/
























































































































Text
А. П. КАРТАШЕВ,
Б. Л. РОЖДЕСТВЕНСКИЙ
ОБЫКНОВЕННЫЕ
ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ И ОСНОВЫ
ВАРИАЦИОННОГО
ИСЧИСЛЕНИЯ
ИЗДАНИЕ ВТОРОЕ,
ИСПРАВЛЕННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебного пособия для студентов
высших учебных заведений
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1980
22.161.6
K-27
УДК 517.9
Карта ш ев А. П., Рождественский Б. Л. Обыкновен-
Обыкновенные дифференциальные уравнения и основы вариационного ис-
исчисления.—2-е изд., перераб. и доп.— М: Наука. Главная редак-
редакция физико-математической литературы, 1979.—288 с.
Книга посвящена теории обыкновенных дифференциальных
уравнений и основным понятиям и простейшим задачам вариа-
вариационного исчисления. Излагается также метод характеристик
решения уравнений с частными производными первого порядка.
Изложение основано на широком использовании аппарата
линейной алгебры и на единообразном рассмотрении дифферен-
дифференциальных уравнений произвольного порядка путем сведения их
к системам первого порядка.
По своему содержанию книга отвечает программам вузов
с повышенным уровнем преподавания математики и содержит
ряд существенных дополнений: приближенные методы решения
дифференциальных уравнений, краевую задачу, метод прогонки,
линейные системы дифференциальных уравнений с периодиче-
периодическими коэффициентами и др.
В конце каждой главы приводятся задачи, расширяющие
и дополняющие ее содержание.
Книга предназначена для студентов высших учебных за-
заведений.
© Издательство «Наука»,
ллллл л „ Главная редакция
т. 20203—047 1Л ол ,«ЛпЛ1-лллл физико-математической
К ПеЧ/ЛОч оП 10-80 1702050000 литературы, 1Э80,
Uoo(Uzj-oU с изменениями
ОГЛАВЛЕНИЕ
Предисловие , . . . б
Глава 1
ОБЩИЕ СВЕДЕНИЯ О ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЯХ
§ 1. Общие понятия, определения и примеры 7
§ 2. Геометрическая интерпретация нормальной системы диф-
дифференциальных уравнений. Задача Коши 13
§ 3. Некоторые интегрируемые случаи одного дифферен-
дифференциального уравнения первого порядка, разрешенного от-
относительно производной 16
Задачи 25
Глава 2
ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
§ 1. Нормальная система линейных дифференциальных
уравнений 26
§ 2. Линейное дифференциальное уравнение п-го порядка 39
§ 3. Метод исключения для линейной системы дифференци-
дифференциальных уравнений 43
§ 4. Приемы, упрощающие решение линейных дифферен-
дифференциальных уравнений 45
§ 5. Линейные дифференциальные уравнения с комплексны-
комплексными коэффициентами 47
§ 6. Преобразование линейных систем дифференциальных
уравнений. Преобразование линейной системы с по-
постоянной матрицей к линейной системе с треугольной
матрицей 49
§ 7. Структура решений линейной однородной системы диф-
дифференциальных уравнений с постоянными коэффициен-
коэффициентами 52
§ 8. Линейное дифференциальное уравнение п-то порядка
с постоянными коэффициентами 57
§ 9. Линейные системы и линейные дифференциальные урав-
уравнения с постоянными действительными коэффициентами 64
§ 10. Линейное дифференциальное уравнение второго поряд-
порядка с постоянными коэффициентами 66
§ 11. Линейные системы дифференциальных уравнений с пе-
периодическими коэффициентами 76
Задачи 80
4 ОГЛАВЛЕНИЕ
Глава 3
ОБЩАЯ ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
§ 1. Теоремы существования и единственности 83
§ 2. Непродолжаемые решения 100
§ 3. Уравнения, не разрешенные относительно производной.
Особые решения 103
§ 4. Зависимость решения задачи Коши от параметров и
начальных условий 109
§ 5. Приближенные методы решения задачи Коши . . .119
§ 6. Поведение решений линейных однородных дифферен-
дифференциальных уравнений второго порядка 132
§ 7. Первоначальные сведения о краевой задаче . . . .137
Задачи 145
Глава 4
ДИНАМИЧЕСКИЕ СИСТЕМЫ
§ 1. Динамические системы и их геометрическая интерпре-
интерпретация . . . . ' 148
§ 2. Свойства решений динамических систем 149
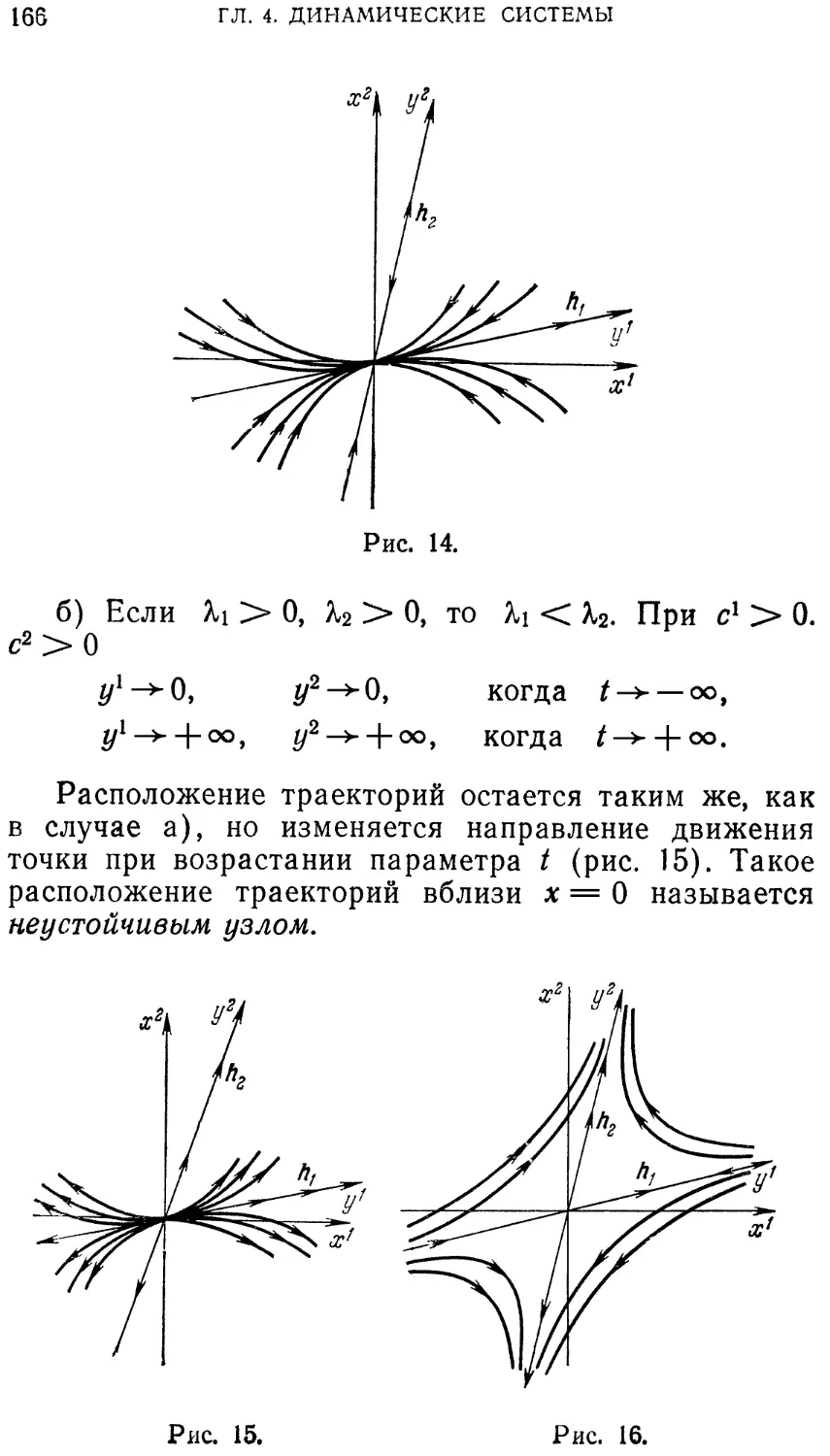
§ 3. Поведение траекторий динамических систем на пло-
плоскости 154
§ 4. Поведение траекторий линейной однородной системы
дифференциальных уравнений второго порядка с по-
постоянными действительными коэффициентами .... 164
Задачи 177
Глава 5
ТЕОРИЯ УСТОЙЧИВОСТИ
§ 1. Определения и примеры 179
§ 2. Однородная линейная система дифференциальных
уравнений с постоянными коэффициентами. Устойчи-
Устойчивость решения х = 0 181
§ 3. Лемма Ляпунова 185
§ 4. Теорема Ляпунова 188
§ 5. Консервативная механическая система с одной степенью
свободы 194
Задачи 196
Глава 6
УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ ПЕРВОГО
ПОРЯДКА
§ 1. Основные определения 198
§ 2. Понятие характеристики квазилинейного уравнения . 200
§ 3. Задача Коши для уравнения с частными производ-
производными первого порядка 203
§ 4. Решение задачи Коши для квазилинейного уравнения 205
§ 5. Линейное однородное уравнение с частными производ-
производными первого порядка и первые интегралы динамиче-
динамических систем ..,*,,* 212
ОГЛАВЛЕНИЕ 5
§ 6. Решение задачи Коши для нелинейного уравнения с
частными производными первого порядка 219
Задачи 223
Глава 7
ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
§ 1. Функционалы в линейном нормированном простран-
пространстве 225
ь
§ 2. Функционалы вида F (у) = \ f (x, у, у') dx 234
а
Ь
§ 3. Функционалы вида F (у) = \ / (х, у, у', ..., у{п)) dx . . 240
а
§ 4. Функционалы вида/7 (и) = \ \ f ( х, у, и,-^—, -r-J dxdy 242
G
§ 5. Замечания о достаточных условиях экстремума функ-
функционала 246
§ 6. Условный экстремум 250
§ 7. О приближенных методах решения вариационных задач 259
Задачи 261
ДОПОЛНЕНИЕ
§ 1. Некоторые сведения из линейной алгебры 264
§ 2. Комплексные функции действительного переменного и
действия над ними 279
§ 3. Три леммы о вектор-функциях 280
Предметный указатель , . . . 285
ПРЕДИСЛОВИЕ
Предлагаемая вниманию читателя книга написана на основе
лекций, которые авторы читали в Московском инженерно-физи-
инженерно-физическом институте. Она предназначена для студентов высших
учебных заведений и в первую очередь для студентов физико-
технических специальностей.
При изложении материала существенно используется аппа-
аппарат линейной алгебры. Применение векторов и матриц позволяет
значительно сократить изложение. Авторы предполагают, что
студенты встречались ранее с основными понятиями и методами
линейной алгебры, тем не менее в дополнении приводятся не-
некоторые сведения, необходимые для понимания излагаемого ма-
материала.
Широкое внедрение в науку вычислительных методов, свя-
связанное с появлением вычислительных средств большой мощ-
мощности, требует переоценки значения различных разделов мате-
математики и, в частности, разделов теории обыкновенных диффе-
дифференциальных уравнений. В настоящее время выросло значение
методов качественного исследования решений дифференциальных
уравнений, а также методов приближенного нахождения реше-
решений. В связи с этим мы приводим здесь некоторые сведения
о численных методах решения задачи Коши, о краевой задаче
и методе «прогонки». Большое внимание уделено теоремам су-
существования и единственности, теоремам о непрерывной зави-
зависимости решения от параметров и начальных значений.
В конце каждой главы помещены задачи, иллюстрирующие
рассматриваемые понятия и методы, а также содержащие до-
дополнительные сведения, не вошедшие в основной текст книги.
В процессе работы над книгой авторы пользовались сове-
советами многих своих коллег из Московского инженерно-физиче-
инженерно-физического института. Особенно мы благодарны Д. А. Василькову,
который прочел рукопись и сделал много критических замеча-
замечаний. Мы также признательны С. Г. Селивановой за обсуждение
содержания гл. 5.
Авторы
Глава 1
ОБЩИЕ СВЕДЕНИЯ
О ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЯХ
В этой главе вводятся основные понятия, отно-
относящиеся к обыкновенным дифференциальным урав-
уравнениям. Формулируется задача Коши для нормаль-
нормальной системы обыкновенных дифференциальных урав-
уравнений. В конце главы рассматриваются простейшие
дифференциальные уравнения первого порядка, ин-
интегрируемые в квадратурах, т. е. такие уравнения,
решения которых можно представить в виде конеч-
конечных формул, содержащих операции интегрирования
(квадратуры) и другие стандартные математические
операции.
Бее функции, встречающиеся в этой главе, будем
считать действительными.
§ 1. Общие понятия, определения и примеры
В курсе обыкновенных дифференциальных урав-
уравнений изучаются уравнения и системы уравнений, в
которых неизвестными являются функции одного дей-
действительного переменного, а в сами уравнения входят
производные от неизвестных функций.
Будем обозначать независимое переменное бук-
буквой ty неизвестные функции — x\(t), x2(t), ..., xn(t),
а производные функции x(t), как обычно, х (t),
x"(t), ..., x(m)(t). Употребляются также обозначения
x'{t) = x{t), x"(t) = ?(t) и x"'(t) = x(t).
Системой обыкновенных дифференциальных урав-
уравнений называется система уравнений вида
Ъ(и *,, *;,..., х^\..., хп, х'п9..., 4Wn))=0 (D
(/ = 1,..., о,
где ff^ — функции от указанных аргументов,
g ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
Наибольшее из чисел т\, т2, ..., тп называется
порядком системы уравнений A).
Например, в систему дифференциальных уравне-
уравнений первого порядка могут входить лишь перемен-
переменное t, неизвестные функции х\, ..., хп и их первые
производные х[, х'2, ..., х'п\ в систему уравнений вто-
второго порядка входят еще вторые производные
лх , . . ., лп>
Определение. Набор функций x\{t), ..., xn(t),
определенных на некотором промежутке Т (конечном
или бесконечном, открытом или замкнутом) оси t,
имеющих на этом промежутке те производные, кото-
которые входят в уравнения A), и удовлетворяющих
этим уравнениям при всех (еГ, называется реше-
решением*) системы уравнений A).
Очень многие физические процессы описываются
дифференциальными уравнениями. Величины, харак-
характеризующие процесс, как правило, зависят от време-
времени, поэтому, когда это удобно, мы будем интерпрети-
интерпретировать независимое переменное t как время.
Для упрощения записи употребляются векторные
обозначения. Так, набор функций x\(t), ..., xn(t)
обозначается
*@ = {*i@. .... xn(t)}9
при этом x(t) называется вектор-функцией скалярно-
скалярного аргумента t.
Производные вектор-функции определяются, как
обычно:
*(') = {*! (О, ...> *п@).
Система обыкновенных дифференциальных урав-
уравнений первого порядка
3*Ж хь ..., хп, хи ..., хп) = 0 (i = l,...9l), B)
которая в векторных обозначениях имеет вид
, х, х)=0 (/ = 1, ..., О, C)
*) Употребляется также термин частное решение.
§ I. ОБЩИЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ 9
занимает особое положение среди систем дифферен-
дифференциальных уравнений, так как к ней приводится про-
произвольная система уравнений A) (с помощью введе-
введения новых неизвестных функций и увеличения числа
уравнений).
В самом деле, вводя в уравнения A) пг =
= т\ + т2 + ... + тп новых неизвестных функций
Uv У* •••> Уп* по
Уп'-тп+\ лп> Уп'-тп+2 лл> • • •> Уп' лп '
мы получим вместо уравнений A) уравнения первого
порядка
(/ = 1, ..., 0.
Из формул D) следует, что новые неизвестные
функции удовлетворяют также следующим п' — п
уравнениям:
/ F /
Л .2.' .2. . .3'.".". Л. . Т\ F)
Уп'~т„ + 1 ^ Уп'-т„+2> •••» Уп' — \^Уп"
п п
Уравнения E) и F) образуют систему п'—п + I
обыкновенных дифференциальных уравнений первого
порядка, т. е. систему вида B).
Если в B) число уравнений равно числу неизвест-
неизвестных функций (п=1) и сами уравнения можно раз-
разрешить относительно х\, ..., хп, то систему B) мож-
можно записать в виде
*2=Ы'» *i. •••> *п)> G)
Ю ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
или сокращенно
* = /(/,*).
Система дифференциальных уравнений вида G)
называется нормальной системой обыкновенных диф-
дифференциальных уравнений. Число неизвестных функ-
функций п иногда называют порядком нормальной систе-
системы дифференциальных уравнений G).
В качестве примера рассмотрим одно дифферен-
дифференциальное уравнение m-го порядка с одной неизвест-
неизвестной функцией x(t)\
$~(t, *,*',..., *<»>) = 0. (8)
Это частный случай системы A), когда /= 1, п= 1,
ш\ = т. Вводя новые переменные
У\ = х> У2 = *'> ..., Ут = х{т~1)>
получим систему уравнений
У\ = У* У2=Уг> •••> Ут-1=Ут>
( }
УЬ ...э Ут, Ут)=0.
Если x=x(t)—какое-либо решение уравнения
(8), то набор функций y{ = x(t), #2 =*'@> • • •
..., ут = xSm-l)(t) будет решением системы уравне-
уравнений (9), и наоборот, если y\(t), ЫО, •••» ym(t) —
решение системы (9), то функция # = #iG) будет
решением уравнения (8).
Таким образом, можно сказать, что уравнение (8)
сводится к системе уравнений (9).
Если уравнение 3T(t, уи ..., ут, Ут) = 0 можно
разрешить относительно ут, то вместо системы (9)
получим нормальную систему дифференциальных
уравнений
Ук = Ук+г (k=l, ..., т— 1),
Ут = !У, Уи ..., Ут)-
При т=1 уравнение (8) будет обыкновенным
дифференциальным уравнением первого порядка:
y(t, х, х) = 0,
а соответствующая ему нормальная форма имеет вид
x = f(t,x).
§ Т. ОБЩИЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ И ПРИМЕРЫ 11
Рассмотрим два примера, связанных с решением
физических задач.
Примеры. 1. Радиоактивный распад. Пусть m(t)—масса
неустойчивого вещества в момент времени t, а а > О — сече-
сечение распада. Согласно общему закону радиоактивного распада
dm 1Л1Ч
— = _aw. A1)
Таким образом, соотношение A1) представляет собой диффе-
дифференциальное уравнение первого порядка. Легко проверить, что
при любой постоянной с функция m(t) = ce~at является реше-
решением уравнения A1); при этом с равно т@) — массе вещества
в момент времени t = 0.
Время t0 = In 2/a называется периодом полураспада:
2. Движение космического корабля вокруг Земли. При рас-
рассмотрении движения космического корабля вокруг Земли на
небольших расстояниях от нее обычно можно пренебречь при-
притяжением Солнца и других планет Солнечной системы, а также
движением Земли вокруг Солнца. В связи с этим выберем си-
систему декартовых координат с началом в центре Земли, при-
приблизительно неподвижную относительно звезд. Пренебрегая со-
сопротивлением атмосферы Земли и рассматривая корабль как
материальную точку, будем описывать его движение тремя функ-
функциями Xi(t), x2(t), Xz(t)—координатами корабля в момент
времени t.
В силу второго закона Ньютона сумма всех сил, действую-
действующих на космический корабль, должна быть равна вектору уско-
ускорения {#ь Х2, хг], умноженному на массу космического корабля.
Поэтому уравнения движения имеют вид
m(t)xi=Fi + Pl (/=1,2,3), A2)
где m(t)—масса космического корабля, xi — компоненты скоро-
скорости корабля, Ft — компоненты силы притяжения корабля Зем-
Землей, Pt — компоненты силы тяги двигателей корабля.
Как известно,
ь ^^ г=^х\ + х\ + х\% A3)
где R — радиус Земли. При работе реактивных двигателей
уменьшается масса корабля; при этом иногда можно считать*
что
i-
а>0. A4)
Величина а зависит от вида топлива, направление силы
Р = {рь р2} Я3} и ее величина в технически допустимых пре-
пределах призвольны и задаются программой полета. При заданной
12 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
силе тяги Р = P(t) определение движения корабля сводится
к отысканию четырех неизвестных функций (Xi(t) (i = 1,2,3) и
m(t)) из четырех дифференциальных уравнений A2), A4), ко-
которые образуют систему дифференциальных уравнений второго
порядка.
В простейшем случае пассивного движения корабля Р = О
m(t) = т = const и мы имеем дело с системой трех обыкно-
обыкновенных дифференциальных уравнений второго порядка:
A5)
При пассивном движении корабль остается в плоскости, в
которой лежат вектор скорости х = {х\, х2, х2} и вектор ускорения
F ( Xi х2 Хъ Л п, г,
— = "I "Т"» Т"» "~Г г 8% ' Помещая координатные оси Х\ и х2
в эту плоскость, получим систему двух уравнений (л:з = 0):
'=1.2).
A6)
Умножив каждое из уравнений A6) на соответствующее
суммируя по i = 1, 2, получим уравнение
ХХХх + Х2Х2 = ~ -^з~
которое можно записать в виде
d
-gR Tt\7)>
или
А / +~, . - _. **i D'2rr\
= 0. A7)
Уравнение A7) выражает закон сохранения энергии: сумма
m
т
кинетической энергии корабля V = — (х\ + х%) и потенциальной
гт tnR2?
энергии и = постоянна.
Из уравнения A7), как следствие, получаем одно диффе-
дифференциальное уравнение первого порядка
х\ + х\ R2g
1 2 ^=c = const A8)
Постоянная с может быть определена, если в какой-нибудь точ-
точке орбиты известны скорос
стояние г от центра Земли.
ке орбиты известны скорость корабля ^ = д/^ + *2 и его Рас
§ 2. ЗАДАЧА КОШИ 18
Соотношение A8) называют промежуточным интегралом
системы уравнений A6).
Из соотношения A8) определяется, например, вторая косми-
космическая скорость, т. е. такая скорость v0 на поверхности Земли
(г = R), при которой корабль неограниченно удаляется от Зем-
Земли. Согласно A8)
х2 + xl R2g vl
4iJ? ^ <19>
Переходя в соотношении A9) к пределу при t->~+oo и
предполагая, что при этом г->+оо, получим
откуда следует, что v20^2Rg или vQ^^/2Rg «11,2 км/с.
§ 2. Геометрическая интерпретация нормальной
системы дифференциальных уравнений.
Задача Коши
Дифференциальные уравнения и системы диффе-
дифференциальных уравнений имеют, как правило, беско-
бесконечное множество решений (см. примеры 1, 2). По-
Поэтому важным является вопрос о том, какие условия
однозначно выделяют конкретное решение из беско-
бесконечной совокупности решений. Изучением такого рода
условий мы здесь и займемся.
Рассмотрим более подробно нормальную систему
дифференциальных уравнений
* = /(/,*), A)
где * = {*',...,*»}, /(/,*) = {/'(<>*). ..-> /я(<>*)>>
причем верхние индексы обозначают номера коорди-
координат вектора.
Вектор-функцию f(t,x) будем считать определен-
определенной на некотором открытом множестве G (п + 1)-мер-
1)-мерного евклидова пространства переменных t,xl, ..., хп.
Всякое решение
(*' = <р'(а i = U ...> п) B)
системы уравнений A) определяет в (п + 1)-мерном
пространстве переменных /, х\ ..., хп некоторую кри-
кривую. Например, при п = 1 уравнение B) определяет
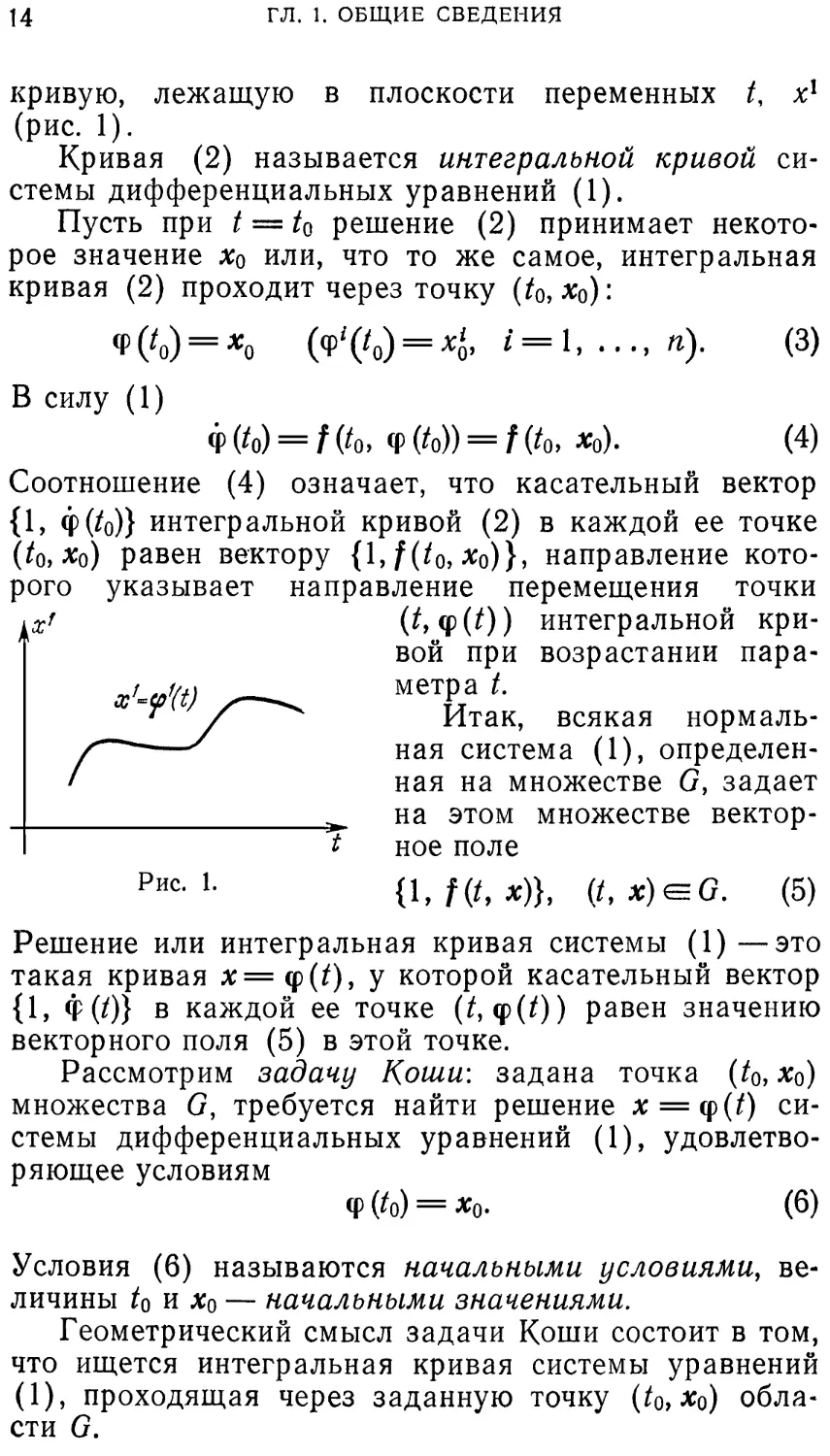
14 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
кривую, лежащую в плоскости переменных t, xx
(рис. 1).
Кривая B) называется интегральной кривой си-
системы дифференциальных уравнений A).
Пусть при t = U решение B) принимает некото-
некоторое значение х0 или, что то же самое, интегральная
кривая B) проходит через точку (to,Xo):
Ф Со) = *о (ф'Со) = 4 i = 1, • • •, п). C)
В силу A)
Ф(*о) = /(/<>, Ф Со)) = /(*<>,*<>)¦ D)
Соотношение D) означает, что касательный вектор
0> Ф(*о)} интегральной кривой B) в каждой ее точке
(to,xo) равен вектору {1, f(t0, x0)}, направление кото-
которого указывает направление перемещения точки
(t, ф (/)) интегральной кри-
кривой при возрастании пара-
метра L
Итак, всякая нормаль-
нормальная система A), определен-
определенная на множестве G, задает
на этом множестве вектор-
ное поле
РисМ' {l,f(t,x)}9 (t,x)<=Q. E)
Решение или интегральная кривая системы A)—это
такая кривая *= <р@> У которой касательный вектор
{1, Ф(/)} в каждой ее точке (/, <р@) равен значению
векторного поля E) в этой точке.
Рассмотрим задачу Коши: задана точка (/о, #о)
множества G, требуется найти решение x = q>(t) си-
системы дифференциальных уравнений A), удовлетво-
удовлетворяющее условиям
) = *о. F)
Условия F) называются начальными условиями, ве-
величины (ои^о — начальными значениями.
Геометрический смысл задачи Коши состоит в том,
что ищется интегральная кривая системы уравнений
A), проходящая через заданную точку (t0) x0) обла-
области G.
4 2. ЗАДАЧА КОШИ 15
Оказывается, что при некоторых предположениях
относительно правых частей системы уравнений A)
эта задача всегда разрешима, и более того, решение
единственно *).
Важность задачи Коши с физической точки зрения
состоит в том, что начальные условия, присоединен-
присоединенные к системе дифференциальных уравнений, описы-
описывающих какой-либо процесс, делают задачу «физиче-
«физически определенной».
Например, начальное условие в задаче о радио-
радиоактивном распаде задает массу вещества т@) в на-
начальный момент времени t = О, после чего по фор-
формуле
m(t) = m@)e"at G)
масса вещества вычисляется в любой момент времени.
Поясним введенные понятия на примере одного
уравнения
Множество G в данном случае есть множество точек
(t, х), у которых ^=7^=0, г. е. плоскость t, x с исклю-
исключенной осью х.
Легко проверяется, что при любом k функция
х = Ы (9)
есть решение уравнения (8).
Пусть (to, xo) (to Ф0) — произвольная точка мно-
множества G. Будем искать среди решений (9) решение,
проходящее через точку (to,xo). Подставляя в (9)
координаты точки (to, x0), находим k=xojU. Таким
образом, получаем решение задачи Коши для урав-
уравнения (8) с начальными значениями t0, xq:
*=4Ч (Ю)
где t изменяется в интервале @, +°°)> если to > 0,
и в интервале (•—оо,0), если /0 < 0. Соответствую-
Соответствующая интегральная кривая представляет собой полу-
полупрямую (соединяющую точки @,0) и (^> #о))> из ко-
которой выброшена точка @, 0).
Подробно эти вопросы будут рассмотрены в гл. 3.
16 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
Рассмотрим уравнение п-го порядка, разрешенное
относительно старшей производной:
yM=F(t, у,у\..., y*-{)). A1)
Как было показано в § 1, уравнение A1) сводится
к нормальной системе дифференциальных уравнений
xn=F{t, х\ ..., хп)
с п неизвестными функциями
х1 = у, х2 = у\ ..., хп = ур~хК
Начальные условия для системы уравнений A2)
имеют вид
„) = ** *" ('„) = *!?• A3>
Условия A3) переходят в следующие условия для
решения уравнения A1):
у Со)=4 у' Со)=4 • • • > у{п~1) Со)=*?¦
В связи с этим задача Коши для уравнения A1)
ставится так: ищется решение y = y{t) уравне-
уравнения A1), удовлетворяющее следующим начальным
условиям:
у Со)=у* уг Со)=*;.¦¦¦. у{п~1) Со) = <"!).
где (/0, г/0, ..., ^п~1))— произвольная фиксирован-
фиксированная точка из области определения функции F.
§ 3. Некоторые интегрируемые случаи одного диф-
дифференциального уравнения первого порядка, раз-
разрешенного относительно производной
1. Самым простым случаем одного уравнения пер-
первого порядка является уравнение вида
0)
где f(t) —заданная функция, непрерывная на некото-
некотором интервале (а,Ь). Задача нахождения решения
§ 3. НЕКОТОРЫЕ ИНТЕГРИРУЕМЫЕ ЧАСТНЫЕ СЛУЧАИ 17
x = x(t) в данном случае есть классическая задача
математического анализа об отыскании функции по
ее производной. Как известно, эта задача решается
с помощью понятия первообразной:
х =
Поскольку все первообразные отличаются одна от
другой на постоянную, то любое решение можно за-
записать в виде
t t
(а0 < /о < Ь), B)
так как С есть значение x(t) при t = to. Решение B)
определено на всем интервале (а, Ь).
Выражение B) дает все первообразные функции
для f(t), поэтому формула B) содержит все реше-
решения уравнения A). В этом случае говорят, что B)
есть общее решение уравнения A).
2. Уравнение вида
* = Ш)Ш) (Ш?=0) C)
или
g(x)x=f(t) (g(x) = -l-r f(t) = h(t)) C0
называется уравнением с разделяющимися перемен-
переменными. Функцию f\(t) будем предполагать непрерыв-
непрерывной при а < / < fr, a функцию /2 (я)—непрерывной
при с < х < d.
Фиксируем какие-либо значения to^(a9b)t Xo^.
е {с, d) и рассмотрим функции
t х
F(t) = \f(x)dx, G(x) = \g(®dl,
U Xq
определенные соответственно на интервалах а < t <
<ibnc<ix<.d. Покажем, что уравнение
G(x)-F(t) = 0 D)
определяет х как неявную функцию t, являющуюся
решением уравнения C) и удовлетворяющую началь-
18 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
ному условию x{to)=xo. Так как G'(x) = g(x) =
= If2(x)]~l ФО, то существует обратная по отноше-
отношению к 6(х) функция h{z) и из уравнения D)
x = x{t) = h{F{t)).
Эта сложная функция заведомо определена при
всех t, достаточно близких к /0, так как /7(/0)=0 и
h(z) определена на некоторой окрестности нуля. Вы-
Выполнение начальных условий явствует из соотношений
F(to) = O, G(*o) = O. Вычислим производную функции
x(t):
Таким образом, x(t) — решение уравнения C).
Хотя уравнение D):
E)
и не дает явного выражения для решения, тем не ме-
менее задача интегрирования дифференциального урав-
уравнения C') считается выполненной, так как обращение
функции О(х) есть классическая задача математиче-
математического анализа.
Пример. Формула Циолковского. Рассмотрим прямолиней-
прямолинейное движение ракеты под действием силы тяги двигателей. Най-
Найдем скорость ракеты (пренебрегая силой тяготения и сопротив-
сопротивлением воздуха).
Обозначим массу ракеты в момент времени t через m(t),
а скорость v(t), тогда закон сохранения импульса запишется
в виде
d(mv) + (v0 ~ v) dm = О,
или
mdv + vodm = 0,
где v0 — скорость истечения продуктов горения. Это же уравне-
уравнение можно получить из уравнений, описывающих движение кос-
космического корабля (см. пример 2 на стр. 11), в которых нужно
положить Fi =0, х2 = #з = 0s Рг = ^з = 0, а = \/v0. Таким
образом, для нахождения скорости мы получили уравнение с
разделяющимися переменными. Решая его получим
v (т) = — vq In m 4- с.
§ 3. НЕКОТОРЫЕ ИНТЕГРИРУЕМЫЕ ЧАСТНЫЕ СЛУЧАИ 1§
Пусть в начальный момент времени скорость ракеты равна
нулю, а ее масса (с полным запасом топлива) М, тогда
v (М) = О,
откуда следует, что с = vq In M и
vim) = t>o In—.
т
Полученная формула называется формулой Циолковского.
3. К уравнению с разделяющимися переменными
приводится уравнение вида
x=f(i), (в)
в котором функция f(y) предполагается заданной и
непрерывной на некотором интервале у\ <С у <С \)i
(таким образом, множество G в плоскости t, x пред-
представляет собой открытое множество, границу которого
образуют прямые x = yxt и дс = #20' Уравнение F)
называется однородным уравнением.
Произведем замену зависимого переменного х по
формуле
x = yt, G)
где y = y(t)—новая неизвестная функция. Диффе-
Дифференцируя G) по t и подставляя полученное выраже-
выражение в F), получим
ty=f{y)-y. (8)
Уравнение (8) есть уравнение с разделяющимися пе-
переменными. Решая его указанным выше способом, по-
получим
Следует отметить, что помимо решений, заданных
формулой (9), уравнение (8) может иметь еще реше-
решения вида
У = Уо = const, A0)
где у0 — корень уравнения f(y) = y- Решению A0)
уравнения (8) отвечает решение x = yot уравне-
уравнения F).
20 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
К однородному уравнению приводится уравнение
более общего вида
х
где f(z) непрерывна на некотором интервале z\ <
< z < z2. Если ab — аC ф 0, то, производя замену
зависимого и независимого переменных по формулам
получим однородное уравнение. Если ab — аC = 0, то
заменой у = ах + fit рассматриваемое уравнение
приводится к уравнению с разделяющимися перемен-
переменными.
4. Уравнение вида
x=a(t)x + g(t) A1)
называется линейным уравнением, а уравнение
У = аA)у A2)
— однородным линейным уравнением, соответствую-
соответствующим уравнению A1). Функции a(t) и g(t) предпола-
предполагаются непрерывными при t\ <C t <C h-
Решая уравнение A2) как уравнение с разделяю-
разделяющимися переменными, получим
A3)
Решение неоднородного уравнения A1) будем
искать в виде
x = C(t)e'* , A4)
т. е. в виде произведения некоторой функции C(t) на
решение соответствующего однородного уравнения.
Такой метод нахождения решений неоднородных ли-
линейных уравнений с помощью решения однородного
уравнения называется методом вариации постоянной.
Константа С в решении A3) однородного уравнения
A2) заменяется на функцию C(t), и в таком виде
ищется решение неоднородного уравнения A1).
§ 3. НЕКОТОРЫЕ ИНТЕГРИРУЕМЫЕ ЧАСТНЫЕ СЛУЧАИ 21
Подставив A4) в A1), получим уравнение для
C(t):
- J а (?) dx
Функция C(t) находится с помощью квадратуры:
' - $ а (?) dx
C(t)=)g@e '• dt + Cl9 A5)
где С\ — новая произвольная постоянная. Подставляя
A5) в A4), получим решение уравнения A1):
-к.
- $ a (?) dx
xtf)=\\g(Qe '•
Решим задачу Коши для уравнения A1). Пусть
начальное условие имеет вид х(/о)=*о. Полагая
в A6) t = tOy получим С\ = Хо. Таким образом, реше-
решение задачи Коши для уравнения A1) дается фор-
формулой
t\ -$a(?)rf? I {a{x)dx
\g®e <° rfC + ^ol^ . A7)
Пример. Пусть в некоторый объем за единицу времени
вводится извне масса g(t) неустойчивого вещества, m(t) —
масса вещества в этом объеме в момент времени t. Тогда для
m(t) имеем линейное дифференциальное уравнение
dm . ...
-—- = — am + g (t),
dt isw»
где a > 0 — постоянная распада.
Пусть g(t) = go = const, m@) = 0. Тогда, согласно A7),
имеем решение
Когда *->+оо, m(?)->—, т.е. процесс становится стационарным.
22 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
5. К линейному уравнению сводится уравнение
Бернулли
x = f(t)x + g(t)xn (пф19 л#0),
где f(t) и g(t) непрерывны на некотором интервале
U < t < t2. Замена неизвестной функции
хх~п = у
приводит уравнение Бернулли к линейному уравне-
уравнению для у:
TZrS
6. Уравнение
* = t(Ux) A8)
можно записать в виде
M(t, x)dt + N(t, x)dx = 0, A9)
если функции M(t,x) и N(t,x) удовлетворяют уело*
вию
Пусть M(t, x) и N(t,x) определены на некотором
открытом множестве D плоскости t, x и непрерывны
на нем. Может случиться, что функции M(t,x) и
N(t,x) удалось выбрать такими, что они удовлетво-
удовлетворяют условию B0) и в то же время левая часть
уравнения A9) является полным дифференциалом,
т. е. существует такая функция V(t9x)> что на мно-
множестве D
dV (/, х) = М (/, x)dt + N (t, x) dx.
В этом случае уравнение A9) имеет вид
dV(t,x) = 0,
и потому формула
V(U x) = C B00
определяет все решения уравнения A9). Уравнение
B0г) определяет неявную функцию x(t), являющую-
являющуюся решением дифференциального уравнения A9).
Эта неявная функция зависит от С. Изменяя С, полу-
получаем множество всех решений уравнения A9).
§ 8. НЕКОТОРЫЕ ИНТЕГРИРУЕМЫЕ ЧАСТНЫЕ СЛУЧАИ 23
Уравнение A9), левая часть которого является
полным дифференциалом, называется уравнением в
полных дифференциалах.
Если производные -^ и -^- непрерывны на множе-
множестве D, то для того чтобы выражение Mdt + Ndx
было полным дифференциалом, необходимо условие
B1)
дМ
дх
Это следует из равенств
дМ d2V
дх dxdt
dN
~~ dt '
d2V
dtdx
dN
dt
Замечание. Из курса математического анализа
известно, что если D — односвязная область, то усло-
условие B1) достаточно для того, чтобы уравнение A9)
было уравнением в полных дифференциалах.
Уравнение A9) может быть сведено к уравнению
в полных дифференциалах, если удастся найти функ-
функцию ji(/, х) Ф 0, непрерывную вместе с частными про-
производными первого порядка, такую, что выражение
ji(/, x) [M(t, x)dt + N(t, x)dx] будет полным диффе-
дифференциалом. Такая функция называется интегрирую-
интегрирующим множителем уравнения A9).
Применяя необходимые условия B1) к рассмат-
рассматриваемому случаю, получим, что интегрирующий мно-
множитель должен удовлетворять уравнению
?(М*)=-^-(М0. B2)
или
дЫ дМ
Уравнение B2) или B3) является уравнением с
частными производными. Решение этого уравнения —
задача, вообще говоря, не более легкая, чем решение
исходного уравнения A9). Более того, в процессе ре-
решения уравнения B3) приходится решать уравне-
уравнение A9).
24 ГЛ. 1. ОБЩИЕ СВЕДЕНИЯ
Однако в некоторых случаях удается найти инте-
интегрирующий множитель подбором. При этом бывает
полезна следующая
Теорема. Если ji(^, х) — интегрирующий множи-
множитель уравнения A9), т. е. \хМ dt + \xN dx = dV(t, x),
то интегрирующим множителем является и функция
(p(F)-jLi, где ф(г)—произвольная непрерывная функ-
функция, не равная нулю.
В самом деле, пусть F(z)—первообразная для
4>(z):F'(z) = <p(z). Тогда
Таким образом, ф(У)[л — интегрирующий множитель
уравнения A9). Теорема доказана.
Пример. Известно, что состояние газа, находящегося в
термодинамическом равновесии, характеризуется двумя термо-
термодинамическими параметрами. Пусть это будут удельный объем
V и давление р. При адиабатическом процессе внутренняя энер-
энергия е газа изменяется согласно второму закону термодинамики:
de + p dV = 0. B4)
Внутренняя энергия е зависит только от р и V. Уравнение
B4) есть уравнение вида A9). Один из интегрирующих множи-
множителей уравнения B4) (задаваемый дополнительными условиями)
обозначается 1/7", величина Т называется температурой. Итак,
есть полный дифференциал некоторой функции S(p, У), назы-
называемой энтропией.
Для идеального политропного газа с показателем адиа-
адиабаты V
V- 1
и уравнение B4) принимает вид
_L_. pdV + _!_ V dp = о. B5)
1 R
После умножения B5) на \i = -=-= "~~р" (R — газовая по-
постоянная) получим уравнение в полных дифференциалах
yR dV R dp _
y-\ V ^ y-l p
Левую часть этого уравнения запишем в виде
ЗАДАЧИ 25
Итак,
Задачи
1. Показать, что решение задачи Коши для ли-
линейного уравнения
x = a(t)x + g(t)
с начальным условием x(to) = xo можно записать в
виде
t
п
где u(t, т) — решение однородного уравнения
iJ = a{t)y, A)
удовлетворяющее начальному условию (при t = х)
и(х, х) = 1.
Решение u(t, х) можно записать в виде ^(^) = "^)>
где v(t) — любое нетривиальное решение однородно-
однородного уравнения A).
2. Уравнение Риккати
в общем случае не решается в квадратурах. Пока-
Показать, что если известно его частное решение x\(t), то
заменой переменных x = #i(^) + # уравнение Рикка-
Риккати сводится к уравнению Бернулли, которое уже мо-
может быть решено в квадратурах.
3. Доказать, что для того, чтобы уравнение
M(t, x)dt + N(t, x)dx = 0,
где M(t9 x), N(t, x), -^j- и -gjr непрерывны в одно-
связной области D и М ф 0 в Д допускало интегри-
интегрирующий множитель, зависящий только от х, необхо-
димо и достаточно, чтобы функция -^ [-щ j^-
зависела только от л\
Глава 2
ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ
В этой главе будут подробно изучены нормальные
системы линейных дифференциальных уравнений с
действительными и комплексными коэффициентами,
а также линейное дифференциальное уравнение п-го
порядка. Отдельно будут рассмотрены линейные диф-
дифференциальные уравнения с постоянными коэффи-
коэффициентами и с периодическими коэффициентами.
§ 1. Нормальная система линейных
дифференциальных уравнений
Нормальной системой линейных дифференциаль-
дифференциальных уравнений с действительными коэффициентами
называется .система вида
**=J:/ио*у+?<(о (/=1,.... п) (о
или более коротко
B)
где F (/) = (/)(/))— действительная матрица, а
g(t) = {gl(t)f ..., gn(t)} — действительный вектор,
определенные при a ^t ^b.
Однородной системой линейных уравнений, соот-
соответствующей системе B), называется система урав-
уравнений
x = F(t)x. C)
Докажем несколько теорем, устанавливающих
наиболее важные свойства решений систем линей-
линейных уравнений.
Теорема 1. Линейная комбинация решений од-
однородной линейной системы C) также является ре-
решением этой системы.
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 27
Доказательство этой теоремы следует из
равенств
(ах)' = ax = aF(t)x = F (t) (ax) (a = const),
где х, Х\, х2 — решения системы C).
Теорема 2. Разность любых двух решений не-
неоднородной системы уравнений B) есть решение од-
однородной системы C).
Доказательство. Пусть x\(t) и x2(t) — реше-
решения системы B). Тогда к\ = F(t)x\ + g(t), x2 =
= F(t)x2-\- g(t), Вычитая из первого равенства
второе, получим (х\ — х2)' = F(t) (x\ — х2), т. е.
Х\ — х2 — решение системы C).
Совершенно так же доказывается, что сумма лю-
любого (частного) решения неоднородной системы B) и
решения соответствующей однородной системы C)
есть решение неоднородной системы B).
Сформулируем правило сложения решений линей-
линейных неоднородных систем уравнений, которое приме-
применяется при практическом нахождении решений неод-
неоднородных систем.
Теорема 3. Если x\(t) и x2(t) —решения систем
уравнений
соответственно, то
— решение системы уравнений
Доказательство этой теоремы проводится
простым вычислением.
Теорема 4. Пусть x(t) (a ^t ^b) —решение
системы уравнений B), матрица F(t) и вектор g(t)
непрерывны на отрезке [а,Ь]. Пусть \\F(t)\\ ^F (где
\\F\\ означает норму матрицы F: \\F\\= sup \Fx\) и
28 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
|g"(Ol^g- Тогда для \x(t)\ имеет место следующая
оценка:
Доказательство. Решение x(t) удовлетво-
удовлетворяет интегральному уравнению
t t
x(t) = x(to)+^F(i:)x(i:)di: + ^g(i:)di: (fl</0, t<b).
Оценим сверху \x(t) |:
ъ г
\\F(x)x{x)\dx + \\g(x)\dx
Но |F(t)*(t)|<F|*(t)|, так как
+F
. Поэтому
\\x(x)\dx
Применяя к неравенству
t
\\x(x)\
dx
лемму 3 из § 3 дополнения, получим (А = |*(/о) | +
+ g(b-a),F = K)
Теорема доказана.
В частности, для линейной однородной системы
C) имеем оценку (g = 0):
ы. E)
Теорема 5. Пусть матрица F(t) системы B)
непрерывна на отрезке [а,Ь] и f0 s [a, ft]. Тогда ре-
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 29
шение системы B) однозначно определяется на от-
отрезке [а, Ь] условием
X(tQ) = Xo. F)
Доказательство. Пусть х\(() и x2(t) — два
решения системы B), удовлетворяющие условию F).
Тогда их разность x(t) = Х\(t) — x2{t) является реше-
решением однородной системы
x = F(t)x
и удовлетворяет условию
* (tQ) = хх (/о) — х2 (tQ) =хо — хо = О.
Следовательно, |*(fo)|=O. Применяя оценку E),
получим
O()FI'M O
или \x\(t) — X2(t) | = 0. Таким образом, #i(?) = x2{t).
Теорема доказана.
Итак, из оценки E) вытекает единственность ре-
решения задачи Коши для линейной системы B) с не-
непрерывной матрицей F(t). Из доказанных теорем 4
и 5 вытекают важные следствия.
Следствие 1. Пусть матрица F(t) непрерывна
на [а,Ь], тогда \\F(t)\\ ^ F и для решения x(t) одно-
однородной системы C) имеет место оценка
1*(/о)к^'^|<|*(ОК1*(/оI^и-/в|. G)
Иначе говоря, рост функции \x{i)\ ограничен экспо-
нентой.
В самом деле, оценка сверху есть оценка E).
С другой стороны, та же оценка E) имеет место для
любых to, t^ [a,b]. Поэтому, заменяя to на t, a t на
t0, получим | х (tQ) |< | х (t) \eF I **-*', т. е.
что совпадает с левой частью неравенства G).
30 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Очевидно, что дф) = 0 есть решение однородной
системы дифференциальных уравнений C). Поэтому
справедливо
Следствие 2. Решение x(t) однородной линей-
линейной системы с непрерывной матрицей F(t) тожде-
тождественно равно нулю, если оно равно нулю в какой-
либо точке отрезка [а, Ь].
Это следует как из оценки G), так и из теоре*
мы 5.
Начиная с этого момента матрица F(t) и вектор
g(t) предполагаются непрерывными на [а, 6].
Определение 1. Решения X\(t), ..., xm(t) од-
однородной системы C) называются линейно независи-
независимыми на отрезке [а, Ь], если в каждой точке t e
е [а, Ь] векторы x\(t), ..., xm(t) линейно незави-
независимы.
Очевидно, что если m решений x\(t), ..., xm(t)
линейно независимы, то m ^ п.
Пусть теперь задана система п решений x\(t), ...
..., xn(t) однородной системы C), определенных на
[а, Ь]:
xt={x\(t), ..., 4@} (/ = 1, ..., п). (8)
Определение 2. Определитель
W{t) =
x\{t) x\(i) ... **(*)
x% (t) ... xnn(t)
(9)
называется определителем Вронского системы реше-
решений Xi(t), ..., Xn(t).
Определение 3. Система из п решений одно-
однородной системы уравнений C), линейно независимых
на отрезке [а, 6], называется фундаментальной.
Теорема 6. Определитель Вронского W(t) фун-
фундаментальной системы (8) отличен от нуля во всех
точках отрезка [а, Ь]> на котором система решений
x\(t), ..., xn(t) фундаментальна.
Доказательство. Предположим противное.
Тогда W7(/o)=O в некоторой точке ^о отрезка [а, Ь].
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 31
Рассмотрим систему п линейных однородных уравне-
уравнений относительно с\ ..., сп:
c>x\(to)+ ... +c*x
0, (Ю)
В векторной форме система уравнений A0) имеет вид
t0) = 0. A1)
Так как определитель этой системы HP(fo) = 0, то су-
существует нетривиальное решение с1, ..., с" системы
уравнений A0). Это означает (в силу A1)) линейную
зависимость векторов x\(to), ..., xn(U), что противо-
противоречит определению фундаментальной системы реше-
решений. Теорема доказана.
Теорема 7. Пусть матрица F(t) непрерывна на
отрезке [а, Ь]> тогда система решений (8) линейно не-
независима на [а, Ь], если в какой-либо точке to отрезка
[а,Ь] векторы x\(to), ..., xn{U) линейно независимы.
