/










































































































































































Author: Дьяконов В.П.
Tags: электротехника компьютерные технологии импульсные устройства программирование математика микрокалькулятор расчет
Year: 1984




Text
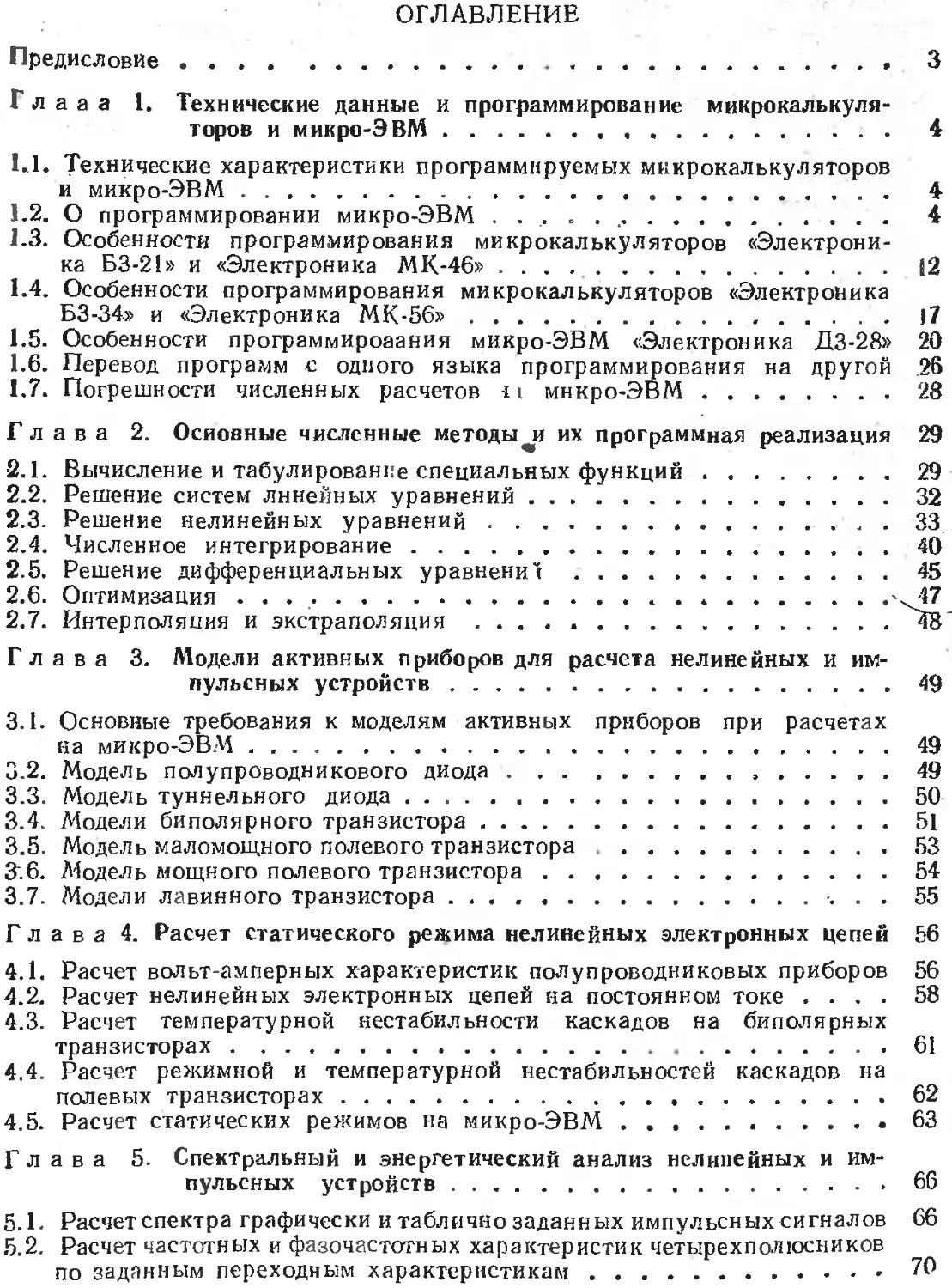
ОГЛАВЛЕНИЕ
Предисловие....................................................... 3
Глава 1. Технические данные и программирование микрокалькуля-
торов и микро-ЭВМ................................................. 4
1.1. Технические характеристики программируемых микрокалькуляторов
и микро-ЭВМ................................................... 4
1.2. О программировании микро-ЭВМ ................................ 4
1.3. Особенности программирования микрокалькуляторов «Электрони-
ка БЗ-21» и «Электроника МК-46»...................................12
1.4. Особенности программирования микрокалькуляторов «Электроника
БЗ-34» и «Электроника МК-56»......................................17
1.5. Особенности программирования микро-ЭВМ «Электроника ДЗ-28» 20
1.6. Перевод программ с одного языка программирования на другой .26
1.7. Погрешности численных расчетов и мнкро-ЭВМ...................28
Глава 2. Основные численные методы и их программная реализация 29
2.1. Вычисление и табулирование специальных функций...............29
2.2. Решение систем линейных уравнений............................32
2.3. Решение нелинейных уравнений.............................. 33.
2.4. Численное интегрирование.....................................40
2.5. Решение дифференциальных уравнений...........................45
2.6. Оптимизация . . ...........................................-,47
2.7. Интерполяция и экстраполяция.................................48
Глава 3. Модели активных приборов для расчета нелинейных и им-
пульсных устройств................................................49
3.1. Основные требования к моделям активных приборов при расчетах
на микро-ЭВМ......................................................49
3.2. Модель полупроводникового диода............................ 49
3.3. Модель туннельного диода.....................................50
3.4. Модели биполярного транзистора..............................51
3.5. Модель маломощного полевого транзистора ....................53
3.6. Модель мощного полевого транзистора..........................54
3.7. Модели лавинного транзистора ............................. . . 55
Глава 4. Расчет статического режима нелинейных электронных цепей 56
4.1. Расчет вольт-амперных характеристик полупроводниковых приборов 56
4.2. Расчет нелинейных электронных цепей на постоянном токе .... 58
4.3. Расчет температурной нестабильности каскадов на биполярных
транзисторах .................................................... 61
4.4. Расчет режимной и температурной нестабильностей каскадов на
полевых транзисторах ............................................ 62
4.5. Расчет статических режимов на микро-ЭВМ.....................63
Глава 5. Спектральный и энергетический анализ нелинейных и им-
пульсных устройств................................................66
5.1. Расчет спектра графически и таблично заданных импульсныхсигналов 66
5.2. Расчет частотных и фазочастотных характеристик четырехполюсников
по заданным переходным характеристикам............................70
5.3. Расчет спектра методом Берга................................ 72
5.4. Расчет коэффициента нелинейных искажений методом пяти ординат 73
5.5. Расчет энергетических параметров...........’..............- 75
Глава 6. Расчет пассивных элементов нелинейных и импульсных
устройств........................................................76
6.1. Расчет индуктивностей........................................ 76
6.2. Расчет дросселя фильтра . .................................80
6.3. Расчет силового трансформатора.............................. 81
6.4. Расчет емкостей............................................. 82
6.5. Расчет линий передачи, линий задержки и реактивных формирующих
двухполюсников..................................•..............-. .. 83
6.6. Расчет резонансных цепей усилителей радиоимпульсов............87
Глава 7. Расчет переходных процессов и переключающих устройств 90
7.1. Расчет переходных процессов в линейных цепях по аналитическим
выражениям........................................................ 90
7.2. Расчет переходных процессов в линейных и нелинейных цепях 1-го
порядка численным методом переменных состояния . ..................93
7.3. Расчет переходных процессов в переключающей цепи на туннельном
диоде............................................................ 96
7.4. Расчет ключей на биполярных транзисторах......................97
7.5. Расчет ключа на маломощном полевом транзисторе...............100
7.6. Расчет ключей на мощных полевых транзисторах . ..............100
7.7. Расчет переходных процессов прямым численным интегрированием 103
7.8. Расчет переходных процессов в линейных и нелинейных резонансных
цепях.............................................................104
7.9. Расчет переходного процесса установления амплитуды колебаний
/.С-генератора....................................................105
7.10. Расчет реакции видеоусилителей с высокочастотной коррекцией 106
7.11. Расчет переходных процессов в линейных цепях с помощью ин-
теграла суперпозиции..............................................108
Глава 8. Расчет и моделирование релаксационных генераторов . . 109
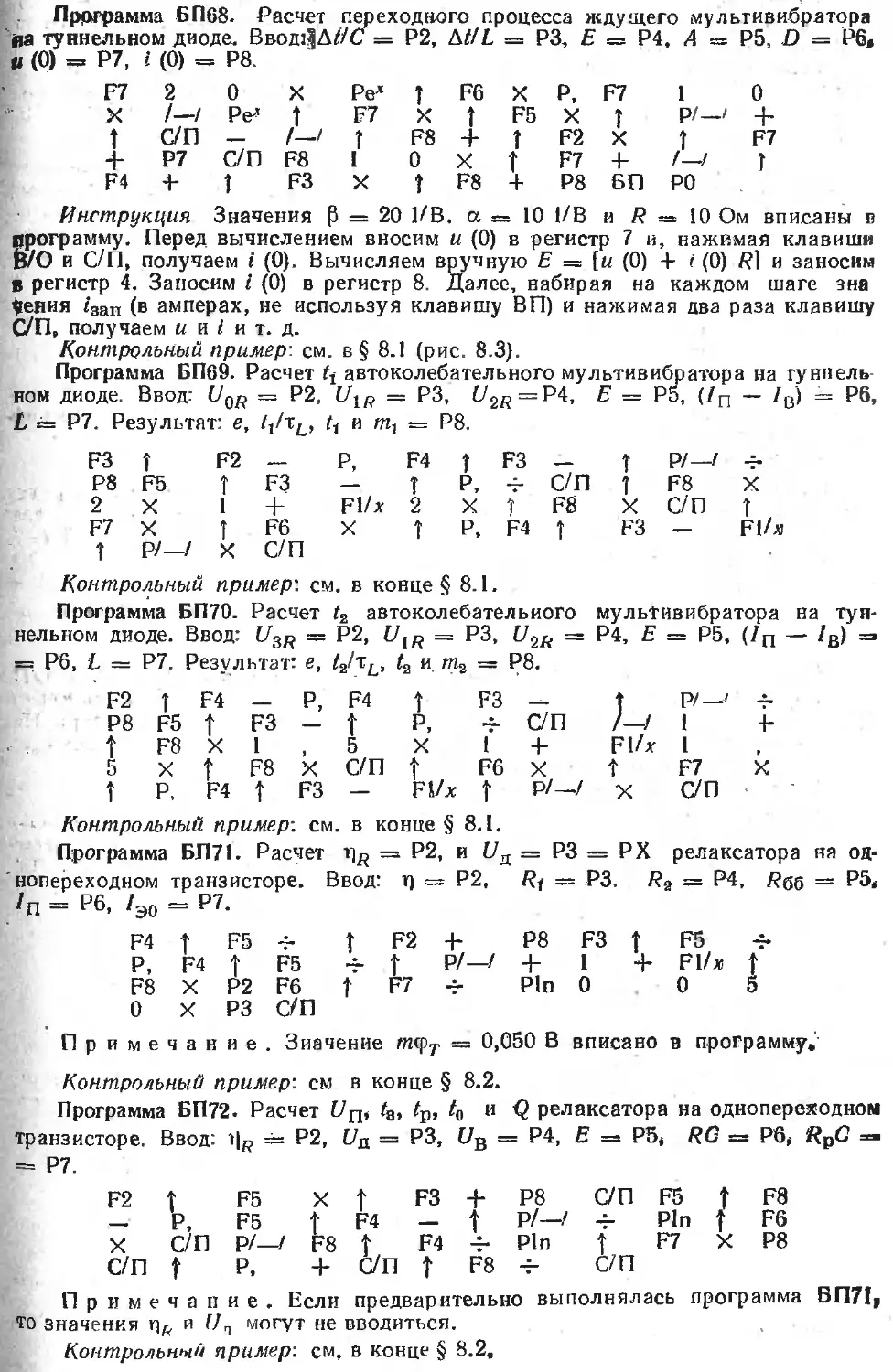
8.1. Расчет и моделирование мультивибраторов на туннельном диоде 109
8.2. Расчет релаксационного генератора не однопёреходном транзисторе 111
8.3. Расчет и моделирование релаксатора на лавинном транзисторе 112
8.4. Расчет автоколебательных мультивибраторов на интегральных
микросхемах..................................................... 114
8.5. Расчет ждущих мультивибраторов на интегральных микросхемах 117
Глава 9. Статистическое моделирование и макромоделирование ра-
диоэлектронных систем и устройств . ............. 120
9.1. Расчет чувствительности к изменениим параметров..............120
9.2. Основы статистического моделирования и расчета радиоэлектроп
ных устройств (метод Монте-Карло) ......................... . 122
9.3. Расчет основных статистических характеристик.................123
9.4. Формирование псевдослучайных чисел с. заданным законом распре-
деления ..........................................................125
9.5. Аппроксимация различных зависимостей.........................128
9.6. Макромоделирование нелинейных и импульсных устройств .... 131
Приложение 1. Библиотека программ программируемого микро-
калькулитора «Электроника БЗ-21»..............................134
Приложение 2. Пакет программ программируемого микрокаль-
кулятора «Электроника БЗ-34»..................................156
Приложение 3. Пакет программ микро-ЭВМ «Электроника ДЗ-28» 165
Список литературы.................................................171
ПРЕДИСЛОВИЕ
С помощью микрр-ЭВМ индивидуального пользования можно решать мно-
жество учебных, инженерных и научных задач, высвобождая дорогостоящее ма-
шинное время больших ЭВМ для решения задач особо большой сложности [1, 2].
Описанные в зарубежной литературе программы непригодны для пользователей
отечественных микро-ЭВМ из-за сильного различия символики клавиатуры,
языков программирования и функциональных возможностей различных моделей
микро-ЭВМ..
В данной книге впервые дается систематизированное изложение теории и
практики технических расчетов на микро-ЭВМ нелинейных и импульсных уст-
ройств, построенных на современных полупроводниковых приборах н интеграль-
ных микросхемах. Особое внимание уделено программной реализации важнейших
методов расчета этих устройств, иллюстрированной большим числом конкретных
примеров. Описано свыше 170 программ для программируемых микрокалькуля-
торов «Электроника БЗ-21», «Электроника БЗ-34», их аналогов и настольной
микро-ЭВМ «Электроника ДЗ-28» с более высоким быстродействием и большими
функциональными возможностями, чем у микрокалькуляторов. Программы запи-
саны построчно, как в [2, 3], причем число под их номером указывает на тип
микро-ЭВМ. Так как расчеты базируются на электрофизических моделях актив-
ных приборов, используется система физических параметров последних. Много-
полюсники, RC- и активные фильтры, малосигнальиые усилители (кроме1 им-
пульсных) не рассматриваются, поскольку они детально описаны в работе
Я. К. Трохименко и Ф. Д. Любича «Радиотехнические расчеты на микрокальку-
ляторах» [3].
Книга рассчитана на широкий круг читателей, инженеров и научных работ-
ников, она может быть полезной .студентам вузов и техникумов.
Автор выражает глубокую благодарность докторам техн, наук профессорам
Я. С. Ицхоки, Л. Я. Нагорному, Я. К. Трохименко, кандидатам техн, наук доцен-
там А. Я. Архангельскому, Ф. Д. Любичу и И. Г. Недолужко за полезные советы
по улучшению книги. Отзывы и пожелания следует направлять по адресу:
101000, Москва, Почтамт, а/я 693, изд-во «Радио и связь».
[технические данные и программирование
микрокалькуляторов И МИКРО ЭВМ
1.1. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ПРОГРАММИРУЕМЫХ микрокалькуляторов и микро эвм
В микро-ЭВМ индивидуального пользования предусмотрен простой ввод
данных и программы с клавишного пульта (поэтому такие ЭВМ иногда называют
электронными клавишными вычислительными машинами — ЭКВМ). В наиболее
совершенных микро-ЭВМ этого класса ввод данных и программы возможен с
внешних периферийных устройств, а также с встроенного магнитофона [4, 5].
Основные технические характеристики ряда отечественных микро-ЭВМ ин-
дивидуального пользования приведены в табл. 1.1 Микрокалькулятор «Электрони-
ка БЗ-21» прост в эксплуатации. Его удобно применять при выполнении опера-
ций над комплексными числами. Для этого в нем предусмотрено вычисление
функции eiJC = (cosx + i sinx) одной операцией. Недостатком последнего яв-
ляется отсутствие микропрограмм вычисления ряда широкораспространенных
функций (см. табл. 1.1). Этого недостатка нет у более совершенного микрокаль-
кулятора «Электроника БЗ-34». Настольные микрокалькуляторы «Электроника
М1\-46» и «Электроника МК-56» разработаны на базе двух упомянутых микро-
калькуляторов, программно совместимы с ними и аналогичны по функциональ-
ным возможностям. У модели «Электроника МК-46» предусмотрена возможность
ввода данных с внешних устройств.
Микрокалькуляторы «Электроника МК-54» по своим возможностям анало-
гичны базовой модели «Электроника БЗ-34». У них добавлено представление
углов в десятичных градусах — градах, уменьшены габаритные размеры и мас-
са. Символы у ряда машин на клавишах даны на английском языке, что облег-
чает перевод для них программ, описанных в зарубежной литературе.
Настольная микро-ЭВМ индивидуального и коллективного (при наличии до-
полнительных пультов управления) пользования «Электроника ДЗ-28» намного
превосходит микрокалькуляторы по быстродействию и числу ячеек памяти, до-
пускает работу'С развитым периферийным оборудованием: перфораторами, фо-
тосчитыватвдями, дисплеями, пишущими машинками и т. д. Данная микро-ЭВМ
снабжена встроенным цифровым кассетным магнитофоном для записи и считы-
вания программ, вводимых данных и результатов вычислений. В то же время
программирование этой микро-ЭВМ почти не отличается от программирования
микрокалькуляторов*. С микро-ЭВМ «Электроника ДЗ-28» программно совмести-
мы микро-ЭВМ «15ВСМ-5» [5].
Некоторые вычисления на упомянутых микро-ЭВМ могут выполняться при
ручном управлении. Однако основным режимом их работы являются вычисления
в автоматическом режиме по введенной программе. Последовательность нажатий
клавиш пульта при вводе программы почти повторяет таковую при вычислениях
«вручную». Поэтому в дальнейшем описываются только вычисления в автомати-
ческом режиме для рассмотренных микро-ЭВМ с символьно-кодовым программи-
рованием.
1.2. О ПРОГРАММИРОВАНИИ МИКРО-ЭВМ
Рассмотрим основные понятия о программировании микрокалькуляторов
«Электроника БЗ-21», «Электроника БЗ-34» и мнкро-ЭВМ «Электроника ДЗ-28».
* На базе мнкро-ЭВМ «Электроника ДЗ-28» выпускается вычислительная
микросистема с программированием на языке более высокого уровня БЕЙСИК.
Таблица 1.1
Технические характеристики микро-ЭВМ индивидуального пользования
Тип микро-ЭВМ Электроника
БЗ-21 МК-46 БЗ-34 МК-56 МК-54 ДЗ-28
Число разрядов мантиссы-по- рядка 7,8/2 7,8/2 8/2 8/2 8/2 12/2
Число регистров операционно- го блока 2 2 4 4 . 4 2
Наличие регистра восстанов- ления результата предшествую- щей операции Нет Нет Есть Есть Есть Her
Число добавочных регистров (ячеек) памяти 6+стек на 6 чисел 6+стек на 6 чисел 14 14 14 166 с набором с пульта
Максимальное число шагов программы 60 66 98 98 98 32 512 при ОЗУ, 32кбайт
Вычисление функций х: \/х, х2, Ух, ех, In х, sin х, cos х Есть Есть -Есть Есть Есть Есть
Вычисление функций х: tg х, arc sin х, arc cos х, arc tg x, 10х, 1g x Представление углов Нет Нет Есть Есть Есть Есть
Радианы Радианы Радианы, градусы Радианы, градусы, грады*) Радианы, градусы, грады*) Радианы, градусы
Адресация Прямая Прямая Прямая и косвенная Прямая и косвенная Прямая и косвенная Прямая и косвенная
Время выполнения арифмети- ческих операций, не более, с 0,5 0,5 0,5 0,5 0,5 167Х7ЙХ36 0,0005
Габаритные размеры, мм 185ХЮ0Х48 280X240X90 185X100X4-; 208X205X60 580X480X180
Масса, кг 0,39 2,5 0,39 1,3 0,25 25
Питание Универсальное Сетевое Универсальное Сетевое Универсальное Сетевое
Оформление Переносное Настольное Переносное Настольное Переносное Настольное
*> 1 град — градусная мера, равная 1/100 части прямого угла.
проставление чисел и их ввод. Числа, большие 1 и меньшие 10'', где р —
число разрядов индикатора, представляются в естественной форме с фиксирован-
ной запятой, например 1234 или 12,345 и т. п. Числа, меньшие 1 и большие 10₽,
представляются в экспоненциальной форме с плавающей запятой
х = ±М 10±£,
где М — нормализованная мантисса с первым знаком 0-или в виде целого числа
от 1 до, 9; Е — порядок (целое число до 99). Например, число 423 • 10_ 12 при
нормализации приобретает вид 0,423 10—8 или 4,23 • 10—10.
Конечное число разрядов ЭВМ ограничивает диапазон чисел обычно от
хМИ11—1 • 10-88 до хмакс =9,999999 • 10" у микрокалькуляторов «Электроника
БЗ-21», 9,9999999 • Ю88 у микрокалькуляторов «Электроника БЗ-34» и
9,99999999999 • 1088 у микро-ЭВМ «Электроника ДЗ-28».
Числа, большие хмакс, относятся к машинной бесконечности и.ведут к пере-
полнению операционных регистров (см. далее). Числа, меньшие хМи„, воспри-
нимаются ЭВМ как 0 и относятся к области машинного нуля.
Ввод чисел осуществляется с помощью цифровых клавиш пульта 0,1 ... 9,
клавиши запятой, клавиши ввода порядка (ВП или Е) н клавиши смены знака
мантиссы и порядка (/—/или ЗН), например:
ввод
ввод
ввод
мантиссы можно не вводить!
1234
-25,67
1,74-10's 6
У микро-ЭВМ «Электроника ДЗ-28» нуль
0,123'10’ ввод
9
Операционные регистры. В общем случае элементарная двухместная опе-
рация выполняется над двумя числами х и у, называемыми операндами. Для вво-
да их в микро-ЭВМ служат два операционных регистра X и Y. В один из них
заносится результат операции. В микрокалькуляторах «Электроника БЗ-34»
н «Электроника МК-56» используется стековый блок из четырех операционных
регистров и дополнительного регистра восстановления результата предшествую-
щей операции, что позволяет реализовать в блоке сложные вычисления. Элемен-
тарные одноместные операции выполняются над числами, вводимыми в регистр
X, в него поступает и их результат. Регистр X снабжен индикатором (в микро-
ЭВМ «Электроника ДЗ-28» предусмотрена индикация чисел, имеющихся и в ре-
гистре Y).
Дополнительные регистры (ячейки) памяти и обращение к ним. Для хране-
ния исходных данных и промежуточных результатов вычислений используются
дополнительные десятичные регистры (ячейки) памяти, обозначенные буквами
Р или ЯП. Они имеют определенные номера (адреса), обозначенные цифрами,
например второй регистр обозначается Р2 в микрокалькуляторах и ЯП 0002 в
микро-ЭВМ «Электроника ДЗ-28». Обращение к регистрам или их адресация про-
изводятся, если число х надо записать в регистр или вызвать Это число из по-
следнего в регистр X.
Запись чисел в регистры осуществляется командой с символом Р, П или ЗП
с последующим указанием адреса регистра. Например, число 12 в регистр 2
записывается вводом символов!
I
у микрокалькулятора ’’Электроника БЗ -34”,
I 2 ЗП 00
02
у микро-ЭВМ ’’Электроника ДЗ -28”.
Вызов чисел из регистров производится командой с символом F, ИП или
ВП с указанием адреса регистра, например
ИП
для указанных выше типов ЭВМ.
Обращение к регистрам может выполняться как вручную, так и по програм-
ме. Ввод числа х в регистр с номером N схематично обозначается как х = ПМ
нли х = Я ПЛ'
Программа вычислений, символьно-кодовое программирование. Последо-
вательность команд, заданных ЭВМ и выполняемых ею, называется программой.
Простейшие программы являются линейными, т. е. все их команды выполняют-
ся строго последовательно по одной ветви. У разветвляющихся программ вы-
числения происходят по нескольким ветвям, например в зависимости от комби-
нации исходных данных. В циклических программах их определенные фрагменты
многократно повторяются заданное число раз или до тех пор, пока не будет
получен результат с заданной точностью.
Каждая команда имеет свой код в виде числа или особого знака. В режиме
ввода программы или при ее пошаговой проверке коды выводятся на индикатор.
Однако коды неудобны для запоминанйя пользователем. Поэтому в микро-ЭВМ с
символьно-кодовым программированием каждая команда (операция) вводится
соответствующим понятным и легко запоминающимся символом. Например,
для ввода операции е* в микрокалькуляторе «Электроника БЗ-21» достаточно
нажать клавиши Р и е*. Микрокалькулятор преобразует символ Ре* в код в
виде числа 36. Таблицы кодов даны в инструкциях к микро-ЭВМ и нужны при
отладке программы. Далее под программой будет подразумеваться построчная
запись символов (иногда кодов) команд (операций), вводимых в микро-ЭВМ в
режиме программирования.
Шаги программы и их номера (адреса). Каждая команда в программе зани-
мает строго определенное место, называемое ее адресом. Адреса команд последо-
вательно нумеруются в определенном порядке. Так, в микрокалькуляторах «Элек-
троника БЗ-21» все возможные 60 шагов программы можно объединить в десять
«страниц» по шесть адресов в каждой или в пять листов (табл, 1.2).
Таблица 1.2
Система адресов программы микрокалькулятора «Электроника БЗ-21»
«Лист 1» 00 01 02 03 04 05 10 11 12 13 14 15
«лист 2» 20 21 22 23 24 25 30 31 32 33 34 35
«лист 3» 40 41 42 43 44 45 50 51 52 53 54 55
«Лист 4» 60 61 62 63 64 65 70 71 72 73 74 75
«Лист 5» 80 81 82 83 84 85 90 91 92 93 94 95
Система адресов микрокалькулятора «Электроника ЬЗ-34» проще: 98 шагов
его программы нумеруются двузначными десятичными числа от 00 до 97. Удоб-
но записывать их по десять в строке. Адреса (номера) шагов программы микро-
ЭВМ «Электроника ДЗ-28» задаются пятизначными десятичными числами, на-
пример нулевой шаг будет обозначаться как 00000, а пятый шаг — 00005 и т. д.
Счет шагов ведет специальный счетчик адресации. Адреса операций при
вводе программы индицируются индикатором. Программа запоминается в опе-
ративном запоминающем устройстве (ОЗУ) ЭВМ. Часть объема ОЗУ использует-
ся для организации регистров (ячеек памяти).
Прямая и косвенная адресация. Адресацией называется указание адреса
(номера) регистра (ячейки) памяти или шага программы Непосредственное
указание адреса — прямая адресация. Так, на с. 6, 7 были даны примеры пря-
мой адресации к регистру 2. Если адрес указывается числом хранящимся в
другом регистре памяти, то адресация будет косвенной. Этот регистр называется
регистром адресации. Его нельзя будет использовать для хранения исходных
данных или промежуточных результатов.
Микрокалькуляторы «Электроника БЗ-21» и «Электроника МК-46» имеют
только прямую адресацию, другие указанные в табл. 1.1 микро-ЭВМ имеют
как прямую, так и косвенную адресацию.
Команды сброса на нуль счетчика адресации и пуска — останова вычис-
лений по программе. После ввода программы и перехода к автоматическим вы-
числениям программу обычно нужно установить на нулевой шаг. В микрокаль-
куляторах это производится сбросом на нуль счетчика адресации при нажатии
клавиши с символом В/О, а в микро-ЭВ>М «Электроника ДЗ-28» клавиши с симво-
лом С (эта"клавиша не вводит код в программу). Остановка вычислений в нужном
месте программы в микрокалькуляторах осуществляется вводом символа С/П, а
в микро-ЭВМ «Электроника ДЗ-28» — кода 0515. В режиме автоматических вы-
числений пуск программы с любого шага осуществляется нажатием клавиши
С/П (стоп—пуск) в микрокалькуляторах и S в микро-ЭВМ «Электроника ДЗ-28».
Безусловные прямые и косвенные переходы. При построении разветвляю-
щихся и циклических, программ бывают необходимы переходы с одного адреса
программы на другой. Такие жесткие переходы называются безусловными. При
прямом указании адреса, на который надо перейти, имеем безусловный прямой
переход. В микрокалькуляторах он вводится символом БП, за которым указыва-
ется оператор А перехода к нужному адресу.
В микрокалькуляторах «Электроника БЗ-21» оператор А является символом,
код которого на единицу больше адреса перехода. Так, если надо перейти к адре-
су 00, надо дать символ Р0, код которого 01. Это поясняется следующим фраг-
ментом циклической программы:
-Шаг 00 01 02 03 04 51 52 53
Символ F3 t F4 + РЗ Р8 БП Р0
Код 32 06 42 96 31 81 58 01
Безусловный переход на шаг 00 = 01 - 1
При выполнении этой программы происходят следующие операции:
00 — вызов числа из регистра 3 в регистр X (F3);
01 — пересылка числа из регистра X в регистр Y (ф);
02 — вызов числа из регистра 4 в регистр X (F4);
03 — суммирование чисел в регистрах X и Y, причем результат заносится в
регистр X (+);
04 — запись результата в регистр 3 (РЗ);
05...50 — выполнение последующей части программы;
51 — запись результата в регистр 8 (Р8);
52 — подготовка к безусловному переходу (БП);
53 — безусловный переход по адресу 00 (Р0 = А).
Значительно проще организация безусловных переходов в микрокальку-
ляторах «Электроника БЗ-34». Для них команда безусловного прямого перехода
имеет вид БП Л, где А — номер шага, на который иужно перейти (указывается
двузначным десятичным числом). Так, описанный фраг.мент'программы при реа-
лизации его на этом микрокалькуляторе имеет вид
ИЛЗ ИП4 + ПЗ ... П8 БП 00
|Безусловный переход по адресу 00 I
В этом фрагменте вызов числа из регистра N обозначен символами ЙПЛ7, запись
числа в регистр W-обозначена символами ПЛГ. Оператор f между командами ИПЗ
и ИП4 не вводится, так как в этом микрокалькуляторе вызов числа из любого
регистра ведет к автоматическому переводу ранее имеющегося в регистре X чис-
ла в регистр Y.
Безусловные переходы могут происходить в любом направлении. Их можно
использовать для установки программы (в режиме вычислений) на заведомо оп-
ределенный шаг программы. Так, нажав в этом режиме клавиши микрокальку-
лятора «Электроника БЗ-21» БП и Р5 (код 58 и 51), мы установим программу на
шаг с адресом 51 — 1 = 50. Для аналогичного перехода в микрокалькуляторе
«Электроника БЗ-34» нажимаются клавиши БП, 5 и 0.
Если адрес безусловного перехода указан в специально выделенном регистре
адресации, то безусловный, переход будет косвенным. В микрокалькуляторах
«Электроника БЗ-34» косвенный переход вводится командой вида КБП/V, где
N — номер регистра адресации.
Условные прямые и косвенные переходы. Если переход осуществляется
по результатам анализа на определенное условие содержимого операционных
регистров, то он называется условным. В микрокалькуляторах такой анализ
проводится по содержимому х регистра X. Имеются четыре типа условных
переходов, осуществляемых прн х = 0, х<0; х>0 и Команды прямых
условных переходов вводятся нажатием префиксной клавиши Р («Электроника
БЗ-21») или F («Электроника БЗ-34»), клавиши с символом нужного перехода
и клавиши с указанием адреса шага, на который осуществляется переход при
невыполнении заданного условия. Если это условие выполняется, команда
перехода игнорируется и выполняется команда, .следующая после команд пе’-
рехода.
Например, в фрагменте программы для микрокалькулятора «Электроника
БЗ-21»
еслих< 0
F3 t F8 + ... F4 "Р0 П.
еслих> 0
начинающемся с нулевого адреса командой F3, перед командами условного пе-
рехода в регистр X вызывается число из регистра 4 (команда F4). Далее содер-
жимое регистра X исследуется на выполнение условия х < 0. Если условие вы-
полняется, то команда условного перехода Рх<5 0 Р0 игнорируется и -выпол-
няются последующие команды. Если условие не выполняется, т. е. х 0, то
осуществляется переход по адресу, указанному кодом команды Р0 за вычетом 1,
т. е. 01 — 1 = 00.
Аналогично выглядит фрагмент программы условного прямого перехода
Для микрокалькуляторов «Электроника БЗ-34»:
ИПЗ
если х < О
I I
ИП8 + ... ИП4 Fx<0 00 ...
если х> 0
в микрокалькуляторах этого типа возможны и косвенные условные переход .
В этомРслучае адрес перехода при невыполнении его условия указывается целым
числом, хранящимся в регистре адресации N. Косвенные переходы вводятся
символом К, после которого указываются условие перехода и иомер регистра
д', в котором хранится адрес перехода, например:
если х<0
ИПЗ ... ИП4 Кх'<О N
Переход на шаг7Уш если х > 0 (вперед или назад)
Подпрограммы. Отдельные многократно повторяющиеся фрагменты про-
грамм метут выделяться в подпрограмму, которая записывается после (иногда до)
основной программы. Обращение к подпрограмме в микрокалькуляторах вводит-
ся символами ППЛ, где оператор перехода А указывает на тот шаг подпрограм-
мы, с которого начинается ее выполнение. Для возврата из подпрограммы к вы-
полнению основной программы в конце подпрограммы символом В/О вводится
операция возврата. Подпрограммы могут размещаться одна в другой (с глуби-
ной обращения до 5 в микрокалькуляторах).
В микрокалькуляторах «Электроника БЗ-21» оператор А вводится символом,
код которого на 1 больпе адреса трага подпрограммы, с которого начинает-
ся ее выполнение. В микрокалькуляторах «Электроника БЗ-34» А—двузначное
число, равное номеру шага Л)ш. В1них возможно и косвенное обращение к под-
программе фрагментом КПП?/, где N — номер регистра адресации, в котором
хранится адрес Nu, перехода. (В микро-ЭВМ «Электроника ДЗ-28» под-
программа помечается меткой М с Ромером в виде 4-значного десятичного числа,
например М 0005. Для обращения к подпрограмме в тексте основной програм-
мы нужно ввести код в виде номера метки. Возврат из подпрограммы осущест-
вляется помещением в ее конце операции возврата, вводимой кодом 0511.
Допустим, некоторый фрагмент программы имеет п шагов и повторяется
tn раз. Следовательно, без введения подпрограммы на его запись в программу
затрачивается тп шагов. Введенная подпрограмма займет (п + 1) шаг (один шаг
команда возврата). Кроме того, в тексте основной программы микрокалькуляторов
придется выполнить 2m раз обращения к подпрограмме, заданные двумя шага-
ми. Таким образом, выигрыш в числе записанных шагов при введении подпро-
граммы будет, если тп > (2m + п + 1) или [2] п > (2m + l)/(m— 1). При
числе обращений т — 2 п > 5, при m = 3 п > 4, при m — 4 п > 3 и т. д.
Аналогично для микро-ЭВМ «Электроника ДЗ-28» выигрыш по числу запи-
сываемых-шагов от введения подпрограммы будет, если тп > (т + п 4- 3)
илл'7? > (т + 3)/(т — 1). При т = 2 п > 5, при т = 3 п > 3, при т = 5
-л>2 и т. д.
Сокращая запись программ, введение подпрограмм в то же время увеличи-
вает общее число шагов проводимых вычислений. Поэтому время вычислений при
введении подпрограмм увеличивается, что следует иметь в виду при оценке
целесообразности введения подпрограмм.
Модификация (изменение) адреса косвенных переходов. При организации в
программе косвенных переходов они могут производиться по неизменяемому
'Адресу, указанному в регистре адресации, и по изменяемому при каждом обра-
щении к нему. Так, в микрокалькуляторах «Электроника БЗ-34» адрес перехода
при каждом обращении к регистру адресации 0, 1, 2 или 3 уменьшается на I, при
|каждом обращении к регистру 4, 5 или 6 увеличивается на 1 и не меняется при
Обращении к регистру адресации 7, 8, 9, А (10) В (11), С (12) или Д (13). Мо-
ифнкация адреса существенно расширяет возможности программирования п
Дозволяет строить программы с автоматически изменяемой при вычислениях
^труктурой.
, Модификацию адреса можно использовать для автоматического ввода п
чисел в регистры памяти с помощью фрагмента программы
5 П4 С/П КП4 БП 02
Цикл I
Здесь в качестве регистра адресации использован регистр 4, в который (в нача*
ле программы) вводится число 5. После остановки (команда С/П) вводится число
Xi- При пуске программы происходит обращение к регистру 4, его содержимое
изменяется на +1. В результате число хг записывается в регистр 6, после чего
осуществляется безусловный переход к команде остановки С/П. Второе .число
х2 запишется в регистр 7, третье х3 — в регистр 8 и т. д. Так как последний ре-
гистр Д микрокалькулятора «Электроника БЗ-34» имеет номер 13, то максималь-
ное значение п = 8. Командой вида КИП/V можно организовать последователь-
ный вызов чисел из регистров.
Организация циклов. Для подсчета числа циклов циклических программ
используются формулы, дающие ряд целых чисел /V: Nn+i = Nn + Г или
Nn+i — Nn— 1- В микрокалькуляторах «Электроника БЗ-21» эти вычисления
организуются следующими фрагментами программы:
... F2 1 + Р2 ...
или ... F2 1 — Р2 ...
В данном случае под счет /V отведен регистр 2. Начальное значение N вписыва-
ется в него перед, первым пуском программы. Фрагмент программы
если х = No
I-----!---1
... F2 1 - Рх=0 РО .:
Т если х<М0
обеспечивает выход из цикла, если число циклов и становится равным числу
/Vo, введенному в регистр 2.
Подобный фрагмент программы в микрокалькуляторы «Электроника БЗ-
34» вводится одной командой организации циклов ...FL/V..., где /V — 0,1, 2 или
3 Так, ввод восьми чисел в регистры 6, 7, 8, 9, А, В, С и Д с автоматическим
выходом из цикла при вводе последнего числа организуется фрагментом програм-
мы
если п = 8
I-----1i
5 П4 8 ПО С/П КП4 FLO 04
f если л<8
Есди надо ввести меньшее число чисел п, его записывают вместо цифры 8. Чис-
ла 5 и 8 можно ввести в регистры 4 и 0 (адресации и счетчика) вручную. Тогда
фрагмент программы будет содержать только 4 шага: С/П КП4 FLO 00 ...
Отметим, что подобный ввод при использовании прямой адресации для восьми
чисел занял бы 15 шагов программы:
П6 С/П П7 С/П П8 С/П П9 С/П ПА С/П
ПВ С/П ПС С/П ПД .............................
Ввод микропрограмм вычисления функций. Специальные функции аргу-
мента х в микро-ЭВМ вычисляются микропрограммно. Микропрограммы вы-
числения специальных функций вводятся их символами, например ех,. хУ, 1пх,
sinx, cosx и т. д. Перед символом в микрокалькуляторах указывается символ
префиксной клавиши (см. далее). Например, фрагмент программы ;.. Ь4 Ре
... для микрокалькулятора «Электроника БЗ-21» означает, что число х вызыва-
ется из регистра 4, после чего запускается микропрограмма вычисления функции
ех. Микропрограммы обычно реализуют итерационные или другие численные ме-
тоды вычисления функций. Время вычисления их существенно больше времени
выполнения простейших арифметических операций.
Команды окончания вычислений. Команда окончания вычислений в микро-
калькуляторах вводится в программу символом С/П. Ей может предшествовать
вызов числа на индикацию из регистра памяти N и затем запись результата в
регистр М, например ... FN С/П ... или ... F/V С/П Р7И ... Отсутствие
команды С/П ведет к зацикливанию программы. В микро-ЭВМ «Электроника
ДЗ-28» подобная команда вводится кодом 0515.
Редактирование программы. При вводе программ возможны ошибки (нажа-
та не та клавиша, введена лишняя команда, пропущена нужная операция и т. п.)
Поэтому бывает необходимо редактирование программы. Оно осуществляется
просмотром кодов всех операций. В микрокалькуляторах в режиме программи-
рования индицируются номер шага очередной операции и коды трех операций, в
микро-ЭВМ «Электроника ДЗ-28» — номер шага, код одной операции (в индика-
торе регистра X) и номер шага в шестнадцатиричной форме (в индикаторе регист-
ра Y).
Для просмотра кодов с помощью клавиш ШГ й ШГ в микрокалькуляторах
(III и ШН в микро-ЭВМ «Электроника ДЗ-28») программа смещается на шаг впе-
ред или назад. Ошибочно введенная команда заменяется правильной или исклю-
чается. В’микрокалькуляторах исключение производится вводом символа НОП
(нет операции), а в микро-ЭВМ «Электроника ДЗ-28»— нажатием клавиши ИШ
(исключить шаг). Если нужная команда пропущена, в микрокалькуляторы при-
дется ввести ее и все последующие команды. В микро-ЭВМ с этой целью нажи-
мается клавиша ПШ (поставить шаг), после чего вводится только нужная коман-
да. При исключении или вводе команд в микро-ЭВМ автоматически меняются
адреса всех последующих команд.
Пуск программы и ее отладка. Последовательность нажатия клавиш пуль-
та при вводе программы и при выполнении по ней автоматических вычислений
описывается далее. Рекомендуется снабжать программы контрольным примером
и проверять правильность его решения перед использованием программ. В необ-
ходимых случаях отлаживать программу можно, контролируя шаг за шагом вы-
числения. Для этого служат (в режиме вычислений) клавиша ПП в микрокаль-
куляторах и Ш в микро-ЭВМ «Электроника ДЗ-28». Одно нажатие этой клави-
ши ведет к выполнению одной операции.
Индикация переполнения и ошибок. При некорректных операциях (напри-
мер, деление на 0, вычисление логарифма отрицательного числа) микро-ЭВМ
останавливают счет и выдают на индикаторе специальный знак ошибки: 00 -или
другой в микрокалькуляторах «Электроника БЗ-21», ЕГГОГ* в микрокальку-
ляторах «Электроника БЗ-34», заго-рание индикатора ОП (ошибка программы)
в микро-ЭВМ «Электроника ДЗ-28». Сбой лентопротяжного механизма этой мик-
ро-ЭВМ фиксируется загоранием индикатора ОМ (ошибка механизма).
1.3. ОСОБЕННОСТИ ПРОГРАММИРОВАНИЯ МИКРОКАЛЬКУЛЯТОРОВ
«ЭЛЕКТРОНИКА БЗ-21» И «ЭЛЕКТРОНИКА МК-46»
Микрокалькулятор «Электроника БЗ-21» (рис. 1.1) и настольная микро-
ЭВМ «Электроника МК-46» аналогичны по функциональным возможностям.
Помимо очевидных символических обозначений на клавишах, над и под ними
отметим специфические:
F и Р — символы префиксных клавиш,
| —- оператор переноса числа из регистра X в регистр Yj
/—/ — смена знака мантиссы или порядка числа:
Искаженное написание английского слова Error — ошибка.
вп — ввод порядка числа;
Сх — сброс регистра X на нуль;
XY — обмен числами между регистрами
—> X и Y;
БП — безусловный переход (ввод);
ПП — подпрограмма (ввод) и пошаговое
выполнение программы;
ШГ и ШГ —' шаг вперед и шаг назад при
просмотре программы; ’
В/О — возврат к нулю счетчика адресации
и конец подпрограмм;
С/П — стоп—пуск вычислений по про-
грамме;
РР — рабочий режим автоматических вы-
числений по программе;
РП — режим программирования (ввода
программы и ее просмотра);
НОП — нет операции (команда ликвидации
ошибочно введенной операции);
(^) и (^) — поворот стека по часовой
стрелке и против нее.
Операции, обозначенные символами
на клавишах, выполняются или вводятся
в программу при непосредственном нажа-
тии соответствующей клавиши. Операции,
обозначенные символами над или под кла-
вишами, выполняются или вводятся в про-
грамму после нажатия соответствующей
префиксной клавиши. Цветовая маркиров-
ка символов (красный цвет для вводимых
после нажатия префиксной клавиши Р
операций и черный — для операций, вво-
Рис. 1.1. Внешний вид программ,
мого микрокалькулятора «Электре
БЗ-21»
димых после нажатия префиксной клави-
ши F) облегчает поиск нужной префиксной клавиши. Программа вводится
нажатия клавиш Р РП. При этом на индикаторе справа высвечивается
00—адрес нулевого шага программы. В процессе ввода адреса меняются в соот
ветствии с приведенными в табл. 1.2, а слева от адресов появляются коды one'
раций (только что введенной и двух предшествующих). Для перехода в рабочш
режим автоматических вычислений нажимаются клавиши Р, РР и В/О. Пр1
этом на индикаторе высвечивается знак 0, а при наборе чисел в операционньи
регистр X или выводе результатов индицируются восемь разрядов мантиссь
(включая запятую) и два разряда порядка числа, а также их знаки (знак —
если мантисса или порядок числа отрицательные). Вычисления по программ»
сопровождаются мерцанием индикатора. Прервать вычисления можно нажа
тием клавиши С/П, например, если программа «зациклилась».
Для рационального составления программ нужно знать, как перемещаются
числа в операционных регистрах при выполнении различных операций. При
ведем примеры таких перемещений.
1. Операция переноса f (перевод числа из регистра X в регистр Y)
Y 12 12 7
X 12 12 7 7
12 1 7
t
2. Двухместная арифмегическая операция а условным символом @ (X
Y;---—*- Y
Y 3 3 3 3 4,5 4,5 4,5
X 3 3 2 1,5 4,6 2 6,5 11
X — @ X
3t24x2+*
3. Операция хУ
Y Y X хУ—* X Y 10 10 . .10 10
X 10 10 2 1024 10240
10 t 2 хУ х
5. Вычисление функции * аргумента х = РХ (1/х, х2, ~\/х, ех, 1пх, sin.x,
Cosx, вызов числа л РХ)
Y 5 5 5 5
X 5 5 2 0,693147 3,465736
5t2 Pin. х
6. Обмен содержимым рагистров X и Y (XY или в дальнейшем упрощений
XY) •
Y 9 9 4
X 9 9 4 9
9 ♦ 4 XY
Используя приведенные данные, легко объяснить выполнение ряда типовыя
операций несколько «необычными» фрагментами программ, например'
1. При а = Р2, b = РЗ величина у — asinfc вычисляется фрагментом про-
граммы
F3 Peljc F2 X
вместо очевидного F3 Р sin f F2 X.
> 2, При a == РХвычисление siha и cose с заносомих.в регистры 3 й 4 выпол-
.вяются следующим фрагментом!
Ре1* РЗ XY Р4.
3. При а — Р2, b — РЗ вычисление (2а— Ь) выполняется .гак:
F2 | F3 — +,
а вычисление (а + Ь) а — так:
F2 t F3 + X.
4. При а = РХ, b — PY вычисление (Ь — а) и (Ь 4- а) с заносом результатов
-в регистры 5 и 6 выполняется следующим образом:
— Р5- — + Р6.
5. Функции tgx при х — РХ вычисляются следующими операциями:
Ре1* 4,
a ctgjc
Ре1* -=- Fl/x.
Оператор переноса f можно не вводить, если непосредственно вслед за опе-
рацией (включая вызов числа из регистра N) вводится другое число. Так, фраг-
мент программы F2 2 4 X означает, что вызванное из регистра 2 число будет
умножено на 24. Однако, когда второе число двухместной операции хранится в
регистре памяти (например, 3), перед его вызовом вводится оператор, например:
F2 F3 X. При одноместных операциях после вызова числа из регистра
оператор f не нужен.
Для округления х с точностью до р цифр после запятой можно сложить х с
числом а = IO714 — 10<7~р)> а из (х + а) вычесть а. Так, если х = 12,34567 и
р = 4, имеем (х + а) = 10012,345. Остальные цифры 8-разрядным регистром
X отбрасываются. При х = РЛ' это реализуется фрагментом программы 1 ВП
ЛГ f FN -|- XY —, а при х = РХ—фрагментом f 1 ВП М XY
+ XY —. Для выделения целой части х при (х + а) < 109 надо положить
М = 7 (р — 0). Выделение дробной части х = PN обеспечивает фрагмент про-
граммы 1 ВП 7 f FW + XY — /—/ FA7 + .
Как отмечалось, организация переходов (безусловных, условных и к под-
программам) в микрокалькуляторе «Электроника БЗ-21» усложнена тем, что
нужно знать код операции, который на 1 больше номера шага, к которому осу-
ществляется переход. Для быстрого поиска символов, задающих переход на
нужный шаг Л?ш, можно использовать табл. 1.3.
Таблица 1.3
Символы, обеспечивающие переходы па требуемый шаг программы
Л'ш 00 01 02 оз- 04 05 10 11 12 13 14 15
Символ Р0 F0 Р t 0 Fe1* T Pl Fl Pin 1 FXY XY
20 21 22 23 24 25 30 31 32 33 34 35
Символ Р2 F2 Рл 2 FX X P3 F3 Pe* 3 F-?
40 41 42 43 44 45 50 51 52 53 54 55 ’.
Символ Р4 F4 Р, 4 Fl/x P5 F5 P/-/ 5 Fx-2 /-/
Яш 60 61 62 63 64 65 70 71 ' 72 73 74 75
Символ Р6 F6 РВП 6 F< ВП P7 F7 PCx 7 FCx Cx
80 81 82 83 84 85 90 91 92 93 94 ’ 95
Символ Р8 F8 Pcos 8 F— — P9 F9 Psln 9 F+ 4-
Подчеркнутые символы с номерами шагов 55, 65, 70, 80, 81, 91 и 92 нельзя
использовать в качестве операторов перехода к подпрограмме, так как (специфи-
ческий недостаток данного микрокалькулятора) эти операторы не будут воспри-
ниматься. Использование табл. 1.3 поясним примером. Пусть надо сделать ка-
кой-то переход на шаг с Л/ш =41. Из таблицы находим символ оператора
перехода F4. Таблицу 1.3 можно использовать в качестве таблицы кодов при-
веденных в ней символов. Код всегда на 1 больше Nm. Так
для оператора f Nm — 05, следовательно, его код будет 06.
X Структура стека (рис. 1.2) обеспечивает круговой
□ обмен чисел в его ячейках при нажатии клавиш
11
₽ = Р, и Р = р/~/ соответственно по часовой
сг стрелке и против нее. В дальнейшем будут использовать-
ся более удобные для типографского набора символы пово-
рота стека Р, и Р/—/. Пусть, например, в регистре X хра-
s нится число х0=РХ(знак = означает присвоение числа
Рис. 1.2 Структура
стека микрокалькуля-
тора «Электроника
БЗ-21»
содержимому регистра X), а в других регистрах стека
хранятся числа хх = Cl, х2 = С2, .... xG = С6. При на-
жатии клавиш Р и , происходят следующие обозначенные
стрелками переходы: х0->С1, Xi С2, ..., х5-* С6,
РХ.
При вычислениях функций sinx, cosx, ех, е'х и х? аргумента х регистры
стека испояьзуются как рабочие, и в них могут попадать произвольные числа.
В [2] приведена таблица значений х и номеров регистров стека, которые нельзя
применять для данных значений х. Однако значения х редко бывают наперед
известны. Поэтому не рекомендуется применять стек при выполнении этих опе-
раций в промежутке между операциями ввода и вывода чисел из стека.
При линейных программах остановки вычисления вводятся оператором
С/П. При циклических программах остановка по заданному числу п = PN цик-
лов выполняется фрагментом
FN 1 — PN Рх = О А ... С/П,
где А — оператор перехода к нужному адресу при числе циклов меньше и.
Программы, реализующие итерационные циклы, останавливаются при вы-
полнении условия |Xn+i— Хп1 < в, где е— малое число, задающее точность
результата. Иногда остановку счета осуществляют по условию Xn+i = хп с
точностью до машинного нуля. При xn = PN для этого используют следующие
фрагменты программ [2]:
... | FN XY + PN — Рх = 0 A FN С/П:
... | FN + PN 4- Psin Рх = О A FN С/П.
В некоторых случаях остановка осуществляется, если приращение Дх = PN
достигает машинного нуля, что реализуется фрагментом программы
... FN Psin Рх = О А ... С/П,
основанным на том, что sinAx ~ Дх =/= О при малом Дх, большем машинного
нуля, и sinAx= 0 при любом малом Дх, меньшем машинного нуля.
Следует стремиться к удобству и естественности расположения исходных
данных и результатов вычислений в регистрах памяти. Так, решая систему из
двух уравнений
П1Х + = ct, 1
а2х + 62j/= с2, / (1.1)
коэффициенты целесообразно вводить по строкам так:
a, = Р7, bj = Р8, с, = Р6,
«г = Р4. Ь2 =. Р5. с2 = РЗ.
что соответствует естественному расположению их и клавиш пульта (см. рис. 1.1)-
Сложные константы, например заряд электрона q = — 1,602-10“18 Кл по
возможности следует вводить в один из регистров N. Тогда константа вызыва-
ется одной операцией вида FA. Если константу q вписать в программу, она
займет 10 шагов:
1 6 0 2 /-/ ВП I 9 /—/.
Напротив, малые целые числа (1, 2, 3, .... 9) удобно вводить прямо в программу,
что занимает 1 шаг. Для сокращения программы операцию 0,5а при а=РА следу-
ет записывать как FA 2 -? (т. е. деление а на 2). Вычисление амплитудного
значения Um— Д/2ДэфФ ~ 1,414 1/эфф лучше записывать как FA 2 FK X,
а не как FA 1 , 4 1 4 X (Дэфф — РА). Для ускорения вычислений Xs
и х9 лучше вычислять как х • х2 и х2 • х2. не используя операцию х>'.
Для табулирования функций аргумента х последнему задают программно
дискретные значения. Например,
u(tn)=Um(l-e~^/T} (1.2)
вычисляют, задавая
tn = tn-f + ^. (1-3)
Программа при этом имеет вид (tn — Р2, &t = РЗ, т = Р4, Um = Р5)
0 Р2 f F4 ч- 1—1 Ре* /—/ 1 + Т F5
X С/П F2 t F3 + БП F0.
При каждом выполнении программы t получает приращение на величину А/,
после чего новое значение tn записывается в регистр 2 с помощью команды без-
условного перехода БП F0 ко второму шагу программы Р2 (запись tn и в регистр
2). Например, при Um = 1 В, т = 1 с и Д/= 0,5 с, нажимая клавишу С/П,
получаем: и (0) = 0, и (0,5) = 0,3934693; и (1) = 0,6321205 и и (1,5) =
= 0,7768698 и т. д. Отметим, что в приведенной программе при первом пуске
(нажатием клавиш В/О и С/П) автоматически очищается регистр 2 (в него вво-
дится 0). Значения tn всегда можно вывести из регистра 2.
Аргумент тригонометрических функций при расчетах на микрокалькулято-
рах «Электроника БЗ-21» должен выражаться в радианах. Если он выражен в
градусах, то вводится фрагмент программы f Рл X 18 0 4-.
Вычисления по введенной и отлаженной программе выполняются в следую-
щем порядке: нажимаются клавиши Р, РР и В/О, вводятся исходные данные и
нажимается клавиша С/П. Если вычисления должны вестись не с нулевого
адреса, перед нажатием клавиш С/П нажимаются клавиша БП и клавиши ввода
символа установки нужного шага Аш.
1.4. ОСОБЕННОСТИ ПРОГРАММИРОВАНИЯ
МИКРОКАЛЬКУЛЯТОРОВ «ЭЛЕКТРОНИКА БЗ-34»
И «ЭЛЕКТРОНИКА МК-56»
Микрокалькуляторы «Электроника БЗ-34» (рис. 1.3) более совершенны,, чем
«Электроника БЗ-21». В них больше число шагов программы (98 против 60),
Увеличено число дополнительных регистров (до 14), введены многофункциональ-
ный стековый блок операционных регистров, регистр восстановления результа-
та предшествующей операции, микропрограммное выполнение дополнительных
Функций аргумента х (10*, Igx, tgx, arcsinx, arccosx. arctgx), предусмотрены не
только прямые, но и косвенные переходы и обращения, выполняются команды
организации счетчиков циклов, упрощена система адресации команд и переходов
Различных типов. Настольная микро-ЭВМ «Электроника МК-56» является
Функциональным аналогом данного микрокалькулятора.
Помимо очевидных символических обозначений на клавишах, над и под ни-
ми для микрокалькулятора «Электроника БЗ-34» отметим специальные:
*.— символ префиксной клавиши ввода символов, нанесенных над клавишами,
К — символ префиксной клавиши, ввода косвенных переходов и обращений к
Регистрам памяти,
Рис. 1.3. Внешний вид программи-
руемого микрокалькулятора «Элек-
троника БЗ-34»
обычная запись
ab + с
а Ьс
' а{Ь + с)
(a+b) (c — d)
ab/c
ad — be
uz— vy
, ln(x + \yz — sin «)
ИН — вызов чисел из регистров памяти,
П___ ввод чисел в регистры памяти,
ДВТ___ перевод в рабочий режим (автомати-
ческих вычислений по введенной программе),
ПРГ___ программирование (ввод программы),
CF — сброс действия префиксной клавиши F,
Вя — восстановление в регистре X резуль-
тата предшествующей операции,
А, В, С, Д— обозначения четырех послед-
них регистров памяти (из четырнадцати),
LO, LI, L2, L3 — операторы организации
счета циклов в регистрах памяти (X 1, 2 и 3.
Расшифровка других символов (ШГ, ШГ,
В/О, С/П, ПП, БП, ВП, Сж и /—/) аналогична
приведенной для микрокалькулятора «Элек-
троника БЗ-21». Расшифровка символа
поясняется далее (рис. 1.4).
В режим программирования микрокаль-
кулятор «Электроника БЗ-34» вводится нажа-
тием клавиш F и ПРГ. При вводе программ
на индикаторе слева направо индицируются
три кода (см. приложение 2, табл. П2.1) вве-
денных последними операций и номер шага
очередной вводимой операции. В режим авто-
матических вычислений микрокалькулятор пе-
реходит при нажатии клавиш F и АВТ. При
этом индицируются мантисса (восемь разря-
дов) и порядок (два разряда) вводимого числа
или результата вычислений, а также знаки
«минус» мантиссы и порядка (если они отрица-
тельны). Запятая мантиссы отдельного разря-
да индикатора не занимает.
Операционный стек микрокалькулятора «Электроника БЗ-34» содержит
4 регистра (X, Y, Z.h Т), а также регистр восстановления результата предшест-
вующей операции (XI). Перемещение чисел в стеке при различных операциях
показано на рис. 1.4. Операции выполняются по.так называемой обратной бес-
скобочной форме записи, предложенной польским математиком Лукасевичем.
Приведем формы записи ряда выражений:
обратная бесскобочная запись
a-t-feXc-f-
а j b f с X +
а f b f с -{- X
a t b 4- с f d — X
a j b X с 4-
а j d Xb f с X —
« t z X v t // X —
y f z Xu sin — -f-In
Из этих примеров видно, что обратная бесскобочная запись позволяет про-
изводить довольно сложные, вычисления непосредственно в операционном сте-
ке, не прибегая к использованию вспомогательных регистров памяти. Для нее
возможен последовательный ввод нескольких (до четырех) чисел с последующим
указанием операций над ними. В ручном режиме для разделения ввода исполь-
вуётся оператор |. При его использовании числа в стеке перемещаются на одну
ступеньку вверх. В режиме автоматических вычислений по программе такой
переход осуществляется автоматически всякий раз, когда в регистр РХ вводит-
ся число непосредственно или из А/-го регистра памяти. При выполнении ариф-
Теряется
Рис. 1.4. Перемещение чисел в стеке операционных регистров микрокалькулятора «Электро»
вика БЗ-34» при различных операциях
метических операций результат получается в регистре X, а все числа в регистрах
опускаются на ступеньку вниз. Например, вычисление а (Ь 4* с) по программе
При а = РА, b = РВ и с — PC реализуется таким фрагментом)
НПА ИПВ ИПС 4- X С/П
(вручную а | Ь | с J- X). Число в регистре Т сохраняется.
Эти правила можно распространить на более сложные вычисления. Напри-
мер Определитель 3-го порядка можно раскрыть, используя правило Крамера
=Ct (а2 b3—a3 b2) j-c2 (а3 bi~ai b3)4-с3 а2 Ьх),
01 01
О2 Од
а3 ^3 сз
следующим образом (вручную):
f Ь3 X о>3 f b2 X — 01 X
«3 f bt X «i f bs X — c£ X 4-
а. t b2 X a2 f bi X — c3 X 4-
Разместив коэффициенты определителя в естественной форме в регистрах микро-
калькулятора
o'! = Р7, bi = Р8, С] = Р9,
а2 — Р4, b2 = Р5, са = Р6,
а3 = Pl, b3 — Р2, с3 = РЗ,
Л можно вычислить по следующей программе:
ИП4 ИП2 X ИП1 ИП5 X — ИП9 X ИП1
ИП8 X ИП7 ИП2 X — ИП6 X 4- ИП7
ИП5 X ИП4 ИП8 X — НПЗ X 4- С/П
Возможности операционного блока проиллюстрируем также на примера
вычисления достаточно сложного выражения
fe=ln а(Ь+с^- = 1п 2№’-3+1'7)=1п 2 = 0,69314717.
Vd+ef У14-2-1,5
Введя а = РО, b = Pl, с = Р2, d = РЗ, е = Р4, и f = Р5, составим программу
вычисления k‘.
НПО ИП1 ИП2 4- X ИПЗ ИП4 ИП5 X +
F/ = Fin С/П
Операторы
ких программ.
+ 3 + ... + «)
„„„-я циклов упрощают построение ряда цикличес-
"РО-ых чисел С= (1 + 2 +
выполняется по программе
если х0 = РО = О
I---------1
ПО О НПО + FLO 02 СП
t___________________!
еслих0 = РО < О
Число п при первом пуске заносится в регистр счетчика 0. При каждом прохож-
дении оператора FLO число х0 (вначале х0 = н) уменьшается на 1 и организует-
ся суммирование п чисел. Аналогично вычисляется произведение П = (1 X
X 2 • 3 • ... • л):
ПО 1 ИПО X FLO 02 С/П
и факториал п! (с учетом особого случая 0! = 1):
ПО Fx=#0 11 1 ИПО X FLO 04 С/П БП
00 1 БП 08.
Косвенная адресация к регистрам памяти с модификацией их адреса удоб-
на для вычисления многочленов по схеме Горнера. Так, многочл'ен степени т <
<11
у = а(Н- сцх + а2х2 4- ... + атхт = а0 + х (аг + х (а2 4- ... -I- хат)...)
при а0 = PC, <?! ... ап = Р1 .. Р9, РА, РВ вычисляется по программе
ПД ... т ... ПО ИПт f XY ИПД X КИП0
+ ИПО Fx = 0 06 XY ИПС + С/П БП 00
Фрагмент программы косвенной адресации вида П/V КИПА ИПА, где N
номер регистра 7, 8, 9, А, В, С или Д, можно использовать для выделения целой
части дробного числа х = РХ (108 > х > 1). Для выделения дробной части
числа х>0 пригоден другой фрагмент: ... f 1 + ПА/ КИПА XY
ИПА — С/П. Если результат вычислений у = РА получается с точностью
до малого е = 1 10~п = РД, то его округление до п знаков после запятой
выполняется с помощью фрагмента программы
ИПА ИПД 4- ПС кипе ИПС. ИПД X С/П.
