 м®/с
на 1 КВт мощности привода машины, причем большие значе-
ния Qn соответствуют большим значениям мощности привода.
Прн проектировании узла питания для обеспечения подпора на
сливе из ГДТ принимают Гподв = 2ГОТВ. Для предотвращения
перетечек из области подвода в область слива угол взаимного
смещения каналов ап выбирают равным 90 ... 180°. Конструкции
узлов питания в различных ГДТ приведены в работах [3, 22].
Уплотнения во многом определяют надежность работы ГДТ
и влияют на КПД, энергоемкость и себестоимость изготовления.
К ним предъявляются следующие основные требования: герме-
тичность, степень которой определяется конкретными условиями
работы машины; длительность срока службы без проведения про-
филактических работ, связанных с разборкой или демонтажом
агрегата, включая срок хранения на складах; стабильность ра-
боты в течение всего срока службы в широком диапазоне темпе-
ратур рабочей жидкости; минимальное трение, минимальный
износ и противокоррозионные свойства; компактность н мини-
мальная масса; технологичность изготовления и сборки, невы-
сокая себестоимость.
По назначению различают уплотнения вращающихся деталей н
неподвижных соединений. Уплотнения вращающихся деталей
разделяют на контактные, бесконтактные и комбинированные.
Контактные уплотнения применяют в тех случаях, когда необ-
ходимо обеспечить высокую степень герметичности, зависящую от
перепада давлений, плотности контакта, материалов и чистоты
обработки уплотняющих поверхностей, свойств и температуры
рабочей жидкости. Контактные уплотнения препятствуют про-
никновению рабочей жидкости для смазывания трущихся поверх-
ностей, что способствует нагреву и изнашиванию деталей уплот-
нения. Оптимальное давление на контактной поверхности опре-
деляют экспериментально для конкретного типа уплотнения или
на основании экспериментальных данных удовлетворительно ра-
ботающих аналогичных уплотнений. Для уменьшения трення
и износа контактных поверхностей необходимо располагать их на
минимально возможных диаметрах, что обеспечит уменьшение
окружных скоростей.
Наиболее широкое распространение для уплотнения валов
ГДТ получили контактные манжетные уплотнения [22], реже
для этих целей применяют торцовые уплотнения. В качестве
контактных уплотнений рабочей полости ГДТ часто используют
металлические упругие уплотнительные кольца, по конструкции
аналогичные компрессионным кольцам поршней двигателей вну-
229
треннего сгорания 1221. Чтобы добиться хорошей герметичности,
применяют в одном уплотнении не менее двух колец. Расстояние
между кольцами обычно равно одной (или двум) ширине кольца.
Уплотнительные кольца применяются без ограничений по давле-
нию и температуре рабочей жидкости при высокой угловой ско-
рости (20 м/с и более). Однако следует иметь в виду, что кольца
являются дорогим и недостаточно надежным уплотнением из-за
повышенного износа контактных поверхностей.
Бесконтактные уплотнения чаще всего используют в качестве
уплотнений рабочей полости и реже — для уплотнения валов.
К ним относятся щелевые, лабиринтные н гидродинамические
уплотнения винтового н центробежного типов. Они работают
без механического трения уплотняющих поверхностей, а следова-
тельно, и без износа. Но эти уплотнения не могут обеспечить
абсолютную герметичность, а степень их герметичности прн
заданном перепаде давления определяется зазором, формой н
числом пар уплотняющих поверхностей. Поэтому при требовании
повышения степени герметичности уплотнения себестоимость их
увеличивается и нередко оказывается выше себестоимости кон-
тактных уплотнений. Однако в данном случае повышение себе-
стоимости ГДТ в короткие сроки окупается повышением его на-
дежности. Схемы, конкретные примеры применения и расчета
бесконтактных уплотнений рабочей полости ГДТ приведены
в работе [2 ].
Уплотнения неподвижных соединений в большинстве случаев
обеспечивают абсолютную герметичность в широком диапазоне
температур и давлений уплотняемой среды. К ним относятся
эластичные кольца круглого (реже — прямоугольного) сечения,
плоские прокладки. Наиболее распространенный виды этих уплот-
нений и применяемые материалы для их изготовления приведены
в работе [22 ].
