
























Author: Ефанов В.В.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космонавтика
ISBN: 978-5-905646-13-3
Year: 2020




РОСКОСМОС
АО«НПО ЛАВОЧКИНА»
■«ж,
48 '4
/ /
//
Ч\
2020
РОССИЙСКИЙ
СЕГМЕНТ
МЕЖДУНАРОДНОЙ
КОСМИЧЕСКОЙ
ЭКСПЕДИЦИИ
экзо
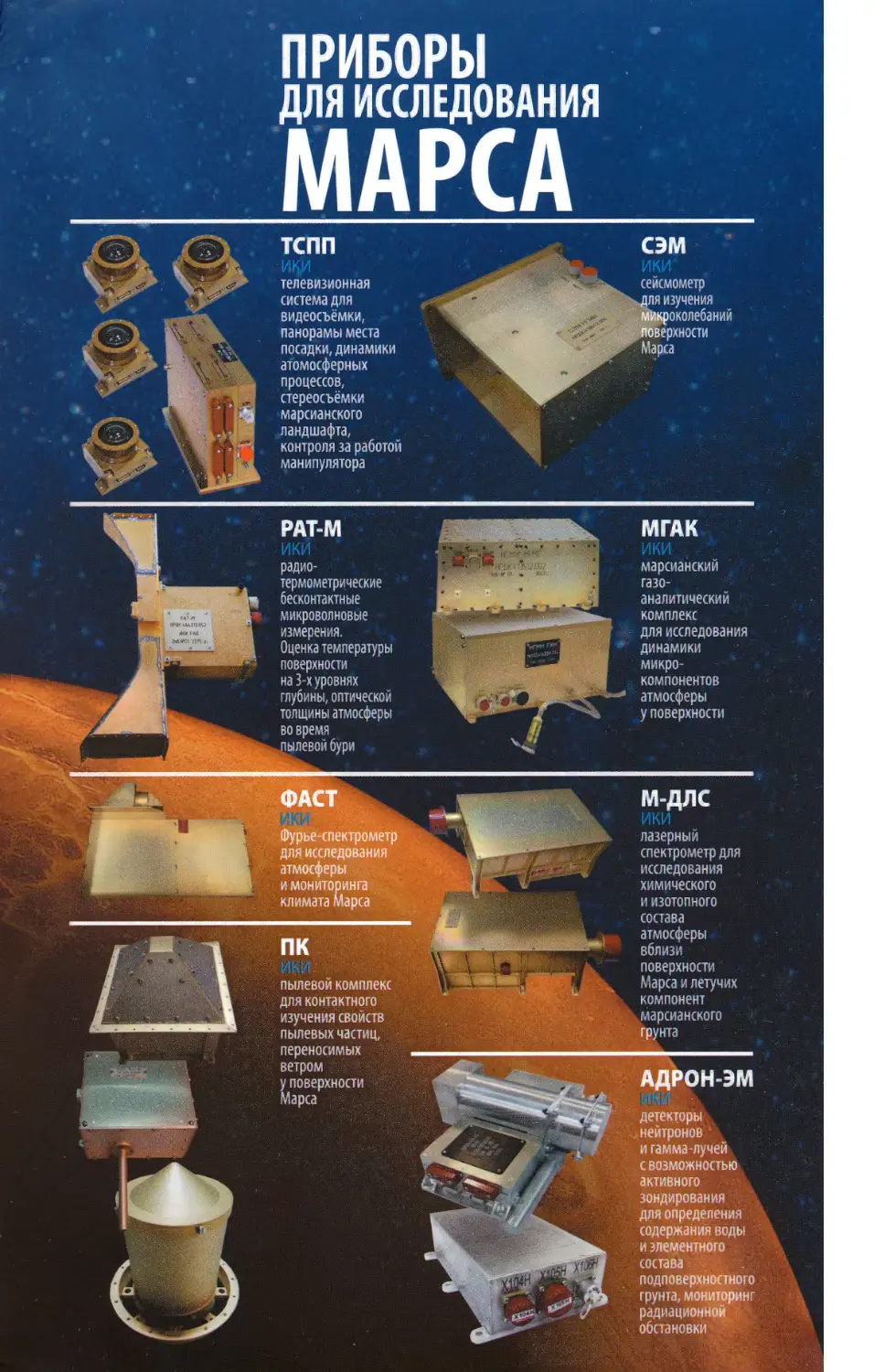
ПРИБОРЫ
ДЛЯ ИССЛЕДОВАНИЯ
МАРСА
СЭМ
сейсмометр
шля изучения
микроколебаний
поверхности
Марса
РАТ-М
икй
радио-
термометрические
бесконтактные
микроволновые
измерения.
Оценка температуры
поверхности
на 3-х уровнях
глубины, оптической
толщины атмосферы
во время
пылевой бури
телевизионная
тспп
система для
видеосъёмки,
панорамы места
посадки, динамики
атомосферных
процессов,
стереосъёмки
марсианского
ландшафта,
контроля за работой
манипулятора
марсианский
газо¬
аналитический
комплекс
Фурье-спектрометр
для исследования
атмосферы
и мониторинга
климата Марса
м-длс
ФАСТ
и изотопного
марсианского
грунта
АДРОН-ЭМ
пылевой комплекс
лазерный
спектрометр для
исследования
химического
состава
атмосферы
вблизи
поверхности
Марса и летучих
компонент
детекторы
нейтронов
и гамма-лучей
с возможностью
активного
состава
для контактного
изучения свойств
пылевых частиц,
переносимых
ветром
у поверхности
Марса
зондирования
для определения
содержания воды
и элементного
подповерхностного
грунта, мониторинг
радиационной
обстановки
МГАК
ики
для исследования
динамики
микро¬
компонентов
атмосферы
у поверхности
ТВ??
РОСКОСМОС
АО «НПО ЛАВОЧКИНА»
РОССИЙСКИЙ
СЕГМЕНТ
МЕЖДУНАРОДНОЙ
КОСМИЧЕСКОЙ
ЭКСПЕДИЦИИ
2
ПОД РЕДАКЦИЕЙ
ДОКТОРА ТЕХНИЧЕСКИХ НАУК, ПРОФЕССОРА В.В. ЕФАНОВА
КАНДИДАТА ЭКОНОМИЧЕСКИХ НАУК Х.Ж. КАРЧАЕВА
2020
ББК 39.62
УДК 629.785
Р764
Научное издание в 2-х томах
Российский сегмент международной космической экспедиции «ЭкзоМарс-
Р764 2022» / Авт.-сост. В.В. Ефанов. Под ред. д.т.н. В.В. Ефанова, к.э.н. Х.Ж. Карчаева:
В 2-х т. Т. 2. Химки: Издатель АО «НПО Лавочкина», 2020. - 240 с.: ил.
Во втором томе книги «Российский сегмент международной космической экспе¬
диции “ЭкзоМарс-2022”» представлена конструкция описываемого космического ком¬
плекса. Показаны такие его части, как десантный модуль, посадочная платформа, дви¬
гательная установка, аэродинамический экран, системы обеспечения теплового режима
и энергоснабжения и другие. А также описаны прочностные и кинематические испыта¬
ния посадочного модуля.
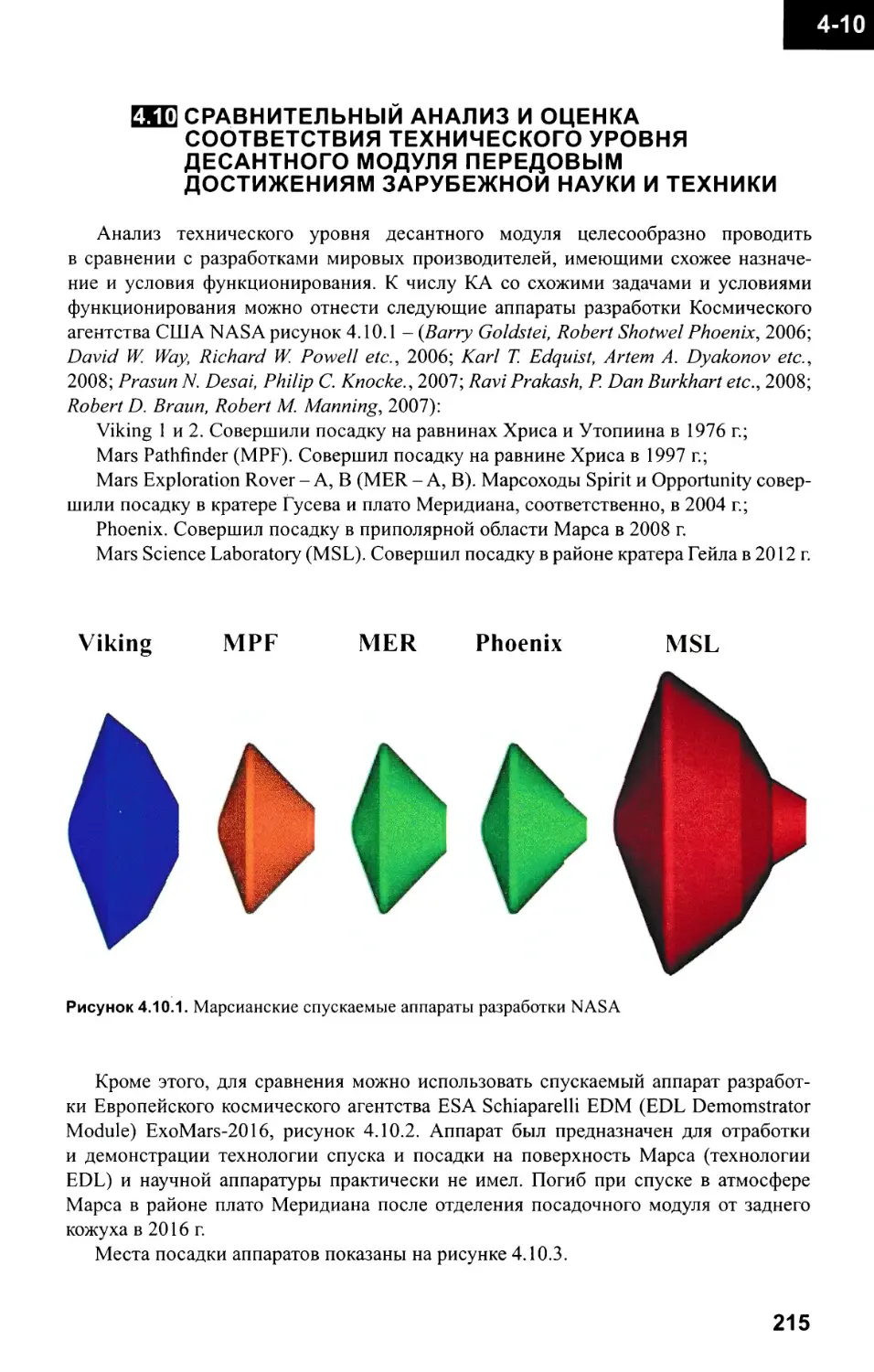
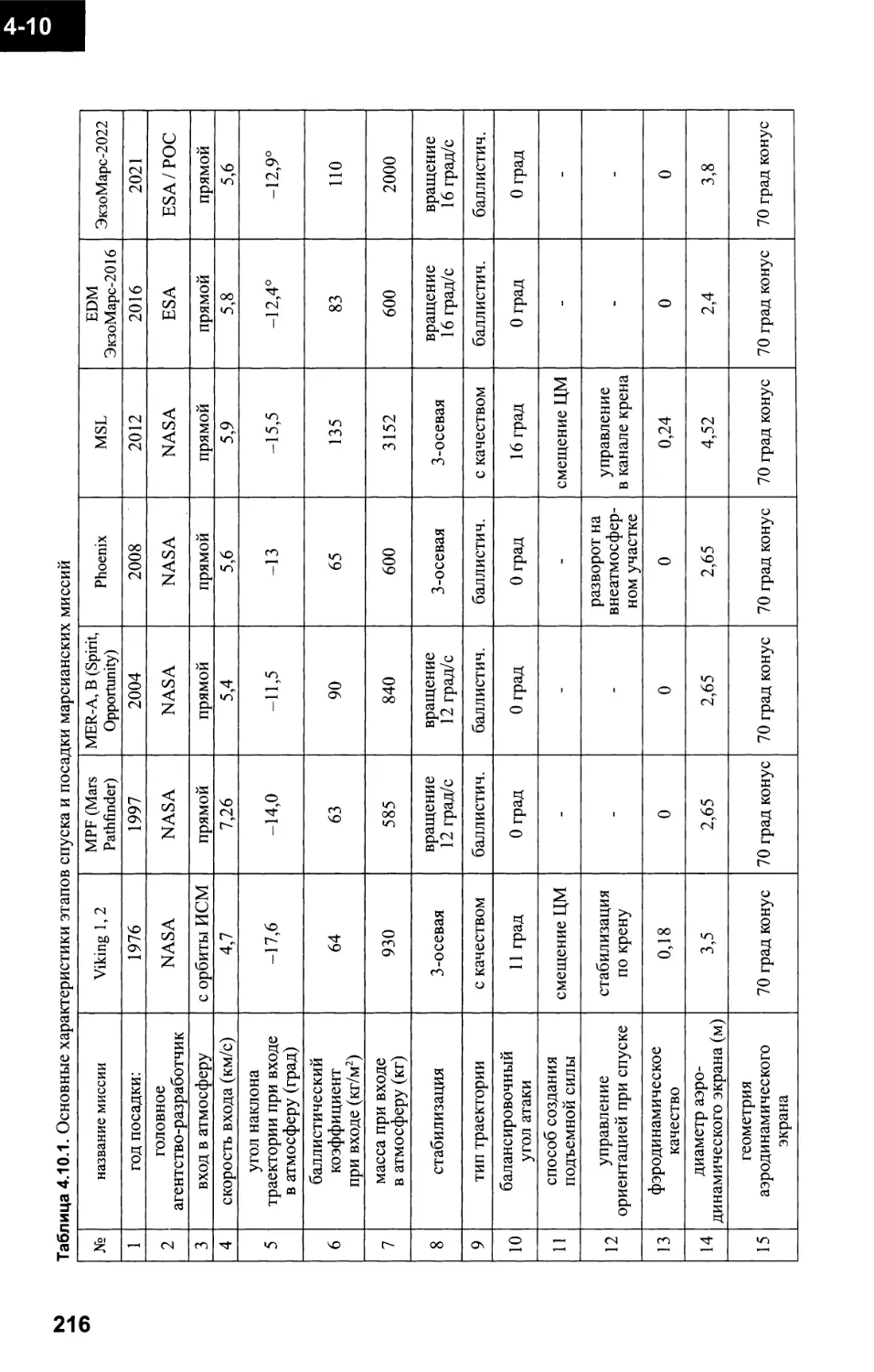
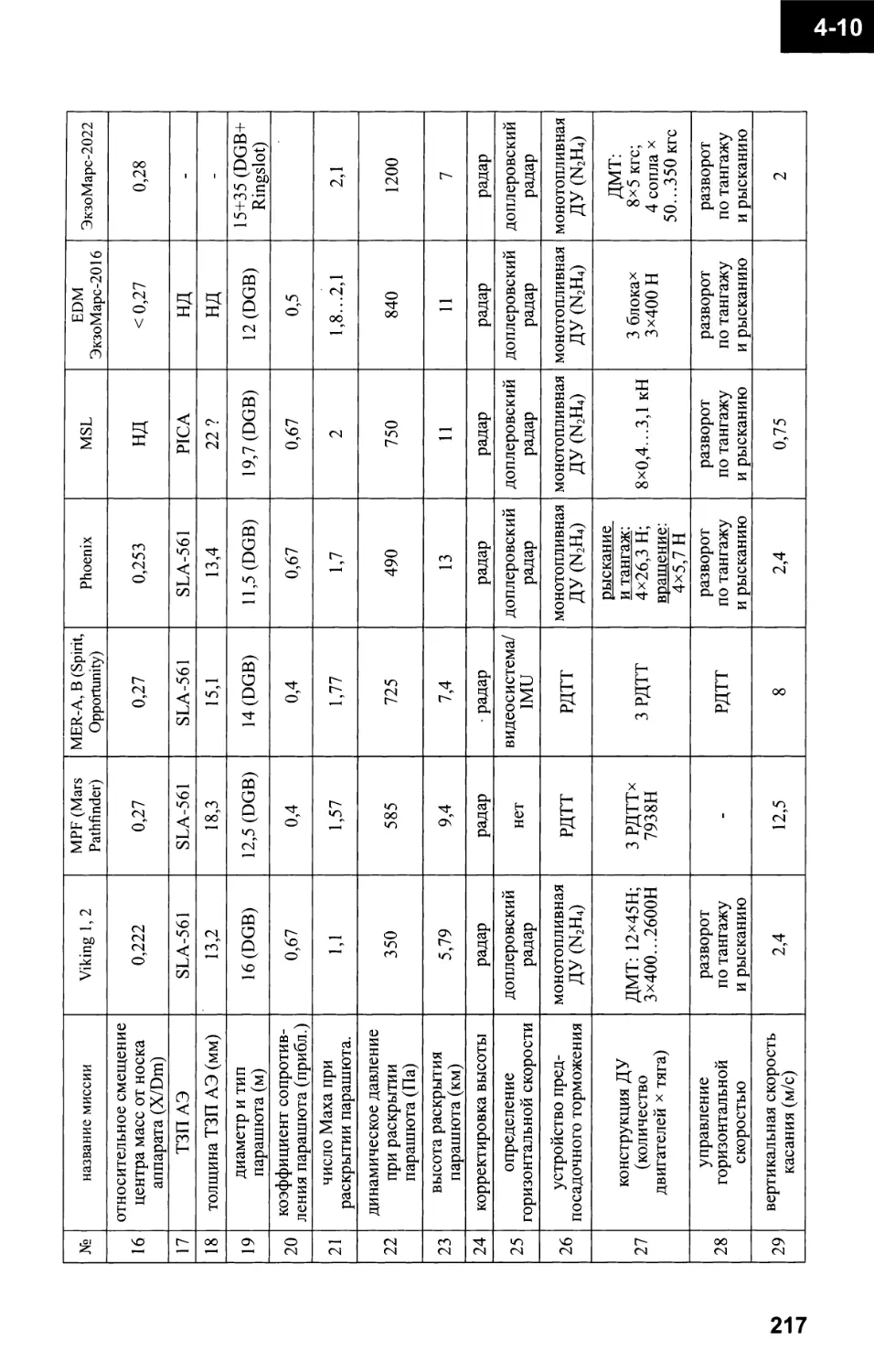
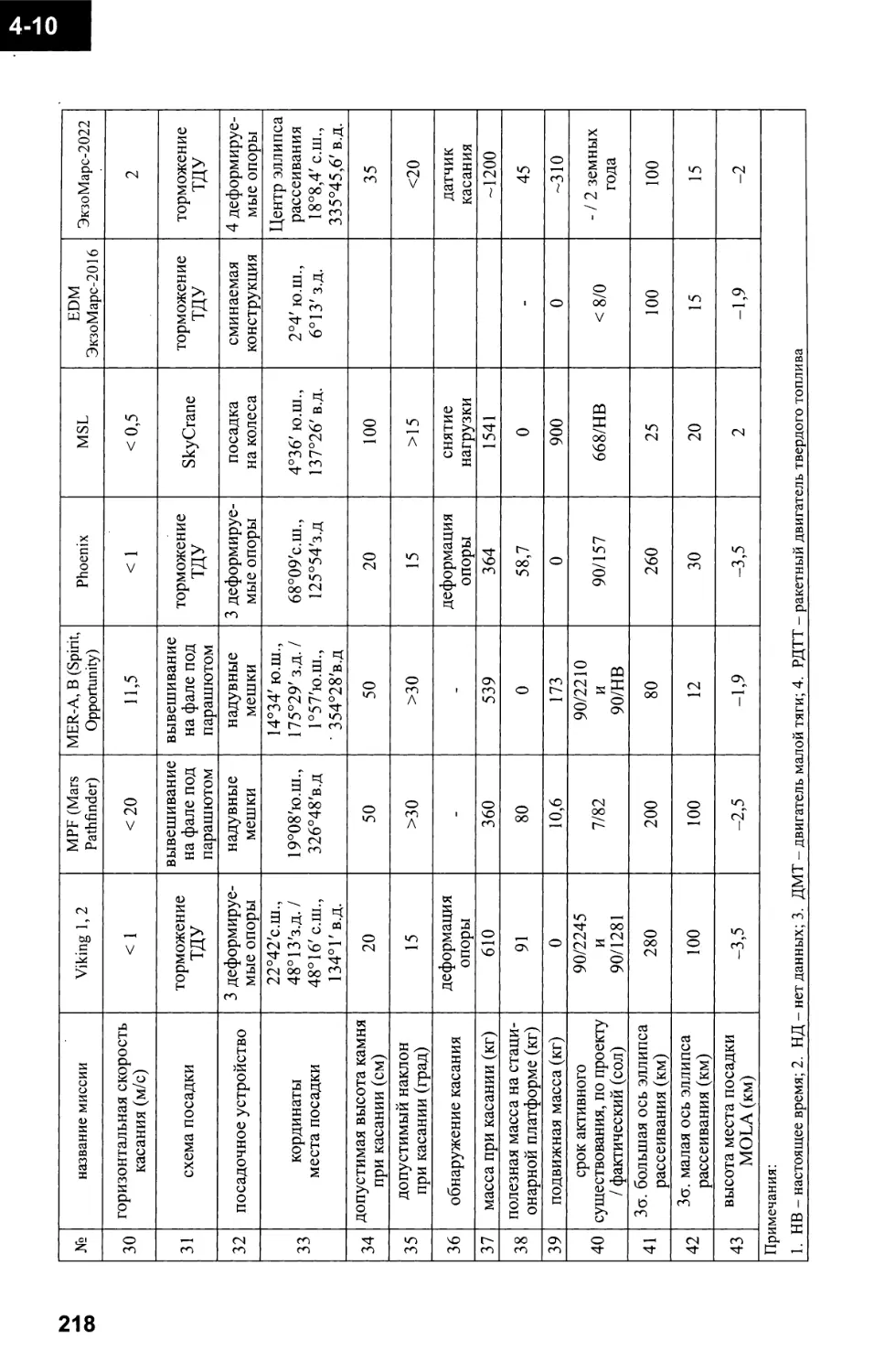
Проведены сравнительный анализ и оценка технического уровня конструкции де¬
сантного модуля, соответствующего передовым достижениям зарубежной космической
техники.
Второй том написан учеными и специалистами АО «НПО Лавочкина» с участием
кооперации.
рецензенты:
академик РАН О.М. Алифанов
доктор технических наук, профессор В.В. Хартов
издатель
АО «НПО Лавочкина»
автор-составитель
художник
верстальщик
В.В. Ефанов
В.М. Давыдов
А.Ю. Титова
ISBN 978-5-905646-13-3
ISBN 978-5-905646-13-3
978-5-905646-17-1 (т. 2)
© АО «НПО Лавочкина», 2020
российский сегмент
международной космической
ЭКСПЕДИЦИИ «ЭКЗОМАРС-2022»
ОГЛАВЛЕНИЕ
ТОМ 1
ВВЕДЕНИЕ
ЧАСТЬ 1 ИССЛЕДОВАНИЯ МАРСА КОСМИЧЕСКИМИ
__ АППАРАТАМИ 10
ИМ Проект «ЭкзоМарс»: краткая предыстория космических
исследований и природа Марса 10
1.1.1 Полеты космических аппаратов 10
1.1.2 Современный Марс 19
ЧАСТЬ 2 БАЗИС, МИССИЯ «ЭКЗОМАРС-2022» 49
Концепция экспедиции 49
Космический аппарат «ЭкзоМарс-2022» 52
Средства выведения 57
2.3.1 Ракета космического назначения 57
2.3.2 Выведение КА «ЭкзоМарс-2022-КА» 63
2.3.3 Подготовка РКН на космодроме Байконур 65
2.3.4 Основные этапы адаптации средств выведения
к запуску КА «ЭкзоМарс-2022-КА» 72
ЧАСТЬ 3 ПРОЕКТ КОСМИЧЕСКОГО АППАРАТА
«ЭКЗОМАРС-2022» 73
Проектный облик десантного модуля «ЭкзоМарс-2022» 73
fcjfcb Посадочный модуль «ЭкзоМарс-2022» 100
Ис1кЬ Российский сегмент баллистико-навигационного
обеспечения полёта и спуска десантного модуля
миссии «ЭкзоМарс-2022» 112
3.3.1 Международный проект «ЭкзоМарс-2022». Состав КА 112
3.3.2 Схема полёта 113
3.3.3 Сезон пылевых бурь на Марсе 114
3.3.4 Характеристики траекторий перелёта к Марсу 115
3.3.5 Баллистико-навигационное обеспечение полёта 120
3.3.6 Условия пребывания посадочной платформы
на поверхности Марса 124
Миссия «ЭкзоМарс-2022». Радиация 128
3.4.1 Радиационная обстановка на трассе полета
КА «ЭкзоМарс-2022» 128
5
3.4.2 Локальные поглощенные дозы в местах расположения
аппаратуры десантного модуля КА «ЭкзоМарс-2022»
3.4.3
3.5
3.5.1
3.5.2
3.5.3
3.6
3.6.1
3.6.2
3.6.3
3.6.4
3.6.5
3.6.6
от ионизирующего излучения космического пространства
и радиоизотопных источников тепла 134
Анализ структурных повреждений в аппаратуре десантного
модуля КА «ЭкзоМарс-2022», вызываемых излучениями
космического пространства и бортовых радиоизотопных
источников тепла 146
Планетарная защита миссии «ЭкзоМарс-2022» 157
Основные принципы, требования и методы обеззараживания. . . 157
Основные аспекты радиационной стерилизации 164
Средства дезинфекции чистых сборочных помещений,
контролируемых по микробиологической чистоте 173
Управление движением посадочного аппарата на этапе
его спуска и посадки на поверхность Марса 181
Постановка задачи 181
Анализ условий полета 182
Средства управления движением ПсМ 187
Управление движением ПсМ при работе ТД 194
Структура алгоритмов наведения и управления 201
Моделирование процессов управляемого торможения 207
Обеспечение надежности космического комплекса 213
Управление составным космическим аппаратом
«ЭкзоМарс-2022» 219
ТОМ 2
ЧАСТЬ 4
4.1
4.2
4.2.1
СЛУЖЕБНЫЕ СИСТЕМЫ ДЕСАНТНОГО
И ПОСАДОЧНОГО МОДУЛЕЙ «ЭКЗОМАРС-2022» 8
Конструкция десантного модуля 8
Двигательная установка посадочной платформы
десантного модуля 14
Назначение 14
4.2.2 Обоснование выбранной конструкции ДУ и ее описание 14
4.2.3 Описание работы двигательной установки посадочной
платформы 24
Аэродинамика десантного модуля 27
4.3
4.4
Антенно-фидерная система десантного модуля 47
4.4.1 Общие сведения 47
4.4.2 Порядок работы АФС на этапе входа, спуска
и посадки (EDL) 51
4.4.3 Порядок работы АФС на этапе эксплуатации
на поверхности Марса (SURFACE) 52
4.4.4 Антенна заднего кожуха 55
4.4.5 Антенна посадочной платформы 61
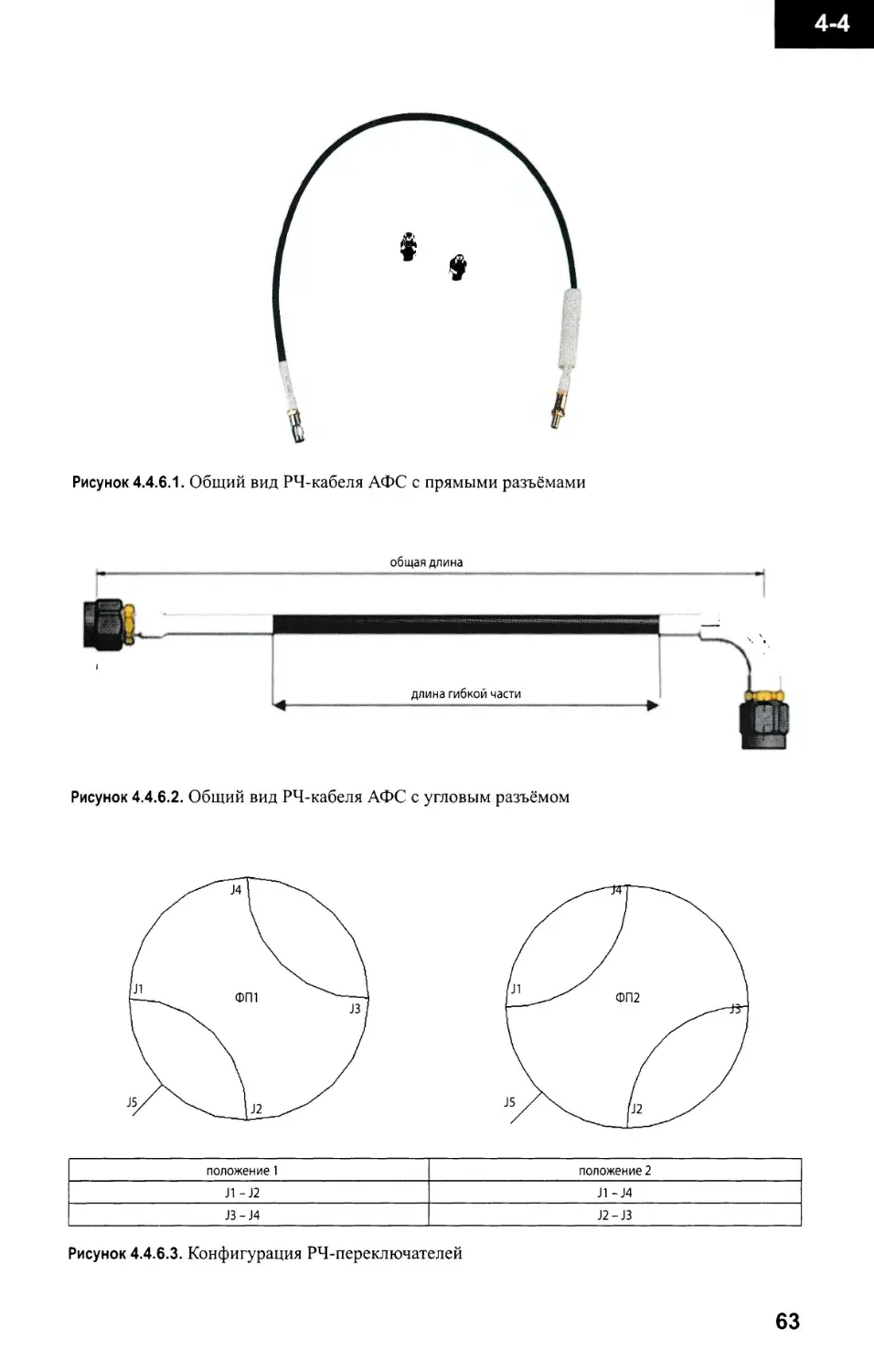
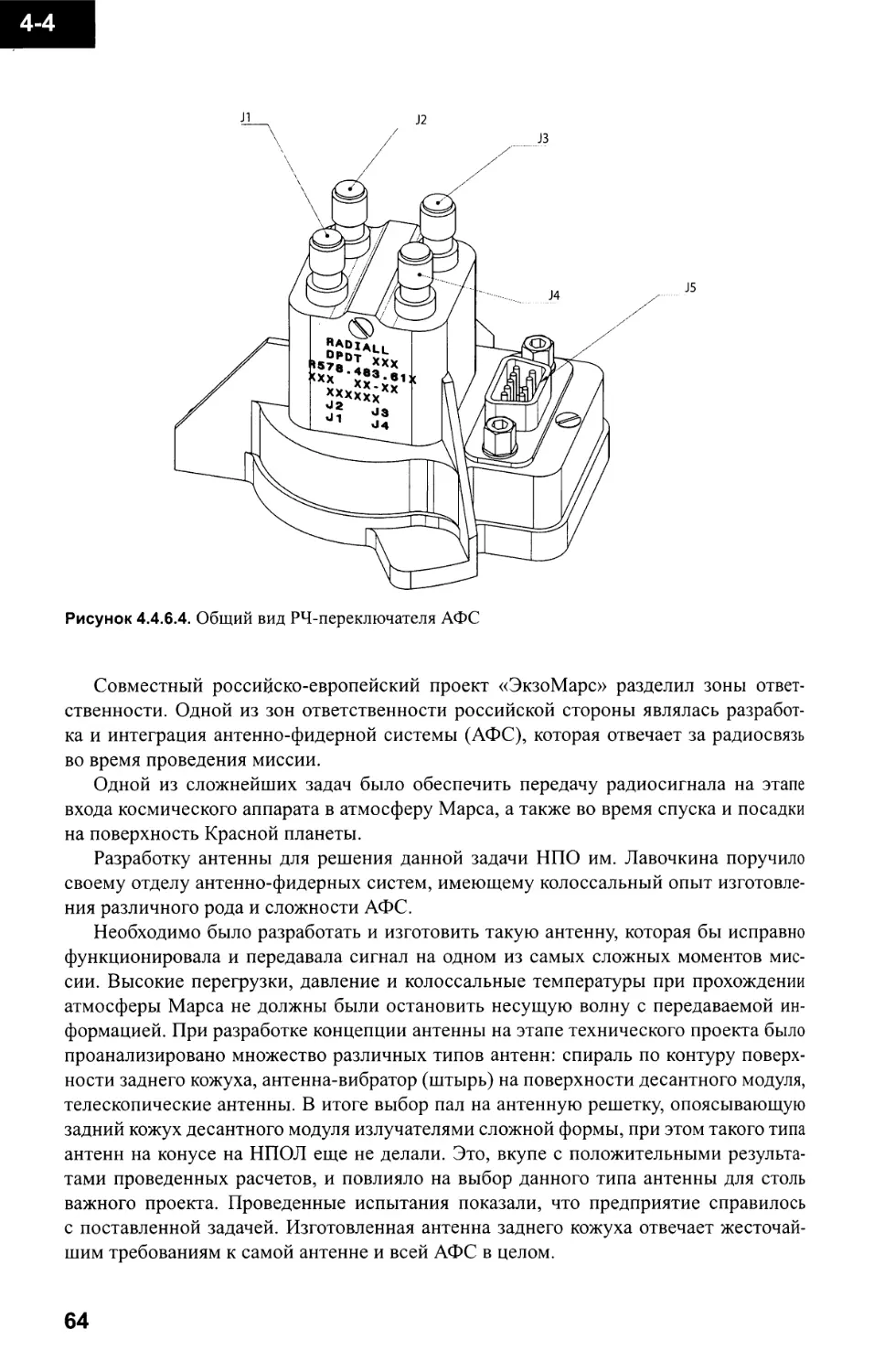
4.4.6 Радиочастотные кабели и переключатели 62
6
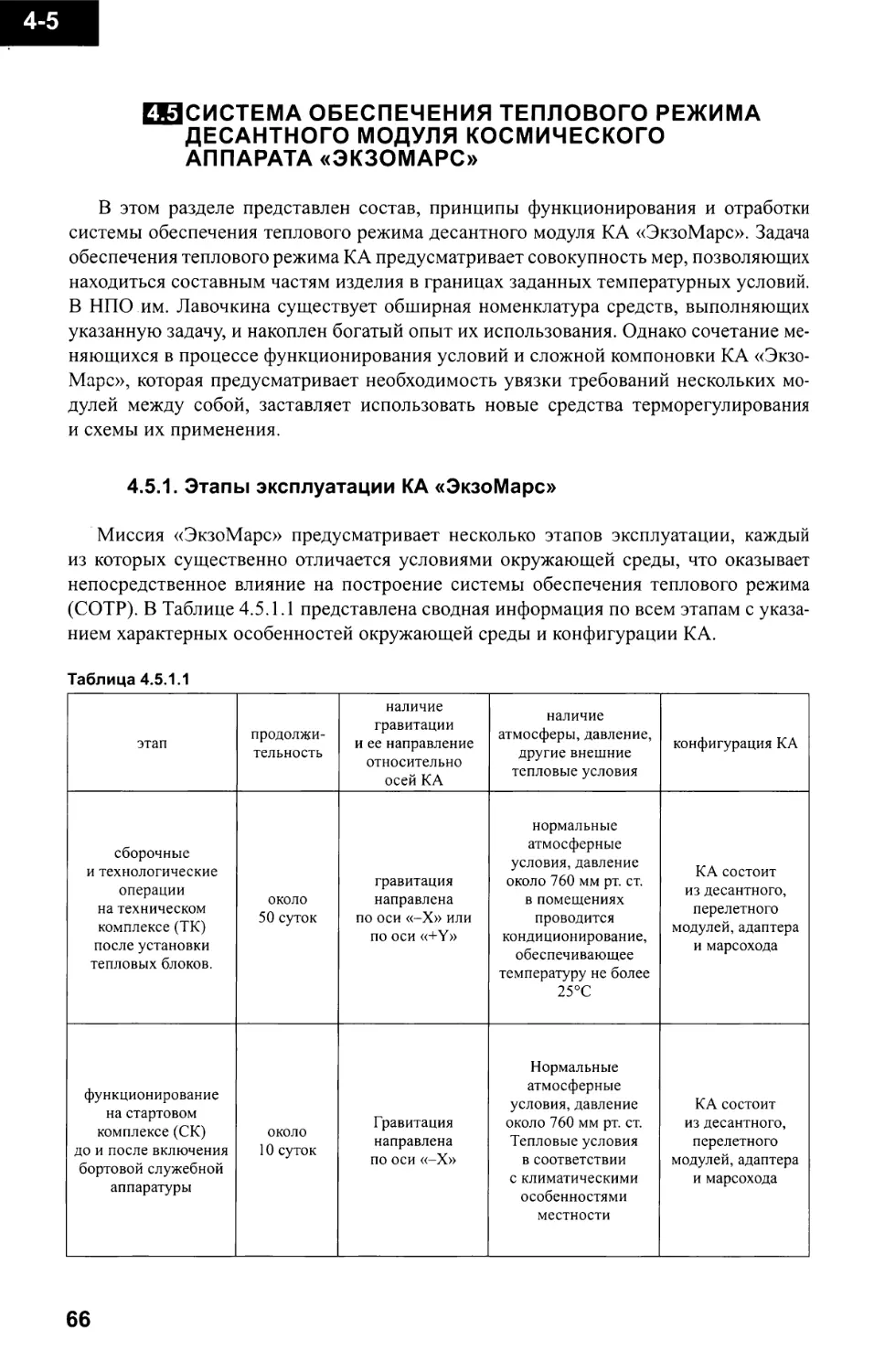
Система обеспечения теплового режима десантного модуля
космического аппарата «ЭкзоМарс» 66
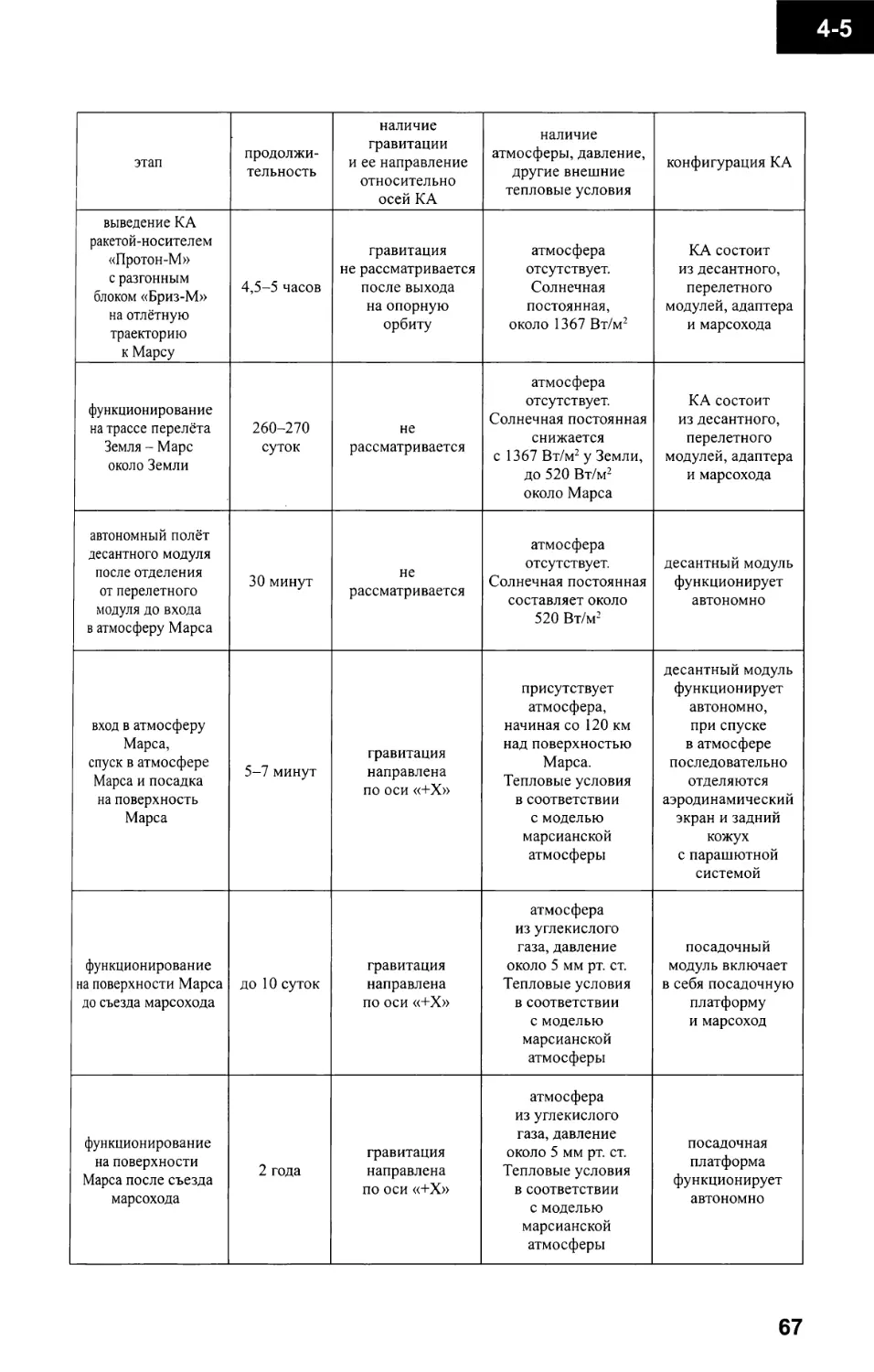
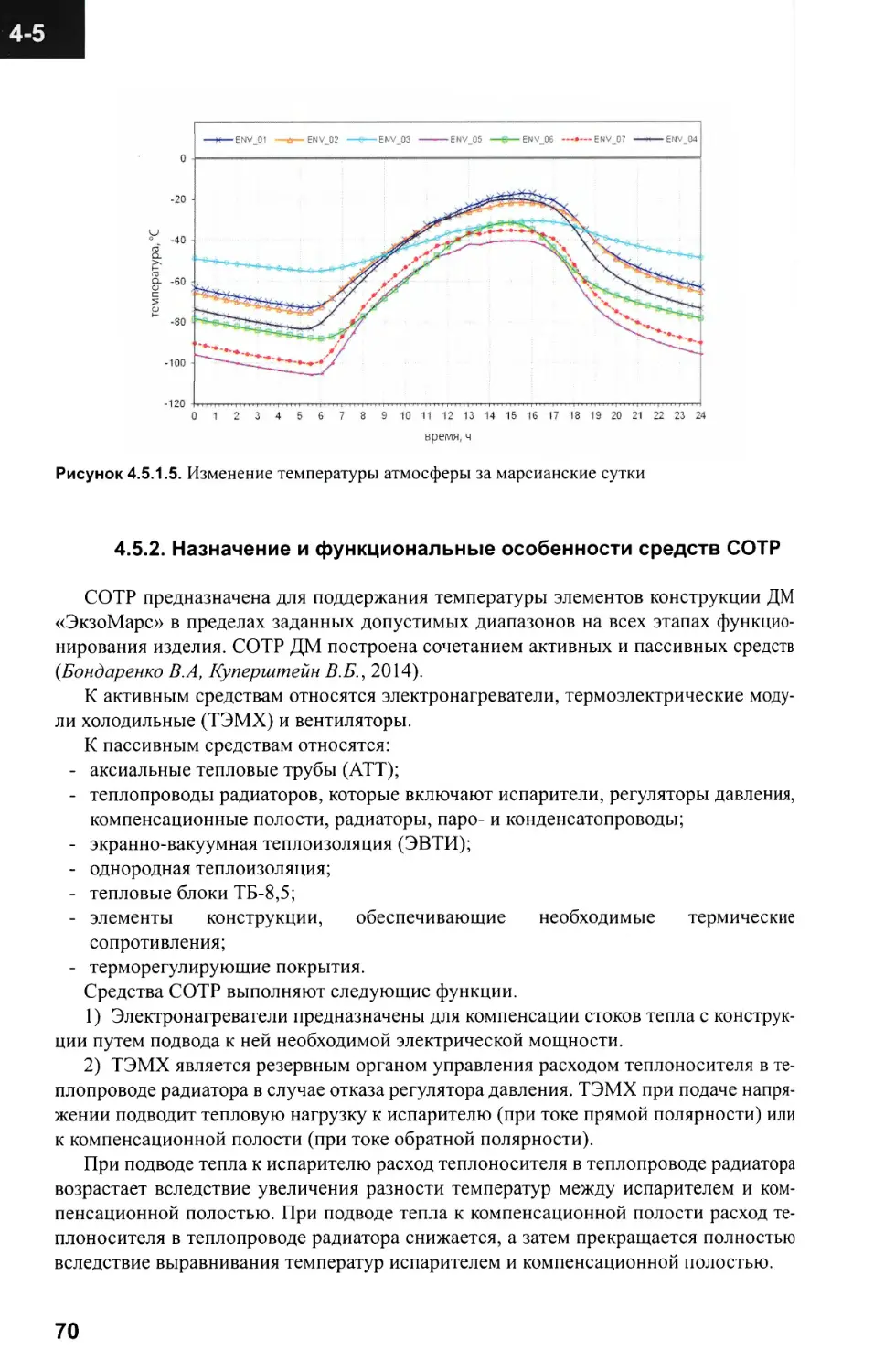
4.5.1 Этапы эксплуатации КА «ЭкзоМарс» 66
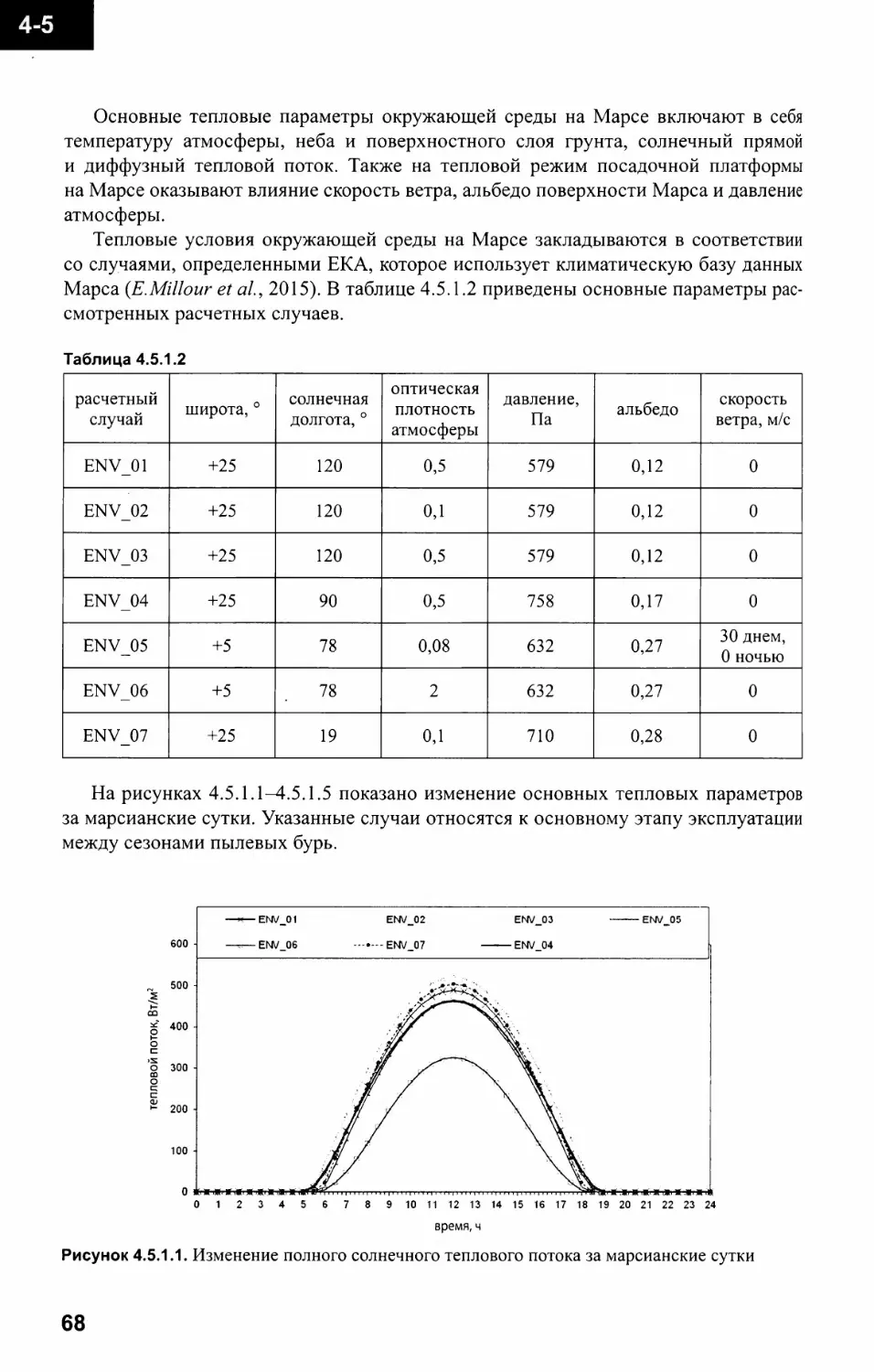
4.5.2 Назначение и функциональные особенности средств СОТР 70
4.5.3 Подсистемы СОТР 71
4.5.4 Алгоритмы управления СОТР 85
4.5.5 Отработка теплового режима десантного модуля
«ЭкзоМарс» 87
ДкД Система энергоснабжения посадочного аппарата 92
KKfl Тепловое и эрозионное воздействие атмосферы Марса
на аэродинамический экран десантного модуля.
Конструкция и тепловая защита аэродинамического экрана 103
4.7.1 Постановка задачи 104
4.7.2 Исходные данные и результаты расчётов 113
KSsI Посадочная платформа 135
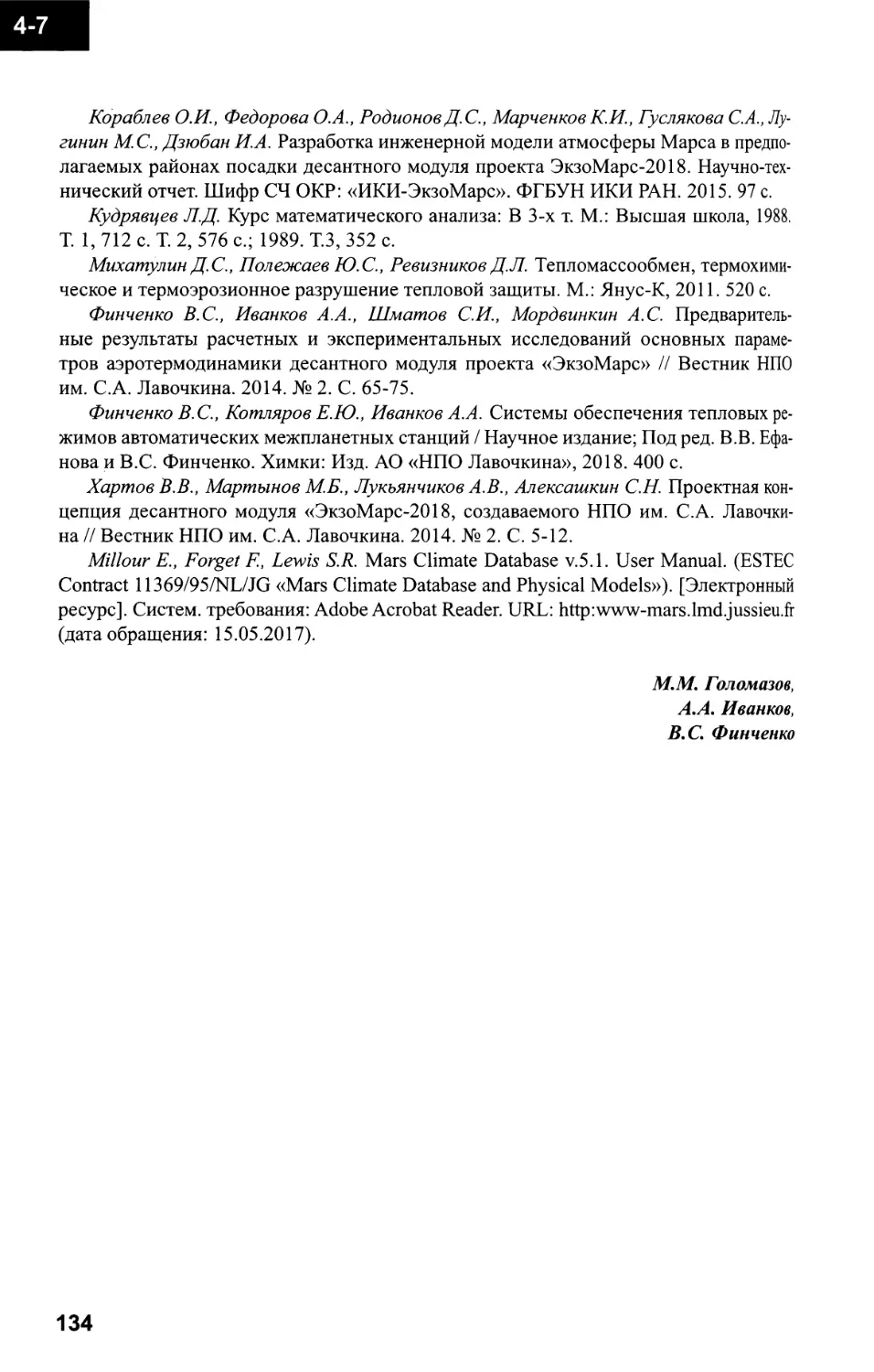
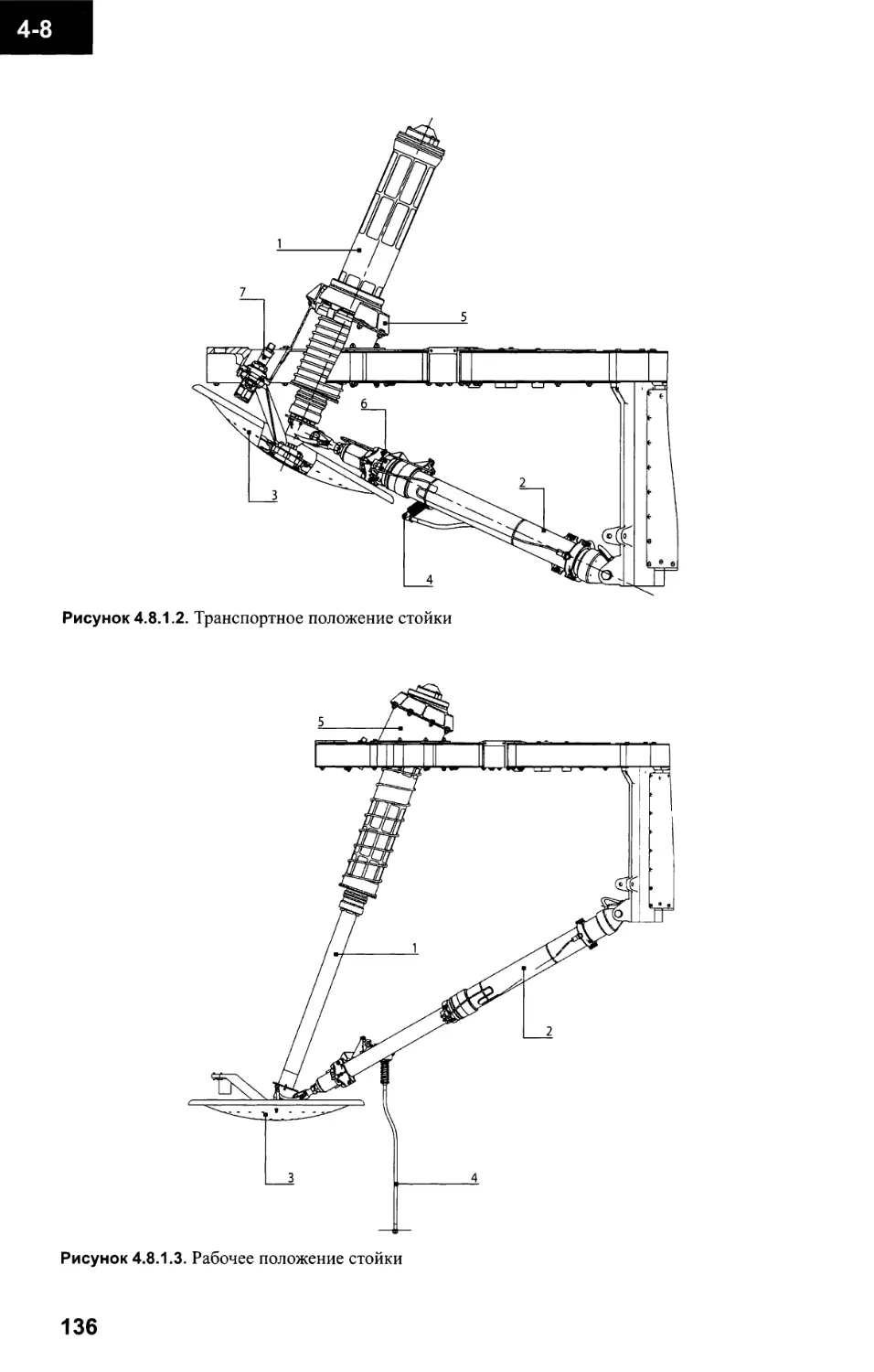
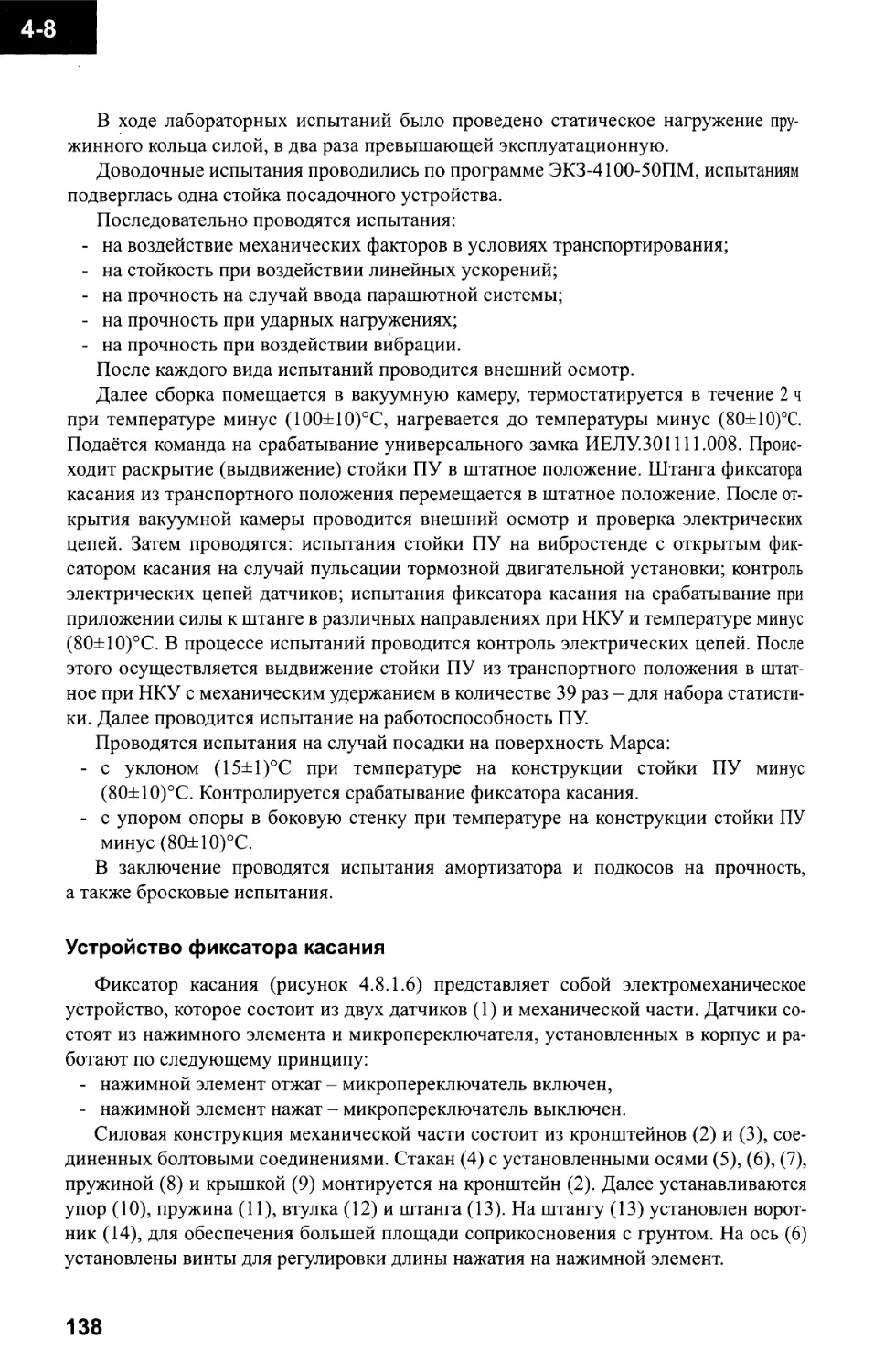
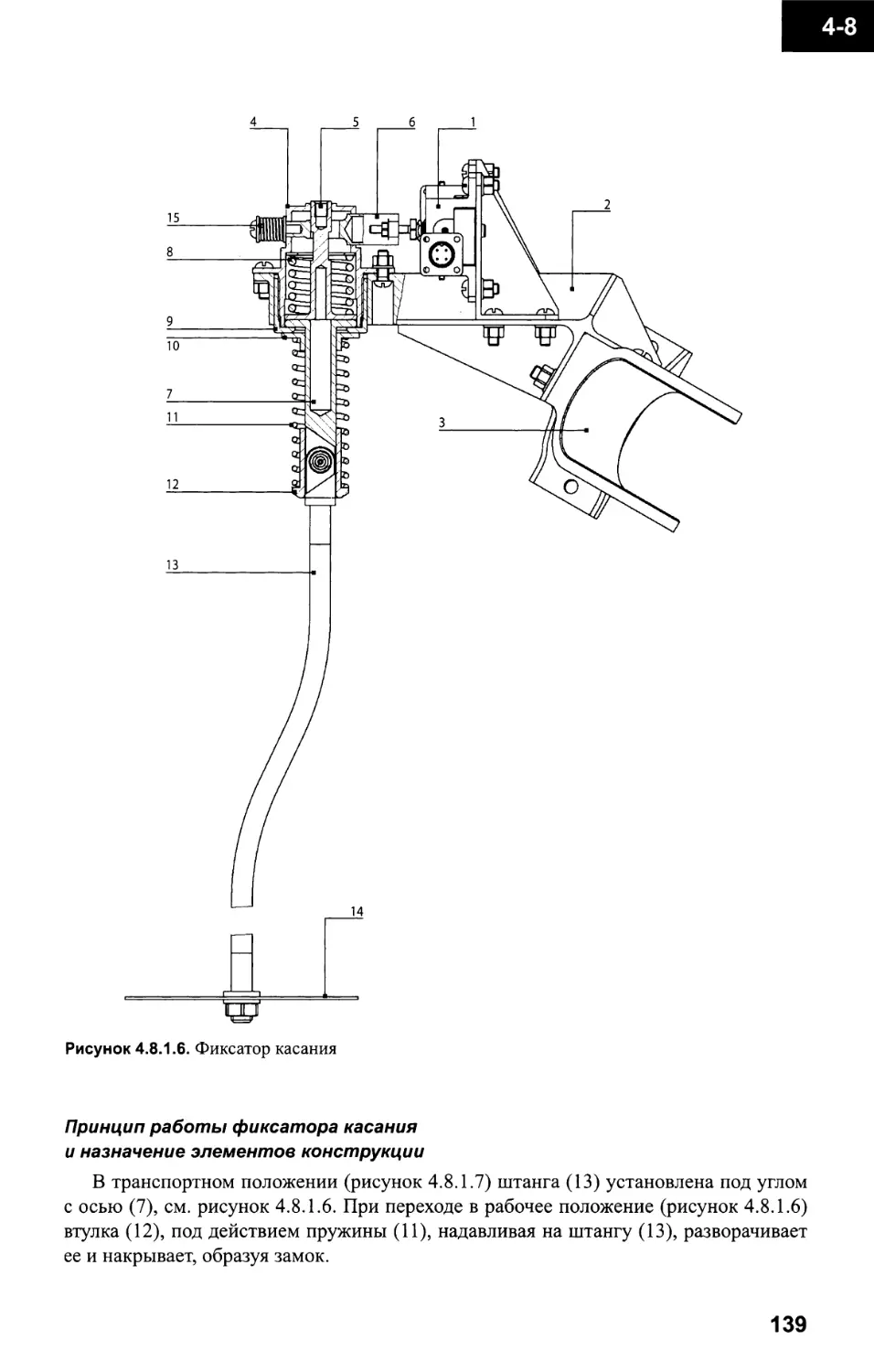
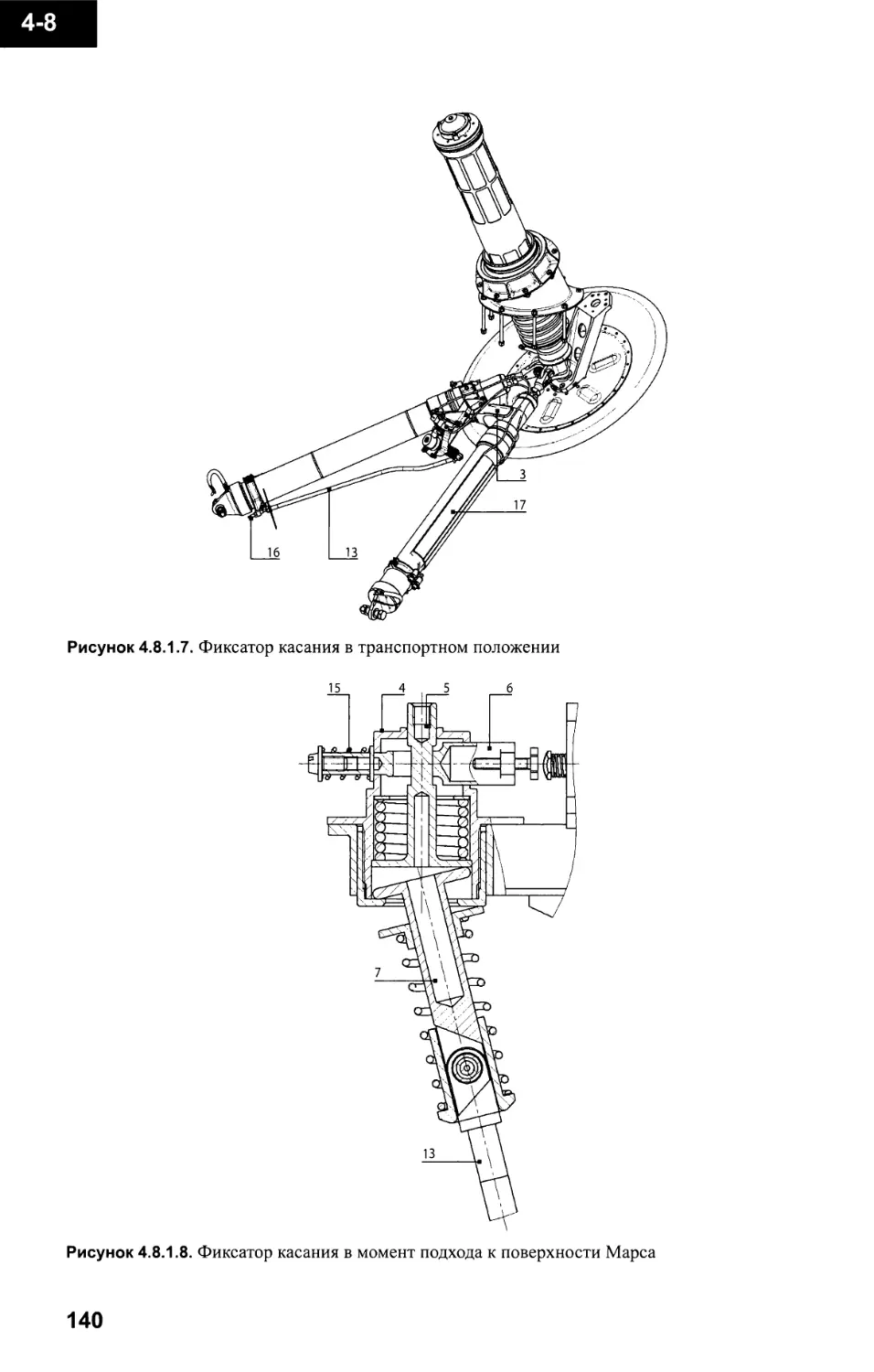
4.8.1 Конструкция посадочного устройства 135
4.8.2 Система схода марсохода с платформы 144
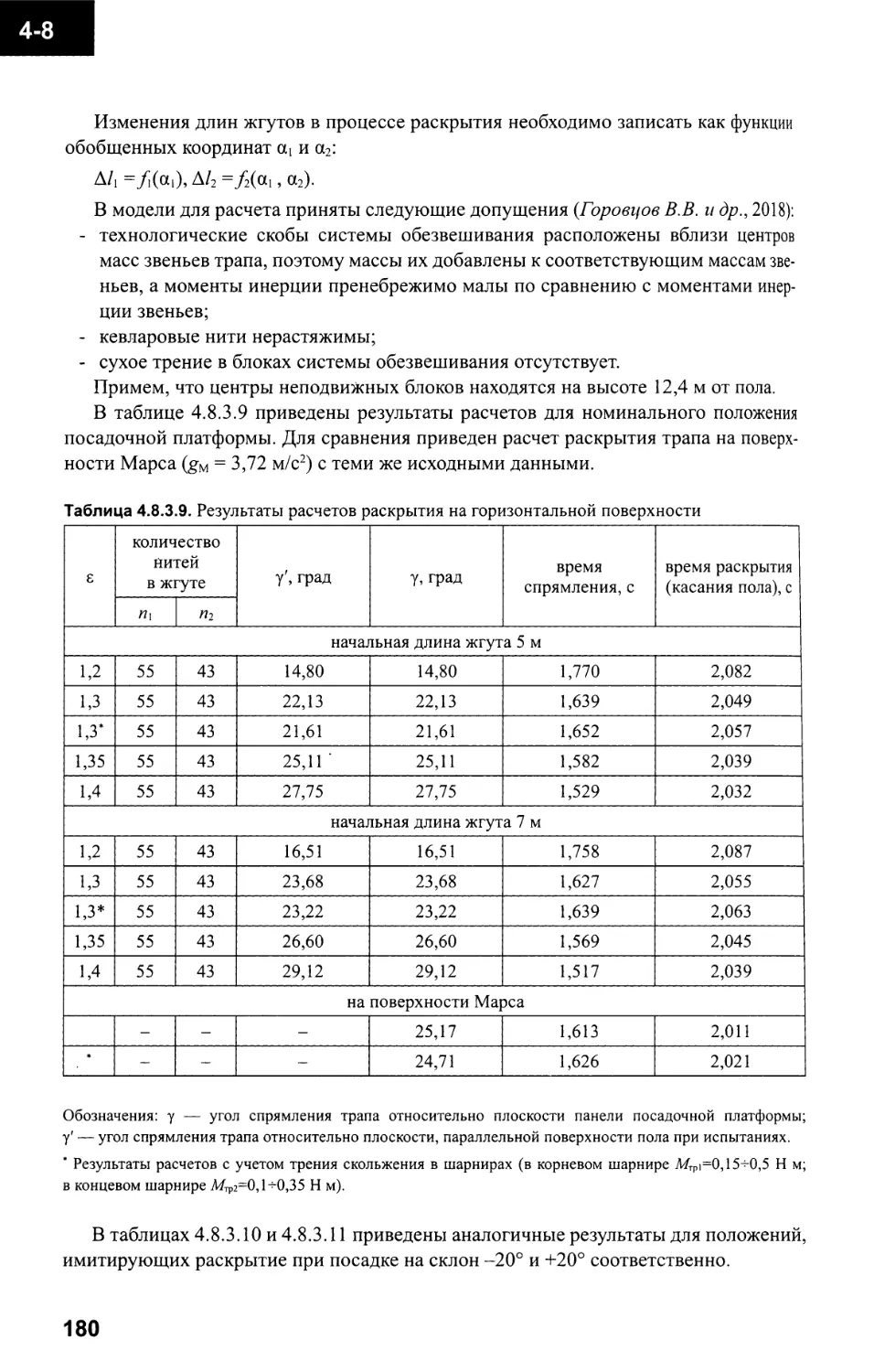
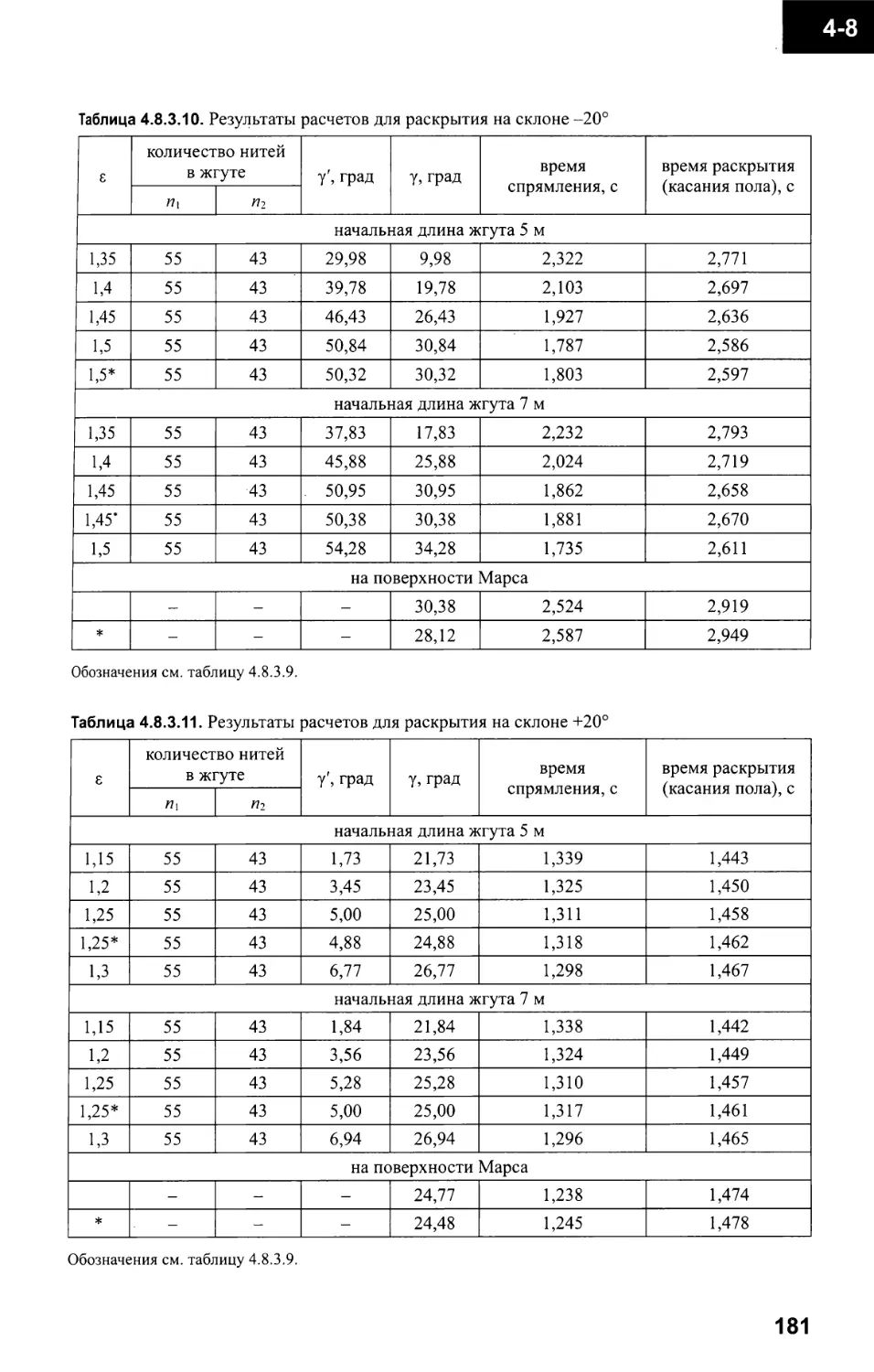
4.8.3 Результаты моделирования динамики раскрытия
трансформируемых конструкций посадочного модуля
в процессе проектирования и доводочных испытаний 162
ЕЕ1 Прочностные и кинематические испытания посадочного
аппарата проекта «ЭкзоМарс-2022» 184
4.9.1 Состав посадочного аппарата и этапы его эксплуатации 184
4.9.2 Наземная отработка конструкции КА «ЭкзоМарс-2022»
в НПОЛ 187
4.9.3 Испытания конструкций агрегатов и КА в целом
на механические нагрузки 188
4.9.4 Бросковые испытания посадочного устройства (ПУ) ПсМ 209
Сравнительный анализ и оценка соответствия технического
уровня десантного модуля передовым достижениям
зарубежной науки и техники 215
ПРИЛОЖЕНИЯ 223
1 Научные задачи комплекса научной аппаратуры
посадочной платформы проекта «ЭкзоМарс-2018»
(ныне ЭкзоМарс-2022) 223
2 Проект «ЭкзоМарс»: ЕКА-
следующий этап научных исследований Марса 233
7
ЧАСТЬ 4
СЛУЖЕБНЫЕ СИСТЕМЫ
ДЕСАНТНОГО И ПОСАДОЧНОГО
МОДУЛЕЙ «ЭКЗОМАРС-2022»
ЕИКОНСТРУКЦИЯ ДЕСАНТНОГО МОДУЛЯ
Основное назначение конструкции десантного модуля (ДМ) - защитить научную
аппаратуру, расположенную на подвижной научной лаборатории - Ровере и стаци¬
онарно на конструкции посадочного аппарата, от воздействий тепловых и механи¬
ческих нагрузок, возникающих на этапе наземной эксплуатации, перелета и посад¬
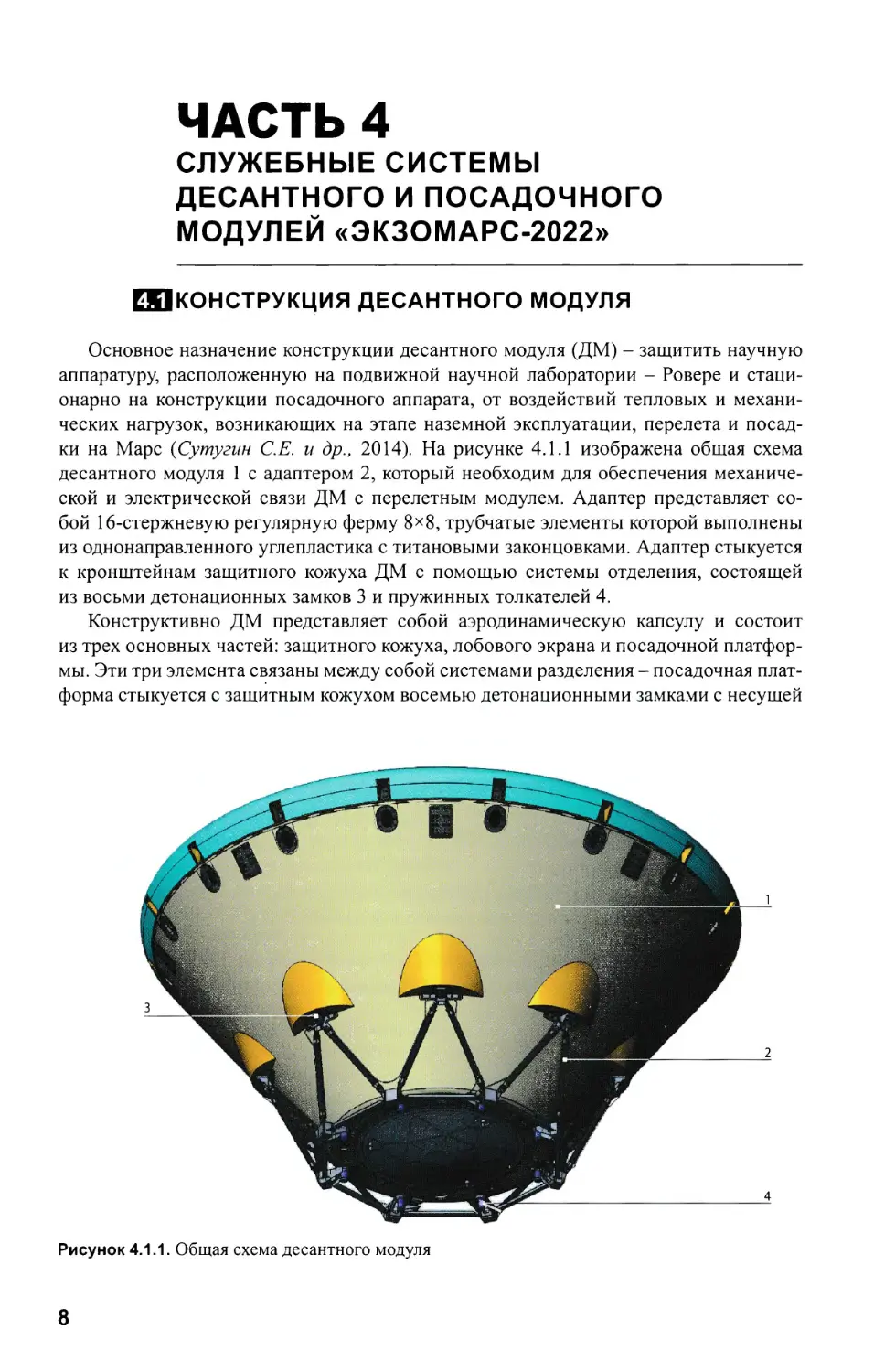
ки на Марс (Сутугин С.Е. и др., 2014). На рисунке 4.1.1 изображена общая схема
десантного модуля 1 с адаптером 2, который необходим для обеспечения механиче¬
ской и электрической связи ДМ с перелетным модулем. Адаптер представляет со¬
бой 16-стержневую регулярную ферму 8><8, трубчатые элементы которой выполнены
из однонаправленного углепластика с титановыми законцовками. Адаптер стыкуется
к кронштейнам защитного кожуха ДМ с помощью системы отделения, состоящей
из восьми детонационных замков 3 и пружинных толкателей 4.