1.5. ОСОБЕННОСТИ ПРОГРАММИРОВАНИЯ МИКРО ЭВМ
«ЭЛЕКТРОНИКА ДЗ-28»
Настольные микро-ЭВМ намного превосходят микрокалькуляторы по
таким важнейшим параметрам, как быстродействие, число регистров (ячеек)
памяти, максимальное число шагов программы, число команд. В то же время
работа на них принципиально ничем не отличается от работы на микрокальку-
ляторах. Микро-ЭВМ «Электроника ДЗ-28» (рис. 1.5) является специализирован-
ным вычислительным и управляющим устройством, которое можно использовать
и для расчетов, и для управления различными объектами (системы обработки
информации, станки с программным управлением и т. д.). При работе.с данной
микро-ЭВМ следует руководствоваться техническим описанием и справочником
программиста, входящими в комплект ее технической документации. Здесь же
приведем основные сведения, необходимые для расчетов на этой микро-ЭВМ.
Клавиши прямого кодирования, расположенные сверху на пульте управле-
ния, служат для задания кодов всех команд и номеров десятичных регистров
памяти. Команды могут быть двух типов: одношаговые и двухшаговые. Они ко-
дируются соответственно двумя В1А1 или четырьмя В1А1 В2А2 шестнадцати-
ричными числами (от 00 до 15). Числа В1 и В2 набираются как сумма чисел на
левых клавишах (нули игнорируются) верхнего ряда. Числа А1 и А2 набирают-
ся нажатием соответствующих правых клавиш верхнего ряда. Например,
Рис. 1.5. Пульт управления настольной микро-ЭВМ «Электроника ДЗ-28»
команда с кодом 04 12 05 15 набирается нажатием клавиш 40, 12, 40, 10, 15.
Следует учитывать, что ряд команд вводится только набором их кодов (при
желании в кодах можно ввести все команды).
Операционными в микро-ЭВМ «Электроника ДЗ-28» являются регистры
X и Y. Оба они снабжены индикаторами. Имеются также дополнительный ре-
гистр Z, регистр остатка и 166 регистров для десятичных чисел с прямой и кос-
венной адресацией (следует отметить, что большой объем ОЗУ этой ЭВМ в
16 или 32 кбайта позволяет организовать в нем большое число добавочных по
отношению к упомянутым регистров памяти). Адрес любого регистра указывает-
ся кодом В2А2 (от 0000 до 1515). Часть объема ОЗУ используется для запомина-
ния команд программ.
Функциональное назначение других клавиш пульта ясно из рис. 1.5 и
табл. 1.4. Отметим, что помимо микропрограмм, указанных для микрокалькуля-
торов, микро-ЭВМ «Электроника ДЗ-28» реализует микропрограммы вычисле-
ния гиперболических (shx, chx, и thx) и обратных гиперболических (arc shx,
arc chx и arc thx) функций, а также микропрограммы перевода чисел у и л из
декартовой системы координат в полярную:
р — Д/х2 -I- у* -> PY; <р = arctg (ylx) -» РХ
и наоборот (р = РУ, <р = РХ):
у = р si я<р -> PY; х = р cos<p -» РХ.
Функции, указанные над верхними правыми клавишами пульта, вычисля-
ются при наборе кода В1А1, где В1 =08 (нажимается клавиша 80 левого ряда)
и А1 — соответствующее число на клавише правого ряда, над которой дан сим-
вол нужной функции.
Коды большинства операций вводятся автоматически при нажатии соответ-
ствующей клавиши пульта (см. табл. 1.4). Часть операций вводится в кодах
(табл. 1,5 и 1.6). С учетом не упомянутых специальных операций (управление
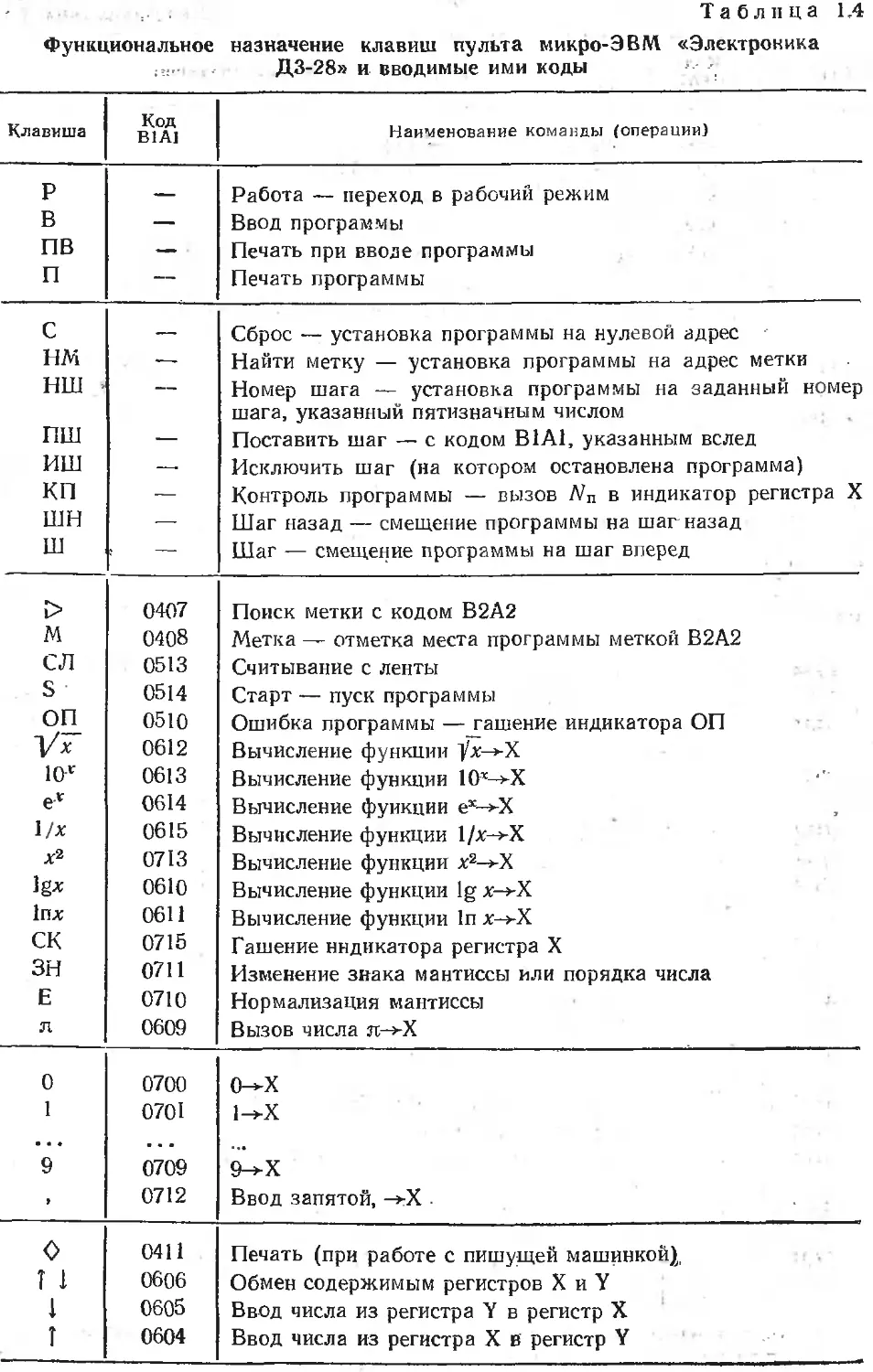
Таблица 1,4
Функциональное назначение клавиш пульта микро-ЭВМ «Электроника
ДЗ-28» и вводимые ими коды
Клавиша Код В1А1 Наименование команды (операции)
р — Работа — переход в рабочий режим
в — Ввод программы
пв — Печать при вводе программы
п — Печать программы
с — Сброс — установка программы на нулевой адрес
нм — Найти метку — установка программы на адрес метки
HUI > — Номер шага — установка программы на заданный номер шага, указанный пятизначным числом
пш — Поставить шаг — с кодом В1А1, указанным вслед
иш — Исключить шаг (на котором остановлена программа)
КП — Контроль программы — вызов Nn в индикатор регистра X
шн —- Шаг назад — смещение программы на шаг назад
ш 1 — Шаг — смещение программы на шаг вперед
0407 Поиск метки с кодом В2А2
м 0408 Метка — отметка места программы меткой В2А2
сл 0513 Считывание с ленты
S 0514 Старт — пуск программы
оп 0510 Ошибка программы — гашение индикатора ОП
X 0612 Вычисление функции )'х—>-Х
К)1' 0613 Вычисление функции КУ’-э-Х
ех 0614 Вычисление функции ех->Х
\/х 0615 Вычисление функции 1/х->Х
X2 0713 Вычисление функции х2->Х
Igz 0610 Вычисление функции 1g х->Х
Inz 0611 Вычисление функции 1п х—>Х
СК 0715 Гашение индикатора регистра X
зн 0711 Изменение знака мантиссы или порядка числа
Е 0710 Нормализация мантиссы
Л 0609 Вызов числа л—>Х
0 0700 0-*Х
1 0701 1^Х
9 0709 9->Х
> 0712 Ввод запятой, ->Х .
0 0411 Печать (при работе с пишущей машинкой),
Т 1 0606 Обмен содержимым регистров X и Y
1 0605 Ввод числа из регистра Y в регистр X
t 0604 Ввод числа из регистра X в регистр Y
Окончание табл 1 1
Клавиша Код Bl А1 Наименование команды (операции)
0603 Деление (Y) : (X) -»• (Y)
X 0602 Умножение (Y) X (X) -> (Y)
— 0601 Вычитание (Y) — (X) -> (Y)
+ 0600 Суммирование (Y) + (X) ->• (У)’
л-П 0403 Деление в ячейке памяти В2А2 на число (X)’
хП 0402 Умножение в ячейке памяти В2А2 иа число (X)’
п— 0401 Вычитание из ячейки памяти В2А2 числа (X)
П+ 0400 Суммирование в ячейке памяти с числом (X)
пп 0406 Обмен числами в ячейке памяти В2А2 и в регистре X
вп 0405 Вызов числа из ячейки памяти В2А2 -»• X
зп 0404 Запись числа (X) в ячейку памяти В2А2
Таблица 1.5
Организация основных безусловных и условных переходов микро-ЭВМ «Электроника ДЗ-28»
Код Условие перехода (ветвления) Переход на шаг программы*
В1А1 В2А2
1402 В2А2 Безусловный переход вверх 16В2+А2—1
• 1403 В2А2 Безусловный переход вниз . + 16В2+А2+1
0407 d Безусловный переход к метке с номером d Шаг после d
0509 (Y) = (X), проверка условия Y—Х = 0 . + 3
0412 0611 (Х)=0 по первому разряду мантиссы •+4
0412 0411 (Y)=0 по первому разряду мантиссы .+4
0507 (Y) (X), проверка условия (Y—Х)ЭгО • Н-з
0508 (Y)<(X), проверка условия (Y—Х)<0 .-|-3
0412 0710 (X) отрицательно (по ненулевому раз- ряду) .4-4
0412 0510 (Y) отрицательно (по ненулевому зна- ковому разряду) • + 4
0412 0711 (Х)=^0 по первому разряду мантиссы • + 4
0412 0511 (Y)=^=0 по первому разряду мантиссы •+4
0412 0610 (X) положительно (по знаковому раз- ряду) •4-4
0412 0410 (Y) положительно (по знаковому раз- ряду) .4-4
1204 Код (Y) равен коду (X) по всем разря- дам • 4-3
* Точкой обозначен номер шага программы, предшествующего команде перехода.
Таблица 1.6
Наиболее употребительные команды общего назначения йикро-ЭВМ
«Электроника ДЗ-28» и их коды
Код Наименование команды (операции)
В1А1 В2Л2
0511 Возврат из подпрограммы
0512 Конец программы
0515 Остановка программы для ввода и вывода данных
. 0608 Сброс дробной части числа в регистре X
0714 Вызов в регистр X остатка числа х
0412 0514 Вызов в регистр X константы 180/л
0412 « 0515 Вызов в регистр X константы зт/180
0412 0615 Пауза в вычислениях (~ 0,9 с) с включением индикации
0412 1209 Перемотка магнитной ленты вперед ([>!> )
1200 Перемотка магнитной ленты назад (<1<1 )
1209 Нормализация числа в ре истре X
0414 В2А2 Запись числа из регистра Y в ЯП В2А2
0415 В2А2 Запись числа из ЯП В2А2 в регистр Y
0406 В2А2 Обмен содержимым между регистром X и ЯП В2А2
0506 Обмен содержимым между регистром X и ЯП, номер, кото-
рой указан в регистре Y
1214 Запись числа из регистра Y в регистр Z
1215 Вызов числа из регистра Z в регистр Y
0504 Косвенная адресация — запись числа из регистра X в ЯП
с номером N, указанным в регистре Y
0505 Косвенная адресация — вызов числа ЯП с номером N, ука-
занным в регистре Y, в регистр X
периферийным оборудованием, действия с шестнадцатиричными числами и др.)
число команд микро-ЭВМ «Электроника ДЗ-28» составляет 463. Отсутствие упо-
минания о многих командах связано также с организацией специальных типов
косвенной адресации.
Любую часть программы или подпрограмму можно обозначить меткой, вво-
димой клавишей с символом М (код 0408) и набором номера В2А2 метки. Коман-
да поиска метки вводится клавишей с символом [> (код 0407) с последующим на-
бором номера В2А2 искомой метки. Так, если введена метка 0408 0001, то при
наличии в программе кода 0407 0001 произойдет безусловный переход к выпол-
нению шага программы, стоящего вслед за командами метки 0408 0001.
Для обращения к подпрограмме в нужном месте программы следует поста-
вить только код номера метки подпрограммы. Так, если в программе встретится
код 0002, то произойдет поиск подпрограммы с меткой 0408 0002 и выполнение
этой подпрограммы. Возврат из подпрограммы выполняется операцией, вводи-
мой кодом 0511. Если указанной подпрограммы нет, загорается индикатор ОП
(ошибка программы). В конце всей программы или блока программ следует по-
ставить оператор «конец программы», вводимый кодом 0512 (можно рекомендо-
вать сделать это дважды, чтобы этот код не воспринимался как часть двух-
шаговой команды).
Заносить исходные данные в регистры памяти и вызывать числа из них мож-
но операциями ЗП (запись в память) и ВП (вызов из памяти) с указанием ко-
дового номера регистра памяти. Например, если число 1234 надо ввести в регистр
0005, в программу после набора этого числа вводится операция ЗП 0005. Фраг-
Т а б л п ц а 1.7
Фрагмент программы полуавтоматического ввода исходных данных
в мнкро-ЭВМ «Электроника ДЗ-28»
Адрес команды Команда Код ко.манды Пояснение
00000 м 0408 Присвоение программе метки
00001 0001 0001 Номер метки
00002 0 0700 Вызов нуля
00003 зп 0404 Обнуление ячейки памяти с номером
00004 0000 0000 0000
00005 зп 0404 Обнуление ячейки памяти с номером
00006 0001 0001 0001
00007 0515 0515 Команда остановки (ввода данных)
00008 ЗП 0404 Запись в ячейку памяти с номером 0002
00009 0002 0002
00010 СК 0715 Гашение индикатора регистра X
00011 0515 0515 Команда остановки (ввода данных)
00012 ЗП 0404 Запись данных в ячейку памяти с номе-
00013 0003 0003 ром 0003
00014 СК 0715 Гашение индикатора регистра X
00015 0515 0515 Команда остановки (ввода данных)
00016 ЗП 0404 Запись данных в ячейку памяти с номе-
00017 0004 - 0004 ром 0004
мент программы полуавтоматического ввода исходных данных с использованием
прямой адресации ячеек (регистров) памяти ЯП дан в табл 1.7. Автоматическое
распределение исходных данных по ЯП реализуется косвенной адресацией
(табл. 1.8). При этом число шагов программы не зависит от числа вводимых
чисел N. Числа последовательно вводятся в ЯП с номерами от 0001 до 1500 (ЯП
0000 используется как счетчик). Перед вводом каждого очередного числа га-
сится индикация регистра X, а на индикатор регистра У выводится порядковый
номер этого числа.
Составление основной программы для микро-ЭВМ «Электроника ДЗ-28» мало
отличается от такового для микрокалькуляторов. Так, выражение (1.2) програм-
мируется следующим образом:
ВП 0002 ЗН | ВП 0003 | е* ЗН
t 1 + ВП 0004 X 0515 ...................
Программы для микро-ЭВМ «Электроника ДЗ-28» получаются несколько длин-
нее, чем у микрокалькуляторов, так как—часть операций осуществляется двух-
шаговыми командами (например, запись чисел в ЯП и вызов их из ЯП). Однако
этот недостаток мало существен так как число шагов программы микро-ЭВМ
«Электроника ДЗ-28» может доходить в пределе до 32512 (для модификаций с
объемом ОЗУ 32 кбайт).
С содержимым десятичных ЯП и регистра X можно проводить арифмети-
ческие операции, вводимые клавишами -т^П, X П, П+ и П— с последующим
Указанием номера ЯП В эту ЯП заносится результат операции. Командой с
«Одом 0714 на индикацию регистра X можно вызвать остаток числа, имеющего-
ся в регистре Y (еще 12 знаков).
Для редактирования и просмотра кодов программ служат клавиши Ш (шаг
вперед), ШН (шаг назад), С (сброс счетчика адреса команд на нулевой адрес),
НШ (номер шага, который указывается затем в виде пятизначного десятичного
Фрагмент программы автоматического размещения исходных данных
в ЯП микро-ЭВМ «Электроника ДЗ-28» ____________________________
. А црес команды' Команда Код Пояснение
00000 зп 0404 Запись числа вводимых параметров V
00001 1501 1501 в ЯП 1501
00002 0 0700 Обнуление ЯП 0000, отведенной под
00003 ЗП 0404 счетчик
00004 0000 0000
00005 1 0701 Вызов 1 в регистр X
00006 П + 0400 Прибавление 1 к содержимому ЯП 0000
00007 0000 0000 (/Vn=Wn-i 4-1)
о'оооз. вп 0405 Вызов содержимого ЯП 0000 в регистр
00009 0000 0000 X (А„ -> X)
00010 t 0604 Перенос содержимого ЯП 0000 в регистр Y(M„^Y)
00011 СК 0715 Гашение индикации регистра X
00012 ♦ 0515 0515 Команда «стоп» для индикации номера вводимого параметра Nn в регистре Y и его ввода в регистр X
00013 0501 0504 Косвенная адресация — запись числа из регистра X в ЯП с номером, указанным числом в регистре Y
00014 вп 0405 Вызов N из ЯП 1501
00015 1501 1501 в регистр X (N -* X)
_00016 0507 0507 Сравнение Nn с N
00017 1402 1402 Безусловный переход при Nn<zN вверх на 13 шагов, т. е. к команде с адресом
00018 0013 0013 00005
00019 ... Выполнение последующей программы при Nn=N
числа), ПШ (поставить шаг), ИШ (исключить шаг) и [> (найти метку). С любого
шага программа запускается нажатием клавиши S.
В рассматриваемой микро-ЭВМ предусмотрены запись программ и их счи-
тывание с помощью встроенного кассетного цифрового магнитофона. Для их
выполнения нажимается клавиша Р (работа), что фиксируется загоранием свето-
диода около этой клавиши (вручную программы вводятся нажатием клавиши В).
Для записи программы на магнитную ленту нажимаются клавиши С (или уста-
новки нужного шага программы) и ЗЛ (запись на ленту). Для считывания про-
грамм нажимаются клавиши С и СЛ (считывание с ленты). При ошибке считыва-
ния загораются индикаторы ОП (ошибка программы) или ОМ (ошибка ме-
ханизма).
Для идентификации программ вычисляется сумма Мп всех кодов, кроме по-
следней операции с кодом 0612. Эта сумма индицируется при . пажатни кла-
виши КП (контроль программ). По номеру метки и Ап нужной программы ев
можно легко найти среди других программ, записанных на ленте.
1.6. ПЕРЕВОД ПРОГРАММ С ОДНОГО ЯЗЫКА
ПРОГРАММИРОВАНИЯ НА ДРУГОЙ
, Большая часть программ в данной книге дана на языке микрокальку-
лятора «Электроника БЗ-21» и легко (часто дословно) переводится на язык
других микрокалькуляторов. Обратный перевод намного сложнее.
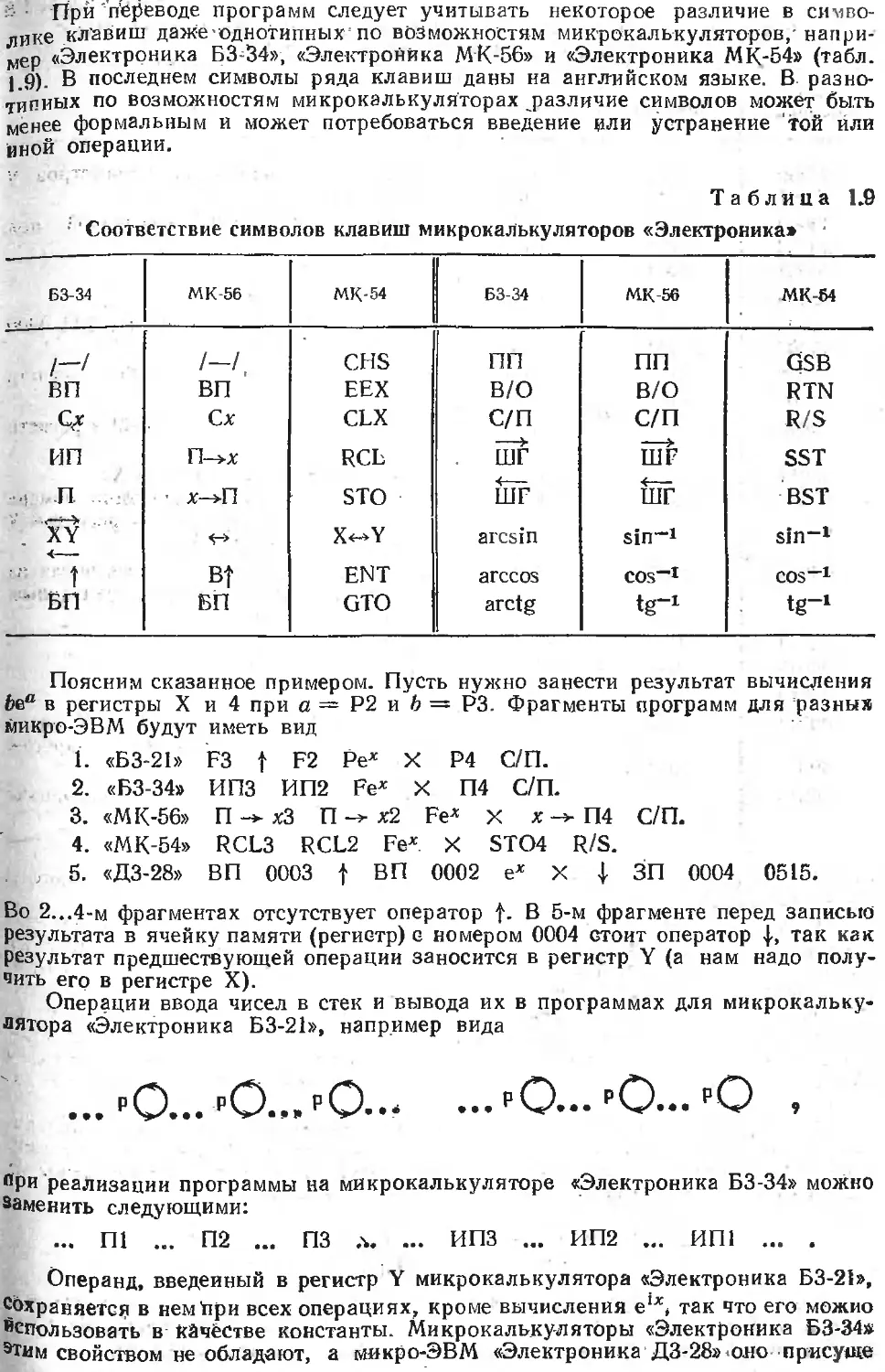
в- При'переводе программ следует учитывать некоторое различие в симво-
лике клавиш даже'однотипных'по возможностям микрокалькуляторов,- напри-
мер «Электроника БЗ-34», «Электроника МК-56» и «Электроника МК-54» (табл.
1.9)- В последнем символы ряда клавиш даны на английском языке. В разно-
типных по возможностям микрокалькуляторах различие символов может быть
менее формальным и может потребоваться введение или устранение 'той или
иной операции.
Таблица 1.9
•' 'Соответствие символов клавиш микрокалькуляторов «Электроника»
БЗ-34 МК-56 МК-54 БЗ-34 МК-56 МК-54
, I-' /-/ CHS ПП ПП GSB
ВП ВП ЕЕХ в/о в/о RTN
Q Сх CLX С/П ——> С/П R/S
ИП П—>х RCL шг ч — ШР SST
П. х—>П STO шг шг BST
". XY " <-> X^Y arcsin sin-1 sin-1
Bf ENT arccos cos-1 cos-1
БП БП GTO arctg tg-1 tg"1
Поясним сказанное примером. Пусть нужно занести результат вычисления
5е“ в регистры X и 4 при а — Р2 и Ь — РЗ. Фрагменты программ для разных
микро-ЭВМ будут иметь вид
Е «БЗ-21» F3 f F2 Ре* X Р4 С/П.
2. «БЗ-34» ИПЗ ИП2 Fe* X П4 С/П.
3. «МК-56» П-ч-хЗ Пх2 Fe* X х -> П4 С/П.
4. «МК-54» RCL3 RCL2 Fe* X STO4 R/S.
1 , 5. «ДЗ-28» ВП 0003 f ВП ООО2 е* X | ЗП 0004 0515.
Во 2...4-м фрагментах отсутствует оператор f. В 5-м фрагменте перед записью
результата в ячейку памяти (регистр) с номером 0004 стоит оператор |, так как
результат предшествующей операции заносится в регистр Y (а нам надо полу-
чить его в регистре X).
Операции ввода чисел в стек и вывода их в программах для микрокальку-
лятора «Электроника БЗ-21», например вида
... Ю... ’О...Ю—
...«О...-О... "О ,
При реализации программы на микрокалькуляторе «Электроника БЗ-34» можно
заменить следующими:
... П1 ... П2 ... ПЗ л. ... ИПЗ ... ИП2 ... ИП1 ... .
Операнд, введенный в регистр Y микрокалькулятора «Электроника БЗ-21»,
Сохраняется в нем При всех операциях, кроме вычисления е1*, так что его можно
Использовать в качестве константы. Микрокалькуляторы «Электроника БЗ-34»
этим свойством не обладают, а микро-ЭВМ «Электроника'ДЗ-28» «оно-присуще
только при выполнении одноместных операции. Поэтому в последние константы
следует ввести в один из регистров памяти или использовать регистр восстанов-
ления результата предшествующей операции (в микрокалькуляторах «Электро-
ника БЗ-34», «Электроника МК-56» и «Электроника МК-54»).
Перевод программ с языка микрокалькуляторов «Электроника БЗ-34» и
микро-ЭВМ «Электроника ДЗ-28» на язык более простых микрокалькуляторов
«Электроника БЗ-21» дословно, как правило, невозможен. Препятствием явля-
ется отсутствие у последнего микропрограмм вычисления ряда функций, в
частности обратных тригонометрических, а также косвенной адресации и опе-
рационного стека.
Наиболее ценным в сложных программах обычно бывает алгоритм вычисле-
ний. Поэтому нередко проще разобраться в алгоритме вычислений имеющейся
программы, а затем составить нужную программу для микро-ЭВМ, имеющейся
в распоряжении пользователя.
Для облегчения перевода программ в § 1.2 параллельно рассматриваются
элементарные приемы программирования для основных типов микро-ЭВМ. Да-
лее описана программная реализация ряда часто встречаемых расчетов для
этих микро ЭВМ.
1.7. ПОГРЕШНОСТИ ЧИСЛЕННЫХ РАСЧЕТОВ НА МИКРО-ЭВМ
Расчетам на микро-ЭВМ присущи погрешности. Если получаемый резуль-
тат у отличается от точного уй, то погрешность Ду = у0 — У Абсолютной и
относительной погрешностью у называются величины
An = IAj/1 = Iz/0— j/|; бу = A{//|yot.
Иногда задается предельное значение Ду безотносительно к у0. Например,
если Az/ = ±1, то при уп = 2 имеем 1 -С у < 3 или у = 2+1, но уже при уа =
= 100 получим 99 < у < 101 или у = 100±1. Для десятичных чисел погреш-
ность часто задается числом верных цифр. Верными называются цифры, если
представляемое ими число имеет абсолютную погрешность не более 1/2 младше-
го разряда (так, при 35,95 < х < 36,05 верными можно принять три цифры лю-
бого х).
Погрешность в общем случае зависит от ряда факторов. Например, она мо-
жет быть обусловлена неточной математической постановкой задачи, неточ-
ностью принятых моделей компонентов схем и неточностью задания исходных
данных.
Ввиду ограниченного числа десятичных разрядов чисел, которыми опери-
рует микро-ЭВМ, возникает погрешность округления. Обычно заведомо неиз-
вестно, как округляются числа. В этом случае считается, что погрешность
округления составляет + 1 младшего разряда.
Каждому методу вычислений присуща методическая погрешность. Методи
ческая погрешность для основных численных методов и причины ее возникнове-
ния описываются в гл. 2. Отметим, что погрешность присуща и вычислениям
основных функций по встроенным микропрограммам (ех, 1пх, sinx и т. Д-). Обычно
она обусловлена заменой бесконечных рядов или цепных дробей, аппроксими-
рующих эти функции, рядами или целыми дробями с конечным числом членов.
Для функции ех и 1пх методическая погрешность микрокалькулятора «Электро-
ника БЗ-21» составляет +2, а для остальных функций ±1 младшего разряда.
В ряде случаев весьма важной является операционная погрешность, т. е.
погрешность, возникающая при операциях над приближенными числами. В
качестве примера отметим, что операционная погрешность алгебраического
суммирования, вычитания, умножения и деления равна сумме погрешностей
чисел, над которыми выполняются эти операции. Погрешность вычисления
сложной функции f (xlt х2, х3, ..., хп) нескольких переменных может быть оце-
нена с помощью коэффициентов чувствительности S, этой функции к измене-
нию каждого параметра х1( х2, х3, ..., хг, ... , хп. Процедура определения ко-
эффициентов чувствительности описана в § 9.1. При такой оценке не учитывает-
ся статистическое распределение параметров и получается завышенная погреш-
ность вычислений. Более близкой к истинной будет погрешность
6/=]/
г 1=1
получаемая путем среднеквадратичного суммирования частных погрешностей
с учетом чувствительности функций / (х;) к изменению каждого параметра Х(.
Для уменьшения операционной погрешности следует выполнять некоторые
правила вычислений [2]. При сложении слагаемые целесообразно разбить на
группы чисел, близких по порядку величины. Сложение следует начинать с
меньших чисел. При умножении рекомендуется умножать меньшее из чисел на
большее. Если промежуточный результат yi > 1, то его надо умножить на мень-
шее, если tji < 1, то на большее из оставшихся чисел и т. д. При вычислении
выражений вида abd(dek) целесообразно чередовать операции умножения и
деления, избегая переполнения регистров, возможного при раздельном вы-
числении произведений аЬс и dek. Следует всегда избегать вычитания близких
чисел, так как результат может попасть в область машинного нуля, что ведет
к грубейшим ошибкам (например, при его последующем умножении на любое,
в том числе большое число).
Вычисляемые’ выражения нередко удается преобразовать так, чтобы со-
блюдались эти рекомендации. Например, выражение у = (а + Ь)2 — а2, где
fetC а, следует представить в виде у — 2аЬ + что исключит вычитание близ-
ких чисел (а + 6)3 и Ь2. Замена выражения у — (е60х — е—49х)/ (е49х — 1) на
равноценное у = (ех— 1) / (1 — е~49х) позволяет избежать переполнения ре-
гистров даже при довольно больших х (при х > 4,6 еВох > 9,999 • 10", т. е.
попадает в область, машинной бесконечности). Полезно также нормировать по-
линомы, уравнения и другие выражения так, чтобы вычислялись числа, дале-
кие от машинного нуля и бесконечности.
ГЛАВА 2
ОСНОВНЫЕ ЧИСЛЕННЫЕ МЕТОДЫ И ИХ ПРОГРАММНАЯ
РЕАЛИЗАЦИЯ
2.1. ВЫЧИСЛЕНИЕ И ТАБУЛИРОВАНИЕ СПЕЦИАЛЬНЫХ ФУНКЦИИ
Некоторые из-широкораспространенных специальных функций микрокаль-
куляторы не могут вычислять по встроенным в них микропрограммам. Однако
их можно выразить через доступные для вычислений функции и вычислять по
специально составленным программам.
К указанным функциям относятся гиперболические функции, выражаемые
через экспоненциальные [6]:
shx=(ex-l/e*)/2,
chx = (ex+l/ex)/2,
th x = sh x/ch x,
cth x = 1 /th x.
Программа 1. Вычисление гиперболических функций. Ввод: х= РХ
Рех Р2 f Fl/x — 2 4- РЗ С/П F2 f Fl/x
+ 2 -г Р4 С/П F3 f F4 -г С/П Fl/x С/П
БП Р0
Программа 1 позволяет вычислять на микрокалькуляторе «Электроника БЗ-21»
все эти функции для любого х. Фрагменты этой программы можно использо-
вать самостоятельно.
Обратные гиперболические функции (ареафункций) имеют решения в опре-
деленных диапазонах изменения аргумента к Гб]:
arshx = ln (x-f-Д/1 +х2), — со < х <Z со,
archx = .ln (хт]/х2—1), х>1,
arth х— In 1/ — * ' * , — 1 < х < 1,.
у х—1
/х+1
---г > % > 1.
х— I
Программа 2. Вычисление ареафункций. Ввод: х— РХ.
Р8 Fx2 1 + F/ t F8 + Pin Р2 0 0
РЗ Р4 Р5 F8 1 + Р7 1 t F8 — Р6
Рх < : 0 7 F8 Fx2 1 —- F/ t F8 + Pin РЗ
F7 t F6 — /-/ F/ Pin Р5 БП Р+ F7 Рх 2 > 0
Р+ F7 t F6 ч- F/ Pin Р4 F2 С/П БП Р0
Программа 2, в которой используются условные переходы, обеспечивает
установление допустимого интервала изменения х и вычисление тех ареафуик-
ций, для которых х попадает в допустимый для них интервал. Если х выходит
за этот интервал, на индикатор микрокалькулятора «Электроника БЗ-21» вы-
водится знак 00. Функция arshx вычисляется для любого х. Пример вычислений
дан в табл. 2.1.
Таблица 2.1
Результаты вычисления ареафункций
К arshx—РХ archx=P3 arthx=P4 arcthx—Р5
1,175201 1 0,583628 00. 1,259472
1,313035 1,086372 0,771936 00. 1
0,761594 0,702396 00. 0,999998 00.
—2 —1,443636 00. 00, 00.
Выше отмечалось, что микрокалькуляторы «Электроника БЗ-21» не имеют
микропрограмм вычисления обратных тригонометрических'функций. Ряд про-
грамм для их вычисления описан в [2]. Ограничимся приведением программы
3 (см. табл. 2.1), по которой вычисляется arctg х при х — ± оо с точностью до
0,09°.с помощью нелинейной аппроксимации:
80,67% .
arctg х =.. .......... ..........
V1 +1/1 + х2+0,805х2
Программа 3. Вычисление обратных тригонометрических функций. Ввод: х -»
P2 Fx3 1 — Px < : о x /-/ F/ t F2 XY 4-
ПП F4 P4 — P5 F2 ПП F4 P6 — P7 F6
С/П P8 Fx2 0 , 8 0 5 X 1 + P3
F8 Fx2 1 + F/ . t F3 + F/ t F8 XY
8 0 . 6 7 X 9 0 XY B/O
Остальные функции вычисляются по известным соотношениям
arcsin х=arctg (х/Д/1 — я2)»
arccos х = л/2—arcsin х,
arcctg х=л/2—arctg х.
При нажатии клавиши С/П получаем arctg х — РХ = Р6. Остальные функции,
если х попадает в область их определения, заносятся в регистры 4,5 и 7. При
1 значения arcsin х и arccosx не вычисляются, а содержимое регистров 4 и
5 не меняются. Результат (угол) получается в градусах.
Обширной сферой применения программируемых микрокалькуляторов яв-
ляется формульный счет и табулирование формул. Число примеров такого при-
менения неограничено. Обычно при табулировании формул программу составля-
ют так, чтобы получались данные для заполнения колонок таблиц. Расчетные
формулы целесообразно нормировать. В качестве примера рассмотрим вычисле-
ние длительности импульса ta обычного транзисторного ждущего мультивибра-
тора по формуле
<и , Г„ ^Ко^б + ^к)
г L ^к + ^ко^б
при различных температурах Т, вызывающих изменение обратного тока коллек-
торного перехода
Т — 20°С
/ко(П=/ко(200С)2
где т — постоянная времени времязадающей ДС-цепи; Pg и RK— сопротивле-
ния резисторов в цепи базы и коллектора; Ту — температура удвоения обратно-
го тока коллектора.
Допустим, надо составить таблицу значений Т, /ко (Т) и talx при дискрет-
ных значениях Т, отличающихся на величину ДТ = 10° С. Сформируем
сетку значений Т: 7'п = 7'п_1+ 10. По программе 4 последовательно вычисля-
ются Т, /ко (Т) и /и/т согласно формулам и можно составить требуемую табли-
цу (табл. 2.2) при нажатиях единственной клавиши С/П.
Программа 4. Вычисление Т, /ко (Т) и /и/т транзисторного мультивибратора
(ввод Та = Р2, Ту = РЗ, /ко (20° С) = Р4, R6 = Р5, RK = Р6, Ек з= Р7)
F2 2 0 — t F3 + t 2 хУ t F4
X Р8 С/П t F5 х t F7 4~ P, F5 t
F6 + t F8 X t P/—/ -X- /-/ 2 + Pin
С/П F2 1 0 + P2 С/П ’ БП PC
Таблица 2.2
Результаты расчета по. программе 4 при
^=—20° С, 7’у = 8сС, /ко (20° С)= 1 • 10-6 А, ДБ=Ю6-Ом, Рк = 5,Ы03 Ом,
£к=10 В
1 T, °C -20 — 10 0 + 10 + 20
10~8A *и/т 3,125 0,692982 7,432544 0,692755 17,67768 0,692219 42,04481 0,690942 100 0,687929
Описанные и подобные им расчеты легко выполняются и на микро кальку-
ляторах других типов. Они относятся к относительно простым, хотя и весьма
распространенным.
2.2. РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИИ
Вычислительные возможности программируемых микрокалькуляторов по-
зволяют автоматически вычислять неизвестные систем из двух и трех линейных
уравнений. Программа 5 обеспечивает решение системы из двух уравнений
«1* + М = н.1
с2х + b2y = с.2[
при последовательном вводе по столбцам alt а2, bt, Ь2, с± и с2 (после ввода каждого
коэффициента нажимается только клавиша С/П). Значения х и у получаются со-
ответственно в регистрах X и Y.
Программа 5. Решение системы из двух линейных уравнений на микро-
калькуляторе «Электроника БЗ-21»
Р7 С/П Р4 С/П Р8 С/П Р5 С/П Р6 С/П РЗ F4
t F8 X Р2 F7 t F5 X t F2 — Р2
F3 t F8 X Р, F5 t F6 X t Р/—/ —-
t F2 — Р, F4 t F6 X Р, F7 t F3
X t р/—/ — t F2 -4- ж I Р/—/ С/П БП XY
Для системы ♦
2х — у = 3,1
Зх 4" у — 7, J
введя коэффициенты 2,3. —1,1, 3 и 7, получим х = 2 = РХ. Нажав клавишу XY,
получим у = 1.
На микрокалькуляторах «Электроника БЗ-21» нельзя полностью автом’ати-
чески вычислять неизвестные хь х2 и xs системы из трех линейных уравнений
4* с2х2 4* с3х3 — а4,
а5х1 + аех2 4- с7х3 = а8,
4- 4* СцХ3 == Ola-
(2.1)
Однако на нем можно вычислить главный определитель этой системы
01 ц2 а?
Д = Оз «в а.-.
а9 а10 аи
и вспомогательные определители, получаемые заменой первого, второго и третье-
го столбцов столбцом свободных членов а4, а8 и а12:
а4 Са а3 ai а4 as Gj G? G4
Д1 = С8 Ср с, . д2= g^ о.ц g? • As — 05 g6
°12 <*10 °11 ай а12 atl a10 a12
Тогда по методу Крамера |7]
х4 = Aj / А, х2 = Д2 / А и х3 = Д3 / А. (2.2)
Определители Д, Дх, Д2 и Д3 могут вычисляться на микрокалькуляторе
«Электроника БЗ-21» по программе БП84, приведенной в приложении 1 и ис-
пользуемой при параболической аппроксимации кривых с минимизацией сред-
неквадратичной погрешности методом наименьших квадратов. Значения xt,
хг и х3 вычисляются по формулам (2.2) в непрограммируемом режиме.
Большее число шагов программы в микрокалькуляторе «Электроника БЗ-34»
я большее число регистров памяти позволяют ввести в нег.о полную матрицу
реэффиииентов системы (2.1), расположив их в регистрах в естественном поряд-
ки расположения клавиш:
а, = Р7 а2 = Р8 а3 = Р9 а4 = РА
а5 = Р4 ае = Р5 а7 = Р6 ае = РВ ,
а8 = Pl а10 = Р2 ап - РЗ cI2 = PC
а также реализовать вычисления хь х2 и х3 методом Крамера по программе
ПП1/34 пакета программ, приведенных в приложении 2. Перед пуском этой про-
граммы следует очистить операционный стек, нажав клавиши Сж f f f
В/О Для системы
4х, -|- 0,24х2 — 0,08х3 = 8>
0,09%! 4- Зх2 — 0,15х3 = 9,
0,04хг — 0,08х2 + 4х3 = 20
вычисления дают xt — 1,9091982: х2 = 3,1949644 и х3 = 5.0448073 при времени
счета около 1 мин. В программе ПП1/34 регистры стека используются как 6v
ферные, при этом обеспечивается последовательная замена столбцов определи-
теля Д столбцами свободных членов. Определители вычисляются с обратным
знаком, что не сказывается на знаке хг, xs и х3.
„(Метод Крамера в общем случае не экономичен по числу арифметических
операций Лучше результаты дает метод исключения переменных при прямом
ходе— метод Гаусса. Прямой ход реализуется алгоритмом:
Ь ~~ » ^6 := ^6 ^2^» ^7 ” ^7 — ^8 := Ср — С.4Р,
6 = , а10 = а10 — а2Ь, Сц = а,, — a3b, а12 = с12 — atb,
b — aitJ а3.
Здесь запись вида с6 = ае — а2Ь означает, что выражение (св — а.гЬ) записы-
вается после вычислений в регистр памяти, где раньше был коэффициен: (!в.
Затем находится оставшаяся переменная х3 и организуется обратный ход:
х3 = (Ди — as Ь)!(аи — а7Ь),
х2 = (ае — CjX3)/a6, х4 = (а,, — atx2 — а3х3)/а7.
Программа, реализующая метод Гаусса на микрокалькуляторе «Электрони-
ка БЗ-34», дана в приложении 2 (ПП2/34). Сравнение ее с программой ПП1/34 по-
казывает, что для системы из трех линейных уравнений метод Гаусса не дает
заметного выигрыша по программной реализации по сравнению с методом Кра-
мера. Ряд других программ, в том числе реализующих итерационные методы
решения систем линейных уравнений, описан в [2]. Там же описана методика
решения в полуавтоматическом режиме систем из более трех уравнений.
2.3. РЕШЕНИЕ НЕЛИНЕЙНЫХ УРАВНЕНИИ
Нелинейные уравнения легко приводятся к виду
F (х) = 0*. (2 3)
Расчет корней х, (или одного корня х) сводится к установлению интервала
[с, Ь] существования корня, в пределах которого F (х) меняет знак один раз.
Для этого применим метод проб, при котором задаются рядом значений хи опре-
деляют знаки F (х). Если между какими-то значениями х = а и х = b F(x) по-
дучается с разными знаками, то полагают, что интервал существования корня
[о, 6] найден Далее сужением [a, 6] добиваются уточнения корня с заданной
степенью точности
* Программы для решения алгебраических уравнений, у которых F (х) —
степенной многочлен одной переменной х, даны в книге |2|.
При методе простых итераций (2.3) приводится к виду х — f (х). Взяв ну
левое приближение х — х0, получим Xi = f(xv), при х — х, получим х2 — I (xt)
и т. д., т. е. в общем случае итерационный процесс описывается уравнением
*п+1 ~ f (Хп)' (2-4)
Программа 6. Метод простых итераций. Ввод: х0 = Р2.
Р2 F2 ... f F2 XY Р2 — Рх = О FO F2 С/П
Программная реализация этого метода на микрокалькуляторе «Электроника
БЗ-21» (программа 6) весьма проста, занимает один регистр памяти (в нем форми-
руются текущие значения х) и всего 11 шагов. Итерационный процесс сходится,
если выполняется условие [8—13]
If (х)| < 1. (S.5)
Скорость сходимости оказывается тем выше, чем сильнее выполняется это не-
равенство.
Для электронных цепей с резко нелинейными приборами (диодами, тран-
зисторами и т. д.) условие (2.5) часто не соблюдается (в этом случае х—напря-
жение или ток). Это наряду с необходимостью предварительной оценки условия
(2.5) ограничивает применимость данного метода.
Для ускорения сходимости используется метод Ньютона (метод касатель-
ных). При этом методе шаг итераций, т. е. разность (хп+1 — хп), делается об-
ратно пропорциональным производной f (х), т. е.
е Xn+i = Xn—f(xn)/f (хп). (2.6)
Сходимость обеспечивается при
f (х) Г (X) > о. (2.7)
Программная реализация метода Ньютона описана в [2]. Однако его практичес-
кое применение затруднено из-за необходимости оценки производных f (х) и
f" (х), а также выполнения условия (2.7). Это относится и к другому класси-
ческому методу — методу хорд, при котором
f (*п) (Ь—хп) f (х„) (х„—а)
*п+1— Хп , или Хп-}-1 — Хп— г
f(b)—f(xn) f(xn)—f(a)
причем берется одна из формул в зависимости от того, на каком конце интервала
1а, Ь] соблюдается условие сходимости (2.7). Оба метода чувствительны к погреш-
ностям округления, а скорость сходимости их сильно зависит от вида функции
/ (х) и ширины интервала [а, Ь].
При практических расчетах на микро-ЭВМ предпочтение следует отдавать
методам, имеющим улучшенную или даже безусловную сходимость при широкой
интервале [а, 6]. Например, в большинстве электронных устройств с нелинейны-
ми приборами, имеющими монотонные вольт-амперные характеристики, целе-
сообразно считать а = 0, а b — Е, где Е — напряжение питания. Тогда корень
U =х заведомо лежит в интервале [0,£]. Обычно известен и знак F (U) при U =
= х = 0 или U = х' = Е.
При монотонных F (х) на интервале [а, Ь] абсолютную сходимость обеспе-
чивает метод половинного деления. При его применении не требуется анализ
условий сходимости, преобразований функции F (х) и оценки производных
/ (х). При методе половинного деления интервал [а, Ь] делится пополам. Затем
выбирается тот полуинтервал, на котором F (х) меняет знак, он вновь делится
пополам и т. д. Выбор интервала осуществляется сменой границы — берется
та, на которой знак F (х) противоположен знаку F (х) в середине интервала.
Программа 7. Метод половинного деления. Ввод. хл = Р2, Дх0 = РЗ, п ==
= Р4.
F3 2 -г РЗ f F2 + Р2 -г Psin Рх = 0 РХ
F2 С/П .................. ...........................
t F4 XY Р4 X Рх < 0 РО F3 /—/ РЗ БП РО
Реализация метода половинного деления (программа 7) описана в [2] Она
ваиимает 26 шагов и 3 регистра памяти. В регистр 2 заносится левая граница
интервала хл — а, в регистр 3 — начальная ширина интервала изоляции корня
дх0 = (Ь— «), в регистр 4— любое число (например, Т1) со знаком, совпа-
дающим со знаком F (хл).
К сожалению, эта реализация метода половинного деления неэкономична
по числу шагов программы и числу занятых регистров памяти. Счет останавли-
вается по критерию максимальной точности, т. е. в пределах точности вычисле-
ния функции F (х) верны все 7—8 знаков результата. Такая точность в практи-
ке расчета нелинейных цепей явно избыточна и ведет к большому времени вы-
числений, даже когда нужно знать результат с точностью до р = 2...4 верных
знаков. Ввод критерия окончания счета вида )хп+1 — хп\ < е усложняет про-
грамму и требует использования еще одного регистра памяти для записи е, от-
личного от машинного нуля.
Метод поразрядного приближения к корню можно рассматривать как ме-
тод проб с поразрядным формированием значений хп. Он реализуется следующим
обобщенным алгоритмом [14]:
1. Формируется ряд значений
с шагом Дхдг, вначале (при N = 1) равном Дх^.
2. Вычисляется F (хп+1) и проверяется условие
F(xn+1)<0. (2 8)
3. Если (2.8) выполняется, организуется возврат к п. 1.
4. Если (2.8) не выполняется, от значения Хп-ц отнимается Дхл, (т. е. делается
шаг назад, компенсирующий лишний шаг вперед), после'чего'Дхд, делится на
показатель разрядности М метода, т. е.
Дхм + 1 =&xN[M.
5. Проверяется условие
Ax2V_|_j<8., (2.9)
и если оно не выполняется, организуется возврат к п. 1.
6. Если (2.9) выполняется, счет прекращается и получается значение х с точ-
ностью до в.
При М = 2 метод поразрядного приближения аналогичен методу половин-
ного деления, если, взять Дхг = Дх0. При Дх, < Дх0 метод поразрядного при-
ближения реализует выделения интервала изоляции корня х методом проб
с равноотстоящими значениями хп с последующим уточнением его методом по-
ловинного деления.
Особо следует отметить случай, когда М = 10, т. е. реализацию метода по-
декадного приближения. При этом значении Дх( целесообразно брать равным
условной единице измерения (например, 10 В, 1 В, 0,1 В и т. д.). В последую-
щем Дхх уменьшается в 10, 100, 1000 раз и т. д. Если учесть, что наиболее ве-
роятной цифрой каждого десятичного разряда является цифра 5 (средняя между
О и 9), то с учетом двух лишних шагов при каждой смене Дх^ число итераций
составит
п as (5 + 2) р = 7р.
Строгий учет п сложен. Отметим, что с ростом М растет число итераций с
шагом Дх^, но сам шаг меняется реже. При малых М меньше число итераций с
Шагом Ахдг, но растут потери времени счета из-за увеличения числа операций
При частой смене Дхдг, сопровождаемой .двумя «лишними» шагами. Практи-
ческая проверка показывает, что обычно оптимальное значение составляет
3—5. При подекадном приближении время вычисления зависит от х. Оно мини-
мально, если х = 0, и максимально, если все знаки х девятки.
Программа 8. Полуавтоматический метод подекадного приближения. Ввод;
хг - Р2, Дхг = РЗ.
F2 | F3 + Р2 ............. Рх < О РО F2
t F3 — Р2 С/П F3 1 0 4- РЗ БП РО
Программа 8 реализует метод подекадного приближения с выдачей пооче-
редно каждой цифры результата при каждом нажатии клавиши С/П. Эта програм-
ма занимает 20 шагов и 2 регистра (хп берется из регистра 2). В регистр 2 перед
пуском программы заносится граница хг интервала изоляции корня, а в регистр
3 — начальное значение шага Дх(. Пользователь имеет возможность оператив-
но останавливать счет, если приближенное значение х далеко от нужного или
если достигнутая точность х достаточна. На практике это существенно умень-
шает время вычислений при р = 2...4.
Программа 9. Автоматический метод подекадного приближения. Ввод.
хг — Р2, Дх, = РЗ.
я F2 t F3 + Р2 ............... ................
.......... Рх < 0 РО F2 f F3 — Р2 F3 1
0 РЗ 1 ВП 3 /—/ — Рх < 0 РО F2 С/П
Программа 9 обеспечивает выдачу результата с точностью до 8 = 10—’,
вписанного в нее. Изменив показатель степени 3, можно легко перестроить
программу под другую точность х. Программа занимает 26 шагов и 2 регистра
памяти. Отметим, что программы 9 и 10 выдают на индикатор все верные цифры
результата, что избавляет пользователя от наблюдения последующих произволь-
ных цифр, получаемых при М =/= 10.
Программа 10. Метод поразрядного приближения. Ввод: хг = Р2, Дх, = РЗ
в = Р4.
F2 t F3 + Р2 ... Px<0 Р0 F2 f F3 -
Р2 F3 М 4-' РЗ t F4 — Рх < 0 Р0 F2 С/П
Программа 10 позволяет оперативно менять s и реализует поразряднса
приближение с М, вписанным в программу. Значение М можно по желанию и<-
менять. В общем случае мантисса х выдается с 7—8 разрядами, но точность ре-
зультата определяется величиной в (при s = 10-3 точны три знака после запя-
той). Эта программа занимает 23 шага и 3 регистра памяти.
Программа 11. Метод поразрядного приближения по критерию макси-
мальной точности. Ввод: хг = Р2, Дх! = РЗ.
F2 | F3 + Р2 .......... Рх < 0 Р0 F2 f
F3 — Р2 F3 М 4- РЗ Psin Рх = 0 Р0 F2 С/П
Программа 11 реализует критерий максимальной точности, т. е. выдает
результат с точностью до 1 последнего знака мантиссы. Остановка производится
фрагментом программы ...... Psin, Рх =0 Р0 F2 С/П при уменьшении
Дхп до машинного нуля. Эта программа занимает 21 шаг и 2 регистра памяти.
Для контроля и сопоставления описанных программ вычислим прямое на-
пряжение U на диоде, подключенном через резистор R к источнику питания Е На-
пряжение U — х в этом случае определяется из решения нелинейного уравнения
(Е — U)1 R = I (U) = 0, где 1 (U) = /0 — 1) — вольт амперная характе-
ристика диода. Таким образом, (2.3) имеет вид
F(U)=E-U-RI0 (ev£7-l)=0.
Фрагмент программы, по которому вычисляется F ([/) при Е — Р5, R — Р6>
/о = Р7 и v = Р8 следующий:
F2 | F8 X Ре1 1 — f F7 X f F6
X f F2' + /—/ t F5 +
Для обеспечения сходимости метода простых итераций можно перейти от
экспоненциальной формы записи вольт-амперной характеристики диода к лога-
г,ифмической. Тогда
, Е-V"1 In (/п//0+1)
R R
а в программу 6 надо вписать фрагмент (1/v = РЗ, 70 = Р4, Е = Р5, R = Р6)
f F4 4- 1 + Pin t F3 X Р8 F5 f
F8 — f F6 f
Метод простых итераций дает схождение к корню в этом случае с двух сторон,
т. е. приближения I/j, t/n+1 поочередно становятся то больше, то меньше
77 Иногда это нежелательно. В частности, в этом случае невозможна остановка
программы по простому критерию заданной точности (Un — Un+1) '< е. Этого
недостатка не имеет метод итераций с усреднением нелинейной зависимости
U (/) «диодного» вида или I ((/) «пентодного» вида на каждом шаге итераций.
Процесс итераций для зависимости U (/), проиллюстрированный на
рис. 2.1, а, соответствует уравнению
, Е Е
n+1 я+tfncp R+U(in)Hn '
где Rnop = U — усредненное (статическое) сопротивление нелинейного
прибора, определяемое наклоном прямых 01, 02, 03 и т д. Для прибора с нели-
нейной зависимостью I (U) «пентодного» типа (рис. 2.1, б)
II _ Р __Rnvp_
n+1 Rnc»+R
При первом приближении Д > /Jpuc. 2.1, а) и [7, > U (рис. 2.1, б) значения fn
и Un монотонно стремятся к 1 и U. Сходимость возможна и при 0 < 1х <Т или
RI (^п)
Un
При максимальной точности вычислений число итераций метода с усред-
нением нелинейности в 1,5—2 раза больше, чем у метода простых итераций. Од-
нако если в программу 6 вместо операции — Рх—0 ... ввести операцию — Psin
Рх — 0 .. или — t F7 — Рх < 0 ... (е=Р7), то для разумной точнос-
ти е — время вычисления методом с усреднением нелинейности можно умень-
шить в 2—4 раза.
В табл. 2.3 сопоставлены результаты расчета U для цепи с диодом, получен-
ные различными методами при Е = 0,5 В, R = 100 Ом, /0 = 10~6 A, v = 20/В,
Таблица 2.3
Сравнение результатов расчета I/ различными методами
Программа 1 Метод U, в Время счета tc. с
6 Простых итераций 0,2717421 75
6 Итераций с усреднением нелиней- 0,2717421 120 х
ности
7 Половинного деления 0,2717423 214
8 Подекадного приближения (7U—10) 0,2717423 200
9 Подекадного приближения (А4=10) 0,2717423 180
10 Поразрядного приближения (Л-1=3) 0,2717421 140
11 Поразрядного приближения (М = 3) 0,2717421 140
Рис. 2.1. Графическая иллю-
страция сходимости мето-
дов с усреднением нелиней-
ности (а, б), секущих — хорд
(в, а) и хорд в плоскости
вольт-амперных характери-
стик (д)
Axj = 0,1 Ви реализации максимальной точности. Согласно приведенным дан-
ным при реализации максимальной точности методы половинного деления и по-
декадного приближения примерно одинаковы по затратам времени на вычисле-
ние одного корня. Метод поразрядного приближения при М = 3 дает несколько
меньшее время вычисления. При е = 10~3 программы 8 и 9 позволяют получить
результат за tc ~ 80...85 с. Программная реализация методов поразрядного
приближения несколько проще, чем методов половинного деления. Достоинст-
вом последнего (программа 7) является возможность вычисления корня при функ-
ции F (х), нарастающей в пределах интервала [а, 6] или падающей с ростом х без
перестройки команд условных переходов.
Микрокалькуляторы «Электроника БЗ-34» позволяют реализовать более
сложные методы, обеспечивающие ускоренную или гарантированную сходимость.
Так, используя итерационную формулу (2.6), можно избавиться от необходимо-
сти вычисления производной f (х), заменив касательную секущей или хордой,
проходящей через точки [xn_j, f (хп_()1 и [xn, f (xn)]. Тогда получим реализацию
комбинированного метода секущих — хорд с помощью формулы
*п+1 — хп—f (хп)
Хп--хп—1
f (Хп)—/ (Яц-г)
При выборе х0 < Xj < х этот метод дает быструю монотонную сходимость
Как метод секущих (рис. 2.1, в). Сходимость возможна и при хи < х и Xj > х.
но при этом она немонотонна (рис. 2.1, а). При реализации этого мётода надо
задаваться двумя начальными приближениями: нулевым х0 и первым xt. Останав-
ливать вычисления следует по критерию
(*n+i—xn)2<s2 или [f(*n+i)— f(xn)P <а2.
Быструю сходимость обеспечивает итерационный метод Эйткена — Стеффен-
сона. При этом методе задаются начальным приближением х0 и определяют два
следующих приближения: xt = f(x0) и х2 = / (х5). После этого находится уточ-
ненное значение
х3 = (х0х2 — х|)/(х0 — 2х, + х2).
Если (хд — х0)а < е2, вычисления останавливают, в протицном случае за новое
нулевое приближение принимают значение х3 и описанный выше итерационный
процесс повторяется.
Гарантированная сходимость обеспечивается при решении нелинейных
уравнений методом Монте-Карло. В этом случае программно генерируются слу-
чайные числа Гц с равномерным распределением на интервале [0,1], которые
затем пересчитываются в интервал [а, 6] (см. далее § 9.4). Для любого случайного
числа хп в интервале [а, Ь] вычисляется F (хп) Если (для функции с F (а) > 0)
F (хп) > 0, то значение хп приписывается границе а, если F (хп) < 0, то значе-
ние хп приписывается границе Ь. Таким образом, интервал [а, Ь] сужается с обеих
концов по случайному закону. Вычисление прекращается, если (Ь— а) С е.
В ППЗ/34 даны программы решения нелинейных уравнений. Для типовых
задач, рассмотренных в данной книге, время вычисления методами секущих —
корд и Эйткена — Стеффенсона примерно в 2 и 4 раза меньше, чем методами поло-
винного деления (или Монте-Карло). Однако программная реализация первых
существенно сложнее.
Отметим некоторые дополнительные методы улучшения сходимости. Так, ес-
ли метод простых итераций для цепи с «пентодной» зависимостью I ((/) не схо-
дится, то можно представить I (U) обратной функцией, например введя в рассмот-
рение вспомогательную нагрузочную прямую характеризующуюся сопротивле-
нием Rn = (Е — Un)/HUn), и организовав итерационный процесс по формуле
Un+l = Un Rn/R=Un (E-Un)l(Rl (Un)).
При п оо Hn+j Un, Rn -> R, что возможно, если Еп-щ -> U. Сходимость
возможна при начальном приближении U„< U и Uo> U.
Быструю сходимость обеспечивает метод с усреднением нелинейности и сдви-
гом обеих границ интервала изоляции корня к корню (рис. 2.1, д). Его реализа-
ция требует, чтобы фу нкция / ((/) аналитически была определена и как II (/).
Задавшись двумя приближениями l)0 > U (в частности, Uo = Е) и Го < [
(в частности, = 0) итерационный процесс можно описать выражениями
Rn=(Un-u;r)/(in-/'ny,
= (£~ ^n+^i^nj/iRn+R);
Un+i=E ~^4-1
При Uo = Е, = 0 и е ~ 10“’ этот метод имеет наименьшее число итераций:
всего пять —• семь. Однако на каждой итерации нелинейная функция вычисля-
ется дважды как I (Un) и U (1п)- Поэтому выигрыш по времени вычислений
оказывается незначительным. Сходимость этого метода монотонная.
2.4. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Основной задачей численного интегрирования является вычисление собст»
венных определенных интегралов вида
ь
7=J f (х) dx.
а
Оно равносильно вычислению площади фигуры (рис. 2.2, «), ограниченной осью
х, кривой f (х) и отрезками прямых х = а и х — Ь. Обычно интервал [а, 6] раз-
бивается на N интервалов с шагом
h = Дх = (6 — а)! N.
В пределах шага h функция f (х) аппроксимируется полиномом той или иной
степени, что позволяет вычислить интеграл в пределах h аналитически. Погреш-
ность аппроксимации приводит к появлению остаточного члена R — разности
между вычисленным и действительным значениями интеграла. Величина R опре-
деляет погрешность выбранного метода численного интегрирования.
В простейшем методе прямоугольников (рис. 2.2,6) интеграл берется как
сумма площадей элементарных прямоугольников с основанием /г = Дх и высо-
той у,= f (хг):
N N
г V» . b~a
/ = z У1&х = —-— У yt.
. N jbni
г = 0 i = 0
Этот метод имеет низкую точность н применяется кпайне редко.
Значительно более высокую точность дает модифицированный метод прямо-
угольников, при котором yi берется в середине соответствующего отрезка Дх
(рис. 2.1, в):
Рис. 2.2. Графическая иллюстрация к методам численного интегрирования:
а идеальное; б — простым методом прямоугольников; в — модифицированным методом
прямоугольников, г, д — методом трапеций и Симпсона
В этом случае остаточный член
R = h*(b- а) Гм (?) /24.
где f"M (?) — максимальное значение второй производной на отрезке fa Ь]; ? -•
значение х, при котором производная максимальна.
При методе трапеций (рис. 2.1, г) f (х) аппроксимируется в пределах шага Лх
прямой, а интеграл вычисляется как сумма площадей элементарных трапеций
W N
, V yt+yt+^ Лг b~a v , ,
I=2d ------2---Л ~2лГ^ (yt+yi+1)
1 = 0 г = 0
с остаточным членом
R = - № (b - a) f"M (?)/12.