5.11.5. Выбор основных параметров МСХ.
Муфта свободного хода — одни из наиболее нагружен-
ных и ответственных узлов в блокируемых и комплексных ГДТ.
От нее в значительной степени зависит долговечность в работо-
способность гидропередачи в целом. Наряду о требуемой долго-
вечностью муфта должна обладать компактностью, а также иметь
минимальные потери на режиме свободного хода для увеличения
КПД ГДТ. На отечественных ГДТ преимущественное распро-
странение получили роликовые муфты как более технологичные
и надежные.
Для увеличения долговечности МСХ целесообразно звездочку
центрировать относительно обоймы (втулки). Часто это делают
с помощью покрытия поверхностей звездочки в местах контакта
с обоймой (втулкой) специальным антифрикционным материалом
(например, баббитом). Лучше центрирование выполнять при по-
230
мощи подшипников, устанавливаемых между звездочкой н обой-
мой (втулкой). Центрирование звездочки и обоймы позволяет
значительно снизить фактические касательные напряжения на
рабочих поверхностях, так как при этом обеспечивается более
равномерная нагрузка на ролики МСХ. Кроме центрирования
вводит принудительное постоянное смазывание муфты, так как
в процессе работы ролики не только проворачиваются, но и про-
скальзывают на рабочих поверхностях, что вызывает значительный
нагрев в местах контактов и износ.
Как показал опыт эксплуатации МСХ, в ГДП необходимо
соблюдать отношение е = £рол/^рол = 1,8 ... 2,8 (где dpo„ —
диаметр ролика). При больших значениях е возникает опасность
перекоса ролика. Обычно стремятся увеличить длину 1рол ро-
лика, чтобы уменьшить контактное напряжение. Однако в этом
случае более целесообразно применять двухрядную муфту (о двумя
рядами роликов). Одним из важных конструктивных элементов
МСХ является устройство, прижимающее ролик к контактным
поверхностям звездочки и обоймы (втулки). Пружины прижи-
мают ролики через толкатели или без них. Прижимное усилие
в различных конструкциях МСХ составляет 3,9 ... 7,8 Н. Пред-
варительный расчет МСХ производят иа контактную прочность.
Расчету предшествует проверка угла заклинивания ссрол по
соотношению
COS Ctpojj = мсх “Ь ГРол)/(^об fрол)*
по которому определяют минимальный, номинальный и макси-
мальный угол заклинивания с учетом допусков на размеры hp. Ысх>
грол И радиус обоймы 7?ое. Угол заклинивания должен находиться
в пределах 5 ... 8°. На контактную прочность ролнк проверяют
по выражению
= 0.418 ]/,PpoJ,£ ,
\f *-ролгрол
гДе ^роп — сила, определяемая по выражению
р _______________________ Л1расч
2РОЛ Р?об-ГРол) sin ССрол
[здесь Afpac4 — расчетный момент; для блокируемого ГДТ AfpaC4 =
— (Afi — Мз)1=1^дин (гДе All и Afa — моменты на входном н выходном валах ГДТ,
которые определяют по внешней характеристике прн i = 1; kj^ «2 — динами-*
ческнй коэффициент)]; Е — модуль упругости.
Дли комплексного ГДТ расчетный момент при одном реакторе
^расч = ^р = ^410 (^0 — 1) ^дин,
при двух реакторах
^4расч ~ (^Со 1) ^дин/2,
где М10— момент иа входном валу иа стоповом режиме; Епрн — 1,2 ... 1,5.
Внутренний диаметр обоймы можно проверить по выражению
= 16.6у'Л1рвсч/2рол,
231
а минимальную толщину обойми по выражению
n0o=lu-J/ DQ<sBoefc[u]mr
где Do6 — наружный диаметр обоймы; е — коэффициент, учитывающий влияние
числа роликов грол иа деформацию обоймы;
1 / грол 180 \ .
в=“5;— (— ctg_;—);
*2рол \ 31 грол /
А| « 1,05 ... 1,08 — коэффициент, учитывающий влияние радиуса кривизны
обоймы на ее деформацию; Boq — ширина обоймы; fz ж 0,008 ... 0,01 — коэф-
фициент трения; — допускаемое напряжение изгиба.