Конструктивно ДМ представляет собой аэродинамическую капсулу и состоит
из трех основных частей: защитного кожуха, лобового экрана и посадочной платфор¬
мы. Эти три элемента связаны между собой системами разделения - посадочная плат¬
форма стыкуется с защитным кожухом восемью детонационными замками с несущей
8
4-1
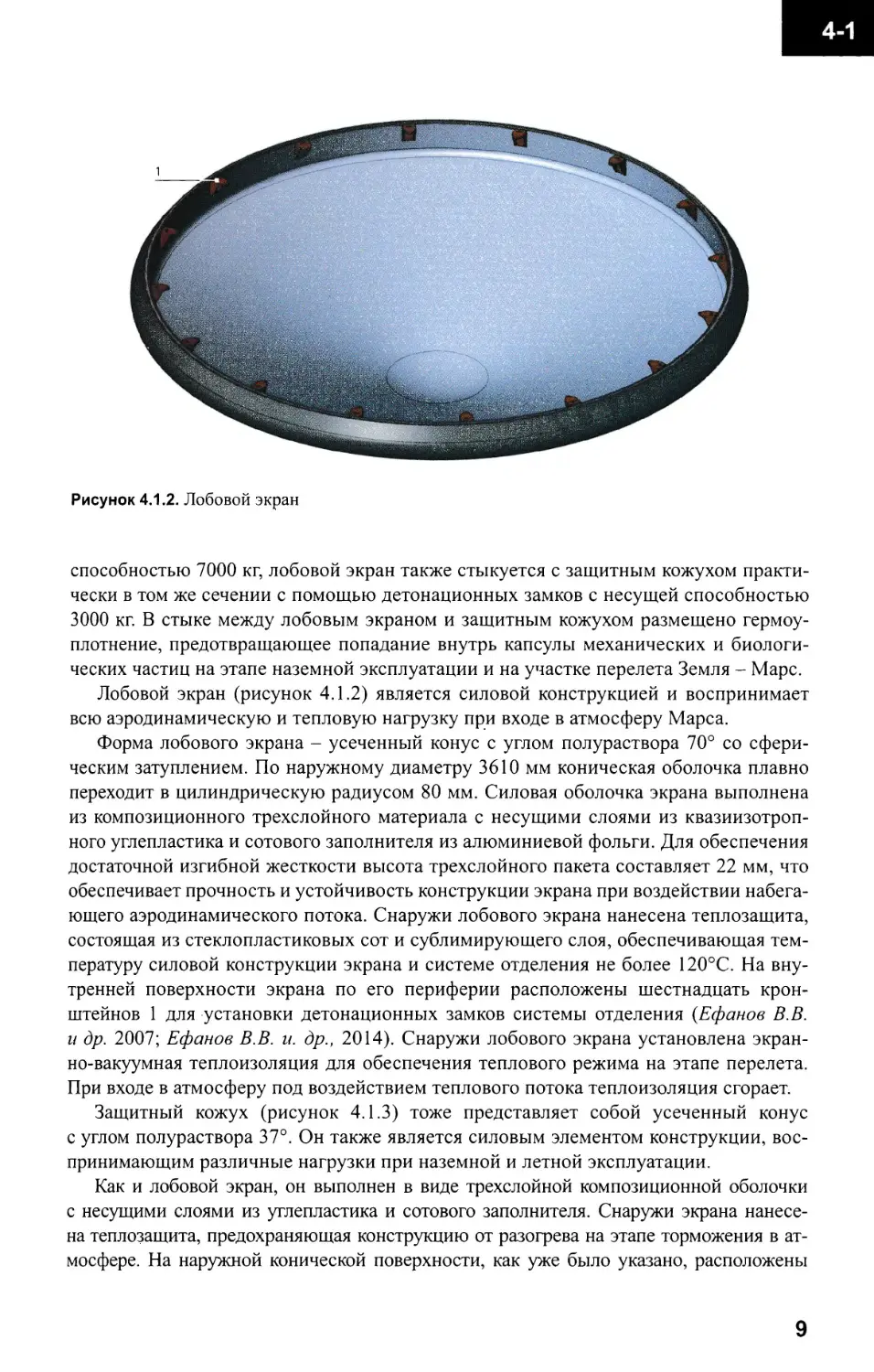
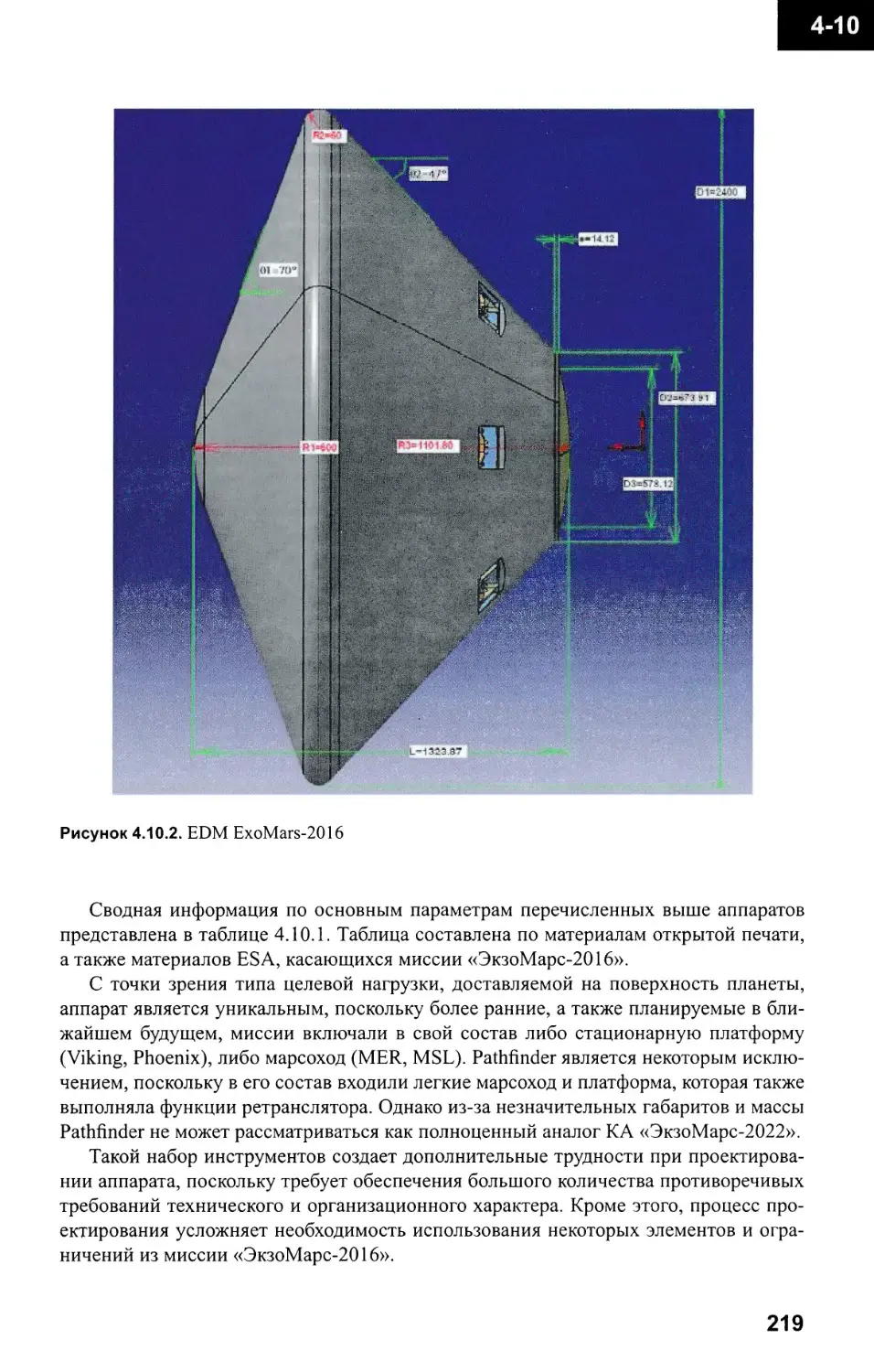
Рисунок 4.1.2. Лобовой экран
способностью 7000 кг, лобовой экран также стыкуется с защитным кожухом практи¬
чески в том же сечении с помощью детонационных замков с несущей способностью
3000 кг. В стыке между лобовым экраном и защитным кожухом размещено гермоу¬
плотнение, предотвращающее попадание внутрь капсулы механических и биологи¬
ческих частиц на этапе наземной эксплуатации и на участке перелета Земля - Марс.
Лобовой экран (рисунок 4.1.2) является силовой конструкцией и воспринимает
всю аэродинамическую и тепловую нагрузку при входе в атмосферу Марса.
Форма лобового экрана - усеченный конус с углом полураствора 70° со сфери¬
ческим затуплением. По наружному диаметру 3610 мм коническая оболочка плавно
переходит в цилиндрическую радиусом 80 мм. Силовая оболочка экрана выполнена
из композиционного трехслойного материала с несущими слоями из квазиизотроп-
ного углепластика и сотового заполнителя из алюминиевой фольги. Для обеспечения
достаточной изгибной жесткости высота трехслойного пакета составляет 22 мм, что
обеспечивает прочность и устойчивость конструкции экрана при воздействии набега¬
ющего аэродинамического потока. Снаружи лобового экрана нанесена теплозащита,
состоящая из стеклопластиковых сот и сублимирующего слоя, обеспечивающая тем¬
пературу силовой конструкции экрана и системе отделения не более 120°С. На вну¬
тренней поверхности экрана по его периферии расположены шестнадцать крон¬
штейнов 1 для установки детонационных замков системы отделения (Ефанов В. В.
и др. 2007; Ефанов В.В. и. др., 2014). Снаружи лобового экрана установлена экран¬
но-вакуумная теплоизоляция для обеспечения теплового режима на этапе перелета.
При входе в атмосферу под воздействием теплового потока теплоизоляция сгорает.
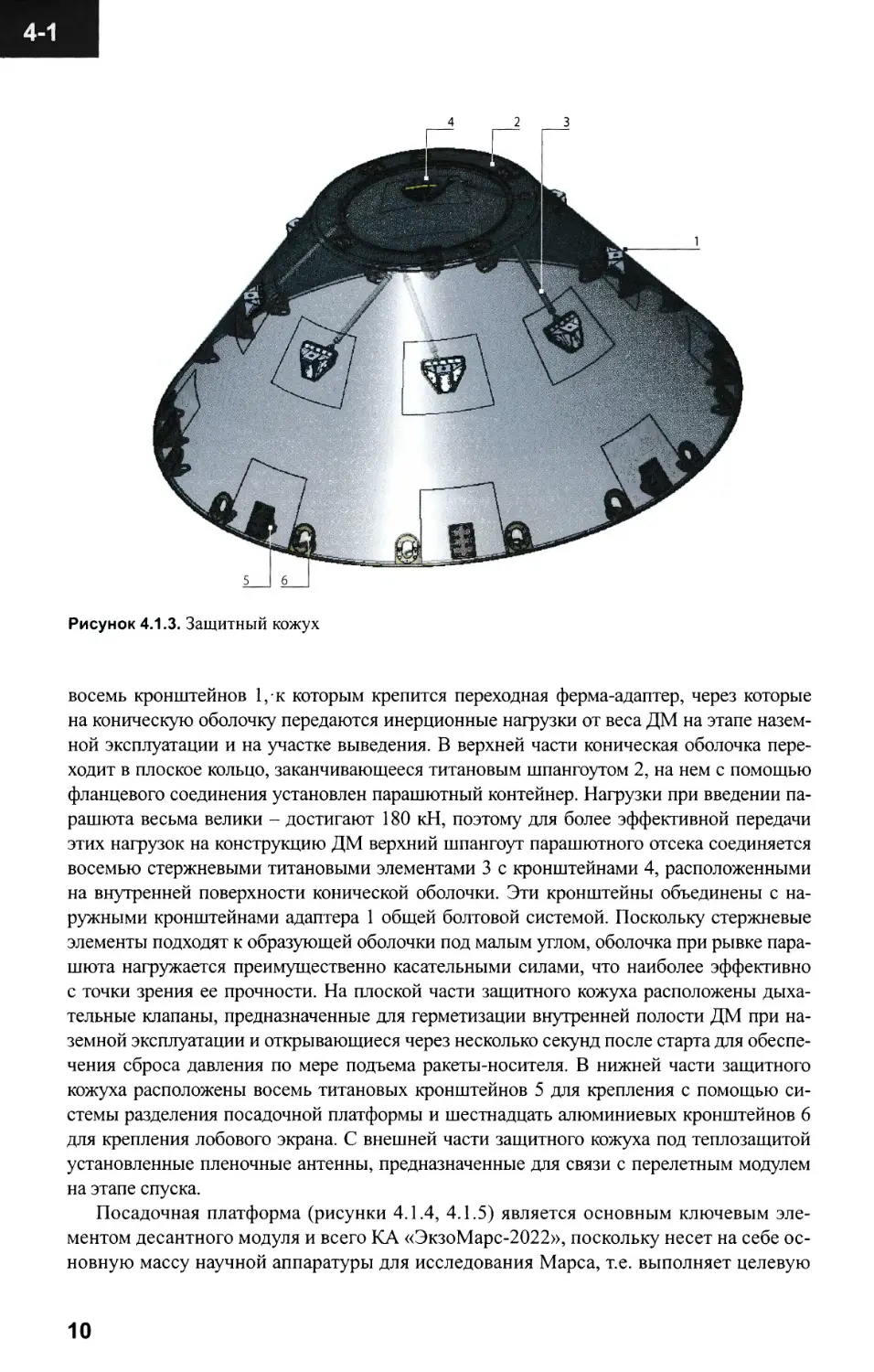
Защитный кожух (рисунок 4.1.3) тоже представляет собой усеченный конус
с углом полураствора 37°. Он также является силовым элементом конструкции, вос¬
принимающим различные нагрузки при наземной и летной эксплуатации.
Как и лобовой экран, он выполнен в виде трехслойной композиционной оболочки
с несущими слоями из углепластика и сотового заполнителя. Снаружи экрана нанесе¬
на теплозащита, предохраняющая конструкцию от разогрева на этапе торможения в ат¬
мосфере. На наружной конической поверхности, как уже было указано, расположены
9
4-1
восемь кронштейнов 1,к которым крепится переходная ферма-адаптер, через которые
на коническую оболочку передаются инерционные нагрузки от веса ДМ на этапе назем¬
ной эксплуатации и на участке выведения. В верхней части коническая оболочка пере¬
ходит в плоское кольцо, заканчивающееся титановым шпангоутом 2, на нем с помощью
фланцевого соединения установлен парашютный контейнер. Нагрузки при введении па¬
рашюта весьма велики - достигают 180 кН, поэтому для более эффективной передачи
этих нагрузок на конструкцию ДМ верхний шпангоут парашютного отсека соединяется
восемью стержневыми титановыми элементами 3 с кронштейнами 4, расположенными
на внутренней поверхности конической оболочки. Эти кронштейны объединены с на¬
ружными кронштейнами адаптера 1 общей болтовой системой. Поскольку стержневые
элементы подходят к образующей оболочки под малым углом, оболочка при рывке пара¬
шюта нагружается преимущественно касательными силами, что наиболее эффективно
с точки зрения ее прочности. На плоской части защитного кожуха расположены дыха¬
тельные клапаны, предназначенные для герметизации внутренней полости ДМ при на¬
земной эксплуатации и открывающиеся через несколько секунд после старта для обеспе¬
чения сброса давления по мере подъема ракеты-носителя. В нижней части защитного
кожуха расположены восемь титановых кронштейнов 5 для крепления с помощью си¬
стемы разделения посадочной платформы и шестнадцать алюминиевых кронштейнов 6
для крепления лобового экрана. С внешней части защитного кожуха под теплозащитой
установленные пленочные антенны, предназначенные для связи с перелетным модулем
на этапе спуска.
Посадочная платформа (рисунки 4.1.4, 4.1.5) является основным ключевым эле¬
ментом десантного модуля и всего КА «ЭкзоМарс-2022», поскольку несет на себе ос¬
новную массу научной аппаратуры для исследования Марса, т.е. выполняет целевую
10
4-1
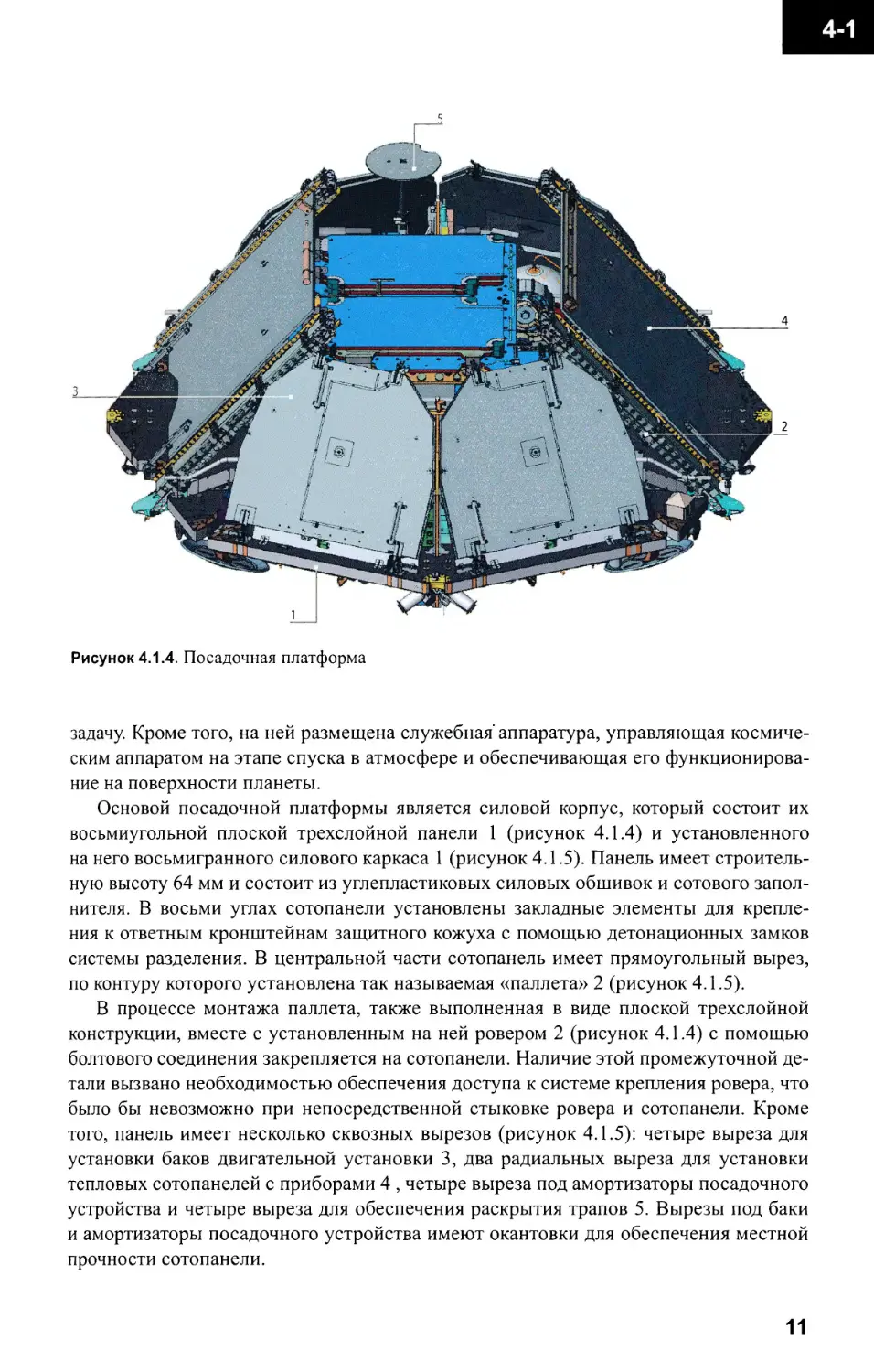
Рисунок 4.1.4. Посадочная платформа
задачу. Кроме того, на ней размещена служебная аппаратура, управляющая космиче¬
ским аппаратом на этапе спуска в атмосфере и обеспечивающая его функционирова¬
ние на поверхности планеты.
Основой посадочной платформы является силовой корпус, который состоит их
восьмиугольной плоской трехслойной панели 1 (рисунок 4.1.4) и установленного
на него восьмигранного силового каркаса 1 (рисунок 4.1.5). Панель имеет строитель¬
ную высоту 64 мм и состоит из углепластиковых силовых обшивок и сотового запол¬
нителя. В восьми углах сотопанели установлены закладные элементы для крепле¬
ния к ответным кронштейнам защитного кожуха с помощью детонационных замков
системы разделения. В центральной части сотопанель имеет прямоугольный вырез,
по контуру которого установлена так называемая «паллета» 2 (рисунок 4.1.5).
В процессе монтажа паллета, также выполненная в виде плоской трехслойной
конструкции, вместе с установленным на ней ровером 2 (рисунок 4.1.4) с помощью
болтового соединения закрепляется на сотопанели. Наличие этой промежуточной де¬
тали вызвано необходимостью обеспечения доступа к системе крепления ровера, что
было бы невозможно при непосредственной стыковке ровера и сотопанели. Кроме
того, панель имеет несколько сквозных вырезов (рисунок 4.1.5): четыре выреза для
установки баков двигательной установки 3, два радиальных выреза для установки
тепловых сотопанелей с приборами 4 , четыре выреза под амортизаторы посадочного
устройства и четыре выреза для обеспечения раскрытия трапов 5. Вырезы под баки
и амортизаторы посадочного устройства имеют окантовки для обеспечения местной
прочности сотопанели.
11
4-1
Рисунок 4.1.5. Посадочная платформа (вид снизу)
'М
т ■ AV
Восьмигранный каркас 1 крепится к сотопанели болтовым соединением и пред¬
ставляет собой сварную рамную конструкцию из восьми стоек, объединенных между
собой по верхней и нижней плоскости стержнями из стандартного профиля угол¬
кового сечения. Четыре боковых стенки каркаса зашиты сотопанелями, на которых
устанавливается аппаратура. Четыре оставшихся зашиваются углепластиковым ли¬
стом толщиной 2 мм. Для увеличения изгибной жесткости платформы и обеспечения
минимальной потребной продольной собственной частоты ДМ 20 Гц верхние углы
восьмигранного каркаса объединены с теми же закладными элементами сотопанели,
к которым крепится система отделения платформы, стержневыми углепластиковыми
стержнями 6 с титановыми законцовками. Для этой же цели служит стержневая си¬
стема из четырех трубчатых элементов, объединяющая восемь угловых точек карка¬
са - так называемый «паук».
В центре платформы внутри силового каркаса установлена 4-камерная двигатель¬
ная установка, предназначенная для торможения и мягкой посадки посадочной плат¬
формы на поверхность планеты.
Платформа содержит ряд механизмов, раскрываемых в процессе торможения
либо после посадки:
- четыре посадочные опоры 7, обеспечивающие устойчивость аппарата при по¬
садке, достаточный зазор между нижней частью платформы и грунтом и допу¬
стимый уровень нагрузок на конструкцию, не превышающий нагрузку на других
этапах эксплуатации;
- две пары трапов 2 (рисунок 4.1.4), раскрываемых в две противоположные сторо¬
ны, для обеспечения гарантированного съезда ровера;
12
4-1
- четыре двойных 3 и две одинарных межтраповых 4 (рисунок 4.1.4) панелей сол¬
нечных батарей;
- штанга с малонаправленной антенной 5 (рисунок 4.1.4).
В процессе создания космического аппарата КА в целом и все его составляю¬
щие элементы проходят экспериментальную отработку (Макаров В.П. и др, 2014).
При этом в наземных условиях воспроизводится весь спектр механических и те¬
пловых нагрузок, которым они подвергаются на всех этапах эксплуатации. Цель та¬
ких испытаний - подтверждение прочности конструкции, так и проверка функцио¬
нирования механизмов в натурных условиях, что является залогом успеха проекта
«ЭкзоМарс-2022».
Список литературы
Ефанов В.В., Горовцов В.В., Котомин А.А. и др. Новое поколение детонационных
устройств разделения конструкции космических аппаратов // Актуальные проблемы
авиационных и аэрокосмических систем. 2007. № 3(25). Т.12. С. 18-31.
Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Детонационные
устройства разделения космического комплекса «ЭкзоМарс-2018» // Вестник НПО
им. С.А. Лавочкина. 2014. № 2. С. 120-123.
Макаров В.П., Бирюков А. С., Михайлов Д.Н., Александров Л.Г. Отдельные аспекты
наземной экспериментальной отработки космического аппарата «ЭкзоМарс-2018» //
Вестник НПО им. С.А. Лавочкина. 2014. № 2 С. 124-127.
Сутугин С.Е., Бирюков А. С., Макаров В.П. К вопросу о создании конструкции ав¬
томатической станции проекта «ЭкзоМарс-2018» // Вестник НПО им. С.А. Лавочки¬
на. 2014. №2. С.110-115.
A. А. Поляков,
B. П. Макаров,
А.С. Бирюков
13
4-2
ПЯДВИГАТЕЛЬНАЯ УСТАНОВКА ПОСАДОЧНОЙ
ПЛАТФОРМЫ ДЕСАНТНОГО МОДУЛЯ
4.2.1. Назначение
Назначение двигательной установки (ДУ) посадочной платформы определяется
задачами выполнения требований общей концепции организации космического пе¬
релета и посадки платформы десантного модуля (ДМ) космического аппарата «Экзо¬
Марс». Это, в частности:
- успокоение ДМ после отделения парашютной системы;
- выполнение маневра увода ДМ из-под парашютной системы;
- интенсивное торможение ДМ с выполнением алгоритма изменения тяги двигате¬
ля ДМ по времени торможения, обеспечивающего сближение посадочной плат¬
формы ДМ с поверхностью Марса с постоянной скоростью;
- обеспечение работы доплеровского радара на этапе посадки путем создания во¬
круг него радиопрозрачной среды;
- обеспечение при посадке условия минимального размывания грунтовой поверх¬
ности Марса газовыми струями от работающего тормозного двигателя.
4.2.2. Обоснование выбранной конструкции ДУ и ее описание
Для решения поставленных задач в двигательную установку посадочной платфор¬
мы десантного модуля включены тормозной двигатель (ТД) с плавно регулируемой
тягой и двигатели малой тяги для ориентации и стабилизации ДМ. Тяга тормозного
двигателя должна изменяться от максимального к минимальному значению не менее
чем в 4,5 раза.
4.2.2.1. Обоснование выбора топлива для двигательной установки
Определяющими обстоятельствами для выбора вида топлива двигательной уста¬
новки при разработке являлись возможность реализации закона глубокого плавного
регулирования тяги тормозного двигателя и радиопрозрачность окружающей десант¬
ный модуль среды при работе двигателя в атмосфере Марса.
Первоначально рассматривались два вида топлив: двухкомпонентное и одно¬
компонентное. Из-за большой длительности космического перелета Земля - Марс
в настоящее время в качестве двухкомпонентного ракетного топлива рассматрива¬
лось топливо на основе тетраоксида диазота и несимметричного диметилгидразина,
а в качестве однокомпонентного топлива - гидразин.
Анализ, проведенный специалистами предприятия-разработчика тормозного дви¬
гателя посадочной платформы, показал, что применение двухкомпонентного топлива
не позволяет выполнить задачу глубокого плавного регулирования тяги ТД и обе¬
спечить радиопрозрачность продуктов истечения жидкостного ракетного двигателя
(ЖРД). Расчеты показали, что для обеспечения посадки на поверхность Марса де¬
сантного модуля массой 1800-2000 кг с постоянной скоростью перепад давления
на форсунках камер тормозного двигателя должен изменяться примерно в 50 раз.
Опыт отработки камер сгорания ЖРД показывает, что организовать устойчивый про¬
цесс горения двухкомпонентных ракетных топлив при такой величине перепада дав¬
ления на форсунках невозможно. Гарантированная максимальная степень плавного
14
4-2
дросселирования двухкомпонентных двигателей на штатном топливе, реализованная
в «КБхиммаш им. А.М. Исаева» при отработке двигателя 11Д417 (двигатель посадоч¬
ной ступени КА «Луна-16»), составляет 1:2,7. Таким образом, для реализации требу¬
емого диапазона изменения тяги ТД при использовании двухкомпонентного топлива
в ДУ ДМ КА «ЭкзоМарс» необходимо либо отключать секции форсуночной головки
камеры сгорания двигателя, либо отключать часть камер сгорания многокамерного
двигателя. При этом закон регулирования тяги тормозного двигателя будет ступен¬
чатым, что может привести к неустойчивой стабилизации посадочной платформы
ДМ. Кроме того, высокая температура продуктов сгорания двухкомпонентного то¬
плива (>3000°С) может привести к ионизации газов атмосферы Марса и, как след¬
ствие, к потере радиопрозрачности окружающей ДМ среды во время работы двигате¬
ля, что создаст значительные помехи работе доплер-радара.
Напротив, в случае применения однокомпонентного топлива - гидразина - ре¬
ализуется возможность глубокого дросселирования тяги двигателя при отсутствии
неустойчивых режимов работы камеры, а также радиопрозрачность окружающей
ДМ среды, так как при низкой температуре продуктов разложения гидразина возмож¬
ность ионизации составляющих атмосферу Марса газов исключена.
4.2.2.2. Обоснование выбора конструкции тормозного двигателя
В ходе разработки проекта был проведен сравнительный анализ использования
4-камерного двигателя и четырех отдельных двигателей торможения с точки зрения
выбора оптимальной возможности управления посадочной платформой.
При использовании 4-камерного двигателя команды управления движением цен¬
тра масс поступают на привод регулирования тяги двигателя (ПРТ) - канал управле¬
ния суммой тяг камер, а команды управления угловым движением в каналах тангажа
и рыскания поступают на два привода регулирования разности тяг диаметрально про¬
тивоположных камер (ПРК) - канал управления разностью тяг камер. То есть испол¬
нительные органы каналов управления независимы друг от друга.
При переводе ПРТ на новый режим изменяется результирующая тяга двигателя
и пропорционально ей изменяются возмущающие моменты, создаваемые самим дви¬
гателем. Но при сохранении угла ПРК в том же соотношении изменяются и управ¬
ляющие моменты. То есть в номинальном случае изменения в канале управления
центром масс не изменяют режима работы каналов управления угловым движением.
Отклонения в соотношении возмущающего и управляющего моментов могут возник¬
нуть только за счет технологических погрешностей в изготовлении и регулировке ка¬
мер. Соответственно изменения разности тяг камер в каналах управления угловым
движением не изменяют результирующую тягу двигателя.
При использовании четырех независимых двигателей торможения необходимо
управлять и четырьмя приводами регулирования их тяг. При этом на каждый из при¬
водов должны поступать сигналы управления от двух каналов управления. Исполь¬
зование одного исполнительного органа для управления двумя каналами всегда ведет
к потерям эффективности каждого из каналов за счет ограничений и по углу поворота
и по его угловой скорости. Так, управление угловым движением требует от двигате¬
лей изменения разности их тяг в пределах ±10-50 кгс. А для управления движени¬
ем центра масс требуется более энергичное изменение тяги двигателя практически
во всём диапазоне регулирования его тяги.
15
4-2
Поэтому при использовании четырех независимых двигателей для сохранения ра¬
ботоспособности канала управления необходимо:
- ограничить требуемую скорость изменения команд управления движением цен¬
тра масс (например, ограничить скорость изменения угла поворота регулятора
тяги в канале управления движением центра масс 75-80% с тем чтобы из распо¬
лагаемого диапазона максимальной скорости ПРТ ±125% для управления угло¬
вым движением всегда оставалась возможность регулировать положение привода
с угловой скоростью 40-50%;
- ограничить командный угол поворота привода в канале управления суммарной
тяги пределом, который ограничит располагаемую для этого канала тягу меньше,
чем сумма максимальных тяг двигателей.
Таким образом, использование четырех независимых двигателей по сравнению
с вариантом использования 4-камерного двигателя:
- вносит существенное взаимное влияние канала управления общей тягой на канал
управления разностью тяг;
- в 1,5-2 раза снижает быстродействие и повышает динамические ошибки и в ка¬
нале управления тягой, и в канале управления разностью тяг.
С учетом выполнения требования минимального эрозионного воздействия струи
ТД на поверхность Марса и устойчивой стабилизации посадочной платформы при
посадке был выбран 4-камерный ЖРД, разработанный специально по проекту «Экзо-
Марс» предприятием «КБхиммаш им. А.М. Исаева».
Тормозной двигатель относится к двигателям термокаталитического типа.
Двигатель выполнен в виде моноблока. Внешний вид двигателя представлен
на рисунке 4.2.1.
Рисунок 4.2.1. Тормозной двигатель
16
4-2
В состав двигателя входят четыре камеры сгорания с пакетами катализатора для
разложения гидразина и соплами Лаваля на выходе. Камеры создают тягу вдоль оси
посадочной платформы и моменты сил для ее стабилизации, регулируемые системой
управления ДМ с помощью трех регуляторов в виде дросселей с электроприводами:
- регулятора общей тяги ТД, изменяющего тягу двигателя в 4,5 раза от максималь¬
ной до минимальной;
- двух регуляторов разнотяговости камер, расположенных диаметрально противо¬
положно в плоскостях тангажа и рыскания; при этом разнотяговость регулирует¬
ся в пределах ±10% от суммарной тяги этих камер.
Кроме того, в состав тормозного двигателя входят пневмоуправляемые пускоот¬
сечные клапаны и электроклапаны, осуществляющие подачу и сброс газа управления
пневмоклапанами и газа продувки полостей двигателя после останова, а также сред¬
ства обеспечения теплового режима камер.
В качестве двигателей стабилизации и ориентации были выбраны ЖРД ма¬
лой тяги на однокомпонентном топливе термокаталитического типа разработки
«КБхиммаш им. А.М. Исаева» (Агеенко Ю.И., 2014). Номинальное значение тяги
двигателя - 50 Н при давлении на входе 1,5 МПа. Внешний вид двигателя представ¬
лен на рисунке 4.2.2.
Рисунок 4.2.2. Двигатель стабилизации и ориентации
4.2.2.3. Обоснование выбора конструкции топливных баков
Результаты баллистического расчёта и анализ потребностей топлива на стабили¬
зацию и ориентацию ДМ, а также учёт невырабатываемых остатков определили, что
массовую потребность топлива не более чем 150 кг. Из условий компоновки топливо
было распределено в четыре топливных бака, топливная полость каждого из которых
имеет вместимость не менее 0,04 м3 (40 л).
17
4-2
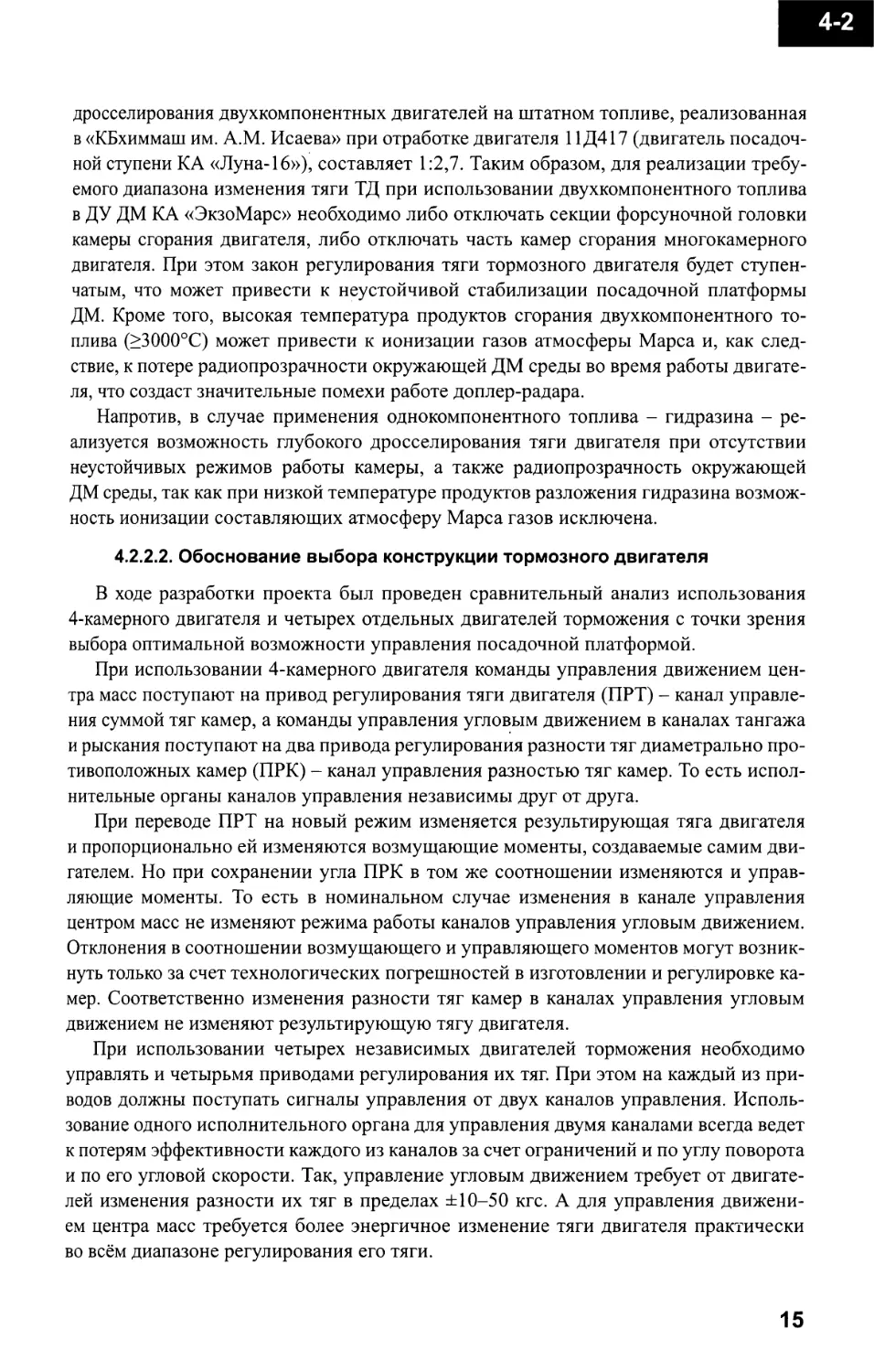
1. Выбор типа внутрибакового устройства. В связи с высокими перегрузками
при торможении, а также с возможной закруткой ДМ в момент начала работы дви¬
гателей было выбрано внутрибаковое устройство с разделительной металлической
мембраной. Конструкция бака представлена на рисунке 4.2.3.
Рисунок 4.2.3. Конструкция топливного бака
2. Выбор материала корпуса бака. При разработке двигательной установки изде¬
лия посадочной платформы потребовалось увеличить рабочее давление топливных
баков с одновременным сохранением (или уменьшением) их массовых характеристик.
Ранее в сварных конструкциях, работающих под давлением, применялся неупрочня-
емый сплав АМгб, отличающийся хорошей свариваемостью, высокой коррозионной
стойкостью и удовлетворительной технологичностью. Недостатком сплава АМгб яв¬
ляется невысокая прочность в отожженом состоянии бв>32 кгс/мм2 и 60>2>16 кгс/мм2,
которая не соответствует возросшим требованиям к прочности в изделиях.
На первоначальном этапе работ по выбору материалов для изготовления новых
топливных баков для изделия «ЭкзоМарс» рассматривалась возможность их изго¬
товления из титановых сплавов, обеспечивающих своими физико-механическими
характеристиками задаваемое рабочее давление. Однако, весовые характеристики
группы титановых сплавов (рср~4,54 г/см3) в сравнении с алюминиевыми сплавами
(рСр~2,64 г/см3) увеличивают массовые параметры проектируемых баков.
Таким образом, с целью снижения веса, обеспечения более высокой конструкци¬
онной прочности и возможности эксплуатации при более высоком рабочем давлении
для изготовления топливных баков был выбран сплав группы магналиев 01570, кото¬
рый за счет дополнительного легирования обладает пределом текучести в отожженом
состоянии, примерно в 1,5 раза превышающим предел текучести сплава АМгб, а его
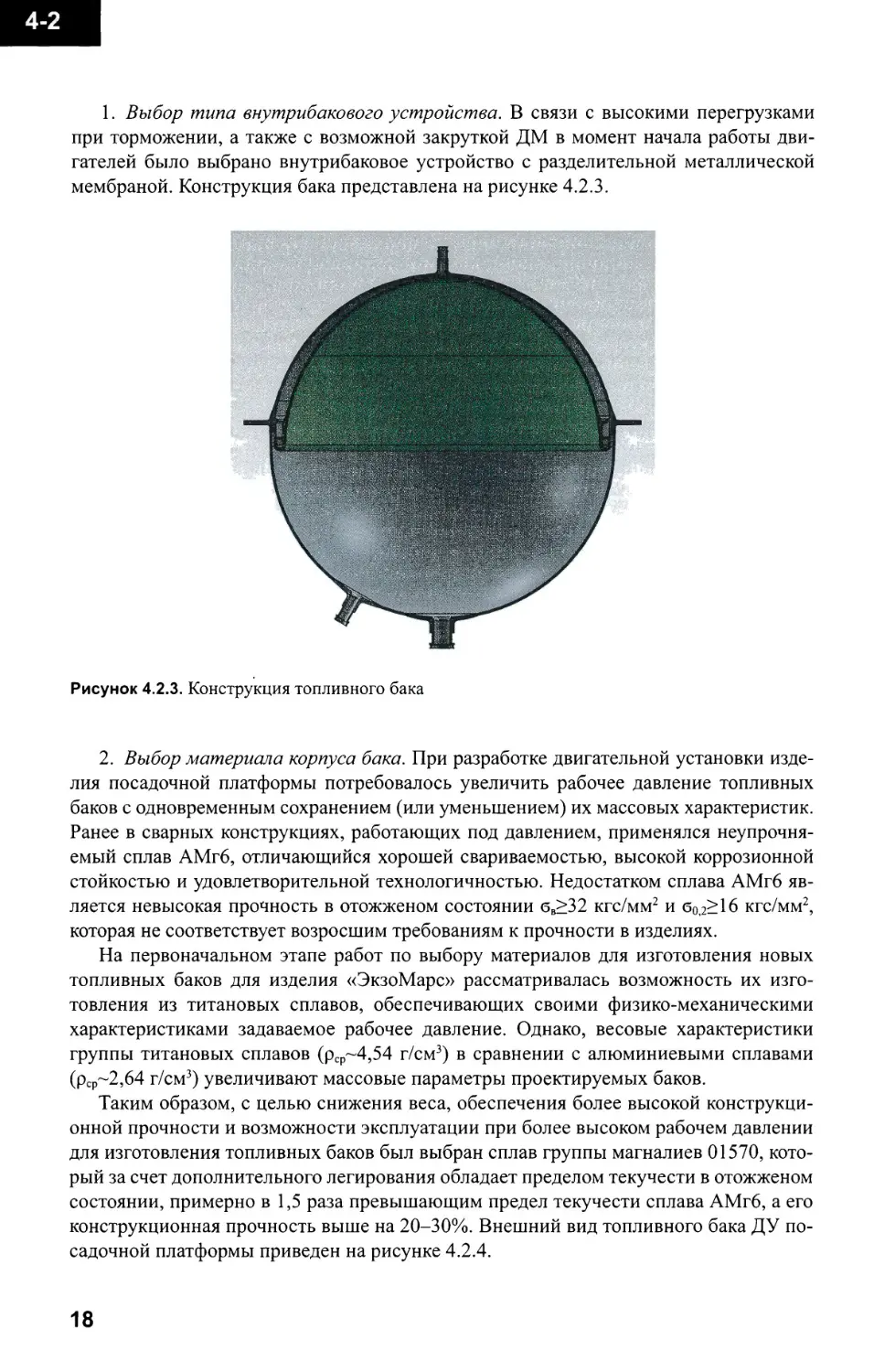
конструкционная прочность выше на 20-30%. Внешний вид топливного бака ДУ по¬
садочной платформы приведен на рисунке 4.2.4.
18
4-2
Рисунок 4.2.4. Топливный бак
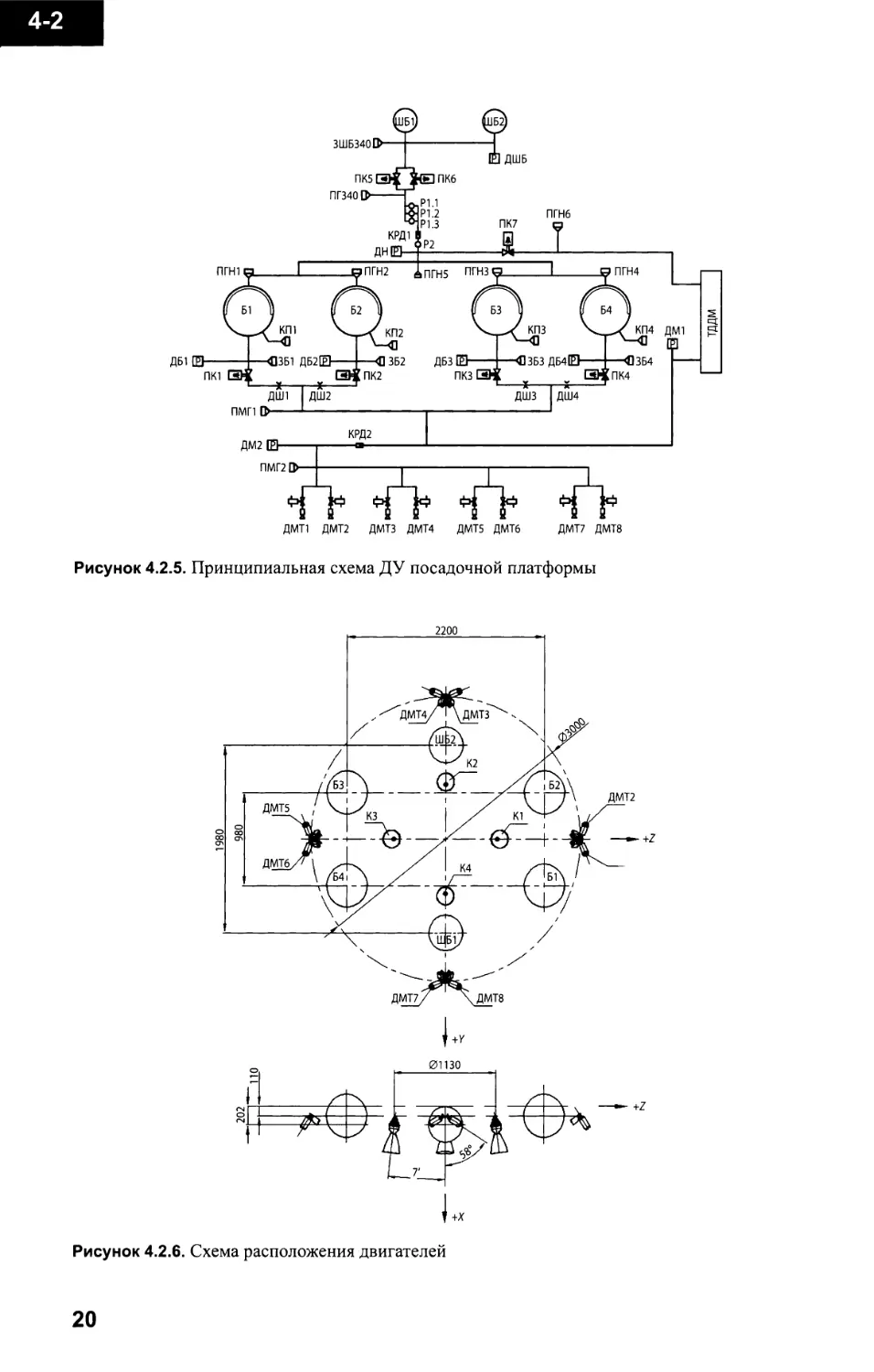
4.2.2.4. Состав двигательной установки посадочной платформы
На базе рассмотренных двигателей была разработана принципиальная схема дви¬
гательной установки посадочной платформы (рисунок 4.2.5).
В состав двигательной установки посадочной платформы входят:
- тормозной двигатель;
- двигатели стабилизации и ориентации - 8 шт.;
- баки топливные - 4 шт.;
- баллоны металлокомпозитные высокого давления для хранения и подачи газа
наддува топливных баков, а также для продувки топливных магистралей тормоз¬
ного двигателя после выключения - 2 шт.;
- агрегаты автоматики, обеспечивающие работу ДУ (пироклапаны системы наддува
и пироклапаны топливные, автоматический регулятор давления, гидроредуктор);
- элементы трубопроводной арматуры (ресиверы, клапаны заправочные и прове¬
рочные, трубопроводы);
- средства обеспечения теплового режима (электронагреватели топливных баков,
камер тормозного двигателя, реакторов двигателей малой тяги, элементов кре¬
пления двигателей, отдельных элементов конструкции ДУ, термокабельные на¬
греватели трубопроводов, теплозащитные экраны высокотемпературных элемен¬
тов ТД и т.д.);
- датчики телеметрического контроля температуры и давления;
- элементы конструкции ДУ (кронштейны крепления двигателей стабилизации,
кронштейны крепления тормозного двигателя, панели агрегатные и т.д.).
19
4-2
ПМГ2
тддм
Рисунок 4.2.5. Принципиальная схема ДУ посадочной платформы
Рисунок 4.2.6. Схема расположения двигателей
20
4-2
Одной из отличительных особенностей организации рабочего процесса двигатель¬
ной установки является обеспечение разных давлений топлива на входах тормозного
двигателя и двигателей стабилизации и ориентации. Диапазон входных давлений то¬
плива у тормозного двигателя находится в пределах от 4,34 до 4,83 МПа, у двигателей
стабилизации - от 1,28 до 2,35 МПа. Данный вопрос был решен следующим образом:
при работе ДУ в топливных баках создается давление наддува от 4,71 до 5,2 МПа,
а на входе в топливную магистраль двигателей стабилизации устанавливается ги¬
дроредуктор, понижающий давление топлива при работе двигателей до заданного
уровня.
Согласно компоновке десантного модуля теоретическая схема расположения тор¬
мозного двигателя и двигателей стабилизации и ориентации имеет вид, представлен¬
ный на рисунке 4.2.6.
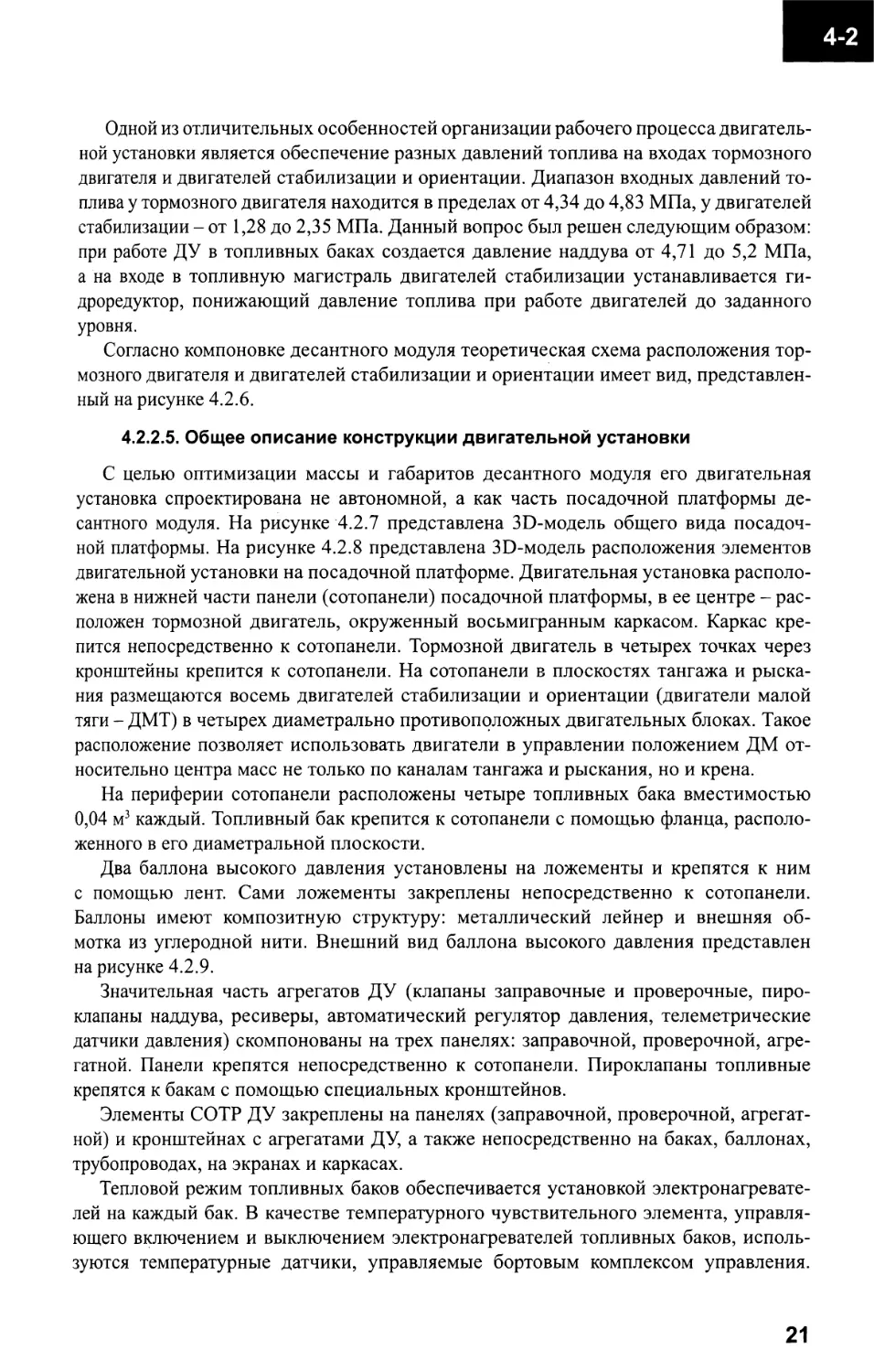
4.2.2.5. Общее описание конструкции двигательной установки
С целью оптимизации массы и габаритов десантного модуля его двигательная
установка спроектирована не автономной, а как часть посадочной платформы де¬
сантного модуля. На рисунке 4.2.7 представлена ЗИ-модель общего вида посадоч¬
ной платформы. На рисунке 4.2.8 представлена ЗЭ-модель расположения элементов
двигательной установки на посадочной платформе. Двигательная установка располо¬
жена в нижней части панели (сотопанели) посадочной платформы, в ее центре - рас¬
положен тормозной двигатель, окруженный восьмигранным каркасом. Каркас кре¬
пится непосредственно к сотопанели. Тормозной двигатель в четырех точках через
кронштейны крепится к сотопанели. На сотопанели в плоскостях тангажа и рыска¬
ния размещаются восемь двигателей стабилизации и ориентации (двигатели малой
тяги - ДМТ) в четырех диаметрально противоположных двигательных блоках. Такое
расположение позволяет использовать двигатели в управлении положением ДМ от¬
носительно центра масс не только по каналам тангажа и рыскания, но и крена.
На периферии сотопанели расположены четыре топливных бака вместимостью
0,04 м3 каждый. Топливный бак крепится к сотопанели с помощью фланца, располо¬
женного в его диаметральной плоскости.
Два баллона высокого давления установлены на ложементы и крепятся к ним
с помощью лент. Сами ложементы закреплены непосредственно к сотопанели.
Баллоны имеют композитную структуру: металлический лейнер и внешняя об¬
мотка из углеродной нити. Внешний вид баллона высокого давления представлен
на рисунке 4.2.9.
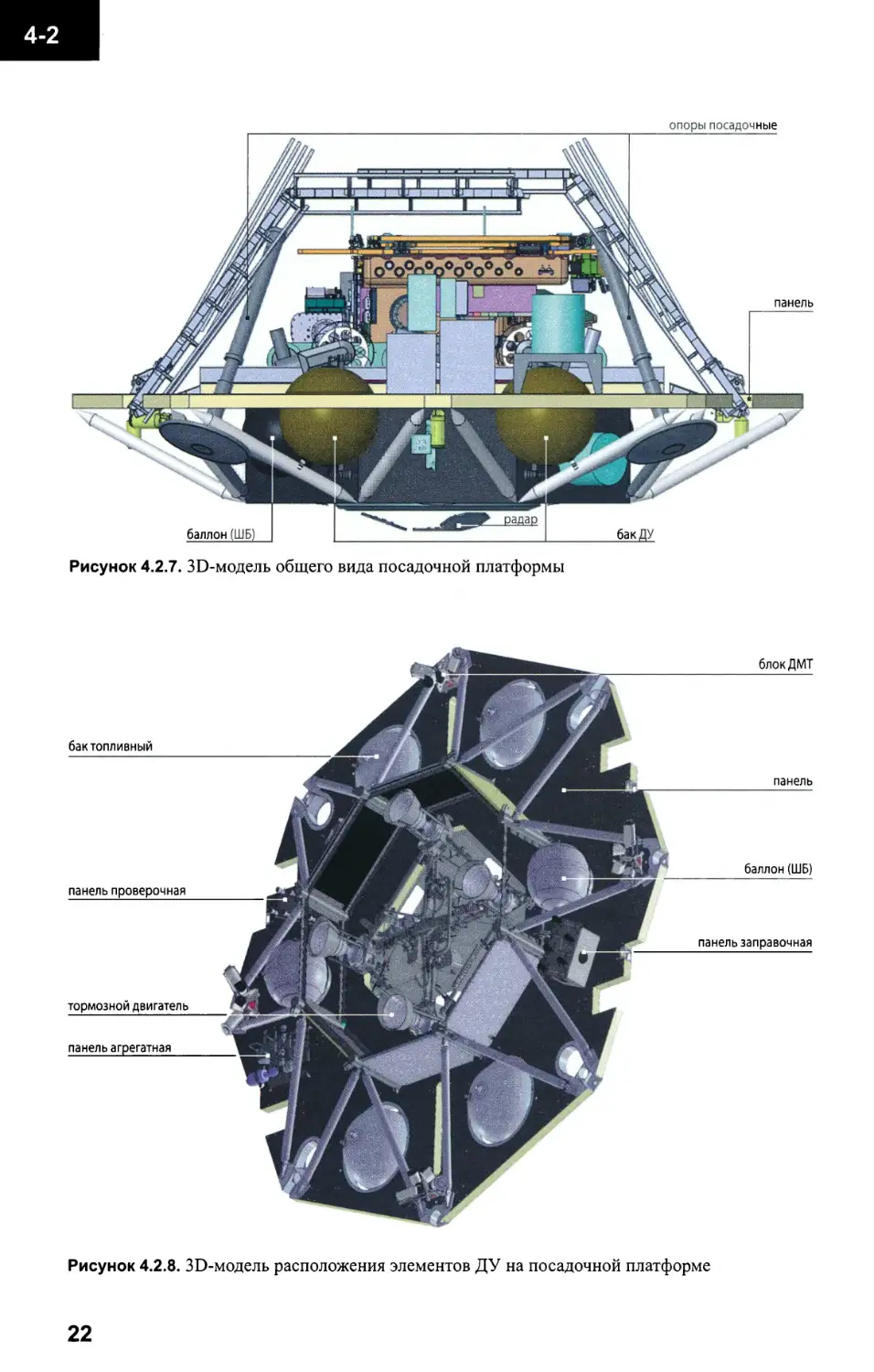
Значительная часть агрегатов ДУ (клапаны заправочные и проверочные, пиро¬
клапаны наддува, ресиверы, автоматический регулятор давления, телеметрические
датчики давления) скомпонованы на трех панелях: заправочной, проверочной, агре¬
гатной. Панели крепятся непосредственно к сотопанели. Пироклапаны топливные
крепятся к бакам с помощью специальных кронштейнов.
Элементы СОТР ДУ закреплены на панелях (заправочной, проверочной, агрегат¬
ной) и кронштейнах с агрегатами ДУ, а также непосредственно на баках, баллонах,
трубопроводах, на экранах и каркасах.
Тепловой режим топливных баков обеспечивается установкой электронагревате¬
лей на каждый бак. В качестве температурного чувствительного элемента, управля¬
ющего включением и выключением электронагревателей топливных баков, исполь¬
зуются температурные датчики, управляемые бортовым комплексом управления.
21
4-2
опоры посадочные
баллон (ШБ)
бак ДУ
Рисунок 4.2.7. ЗЭ-модель общего вида посадочной платформы
бак топливный
панель проверочная
тормозной двигатель
панель агрегатная
блок ДМТ
панель
баллон (ШБ)
панель заправочная
Рисунок 4.2.8. ЗЭ-модель расположения элементов ДУ на посадочной платформе
22
4-2
Рисунок 4.2.9. Баллон высокого давления
Управление работой электронагревателя каждого бака осуществляется следующим
образом: при температуре конструкции топливного бака в зоне установки темпера¬
турных датчиков ниже плюс 15°С электронагреватель включается, при температуре
конструкции топливного бака в зоне установки температурных датчиков выше плюс
20°С электронагреватель отключается.
Кроме того, тепловая мощность, выделяющаяся в приборах и оборудовании ДМ
с помощью лучистого и кондуктивного теплообмена, передается на конструкцию то¬
пливных баков, повышая температуру элементов конструкции и топлива.
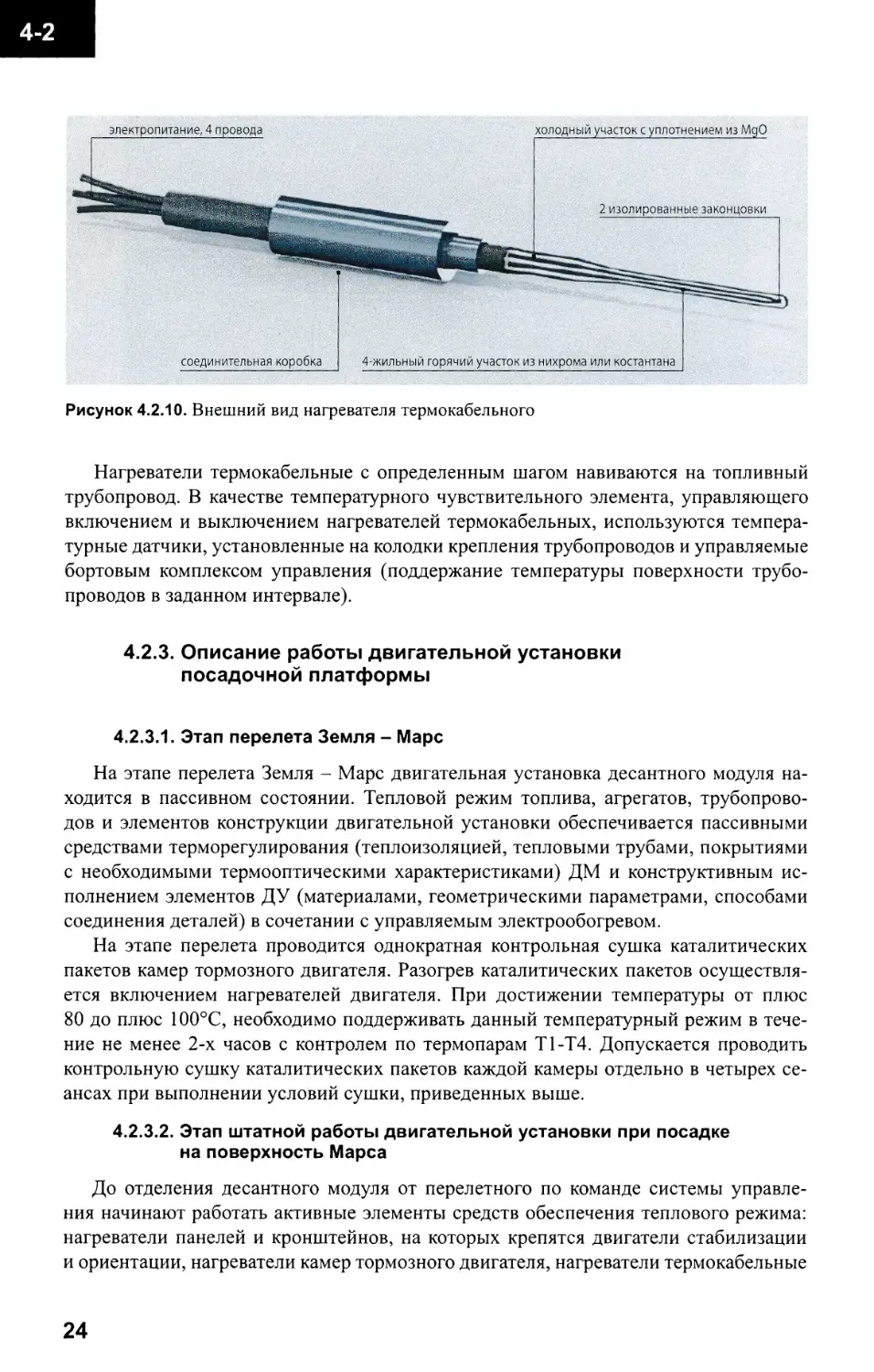
Заданный температурный режим топливных трубопроводов двигательной уста¬
новки обеспечивается специально разработанными для ДУ «ЭкзоМарс» нагревате¬
лями термокабёльными, которые непосредственно устанавливаются на трубы. На¬
греватели термокабельные представляют собой тонкие пластически деформируемые
трубки диаметром от 1 мм до 2,5 мм. Внутри трубки термокабеля протянуты четыре
проводника, на одном конце попарно соединенных сваркой, и, таким образом, обра¬
зующие два контура (один основной + один резервный) нагревательного элемента.
Оболочка (трубка) нагревательного элемента термокабеля выполнена из нержавею¬
щей стали марки 304L. Материал, из которого изготавливается проводник - «нихром
Nc и константан К». Также термокабель включает холодный участок длиной 10 мм
и соединительный элемент (переходник), залитый компаундом, в котором проводни¬
ки нагревательного элемента соединяются с кабелем подвода питания. Внешний вид
нагревателя термокабельного представлен на рисунке 4.2.10.
23
4-2
Рисунок 4.2.10. Внешний вид нагревателя термокабельного
Нагреватели термокабельные с определенным шагом навиваются на топливный
трубопровод. В качестве температурного чувствительного элемента, управляющего
включением и выключением нагревателей термокабельных, используются темпера¬
турные датчики, установленные на колодки крепления трубопроводов и управляемые
бортовым комплексом управления (поддержание температуры поверхности трубо¬
проводов в заданном интервале).
4.2.3. Описание работы двигательной установки
посадочной платформы
4.2.3.1. Этап перелета Земля - Марс
На этапе перелета Земля - Марс двигательная установка десантного модуля на¬
ходится в пассивном состоянии. Тепловой режим топлива, агрегатов, трубопрово¬
дов и элементов конструкции двигательной установки обеспечивается пассивными
средствами терморегулирования (теплоизоляцией, тепловыми трубами, покрытиями
с необходимыми термооптическими характеристиками) ДМ и конструктивным ис¬
полнением элементов ДУ (материалами, геометрическими параметрами, способами
соединения деталей) в сочетании с управляемым электрообогревом.
На этапе перелета проводится однократная контрольная сушка каталитических
пакетов камер тормозного двигателя. Разогрев каталитических пакетов осуществля¬
ется включением нагревателей двигателя. При достижении температуры от плюс
80 до плюс 100°С, необходимо поддерживать данный температурный режим в тече¬
ние не менее 2-х часов с контролем по термопарам Т1-Т4. Допускается проводить
контрольную сушку каталитических пакетов каждой камеры отдельно в четырех се¬
ансах при выполнении условий сушки, приведенных выше.
4.2.3.2. Этап штатной работы двигательной установки при посадке
на поверхность Марса
До отделения десантного модуля от перелетного по команде системы управле¬
ния начинают работать активные элементы средств обеспечения теплового режима:
нагреватели панелей и кронштейнов, на которых крепятся двигатели стабилизации
и ориентации, нагреватели камер тормозного двигателя, нагреватели термокабельные
24
4-2
на трубопроводах. Они доводят температуру элементов двигательной установки, кон¬
тактирующих с топливом, до значения не менее плюс 5°C, а нагреватели камер тор¬
мозного двигателя должны обеспечить на момент выдачи команды «Пуск ТД» темпе¬
ратуру камер в диапазоне от плюс 70°С до плюс 90°С в течение не менее 2-х часов.
Затем подается команда на открытие электроклапанов двигателей стабилизации
и ориентации. Начинается этап вакуумирования топливных магистралей двигатель¬
ной установки до пироклапанов, установленных после топливных баков и до клапа¬
на входа в тормозной двигатель. Этап вакуумирования топливных магистралей дви¬
гательной установки длится 1-2 минуты, после чего подается команда на закрытие
электроклапанов двигателей стабилизации и ориентации. С обмоток электроклапа¬
нов двигателей снимается напряжение.
Через 4 минуты после отделения десантного модуля от перелетного подается ко¬
манда на включение электронагревателей двигателей стабилизации и ориентации.
Время нагрева реакторов двигателей - 60 минут.
Через 57 минут после отделения десантного модуля от перелетного подается ко¬
манда на подрыв пиропатронов пироклапанов топливных ПК1-ПК4. Топливо
начинает заполнять магистрали двигательной установки от баков до электроклапанов
двигателей стабилизации и ориентации и до клапана входа в тормозной двигатель.
Через 30 секунд подается команда на подрыв пиропатронов пироклапанов надду¬
ва ПК5, ПК6, ПК7, установленных на выходе из баллонов высокого давления. Газ
наддува через ресиверы поступает в автоматический регулятор давления, а из него -
в наддувные полости топливных баков. Происходит плавное нарастание давления
топлива в магистралях до заданного значения. Топливо, газ управления и продувки
находятся под необходимым давлением на входе в тормозной двигатель и в двигатели
стабилизации и ориентации.
На 61-й минуте после подачи команды на разогрев двигателей стабилизации
и ориентации их нагреватели выключаются. Двигатели готовы к работе по командам
системы управления десантного модуля. Подается команда «Пуск ДМТ». Ориенти¬
ровочно за 4-5 секунд до команды «Пуск ДМТ» происходит отделение аэродинами¬
ческого (лобового, защитного) экрана.
Через 3 секунды после отделения аэродинамического экрана начинается этап под¬
готовки к пуску тормозного двигателя. Подается команда на открытие пускоотсеч¬
ных клапанов на входах в камеры тормозного двигателя. Начинается вакуумирование
магистралей тормозного двигателя продолжительностью 4 секунды. По заверше¬
нии времени вакуумирования подается команда на открытие электропневмоклапана
управления пускоотсечным клапаном подачи топлива в тормозной двигатель. При
этом пускоотсечные клапаны на входах в камеры закрываются. Топливо (гидразин)
заполняет полости регулятора тяги, регуляторов разнотяговости и топливные поло¬
сти двигателя до клапанов на входах в камеры. Через 12 секунд после команды на ва¬
куумирование подается команда на перевод угла поворота вала ПРТ в положение,
соответствующее началу работы двигателя (с минус 125° на минус 100°). Тормозной
двигатель готов к работе по командам системы управления десантного модуля.
Команда «Пуск ТД» выдается в интервале 13-120 секунд после команды на вакуу¬
мирование. При этом нагреватели камер тормозного двигателя, обеспечившие необ¬
ходимый температурный режим, выключаются. По команде «Пуск ТД» открываются
пускоотсечные клапаны на входах в камеры тормозного двигателя. Топливо (гидра¬
зин) поступает в камеры двигателя. После команды «Пуск ТД», в течение 4 секунд,
25
4-2
осуществляется режим «прогрева» катализатора. На этом интервале запрещается по¬
дача управляющих импульсов на приводы регулятора тяги и разнотяговости. При этом
тяга двигателя составляет ~ 2 кН. По окончании «прогрева» катализатора запрет на по¬
дачу управляющих импульсов на приводы снимается. Далее система управления вы¬
дает команды, по которым регулятор тяги по заданному закону выводит тягу двигателя
на промежуточный режим и, далее, до максимума, а регуляторы разнотяговости камер
создают необходимые управляющие моменты в каналах тангажа и рыскания. Регуля¬
тор тяги и регуляторы разнотяговости камер работают на принципе регулирования
расхода топлива, поступающего в двигатель и в каждую пару камер. По мере сближе¬
ния посадочной платформы с поверхностью Марса система управления уменьшает
тягу двигателя до уровня 4-6 кН.
По касанию специального щупа поверхности Марса система управления выдает
команду «Останов», по которой закрываются пускоотсечные клапаны подачи топли¬
ва в тормозной двигатель и его камеры; тяга двигателя при этом начинает уменьшать¬
ся по линейному закону. Одновременно открываются электроклапаны магистралей
продувки полостей камер. Газ продувки поступает в головки камер двигателя, вы¬
тесняя топливо из подводящих к камерам трубопроводов, а также из полостей камер.
Тяга двигателя при продувке не более 500 Н, продолжительность режима продувки
5 секунд, после чего следует команда «Окончание продувки». Одновременно по ко¬
манде «Останов» снимается напряжение с электроклапанов двигателей стабилиза¬
ции и ориентации. Двигательная установка посадочной платформы прекращает свою
работу.
Список литературы
Агеенко Ю.И. Двигатель стабилизации, ориентации и обеспечения запуска мар¬
шевого двигателя МКБ «Фрегат» // Вестник НПО им. С.А. Лавочкина. 2014. № 1.
С 44-46.
В.П. Крылов,
B. П. Макаров,
А.А. Поляков,
C. С Степанов
26
4-3
ПИаэродинамика десантного модуля
При выборе формы спускаемого аппарата, предназначенного для эффективно¬
го торможения в разреженной атмосфере Марса, предпочтение отдается выпуклым
телам вращения, обладающим достаточно затупленной лобовой поверхностью
с высоким коэффициентом аэродинамического сопротивления и обеспечивающим
максимально возможный объем для размещения полезного груза. Такими формами
обладают конические и сегментально-конические тела, лобовая часть которых вы¬
полнена в виде сферически затупленного конуса или шарового сегмента, а кормо¬
вая - в виде конусов с различными углами раствора, сопрягаемых с лобовой частью.
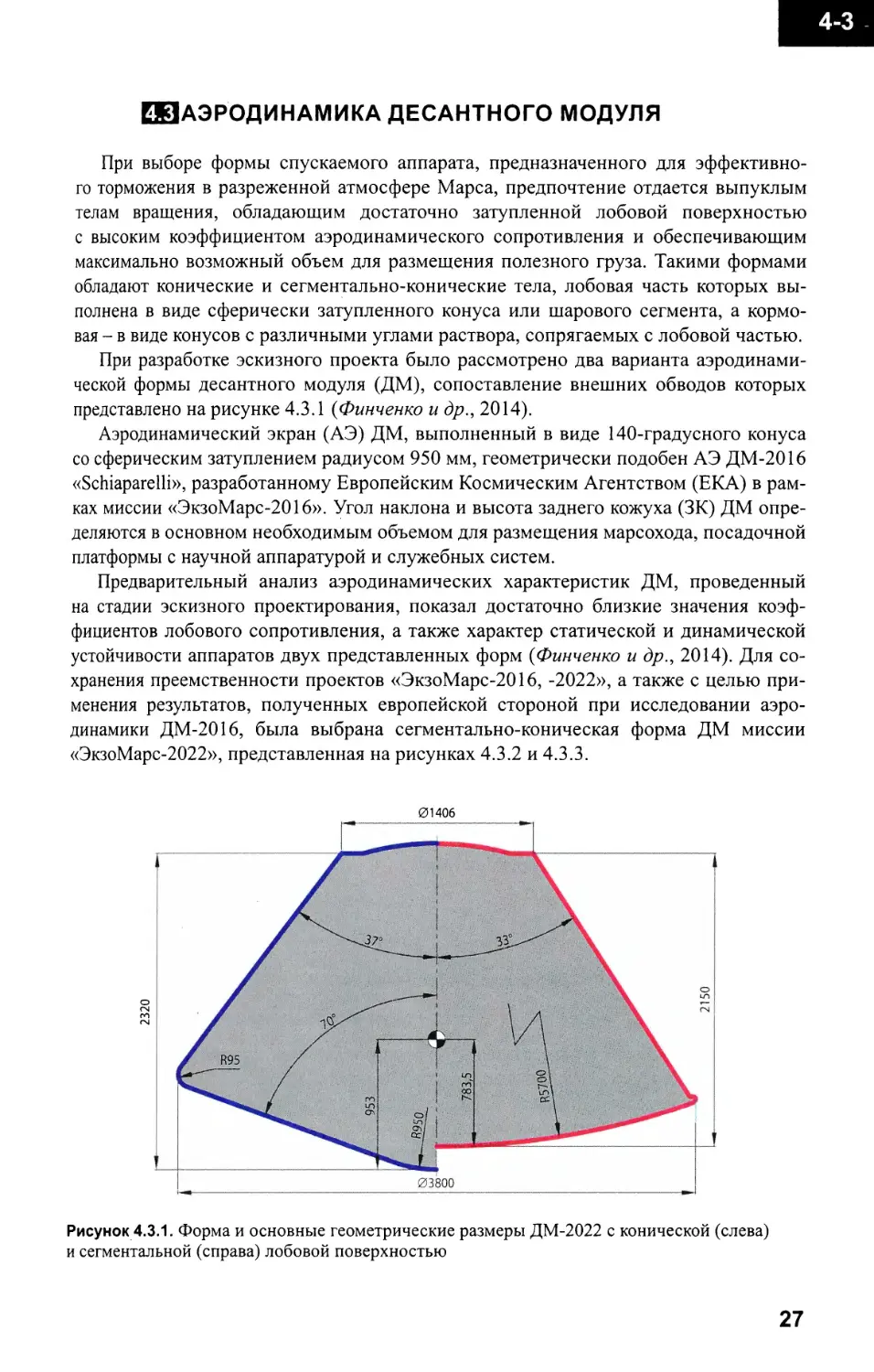
При разработке эскизного проекта было рассмотрено два варианта аэродинами¬
ческой формы десантного модуля (ДМ), сопоставление внешних обводов которых
представлено на рисунке 4.3.1 (Финченко и др., 2014).