Широкое применение нашел метод Симпсона — параболической аппроксима-
ции/ (х) в пределах интервала 2Лх (рис. 2.1, д) В этом случае
/ = [/ (а) + 4/ (а + Дх) 4- 2/ (а + 2Дх) + 4Цат й ах; г --t
Hv* о
+ 4/(ft — Дх) 4-/(/>)]
при остаточном члене
t R=-Nh>f%(№0.
Число интервалов Дх при методе Симпсона должно быть четным Метод да-
ет точные результаты, если f (х) описывается полиномом до 3-й степени включи-
тельно.
Еще более высокую точность дает формула Уэддля для f (х), описываемых
полиномом до 6-й степени [6]:
Хе
Г 3ft
/= 1 f (x)dx = —(у04-5^1+p2+6j/3+j/4+5!fe+i/6)f (2.10)
«о
где у0...уй — ординаты f (х); ft = (хе — х0)/б.
Остаточный член формулы Уэддля
R (10/^ (?)4-9ftVV"i (ЭД/1400.
Высокую точность интегрирования обеспечивает метод Гаусса. При нем
f (х) преобразуется в функцию f (f), определенную на отрезке [—1, 1], причем
абсциссы х; ординат ее подбираются как корни полинома Лежандра с тем, чтобы
получалась высокая точность интегрирования Процедура интегрирования мето-
дом Гаусса довольно проста f 12.13].
1) производится замена переменной х и находится
xt = (ft 4- a)/2 + (ft — a) /;/2 (i = 1,2,3..... n).
где ft — нули полинома Лежандра заданной степени п, определяющей число ор-
динат f (х) в пределах шага й = Лх;
2) находятся коэффициенты Л,;
3) определяется интеграл
Г ft- п
/=J/(x)dx=—^2 (2.11)
a i==l
Значения t} и A t для п 4 даны в табл. 2.4.
Таблица 24
Значения f{ и /Г при интегрировании методом Гаусса
Я 1 ft At
1 1 0 2
2 1,2 +0,57735027 (+V1/3)’ 1
3 1,3 2 +0,77459667 (+=У0?6) 0 5/9 8/9
4 1,4 2,3 4=0,86113631 +0,33998104 0,34785484 0,65214516
Остаточные члены при интегрировании методом Гаусса для п—2, ат оп-
ределяются выражениями [13]:
1 (Ь-аХ1 V1
* s= 15750 ( 2 )
1 !Ь—а\9 rVII1
3472875 \ 2/ м ®'
Из них сле+ет, что метод Гаусса дает точное значение интеграла, если f (х) ап-
проксимируется полиномом до (2п — 1) го порядка. При п = 1 имеем результат,
аналогичный получаемому модифицированным методом прямоугольников.
Точность методов Уэддля и Гаусса также повышается разбиением предела
интегрирования [a, ft] на N частей. Тогда (2 10) и (2.11) последовательно применя-
ются для новых (суженных) пределов интегрирования N раз с суммированием
полученных частных интегралов.
Сравнение описанных методов показывает, что чем выше порядок метода, тем
выше точность (меньше остаточный член /?), но тем сложнее расчетные формулы и,
как следствие., сложнее их программная реализация. Следует отметить, что точ-
ность интегрирования с повышением порядка метода растет быстрее, чем время
вычислении. Поэтому при заданной (не слишком низкой) точности меньшее время
вычислений обеспечивают методы с высоким порядком (Симпсона, Уэддля. Гаус
са).
Программа 12. Метод прямоугольников. Ввод: h — Р2, (а -р 0,5/г) = РЗ,
b = Р4, 0 ~ Р5, данные f (х) при х = РЗ.
................. t F2 X f F5 + Р5
F3 | F2 Ч- РЗ f F4 - Ро О РО F5 С/П
Программа 13. Метод трапеций. Ввод: а = Р2, h — РЗ, й = Р4, 0 = Р5
(Р6 занят), данные f (х) при х = Р2.
ПП + Р0 4 t F5 Р6 F5 С/П F2 4 + Р5 F3 F2 + t t Р2 F4 F3 ПП X 4 Рх 2 < 0 t F4 F6 БП В/О
Программа 14. Метод Симпсона. Ввод а — Р2, Ъ = РЗ, N = Р4 (РЗ зз-
нят), данные f (х) при х = РЗ..
ПП РСх Р8 F3 t F2 РЗ .— t F4 + Р2
ПП FCx 1 ПП Р5 4 ПП Р5 2 БП 2 F8
3 — t F2 X С/П X t F8 + Р8 F4
1 •— Р4 Рх =f= 0 F F3 t F2 + РЗ ... в/о
Программа 15. Упрощенная реализация метода Симпсона. Ввод: а РЗ, N = Р4, h = (Ь — а)!N = Р5 (Р8 занят).
ПП 5 Р8 F2 X 2 БП PXY — Р4 Px=£0 FX РЗ ПП С/П X F3 t 5 1 t F8 F5 + ПП X -1- Р8 РЗ ... 4 F4 ПП 1 В/О
Для получения / нажать клавиши F8 3 4- f F5 X.
Программа 16. Интегрирование табличных моделей методом Симпсона.
Ввод: h=P2, yj=PX. После набора последнего tJt нажать клавиши В/О и С/П.
t F8 Рх = 0 4 XY Р8 С/П ] 4 X f F8
+ Р8 С/П t 2 X f F8 + Р8 С/П БП
Fl + f F2 X 3 4- Р7 О Р8 F7 С/П
В программах 12—16 на микрокалькуляторе «Электроника БЗ-21» реализу-
ются простой и модифицированный методы прямоугольников, метод трапеций и
три варианта метода Симпсона [2]. При реализации простейшего метода прямо-
угольников по программе 12 в регистр 3 записывается предел а, а не величина
(а 4- 0,5 й). В табл. 2.5 приведены результаты вычислений контрольного примера
1
/= 1 10e“*dx=10—------= 6,321205 (2.12)
J е
о
при различном числе N участков разбиения [а, />]. Преимущество метода Симпсо-
на по точности перед остальными в данном случае очевидно. Однако его про-
граммная реализация занимает 47 шагов и 4 регистра памяти. Следовательно,
для записи f (х) в программу остается только 13 шагов и 3 регистра (не считая
стекового). Поэтому при вычислениях на микрокалькуляторе «Электроника
БЗ-21» метод Симпсона применим только для интегралов с очень простыми подын-
тегральными функциями. При увеличении N с 10 до 50 время вычисления этим
методом возрастает (для подобных приведенному примеров) с 1 до 5—8 мин. Те-
кущие значения х берутся из регистра 3, регистр 8 является суммирующим.
Таблица 2.5
Результаты вычисления интеграла (2.12) различными методами
Метод I при N
4 10 20 50
Прямоугольников модифицированный Трапеций Симпсона 6,304773 6,354094 6,321342 6,318572 6,326472 6,321209 6,320547 6,322521 6,321205 6,321098 6,321414 6,321204
Значительно большие возможности для численного интегрирования имеют
микрокалькуляторы «Электроника БЗ-34». В приложении 2 даны программы для
этого микрокалькулятора, реализующие методы Симпсона, Уэддля и Гаусса
(для п = 2 и 3). В реализации метода Симпсона (программа ПП4?34) для записи
f (х) остается 57 шагов и 10 регистров памяти (включая регистр В, из которого
берутся текущие значения х). В качестве суммирующего используется регистр
С. Программа ПП5/34 реализует вычисления по формуле Уэддля при разбивке
пределов интегрирования на N частей. Для записи f (х) остается 38 шагов и 11 ре-
гистров (включая регистр А, из которого берутся текущие значения х). В програм-
мах ПП6/34 и ПП7/34, реализующих метод Гаусса при п = 2 и 3 соответственно,
также предусмотрена возможность разбиения интервала [а, 6] интегрирования
на N частей. Для записи f (х) в них остаются соответственно 44 и 33 шага програм-
мы.
Сравнение результатов интегрирования различными методами
на микрокалькуляторе «Элекроника БЗ-34»
Интеграл / и его точное значение Программа и метод N/n Значение / расчетное Время счета tc, мин
ПП4/34 8/3 0,90813815 1,2
Симпсона 16/3 64/3 0,907764 0,90753062 2,4 8,5
ПП5/34 1/7 0,9065265 1,2
5 о р X3 Уэддля 2/7 0,90743982 2,4
— — dx=0,9074539 4/7 0,90745405 5
J х*-|-16 ПП6/34 4/2 0,90737762 1,5
Гаусса 8/2 0,90745076 3,5
16,2 0,90745383 6,5
ПП7/34 Г аусса 4/3 0,90745631 2,5
ПП4/34 4/3 1,4173964 0,5
Симпсона 8/3 1,4036318 1
16/3 64/3 1,3999809 1,3949855 2 8
1 ПП5/34 Уэддля 1/7 2/7 1,3987159 1,3987174 1 2 .
| 1/2x4-1 dx= 1,3987175 ПП6/34 2/2 1,3987501 0,7
0 Гаусса 4/2 8/2 1,3987198 1,3987177 1,7 2,5'
ПП7/34 2/3 1,3987179 1
Гаусса 4/3 1,3987174 2
Реализация метода Симпсона и Гаусса (п — 3) на микро-ЭВМ «Электроника
ДЗ-28» дана в приложении 3 (программы ПП1/28 и ПП2/28). Время вычисления
на этой микро-ЭВМ примерно в 100 раз меньше, чем на программируемых микро-
калькуляторах (т.е. при высокой точности вычисления измеряется секундами, а
не минутами). Практически сложность f (х) не ограничивается.
Сравнение результатов интегрирования точными методами Симпсона, Уэд-
для и Гаусса (табл. 2.6) показывает, что при высокой точности (до последнего,
знака) преимуществами перед методом Симпсона по времени счета обладают мето-
ды Гаусса и Уэддля. При выборе метода пользователь должен оценить число ша-
гов программы и регистров для записи фрагмента программы, по которому вы-
числяется f (х), а также типовые времена счета tc при заданной точности.
Описанные программы применимы и для вычисления несобственных интег-
ралов, у которых предел интегрирования b = оо или f (х) -> оо при х -> х (оо)
в интервале [а, Ь]. В первом случае интеграл разбивается на части:
со С ОО-
J f (x)dx = J f(x) dx+J f (X)dxt (2.13)
a a c
причем с подбирается так, чтобы
Следовательно, вычисляется только первый интеграл в (2.13).
Если f (х) -> оо в интервале (а, Ь], то надо предусмотреть, чтобы значение
X (со), при котором f (х) -> оо, не совпало с дискретными значениями х, при кото-
рых вычисляются ординаты / (х). В этом случае метод Гаусса не удобен, так как
определение дискретных значений х при нем сложно — они находятся внутри от-
резков Дх. При других методах подбором N можно исключить попадание х (оо)
на дискретные отсчеты х. Однако метод Гаусса применим, если f (х) имеет особен-
ность при х = а или х = Ь, так как ординаты / (х) заведомо не попадают на гра-
ницы интервала [а, />].
2.5. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ
Расчет переходных процессов в нелинейных и импульсных устройствах ча-
ще всего базируется на решении систем дифференциальных уравнений. Это ре-
шение аналогично решению одного дифференциального уравнения 1-го порядка,
представленного в нормальном виде:
у' — dy/dx = / (х, у). (2.14)
Зависимость у (х) при известных начальных условиях у (0) и х (0) находится ин-
тегрированием (2.14) С шагом А = Дх:
хп+Дх
4/n+i = !/n+ f /(x,p)dx. (2.15)
Различные численные методы решения (2.14) отличаются в основном способом вы-
числения входящего в (2.15) интеграла. В качестве переменной х при расчете пере-
ходных процессов выступает время t или нормированное время ill, где т — на-
иболее характерная постоянная времени переходного процесса. Переменной у
являются меняющийся ток или меняющееся напряжение.
Вычисляя интеграл в (2.15) простейшим методом прямоуюльников, полу-
чаем
Уп+i = !/п + Дх/ (хп, уп),
что соответствует простому методу Эйлера 1-го порядка.
Интегрирование модифицированным методом прямоугольников дает форму-
лы модифицированного метода Эйлера 2-го порядка;
Р* ] =yn + ^xf (хп, Уп)12;
п + —
2
рп+1 = рп-|-Дх/(хп-|-Дх/2, у* j ).
«Ч------------------------------
2
Еще более точная параболическая аппроксимация / (х, у) приводит к урав-
нениям метода Рунге— Кутта 4-го порядка:
Уп+1 = Уп + (^1 + 2А2 + 2/г3 ф- /г4) /6,
где
А1 = Дх/(хп', уп)',
k2 = &xf(xn-\-kx/2, yn + kil'Z);
ks — &xf (хп4-Дх/2, Pn+^2/2):
й4 = Дх/(хп + Дх, yn+ka).
(2.16)
Эти методы на микрокалькуляторе «Электроника БЗ-21» реализуются прог-
раммами 17—20 [2]. Чем выше порядок метода, тем больше шагов занимает его
программная реализация и тем больше время вычислений на одном шаге интегри-
рования. Однако точность вычислений растет быстрее, чем время их проведения.
Поэтому при заданной (не слишком низкой) точности результат можно получить
быстрее методами более высокого порядка.
Программа 17. Простой метод Эйлера. Ввод: х (0) = Р2. h = РЗ, у (0)
= Р4, (xn = Р2, уп = Р4)*.
F3 f F2 + Р2 ПП Fx t F3 X f F4
+ Р4 С/П БП РО ... B/O
Программа 18. Модифицированный метод Эйлера. Ввод: Л/2 = Г2
(х (0) — й/2) = РЗ, у (0) = Р4, (уп = Р5, : «п = РЗ)*.
ПП 1 ПП 1 + Р4 ( 2/П БП РО Р5 F2 f
F3 4- РЗ t Г ?2 X f F4 4- В/О
Программа 19. Метод Рунге-Кутта. Ввод: /г/2 = Р2, х (0) = РЗ, у (0) =
= РХ, (уп = Р7, хп = РЗ, Р8 — занят) *.
Р7 Р8 3 X Р4 ПП F5 Р4 ПП Р, 4- Р4
ПП F5 4- Р4 F7 + Р7 ПП Р, Зч- С/П
БП РО F2 | F3 + РЗ
Ч 1 F2 X | F8 4- Р7 F4 4- В/О
Программа 20. Упрошенная реализация метода Рунге— Кутта. Ввод:
Л/2 = Р2, х (0) = РЗ, 3 у (0) = Р4, у (0) = РХ (уп = Р7, хп = РЗ, Р8 — занят)*
Р7 Р8 ПП F4 ПП Рч- 4- Р4 ПП F4 4- Р4
F7 4- Р7 ПП Р4- 3 4- С/П F2 | F3 4-
РЗ
... * | F2 X f F8 4- Р7 F4 4- Р4 В/О
К сожалению, реализация широкораспространенного метода Рунге — Кутта
4-го порядка на микрокалькуляторе «Электроника БЗ-21» сложна. В программе
19 для записи у' (х, у) остается только 19 шагов п 3 регистра памяти, что недо-
статочно для решения большинства решаемых на практике нелинейных дифферен-
циальных уравнений. В упрощенной программе 20 число шагов увеличено до
24, но каждый пуск надо производить нажатием двух клавиш: В/О и С/П.
В приведенной в приложении 2 программе ПП8/34 реализации метода Рун-
ге — Кутта 4-го порядка на программируемом микрокалькуляторе «Электро-
ника БЗ-34» для записи у' = f (х, у) остаются 52 шага и 9 свободных регистров,
что позволяет решать достаточно сложные нелинейные дифференциальные урав-
нения.
Для контроля программ можно решить простейшее дифференциальное урав-
нение
у' = dy/dx = — у/х,
аналитическое решение которого заведомо известно и имеет вид у (х) = ехр (х/т).
Это позволяет в первом приближении оценить точность вычислений и минималь-
ное время счета одного шага. Результаты контрольных вычислений даны в табл.
2.7 при шаге Дх = 0,1 и т = 1. Согласно табл. 2.7 метод Рунге — Кутта 4-го
порядка и имеет высокую точность (верны 6 знаков после запятой). Однако сле-
дует учитывать, что на практике погрешность аппроксимации нелинейных вольт-
амперных характеристик электронных и полупроводниковых приборов редко
бывает менее 2—5%. В этом случае вполне оправданно применение более простых
методов, например Эйлера. Уменьшение погрешности при этом достигается умень-
шением шага h — Дх.
В приложении 3 дана программная реализация метода Рунге—Кутта 4-го
порядка на микро-ЭВМ «Электроника ДЗ-28» (программа ППЗ/28). Применение
микро-ЭВМ этого типа обеспечивает примерно на два порядка большую скорость
вычислений и практически снимает ограничения на сложность вписываемой в про-
грамму функции у' = f (х, у).
При большом шаге h — Дх может наблюдаться неустойчивость решения. Для
ее устранения надо выбрать шаг заметно меньше минимальной постоянной Bpei
* В незаполненную часть программ вписывается фрагмент вычисления
/ (хп, Уп) при значениях хп и уп, которые надо брать из указанных регистров.
Таблица 2.7
Сравнение численных методов решения простейшего дифференциального
уравнения
</т ехр(—//т) Результат решения методом*
Эйлера простым Эйлера модифици- рованным Рунге—Кутта 4-го порядка
0,5 0,6065306 0,59049 0,60707576 0,6065306
1 0,3678794 0,3486784 0,36854098 0,3678790
1,5 0,2231301 0,2058911 0,2237323 0,223130
2 0,1353352 0,1215766 0,13582248 0,135335
* Время вычисления на одном шаге этими методами составляет соответственно 4, б
и 18 с
мени цепи или использовать неявные методы (см. § 7.2). Для опенки точности на
практике выполняют решение при уменьшенном вдвое h и считают, что точность
характеризуется верными р цифрами, совпадающими в полученных двух резуль-
татах — при шаге h и Л/2.
2.6. ОПТИМИЗАЦИЯ
Оптимизация заключается в установлении значений проектных параметров
х, у, г и т. д , при которых целевая функция М (х, у, 2,...) имеет экстремум. Мно-
гие задачи сводятся к одномерной оптимизации, т. е. нахождению экстремума
/М(х) — целевой функции одной переменной. Отметим, что если М (х) при х =
=хм имеет максимум, то функция М (х) будет иметь минимум (и наоборот).
Алгоритмы оптимизации детально описаны в [151.
Одномерный поиск экстремума Л4 (х) можно осуществлять методом пораз-
рядного приближения, задавая ряд значений х, начиная с х = х0 с шагом Дх v
(вначале Axw = Дх0) и оценивая знак приращения Д/И (х). Следует отметить,
что при однократном прохождении экстремума знак Д/И(х) может не изменяться.
Поэтому следует предусмотреть возврат на два шага после смены знака ДЛ4 (х),
после чего изменить ДхЛ, на Дхд,, р Ниже дана реализация одномерной оптими-
зации на микрокалькуляторах.
Программа 21. Одномерная оптимизация на микрокалькуляторе «Электро-
ника БЗ-21» [2]. Ввод: х0 = Р2, Дх0 = РЗ (текущие значения х — в Р2).
F2 t F3 + Р2 ........... ... ...........
... t F8 XY Р8 XY - Px>0 РО F3 /—/ 4
н- РЗ t F2 XY + XY - Рх = О Р f F2 С/П
Программа 22. Одномерная оптимизация на микрокалькуляторе «Электро-
ника БЗ-34» [21]. Ввод х0 = РА, Дх0 = РВ е/4 = Р0 (текущее значение х—-в РА,
/Ммакс заносится в PC),
О ПС ИПА ИПВ + ПА ПП 35 f ИПС
— Fx>0 19 XY ПС ИПА ПД БП 02 ИПА
ИПВ 2 X — ПА ИПВ 4 ~ ПВ ИПО
- Fx<0 02 ИПД С/П ........................... В/О
Первая из этих программ обеспечивает поиск минимума, а вторая — макси-
мума. Функция М (х) вписывается в незаполненную часть программ. Например,
Для определения хм функции М (х) = хе-3*, имеющей максимум, воспользуемся
программой 22 и впишем в нее фрагмент вычисления М (х)'. ИПА 2 1—1
X Fe* ИПА X. При х0 = 0, Дх0 = 0,2 и е/4=2,5-10"1 получим хм = 0,5
и /Имакс = 0,18395972 при времени счета около 100 с. Отметим, что в первой
программе вычисления останавливаются по равенству е машинному нулю.
11. ИНТЕРПОЛЯЦИЯ И ЭКСТРАПОЛЯЦИЯ
Отыскание значенийнелинейной функции у (х), заданной только п ордината-
ми в интервале аргумента х |х0, xn_j], называется интерполяцией, а за предела-
ми этого интервала — экстраполяцией этой функции. Простейшие виды интер-
поляции и экстраполяции реализуются на микрокалькуляторе «Электроника
БЗ-21».
Программа 23. Линейная интерполяция и экстраполяция по формуле
У (х) = Уо+ (х— хв) (у, — yB)/h,
где h — шаг, на который отстоят друг от друга абсциссы хв и х1 = х0 -ф ft.
Ввод: h — Р8, хв, ув, yt и х в регистр X.
Р5 С/П Р6 С/П Р7 С/П | F5 — Р4 F7 |
F6 — | F4 X f F8 -? f F6 + БП
t
При ft = 0,01, х0 = 2,47, у0 — 0,493244, у{ = 0,493431 и х = 2,475 получа-
ем у (х) = 0,4933375 (интерполяция), затем, вводя х — 2,465 = РХ и нажимая
клавишу С/П, получаем у (х) = 0,4931505 (экстраполяция).
Программа 24. Квадратичная интерполяция и экстраполяция по формуле
Лагранжа при равноотстоящих друг от друга абсциссах по формуле
у (хв + ph) = р (р — 1) y_i/2 + (1 — р2) ув + Р (р + 1) г/, /2,
где р = (х — х0)/й; у_г = у (х0 — й); ув = у (х0); й = у (х + й). Ввод: ft =
= Р8, y_i, yB,iJi- х0 и х в регистр X
Р4 С/П Р5 С/П Р6 С/П Р7 С/П f F7 — f
F8 РЗ 1 — X 2 -г- f F4 X Р2
F3 1 4-Х 2 -т- f F6 X | F2 4-
Р2 1 f F3 Fx2 — f F5 X t F2 4-
БП Fl
При h = 0,1, у—} = 0,934, yB = 0,9525, yit = 0,9661, x0 = 1,4 и x = 1,43
получаем у (x) = 0,9570945 (интерполяция), а при x— 1,55 у (x) = 0,9710625
(экстраполяция).
Большее число шагов программы микрокалькулятора «Электроника БЗ-34»
позволяет реализовать интерполяцию и экстраполяцию с помощью интерпо-
ляционного полинома Лагранжа с произвольным расположением до пяти абсцисс
и с одновременным вычислением коэффициентов Вв — Bi (по схеме, описанной в
116, с. 690]) этого полинома, представленного в.виде
у (х) = |[[В4 (х — х3) 4- В3] (х — х2) 4- В21 (х — xi) 4- BJ (х — х0) 4- Вв.
Программа 25. Интерполяция и экстраполяция полиномом Лагранжа при
произвольном расположении пяти абсцисс. Ввод: х0...х1 = Р0...Р4, ув = Р9,
y1...yi= РА...РД. Результат: 0= РХ, Вв = Р9, B1...Bi= РА...РД и (после
ввода х = РХ) у (х) = РХ,
ИПА ИП9 — ИП1 ИПО — — ПА ИПВ ИП9
— ИП2 ИПО — -г- ИПА — ИП2 ИП1 «
ПВ ИПС ИП9 — ИПЗ ИПО — -2- ИПА
— ИПЗ ИП1 — . -2- ипв — ИПЗ ЙП2 —
-л- ПС ИПД ИП9 — ИП4 ИПО — ИПА
* ИП4 ИП1 — — ИПВ — ИП4 ЙП2 «
— ИПС — ИП4 йпз — -2- пд 0 С/П
П8 ИПЗ —- ИПД X ИПС + ИП8 ИП2 —
X ипв 4- ИП8 ИП1 — X ИПА 4- ИП8
ИПО — X ИП9 4- БП 69
Пусть у (х) задана значениями х0 = 2,2, ув = 0,4860966, хг — 2,3, уг =
= 0,4892759, х2 = 2,4, у2 = 0,4918025, х3 = 2,5, у3 = 0,4937903, х4 = 2,4 и
Ui = 0,4953388. Вводим эти данные и, нажимая клавишу С/П, ожидаем появле-
ния на индикаторе цифры 0. При этом вычисляются Вв... Вл (Вв = 0,4860966,
BL = 0,031793, В2 = — 0,032635, В3 = 0,0189833 и В4 = — 0,0599965). Далее,
I набирая, например, х — 2,45 = РХ и нажимая клавишу С/П. получаем у (х)=
= 0,49285719 при точном значении 0,4928572.
Программа 25 может использоваться и для обратной интерполяции и экст-
раполяции, т. е. нахождения значения х, соответствующего заданному значению
у. Для этого значения х0...Хц вводятся в регистры Р9, РА...РД, а значения у0...
•У1 — в регистры Р0-..Р4. Обратная интерполяция является одним из методов
решения нелинейного уравнения (2.3), если положить у = F (х) — 0 и вычислить
х — х.
ГЛАВА 3
МОДЕЛИ АКТИВНЫХ ПРИБОРОВ ДЛЯ РАСЧЕТА
НЕЛИНЕЙНЫХ И ИМПУЛЬСНЫХ УСТРОЙСТВ
3.1. ОСНОВНЫЕ ТРЕБОВАНИЯ К МОДЕЛЯМ АКТИВНЫХ ПРИБОРОВ
ПРИ РАСЧЕТАХ НА МИКРО-ЭВМ
Модели, используемые при расчетах на микрокалькуляторах, должны удов-
летворять ряду требований: быть достаточно простыми и точными, иметь неболь-
шое число доступных для измерения или расчета исходных параметров, описы-
ваться уравнениями, содержащими функции, доступные для вычислений по мик-
ропрограммам, и др. Обычные модели не всегда удовлетворяют этим требовани-
ям. Например, универсальные модели биполярных транзисторов имеют более
25—30 исходных параметров [17—20], что не позволяет разместить их в регист-
рах памяти микрокалькуляторов. Поэтому целесообразно использовать упрощен-
ные модели, например описывающие приборы не во всех режимах, а только в не-
обходимых для расчета заданных схем. Поскольку многие второстепенные
параметры моделей часто не задаются в ТУ и достоверно не известны, то ис-
ключение их из упрощенных моделей не делает последние менее точными, чем
универсальные и гораздо более сложные модели.
При расчетах на больших ЭВМ стремятся автоматизировать процесс состав-
ления уравнений, описывающих работу электронных устройств. При расчетах
на микрокалькуляторах преобладает иной подход: уравнения составляются
вручную и нередко требуют упрощающих преобразований, например нормиро-
вания переменных и уменьшения их числа.
Часто расчет и моделирование радиоэлектронных устройств можно свести к
расчету их параметров по известным, подчас сложным, аналитическим выраже-
ниям. Такие задачи нецелесообразно решать на больших ЭВМ из-за отсутствия
стандартных программ, сложности программирования, большой стоимости ма-
шинного времени и зачастую сложной и долгой процедуры подготовки к вычисле-
ниям на большой ЭВМ. В этом случае весьма удобны микрокалькуляторы.
3.2. МОДЕЛЬ ПОЛУПРОВОДНИКОВОГО ДИОДА
Полупроводниковый диод можно представить в виде идеального диода,
вашунтироваиного барьерной Сц и диффузионной Сд емкостям^ и шунтирую-
щим сопротивлением /?ш (рис. 3.1). Часто считают 7?ш = оо. Последовательное
сопротивление выводов и областей р и п перехода диода учитывается введением
последовательного сопротивления Rn.
На основании анализа физических закономерностей работы идеального диода
вольт-амперная характеристика (ВАХ) может быть представлена уравнениями
(3.1)
/
I»
U=m<pT In
Н (3.2)
Рис. 3 1. Электрическая
модель диода
где /0 — обратный ток диода; <pr = kTlq — тепловой потенциал (при комнатной
температуре = 0,25 В); т = 1...2 — коэффициент, учитывающий влияние
рекомбинации-носителей в р — «-переходе; k — постоянная Больцмана;^ — аб-
солютная температура; q — заряд электрона. Значение 70 =» 10 4 ...10 г А для
германиевых диодов и на несколько порядков меньше
для кремниевых (при Т = 20° С).
Барьерная емкость диода
п _____________________________
Сб = со VА<Ро/(А<Ро—С),
где Д<р0 — барьерная разность потенциалов (доли
вольт); Со — барьерная емкость при напряжении на
диоде, равном 0. Учет Сб существен при обратном на-
пряжении на диоде U <. 0, так как при U > 0 преоб-
ладает диффузионная емкость. Показатель п — 2 для
резких и п — 3 для плавных переходов.
Диффузионная емкость диода обусловлена накоп-
лением в его структуре зарядов неосновных носителей
при их инжекции в прямом включении диода. Заряд неосновных носителей Qo,
накопленный в базе диода, можно определить, решая дифференциальное урав-
нение заряда
dQfi/dt + = 1Д (/),
которое отражает то обстоятельство, что скорость изменения заряда dQ(j/dt рав-
на разности между скоростью их поступления (т. е. тока /д) и скоростью рекомби-
нации их (член QfjlTji, где тн — эффективное время жизни носителей в базе.
При «д (/) = 1 = const dQddt = 0 и Сб = Значение тн обычно составляет
от долей до десятков наносекунд.
. Диффузионная емкость диода определяется как
Сд = dQf,ldU= /Тн/(т(₽г) = ДЛп- диф.
где Гд.диф находим из (3.2), дифференцируя последнее;
dU mtfT mtpT
rR.№*=-^-=777 ~ -~r
— и полагая, что при прямом включении / > /0. Обычно Сд> Сб уже при токах
порядка единиц миллиампер. Исключением являются диоды Шоткц, имеющие
Сд ~ 0.
3.3. МОДЕЛЬ ТУННЕЛЬНОГО ДИОДА
Туннельные диоды, в отличие от обычных, выполняются из сильнолегиро-
ванного полупроводника (германия или арсенида галлия). При такой степени ле-
гирования в них наблюдается туннелирование носителей через р— п-переход
при малых U (при узком переходе). С ростом U р— «-переход расширяется и
туннелирование носителей уменьшается. Однако при этом начинает сказываться
рост тока через р — «-переход за счет инжекции неосновных носителей.
Вольт-амперная характеристика туннельного диода (рис. 3.2, а) может быть
представлена как зависимость туннельной и диффузионной составляющих тока
от напряжения U. Такому представлению хорошо отвечает аппроксимация
{ = AUe-aU+D(^— 1), (3.3)
где первый член описывает туннельную, а второй диффузионную составляющие
тока. При этом величины а, Р, А и D легко определяются через параметры ВАХ и
параметры идеального диода (см. выше):
а= l/1/i; Р = 1/тфг;
А = е Iп/Ui, D - /0.
Достоинством данной аппрокси-
мации является ее непрерывность
во всем диапазоне изменения U.
Существует ряд других аппрокси-
маций [22, 23].
Инерционность туннельного
диода учитывается его общей ем-
костью Со. У современных тун-
нельных диодов нелинейная барь-
ерная емкость р — n-перехода Сп
составляет малую часть емкости
Со, обусловленной в основном
элементами конструкции. Это поз-
воляет считать Со = const. Обоб-
щенным параметром, характеризующим инерционность туннельного диода, яв-
ляется отношение пикового тока уп к емкости Со (чем больше /П/Со, тем быстрее
переключается диод). В ряде случаев необходимо учитывать еще и индуктивность
выводов (рис 3.2,6). У арсенид-галлиевых туннельных диодов типовые парамет-
ры следующие: иг ш 0,1 В; /п = 1...100 мА; Zo < 10~8 А и Со = 5...100 пФ.
Рис. 3.2. Вольт-амперная характеристика (а)
электрическая модель (б) туннельного диода
3.4. МОДЕЛИ БИПОЛЯРНОГО ТРАНЗИСТОРА
Одной из наиболее распространенных статических моделей биполярного
транзистора является хорошо известная модель Эберса — Молла [17, 21|. Она
дает связь напряжений и токов эмиттерного и коллекторного переходов:
I Гэо (сиэ/чт Л а1'ко (ес'к/ч>г_1).
1 Юдг 1 ССу
а / / (ЗЛ)
I ~ aN‘K0 (^э/фу 'ко ^"к/ФГ_Л
К 1—ССуу ССу 1
В таком виде модель сложна для расчета на микрокалькуляторах, поскольку в
нее входят семь исходных параметров: обратные токи коллекторного /ко и эмит-
терного /эо переходов, прямой aN в инверсный а; коэффициенты передачи тока
эмиттера, температурный потенциал и напряжения и £7Э. Хотя расчет
ВАХ по (3.4) на микрокалькуляторах вполне возможен, он занимает всю програм-
мную память. Однако существует ряд возможностей существенного упрощения
модели Эберса-Молла
Прежде всего отметим, что у современных диффузионных и планарных тран-
зисторов at < aN тс 1. Это позволяет записать уравнения Эберса — Молла в
более компактном виде:
/ — I (оиэ1ч>т .) I (риК./ч>Т_.\.
'э ~ 'эо Vе ~~.* I а/1 Ко Vе 1 /.
, _ , ( иЭ!Ч>Т , ] , ( ик/чт , 1 ’
Iv. ~ \с 1) —' ко 'е * 1 •
В схеме с общей базой заданной величиной удобно считать ток эмиттера,
а не напряжение на нем. Тогда, выражая член (е —1) в верхнем уравнении
(3.5) через другие параметры и подставляя этот член в нижнее уравнение, полу-
чаем простое выражение для семейства выходных характеристик:
(3.6)
Аналогичным образом, разрешая верхнее уравнение (3 5) относительно U&, по-
лучаем выражение для семейства входных характеристик
В активном режиме работы (17^ •< 0, иэ > 0 и |ОК >• Зсрг) эти выражения
еще более упрощаются и принимают вид:
/K==aN /э+/ко! (3-7)
{7э = Фт- 'п (7э/7эо)- (3-8)
Конечное усредненное дифференциальное сопротивление коллектора гк
можно учесть, добавив в (3.7) член 1/к/7к, а конечное последовательное сопротив-
ление базы Гб учитывается добавлением в (3.8) члена г^1э (1 — aN). В последнем
случае учтено, что через Гб течет ток /р = (7э — ~ 7э П — ад/)-
В схеме с общим эмиттером удобно выразить 7К и Ue = Uq через ток базы:
/k = Pn/b + (Pw+1) (3.9)
УБ=Ф7-1п('Б(Рл,+ 1)//30), (3.10)
где P,v=aw/(1— aN),
Дифференциальное сопротивление коллектора в этом случае г* = гн/$^ф
Его можно учесть, добавив в (3.9) член б/кэ/г*; гБ учитываем, добавляя
в (3.10) г61Б.
Из уравнений Эберса—Атолла можно найти напряжение (/КЭн биполярного
транзистора в области насыщения, т. е. при прямо-смещенных эмиттерном и кол-
лекторном переходах. Ограничимся приведением выражения, справедливого
при ₽д,/Б > (3...4) /к
а1
~ фт In---------------• (3.11)
10 н i+/k/(i+₽n)/b
Рекомбинацию носителей в эмиттерном переходе, как и в случае диода, мож-
но учесть, заменив во всех приведенных формулах срт на т ф7. (считаем, что
т = 1 у германиевых и т ас 1...2 у кремниевых приборов). Типовые параметры
модели можно оценить по справочным данным на транзисторы.
Динамические свойства биполярного транзистора обусловлены рядом меха-
низмов его инерционности. Основными из них являются конечное время пролета
неосновными носителями активной области прибора и влиянием емкости коллек-
торного перехода СКБ [21]. Эти механизмы учтены в электрической модели —-
эквивалентной схеме транзистора (рис. 3.3, с). Емкость
Сцб = С„бо Дфо/(Лфо—^кв).
Конечное время пролета ведет к частотной зависимости коэффициента переда-
чи тока базы
aN (ico) = aN е-1“'3“/(1 + ico/to^),
где t3a — время задержки переходной характеристики aN ((); ста = 1 /т — пре-
дельная частота коэффициента передачи тока базы; та— постоянная времени
переходной характеристики aN (/). В ряде случаев допустимо считать /за = 0.
Рис. S.3. Электрическая модель биполярного транзистора (а) и ее модификация иля гмгемы
с общим эмиттером (б)
В схеме с общим эмиттером удобно использовать
(рис, 3.3, б) с параметрами:
4=гк/(1+М’
Скб = Скб (l + ₽w);
Рд> (ico) ~ P/v/(l +ico/<»(j);
m[i = ma/(1+PA,) = l/Te.
элекгричесд^ tv мидсдь
Для расчета импульсных устройств удобной и физически наглядной оказыва
ется математическая зарядная модель биполярного транзистора:
dQe Qe ГР . ...
dl + т — т гв (О
тэкв Трэкв
<2б = га /k/^w,
(312)
где в активном режиме
тИзив“Тз + Скб
(7?к— сопротивление коллекторной нагрузки, активное), а в режиме насыщения
г(5экв = тн (Hi — время жизни неосновных носителей в базе в режиме насыще-
ния, часто считают тн — Тр). Усредненная емкость CKg различна при включении
и выключении транзистора [21|. В ключевом режиме считают Скд = 1,6 Скб(£^
при отпирании и Скб = 2,1 СКб (Er) при запирании транзистора, где Скб (А к)—
емкость СКБ при 4/кб = Ек
3.5. МОДЕЛЬ МАЛОМОЩНОГО ПОЛЕВОГО ТРАНЗИСТОРА
Из анализа физических процессов в маломощных полевых транзисторах при
условии постоянства подвижности носителей в канале получены уравнения для
выходных вольт-амперных характеристик МДП-транзисторов 121]:
'с= 6 [("з — <70) UQ—(1 + 4) О-13)
при Uq (Uз —
1 b
(ЗЛ4)
при UG> (U3 — AfJ)/(l + П).
Рис. 3.4. Электрическая модель
полевого транзистора
где /с— ток стока; Uc— напряжение на стоке;
UB — напряжение отсечки; U3 — напряжение на
затворе; b — удельная крутизна и г; — коэффи-
циент влияния подложки. Формулы (3.13), (3.14)
применимы и к полевым транзисторам с управ-
ляющим переходом.
Электрическая модель маломощного полево
го транзистора (рис. 3.4) может использоваться
для расчета как статических, так и динамических
режимов электронных цепей. Инерционность по-
левого транзистора обусловлена его емкостями;
«затвор—исток» Сзи, «сток — исток» Сси и «затвор — сток» Сзс.
В ряде случаев уравнения для нелинейной зависимости Ic (Uc, Д3) (3.13) и
(3.14) неудобны для расчетов, так как описывают ВАХ раздельно для указанных
значений Uc. Единое для всех значений Uc выражение дает аппроксимация ВАХ
вида
, _ 1 ь(из~ио')2 г, <.-Wc/(^3-^)l
с 2 1+т]
(3.15)
где k = const — коэффициент, подбираемый по наилучшему совпадению резуль-
татов расчета и эксперимента. Эта аппроксимация удобна для расчета импульс-
ных устройств. В ряде случаев приведенные выражения можно упростить, пола-
гая Т) = 0. В частности, значение q = 0 следует принимать для полевых транзис-
торов с управляющим переходом и МДП-транзисторов с подложкой, соединен-
ной с истоком.
3.6. МОДЕЛЬ МОЩНОГО ПОЛЕВОГО ТРАНЗИСТОРА
В настоящее время появилась серия мощных кремниевых ВЧ и СВЧ МДП-
транзисторов с большими мощностями (от 3 до 75 Вт) и рабочими токами (от 0,2 до
7,5 А). К ним относятся отечественные приборы КП901, КП902. КП904, КП905,
КП907, КП908 [24, 25].
Электрическая модель мощных МДП-транзисторов в первом приближении
аналогична модели маломощных приборов (см. рис. 3.4). Однако выражения
для выходных ВАХ маломощных полевых транзисторов неприменимы для мощ-
ных приборов. Прежде всего необходимо отметить, что из-за уменьшения под-
вижности носителей в канале мощных приборов при больших £73 зависимость /с
от (Д3 — До) в пологой области ВАХ отлична от квадратичной (3.13) и до напря-
жений U3 = 10... 15 В близка клиненной, т. е.
("з—^o) = /Ch+S^3,
где 7Сн = S(JB— начальный ток стока (при U3'= 0); UB = ± 2 В — напря-
жение отсечки; S — крутизна при больших Uc. Эта формула верна только при
(Д3— UB) > 0, при (Д3— £70)<0 1С = 0, так как транзистор запирается.
Используя такую передаточную характеристику и учитывая, что зависимость
/с от напряжения на стоке Uc близка к экспоненциальной, можно получить
следующее выражение для полного семейства ВАХ мощного МДП-транзистора
[25];
/c=S ((73 UBy [1—ехр ( Р^с/(^з — ^о))]. (3.16)
Аппроксимация (3.16) справедлива в первом приближении. При U3 > 1О...15'В
передаточная характеристика отклоняется от линейной и с ростом U3 посте-
пенно ограничивается ток стока. Для учета этого явления, обусловленного на-
личием последовательного сопротивления полностью открытого канала, можно
использовать более точную параболическую аппроксимацию передаточной харак*
теристики:
/G=/CH+S£73+^ = S(t73-^0 + W71),
где а < 0 и Ь = alS < 0. Параметры /Сн, S и а могут быть определены по ряду
экспериментальных значений /е и (73 с использованием критерия минимума
среднеквадратичной погрешности аппроксимации (методика параболической ап-
проксимации подробно описана в § 9.5).
С учетом параболической аппроксимации передаточной характеристики пол-
ное семейство ВАХ описывается формулой
/G = S (L73-l/o+bUl) [1 -exp (-р1/с/(1/3-1/0+ЫУ1))]. О- 'П
Коэффициент р в формулах (3.16), (3.17) может определяться по значению тока
стока /с = 7содля £73'= Uc = Uco = const (значения /со и (7С0 обычно явля-
ются паспортными параметрами). С учетом этих условий из (3.17) получаем
Цзо—^o~\~bU^o
$ (^со ^о+^со)
При упомянутой методике определения параметров аппроксимации (3.17) погреш-
ность вычисления обычно не превышает 5—20%, что вполне приемлемо для ин-
женерных расчетов.
3.7. МОДЕЛИ ЛАВИННОГО ТРАНЗИСТОРА
Лавинные транзисторы основаны на использовании явления лавинного ум-
ножения носителей в коллекторном переходе биполярного транзистора [26|.
Зависимость коэффициента умножения М от напряжения на коллекторном пере-
ходе описывается полуэмпирической формулой Миллера )
М = [1 —(ДКБ/ДМ)П ] *, (3.19)
где UM — напряжение лавинного пробоя коллекторного перехода; и* — пока-
затель, зависящий от типа транзистора (п* = 2...6).
Статические ВАХ лавинных транзисторов описываются уравнениями Эберт
са — Молла, если в них записать MIвместо /ко и aNM вместо ад,. Например,
учтя, что aNM > 1, следует записать
/K = (-awM/6—M7K0)/(awM-l). (3.20)
Обычно лавинные транзисторы используются при обратной полярности тока
базы (/Б < 0) и имеют в схеме с общим эмиттером S образные выходные ВАХ
При /к < | /Б | эмиттерный переход закрыт, aN = О и /к = М/Ко. С ростом
(7Кэ ~ ^КБ М ток IК Растет- и при 7к 5s 17 в! эмиттерный переход отпира-
ется. При этом /распределяется выражением (3,20). Нетрудно заметить, что рост
должен сопровождаться уменьшением напряжения UТак, при /к -> оо
1, что возможно, если
N _____
= aN> (3.21)
где — напряжение пробоя транзистора при обрыве базы.
По своим динамическим свойствам лавинные транзисторы делятся на ряд ти-
пов. Из них основными являются лавинно-инжекционные и транзисторы с об-
ластью объемного заряда, ограниченной смыканием.
Значение лавинно-инжекционных транзисторов близко к обычному зна-
чению (в це.'п-ткительности оно может быть существенно меньше, так как при
больших Ь , нирчна базы транзистора уменьшается). Динамическая зарядная
модель таких транзисторов описывается выражением (3.12), если aN заменить
иа aNM.
В лавинных транзисторах с ограниченной смыканием областью объемного
заряда в рабочем диапазоне токов коллекторный переход смыкается с эмиттер-
ным [27, 28]. При этом время пролета неосновными носителями активной области
прибора резко уменьшается, достигая значения
мин ~ (^б + ^по^цр*
где Wfj и 1п0 — конструктивная ширина базы и высокоомного коллекторного
слоя; Одр 107 см/с — скорость дрейфа неосновных носителей в сильном поле.
Значения тГнин часто составляют доли наносекунды.
Достаточно точную физико-математическую модель биполярного транзисто-
ра, учитывающую смыкание переходов в лавинном режиме [28], из-за сложно-
сти трудно использовать при расчетах на микрокалькуляторах. Для таких расче-
тов удобна бо'яее формальная модель динамического пробоя [26], в основе которой
лежит описание быстрого спада напряжения на коллекторе с уровня Uo UM
до уровня (7g с помощью приближенного выражения
п ________________
UK3 (/) ~ UM(i_е </Тг)+Л4о1-
или при большом начальном умножении /Ио > 1
п* ____________________________________________
^кэ(0 Vl-aw(l-e“i/T7’). (3-22)
Согласно (3.22) U^g (Л не может падать ниже уровня U&. В действительности
такой спад наблюдается в релаксационных схемах на лавинном транзисторе (он
легко объясняется зарядной моделью лавинно-инжекционного транзистора). К
спаду Пхэ W приводит также наличие последовательной эквивалентной индук-
тивности коллекторной цепи. Существование индуктивных свойств у лавинных
транзисторов вытекает и из общих свойств всех приборов с S-образными
ВАХ [29].
ГЛАВА 4
РАСЧЕТ СТАТИЧЕСКОГО РЕЖИМА НЕЛИНЕЙНЫХ .
ЭЛЕКТРОННЫХ ЦЕПЕЙ
4.1. РАСЧЕТ ВОЛЬТ-АМПЕРНЫХ ХАРАКТЕРИСТИК
ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ
Ряд задач синтеза нелинейных электронных цепей просто решается на осно-
ве расчета ВАХ полупроводниковых приборов. Так, для определения Е и R в
простейшей (рис. 4.1, а) и в более сложных цепях достаточно задаться положени-
ем рабочей точки (рис. 4.1, б) Up, 1р. Тогда Е = (£7Р + R/р) при заданном R
или R — (Е— Uр)//р при заданном Е. Такой расчет можно объединить с расче-
том температурной нестабильности рабочей точки.
По программе БП1 (см. приложение 1) реализуется расчет ВАХ диода по
формуле (3.2), причем 10 и <рг при заданной температуре Т рассчитывается по
формулам:
70(Т) = /0(20оС).2(Г_20°С)/ГУ; (4 1)
(Т 20°C \
(42)
При расчете ВАХ S, N и А-образ-
ной формы (рис. 4.2) необходимо
считаться о их неоднозначностью
при питании от источника напряже-
ния или тока. Так, / (U) по про-
грамме БП2 будет однозначной, если
задавать напряжение на туннельном
диоде и определять ток.
В некоторых случаях ВАХ рас-
считывается по нескольким форму-
лам с помощью разветвляющихся
программ. Так, в программе БПЗ для
расчета выходных ВАХ маломощных
полевых транзисторов с помощью операций с адресами 03—19 рассчитывается
разница между напряжением Uc и (U3— С70)/(1 г|). Если она отрицательна,
и положение ее нагрузочной прямой (6J)
расчет осуществляется по формуле (3.13). При положительной разнице выпол-
няется условие условного перехода х 0 (адрес операции 20) и программа пе-
реводится автоматически на вычисления по формуле (3.14).
4.2. S-. N- и добрачные ВАХ
Z/
Программы БП4 и БП5 служат для расчета семейства выходных ВАХ мощ-
ных МДП-транзисторов по формуле (3.17) и для определения параметра р по
формуле (3.18).
Программа БП6 предназначена для расчета выходных S-образных ВАХ
лавинных транзисторов. Для обеспечения однозначности расчетов уравнение
(3.20) представлено в виде
^кэ=+ <4
В программе сравниваются /к с 11 Б|—операции с адресами 00—03. Если (/к —
— |?Б|) < 0, происходит безусловный переход к операции с адресом 14, т. е. рас-
чет осуществляется по (4.3) сйэ= 0 (транзистор закрыт) В противном случае
выполняется переход на команду с адресом 12, т. е. нз регистра 2 вызывается
значение аЛ„ а расчет идет по (4.3) при аэ = a,v.
.-. 'л 7q
О
a)
Рис. 4 3. Двухтактный каскад на мощных МДП-транзисторах (а) и положение его нагрузоч-
ной прямой при разных /?'п (б)
Рис. 4.4. Зависимость выходной мощности
двухтактного каскада от /?'н При разных Е
Программа БП7 иллюстрирует
применение расчета ВАХ для инже-
нерного расчета выходной мощности
двухтактного каскада (рис. 4.3,а)
на мощных МДП-транзисторах и при-
веденного сопротивления нагрузки
Рн при Е = const по формулам:
Г„ = О,5(£с-4/со)/См; (4.4)
= (4.5)
где значение амплитуды тока стока
одного плеча 7Сн при амплитудном
значении напряжения на затворе £73м
вычисляется по формуле (3.17), за-
писанной в виде
'cm=-S (773м-7/о+
(4-6)
На рис. 4.4 приведены результаты расчета Р~ по программе БП7 для двух-
тактного каскада на мощных МДП-транзисторах КП904 с типовыми параметра-
ми: S = 0,502*А/В; Uo = 1 В; р — 1; b = — 0,012 и £73м = 15 В. Из них от-
четливо видно существование оптимального значения Ри = Рцо, при котором
Р~ максимальна. При RB > Rrb транзисторы недоиспользуются по току, а при
/?н < RnB падает коэффициент использования по напряжению из-за роста оста-
точного напряжения Uc0 (см. рис. 4.3, б). Расчет Р~ справедлив в области сред-
них частот, где влиянием инерционности каскада допустимо пренебречь, и при
идеальном трансформаторе.
Упомянутые программы расчета статических ВАХ различных полупровод-
никовых приборов могут входить (в виде подпрограмм) в более сложные про-
граммы, рассматриваемые далее.
4.2. РАСЧЕТ НЕЛИНЕЙНЫХ ЭЛЕКТРОННЫХ ЦЕПЕЙ
НА ПОСТОЯННОМ ТОКЕ
Расчет нелинейных цепей сводится к определению положения рабочих точек
активных приборов. Так, для простейшей цепи (см. рис. 4.1, а), к которой могут
быть сведены более сложные цепи, рабочая точка определяется из решения
системы уравнений
Рис. 4.5. Каскады с эмиттсрной ста-
билизацией:
а~ с. делителем; б — с отдельным
источником базового смещения
I =
I = f (иу, 1
(Е - U)/R, J
(4.7)
первое из которых — нелинейное уравнение
вольт-амперной характеристики нелинейного
элемента (НЭ), второе — уравнение нагрузоч-
ной прямой резистора R. Аналитического ре-
шения система (4.7) обычно не имеет. Однако
решение (4.7) возможно (наряду с прибли-
женными графическими методами) численными
методами, описанными в гл. 2.
Рассмотрим расчет типовых нелинейных
цепей иа биполярном транзисторе, показан-
ных на рис. 4.5. Схема на рис. 4,5, а сводится
к схеме на рис. 4.5, б, ток эмиттера 7Э которой определяется из решения нели-
ценного уравнения
„ /э
еБ—(!— аЛ7)7э^б+/Ко/?б—^Э^э — м<рг1п —-------=0 (4.8)
'эо
или
Г(1э)~~Б~ +^э+п/эо — ~7> ,п'“7 = 0, (4.9)
«б Кб 1Э0
где
/г=(ал,—! — Кэ/Кб); (4.10)
И==/КоЛэо ~ aN/al-
По программе БП8 параметры Rl, R2, Rg и £к схемы на рис. 4.5, а пере-
считываются в параметры
Е^Кб= Er/Ki = С6; (4.11)
1/Яб = 1/Я1 + 1/Я2 = Р8 (4.12)
схемы на рис. 4.5, б, затем вычисляется значение k — Р6 согласно (4.10); /эо=
— Р5 при заданной температуре окружающей среды Т согласно (4.1) и
m(pT m<pr(20°C) / Т-20°С \
Кб ~ Кб ( 1+ 293°С у=Р7’ (4ЛЗ)
где <рг (20°С) = 0,025 В. Эти параметры по программе заносятся соответственно
в ячейку 6 стека и регистры 8, 6, 5 и 7.
Программа БП9 является продолжением программы БП8 для схемы на
рис. 4.5, а или может использоваться самостоятельно при расчете схемы на
рис. 4.5, б. С помощью этой программы вычисляется /э методом подекадного
приближения при F (х) = F (/э) вида (4.9).
Оценим дополнительные возможности программ БП8 и БП9. Они могут ис-
пользоваться (наряду со специальными программами, описанными в § 4.3) для
расчета температурной нестабильности тока покоя усилительных каскадов. Ре-
вультаты расчета схемы на рис. 4.5, а с параметрами R} = 20 кОм; Rz =
=10 кОм; Ra = 1 кОм и = 10 В приведены в табл. 4.1.
Таблица 4.1
Результаты расчета параметров схемы на рис. 4.5, а
т +20°С +60°С
aN 0..95 0,96
/эо, мА, при Ту = 8° С 0,001 0,032
k —0,2 —0,19
rntpy/Re, мА 7,5-10~3 8,524-10-3
7Э, мА 2,235 3,266
Рис. 4.6. Ключи на маломощном (а) и
мощном (6) полевых транзисторах
Рис. 4.7. Передаточная характери-
стика ключа со схемой иа рис. 4,6, б
Дополнив программу БП9 элементарными вычислениями в непрограммируе-
мом режиме по формуле
£7к=£'к—(aN ^э+7Ко) ^к» (4-14)
можно оценить температурную нестабильность напряжения иа коллекторе, а рас-
сматривая £б как входное напряжение— построить передаточную характе-
ристику каскада со схемой на рис. 4.5, б, т. е. зависимость £7К = ф(ДБ) или
= ср (Двх). Взяв два близких отсчета в пределах линейного участка переда-
точной характеристики, нетрудно найти коэффициент усиления в режиме малого
сигнала по формуле
. ЛИ вых А<7К _ ^К1~ ^кг
^Б1 —АБ2
Для расчета остаточного напряжения ключа на маломощном ключевом тран-
зисторе (рис. 4.6, а) можно использовать программу БП10 решения нелинейного
уравнения
F (Uc)^Ec-UG-bRc[(U3-U0) Дс-(1+т]) </£/2]=0 (4,15)
методом подекадного приближения с записью е = 10-3 и ДДС1 = ^непосред-
ственно в программу. Программу удобно использовать при получении Uc =
= Пост ПРИ различных U3— Uo, вводимых в регистр X. В (4.15) использована
аппроксимация вольт-амперных характеристик, справедливая при U3 —
> Uc.
Расчет передаточной характеристики ключа на мощном МДП-транзисторе
(рис. 4.6, б) требует решения велинейного уравнения
F (Vc) = Ec-uc-SIb (U3-U0-b(J$ [1—exp (_pUc/(U3-Uo-bU$)] = O.
(4.16)
Для уменьшения числа шагов программы это уравнение целесообразно предста-
вить в виде
F(£7c) = S/?c(W3-£73+£70)X
X [exp —Д3 + До) —1] + (/с—£с = 0. (4.17)
С помощью программы БП11 вычисляется Uc — f (173) согласно (4.17) ме"
тодом подекадного приближения с записью е = 10-2 и &UCI = 1 В непосред-
ственно в программу. Для получения U при заданном U3 — Uo достаточно это
значение набрать на цифровых клавишах и нажать клавишу С/П. При этом авто-
матически значение U3—Uo заносится в регистр 8, а Д(7С1—в регистр 3. Пред-
шествующее значение сохраняется в регистре 2, что уменьшает число итераций,
нужных для приближения к новому значению UG. Расчет нужно начинать с боль-
ших U3 — Uo и соответственно малых Uc. Для уменьшения времени вычисле-
ния член (bU3 — U3 + Uo) вычисляется в начале программы один раз.
По программе ПП9/34 на программируемом микрокалькуляторе «Электро-
ника БЗ-34» уравнение (4.17) решается методом секущих — хорд, описанным в
$ 2.3. На рис. 4.7 показана расчетная зависимость Uc = f (U3) для ключа на
мощном МДП-транзисторе КП904, полученная при следующих данных: b —
= 0,01 1/В; р = 1; Ес = 35 В; /?с = 5 Ом и S = 0,5 А/В
4.3. РАСЧЕТ ТЕМПЕРАТУРНОЙ НЕСТАБИЛЬНОСТИ КАСКАДОВ
НА БИПОЛЯРНЫХ ТРАНЗИСТОРАХ
Известные схемы одиночных каскадов на биполярных транзисторах явля-
ются модификацией обобщенной схемы на рис. 4.8. Их можно получить из этой
схемы, полагая сопротивления тех или иных резисторов равными нулю или бес-
конечности.
Анализ приведенной схемы показывает, что приращение коллекторного тока
Д/к при изменении температуры Т определяется приращением обратного тока
коллекторного перехода Д/Ко> смещением входной вольт-амперной характерис-
тики на величину £ДТ (где £ — 2,5 мВ/°С — смещение на 1°С) и относитель-
ной нестабильностью ДРдУР^ коэффициента передачи тока базы в заданном диа-
пазоне температур [30]. При этом
ЁДТ A0W
+ +(/б + /К0) ₽w .
где 3 — коэффициент нестабильности, а
Кб = ^?1 (Rz + Rki)/[Ri + (R2 + ^К1)]
•— эквивалентное сопротивление в цепи базы.
Для 3 схемы на рис. 4.3 известно выражение [31]
8= (1 ф D)/(l - aN ф О),
Д/к—3 Д/Коф
(4.18)
(4.19)
п . Ra , Ri’1 . Ra Rkz
ГДе ~ R, + Rz + R2 + Ri R2
Для удобства расчета 3 на микрокалькуляторе преобразуем эти
уч)Я, что aN = Pw/(₽w + 1). Тогда получим:
(1 -ф D) -1 + — +— + + -3 •
(1+D)-1+ R, + R2 + /?2 + R.R2 ’
_____1 __________
(l + l/pw)(l+D) j
выражения.
(4.26)
(4.21)
3 =
Обычно при расчетах задаются положением рабочей точки на входной и вы
ходной вольт амперных характеристиках каскада (см. § 4.2 и относящиеся к не-
му программы). После этого по закону Ома рассчитывают сопротивления ре-
Рис. 4.8. Обобщенная схема
стабилизации каскада ча
биполярном транзисторе
Рис 4.9. Примеры к расчету коэффи-
циента нестабильности S
зисторов для выбранной схемы каскада. Завершает расчет по постоянному току
определение S и Д/к.
По программе БП12 рассчитывается S для обобщенной схемы, а по сопря-
женной с ней программе БП13 — значение Д/^. При совместном использовании
этих программ вначале необходимо найти значение
Д/КО = /Ко(П-^Ко(7’о) (4.22)
и нестабильность ДРд/Рд, оценить из справочных данных (см. например, [32]),
Затем по программе БП12 находится значение S и запоминается в регистре 8.
После этого вводится программа БП13, причем значения R3, Rt и S вводить не
требуется. Вычисленное значение Д/к сравнивается с допустимым, и если оно
меньше последнего, результат расчета считается удовлетворительным. В против-
ном случае следует повторить расчет, задавшись целью получить меньшее значе-
ние S. Часто величина S служит основным показателем температурной нестабиль-
ности каскада, и Д/к не рассчитываются. Достаточно хорошей температурной
стабильностью обладают обычные резисторные каскады при S < (3—5).
Уменьшить S можно, увеличивая Rg и уменьшая R& Однако при уменьшении
Rg может сильно возрасти влияние второго члена в квадратных скобках (4.18).
Иногда целесообразно рассчитать значения Д/^ при различных S, R3 и Rg, вы-
брав эти значения по минимуму Д/к.
Для иллюстрации расчетов на рис. 4.9 приведены две схемы каскадов с по-
стоянной составляющей коллекторного тока /к (20° С) ~ 1 мА, значения S и
Д/ к которых рассчитывались по упомянутым программам при Рд, = 100; ДРд,/
Рд, = 0,1; /ко (20°С) = 1 мкА; 7Б = 9 мкА; Д/ко = 15 мкА; /ко (60°С) =
= 16 мкА и (/Б + 7ко)=1О мкА. Для схемы на рис. 4.9, б расчет дает S = 101?
Д/к = 1626- мкА (при ДТ = 40°С), и для схемы на рис. 4.9, a S = 3,194 и Д/к =
= 85,2 мкА. .
4.4. РАСЧЕТ РЕЖИМНОЙ И ТЕМПЕРАТУРНОЙ НЕСТАБИЛЬНОСТЕЙ
КАСКАДОВ НА ПОЛЕВЫХ ТРАНЗИСТОРАХ
Стабилизация каскада на полевом транзисторе (рис. 4.10) обеспечивается со-
ответствующим выбором постоянной составляющей тока стока 7С, а также вве-
дением отрицательной обратной связи по току, осуществляемой включением
резистора RH. В усилительных каскадах рабочая точка полевого транзистора вы-
бирается на пологом участке выходной вольт-амперной характеристики. Обозна-
чив ток стока при С73 = 0 через /См и учтя падение напряжения на резисторе Ra,
получим [33]
zC = zCm(1— (7с — £3)/^о)2. (4.23)
Дифференцируя (4.23) по параметрам /См, Uo и Т, после простых преобразова-
ний и замены дифференциалов малыми приращениями находим
Д/с/^С 2]/7c7CmRh
«м = —--—‘ = 1Ч---------------
AZCm/ZCm Ц)
, д/сЛс 2(1- р^тгс)
Д(/0/(70 1+2//с7СмДи/Пи ’
...А/см +2fДПр
д/с 7с^дг \ у zc / До Д7’
” 1+2/7^Яи/(/0
(4.24)
(4.25)
(4.26)
Коэффициенты нестабильности по масштабному току стока
kK и пороговому напряжению показывают, какую чйсть
составляет относительнаи нестабильность тока стока
от относительных нестабильностей А/См//См и
&Uo/Uo. Они характеризуют стабильность каскада при
смене транзисторов. Величина A/q/AT характеризует из-
менение /с на 1°С.
Расчет по формулам (4.24) — (4.26) реализуется про-
граммой ВП14. Для иллюстрации расчета по ней рассмот-
рим следующий пример. Пусть &1Сгл/&Т = —0,002 мА/°С;
/См = 1 мА; Uo = — 1 В и ДТ/АПо = — 400°С/В (это
значение занесено как типовое в программу). Результаты
вычислений соответствуют типовым данным для полевого
транзистора КПС104В с управляющим р — п-переходом
(табл. 4.2). Из таблицы видно, что при больших /с -> /См
ток стока (как и /См) падает с ростом температуры. При уменьшении /с вели-
чина |Д/С/Д7'| падает и затем AlJkT меняет знак. Значение тока /с = /с0,
при котором А1С/АТ = 0, равно
. Uo А/ V2
со См дг 2/См дс,о }
Рис. 4. Ю. Каскад на
полевом транзисторе
с автоматическим
смещением
(4 27)
К сожалению, при выборе /с = 7С0 значительно уменьшается крутизна по-
левого транзистора и уменьшается коэффициент усиления каскада. Поэтому бо-
лее гибкой является стабилизация каскада с помощью отрицательной обратной
связи. Для устранения этой связи по переменному току резистор Ди шунтируетси
конденсатором большой емкости.