Б.12. УНИФИКАЦИЯ И ТИПИЗАЦИЯ ГДТ
Для обеспечения оптимальных показателей качества
каждой вновь создаваемой машины необходимо проектировать
для нее свой ГДТ. Однако выполнение этого требования при боль-
шой номенклатуре машин и двигателей, параметры и показатели
которых постоянно совершенствуются в процессе эксплуатации
машины, приводит к увеличению количества различных моделей
и размеров выпускаемых ГДТ. Расширение производства ГДТ
может быть достигнуто в основном путем уменьшения трудоем-
кости их изготовления и себестоимости.
Одним из самых значительных факторов при снижении себе-
стоимости продукции является ее унификация, которая, кроме
снижения себестоимости, одновременно ведет к улучшению каче-
ства выпускаемых изделий. Поэтому становится очевидной необ-
ходимость создания параметрических рядов максимально унифи-
цированных по технологии и конструкции ГДТ с минимальным
числом типоразмеров, одновременно находящихся в производ-
стве, для различных отраслей народного хозяйства. В настоящее
время в СССР разработаны параметрические ряды одноступен-
чатых ГДТ с центростремительными турбинными колесами для
строительных и дорожных машин, автомобилей и тракторов. За
рубежом для различных самоходных машин разработаны пара-
метрические ряды одноступенчатых ГДТ с центростремительными
и центробежными турбинами, а также — многоступенчатых ГДТ
11,11,22,24].
Параметрический ряд отроится по следующему принципу.
Известно, что для ГДТ можно обеспечить изменение энергоемкости
приблизительно в 2 ... 2,5 раза для данного типоразмера путем
изменения параметров его лопастной системы (углов, радиусов,
числа лопастей и т. д.). Одиако для каждого типа ГДТ пределы
изменения энергоемкости устанавливаются в результате решения
оптимальной задачи, в которой целевой функцией является
энергоемкость (например, коэффициенты шах или Ш1П),
а ограничениями — показатели качества ГДТ (например, коэф-
фициенты /Со, щ*, /7, и др.), которые должны отвечать
232
определенным техническим требованиям. Определив пределы энер-
гоемкости данного ГДТ, находят знаменатель параметрического
ряда
Я ~ твхАтИ, min »
где шах и Км, mln — максимальное и минимальное значения коэффициентов
момента в оптимальном режиме работы, которые могут быть достигнуты при из-
менении параметров лопастной системы данного типоразмера ГДТ.
В качестве главного параметра ряда наиболее целесообразно
принимать активный дяаметр Dat который в наибольшей степени
определяет показатели качества ГДТ. Определив знаменатель
ряда, округляют его до ближайшего значения в ряду предпочти-
тельных чисел (ГОСТ 8032—56) Выбрав тип и конструкцию ба-
зового образца ряда, для существующих (или требуемых) диа-
пазонов мощностей и угловых скоростей валов двигателей с уче-
том полученного знаменателя ряда определяют число типоразме-
ров ГДТ, перекрывающих требуемые диапазоны мощности и
скорости двигателей.
По результатам расчетов строят зависимость мощности ГДТ
параметрического ряда, например, в координатах Na — соя,
выделив на нем поля, перекрываемые определенными активными
диаметрами ГДТ (аналогично рис. 4.55). Таким образом, пара-
метрический ряд имеет конструктивно один базовый образец
ГДТ, параметры которого (за исключением углов лопастей колес)
для каждого типоразмера подчиняются законам геометрического
подобия, что позволяет иметь при серийном изготовлении ГДТ
подобного ряда единую технологию и однотипную оснастку, т. е.
в данном случае возможна унификация технологического про-
цесса, позволяющая тщательно отработать его отдельные элементы
и дополнительно снизить себестоимость машины.
СПИСОК ЛИТЕРАТУРЫ
1. Брацлавский X. Л. Гидродинамические передачи строительных н дорож-
ных машин. М-’- Машиностроение, 1976. 149 с.
2. Вильнер Я. М., Ковалев Я- Т., Некрасов Б. Б. н др. Справочник-пособие
по гидравлике, гидромашннам и гидропрнводам/Под общ. ред, Б. Б. Некрасова.
Минск: Вышейшая школа, 1985. 382 с.