Аэродинамический экран (АЭ) ДМ, выполненный в виде 140-градусного конуса
со сферическим затуплением радиусом 950 мм, геометрически подобен АЭ ДМ-2016
«Schiaparelli», разработанному Европейским Космическим Агентством (ЕКА) в рам¬
ках миссии «ЭкзоМарс-2016». Угол наклона и высота заднего кожуха (ЗК) ДМ опре¬
деляются в основном необходимым объемом для размещения марсохода, посадочной
платформы с научной аппаратурой и служебных систем.
Предварительный анализ аэродинамических характеристик ДМ, проведенный
на стадии эскизного проектирования, показал достаточно близкие значения коэф¬
фициентов лобового сопротивления, а также характер статической и динамической
устойчивости аппаратов двух представленных форм (Финченко и др., 2014). Для со¬
хранения преемственности проектов «ЭкзоМарс-2016, -2022», а также с целью при¬
менения результатов, полученных европейской стороной при исследовании аэро¬
динамики ДМ-2016, была выбрана сегментально-коническая форма ДМ миссии
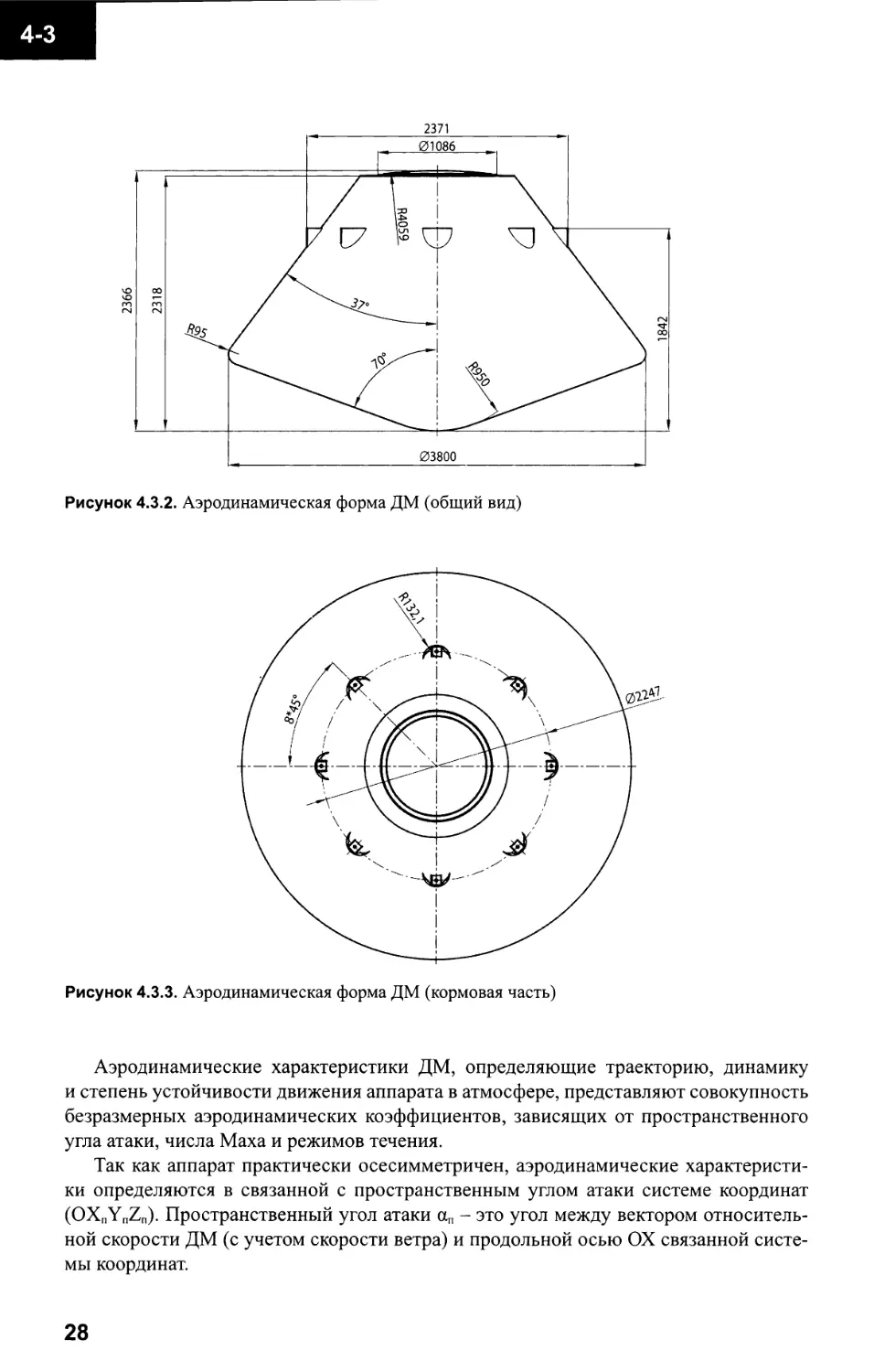
«ЭкзоМарс-2022», представленная на рисунках 4.3.2 и 4.3.3.
Рисунок 4.3.1. Форма и основные геометрические размеры ДМ-2022 с конической (слева)
и сегментальной (справа) лобовой поверхностью
27
4-3
Рисунок 4.3.3. Аэродинамическая форма ДМ (кормовая часть)
Аэродинамические характеристики ДМ, определяющие траекторию, динамику
и степень устойчивости движения аппарата в атмосфере, представляют совокупность
безразмерных аэродинамических коэффициентов, зависящих от пространственного
угла атаки, числа Маха и режимов течения.
Так как аппарат практически осесимметричен, аэродинамические характеристи¬
ки определяются в связанной с пространственным углом атаки системе координат
(OXnYnZn). Пространственный угол атаки ап - это угол между вектором относитель¬
ной скорости ДМ (с учетом скорости ветра) и продольной осью ОХ связанной систе¬
мы координат.
28
4-3
Значения коэффициентов аэродинамической силы в связанной системе коорди¬
нат и аэродинамических характеристик ДМ в системе координат OXnYnZn связаны
соотношением:
(с >
Cx_body
ГсЛ
'\ 0
0
Cy_body
=
Су
• 0 cos ф
sin ф
^Cz_body J
<0 J
k0 -БШф
COS ф?
где Сх, Су - коэффициенты осевой и нормальной аэродинамической силы в системе
координат OXnYnZn как функции пространственного угла атаки (ап) и числа Маха (М)
или пространственного угла атаки и числа Кнудсена (Кп) в зависимости от режима
обтекания;
Сх body, Су body, Cz body - проекции аэродинамических коэффициентов на оси связан¬
ной системы координат OXYZ;
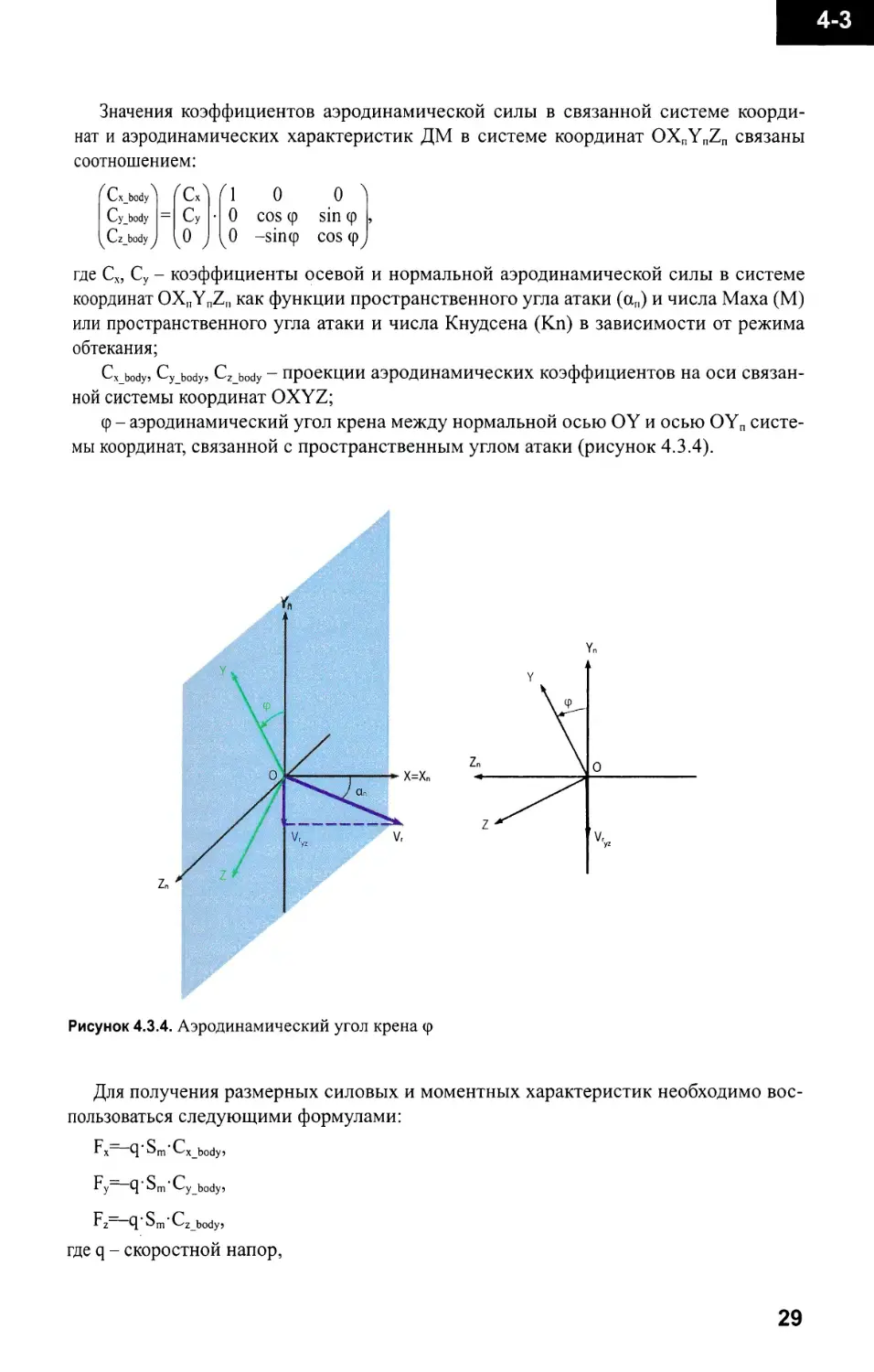
(р - аэродинамический угол крена между нормальной осью OY и осью OYn систе¬
мы координат, связанной с пространственным углом атаки (рисунок 4.3.4).
Рисунок 4.3.4. Аэродинамический угол крена ф
Для получения размерных силовых и моментных характеристик необходимо вос¬
пользоваться следующими формулами:
Fx Q Sm’Cx_body,
Fy q Sm Cy_body,
Fz—q*Sm-C
zbody,
где q - скоростной напор,
29
4-3
Vr - относительная скорость ДМ;
р - плотность атмосферы;
Sm - характерная площадь.
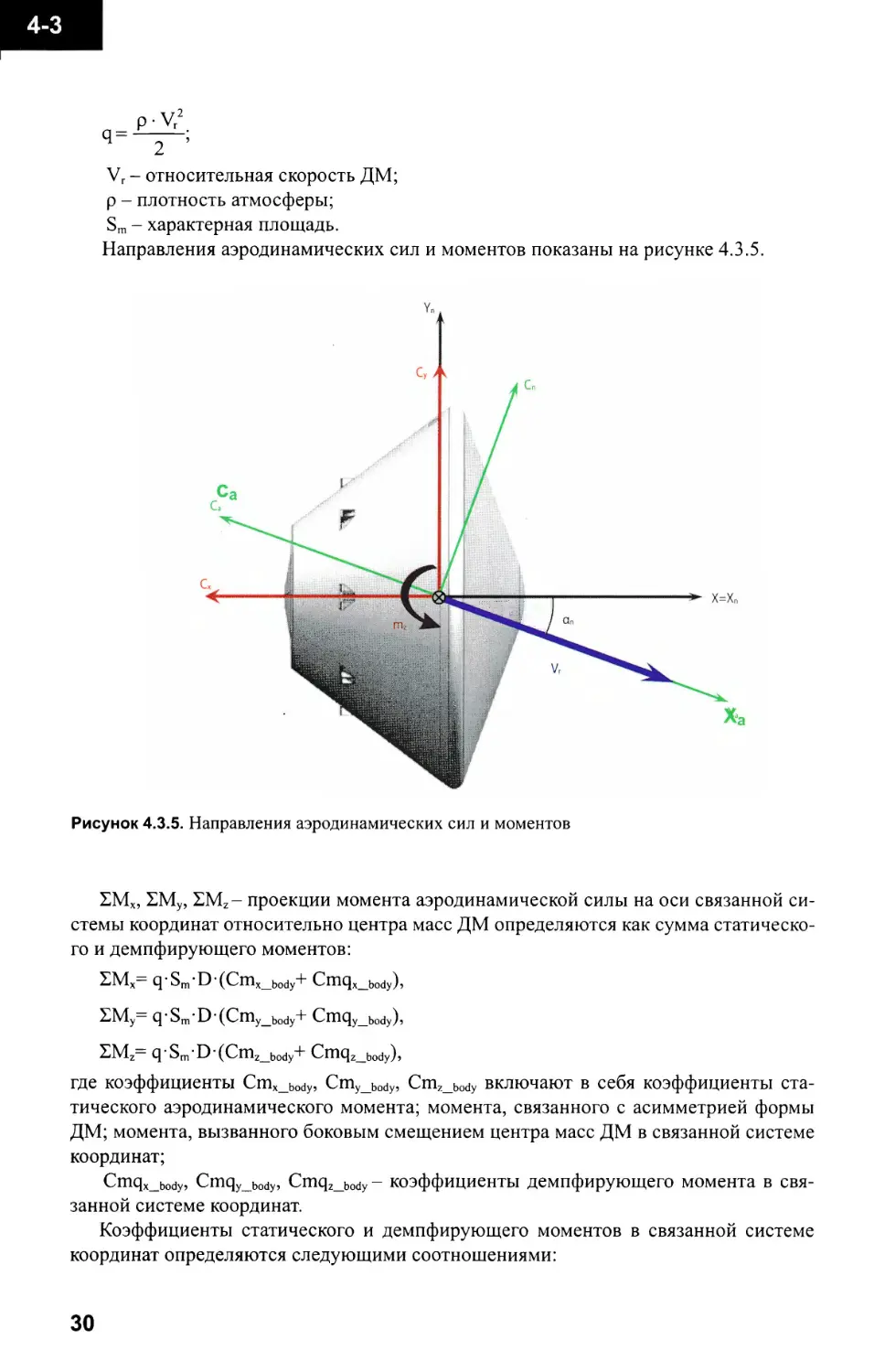
Направления аэродинамических сил и моментов показаны на рисунке 4.3.5.
Yn
Рисунок 4.3.5. Направления аэродинамических сил и моментов
ZMX, LMy, ZMz- проекции момента аэродинамической силы на оси связанной си¬
стемы координат относительно центра масс ДМ определяются как сумма статическо¬
го и демпфирующего моментов:
q Sm D (Cmx_bOdy+ Cmqx body),
SMy q-Sm D(Cmy body^- Cmqybody),
SMZ — q-Sm-D-(Cmz body-*- Cmqz_bOdy),
где коэффициенты Cmx_body, Cmy_bOdy? Cmz_bOdy включают в себя коэффициенты ста¬
тического аэродинамического момента; момента, связанного с асимметрией формы
ДМ; момента, вызванного боковым смещением центра масс ДМ в связанной системе
координат;
Cmqx_body, Cmqy_body, Cmqz_bOdy- коэффициенты демпфирующего момента в свя¬
занной системе координат.
Коэффициенты статического и демпфирующего моментов в связанной системе
координат определяются следующими соотношениями:
30
4-3
ClTlxbody
Cniybody
ClTlz_body ;
0
cos ф
-sin (p
sin (p
cos (p?
—Cx_body ’
к
Y_CoG
D
Ycog"
D
^CmQxbody^
Cmqy_body
4Cmqz_body ?
Vr
т“2-со;,-D
m^-oyD
Vr
к 7
7
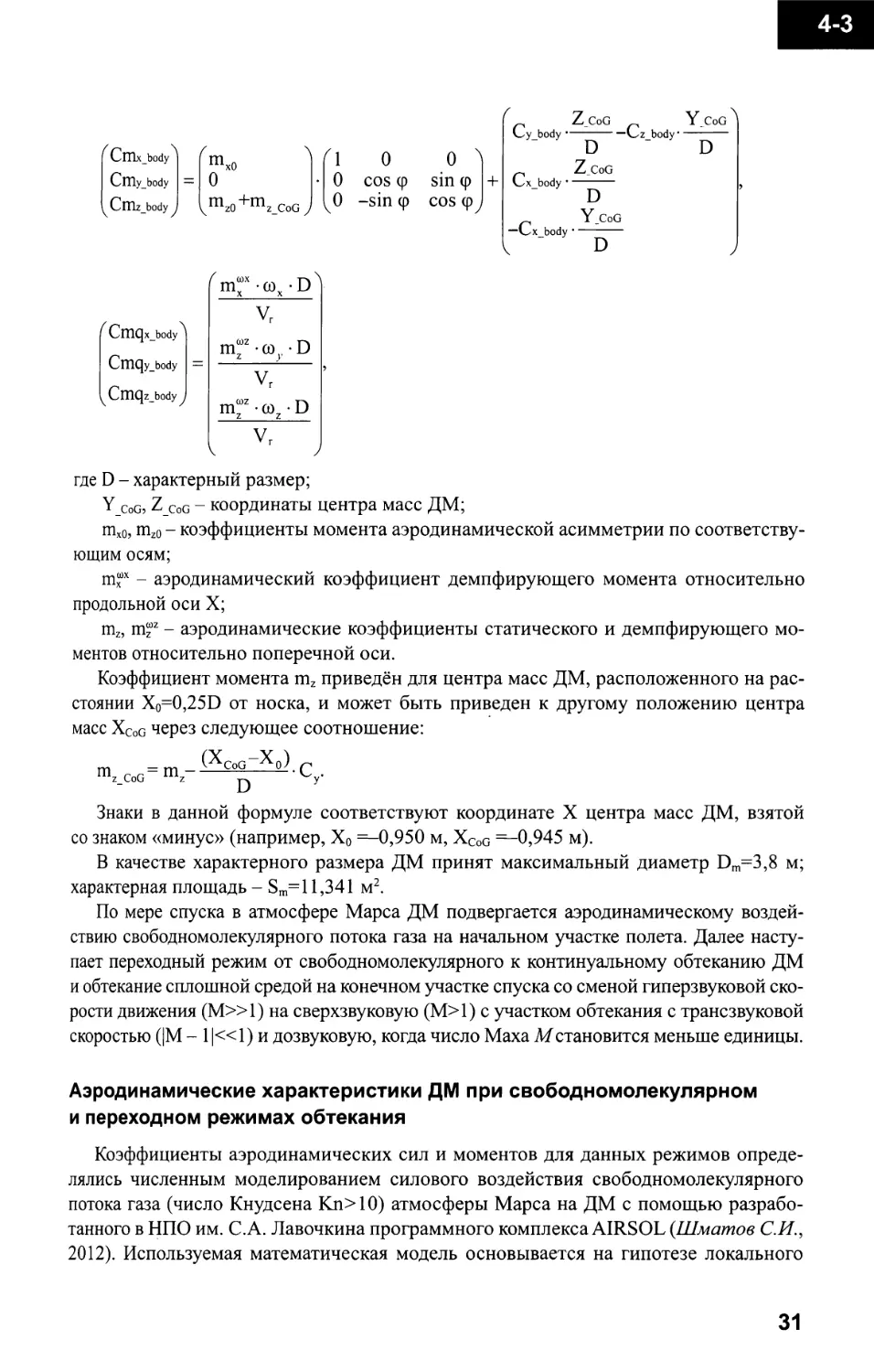
где D - характерный размер;
Y cog, Z Cog - координаты центра масс ДМ;
mx0, mz0 - коэффициенты момента аэродинамической асимметрии по соответству¬
ющим осям;
т“х - аэродинамический коэффициент демпфирующего момента относительно
продольной оси X;
mz, mzz - аэродинамические коэффициенты статического и демпфирующего мо¬
ментов относительно поперечной оси.
Коэффициент момента mz приведён для центра масс ДМ, расположенного на рас¬
стоянии Xo=O,25D от носка, и может быть приведен к другому положению центра
масс Хсос через следующее соотношение:
Знаки в данной формуле соответствуют координате X центра масс ДМ, взятой
со знаком «минус» (например, Хо =-0,950 м, ХСос =-0,945 м).
В качестве характерного размера ДМ принят максимальный диаметр Dm=3,8 м;
характерная площадь - Sm=l 1,341 м2.
По мере спуска в атмосфере Марса ДМ подвергается аэродинамическому воздей¬
ствию свободномолекулярного потока газа на начальном участке полета. Далее насту¬
пает переходный режим от свободномолекулярного к континуальному обтеканию ДМ
и обтекание сплошной средой на конечном участке спуска со сменой гиперзвуковой ско¬
рости движения (М»1) на сверхзвуковую (М>1) с участком обтекания с трансзвуковой
скоростью (|М - 1|«1) и дозвуковую, когда число Маха Л/становится меньше единицы.
Аэродинамические характеристики ДМ при свободномолекулярном
и переходном режимах обтекания
Коэффициенты аэродинамических сил и моментов для данных режимов опреде¬
лялись численным моделированием силового воздействия свободномолекулярного
потока газа (число Кнудсена Кп>10) атмосферы Марса на ДМ с помощью разрабо¬
танного в НПО им. С. А. Лавочкина программного комплекса AIRSOL {Шматов С.И.,
2012). Используемая математическая модель основывается на гипотезе локального
31
4-3
взаимодействия потока частиц с обтекаемой поверхностью, согласно которой воздей¬
ствие на элементарную площадку поверхности ДМ зависит только от параметров на¬
бегающего потока и угла между вектором скорости набегающего потока и локальной
нормалью к поверхности {Коган М.Н., 1967; Финченко В. С., Шматов С.И., 2012).
По мере снижения ДМ наступает переходный режим обтекания (Кп~1), когда роль
межмолекулярных столкновений становится существенной. В переходном режиме
обтекания (0,001<Кп<10) аэродинамические характеристики определялись с помо¬
щью бриджинг-метода, который также опирается на гипотезу локальности и пред¬
ставляет собой инженерную интерполяцию аэродинамических коэффициентов.
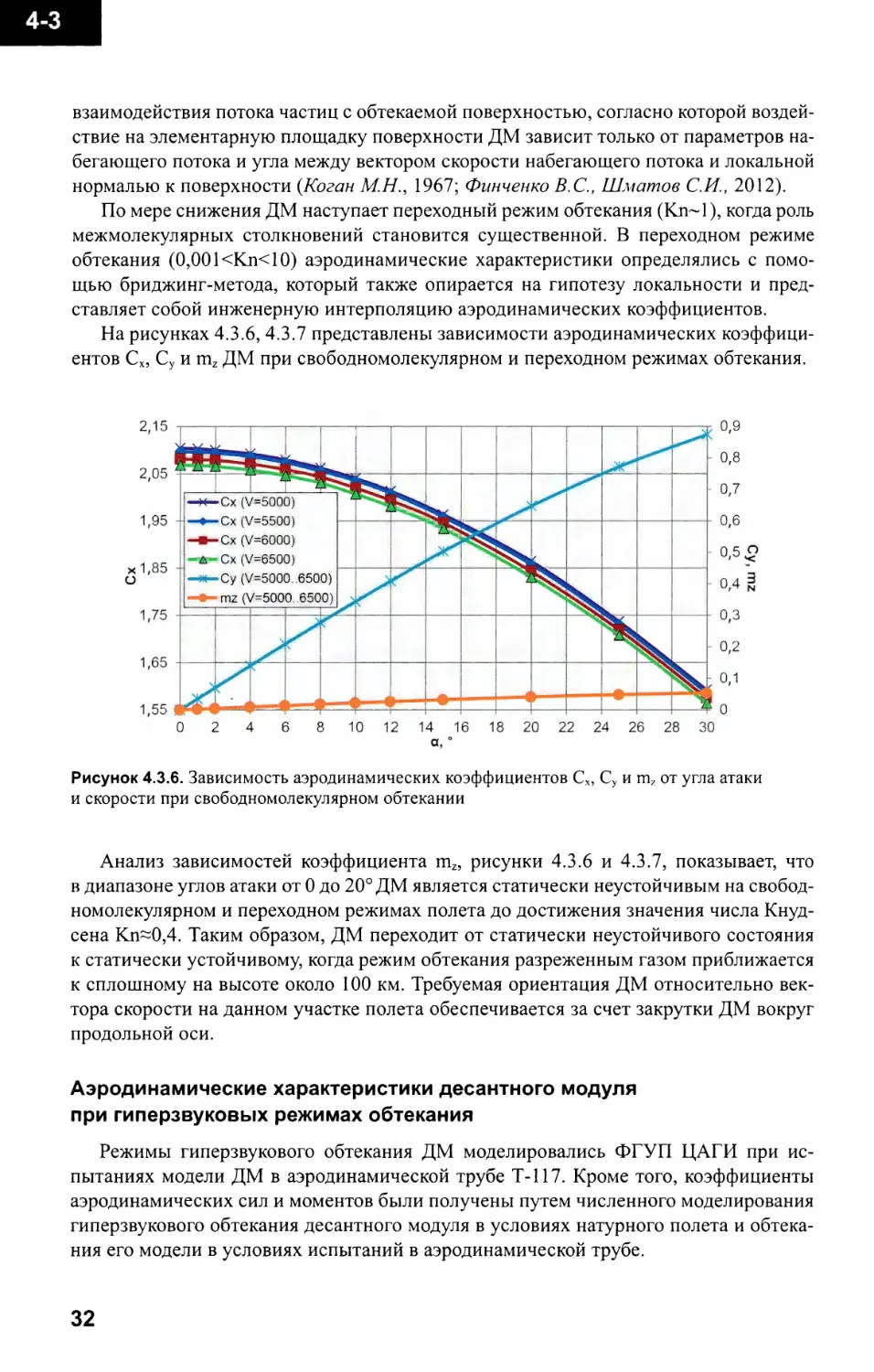
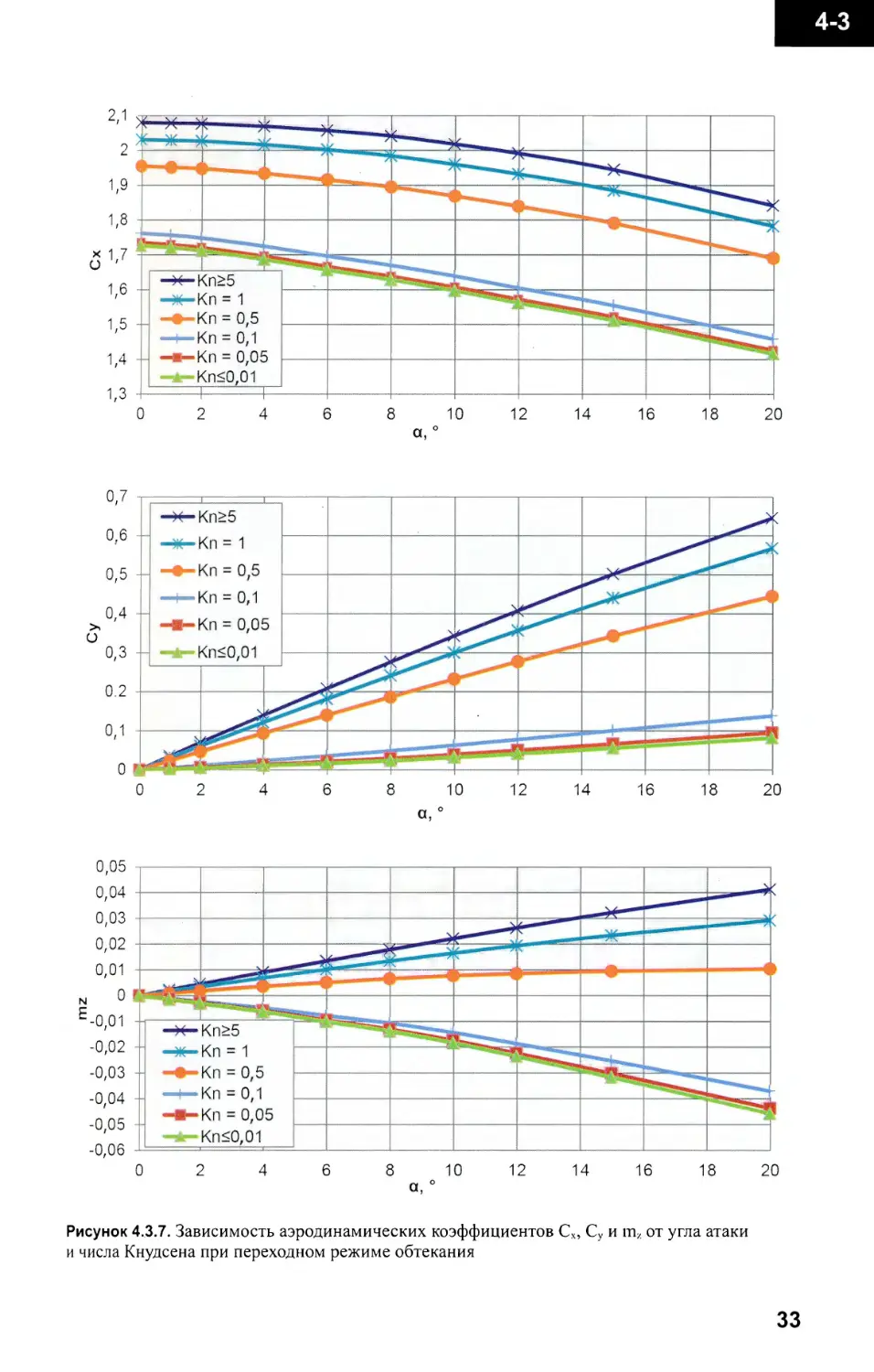
На рисунках 4.3.6, 4.3.7 представлены зависимости аэродинамических коэффици¬
ентов Сх, Су и mz ДМ при свободномолекулярном и переходном режимах обтекания.
а, °
Рисунок 4.3.6. Зависимость аэродинамических коэффициентов Сх, Су и mz от угла атаки
и скорости при свободномолекулярном обтекании
Анализ зависимостей коэффициента mz, рисунки 4.3.6 и 4.3.7, показывает, что
в диапазоне углов атаки от 0 до 20° ДМ является статически неустойчивым на свобод¬
номолекулярном и переходном режимах полета до достижения значения числа Кнуд¬
сена Кп~0,4. Таким образом, ДМ переходит от статически неустойчивого состояния
к статически устойчивому, когда режим обтекания разреженным газом приближается
к сплошному на высоте около 100 км. Требуемая ориентация ДМ относительно век¬
тора скорости на данном участке полета обеспечивается за счет закрутки ДМ вокруг
продольной оси.
Аэродинамические характеристики десантного модуля
при гиперзвуковых режимах обтекания
Режимы гиперзвукового обтекания ДМ моделировались ФГУП ЦАГИ при ис¬
пытаниях модели ДМ в аэродинамической трубе Т-117. Кроме того, коэффициенты
аэродинамических сил и моментов были получены путем численного моделирования
гиперзвукового обтекания десантного модуля в условиях натурного полета и обтека¬
ния его модели в условиях испытаний в аэродинамической трубе.
32
4-3
а, °
а, °
Рисунок 4.3.7. Зависимость аэродинамических коэффициентов Сх, Су и mz от угла атаки
и числа Кнудсена при переходном режиме обтекания
33
4-3
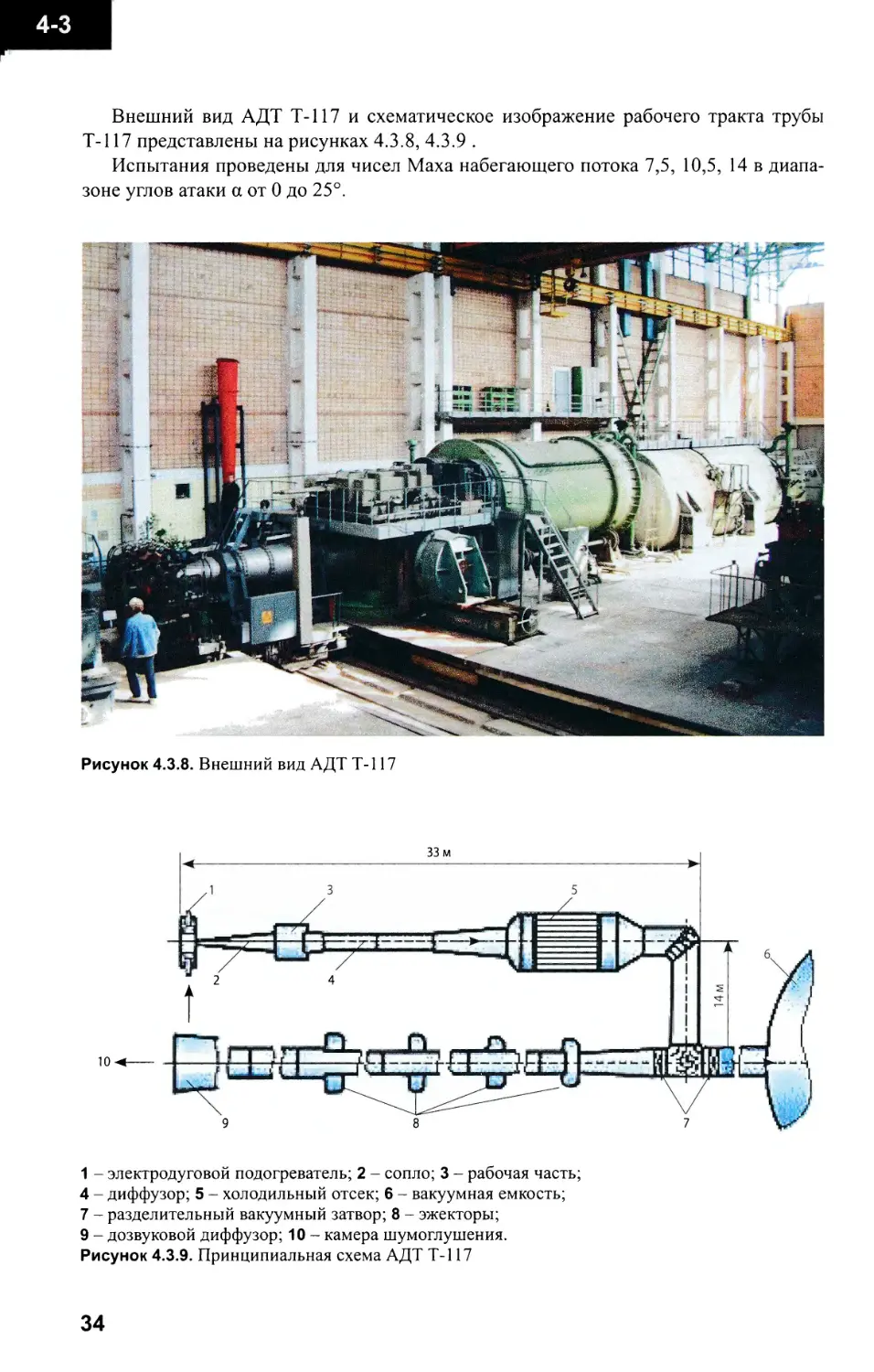
Внешний вид АДТ Т-117 и схематическое изображение рабочего тракта трубы
Т-117 представлены на рисунках 4.3.8, 4.3.9 .
Испытания проведены для чисел Маха набегающего потока 7,5, 10,5, 14 в диапа¬
зоне углов атаки а от 0 до 25°.
Рисунок 4.3.8. Внешний вид АДТ Т-117
1 - электродуговой подогреватель; 2 - сопло; 3 - рабочая часть;
4 - диффузор; 5 - холодильный отсек; 6 - вакуумная емкость;
7 - разделительный вакуумный затвор; 8 - эжекторы;
9 - дозвуковой диффузор; 10 - камера шумоглушения.
Рисунок 4.3.9. Принципиальная схема АДТ Т-117
34
4-3
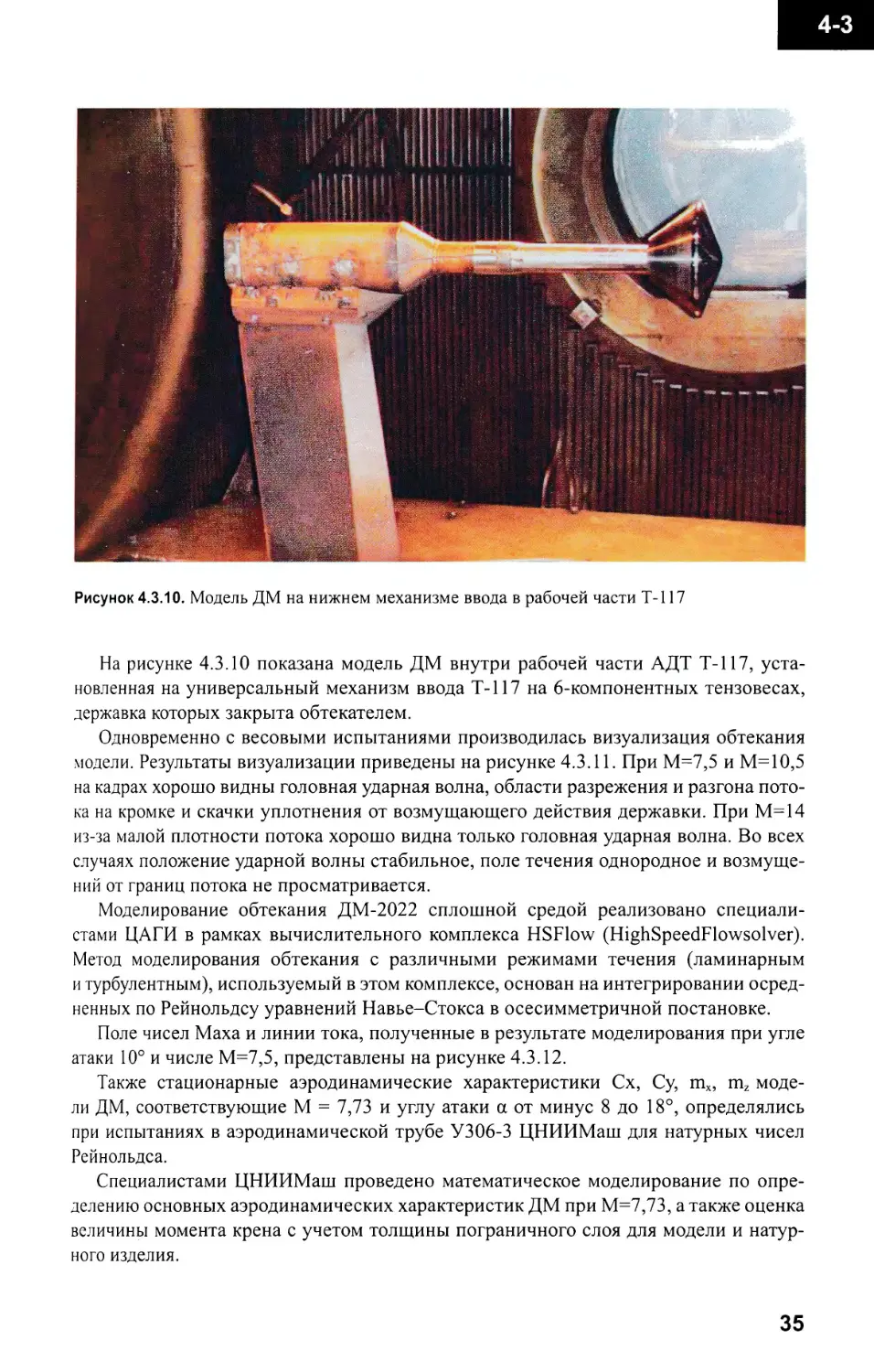
Рисунок 4.3.10. Модель ДМ на нижнем механизме ввода в рабочей части Т-117
На рисунке 4.3.10 показана модель ДМ внутри рабочей части АДТ Т-117, уста¬
новленная на универсальный механизм ввода Т-117 на 6-компонентных тензовесах,
державка которых закрыта обтекателем.
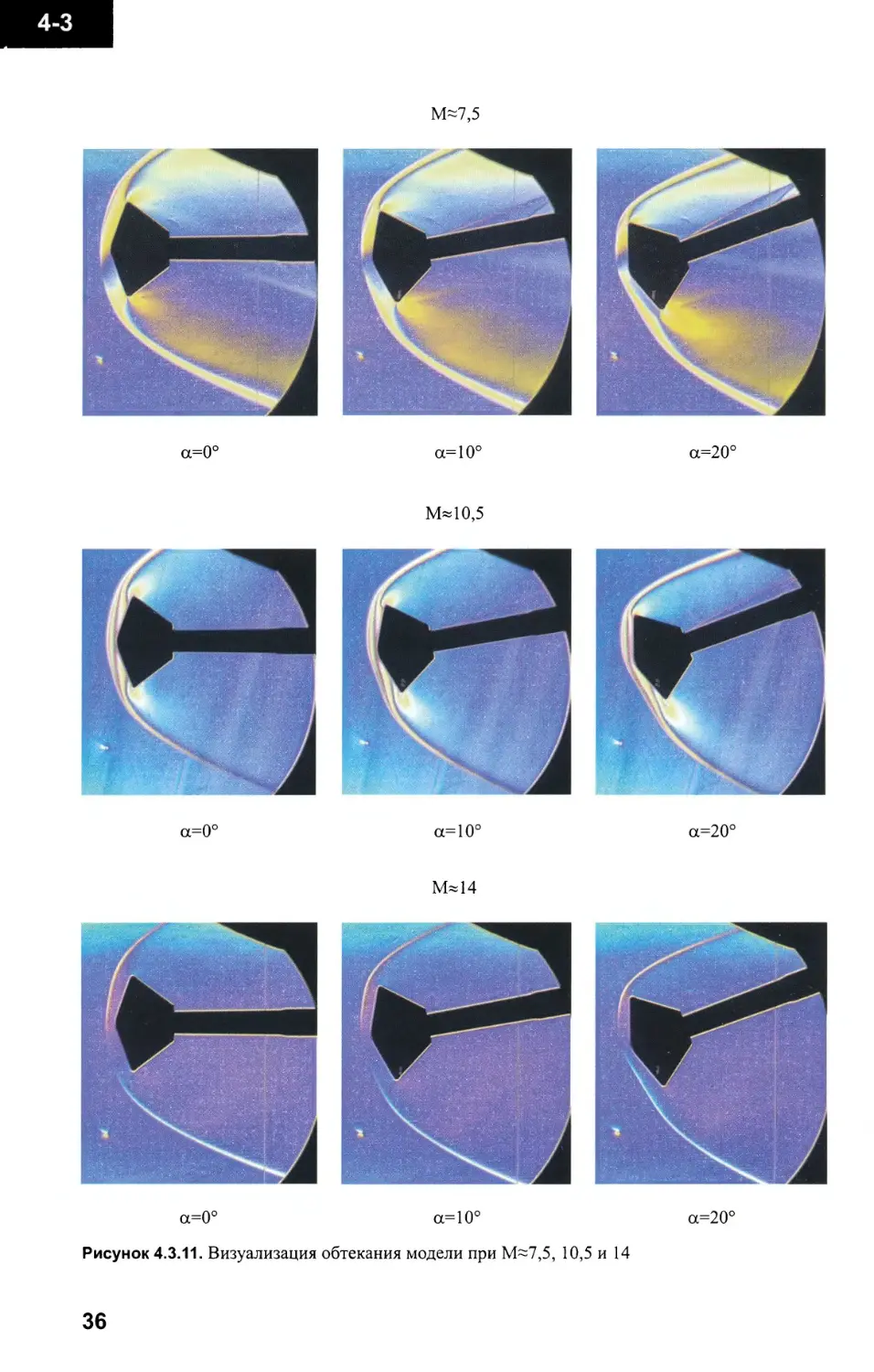
Одновременно с весовыми испытаниями производилась визуализация обтекания
модели. Результаты визуализации приведены на рисунке 4.3.11. При М=7,5 и М=10,5
на кадрах хорошо видны головная ударная волна, области разрежения и разгона пото¬
ка на кромке и скачки уплотнения от возмущающего действия державки. При М=14
из-за малой плотности потока хорошо видна только головная ударная волна. Во всех
случаях положение ударной волны стабильное, поле течения однородное и возмуще¬
ний от границ потока не просматривается.
Моделирование обтекания ДМ-2022 сплошной средой реализовано специали¬
стами ЦАГИ в рамках вычислительного комплекса HSFlow (HighSpeedFlowsolver).
Метод моделирования обтекания с различными режимами течения (ламинарным
и турбулентным), используемый в этом комплексе, основан на интегрировании осред-
ненных по Рейнольдсу уравнений Навье-Стокса в осесимметричной постановке.
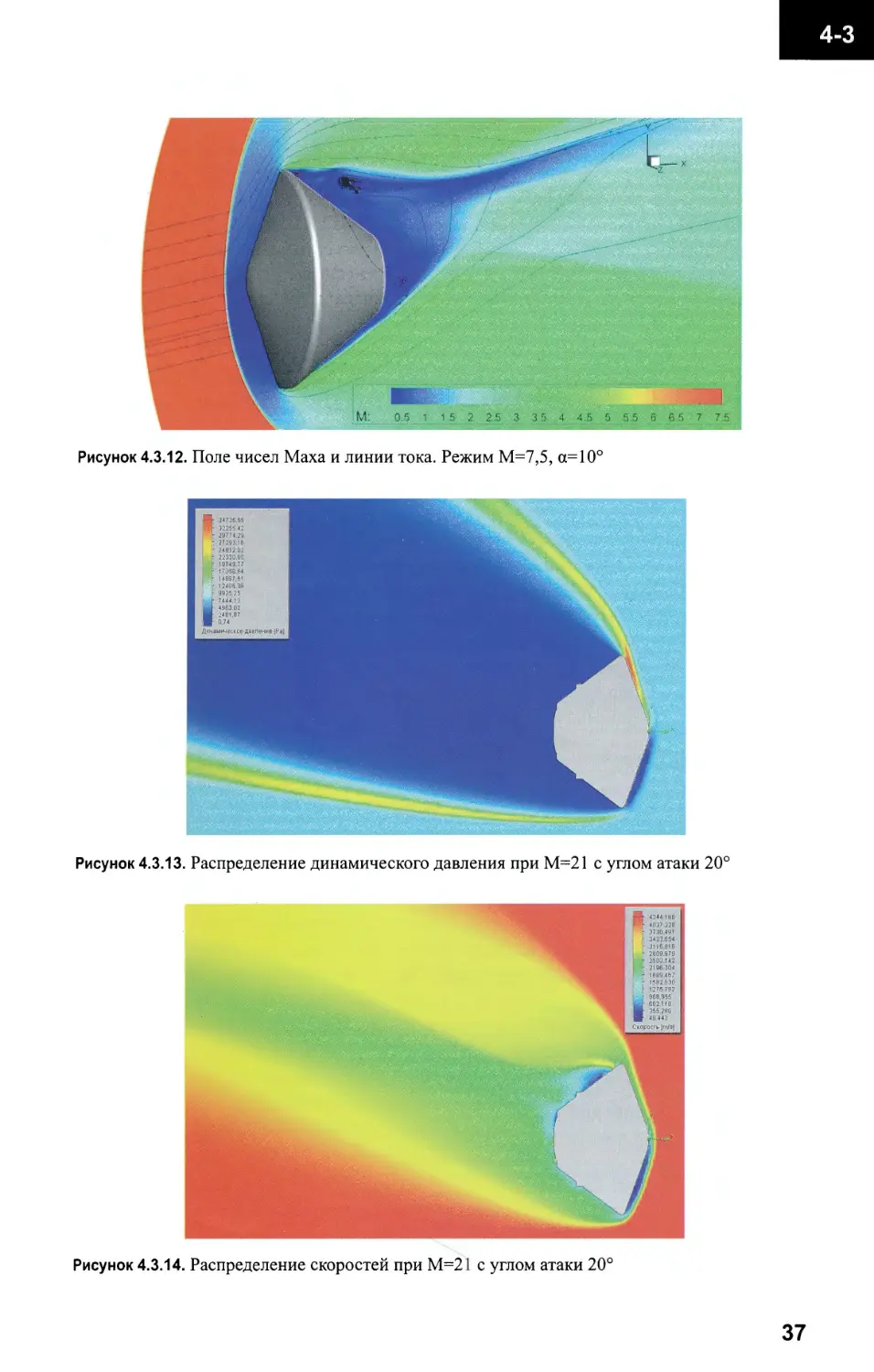
Поле чисел Маха и линии тока, полученные в результате моделирования при угле
атаки 10° и числе М=7,5, представлены на рисунке 4.3.12.
Также стационарные аэродинамические характеристики Сх, Су, mx, mz моде¬
ли ДМ, соответствующие М = 7,73 и углу атаки а от минус 8 до 18°, определялись
при испытаниях в аэродинамической трубе УЗ06-3 ЦНИИМаш для натурных чисел
Рейнольдса.
Специалистами ЦНИИМаш проведено математическое моделирование по опре¬
делению основных аэродинамических характеристик ДМ при М=7,73, а также оценка
величины момента крена с учетом толщины пограничного слоя для модели и натур¬
ного изделия.
35
4-3
М~7,5
а=0°
ос=10°
М«10,5
ос=0°
ос=10°
М«14
а=0°
ос=10°
Рисунок 4.3.11. Визуализация обтекания модели при М~7,5, 10,5 и 14
36
4-3
Рисунок 4.3.12. Поле чисел Маха и линии тока. Режим М=7,5, а=10°
Рисунок 4.3.13. Распределение динамического давления при М=21 с углом атаки 20°
Рисунок 4.3.14. Распределение скоростей при М=21 с углом атаки 20°
37
4-3
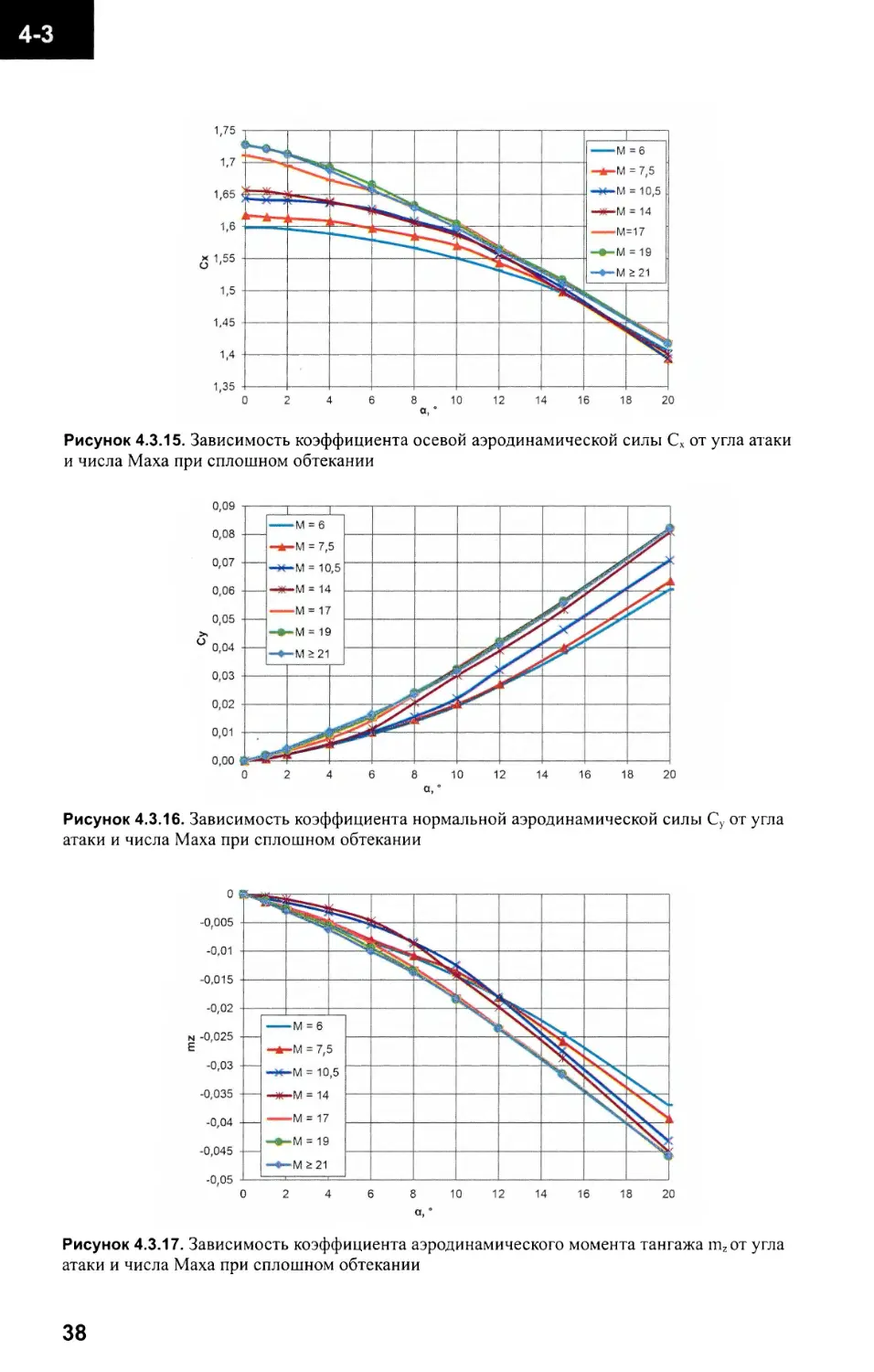
Рисунок 4.3.15. Зависимость коэффициента осевой аэродинамической силы Сх от угла атаки
и числа Маха при сплошном обтекании
Рисунок 4.3.16. Зависимость коэффициента нормальной аэродинамической силы Су от угла
атаки и числа Маха при сплошном обтекании
Рисунок 4.3.17. Зависимость коэффициента аэродинамического момента тангажа т2от угла
атаки и числа Маха при сплошном обтекании
38
4-3
Определение АДХ ДМ для натурных условий полета в гиперзвуковом диапазоне
проводилось также в НПО им. Лавочкина с использованием программного комплекса
FloEFD.
На рисунках 4.3.13, 4.3.14 представлена визуализация распределения параметров
потока вокруг ДМ, полученная с помощью FloEFD для М=21 и угла атаки 20°.
Прогноз аэродинамических характеристик ДМ в условиях натурного полёта в ат¬
мосфере Марса сделан на основе анализа расчётных и экспериментальных данных.
На рисунках 4.3.15^1.3.17 представлены зависимости АДХ от числа Маха и угла
атаки.
Аэродинамические характеристики десантного модуля
при сверх-, транс- и дозвуковом режимах обтекания
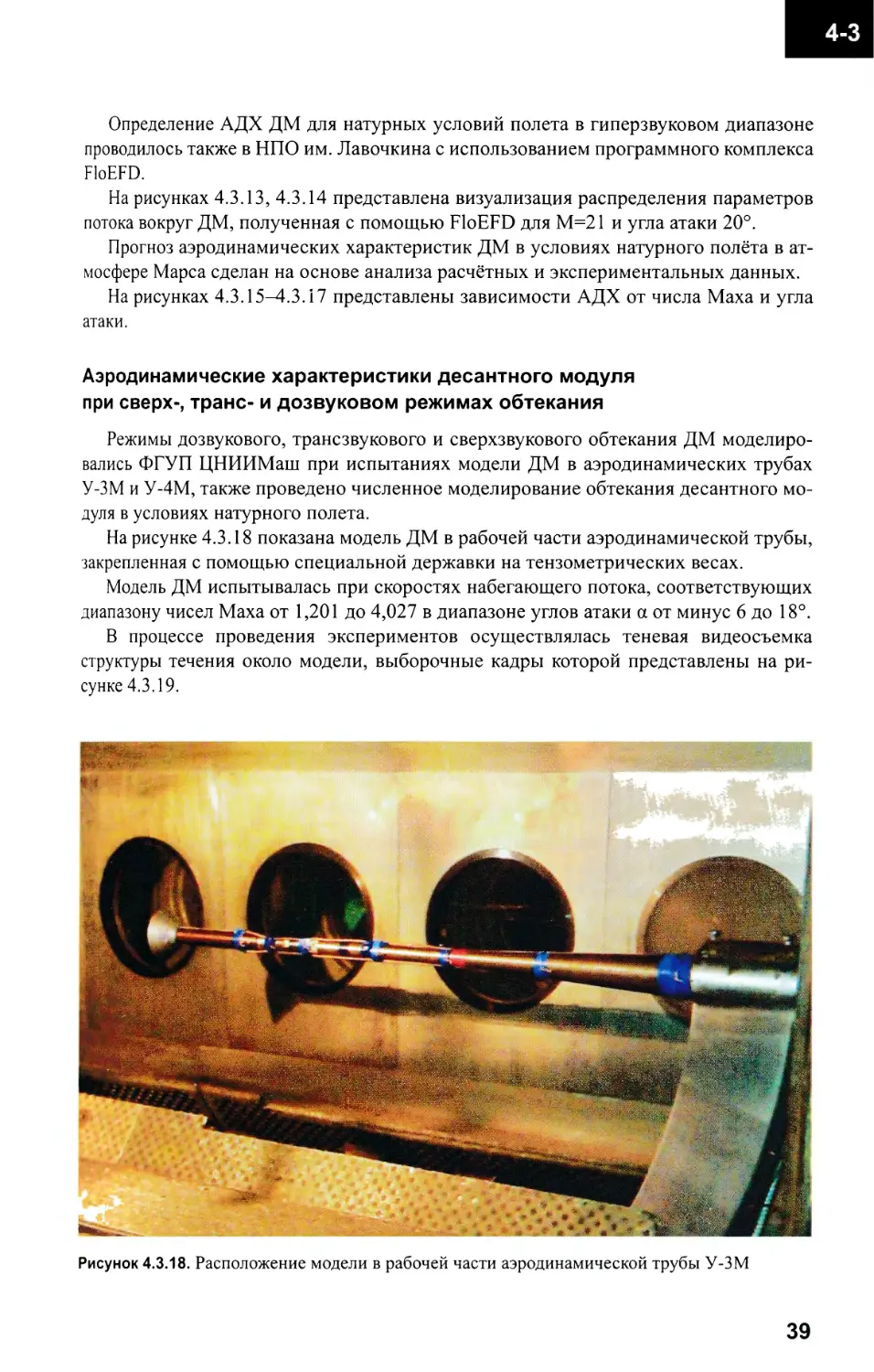
Режимы дозвукового, трансзвукового и сверхзвукового обтекания ДМ моделиро¬
вались ФГУП ЦНИИМаш при испытаниях модели ДМ в аэродинамических трубах
У-ЗМ и У-4М, также проведено численное моделирование обтекания десантного мо¬
дуля в условиях натурного полета.
На рисунке 4.3.18 показана модель ДМ в рабочей части аэродинамической трубы,
закрепленная с помощью специальной державки на тензометрических весах.
Модель ДМ испытывалась при скоростях набегающего потока, соответствующих
диапазону чисел Маха от 1,201 до 4,027 в диапазоне углов атаки а от минус 6 до 18°.
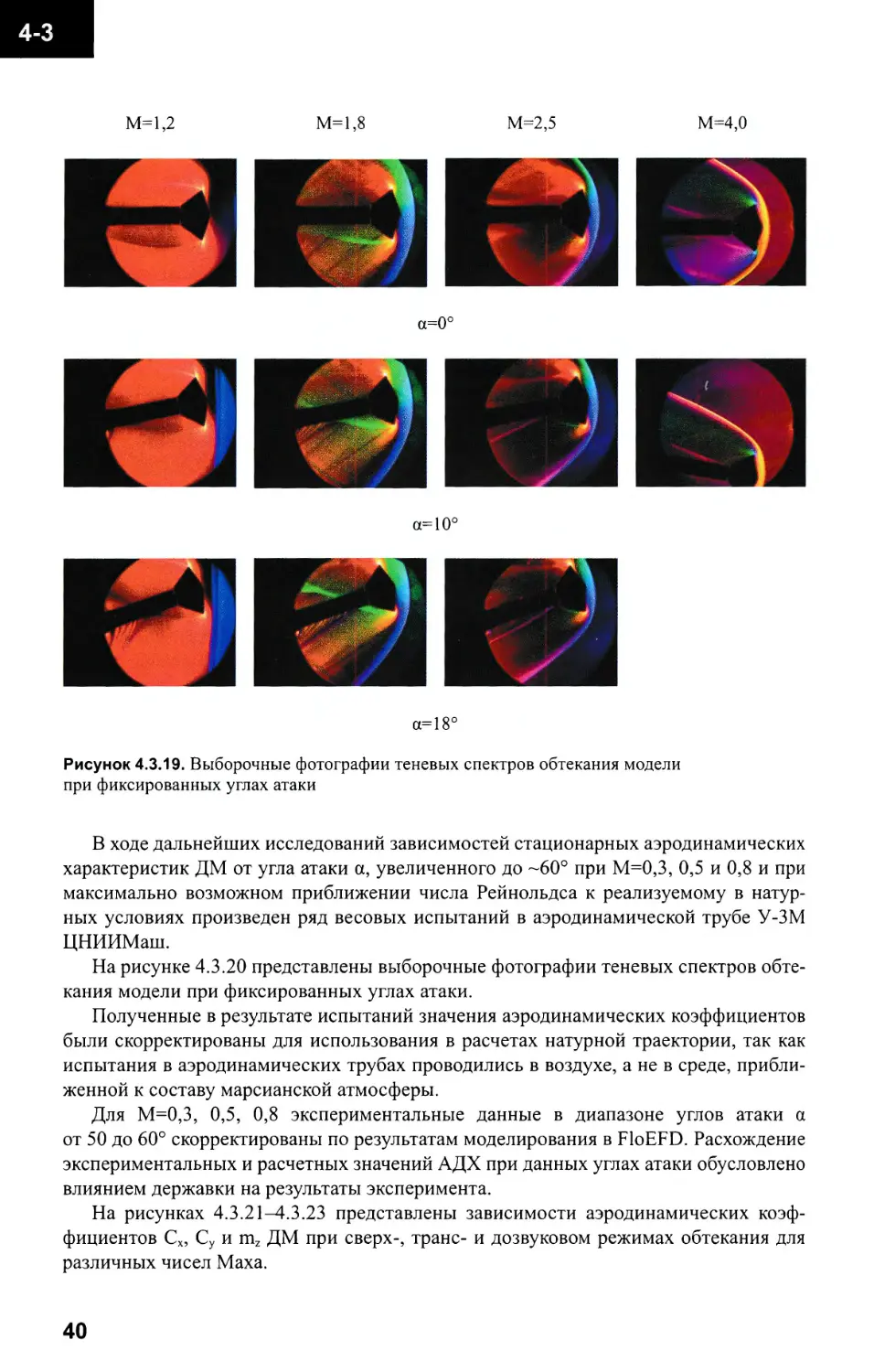
В процессе проведения экспериментов осуществлялась теневая видеосъемка
структуры течения около модели, выборочные кадры которой представлены на ри¬
сунке 4.3.19.
Рисунок 4.3.18. Расположение модели в рабочей части аэродинамической трубы У-ЗМ
39
4-3
M=l,2
M=l,8
М=2,5
М=4,0
а=0°
а=10°
а=18°
Рисунок 4.3.19. Выборочные фотографии теневых спектров обтекания модели
при фиксированных углах атаки
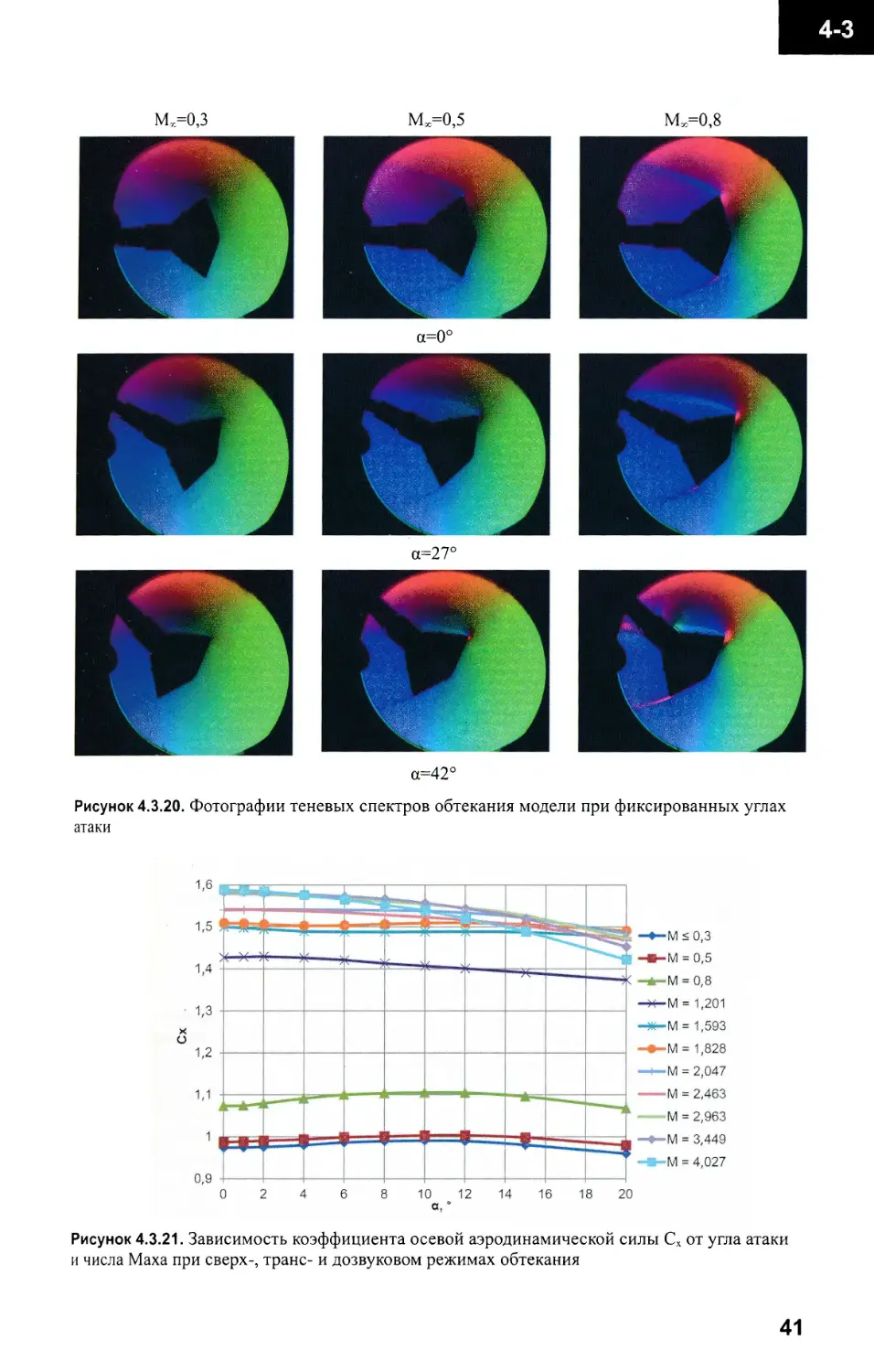
В ходе дальнейших исследований зависимостей стационарных аэродинамических
характеристик ДМ от угла атаки а, увеличенного до -60° при М=0,3, 0,5 и 0,8 и при
максимально возможном приближении числа Рейнольдса к реализуемому в натур¬
ных условиях произведен ряд весовых испытаний в аэродинамической трубе У-ЗМ
ЦНИИМаш.
На рисунке 4.3.20 представлены выборочные фотографии теневых спектров обте¬
кания модели при фиксированных углах атаки.
Полученные в результате испытаний значения аэродинамических коэффициентов
были скорректированы для использования в расчетах натурной траектории, так как
испытания в аэродинамических трубах проводились в воздухе, а не в среде, прибли¬
женной к составу марсианской атмосферы.
Для М=0,3, 0,5, 0,8 экспериментальные данные в диапазоне углов атаки а
от 50 до 60° скорректированы по результатам моделирования в FloEFD. Расхождение
экспериментальных и расчетных значений АДХ при данных углах атаки обусловлено
влиянием державки на результаты эксперимента.
На рисунках 4.3.21^.3.23 представлены зависимости аэродинамических коэф¬
фициентов Сх, Су и mz ДМ при сверх-, транс- и дозвуковом режимах обтекания для
различных чисел Маха.
40
4-3
Мх=0,3 Мх=0,5 Мх=0,8
а=0°
а=27°
а=42°
Рисунок 4.3.20. Фотографии теневых спектров обтекания модели при фиксированных углах
атаки
—м<о,з
—в—м = 0,5
—ф—м = 0,8
-*-М = 1,201
-*-М = 1,593
—М = 1,828
—М = 2,047
М = 2,463
М = 2,963
—М = 3,449
-»-М = 4,027
Рисунок 4.3.21. Зависимость коэффициента осевой аэродинамической силы Сх от угла атаки
и числа Маха при сверх-, транс- и дозвуковом режимах обтекания
41
4-3
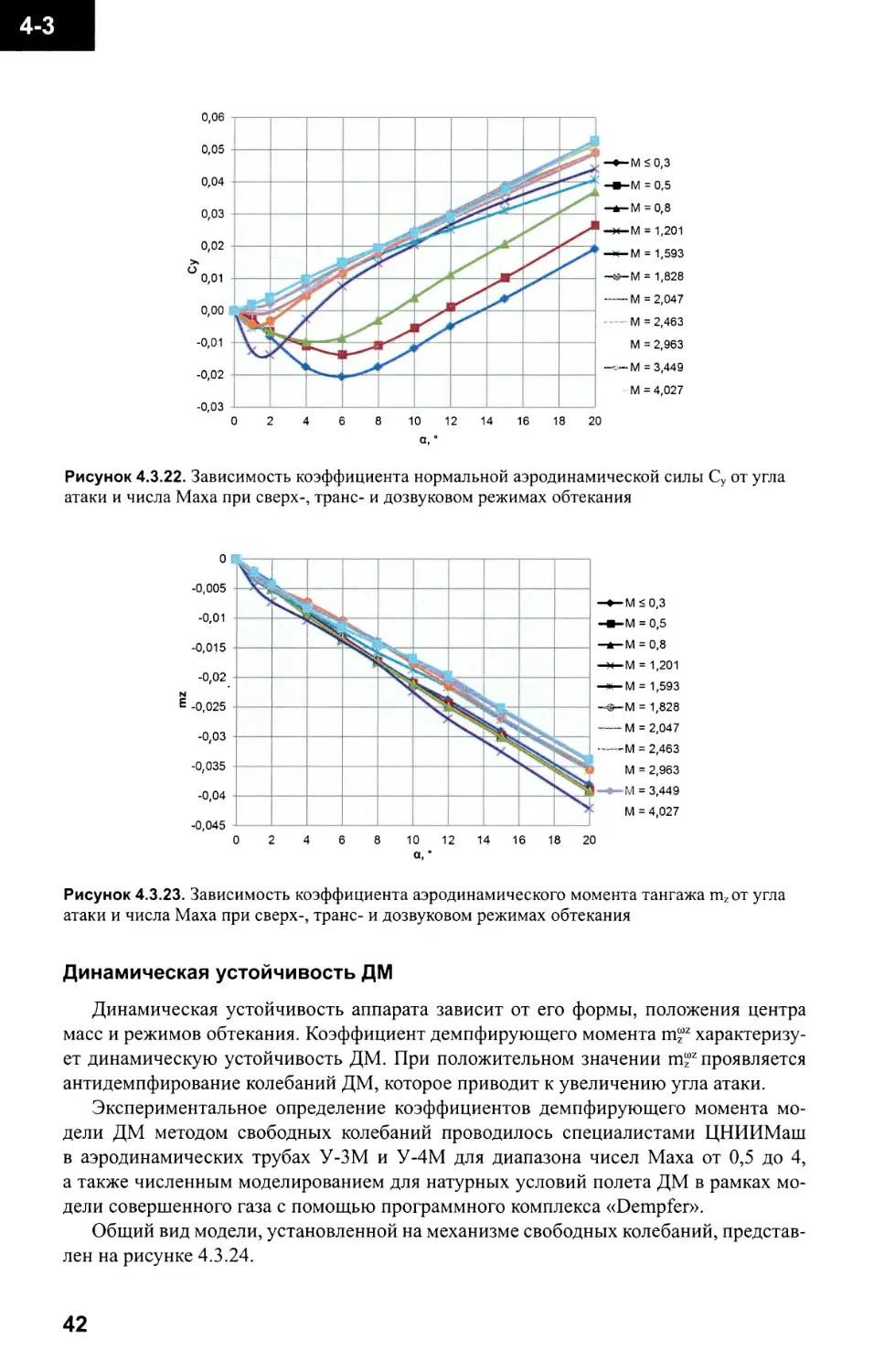
Рисунок 4.3.22. Зависимость коэффициента нормальной аэродинамической силы Су от угла
атаки и числа Маха при сверх-, транс- и дозвуковом режимах обтекания
Рисунок 4.3.23. Зависимость коэффициента аэродинамического момента тангажа т2от угла
атаки и числа Маха при сверх-, транс- и дозвуковом режимах обтекания
а, °
Динамическая устойчивость ДМ
Динамическая устойчивость аппарата зависит от его формы, положения центра
масс и режимов обтекания. Коэффициент демпфирующего момента m“z характеризу¬
ет динамическую устойчивость ДМ. При положительном значении m“z проявляется
антидемпфирование колебаний ДМ, которое приводит к увеличению угла атаки.
Экспериментальное определение коэффициентов демпфирующего момента мо¬
дели ДМ методом свободных колебаний проводилось специалистами ЦНИИМаш
в аэродинамических трубах У-ЗМ и У-4М для диапазона чисел Маха от 0,5 до 4,
а также численным моделированием для натурных условий полета ДМ в рамках мо¬
дели совершенного газа с помощью программного комплекса «Dempfer».
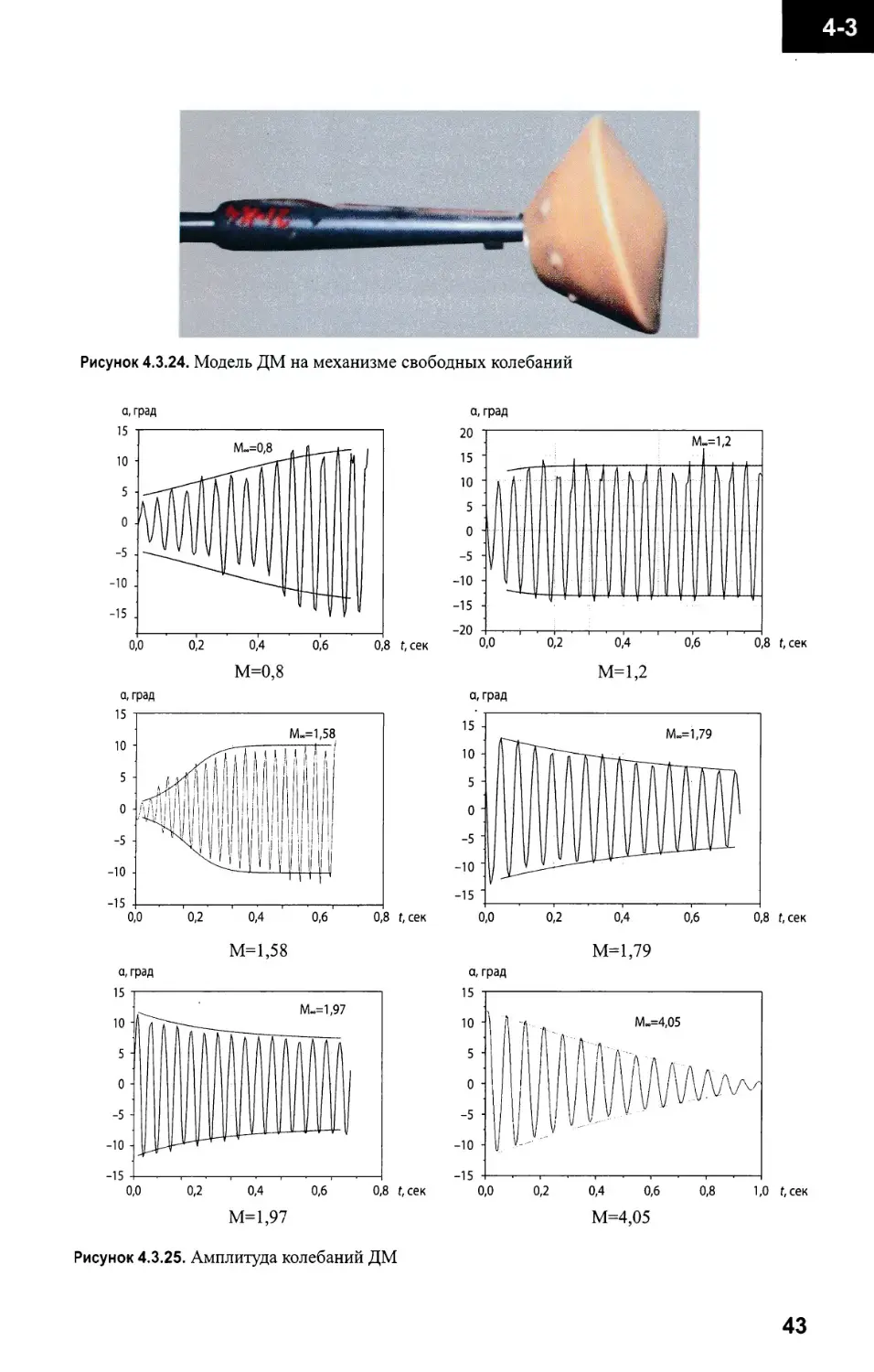
Общий вид модели, установленной на механизме свободных колебаний, представ¬
лен на рисунке 4.3.24.