Доказательство. Нам нужно доказать, что
при каждом фиксированном / из отрезка [а, Ь) ра-
равенство
c%(t)+ ... +C"xn(t)=0
выполняется лишь при с1 = ... = сп = 0. Предполо-
Предположим противное. Пусть при некотором t\ из [а, Ь] су-
существуют такие с\ ..., сп, не все равные нулю, что
Тогда линейная комбинация
x(t) = clxx(t)+ ... +cnxn(t)
решений (8) есть решение системы C), удовлетво-
удовлетворяющее условию #(/i) = 0. Согласно следствию 2 из
32
ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
теорем 4, 5 х (t) = 0 на [а, Ь]. В частности, для t = t0
O = x(to)=clx{(to)+ ... + cnxn(t0),
т. е. векторы *i(*o), •••> xn(to) линейно зависимы, что
противоречит условию теоремы. Полученное противо-
противоречие доказывает теорему. Из этой теоремы вытекает
ряд следствий.
Следствие 1. Определитель Вронского W(t)
системы решений (8) отличен от нуля во всех точках
отрезка [а,Ь] (на котором эти решения определены),
если он отличен от нуля хотя бы в одной точке от-
отрезка [а, Ь].
Доказательство очевидно.
Можно и непосредственно показать, что опреде-
определитель Вронского может обращаться в нуль лишь
сразу на всем отрезке [а, Ь). Для этого продифферен-
продифференцируем определитель Вронского W(t), пользуясь пра-
правилом дифференцирования определителя:
W=W{
где Wk [k =
и) — определитель, отличающий-
отличающий\
р
ся от W k-н строкой; вместо строки х\
стоит строка из производных х
xRn в нем
Но в силу C)
A2)
т. е. k-я строка определителя Wk есть линейная ком-
комбинация строк самого определителя W. Вычитая из
k-ft строки определителя Wk линейную комбинацию
первой, ,.., (k— 1)-й, (& + 1)-й, ..., м-й строк с
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
33
коэффициентами /*(/), ..., fkk_{(t), /
соответственно, получим, в силу A2),
wk =
Поэтому
где
= №.
W = S{t)W,
s(t)=tfkk(t).
A3)
Функция S(t) называется следом матрицы F(t) и обо-
обозначается Tr F(t).
Решая уравнение A3), как уравнение с разделяю-
разделяющимися переменными, получим формулу
которая называется формулой Лиувилля.
Из этой формулы следует, что если Щ^о)= 0 в не-
некоторой точке ^о, то W(t)= 0 на отрезке [а, Ь].
Замечание. Решая уравнение A3) методом
разделения переменных:
= S(t)
dW
W
и т. д., мы предполагаем, что 1^@=7^ 0 на [а, Ь]. Од-
Однако формула Лиувилля дает все решения уравне-
уравнения A3), так как ее правая часть является решением
при любом W^(^o) (в частности, при Щ^о) = О), а в
силу теоремы 5 любое решение A3) однозначно опре-
определяется значением W(to).
Следствие 2. Любое решение x(t) однородной
системы уравнений есть линейная комбинация
54 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
решений фундаментальной системы решений X\(t)9 ..*
..., xn(t).
В самом деле, в точке ^о вектор x(to) можно запи-
записать как линейную комбинацию векторов xi(to), ...
..., Xn(t0):
x(to)=clxl(to)+ ... +cnxn(t0). A4)
Рассмотрим два решения однородной системы
уравнений C) x(t) и clx\(t)+... + cnxn(t). В силу
A4) эти два решения удовлетворяют одному и тому
же начальному условию при t = to. Следовательно, по
теореме 5
x(t) = c1xl(t)+ ... +cnxn(t)
при всех t^ [a, b]. Следствие 2 доказано.
Определение 4. Общим решением линейной
системы уравнений B) называется множество всех
решений этой системы.
Теорема 8. Пусть x\(t), ..., xn(t) — фундамен-
фундаментальная система решений однородной системы урав-
уравнений C), тогда формула
x(t) = c%(t)+ ... +с»хпA), A5)
где с1, ..., сп — произвольные постоянные, дает об-
общее решение этой системы. Множество всех решений
однородной системы уравнений C) образует п-мер-
ное векторное пространство, базисом которого может
служить любая фундаментальная система решений.
Доказательство. При любых с\ ..., сп фор-
формула A5) представляет собой решение однородной
системы уравнений C), а в силу следствия 2 любое
решение системы уравнений C) может быть записав
но в виде A5). Поэтому формула A5) дает общее
решение системы уравнений C). Сумма двух реше-
решений однородной системы уравнений C) и произведе-
произведение решения системы уравнений C) на число есть
снова решения этой системы. Кроме того, любая
фундаментальная система решений x\(t), ..., xn(t)
линейно независима и любое решение через нее ли-
линейно выражается. Следовательно, множество зсех
решений однородной системы уравнений C) образует
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 35
n-мерное векторное пространство, базисом которого
может служить любая фундаментальная система ре-
решений. Теорема доказана.
Замечание. Из теоремы существования (кото-
(которая будет приведена в гл. 3) следует, что для любой
однородной системы уравнений фундаментальная си-
система решений всегда существует. Для ее построения
достаточно задать произвольно п линейно независи-
независимых векторов аи ..., ап и рассмотреть решения xi(t)
(* = 1, ..., п) однородной системы, удовлетворяю-
удовлетворяющие условиям xi(to) = ui. В силу теоремы 7 система
решений xi(t), ..., xn(t) будет фундаментальной.
Следствие. Пусть xo(t) — частное решение не-
неоднородной системы уравнений B), a x\(t)9 ...
..., xn(t)—фундаментальная система решений одно-
однородной системы уравнений C), тогда формула
х (t) = х0 @ + с% (/)+...+ спхп (t), A6)
где с1, ..., сп — произвольные постоянные, дает об-
общее решение неоднородной системы уравнений B).
В самом деле, при любых с1, ..., сп формула A6)
представляет собой решение системы уравнений B).
Наоборот, если x(t)—какое-либо решение системы
уравнений B), то x(t) — xo(t)—решение однородной
системы уравнений C) и по теореме 8 может быть
записано в виде
x(t)-xQ(t)=clxl(t)+ ... +cnxn(t).
Следовательно, любое решение x(t) системы уравне-
уравнений B) представляется в виде A6). Следствие до-
доказано.
Сейчас мы покажем, что интегрирование неодно-
неоднородной системы B) сводится к нахождению фунда-
фундаментальной системы решений соответствующей одно-
однородной системы C). Именно, будет доказана следую-
следующая.
Теорема 9. Пусть на отрезке [а, Ь] матрица
F(t) и вектор g(t) непрерывны и пусть известна фун-
фундаментальная система решений для однородной си-
системы уравнений C). Тогда общее решение неодно-
неоднородной системы уравнений B) находится с помощью
квадратур.
36 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Доказательство. Пусть x\(t), ..., хп (t) —
фундаментальная система решений для уравнения
C), тогда
xi = F(t)xi (/=1, ..., п),
или, в матричной форме,
X(t) = F(i)X(t), A7)
где
*}(*) ... x\(t)
X(t)=
_xf(t) ... *?(*)_
— матрица, называемая фундаментальной матрицей
системы уравнений C). Определитель \X(t) | фунда-
фундаментальной матрицы есть, очевидно, определитель
Вронского и потому отличен от нуля на отрезке
[а,Ь):
Будем искать решение системы уравнений B)
в виде
х @ = с1 (/) *i (/)+...+ сп (t) xn (t) = X(t)c @, A8)
где
c(t)={cl(t), ..., cn(t)}.
Подставляя выражение A8) в B), получим
X (/) с (t) + X (t) c(t) = F (t) X (t) c(t) + g (/). A9)
В силу A7) уравнение A9) примет вид
X(t)c(t) = g(t). B0)
Так как \X(t) \ Ф 0 и матрица X(t) непрерывна на
[а, Ь], то существует непрерывная на [а, 6] обратная
матрица X""l(t).
Умножая обе части уравнения B0) слева на
<ЯН@» получим
l
откуда
M'Л + в0, B1)
§ 1. НОРМАЛЬНАЯ СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 37
где с0 = {clQ, ..., cj} — произвольный постоянный век-
вектор. Подставляя найденное выражение B1) для c(t)
в формулу A8), получим
x(t)=X (/) Co + X @ J Х'\т) g(x) dr. B2)
U
Докажем, что формула B2) дает общее решение не-
неоднородной системы уравнений B).
Так как Со — произвольный постоянный вектор, то,
выбирая Со= 0, получим частное решение
п
системы уравнений B). С другой стороны,
^(Oeo=cJ»,(/)+ ... +c$xn(t),
и формулу B2) можно переписать в виде
х (/) = х0 (/) + сЪх{ (t)+ ... + с«хп (/). B3)
В силу следствия из теоремы 8 формула B3), а сле-
следовательно и B2), дает общее решение неоднородной
системы уравнений B).
Покажем, как с помощью формулы B2) решается
задача Коши для системы B). Пусть ищется решение
x(t), удовлетворяющее начальному условию ж(/0) =
= xq. Полагая в формуле B2) t = to, получим
х0 = X (t0) Co,
откуда
co=X-l(to)xo.
Таким образом, решение задачи Коши для системы
B) задается формулой
*(/) = X @ X-\t0) хо + Х (О J Х'\т) g{%) dr.
и
Метод нахождения решения системы B), исполь-
использованный при доказательстве теоремы 9, называется
методом вариации постоянных или методом неопреде-
неопределенных коэффициентов Лагранжа.
38 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Этот метод уже был раньше использован при ре-
решении одного линейного уравнения первого порядка.
Практически удобно поступать следующим обра-
образом:
Уравнение B0) в развернутом виде представляет
собой систему линейных уравнений относительно cl(t):
x\(t)cl(t) + ... +x]l(t)c-(t) = gl(t)t
x](t)cl(t)+ ... + x*n(t)?*(t) = g*(t)9
Решая эту систему относительно с'(/)(/ = 1, ..., /г),
получим с1 (t) = <р* (t) или
t
Подставляя найденные выражения для cl{t) в A8),
получим общее решение для системы B).
Теорема 10. Фундаментальная система реше-
решений однозначно определяет нормальную форму линей-
линейной однородной системы, т. е. матрицу F(t). Иначе
говоря, зная фундаментальную матрицу X(t) системы,
можно однозначно восстановить эту систему урав-
уравнений.
Доказательство. Пусть задана фундамен-
фундаментальная матрица X(t) однородной системы C). Тогда
в соответствии с A7)
X(t)=F(t)X(t). B4)
Умножая соотношение B4) справа на X~l(t), по-
получим
F(t) = X(t)X-l(t). B5)
Формула B5) однозначно определяет матрицу F(t).
Теорема доказана.
Замечание. Общее решение неоднородной си-
системы B) однозначно определяет эту систему. В са-
§ 2. ЛИНЕЙНОЕ УРАВНЕНИЕ п-ТО ПОРЯДКА 39
мом деле, по фундаментальной матрице решений од-
однородной системы определяется матрица F(t). Выби-
Выбирая какое-нибудь частное решение х (t) системы B),
находим вектор g{t) = x — F(t)x.
Поставим теперь вопрос о степени гладкости ре-
решения линейной неоднородной системы B). По опре-
определению решение x = x(t) является дифференцируе-
дифференцируемой вектор-функцией переменного t на всем отрезке
[а, Ь].
Может случиться, что решение обладает большей
гладкостью.
Теорема 11. Пусть матрица F(t) и вектор g(t)
обладают на отрезке [a, b] k первыми производными.
Тогда любое решение x = x(t) системы уравнений B)
обладает (k+\) первыми производными.
Доказательство. Так как x{t) — дифферен-
дифференцируемая вектор-функция, то в правой части системы
B) при k ^ 1 стоит дифференцируемая вектор-функ-
вектор-функция. Поэтому x = F (t)x + F(t)x + g(t). Если k ^ 2,
то в правой части снова стоит дифференцируемая
вектор-функция и потому х существует. Повторяя это
рассуждение k раз, получим утверждение теоремы.
Замечание. Если матрица F(t) и вектор g(t)
бесконечно дифференцируемы, т. е. имеют на [а, Ь]
производные всех порядков, то из доказанной теоре-
теоремы следует, что и любое решение системы B) беско-
бесконечно дифференцируемо.
§ 2. Линейное дифференциальное уравнение
я-го порядка
Рассмотрим дифференциальное уравнение n-го по-
порядка
У{п) + а, @ у("~» + ... +an(t)y = g{t). A)
Действительные функции ai(t)t ..., an(t), g(t) пред-
предполагаются определенными на некотором отрезке
[а, ы
Введем функции xl = y(t), ..., хп = у("~1)@ (см-
гл. 1, § 1). Легко видеть, что они удовлетворяют
следующей системе линейных дифференциальных
40 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
уравнений:
хх=х\
X2 = X3,
B)
#1-1 = хп9
хп=-апУ)х1-ап„{«)х*~ ... -a{(t)xn + g(t)9
или, в матричной форме,
x = F(t)x + g(t), C)
где
о 1 о ... о
F(t)=
о о 1 ... о
= {0, .... О,
Итак, линейное дифференциальное уравнение A)
порядка п сводится к линейной системе первого
порядка из п дифференциальных уравнений C) весь-
весьма специального вида. При этом, если y(t)— какое-
либо решение уравнения A), то xl=y(t) x2 =
= г//(/), ..., xn = y(n-V{t) служит решением системы
уравнений C); обратно, если xl(t)9 ..,, xn(t)—ка-
xn(t)—какое-либо решение системы C), то y(t) = xl(t)—ре-
xl(t)—решение уравнения A), причем yW (t) = xk+l (t) (k =
= 1, ..., /i-l).
Задача Коши для линейного уравнения A) ста-
ставится следующим образом: заданы произвольно п чи-
чисел у0, у'о, ..., у^-{) и /os[a, b]\ требуется найти
решение y(t) уравнения A), удовлетворяющее на-
начальным условиям
=у* у' (М = &.... у{п~1) (д=yf-l)- D)
Соотношения B) показывают, что, сводя уравне-
уравнение A) к системе уравнений C), мы одновременно
сводим задачу Коши для уравнения A) к задаче
Коши для C), так как условия D) записываются в
виде начальных условий для системы уравнений C):
§ 2. ЛИНЕЙНОЕ УРАВНЕНИЕ м-ГО ПОРЯДКА
41
Предположим, что функции a\(t)y ..., an(t)y g(t)
непрерывны на некотором отрезке [а, Ь]. При этих
условиях существование решения задачи Коши для
уравнения A) при любом выборе начальных данных
обеспечивается теоремой существования, которая бу-
будет доказана в гл. 3. Единственность решения задачи
Коши вытекает из соответствующего предложения, от-
относящегося к системам линейных уравнений (см. § 1,
теорема 5). В самом деле, если бы при некоторых
начальных данных существовали два различных ре-
решения y\(t) и у2(/) задачи Коши для уравнения A),
система уравнений C) имела бы два различных ре-
решения x\ = yx(t), x\ = y[{tl ..., x» = tfr-lHt) и
4 = У 2 (*). 4 = У г (')> • • • > *? = У{2~1) @. удовлетворяю-
удовлетворяющие одним и тем же начальным условиям, что невоз-
невозможно.
Для уравнения A) имеют место свойства, анало-
аналогичные свойствам, доказанным в теоремах 6, 7 (и
следствиях из них) § 1, если ввести следующие опре-
определения.
Определение 1. Решения y\(t), ..., ут (t) од-
однородного уравнения
ум + а, @ */<»-'> + ... +an(t)y = O
называются линейно независимыми на отрезке
если в каждой точке t e [a, b] векторы
{МО,..., У{Г1)Щ, ..., {ym(t)9 ..., у*-х)Щ
линейно независимы.
Определение 2. Определителем Вронского си-
системы п решений y\{t), ..., yn(t) уравнения E) на-
называется определитель
E)
[а, Ь],
W(t) =
v[{t)
W)
F)
Определение З. Система из п решений урав-
уравнения E), линейно независимых на отрезке [а, Ь]9
называется фундаментальной.
42 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Для определителя Вронского имеет место форму-
формула Остроградского — Лиувилля
W(t)=W(to)e '•
которая получается из формулы Лиувилля для одно-
однородной системы x = F(t)x, если заметить, что по
столбцам определителя Вронского стоят решения этой
системы, а
в силу C).
Теорема (метод вариации постоянных для урав-
уравнения A)). Пусть y\{t), ..., уп(t) — фундаменталь-
фундаментальная система решений однородного уравнения E).
Тогда
t
— решение неоднородного уравнения A), если функ-
функции c'(t) удовлетворяют системе линейных уравнений
.. +cn{t)yn(f) =0,
2)(О=о, G)
с1 (t) У(Г '> @ + ... + с» (t) е-ц @ = g (*).
Доказательство. Система G) однозначно
разрешима относительно 61(г)у так как определитель
этой системы есть определитель Вронского W@=^=0.
В силу определения 1, вектор-функции
xl(t)={yl(t), y[(t), ..., у?-Щ,
*ji) = {y'n«),'y'Jt),'..'.,'y«-»(i)}
образуют фундаментальную систему решений для си-
системы уравнений
i = F(t)x.
Как было показано в § 1, если cl(t) (* = 1, ..., п)
удовлетворяют уравнениям G), то
x{t)=t/{t)xi{t) (9)
§ 3. ИНТЕГРИРОВАНИЕ СИСТЕМ МЕТОДОМ ИСКЛЮЧЕНИЯ 43
— решение неоднородной системы C). Но тогда пер-
первая координата xl(t)=y(t) вектора х(t) — есть ре-»
шение уравнения A), т. е. в силу (9)
y(t) = tc{(t)x](t)=tcl(t)yl(t),
так как, согласно (8), x\ = yt(t). Теорема доказана*
§ 3. Метод исключения для линейной системы
дифференциальных уравнений
В § 2 было показано, что одно линейное уравне-
уравнение п-го порядка сводится к линейной системе из п
уравнений.
Здесь мы покажем, что имеет место в некотором
смысле и обратное утверждение.
Предположим, что на отрезке [а, Ъ] матрица F(t)
и вектор g(t) (n—l) раз дифференцируемы. Тогда
каждое решение линейной системы
x = F(t)x + g(t) A)
п раз дифференцируемо на отрезке [а, Ь] (см. § 1),
Пркажем, что каждая компонента xl(t) любого
решения x(t) системы A) будет решением некоторого
линейного уравнения порядка не выше, чем п.
Выведем дифференциальное уравнение, например,
для xl(t). Для этого запишем систему A) в развер-
развернутом виде
• • • • • B)
xn=fn{(t)xl+ ,.. +fnn (t)x
Дифференцируя первое уравнение системы B),
получим
Исключая из этого уравнения все х1 с помощью урав-
уравнений B), получим
xi=b?1(t)xl+ ... +blx» + h2(t), C)
44 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
где функции b)(t)(i=l, ..., п) линейно выражают-
выражаются через fj(t) и их первые производные, а функция
Л2@—через g\ gl(t) и /j(/). Поэтому функции b\{t)
и h2(t) будут (л —2) раза дифференцируемыми.
Снова дифференцируя уравнение C) и снова ис-
исключая х1 с помощью уравнений системы B), получим
t=b\(t)xl+ ... +bl(t)xn + hz(t),
где функции 6?(/)(*'= 1, ..., я) линейно выражают-
выражаются через /ДО и их первые и вторые производные,
а функция Л3 (О—через g\ gl (/), /J(/) и их первые
производные. Поэтому функции b\(t) и Л3@ будут
(п — 3) раза дифференцируемыми.
Продолжая указанные операции, мы придем в ре-
результате (я— 1)-кратного дифференцирования перво-
первого уравнения системы B) и исключения х1 с помощью
уравнений этой же системы к соотношениям
x{=b\(t)xl+ ... + bln(t)xn + hl(t),
x{=b](()xl+ ... +bl(t)xn + h2(t), D)
(х*)Ь* = ЬЧ(()х1+ ... +bnn(t)xn + hn(t)
Последовательно исключая из уравнений D) неиз-
неизвестные jc1, ..., л:Л методом Гаусса, получим уравне-
уравнение вида
bo(/) (я1H0 + 6i (t) (xlf~l) + • • • + МО ^! + b(t) = 0, E)
где коэффициенты bo(t), ..., 6Я(/), 6@ выражаются
через 6/@ и Af@ (/, /=1, ..., п).
Итак, компонента xl(t) любого решения x=x(t)
системы уравнений A) удовлетворяет линейному диф-
дифференциальному уравнению E) порядка т^п*).
Таким образом, каждая компонента xl(t) реше-
решения x(t) системы уравнений A) удовлетворяет не-
некоторому линейному дифференциальному уравнению
*) Неравенство т < п будет иметь место тогда, когда
b(t) 0
§ 4. ПРИЕМЫ, УПРОЩАЮЩИЕ РЕШЕНИЕ УРАВНЕНИЙ 45
типа E), общее решение которого, как известно,
имеет вид
х = х1 (/) = xl (t) + спх[ (/)+...+ с*"* xU @. F)
где x\(t), ..., х1щ (t)— фундаментальная система ре-
решений соответствующего однородного уравнения типа
E). Однако это не означает, что в качестве решения
x = x(t) системы уравнений A) можно выбрать век-
вектор {xl(t), ..., xn(t)}, где xl(t)— функции, опреде-
определенные равенствами F), а с1, ,.., сгщ — произволь-
произвольные постоянные. В самом деле, каждое из уравнений
системы B) показывает, что функции xl(t), ..., xn(t)
связаны между собой дифференциальными соотноше-
соотношениями и, следовательно, не являются произвольными
решениями своих уравнений типа E).
Для того чтобы из множества вектор-функций,
определяемых формулами F), выделить решения си-
системы уравнений A), нужно подставить их в систему
уравнений B). Потребовав, чтобы полученные в ре-
результате подстановки равенства были тождествами
по / (t^[a,b])9 мы придем, очевидно, к системе ли-
линейных алгебраических уравнений относительно
cl\ ..., сш'(/=1, ..., п). Найдя общее решение
этой линейной системы уравнений и подставив его
в F), получим общее решение системы уравнений A).
Замечание. Как было показано в § 1, общее
решение системы дифференциальных уравнений F)
зависит от п произвольных постоянных. Поэтому си-
система линейных алгебраических уравнений относи-
относительно cl\ ..., ctmi(i = l, ..., п) будет совместной
и ее общее решение зависит от п произвольных по-
постоянных.
Описанный здесь способ решения системы линей-
линейных дифференциальных уравнений A) называется
методом исключения.
§ 4. Приемы, упрощающие решение
линейных дифференциальных уравнений
Укажем некоторые частные случаи, когда решение
дифференциальных уравнений либо упрощается, либо
сводится к квадратурам.
46
ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
1. Рассмотрим линейное однородное уравнение п-то
порядка
xM + ax(t)&-v+ ... +an(t)x = 0. A)
Предположим, что известно частное решение х = ф(/)
этого уравнения, отличное от нуля на рассматривае-
рассматриваемом отрезке a ^t ^ b. Сделаем замену переменных
х = У ф (О-
Тогда получим следующее уравнение для у:
Ф @ У{п) + Ьх (/) I/*-» + ... + Ъп_х (/) у +
+ (Ф^ + а1ф^-1)+ ... +аяФ)г/ = 0. B)
Последнее слагаемое в B) равно нулю, так как
ф@ — решение уравнения A). Обозначая у = 2, по-
получим линейное однородное уравнение (п— 1)-го по-
порядка (()#0)
2. Рассмотрим линейную неоднородную систему
уравнений
x = F(t)x + g(t) C)
с диагональной матрицей
F(t) =
В этом случае система распадается на п линейных
уравнений первого порядка
*' = /'@*Ч«т'@ (/ = 1, .... л)
и потому интегрируется в квадратурах.
3. Рассмотрим линейную неоднородную систему
уравнений C) с треугольной матрицей
г f\(t)
/a
5 5 УРАВНЕНИЯ С КОМПЛЕКСНЫМИ КОЭФФИЦИЕНТАМИ 47
В этом случае интегрирование системы C) также
сводится к квадратурам. В самом деле, первое урав-
уравнение системы
*l = f\(t)xl+gl(t) D)
— линейное уравнение с одной неизвестной функцией
х19 и его решения находятся с помощью квадратур.
Второе уравнение системы, записанное в виде
— также линейное уравнение относительно функции х2
(функция xl(t) найдена из D)) и т. д. Последователь-
Последовательно решая получающиеся линейные уравнения, мы
получим решение системы уравнений C) с треуголь-
треугольной матрицей F(t).
§ 5. Линейные дифференциальные уравнения
с комплексными коэффициентами
Пусть задана система линейных дифференциаль-
дифференциальных уравнений
zl=?!iftk(t)zk + gi(t) (/=1, ..., я), A)
где f[ (t), g1(t) — комплексные функции действитель-
действительного переменного ty непрерывные при а ^ t ^ Ь.
Решением системы A) называется набор п ком-
комплексных функций zf = xf(t) + iyj (t), определенных
при a^t^b, подстановка которых в систему A)
обращает ее в тождество.
Рассмотрим следующую задачу: заданы точка
f0E [а, Ь] и п комплексных чисел z{ (/ = 1, ..., п);
требуется найти решение zl = zi(t) (/ = 1, в*., п)
системы дифференциальных уравнений A), удовле-
удовлетворяющее условиям
*%)=4 (/=!,.•.,«). B)
Сформулированная задача называется задачей Коши.
Покажем, что решение задачи Коши для системы
уравнений A) единственно.
48 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
В самом деле, пусть ziQ = x!Q + iy!Q9 a zf(t) =
+ iy*(О— решение задачи Коши для системы урав-
уравнений A), удовлетворяющее начальным условиям B).
Представив комплексные функции gj(t) и f[(t) в виде
fi (t) = u'k (t) + iv[ (/), gj (t) = w\t) + is\t)
и подставив эти выражения в уравнения A), мы об-
обнаружим, что вещественные функции х} (t) и y*(t)
удовлетворяют следующей действительной системе
линейных дифференциальных уравнений:
*' = Z D V) *k - v*k (t) yk) + w'{t),
C)
к— 1
и начальным условиям
=4
Но для вещественной системы уравнений C) задача
Коши с начальными условиями х^ (tQ} = х?09 yl(tQ} = ylQ
имеет единственное решение. Поэтому решение за-
задачи Коши для комплексной системы уравнений A)
единственно.
Замечание. Существование решения задачи
Коши для системы A) следует из существования ре-
решения задачи Коши для системы C), что, в свою оче-
очередь, следует из теоремы существования (см. гл. 3).
Нетрудно проверить, что для систем линейных
дифференциальных уравнений с комплексными коэф-
коэффициентами справедливы все теоремы § 1, если вве-
ввести следующее
Определение. Решения z\(t), ..., zm(t) одно-
однородной системы
z = F(t)z,
где F (f) = (/}(*))» называются линейно независимыми
на отрезке [a, ft], если в каждой точке /e[a,ft],
векторы z\(t), ..., zm(t) линейно независимы как
векторы комплексного векторного пространства. (См.
Дополнение, § 1.)
§ 6. ПРЕОБРАЗОВАНИЕ ЛИНЕЙНЫХ СИСТЕМ УРАВНЕНИЙ 49
Все остальные определения остаются без измене-
изменений. В формулировке теоремы 8 постоянные с1, ...
..., сп следует считать комплексными.
Точно так же все результаты § 2 остаются вер-
верными и для уравнения п-то порядка
«w + fliW^H ... + an{t)z = g(t)
с комплексными коэффициентами a\(t), ..., an(t)>
g(t)y если ввести следующее
Определение. Решения z\(t)y ..., zm(t) одно-
однородного уравнения
1>+ .-. +an(t)z = O
называются линейно независимыми на отрезке [а, Ь],
если в каждой точке t^ [a, b]9 векторы
линейно независимы как векторы комплексного век-
векторного пространства.
§ 6. Преобразование линейных систем
дифференциальных уравнений. Преобразование
линейной системы с постоянной матрицей
к линейной системе с треугольной матрицей
Мы рассмотрим такие преобразования линейных
систем дифференциальных уравнений, при которых
линейная система
A)
снова переходит в линейную систему. Здесь F(t) —
комплексная квадратная матрица порядка /г, a g(t) —
комплексная вектор-функция.
Введем вместо г1, ..., гп новые неизвестные
функции wl, ..., wn посредством линейного преобра-
преобразования
t
ft-i
которое в матричной форме имеет вид
z = R{t)w, C)
50 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
где
Функции r[{t) (/, ft = l, ..., п) будем предполагать
дифференцируемыми.
Подставляя выражение C) в A), получим
w = F(t)R(t)w + g(t). D)
Так как преобразование B)—невырожденное, то
для R(t) существует обратная матрица R~l(t). Умно-
Умножив обе части равенства D) на R~l(t) слева, по-
получим
w = G(t)w + h(t), E)
где
G (t) = R~l (t)F (t) R (t) - R~l(t) R (t),
h(t) = R-{(t)g(t).
Таким образом, при линейном невырожденном
преобразовании B) линейная система A) снова пе-
переходит в линейную систему E).
Зная решение w(t) системы E), можно сразу на-
написать (в силу C)) соответствующее решение си-
системы A):
z(t) = R(t)w(t).
Попытаемся найти такое невырожденное преобразо-
преобразование C), чтобы преобразованная система уравне-
уравнений E) интегрировалась более просто.
Как было показано в § 4, система E) легко ин-
интегрируется, если G(t) — треугольная матрица.
Для сведения системы A) к системе E) с тре-
треугольной матрицей G(t) необходимо найти невырож-
невырожденную матрицу R(t) из уравнения
R-l(t)F(t)R(t)~R-l(t)R(t) = G(t),
или, после умножения на R(t) слева,
R(t) = F(t)R(t)-R(t)G(t). G)
В общем случае отыскание R(t) из матричного
уравнения G) — задача не более легкая, чем инте-
интегрирование исходной системы A). Однако, если
§ 6. ПРЕОБРАЗОВАНИЕ ЛИНЕЙНЫХ СИСТЕМ УРАВНЕНИЙ 51
F(t) — постоянная матрица, которую мы обозначим Л,
то, как показано в § 1 дополнения, существует подоб-
подобная ей треугольная матрица В, т. е. можно указать
такую постоянную невырожденную матрицу R, что
B = R~lAR— треугольная матрица. К рассмотрению
этого важного частного случая мы сейчас и пере-
переходим.
Рассмотрим систему уравнений
z=Az + g(t) (8)
с постоянной комплексной матрицей А.
При невырожденном преобразовании
z = Rw (\Я\ФО) (9)
(R — постоянная комплексная матрица) в силу соот-
соотношений E), F) система (8) переходит в систему
w = Bw + h(t) (B = R~lAR, h = R"lg) A0)
с постоянной матрицей В. Подберем матрицу R так,
чтобы матрица В была треугольной. Тогда интегри-
интегрирование системы уравнений (8) сведется к интегри-
интегрированию системы уравнений A0) с треугольной мат-
матрицей, которая уже легко интегрируется.
Отметим здесь один важный частный случай, ко-
когда у матрицы Л существуют п линейно независимых
собственных векторов г\, ..., гп с собственными зна-
значениями Хи . •. 9 кп соответственно:
Ar!=Xjrj (/=1, ..., п). A1)
Пусть
и
тогда,
где ei
rl = {r
очевидно,
1 гп\
у, • • • > * у (
(/=1, ..., ft)
5^} — единичные векторы, а
A2)
52
ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Рассмотрим матрицу В = R~lAR. Используя ра-
равенства A1) и A2), получим
— 1 \ — 1а — 1 / \ —1
т. е. матрица В имеет диагональный вид
¦•. о
В =
О
причем на главной диагонали стоят собственные зна-
значения матрицы А.
Итак, в рассматриваемом частном случае суще-
существует преобразование (9), переводящее систему
уравнений (8) с постоянной матрицей в систему урав-
уравнений A0) с диагональной матрицей.
§ 7. Структура решений линейной
однородной системы дифференциальных
уравнений с постоянными коэффициентами
Пусть
г=Аг A)
— однородная линейная система дифференциальных
уравнений с постоянными коэффициентами. Из ре-
результатов § 6 и теоремы 3 из § 1 дополнения следует,
что существует невырожденное преобразование
z=Rwt
переводящее систему A) в систему уравнений
w = Bw
с треугольной матрицей В = R~lAR вида
B)
о
в=
О
0
B0
О '*„
§ 7. СТРУКТУРА РЕШЕНИЙ ОДНОРОДНОЙ СИСТЕМЫ 53
Система уравнений B) легко интегрируется. Нас бу-
будет интересовать структура произвольного решения
системы уравнений A).
Лемма. Пусть дано линейное дифференциальное
уравнение
^ 0*4 C)
где к — некоторое комплексное число, %\, ..., hq —
попарно различные комплексные числа, fi(t), ...
..., fq(t) — многочлены степени k\, ..., kq соответ-
соответственно.
Если % не совпадает ни с одним из чисел %и ...
..., %qt то любое решение уравнения C) имеет вид
х = coeKt + Вх (/) е*ч* + ... +gg(t) e\\ D)
где со — постоянное, gi(t), ..., gq(t) — многочлены
степени k\, ..., kq соответственно.
Если i=%u то любое решение уравнения C)
имеет вид
x = gx (t) *V + ft (t) e4 + ... +gq(t) eV, E)
где g\(t)—некоторый многочлен степени k\ + l,
§2(t)y ..., gq(t)—многочлены степени k2) ..., kq со-
соответственно.
Доказательство. Будем решать линейное
уравнение C) методом вариации постоянной. Пусть X
не равно ни одному из чисел Ки ..., Xq. Подставляя
выражение
x = c{t)eu F)
в уравнение C), получим
G)
В силу сделанного предположения ни одно из чисел
%\ — X, ..., kq — X не равно нулю. Очевидно, в этом
54
ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
случае каждый из интегралов в правой части фор-
формулы G) имеет вид
(8)
где gj{t) — многочлен степени kj. (Чтобы в этом убе-
убедиться, достаточно применить к этим интегралам
формулу интегрирования по частям.)
Подставив выражение (8) в формулу G), а фор-
МУЛУ G)—в F), получим
(9)
Первое утверждение леммы доказано.
Пусть Я= к\. Подставляя выражение
x=c{t)eKt
в уравнение C), получим
Очевидно, c(t) имеет вид
где gi{t)—многочлен степени k\-\-\, a g2(t), ...
•••» gi(t)—многочлены степеней k2, ..., kq соответ-
соответственно.
Подставляя полученное выражение в формулу
(9), получим формулу E). Лемма доказана.
Теорема 1. Пусть матрица А имеет m различ-
различных собственных значений \хи ,.., \im и s (s^m)
линейно независимых собственных векторов. Тогда
любое решение однородной системы уравнений A)
имеет вид
§ 7. СТРУКТУРА РЕШЕНИЙ ОДНОРОДНОЙ СИСТЕМЫ 55
где fj(t) (/ = 1, ..., га)—вектор-функция, каждая
координата которой есть многочлен, степень которого
не превосходит разности между кратностью собствен-
собственного значения (я/ и числом линейно независимых соб-
собственных векторов, соответствующих этому собствен-
собственному значению.
Доказательство. В силу рассуждений, при-
приведенных в начале этого параграфа, теорему 1 до-
достаточно доказать для системы уравнений B), полу-
полученной из системы A) заменой переменных z = Rw.
Последнюю запишем подробно:
wl = ЯУ + bl+lws+l + bls+2ws+2 +...+ b\_xw^ + b\w\
ws=Xsws+bss+lws+l + bss+2ws+2 + ... + bsn__{wn-1 +bsnw\
П~]
A1)
Обозначим через k\ кратность собственного значе-
значения щ (/ = 1, ..., га), а через // — число линейно не-
независимых собственных векторов, соответствующих
значению щ.
Отметим, что на главной диагонали матрицы B')
встречается только га различных собственных значе-
значений (яь ,,., \im (m<n). Кроме того, среди первых s
элементов главной диагонали каждое собственное
значение \ij встречается столько раз, сколько линейно
независимых собственных векторов соответствует
этому собственному значению, т. е. // раз.
Будем интегрировать систему A1), начиная с по-
последнего уравнения, тогда
В силу леммы, если %п-\ Ф К, wn~l имеет вид
где /"ij @ — многочлен нулевой степени, а /^~!@"—
многочлен нулевой степени или тождественно равный
56 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
нулю (если Й~1 = 0). Если же Я/г_1 = Л„, то
где fn~l(t) — многочлен степени ^ 1.
Переходя последовательно к wn-2, wn~3 и т. д. и
применяя лемму, придем к выводу, что
где fSj+l(t) (j = l, ..., m) — многочлен степени
— // — 1, так как среди элементов Xs+u ..., К глав-
главной диагонали (я/ встречается k\ — // раз.
При k = 1, ..., s получим
wk = \
где № (t) (j = 1, ..., m) — многочлен, степень которо-
которого не превосходит kj — lj. Теорема доказана.
Замечания. 1. Доказанная теорема позволяет
решать однородную систему A) следующим спосо-
способом. Ищем решение в виде A0), где координаты
вектор-функций
*), ..., f\(t)} A = 1, ..., m)
записаны в виде многочленов соответствующих сте-
степеней с неопределенными коэффициентами. Подстав-
Подставляем выражение A0) в систему уравнений A) и тре-
требуем, чтобы полученные соотношения выполнялись
тождественно по t. В результате получим некоторую
систему линейных однородных уравнений относитель-
относительно коэффициентов, определяющих многочлены fk. (t)
(ft=l, ..., n; / = 1, ..., m). В силу доказанной
теоремы, полученная система линейных однородных
уравнений будет совместной, а ее решение будет за-
зависеть от п произвольных постоянных (так как об-
общее решение любой линейной системы дифференци-
дифференциальных уравнений зависит от п произвольных по-
постоянных).
2. Если матрица А имеет п линейно независимых
собственных векторов г/ (/ = !» ..., п) с собственны-
§ 8. ЛИНЕЙНОЕ УРАВНЕНИЕ n-ГО ПОРЯДКА 57
ми значениями ц/ (среди которых могут быть одина-
одинаковые), то любое решение системы A) имеет вид
* = ЛМг,+ ... +сп^Гп, A2)
где с1, ..., сп — произвольные постоянные.
Это следует из того, что каждое из слагаемых,
входящих в формулу A2), является решением систе-
системы A) и все эти решения линейно независимы.
3. Если матрица А системы уравнений A) обла-
обладает эрмитовой симметрией (т. е. А=А') *), то лю-
любое решение этой системы имеет вид A2), поскольку
у всякой эрмитово-симметрической матрицы /г-го по-
порядка существует п линейно независимых собствен-
собственных векторов.
§ 8. Линейное дифференциальное уравнение
/г-го порядка с постоянными коэффициентами
Пусть
z{n) + aiZ(n-i) + _ +anz = F(t) A)
— линейное уравнение /г-го порядка с постоянными
комплексными коэффициентами
п\у ..., ап\
F(t) — комплексная функция переменного t, заданная
на некотором промежутке. Левая часть уравнения A)
называется линейным дифференциальным оператором
порядка п и обозначается L[z]. Само уравнение A)
можно записать так:
L[z]=F(t). B)
Вначале рассмотрим однородное уравнение п-го
порядка с постоянными коэффициентами.
I. Однородное уравнение.
Каждому оператору
L[z] = zw + aiz<n-v+ ... +anz
или однородному уравнению
L[z] = 0 C)
*) Аг — матрица, комплексно сопряженная с транспонирован-
транспонированной матрицей А'.
58 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
поставим в соответствие многочлен
D(p)=pn + aipn-i+ ... +а„, D)
который называется характеристическим многочленом
оператора L [г] или уравнения C).
Лемма 1. Какова бы ни была п раз дифферен-
дифференцируемая функция f(t), имеет место следующая фор-
формула:
Доказательство. Пусть L [г] = z^k) @ ^ k ^
/г), тогда D(p)=pk и поскольку ?К*)(Я) = О при
Ш f(t)} = —k{e f(t))=) Ck—j-f{e )-f {t) =
z=o
(Здесь использована формула Лейбница для нахож-
нахождения k-я производной произведения двух функций.)
Итак, формула E) доказана для частного случая
L[z]=z(kK Справедливость формулы E) в общем
случае следует из того, что линейный оператор L[z]
представляется в виде линейной комбинации с по-
постоянными коэффициентами операторов вида L[z] =
= z^k) @ ^ k ^ п). Лемма доказана.
Лемма 2. Пусть А, — корень характеристического
многочлена D(p) кратности k, тогда функции
г{ = еы, z2=teu, ..., zk=tk~leu
являются решениями однородного уравнения C).
§ 8. ЛИНЕЙНОЕ УРАВНЕНИЕ п-ТО ПОРЯДКА 59
Доказательство. Поскольку % — корень ха-
характеристического многочлена кратности &, то
Применяя формулу E) к функции 2/+i = Veu @
^ / ^ k — 1), получим
di
так как —р(/у)=0 при / > /. Лемма доказана.
а %
Лемма 3. Пусть L[trehr\\tst0 = 0 при г = 0, 1, ...
..., й — 1. Тогда X — корень характеристического мно-
многочлена, имеющий кратность, не меньшую k.
Доказательство. В силу леммы 1,
так как —% (tr) = О при k > г. Кроме того,
= 0 при k < г, поэтому
Следовательно, Х является корнем характеристическо-
характеристического многочлена кратности, не меньшей k. Лемма до-
доказана.
Вернемся теперь к однородному уравнению C).
Пусть характеристический многочлен D(p) имеет
m(m^n) различных корней Ки ..., Ят. Обозначим
через ku ..., km их кратности. В силу леммы 2,
функции
tKt .., zki =tki~leKlt9
у /fea—1 r&<>t
60
ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
будут решениями однородного уравнения C). По-
Поскольку k\ + ... + km = n, формулы F) определяют
п решений zj(t) уравнения C).
Лемма 4. Если z\, •.., zn — функции, опреде-
определяемые равенствами F), то
*!«» z2@) ... zn@)
z[@) 4@) ... /п@)
40)
*-'>@)
40)
Ф0.
G)
Доказательство. Предположим, что опреде^
литель G) равен нулю. Тогда между его строками
существует лин-ейная зависимость:
bQzf~» @) + bxzf-v @) + ... + bn_xzt @) = 0 (8)
(/=1, ..., /г),
где не все коэффициенты 60, ^ь ... • Ъп-\ равны нулю.
Рассмотрим дифференциальный оператор
Ему соответствует характеристический многочлен
Dl(p) = bopn~l+ ... +&я_ь
степень которого не превосходит п — 1.
Пусть / = 1, 2, ..., ku тогда соотношения (8)
можно записать в виде
Ы*/]к.о = О (/ = 1, ..., kx)
или
В силу леммы 3 число %\ является корнем харак-
характеристического многочлена D\(p), имеющим крат-
кратность, не меньшую k\. Совершенно так же, выбирая
/ = k\ + 1, ..., k\ + k2, докажем, что %2 — корень
многочлена D\(p) кратности, не меньшей k2i и т. д.,
%т—корень многочлена D\(p) кратности, не мень-
меньшей km- Таким образом, придем к выводу, что много-
многочлен D\(p) имеет не менее ki+...+km = n корней,
считая каждый корень столько раз, какова его крат-
кратность. Но это невозможно, поскольку степень много-
§ 8. ЛИНЕЙНОЕ УРАВНЕНИЕ п-ТО ПОРЯДКА 61
члена D\{p) не выше п— 1. Противоречие доказывает
лемму.
Теорема 1. Любое решение однородного урав-
уравнения C) может быть представлено в виде
.. +cnzn(t),
где с1, ..., сп — некоторые постоянные, a z\(t), ...
...9 zn(t)—решения, определяемые формулами F).
Доказательство. В силу леммы 4, решения
Z\(t), ..., zn(t) образуют фундаментальную систему
решений, а тогда любое решение z(t) уравнения C)
является их линейной комбинацией. Теорема дока-
доказана.
Замечания. 1. Если характеристический много-
многочлен уравнения C) имеет п различных корней %и •••
..., Хп, то любое решение уравнения C) имеет вид
г ({) = №*+ ... +ЛЧ
2. Любое решение уравнения C) имеет вид
где Яь ..., %т — попарно различные корни многочле-
многочлена D(p) соответственно кратности ku ..., km, a
f 1 @, • • •» fm (t) — многочлены, степени которых не
превосходят k\ — 1, k2 — 1, ..., km — 1 соответ-
соответственно.
Условимся называть квазимногочленом всякую
функцию вида Y,pj(t)eal\ где а(— постоянные, а
pi(t) —многочлены.
II. Неоднородное уравнение с квази-
квазимногочленом вправойчасти.
Рассмотрим неоднородное уравнение A), правая
часть которого представляет собой квазимногочлен
F(t) = h(t)e^+ ... +fm(f) (?•»'. (9)
Из общих свойств линейных уравнений следует,
что общее решение уравнения A) имеет вид
Z
62 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
где Zj(t) (/ = 1, ..., п) — фундаментальная система
решений однородного уравнения C), определяемая
формулами F), Ы — постоянные, a zo(t) — какое-ни-
какое-нибудь частное решение уравнения A).
Поэтому задача интегрирования уравнения A)
сводится к нахождению частного решения этого
уравнения.
Пусть известны частные решения zOk(t) каждого
из уравнений
тогда
Zo(t) = zOi(t)+ ... +zOm(t)
будет, очевидно, частным решением уравнения
где F(t) —квазимногочлен, определяемый равен-
равенством (9).
Таким образом, для интегрирования уравнения A)
с квазимногочленом в правой части достаточно уметь
находить частные решения для неоднородных уравне-
уравнений вида
L[z] = g(t)<P*, A0)
где g(t) — многочлен степени г.
Теорема 2. Если постоянная \х в правой части
неоднородного линейного уравнения A0) не является
корнем характеристического многочлена D(p), то
уравнение A0) имеет решение вида
z = f(t)<P*t A1)
где f(t) — некоторый многочлен той же степени г, что
и многочлен g(t). Если же \i — корень кратности k
характеристического многочлена D(p)f то уравнение
A0) имеет решение вида
49 A2)
где f(t) — некоторый многочлен степени г.
Доказательство. Подставляя A1) или A2)
в уравнение A0), получим для f(t) уравнение
L[ePt*f(O] = eP*g(t) A3)
(если в A0) подставляется A1), то k =0).
где a$tr—старший член многочлена, a g\(t)—много-
g\(t)—многочлен степени не выше г —1. Точно так же запишем
§ 8. ЛИНЕЙНОЕ УРАВНЕНИЕ n-ГО ПОРЯДКА 63
Запишем многочлен g(t) в следующем виде:
A4)
ого-
огошем
A5)
Степень многочлена fi(t) не превосходит г —1.
Подставив выражения A4), A5) в A3), получим
L [/V+1 + L [е% @ . /*] = fa/ + #*gx (t). A6)
По условию теоремы
В самом деле, эти равенства означают, что число [я
не является корнем характеристического многочлена
D{p) при 4=0 и что \х — корень кратности k при
k > 0. Применяя к первому слагаемому формулы
A6) лемму 1, получим
e
D{k+{)(\x) dk+l ,k+r\
A7)
Соотношение A7) можно переписать следующим об-
образом:
= e aot
Приравнивая коэффициенты при r-х степенях пе-
переменной t, обнаружим, что
, k\aQ
64 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
а уравнение A8) принимает следующий вид:
L|W/iWM), A9)
где gi(t)—многочлен, стоящий в квадратных скоб-
скобках формулы A8). Теперь степени многочленов fi(t)
и gi(t) не превосходят г—1. Таким образом, в ре-
результате приведенных выше вычислений найден стар-
старший коэффициент bo многочлена /(/), а вместо урав-
уравнения A3) получено аналогичное уравнение A9), в
котором степень многочленов f\(t) и g\(t) уменьши-
уменьшилась по крайней мере на единицу. Из уравнения A9)
найдем старший коэффициент многочлена f\(t), т. е.
второй коэффициент многочлена f(t). Продолжая дей-
действовать таким образом, найдем последовательно все
коэффициенты многочлена f(t). Теорема доказана.
§ 9. Линейные системы и линейные
дифференциальные уравнения с постоянными
действительными коэффициентами
До сих пор мы рассматривали системы линейных
дифференциальных уравнений и линейные уравнения
/г-го порядка с постоянными комплексными коэффи-
коэффициентами и искали их комплексные решения. Однако
решение многих практически важных задач приводит
к нахождению действительных функций, удовлетво-
удовлетворяющих линейным дифференциальным уравнениям с
постоянными действительными коэффициентами. Раз-
Развитая до сих пор теория позволяет найти все ком-
комплексные решения этих уравнений. Среди них, в част-
частности, находятся интересующие нас действительные
решения. Таким образом, мы приходим к следующей
задаче: из совокупности всех комплексных решений
заданной линейной системы или линейного уравнения
выделить все действительные решения.
В качестве примера рассмотрим линейную одно-
однородную систему дифференциальных уравнений с по-
постоянными действительными коэффициентами, т. е.
систему
г=Аг9 A)
где А — действительная матрица.
$ 9. УРАВНЕНИЯ С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 65
Теорема. Если z(t)—решение системы уравне-
уравнений A), то
x(t)=Rez(t), y(t) = lmz(t)
также являются ее решениями.
Доказательство. Пусть z(t) = x(t) + iy(t) —
комплексное решение системы уравнений A). Тогда
* (t) + iy (t) = A(x (t) + iy @) = Ax (t) + iAy (/).
Так как А—действительная матрица, то Ax(t) и
Ay(t) представляют собой действительные вектор-
функции. Отсюда следует, что
x(t) = Ax(t), y(t)=Ay(t))
т. е. x(t) = Re z(t), y(i) = Im z(t) — решения системы
уравнений A). Теорема доказана.
Очевидно, что любое действительное решение x(t)
системы уравнений A) можно представить в виде
x(t)=Rez(t) (в качестве z(t) достаточно взять саму
вектор-функцию x(t)).
Аналогичная теорема имеет место и для линейного
однородного уравнения п-го порядка с постоянными
действительными коэффициентами.
Пример. Рассмотрим линейное уравнение второго поряд-
порядка с постоянными действительными коэффициентами
z + 2z + 2z = e~tsint. B)
Сначала найдем все комплексные решения уравнения B), а по-
потом выделим среди них действительные. Правая часть уравне-
уравнения B) представляет собой квазимногочлен
Для нахождения частного решения уравнения B) достаточно
найти частные решения Z\ и z2 уравнений
i)t C)
z + 2z + 2z = r e D)
соответственно.
Характеристический многочлен р2 + 2р + 2 однородного
уравнения
z + 2? + 2z = 0 E)
имеет следующие корни: К\ = —1 + i, Я2 = —1— i.
66 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Общее решение однородного уравнения E) имеет вид
Согласно теореме 2 § 8 частное решение неоднородного уравне-
уравнения C) нужно искать в виде
(в этом случае г = О, k = 1, А — постоянная — многочлен нуле-
нулевой степени).
Подставляя выражение F) в уравнение C), получим
А = — 74. Таким образом,
4
Точно так же находим частное решение уравнения D)
4
Сумма найденных решений уравнений C) и D)
Zl + Z2 = _^.<[e(-i+«' + e-(l + «*] Ite-'cost G)
будет решением уравнения B). Общее решение уравнения B)
получается как сумма частного решения G) и общего реше-
решения однородного уравнения E)
z=-±te-tcost + c1e<-l + i)t + c2e-«+»i. (8)
Формула (8) содержит все комплексные решения уравнения
B). Выделим действительные решения. Положим с1 = а1 + ib\
с2 = а2 + ib2, тогда
= -|г^ cos t + е [(а1 + а2) cos t + (b2 — bl) sin t].
Обозначая a1 + a2 = Л, Ь2—Ы= В, получим
x (t) = — y te-*cos t + e~f [A cos t + В sin t].
Эта формула задает все действительные решения уравнения B),
если А и В — действительные числа.
§ 10. Линейное дифференциальное уравнение
второго порядка с постоянными коэффициентами
В этом параграфе мы более подробно рассмотрим
свойства решений дифференциального уравнения вто-
второго порядка
mx + r\x+kx = f(t)9 A)
§ 10. ЛИНЕЙНОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА 67
где т, г) и k — вещественные постоянные, f(t) — ве-
вещественная функция.
Дифференциальные уравнения вида A) приме-
применяются при описании и изучении многих процессов в
физике, механике, технике.
Мы ограничимся здесь лишь одной интерпретацией
уравнения A).
Если т > 0, т] ^ 0, k ^ 0, это уравнение описы-
описывает прямолинейное движение материальной точки с
массой т вдоль оси х под действием силы трения
—г\х, упругой силы — kx и внешней силы f(t).