Таблица 4.2
Результаты расчета нестабильности каскада на полевом транзисторе
/?И, Ом 0 5 000
/6, мА 0,2 0,5 0,75 1 0,2 0,5 0,75 1
/гм 1 1 1 1 0,183 0,124 0,104 0,091
ко 2,472 0,828 0,309 0 0,452 0,103 0,032 0
Д/е/ДТ-10-’, А/°С 8,361 0,355 —9,199 -20 1,528 0.044 —0,952 — 1,818
4.5. РАСЧЕТ СТАТИЧЕСКИХ РЕЖИМОВ НА МИКРО-ЭВМ
С помощью микро-ЭВМ могут решаться существенно более сложные, чем рас-
смотренные в'§4.1—4.4, задачи расчета и моделирования статического режима ра-
боты нелинейных схем. Например, одной из таких задач является расчет напря-
жения на стоках Uc параллельно включенных мощных МДП-транзисторов с про-
извольными параметрами Sj, UOj, bt и pi, а также распределения токов их стоков
Jci при заданном напряжении на затворе U3 (рис. 4.11). Такая задача возникает
при проектировании многоструктурных мощных МДП-транзисторов, расчете
ключей на параллельно включенных мощных МДП-транзисторах, расчете уси-
лителей с распределенным усилением и т. д. Математически решение данной за-
дачи сводится к подбору такого значения Uq,при котором соблюдается
условие
£ __fj N
(^3 ^Oi “Ь U3) X
X [1 — ехр( —PtUcl(U3—UBi + biU^))]=0, <4.28j
и расчету
la = Si (U3-Uoi + bU$) [1—exp (-рг Uc/(U3-Uoi + bi £/*))]
для каждого транзистора. Если получаются /С(. < 0, программа должна интер-
претировать их как нулевые.
Для решения такой задачи необходимо большое число регистров (ячеек па-
мяти). Например, при N = 30 только для запоминания Sj, UBt, 6; и pi потре-
буется 120 ячеек памяти. В пакете программ микро-ЭВМ «Электроника ДЗ-28»
приведена программа ПП4/28, реализующая такой расчет при /V 30. В про-
грамме используется косвенная адресация ячеек памяти по четырем группам
последних. Адреса их указываются регистром-счетчиком 0000.
Массив S;, UBi, bt и pi размещается в 4М ячейках от 0001 до 4 М (при N=
= 30 всего 120 ячеек). При выполнении расчетов нужные параметры вызываются
из соответствующей ячейки памяти. По программе решается нелинейное уравне-
ние (4.28) методом подекадного приближения.
Порядок работы для данной программы следующий. Вводятся N, 8, массив
Sj, UBi, bt и Pi, Rc, Eq и U3 (после ввода каждого параметра нажимается
клавиша S). После ввода U3 программа автоматически переходит к вычислению
Uq с точностью до 8. Общий ток стоков /со всех транзисторов заносится в ЯП
1514, а токн /Ci.../Cw — в ЯП с номерами от 121 до (120 + N). При смене U3
достаточно набрать новое значение U3 и нажать клавишу S .
По описанной программе были рассчитаны зависимости /С1 и /со
для четырех параллельно включенных мощных МДП-транзисторов (рис. 4.12)
при следующих исходных данных: N = 4; е = 0,001; S4 = 0,15 A/В; Un =
= 1 В; 6'1 = 0,002 1/В; рг = 1; S2 = 0,15 A/В; UB2 = 1 В; Ь2 = 0,002 1/В;
рг = 1; S3 = 0,12 A/В; UB3 = 2 В; Ь3 = 0,002 1/В; р3 = 1; S4 = 0,18 А/В;
По4 — 0,5 В; t4 — 0,002 1/В; р4 =1; Rc = 25 Ом; Ес = 60 В. Например, для
U3 — 5 В получим Uq = 8,135 В; /С1 = 0,526 А; /С2 — 0,526 А; /сз =
= 0,3401 А; /С4 = 0,682 А и /со = 2,075 А.
Рис. 4.11. Параллельное включение мощ-
ных МДП-транзисторов
Рис. 4.12. Результаты расчета распре- у
деления токов четырех параллельно
включенных мощных МДП-транзисто-
. ров
Другой задачей является расчет
Uc = Uqct ключа (например, на
рис. 4.6, б) с учетом саморазогрева
мощного МДП-транзистора. Такой рас-
чет можно выполнить, моделируя про-
цесс саморазогрева на микро-ЭВМ по
следующему алгоритму:
1) находим температуру кристалла.
Т = UCICRT + Тв, (4.29)
где Тв— температура окружающей сре-
ды; UCIC — выделяемая мощность;
Rf— тепловое сопротивление, причем в
первом приближении полагаем Uc = О
и Т = То;
2) вычисляем температурозависи-
мые параметры
S (Г) = S [1 + as (Т — 20° С)]; (4.30)
Рис. 4.13. Расчетные зависимости напря-
жения на стоке МДП-транзистора в схеме
ключа рис. 4.6, б и температуры кристал-
ла от напряжения Us
Св (Т) = UB [1 + а(у(Т'—20° С)], (4.31)
Где as и a(J— температурные коэффициенты изменения крутизны и порогового
напряжения;
3) методом подекадного приближения находим значение UCN, решая транс-
цендентное уравнение
(£с—(Т) [П3 (Т) — t>Ug] X
X {1-ехр{-рДСЛ,/[(/3-У0(7')-6(/|]}} = 0, (4.32)
где Л' — номер приближения;
4) подставляя найденное значение UCN в (4.29), повторяем расчет е п.1 и
т. д. до тех пор, пока не будет соблюдаться условие
^CN Ucn— 1=8> (4.33)
5) при выполнений (4.33) прекращаем счет и получаем значение Uc с точно-
стью до е.
Таким образом, в программе необходимо организовать два итерационных
цикла. Один—внутренний — используется для решения трансцендентного урав-
нения (4.32), другой — внешний — для моделирования процесса саморазогре-
ва. Такой расчет осуществляется на микро-ЭВМ «Электроника ДЗ-28» (програм-
ма ПП5/28). Все параметры схемы и транзистора (кроме U3) последовательно за-
носятся в ячейки памяти с номерами от 0001 до ООН (S, UB, b, р, o.s, a(J, Ес,
Rc, То, RT, е) путем косвенной адресации к ням (счетчик организован в ЯП 0000).
После ввода U3 рассчитываются /с = PY и Uc = РХ. Значения Т, S (Т) и
UB (Т) заносятся соответственно в ячейки памяти 0015, 0106 и 0107. Например,
при S = 0,15 A/В; UB = 1 В; b = — 0,002 1/В; р = 1; as = — 0,002 1/°С;
Пу = — 0,005 1/°C (параметры мощного МДП-транзистора КП901); Ес =
= 60 В; 7?с = 50 Ом; Тв = 20°С; RT= 5° C/Вт; е = 0,001; U3 = 10 В получим:
/с — 0,927 A; Uc = 13,645 В; Т = 83, 25°С (отсюда видно, насколько сущест-
вен перегрев мощного МДП-транзистора по отношению к температуре окружаю-
щей среды). Из рнс. 4.13, на котором показаны рассчитанные по программе
ПП5/28 зависимости, видно, что с уменьшением Rc температурный режим ключа
существенно ухудшается. Для уменьшения остаточного напряжения Uq и тем-
пературы кристалла следует отпирать ключ большими U3 (более 15 В, но не
выше (73м = 30 В).
ГЛАВА б
СПЕКТРАЛЬНЫЙ И ЭНЕРГЕТИЧЕСКИЙ АНАЛИЗ
НЕЛИНЕЙНЫХ И ИМПУЛЬСНЫХ УСТРОЙСТВ
5.1. РАСЧЕТ СПЕКТРА ГРАФИЧЕСКИ И ТАБЛИЧНО
ЗАДАННЫХ ИМПУЛЬСНЫХ СИГНАЛОВ
Сигналы в импульсных и нелинейных устройствах резко отличаются от сину-
соидальных. Это делает особенно важным их спектральный анализ, включающий
оценку степени искажений сигналов, расчет отдаваемой на заданных частотах
мощности, определение коэффициента нелинейных искажений и т. д.
Спектр периодических несинусоидальных сигналов у (/) с периодом повторе-
ния Tj = l/fi и частотой повторения задается зависимостью амплитуд и фаз гар-
моник от частоты. Он определяется разложением в усеченный т членами ряд
Фурье функции у (/). Для последней, заданной N дискретными отсчетами yt =
= -у (ti) при (=1, 2.. N с шагом А/ = Tr/N, в тригонометрической форме
этот ряд имеет вид
т
у(0=Л+2 Mlcos (2лпМ+Ч>) =
п=1
т
"=^о+ 2 (^esin 2лп^ t+Accos2nnf1 (),
П = 1
где и— номер гармоники; А о— постоянная составляющая у (/).
I, Амплитуда синусной As и косинусной Ас составляющих
г,
2 С sin
Л,С(П=— \ 1/(0 (2пп^/)сИ
J cos
о
(5 1)
(5 2)
причем для определения As берется sin (2nn/t0> а для —соответственно
cos (2jinf1t) Амплитудно- и фазочастотная характеристики спектра определяются
выражениями;
А (Л = V(As(/)2+ Ас (Д2]; (5.3)
<р (/)== — arctg [As (/)/Ас(Д]. (5.4)
Для периодических у (/) имеют смысл частоты f = nflt где п — целые числа (номе-
ра гармоник).
Численные методы спектрального анализа сводятся к численному интегри
рованию (5.2) и определению А (/) и <р (f) по формулам (5.3) и (5.4). Их реализа-
ция на микрокалькуляторах довольно сложна. При вычислении As и Ас чис-
ленным методом прямоугольников [2]
^S,CJ—
Vi
sin
cos
2лп1 \
А/ /
(5.5)
и методом трапеций [34] точность спектрального анализа низка, так как входящие
в (Б-.2) быстроосциллирующие множители при практически приемлемом шаге
интегрирования At обусловливают ухудшение точности интегрирования по мере
роста п или / = nff. Уменьшение At требует использования неоправданно боль-
шого числа отсчетов у, функции у (t) и ведет к увеличению времени анализа.
Повысить точность интегрирования можно, применяя следующий метод [101.
Представим у (t) аппроксимирующей функцией на каждом шаге А/, произведение
которой на осциллирующие члены дает аналитически интегрируемую функцию.
В этом случае шаг А/ достаточно выбирать лишь исходя из точности аппроксима-
ции у (/), а не всего подынтегрального выражения (5.2). Тогда на ЭВМ осуществ-
ляются расчет N частных интегралов по точным формулам и их суммирование.
Простейшей для у (/) будет ступенчатая аппроксимация, при которой в пре-
делах шага At У1— у (it) = const. При этом ступенчатая функция аппроксима-
ции располагается слева от у (I), т. е. сдвинута на полшага (—Повысить
точность аппроксимации можно, устранив этот сдвиг, т. е. добавив к текуще-
му времени t величину + Lt!2. Тогда вместо (6.2) можно записать
„ N
2 хт
•^з.с /n„„f \ Vi Х
Tt(2nnft)
1Ы
x j cos [2яя^(/+Т')]а[2яя/* ('+?)]• (»«
(*—*{> а/
Выполнив интегрирование в (5.6) аналитически, после простых преобразований
получим
N
„ 2 / sin nnf, At \ хт sin . . .
Л’’в (П“ ~N ( mfr M )2 yt cos i2nnfl Д<‘>-
От (5.6) это выражение отличается корректирующим множителем перед знаком
суммы, меньшим 1. Это отличие существенно повышает точность расчета
^в,о (/)•
Иногда желательно разложение в ряд Фурье в синусоидальными членами, в
частности для периодических у (t) 0 при / = 0. Введя нормированную пере-
менную х =• &it = такой ряд можно записать в виде
/(*) = Л»+ У I А |51П(пх4-ф), (5.7)
п=1
где
N
2 fsinnn/N Xi gin / Sani \
N nn!N Vi cos ( n J
Фазовый сдвиг гармоник определяется выражением
<р (х) = arctg (Ло/Л,). (5.8)
Аналогично находится спектр непериодических сигналов, определенных
ва конечном промежутке времени от 0 до t0 (финитные сигналы). Их спектральная
плотность
S (Iw)-Sc+iSs=-S (ш) е1’’(“>,
причем расчет по описанному методу дает
G> Z • Л W
W У‘ со" <2я^-'
При атом
S (Л = V [se (Л2 + Se (f)sJ I (5.10)
<P (/) = - arctg [S„ (/)/Se /(/)!- (5.11)
Ha (5.9) и (5.6) следует, что при / — nft
Sa.o ASlCN S AN
At 2 At 2 *
т. е. АЧХ периодических и финитных колебании по форме идентич ны и отлнчают-
ся только масштабом. Поэтому их спектральный анализ может проводиться по
одной программе БП15.
Программа БП15 имеет ряд особенностей. Перед ее пуском в регистр 8 вво-
дится число N ненулевых отсчетов t/j, в регистр 5 вводится первый отсчет уъ
а на цифровых клавишах набирается число п (при непериодических у (/) значение
п задает f = n/i, где fa — 1//0, причем п может быть любым положительным чис
лом). После нажатия клавиш В/О и С/П вычисляется значение пп/N, обнуляются
регистры 2, 3 и регистр 3 счетчика /=(« + 2), а затем обрабатывается первый от-
счет. Величины sin (2 nni!N) и cos (2лш7N) вычисляются одной операцией (е“),
что сокращает время обработки каждого отсчета примерно до 5 с. После ввода
каждого отсчета yt нажимается клавиша С/П. По окончании ввода всех ненулевых
отсчетов суммы
•^1 sin / 2лн« \
cos \ N /
» » = 1
накапливаются в регистрах 2 и 3. Для перехода к вычислению величин
N
NASaC /s'mnn/N sin / 2лш \
2~ \ nn/N 4,4 cos ( /у )’
г = 1
* NA ] /~ (NA* у (NAc у
2 ~ \ 2 ) +Д 2 J
нажимаются клавиши БП 6 и С/П. Нажав еще раз клавишу С/П, получим tg ф =
= — (Д8Мс).
Для контроля программы вычислим спектр прямоугольного импульса с дли-
тельностью /и = 1 мкс, периодом Т\ = 4 мкс и амплитудой UH = I В. В табл.
5.1 представлены результаты расчета по программе [2], реализующей вычисления
по (5.5), и по программе БП15 при N = 32 (восемь отсчетов yt = 1). Как видно
из этой таблицы, описанный метод существенно повышает точность расчета S (/).
Таблица 5.1
Контрольный текст для программ спектрального анализа
f, кГц 250 500 750 1 000 1 250
S, Ю-’В/Гц БЗ-21 [2] БЗ-21 9,01764 9,00315 6,40728 6,36619 3,04488 3,00105 7,90569-10“’ 7,30867-10“’ 1,87503 1,80063
ф, рад БЗ-21 —0,883572 1,374446 0,490873 — —1,2762721
S,10~’ В/Гц ф, град БЗ-34 9,0031637 —50,624991 6,366198 78,759007 3,0010541 28,124997 1,5835548-10-’ 1,800632 —73,124981
S,10~’ В/Гц Ф, рад ДЗ-28 9,0031646 —0,8835735 6,3661936 1,374446 3,0010578 0,490875 4,87248-ю-6 1,8006278 —1,276272
S.10-’ В/Гц Точно 9,00316316 6,3661977 3,0010544 0 1,8006326
Следует отметить, что при использовании про-
граммы БП15 нельзя задавать п = 0, так как при
вычислении корректирующего множителя деле-
ние иа лп/N =0 приведет к переполнению реги-
стра X. Однако малые п можно задавать (напри-
мер, п = 10-в, что на практике эквивалентно за-
данию п — 0).
В качестве другого примера рассмотрим
спектральный анализ графически заданного не-
синусоидального сигнала (рис. 5.1). Так как сиг-
нал y(t) симметричен относительно оси абсцисс,
то четных гармоник в разложении не будет. Пусть
ординаты у (?) соответствуют примеру в [35, с. 240]
и для пеового полупериода определяются
табл. 5.2 (для второго полупериода они отрица-
тельны).
Вычисления организуем для ряда (5.7), для чего в программе БП15 заменим
вычисления tg <р = — ASIAC (5.4) на tg <р = Ас/As (5.8). Результаты вычислений
в сравнении с приведенными в [35] даны в табл. 5.3. Соответствие их высокое.
Большой интерес представляет вычисление спектров наносекундных импуль-
сов, частоты составляющих которых нередко измеряютси долями — единицами
гигагерц, где прямые измерения весьма сложны. На рис. 5.2 показана осцилло-
грамма импульса формируемого наносекундным релаксатором на лавиином тран-
зисторе. Выделим на ней интервал t0 = 10 нс, т. е. припишем импульсам условно
частоту повторения 0,1 ГГц. Составим таблицу значений ординат импульсов
(табл. 5.4). Результаты вычисления спектра импульса (рис. 5.2, б) по программе
БШ5 представлены на рис. 5.3.
Таблица 5.2
Ординаты y(t,) для рис. 5.1 .
i 1 2 3 4 5 6 7 8 9 10 11 12
y(tt) 7 И 13,5. 15,4 17,4 20,5 25,4 32,5 27.7 19,2 10 0
Недостатком программы БП15 является необходимость отдельно вычислять
угол <р по значению tg <р, так как в микрокалькуляторе «Электроника БЗ-21>
вычисление обратных тригонометрических функций не предусмотрено. Этого не-
достатка нет у подобной программы ПП10/34 (см. приложение 2). Данные конт-
рольного расчета даны в табл. 5.1. Время обработки одного отсчета по этой про-
грамме—около 10 с.
Более серьезным является другой недостаток — необходимость повторного
ввода всех значений у, при смене значения п (или f — п ft). При большом числе
отсчетов yj это становится утомительным, а время анализа сильно возрастает.
Таблица 5.3
Результаты спектрального анализа сигнала, форма которого приведена
на рис. 5.1
Метод А1С tg Q>i Л38 Азс А, tg <р,
Численный Графоаналитический [35] 25,32 25,3 —5,11 —5,23 .25,76 25,9 —0,202 —0,206 3,43 3,47 5,11 5,1 6 6 1,47 1,49
Рис. 5 2. Осциллограмма импульса,
формируемого релаксационным генера-
тором на лавинном транзисторе
Рис. 5.3. Рассчитанный иа микрокаль-
куляторе спектр выходных импульсов
релаксатора на лавинном транзисторе
Таблица 5.4
Ординаты осциллограммы на рис. 5.2,6 (Л/ = 0,25 нс, остальные
ординаты нулевые)
Ч, нс 0 0,25 0,5 0,75 1 1,25 1,5 1,75 2 2,25 2,5 2,75 3
иг, В 0 0,1 0,5 2,5 4,2 3,5 3,2 2,7 2 1,5 0,5 0,3 0,2
Этих недостатков практически нет в программе ПП6/28 (см. приложение 3)
спектрального анализа на настольной микро-ЭВМ «Электроника ДЗ-28». Благо-
даря использованию косвенной адресации ячеек памяти согласно программе обес-
печиваются ввод, запоминание и вывод до 150 значений yt. Поэтому при смене
значения f, для которого вычисляются S (/) и <р (/), повторять Ввод отсчет в t/.j
уже не требуется. Кроме того, скорость вычисления S (f) и <р (J) после ввода t/j
примерно в 100 раз выше, чем при ранее описанных программах для микрокаль-
куляторов. В табл. 5.1 приведены данные контрольного расчета по этой программе.
Часто возникает обратная задача — суммирование т членов ряда Фурье
(5.1). При т = 3....5 для этого можно использовать микрокалькуляторы «Элект-
роника БЗ-21» [2]. Программа ПП7/28 обеспечивает автоматическое разнесение
Ап и <рп по ячейкам памяти микро-ЭВМ «Электроника ДЗ-28» и суммирование до
т 75 членов ряда Фурье. Число т может задаваться любым до т — 75. В про-
грамме используется косвенная адресация ячеек памяти при вводе пар Ап, <рге
и их выводе в процессе суммирования (см. также подобную программу ПП27/34
для т 6).
При суммировании конечного числа гармоник разрывных функций у (0
следует считаться с эффектом Гиббса [16]. Он заключается в образовании выбро-
сов восстановленной функции у (t), амплитуда которых в местах разрыва может
достигать 18% от амплитуды перепадов у (/). При т -> оо длительность выбро-
сов /п -> 0.
5.2. РАСЧЕТ ЧАСТОТНЫХ И ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК
ЧЕТЫРЕХПОЛЮСНИКОВ ПО ЗАДАННЫМ ПЕРЕХОДНЫМ
ХАРАКТЕРИСТИКАМ
О способности линейных четырехполюсников передавать или усиливать им-
пульсные сигналы с заданными искажениями формы часто судят по их амплитуд-
но- и фазочастотной характеристикам. Они описывают зависимость от часто-
ты f коэффициента передачи К (/) и угла сдвига фаз <р (/) выходного сигнала
относительно входного.
Процесс снятия частотных характеристик 4-полюсников, особенно широко-
полосных, весьма трудоемок. Нередко он требует применения нескольких ге-
нераторов стандартных сигналов, перекрывающих требуемый диапазон частот.
Еще сложнее снятие фазочастотных характеристик в широкой полосе частот.
При этом одни только частотные характеристики не позволяют однозначно су-
дить о степени искажений импульсных сигналов при прохождении их через
четырехполюсник.
В то же время появление широкополосных стробоскопических осцилло-
графов (с эффективной полосой частот до 10—20 ГГц) и разработка импульс-
ных генераторов с длительностью фронта импульсов <1 нс на лавинных тран-
зисторах, туннельных диодах и диодах с накоплением заряда позволяют экс-
периментально наблюдать переходную характеристику 4-полюсников a (f), т. е.
их реакцию иа единичный перепад напряжения или тока.
В связи с этим существенный практический интерес представляет расчет
частотных и фазочастотных характеристик 4-полюсников по заданной переход-
ной характеристике. В основе его лежит известная связь между нормирован-
ной частотной характеристикой A (i со) и переходной а (/) [37]:
A (ico) = а (0)4- f a' (t) eimZ dt=,
о
= a(0)4-f а'(0 cos w/rf/4-i f a' (0sin totdt, (5.12)
о 0
где a' (t) — производная переходной характеристики, не имеющей начального
скачка; а (0) — начальное значение переходной характеристики; со = 2л/
На практике a (t) определяется на конечном интервале времени от 0 до t0.
Тогда (5.12) можно записать в виде
A (ico) = а (0) 4- Ас (со) 4- iAs (со).
где частотная характеристика
A (f) = 1/AS (f? 4- Ас
а фазочастотная
ср (f) = —arctg [Л8 (/)/Лс (/)],
причем
A8,c(f) = J a'(t) sj (2nft)dt, (5.13)
о
Если a (t) задана N дискретными отсчетами аг = a (t,). где I = 1, 2, .... N,
то в пределах шага Д/= tjN можно считать
а/ =а' (0) = (а;—ai-tJ/At.
Такая ступенчатая аппроксимация а' (I) означает сдвиг ступенчатой кривой «а
&tl%, приводящий к возникновению значительных фазовых погрешностей Для
устранения этого сдвига к текущему времени t следует прибавить величину
— At/2,. Тогда вместо (5.13) можно записать
Выполнив аналитически интегрирование (5.14), находим
N
, . / sinnfAt \ , sin ,
AS.C(J) = (-77—)У.(аг—аг-i) [л/Дг (2с —1)],
\ л/Д/ ] cos
Рис. 5.4. Интегрирующая /?С-цепь (а) и ее
переходная характеристика (б)
программа БШЬ рассчитываем /1 (/) и
tg ср (/) при множителе (sin л/Д/)/(л/А/)=
= 1. Для уточненйя A (f) он может вы-
числяться вручную. Программа ПП11/34
позволяет вводить и запоминать 11 зна-
чений at', от ав до — с использова-
нием косвенной адресации к регистрам
памяти. Поэтому при смене /А/ повто-
рять ввод а, не требуется. Кроме того,
эта программа выдает значения <р в пре-
делах ±180°. Программа ПП9/28 для микро-ЭВМ «Электроника ДЗ-28» обеспе-
чивает ввод и запоминание до 150 отсчетов а,- и вычисляет A (f) и ср (/) для
заданного f на два порядка быстрее, чем предшествующие программы для ми-
крокалькуляторов.
Таблица 5.5
Расчет Atf) и cp(f) по программам для различных микро-ЭВМ
f/t 0,05 0,1 0,159 0,25 0,5
A(f)*) БЗ-21 0,954 0,856 0,713 0,550 0,339
"0,953 0,853 0,706 0,535 0,305
4>°(f) — 17,4 —32,9 —46,6 —59,0 —76,1
A(f) БЗ-34 0,954 0,853 0,706 0,535 0,305
—17,4 —32,9 —46,6 —59,0 —76,1
4(f) ДЗ-28 0,954 0,853 0,706 0,535 0,305
Ф°(Л — 17,0 —32,9 —46,6 —59,0 —76,1
A(f) Точно 0,954 0,847 0,707 0,537 0,303
— 17,4 —32,1 —45 —57; 5 —72,3
*) Верхние цифры значения A(f) — вычисленные непосредственно по программе БП]6,
нижние — уточненные умножением на множитель (sin 3ifЛОДя/ДО, вычисленный на том же
микрокалькуляторе.
Для проверки правильности программ выполним контрольный расчет A (f)
и ср (f) для интегрирующей RC-nemt (рис. 5.4, а), переходная характеристика
которой (рис. 5.4, б) экспоненциальна: а (/) = 1 — ехр (—th), где x = RC,
а для A (f) и ср (f) заведомо известны аналитические выражения А (/) =
= (1/1 + (2л/Ч)а)—*; ср (f) — —arctg 2nfx. Взяв i = 1 с, N = 10, t0 = 5 с и
At = 0,5 с, определим a (t;) десятью отсчетами: 0,393; 0,632; 0,776; 0,864; 0.918;
0,95; 0,97; 0,982: 0,989; 0,993 (с точностью до трех цифр после запятой). Резуль-
таты расчета и точные значения A (f) и ср (f) даны в табл. 5.5.
5.3. РАСЧЕТ СПЕКТРА МЕТОДОМ БЕРГА
В резонансных усилителях и умножителях частоты (рис. 5.5) активные
приборы часто работают в нелинейном режиме. При этом импульсы выходного
тока при синусоидальном входном напряжении имеют форму отсеченных отрез-
ков синусоиды (рис. 5.6). Они характеризуются углом отсечки
е=— arccos ((Ео—UB)/(UmBX)],
где Ео = £3— напряжение смещения входной цепи; UB— напряжение отпи-
рания активного прибора; l/mEX — амплитуда входного синусоидального сиг-
нала. Предполагаем, что передаточная характеристика активного прибора ли-
нейна при UBX > VB.
Рис. 5.5. Резонансные каскады на электронной лампе (а), мощном полевом (б) и биполяр-
ном (s) транзисторах
Рис. 5.6. Передаточная характеристика резонансного каскада на мощном МДП-травзисторе
КП908 (а> и форма импульса тока стока (б)
Нормированные постоянная составляющая выходного тока и амплитуды
первой и высших гармоник определяются значениями коэффициентов Берга
137, 38]:
/0 sin 0—0 cos 0
а° 1М л(1—cos 0) ’
11т 0—sin 0 cos О
K' /м л (1—COS0)
1птп 2 sin «0 cos 0—п cos n0 sin 0
/м я п (п2—1) (1—cos 0)
(5.15)
(5.16)
(5-17)
Таким образом, спектральный анализ выходного тока методом Берга сводится
к прямым вычислениям по формулам (5.15), (5.17). Коэффициенты Берга рассчи-
тываются по программе БП17 [2] (определяются ап при любом п = 0, 1,2
и 1. д.).
5.4. РАСЧЕТ КОЭФФИЦИЕНТА НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ
МЕТОДОМ ПЯТИ ОРДИНАТ
В ряде случаев, например при расчете усилителей низкой частоты, кусочно-
линейная аппроксимация передаточных характеристик активных приборов
неприемлема. Если известна нелинейная передаточная характеристика, то ана-
лиз спектра, ограниченного первыми четырьмя гармониками, можно выполнить
хорошо известным методом пяти ординат [30].
Пусть необходимо вычислить спектр коллекторного тока усилителя
(рис. 5.7, а). Передаточная характеристика такого усилителя (рис. 5.7, б) стро-
ится как зависимость тока коллектора гк от напряжения на входе 1/ЕХ —
= (УБЭ (7б)+Яг^б- Допустим, что рабочий участок ее ограничен почти ли-
нейным участком—от значения iK = ij до гк = t&. Разобьем этот интервал на
Рис. 5.7. Схема трансформаторного однотактного усилителя мощности низкой частоты (а) а
его передаточная характеристика (6) с пятью ординатами
четыре равных отрезка и найдем пять ординат зависимости (I/BX) ; ei, is, /3,
'4и i5. Составив систему уравнений, описывающих разложение (f) в степенной
тригонометрический ряд [37], при отмеченных значениях iK, решение такой
системы можно получить в виде формул:
, 01 + !г>) +2 (е2 + й)
/ср“ 6 ;
, Qi—й)+(Ч—1$)
ml— 3 :
. (*i Ч~ *б)—2(з___0'1 + й)/2—tg .
ТП2— 4 - 2
, (0—(б)—2 (t2—14)___/т1—(t2—/4)
тз— 6 — 2 ;
. _ ((l~Hs)--4 fe + <4) ~~T~ 6t з _ .
'm« 12 —'m2—'ср + ез-
Три последние формулы преобразованы так, чтобы сократилось число шагов
программы БП18 [2], по которой вычисляются /ср, 1т1... /т4 и коэффициент
гармоник
fer= /^г + ^з+^^т!-
Для трансформаторного усилителя мощности низкой частоты на транзис-
торе КТ807 (рис. 5.7, а) и построенной обычным способом (использованием
графически заданного справочного семейства характеристик) передаточной
характеристики (рис. 5.7, б) расчет дает kr = 6,351793 • 10—2, или kr кг 6,35%;
/Ср — 0,2866666 А; 1т1 = 0,2433333 А; 1т2 = — 1,5 • 10~2 А; 1тз =
----3,333335 • 10~3 А; /т4 = —1,66666 • 10—3 А. Эти вычисления выполня-
ются и с помощью программы ПП 12/34.
5.5. РАСЧЕТ ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ
Энергетическими параметрами характеризуются сигналы и различные уст-
ройства (усилители мощности, генераторы и т. д,), генерирующие или усиливаю
щие эти сигналы. Энергетическими параметрами сложных сигналов (например,
импульсов) являются их вольт-секундные и вольт-амперные площади. Так.
если в интервале времени от начального /н до конечного tK сложное напряжение
меняется по закону и (/), то вольт-секундная площадь определяется как
'н
8и= J и (t)dt.
Эффективное значение периодически повторяющегося сигнала
ГБ. 18)
Для расчета данных параметров непосредственно пригодны программы числен-
ного интегрирования (§ 2.4), дополненные делением на 7\ и извлечением кор-
ня в (5.18). Выбор конкретной программы определяется сложностью подынтег-
ральной функции, свободными регистрами памяти и шагами программы микро-
калькуляторов.
. Энергетические параметры радиоэлектронных устройств определяются по
результатам спектрального анализа их выходных сигналов или временной за-
висимости выходного тока активного прибора. Например, для однотактного ре-
зонансного каскада (усилителя мощности
или умножителя частоты), используя коэф-
фициенты Берга, можно найти выходную
Рп и потребляемую Р„ мощности и КПД
на n-й гармонике:
Рп — («п Im)2/2R^;
Ро — ао^м^С’ ’>1 = Рп/Рог
где Rn — сопротивление нагрузки, пере- Рис. 5.8 Двухфазный мостовой выпря-
считанное в выходную цепь активного митель
прибора.
Так, для схемы на рис. 5.5, б при /м = 0,28 А; 0 = 72,54°; а0 (0) — 0,261;
ai (6) — 0,446 (рассчитывается по программе БП17) получим Рп = 1,971 Вт;
== 0,781 Вт и г; = 0,396 (п = 1).
Для усилителя низкой частоты (рис. 5.7, a) Pt = ltn\l2Rn' ~ ^ер^с*
г; = PJ Рв. В приведенном в § 5.4 примере RK = 30 Ом; /ср = 0,287 ,А: Imi =
= 0,243 А и Ек = 9 В. Следовательно, Рл = 0,886 Вт; Р„ = 2,583 Вт и i) =
= 0,343.
В выпрямителях угол отсечки 0 зависит от уровня выходного напряжения.
Например, для m-фазной схемы выпрямителя (на рис. 5.8 показана двухфазная
мостовая схема) со сглаживающим конденсатором угол отсечки 0 находится из
решения трансцендентного уравнения [391
tg 0 — 0 = А = nrlmRn, (5.19)
где г — внутреннее сопротивление открытых вентилей и вторичной обмотки
тра нсфор матора
Определив коэффициенты-
К (0) = sin 0 — 0 cos 0;. (5.20)
F (0) = л (1 — cos 0)/К (0); (5.21)
В (0.) = 0,707/ cos 0- . (5.22)
D (0) = д/л [0 (1 + COS 20/2) — 3 sin 20/4)/К (0), (5.23)
при заданном выходном напряжении Uo можно найти вторичной обмотке трансформатора нужное напряжение на
U2 = U0B (0); (5.24)
пиковое значение тока вентиля
IBm = rBF (0)/га; (5.25)
действующее значение тока вентиля^
/в = D (0)/о/т: (5.26)
ток вторичной обмотки Z2= -]/2/в= 1,41/в (5.27)
и коэффициент пульсаций
fen.B = (1/ш + 0/л)/ (2fCRH). (5.28)
Расчет по формулам (5.20)—(5.22) обеспечивает пакет из двух сопряженных
программ БП19. С помощью первой решается трансцендентное уравнение (5.19)
методом поразрядного приближения и вычисляются 0 = Р2; sin 0 = Р5;
cos 0 = Р6; К (0) = Р7; 1/В (0) и F (0). По совмещенной с ней второй про-
грамме вычисляются D (0) и Апв. Совместив эти вычисления с элементарными
расчетами по (5.23)—(5.27), можно рассчитать выпрямитель по его заданному
выходному напряжению Uo и току lB = Ufl/RK.
Проиллюстрируем вычисления по этим программам на конкретном при-
мере. Пусть требуется рассчитать параметры выпрямителя при Uo = 150 В и
/0 = 0,15 А, т. е. RH = UB/IB = 1000 Ом. Выбираем диоды Д226 В с 1/обр =
= 300 В > 1,31/0 = 195 В и примерно подходящим средним током. Сопротив-
ление этих диодов 2г Е = 20 Ом. Считая сопротивление вторичной обмотки.транс-
форматора гтр = 80 Ом, принимаем г = (гтр + 2гв) = 100 Ом. Расчет по (5.19)
лает А = 0,1570796.
По первой программе БП19, введя А = Р8; 0 (0) = 0, Д0 = 0,1 и е =
= 0,001, найдем 0 = 0,71875 = Р2, 1/В (0) = 1,064378, т. е. В (0) = 0,9395153;
К (0) = 0,1174920 = Р7 и F (0) = 6,614386. Введя вторую программу БП19
без выключения микрокалькулятора, найдем D (0) = 2,296037. Для расчета
Лп.в введем новые данные: т = 2 = РЗ: / = 50 Гц = Р4; С = 50 • 10-6 Ф =
= Р5 и RK = 1000 Ом = Р6. Нажав клавишу С/П, получим kn Е = 0,1457570.
По формулам (5.24)—(5.27) находим С2 = 140,9272 В; /в m = 0,4960789 А;
/в = 0,1722027 Аи /2 = 0,2428059. Потребляемая от трансформатора мощность
Рпотр = 1/2/2 = 34,21795 Вт; мощность в нагрузке Ри = 22,5 Вт. КПД выпря-
мителя т) = Рц^Рцотр — 0,6575495. Сравнение /в с предельно допустимым зна-
чением /в.макс — 0.3 А показывает, что диоды выбраны правильно. Для умень-
шения пульсаций на выходе выпрямителя можно предусмотреть сглаживающий
фильтр.
ГЛАВА 6
РАСЧЕТ ПАССИВНЫХ ЭЛЕМЕНТОВ НЕЛИНЕЙНЫХ
И ИМПУЛЬСНЫХ УСТРОЙСТВ
6.1. РАСЧЕТ ИНДУКТИВНОСТЕЙ
Индуктивные катушки являются важными компонентами радиоэлектрон-
ных цепей. Они отличаются разнообразием конструкций (рис. 6.1 —6,6). Ин-
дуктивность L катушек или электрических цепей зависит от их конфигурации,
геометрических размеров, наличия внутри их или около них ферромагнитных
материалов.
В справочной литературе [40] приводятся формулы для индуктивности L
применяемых па практике конструкций катушек. Однако обычно нужно выбрать
определенный конструктивный параметр катушек х (чаще всего число витков
Рис. 6.1. Индуктивные катушки:
а — в виде витка в плоскости;
б — однослойная цилиндрическая
Рис. 6.2. Тороидальные катушки круглого (а)
и прямоугольного (6} сечений
го) при заданных L и других конструктивных параметрах. В дальнейшем величи-
на L будет задаваться в наногенри, а геометрические размеры катушек — в сан-
тиметрах.
Индуктивность витка в свободном пространедве (рис. 6.1, а)
L = 4,6 (In //d) / ( In 10) — й ~ 2 In (Ud) — k, (6.1)
так как 4,6/ In 10 = .1,99754 хз 2. Длина провода /п диаметром d определяет
диаметр витка
D=de(L+A,/2/n. (6.2)
Простота формул (6.1), (6.2) делает целесообразным расчет по ним в ручном ре-
жиме счета. Константа k = 2,1 для круглого витка. Например, для L = 7 нГн
при d = 0,1 см расчет дает D = 3,012242 см. Для витков другой формы удобно
находить длину провода /п = de<L+ft>/2, причем й = 3,6 для витка в виде рав-
нобедренного треугольника, 2,9 для квадрата и 2,5 для правильного шести-
угольника.
Индуктивность однослойной цилиндрической катушки (рис. 6.1, б) рассчи-
тывается по формуле
(лгоО)2
/4-0,450
-1-гоО
( 3,5а
V d ~
(6.3)
где D — диаметр (между центрами витков); а — шаг иамотки: I — длина ка-
тушки.
Для этой катушки определение го по заданной L представляет трудности.
Отметим, что при изменении го и заданной длине / меняется шаг намотки а =
.= //го. При этом L становится сложной нелинейной функцией от го и определе-
ние го по заданной L приводит к весьма громоздкому уравнению.
Для вычисления некоторого параметра х, сложной функцией от которого
является индуктивность L (х), целесообразно воспользоваться численными ме-
тодами решения нелинейных уравнений. Если Lv — заданное значение индук-
тивности, то х находится из решения уравнения F (х) = LB — L (х) = 0. В
данном случае го = х и при I = const для катушки на рис. 6.1, б
(лгоО)2 [ 3,5/ \
F(w}~LB — —-—wD —-4 1=0. (6.4)
/-f-0,450 \ rod /
Решение (6.4) методом подекадного приближения обеспечивает программа
БП20 При го (0) = 0; Дго j = 10; D — I = 2 см; 3,5l/d — 140 (d — 0,05 см)
и LB = 5 • 103 нГн получим (нажав 3 раза клавишу С/П) го = 18,9.
Для катушек на рис. 6.1, б с сечением в виде n-стороннего многоугольника
в (6.3), (6.4)
О — DB cos2 (л/2п),
где О0— диаметр описанной окружности.
Приведенные в [40] формулы для L можно разрешить относительно числа
витков го:
1) для однослойной тороидальной катушки круглого сечения и>ни. и) с
плотной намоткой ____________________
w^VLl(2n (D—
2) для однослойной тороидальной катушки прямоугольного сечения
(рис. 6.2, б) с плотной намоткой
w = ~\/ L/ (2h In (DJDj))',
3) для многослойной тороидальной катушки круглого сечения (рис. 6.2, а)
w = д/Ы (2nD ( In (80/0^ — 1,75)));
4) для короткой цилиндрической многослойной катушки (рис. 6.3)
w = Д/Г (3D + 9/ + 10с)/ (25яD2).
Расчет w для этих катушек реализует пакет программ БП21. Подобные вы-
ражения можно получить и для катушек с ферромагнитными сердечниками.
Так, для катушки на кольцевом сердечнике
u>=l//.(rfH+dB)/4pi/i (rfH-rfB) при йн/^в<(1>5... 2);
(6.5)
u>="|/L/2pift In (dRlds) при dH/dE > (1,5.. .2),
rue c?H, dB — наружный и внутренний диаметры сердечника; h— высота его;
[1 — относительная магнитная проницаемость.
Расчет по формулам (6.5) выполняется с помощью программы БП22.
Для катушки на броневом сердечнике (рис. 6.4)
ш=1/ + ln~ I / (РМ-о). (6.6)
V L \Лг Fi 1 и J /
где hm — + h2)/2; d = (h2 — Л.4)/2; F; = л (df — dx)/4', Fa= л (d| — d|)/4;
u = (с?! + rf2)/4; v = (d3 + rf4)/4; [i0 = 4л • IO-9 Гн/см — магнитная прони-
цаемость вакуума; L — индуктивность, Гн.
Обозначив
- , , . / 1 1 \ 1 / d. 4- d. \
Л (hi + А2) ------+------------ ; В =----------In —3 - I,
2 \ dl-df df-dl )’ h^-hi di+d2 Г
можно (6.6) представить в виде, где L выражена в наногенри:
w = 1/£ (Л + В)/ (19,74 [1).
С помощью совмещенных программ БП23 рассчитывается w катушки на броне-
вом сердечнике. По программе 1 вычисляются Л и В, по программе 2 —• число
ВИТКОВ W.
Рис. 6.3. Короткая цилиндриче-
ская катушка
Рис. 6.4. Катушка в бро-
невом сердечнике
Рис. 6.5. Сердечники П- (а) и Ш (6) образной формы
Индуктивность катушек с замкнутым сердечником (рис. 6.5) без зазора
L — iniiM>2Fc/lm, (6.7)
где Fc — площадь поперечного сечения сердечника; 1т — средняя длина маг-
нитной линии. При введении зазора L (6.7) надо умножить на коэффициент
ki = [1 + lidj/ (6.8)
где а — ширина рабочей части сердечника; — зазор.
Объединив (6.7) и (6.8), получим
w=l/Llm (1 +pJz/aZm)/(4npFc)'
Расчет ki и w производится по программе БП24.
В интегральных микросхемах применяются тонкопленочные катушки
(рис. 6.6), для которых
L = kl (Лн-|-Лв) w3^3 In (k2 (Лн +ЛВ)/(ЛН—Лв)), (6 9)
откуда
г0={Т/[й1(Лц4-ЛЕ) 1п(йг(Лн-фЛв)/(Лн—Лв))]}3/5. (6.10)
Коэффициенты = 2,33 и k2 = 4 для круглой (рис. 6.6, а) и йг — 12,05 и k2 =
— 8 для квадратной (рис. 6.6, б) катушек. Расчет w выполняется по программе
БП25.
Расчет по формуле (6.10) дает требуемое значение w при заданных L и раз-
мерах Лн и Л в катушки. Однако в практике разработки пленочных микросхем
часто нужно получать заданные L при минимальных размерах катушки. Обыч-
но в этом случае задаются внутренним размером Лв и шагом спирали I исходя
из технологических возможностей и нужной добротности катушки. Тогда Лн
становится функцией числа витков Ли = Лв + wl. Подставляя Лп в (6.9), по-
лучаем нелинейное уравнение вида L (и*), аналитически не разрешимое относи-
тельно w. Однако, как было показано выше, значение w можно получить, ре-
шая численными методами уравнение LB — L (w) = 0, где Lo — заданная ин-
дуктивность. Это уравнение в данном случае имеет вид
! 2ЛВ \ о,, Г / 2ЛВ
F(w) = L0—k, 11+—— lw6'3 In М 1 +--------— ) =0. (6.И)
\ wl ) L V wl )\
Решение (6.11) обеспечивает программа БП26, в которой реализуется метод по-
декадного приближения. При w (0) =0; Дш t = 1; Лв = 0,2 см; I = 0,05 см;
б)
Рис. 6 6. Тонкопленочные индуктивные катушки круглой (а) и квадратной (б) формы
£0 = 100 нГн получим w = 7,14 для круглой катушки. Отметим, что значение
k2 = 4 вписано в программу. При расчете w для квадратной катушки надо взять
другие коэффициенты: k± — 12,05 и k2 = 8.
Для импульсных устройств, в которых индуктивные элементы используют-
ся в основном как корректирующие, знать точное значение добротности Q ка-
тушки не требуется. Расчет потерь в катушках и Q на высоких частотах можно
найти в литературе [40].
6.2. РАСЧЕТ ДРОССЕЛЯ ФИЛЬТРА
Дроссели фильтров выпрямителей должны обеспечивать заданную индук-
тивность £др при постоянной составляющей тока нагрузки lv. Методика расче-
та дросселя фильтра на П- или Ш-образном сердечнике описана в [39]. Порядок
расчета следующий: 4 ______
1. По заданным £др и 1п определяем ширину стержня а==2,бУ£др/[] и сечение
сердечника (стального) <?ст = 1,5 а2.
2. Выбираем стандартный сердечник со значением а, большим полученного, и
расчетным QCT (или чуть большим). Выбранный сердечник характеризуется уточ-
ненными' параметрами: (?ст, шириной окна Ь, высотой окна h и длиной магнит-
ной линии 1т. В дальнейших расчетах используем эти параметры сердечника.
3. Определяем толщину набора пластин сердечника с — QCT/a.
4. Находим вспомогательный коэффициент М = LKVIll
5. .Находим оптимальную длину воздушного зазора Zz/2 и значение эффектив-
ной магнитной проницаемости p.z. Обычно они заданы графически [39]. Однако,
используя нелинейную аппроксимацию функций с минимизацией погрешности
по методу наименьших квадратов (см. § 9.5), зависимость lz% (в процентах от
1т) можно аппроксимировать параболой; Z,% =330714 — 15 • 10s 714 2, а рг экспо-
нентой: Цг = 114е—401Л1 + 50. Погрешность вычисления tz% и рг по этим форму-
лам не превышает 2—5%, т. е. не больше той, которую можно получить, опре-
деляя эти параметры непосредственно по графикам. Используя данные форму-
лы, можно отказаться от использования графиков, которые не всегда находятся
под рукой.
6. Находим длину зазора (толщину немагнитной прокладки)
/z/2=0,05/2„/o 1т=1г% 1т/20.
7. Задавшись допустимой плотностью тока 6, находим диаметр провода d =
= 1,1зУ/0/б. ______________
8. Определяем число витков дросселя шдр = 10*У£др1т/1,26 р. гас.
9. Находим коэффициент заполнения окна сердечника медью
= 8 • 10-3®npd2/ (bh).
10. Определяем сопротивление обмотки дросселя по постоянному току г™ ==
— 2,25 • 10-4шдр [2 (а + с) 4- лЬ}/<Р.
Расчет параметров дросселя фильтра на микрокалькуляторе «Электрони-
ка БЗ-21» реализуется пакетом из трех совмещенных программ БП27. Порядок
расчета и используемые размерности величин рассмотрим на конкретном приме-
ре для дросселя с индуктивностью £др =. 3 • 10~« Гн и рабочим током /0 =>
Вводим программу 1, заносим £др = 3 • 10~« Гн = Р2; 10 = 15 А = РЗ.
Нажимая клавишу С/П, получаем QCT = 2,634449 см2. В регистр 4 программой
заносится значение а. Нажимая клавиши F и 4, считываем а = 1,325254 см. По
нормали Н0.666.002 («Магнитопроводы ленточные») выбираем броневой ленточ-
ный сердечник с шириной стержня а = 1,6 см (ШЛ 16 X 16), шириной окна Ь =
= 1,6 см, высотой окна h = 4 см и средней длиной магнитной линии 1т =
= 13,7 см. Вводим уточненные исходные данные: а = 1,6 см = Р4; Zm =
ту 13,7 см = Р5; QCT = 2,65 см2 = РХ. Нажимая клавишу С/П, получаем
/г/2 = 3,847643 10—1 мм, значение с= 1,65625 см ~ 1,6 см вызываем из ре-
гистра 7, а значение 714 = 1,859248 • 10~3—из регистра 8.
Не выключая микрокалькулятор, вводим программу 2. Набираем значение
6=3 А/мм2 = РХ. Нажимая клавишу С/П, получаем d = 2,526756 мм. Еще
раз нажимай клавишу С/П, получаем и)др = 34,38818.
Не выключая микрокалькулятор, вводим программу 3. Заносим уточнен-
ные (округленные) данные: и)др = 35 = Р2; d = 2,5 мм = РЗ; b — 1,6 см =«
= Р5 и h = 4 см = Р6. Нажав клавишу С/П, получим kM = 2,734374 • 10-1.
Еще раз нажимая клавишу С/П, получаем гцр = 1,45392 • 10—2 Ом.
6.3. РАСЧЕТ СИЛОВОГО ТРАНСФОРМАТОРА
Силовой трансформатор рассчитывается при следующих исходных данных:
габаритная мощность трансформатора Ргаб> максимальная индукция в сердеч-
нике Вт, частота сети f, число стержней сердечника с обмотками s, допустимая
плотность тока 6, коэффициент заполнения сердечника сталью й0, коэффици-
ент заполнения окна медью Ам, КПД трансформатора т)Тр, напряжения Ui и Ut
и токи Л и /2 обмоток. Последовательность расчета следующая [39]:
1. Находим произведение сечений стали сердечника Q0T и окна Qo QctQo "
= Ргаб/ (0,0222/Bm6T]TpsfecfeM). Выбираем подходящий тип сердечника (магии-
топровода) и уточняем значения Q0T и Qo.
2. Определяем ЭДС одного витка е = 4,44/BmQCTfec • 10-1.
3. Находим число витков вторичной обмотки а>2 = 1/2/е.
4. Находим приближенное число витков первичной обмотки Wf = Uje.
5. Определяем диаметр провода вторичной обмотки (без изоляции) d2 «
= 1,1зУ/2/б.
6. Определяем диаметр провода первичной обмотки трансформатора
•= 1,13 VZi/6.
7. Находим длину провода первичной обмотки If = а)± [2 (а + с) + лЬ] 10*’,
где а — ширина стержня сердечника; b — ширина окна; с — толщина набора
пластин сердечника.
Таблица 6.1
Порядок расчета силового трансформатора
Ввод исходных Данных Порядок нажатия клавиш Вывод результата
— Ввод программы БП28, Р РР В/О —
В. регистры 2—8 50 | 1,2 X Р2 2 РЗ 2 Р4 0,95 Р5
согласно БП28 0,96 | 0,32 X Р6 215 Р7 0,0222 Р8 С/П = 138,2704 см4
Сст=Р7 4,44- 10~4=Р8 2,5 | 5 X Р7 4,44 ВП 4 /—/ Р8 С/П е=3,1635-10-1 В
wl/100=P5 127 f F7 4- 100 4- Р5 w1 = 401,4540 вит- ка
t/2=PX 450 | F7 4- м2= 1422,475 вит- ка
/2=Р6 1,13=Р8 0,475 Р6 1,13 Р8 С/П d2=5,506938 X Х10~‘ мм
А-Р6 1,7 Р6 БП 5 С/П d, = 1,041808 мм
df =Р2, 2(а+с) = =РЗ, л6=Р4, 0,0225= -Р8 Fx! Р2 2,5 t 5 + t 2 X РЗ Рл 2 X Р4 0,0225 Р8 С/П li=85,44221 м
—. С/П Д(Л=3,011120 В
— /-/ 127 + | F7 4-' Wi=391,9357 вит- ка
о. Рассчитываем падение напряжения в первичной обмотке АО/, —
= 2,25 •
9. Уточняем число витков первичной обмотки — (Ui—
Этот расчет реализуется одной программой БП28 при условии, что часть
элементарных вычислений проводится вручную. Порядок расчета дан в
табл. 6.1. Там же даны контрольные результаты расчета трансформатора, имею-
щего следующие исходные данные: Ргаб = 215 Вт; Вт = 1,2 Тл; s = 2; 6 —
= 2 А/мм2; kc = 0,95; kM = 0,32; т]тр = 0,96. Так как QCTQ0 — 140 см*, то
выбираем подходящий ленточный магнитопровод ПЛ 25 X 50 = 65 (а = 2,5 см;
5=2 см; с — 5 см) с QCTQ0 = 162 см4. При дальнейшем расчете использованы
значения исходных параметров QCT = 2,5 X 5 см2; /Д = 127 В; (/2 = 450 В;
Ц = 1,7 А и /2 = 0,475 А.
6.4. РАСЧЕТ ЕМКОСТЕЙ
В отличие $т индуктивных элементов, конструкции которых нередко не-
стандартны, конденсаторы являются обычно стандартными компонентами элек-
тронных схем и йх емкости разработчики схем не рассчитывают. Исключение
составляет расчет емкости пленочных конденсаторов (например, пленочных
схем) и емкости проводников в свободном пространстве. Последний необходим
и для оценки паразитных емкостей монтажа.
Пленочные конденсаторы (рис. 6.7) рассчитываются в следующем порядке:
1. Вычисляется «удельная емкость (на 1 см2) Со = 0,0885s (т— l)/d, где е —
стносйт^льная диэлектрическая проницаемость диэлектрика; т — число обкла-
док; d — толщина диэлектрика.
2. Находится площадь обкладок S = С/Св, где С —• требуемая емкость конден-
сатора.
3. Определяются размеры сторон обкладок А — Д/QS ч В = ~\/slQ, где Q=
= А/В — требуемое отношение А к В. Этот расчет выполняется по программе
1 пакета БП29.
Расчет емкости проводников в свободном пространстве выполняется по фор-
муле [40]
С = ktzl In 10/ In (k2xld) (6.12)
с помощью программы 2 пакета БП29. В табл. 6.2 даны значения коэффициен-
тов kt и /г2, а также расшифровка параметра х.
Таблица 6.2
Значения k2 и смысл коэффициента х в формуле (6.12)
Элементы, определяющие емкость *1 ^2 X
Два провода вдали от земли 0,12 2 Расстояние между про^ водами
Горизонтальный провод и земля 0,24 4 Высота подвески
Вертикальный провод и земля при рас- стоянии от земли до нижнего конца Л>//4 0,24 1 Длина провода
То же при h<_l^ 0,24 1,15 Длина провода
Провод и корпус при вводе провода че- рез отверстие 0,24 2 Диаметр отверстия
6.5. РАСЧЕТ ЛИНИЙ ПЕРЕДАЧИ, ЛИНИЙ ЗАДЕРЖКИ
И РЕАКТИВНЫХ ФОРМИРУЮЩИХ ДВУХПОЛЮСНИКОВ
В радиоэлектронных импульсных устройствах широкое применение находят
линии передачи — проводные, коаксиальные, полосковые и др. Полосковые
несимметричные (см. 6.8, а) и симметричные (рнс. 6.8, б) линии часто исполь-
зуются в пленочных микросхемах, а также в аппаратуре, построенной на осно-
ве печатного монтажа. Основными параметрами линий передачи являются их
входное сопротивление Zn, фазовая скорость распространения волны v и (для
относительно длинных линий) потери на единицу геометрической длины.
Рис. 6.7. Пленочный конден-
сатор
Рис. 6.8. Полосковые линии — несимметричная («) и
симметричная (б)
W
В справочной литературе обычно приводятся формулы для Хл и о, выра-
женных через конструктивные параметры линий [40]. Однако на практике бы-
вает необходимо проектировать линию с заданным Хл, изменяемым одним из кон-
структивных параметров х, при заданных других параметрах. Для ряда линий
Хл выражается через параметр х — D/d с помощью простых формул;
D ехр (Z,n Д/е/60)
х=—— =--------------------
d k
где е — относительная диэлектрическая проницаемость диэлектрика; d — диа-
метр внутреннего проводника; k — константа, зависящая от типа линии. Рас-
шифровка D и значение k для таких линий следующие:
1) линия в виде круглого проводника., помещенного в середине между проводя-
щими плоскостями, находящимися друг от друга на расстоянии D (k = 1,27);
2)линия в виде круглого проводника, помещенного в экран с квадратным се-
чением и стороной последнего D (k = 1,08);
3) линия в виде круглого проводника, помещенного в экран круглого сечения
(коаксиальная линия) диаметром D (k = 1);
4) линия в виде круглого проводника, расположенного на биссектрисе прямого
угла, образованного двумя полубесконечными проводящими плоскостями, на
равном расстоянии Dl‘2 от каждой (k = 1,4).
Расчет по этим формулам довольно прост, и его целесообразно выполнять в
режиме ручных вычислений (без использования программ). Для несимметрич-
ной полосковой линии (рис. 6.8, а) формулу для Z„ можно представить в виде,
при котором ширина полоски W определяется через заданные Z,n и другие пара-
метры линии [41]:
W= 1,25
5,98/г
----------------— t
exp [Zn (е-Ь 1.41)*/2/871
При этом для такой линии
ц/с = 1/ [ (0,475е + 0,67)1/г],
(6. В)
(6.14»
где с— скорость света.
Для симметричном линии;
т Г 4Ь
№=0,59 ---------—----—2,1/ ?
' |_ехр (/л Vе/60)
vic —
(6.15)
(6.16)
Программы 1 и 2 пакета БПЗО позволяют рассчитать № и vic полосковых
линий непосредственно по формулам (6.13)—(6.16). Отметим, что время задержки
для линий длиной I составляет ts == vl.
Полосковые линии применяются в качестве линий задержки при малом
времени задержки (до 20—30 нс). При больших длительностях часто использу-
ются искусственные линии. В простейшем случае такие линии состоят из звень-.
4/2 I L L/2
ff)
Рис. 6.9. Звенья искусственных линий К- (а) и М (б)-типов
ев (рис. 6.9) LC-фильтров нижних частот типа К [42, 43]. Время задержки и дли-
тельность фронта одного звена рассчитывают по формулам /81 = 1,07~[/lC;
/ф, = 1,13 ~[/lC. Линия со звеньями К-типа имеет линейную фазовую характе-
ристику и относительное постоянство характеристического сопротивления в
узкой полосе частот со (0,2 ... О,3)сос, где сос = ll~[/LC. Лучшими характе-
ристиками обладают линии со звеньями М-типа, между смежными индуктивны-
ми элементами которых имеется магнитная связь (коэффициент взаимоиндукции
М). В таких линиях при М — 1,27
/зГ= 1,2]/LC, = 1,151/1С. (6.17)
Для линий с п звеньями
3/—
43 = п/31 и /ф = /ф, р п.
(6.18)
На практике представляет интерес расчет значений п, С и L по заданным
/ф, t3 и волновому сопротивлению Zn = ~\/L/C. В этом случае из выражений
(6.17) и (6.18) можно получить следующие расчетные формулы:
я—(/3//ф)^’^,
C=t3lk3fiZsi', L = k.n,
(6.19)
(6.20)
где k± — 1,1 и k2 = 1,07 для линий со звеньями К-типа; ki — 0.94 и k9 = 1,2 для
линий со звеньями М-типа при М — 1,27.
При нагрузке линии со стороны входа на активное сопротивление 7?и и вы>
хода коэффициенты отражения
Ловх—
Ли-2
Лм + 2Л
; Довых —
ЛН+2Л
(6.21)
л
Параметры искусственных линий задержки по формулам (6.19)—(6.21) рас-
считываются по программе 3 пакета ПБЗО. Допустим, нужно определить пара-
метры линий К-типа с исходными данными: /ф = 0,05 • Ю~в с: Za = 600 Ом;
Ru = Ra = 1000 Ом; t3 — 10~6 с. По этой программе получим и = 98,3; С =
= 15,57 пФ; L — 5,61 мкГн; Ки = 0,25.
Для многих типов линии выражения для 2Л неразрешимы или трудно раз-
решимы в аналшическом виде относительно требуемого конструктивного па-
раметра х. Приведем выражения для 2Л некоторых из таких линий [40].
1) коаксиальная линия со смещенным на расстояние I от центра внутренним
проводником;
£>2+d2—4Z2
2Л = k arch----—-------, k = 60/ V е;
2dD
2) линия из двух проводников одинакового диаметра а, расположенных в сво-
бодном пространстве на расстоянии d:
Zn — k arch x, k — 120/Д/к, x = a/d;
3) линия в виде круглого проводника диаметром d, расположенного на расстоя-
нии D/‘2 от проводящей плоскости:
2Л = k arch х, k — 60/фА, х = D/d;
4) линия в виде двух проводников диаметром d, расположенных на расстоянии
а друг от друга и на расстоянии D от проводящей плоскости:
2л—k
а
arch----— In
d
fc=120/Ve;
5) линия из двух проводников разного диаметра (dT и d2) на расстояние а друг от
друга и расположенных в свободном пространстве:
4а2—d?—df ,
/л = /гагсЬ------------- , й = 60/^/е;-
2dT d2
6) линия коаксиальная с внутренним проводником, выполненным в виде намо-
танной спиралью ленты:
2Л — 2ЛК
(nnd)2
2 In (D/d)
где n— число витков спирали на 1 см длины (эта линия характеризуется боль-
шим 2Л и малой v =vK/Fw; Zm, — сопротивление коаксиальной линии с обыч-
ным круглым проводником такого же диаметра d; он — фазовая скорость обыч-
ной коаксиальной линии.
Для линий указанных (и ряда других) типов требуемый параметр х при за-
данном волновом сопротивлении 2Л0 может рассчитываться численным методом
поразрядного приближения (или другим методом, обеспечивающим сходимость).
Для этого волновое сопротивление представляется нелинейной функцией пара-
метра х, т. е. Zn (х), и решается уравнение F (х) = 2Л0 — 2Л (х) = 0.
В пакете программ БП31 даны фрагменты программ вычисления функций
F (ж) для линий перечисленных типов. Для вычисления соответствующего пара-
метра х достаточно вписать нужный фрагмент в программу, реализующую метод
подекадного приближения (см. § 2.3) с полуавтоматической выдачей результата
(каждое нажатие клавиши С/П ведет к выдаче очередной десятичной цифры per
вультата х). При трех-четырех цифрах результата время расчета составляет
1,5—2,5 мин. В программах используется известное выражение arch у =
- 1П (у + ]/у2 + 1). При менение описанного метода избавляет разработчика
от использования многочисленных графиков [40], по которым нужные парамет-
ры определяются с большой погрешностью (примерно до 5%), и повышает точ-
ность расчетов. Исключив из фрагментов программ пакета БП31 операцию по-
лучения разности и Лд (х) и добавив команду остановки С/П, с помощью этих
программ можно непосредственно вычислить Zn, занося параметр х (теперь
уже как заданный) в регистр 2.
Часто возникает задача определения модуля коэффициента отражения
|К0|, фазового сдвига <р и входного сопротивления ZBX однородной линии пере-
дачи с потерями, нагруженной на комплексное сопротивление ZH = RH + iXn,
при известных длине линии I и параметрах Р (волновое число) и а (коэффициент
затухания). Расчетные формулы для искомых параметров следующие:
Ио1 =
। («и 2л)'24-^в_
|/ (^н + 2,ч)3 + X *
<р = arctg
2ХН гл
(6.22)
(6.23)
(1 — К§ e~4af)—2iK0 e~2(z/ sin (2flZ - <р)
(1-j-Kg e-4aZ)— 2K0e~2a/cos (2p/—<p)
программ
Расчет'по (6.22) и (6.23) реализуется программой 1 [2] пакета
БП32, по которой вычисляются [Ко| и tg <р. После пуска и выполнения програм-
мы значения |Я0| и tg <р заносятся в регистры 4 и 7 соответственно, а на инди-
каторе высвечиваются цифры 7, 180 или 90 в зависимости от знака числителя
или знаменателя выражения,
^ор
определяющего tg <р. Если дробь этого выраже-
ния положительна, высвечивается . цифра 7,
указывающая, что значение tg <р ищется в ре-
гистре 7. Если знаменатель дроби отрицате-
лен, высвечивается число =р 180, указывающее,
что его надо добавить к значению <р, опреде-
ленному по значению tg <р, взятому из реги-
стра 7. Если знаменатель дроби равен 0, вы-
свечивается число 90 (это значит, что <р= ±90°,
причем знак определяется знаком мнимой
части Хп полного сопротивления нагрузки).