3. Гавриленко Б. А., Семичастнов И. Ф. Гидродинамические муфты и транс-
форматоры. М.: Машиностроение, 1969. 392 с.
4. Кочкарев А. Я- Гидродинамические передачи. М.: Машиностроение,
1971. 336 с.
5. Лаптев Ю. Н. Автотракторные гидротрансформаторы. М.: Машинострое-
ние, 1973. 280 с.
6. Лаптев Ю. Н. Динамика гидромеханических передач. М.: Машинострое-
ние, 1983. 104 с.
7. Ломакин А. А. Центробежные н осевые насосы. М.—Л.: Машиностроение.
1966. 364 с.
8. Лопастные насосыУПод ред. Л. П. Грянко, А. Н. Папнро. Л.: Машино-
строение, 1975. 430 с.
9. Малюшенко В. В., Михайлов А- К- Энергетические насосы: Справочное
пособие. М-: Энергоиздат, 1981. 199 с.
10. Нагорная Н. К. Расчет осевых сил в гидродинамических передачах,
М-: Машиностроение, 1975, 168 с.
11. Нарбут А. Н. Гидротрансформаторы. М-: Машиностроение, 1966, 215 с,
12. Насосы центробежные: Справочник. М-: Минводхоз СССР, 1972. 72 с,
13. Прокофьев Ю. В. Баланс энергии гидродинамического трансформатора
прн неустановнвшихся режимах работыУ/Труды ВИГМ. М-, 1963. Вып. 32.
С. 28—43.
14. Прокофьев В. Н. Учет взаимодействия потока с ограничивающими его
стенками при анализе переходных процессовУ/Энергетнка н транспорт. 1963.
№ 3. G 377—380.
15. Реклейтнс Г., Рейвиндрак А., Рэгсдел К. Оптимизация в технике: Перев.
с англ. В 2 т. М.: Мар, 1986.
16. Стесни С. П. Демпфирующие свойства одноступенчатых гидродинами-
ческих трансформаторов прнаодов самоходных машинУ/Вестник машинострое-
ния. 1977. Ns 9. С. 17—19.
17. Стесни С. П. Метод оптимального синтеза трансформаторов самоходных
машинУ/Вестник машиностроения. 1984. Ns 6. С. 15—17.
18. Стесни С. П. Оптимизация параметров гидродинамических трансформа-
торовУ/Автомобнльная промышленность. 1983. Ns 7- С. 10—13.
19. Стесни С. П. Эффективность использования лабиринтных уплотнений
рабочей полости в гидротрансформаторах самоходных машинУ/Вестинк машино-
строения. 1988. Ns 1. С. 29—31.
234
20. Стесни С. П. Эффективность учета кавитационных свойств при внедре-
нии гидротрансформаторов//Вестник машиностроения. 1976. № 10. С. 45—49.
21. Стесни С. П., Оганесов О. А. Методика определения расчетной нагрузки
на подшипниках гидротрансформаторов с учетом неустановившихся режимов
работы самоходных машин//Вестннк машиностроения. 1981. № 10. С. 9—12.
22. Стесни С. П., Яковенко Е. А. Гидродинамические передачи. М.: Машино-
строение, 1973. 352 с.
23. Сыри цы н Т. А. Надежность гидро- и пневмопривода. М.: Машинострое-
ние, 1981. 216 с.
24. Трусов С. М. Автомобильные гидротрансформаторы. М.: Машинострое-
ние, 1977. 270 с.