В самом деле, уравнение A), переписанное в виде
тх = — цх — kx + / @,
представляет собой запись второго закона Ньютона,
при этом x(t) — координата материальной точки в
момент времени /, x(t) — скорость точки, x(t)— ее
ускорение, г\ — коэффициент трения, k — коэффициент
упругости.
Мы будем рассматривать уравнение A) ив слу-
случаях, когда величины ц и k отрицательны, так как
этот случай также встречается в физических прило-
приложениях. Уравнение A) часто называют уравнением
колебаний.
Наиболее естественной задачей для уравнения A)
(в рассматриваемой интерпретации) является задача
Коши, когда ищется решение x(t), удовлетворяющее
начальным условиям
x(to) = xo, x(to) = vo, B)
где хо — начальное положение (отклонение) точки,
a vo— ее начальная скорость.
В дальнейшем будем считать, что для определе-
определения решения заданы начальные условия B).
Встречаются математические и физические зада-
задачи, в которых под независимым переменным t в урав-
уравнении A) понимается не время, а координата вдоль
некоторой оси. В этом случае уравнение второго по-
порядка удобно записывать в других обозначениях:
68 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
и понимать под х— координату точки на оси, а под
у(х) — значение некоторой физической величины в
этой точке. В такой интерпретации для уравнения C)
часто ставят следующую задачу: найти решение
у = у(х), определенное при х\ ^.х^.х2 и удовлетво-
удовлетворяющее краевым условиям
Некоторые сведения о краевой задаче для линей-
линейного дифференциального уравнения второго порядка
изложены в § 7 гл. 3. Здесь же мы будем рассматри-
рассматривать уравнение колебаний A), понимая под незави-
независимым переменным t время.
I. Однородное уравнение второго по-
порядка (свободные колебания).
В отсутствии внешней силы (/(^) = 0) уравнение
колебаний
тх + цх + kx = О D)
описывает свободные колебания материальной точки
под действием силы трения и упругой силы.
Характеристический многочлен D (р) = тр2 +
-\-y\p-\-k однородного уравнения D) имеет следую-
следующие корни:
Я' = 2^ • Я2 = ш ' E)
При ц2 > Amk корни характеристического много-
многочлена вещественные и различные. Общее решение
уравнения D) (см. § 8) имеет вид
х (t) = схе^ + с2б?Ч F)
где С\ и с2 — произвольные вещественные постоянные,
При г]2 < Amk корни характеристического много-
многочлена комплексно сопряженные: ^= —у + /соь Х2 =
= — у — ш>1 (y = л/2т, а>! = ^/Amk — ц212т). Общее
решение уравнения D) имеет вид
х (/) = e~yt(ci cos со^ + с2 sin coiO. G)
(e~yt cos ©i/, е~ч* sin ©i/ являются соответственно дей-
действительной и мнимой частью комплексного решения
eXlt (или еы).)
§ 10. ЛИНЕЙНОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА
69
При т]2 = 4т& характеристический многочлен
имеет единственный вещественный корень: Х\ = к2 =
= Х. Общее решение уравнения D) имеет вид
x(t)=cleKt + c2telt. (8)
Заметим, что постоянные с\ и с2 в формулах G),
(8) вещественные.
Переходим к анализу поведения решений уравне-
уравнения колебаний D). Пусть т > 0, г) = 0, k > 0, т. е.
отсутствует трение, а упру-
гая сила направлена в сто-
сторону положения равновесия
х=0. Решение уравнения
D) в рассматриваемом слу-
случае имеет вид G) (при
т] = 0). Материальная точ-
точка совершает незатухающие
Колебания С ЧаСТОТОЙ (Со = Рис. 2.
= а/— . Амплитуда и фаза
колебаний определяются из
начальных условий B).
В процессе колебаний пол-
полная энергия Е = тх2/2 +
+ kx2/2 остается постоян-
постоянной. (Это нетрудно прове-
проверить.) На рис. 2 показан
график колебаний x = x(t)
для этого случая.
Пусть теперь т > 0,
г] > 0, k > 0, т. е. присут-
присутствует трение, а упругая си-
сила направлена в сторону
положения равновесия х =
= 0. При этих условиях, в
зависимости от знака ц2 —
— 4tnk, решение задается
формулами F), G) или (8).
Наличие трения приводит
к затуханию колебаний, так как во всех трех случаях
Re^i<0, Reta<0 и отклонение x(t)->0 при
^>»*— t
Рис. 3.
Рис. 4.
70 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
При небольшом трении (rf < Amk) имеет место
формула G); график решения x = x(t) представлен
на рис. 3, где пунктиром показан амплитудный фак-
фактор х = e~ytд/с\ + с\. Иногда говорят, что затуха-
затухание носит «периодический характер», так как реше-
решение x = x(t) колеблется вокруг положения равнове-
равновесия х = 0, причем x(t)-*-0 при ?-^-foo.
При достаточно большом трении (ц2 ^ Amk)
имеют место формулы F) или (8). В обоих случаях
колебания затухают «апериодически», как это пока-
показано на рис. 4. Решение х = x(t) пересекает ось х не
более одного раза, а при
достаточно больших t
стремление x(t)-*0 моно-
монотонно.
Итак, при наличии
трения (ц > 0) и k > 0
колебания всегда зату-
затухают и, как нетрудно про-
проверить, энергия колебаний
?(/) = mjL- + /,.?__^o при
Рис. 5. ii
/_^_]_оо, как это и долж-
должно быть вследствие потери энергии на трении. Эти по-
потери выделяются в виде тепла.
Можно сказать, что при ц > 0, k > 0 положение
равновесия х = 0 устойчиво*), так как любое реше-
решение уравнения колебаний ^(О-^О при /->-+оо. Так
как при ri=0, /г > 0 колебания сохраняют постоян-
постоянную амплитуду, то отсюда следует, что трение ока-
оказывает стабилизирующее влияние на колебания.
Несколько слов о более редких случаях, когда
т > 0, но k < 0 или г\ < 0 **).
Если т] < 0, то в силу E), действительная часть
корня К\ положительна и при С\ ф 0 решение л: =
= x(t) неограничено при /-^ + оо (см. формулы F),
G), (8)). Один из возможных случаев изображен на
*) Более подробно вопросы устойчивости будут рассмот-
рассмотрены в гл. 5.
**) Уравнение A) с к < 0 возникает, например, при рас-
рассмотрении отклонений материальной точки от положения не-
неустойчивого равновесия.
§ 10. ЛИНЕЙНОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА 71
рис. 5. Таким образом, «отрицательное трение» де-
дестабилизирует положение равновесия х = 0.
Аналогичная картина имеет место и при k << 0,
так как в этом случае К\ > 0 и при С\ ф 0 решение
x = x(t) неограничено (см. формулу F)).
Можно сказать, что в последних двух случаях по-
положение равновесия х = 0 неустойчиво.
II. Неоднородное уравнение второго
порядка (вынужденные колебания).
Движения материальной точки, описываемые урав-
уравнением колебаний A) при наличии внешней силы,
называются вынужденными колебаниями.
Здесь мы рассмотрим лишь естественный случай
т] ^ 0, k > 0, ц2 < Amk. Предположим, далее, что
внешняя сила периодически зависит от времени:
f(/)=i4sin(flrf + a)f (9)
где Л, 0 и a —некоторые постоянные.
Как известно, общее решение неоднородного урав-
уравнения колебаний
тх + щ + kx = A sin @/ + a) A0)
есть сумма общего решения однородного уравнения
D) (свободные колебания) и частного решения х =
= *о(О неоднородного уравнения A0) (вынужден-
(вынужденные колебания).
Решение x = xo(t) уравнения A0) будем искать
в виде
(И)
где В и C — неизвестные пока постоянные.
Подставляя A1) в A0), получим соотношение для
определения В и C:
В [{k — mco2) sin @/ + р) + г|со cos @/ + р)] =
= Л sin (erf + a). A2)
Используя формулы сложения для тригонометри-
тригонометрических функций, нетрудно проверить, что соотноше-
соотношение A2) выполняется тождественно (по t), когда
я Л A3)
- таJJ + т]2со
2со2
72 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
и а и C связаны равенствами
, о\ k — таJ
cos (а — р) =
- тсо2J + л2со2
sin (а — р) = , Л® 2
V(& — тсо2;2 + Л со2
(которые определяют C с точностью до целого крат-
кратного 2я).
При г] > 0 и любом со имеем (А — mco2J + if®2 >
> 0, поэтому общее решение уравнения A0) для вы-
вынужденных колебаний имеет вид
x(t) = B sin (со/ + р) + е~ч* (сх cos <s>xt + с2 sin соД A5)
где В и р определены формулами A3), A4), у = г\/2т9
coj = л/Amk — ц2/2т, с\ и с2—произвольные веще-
вещественные постоянные.
Распоряжаясь постоянными с\ и с2, можно удов-
удовлетворить любым начальным условиям B).
Очевидно, формула A5) дает решение уравне-
уравнения A0) и в случае отсутствия трения (г]=0), если
только k ф тсо2, т. е. если частота со внешней силы
не совпадает с частотой со0= л/к[т незатухающих
свободных колебаний.
В этом последнем случае, когда rj = O и со = со0 =
= <\lk\m, частное решение xo(t) уравнения A0) будем
искать в виде:
х0 (/) = Bt sin (со0/ + Р). A6)
Подставляя A6) в A0) и учитывая, что ц = 0,
со = со0 =V&Arc, получаем соотношение для опреде-
определения Вир:
2тщВ cos (со0/ + Р) = A sin (co0/ + а)>
которое будет тождественно удовлетворено, если по-
положить
§ 10. ЛИНЕЙНОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА 73
Таким образом, общее решение уравнения A0) в
случае, когда ti = 0, (o = to0=V&M дается формулой
х (/) = ^- sin (со0/ + а — ^) + ci cos ао1 + с2 sin ©q/.
A7)
Во всех остальных случаях общее решение урав-
уравнения A0) задается формулой A5).
Переходя к анализу вынужденных колебаний, рас-
рассмотрим сначала случай rj = 0. Если при этом ча-
частота со внешней силы совпадает с частотой со0 неза-
незатухающих свободных колебаний, то, как видно из
формулы A7), амплитуда вынужденных колебаний
(первое слагаемое в A7)) линейно растет с ростом t
и может стать сколь угодно большой. Это явление
называется резонансом] оно имеет очень большое зна-
значение в физике и технике. Для многих конструкций и
приборов явление резонанса является вредным или
даже разрушительным. Поэтому принимаются меры,
чтобы избежать резонанса, т. е. совпадения частот со
и'оо.
Амплитуда вынужденных колебаний может быть
очень большой и при со ф соо, если | со — соо 1 — малая
величина. Это видно из формулы A3), в которой по-
полагаем г| = 0:
~9 9Т-*0 ПРИ
щ — ест I
Явление механического резонанса возникает и при
достаточно малом трении {л/2пт> ц > 0). В самом
деле, как нетрудно показать, амплитуда В =
д
вынужденных колебаний дости-
со2
— тсо2J + т]2со
,, / ч 2Am
гает максимума мо(г|)=—. при
цуАкт гJ
— гJ
(О
V2km п2
—2т2 . Очевидно, что при т]-^0 ам-
амплитуда ^0 01)-^ + °°; при этом со-^со0=д/?/т.
В заключение приведем пример решения задачи
Кош и для уравнения A0). Рассмотрим развитие вы-
вынужденных колебаний под действием внешней силы
74 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
(9) (в нерезонансном случае (со=^со0)), которая на-
начинает действовать в момент времени /о = 0, а ма-
материальная точка при t = О находится в положении
равновесия и обладает нулевой скоростью. Это зна-
значит, что мы ищем решение уравнения A0), удовле-
удовлетворяющее начальным условиям B) с Xo=t>o = O,
*@)=0, *@)=0. A8)
Сначала рассмотрим колебания без трения
(tj = O). Тогда в силу формул A3), A4), A5) имеем:
а=Р> в= Л
х @ = В sin (со/ + а) + ?i cos со0/ + ?г sin °М«
Используя начальные условия A8), находим
С\ = — В sin а, с2 = — В — cos а и само решение
# (/) = 5 sin (со/ + а) — sin а cos a>Qt —— cos а sin ®ot \=
L coo J
= 2S sin i^°Il cos
-«>.) cos a
Если число Iсо — cooI достаточно мало, то первое
слагаемое в A9) представляет собой гармоническое
колебание с периодом То = -^-~— и медленно
меняющейся амплитудой
M(t) =
sin
((О -—
2Л
sin-
Амплитуда M{t) изменяется от нуля до макси-
2Л
мального значения Мо = ъ — периодически
т | (Oq — or |
с периодом Т= . _ , . Такие колебания назы-
называются биениями. Их график приведен на рис. 6.
Второе слагаемое в A9) представляет собой
гармоническое колебание, амплитуда которого
§ 10. ЛИНЕЙНОЕ УРАВНЕНИЕ ВТОРОГО ПОРЯДКА 75
D со — coo cos а Л cos а i ,
gj uj l= l—^> ПрИ малом со — ©о
coo гасо0 (со + соо) '
мала по сравнению с максимальной амплитудой Мо
биений.
Рис. 6.
-А//
Рис. 7.
Аналогично (с более сложными выкладками) ре-
решается задача Коши A0), A8) и при наличии тре-
трения (tj>0). В этом случае второе слагаемое в фор-
формуле A5), т. е. свободные колебания, содержащие
информацию о начальных условиях, затухают с ро-
ростом времени и устанавливаются вынужденные
76 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
колебания с частотой со и амплитудой
Процесс колебаний также начинается с биений,
затем свободные колебания затухают и остаются
лишь вынужденные колебания (рис. 7).
§ 11. Линейные системы дифференциальных
уравнений с периодическими коэффициентами
I. Однородная линейная система диф-
дифференциальных уравнений с периоди-
периодическими коэффициентами.
Рассмотрим систему дифференциальных уравне-
уравнений
z = F(t)z (~-oo</< + oo), A)
где F(t) — непрерывная периодическая матрица с
периодом со:
F(t + <o) = F(f).
Пусть z\ (t), ..., гп (t) — фундаментальная систе-
система решений для системы уравнений A), определяе-
определяемая начальными условиями
Zj@) = ef (/=1, ..., п\ B)
где е/ = {б), ..., 6"}. Поскольку матрица F(t) пе-
периодическая, функции 2i (/ + ю), ..., г,г(/ + со) так-
также образуют фундаментальную систему решений.
В силу следствия 2 из теоремы 7 § 1 каждая из
функций Zj(t + со) будет линейной комбинацией
%k(t) (k = l9 ..., п) с постоянными коэффициентами,
поэтому
где cf (/, k=l, ..., п) — постоянные. Последние со-
соотношения можно записать в виде
Z(t+<*) = Z(t)C, C)
где Z(t) — фундаментальная матрица решений
Zj(t)(j = l, . ..,/i),a C=(^) — постоянная матрица.
§ П. СИСТЕМЫ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ 77
В силу A) и B) матрица Z(t) удовлетворяет усло-
условиям
Z = F(t)Z, Z@) = E.
Полагая в равенстве C) t = О, получим
Z(co) = C.
Таким образом,
. D)
Матрица Z(co) называется матрицей монодромии
системы уравнений A). Очевидно, |Z(<o)|#0. Соб-
Собственные значения матрицы Z(co) называются муль-
мультипликаторами системы уравнений A).
Отметим, что если матрица F(t) действительная,
то матрица монодромии также действительная, одна-
однако мультипликаторы будут, вообще говоря, комплекс-
комплексными числами.
Теорема 1. Для того чтобы комплексное чис-
число р было мультипликатором системы уравнений A),
необходимо и достаточно, чтобы существовало такое
нетривиальное решение <p(f) системы A), для кото-
которого
) ) E)
Доказательство. Пусть р — мультипликатор
системы уравнений A), тогда существует такой век-
вектор 20 ф О, ЧТО
Рассмотрим следующее нетривиальное решение си-
системы уравнений A):
В силу D)
Ф (t + со) = Z (/ + ©J0 = Z (() Z (соJ0 =
Необходимость условия, сформулированного в тео-
теореме, доказана. Докажем достаточность. Из соотно-
соотношения E) при /= 0 получим
F)
78 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
В силу теоремы единственности
q>(/) = Z(/)q>@), G)
причем ф@)=^=0, так как в противном случае реше-
решение ф(^) было бы тривиальным. Из равенства G)
в силу F) следует, что
Z(©)q>(O) = q>(©)
Таким образом, ср(О) — собственный вектор матрицы
Z(co), а р — мультипликатор системы уравнений A).
Теорема доказана.
Из доказанной теоремы непосредственно вытекает
Следствие. Линейная однородная система
уравнений A) имеет нетривиальное решение с перио-
периодом со в том и только в том случае, когда один из ее
мультипликаторов равен единице.
Замечания. 1. Имеет место
Теорема Флоке. Фундаментальная матрица
Z(t) допускает следующее представление:
где Q)(t) — периодическая матрица с периодом со, а
А — постоянная матрица.
2. Легко видеть, что матрица Ф(/) удовлетворяет
следующему условию:
O(t) = F(t)O(t)-Q>(t)At
откуда непосредственно следует, что замена перемен-
переменных z = (f)(t)y переводит систему уравнений A) в
систему уравнений с постоянными коэффициентами
П. Неоднородная линейная система
дифференциальных уравнений с перио-
периодическими коэффициентами.
Рассмотрим систему дифференциальных уравне-
уравнений
(_oo</<+oo), (8)
*) Определение матрицы eAt см. на стр. 96.
§ П. СИСТЕМЫ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ 79
где F(t) — непрерывная периодическая матрица с пе-
периодом со, g(t)—непрерывная периодическая вектор-
функция с периодом со. Нас будут интересовать пе~
риодические решения этой системы уравнений с пе-
периодом со.
Теорема 2. Пусть однородная система уравне-
уравнений A) (соответствующая неоднородной системе (8))
не имеет нетривиальных периодических решений с пе-
периодом со (т. е. все ее мультипликаторы отличны от
единицы). Тогда система уравнений (8) имеет един-
ственное периодическое решение с периодом со.
Доказательство. Как было показано ранее
(см. § 1), любое решение системы уравнений (8) мо-
может быть представлено в виде
t
z(t) = Z (t) Z~l(t0) Zo + Z (t) J Z-\x)g(x) dx, (9)
где Z(t)—фундаментальная матрица системы урав-
уравнений A). Выберем фундаментальную матрицу Z(t)
так, чтобы было
Z{0) = E.
В этом случае формула (9) примет вид (при /о = О)
dx. A0)
Потребуем, чтобы решение z(t) имело период со:
*(/ + ©) = *(/). A1)
В частности, при t = 0
2@) = z(O). A2)
Оказывается, что если для некоторого решения z(t)
выполнено условие A2), то оно имеет период со.
В самом деле, z(t + ®) и z(t)—два решения систе-
системы уравнений (8), удовлетворяющие в силу A2) од-
одному и тому же начальному условию при t = 0.
В силу теоремы единственности эти решения тожде-
тождественно совпадают, т. е. имеет место соотношение
A1). Таким образом, условие того, что решение z(t)
80 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
имеет период со, можно записать в виде A2). В силу
формулы A0) соотношение A2) примет вид
со
Z(co) z0 + Z(co) J Z~' (т) g (t) dx = z0,
0
или
- E)zo=- Z{<u)\z-\%) g{x)d%. A3)
По условию теоремы, все мультипликаторы системы
A) отличны от единицы. Поэтому |Z(co) — Е \ Ф 0
(характеристическое уравнение |Z(co) — p?| = 0 не
имеет корня р = 1) и система уравнений A3) одно-
однозначно разрешима относительно г0.
Итак, единственное решение системы уравнений (8)
с периодом со определяется формулой A0) и найден-
найденным из A3) начальным значением г0. Теорема до-
доказана.
Замечание. В случае, когда однородная систе-
система уравнений A) имеет нетривиальное периодическое
решение с периодом со, линейная неоднородная систе-
система уравнений (8) может или вообще не иметь перио-
периодических решений с периодом со (если система урав-
уравнений A3) несовместна), или иметь несколько линей-
линейно независимых периодических решений с периодом о>
(если система уравнений A3) имеет бесконечное
множество решений).
Задачи
1. Пусть yi(t) — нетривиальное решение, а #г@ —
произвольное решение линейного однородного урав-
уравнения второго порядка
Используя формулу Остроградского — Лиувилля, до-
доказать, что
t
dt\yx{t))
ЗАДАЧИ
81
Таким образом, если известно частное решение ли-
линейного однородного уравнения второго порядка, то
оно интегрируется в квадратурах. (См. также § 4,
п. 1.)
2. Пусть функции yi{t), ..., yn{t) n раз непре-
непрерывно дифференцируемы на отрезке [а, Ь] и
y[(t)
у fn{t)
У\
f@ ...
0.
Составить линейное однородное дифференциальное
уравнение м-го порядка, для которого y\(t), ..., yn(t)
образуют фундаментальную систему решений.
Ответ:
yi(t)
y[(t)
y[n)
y[n)(t)
„(n)
= 0.
3. Доказать, что частное решение неоднородного
линейного уравнения
}+ ... +an(t)y = i
удовлетворяющее нулевым начальным условиям
y(to)=O, y'(tQ)=O, ..., y<n-lHtQ)=O,
допускает следующее представление:
t
y(t)= \ju(t,x)g(x)dT,
где u(t}%) —решение однородного уравнения
y{n) + al(t)yi«-v+ ... +an(t)y = 0,
удовлетворяющее начальным условиям
(дифференцирование функции u(t,x) производится
по первому аргументу).
82 ГЛ. 2. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
4. Показать, что уравнение Эйлера
где аи ..., ап — постоянные, сводится к линейному
уравнению с постоянными коэффициентами заменой
независимого переменного /=ет при />0 и t =
= —ех при t < 0. (Или, более коротко, х = In 11 \.)
5. Показать, что линейное уравнение второго по-
порядка
2 f() (-oo</<+oo), A)
где f(t)—непрерывная периодическая функция с пе-
периодом со, имеет единственное периодическое реше-
решение с периодом со, если
аф^ (? = 0, ±1, ±2, ...).
Указание. Свести уравнение A) к системе и
применить теорему 2 из § 11.
6. Показать, что линейное уравнение второго по-
порядка
х + сгх= sin — /
при а ф 2nk/(d (k = 0, ±1, ±2, ...) имеет единствен-
единственное периодическое решение с периодом со (см. зада-
задачу 5), при а==Ь2я/оо не имеет периодических реше-
решений с периодом со, а при а = 2я&/оо (k —любое целое
число, не равное =Ы) все его решения — периодиче-
периодические с периодом со.
Глава 3
ОБЩАЯ ТЕОРИЯ СИСТЕМ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ
В этой главе доказываются основные теоремы, от-
относящиеся к нормальным системам обыкновенных
дифференциальных уравнений: теоремы существова-
существования и единственности, теоремы о зависимости реше-
решения задачи Коши от параметров и начальных усло-
условий. Рассматриваются простейшие приближенные ме-
методы решения задачи Коши. Изучаются свойства ре-
решений линейных однородных дифференциальных
уравнений второго порядка.
§ 1. Теоремы существования и единственности
I. Сведение задачи Коши к интеграль-
интегральным уравнениям.
Задача Коши для нормальной системы дифферен-
дифференциальных уравнений
* = /(/,*) A)
состоит в отыскании решения x = x(t), удовлетво-
удовлетворяющего начальному условию
x(tQ) = xQ. B)
Мы предполагаем, что функция f(t,x) непрерывна на
некотором открытом множестве G пространства пере-
переменных (tyx) и (to, xo)^G.
Покажем, что решение задачи Коши для системы
A) равносильно решению некоторого интегрального
уравнения.
В самом деле, пусть x(t) — решение системы урав-
уравнений A), заданное на некотором интервале А
(to^A) и удовлетворяющее начальному условию B).
Тогда при t ^ А имеет место тождество
x(t) = f(t,x(t)). C)
84 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Интегрируя тождество C) по t и учитывая равенство
B), получим
t
\(xix(x))dx (/eA).
Очевидно и обратное: если непрерывная функция
x(t) задана на некотором интервале Д и удовлетво-
удовлетворяет интегральному уравнению
t
*@=*b+ \f(x9x(x))dx9 D)
П
то ввиду непрерывности f (т, х)
x = f(t,x(t))9 x(to) = xOy
т. е. x(t) есть решение системы уравнений A), удов-
удовлетворяющее начальному условию B).
Таким образом, решение задачи Коши A), B)
равносильно отысканию непрерывного решения инте-
интегрального уравнения D).
II. Теорема единственности.
Говорят, что функция f(t,x) удовлетворяет уело-
вию Липшица по векторному переменному х на мно-
множестве D пространства переменных (t,x), если суще-
существует такое число К, что для любых двух точек (/, х)
и (t,y) из множества D выполняется неравенство
\f(ttx)-f(t,y)\KK\x-y\.
Число К называется постоянной Липшица.
Теорема. Пусть функция f(t,x) непрерывна на
некотором открытом множестве G пространства пере-
переменных (t, x) и удовлетворяет условию Липшица по к
на любом замкнутом ограниченном множестве, содер-
содержащемся в G; тогда, если * = <р(/) и # = i|>(zc) — два
решения задачи Коши A), B), определенные на не-
некоторых интервалах, то <р @ = ^@ для всех тех зна-
значений t, для которых оба решения одновременно опре-
определены.
Доказательство. Сначала докажем следую-
следующее утверждение: если в некоторой точке t\ <p(/i) =
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 85
= t|)(^i)=#i, то q)(t)=ty(t) в некоторой окрестности
\t — t\\<i h этой точки.
Действительно, поскольку ф(^) и г|з(/) — решения
системы A), то
t
$/(т,ф(т))Л, E)
и
t
f(T,4>(T))dT. F)
Вычитая из E) равенство F), получим
t
- W) = S [/(т, Ф(т)) - /(т, ф(т))] Л. G)
Пусть цилиндр | f — f! | ^ /ii, | x — x\ I ^ г содер-
содержится в множестве G (так как множество G — от-
открытое, такой цилиндр всегда существует). В силу
непрерывности функций <p(tf) и $(t) существует такое
Аг ^> 0, что при | / — /i | ^ Аг
(8)
Выберем А = min(Ai, Аг). Тогда цилиндр
(9)
целиком содержится в множестве G и при 11 — t\ \ ^ h
имеют место неравенства (8). Переходя в равенстве
G) к абсолютным величинам (см. следствие из
леммы 2 § 3 дополнения), получим
A0)
В силу неравенств (8) точки (т, ф(т)) и (т, г|з(т))
заключены в цилиндре (9), являющемся замкнутым
ограниченным множеством, поэтому для оценки раз-
разности, стоящей под знаком интеграла, можно восполь-
воспользоваться условием Липшица
I /(т, Ф(т)) - /(т, t|>(T))| </С|<р(т) - f (т)|. A1)
86 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
В силу A1) из неравенства A0) получим
t
Применяя к функции
лемму 3 § 3 дополнения (с постоянными А = 0, ^о =
= ^i), получим неравенство
1*@1<0.
Таким образом,
т. е. утверждение доказано.
Перейдем к доказательству теоремы. Пусть реше-
решения дс=ф(^) и # = t|)(/) определены на интервале
(а, Ь) и <p(*o) = iH*o) ПРИ to^(a9b). Докажем, что
() = <$(t) на всем интервале (а,Ь).
Предположим противное. Тогда существует такое
t\^(a,b), что q>(t\) ф ty(t\). Для определенности бу-
будем считать t\ > ^о. Рассмотрим множество М точек
t<t\ интервала (а,Ь), удовлетворяющих условию
ф@ = /Ф@- Множество М замкнуто. Действительно,
пусть ? — предельная точка множества М, a tk — лю-
любая последовательность точек множества М, сходя-
сходящихся к ?, тогда ф(^) = /ф(^). В силу непрерывно-
непрерывности функций ф(/) и ф(/)9
Ф (О = lim Ф (/,) = lim ф (^ =
Так как ^ < ^, то ? < ^ (равенство ^ = t\ невоз-
невозможно, так как ф(^) =^я|?(^)), следовательно, f ^ М.
Итак, множество М замкнуто. По определению мно-
множества М оно ограничено сверху. Пусть t* = supM.
В силу замкнутости М, 1*еМ и ф(^*) = г|з(^*). Со-
Согласно доказанному выше утверждению ф(^) = 1|?(^) в
некоторой окрестности \t —1*\ < б точки /*, т. е. най-
найдется такая точка t2>t*, что ф(?2) = Ф(^). Но это
невозможно, так как /* — точная верхняя грань мно-
множества М. Полученное противоречит доказывает тео-
теорему.
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 87
Замечания. 1. В формулировке теоремы един-
единственности требование выполнения условия Липшица
в любом замкнутом ограниченном множестве, содер-
содержащемся в множестве G, можно заменить более
сильными условиями: дифференцируемости функции
f(tyX) по х на множестве G и ограниченности частных
производных —— (/,/=1, ..., п) на любой замкну-
замкнутой ограниченной части G.
Эти условия выполняются, в частности, тогда, ко-
когда частные производные —'— (/, /= 1, ..., п) непре-
непрерывны на множестве G.
При доказательстве теоремы единственности мы
пользовались лишь тем, что функция f{t,x) удовле-
удовлетворяет условию Липшица в любом замкнутом огра-
ограниченном цилиндре, а не на любом замкнутом огра-
ограниченном множестве, содержащемся в G.
Покажем, что из ограниченности частных произ-
производных следует выполнение условий Липшица в лю-
любом замкнутом ограниченном цилиндре С, содержа-
содержащемся в G.
В самом деле, пусть точки (t, x) и (t,y) лежат
в С. Тогда отрезок прямой (ty %(%)), 1(^) = */ +
-\-%{х — у) @^Я^1) также заключен в этом ци-
цилиндре (в силу выпуклости С).
По формуле Лагранжа имеем
f% х) -1% y)=f% 6A»- /'(*, im=
Так как производные —-г ограничены на С,
дх*
^L (/, k = l, ..., п),
то из равенств A2) получаем
\t%x)-f%y)\<t
t \-yk\<t Цх-у\ = пЦх-у\
k—l k—1
ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
k
(так как | хк — yk К | х — у |) и
\f{t,x)-f(t,y)\ =
{п \
i-i )
1/2 Г п \ 1/2
?«2№-9}
1=1
{nL\
Таким образом,
\f(t,x)-f(t,y)\^K\x-y\ (K = nmL)
и условие Липшица выполнено.
2. Приведем пример нарушения единственности
решения задачи Коши.
Рассмотрим дифференциальное уравнение
х = 2л/Ш. A3)
Его правая часть /(д:) = 2д/Г^Г определена и непре-
непрерывна при всех t и х. Однако условие Липшица не
выполнено в прямоугольниках, содержащих точки
оси t.
В самом деле, если бы условие Липшица выпол-
выполнялось, мы имели бы при хфу неравенство
\f(x)-f(y)\ _ 2(УЙ
\х-у\ \х-у\
тогда как при г/ = 0их^0
\х\
Легко проверить, что существуют два решения
уравнения A3), удовлетворяющие начальному усло-
условию x(t0) = 0:
Г С-'оJ, t>t0,
X1{t) \-(t-t0J, t<t0,
x2(t)=0.
Таким образом, одной непрерывности правых ча-
частей системы уравнений A) недостаточно для того,
чтобы задача Коши имела единственное решение.
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 89
III. Теорема существования.
Теорема. Пусть функция f(t,x) непрерывна на
некотором открытом множестве G пространства пере-
пенных (t,x) и удовлетворяет условию Липшица по х
на любом замкнутом ограниченном множестве, содер-
содержащемся в множестве G. Тогда, какова бы ни была
точка (t0, #0)^G, существует решение * = <р(/) си-
системы уравнений A), определенное в некоторой
окрестности точки to и удовлетворяющее условию
<p(to)=xQ.
Доказательство. Как было показано выше,
решение задачи Коши для системы уравнений A)
с начальным условием <p(/0) = #0 сводится к решению
интегрального уравнения D). Решение этого уравне-
уравнения мы построим методом последовательных прибли-
приближений Пикара.
В качестве нулевого приближения искомого реше-
решения возьмем функцию <po(/) = #o, а последовательные
приближения фл@ {\t — to\ ^A), где h — некоторое
положительное число, которое будет выбрано ниже,
определим рекуррентно по формуле
K ФЛ(т))сГт (/i = 0, 1, 2, ...).
A4)
Чтобы последовательность функций A4) была опре-
определена для всех п = 0, 1, 2, ..., необходимо, чтобы
каждая из кривых x=qn(t) при \t— to\^.h была
заключена в множестве G (в противном случае ин-
интеграл в правой части A4) не будет определен).
Покажем, как можно добиться выполнения по-
последнего условия. Выберем замкнутый цилиндр
С: \t-to\<hu |*-*ol<>-,
целиком содержащийся в множестве G; так как G —
открытое множество, это всегда возможно. Будучи
непрерывной на множестве G, функция f(t,x) огра-
ограничена на цилиндре С:
90 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Выберем h = minf/ii, ^ J и рассмотрим другой ци-
цилиндр
который лежит внутри цилиндра С. Очевидно, кривая
* = Фо(О = *о (| / — /о| ^S Л) заключена в цилинд-
цилиндре С]. Предположим, что кривая # = q>n(t) (\t— to\ ^
^ h) лежит в этом цилиндре, т. е. |фя(О~*о| ^ г
при \t — U\^.h, и покажем, что тогда и кривая
# = фя+1@ (\t — to\ ^ h) не выходит из цилиндра С\.
В самом деле,
Каждая из построенных функций <pn(t) будет, оче-
очевидно, непрерывной.
Итак, построена последовательность непрерывных
кривых x = q)n(t) (/г=0, 1, 2,...), определенных
при \t — to\ ^ h\ все они заключены в цилиндре Сь
Докажем, что последовательность 4>n{t) сходится
равномерно при \t — U\ ^h.
Рассмотрим модуль разности q>n+i(t) — q)n{t). Из
A4) следует, что
A5)
Для оценки правой части A5) воспользуемся усло-
условием Липшица
1/(т, Фй(т))-/(т, Ф.^МЖ/^Ф^-ф^^т)!, A6)
где К—постоянная Липшица, соответствующая ци-
цилиндру d.
Подставляя неравенство A6) в A5), получим
A7)
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 91
Методом математической индукции докажем, что
при \t — to\ ^.h имеют место неравенства
l±№ {n=U 2, ...). A8)
n\
При п= 1 неравенство A8) имеет место, так как
t
f(xy xQ) dx
Пусть неравенство A8) имеет место при п =
A9)
Покажем, что оно справедливо и при /г = й+1.
В самом деле, в силу A7) и A9)
|т-*о1*
= MKk
/ 1
*+'
(ft+ 1I
Справедливость неравенств A8) доказана.
На отрезке \t — to\ =?S h
Числовой ряд
(n=U 2, ...)•
M
сходится. Последовательность q>n(t) является после-
последовательностью частичных сумм ряда
ФО @ + [Ф1 @ - ФО @1 + • • • + [фЯ @ - Фя-1 (t)] + . . .
B1)
В силу неравенств B0) ряд B1) сходится равномерно
на отрезке | / — /01 ^ Л,
92 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Таким образом, последовательность фл(/) сходится
равномерно на отрезке \t — /o|^A к некоторой не-
непрерывной функции ф@-
Переходя к пределу при я-^оо в неравенствах
получим
при | / — ^о | ^ h, т. е. кривая х = ф (t) заключена в ци-
цилиндре С! и интеграл \/(т, q>(x))dx имеет смысл при
всех /е[/0 — /г, /0 + А]. °
Покажем, что функция ф(/) является решением
интегрального уравнения D).
Сначала докажем, что
t t
lim \ f (т, Фя(т)) dx=\f (т, ф(т)) dx. B2)
to to
Функция f(t,x), будучи непрерывной на множе-
множестве G, равномерно непрерывна на цилиндре С\.
Так как последовательность <pn(t) сходится равно-
равномерно на отрезке |/ — to\ ^ /г, а функция f(t,x) рав-
равномерно непрерывна на цилиндре С\, то и последова-
последовательность f(t, фл@) также сходится равномерно*) на
*) В самом деле, из равномерной непрерывности / (t, x) в
цилиндре следует, что для любого е >¦ 0 найдется такое б > 0,
что
\f(*.x)-f(tty)\<B
для любых точек (t, x) и (t, у) цилиндра С\> удовлетворяющих
условию | х — у | < б. Поскольку ф/г (/) Z$ cp @ на отрезке
\t — U\ ^ h, для эгого б > 0 найдется такое N, что при п> N
и при всех t(\t — tQ\ ^ h) выполнено неравенство
Следовательно, при п "> N и \t — to\
т.е. последовательность f(t,q>n(t)) на отрезке \t — ?0| ^ ^ схо-
сходится равномерно к функции f(t,y(t)).
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 93
отрезке \t — to\ ^ ft. Поэтому
t t
lim \/(т,фя(т))?/т= (/(т, Н
Соотношение B2) доказано.
Переходя теперь в равенстве A4) к пределу при
/г->оо, получим
t
т. е. ф@ — решение интегрального уравнения D), а
следовательно, и решение системы уравнений A),
удовлетворяющее начальному условию ф(^о) = #о-
Теорема доказана.
Коротко остановимся на значении доказанных тео-
теорем. Как уже отмечалось, системы дифференциаль-
дифференциальных уравнений далеко не всегда можно проинтегри-
проинтегрировать в квадратурах. Однако важно знать, имеет ли
данная система решения и сколько их. Доказанные
теоремы существования и единственности показывают,
что при некоторых предположениях относительно пра-
правых частей системы уравнений A) можно гаранти-
гарантировать разрешимость задачи Коши для этой системы,
причем решение этой задачи определяется начальны-
начальными условиями единственным образом.
Замечания. 1. Можно доказать разрешимость
задачи Коши в предположении лишь непрерывности
функций fl{t9x) (/ = 1, ..., п) на множестве G. Од-
Однако в этом случае решение задачи Коши не обяза-
обязательно единственно (см. приведенный выше пример).
2. Метод последовательных приближений Пикара
обеспечивает существование решения x=(p(t) си-
системы уравнений A) с начальными значениями t0, xQ
на некотором отрезке [to — ft, to + h].
Рассмотрим решение x = qi(t) системы уравнений
A) (построенное методом Пикара) с начальными
значениями t\ = to + ft, x\ = ф(^о + ft). Это решение
94 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
будет определено на некотором отрезке [t\ —h\>
t\ + h\]. Рассмотрим функцию # = г|з(^), определен-
определенную на отрезке [to — A, t\ + h\],
Очевидно, # = ф@ будет решением системы урав
нений A) с начальными значениями /0, #о- Таким об-
образом, мы получили продолжение решения х = <р (t)
с отрезка [to — A, to+ А] на больший отрезок
[to-h, ti + hi].
Построив решение x = q>2(t) системы уравнений
A) с начальными значениями t2 = t\ + Ai, х2 =
= Ф1 (^i + h\) у получим продолжение решения х =
= ф(/) на еще больший отрезок [t0 — A, U + h2]
и т. д.
Аналогичным образом решение # = ф@ продол-
продолжается в сторону убывания переменного /.
Можно показать, что в результате такого продол-
продолжения мы построим решение с начальными значе-
значениями /о, *о, определенное на некотором максималь-
максимальном интервале (а, Ь). Это решение называется не-
продолжаемым. (Более подробно непродолжаемые
решения и их свойства будут рассмотрены в § 2.)
3. Метод последовательных приближений Пикара,
использованный при доказательстве теоремы суще-
существования, является хорошим приближенным методом
решения задачи Коши. Обрывая процесс последова-
последовательных приближений на некотором значении п, мы
получим приближенное решение <ря(?), тем более точ-
точное, чем больше п. (Приближенные методы решения
задачи Коши будут рассмотрены в § 5.)
4. Переход от нормальной системы A) к инте-
интегральному уравнению D) позволяет ввести понятие
обобщенного решения для системы A).
Пусть функции fl{t,x) непрерывны по t и я, за
исключением конечного числа значений t, ограничены
и удовлетворяют условию Липшица по х на любом
замкнутом, ограниченном, выпуклом множестве Gcz
czG. Обобщенным решением системы A) с началь-
начальным значением (^о, Хо) называется непрерывное ре-
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 95
шение интегрального уравнения D). Точно так же,
как это делалось при доказательстве теоремы суще-
существования и единственности, можно показать, что при
сделанных предположениях такое решение суще-
существует и единственно*).
5. Для нормальной системы линейных дифферен-
дифференциальных уравнений
i = F(t)x + g(t), B3)
у которой матрица F(t) и вектор-функция g(t) не-
непрерывны на некотором отрезке [а, Ь], последователь-
последовательные приближения
t
ФЛ+1@ = *о+ $ Ит)<РЛ(т) + g(r)]dx (n= 0, 1,2,...),
и
<Ро(О = *о
равномерно сходятся на всем отрезке [а, Ь).
В самом деле, из непрерывности матрицы F(t) и
вектор-функции g(t) следует, что существуют такие
положительные числа К и Л, что
II/40II < Я, 1Ф1(О-Фо(ОКЛ
при всех t ^ [а, Ь].
Точно так же, как доказывались неравенства A8),
можно показать справедливость неравенств
(n=l, 2, ...)
при t e [a, b], из которых следует равномерная схо-
сходимость последовательности q>n{t) на всем отрезке
[а, Ь].
Поэтому в случае линейной системы уравнений
B3) можно рассматривать решения, определенные
сразу на всем отрезке [а, Ь].
Пример. Применим метод последовательных приближений
Пикара к линейной однородной системе дифференциальных урав-
уравнений с постоянными коэффициентами
ж=Ах- B4)
*) Подробнее об этом см.: Сансоне Дж. Обыкновенные
дифференциальные уравнения. — М.: ИЛ, 1954, т. 2.
96 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Последовательные приближения в этом случае будут иметь вид
фо(О=*о,
t t
Sf
Лфо(т) dx = Хо -\- \ Ахо dx = Хо -\- (t — to)Axo,
J
tQ to
t
-to)Axo+ K 20) A2x0,
B5)
Как отмечалось выше (см. замечание 5), для линейных
систем уравнений последовательные приближения сходятся
равномерно на любом отрезке а ^ t ^ b, где правая часть
системы непрерывна. В рассматриваемом случае правая часть
системы уравнений B4) не зависит от t. Поэтому последова-
последовательность B5) сходится к решению х = <р(/) задачи Коши для
системы уравнений B4), удовлетворяющему начальному усло-
условию <р(/о) = #о ПРИ всех значениях t.
Введем обозначения
Е+(±=ЖА + + (±z^t A" = Bn(t) = ( 6 {@). B6)
Тогда формула B5) запишется в виде
Ф*@ = Bn(t) хо.
Полагая л:0 = et (et = {б\, ..., 6?}), получим, что существует
предел
6.@= Ига BnV)et,
или, переходя к координатам
b[{t) = lim b{(t)9
п-*°°(п)
где bi(t) = {b\(tI ..., b?(t)}.
Таким образом, при п-^оо каждый элемент матрицы Bn{t)
стремится к определенному пределу. В этом случае говорят,
что существует предел последовательности матриц B6), кото-
который обозначают e^~to^ и называют экспоненциалом матрицы
(t — to)A. Итак,
B7)
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 97
Соотношение B7) записывают также в виде ряда
^°Г An {Ao = Е) B8)
Решение задачи Коши для системы уравнений B4) можно те-
теперь записать в виде
x = e(t-U)AXQt B9)
В силу быстрой сходимости ряда B8) из формулы B9) полу-
получается хороший приближенный метод решения задачи Коши для
системы уравнений B4). Матрица е(*-*°)л вычисляется прибли-
приближенно по формуле
e(t-U)A ъЕ + ?=±±А +... + ^=^ А",
а формула B9) дает приближенное решение задачи Коши с
начальным условием x(to) = xq.
6. Рассмотрим задачу Коши для уравнения
x = f(t,x) C0)
с начальным условием
x(to) = xo C1)
в случае, когда правая часть f(t,x) уравнения C0) —
аналитическая функция в окрестности точки (tOi xq),
т. е. f(t,x) раскладывается в степенной ряд по степе-
степеням t— t0 и х — х0: /(/,#)=? Z Cjk(t — toy(x— xQf.
/>0k>0
Имеет место следующая
Теорема. Пусть функция f(t,x) — аналитиче-
аналитическая в окрестности точки (to,xo). Тогда задача Коши
C0), C1) имеет единственное аналитическое решение
x = x(t), определенное в некоторой окрестности точ-
точки to.
Сформулированная теорема позволяет искать ре-
решение задачи Коши C0), C1) в виде степенного ряда
x(t)=cQ + c{(t-t0)+ ...+ ck(t-t0)k + ..., C2)
где в силу C1), Со=Хо.
Разложив правую часть уравнения C0) в ряд по
степеням t — to я х — хоя подставив разложение C2)
в уравнение C0), придем к системе линейных урав-
уравнений для определения коэффициентов Ck (k=l9 2,...).
98 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Эта система уравнений получается приравниванием
коэффициентов при одинаковых степенях t — t0, нахо-
находящихся в правой и левой частях уравнения C0).
В силу сформулированной выше теоремы, полученная
система линейных уравнений имеет единственное ре-
решение.
Отметим, что ряд C2) определяет решение задачи
Коши C0), C1) лишь для тех значений ty для кото-
которых он сходится.
Теорема, аналогичная сформулированной выше,
имеет место и для уравнения n-го порядка
*<«> = /(/, х, х', ..., х^-Ъ) C3)
с начальными условиями
x(to) = xo, x'(to) = x'o, ..., x*-4to) = x<?-»
в случае, когда правая часть f(t,xtxr, ..., х^п~1)) —
аналитическая функция в окрестности точки
(t х х' х{п~1Л
В приложениях часто встречаются линейные од-
однородные дифференциальные уравнения вида
aQ(t) x+ax(t)x + a2(t) x = 0 C4)
с аналитическими коэффицентами, у которых
Говорят, что t0 является особой точкой уравне-
уравнения C4), поскольку в окрестности такой точки урав-
уравнение C4) нельзя разрешить относительно х. В этом
случае решения, представимого в виде степенного
ряда, может и не существовать. Однако могут суще-
существовать решения, представимые в виде обобщенных
степенных рядов:
x(t) = Co(t-toy+cl(t-to)r+l+...+ck(t-to)r+k + ...,
где г — некоторое (не обязательно целое) число.
§ 1. ТЕОРЕМЫ СУЩЕСТВОВАНИЯ И ЕДИНСТВЕННОСТИ 99
Пример. Рассмотрим уравнение *)
t2x + (t> +1) * = о C5)
при t > 0.
Будем искать решение этого уравнения в виде обобщенного
степенного ряда по степеням / (tQ = 0):
оо
^) = Е^(^о)- C6)
Подставляя ряд C6) в уравнение C5), получим соотно-
соотношение
(r+ k) (r +k - I) tr+k+ (t> +\^ ][/fc*'+* = 0. C7)
Приравнивая коэффициент при t в наименьшей степени нулю,
имеем
откуда следует (поскольку с0 Ф 0), что г = 1/2. Положив в C7)
г = 7г и приведя подобные члены, придем к следующему ра-
равенству:
1+k
из которого находим линейные уравнения, определяющие коэф-
коэффициенты Ск\
C8)
Из соотношений C8) видно, что коэффициенты ck с нечетными
номерами равны нулю: с2Р-\ = 0 {р = 1, 2, ...). Для четных
номеров (в силу C8))
BрJ " BрJ Bр - 2J
?2_(-\)Рс0
?2
BрJ Bр - 2J ... 22 ~ 22Р [р\]2
*) Это уравнение получено из уравнения Бесселя нулевого
1 х
порядка у + — ^/ + г/=0 заменой г/ = —=-.
* V/
100 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Подставляя найденные значения для Си в C6), получим
оо 2р + оо
т
Ымг
Легко проверить (например, с помощью признака Даламбера),
что ряд C9) сходится при всех t ^ 0.
§ 2. Непродолжаемые решения
Рассмотрим нормальную систему дифференциаль-
дифференциальных уравнений
* = f(t,x), A)
для которой выполнены условия теорем существова-
существования и единственности на некотором открытом мно-
множестве G.
В силу теоремы существования для любой точки
(to, Xo)^G найдется решение #=<р(?) системы урав-
уравнений A) с начальными значениями (to, #о), опреде-
определенное на некоторой окрестности точки t0. Покажем,
что окрестность, в которой определено решение с на-
начальными значениями (?о>*о), может быть расширена
до некоторого максимального открытого интервала.
Определение 1. Говорят, что решение х = ф(t)
системы уравнений A), определенное при U<.t< t2,
является продолжением решения x=ty(t), опреде-
определенного приt[ < t < f2, если t{ ^t'v tf2^t2 и <р(/) = ф(t)
при t[<t<t'2.
В частности, любое решение является своим соб-
собственным продолжением.
Определение 2. Решение называется непро-
должаемым, если любое его продолжение совпадает
с ним самим.
Докажем некоторые свойства непродолжаемых ре-
решений.
Свойство 1. Для любой точки (to, Xo)^ G суще-
существует непродолжаемое решение x = q>(t) системы
уравнений A), удовлетворяющее начальному условию
<f>(to)=xo.
Доказательство. Рассмотрим совокупность
всех решений системы уравнений A), удовлетворяю-
§ 1. НЕПРОДОЛЖАЕМЫЕ РЕШЕНИЯ 101
щих условию x(to) = Xo. Каждое решение этой сово-
совокупности определено на некотором открытом интер-
интервале. Множество правых концов всех этих интервалов
обозначим Г2, а множество их левых концов — Т\.
Обозначим inf 7\ =/пь sup Т2 = m2, если Т\ не огра-
ограничено снизу, то полагаем т\ = — оо, если Т2 не
ограничено сверху, то т2=+оо. Построим решение
х = ф(/), удовлетворяющее условию ф(/0) = х0 и
определенное на всем интервале гп\ <С / <С т2. Пусть
f — произвольная точка этого интервала. Согласно
определению т\ и т2 существует решение # = ф(/),
удовлетворяющее условию \|5(/o) = #o и определенное
на некотором интервале (Л,/г), содержащем точку f.
Положим <p(f') = if(f). Докажем, что значение <р(/')
не зависит от выбора решения $(t). В самом деле,
если x = ty\(t)—какое-либо другое решение, удовле-
удовлетворяющее условию \|3i(^o) = #o и определенное на
интервале, содержащем точку f, то ty(f) = tyi(t') по
теореме единственности, так как ty(to)=ty\(to).
Итак, функция x = <p(t) однозначно определена на
всем интервале (mi, т2) и ф(^о) = д;о. Она представ-
представляет собой решение системы уравнений A), посколь-
поскольку в окрестности любой точки f (m\ < f < т2) оно
совпадает с некоторым решением системы. Таким
образом, ж=ф(/) — решение системы уравнений A),
удовлетворяющее условию ф(/о) = *о и определенное
на всем интервале (т\>т2). Докажем, что # = ф(/) —
непродолжаемое решение. Пусть #=ф(/) (t\ < t <
< t2) — продолжение решения х = ф(t), тогда t\ ^
^ть т2 ^ /2, ^(^о) = л:о и ф(/) = ^(/) при т\ < t <
< Ш2. Из самого построения решения ф(/) вытекает,
что ф@ служит продолжением решения ty(t)> поэто-
поэтому т\ ^ t\y и t2 ^ m2. Следовательно, ^ = mi, /2 = rti2
и ф(^) = yp(t) при mi < / < m2, т. е. ф@ — непродол-
непродолжаемое решение.
Свойство 2. Ясли л: = ф(t) — непродолжаемое
решение, a x = ty(t)—некоторое решение системы
уравнений (I) с одинаковыми начальными значениями
(to,Xo), то x = q>(t) является продолжением решения
*=¦(*).
Доказательство. Пусть решение (
определено при t\ < t <С /2, а решение х^
102 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
при t\ < t < t2. В силу теоремы единственности
решения q>(t) и \|)@ совпадают на общей части
интервалов (tv t2) и (t'v f2). При t2 > t2 функция
x
была бы продолжением решения x = q>(t)y отличным
от ф@» что невозможно, так как ф(/)— непродолжае-
мое решение. Следовательно, t^^U,-
Точно так же доказывается, что t{^t[t Таким
образом, q>(t) — продолжение решения ty(t).