По программе 2 [2] пакета БПЭ2 вычис-
ляются |/вх|//л, RbsJZb и XByJZB, причем
эти данные заносятся соответственно в реги-
стры РХ = Р6, Р7 и Р8 (содержимое других
регистров не меняется). Здесь /?ЕХ и Хвх —
активная и реактивная составляющие входно-
го сопротивления линий с потерями при ком-
плексной нагрузке.
Параметры а и Р зависят от частоты.
Используя эти зависимости, приведенные в
[37], можно найти зависимость составляющих
ZBX (>ю) от частоты со = 2nf. Для этого доста-
точно при использовании программы 5 изме-
нять значения а и р. В [2] описана програм-
ма вычисления параметров линии на микро-
калькуляторе «Электроника БЗ-34». Распре-
Ключ
Рис. 6.10. Формирующий реак-
тивный двухполюсник
деление напряжения и тока вдоль линии позволяет рассчитать программа,
описанная в [44].
Линии передачи и задержки нередко используются в качестве формирую-
щих в генераторах импульсов почти прямоугольной формы. Наряду с ними при-
меняются реактивные формирующие двухполюсники. Такиё двухполюсники
обычно состоят из колебательных контуров, рассчитанных так, что их колеба-
ния, суммируясь, образуют почти прямоугольные импульсы. Формирующий
двухполюсник подключается к нагрузке через ключ (рис. 6.10), в качестве ко-
торого используется тиристор, лавинный транзистор или другой коммутирую-
щий прибор.
Синтез и расчет формирующих двухполюсников хорошо освещен в литера-
туре (42]. Расчет их сводится к определению индуктивностей и емкостей звеньев
двухполюсников по известным формулам. Так, для двухполюсника с пятью
ввеньями, скорректированными по наилучшей форме импульсов:
CJ=O,46tno/fl; С;=0,51С'; С£=0,56С^. С£=0,675С£; C'=1,43CJ;
Т5=0,08/?/И(1; Т'=0,024£'; =0,092/^; ££=0,248Ц; L\ = 1,07Ц.
Ввиду простоты этих выражений параметры звеньев можно вычислить вручную,
что займет меньше времени, чем составление и ввод соответствующей программы.
При /и0 — 1 мкс (длительность импульса при числе звеньев s' -> оо) и /? =
= 100 Ом расчетные значения емкостей и индуктивностей следующие: 4,6;
2,346; 2,576; 3,165; 6,578 ьФ, 8; 0,192; 0,736; 1,984 и 8,56 мкГн.
6.6. РАСЧЕТ РЕЗОНАНСНЫХ ЦЕПЕЙ УСИЛИТЕЛЕЙ
РАДИОИМПУЛЬСОВ
Полоса пропускания резонансных широкополосных усилителей высокой и
сверхвысокой частот 2ДД измеренная на уровне усиления 0,7 от максимального,
в первом приближении определяет длительность фронта радиоимпульса на вы-
ходе настроенного усилителя
?фри~2,2/(2лДД ~0,7/(2ДД.
Для построения резонансных цепей усилителей радиоимпульсов применя-
ются как отдельные колебательные контуры, так и их системы, обеспечивающие
получение более близкой к прямо-
угольной формы частотной характе-
ристики усилителей. Рассмотрим
расчет последних на микрокальку-
ляторах.
Простейший последовательный
колебательный контур (рис. 6.И, а)
характеризуется резонансной часто-
той fB и добротностью
Q = VUC/r = fB / (2ДД.
Представляет интерес расчет резо-
нансной кривой контура
Ki (/) = I (f)/ (E/r),
Рис. 6.11. Последовательный (а) и параллель-
ный (б) резонансные контуры
сдвига фаз <р между ЭДС Е и током I и модуля входного сопротивления |Znx|.
Для последовательного колебательного контура резонансная частота
fB = 1/ (2n]/£Q.
Удобно рассчитывать основные параметры для ряда частот f = f0 + А/, соот-
ветствующих обобщенным расстройкам
В = Q WfB ~ fB/fl (6.24)
Тогда Ki = 1/УПГр; г= УПс/Q; |ZBX| = тУГ+12 и tg <р (|) = g. Эти
расчеты выполняются по программе 1 пакета БПЗЗ. Цикл выдачи результатов
f. £, Kt, г и |ZBX| повторяется автоматически по мере формирования сетки зна-
чений f с шагом Д/ (положительным или отрицательным), что позволяет строить
амплитудно- и фазочастотные характеристики.
Для параллельного ненагруженного (Дк — оо) колебательного контура
(рис. 6.11,6) определяется эквивалентное активное сопротивление при резо-
нансе /?0 = Q~\/UC, причем |ZBX| = 4* 62- Расчет выполняется по про-
грамме 2 пакета БПЗЗ.
Для расчета параметров нагруженного параллельного контура Кн -р «> о
заданной частотой /0 используются следующие выражения:
, L= НС (2л/0)2; р = 1/LZC; QH = р/ (г + Р2//?н);
= = f(jdw
9ти параметры рассчитываются по программе 3 пакета БПЗЗ. В нем приведены
также контрольные примеры расчета по программам 1—3.
Рис. 6.12 Связанные контуры с индуктивной (о) и емкостной (б) связью
Резонансная кривая одиночного LC-контура заметно отличается от прямо-
угольной. В этом отношении лучшие результаты дает применение связанных
контуров (рис. 6.12). Коэффициент связи
. М ^св
«СВ — - » ИЛИ «Св — . ____________-____
у (с
1 + ^св) (С2 + Сев)
Нормированная относительно тока при резонансной частоте резонансная
кривая при идентичных контурах определяется выражением [37]
W=-^- =
'2Р
]/’(1+рс2в-&2)2+^2_
где п— 1 для одной пары контуров (случай n> 1 соответствует расчету п'<
каскадного усилителя с я-парами связанных контуров).
Резонансную кривую связанных контуров можно рассчитать по програм-
ме БП34. В ней значения обобщенной расстройки вычисляются по формуле
где ЛЕ. — шаг расстройки.
Дальнейшее улучшение формы кривой избирательности достигается в уси-
лителях, содержащих большее число резонансных контуров. Рассмотрим расчет
кривой избирательности для ряда типовых усилителей радиоимпульсов. Резуль-
таты будем представлять в нормированном виде:
Г(П = К(/)/Кмакс.
где К (f) — коэффициент усиления (передачи) на заданной частоте f: Кмакс ~*
максимальное значение К if).
Широкое применение в усилителях радиоимпульсов нашли идентичные
каскады со связанными контурами (рис. 6.13). Для таких каскадов уравнение
нормированной относительно Кмакс кривой избирательности имеет вид [37]
У (Л = [2Рсв/K(1+PcB-£2)2 + 4£2h f6-25)
где п— число пар связанных контуров (каскадов). Кривая избирательности
л-каскадного усилителя с такими контурами согласно (6.24) и (6.25) может рас-
считываться по программе БП35.
Рис. 6.13. Функциональная схема избирательного усилителя со связанными контурами
Программа БП36 позволяет рассчитать кривую избирательности «-каскад-
ного (п 4) усилителя с идентичными по добротности взаимно расстроенными
контурами (частоты из /+, fai, fos и fM в общем случае различны, но могут быть
и одинаковыми) по формуле
1/1+Vf V1+U l/1+gi 1/1+и’
причем, начиная с адреса 52, оформляются вычисления члена
Ь- = {1/1 + [Q (Wui + }Л
где 1= 1 ...4— номер контура (каскада). Значения Q<999 записываются не-
посредственно в программу по адресам 72, 73 и 74.
Усилители с взаимно расстроенными контурами могу, иметь кривую изби-
рательности с одним или п горбами. Обычно желательно, чтобы высота горбов
была одинаковой. Это условие сравнительно легко выполняется в трехкаскад-
иом усилителе, у которого один из контуров настроен на среднюю частоту, т. е.
fos = (foi + /ов)'2. и имеет добротность Q3 = 0,5Q1i2 (Q, = Q2).
Для расчета такого усилителя можно использовать программу БП37. Рас-
чет ведется по формуле
Y (П = {l/fl+(Q1.2 «О2] П + (Q1,2 «г)21 fl+(Qgas)2|}"\
причем значения
аг — fol fnil f)
вычисляются по подпрограмме, записанной s адреса 72.
. Близкую к прямоугольной форму кривой избирательности обеспечивают
усилители, в которых каскады со связанными контурами комбинируются с кас
кадом на одиночном контуре (рис. 6.14). Уравнение резонансной кривой в этом
случае имеет вид
1 + Qi Qz
КГ + & (*СВ - V3)]2 + (Qi + Qs) 2 V2
— .------- . . (6.26)
1/1 + (QI V2)
где v — 2bflfn.
Первый сомножитель в (6.26) — квадрат К (/) системы из двух связанных
контуров, второй — значение К (f) для одиночного контура. Таким образом,
(6.26) описывает 3-каскадный усилитель, один из каскадов которого содержит
одиночный контур, два каскада — идентичные связанные контуры. Если в про-
грамме убрать возведение в квадрат первого сомножителя, то получим уравне-
Рис. 6.14. Функциональная схема избирательного усилителя со связанными контурами и кас-
кадом с одиночным контуром
Выход
ние крииои избирательности двухкаскадного усилителя (один каскад со связан-
ными контурами и один с одиночным контуром).
Расчет по (6.26) выполняется с помощью программы БП38. Следует отме-
тить, что для получения симметричной кривой избирательности целесообраз-
но выбирать добротности Q± и Q2 связанных контуров одинаковыми. Другие при-
меры расчета резонансных усилителей и цепей на микрокалькуляторах можно
найти в [45, 46].
Описанные программы позволяют рассчитывать АЧХ резонансных каска-
дов при линейном изменении текущего значения частоты f или обобщенной рас-
стройки. При необходимости легко задать другой закон изменения, например
логарифмический. Для вычисления АЧХ сложных линейных 4-полюсников,
выражаемых многочленами с числом полюсов т 10, могут использоваться
программы, описанные в [2]. Программы расчета фильтров и передаточных ха-
рактеристик линейных цепей описаны в работах [47—53].
(7.1)
(7.2)
(7.3)
ГЛАВА 7
«>
РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ И ПЕРЕКЛЮЧАЮЩИХ
УСТРОЙСТВ
7.1. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ
ПО АНАЛИТИЧЕСКИМ ВЫРАЖЕНИЯМ
Три типа* аналитически заданных входных воздействий: ступенчатое
(/) =0 при t < 0 ; 1
UBx(t) — E при б>0;1
линейно изменяющееся
«вх (0 =0 при 7 < 0;
«вх (0 = Е(/(ф0 при 0 < t < ;
«вх (0 = Е при t > 1ф0
и экспоненциальное
«вх (0=0 при t <0;
“вх (0 = ^(1— е (/Тф) при />0
— позволяют с хорошим приближением описать нарастание реальных входных
сигналов. Сигналы в виде ступенчатого перепада (7.1) обычно используются как
контрольные при оценке переходных характеристик цепей. На практике такое
воздействие не реализуется, однако к нему сводятся более близкие к реальным
воздействиям (7.2) и (7.3), если /ф0 или Тф значительно меньше времени нарас
тания переходной характеристики цепи в области малых времен.
Выражения (7.1)—(7.3) описывают характер возникновения воздействия
При исчезновении воздействия временная зависимость его также может быть
скачкообразной, линейной или экспоненциальной. Для многих встречающихся
на практике линейных цепей реакция на аналитически заданные воздействия ви-
да (7.1)—(7.3) может определяться аналитически. В таких случаях расчеты на
микрокалькуляторах сводятся к вычислениям выходного напряжения по фор-
мулам. Рассмотрим несколько характерных примеров таких расчетов.
Для линейных дифференцирующих цепей выходное напряжение нв (/) в
любой момент времени t можно найти, воспользовавшись интегралом Дюамеля
(см. подробнее в §7.11). Так, для /?С-цепи
i
“2 (0 = f (d«Bx/<tt)t==(_e “ (6) d0 <7-4>
О
где а (0) = е—е/^С— переходная характеристика цепи; 0— текущее время.
При линейно нарастающем входном сигнале вида (7.2) интегрирование (7.4)
дает:
и2(/)=£—-----(1—е~'/т) при (7.5)
*ф..
и2(/)=и2(/ф0)е U при t > «ф0 , (7.6)
где т = /?С (или т= £//? для /?£-цепи)— постоянная времени цепи.
Временная зависимость u2 (/) по этим выражениям рассчитывается с по-
мощью программы БП39. Вначале вычисляется (t — /ф0) и сравниваетая t со
значением /ф(). Если /ф0, то организуется вычисления по (7.5), в против-
ном случае — по (7.6). После вычисления и2 на данном шаге значению t да-
ется приращение Д/ и производится безусловный
переход к началу программы. Перед выдачей
значения и2 (/) выдается соответствующее значе-
ние t (для удобства составления таблицы).
При экспоненциальном воздействии на ли-
нейную дифференцирующую ЛС-цепь (7.4) дает
«г(0=’;——т~(е~"'/т— е '/ТФ) при х=!= Тф?
1—Тф'х
(7.7)
«2 (0 = (Et/x^) е при т = тф. (7.8)
Расчет и2 (Z) выполняется по программе БП40. Программа обеспечивает срав-
нение т с Тф. При т =/= Тф вычисления проводятся по (7.7), а при т = Тф — по
(7.8). Перед выдачей значения и2 (t) выдается соответствующее значение t.
Временная зависимость вида (7.7) при т > Тф является частным случаем
временной зависимости напряжения двухэкспоненциального импульса (42|:
u(t) = B (е"-‘/т-е_‘/ТФ), (7.9)
где экспонента е формирует в основном фронт импульса, а е~f/T —
его спад (рис. 7.1).
Дифференцируя (7.9) по времени t и полагая du/dt = 0, находим время на-
растания двухэкспоненциального импульса до максимального значения и (/)
In V/ (т — Тф), (7.10)
где v = т/тф.
Подставив (7.10) в (7.9), найдем относительную амплитуду импульса
ЛЛ1 = Л/В=е-**-(е-Л’*Г. (7U)
где Vi = (In v)/ (v — 1). (7.12)
Сравнивая (7.7), (7.8) и (7.9), можно найти, что выходной импульс линей-
ной дифференцирующей цепи при экспоненциальном воздействии тождествен
двухэкспоненциальному, если положить
В = (1 — тф/т)-1 = (1 — l/v)-i.
Тогда относительная амплитуда импульса на выходе дифференцирующей цепи
Um/E = kM (1 - l/v)-i, (7.13)
где Um — амплитуда выходного импульса.
Расчет по этим выражениям реализуется при использовании программы
БП41. Последовательность выдачи параметров при расчете следующая: V, «щ,
о
Выход
/77«£ О2«с
Рис. 7 2. Реальная диффе-
ренцирующая цепь
vlt йд. Для расчета активной длительности двух-
экспоненциального импульса 142] даны приближен-
ные (с точностью до 10%) выражения:
ta = т (0,78 + 2%) при -v < 20;
tK = т (0,7 + З/v) при -V > 20.
(7 14)
(7.15)
Расчет по формулам (7.14) или (7.15) реализуется
программой БП42, с помощью которой значение v
сравнивается с числом 20 и в зависимости от ре-
зультатов сравнения автоматически вычисляется /и.
С учетом конечного сопротивления источника входного сигнала А’г и пара-
зитных емкостей С\ и С2 на входе и выходе дифференцирующая RC-цепь прини-
мает вид, показанный на рис. 7.2. Для нее реакция на ступенчатое входное воз-
действие имеет вид
У
где при Rr < R;
также двухэкспоненциального импульса
цг(0 = ^дЕ(е-‘/т-е-(/М>
(7-16)
т ~ Rr (С + с2);
тф0 Rr (Cx-j-Cg);
Л Ry , 6?х ~рСа
\ R
С
(7.17)
(7.18)
(7.19)
Если на вход такой
то вместо Тф0 надо записать значение У^Тфо + Тф. Таким образом, по существу
цепь на рис. 7.2 может рассчитываться по описанным ранее программам.
Объем программной памяти микрокалькулятора «Электроника БЗ-21» по-
зволяет рассчитывать переходную характеристику линейных многокаскадных
усилителей в области малых времен. Последняя при идентичных каскадах с экс-
поненциальной переходной характеристикой описывается выражением [30]
2
цепи подается сигнал в виде экспоненциального перепада
К Ш
a (h = ——
t
%
_________1
" + (Л/ + 1)!
где N — число каскадов; Ко — общий коэффициент усиления всех каскадов на
сре (них частотах; тв— постоянная времени верхних частот одного каскада.
Ограничившись числом каскадов N ^.6 и введя выражения
(7.20)
k$ =
т = //тв; k,=—— = -----=0,167;
3 31 1-2-3
11 11
— = —Г7— = 4,17.10~2; fe6 = —-= -------- = 8,33-10-3,
4! 1-2-3-4 5! 1-2-3-4.5
5!
.преобразуем (7.20) к виду, удобному для вычислений на микрокалькуляторе:
а (т) = 1 — (1 + т + т2/2 4- Л3т3 + /?4т4 + &5т6)е т. (7.21)
Вычисления по (7.21) для N = 3 ...6 осуществляются по программе БП43.
Значения k3, k4 и k6 заносятся в регистры, что уменьшает число шагов программы
и позволяет использовать ее для расчетов при разных N. При N < 6 вместо не-
использованных коэффициентов в соответствующие им регистры вносятся нули.
7.2. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ
И НЕЛИНЕЙНЫХ ЦЕПЯХ 1-ГО ПОРЯДКА ЧИСЛЕННЫМ
МЕТОДОМ ПЕРЕМЕННЫХ СОСТОЯНИЯ
Анализ переходных процессов в линейных цепях усложняется по мере ус-
ложнения входного воздействия. Особый интерес представляет анализ при про-
извольном (заданном графически или таблично) воздействии, который целесо-
образно проводить численными методами. Отклик же нелинейных цепей даже
на простейшие воздействия, как правило, не рассчитывается аналитическими
методами, что делает принципиально необходимыми численные методы. Пере-
ходные процессы удобно рассчитывать классическим методом переменных со-
стояния, в качестве которых берутся напряжения на конденсаторах, токи че-
рез индуктивные элементы и другие параметры цепи, которые не могут изменять-
ся мгновенно из-за ограничений, налагаемых на них законами коммутации..
Часто оказывается необходимым рассчитывать переходные процессы в
простейших RC- и Р£-цепях при произвольном нвх (t), заданном дискретными
значениями. Цепь RC описывается уравнениями состояния;
duc/dt=(uBX(t)—пс)/т ; (7.22)
Ц/ЦО—wBX(Z) (7.23)
где т= RC— постоянная времени цепи. Если снимать пВЬ1х (О с конденсато-
ра, цепь будет интегрирующей, если с резистора — дифференцирующей.
Для расчета ис (/) можно воспользоваться стандартной программой 20 (см.
§2.5), реализующей метод Рунге—Кутта 4-го порядка. Для этого в ее незапол-
ненную часть следует вписать выражение F6 f F7 — f F5 Оно служит для
вычисления правой части (7.22) при т= Р5 и ггвх = Р6. Однако применение
стандартной программы не всегда удобно, так как требует перед каждым шагом
вычислений вносить в регистр 6 новое значение пвх (0 и вручную вычислять
uR Кроме того, многократное обращение к подпрограммам ведет к большо-
му времени счета (около 16 с на один шаг). Поэтому целесообразно составить
специальную программу для таких расчетов. С этой целью, обозначив
6 = th, = t/RC; (7.24)
Н = М/т, = M/RC, (7.25)
после простых преобразований приведем основные уравнения метода Рунге—
Кутта 4-го порядка (2.16) при х = t и у = ис к следующему виду.
Uf = Ur -f-Н (fej2й2-р2fex-р/6, (7,26)
n—t n
где нвх(0п) tir •
n n’
k2=uRn(l — H'/2}-,
ks=uR —uRn(l—HI2)HI2-,
ki=uJlx(Qri)—uc —uR H-}-uR (1—H/2) H2/2.
Подставляя kx — kt в (7.26), получаем окончательную систему уравнений в
более простом виде:
ис =ис +HuR (6—ЗД + №—№Д/4)/6 ;
’"'п+1 'п
Up (6п) ' I ®п+1 = “Ь АО •
п’
Расчет по этим формулам реализует программа БП44. По сравнению со
стандартной программой время вычисления по ней на одном шаге уменьшается
ДО 10 с, причем вычисляется не только ис (0), но и uR (0). После вычисления
Рис 7.3. Результаты расчета
переходного процесса ДС-цепи
методом Рунге — Кутта
ц^(0) сразу же набирается новое значение
ивх(б)»«РХ, нажимается клавиша С/П и т. д.
Пример расчета при Н = 0,1 дай на рис. 7.3
Переходные процессы можно рассчитывать
также неявными методами. Так, неявный метод
Эйлера реализуется выражением
J/n+l=4/nH“/1/хп)> (7.27)
где Уп+i входит как в левую, так и в правую
части выражения (7.27). В общем случае для ре-
шения (7.27) на каждом шаге приходится исполь-
зовать тот или иной итерационный метод. Это
значительно усложняет реализацию неявного
метода и ведет к большим затратам времени на вычисления при каждом шаге.
Поэтому для расчетов на микрокалькуляторах этот метод (за исключением
отмеченных £алее особых случаев) почти не используется. Достоинством неяв-
гых методов является отсутствие числовой неустойчивости решения при боль-
ших h.
В отдельных случаях уравнение (7.27) удается разрешить относительно
+ 1 аналитически. Так, для рассмотренной йС-цепи (7.27) приобретает вид
(у = ис, h = Ы, х = t)
«С — Uc -]-Д<(ивх(<п)— ис )/t •
п+1 п п+1
Разрешив это уравнение относительно ис , получим
n+i
тос -|-Д/«вх(0 ис и it 1
ис = ---------=------5—- вк( (7 28)
cn+i т-|-Д/ 1 -|-Д//т 1+т/Д/
Сравним (7.28) с уравнением простого явного метода Эйлера для данной
кепи:
ис <1~ис "ЬД^ (ивх (^п) — Wt. (7.29)
Tl “г 1 TL V 71/
Из (7.29) видно, что при больших Д//т приращение (ис — ис ) может изме-
нить нормальный знак, а при Д//т > 2 возникает нарастающая числовая неус-
тойчивость решения. Согласно (7.28) такая ситуация при неявном методе прин-
ципиально невозможна. Однако это достоинство на практике обычно не реали-
зуется, так как при больших Д? погрешность оказывается недопустимо большой
(а при малых Д/ предпочтение отдается более простым явным методам).
Интересно отметить, что абсолютные погрешности явного и неявного ме-
тодов близки, но противоположны по знаку. Взяв полусумму результатов, по-
лученных этими методами, можно получить существенно меньшую погрешность
при больших Д^/т. Такой комбинированный метод расчета реализует программа
БП45. В табл. 7.1 сопоставлены результаты расчета контрольного примера —
расчета ивых (/) дифференцирующей /?С-цепи при скачкообразном воздействии
для пвх (f) = 1 В при (>0 и Д//т = 0,6 По точности комбинированный метод
уступает методу Рунге—Кутта 4-го порядка, но значительно превосходит явный
и неявный методы Эйлера.
Нелинейные/?С-цепи в общем случае описываются нелинейным дифферен-
циальным уравнением вида
dUg/dt = (цвх (/)—(ur) С (ис)1 » (7 -30)
где R (uR) — нелинейное сопротивление и С (ис) — нелинейная емкость RC-
Цепи. Решение (7.30) с нелинейным R (tzR) будет рассмотрено в §7.3 (пример
схемы с туннельным диодом). Рассмотрим расчет переходного процесса в RC-u»-
ли с нелинейной емкостью (варикапом), описываемой зависимостью
с=с0|Л1/(1+«с/Фк)1
Таблица 7.1
Результаты контрольного расчета uR (t) дифференцирующий
7?С-цепи при большом шаге Д//т=0,5
1 W е—f/т (точное решение) ивх (б), В. при методе
Эйлера явном Эйлера неявном Эйлерг комбиниро- ванном Рунге—Кутта 4-го порядка
0,5 0,606530 0,5 0,6666666 0,5833333 0,606770
I 0,367879 0,25 0 4444444 0,3472222 0,368170
1,5 0,223130 0,125 0,2962563 0,2106482 0,223395
2 0 1355535 0,0625 0,1975308 0,1300154 0,135545
где <рк — контактная разность потенциалов; ис— обратное напряжение. Пред-
положим, что пвх (t) нарастает по экспоненциальному закону в постоянной вре-
мени твх и предельным уровнем Um.
При экспоненциальном законе изменения пвх (f), применяя простой метод
Эйлера, получаем следующие уравнения для численного моделирования нели-
нейной 1?С-цепи:
«Bx('n) = t/mU-e“<n/TBX);
Af ивх (^n) —l<cn
Ur =Ur -4-——------- n i
n-H n RC0 }/1/(1 + йс/фн)
Таблица 7 J2
Результаты расчета нелинейной 7?С-цепи при экспоненциальном
входном воздействии
In. 10-“ с UBx(fn), В '<?<*"). в uR(tn), В
0 0 0 0
1 1,90325 0 1,90325
2 3,625386 0,190325 3,435061
4 6,5936 1,176490 5,417109
6 9,023766 3,126234 5,897531
8 11.01342 5,874051 5,13937
10 12,64241 8,798765 3,843644
12 13,97611 11,31756 2,658548
14 15,06806 13,24310 1,824957
16 15,96207 14,66582 1,296245
18 16,69402 15,73297 0,961046
20 17,29329 16,55617 0,737119
25 18,35830 17,94727 0,411029
30 19,00425 18,76422 0,240025
Расчет по этим формулам реализуется программой БП46. При каждом шаге
вычислений клавиша С/П нажимается'4 раза с перерывами на время счета, что
ведет к выдаче последовательно tn, ивх (tn), ис (tn) и (tn). Перед пуском
первого шага нажимаются клавиши В/О. Вычисления начинаются с г-.улевых
значений указанных величин. Результаты расчета цепи с параметрами Д/ —
— 10~8 с, RC0 = 10~7 с, твх = 10—7 с, Um = 20 В, срк = 0,8 В приведены
табл. 7.2.
Следует отметить, что при анализе нелинейных цепей шаг Д/следует брать
меньше минимальной постоянной времени тмин. В последнем примере Смин =
= С (20 В) = 0,196С0. Следовательно, тмин = 0,196 RC0 = 0,196 • 10-7 с >
> Д£ = 10~8 с. Поэтому числовая неустойчивость в данном случае отсутство-
вала.
Возможности микрокалькуляторов «Электроника БЗ-21» для расчета пере-
ходных процессов в нелинейных цепях довольно ограничены. Так, методом Рун-
ге— Кутта' 4-го порядка можно рассчитывать только простейшие цепи. Значи-
тельно шире возможности микрокалькуляторов «Электроника БЗ-34» Напри-
мер, программа ПП8/34 позволяет рассчитывать схемы с приборами, имеющими
достаточно сложные нелинейные ВАХ. Однако время таких расчетов значитель-
но (до 10—60 с на один шаг). Это время на 2 порядка меньше при выполнении
расчетов на микро-ЭВМ «Электроника ДЗ-28». Реализация метода Рунге-
Кутта на этой ЭВМ обеспечивается программой ППЗ/28.
7.3. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ПЕРЕКЛЮЧАЮЩЕЙ
ЦЕПИ НА ТУННЕЛЬНОМ ДИОДЕ
Расчет переключающей цепи на туннельном диоде (рис. 7.4) является хоро-
шей практической иллюстрацией к применению микрокалькулятора для ре-
шения нелинейного дифференциального уравнения первой степени. Схемы,
приведенные на рис. 7.4, находят широкое применение, например, в узлах син-
хронизации современных электронных осциллографов.
Применив модель и аппроксимацию N-образной ВАХ туннельного диода,
описа! ные в § 3.3, для расчета цепи на рис. 7.4, а получим дифференциальное
уравнение
Со^-=/вх(0 - Лие-““-Д(е₽и-1).
Отсюда для простого метода Эйлера
Пп+1—ип —Tlue — О(е^“—1))/С0.
(7.31)
Рис. 7.4. Переключающие цепи с туннель-
ным - диодом, управляемым импульсами
тока (а) и напряжения (б)
Вычисления по (7.31) обеспечиваются программой БП47. Для примера времен-
ная зависимость и (/) при действии на туннельный диод прямоугольного импуль-
са тока рассчитана (рис. 7.5) при следующих данных: mtpr = 0,055 В; Ur =
= 0,1 В; D = 1й = IO-8 А; Со = 20 • 10-72 Ф; /п = 10 мА; А = 0,2718;
/БХ = 12 мА при t «и и /вх = 0 при 0 > / > Д/ = 0,1 нс; /и = 3 нс. От-
четливо видны задержка переключе-
ния и регенеративные стадии этого
процесса.
Переключающая цепь на рис.
7.4, б обычно используется как быст-
родействующий триггер с двумя
устойчивыми состояниями равнове-
сия. Из одного состояния в другое
триггер переходит при кратковре-
менном увеличении или уменьшении
Е (t) (рис. 7.6). Возможно также пе-
Рис. 7.В. Результаты расчета переход-
ного процесса при переключении тун-
нельного диода импульсами тока
Рис. 7.6. Результаты расчета переходного
процесса при переключении триггера на
туннельном диоде
реключение разнополярными импульсами тока /вх (t) — они увеличивают на-
пряжение Е на величину Р7ВХ (О- Нелинейное дифференциальное уравнение,
описывающее работу данной цепи, имеет вид
du
Со----
dt
*V>-JL_Aue-™_D (е₽“_ 1).
Следовательно, по простому методу Эйлера
Un+i = un +-^~ Аипе'~аип —D(e®un —1)1. (7.32)
со L Е J
Схема на рис. 7.4, б рассчитывается по программе БП48. Из рис. 7.8, на ко-
тором приведена расчетная зависимость и (£), легко оценить разрешающее вре-
мя триггера и параметры его стабильных состояний.
7.4. РАСЧЕТ КЛЮЧЕЙ НА БИПОЛЯРНЫХ ТРАНЗИСТОРАХ
Рассчитывать ключ на биполярном транзисторе (рис. 7.7) удобно исходя
из зарядовой модели, описанной в § 3.4. Рассмотрим два характерных случая,
когда ключ управляется прямоугольным импульсом (рис. 7.8) й импульсами с
конечной длительностью фронта и среза (рис. 7.9 и 7.10).
Рис. 7.7. Схема ключа на
биполярном транзисторе
Рис. 7.8. Временные диа-
граммы ключа при запуске
прямоугольным импульсом
В первом случае, учтя нелинейную зависимость емкости СкБ от напряжения
1/КБ ~ Пкэ, времена включения, рассасывания неосновных носителей и выклю-
чения можно определить по известным аналитическим выражениям [21]:
^вкл ='1в|<л1п Г7Б1 /(/Б1 /Б в)];
ip =тр In [(/Б1 — /Б2)/(/Б н—7Б2)];
^выкл = твыкл In [(7 Б2 7Б н)/7б2],
(7.33)
(7-34)
(7.35)
где
(тг+1.6Ске RK) (Рдг +1) ;
сп=^о хт (Pw+1);
<гвыкл=3('1'7’+ 2>1^кб + O
(7.39)
(7.37)
(7.38)
и численные коэффициенты 1,6 и 2,1 учитывают нелинейность зависимости Ско
от 17кб (усредненная емкость Свб получается разной при включении и выклю.
чении ключа). Коэффициент k^, в общем случае не равный 1, позволяет учесть
некоторое отличие постоянной времени рассасывания от постоянной времени
Рис. 7.9. Результаты расчета переход-
ного процесса ключа при запуске им-
пульсами с линейно изменяющимися
фронтом и срезом
Рис, 7.10. Результаты расчета переход-
ного процесса ключа при запуске им-
пульсами с экспоненциально изменяю-
щимися фронтом и срезом
= 'т (₽дг + 1) в активном режиме (тг — время пролета, носителями актив-
ной области прибора). При записи тр емкость СкБ не учитывается, так как
пкэ (1) =const на стадии рассасывания носителей и емкостный ток равен нулю.
Токи /Б1, /Б2, /Б и и сопротивление резистора RK рассчитываются по простым
формулам [21] в ручном режиме.
Расчет по приведенным выражениям реализуется двумя сопряженными
программами БП49 и БП50. В первой из них по (7.36)—(7.38) вычисляются по-
стоянные времени твкл, тр и твыкл. Значение йр = 1,0 вписано в программу по
адресам 25, 30 и 31 (при kn =/= 1 следует по этим адресам вписать нужное значе-
ние fe0). После вычислении постоянные времени заносятся в регистры 2, 3 и 4.
Следующая программа является продолжением первой н позволяет вычислить
значения /внл, 1р и 1Выкл по (7.33)—(7.35).
При тт = 10-8 с, Скб = 5 • 10—и Ф, Pw + 1 = 101 и RK = 500 Ом расчет
по первой программе дает: твкл = 1,414 • 10—8 с, тр = 1,01 • 10—8 с и твыкл =
= 1,54 • 10-8 с. Если /В1 = 2 мА, /бн= и ^Б2 = —2 м-^,
то расчет по второй программе дает: 1ВКЛ = 0,407 • 10—8 с, 1р = 0,475 • 10—8 о
Б ^вынл ж 0,344 • 10 8 с.
При конечной длительности фронта входного сигнала влияние нелиней-
ности емкости Скб (н самой емкости) существенно ослабляется. В этих случаях
часто представляет интерес расчет временной зависимости коллекторного тока.
Прж запуске ключе импульсами с линейными фронтом и срезом (см. рис. 7.9)
для яременибй зависимости 1ц (0 можно использовать универсальное выраже-
ние
/б(0=*7Б(о + ^Тф). (7.39)
Так, вели а — 0 и /в > 0, получим линейный рост /р (0 ” При а = О
s /|<0 получим линейный спад Iq (0 = —Если взять а = —0,5 и
/Б •< 0, то произойдет Линейный спад ig (0 от уровня +0,5 /в до —0,5/в, т. е.
»б (0 - - /Б(~0,5 + 7/7ф).
Наконец, при а = 0 и f” 1ф зависимость (7.39) имеет вид ip (0 = /0 = const.
Для рассматриваемого случая уравнения зарядной модели можно предста-
вить в виде
dQ6/d/-(-Qp/Tpe=./B (а+<//ф)|
Qe ~ tp tK/p^, ,
Отсюда
dlK j lK _ PjV (a+^0t)
dz Tp Tp
Численный расчет простым методом Эйлера выполняется по формулам!
. , At Г / t \ 1
*кп+1='кп+— 1к (°0) I а4—, ') —*кп I»
тр L \ 0j> ) 1
0i+i = tn-|-At,
где 1К («о) = PW7B. Расчет п0 9ТИМ выражениям можно выполнить по програм-
ме БП51. Расчетная зависимость iK (0, приведенная на рис. 7.9, получена для
транзистора с Тр = 10~8 с (At = 50 • 10-8 с). При включении принималось!
<и (°°) = 100 мА; а ~ 0; *к (0) =* 0- При выключении tK (оо) =- —200 мА; а =
= —0,5; 1К (0) =73 мА.
Зависимость «б(0 вида, показанного на рис. 7.10, может быть получена со-
ответствующим выбором /Б0 и 7Вм в выражении
05(О=/Бо + 'Бм(1-в"'‘,’ВХ)-
Тогда *
dlH [ tB _ Pw Рбо+^Вм (1~е вг)]
dt Тр Тр
и для численных расчетов пригодны уравнения;
tn+i — tn-rAt (7.40)
U-H = »«n+-TL [/oK+/KMV-e"<n+1/TBX)-^Kn], (7.41)
т₽
где t0K =PW/0Б и /Km=Pw/Бм.
Вычисления по (7.40) и (7.41) реализуются программой БП52. Результаты
вычислений показаны на рис. 7.10 для случая, когда твх = 0,5 • 10~8 с; тр =
= 10—в С; At = 10-7 с; /0К(0)=0; 0,(0) =0; 7кМ=100 мА при включении (при
выключении /ок = 100 мА; 7Км — —200 мА и iK (0) = и = 64 мА).
7 5. РАСЧЕТ КЛЮЧА НА МАЛОМОЩНОМ ПОЛЕВОМ
ТРАНЗИСТОРЕ
Типовой ключ на маломощном полевом транзисторе с управляющим р—п-
переходом (рис. 7.11) описывается нелинейным дифференциальным уравнением
Cdiddt — (Е — и)/ R — 1С (и, п3),
(7.42)
где для нелинейной зависимости 1С (и, и3) целесообразно использовать единую
аппроксимацию вида (3.15). В емкость С входят емкость монтажа, нагрузки и
выходная емкость транзистора.
Рис. 7.11. Схема ключа на
маломощном полевом, тран-
зисторе
Рис. 7.12. Результаты расчета переходного
процесса ключа на маломощном полевом
транзисторе
Обозначив г = RC и Ъ' = bl (1 + »]), для решения (7.42) простым методом
Эйлера запишем следующие уравнения
A'n+i = jVn-f-l;
Е—и—b' R [и3—Uo)2
1 — е
Вычисления производятся по программе БГ153. На рнс. 7.12 приведены ре
аультаты расчета переходного процесса ключа иа полевом транзисторе с пара
метрами: Ь' = ~ $ МА/В2; k = 1; Uo = 3 В. Параметры ключа: b'R —
= 5 1/В; R = 1 кОм; Е = 15 В; С = 20 пФ; т = 20 нс. Расчет велся при шаге
А/ = 1 нс, входное воздействие было в виде линейно растущего перепада; на-
пряжение (U3— Ui,) возрастало с 0 до 2,5 В за 5 нс
7.6. РАСЧЕТ КЛЮЧЕЙ НА МОЩНЫХ ПОЛЕВЫХ ТРАНЗИСТОРАХ
Ключи на мощных МДП-транзисторах обеспечивают уникальное сочетание
высокого быстродействия с большими переключаемыми токами [24, 25]. Так,
ключ на МДП-трапзисторе КП907 способен переключать ток до 2—2,5 А за вре-
мя менее 1 нс
Рассмотрим расчет переходных процессов в ключе (рис. 7.13) при различных
приближениях. Оценить переходный процесс в идеальных условиях, когда L. =
= 0 и Rr = 0, можно, решая нелинейное дифференциальное уравнение (7.42)
при зависимости Ic (U3, U(), определяемой (3.16). Используя простой метод
Эйлера, получаем следующие расчетные выражения для зависимости и (t):
tn+i (7.43)
“п+г—^пЧ ~ [Ес~,(п——е 3)]> (7-44)
где т = рс С и С = (С22 + С12 + Сн).
На рис. 7.13, в сплошной линией показаны результаты расчета по форму-
лам (7.43) и (7.44), реализуемого программой БП54 при следующих данных1
$ = 0,03 A/В; р = 2 (транзистор КП905); Rc — 100 Ом; С = 10 пФ; т = 1 нс;
£с — 20 В и Л/= 0,1 нс.
Как видно из рис. 7.13, в, времена переключения ключа составляют 1 нс и
менее, что хорошо согласуется с экспериментальными данными (25). Однако при
таких малых временах переключения даже малая индуктивность L стоковой
Рис. 7.13. Схема ключа на мощном МДП-транзисторе (а), эквивалентная схема (б) и пример
расчета переходных процессов в нем (б)
цепи (единицы наногенри) может существенно влиять на характер и временные
параметры переходного процесса. Учет L 0 при Rr = 0 приводит к системе
из двух дифференциальных уравнений 1-го порядка:
du/dt = (г-SU3 (1 —е ~ри/и3])/С;
dildt = (Ес — и — iRc)i L,
первое из которых нелинейно. Им соответствуют формулы для расчета простым
методом Эйлера:
ип+1 = Pn—SU3 (1 —еj. (7
/ А/ \
*n+i = tn + f £ I (^с’ ип.+1~~^п :(7.4б)
Расчет по (7.45) и (7.46) выполняется с помощью программы БП55. На каждом
шаге вычислений выдается номер шага п, что позволяет оценивать текущее вре-
мя tn = На рис. 7.13, в штриховой линией показан переходный процесс,
рассчитанный при L. = 50 иГи и указанных остальных данных ключа. Наличие
индуктивности L ведет к уменьшению времени переключения при малых т =
= L! (RcC). Однако при т > 0,25 во временной зависимости и (0 появляются
выбросы. В рассматриваемом случае т = 0,5 и эти выбросы отчетливо видны
на кривой переходного процесса.
Возможности расчета на серийных микрокалькуляторах переходных про-
цессов в нелинейных цепях, описываемых дифференциальными уравнениями
2-го и более высокого порядков, ограничены. В частности, из-за этого при L =/= О
приходится использовать упрощенную аппроксимацию для зависимости
/с (С/с, t/3) вида (3.14). В программе БП55 уже нет места для учета /?г ^0 и ав-
томатического формирования более сложной, чем скачок, зависимости 1/вх (/)
(однако можно вручную задавать значения UЗп на каждом п-ы шаге вычисле-
ний). Кроме того, в приведенных примерах не учитывается обратная связь че-
рез проходную емкость С12, что допустимо только при Rr = 0. Таким образом,
расчет переходных процессов оказывается в известной мере идеализированным
даже при учете L =/= 0.'
Эти ограничения практически отсутствуют при организации подобных рас-
четов на микро-ЭВМ. В пакете программ микро-ЭВМ «Электроника ДЗ-28» дана
программа ПП9/28 расчета ключа (рис. 7.13, а) при L =/= 0 с учетом Rr =# 0. В
этом случае ключ описывается системой из трех дифференциальных уравнений,
следующих из рассмотрения эквивалентной схемы на рис. 7.13, б [54):
w «1—«2 dt7c г'з di ^с~^с
dt Cu ’ di Сн ’ dt L
где /
ii— (HBX— ^з)/^г!
♦ . /с—i3)/C22
1/Сн-}-1 / C22 +1 / C]2
is = (i— 7^— i2)/ (14" C22/C);
Ic = f (U3, дается формулой (3.17); 17вх— напряжение генератора вход-
ного сигнала (t/BX=/= U3, так как в данном случае учтено конечное 7?,).
Вычисление любого заданного аналитически значения (7ВХ (!) программой
ПП9/28 обеспечивается с помощью подпрограммы, помеченной меткой М 0002.
Непосредственно в текст программы вписана подпрограмма вычисления t/BX (/)
в виде импульса с экспоненциальными фронтом и срезом:
uBx(t) = Um (1— е */Твх) при
«вх(0 = «вх(<и)е-(/ (и)/твх при t > t„
Такой сигнал чаще всего используется для запуска ключей на мощных МДП-
транзисторах. При необходимости расчета переходного процесса при другом
законе изменения пвх (/) подпрограмма может быть изменена без изменения тек-
ста основной программы.
После ввода исходных данных при каждом пуске согласно программе
ПП9/28 выдаются значения wBX (/) = РУ, t = РХ, затем Uc (i) = РУ и i (/) =
= РХ (время вычисления для одного значения t— доли секунды, так что на
практике оно ограничено лишь скоростью записи результатов). Предусмотрена
возможность выдачи результатов через интервалы времени N&t, что позволяет
выбирать Д/ малым с целью обеспечения необходимой точности и предотвраще-
ния числовой неустойчивости решения. Вычисления по программе легко прове-
рить, введя в рассмотренном примере дополнительные данные: твх, ta, Си, С12,
С22, Яг> Ь, и3 (0). При малых Rr и твх полученный результат будет близок к при-
веденному на рис. 7.13, в штриховой линией. Программа ПП9/28 реализует
расчет простым методом Эйлера, так как из-за невысокой точности аппрокси-
мации ВАХ полевого транзистора применение бол,ее точного метода Рунге^-
Кутта не дает особых преимуществ.
7.7. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРЯМЫМ ЧИСЛЕННЫМ
ИНТЕГРИРОВАНИЕМ
Нередко важно знать не саму зависимость напряжения (или тока) переход-
ного процесса от времени, а время, в течение которого напряжение (или ток)
меняется в определенных пределах. Например, длительность фронта и среза
импульсов обычно оценивается как время, в течение которого и (/) меняется от
значения 0,1(7т до 0,9(7т, где Um — амплитуда импульса. Для импульсных
устройств, описываемых нелинейным дифференциальным уравнением l-ro по-
рядка, например вида
. du/dt = (Е —и — RI (и))/ (RC), (7.47)
допускающим разделение переменных, получить время t можно численным
интегрированием. Так, для уравнения (7.47) можно записать dt — CRdul(E—и~
— Rl(u)). Отсюда искомое время
„ С du
t = CR \ -------
J E—u—Rl (и)
(7.48)
Процедуре численного интегрирования в общем случае должен предшество-
вать расчет статического режима соответствующей схемы (см. гл. 4), при кото-
ром определяются начальные ин и конечные ик значения и (/).
В качестве конкретного примера рассмотрим расчет переходного процесса
включения ключа на полевом транзисторе, запускаемого перепадом Um =
= const или t > 0 (при (73 (/) = var данный метод не применим). Для зави-
симости 7с (и) маломощных и мощных полевых транзисторов можно использо-
вать обобщенное выражение
^С=УСм(1-е-И/С7’), (7.49)
где для маломощных транзисторов /См = Ь' (173— 4/о)2, а Для мощных
/См = S (U3 — U„), причем U* = (U3 — UB)/p. Тогда из (7.48) и (7.49) по-
лучим
t
~RC
(7.50)
Для вычислений по (7.50) воспользуемся программой вычисления определенно-
го интеграла методом трапеций (см § 2.4), дополнив ее подпрограммой вычис-
ления подынтегральной функции (7.50). Программа БП56 составлена таким
способом.
Следует отметить, что вычисление интеграла методом трапеций дает более
высокую точность, чем интегрирование дифференциальных уравнений простым
методом Эйлера (при том же шаге). Шаг Ди при этом следует выбирать из усло-
вия Ди = (и„ — uK)/N, где N — целое число (обычно от 4 до 20).
Описанным методом можно рассчитывать не только единичные значения t,
но и всю кривую монотонного переходного процесса. Для этого следует зада-
ваться рядом значений uKi и определять соответствующие tt (пример в табл. 7.3
для случая: RIqm = 30 В; R = Rc — 100 Ом; /См = 0,3 А (прибор КП905);
U* = 5 В, Ес =20 В; С = 10 пФ и т = 1 нс). Надо помнить, что нельзя зада-
вать ик ниже остаточного напряжения включенного ключа в статическом режи-
ме, поскольку в противном случае расчет будет заведомо ошибочным. При за-
крытом ключе ив = (Ес— 1q3 R) ~ Ес, где /Сз— ток стока закрытого тран-
зистора. z
Результаты расчета переходного процесса включения ключа
на мощном МДП-транзисторе
и, В 20 15 Ю 8 6 5 4
tl(RC) 0 0,189 0,443 0,588 0,805 1,003 2,09
7.8. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ
И НЕЛИНЕЙНЫХ РЕЗОНАНСНЫХ ЦЕПЯХ
Резонансные контуры широко применяются в импульсных устройствах. Так,
высокодобротпые контуры с ударным возбуждением используются в отметчиках
временных интервалов, а ннзкодобротные контуры — для формирования ко-
ротких импульсов. Реакция реального (особенно низкодобротного) контура
на перепад с конечной длительностью фронта может вычисляться аналитически,
но расчетные формулы при этом оказываются весьма громоздкими и выводятся
с рядом упрощений [37, 38). Микро-ЭВМ позволяют вычислить реакцию чис-
ленными методами, в частности методом переменных состояния, без таких упро-
щений.
Параллельный колебательный контур (рис. 7.14) с ударным возбуждением
коллекторным током i (/) транзистора описывается системой из двух линейных
дифференциальных уравнений 1-го порядка:
duldt = (i (t) — ij — ulR)IC‘,
dildt = (u — t^)/L.
С помощью программы БП57 решается система (7.51) при экспоненциально
нарастающем возбуждающем токе i (t) = 1А (1 — е~^т) простым методом
Эйлера. На рис. 7.15 дан пример расчета переходного процесса по этой програм-
ме при следующих исходных данных: М = т/&t = 5; L = 10“3 Гн; С = 10~8 Ф;
А/ = 0,25 • 10~6 с; г = 20 Ом; Я = 104 Ом; и (0) = 0 и I (0) = 0.
(7-51)
Рис. 7.14. Транзисторная схема возбуждения параллельного контура ударного возбуждения
(а) и его эквивалентная схема (б)
Система (7.51) решается с помощью программы БП58 при линейно нарас-
тающем до 1 А за время /ф0 = Л4Д/ воздействии i (/). Результат расчета по ней
дай на рис. 7.16 (R уменьшено до 2 • 103 Ом, остальные данные прежние). Сле-
дует отметить, что такой характер переходного процесса наблюдается при работе
транзистора в схеме на рис. 7.14, а в активном режиме.
Последовательный контур, возбуждаемый источником напряжения Е (f)
(рис. 7.17, а), описывается следующими дифференциальными уравнениями
di/dt = (Е (/) — iR — u)!L\ duldt = ilC.
По программе БГ159 рассчитывается переходный процесс при скачкообразном
воздействии Е (/) = Е = const при t 0. Результаты расчета представлены
на рис. 7.17, б при Е = 10 В; L = 10~з Гн;' С= 10~» Ф: R = 0; А/ =
= 0,5 • 10-е С; и (0) = 0; i (0) = 0.
Аналогично могут быть рассчитаны переходные процессы при возбуждении
нелинейных контуров. По программе БП60 рассчитывается переходный процесс
и, В ‘,нА
-В-
Рис. 7.15. Результаты расчета пе-
реходного процесса в параллельном
£С-контуре при возбуждении его
экспоненциальным перепадом тока
Рис. 7.16. Результаты расчета пе-
реходного процесса в параллельном
£С-контуре при возбуждении его
линейно изменяющимся перепадом
тока
в контуре, изображенном на рис. 7.17, af при нелинейной емкости, в качестве
которой используется варикап. Зависимость С от и в этом случае следующая;
х С ~ Cq "|/' Uо/(и 4- <Рк)>
где Со — емкость С при (и 4- Фн) ~ Цъ Фк — контактная разность потенциа-
лов.
Если Е (t) меняется во времени, то в программах БП59 и БП60 нужно вво-
дить соответствующее значение Е (tn) для каждого tn~ NAt. Результат расчета
переходного процесса в нелинейном последовательном LC-контуре при линейно
Рис. 7.17. Последовательный линейный контур ударного
возбуждения (а) и пример расчета переходных процес-
сов в нем (б)
Рис. 7.18. Переходные про-
цессы при возбуждении не-
линейного £ С-контура ли-
нейно нарастающим перепа-
дом напряжения
нарастающем до 20 В за время /ф = 4 нс напряжении Е (/) и параметрах Св =
=> 20 • 10—12 Ф, L — 20 • 10~9 Гн, R = 50 Ом, и ([)) = 0 и i (0) = 0 приведен
на рис. 7.18. Как видно из рисунка, уменьшение С (и) при переходном процессе
ведет к обострению фронта входного перепада. Следовательно, нелинейный кон-
тур можно использовать для укорочения фронта импульсов, что находит при-
менение в импульсной технике.
7.9 РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА УСТАНОВЛЕНИЯ
АМПЛИТУДЫ КОЛЕБАНИИ ЕС-ГЕНЕРАТОРА
Генератор синусоидальных колебаний на полевом транзисторе (рис. 7.19)
или электронной лампе описывается нелинейным дифференциальным уравне-
нием 2-го порядка [37, 38]
d?u 1 Г MS(u)1 du
-----1-— г—-------'-------<Вп «=0, (7.52)
dt2 L [ С J dt 0
где М — коэффипиент взаимоиндукции катушек контура и связи; ю0 =
и принято, что выходное сопротивление активного прибора R, — оо (его легко
пересчитать в последовательное сопротивление контура г).
В принципе уравнение (7.52) при известной нелинейной зависимости кру-
тизны S от напряжения и решается численными методами. Одиако известно, что
при высокой добротности колебательного контура напряжение и (/) оказывает-
ся практически синусоидальным:
и (/) = U (/) sin <о0(, (7.53)
причем его амплитуда U (/) оказывается медленно изменяющейся по отношению
к sin a>ot функцией. Поскольку шаг численного интегрирования должен быть
заметно меньше периода высокочастотной синусоидальной составляющей и (/),
то непосредственное численное решение (7.52) требует весьма большого объема
вычислении и на микрокалькуляторах нецелесообразно.
Рис. 7.19. LC-генсратор синусоидальных колебаний на мощном МДП-транзисторе (а) н вре-
менная зависимость амплитуды колебаний (в относительных единицах)
Если решение (7.52) заранее искать в форме (7.53), то оно приводит к ана-
литическим выражениям для зависимости U (/) [37, 38]. При таком подходе не-
линейную зависимость тока от и аппроксимируют неполным полиномом 3-й
степени: = аа + аги + а3и3 (о, >0, а3 С 0). Тогда 5 (u) = di^du = at +
+ ЗадЦ2 = 50 — 3|as|u2 и уравнение (7.52) принимает вид
d2 и /г
dt2 "ЧТ
Л450 М
~LC—^3^~LC~U
du
—+<о§ «=0.
(7.54)
Считая, что колебания возрастают медленно, решение (7.54) можно получить
в виде [38]
U (О = Чт/V1 +[(Нст/(70)2-1] ехр (-2 | аэкв | /), (7.55)
где
Vvэкв/2сХэкв
l/r—c^M/L 3[as [ЛИ
2<^экв— , v3kb— 1_2 С ’ 7’56)
С/о — начальное значение амплитуды.
Расчет переходного процесса установления амплитуды колебаний £С-ге-
нератора по (7.55) и (7.56) реализуется программой БП61 (пример расчета см.
на рис. 7.19, б). Он соответствует мягкому режиму возникновения колебаний.
7.10. РАСЧЕТ РЕАКЦИИ ВИДЕОУСИЛИТЕЛЕЙ С ВЫСОКОЧАСТОТНОЙ
КОРРЕКЦИЕЙ
Импульсные усилители находят широкое применение в различных радио-
технических устройствах. Усилители без коррекции имеют экспоненциальные
переходные характеристики, и их аналитический или численный расчет не вызы-
веет трудностей. Усилители с простой индуктивной коррекцией можно рассчи-
тывать, используя программу БП55 расчета ключа при ограничении входного
сигяала по амплитуде.
Видеоусилители со сложной коррекцией обычно проектируются <з исполь-
зованием известных критериев оптимальности частотных или переходных харак-
теристик [55], Однако при этом неясно, к каким искажениям переходной харак-
теристики ведет отклонение параметров коррекции от оптимальных. Кроме
того, реакция таких усилителей на более сложное, чем перепад, воздействие
аналитически трудно предсказуема. В связи с этим расчет реакции каскадов
видеоусилителей как на простое, так и сложное воздействия численными мето-
дами представляет большой практический интерес.
Рие. 7.21. Результаты расчета временной зависимости выходного напряжения каскада сс
сложной коррекцией при ступенчатом (а) и линейно нарастающем (б) входном перепаде
, Реакция выходной цепи каскада со сложной коррекцией (рис. 7.20) на сиг-
нал i (f) = SuBX (f), где 5 — крутизна передаточной характеристики усилите-
ля, определяется решением системы из четырех линейных дифференциальных
уравнений 1-го порядка:
C^du]ldt = i — i2 — щ/Rt
Czdujdt ;= (g г/g/Rr\
L^dijdt = Uf — u2;
Lidijdt = u2 — t\R.
Эта система решается простым методом Эйлера по формулам;
^in+i ~ uin ~i~ (A//Cj) (z'n d.2n /?г);
izn+i — /L2) (Wjn-f-j игп)',
^2П“Р (AtIC2) (t2 П-Н zln «2п/7?H);
= + (u2n+l—zln R~)'
(7.57)
Для решения системы (7.57) программной памяти микрокалькулятора «Электро-
ника БЗ-21» недостаточно. В связи с этим целесообразно рассмотрение трех
частных случаев: 1) Rt — оо и Rn = оо; 2) Ri = оо и /?и ^оо; 3) Rt =^=оо
и /?н = оо. Расчеты при этих данных реализуются по программам БП62—64.
На рис. 7.21 показаны расчетные реакции видеоусилителя на ступенчатый и
линейно нарастающий (£ф0 = 2 нс) сигналы при следующих данных: Cj =
= 2,5 пФ; С2 = 20 пФ; Lx = Lz = 50 нГ; Д/ = 0,1 нс; /?, = 500 Ом; Ra = оо
и R == 100 Ом. Как видно из приведенного примера, реакция на скачок имеет
заметную колебательную составляющую, которая отсутствует при реакции на
линейно нарастающий перепад конечной длительности /ф0 = 2 нс. Данный
пример (решение системы из четырех дифференциальных уравнений) характе-
ризует предел сложности подобных вычислений для микрокалькуляторов
«Электроника БЗ-21».
Рис. 7.22. Представление кривой
х(6) суперпозицией скачков
7.11. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЛИНЕЙНЫХ ЦЕПЯХ
в С ПОМОШЬЮ ИНТЕГРАЛА СУПЕРПОЗИЦИИ
Одним из широкораспространенных методов расчета переходных процес-
сов в линейных импульсных цепях является метод, основанный на использова.
нии интеграла суперпозиции (Дюамеля) {35, 37, 38, 56]. При этом методе на'-
ходится выходное напряжение (или ток)
цепи у (?) в' любой момент времени t при
известных переходной характеристике це-
пи а (0) и входном сигнале х (0), где 0 —
текущее время (обозначение 0 введено,
чтобы текущее время отличалось от задан-
ного момента времени /).
Суть метода поясняет рис. 7.22. Заме-
ним плавную зависимость х (0) ступенча-
той. Начальное значение х (0) создает
выходной сигнал х (0) а (0) Если в мо-
мент времени (0 4- Д0) возникает скачок
входного сигнала, то его знач.ние Дх ss
~ (dx/d0) Д0. Этот скачок создает выход-
ной сигнал, являющийся результатом ум-
ножения Дх на значение переходной ха-
рактеристики, определяемое с учетом вре-
мени действия скачка до момента времени /. Это время равно t — 0 — Д0. Про-
суммировав реакции от х (0) и всех скачков, получим выходной сигнал как су-
перпозицию реакций цепи на все скачки:
6=t. , .
y(t) = x
a(t—e—дв) де.
(7.58)
О' '
Формула (7.58) непосредственно пригодна для численных расчетов Если
она переходит в обычную конечную форму записи интеграла
Д0 dO -> 0, то
суперпозиции:
(7.59)
Приведем также
у Ц) — х (0) a (t) + f х' (0) a (t — 0) d0,
о
другие равноправные выражения [57]:
t y(t) = x (0) a (t)+ J 0 x' (t — 0) a (0) й0; (7.60)
t y(t) = a (0) x (t) + J 0 l' (0) x (t — 0) d0; (7.61)
t У (0 = a (0) X (f) + f 0 a' {t — 0) x (0) dQ. (7.62)
Применение одной из формул (7.59)—(7.62) обычно определяется условиями
простоты дифференцирования входного воздействия или переходной характе-
ристики. Для реализации расчетов данным методом легко приспособить под-
ходящую (прежде всего по числу шагов и свободных регистров памяти) програм-
му численного интегрирования (см. § 2.4).
Данный метод применим при расчете реакции линейных цепей (усилителей,
четырехполюсников и др.) на произвольное, заданное своими дискретными зна-
чениями, воздействие. По программе БП65, использующей для интегрирования
метод прямоугольников, вычисляется реакция цепи
с экспоненциальной переходной характеристикой
а(6) =(1—е—е/т) (7.63)
на дискретно заданные входные сигналы инх (f). Ре-
зультат расчета выходного напряжения и (/) на гра-
фически заданное входное воздействие дан на
рис. 7.23.
Если иЕХ (9) выражается аналитически, то ди-
скретные значения псх (6) можно сформировать в
самой программе. Иллюстрацией к такому подходу
является программа БП66, по которой вычисляется
и (0 при а (0) вида (7.63) и
«вх<6) = (1— е 6/Твх).
Результат вычислений по этой программе практически совпадает с приведенным
иа рис. 7.23. По примеру составления этой программы можно составить програм-
мы для вычисления реакции линейных цепей на более сложные воздействия,
трудно поддающиеся аналитическому расчету.
Рис. 7.23. К расчету «.(/) на
выходе цепи с экспоненци-
альной переходной характе-
ристикой с помощью инте-
грала суперпозиции
ГЛАВА 8
РАСЧЕТ И МОДЕЛИРОВАНИЕ РЕЛАКСАЦИОННЫХ
ГЕНЕРАТОРОВ
8.1. РАСЧЕТ И МОДЕЛИРОВАНИЕ МУЛЬТИВИБРАТОРОВ
НА ТУННЕЛЬНОМ ДИОДЕ
Автоколебательный и ждущий мультивибраторы на туннельных диодах
(рис. 8.1) являются нелинейными регенеративными импульсными устройства-
ми высокого быстродействия. Их работа описывается системой из двух дифферен-
циальных уравнений l-ro порядка:
dildt — (Е — '.R — и)! L\ (8.1)
du/dt = (i + iaaD (/) — I («))/С, (8.2)
где зап (О — временная зависимость запускающего тока (у автоколебатель-
ного мультивибратора <вап(0] = О); / (и) — нелинейная N-образная характери-
стика туннельного диода (3.3). Уравнение (8.2) нелинейно, так что данная систе-
ма не имеет аналитического решения.
Для автоколебательного мультивибратора (8,1) и (8.2) решаются простым
численным методом Эйлера с использованием формул:
<п+1 = 'п + (д^/^) —*'n R—ин)» (9.3)
«n+i=«n + (A//C) [ln+i-A«ne-aUn_P (е₽“"-1)1. (8.4)
Расчет по (8.3) и (8.4) реализуется программой БП67, а результат примера
расчета временных зависимостей I (t) и и (/) по этой программе показан на
рис. 8.2 при С = 10-Ю-i2 ф; L — 100-10—» Гн; А/= 0,1 нс; Е = 0,3В; А =
= 0,2718; /п - 10 мА; D = 10—8 A; Ut = 0,1 В; а = 10 1/В и ₽ = 20 1/В.
Программой БП68 реализуется расчет и моделирование .ждущего мульти-
вибратора по формулам:
Ьп4~<зап (*n) ^une п De n]j (8.5)
in+i—гп+ (At/^-) (Е—inR—un+i)-
(8-6)
При записи (8.5) в члене (е15" — 1) опущена единица, что ведет к очень малой
погрешности в определении / (и) — порядка D = I0. Последнее упрощает про-
грамму и уменьшает до допустимого значения число ее шагов. Результаты рас-
Л’цс. 8.1. Автоколебательный (а) и ждущий (б) мультивибраторы на туннельном диоде
чета временной зависимости при запуске мультивибратора прямоугольным им-
пульсом даны рис. 8.3 (R = 10 Ом; и (0) = 0,095 В; i (0) = 9,986 мА; остальные
данные см. выше).
Расчет временных зависимостей и (I) и I (/), т. е. моделирование мульти-
вибратора занимает много времени. Поэтому в инженерной практике целесооб-
разен расчет с использованием аналитических выражений, получаемых при со-
Рис. 8.2. Результаты расче-
та переходных процессов
автоколебательного мульти-
вибратора на туннель-
ном диоде
ответствующей аппроксимации I (и). При больших L длительность стадии роста
тока от значения /в до /п (рабочая точка на туннельной ветви ВАХ) может
с ыть определена по выражениям [23]
= 2т L /7^/(1 + (8.7)
где = —(8.8)
е=(Е —П1К)/((/2К —i/|R); (8.9)
'lL = L (^П — {b)/(^2R~ (8.10)
и значения напряжений
Рис. 8.3. Результаты расчета переходных,
процессов ждущего мультивибратора иа
туннельном диоде
Результаты расчета по (8.7)—'8.10).
реализуемого программой БП69, соот-
ветствуют промежуточным результатам
расчета по линейной и параболической
аппроксимации туннельного участка
ВАХ туннельного диода. Результаты
этого расчета более близки к реальным
результатам чем получаемые при рас-
чете по указанным аппроксимациям.