42
4-3
Рисунок 4.3.24. Модель ДМ на механизме свободных колебаний
М=1,58
а, град
М=1,2
М=1,97
Рисунок 4.3.25. Амплитуда колебаний ДМ
М=4,05
43
4-3
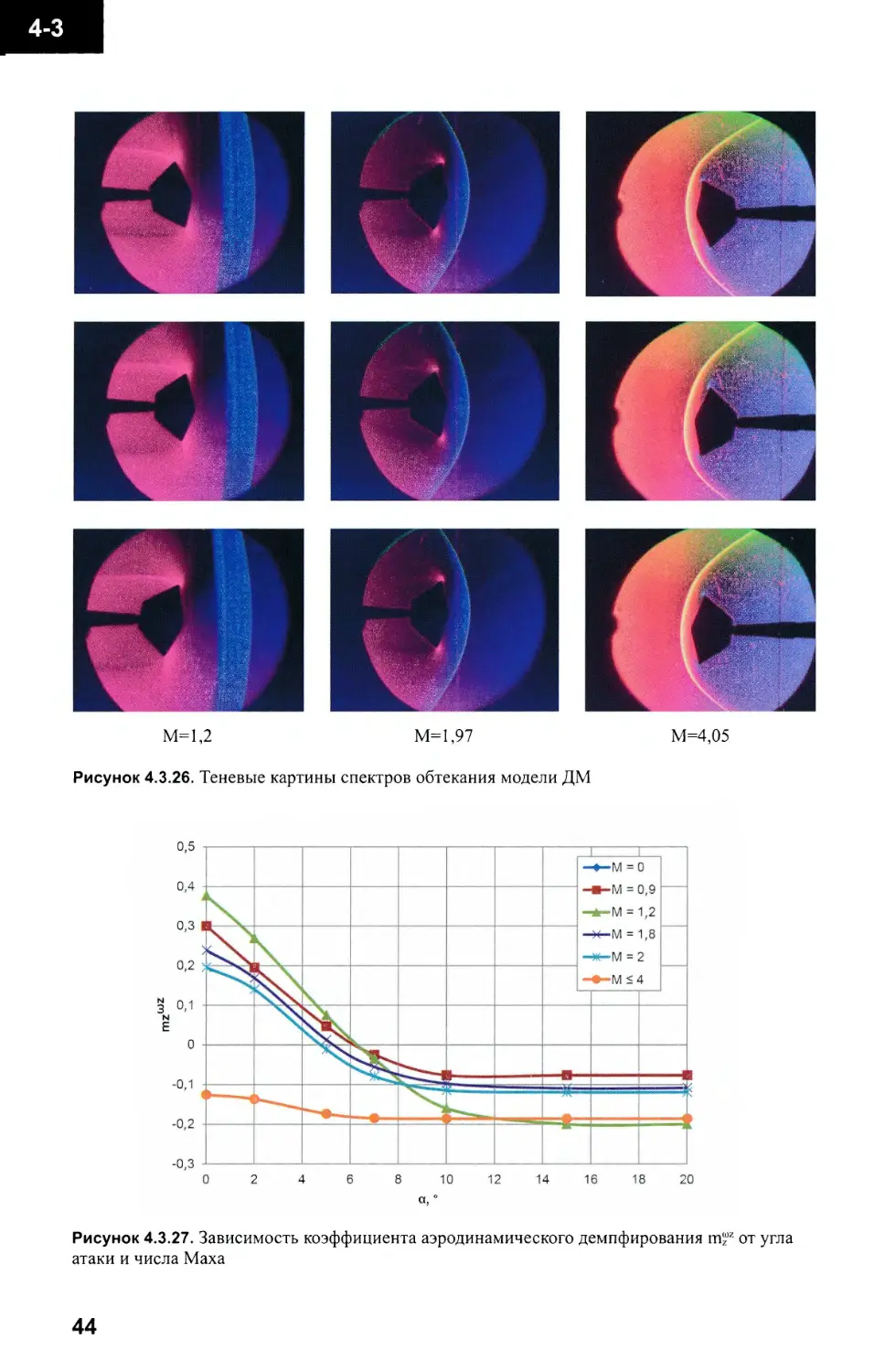
М=1,2 М=1,97 ММ,05
Рисунок 4.3.26. Теневые картины спектров обтекания модели ДМ
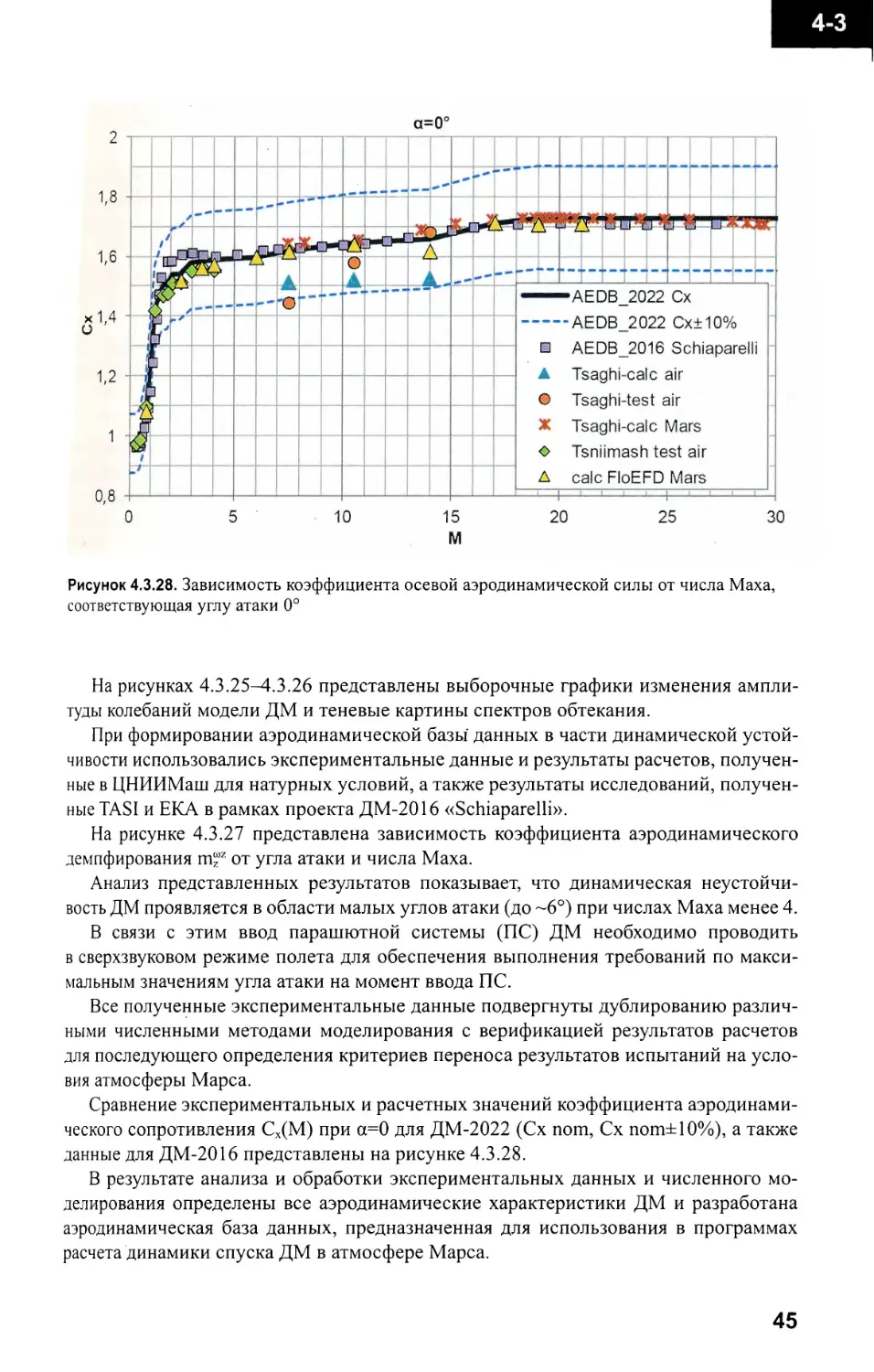
Рисунок 4.3.27. Зависимость коэффициента аэродинамического демпфирования m“z от угла
атаки и числа Маха
44
4-3
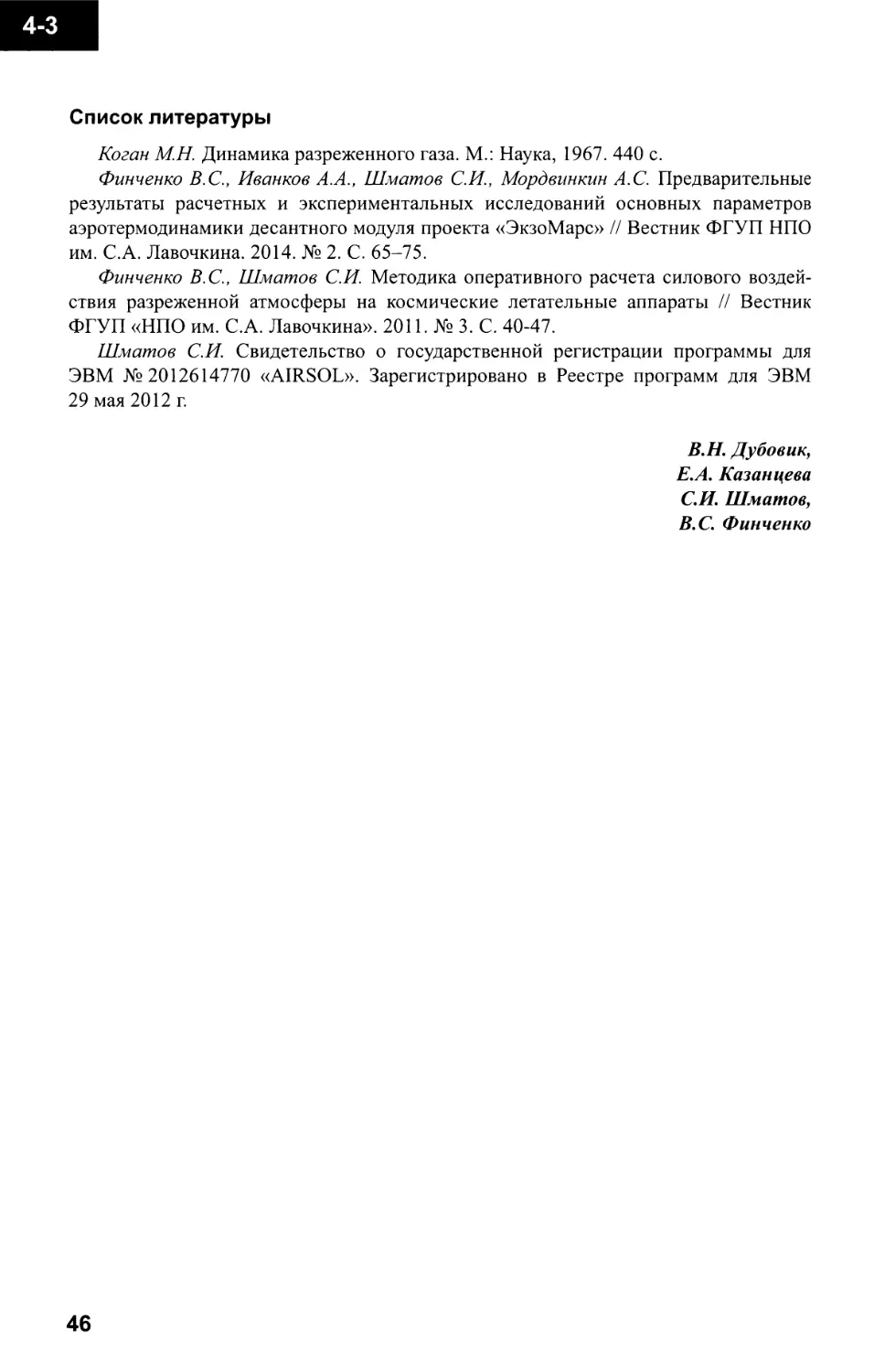
Рисунок 4.3.28. Зависимость коэффициента осевой аэродинамической силы от числа Маха,
соответствующая углу атаки 0°
✓
✓
--
—
Л
/ ЕЕ
о
L-
/
—
о
Ягу
r Z.
/
AEDB-2022 Сх
— AEDB__2022 Cx±10%
AEDB__2016 Schiaparelli
Tsaghi-calc air
Tsaghi-test air
Tsaghi-calc Mars
Tsniimash test air
calc FloEFD Mars
На рисунках 4.3.25^.3.26 представлены выборочные графики изменения ампли¬
туды колебаний модели ДМ и теневые картины спектров обтекания.
При формировании аэродинамической базы данных в части динамической устой¬
чивости использовались экспериментальные данные и результаты расчетов, получен¬
ные в ЦНИИМаш для натурных условий, а также результаты исследований, получен¬
ные TASI и ЕКА в рамках проекта ДМ-2016 «Schiaparelli».
На рисунке 4.3.27 представлена зависимость коэффициента аэродинамического
демпфирования m“z от угла атаки и числа Маха.
Анализ представленных результатов показывает, что динамическая неустойчи¬
вость ДМ проявляется в области малых углов атаки (до ~6°) при числах Маха менее 4.
В связи с этим ввод парашютной системы (ПС) ДМ необходимо проводить
в сверхзвуковом режиме полета для обеспечения выполнения требований по макси¬
мальным значениям угла атаки на момент ввода ПС.
Все полученные экспериментальные данные подвергнуты дублированию различ¬
ными численными методами моделирования с верификацией результатов расчетов
для последующего определения критериев переноса результатов испытаний на усло¬
вия атмосферы Марса.
Сравнение экспериментальных и расчетных значений коэффициента аэродинами¬
ческого сопротивления СХ(М) при а=0 для ДМ-2022 (Сх пот, Сх пот±10%), а также
данные для ДМ-2016 представлены на рисунке 4.3.28.
В результате анализа и обработки экспериментальных данных и численного мо¬
делирования определены все аэродинамические характеристики ДМ и разработана
аэродинамическая база данных, предназначенная для использования в программах
расчета динамики спуска ДМ в атмосфере Марса.
45
4-3
Список литературы
Коган М.Н. Динамика разреженного газа. М.: Наука, 1967. 440 с.
Финченко В.С., Иванков А.А., Шматов С.И., Мордвинкин А.С. Предварительные
результаты расчетных и экспериментальных исследований основных параметров
аэротермодинамики десантного модуля проекта «ЭкзоМарс» // Вестник ФГУП НПО
им. С.А. Лавочкина. 2014. № 2. С. 65-75.
Финченко В.С., Шматов С.И. Методика оперативного расчета силового воздей¬
ствия разреженной атмосферы на космические летательные аппараты // Вестник
ФГУП «НПО им. С.А. Лавочкина». 2011. № 3. С. 40-47.
Шматов С.И. Свидетельство о государственной регистрации программы для
ЭВМ №2012614770 «AIRSOL». Зарегистрировано в Реестре программ для ЭВМ
29 мая 2012 г.
B. Н. Дубовик,
Е.А. Казанцева
C. И. Шматов,
В, С. Финченко
46
4-4
ОНантенно-фидерная система
ДЕСАНТНОГО МОДУЛЯ
4.4.1. Общие сведения
Антенно-фидерная система (АФС) десантного модуля (ДМ) космического ап¬
парата (КА) «ЭкзоМарс» является одной из систем проекта, в состав которой вхо¬
дят составные части как российского (изготавливаются на АО «НПО Лавочкина» -
НПОЛ), так и зарубежного производства (поставляются Европейским космическим
агентством - ЕКА).
В состав АФС входит:
- антенна заднего кожуха (ЗК) [НПОЛ];
- антенна посадочной платформы (ПП) [ЕКА];
- радиочастотные переключатели [ЕКА];
- радиочастотные кабели [ЕКА].
Антенна ЗК является новой разработкой НПОЛ, а остальные составные части
АФС - антенна ПП, переключатели и кабели - поставляются ЕКА в рамках междуна¬
родного сотрудничества по миссии «ЭкзоМарс» между ЕКА и ГК «Роскосмос».
Ответственным за сборку, интеграцию и функционирование всей АФС является
АО «НПО Лавочкина».
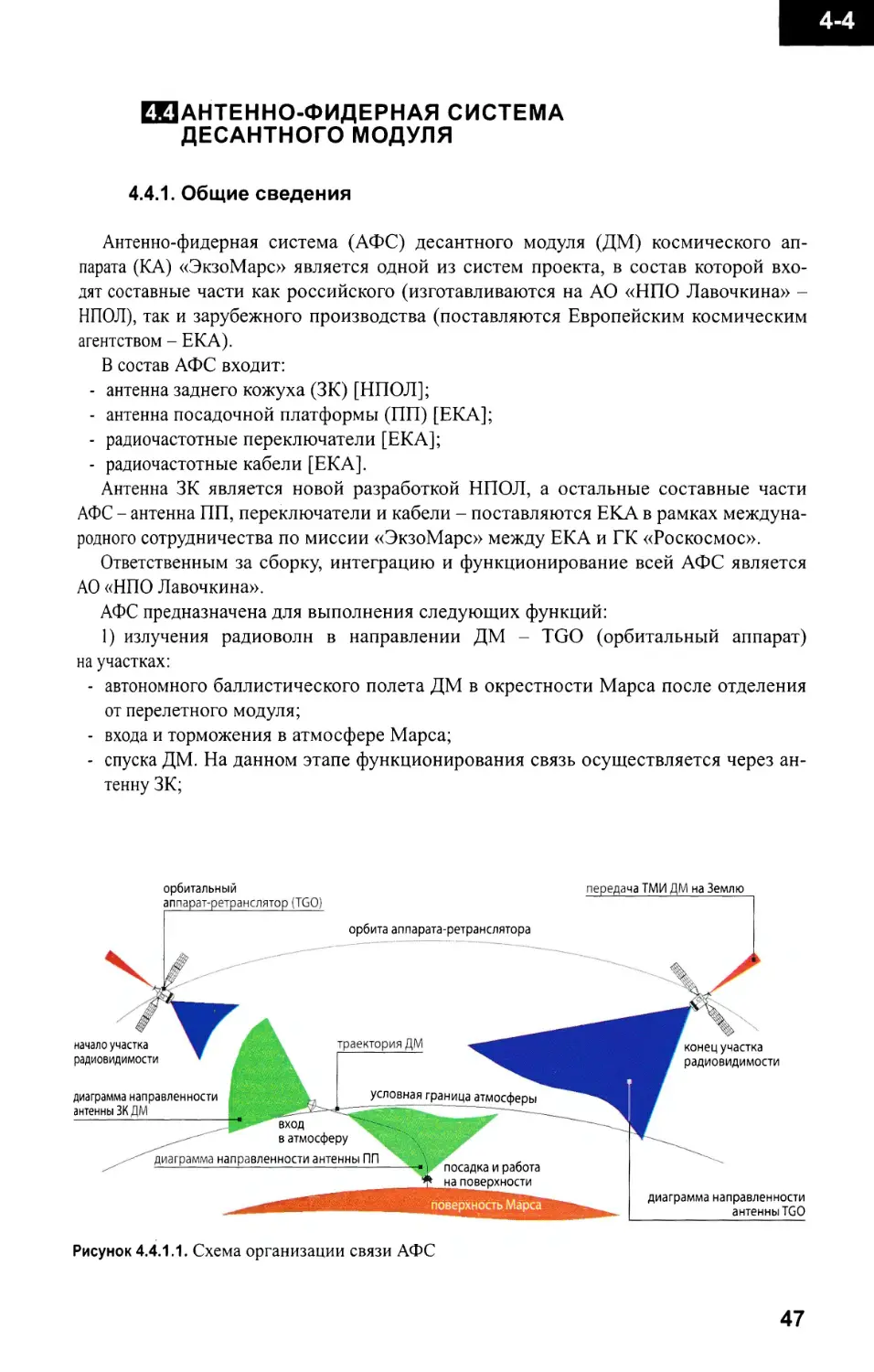
АФС предназначена для выполнения следующих функций:
1) излучения радиоволн в направлении ДМ - TGO (орбитальный аппарат)
на участках:
- автономного баллистического полета ДМ в окрестности Марса после отделения
от перелетного модуля;
- входа и торможения в атмосфере Марса;
- спуска ДМ. На данном этапе функционирования связь осуществляется через ан¬
тенну ЗК;
47
4-4
2) излучения радиоволн в направлении ПП - TGO на участке посадки ПП и при
эксплуатации на поверхности Марса;
3) приема радиоволн, передаваемых в направлении TGO - ПП при эксплуатации
на поверхности Марса. На данном этапе функционирования связь осуществляется
через антенну ПП, ранее используемой в миссии «ЭкзоМарс» 2016 года.
Схема организации связи АФС через антенны ЗК и ПП, а также ретрансляции
информации на Землю через TGO показана на рисунке 4.4.1.1.
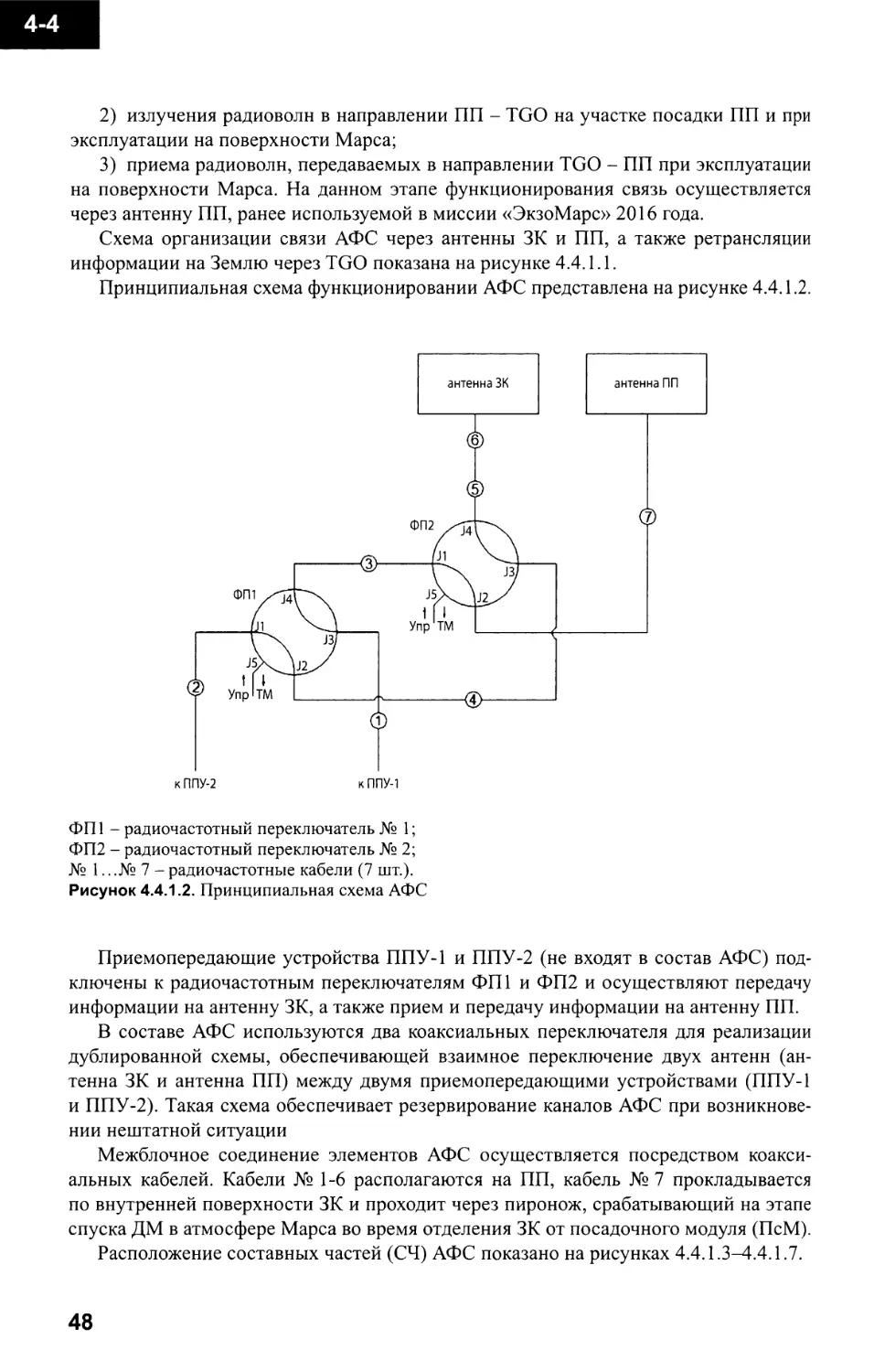
Принципиальная схема функционировании АФС представлена на рисунке 4.4.1.2.
к ППУ-2 к ППУ-1
ФП1 - радиочастотный переключатель № 1;
ФП2 - радиочастотный переключатель № 2;
№ 1.. .№ 7 - радиочастотные кабели (7 шт.).
Рисунок 4.4.1.2. Принципиальная схема АФС
Приемопередающие устройства ППУ-1 и ППУ-2 (не входят в состав АФС) под¬
ключены к радиочастотным переключателям ФП1 и ФП2 и осуществляют передачу
информации на антенну ЗК, а также прием и передачу информации на антенну ПП.
В составе АФС используются два коаксиальных переключателя для реализации
дублированной схемы, обеспечивающей взаимное переключение двух антенн (ан¬
тенна ЗК и антенна ПП) между двумя приемопередающими устройствами (ППУ-1
и ППУ-2). Такая схема обеспечивает резервирование каналов АФС при возникнове¬
нии нештатной ситуации
Межблочное соединение элементов АФС осуществляется посредством коакси¬
альных кабелей. Кабели № 1-6 располагаются на ПП, кабель №7 прокладывается
по внутренней поверхности ЗК и проходит через пиронож, срабатывающий на этапе
спуска ДМ в атмосфере Марса во время отделения ЗК от посадочного модуля (ПсМ).
Расположение составных частей (СЧ) АФС показано на рисунках 4.4.1.3^.4.1.7.
48
4-4
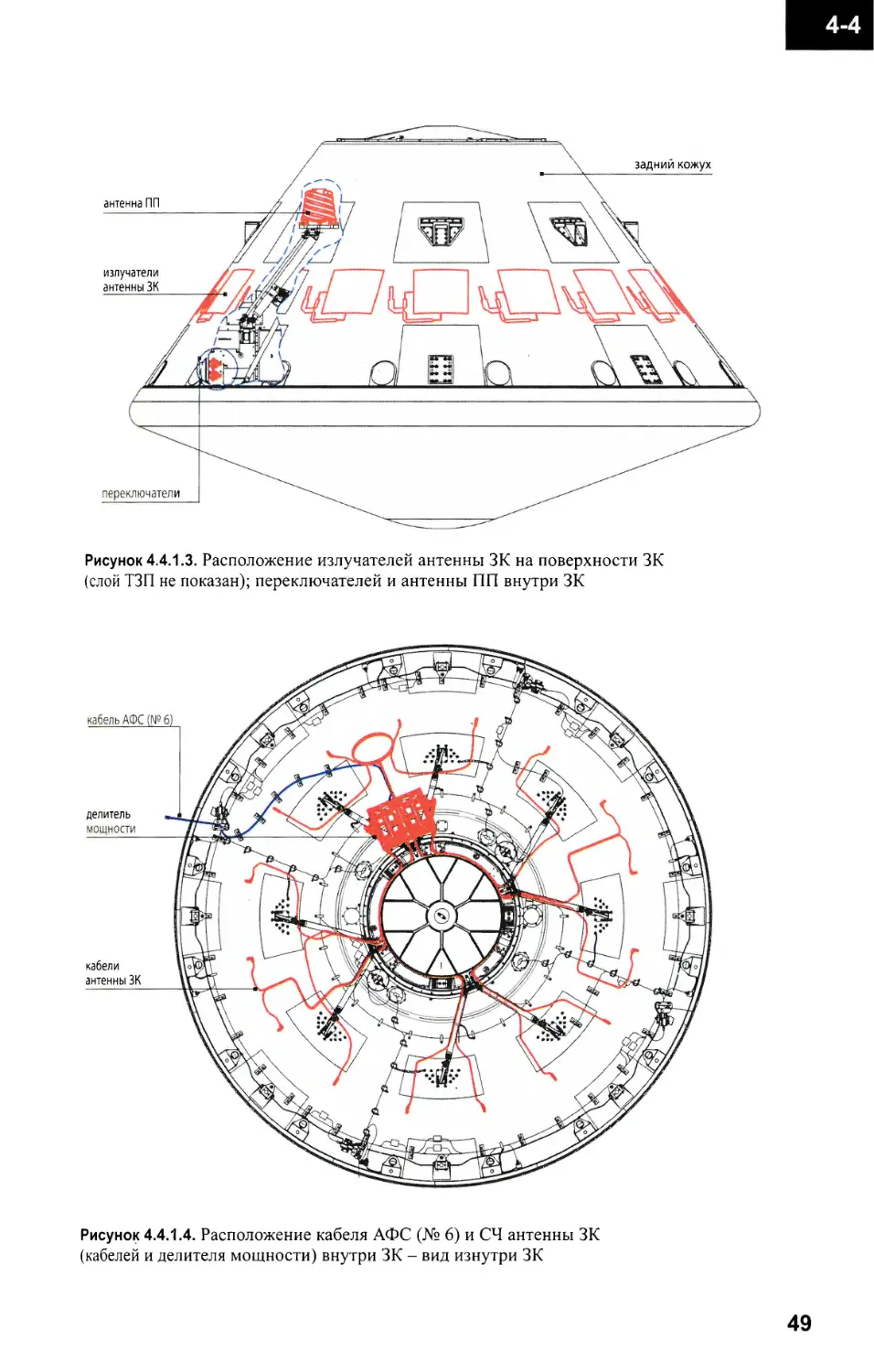
Рисунок 4.4.1.3. Расположение излучателей антенны ЗК на поверхности ЗК
(слой ТЗП не показан); переключателей и антенны ПП внутри ЗК
Рисунок 4.4.1.4. Расположение кабеля АФС (№ 6) и СЧ антенны ЗК
(кабелей и делителя мощности) внутри ЗК - вид изнутри ЗК
49
4-4
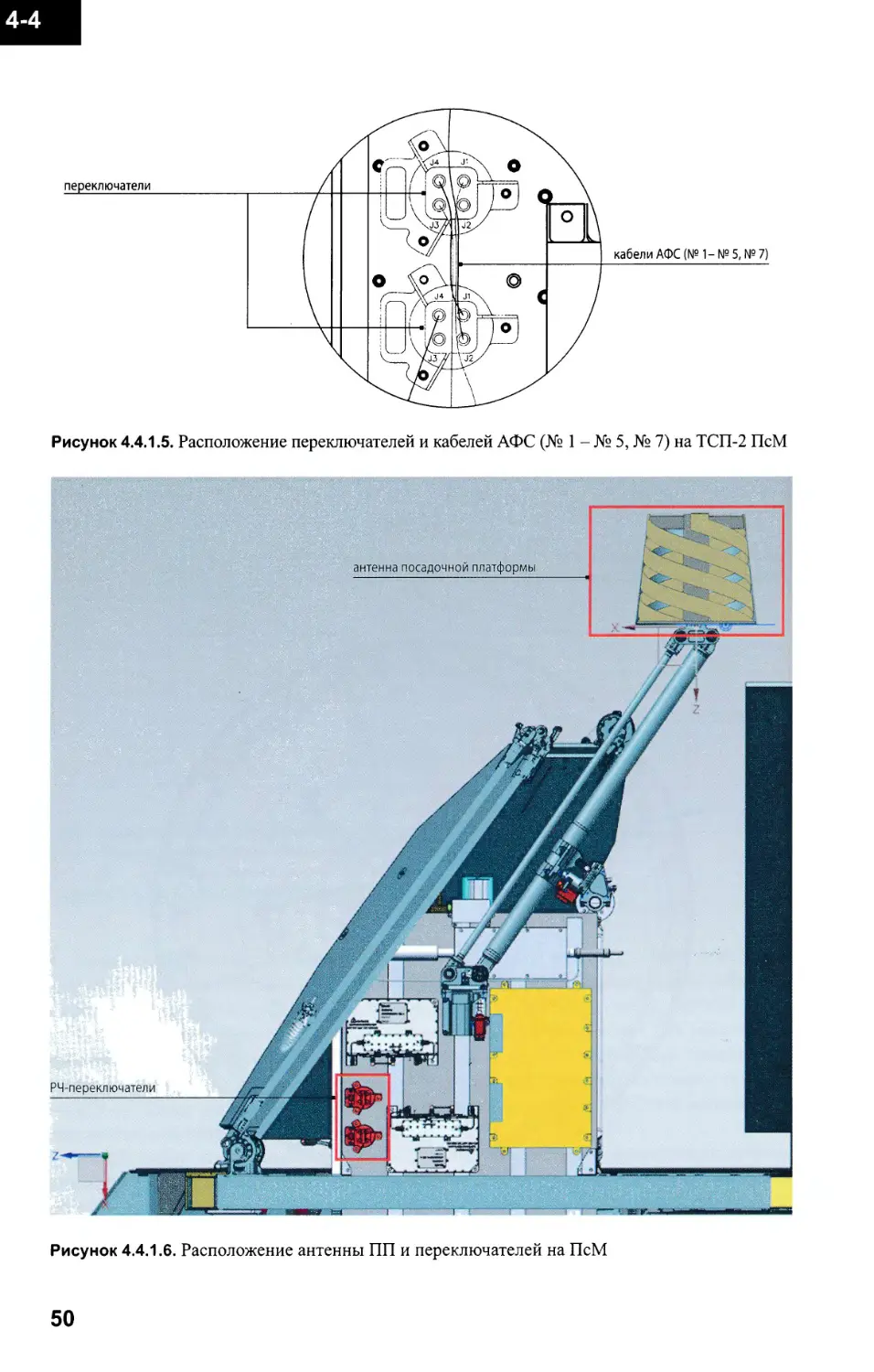
переключатели
кабели АФС (№1-№ 5, № 7)
Рисунок 4.4.1.5. Расположение переключателей и кабелей АФС (№ 1 - № 5, № 7) на ТСП-2 ПсМ
50
4-4
Рисунок 4.4.1.7. Расположение антенны ПП и переключателей на ПсМ
4.4.2. Порядок работы АФС на этапе входа, спуска и посадки (EDL)
За 13 минут до отделения ДМ от перелетного модуля (ПМ) подается питание
на ППУ-1 и ППУ-2 для их включения в дежурном режиме. За одну минуту до отде¬
ления ДМ от ПМ, ППУ, скоммутированный по схеме на канал антенны ЗК, переклю¬
чается в сеансный режим для начала передачи телеметрической информации через
антенну ЗК. Прием сигнала от антенны ЗК на этапе входа и спуска в атмосферу Марса
начинается при входе ДМ в зону видимости орбитального аппарата TGO (приблизи¬
тельно за 7 минут до посадки).
51
4-4
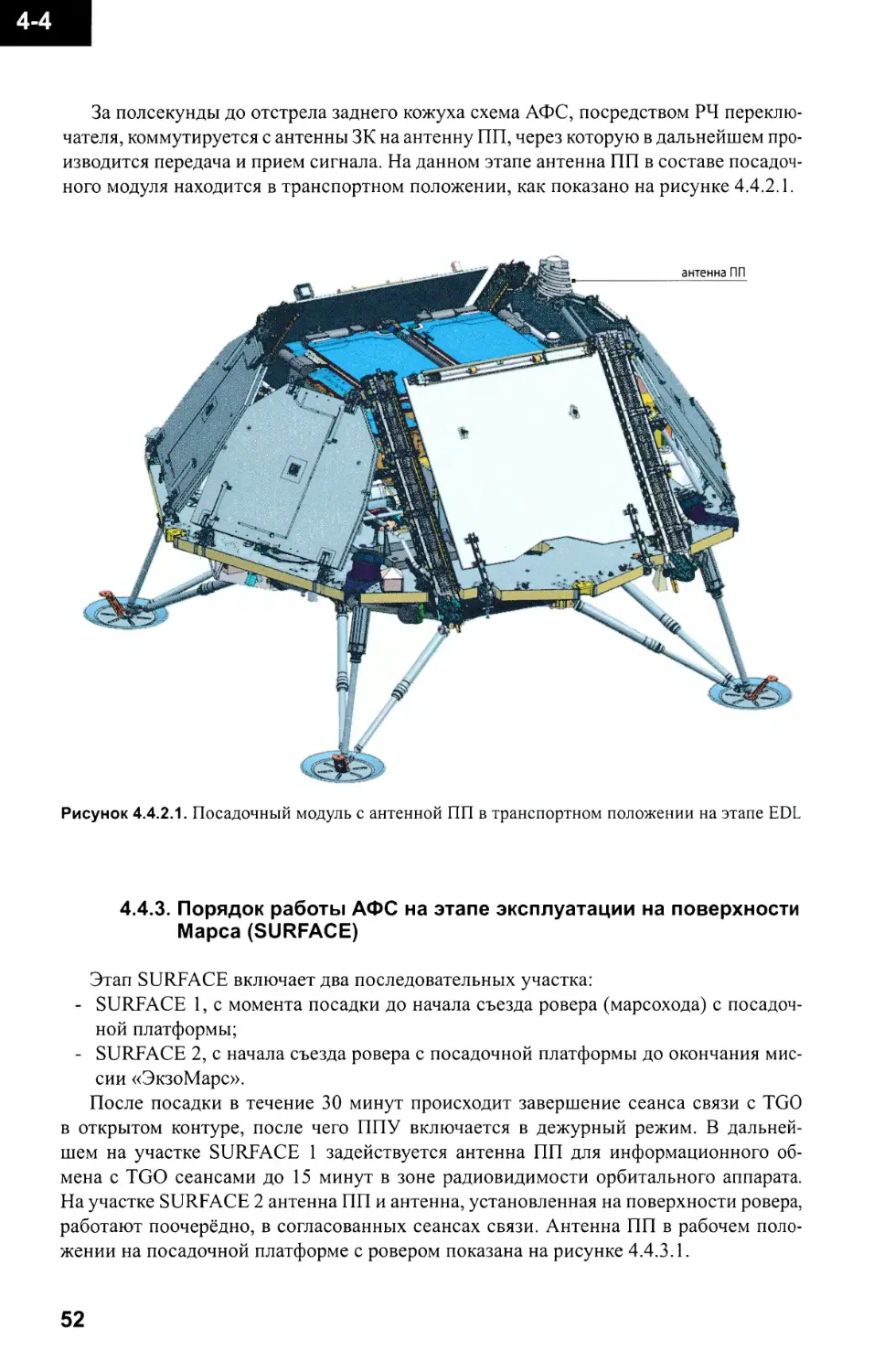
За полсекунды до отстрела заднего кожуха схема АФС, посредством РЧ переклю¬
чателя, коммутируется с антенны ЗК на антенну ПП, через которую в дальнейшем про¬
изводится передача и прием сигнала. На данном этапе антенна ПП в составе посадоч¬
ного модуля находится в транспортном положении, как показано на рисунке 4.4.2.1.
Рисунок 4.4.2.1. Посадочный модуль с антенной ПП в транспортном положении на этапе EDL
4.4.3. Порядок работы АФС на этапе эксплуатации на поверхности
Марса (SURFACE)
Этап SURFACE включает два последовательных участка:
- SURFACE 1, с момента посадки до начала съезда ровера (марсохода) с посадоч¬
ной платформы;
- SURFACE 2, с начала съезда ровера с посадочной платформы до окончания мис¬
сии «ЭкзоМарс».
После посадки в течение 30 минут происходит завершение сеанса связи с TGO
в открытом контуре, после чего ППУ включается в дежурный режим. В дальней¬
шем на участке SURFACE 1 задействуется антенна ПП для информационного об¬
мена с TGO сеансами до 15 минут в зоне радиовидимости орбитального аппарата.
На участке SURFACE 2 антенна ПП и антенна, установленная на поверхности ровера,
работают поочерёдно, в согласованных сеансах связи. Антенна ПП в рабочем поло¬
жении на посадочной платформе с ровером показана на рисунке 4.4.3.1.
52
4-4
К моменту штатной работы антенна ПП переводится в раскрытое положение; тра¬
пы и солнечные батареи ПП полностью раскрыты; ровер переводится в транспортное
положение и съезжает с ПП. Антенна ПП в рабочем положении на посадочной плат¬
форме без ровера показана на рисунке 4.4.3.2.
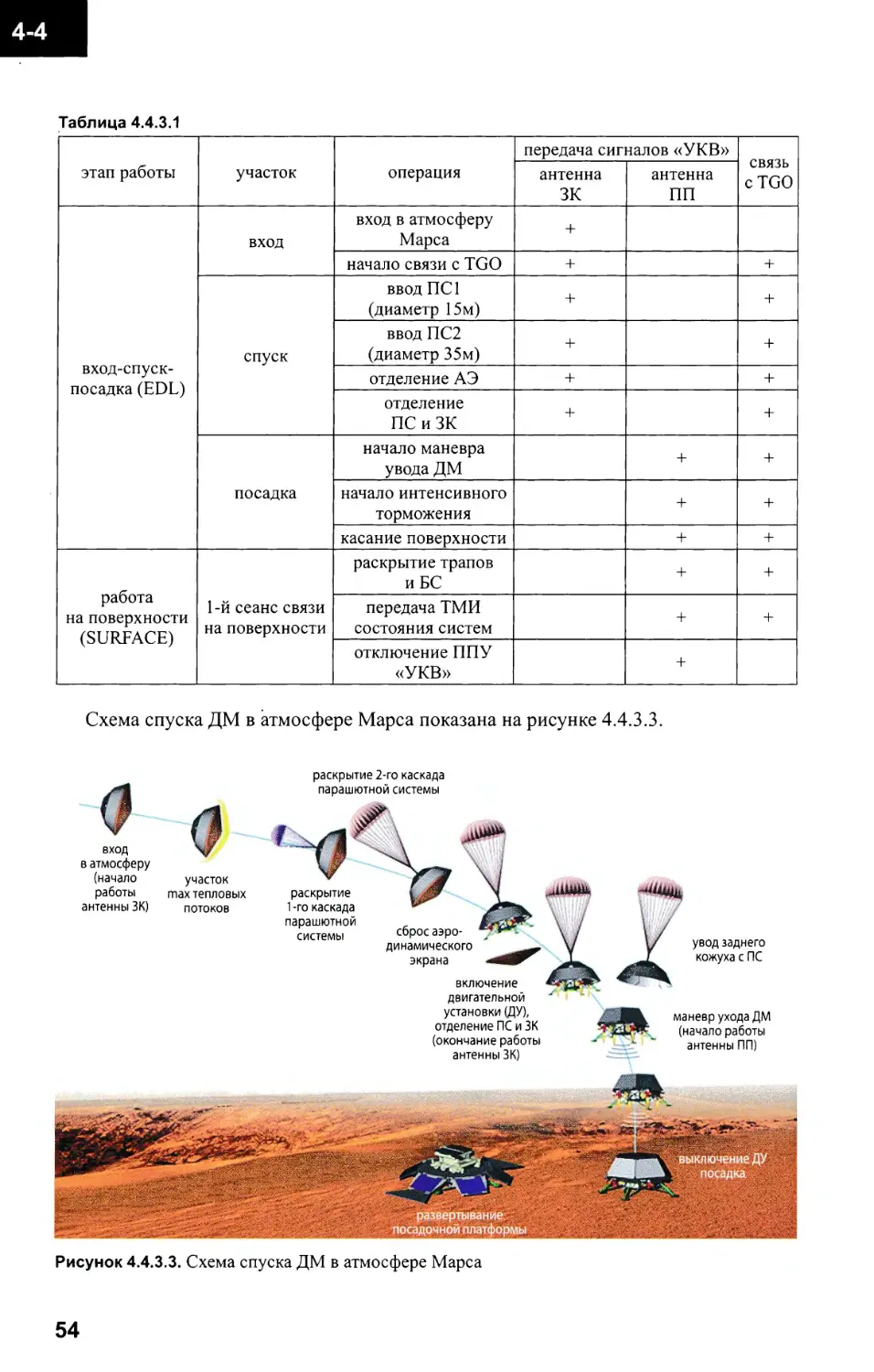
Циклограмма работы радиосвязи через антенны ЗК и ПП показана в таблице 4.4.3.1.
Рисунок 4.4.3.1. Антенна ПП в рабочем положении на посадочной платформе с ровером.
Трапы и солнечные батареи раскрыты
Рисунок 4.4.3.2. Антенна ПП в рабочем положении на посадочной платформе без ровера.
Трапы и солнечные батареи раскрыты
53
4-4
Таблица 4.4.3.1
этап работы
участок
операция
передача сигналов «УКВ»
связь
с TGO
антенна
ЗК
антенна
ПП
вход-спуск-
посадка (EDL)
вход
вход в атмосферу
Марса
+
начало связи с TGO
+
+
спуск
ввод ПС1
(диаметр 15 м)
+
+
ввод ПС2
(диаметр 35 м)
+
+
отделение АЭ
+
+
отделение
ПСиЗК
+
+
посадка
начало маневра
увода ДМ
+
+
начало интенсивного
торможения
+
+
касание поверхности
+
+
работа
на поверхности
(SURFACE)
1-й сеанс связи
на поверхности
раскрытие трапов
иБС
+
+
передача ТМИ
состояния систем
+
+
отключение ППУ
«УКВ»
+
Схема спуска ДМ в атмосфере Марса показана на рисунке 4.4.3.3.
вход
в атмосферу
(начало
работы
антенны ЗК)
участок
max тепловых
потоков
раскрытие 2-го каскада
парашютной системы
раскрытие
1 -го каскада
парашютной
системы
динамического
экрана
включение
двигательной
установки (ДУ),
отделение ПС и ЗК
(окончание работы
антенны ЗК)
увод заднего
кожуха с ПС
* iV' ’
z.z -
маневр ухода ДМ
(начало работы
антенны ПП)
Рисунок 4.4.3.3. Схема спуска ДМ в атмосфере Марса
54
4-4
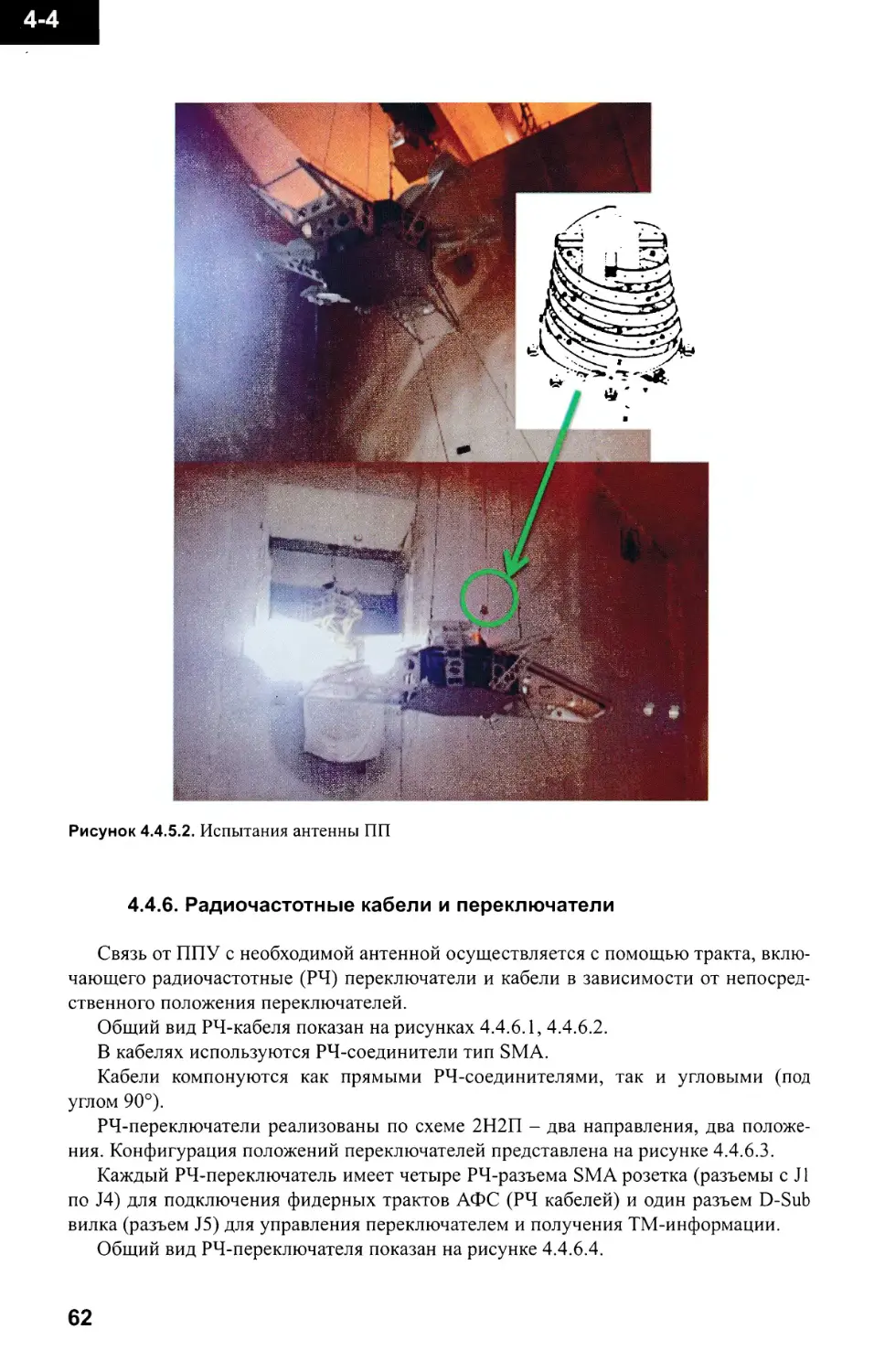
4.4.4. Антенна заднего кожуха
Разработка антенны заднего кожуха космического аппарата миссии «ЭкзоМарс»
началась, когда появилась необходимость передачи телеметрической информации
в самый ответственный этап миссии - при входе в атмосферу Марса и посадке.
В качестве передающей антенны на этом этапе (антенна ЗК) было принято реше¬
ние использовать так называемую антенную решетку (АР), состоящую из 16 излуча¬
телей, синфазно запитанных от источника питания. Основное отличие АР антенны
ЗК от других антенн подобного типа заключается в том, что она располагается не на
плоскости, как это обычно бывает с АР, а непосредственно на поверхности конуса ЗК
(Biswas Diptiman, 2013).
Система питания такой антенны должна обеспечивать равноамплитудное синфаз¬
ным деление высокочастотного сигнала на 16 выходов.
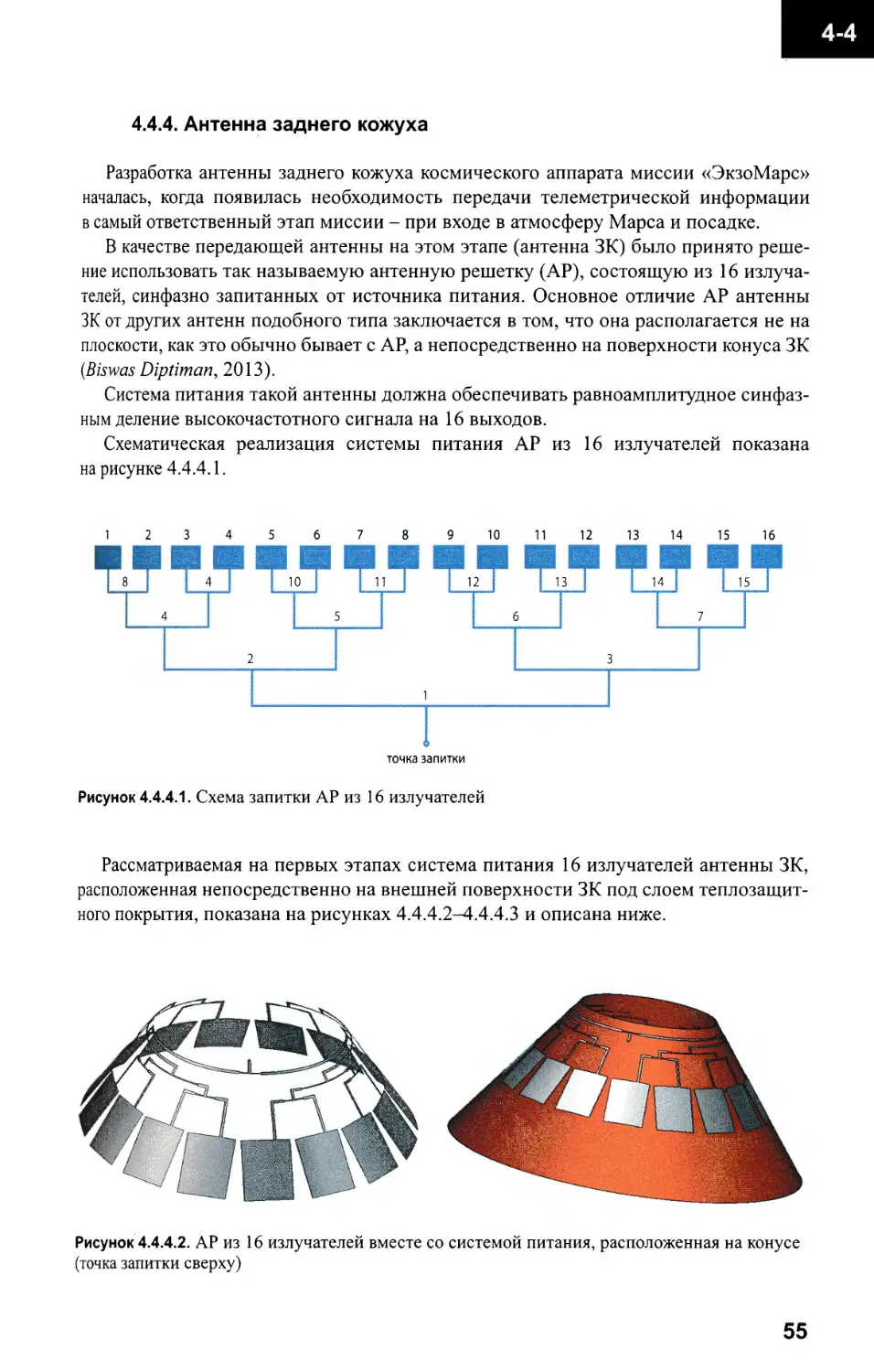
Схематическая реализация системы питания АР из 16 излучателей показана
на рисунке 4.4.4.1.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
точка запитки
Рисунок 4.4.4.1. Схема запитки АР из 16 излучателей
Рассматриваемая на первых этапах система питания 16 излучателей антенны ЗК,
расположенная непосредственно на внешней поверхности ЗК под слоем теплозащит¬
ного покрытия, показана на рисунках 4.4.4.2—4.4.4.3 и описана ниже.
Рисунок 4.4.4.2. АР из 16 излучателей вместе со системой питания, расположенная на конусе
(точка запитки сверху)
55
4-4
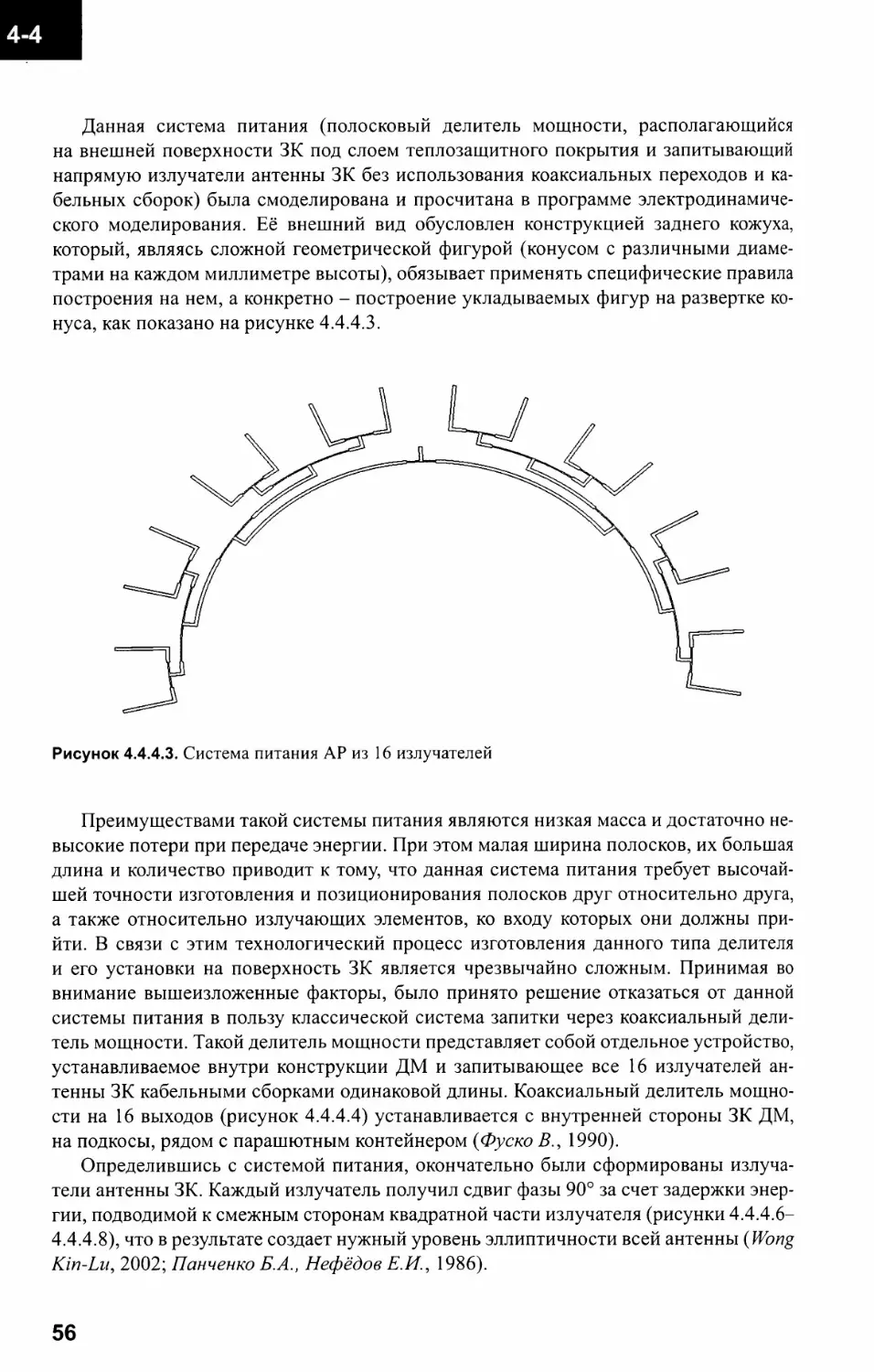
Данная система питания (полосковый делитель мощности, располагающийся
на внешней поверхности ЗК под слоем теплозащитного покрытия и запитывающий
напрямую излучатели антенны ЗК без использования коаксиальных переходов и ка¬
бельных сборок) была смоделирована и просчитана в программе электродинамиче¬
ского моделирования. Её внешний вид обусловлен конструкцией заднего кожуха,
который, являясь сложной геометрической фигурой (конусом с различными диаме¬
трами на каждом миллиметре высоты), обязывает применять специфические правила
построения на нем, а конкретно - построение укладываемых фигур на развертке ко¬
нуса, как показано на рисунке 4.4.4.3.
Рисунок 4.4.4.3. Система питания АР из 16 излучателей
Преимуществами такой системы питания являются низкая масса и достаточно не¬
высокие потери при передаче энергии. При этом малая ширина полосков, их большая
длина и количество приводит к тому, что данная система питания требует высочай¬
шей точности изготовления и позиционирования полосков друг относительно друга,
а также относительно излучающих элементов, ко входу которых они должны при¬
йти. В связи с этим технологический процесс изготовления данного типа делителя
и его установки на поверхность ЗК является чрезвычайно сложным. Принимая во
внимание вышеизложенные факторы, было принято решение отказаться от данной
системы питания в пользу классической система запитки через коаксиальный дели¬
тель мощности. Такой делитель мощности представляет собой отдельное устройство,
устанавливаемое внутри конструкции ДМ и запитывающее все 16 излучателей ан¬
тенны ЗК кабельными сборками одинаковой длины. Коаксиальный делитель мощно¬
сти на 16 выходов (рисунок 4.4.4.4) устанавливается с внутренней стороны ЗК ДМ,
на подкосы, рядом с парашютным контейнером (Фуско В., 1990).
Определившись с системой питания, окончательно были сформированы излуча¬
тели антенны ЗК. Каждый излучатель получил сдвиг фазы 90° за счет задержки энер¬
гии, подводимой к смежным сторонам квадратной части излучателя (рисунки 4.4.4.6-
4.4.4.8), что в результате создает нужный уровень эллиптичности всей антенны (Wong
Kin-Lu, 2002; Панченко Б.А., Нефёдов Е.И., 1986).
56
4-4
Рисунке 4.4.4.Д. Делитель мощности антенны ЗК на 16 выходов
Рисунке 4.4.4.5. Послойная конструкция заднего кожуха с установленным излучателем
антенны ЗК
Рисунке 4.4.4.6. Расположение излучателя с коаксиальным переходом от кабельной сборки
делителя мощности
57
4-4
Рисунок 4.4.4.7. Общий вид излучателей антенны ЗК, установленных на поверхности ЗК
(модель)
Рисунок 4.4.4.8. Общий вид излучателей антенны ЗК, установленных на поверхности ЗК
(изделие)
58
4-4
Рисунок 4.4.4.Э. Расположение согласующего устройства антенны ЗК
Рисунок 4.4.4.10. ЗК (с установленной антенной ЗК), покрытый слоями ТЗП и ЛКП
59
4-4
Рисунок 4.4.4.11. ДН по КУ антенны ЗК
Рисунок 4.4.4.12. Испытания антенны ЗК
16 кабельных сборок, идущих от делителя мощности, параллельно запитывают
излучатели с помощью коаксиальных переходов, проходящих через многослойную
конструкцию ЗК.
Послойная конструкция заднего кожуха с установленным излучателем антенны
ЗК показана на рисунке 4.4.4.5.
Излучатель антенны ЗК с коаксиальным переходом показан на рисунке 4.4.4.6.
Внешний вид излучателей антенны ЗК, установленных на поверхности ЗК, пока¬
зан на рисунках 4.4.4.7^4.4.4.8.
Настройка коэффициента стоячей волны (КСВ) антенны ЗК производится посред¬
ством использования согласующего устройства.
60
4-4
Согласующее устройство, установленное внутри ДМ рядом с делителем мощно¬
сти, показано на рисунке 4.4.4.9.
Финальная стадия изготовления антенны ЗК - покрытие ЗК слоями теплозащитного
покрытия (ТЗП) и лакокрасочного покрытия (ЛКП), как показано на рисунке 4.4.4.10.
Одновременное излучение каждого излучателя формирует диаграмму направлен¬
ности по коэффициенту усиления (ДН по КУ) антенны ЗК, имеющую тороидальную
форму, рисунок 4.4.4.11.
Радиотехнические параметры антенны ЗК, а также влияние конструкции ЗК на из¬
лучение антенны были успешно подтверждены во время испытаний антенного маке¬
та десантного модуля, (рисунок 4.4.4.12).
4.4.5. Антенна посадочной платформы
Антенна посадочной платформы представляет собой резонансный квадрофиляр-
ный спиральный излучатель и работает как на прием, так и на передачу сигнала.
Общий вид антенны ПП представлен на рисунке 4.4.5.1.
Рисунок 4.4.5.1. Общий вид антенны ПП
Антенна ПП устанавливается на штангу раскрытия посадочного модуля. Поло¬
жения антенны ПП на разных этапах осуществления миссии показаны на рисун¬
ках 4.4.2.1,4.43.1 и 4.4.3.2.
Радиотехнические параметры антенны ПП, а также влияние конструкции ПсМ
на излучение антенны были успешно подтверждены во время испытаний антенного
макета посадочного модуля (рисунок 4.4.5.2).
61
4-4
Рисунок 4.4.5.2. Испытания антенны ПП
4.4.6. Радиочастотные кабели и переключатели
Связь от ППУ с необходимой антенной осуществляется с помощью тракта, вклю¬
чающего радиочастотные (РЧ) переключатели и кабели в зависимости от непосред¬
ственного положения переключателей.
Общий вид РЧ-кабеля показан на рисунках 4.4.6.1, 4.4.6.2.
В кабелях используются РЧ-соединители тип SMA.
Кабели компонуются как прямыми РЧ-соединителями, так и угловыми (под
углом 90°).
РЧ-переключатели реализованы по схеме 2Н2П - два направления, два положе¬
ния. Конфигурация положений переключателей представлена на рисунке 4.4.6.3.
Каждый РЧ-переключатель имеет четыре РЧ-разъема SMА розетка (разъемы с J1
по J4) для подключения фидерных трактов АФС (РЧ кабелей) и один разъем D-Sub
вилка (разъем J5) для управления переключателем и получения ТМ-информации.
Общий вид РЧ-переключателя показан на рисунке 4.4.6.4.
62
4-4
Рисунок 4.4.6.1. Общий вид РЧ-кабеля АФС с прямыми разъёмами
общая длина
Рисунок 4.4.6.2. Общий вид РЧ-кабеля АФС с угловым разъёмом
положение 1
положение 2
Л -J2
Л -J4
J3-J4
J2-J3
Рисунок 4.4.6.3. Конфигурация РЧ-переключателей
63
4-4
Рисунок 4.4.6.4. Общий вид РЧ-переключателя АФС
Совместный российско-европейский проект «ЭкзоМарс» разделил зоны ответ¬
ственности. Одной из зон ответственности российской стороны являлась разработ¬
ка и интеграция антенно-фидерной системы (АФС), которая отвечает за радиосвязь
во время проведения миссии.
Одной из сложнейших задач было обеспечить передачу радиосигнала на этапе
входа космического аппарата в атмосферу Марса, а также во время спуска и посадки
на поверхность Красной планеты.
Разработку антенны для решения данной задачи НПО им. Лавочкина поручило
своему отделу антенно-фидерных систем, имеющему колоссальный опыт изготовле¬
ния различного рода и сложности АФС.
Необходимо было разработать и изготовить такую антенну, которая бы исправно
функционировала и передавала сигнал на одном из самых сложных моментов мис¬
сии. Высокие перегрузки, давление и колоссальные температуры при прохождении
атмосферы Марса не должны были остановить несущую волну с передаваемой ин¬
формацией. При разработке концепции антенны на этапе технического проекта было
проанализировано множество различных типов антенн: спираль по контуру поверх¬
ности заднего кожуха, антенна-вибратор (штырь) на поверхности десантного модуля,
телескопические антенны. В итоге выбор пал на антенную решетку, опоясывающую
задний кожух десантного модуля излучателями сложной формы, при этом такого типа
антенн на конусе на НПОЛ еще не делали. Это, вкупе с положительными результа¬
тами проведенных расчетов, и повлияло на выбор данного типа антенны для столь
важного проекта. Проведенные испытания показали, что предприятие справилось
с поставленной задачей. Изготовленная антенна заднего кожуха отвечает жесточай¬
шим требованиям к самой антенне и всей АФС в целом.
64
4-4
Список литературы
Панченко Б.А., Нефёдов Е.И. Микрополосковые антенны. М.: Радио и связь, 1986.
145 с.
Фуско В. СВЧ-цепи. Анализ и автоматизированное проектирование М.: Радио
и связь, 1990. 288 с.
Biswas Diptiman, Dr. V Ramachandra. A novel approach to design conformal frustum
wrap around antenna. Bangalore, India, 9th international radar symposium, 2013.4 p.
WongKin-Lu. Compact and broadband microstrip antennas. New York, John Wiley and
Sons, 2002. 340 p.
T.P. Сабиров,
В. О. Крылов,
Ю.Ю. Назаров
65
4-5
ЕНСИСТЕМА ОБЕСПЕЧЕНИЯ ТЕПЛОВОГО РЕЖИМА
ДЕСАНТНОГО МОДУЛЯ КОСМИЧЕСКОГО
АППАРАТА «ЭКЗОМАРС»
В этом разделе представлен состав, принципы функционирования и отработки
системы обеспечения теплового режима десантного модуля КА «ЭкзоМарс». Задача
обеспечения теплового режима КА предусматривает совокупность мер, позволяющих
находиться составным частям изделия в границах заданных температурных условий.
В НПО им. Лавочкина существует обширная номенклатура средств, выполняющих
указанную задачу, и накоплен богатый опыт их использования. Однако сочетание ме¬
няющихся в процессе функционирования условий и сложной компоновки КА «Экзо¬
Марс», которая предусматривает необходимость увязки требований нескольких мо¬
дулей между собой, заставляет использовать новые средства терморегулирования
и схемы их применения.
4.5.1. Этапы эксплуатации КА «ЭкзоМарс»
Миссия «ЭкзоМарс» предусматривает несколько этапов эксплуатации, каждый
из которых существенно отличается условиями окружающей среды, что оказывает
непосредственное влияние на построение системы обеспечения теплового режима
(СОТР). В Таблице 4.5.1.1 представлена сводная информация по всем этапам с указа¬
нием характерных особенностей окружающей среды и конфигурации КА.
Таблица 4.5.1.1
этап
продолжи¬
тельность
наличие
гравитации
и ее направление
относительно
осей КА
наличие
атмосферы, давление,
другие внешние
тепловые условия
конфигурация КА
сборочные
и технологические
операции
на техническом
комплексе (TK)
после установки
тепловых блоков.
около
50 суток
гравитация
направлена
по оси «-Х» или
по оси «+У»
нормальные
атмосферные
условия, давление
около 760 мм рт. ст.
в помещениях
проводится
кондиционирование,
обеспечивающее
температуру не более
25°С
КА состоит
из десантного,
перелетного
модулей, адаптера
и марсохода
функционирование
на стартовом
комплексе (СК)
до и после включения
бортовой служебной
аппаратуры
около
Ю суток
Гравитация
направлена
по оси «-Х»
Нормальные
атмосферные
условия, давление
около 760 мм рт. ст.
Тепловые условия
в соответствии
с климатическими
особенностями
местности
КА состоит
из десантного,
перелетного
модулей, адаптера
и марсохода
66
4-5
этап
продолжи¬
тельность
наличие
гравитации
и ее направление
относительно
осей КА
наличие
атмосферы, давление,
другие внешние
тепловые условия
конфигурация КА
выведение КА
ракетой-носителем
«Протон-М»
с разгонным
блоком «Бриз-М»
на отлётную
траекторию
к Марсу
4,5-5 часов
гравитация
не рассматривается
после выхода
на опорную
орбиту
атмосфера
отсутствует.
Солнечная
постоянная,
около 1367 Вт/м2
КА состоит
из десантного,
перелетного
модулей, адаптера
и марсохода
функционирование
на трассе перелёта
Земля - Марс
около Земли
260-270
суток
не
рассматривается
атмосфера
отсутствует.
Солнечная постоянная
снижается
с 1367 Вт/м2 у Земли,
до 520 Вт/м2
около Марса
КА состоит
из десантного,
перелетного
модулей, адаптера
и марсохода
автономный полёт
десантного модуля
после отделения
от перелетного
модуля до входа
в атмосферу Марса
30 минут
не
рассматривается
атмосфера
отсутствует.
Солнечная постоянная
составляет около
520 Вт/м2
десантный модуль
функционирует
автономно
вход в атмосферу
Марса,
спуск в атмосфере
Марса и посадка
на поверхность
Марса
5-7 минут
гравитация
направлена
по оси «+Х»
присутствует
атмосфера,
начиная со 120 км
над поверхностью
Марса.
Тепловые условия
в соответствии
с моделью
марсианской
атмосферы
десантный модуль
функционирует
автономно,
при спуске
в атмосфере
последовательно
отделяются
аэродинамический
экран и задний
кожух
с парашютной
системой
функционирование
на поверхности Марса
до съезда марсохода
до 10 суток
гравитация
направлена
по оси «+Х»
атмосфера
из углекислого
газа, давление
около 5 мм рт. ст.
Тепловые условия
в соответствии
с моделью
марсианской
атмосферы
посадочный
модуль включает
в себя посадочную
платформу
и марсоход
функционирование
на поверхности
Марса после съезда
марсохода
2 года
гравитация
направлена
по оси «+Х»
атмосфера
из углекислого
газа, давление
около 5 мм рт. ст.
Тепловые условия
в соответствии
с моделью
марсианской
атмосферы
посадочная
платформа
функционирует
автономно
67
4-5
Основные тепловые параметры окружающей среды на Марсе включают в себя
температуру атмосферы, неба и поверхностного слоя грунта, солнечный прямой
и диффузный тепловой поток. Также на тепловой режим посадочной платформы
на Марсе оказывают влияние скорость ветра, альбедо поверхности Марса и давление
атмосферы.
Тепловые условия окружающей среды на Марсе закладываются в соответствии
со случаями, определенными ЕКА, которое использует климатическую базу данных
Марса (E.Millour et al., 2015). В таблице 4.5.1.2 приведены основные параметры рас¬
смотренных расчетных случаев.
Таблица 4.5.1.2
расчетный
случай
широта, °
солнечная
долгота, °
оптическая
плотность
атмосферы
давление,
Па
альбедо
скорость
ветра, м/с
ENVOI
+25
120
0,5
579
0,12
0
ENV_02
+25
120
0,1
579
0,12
0
ENV03
+25
120
0,5
579
0,12
0
ENV_04
+25
90
0,5
758
0,17
0
ENV_05
+5
78
0,08
632
0,27
30 днем,
0 ночью
ENV06
+5
78
2
632
0,27
0
ENV_07
+25
19
0,1
710
0,28
0 1
На рисунках 4.5.1.1-4.5.1.5 показано изменение основных тепловых параметров
за марсианские сутки. Указанные случаи относятся к основному этапу эксплуатации
между сезонами пылевых бурь.
время, ч
Рисунок 4.5.1.1. Изменение полного солнечного теплового потока за марсианские сутки
68
4-5
Рисунок 4.5.1.2. Изменение диффузного солнечного теплового потока за марсианские сутки
время, ч
Рисунок 4.5.1.3. Изменение температуры неба за марсианские сутки
Рисунок 4.5.1.4. Изменение температуры поверхностного слоя грунта за марсианские сутки
69
4-5
время, ч
Рисунок 4.5.1.5. Изменение температуры атмосферы за марсианские сутки
4.5.2. Назначение и функциональные особенности средств СОТР
СОТР предназначена для поддержания температуры элементов конструкции ДМ
«ЭкзоМарс» в пределах заданных допустимых диапазонов на всех этапах функцио¬
нирования изделия. СОТР ДМ построена сочетанием активных и пассивных средств
(Бондаренко В.А, Куперштейн В.Б., 2014).
К активным средствам относятся электронагреватели, термоэлектрические моду¬
ли холодильные (ТЭМХ) и вентиляторы.
К пассивным средствам относятся:
- аксиальные тепловые трубы (АТТ);
- теплопроводы радиаторов, которые включают испарители, регуляторы давления,
компенсационные полости, радиаторы, паро- и конденсатопроводы;
- экранно-вакуумная теплоизоляция (ЭВТИ);
- однородная теплоизоляция;
- тепловые блоки ТБ-8,5;
- элементы конструкции, обеспечивающие необходимые термические
сопротивления;
- терморегулирующие покрытия.
Средства СОТР выполняют следующие функции.
1) Электронагреватели предназначены для компенсации стоков тепла с конструк¬
ции путем подвода к ней необходимой электрической мощности.
2) ТЭМХ является резервным органом управления расходом теплоносителя в те¬
плопроводе радиатора в случае отказа регулятора давления. ТЭМХ при подаче напря¬
жении подводит тепловую нагрузку к испарителю (при токе прямой полярности) или
к компенсационной полости (при токе обратной полярности).
При подводе тепла к испарителю расход теплоносителя в теплопроводе радиатора
возрастает вследствие увеличения разности температур между испарителем и ком¬
пенсационной полостью. При подводе тепла к компенсационной полости расход те¬
плоносителя в теплопроводе радиатора снижается, а затем прекращается полностью
вследствие выравнивания температур испарителем и компенсационной полостью.
70
4-5
3) Вентилятор совместно с кожухом-воздуховода устанавливается на один из ра¬
диаторов ТСП, с которого отводится тепло, вырабатываемое тепловыми блоками.
Вентилятор увеличивает эффективность конвективного охлаждения при работе в ус¬
ловиях нормальной (земной) атмосферы. Вентиляторы прекращают функционирова¬
ние непосредственно перед пуском КА.
4) АТТ встроены в ТСП, на которых расположена тепловыделяющая бортовая
аппаратура. По АТТ тепло отводится к испарителю теплопровода радиатора с мини¬
мальным перепадом температур.
5) Теплопровод радиатора предназначен для отвода тепла с ТСП на радиаторы,
откуда оно снимается излучением и конвекцией (в условиях атмосферы) или только
излучением (в вакууме) в окружающую среду.
6) ЭВТИ предназначена для минимизации теплообмена элементов конструкции
ДМ с окружающей средой или друг с другом. ЭВТИ наиболее эффективна в условиях
вакуума, когда в полостях между экранами отсутствует теплопроводная среда и пере¬
дача тепла осуществляется в основном излучением.
7) Однородная теплоизоляция предназначена для минимизации теплообмена эле¬
ментов конструкции ДМ с окружающей средой в условиях атмосферы Марса. Тепло¬
изолирующие свойства достигаются благодаря низкой теплопроводности материала
однородной теплоизоляции.
8) Тепловые блоки предназначены для компенсации стоков тепла с конструкции
ТСП через теплоизоляцию путем подвода тепла, выделяемого в результате реакции
распада радиоизотопного источника.
9) Терморегулирующие покрытия благодаря сочетанию термооптических свойств
позволяют обеспечивать необходимую интенсивность теплообмена излучением меж¬
ду поверхностями элементов конструкции ДМ и с окружающей средой.
4.5.3. Подсистемы СОТР
Состав СОТР определяется компоновочной схемой КА, периодом, режимами
функционирования и допустимыми диапазонами температур оборудования и аппа¬
ратуры. Компоновочное решение, принятое в ДМ, предусматривает размещение всех
систем внутри оболочки, образованной задним кожухом и аэродинамическим экра¬
ном, и нанесенного на них теплозащитного покрытия (Хартов В.В. и др., 2014). Кроме
того блоки аппаратуры и оборудования посадочного модуля монтируются на единой
базовой сотопанели. Таким образом, в тепловом отношении системы ДМ до момента
посадки на поверхность Марса связаны в одно целое и оказывают значительное вли¬
яние друг на друга. Тем не менее, СОТР ДМ можно условно разделить на следующие
группы, функционирующие в определенной степени автономно или же привязанные
к определенной бортовой системе:
- СОТР ТСП 1 и ТСП2;
- СОТР двигательной установки (ДУ);
- СОТР узлов разделения (УР);
- СОТР парашютной системы (ПС);
- СОТР установки радара;
- СОТР посадочных мест приборов внешнего расположения;
- СОТР ТСП БИБ1 и ТСП БИБ2.
71
4-5
СОТР ТСП1 и ТСП2
На ТСП1 и ТСП2 расположены основные служебные и научные блоки аппара¬
туры, к которым предъявляются самые строгие температурные требования. Также
на ТСП1 и ТСП2 установлена только та аппаратура, которая осуществляет функци¬
онирование на поверхности Марса, так как значительный дефицит электроэнергии
на Марсе, необходимой для обогрева, компенсируется тепловыми блоками установ¬
ленными именно на ТСП1 и ТСП2.
Всего на ТСП1 и ТСП2 установлено 14 тепловых блоков (6 шт. на ТСП1 и 8 шт.