Свойство 3. Если х = q>(t) м ju = tf(/) — непро-
должаемые решения системы уравнений A) с одина-
одинаковыми начальными значениями (?о,*о)» то они опре-
определены на одном и том же интервале и совпадают
на нем.
Доказательство. Пусть решение x = t${t)
определено на интервале {t\,U), a # = \|5(/) на интер-
интервале (t'v /0. В силу свойства 2 решение x=q>(t) яв-
является продолжением решения x = ijp(t)y причем
*i<^i> <?<'2 и (Р(/) = М)(/) ПРИ ?\<*<?г. Точно так
же х = i|) (t) — продолжение решения х = ф (t). Поэтому
t2<<2- Следовательно, t\ = tv t2=t2 и q>(/) =
|( на интервале (tu t2).
Теорема. Пусть F — произвольное замкнутое
ограниченное множество, содержащееся в открытом
множестве G, х = q>(t) — непродолжаемое решение,
определенное при ni\ < t < m2. Тогда существуют та-
такие числа U и t2 (mi < t\ < t2 < m2), '/то при t <t\
и t > t2 точка (t> ф@) лежит вне множества F.
Доказательство. Остановимся на доказа-
доказательстве существования числа t2.
Случай 1. т2 = +°°- Так как множество F —
ограниченное, то координаты точек, принадлежащих
множеству F, ограничены. В частности, значение t
первой их координаты не превосходит некоторого
Т > 0. Полагая t2=Ty получим, что при t > /2 точ-
точка (^ф(О) лежит вне множества F,
§ 3. ОСОБЫЕ РЕШЕНИЯ 103
Случай 2. т2—конечное число. Поскольку F—
замкнутое и ограниченное множество, то расстояние d
от множества F до границы множества G положи-
положительно. Пусть F\ — множество точек, расстояние ко-
которых от множества F не превосходит d/2. (Если
d = + oo, то в качестве d/2 берем 1.) Очевидно, F\ —
замкнутое ограниченное множество и F cz F\cz G.
Функция f(tyx) непрерывна и, следовательно,
ограничена на F\:
Если h\ + г2 ^ d2/4 и (/0, ж0) е F, то цилиндр
11 — to| ^ h\, |x — Xo| ^ г содержится в множестве Flt
Выбрав h = min (h\, r/M), получим цилиндр 11 — t0 \ ^
^ h, \x — xo\ ^г, содержащийся в множестве F\.
Из доказательства теоремы существования сле-
следует, что существует решение системы уравнений A)
с начальным значением (f0, xq), определенное на ин-
интервале \t — to\ <C h. Покажем, что число t2 = m2 — h
удовлетворяет условиям теоремы. В самом деле, если
бы при некотором U> Ш2— h = t2 точка (to, <p(?o))
принадлежала множеству F, то решение q>(t) с на-
начальными значениями (t0, q)(t0)) было бы определено
по крайней мере на интервале to — h < t < to + h.
Так как дс = ф(/)—непродолжаемое решение, то
этот интервал должен содержаться в интервале
(ть т2). В частности, t0 + h ^ т2 или to^m2 — h,
что противоречит неравенству U> m2 — h. Теорема
доказана.
§ 3. Уравнения, не разрешенные
относительно производной.
Особые решения
В этом параграфе будут рассмотрены некоторые
свойства решений одного дифференциального урав-
уравнения первого порядка, не разрешенного относительно
производной
F(U x,x) = 0, A)
где функция F(t,x,p) определена и непрерывна вме-
вместе с производными р'х и ?' на некотором открытом
множестве G в пространстве переменных t, x и р.
104 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
I. Огибающая однопараметрического
семейства кривых.
Пусть
f(t,x,c) = O B)
— уравнение однопараметрического семейства кривых
на плоскости t, х; с— параметр. Функцию / и произ-
производные f'r f'x, f'c будем предполагать непрерывными
на некотором открытом множестве Е пространства
переменных t, x, с. Кроме того, предположим, что
(/<J+(Q2=^° на множестве Е.
Определение. Гладкая кривая / = <р(с), х =
= г[э(с) (ф' и г|/ непрерывны и (фгJ + (^t>/J =И= 0 при
С\ < с <L c2) называется
огибающей однопарамет-
однопараметрического семейства кри-
кривых B), если в каждой
своей точке (<р(с), -ф (с))
она касается кривой се-
сей
f(t,x,c)-0
Рис. 8.
мейства, соответствующей
—** значению параметра с, и
отлична от нее в любой
окрестности этой точки
(рис. 8).
Теорема 1. Если кривая t = y(c), x = -ф (с)
(с\ < с < с2) — огибающая однопараметрического се-
семейства кривых B), то функции t = (f(c) и х = -ф (с)
удовлетворяют уравнениям
/(/,*, С) = 0,
f'e(t,x,c) = O.
C)
Доказательство. По определению огибающей
кривая однопараметрического семейства B), соответ-
соответствующая значению параметра с, проходит через точ-
точку (ф(с)> 'Ф(с)) огибающей и касается ее в этой
ке. Это означает, что при С\ < с < с2
ft (ф (с), i|> (с), с)
(с)
D)
E)
§ 3. ОСОБЫЕ РЕШЕНИЯ 105
(равенство E) — условие касания огибающей и кри-
кривой семейства в точке (ф(с), ty(c))).
Соотношение E) перепишем в виде
Г, (Ф> Ч>> с) ср' (с) + f'x (Ф, г|>, с) Ч>' (с) = 0. F)
Дифференцируя D) по с, получим
Г, (Ф, Ъ с) ф' (с) + /; (Ф, ф, с) ф' (с) + f'c (Ф, 1>, с) = 0. G)
В силу F) соотношение G) принимает вид
/;ЛФ,*М)=О. (8)
Равенства D) и (8) показывают, что функции t =
= ф(с), х = г|) (с) удовлетворяют уравнениям C).
Теорема доказана.
Замечание, Мы доказали, что огибающая се-
семейства кривых B) удовлетворяет уравнениям C).
Однако, как показывают примеры, обратное неверно:
не всякая кривая, удовлетворяющая уравнениям C),
будет огибающей. Поэтому для отыскания огибающей
семейства кривых C) находят все кривые, удовлетво-
удовлетворяющие уравнениям C), и проверяют, какие из них
будут огибающими.
II. Особые решения.
Определение. Решение x=y(t) уравнения
A) называется особым решением, если через каждую
его точку кроме этого решения проходит и другое ре-
решение, имеющее в этой точке ту же касательную, что
и решение х = ф(/), и отличное от него в любой
окрестности этой точки. Интегральная кривая, соот-
соответствующая особому решению, называется особой
интегральной кривой уравнения A).
Теорема 2. Если x = y(t) — особое решение
уравнения A), то оно удовлетворяет уравнениям
F(/,jt,*) = O, F'p(t,x,x) = 0. (9)
Доказательство. Так как x=q>(t) — реше-
решение уравнения A), то
т.е. ф(/) удовлетворяет первому из уравнений (9).
106 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Пусть (fo>*<))> гДе *о = ф(^о), — произвольная точ-
точка особой интегральной кривой. Покажем, что
Предположим противное, т. е.
или
Р'рУо,хо,ро)ФО, (Ю)
где *о = ф(<о)> Ро = Ф('о)« В этом случае по теореме
с неявной функции уравнение
F(t,x9p)=0
в окрестности точки (to, хо, ро) определяет р как не-
неявную функцию от (t,x):
при этом функция f(t,x) непрерывна по t> x, имеет
непрерывную производную по х и f(tOj х0) = р0.
Таким образом, в окрестности точки (/0, Хо, р0)
уравнение A) равносильно уравнению
* = f(t9x). A1)
В силу теорем существования и единственности, су-
существует единственная интегральная кривая уравне-
уравнения A1), а следовательно, и уравнения A), проходя-
проходящая через точку (to, *о) и имеющая в этой точке
угловой коэффициент р,о. Поэтому ^^ф(^) не может
быть особым решением. Следовательно,
Поскольку (to, ф(*о)) — произвольная точка особой
интегральной кривой, имеем тождество
Теорема доказана.
Замечание. Уравнения (9), вообще говоря,
определяют одну или несколько кривых, которые на-
называются дискриминантными кривыми уравнения A).
В силу доказанной теоремы каждое особое решение
уравнения A) является дискриминантнои кривой это-
этого уравнения. Обратное неверно: не всякая дискри-
§ 3. ОСОВЫЕ РЕШЕНИЯ 107
минантная кривая является особым решением. По-
Поэтому для нахождения особых решений нужно найти
все дискриминантные кривые уравнения A) и выде-
выделить среди них те, которые являются особыми инте-
интегральными кривыми.
Теорема 3. Пусть
<D(t,x,c) = 0 A2)
— однопараметрическое семейство решений уравнения
A), имеющее огибающую # = ф(/) (t\<. t<:t2). То-
Тогда эта огибающая есть особая интегральная кривая
уравнения A).
Доказательство. Покажем, что x=y(t) яв-
является решением уравнения A). Пусть (/о,#о), *о =
= <р(/0)—произвольная точка огибающей. По опре-
определению огибающей, через эту точку проходит ре-
решение
из однопараметрического семейства решений A2), ко-
которое касается огибающей в этой точке. Таким обра-
образом,
A3)
Так как x = ty(t)— решение уравнения A), то
F(to,$(to),Jt(to)) = O. (И)
В силу равенств A3) из A4) получим
v(to),4(to)) = O. A5)
Так как to— произвольная точка интервала (/ь/г), то
соотношение A5) означает, что x = q>(t) — решение
уравнения A).
Это решение — особое, так как по определению
огибающей через каждую его точку проходит решение
семейства A2), имеющее ту же касательную и отлич-
отличное от решения x=y(t) в любой окрестности этой
точки. Теорема доказана.
III. Уравнения Клеро и Л а г р а н ж а.
Уравнением Клеро называется уравнение вида
108 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
где ф(р) —функция, определенная на некотором про-
промежутке и имеющая непрерывную производную. Вво-
Вводя новое переменное р = х, получим систему уравне-
уравнений
dx=pdt,
равносильную уравнению Клеро. Подставляя второе
из уравнений A6) в первое, получим
Отсюда р = с = const или t = —ф'(р).
В первом случае
x=ct + <p(c). A7)
Во втором случае
Нетрудно проверить, что, если существует отличная
от нуля вторая производная ф"(р), кривая A8) яв-
является огибающей для однопараметрического семей-
семейства кривых A7) и, следовательно, будет особой ин-
интегральной кривой для уравнения Клеро.
Уравнением Лагранжа называется уравнение вида
* = /<р(х)+ *(*), A9)
где функции ц(р)Фр и гр (р) непрерывно дифферен-
дифференцируемы.
Решается уравнение Лагранжа так же, как урав-
уравнение Клеро. Вводя новое независимое переменное
р = х, получим следующую систему уравнений:
(р)
Подставляя второе уравнение в первое, получим
Ф (р) dt + /q/ (р) dp + V (р) dp = p dt,
или
dp
§4. ЗАВИСИМОСТЬ РЕШЕНИЯ ОТ ПАРАМЕТРОВ 109
Уравнение B1) является линейным дифференци-
дифференциальным уравнением относительно функции / = /(р) и
легко интегрируется. Если
t = X(py с)
— его общее решение, то в силу второго из уравне-
уравнений B0)
Таким образом, найдено однопараметрическое се-
семейство решений уравнения Лагранжа A9), заданное
в параметрической форме:
§ 4. Зависимость решения задачи
Коши от параметров и начальных условий
При рассмотрении дифференциальных уравнений,
описывающих какой-либо физический процесс, необ-
необходимо учитывать, что сами эти уравнения и началь-
начальные условия для разыскиваемых решений обычно бы-
бывают известны лишь приближенно.
Поэтому крайне важно выяснить, какое влияние
на поведение решений задачи Коши оказывают малые
изменения правых частей нормальной системы урав-
уравнений, а также малые изменения начальных данных.
Для изучения этой зависимости будем считать, что
правая часть нормальной системы уравнений непре-
непрерывно зависит от некоторого параметра \х.
Рассмотрим нормальную систему уравнений
i=f(t,x,\i) A)
и пусть правая часть этой системы уравнений опреде-
определена на некотором открытом множестве G в про-
пространстве переменных (t, х, \х).
Теорема 1. Пусть функция /(/, л:, jut) непрерывна
на открытом множестве О и удовлетворяет условию
Липшица по аргументу х на любом замкнутом огра-
ограниченном множестве, содержащемся в О. Пусть
(to,XQ, \хо)—произвольная точка множества G и х =
= q>(t, \х) (\хо — h < [х < \iq + h) — семейство непро-
должаемых решений системы уравнений A), удовле-
ПО ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
творяющих начальным условиям ф(/о>|ы) = #о- Пусть,
далее, при \i=\i$ решение дс = ф(/, \х0) задано на ин-
интервале гп\ < t < m2 и [а, Ь] — произвольный отре-
отрезок, заключенный в интервале (m\,m2).
Тогда существует такое а > 0, что при \\х— \хо\ <
< а решения х= q>(t, \x) определены при a^t^b
и для любого е > 0 найдется такое 6@ < б ^ а), что
при \\х— |io|< б будет выполняться неравенство
|ф(/, \\) — ф(/, Но) | < е
для всех f е [а, &], т. ^. функция ф(^|ы) непрерывна
по \i в точке \л = |io, притом равномерно относительно
t на отрезке [а, 6].
Доказательство. Обозначим через F множе-
множество точек (t, х, \х), удовлетворяющих следующим
условиям:
а</<6, |q>(f,ii0)-* Kr, ||i-|ioKa. B)
Так как множество точек (/, ф(^, \хо), ^о), где а^^^
^ 6, представляет собой замкнутое ограниченное
множество, целиком лежащее в открытом множе-
множестве C, то при достаточно малых г и а множество F
будет заключено в О.
Будем считать, что г и а уже выбраны так, чго
FczG. Очевидно, F—замкнутое, ограниченное мно-
множество. По условию теоремы, функция f(t> x, \х) удов-
удовлетворяет условию Липшица на множестве F, т. е.
\t{U xu v) -fit, *2, ц) К К\ хх - х21 C)
для любых двух точек (/, Хи\л), (t, x2, \х) из F. (Кон-
(Константа К зависит от множества F и, следовательно,
от г, а.)
Оценим разность | ф (^, |ы) — ф (/, |Ыо) | для тех зна-
значений / и [I, для которых функции ф(/, [i) и ф(*, \х0)
определены. Функции ф(/, ji) и ф(/, \х0) удовлетворяют
интегральным уравнениям
t
ф (/, \i) = Хо + jj / (Т, ф (Т, (А), Ц) dT,
ф (/, И-о) = ^о + \f (т, Ф (т, |Хо), И-о) dr.
§ 4. ЗАВИСИМОСТЬ РЕШЕНИЯ ОТ ПАРАМЕТРОВ 111
Вычитая из первого уравнения второе, получим
*, и) —ф(*> но) К
t
\ I f (т, Ф (т, и), |х) — f (т, ф (т, |х0), Но)
D)
Вначале оценим модуль разности под знаком инте-
интеграла
I / (Т, ф (Т, [А), М-) — f (Т, ф (Т, Но), Но) I <
<|f(r, ф(т, и), И)—f(*> ф(т, Но), иI +
+ | f (т, ф (т, цо), н) — / (*, Ф (т, но), но) I- E)
В силу неравенства C)
I /(т, Ф (т, н), Н) - f К Ф(т, но), нЖ
</С|ф(т, и)-ф(т, Но)|. F)
Из равномерной непрерывности функции f(t, дс, н) на
ограниченном замкнутом множестве F следует, что
для любого ei > 0 найдется такое а > 0, что, каковы
бы ни были точки (т, х, н) и (т, дс, но) из F, удовле-
удовлетворяющие условию |и~ Ио|<а> выполняется нера-
неравенство
|/(т, х, \i)—f(x,x, Ho)l<eb
Будем считать, что число а в неравенствах B)
выбрано удовлетворяющим сформулированным усло-
условиям. (Каким нужно выбрать число ei, будет указано
ниже.)
В частности, тогда
I f (т, Ф (т, но), И) — f С*. Ф (т. Но), Но) I < еь G)
Из неравенства E) в силу F) и G) имеем
I f (т, Ф (т, н), Н) — / (т> Ф (т» Но), Но) К в! +
(8)
112 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Подставляя неравенство (8) в D), получим
t
\ (г{ + К | Ф (т, [i) — ф (т, \х0) |) dx
и
t
j|q>(T, ц)— ф(т,
/о
t
<е, (Ь - а) + К
\ I Ф (т,|х) — <Р (*, M-o)
Применяя к последнему неравенству лемму 3 из § 3
дополнения (*(/) = ф(/, \х) — ф(/, цо))» получим при
I М- — Ню I < о
(9)
По теореме, доказанной в § 2, непродолжаемое
решение #=ф(/, jx) должно выйти за пределы мно-
множества F при возрастании (или убывании) t.
Обозначим через t\ = ti(\x) то значение t > t0 (или
t < /о), при котором точка (t, ф (/, |ы), \х) (| |ы — \х0\ < а)
впервые попадает на границу множества F. Пусть
1 (fo а\е М о—а)
тогда, в частности при t = t\, из неравенства (9) по-
получим
— <Р (*ь Но) К
при
— \io\<0. A0)
Однако, поскольку точка (tu ф(*ь |ы), [i) лежит на
границе множества F, то хотя бы одно из неравенств
в B) должно обращаться в равенство. В силу A0)
это возможно только при t\ = b (или при t\ = а, если
fi</o). Следовательно, решение * = ф(/, \х) опреде-
определено при всех a^t^by если |\х — \х0\ < а.
т-, . min{e,r}
Если теперь в качестве ъх взять гх < кф-а) *
где е—произвольное положительное число, а соот-
соответствующее этому ej число а обозначить 6, то в силу
§4. ЗАВИСИМОСТЬ РЕШЕНИЯ ОТ ПАРАМЕТРОВ ИЗ
неравенства (9) получим
p.) —q>(/, щ)|<в при ||i —|10|<6.
Теорема доказана.
Следствие. Функция <р(t, р,) непрерывна на
множестве a^t^bt |р — \хо\ <С о по совокупности
переменных (/, р).
Доказательство. Пусть (t\, pi) — произволь-
произвольная точка множества a^Zt^ib, |р — ро| <С о. Рас-
Рассмотрим разность
, р) — ф(/ь pi)|<
q> (/, |i) - <р (*, \х{) | + I Ч> (Л |ii) - q> (^ь
В силу доказанной теоремы для любого е/2 >> 0 най-
найдется такое число б > 0, что
|q>(f, \х) — q>(/, pi)|<e/2 при | ц — щ |< 6,
A2)
Из непрерывности функции <p(^,pi) следует, что для
любого е/2 > 0 найдется такое 6i > 0, что при
|| S
щ) | < е/2. A3)
Из неравенств A1), A2), A3) следует, что при
|*-*l| <6i И ||i-|li| <б
, М-) — <р(*ь Pi)l<e.
Таким образом, функция ф(/, \х) непрерывна в точке
(/ь (lxi) . Следствие доказано.
Т ео рем а 2. Пусть функции /(/, х, р), —^(^, л:, jlx),
(/ =1, ..., /г), -^р- (/, дс, |ы) непрерывны на множе-
множестве G. Пусть дс = ф(/, (ц)—решения системы урав-
уравнений A), удовлетворяющие начальным условиям
ф(^о, \л) = *о w определенные при a ^t ^ Ь, | р—ро| <С
< а.
Тогда не только ц> (/, fi), яо м б?в частная производ-
производная ~ (t, \x) непрерывна при тех же значениях t и \л.
Доказательство. Из непрерывности производ-
производных —у (/=1, .,., п) следует выполнение условия
114 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Липшица на любом замкнутом ограниченном множе-
множестве, содержащемся в G. В силу следствия из пре-
предыдущей теоремы, <p(tf, |i) непрерывна при a ^t ^ 6,
| |ы — |i01 < а.
Пусть (ы — любое число из интервала |ji — jlxo | <C a,
а б — такое, что интервал (\i — б, jui+б) содержится
в интервале ||х — \ю\ < а. Пусть | Ajlx| < б. Тогда
Вычитая из второго равенства первое, получим
= / (U Ф (^, I* + А|ы), ^ + Д,х) - f (^, Ф (/, р), р). (И)
В силу леммы 1 из § 3 дополнения
- f (t, ф (/, |i), ]i) =
= t F\ (U |i, A|i) [ф7 (Л |i + ^) ~ Ф7'
(f = l, ..., /г)
или в матричной форме
= F (/, |х, Дц) [ф (t9 ц
+ ?(/, ^х, А^.А^х, A5)
где F (/, jx, Aji) = (F) (t, \xf Aji)) — квадратная матрица,
g(t,p,k\i) = {gl(t,ii,&ii), ..., gn(t, \i, Aji)} — вектор.
Очевидно, f/ и ^ — непрерывные функции.
Вводя обозначение ф(/, \х + A/lx) — ф(/, [х) = Аф и
используя равенство A5), запишем соотношение A4)
в виде
-^ (Аф) = F (/, |х, А^х) Аф + g (t, ti, Д|х) • А^х. A6)
При Aji=7^0 соотношение A6) примет вид
§4. ЗАВИСИМОСТЬ РЕШЕНИЯ ОТ ПАРАМЕТРОВ 115
Равенство A7) показывает, что при А\хфО функ-
функция -г^- удовлетворяет нормальной линейной системе
дифференциальных уравнений
y = F(t, |i, &\i)-y + g(t, |i, Aii).
Пусть у = <ф(/, \i, Ajui) — решение этой системы
уравнений, удовлетворяющее начальному условию
ф (/о, A, А|х) = О.
В силу теоремы 1 функция ip(f, ji, А(ы) непрерывна
при
|/-'ol<A, и-о — о < \i < и* + а, | Aji |< 6.
Так как
Аф
Ф (t0, \i + Atu) —
то в силу теоремы единственности при Ajlx Ф 0
Переходя в этом равенстве к пределу при А|ы->0,
получим
!?(/, |х) = Hm U = lim f (/, н, A>x) = if (/, ^, 0).
Таким образом, производная -—• существует и не-
непрерывна при \t — to\<.h, (но — а < \х < \iQ + а, по-
поскольку функция фA, |1,0) непрерывна. Теорема до-
доказана.
Замечания. 1. Пусть х=ф(/, |х) — непродол-
жаемое решение системы уравнений A), удовлетво-
удовлетворяющее начальным условиям q>(to,\i) = Xo. Фиксируем
некоторое значение параметра ц= \х0. Покажем, что
производную y^(f, и-о) можно найти, решая задачу
Коши для некоторой системы линейных дифференци-
дифференциальных уравнений. В самом деле, дифференцируя
тождество
116 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
по [I и полагая |ы = jli0, получим
откуда следует, что производная у'Ч/, м-о) удовле-
удовлетворяет системе линейных уравнений
A8)
где k
А (/) = (|L (/, q> (/, ц0), ^)), Ь (/) = -J(/, q> (/,
Кроме того, поскольку <p(<0, \x) = Xq, имеем
дФ д
Следовательно, для нахождения производной ~^-(U M-o)
нужно решить задачу Коши для уравнения A8) с на-
начальными условиями
У('о) = О.
Таким образом, для нахождения производной
~(ty \i0) нет необходимости искать решение <р(^, |л)
для переменного |ы и потом дифференцировать его
по \i.
Система уравнений A8) называется системой
уравнений в вариациях для системы A) при |ы = |ио.
2. Если в теореме 2 потребовать непрерывность
всех смешанных производных
(дх1) 1 ... (дхп) п
функции /(/, х, ji) по всем х1' (/ = 1, ..., я) и (ы до
р-го порядка включительно, то решение #=ф(/, |ы)
имеет р непрерывных производных по переменному \х
в прямоугольнике
§4. ЗАВИСИМОСТЬ РЕШЕНИЯ ОТ ПАРАМЕТРОВ 117
и, следовательно, разлагается по степеням парамет-
параметра ц по формуле Тейлора
Для нахождения функций tffe(^) (k = О, 1, ..., р)
нужно подставить разложение A8х) в систему урав-
уравнений A) и, разложив правую часть по степеням па-
параметра |д, приравнять коэффициенты при одинако-
одинаковых степенях \i. В результате получим систему диф-
дифференциальных уравнений, из которой последователь-
последовательно находятся t|>o(O> ^i@» •••» %{t)- Начальные усло-
условия в рассматриваемом случае имеют вид
^о(^о) = *о. Мо) = 0, ..., %(t0) = О,
так как в силу A8')
*о = ^о(^о) + |nh(fo) + • • • + Pp%(to) + о (\хр).
3. Доказанные теоремы 1 и 2 очевидным образом
обобщаются на случай, когда правая часть системы
уравнений A) зависит от нескольких параметров
/(/,*, (!)=/(/,*, (X1, ..., (X*).
В заключение параграфа покажем, что вопрос о
зависимости решений задачи Коши от начальных
данных сводится к исследованию зависимости реше-
решения некоторой системы уравнений от параметров,
входящих в ее правую часть.
В самом деле, пусть
x = <f(t,s,l) A9)
— непродолжаемое решение системы уравнений
i = f(t,x), B0)
удовлетворяющее начальным условиям (при t = s)
q>(*,s,6) = 6. B1)
Введем новое независимое переменное x=t — s и
новую неизвестную функцию
y(x,s,l) = x(x + s)-lt B2)
тогда
4L
118 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Если в качестве x(t) взять решение A9) системы
уравнений B0), удовлетворяющее начальным усло-
условиям B1), то соответствующая функция B2) будет
решением системы уравнений
^ = f(r+s,y + l), B3)
удовлетворяющим начальным условиям (при т = 0)
if(O,s,g) = O, B4)
поскольку в силу B1)
0@, s9l) = 4(s, s, 6)-6=0.
Таким образом, исследование зависимости реше-
решения системы уравнений B0) от начальных данных
(s> %) сведено к исследованию зависимости решения
задачи Коши B3), B4) от параметров s и %.
В силу замечания 3 к теореме 2 имеет место сле-
следующая
Теорема 3. Пусть правая часть f(t,x) системы
уравнений B0) непрерывна на открытом множестве G
пространства переменных (t, x) и удовлетворяет
условию Липшица по аргументу х на любом замкну-
замкнутом ограниченном множестве, содержащемся в G.
Пусть (so> %о) — произвольная точка множества G и
х = ф (t, s, |) — семейство непродолжаемых решений
системы уравнений B0), удовлетворяющих началь-
начальному условию фE, s, |) = |. Пусть, далее, при s = so>
| = §0 решение х = ф (t, s0, 6o) задано на интервале
Ш\ <.t <L Ш2У и [а, Ь] — произвольный отрезок, за-
заключенный в (mi, m2).
Тогда существует такое о > 0, что при \s — $о| <С
< а, 11 — |о | < о решения х = ф (/, s, %) определены
при a ^t ^ b, и для любого г > 0 найдется такое
<б<а), <m? при \s — so\ < б, |6 —§о| < 6 бу-
выполняться неравенство
I Ф (/, 5, |) — ф (/, s0, У К е
вс^х ^е[а, 6], т. е. функция ф(/, 5, §) непрерыв-
непрерывна по s и % в точке s = so, ? = 6о, притом равномерно
относительно t на отрезке [а, Ь].
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ Ц9
Точно так же, как и выше, доказывается, что
функция ф(^,5, |) непрерывна на множестве
, \s-s0\<o, |6-|01<а
по совокупности переменных (/, s, %).
Имеет место теорема, аналогичная теореме 2.
Теорема 4. Пусть функции f(ty х) и —Ы/, х)
дх1
(/= 1, ..., п) непрерывны на множестве G простран-
пространства переменных (/, х). Пусть x=q>(t,s,%) — реше-
решения системы уравнений B0), удовлетворяющие на-
начальным условиям (p(s, s, S) = S u определенные при
a^it^ib, | s — So | < а, | S — So | < <?•
Тогда не только q>(/, s, S), но ^ частные производ-
производные -Д- (/=1, ..., я) непрерывны при тех же зна-
значениях (t, s, S)-
§ 5. Приближенные методы решения задачи Коши
В этом параграфе будут рассмотрены некоторые
приближенные методы решения задачи Коши для
нормальной системы дифференциальных уравнений
x = f(t,x) A)
с начальным условием
*(*о)=*о. B)
Будем предполагать, что выполнены условия тео-
теорем существования и единственности решения задачи
Коши A), B).
Задачу приближенного решения системы уравне-
уравнений A) при условии B) можно понимать по-разному.
Мы будем понимать ее как задачу построения на за-
заданном отрезке [to,T] функции y(t), которая «близ-
«близка» к решению x(t) задачи Коши A), B) с заданной
точностью е в том смысле, что
\x(t) — y(t)\^.e (to^t^T). C)
При этом необходимо, чтобы для построения
функции y(t) требовалось конечное число простей-
простейших математических операций (таких, как сложение,
120 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
вычитание, умножение, деление и некоторые логиче-
логические операции). Сами операции выполняются прибли-
приближенно с заданной степенью точности.
Как правило, при этом оказывается достаточным
указать значения функции y(t) в некоторых точках
^о < U < • • • < tu= T, если интерполяция этой функ-
функции в промежутках (/0,Л) (*ь*2), ..., (tN-i,T) не
нарушает условия C).
Поскольку точность е может меняться от задачи
к задаче, то от алгоритма приближенного решения
естественно требовать, чтобы функцию y(t) можно
было определить с произвольно заданной точ-
точностью 8 > 0.
В § 1 (см. замечание 3 на стр. 94) было отмечено,
что метод последовательных приближений Пикара
является хорошим приближенным методом решения
задачи Коши. Недостатком этого метода является
сложность вычислений, связанная с необходимостью
вычислять для каждого последующего приближения
интеграл вида
Тем не менее в некоторых случаях (как, напри-
например, для системы линейных дифференциальных урав-
уравнений с постоянными коэффициентами) метод Пикара
приводит к удобным вычислительным формулам (см.
пример на стр. 95).
Теперь рассмотрим подробнее два часто встре-
встречающихся метода решения задачи Коши A), B).
1. Метод Эйлера*).
Будем рассматривать равномерную сетку {tk}
т = *л+1 — /л = const
и зададим следующий алгоритм:
Ук + *?(*к>УкУ> Уо = хо- D)
*) Его называют также методом ломаных или методом ло-
ломаных Эйлера.
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ
Он основан на приближенных равенствах
/(/*,* (/*))« / D. Ун), * ('*)
Формулы D) получаются, если в системе уравнений
A) при t = tk левую и правую части заменить соот-
соответствующими приближенными значениями E). Ина-
Иначе говоря, пользуясь методом Эйлера, мы заменяем
функцию f(t, х(t)) кусочно-постоянной функцией, зна-
значение которой на промежутке (/*, tk+\) постоянно и
равно f(tk,Vk).
Формулу D) сравним с формулой
F)
(где Xk = x(tk))9 вытекающей из системы уравнений
A). Вычитая из F) равенство D), получим
[f(t,x(t))-f(tkyyk)]dt G)
Будем предполагать, что функция f(t, x) задана
на открытом выпуклом множестве G, имеет непрерыв-
непрерывные частные производные первого порядка по всем
переменным и что точки (?*, у*)> ('*> хь) не выходят
за пределы множества G.
Предположим, кроме того, что
dt
дх'
(8)
Оценим величину /(?, ж(g))—/(/*,#*), стоящую под
знаком интеграла в формуле G). Для этой цели
применим лемму 1 из § 3 дополнения и следствия из
этой леммы. При этом заметим, что мы выделили
особо один аргумент функции f(t,x), именно t. По-
Поэтому под векторами х и у в лемме 1 здесь следует
понимать векторы
{I, *'(?) **(&)} =&*(»}
122 гл- 3- ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Таким образом, мы имеем здесь дело с вектор-функ-
вектор-функцией f = {f\ ..., /"}, зависящей от (п + I) аргумен-
аргумента. На основании указанной леммы существует такая
матрица F(|) из п строк и (п + 1) столбцов, что
/ (|, х (|)) - / (tk9 ук) = F (g) {| - th9 х (|) - у). (9)
В силу следствия из лв1\шы 1 норма Ц/*1 (ё) II
рицы F(%) ограничена числом ^Jn(n-\- \)F, поэтому
из (9) получаем
1/A, *(!))- f(tk,yk)\<
+ \*(tk)-Vk\). A0)
Пусть на множестве О \f(t, х) \ ^ /, тогда \x(t) | ^
^ f. Поэтому в силу следствия из леммы 2 допол-
дополнения
Подставляя последнее неравенство в A0), получим
1/A, *(?))- f(tk, У к) К
(л + 1) F (|| - tk \ + f || - 4 I +1 хк - yk |) <
Обозначив C = (n + l)F, D = (n + \)F(I +/), по-
получим окончательно
1/A, «©) -/(/*, у„)\<С\ xk-yk\ + Dx. A1)
Из G), в силу неравенства A1), следует, что
A2)
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ 123
Обозначим \xk — f/k\=Pk и рассмотрим монотон-
монотонно возрастающую последовательность Zk, определяе-
определяемую соотношениями
zk+x = zk + Cxzk + Dx2y z0 = 0,
Используя A2), с помощью метода математической
индукции легко доказываются неравенства Zk ^ р*.
Запишем теперь последние формулы в виде
A3)
Обозначим z(t) решение следующей задачи Коши:
-?- = Cz + Dx, z(to) = O.
Очевидно,
Покажем, что z(tk)^zk. Для этого применим ме-
метод математической индукции. При k = 0 неравен-
неравенство очевидно. Пусть z(/*)^z*. Тогда, в силу монсь
тонности z(t) и равенств A3),
z(tk+l)-z(tk)= J -%-* =
Таким образом, z(tk+\)^ zk+\ + z(tk) — Zk и
) поскольку по предположению z(tk)^
>zk.
Итак,
>Pk = \*k- Vk\
124 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
В частности,
1*('*)-Ы<-?-1>С(Г"д-1]. A4)
Последняя формула показывает, что при т-»-0
\x(tk)—yk\->0. По этой формуле можно вычислить
шаг т, который достаточно применить в алгоритме D),
чтобы выдержать заданную точность 8.
При уменьшении т погрешность схемы уменьшает-
уменьшается линейно по т, поэтому схему Эйлера D) называют
схемой первого порядка точности.
Пример. Применяя метод Эйлера для решения задачи
Коши
х = х, *@)=1 A5)
на отрезке [0, 1], получим следующие формулы:
откуда следует, что
Сравним полученное приближенное решение с точным реше-
решением x(t) = еК Наибольшая погрешность |jc* — tjk\ будет в
точке / = 1 при k = N.
Покажем, что имеет место оценка
В самом деле, из неравенств — > In ( 1 + -77- ) > — -¦-*
N \ N ) N 2N2
следует, что
— I > е =
1 , 1
W+ 2\{2N)*
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ 125
Таким образом,
Из полученных неравенств видно, что
Поэтому можно оценить число N точек сетки, при котором
ошибка приближенного решения будет заведомо меньше назна-
назначенной точности 8. Из требования \xk— yk\ <е теперь легко
получаем N ^ \~к~" + 1- Так, например, при е = 10~2 имеем
N ^ 136, при 8 = Ю-3 N ^ 1360.
Отметим, наконец, что оценка A4) ошибки метода Эйлера
довольно груба. Так, для рассматриваемой задачи Коши A5)
имеем ^о = О, Т = 1, F = 1, / = е, п = 1; поэтому С = 2,
D =2(е+ 1) и
\xk-yk\<(e+\)T(e2-\).
Коэффициент при т (в сравнении с формулой A6)) завы-
2
шен в —(е + 1) (е2—1) раз, т. е. примерно в 17 раз. Поэтому,
пользуясь подобной «теоретической» оценкой точности схемы,
вычислитель может взять шаг т в 17 раз меньше, чем требуется
реально для достижения заданной точности. Это в 17 раз уве-
увеличит общий объем вычислительной работы!
Замечания. 1. Приведенный пример хорошо
иллюстрирует общее положение с теоретическими
оценками точности приближенных решений дифферен-
дифференциальных уравнений. За редким исключением они
всегда сильно завышают ошибку метода, и по этой
причине с их помощью нельзя достаточно точно опре-
определить максимальный шаг т. В связи с этим прихо-
приходится пользоваться самими результатами численного
решения для оценки точности. Например, можно про-
провести два расчета с шагами т и 2т. Если результаты
отличаются друг от друга в пределах заданной точ-
точности, то для сходящегося метода (т. е. метода, для
которого доказано, что \xk — ^|-^0 при т->0) это
служит характеристикой реальной точности алго-
алгоритма.
2. Если правую часть f(t,x{t)) системы уравне-
уравнений A), рассматриваемой на отрезке [tk,tk+i], заме-
заменить на f(tk+i,yk+i)9 то для приближенного решения
126 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
задачи Коши A), B) (так же, как это делалось для
метода Эйлера) получим следующие формулы:
В отличие от алгоритма D), полученные формулы,
вообще говоря, не позволяют явно выразить tjk+\ че-
через ун и редко используются. Такие схемы называют-
называются неявными.
2. Схема «предиктор-корректор».
Эту схему можно представить формулами
У\+х = yk + xf (*» Ук)> Уо = хо>
где yl+l — некоторые вспомогательные векторы.
После того как величина Ун вычислена, вычисляют
у?+{ по формуле A7). Это первое вычисление назы-
называют «предиктором»*). Затем по более точной фор-
формуле A8) вычисляют Ук+\- Это вычисление называет-
называется «корректором».
Подставляя формулу A7) в A8), получим
^+1=^+у[/D,Ы + /D+ь^ + т/D, ук))]. A9)
Для оценки погрешности метода A7), A8), ана-
аналогично предыдущему, нужно оценить величину
-Ук+\= \
- y f (tk+i, Ук + т/ D, yk))\ dl+xk- yk. B0)
Подобно тому, как это делалось выше при рас-
рассмотрении метода Эйлера, можно показать, что
\*к-Ук\=О{х)
*) От английского слова to predict — предсказывать. Фор-
Формулы A7) дают предварительные значения у\+\, которые затем
корректируются по формуле A8).
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ 127
(последняя запись означает, что \хц — Ун\ имеет по-
порядок не ниже, чем т).
Применив к интегралу в B0) более точную оцен-
оценку, можно показать, что на самом деле \хи — Ук\ =
= О(т2). Для этого разложим функции /(|, #(?)) и
f(tk+uyk + rf(tk,yk)) по формуле Тейлора*):
+ V/ (/*, ук) [(хк - ук) + (х (?) - xk)] + О (т2),
f(h+u Ук + т/(/А, Ун)) = /(/л, yk) + -jt Vk> Ук)
B1)
В первую из форхмул B1) подставим разложение
*©-**=/ (tk, Ук) (I - к) + О (т2) =
= / &, Уи + (хк - Ук)) {I -tk)+O (т2) =
получим
f (I, * ®) = f {tb Ук) + If (tk, Ук) (I - tk) +
+ V/ • / • (| - 4) + V/ • (xk -yk) + O (t2). B2)
Подставим формулу B2) и вторую из формул
B1) в B0). Воспользовавшись соотношением
*) Начиная отсюда и до конца параграфа, мы будем опу-
опускать некоторые несложные промежуточные вычисления, чтобы
избежать громоздкости изложения.
128 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
придем к выражениям
xk+l — Ук+l =
\
'к
+
Гд
Id
v/.
К1"
•(«* —
tk-
Уь)
+
1
i)
0(
'а + 1
Xk-yk =
= rVf'(xk-yk) + O(T3) + xk-yh. B3)
Если норма матрицы V/ ограничена:
II v/IK с,
то из формулы B3), так же как и выше, получим
оценку
I xk+{ — yk+l \<\xk — yk\ + CT\xk — yk\ + O(т3).
Дифференциальное уравнение для мажоранты z(t)
имеет вид
i|- = Cz + O(T2), z(/0) = 0. B4)
Из B4) находим
и, следовательно,
Таким образом, схема «предиктор-корректор» есть
схема второго порядка точности.
Пример. Применим схему A9) второго порядка точности
для приближенного решения задачи Коши A5). Для нее фор-
формулы A9) принимают вид
)*/А (k = 0, 1, .... N-l),
Отсюда находим
Ук = A+ т + 0,5тгN (k=Q,l, .... N).
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ J 29
Ошибка \xk — yk\ ^ e — yN оценивается аналогично предыду-
предыдущему. Используя неравенство
In A + т + 0,5т2) > т A + 0,5т) -Т2
получаем (т = 1/N)
A+
Задаваясь точностью 8 = 10~2, находим отсюда, что N ^ 12;
при е = К)-3 имеем N ^ 38. Напомним, что для метода Эйлера
соответствующее число точек значительно больше: N ^ 136 и
N ^ 1360!
Этот пример показывает, что применение схемы второго по-
порядка точности может существенно сократить число точек N и
общий объем вычислительной работы по сравнению с методом
Эйлера.
В рассмотренных выше схемах при вычислений
tjk+\ использовалось лишь одно значение t/k из вычис-
вычисленных у0, • • •, У к- Поэтому эти схемы называют
двухточечными. Покажем, что порядок точности схе-
схемы можно повысить и за счет увеличения числа то-
точек, входящих в формулы для вычисления Ук+и
В разложении
х (tk+l) = х D) + х (tk) т + х (tk) -f + О (т3) B5)
используем приближенные формулы
Ш
Подставив эти формулы в B5) и отбросив член
О(т3), получим трехточечную схему второго порядка
точности
|У*)-| */('*-!> Ук-\) B6)
(ft = l, 2, ..., N-l).
Схема B6) имеет весьма существенный недоста-
недостаток: для вычисления по ней недостаточно одного
лишь начального значения Уо = х0, необходимо знать
130 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
также У\. Это значение не может быть вычислено из
самой схемы B6); оно должно быть получено из дру-
гих формул. При этом очень существенно, чтобы зна-
значение ух было вычислено также с точностью до чле-
членов порядка О(т3), иначе мы потеряем точность, ко-
которой обладает схема B6). (Значение у\ может быть
вычислено, например, по схеме «предиктор-коррек-
«предиктор-корректор» A9).)
Итак, многоточечные разностные схемы обладают
общим недостатком: для них необходимо отдельно
рассчитывать «начальные значения» по совершенно
другому алгоритму. Это приводит к излишней рабо-
работе, в частности, это более чем удваивает работу по
программированию.
Другой недостаток многоточечных разностных
схем состоит в том, что изменение шага т в процессе
счета требует специальной процедуры — «смены ша-
шага». Суть этой процедуры состоит в том, что при из-
изменении шага т в процессе счета приходится (приме-
(применяя специальный алгоритм) заново рассчитывать
«начальные значения».
Многоточечные разностные схемы, как правило, имеют ре-
решения, поведение которых даже качественно не похоже на по-
поведение решений дифференциальных уравнений, которые они
аппроксимируют.
Например, для схемы B6) в применении к задаче Коши
A5) имеем
Будем искать решения вида #л=Л<7л,где А и q— постоян-
постоянные. Тогда для q получим квадратное уравнение
q2 —
корни которого
qx = 0,5 + 0,75т + 0,5 VI + т + 2,25т2,
q2 = 0,5 + 0,75т — 0,5 VI + т + 2,25т2.
При малых т Ц\ = 1 + т+ 0,5т2 + О(т3) « e%t q2 = О(т).
Тем самым решения yk = Aq\ убывают по модулю с ростом kt
что совершенно неестественно для решений дифференциального
уравнения х = х (растущих с ростом t).
Приведенные схемы D), A9), с одной стороны,
и многоточечная схема B6) демонстрируют два раз-
§ 5. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧИ КОШИ 131
личных подхода к составлению разностной схемы для
дифференциального уравнения A).
Первый подход носит название метода Рунге —
Кутта и состоит в том, что при вычислении t/k+\ ис-
используется лишь одна величина уи из сосчитанных ве-
величин уи ..., Уи. Аппроксимация уравнения и повы-
повышение порядка точности схемы достигаются в методе
Рунге — Кутта за счет вычисления правой части
уравнения A) — функции f{tyx) в ряде точек G?, ylk)
(i=l, ..., m), зависящих явно лишь от ун. Если
используются m точек, то при правильном подборе
коэффициентов разностной схемы можно достичь т-го
порядка точности разностной схемы*). Таковы схе-
схемы метода Эйлера D) и схема «предиктор-коррек-
«предиктор-корректор» A9), для которых соответственно т = \ и
т= 2.
Второй подход называют методом Адамса. В от-
отличие от метода Рунге — Кутта, в нем используется
несколько значений уи, Ук-и •••, Ук-m+i для вычисле-
вычисления значений правой части f(tk,yk), f(tk-u Jte-i), ...
..., f(tk-m+\,yk-m+i) системы уравнений A). Эти зна-
значения затем используются в разностной схеме.
Таковы, например, схема метода Эйлера D), для
которой m = 1, и трехточечная схема B6), для кото-
которой m = 2. Правильно подобрав коэффициенты раз-
разностной схемы, можно достичь т-го порядка точности.
Как мы уже видели выше, схемы, получаемые по
методу Адамса, при пг > 1 обладают рядом суще-
существенных недостатков по сравнению с методами Рун-
Рунге— Кутта. Неудивительно поэтому, что наибольшее
распространение в практике вычислений и особенно
при вычислениях на ЭВМ получили схемы, основан-
основанные на методе Рунге — Кутта.
Широкое распространение получила схема Рун-
Рунге— Кутта четвертого порядка точности; она реали-
реализована в виде стандартных программ для ЭВМ. Не-
Некоторые стандартные программы имеют автоматиче-
автоматический выбор шага т, достаточного для достижения за-
заданной точности 8. В методе Рунге — Кутта каждый
*) Это верно при m = 1, 2, 3, 4, 6. При m = 5 не суще-
существует схемы Рунге — Кутта пятого порядка точности.
132 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
новый шаг по времени не зависит от предыдущего,
поэтому в процессе счета легко менять шаг.
Приведем без вывода формулы того варианта ме-
метода Рунге — Кутта четвертого порядка точности,
который реализован в большинстве стандартных про-
программ. Они имеют следующий вид в применении к
задаче Коши A), B):
yk+l = yk + ~ (ak + 2bk + 2ck + dk),
ak=f{tk} yk),
t, yk + 0,6xak)9
( j
(k=l, 2, ..., N-l).
§ 6. Поведение решений линейных однородных
дифференциальных уравнений второго порядка
Линейные дифференциальные уравнения второго
порядка часто встречаются при решении самых раз-
различных задач физики.
Здесь мы рассмотрим простейшие свойства реше-
решений линейного однородного уравнения
x + a{(t)x + a2(t)x = 0, A)
связанные с частотой перемен знака функции x(t).
Пусть функции a\(t), аг(/), #i@ непрерывны на
некотором интервале а < t < |3. Вместо x(t) введем
новую неизвестную функцию y(t) по формуле
t
-j J fll(t) dx
x(t) = y(t)e '• , B)
тогда для у(t) получим дифференциальное уравнение
= 09 C)
где В (/) = а2 (/) ^ 2~ — непрерывная на ин-
интервале (а, C) функция.
§ 6. ЛИНЕЙНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 133
Отметим, что в силу B) функции х(t), y(t) ме-
меняют знак при одних и тех же значениях t. Поэтому
в дальнейшем будем считать, что уравнение A) при-
приведено к виду C).
Точку /0, в которой у(^о) = О, будем, как обычно,
называть нулем функции y\t).
Лемма. Пусть y(t)—нетривиальное, т. е. нерав-
неравное нулю тождественно, решение уравнения C). Тогда
множество нулей решения y{t), содержащееся на лю-
любом замкнутом промежутке [/ь /2] cz(a, Р), конечно.
Доказательство. Предположим противное.
Тогда существует бесконечная последовательность
tkd[t[1t2] нулей решения y(t). Из ограниченной по-
последовательности tk можно выбрать сходящуюся под-
подпоследовательность tnk -> /о s 1/ь h]-
В силу непрерывности решения y(t)
У (to) = У (lim tnk) = Hm у ftn) = 0.
По определению производной
Vf =limy(y-fW =Q,
Таким образом, y(to) = y(to) = 0. Но тогда по тео-
теореме единственности y(t) = 0, что противоречит пред-
предположению относительно y(t).
Из доказанной леммы непосредственно получаем
следующее.
Следствие. Если нетривиальное решение y(t)
уравнения C) имеет больше одного нуля на (а, Р) и
если у(^о) = О, то существует такой нуль t\=?to ре-
решения y(t), что интервал (to,t\) не содержит других
нулей этого решения. Такие точки to, t\ называют по-
последовательными нулями решения y(t).
Рассмотрим теперь два уравнения
Oy D)
z+B2(t)z = 0t E)
где B\(t) и B2(t) непрерывны на интервале (а, Р).
Теорема Штурма. Пусть B\(t)^ B2(t) на
(а, р) и to, t\—два последовательных нуля нетриви-
134 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ального решения y = y(t) уравнения D). Тогда лю-
любое решение уравнения E) имеет хотя бы один нуль
на отрезке [to, t\).
Доказательство. По условию теоремы
о)= #(fi)=0 и на интервале (to,t\) функция у (t)
сохраняет знак.
Без ограничения общности можно считать y(t)>
> 0 на интервале (to, fi), так как в противном случае
можно было бы рассмотреть решение
у=-у@.
Пусть z(t) — произвольное решение уравнения E).
Допустим, что z(t) не имеет нулей на [tOit\], и бу-
будем считать функцию z(t) положительной на этом от-
отрезке.
Умножив уравнение D) на z(t) , а E) — на y(t) и
вычитая одно из другого, получим
yz-zy=(B2(t)-Bx(t))yz. F)
Равенство F) можно переписать в виде
№*У) Ш0В1@)уг. G)
Проинтегрировав соотношение G) в пределах от
to до t\ и воспользовавшись равенством у (to) =y(t\) =
= 0, получим
У (h) z (/,) - у (t0) z (to) = J (B2 (t) - В{ (/)) у @ z (/) dt.
to
Так как y(t)>0 на (toj\), то y(to)^O. Равен-
Равенство y(to) = O исключено, так как иначе y(t) было бы
тождественно равно нулю.
Таким образом, y(to)>O. Точно так же можно
показать, что y(t\) < 0.
Так как z(t)>0 при t^[to,t\], в частности,
?(*o)>O, z(t{)>0 и B2(t)—Bx(t)^0 по условию, то
приходим к противоречию:
§ 6. ЛИНЕЙНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 135
Следствие 1. Пусть yi(t), y2{t) — линейно не-
независимые решения уравнения
y+B(t)y = 0.
Если to, t\ — два последовательных нуля решения
yi(t), то решение y2(t) имеет на интервале (to,t\)
в точности один нуль.
Доказательство. Вначале докажем, что на
интервале (tOi t\) имеется хотя бы один нуль решения
#2@- В самом деле, пусть уравнения D) и E) из тео-
теоремы Штурма совпадают и B\(t) = B2(t) = B{t)9
тогда решение y2(t) имеет на отрезке [tOi t\] хотя бы
один нуль (в силу теоремы Штурма). Но ни /о, ни t\
не могут быть нулями y2(t)y так как в противном слу-
случае определитель Вронского
W{1)~ Mt) hit)
обращался бы в нуль при t = t0 или при t = t\ и ре-
решения y\{t) и y2(t) были бы линейно зависимы.
Итак, решение y2{t) имеет на интервале (/о, ^i)
по крайней мере один нуль. Обозначим его Ar
Докажем теперь, что других нулей у решения
y2{t) на интервале (t^t\) нет. Допустим, что решение
y2(t) имеет на интервале (toft\) более одного нуля.
Тогда в силу следствия из леммы, доказанной в на-
начале этого параграфа, в интервале (/о, ^i) существует
такой нуль t\ решения у2 (/), что между t'o и t[ других
нулей уже нет, т. е. to и t\ — последовательные нули
решения y2{t). Но тогда по теореме Штурма между
t'Q и t\ должен быть хотя бы один нуль решения y\(t),
а это противоречит тому, что t0 и t\ — последователь-
последовательные нули функции y\{t).
Следствие 2. Если B(t)^O на интервале
(а, Р), то всякое нетривиальное решение уравнения
g + B(t)y = O (8)
имеет на (а, C) не более одного нуля.
Доказательство. Предположим противное.
Тогда найдется нетривиальное решение y(t) уравне-
136 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
ния (8), имеющее более одного нуля на (а, Р). Пусть
to и t\ — последовательные нули этого уравнения.
Рассмотрим уравнение
5 = 0, (9)
для которого В2 (/) = 0 ^ В (t).