25. Яременко О. В.Ограничивающие гидродинамические муфты. М-' Машино-
строение, 1970. 228 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автоматичность работы ГДТ 133
Автомодельность 37, 41
Б
Баланс моментов 31, 131
— удельной энергии 32, 67, 135
------при неустановившемся режи-
ме 167
Быстродействие регулирования 85
В
Вихрь относительный 14
Высота всасывания 54
------вакуумметрическая 54
------допустимая 55, 57
Вязкость жидкости кинематическая 20,
96
Г
Гидромашина 5
Гидромуфта 7
— ограничивающая 100
------ предохранительная 100
------с самоопоражниваннем дина-
мическим 103
------------статическим 101
------ пусковая 105
------ пускотормозная 109
— регулируемая изменением наполне-
ния 86
---------7 с черпаковой трубкой не-
подвижной 90, 91, 92
------формы рабочей полости 93
— с лопастями наклонными НО
------радиальными 69
Гидропередача 6
Гидротрансформаторы 7, 128
— блокируемые МСХ 181
------фрикционом 182
— комплексные 175
— многоступенчатые 130, 201
— обратного хода 185
— одноступенчатые 130
236
— прямого хода 129
— реверсируемые 185
— реверсирующие заменой лопастных
колес 183
-------соединения колес с ввлами
184
— регулируемые изменением заполне-
ния 187
---- поворотом лопастей 188
Гидротурбина 5, 61
Гипотеза бесконечного числа лопастей
10
д
Давление иасоса 8
— насыщенных паров 53, 56
— питания ГДТ 159
Диаметр активный ГДП 36, 114, 153
Диапазон экономичной работы 154
Ж
Жесткость переходного пропесса ГДМ
88
— характеристики 75, 155
3
Законы подобия лопастных гидрома-
шии 37
Запас кавитационный 56
----допустимый 57
---- критический 56
Знаменатель параметрического ряда
233
Зона рабочая иасоса 48
К
Кавитация в ГДТ 158
— в насосах 53
Колебания момента и угловой скоро-
сти в ГДТ 169
Колесо турбинное осевое 128, 139
----центробежное 128, 139
----центростремительное 128, 139
Контур циркуляции большой (БКЦ) 87
----малый (МКЦ) 87
Коэффициент быстроходности 39, 44,
201, 212
----гидротурбины 64
----кавитационный 60
----турбинного колеса 201
— вариацйи нагрузки 169
— Дарси 25
— демпфировании 157
— дискового трения 19
— кавитации гидротурбин 65
— момента 38, 78, 150, 152, 167
— мощности 39, 78
— напора 37
— ограничения по моменту 198
---- по скорости 198
— осевых сил 228
— перегрузки ГДМ 84
— полезного действия 8
-------гидравлический 26, 135
-------ГДМ 9
-------ГДТ 9, 148
----— гидротурбины 9
------- насоса 8
------- механический 20
------- — объемный 20
----— полный 26
— потерь на удар 69, 136
----холостого хода 154
— прозрачности 151
— реакции лопастного колеса 33
— сопротивления лопастного колеса
24, 135, 223
---- трубопровода 47
— стеснения потока лопастями 11
Критерий подобия переходных режи-
мов 170
Л
Линия тока средняя 14, 212
М
Модель математическая ГДТ 205
Момент инерции 156
Мощность иасоса 8
------ полезная 8
— потока жидкости 9
Муфта гидродинамическая (см. гидро-
муфта)
Муфта гидромеханическая 108
Муфта свободного хода (МСХ) 176,
181, 230
Н
Напор инерционный 156
— иасоса 8
----теоретический 26
— потребный насосной установки 47
— турбины полезный 63
---- теоретический 29
Насосы лопастные 5
— классификация 44
О
Обратимость 75
Обточка лопастного колеса 51
Оптимизация показателей 207
Отклонение потока на выходе 14
Открытие направляющего аппарата 65
Отношение передаточное 9
Отображение конформное 213
----на плоскость 217
---- иа цилиндр 215
П
План скоростей 12, 13, 69, 185
Плотность жидкости 96
Подача насоса объемная 8
Подобие лопастных гидромашии 36
Показатели качества ГДТ 198
Показатель кавитационных свойств
ГДТ 164
Помпаж 49
Потери диффузорные 24
— гидравлические 23
— зависящие от угла атаки 135, 138
— иа трение 23, 41, 135
— иа удар 24, 41, 69, 135
— механические 18
— объемные 20
Поток осесимметричный 10
Прозрачность ГДТ 150
Профилирование лопастных колес 211
Профиль лопасти 217, 219
Р
Радиус гидравлический 224
Ранжирование показателей ГДТ 206
Расход турбины 8
Регулирование подачи иасоса дроссе-
лированием 50
------- перепуском 50
-------изменением частоты вращения
51
— ГДМ н ГДТ изменение свойств
жидкости 95, 190
Режим работы неустаиовившийся 169
— — неустойчивый 49, 88, 104
— — обгонный 75, 148
----обратимый 75
-----оптимальный 74, 125
----переходный 122, 170
---- привода 82
— — противовращения 74, 148