на ТСП2). Тепловой блок ТБ-8,5 представляет собой капсулу из углеродного волок¬
на, в которой заключено радиоизотопное вещество, которое постепенно разлагает¬
ся, выделяя при этом тепловую мощность равную в среднем за период эксплуатации
8,5 Вт. При этом количество ТБ выбирается исходя из необходимой для поддержания
допустимой температуры ТСП мощности обогрева на Марсе. Тепловыделение ТБ ни¬
каким образом регулироваться не может, поэтому начиная с момента их установки
на ТК СОТР должны обеспечивать теплоотвод от ТБ в окружающую среду, характе¬
ристики которой на Земле и Марсе значительно различаются. Также из-за особенно¬
стей технологических операций, выполняемых на ТК, ориентация ДМ относительно
вектора силы тяжести перпендикулярна или прямо противоположна предусмотрен¬
ной на Марсе. На стартовом комплексе ось «-Хдм» совпадает с направлением силы
тяжести, в то время как на Марсе ось «+Х» направлена в сторону поверхности с воз¬
можным отклонением ±15°.
С учетом указанных выше условий задача обеспечения теплового режима ТСП1
и ТСП2 решается следующим образом (рисунки 4.5.3.1-4.5.3.4). На каждую из ТСП
устанавливается по два теплопровода радиатора, представляющие собой КнТТ. Соот¬
ветственно на каждой ТСП установлено по два испарителя (испаритель «+Х» и ис¬
паритель «—X»), Внутри ТСП1 проведены три основные аксиальные тепловые трубы
(АТТ), проложенные между двумя испарителями, а также три дополнительные АТТ,
между отдельными блоками служебной аппаратуры и испарителями со стороны оси
«+Х». Внутри ТСП2 три АТТ, проложенные между двумя испарителями, а также две
дополнительные АТТ между отдельными блоками служебной аппаратуры и испари¬
телями со стороны оси «+Х». Контейнер с тепловыми блоками устанавливается непо¬
средственно на испаритель «+Х».
При наличии гравитации условием запуска АТТ является расположение зоны
конденсации выше зоны испарения или на одном уровне. Наличие двух испарите¬
лей потенциально позволяет обеспечить независимость работы АТТ от ориентации
ДМ. Кроме того, необходимо развести диапазоны регулирования двух КнТТ, для того
чтобы запуск испарителя «+Х», расположенного внизу на Марсе, не привел к отсут¬
ствию запуска АТТ и соответственно испарителя «-Х», расположенного на Марсе
вверху. Так для испарителя «-Х» диапазон регулирования КнТТ составляет 11±3°С,
а для испарителя «+Х» 18±3°С.
Регулирование теплопровода радиатора осуществляется регулятором давления,
который открывает или закрывает основную магистраль КнТТ при достижении тем¬
пературы регулирования, которая также определяет давление в контуре. В качестве
резервного органа управления КнТТ применяется термоэлектрический модуль хо¬
лодильный, который при определенных условиях включается в прямой - для запу¬
ска циркуляции в контуре, или в обратной полярности - для остановки циркуляции
72
4-5
в контуре. Даже при наличии работоспособного регулятора давления запуск контура
может не произойти самопроизвольно, и в этом случае ТЭМХ принудительно осу¬
ществляет данную операцию.
Дополнительно каждая ТСП оснащена трехсекционным электронагревателем
(НГ1 и НГ2 соответственно), расположенным в зоне прохождения АТТ со стороны
«-Х», мощностью 12 Вт. При функционировании на поверхности Марса электрона¬
греватели НГ1 и НГ2 являются резервными электронагревателями по отношению
к тепловым блокам.
Площади радиаторов выбираются исходя из необходимого для отвода тепла, ус¬
ловий окружающей среды на Марсе, Земле и на перелете, а также различной кон¬
фигурации солнечных батарей, две створки которых в сложенном состоянии распо¬
лагаются непосредственно перед каждым радиатором. Площадь каждого радиатора
составляет около 0,48 м2. Рабочими сторонами радиатора являются как фронтальная,
так и тыльная стороны. На трассе перелета тепло от радиаторов отводится исключи¬
тельно лучистым способом, однако в присутствии атмосферы Земли конвективный
теплообмен вносит наибольший вклад, на Марсе конвекция также оказывает суще¬
ственное влияние, особенно в условиях сильного ветра.
Для увеличения теплоотдачи с поверхности радиатора на него вместе с кожу¬
хом-воздуховодом устанавливается вентилятор, который работает на всех опера¬
циях при подготовке к запуску: электрических проверках, на ТК, транспортиров¬
ке и СК. На рисунке 4.5.3.4 показано расположение вентилятора на одном из двух
радиаторов.
радиатор 2.1
радиатор 1.1
радиатор 1.2
ТСП2
радиатор 2.2
ТСП1
Рисунок 4.5.3.1. Расположение радиаторов и ТСП на посадочной платформе
73
4-5
Для минимизации утечек тепла с ТСП1 и ТСП2 на них устанавливается теплои¬
золяция. В условиях марсианской атмосферы ЭВТИ не эффективна с точки зрения
соотношения массы к термическому сопротивлению. В этой связи на ТСП устанавли¬
вается теплоизоляция однородного типа, имеющая коэффициент теплопроводности
на уровне 0,03-0,038 Вт/(мК) в условиях атмосферы. Средняя толщина теплоизоля¬
ции выбирается исходя из обеспечения теплового режима ТСП марсианской ночью
при полностью отключенной бортовой аппаратуре и составляет не менее 70 мм. Кро¬
ме того, для улучшения характеристик теплоизоляции в условиях вакуума, а также
защиты однородной теплоизоляции от длительного солнечного воздействия допол¬
нительно к ней устанавливается ЭВТИ облегченного состава.
Рисунок 4.5.3.2. Расположение блоков аппаратуры и тепловых труб со стороны «+Y»
Так как на ТСП1 и ТСП2 устанавливаются в том числе научные приборы, имею¬
щие чувствительные зоны, не закрываемые теплоизоляцией, в ней неизбежно обра¬
зуются отверстия. Для снижения влияния этих отверстий на тепловой режим ТСП
в целом высота бленд приборов должна составлять не менее 40 мм, а общая площадь
отверстий должна быть минимизирована. Приборы с большой площадью чувстви¬
тельных зон вынесены на ТСП1, так как нижняя предельно допустимая температура
ТСП2 на 30°С выше.
Двигательная установка ДМ «ЭкзоМарс» состоит из тормозного двигателя (ТД),
двигателей малой тяги (ДМТ) и агрегатов, обеспечивающих их работу при посад¬
ке на Марс. Агрегаты ДУ размещены на базовой сотопанели со стороны «+Х», при¬
чем ТД отделен от остальной аппаратуры, расположенной на сотопанели, восьми¬
гранным корпусом. На ДМ расположено восемь ДМТ в четырех противоположных
74
4-5
углах сотопанели. Четыре топливных бака объемом 40 литров каждый размещены
по бокам от ТСП1 и ТСП2 и находятся в круговых вырезах сотопанели таким обра¬
зом, что сотопанель делит их на две части, одна из которых обращена на АЭ, дру¬
гая - в сторону ЗК. Два шар-баллона расположены по осям «±У» и также устанав¬
ливаются на сотопанели. На базовой сотопанели также расположены четыре панели
ДУ - заправочная, проверочная, пневматическая (с агрегатами газовых магистралей)
и топливная (с агрегатами топливных подающих магистралей). Между топливными
баками и двигателями проходят подающие топливные трубопроводы, в том числе
коллектор внутри восьмигранного корпуса. Кроме того, от заправочной панели, про¬
верочной панели и шар-баллонов в топливные баки проходят соответственно запра¬
вочные, проверочные и газовые магистрали. Как видно из рисунков 4.5.3.5 и 4.5.3.6,
агрегаты ДУ расположены по всей базовой сотопанели.
Рисунок 4.5.3.3. Расположение блоков аппаратуры и тепловых труб со стороны «-У»
Так как базовая сотопанель не содержит тепловых труб и зашита листами из угле¬
пластика, теплопроводность которого приблизительно в несколько десятков раз мень¬
ше теплопроводности алюминиевых сплавов, между различными агрегатами ДУ нет
сколько-нибудь эффективной теплопередачи.
Во время всего этапа перелета ДУ находится в состоянии хранения. В целях эко¬
номии электроэнергии температура агрегатов поддерживается на минимально воз¬
можном уровне с помощью электронагревателей и для большинства из них является
отрицательной (не выше минус 20°С). Температура топливных баков в течение всего
перелета поддерживается на рабочем уровне (не ниже плюс 15°С), также выше 0°С
поддерживается температура заправочных магистралей, заправочной и проверочной
панелей.
75
4-5
Рисунок 4.5.3.5. Средства СОТР ДУ со стороны «+Х»
76
4-5
Рисунок 4.5.3.6. Средства СОТР ДУ со стороны «-Х»
Для обеспечения работы ДУ все агрегаты должны быть заблаговременно разо¬
греты до рабочих температур, исходя из чего выбирается мощность установленных
электронагревателей. Для достижения данного результата с учетом необходимости
минимального энергопотребления электронагревателей все агрегаты автономно за¬
крываются ЭВТИ и устанавливаются на базовую сотопанель через тепловые развязки
из стеклотекстолита в случае небольшого веса агрегата (например, трубопроводы)
или из титановых сплавов для более массивных конструкций (например, топливные
баки или рама ТД). Электронагреватели устанавливаются непосредственно на то¬
пливные баки, шар-баллоны, кронштейны ДМТ, топливные трубопроводы и панели
ДУ. Для обогрева топливных трубопроводов используются электронагреватели тер¬
мокабельного типа, ранее не применявшиеся в изделиях НПОЛ.
Разогрев конструкции ТД производится в два этапа: сначала с помощью тепловых
экранов, расположенных по осям «+Х» (на кронштейне радара) и «-Х» (под платфор¬
мой марсохода), а затем, за четыре часа до посадки, с помощью электронагревателей,
встроенных в камеры сгорания ТД, температура которых должна составлять не менее
плюс 70°С на момент подачи топлива. Тепловые экраны представляют собой углепла¬
стиковые листы, с одной стороны обращенной к ТД, имеющие покрытие с высокой
степенью черноты, а с другой стороны - электронагреватели. Таким образом, перво¬
начальный разогрев конструкции ТД происходит с помощью лучистого теплообме¬
на, что позволяет равномерно прогреть ТД, состоящий из многочисленных агрегатов
сложной формы.
77
4-5
СОТР узлов разделения
К узлам разделения ДМ «ЭкзоМарс» относятся собственно узлы систем отделе¬
ния и узлы раскрытия механизмов. В десантном модуле можно выделить три системы
отделения:
- система отделения АЭ и ЗК;
- система отделения адаптера и ЗК;
- система отделения ЗК и ПП;
К механизмам раскрытия относятся:
- механизм раскрытия трапов;
- механизм раскрытия солнечных батарей;
- механизм раскрытия антенны УКВ.
К узлам разделения также относятся узлы резки кабелей, расположенные в дон¬
ной части ЗК и на стыке ЗК и АЭ. Внутри всех узлов разделения и резки содержатся
пиросредства, чувствительные к температуре. Причем допустимый температурный
диапазон должен обеспечиваться как на перелете, так и в момент подрыва. Так как
узлы разделения располагаются на внешней оболочке ДМ, то для удержания темпе¬
ратуры не ниже минус 50°С на электрод етонационные устройства устанавливают¬
ся электронагреватели. Кроме того, для уменьшения теплопотерь АЭ закрывается
ЭВТИ полностью, а ЗК - на высоте 200.мм от зоны стыка. Также закрывается ЭВТИ
конструкция адаптера. На рисунках 4.5.3.7-4.5.3. И показано расположение ЭВТИ
на внешней оболочке ДМ, а также размещение электронагревателей на узлах разде¬
ления и раскрытия. Выбор титанового сплава в качестве материалов кронштейна об¬
условлен его низкой теплопроводностью, благодаря чему снижается интенсивность
теплообмена с окружающей средой.
Рисунок 4.5.3.7. ЭВТИ десантного модуля внешнего расположения
78
4-5
Рисунок 4.5.3.8. Средства СОТР системы отделения ЗК и ПП
Рисунок 4.5.3.9. Средства СОТР системы отделения АЭ и ЗК
79
4-5
Рисунок 4.5.3.10. Средства СОТР системы отделения адаптера и ЗК
Рисунок 4.5.3.11. Средства СОТР узлов раскрытия механизмов
80
4-5
СОТР парашютной системы
Парашютная система разрабатывается европейской стороной и размещается
в контейнере, закрепленном в донной части ЗК. Контейнер представляет собой ци¬
линдрическую оболочку из алюминиевого сплава с фрезерованным дном, которая
закреплена с помощью заклепок на массивном титановом шпангоуте, устанавливае¬
мом на ЗК. С внешней стороны на шпангоуте устанавливается закрывающая контей¬
нер крышка с нанесенным на нее ТЗП. СОТР ПС поддерживают температуру только
внешних поверхностей парашютного контейнера - шпангоута, оболочки и крышки.
Для этой цели на парашютный контейнер под ЗК устанавливаются электронагре¬
ватели (рисунок 4.5.3.12) и ЭВТИ. Также на крышку ПС поверх ТЗП устанавливается
пленка с низкой степенью черноты (не более 0,1) для предотвращения захолаживания
крышки на этапе автономного полета после отделения от ПМ.
Рисунок 4.5.3.12. СОТР парашютной системы
СОТР установки радара
Радар разрабатывается европейской стороной и размещается между АЭ и ТД,
замыкая тем самым восьмигранный корпус по оси «+Х». Радар представляет собой
плиту, на которой с одной стороны располагаются блоки электроники, а с другой -
четыре антенны, обращенные после отделения АЭ к поверхности Марса. Радар уста¬
навливается на базовую сотопанель с помощью тяг, которые закреплены на радаре
через кольцевой кронштейн.
Во время перелета радар является пассивным элементом и находится в выключен¬
ном состоянии. Функционирование радара осуществляется только при спуске в ат¬
мосфере Марса. Однако аппаратура, входящая в состав радара, накладывает одинако¬
вые требования по температуре как во включенном, так и в выключенном состоянии.
Требуемый тепловой режим обеспечивается с помощью электронагревателей, рас¬
положенных на кронштейне радара (рисунок 4.5.3.13). Кронштейн устанавливается
на радар через теплопроводящую прокладку, что обеспечивает хорошую тепловую
связь между плитой радара и кронштейном. Также радар закрывается ЭВТИ с обеих
сторон, кроме чувствительных зон антенн.
81
4-5
электронагреватель
электронагреватель
Рисунок 4.5.3.13. СОТР установки радара
СОТР посадочных мест приборов внешнего расположения
СОТР посадочных мест приборов внешнего расположения должна поддерживать
температурный режим конструкции ДМ в зоне установки этих приборов в заданных
температурных диапазонах.
В состав СОТР приборов внешнего расположения в соответствии с чертежами
входят:
- электронагреватели;
- терморегулирующие покрытия;
- однородная теплоизоляция;
- ЭВТИ;
- штатные и управляющие температурные датчики;
- нормированные термические связи по элементам конструкции.
Базовая сотопанель является основным конструктивным элементом посадочной
платформы, на которую, однако, не накладываются какие-либо ограничивающие тем¬
пературные требования. Тем не менее, на базовую сотопанель устанавливаются: все
агрегаты посадочного модуля, в том числе ТСП 1 и ТСП 2; платформа марсохода;
агрегаты ДУ; трапы; солнечные батареи, а также некоторые научные приборы, выне¬
сенные за пределы ТСП 1 и ТСП 2 - четыре телекамеры, ударный сенсор пылевого
комплекса и прибор РАТ-М. Данные приборы функционируют на поверхности Марса
и являются единственными, под которые зарезервирована электрическая мощность
для обогрева. Тепловой режим остальных научных приборов, располагающихся вне
ТСП 1 и ТСП 2, обеспечивается разработчиками приборов.
СОТР посадочных мест научных приборов аналогичны. Приборы устанавливают¬
ся на базовую сотопанель через кронштейн, на который устанавливается электрона¬
греватель. Кронштейн устанавливается на сотопанель через тепловую развязку (ти¬
тановые шайбы или стеклотекстолитовые прокладки). Прибор вместе с кронштейном
закрывается теплоизоляцией однородного типа толщиной 40 мм и ЭВТИ облегченного
82
4-5
состава. На рисунке 4.5.3.14 представлено размещение ЭВТИ и электронагревателей
на примере прибора РАТ-М. Аналогично задача обеспечения теплового режима реша¬
ется для приборов КАМ-О/ЭМ и ударный сенсор. Так как данные приборы не работа¬
ют постоянно, а ограниченное время по циклограмме их теплоемкости достаточно для
удержания температуры их кронштейна крепления ниже верхнего предела допустимо¬
го диапазона, для уменьшения стоков тепла с установленных на базовой сотопанели
агрегатов панель полностью закрывается ЭВТИ.
Восьмигранный корпус отделяет ТД от остального объема ДМ и состоит из карка¬
са, образующего восемь граней. На трех гранях расположены сотопанели, на которых
установлены соответственно выносные научные приборы (СЭМ, Адрон-ЭМ-ДЭ),
блок управления приводами регулятора тяги (БУ ПРТ) и блок БА ПП. Остальные гра¬
ни зашиты углепластиковыми листами.
Приборы, расположенные на сотопанелях, имеют малое тепловыделение (БА ПП),
или непродолжительное время работы (БУ ПРТ), или достаточно широкий допусти¬
мый диапазон температур (СЭМ, Адрон-ЭМ-ДЭ).
Соответственно для приборов БА ПП и БУ ПРТ необходимо только обеспечить
приемлемые температуры хранения, что обеспечивается установкой электронагрева¬
теля и закрытием их ЭВТИ. Выносные научные приборы закрываются ЭВТИ, элек¬
тронагреватели для их обогрева не предусмотрены.
Все грани восьмигранного корпуса снаружи и изнутри закрывается ЭВТИ с целью
уменьшения потерь тепла из внутреннего объема восьмигранного корпуса.
Рисунок 4.5.3.14. Средства СОТР прибора внешнего расположения
СОТР ТСП БИБ1 и ТСП БИБ2
СОТР ТСП БИБ1 и ТСП БИБ2 должны поддерживать температурный режим эле¬
ментов конструкции ДМ в зоне установки приборов БИБ1 и БИБ2 в заданных темпе¬
ратурных диапазонах.
На поверхности Марса БИБ1 и БИБ2 не функционируют, и поэтому температур¬
ные требования к ним не предъявляются.
В состав СОТР ТСП БИБ1 и ТСП БИБ2 входят:
- две ТСП с аксиальными тепловыми трубами;
- электронагреватели;
83
4-5
- штатные управляющие и контрольные температурные датчики;
- терморегулирующие покрытия;
- ЭВТИ;
- элементы конструкции, обеспечивающие необходимые термические сопротив¬
ления.
На двух гранях восьмигранного корпуса со стороны осей «+Z» «+У» и «-Z» «-Y»
располагаются ТСП, на каждой из которых установлен прибор БИБ (ТСП БИБ1
и ТСП БИБ2). Прибор БИБ имеет значительное тепловыделение (25 Вт максималь¬
но), работает постоянно на перелете после этапа выведения и имеет достаточно узкий
допустимый диапазон температур (от минус 20 до плюс 50°С).
Для отвода тепловой нагрузки от посадочных мест приборов предусмотрены ра¬
диаторы, которые представляют собой незакрытую поверхность ТСП. Площадь ради¬
аторов каждой ТСП БИБ составляет около 0,29 м2.
Радиаторы ТСП БИБ 1 и ТСП БИБ 2 имеют следующие покрытия:
- эмаль ЭКОМ-1 белая с термооптическими характеристиками As не более 0,3
и £ не менее 0,9;
- гибкое терморегулирующее покрытие «НИИКАМ-ТР-СО-ФТЭ» с термооптиче¬
скими характеристиками As не более 0,15 и £ не менее 0,71.
Требуемый тепловой режим обеспечивается с помощью двухсекционного
электронагревателя.
На приборы БИБ 1, БИБ 2 устанавливается стеклотекстолитовый кожух для пре¬
дотвращения непосредственного соприкосновения с ЭВТИ.
Принципиальная схема СОТР ТСП БИБ представлена на рисунке 4.5.3.15.
Рисунок 4.5.3.15. СОТР ТСП БИБ
84
4-5
4.5.4. Алгоритмы управления СОТР
Управление активными элементами СОТР (электронагревателями и ТЭМХ) осу¬
ществляет БЦВМ-1 производства ЕКА. Исходные данные на программное обеспече¬
ние БЦВМ-1 для управления системами десантного модуля, в том числе СОТР, опре¬
деляет НПО им. Лавочкина.
Функционирование СОТР возможно в автоматическом режиме и с помощью ко¬
манд с наземного комплекса управления.
Логика автоматического управления электронагревателями
Автоматическое управление электронагревателями предусматривается в следую¬
щих режимах:
- управление по температурным показаниям группы из трех термодатчиков;
- управление по температурным показаниям группы из двух термодатчиков;
- управление по времени.
При управлении по температуре включение электронагревателя осуществляется
при достижении температурой регулирования заданного нижнего порога, выключе¬
ние электронагревателя осуществляется по достижении температурой регулирования
заданного верхнего порога. В обоих случаях команда на включение или выключение
выдается при однократном подтверждении значения температуры.
При управлении по показаниям группы из трех термодатчиков для определения
температуры регулирования берутся показания двух термодатчиков с наименьшей
разностью температур. Температурой регулирования является среднее значение по¬
казаний данных термодатчиков.
Управление по показаниям группы из двух термодатчиков является менее надеж¬
ным по сравнению с тремя термодатчиками и предусматривается только для тех мест,
где отсутствует необходимость точного поддержания температуры. Данный способ
управления был введен в связи с ограничениями, накладываемыми системой электро¬
автоматики по количеству линий опроса термодатчиков.
Логика управления по двум термодатчикам предполагает, что если температура
хотя бы одного из двух термодатчиков достигает нижнего порога регулирования,
электронагреватель должен быть включен. И наоборот, если температура хотя одного
из двух термодатчиков достигает верхнего порога регулирования, электронагреватель
должен быть выключен. При этом показания двух термодатчиков никогда не долж¬
ны находиться по разные стороны диапазона регулирования (между верхним и ниж¬
ним порогами), иначе показания считаются недостоверными, и происходит переход
на управление по времени.
В режиме управления по времени электронагреватели функционируют в соответ¬
ствии с заданными длительностями включенного и выключенного состояний. Данный
режим является резервным способом по отношению к управлению по температуре.
Логика автоматического управления ТЭМХ
Автоматическое управление ТЭМХ осуществляется:
- по температурным показаниям двух групп из трех термодатчиков каждая, одна
из которых располагается на испарителе, а другая - на входе теплоносителя КнТТ
в радиатор.
85
4-5
- по времени в прямой полярности;
- по времени в обратной полярности.
Для целей управления ТЭМХ по температуре для каждого из теплопроводов ради¬
атора задаются следующие параметры:
1) ATI - разность температур между испарителем и радиатором, при превыше¬
нии которой ТЭМХ включается в прямой полярности.
2) АТ2 - разность температур между испарителем и радиатором, при уменьше¬
нии ниже которой с ТЭМХ снимается напряжение в прямой полярности (т.е. ТЭМХ
выключается).
3) АТ4 - разность температур между испарителем и радиатором, при превы¬
шении которой с ТЭМХ снимается напряжение в обратной полярности (т.е. ТЭМХ
выключается).
4) АТ5 - разность температур между испарителем и радиатором, при уменьшении
ниже которой ТЭМХ включается в обратной полярности.
5) ТЗ - температура испарителя, при снижении ниже которой ТЭМХ включается
в обратной полярности.
6) Т4 - температура испарителя, при увеличении выше которой с ТЭМХ снимает¬
ся напряжение в обратной полярности (т.е. ТЭМХ выключается).
7) Т7 - температура испарителя, при снижении ниже которой с ТЭМХ снимается
напряжение в прямой полярности (т.е. ТЭМХ выключается).
8) Т8 - температура испарителя, при увеличении выше которой ТЭМХ включает¬
ся в прямой полярности.
Включение ТЭМХ в прямой полярности происходит при одновременном выпол¬
нении условий по позициям 1) и 8). Включение ТЭМХ в обратной полярности про¬
исходит при одновременном выполнении условий по позициям 4) и 5). Выход ТЭМХ
из режима прямой полярности происходит при выполнении любого из условий по по¬
зициям 2) и 7). Выход ТЭМХ из режима обратной полярности происходит при выпол¬
нении любого из условий по позициям 3) и 6).
Температуры испарителя и радиатора определяются усреднением показаний тер¬
модатчиков в соответствующих группах.
Как и для электронагревателей, предусматривается возможность управления
ТЭМХ по времени в режиме как прямой, так и обратной полярности.
Функция ограничения мощности, потребляемой СОТР.
На десантном модуле установлены 59 электронагревателей и 4 ТЭМХ. Суммар¬
ная номинальная мощность элементов СОТР составляет около 1 кВт. При этом пере¬
летный модуль, подающий питание на десантный модуль в течение этапа перелета,
ограничивает потребление десантного модуля 400 Вт. Таким образом, одновремен¬
ное включение даже половины электронагревателей является недопустимым и может
привести к переходу ПМ в безопасный режим.
В целях ограничения электропотребления СОТР был разработан специальный
алгоритм:
На каждом цикле работы контура каждому электронагревателю присваивает¬
ся приоритет, который является произведением весового коэффициента, заданного
изначально и определяющего критичность электронагревателя, и разностью между
температурой регулирования нагревателя и порогом его включения.
86
4-5
Далее электронагреватели сортируются в порядке убывания приоритета, и начи¬
ная с самого приоритетного нагревателя, происходит проверка статуса электронагре¬
вателя (включен / выключен). Если электронагреватель должен быть включен, алго¬
ритм вычисляет сумму его мощности по этикетке и текущей измеренной мощности
десантного модуля. Если полученное значение больше максимально допустимого
потребления ДМ, электронагреватель не включается.
Данный алгоритм применяется в течение всего этапа перелета до перехода на ав¬
тономное питание ДМ. Наиболее важное значение данный алгоритм приобрета¬
ет на этапе разогрева двигательной установки и других систем ДМ при подготовке
к разделению с ПМ.
4.5.5. Отработка теплового режима десантного модуля
«ЭкзоМарс»
Разработка системы обеспечения теплового режима предполагает комплекс про¬
ектно-конструкторских работ, включающий выбор параметров элементов СОТР,
проведение тепловых расчетов, макетирование, разработку конструкторской доку¬
ментации, тепловакуумные испытания (ТВИ), корреляцию тепловой модели с резуль¬
татами ТВИ. На каждом этапе проектирования параметры СОТР могут уточняться
с доработкой конструкции КА.
В связи с тем, что составные части ДМ «ЭкзоМарс» располагаются под единой
оболочкой, изначально была разработана его общая тепловая модель, которая также
включала тепловые модели европейских модулей и оборудования: марсохода, пере¬
летного модуля, парашютной системы, радара,’ БЦВМ, УКВ передатчика, БИБ.
Тепловая модель десантного модуля на этапе эскизного проекта носила упро¬
щенный характер, что позволило просчитать максимальное количество расчетных
случаев, выбрать предварительные параметры СОТР, сформировать требования
к интерфейсу ДМ с бортовой аппаратурой. В дальнейшем тепловая модель неодно¬
кратно обновлялась, чтобы учесть существенные для теплового режима изменения
конструкции.
Тепловые расчеты проводились в худших случаях внешних и внутренних тепло¬
вых нагрузок. В горячем случае были заданы наибольшие внешние тепловые потоки
и тепловыделение бортовой аппаратуры, таким образом проверялась достаточность
охлаждающей способности СОТР. В холодных случаях, наоборот, были заданы наи¬
меньшие внешние тепловые потоки и тепловыделение, что позволило проверить до¬
статочность мощности нагрева СОТР.
На рисунке 4.5.5.1 представлено температурное поле, полученное с использовани¬
ем тепловой модели десантного модуля на этапе перелета в горячем режиме. На ри¬
сунке 4.5.5.2 представлено температурное поле посадочной платформы при функци¬
онировании на поверхности Марса также в горячем режиме. Данная тепловая модель
выполнена с большей детализацией.
Все проведенные тепловые расчеты показали достаточность состава и выбранных
параметров средств СОТР.
Тепловые расчеты позволили определить состав и требования к сборкам для авто¬
номных и комплексных тепловакуумных испытаний, а также режимы ТВИ, имитиру¬
ющие реальные внешние и внутренние тепловые воздействия.
87
4-5
ExoMars Jlight: case 203 cmli continue Result
Load Case 1, Increment 65. Time = 1.7280E+005 s
Temperature - Elemental, Scalar
Shell Section : Top
Min : -160.90, Max : 78.22, Units = C
123.21
17.41
11.61
5.81
-23.18
g *40'58
■ -46.38
Units = C
[-27.468 C
-39.386
Рисунок 4.5.5.1. Расчетное температурное поле ДМ на этапе перелета
Рисунок 4.5.5.2. Расчетное температурное поле ПП при функционировании на поверхности
Марса
88
4-5
В соответствии с комплексной программой экспериментальной отработки было
запланировано проведение ТВИ на следующих экспериментальных изделиях:
- автономные отработочные ТВИ ТСП1;
- автономные отработочные ТВИ ТСП2;
- автономные доводочные ТВИ фрагмента двигательной установки (ДУ);
- отработочные ТВИ посадочной платформы;
- отработочные ТВИ десантного модуля.
ТВИ фрагмента ДУ проводились с целью проверки функционирования ранее
не применявшихся в изделиях НПОЛ термокабельных электронагревателей на то¬
пливных трубопроводах. В процессе испытаний отрабатывались режимы поддержа¬
ния температуры агрегатов ДУ при наиболее низком температурном фоне и режим
разогрева ДУ при подготовке к посадке. На рисунке 4.5.5.3 показан фрагмент ДУ
в собранном виде до установки ЭВТИ.
Рисунок 4.5.5.3. Фрагмент ДУ
ТВИ ТСП1 и ТСП2 позволили автономно проверить работу самой сложной ча¬
сти системы обеспечения теплового режима, которая поддерживает температуру
бортовой аппаратуры и оборудования, функционирующего на всех этапах эксплу¬
атации в наиболее узком допустимом диапазоне температур. Кроме того, изделия
ТВИ ТСП1 и ТСП2, в отличие от ТВИ посадочной платформы, благодаря мень¬
шим размерами были испытаны в условиях атмосферы с пониженным давлением -
от 5 до 30 мм рт. ст., которое соответствует параметрам атмосферы Марса с учетом
ветровой нагрузки.
ТВИ ТСП1 и ТСП2 проводились каждые в три этапа, соответствующие условиям
функционирования десантного модуля:
89
4-5
1) При нормальном атмосферном давлении были отработаны различные режимы
функционирования и положения относительно силы тяжести, возникающие при под¬
готовке к запуску на Земле.
2) При пониженном давлении (от 5 до 30 мм рт.ст.) были отработаны режимы
функционирования на поверхности Марса.
3) При давлении ниже 10 5 мм рт.ст. были отработаны режимы на этапе перелета.
На этом этапе радиаторы ТСП переводились в горизонтальное положение для пра¬
вильной имитации условий перелета и их воздействия на тепловые трубы.
Во всех режимах особое внимание было уделено процессу запуска и функциони¬
рованию теплопроводов радиаторов.
На рисунке 4.5.5.4 представлено изделие ТВИ ТСП1 на монтажном столе вакуум¬
ной камеры со стороны оси «-Z».
Рисунок 4.5.5.4. Изделие ТВИ ТСП1
По состоянию на июнь 2019 года проведены все автономные ТВИ с положитель¬
ным результатом - оцениваемые температурные параметры удовлетворяют заданным
требованиям.
Полностью собранное изделие проходит ТВИ в двух штатных конфигурациях:
1) Посадочная платформа после съезда марсохода.
2) Десантный модуль при подготовке к запуску и на этапе перелета вместе с ма¬
кетами перелетного модуля и марсохода.
На рисунке 4.5.5.5 представлено расположение изделий ТВИ посадочной плат¬
формы и десантного модуля в вакуумной камере.
90
4-5
Рисунок 4.5.5.5. Расположение изделий ТВИ посадочной платформы и десантного модуля
в вакуумной камере
ТВИ на собранных изделиях позволят проверить тепловой режим уже испытан¬
ных фрагментов с учетом влияния обстановки и остальных составных частей, входя¬
щих в десантный модуль.
После окончания всех планируемых ТВИ при положительном результате квали¬
фикация СОТР будет завершена итоговым тепловым расчетом, проведенным на вери¬
фицированной тепловой модели, учитывающей все полученные экспериментальные
данные.
Список литературы
Бондаренко В.А., Куперштейн В.Б. Обеспечение теплового режима десантного
модуля космического аппарата «ЭкзоМарс-2018» // Вестник ФГУП НПО им. С.А. Ла¬
вочкина. 2014. № 2. С. 95-104.
Хартов В.В., Мартынов М.Б., Лукъянчиков А.В., Алексашкин С.Н. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на // Вестник ФГУП НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12.
E.Millour, F.Forget et al., The Mars Climate Database (MCD version 5.2), EPSC
Abstracts, Vol. 10, EPSC2015-438, 2015.
B.A. Бондаренко,
В.Б. Куперштейн
91
4-6
НЭСИСТЕМА ЭНЕРГОСНАБЖЕНИЯ ПОСАДОЧНОГО
АППАРАТА
Система энергоснабжения (СЭС) предназначена для непрерывного электроснаб¬
жения бортовой аппаратуры (БА) десантного модуля (ДМ) КА «ЭкзоМарс-2022-КА»
с момента включения на стартовом комплексе и далее в течение всего срока натурной
эксплуатации, а также при наземной подготовке КА.
Исходя из задач миссии «ЭкзоМарс-2022» к СЭС предъявлялись довольно жест¬
кие требования, главное из которых - надежность и энерговооруженность системы
электроснабжения при минимальной массе.
На всем жизненном цикле, начиная от изготовления КА до окончания срока актив¬
ного существования, к СЭС предъявляются следующие требования:
1) На этапе НЭО СЭС должна обеспечивать питание КА на уровне, заложенном
в техническом задании на КА.
2) На этапе выведения и перелета по трассе Земля - Марс СЭС должна обеспе¬
чивать питанием всю бортовую аппаратуру, при этом питание СЭС осуществляется
от перелётного модуля, изготовителем которого является европейская сторона.
3) На этапе отделения ДМ от перелетного модуля, входа в атмосферу Марса и по¬
садки на поверхность Марса питание ДМ осуществляется от аккумуляторных бата¬
рей ДМ.
4) После посадки ДМ на поверхность Марса и съезда марсохода с посадочной
платформы питание БА должно осуществляться от внутренних источников питания
десантного модуля, входящих в состав СЭС, в течение двух земных лет до окончания
работы посадочной платформы на поверхности Марса.
Для выполнения поставленных задач на этапе технического проекта был выбран
состав СЭС, определены типы источников питания и выбраны их энергетические
характеристики, достаточные для обеспечения циклограмм потребления БА. Так,
в состав СЭС вошли традиционные источники питания - батарея фотоэлектрическая
(первичный источник энергии) и батарея аккумуляторная. С целью обеспечения со¬
гласования работы источников питания в состав СЭС вошел комплекс автоматики
Рисунок 4.6.1. Модель СЭС. Здесь ПМ - перелетный модуль;
СК КАС - силовой коммутатор, входящий в состав КАС
92
4-6
и стабилизации, формирующий шину централизованного электроснабжения БА с на¬
пряжением в диапазоне от 26,0 до 32,8 В. Все составные части СЭС объединены
бортовой кабельной сетью. Упрощенная модель СЭС представлена на рисунке 4.6.1.
Резервирование всех составных частей СЭС осуществляется в «горячем» режи¬
ме, кроме устройств обмена по мультиплексному каналу информационного обмена
(МКО). При снятии электропитания с входной шины, агрегаты СЭС автоматически
приводятся в исходное состояние (Иванчура В.И., Исляев Ш.Н., Соустии Б.П., Чер¬
нышев А. И., 1994).
С целью обеспечения простоты управления, а также автономного существова¬
ния ПМ и ДМ на весь период САС СЭС функционирует автономно без привлече¬
ния средств НКУ и не требует для поддержания своей работоспособности внешних
управляющих воздействий (команд), за исключением парирования нештатных ситу¬
аций в части передачи телеметрии по МКО, а также приведения системы в рабочее
состояние перед стартом.
Батарея фотоэлектрическая
Для питания БА на поверхности Марса в дневное время используется батарея
фотоэлектрическая (БФ). С целью обеспечения высоких энергетических характери¬
стик в БФ десантного модуля КА «ЭкзоМарс-2022-КА» применяются трехпереход¬
ные фотопреобразователи типа 3G30C фирмы AZUR SPACE Solar Power GmbH. Дан¬
ный тип фотопреобразователей имеет КПД не менее 31 %, это соответствует лучшим
характеристикам, которые доступны на момент проектирования и создания ДМ КА
«ЭкзоМарс-2022-КА».
Для обеспечения энерговооруженностью КА «ЭкзоМарс-2022-КА» БФ должна
обеспечивать энергией БА, а также иметь запас для обеспечения полного заряда АБ.
С целью определения мощности БФ осуществлен расчет энергобаланса. При расчете
были учтены модель движения Солнца на Марсе, а также факторы внешнего воз¬
действия: пылевые бури, радиация, затенение элементов БФ конструкцией и другие.
Данные были доступны благодаря опыту функционирования на поверхности Марса
КА, созданных в рамках других марсианских программ.
БФ ДМ КА «ЭкзоМарс-2022-КА» должна вырабатывать при прямом падении сол¬
нечного излучения мощность:
- на начало срока активного существования не менее 1079 Вт (напряжение нагруз¬
ки - 33 В; ток нагрузки - 32,7 А);
- на конец срока активного существования не менее 980 Вт (напряжение нагрузки -
33 В; ток нагрузки - 29,6 А).
В результате проведенных расчетов была определена полезная площадь батареи
фотоэлектрической, которая составила 8,3 м2. Исходя из этого определился облик
посадочной платформы. Так, БФ конструктивно состоит из 12 генераторов «GS1 /1»,
«GS1/2», «GS2/1», «GS2/2», «GS3/1», «GS3/2», «GS4/1», «GS4/2», «GS5», «GS6»,
«GS7», «GS8», размещаемых на восьми сотовых панелях с обшивками из углепла¬
стика. Генераторы «GS1/1», «GS 1 /2», «GS2/1», «GS2/2», «GS3/1», «GS3/2», «GS4/1»,
«GS4/2» размещаются на панелях № 1 - № 4, которые состоят из двух трапециевид¬
ных створок. Генераторы «GS7» и «GS8» размещаются на двух идентичных пане¬
лях № 5 и № 7 соответственно. Генераторы «GS5» и «GS6» размещаются на двух
93
4-6
идентичных панелях № 6 и № 8 соответственно. Вид сверху ПП в разложенном со¬
стоянии представлен на рисунке 4.6.2.
Раскрытие панелей осуществляется в следующем порядке - вначале раскрывают¬
ся панели № 1, № 2, № 3, № 4, затем панели № 6 и № 8. Панели № 1 - № 4 в раскры¬
том положении образуют горизонтальную плоскость. Панели № 6 и № 8 открываются
одновременно (вместе) с трапами. Угол наклона панелей № 6 и № 8 в раскрытом по¬
ложении с горизонтальной поверхностью составляет 20 градусов. Панели № 5 и № 7
неподвижны и установлены в горизонтальной плоскости.
Дополнительно на панелях № 1 - № 5 и № 8 установлены телеметрические датчи¬
ки для контроля температуры поверхности БФ.
В состав каждого генератора входят:
1) элементарные генераторы;
2) развязывающие устройства (РУ);
3) внутренняя кабельная сеть;
4) кронштейны и элементы крепления РУ к каркасам панелей.
Все элементарные генераторы состоят из 16 последовательно соединенных ар-
сенид-галлиевых фотопреобразователей (ФП) на основе GaInP/GaInAs/Ge-структур.
Особенностью этих структур является более полное преобразование энергии свето¬
вого потока входящими в состав каскада фотопреобразователями на основе полупро¬
водниковых соединений с различной шириной запрещенной зоны, каждый из кото¬
рых работает в соответствующей области спектра:
панель №6
панель № 8
зона
размещения
радиаторы СОТР
панель № 7
Рисунок 4.6.2. Схема размещения генераторов БФ и термодатчиков (TCI.. .ТС6) на панелях
панель № 5
94
4-6
- GalnP - в спектральном диапазоне 300-700 нм;
- GalnAs - в спектральном диапазоне 700-900 нм;
- Ge - в спектральном диапазоне 900-1600 нм.
Для обеспечения взаимной электрической развязки элементарного генератора,
а также исключения разряда аккумуляторной батареи от БФ на период отсутствия
Солнца в состав каждого генератора входят развязывающие устройства - диодные
блоки. В конструктивном исполнении блок диодный содержит корпус из электроизо¬
лирующего материала (стеклотекстолита) с полостью. В эту полость установлены два
параллельно-соединенных диода (основной и дублирующий) в бескорпусном испол¬
нении. Для обеспечения одинакового теплового режима диодов на них с двух сторон
установлены кремниевые пластины.
С целью электроизоляции цепей диодов от сотовой панели поверх кремниевых
пластин приклеены стеклянные пластины, при этом лицевая пластина имеет зер¬
кальное покрытие, которое уменьшает нагрев блока диодного от прямого солнечного
потока.
Внутренняя кабельная сеть БФ объединяет отдельные элементарные генераторы
БФ в общую электрическую цепь, а также подключает телеметрические датчики к ка¬
налам телеметрической системы (Рауъиенбах Г, 1983).
Аккумуляторная батарея
Аккумуляторная батарея предназначена бортовой аппаратуры для осуществления
питания на этапе после отделения от перелетного модуля до момента развертывания
панелей солнечной батареи на поверхности Марса, а также для обеспечения мини¬
мального питания платформы в ночное время.
На этапе проектирования рассматривались два типа АБ, которые могли приме¬
няться в СЭС - никель-водородные АБ (НВАБ) и литий-ионные АБ (ЛИАБ).
Уступая литий-ионным АБ (ЛИАБ) по массе, никель-водородные батареи (НВАБ)
имеют несомненное превосходство над ЛИАБ в части ресурса, надежности и живу¬
чести в нештатных ситуациях, например в запредельных режимах (перезаряд, пе-
реразряд). При переразряде ЛИАБ с большой вероятностью происходит короткое
замыкание (КЗ) литий-ионных аккумуляторов (ЛИА), после которого аккумуляторы
не подлежат восстановлению. Необратимые процессы, возникающие в ЛИАБ при пе¬
резаряде, опасны не только с точки зрения деградации энергоемкости, но и с точки
зрения безопасности работы АБ и бортового оборудования.
В настоящее время разработаны и реализованы (имеют летную квалификацию)
технические решения, обеспечивающие надежную защиту ЛИАБ от перезаряда
и переразряда.
С учетом летной квалификации ЛИАБ, а также успешной реализации необходи¬
мых мер безопасной эксплуатации (управления) ЛИАБ и принимая во внимание сле¬
дующие факторы:
1) практически вдвое большую удельную энергию по сравнению с НВАБ;
2) существенно больший энергетический КПД ЛИАБ за цикл (0,92) в сравне¬
нии с НВАБ (0,72), что приводит к снижению площади и массы БС и радиационных
теплообменников;
95
4-6
3) упрощение предстартовой подготовки из-за существенно меньшей величины
саморазряда ЛИАБ (заряд ЛИАБ выполняется на ТК КГЧ, заряд НВАБ должен вы¬
полняться только на СК), в качестве системы накопления электроэнергии в составе
СЭС десантного модуля КА «ЭкзоМарс» выбрана АБ литий-ионной электрохимиче¬
ской системы.
Для выбора достаточной энергоемкости АБ проведен расчет потребления, в соот¬
ветствии с циклограммой потребления бортовой аппаратуры посадочной платформы
на этапе спуска и посадки на поверхность Марса, вплоть до момента раскрытия па¬
нелей солнечных батарей. В результате расчета была определена необходимая энер¬
гоёмкость и тип АБ, достаточной для успешного выполнения миссии. В результате
чего в состав ДМ КА «ЭкзоМарс-2022-КА» вошла литий-ионная аккумуляторная
батарея VES16 8S24P производства фирмы SAFT. АБ 8S24P представляет собой три
модуля 8S8P, соединенных параллельно. Конструкция каждого модуля основывает¬
ся на архитектуре S - Р: аккумуляторы последовательно объединяются в цепочки,
а цепочки соединяются параллельно. Каждый модуль 8S8P состоит из восьми таких
параллельно соединенных цепочек, которые, в свою очередь, состоят из восьми акку¬
муляторов VES16, соединенных в серии (рисунок 4.6.3).
8 аккумуляторов
8 параллельных
каналов
Рисунок 4.6.3. Архитектура модуля 8S8P
Главным преимуществом данной АБ является наличие в ее составе автоматиче¬
ского байпасного переключателя на каждом аккумуляторе, а также автономной ба¬
лансировочной системы SBS (Simplified Balancing System). Такой подход позволяет
отказаться от использования дополнительных устройств выравнивания заряда акку¬
муляторной батареи и цепей задействования байпасного переключателя в энергопре¬
образующей аппаратуре СЭС.
Автоматический размыкатель цепи включен в конструкцию аккумулятора VES16,
является частью его положительной клеммы и представляет собой предохрани¬
тельное устройство. Если аккумулятор продолжает заряжаться под напряжением,
превышающим нормальное (т.е. 4,1 В), это приводит к окислению электролитного
растворителя, что вызывает образование газа и повышение внутреннего давления.
При повышении давления предохранитель срабатывает, и его активация исключает
цепь поврежденного аккумулятора.
96
4-6
Принцип выравнивания заряда, реализованный в системе SBS, основан на бай¬
пасном разряде каждого аккумулятора через индивидуальную схему. При снижении
напряжения аккумулятора ниже 3,98 В ток через байпас прекращается, при повы¬
шении - линейно увеличивается. При разбалансировке отдельных аккумуляторов
осуществляется самовыравнивание напряжения отдельных аккумуляторов током
до 30 мА, процесс прекращается при снижении напряжения меньше 3,98 В.
Общий вид модуля АБ 8S8P приведен на рисунке 4.6.4.
J01 силовой разъем
J02 разъем нагревателя
J03 ТМ температурный разъем
J04TM разъем напряжения
модуль 2*8S4P
2-этажный, закрыт
защитной крышкой FR4
(луженая снаружи)
Рисунок 4.6.4. Общий вид модуля 8S8P VES 16
Комплекс автоматики и стабилизации
КАС в составе СЭС совместно с БФ и АБ предназначен для обеспечения:
1) электропитания КАС от БФ на поверхности Марса или от ПМ на трассе
перелета;
2) электроснабжения БА нестабилизированным напряжением постоянного тока
от общей шины, образованной от АБ;
3) заряда АБ и защиты АБ от перезаряда;
4) коммутации АБ к выходной шине и защиты АБ от переразряда;
5) получения из блока управления (БУ) и бортового компьютера ОВС1 по МКО
команд управления и корректировки параметров экстремального регулятора мощно¬
сти БФ;
6) контроля параметров СЭС, формирования и выдачи в ОВС1 сигналов опе¬
ративного контроля и информационных массивов о состоянии параметров АБ, БФ
и КАС по МКО;
7) электроснабжения БА от наземных имитаторов БФ и ПМ при испытаниях ДМ
и КА;
8) контроля состояния резервов, параметров и функций во время проведения
испытаний.
97
4-6
КАС обеспечивает электроснабжение БА на следующих этапах функционирования:
1) включение на стартовом комплексе как минимум за 10 часов до контакта
подъема;
2) перелет Земля - Марс составного КА (ПМ и ДМ) в течение 9,5 месяцев;
3) подготовка к разделению ПМ и ДМ;
4) вход ДМ в атмосферу Марса, отделение лобового экрана и заднего кожуха,
спуск и посадка посадочной платформы (ПП) на поверхность Марса;
5) функционирование ПП на поверхности Марса до съезда марсохода в течение
10 суток;
6) функционирование ПП на поверхности Марса после съезда марсохода в тече¬
ние двух земных лет после посадки.
Проработка конструкции и схемотехнических решений для КАС проводилась
исходя из опыта, накопленного при разработке и изготовлении энергопреобразую¬
щих комплексов для КА. Выбранные конструктивные и схемотехнические решения
обеспечивают минимальную массу и максимальную надежность КАС {Косенко В.Е.,
Чеботарев /?.£., 2011).
При проработке выбраны наиболее надежные и наработанные схемные и кон¬
структивные решения, использованные в энергопреобразующей бортовой аппаратуре
смежных российских и зарубежных предприятий.
КАС выполнен в виде моноблока и конструктивно состоит из пяти функциональ¬
но законченных блоков: блок фильтра, два блока преобразователей, блок автоматики
и вычислительное устройство.
Общий вид прибора КАС приведен на рисунке 4.6.5.
1 - блок фильтра; 2 - блок преобразователей; 3 - блок преобразователей;
4 - блок автоматики; 5 - блок вычислительное устройство.
Рисунок 4.6.5. Общий вид прибора КАС
98
4-6
В соответствии с назначением в структурную схему КАС входят:
1) узел включения КАС;
2) силовые блоки экстремального регулятора СБ ЭРМ1 ... СБ ЭРМ4;
3) силовой коммутатор S1 шины «+АБ» со схемой управления коммутатором;
4) модуль адаптации внешнего электропитания перелётного модуля (МА ЭПМ),
обеспечивающий формирование заданного входного импеданса со стороны перелёт¬
ного модуля, а также повышение напряжения получаемого от ПМ питания до необхо¬
димого для полного заряда АБ значения;
5) два комплекта вычислительного устройства ВУ1 и ВУ2 с МКО, схемами пере¬
ключения комплектов и схемами коммутации сигналов;
6) выходной фильтр ФВЬ1Х, формирующий выходной импеданс КАС по шинам под¬
ключения БА;
7) схемы защиты АБ от переразряда, обеспечивающие формирование сигналов
оперативного управления и отключение шин АБ при снижении напряжения на шинах
АБ до минимально допустимого значения;
8) интегратор Инт.32;
9) задающий генератор (ЗГ), обеспечивающий синхронизацию работы каналов
СБ ЭРМ1.. .СБ ЭРМ4 в многофазном режиме.
Структурная схема КАС приведена на рисунке 4.6.6.
Узел включения КАС обеспечивает:
1) формирование циклограммы включения КАС с обеспечением плавного заря¬
да фильтров КАС и нагрузки ограниченным током при замыкании коммутатора S1
по технологической команде управления (ТКУ) «Включить АБ»;
2) минимальное потребление КАС с шин АБ в режиме выключенного прибора
и в режиме размыкания коммутатора S1 по сигналу порогового устройства защиты
АБ от переразряда;
3) приём и исполнение ТКУ «Включить АБ» и «Отключить АБ»;
4) приём и исполнение релейной импульсной команды управления из БУ «Под¬
ключить АБ»;
5) исполнение внутренней команды отключения АБ, формируемой узлом защиты
АБ от переразряда;
6) питание вторичного источника питания (ВИП) при включении КАС;
7) восстановление работы КАС после полной потери энергетики.
Экстремальный регулятор мощности в составе ВУ и СБ ЭРМ 1...СБ ЭРМ4 обе¬
спечивает работу БФ в режиме максимальной выходной мощности путём перевода
режима работы БФ в оптимальный, соответствующий выполнению условия:
РвыхБФ £7бф'А>ф Р макс-
Экстремальное регулирование осуществляется при работе ВУ путём принудитель¬
ного перемещения рабочей точки на вольтамперной характеристике (ВАХ) БФ и уста¬
новки напряжения (тока), соответствующего максимальной выходной мощности ЭРМ.
В системе экстремального регулирования мощности БФ использованы:
- четыре силовых понижающих преобразователя напряжения СБ ЭРМ1 ... СБ
ЭРМ4, защищённых от отказа типа «короткое замыкание», в состав каждого
из которых входят два комплекта силовых ключей, драйверов управления клю¬
чами, ШИМ-контроллеров (широтно-импульсный модулятор) со схемами выбора
обратных связей и датчиков тока канала;
99
4-6
Рисунок 4.6.6. Структурная схема КАС
100
4-6
- процессорный блок на базе комплекта ВУ1 (ВУ2), обеспечивающий измерение
тока и напряжения БФ, вычисление и формирование управляющих напряжений
и контрольных сигналов, подаваемых на вход СБ ЭРМ1 ... СБ ЭРМ4.
Суммарный выходной ток четырёх каналов СБ ЭРМ определяется выходной мощ¬
ностью БФ и напряжением на шинах нагрузки.
При мощности БФ 1000 Вт и напряжении АБ (нагрузки) 30 В суммарный ток вы¬
хода СБ ЭРМ составит 31,70 А, выходной ток каждого канала 7,93 А.
Максимальный ток каждого из четырёх каналов СБ ЭРМ ограничен на уровне
12 А.
При отказе одного из каналов СБ ЭРМ на обрыв токовая нагруз¬
ка на СБ ЭРМ распределяется между исправными каналами и составляет
10,6 А.
Управление коэффициентом заполнения ключа Кзап в преобразователях СБ
ЭРМ1 ... СБ ЭРМ4 осуществляется широтно-импульсным модулятором, на один
из входов которого поступает управляющее напряжение, формируемое ВУ. Погреш¬
ность определения точки генерирования максимальной мощности при регулирова¬
нии не превышает ±0,5 В.
Схемы защиты АБ от переразряда предназначены для:
- формирования сигнала оперативного управления «Разряд АБ» при снижении на¬
пряжения на шинах АБ до 28,0 В на время не менее 1 с;
- формирования сигнала оперативного управления «Предельный разряд АБ» и те¬
леметрического сигнала «ПР2» при снижении напряжения на шинах АБ до 26,5 В
на время не менее 1 с;
- формирования команды отключения АБ силовым коммутатором S1 при сохране¬
нии сигнала «Предельный разряд АБ» не менее 8 с.
Помимо функции отключения АБ силовой коммутатор шины «+АБ» также пред¬
назначен для подключения шин АБ к шинам БА при включении КАС. Коммутатор
обеспечивает пропускание тока заряда АБ до 32 А, тока разряда до 26 А (постоянно),
до 80 А (импульсно, на время не более 50 мс). Напряжение на разомкнутом коммута¬
торе не более 33 В.
Вычислительное устройство КАС выполняет следующие задачи:
- формирование управляющего сигнала, обеспечивающего совместно с СБ ЭРМ
отбор максимальной мощности БФ путём выбора и удержания соответствующей
рабочей точки на ВАХ БФ;
- приём команд управления из БУ и ОВС1 по МКО;
- передача принятых команд на схемы КАС;
- формирование и выдача в ОВС1 информационных массивов о состоянии параме¬
тров АБ, БФ и КАС по МКО;
- контроль состояния резервов, параметров и функций во время проведения
испытаний.
В блок ВУ входят:
- модуль измерительно-преобразовательный (МИП);
- модуль контроллера (МК);
- модуль ВИП;
- модуль коммутации сигналов;
101
4-6
- оконечное устройство МКО;
- системный контроллер (СК).
Интегратор Инт.32 предназначен для:
- защиты АБ от перезаряда посредством обеспечения ограничения выходного на¬
пряжения КАС (напряжения АБ) на уровне 32,7 В путём автоматического пере¬
мещения рабочей точки по ВАХ БФ в зону высокого выходного напряжения БФ.
Указанная зона соответствует выходу ЭРМ из режима удержания максимальной
мощности БФ и ограничению выходной мощности БФ на уровне, соответствую¬
щем мощности нагрузки и необходимой мощности заряда АБ;
- обеспечения защиты шин АБ и нагрузки от перенапряжения при программных
сбоях или отказах в узлах управления экстремального регулятора;
- обеспечения ограничения напряжения на шинах нагрузки при отключенной АБ;
- обеспечения режима хранения АБ на этапе перелёта при питании КАС от ПМ
путём ограничения напряжения заряда АБ на уровне 30,0 В.
Задающий генератор обеспечивает синхронизацию работы каналов СБ ЭРМ1 ...
СБ ЭРМ4 в многофазном режиме, характеризующемся равномерным распределе¬
нием моментов коммутации силовых ключей СБ ЭРМ1 ... СБ ЭРМ4 по периоду
преобразования.
Многофазный режим работы преобразователей СБ ЭРМ обеспечивает:
- уменьшение амплитуды коммутируемых токов, что уменьшает величину возни¬
кающих при коммутации помех;
- фазовое распределение пульсаций тока по периоду преобразования, что приводит
к уменьшению токовой нагрузки на входной и выходной фильтры СБ ЭРМ и, со¬
ответственно, к уменьшению амплитуды пульсаций на фильтрах.
Принятые решения позволили получить СЭС с характеристиками, соответствую¬
щими мировым аналогам, что позволило обеспечить требуемой энерговооруженно¬
стью КА «ЭкзоМарс-2022» при минимальной массе. Все это позволяет обеспечить
дополнительный массовый резерв с целью установки полезной нагрузки для прове¬
дения научных исследований.
Список литературы
Иванчура В.И., Исляев Ш.Н., Соустии Б.П., Чернышев А.И. Системы электропи¬
тания космических аппаратов / Новосибирск: ВО «Наука». Сибирская издательская
фирма, 1994. 318 с.
Косенко В.Е., Чеботарев В.Е. Основы проектирования космических аппаратов ин¬
формационного обеспечения: учеб, пособие / Сиб. гос. аэрокосмич. ун-т. Красноярск,
2011.488 с.
Раушенбах Г. Справочник по проектированию солнечных батарей / Пер. с англ.
М.: Энергоатомиздат, 1983. 360 с.
А, С, Митькин,
А.Л, Бондаренко,
Д.С, Карплюк,
А.И, Назимко,
Е.Н. Прокофьев,
Д.В, Пушкарев
102
4-7
ШТЕПЛОВОЕ И ЭРОЗИОННОЕ ВОЗДЕЙСТВИЕ
АТМОСФЕРЫ МАРСА НА АЭРОДИНАМИЧЕСКИЙ
ЭКРАН ДЕСАНТНОГО МОДУЛЯ.
КОНСТРУКЦИЯ И ТЕПЛОВАЯ ЗАЩИТА
АЭРОДИНАМИЧЕСКОГО ЭКРАНА
Исследование Марса в АО «НПО Лавочкина» (НПОЛ) является важным направ¬
лением в области разработки автоматических космических комплексов (КК), пред¬
назначенных для изучения планет Солнечной системы. Для этой цели в НПОЛ со¬
вместно с Европейским космическим агентством (ЕКА) разрабатывается проект
«ЭкзоМарс-2022», в состав которого, наряду с перелётным модулем разработки ЕКА,
входит десантный модуль (ДМ) разработки НПОЛ, предназначенный для доставки
марсохода на поверхность Марса (Хартов В.В. и др., 2014).
В составе ДМ тепловая защита является одной из основных по значимости систем
аппарата, определяющей его тепловой режим и работоспособность на этапе аэроди¬
намического торможения в атмосфере Марса и существенным образом влияющей
на успешное выполнение миссии экспедиции «ЭкзоМарс-2022».
Действительно, при движении ДМ в атмосфере Марса со стороны набегающе¬
го потока газа атмосферы на аппарат производится тепловое и силовое воздействие,
в результате которого происходит нагрев тепловой защиты и конструкции. При пре¬
вышении допустимых уровней тепловых нагрузок и недостаточности тепловой защи¬
ты возможно разрушение элементов конструкции аппарата, что приведет к невозмож¬
ности выполнения целевой задачи экспедиции «ЭкзоМарс».
Дополнительное воздействие на космический аппарат (наряду с тепловым) оказы¬
вают твёрдые частицы, такие, как частицы пыли и водного льда, распределённые в ат¬
мосфере на высотах до 40-60 км, на которых скорость аппарата достаточно велика.
Количество пылевых частиц особенно возрастает в периоды пылевых бурь на Марсе.
При больших скоростях движения аппарата твердые частицы в атмосфере представ¬
ляют существенную опасность для теплозащиты ДМ, разрушение (эрозия) которой
может привести к разрушению конструкции аппарата. Поэтому процессы эрозион¬
ного воздействия частиц на конструкцию десантного модуля также необходимо учи¬
тывать при разработке тепловой защиты ДМ (Голом азов М.М., Иванков А.А., 2016).
Для предотвращения разрушительного теплового и эрозионного воздействия
на аппарат со стороны атмосферы Марса на ДМ устанавливается тепловая защита
и теплоизоляция. В настоящем разделе представлены результаты расчетного опреде¬
ления газодинамического, теплового и эрозионного воздействия атмосферы Марса
на аэродинамический экран (АЭ) ДМ (который формирует лобовую часть аппарата)
на этапе аэродинамического торможения. В этих расчетах использовалось программ¬
ное обеспечение (Иванков А.А., 2009).
Показаны также результаты расчетов прогрева конструкции АЭ и выбора значе¬
ний толщины его теплозащитного покрытия (ТЗП), обеспечивающие заданный те¬
пловой режим конструкции ДМ при минимальных весовых затратах теплозащитных
материалов.
Приведены результаты эрозионного воздействия на аппарат со стороны твердых
частиц - пыли и водного льда, распределенных в атмосфере. Эти результаты имеют
самостоятельное значение, особенно в периоды экстремальной пылевой обстановки
в атмосфере Марса.
103
4-7
4.7.1. Постановка задачи
Вычислительный алгоритм
При проведении расчётов используется комплексный подход, который включа¬
ет два основных этапа. На первом этапе (внешняя задача теплообмена) проводится
расчёт обтекания ДМ потоком газа атмосферы с определением газодинамического
поля течения и теплообмена - конвективного и лучистого у поверхности аппарата.
На втором этапе (внутренняя задача теплообмена) определяются прогрев конструк¬
ции и унос массы (в случае его реализации) ТЗП как с внешней (обтекаемой газом)
поверхности, так и с внутренних слоёв покрытия, если разрушение происходит вну¬
три материала. При этом учитывается и эрозионное воздействие на аппарат атмос¬
ферных частиц. Комплексный характер проводимых расчётов состоит в совместном
решении внешней и внутренней задач теплообмена, поскольку их решения взаимос¬
вязаны и влияют на конечный результат.
Вычислительный процесс при расчётном определении внешних воздействий
на аппарат и тепловой защиты ДМ включает три взаимосвязанных процесса, разли¬
чающихся по физическому содержанию описываемых явлений:
1. Расчёт траектории движения ДМ в атмосфере Марса с учётом изменения массы
и баллистического коэффициента при термическом и эрозионном разрушении ТЗП.
2. Расчёт газодинамического поля течения возле ДМ вдоль траектории движе¬
ния с определением конвективных и лучистых тепловых потоков, действующих
на аппарат.
3. Расчёт прогрева конструкции аппарата и материалов тепловой защиты под дей¬
ствием аэродинамических тепловых и эрозионных нагрузок с учётом уноса массы
ТЗП и его влияния на траекторию движения.
Представленная комплексная постановка задачи позволяет точнее разрабатывать
конструкцию тепловой защиты, поскольку учитывает влияние сопутствующих фи¬
зико-химических процессов, происходящих в ударном слое у поверхности аппарата
и в материалах тепловой защиты, включая унос массы ТЗП и его влияние на траекто¬
рию движения аппарата.
Расчетное определение тепловой защиты в представленной сопряжённой поста¬
новке приводит к следующей организации вычислительного алгоритма. Все про¬
граммные единицы, реализующие конкретные вычислительные процессы, такие,
как расчёт траектории движения, определение внешних тепловых потоков, расчёт
прогрева конструкции и др., оформляются в виде отдельных независимых модулей,
каждый со своей системой обозначений, набором модульных и внутренних процедур.
Программный модуль, в котором определяется траектория движения ДМ, оформ¬
ляется в виде головной программы, управляющей ходом всего вычислительного
процесса. Доступ к подпрограммам модулей и входным данным осуществляется
подключением соответствующего модуля в рамках use-ассоциирования, ассоции¬
рования через носитель или ассоциированием параметров (Бартеньев О.В., 2005).
Такая структура программного комплекса позволяет использовать модули как само¬
стоятельные программные единицы или как части в составе программного пакета.
Автоматизированная обработка результатов расчёта осуществляется средствами мно¬
гооконной графики в стандарте языка Фортран 95.
104
4-7
Далее представлена постановка общей задачи, состоящей из ряда отдельных
(частных) задач и соответствующих им программных модулей, совместно функци¬
онирующих в рамках единого программно-вычислительного алгоритма и комплекса
(Гол ом азов М.М., Иванков А. А., 2017).
Расчет траектории движения ДМ
Приведем систему уравнений движения ДМ в поле тяготения планеты, процедура
решения которой используется в качестве программного алгоритма, управляющего
процессом вычислений вдоль траектории движения аппарата.
Расчёт траектории движения ДМ с определением параметров, используемых
в дальнейшем для расчета поля течения, тепловых и эрозионных нагрузок, проводит¬
ся в рамках системы уравнений {Борисов В.М. и др., 2004)
dV рУ2 ■ а
dH . dL Япл
= HsinO, — = V——cos 0,
dt dt R
(4.7.1)
cx S cv
Mg Cx
где V- скорость движения центра масс ДМ;
0 - угол наклона вектора скорости аппарата к местному горизонту;
Н- высота полёта ДМ над поверхностью планеты;
L - дальность полёта, отсчитываемая вдоль образующей поверхности планеты;
ол - баллистический параметр;
go, g ~ ускорение силы тяжести соответственно на поверхности планеты и на вы¬
соте Я;
Sm - площадь миделевого сечения аппарата;
M=M{t) - масса аппарата;
7?пл, R=Rnn+H- радиус планеты и расстояние от её центра до центра масс аппарата;
cx=cx{t), Су - коэффициенты аэродинамических сил соответственно лобового со¬
противления и подъёмной силы; в расчётах полагается сд.=0, т.к. исследуется случай
спуска ДМ осесимметричной формы;
К=Су!сх - аэродинамическое качество аппарата;
у - гравитационная постоянная планеты;
Мпп - масса планеты.
Начальными условиями для системы (4.7.1) являются значения искомых балли¬
стических функций - высоты полёта Но, скорости Ко, угла 0О и дальности £0 в началь¬
ный момент времени.
Система (4.7.1) получена в предположении, что движение аппарата происхо¬
дит под действием аэродинамических сил и силы тяготения, планета - сфера ра¬
диуса 7?пл, её поле тяжести - центральное. Движение аппарата вокруг центра масс
не рассматривается.
Баллистический параметр оА в системе (4.7.1) является переменной величиной
по времени ov=or(/), поскольку зависит от входящих в него меняющихся по траекто¬
105
4-7
рии величин - массы аппарата M=M(t) (при реализации уноса ТЗП) и коэффициента
лобового сопротивления cx(t). При проведении расчётов пренебрегается изменением
коэффициента сх при уносе ТЗП вследствие малого изменения формы и линейных
размеров аппарата в исследуемом процессе (менее 0,5%).
Для численного решения системы обыкновенных дифференциальных уравнений
движения ДМ (4.7.1) используется метод Эйлера с пересчётом с погрешностью ап¬
проксимации <9(т2), т - шаг сетки по времени t. Применять разностную схему с боль¬
шей точностью не целесообразно, поскольку в рамках используемого алгоритма
погрешность в определении некоторых параметров, входящих в уравнение теплопро¬
водности, составляет О(т).
Методика расчёта траектории движения ДМ в поле тяжести планеты представлена
в работе (Борисов В.М. и др., 2004).
Расчёт уноса массы ТЗП аппарата
Представим методику определения уноса массы аппарата ДА/за счёт разрушения
материала ТЗП при тепловом и эрозионном воздействии на поверхность АЭ.
Скорость уноса массы dM/dt вдоль траектории движения аппарата определяется
следующим образом. Из решения уравнения теплопроводности с соответствующим
граничным условием по тепловому или эрозионному разрушению поверхности нахо¬
дится распределение значения толщины уноса ТЗП Д5 вдоль образующей поверхно¬
сти S, т.е. рассчитывается зависимость вида
Д8 = Д5(^,г), reS.
Элемент объёма dV унесённого материала с поверхности 5 за время dt определяет¬
ся поверхностным интегралом вида
dV=^\Z>(t,r)dS.
S
Выражения для элемента поверхности dS в сферической системе координат (г, 0, (р),
связанной с аппаратом (рисунок 4.7.1а), и значения толщины уноса ТЗП Д8 в точке
поверхности через скорость уноса массы Vd имеют вид
0J0J(p
/&($) = Vddt,
где r=rw(0) - полярный радиус образующей поверхности.
С учётом этих выражений для элемента объёма dV унесённого материала за ин¬
тервал времени dt получается выражение в виде определённого интеграла вдоль об¬
разующей поверхности
2 я 0/,
dV = |д8(г )dS = р(р[д8(0)г2(0)
S 0 0
Г^ги2(0)зт0
1 +
0,5 >
de
J
106
4-7
а
а - картина течения возле ДМ;
б - расчётная схема стенки ДМ.
Рисунок 4.7.1. Области решения внешней и внутренней задач теплообмена;
конфигурация ДМ, расчётные точки, состав стенки ДМ
Элементарный унос массы покрытия с обтекаемой поверхности за промежуток
времени dt определяется выражением
(
0/,
Г э
(
2>
0,5
^=PmdV = 2npm
jFX2(e)sine
1 +
( rdS ;
б/О
0
7
а скорость уноса массы - выражением
(4.7.2)
При отсутствии термического разрушения и уноса материала ТЗП с поверхности
масса аппарата остаётся неизменной.
Полученный интеграл (4.7.2), используемый для нахождения скорости уноса мас¬
сы теплозащитного покрытия dM/dt, определяется численно посредством квадратур¬
ной формулы трапеций {Кудрявцев Л.Д., 1988), для которой погрешность аппрок¬
симации составляет О(Ли2), Оу-ц - шаг сетки по угловой переменной о вдоль
107
4-7
поверхности аппарата. В качестве узловых значений аргумента о на отрезке инте¬
грирования [О, 0Л] используются координаты о,- расчётных точек поверхности ДМ,
расположенных на лучах сетки по угловой переменной о. Эта сетка вводится для ре¬
шения задачи радиационной газовой динамики (РГД) при определении поля течения
возле ДМ.
Расчёт внешних тепловых потоков к обтекаемой поверхности
Расчёт поля течения и теплообмена у поверхности аппарата проводится с исполь¬
зованием системы уравнений РГД {Борисов В.М., Иванков А.А., 1992), в которой пере¬
нос излучения учитывается в рамках метода сферических гармоник (МСГ).
На рисунке 4.7.1а приведены физическая картина течения и область ABCD - об¬
ласть решения задачи обтекания ДМ атмосферным потоком. В плоскости, проходя¬
щей через ось симметрии течения, изображены образующие поверхностей - ударной
волны rv, поверхности тела ги., верхнего граничного луча с углом 0Л. Область ABCD
в исследуемом осесимметричном случае ограничена ударной волной гЛ, осью симме¬
трии, образующей поверхности тела ги. и верхним граничным лучом 0/;.
В области решения задачи обтекания течение газа дозвуковое и сверхзвуковое,
с большими значениями и градиентами давления и температуры газа.
При учёте свойств газовой среды, соответствующей атмосфере Марса, пренебре-
гается вязкостью и теплопроводностью газа, предполагается, что газ находится в со¬
стоянии локального термодинамического равновесия, что справедливо для исследуе¬
мого диапазона высот и интенсивного теплового воздействия атмосферы.
Система уравнений РГД для установившихся пространственных течений газа
имеет вид:
V-(pF)=0, (k-v)k+(l/p)VP=0,
V-[Pr(/! + P2/2)+77] = 0,
Н= jtfvdv, р=р(Р, Т), h=h(P, Ту,
О
V-n=KvHv, nv=-^v-^V.tfvjp,
2/ьсУ
exp(h,cv /kT)-l
, KV=KV(P, Г).
(4.7.3)
(4.7.4)
Здесь V - оператор градиента в трёхмерном евклидовом пространстве с ради¬
ус-вектором г; V - вектор скорости газа; р, Л, Р, Г, Kv - соответственно плотность,
удельная энтальпия, давление, температура газа и коэффициент поглощения излуче¬
ния; Hv - вектор монохроматического лучистого теплового потока; с - скорость света
в вакууме; Л* - постоянная Планка; v - частота излучения; к - постоянная Больцмана;
Пу/с - тензор монохроматического излучения; Е - единичный тензор; р, Л, Kv - задан¬
ные функции своих аргументов - Р и Г; индекс «V» относится к параметрам монохро¬
матического излучения.
108
4-7
Система уравнений РГД состоит из двух подсистем: газодинамической (4.7.3)
и тепловой (4.7.4). Подсистема (4.7.3) включает законы сохранения массы, импульса
и энергии для частицы газа. Подсистема (4.7.4) содержит закон равновесия для излу-
чающе-поглощающей среды и реологическое соотношение, которое даёт выражение
для тензора Пу. В терминах МСГ представленная тепловая подсистема (4.7.4) соот¬
ветствует Р}-приближению.
Подробно метод решения системы уравнений РГД представлен в работе {Финчен¬
ко В.С. и др., 2018).
Для проведения быстрых оценок лучистых тепловых потоков вместе с системой
уравнений РГД (4.7.3), (4.7.4) используется упрощённая модель, основанная на ис¬
пользовании интегральной полусферической степени черноты плоского ударного
слоя {Баула Г.Г. и др., 1984). По этой модели для каждого сечения ударного слоя ис¬
пользуется аппроксимация локально-плоским слоем, однородным по распределению
температуры Т и давления газа Р в исследуемом сечении. В качестве постоянных
значений Т и Р выбираются их средние интегральные значения вдоль исследуемого
сечения.
Расчёт конвективных тепловых потоков ведется по приближённой методике, раз¬
работанной по результатам расчётных и экспериментальных работ, выполненных
в ракетно-космической отрасли. Конвективные тепловые потоки определяются в за¬
висимости от режима течения, реализуемого возле обтекаемой поверхности - по кри¬
терию Кнудсена Kn=//Z, где / - средняя длина свободного пробега молекул газа; L -
характерный линейный размер обтекаемого тела, в качестве которого выбирается
диаметр миделевого сечения аппарата D,„.
При свободномолекулярном режиме течения (Кп>10) конвективный тепловой по¬
ток к поверхности определяется следующим образом {Коган М.Н., 1967):
J Л-1 2 (Л-1) Тх J
xX(S<(,)-0,5exp(-S;)
71
о<(р<-,
2
0, — < Ср < 71,
где ае - коэффициент аккомодации тепловой энергии;
7?* - универсальная газовая постоянная;
ц - молярная масса газа;
(р - угол падения линии тока к поверхности элемента;
к - показатель адиабаты;
y(x)=exp(-x2)+7i°-5x( 1 +erf(x));
Л'
erf(x) = 2тг-0'5 J exp{-t2)dt - функция ошибок;
о
5=(£/2)°’5Мх - скоростное отношение; 50 = £’cos(0);
М - число Маха.
Для переходного режима течения (0,01<Кп<10) конвективный тепловой поток qQi
{i - идентифицирует форму расчётного элемента) при нулевом угле падения вектора
скорости к обтекаемой поверхности определяется по зависимостям чисел Стантона
St,- от числа Кнудсена Кп, полученным обобщением большого количества экспери¬
109
4-7
ментальных и расчётных данных при обтекании тел различной формы, таких, как
сфера, цилиндр, цилиндрический торец:
g0,=St,(Kn) • poo Кс(70-/и),
где /0 и Л - соответственно энтальпия торможения и энтальпия газа при температуре
обтекаемой поверхности.
Для распределения теплового потока по поверхности сферы используется аппрок¬
симация, применимая для ламинарного пограничного слоя:
<7i(0)=goi[O,55+O,45cos(2O)J, О<0<л/2,
где 0 - полярный угол точки на поверхности сферы, отсчитываемый от оси симме¬
трии течения.
Для сплошного режима течения (Кп<0,01) конвективный тепловой поток для лами¬
нарного и турбулентного пограничных слоёв определяется с помощью соотношений
^=ад)-р^5 V5^’05 (1-Zw/Zq),
qT=KT(Q)• р*8 V2
где Kl=Al [O,55+O,45cos(20)], Kf=AT [3,75sin(0)-3,5sin2(0)J.
Здесь коэффициенты AL и Ат - заданные числовые множители; Re - характерный
(эффективный) линейный размер обтекаемого тела, формируется программно с при¬
менением метода эффективной длины (Власов В.И. и др., 2010). При проведении
расчётов вдоль образующей обтекаемой поверхности значения тепловых потоков qL
и qT сравниваются, а в качестве окончательного решения выбирается значение, мак¬
симальное из двух величин qL й qT. Такой подход даёт верхнюю оценку уровня тепло¬
вой нагрузки на аппарат, что обеспечивает запас работоспособности конструкции ДМ
при расчётном определении тепловой защиты.
Расчёт прогрева конструкции и термического разрушения ТЗП
Расчёт прогрева конструкции и термического разрушения материалов ТЗП прово¬
дится в одномерной постановке (Иванков А.А., 2012), поскольку в исследуемом слу¬
чае температурные градиенты в материале в нормальном к разрушаемой поверхности
направлении существенно больше, чем в касательном. Используется нестационарное
уравнение теплопроводности, дополненное учётом процессов внутреннего термиче¬
ского разложения материалов и фильтрации газа
Cp^ = ^k(x)^l-CgGg~a, 0<х<8, Q<t<tf> (4.7.5)
dt dx|_ dxj s dx
где T=T(x, f) - температура материала стенки; C(x), p(x) и X(x) - соответственно те¬
плоёмкость единицы массы, плотность и коэффициент теплопроводности материала
(с учётом газообразных продуктов разложения); Cg=Cg(P, Т) - теплоёмкость единицы
массы газообразных продуктов; Gg=Gg(P, Т) - массовый расход газообразных продук¬
тов; Р - давление газа; х - координата, отсчитываемая в направлении, нормальном
к обтекаемой поверхности, х=0 соответствует стороне, обтекаемой газом; 5 - началь¬
ное значение толщины стенки ДМ; twtf- соответственно текущее и конечное время
прогрева материала и, в целом, всего вычислительного процесса.
110
4-7
В исследуемом случае теплофизические характеристики материала - коэффици¬
енты уравнения (4.7.5) С(х), р(х) и Х(х) имеют сильный разрыв на стыке материалов
с различными теплофизическими свойствами. В точке разрыва коэффициентов вы¬
полняются естественные условия сопряжения - непрерывности температуры Т(х, t)
и теплового потока (ХдТ/дх).
В качестве начального условия задаётся распределение температуры поперёк
стенки в начальный момент времени /=0:
ДО, х)=Д(х), 0<х<5, t=0. (4.7.6)
Унос материала с поверхности описывают граничные условия 1-го рода. Принято
допущение, по которому унос материала ТЗП с поверхности начинается при дости¬
жении температуры разрушения материала Td:
T(t, х)=Тм, x=xd,0(t); 0<х^0<8, (4.7.7)
где х^о(О - положение разрушаемой поверхности, определяемое в процессе решения
уравнения (4.7.5). Скорость разрушения обтекаемой газом поверхности находится
из соотношения
?q-SqO Т
РоД/'.О
(4.7.8)
где q0 - суммарный тепловой поток к поверхности; е0 - степень черноты; о - посто-
янная Стефана - Больцмана; Ieffi- эффективная энтальпия разрушения материала;
индекс «О» относится к внешней поверхности ТЗП. В формуле (4.7.8) пренебрегается
тепловым потоком, идущим на нагрев стенки, что приводит к незначительному завы¬
шению уноса материала.
Если температура поверхности ТЗП не достигает температуры разрушения Td9
то вместо (4.7.7) задаётся условие
-X—= ^0-£0с7’4, x=xd0, (4.7.9)
ox
На поверхности стенки, обращённой внутрь аппарата, температура Д7, х) всегда
меньше температуры разрушения материала. На этой границе условие записывается
в виде
X—^^-EjCrT4, х=5, 0<7<Zz, (4.7.10)
дх
где индекс «1» относится к внутренней границе стенки х=8.