Для времени спада тока от значения/п
до /в воспользуемся выражением [23]
4 = 1,5т2Тд/(1 + 1,5т2 Ц — е)),
где
tih = —U j R) / (IJ3R—U2R);
Расчет /2 выполняется по программе
БП70.
Приближенные выражения для длительности фронта и среза выходных им-
пульсов и (/) приведены в [22, 23, 58]. Так, для GaAs туннельных диодов
/ф~(0,78... 1)С/(/п-/в); /с~(120... 134) С(/п//п.
Расчет по этим формулам легко провести в непрограммируемом режиме работы
микрокалькулятора.
Рассмотрим пример расчета tr и t2 по программам БП69 и 70. Пусть UGR =
= 0,05 В; H1r=0,2 В; U2R = 0,542 В; U3R = 0,77 В; £' = 0,3 В; /п =
= 10-10-3 А; /в = 0,5-10—3 А; £ = 100-10_® Гн; R = 10 Ом. Тогда расчет дает:
е = 0,2924; /х/тв = 1,954; /1 = 5,43-10-» с; t2/%L = 0,868; /2 = 2,41 • 10~» с,
8.2. РАСЧЕТ РЕЛАКСАЦИОННОГО ГЕНЕРАТОРА
НА ОДНОПЕРЕХОДНОМ ТРАНЗИСТОРЕ
Релаксационный генератор на однопереходном транзисторе (рис. 8.4, а)
применяется как высокостабильный низкочастотный задающий автогенератор
импульсных колебаний. Резистор R1 иногда включается для термокомпенсации,
a R2 — для съема коротких разрядных импульсов. Сопротивление зарядного
резистора R выбирается из условий
(£—Un)/ln>R >
где С/п. Пв и /п, /в — напряжения и токи пика и впадины S-образной
ВАХ однопереходного транзистора (рис. 8.4, б). Постоянная времени RC опре-
деляет время заряда i3 конденсатора С, а постоянная времени CRfl = С (Rz +
+ /?д) (Лд — дифференциальное сопротивление включенного прибора со сторо-
ны эмиттера) — время разряда С.
Коэффициент деления напряжения при Rj и R2 [59, 60]
_ 'П+Кг/Кбб .
1-|-/?бб “1“ А]//?бб
где т] — собственный коэффициент деления транзистора; Rec — межбазовое со-
противление.
Напряжение пика (включения)
^+^д,
где 17д ~ mcpr In (/п//эо) (8.12)
и /ао _ обратный ток эмиттера.
Рис. 8.4. Релаксатор на однопереходном транзисторе (а) н выбор положения нагрузочной
прямой зарядного резистора R (б)
V
Время экспоненциального заряда конденсатора С от уровня (7В до уровня
Un (р ис. 8.5)
t3=RC In [(E-UB)l(E-Un)],
а время разряда
* ?p = A’pCln((7n/i7B).
Расчет по этим выражениям реализуется совмещенными программами БП71
и 72. Первая из них определяет значения T|R и (7д по (8.11) и (8.12), причем
значение т<рт ~ 0,050 В вписано в программу по адресам 53—55, 60, 61. Вто-
рая позволяет найти Оп, t3, tp, период колебаний t0 = t3 + и скважность
импульсов Q =
В качестве примера рассмотрим расчет релаксатора на однопереходиом
транзисторе КТ117В с параметрами: т; = 0,6; Rt = 1000 Ом; R2 — 100 Ом;
/?бб = Ю4 Ом; /п = 20 мкА; /э0 = 0,01 мкА; (7В = 5 В; Е = 15 В /? =»
= 105 Ом; С = 0,1 -10”6 Ф; R„ = 100 Ом. Расчет по первой программе дает
1]д = 0,5495 и t/д = 0,38 В, а по второй Un = 8,623 В; t3 — 4,5-10~3 с;
tp = 1,09-IO-3 с; t0 = 4,50-Ю-з с и Q = 412,8.
8.3. РАСЧЕТ И МОДЕЛИРОВАНИЕ РЕЛАКСАТОРА
НА ЛАВИННОМ ТРАНЗИСТОРЕ
Наиболее распространенная схема емкостного релаксатора на лавинном
транзисторе с общим эмиттером (рис. 8.6, а) широко применяется в качестве ге-
нератора импульсов с временем нарастания /ф 1 яс [26—28]. Детальный рас-
Рис. 8.S. Переходные процессы ре-
лаксатора на однопереходном тран-
зисторе
Рис. 8.6, Схема релаксатора и а лавинном транзисто-
ре (а) и модель его разрядной цепи (б)
чет сложных переходных процессов в этой схеме весьма труден,.так как требует
учета ряда факторов нелинейности и инерционности. В ряде случаев он выпол-
нен на ЭВМ [28, 61]. Однако для некоторых практически важных случаев его
можно провести и с помощью микрокалькулятора.
Прежде всего отметим, что рассматриваемый релаксатор обычно использует-
ся в ждущем режиме. При этом необходимо выполнение условия
/н (О)==^ок ~ (^К—ис (0))/^к< ^ОБ 753 ^в/^б-
В исходном состоянии ток базы /в (0) — «к (0)> 8 разность токов (70В — 70К)
протекает через открытый диодДБ. При этом конденсатор С заряжен до началь-
ного напряжения ис (0), весьма близкого к Uм. При подаче запускающего
импульса ток базы обратной полярности уменьшается до нуля (или становится
прямой полярности). При этом конденсатор С разряжается через лавинный тран-
вистор и резистор нагрузки Rn, на котором формируется короткий импульс.
После разряда С заряд происходит по экспоненциальному закону с постоянной
времени CRK. Эта стадия не представляет для расчета каких-либо трудностей.
При RK Rh значения RK практически не влияют на процесс разряда.
При использовании в релаксаторе лавинных транзисторов с ограниченной
смыканием областью объемного заряда (в частности, специальных лавинных
транзисторов серии ГТ338 и большинства кремниевых планарно-эпитаксиальных)
соблюдается условие
тт Т£=Ь/Д = Д/(Дт-]-Дн), (8.13)
где L — индуктивность разрядной цепи; /?т — последовательное активное со-
противление полностью открытого лавинного транзистора.
В этом случае можно пренебречь собственной инерционностью лавинного
транзистора и представить модель разрядной цепи релаксатора в виде, показан-
ном на рис. 8.6, б. Здесь S — нелинейный двухполюсник, динамическая ВАХ
которого определяется формулой (3.20), если положить в ней /в = tg (t). При
(t) = const эта характеристика совпадает со статической. Так .как обычно
ток /ко ничтожно мал, то им можно пренебречь и из (3.19) и (3.20) получить
” /” «К~*’б(0
«т(0^кэ W = 1-а—---------. (8.14)
Согласно рис. 8.6, б
diK ис——“т (0 duc 1К
dt — L ’ dt
Следовательно, используя простой метод Эйлера, временные зависимости
(к (Q и ис (/) можно рассчитывать по формулам:
«к п+1 = *нп + (^/(иСп—^кп—итп)‘, (8-15)
иС п-}-1 =иСп (Л£/С) iK n+i t (8.16)
где итп = uT (tn) на каждом шаге вычислений определяется по (8.14).
Моделирование и расчет иа микрокалькуляторе релаксатора по формулам
(8.14), (8.15) и (8.16) реализуются программой БП73. При расчетах по програм-
ме необходимо вводить начальные значения tK (0) и ис (0) (обычно 1К (0) =»
= 70к и ис (0) = 7/м), а временную зависимость 1g (t) учитывать вводом
вначений 1g (tn) в соответствующие моменты времени.
На ряс. 8.7 показаны рассчитанные зависимости ит (t), ис (t) и 1И (f) при
вапуске релаксатора импульсом тока tg (1), также показанным на рисунке. Рас-
чет велся при типовых данных релаксатора на лавинном транзисторе ГТ338А:
Рис. 8.7. Переходные процессы релак-
сатора на лавинном транзисторе, рас-
считанные на микрокалькуляторе
(------расчет методом динамическо-
го пробоя)
U м = 50 В; а = 0,98; п* = 3 (записано
по адресу 22); /?т = 15 Ом; Ru = 75 Ом;
R = 90 Ом (записано по адресам 41 и 42);
£ = 40 нГ; Л/=0,1 нс; М/L =
= 2,5-10-3 С/Гн; с=20 пФ; Д?/С=5 с/Ф;
iK(0)=10—3 ‘"А; ис(0)=50 В. Расчет справед-
лив до момента выключения лавинного
транзистора, определяемого по скачку пт(/).
Обычно после скачка наблюдается неустой-
чивость решения, легко отмечаемая по не-
реальным значениям ит > ис. Скачок со-
ответствует переходу релаксатора в ста-
дию заряда конденсатора С, при котором
напряжение ис (f) экспоненциально (с по-
стоянной времени CRK) достигает уровня
ис (0).
Основная особенность описанной мо-
дели релаксатора — отсутствие учета соб-
ственной инерционности лавинного транзи-
стора. Поэтому зависимость пт (/) содержит
разрывные участки спада (при включении
транзистора) и роста (при выключении
транзистора). В действительности резких
скачков ит (0 не наблюдается. В то же вре-
мя эта модель легко учитывает влияние
временной зависимости i6 (/) на характер
переходного процесса.
Если условие (8.13) не выполняется, то расчет можно выполнить более при-
ближенным методом динамического пробоя (см. § 3.7). В этом случае модель ре-
лаксатора на стадии разряда конденсатора С представляется также в виде пред-
ставленной на рис. 8.6, б, но двухполюсник S следует рассматривать как источ-
ник перепада напряжения пт (/) конечной длительности, причем зависимость
ит (t) = Укэ (0 определяется приближенной формулой (3.22). Расчет реали-
зуется программой БП74. В начале программы (адреса 00—10) организуется
ряд значений величины
(^/Ст)п+1 = (</Тт)п + (Л</т.г),
после чего по (3.22) рассчитывается значение ит — адреса команд И—43. За-
тем по (8.15) определяется значение iK (адреса команд 43—75) и по (8.16) — зна-
чение ис (адреса команд от 75 до 94).
Для сравнения на рис. 8.7 даны зависимости (/), ис (f) и i„ (/), рассчи-
танные методом динамического пробоя (Л//тт = 0,2). Как видно, в данном слу-
чае учет заметной .инерционности транзистора (тт = 0,5 нс) ведет к дополнитель-
ной задержке разрядного импульса, удлинению его фронта и среза, а также
уменьшению амплитуды. Более детально моделирование релаксатора на лавин-
ном транзисторе описано в [28, 61].
8.4. РАСЧЕТ АВТОКОЛЕБАТЕЛЬНЫХ МУЛЬТИВИБРАТОРОВ
НА ИНТЕГРАЛЬНЫХ МИКРОСХЕМАХ
Одна из наиболее простых схем мультивибраторов иа интегральных ТТЛ-
микросхемах (рис. 8.8, а) содержит два инвертора и времязадающую /?С-цепь.
Длительности основных стадий переходного процесса (рис. 8.8, б) определяются
выражениями [62]:
ti = = /?б, м.т 2СТ-^п-^о
RC ~ П ’ RC Я + Яб.м.т.П U'-Ua *
где /вх — входной ток при 17вх > (7П; /?б.м.т — сопротивление в печи базе
цногоэмиттерного транзистора, входящего в ТТЛ-микросхему.
Расчет по этим формулам реализуется программой 1 пакета БП75. Период
колебаний tB легко найти, суммируя значения ^/(^С) и /8/(/?С). При типовых для
серий 155 ТТЛ-микросхем данных (У° = 0,2 В; U1 = 3,5 В; Un = 1,4 В; Яб.м.т =
1200 Ом; R = 510 Ом; /вх = 10-10-6 А расчет дает ^/(RC) = 1,325}
Рис. 8.8. Схема автоколебательного мультивибратора на двух логических микросхемах (а) и
временные диаграммы его работы (б)
tJ(RC) = 0,663 и tn!(RC) = 1,988. Следовательно, если нужна частота колеба-
ний 100 кГц (t0 — 10-10~6 с), то значение С = /</(1,9887?) = 9,863-10-® Ф fs
~10 нФ.
Мультивибраторы такого типа просты, но имеют низкую стабильность
t2 и t0, так как напряжение U1 почти пропорционально напряжению питания,
a Un тъ const. Кроме того, U1 и Ua сильно меняются при изменении темпера-
туры. Лучшие результаты получаются при построении мультивибраторов на
интегральных операционных усилителях и компараторах.
Простейший мультивибратор на интегральном операционном усилителе
(или компараторе) помимо 7?С-цепи содержит резисторный делитель цепи положи-
тельной обратной связи Rt, R2 (рис. 8.9, а). Из анализа экспоненциальных вре-
мязадающих процессов (рис. 8.9, б) известны следующие выражения для дли-
тельности медленных стадий [62]:
/я . ^+₽{/й /р . ^м+РЦ?
---5— — |п ------- • ——— ]п--------"
RC ~ (7+(1-₽) ’ RC ^(1-₽) *
где Р = R^(Ri + Rt)~, Um , Uu — предельные уровни выходного напряжения
положительной и отрицательной полярностей.
Для расчета параметров этого мультивибратора может использоваться про-
грамма 2 пакета БП75. При типовых данных мультивибратора на микросхемах
серий 140УД1 и 140УД5 (Um = 9 В; Um = 7 В, Rt = R2 = 10 кОм) расчет
дает ts/(RC) = 1,022 и tyf(RC) = 1,19, т. е. различие Um и Um ведет к разли-
чию t8 и 1р. Поскольку Um к Um зависят от напряжения питания и температуры,
стабильность tB = /р + t3 оказывается также невысокой (но почти на порядок
лучшей, чем у мультивибраторов иа ТТЛ-микросхемах).
а)
Рис. 8.10. Схема высокостабильного автоколебательного мультивибратора на интегральном
операционном усилителе {и) и временные диаграммы его работы (б)
Высокостабильпый несимметричный мультивибратор на интегральном опе-
рационном усилителе или компараторе (рис. 8.10, а) описан в [63]. В нем (с по-
мощью диодов R1 и Д2) разделены цепи заряда и разряда конденсатора С, при-
чем при заряде через резистор R напряжение переключения прямо пропорцио-
нально (коэффициент пропорциональности Pi) предельному напряжению заряда
Um - Поэтому значение UM не влияет на время ta. Анализ переходных процессов
(рис. 8.10. б) дает следующие выражения для длительности медленных стадий
[63]:
—— = Ш------;
/?з С 1 —Pj
—^—= ---—- In
R$ U I р^
U* ]
1 + -^— Р,(1-Р2) ,
где Р- = «,/(/?, + Rz + R3); Pt = R2/(R, + R2).
Расчет по этим формулам выполняется по программе 3 пакета БП75. При
указанных в [63] данных (Rt = 16 кОм; R2 = 27 кОм; R3 = 43 кОм; Rt =
= 0,68 кОм; Um/Um = 1,5; микросхема 140УД1) получаем t3/R3C = 0,465;
tp/RtC = 0,444; Pi = 0,372; P2 = 7,91-10~3. Так как R3 > R4, to t3 > tp
и te ~ ts. Нестабильность t3 такого мультивибратора не превышает ± 0,3% при
изменении питающих напряжений на ± 10 и ± 0,1% при изменении температу-
ры от 20 дс 60° С (эти нестабильности мультивибратора со схемой на рис. 8.9
составляют примерно ± 2 и 1%, т е. почти на порядок больше).
В ряде случаев необходимы мультивибраторы с управляемой внешним
строб-импульсом генерацией. Такой мультивибратор (рис. 8.11, а) [64] генери-
рует колебания только в том случае, если > U„. При UBX < Uo иа выходе
будет «высокое» напряжение 77н. Это достигается построением мультивибратора
на сдвоенном интегральном компараторе, на выходе которого установлена ло-
гическая микросхема. Компаратор KJ используется для стробирования выход-
я-~с сигнала, К2— нижний — для построения собственно мультивибратора,
В режим* автоколебаний (рис. 8.11, б) (641
0Л?3 Uh — UH CR& Ui— UL
где Uh = U^i/Wj + /?г); Ui = UlR./(Ri + 1?2); UH = Us - 0,75 [BJ5
Us — напряжение на входе стробирования; UH, UL — верхний и нижний
уровни выходного напряжения; Uh, Ui — соответствующие им пороги пере-
ключения, задаваемые делителем Rl, R2.
Рис. 8.11. Схема мультивибратора с управляемой генерацией на интегральном компараторе
(а) и времеиийе диаграммы его работы в автоколебательном режиме (б)
Расчет по этим формулам можно проводить, используя программу 4 паке-
та БП75. Взяв типовые данные (компаратор 521СА1; /?, = R2 = 10 кОм: UH —
= 4,25 В; UL = — 1 В), получим tJR3C = 0,8044 и tvi RtC = 1,8326. При
Rs — Rs полупериоды существенно различны (13 < /р) так как различны уров-
ни UH и UL.
8.5. РАСЧЕТ ЖДУЩИХ МУЛЬТИВИБРАТОРОВ НА ИНТЕГРАЛЬНЫХ
МИКРОСХЕМАХ
Ждущие мультивибраторы используются в качестве генераторов и формиро-
вателей почти прямоугольных импульсов с заданными длительностью, ампли-
тудой и длительностями фронта и среза. Последовательность их расчета практи-
чески аналогична описанной в § 8.4 для автоколебательных мультивибраторов.
Спецификой проектирования ждущих мультивибраторов обычно является опре-
деление порога запуска, т. е. минимальной амплитуды запускающих импульсов
заданной длительности. При построении мультивибраторов на интегральных
логических микросхемах этот важный параметр однозначно определяется поро-
гом переключения Ua и задержкой t3 микросхемы, 1. е. его рассчитывать не тре-
буется. Точный расчет, как правило, необходим для длительности выходного
импульса. Время восстановления ждущих мультивибраторов допустимо рассчи-
тывать с большой (до 10—20%) погрешностью, что упрощает расчеты — в расчет-
ных формулах можно не учитывать второстепенные параметры (малые входные
токи микросхем, малое напряжение U0 и т. д.).
В простейшей схеме ждущего мультивибратора (рис. 8.12, а) [65] исполь-
зованы два инвертора (ТТЛ-микросхемы) и времязадающая /?С-иепь. Анализ
Рис. 8.12. Схема ждущего мультивибратора иа двух логических микросхемах (а) и времен'’
ные диаграммы его работы (б)
временных диаграмм (рис. 8.12, б) дает следующие выражения для длительности
формируемого импульса t„ и времени восстановления 5,:
^?б- мт ]п Л । °
RC R + Rc. мт \ ^экв /
/в
----= 1п
RC
и1—и^>
1 + -ТГ~
где
Гэнв — R (Е —0,7 [В])/(/? 7?g. м т) •
Вычисления по этим формулам реализуются программой 1 пакета БП76. При
типовых данных (R = 2 кОм; /?е.м.т — 1>2 кОм; U1 = 3,5 В; Ц° = 0,2 В; 17п =
= 1,4 В и Е = 5 В) получаем tB/(RC) = 0,476; tB/(RC) = 1,211. Отсюда по за-
данным tn и R нетрудно найти нужное значение С. Заметим, что величина R
в этой схеме должна удовлетворять условию
R > UB/I°X ,
где /£х — входной ток микросхемы перед ее переключением из состояния ло-
гического 0 на выходе в состояние логической 1(1 мА для ТТЛ-микросхем се-
рий 133 и 155).
Недостатком рассматриваемого мультивибратора (см. рис. 8.12, а) являет-
ся то, что пиковые значения напряжения в точке, г близки к предельно допусти-
мым и могут превысить последние. Поэтому широкое применение находят муль-
тивибраторы,построенные на основе 7?8-триггера с интегрирующей хронирующей
7?С-цепью (рис. 8.13, с). В них после запуска напряжение в точке г (рис. 8.13, б)
меняется от уровня U1 до 17(1.
Рис. 8.13. Схема ждущего
мультивибратора на основе
^S-триггера (а) и времен-
ные диаграммы его рабО-
ты (б)
&
Для такого мультивибратора [62]
1И , U«—Ul
RC П Uo—llx R—ип ; *в~ЗЯС. (8 .17)
расчет но (8.17) проводится с использованием программы 2 пакета БП76. При
указанных выше типовых данных и R = 510 Ом (здесь нужно выбирать R <3
С l/n//gX) получим tn/RC = 1,007, т. е. значение, близкое к значению постоян-
ной времени /?С-цепи.
Общим недостатком описанных схем является низкая стабильность t„ (из-
менения ta достигают 10—20% при изменении питающего напряжения Е на
± 10% (&Е ~ EU1 к температуры от + 20 до + 60° С) В [66] предложена но-
вая модификация высокостабильного мультивибратора (рис. 8.14). Ее отличи-
Рис. 8.14. Схема высоко-
стабильно о ждущего
мультивибратора на ло-
гических микросхемах
Рис. 8.15. Схема высокостабильиого ждущего мультиви-
братора иа основе интегрального таймера
тельной особенностью является охват третьего инвертора нелинейной отрица-
тельной обратной связью, осуществляемой через резисторный делитель RI,
R2. Если бы коэффициент усиления инвертора в линейном режиме Ку был ра-
вен оо, то на выходе его устанавливалось бы напряжение
HJ,C= Uq (Rt + Rb>/R2 (8.18)
При U° ~ 0 и /вх ~ 0 .из (8.17) и (8.18) получаем
tH/(RC) = In К/?, -f- R2)/R2] = const, (8.19)
если все три инвертора идентичны (они должны быть в составе одной микросхе-
мы).
Более точный анализ, учитывающий конечное значение Ку н входной ток
инвертора, дает для 1/£с выражение [67]
^nK(7-/gx RiRa/(Ri + R2)
1 + Ку R2+R|. + Ra)
(8.20)
Значение (и определяется по (8.17) при замене в ней U1 на L/ж. Расчет по (8.17)
и (8.20) реализуется по программе 3 пакета БП76. При Rt = R2 = R = 510 Ом;
Kv = 40; Ua = 1,4 В; = 10~s A; Uo = 0,2 В и /вХ = 10-Ю"» А расчет
Дает значение („/(RC) = 0,716. Заметим, что при Ку — <» согласно (8.19)
+/(RC) = In 2 = 0,693. При изменении Еа на ± 10% изменение /и составляло
по данным эксперимента + 0,3 ... — 0,8%, а при изменении температуры
(+20 ... +60°С) не более 1,5% 167].
В последнее время получают распространение специальные микросхемы, пред-
назначенные для формирования импульсов стабильной длительности — инте-
гральные таймеры [68, 69] В типовой схеме ждущего мультивибратора на ос-
нове таймера (рис. 8.15) реализуется мостовой принцип стабилизации ?и. При
нем пороговое напряжение переключения UDl, задаваемое интегральным компара-
тором ИК1, прямо пропорционально напряжению питания Е хронирующей RC-
непи. Это достигается заданием 77 п с помощью делителя из резисторов Rl, R2.
R3 с одинаковыми сопротивлениями
Um — 41 Е =
_E2 + Ej_
R1 + Rz + Rz
Е ~ о ,666Е .
Высокая идентичность номиналов резисторов достигается интегральной техноло
гией изготовления. Другое пороговое напряжение
77П2 = ЪЕ= R 3E/(Rj + Е2 + Ез) ~ О.ЗЗЗЕ
определяет порог запуска мультивибратора.
При запуске интегральный компаратор ИК2 переводит триггер Т в такое
состояние, при котором запирается ключевой транзистор таймера Конденсатор
С заряжается через резисторы (R, Rp) от начального уровня U° 0,05 В до
уровня иш при предельном уровне
ис (°°) — U /цх (RЕр),
где /Вх— малый входной ток компаратора ИК1.
Следовательно,.
-^-=1п /Г^х^ + Ер)-^ . (821)
ЕС с — /вх(ЕЧ-Ер)—t]j Е
Время восстановления tB ~ ЗСЕР
Малые значения U0- и /Вх интегральных таймеров позволяют получать зна-
чения ta/(C (R 4- Ер)), весьма близкие к идеальному значению 1пЗ= 1,0986 =
= const, не зависящему от Е. Расчет по (8.21) с помощью программы 4 пакета
БП76 дает t„/(C (Е + Ер») = 1,09328 при Е = 15 В; /вх = 10~9 А; =0,05В
и Е + Ер = 100 кОм. Это значение отличается от идеального в третьем зна-
ке после запятой, что указывает на высокую стабильность t„.
Схемы ряда других мультивибраторов и расчетные выражения для них мож-
но найти в литературе [62—72].
ГЛАВА 9
СТАТИСТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И МАКРОМОДЕЛИРОВАНИЕ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ И УСТРОЙСТВ
9.1. РАСЧЕТ ЧУВСТВИТЕЛЬНОСТИ К ИЗМЕНЕНИЯМ
ПАРАМЕТРОВ
При проектировании радиоэлектронных устройств весьма важен анализ
чувствительности их выходных параметров уг к изменениям или разбросу внеш-
них и внутренних параметров Х{, совокупность которых обозначим через П.
В общем случае параметр
yt = f х2, xt, xk) = f (П), (9.1)
где под хг ... xh подразумеваются такие параметры, как напряжения, токи, со-
противления резисторов, емкости конденсаторов к т. д. Разложив (9.1) в ряд
Тейлора, получим
df (П) df (П) df (П) , df (П)
&Н =~------Дхг +—-----Ах2 + ... + —---Дхг+ ... 4-——— Дхь.
ОХ^ иХ% UX&
Коэффициенты перед абсолютными приращениями параметров Xj, х2, xt на-
зываются абсолютными коэффициентами нестабильности. Так, при изменении
х абсолютный коэффициент нестабильности
^i=c’/(x1, х2, .... Xi, xh)/dXi ~ А/ (П)/Дхг. (9.2)
Нередко используются безразмерные относительные коэффициенты неста-
бильности, например
= <?/(П)//(П) ~ Д/(П)/НП)
1 dxilxi &Xil Xi ’ '
Тождества А/ (П) =<Э/ (П) и Дхг = dxt справедливы лишь при линейной зависи-
мости f (П) от параметра хг. Иногда (см. § 4.3, 4.4) коэффициенты нестабильности
определяются аналитически. В большинстве случаев, однако, эта зависимость
нелинейная, указанные тождества оказываются неточными при реальных изме-
нениях xi и f (П) и расчет Аг н Sj упрощается при использовании ЭВМ.
Из множества возможных методов расчета чувствительности на ЭВМ [73—
75] для микрокалькуляторов наиболее приемлем простейший.— метод малых
приращений X/. При этом методе параметру xt задают малое приращение Дхг и
находят А/ (П) при постоянных других параметрах. Затем по формулам (9.2) и
(9.3) находят Аг и St.
Выбор Дх; противоречив. При двух значениях X;, определяющих Дх^ =
— хп — xi2> получаем Д/ (П) = f (П)х — f (П)2. При близких / (ПД и f (П)2
их разность может вычисляться с большой погрешностью. В общем случае уве-
личение Дхг приводит к увеличению погрешности из-за нелинейности f (П). По-
лезно задавать два значения Дх; — положительное и отрицательное. Если
|— Д/ (П)| ~ Д/ (П), то нелинейность сказывается слабо и можно увеличить
Дхг- Значения Ai и St при этом целесообразно вычислять как средние при рас-
чете по приращениям +Дх/ и —Дх,-.
Для иллюстрации рассчитаем чувствительность длительности импульс»
/„.релаксатора на однопереходном транзисторе (см. рис. 8.4, а) к изменению
параметров R, С и 1] при R: = R2 = 0. Для /и имеем выражение
/„ = RC In (1 — т))~Ч (9.4)
Пусть R = 100 кОм; С = 10 нФ и т) = 0,66. При точных значениях этих пара-
метров /„ = /и0 = 1,0788-10_3 с. Зададимся AR = 1 кОм, т. е. возьмем R =
= 101 кОм. При этом /„ = 1,0896 10“3 с. Следовательно, Ад — 1,08-10—®
с/кОм. Аналогично, взяв ДС = 1 нФ, получим Ас = 1,08-10~4 с/нФ.
Из (9.4) следует, что зависимость ta от R и С линейна, так что выбор AR
и ДС произволен. Однако зависимость"/„ от т] нелинейна. Допустим, что измене-
ния 7] составляют ± 10%, т. е. Дт] = ± 0,066. Задав приращение Дт| положи-
тельным, а затем и отрицательным, получим А^ = 3,27-10~3 с и Ат; = 2,69 X
X 10—з. Различие А^ и Aif не очень большое, но указывает па нелинейность
зависимости /и от т). В интервале изменения Г) на ± 10% более точно принять
среднее значение А^ = (А-^ + А^)/2 — 2,98-10—® е. Относительные коэффи-
циенты нестабильности в данном примере Зд = Sc = 1; 3^ = 1,823.
Зная коэффициенты нестабильности, легко вычислить абсолютные и отно-
сительные изменения выходных параметров при заданных малых изменениях
внешних и внутренних параметров. Так, в данном примере
Д/„ = Ар AR -4- Aq ДС А^ Дт);
A/„//„,) = SrAR/R + ScAC/C + S^Atj/t). (9.5)
Описанная методика расчета применима при любых изменениях парамет-
ров: вследствие технологического разброса, из-за изменения температуры, ча-
стоты и т. д. Проиллюстрируем это следующим примером. Пусть требуется опре-
делить величины 6/и = Д/и//и0 ПРИ изменении температуры схемы на 1° С,
если применен резистор R с температурным коэффициентом изменения сопротив-
ления -Ы00-10—6 1/° С, конденсатор С с температурным коэффициентом емко-
сти —150-10~« 1/° С и однопереходный транзистор с температурным коэффициен-
том = — 25-10“f 1/° С. Используя (9.5), получаем = 1-100-10-6 —
— 1-150-10~6 + 1,823-25-10-« == — 4,425-10~6 1/° С. Малое значение б4и в
данном случае получено благодаря частичной взаимной компенсации нестабиль-
ности R, и С.
Описанный метод легко приспособить к расчету диапазона изменения вы-
ходных параметров при заданных диапазонах изменения внешних и внутренних
параметров. Если берутся максимальные отклонения параметров *f, ведущие
к максимальному изменению yi, то выполняется расчет на наихудший случай
Следует отметить, что такое отклонение всех параметров X; в худшую сторону
маловероятно.
9.2 ОСНОВЫ СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ
И РАСЧЕТА РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ
(МЕТОД МОНТЕ-КАРЛО)
s
При расчете на наихудший случай игнорируется статистический характер
изменения параметров устройств Это ведет к неоправданному ужесточению до-
пусков на параметры, усложнению настройки и регулировки аппаратуры, сни-
жению процента выхода годных изделий, а иногда ошибочно указывает на не
возможность создания аппаратуры с требуемыми выходными параметрами
В связи с этим на практике нередко прибегают к испытаниям большой пар-
тии готовых уст >ойств с последующей статистической обработкой полученных
результатов (см. § 9.3) Такой метод называется статистическим эксперименталь-
ным методом анализа. Его недостатком является то, что он применим на за-
ключительных стадиях разработки (когда аппаратура или ее узлы уже разра-
ботаны), весьма трудоемок, требует больших материальных затрат на проведе-
ние экспериментальных работ и последующую доводку аппаратуры. В связи с
этим перспективны автоматизированные методы статистического моделирования
18, 74—76] основанные на заимствованном из теории игр методе Монте-Карло
|8 77].
При методе Монте-Карло входные и другие воздействия моделируются на
ЭВМ. С этой целью создаются датчики случайных чисел с равномерным распре-
делением, из которых затем формируются числа с иными требуемыми законами
распределения (см. § 9.41. Эти числа используются как эквиваленты входных
воздействий, внутренних параметров схем и т. д. Затем многократно рассчиты-
ваются выходные параметры по математической модели устройства. На заклю-
чительной стадии выполняется статистическая обработка полученных резуль-
татов Итогом моделирования могут быть гистограммы разброса выходных пара-
метров, расчетные данные о работоспособности устройства, опенка его реакции
на сложные сигналы (с помехами) и т. д.
Таким образом, метод Монте-Карло позволяет оценить на ЭВМ работу уст-
ройств при самом различном сочетании их внешних и внутренних параметров
с учетом их статистических характеристик. В отличие от экспериментального
статистического метода, данный метод применим на начальном этапе проектиро-
вания устройств, позволяет резко уменьшить объем трудоемких эксперименталь-
ных исследований, уменьшить затраты на приобретение лабораторного оборудо-
вания, задать такую совокупность параметров, которую трудно или рискован-
но задавать при эксперименте.
Статистическое моделирование на ЭВМ имеет и недостатки. Для его реали-
зации нужны корректные и аппробированные (иногда сложные) математические
модели устройств. При малой погрешности расчетов (0,1—0,001%) требуется
очень большое число испытаний А (многие тысячи). Однако при обычно приемле-
мой на практике погрешности моделирования 1—5% необходимое число испы-
таний сокращается до 100—500 [8]. Это позволяет в некоторых случаях реализо-
вать статистическое моделирование с помощью программируемых микрокаль-
куляторов. Возможности его резко увеличиваются при реализации на совре-
менных микро- и мини-ЭВМ с большой скоростью вычислений.
9.3. РАСЧЕТ ОСНОВНЫХ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК
Важнейшей статистической характеристикой является вероятность события
(например, появления величины хп) Р. Если при общем числе условий возник-
новения события N оно появляется при К условиях, то Р = K/2V. Плотность
вероятностей можно оценить частотой появления случайной величины хп в ин-
тервале dx, т. е. функцией f (х). Интеграл от этой функции
х
F (х) = J f (х) dx
—• оо
называется функцией распределения вероятности.
Обычно случайные числа заданы массивом из N случайных чоличип. К важ-
нейшим характеристикам такого массива относятся начальные
1 N
mk(x)=—- У xkn (6 = 1,2,...)
/V
П=1
и центральные
Mh(x) =4 у; [xn-m,(x)]ft (6 = 2,3,...)
/V
п— I
моменты 6-го порядка. Как правило, ограничиваются рассмотрением моментов
до 4-го порядка включительно. Момент Мг (х) = 0.
Вычисление начальных моментов легко организовать по мере ввода чисел
хп (п от 1 до N) с накоплением сумм величин х* в соответствующих регистрах
памяти ЭВМ. Сложнее вычислять /И/, (х), так как в формулы для центральных
моментов входит первый момент тг (х), определяемый после ввода всех хп. Что-
бы избежать запоминания всех хп или их повторного ввода, целесообразно
воспользоваться известными выражениями [2, 10], позволяющими вычислить
центральные моменты через начальные (для простоты записи далее опускаем х
в скобках):
М2 = т2—т\\
М2 = т2—3mxm2+2ml =m3-|-mt (2m J —3m2)$
г з 1
M4 = m4—4m, m3 + 6mjf m2—3mf = m4-]- 4m, “J" m, (2m2—mJ) —m3 .
Основными статистическими характеристиками массива хп считаются:
среднее значение х, дисперсия D, асимметрия S и эксцесс Е, Среднее значе-
ние — первый начальный момент —
п= I
характеризует математическое ожидание (или наиболее вероятное значение)
величины х. Дисперсия
N
D = g2=Z~N~ (хп—~х) = М2
п= I
характеризует вероятную степень отклонения случайной величины от ее мате-
матического ожидания. При этом величина о = ~\/D является стандартным от-
клонением (или средней квадратической погрешностью).
Для нормального распределения (см. §9 4) дисперсия оказывается смешен-
ной. Несмещенная дисперсия определяется выражением
D0=O*n_,~M2NJ(N-\).
Асимметрией является нормированный относительно дисперсии центральный
момент 3-го порядка
S=~~ X (Xn-x)3^Ms/M32'2.
ND n=l
Асимметрия указывает на характер скошенности графика функции f (х) (рис. 9.1).
При S = 0 кривая f (х) симметрична, при S > 0 вытянута правая, а при S < 0 —
левая спадающая часть этой, кривой. Искажения формы оцениваются относи-
тельно формы при нормальном распределении. Эксцесс является показателем
«сгруппированности» случайных величин вокруг среднего значения
* Д'
п= I 2
и характеризует степень заостренности пика кривой f (х) (относительно кривой
при нормальном распределении).
С помощью программы БП77 вычисляются четыре начальных момента, сред-
нее значение и дисперсия Du массива Л? вводимых в микрокалькулятор «Элек-
троника БЗ-21» чисел. Ее первая часть (до команды с адресом 50) служит для
вычисления N, Хп, хп и Хп, а также накопления сумм хп и трех последних ве-
личин в регистрах памяти Р2 .. Р5. По окончании ввода запускается вторая
часть программы (нажатием клавиш БП Р5 С/П) и вычисляется значение (Л'—
— 1) = Р7 и х — пц — Р2 = РХ (до команды с адресом 61). При еще одном
нажатии клавиши С/П вычисляются — Р8 и Dt) — РХ. Для вычисления D
в конце расчета О0 следует нажать клавиши f F7 X f F6 4- .С целью облег-
чения ввода хп предусмотрен вывод на индикацию номера каждого введенного
числа после его обработки. Обработка одного числа занимает около 5 с
Для вычисления S и Е служит программа БП78. которая вводится после
программы БП77 и является ее продолжением. Минимизация числа шагов этой
программы достигнута преобразованием формул для /И3 и и рациональным
использованием регистров памяти микрокалькулятора.
Наглядное представление о виде функции f (х) дают гистограммы распреде-
ления величин хп в заданных интервалах Лх. Программа БП79 служит для ав-
томатического подсчета числа значений хп, попадающих в следующие интервалы
(числа хранятся в регистрах Р2 ... Р7): х < 5 (Р2); 5 х < 6 (РЗ); 6 х <
< 7 (Р4); 7 х < 8 (Р5); 8 х < 9 (Р6); 9 < х (Р7). Левая граница интерва-
ла хл = 5 может быть изменена путем записи по адресам 05 и 10 вместо числа
05 другого значения хл 99- В общем случае числа хп следует нормировать
лмиожая их на константу К и суммируя с константой S), чтобы полученные
значения попали в указанные пределы.
Число значений хп подсчитывается с помощью операций условных перехо-
дов. Вначале величина хп — хл сравнивается с 0. Если хп — хл < 0, т. е.
х < хл- т0 происходит прибавление 1 к содержимому регистра памяти Р2 и
возврат к адресу 02 (началу программы). Если хп — хл > 0, то проверяется
условие (хп— хл— 1) < 0; если оно не выполняется, то проверяется условие
гх — хл — 2) < О и т. д. При этом 1 прибавляется всегда к содержимому толь-
ко того регистра, который соответствует интервалу Дх, в который попадает
данное значение хп. Время обработки одного отсчета составляет от 2 до 5 с
(в зависимости от значения хп).
Большее число регистров памяти и шагов программы микрокалькулятора
^Электроника БЗ-34» позволяет вычислять все перечисленные статистические
параметры по одной программе ПП13/34 (см. приложение 2). При этом переход
от накопления данных к расчету осуществляется автоматически после ввода
последнего числа xN.
Еще большие возможности автоматизации статистических расчетов откры
вают микро-ЭВМ, в частности «Электроника ДЗ-28». В ее математическое обеспе-
чение включена программа статистических расчетов. Пакет программ содержит
программу ПП10/28, по которой рассчитываются среднее, дисперсия, асимметрия
эксцесс и осуществляется накопление данных для построения гистограмм
при 20 интервалах с произвольно заданными границами. По этой программе
вычисляются также коэффициенты
_ 6(W —1) /~ 24М(А'—2)(;У —3) '
as“~|/ (N + 1) (N4-3) ; аЕ~|/ (A?_i)2(/v+3)(/v+5)-
Если S и Е меньше 2as и 2а £, то можно считать, что закон распределения
случайных чисел близок к' нормальному.
В микро-ЭВМ «Электроника ДЗ-28» и в настольный микрокалькулятор
«Электроника МК-46) числа могут вводиться с внешних периферийных уст-
ройств, например аналого-цифровых преобразователей. Это открывает возмож-
ности применения этих микро-ЭВМ в автоматических системах сбора и статисти-
ческой обработки информации.
9.4. ФОРМИРОВАНИЕ ПСЕВДОСЛУЧАЙНЫХ ЧИСЕЛ
С ЗАДАННЫМ ЗАКОНОМ РАСПРЕДЕЛЕНИЯ
Для имитации параметров радиоэлектронных систем и устройств широко
применяются равномерно распределенные случайные числа; Они заключены в
интервале от 0 до 1 с одинаковой вероятностью любой их величины в этом интер-
вале. Источниками таких чисел служат специальные физические датчики, таб
лицы случайных чисел, их получают различными программными способами.
В последнем случае речь идет о повторяющихся больших последовательностях
случайных чисел с равномерным распределением, т. е. псевдослучайных чисел.
Приставку «псевдо» будем опускать, помня, однако, о таком характере програм-
мно формируемых чисел. Рассмотрим некоторые методы формирования случай-
ных чисел [2, 10, 77, 78].
Метод Неймана получения случайных чисел с равномерным распределением
заключается в возведении р-разрядного числа Vn в квадрат, причем из середины
Цифровой последовательности результата Vn выделяют р цифр, образующих
новое число Еп+1, и т- Д- Другой метод заключается в таком выделении сере-
дины ряда цифр произведения Vn_iVn. Апериодичность последовательности,
т. е. число неповторяющихся чисел L, мала и составляет L < 2Г.
Метод Коробова основан на вычислении случайных чисел по формуле
где р— большое простое число (2027,6087 и т. д.), а? берется близким к р/8
из Множества чисел р — Зт (где т — целое число). Большое число парамет-
ров (р, q, т) является недостатком этого метода, программная реализация кото-
рого на микрокалькуляторах описана в [2]. Кроме того, получаемые случайные
числа распределены в интервале [1, р— 1], и их для приведения в интервал
[0, 1) следует дополнительно делить н р.
Более простой мультипликативный метод реализуется формулой
^п+1 = (^Ип)др»
где k = St ± 3 = const; (бКп)др—дробная часть произведения kVn,
целое число. В дальнейшем взято k = (8-5— 3) = 37. Получающиеся слу-
чайные числа равномерно распределены в интервале 0, 1. Их можно привести
в интервал (а, 6], применив формулу пересчета каждого числа: Хп = а +
Р (б—а) Vп.
По программе 1 пакета БП80 реализуется этот метод. Дробная часть произ-
ведения] 37 Vn отделяется фрагментом программы (Р2 1 ВП 7 XY + XY —•
/ — /{F2+), описанным в § 1.5. Согласно программе выдаются числа Vnx
ХЮ, 1] и Хп [а, 6] после ввода а, би начального случайного числа Vo (любое не-
четное число менее 1, например 0,37843). Приведем 50 случайных чисел (округ-
ленных на третьем знаке после запятой), полученных с помощью этой програм-
мы: 0,378; 0,002; 0,071; 0,615; 0,747; 0,648; 0,958; 0,441; 0,324; 0,989; 0,597}
0,092; 0,389; 0,387; 0,308; 0,406; 0,022; 0,8; 0,612; 0,624; 0,102; 0,79; 0,227;
0,368, 0,311; 0,516; 0,074; 0,733; 0,128; 0,737; 0,273; 0,103; 0,833; 0,815; 0,144;
0,338; 0,506; 0,708; 0,207; 0,676; 0,026; 0,978; 0,183; 0,759; 0,075; 0,784; 0,99;
0,625; 0,132; 0,885.
Случайные числа с иными законами распределения можно получить с по-
мощью соответствующих уравнений преобразования (табл. 9.1), например по
Таблица 9.1
Законы распределения случайных чисел и уравнения преобразования
Закон распределения Уравнения преобразования равномерно распределенной величины
Экспоненциальный / (х) = кеКх Хп= “Т" л
Сдвинутый экспоненциальный 1 Хп=ь-4- 1п Vn л
Вейбулла rn(x—y)m-1 /(*)•= е = In (1 — Vп) -|- У
Рэлея f(x)=-^-e-^'20' Xn=aV—2 In l/n
программе 2 пакета БП80. Особое значение имеет нормальный закон распределе-
на (Гаусса)
функция распределения вероятностей которого (рис. 9.2)
х. X
F(*> — f I(*) dx=—f ехр Г— dx,
J а У2я J L 2а2 J
— ОИ со
где p=xi as=D.
с равномер*
Рис. 9.2. Нормированные зави-
симости f(x) и F(x) для случай-
ных чисел с нормальным рас-
пределением при ц = 0. б =* 1
Ввиду сложности генерации чисел с нормальным распределением /? нсполь”
зуется ряд специальных методов получения их из случайных чисел
ным распределением V [33, 77, 78]. Так, бази-
руясь на известной центральной теореме f77], R
Можно вычислить по т > 6 равномерно распре-
деленных чисел Vni
Яп“( 3 V„- «/2 | / (т/2)1'3
\п—1 //
илв при т = 6
в
Rn = ( 2 Vn—3)/0.7071.
Этот способ не удобен для реализации на микро-
калькуляторах, так как требует запоминания
шести чисел Уп.
Нейманом предложена процедура отбора чисел с нормальным распределе-
нием из массива Vn с помощью формул 177]:
Rn = c(2Vn- 1)
(9 6)
при условии
-2cs(Vn-0,5)2>lnVn+1.
(9 7)
Вели условие (9.7) не выполняется, вычисленное по (9.6) значение Rn бракует-
ея. Реализация метода Неймана иллюстрируется программой 3 пакета БП80.
Недостаток метода — низкая скорость генерации случайных чисел, поскольку
вначительная их часть бракуется. Этот недостаток относится и к другому мето-
ду отбраковки по формуле
Rn = - In Vn
при условии
0,5(—In Vn-1)»> - in Vn+I.
Еще один способ генерации случайных чисел с нормальным распределением,
предложенный Муллером [77], позволяет получить пару сопряженных чисел
с помощью формул
/?;=)/21n(l/Vn) cos (2nVn_i)j
Rn = l/2 1n(l/V„) sin (2nVn_i). (9.8)
Для упрощения программной реализации можно использовать одну из послед-
пих двух формул.
Получаемые описанными способами числа /?п соответствуют нормированно-
му нормальному распределению (о = 1, р = х = 0). В общем случае, если
о =j= 1 и х =j= О, получаем
/*п — О.
(9-9)
Генерацию случайных чисел с нормальным распределением обеспечивает
программа 4 пакета БП80. В начале ее выполнения формируются случайные
числа с равномерным распределением, а затем с помощью (9.8) и (9.9) вычисляют-
ся числа гп. В конце программы число Vn+i вызывается из регистра 3, проис-
ходит безусловный переход на первый шаг программы, т. е. это число заносит-
ся в регистр 2, и операции повторяются. Приведем первые 50 случайных чисел,
формируемых по этой программе при X = 1, о = 0,1 и Vo = 0,12345: 1,074513;
0 8596403; 1,004002; 1,121478; 1,106327; 1,009541; 1,215648; 1,046015;
0.9514849; 1,124708; 1,04446; 0,987115; 1,060980; 1,099730; 0,9224485;
1,059320; 1,014229; 0,9265782; 1,085754; 1,059342; 0,9483776; 0,959669;
0.881554; 1,007637; 1,082138; 0,8556025; 1,145623; 1,177357; 1,085406;
0,9961106; 0,9998403; 0,9814776; 0,951891; 0,9246351; 0,9508412;
1,042991; 0,9575241; 0,9595863; 0,9127397; 0,775545; ; 1,026912; 0,9244854:
1.005543; 0,8880986; 1,036104; 0,9489098; 1,023539; 1,023054;
0,8397068; 1,062862. -
Качество последовательностей случайных чисел, т. е. соответствие их ста-
тистических параметров требуемым, проверяется различными способами. Один
из них — частотный — заключается в подсчете относительного числа п!N
чисел, попадающих в интервал ±а (от 0,2113 до 0,7887 для равномерно распре-
деленных чисел). Для последних теоретически п/N = 0,5774 (для чисел получен-
ных по программе БП80 п = 27, N = 50 и n/N = 0,54, что близко к 0,5774 с
учетом относительно малого N). Для таких чисел х = 0,5 и о = 0,2887 [77].
Для чисел с нормальным нормированным распределением х =0 и D = 1.
Для проверки нормальности распределения вычисляются коэффициенты
и Как отмечалось, распределение можно принять нормальным, если S и
Ь превышают и аЕ не более чем в 2 раза.
9.5. АППРОКСИМАЦИЯ РАЗЛИЧНЫХ ЗАВИСИМОСТЕЙ
Одной из областей практического приложения статистических методов рас-
чета является аппроксимация различных зависимостей, задаваемых числами.
Обычно с этой целью график искомой зависимости y=f (х) строят в линейном,
логарифмическом или ином масштабе, что по его виду позволяет оценить закон
изменения величины у (х). Такой процесс трудоемок, а главное, не обеспечивает
предельно высокой точности аппроксимации.
Согласно известному методу наименьших квадратов (см. подробно в [79])'
условие максимальной приближенности реальной зависимости у = f (х), задан-
ной числами, к аппроксимирующей ее функции, заданной аналитически,'
совпадает с условием минимума суммы квадратов погрешностей для всех дис-
кретных значений уп = f (хп). Формулы, позволяющие найти параметры ап-
проксимирующей зависимости по ряду ее приближенных дискретных значений
Уп = f (хп), полученные на основе метода наименьших квадратов, даны в [77].
Рассмотрим реализацию таких расчетов на микрокалькуляторах при любом
(в отличие од [2]) числе дискретных значений хп и уп.
А. Линейная аппроксимация. Пусть дано N пар точек хп, уп, приближен'
но представляющих линейную зависимость у = (30 + (JjX, где Ро — отрезок,
отсекаемый прямой у — f (х) на оси у; —• угловой коэффициент этой прямой.
Тогда |30 и определяются как
₽‘“v(
NN N
У У 9n N 2 *n Fn
ft-; —v1—i <91°)
( 2 *n) ~N 2 x*
\ n =» 1 / n= 1
N N \
2^-₽iS*n- (9H)
71=1 71=1 /
Значения Po и Pj рассчитываются no согласованным программам БП81 и БП82.
Первая из них — программа накопления данных — служит для вычисления
сумм величин хп. Хп, уп и хпуп. Вторая позволяет найти Pj и ро по формулам
(9.10) и (9.11).
Рассмотрим практический пример. Пусть преобразователь напряжения U
в частоту / имеет зависимость f (U), заданную значениями:
х = (/, В 2 4 6 8 10
р=/, кГц 5,5 6,3 7,2 8 8,6
N N N N
Расчет по программе БП81 дает 2*п=30; 5^хп = 220; 2^ = 35,6; 2*п.'/п =
71=1 71=1 71=1 71=1
“ 229,4; Л'= 6. Расчет по программе БП82 дает Ро = 4,75 кГц; [i, =
=0,396 кГц/B. Следовательно, аппроксимирующая прямая выражается форму-
лой f = 4,75 4- 0,395(7, где f— в килогерцах, U — в вольтах. Программа
ПП14/34 реализует линейную аппроксимацию с помощью микрокалькулятора
«Электроника БЗ 34».
Б. Параболическая аппроксимация. Пусть между ¥ и X существует нели-
нейная зависимость вида У = fjo 4- Pi А 4" Р8Х2 В этом случае для нахожде-
ния коэффициентов (30, и 02 необходимо решить довольно громоздкую систе-
му линейных алгебраических уравнений
N N N
РоЛ/4-Pi Лп4-Р. 2 х" = 2 уп5
П*=1 П==1 П^я\
N N N N Ро 2 Хп4-Р1 и xUps 2 х«~ 2 хпуп; П^1 П=» 1 (9.12)
N N N N Ро 2 х*+^ 2 х’+ь 2 х"=2 х«уп- 71=1 71 = 1 71=1 71=1
Систему ^9.12) можно привести к классическому виду системы из трех алгебраи-
ческих уравнений (2.1) считая Рс, и Рв неизвестными xlt ха и х8, а суммы,
входящие в (9.12), коэффициентами в соответствии с матрицей
N N 2 71= 1 Хп N 2 х- 1 N 2 уп /1=3 1 fig fig
й с N 2 1 Х2п N 2 х" «ЯС 1 2Х"У» 71—1 fib a8 a7 ^8 (9.13)
N 2 х« п=» L 2 п= 1 Хап N 2 х« 71=1 N 2 х*уп п==1 fig fijQ ^11 ai2
Программа БП83 для микрокалькулятора «Электроника БЗ-21» обеспечи-
вает накопление данных для расчета коэффициентов матрицы (9.13), а програм-
ма БП84 позволяет найти главный определитель А системы (9.12). Заменяя в
нем столбцы столбцом свободных членов п4, as и а12, находим Ад, А, и As
и соответственно Хд = Ро = Ад/Л; х2 — Рд = А2/А и х3 = Р2 = А3/А.
Рассмотрим пример параболической аппроксимации зависимости, заданной
следующими значениями Хп и Yn:
X 2 4 6 8 10 12 14
Y 3,76 4,44 5,04 5,56 6,0 6,36 6,64
Используя программу БП83, получаем матрицу чисел, соответствующую (9.13): t? 7 56 560 37,8 56 560 6272 329,28 . 560 6272 74816 3440,64
Взяв первых три столбца, с помощью программы БП84 находим А = 1 053 69 6
Заменив первый столбец четвертым и повторив все операции по программе БП84,
получим Ад = 3 161 052. Следовательно, Ро = Ад/А = 2,999965 ~ 3. Заменив
второй столбец четвертым, получим Д2 = 421478,4, следовательно, Рд =
= Л2/А = 0,4, и, наконец, заменив третий столбец четвертым, получим Л3 =
= — 10537, т. е. Р2 = А3/А =— 1,000003-IO"2 — 0,01. Таким образом,
заданная зависимость аппроксимируется выражением Y = 3 + 0,4Х — 0,01 X2.
На микрокалькуляторе «Электроника БЗ-34» эти вычисления реализуются од-
ной программой ПП 15/34.
В. Степенная аппроксимация. Будем искать зависимость у от х в виде сте-
пенной функции
Г/ = Ро х₽’»
коэффициенты которой
N N N
2 1п*п 2 ^yn—N У 1пхп1прп
п— 1 л = 1 п = I
/ N \2 N
2 ln х* ~N 2 (1п хп)2
\п=| / П=1
1 ' N N \
in Ро= д. I 2 ‘п Уп Pi 2 ‘п Хп) *
JV \п=1 П=1 /
Ро = ехр (In Ро).
(9.14)
(9.15)
(9.16)
Расчет по программе БП85 дает значения:
N fj N я
У, >п *п=6,58; У xf=9,41; У In iyn =. |9,75; У In !п =26,05.
и=1 П=®1 П = I И — '
Расчет по программе БП86 при N = 6 дает значения ; Pf = 3. Следова-
тельно, зависимость (9.16) имеет вид /, = Зх2. Тот же результат получим, исполь
вуя одну программу ПП16/34, реализующую степенною аппрокси /ацию с по-
мощью микрокалькулятора «Электроника БЗ-34»
Г. Экспоненциальная аппроксимация. В простейшем виде такая аппрокси-
мация описывается зависимостью
У = х.
Значения Ро и определяются по формулам!
' п N 1\1
2 ХП 2 In у,, — .V 2 АГп Тп»п
(9-17)
(9.18)
(9.19)
(9.20)
Ро = ехр (In PG).
Для накопления данных служит программа БП87, а для расчета р„ и pj по
(9.18)—(9.20) — программа БП88 Приведем численный пример. Пусть зависи-
мость у (х) задана числами:
X 2 3 4 5 6 7 8 9 10
У 3,5 5,0 6,2 9,0 13,0 16,0 23,0 30,0 <0,0
Применяя программу БП87, поручаем
N N N N
У Хп = 54; у Сл=384; 2 1 п Уп = 22,45; 2 *п1пу„ = 153.
п=1 /1=1 /1=1 /1=1
Далее по программе БП88 находим Pt = 0,305 и Ро = 1,94. Следовательно,
зависимость (9.17) имеет вид у = 1,94е°'305л:. Этот результат можно получить,
используя единую программу ПП17/34.
В [2] описан ряд программ для вычисления специальных функций на микро-
калькуляторе «Электроника БЗ-21» по их аппроксимациям или разложениям в
ряд. Наиболее распространенные функции можно вычислить о помощью про-
грамм ПП18/34—ПП27/34.
9.6. МАКРОМОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ И ИМПУЛЬСНЫХ
УСТРОЙСТВ г
Микро-ЭВМ могут использоваться для макромоделирования, т. е. для ук-
рупненной имитации работы и для расчета параметров нелинейных и импульс-
ных устройств. Макромоделирование особенно целесообразно для устройств, по-
кроенных на интегральных микросхемах, внутренняя структура и параметры
компонентов которых разработчику аппаратуры достоверно неизвестны. Рассмо-
трим два примера макромоделирования нелинейных импульсных устройств.
. Структурная схема функционального генератора (рис, 9.3) содержит: задаю-
щий е.нератор прямоугольных нмпульсов ЗГ, интегратор И и нелинейный пре-
образователе (НП). преобразующий треугольные импульсы интегратора в сину.
соидальный сигнал В состав НП входят сумматоры (£), умножители (X), мас-
штабирующий усилитель А и делители напряжения В и С. осуществляющие не-
лин йное^преобразование вида
у (х) = Ах — хг (В 4- Су) = Ах — Вх3)/(1 + С*’), (9 21)
где у (х)— нормированное выходное напряжение; х = ± я/2— нормирован-
ное напряжение на входе НП
Пусть 0, и 02 — приведенные погрешности числителя и знаменателя (9.21)
обусловленные ЭДС смещения операционных усилителей, входящих в сумматор
и умножигели НП. Тогда функционирование генератора можно описать урав-
нением
у |х) = Ах - fix3 + Й,)Д1 + Сх8 + 02)
Задача макромоделирования заключается в подборе коэффициентов А 13
о С по минимуму погрешности бр (х) = sin х — у (х) выходного сннусоидаль.
Рис. 9 4 Зависимость относительной
погрешности аппроксимации от па-
раметра х при оптимальном выборе
коэффициентов А, В и С
Рис. 9 5 Функциональная схема тиристорного
стабилизирующего выпрямителя
ного сигнала. Для этого может использоваться программа БП89, позволяющая
вычислять Оу (х) по заданным А, В, С, 0д и 02 с помощью микрокалькулятора
«Электроника БЗ-21». Значения х вводятся в градусах.
Вычислительные возможности микрокалькуляторов не позволяют решать
данную задачу как задачу автоматической оптимизации коэффициентов А б
и С при 0J D =* О пс минимуму бу (х) в диапазоне х = ± л/2. Поэтому такая
оптимизация может проводиться лишь методом целенаправленных проб 1801-
В результате получим: А « 1,00042; В •= 0,111382 и С =» 0,056646. Из загш-
симости Ьу (х), рассчитанной по программе БП89 крис. 9.4), видно, что максима ль-
ная погрешность несколько меньше 0,01%
Согласно расчету при А = 1 (т. е, когда из схемы исключен масштабирую-
щий усилитель) максимальная погрешност. Ьу (х) возрастает до — 0,0-'% и
наблюдается при :: — 90°. Диалогично можно оценить погрешность (х) при
изменениях других параметров и сделать выводы о необходимой точности входя-
щих г НН узлов.
В качестве другого примера рассмотрим функциональное макромоделиро-
вание замкнутой импульсной системы тиристорного стабилизирующего .ыпрями-
теля (рис. 9.5), сод< ржащего! двухполупериодный управляемый выпрямитель
на твристорах, диод Д LC-фильтр, схему фазоимпульаного управления СФИУ
и усилитель рассогласования У1. сравнивающий сглаженное-выходное напря-
жение 17Вых с опорным Uq и меняющим е помощью СФИУ фазовый угол регули-
рования а
Работа такого выпрямителя описывается . равнениями:
('вых ™ ВБ (1 "I* COS ос) / Л; Uy К (Uq — (-'вых)» ОС » 0,5 л (I-}- Ку Uy' ,
где К — коэффициент усиления У1\ Ку — коэффициент преобразования управ-
ляющего напряжения Uy СФИУ в угол регулирования a; UmBT — амплитуда
входного напряжения.
Эти уравнения легко свести к следующим!
| (а) =» Uy! К ° Uq (^вых (-'о Um (1 cos а) / л) ;
Ф (а) = Uy/K = (2а/л — \)/(ККу).
Нелинейную систему (9.22) можно решить численным методом поразрядно’
го приближения определив равенство f (ос) = <р (а), соответствующее квазиста*
пионарному режиму работы выпрямителя По программе БП90 реализуется по-
?обное цифровое моделирование и находится t/Bbls = / (UmBX., Uo К. Ку) и а-
1ри Uq = 10 В; К Ку “° 20 рад/В; Да = 1 рад вычисления дают следующую
вависимость 1/вых от DmBX:
(9.22)
^771Б X в 20 25 30 35 40
в 10,01945 10,00827 10,00138 9,996718 9,993012
Используя эти данные, нетрудно иайти коэффициент стабилизации
Кот “ ДОт вх Квых/А(Ап вых (-'вх 335 для Utn ex ^30 . •« 35 В
ПРИЛОЖЕНИЕ 4
БИБЛИОТЕКА ПРОГРАММ ПРОГРАММИРУЕМОГО
МИКРОКАЛЬКУЛЯТОРА «ЭЛЕКТРОНИКА БЗ-21»
Общая инструкция к пользованию программами:
1. Для ввода программы ..ажимаются клавиши Р н РП.
2. Программы вводятся последовательным нажатием клавиш, указанных
в тексте программ, записанных построчно. .Для упрощения типографской за-
писи программ операция поворота стека по часовой стрелке обозначена симво-
лами Р,, а против часовой стрелки Р/—/. Ввод контролируется по кодам опера-
ций, определяемым с помощью таблицы кодов.
3. После ввода программы переходе рабочий режим производится нажати-
ем клавиш Р РР и В/О.
4. В регистры памяти вводятся исходные данные согласно правилам ввода,
указанным в инструкции к программе.
5. Программа или ее части запускаются нажатием клавиши С/П. При по-
луавтоматическом вводе исходных данных, когда номер регистра памяти содер-
жится в тексте программы, после ввода каждого числа нажимается клавиша
С/П.
6. Перед использованием программ следует опробовать их на контрольных
примерах, приведенных в тексте или в кратком описании программы.
7. Сложные программы снабжены дополнительными краткими инструк-
циями. Рекомендуется тщательно разобраться в последовательности ввода дан-
ных и вывода результатов. Для согласованных программ каждая последующая
программа вводится без выключения микрокалькулятора после выполнения
предшествующей программы.
8. Если программа «зациклилась», счет останавливается нажатием клавиши
С/П. В этом случае и при выдаче знаков переполнения следует тщательно прове-
рить программу по шагам и убедиться в правильности решаемой задачи.
Программа БГП. Расчет ВАХ диода по (4.1), (4.2) и (3.2). Ввод: Т = Р2,
Ту= РЗ. /(1 (20° С) = Р4. т— Р5. Результат: l0 (Т), (Т) и (после набо>а
/) U.
F2 2 0 - 2 9 3 -т- Р8 F3 -г 2
хУ f F4 X Р7 С/П F8 1 + 4 0 -
Р6 С/П f F7 -~ I -) Pin f F5 X t
F6 X С/П БП Р.
Контрольный пример: Т = + 60° G, Т„ = 8° G, /0 (20° С) = 10~11 А. т =
= 2 Получаем /0 — 3,199999-10-10 А <рг = 2,841296• 10—2 В и вводя 1 =
= Ю-з A. U = 8,498286-10"1 В.
Программа БП2. Расчет ВАХ туннельного диода по формуле (3.3). Ввод:
А = Р2, а = РЗ. D = Р4, (3 = Р5, U = РО. Результат: / (прн изменении
U = РО нажать клавишу С/П и получить новое значение /).
t Р6 F3 X /—/ Ре* f F2 X f F6 X
Р8 F6 f F5 X Ре* 1 — f F4 X f
F8 ф С/П БП РО
Контрольный пример: А = 2,718281 • 10"i A/В, а = 10 В-1, D = 10~в А,
(3 = 20 В-1. Получаем прн U — 0,1 В / = 10-2 А. при (/ = 0,4 В / = 1.994462Х
ХЮ-3 А, при U= 0,8 В /= 8,959058-Ю-з А.