По теореме Штурма любое решение z(t) уравне-
уравнения (9) имеет хотя бы один нуль на отрезке [^о, ^iL
Однако это не так: решение z(t)= 1 уравнения (9)
вообще не имеет нулей. Противоречие доказывает
следствие 2.
Пример. На интервале 0 < / <+оо рассмотрим уравне-
уравнение Бесселя нулевого порядка
x + jx + x = 0. A0)
Заменяя неизвестную функцию x(t) по формуле B):
t
x{t)=y(t)e=m
для y(t) получим дифференциальное уравнение
Одним из решений уравнения A0) является функция Бес-
Бесселя нулевого порядка
Соответствующее решение уравнения A1) имеет вид
y(t) = VtJo(t). A2)
Уравнение (И) сравним с уравнением
z = 0.
Решение z = sin t этого уравнения имеет на интервале @, +оо)
бесконечное множество нулей tk = kn (k = 1, 2, ...).
По теореме Штурма решение A2) уравнения (И), а сле-
следовательно и функция Jo(t), имеет на каждом из отрезков
[&л, (&+1)л] (k= 1, 2, ...) по крайней мере один нуль.
§ 7. ПЕРВОНАЧАЛЬНЫЕ СВЕДЕНИЯ О КРАЕВОЙ ЗАДАЧЕ 137
§ 7. Первоначальные сведения о краевой задаче
Рассмотрим дифференциальное уравнение второго
порядка
x + a(t)x + b(t)x = f(t). A)
Пусть функции a(t)9 b(t) и f(t) определены и непре-
непрерывны на некотором отрезке t0 ^ t ^ t\.
Будем искать решение x(t) уравнения A), удов-
удовлетворяющее следующим условиям:
x(to) — aox(to) = au
*(*i)-ft>*('i)=Pb ( '
где ао, оы, Po, Pi —постоянные.
Условия B) называются краевыми или гранич-
граничными условиями, а сама задача A), B) — краевой
задачей.
Условия B) не позволяют найти одновременно
значение x{t) nx(t) ни при t = tOi ни при / = t\. По*
этому краевая задача A), B) не сводится к задаче
Коши.
Для краевой задачи A), B) может осуществ-
осуществляться любая из трех возможностей: она может
иметь единственное решение, бесконечное множество
решений и вообще не иметь решений.
Пример. Для дифференциального уравнения
х + х = 0, C)
общее решение которого имеет вид
х = с\ cos t + c2 sin tt D)
рассмотрим следующие три краевые задачи с граничными усло-
условиями:
l; E)
1; F)
х @) = 0, х (я) = 0. G)
Краевая задача C), E) имеет единственное решение, так
как из формулы D), в силу условий E), получаем
С1=-жт- С2=0-
Краевая задача C), F) не имеет решений, так как из фор-
формулы D), в силу F), следует что
1 =—с\ sin л = 0?
что невозможно.
138 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Краевая задача C), G) имеет бесконечное множество ре-
решений:
X = С\ COS t,
где с\ — произвольная постоянная.
Рассмотрим три способа решения задачи A), B),
причем будем предполагать, что решение этой задачи
существует и единственно.
I. Метод «стрельбы».
Пусть xo(t) — частное решение уравнения A),
удовлетворяющее начальным условиям
*о (*о) = а, х0 (to) = <*о*о (*о) + а1 >
где а — произвольно выбранное число; yo(t) — реше-
решение соответствующего однородного уравнения
удовлетворяющее начальным условиям
У о (to) =У, У о (to) = ЩУо (to)
(у — произвольно выбранное число).
Тогда при любом с функция
x(t)=xo(t) + cyo(t) (8)
есть решение уравнения A), удовлетворяющее пер-
первому из краевых условий B).
Константу с подбираем так, чтобы решение (8)
удовлетворяло второму краевому условию из B):
хо (h) + суо (h) - Ро [хо (h) + су0 (h)] = Pf,
отсюда находим
. = Pi — JC
Замечание. Легко видеть, что yo(t\)— $oyo(t\)?=
Ф0, так как в противном случае краевая задача A),
B) либо не имеет решения, либо имеет бесконечное
множество решений. Мы же рассматриваем случай,
когда задача A), B) имеет единственное решение.
Итак, метод «стрельбы» состоит в том, чтобы из
однопараметрического семейства решений (8) уравне-
уравнения A), удовлетворяющих первому из краевых ус-
условий B), выделить то, которое удовлетворяет втсь
рому краевому условию.
§ 7. ПЕРВОНАЧАЛЬНЫЕ СВЕДЕНИЯ О КРАЕВОЙ ЗАДАЧЕ 139
При численном решении краевой задачи метод
«стрельбы» имеет существенный недостаток. Кон-
Константа с, вычисляемая по формуле (9), находится
с ошибкой. Если уо(t) — быстро растущее решение
типа ekt (k>0), то решение (8) будет найдено с
большой погрешностью. В самом деле, если *o(O>
yo{t) и с вычислены с погрешностями Дхо, Д#о, Ас со-
соответственно, то, в силу (8), ошибка вычисления
x{t) есть
кх = Дяо + с Аг/о + Уо Ас + Д#о' Ас.
Из этой формулы видно, что погрешность |Ах| мо-
может быть весьма большой за счет слагаемого
Рассмотрим другой метод решения краевой за-
задачи, как правило, свободный от этого недостатка.
II. Метод «прогонки» (или факториза-
ц и и).
Запишем уравнение A) в виде
Для этого функции \x(t) и v(/) нужно подобрать так,
чтобы
х + [ix @ + v (/)] х + [v (/) + |i (/) • v (/)] х =
= x + a(t)x+b(t)x,
т.е. функции n(t) и v(t) должны удовлетворять урав-
уравнениям
Из уравнений A1) получаем
v(t) + a(t)v(t)-v2(t) =
Положим v(/o)^ —«о, тогда для нахождения v(t)
имеем следующую задачу Коши:
140 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Обозначим х+ v(t)x=z, тогда, в силу первого
граничного условия из B),
г (to) = х (t0) + v (to) х (t0) = x (t0) - aQx (t0) = Щ
и для нахождения z(t) (в силу A0) и A2)) получаем
следующую задачу Коши:
z + [a(t)-v(t)]z = f(t)t
z(to)=al. { }
Для нахождения x(t) нужно решить задачу Коши
x+v(t)x = z(t),
причем x(t\)=x\ находится из следующих уравне-
уравнений:
Легко видеть, что, решая последовательно задачи
Коши A3), A4) и A5), получим решение x(t) крае-
краевой задачи A), B).
Замечания. 1. Решение задачи Коши A4) на-
называется прямой прогонкой, а задачи Коши A5) —
обратной прогонкой.
2. Можно показать, что при решении краевой за-
задачи методом прогонки не происходит потери точ-
точности, характерной для метода «стрельбы».
3. Встречаются краевые задачи с несколько более
общими граничными условиями, чем B), а именно
причем al + a\>0 и Р20+р^>0.
III. Решение краевой задачи с по-
помощью функции Грина.
Для уравнения
x+a(t)x + b(t)x = f(t) A6)
§ 7. ПЕРВОНАЧАЛЬНЫЕ СВЕДЕНИЯ О КРАЕВОЙ ЗАДАЧЕ 141
рассмотрим краевую задачу с однородными гранич-
граничными условиями
«а* ('о)+ <*,*('<>) = 0 (а?+ «?><>)>
+ MC) = O (Р2 + ^>О) A '
Как и раньше, будем предполагать, что рассмат-
рассматриваемая краевая задача имеет единственное ре-
решение.
Пусть x=x\(t) — какое-либо нетривиальное реше-
решение однородного уравнения
= O, A8)
удовлетворяющее первому из граничных условий A7),
Со) + <*i*i Со) = О,
а л; = л?2(/) — нетривиальное решение уравнения A8),
удовлетворяющее второму граничному условию
Тогда x\(t) не удовлетворяет второму граничному
условию, так как в противном случае при любой по-
постоянной с функции x = cx\(t) были бы решениями
краевой задачи A8), A7), и наша исходная краевая
задача A6), A7) имела бы бесконечное множество
решений. Точно так же доказывается, что лгг(О не
удовлетворяет первому граничному условию. Итак,
Mi (ti) + Mi (ti) Ф 0,
)#0 ( j
Построенные решения # = Jti(f), x=x2(t) ли-
линейно независимы, так как в противном случае они
были бы пропорциональны и потому удовлетворяли
бы одним и тем же граничным условиям, что не-
невозможно.
Решение неоднородного уравнения A6) будем ис-
искать методом вариации постоянных. Записывая ре-
решение x{t) в виде
B0)
142 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
для определения функций C\(t) и c2(t) получим сле-
следующую систему линейных уравнений:
Решение этой системы уравнений имеет вид
W(t) ' B1)
^ w (t)
где
„.. /j.\ X\ (t) X2 (
W{t)~ it {t) x2(
— определитель Вронского, составленный для линей-
линейно независимых решений x\(t) и x2(t). Интегрируя
соотношения B1), получим
где ti и 72 — постоянные.
Подставляя найденные выражения для C\(t) и
c2(t) в B0), получим общее решение уравнения A6)
\
t
t
+ х2 (t) \ Х1^Ц8) ds + y{Xl (I) + ъх2 (i). B2)
to
Дифференцируя B2) no t, имеем
t
t
a, il\ ds + Yi«i W + Y2^2 (/)• B3)
to
§ 7, ПЕРВОНАЧАЛЬНЫЕ СВЕДЕНИЯ О КРАЕВОЙ ЗАДАЧЕ 143
Потребуем теперь, чтобы решение B2) удовлет-
удовлетворяло граничным условиям A7). Подставляя выра-
выражения B2), B3) в первое из граничных условий
A7), получим (так как aoXi(to) + a\Xi(to)= 0)
О =
Со) + alXl (t0))
ds
+ Yi («oil Co) +
(t0)) + Y2 («0*2 Co) + «1*2 (to)) =
= Y2 («0*2 Co) + «1*2
В силу неравенств A9) это возможно только при
72 = 0.
Подобным же образом доказывается, что у\ = 0.
Итак, решение краевой задачи A6), A7) можно
представить в виде
¦ds,
или
где
x(t)=\G(t,s)f(s)ds,
B4)
G(t9s) =
Xi(s)Xj(t)
w(s) ''
xi(t)x2(s)
w(s) J
xi(t)x2(s)
w{s) '¦
x2(t)xi(s)
w(s) '
B5)
Построенная функция G(t,s) называется функ-
функцией Грина краевой задачи A6), A7). Таким обра-
образом, если функция Грина найдена, то решение крае-
краевой задачи A6), A7) задается формулой B4). Сама
функция Грина от /(/) не зависит (она определяется
решениями X\(t) и Х2О) однородного уравнения A8)).
Легко проверить, что функция Грина G(t,s) при
144 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
любом фиксированном 5 обладает следующими свой-
свойствами:
1) при t=?s G(t,s) удовлетворяет однородному
уравнению A8);
2) при t = to и * = *i G(t,s) удовлетворяет соот-
соответственно первому и второму граничным усло-
условиям A7);
3) при t = s G(t, s) непрерывна;
4) при t=s производная Gi(t, s) имеет скачок,
равный 1:
H H 1
Свойства 1)—3) проверяются совсем просто. Дока-
Докажем свойство 4). В силу B5)
X\(t) X2(s)
w(s)
откуда следует, что
t U - tot
X2 (S) X\ (s) —Xj (S) X2(S)
= ^
Можно показать (здесь мы этого делать не бу-
будем), что свойства 1)—4) однозначно характеризуют
функцию Грина, т. е. что любая функция G(t,s), об-
обладающая свойствами 1)—4), имеет вид B5).
Замечание. Использование функции Грина осо-
особенно удобно в тех случаях, когда приходится много-
многократно решать краевую задачу A6), A7) для раз-
различных правых частей f(t).
Пример. Построим функцию Грина для краевой задачи
x—x = f(t), *@) = 0, х(\) = 0.
Общее решение однородного уравнения х— х = 0 имеет вид
х = С\ -\- с2 е\ откуда находим #i(/)=l— e* (нетривиальное
решение, удовлетворяющее первому граничному условию),
#2@ = 1 (нетривиальное решение, удовлетворяющее второму
граничному условию),
B5)
1-е* 1
-е* О
=е\ В силу формулы
ЗАДАЧИ 145
Задачи
1. Показать, что решение уравнения х = х2, удов-
удовлетворяющее начальному условию #A)=1, нельзя
продолжить до решения, определенного на всей оси t,
несмотря на то, что правая часть этого уравнения —
гладкая функция во всей плоскости t, x.
2. Показать, что уравнение Лагранжа
x = t-±x* + ^rX* A)
имеет однопараметрическое семейство решений
t = ^p2 + c, х = -~-р3+с
(или, исключая р, (t— сK = (а:— сJ), а также ре«
шение х=^ —4/27, которое будет особым, в чем
можно убедиться, построив графики соответствующих
кривых.
3. Показать, что дискриминантная кривая уравне-
уравнения Лагранжа A) распадается на пару прямых:
х = t и х= t — 4/27. Особым решением будет лишь
вторая из них.
4. Показать, что система уравнений для нахож-
нахождения огибающей однопараметрического семейства
кривых
{t-cf={x-cf
имеет два решения: х = /, х = t — 4/27, причем оги-
огибающей будет лишь вторая прямая.
5. Найти производную по параметру [х: —
от решения следующей задачи Коши:
ц-0
Указание. Производная -^- = у(/) является
dy | 1 , о
решением линейного уравнения -тг= У + / + х
удовлетворяющим начальному условию #@) = 0 (так
146 ГЛ. 3. ТЕОРИЯ СИСТЕМ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
= 0), причем функция *| 0 является решением сле-
следующей задачи Коши:
? у у (Г\) = 1
Ответ: —• = e2t — t — 1.
6. Разложить решение задачи Коши
по степеням параметра \х до второго порядка включи-
включительно.
Ответ:
х= 1 + 3\х + ц2 ( Jr- 3/) + о(ц2).
7. Показать, что если в уравнение п-го порядка
F(xtx\ ...,*W) = 0
не входит явно t, то его порядок может быть понижен
на единицу с помощью замены переменных хг =
= р(х). (Здесь р(х) — новая неизвестная функция.)
Указание. Имеют место формулы
х" = р' (х) • р, х'" = р" (jc) р2 + \р' (х)]2 ¦ р, ...
8. Показать, что если в уравнении n-го порядка
F(t,x,x', ...,XM) = 0
функция F{t,x,x\ ..., х(/г)) однородна относительно
аргументов х, х\ ..., х{п\ т. е.
F (/, kx, kx\ ..., kx<n)) = kpF (t, x, x\ ..., хЫ)
(p — некоторая постоянная), то его порядок можно
понизить на единицу заменой переменных
\zdt
х = е ,
где z = z(t) — новая неизвестная функция.
Указание. Имеют место формулы
где Ф (г, z', .... г(*-'>) — многочлен.
ЗАДАЧИ 147
9. Показать, что схема Рунге — Кутта (см. § 5)
имеет четвертый порядок точности.
Указание. Разложив все встречающиеся в B7)
величины в ряды Тейлора в окрестности точки (tk,!Jk),
с точностью до О (т4), показать, что | xk — t/k \ = О (т4).
10. Оценить точность решения задачи Коши A5)
из § 5 по схеме Рунге—Кутта. Оценить шаг т, га-
гарантирующий достижение точности е = 10~2 и е =
= Ю-3.
Указание. Применить оценку
д.2 д.3 д-4
In A + Х)> X — -2" + "з 4"»
справедливую при |#|< 1.
Глава 4
ДИНАМИЧЕСКИЕ СИСТЕМЫ
Эта глава посвящена важному классу нормаль-
нормальных систем дифференциальных уравнений—динами-
уравнений—динамическим системам.
Вначале рассматриваются общие свойства реше-
решений динамических систем, а затем подробно изу-
изучается поведение траекторий динамических систем
на плоскости.
§ 1. Динамические системы и их геометрическая
интерпретация
Рассмотрим нормальную систему дифференциаль-
дифференциальных уравнений
* = /(*), A)
правая часть которой не зависит от переменного /.
Системы дифференциальных уравнений вида A)
называются динамическими или автономными.
Заметим, что если задана нормальная система
дифференциальных уравнений
x = f(t,x),
то, вводя новую неизвестную функцию xn+l = t, ее
можно записать в виде динамической системы в про-
пространстве переменных х\ ..., хп, хп+1:
Предположим, что функция f(x) непрерывна на
некотором открытом множестве D пространства пе-
переменных х1, ..., хп и удовлетворяет условию Лип-
Липшица в любом замкнутом ограниченном множестве,
целиком содержащемся в D. Тогда, в силу теорем
§ 2. СВОЙСТВА РЕШЕНИЙ ДИНАМИЧЕСКИХ СИСТЕМ 149
существования и единственности, для любого дей-
действительного числа to и для любой точки xo^D бу*
дет существовать единственное решение
* = Ф(О
системы уравнений A), удовлетворяющее условию
Ф (to) = *о.
В пространстве переменных х1, ..., хп любое ре-
решение * = ф(/) динамической системы A) опреде-
определяет кривую. Эту кривую с заданным на ней пара-
параметром / будем называть траекторией. Само прост-
пространство переменных х1, ..., хп называется фазовым
пространством.
В каждой точке х^ D определен вектор /(#),
т.е. динамическая система A) определяет векторное
поле на множестве D.
Пусть # = ф(/) — решение системы A), опреде-
определенное на некотором интервале а < t < b, и пусть
а < to < b. Обозначим <p(tfo)= x0. Тогда
Ф(/о)=/(ф(/о)) = /(*б). B)
Трактуя t как время, можно придать соотноше-
соотношению B) следующий геометрический смысл: кривая
л; = ф(/) в множестве D является траекторией си-
системы A) тогда и только тогда, когда в каждой ее
точке #о = ф(^о) скорость ф(/о) равна значению век-
векторного поля f(x) в этой точке.
§ 2. Свойства решений динамических систем
1. Если лс=ф(/) — решение динамической си-
системы
x = f(x), A)
то, какова бы ни была постоянная с} x = <p(t+c)
также является решением.
Доказательство следут из равенств
2. Если #=ф(/) и ж=г|?(/)—два решения систе-
системы A) и ф(/!) = ^(/2), то г|?(/) = ф(/ +с), где с =
150 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
= t\ — ?2. Иначе говоря, если траектории x = (p(t) и
х= ty(t) имеют общую точку, то эти траектории сов-
совпадают.
Доказательство. В силу свойства 1, х =
= ф(/ + с) (с = t\ — t%)—решение системы A), а в
силу равенства <р(Л) = ()
Таким образом, решения х = q>(t + с) и x='$(t)
удовлетворяют одинаковым начальным условиям при
t = h и, в силу теоремы единственности, совпадают,
Свойство 2 доказано.
3. Решения динамической системы обладают груп-
групповым свойством-, если x=q>(t, Xq) — решение систе-
системы A), удовлетворяющее начальному условию
ф@, *о)= Xq, TO
q>{t, ф E, х0)) = Ф (t + s, x0).
Доказательство. Положим #1 = ф(?, Хо).
Тогда ф1@ = ф(^,^1) — решение системы A) и, в
силу свойства 1, ф2@ = ф(^ + s, x0) также является
решением A); при этом
ф2@)=фE, xQ) = xx.
Таким образом, решения cpi(O и Фг(О системы урав-
уравнений A) удовлетворяют одинаковым начальным ус-
условиям. В силу теоремы единственности cpi(f)= ф2@
или
ф (/, ф E, Xq)) = ф E + /, Xq).
Свойство 3 доказано.
Решение системы A) вида х = а, где а — постоян-
постоянный вектор, называется положением равновесия (или
точкой покоя).
Очевидно, что если ж=а — положение равнове-
равновесия, то /(я)=0, и наоборот, если /(я) = 0, то х =
= а — положение равновесия.
§ 2. СВОЙСТВА РЕШЕНИЙ ДИНАМИЧЕСКИХ СИСТЕМ 151
Пусть x = q(t) — решение динамической системы
A), определенное при — оо < t << + оо. Число с на-
называется периодом решения х = ф(^),еслиср(/+ с) =
= q)(t) при всех г.
Обозначим F множество всех периодов решения
я = ф(/) (это множество непусто, так как OeF).
Докажем следующие свойства множества F.
1. Если с е F, то —с е F.
Доказательство. Так как с — период, то
ф + с) = ф(^). Заменяя в этом равенстве / на t — с,
получим q>(t) = q>(t — с), т. е. —с является периодом.
2. Если С\ g F, С2 g F, то с\ + <?2 ^ F.
Доказательство следует из равенств
Ф (/ + а + с2) = ф (t + с{) = ф (О-
3. F — замкнутое множество.
Доказательство. Пусть сп — сходящаяся по-
последовательность периодов и lim cn= cQ. Тогда в
силу непрерывности <р(/) имеем
ф(^ + ^о) = ф('+ Hm cn) =
= lim ф (t + сп) = Hm ф (/) = Ф @-
Таким образом, Cq^F и, следовательно, F—замкну-
F—замкнутое множество.
Теорема. Пусть траектория х = ф (t) динамиче-
динамической системы A) сама себя пересекает. Тогда ре-
решение ср(/) может быть продолжено на интервал
— оо <с t <С + оо и имеет место одна из следующих
возможностей:
1) ф(^)=а, т. е. решение ф@ является положе-
положением равновесия;
2) существует такое число Т > 0, что ф(/ + Г) =
= ф@ пРп всех t> н0 пРи 0 < | U — ^| < Т
(<)
ф)
В случае 2) решение я = ф(^) называется перио-
периодическим, а его траектория — замкнутой траекторией
или циклом.
Доказательство. Пусть решение х = ф@
определено при а < f < b. По предположению траек-
152 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
тория решения сама себя пересекает, т. е. существуют
такие числа t\^(a9b), 12^(а, b) (t\ > /2), что
В силу свойства 2 решений динамических систем,
ф(/)=ф(/ + с), B)
где с = t\ — t2 > 0.
Функция х = ф(/ +с) является решением системы
A), определенным при а — с <. t < b — с, и, кроме
того, в силу B), эти решения совпадают на общей
части их областей определения, т. е. при а <С t <
<С b — с. Следовательно, решение
,_¦«,_,*«-. <¦<'<»¦
С/, d С "^ t ^s tt,
является продолжением решения x = ($(t) на интер-
интервал (а — с,Ь). Последовательно повторяя описанную
процедуру, получим продолжение решения ж=ф(^),
определенное на интервале (—оо,6).
С помощью равенства <р@ = ф(^~с)> которое
получается из B) заменой t на t — с, получим про-
продолжение решения x = y(t) с интервала ( — оо, Ь) на
всю числовую ось (— оо, + оо).
Итак, решение я = <р(/) можно считать опреде-
определенным при — оо < t < + со, причем, как явствует
из самого способа продолжения, постоянная с =
= t\ — /2 > 0 является периодом этого решения.
Пусть F — множество периодов решения ж =
Могут представиться две возможности:
а) F содержит сколь угодно малые положитель-
положительные числа,
б) в F найдется наименьшее положительное чи-
число Т.
В случае а) существует сходящаяся к нулю по-
последовательность положительных периодов сп.
Пусть t — произвольное действительное число.
Дробные части
t
§ 2. СВОЙСТВА РЕШЕНИЙ ДИНАМИЧЕСКИХ СИСТЕМ 153
чисел — образуют ограниченную последователь-
ность, а так как ?«-^0, то
lim \t - Г-f-l сп\ = lim (ancn) = 0.
Числа —\сПУ будучи целыми кратными перио-
дов сп, сами являются периодами решения ф@« По-
Поэтому
Ф«=Ф (*-[-?]**). C)
Переходя в равенстве C) к пределу при /г->оо, по-
получим
Таким образом, решение л:^ф(/) в случае а) яв-
является положением равновесия.
В случае б)
Покажем, что q>(/i)^<p(/2) при 0<|/i — t2\<T.
Предположим противное. Тогда найдутся такие tu U
@<|*i — t2\< 71), что ф(/1)=ф(/2). В силу свой-
свойства 2, ф@=ф(^ + с)> гДе С = ^i "" h Ф 0. Таким
образом, c=t\— t2 служит периодом решения ф@-
В силу свойства 1 множества Fy положительное число
|^1 — ^21 ^ ± с также является периодом, а это про-
противоречит предположению, что Т — наименьший по-
положительный период решения ф@- Теорема дока-
доказана.
Из доказанной теоремы непосредственно получаем
следующее
Следствие. Траектория любого непродолжае-
мого решения динамической системы A) может быть
либо положением равновесия^ либо замкнутой траек-
траекторией, либо траекторией без самопересечений.
154 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
§ 3. Поведение траекторий динамических систем
на плоскости
Рассмотрим динамическую систему
в которой функции р(х\х2) и f2(x\x2) определены и
непрерывны на всей плоскости х\ х2 и удовлетво-
удовлетворяют условию Липшица в любом замкнутом ограни-
ограниченном множестве.
Пусть L — отрезок прямой, обладающий тем свой-
свойством, что, какова бы ни была точка x^L, вектор
f(x) не параллелен L. Заметим, что f(x) ф 0 в точках
отрезка L. В силу непрерывности вектор-функции
f(x) через любую точку ху не являющуюся положе-
положением равновесия, можно провести такой отрезок до-
достаточно малой длины.
Запишем уравнение отрезка L в виде
х= ц (и) = а + и (Ь — а) (О < и < 1). B)
Для удобства дальнейшего изложения концы а и Ь
не будут причисляться к L.
Фиксируем произвольную точку х = ^(и) @ <
<Lu<.\) отрезка L и рассмотрим траекторию х =
= ф(^) динамической системы A), проходящую че-
через эту точку. Пусть при некотором значении t=t\
<p(^i) = ij)(w). Может случиться, что при некоторых
t > t\ наша траектория снова пересечет отрезок L.
Пусть t2 (t2>t\) — ближайшее к t\ значение пара-
параметра*), при котором это происходит: ф(^) =
= ty(U)^L @ < U < 1). Очевидно, что значение V
зависит только от выбора иу т. е. 1) = %(и).
Таким образом, на некотором подмножестве ин-
интервала 0<^<1 определена функция f/ = x(^),
которая называется функцией по следования.
Остановимся на некоторых свойствах функции по-
следования:
*) Если допустить что ф@ попадает на L при /, сколь
угодно близких к tu то окажется, что вектор ф (^), а, следова-
следовательно, и вектор /(<p(fi)) Ф 0 коллинеарны L.
§ 3. ПОВЕДЕНИЕ ТРАЕКТОРИЙ НА ПЛОСКОСТИ
155
1. Если функция %(и) определена при u = uOi то
она определена и непрерывна в некоторой окрестно-
окрестности (Uq — б, Но + б) ТОЧКи Uq.
Доказательство. Пусть х = <р (t, у) — реше-
решение динамической системы A), удовлетворяющее на-
начальному условию <р@, у)= у. Уравнение траектории,
проходящей через точку #o = i|3(wo), можно записать
в виде х = <р(/, *о).
Предположим, что эта траектория вновь пересе-
пересекает отрезок L в точке ?/0 =%(wo), тогда Х\ = ip (С/о)»
где Uо = х(мо), и имеет место равенство
C)
как систему двух уравнений относительно перемен-
переменных /, и, U:
11)
Рассмотрим векторное уравнение
Фа
= 0.
Обозначим левые части уравнений D) через F1 и
F2 соответственно и, используя B), вычислим яко-
якобиан
dF1
dU
dF1
dF2
dU
dF2
= dU
dU
al-bl
/4<P('. ¦(«)))
a2—b2
где
a = {a1,a2}, b = {b\ b2}.
При U=UOi u=uOi t = to получим, что
ая ая
dU dU
al — bl a2—b2
#0,
dt dt
поскольку вектор f(x) не параллелен отрезку L для
156
ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
По теореме о неявной функции уравнение C)
можно однозначно разрешить относительно U (и t)
на некотором интервале («о—б, щ + б):
причем Uo = %(uo) и функция %(и) непрерывна.
Свойство 1 доказано.
2. Функция U = %(и) строго монотонна.
Доказательство. Так как вектор f(x) не па-
параллелен L при #eL, то все векторы f(x) направ-
направлены в одну сторону от отрезка L; в противном слу-
случае в силу непрерывности f(x) на L нашлась бы точ-
точка #о, в которой вектор /(#о) был бы параллелен L.
Рис. 9.
Если п2 > и\, то траектория, соединяющая точки
и ^{U2), не может пересечь траекторию, соеди-
соединяющую точки ife(wi) и Ф(?Л). Поэтому U2 > U\ или
Х(^2)>х(^0> т- е- %(и) — строго возрастающая функ-
функция (см. рис. 9; стрелки указывают направление дви-
движения точки на траектории при возрастании t).
Рассмотренный случай соответствует возрастанию
параметра и в направлении от а к Ь. Если изменить
направление отрезка L (т. е. поменять а и Ъ ме-
местами), то функция %(и) будет строго убывающей.
Свойство 2 доказано.
Замечание. Изменив в случае необходимости
направление отрезка L, всегда можно добиться того,
§ 3. ПОВЕДЕНИЕ ТРАЕКТОРИЙ НА ПЛОСКОСТИ 157
чтобы функция последования была строго возра-
возрастающей.
Теорема 1. Для того чтобы через точку хо =
= ty(uo) отрезка L проходила замкнутая траектория
динамической системы A), необходимо и достаточно,
чтобы функция %{и) была определена при и = и0
и чтобы х(«о) = uq.
Доказательство необходимости. Пусть
* = <р@— замкнутая траектория, проходящая через
Рис. 10.
точку лго = ф(но), и ПУСТЬ %(и^)Фиъ. Тогда могут
представиться два случая (рис. 10).
Возьмем замкнутую ограниченную область G с
границей, состоящей из куска траектории, соединяю-
соединяющего точки ty(u0) и $(Uq) {Uo = %(uo))y и отрезка
прямой (ip(tto), *(^о)).
Для определенности рассмотрим подробно случай,
изображенный на рис. 10, а.
Как было отмечено выше, векторы f(x) (x^L)
направлены в одну сторону от отрезка прямой L. По-
Поэтому все траектории, проходящие через отрезок
(я|)(&о), 'Ф(^о)), с ростом t покидают множество G.
Сама траектория х = <р(^), пройдя точку tf(f/o), по-
покинет G (так как сама себя она пересечь не может,
а_ через отрезок (ч|?(«о), Н'(^о)) траектории покидают
G) и, следовательно, не может попасть в точку ф(мо)>
т. е. не будет замкнутой. Однако это противоречит
условию теоремы.
158 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Точно так же при убывании t траектория * = p(
попадает во внутренность G и не может попасть в
точку г|?(мо). Необходимость доказана.
Доказательство достаточности. Если
то траектория, проходящая через точку
) сама себя пересекает и, в силу следствия
из теоремы § 2, является замкнутой или положением
равновесия. Последнее, однако, невозможно, так как
в этом случае вектор /(#о) равнялся бы нулю и был
бы параллелен отрезку L, что невозможно. Теорема
доказана.
Определение. Замкнутая траектория К: х =
= <р(/) называется предельным циклом динамиче-
динамической системы A), если в множестве траекторий, про-
проходящих через точки, достаточно близкие к К, нет
замкнутых (кроме самой К).
Теорема 2. Для того чтобы через точку х0 =
= /Ф(ио) проходил предельный цикл динамической
системы A), необходимо и достаточно, чтобы функ-
функция %(и) была определена при и = и0, %(^о)=мо
и чтобы уравнение %{и) = и при достаточно малом
\и — uq\ имело единственное решение и=щ.
Доказательство необходимости. Пред-
Предположим, что через точку *о=ф(но) проходит зам-
замкнутая траектория К: * = <р(/). Если каково бы ни
было 6 > 0 уравнение %(и) = и имеет решение на
интервале | и — uq\ < 6, отличное от и = uQy то, в
силу теоремы 1, через точки, как угодно близкие к/С,
проходят замкнутые траектории динамической си-
системы A). Поэтому К не будет предельным циклом.
Доказательство достаточности. Если
условия, сформулированные в теореме, выполнены, то
в силу равенства %(^0) = ^0, траектория К: # = ф(/),
проходящая через точку г|)(м0), замкнута. Что ка-
касается траекторий, отличных от /С, но проходящих
через точки, достаточно близкие к К, то они не будут
замкнуты. В самом деле, в противном случае, в силу
непрерывной зависимости решения от начальных ус-
условий, замкнутые траектории пересекали бы отрезок
L в точках, как угодно близких к точке ty{u0). Так
как функция %(и) непрерывна и строго монотонна, то
этим траекториям отвечали бы корни уравнения
§ 3. ПОВЕДЕНИЕ ТРАЕКТОРИЙ НА ПЛОСКОСТИ
159
х(и) = м, сколь угодно близкие к и = и0. А это про-
противоречит условиям теоремы. Теорема доказана.
Пусть x=y(t) — предельный цикл динамической
системы A). Через произвольную точку *о = ф(*о)
проведем прямолинейный отрезок L, заданный урав-
уравнением вида B), так, чтобы вектор /(*) не был па-
параллелен L при x^L\ это возможно в силу того, что
функция f(x) непрерывна и /(*0)#0, поскольку пре-
предельный цикл не является положением равновесия.
U-u
и0
а)
V-ir
un-c
U=u
I L
Рис. 11.
Пусть xo = ty(uo) и х (и) —функция последования,
которую без ограничения общности можно считать
строго возрастающей.
В силу теоремы 2, при достаточно малом б > О
на интервале \u—uQ\<8 существует единственное
решение и = и0 уравнения %(и)=и. Поэтому имеет
место одна из четырех возможностей взаимного рас-
160 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
положения графиков функций U = и и U = %(и)
(рис. 11).
Остановимся подробнее на случае, изображенном
на рис. 11, а.
Пусть uq— 8 < и\ < uq. Положим u2 = %(и\)9
из = %(и2), ..., tin = %{пп~\). Как следует из
рис. 11, а, щ < х(м0< "о, т. е. ^ < w2 < Ио, и потому
значение %{и2) определено. Точно так же и2 <
< x(w2) < wo, т. е. М2 < «з < Wo, и определено значе-
значение х(мз). Продолжая таким же образом, получим,
что ип-\ <. ип < и0 при всех я. Итак, ии и>2, ...
..., ип, ... — возрастающая ограниченная последова-
последовательность, поэтому она сходится.
Докажем, что lim w^ = w0. В самом деле, так как
П->оо
щ — &<ип<щ, то щ — 6 < lim ип ^ и0. Допустим,
что lim Hft = tt6<«o- Тогда, переходя к пределу вра-
/2>оо
венстве ип = %{ип-\). в силу непрерывности
лучим «о = х("о), т. е. w = «o — решение уравнения
Х(и)— w = 0 на интервале \и — wo|<6, отличное от
и = Wo, что невозможно. Таким образом, lim un = tiQ.
Эти соображения показывают, что если К\: х =
= q?i(t) — траектория, проходящая через точку t|?(wi),
и tn—значение параметра t, при котором К\ про-
проходят через точку ty(un)j то, в силу непрерывности
функции ф(и), последовательность точек q>\{tn)
(=$(ип)) сходится к tf(wo) = xQ. При этом/л-*+оо,
так как непродолжаемое решение при t ^ 0 не вы-
выходит за пределы замкнутого ограниченного множе-
множества, границей которого служит предельный цикл
* = <р@- Таким образом, траектория #=ф1(^) при
^^- + оо имеет вид спирали и приближается к пре-
предельному циклу x = y(t) изнутри. Точно так же по-
показывается, что траектория, начинающаяся в неко-
некоторой точке ty {и[) {щ < и[ < щ + 6), приближается к
предельному циклу извне. В этом случае предельный
цикл называется устойчивым (рис. 12).
Аналогичные рассуждения показывают, что в слу-
случае, изображенном на рис. 11,6, траектории, начи-
начинающиеся вблизи предельного цикла, приближаются
§ 3. ПОВЕДЕНИЕ ТРАЕКТОРИЙ НА ПЛОСКОСТИ
161
к нему при i-i—оо и удаляются от него при /-*•
->+оо. Такой предельный цикл называется неустой-
неустойчивым.
Рис. 12.
Для предельных циклов, соответствующих рис. 11, в
и г, траектории, начинающиеся вблизи предельного
цикла, приближаются к нему при /-^ + оо (соответ-
(соответственно при t-*—оо) изнутри, а при t-*—оо (соот-
(соответственно при ^-^ + оо) извне. Такие предельные
циклы называются полуустойчивыми.
т
Пи)
Рис. 13.
Пример. Рассмотрим простейший ламповый генератор
(рис. 13,а). Работа триода характеризуется функцией IA=f(U),
где 1а — ток, идущий через лампу, a U— сеточное напряжение.
Функция f(U) (рис. 13,6) называется характеристикой триода.
Составим дифференциальное уравнение, описывающее рабо-
работу лампового генератора. Пусть / — ток, идущий через сопро*
162 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
тивление R, а /с — ток, идущий через конденсатор С; тогда
U = I + /с . E)
Поскольку сумма падений напряжений в контуре, содержащем /?,
L и С, равна нулю, приходим к уравнению
t
/о
Дифференцируя его, получим
U + RI-±IC = O. F)
Из соотношения E) находим
Ic=IA-I = f(U) = I, G)
причем
U = kl, (8)
где — /г (k > 0) — коэффициент взаимной индукции между ин-
дуктивностями Li и L. Подставляя формулы G) и (8) в F),
приходим к дифференциальному уравнению
LI+RI+±I=±f(ki), (9)
которое описывает работу лампового генератора.
После замены переменного а; = / — /@) из уравнения (9)
получаем
x + 2dx + (*2x=g(x), A0)
где
26= -?¦ > 0 о2 = 7~, g(i) = -jL [ДН) - f@)].
Вводя новое переменное у = х, вместо уравнения A0) полу-
получим систему дифференциальных уравнений
Можно показать, что при определенных соотношениях ме-
между R, L, Li, С и характеристикой триода f(U) система A1)
имеет периодическое решение. Ламповый генератор в этом слу-
случае будет источником периодических электрических колебаний.
Остановимся на случае*), когда g(y) = co2asgnу (а>0).
Система уравнений A1) при у > 0 имеет вид
у = — tfx _ 2ду + со2а,
*) Этот случай был рассмотрен А. А. Андроновым. Им же
впервые было составлено дифференциальное уравнение (9). Бо-
Более подробное исследование свойств уравнения (9) можно най-
найти в книге: Понтрягин Л. С. Обыкновенные дифференциаль-
дифференциальные уравнения, — М.: Наука, 1974.
§ 3. ПОВЕДЕНИЕ ТРАЕКТОРИЙ НА ПЛОСКОСТИ 163
а при у<0
у = — а2* _ 26у — (о2а. u '
Предположим, что корни характеристического многочлена
X2 + 26Х + <*>2 линейной однородной системы уравнений, соответ-
соответствующей системе A2) или A3),—комплексные. Тогда со > б.
Решения систем уравнений A2), A3) имеют соответственно
следующий вид:
х = е~ы (с\ cos at + с2 sin at) + а,
У = х\
х = е~ы (с\ cos a/ + c2 sin at) — a,
где а = Vе02 —
Будем искать периодические решения системы уравнений
A1). Для этого построим функцию последования ?/ = %(и).
Рассмотрим траекторию системы уравнений A1), проходящую
при t = 0 через произвольную точку (и, 0) оси х. Легко видеть,
что при возрастании t траектория попадет в полуплоскость
у < 0 и ее уравнение будет иметь вид
-^ sinaA —a
У=х.
При t >» я/a траектория попадет в полуплоскость у > 0 и ее
уравнение запишется в виде
6f
где й = — е (и -\-а) — а. При t = 2я/а траектория вновь пе-
пересекает ось х в точке
, -б^ч2
и+(\+е ° \ а.
Итак, функция последования найдена.
Уравнение %(и)= и имеет единственное решение
1-е
164 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
которому соответствует единственное периодическое решение си-
системы уравнений A1). Построив графики функции U = %(и) и
U = и, легко убедиться (рис. 11, а), что найденное периодиче-
периодическое решение представляет собой устойчивый предельный цикл
системы уравнений A1).
Таким образом, в рассматриваемом случае ламповый гене-
генератор будет источником периодических незатухающих электри-
электрических колебаний.
§ 4. Поведение траекторий линейной
однородной системы дифференциальных
уравнений второго порядка с постоянными
действительными коэффициентами
Рассмотрим поведение траекторий однородной си-
системы уравнений
х — а{х -г- а2х f
или, в векторной форме,
i = Axt
Га'аП
где >4= 0 _ —действительная матрица.
Заметим, что х = О представляет собой положе-
положение равновесия динамической системы A).
Поскольку матрица А — действительная, могут
представиться три случая: 1) собственные значения
%\ и %2 матрицы А—действительные и различные,
2) собственные значения Х\ и ^2 матрицы А — ком-
комплексно сопряженные (различные) и 3) матрица А
имеет единственное действительное собственное зна-
значение Х\.
Сначала рассмотрим так называемые невырожден-
невырожденные случаи.
А. к\ ф Х2 — действительные, Х\ Ф О, Х2 Ф 0.
В этом случае у матрицы А существуют два линейно
независимых (действительных) собственных вектора
h\ и h2 с собственными значениями К\ и Х2 соответ-
соответственно. Общее решение системы уравнений A)
имеет вид
§ 4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА Ib5
Обозначая у1 и у2 координаты вектора х относительно
базиса hx и й2*), получим
yi=c\eUy у2=с2еМл B)
Заметим, что достаточно исследовать поведение тра-
траекторий при с1 ^ 0 и с2 > 0, так как наряду с траек-
траекторией B) система уравнений A) имеет также сле-
следующие траектории:
*/1 = — cleKltt у1 = — cleklt, i/=clelxt,
у2 = с2ек**\ у2 = — c2ehit, у2 = — c2eKtt,
которые расположены соответственно во втором,
третьем и четвертом квадрантах.
1) Пусть >ч и %2 — одного знака. Можно считать,
не нарушая общности, что
|Л,|<|Л2|. C)
а) Если %\ < О, ^2 < 0, то, согласно C), Х\ > К2.
При с1 > 0 и с2 > О
^->0, #2-^0, когда *-> + «>,
г/1->-+оо, #2->-+оо, когда t^>—оо.
Кроме того,
*1М
dy] c'Xi e U>
когда /-> + оо.
Таким образом, при /^- + оо траектория «входит»
в начало координат и в пределе касается оси у1,
а при t-*—оо удаляется от начала координат, оста-
оставаясь в первом квадранте системы координат у1, у2.
При с1 = с2 = 0 траектория представляет собой
положение равновесия х = 0 (у1 = у2 = 0).
При с1 = 0, с2 > 0 траектория совпадает с поло-
положительной полуосью оси у1. Схематическое располо-
расположение траекторий представлено на рис. 14 (стрелки
показывают направление движения точки по траекто-
траектории при возрастании параметра t). Такое расположе-
расположение траекторий вблизи х = 0 называется устойчивым
узлом.
*) Векторы hi и &2 образуют лишь аффинный базис, они,
вообще говоря, не ортогональны.
166
ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Рис. 14.
б) Если Х\ > 0, Х2> О, то Х\ < Л2. При с1 > 0.
когда
когда
— оо,
Расположение траекторий остается таким же, как
в случае а), но изменяется направление движения
точки при возрастании параметра t (рис. 15). Такое
расположение траекторий вблизи х = 0 называется
неустойчивым узлом.
Рис. 15.
Рис. 16.
§ 4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА \?7
2) К\ и %2 имеют разные знаки. Достаточно рас-
рассмотреть случай %\ < 0 < %2. В этом случае при
с1 > 0 и с2 > О
г/'-^О, у2^+оо, когда f->+«>,
yi^+oo, #2->-0, когда t^ — оо.
В данном случае расположение траекторий назы-
называется седлом (рис. 16).
В. ^i и Яг — комплексно-сопряженные: %i = \х + rv,
^2 = [i — iV, V =^= 0.
Матрица А имеет комплексный собственный век-
вектор h = A/2) (hi — ih2) с собственным значением К\
(векторы hi и иг—действительные). Кроме того, оче-
очевидно, h = A/2) (hi + ih2) — собственный ректор мат-
матрицы А с собственным значением A,2=^i. Векторы
hi и h2 линейно независимы, так как в противном_ слу-
случае были бы линейно зависимы векторы h и А, что
невозможно, поскольку h и h соответствуют различ-
различным собственным значениям.
Любое комплексное решение системы уравнений
A) можно записать в виде
D)
где с1 и с2 — комплексные константы.
Любое действительное решение, как было пока-
показано в гл. 2, имеет вид
В силу D), имеем
х = Re z = y (z + z) =
с2еЩ + (cle™h+ c
= у (с1 + с2) e^h + у (с1 + с2) e^h.
Пусть -^(с1 + ё2)= с, тогда у (с1 + с2) = с и
х=с№к + сеЪ*Ъ. E)
Запишем число с в тригонометрической форме:
с = R (cos а + / sin а) = Reia.
168 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Тогда с = Re~ia и из соотношения E) получим
х = Яе'«еО*+wi(ft, - ih2) + &r'«^-'v>'-j(A, + ih2) =
J{a+vt) _i_ -i(a+v*) pi{a+vt) _ -i(a+vt)
= R<P* Ц ft, - IReP* 1 ft2 =
= Re»* cos (a + vt)h{ + Re»* sin (a + vt)h2.
Обозначая у1 и у2 координаты вектора х относи-
относительно базиса fti и ft2, получим
cos (a _|_ v^ y2 = j^eixt sin (a _^ vty
1) Если (л < 0, то при R = 0 получается положе-
положение равновесия, а при /? > О
yl^0; #2-^0, когда ^->- + оо,
(У1J + (У2J^+°°, когда /->— оо.
Траектория представляет собой спираль. Расположе-
Расположение траекторий в данном случае называется устойчи-
устойчивым фокусом (рис. 17).
2) Если (л > 0, то при R > О
(у1J + (У2?^ + °°> когда /-^ + оо,
у1^~0, у2^0> когда /-а—оо.
Расположение траекторий изображено на рис. 18
и называется неустойчивым фокусом.
3) Если |i = 0, то (ylJ + (у2J = R2 и траектория
представляет собой эллипс с центром в начале коор-
координат. В данном случае расположение траекторий
называется центром и изображено на рис. 19.
Перейдем к вырожденным случаям. Из перечис-
перечисленных в начале этого параграфа возможностей
остается рассмотреть случай, когда одно из двух раз-
различных собственных значений Хи Х2 матрицы А равно
нулю, а также случай К\ = %2.
С. Х\ Ф 0, Яг = 0. В этом случае, как и в случае
А, существуют два линейно независимых собствен-
собственных вектора hx и ft2 с собственными значениями К\
и 0 соответственно. Общее решение системы уравне-
уравнений A) имеет вид
4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА 169
Рис. 17.
(у>0)
(у<0)
Рис. ie.
170
ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Обозначая
тельно базиса
1 и у2 координаты вектора х относи-
относиh
у р
и h2y получим
у1 =
У2=с2.
Траекториями в этом случае будут полупрямые,
параллельные оси у\ оканчивающиеся на оси у2. Все
точки оси у2 будут положениями равновесия. Поведе-
Поведение траекторий изображено на рис. 20.
D. Матрица А имеет единственное собственное
значение Х\. В этом случае существует хотя бы один
действительный собственный вектор й] с собственным
Рис. 20.
значением Х\: Ahx = %\h\. Дополняя h{ произвольно
вектором h2 до базиса и полагая
x = ylh\ + y2h2,
получим
ylhx + y2h2 = х = Ах = A {ylh{ + y2h2) =
= yl^\hi + у2 (\ih\ + vh2) = (Хуу1 + \iy2) hi + vy2h2>
где
Ah2^ [ih\ -\- vh2.
Таким образом,
У1 = к\у1 + \iy2, y2 = vy2' F)
Характеристический многочлен матрицы системы
F) имеет вид
1-* I* \ = n -U(y-x)
0 v — Я I
§ 4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА 171
Но в рассматриваемом случае матрица А имеет
единственное собственное значение Х\. Следователь-
Следовательно, v = к\, и система уравнений F) принимает вид
1) Если ii = 0, то имеем следующую систему:
Ее общее решение
у[ = cleKxt, у2 = c2eKxt.
При Х\ ф 0 траектории представляют собой либо по-
полупрямые, выходящие из начала координат, либо по-
Рис. 21.
ложение равновесия у1 = у2 = 0 при с1 = с2 = 0 (см.
рис. 21). Такое расположение траекторий называется
дикритическим узлом.
При %\ = 0 каждая траектория у1 = с\ у2 = с2
представляет собой положение равновесия. Другими
словами, вся фазовая плоскость заполнена точками
покоя. При этом, очевидно, А есть нулевая матрица.
2) [х Ф 0. В качестве базиса возьмем векторы
Н[ = [ih\ и Н2 = h2. Тогда
АН{ =
АН2 =
Полагая х = у[Н{ + у2Н2, вместо G) получим
(8)
172 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Общее решение системы уравнений (8) имеет вид
01 = (с1+Л)еЧ у2 = с2е^.
а) %х < 0. При с2 = 0
Траектория представляет собой полуось у1 > 0 (при
с1 > 0), у1 < 0 (при с1 < 0) или положение равнове-
равновесия при с1 = 0.
Если с2 Ф 0, то
/ cl\
> 2 м 2 4*"/
Здесь т = /+с7с2. Обо-
Обозначая с'е с =а, получим
Р ттл 99 1 * т о а «.
Ha рис. 22 изображен график функции #! = ат^1<т
при а > 0. В точке т=—lAi функция t/1 имеет
максимум. При а < 0 график получается зеркальным
отражением относительно оси т. Очевидно,
#2->-0, когда т->-+оо,
когда т->—оо.
Кроме того,
——г = —гг„ , д—г —^ 0>
rf^/1 аеЛ1Т A + К\т)
когда т ->+ оо.
Расположение траекторий в этом случае назы-
называется устойчивым вырожденным узлом (рис. 23).
b) При Х\ > 0 из аналогичных соображений по-
получается картина, изображенная на рис. 24. Такое
расположение траекторий называется неустойчивым
вырожденным узлом.
c) При К\ = 0
У"=с\
§ 4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА t73
Если с2 Ф О, то траектории представляют собой
прямые, параллельные оси у1. При с2 = О все точки
оси у1 будут положениями равновесия (рис. 25).
Рис. 23.
Рис. 24.
Пример. Рассмотрим линейное однородное дифференци-
дифференциальное уравнение второго порядка с постоянными коэффициен-
коэффициентами
тх + ок + р* = О,
где т > 0, а > 0, р > 0.
Это уравнение описывает прямолинейное движение матери-
материальной точки с массой т вдоль оси х под действием силы тре-
трения — ах и упругой силы —$х.
Рис. 25.
Перепишем это уравнение в виде
X +й\Х + U2X = 0,
где ai = -— > 0, а2 = -—- > 0.
174 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
Вводя новые неизвестные функции я1 = ху х2 = ху сведем
наше уравнение к линейной однородной системе дифференциаль-
дифференциальных уравнений
матрица А которой имеет вид
А=\ ° 1 1.
L — а2 —aiJ
Собственные значения Яь Я2 матрицы А являются корнями
характеристического многочлена
D(p)= ~P 1
— a<i —п\ — р
и следующим образом выражаются через коэффициенты а,\ и а%\
При — > а2 корни вещественные различные, причем
ki < 0, Яг < 0. Расположение траекторий системы уравнений
(9) представляет собой устойчивый узел.
При /-* + оо материальная точка приближается к началу
координат (так как х = xi->0).
2
При -г < а2 корни комплексные сопряженные, причем
=-y
Если а\ >¦ 0, то расположение траекторий представляет со-
собой устойчивый фокус. Материальная точка совершает затухаю-
затухающие колебания около начала координат х = 0.
Если а\ = 0 (трение отсутствует), то расположение траек-
траекторий представляет собой центр. Материальная точка совершает
незатухающие колебания около начала координат.
При -? = а2 корни характеристического многочлена веще-
вещественны и совпадают, причем %\ = Х2 = ^~ < 0* Можно по-
показать, что в этом случае расположение траекторий представляет
собой устойчивый вырожденный узел.
Замечания. 1. Рассмотрим динамическую си-
систему
х
§ 4. ТРАЕКТОРИИ ЛИНЕЙНОЙ СИСТЕМЫ 2-ГО ПОРЯДКА |75
или, в векторной форме,
* = /(*).