В случае процессов разрушения материалов, происходящих внутри стенки, на гра¬
нице, разделяющей соседние материалы, ставится условие 1-го рода с температурой
разрушения материала с меньшим значением Tdk, поскольку этот материал разруша¬
ется первым. В этом случае скорость уноса определяется по формуле (Иванков А.А.,
2005)
^=^4^’ (4-7л1)
Рл *ef,k
где - означает скачок теплового потока, расходуемого на разрушение материала
k-го слоя с плотностью гк при температуре разрушения Tdk с энтальпией Iefk. В этой
точке по-прежнему реализуется условие непрерывности температуры.
111
4-7
Решение уравнения (4.7.5) определяется при заданных начальных условиях (4.7.6)
и следующих граничных условиях:
- на внешней поверхности ДМ задаётся условие (4.7.7) с учётом соотноше¬
ния (4.7.8) или условие (4.7.9);
- на внутренней поверхности ДМ задаётся условие (4.7.10).
В случае если разрушение материалов происходит внутри стенки, то вместе с гра¬
ничным условием 1-го рода используется соотношение (4.7.11).
Расчёт эрозионного воздействия на поверхность ТЗП
Одновременно с тепловым разрушением, которое происходит при достижении
температуры Т поверхностного слоя материала его температуры разрушения T=Td,
может происходить эрозионное разрушение поверхности при достаточно большой от¬
носительной скорости сталкивающихся объектов (Ки>200 м/с). Процессы соударения
с теплозащитным покрытием ДМ твёрдых частиц, таких, как частицы пыли и водного
льда, присутствующие в атмосфере Марса, сопровождаются рядом физических явле¬
ний, связанных с превращением кинетической энергии частиц во внутреннюю энер¬
гию сталкивающихся объектов, с возможным изменением их агрегатного состояния.
При учёте процессов разрушения обычно рассматриваются две предельные мо¬
дели взаимодействия - абсолютно упругий и неупругий удары. Для рассматривае¬
мого случая принимается модель неупругого взаимодействия, при которой после
соударения частиц с поверхностью сталкивающиеся объекты продолжают совмест¬
ное движение. В этом случае кинетическая энергия частиц расходуется в основном
на разрушение материала ТЗП. Часть энергии при этом переходит в тепловую, а так¬
же расходуется на разрушение падающих частиц.
С учётом принятых допущений для определения максимально возможного уноса
материала покрытия используется модель, по которой кинетическая энергия частиц
в набегающем потоке газа полностью расходуется на разрушение теплозащитного
покрытия. Скорость эрозионного уноса ТЗП Ver определяется соотношением (Миха-
тулин Д. С. и др., 2011)
Рр (нк. (о с°5(е) /(Q) = ^(r) c°s(9) /(0Х (4712)
ef.er Рш hf.er Рш
где рр(Н) - плотность частиц (пыли или водного льда) в единице объёма, содержащих¬
ся в атмосфере Марса; Vw(t) - скорость частиц относительно разрушаемой поверхно¬
сти; 1е1-ег - эффективная энтальпия разрушения ТЗП в результате эрозии; /(0) - мно¬
житель, определяющий зависимость Ver от угла падения вектора скорости частицы
к разрушаемой поверхности,У(А)<1, в расчётах полагалось /(0)=1; W=0,5рр• Ги3 - поток
кинетической энергии частиц. По известным данным, для осуществления процесса
эрозии минимальное значение скорости частиц относительно разрушаемой поверх¬
ности должно быть не менее 200 м/с, поэтому расчёты по формуле (4.7.12) проводят¬
ся при условии Ии>200 м/с.
В экспериментах по исследованию эрозии ТЗП от воздействия атмосферных во¬
дных частиц (капель дождя), проведённых в ЦНИИмаш, для эффективной энтальпии
разрушения ТЗП было определено значение Д/>=1400 кДж/кг. Это же значение ис¬
пользуется и для оценки эрозионного разрушения теплозащитного материала от воз¬
действия частиц льда.
112
4-7
В работе {Михатулин Д. С. и др., 2011) для широкого класса ТЗП и воздействую¬
щих твёрдых частиц предложен интервал значений /сУ>/=300...500 кДж/кг. В расчё¬
тах эти значения используются при определении эрозии от частиц пыли. В отличие
от уноса материала ТЗП, обусловленного аэродинамическим нагревом, эрозионный
унос слабо зависит от температуры обтекаемой поверхности.
Значение линейного эрозионного уноса АЗег теплозащитного покрытия вдоль тра¬
ектории ДМ определяется интегралом
(4.7.13)
где моменты tQei. и tier соответствуют началу и прекращению процесса эрозионного
разрушения, а скорость Ver определяется по формуле (4.7.12).
4.7.2. Исходные данные и результаты расчётов
4.7.2.1. Исходные данные и результаты расчетов
для экспедиции «ЭкзоМарс-2022» без учета эрозии
Исходные данные
В качестве материала ТЗП АЭ ДМ рассматривается композиционный материал
типа Ml, выбранный в качестве основного теплозащитного материала для конструк¬
ции АЭ ДМ.
Результаты получены для выбранной для КК «ЭкзоМарс-2022» точки посадки
на поверхность Марса - Oxia Planum с координатами 18,2° северной широты и 335,5°
восточной долготы.
Анализ состояния атмосферы Марса показал, что для экспедиции «Экзо¬
Марс-2022» не реализуется пылевой сценарий атмосферы с повышенным содержани¬
ем пыли, как это имело место для экспедиции «ЭкзоМарс-2018» {Кораблев О.И. и др.,
2015). Поэтому в проводимых расчётах для экспедиции «ЭкзоМарс-2022» исключа¬
ется дополнительная эрозионная нагрузка на тепловую защиту ДМ, связанная с уно¬
сом ТЗП за счёт воздействия на поверхность аппарата пылевых частиц атмосферы
планеты, как это было представлено в работе {Голом азов М.М., Иванков А.А., 2016).
В данном разделе представлены результаты исследований только для двух моделей
атмосферы Марса - «холодной» и «тёплой» {Millour Е. et al., 2014), причем в качестве
основной модели при проведении расчётов выбрана более критичная по тепловому
воздействию на аппарат «тёплая» модель атмосферы.
Малоизученным фактором, влияющим на унос материалов ТЗП, являются каса¬
тельные напряжения, возникающие в результате поверхностного трения со стороны
газовой среды при обтекании ДМ. Влияние касательных напряжений в данной рабо¬
те не учитывалось по причине отсутствия результатов соответствующих испытаний.
Точный учет влияния касательных напряжений на ТЗП и тепловой режим ДМ может
быть выполнен после проведения соответствующих испытаний и уточнения необхо¬
димых исходных данных.
Исследовался следующий диапазон начальных значений баллистических параме¬
тров: скорость входа И0=5582 м/с, углы входа в интервале 0о=-12,6... 13,1° при оди¬
наковой начальной высоте //о=12О км. Масса ДМ полагалась равной 2000 кг. Угол
атаки при движении по траектории не превышал 10°. По оценкам, влияние этого
113
4-7
фактора приводит к увеличению тепловых потоков на аппарат до ~10%. В расчётах
использовались аэродинамические характеристики ДМ по результатам работы (Го-
ломазов М.М., Финченко В.С., 2013). Траектории рассчитывались до момента ввода
1-го каскада парашютной системы при значениях чисел Маха ~1,8-2,1.
Описание конструкции ДМ подробно представлено в работе (Хартов В.В. и др.,
2014). Особенности конфигурации аппарата видны из рисунка 4.7.1а. Лобовая по¬
верхность ДМ представляет собой затупленный по сфере конус с углом полураствора
aKi=70° и радиусом сферического затупления R,=950 мм. Лобовая поверхность посред¬
ством торовой кромки радиуса R2=95 мм гладко сопрягается с конической поверхно¬
стью донной части с углом полураствора ак2=37°. Диаметр миделевого сечения аппа¬
рата составляет Dm=3,8 м. Протяженность аппарата вдоль оси симметрии - 2408 мм.
Па рисунке 4.7.16 приведены состав материалов стенки корпуса ДМ по слоям
и расчётная схема стенки, где 1 - теплозащитное покрытие; 2 - сотовая конструкция;
слои 3 и 5 являются обшивками сотовой конструкции 4, причем слои 3...5 составля¬
ют несущую конструкцию ДМ. Подробное описание конструкции стенки ДМ и со¬
става материалов по слоям приведено в работе (Финченко В.С. и др., 2014).
Результаты расчетов
При проведении расчётов в качестве основной выбрана траектория с минималь¬
ным значением (по абсолютной величине) угла входа 90i= -12,6°, для которой дости¬
гается максимальная тепловая нагрузка. В последующем изложении эта траектория
будет называться «пологой», и для неё (если не оговорено обратное) будут демон¬
стрироваться основные результаты. Траектория с углом входа 0О2= -13,1° - с меньшей
тепловой нагрузкой - будет называться «крутой»» и использоваться в дальнейшем
для сравнения с результатами для пологой траектории.
На рисунке 4.7.2 представлено изменение вдоль исследуемой (пологой) траекто¬
рии: высоты Н, скорости V и скоростного напора ^*=рИ2/2.
На рисунке 4.7.3 приведены значения параметров торможения газового потока:
удельной энтальпии Яо, давления Ро и температуры То. Эти параметры характеризуют
состояние газового потока за ударной волной и позволяют оценить уровни темпера¬
туры и давления газа в высокотемпературном ударном слое у поверхности аппарата.
Как следует из графиков, в ударном слое реализуются максимальные значения темпе¬
ратуры r0w~3800 К - в промежутке времени /=50.. .70 с и давления газа Рцт~Х1 кПа -
в промежутке /=90... 110 с. Максимальное значение энтальпии торможения достига¬
ется на начальном участке траектории и составляет Н0т~16 МДж/кг.
На рисунке 4.7.4 представлено распределение суммарного удельного теплового
потока q(t) к поверхности ДМ вдоль исследуемой траектории при нулевом угле атаки
для пяти характерных точек поверхности (рисунок 4.7.1а). В окрестности критиче¬
ской точки аппарата (точка 1) при полном торможении газового потока тепловое воз¬
действие атмосферы является максимальным за счёт перехода кинетической энергии
газа в тепловую.
На рисунке 4.7.5 для максимального угла атаки а=10° ДМ приведены значения
суммарных тепловых потоков q(L) соответственно для подветренной и наветренной
сторон лобовой поверхности аппарата (L отсчитывается от критической точки по¬
верхности АЭ). Распределения q(L) представлены для пяти характерных моментов
времени (=30, 60, 86, 90, 120 с,у=1...5 вдоль траектории, включая распределение
в момент достижения максимума теплового потока при /=86 с.
114
4-7
q*, кПа V, км/с Н, км
Рисунок 4.7.2. Параметры траектории входа ДМ в атмосферу Марса
70, к
4000
3500
3000
2500
2000
1500
1000
500
0
I, с
Рисунок 4.7.3. Параметры торможения газового потока
В распределениях q(L) отмечается в основном монотонное убывание теплового
потока от критической точки к кромке, для которой за счёт роста скорости газа при
её обтекании происходит увеличение тепловой нагрузки. Отметим также локальное
увеличение тепловых потоков в определённые моменты времени в окрестности точ¬
ки сопряжения носового сферического затупления и конической поверхности ДМ,
которое обусловлено интенсификацией теплообмена при турбулентном режиме обте¬
кания в этой области течения.
115
4-7
q, кВт/м2
Рисунок 4.7.4. Распределение тепловых потоков вдоль траектории
в точках поверхности 1.. .5
Это происходит на подветренной стороне поверхности (рисунок 4.7.5а) при из¬
менении режима течения в моменты времени t > 86 с в пограничном слое от ла¬
минарного - в окрестности критической точки при 0 < L < 0,33 м к турбулентному
при L > 0,33 м.
На наветренной стороне поверхности (рисунок 4.7.56) реализуется ламинарный
режим течения газа. Из рисунков следует, что уровни тепловых потоков на подве¬
тренной стороне ДМ выше. Эту особенность тепловой нагрузки на аппарат при дви¬
жении под углами атаки необходимо учитывать при разработке тепловой защиты.
Для оценки уноса массы по траектории будем использовать расчётный случай
движения аппарата без угла атаки, что соответствует симметричному (относительно
оси симметрии аппарата) распределению тепловых потоков по поверхности (рису¬
нок 4.7.6) и в среднем - суммарной тепловой нагрузке на аппарат.
Разработка тепловой защиты ДМ с применением программного комплекса про¬
водится по следующей схеме. Сначала в ходе предварительных расчётов определя¬
ется распределение линейного уноса ТЗП - Д5ТЗП(Л) по обводу поверхности аппарата.
В этих расчётах значение толщины ТЗП задаётся с некоторым запасом, превышаю¬
щим полный унос покрытия. По результатам расчётов осуществляется оценка на¬
чального распределения значений толщины ТЗП.
На следующем этапе предварительные результаты значений толщины ТЗП уточ¬
няются исходя из условия, что выбранные значения 5ТЗП должны обеспечивать задан¬
ный температурный режим конструкции аппарата, т.е. температура конструкции Т
не должна быть выше допустимых значений Тд - Т < Тл. Следует отметить, что в этих
расчётах определяется распределение минимально необходимых значений толщины
покрытия 5T3ntmin, обеспечивающих тепловой режим конструкции при минимальных
весовых затратах.
116
4-7
а б
Рисунок 4.7.5. Распределения тепловых потоков вдоль образующей поверхности АЭ
на подветренной (а) и наветренной (б) стороне
Рисунок 4.7.6. Распределение тепловых потоков вдоль образующей поверхности АЭ
с нулевым углом атаки
На практике при определении 5ТЗП необходимо учитывать следующие факторы.
Окончательное значение параметра 5ТЗП формируется таким образом, чтобы исклю¬
чить влияние погрешностей производственного характера и технологии нанесе¬
ния ТЗП на защищаемую поверхность. Принимается, что локальная погрешность
117
4-7
в значении 8ТЗП при нанесении ТЗП на поверхность не должна превышать некоторой
величины А8. Необходимо также учитывать погрешности в задании исходных дан¬
ных и погрешности вычислений при расчётном определении 8ТЗП.
Таким образом, окончательная величина 8ТЗП формируется с определённым запа¬
сом по отношению к рассчитанному минимальному значению 8T3n,min, т.е. значение
8ТЗП должно составлять не менее 8T3n,min, где масштабный множитель к (коэффициент
запаса) А=1,1... 1,15.
С учётом представленных допущений и предположений значение толщины 8ПП
определяется из условия
5ТЗП > &-6T3n,min + AS. (4.7.14)
В последующем изложении (если не оговорено обратное) в качестве величины
8ТЗП будем использовать именно значение параметра 8T3nmin без учёта погрешностей
производственного и технологического характера и коэффициента запаса, принимая
во внимание, что окончательное значение толщины ТЗП формируется на основе вы¬
бранного значения 8T3n;min с использованием формулы (4.7.14).
На рисунке 4.7.7 демонстрируются распределения линейного уноса ТЗП А6ТЗП,
причем на рисунке 4.7.7а распределение А8ТЗП(£) представлено вдоль поверхности
АЭ, на рисунке 4.7.76 - вдоль траектории полета ДМ.
На рисунке 4.7.7а результаты приводятся для расчётных случаев как без учёта угла
атаки (а=0°) - кривая красного цвета, так и с его учётом (а=10°) - кривые синего
цвета для подветренной стороны и зелёного - для наветренной стороны. Из графи¬
ков распределения А8ТЗП(£) следует, что максимальный унос ТЗП достигается в кри¬
тической точке аппарата, а минимальный - в окрестности участка поверхности перед
торовой кромкой - зоны сопряжения лобовой и задней поверхности ДМ. Результаты
на рисунке 4.7.7а позволяют оценить начальные значения толщины ТЗП вдоль по¬
верхности ДМ для их уточнения в последующих расчётах, а также при формирова¬
нии окончательного значения 8ТЗГ1 с использованием формулы (4.7.14).
На рисунке 4.7.76 для иллюстрации динамики линейного уноса ТЗП - А8ТЗП(/)
приведён график зависимости этого параметра вдоль траектории ДМ без угла ата¬
ки. Результаты приведены для точек 1.. .4 поверхности АЭ аппарата (рисунок 4.7.1а),
в которых происходил унос ТЗП.
Максимальное значение уноса А8ТЗП после его завершения достигается в критиче¬
ской точке 1 и составляет примерно 11,1 мм. По обводу поверхности с уменьшением
тепловой нагрузки унос ТЗП также последовательно уменьшается, меняясь в преде¬
лах ~ 11 ...6 мм.
На рисунке 4.7.8 для иллюстрации динамики уноса массы аппарата при терми¬
ческом разрушении ТЗП за счёт аэродинамического нагрева приведены распределе¬
ния потери массы АЛ/ (кривые красного цвета) и скорости потери массы dM/dt (кри¬
вые синего цвета), причем на рисунке а - для пологой траектории ДМ, на рисунке
б - для крутой.
На рисунке 4.7.9 для иллюстрации процесса выбора значения толщины ТЗП
по обводу поверхности представлены распределения температуры по толщине кон¬
струкции стенки в критической точке АЭ ДМ.
На рисунке 4.7.9а показано распределение температуры T{t), z=l.. .5 по времени
в заданных точках по сечению стенки ДМ в соответствии с системой обозначений:
кривая 1 соответствует внешней поверхности ТЗП; кривые 2...5 - стыкам слоёв
1.. .5 материалов стенки ДМ (рисунок 4.7.16).
118
4-7
Рисунок 4.7.7. Распределение линейного уноса ТЗП А8ТЗП:
а - вдоль поверхности АЭ; б - вдоль траектории движения ДМ
а
Рисунок 4.7.8. Распределение потери массы ЛМи скорости потери массы dM/df.
а и б - соответственно вдоль пологой и крутой траекторий
б
На рисунке 4.7.96 приведено распределение температуры 7}(х),у=1 ...5 по толщи¬
не стенки в характерные моменты времени tf= 20, 39,4 (начало уноса ТЗП), 80, 124,7
(завершение уноса ТЗП), 210 с.
119
4-7
а
Рисунок 4.7.9. Распределение температуры Т в критической точке АЭ:
а - распределение T^t) в заданных точках /=1.. .5 по сечению стенки вдоль траектории ДМ;
б - распределение 7}(х) по толщине стенки в заданные моменты времени tjJ=\.. .5
Из графиков на рисунке 4.7.9 следует, что температура несущей конструкции ДМ
(кривые 3.. .5 на рисунке 4.7.9а) не превышает значения допустимой температуры Д
В исследуемом случае Т = 130°С, т.е. выполняется условие Т<ТЛ. Таким образом,
выбранное расчётное значение толщины ТЗП, которое в окрестности критической
точки аппарата составляет 13,5 мм, обеспечивает заданный тепловой режим кон¬
струкции. Рассчитанное значение представляет собой минимальное значение тол¬
щины ПОКРЫТИЯ 5T3n,min-
При окончательном формировании величины 8ТЗП с использованием форму¬
лы (4.7.14) следует учитывать коэффициент запаса и особенности технологии на¬
несения ТЗП на поверхность ДМ. Эти факторы учтены при окончательном фор¬
мировании значений толщины 8ТЗП в исследуемых точках 1...4 (рисунок 4.7.1а)
поверхности АЭ ДМ, которые приведены в таблице 4.7.1. Представленные резуль¬
таты в основном соответствуют пологой траектории входа ДМ. В таблице приведе¬
ны также значения линейного уноса ТЗП - А8ТЗП вместе с рассчитанными значени¬
ями полного уноса массы ТЗП с поверхности ДМ - АМТЗП, достигаемого к моменту
полного прекращения уноса ТЗП. Данные для АМТЗП приведены как для пологой
(0о1=-12,6°), так и для крутой (0О2=-13,1°) траекторий. Здесь же даны значения
максимальной температуры Т1пах, достигаемой на обшивке из углепластика несу¬
щей конструкции АЭ ДМ. Значения Ттах позволяют контролировать температурный
режим конструкции аппарата и, таким образом, управлять процессом выбора па¬
раметров ТЗП. Распределение значений толщины 8ТЗП между расчетными точками
реализуется по линейному закону.
120
4-7
Таблица 4.7.1 - Характеристики теплозащиты АЭ и данные по уносу ТЗП для пологой
(0о1=-12,6°) и крутой (0О2~ -13,1°) траекторий
№
точки
зона поверхности АЭ
6Тзп,ММ
Дб-гзп, мм
ДМ™, кг
Ттах, °C
0oi—12,6o
002^13,1°
I
сферическое затупление
16,0
11,1
40,3
40,1
37,8
2
коническая поверхность
10,5
7,40
59,6
3
коническая поверхность
10,0
6,07
60,8
4
торовая кромка
11,0
7,27
60,6
4.7.2.2. Исходные данные и результаты расчетов эрозионного
воздействия на АЭ
Исходные данные
Оценка состояния атмосферы Марса в рамках моделей, рассчитанных по про¬
грамме «Mars Climate Database version 5.1» (MCD 5.1) (Millour E. et al., 2014) для
различных временных интервалов, показала, что с учетом постоянно возникающих
пылевых бурь на Марсе возможны состояния атмосферы {Кораблев О.И. и др., 2015),
которые наряду с содержанием частиц водного льда характеризуются повышенным
содержанием частиц пыли. Атмосферная пыль представляет собой минеральные ча¬
стицы, средний размер которых 1.. .2 мкм.
В связи с этим вместе с рассматриваемыми для экспедиции «ЭкзоМарс-2022» «хо¬
лодной» и «теплой» моделями рассматривалась «пылевая» модель атмосферы, кото¬
рая была реализована, например, для экспедиции «ЭкзоМарс-2018».
В настоящем разделе исследуется траектория входа ДМ в атмосферу Марса
с начальными значениями: высоты Я0=125 км, скорости К0=5796 км и угла входа
00—12,56°.
На рисунке 4.7.10 представлены баллистические параметры траектории полета
ДМ, исследуемой при эрозионном воздействии атмосферных частиц на АЭ: высо¬
ты Н, скорости V и скоростного напора ^*=р!/2/2. Данные приведены для пылевой
модели атмосферы Марса, результаты для других моделей атмосферы различались
незначительно.
На рисунке 4.7.11 также для пылевой модели приведены распределения по траек¬
тории чисел Кнудсена Кп, Рейнольдса Re и высоты полёта Н, позволяющие опреде¬
лять режимы течения возле аппарата и соответствующим образом выбирать методики
расчёта тепловых потоков.
На рисунке 4.7.12 представлены распределения параметров торможения газово¬
го потока вдоль исследуемой траектории для критической точки поверхности АЭ:
удельной энтальпии Яо, давления Ро и температуры газа То, которые с точностью
до 5% соответствуют значениям давления и температуры газа за ударной волной и,
таким образом, характеризуют уровни этих величин в ударном слое у поверхности
аппарата.
На рисунках 4.7.13-4.7.15 для исследуемых моделей атмосфер - соответственно
холодной, теплой и пылевой - представлены рассчитанные с использованием базы
данных MCD 5.1 распределения по высоте массовой доли (р/рг)</ частиц пыли (р и рг -
плотность частиц пыли и газа атмосферы) и мольной доли (р/рг)о частиц льда (здесь
р и рг - число молей водного льда и газа атмосферы).
121
4-7
Рисунок 4.7.10. Параметры траектории входа ДМ в атмосферу Марса
Рисунок 4.7.11. Распределения высоты Я, чисел Re и Кп вдоль траектории полета ДМ
На рисунках 4.7.13-4.7.15 приведены также распределения значений характер¬
ных размеров частиц пыли и льда - эффективных радиусов 7?эф. Между значениями
эффективного 7?эф и среднего геометрического RQ радиусов частиц существует связь
вида Ro = kR3$, где &=0,36 - для пылевых частиц и £=0,8 - для частиц водного льда
(Millour Е. et al., 2014).
122
4-7
Рисунок 4.7.12. Распределения параметров торможения Но, Ро и То вдоль траектории
полета ДМ
Рисунок 4.7.13. Распределение по высоте Я относительной плотности и размеров частиц
пыли и льда для холодной атмосферы
Кривые 1 и 3 обозначают массовую и мольную доли частиц пыли и льда; 2 и 4 -
их эффективный радиус. Данные в относительных (безразмерных) величинах пред¬
ставляют интерес для анализа состояния атмосферы и содержания в ней твёрдых
частиц. Более важной является информация о приведённых величинах в размерном
виде вдоль траектории спуска аппарата. Это позволяет непосредственно оценить воз¬
действие частиц на конструкцию тепловой защиты ДМ.
123
4-7
Рисунок 4.7.15. То же, что на рисунке 4.7.13 - для пылевой атмосферы
На рисунках 4.7.16-^4.7.18 вдоль траекторий спуска ДМ представлены рассчитан¬
ные с использованием результатов, приведенных на рисунках 4.7.13^1.7.15, значения
массовых плотностей частиц пыли и водного льда, а также значения их эффективных
радиусов соответственно для холодной, теплой и пылевой моделей атмосферы Мар¬
са. Кривые 1 и 3 обозначают плотность г соответственно частиц пыли и льда; 2 и 4 -
их эффективный радиус 7?эф; кривая 5 - высота полёта Н.
124
4-7
К,,!,, мкм р, кг/м3
Юг
1 г
0.1 г
0.01 г
0.001 г
0.0001 г
1Е-005 г
1Е-006 -
1Е-007 г
1Е-008 г
1Е-009 г
1Е-010-
Н, км
Рисунок 4.7.16. Распределение массовой плотности и размеров частиц пыли и льда
в холодной атмосфере
Рисунок 4.7.17. То же, что на рисунке 4.7.16 - для теплой атмосферы
Из результатов, представленных на рисунках 4.7.16—4.7.18, следует, что макси¬
мальное значение плотности частиц пыли достигается для пылевой модели атмосфе¬
ры, а максимальное значение плотности частиц льда - для теплой.
На рисунке 4.7.19 приводятся результаты, определяющие конфигурацию расчёт¬
ной области между ударной волной и телом. Здесь вдоль траектории ДМ представ¬
лено распределение отхода ударной волны Е от поверхности аппарата вдоль лучей
125
4-7
R,(|1, мкм p, кг/м3 H, км
Рисунок 4.7.18. То же, что на рисунке 4.7.16 - для пылевой атмосферы
I, с
Рисунок 4.7.19. Отход ударной волны вдоль лучей 1)1=0, 'U2==O,50£9 и3=06
сетки в, по угловой переменной: i)i=0, о2=0,59Л, о3=0Л (рисунок 4.7.1а). Эти данные
используются для оценки движения частиц в высокотемпературном ударном слое
от ударной волны к поверхности тела. Результаты представлены для участка тра¬
ектории, на котором в основном реализуется тепловое и эрозионное воздействие
атмосферных частиц. Подробно результаты расчётов распределений других газо¬
динамических функций (давления, температуры и др.) в ударном слое, используе-
126
q,
кВт/м2
700
600
500
400
300
200
100
0
Рисунок 4.7.20. Распределение аэродинамического теплового потока и потока
кинетической энергии частиц пыли и льда для холодной атмосферы
Рисунок 4.7.21. То же, что на рисунке 4.7.20 - для теплой атмосферы
мых для анализа состояния газа за ударной волной, представлены в работе (Голом а-
зов М.М., Иванков А.А., 2015).
На рисунках 4.7.20-4.7.22 представлено распределение аэродинамического тепло¬
вого потока q и потока кинетической энергии W частиц пыли и льда вдоль траектории
ДМ для моделей атмосферы - холодной, теплой и пылевой. Эти данные позволяют
сравнить уровни аэродинамического теплового воздействия и кинетической энергии
атмосферных частиц.
127
4-7
О 50 100 150 200 А с
Рисунок 4.7.22. То же, что на рисунке 4.7.20 - для пылевой атмосферы
Кривые на рисунках 4.7.20^.7.22 для критической точки поверхности АЭ ДМ
обозначают: 1 - аэродинамический тепловой поток; 2 и 3 - потоки кинетической
энергии соответственно частиц пыли и льда, фигурирующие в формуле (4.7.12) при
формировании эрозионного уноса ТЗП; 4 - высота полёта. Из рисунков следует, что
уровни потока кинетической энергии частиц более чем на два порядка меньше уров¬
ней соответствующего теплового потока. Ещё меньшими были интегральные значе¬
ния потока кинетической энергии, рассчитанные вдоль траектории ДМ с помощью
интеграла
/2
'1
определяемого численно по формуле трапеций с узлами на расчётной временной сет¬
ке. Именно эти значения определяют тепловое воздействие частиц на АЭ ДМ.
Если предположить, что вся кинетическая энергия частиц пыли и льда переходит
в тепловую энергию (без учёта затрат на эрозионное разрушение поверхности), то её
вклад в суммарное тепловое воздействие на аппарат составляет менее 1%, и таким
вкладом можно пренебречь.
Оценим другой эффект взаимодействия частиц с поверхностью ДМ, а именно эро¬
зионное воздействие, в предположении, что вся кинетическая энергия частиц расхо¬
дуется на разрушение ТЗП, пренебрегая переходом части этой энергии в тепловую.
Оценим по формуле (4.7.12) эрозионный унос ТЗП и сравним его с уносом покры¬
тия, обусловленного аэродинамическим нагревом, рассчитанным по формуле (4.7.8).
При оценках воспользуемся указанными выше значениями эффективной энтальпии
эрозионного разрушения ТЗП: максимальным (1400 кДж/кг) - для частиц льда и ми¬
нимальным (300 кДж/кг) - для частиц пыли.
128
Д8СГ, мм
0.012 г
0.01
0.008
0.006
0.004
0.002
0
Дб, мм
Рисунок 4.7.23. Распределение линейных теплового и эрозионного уносов ТЗП для холодной
атмосферы
Рисунок 4.7.24. То же, что на рисунке 4.7.23 - для теплой атмосферы
Следует отметить, что скорость газа при переходе через ударную волну в ударном
слое значительно снижается и становится дозвуковой в большей части ударного слоя
у поверхности тела. При этом плотность, давление и температура газа значительно
возрастают (Голомазов М.М., Иванков А.А., 2015).
Скорость частиц пыли и льда в ударном слое за счёт работы сил аэродинамиче¬
ского сопротивления при движении частиц от ударной волны к телу также снижается,
но менее значительно. Оценки для гиперзвуковых скоростей полёта ДМ (Моо>5-6)
129
Рисунок 4.7.25. То же, что на рисунке 4.7.23 - для пылевой атмосферы
показывают, что за счёт торможения в ударном слое скорость частиц к поверхности
тела снижается до значения Vw, определяемого из соотношений
V=b-V„, b=^-, а=0,375-?^^,
1 + a R0Pp
где К» - скорость частиц до ударной волны; Es - путь (отход ударной волны, см. рису¬
нок 4.7.19), пройденный частицей от ударной волны к телу; индекс «s» соответствует
параметрам, вычисленным в ударном слое; сх - коэффициент лобового сопротивле¬
ния, для сферы принимается сх=1. Приведённая для гиперзвуковых скоростей полёта
формула дает снижение скорости частиц Vw на высотах полёта 65-20 км в пределах
/>=0,95-0,3 5. Оценки при меньших сверхзвуковых скоростях полёта на высотах ниже
20 км дают снижение скорости в пределах />=0,4-0,5. Таким образом, при расчётах
вдоль траектории (см. рисунок 4.7.10) всегда выполнялось условие Ии>200 м/с, не¬
обходимое для эрозионного воздействия частиц на ТЗП АЭ. При проведении оценок
пренебрегалось уменьшением скорости частиц к поверхности аппарата, что дает мак¬
симальный унос ТЗП.
На рисунках 4.7.23-4.7.25 вдоль траектории полета ДМ для моделей атмосфе¬
ры - холодной, теплой и пылевой - представлены распределения линейных тепло¬
вого и эрозионного уносов ТЗП. Используются обозначения кривых: 1 - суммарный
унос ТЗП (тепловой и эрозионный); 2 - тепловой (аэродинамический) унос, форму¬
ла (4.7.8); 3 и 4 - эрозионный унос, обусловленный воздействием соответственно
частиц пыли и льда, формула (4.7.12).
Расчёты проводились с учётом принятых допущений для ТЗП с плотностью
pw=500 кг/м3. Плотность частиц пыли полагалась равной рб/=2500 кг/м3, а частиц
льда - pfl=917 кг/м3. В расчётах пренебрегалось нагревом и изменением агрегатного
состояния частиц при движении в высокотемпературном (Т~ 1000-4000 К) ударном
слое. Учёт этого фактора приводит к уменьшению значений эрозионного уноса.
130
В таблице 4.7.2 представлены максимальные величины рассчитанных значений
уноса ТЗП (достигались по его завершении), реализуемых за счёт исследуемых фи¬
зических процессов. Нижние индексы в таблице при обозначении уносов ТЗП соот¬
ветствуют: «d» и «а» - уносу соответственно от частиц пыли и льда, «Ь» и «s» - аэро¬
динамическому тепловому и суммарному уносам ТЗП (суммируются все значения).
Наиболее критичной по тепловым нагрузкам на ДМ и процессам разрушения ТЗП
оказалась пылевая модель атмосферы. Здесь максимальными являются как тепловой
А8Л=12,32 мм, так и эрозионный (пылевой) Д8<у=0,5984 мм уносы материала, причём
эрозионный унос составил 4,6% от теплового уноса ТЗП. Для пылевой модели ат¬
мосферы максимальным является также суммарный унос ТЗП, который составляет
Д35= 12,92 мм.
Таблица 4.7.2 - Значения линейных уносов ТЗП
параметр
модель атмосферы
холодная
тёплая
пылевая
Д3<,
0,01199
0,1323
0,5984
Д8„
0,00218
0,0149
0,0008
Д8„
11,55
11,82
12,32
Д8„
11,56
11,97
12,92
Следует отметить, что от воздействия частиц льда максимальный унос ТЗП дости¬
гается для теплой модели атмосферы и составляет Д8^0,0148 мм, что не превышает
3% максимального уноса от пылевых частиц. Таким образом, в условиях исследуе¬
мой задачи при оценке эрозионного уноса можно пренебречь воздействием частиц
льда по сравнению с воздействием пылевых частиц.
Рисунок 4.7.26. Распределение линейного аэродинамического теплового и эрозионного уноса
ТЗП для пылевой атмосферы
131
4-7
Из результатов расчётов следует вывод о том, что холодная модель атмосферы
наименее критична по тепловым нагрузкам и процессам разрушения теплозащитного
материала. Тёплая модель занимает промежуточное положение среди исследуемых
моделей атмосферы Марса.
На рисунке 4.7.26 в качестве иллюстрации для пылевой модели атмосферы - наи¬
более критичной по тепловой нагрузке и уносу ТЗП -представлено распределение
различных видов уноса ТЗП вдоль лобовой поверхности ДМ. Обозначения на рисун¬
ке те же, что и на рисунках 4.7.23-4.7.25. Отметим, что для пылевой модели атмос¬
феры эрозионный унос от частиц льда по сравнению с другими моделями является
наименьшим и не превышает 0,001 мм, что в масштабе рисунка 4.7.26 соответствует
нулевому значению. Представленная информация о распределении уноса ТЗП по об¬
воду поверхности аппарата необходима при проектировании и важна для отработки
тепловой защиты ДМ.
Таким образом, результаты расчётов, проведённых для исследуемых климатиче¬
ских условий в точке посадки Oxia Planum на поверхность Марса, показали, что наи¬
более критичной по тепловым нагрузкам и уносу ТЗП (тепловому и эрозионному)
из исследуемых моделей атмосферы Марса (холодной, теплой и пылевой) является
пылевая модель. Вследствие этого при разработке тепловой защиты ДМ и принятии
соответствующих проектных решений необходимо руководствоваться результатами
расчётов именно для пылевой модели атмосферы. Тепловая защита, разработанная
для пылевой модели атмосферы Марса, подойдёт, причём с запасом, для других мо¬
делей атмосферы, менее критичных по тепловым и эрозионным нагрузкам.
Материалы раздела, предоставленные М.М. Голомазовым, написаны по резуль¬
татам работ, выполненных в рамках государственного задания Института авто¬
матизации проектирования Российской академии наук.
В разделе представлено описание математической модели, программы и методов
расчёта, используемых для определения тепловой защиты АЭ ДМ при спуске в ат¬
мосфере Марса, с учетом аэродинамического теплового и эрозионного воздействия
атмосферных частиц на поверхность АЭ ДМ.
Особенностью используемого программного комплекса является возможность
в рамках единого алгоритма проводить большой объём вычислительных работ, свя¬
занных с выбором проектных параметров теплозащитных систем, за приемлемое при
проектировании космической техники время на ЭВМ. Это актуально при разработ¬
ке тепловой защиты спускаемых аппаратов, когда приходится иметь дело с большим
количеством входных данных и расчётных параметров. Возможности программного
комплекса реализованы при разработке тепловой защиты ДМ КК «ЭкзоМарс-2022».
Представлены результаты расчётного определения эрозионного воздействия ча¬
стиц атмосферы Марса (пыль и водяной лёд) на поверхность АЭ ДМ в случае реали¬
зации пылевого сценария состояния атмосферы. Результаты по эрозионному воздей¬
ствию атмосферных частиц представлены для условий входа ДМ в атмосферу Марса
экспедиции «ЭкзоМарс-2018». Показано, что для климатических сценариев состоя¬
ния атмосферы - холодного, теплого и пылевого - пылевая модель атмосферы яв¬
ляется наиболее критичной по тепловым и эрозионным нагрузкам. Определено, что
эрозионное воздействие пылевых частиц составляет до 5% от уноса ТЗП, обуслов¬
ленного аэродинамическим нагревом. Эрозионный унос от частиц льда не превышал
2% от воздействия пылевых частиц, и этим воздействием можно пренебречь.
132
4-7
П редставленные методы, программный комплекс и результаты могут быть ис¬
пользованы при решении аналогичных задач при разработке тепловой защиты аппа¬
ратов, спускаемых в атмосферах планет.
Список литературы
Бартеньев О.В. Современный Фортран. М.: Диалог - МИФИ, 2005. 388 с.
Баула Г.Г., Маркелова Т.В., Николаев В.М., Пластинин Ю.А. и др. Методические
указания. Модель излучения высокотемпературных газовых объёмов для расчёта
теплообмена летательных аппаратов // РД 50-25645.114-84. М.: Изд-во стандартов,
1984. 60 с.
Борисов В.М., Голомазов М.М., Иванков А.А., Финченко В.С. Расчет лучистого те¬
плообмена в задачах обтекания тел с учетом потери массы теплозащитного покры¬
тия // Известия РАН. Механика жидкости и газа. 2004. № 4. С. 143-151.
Борисов В.М., Иванков А.А. Расчет переноса лучистой энергии при гиперзвуковом
обтекании затупленных тел с использованием Рг и Р2-приближений метода сфери¬
ческих гармоник // Журнал вычислит, математики и мат. физики. 1992. Т. 32, № 6.
С. 952-966.
Власов В.И., Горшков А.Б., Залогин Г.Н., Землянский Б.А. и др. Руководство для
конструкторов. Конвективный теплообмен изделий РКТ / Под ред. Б.А. Землянского.
Королев: ЦНИИмаш, 2010. 397 с.
Голомазов М.М., Иванков А.А. Программный комплекс для разработки систем те¬
пловой защиты космических аппаратов, спускаемых в атмосферах планет // Вестник
НПО им. С.А. Лавочкина. 2017. № 3. С. 41-53.
Голомазов М.М., Иванков А.А. Расчетно-теоретическое исследование воздействия
атмосферы Марса на десантный модуль проекта «ЭкзоМарс-2018» при аэродинами¬
ческом торможении // Вестник НПО им. С.А. Лавочкина. 2015. № 2. С. 26-35.
Голомазов М.М., Иванков А.А. Численное исследование влияния частиц атмосфе¬
ры Марса на конструкцию теплозащиты десантного модуля «ЭкзоМарс-2» // Вестник
НПО им. С.А. Лавочкина. 2016. № 2. С. 11-21.
Голомазов М.М., Финченко В.С. Аэродинамическое проектирование спускаемо¬
го аппарата в атмосфере Марса по проекту «ЭкзоМарс» // Вестник ФГУП НПО им.
С.А. Лавочкина. 2013. № 4. С. 40-46.
Иванков А.А. Свидетельство о государственной регистрации программы для ЭВМ
№2009614632 РФ. Расчетное определение тепломассообмена при проектировании
космических спускаемых аппаратов / А.А. Иванков (ФГУП «НПО им. С.А. Лавочки¬
на» (RU)); Заявка: № 2009613552; 09.07.2009; Зарегистрировано в Реестре программ
для ЭВМ: 31.08.2009.
Иванков А.А. Численное исследование влияния фильтрации газообразных про¬
дуктов термического разложения на теплозащиту спускаемых аппаратов // Тепловые
процессы в технике. 2012. Т. 4, № 8. С. 368-375.
Иванков А.А. О численном решении задачи прогрева многослойной теплозащиты
спускаемого аппарата с учетом уноса массы внешних и внутренних слоев покрытия //
Журнал вычислит, математики и мат. Физики. 2005. Т. 45, № 7. С. 1279-1288.
Коган М.Н. Динамика разреженного газа. М.: Наука, 1967. 440 с.
133
4-7
Кораблев О.И., Федорова О А., Родионов Д.С., Марченков К И., Гуслякова С.А., Лу-
гинин М.С., Дзюбан И.А. Разработка инженерной модели атмосферы Марса в предпо¬
лагаемых районах посадки десантного модуля проекта ЭкзоМарс-2018. Научно-тех¬
нический отчет. Шифр СЧ ОКР: «ИКИ-ЭкзоМарс». ФГБУН ИКИ РАН. 2015. 97 с.
Кудрявцев ЛД. Курс математического анализа: В 3-х т. М.: Высшая школа, 1988.
Т. 1, 712 с. Т. 2, 576 с.; 1989. Т.З, 352 с.
Михатулин Д.С., Полежаев Ю. С., Ревизников Д.Л. Тепломассообмен, термохими¬
ческое и термоэрозионное разрушение тепловой защиты. М.: Янус-К, 2011. 520 с.
Финченко В.С., Иванков А.А., Шматов С.И., Мордвинкин А.С. Предваритель¬
ные результаты расчетных и экспериментальных исследований основных параме¬
тров аэротермодинамики десантного модуля проекта «ЭкзоМарс» // Вестник НПО
им. С.А. Лавочкина. 2014. № 2. С. 65-75.
Финченко В. С., Котляров Е.Ю., Иванков А.А. Системы обеспечения тепловых ре¬
жимов автоматических межпланетных станций / Научное издание; Под ред. В.В. Ефа-
нова и В.С. Финченко. Химки: Изд. АО «НПО Лавочкина», 2018. 400 с.
Хартов В.В., Мартынов М.Б., Лукъянчиков А.В., Алексашкин С.Н. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018, создаваемого НПО им. С.А. Лавочки¬
на // Вестник НПО им. С.А. Лавочкина. 2014. № 2. С. 5-12.
Millour Е., Forget Е, Lewis S.R. Mars Climate Database v.5.1. User Manual. (ESTEC
Contract 11369/95/NL/JG «Mars Climate Database and Physical Models»). [Электронный
ресурс]. Систем, требования: Adobe Acrobat Reader. URL: http:www-mars.lmd.jussieu.fr
(дата обращения: 15.05.2017).
M.M. Голомазов,
А.А. Иванков,
В. С, Финченко
134
4-8
ПЕ1ПОСАДОЧНАЯ ПЛАТФОРМА
4.8.1. Конструкция посадочного устройства
Посадочное устройство (ПУ) установлено на силовой платформе посадочного мо¬
дуля (рисунок 4.8.1.1).
Рисунок 4.8.1.1. Посадочное устройство
ПУ состоит из четырёх стоек (рисунки 4.8.1.2, 4.8.1.3), каждая стойка включает:
амортизатор телескопический (1), два телескопических подкоса (2), опору (3), фикса¬
тор касания (4), силовой корпус (5). Корпус (5) установлен на посадочной платфор¬
ме, усиленной в этом месте закладной деталью. ПУ предназначено для обеспечения
устойчивой посадки посадочного модуля на поверхность планеты с перегрузками,
не превышающими указанные в ТЗ.
На подкосах (2), закреплённых одним концом к амортизатору (1), а другим к фер¬
ме посадочной платформы, установлены фиксаторы касания поверхности (4) и дат¬
чики начала раскрытия ПУ (6).
В транспортном положении стойки ПУ сложены и удерживаются в этом положе¬
нии устройствами разделения опор (7).
В рабочем положении стойки ПУ выдвинуты и установлены на фиксирующие
кольца.
Амортизатор
Амортизатор (рисунок 4.8.1.4) изготовлен телескопическим. Он состоит из штоков
(1) и (2), корпусов (3) и (4), сферического подшипника (5), приводящих пружин (6)
и (7), пружинных колец (8) и (9), четырех лент (10). Пружинное кольцо (9) фиксирует
между собой штоки (1) и (2), а кольцо (8) - корпуса (3) и (4). Лента, изготовленная
из пластичного материала 12Х18Н10Т-МЗа с относительным удлинением >40%, од¬
ним концом, через обоймы, закреплена к штокам, другим - к корпусам. Сечение ленты
определяется расчетом, а после изготовления подтверждается испытаниями. Во вре¬
мя испытаний строится диаграмма растяжения, в случае необходимости проводится
корректировка размеров поперечного сечения. При срабатывании амортизатора штоки
перемещаются внутрь корпусов, растягивая ленты. Таким образом происходит погло¬
щение кинетической энергии при посадке. При различных случаях посадки на поверх¬
ность планеты ленты в каждом амортизаторе деформируются на различную величину.
135
4-8
Рисунок 4.8.1.2. Транспортное положение стойки
Рисунок 4.8.1.3. Рабочее положение стойки
136
4-8
Подкос
Подкос (рисунок 4.8.1.5) состоит из штока (1), корпуса (2), приводящей пружи¬
ны (3), наконечников (4) и (5). После выдвижения шток (1) и корпус (2) фиксируются
между собой кольцом (6) через муфту (7).
Установка стойки ПУ на КА и функционирование
После сборки амортизатор и подкосы устанавливаются на посадочную платформу
КА. Амортизатор и подкосы находятся в штатном (выдвинутом) положении.
После установки амортизатора в транспортное положение к нему пристыковыва¬
ются подкосы, другим концом они крепятся к вилкам на конструкции силовой плат¬
формы. Присоединение подкосов осуществляется через сферические подшипники.
Подкосы устанавливаются в транспортное положение. На подкосы монтируются дат¬
чик касания поверхности и датчик начала раскрытия стойки посадочного устройства.
Устанавливается опора.
После отделения аэродинамического экрана подается команда на срабатывание
устройства разделения опор, удерживающего посадочное устройство в транспортном
положении. Стойки ПУ под действием пружин сжатия раскрываются, а в конце хода
фиксируются пружинными кольцами.
Одновременно открывается фиксатор касания и срабатывает датчик начала рас¬
крытия ПУ.
Отработка конструкции посадочного устройства
Отработка конструкции ПУ включает: лабораторные, доводочные, бросковые ис¬
пытания, испытания ПУ в составе изделий прочностных испытаний.
137
4-8
В ходе лабораторных испытаний было проведено статическое нагружение пру¬
жинного кольца силой, в два раза превышающей эксплуатационную.
Доводочные испытания проводились по программе ЭКЗ-4100-50ПМ, испытаниям
подверглась одна стойка посадочного устройства.
Последовательно проводятся испытания:
- на воздействие механических факторов в условиях транспортирования;
- на стойкость при воздействии линейных ускорений;
- на прочность на случай ввода парашютной системы;
- на прочность при ударных нагружениях;
- на прочность при воздействии вибрации.
После каждого вида испытаний проводится внешний осмотр.
Далее сборка помещается в вакуумную камеру, термостатируется в течение 2 ч
при температуре минус (100±10)°С, нагревается до температуры минус (80±10)°С.
Подаётся команда на срабатывание универсального замка ИЕЛУ.301111.008. Проис¬
ходит раскрытие (выдвижение) стойки ПУ в штатное положение. Штанга фиксатора
касания из транспортного положения перемещается в штатное положение. После от¬
крытия вакуумной камеры проводится внешний осмотр и проверка электрических
цепей. Затем проводятся: испытания стойки ПУ на вибростенде с открытым фик¬
сатором касания на случай пульсации тормозной двигательной установки; контроль
электрических цепей датчиков; испытания фиксатора касания на срабатывание при
приложении силы к штанге в различных направлениях при НКУ и температуре минус
(80±10)°С. В процессе испытаний проводится контроль электрических цепей. После
этого осуществляется выдвижение стойки ПУ из транспортного положения в штат¬
ное при НКУ с механическим удержанием в количестве 39 раз - для набора статисти¬
ки. Далее проводится испытание на работоспособность ПУ.
Проводятся испытания на случай посадки на поверхность Марса:
- с уклоном (15±1)°С при температуре на конструкции стойки ПУ минус
(80±10)°С. Контролируется срабатывание фиксатора касания.
- с упором опоры в боковую стенку при температуре на конструкции стойки ПУ
минус (80±10)°С.
В заключение проводятся испытания амортизатора и подкосов на прочность,
а также бросковые испытания.
Устройство фиксатора касания
Фиксатор касания (рисунок 4.8.1.6) представляет собой электромеханическое
устройство, которое состоит из двух датчиков (1) и механической части. Датчики со¬
стоят из нажимного элемента и микропереключателя, установленных в корпус и ра¬
ботают по следующему принципу:
- нажимной элемент отжат - микропереключатель включен,
- нажимной элемент нажат - микропереключатель выключен.
Силовая конструкция механической части состоит из кронштейнов (2) и (3), сое¬
диненных болтовыми соединениями. Стакан (4) с установленными осями (5), (6), (7),
пружиной (8) и крышкой (9) монтируется на кронштейн (2). Далее устанавливаются
упор (10), пружина (11), втулка (12) и штанга (13). На штангу (13) установлен ворот¬
ник (14), для обеспечения большей площади соприкосновения с грунтом. На ось (6)
установлены винты для регулировки длины нажатия на нажимной элемент.
138
4-8
Рисунок 4.8.1.6. Фиксатор касания
Принцип работы фиксатора касания
и назначение элементов конструкции
В транспортном положении (рисунок 4.8.1.7) штанга (13) установлена под углом
с осью (7), см. рисунок 4.8.1.6. При переходе в рабочее положение (рисунок 4.8.1.6)
втулка (12), под действием пружины (11), надавливая на штангу (13), разворачивает
ее и накрывает, образуя замок.
139
4-8
Рисунок 4.8.1.7. Фиксатор касания в транспортном положении
Рисунок 4.8.1.8. Фиксатор касания в момент подхода к поверхности Марса
140
4-8
На рисунке 4.8. L8 показан пример срабатывания фиксатора в момент подхода
к поверхности Марса при наличии вертикальной и горизонтальной составляющих
скорости. Штанга (13) меняет угловое положение, ось (7) торообразной поверхно¬
стью толкает ось (5) до упора со ступенью, выполненной в стакане (4). Срабатыва¬
ние фиксатора происходит в момент, когда шейка, выполненная на оси (5), совпадет
с пазом соответствующего размера на оси (6), и под действием пружины (15) ось (6),
перемещается, освобождая нажимной элемент микропереключателя.
Установка фиксатора касания на стойку посадочного устройства
На рисунке 4.8.1.7 представлена установка фиксатора на стойку ПУ. Фиксатор
фиксируется скобой на одном из подкосов, а другой подкос охватывает кронштей¬
ном (3). Такое соединение позволяет компенсировать изменение угла между под¬
косами во время выдвижения стойки. Штанга (13) складывается и в транспортном
положении удерживается сферической головкой винтом (16). При выдвижении стой¬
ки штанга (13) выходит из зацепления с винтом (16) и разворачивается в рабочее
положение.
Провода от датчиков фиксатора проложены по конструкции подкоса. Для обеспе¬
чения возможности выдвижения штока подкоса при раскрытии стойки ПУ из транс¬
портного положения в рабочее провода датчика изготовлены такой же длины, как
и выдвинутый подкос, и назначен плюсовой технологический припуск для прове¬
дения укладки. Провода укладываются в чехол (17), сшитый из капроновой ткани
и имеющий две полости (для каждого провода своя полость). Чехол закреплен на под¬
косе. На штоке подкоса провода закреплены капроновыми нитями с добавлением
клея, обеспечивая выход каждого провода из своей полости чехла. Такая конструкция
обеспечивает организованный процесс выхода проводов до нужной длины.
Обоснование надежности конструкции, в том числе предотвращения
возможности заклинивания движущихся частей при наличии
горизонтальной и вертикальной составляющей скорости при посадке
Требования к высокой надежности фиксатора касания обусловлено ответственно¬
стью задачи, которую должен выполнить этот узел при функционировании. Фиксатор
касания должен выдать сигнал на отключение двигателей торможения при подходе
посадочной платформы к поверхности. Предотвращение заклинивания гарантирует¬
ся выбором допусков в сопрягающихся деталях, подбором материалов и назначени¬
ем необходимой шероховатости при механической обработке. Фиксатор изначально
проектировался таким образом, чтобы любой вращательно-поступательный вектор
силы, действующий на штангу (13), был преобразован в поступательный. Как было
описано в принципе работы фиксатора, направление вектора горизонтальной скоро¬
сти не имеет значения.
План верификации
План верификации фиксатора касания должен включать в себя перечень требова¬
ний, заданных ЕКА, и внутренних ТЗ на фиксатор касания и методы их подтвержде¬
ния (анализ документации, испытания, математическое моделирование и т.д.)
Верификация фиксатора касания начинается с выполнения технических требова¬
ний конструкторской документации. Проводится большой объем испытаний, в кото¬
рых фиксатор касания испытывается на всех режимах вибродинамических испытаний,
141
4-8
испытания на функционирование в составе различных макетов подтверждают надеж¬
ность конструкции. Кроме этого проводится математическое моделирование процесса
посадки.
Принятый объем испытаний позволяет отработать и подтвердить работоспособ¬
ность конструкции.
Планы проведения испытаний фиксатора касания
в составе опытных изделий и макетов
Планы должны включать не только перечисление видов планируемых испытаний,
но и описание места испытаний, испытательной установки, внешних условий (тем¬
пература, давление), параметров нагружения (сила, скорость приложения нагрузки
и т.д.), количества нагружений, критерии успешности проведения испытания для
каждого вида проводимых испытаний.
Доводочные испытания фиксатор касания будет проходить в составе стойки
ПУ. Автономные испытания фиксатора касания не предусмотрены, т.к. испытания
в составе стойки являются необходимым и достаточным условием.
Испытания по программе доводочных испытаний проводятся на испытательном
оборудовании НПО, при нормальных климатических условиях, кроме испытаний,
особо оговоренных в программе.
При сборке стойки в цехе будет проведена проверка возможности перевода стойки
из штатного положения в транспортное и обратно в ручном режиме.
После установки на приспособление стойка передается на доводочные испытания.
Последовательно проводятся испытания:
- на воздействие механических факторов в условиях транспортирования;
- на стойкость при воздействии линейных ускорений;
- на прочность при ударных нагружениях;
- на прочность при воздействии вибрации;
После каждого вида испытаний проводится внешний осмотр и проверка электри¬
ческих цепей при исходном положении фиксатора касания.
Далее сборка помещается в вакуумную камеру, термостатируется в течение
2 ч при температуре минус (100±10)°С, нагревается в течение 2 ч до температу¬
ры минус (80±10)°С. Подается команда на срабатывание универсального замка
ИЕЛУ.301111.008. Происходит раскрытие (выдвижение) амортизатора и подкосов
в штатное положение. Штанга фиксатора касания из транспортного положения пере¬
мещается в штатное. После открытия вакуумной камеры проводится внешний осмотр
и проверка электрических цепей. Затем проводятся испытания: на прочность при
воздействии вибрации в штатном (раскрытом) положении стойки. Далее проводятся
испытания на случай посадки на поверхность Марса при температуре на конструк¬
ции стойки ПУ минус (80±10)°С. Стойка ПУ, закрепленная на приспособлении для
механических испытаний, крепится на ферме. Ферма установлена на оси вращения,
на некотором плече от оси вращения смонтирован гидроцилиндр, который через дат¬
чик силы крепится к ферме. Эта конструкция удерживается на определенном расстоя¬
нии над поверхностью, образованной аналогом грунта Марса, с уклоном (15± 1)°. При
испытаниях связь, удерживающая ферму с приспособлением в исходном положении,
отсоединяется, ферма поворачивается на оси и перемещается к грунту. При касании
поверхности грунта происходит срабатывание фиксатора. Далее на грунт ложится
опора ПУ, при подаче расхода в гидроцилиндр начинается перемещение фермы, амор¬
тизатор ПУ обжимается на ~ 190 мм.
142
4-8
Изменение состояния (включен/выключен) микропереключателей фиксатора за¬
писываться не будет ни на одном этапе доводочных испытаний, т.к. срабатывание
можно оценить визуально.
Испытания на динамическую и статическую прочность
по программе ЭКЗ-0000-0 ПМ-9.1 е составе изд.4010/1
Фиксатор касания устанавливается на четыре стойки ПУ. После отделения аэро¬
динамического экрана подается команда на раскрытие стоек посадочного устройства.
Происходит выдвижение (раскрытие) стоек ПУ и фиксаторов касания из транспорт¬
ного положения в штатное. После этого отделяется посадочная платформа и с рас¬
четной высоты падает на посадочное устройство. Срабатывают фиксаторы касания,
обжимаются амортизаторы ПУ.
Следующий этап отработки фиксаторов касания - бросковые испытания изд.4011/1
и 4011/2.
Изд.4011/1 представляет собой макет посадочной платформы (динамически экви¬
валентная модель), по результатам бросковых испытаний проводится верификация
математической модели посадки.
Изд.4011/2 представляет собой макет для отработки динамики посадки посадоч¬
ного модуля. При этом проводится проверка функционирования макета КА в процес¬
се посадки в условиях, приближенных к натурным (с моделированием марсианской
гравитации).
Испытания проводятся при НКУ, в помещении. Для проведения испытаний ис¬
пользуется стенд сброса, представляющий собой ферменную конструкцию, которая
позволяет получить горизонтальную и вертикальную составляющие скорости при
посадке, а также смоделировать марсианскую гравитацию.
Планируется шесть сбросов изд.4011/1, при каждом сбросе на ПУ будет установ¬
лен фиксатор касания в количестве, определенном для каждого конкретного случая
сброса.
Список литературы
Анурьев В.И. Справочник конструктора - машиностроителя. В 3 т. М.: Машино¬
строение, Т. 1, 2001. 920 с.; Т. 2, 2001. 901 с.; Т. 3, 2001. 859 с.
А.Ю. Сходкин,
Ю.М. Романенко,
С.Е. Су ту г ин
143
4-8
4.8.2. Система схода марсохода с платформы
Устройство схода марсохода
Устройство схода марсохода (УСМ) предназначено для обеспечения съезда мар¬
сохода (MX) с посадочной платформы десантного модуля на поверхность Мар¬
са (Кемурджиан А.Л. и др., 1976). При разработке конструкции УСМ необходимо
определить возможные угловые положение трапа при посадке аппарата на склон.
Поскольку кинематические параметры движения аппарата могут изменяться в ши¬
роком диапазоне и при этом аппарат совершает неориентированную посадку, опо¬
ры посадочного устройства будут обжаты на разную величину. Угловое положение
аппарата на поверхности посадки существенно влияет на выбор параметров трапов
(Анурьев В. И.,200
Необходимо определить моментные характеристики упругих элементов в узлах
вращения трапа, с помощью которых звенья трапов не только надежно открывались
с постановкой на замок, но и раскрывались в расчетной зоне спрямления. С другой
стороны, упругие элементы не должны вызывать больших перегрузок при ударе тра¬
па о поверхность грунта. Трапы в полетном положении должны быть компактно сло¬
жены и конструктивно совместимы с компоновкой аппарата.
Кроме этого, нужно учитывать особенности рельефа места посадки, распреде¬
ление камней и др. Например, если один из трапов колеи при раскрытии попадет
на камень, то неизбежны «ножницы» трапов, поэтому необходимо предусмотреть
установку датчиков углового положения трапов с тем, чтобы выбрать наиболее бла¬
гоприятное направление съезда.
Из расчета тягово-сцепных характеристик MX известно, что для надежного дви¬
жения MX по грунту и по трапу УСМ коэффициент сцепления должен быть не ме¬
нее 0,8. Коэффициенты сцепления определялись экспериментальным путем.
Описание конструкции УСМ
УСМ предназначено для обеспечения съезда марсохода с посадочной платфор¬
мы десантного модуля на поверхность планеты. На посадочной платформе в составе
УСМ предусмотрены четыре трапа. Два диаметрально установленных трапа позволя¬
ют съезд MX в двух направлениях, рисунок 4.8.2.1. Направление съезда выбирается
в зависимости от углов наклона трапов и рельефа местности.
Конструктивно каждый трап состоит из одного неподвижного звена, закрепленно¬
го на посадочной платформе 2, и двух подвижных звеньев: корневого 3 и концевого
4, рисунок 4.8.2.2. На подвижных звеньях трапа установлены складывающиеся пери¬
ла 5, 6, на силовой платформе - неподвижные перила 7. В узлах вращения подвижных
звеньев установлены энергоемкие упругие элементы: в корневом звене - пучок тор-
сионов 8 из пяти штук, в концевом звене - две пружины кручения 9.
Раскрытие перил обеспечивается за счет пружин кручения, установленных в уз¬
лах вращения стоек (Левин И.Я., 1967).
В полетном положении перила и звенья трапов сложены и зачекованы с помощью
детонационного замка 10 на жесткой опоре Постановленной на силовой платформе.
MX устанавливается на паллете 12.
144
4-8
1 - трап; 2 - посадочная платформа; 3 - марсоход.
Рисунок 4.8.2.1. Схема трапов в рабочем положении
1 - неподвижное звено; 2 - силовая платформа; 3 - корневое звено; 4 - концевое звено;
5, 6 - перила складывающиеся; 7 - перила неподвижные; 8 - торсионы;
9 - пружины кручения; 10 - детонационный замок; 11 - опора; 12 - паллета.
Рисунок 4.8.2.2. Полетное положение трапов
145
4-8
1 - кронштейн концевого звена; 2 - кронштейн корневого звена;
3 - кронштейн неподвижный; 4 - детонационный замок;
5 - опора; 6 - ловитель-амортизатор; 7 - пружины кручения перил.
Рисунок 4.8.2.3. Узел зачековки трапов
С помощью детонационного замка стягиваются три кронштейна, два из которых
установлены на боковых поверхностях звеньев трапа, третий кронштейн, неподвиж¬
ный, крепится к регулируемой опоре, рисунок 4.8.2.3. Для улавливания гайки после
срабатывания детонационного замка служит ловитель-амортизатор.
Выбранное угловое положение трапов при полете (49 градусов к силовой плат¬
форме) обусловлено необходимостью обеспечения гарантированных зазоров между
трапами и аэродинамическим экраном, теплозащитным кожухом и MX.
После посадки аппарата на поверхность Марса и срабатывания детонационного
замка трапы раскрываются с помощью пружин и торсионов, спрямленные звенья
фиксируются между собой защелкой. При не обжатых опорах ПУ и длине трапов
равной три метра, угол наклона трапов к поверхности посадки не более 20°. Это одно
из требований для обеспечения успешного съезда MX.
Геометрическая кинематика раскрытия трапа показана на рисунке 4.8.2.4 (Бух¬
гольц ЯЯ, 1965-1966).
Конструктивно каждое звено трапа состоит из двух швеллеров, соединенных
сваркой, рисунок 4.8.2.5.
Ширина звеньев трапа несколько превышает ширину колеса MX и составляет
145 мм, а строительная высота кессона выбрана из условия прочности и равна 40 мм.
При съезде MX весом 1250 Н максимальный расчетный прогиб трапа составляет
не более 40 мм. В качестве материала несущей конструкции трапа выбран магниевый
сплав, обладающий высокой удельной прочностью. В силовом отношении трапы об¬
ладают достаточной прочностью и жесткостью.
Поскольку масса для систем и устройств всегда критична для посадочного аппа¬
рата, для трапов также были даны ограничения по массе. В связи с этим рассматри¬
вались разные материалы с учетом требований прочности и технологических огра¬
ничений, связанных с возможностью изготовления минимальных толщин для стенок
и полок швеллера протяженной длины (Астахов М.Ф и др.,, 1954).
146
4-8
Рисунок 4.8.2.4. Кинематика раскрытия трапа
Рисунок 4.8.2.5. Силовая балка звена: 1,2- швеллеры
В качестве альтернативного варианта несущей конструкции звеньев трапа рас¬
сматривалась трехслойная панель с листами из углепластика и заполнителем в виде
сотовой конструкции из алюминиевой фольги. По результатам конструкторской про¬
работки и оценки прочности вариант с трехслойной панелью выигрыша по массе
не дал. Это объясняется большой долей металлоконструкций (узлы вращения, пру¬
жины, муфты, замки, кронштейны) в трапе, для установки которых требуется боль¬
шое количество закладных элементов при относительно малой поверхности (площа¬
ди) трапов. Помимо этого, на рабочей поверхности трапа, на листе из углепластика,
нужно было установить большое количество анкерных гаек для крепления панели
или конструктивных элементов, обеспечивающих требование по коэффициенту сце¬
пления с колесом MX.
147
4-8
1 - неподвижное звено, 2 - проушина, 3 - втулки, 4 - ось,
5 - кольцо, 6 - торсион, 7 - опора, 8 - фланец, 9 - муфта.
Рисунок 4.8.2.6. Узел вращения корневого звена
Кроме того, вариант изготовления звеньев из магниевого сплава в технологиче¬
ском отношении значительно проще и дешевле, тем более для оригинальной кон¬
струкции разового применения.
Узел вращения корневого звена, показан на рисунке 4.8.2.6.
Узел вращения корневого звена состоит из неподвижного звена 1 в виде коробки
с фланцем из АМгб, с помощью которого крепится на силовой платформе, и проу¬
шин 2 из АК8, жестко закрепленных на конце корневого звена.
На боковых стенках звена 1 выполнены бобышки с отверстиями, в которых для
уменьшения трения установлены стальные втулки 3. В отверстия соединения уста¬
новлена пустотелая ось 4 из титанового сплава ВТ6, которая удерживается от ради¬
ального перемещения с помощью пружинных колец 5. Соединение имеет посадку
H9/d9, которая учитывает температурные деформации и обеспечивает плавное вра¬
щение корневого звена (Технологичность конструкций, 1969; Феодосьев В.И., 1962).
Внутри оси размещены торсионы 6. На одном конце узла вращения торсионы
жестко заделаны с помощью опоры 7 и фланца 8 на неподвижном звене. На другом
конце торсионы заделаны на ухе корневого звена с возможностью регулировки мо¬
мента затяжки с помощью зубчатой муфты 9.
Торсионы изготовлены из пружинной коррозионно-стойкой нагартованной ста¬
ли 12Х18НЮТ-ВО. Для получения стабильных характеристик торсионы производят
партиями по отработанной технологии. Торсионы для левого и правого трапа группи¬
руют по 5 штук с минимальными отклонениями размеров и остаточной деформации,
с учетом направления заневоливания. Направление заневоливания должно совпадать
с направлением рабочего момента затяжки.
Силовая характеристика торсиона показана на рисунке 4.8.2.7.
148
4-8
Рисунок 4.8.2.7. Силовая характеристика торсиона
момент и угол
заневоливания
Силовая характеристика торсиона определена с учетом угла наклона трапа
в транспортном положении, максимального угла наклона посадочной платформы
и инерционных характеристик трапа.
После поворота трапа на рабочий угол ф2 торсионы начинают закручиваться в на¬
правлении, обратном направлению вращения корневого звена трапа. При этом умень¬
шаются нагрузки при ударе трапа о грунт.
Узел вращения концевого звена показан на рисунке 4.8.2.8.
Узел вращения концевого звена состоит из проушин 1, выполненных из АК-8,
жестко закрепленных на конце корневого звена, и проушин 2 из АК-8, жестко закре¬
пленных на торце концевого вена. Для . уменьшения трения в отверстиях проушин
концевого звена установлены стальные втулки 3. В отверстия соединения установ¬
лена пустотелая ось 4 из титанового сплава ВТ6. По центру оси жестко закреплен
кулачок 5, слева и справа от кулачка установлены стаканы 6 из АМгб, которые цен¬
трируются на проточках кулачка и служат для поддержания пружин кручения {Маши¬
ностроительные материалы, 1980).
1 - проушины корневого звена; 2 - проушины концевого звена; 3 - втулка;
4 - ось; 5 - кулачок; 6 - стакан; 7 - шайба; 8 - пружина кручения; 9 - муфта
Рисунок 4.8.2.8. Узел вращения концевого звена
149
4-8
Для уменьшения трения при раскрытии трапов между запрессованными втулками
и торцами стаканов размещены шайбы 7 из фторопласта. Вокруг стаканов располо¬
жены пружины кручения 8, соответственно с левой и правой навивкой. Одни концы
пружин закреплены на кулачке, другие концы пружин свободно опираются на кон¬
струкцию концевого звена.
На одном конце оси установлена зубчатая муфта 9, внутренняя часть которой
жестко закреплена на ухе корневого звена, а наружная часть имеет возможность пе¬
ремещаться вдоль оси. На концах оси выполнены шестигранники, с помощью кото¬
рых регулируется момент затяжки пружин при выведенной из зацепления полумуфте.
Пружины изготовлены из пружинной высокопрочной стали 65С2ВА-Ш-В.
Силовая характеристика пружины показана на рисунке 4.8.2.9.
Рисунок 4.8.2.Э. Силовая характеристика пружины
Имея муфты в узлах вращения, можно варьировать характеристиками пружин
и торсионов и выбрать оптимальное сочетание, обеспечивающее надежное раскры¬
тие трапов в заданной зоне спрямления звеньев трапов.
Перила трапов показаны на рисунке 4.8.2.10.
Для обеспечения конструктивной совместимости трапов с компоновкой посадоч¬
ного аппарата перила выполнены складывающимися. Перила состоят из уголкового
профиля 2, который закреплен на стойках 3. Стойки, в свою очередь, шарнирно закре¬
плены на боковой поверхности трапа, образуя подпружиненный 4 узел вращения 5.
В сложенном положении перила корневого и концевого звена плотно прилегают
к рабочей поверхности звеньев трапа и удерживаются с помощью регулируемых тан-
деров 4 рисунок 4.8.2.11 (Артоболевский Я.Я.,1951).
Один конец тандера имеет ухо, другой конец - вилку. Ухо тандера шарнирно кре¬
пится за ось стойки концевого звена. После расчековки трапа корневое и концевое
звено поворачиваются вокруг оси Oi на небольшой угол, (рисунок 4.8.2.2). По мере
поворота вилки тандеров последовательно выходят из зацепления с осью стоек кор¬
невого звена, после чего перила концевого звена за счет пружин поворачиваются
до упора в винты 6, которые позволяют регулировать угол наклона стоек в раскрытом
положении.
При дальнейшем вращении перила корневого звена выходят из зацепления (из окна
неподвижного звена), рисунок 4.8.2.12, и поворачиваются до упора в винты 6, такая
задержка при раскрытии позволяет исключить удар перил корневого звена о MX.
150
4-8
1 - звено трапа; 2 - уголок; 3 - стойка; 4 - пружины кручения; 5 - узел вращения
Рисунок 4.8.2.10. Конструктивная схема перил
1 - уголок; 2 - стойка; 3 - узел вращения; 4 - тандер; 5 - вилка; 6 - винт регулировочный
Рисунок 4.8.2.11. Узлы вращения стоек
151
4-8
Рисунок 4.8.2.12. Окно в неподвижном звене
При посадке аппарата на склон 15° и неравномерном обжатии опор посадочного
устройства (ПУ), максимальный угол наклона платформы с установленными на ней
трапами может составлять 20°. При этом MX при сходе по трапам за счет боковой
составляющей сил тяжести может прижаться к перилам одного борта трапов.
Боковое смещение MX возможно также при наличии камня под одним из трапов
или за счет начальных возмущений после снятия механических и электрических свя¬
зей MX с паллетой и креном силовой платформы.
При высоте перил, контактирующих со ступицами колес с малым коэффициентом
трения /^<0,3, движение MX по трапам с коэффициентом сцепления ср>0,8 происхо¬
дит без опрокидывания и без разрушения перил. По результатам испытаний для пе¬
рил, выполненных из МА2-1 с покрытием: хим.оке, грунт АК-070, эмаль ЭП-140 или
с покрытием из фторопласта коэффициент трения составил 0,16-0,2.
Ходовая часть MX состоит из шести ведущих колес и упругой подвески с про¬
дольным и поперечным балансирами, в ступице каждого колеса установлен электро¬
механический привод, за счет чего обеспечиваются высокая проходимость и высокая
надежность {Волков Л.И., Шишкевич А.М., 1975).
Кроме того, для высокой проходимости и снижения нагрузок при движении MX
колеса выполнены с внутренним подрессориванием, а по периметру колеса установ¬
лены грунтозацепы.
Приспособление для определения сцепных свойств колеса марсохода изображено
на рисунке 4.8.2.13.
152
4-8
1 - термокамера; 2 - колесо марсохода;
3 - подвижная опора с фрагментом трапа; 4 - подшипник качения
Рисунок 4.8.2.13. Приспособление для определения сцепных свойств
Расчет тягово-сцепных характеристик MX при ограниченной мощности буферной
батареи показал, что для надежного движения MX по грунту и по трапам У СМ коэф¬
фициент сцепления должен быть не менее 0,8.
Коэффициенты сцепления определялись экспериментальным путем при исследо¬
вании контактного взаимодействия натурного колеса с разными материалами рабочей
поверхности трапа. В качестве возможных материалов рассматривались: пенопласты
ПС-1-100, ПС-1-200, образцы из АМг-6, углепластика КМ-4, МА2-1; сетка, выпол¬
ненная из материала АМгб толщиной 1,5 мм с ячейкой 6-8 мм и толщиной ребер
между ячейками 1,5 мм {Машиностроительные материалы, 1980).
По результатам испытаний по определению коэффициента сцепления при тем¬
пературах от плюс 20°С до минус 80°С и вертикальных нагрузках на колесо 20 кгс
и 40 кгс между фрагментами макета трапов, выполненными из различных материа¬
лов, и колесом MX можно сделать следующие выводы:
1. Наибольший коэффициент сцепления <р=0,8— 1 у пенопласта ПС-200 и сетки.
2. Применение сетки на трапах для контактного взаимодействия с грунтозацепа¬
ми колеса является более предпочтительным по сравнению с пенопластом, т.к. по¬
следний склонен к выкрашиванию при взаимодействии с грунтозацепами и, кроме
того не обладает стабильными характеристиками при длительном воздействии вакуу¬
ма, радиации и термоциклирования.
Фрагмент сетки показан на рисунке 4.8.2.14.
153
4-8
Сетка крепится к рабочей поверхности трапов с помощью винтов, (рисунок 4.8.2.15).
Для определения углового положения трапов служат датчики на основе потенци¬
ометров. Конструктивно в оси вращения корневого звена установить датчик не пред¬
ставлялось возможным. Поэтому датчик был размещен вблизи оси вращения в зоне,
ограниченной силовой платформой и перилами, в сложенном положении с обеспе¬
чением зазоров близлежащих элементов конструкции. Установка датчика показана
на рисунке 4.8.2.16.
Датчик 1 закреплен с помощью кронштейна 2 на неподвижном звене 3. На верх¬
ней части уха корневого звена 4 установлена направляющая 5. Для связи датчика
с направляющей служит поводок 6, который одним концом жестко закреплен на валу
датчика, другим концом скользит по направляющей при вращении корневого звена
трапа. Поводок удерживается на оси датчика установочными винтами 7 и гайкой 8.
154
4-8
5
4
6
8
7
1 - датчик, 2 - кронштейн; 3 - неподвижное звено; 4 - ухо корневого звена;
5 - направляющая; 6 - поводок; 7 - установочный винт, 8 - гайка
Рисунок 4.8.2.16. Установка датчика
Для определения углов раскрытия трапов производится настройка датчиков, она
состоит в совмещении нулевого механического положения трапов (зачекованное по¬
ложение) с «нулевым» электрическим положением потенциометра датчика с после¬
дующим контрольным раскрытием трапа на рабочий угол. По результатам настройки
датчиков производится их тарировка с построением графика угла поворота в зависи¬
мости от выходного напряжения (р=/(^вых) для каждого датчика.
При проведении контрольных раскрытий трапа определяют точность измерения
угла с помощью датчика на возможных углах контакта трапа с поверхностью посадки.
Для обеспечения температурных условий эксплуатации детонационного замка
в соответствии с требованием ТУ в зоне замка установлены нагреватель и темпера¬
турный датчик. Для подтверждения работоспособности и надежности детонационно¬
го замка были успешно проведены их испытания на режимах эксплуатации.
При посадке аппарата на поверхность Марса после срабатывания детонационного
замка трапы начинают раскрываться. Факт отхода трапа телеметрируется срабатыва¬
нием микровыключателя, который установлен в зоне узла вращения корневого узла.
155
4-8
Описание испытаний УСМ '
У СМ проекта «ЭкзоМарс» представляет собой оригинальную конструкцию с до¬
статочно сложной кинематикой раскрытия звеньев и перил, поэтому были проведе¬
ны в большом объеме доводочные испытания трапов. При испытаниях на раскрытие
трапы обезвешивались на приспособлении с резиновыми жгутами, (рисунок 4.8.2.17)
и приспособлении с наклонной плоскостью (рисунок 4.8.2.21) с моделированием
марсианской гравитации.
На приспособлении с обезвешиванием с помощью резиновых жгутов проводились
испытания: на раскрытие трапов после воздействия механических нагрузок; по запа¬
су энергоемкости упругих элементов (рисунок 4.8.2.19); по проверке корректности
момента спрямления трапа (рисунок 4.8.2.20); на прочность при раскрытии с ударом
о бетон; на прочность на случай съезда марсохода. Для выполнения поставленных за¬
дач основание приспособления, к которому крепился трап, спроектировано съемным
и имело возможность крепления при углах ±20° относительно горизонта. Раскрытие
и спрямление фиксировались с помощью кинокамеры.
Рисунок 4.8.2.17. Приспособление с обезвешиванием резиновыми жгутами
156
4-8
Кинематика раскрытия трапа при обезвешивании резиновыми жгутами показана
на рисунке 4.8.2.18.
Рисунок 4.8.2.18. Кинематика раскрытия трапа
157
4-8
Рисунок 4.8.2.19. Схема обезвешивания трапа резиновыми жгутами с углом наклона
посадочной платформы минус 20°
Рисунок 4.8.2.20. Схема обезвешивания трапа резиновыми жгутами с углом наклона
посадочной платформы 20°
На приспособлении с наклонной плоскостью проводили контрольные (цеховые)
испытания трапов на раскрытие с фиксацией спрямления в расчетной зоне, испыта¬
ния в вакуумной камере с температурой минус 80°С, последующим срабатыванием
детонационного замка и раскрытием трапа. На этом же приспособлении с наклонной
плоскостью с моделированием марсианской гравитации проводили многочисленные
испытания на раскрытие трапа для подтверждения ВБР (рисунок 4.8.2.21).
158
4-8
1 - основание; 2 - узлы вращения; 3 - узел зачековки;
4 - наклонный сектор зоны спрямления звеньев трапа
Рисунок 4.8.2.21. Приспособление с наклонной плоскостью, имитирующее марсианскую
гравитацию
159
4-8
Характерный график изменения перегрузки по времени при раскрытии трапа по¬
казан на рисунке 4.8.2.22.
Акселерометр был установлен на конце трапа. В результате обработки результатов
измерений ускорений с помощью компьютера, для которого разработано специальное
программное обеспечение, был получен график n=flx). Как видно из графика, время
раскрытия до первого удара приблизительно две секунды, что совпадает с результа¬
тами расчета.