Программа БПЗ. Расчет семейства ВАХ маломощного полевого транзисто-
ра по формулам (3.13), (3.14). Ввод: b — Р2, Us = РЗ, (/0 = Р4, 1 -J- ц = Р5,
Uc = Р0. Результат: 1С (при смене Uc нажать клавишу С/П н получить
новое значение 1^.
Р6 F3 f F4 - Р8 t F5 4- | F6 —
Рх > 0 /—/ F6 Fx2 f F5 X 2 4- Р7 F6 f
F8 X f F7 - f F2 X С/П БП Р0 F8
Fx2 f F2 X f F5 4- 2 ~ С/П БП P0
Контрилипи пример: b-= 10 4 A/В2, Us ~ 0, Uo = — 5В, (1 q) = I.
При <7а «= 1 В 1в— 4,5- Ю"4 А. при UQ = 3 В lQ = 1.05-10~3 А. при
Uo > 5 В 1С = 1.25-10-3 А.
Программа БП4. Расчет ВАХ мощного МДП-транзистора по формуле
(3.17). Ввод: S = Р2, U„ = РЗ. U3 = Р4, р = Р5, b = Р6, UG = РО Ре-
аультат: Ze (при смене UG нажать клавишу С/П и получить новое значение
Z®)
Р7 F4 Fx2 t F6 X 1 F3 + ♦ F4 +
f P8 F7 f F6 X f Г8 -r /—/ Pe* /—/
1 + f F8 X f F: X С/П БП P0
Контрольный пример: S — 0,15 A/В, UB = 1 B, U3 = 10 В, P = 1, b =
= 0,01 (транзистор КП901). При UQ = 5 В ZG = 0,6133669 А. при Uc =
= 10 В zc= 1,017723 А при Uc = 40 В Ze = 1,735786 A.
Программа БП5. Расчет коэффициента p для аппроксимации ВАХ мощно-
го МДП-транзистора по формуле (3.18). Ввод: S = Р2. (7С0 = РЗ Uo~ Р4,
b = Р5, Zco = Р6.
F3 Fx2 f F5 X f F3 + f F4 — P8
t F2 X Fl/x f F6 X /—Z 1 + Fl/x Pin
f F8 X f F3 4- С/П
Контрольный пример: S = 0,15 A/В, Uco = 20 B. U(I = 1
Zeo = 2 А. Получаем p — 0,996831.
Программа БП6. Расчет BAX лавинного транзистора по
Ввод: aN = Р2, п* = РЗ, UM = Р4, 1ZB1 = Р5, ZKo = Р6,
•= Р0 Результат: М и UKS.
В. b = 0,01/Ва,
формуле (4.3).
0 = Р8, ZK =
Р7 f F5 - Рх < 0 PXY
F5 - f F8 X t
Fl/л С/П F8 /—/ 1 +
«у f F4 X С/П БП
БП FXY F2 Р8 F7 |
F6 + f F7 -г Р8
t Р, F3 Fl/x f Pl— /
Р0
Контрольный пример: aN = 0,98, п* — 2, UM = 120 В, |/Б| = 10—2 А,
/ад = 10-е д_ При /к = 0,5-10—3 А получаем М = 500, (/кэ = 119,8798 В,
при ZK = 2-Ю-8 А М = 2,038735, (/кэ = 85,65511 В, при /к = 20-10-» А
М = 1,074056, икэ = 31,50999 В.
Программа БП7. Расчет /см мощных МДП-транзисторов и энергетиче-
ских параметров двухтактного каскада на них. Ввод: S = Р2, Z/o = РЗ, Г73м «
Uco — P7. Результат:
= Р4, р = Р5, b = Р6,
и /?н.
F4 Fx2 f
Р8 F7 f
4- f F8
f F8 X
F8 4- С/П
ZCM’ (после набора £<-) P~
F6 X f F3 —
F5 X t F8 4-
X f F2 X P8
2 4- С/П 2 X
f F4 - f
/—/ Pe* /—/ 1
C/П f F7 -
t F8 4- t
Контрольный пример: см. в § 4.1.
Программа БП8. Подготовка данных к расчету каскада по схеме на
Рис. 4.5, а. Ввод: /?г = Р2, Rs = РЗ, Ra — Р4, Ек = Р0. Результат»
EK/Ri = С6, /эо (Т) = Р5, k *= Р6, /п<р7 {T)IRe = Р7 и 1//?б = Р8.
+ F2 Р, F3 Fl/je Р8 F2 F1Z: •’8 +
Р8 t F4 X 1 + /-/ С/П + Р6 с/п t
2 0 — Р7 t F3 ч* t 2 хУ t F2
X Р5 F7 2 9 3 л. 1 + 0 0
5 0 X t F8 X Р7 С/П БП Р0
Инструкция: При первом нажатии клавиши С/П получаем значение —, (1 +
-г РУКб)- Набираем aN (Г) и, нажав клавишу С/П получим k. Вводим /эо
(20° С) — Р2 и Ту = РЗ, набираем Т = РО. Нажав клавишу С/П, завершаем
расчет (mcpr//?6 заносится в Р7, /эо (Г) в Р5). При изменении Т повторяем
расчет.
Программа БП9. Расчет /э каскада со схемой на рис. 4.5, б. Ввод:
E^/R, = Р /э <о) = РЗ. = Р4, 1эо = Р5, k = Р6, mq>T/R6 = Р7
п = ^ко^эо = = Р8
Р/—/ Р2 F3 t F4 + РЗ t F5 -I- Pin Г
F7 X Р, F8 t F5 Р, F6 f F3 X
t F2 + Л t Р/—/ + г Р/-/ — Рх < 0 Pf F3
f F4 — РЗ F4 1 0 — Р4 1 ВП 3
/-/ - Рх< 0 Pf F3 С/П
Контрольный пример: для Т = 20° С и 60° С, = 20 кОм, R2 = 10 кОм,
R3 = /?к = 1 кОм, Ек = 10 В, Ту = 8° С, 1Э (0) = 0. Д/Э1 - 1 мА,
п = 5 получаем приведенные в таблице данные.
Т °C k /эо. мА Еб/«б- мА /д, мА UK = (£K- в
20 0,95 -0,2 0,001 0,5 2,235 7,765
60 0,96 —0,19 0,032 0,5 3,266 6,734
Программа БП10. Расчет остаточного напряжения ключа
посевом транзисторе Uc < (U3— Uo) Ввод: Uc (0) = Р2,
на маломощной
Rc = Р5, b =>
= Р6 Ес = Р7, (1 + т|)/2 = Р8, (U3 - UQ) = РХ
Р4 1 РЗ F2 F3 + Р2 Fxs t F8 X
Р, F2 t F4 t Р/-/ — t F6 t
F5 X L F2 /-/ t F7 + Px<0 0 F2
t F3 Р2 F3 1 0 -Л. РЗ 1 ВИ 3
/—/ — Рх<0 0 F2 С/П БП Р0
Контрольный пример:
при ис (0) = 0, Ro = 2- 10” Ом, b = 10-4 д/вз,
Eq = 12 В, q = 0,8 и U3 — U(, = 12; 10 и 8 В получаем l/oc-j — Uc=*
= 0 497; 0,602 и 0,768 В, нажимая клавишу С/П после ввода U3— Uu = РХ.
Программа БП11. Расчет передаточной характеристики Uq = j: (U3)
ключа на мощном МДП-транзисторе. Ввод: 0 = Р2, р = Р4, b = Р5, SR0 =»
== Р6, Ес == Р7 и U3 — Uo = РХ.
t
F2
1
F7
Р8
L
РЗ
Fx2
F3
t
Рх > 0
1
f F5
4- Р2
F8 X
Р2 F2
ВП 2
f к
F6
F3
/-/ -
F8 — Р8
X f F8
X f F2
— Р2 F3
Рх < 0 Р2 F2
1 РЗ
-г Ре
+ t
1 0
С/П в/о
Контрольный пример: при р = 1, b == 0,01 1/В, SR0 = 2,5, EQ = 35 В
п U3 — Uq = 15, 10, б, 2 и 0,5 В имеем 1/Р = 13,86. 16,21, 23,21, 30.1 и
33,75 В.
Программа БП12. Расчет коэффициента нестабильности S каскада на би-
полярном транзисторе. Ввод: R = Р2, Kj = РЗ, R2 = Р4, 7?м « Р5, /?к2 =>
= Р6, = ₽7.
F2 f F6 X
f F4 4- P
-r I + t
P/—/ F7 Fl/л 1
Fl/x P8 С/П
t F3 f
F2 f F4 -r
P/—/ + f P/—/
+ • f P, X
F4 P F5
P F2 f F3
+ f P/-z +
Fl/x /—/ 1 -f-
Контролъный пример-, см. в 5 4.3.
Программа БП!3. Расчет Л?к каскада на биполярном транзисторе Ввод-.
Яэ = Р2 R, = РЗ, (Т?2 + 7?в1) =» Р4 ДТ = Р5 Д/Ко = Р6. Д0/3 = Р7.
•8 = Р8, (1Ъ - 1К0) = 'О
f F7 X Р, F3 f F4 + Fl/ж f F3 X
} F4 X f F2 + Fl/ж f F5 X 2 ,
5 X f F6 + f P/—/ + f F8 X C/D
Инструкция. Сопротивления вводятся в килоомах; токи — в микроампе-
рах, значение е = 2,5 мВ/° С вписано в программу
Контрольный пример-, см. в § 4.3.
Программа ЗЯ14. Расчет коэффициентов температурной нестабильности
и Л/С/ДТ каскада на полевом транзисторе Ввод: Д/См/Д7’ = Р2 /Ся — РЗ,
|— Р4 Ra = Р5 lG = РО Результат: kM kQ и KlJKT
Р6 t F3 X F/- t F5 х 2 x t F4
-Д- 1 + Р7 Fl/x С/П F3 t F6 — F/~ 1
— 2 X Р8 t F7 — С/П F2 t F3 —
Р F4 4 0 0 X Fi/x f F8 X t p/—/
+ t F7 — t F6 /\ C/D
Контроль ый пример-, см в $4.4
Программа БЯ15. Гармонический анализ таблично или графически задан-
ной функции Ввод: т = Ро, N = Р8, а ~ РО Результат: A N/2 = РО
4ns Д72 = Р2 AncN/2 = РЗ tg <рп = РО
t 2 F8 t Pn X Р6 0 P2 P3 P4 F4
+- Р4 t F6 X pei* Р7 F5 x F2
+ Р2 F7 t F5 X t F3 + P3 т-5 С/П
Р5 БП XY F2 Fx2 t F3 Fx2 + FF F6
Psin X t F6 4- С/П F2 t F3 —/ С/П
Инструкция. После ввода //t и N и набора на цифровых клавишах п нажи-
маем клавишу С/П. После отработки отсчета набираем второй отсчет у2 и нажи-
маем клавишу С/П и т д. (в конце отработки каждый отсчет вновь высвечивает-
ся на индикаторе) После отработки ненулевых отсчетов нажимаем клавиши
БП6 и С/П, получаем AnN!2, нажав еще раз клавишу С/П получим tg (рп (зна-
чения AnsN/2 и AncNl2 можно вызвать из регистров Р2 и РЗ).
Контрольный пример: см. в § 5.2.
Ввод:
Программа БП16. Расчет частотной и фазочастотной характеристик
4-полюсников по заданной таблично или графически переходной характеристике.
Kt = P6 at = PO Результат: 4 (f). Ф (0
P2 0 P3 P5 P7 P8 F2 t F3 —
2 4- P5 I — t F3 X Pn
Pl F3 X t F7 + PZ F4 F3
F8 F P8 F2 P3 С/П P2 БП Fl F7
F8 Fx’ + F/“ 0/П F7 t F8 4- /-/
РЗ
X
X
F№ f
С/П
F5
Ре1*
t
Инструкция После ввода fKt набираем на цифровых клавишах первый от-
счет oj и нажимаем клавишу G/П и т. ц. до ввода (в конце отработки каждый
отсчет вновь высвечивается на индикаторе). Затем, нажав клавиши БП7 и С/П,
получим 4 0, нажав еще раз клавишу С/П, получим tg <р (/).
Контрольный пример: см. в § 5 3
Программа БП17. Расчет коэффициентов Берг а ап Зводг /» = Р2.
’(град) — РЗ Р0. 1 8 0 -г f Рл XY X Р4 Pcos X
— Р5 F2 Рх = 0 Р, F4 t Pcos X XY Psin XY
БП F7 ] + ПП Р8 Р8 F2 1 — Рх = 0 6
F4 БП ВП ПП Р8 t F8 —- t F5 С/П
Р7 f F4 X Ре1* F7 t F2 -Г- В/О
Контрольный пример-. а0 (30° С) = 0,1105983, ccj (90' С) == 0,4999999,
Oi (180° С) = 0,5, а2 (60° С) = 0,2756644. а, (40° С) = 0,f845363.
Программа БП18. Расчет спектра н коэффициента гармоник методом пяти
ординат. Ввод: i3 — Р6, = Р7, г2 = Р8, (j = Р1, г6 = Р0. Результат:
(/Ср. ^пл 1гм заносятся соответственно в регистры Р2 ... Р6).
— Р5 — + 2 4- F6 —P.F7 +
t F8 + 3 4- Р2 Р/—/ 2 4- Р4 | F2
— t F6 + Р6 F8 F7 — Р7 | F5
+ 3 ч- РЗ f F7 — 2 4- Р5 F? f
F6 Fx2 + f F4 Fx2 4- F/~ f F3 4- С/П
Контрольный пример: см. в § 5.4.
Программа БП19. Расчет выпрямителя.
1. Расчет 0, \/В (0) и К (0) по заданному А.
е = Р4, и А = Р8.
Ввод: 0 (0) = Р2, Д0, = РЗ,
F2 f F3 + Р2 Ре1* 4- f F2 — f F8
— Px>0 Р0 F2 f F3 — Р2 F3 2 4- РЗ
t F4 — Рх < 0 Р0 F2 Ре1* Р6 XY Р5 F6 t
F2 X 1—1 + F5 4 Р7 2 F/~ J F6 X
С/П 1 f F6 — f Рл X t F7 4- С/П
2. Расчет D (0) и £пв Ввод: 0 = Р2, т = РЗ, sin 0 = Р5, cos 0 = Р6,
/г (0) = Р7. При использовании перед расчетом программы 1 эти данные мож-
но не вводить.
F2 2 X Р8 Pcos 2 t 1 + t F2
X Р4 F8 Psin 0 7 5 X /-/ t F4
+ L Рл X t F/“ t F7 С/П F2 t
Рл Р8 F3 Fl/x t F8 + 2 t F4
4- Г F5 4- t F6 4- С/П
Контрольный пример: см. в § 5.5.
Программа БП20. Расчет w для заданной индуктивности L катушки
(рис. 6.1, б). Ввод: w (0) = Р2, Лш = РЗ, D = Р4, I = Р5 3,5 Hd = Р6, Z-- -
-= Р7.
F2 t F3 + Р2 F4 0 , 4 5
F5 4- Р/—/ F2 t F4 X Р8 f Рл
t Р, 4- Р/—/ F6 f F2 4- 4 —
X f Р, 4- /— / | F7 + Рх < 0 Р0
F3 — Р2 С/П F3 1 0 4- РЗ БП
X t
X Fxa
f F8
F2 f
P0
Контрольный пример: см в §6.1.
Программа БП21. Расчет числа витков катушек (рис 6.2, 6.3).
1 Катушка тороидальная однослойная круглого еечения (рис. 6.2, а).
Е вод: £» = Р2. = 3, L = РХ
Р4 F2 Fx2 f F3 Fx2 — F y~ I—I f F2 4
2 X f Рл X Fl/x t F4 X Ff С/П БП
P0
Для D «= 5 cm, Dj = 2 cm, L= 10f нГн имеем w — 195,2635,
2. Катушка тороидальная однослойная прямоугольного сечения (рис. 6.2. о.
Ввод! Di “ Р2, £>а = РЗ, й =» Р4, L = РХ.
РЗ F3 ] F2 -F Pin 2 X f F4 X Fl/л
f F5 X F/~ С/П БП РО
Для E>i = 3 см, D2 = 4 см, h = 1 см, L — 10* нГн имеем га = 131.8344
3. Катушка тороидальная многослойная круглого сечения Ввод: D = Р2.
Di -- РЗ, £ = Р'(
Р4 F2
- t
X F/~
8 X
Ря X
С/П БП
F3 4- Pin
F2 X 2
1 5
Fl/x f F4
1
X
Для D = 4 см, Di — 0,8 см, L — 10’ нГн имеем w = 453,0067.
4. Катушка короткая цилиндрическая многослойная (см рис. 6.3). Ввод:
р - Р2, I = РЗ, с = Р4, L = РХ.
Р5 F2 3 X Р6 F3 9 X Р7 F4 1 0
X t F6 + | F7 + | F5 X f F2
Fx3 4- f Рл -5- 2 5 4- F/“ С/П БП P0
Дли D = 2,5 cm, I — c = 1 cm, L = 200 000 нГи имеем w = 103,9089.
Программа БП22. Расчет w при заданной индуктивности L для торои-
дальной катушки на ферромагнитном сердечнике в круглым сечением. Ввод:
= Р2, dE — РЗ, Л = Р4, р =» Р5, и L = РХ Результат: w при dahl^ < I,
б ... 2 И W при du/dB > ,5 ... 2.
Р6 F2 t F3 - t F4 X t F5 X 4
X Р8 F2 F3 *г t F6 X Л F8
IV С/П F2 F3 — Pin t F4 X t F5
X 2 X F6 -г Fl/x F/- С/П БП P0
Контрольный пример: при dH = 4 см, dB = 2
и р = 1000 имеем и/ = 122,4744 и 120,1122.
см Л = 1 см. /. = 2-10” нГн
Программа БП23. Расчет w катушки на броневом сердечнике (см. рис. 4.4).
1. Расчет коэффициентов А и В Ввод: dt = Р2. d., = РЗ, d3 = Р4 d4 =
Р5, ht = Р6 и й2 = Р7.
F4 Fx3 P, F5 Fx3 t P/—/ - Fl/x P8 F2 Fx'3
P, F3 Fx2 t P/—/ Fl/x t F8 + P8 F6
t F7 + t F8 X P, F2 F3 P P8
F4 t F5 + t F8 -X- Pin P8 F7 t F6
— Fl/x t F8 X P8 P/—/ P7 С/П
При di = 1 см, do = 2 см, d3 — 4 см, d4 = 5 см, hi — 3 см, й., = 4 см име-
ем А = 3,111111 = Р7 = РХ, В = 1,098611 = Р8.
2 Расчет w Ввод: р. = Р2, L — РХ (Л = Р7 и В — Р8 заносятся пред-
шествующей программой).
РЗ F2. 1 9 , 7 4 X Р4 F7 J F3
+ f F3 X f F4 —- F/ С/П БП Р0
При ц = 10, Б = 5-10§ нГн имеем w— 103,2614.
Программа БП24. Расчет йэ и L катушек с сердечником (см. рис.6.5). Ввод:
а = Р2, dt = РЗ, lm = Р4,
Р7 F6 F3 X ‘
+ Р8 Fl/x С/П F8 J
F5 ~ t F6 -j- ‘
БП Р0
Fс = Р5. р = Р6. L = РХ,
F2 4- t F4 т 1
F7 X } F4 X f
Рл 4- 4 4- F/ С/П
Контрольный пример:
Н = 1000, L = 50- 10я нГн
при а = 1,5 см, di — 0,05 см, 1т = 10 см, Fo = 1 см3,
имеем kB = 0,2307692 и w == 415,2322.
Программа БП2Б. Разчет ш тонкопленочння катушек (ем. рив. б.в). В»»Д|
ЛВ=Р2 ЛВ=РЗ fej = Р4 fe2 = Р5 L = РХ.
Р6 F2 t F3 + Р8 F3 — F-'i/x t F6 X
t F8 X Pin t F8 X t F4 X t F6
4- Fl/x Р8 3 t 5 е- t F8 X» С/П БП
Контрольный пример: при /н = 1 см, /1Б=0,5 см, kA = 2,33, k, » 4,
L = 200 нГн имеем а> = 6,566939.
Программа БП26. Расчет и> тонкопленочной катушки (см. рие. 6.6) е аадан*
ным шагом витков Ввод: а> (0) = Р2, Affi'i = РЗ, Лв = Р4, I = Р5, = э6,
k = Р7.
F2 t F3 + P2 F5 4- 1 4 P8 F4 4 2 X X Pin f F5 X г t
F8 X f F7 X t Р8 8 f 3 4- t
* F2 X» f F8 X /- / f F6 + Pa-< 0 P0 E2
f F3 - P2 С/Г 1 F3 1 0 4- P3 БП P0
Примечание. Значе. ие fe2 (подчеркнутая цифра 4) вписано в програм.
му).
Контрольный пример: дан в §6.1.
Программа БП27. Расчет дросселя фильтра.
1. Расчет (?ст, с, с, М и /2/2.
F3 Fx2 f F2 X Р8 Fy- Fy_ 2 6 X
Р4 F№ 1 . 5 X с/п P6 t F4 P7
F8 f F4 4 ) F5 t F7 4- P8 1 Fx2
1 5 ВП 3 X Р. F8 3 3 0 X t
Р/—/ — 2 0 4 t F5 X c/n
2, Расчет d и шдр.
t F3 4- Fl/x Fy~ 1 1 3 X P3 c/n
F8. 4 0 1 X /- / Ре* 1 1 4 X 5
0 + f F4 X t F7 X 1 2 6
X Fl/x f F2 X t F5 X Fl /- i ВП 4
X P2 С/П
3. Расчет kM и гдр.
F3 Fx2 РЗ f F2 X t F5 4-. t F6 -Z-
8 ВП 3 /—/ X С/П F5 f Pn X P8 F4
f F7 + 2 X f F8 + t F2 • X t
F3 4 2 , 2 5 ВП 4 /-/ X c/n
Порядок ввода и пример расчета даны в §6.2.
Программа БП28. Расчет силового трансформатора Ввод: /В„ = > P2, о -
= РЗ, Ъ = Р4. k0 = Р5, = Р6, Р габ = P7, 0,0222 =
F2 f F3 X | F4 X t F5 X f F6
X f F8 X Fl/x t F7 X c/n F3 ? F2
X t F7 X f F5 X P7 С/П F6 f F4
4- F/- f F8 X С/П F3 * F4 + t F5
X C/П f F6 X t F8 x t F2 4- С/П
Порядок расчета дан в § 6.3.
Программа БП29. Расчет емкосте!
1. Расчет Со, S, А и В пленочного • конденсатора. Ввод: e = P2, m= P3,
С = Рб, Q= Р6, d = РХ.
Р4 F3 1 — | F2 X 0 , 1 » 8
Б X | F4 4- С/П Fl/x f F5 X P7 С/П
F6 f F7 X Fy“ С/П F7 t F6 4- Fy- c/n
При в = 4,7, т =» 3, О = 150 пФ, Q = 2, d = 0,01 см имеем С„ = АЗ 19
пф/см», S = 1,803101 см», А = 1,899 см, й = 0,9495001 см
2. Расчет емкости проводников. Ввод: kj = Р2, й8 — РЗ, в = Р4, L = fo,
d = Р6, х - РХ.
t F3 X f F6 4- Pin Р8 F2 | F4 X
t F5 X 1 0 Pin X f F8 4- С/П БП
РО
При ki — 0,24, fe2 » 4, I = 10’ см, d = 0,2 ом, е = 1, х — h = 100 см полу-
чаем С = 72,70457 пФ.
Программа БПЗО. Расчет линий передачи.
1. Расчет и vic линии (см рис. 6.8, а) Ввод: в = Р2, Za = РЗ, I - - Ро,
6 = Р0.
Р4 F2 1 , 4 1 + Fy~ t F3 X 8
7 4- Ре* f Fl/x 5.9 8 X f F4
X f F6 - 1 ,25 X С/П F2 0
, 4 7 5 X 0,6 7 +’ Fy~ Ft/x
С/П БП PO
При в = 4,7, Zn = 75 Ом t = 0.05 мм h = 1 мл получаем IF = 0,8250117
мм vic = 0,5869672.
2. Расчет IF и vic линии (см. рис. 6.8, б) Ввод: в — Р2, Zn — ^З Ро,
С = РХ.
P4 F2 PV~ t F3 X 6 0 - t Pe* Fl/x
4 X t F4 X P8 F5 2 1 X /—/
t F8 + 0 5 9 X C/П F2 Fy~ Fl/x
С/П БП P0
При в = 4,7, 2Л — 50 Ом t = 0.5 мм и Ь = 2,5 мм получаем IF =
мм. vic — 0,4612656.
3. Расчет параметров искусственных линий задержки Ввод;
1В ” РЗ. /?„=£„ = Р4. fe, = Р5 kt = Р6 ta = РХ.
0 34Q3252
гф
P8 t F2 P7 1 5 F7 x> t
F5 X С/П P7 F8 t F6 F7 J- t
F3 — С/П F8 t F6 t F3 X t F7
С/П F4 t F3 + P F4 t F? t
p/—/ 4- С/П БП P0
При /ф = 0,05-10-® в, Zn = 600 Ом, Ra ** /?н = 1000 Ом fe, = l,l fi2 = 1 07
и t3 = 10*® о получаем п = 98,38697. Округляем п = 100 =» РХ и получаем
С = 1,557632 X 10“п Ф, L = 5”,607476 мкГи и Ко = 0,25
Программа БП31. Вычисление параметре х линий передачи по заданному
2Л0, фрагмен ы вписываются в программу реализации метода подекадного при-
ближения
I х = d Ввод: х (0) = Р2, Дх, = РЗ 60/Д/е = Р4, D = Р6, I - Ро,
2вв = Р7.
F6 Fx» 4 X /—/ f F2 Fx2 + f F5 Fx»
+ f F2 4- f F5 4- 2 4- P8 Fx3 1
— F/“ | F8 + Pin f F4 X f F7 —
При x (0) — 0, Дх, = 0,1 ем, 60 =* P4, D = 1 ем, I = 0,25 см, 7Л0 «= 100
Ом имеем d — x — 0.1403 см.
2 . x = aid Ввод: x (0) = P2, Ax, ~ РЗ. 120/Д/в = P4, 2Л0 = P6.
Fx3 1 _ ,F/— f F2 + Pin f F4 X P6
F5 f F6 —
При x (0) = 0, Ax, — 1 ем, 120 “ P4. 2Л0 = 300 Ом имеем x =» 6.132
3 x = Did. Ввод: * (0) = P2, Ax, — P3, 60/Д/е “ 2ло — HpoipaM-
Ma совпадает с приведенной в п. 2.
4 х = а. Ввода x (0) = P2, Дх4 = РЗ, 120/Д/е = Р4. D = Р5, d = Р6,
2ло = Р7.
I F5 -г 2 4- Fx2 1 + F/- Pin Р8 F2
4 F6 4- Fx2 1 - F/“ XY F/“ + Pin f
F8 — f F4 X P8 F7 f F8 -
При x (0) = 0, Дх4 = 0,1 см, 120 = P4, D — 1,5 cm. d — 0,1 cm =•
— 200 Ом имеем a = 0,275 cm.
5. x = а. Ввод: x (0) = P2, Дх4 = РЗ, 60/Д/е = P4. d4 = P5, a2 = P6,
= P7.
Fx2 4 X f F5 Fx3 - f F6 Fx2 - f
F5 4- f F6 4- 2 4- P8 Fx2 1 - F/~
f F8 + Pin f F4 X P8 F7 f F8 —
При x (0) = 0, Дх4 = 0,1 см, 60 = P4, di = 0,1 см, d2 = 0,05 см =
= 300 Ом .имеем a = 0,434.
6. Расчет x = n по заданному F^o. Ввод: х (0) = Р2, Дх4 = РЗ, D — Р4,
d = Р5, Fwo = Р6.
F4 I F5 F Р7 Pin 2 X Р8 F7 Fl/x Fx3
/—/ 1 -Ь t F8 4- Р8 F2 f Рл X f
F5 X Fx2 } F8 X 1 + F/~ P8 F6 |
F8 —
При x (0) = 0, Дхх = 0,1 см, D = 1 см, d = 0,5 см, Fwo — 4 имеем n =
= 3,35 витка на 1 см.
Программа БП32. Расчет линий передачи при комплексной XH = P8. нагрузке.
1. Расчет Ко и tg ф. Ввод: Zn = Р6, RH = P7,
F6 Fl/x t F7 X P7 F8 X P8 Fx2 t F7
Fx2 + 1 + 2 U- P6 t F7 + P5 F7
— t F5 -i- F/“ P4 F6 1 — Px 0 P- P2
F8 XY F P7 F2 Px; > 0 FCjc 7 С/П 1 8
0 С/П F8 t Fx2 F/~ 4- 9 0 X С/П
2. Расчет Zbx- Ввод: 2PZ = P2, a/P = P3, Ko — P4, фрад ~ = P5.
F2 t F5 — P7 F3 X /—/ Pe* t F4 X
Р6 2 X F7 Psin X /—/ P8 F7 Pcos X
Р7 F6 Fx2 1 4- P6 2 — /-/ P/—/ F6 t
F7 Р8 Fx2 P6 t p, F7 t Fx2 F6 + F/~ P7 F8 P6 С/П t F6 БП P0
Контрольный пример: вычислить параметры линии при Zn — 75 Ом, RB =>
— 50 Ом, Хп — 30 Ом, а — 0,01 Нп/м, Р = 1 рад/м и I — л/10 м. Введя програм-
му 1 и ее исходные данные, нажав клавишу С/П, получим на индикаторе число
180. Из регистра 4 вызываем значение /<0 = 0,3037835, из регистра 7 вызываем
значение tg ф = — 2,022471 (время счета — около 10 с). Последнему соответст-
вует tp = 2,0299896 рад. Вводим программу 2 и ее исходные данные 2р/ = л/5,
а/р = 0,01, ф = 2,0299896 рад. Нажимая клавишу С/П получаем |2ВХ|/2Л =
= 1,097909, из сегистров 7 и 8 вызываем составляющие RB-JZn — 0,9185060 и
Хвх/7Л = 0,6014585.
Программа БПЗЗ. Расчет колебательных контуров
1. Расчет параметров последовательного контура. Ввод: L ~ Р2, С =
= РЗ, Q = Р4, Д/ = РХ.
P5 F2 t F3 X F/- 2 X t Рл X Fl/x
P6 С/П t F5 + P7 С/П F6 t F7 — P,
F7 t F6 t P/— / — t F4 X С/П Fx3
1 + F/“ P8 Fl/x С/П F2 t F3 FK“ i
F4 4- С/П t F8 X С/П БП P0
Для L = 2,533-10-4 Гн, С =» 1ОО-10“и Ф, Q = 100, Л/= 10 000 Гц по-
лучим f0 = 1 000 005 Гц, f = 1 010 005 Гц, ё = 1,99008, Ki = 0,4489943, г =
J 15,9154 Ом, ZBX => 35,44677 Ом.
2. Расчет параметров параллельного контура. Ввод: L = Р2, С — РЗ,
0 = Р4. Д/ = РХ
Р5 Г2 f F3 X Fy" 2 X | Рл X Fl/x
Р6 С/П | F5 + Р7 С/П F6 | F7 4- Р,
F7 f F6 ~ | Р/—/ — f F4 X С/П Fx2
1 + Fy~ Р8 Fl/x С/П F2 f F3 -г- Fy- f
F4 X С/П f F8 4- С/П БП Р0
Для £= 2,533-10-4 Гн, С= 100-10-12 Ф, Q = 100, Д/= 10 000 Гц по-
лучаем /о = 1 000 005 Гц, f = 1 010 005 Гц, | = 1,99008, Kt = 0,4489943,
Яэ=» 159154 Ом, |ZBX| = 71459,24 Ом
3. Расчет параметров нагруженного контура. Ввод /0=Р2, С = РЗ,
г = Р4, /?н = Р5.
F2 2 X f Рл X F? I F3 X Fl/x Р6
С/П f F3 4- Fy~ Р7 С/П Fx2 1 F5 4- +
F4 + Fl/x f F7 X С/П Fl/x С/П f F2 х
С/П
Для /„= 10» Гц, С= 100-Ю-12 Ф, г= 10 Ом, /?н= 5-10® Ом получаем
L= 2,533-Ю-4 Гн, р= 1592 Ом, QH = 106, dH = 9,47-10~з, 2Д/= 9466 Гц
(округленно).
Программа БП34. Расчет резонансной кривой «-каскадного усилителя с
идентичными связанными контурами. Ввод: рсв = Р2, ёо = РЗ, Дё — Р4,
п «= Р5. Результат: ё и К
F3 f F4 4-
F6 + 1 4* ’
+ Fy~ Р6 F2
] F6 хУ С/П
РЗ С/П Fx2 /—/
Fx8 Р6 F3 Fx3
Fx2 1 4- f
БП P0
Р6 F2 Fx2 f
4 X f F6
F6 4- P6 F5
Контрольный пример: рсв = 1, ёо = 0, Дё = 0,5, п = 1. Получаем, на-
жимая клавишу С/П, ё: — 0,5, Ki = 0,992275 ёг — 1. Кг =0,894428, ёз = 1,5,
Кз= 0,664364, ё4 = 2 Kt = 0,447214 и т. д.
Программа БП35. Расчет резонансной кривой «-каскадного усилителя с
идентичными связанными контурами, нормированной относительно максималь-
ного значения, по формулам (6.24) н (6.25). Ввод: рсв = Р2, Дё = Р4, п = Р5,
ёо = Р0. Результат: Ъ, н К-
РЗ Fx2 /—/ Р6 F2 Fx2 f F6 + 1 4- Fx2
Р6 F3 Fx2 4 X | F6 4- Fy P6 F2 2
XI F6 4- P6 F5 f F6 x* С/П F3 f
F4 4* С/П БП P0
Контрольный пример: рсв = 1,6» Дё = 0,5, п — 1, ёо = 0. Получаем Ко =
= 0,923075, ё1 = 0,5, Kt = 0,948682, ёз = 1, /С2 = 0,996544. ёз = 1,5, 7<3 =
= 0,948682, ё4 = 2, /<4 = 0,737154, ёо = 2,5, Къ = 0,514495 и т. д.
Программа БП36. Расчет резонансной кривой «-каскадного («4) из-
бирательного усилителя с взаимно расстроенными идентичными контурами
(добротность Q = 30
f =
Р0
Ввод: /01 = Р2, /02 = РЗ,
вписана в программу как
fos = Р4, /о4 = РБ.
число 030)
Р8 F2 Р7 ПП F5 Р, F3 Р7 ПП F5
Р7 ПП F5 Р, F5 Р7 ПП F5 t Р/—,
Р/—/ X f Р/—/ X С/П БП Р0 F7 t
Р6 Fx2 F8 1 t т F7 Fy“ Fl/x В/О F6 0 3
Р,
F8
0
F4
X
Инструкция. При п = 3 по адресам 04 и 05 записать РНОП и 1, при п == 2
то же записать по адресам 13 и 14. Значение У (?) получаем, набрав / = Р0
и нажав клавишу С/П, и т. д.
Контрольный пример-. f01 = 97 МГц, /от = 98 МГц, fos “ 102 МГц, «
= ЮЗ МГц, Q= 30. Получаем
(, МГн 95 96 97 98 99 100 101 102 103 104 105 106
Y(f) Ю-г 1 ,36 3,26 7,17 10,4 10,2 9,66 10,3 10,4 7,33 3,53 1,570 0,764
Программа БП37. Расчет кривой избирательности 3-каскадного усилите-
ля с взаимно расстроенными контурами с разной добротностью. Ввод: /и = Р2,
/02 = РЗ, fos — Р4, Q 1.2 — Р5, Qg = Р6, f = P0.
Р8 F2 Р7 ПП F7 t F5 X Fx* 1 + P,
F3 Р7 ПП F7 t F5 X Fx2 1 + P, F4
Р7 ПП F7 t F6 X Fx2 1 + t P/-/ X
t Р/-/ X F/~ Fl/x С/П БП Р0 F8 t F7 -4-
Fl/x — В/О
Контрольный пример: = НО МГц, foi = 90 МГц, fog = 100 МГц, Q1>a =
= 23, Qs — 10. Получаем:
f. МГц 80 84 . 88 92 96 100 104 108 112 116 120
F(/),I0-2 0,35 0,86 2,98 5,32 5,04 5,84 5,44 5,93 3,68 1 ,31 0,02
Программа БП38. Расчет кривой избирательности комбинированного УПЧ
no (6.26). Ввод: Qi = P2, Qs = P3, Q3 = P4, kCB = P5, V = 2 А/// = P0.
Fx2 P- 7 F5 Fx2 t F7 — t F2 X t F3
X 1 1 F8 Fx2 P8 F2 t F3 + Fx2 t F7
X f F/“ P8 FE > Fx2 t F2 X t
F3 X 1 4- t F8 — Fx2 P8 F4 Fx2 t
F7 X 1 + F/~ Fl/x t F8 X С/П БП P0
Контрольный пример-. Qi = Q2 = 100, Qs = 50. ^CB ~ 0,02. Получаем
V 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04
У 1 1,03 1,12 1,21 1,04 0,588 0,267 0,122 0.06
Программа БП39. Расчет и, (I) дифференцирующей /?С-цепи при линей
ном нарастающем иг (/). Ввод: т = Р2, /ф0 = РЗ, Е = Р4, Д/ = Р5, 4 = РХ
Результат: t и иг (/).
Р8 /—/ f F3 + Р6
1 + f F4 X f
БП 1—1 F6 f F2 -
F8 f С/П F6 С/П F5
РО0 p, F2 4- Ре* /-/
F2 X + F3 -г Р7
Ре* | FT X f Р0
+ БП Р0
Контрольный пример: т = 1 с, /ф0 = 1 с, Е «= 10 В, Д/ = 0,5 с, 4 = 0-
Получаем: иа (0) = 0, и2 (0,5) = 3,934693, иг (1) = 6,321205, и2 (1,5) =
“ 3,834004, ия (2) = 2,325441, и2 (2,5) = 1,410451, и2 (3) = 0,8554821 и т. д.
Программа БП4О. Расчет u2 (fl дифференцирующей RC-цепи при экспо-
ненциальном th (t) = E (1 — e t/Тф) Ввод: т = P2. тф — РЗ, E = P4, Kt =
= P5, /0 = PX. Результат: t и u2 (fl.
P8 t' F3 4- /-/ Pe* P6 F2 t F3 — Px = 0
F4 F6- t F4 X t F8 X t F3 — БП
F8 F8 t F2 4- /-/ Pe* t F6 — P6 F3
t F2 /-/ 1 + Fl/x t F4 X t F6
X P7 F8 t С/П F7 С/П F5 + БП P0
Контрольный пример-, т = 1 с, Тф = 1 с, Е — 10 В, Д/ = 0,5 с, t0 = 0,
Получаем: и2 (0) = 0, u2 (0,5) = 3,032653, и2 (1) = 3,678795, и2 (1,5) =
= 3,346953, и2 (2) = 2,706706, и2 (2,5) = 2,052125, и2 (3) = 1,493612. При
т.' = 2 с и указанных других исходных данных и2 (0) = 0, и2 (0,5) = 3,445402,
u2 (1) = 4,773024, и2 (1,5) = 4,984728, и2 (2) = 4,650884, и2 (2,5) = 4,088396,
и2 (3) = 3,466862 и т. д.
Программа БП41. Расчет /м и Лм двухэкспоненциального импульса и
1)т!Е дифференцирующей цепи по (7.10)—(7.12). ВвоД1 т = Р2, Тф.= РЗ.
F2 t F3 — P4 Pin Р5 - F3 — Fl/x t F2
X t F3 X F5 X С/П F4 1 Fl/x
t F5 X P6 I-/ Pe* P8 F4 t F8 хУ /-/
t F8 + P8 С/П F4 FI/x /—/ 1 + Fl/x t
F8 X С/П
Контрольный пример", т — 5 мкс, Тф = 1 мкс. Получаем: tM — 2,011796 мкс,
Лм = 0.5349934, Um/E = 0,6687417.
Программа БП42. Расчет активной длительности 1П двухэкспоненциаль-
ного импульса по (7.14) и (7.15). Ввод: т = Р2, Тф = РЗ
F2 f F3 4- Р4 2 0 f F4 - РО О F4
2 + F4 -г- 0 , 7 8 + f F2 X
С/П 3 t F4 -Г 0 , 7 + f F2 X
С/П
Контрольный пример", т = 5 мкс, Тф =. 1 мкс. Получаем tn = 5.9 мкс
(при т = 30 мкс, Тф = 1 мкс, tK — 24 мкс).
Программа БП43. Расчет переходной характеристики а (т) многокаскад-
ного (п = 3 . . . 6) усилителя в области малых времен по (7.21). Ввод: k3 = РЗ,
^ = Р4. ^=Р5 т = РХ.
Р2 Fx2 2 4- Р6 3 f F2 х’ t F3 X
Р7 4 | F2 хУ f F4 X Р8 5 t F2
хУ | F5 X f F8 + f F7 + f F6
4- f F2 + 1 + P8 F2 /—/ Pe* f F8
X /—/ 1 + С/П БП P0
Контрольный пример: n = 6, ks— 0,167. = 4,17-IO-2, k6— 8,33-10—3.
Получаем:
Г 1 2 3 4
La 4,603-10-« 1,61449-IO-2 8.33778-10-2 0,2143851
T 5 6 8 Ю
a (t) 0,3836906 0,5541009 0,8086974 0,9328989
Пршрамма БП44. Расчет ис (/) и
дискретных значениях, ивх(0) = Р4, и}
uR (0) =* Р5, ис (0) = Р6, нвх = РХ.
F4 f F6 — Р5 С/П
4 4-/_/|F8 +
+ f F8 + t F3
f F6 + P6 С/П P4
P0
:R (0 линейной RC-цепи при заданных
х (0. Ввод:. 6 = 0 = Р2, Н « РЗ.
F3 Fx® Р8 f F3 X
Р8 F3 3 X /—/ 6
X f F8 X 6 -=-
F2 f F3 4- Р2 БП
Контрольный пример: см. в § 7.2
Программа БП45. Расчет ис (0 и i
ными значениями ивх (£) комбинирован!
Л/ = РЗ, Д//т = Р4, ис (0) = Р5 = Рб,
(рис. 7.3).
iR (f) RC-цепи при заданном дискрет-
1ым методом Эйлера. Ввод: 0 » Р2,
пвх (0) Р7 и ивх (/) РХ.
F2 t F3 4- Р2 F7 t F5 — t F4 X
t F5 4- Р5 F4 Fl/x 1 4- Fl/x t F7 X
Р8 F4 1 + Fl/x t F6 X t F8 4- P6
t F5 4- t 2 c/n /-/ t F7 4- c/n
Р7 БП Р0
Контрольный пример: с л. в § 7.2.
Программа БП46. Расчет t, ивх (/), uR (f) и ис (t) нелинейной RC-цепи
при экспоненциальном входном сигнале. Ввод: 0= Р2, Д/ = РЗ, ис (0) =
= Р4, RC0 = Р5, тЕХ = Р6, Um = Р7, <рк = Р8.
F2 С/П f F6 4- /—/ Ре* /—/ 1 + | F7
X С/П | F4 С/П — С/П Р, F4 | F8 4-
1 4- Fl/x F/~ Fl/x f P/—/ X f F3 X f
F5 4- f F4 -f- P4 F2 f F3 4- P2 БП
P0
Контрольный пример: см. § 7.2.
Программа БП47. Расчет переходного процесса и (/) при переключении туннель-
ного диода импульсами тока по (7.31). Ввод: IBX — Р2, — А = РЗ, и (0)=
= Р4, D = Р5, Со = Р6, Д/ = Р7.
F4 1 0 X /—/ Ре* | F4 X f F3 X
f F2 + Р8 F4 0 ,0 5 5 4- Ре*
1 - f F5 X /— / | F8 + f F7 X
f F6 4 f F4 4- P4 С/П БП P0
Контрольный пример: см. в § 7.3
но составить таблицу
(рис. 7.5).
Рекомендуется предварнтель-
Программа БП48. Расчет переходного процесса u(t) переключающей схемы
на туннельном диоде по (7.32). Ввод: Е (0) = Р2, А = РЗ, и (0) = Р4, D — Р5,
С = Р6, Д/ = Р7, R = Р8.
F4 1 0 X /—/ Ре* f F4 X t F3 X
Р, F4 0 , 0 5 5 4- Рё* 1 — |
F5 X 4 Р/—/ 4- 1—1 Р, F2 | F4 — f
F8 4- | Pl— I 4- t F6 4- I F7 X j
F4 4- P4 С/П- P2 БП P0
Инструкция. После получения каждого значения и (t) набирается новое
значение Е (t) на цифровых клавишах.
Контрольный пример: см. в § 7.3 при R = 200 Ом (рис. 7.6). Рекомендуется
предварительно составить таблицу tn.
Программа БП40. Расчет постоянных времени твкл, тр и твыкл ключа на
биполярном транзисторе по (7.36)—(7.38). Ввод; тт = Р2, = РЗ, (Pw + 1)=
t Р4, RK = Р5
F5 1 ,6 X t F3 X f . F2 4- f
F4 X Р6 С/П F2 1 , О X f F4 X
Р7 С/П F3 2 , 1 X f F5 X f F2
4- f F4 X Р4 F6 Р2 F7 РЗ F4 С/П
Примечание. После вычисления тВЬ1кл значения твкл тр и твЫ(!1
взносятся в регистр л 2, 3 и 4.
' Контрольный пример см. в § 7.4
Программа БП50. Расчет времен /вкл, tp и /выкл ключа на биполярном тран-
зисторе по (7.33) — (7.39). Ввод: тввл = Р2 тр = РЗ. твыкл = Р4 = Р5,
/бн=р6. /02 = Р7-
F5 t F6 - t F5 4- Fl/x Pin t F2 X
С/П F5 t F7 — P8 F6 t F7 t F8
Fl/x Pin t F3 X С/П F7 t F6
F7 Pin t F4 X С/П
Инструкция. Рекомендуется вводить программу после выполнения вычис-
лений по программе БП49, не выключая микрокалькулятора. В этом случае ввод
Твкл. тр и твыкл не требуется.
Контрольный пример см. в § 7.4.
Программа БП51. Расчет iK{t) ключа на биполярном транзисторе при ли-
нейном нарастании и опаде тока базы. Ввод; 1^ (оо) = Р2, а=РЗ, 1К (0) = Р4.
tp = Р5. Et = Р6. 0 = Р7, /ф = Р8, 0 = Р/—/. Результат «к (0 и t.
Р7
БП
F2
F4
f F6 + Р7 F8 f F7-
X F8 Р7 F7 | F8 4- |
X f F4 — | F6 X t
-I- P4 С/П P. f F6 4- С/П
Px > 0 F2 F7
F3 4- f
F5 4- f
P/—/ БП PC
Контрольный пример: см. в § 7.4 (рис. 7.9).
. Программа БП52. Расчет гк (/) ключа на биполярном транзисторе при экспо-
ненциальном нарастании и спаде тока базы. Ввод: /ок = Р2, /^м =» РЗ, 1И (0)=»
= Р4, твх. = Р5, Tg = Р6. Д/ = Р7, 0 = Р8. Результат t н 1К (0
F8 f F7 4- Р8 С/П | F5 4- /—/ Ре* 1—1
1 4- t F3 X f F2 4- f F4 - f
F7 X f F6 4- f F4 4- P4 С/П БП P0
Контрольный пример: ем. в §7.4 (рис. 7.10).
Программа БП53. Расчет переходного процесса переключения ключа иа
маломощном полевом транзисторе. Ввод: Е = Р2, ивх (0) — РЗ, b' R = Р4,
k = Р5, Д//т = Р6, 0 = Р7, и (0) = Р8. Результат: N, (U3 — i/oJn-j, и.
F7
t
Fx2
F2
1 4- Р7 С/П F3 С/П РЗ Fl/x f F8 X
F5 X /-/ Ре* /—/fl + f Р,
f F4 X f P/—/ X /—/ f F8 - J
4- f F6 X t F8 4- P8 С/П ВП P0
Инструкция. На каждом шаге первое нажатие клавиши С/П дает значения
N, второе — (U3 — Uo). Если (U3 — U0)n отлично от (U3 — (70)n-i. то первое
значение набирается на цифровых клавишах и клавиша С/П нажимается тре-
тий раз (получаем пит д.).
Контрольный пример: см. в § 7,5 (рис. 7.12).
floorрамма БП54. Расчет переходного процесса переключения ключа на
мощном МДП-транзисторе. Ввод: Е = Р2, 17g = РЗ. RoS — Р4, р = Р5,
i = Р6 М = Р7. и (0) = Р8, 0 = Р/—/. Результат: tn U3 (tn_t) и и (tn).
Р F7 + С/П Р/—/
X РЕ X /—/ Ре*
X F4 X f F8
F7 X t F6 + |
Инструкция. При вычислениях
F3 С/П РЗ Fl/x | F8
/—/ f 1 + f F3
+ t F? + f
F8 4- P8 С/П БП P0
нельзя задавать U3 = 0 (в этом случае
задается малое значение U3, например 0,001 В), порядок вычислений см. в инст-
рукции к программе БП53.
Контрольный пример-, см. в § 7.6 (рис. 7.13).
Программа БП55. Расчет переходного процесса переключения ключа на
мощном МДП-транзисторе в индуктивностью в цепи стока. Ввод: /Kt/С = Р2„
M''L = РЗ. Ео = Р4, Ro == Р5. — U3 = Р6, I (0) = Р7, и (0) = Р8, 0 «« Р/—/.
Резул’ гат: п и и (i = Р7)
р. t 1 4- С/П Р/—/ F8 2 й 0 X t
F6 Ре* /—/ 1 4- 0 F2 б 3 0 X
t F6 X t F7 4- t X t F8 4-
Р8 С/П F7 t F5 X t F8 4- /—/ f F4
4- t F3 X t F7. 4- Р7 БП Р0
Инструкция Значение р = 2,0 и 3 = 0,030 A/В вписаны в программу.
Нельзя задавать —U3 = 0 (можно задать —U3 близким к нулю, например
— 0,001 В). На каждом шаге выдается номер шага пи и (значение < можно вы
звать из регистра 7 после вывода и).
Контрольный пример-, см. в § 7.6 (рис. 7.13)
Программа БП56. Расчет времени переключения ключа на полевом транзис-
торе численным интегрированием Ввод: Ес = Р2. /См R = РЗ. ын = Р4 Ди=
= Р5 0 = Р6 uK =
ПП 4 Р8 F4 t F5 4- Р4 ПП 4 t F8
+ t F6 4- Р6 F7 t F4 — Рх < *' F4 БП
Р0 F6 С/П F4 5 0 /—/ Ре* /—/ 1
4- t F3 X t F4 4- /—/ t F2 + Fl/x
t F5 X 2 В/О
Инструкция. Знтчение Ди должно выбираться как целая часть (ин—пк),
знак Дп отрицателен, если и (/) падает, и положителен, если и (t) растет
Контрольный пример- см в § 7.7 (табл 7.2)
Программа БП57. Расчет реакции ДС-коитура на экспоненциальный перепад
тока. Ввод: Д(/Д = Р2, Д//С — РЗ, г — Р4, R' = Р5. и (0) = Р6,
(0) = Р7, 0 — Р8 Результат: п, i (tn), и (tn) и ij (Д,) = Р7.
F8 1 + Р8 С/П 0 0 5 -f- /—/ Ре* /—/
1 4- С/П Р, F6 f F5 4- f F7 + /—/
t Р/—/ + f F3 X f F6 4- P6 С/П F7
f F4 X /—/ f F6 + f F2 X t F7
4- P7 БП P0
Контрольный пример-, см. в § 7.8 .рис. 7.15).
Программа БП58. Расчет реакции ДС-контура на линейно нарастающий
перепад тока. Ввод: Д//Д = Р2, Д(/С = РЗ, г = Р4, R = Р5. и (0) = Р6, Д(0)=
= Р7, 0 = Р/—/. Результат: п, и (tn) и (7П) =» Р7
Р, 1 + С/П Р8 Р/—/ F8 0 5 -=- Р8 I
- Рх< 0 8 F6 f F5 -F | F7 -Ь — /
F8 4- f F3 X | F6 4- P6 С/П F7 f
F4 X /—/ f F6 4- f F2 X f F7 4-
P7 БП P0 1 P8 БП 2
Контрольный пример-, см. в § 7.8 (рис. 7,16).
Программа БП58 Расчет переходного процесса в последовательном LC-
ирнтуре. Ввод: L = Р2. С= РЗ R =f Р4, Д/ = Р5. £(0) = Р6. и (0) = Р7,
( (0) = ₽8, 0 = Р/—/. Результат: п, i (tn) и и (tn)
Р f 1 + С/П Р/—/ Fi : х F7
+ f F6 - /—'.f F2 - t F5 x f
- F8 + P8 C/П F8 f F3 -=- f F5 X t
F7 4- P7 С/П P6 БП P0
Инструкция. После вычисления на каждом шаге значений п, I (tn) и и (tn)
следует на цифровых клавишах набрать очередное значение Е (t). При Е (/) =
=const целесообразно исключить команду Р6 третью с конца, тогда Е заносит-
ся в регистр 6 один раз Контрольный пример-, см. • § 7.8 (рис. 7 17)
Программа БП60. Расчет переходного процесса в последовательном не
линейном £С-контуре. Ввод: L = Р2 Со = РЗ, R = Р4. Et — Р5 Е (0) = Р6,
и (О) = Р7, i (О) = Р8, 0 = Р/—/. Результат: п, i (in) и и (tn)
Р. f 1 + С/П Р/—/ F8 f F4 х t- F7?
+ f F6 — /—/ f F2 -j- f F5 X f
F8 + P8 C/П F7 0 ,4.4-10-=-
,F/“ 4 F8 X f F5 X f F3 4- f F7
+ P7 С/П P6 БП P0
В
Инструкция. Значения <рв
= 0,4
Vo =
10
программу.
... . , „ „ В вписаны в
Порядок работы соответствует инструкции к программе БП59
....Контрольный пример: см. в § 7.8 (рис. 7.18)
,г Программа БП61. Расчет установления амплитуды £С-генератора. Ввод::
S |а^кв! = Р2. тэив = РЗ, = Р5, 0 = Р6, Д/ = Р7. Результат: t и U (I) (Ucrri =
и
F6 . | F7 4- Р6 С/П F3- t F2 -- Fp |
Fl/x 2 X- Р4 j F5 -г Fxs 1 — Р8 F2
/—/ Т F6 X РеЛ f F8 X 1 + Fy Fl/x
f F4 X С/П БП Р0
Контрольный пример: при 2|аэвв| = 1, vaKB = 0,1, (70 = 0,2, Дг = 0,5
(единицы везде .безразмерные) получаем Ucm =.в,324, при f=0,5 U —
= 0,2567218, при t — I U = 0,3294613 и т. д. (см. также рис. 7.19).
Программа БП62. Расчет реакции видеоусилителя со сложной коррекцией
на заданный таблично входной сигнал (/?, = оо, RH = оо). Ввод: i (0) = Р2,
«1 (0) = РЗ, /2 (0) = Р4, и, (0) = Р5, us (0) = Р6, Д//£, = Р7, Д^/£а = Р8.
Результат: и2 (f).
F2 | F4 - 4 0 X t F5 + Р5 f
F6 - J F8 X f F4 + Р4 f F3 —
1 OX t F6 4- P6 С/П P2 F3 1 0
0 X /—/ t F6 4- T F7 x t F3 4-
РЗ БП P0
Инструкция. Значения &.t/C1 = 40, Kt/C^ = 10 и R == 100 вписаны в про-
грамму. После получения и2п очередное значение i набирается на цифровых
клавишах. При i = 0,01 = const, htlL* = Д//£2 = 2-10_sj (О) = 0, i2 (0) =
== 0, щ (0) = 0, tz2 (0) = 0 получаем значения и2 при каждом нажатии клавиши
С/П: 0,8 10~3; 3,104 10~2; 7,43744 • Ю'2; 1,408609 • 10"’ и т. д.
Программа БП63. Расчет реакции видеоусилителя со сложной коррекци-
ей на заданный таблично входной сигнал (RB = оо). Ввод: i (0) = Р2, i± (0) =
- РЗ, i2 (0) == РЗ,
тат: и2 (/).
F5
4
X
F6
F6
5
0
t
+
Uj (0) = Р5, ы2 (0) = Р6, Д//£,
о
t
Г1 +
Р6 С/П
F7
0
F4
t
F5
Р4
Р2
1
F3
t
F4
Р5
F3
1
F3
4-
Т
о
4-
/—/
F6
0
0
РЗ
Р7,
Д//£2
= Р8. Резуль-
Т
5
БП
F2
1
X
/—/
Р0
4"
F8
I
t
Инструкция. Значения Ri = 500, Д//Cf = 40 и Kt/Ci = 5 , и /( = 100
вписаны в программу. После получения и2П очередное значение Г набрать на
цифровых клавишах.
Контрольный пример: I = 0,01 = const, (0) = 0,i2 (0) == 0, uj (0) = 0,
u2 (0) = 0, Kt/Lt = Kt/L2 = 2 10-s. Получаем, нажимая клавишу С/П, зна-
чения и2 : 4 • IO"3; 1,528 • 10~2; 3,6128 • 10-2; 6,768412 • 10~2; 1,099054 • 10~»
и т. д.
Программа БП64. Расчет реакции
иа заданный таблично входной сигнал
(2 (0) = Р4, и, (0) = Р5, п2 (0) = Р6,
и2 (0.
видеоусилителя со сложной коррекцией
(Ri = оо). Ввод: t (0) = Р2, tj (0) = РЗ,
Kt/Li — Р7, Kt/ — Р8. Результат:
Kt/ La — Р8. Результат:
F2 1 F4 — 4 0 X J F5 + Р5 1
F6 — f F8 X t F4 + Р4 F6 5 0
0 4- t F3 + !—! Т F4 + 1 0 х
1 F6 + Р6 С/П Р2 F3 1 0 0 X /—!
1 F6 + t F7 X | F3 + РЗ БП Р0
Инструкция: Значения Kt/Ci = 40, RH = 500, Д//С2 = 10 и R — 100 впи-
саны в программу. После получения и2п очередное значение i набрать на циф-
ровых клавишах.
Контрольный пример: см. в § 7.10 (рис. 7.21).
Программа БП65. Расчет переходного процесса линейной цепи 1-го порядка
с применением интеграла суперпозиции при табличном задании входного воз-
действия. В$од: 0 = Р2, т = РЗ, 0 = Р4, ДО = Р5, 0 = Р6, t = Р7, 0 = Р /—/,
Результат- uBXn (и = Р6).
F4 1 F5 + Р4 F2 Р, С/П Р2 J Р/—/ —
Р8 F4 1 F5 + | F7 - t F3 -Р Ре*
/—/ 1 + t F8 X t F6 + Р6 БП Р0
Инструкция: После ввода исходных данных нажать клавиши В/О и С/П,
на индикаторе высвечивается цвхо = 0. Набрать значение ивх1 и нажать клави-
шу С/П. После обработки этого отсчета он высвечивается на индикаторе. На-
брать ивх2, нажать клавишу С/П и т. д. (до ввода и обработки всех отсчетов ывх).
Вызвать значение и (/) из регистра 6, нажав клавиши F и 6.
Контрольный пример: см. в § 7.11.
Программа БП66. Расчет переходного процесса линейной цепи 1-го порядка
с применением интеграла суперпозиции при аналитически заданном входном
воздействии (экспоненциальном). Ввод: твх = P2,
0 = “' — -
т = РЗ, 0 == Р4, ДО = Р5,
Р6, t — Р7. Результат: и (/).
ПП 4 Р8 F4 f F5 + P4 ПП 4 t F8
+ t F6 Р0 F6 С/П + Р6 F4 t F7 — Px < : 0 F4 БП
F7 t F4 t F3 -U /-/ Pe*
/-/ 1 + Р, F4 t F2 /.-/ Pe* t P/-7
X J F2 -у- t F5 X 2 v B/O
Контрольный пример: см. в§ 7.11.
переходного
Программа БП67. Расчет
мультивибратора на туннельном диоде. Ввод:
* “ "" "• i (0) = Р8. ~
F7
Р8
Р,
А = Р5, D
F8
F3
1
1
= Р6, и (0) = Р7,
1
X
F7
Т
е ч а
Прим
таблицу значений
F2
н и
F8
F6
1
X
автоколеб ател ь кого
Kt/L =
Ип-
процесса
Kt/С = Р2,
Результат:
t
2
О
РЗ, Е = Р4,
tn и
F4
0
X
/-/
БП
t
Ре*
Ре*
F8
С/П
F7
1
F5
t
Рекомендуется
F7
С/П
/-/
t
P0
/-/
F7
1
Р/—/
Р7
перед началом вычислений составить
о
t
t
L
е .
Контрольный пример: см, в § 8.1 (рис, 8,2),
Программа БП68. Расчет переходного процесса ждущего мультивибратора
на туннельном диоде. Ввод^Д</С = Р2, A//L = РЗ, Е = Р4, А = Р5, D = Р6»
и (0) = Р7, i (0) = Р8.
F7 2 0 X Рех т F6 X Р, F7 1 0
X /-/ Ре* 1 F7 X 1 F5 X т р/—/ 4-
t С/П — /—/ t F8 4- t F2 X t F7
+ Р7 С/П F8 1 0 X t F7 4- /—/ 1
F4 4- t F3 X t F8 4- Р8 6П Р0
Инструкция Значения Р = 20 1/В. а = 10 1/В и R = 10 Ом вписаны в
дрограмму. Перед вычислением вносим и (0) в регистр 7 и, нажимая клавиши
6/0 и С/П, получаем i (0). Вычисляем вручную Е = [и (0) 4- t (0) /?1 и заносим
в регистр 4. Заносим I (0) в регистр 8. Далее, набирая на каждом шаге зна
фения «зап (в амперах, не используя клавишу ВП) и нажимая два раза клавишу
С/П, получаем и и I и т. д.
Контрольный пример- см. в§ 8.1 (рис. 8.3).
Программа БП69. Расчет t, автоколебательного мультивибратора на туннель-
ном диоде. Ввод: U0R — Р2, UlR = РЗ, 1/2r = P4, & = р5, </п ~ /в) = рб>
L i= Р7. Результат: е, ^/tl, и m, = Р8.
F3 i F2 — Р, F4 t F3 — Т Р/—>
Р8 F5 t F3 — Т Р, С/П 1 F8 X
2 X 1 4* Fl/x 2 X F8 X С/П Т
F7 X 1 F6 X 1 Р, F4 1 F3 — Fl/x
1 Р/—/ X С/П
Контрольный пример-, см. в конце § 8.1.
Программа БП70. Расчет 72 автоколебательного
нельном диоде. Ввод: U3R = Р2, U1R = РЗ, (72ft =
= Р6, L = Р7. Результат: е, tJtL, t2 и m2 = Р8.
мультивибратора на тун-
Р4, Е = Р5, (/п - /в) =»
F2 | F4 - Р, F4 | F3 — t Р/—' 4-
Р8 F5 | F3 - f Р, 4- С/П /—/ 1 4-
t F8 X 1 , 5 X 14- Fl/x 1
5 X f F8 X С/П f F6 X t F7 X
t P, F4 j F3 - Fl/x f P/—/ x С/П •
Контрольный пример-, см. в конце § 8.1.
Программа БП71. Расчет т]д = Р2, и 17д = РЗ = РХ релаксатора на од-
нопереходном транзисторе. Ввод: г) = Р2, = РЗ. /?а = Р4, Rqq = Р5,
/п = р6, /эо = р7.
F4 t F5 т t F2 4* Р8 F3 f F5 4-
Р, F4 | F5 4- f Р/—1 + 1 + t
F8 X Р2 F6 f F7 -=- Pin 0 0 5
0 X РЗ С/П
Примечание. Значение т<рг = 0,050 В вписано в программу.
Контрольный пример-, см. в конце § 8.2.
Программа БП72. Расчет 77п, /в, /р, /0 и Q релаксатора на однопереходном
транзисторе. Ввод: t|R == Р2, 77д = РЗ, l/B = Р4, Е = Р5, RG = Р6, /?РС =-
= Р7.