Пусть а—положение равновесия этой системы урав-
уравнений. Без ограничения общности можно считать, что
а = 0 (этого всегда можно добиться за счет переноса
начала координат в точку а).
Предположим, что правая часть системы уравне-
уравнений A0) допускает представление
f(x)=Ax + F(x) (F@)=0),
где А = \ 2 2 — постоянная матрица и
L п\ п2 J
^ М |#|i+a при достаточно малом \х\\ М и а — неко-
некоторые положительные постоянные.
Если, кроме того, матрица А такова, что ее соб-
собственные значения Х\ и %2 различны и их действи-
действительные части отличны от нуля, то в достаточно ма-
малой окрестности начала координат расположение тра-
траекторий динамической системы A0) будет таким же,
как у линейной однородной системы уравнений к =
= Ах*).
Так, например, в случае, когда A,i и ^2 веществен-
вещественны, отрицательны и A,i > А,2, имеются две траектории
системы уравнений (9), входящие в начало коорди-
координат (при ?-»-+оо) по направлению собственного век-
вектора матрицы А с собственным значением А,ь и две
траектории, входящие в начало координат (при t ->•
-»- + оо) по направлению собственного вектора с соб-
собственным значением А,2. Все остальные траектории
(начинающиеся вблизи начала координат) прибли-
приближаются к началу координат (при ^->- + оо) по на-
направлению собственного вектора с собственным зна-
значением А,ь
Если же A,i и Я2 комплексно сопряженные и
Re^i =Re^2<0, то все траектории, начинающиеся
*) Линейная однородная система дифференциальных урав-
уравнений х = Ах называется линеаризацией системы уравнений (9).
176 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
вблизи начала координат, наматываются на положе-
положение равновесия как спирали при t ->- +00 *).
2. Наряду с системой уравнений A0) рассмотрим
уравнение
dxl fl(x\x2)'
Покажем, что всякая интегральная кривая урав-
уравнения A1) определяет траекторию системы уравне-
уравнений A0). В самом деле, пусть х2 = х2(х1)— интег-
интегральная кривая уравнения A1). Тогда вдоль нее
Р(х1,х2(х1))ф0 (так как в противном случае пра-
правая часть уравнения A1) не определена). Выберем
на интегральной кривой новый параметр t=t(xl)
так, чтобы
dt — 1 (\о\
dxl —fl(x\x2(x1))' K }
Соотношение t = t(xl) можно разрешить относитель-
относительно х1: xl = xl(t)y поскольку функция t = t(xl) моно-
монотонна (так как ^ = /1(д;1> ]>(jgl)) # о) ¦
Теперь интегральная кривая задается параметри-
параметрически:
x'=x2(x1(t)).
В силу A1) и A2)
Уравнение A2) можно записать в виде
Таким образом, интегральная кривая уравнения A1)
определяет траекторию A3) системы уравнений A0).
Точки плоскости х\ х2, в которых одновременно
fl (х\ х2) = 0 и f2 (х\ х2) = 0, называются особыми точ-
точками уравнения A1). Им соответствуют положения
равновесия системы уравнений A0).
*) Подробнее см. в книге: Понтрягин Л. С. Обыкно-
Обыкновенные дифференциальные уравнения.— М.: Наука, 1974.
ЗАДАЧИ 177
Задачи
1. Решение #=ф(^,#о) (ф@, #о)=*о) динамичес-
динамической системы
* = /(*), A)
у которой правая часть определена во всем простран-
пространстве переменных х\ ..., хп9 задает при каждом фик-
фиксированном / отображение пространства переменных
х1, ..., хп в себя. Полученное однопараметрическое
семейство преобразований называется фазовым пото-
потоком, соответствующим динамической системе A).
Пусть Qo — замкнутая ограниченная область в
пространстве переменных х1, ..., хп. Обозначим Qt
образ Qo при отображении * = <p(f, *о). Пусть V(t) —
объем области Qt. Доказать следующую формулу
(теорему Лиувилля):
V(t)= \..
предполагая, что f{x)—векторное поле класса С1.
Указание. Показать, что
V(t) = \... \ dxl... dxn = \ ... \ |У| dx\...dxl
Qt Qo
где /—якобиан преобразования #=cp(/, я0) и
2. Система дифференциальных уравнений вида
bi__dH
dp1 р ~
yi-Ш. bi__dH_ (i =
где // = Я(л:1, . ..,*", р\ ...,рЛ) — некоторая функ-
функция, называется системой канонических уравнений
Гамильтона. Считая Н функцией класса С2 и исполь-
используя теорему Лиувилля (см. задачу 1), показать, что
соответствующий фазовый поток сохраняет объем.
178 ГЛ. 4. ДИНАМИЧЕСКИЕ СИСТЕМЫ
3. Перейдя к полярным координатам (г, <р), пока-
показать, что система уравнений
х = х A — д/х2 + у2) — у,
имеет единственное положение равновесия @,0) и
устойчивый предельный цикл х2 + у2 = 1. Все осталь-
остальные траектории этой системы незамкнуты.
Указание. В полярных координатах исследуе-
исследуемая система уравнений имеет вид
г = г(\ — г), ф = 1.
Глава 5
ТЕОРИЯ УСТОЙЧИВОСТИ
В этой главе вводятся важные понятия устойчи-
устойчивости решения нормальной системы дифференциаль-
дифференциальных уравнений по Ляпунову и асимптотической ус-
устойчивости. Приводятся необходимые и достаточные
условия асимптотической устойчивости тривиального
решения однородной линейной системы дифферен-
дифференциальных уравнений с постоянными коэффициен-
коэффициентами. Доказывается теорема Ляпунова об устойчиво-
устойчивости по первому приближению.
§ 1. Определения и примеры
В § 4 гл. 3 показано, что решение задачи Коши
для нормальной системы дифференциальных уравне-
уравнений
* = /(/,*) A)
непрерывно зависит от начальных условий, когда t
изменяется на отрезке [а, 6], если правая часть
f(t9 х) удовлетворяет условиям теорем существования
и единственности.
В этой главе будет исследоваться зависимость
решения задачи Коши от начальных условий, когда t
изменяется на бесконечном промежутке [/о, +<»).
Будем предполагать, что для системы уравнений
A) выполнены условия теорем существования и един-
единственности на множестве таких точек (/,#)> что
а < / < +оо и я е С, где С —открытое множество
в пространстве переменного х.
Пусть # = <р(?) — решение системы уравнений A),
определенное при / ^ to.
Определение. Решение # = <p(tf) системы A)
называется устойчивым по Ляпунову, если для лю-
любого е > 0 найдется такое б > 0, что для любого
180 гл- 5. теория устойчивости
вектора #о, подчиненного условию
решение # = г|э(/), удовлетворяющее начальному ус-»
ловию
Ф (to) = Xq,
определено при всех />/ои имеет место неравенство
1*@-ф@Ке при
Если, кроме того,
lim
то решение x = ip(t) называется асимптотически
устойчивым.
Примеры. 1. Рассмотрим уравнение
х = kx (k = const).
Решение этого уравнения с начальными значениями (/0, х0)
имеет вид
h(tU\
При k ^ 0 решение B) будет устойчивым по Ляпунову, так как
при всех t ^ ^о
I X\6 — Xq6 I — S | X\ — ло I ^ I «M Л
коль скоро | Xi — xo I < 6 = 8.
Если k <C 0, то
lim ek{t-t*)\xl — x0\ = 0
и, следовательно, решение асимптотически устойчиво.
Если k == 0, то при Xi ф Хо разность |a;i —д;о| не стремится
к нулю при t-**-\-ooy т.е. решение х = х0 устойчиво по Ляпу-
Ляпунову, но не асимптотически устойчиво.
При k > 0 и х\ ф хо
lim |*! — x0\ek{t~to) = + oo
и, следовательно, решение х = хоек^~*о) неустойчиво.
2. Рассмотрим линейную однородную систему двух уравне-
уравнений с постоянными коэффициентами (см. гл. 4, § 4).
В случаях устойчивого узла и устойчивого фокуса решение
х = 0 будет, очевидно, асимптотически устойчивым. В случае
центра решение х = 0 будет устойчивым по Ляпунову, но не
будет асимптотически устойчивым. В случае седла решение х = 0
неустойчиво.
$ 2 СЛУЧАЙ Л ИРИНОЙ СИСТЕМЫ 181
Исследование устойчивости решения х = q>(t) си-
системы уравнений A) может быть сведено к исследо-
исследованию устойчивости решения, тождественно равного
нулю, т. е. некоторого положения равновесия другой
нормальной системы.
В самом деле, введем новую неизвестную функ-
функцию
C)
Очевидно, она удовлетворяет следующей системе
уравнений:
У = f (/, У + Ф) - / (/, <Р) = /i(*, У), D)
где f\(t, 0) = 0. При этом устойчивость (по Ляпунову
или асимптотическая) решения # = <р(/) равносильна
устойчивости решения # = 0 системы уравнений D).
В дальнейшем будем считать, что замена C) уже
сделана. Тогда система уравнений A) имеет решение
х = 09 т. е. /(f,0)=0.
§ 2. Однородная линейная система
дифференциальных уравнений
с постоянными коэффициентами.
Устойчивость решения х = 0
Рассмотрим линейную однородную систему из п
дифференциальных уравнений
х = Ах, A)
где А — постоянная действительная матрица.
Пусть
h = V>k + lVk (k = 1, • • •, m, m < п)
— собственные значения матрицы Л.
Лемма 1. Если все собственные значения мат-
матрицы А имеют отрицательные действительные части,
то для любого решения x = ip(t) системы уравнений
A) существуют такие положительные постоянные а,
R, что при t ^s 0
182 гл- 5. ТЕОРИЯ УСТОЙЧИВОСТИ
Доказательство. Как было показано в гл. 2
§ 7, любое решение x=q>(t) системы уравнений A)
имеет вид
? «Г*()Ч B)
где gk{t) — вектор-функция, каждая координата кото-
которой есть некоторый многочлен.
По условию леммы Re^<0 (k = 1, ..., rn).
Пусть а >> О таково, что
Relk=\xk<-a<0. C)
Из соотношения B) следует, что
МОК ? l**@l|e(u*+'v*>'l = S 1^@1^. D)
Умножая неравенство D) на eat, получим
т
lf@le<rt<jgilfo@le(|l*+e)'. E)
В силу неравенства C),
Pk + a < 0
и, следовательно, поскольку каждая координата век-
вектора gk{t) представляет собой многочлен,
т
Hm Z \gk(t)\e^+a^ = O. F)
Из равенства F) следует, что при t ^ 0 функция
т
a^ ограничена. Если
Е
то, в силу E),
т. е. при ^ ^ 0
Лемма 1 доказана.
§ 2. СЛУЧАЙ ЛИНЕЙНОЙ СИСТЕМЫ 183
Лемма 2. Если все собственные значения мат-
матрицы А имеют отрицательные действительные части,
то для решения <p(f, дг0) системы уравнений A), удо-
удовлетворяющего начальному условию ф@, х0) = х0, су-
существуют такие постоянные г > 0 и а > 0, «/то
Доказательство. Пусть д: = ф/(t) — решение
системы уравнений A), удовлетворяющее началь-
начальному условию
где е}- — единичный координатный вектор {б/, б/,... , б/}.
По теореме единственности
п
| G)
где жо={д;1, ..., х^}. Действительно, в правой части
формулы G) стоит решение системы уравнений A),
удовлетворяющее при t = 0 тому же начальному ус-
условию, что и ф(/, *о).
В силу леммы 1, существуют такие Rj (/= 1, ...
..., п) и а > 0, что при f ^ 0
Положим /? = max {Ri, ..., /?«}, тогда при
\<tj(t)\^Re-ai (/ = 1 п).
В силу G)
Обозначая лг/? = г, получим для t ^ 0
Лемма 2 доказана.
Установим теперь необходимые и достаточные ус-
условия устойчивости положения равновесия х = 0 си-
системы уравнений A).
Теорема. Для того чтобы положение равновесия
# = 0 системы уравнений A) было асимптотически
184 ГЛ. 5. ТЕОРИЯ УСТОЙЧИВОСТИ
устойчивым, необходимо и достаточно, чтобы все соб-
собственные значения матрицы А имели отрицательные
действительные части.
Доказательство достаточности. Пусть
б — произвольное положительное число, а д: = ^(^) =
= ф(^#о) — решение системы уравнений A), удов-
удовлетворяющее начальному условию г|)(О)=л;о. В силу
леммы 2 существуют такие г > О, а > 0, что для
0
Положим б = г/г, тогда при |#0| < б для t ^ О
т. е. положение равновесия устойчиво по Ляпунову.
Очевидно, lim |г|з(/)|=О, так как lim e~at = 0.
*+ t
Следовательно, положение равновесия ж = 0
асимптотически устойчиво.
Доказательство необходимости. Если
хотя бы одно собственное значение матрицы А имеет
неотрицательную действительную часть, то положе-
положение равновесия х = О не может быть устойчивым по
Ляпунову.
В самом деле, если, например, Re?w = |Lii^O и
кфО — собственный вектор матрицы Л, соответст-
соответствующий собственному значению Х\, то
— решение системы уравнений A).
Пусть h = hx + /й2; тогда
х = Re {(ft, + ih2) e<Ul+'Vl) f} = e^ (ft, cos v{t — ft2 sin v{t)
при /-^+оо не стремится к нулю.
Этим же свойством, очевидно, обладает любое ре-
решение
x = cRe(he^) (сФО). (8)
При достаточно малом с решение (8) в момент
t = 0 сколь угодно близко к положению равновесия
х = 0, но при /->+оо оно не стремится к нулю. Сле-
Следовательно, положение равновесия х = 0 не будет
асимптотически устойчивым. Теорема доказана.
§ 3 ПЕМMA ЛЯПУНОВА 185
Замечание. Для устойчивости по Ляпунову
положения равновесия х = 0 системы уравнений A)
необходимо (но не достаточно), чтобы все собствен-
собственные значения матрицы А имели неположительные
действительные части.
§ 3. Лемма Ляпунова
Рассмотрим нормальную систему дифференциаль-
дифференциальных уравнений
x = f(t,x). A)
Будем предполагать, что х = О — решение этой си-
системы. Такое предположение, как было показано в
§ 1, не нарушает общности. Из него, в частности,
следует, что f(t, 0) = 0.
Лемма Ляпунова. Пусть правая часть си-
системы уравнений A) определена на множестве С:
|#|<r; t^to. Предположим, что выполнены усло-
условия теорем существования и единственности и, кроме
того, при \х\<г определена такая неотрицательная
функция V(x) класса С1, обращающаяся в нуль толь-
только при х = 0, что
7^j
La dxl
на множестве С. Тогда решение х = 0 системы урав-
уравнений A) устойчиво по Ляпунову.
Если, кроме того, на множестве С
i-l
где №(*)^0 — некоторая непрерывная функция, об-
обращающаяся в нуль только при х = 0, то решение
х = 0 асимптотически устойчиво.
Доказательство. Пусть е—любое число,
удовлетворяющее неравенствам 0 < е < г. Обозна-
Обозначим Se поверхность шара |х| <е и пусть
l/e=min V(x). B)
S
186 гл. 5. теория устойчивости
Выберем б таким образом, чтобы при |ж|^б вы-
выполнялось неравенство
V(x) < Ve. C)
Такое б существует, поскольку функция V(х) непре-
непрерывна при |*| ^ б и V@) = 0.
Покажем, что всякое решение # = ф@> Для кото-
которого |ф(?о)|<6> определено при всех t ^ t0 и имеет
место неравенство
т. е. решение х = 0 будет устойчивым по Ляпунову.
В самом деле, пусть непродолжаемое решение
х = ф(?) определено на интервале (mi, тг), где т2 <
<С + оо. Тогда по теореме из § 2 гл. 3 это возможно
только в том случае, когда траектория х= ф(/) пере-
пересекает поверхность Se (так как в противном случае
при всех to ^ t < т2 выполняется неравенство
|ф(/)|<е и график решения * = <р(/) не может
выйти за пределы замкнутого ограниченного множе-
множества \х\ ^ е; to ^ t ^ тг).
Таким образом, траектория x = q>(t) пересекает
поверхность S8. Пусть t\ (t\>to)—наименьшее зна-
значение параметра t, при котором траектория впервые
достигает поверхности Se.
Рассмотрим сложную функцию V(q>(t)). В силу
условий леммы,
т. е. функция V(q>(t)) не возрастает. Но тогда, в силу
B) и C),
что невозможно. Следовательно, решение х =
определено при всех t ^ to и его траектория не мо^
жет достигать поверхности S8, т. е. при всех t ^ to
МОК*.
Первое утверждение леммы доказано.
Докажем второе утверждение. Пусть е > 0 за-
задано произвольно. Выберем 6 так же, как это дела-
ЛЕММА ЛЯПУНОВА 187
лось выше. Тогда для любой траектории * = р(),
для которой |ф(^о)|<6, имеет место неравенство
|ф@1<е.
Рассмотрим снова сложную функцию V((p(t)). По-
Покажем, что
lim 1/(ф@)=0.
+
В самом деле, допустив противное, мы придем к за-
заключению, что у невозрастающей неотрицательной
функции К(ф@) существует положительный предел
lim 1/(ф@)=Л>0; D)
кроме того, V((f(t)) ^ А при t ^ to. Но тогда суще-
существует такое а > О, что
|ф(О1^ст при всех t^to,
так как иначе, в противоречии с D), нашлась бы
такая последовательность tk^t0, что |ф(М|->0 и
К(ф(/а?))->0, поскольку 1/@) = 0. Итак, мы получили
неравенства
По условию леммы на замкнутом ограниченном
множестве а^|л;|^е функция W(x) строго поло-
положительна, поэтому существует такое а > 0, что
W() а на этом множестве и
Интегрируя неравенство E) в пределах от ?о до t,
получим 1/(ф(/))— ^(ф(^о)Х — a{t —10). Отсюда
следует, что при t->-\- oo
хотя функция V(x) неотрицательна. Таким образом,
lim К(ф@) = 0. F)
Докажем теперь, что
lim ф@ = 0.
188 ГЛ. 5. ТЕОРИЯ УСТОЙЧИВОСТИ
Предположим противное, тогда найдется такое ц > О
и такая последовательность /„-> +оо, что |<р(М1^
^ Y]. На замкнутом ограниченном множестве rj ^
^|#|^е функция V(x) строго положительна, по-
поэтому существует такое число Р > 0, что V(x) ^ р >
>0 и тогда V((p(/)) ^ р > 0, что противоречит ра-
равенству F). Итак, lim ф(/)=0, т.е. положение рав-
новесия х = 0 асимптотически устойчиво. Лемма до-
доказана.
Замечание. Для облегчения последующих вы-
вычислений заметим, что каково бы ни было решение
x = x(t) системы уравнений A), имеет место тож-
тождество
Пример. Рассмотрим динамическую систему
х = ху\
у = — х2у.
Положим V(x,y) = х2 +t/4, тогда V(x, t/)>0 и обращается в
нуль только при х = у = 0. Кроме того,
В силу леммы Ляпунова, положение равновесия @, 0) рас-
рассматриваемой системы устойчиво по Ляпунову.
§ 4. Теорема Ляпунова
Пусть х = 0 — положение равновесия нормальной
системы дифференциальных уравнений
x = f(t,x), A)
правая часть которой удовлетворяет условиям теорем
существования и единственности и имеет вид
где A(t) — матрица, причем
11»
§ 4 ТЕОРЕМА ЛЯПУНОВА 189
Линейная однородная система дифференциальных
уравнений
x = A(t)x
называется первым приближением или линеаризацией
исходной системы уравнений A).
Заметим, что, согласно предположениям,
Рассмотрим частный случай, когда матрица A(t)
постоянна.
Теорема Ляпунова. Пусть имеется нормаль-
нормальная система уравнений
x=Ax + F(t9x) (F(t,O)=O)t B)
где А — постоянная матрица, все собственные значе-
значения которой имеют отрицательные действительные
части, и при t ^ t0 и достаточно малом \х\
где а и М — положительные постоянные. Тогда поло-
положение равновесия х = О системы уравнений B)
асимптотически устойчиво.
Доказательство. Пусть х = x(t) — решение
системы уравнений B). Введем вспомогательную (во-
(вообще говоря, комплексную) вектор-функцию y(t) по-
посредством равенства
x(t) = Ry(t),
где R — невырожденная постоянная матрица. Оче-
Очевидно,
y = By + G(t,y)9 C)
где
B=R-lAR, G(t,y)=R~lF(ttRy).
Как показано в § 1 дополнения, матрицу R (вообще
говоря, комплексную) можно подобрать так, чтобы
190
ГЛ. 5. ТЕОРИЯ УСТОЙЧИВОСТИ
матрица В имела вид
В =
о я2 ... ьгп
.0 0 ... %п .
D)
где %\, •••> кп — собственные значения матрицы А,
а элементы Ц (i < /) по модулю меньше заданного
числа Ь > 0.
В силу условий теоремы,
\Q(U У)\ < \\R'{\\ \F(URy)\ < \\R-{\\ -M- \Ry\l+a =
= М{\у\
1+a
E)
где
м] = \\я
Рассмотрим функцию
t
t\
где у1 — число, комплексно-сопряженное с у\ а у =
= R-lx. Очевидно, 1/(*)>0 при х Ф 0 и 1/@)= 0.
В самом деле, если х Ф 0, то у = R-^ФО и V(*) =
= \У\2>О.
п
Для вычисления У —j fl воспользуемся замеча-
замечанием, сделанным в конце § 3, и тем обстоятельством,
что через любую точку (/, х) можно провести ин-
интегральную кривую x = x(t) системы уравнений B)
(в силу теоремы существования и единственности):
dV_fi=± V(x)= —
дх1 ' dtVyX) dt
dt
dt
У У
§ 4 ТЕОРЕМА ЛЯПУНОВА
В силу C) и D),
Подставляя G) в F), получим
i=i /=-1
+ ) 7 \Ь)УУ + Ь)у!у1) + > (gV + GV) =
n n
(ki+Ai)yy +) > (bfUU +bjUU) +
V). (8)
Так как по условию теоремы Re ^ < 0, существует
такое а > 0, что Re ?w ^ — а и
< -2а (/ = 1, ..., п).
Пусть | Ъ\ | = | 6/1 < Ь. В силу E),
Из равенства (8) следует, что
192 гл. 5. теория устойчивости
i=\
= -2aV + 2b n(n~l)\y\2+2Ml.n\y p+° =
= -2aV + n(n-l)bV + 2nM{V 2. (9)
Матрицу R подберем так, чтобы
a
^- 2n(n — 1) '
a | x | будем считать настолько малым, что Ка/2^
^тт:—. Тогда из неравенства (9) получим
+ ±V=-aV. A0)
В силу леммы Ляпунова, из A0), где роль функ-
функции W(x) играет—aV(x), следует асимптотическая
устойчивость положения равновесия системы уравне-
уравнений B). Теорема доказана.
Пример. Рассмотрим следующую систему дифференциаль-
дифференциальных уравнений вида B):
х у
i+t2'
При t ^ 0 все условия теоремы Ляпунова, очевидно, выпол-
Г— 1 —11
нены (матрица А = имеет собственные значения
^i, 2 = — 2 ±/). Поэтому положение равновесия х = у = 0 бу-
будет асимптотически устойчивым.
Замечания. 1. Имеет место следующая
Теорема о неустойчивости. Пусть задана
нормальная система уравнений B), где А—постоян-
А—постоянная матрица, имеющая хотя бы одно собственное
значение с положительной действительной частью, и
при t^ to и достаточно малом \х\
§ 4. ТЕОРЕМА ЛЯПУНОВА
193
где а и М — положительные постоянные. Тогда поло-
положение равновесия х = О системы уравнений B) не-
неустойчиво.
2. При исследовании устойчивости положения рав-
равновесия по первому приближению важно иметь воз-
возможность установить тот факт, что все собственные
значения действительной матрицы Л, т. е. все корни
характеристического многочлена, имеют отрицатель-
отрицательные действительные части. Известна следующая тео-
теорема Гурвица, которую мы приведем без доказа-
доказательства:
Для того чтобы у многочлена
с действительными коэффициентами все корни имели
отрицательные действительные части, необходимо и
достаточно, чтобы все главные миноры матрицы
{где ak
чтобы
= 0
а\
do
аъ
а.
а3
Я2Л— 1
1
а2
а*
л>
>о,
1
02
п)
Д2 =
#
•
#2tt—2 •
0
а\
а3
ббии
-
аз
.. 0
.. 0
0
1
а2
... о ¦
... 0
... 0
положителх
=
>о, ..
эными, т. е
Последнее условие можно заменить условием ап > 0.
Для многочлена второй степени z2 + a\z+a2 полу-
получаются следующие условия: а\ > 0, а2 > 0, а для
многочленов третьей степени гъ + a\Z2 + a2z + аз —
такие:
0,
— а3 > 0, а3 > 0.
194 гл. 5. теория устойчивости
§ 5. Консервативная механическая система
с одной степенью свободы
Консервативная механическая система с одной
степенью свободы (без трения) описывается уравне-
уравнением второго порядка
x = f(x). A)
Пусть f(x) — функция класса С1 на некотором ин-
интервале (а, Ь). Функция
х
U{x) \f{\)d\ (a<c<b) B)
С
называется потенциальной энергией механической си-
системы. Уравнение второго порядка A) эквивалентно
системе уравнений
p=-U'(x). C)
Непрерывность производной f'(x) обеспечивает, в
силу теорем существования и единственности (см.
гл. 3, § 1), существование и единственность решения
задачи Коши для системы уравнений C). Положе-
Положению равновесия х = х0 уравнения A) соответствует
положение равновесия х = хОу р = О системы урав-
уравнений C).
Положение равновесия х=х0 уравнения A) яв-
является стационарной точкой потенциальной энергии
U(x). В самом деле, если х = х0 — положение равно-
равновесия, то f (хо) = О и, в силу B), V (х0) = — f (х0) = 0.
В случае, когда х0 является точкой строгого эк-
экстремума потенциальной энергии U(x), имеет место
следующая.
Теорема. Пусть f(x) — функция класса С2 на
интервале {а,Ь). Тогда, если х = Xq— точка строгого
минимума потенциальной энергии U(x), то положе-
положение равновесия х = х0, р = 0 системы уравнений C)
устойчиво по Ляпунову] если х = х0 — точка строгого
максимума потенциальной энергии U(x) и Г(л:о)> 0,
§ 5. КОНСЕРВАТИВНАЯ МЕХАНИЧЕСКАЯ СИСТЕМА 195
то положение равновесия х = хОу р = О системы урав-
уравнений C) неустойчиво.
Доказательство. Без ограничения общности
можно считать Xq = О (этого можно добиться за счет
замены переменных у = х — xq).
Пусть х = О — точка строгого минимума потен-
потенциальной энергии; тогда в некоторой окрестности
точки 0 U(x)> U@) при хФО. Построим функцию
V(x, р) = U(x)— U@)+ p2/2 (полная энергия меха-
механической системы). Очевидно,
fp + f <-"'(*»-о,
и тогда, в силу леммы Ляпунова (см. § 3), положе-
положение равновесия х = 0, р = 0 устойчиво по Ляпунову.
Пусть х = 0 — точка строгого максимума потен-
потенциальной энергии U(x) и f@)>0; тогда ?//@)=0,
[/"@) = —/'(())< 0. Систему уравнений C) можно
записать в виде
p = -U"@)x+F(x),
причем при достаточно малых х
так как по формуле Тейлора
\
?/' (х) = V @) + U" @) х + \ V" фх)
и
Линеаризация системы уравнений D) имеет вид
х = р,
p=-U"@)x.
196 ГЛ. 5. ТЕОРИЯ УСТОЙЧИВОСТИ
Матрица
А=\ ° Ч
имеет действительные собственные значения Х =
= =Ь л/— U" @), одно из которых положительно.
В силу теоремы, сформулированной на стр. 192, поло-
положение равновесия х= 0, р= 0 неустойчиво. Теорема
доказана.
Замечание. Как видно из доказательства, пер-
первое утверждение теоремы остается справедливым в
случае, когда f(x) — функция класса С1. Можно по-
показать, что и второе утверждение теоремы остается
верным при этих предположениях.
Задачи
1. Доказать, что любое решение линейной неод-
неоднородной системы уравнений
x = F(t)x + g(t)
(F(t) и g(t) непрерывны при ^о^^<+°°) устой-
устойчиво по Ляпунову (асимптотически) тогда и только
тогда, когда устойчиво по Ляпунову (асимптотиче-
(асимптотически) тривиальное решение х = 0 соответствующей од-
однородной системы уравнений
x = F(t)x.
2. Доказать, что устойчивость по Ляпунову три-
тривиального решения х = 0 однородной системы урав-
уравнений x = F(t)x эквивалентна ограниченности при
t ^ to любого решения этой системы.
3. Доказать, что асимптотическая устойчивость
тривиального решения х = 0 однородной системы
уравнений x=F(t)x эквивалентна стремлению к
нулю при ^-^+оо любого решения этой системы.
4. Рассмотрим систему дифференциальных урав-
уравнений
где U=U(x) — функция класса С1, имеющая стро-
строгий минимум в начале координат. Применив лемму
ЗАДАЧИ 197
Ляпунова (см. § 3), показать, что тривиальное реше-
решение х = О устойчиво по Ляпунову.
Указание. В качестве функции V(х) взять
разность U(x)— f/@).
5. Показать, что для уравнения физического маят-
маятника
je= — sinx
положения равновесия х = 2Ы (& = О, =Ы, ±2, ...)
устойчивы по Ляпунову, а положения равновесия
x={2k+\)n (k = 0, ±1,±2, ...) неустойчивы,
Указание. См. § 5,
Глава 6
УРАВНЕНИЯ С ЧАСТНЫМИ
ПРОИЗВОДНЫМИ ПЕРВОГО ПОРЯДКА
В этой главе изучаются уравнения с частными
производными первого порядка. Излагается метод ха-
характеристик решения задачи Коши для квазилиней-
квазилинейных уравнений. Устанавливается связь между реше-
решениями линейного однородного уравнения с частными
производными первого порядка и первыми интегра-
интегралами динамических систем. В конце главы рассмат-
рассматривается задача Коши для нелинейного уравнения с
частными производными первого порядка.
§ 1. Основные определения
Рассмотрим уравнение вида
р(х\ хп и дЦ_ -20-\ — 0 (I)
г ух , • •., х , и, Qxl , ..., flxnj — и> ^i;
где и = и{х) = и(х\ ..., хп) — неизвестная функция.
При этом будем рассматривать случай, когда
функция F(x, и, р) = F(x\ ..., хп, и, ри ..., рп) диф-
дифференцируема по переменным р\, ..., рп на некото-
некотором открытом множестве G пространства переменных
х, и,р (р = {pi, ..., рп}) и на этом множестве
V ( dF
/, i V dpi
Если перечисленные условия выполнены, то урав-
уравнение A) называется дифференциальным уравнением
с частными производными первого порядка, а любая
дифференцируемая функция а = а(дс), обращающая
уравнение A) в тождество, — его решением. Если
и(х) — решение, то поверхность и=и(х) в простран-
пространстве переменных #, и называется интегральной по-
поверхностью уравнения A).
§ 1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ 199
В общем случае уравнение A) называется нели-
нелинейным уравнением с частными производными пер-
первого порядка. Если же функция F(x,u,p) линейна
относительно переменных р\, ..., рп, то уравнение
A) называется квазилинейным.
Итак, квазилинейное уравнение — это уравнение
вида
fi(x,u)fr = b(x,u). B)
дх
2=1
Если в уравнении B) коэффициенты а1 не зависят от
и, т.е. а'=а'(я), то уравнение называется полули-
полулинейным и имеет вид
fal(x)pr = b(x,u). C)
La ч ' дх1 v » / > '
t=l
Если в уравнении C) правая часть Ъ (х, и) — линей-
линейная функция относительно и, то уравнение называет-
называется линейным и имеет вид
YV(
D)
Уравнение B) можно записать в виде скалярного
произведения вектора а={а1, ..., ап} и градиента
^ г ди ди л
или
Выражение, стоящее в левой части формулы E),
есть производная функции и=и(х) в направлении
вектора а. Поэтому решениями уравнения B) будут
такие функции и = и(х), производная которых в каж-
каждой точке х множества, на котором определена функ-
функция и(х), по направлению вектора а(х, и(х)) равна
Ь(х, и(х))
200 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
§ 2. Понятие характеристики квазилинейного
уравнения
Рассмотрим квазилинейное уравнение
(*,иH=&(*,«), A)
и пусть функции а1(х,и) (/= 1, ..., /г), Ь(х, и) при-
принадлежат к классу С1 на некотором открытом множе-
множестве G пространства переменных x,ut причем на этом
множестве
t [аг(х, u)f Ф 0.
Пусть и = и(х)—решение уравнения A), опреде-
определенное в некоторой области D пространства перемен-
переменных х7 х = х(%)—кривая, лежащая в D. Тогда, рас-
рассматривая решение и = и(х) на этой кривой, полу-
получим функцию U(%) = и(х(%)).
Подберем кривую х = х(%) так, чтобы ее каса-
касательный вектор -?? в каждой точке был равен
а(х(%), U(%)). Для этого должны выполняться урав-
уравнения
Дифференцируя функцию С/(т), получим
п
п
dU V1 ди , , чч dxl
L
)> и{х))=
последнее равенство имеет место в силу того, что
и{х) — решение уравнения A).
Следовательно, искомая кривая # = #(t) в про-
пространстве х должна быть такой, чтобы уравнения
§ 2. ХАРАКТЕРИСТИКИ КВАЗИЛИНЕЙНОГО УРАВНЕНИЯ 201
определяли траекторию системы обыкновенных диф«
ференциальных уравнений
jg \) ( )
. B)
§=b (*,«).
Система уравнений B) называется характеристи-
характеристической системой уравнения A), а ее траектории в
пространстве переменных х, и — характеристиками
уравнения A).
Замечание. Подчеркнем, что параметр т на ха-
характеристике уравнения A) определен лишь с точно-
точностью до постоянного слагаемого.
Согласно нашим предположениям, функции а1 (х, и)
(i=l, ..., п), Ь(х,и) принадлежат классу С1 на
множестве G, поэтому для системы уравнений B)
выполнены условия теорем существования и един-
единственности.
Теорема 1. Если поверхность S: и=и(х) клас-
класса С1 в пространстве переменных х, и такова, что, ка-
какова бы ни была точка (хо, Uo)^S> характеристика
уравнения A), проходящая через (xOfuo), касается S
в этой точке, то S является интегральной поверх-
поверхностью уравнения A).
Доказательство. Пусть (х0, ио), uq = и(#о) —
произвольная точка поверхности S. Рассмотрим ха-
характеристику
х = х{%), u = U(x)
уравнения A), проходящую через эту точку; таким
образом, при некотором т = т0
Касательная плоскость к поверхности S в точке
о, Uq) имеет уравнение
По условию теоремы, характеристика касается
поверхности S в точке {xq.Uq). Это означает, что
202 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
касательный# к характеристике вектор {xl(xo)>...
..., хп(хо), О(хо)} лежит в указанной плоскости, т.е.
C)
Так как дс = дс(т), u=U(%) — решение системы
B), то
х1 (т0) = а\х (т0), ?/(т0)) = аг(дс0, и0),
)
В силу D) равенство C) можно переписать так:
т.е. функция и = и(х) удовлетворяет уравнению A)
при х = х0. Так как (*0, щ) — произвольная точка по-
поверхности 5, то и = и(х) представляет собой реше-
решение уравнения A). Теорема доказана.
Теорема 2. Пусть и = и(х) — решение уравне-
уравнения A), определенное в некоторой области D, х =
= х(т), и = U (х) (а < х < Р) — решение системы
B). Если при этом кривая х = х(х) (а < х < Р) ле-
лежит в D и U(xo) = u(x(xo)), то
u(x(x)) = U(x).
Доказательство. Пусть v(x) = а(#(т)), тогда,
поскольку х = х(х), и = U(x) —решение системы
уравнений B),
*1 г 1
E)
Так как и (х)—решение уравнения A), то, в силу B),
из равенства E) получим
откуда следует, что
о(т) = ?/(т) + с.
§ 3. ЗАДАЧА КОШИ 203
Но ?/(то)=и(*(то)), т. е. v (%0) = U (%0). Следова-
Следовательно, с = 0 и t;(t)= U(x). Теорема доказана.
Эта теорема имеет простой геометрический смысл.
Пусть и = и(х) — интегральная поверхность уравне-
уравнения A), кривая # = #(t), и = U{x) (а < т < C)—
характеристика уравнения A). Условие f/(to) =
= u(x(xq)) означает, что точка (*(т0), U(x0)) харак-
характеристики находится на интегральной поверхности
и = и(х). Теорема утверждает, что при этом вся ха-
характеристика лежит на интегральной поверхности.
Таким образом, любая интегральная поверхность
уравнения A) образована некоторым семейством ха-
характеристик.
Примеры. 1. Для линейного уравнения "э~т+ л~~г =^
характеристическая система имеет вид
dx dx dx
Характеристиками в этом случае будут прямые #1=т+с1,
х2 = х + с2, и = с.
2. Рассмотрим квазилинейное уравнение
ди , ди
Характеристическая система в этом случае имеет вид
dx1 л dx2 du
d^ = l> d^ = u> 7h=0'
Интегрируя ее, получим
хх = х + с1, х2 = сх + с2, и = с.
Характеристики образуют некоторое семейство прямых» парал-
лельных плоскости я1, х2.
§ 3. Задача Коши для уравнения
с частными производными первого порядка
Так же, как и в случае обыкновенных дифферен-
дифференциальных уравнений, уравнения с частными произ-
производными первого порядка имеют бесконечное множе-
множество решений. Для однозначного выделения решения
из бесконечной совокупности решений добавляются
так называемые начальные условия.
204 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
Рассмотрим следующую задачу для уравнения
'(*.«¦? !?)=»• т
Пусть S: х = %(х\ ..., %п~1) — регулярная п — \-
мерная поверхность класса С1 *) без самопересече-
самопересечений в пространстве переменных х\ ..., хп. На этой
поверхности определена функция uo(i\ ..., %п~1).
Ищется решение и = и(х) уравнения A), удовлет-
удовлетворяющее начальному условию
и{1{%\ ...,*сп-1)) = ио(т\ ...т-1). B)
При /г = 2 задача Коши имеет простой геометри-
геометрический смысл. Уравнение дс=?(т1) определяет кри-
кривую на плоскости х\ х2, а уравнения # = <§(т1), и =
= ио(т1) — кривую в пространстве х1, х2у и. Условие
B) в рассматриваемом случае имеет вид
и геометрически означает следующее: интегральная
поверхность и = и(х\х2) проходит через кривую
* = ?(ti)i ti= щ(ъ1)-
Таким образом, при п = 2 задача Коши состоит
в том, что ищется интегральная поверхность и =
= и(х\х2) уравнения
9х2,и, —.-^ = 0,
проходящая через заданную начальную кривую
х = Ъ(х]), и=щ(х1).
*) 5 называется оегиляпной поверхностью класса С1, если
функции —^ (&= 1,..., п — 1) непрерывны и при любых фик-
фиксированных значениях т1 тп~1 векторы —% (k = 1,..., п — 1)
дхк
линейно независимы.
§ 4. ЗАДАЧА КОШИ ДЛЯ КВАЗИЛИНЕЙНОГО УРАВНЕНИЯ 205
§ 4. Решение задачи Коши для квазилинейного
уравнения
Рассмотрим квазилинейное уравнение
\х,и)-§?г = Ь{х,и). A)
*«1
Пусть S: # = ?(т1, ..., xn~l)—регулярная п — 1-
мерная поверхность класса С1 без самопересечений,
параметры (т1, ..., хп-[) изменяются в некоторой об-
области Г, ио(хг9 ..., хп~1) — функция класса С1 на Т.
Будем решать задачу Коши для уравнения A)
с начальным условием
и{%(х1, ..., хп~1)) = щ(х\ ...,хп~). B)
Геометрический смысл задачи Коши A), B) со-
состоит в том, чтобы в пространстве переменных х, и
через п— 1-мерную поверхность 5:
провести интегральную поверхность и = и(х) уравне-
уравнения A).
В силу теоремы 2 из § 2, всякая характеристика
уравнения A), проходящая через любую точку по-
поверхности 5, лежит на искомой интегральной поверх-
поверхности и = и(х). Проведем через каждую точку по-
поверхности S характеристику уравнения A). Пара-
Параметр т на ней выберем так, чтобы итри т = 0 она
проходила через точку поверхности S. Уравнения
этих характеристик можно записать в виде
*'=ф'(Т| g(Ti т-i), ио(х\ ...,х*-% C)
п=и{хЛ{х\ ...,т"-'), Мт1, ....т*-1)). D)
Здесь
х{ = ер' (т, дс0, и0) (/ = 1, ..., п)9
u = U(x, х, по)
206 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
— непродолжаемые решения характеристической си-
системы
du . , ч
уравнения A), удовлетворяющие начальным усло-
условиям
<р*@, х0, ио) = х*о (i = 1, ..., п)9
U(Q, ж0» "о) = Щ.
Уравнения C), D) определяют в пространстве пе-
переменных #, и некоторую поверхность S' (вообще го-
говоря, /г-мерную).
Замечание. Может случиться, что построенная
поверхность C), D) имеет сложное строение. Во-
первых, S' может оказаться п— 1 -мерной поверх-
поверхностью в пространстве п + 1 измерений. Во-вторых,
она может сама себя пересекать, так как характери-
характеристика, пройдя при т = 0 через некоторую точку
(?, ^о) поверхности S, может с изменением т вновь
пересечь поверхность S. В-третьих, при проектирова-
проектировании этой поверхности на гиперплоскость и = 0 раз-
различные точки этой поверхности могут проектировать-
проектироваться в одну, т. е. поверхность C), D), вообще говоря,
нельзя задать уравнением вида и=и(х) для всех
допустимых значений т, т1, ..., %п~\ Для того чтобы
поверхность C), D) допускала такое представление,
необходимо и достаточно, чтобы любым различным
допустимым системам значений т, т1, ..., %п~1 отве-
отвечали различные системы значений х\ ..., хп, опреде-
определяемые формулами C). Иначе говоря, уравнения C)
должны быть однозначно разрешимы относительно
т, т1, ..., %п~х при всех допустимых значениях этих
переменных.
Теорема. Пусть при а < т < Р (а < 0, Р > 0)
и при всех (т1, ..., t^jgT уравнения C) одно-
значно разрешимы относительно т, т1, ..., хп~\ при-
причем полученные функции % = %{х), х1 = xl(x) (i =
§ 4. ЗАДАЧА КОШИ ДЛЯ КВАЗИЛИНЕЙНОГО УРАВНЕНИЯ 207
= 1, ..., п— 1) принадлежат классу С1. Тогда
функция
и = и(х) =
E)
решением задачи Коши для уравнения A) с
начальным условием B).
Доказательство. Из условий теоремы сле-
следует, что уравнения C) и D) при а < т < р и всех
(т1, ..., ти)еГ задают поверхность E) в парамет-
параметрической форме. Поэтому поверхность и = и(х) об-
образована характеристиками уравнения A), проходя-
проходящими через поверхность S. В силу теоремы 1 из § 2,
и=и(х) будет интегральной поверхностью уравне-
уравнения A). При т = 0 из уравнений C) и D) получим
т. е. интегральная поверхность E) проходит через
поверхность 5. Теорема доказана.
Замечания. 1. Предположим, что поверхность
5 такова, что ни одна из характеристик, проходящих
через точки поверхности 5, не касается 5 в этих точ-
точках. Пусть и = и(х) — решение задачи Коши A), B).
Тогда поверхность C), D) совпадает с интегральной
поверхностью и=и(х) в некоторой окрестности по-
поверхности 5*). В этом смысле (при сделанных пред-
предположениях) задача Коши имеет единственное реше-
решение.
В самом деле, поскольку характеристики, прохо-
проходящие через точки поверхности 5, не касаются 5,
поверхность C), D), образованная характеристи-
характеристиками, проходящими через 5, будет ^-мерной. Кроме
того, в силу теоремы 2 из § 2, кусок характеристики,
проходящей через поверхность 5, лежит на интег-
интегральной поверхности и = и(х). Следовательно, по-
поверхность C), D) и и= и(х) совпадают в некоторой
окрестности поверхности 5.
*) Под окрестностью поверхности S здесь подразумевается
область, содержащая поверхность S.
208 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
2. В случае, когда поверхность 5 состоит из ха-
характеристик, задача Коши имеет, вообще говоря, бес-
бесконечное множество решений.
Рассмотрим для простоты случай п = 2. Тогда по-
поверхность S представляет собой кривую
* = 6(т!), и=ио(г1).
Предположим, что кривая S — характеристика, и
/ — такая кривая класса С1, пересекающая S, что ни
одна характеристика, проходящая через точки кри-
кривой /, не касается / в этих точках. Рассмотрим по-
поверхность, образованную характеристиками, проходя-
проходящими через точки кривой /, и предположим, что ее
уравнение можно записать в виде и = и(х), где
и(х) — функция класса С1. Тогда (по теореме 1 из
§2) и = и(х) — решение задачи Коши A), B). Так
как существует бесконечное множество кривых, пе-
пересекающих 5, то задача Коши имеет в рассматри-
рассматриваемом случае бесконечное множество решений.
Пример. Решим задачу Коши для уравнения
-*&+??- <»>«> F>
со следующим начальным условием:
и(х,у) = у, х + у = \. G)
Выбирая на кривой G) у = 5 в качестве параметра, полу-
получим следующую кривую в пространстве переменных х, у, и:
х=\ — s, y = s, u= s. (8)
Характеристическая система, соответствующая уравнению
F), имеет вид
dx dy и du
Решая ее, получим
x = cie~x, у = Д/'се% + с2, и = сех- (9)
Интегральная поверхность, дающая решение задачи Коши
F), G), образована кусками характеристик, проходящих при
т = 0 через кривую (8). Полагая в уравнениях (9) т = 0 и
используя (8), придем к соотношениям
С\ = 1—s, aJc + с2 =s, с = s,
§ 4. ЗАДАЧА КОШИ ДЛЯ КВАЗИЛИНЕЙНОГО УРАВНЕНИЯ 209
откуда
С2= S2 — S.
Подставляя найденные значения си с2 я с в (9), получим реше-
решение задачи Коши F), G), заданное в параметрической форме:
х= A — s)e~"T, y= VseT + s2 — s, M=seT. A0)
Исключая из уравнений A0) параметры s и т, получим
« = Т^7- <">
Непосредственной проверкой легко убедиться, что функция A1)
является решением задачи Коши F), G).
В приложениях часто встречается задача Коши
для квазилинейного уравнения
A2)
со следующим начальным условием:
и@,х)=щ{х) A3)
(т. е. начальная функция задается на гиперплоскости
t = 0 пространства переменных t, x, и).
Нам известно, что интегральная поверхность и =
= u(t,x), дающая решение задачи Коши A2), A3),
образована характеристиками, проходящими при
т = 0 через поверхность
/ = 0, xl = x\ и = щ{х\ ...,тп) (/ = 1, ...,п) A4)
в пространстве переменных t, x, и (в качестве пара-
параметров на поверхности выбраны сами х1).
Уравнению A2) соответствует характеристическая
система
dt л dxl i,, ч
1 а(*хи)
L = b(t,x,u) (i = U ...,n).
Таким образом, для системы уравнений A5)
но решить задачу Коши с начальными условиями
/|t=0=0, х%=0=г\ и\%=о=щ(х1, ...,тя) A6)
210 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
Из первого уравнения системы A5) и начального
условия t\x=o = 0 находим t = т.
Оставшиеся уравнения системы A5) можно те-
теперь записать в виде
dx^
-п- = a1 (t, х, и) (г = 1, ..., п),
A7)
а начальные условия A6) — в виде
*Ч-о = *' (i = U...,n),
«U=«o(ti, ...,V). ( ]
Решив задачу Коши A7), A8), получим
х1 = х1Ц,%1, ...,%n), (i = l,...,n),
u = U(t,r\...,x%
Если первые п уравнений A9) однозначно разре-
разрешимы относительно т1, ..., гп, то, в силу доказанной
выше теоремы, формулы A9) определяют решение
задачи Коши A2), A3).
Пример. Рассмотрим для уравнения
ди . ди л
dt дх
задачу Коши со следующим начальным условием:
и @, х) = и0 (х) е= С1 (—оо < х < +оо).
Соотношения A7), A8) имеют в данном случае вид
Решая задачу Коши B0), получим
u = uo(t), x=tuo(l)+t B1)
Уравнения B1) определяют решение рассматриваемой зада-
задачи Коши, вообще говоря, не для всех значений переменного t.
В самом деле, если при некотором t = t\ второе уравнение
B1) разрешимо относительно g не единственным образом, т.е.
найдутся такие gi ф ?г, что
Л-1ъ B2)
§4. ЗАДАЧА КОШИ ДЛЯ КВАЗИЛИНЕЙНОГО УРАВНЕНИЯ 211
то уравнения B1) не определяют при t = ti никакой однознач-
однозначной функции и = u(t,x) и при t = ti решение задачи Коши не
определено.
Геометрический смысл равенства B2) состоит в том, что
при t = ti проекции на плоскость /, х двух характеристик B1),
соответствующих значениям ?4 и g2, пересекаются в точке с ко-
координатами
t=tu x=tlu(ll) + h.
В частном случае, когда
ио{х) = ах (а>0),
из уравнений B1) получаем
u=al, x = atl + l, B3)
откуда
ах
и
Полученная функция определяет решение задачи Коши лишь при
t > — 1/а, так как при t=—l/a, проекции характеристик B3)
на плоскость /, х пересекаются.
Замечания. 1. Для полулинейного уравнения
1(хф=Ь(х,и) B4)
характеристическая система имеет вид
dx ^ ^ >•••>/>
Первые п уравнений этой системы
представляют собой динамическую систему в про-
пространстве переменных х{ (/ = 1, ..., п). Траектории
этой системы, очевидно, являются проекциями харак-
характеристик уравнения B4) на гиперплоскость и = 0.
Часто траектории динамической системы B5) также
называют характеристиками уравнения B4).
2. Понятие характеристики может быть опреде-
определено и для системы квазилинейных уравнений с
п
212 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
«одинаковой главной частью»:
(*,«)g= &<(*,«) (i=l т) B6)
(« = {«',..., и}).
Характеристиками в этом случае называются тра-
траектории динамической системы
^ = aj(xtu) (/ = 1, ...,л),
% • B7)
*k l) )
в пространстве переменных х, и. Имеют место тео-
теоремы, аналогичные теоремам 1, 2 из § 2.
Теорема У. Если п-мерная поверхность S: и =
= и(х) класса С1 в п + m-мерном пространстве пере-
переменных х19 ..., хп, и1, ..., ит такова, что, какова бы
ни была точка (х0, щ) е S, характеристика системы
уравнений B7), проходящая через (х0, щ), касается
S в этой точке, то S является интегральной поверх-
поверхностью системы уравнений B6).
Теорема 2'. Пусть и = и(х) — решение системы
уравнений B6), определенное в некоторой области D,
х = х(т), M=t/(t) (а < т < Р)-— решение системы
уравнений B7). Если при этом кривая х = х{%) за-
заключена в D и J7(to) = и(х(х0)), то при всех те
e(afp)
u(x(x))=U(x).
§ 5. Линейное однородное уравнение
с частными производными первого порядка
и первые интегралы динамических систем
Рассмотрим динамическую систему
W ='<*>• A)
правая часть которой /(*)= {/Ч*)> •••> fn(x)} яв-
ляется функцией класса С1 на некотором открытом
множестве G пространства переменных х{, ..., хп.
§ 5. ПЕРВЫЕ ИНТЕГРАЛЫ ДИНАМИЧЕСКИХ СИСТЕМ 213
Определение. Функция и(х) класса С1, опре-
определенная на некотором открытом множестве D, со-
содержащемся в G, называется первым интегралом си-
системы A), если на любой траектории # = ф(т) этой
системы, заключенной в D, функция а(ф(т)) по-
постоянна.
Теорема 1. Для того чтобы функция и(х) была
первым интегралом динамической системы A), необ-
необходимо и достаточно, чтобы она была решением урав-
уравнения
Доказательство необходимости. Пусть
и(х)—первый интеграл системы уравнений A). Рас-
Рассмотрим характеристическую систему уравнения B):
Ее решение имеет вид
дс = ф(т), и=с, D)
где дс = ф(т) — решение системы уравнений A).