Второй удар, более слабый, обусловлен поворотом трапа с помощью растянутых
резиновых жгутов на высоту приблизительно 0,8 метра с последующим ударом.
Трапы в раскрытом положении испытывались на эксплуатационные нагрузки, ре¬
ализуемые при съезде MX, а также расчетные нагрузки и подтвердили тем самым
прочность и жесткость конструкции трапов, полученные расчетным путем. Прове¬
дены также испытания трапов по проверке перемещения конца трапа при одновре¬
менном действии эксплуатационных нагрузок на трап и перила. Перемещение конца
трапа в грунте не превысило 20 мм. По результатам доводочных испытаний под¬
тверждена работоспособность и надежность конструкции трапов.
При испытаниях была подтверждена прочность трапов и перил во всех случаях
нагружения и обеспечен съезд марсохода по трапам на грунт.
Вместе с тем при контактном взаимодействии ступицы колес с перилами с покры¬
тием АК-512 были выявлены высокие напряжения вследствие большого коэффици¬
ента трения.
Для нейтрализации данного эффекта на перила была установлена лента на основе
фторопласта PFTE, что снизило трение и давление.
В некоторых случаях съезда MX при поперечном склоне в конце съезда последнее
колесо MX зацеплялось за край перил, что приводило к большой деформации обода
колеса.
При доработке конца перил (а именно установка наконечника из алюминия) заце¬
пление колеса о перила не наблюдалось. В результате ходовых испытаний были даны
рекомендации по доработке перил, которые в НПО им. С.А. Лавочкина были учтены
и выполнены.
Разработанная конструкция У СМ предназначена для обеспечения съезда MX
с посадочной платформы десантного модуля на поверхность Марса. На посадочной
платформе в составе У СМ предусмотрены четыре трапа, позволяющих съезд MX
в двух направлениях в зависимости от углов наклона трапов и рельефа местности
(Цытович Н.А., 1973).
При разработке конструкции У СМ учитывались ограничения: по обеспечению
гарантированных зазоров между трапами и элементами конструкции посадочного
аппарата, по массе, технологии сборки и др.
Рассматривались альтернативные варианты трапов, и выбран оптимальный из них
по массе.
Конструкция У СМ обладает всеми техническими характеристиками, изложенны¬
ми в исходных данных для проектирования трапов. Для подтверждения работоспо¬
собности и надежности конструкции трапов были проведены доводочные испытания
с обезвешиванием, обеспечивающим гравитацию на Марсе.
При проведении ходовых испытаний MX при съезде его по трапам подтвердились
тягово-сцепные характеристики шасси при взаимодействии с рабочей поверхностью
трапов, а также устойчивость движения MX без опрокидывания при максимальном
расчетном наклоне трапов и допустимом препятствии под одним из трапов.
160
4-8
Список литературы
Анурьев В.И. Справочник конструктора-машиностроителя. В 3 т. М.: Машино¬
строение, Т. 1, 2001. 920 с.; Т. 2, 2001. 901 с.; Т. 3, 2001. 859 с.
Артоболевский И.И. Теория механизмов и машин. М.:, Л.: Государственное изд-во
технико-теоретической лит., 1951. 704 с.
Астахов М.Ф., Караваев А.В., Макаров С.Я., Суздальцев Я.Я. Справочная книга
по расчету самолета на прочность. М.: Государственное изд-во обор, пром., 1954.
706 с.
Бухгольц Н.Н. Основной курс теоретической механики. В 2 ч. М.: Наука, Ч. 1,
1965.468 с.;Ч. 2, 1966. 332 с.
Волков Л.И., Шишкевич А.М. Надежность летательных аппаратов. М. Высшая
школа, 1975. 294 с.
Кемурджиан А.Л., Громов В.В., Черкасов И.И., Шварев В.В.. Автоматические
станции для изучения поверхностного покрова Луны. М.: Машиностроение, 1976.
200 с.
Левин И.Я. Справочник конструктора точных приборов. М.: Машиностроение,
1967. 743 с.
Машиностроительные материалы. Краткий справочник / Под ред. В.М. Раскато¬
ва. М.: Машиностроение, 1980. 511 с.
Технологичность конструкций', справочное пособие / Под ред. С.Л. Ананьева,
В.П. Купровича. М.: Машиностроение, 1969. 424 с.
Феодосьев В.И Сопротивление материалов. М.: Государственное изд-во физ.-мат.
лит., 1962. 535 с.
Цытович Н.А. Механика грунтов. М.: Высшая школа, 1973. 280 с.
Разработчики устройства схода марсохода выражают благодарность всему коллек¬
тиву АО «НПО им. С.А. Лавочкина» за профессионализм и любовь к своему труду
на всех стадиях создания и отработки трапов макета.
Особо отмечаем вклад:
АО «НПО им. С.А. Лавочкина»'.
М.А. Зверева, А.В. Жирякова, М.В. Стрункина, С.Е. Соколова, Л.В. Царьковой,
Я.В. Коврижных, М.М. Подлесных, Т.С. Хурасевой, А.Ю. Кочеткова, Е.С. Шубенки-
на, Г.М. Панина, В.В. Трубкина., Г.А. Клепко;
АО «Научно-Исследовательский Институт Физических Измерений» г.Пенза:
К.И. Бастрыгина, Н.И. Баринова.
Ю.А. Петров,
А. С. Берников,
С.Е. Су туг ин
161
4-8
4.8.3. Результаты моделирования динамики раскрытия
трансформируемых конструкций посадочного модуля
в процессе проектирования и доводочных испытаний
Обеспечение упорядоченного и надёжного раскрытия на поверхности плане¬
ты элементов конструкции космического аппарата (КА), сложенных при перелете,
с минимальными нагрузками при ударе о поверхность грунта занимает не последнее
место среди задач динамики посадочных модулей автоматических межпланетных
станций. При проектировании таких элементов исследование динамики раскрытия
позволяет подобрать рациональные конструкторские решения.
Основными этапами решения данной проблемы являются:
1. Определение допустимых отклонений от номинального исходного положения
посадочной платформы с трапами при посадке и зоны спрямленного положения зве¬
ньев трапов.
2. Определение минимальных потребных моментов в узлах вращения для прео¬
доления внешних воздействий - сил гравитации и трения в шарнирах.
3. Вычисление времени раскрытия трапов и конечных угловых скоростей для раз¬
личных вариантов в рамках принятых допусков.
4. Выбор оптимального по кинематическим параметрам варианта раскрытия
трапов.
5. Исследование способов снижения конечных угловых скоростей трапов и соот¬
ветственно нагрузок при ударе о поверхность грунта (установка пружин обратного
хода (торможения) в узлах вращения, использование блока амортизаторов на консоли
концевого трапа, применение демпфирующих устройств в шарнирах).
162
4-8
6. Выдача рекомендаций по силовым характеристикам пружин, устанавливаемых
в узлах вращения звеньев трапов.
Рассмотрим решение данной задачи на примере посадочной платформы десант¬
ного модуля КА «ЭкзоМарс». Вместе с другой научной аппаратурой посадочная плат¬
форма должна доставить Марс ровер (марсоход) и обеспечить его уверенный сход
на поверхность планеты (Пичхадзе К.М. и др., 2010; Пичхадзе К.М. и др., 2015; Хар¬
тов В.В. и др., 2014). На рисунке 4.8.3.1 приведён общий вид посадочной платфор¬
мы и обозначены оси строительной системы координат (ССК). Предполагается, что
платформа будет оснащена двумя парами трапов, раскрывающихся соответственно
по оси +Y и -Y.
Постановка задачи
В состав каждого трапа входят два звена (корневое 1 и концевое 2), две оси враще¬
ния О[ и О2 и соответственно две пружины кручения, установленные в осях Oi и О2.
Схема раскрытия одного трапа приведена на рисунке 4.8.3.2. На рисунке
обозначено:
/1, /2 - длины корневого и концевого звеньев;
Г1, г2 - расстояние от осей вращения Oi и О2 до центров масс корневого и конце¬
вого звеньев;
т}, т2- массы корневого и концевого звеньев;
Jci, Jc2 - собственные моменты инерции корневого и концевого звеньев;
а0 - угол установки сложенного трапа к оси ОХ ССК десантного модуля;
ак - угол, характеризующий положение раскрытого трапа по отношению к поверх¬
ности грунта.
Рисунок 4.8.3.2. Схема раскрытия трапа
163
4-8
Раскрытие звеньев трапа происходит одновременно после срабатывания пирочеки
(Ефанов В.В. и др., 2014). Звенья трапа рассматриваем как твёрдые тела.
Силовые характеристики пружин, установленных в узлах вращения, приведены
на рисунке 4.8.3.3. Здесь - начальный момент закрутки z-й пружины; (р3/ - началь¬
ный угол закрутки z-й пружины.
а - в концевом звене;
б - в корневом звене.
Рисунок 4.8.3.3. Силовые характеристики пружин в шарнирах
Обозначим текущий угол поворота в шарнире корневого звена аь в шарнире
концевого звена - а2. В сложенном (зачекованном) положении ai=a2=0. Конечный
угол поворота в шарнире корневого звена aiK=ao+aK+9O°, в шарнире концевого звена
а2к=180°.
Следует предусмотреть возможность посадки посадочной платформы на склон
с углом р. Схема приведена на рисунке 4.8.3.4. В качестве номинального исходного
положения посадочной платформы принимаем её посадку на горизонтальную по¬
верхность (Р=0).
Рисунок 4.8.3.4. Посадка платформы на склон с углом Р
164
4-8
Для обеспечения гарантированного спрямления трапа до контакта с поверхно¬
стью с учётом разной деформации опор посадочной платформы и возможных локаль¬
ных неровностей грунта задаём зону спрямления, определяемую углом у. Ускорение
свободного падения на поверхности Марса составляет gM=3,72 м/с2. На рисунке GM -
вектор силы тяжести.
Вывод уравнений движения
Для получения уравнений движения системы воспользуемся известными из те¬
оретической механики уравнениями Лагранжа II рода в обобщённых координатах
(Лурье А.И., 1961):
d(дт\ дТ ( dU
dt[dqj dq,+dqt
(z = l,...,3).
Здесь T и U - кинетическая и потенциальная энергия системы, записанная в обоб¬
щённых координатах; Qj(t) - обобщённая сила, соответствующая обобщённой коор¬
динате q{t).
Движение рассмотрим в неподвижной системе координат, начало которой нахо¬
дится в точке 01 крепления трапа к корпусу. Система имеет две степени свободы.
В качестве обобщённых координат q, рассмотрим углы поворота а, каждого из звеньев
от начального (зачекованного) положения (рисунок 4.8.3.2) (Виттенбург Й, 1980).
Выражение для кинетической энергии системы имеет вид
где г, - скорость центра масс z-ro звена; со, - угловая скорость z-ro звена.
Линейная скорость центра масс z-ro звена в неподвижной системе координат у
представляет собой векторную сумму двух скоростей: у, = у." + у/, где v. - скорость
начала подвижной системы координат с центром О, на оси вращения z-ro звена; у/ -
скорость центра масс z-ro звена в подвижной системе координат. Модуль линейной
скорости у, определяется выражением
У,. = л/(у,н)2 + (у- )2 + 2у"у' COS(a,_, + а,)
или
у2=(у/)2+(у- )2+2у"у' cos(a,._1 +а;). (4.8.3.1)
Квадраты линейных скоростей центра масс секций в неподвижной систе¬
ме координат с центром в О] запишем через обобщённые координаты с учётом
выражения (4.8.3.1):
v2 = fai + г2^2 + 2? + а2).
Угловые скорости поворота секций:
со^оц; co2=d2.
165
4-8
Квадраты угловых скоростей:
2 -2 2 -2
ш1 = а1; со2=02.
Тогда выражение для кинетической энергии примет вид
+ ^ra2r22d2 + w2^ir2did2C0S(ai + a2) + -^-J2a2.
Потенциальная энергия является суммой потенциальной энергии системы в поле
сил тяжести и потенциальной энергии деформированных пружин:
gM ri cos(ao + ₽ - <4) + тг £м [A cos(oc0 + р - ocj) -
где кх и к2 - жёсткости пружин кручения.
Частные производные от функции кинетической энергии по обобщённым коорди¬
натам и их производным:
= + /w2/2 )a1 + w2/1r2 cos(aj+a2)d2;
6dj
= m2l}r2 cos(a1+a2)a1 + (J2+w2r22)d2;
da2
d ( dT
dt\ dal
= (w/j2 + J] + m2l\)a\ + m2lxr2 cos^ + a2)a2 -
- w2/1r2a2(a] +a2)sin(a1 +oc2);
d ( dT
dt I da2
= (J2 + m2r2)a2 + m2lxr2 cos(ot] + oQoq -
-m2lxr2ux(ax +d2)sin(a1 + a2);
dT dT . . . z
= = -m2lxr2axa2 sinto^ + a2).
5a! da2
Частные производные от функции потенциальной энергии по обобщённым
координатам:
= (m}gM rx + m2gMlt) sin(a0 + P - a1) +
da!
+ К(<p31 + a,) + ^(a, + a2 -<p32);
— = т2§мг2 sin(a0 + P + a2) + ^(a, + a2 - <p32).
da2
166
4-8
Уравнения движения в обобщённых координатах для двухзвенного трапа - система
двух дифференциальных уравнений 2-го порядка с переменными коэффициентами:
(т^г2 + + m2li)a{ + m2lxr2 cos^ + ot2)oc2 -
-m2lxr2 sin(ocj + а2)ос2 + + k2a2 +
+ ('W|gM'i +'”2gM/l)sin(«o+P-al) + ^l(P3l ~k2^2 =Q;
(4.8.3.2)
m2ltr2 cos(a, + a2)a, + (J2 + m2r2)a2 -
- m2ltr2 sin(a, + a2 )a^ + k2at + k2a2 +
+ w2gMr2sin(a0+P + a.2)-£2(p12 =02-
Чтобы получить выражения для обобщённых сил, необходимо записать вариацию
работы внешних нагрузок в виде
2
/=1
(4.8.3.3)
В нашей системе работу на поверхности Марса совершают диссипативные силы,
обусловленные трением в шарнирах трапа при раскрытии:
Лр= —
где МТ/ - момент трения в i-м шарнире.
Дополнительные силовые воздействия при проведении наземных испытаний вой¬
дут в виде добавочных членов в выражения для обобщенных сил в правой части урав¬
нений (4.8.3.2) и будут рассмотрены ниже.
Способ решения
Решение системы полученных дифференциальных уравнений (4.8.3.2) возможно
только численными методами. Для решения задачи предлагается использовать про¬
граммный комплекс EULER (разработчик НПО «Автомеханика»).
Программный комплекс EULER (Бойков В.Г, Юдаков А.А., 2011) позволяет про¬
вести математическое моделирование динамического поведения рассматриваемой
системы и исследовать её движение.
На рисунке 4.8.3.5 приведена визуализация проекта, выполненного в программе
EULER.
Рассматривалось движение системы, состоящей из двух звеньев, соответствую¬
щих раскрывающимся звеньям трапа. Корневое звено трапа моделировалась звеном
Body 1, в состав которого входили объекты Solid 1 (тело) и MIP 1 (массово-инерцион¬
ная характеристика), концевое - звеном Body 2, имеющим в своём составе объекты
Solid 2 и MIP 2.
Узлы поворота трапа задавались парами вращения (joint 1 и joint 2). Силовые воз¬
действия на звенья 1 и 2 вводились в виде силовых элементов «момент по датчикам
на одну точку» (Body 1) и «момент по датчикам на две точки» (Body 2). Функции при¬
ложенных моментов имеют вид, приведенный на рисунке 4.8.3.3 (линейный закон).
Моменты трения скольжения в шарнирах определяются в виде Мтс=цтш-7?ш, где
ц - коэффициент сухого трения; гш - радиус шарнира; 7?ш - радиальная сила в шарни¬
ре (вычисляется программно на каждом шаге интегрирования).
167
4-8
V’
joint 2
Surface
Рисунок 4.8.3.5. Визуализация динамической модели в программе EULER
Возможно задание моментов вязкого трения в шарнирах в виде Мтв= с • dz, где с -
коэффициент вязкого трения; dz - угловая скорость z-го звена.
Положение посадочной платформы при посадке на склон с углом Р определялось
поворотом вектора направления силы гравитационного притяжения на этот угол. По¬
верхность грунта моделировалась объектом Surface.
Датчики определяют текущие значения углов ct) и а2 при раскрытии трапа, угло¬
вые скорости di и d2, моменты М\ и М2 относительно осей вращения трапа.
Разработанная динамическая модель позволяет в интерактивном режиме варьиро¬
вать её характеристики: геометрию и массово-инерционные характеристики звеньев
трапа, жёсткости и углы закрутки пружин кручения, положение посадочной платфор¬
мы при посадке на склон и др. и выполнять интегрирование системы дифференци¬
альных уравнений (4.8.3.2).
Результаты моделирования раскрытия трапа на поверхности Марса
В качестве примера приведены результаты моделирования для следующего вари¬
анта исходных данных (обозначения на рисунках 4.8.3.2 и 4.8.3.4):
Zi=l ,4 м; /2=1,304 м; ^=0,810 м; г2=0,610 м;
mi=4,3 кг; т2=3,35 кг; Jci=0,703 кг-м2; </С2=0,472 кг-м2; р=0,15;
168
4-8
а0=41°; ак=20°; а1к=ао+ак+9О°=151°; а2к=180°; 0=15°; у=0-20°.
Индексы 1 и 2 относятся соответственно к корневому и концевому звеньям трапа.
Рациональным представляется следующее решение: пружина корневого звена
обеспечивает раскрытие трапа до вертикали (рисунок 4.8.3.4, линия действия век¬
тора GM) с некоторым запасом (т.е. на угол ao+0+Aai), а дальнейшее движение кор¬
невого звена происходит уже под действием силы тяжести. Таким способом можно
добиться снижения конечной угловой скорости трапа. Пружина же концевого звена
должна быть закручена на полный угол поворота этого звена с небольшим запасом
(т.е. на угол а2к+Да2). Примем угол закрутки корневой пружины (p3i=41 °+20°+19°=80°,
минимальный угол закрутки концевой пружины (рз2=180°+10°=190°.
т=0
т=1,08 с
Рисунок 4.8.3.6. Визуализация раскрытия трапа +Y без торможения (вариант 7)
&
Минимальный потребный момент для раскрытия трапов определяется расчётом
для худшего случая - раскрытия трапа +Y при посадке на склон с углом 0=15° (рису¬
нок 4.8.3.4). Выполнено несколько вариантов расчётов для рассматриваемого случая.
Результаты приведены в таблице 4.8.3.1.
Дальнейшее увеличение жёсткости корневой пружины ограничено конструк¬
тивными параметрами кронштейна крепления и узла вращения корневого зве¬
на, определяющими наружный диаметр и высоту пружины кручения. Выбран
вариант 7, визуализация раскрытия трапа +Y для данного варианта приведена
на рисунке 4.8.3.6.
169
4-8
Таблица 4.8.3.1. Результаты для трапа +Y без торможения
вариант
Кь
Нм
фз1,
град
Н/(мрад)
Л^р2,
Нм
фз2,
град
к2,
Н/(мрад)
У,
град
время
спрямления, с
время
раскрытия, с
конечная
угловая
скорость, с 1
1
20,0
80
14,33
9,0
190
2,71
нет раскрытия
2
20,5
80
14,68
9,0
190
2,71
-0,90
3,185
3,369
2,006
3
21,0
80
15,04
9,0 .
190
2,71
2,02
2,966
3,179
2,026
4
22,0
80
15,76
9,0
190
2,71
5,00
2,538
2,885
2,036
5
23,0
80
16,47
9,0
190
2,71
5,57
2,419
2,674
2,027
6
25,0
80
17,91
9,0
190
2,71
3,51
2,132
2,369
1,984
7
26,0
80
18,62
9,0
190
2,71
1,73
2,034
2,255
1,957
8
27,0
80
19,34
9,0
190
2,71
-0,27
1,953
2,154
1,927
Результаты расчёта аналогичных вариантов для трапа -Y приведены в табли¬
це 4.8.3.2. В этом случае по сравнению с трапом +Y время раскрытия будет меньше,
а конечные угловые скорости - выше. Необходимо выполнить расчёт на прочность
трапа -Y (вариант 7) от удара о поверхность Марса. Если нагрузка от удара превыша¬
ет допустимую, следует предпринять меры по снижению конечных угловых скоро¬
стей трапов и, соответственно, нагрузок при ударе о поверхность грунта (Ефанов В.В.
и др., 2013).
Таблица 4.8.3.2. Результаты для трапа -Y без торможения
вариант
л4Р|,
Нм
фз1,
град
*1,
Н/(мрад)
М°ПР2,
Нм
фз2,
град
fe,
Н/(м-рад)
У,
град
время
спрямления, с
время
раскрытия, с
конечная
угловая ско¬
рость, с 1
3
21,0
80
15,04
9,0
190
2,71
21,39
1,424
1,787
2,352
4
22,0
80
15,76
9,0
190
2,71
18,23
1,397
1,737
2,323
5
23,0
80
16,47
9,0
190
2,71
16,11
1,373
1,691
2,295
6
25,0
80
17,91
9,0
190
2,71
11,07
1,331
1,607
2,236
7
26,0
80
18,62
9,0
190
2,71
8,61
1,313
1,568
2,206
8
27,0
80
19,34
9,0
190
2,71
6,20
1,297
1,531
2,176
Установка на консоли концевого трапа блока амортизаторов в виде сминаемой обо¬
лочки или сотоблока проблематична (Теча В.Я., 2015). В случае линейной зависимо¬
сти амортизирующей силы от перемещения с приведённой жёсткостью £=2,5* 104 Н/м
ощутимый результат по снижению конечной угловой скорости трапа наблюдается для
длины амортизатора 6>40 мм. Возникают трудности с размещением такого амортиза¬
тора в сложенном положении трапа, зона спрямления требует корректировки.
Более рациональной представляется установка пружины торможения в кор¬
невом узле вращения. В конечном случае пружина включается в работу после по¬
ворота корневого звена трапа на угол (p3i, её силовая характеристика представлена
на рисунке 4.8.3.36.
170
4-8
В таблицах 4.8.3.3 и 4.8.3.4 приведены результаты расчетов для трапов +Y и -Y
с торможением. Применение пружины торможения с такой жёсткостью снижает ко¬
нечные угловые скорости трапа от 15 до 20%.
Таблица 4.8.3.3. Результаты для трапа +Y с торможением
вариант
л4„
Нм
фз1,
град
Н/(мрад)
м°пр2>
Нм
фз2,
град
^2,
Н/(мрад)
У,
град
время
спрямления, с
время
раскрытия, с
конечная
угловая ско¬
рость, с 1
3
21,0
80
15,04
9,0
190
2,71
1,27
2,985
3,214
1,755
4
22,0
80
15,76
9,0
190
2,71
4,42
2,654
2,923
1,745
5
23,0
80
16,47
9,0
190
2,71
5,11
2,434
2,714
1,721
6
25,0
80
17,91
9,0
190
2,71
3,22
2,146
2,413
1,655
7
26,0
80
18,62
9,0
190
2,71
1,56
2,049
2,300
1,619
8
27,0
80
19,34
9,0
190
2,71
-0,39
1,968
2,200
1,582
Таблица 4.8.3.4. Результаты для трапа -Y с торможением
вариант
<1,
Нм
фз1,
град
Н/(мрад)
Л^„р2,
Нм
фз2,
град
Н/(мрад)
У,
град
время
спрямления, с
время
раскрытия, с
конечная
угловая ско¬
рость, с1
3
21,0
80
15,04
9,0
190
2,71
21,39
1,425
1,813
2,086
4
22,0
80
15,76
9,0
190
2,71
18,69
1,398
1,764
2,046
5
23,0
80
16,47
9,0
190
2,71
16,11
1,375
1,719
2,007
6
25,0
80
17,91
9,0
190
2,71
11,07
1,334
1,635
1,930
7
26,0
80
18,62
9,0
190
2,71
8,66
1,316
1,597
1,893
Моделирование раскрытия трапов в процессе
наземных кинематических испытаний
Целью испытаний является проверка соответствия конструктивных характери¬
стик объекта испытаний (двухзвенного трапа посадочного модуля КА «ЭкзоМарс»)
заданным требованиям к функционированию в условиях марсианской гравитации.
Поскольку воспроизведение в лаборатории реальных условий на поверхности Мар¬
са невозможно (или очень дорого), предлагается обезвешивание трансформируемой
конструкции трапа для создания условий, приближенных к реальным (Микиъиев Г.Н.,
1978). Однако при этом необходимо учесть ряд воздействий (факторов), которые при¬
ведут к отклонению значений исследуемых параметров от тех, что будут наблюдаться
в реальных условиях эксплуатации.
Ранее (Горовцов В.В. и др., 2016) расчетным путем были определены силовые ха¬
рактеристики пружин звеньев трапа и кинематические параметры при его раскры¬
тии. По результатам расчетов найдено рациональное конструкторское решение. Те¬
перь требуется применить разработанную динамическую модель для оптимизации
средств и методики проведения испытаний.
171
4-8
Проведена модернизация (корректировка) исходной модели применительно к ус¬
ловиям и средствам испытаний: добавлены новые связи и датчики, изменены сило¬
вые воздействия. В дальнейшем будем называть исходную динамическую модель
трапа «талонной», откорректированную модель испытаний - «тестируемой».
Основным параметром сравнения «эталонной» и «тестируемой» моделей выбрано
время раскрытия трапа, дополнительными - конечная угловая скорость, угол и время
спрямления.
В качестве рационального варианта, вытекающего из предварительно выполнен¬
ных расчетов, приняты следующие исходные данные:
/1=1,4 м; /2= 1,3 м - длины корневого и концевого звеньев;
Г1=0,840 м; г2=0,613 м - расстояния от осей вращения Oi и О2 до центров масс
корневого и концевого звеньев;
Д1=0,15 м; Д2=0,16 м - длины корневой и концевой осей вращения;
б/1=0,020 м; б/2=0,0075 м - диаметры корневой и концевой осей вращения;
mi = 3,95 кг, т2 = 3,1 кг - массы корневого и концевого звеньев;
Jci=0,666 кг-м2, Jc2=0,439 кг-м2 - собственные моменты инерции корневого и кон¬
цевого звеньев;
Л/о1=23,75 Н-м, Л/02=9,0 Н-м - начальные моменты корневой и концевой пружин;
ф31 = 80°, (рз2 = 190° - начальные углы закрутки корневой и концевой пружин;
а0=41° - угол установки сложенного трапа к вертикальной оси ОХ ССК десант¬
ного модуля.
Были получены дифференциальные уравнения движения звеньев трапа в обоб¬
щённых координатах с переменными коэффициентами (4.8.3.2) (Горовцов В.В. и др.,
2016):
В уравнениях (4.8.3.2) появятся добавочные члены (обобщенные силы) либо от мо¬
ментов сопротивления, обусловленных действием сил сухого трения в шарнирах, либо
от переменных компенсирующих сил резиновых жгутов системы обезвешивания.
Выражения для обобщённых сил в этом случае можно получить, записав вариа¬
цию работы внешних нагрузок (4.8.3.3).
Для решения задачи использовался программный комплекс EULER, позволяю¬
щий исследовать движение рассматриваемой системы при проведении испытаний.
Предложено два способа обезвешивания:
1) раскрытие трапа на наклонной плоскости (под углом к горизонту);
2) обезвешивание звеньев трапа на резиновых жгутах.
Способ обезвешивания 1. При проведении доводочных испытаний трапа ЭКЗ-4400-
10 для моделирования марсианской гравитации предполагается раскрытие трапа
в плоскости с углом наклона у к горизонту:
<?м 3,72
\|/=arcsin^~=arcsin"^j=22,3°,
где gM и g3 - ускорение свободного падения на поверхности Марса и Земли
соответственно.
На рисунке 4.8.3.7 приведена схема раскрытия трапа (вид сбоку). Индексы 1 и 2
относятся соответственно к корневому и концевому звеньям трапа.
172
4-8
Рисунок 4.8.3.7. Схема раскрытия трапа под углом к горизонту
Силу тяжести приложенную к центру масс /-го звена, можно представить
в виде суммы осевой Fi0 и боковой F/6 составляющих (рисунок 4.8.3.8). Боковая со¬
ставляющая силы тяжести приведет к возникновению момента сопротивления в уз¬
лах вращения трапа. Оценка дополнительных моментов сопротивления необходима
для уточнения времени раскрытия трапа в процессе испытаний.
Моменты от боковых составляющих сил тяжести в каждом узле вращения урав¬
новешены парами сил нормального давления в точках прижима осей вращения F/N.
В концевом узле вращения эта сила постоянна, и можно записать:
^2б L2 = F2h Аг-
173
4-8
В корневом узле вращения она является результирующей сил нормального давле¬
ния от действия боковых составляющих сил тяжести каждого из звеньев:
и, следовательно,
F>n=^n + F^)2 + + ^2 J2/A| =
=/F^ + + (F^ + F2^2)2
где F/6.= т, g3 cosy - боковая составляющая силы тяжести z-ro звена.
Моменты сопротивления, обусловленные действием сил сухого трения:
dx dx
МИр = 2Firp—=2FiN pi— - в корневом узле вращения;
M2rp = 2F2r^~2 F2N ц2-у=Г2б Lz d2 ц2 /А2 - в концевом узле вращения.
Здесь pi и ц2 - коэффициенты сухого трения в корневом и концевом узлах вращения.
Обобщенные силы, обусловленные действием сил сухого трения в шарнирах при
раскрытии в условиях земной гравитации, имеют вид
2, = Мтр, /=1,2.
В нашем случае Ln=rh L2=r2. Плечо Ln, а также его проекции Ц2 и Д2 на оси ССК
являются функциями углов поворота в шарнирах корневого (Xi и концевого звена а2
и вычисляются программой на каждом шаге интегрирования.
Силы трения, действующие в узлах вращения, определить теоретически очень
сложно. На практике значение коэффициента сухого трения зависит от большого ко¬
личества факторов, его изменение носит нелинейный характер. Исследовали весь ди¬
апазон возможных значений коэффициента сухого трения (изменение ц, от 0 до 0,5).
В таблице 4.8.3.5 приведены результаты расчетов без учета сил трения.
Таблица 4.8.3.5. Результаты расчетов без учета сил трения
вариант
Afoi,
Нм
фз1,
град
Л/()2,
Нм
фз2,
град
У,
град
время
спрямления, с
время
раскрытия, с
конечная
угловая
скорость, с-1
1
23,75
80
9,0
190
20,07
1,570
1,970
1,968
Обозначения: у - угол спрямления трапа относительно горизонта.
В таблице 4.8.3.6 приведены результаты расчетов с учетом моментов сопротивле¬
ния в узлах вращения, обусловленных действием сил сухого трения. Расчеты выпол¬
нены для пяти вариантов с коэффициентами сухого трения ц, от 0,1 до 0,5.
В таблице 4.8.3.7 приведены результаты моделирования раскрытия трапа при по¬
садке на склон с углом 0=15° (наихудший расчетный случай) без учета сил трения
(вариант 0) и для пяти вариантов с коэффициентами сухого трения ц, от 0,1 до 0,5.
174
4-8
Таблица 4.8.3.6. Результаты расчетов с учетом сил трения
вариант
Pi
Ц2
A/oi,
Нм
фз1,
град
М)2,
Нм
фз2,
град
Y,
град
время
спрямления,
с
время
раскрытия,
с
конечная
угловая
скорость,
с-1
I
0,1
0,1
23,75
80
9,0
190
19,09
1,602
1,996
1,938
2
0,2
0,2
23,75
80
9,0
190
17,72
1,639
2,024
1,905
3
0,3
0,3
23,75
80
9,0
190
16,40
1,677
2,053
1,870
4
0,4
0,4
23,75
80
9,0
190
14,91
1,718
2,083
1,836
5
0,5
0,5
23,75
80
9,0
190
13,25
1,762
2,115
1,800
Таблица 4.8.3.7. Результаты расчетов при посадке на склон с углом 0=15° с учетом сил трения
вариант
М2
Moi,
Нм
Фз1,
град
Л/()2,
Нм
Фз2,
град
Ъ
град
время
спрямления,
с
время
раскрытия,
с
конечная
угловая
скорость,
с-1
0
0
0
23,75
80
9,0
190
20,01
2,058
2,508
1,794
1
0,1
0,1
23,75
80
9,0
190
17,20
2,134
2,556
1,759
2
0,2
0,2
23,75
80
9,0
190
13,65
2,227
2,612
1,717
3
о,з
о,з
23,75
80
9,0
190
9,64
2,329
2,671
1,673
4
0,4
0,4
23,75
80
9,0
190
5,Н
2,440
2,734
1,625
5
0,5
0,5
23,75
80
9,0
190
0,24
2,561
2,801
1,574
О
время раскрытия, с
время спрямления, с
время, с
коэфф, сухого трения
б
Рисунок 4.8.3.9. Зависимости времени спрямления и раскрытия от коэффициента сухого трения
время раскрытия, с
время спрямления, с
175
4-8
На рисунке 4.8.3.9а приведены зависимости времени спрямления и раскрытия
трапа от коэффициента сухого трения при посадке на ровную поверхность, на рисун¬
ке 4.8.3.96 — аналогичные зависимости при посадке на склон с углом р=15°.
Расчеты показали увеличение времени раскрытия трапа ЭКЗ-4400-10 при учете
момента сопротивления в узлах вращения: от 1,5 до 7,5% при изменении коэффици¬
ентов сухого трения в узлах вращения ц, от 0,1 до 0,5.
В наихудшем расчетном случае при посадке КА на склон с углом Р=15° увеличе¬
ние времени раскрытия трапа составит от 2 до 12% при изменении ц, от 0,1 до 0,5.
Таким образом, силы сухого трения, действующие в узлах вращения, не оказывают
существенного влияния на время спрямления и раскрытия трапа на наклонной пло¬
скости. Для сопоставления результатов испытаний с “эталонными” можно принять
в расчетах средние значения ц, (кинематические параметры для вариантов 2 или 3).
Рисунок 4.8.3.10. Схема обезвешивания трапа ЭКЗ-4400-10 при проведении доводочных
испытаний
176
4-8
Способ обезеешиеания 2. В данном случае в качестве средств испытаний для обе-
звешивания используются резиновые жгуты.
Имитация в земных условиях силы тяжести на поверхности Марса состоит в соз¬
дании компенсирующих сил, направленных противоположно силе земного притя¬
жения. Эти силы создаются предварительным натяжением резиновых жгутов. Ре¬
зиновые жгуты посредством кевларовых нитей, перекинутых через неподвижные
блоки, и технологических скоб соединены с центрами масс каждого из звеньев (ри¬
сунок 4.8.3.10). В процессе раскрытия удлинения резиновых жгутов, а следователь¬
но, и компенсирующие силы изменяются. Поэтому результаты экспериментов будут
отличаться от реальных на поверхности Марса {Аминов В.Р. и др., 1996).
Испытания необходимо провести для трех положений посадочной платформы:
1 - номинального, имитирующего раскрытие при посадке на горизонтальную по¬
верхность (рисунок 4.8.3.10);
2 - имитация раскрытия при посадке на склон -20° (исходный угол установки
трапа равен 49-20=29° к плоскости пола);
3 - имитация раскрытия при посадке на склон +20° (исходный угол установки
трапа равен 49+20=69° к плоскости пола).
Проведена доработка конструкции трапов после испытаний по их раскрытии под
углом к горизонту. Уточненные исходные данные для расчета приведены ниже:
51=1,4 м; s2= 1,304 м - длины корневого и концевого звеньев;
ri=0,837 м; г2=0,611 м - расстояния от осей вращения Oi и О2 до центров масс
корневого и концевого звеньев;
/771=4,18 кг, /772=3,185 кг - массы корневого и концевого звеньев;
Т77СК|=О,87 кг, 777ск2=0,72 кг - массы скоб систем обезвешивания корневого и конце¬
вого звеньев;
Jci=0,7 кг-м2, Jc2=0,455 кг-м2 - собственные моменты инерции корневого и конце¬
вого звеньев;
Л/01=23,0 Н-м, Л/о2=9,6 Н-м - начальные моменты корневой и концевой пружин;
(р31=83°, (рз2=180° - начальные углы закрутки корневой и концевой пружин;
а0=41° - угол установки сложенного трапа к вертикальной оси ОХ ССК десант¬
ного модуля.
Определим компенсирующие силы для каждого из звеньев трапа. Обозначим
gM=3,72 м/с2 и g3=9,81 м/с2 - ускорение свободного падения на поверхности Марса
и Земли соответственно.
Вес корневого звена на Земле (с учетом технологической оснастки) Gi3=(t77i+777cki)x
xg3=5,05 кг-9,81 м/с2=49,54 Н; на Марсе C|M=777igM= 4,18 кг-3,72 м/с2= 15,55 Н.; ком¬
пенсирующая сила AG]=G]3-(7im=33,99 Н.
Аналогично для концевого звена G23=(/772+777CK2)g3 =3,905 кг-9,81 м/с2= 38,31 Н,
С2М= 7772gM=3,185 кг-3,72 м/с2=11,85 Н, AG2=26,46 Н.
Жгуты состоят из резиновых нитей сечением 1^1 мм. Зависимость силы Р, необ¬
ходимой для растяжения нити, от ее относительной деформации е приведена на экс¬
периментальной диаграмме «Р - е» (рисунок 4.8.3.11). Видно, что в рабочей зоне
деформаций жгута при раскрытии трапа (при относительной деформации е=1,0^2,0)
эта зависимость имеет практически линейный характер. В качестве модели резино¬
вой нити длиной 1 метр можно принять линейный упругий элемент с коэффициентом
жесткости &пити = ((88-52)/1) гс/м = 36 гс/м.
177
4-8
Рисунок 4.8.3.11. Диаграмма растяжения резиновых нитей «Р - £»
Соответственно для нити длиной lQ5=5 м коэффициент жесткости составит
к5=36/5=7,2 гс/м=0,0706 Н/м, а для нити длиной /07=7 м коэффициент А:7=36/7=
=5,143 гс/м = 0,0504 Н/м.
Жесткость жгута определяется количеством входящих в него нитей и начальной
(недеформированной) длиной, а начальная сила натяжения - его жесткостью и на¬
чальной деформацией.
Пусть начальная относительная деформация составляет е~1,3. Для создания ком¬
пенсирующей силы AGi~34 Н понадобится жгут, состоящий из пх~ 55 резиновых ни¬
тей. Действительно:
AG, = w1-[P1+^-/o5-(£-l)Wr[/>i+^7-/o7-(£-l)]=55-[O,51+O,353-(8-l)]~33,9 Н,
где Рх = 52 гс = 0,51 Н - сила натяжения нити в начале линейной зоны (рисунок 4.8.3.11).
Для создания компенсирующей силы AG2~26,5 Н понадобится жгут из п2~ 43 ре¬
зиновых нитей.
Для жгута из 55 нитей коэффициенты жесткости составят к-^щ-к^ 3,883 Н/м
и &ЖГ1=«г£7=2,772 Н/м для начальной длины 5 и 7 м соответственно; для жгута
из 43 нитей - ^жг2=3,036 Н/м и 2,167 Н/м для начальной длины 5 и 7 м соответственно.
178
4-8
Следует принять во внимание, что на первом этапе раскрытия трапа удлинение
жгутов и компенсирующие силы уменьшаются, а на втором, ближе к завершению
раскрытия, — возрастают по сравнению с начальными значениями.
Для обеспечения раскрытия при посадке на склон -20° жгуты должны произве¬
сти дополнительную работу по преодолению сил гравитации. Необходимо увеличить
начальные значения компенсирующих сил путем усиления натяжения жгутов. Для
имитации раскрытия при посадке на склон +20° начальное натяжение жгутов, наобо¬
рот, нужно ослабить.
В таблице 4.8.3.8 приведены длины и силовые характеристики жгутов с началь¬
ной длиной (в недеформированном состоянии) соответственно 5 и 7 м.
Таблица 4.8.3.8. Характеристики жгутов системы обезвешивания
£
начальная длина жгута 5 м
начальная длина жгута 7 м
начальная сила жгута, н,
состоящего из
длина
в натянутом
состоянии,м
изменение
длины А/, м
длина
в натянутом
состоянии, м
изменение
длины А/, м
55 нитей
43 нитей
1,о
10,0
5,0
14,0
7,0
28,05
21,93
1,1
10,5
5,5
14,7
7,7
29,99
23,45
1,2
11,0
6,0
15,4
8,4
31,93
24,97
1,3
11,5
6,5
16,1
9,1
33,87
26,48
1,4
12,0
7,0
16,8
9,8
35,82
28,00
1,5
12,5
7,5
17,5 .
10,5
37,76
29,52
1,6
13,0
8,0
18,2
11,2
39,70
31,04
1,7
13,5
8,5
18,9
11,9
41,64
32,56
1,8
14,0
9,0
19,6
12,6
43,58
34,07
1,9
14,5
9,5
20,3
13,3
45,52
35,59
2,0
15,0
10,0
21,0
14,0
47,47
37,11
Обозначения: е=А///0 - относительная деформация жгута.
Для решения задачи применялся программный комплекс EULER. Использовали
модель, разработанную для раскрытия трапа в плоскости под углом к горизонту, в ко¬
торую внесены изменения после доработочных испытаний. Отличие состоит в том,
что задано гравитационное поле на поверхности Земли (g=9,81 м/с2). Компенсиру¬
ющие силы для звеньев создаются поступательными силовыми элементами «сила
по датчикам на одну точку». Направление этих сил задается векторами, связываю¬
щими текущие положения центров масс звеньев и центры неподвижных блоков. Про¬
граммой вычисляется изменение длин жгутов в процессе раскрытия и производится
расчет компенсирующих сил по формуле: F—Fu-kwi (/0, - /,), где /0/ - начальная длина
z-ro жгута; - текущая длина z-ro жгута; F0/ и k*vi - начальная сила и коэффициент
жесткости z-ro жгута.
Вариация работы компенсирующих сил от резиновых жгутов имеет вид
2
5Лр= £ 2,5а,, где 2/ = Го/ - /сжг, А/,.
/=1
179
4-8
Изменения длин жгутов в процессе раскрытия необходимо записать как функции
обобщенных координат cxi и а2:
ДА =/i(ai), ДА =^(oii> аг)-
В модели для расчета приняты следующие допущения (Горовцов В.В. и др., 2018):
- технологические скобы системы обезвешивания расположены вблизи центров
масс звеньев трапа, поэтому массы их добавлены к соответствующим массам зве¬
ньев, а моменты инерции пренебрежимо малы по сравнению с моментами инер¬
ции звеньев;
- кевларовые нити нерастяжимы;
- сухое трение в блоках системы обезвешивания отсутствует.
Примем, что центры неподвижных блоков находятся на высоте 12,4 м от пола.
В таблице 4.8.3.9 приведены результаты расчетов для номинального положения
посадочной платформы. Для сравнения приведен расчет раскрытия трапа на поверх¬
ности Марса (gM = 3,72 м/с2) с теми же исходными данными.
Таблица 4.8.3.9. Результаты расчетов раскрытия на горизонтальной поверхности
£
количество
нитей
в жгуте
у', град
у, град
время
спрямления, с
время раскрытия
(касания пола), с
П\
начальная длина жгута 5 м
1,2
55
43
14,80
14,80
1,770
2,082
1,3
55
43
22,13
22,13
1,639
2,049
1,3*
55
43
21,61
21,61
1,652
2,057
1,35
55
43
25,11 ’
25,11
1,582
2,039
1,4
55
43
27,75
27,75
1,529
2,032
начальная длина жгута 7 м
1,2
55
43
16,51
16,51
1,758
2,087
1,3
55
43
23,68
23,68
1,627
2,055
1,3*
55
43
23,22
23,22
1,639
2,063
1,35
55
43
26,60
26,60
1,569
2,045
1,4
55
43
29,12
29,12
1,517
2,039
на поверхности Марса
-
-
-
25,17
1,613
2,011
*
-
-
-
24,71
1,626
2,021
Обозначения: у — угол спрямления трапа относительно плоскости панели посадочной платформы;
у' — угол спрямления трапа относительно плоскости, параллельной поверхности пола при испытаниях.
* Результаты расчетов с учетом трения скольжения в шарнирах (в корневом шарнире 71/тр1=0,15+0,5 Н м;
в концевом шарнире 71/^2=0,1+0,35 Н м).
В таблицах 4.8.3.10и4.8.3.11 приведены аналогичные результаты для положений,
имитирующих раскрытие при посадке на склон -20° и +20° соответственно.
180
4-8
Таблица 4.8.3.10. Результаты расчетов для раскрытия на склоне -20°
£
количество нитей
в жгуте
у', град
У, град
время
спрямления, с
время раскрытия
(касания пола), с
П\
Н2
начальная длина жгута 5 м
1,35
55
43
29,98
9,98
2,322
2,771
1,4
55
43
39,78
19,78
2,103
2,697
1,45
55
43
46,43
26,43
1,927
2,636
1,5
55
43
50,84
30,84
1,787
2,586
1,5*
55
43
50,32
30,32
1,803
2,597
начальная длина жгута 7 м
1,35
55
43
37,83
17,83
2,232
2,793
1,4
55
43
45,88
25,88
2,024
2,719
1,45
55
43
. 50,95
30,95
1,862
2,658
1,45*
55
43
50,38
30,38
1,881
2,670
1,5
55
43
54,28
34,28
1,735
2,611
на поверхности Марса
-
-
-
30,38
2,524
2,919
*
-
-
-
28,12
2,587
2,949
Обозначения см. таблицу 4.8.3.9.
Таблица 4.8.3.11. Результаты расчетов для раскрытия на склоне +20°
£
количество нитей
в жгуте
у', град
у,град
время
спрямления, с
время раскрытия
(касания пола), с
П\
п2
начальная длина жгута 5 м
1,15
55
43
1,73
21,73
1,339
1,443
1,2
55
43
3,45
23,45
1,325
1,450
1,25
55
43
5,00
25,00
1,311
1,458
1,25*
55
43
4,88
24,88
1,318
1,462
1,3
55
43
6,77
26,77
1,298
1,467
начальная длина жгута 7 м
1,15
55
43
1,84
21,84
1,338
1,442
1,2
55
43
3,56
23,56
1,324
1,449
1,25
55
43
5,28
25,28
1,310
1,457
1,25*
55
43
5,00
25,00
1,317
1,461
1,3
55
43
6,94
26,94
1,296
1,465
на поверхности Марса
-
-
-
24,77
1,238
1,474
*
-
-
-
24,48
1,245
1,478
Обозначения см. таблицу 4.8.3.9.
181
4-8
На основании выполненных расчетов было рекомендовано производить раскры¬
тие трапов КА «ЭкзоМарс» на жгутах из 55-ти нитей для корневого звена и 43-х ни¬
тей - для концевого звена. Это позволяет достичь близких к реальным значениям
времени спрямления, раскрытия и углов спрямления трапа для трех положений плат¬
формы путем регулировки натяжения жгутов в «линейной» зоне относительных де¬
формаций: 8= 1,45-И ,5 для установки под углом -20°, 8=1,3^1,35 для установки под
нулевым углом и 8=1,2^1,25 - для установки под углом +20°. В случае ограниченного
пространства можно использовать более короткие жгуты длиной 5 м.
Таким образом, разработана динамическая модель для исследования раскрытия
трансформируемых конструкций на примере трапов посадочного модуля КА «Экзо¬
Марс». Получены уравнения движения системы. Для формирования модели и ин¬
тегрирования системы дифференциальных уравнений использовался программный
комплекс EULER.
Динамическая модель является универсальной и позволяет в интерактивном
режиме варьировать характеристики рассматриваемой системы: геометрию и мас¬
сово-инерционные характеристики звеньев трапа, жесткости и углы закрутки пру¬
жин кручения, трение в шарнирах, положение посадочной платформы при посадке
на склон и др. Фактически создан инструмент для поиска рационального конструк¬
торского решения на стадии проектирования.
Выполнены расчёты для нескольких вариантов исходных данных, поскольку ге¬
ометрические и массово-инерционные характеристики звеньев трапа, характеристи¬
ки пружин кручения в шарнирах изменялись в процессе доработки. Приняты меры
по снижению конечных угловых скоростей трапов путем установки пружины тормо¬
жения в корневом узле вращения.
Проведена модернизация математической модели применительно к условиям
и средствам доводочных испытаний: добавлены новые связи и датчики, изменены
силовые воздействия. В результате получен инструмент для оптимизации средств ис¬
пытаний и рационального проектирования оснастки.
Выполнены расчеты для различного трения в шарнирах с учетом положения поса¬
дочной платформы при посадке на склон; даны рекомендации по выбору комбинации
жгутов при обезвешивании.
В качестве основного критерия рассматривалось достижение «эталонных» (соот¬
ветствующих гравитации на поверхности Марса) кинематических параметров рас¬
крытия: времени и конечной угловой скорости.
Как показали результаты расчетов, при проведении доводочных испытаний тра¬
пов в земных условиях возможны два способа их обезвешивания. Выбор способа обе¬
звешивания определялся конструктором совместно с испытателями.
В АО «НПО им. С.А. Лавочкина» сначала были проведены испытания по раскры¬
тию трапа ЭКЗ-4400-10 под углом к горизонту. Затем, после соответствующих до¬
работок конструкции, связанных с устранением сухого трения, успешно завершены
испытания при обезвешивании звеньев трапа на резиновых жгутах.
Список литературы
Аминов В.Р. и др. Справочные материалы для конструкторов по динамике. Т. 8.
Математические модели движения упругих космических аппаратов. Кн. 1. Методы
составления математических моделей движения упругих КА и определения их пара¬
метров. Королев: ЦНИИмаш, 1996.
182
4-8
Бойков В.Г., Юдаков А.А. Моделирование динамики твердых и упругих тел в про¬
граммном комплексе EULER // Информационные технологии и вычислительные си¬
стемы. 2011. № 1. С. 42-52.
Виттенбург Й. Динамика систем твердых тел. М.: Мир, 1980. 292 с.
Горовцов В.В., Жиряков А.В., Телепнев П.П., Петров Ю.А., Берников А.С. Иссле¬
дование динамики и решение задачи проектирования трансформируемых конструк¬
ций посадочного модуля КА «ЭкзоМарс» // Вестник НПО им. С.А. Лавочкина. 2016.
№4(34). С. 75-80.
Горовцов В.В., Жиряков А.В., Телепнев П.П., Петров Ю.А., Берников А.С., Мака¬
ров В.П. Исследование динамики раскрытия трансформируемых конструкций в про¬
цессе проведения испытаний // Полет. 2018. № 4. С. 30-38.
Ефанов В.В., Бирюков А. С., Деменко О.Г. К вопросу снижения динамических на¬
грузок при срабатывании устройств разделения перспективных орбитальных астро¬
физических обсерваторий // Вестник ФГУП НПО им. С.А. Лавочкина. 2013. № 3 (19).
С. 21-25.
Ефанов В.В., Горовцов В.В., Котомин А.А., Дуиленок С.А. Детонационные
устройства разделения космического комплекса «ЭкзоМарс-2018» // Вестник НПО
им. С.А. Лавочкина. 2014. № 2 (23). С. 120-124.
Лурье А.И. Аналитическая механика. М.: Физматгиз, 1961. 824 с.
Микишев Г.Н. Экспериментальные методы в динамике космических аппаратов.
М.: Машиностроение, 1978.
Пичхадзе К.М., Ефанов В.В., Мартынов М.Б. Создание автоматических космиче¬
ских комплексов для научных исследований Луны: вчера, сегодня, завтра (к 45-летию
космической деятельности НПО им. С.А. Лавочкина) // Полёт. 2010. № 11. С. 3-8.
Пичхадзе К.М., Финченко В.С., Алексаъикин С.Н., Остреъико Б.А. Трансформиру¬
емые аппараты, спускаемые в атмосферах планет // Вестник НПО им. С.А. Лавочки¬
на. 2015. №2 (28). С. 4-13.
Хартов В.В., Мартынов М.Б., Лукъянчиков А.В., Алексаъикин С.Н. Проектная кон¬
цепция десантного модуля «ЭкзоМарс-2018», создаваемого НПО им. С.А. Лавочки¬
на // Вестник НПО им. С.А. Лавочкина. 2014. № 2 (23). С. 5-12.
В.В. Горовцов,
А,В. Жиряков,
П.П. Телепнев,
Ю.А. Петров,
А. С. Берников
183
4-9
ПЯПРОЧНОСТНЫЕ И КИНЕМАТИЧЕСКИЕ ИСПЫТАНИЯ
ПОСАДОЧНОГО АППАРАТА
ПРОЕКТА «ЭКЗОМАРС-2022»
4.9.1 Состав посадочного аппарата и этапы его эксплуатации
Посадочный аппарат по проекту «ЭкзоМарс-2022» представляет собой десантный
модуль (ДМ), в состав конструкции которого входят: собственно посадочный модуль
(ПсМ), а также аэродинамический экран и защитный кожух с парашютным контей¬
нером, обеспечивающие необходимые защиту и доставку научной аппаратуры для
исследования Марса как в процессе перелета к планете, так и при спуске в атмосфере
и посадке на поверхность планеты.
Схема и состав ДМ приведен на рисунке 4.9.1.1.
парашютная система
задний кожух
аэродинамический экран
Рисунок 4.9.1.1. Общая схема десантного модуля
Аэродинамический экран размещен в передней части ДМ и воспринимает основ¬
ную часть тепловой и аэродинамической нагрузки, действующей со стороны набега¬
ющего потока на участке аэродинамического торможения.
Задний кожух - силовой элемент конструкции ДМ, на нем размещаются механи¬
ческие и электрические интерфейсы с системой отделения от перелетного модуля,
а также интерфейсы с посадочным модулем. В задней части кожуха устанавливается
парашютный контейнер и система выравнивания давления. Конструкция парашют¬
ной системы (ПС) включает пиротехнические элементы, обеспечивающие отделение
тормозного парашюта с последующим вводом в действие основного парашюта. Кон¬
струкция и теплозащита заднего кожуха аналогичны конструкции аэродинамическо¬
го экрана.
184
4-9
Посадочный модуль (ПсМ) является основным конструктивным элементом ДМ.
На нем установлены: платформа с марсоходом, комплекс научной аппаратуры соб¬
ственно посадочной платформы, двигательная установка, посадочные устройства,
устройство схода марсохода. Посадочный модуль крепится к заднему кожуху по¬
средством системы отделения. Конструктивно ПсМ представляет собой трехслойную
плиту, установленную на восьмигранный каркас, составленный также из трехслой¬
ных панелей.
Схема ПсМ приведена на рисунке 4.9.1.2.
Рисунок 4.9.1.2. Общая схема посадочного модуля в полетной конфигурации
Задачей посадочного модуля является: обеспечение торможения на предпосадоч¬
ном участке, обеспечение мягкой посадки на поверхность Марса, а также схода са¬
моходного аппарата (марсохода) и в дальнейшем функционирование научной и слу¬
жебной аппаратуры.
Устройство схода самоходного аппарата (марсохода) состоит из складывающихся
трапов коробчатого сечения, устройств зачековки, развертывания и контроля поло¬
жения. Трапы должны обеспечить угол схода не более 20 угловых градусов. Трапы
выполнены из алюминиевого сплава. Как вариант рассматривалось применение ком¬
позиционных материалов.
Посадочные устройства представляют собой четыре складывающиеся опоры те¬
лескопического типа с подкосами и встроенными амортизаторами. Опоры выполне¬
ны в основном из алюминиевого сплава.
Схема членения ДМ приведена на рисунке 4.9.1.3.
185
4-9
Этапы и стадии эксплуатации ДМ в процессе его жизненного цикла представлены
в таблице 4.9.1.1.
Таблица 4.9.1.1
этап эксплуатации
стадия эксплуатации
эксплуатация
в наземных условиях
хранение
транспортирование
эксплуатация
в космических условиях
выведение на орбиту
перелет по траектории Земля - Марс
эксплуатация
в марсианских условиях
участок спуска в атмосфере Марса
функционирование на поверхности Марса
ДМ в зависимости от этапа и стадии эксплуатации подвергается комплексному
воздействию целого ряда внешних воздействующих факторов (ВВФ).
При наземной эксплуатации это следующие ВВФ:
- температура окружающей среды;
- влажность воздуха;
- давление окружающей среды;
- механическое нагружение.
186
4-9
На участке выведения PH:
- высокотемпературные воздействия на элементы конструкции и оборудование КА
на участке выведения PH после сброса ГО;
- механическое нагружение;
- давление окружающей среды.
На участке перелета КА:
- радиационное излучение космического пространства;
- метеорно-техногенные воздействия;
- температурные условия эксплуатации;
- внешние тепловые потоки.
На участке спуска в атмосфере:
- механическое нагружение;
- высокотемпературное тепловое воздействие газового потока.
На этапе функционирования на поверхности Марса:
- температурные условия эксплуатации;
- марсианская пыль.
Каждый конструктивный элемент посадочного аппарата по проекту «Экзо¬
Марс-2022» подвергается испытаниям на внешние воздействующие на него при
эксплуатации факторы и последующим проверкам на функционирование его систем
и приборов.
В данной главе рассматриваются прочностные и кинематические испытания со¬
ставных частей и КА в целом, проведенные в процессе отработки конструкций вибро-
динамического макета КА и макета для отработки динамики посадки ПсМ на испыта¬
тельной базе НПО им. С.А. Лавочкина (НПОЛ).
4.9.2. Наземная отработка конструкции КА «ЭкзоМарс-2022»
в НПОЛ
В отрасли принята многоэтапная система наземной экспериментальной отработки
(НЭО): начальный этап автономные отработочные испытания, затем проводятся ком¬
плексные испытания экспериментальных изделий и завершающий этап контрольные
технологические вибрационные испытания штатного образца.
НЭО КА «ЭкзоМарс-2022» проводится в несколько этапе:
- этап автономных испытаний (АИ),
- этап комплексных испытаний (КИ).
Автономные испытания составных частей КА включают в себя:
- лабораторно - отработочные испытания (ЛОИ),
- доводочные испытания (ДИ),
- предварительные испытания (ПрИ).
Испытания АИ проводятся с целью:
- отработки и проверки функционирования отдельных узлов, агрегатов и систем
изделий комплекса в условиях, близких к реальным режимам, с одновременной
имитацией различных воздействующих факторов;
- выявления и устранения ненадежных изделий и недопустимых режимов и усло¬
вий работы критичных элементов, электрорадиоизделий (ЭРИ) и комплектую¬
щих элементов;
187
4-9
- определения запасов работоспособности, оценки соответствия характеристик
опытных изделий комплекса требованиям ТЗ по результатам испытаний;
- корректировки КД (при необходимости);
- отработки новых технологических процессов.
Испытания ДИ и ПрИ проводятся на структурных макетах с функционально авто¬
номными частями агрегатов и систем:
- элементы ДУ (баки с вытеснительными системами, элементы гидропневмоавто¬
матики и т.д.);
- силовые элементы конструкции;
- пиротехнические системы разделения и их элементы;
- раскрываемые конструкции (БС, трапы и т.д.);
- БКС;
- элементы СОТР;
- элементы служебного комплекса и др.
Комплексные испытания проводятся для отработки КА на соответствие требова¬
ниям ТЗ, ТТЗ в условиях, максимально приближенных к реальным, на макетах, экс¬
периментальных машинах КА в соответствии с принятыми в отрасли и на НПОЛ
стандартами.
Испытания КИ проводятся с целью:
- определения технической готовности КА и комплекса для испытаний при ЛКИ;
- оценки ТТХ опытных изделий;
- проверки работоспособности изделий при имитации аварийных ситуаций, кото¬
рые технически можно имитировать в НКУ;
- проверки отработанности технологии изготовления, достаточности и эффектив¬
ности контроля качества изделия.
В результате проработок конструкции и состава комплектующих систем создает¬
ся перечень подлежащих отработке элементов конструкции КА и уточняется, какие
элементы должны быть испытаны в защиту экспериментального и штатного изделий,
а также корректируется перечень испытательного оборудования и КИС, его достаточ¬
ность и правильность выбора.
В составе испытательной базы НПОЛ имеется следующее оборудование: комплекс
электродинамических вибростендов, комплекс центробежных стендов, комплекс ди¬
намических и ударных стендов, силовое оборудование для статических испытаний
и оборудование для испытаний систем отделения, бросковый стенд для отработки
динамики посадки, тепловакуумное оборудование и стенды для отработки систем
и агрегатов ДУ (проливочные стенды).
4.9.3. Испытания конструкций агрегатов и КА в целом
на механические нагрузки.
В процессе выполнения своих функций на конструкцию ДМ воздействует ряд на¬
грузок различного вида как механического, так и температурного.
Отработка конструкции КА «ЭкзоМарс-2022» на механические нагрузки прово¬
дилась на оборудовании отдела прочностных и кинематических испытаний и дру¬
гих подразделений комплекса наземной экспериментальной отработки конструкций
НПОЛ.
Виды испытаний ДМ и состав испытываемого макета приведены в таблице 4.9.3.1.
188
4-9
Таблица 4.9.3.1. Вибродинамические испытания ДМ
категория испытаний
вид испытаний
объект испытаний
механические
испытания
на синусоидальную вибрацию
макет КА (ДМ+ПМ)
для вибродинамических
испытаний
испытание
по определению форм колебаний*
акустическое испытание
удар при отделении адаптера PH
(замковая лента)
удар при отделении ДМ от ПМ
удар при отделении АЭ
макет ДМ
для вибродинамических
испытаний
удар при отделении ПсМ от ЗК
квазистатические испытания
испытания на функционирование
механизмов ДМ
(развёртывание опор ПУ, раскрытие
панелей БС, раскрытие трапов схода
СХА, раскрытие антенны МНА)
* осуществляется в рамках испытаний на синусоидальную вибрацию
Имеющееся испытательное оборудование позволяет воспроизвести практически
любые нагрузки: динамические - от гармонических колебаний на фиксированной ча¬
стоте до широкополосных случайных колебаний и различные виброударные нагрузки
(вибростенды), одиночные удары (ударные стенды), а также статические нагрузки -
с усилиями до 25 тонн с квадратного метра и до 15 тонн с точки (силовые колонны
и стенки) и квазистатические нагрузки с ускорениями от 10 g до 400 g (центробежные
стенды).
4.9.3.1. Вибрационные испытания посадочного модуля КА
Вибрационные испытания конструкции ДМ в составе сборки КА и отдельно каж¬
дого элемента конструкции проводились на испытательной базе в НПОЛ.
До и после каждого вибрационного нагружения испытываемого образца проводи¬
лись вибрации малого уровня для сравнения параметров нагрузки и уточнения режи¬
мов испытаний.
Также были проведены вибрационные испытания по определению модальных
характеристик в целях идентификации математической модели КА. Определялись
собственные частоты конструкции КА и формы колебаний, а также коэффициенты
демпфирования на резонансных частотах.
Вибрационные испытания на нагрузки при транспортировании
Испытания на все виды нагрузки, действующие на КА при транспортировании
на Земле, проводятся на испытательном оборудовании, в состав которого входят элек¬
тродинамические стенды различной грузоподъёмности.
Максимальные эксплуатационные перегрузки, действующие на КА со стороны
транспортных средств, приведены в таблице 4.9.3.2.
189
4-9
Таблица 4.9.3.2
вид транспорта
ускорения,ед.g
Nx
Ny
Nz
авиационный транспорт,
в том числе аварийная посадка
-6
1±3
±1,5
-1,5
4
±1
железнодорожный транспорт
±3
1±1,25
±1
автомобильный транспорт,
при скорости не более 40 км/час
±2
1±2
±1,25
транспортирование с ТК на СК
в составе PH
±0,5
1±0,2
±0,1
Сборка КА, состоящая из модулей ПМ и ДМ, соединенных фермой с системой
разделения, и переходного адаптера с системой отделения всего КА от PH прошла
испытания на воздействие транспортных нагрузок в натурных условиях в процессе
транспортировки в штатном контейнере автомобильным транспортом при выполне¬
нии перевозок на территории РФ, а также при транспортировании воздушным транс¬
портом в организации ЕКА.
В процессе транспортных перевозок ускорения, действующие на испытывае¬
мом образце КА, контролировались по показаниям трехкомпонентных акселероме¬
тров типа ICP DPP3, DPA1, DTR3, АР2082М и регистрировались регистраторами
типа RD-298 с модулем НРТ, установленными внутри и с наружи транспортного
контейнера.
Данные, полученные при перемещении макета ДМ в транспортном контейнере,
обрабатывались с помощью измерительно-вычислительного комплекса MIC-200M
со специальным ПО и не превысили значений, указанных в таблице 4.9.3.2.
Вибрационные испытания на полетные нагрузки при выведении PH
До и после каждого вибрационного нагружения образца на прочность проводи¬
лись вибрации малого уровня для сравнения параметров нагрузки и уточнения режи¬
мов испытаний.
Также были проведены вибрационные испытания по определению модальных ха¬
рактеристик в целях идентификации математической модели КА. Определялись соб¬
ственные частоты конструкции КА и формы их колебаний, а также коэффициенты
демпфирования на резонансных частотах.
Сборка КА, состоящая из модулей ПМ и ДМ, соединенных фермой с системой
разделения, и переходного адаптера с системой отделения всего КА от PH прошла
вибрационные испытания на электродинамическом стенде V994, оснащенном гори¬
зонтальным столом и многоканальной системой управления LMS CSADAS Lab типа
SCL20-ENV (рисунки 4.9.3.1 и 4.9.3.2)
Вся измерительная информация по ускорениям, поступающая с вибродатчиков
в процессе нагружения, регистрировалась многоканальной системой LMS CSADAS
Lab типа SCL20-2E20 и SCL21S и в обработанном виде, в полном объёме, передава¬
лась в ЕКА для последующего анализа партнерами по проекту.
190
4-9
Рисунок 4.9.3.1. Испытания на вибрационные нагрузки макета ДМ в составе сборки КА
(ДМ с ПМ) по продольной оси на стенде V994 - полетный случай
Рисунок 4.9.3.2. Испытания на вибрационные нагрузки макета ДМ в составе сборки КА
(ДМ с ПМ) по поперечной оси на стенде V994 - полетный случай
191
4-9
Виброакустические испытания на полетные нагрузки при выведении PH
ДМ, его аппаратура и оборудование при выведении PH, находящиеся под голов¬
ным обтекателем (ГО), подвергаются воздействию поля акустического давления со
стороны ГО.
Характеристики поля акустического давления в пространстве под головным обте¬
кателем (спектр шума, SPL, в 1/3-октавных и октавных поддиапазонах частот и пол¬
ный уровень) приведены в таблице 4.9.3.3.
Таблица 4.9.3.3
центральная
частота
1/3-октавного
диапазона, Гц
центральная
частота октавного
диапазона, Гц
уровень звукового давления, дБ
(отсчет от 2 • 10-5 Па)
время
действия,
с
SPL
1/3-октавный
SPL
октавный
25
117
31,5
31,5
123
128,8
40
127
50
126,5
63
63
127,8
134
80
131,6
100
132,4
125
125
131,3
136,7
160
132,1
200
132,1
250
250
132,1
136,3
315
129,9
400
129,0
500
500
127,0
131,9
630
124,0
800
121,0
1000
1000
119,0
124,1
1250
117,0
1600
114,5
2000
2000
112,5
117,7
2500
111,0
3150
109,0
4000
4000
108,0
112,8
5000
107,0
6300
105,5
8000
8000
104,0
109,2
10000
103,5
полный среднеквадратический уровень,
141,5
60
OSPL, дБ
192
Испытания на акустические нагрузки, действующие на КА в процессе работы
двигателей PH при выведении его на отлётную орбиту около Земли, проводятся на ис¬
пытательном оборудовании в акустической камере РКК «Энергия» (рисунок 4.9.3.3).
Рисунок 4.9.3.3. Испытания на акустические нагрузки макета ДМ в составе КА (ДМ с ПМ)
в камере ВАК РК-1 000 - полетный случай
Непосредственно перед испытаниями проводился контроль чистоты воздушной
среды в помещении камеры - значения параметров чистоты соответствовало 9 классу
ИСО.
Виброакустические испытания проводились на нескольких режимах и в следую¬
щем порядке: предварительное формирование звукового поля; собственно акустиче¬
ское нагружение; анализ результатов измерения и внешний осмотр испытываемого
образца изделия после испытания. Данная методика испытаний согласована с пред¬
ставителями ЕКА и использовалась при испытаниях на всех режимах акустического
воздействия на сборку макета КА (ДМ с ПМ) в соответствии с утвержденной про¬
граммой испытаний.
193
4-9
В процессе испытаний контроль и управление акустическим нагружением про¬
водились с использованием конденсаторных микрофонов В&К Туре 4944 и измери-
тельно-управляющей аппаратуры VibRunner. Регистрация сигналов с измерительных
микрофонов и вибродатчиков осуществлялась с помощью блока регистрации и обра¬
ботки типа SCADASIII.
Акустические испытания сборки КА проведены в полном объеме и в соответствии
с заданными программой испытаний режимами. В процессе испытаний подтвержде¬
на способность конструкции КА выдерживать виброакустические нагрузки, действу¬
ющие на КА при выведении на орбиту, и были уточнены условия вибронагружений
в местах установки на конструкции бортовой аппаратуры.
После завершения испытаний на акустическое нагружение проводились вибрации
малого уровня для сравнения параметров состояния конструкции КА
4.9.3.2. Испытания на динамические нагрузки конструкции ДМ
Испытания на динамические нагрузки включают в свой состав испытания
на прочность конструкции ДМ при действии ударных ускорений: от рывка парашюта
при его раскрытии в атмосфере Марса; от срабатывания пиротехнических средств
при отделении (сбросе) аэродинамического экрана и при отделении ПсМ от заднего
кожуха ДМ, а также от действия нагрузок при введении парашютной системы и от
срабатывания ПУ при посадке ПсМ на поверхность планеты.
Испытания на нагрузки от срабатывания системы отделения КА от PH
Пиротехнические устройства широко применяются в ракетно-космической тех¬
нике в качестве основных элементов систем разделения ступеней, отделения косми¬
ческого аппарата от разгонного блока, расчековки и раскрытия панелей солнечных
батарей и антенн и пр. В конструкции пиротехнических изделий содержатся заряды
взрывчатого вещества (ВВ), инициирование которых приводит к разрушению связи
и как следствие - к динамическому локальному воздействию на конструкцию им¬
пульсной нагрузки. Такое динамическое воздействие представляет собой распро¬
страняющийся по конструкции быстропротекающий затухающий колебательный
процесс, характеризующийся высокими частотами и амплитудами волн деформации.
Динамические испытания по определению ударного воздействия на конструкцию
ДМ, при отделении КА от PH, осуществлялись в процессе срабатывания пиротехни¬
ки системы отделения КА.
При проведении испытаний в комплектацию КА добавляются корпус переходной
системы с пиротехническими средствами разделения в штатном исполнении и си¬
стема подвески сборки КА, а также такелажное кольцо, с помощью которого осу¬
ществляется выравнивание испытываемого образца КА в вертикальном положении.
Подрыв пиротехнического устройства осуществлялся со специального пульта.
Аппаратура ДМ при выведении PH подвергается эксплуатационным ударным воз¬
действиям с ударным спектром ускорений, приведенным в таблице 4.9.3.4.
Таблица 4.9.3.4.
частота, Гц
30-50
50-100
100-200
200-500
500-1000
1000-2000
2000-5000
ускорение, g
3-5
5-15
15^40
40-175
175-500
500
500
194
4-9
Испытания на нагрузки от срабатывания системы отделения КА от PH, действую¬
щие на КА в процессе отделения от PH на конечном участке выведении его на отлёт¬
ную орбиту вокруг Земли, проводятся на испытательной базе НПОЛ (рисунок 4.9.3.4)
с использованием оборудовании и в кооперации с ГКНПЦ им. М.В. Хруничева.
(а - до отделения; б - после отделения) - полетный случай.
Рисунок 4.9.3.4. Испытания макета ДМ в составе сборки КА (ДМ с ИМ) на ударные нагрузки
от срабатывания системы отделения КА от PH
Испытания на нагрузки от срабатывания пиротехнических средств системы отде¬
ления КА от PH проведены успешно, их результаты показали, что конструкция ДМ
выдержала данные нагрузки и механические повреждения отсутствуют.
Испытания на нагрузки от срабатывания системы отделения ДМ от ПМ
Динамические испытания по определению ударного воздействия на конструкцию
ДМ, при разделении ДМ от ПМ, осуществлялись в процессе срабатывания пиротех¬
ники системы разделения, установленной на переходной ферме (адаптере) между ДМ
и ПМ (рисунок 4.9.3.5).
При проведении испытаний в комплектацию сборки вместо ПМ входил его ими¬
татор, состыкованный с ДМ через ферму, с пиротехническими средствами разделения
в штатном исполнении и система подвески сборки, а также такелажное кольцо, с по¬
мощью которого осуществляется выравнивание испытываемого образца ДМ в верти¬
кальном положении. Подрыв пиротехнического устройства осуществлялся со специ¬
ального пульта.
При отделении КА, отделении ДМ, сбросе аэродинамического экрана, отделении
заднего кожуха аппаратура ДМ дополнительно подвергается ударным воздействиям
с ударным спектром ускорений, приведенным в таблице 4.9.3.5.
Таблица 4.9.3.5.
частота, Гц
30-50
50-100
100-200
200-500
500-1000
1000-2000
2000-5000
ускорение, g
50
50-200
200
200-1000
1000
1000
1000
195
4-9
Рисунок 4.9.3.5. Схема членения КА проекта «ЭкзоМарс»
Испытания на нагрузки от срабатывания пиротехнических средств системы отде¬
ления ДМ от ПМ при подлете КА к Марсу показали, что механические повреждения
конструкции отсутствуют.
Испытания на динамические нагрузки конструкции ДМ при посадке на Марс
Динамические испытания по определению ударного воздействия на конструкцию
ДМ при спуске и посадке на планету осуществлялись в процессе срабатывания пи¬
ротехники системы отделения различных отделяемых элементов, входящих в состав
ДМ.
В процессе испытаний на динамические нагрузки при введении парашютной си¬
стемы, сбросе аэродинамического экрана, отделении ПсМ от заднего кожуха и сраба¬
тывании ПУ при посадке ПсМ на поверхность планеты Марс используется различное
испытательное оборудование: стенд динамики посадки, а также эстакада для испыта¬
ний систем отделения КА с подвижными балками, оснащенными грузоподъёмными
механизмами.
Испытания на динамические нагрузки выполнены в полном объёме с положитель¬
ными результатами - внешние повреждения конструкции отсутствуют.
4.9.3.3. Испытания на статические нагрузки конструкции КА в целом
и отдельных элементов конструкции ДМ
Испытания на статическую прочность проводились на силовом оборудовании
отдела прочностных испытаний в соответствии со схемами случаев нагружения, за¬
данными в программе испытаний, на усилия, соответствующие следующим случа¬
ям эксплуатации ДМ: на действие нагрузки при транспортировании PH, при старте
196
4-9
PH и при разделении ступеней PH. Проводились также квазистатические испытания
на действие нагрузки при спуске на планету - при входе в атмосферу и срабатывания
парашютной системы.
Испытания на статические нагрузки конструкции КА в целом
Испытания на прочность проводились в корпусе статических испытаний при вер¬
тикальном положении сборки ДМ. Испытания проводились по схемам случаев на¬
гружения в соответствии с программой испытаний как в направлении поперечных
осей (рисунок 4.9.3.6), так и в направлении продольной оси макета (рисунок 4.9.3.7)
с использованием универсального силового оборудования различной мощности.
При статических испытаниях нагружения конструкции проводились усилиями,
поэтапно, с нагрузками с разницей по 10% от максимальных величин (эксплуатаци¬
онных и расчетных значений), заданных в ТЗ на КА.
В процессе нагружения осуществлялась запись показаний лазерных триангуля¬
ционных измерителей типа RF 603-60/10-485 и тензорезисторов на регистрирующую
аппаратуру ИВК MIC-036 с последующей их обработкой специальным программным
обеспечением.
Рисунок 4.9.3.6. Испытания макета ДМ в составе сборки КА (ДМ с ПМ) на статические
нагрузки по поперечной оси при старте PH - полетный случай
197
4-9
Рисунок 4.9.3.7. Испытания макета ДМ в составе сборки КА (ДМ с ПМ) на статические
нагрузки по продольной оси при старте PH - полетный случай.
Испытания на квазистатические нагрузки конструкции ДМ в целом
Максимальные квазистатические ускорения, действующие на бортовую аппара¬
туру и оборудование, установленные на ДМ, определяются условиями вывода КА
проекта «ЭкзоМарс» на PH на орбиту, спуска ДМ в атмосфере Марса и при посадке
ПсМ на его поверхность.
Случаи нагружения и эксплуатационные уровни ускорений приведены в табли¬
це 4.9.3.6.
Таблица 4.9.3.6
этап эксплуатации
ускорение ях, g
ускорение абок, g
длительность, с
вывод на PH
7,1
2,3
торможение в атмосфере
10,0
±1,0
статическая
ввод ПС
10,0
±2,5
0,05-0,20
посадка:
случай max a*
случай max <7бок
10,2
5,4
0
9
0,03-0,10
g=9,81M/c2
198
4-9
Испытания сборки ДМ на квазистатические ускорения проводились на стенде
ускорений (центрифуге) СУ-268 (Гришин С.А., Захаров Ю.В. и др.,2012) в направле¬
нии продольной оси (рисунок 4.9.3.8), в комплектации макета без АЭ из-за сложности
установки его на оснастке центрифуги, и в направлении поперечных осей (рисунок
4.9.3.9) только сборки ПсМ в транспортной конфигурации.
В процессе испытаний испытываемые сборки с установленным на ПсМ макетами
аппаратуры и приборов нагружались ускорениями максимального значения с повы¬
шающим коэффициентом в соответствии с программой испытаний.
Рисунок 4.9.3.8. Испытания сборки ДМ на квазистатические нагрузки по продольной оси
на стенде ускорений СУ-268 - случаи «Вход в атмосферу» и «Рывок парашюта»
Рисунок 4.9.3.9. Испытания сборки ПсМ на квазистатические нагрузки по поперечным осям
на стенде ускорений СУ-268 - случаи «Вход в атмосферу» и «Рывок парашюта»
199
4-9
Система измерения параметров нагружения, входящая в состав многоканально¬
го измерительного комплекса и установленная на центрифуге СУ-268, обеспечивала
измерение деформаций с помощью тензометрических резисторов и измерение ли¬
нейного ускорения с регистрацией полученной информации на компьютере для по¬
следующей обработки.
Программное обеспечение многоканального измерительного комплекса обеспе¬
чило в реальном времени вывод информации выбранных измерительных каналов
на монитор ЭВМ (экран) в цифровом и графическом виде. Кроме того, оно позволило
выдавать результаты измерений не только как величину деформации по времени, но
и по числу оборотов и по реализованным ускорениям.
Испытания на квазистатические нагрузки выполнены в полном объёме с положи¬
тельными результатами - внешние повреждения конструкции отсутствуют.
Статические испытания отдельных элементов конструкции ДМ
Важное значение при наземной отработке конструкции КА придается проведению
статических испытаний на подтверждение запаса прочности основных агрегатов ДМ.
Статическим испытаниям подвергались следующие устройства и силовые эле¬
менты конструкции посадочного аппарата: аэродинамический экран на внешнее
давление (рисунок 4.9.3.10); защитный кожух - усилия на узлы подвески парашюта;
крыла БС; установки антенны ПП; установки посадочных опор; установки трапов
устройства схода; баков ДУ (внутреннее давление).