----синхронного вращения 149
----столовый 149
— — тормозной 75, 147
237
— — тяговый 74, 147
---холостого хода 87, 148
Ряд параметрический 124
С
Сечение живого потока 11
— меридиональное 211
Силы осевые в ГДМ 119
---в ГДТ 227
Скольжение ГДМ 9
Скорость движения абсолютного 9
---относительного 9
--- переносного 9
— потерянная 25
Т
Тор внутренний 67, 222
— наружный 222
Точка рабочая 48
Точки совместной работы двигателя я
ГДП 8, 195
Трансформатор гидродинамический
(см. гидротрансформатор)
Тренне дисковое 18
Треугольник скоростей (см. план ско-
ростей)
У
Угол атаки 12, 24
— крученин лопасти 220
— отклонения потока 14
— потока 17
— установки лопасти 12
Узел питании ГДТ 228
Унификация ГДМ 124
— ГДТ 232
Уплотнение 5, 21, 229
— во внутреннем торе ГДТ 21
Условии бескавитационной работы 55,
57
Устойчивость работы привода с ГДМ
Утечка 20
Учет стеснения потока лопастями 11
— конечного числа лопастей 14, 135
Уравнение кавитации основное 58
— основное лопастных гидромашни 29,
35
Ф
Формула Проскуры 17
— Пфлейдерера К- 16
— Шлаикаке 17
Формулы пропорциональности 39
Функция целевая 207
X
Характеристика гидромуфты внешняя
74
----относительная 79
---- полная 78
---- приведенная 79
----универсальная 79
Характеристика гидротрансформатора
внешний полная 147
---- внутренння 133
---- входнан 81, 194
---- расходная 139
— выходная привода 81, 195
— насоса кавитационная 56
----напорная 33, 42
----неустойчивая 49
----мощностная 42
— насосной установки 47
— турбины универсальная 65
Ч
Число Рейнольдса 20, 23, 37
Э
Энергоемкость ГДТ 152
Эпюра скоростей в межлопастных ка-
налах 15
----а ГДМ 70
ОГЛАВЛЕНИЕ
Введение ............................................................. 3
Глава 1. Основы теории лопастных гидромашнн......................
--71.1. Принцип действия лопастных гидромашии и гидродииа-
4 < мических передач .....................................
"'^1.2. Основные параметры лопастных гидромашни и гидро-
передач ......................................... .
2 >-1.3. Движение жидкости в лопастных колесах............
3 >4.4. Учет влияния конечного числа лопастей.
>1.5. Виды потерь в лопастных гидромашинах н их определе-
ние ...................................................
1.6. Основное уравнение лопастных гидромашнн.........
1.7. Особенности рабочего процесса в ГДП ............
1.8. Теоретические напорные характеристики лопастных
колес. Коэффициент реакции лопастного колеса. . .
>1.9. Основы теории подобия лопастных гидрома ши и . . . .
Глава 2. Лопастные насосы........................................
2.1. Характеристики насосов..........................
. 2.2. Пересчет характеристик насосов при изменении ча-
стоты вращения.........................................
2.3. Классификация насосов по коэффициенту быстроход-
ности ...............................................
2.4. Насосная установка. Работа насоса на сеть.......
2.5. Неустойчивая работа насосной установки (помпаж). .
2.6. Регулирование режима насоса н насосной установки . .
V2.7. Совместная работа насосов............................
О 2.8. Кавитация в лопастных насосах ......................
5
5
8
9
14
18
26
31
33
35
41
41
42
44
47
49
50
52
58
Глава 3. Гидравлические турбины .................................... 61
j 3.1. Основные виды турбин..................................... 61
3.2. Основные параметры турбин. Виды потерь............. 62
3.3. Основные расчетные зависимости для турбин.......... 63
3.4. Характеристики турбин ............................. 65
Глава 4. Гидродинамические муфты................................... 67
„>4.1. Устройство и классификация .......................... 67
4.2. Особенности рабочего процесса ГДМ................. 67
Г ‘>4=3. Характеристики ГДМ .................................. 73
4.4. Совместная работа двигателя и ГДМ................. 80
<5 >4.5. Регулирование ГДМ.................................. 35
3 >4.6. Ограничивающие ГДМ ................................ 100
4.7. Методы определения основнык параметров ГДМ. ... 112
^>4.8. Работа ГДМ на переходных режимах.................... 122
> 4.9. Типизация и унификация ГДМ. Их преимущества я
недостатки............................................... 124
Г л а а а 5. Гидродинамические трансформаторы.....................