Пусть характеристика D) проходит через точку,
лежащую на поверхности и=и(х), т. е. при некото-
некотором т = т0 с = м(ф(то)). Тогда, поскольку и(х) —
первый интеграл, и(ф(т)) не зависит от т и и(ф(т)) =
= #(ф(то)). Следовательно, характеристика D) ле-
лежит на поверхности и = и(х). По теореме 1 из § 2
поверхность и = и(х) будет интегральной поверх-
поверхностью уравнения B).
Доказательство достаточности. Пусть
и(х) — решение уравнения B). Для любого решения
#=ф(т) системы уравнений A), траектория кото-
которого заключена в D,
х = ц (т), и = и (ф (то))
будет решением характеристической системы C);
здесь to — произвольное число из интервала, на
214 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
котором определено решение #=<р(т). В силу тео-
теоремы 2 § 2 имеет место равенство
и (ф (т)) = и (ф (т0)) = const,
т. е. и (х) представляет собой первый интеграл си-
системы A).
Замечание. Если динамическая система A)
описывает поведение некоторой физической системы
(параметр т рассматривается как время), то любой
ее первый интеграл, не равный тождественно постоян-
постоянной, определяет некоторый закон сохранения: с изме-
изменением времени т параметры х19 ..., хп, задающие
состояние системы, меняются, а функция и(х) сохра-
сохраняет постоянное значение.
Пример. Пусть тело массы т свободно падает под дей-
действием силы тяжести F = tug. Тогда его движение описывается
следующей динамической системой уравнений:
^L-v — --е
dx ~Vt dx~ gy
где v — скорость тела, х — расстояние тела от поверхности Зем-
ли. В силу теоремы 1, функция и {х,у) = т8х-\ jr- является
первым интегралом рассматриваемой динамической системы и,
следовательно^ постоянна на любой траектории этой системы:
mgx Н—2~~ = const.
Полученное равенство представляет собой закон сохранения
энергии.
Пусть динамическая система A) определена в не-
некоторой окрестности точки а, не являющейся поло-
положением равновесия; это условие означает, что $(а)ф
#0.
Пусть п\(х), ..., Uk(x) — первые интегралы си-
системы A), определенные в окрестности точки а.
Определение. Первые интегралы «i(x), ...
..., Uk(x) называются независимыми в точке а, если
ранг матрицы [^(а)| (i = l,...,n, /=1, ...,&)
равен k.
Теорема 2. В достаточно малой окрестности
точки а={а1, ..., ап}, не являющейся положением
§ 5. ПЕРВЫЕ ИНТЕГРАЛЫ ДИНАМИЧЕСКИХ СИСТЕМ
215
равновесия динамической системы A), существуют
п — 1 независимых (в точке а) первых интегралов.
Кроме того, если щ(х),..., ип-\(х) — независимые
первые интегралы, а и(х) — произвольный первый ин-
интеграл, то
) (()y ...9un-i(x))9
где w(yu ..., уп-Х)—некоторая функция класса С1,
определенная в окрестности точки у\ =и\(а)у ...
..., уп-х =ип-\{а).
Доказательство. Поскольку /(#)=^0, то без
ограничения общности можно считать fn(a)=?O.
Определим первый интеграл Uk(x) (? = 1, ...
..., п— 1) как решение задачи Коши для уравнения
B) с начальным условием
Для решения поставленной задачи Коши нужно
(см. § 4) найти решение
*'=ф'(т, лг0) (/ = 1, ..., п),
характеристической системы C) уравнения B),удов-
B),удовлетворяющее начальным условиям
и = щ,
и составить следующие уравнения:
Легко видеть, что при т = 0, т1 = а\
якобиан
дар1 dtp1 dtp1
дх1 дхп~~х дх
д<рп
дх1
дер" дуп
д%п'х дх
F)
216
ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
составленный для функций, стоящих в правых частях
первых п уравнений F), равен
1 /"->(
О /•(«)
= /»#0.
По теореме о неявных функциях первые п уравне-
уравнений F) однозначно разрешимы относительно пере-
переменных т1, ..., тп~1 (и т) в окрестности точки т1 =
= а\ ..., %п-х = ап~\ % = 0:
t* = v\x) (k = l, ...,/г-1).
В силу теоремы из § 4, каждая из функций tik =
= vk(x) (k = 1, ..., п — 1) будет решением задачи
Коши B), E), а следовательно, и первым интегра-
интегралом системы A) (в силу теоремы 1).
Построенные первые интегралы независимы, так
как матрица
Г1 о ... о
дхп
0 1 ... 0
0 0 ... 1
дип-
дхп
На)
имеет ранг п — 1. Итак, в достаточно малой окрест-
окрестности точки а существуют п — 1 независимых в точ-
точке а первых интегралов.
Пусть и(х) — произвольный первый интеграл, а
^i(*), •••» ип-\(х) — независимые первые интегралы,
тогда имеем следующие уравнения:
= l п-\),
§ 5. ПЕРВЫЕ ИНТЕГРАЛЫ ДИНАМИЧЕСКИХ СИСТЕМ
217
Так как f(a) ФО, то $(х)Ф О в некоторой окрест-
окрестности точки а. В этой окрестности уравнения G)
можно рассматривать как систему п однородных ли-
линейных уравнений относительно п неизвестных
fl(x)> •••> /"(*)• Поскольку f(x) Ф О, то эта система
имеет нетривиальное решение и, следовательно,
ди\ дих
~дхт •" ~дх"
дип-\
дх1
ди
дх'
дип-\
дхп
ди
дхп
= 0
в рассматриваемой окрестности точки а.
По теореме о функциональной зависимости суще-
существует такая функция w (t/i,..., уп-\), определенная
в окрестности точки z/i = «i(fl), ..., уп-\ = ип~\(#),
что для всех х, достаточно близких к а,
и(х) = хю(щ(х), ,..,ия_1(*)). (8)
Теорема доказана.
Следствие. Если 1(а)фО, любое решение и =
= и(х) уравнения B) в некоторой окрестности
точки а имеет вид (8), где U\{x), ...,un-\(x) — неза-
независимые (в точке а) первые интегралы системы A).
Примеры. 1. Найдем первые интегралы динамической си-
системы
— = у ^-=—х — =у. (9)
Записав ее в виде
dx _ dy _ dz _ ,
~У~ ~~ ^х~ ~~У~~ Т>
замечаем, что вдоль любой траектории этой динамической си-
х dx + у dy = 0, dx — dz = 0,
стемы
или
)=0, d(x-z)=09
откуда следует, что
и2 = х — z
— первые интегралы системы (9).
218 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
Матрица первых частных производных функций «ь и2 по х, у, z
имеет вид
L1 о —1J-
Очевидно, ранг этой матрицы равен 2 при х2 -\-у2 > 0, и, следо-
следовательно, при х2 + у2 > 0 первые интегралы щ и и2 независимы.
В силу доказанной выше теоремы, любой первый интеграл си-
системы (9) в окрестности произвольной точки(*0, г/0, 2о)(*о + у\^
> О) представляется в виде
и(х, у, z) = w(x2 + y2t х — z),
где w(yu ^ — произвольная функция класса С1.
2. Для уравнения
•?+»?- A0>
решим задачу Коши со следующим начальным условием:
Решением уравнения A0) будут первые интегралы динамической
системы
Записывая систему A2) в виде
х у
найдем ее первый интеграл
Решение задачи Коши A0), A1) ищем в виде
A3)
где w(y\) — функция класса С1.
Полагая в A3) х = 1 и используя начальное условие A1),
получим
м(у) = У2',
таким образом,
•<•• •>—(*)-¦
— решение рассматриваемой задачи Коши.
§ 6. ЗАДАЧА КОШИ ДЛЯ НЕЛИНЕЙНОГО УРАВНЕНИЯ 219
§ 6. Решение задачи Коши
для нелинейного уравнения
с частными производными первого порядка
Рассмотрим задачу Коши для нелинейного урав-
уравнения
п ди ди \ л ,1Ч
\...9x*, и9Ш,...91рг)=09 A)
где F(x\...,xn,u,pu...,pn) — функция класса С2,
определенная на некотором открытом множестве
в пространстве переменных х19 ..., хп, и, ри ..., рп,
с начальным условием
u(U*1,..., tn-l)) = uo(xl9...> т")- B)
Здесь х = |(т!,. ..,тп")—некоторая п— 1-мерная
регулярная поверхность S класса С2 без самопересе-
самопересечений, а ио(х1,... ,x"-1) — начальная функция клас-
класса С2, определенная на поверхности S.
Пусть функция и = и(х) класса С2 есть решение
задачи Коши A), B). Подставив это решение в A),
получим тождество, которое продифференцируем
по xl\
д? , dF ,
/==1 ;
Поскольку yj- = д id I =TT' равенства C) можно
записать в виде
dF , dF A
Из этих уравнений видно, что функции pi удовле-
удовлетворяют системам квазилинейных уравнений с «оди-
«одинаковой главной частью»
чгч dF dpt dF dF . .
/—1
220 гл- 6- уравнения с частными производными
Рассмотрим решение и = и(х) вдоль траекторий
системы дифференциальных уравнений
17-f «-• * <5>
Соотношения D) в этом случае можно записать так:
dpi dF dF л ч ,Ач
-*=—&—*;р* {t=l п)- F)
Воспользовавшись соотношением E), вычислим
dx Lj dxk dx La dpbPk% K '
Итак, если и = и(х) решение задачи Коши A),
B), то вдоль любой траектории системы уравнений
E) функции и= и(х) и pi = -^L (/ = 1, ..., п) удов-
удовлетворяют уравнениям F) и G).
Система из 2п + 1 обыкновенных дифференциаль-
дифференциальных уравнений E), F) и G) называется характери-
характеристической системой уравнения A), а ее траектории
в пространстве переменных дс, щ р — характеристи-
характеристиками этого уравнения.
Опишем способ решения задачи Коши A), B).
Считая, что «= и (х) — решение рассматриваемой за-
задачи Коши, и дифференцируя B) по xk (fe=l,...
»..,я— 1), получим
Кроме того, функции w(#) и /?,• должны удовлетво-
удовлетворять уравнению
Ри ..., ря) = 0 (9)
Коши A), B)).
= 4i(xl т*-1) (/ = 1 п) A0)
(поскольку w(#) —решение задачи Коши A), B)).
Предположим, что
§ 6. ЗАДАЧА КОШИ ДЛЯ НЕЛИНЕЙНОГО УРАВНЕНИЯ 221
— такое непрерывное решение системы уравнений
(8), (9), что на поверхности S определитель
dF
dpi
~дх~1
dF
dpn
~дх~1
дхп
-1
дхп
-1
отличен от нуля.
Далее решаем задачу Коши для характеристиче-
характеристической системы E), F) и G) со следующими началь-
начальными условиями:
х \ =.
|т=о
"
) (/=!, ..., п),
) A = 1, .... п).
Решение этой задачи Коши существует, единствен-
единственно и имеет вид
*' = *'(т, т1, ..., т") (i=ly ..., п),
и=и(т, т1, ..., т"), A1)
P! = Pj(t> т1, ..., т^") (/ = !» •••> п)-
Первые две группы уравнений из A1) определяют
решение задачи Коши A), B) (заданное параметри-
параметрически) в некоторой окрестности поверхности S, и это
решение единственно, если выбраны функции
Замечания. 1. Система уравнений (8), (9),
вообще говоря, неоднозначно разрешима относитель-
относительно pi = —^j> поэтому и задача Коши A), B) может
иметь более одного решения.
2. В приложениях часто встречается задача Коши
для нелинейного уравнения вида
222 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
с начальным условием
и (О, х) = ио{х).
В этом случае уравнения (8), (9) имеют вид
дх ^и' Х) дх W)
<р(о, х, ио(х)9 fj(O, x)) = 0.
Очевидно, эти уравнения однозначно разрешимы от-
относительно ^т" @, х) и -р@, х), и поэтому решение
рассматриваемой задачи Коши единственно.
Если функция ф не зависит от и> то решение не-
нелинейного уравнения
ди_ , л ди\ _ q
сводится к решению некоторого квазилинейного урав-
уравнения. В самом деле, функция v = -р удовлетво-
удовлетворяет следующему квазилинейному уравнению
w a(^ tx()
Пример. Решим задачу Коши для уравнения
?+*(?)"—•
с начальным условием
и@, х) = ±ах2 (а>0). A3)
Обозначая — = р, -гг— = q, получим следующую характе-
характеристическую систему, отвечающую уравнению A2):
^. = 1, =<,, ^=0, ^-=0, ?-=Р + Я- О4)
dx dx ч dx dx dx H ч 7
Поверхность 5 в рассматриваемом случае — прямая t = 0.
Ее уравнения можно записать в виде
t = о, * = т1,
где т1— параметр.
ЗАДАЧИ 223
Начальные условия для р и q имеют вид (см. (8), (9))
Q U-n = ~^-т@> т1) = ат1» Р 1т-п = 1 —?га2(т1J-
Таким образом, для системы уравнений A4) нужно решить
задачу Коши со следующими начальными условиями:
Интегрируя систему A4), получим
/ = т + с1, х = сАт + с2, р = с3, q = cA> и =
откуда, в силу A5),
Cl = 0, с2 = х\ съ=\-±а2{%1)\ с4 = ат1, св = ^^-.
Решение задачи Коши A2), A3) можно записать в виде
Исключая из уравнений A6) параметры т и т1, получим
Непосредственной подстановкой легко убедиться, что форму-
формула A7) дает решение задачи Коши A2), A3).
Заметим, что это решение определено в полуплоскости
t>—l/a (a>0). При t < — 1/а получается также решение
уравнения A2), но оно не удовлетворяет начальному условию
A3), так как область определения этого решения не содержит
прямую t = 0.
3 адачи
1. Решить задачу Коши для уравнения
§ +ag=f(t,x) (a = const)
с начальным условием и@,л;)= uQ(x).
Ответ: и = и0 (х — at) + \ /(?, х — at + а|) rf|.
о
224 ГЛ. 6. УРАВНЕНИЯ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ
2. Составить уравнение конической поверхности
z = z(x,у) в трехмерном пространстве с вершиной
в начале координат. Для полученного уравнения ре-
решить следующую задачу Коши: на окружности х2 +
+ У2=1 г(х,у) = х + 1.
Указание. Если z = f(x,y) — уравнение кони-
конической поверхности с вершиной в начале координат,
то при любом t
f(tx,ty) = tf(x,y),
откуда при t = l/х получим
f(x,y) = xg(±) (g(u)=f(l,u)).
Чтобы получить дифференциальное уравнение ко-
конической поверхности, нужно вычислить производные
dz dz , ( у \ (у \
а7 и ~д^ ФУНКЦИИ г = х8{х) и' исключая ё{—)
gy^r\ найти зависимость между z> -^ и -щ.
Ответ: х -^- + у -^-= z. Решение задачи Коши
3. Доказать, что функции Н (класса С1), опреде-
определяющая систему канонических уравнений Гамильтона
xl= — '1 = — — (i = \ п)
др1 ' Р дх1 ' ' ' ''
является ее первым интегралом.
4. Решить задачу Коши для нелинейного уравне-
уравнения
\~дх
с начальным условием: z/= U при
Указание. Система (8), (9) (стр. 220) в рас-
рассматриваемом случае имеет два непрерывных ре-
решения.
Ответ: Задача Коши имеет два решения:
Глава 7
ПРОСТЕЙШИЕ ЗАДАЧИ
ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
В ряде задач математики и физики приходится
иметь дело с функциями, определенными на некото-
некотором множестве, элементами которого также являются
функции одного или нескольких переменных.
Функции, определенные на множестве, элементами
которого являются функции, называются функцио-
функционалами.
В вариационном исчислении рассматриваются за-
задачи нахождения наибольшего или наименьшего зна-
значения функционалов.
§ 1. Функционалы в линейном нормированном
пространстве
Напомним определение линейного пространства,
Определение 1. Линейным пространством на-
называется множество Е (элементы которого будем
обозначать х, у, г, ...), в котором определены опера-
операции сложения и умножения на действительные числа,
удовлетворяющие следующим условиям:
1° х + у = у + х для любых х, у^Е.
2° (х+ у) + z = x+ (у + г) для любых х, у, ze
<=?.
3° Существует такой элемент 0 е Е, что х + О = х
для любого х е Е.
4° Для любого jcg? найдется такой элемент
—х^Е, что
*+(-*) = 0.
5° (X\i)x = X(\ix) для любого х^Е и любых дей-
действительных чисел Я и |ы.
6° 1-х = х для любого х^Е.
7° (X + \х)х = Хх+ \ix для любого х^Е и лю-
любых действительных чисел Я и |ы.
226 ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
8° 'к(х + у) = Хх + %у для любых j:, je? и лю-
любого действительного числа К.
Замечания. 1. Элемент О^Е будем обозна-
обозначать так же, как действительное число, не вводя для
него специального обозначения.
2. Так же, как в случае конечномерных векторных
пространств, легко доказывается, что элементы О
и (—х) определены единственным образом и имеют
место соотношения 0*х = 0 и — х=(— \)х для лю-
любого х ^ Е.
Примеры линейных пространств.
1. Векторное пространство Еп. Элементами Еп яв-
являются упорядоченные наборы из п действительных
чисел х = {х1, ..., хп}. Операции сложения и умно-
умножения на число определяются следующим образом:
x+y = {xl+y\ ..., хп+уп}>
Хх = {кх\ ..., Ххп},
где х = {х\ ..., хп}, у = {у\ ..., уп).
Легко проверяется, что введенные операции удов-
удовлетворяют условиям Г—8°. Пространство Еп — ко-
конечномерное: векторы е. = {6}, ..., 6^} (*'=1, .•¦, п)
образуют в нем базис. Здесь
О, 1Ф\.
2. С( [а, 6])— пространство функций, непрерыв-
непрерывных на отрезке [а, 6] Операции сложения функций
и умножения функций на число определяются есте-
естественным образом и представляют собой непрерыв-
непрерывные функции. Условия 1°—8°, очевидно, выполнены.
Пространство С([а,Ь]) бесконечномерно. В самом
деле, любое конечное число членов последовательно-
последовательности функций
1 х х2 уп
линейно независимо, так как в противном случае
нашлись бы такие числа а0, а\, ..., ап, ап Ф 0, что
а0 + п\Х + ... + апхп = 0 для любых х ^ [а, Ь].
Последнее, однако, невозможно, так как много-
многочлен n-й степени имеет не более п корней (здесь же
§ 1. ФУНКЦИОНАЛЫ В ЛИНЕЙНОМ ПРОСТРАНСТВЕ 227
все точки отрезка [а, Ь] являются корнями много-
многочлена а0 + ... + апхп).
3. D{([a, &]) — пространство функций, непрерыв-
непрерывных на отрезке [а,Ь] вместе со своей производной.
Очевидно, что сумма двух функций с непрерывной
производной будет снова функцией с непрерывной
производной. Точно так же функция с непрерывной
производной, умноженная на число, имеет непрерыв-
непрерывную производную. Требования Г—8°, очевидно, вы-
выполнены. Поэтому пространство D\([atb]) является
линейным пространством. Имеет место вложение
Di{[a9b])cC([a9b]).
Определение 2. Линейным нормированным
пространством называется линейное пространство Е,
в котором каждому элементу х^Е поставлено в со-
соответствие действительное число ||я||, называемое
нормой элемента х, при этом выполняются следую-
следующие условия:
1° II х II ^ 0 и || х || = 0 тогда и только тогда,
когда х = 0;
2° IU*|| = |MII*||;
3° \\х + у\\^\\х\\ + \\у\\
для любых х, у^Е и любого действительного чис-
числа %.
Замечание. В линейном нормированном прост-
пространстве Е можно следующим образом определить
расстояние р(х,у) между двумя точками х, у:
Из свойств нормы 1°—3° непосредственно следует,
что расстояние р(х9у) обладает такими свойствами:
Г р(х,у)^0, причем р(х9у) = О тогда и только
тогда, когда х = у\
2° р(х,у) = р{у,х)\
3° p(x,z)^p(x,y) + p(y,z).
Примеры линейных нормированных
пространств.
1. В пространстве Еп можно ввести норму сле-
следующим образом:
228 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
где х = {х\ ..., хп]. Условия Г—3°, очевидно, вы-
выполняются. Таким образом, пространство Еп стано-
становится линейным нормированным пространством. Для
вычисления расстояния р(х,у) получаем формулу
Р(х9у) = \х-у\= У (х1 - у1J +...+(хп- у11?,
где
х = {х\ ..., хп}9 у = {у\ .... ynY
2. В пространстве С([а,Ь]) норма вводится сле-
следующим образом:
||у||= max \y(x)\.
Условия Г, 2°, очевидно, выполняются. Проверим
условие 3°. Пусть у\ (х) и у2{х) — две функции из
пространства С([а,6]), тогда
max \ух(х)\+ max \у2(х)\ = \\ух\\ + \\ у2\\,
откуда следует, что
\\Уг + У2\\= max \ Ух(х) + у2(х)\<\\у1\\
<<6
Таким образом, введенная норма обладает свой-
свойством 3°.
3. В пространстве D\([a,b]) обычно рассматри-
рассматривают норму
\\у\\= max {\y(x)\,\/(x)\},
max {\y(x) |, I^X*)!} представляет собой сокращенное
обозначение числа max { max | y(x) |, max | у'{х) |}.
<<6 ККЬ
Легко проверить, что условия 1°—3° выполнены.
Определение 3. Функционалом в линейном
нормированном пространстве Е называется функция,
принимающая действительные значения и определен-
определенная на всем Е *).
*) Функции, принимающие действительные значения и опре-
определенные на некотором множестве М cz E, также называют функ-
функционалами,
§ 1. ФУНКЦИОНАЛЫ В ЛИНЕЙНОМ ПРОСТРАНСТВЕ 229
b
Так, например, длина дуги 1(у)= \ л/1 + [y'(x)f dx
а
кривой у = у(х) — функционал в линейном нормиро-
нормированном пространстве D\([a,b]).
Определение 4. Функционал F называется не-
непрерывным в точке уо^Е, если для любого е>0
найдется такое б > 0, что для всех у, удовлетворяю-
удовлетворяющих условию || у — #оИ<6, выполняется неравен*
ство
\F(y)-F(yQ)\<e.
Если функционал F непрерывен в каждой точке
пространства Е, то говорят, что F—непрерывный
функционал на Е.
Пример. В пространстве Еп непрерывная функция
F(x\ ..., хп) является, очевидно, непрерывным на Еп функцио-
функционалом.
Определение 5. Функционал F называется ли-
линейным, если для любых у, у\, у2 из Е и любого дей-
действительного числа % выполняются следующие свой-
свойства:
2°
Примеры. 1. В пространстве С ([а, Ь]) рассмотрим функ-
функционал
F(y)=y(x0),
где у(х) еС([а,1)]) (а ^ х0 ^ Ь). Покажем, что этот функцио-
функционал — линейный и непрерывный. Линейность функционала сле-
следует из равенств
Р(У\ + Уг) = У\(х0) + #2(*о) = F(y{) + F(y2),
а непрерывность — из следующих соотношений:
< max \y(x)- yo(x)\ = \\y -уо\\.
Задав произвольно 8 > 0 и выбрав 6=8, получим
\Р(у)-Р(Уо)\<Ъу-У*\\<*
при || у - у01| < б.
230 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
2. Пусть
ь
f (I)— функция, непрерывная при а < g < b. Очевидно, F(y) —
линейный функционал на С ([а, Ь]). Покажем, что он непреры-
непрерывен. Поскольку функция f(l) непрерывна на отрезке [а,Ь], то
по теореме Вейерштрасса она ограничена:
\Н1)\<м.
Пусть у, уо& С ([а, Ь])\ тогда
Ь
f(t)[y(t) -
\F(y)-F(yo)\ =
a
b b
< \ \ПЪ)\Ы1) - УоA)\ dl<\M max \y&) - уо&)\ dl =
a a
= M\\y-yo\\(b-a).
Для заданного е>0 положим 6 = e/AfF — a), тогда при
IIУ — Уо II < б получим в силу последнего неравенства
\F(V) ~ F(yo)\<M(b - а) || у - у01|< е,
т.е. функционал /^(г/) непрерывен в пространстве С([а, &]).
Замечание. В бесконечномерном простран-
пространстве Е могут быть линейные, но не непрерывные
функционалы. Построить пример такого функцио-
функционала довольно сложно.
Определение 6. Множество Sr(yo) = {у^ Е,
\\ У — Уо\\<г} называется открытым шаром радиу-
радиуса г с центром в точке у0. (Иначе говоря, Sr(yo) —
множество таких точек из Е, расстояние которых
р(У>Уо) = II У — У А До точки у0 меньше г.)
Определение 7. Говорят, что функционал F
имеет в точке у0 относительный минимум (макси-
(максимум), если существует такой шар Sr(yo), что для
всех у е= Sr(yo)
F(y)>F(y0) (F(y)^F(y0)).
Определение 8. Пусть F — функционал, опре-
определенный в линейном нормированном пространстве Е.
Если в некоторой точке уо^Е функция F(yo+th)
§ 1. ФУНКЦИОНАЛЫ В ЛИНЕЙНОМ ПРОСТРАНСТВЕ 231
переменного / дифференцируема при t = О для лю-
любого h ^ ?, то ее производная
называется вариацией функционала F в точке г/о
и обозначается
6F(yQ9 h).
Замечание. Вариация 6F(y0y h) есть снова
функционал в пространстве Е (h^E).
Теорема. Пусть точка уо^Е является точкой
относительного экстремума функционала F и в этой
точке существует вариация 6Р(у0>Н), тогда
6^(#о> А) = 0 для любого h^E.
Доказательство. При h = 0 утверждение
теоремы очевидно. Пусть h ф 0. Докажем теорему
в предположении, что г/о — точка относительного ми-
минимума. (В случае относительного максимума доста-
достаточно вместо функционала F рассмотреть функцио-
функционал —F, который имеет в точке у0 относительный
минимум.)
В силу определения относительного минимума
найдется такой шар Sr(f/o), что F(y)^ F(y0) для
любого y(=Sr(yo). Пусть |*<г/||й||, тогда уо +
+ th<= Sr(yQ) (поскольку \yo+th — уо\\ = \\th\\ =
ИИА||<г) и
Таким образом, при ? = 0 функция F(yo+th) имеет
относительный минимум и дифференцируема при
? = 0 (функционал F имеет вариацию в точке у0).
Следовательно, по известной теореме анализа
при любом /ig?. Теорема доказана.
Определение 9. Пусть F — функционал. Точка
j/e? называется стационарной точкой функционала,
если вариация 8F(y,h) определена в этой точке
и 8F(y, /i) = 0 при любом h^E.
232 Г«Л. 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Замечание. Итак, точки относительного экс-
экстремума, в которых определена вариация, являются
стационарными. Обратное, вообще говоря, неверно:
не всякая стационарная точка является точкой отно-
относительного экстремума.
Определение 10. Подмножество Е'аЕ назы-
называется линейным многообразием пространства Е,
если для любых двух точек у\^Е, у2^Е все точки
У\~\~ НУ2 — У\)у —°°<^<+оо, принадлежит Е'.
Другими словами, вместе с любыми двумя точ-
точками из Ег множеству Ег принадлежит вся прямая,
соединяющая эти точки.
Все проведенные до сих пор построения без изме-
изменения переносятся на несколько более общий случай,
где вместо линейного нормированного пространства Е
рассматривается линейное многообразие Ег простран-
пространства Е.
Примеры линейных многообразий.
1. В пространстве ?3 любая плоскость или прямая
представляют собой линейное многообразие.
2. В пространстве С ([а, Ь]) рассмотрим множе-
множество
Е' = {у = С([а,Ь]); у(а) = А, у(Ь) = В}
(Е' — множество кривых, соединяющих точки {а, А)
и (btВ)), Покажем, что Ег — линейное многообразие.
Пусть ух^Ег и у2^Е\ тогда у\(а) =у2(а) = А9
Ь) {Ь)=В и
\У\ + t(y2- yi)]Xasa = Ух (а) + t (У2 (а) - Ух (а)) = А>
[Ух + t(y2- Ух)]ХавЬ =Ух (b) + t (у2 (Ь) - у г (Ь)) =В,
т. е. у\ + t(y2 — y\)^E' при —оо < t < +oo. Следо-
Следовательно, Ег — линейное многообразие в С ([а, Ь)).
При нахождении стационарных точек функциона-
функционалов в функциональных пространствах (как, напри-
например, Di([a,b])) используется
Основная лемма вариационного ис-
исчисления. Если функция f(x) (a^x^b) непре-
§ 1. ФУНКЦИОНАЛЫ В ЛИНЕЙНОМ ПРОСТРАНСТВЕ 233
рывна и для любой непрерывной функции h(x) (a ^
ъ
\f(x)h(x)dx = 0,
!¦
то f(x)= 0.
Доказательство. Пусть 1(х)Ф0, тогда су-
существует такая точка х0 (а<хо<.Ь), что f(xo)=?O.
Будем, для определенности, считать, что /(jco)>O.
Существует окрестность (хо — б, *о+ б)с [а, Ь], в ко-
которой f(x) > Щ^-. Пусть h(x) — такая непрерывная
на [а, Ь] функция, что h(x)^0 на (лг0 — б,хо + б),
h(xo) > 0 и h(x) = 0 вне (дго — б, х0 + б), тогда
и #0 + 6 #0 + 6
что противоречит условию теоремы. Следовательно,
f (x) = 0. Лемма доказана.
Замечание. Доказанная лемма остается вер-
верной, если считать h(x) функцией класса Ck (или
даже С°°), удовлетворяющей некоторым граничным
условиям, например, h(a) = h(b) = 0 (т. е. соотноше*
ь
ние \ f(x)h(x)dx = 0 может выполняться для более
а
узкого класса функций h(x), чем класс непрерывных
функций).Так, если считать h(x) функцией класса С\
удовлетворяющей граничным условиям h(a) = hF) =
= 0, то при доказательстве леммы можно рассмот-
рассмотреть следующую функцию h(x), определенную на от-
отрезке [a, b]:
Ц) \ 1+CQS "'"Г0'' *^[*о-б, *0 + б],
Ц) \
1 0, х <? [х0 - б, х0 + б].
Аналогичная лемма имеет место для функций
двух и более переменных, при этом интегрирование
производится по некоторой замкнутой ограниченной
области G,
234 Г«Л. 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
ь
§ 2. Функционалы вида F(y)=\ f(x, у, y')dx
а
1. Рассмотрим функционал
b
F{y) = \f{x,y,y')dx, A)
а
где f{x9y,yf)—функция, имеющая непрерывные про-
производные первого порядка на множестве а ^ х ^ 6,
— оо < #, ^ <+оо в пространстве Di([a,6]). Най-
Найдем вариацию функционала A). По определению
ь
=jt \ fix, У(х) + th{x), у'{х) + tti(x)) dx\^ =
а
Ъ
= \[Гу(х, y+th,y'+th')h + f'y,{x, y+th,y'+th'W]dx\t= =
а
Ъ
= J [fy(x, У, У') h + Гу1(х, у, у') /г'] dx.
а
(Здесь произведено дифференцирование интеграла по
параметру /.)
Итак,
ъ
bF(y,h)=\[fyh+f'y,h'-\dx. B)
а
2. Уравнение Эйлера. Предположим, что функция
/(*>#> У') имеет непрерывные частные производные
до второго порядка включительно на множестве а ^
^ я ??; 6, —оо < у, #/<+оо. Рассмотрим линейное
нормированное пространство D2( [a, b]) — простран-
пространство функций, имеющих непрерывные производные
первого* и второго порядка, со следующей нормой:
|| г/1|= max {\у(х)\,\у'{х)\,\у"{х)\}.
§ 2. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА 235
(Легко проверить, что D2([a,b]) обладает всеми
свойствами линейного нормированного пространства.)
Пусть
E' = {ye=D2([a, 6]); у(а) = А, у(Ь) = В}
— линейное многообразие в D2([a,b]).
Будем искать стационарные точки функционала
A) (которые называются также экстремалями) на
линейном многообразии Е\ т. е. такие функции у(х)
из пространства Ь2([а,Ь]), удовлетворяющие усло-
условиям у(а)=А, #F) = В, для которых 8F(y,h) = 0.
Так как функционал рассматривается на линейном
многообразии ?', приращение h(x) должно удовле-
удовлетворять условиям
0. C)
В самом деле, поскольку у, y + h^E',
у{а) = А, y{a) + h(a)=A,
y(b)=B, y(b) + h(b)=B,
откуда и получаются условия C).
Вариация функционала A) вычисляется по фор-
формуле B). Преобразуем интеграл от второго слагае-
слагаемого в выражении B) с помощью формулы интегри-
интегрирования по частям:
(Здесь использованы условия C).) Подставляя ра-
равенство D) в B), получим
236 ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Для стационарных точек должно выполняться ра-
равенство
ь
[АЛХ-О E)
для любого допустимого А. В силу основной леммы
вариационного исчисления из E) следует, что
или
f — f" — f" t/ — f" n" — 0 G)
Уравнение F) (или G)) называется уравнением
Эйлера для функционала (I) при у (а) = Л, у(Ь) = В.
Итак, для нахождения экстремалей рассматривае-
рассматриваемой задачи нужно искать решение уравнения F),
удовлетворяющее условиям
у(а) = А, у(Ь) = В.
Полученная краевая задача для уравнения F) не
всегда имеет решение. Если же решение существует,
то оно может быть не единственным (см. далее при-
пример 2 на стр. 237).
3. Рассмотрим частные случаи, когда уравнение
Эйлера допускает понижение порядка.
1) Пусть функция f не зависит от у: f = f(x,y').
В этом случае уравнение Эйлера имеет вид
— F =0
откуда получаем f'yf = c — уравнение первого порядка.
2) Пусть функция f не зависит от х: f = f(y, у').
Тогда уравнение Эйлера G) имеет вид
так как /^ = 0.
Уравнение (8) можно переписать в виде
откуда f — y'fy, = с — дифференциальное уравнение
первого порядка.
§ 2. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА
237
Примеры. 1. Пусть у = у(х) (а
вая на плоскости х, у. Длина дуги
ъ
I (У) = \ Yl + [У'(х
х < Ь) — гладкая кри-
криdx
есть функционал, определенный на множестве гладких кривых
у(х) (а^х^ Ь).
Для функционала 1(у) рассмотрим следующую задачу: найти
кривую, соединяющую точки (а, Л), (Ь, В), для которой функ-
функционал 1(у) принимает наименьшее значение, т.е. найти кратчай-
кратчайший путь, соединяющий точки (а, Л) и (Ь, В) (рис. 26).
Функционал 1(у) рассматривается на линейном многооб-
многообразии Е' = {у е Dt([а, Ь])\
у (а) = А, у(Ь) = В). Функция
f = Yl + [у\х)\2 не зависит
от у, поэтому уравнение Эйле-
Эйлера в данном случае сведется
к уравнению fy, = с или
VI +
(9)
Из соотношения (9) следует,
что
Рис. 26.
где С\ — некоторая постоянная (зависящая от с). Отсюда
Из условий у (а) = Л и у(Ь) = В находим
А-В
а-Ь
с2 =¦
аВ- ЬА
а-Ь
Таким образом, в линейном многообразии Е' содержится един-
единственная экстремаль функционала 1(у):
У =
(Л - В) х + аВ - ЬА
а-Ь
представляющая собой отрезок прямой, соединяющей точки
(а,А), (Ь,В). Можно доказать, что на этой экстремали дости-
достигается относительный минимум функционала 1(у).
2. Функционал
dx,
определенный для гладких кривых у (х) (—а^х^.а), пред-
представляет собой площадь поверхности, образованной вращением
238 Г«Л. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
дуги у = у(х) (—а ^ х ^ а) вокруг оси х. Для этого функцио-
функционала рассмотрим такую задачу: среди кривых у = у(х), соеди-
соединяющих точки (—а, А), (а, А) (А > 0), найти ту, на которой
функционал S(y) достигает наименьшего значения. Иначе го-
говоря, ищется поверхность вращения наименьшей площади, про-
проходящая через две окружности (радиусов А) с общей осью
(рис. 27).
Таким образом, функционал S(y) рассматривается на линей-
линейном многообразии Е' = {у g ?>2([fl, Ь])\ г/(а) = Л, у(—а) = А).
Функция / = 2лу Vl + [У']2
У
Ш)
не зависит от х, поэтому решение
уравнения Эйлера в данном слу-
чае сводится к решению уравне-
уравнения f - y'f'y, = с, т. е.
У
= -?-=с (Ю)
2я
В уравнении A0) сделаем замену
у = с ch t, тогда
Рис. 27.
yf = sh t.
Для нахождения х получаем следующее уравнение:
dy с sh t dt
dx—jr-
откуда
= cdt,
X = Ct + C\.
Таким образом, решение уравнения A0) имеет вид
# = c/-f-Ci, у = с ch t.
Исключая из этих уравнений параметр /, получим
Из условий у (—а) = у (а) = А следует, что
Равенство (И) возможно либо при
а — с\ а + с\
т.е. при а=0, либо при —
а — сх
с
т. е.
(И)
— а—сх
с
сх = 0.
при
с с
Случай а=0 тривиален (функционал S = 0). Рассмотрим слу-
случай сх = 0. Тогда экстремали находятся среди однопараметри-
ческого семейства кривых
y = cch —
(рис. 28).
§ 2. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА
239
В зависимости от положения точек (—а, Л), (а, А) линей-
линейное многообразие Е' может содержать одну экстремаль функцио-
функционала S(y) (точки Mi и Ni)t две экстремали (точки М2 и N2)
или ни одной (точки Мъ и N3).
Рис. 28.
Замечание. Функционалы вида
ь
F{y)= \ f(x, ух(х), ..., уп(х), у[(х), ..., yrn{x))dx
а
рассматриваются в линейном нормированном прост-
пространстве D[n)([a, b]) вектор-функций у(х) = {у\(х),...
. • • > Уп{х)}, имеющих непрерывную производную
у'(х). Норма в D(itt)([a, b]) определяется по формуле
..., \уп(х)\, \у[(х)\, .... \у'п(х)\].
= max
CL ^ X ^^ и
Вариация функционала F(y) имеет вид
ъ
df j,
ду'п п
dx
(предполагается, что функция f имеет непрерывные
частные производные первого порядка).
Для нахождения экстремалей функционала F(y),
удовлетворяющих условиям у(а) = А, у(Ь) = Ву по-
получаются следующие уравнения:
dxK
240 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
(предполагается, что сама экстремаль у =у(х) имеет
непрерывные производные у'(х) и у"{х), а функция /
имеет непрерывные частные производные первого
и второго порядков).
§ 3. Функционалы вида
(x, у, у'
Функционалы вида
ь
F(y) = \ f(x> У> У', .-.* y{n))dx, A)
а
где функция f(x,y,...,yW) имеет непрерывные част-
частные производные первого порядка по всем аргумен-
аргументам, определены на множестве функций у = у(х)
(а^.х^.Ь), имеющих непрерывные производные до
n-го порядка включительно. Множество таких функ-
функций превращается в линейное нормированное прост-
пространство, если норму определить следующим образом:
= max {\y(x)\, \у'(х)\, ...,
Построенное пространство обозначается Dn([a, b]).
Найдем вариацию функционала A). По опреде-
определению
t = 0
... +fy*{x, y+th, .... y(n)+thM)h
b
= \ [Vyix, y, ..., yW)h+f'y,(x, y,...,
... +f'yM(x, У, ...,yM)h(n)]dx.
§ 3. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА 241
Итак,
ь
Предположим, что функция / имеет непрерывные
частные производные до порядка п + 1 включитель-
включительно, а функция у = у(х)—непрерывные производные
до порядка 2п включительно.
Будем искать экстремали функционала A), удов-
удовлетворяющие условиям
у(а) = Ао, у'(а) = Аи ..., tp-»(a)=An_u
у(Ь) = В0, у'(Ь) = Ви ..., tp-»(b) = Bn_u F)
где Ло, ..., Ап-и ВОу ..., Вп-\ — некоторые посто-
постоянные.
Покажем, что все такие экстремали являются ре-
решениями следующего уравнения Эйлера:
ду dx \ду') ^ dx2\dy"
В самом деле, преобразуем интеграл от & + 1-го
слагаемого в формуле B) с помощью формулы инте-
интегрирования по частям:
ъ ъ
a
b
l^{ik) -!• ....п). E)
а
(Здесь были использованы равенства
h(a) = h'{a)= ... =/z(»-D(a) = O,
hi<b) = hr{b)= ... =/*(«-!)(&)= О,
которые непосредственно следуют из условий C)).
242 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Подставляя каждое из выражений E) в B) и при-
приравнивая вариацию к нулю, получаем
ь
\ df d / df
ду dx V ду'
для любой п раз непрерывно дифференцируемой
функции h(x), удовлетворяющей условиям F). В силу
основной леммы вариационного исчисления, из G)
вытекает равенство D). Таким образом, экстремали
функционала A), удовлетворяющие условиям C), яв-
являются решениями уравнения Эйлера D).
§ 4. Функционалы вида
G
1. Рассмотрим функционалы вида
определенные на множестве функций и = и(х, у),
имеющих непрерывные частные производные первого
порядка в замкнутой ограниченной области G. Мно-
Множество таких функций превращается в линейное нор-
нормированное пространство, если норму ввести следую-
следующим образом:
Построенное пространство будем обозначать D\(G).
Относительно функции / предположим, что она имеет
непрерывные частные производные первого порядка
по всем аргументам.
§ 4. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА 243
Найдем вариацию функционала A) (произведя
дифференцирование по t под знаком интеграла):
= И j J Кх> У> п(х> У) + th(x> У)> их(х> у) +
G
+ th'x(x,у), и'у(х,у) + th'y(x,у)) dx dy \tmmQ =
№ У> U+th> U'x + th'x' U'y + t
+ f'u'x(x, y, u + th, u'x+th'x, u'y+th'y)h'x +
У> u + th, u'x+th'x, u'a+th'u)h'u-\dxdy\tm(i =
+ ru,(x,y,u,ux,u'y)hy]dxdy.
Итак,
<*<«• л>—SS(jth+Ah'x+4h»)dxdy- B)
G y
2. Уравнение Эйлера — Остроградского. Предпо-
Предположим, что функция f(x, у, и, их, и'у^ имеет непре-
непрерывные частные производные до второго порядка
включительно по всем аргументам. Рассмотрим ли-
линейное нормированное пространство D2(G) — прост-
пространство функций и = и(х, у), имеющих в G непре-
непрерывные частные производные до второго порядка
включительно, со следующей нормой:
Пусть на границе Г замкнутой области G задана
функция ср (#,#). Рассмотрим линейное многообразие
E'={u<=D2{G)\ и\г = ф,у)}.
Будем искать стационарные точки функционала
A), лежащие на линейном многообразии Е'.
244 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Поскольку функционал рассматривается на линей-
линейном многообразии Е', приращение h(x,y) должно
удовлетворять условию
h(x,y)\r=0. C)
В самом деле, если ut u-\-h^ ?', то
и(х,у)\г=у(х,у),
и{х, у)\г + h(x, у)\г=(р(х, у),
откуда следует равенство C).
Вариация функционала A) вычисляется по фор-
формуле B), которую можно записать в виде:
Для вычисления второго интеграла в D) приме-
применим формулу Грина:
Полагая здесь P = —^rh, Q = ^~rh, получим
у х
так как А(*,#)|г=0. В силу E) выражение D) для
вариации функционала A) примет вид
§ 4. ФУНКЦИОНАЛЫ СПЕЦИАЛЬНОГО ВИДА 245
Для стационарных точек должно выполняться равен-
равенство
для любого допустимого h. В силу основной леммы
вариационного исчисления,
ди дх\ди'х) ду\ди'у) и* W
Уравнение F) называется уравнением Эйлера —
Остроградского. Итак, для нахождения стационарных
точек функционала A), лежащих на линейном много-
многообразии Е\ нужно искать решения уравнения в част-
частных производных второго порядка F), удовлетворяю-
удовлетворяющие граничному условию и(х, у)\Г =<р(х,у).
Примеры. 1. Площадь гладкой поверхности и = и(х, у)
(()G)
*<¦>
есть функционал, заданный на множестве функций класса С1,
определенных в некоторой замкнутой ограниченной области G.
Для функционала S(u) можно поставить следующую за-
задачу: среди поверхностей, проходящих через замкнутый кон-
контур С, найти поверхность наименьшей площади, т. е. найти по-
поверхность и = и(х, у), проходящую через контур С, на которой
функционал S(u) принимает наименьшее значение.
Уравнение Эйлера — Остроградского в даннном случае имеет
вид
\ + д( и» \=о
V a4V» + «J+K)v '
или
Л ди ди
Уравнение G) представляет собой уравнение поверхностей,
средняя кривизна которых равна нулю. Такие поверхности назы-
называются минимальными. Физически минимальные поверхности реа-
реализуются мыльными пленками, натянутыми на контур С.
2. Уравнение продольных колебаний стержня. Упругий стер-
стержень длины / расположен в состоянии равновесия между точ-
точками 0 и / на оси х. Пусть плотность стержня р и модуль упру-
246 Г«Л. 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
гости k зависят только от х\ р = р(#), k = k(x). Колебания
стержня характеризуются смещением и(х, t) вдоль оси х сече-
сечения, соответствующего абсциссе х. Будем считать, что внешние
силы отсутствуют и концы стержня закреплены, м@, t) =
= иA} 0 = 0. Легко видеть, что кинетическая энергия стержня
выражается интегралом
а потенциальная — интегралом
о
Функционал Гамильтона в рассматриваемом случае имеет вид
U 0
Записав для функционала Гамильтона уравнение Эйлера —
Остроградского, получим уравнение продольных колебаний
стержня
д2и д
Замечание. Во всех рассмотренных здесь при-
примерах вариация 8F(y, h) функционала F представ-
представляла собой линейный непрерывный функционал отно-
относительно h. В общем случае это не так. Существуют
примеры функционалов, у которых вариация не будет
линейным функционалом.
§ 5. Замечания о достаточных условиях
экстремума функционала
В § 1 было показано, что если функционал F в ли-
линейном нормированном пространстве Е имеет в точке
экстремума у0 вариацию 8F(yo,h), то 8F(y0, h)= 0
для любого h^E. Обращение вариации в ноль яв-
является необходимым условием экстремума, но не до-
достаточным.
Для получения простейших достаточных условий
нужно ввести понятие второй вариации функционала.
Сформулируем необходимые определения.
§ 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА ФУНКЦИОНАЛА 247
Определение 1. Функционал F, определенный
в линейном нормированном пространстве Е, назы-
называется дифференцируемым в точке уо^Е, если его
приращение F(yo+h) — F(y0) можно представить в
виде
F(yo+h) - F(y0) = Цу0, h) + r(y0, ft), A)
где L(y0, К)— линейный непрерывный функционал
(по /г), а остаток г(у0, К)— бесконечно малая высшего
порядка по сравнению с |] h ||, т. е. для любого 8 > О
найдется такое б > 0, что при || h || <С б
Покажем, что если функционал F дифференци-
дифференцируем в точке уо, то в этой точке существует вариация
6F(yo,h) и
6F(yo,h) = L(yo,h). B)
В самом деле, пусть е — произвольное положи-
положительное число и h Ф 0 (при h = О равенство B), оче-
очевидно, имеет место). В силу дифференцируемости
функционала F в точке у0 по числу ei = е/|| к || най-
найдется такое число 6 > О, что при \\ h\ II < б
\г (уо, hi) | ^ -щ-1| h\ ||. C)
Полагая в неравенстве C) hi = th, получим, что при
И < 6/|| й||
и, следовательно,
В силу A) и D) имеем
= L(y0, h) + lim !ЩУ± = L(y0, h).
Равенство B) доказано.
248 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Определение 2. Функционал Q(h) называется
квадратичным, если существует такой билинейный
функционал B(h\, А2) (т. е. функционал, линейный по
hi и А2), что
Q{) = B(h, А).
Определение 3. Пусть функционал F диффе-
дифференцируем в точке у о, а остаток r(yo,h) допускает
следующее представление:
г (у о, А) = у Q(y0, A) + r{(yOy А),
где Q (#,o, A) — квадратичный непрерывный функцио-
функционал (по A), a r\{yo,h)—бесконечно малая высшего
порядка, по сравнению с || А ||2, т. е. для любого е > 0
найдется такое б > 0, что при || А || < б
kiQ/o, Л) |< е || л и2.
Тогда функционал F называется дважды дифферен-
дифференцируемым, а квадратичный функционал Q(yo,h) —
второй вариацией, которая обозначается 82F(y0ih).
Сформулируем теперь достаточное условие суще-
существования относительного экстремума дважды диф-
дифференцируемого функционала.
Пусть функционал F дважды дифференцируем
в стационарной точке уо^Е, тогда для того чтобы
точка у0 была точкой относительного минимума (мак-
(максимума), достаточно, чтобы существовало такое А >
> 0 (А < 0), что при всех А ^ Е выполняется нера-
неравенство
b2F(yQ, h)>A\\h||2 (ЬЩуо, А)<А||А||2).
Замечания. 1. Все проведенные в этом пара-
параграфе построения естественным образом переносятся
на функционалы, определенные на линейном много-
многообразии Е' а Е.
2. Понятие дифференцируемого функционала есть
обобщение понятия дифференцируемой функции, оп-
определенной в векторном пространстве Еп на случай,
когда функция F определена на линейном нормиро-
нормированном пространстве Е.
§ 5. ДОСТАТОЧНЫЕ УСЛОВИЯ ЭКСТРЕМУМА ФУНКЦИОНАЛА 249
В самом деле, если в определении дифференци-
дифференцируемого функционала в качестве Е взять Еп с обыч-
обычной нормой
то
F(!fo + й) - F(y0) = Цу0, h) + г(у0, А). E)
Пусть h = hxex + ... + hnen, где ей ..., en — единич-
единичные векторы координатных осей, тогда (поскольку
й)—линейный функционал)
или
)=A^+ ... +Anh\
Ai = L(yQ,ei) (/ = 1, ..., п).
Теперь равенство E) имеет вид
F(yo+h)-F(yo) = Alhl+ ... +Anhn+r{yQ,h).
Здесь r(yo, ft) — бесконечно малая высшего порядка
по сравнению с А. Таким образом, мы получили обыч-
обычное определение дифференцируемой функции в точ*
ке у0.
Сформулированное выше достаточное условие су-
существования относительного экстремума дважды диф-
дифференцируемого функционала часто оказывается
слишком грубым и трудно проверяемым. Имеются
более тонкие достаточные условия, в которых исполь-
используется конкретный вид рассматриваемого функцио-
функционала. Так, например, для функционала вида
ь
= \f(x,y,y')dx
можно доказать следующее достаточное условие
Вейерштрасса.
Пусть экстремаль у = уо(х) можно включить
в однопараметрическое семейство экстремалей у =
= у(х,Х) (|М<а), у(х,0)= уо(х), причем функция
у(х,'к) дифференцируема по Я, -— > 0, и кривые
у(ху %) при а ^ х ^ Ъ и при разных значениях X не
пересекаются. Тогда, если для всех х и у на множе-
250 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
стве, покрытом экстремалями */ = #(яД), при лю-
любом р выполняется неравенство
то экстремаль у = уо(х) реализует относительный ми-
минимум (максимум) функционала F(y) в пространстве
Dx ([a, Ь]).
Пример. Рассмотрим задачу о минимуме функционала
ъ
F)
со следующими граничными условиями: у(а) = Л, у(Ь)=В. Как
было показано раньше (см. пример 1, стр. 237), имеется един-
единственная экстремаль рассматриваемой задачи:
_ (А-В)х+аВ-ЬА
У~ а—Ь ' кп
С помощью критерия Вейерштрасса покажем, что на прямой G)
функционал F) имеет относительный минимум. В самом деле,
экстремаль G) можно включить в поле экстремалей:
Кроме того, ]",,-= — и, следовательно, при любом р
A + [0ТГ
A+Р2K/2 >0<
Таким образом, достаточное условие Вейерштрасса выполнено.
§ 6. Условный экстремум
Пусть F(y) и G(y) — дифференцируемые функцио-
функционалы в линейном нормированном пространстве Е.
Рассмотрим следующую задачу: найти экстремум
функционала F(y) при условии, что G(y)=Co, где
Со — некоторая постоянная. Поставленная задача на-
называется задачей на условный экстремум*).