Для необходимых при испытаниях измерений использовались мобильные ИВК
(MIC-200, MIC-300, MIC-026 и др.). Достоинством этих ИВК является их малый вес
и возможность измерения одним комплексом различных физических величин путем
изменения конфигурации установленных в них модулей. На всех ИВК используется
одинаковое программное обеспечение (ПО): Recorder (управление измерительными
Рисунок 4.9.3.10. Испытания аэродинамического экрана макета ДМ на статические нагрузки
от действия внешнего давления - случай «Вход в атмосферу»
200
4-9
комплексами MIC), MR-300 (регистрация и экспресс обработка динамических пара¬
метров) и WinTIOC (пакет обработки сигналов: обработка измерительной информа¬
ции с помощью стандартных математических и статистических алгоритмов, графиче¬
ское представление, документирование).
ПО позволяет производить оперативную обработку полученной измерительной
информации в темпе испытаний.
Силовые элементы конструкции ДМ выдержали испытания на статические на¬
грузки в полном объёме, при этом подтверждены запасы прочности, заложенные
в данных элементах конструкции ДМ.
4.9.3.4. Автономные испытания отдельных устройств посадочной
платформы ДМ
Испытаниям прочностного изделия и других макетов ДМ должен предшествовать
необходимый объем автономных испытаний, который определяется разработчиками
отдельных агрегатов и систем исходя из состава ДМ, степени новизны, конструктив¬
ных особенностей и других факторов.
В процессе наземной экспериментальной отработки конструкций систем и агре¬
гатов КА были проведены вибродинамические, статические испытания, испытания
на линейные (квазистатические) ускорения, функциональные испытания системы
отделения от PH и систем разделения ДМ от ПМ, а также АЭ и ЗК от ПсМ; испы¬
тание баков ДУ СОИС на внутреннее давление и в полном объёме предварительные
испытания крупных агрегатов ПсМ, таких, как устройства раскрытия БС, антенны
МНА и трапов схода самоходного аппарата - марсохода, а также проведены броско-
вые испытания имитатора (динамически подобного макета) посадочной платформы
для подтверждения работоспособности посадочного устройства.
Испытания устройства раскрытия панелей БС
В конструкции посадочной платформы ПсМ используются солнечные батареи
двух видов конструкции, состоящих из панелей БФ и механического устройства
(МУ), обеспечивающего их раскрытие в рабочее положение (рисунок 4.9.3.11).
Рисунок 4.9.3.11. Общая схема посадочного модуля с раскрытыми панелями БС
201
4-9
Рисунок 4.9.3.12. Испытания устройства раскрытия панелей БС на безотказность
срабатывания МУ - случай функционирования
Рисунок 4.9.3.13. Испытания устройства раскрытия панелей БС на срабатывание МУ после
воздействия циклических температур в термостате СУ-330 - случай функционирования.
Испытания устройства раскрытия панелей БС проводились на испытательном
оборудовании на нагрузки, максимально приближенные к действующим на этапах её
эксплуатации (рисунки 4.9.3.12, 4.9.3.13).
Задачей испытаний является экспериментальное подтверждение прочности кон¬
струкции устройства панелей БС при принятых проектных решениях.
Сборки МУ панелей БФ, штатно установленные на приспособлениях, прошли
испытания на механические факторы при транспортировании, при выведении PH
202
4-9
(вибрации, ускорения, удары), при спуске и посадке на планету Марс (усилия при
раскрытии), а также испытания на безотказность и испытания на раскрытие с повы¬
шенными скоростями. При испытаниях на раскрытие МУ панелей БС использовалось
специальное приспособление, имитирующее марсианскую гравитацию.
Элементы МУ сохранили свою целостность после воздействия данных нагрузок.
Испытания устройства выдвижения опоры ПУ
Испытания стойки посадочного устройства проводились на испытательном обо¬
рудовании на нагрузки, максимально приближенные к действующим на этапах её
эксплуатации. Задачей испытаний является экспериментальное подтверждение проч¬
ности конструкции стойки ПУ при принятых проектных решениях.
Стойка ПУ, штатно смонтированная на приспособлении (рисунок 4.9.3.14), про¬
шла различного вида испытания: на механические факторы при транспортировании,
при выведении PH (вибрации, ускорения, удары - рисунок 4.9.3.15), при спуске и по¬
садке на планету Марс (усилия при выдвижении и срабатывании амортизации - ри¬
сунок 4.9.3.16), а также испытания на определение запаса прочности конструкции
(рисунок 4.9.3.17) и ресурсные испытания.
Рисунок 4.9.3.14. Общий вид устройства выдвижения опоры ПУ в транспортном положении
на испытательной оснастке
203
4-9
Рисунок 4.9.3.15. Испытания устройства выдвижения опоры ПУ на вибрационные нагрузки
на стенде V8-440 по боковой оси - полетный случай
Рисунок 4.9.3.16. Испытания устройства выдвижения опоры ПУ на усилия при выдвижении
и срабатывании амортизации после температурных воздействий - случай функционирования
Все элементы конструкции стойки ПУ по окончании проведения испытаний со¬
хранили свою целостность и работоспособность в процессе проведении 40 циклов
выдвижения амортизатора и подкосов, из транспортного положения в рабочее, с уста¬
новкой их на фиксирующие кольца и с раскрытием фиксатора касания грунта.
204
4-9
Рисунок 4.9.3.17. Испытания устройства выдвижения опоры ПУ ПсМ на статические
нагрузки по определению запаса прочности - случай «Посадка»
Испытания устройства раскрытия антенны МНА
Установка антенны МНА посадочной платформы (ПП), штатно смонтированная
на приспособлении, прошла различного вида испытания: на механические факторы
при транспортировании, при выведении PH (вибрации, ускорения, удары , рисунок
4.9.3.18) , при спуске и посадке на планету Марс (усилия при раскрытии, рисунок
4.9.3.19) , а также испытания на определение запаса прочности конструкции и ресурс¬
ные испытания. При испытаниях на раскрытие антенны МНА использовалось специ¬
альное приспособление, имитирующее марсианскую гравитацию.
а б
Рисунок 4.9.3.18. Испытания механизма раскрытия МНА на вибрационные нагрузки
по продольной (а) и поперечной (б) осям на стенде V8-440T - полетный случай
205
4-9
б
Рисунок 4.9.3.19. Испытания на ударные нагрузки при раскрытии антенны МНА
(а - до раскрытия, б - после раскрытия) - случай функционирования
Конструкция механизма раскрытия выдержала полный объём испытаний, сохра¬
нив свою целостность и обеспечив работоспособность собственно антенны МНА.
206
4-9
Испытания трапов устройства схода СХА
В конструкции посадочной платформы ПсМ применено устройство схода само¬
ходного аппарата (СХА), обеспечивающее движение марсохода в двух противопо¬
ложных направлениях схода (рисунок 4.9.3.20).
Для отработки конструкции устройства схода марсохода с посадочной платформы
использовался трап в штатном исполнении и установленный на приспособлении, по¬
зволяющем состыковывать его с различного типа испытательными стендами.
Рисунок 4.9.3.20. Общая схема посадочного модуля с раскрытыми трапами устройства схода
СХА
Рисунок 4.9.3.21. Испытания трапа устройства схода на вибрационные нагрузки на стенде
V8-440 по боковой оси - полетный случай
207
4-9
Рисунок 4.9.3.22. Испытания трапа устройства схода с ПсМ на статические нагрузки,
действующие при движении СХА - случай «Сход марсохода»
Рисунок 4.9.3.23. Испытания трапа устройства схода на ударные нагрузки при раскрытии
устройства схода СХА - случай функционирования
208
4-9
Испытания трапов устройства схода марсохода с посадочной платформы прово¬
дились в условиях, приближенных к условиям штатной эксплуатации, с целью под¬
тверждения целостности и работоспособности трапа после воздействия механиче¬
ских факторов: вибрационных (рисунок 4.9.3.21), ударных, линейных ускорений,
а также статических нагрузок по определению запаса прочности (рисунок 4.9.3.22).
При испытаниях на раскрытие устройства схода использовалось специальное при¬
способление, имитирующее марсианскую гравитацию.
Конструкции трапа устройства схода по окончании проведения испытаний со¬
хранила свою целостность и работоспособность в процессе проведения циклов рас¬
крытий трапа из транспортного положения в штатное положение (рисунок 4.9.3.23).
Трап, представляющий собой конструкцию одноразового действия, выдержал соро¬
каразовое раскрытие, подтвердив тем самым высокую надежность.
Конструкция трапов устройства схода СХА выдержала полный объём испытаний,
сохранив свою прочность и работоспособность для обеспечения гарантированного
схода СХА - марсохода ЕКА, а также показала свой ресурс после многократной про¬
верки на безотказность раскрытия.
4.9.4. Бросковые испытания посадочного устройства (ПУ) ПсМ
В соответствии со схемой полета КА «ЭкзоМарс» на заключительном этапе экс¬
педиции осуществляется мягкая посадка посадочного модуля (ПсМ) на поверхность
Марса (рисунок 4.9.4.1). В процессе посадки ПсМ ускорения не должны превышать
предельно допустимые для аппаратуры и других элементов конструкции значения,
а также не допускается потеря устойчивости (опрокидывание) ПсМ.
209
4-9
Поэтому одной из задач наземной экспериментальной отработки являются ис¬
пытания динамики посадки ПсМ. Отработочные испытания динамики посадки
представляют собой серию сбросов на стенде бросковых испытаний (Голиков Г.В.,
Гришин С.А. и др., 2013) макета посадочной платформы с расчетной высоты, обеспе¬
чивающей заданную скорость посадки на поверхность, имитирующую уклоны в зоне
предполагаемой посадки КА.
Параметры режимов испытаний динамики посадки макета ПсМ приведены в та¬
блице 4.9.4.1.
Таблица 4.9.4.1
№
режима
скорость
касания
VB, м/с
угол
от вертикали
Эо, градус
схема
сброса
на опоры
угол уклона
а, градус
модель
грунта
1
2,0
0,0
4
15
бетон
2
2,0
0,0
4
0
бетон
3
2,0
7,0
1-2-1
15
бетон
4
2,0
0,0
1-2-1
0
грунт-аналог
5
2,0
7,0
2-2
15
грунт-аналог
6
2,0
0,0
2-2
0
бетон
В соответствии с программой бросковых испытаний на рисунке 4.9.4.2 приведены
схемы сброса макета (Александров Л.Г, Бирюков А. С., 2014) при различном располо¬
жении опор при подходе к имитатору поверхности с углом склона а, равным значе¬
ниям 0 и 15 градусов.
Испытаниям по отработке динамики посадки подвергался натурный габарит¬
но-массовый макет (НГММ) посадочного модуля проекта «ЭкзоМарс».
Основным конструктивно-силовым элементом НГММ является корпус, выпол¬
ненный в виде фермы. Посадочное устройство устанавливается на корпус в раскры¬
том состоянии.
В состав посадочного устройства, смонтированного на макете, включено четыре
стойки. Каждая стойка состоит из амортизатора, двух подкосов и опоры (пяты). Верх¬
ние концы подкосов и амортизатора шарнирно крепятся к кронштейнам, установлен¬
ным на корпусе НГММ. Нижний конец амортизатора шарнирно связан с подкосами.
Пята установлена на сферической опоре, закрепленной на амортизаторе.
Для проведения испытания на НГММ предусмотрена установка специальных эле¬
ментов конструкции: узлов подвеса (для установки на стенд); карданного подвеса
(для разворота в ходе эксперимента и для связи с системой обезвешивания макета);
накладок из пенопласта на пяты (только при сбросе на бетон) рисунок 4.9.4.3,.
Стенд для отработки динамики посадки на натурном макете с обезвешиванием
обеспечивает режимы сброса объекта испытаний, приведенные в таблице 4.9.4.1,
в условиях, приближенных к марсианским. Для имитации марсианского ускорения
g=3,74 м/с2 производится обезвешивание НГММ до 62% своего веса.
210
4-9
а
—1
б
в
Рисунок 4.Э.4.2. Схемы параметров подхода НГММ ПсМ к посадочной поверхности при
бросковых испытаниях: на четыре опоры (а); на одну опору (б); на две опоры (в)
211
4-9
Рисунок 4.9.4.3. Общий вид и схема НГММ посадочного модуля
В состав стенда включены:
- система обезвешивания, которая обеспечивает разгрузку веса объекта испытаний
до веса ПсМ на Марсе при соударении его с грунтом-аналогом;
- система подъема и сброса, которая обеспечивает подъем и сброс НГММ ПсМ
«ЭкзоМарс» с заданной высоты (для получения требуемой вертикальной состав¬
ляющей скорости) и угол наклона продольной оси макета к гравитационной вер¬
тикали при касании его с грунтом;
Рисунок 4.Э.4.4. Конструктивная схема стенда отработки динамики посадки ПсМ
212
4-9
а
в
Рисунок 4.Э.4.5. Виды посадочного устройства НГММ после бросковых испытаний
на бетон (а, б) и грунт-аналог (в)
213
4-9
- каркас силовой;
- площадка сброса поворотная, выполненная в виде поворотного контейнера, в ко¬
торый укладывается марсианский грунт-аналог;
- имитатор НГММ ПсМ «ЭкзоМарс» для отработки режимов испытаний, изготов¬
лен в соответствии с документацией разработчика.
Для проведения монтажных работ используется кран, установленный в корпусе.
Марсианский грунт-аналог разрабатывается по договору с ГЕОХИ РАН и изготав¬
ливается в соответствии с разработанной институтом документацией.
Конструктивная схема стенда представлена на рисунке 4.9.4.4.
Бросковые испытания НГММ на стенде динамики посадки проводились с целью
получения экспериментальных данных для корректировки физико-математической
модели расчета динамики посадки ПсМ на поверхность Марса на основе сравнитель¬
ного анализа данных, полученных в результате отработочных испытаний.
Виды ПУ после проведения бросковых испытаний приведены на рисунке 4.9.4.5.
Полученные в ходе бросковых испытаний результаты соответствуют заданным
в ТТХ значениям. Режимы бросковых испытаний, указанные в таблице 4.9.4.1, вы¬
держаны в пределах допускаемых отклонений: по скорости подхода к поверхности
AVB±0,3 м/с и по углу отклонения продольной оси от вертикали Д30±1°, при этом
максимальный ход амортизатора стойки ПУ не превысил 0,185 метра.
Разработанные специалистами НПОЛ и реализованные в процессе отработки кон¬
струкции посадочного аппарата проекта «ЭкзоМарс-2022» методики проведения ис¬
пытаний на прочность элементов и систем КА позволяют в полном объёме подтвер¬
дить технические характеристики аппарата на соответствие техническому заданию.
Список литературы
Александров Л.Г., Бирюков А. С., Макаров В.П., Михайлов Д.Н. Отдельные аспекты
наземной экспериментальной отработки космического аппарата «ЭкзоМарс-2018» //
Вестник НПО им. С.А. Лавочкина. 2014. № 2. С. 124-127.
Голиков Г.В., Гришин С.А., Захаров Ю.В., Макаров В.П., Маркачёв Н.А. Создание
и совершенствование стенда бросковых испытаний автоматических космических ап¬
паратов // Вестник НПО им. С.А. Лавочкина. 2013. № 1. С. 56-62.
Гришин С.А., Захаров Ю.В., Маркачёв Н.А. Опыт использования центробежных
установок для наземной отработки автоматических космических аппаратов // Вест¬
ник НПО им. С.А. Лавочкина. 2012. № 2. С. 44-51.
A. С. Бирюков,
С.А. Гришин,
С.А. Защиринский,
B. А. Лошаков,
Н.А. Маркачев,
Д.Н. Михайлов
214
4-10
ИЕ СРАВНИТЕЛЬНЫЙ АНАЛИЗ И ОЦЕНКА
СООТВЕТСТВИЯ ТЕХНИЧЕСКОГО УРОВНЯ
ДЕСАНТНОГО МОДУЛЯ ПЕРЕДОВЫМ
ДОСТИЖЕНИЯМ ЗАРУБЕЖНОЙ науки и техники
Анализ технического уровня десантного модуля целесообразно проводить
в сравнении с разработками мировых производителей, имеющими схожее назначе¬
ние и условия функционирования. К числу КА со схожими задачами и условиями
функционирования можно отнести следующие аппараты разработки Космического
агентства США NASA рисунок 4.10.1 - (Barry Goldstei, Robert Shotwel Phoenix, 2006;
David W. Way, Richard W. Powell etc., 2006; Karl T. Edquist, Artem A. Dyakonov etc.,
2008; Prasun N. Desai, Philip C. Knocke., 2007; Ravi Prakash, P. Dan Burkhart etc., 2008;
Robert D. Braun, Robert M. Manning, 2007):
Viking 1 и 2. Совершили посадку на равнинах Хриса и Утопиина в 1976 г.;
Mars Pathfinder (MPF). Совершил посадку на равнине Хриса в 1997 г.;
Mars Exploration Rover-А, В (MER-А, В). Марсоходы Spirit и Opportunity совер¬
шили посадку в кратере Гусева и плато Меридиана, соответственно, в 2004 г.;
Phoenix. Совершил посадку в приполярной области Марса в 2008 г.
Mars Science Laboratory (MSL). Совершил посадку в районе кратера Гейла в 2012 г.
Viking
MPF
MER
Рисунок 4.10.1. Марсианские спускаемые аппараты разработки NASA
Phoenix
A
V
MSL
Кроме этого, для сравнения можно использовать спускаемый аппарат разработ¬
ки Европейского космического агентства ESA Schiaparelli EDM (EDL Demomstrator
Module) ExoMars-2016, рисунок 4.10.2. Аппарат был предназначен для отработки
и демонстрации технологии спуска и посадки на поверхность Марса (технологии
EDL) и научной аппаратуры практически не имел. Погиб при спуске в атмосфере
Марса в районе плато Меридиана после отделения посадочного модуля от заднего
кожуха в 2016 г.
Места посадки аппаратов показаны на рисунке 4.10.3.
215
4-10
Таблица 4.10.1. Основные характеристики этапов спуска и посадки марсианских миссий
ЭкзоМарс-2022
СЧ
О
сч
ESA/POC
прямой
4©
мп"
-12,9°
о
2000
вращение
16 град/с
баллистич.
Оград
1
о
ос
СП
о
I
§
§
о.
о
г-
EDM
ЭкзоМарс-2016
ЧО
О
сч
ESA
прямой I
ОО
МП
-12,4°
СП
00
009
вращение
16 град/с
баллистич.
0 град
1
■
о
сч"
70 град конус
MSL
сч
о
сч
NASA
прямой I
мп
мп
мп"
7
135
3152
3-осевая
с качеством
16 град
смещение ЦМ
управление
в канале крена
0,24
4,52
70 град конус
Phoenix
2008
NASA
I прямой
40
мп"
СП
7
МП
40
009
3-осевая
баллистич.
0 град
1
разворот на
внеатмосфер¬
ном участке
о
2,65
70 град конус
MER-A, В (Spirit,
Opportunity)
о
о
сч
NASA
прямой
-11,5
06
840
вращение
12 град/с
баллистич.
0 град
1
■
о
2,65
70 град конус
MPF (Mars
Pathfinder)
04
С4
NASA
прямой |
40
СЧ
г-"
-14,0
СП
40
585
вращение
12 град/с
баллистич.
0 град
■
■
о
2,65
70 град конус
Viking 1, 2
40
О
04
NASA
| с орбиты ИСМ |
тг"
40^
7
64
930
3-осевая
с качеством
11 град
смещение ЦМ
стабилизация
по крену
0,18
мп
СП
70 град конус
название миссии
год посадки:
головное
агентство-разработчик
вход в атмосферу |
скорость входа (км/с)
угол наклона
траектории при входе
в атмосферу (град)
баллистический
коэффициент
при входе (кг/м2)
масса при входе
в атмосферу (кг)
стабилизация
тип траектории
балансировочный
угол атаки
способ создания
подъемной силы
управление
ориентацией при спуске
фэродинамическое
качество
диаметр аэро¬
динамического экрана (м)
геометрия
аэродинамического
экрана
2
сч
СП
мп
40
Г-
00
04
о
сч
СП
мп
216
4-10
ЭкзоМарс-2022
0,28
■
■
15+35 (DGB+
Ringslot)
rf
1200
г-
радар I
доплеровский
радар
§
s ас
cZ
К
О
2
ДМТ:
8x5 кгс;
4 сопла х
50...350 кгс
разворот
по тангажу
и рысканию
ГД
EDM
ЭкзоМарс-2016
<0,27
I НД 1
НД
12 (DGB)
o'
гд"
°°1
840
радар
доплеровский
радар
S
с Z
2
к
о
S
3 блоках
3x400Н
разворот
по тангажу
и рысканию
MSL
НД
PICA
22?
19,7 (DGB)
40
o'
ГД
750
радар
доплеровский
радар
§
я
CQ
s ас
о
Е
ас
&
СП
o'
X
оо
разворот
по тангажу
и рысканию
0,75
Phoenix
0,253
SLA-561
cn"
11,5 (DGB)
r-
40
oT
490
гп
радар
доплеровский
радар
монотопливная
ДУ (N2H4)
рыскание
и тангаж:
4x26,3 Н;
вращение:
4x5,7 Н
разворот
по тангажу
и рысканию
гд"
MER-A, В (Spirit,
Opportunity)
о
гд
o'
Р SLA-561
15,1
14 (DGB)
o'
г-
725
• радар
видеосистема/
IMU
РДТТ
3 РДТТ
РДТТ
оо
MPF (Mars
Pathfinder)
0,27
SLA-561 |
18,3
12,5 (DGB)
o'
г-
585
сь
радар
нет
РДТТ
3 РДТТх
7938Н
1
12,5
Viking 1, 2
0,222
SLA-561
13,2
16 (DGB)
0,67
-
350
5,79
Г радар
доплеровский
радар
3
ж
s за
с Z
2 °
£>
2
X ГД
ГД ;
Н о
сп
разворот
по тангажу
и рысканию
гд"
название миссии
относительное смещение
центра масс от носка
аппарата (X/Dm)
ТЗП АЭ
толщина ТЗП АЭ (мм)
диаметр и тип
парашюта (м)
коэффициент сопротив¬
ления парашюта (прибл.)
число Маха при
раскрытии парашюта.
динамическое давление
при раскрытии
парашюта (Па)
высота раскрытия
парашюта (км)
корректировка высоты ]
определение
горизонтальной скорости
устройство пред¬
посадочного торможения
конструкция ДУ
(количество
двигателей х тяга)
управление
горизонтальной
скоростью
вертикальная скорость
касания (м/с)
£
ЧО
г-
оо
Ch
о
ГД
ГД
ГД
ГД
СП
ГД
24
1Г)
ГД
26
г-
ГД
оо
ГД
04
ГД
217
4-10
ЭкзоМарс-2022
ГЧ
торможение
ТДУ
4 деформируе¬
мые опоры
Центр эллипса
рассеивания
18°8,4'с.ш.,
335°45,6' в.д.
МО
со
<20
датчик
касания
О
о
гч
7
МО
О
СО
1
- / 2 земных
года
100
МО
ГЧ
1
Примечания:
1. НВ - настоящее время; 2. НД - нет данных; 3. ДМТ - двигатель малой тяги; 4. РДТТ - ракетный двигатель твердого топлива
EDM
ЭкзоМарс-2016
торможение
ТДУ
сминаемая
конструкция
з
2 7
1
о
<8/0
100
МО
Оу
7
MSL
MO^
o'
V
SkyCrane
посадка
на колеса
4»
2 чо
ГО >-
о, ГО
"Ч
100
>15
снятие
нагрузки
nf-
мо
о
1 006 1
668/НВ
МО
гч
о
гч
ГЧ
Phoenix
< 1
торможение
ТДУ
3 деформируе¬
мые опоры
з
Я со
J-)
gif
о £
оо
40 ~
20
МО
деформация
опоры
40
со
58,7
о
90/157
260
30
мо^
со"
1
MER-A, В (Spirit,
Opportunity)
вывешивание
на фале под
парашютом
надувные
мешки
4 4 дг 5
о m • -
ж - о оо
- 04 ГЧ
’t (Д О
го о мо
о мо о мо
хГ < со
50
>30
1
04
со
МО
о
со
Г"-
90/2210
и
90/НВ
80
ГЧ
Оу
7
MPF (Mars
Pathfinder)
<20
i
вывешивание
на фале под
парашютом
надувные
мешки
я- 7
Я оз
2 ^0
о
МО
>30
1
360
о
ОО
10,6
7/82
200
100
МО
7
Viking 1, 2
< 1
торможение
ТДУ
3 деформируе¬
мые опоры
4* 4 2
о м ° ”
5? 2 Г
о о Г
(N ОО оо по
ГЧ Tt
20
МО
деформация
опоры
610
04
о
90/2245
и
90/1281
280
100
мо^
со"
1
название миссии
горизонтальная скорость
касания (м/с)
схема посадки
посадочное устройство
кординаты
места посадки
допустимая высота камня
при касании (см)
допустимый наклон
при касании (град)
обнаружение касания
масса при касании (кг)
полезная масса на стаци¬
онарной платформе (кг)
подвижная масса (кг) |
срок активного
существования, по проекту
/ фактический (сол)
Зо. большая ось эллипса
рассеивания (км)
Зо. малая ось эллипса
рассеивания (км)
высота места посадки
MOLA (км)
о
СО
ГО
ГЧ
ГО
со
со
тГ
со
МО
со
40
СО
Г-
со
оо
СО
04
со
40
42
43
218
4-10
Рисунок 4.10.2. EDM ExoMars-2016
Сводная информация по основным параметрам перечисленных выше аппаратов
представлена в таблице 4.10.1. Таблица составлена по материалам открытой печати,
а также материалов ESA, касающихся миссии «ЭкзоМарс-2016».
С точки зрения типа целевой нагрузки, доставляемой на поверхность планеты,
аппарат является уникальным, поскольку более ранние, а также планируемые в бли¬
жайшем будущем, миссии включали в свой состав либо стационарную платформу
(Viking, Phoenix), либо марсоход (MER, MSL). Pathfinder является некоторым исклю¬
чением, поскольку в его состав входили легкие марсоход и платформа, которая также
выполняла функции ретранслятора. Однако из-за незначительных габаритов и массы
Pathfinder не может рассматриваться как полноценный аналог КА «ЭкзоМарс-2022».
Такой набор инструментов создает дополнительные трудности при проектирова¬
нии аппарата, поскольку требует обеспечения большого количества противоречивых
требований технического и организационного характера. Кроме этого, процесс про¬
ектирования усложняет необходимость использования некоторых элементов и огра¬
ничений из миссии «ЭкзоМарс-2016».
219
4-10
Рисунок 4.10.3. Места посадки аппаратов
К числу подобных требований следует отнести:
- размещение большого (с точки зрения массы и габаритов) марсохода на поса¬
дочной платформе с научной аппаратурой, что ведет к значительному усложне¬
нию компоновочной схемы посадочной модуля, а также к увеличению габаритов
и массы всего десантного модуля;
- ухудшение массово-инерционных характеристик аппарата за счет «высокого»
размещения марсохода, а также относительно тяжелой парашютной системы
(2 каскада) - отдаление центра масс от носка, рост поперечных моментов инер¬
ции и как следствие -снижение поперечной устойчивости при движении и уже¬
сточение требований по отклонениям центра масс и величинам центробежных
моментов инерции;
- из-за разреженности марсианской атмосферы масса ДМ при входе в атмосферу
ограничена 2000 кг;
- ограниченные возможности по статической и динамической балансировке аппа¬
рата и его составных частей из-за значительных ограничений по массе, плотно¬
сти компоновки, графика;
- дополнительные требования по значениям центробежных моментов со стороны
перелетного модуля, которые обосновываются требованиями по условиям связи
с Землей;
- дополнительные требования по обеспечению теплового режима (в том числе
на стартовой позиции), которые обуславливаются конструкцией марсохода, а так¬
же наличием на борту аппарата 17 радиоизотопных источников тепла (3 на марсо¬
ходе и 14 на ТСП посадочной платформы);
- необходимость обеспечению питания марсохода перед отделением от перелетно¬
го модуля, а также сразу после посадки, что ужесточает условия существования
платформы в условиях дефицита энергии;
220
4-10
- длительное время подготовки марсохода к сходу с платформы, что снижает на¬
дежность миссии и увеличивает требования по обеспечению питания марсохода;
- одновременное наличие двух объектов на поверхности Марса ведет к необходи¬
мости поочередной ретрансляции данных через орбитальный аппарат;
- различия в стандартах Европейского и Российского космических агентств, что ве¬
дет к субъективным сложностям, связанным с подходом к проектированию и тре¬
бованиям к аппаратуре (политика ES А в части запасов, требования к ЭМС, приня¬
тая последовательность разработки изделий, требования к документации и т.д.).
С точки зрения реализуемой схемы спуска и посадки, ДМ проекта «Экзо-
Марс-2022» использует комбинированную схему, которая включает в себя следую¬
щие этапы:
- участок аэродинамического торможения;
- парашютный участок с использованием двухкаскадной парашютной системы
(ПС);
- участок активного торможения при помощи двигательной установки;
- посадка на деформируемые посадочные опоры.
Десантный модуль реализует баллистическую траекторию движения в атмосфере
с нулевым аэродинамическим качеством. Ориентированный вход в атмосферу обе¬
спечивается закруткой аппарата вокруг продольной оси.
По типу траектории на участке внеатмосферного полета и участке аэродинами¬
ческого торможения в атмосфере наиболее близкими аналогами (таблица 4.10.1) яв¬
ляются спускаемые аппараты миссий Pathfainder, MER - А,В и ExoMars-2016. Од¬
нако все четыре аппарата имели значительно меньшую массу (более чем в два раза)
по сравнению с ДМ, что показывает величина баллистического коэффициента. Имен¬
но поэтому на борту ДМ необходимо использовать двухкаскадную парашютную си¬
стемы, в отличие от всех предыдущих марсианских миссий.
Использование управляемой траектории на внеатмосферном участке, а также
на участке аэродинамического торможения ограничено формальным требованием
о том, что ДМ должен использовать задел миссии ExoMars-2016. Также существен¬
ной причиной является то, что использование управляемой траектории в условиях
Марса значительно усложнит экспериментальную отработку аппарата и приведет
к значительному удорожанию проекта.
На участке предпосадочного торможения ДМ использует схему посадки с исполь¬
зованием двигательной установки, которая аналогична миссиям Viking 1, 2, Phoenix,
ExoMars-2016. Однако, в отличие от перечисленных миссий, для которых было харак¬
терно использование одних и тех же камер ДУ как для управления скоростью центра
масс платформы, так и для управления и стабилизации углового положения, в поса¬
дочном модуле «ЭкзоМарс-2022» используется четырехкамерный двигатель с глубо¬
ким дросселированием тяги, обеспечивающий регулировку тяги по общему уровню,
а также разнотяговость между противоположными камерами, что позволяет управ¬
лять угловым положением ПсМ в каналах тангажа и рыскания. Управление общим
уровнем тяги и разнотяговостью камер производится тремя независимыми регулято¬
рами тяги. Стабилизация в каналах тангажа и рыскания осуществляется при помощи
двигателей малой тяги (ДМТ), расположенных по периметру платформы в пакетах
по два двигателя. ДМТ установлены таким образом, что позволяют осуществлять
демпфирование остаточной угловой скорости закрутки вокруг оси X (в канале соб¬
ственного вращения) сразу после отделения аэродинамического экрана на участке
движения под парашютом.
221
4-10
Использование отдельных регуляторов тяги в различных каналах управления,
а также отдельные исполнительные органы для стабилизации по угловым каналам
дает определенные преимущества при посадке. Преимущества связаны с упрощени¬
ем алгоритмов управления, повышением надежности; кроме того, повышается эф¬
фективность и плавность управления.
По типу посадочных устройств, обеспечивающих допустимый уровень перегруз¬
ки при контакте с поверхностью Марса, ДМ является близким аналогом таких аппа¬
ратов, как Viking и Phoenix. Во всех трех случаях остаточная кинетическая энергия
поглощается амортизаторами, которые размещаются в деформируемых посадочных
опорах. Различия заключаются в количестве посадочных устройств: в аппаратах
NASA по три опоры, в ПсМ «ЭкзоМарс-2022» - четыре опоры.
Выбор числа опор для ПсМ обусловлен требованием сохранения устойчивости
при большой горизонтальной посадочной скорости и высоким положением центра
масс модуля.
В целом можно утверждать, что десантный модуль проекта «ЭкзоМарс-2022»
полностью соответствует текущему уровню зарубежных разработок.
Список литературы
Barry Goldstei, Robert Shotwel. Phoenix - The First Mars Scout Mission // IEEE
Aerospace Conference, 2006.
David W. Way, Richard W. Powell etc. Mars Science Laboratory: Entry, Descent, and
Landing System Performance // IEEE Aerospace Conference, 2006.
Karl T. Edquist, Artem A. Dyakonov etc. Mars Science Laboratory Entry Capsule
Aerothermodynamics and Thermal Protection System // IEEE Aerospace Conference, 2008.
Prasun N. Desai, Philip C. Knocke. Mars Exploration Rovers Entry, Descent, and
Landing Trajectory Analysis // Journal of the Astronautical Sciences. September 2007.
Ravi Prakash, P. Dan Burkhart etc. Mars Science Laboratory. Entry, Descent, and
Landing System Overview // IEEE Aerospace Conference, 2008.
Robert D. Braun, Robert M. Manning. Mars Exploration Entry, Descent and Landing
Challenges // Journal of Spacecraft and Rockets. Vol. 44, № 2, 2007.
C.H. Алексашкин,
Б.А. Острешко
222
ПРИЛОЖЕНИЯ
В целях концептуального представления научного комплекса межпланетной стан¬
ции, описанного в данном издании, приводим выдержки из статей, опубликованных
ранее в журнале «Вестник НПО имени С.А.Лавочкина». 2014. № 2 (23) стр. 13-32. Их
содержание актуально и сегодня. Просим читателей иметь в виду, что ранее запуск
к Красной планете данной межпланетной станции планировался в 2018 году, но в силу
организационно-технических обстоятельств перенесён на август-сентябрь 2022 года.
1. НАУЧНЫЕ ЗАДАЧИ КОМПЛЕКСА НАУЧНОЙ АППАРАТУРЫ
ПОСАДОЧНОЙ ПЛАТФОРМЫ ПРОЕКТА «ЭКЗОМАРС-2018»
(НЫНЕ ЭКЗОМАРС-2022)
Л.М. Зелёный, О,И. Кораблёв, Д.С. Родионов, Б, С. Новиков,
КН. Марченков, О.Н. Андреев, Е.В. Ларионов
Введение
Научная миссия посадочной платформы связана прежде всего с мониторингом
различных процессов на поверхности Марса на масштабе суток, сезонов и, возмож¬
но, даже нескольких марсианских лет. Такой мониторинг естественным образом вы¬
полняется с долгоживущей стационарной платформы. Планируемый срок работы
на поверхности - один марсианский год, но это время может быть существенно уве¬
личено в случае успешного хода проекта.
Научный комплекс посадочной платформы проекта «ЭкзоМарс» позволяет выпол¬
нить ряд научных задач, типичных для т.н. сетевых посадочных миссий, основными
задачами которых является мониторинг климата Марса посредством метеонаблюде¬
ний на поверхности и исследование внутреннего строения планеты путем сейсмиче¬
ских измерений.
Основные научные задачи посадочной платформы определяются как:
- долговременный мониторинг климатических условий на марсианской поверхно¬
сти в месте посадки;
- исследование состава атмосферы Марса с поверхности;
- исследование взаимодействия атмосферы и поверхности;
- исследование состава поверхности;
- изучение внутреннего строения Марса;
- мониторинг радиационной обстановки и других факторов.
Для решения данных задач проектируется комплекс научной аппаратуры
(КНА-ЭМ).
Комплекс научной аппаратуры КНА-ЭМ
Планируемый для решения научных задач посадочной платформы долгоживущей
станции комплекс научной аппаратуры будет иметь общую массу не более 50 кг с уче¬
том межблочных кабелей.
Расчетное время функционирования посадочной платформы на поверхности -
не менее одного марсианского года. Для передачи данных на Землю в качестве ре¬
транслятора планируется использование спутника TGO (запуск в 2016 году). При¬
боры размещены на термосотовых панелях (ТСП). В состав научной аппаратуры,
помимо собственно научных приборов, входит ряд обеспечивающих устройств.
Предварительный список научной аппаратуры приведен в таблице 1.
223
В приборах KHA-ЭМ учтен опыт разработки и испытаний, технологический задел
и методики калибровок и проверенные при создании аналогичных научных приборов
для космических экспериментов на КА «Фобос-Грунт», «Луна-Глоб», «Луна-Ресурс»,
MSL, «MetNet», «БепиКоломбо», «ЭкзоМарс-2016».
Таблица 1 - Список научных приборов и вспомогательных устройств КНА-ЭМ
прибор
функция
ключевые параметры
масса
(с учетом
системного
запаса)
ТСПП
телевизионная система для
видеосъёмки панорамы
места посадки, динамики
атмосферных процессов,
стереосъёмки марсианского
ландшафта, контроля
за работой манипулятора
4 обзорных камеры, поле
зрения 100°, стереокамера,
поле зрения 50°, блок сбора
и обработки информации
(сжатие 2-20, объем
хранения 64 Гб). Все камеры
2048x2048 пике; 3 цвета
3,9 кг
БИП
блок интерфейсов
и памяти, общий интерфейс
команд и данных КНА-ЭМ
18 интерфейсов, буферная
память 128 Гбит
2,5 кг
МТК
метеокомплекс;
измерения на спуске
8 датчиков температуры,
2 датчика давления,
2 датчика влажности;
двухкомпонентный
анемометр;
датчики аэрозоля
(нефелометр-лидар и датчики
солнечной радиации);
трехкомпонентный
акселерометр,
трехкомпонентный датчик
угловых скоростей;
магнитометр;
микрофон
3,5 кг
штанга
РАТ-М
радиотермометрические
бесконтактные
микроволновые измерения;
оценка температура
поверхности на 3-х уровнях
глубины, оптическая
толщина атмосферы
во время пылевой бури
СВЧ-радиометр
на 3-х частотах
(6-20 ГГц)
0,6 кг
ФАСТ
Фурье-спектрометр
для исследования
атмосферы и мониторинга
климата Марса
наблюдения Солнца
и излучения атмосферы;
спектральный диапазон
2-17 мкм, спектральное
разрешение до 0,05 см-1
3,5 кг
224
прибор
функция
ключевые параметры
масса
(с учетом
системного
запаса)
ПК
пылевой комплекс для
контактного изучения
свойств пылевых частиц,
переносимых ветром
у поверхности Марса
ударный датчик,
лазерный нефелометр,
датчик электрического
поля
1,6 кг
СЭМ
сейсмометр для изучения
микроколебаний
поверхности Марса
двухкоординатный
горизонтальный сейсмометр
1,5 кг
МГАК
марсианский газо¬
аналитический комплекс
для исследования динамики
микрокомпонентов
атмосферы
у поверхности
анализ газов, выделяемых
при нагреве проб грунта;
термоанализатор
(до 1000°С,
многоразовая
пиролитическая ячейка),
газовый хроматограф,
масс-спектрометр
(разрешение по массе:
1000, 2-1000 а.е.м.)
10 кг*
М-ДЛС
лазерный спектрометр для
исследования химического
и изотопного состава
атмосферы вблизи
поверхности Марса
и летучих компонент
марсианского грунта
5’лазеров в диапазонах
1,4-1,6 мкм и 2,5-2,7 мкм
3 атмосферные кюветы,
гетеродинный канал
атмосферы;
кювета для анализа летучих
компонент грунта
(в составе МГАК)
2,6 кг
штанга
АДРОН-ЭМ
детекторы нейтронов
и гамма-лучей
с возможностью активного
зондирования для
определения содержания
воды и элементного
состава
подповерхностного грунта,
мониторинг радиационной
обстановки
нейтронный генератор,
нейтронные детекторы
(0.001 эВ - 1 кэВ),
гамма-спектрометр
(100 кэВ-8 МэВ,
разрешение 3%),
дозиметр
5,6 кг
МЭГРЭ
мониторинг
электромагнитных эмиссий
на поверхности
магнитное поле в диапазоне
до 30 кГц;
электрическое поле
на частотах до 3 МГц
1,5 кг*
штанги
225
Научные задачи посадочной платформы
Мониторинг климатических условий на поверхности Марса
Изучение климата Марса и других планет, близких к Земле по свойствам, явля¬
ется фундаментальной задачей, имеющей отношение как к освоению Марса, так
и к более глубокому пониманию природы климатических процессов на Земле. От¬
носительно простая климатическая система Марса является для атмосферы Земли
удачным «крайним случаем». Глубокое понимание современных климатических
процессов на Марсе позволяет лучше оценить особенности климата прошлых эпох,
причин, приведших к катастрофическим изменениям климата, процессов диссипации
атмосферы.
Климат характеризуется временными и пространственными вариациями основ¬
ных параметров атмосферы (таких, как температура, давление, скорость ветра и т.д.),
являющимися следствием глобальной циркуляции, теплового баланса, взаимодей¬
ствия атмосферы с поверхностью планеты и космическим пространством. Многие
из этих параметров, как глобальные характеристики, давно и успешно измеряются
с орбитальных космических аппаратов. По данным инфракрасных спектрометров
и радиометров, работавших и работающих на КА «Mars Global Surveyor» (MGS),
«Mars Odyssey» (ODY), «Mars Express» (MEX), «Mars Reconnaissance Orbiter» (MRO)
доступны многолетние ряды таких параметров как температура поверхности, тем¬
пература атмосферы (на уровне от 2-5 до 30^40 км), общее содержание пыли и кон¬
денсационных облаков в атмосфере, общее содержание водного пара {Кораблев О.И.,
2013).
Однако такие характеристики, как давление и скорость ветра нельзя точно изме¬
рить дистанционно. Особенно важен цикл атмосферного давления на Марсе, так как
существенная часть углекислотной атмосферы конденсируется зимой в полярных
областях. Настройка моделей общей циркуляции без длительных рядов измерений
давления невозможна. К сожалению, до недавнего времени практически единствен¬
ным источником таких данных оставались измерения VL 1, 2 {Hess S.L. et al., 1980).
Метеокомплекс установлен также на марсоходе Curiosity {Gomez-Elvira J. et al., 2012),
однако подвижность платформы является осложняющим фактором для таких изме¬
рений. Например, искажения измерительного ряда из-за изменений местной топо¬
графии очень трудно учесть. В связи с этим понятен интерес к метеорологическим
станциям на поверхности Марса (см. введение).
К основным изучаемым процессам относятся: общая циркуляция, основные кли¬
матические циклы, гидрологический цикл и пыли, мезомасштабные явления, процес¬
сы в пограничном слое, тепловой баланс атмосферы.
Эти процессы будут исследованы путем длительного мониторинга и исследова¬
ния циклов различных временных масштабов таких параметров, как атмосферное
давление, температура, температура поверхности, состояние (термическая структу¬
ра) пограничного слоя, содержание водяного пара в атмосфере, содержание пыли
и конденсационного аэрозоля в атмосфере, состояние облачности. Кроме того, будет
получен профиль атмосферы при спуске посадочного аппарата.
Основным прибором для проведения таких измерений на поверхности Марса
и при спуске в атмосфере является Метеокомплекс (МТК). В его состав входят во¬
семь датчиков температуры российской разработки; два баросенсора с компенсаци¬
ей абсолютного давления российской и финской разработки; два датчика влажности
226
финской разработки; двухкопонентный анемометр российской разработки, ряд оп¬
тических датчиков аэрозоля. Датчики давления и инфразвука позволят исследовать
такие мезомасштабные процессы, как инфразвуковые, звуковые и гравитационные
волны.
При помощи МТК будут проведены измерения профиля атмосферы на спуске:
на этапе торможения с помощью аэродинамического экрана будут работать трехком¬
понентный датчик ускорений с упругим элементом емкостного типа и трехкомпо¬
нентный датчик угловых скоростей, а на этапе спуска на парашюте - датчики давле¬
ния и температуры. Прототипом МТК служит комплекс приборов, разработанный для
малых посадочных станций «MetNet» {HarriA.M. et al., 2013).
Другим важнейшим прибором для исследования пограничного слоя является
Фурье-спектрометр для атмосферных составляющих и температуры (ФАСТ). Фу¬
рье-спектрометр измеряет собственное излучение атмосферы в тепловом ИК-диапа-
зоне (до 20 мкм, спектральное разрешение 2 см1), он позволяет проводить измере¬
ния температурного профиля атмосферы на высотах от 0 до 50 км, причем особенно
детально определяются характеристики пограничного слоя {Smith M.D. et al., 2006).
Данные эксперимента позволят также, определять характеристики аэрозоля и изме¬
рять полное содержание водяного пара в атмосферном столбе. ФАСТ - новая версия
Фурье-спектрометра, разработка которого основана на опыте создания аналогич¬
ных приборов для проектов «Фобос-Грунт» {Кораблев О.И. и др., 2012) и «Экзо-
Марс-2016» {Korablev O.I. et al., 2014).
Важная информация о динамике атмосферы возможно будет получена с помощью
прибора марсианский диодно-лазерный спектрометр (М-ДЛС). При наблюдениях
Солнца методом оптической гетеродинной спектроскопии разрешается контур линии
поглощения какого-либо газа, например СО2, что позволяет точно измерять допле¬
ровское смещение линии и непосредственно оценивать скорость ветра на высотах
эффективного поглощения в линии (от поверхности до ~10 км). Подобные измерения
продемонстрированы на прототипе {Rodin A. et al., 2014).
Дополнительную информацию об аэрозольной составляющей позволят получить
приборы: Пылевой комплекс (ПК), Радиометр грунта (РАТ-М) и Телевизионная си¬
стема посадочной платформы (ТСПП).
ПК включает несколько типов датчиков, предназначенных для изучения пылевой
компоненты на Марсе, а также процессов в атмосфере Марса и у его поверхности,
связанных с динамикой пыли. Ударные датчики ПК предназначены для прямого
измерения потоков пылевых частиц в приповерхностном слое, исследования про¬
цессов сальтации и пылевых вихрей. Нефелометр позволит точно охарактеризовать
оптические характеристики пылевых частиц. Датчик электрического поля предна¬
значен для регистрации электрических полей и электромагнитных шумов, генери¬
руемых при движении пылевых частиц в атмосфере и у поверхности Марса. В про¬
екте прибора ПК использован опыт разработки аналогичных приборов для проектов
«Фобос-Грунт» {Esposito F. et al., 2011) и «Луна-Ресурс».
Прибор РАТ-М в качестве дополнительной научной задачи позволит измерять ра-
диояркостную температуру марсианской атмосферы в направлении зенита. Во время
пылевой бури при больших оптических плотностях яркостная температура позволит
сделать выводы о плотности и физическом составе пыли.
ТСПП - комплекс из шести видеокамер - предназначен для контроля окружающей
обстановки в диапазоне до 360° по горизонтали и до 60° по вертикали и получения
227
цветных изображений атмосферных процессов в видимой области спектра (0,45, 0,55
и 0,65 мкм). В условиях ограниченного объема передаваемых на Землю данных это по¬
зволит производить периодический контроль состояния облачности, туманов, дымок,
дистанционное обнаружение пылевых дьяволов. При создании ТСПП будут использо¬
ваны разработки отдела оптико-физических исследований ИКИ РАН высокой степени
технологической готовности.
Для измерений температуры поверхности служат специальный датчик метеоком¬
плекса, а также приборы: Система термоэлектрического мониторинга марсианского
грунта РАТ-М.
Исследования состава атмосферы Марса
Измерения состава атмосферы на поверхности Марса обладают несомненными
преимуществами перед орбитальными и наземными наблюдениями. Поиск и уточ¬
нение верхних пределов малых газовых составляющих, возможно локализованных
в нижних слоях атмосферы вследствие дегазации с поверхности, надежнее осущест¬
влять insitu и при достаточном накоплении сигнала. Это же относится к измерениям
изотопных отношений. Инертные газы и их изотопы дистанционно не измеряются.
Для изучения состава атмосферы служат ряд приборов КНА-ЭМ: ФАСТ, М-ДЛС,
Марсианский газоаналитический комплекс (МГАК). Исследования состава атмосфе¬
ры составляют главную научную задачу прибора ФАСТ. Основной режим наблюде¬
ния для детектирования линий поглощения малых газовых составляющих в атмос¬
ферном столбе - наблюдение солнечного диска. Измеряя поглощение газовых линий
и изотопов с высоким спектральным разрешением 0,05 см-1 в диапазоне 2-10 мкм,
прибор позволяет проводить измерения метана, вести мониторинг содержания Н2О
и HDO и отношения D/Н, СО, Н2О2, О3. Прибор ФАСТ позволит уточнить верхние
пределы, или обнаружить новые соединения: органические (С2Н2, С2Н4, С2Н6, СН2О),
азотосодержащие (NH3 NO2), хлорсодержащие (НС1, СН3С1), серосодержащие (OCS,
SO2) и др. Водяной пар и СО также измеряются в режиме наблюдения собственного
излучения атмосферы, что, в сочетании с наблюдениями на наклонных трассах, воз¬
можно, позволит получить ограничения на вертикальное распределение этих газов.
Прибор М-ДЛС предназначен для исследований химического и изотопного соста¬
ва атмосферы вблизи поверхности Марса, его суточных и сезонных вариаций путем
спектрального анализа как атмосферных проб (при измерениях методом лазерной
абсорбционной спектроскопии в кюветах), так и интегрального содержания атмос¬
ферных компонент в нижних шкалах высот (при наблюдениях Солнца методом опти¬
ческой гетеродинной спектроскопии). Основной научной задачей прибора является
исследование вариаций изотопного состава паров воды, связанного с фракциониро¬
ванием в процессах конденсации и сублимации ледяных частиц в облаках. Изотопное
фракционирование является чувствительным маркером этого ключевого процесса
атмосферного гидрологического цикла воды на Марсе, но до настоящего момента
оно не исследовалось. М-ДЛС представляет собой новую разработку, многие прин¬
ципы которой были продемонстрированы при создании Газо-хроматографического
комплекса для проекта «Фобос-Грунт» и при разработке аналогичного прибора для
проекта «Луна-Ресурс».
Атмосферные задачи может выполнять и хромато-масс-спектрометр МГАК. По¬
мимо своей основной научной задачи - изучения взаимодействия атмосфера - по¬
верхность, он позволит измерить изотопные отношения основных летучих элемен¬
228
тов: D/H, 17О/16О, 18О/16О, l3C/12C, 34S/32S, 37С1/35С1, а также содержание и изотопный
состав благородных газов, не измеряемых иными методами.
Исследование взаимодействия атмосферы и поверхности
Задача исследования взаимодействия атмосферы и поверхности решается ком¬
плексно с применением как специальных средств физико-химической диагностики
поверхности, так и анализа атмосферных процессов. В решение этой задачи вносят
свой вклад многие приборы, особое место занимает исследование летучих компонент
грунта и их распространения в приповерхностной атмосфере Марса. Летучие могут
взаимодействовать с реголитом поверхности как на физическом уровне (вымерзание
и адсорбция ночью в охлажденный реголит и выделение из реголита с прогревом
днем), так и через разнообразные химические реакции.
Для анализа и оценки условий на поверхности и под поверхностью предназначе¬
ны приборы РАТ-М, Активный Детектор Нейтронов и Гамма-лучей (АДРОН ЭМ).
Атмосферные процессы будут анализировать М-ДЛС, МТК, ФАСТ. Взаимодействие
атмосферы и поверхности составляет основную задачу МГАК, который предназначен
для исследования летучих и в грунте, и в атмосфере.
Основной научной задачей прибора РАТ-М является бесконтактное измерение
радиояркостной температуры марсианского грунта (реголита) на глубинах до полу¬
метра. Физическая температура марсианского реголита на указанных глубинах непо¬
стоянна и зависит от местных времени суток и сезона. Информация о радиояркостной
температуре реголита на различных глубинах позволяет судить о параметрах реголи¬
та: теплопроводности, теплоемкости, диэлектрических свойствах. Анализ зависимо¬
сти температуры реголита от глубины позволяет также обнаружить наличие в нем тех
или иных включений, например, льдов. Близкий прототип прибора РАТ разрабатыва¬
ется для лунных посадочных аппаратов.
Одной из основных научных задач эксперимента АДРОН-ЭМ является опреде¬
ление содержания связанной воды в составе грунта Марса на глубине до 0,5-1,0 м
и длительный мониторинг этого содержания. Прибор также позволит исследовать
физические свойста приповерхностного грунта (слоистая структура, плотность,
температурные эффекты). Совместные измерения прибора АДРОН-ЭМ и прибора
АДРОН-РМ (Nikiforov S. et al., 2013), установленного на мобильной платформе (мар¬
соход ЕКА), позволят более детально исследовать профиль по глубине, проводя заме¬
ры затухания нейтронного сигнала от импульсного нейтронного генератора по мере
удаления марсохода от посадочной платформы. Прибор АДРОН-ЭМ основан на раз¬
работках для проектов MSL
Прибор СТЭМ предназначен для долговременного мониторинга физических
свойств поверхностного слоя марсианского грунта. Исследования предполагают из¬
мерения тепло- и электрофизических характеристик. Обмен воды между поверхност¬
ным грунтом и атмосферой планеты имеет хорошо выраженный сезонный ход и зави¬
сит от географической широты. Сезонное появление в поверхностном слое водяного
льда и связанной воды может вызывать изменение его теплофизических характери¬
стик. Одновременное наличие в марсианском грунте солей и льда может привести
к временному появлению в нем жидкой фазы в форме пленок солевых растворов, что
вызовет увеличение электропроводности и диэлектрической проницаемости грунта.
229
СТЭМ является новой разработкой, в которой использован опыт создания прибора
ТЕРМОФОБ проекта «Фобос-Грунт».
Прибор М-ДЛС, совместно с прибором ФАСТ, позволит провести исследования
химического и изотопного состава атмосферы вблизи поверхности Марса, его суточ¬
ных и сезонных вариаций и, совместно с комплексом МГАК, - химического и изотоп¬
ного состава летучих компонент грунта.
Комплекс МГАК позволит исследовать содержание воды и других летучих соеди¬
нений в породах.
Исследования состава поверхности
Исследования состава поверхности на стационарной платформе являются допол¬
нительной научной задачей, тем не менее, ее решение российскими приборами по¬
зволит существенно дополнить измерения на марсоходе, особенно учитывая возмож¬
ные ограничения на число анализируемых им кернов.
К числу приборов, непосредственно исследующих состав грунта, относятся
АДРОН-ЭМ, АБИМАС, МГАК.
Гамма-спектрометр, входящий в состав АДРОН-ЭМ, позволит провести опреде¬
ление элементного состава подповерхностного грунта на глубину до 0,5 м, измеряя
вторичные нейтронное и гамма-излучение. Полученная в результате активного им¬
пульсного зондирования возможность обойтись без взятия и подготовки проб грунта
является важным преимуществом прибора АДРОН-ЭМ, обеспечивающим высокую
надежность измерений.
Внутреннее строение Марса
Сейсмические измерения на поверхности Марса должны внести свой вклад в ре¬
шение фундаментальных вопросов исследования внутреннего строения планеты,
таких, как размер ядра, состав мантии и коры, толщина коры. Эти данные важны
для решения проблемы происхождения планет, закономерностей их эволюции, а так¬
же для получения ответов на вопросы о тектонической активности Марса, природы
магнетизма, проблемы воды и пр. Хотя до сих пор сейсмичность Марса не обнару¬
жена, опыт земной и лунной сейсмологии позволяет рассчитывать, что и на Марсе
сейсмология окажется ведущим методом при изучении внутреннего строения. Един¬
ственные пока измерения на КА «Викинг» при помощи сейсмометра, сильно ограни¬
ченного в ресурсах, позволили получить лишь одну запись, подобную сейсмической.
Основной объем данных составили ветровые шумы; в редкие периоды затишья по¬
лучены оценки сейсмических сигналов, составляющие единицы микрон в диапазоне
частот 1-8 Гц.
Прибор Сейсмогравиметр и наклономер («СейсмогранЭкзоМарс», СЭМ) состоит
из двух одинаковых блоков. Каждый блок состоит из двухкоординатного горизон¬
тального сейсмометра, являющегося одновременно двухкоординатным наклономе¬
ром, и вертикального сейсмометра, одновременно исполняющего функции грави¬
метра, блока электроники и системы вертикализации. Горизонтальный сейсмометр
предназначен для измерения сейсмических горизонтальных колебаний основания
в диапазоне частот 10-2—10 Гц и медленных наклонов основания на периодах меся¬
цы-годы. Вертикальный сейсмометр предназначен для измерения вертикальной ком¬
поненты колебаний основания в диапазоне частот 10-2—10 Гц и медленных вариаций
ускорения свободного падения. Показания наклономера позволяют вводить поправки
230
в измерения вариаций ускорения свободного падения, связанные с наклонами осно¬
вания прибора.
Собственная частота механических колебаний горизонтального сейсмометра-на¬
клономера - около 2 Гц, величина пробной массы -100 г, а разрешение по горизон¬
тальным ускорениям -8 10-10 м/с2. Для вертикальной компоненты прибора предель¬
ное разрешение по ускорениям на частоте 1 Гц составит -8* 10-9 м/с2.
Мониторинг радиационной обстановки и других факторов
Длительный мониторинг радиационной обстановки на поверхности Марса прежде
всего важен для будущих планов по освоению планеты, в том числе для пилотируемых
полетов. Дозиметр, входящий в состав прибора АДРОН, позволит проводить измере¬
ния как в условиях спокойного Солнца, так и в ходе солнечных протонных событий.
Для мониторинга электромагнитной обстановки на поверхности Марса служит
комплекс Монитор Электромагнитных Эмиссий (МЭГРЭ). Новый эксперимент,
никогда ранее не проводившийся на поверхности Марса, может дать информацию
по многим направлениям: исследование намагниченности пород на месте посадки,
мониторинг эффектов взаимодействия межпланетной среды с ионосферой Марса
на поверхности планеты, электромагнитных эмиссий атмосферного происхождения.
В качестве дополнительной задачи возможен вклад в изучение внутреннего строения
планеты с помощью методов электромагнитного зондирования, основанных на ана¬
лизе отклика глубинных проводящих структур на индукционное возбуждение пере¬
менными электромагнитными полями естественного происхождения.
В комплекс МЭГРЭ входят: феррозондовый датчик, трехкомпонентный датчик пе¬
ременного магнитного поля, дипольная электрическая антенна и блок электроники.
В нем планируется использовать датчики и системы, разработанные для многих кос¬
мических проектов («Фобос-Грунт», «Луна-Глоб», «CubeSat», «Метеор-МП»).
Заключение
Планируемые эксперименты с помощью комплекса научной аппаратуры на по¬
садочной платформе «ЭкзоМарс» позволят решить ряд приоритетных задач иссле¬
дования Марса. Основные ожидаемые результаты KHA-ЭМ можно сформулировать
следующим образом:
- Получение метеорологических данных (как атмосферы, так и приповерхностно¬
го слоя) в течение марсианского года. Это позволит усовершенствовать суще¬
ствующие модели марсианского климата, что очень важно как с научной точки
зрения, так и для подготовки дальнейшего освоения Марса.
- Мониторинг состояния пограничного слоя атмосферы и выше (0-50 км), в том
числе определение характеристик аэрозоля и измерения температурного профи¬
ля, наблюдения сезонных и суточных вариаций химического состава атмосферы,
включая чувствительные измерения малых составляющих.
- Фотографирование места посадки, получение панорамных снимков. Ожидается
получение первых в истории советского и российского освоения космоса сним¬
ков и панорам поверхности Марса, что представляет значительный интерес как
для широкой публики, так и для научных целей проекта. Также возможно визу¬
альное сопровождение марсохода ЕКА на первых этапах его работы и наблюде¬
ние сезонных вариаций.
231
- Определение содержания воды в приповерхностном слое. Долгое время жизни
платформы позволяет оценить вариативность содержания воды в поверхностном
слое. Важным аспектом является также синергия измерений с орбитальным КА
и марсоходом, что позволит получить уникальный массив данных.
- Получение данных об элементном и изотопном составе реголита в месте посадки
и наблюдение вариаций в течение времени жизни посадочной платформы. Полу¬
чение данных о реголите в новой точке позволит дополнить наши знания о геоло¬
гическом строении Марса, наблюдения в течение значительного периода времени
помогут глубже изучить взаимодействие атмосферы и поверхности.
- Проведение дозиметрических измерений в течение времени жизни посадочной
платформы. Получение подобных данных является принципиальным для прове¬
дения пилотируемых экспедиций к Марсу.
- олучение сведений о сейсмической активности Марса. На основе данных о сейс¬
мических колебаниях даже в одной точке наблюдений можно получить физи¬
ческие оценки, позволяющие уточнить модели внутреннего строения планеты
(данные о мощности коры, о скорости распространения сейсмических волн как
функции глубины, о размерах ядра). Возможна совместная работа с сейсмоме¬
тром миссии НАСА «InSight».
232
2. ПРОЕКТ «ЭКЗОМАРС»: ЕКА - СЛЕДУЮЩИЙ ЭТАП
НАУЧНЫХ ИССЛЕДОВАНИЙ МАРСА
X. Ваго, О. Витасе, П. Бальони, А. Хальдеманн,
Дж. Джанфильо, Т Бланкар, Д. Маккой, Р. де Гроот
Миссия «ЭкзоМарс» 2018 года (ныне «ЭкзоМарс-2022»)
В рамках миссии предполагается выполнение двух главных научных задач про¬
граммы и всех технических задач. На борту марсохода «ЭкзоМарс» будет находиться
комплекс научных приборов, названный в честь Луи Пастера и предназначенный для
проведения экзобиологических и геологических исследований. Марсоход, способ¬
ный перемещаться на расстояние нескольких километров, выполнит поиск признаков
прошлой и настоящей жизни путем сбора образцов каменистой обнаженной породы
и грунта из подповерхностного слоя (до глубины 2 м) и их анализа. Уникальной осо¬
бенностью миссии является сочетание мобильности и возможности доступа к зонам,
где могут сохраниться органические молекулы. Кроме того, планируется разместить
на посадочной платформе приборы для исследования среды на поверхности Марса,
однако датчики для этих исследований еще не выбраны.
Поиск следов жизни
Термин «экзобиология», в самом широком понимании, означает изучение проис¬
хождения, развития и распространения жизни во Вселенной. Достоверно установле¬
но, что жизнь на молодой Земле зародилась очень рано. Исследуя палеонтологические
данные, ученые выяснили, что уже 3,5 миллиарда лет назад жизнь на Земле достигла
высокой степени биологического развития. С тех пор живые организмы проявили
высокую приспосабливаемость, обживая самые разнообразные места обитания, на¬
ходящиеся в широком диапазоне температур, давления и химического состава среды.
Климат Марса холодный и сухой. Его поверхность сильно окислена, подвержена
разрушающему воздействию ультрафиолетового света и ионизирующего излучения.
Низкая температура и давление исключают существование воды в жидкой форме, она
присутствует лишь в чрезвычайно ограниченных областях и только периодически.
Тем не менее, многочисленные признаки, такие как широкие каналы, сети развет¬
вленных долин и осадочные горные породы, свидетельствуют о присутствии в про¬
шлом на поверхности Марса большого количества воды. Размеры каналов, образо¬
ванных существовавшими когда-то водными потоками, говорят об огромных объемах
воды, превышающих любые известные наводнения на Земле. Геологическая история
Марса, следы которой сохранились до наших дней, насчитывает приблизительно
4,5 миллиардов лет. Основываясь на количестве перекрывающихся кратеров, можно
сделать вывод, что возраст старейших рельефов составляет около 4 мрлд лет, а наи¬
более молодых - менее 100 млн лет. Большинство сетей речных долин имеет древ¬
ний возраст (4,0-3,5 млрд лет). В наше время вода на Марсе в стабильном состоянии
присутствует только в виде льда на полюсах, в виде обширных подземных участков
вечной мерзлоты и в виде атмосферных примесей. С биологической точки зрения,
сам факт существования в прошлом воды в жидком состоянии заставляет задуматься
о жизни на Марсе. Несмотря на преобладание на планете холодного климата, в те¬
233
чение первых 500 млн лет на поверхности существовали теплые и влажные зоны.
Возможно, жизнь на Марсе зародилась независимо приблизительно в то же время,
что и жизнь на Земле. Существует также вероятность перемещения земных организ¬
мов на Марс метеоритами. Согласно другой гипотезе, жизнь могла зародиться в те¬
плых и влажных подземных зонах. Принимая во внимание открытие разнообразной
биосферы на километровой глубине под поверхностью Земли, можно сделать вывод
о вероятности существования на Марсе подобной колонии микроорганизмов, заняв¬
ших эту экологическую нишу после исчезновения благоприятных условий на поверх¬
ности. Существует также вероятность того, что жизнь зародилась на Марсе в более
ранний период, когда вода существовала на поверхности, и сохранилась в подземных
областях. Такое предположение заставляет рассматривать планету в качестве главно¬
го кандидата для поиска жизни за пределами Земли.
Наиболее вероятный период зарождения жизни на Марсе - первые 0,5-1 млрд лет
его истории. В тот период условия на планете были сходны с условиями на Земле:
вулканическая и гидротермальная активность, падения метеоритов, большие водое¬
мы (возможно, покрытые льдом), и не слишком разреженная атмосфера. Тем не ме¬
нее, высока вероятность обнаружения убедительного свидетельства существования
древних микроскопических форм жизни.
На поверхности нашей планеты постоянное присутствие проточной воды, сол¬
нечное ультрафиолетовое излучение, атмосферный кислород существование жизни
как таковой стирает все следы мертвых организмов. Единственная возможность их
обнаружить - найти их биосигнатуры в защищенной среде - например, внутри пласта
скальной породы. Однако, учитывая изменения большинства древних рельефов, вы¬
званные высокотемпературными метаморфическими процессами и сдвигами текто¬
нических плит, на Земле трудно найти скалы старше 3 миллиардов лет в хорошем
состоянии. На Марсе же тектоническая активность была не так высока, как на Земле.
Это означает, что сохранились горные породы, сформированные в самые ранние пе¬
риоды марсианской истории и не подвергшиеся разрушающему воздействию высо¬
ких температур. Следовательно, учеными могут быть обнаружены хорошо сохранив¬
шиеся древние биомаркеры. Почему же они не были найдены по сей день? Возможно,
ответ на этот вопрос кроется в том, в какие периоды и какими методами проводились
исследования Марса.
В 1976 году два спускаемых аппарат «Викинг» выполнили первые контактные
измерения, основной задачей которых было обнаружение органических соединений
и следов жизни на Марсе. Комплекс научной аппаратуры для биологических ис¬
следований миссии «Викинг» включал в себя три прибора, каждый из которых был
предназначен для поисков следов метаболизма в образцах грунта. Один из них - экс¬
перимент по внесению меченых веществ (Labelled Release) дал очень интересные ре¬
зультаты. Полученные данные могли бы быть истолкованы как доказательство биоло¬
гической активности, однако результаты других экспериментов не позволили сделать
таких выводов. Тем не менее, теоретическое моделирование марсианской атмосферы
и химический состав реголита натолкнули на мысль о существовании сильных окис¬
лителей, которые могли в той или иной степени повлиять на результаты трех экспе¬
риментов. Самым большим ударом стала неудача прибора GCMS (газовый хромато-
граф/масс-спектрометр), предназначенного для обнаружения органических молекул
234
в миллиардных долях. Большинство ученых, за редким исключением, заключили, что
результаты миссии «Викинг» не подтвердили присутствие жизни. В лабораторных
условиях были предприняты многочисленные попытки имитировать реакции, наблю¬
даемые научными приборами «Викинг» при проведении биологических исследова¬
ний. В некоторых случаях удалось частично воспроизвести полученные результаты,
однако полного успеха ученые добиться не смогли. Следующий этап в нашем пони¬
мании природы марсианской поверхности стал абсолютно неожиданным. Результаты
измерений в субполярных областях северного полушария, проведенных аппаратом
«Феникс» в 2009 году, стали полной неожиданностью. На «Фениксе» был впервые
установлен прибор для «мокрого» химического анализа. В образцах грунта, собран¬
ных манипулятором, с помощью этого прибора был обнаружен анион перхлората
(СЮ4“). Перхлораты - интересные молекулы. Например, перхлорат аммония обычно
используется в качестве окислителя ракетного топлива. Его соли химически инертны
при комнатной температуре, однако при нагревании выше нескольких сотен граду¬
сов выделяются четыре атома кислорода, активно вступающие в реакцию окисления.
При анализе образцов, полученных аппаратом «Викинг», для высвобождения орга¬
нических молекул использовалось нагревание. Если в почве в местах посадки двух
аппаратов «Викинг» присутствовал перхлорат, возможно, он мог повлиять на резуль¬
таты анализа? Повторный анализ образцов позволил обнаружить некоторое количе¬
ство органических молекул, содержащих атомы хлора. На этот раз присутствие та¬
ких соединений ученые объяснили существованием остатков очищающего вещества,
использовавшегося при подготовке космического аппарата. В 2011 году марсоход
MSL (Марсианская научная лаборатория) приступил к поиску органических молекул
в образцах грунта, полученных в результате бурения скал на поверхности. Образцы
содержали те же соединения хлора, что и образцы, полученные «Викингом». Можно
сделать вывод, что результаты, полученные приборами MSL, подтверждают присут¬
ствие перхлората. Эти результаты необходимо учесть при подготовке нашей миссии.
Необходимость исследования подповерхностного слоя
Зарождение и развитие живых организмов на Марсе было возможно только при
условии наличия воды в жидком состоянии. Вода необходима для большинства про¬
цессов клеточного метаболизма. При отсутствии воды живые организмы погибают
или переходят в состояние покоя. Таким образом, поиск прошлой или сохранившейся
жизни означает поиск существовавших или существующих в течение продолжитель¬
ного времени влажных областей Марса.
Стратегия поиска следов прошлой биологической активности основывается
на предположении, что любые сигнатуры, представляющие интерес для ученых,
должны сохраниться в геологических разрезах в виде окаменелостей и органических
материалов. Принимая во внимание, что условия на поверхности Марса неблагопри¬
ятны для большинства организмов, при поиске следов сохранившейся жизни необхо¬
димо основное внимание уделять защищенным зонам, в частности, под поверхностью
и внутри обнаженных пород. Для обоих видов исследований может быть использован
один комплекс научных приборов, включая устройство для забора образцов грунта.
Как объясняется ниже, функция передвижения марсохода и возможность бурения
на глубину 2 м крайне важны для успеха научных исследований миссии.
235
Марсоход «ЭкзоМарс» выполнит поиск двух типов сигнатур жизни: морфологи¬
ческих и химических. При этом будет учитываться геологический контекст, опреде¬
ленный с высокой точностью. На поверхности скал может сохраниться морфологиче¬
ская информация, относящаяся к биологическим процессам - к примеру, отложения,
имеющие микробиологиечское происхождение, окаменевшие бактериальные маты,
строматолитовые бугры и т.д. Такого рода исследования могут быть выполнены толь¬
ко при условии мобильности и возможности получения изображений от метрового
до субмиллиметрового разрешения.
Для эффективной химической идентификации биосигнатур необходим доступ
к хорошо сохранившимся органическим молекулам. Марсианская атмосфера более
разрежена, чем земная, и поэтому поверхность Марса более подвержена воздействию
физических факторов, уменьшающих вероятность длительного сохранения биомар¬
керов: К этим агрессивным воздействиям можно отнести, во-первых, уровень ультра¬
фиолетового (УФ) излучения, значительно превосходящий значения на поверхности
нашей планеты. УФ-излучение вызывает разрушение не защищенных от него орга¬
низмов и биомолекул. Во-вторых, вызванные ультрафиолетовым излучением фото¬
химические процессы стимулируют образование реактивных оксидантов (таких, как
вышеупомянутые перхлораты), которые, в свою очередь, могут уничтожить биомар¬
керы; механизм проникновения оксидантов в подповерхностный слой недостаточно
изучен, в рамках миссии предполагается выполнить соответствующие измерения.
И, наконец, в-третьих, верхние несколько метров поверхности Марса подвержены
воздействию проникающей радиации, вызывающей замедленный процесс деграда¬
ции, приводящий на протяжении нескольких миллионов лет к тому, что содержание
органических молекул станет настолько малым, что для его обнаружения не хватит
чувствительности существующих приборов. При этом следует учитывать, что сте¬
пень воздействия ионизирующего излучения изменяется по глубине подповерхност¬
ного слоя, поскольку верхние слои получают большую экспозиционную дозу, чем
нижележащие слои.
Наиболее благоприятным периодом для возникновения жизни на Марсе были са¬
мые ранние этапы его развития, когда воды на планете было больше. Поэтому крайне
важно, чтобы марсоход совершил посадку в области, имеющей древнее происхожде¬
ние (старше 3,5 миллиардов лет). Однако следы жизни, возможно, существовавшей
на ранних этапах развития Марса, могли сохраниться после губительного воздействия
радиации и химических веществ лишь в случае длительного нахождения под поверх¬
ностью. Согласно результатам исследований, для получения хорошо сохранившихся
органических веществ, относящихся к самым ранним периодам истории Марса, не¬
обходим доступ в подповерхностный слой на глубину 2 м. Кроме того, крайне важно
избегать отложений пыли, переносимой в результате эоловой активности, поскольку
переносимые ветром материалы подвергаются воздействию УФ-излучения, ионизи¬
рующего излучения и, возможно, окислителей в атмосфере и на поверхности Мар¬
са. Биомаркеры, потенциально присутствующие в таких образцах, подверглись бы
значительной деградации. По вышеперечисленным причинам бурильное устройство,
устанавливаемое на марсоходе «ЭкзоМарс», должно иметь возможность проникать
на глубину до 2 м, чтобы достичь твердых образований, таких как осадочные породы
и эвапоритовые отложения. Бурильное устройство оснащено инфракрасным спектро¬
метром, который будет проводить минералогические исследования внутри скважины.
236
1. Исследование
камнедробилка
порошок
2. Подробный анализ
образец
органические
вещества
исследование
LDMS (масс-
спектрометрия
с лазерной
десорбцией)
Рисунок 1. Диаграмма, иллюстрирующая этапы исследований, выполняемых приборами
аналитической лаборатории «Пастер»
подробное исследование
LDMS анализатором
органических молекул
поверхности Марса
+ газовый хроматограф-
масс-спектрометр
Марсоход будет контролировать крутящий момент, глубину бурения и темпера¬
туру буровой головки. Бур, проникающий при полном развертывании на 2 м в глу¬
бину, состоит из четырех секций: одной ударной штанги, снабженной внутренней
перегородкой и устройством забора образцов, и трех выдвижных штанг. Бурильное
устройство также оснащено инфракрасным спектрометром, который будет проводить
минералогические исследования внутри скважины.
237
На Земле микроорганизмы быстро распространились по всей планете. В случае,
если на ранних этапах истории Марса имел место подобный быстротекущий процесс,
вероятность обнаружения следов прошлой жизни может быть высока. Обнаружение
и изучение форм жизни, успешно приспособившихся к современным марсианским
условиям, было бы еще более интересным. Это предполагает, однако, предваритель¬
ное определение соответствующих с геологической точки зрения и благоприятных
для жизни областей, где может быть доказано наличие воды, по крайней мере пери¬
одическое. До сих пор такие области обнаружены не были. Поэтому на этапе про¬
работки технического задания консультативная группа ученых рекомендовала ЕКА
уделить основное внимание поискам прошлой жизни, обеспечив при этом в рамках
миссии необходимые средства для обнаружения настоящей жизни.
Стратегия миссии, обеспечивающая выполнение научных задач марсохода
«ЭкзоМарс»:
- Посадка в зоне, имеющей древнее происхождение и обладающей высокой науч¬
ной привлекательностью с точки зрения поиска следов прошлой (и/или настоя¬
щей) жизни, т.е. возможность проведения исследований в требуемой геологиче¬
ской среде.
- Сбор хорошо сохранившихся научных образцов, не подвергшихся окислению
и воздействию радиации на поверхности, в разных зонах с помощью марсохо¬
да, оснащенного буровым устройством, способным проникать глубоко в грунт
и скальную породу на поверхности. Для этого необходима возможность передви¬
жения и забора образцов грунта подповерхностного слоя.
- Проведение в каждой зоне комплекса многомасштабных измерений, обеспечива¬
ющих ясное понимание геологического контекста и проведение информирован¬
ного поиска биосигнатур. На начальном этапе поиска выполняется панорамный
анализ геологической среды, затем масштаб исследований сужается и проводит¬
ся изучение текстуры горной породы. В заключение выполняется сбор тщатель¬
но отобранных образцов и их изучение с помощью аналитической лаборатории,
установленной на марсоходе.
Стратегия научных исследований с помощью комплекса «Пастер» предусматри¬
вает выполнение продуманного комплекса исследований, способных достоверно под¬
твердить или опровергнуть существование биосигнатур в каждой зоне поиска.
Для обеспечения получения марсоходом достоверных результатов, касающихся
возможного существования биосигнатур, необходима безопасная доставка аппарата
в соответствующую научным требованиям область. Эта область должна иметь древ¬
ний возраст (>4 млрд лет), морфологическое или минералогическое подтверждение
присутствия в прошлом воды в течение длительного времени, многочисленные выхо¬
ды породы на поверхность в границах эллипса посадки (для обеспечения доступно¬
сти по крайней мере некоторых из них для марсохода) и низкую запыленность.
Марсоход «ЭкзоМарс»
Номинальный срок жизнедеятельности марсохода «ЭкзоМарс» составляет
220 марсианских суток. В течение этого периода марсоход будет иметь возможность
передвигаться в пределах нескольких километров. Электропитание при этом будет
обеспечиваться солнечными батареями. Комплекс научной аппаратуры «Пастер»
238
включает в себя: приборы панорамного обзора (камеры, инфракрасный спектрометр,
подповерхностный радиолокатор и нейтронный спектрометр); приборы для контакт¬
ных исследований скальной породы на поверхности и отобранных образцов (камера
для съемки с близкого расстояния); устройство для бурения на глубину 2 м и забора
образцов грунта; система подготовки и распределения образцов (SPDS) и блок анали¬
тической лаборатории (спектрометр УФ и видимой областей спектра с формировани¬
ем изображения, рамановский спектрометр и хроматографический масс-спектрометр
с лазерно-термическим испарением вещества).
Марсоход выполнит измерения в разных масштабах. Начав с панорамного ана¬
лиза геологической среды в непосредственной близости, марсоход перейдёт к бо¬
лее детальным исследованиям текстуры осадочной горной породы на поверхности
и истории ее образования, после чего приступит к поиску биосигнатур. Кроме того,
планируется получение более детальной информации о геологическом строении под¬
поверхностного слоя.
Диаграмма, изображенная на рисунке 1, иллюстрирует последовательность
анализа образцов грунта с помощью аналитической лаборатории, установленной
на марсоходе.
239
ISBN 978-5-905646-13-3
ISBN 978-5-905646-17-1
научное издание
монография
РОССИЙСКИЙ СЕГМЕНТ
МЕЖДУНАРОДНОЙ КОСМИЧЕСКОЙ ЭКСПЕДИЦИИ
«ЭКЗОМАРС-2022»
Том 2
подписано в печать 12.10.2020
бумага мелованная
формат 70x100 1/16
печать офсетная
усл. печ. л. 15
тираж 500 экз.
издатель - АО «НПО Лавочкина»
отпечатано с готового оригинал-макета в книжной типографии
ООО «КОМПАНИЯ Полиграфмастер», 125130, Москва, ул. Клары Цеткин, д. 28.
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ
имени Семёна Алексеевича ЛАВОЧКИНА
является головным в ракетно-космической отрасли по созданию автоматических
космических комплексов для фундаментальных научных исследований Вселенной,
в том числе Солнечной системы и её планет.
Для реализации этого направления предприятие осуществляет разработку, испытания,
производство, дистанционное управление в полёте космическими аппаратами
научного и прикладного назначения, а также средств выведения
(космических межорбитальных буксиров, головных обтекателей, переходных отсеков).
АО «НПО ЛАВОЧКИНА»
ул. Ленинградская, д. 24, город Химки,
Московская область, Российская Федерация, 141402
+7(495) 251-6744, факс: +7(495) 573-3595