/Х£7>5.1. Классификация ГДТ...................................
। 5.2. Особенности рабочего процесса ГДТ ................
'-^=-//9 5.2.1. Моменты лопастных колес ..................
5.2.2. Автоматичность работы ГДТ ................
5.2.3. Внутренняя характеристика ГДТ.............
/‘ 5.2.4. Расчет поля скоростей я давлений в рабочей
( полости ГДТ................................
128
128
131
131
133
133
140
239
fft >5.2.5. Внешняя характеристика ГДТ ..............
f 5.2.6. Приведенная характеристика ГДТ..............
5.3. Свойства ГДТ и показатели их оценки........
*77 >>5.3.1. Прозрачность внешней характеристики ГДТ. .
5.3.2. Нагружающее свойство ГДТ...............
5.3.3. Преобразующее свойство ГДТ.............
5.3.4. Предохранительное свойство ГДТ.........
5.3.5. Тормозное свойство ГДТ ................
5.3.6. Демпфирующее свойство ГДТ..............
5.3.7. Кавитационное свойство ГДТ ........
5.4. Влияние иеустановившихся режимов работы на ха-
рактеристики ГДТ....................................
5.4.1. Уравнения динамики ГДТ.................
5.4.2. Характеристики ГДТ при переходном и иеуста-
новившемся режимах работы . ..................
5.5. Комплексные ГДТ ...............................
Лу > 5.6. Блокируемые ГДТ ...............................
I / > 5.7. Реверсирующие ГДТ ............................
' 5.8. Регулируемые ГДТ...............................
Совместная работа двигателя и ГДТ..............
5.10. Основы расчета и проектирования ГДТ...........
5.10.1. Техническое задание иа расчет и особенности
методологии проектирования ГДТ................
5.10.2. Этапы анализа ........................
5.10.3. Постановка задачи и синтез параметров
ГДТ ..........................................
5.11. Особенности расчета и проектирования отдельных
сборочных единиц и деталей ГДТ .....................
5.11.1. Построение меридионального сечения и про-
филирование лопастей иолес ...................
5.11.2. Выбор размеров валов лопастных колес. . .
5.11.3. Опорные узлы ГДТ......................
5.11.4. Узлы питания я уплотнения в ГДТ.......
5.11.5. Выбор основных параметров МСХ . . . . .
5.12. Унификация и типизация ГДТ ...................
Список литературы..............................................
Предметный указатель ..................................
146
150
150
150
151
153
155
155
156
158
166
166
169
175
180
183
186
192
197
197
200
207
211
211
225
226
228
230
232
234
236
УЧЕБНОЕ ИЗДАНИЕ
Стесни Савелий Павлович, Яковенко Елена Андреевна
ЛОПАСТНЫЕ МАШИНЫ И ГИДРОДИНАМИЧЕСКИЕ ПЕРЕДАЧИ
Редактор Я. Я. Якунина
Художественный редактор В. Д. ЛысЬков
Технический редактор Л. П. Гордеева
Корректоры л. П- Озерова, А. П. Сизова
ИБ № 5604
Сдано в набор 12-05.89- Подписано в печать (11.09.89. Т-04948. Формат 60X90*/»» •
Бумага офсетная Иг 1. Гарнитура литературная. Печать офсетная. Усл. печ. л. 15.0.
Усл. кр.-отт. 15,0- Уч.-изд. л. 16.19- Тираж 4850 вкз. Заказ 771- Цена 95 к.
Ордена Трудового Красного Знамени издательство «Машиностроение», [07076, Москва,
Стромынский пер., 4
Типография М 6 ордена Трудового Красного Знамени ааддтельстаа «Машиностроение!
прн Государственном комитете СССР по печати.
193144, г. Ленинград, ул. Моисеенко, 10,