Лемма 1. Если функционал F(y) достигает экс-
экстремума в точке уо при условии G (у) = Со и уо не яв-
является стационарной точкой функционала G(y)
(8G(y0, h) Ф 0), то для любого h^E, удовлетворяю-
*) Иногда такие задачи называют изопериметрическими.
§ 6. УСЛОВНЫЙ ЭКСТРЕМУМ 251
щего условию 8G(yo, /z) = 0, имеет место равенство
(h
(y)
Доказательство. Пусть h^E такой эле-
элемент, что 6G (f/o, h) = 0. В силу условий леммы
(8G(y0, к)фО) существует такой элемент ho^E, что
SG(, ho) Ф 0. Рассмотрим следующие функции:
v(tys) = G(y0 + th + sh0) — c0.
Из того, что функционал F(y) достигает экстремума
в точке у0 при условии G (у) = с0, следует, что функ-
функция u(t, s) достигает экстремума в точке / = 0, s = 0
при условии v(t, s) = 0. Покажем, что при достаточно
малых t и s уравнение v (/, s) = 0 определяет функ-
функцию s = s(t), удовлетворяющую условиям
s@) = 0, |f@) = 0. A)
В самом деле, по определению вариации
4?@, 0) = 6G(y0 + sh0, h) = 6G(y0, h) = 0,
Ol 5=0
|l@f 0) = 6G(y0 + th, h0)[_Q = 6G(yQ, ко)ФО,
аткуда по теореме о неявной функции следует суще-
существование функции 5=5@, удовлетворяющей усло-
условию s@)=0 (так как у@, 0) =G(y0) — со = О), причем
Очевидно, функция w(t) = u(t, s(t)) имеет экстремум
при / =
силу A)
()
при / = 0. Поэтому jj- @) = 0. С другой стороны, в
= j-tF(yo+th+s(t)ho)\t=o+-§-$F(yo+th+s(t)ho)\t=o§(O) =
= 6F(yo+s(t)ho, h)\t=0 = bF(yQ, h).
252 ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Таким образом, 6F(y0i h) = -^@) = 0. Лемма дока-
доказана.
Следующая лемма относится к произвольным ли-
линейным непрерывным функционалам в Е.
Лемма 2. Если линейный функционал L\(h) об-
обращается в нуль на любом элементе, на котором об-
обращается в нуль линейный функционал L(h)t то
Lx{h)=KL{h\
где Я— некоторое число.
Доказательство. Если L(A) = 0, то утвер-
утверждение леммы очевидно. Пусть Ь(И)Ф0\ тогда най-
найдется такой элемент /to, что Ь(ко)ФО. Рассмотрим
элемент h— r /, \ h0. Очевидно, L\h— Т/ГТ^о) = О.
По условию леммы тогда и L{(h— j)h* hoj = 0, от-
откуда следует, что Z>i(ft)= r,u \ L(h). Таким образом,
Ь{По)
Li(h) = KL(h), где Я = Л 0. . Лемма доказана.
Теорема. Пусть у0 — точка экстремума функ-
функционала F(y) при условии G(y) = Ci0, причем у0 не
является стационарной точкой функционала G{y)
(8С(уо,к)ФО)\ тогда уо будет стационарной точкой
функционала F—XG, где Я — некоторое число.
Доказательство. В силу леммы 1 равенство
6F(y0, й)=0 имеет место для всех h^E, для кото-
которых 6G(#o, h) = 0. Отсюда в силу леммы 2 8F(y0, h) =
= Я6б(уо, h) для любого h^E. Последнее равенство
можно переписать в виде 8(F— XG) (уо, h) = 0. Та-
Таким образом, уо является стационарной точкой функ-
функционала F— ЯС? при некотором Я. Теорема доказана.
Итак, в силу доказанной теоремы точки условного
экстремума функционала F(y) при условии G(y) = c0
находятся либо среди стационарных точек функцио-
функционала F—XG, либо среди стационарных точек функ-
функционала G{y).
Замечания. 1. Доказанная теорема имеет место
и в том случае, когда функционалы F(y) и G(y) опре-
определены на некотором линейном многообразии Е* с: Е.
§ 6. УСЛОВНЫЙ ЭКСТРЕМУМ 253
2. Рассмотрим более общую задачу на условный
экстремум: найти экстремум дифференцируемого
функционала F(y) при условиях Gi(y) = Ci, ...
..., Gn(y) = cn, где G\(у), ..., Gn(у) — дифференци-
дифференцируемые функционалы на Е' cz E. Имеет место сле-
следующая
Теорема. Если функционал F{y) достигает экс-
экстремума в точке уо при условиях G\(y)= C\y ...
..., Gn{y) = cm причем уо не является стационарной
точкой ни одного из функционалов Gt(y) (i=l,...
...,я) и функционалы 8Gi(y,h) (i = l,...,n) линей-
линейно независимы, то у0 будет стационарной точкой
функционала F — XiG\ — ... — %nGn, где %\, ..., К —
некоторые числа.
Пример. Решим следующую задачу: найти такую кривую
У = У(Х)> У(а) = У(Щ = 0 заданной длины /0>6 —а, которая
вместе с отрезком а ^ х ^ Ь ограничивает фигуру наибольшей
площади.
Сформулированная задача сводится к нахождению наиболь-
ь
шего значения функционала F(y)= \ y(x)dx (площадь искомой
а
Ъ
фигуры) при условии С(г/)= \ У1 + [у'(х)]2 dx = /0 (длина
а
кривой у = у(х) (а^ х ^.Ь)). Интересующие нас экстремали
содержатся среди экстремалей функционала
ь
Р(У) ~ №(у) =\(У~ ЯVTTIFF) dx. B)
Уравнение Эйлера для функционала B) допускает пониже-
понижение порядка (см. § 2, п. 3). Поэтому экстремали функционала
B) удовлетворяют уравнению
где ( = у — Кл/\ + [у']2, которое после несложных преобразо-
вании примет вид у , = с или
VHFT7F
(При % = 0 наша задача, очевидно, не имеет решений.)
Решая уравнение C), получим
254 ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Таким образом, экстремали функционала C) представляют со-
собой дуги всевозможных окружностей. Среди них нужно выде-
выделить дуги, проходящие через точки (а, 0), (Ь, 0) и имеющие
ъ
заданную длину /о = \ л/\ + [у']2 dx. Из геометрических сооб-
а
ражений ясно, что все эти условия можно удовлетворить за счет
выбора постоянных си с и X.
Замечание. Ряд задач механики приводит
к следующей задаче на условный экстремум: найти
экстремали функционала
ъ
F{y) = \f{x,yv ..., уп>у[, ..., y'n)dx D)
а
при наличии условий
<Vi(x, Уи ..., Уп) = ® (i = l, ..., т; т<п) E)
у(а) = А, у(Ь) = В. F)
Функции ф/(я, уи ..., Уп) (i = 1, -.., ш) предпола-
предполагаются гладкими и независимыми по переменным
уи ..., уп. Имеет место следующая
Теорема. Если у = Уо(х) — экстремаль функ-
функционала D), удовлетворяющая условиям E), F), то
она удовлетворяет уравнениям Эйлера, составленным
для функционала
где %i = %i(x) — соответствующим образом подобран-
подобранные функции.
Таким образом, экстремали функционала D) и
функции Xi(x) (/ = l,...,m) должны удовлетворять
уравнениям
Ф^ = 0 (t = l, ..., т),
т
где / = / + 2^/Фп а также условиям F).
§ 6 УСЛОВНЫЙ ЭКСТРЕМУМ 255
Примеры. 1. Геодезические линии на поверхности. Пусть
ф(лт, у, г) = О — гладкая регулярная*) поверхность в трехмер-
трехмерном евклидовом пространстве. Будем искать гладкую кривую
х = x(t), y = y(t), z = z(t), соединяющую точки (х0, у0, г0),
(х\, y\f Z\), лежащие на поверхности, и являющуюся экстремалью
функционала длины дуги
ъ
F(x, у, z) = jj У*2 + У2 + z2 dt. G)
Такая линия называется геодезической линией поверхности
ф(лт, у, z)= 0. Итак, нам нужно найти экстремали функционала
G), которые удовлетворяют условиям
q>(x,y,z)=0 (8)
и
х(а)=х0,
(9)
x(b)=xu y(b)=yu z(b)=zi.
В силу сформулированной выше теоремы, для нахождения
экстремалей функционала G), удовлетворяющих условиям (8),
(9), нужно составить вспомогательный функционал
ъ
G (xf у, z) = jj (л/хтТ?ТТ2 + ЯФ (*, у, z)) dt
а
и для него выписать уравнения Эйлера:
ч/ d х _.
х dt л/х2-\- {п
Яф'— —— у =о, (Ю)
2 dt л/х2+
Тогда искомая экстремаль, т. е. геодезическая линия поверх-
поверхности (8), является решением уравнений (8), A0), удовлетво-
удовлетворяющим краевым условиям (9).
Заметим, что длина дуги G) не зависит от выбора пара-
параметра на кривой х = x(t), у = y(t), z= z(t). Выберем в каче-
качестве t длину дуги этой кривой; тогда
l. A1)
*) Поверхность ф(лт, у, г) = 0 называется гладкой регуляр-
регулярной поверхностью, если функция ф(лт, у, z) непрерывна на неко-
некоторой области D вместе со своими первыми производными и,
кроме того, (ф?J + (Фр2 + (ф?J ф 0.
256 гл- 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Уравнения A0) в этом случае примут вид
х — Яф^ = О, у — Яф^ = 0, z — Яф^ = О. A2)
Таким образом, любая геодезическая линия поверхности (8)
(если в качестве параметра на ней выбрана длина дуги) явля-
является решением системы уравнений (8), A1), A2).
Найдем геодезические на сфере
x2+y2 + z2=R2. A3)
Уравнения A2) в рассматриваемом случае имеют вид
х — 2Ях = 0, y — 2ly=0, z — 2Xz = 0. A4)
Дифференцируя уравнение A3) дважды по t и используя урав-
уравнение A1), получим
хх + у у + zz = — 1,
откуда в силу A3) и A4)
x = -w<0-
Решая линейные уравнения A4), найдем
у = a2cos -g+b2sin-?t A5)
z = ascos -»-
Подставляя A5) в A3), получим
+ a2b2 + a3b3) sin 2-^- = R2,
откуда следует, что
a2b2
или
\a\=R, \b\ = R, (a, 6) = 0, A6)
где a = {au a2, a3}, b = {bu b2, 63}. Уравнения A5) можно пере-
переписать в векторной форме
+6sin-, A7)
§ 6. УСЛОВНЫЙ ЭКСТРЕМУМ 257
где г = {х, у, z). Легко видеть, что формулы A6), A7) задают
окружность радиуса R, лежащую в плоскости, проходящей через
начало координат параллельно векторам а и Ь. Таким образом,
геодезические на сфере — дуги окружностей, которые получаются
в результате пересечения сферы A3) произвольной плоскостью,
проходящей через начало координат.
Найдем геодезические на цилиндре
Уравнения A2) для цилиндра имеют вид
*-2Я* = 0, у-2Ху = 0, 2 = 0. A9)
Из последнего уравнения находим z:
z=ct + cu B0)
причем \с\^. 1, так как в силу A1)
1 — с2=\ — z2 = x2 + y2^0.
Дифференцируя уравнение A8) дважды по t, получим
откуда в силу A1) и A9)
\-z2+2k(x2+y2) = 0.
В силу A8) и B0), последнее соотношение примет вид
Итак, Ь=-^$Г-* М<1.
Пусть |с|= 1; тогда ^ = 0. Решая уравнение A9), найдем
x = alt-\-bl, y = a2t + b2, z = ±t + c{. B1)
Подставив B1) в A8), получим соотношения
Таким образом, при с = ±1 геодезическими на цилиндре будут
прямые
х = Ь19 y = b2, z=±t + c, (b\ + b\ = R2).
Пусть |с|<1; тогда К < 0. Решая в этом случае уравнения
A9), найдем
х = а\ cosV—2% t -\- b\ sin-V—2Я /,
258 Г«Л. 7- ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
Подставив B2) в A8), получим
+ (афх + a2b2) sin 2
откуда следует, что
а] + а\ = R2, Ь] + Ь22= R2, axbx + a2b2 = 0. B3)
Легко видеть, что в рассматриваемом случае геодезические,
определяемые уравнениями B2), B3), будут винтовыми линиями
(если с ф 0) или окружностями (если с = 0).
2. Покажем, что траекториями движения по инерции мате-
материальной точки с массой т при наличии единственной связи
Ф(*,У,*) = 0 B4)
являются геодезические поверхности ф(х, у, г) = 0.
В силу вариационного принципа Гамильтона, траектория
движения материальной точки должна быть экстремалью функ-
функционала
U
Ldt B5)
при условии B4), где L = Т — U — разность кинетической энер-
энергии Т и потенциальной энергии U.
Чтобы найти экстремали функционала B5) при условии B4),
для функционала
U
G(x,y,z)=[(L+Xy)dt
записываем уравнения
dL_
dL
dz
Г 1Л ЛГГ Л. ТТТ ГЯ*« V^ ТТ Л ТТТ Л « V У% ТТ-
Эйлера:
+ Я1г-
+ Х~ду~~
д<р
+ ~д!~
• «ТТЛ S4 Т*
d (dL>
m /д2 1
/.2 1 Л2
B6)
Поскольку в нашем случае Т = (х + у + z), U = 0 (движе-
(движение происходит по инерции), то уравнения B6) имеют вид
*-Ш** = 0> 9~У, = Ь *-ШЪ = °- <27>
§ 7. ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕНИЯ 259
Вдоль траектории х2 + у2 + z2 = v2Q = const, так как в силу B7)
и B4)
Непосредственной подстановкой легко проверить, что любое ре-
решение системы уравнений B4), B7) удовлетворяет уравнениям
Я
A0), где X нужно заменить на wri . Таким образом, траекто-
iiIVq
рия движения материальной точки будет геодезической линией
поверхности B4).
§ 7. О приближенных методах решения
вариационных задач
Дифференциальные уравнения, которые возни-
возникают при решении вариационных задач, редко удает-
удается проинтегрировать. В связи с этим возникает необ-
необходимость приближенного решения вариационных
задач. Методы приближенного решения вариацион-
вариационных задач называют прямыми методами.
Здесь мы рассмотрим один довольно часто приме-
применяемый метод — метод Ритца. Для определенности
будем рассматривать следующую вариационную за-
задачу: найти функцию у(х)^Е' = {y(x)^D\([a, &]);
у (а) = у(Ь) = 0}, на которой функционал F (у) =
ъ
= \ f(x> У> y')dx принимает наибольшее (наименьшее)
а
значение.
На отрезке [а, Ь] построим полную последова-
последовательность*) функций <pt(x)^E' (/ = 1,2,...). Функ-
Функции ф/(х), в частности, удовлетворяют граничным
условиям ф/(а) = ср*(&)= 0 (t'=l, 2, ...). Будем
*) Последовательность ср/(я) называется полной в Е\ если
для любой функции у(х) е Е' и любого е > 0 найдется
такая конечная линейная комбинация функций Ф/(*), что
\\у(х)— ? Х/ф/М <е (||...|| — норма BDfia.b])).
II II
260 ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
теперь рассматривать функционал F(y) на всевозмоЖ"
йых конечных линейных комбинациях
thPW (n=U 2, ...)• (О
При п фиксированном F(yn(x)) = wn(X\y..., Хп) пред-
представляет собой функцию от п переменных Х\9 - . •, Я,я.
Переменные К\, ..., %п подберем так, чтобы функ-
функция wn(ku ... у К) достигала наибольшего (наимень-
(наименьшего) значения. Для этого необходимо, чтобы выпол-
выполнялись соотношения
ff=O (t = h..., n). B)
При некоторых ограничениях, наложенных на
функционал F(y) и функции цн(х) (t = 1,2,...), по-
последовательность уп (х) сходится к решению рассмат-
рассматриваемой вариационной задачи. В этом случае, выби-
выбирая п достаточно большим, можно найти решение
с любой степенью точности.
Практически поступают следующим образом: для
выбранного п составляют систему уравнений B). Ре-
Решают ее относительно %i (/ = l,...,n) и найденные
значения подставляют в формулу A), которая дает
приближенное решение рассматриваемой задачи.
Замечания. 1. Если рассматривается вариа-
вариационная задача с неоднородными граничными усло-
условиями, то, вводя новую неизвестную функцию z(x) =
= у(х) — фо(#), где фо(х) — функция, удовлетворяю-
удовлетворяющая неоднородным граничным условиям, мы придем
к вариационной задаче с однородными граничными
условиями.
2. Успех применения метода Ритца в значительной
степени зависит от выбора последовательности cpi(x)
(/ = 1,2,...).
3. Метод Ритца с соответствующими изменениями
можно применять для решения вариационных задач,
связанных с функционалами, зависящими от несколь-
нескольких неизвестных функций или от функций нескольких
переменных.
4. Решение системы уравнений B) представляет
собой довольно сложную задачу. Однако для функцио-
ЗАДАЧИ 261
и
налов вида F(y)=\j [p (x) {y'f + q(x)y2 + r (x) у] dx,
а
которые часто встречаются в приложениях, система
уравнений B), будет линейной относительно %i и по-
поэтому довольно просто решается. Для этих функцио-
функционалов при условии, что функции р{х), р'{х), q(x),
г(х) непрерывны и р{х)> О, q(x)^ О на [а, Ь]9 дока-
доказана сходимость последовательности уп(х) к решению
у(х) (у(а) = у(Ь) = 0) соответствующей вариацион-
вариационной задачи и имеются различные оценки погрешности
т*х\у(х)—уп(х)\.
[а,Ь]
Задачи
1. Найти экстремали функционала
1
-1
удовлетворяющие условиям
Ответ: (х + С\J = 4с2(у — с2).
При А > 1 имеются две экстремали f ^!^0, с2 =
_ А ± V А2 — 1 Л
"" 2 )ш
При А = 1 имеется единственная экстремаль
(Cl = 0, с2= 1/2).
При А < 1 экстремалей нет.
2. Вариационный принцип Гамильтона. Рассмот-
Рассмотрим систему из N материальных точек с массами mt
(i= I,..., Af), находящихся в потенциальном сило-
силовом поле. Траектории движения этих точек опреде-
определяются системой 3N дифференциальных уравнений
Ньютона
3U .. dU .. dU
(/ = 1, .... АО.
ГЛ. 7. ПРОСТЕЙШИЕ ЗАДАЧИ ВАРИАЦИОН. ИСЧИСЛЕНИЯ
где U = U (хи ..., xN, уи ..., Уы> ги ..., zN) — потен-
потенциал.
Показать, что любое решение системы уравне-
уравнений Ньютона xi = xi (/), \ji = iji (t), Zi = zi (/)
(i = 1,..., N) определяет экстремаль функционала
Гамильтона
\Ldt,
п
где L = T—U—функция Лагранжа, а Г =
N
— кинетическая энергия системы.
3. Показать, что экстремали функционала
G
являются решениями уравнения Пуассона
дх2 ^ ду2 — пх> у)'
4. Найти форму равновесия гибкой, однородной,
нерастяжимой нити, находящейся в поле силы тяже-
тяжести. Нить длины L подвешена за два конца в точках
(#b#i)> (#2,^/2). Сила тяжести направлена парал-
параллельно оси у.
Указание. В положении равновесия потенци-
потенциальная энергия нити
х2
(ё — ускорение силы тяжести, \х — линейная плотность
нити) минимальна. Таким образом, задача сводит-
сводится к нахождению минимума функционала
х2
при условии \ VI + (у'J dx = L.
ЗАДАЧИ 263
Ответ. Экстремалями будут кривые (цепные ли-
линии)
Постоянные с, с\ и X находятся из условий
ДОПОЛНЕНИЕ
§ 1. Некоторые сведения из линейной алгебры
I. Упорядоченная совокупность z = {z\ ..., zn}
из п комплексных чисел называется (комплексным)
вектором. Числа z\ ..., zn называются координатами
вектора z.
Два вектора z{ = {z\, .,., ^} и z2={z{2i ..., z%}
считаются равными в том и только в том случае,
когда z\ = zl2, ..., z1=z%.
Сложение векторов и умножение вектора на ком-
комплексное число X определяются следующим образом:
{*},...,«?}+ {4 •¦¦• *?} = {4+ 4. ¦••• *? + *#. A)
Легко проверяется, что для любых векторов z\, z2i
Zzy z и комплексных чисел К, \х введенные операции
A) обладают свойствами:
Г z\ + z2 =z2+zi;
2° () +
3° z + 0 = z, где 0= {})
4° z + (-z) = 0, где z = {z\ ..., zn)
-z = {-z\...,-zn}\
5° l-z=z;
6°
7°
8°
Множество всевозможных комплексных векторов
с определенными выше сложением и умножением на
комплексные числа называется комплексным вектор-
векторным пространством и обозначается Сп, число п на-
называется размерностью комплексного пространства Сп.
*) Элемент {0, ..., 0} будем обозначать так же, как число 0.
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 265
Векторы
Re2 = {Rez!, ..., Res'1}
называются соответственно действительной и мнимой
частью комплексного вектора z = {zl,..,, zn).
Вектор z называется действительным, если Im z =
= О, т. е. если координаты вектора — действительные
числа.
Вектор ~z называется комплексно-сопряженным
с вектором г, если Res = Re г", 1т<г = —Im ~z. Оче-
Очевидно, вектор z будет действительным тогда и только
тогда, когда J= г.
Векторы Z[, ..., zr называются линейно зависи-
зависимыми, если существуют такие комплексные числа
V, ..., AT, не все равные нулю, что
Xlz{+ ... +Xrzr = 0;
В противном случае векторы Z\, ..., zr называются
линейно независимыми.
Как обычно, доказывается, что в векторном про-
пространстве Сп существуют п линейно независимых век-
векторов (называемых базисом пространства Сп) и что
любой вектор является их линейной комбинацией.
Например, действительные векторы
в! = {1, 0, ..., 0},
е2 = {0, 1, ..., 0}, ..., еп = {0, 0, ..., 1}
образуют базис в Сп\ система векторов
/??! = {/, 0, ..., 0},
/е2 = {0, U ..., 0}, ..., 1еп = {09 0, ..., 1}
также служит базисом.
II. Приведем некоторые сведения, относящиеся
к линейным операторам.
1. Пусть L — линейный оператор в Ся, е\, ...,еп —
некоторый базис в С„, тогда
Le
'/ = ?«/4 (/ = 1. ¦•¦• ^). B)
266 ДОПОЛНЕНИЕ
Матрица А = (а^) называется матрицей линейного
оператора L относительно базиса ей ..., еп.
Каждому линейному оператору L в Сп (относи-
(относительно фиксированного базиса ей • - •, ?n) соответ-
соответствует некоторая матрица А = [aJf)9 называемая мат-
матрицей линейного оператора L. Наоборот, если е\9 ...
..., еп — некоторый базис в Сп и А = (cfij) — произ-
произвольная квадратная матрица порядка п9 то формулы
B) определяют некоторый линейный оператор L в Сп.
Пусть г\9 ..., гп — другой базис в Ся> связанный
с базисом e\t ..., еп посредством формул
п
rf= S u)ek (/ = 1, ..., п),
где U=(uIj)—невырожденная матрица. Тогда мат-
матрица В оператора L относительно базиса ги ..., гп
следующим образом выражается через матрицу А:
B = U~lAU.
Определение. Вектор гФО называется соб-
собственным вектором оператора L, если
Lz = Xz,
где X — некоторое комплексное число, называемое
собственным значением оператора L.
2. Собственными значениями оператора L служат
корни характеристического многочлена матрицы А
(оператора L относительно некоторого базиса еи ...
..., еп) и только они; характеристический многочлен
есть
\А-ХЕ\ =
а\-Х а\ ... а\
9 9 2
а2
(Е означает единичную матрицу).
3. Любой линейный оператор L в комплексном
векторном пространстве Сп имеет хотя бы одно соб-
собственное значение и, следовательно, хотя бы один
собственный вектор.
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 267
4. Квадратные матрицы А и В (порядка п) назы-
называются подобными, если существует такая невырож-
невырожденная матрица Т (порядка п)> что В = Т~1АТ. При
этом
\В-КЕ\=\А-ХЕ1
т. е. подобные матрицы имеют одинаковые характе-
характеристические многочлены.
5. Всякая квадратная матрица Л=(а?) порядка
п определяет в Сп линейный оператор L, который
переводит произвольный вектор z = {zlt..., zn} e Cn
в вектор w = {wl,..., wn} с координатами
п
wf=Y, a{zk (/ = 1. • • •» п).
k=i
Последние равенства можно записать в матричной
форме
w= Az,
причем векторы z и w рассматриваются как матри-
матрицы-столбцы.
Рассматриваемый оператор L иногда обозначают
той же буквой А. Собственные векторы этого опера-
оператора называют собственными векторами матрицы Л.
III. Докажем три теоремы.
Теорема 1. Пусть А = (afy — квадратная мат-
матрица порядка п. Тогда существует такая невырожден-
невырожденная матрица Г, что матрица В = Т~1АТ будет тре-
треугольной:
В =
... ъ\
.0 0 ... %п_
C)
причем %и ..., hn — собственные значения матрицы А.
Доказательство теоремы 1 проведем мето-
методом математической индукции. При п = 1 утвержде-
утверждение теоремы очевидно. Пусть теорема верна для лю-
любых матриц порядка п — 1. Докажем, что в таком
случае она веряа для матриц порядка п. В векторном
268
ДОПОЛНЕНИЕ
пространстве Сп выберем некоторый базис ей ..., еп
и рассмотрим оператор L, имеющий в этом базисе
матрицу Л. Пусть г\ — какой-либо собственный вектор
оператора L с собственным значением %\. Выберем
векторы Гг, ..., гп так, чтобы вместе с г\ они образо-
образовывали базис в Сп. Обозначим через U=(ufy мат
рицу перехода от базиса г\, ..., г„ к базису е\9 ..., еп
fe-1
4ek
(/ = 1, .... п).
Тогда матрица С оператора L относительно ба-
базиса Г\, ..., г„ имеет вид
= U~lAU.
D)
Поскольку Г\ — собственный вектор оператора L, мат-
матрица С имеет следующий вид:
С =
0
с,
где С\—некоторая квадратная матрица порядка
п-1.
Перейдем к новому базису Аь ..., hn посредством
преобразования
t / j С//Г
k
(/=1, ..., п),
где У =
— невырожденная матрица вида
01
Г1 о
о
V =
Здесь V\—невырожденная матрица порядка п — \.
Относительно базиса Аь ...» hn матрица В опера-
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 269
тора L, очевидно, имеет вид
= V~lCV =
0
0
62 ... Ъ п
E)
По предположению индукции существует такая
невырожденная матрица Vu что матрица V\XC\V\ бу-
будет треугольной:
,2 ,2 1
ьъ ... ъп
о
О 0 ... Хп
Тогда и матрица В будет треугольной матрицей:
В =
О
о о ... %п
В силу D) и E)
В = V~l U~
x AUV=
F)
где Т = UV. На главной диагонали матрицы В, оче-
очевидно, стоят ее собственные значения К\, ..., Хп. Все
h (/=l,...,/z) будут собственными значениями
матрицы А> так как в силу F) матрицы А и В
подобны и, следовательно, имеют одинаковые харак-
характеристические многочлены. Теорема доказана.
На языке операторов доказанная теорема форму-
формулируется так: если L — линейный оператор в ком-
комплексном векторном пространстве Сп, то в Сп суще-
существует такой базис, что матрица оператора L относи-
относительно этого базиса будет иметь треугольный вид C).
В самом деле, пусть А —матрица оператора L от-
относительно какого-либо базиса е\, ..., еп. В силу тео-
теоремы 1 существует такая невырожденная матрица Г,
что матрица В = Т~ХАТ имеет треугольный вид C).
Пусть Т = (//). Рассмотрим новый базис гь ..., гп,
270
ДОПОЛНЕНИЕ
связанный со старым посредством формул
п
г, = ?^/4 (/ = 1, ..., п).
Относительно нового базиса гь ..., гп оператор L
задается матрицей Т~1АТ = В, имеющей треуголь-
треугольный вид C).
Теорема 2. Пусть А = {aJf) — квадратная мат-
матрица порядка п. Тогда существует такая невырож-
невырожденная матрица Г, что матрица В=Т~ХАТ будет
треугольной, а ее элементы b{ (/ < k) будут по мо-
модулю меньше заданного числа Ь > 0.
Доказательство. В самом деле, в силу тео-
теоремы 1 существует такая невырожденная матрица Гь
что
Возьмем матрицу
о
о
тогда
R~l =
0
X9 ... d
о о
0
G)
л
1
о
0
0
—c\
%
2
0
0
Cn-\ 1
' ••• cj n-i
С/г-1 2
<?2 /г
... Vl
0
cn i
Cj я
?яс2
c2 я
gfl n-1
Яд
(8)
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 271
Выбираем сп Ф О произвольно. Взяв достаточно
большим Сп-и можно сделать элемент ^Т^ по
модулю меньше Ь. Вообще, коль скоро Ck+u ..., сп
выбраны, можно за счет выбора ck сделать элементы
матрицы (8), стоящие в k-й строке, по модулю
меньше Ь.
Кроме того, в силу G) и (8)
где Т = T\R. Теорема доказана.
Теорема 3. Пусть у матрицы А = (a!f) (/, k =
= 1, ..., п) имеется s линейно независимых соб-
собственных векторов. Тогда существует такая невырож-
невырожденная матрица Г, что матрица В = Т~1АТ имеет вид
В =
я,
0
•
0
0
я*
0
'я„
(9)
где Х\у ..., Хп—собственные значения матрицы Л,
а на местах, отмеченных *, стоят элементы, вообще
говоря, отличные от нуля.
Доказательство. В векторном пространстве
Сп выберем некоторый базис еи ..., еп и рассмотрим
оператор L, имеющий в этом базисе матрицу А. Пусть
fi, •••> rs — линейно независимые собственные век-
векторы с собственными значениями Х\, ..., Xs соответ-
соответственно, а г8+\9 ...,гп — произвольные векторы, до-
дополняющие г\9 ..., rs до базиса. При переходе от ба-
базиса в\, ..., еп к базису гь ..., гп
щч
(/ = 1 п),
272 ДОПОЛНЕНИЕ
матрица А оператора L переходит в матрицу
(Ю)
где U = (uf).
Поскольку Ги ..., fs — собственные векторы опе-
оператора L, матрица С имеет следующий вид:
С =
0
0
0
где С\ — квадратная матрица порядка n—s.
Перейдем к новому базису hu ..., hn посредством
преобразования
А,=
Ч'к
(/ = 1, ..., п),
где V = (vlj) — невырожденная матрица вида
V =
1
0
0
0
1
0
Ух
a V\ — невырожденная матрица порядка n — s. При
переходе к новому базису hu ..., hn матрица С опе-
оператора L, очевидно, переходит в матрицу
\ = V~{CV =
я,
0
•
0
0
я,
¦TV.
A1)
По теореме 1 матрицу V\ можно выбрать так,
чтобы матрица V\XC\V\ имела треугольный вид. Та-
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 273
ким образом, матрица В будет иметь нужный вид (9)
и, кроме того, в силу A0) и (И),
В = V"lU"lAUV = (UV)"lAUV = T~lAT,
где Т = UV. Все A,/ (i = 1,..., п) будут собствен-
собственными значениями матрицы Л, так как матрицы А
и В подобны и, следовательно, имеют одинаковые
характеристические многочлены. Теорема доказана.
Замечание. Приведем без доказательства тео-
теорему более общую, чем теорема 1.
Теорема. Пусть Л = (а^)— квадратная матри-
матрица порядка я, тогда существует такая невырожден-
невырожденная матрица Т, что матрица В = Т~[АТ имеет вид
В =
о
о
A2)
где h (I = 1,...,р) — некоторая квадратная матрица
порядка m (п\ + п2 + ... +пр = п) вида
1 0 ... 0
0 %i 1 ... 0
A20
// =
1
a %u • • • > К (среди которых могут быть одинако-
одинаковые)— собственные значения матрицы А.
Матрица вида A2) называется жордановой мат-
матрицей, а матрица вида A2Л)—жордановой клеткой.
IV. В пространстве Сп введем скалярное произве-
произведение векторов гх = {z\y ..., 2?}, Z2 = {z\> • • •» ^2}
как комплексное число B1,22), вычисляемое по сле-
следующему правилу:
Ё
A3)
где zl2 — число, комплексно-сопряженное с 2*.
274 ДОПОЛНЕНИЕ
Легко проверяется, что для любых векторов г\, z2)
23, 2 и любого комплексного числа % выполняются
соотношения:
Г BЬ22) = (г^гГ);
2° (z
3° (
4° @, 0) = 0; (г, z) > 0 при z Ф 0.
Из Г и 3°, в частности, следует, что
(*ь Iz2) = l(zu г2).
Вещественное число \z\ = У B, z) называется дли-
длиной или нормой вектора z.
Для любых двух векторов Z\ и z2 из Сп имеет
место неравенство Коши — Буняковского:
(Н)
В координатной форме это неравенство выглядит
так:
г^ 2 п
< У Ы 12 У I у\ Р.
У
Доказательство: Если ((гь(г2) = 0, неравен-
неравенство очевидно. Пусть теперь (zuZ2) = pei(v, где р =
= | (<2ь %2) | > 0. В силу свойства 4°, при любом дей-
действительном I
(lz{ + e^z2t ?г1 + Лг2)>0. A6)
Пользуясь свойствами 1°—3° скалярного произведе-
произведения, запишем неравенство A6) в виде
I2 (*ь *i) + le^ (z2y zx) + le-i* (zl9 z2) + {z2i z2)
Так как (zuz2) = ре'ф, (z% Z\) = pe~/(P, то мы при-
приходим к квадратному трехчлену с действительными
коэффициентами
, г2)>0.
Его дискриминант должен удовлетворять условию
р2-(гь zx){z2y 22)<0. A7)
Полученное неравенство равносильно неравенству
Коши — Буняковского A4).
§ I. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 275
V. Пусть A=(a1j}— квадратная матрица поряд-
порядка п. Линейный оператор в Сл, определяемый фор-
формулами
w'=?alzk (/ = 1, ..., п), A8)
будем обозначать той же буквой Л. В матричной
форме соотношения A8) записываются так:
w = Az,
где векторы w и z рассматриваются как матрицы-
столбцы.
Определение. Оператор В называется сопря-
сопряженным или эрмитово-сопряженным с оператором Л,
если
(Bz{, z2) = (z{, Az2) для любых zu z2^Cn.
Очевидно, что В сопряжен с Л, то и Л сопряжен
с В.
Теорема 4. Если А = (afk) и В= (bfk) — матрицы
двух сопряженных операторов, то
Ь{ = а) (k, /=1, ..., л),
или, короче, _
В=А\
где А' — транспонированная матрица, а А'—матри-
А'—матрица, комплексно-сопряженная с Аг.
Доказательство. Векторы Bz\ и Az2 имеют
/'-е координаты, соответственно равные
По определению скалярного произведения
ii A9)
ii
(*,. Az2) = t t a[z\z[ = t t a)z\zi2. B0)
276 ДОПОЛНЕНИЕ
Сравнивая соотношения A9) и B0), получим
ь'к = Щ.
т. е. В = А'. Теорема доказана.
Замечание. Матрицы А и В, связанные усло-
условием А'= В, называются эрмитово-сопряженными.
Теорема 5. Если z\ — собственный вектор мат-
матрицы А, соответствующий собственному значению Х\,
a z2 — собственный вектор сопряженной матрицы А\
соответствующий собственному значению %2у причем
%х Ф А2, то Z\ и z2 ортогональны, т.е. (гЬ(г2)= 0.
Доказательство. В самом деле, по условию
теоремы
B1)
В то же время
(Azuz2) = (zuA'z2). B2)
Подставляя равенства B1) в B2), получим
или
Следовательно, (z\fz2) = 0, так как Х\ ф Я2.
Замечание. Иногда вектор Afz обозначают сим-
символом zA и говорят, что матрица А умножена на век-
вектор z слева. В этом случае собственные векторы мат-
матрицы А' называются левыми собственными векторами
матрицы А.
VI. Нормой оператора (или матрицы) А назы-
называется действительное число
|| Л ||= sup \Az\. B3)
|2|<I
Функция \Az\ определена и непрерывна на замк-
замкнутом ограниченном множестве М = {z; \z\ ^ 1} и по
теореме Вейерштрасса достигает своего наибольшего
значения. Поэтому норма определена для любого
оператора А.
Для любого z^Cn имеет место неравенство
. B4)
§ 1. НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ЛИНЕЙНОЙ АЛГЕБРЫ 277
В самом деле, если 2=0, то неравенство B4),
очевидно, выполняется. Пусть z Ф 0. Рассмотрим
вектор
Очевидно \w\ = 1. В силу B3)
Подставляя в это неравенство выражение B5), по-
получим
или
Последнее неравенство равносильно неравенству B4).
Замечание. Пусть для всех z^Cn
\Аг\КК\г\ (К>0), B6)
тогда
В самом деле, в силу неравенства B6) при любом
z^Cn, удовлетворяющем условию \г\ < 1,
откуда следует, что
||Л||= sup |Аг|</0
Пусть оператор А задается матрицей (а?) и | а[ | ^ а
(k,j= 1,...,/г); тогда справедлива следующая оцен-
оценка для нормы оператора А:
IIЛ || </га. B7)
Действительно, пусть (Az)! — /-я координата век-
гора Az, тогда
278 ДОПОЛНЕНИЕ
и, в силу неравенства A5),
-I
= (t t И
\/ — 1/5 — 1
откуда и вытекает неравенство B7).
Заметим, что любое собственное значение X опе-
оператора А не превосходит по модулю нормы опе-
оператора:
Щ
Действительно, пусть z — один из собственных
векторов, соответствующих собственному значению К:
Az = Яг.
Тогда
и, так как \г\ ф О,
VII. Если А={а}^) — прямоугольная матрица с m
строками и п столбцами, то формулы
wt=? ф* (/ = 1, ...,т)
определяют линейный оператор (обозначим его так-
также Л), отображающий ^-мерное комплексное вектор-
векторное пространство Сп в m-мерное пространство Ст.
В самом деле, любому вектору z = {z\ ..., zn) ^ Cn
ставится в соответствие вектор w = {w\ ..., wm) ^
^ Сmy при этом, очевидно,
z2) = Az\ + Az2 и A(Xz) = XAz.
Норма ||Л || определяется так же, как для опера-
оператора, отображающего Сп само в себя*).
*) || Л ||= sup \Az\, где Ы вычисляется в пространстве Сл, а
\Аг\ — в пространстве Ст.
§ 2. КОМПЛЕКСНЫЕ ФУНКЦИИ 279
Заметим, что для || А || справедлива оценка, по-
подобная A7); если |я?|<а (/ = 1,...,т; & = 1,...,я),
то
|| Л || < Утла. B8)
В самом деле, если w = Az, то, в силу неравен-
неравенства A5)
-I
откуда и вытекает неравенство B8).
Из B8) следует, в частности, оценка B7), когда
m = п.
§ 2. Комплексные функции действительного
переменного и действия над ними
Здесь будут сформулированы правила обращения
с комплексными функциями, которые понадобятся
при решении дифференциальных уравнений.
Комплексная функция /(/) действительного пере-
переменного / ставит в соответствие каждому t из об-
области определения функции /(/) комплексное число
f(t) = U(t)+if2(t), где /,(/) = Re f (/), f,(t) =
= Im f(t) — действительные функции.
Простейшие арифметические операции с комплекс-
комплексными функциями производятся так же, как операции
с комплексными числами.
Комплексная функция f(t) называется дифферен-
дифференцируемой, если функции f\(t) и f2(t) дифференци-
дифференцируемы. При этом функция f' (t) = f'{ (t) + if2 (t) назы-
называется производной функции f(t).
Имеют место обычные правила дифференцирова-
дифференцирования суммы, произведения и частного двух комплекс-
комплексных функций действительного переменного.
230 ДОПОЛНЕНИЕ
Первообразной комплексной функции /(/), задан-
заданной на некотором промежутке, называется такая
комплексная функция F(t), что /<"(/) = /(/) для всех
t из этого промежутка. Очевидно, F(t) = F\ (t) +
+ //72(/), где F\(t), F2{t) — первообразные функций
fi(t) и f2@ соответственно.
Если z = х + iy — комплексное число, то имеет
место формула Эйлера
ez = ex (cos у + i sin у). A)
Равенство A) может служить определением пока-
показательной функции ег для любого комплексного z.
Пусть а = [х + iv — комплексное число, тогда
(е**)' = (е»*е™)' = [е^ (cos v/ +1 sin vt)]' =
= (e** cos vty + / (e** sin vt)' =
= ([i + /v) e^ (cos vt + / sin v/) = aeat.
Таким образом, при комплексном множителе а со-
сохраняется обычное правило дифференцирования eat.
§ 3. Три леммы о вектор-функциях
Докажем три леммы, неоднократно используемые
в книге. Все встречающиеся в этом параграфе вектор-
функции будем считать действительными.
Лемма 1. Пусть
— функция векторного аргумента х = {х1,..., хп}
класса С[ на некотором открытом, выпуклом*) мно-
множестве G. Тогда для любых двух точек ху у е G су-
существует такая прямоугольная матрица
F(x,y) = (f)(x9y)) (i=h .... т; /=1, ...,п),
что
ф(*) — ФЫ = F(x, у) (х — у),
A)
*) Множество G называется выпуклым, если вместе с лю-
любыми двумя точками х и у этого множества ему принадлежит
также отрезок прямой, соединяющий эти точки (т. е. tx +
+ A — t)y^G при всех /е[0, 1]). В частности, поэтому, вы-
выпуклое множество связно, а открытое выпуклое множество яв-
является областью.
§ 3. ТРИ ЛЕММЫ О ВЕКТОР ФУНКЦИЯХ 281
причем элементы матрицы F(x>y) непрерывны и
Доказательство. Уравнение отрезка прямой,
соединяющего точки х и у, можно записать в виде
Рассмотрим функции
(/=1, ..., т).
В силу выпуклости множества G эти функции опре-
определены при 0 <; Я <; 1.
Разность ф*(#)~ф'(у) можно представить в сле-
следующем виде:
ф1 (*) - ф'(у) = V A) - Ф' @) =
О /=1
1
f = l L О
Вводя обозначение
1
-^7 {у + k(x — у)) dX = fi (x, у) B)
о
получим
п
/-1 7
или в матричной форме
282 ДОПОЛНЕНИЕ
F(*,y)=(f}(*,if)).
В силу равенства B)
Очевидно, fUx, у) — непрерывные функции. Лемма
доказана.
Следствие. Если в дополнение к условиям
леммы 1 потребовать ограниченность частных произ-
"ftp*
водных на множестве G: —т
дх1
f (i = 1, ..., m;
/= 1, ..., п), то будет иметь место оценка
dx*
Доказательство. В силу неравенств
формулы B)
|/}()|f
Применив к матрице F(x,y) оценку B8) из § 1, по-
получим
\\F(x, у)\\<л/тпГ. D)
Из равенства C) и оценки D) следует
Следствие доказано.
Лемма 2. Пусть на отрезке [U,t\] (t\>
F'(t)=y(t) uQ'(t) = \<f(t)\.Toada \F(tx)-F(to)\
<G(/)G(/)
))
Доказательство. Если F(t\) — F(t0) = 0, то
неравенство очевидно, поскольку G(t\)^ Gfa), так
как G/@ = k@|>0. Если F(/i)-F(/0)#0, то че-
через в обозначим вектор \%и^рц°1\ и РассмотРим
функцию
f(t) = (F(t),e)-G(t).
Ее производная
1 = 0.
§ 3. ТРИ ЛЕММЫ О ВЕКТОР ФУНКЦИЯХ 283
Таким образом, функция f(t) — невозрастающая, по-
поэтому
(F(t0), e)-G(t0)
или
С другой стороны,
- F(to)\ = (Fid) - F(t0), e
Лемма доказана.
Следствие. ?с/ш ф(/)— непрерывная на отрез-
отрезке [tOy t\] вектор-функция, то существует вектор-
функция
координаты которой, по определению, равны
t
^{x)dx (/ = 1, ..., п).
Для модуля этой функции имеет место оценка
i.
Доказательства. Пусть F(t) = \ ф(т)dx, G(t) =
и
t
= \\<t(x)\dx; тогда F(to) = O, G(/0) = 0, F'(t) = <f(t)9
и
<3'(/) = |ф(^)| и, в силу леммы 2,
t
= \F(t)-F(to)\<G(t)-G(to) =
284 ДОПОЛНЕНИЕ
Лемма 3. Пусть непрерывная на отрезке [а,Ь]
вектор-функция x(t) при всех t, to^[a,b] удовлетво-
удовлетворяет неравенству
\ E)
где А и К — некоторые неотрицательные постоянные.
Тогда
Доказательство. Для определенности поло-
положим t>to. Пусть М = max |ж(/)|. Тогда из нера-
венства E) получим
t
\x(i)\<A + К j Mdx = A + KM(t -10). F)
Подставляя в правую часть неравенства E) оцен-
оценку F), получим
t
|*(/)|< А + К \ [А + КМ(х - tQ)] dx =
п
= A + AK(t-to) + K2M{^=^. G)
Полученную оценку подставим опять в правую
часть неравенства E). Тогда
t
+ К \ [А + АК(х - to) + K2M{x~2toJ]dx =
Повторив эту операцию s раз, придем к неравенству
Переходя в неравенстве (8) к пределу при s-*oo,
получим
|
Лемма доказана.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Базис векторного пространства 265
Биения 74
Вариация функционала 231
вторая 248
Векторное пространство комплек-
комплексное 264
Вектор собственный оператора 266
Вектор-функции 8, 280
Векторы комплексно-сопряженные
265
- комплексные 264
— линейно зависимые 265
независимые 265
Генератор ламповый 161
Зависимость решения от начальных
условий 109
Задачи Коши 14, 47, 203, 205
- краевая 137
Задачи изопериметрические 250
Значения начальные 14
— собственные оператора 266
коэффициентов
приближений
Максимум функционала относитель-
относительный 230
Матрица жорданова 273
— линейного оператора 266
— монодромии 77
— фундаментальная 36
Матрицы подобные 267
— эрмитово сопряженные 276
Метод Адамса 131
— вариации постоянных 20, 37, 42
— исключения 43
— неопределенных
Лагранжа 37
— последовательных
Пикара 89
— «прогонки» 139
— Ритца 259
— Рунге —Кутта 131
— «стрельбы» 138
— факторизация 139
— Эйлера 120
Методы приближенные решения ва-
вариационных задач 259
задачи Коши 119
— прямые решения вариационных
задач 259
Минимум функционала относитель-
относительный 230
Многообразие линейное 232
Множество выпуклое 280
Мультипликатор 77
Интегрирующий множитель 23
Квазимногочлен 61
Клетка жорданова 273
Колебания вынужденные 71
— свободные 68
Кривая дискриминантная 106
— интегральная 14
— начальная 204
Лемма вариационного исчисления
основная 232
— Ляпунова 185
Линеаризация системы уравнений
189
Линии геодезические на поверхности
255
сфере 257
цилиндре 257
Непродолжаемые решения 94, 100
Неравенство Коши — Буняковского
274
Норма вектора 274
— матрицы 276
— оператора 276
— элемента в линейном нормирован-
нормированном пространстве 227
Нуль функции 133
Обобщенное решение 94
Огибающая 104
Ойератор линейный дифференциаль-
дифференциальный 57
— сопряженный 275
— эрмитово-сопряженный 275
Определитель Вронского 30, 41
Особые решения 105
Первые интегралы независимые 214
Первый интеграл 213
286
предметный указатель
Период полураспада 11
- решения 151
Поверхности минимальные 245
Поверхность интегральная 198
- регулярная 204
Положение равновесия 150
Порядок системы дифференциаль-
дифференциальных уравнений 8, 10
Последовательность функций полная
259
Поток фазовый 177
Принцип Гамильтона вариационный
261
Прогонка обратная 140
- прямая 140
Продолжение решения 100
Произведение скалярное в Сп 273
Пространство линейное 225
нормированное 227
- фазовое 149
- С ([а, Ь]) 226
- ?>, ([а, Ь]) 227
- D2 ([а, Ь}) 234
- Dn ([а, Ъ\) 240
- ?>! (G) 242
- D2 (G) 243
~?д 226
Система решений фундаментальная
30, 41
След матрицы 33
Собственное значение оператора 266
Собственный вектор оператора 266
Схема второго порядка точности 128
— двухточечная 129
— первого порядка точности 124
— «предиктор-корректор» 126
Теорема Гурвица 193
— единственности 84
— Лиувилля 177
— Ляпунова 188
— о неустойчивости 192
— существования 89
— Флоке 78
— Штурма 133
Точка покоя 150
Точки уравнения особые 176
— функционала стационарные 231
Траектория динамической системы
149
— замкнутая 151
Узел вырожденный неустойчивый 172
устойчивый 172
Радиоактивный распад И - дикритический 171
Размерность комплексного вектор- - неустойчивый 166
ного пространства 264 _ устойчивый 165
Резонанс 73 Уравнение Бернулли 22
- механический 73 _ Бесселя 99, 136
Решение асимптотически устойчивое - в полных дифференциалах 23
180 _ дифференциальное линейное 20
- задачи Коши для квазилинейно- второго порядка 66
го уравнения 205 однородное 19, 20
нелинейного уравнения с с комплексными коэффициен-
частными производными первого тами 47
порядка 219 периодическими коэффи-
- обобщенное 94 циентами 76
- общее 34 п.т0 порядка 39
- периодическое 151 с постоянными коэффици
- системы дифференциальных ура- ентами 57
внений 8 _ Клеро Ю7
- устойчивое по Ляпунову 179 _ КОЛебаний 67
Решения линейно независимые 30, _ Лагранжа 108
41, 48, 49 не разрешенное относительно про-
- непродолжаемые 94, 100 изводной 103
- особые 105 _ продольных колебаний стержня
245
— с разделяющимися переменными
17
Седло 167 частными производными перво-
Система автономная 148 го порядка 198
- динамическая 148 квазилинейное 199
на плоскости 154 линейное 199
- дифференциальных уравнений 7 однородное 212
в вариациях 116 нелинейное 199
линейная однородная 26 полулинейное 199
линейных 26 - Эйлера 82, 236
нормальная 10 — Эйлера —Остроградского 245
характеристическая 201, 220 Условие Вейерштрасса достаточное
- канонических уравнений Гамиль- 249
тона 177 - Липшица 84
- механическая консервативная с Условия граничные 137
одной степенью свободы 194 — краевые 68, 137
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
287
Условия начальные 14
— экстремума функционала доста-
достаточные 246
Устойчивость линейных однородных
систем 181
Фазовое пространство 149
Фокус неустойчивый 168
— устойчивый 168
Формула Лиувилля 33
— Остроградского— Лиувилля 42
— Циолковского 19
Функции комплексные 279
Функционал 228
— дважды дифференцируемый 248
— дифференцируемый 247
— квадратичный 248
— линейный 229
— непрерывный 229
Функция Грина 143
— последования 154
Характеристика
уравнения 201
квазилинейного
Характеристика нелинейного уравне-
уравнения 220
— триода 161
Характеристики системы квазили-
квазилинейных уравнений с одинаковой
главной частью 212
Характеристический многочлен 58
Центр 168
Цикл 151
- предельный 158
неустойчивый 161
полуустойчивый 161
устойчивый 160
Шар открытый 230
Экспоненциал матрицы 96
Экстремали функционала 235
Экстремум условный 250
Энергия потенциальная 194
Энтропия 24
Алексей Павлович Карташев,
Борис Леонидович Рождественский
ОБЫКНОВЕННЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
И ОСНОВЫ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
М., 1980 г., 288 стр. с илл.
Редактор И. Е. Морозова
Техн. редактор Е. В. Морозова
Корректор Е. В. Сидоркина
ИБ № 11633
Сдано в набор 24.08.79. Подписано к печати 25.03.80. Бумага
84X108732. тип. № 2. Литературная гарнитура. Высокая печать.
Условн. печ. л. 15,12. Уч.-изд. л. 14,67. Тираж 29 000 экз»
Заказ № 349. Цена книги 50 коп.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
Ордена Трудового Красного Знамени Ленинградская типо-
типография № 2 имени Евгении Соколовой «Союзполиграфпрома»
при Государственном комитете СССР по делам издательств,
полиграфии и книжной торговли, 198052, Ленинград, Л-52,
Измайловский проспект, 29