F2 t F5 X f F3 + Р8 С/П F5 f F8
— Р, F5 i F4 — f Р/—I 4- Pin f F6
X С/П Р/—/ F8 t F4 4- Pin t F7 X Р8
С/П f Р, 4- С/П f F8 4- С/П
Примечание. Если предварительно выполнялась программа БП71(
то значения г|р и I/ч могут не вводиться.
Контрольный пример: см, в конце § 8.2.
Программа БП73. Расчет переходных процессов ждущего релаксатора на
лавинном транзисторе. Ввод: MIL = Р2, М/С = РЗ, tp = Р4, UM = Р5,
а0 = Р6, tK (0) = Р7, ис (0) = Р8. Результат: дт, /и и ис.
F7 t F4 — t F7 f F6 X /—/ 1
+ Р. 3 Fl/x f Р/—/ х> f F5 X С/П Р,
F7 9 О X f Р/—/ 4- /—/ t F8 + J
F2 X j F7 + Р7 С/П t F3 X /—/ f
F8 + Р8 С/П БП РО f
П римечание. Значения п = 3 и R = 90 Ом вписаны в программу.
Контрольный пример: см. в § 8.3 (рис. 8.7).
Программа БП74. Расчет переходных процессов ждущего релаксатора на
лавинном транзисторе методом динамического пробоя. Ввод: 0 = Р2, Д//L =
РЗ, м/с = Р4, а = Р5, = Р6, ис (0) = Р7, i (0) = = Р8. Результат!
иТ, t и ис.
F2 0 а 2 + Р2 /—/ РеЛ 1—1 1 + t
F5 X /—/ 1 + Р, 3 Fl/x t Р/—/ X* t
F6 X С/П Р, F8 9 0 х t р/—/ + /—/
1 F7 4- t F3 X t F8 + Р8 С/П t
F4 X /—/ t F7 4- Р7 С/П БП Р0
Прим ♦ е ч в н и е. Значения Д//тт = 0,2, п = 3, и R = 90 Ом вписаны
в программу.
Программа БП75. Расчет временных параметров автоколебательных муль-
тивибраторов.
1 Расчет tj/ (RC) и (RC) мультивибратора (см. рис. 8.8, а). Ввод: R ==
= F2, /?б. м т = РЗ, U0 = Р4, U1 = Р5, Un = Р6, llx = Р7.
F7 1 F2 X Р8 Т F4 + t F6 — P,
F4 2 X t F8 + t F6 t F5 —
1 Р/—/ Pin С/П F5 t F6 P, F5 2
X t F6 —. t F4 t p/—/ — Pin P8
F2 Г F3 4- Fl/x t F3 X t F8 X С/П
2. Расчет р, tg/ (RC), tvl (RC) и /</ (RC) мультивибратора (см. рис. 8.9,с).
Ввод: R, = P2, R2 > = P3, = P4, 17м = P5.
F2 F3 4- Fl/x t F3 X P8 С/П /—/ 1
+ F4 X P7 F8 t F5 X t F4 4*
t F7 — Pin P7 С/П 1 t F8 t F5
X P6 F8 t F4 X t F5 4- t F6 -Л_
Pin С/П t F7 + c/n
3. Расчет tg/ (RC), tvl (RC), pj = P7 и p2 = P8 мультивибратора (см. рис,
8.10,а). Ввод: Rt = P2, R2 = P3, R3 = P4, R4 = P5, l/^/1/м = P6.
F2 f F3 4- Fl/x t F2 X P7 /—/ I 4-
FI/x Pin C/П F2 f F3 4- t F4 4- Fl/x t
F5 X P8 /—/ 1 4- t F7 X t F6 X
I 4- Pin P, 1 t F8 — FI/x f P/—/ X
С/П
4. Расчет ty/ (R3C), /2/ (R^C), Uh = P7, Ui — P8 мультивибратора (cl m)
рис, 8,11, a). Ввод: Rj = P2, R.2 = P3, UH = P5, UL = P6.
F2 f F3 4- Fl/x j F2 X P8 f F5 X
P7 F8 f F6 X P8 F7 4 F5 - P4 F8
t F5 - f F4 Pin C/П F8 f F6 —
P4 F7 f F6 — t F4 -r Pin С/П
Программа БП76. Расчет временных параметров ждущих мультивибраторов.
1. Расчет tn/(RC) и t^f(RC) мультивибратора (см. рис. 8.12,а). Ввод- R =.
-Р2, R6. м.т = РЗ, У1 = Р4. U0 = Р5 Un = Р6, Е = Р7. Д‘ К
F2 t F3 4- Р8 F7 0 , 7 - f F2
X t F8 -г t F6 — Р, F4 t F5 —
t Р/—/ -i- 1 + Pin t F3XfF8-=-
С/П F4 f F5 - f F6 I 4- Pin С/П
2. Расчет tw/(RC) мультивибратора (см. рио. 8.13,а). Ввод: R = P2, C7°
— P3, U1 = P4, Ua = P5, /вх = P6.
F2 t F6 X j F5 + /—! f F3 + P8
F3 f F4 — f F8 4- Pin С/П
3. Расчет l/oc и tw!(RC) мультивибратора (ем. рис. 8.14). Ввод: R = PS^
/?! = РЗ, R, = Р4, U° = Р5, (7П = Р6, ln 'вх Р7.
F3 J F4 + Fl/x | F4 X Р8 f F5 X
1 4- Р, F8 t F3 X t F7 X Р8 F6
t F5 X t F8 — f -5- Р8 С/П t
F2 X t F6. 4* /—/ { F5 4- Р, F5 f
F8 t Р/- -/ + Pin С/П
Примем а и и е . В регистр 5 вводится Ку, после расчета //оо в него
вводится//0, а /вх = PX.
4. Расчет V (C (R + Rv) ) мультивибратора (см. рис. 8.15). Ввод. (Л f-
+Яр)-= Р2, Е = РЗ, U9 = Р4. T)i =» Р5, /вх = Р6.
, ...... F2 t F6 X Р8 F5 t F3 X t F8 4-
/—/ f F3 + Р7 F3 f F8 - f F4 —
t F7 + Pin С/П
Программа БП77. Расчет начальных моментов тг . . . . mt среднего значения
я, дисперсии Do и числа введенных отсчетов N случайных величин. Ввод: 0 =
== Р2 »= РЗ = Р4 = Р5 = Р6 хп = РХ. Результат: х, Do, пц = Р2, т2 = РЗ,
т3 = Р4, = Р5 /V = Р6, (N — 1) = Р7 и m? = Р8
Р8 Т F2 + Р2 F8 X t F3 + РЗ F8
X f F4 4- Р4 F8 X f F5 4- Р5 F6
1 4- Р6 С/П БП РО Fl/x XV Р7 F2 х Р2
С/П Fxs Р8 F4 X Р4 F5 X Р5 F3 X РЗ
t F8 - t F6 X f F7 -г С/П
Контрольный пример: введя программу и нажав клавиши Р, РР и B/Q,
вводим случайные числа 9; 8; 10; 9; 11; 12; 10; 10; 9 и 11 (в конце каждого
ввода нажимается клавиша С/П). Получаем, нажимая клавиши БП Р5 С/П
и еще раз С/П; следующие результаты: х = 9,9; Do = 1,433333: = 9,9;
т9 = 99,3: т9 = 1008,9; mt = 10379.7: N = 10 и (W — 1) = 9
Программа БП78. Расчет асимметрии S и эксцесса Е случайных чисел. Ввод1
mi = Р2, т2 = РЗ. т3 = Р4, m, = Р5, m? = Р8 (при выполнении перед дан-
ной программой программы БП77 ввод не требуется)
F3 t F8 — f F№ P6 X Fr~ P7 F3 3
X Р F8 2 X t P/—I — t F2 X f
F4 4* t F7 — С/П F3 2 X t_ F8 —•
t F2 X 3 X 4 '4*' t F4 t F2
X 4 X f F5 + t F6 4- 3 С/П
Контрольный пример: при т^-.т^, вычисленных в примере предшествую-
щей программы, получаем S = 1,965657-10-1; Е = — 7,549427 10-1.
Программа БП79. Обработка массива случайных'чисел хп для построения
гистограмм их распределения. Ввод: хп = РХ.
t F8 с/п Р8 0 5 Рх < 0 Рл F2 1 +
Р2 В/О 1 — Рх < 0 4- F3 1 +' РЗ В/О 1
— Рх < 0 р/—/ F4 1 + Р4 В/О 1 — Рх<0 ВП
F5 1 4- Р5 В/О 1 — Рх < 0 Р— F6 1 +
Рб В/О F7 1 + Р7 В/О
. Контрольный пример: введя программу, нажимаем клавиши Р, РР, В/О и
С/П, вводим числа 3; 4; 5; 5,5; 5,8; 6; 6,2 6,7; 7,5; 8; 8,9 ; Ю,5 Получаем ЧИС-
ла'2 — Р2 3 = РЗ. 3 = Р4, 1 = Рб, 2 = Рб и 1 = Р7.
Программа _,П80. Формирование случайных чисел.
1. С равномерным распределением Yn и Хп Ввод: а = Рб, b — Р6, Ро =
= РХ
Р2 3 7 X РЗ 1 ВП 7 XY + XY —
1—1 f F3 + РЗ F2 С/П F6 t F5 — f
F2 X f F5 + С/П F3 БП РО
2. С экспоненциальным, вдвинутым экспоненциальным, Вейбулла и Рэлея
законами распределения. Ввод: Ь = Р4, х0 = Рб, у = Рб, о = Р7, к = Р8,
V» = РХ
Р2 Pin f F8
f F2 - Pin
С/П F2 , Pin 2
3 7 X P2
f F2 + С/П
4- /—/ C/П t
I F5 X /—/
X /-/ F/ f
1 ВП 7 XY
БП PO
F4 + С/П 1
Р/ f F6 +•
F7 X C/п F2
+ XY - /—/
3. С нормальным распределением (метод Неймана). Ввод: с — Р4, х = Рб,
о=Р6, Ц)=РХ.
Р2 3 7 X РЗ 1 В/П 7 XY+XY —
/— / f F3 + РЗ F2 0 , 5 — Fx? f
F4 X f F4 X 2 X /—/ Р7 F3 Pin /—/
'' f F7 -Ь Рх > О P+ F2 2 X I — t F4
X f F6 X f F5 + C/П F3 БП PO
4. С нормальным распределением (метод Муллера) Ввод: о = Р4, х — Рб,
V„ = РХ.
Р2 3 7 х РЗ 1 В/П 1 XY + XY —
/—/ t F3 + РЗ Fl/x Pin 2 X F/ P8 F2
t Рл X 2 X Psin t F8 X t F4 X
f F5 + С/П F3 БП РО
Программа БП81. Накопление данных
Р/ при линейной аппроксимации. Ввод: хп =
для расчета коэффициентов 0О й
РХ, уп = РХ поочередно.
О Р4 Рб Рб
Fx3 f F5 +
F2 f F3 X
Р7 С/П f Р2 F4 -i- Р4
Рб F2 С/П f РЗ F6 +
f F7 + Р7 F3 БП f
F2
Рб
Инструкция. После ввода программы нажимают клавиши В/О и С/П, на ин-
дикаторе высвечивается 0. Затем на цифровых клавишах последовательно наби-
рают значения хь у1г х2, у2, и т. д., нажимая после набора клавишу С/П. В ре-
гистрах 4...7 хранятся суммы величин хп, Хп уп и хпУп
Контрольный пример: см. в § 9.5..
Программа БП82. Расчет коэффициентов р! и ро при линейной аппроксима-
ции. Ввод (после выполнения предшествующей программы): N = Р8.
F7 | F8 X Р2 F4 f F6 X f F2 -
Р2 F5 f F8 X РЗ F4 Fx2 f F3 - РЗ
F2 f F3 4- С/П 4 F4 X /—/ f F6 +
t F8 4- С/П
Контрольный пример: см. в § 9.5.
. Программа. БП83. Накопление данных при параболической аппроксимации.
Р2 t F3 4- РЗ F2 Fx2 t F4 + P4 F2
Fx2 t F2 X t F5 4- P5 F2 Fx2 Fx2 t
F6 + P6 F2 С/П БП PO F2 С/П P2 С/П РЗ
t F4 4- P4 F2 t F3 X t F5 4" P5
F2 Fx2 t F3 X t F6 4- P6 БП F5
Инструкция. Введя программу. нажимаем клавиши P, РР, В/О, затем вво-
дим 0 в регистры 3, 4, 5 и 6. Набираем последовательно все значения Хп, нажи
мая в конце ввода каждого значения клавишу С/П (после обработки каждого Хп
это значение вновь высвечивается на индикаторе). Вызываем суммы величин
Хп, Хп, Хп и Хп из регистров 3, 4, 5 и 6 соответственно. Нажав клавиши БП и 5,
переходим ко второй части вычислений. Вводим 0 в регистры 4, 5 и 6. Последова-
тельно вводим попарно значения Xj, Kj, Х2, ... Xn, Yn, нажимая при вводе
каждого значения клавишу С/П (высвечивается всегда ранее введенное значение
Хп пары Хп, Уп). Результат выводим из регистров 4, 5 и 6 в виде сумм величин-
Yn, XnYп и Хгп Yn
Контрольный при le >: я § >.>
Программа БП84. Вычисление определителя 3-го порядка.
P2 c/n РЗ С/П Р4 С/П Р5 С/П Р6 С/П Р7 F4
f F6 X Р8 F3 t F7 ПП F— Р/—/ F2 t
F7 X Р8 F4 t F5 ПП F— Р/—/ F3 t F5
X P8 F2 t F6 X t ПП Р9 t Р, 4"
t P, 4- С/П X t F8 — t С/П X В/О
Инструкция. После ввода программы нажимаем клавиши Р, РР, В/О. Вво-
дим по столбцам (сверху вниз и слева направо) все коэффициенты определителя,
нажимая после ввода каждого клавишу С/П. После ввода 6-го, 7-го и 8 го коэффи-
циентов на индикаторе высвечивается значение определителя 2-го порядка, кото-
рый умножается на последующий коэффициент. После ввода 9-го коэффициента
получаем значение Л.
Контрольный пример', см. в § 9.5.
Программа БП85. Накопление данных для расчета значений р0 и прн
степенной аппроксимации. Ввод: хп, уп (поочередно).
О РЗ Р4 Р6 Р7 С/П Р8 Pin Р2 f F3 +
РЗ F2 Рх2 f F4 + Р4 F8 С/П Р8 Pin Р5
f F6 + Р6 F2 f F5 X | F7 + Р7
F8 БП |
И нструкция. После ввода программы нажать клавиши В/О и С/П (на инди-
каторе высвечивается 0). Затем ввести последовательно xlt ylt х2, у2. х3, у3
ит. д., нажимая в конце каждого ввода клавишу С/П (при этом на индикаторе
высвечивается введенное число). Результаты заносятся в регистры 3, 4, 6 и 7 в
виде сумм величин 1п хп (1п хп)2, 1п уп и In хпуп
Программа БП86. Расчет значений Ро и Pt при степенной аппроксимации.
Ввод (после выполнения предшествующей программы): N = Р8. Результат: $0
и Pj.
F8 f F7 X Р2 F3 f F6 X
Р2 F4 f F8 X Р5 F3 Fx2 f
f F2 X С/П f F3 X /—/ f
F8 -г Ре* С/П
f F2 —
F§ - Fl/л:
F6 4- f
Контрольный пример', см. в § 9.5.
Программа БП87. Накопление данных для расчета значений % и Pj при
экспоненциальной аппроксимации. Ввод : хп, уп (поочередно). -
О РЗ Р4 Р5 Р6 С/П Р2 f F3 4- РЗ
F2 Fx2 f F4 4- Р4 F2 С/П Р8 Pin Р7
f ' F5 4- Р5 F2 f F7 X t F6 4-
Р6 F8 БП t
Инструкция. После ввода программы нажимаем клавиши В/О и С/П (на
индикаторе высвечивается 0) Затем вводим последовательно хх, yt, х2, уг
Уз и т. д., нажимая в конце каждого ввода клавишу С/П (при этом введенное зна-
чение высвечивается на индикаторе). Результаты заносятся в регистры 3. 4. б, и
6 в виде сумм величин хп, xn, In уп и хп In уп
Программа БП88. Расчет значений Ро и р, при экспоненциальной аппрокси-
мации Ввод (после выполнения предшествующей программы): N = Р8. Реауль-
тат р, и Р2.
F8 t F4 X /—/ Р2 F3 Fx3 f F2 + Р2
F8 f F6 X /—/ Р F3 f F6 X f Р/~ I .
+ f F2 -г C/D f F3 X /—/ f F5 +
f F8 - Pex С/П
Контрольный пример-, см. в конце § 9.6.
Программа БП89. Цифровое моделирование нелинейного преобразователя
функционального генератора Ввод: А = Р4, В — Р5. С= Рб. 0, = Р7, 0L =
= Р8 х (град) *= РХ. Результат: у (х) и (X)
t Рл X 1 8 О
X 1 + t F8 +
f F4 + f F2 X
РЗ С/П F2 Psin /—/ f
-Г- Р2 Fx3
Р F3 f
t F7 +
F3 -I- С/П
РЗ f F6
F5 X /—/
t P/—/ ’t-
БП PO
Контрольной пример: ем. в § 9.6
Программа БП90. Цифровое моделирование тиристорного стабилизирующе-
го выпрямителя Ввод: 0 = Р2 Аа0 = РЗ Uтвх = Un = Рб, ККу == Р7.
Результат: [7ВЫХ ~ РХ = Р5-
F2 t F3 + Р2 Pcos 1 + Pn t
F4 X Р5 F6 t F5 .— P8 2 2 X t
Рл — 1 —. t 77 — /— / F8 + Px < 0
6 БП РО F2 t F3 -— P2 -3 2 P3
1 0 ВП 6 /—/ — Px < 0 PO 75 С/П
Контрольный пример: см. в § 9.6.
ПРИЛОЖЕНИЕ 2
ПАКЕТ ПРОГРАММ ПРОГРАММИРУЕМОГО
МИКРОКАЛЬКУЛЯТОРА «ЭЛЕКТРОНИКА БЗ-34»
Общая инструкция к пользованию программами:
1. Для ввода программы нажимаются клавиши F и ПРГ
2. Программа вводится последовательным нажатием клавиш, указанных в
тексте программ, записанных построчно. Операция поворота стека для упроще-
ния типографской формы записи обозначается как F,. Ввод контролируется по
кодам, определяемым с помощью табл. П2.1, приведенной в конце данного при-
ложения.
3. После ввода программы переход в рабочий режим осуществляется нажа-
тием клавиш F АВТ и В/О.
4. Последующие правила работы аналогичны приведенным для микрокаль-
кулятора «Электроника БЗ-21» (см. общую инструкцию в приложении 1)
5. Для дословного перевода программ на языки трограммирования микро-
калькуляторов «Электроника МК-54» и «Электроника МК-56» следует восполь-
зоваться таблицей соответствия символов (см. табл. 1.9).
Программа ПП1/34. Решение системы из трех линейных уравнений
методом Крамера. Ввод: см. в § 2.2. Вывод: xt. х2 и х3.
пи 64 .. по ПП 32 пи 64 ИПО — с/н
ПП 32 ПП 48 ПП 64 ИПО — С/П ПП
48 ИПА П9 ИПВ П6 ипо пз ПП 64 ипо
— С/П ИП7 ИПА П7 F, ПА ИП4 ИПВ П4
F, ПВ ИП1 ИПС П1 F, ПО В/О ИП8 ИПА
П8 F ПА ИП5 ИПВ П5 F, ПВ ИП2 ИПС
П2 F, ПС В/О ИШ ИП5 X ИП4 ИП2 X
— ИП9 X ИП7 ИП2 X ИП1 ИП8 X —-
ИП6 X + ИП4 ИП8 X ИП7 ИП5 X —.
ИПЗ X + В/О
Контрольный пример: см. в тексте § 2.2.
Программа ПП2/34. Решение системы из трех линейных уравнений методом
Гаусса. Ввод: см. в §2.2. Вывод: Xj = РХ = Р1: ; х2 = Р2 и х3 = РЗ.
ИП4 ИП7 ПД ИП5 ИПД ИП8 X — П5
ИП6 ИПД ЙП9 X — П6 ИПВ ИПД ИПА х
—- ПВ ИП1 ИП7 — ПД ИП2 ИПД ИП8 X
—- П2 ИПЗ ИПД ЙП9 X — ПЗ ИПС ИПД
ИПА X — ПС ИП2 ИП5 ПД ИПС ипд
ИПВ X — ИПЗ ИПД ИП6 X — -4-. пз
ИПВ ИПЗ ИП6 X — ИП5 — П2 ИПА ИП8
ИП2 С/П X БП 00 ИПЗ ИП9 X — ИП7 Т- П1
Контрольный пример: см. в § 2.2.
Программа ППЗ/34. Решение нелинейных уравнений.
1. Методом простых итераций. Ввод: х0 — РХ, РД -> хп.
ПД ИПД ... ИПД XY ПД - Fx = 0 01 ИПД С/П
2. Методом половинного деления. Ввод: Лх0 = РА. х, = РВ. п = РО,
е2 = РД, з х - п.
ИПА 2 4- ПА t ИПВ + ПВ Fx2
ИПД — Fx < 0 16 ИПВ С/П ИПС
XY ПС X Fx « С 0 00 ИПА /—/ ПА БП 00
3. Методом половинного деления при F (а) ? > 0. Ввод: а — РА, b = РВ,
РД, PC -> хп
ИПА ИПВ + 2 — ПС ... ...
Fx 5 s(J JV ИПС ПА БП лГ ИПС
ПВ ЙПВ ИПА — ИПД — Fx < 0 00 ИПА С/П
Примечание N и М — номера шагов команд ИПС и ИПВ соответст-
венно при полном тексте программы
4. Методом поразрядного приближения Ввод: х0 — РА, Дх, = РВ, в =
= PC, РА -» хп
ИПА ИПВ + ПА ... .... ...............
............. Fx < 0 00 ИПА ИПВ — ПА
ИПВ М* -г- ПВ ИПС - Fx < 0 00 ИПА С/П
*М — показатель разрядности, на который делится Axw.
5. Комбинированным (етодом секущих — хорд. Ввод: х0 — РА. xi =
е2 = РО, РХ хп (вносится в начало программы).
ИПА. ПП 34 ПС ИПВ ПП 34 ПД ИПА ИПв
ИПД ПС XY — -Г- ИПА ИПВ — X
ИПВ XY ПВ XY ПА — Fx2 ИПО Г> /О
Fx < 0 04 ИПВ С/П ... ... ... ...
6. Методом Эйткена — Стеффенсона с ускоренной сходимостью. Ввод]
= РО, в2 = РВ, РХ -> Хп-
ИПО ПП 33 ПА ИПО XY пп 4“ по 33 ИПА f И1 2 X Fxs И1 ПО X ИПА Fx ± 0 Fx < 0 В/О
Fx2 - XY —
31 ч- ИПО ПВ —
00 ИПО С/П ...
7. Методом Монте-Карло. Ввод: *п- vo = РО, а = РА, 6 = РВ, е - РД,
ИПО 3 7 X 1 4- ПС кипе XY ИПО
— ПО ИПВ ИПА — X ИПА 4- ПС ...
Fx > 0 А ИПС ПА БП АТ ИПС ПВ
ЙПВ ИПА — ИПД __ Fx < 0 00 ИПА С/П
Примечание. N И 7Й — номера шагов команд ИПС и ИПВ соответст-
венно при полном тексте программы.
Программа ПП4/34. Численное интегрирование методом Симпсона. Ввод:
п— РО, b — РВ, а = РА (регистр С— суммирующий), данные подынтеграль-
ной функции.
ПП 40 ПС ИПВ t ИПА ПВ — ИПО —
ПА ПП 40 1 пп 28 4 пп 28 2
БП 14 ИПС 3 — ИПА X С/П X ИПС
+ ПС FLO 36 БП 22 ИПВ ИПА + ПВ
В/О
Контрольный пример-, см. в § 2.4. Подынтегральная функция вписывается
в незаполненную часть программы при х = РВ.
Программа ПП5/34. Численное интегрирование по формуле Уэддля. Ввод:
данные подынтегральной функции, N — РХ, b = РХ, и а = РХ (регистры О,
А, В .и С— служебные).
ПО 0 ПС С/П t С/П ПА ИПО —
6 — ПВ пп 26 FLO 13 ИПС ипв X
3 X 1 0 — С/П ИПА пп 59 1
пп 51 5 пп 51 1 ПП 51 6 пп
51 1 ПП 51 5 ПП 51 ИПС + ПС
В/О X ИПС + ПС ИПА ИПВ 4- ПА
В/О
Контрольный пример-, см. в § 2.4. Подынтегральная функция вписывается
в незаполненную часть программы при х = РА.
Программа ПП6/34. Численное интегрирование методом Гаусса с двумя
ординатами. Ввод: данные подынтегральной функции N = РХ, b = РХ и а =
= РХ (регистры 0, 1, 2, А, В, С и Д— служебные).
по 3 Fl/x F/- пд 0 ПС С/П t С/П
П1 -— ИПО — П2 ИП1 t ИП2 4- П1
XY пп 27 FLO 15 ИПС С/П ПВ 4- 2
~~ ПА ИПВ —- ПВ ИПД /-/ пп 41 ИПВ
йпд X ИПА 4- ПП 52 ипв X ИПС 4"
ПС В/О ... t В/О
Контрольный пример: см. в § 2.4. Подынтегральная функция вписывается
в незаполненную часть программы при х = РХ, вносимом в ее начало.
Программа ПП7/34. Численное интегрирование методом Гаусса при трех
ординатах. Ввод: данные подынтегральной функции, N — РХ, b = РХ и
а = РХ (регистры 0, 1, 2, А, В, С и Д —. служебные).
ПО 0" , 6 пд 0 ПС с/п t
с/п П1 — НПО П2 ИП1 t ИП2 4-
П1 XY ПП 28 FLO 16 ИПС С/П ПВ 4-
2 ПА ИПВ — ПВ ипд /—/ ПП 48
ИПА ПП 63 '8 ПП 54 ИПВ ипд X ИПА
+ ПП 63 5 X ИПВ X 9 ИПС
-1- ПС В/О ... ... ... г В/О
Контрольный пример: ем. в § 2.4. Подынтегральная функция вписывается
в незаполненную часть программы при х — РХ заносимом в ее начало
Программа ПП8/34. Решение дифференциального уравнения 1-го порядка
методом Рунге—Кутта 4-го порядка. Ввод: h/2 = РА. х (0) = РО, данные
производной, у (0) = РХ (регистры G, Д и 9 — служебные).
ПВ ПС 3 X пд ПП 35 пд пп 31
ИП9 4- пд ПП 35 ИП9 4* пд ИП9 ИПВ
+ пв ПП 31 3 — ПВ с/п ИПВ БП
01 ИПА ипо + ПО ПП 47 ИПА X П9
ИПС 4- ПВ ИП9 ИПД 4- В/О ... В/О
Контрольный пример: см. в § 2.5. Функция F (х, у] записывается в незапол-
ненную часть программы, причем х = РО, у = РВ
Программа ПП9/34. Расчет передаточной характеристики каскада с общим
истоком на мощном МДП-транзисторе комбинированным методом секущих —
хорд. Ввод: еа = РО, 7/С1 — РВ (первое приближение) Eq = Pl, Uo = Р2,’
Rg = РЗ. S = Р4, р = Р5, |fe| = Рб, U3 = РХ Результат: ис-
П9 Fx2 ИП6 X ИП2 4* ИП9 П9 ИПЗ
X ИП4 X П8 ИП5 ИП9 П9 0 ПА
ИП1 ПС ИП1 ИПВ — FBx ЙП9 X Fex 1
— ИП8 X — пд ИПА ИПС t ИПД ПС
— ИПВ ИПА — X + ИПВ XY ПВ
XY БП ПА 00 — Fx2 ипо — Fx <• 0 22 ИПВ С/П
Контрольный пример’, при указанных в § 4.2 данных t/0| ,=1 В. 1/0 = 0,
еа = 1 • 10—в и U3 = 10 В получаем Uc = 17,300578 В за время около 1 мин.
Программа ПП 10/34. Гармонический анализ функции у ^/), заданной :мак0
ненулевыми отсчетами. Ввод А/ — РА. «мак0 = РВ, f = РХ, у± — РХ, ... Умако
= РХ. Зезульт1г: S (/) (град).
t Fn X ИПА X ПС 0 по П1 П2
ИПО 1 4- ПО С/П ПД ипо ИПС X 2
X пз F sin X ИП1 + П1 ИПЗ F cos ИПД
X ИП2 4- П2 ИПВ ИПО — Fx = 0 10 ИПС
F sin ИПС — П4 ИП1 X П5 ИП2 ИП4 X
П6 Fx2 ЙП5 Fx2 + FK" П7 ИПА X П8
С/П ИП5 ИП6 — F arctg 0 XY — П8 1
8 0 X Fn П9 С/П
Контрольный пример: см. в § 5.1. Переключатель «Р—Г» в положении «Р».
При наборе уг ..-Ум&ка высвечивается номер отсчета, вводимого после обработ-
ки ранее введенного. Значения sin л/Д// (nfM) = Р4, NAs/2 = Р5 и NAJ2 =
= Рб.
Программа ПП11/34. Расчет АЧХ и ФЧХ 4-полюсников по 11 отсчетам at
переходной характеристики: Ввод: (после нажатия клавиши С/П) ai0 — PY,
а0 ... а0 = РХ, t&t — РХ. Результат: А (/), ф (/), As = РД, Ас= PC.
1 1 Fx= 0 по 03 XY С/П С/П Fn X кпо ПВ FBx 1 ипо 1 1 по
0 ПС ПД ИПЗ 1 — 2 X 1 —
ИПВ X t Fsin XY F cos кипо XY FBx X
ИПС + ПС F, X ИПД 4- ПД ипо 1
. Fx = 0 23 ИПС Fx3 ИПД Fx2 + РУ" ИПВ
ИПВ Fsin X С/П ИПС Fx < 0 70 1 8
6 ПО ИПД ИПС — ПВ Fx > 0 81 ИПО /—/
п? ИПВ Farctg 1 8 0 /—/ X Fn; —
ипо — БП 13
Контрольный Пример. СМ. в § 5.2. Переключатель «Р—Г» следует устано-
вить в положение «Р».
Программа ПП12/34. Расчет kr методом пяти ординат. Ввод: = Р9 i'a =
= РА, /3 = РВ, — PC. !- = РД Результат: fer = PX /ср = Р0 /т4 = Р1,
— Р2 /m3 (Г РЗ
ИП9 ИПД — П8 ИПА ИПС 4- 2 X ИП9
ИПД 6 — по ИП8 ИПА 4- ИПС
3 — П1 ЙП9 ИПД 4- 2 — ИПВ
— 2 — П2 ИП1 ИПА —, ИПС + 2
— ПЗ ЙП2 ИПО — ИПВ 4" П4 Рх? ИПЗ
Fx3 ИП2 Fx2 4- 4- F/- ИП1 С/П
Контрольный пример. : см. в. § 5.4.
Программа ПП13/34. Расчет статистических параметров N случайных чи-
сел Ввод: N = РО = РА, 0 = Pl = Р2 = РЗ = Р4 = Р5 = Р6, затем, нажав
клавишу С/П х, = РХ х2 = РХ ...xN = РХ Результат: х. a2, S и Е (т, ... mt=
= PI .. Р4 М2 = РВ /И3=РС, /И, = РД)
ИП6 С/П П6 ИП1 4- П1 ИП6 Fx3 ИП2 4*
П2 ИП6 Fx2 ИП6 X ИПЗ + ПЗ ИП6 Fx3
Fx2 ИП4 + П4 FLO 00 ИП1 ИПА — П1
С/П ИП2 ИПА -Л- П2 ИПЗ ИПА — ПЗ ИП4
ИПА — П4 ЙП2 ИП1 Fx2 — ПВ С/П ИП1
Fx3 2 X ИП2 3 X — ИП1 X ИПЗ
4- ПС ИП2 2 X ИЯ1 Fx2 — ИП1 X
3 X 4 ИПЗ — ИП1 X 4 X
ИП4 4* ПД йпс ИПВ t Fx2 X • F/"
С/П ИПД ИПВ Fx2 4- 3 — С/П
Инструкция. После ввода программы нажать клавиши F АВТ и В/о На-
брать /V = Р0 = РА и 0 в регистры Р1 ...Р6. Нажать клавишу С/П (высвечи-
вается 0) Набрать х4 ...xN, нажимая в конце ввода каждого числа клавишу С/П
После ввода последнего числа xN вычисляется х, затем с'1 (для получения не-
смещенного значения умножим вручную о2 на N (N — 1), где N = РА). S и Е.
Значения m, ...т4 и М2 ... /И4 хранятся в указанных выше регистрах.
Контрольный пример: для десяти чисел (9; 8; 10; 9; 11; 12; 10; 10; 9 и 11)
получим х = 9.9; о2 = 1,29; S = 1,9656579 10—i и Е =*= —7,52539 10~1.
Программа ПП14/34. Линейная аппроксимация. Ввод: N = РХ х, = РХ,
М = РХ, х2 = (₽1 = РА, ₽2 = рх, = РВ) Уг = РХ, ... > XN ~ PX, Ум — РХ Результат: ра и Ро
П1 ПО 0 П4 П5 П6 П7 ИП1 ИПО —
1 + С/П П2 С/П ПЗ ИП6 4- П6 ИП2
ИП4 4- П4 ИП2 Fx2 ИП5 4- П5 ИП2 ИПЗ
ИП7 4- П7 FLO 07 ИП4 Fx2 ИП1 ИП5
X —- П8 ИП4 ИП6 X ИП1 ИП7 X —
ИП8 ПВ ПА С/П С/П ИП6 ИПА ИП4 X ИП1
Контрольный пример: см. в § 9.5.
Программа ПП 15/34. Параболическая аппроксимация Ввод: /V = Р7 далее
см. в программе ПП14/34 Результат: —Д.
ИП7 ПО 0 П8 П9 П6 ПЗ ПА ПВ ПС
ИП7 ИПО — 1 4- С/П П1 С/П П2 ИП1
ИП8 4- П8 ИП1 Fx3 ИП9 4- П9 ИП1 Fx3
ИП1 X ИП6 4- П6 ИП1 Fx3 Fx- ИПЗ 4-
ПЗ ИП2 ИПА 4” ПА ИП1 ИП2 X ИПВ 4-
ПВ ИП1 Fx3 ИП2 X ИПС 4- ПС FLO 10
ИП8 П4 ИП9 П5 П1 ИП6 П2 ИП1 ИП5 X
ИП4 ИП2 X — ИП9 X ИП7 ИП2 X ИП1
ИП8 X — ИП6 X 4- ИП4 ИП8 X ИП7
ИП5 X - ИПЗ X 4- С/П БП 67
Порядок вычислений и контрольный пример ем в j 9.5.
Программа ПП16/34. ПП14/34.. Результат: Ро и Степенная аппроксимация Pi (Ро = РА. Р, = РВ). Ввод: см. в программе
ПО П7 0 ПЗ П4 По П6 ИП7 ИПО —
1 4- С/П П1 Fin П8 ИПЗ 4- ПЗ ИП8
Fx3 ИП4 4- П4 ИП1 С/П П2 Fln П9 ИП5
4- П5 ИП8 ИП9 X ИП6 4- П6 FLO 07
ИПЗ ИП5 X ИП7 ИП6 X — ИПЗ Fx3 ИП7
ИП4 X — — ПВ ИП5 ИПЗ ИПВ X
ИП7 ч- Fe* Контрольный пример: ПА см в С/П §9.5 ИПВ с/п- БП 00
Программа ПП17/34. Экспоненциальная аппроксимация, грамме ПП14/34 Результат: Р,, и Pt (Ро = РА. 6, = РВ) Ввод: см в про-
ПО П7 0 ПЗ П4 П5 П6 ИП7 ИПО
1 4- С/П П1 ИПЗ 4- ПЗ ИП1 Fx3 ИП4
4- П4 ИП1 С/П Fin П8 ИП5 4- П5 ИП8
ИП1 X ИП6 4- П6 FLO 07 ИПЗ ИПЗ X
ИП6 ИП7 X — ИПЗ Fx3 И 14 ИП7 X —
+ ПВ ИП5 ПА С/П ИПВ Контрольный пример: ИПЗ С/П см в ИПВ БП §95 X 00 ИП7 Fe*
Программа ПП18/34. Вычисление с точностью до 1,5 • 10—7 функции веро-
ятности ошибок [9]
2
- Ф(х)=—:
е dK = 1 — (й4 t № "b* • • • + ®
где t— 1/ (aex + 1).
Ввод: at = 2,5482959 • 10-» = Pl, a2 = -2,8449673 • 10~i = P2, =
= 1,4214137 = P3, a4 = —1,453152 = P4, a, = 1,0614054 = P5 ae =
= 0,3275911 = P6, x = PX.
П9 ИП6 X 1 + Fl/x П8 5 ПО ИП6
+ XY ИП8 X КИП0 + ИП0 Fx = 0 11 XY
ИП9 /—/ ИП9 X Fe* X П8 1 ИП8 —
С/П БП 00
Контрольный пример: Ф (0, 1) = 0,1124631; Ф (0,5) = 0,5205001; Ф (3) =
= 0.9999779 (время счета — около 20 с).
Программа ПП19/34. Вычисление о точностью до 1,5 • 10 Y функции 191
к
П(х) =---f e-v?2d?i = l—0.5(1+а1х+о2 x2+...+aex6)-le.
У2л J
Ввод: at = 49867347 • 10—» = Pl, а2 = 21141006 • 10~» = РЗ, " аз =
= 3277626 • IO-» = РЗ, я4 = 38004 • 10~9 = Р4, а8 = 48891 • 10~9 = Р5.
яв = 5883 • 10-9 = рб, х = рх.
ПД 6 ПО ИП6 f XY ИПД X КИП0 +
’ ИПО Fx = 0 05 XY 1 + 1 6 1—1 XY
Fx* 2 /—/ 4- 1 + С/П БП 00
Контрольный пример: П (0) = 0,5, П (0,1) = 0,5398275, П (1) — 0,841346,
П (3) = 0,9986556 (время счета около 30 с).
Программа 20/34. Вычисление гамма-функции с точностью до 5 знаков по
формуле Стирлинга
Г(2)= | / — e~z Zz И (Z) ,
1 1 0,7
где W(Z)~14- 12Z 4- 2ggZ2 — 2ggZ3 .
Ввод: Z = РХ. Переключатель «Р—Г» в положение «Р».
П9 Fx < 0 21 /-/ П9 ПП 25 Fn ИП9 X
Fsin X ИП9 X Fl/x Fn /—/ X С/П БП
00 ПП 25 БП 18 t t 1 + X
П8 ИП9 2 + f П7 1 Fe* — Fx?
ИП8 — П8 Fn 2 X ИП7 4- F/- ИП8
X П8 0 ЙП7 7 ИП7 4- 1 XY —•
2 4 — 1 + 1 2
ИП7 4- 1 Контрольный пример: + Г (0,5) ИП8 X = 1,7724781 В/О (время счета 22 с); Г (4,7)
= 15.431423; Г (—3,2) = 0,68905558.
Программа ПП21/34. Вычисление функции Бесселя
Jn 1 (х) = —- nl / X \ 2 \п Г ) 1 - (*/2)а П(п+1) (х/2)4 21 (п-Ь-1) (п + 2) +...].
Ввод: п = РЗ, х = РХ.
П2 0 П4 1 П6 ИПЗ Fx ф 0 17 П8 ИП6
X П6 ИП8 1 —• Fx = 0 08 ИП2 2
ПО Fx'2 П2 ИПЗ ипо РхУ ИП6 -Л- П7 П8
КИП4 ИП4 ИПЗ + ИП4 X ИП2 ——-* ИП7 /—/
XY ИП8 С/П П7 БП ИП8 00 + П8 FBx — Fx = 0 30
Контрольный пример: Jo (0,5) = 0,93846981 (время счета — около 40 с),
Jo (4) — —3,9714976 • 10—1 (время счета — около 80 с), Узо (20) =
= 1,2401602 • L0-4 (время счета — около 180 с).
Программа ПП22/34. Вычисление интегрального синуса при х < 10
<?| /«Д - _ 1 ’sin/ , Я/ V хз X5 X7
Ы (X) = 1 <л<- — А. t 313 515 717 +
Ввод: х = РХ.
П2 П7 П8 Fx2 2 /-/ цз 0 П4
КИП4 ИП4 2 X 1 + Fx2 П5 ИП4 2
X 1 — ИПЗ X ИП7 X ИП4 -X- ИП5
— П7 ИП8 + П8 FBx — Fx = 0 .10 ИП8
С/П БП 00
Контрольный пример-. Si (0,1) = 0,099944467 (время счета — около 30 с).
Si (1) = 0,94608314 (время счета — около 50 с), Si (3) =' 1,8486526 (время сче-
та — около 70 с), Si (10) = 1,6583514 (время счета — около 240 с).
Программа ПП23/34. Вычисление интегрального синуса при х > 8 по
асимптотическому разложению
sinx ( 6 / 20 / 20 .
X2 V *2 \ х2 V X2, /)}'
Ввод: х = РХ (переключатель «Р—Г» в положении «Р»),
П2 Fx2 X Fl/x 1 ПЗ + 1 4 2 X X ИПЗ t X t 2 I
ИП2 Feos X ИП2 — П4 ИПЗ 2 0 X
t t 1 — X 1 + 1 ' 2 X
ИПЗ X 2 —. ИП2 Fsin X ИПЗ X ИП4
+ Frt + 2 -г- С/П БП 00
Контрольный пример-. Si (10) = 1,6583685 (время счета — около 20 с),
S1 (20) = 1,5482415; Si (100) = 1,562254.
Программа ПП24/34. Вычисление интеграла Френеля
С(х)- Г Д/2л J cos/ -2 n = 0 ' ' x4n+!
Lit V/ (2n)l (4n[l) ‘
Ввод: х = РХ;
П8 П7 Fx2 Fx2 Frt Fx2 X 4 -T- П2
0 П4 КИП4 ИП4 2 X ПЗ 1 -— ИПЗ
X ПЗ ИП4 4 X 3 — no 4 +
ИПО XY — ИПЗ ИП2 X ИП7 /-/ X
П7 ИП8 + П8 FBx — Fx = 0 12 ИП8 С/П
БП 00
Контрольный пример-. С (0,5) = 0,49234422 (время счета — около 50 с),
С (1) = 0,77989341 (время счета — около 80 с), С (2) — 0,48825333 (время сче-
та — около 160 с).
Программа ПП25/34. Вычисление интеграла Френеля
S (х) X 1 f sin t sM II II c (-Dn| / л \2' Ч-i x4n+3
УГл J Cll 1/t (2« + l)l (4n-f-3)"
Ввод: х = РХ.
П8 Fx2 Fn X 2 "7“ no Fx2 П2 ИП0
ИП8 X 3 — П7 П8 0 П4 КИП4 ИП4
2 X ПЗ I + ИПЗ X ПЗ ИП4 4
X 1 — no 4 + ИП0 XY — ИПЗ
— ИП2 X ИП7 /-/ X П7 ИП8 + П8
FBx — Fx = 0 18 ИП8 c/n БП 00
Контрольный пример-. S (0,5) = 0,064732433 (время счета около 50 с),
S (1) = 0,43825912 (время счета — около 70 с), S (2) = 0,34341539 (время сче-
та — около 165 с).
1 sin(nx2/2) Г C (x) — + 2 rex [ 3 I cos(nx2/2)|"
(nx2)2 J Л2 x3 L
1 cos (лх2/2) r S (x) — — 1 2 nx [ 3 1 sin (nx2/2) [
(nx2)2 J n2 x3 [
Программа ПП26/34. Вычисление интегралов Френеля С (х) и S (х) при
х I по асимптотическому ряду:
5 1
(лх2)2 ]’’
5 1
(nx2)2 J*
Ввод: x = PX. Результат: C (x) = PX, S (x) = PX.
t Fn X П8 X П9 2 — Feos П7
FBx Fsin П6 ИП9 Fx2 3 XY 1 —
ИП6 X ИП8 — П5 ИП9 Fx2 5 XY —
1 — ИП7 X ИП9 — ИП8 — 2 Fl/x
+ - XY ИП5 БП 12 c/n ИП7 /-/ t ЙП6 /-/ П7
Контрольный пример-. С (2) = 0,48773584, S (2) = 0,34386864. С (10) =
= 0,49989868: S (10) = 0,46816998 (время счета 10—15 с)
Программа ПП27/34. Суммирование т^б членов тригонометрического
ряда Фурье (5.7). Ввод: ап = Р0, ...ае = Pl ...Р6, <pj ...<pe = Р7 ...PC, t/T =
ПД Fn 2 X X ИП7 + Fsin ИП1 X
ИПД Fn 4 X X ИП8 + Fsin ИП2 X
+ ИПД Fn 6 X X ИП9 + Fsin ИПЗ
X + ИПД Fn 8 X X ИПА + Fsin
ИП4 X + ИПД Fn 1 0 X X ИПВ
+ Fsin ИП5 X + ИПД Fn 1 2 X
X ИПС + Fsin ИП6 X + ИП0 + c/n
БП 00
Контрольный пример-. ав = 0, a* = 1, аг = 0,1, а3 = 0,05, а4 = 0,02, ав =
= 0,01, ае = 0, q>j ... срв = 0. Получаем f (0) = 0, [ (0,125) — 0,83539108,
f (0,25) = 0,96 (время счета — около 30 с).
Таблица П2.1
Коды операций (команд) микрокалькулятора «Электроника БЗ-34»
Операция Код Операция Код Операция Код Операция Кол
0 00 no 40 Kx=#00 70 кппо -0
9 09 П9 49 Кл^=09 79 КПП9 —9
0— ПА 4— Kx#=0A 7— КППА —
/-/ 0 L ПВ 4 L к*=/=ов 7 L кппв - L
ВП 0[ ПС 41 Кх=/=0С 71 КППС —’
Сх 0Г ПД 4 Г Кх=/=0Д 7 Г кппд — г
t 0E FBx 6 КБП0 80 кпо L0
+ 10 С/П 50 • . -
— 11 БП 51 КБП9 89 КП9 L9
X 12 B/O 52 КБПА 8— КПА L —
13 ПП 53 КБПВ 8 L КПВ LL
ХУ 14 КНОП 54 КБПС 81 кпе L1
F10* 15 Fx=fc0 57 КБПД 8 Г КПД L Г
Fex 16 FL2 58 Кх>00 90 КИП0 , г0
Fig 17 Fx>0 59
Fin 18 Fx=x0 5E Кх>09 99 КИП9 Г9
Farcsfn 19 Fx<0 51 Кх>0А 9— КИПА Г —
Farccos 1— FLO 5Г Кх>0В 9L кип в Г L
Farctg 1 L FL1 5L Кх>ОС 91 кипе Г1
Fsin П FL3 Э— Кх>0Д 9 Г кипд Г Г
Feos 1 Г ИП0 60 Кх<01 11 Кх = 00 Е0
Ftg IE ...
Far 20 ИП9 69 Кх<09 [9 Кх = 09 Е9
Fy 21 ИПА 6— Кх<0А 1- Кх = 0А Е—
Fx® 22 ИПВ 6.L Кх<0В (L Кх = 0В El
Fl/x 23 ИПС 61 КхсОС 11 Кх = ос El
Fx* 24 ИПД 6 Г КхсОД [ Г Кх = 0Д Е Г
ПРИЛОЖЕНИЕ 3
ПАКЕТ ПРОГРАММ МИКРО ЭВМ «ЭЛЕКТРОНИКА ДЗ-28»
Общая инструкция к пользованию программами
1. Для ввода программы нажимаются клавиши С и В.
2. Программа вводится последовательным нажатием соответствующих кла-
виш пульта. Команды, вводимые кодами вида Bl А1 или В2 А2 и Bl А1 вводят-
ся с помощью верхнего ряда клавиш прямого кодирования. Значения В1 и В2
набираются как сумма чисел на левых клавишах 10, 20, 40 и 80, причем нули
игнорируются Цифры А1 и А2 набираются нажатием соответствующей клави
ши правой группы клавиш: от 00 до 15.
3. После ввода программы микро-ЭВМ переводится в режим автоматичес-
ких вычислений нажатием клавиш Р и С.
4. Вводятся исходные данные (порядок ввода дан в кратких инструк-
циях к каждой программе). При вводе данных в регистр X после каждого вво-
да нажимается клавиша S.
5. Программа запускается нажатием клавиши S.
6. В дополнение к пп. 1—5 следует руководствоваться инструкциями, при-
веденными в § 1.5. и технической документацией к данной микро-ЭВМ
Программа ПП1/28. Численное интегрирование методом Симпсона (Nn =
= 805). Ввод: а = ЯП 0002, b = ЯП 0003, N = ЯП 0004 данные подынтег-
ральной функции.
м зп 2 0003 0000 зп вп 0005 0004 вп 0003 ! зп вп 0002 0002 особ
t 1 м 0001 0002 t 4 0002 2
[> 0001 м 0003 вп 0005 t 3 ВП
0002 X СК 0515 м 0002 X вп 0005 +
1 зп 0005 вп 0004 t 1 — ЗП
0004* 0412 0711 о 0003 вп 0003 ВП 0002
+ 1 зп 0003 м 0000 вп 0003 № X2
t вп 0006 + 4 зп 0007 вп 0003 X2
t вп 0003 X вп 0007 — 1 0511 0512
Инструкция. Вычисление подынтегральной функции оформляется под-
программой, помеченной меткой М 0000 при х, берущемся из ЯП 0003. Резуль-
тат должен заноситься в регистр X. В программу вписана подынтегральная
функция контрольного примера — интеграл
b
С х9 .
I --л--
J х*+с
а
при с = ЯП 0006. При а — 1, b — 5, п — 16 и с — 16. нажав клавишу S по-
лучим / = 0,907458959150
Программа ПП2/28. Численное интегрирование методом Гаусса при /V =
= 3 (й/п = 1080). Ввод: данные подынтегральной функции, N — РХ, b — РХ
и а = РХ.
М 0016 ЗП 0000 зп 6 УX ЗП 0001 0
ЗП 0002 ск 0515 0003 t ск 0515 ЗП
0004 — вп 0000 — 4 зп 0005 м 0000
ВП 0004 зп 0006 t вл 0005 + 1 ЗП
0004 ВП 0006 + 2 — ЗП 0007 вп
0004 t вп 0006 — 2 1 ЗП 0008
ЗН t вп 6001 X вп 0007 + 4 0001
5 0002 ВП 0007 0001 8 0002 вп 0008 t
ВП 0001 X вп 0007 + 1 0001 5 0002
1 П— 0000 вп 0000 0412 0611 о 0000 ВП
0002 ! вп 0008 X ск 0515 м 0002 X
9 1 П+ 0002 0511 М 0001 t 2
X 1 4- 1 Ух t 0511 0512
Инструкция. Вычисление подынтегральной функции оформляется под-
программой, помеченной меткой М 0001 при х, берущемся из регистра X, ре-
зультат должен заноситься в регистр Y. В программу вписана подынтегральная
функция контрольного примера — интеграл
I _______
I = J У2х + 1 dx.
о
При N = 10 получаем I — 1,39871747423 за время около 2 с.
Программа ППЗ/28. Решение дифференциального уравнения !-го порядка
методом Рунге—Кутта 4-го порядка (Nn = 734) Ввод: /1/2 = ЯП 0002, х (0) =
— ЯП 0003, данные у' (х, у), у (0) = РХ
м 1 зп 0007 ЗП 0006 t 3 X 1
зп 0004 0000 ЗП 0004 0001 ВП 0005 +
4 ЗП 0004 0000 вп 0005 + 1 ЗП 0004
вп 0005 t ВП 0007 + 1 ЗП 0007 0001
3 ВП 0003 ЗП 0007 0515 [> 1
м 0001 ВП 0002 t ВП 0003 + ЗП
0003 м 0000 0002 ВП 0002 X 1 ЗП 0005
t вп 0006 + 1 зп 0007 ВП 0005 t
вп 0004 + 0511 м 0002 вп 0008 t ВП
0007 — ВП 0009 — 0511 0512
Инструкция. Вычисление производной у' (х, у) оформляется подпрограммой,
помеченной меткой М 0002 при х, берущемся из ЯП 0003 и у — из ЯП 0007.
Результат вычисления производной должен заноситься в регистр Y В програм-
му вписана у' (х, у) контрольного примера — дифференциальное уравнение
duldt— (Е — и)/ (RC) при и — у, t — х, Е = ЯП 0008 RC = ЯП 0009
Результаты решения приведены в § 2 5.
Программа ПП4/28. Расчет распределения токов стока параллельно вклю-
ченных мощных МДП-транзисторов (А/п = 2799).
М 0013 t 4 X 1 ЗП 1501 0 t
СК 0515 зп 1515 0 ЗП 0000 1 t ВП
0000 + ЗП 0000 СК 0515 0504 ВП 0501
0507 1402 0015 0 t СК 0515 зп 1502 СК
0515 ЗП 1503 М 0 СК 0515 ЗП 1504 0
ЗП 1510 1 0 зп 1511 М 1 0 ЗП
0000 ЗП 0514 1 2 0 ЗП 1513 ВП 1510
| ВП 1511 + 4 ЗП 1510 0000 ВП 0000
f ВП 1501 0507 1402 0008 ВП 1503 t ВП
1510 — вп 1502 — ВП 1514 — 0412 0510
О 1 ВП 1510 t ВП 1511 — 1 ЗП
1510 ВП 151) t .1 0 — 4 ЗП 1511
t вп 1515 0412 0510 [> 1 ВП 1510
t > 0 М 0000 ВП 0000 t 1 +
0505 зп 1505 1 + 0505 ЗП 1506 1
0505 ЗП 1507 1 + 0505 зп 1508 1 ЗП
0000 вп 1504 № t ВП 1507 X ВП 1506
+ вп 1504 —. 0412 0410 1403 0004 0 1403
0109 ЗП 1509 ВП 1508 f ВП 1510 X
ВП 1509 — 4 е* t 1 —. ВП 1509
X вп 1505 X 1 ЗП 1512 вп 1513 kn
1 1514 + + 4 1 ЗП ЗП 1513 1514 ВП 0511 1512 0512 0504 t
Инструкция и контрольный пример приведены в § 4.5
Программа ПП5/28. Расчет статического режима схемы С общим истоком
на мощном МДП-транзисторе (Wn = 1904).
м 0014 0 зп 0000 1 t ВП 0000 +
1 ЗП 0000 СК 0515 0504 I 1 0507 0402
0015 0 СК м 0 0515 зп 0012 0 ЗП
ОНО СК м 1 0 ЗП 0014 1 0 ЗП
0108 ВП оно t ВП 0013 X ВП 0010 X
ВП 0009 + 4 зп 0015 2 0 — ВП
0005 X 1 + вп 0001 X 4 зп 0106
ВП 0015 t 2 0 — ВП 0006 X 1
+ ВП 0002 X зп 0107 м 2 ВП
0014 t ВП 0108 + 4 ЗП 0014 ВП 0012
№ t ВП 0003 X ВП 0012 + ВП 0107
— 1 ЗП 0109 ВП 0004 ЗН t ВП 0014
X вп 0109 — е* ЗН t 1 +
ВП 0109 X вп 0106 X 1 ЗП 0013 ВП
0007 f ВП 0014 — ВП 0008 — ВП 0013
— 0412 0510 О 2 ВП 0014 t ВП 0108
— ЗП 0014 вп 0108 t - 1 0 —
1 ЗП 0108 вп ООН 0508 D> 2 ВП 0014
t вп 0014 0515 Инструкция и 0010 0509 4 ЗП контрольный 1403 0007 ОНО О пример даны ВП 0013 1 0512 в § 4.5. f ВП
Программа ПП6/28. Расчет спектральной налов (Nn = 1981). Ввод: /0, /V, .... YN и плотности непериодических f.
М “ ООН ЗП 1501 t СК 0515 ЗП 1502 Л-
1 зп 1503 0 ЗП 0000 1 t ВП 0000
+ ЗП 0000 СК 0515 0504 ВП 1502 0507
1402 0015 М 0 0515 t эт X ВП 1503
X 1 ЗП 1504 0412 0711 1403 0009 0802 t
ВП 1504 — 1 1403 0001 1. ЗП 1505 0
ЗП 1506 зп 1507 ЗП 1508 ЗП 1509 ЗП 1510
зп • 0000 1 t вп 0000 + ЗП 0000
0505 0000 вп 0000 ВП 1502 0507 1402 0101
0515 вп 1506 t вп 1507 1 0807 ЗН
ЗП 1508 ВП 1507 X® ЗП 1513 ВП 1506 xi
t ВП 1513 + Д/х" t вп 1505 X
ВП 1503 X вп 1508 |> 0 м 0000 ЗП
1509 ВП 0000 t 2 X ВП 1504 X ' 1
ЗП 1510 0'802 t ВП 1509 X ВП 1506 +
.1 ВП ЗП 1507 1506 + вп 4 1510 ЗП 0803 1507 t 0511 ВП 0512 1509 X
Инструкция. При вводе Yt ...Yn номер очередного вводимого отсчета высве-
чивается иа индикаторе регистра Y. После ввода / получаем S (/) и <р (/) в радиа-
нах. При смене f вводится только новое значение f и нажимается клавиша S.
Программа ПП7/28. Bi числение усеченного (т 75) тригонометрическо-
го ряда Фурье (Nn «= 1256). Ввод: т , Аъ срг Д2, ср2.... Ат, cpm, у0, £ Ре-
зультат: у (t).
Л-1 0009 л I X 2 1 X ЗП 1 1503 ЗП 0 1502 ЗП СК 0000 0515 .1
ВП 0000 + 1 ЗП 0000 f ’ вп 1502
0507 1403 0007 fl СК 0515 0504 1402 0104
ск 0515 ЗП 1508 t СК 0515 ЗП 1504 ВП
1508 ЗП 1507 0 ЗП 0000 0000 ВП 0000 f
ВП 1502 0508 1403 0003 1402 0010 ВП 1507 1402
0109 М 0000 ВП 0000 f 1 + 0505 ЗП
1505 1 + 0505 ЗП 1506 1 ЗП 0000 t
ВП 1503 X ВП 1504 X ВП 1506 + 1
0802 1507 t 0511 ВП 0512 1505 X ВП 1507 + 1 ЗП
$ Инструкция. При смене / вводится новое значение / и нажимается клавиша
Программа ПП8/28. Расчет частотной и фазочастотной характеристик це-
пей ио заданной переходной характеристике (Л7О = 2034). Ввод: N, t0, +
f. Результат; S (f) и <р (/) в радианах.
м 0008 ЗП 1501 0515 ЗП 1509 г ВП 1501
1 ЗП 1503 0 ЗП 0000 м 1 1
4 ВП 0000 + 1 ЗП 0000 СК 0515 0504
ВП 1501 0507 О 1 М 0 0515 JT
X ВП 1503 X 1 ЗП 1502 0802 t ВП
1502 -Л, 1 ЗП 1510 0 ЗП 1504 ЗП 1505
ЗП 1506 ЗП 1507 ЗП 1508 ЗП оооо м 2
1 t ВП 0000 -1- 1 ЗП 0000 0505 0000
ВП 0000 4 ВП 1501 0507 О 2 ВП 1507
t ВП 1508 -Z. 1 0807 зн ЗП 1511 ВП
1507 X1 ЗП 1512 ВП 1508 с2 4 ВП 1512
+ 1 4 ВП 1510 X ВП 1511 О
0 м 0000 зп 1506 4 ВП 1505 — 1
ЗП 1505 ВП 0000 4 2 X 1 — ВП
1502 X 4 зп 1504 0802 ^п ВП 1505 X
ВП 1507 + 4 ЗП 1507 1504 0803 t
ВП 1505 X ВП 1508 + 1 ЗП 1508 ВП
150S ЗП 1505 0511 0512
Инструкция При вводе в индикаторе регистра Y высвечивается номер оче-
редного вводимого отсчета После ввода каждого параметра нажимается клави-
ша S. При смене f повторяется ввод только f.
Контрольный пример', см. в § 5.2.
Программа ПП9/28. Расчет п ереходпого процесса ключа на мощном МДП-
гранзисторе (JVn = 3573) регистров затем Uc (0) и Ввод: Д/ — N Ц (0) в порядке, указанном в распределении
м 0004 0 ЗП 0000 0515 зп 0001 0515 ЗП
0002 0515 ЗП 0003 0515 ЗП 0004 0515 зп 0005
0515 ЗП 0006 0515 ЗП 0007 0515 ЗП 0008 0515
ЗП 0009 0515 ЗП 0010 0515 ЗП ООН 0515 ЗП
0012 0515 ЗП 0013 0515 ЗП 0014 0515 ЗП 0015
0515 ЗП 0106 0515 ЗП 0107 М 0000 0 ЗП
0209 ЗП 0000 ЗП 0201 ЗП 0202 ЗП 0203 0515
ЗП 0109 0515 ЗП 0200 0515 ЗП 0204 м 0001
ВП 0000 4 ВП 0001 + 4 З.П 0000 0002
ВП 0108 t ВП 0109 — вп 0012 г—* 4
ЗП 0201 ВП 0109 X2 4 вп 0106 X ВП
0006 + 1 ЗН t вп 0109 + 4 ЗП
0206 0412 0610 Г> 1 вп 0015 t вп 0200
X ВП 0206 — зн е* ЗН 4 1
+ вп‘ 0206 X вп 0014 X 4 о 2
м 1 0 м 2 ЗП 0205 1 4 ВП
0007 -2. I зп 0207 1 t вп 0008 —
ВП 0207 + 1 ЗП 0207 1 4 ВП 0009
вп 0207 + 4 ЗП 0207 вп 0201 4
ВП 0007 1 ЗП 0208 ВП 0204 вп
0205 вп 0203 — ВП 0009 — вп 0208
+ вп 0207 4 ЗП 0202 вп 0009 4
ВП 0010 1 + ЗП 0207 ВП 0204 4
ВП 0205 — вп 0202 —- ВП 0207 — 4
зп 0203 вп 0201 4 вп 0202 — вп 0001
X ВП 0007 — ВП 0109 + 4 зп 0109
ВП 0203 г вп 0001 X ВП 0010 -Л. ВП
0200 + 4 зп 0200 ВП 0204 4 вп 0013
X ВП 0200 + 4 ЗН t ВП 0005 +
ВП 0001 X вп ООН — ВП 0204 + 4
зп 0204 вп 0209 4 1 + 4 ЗП 0209
4 0209 вп 0107 —- 0412 0411 > 0001 0 ЗП
ВП 0108 t вп 0000 0515 вп 0200 4
ВП 0204 0515 о 0001 м 0002 4 ВП 0003
—. 0412 0510 t> 3 вп 0000 t вп 0002
-Ь. 1 ЗН е* ЗН t 1 + вп 0004
X ЗП 0300 t t> 4 м 3 вп
0000 г ВП 0003 вп 0002 — 1 ЗН
ех г ВП 0300 X м 4 1 зп 0108
0511 0512
Инструкция. После набора каждого параметра' нажимаетвя клавиша S. П®
окончании ввода программа переходит к выдаче на каждом интервале N&t вва
чепий t и С/ех (/) а затем (/) и i (/) при каждом нажатии клавиши S.
Контрольный пример ем в § 7.6.
Таблица П3.1
Распределение ЯП в программе ПП9/28
ЯП 0000 000! 0002 0003 0004 0005 0006 0007 0008 0009 0010 ООП 0012
Величина 1 Д( Твх ит Си с12 с22 Си L Rr
ЯП 3013 0014 0015 0106 0107 0Ю8 0109 0200 0201 0202 0203 0204 0205
Величин; /?с S Р ь Л' мвх «3 ис «1 h (з 1с
Праграмма ПП 10/28. Расчет статистических параметров и подготовка дан
ных для построения гистограмм (Na = 5225). Ввод: число чисел хп — N, пре*
делы Xj ...х20 для построения гистограмм, массив хп.
М 0015 зп 0403 2 0 зп 0401 1 П+
0401 вп 0401 t СК 0515 0504 4 0 0507
1402 0013 м 0 0 зп 0401 ЗП 0402 ЗП
0601 зп 0602 зп 0603 зп 0604 1 п+ 0401
ВП 0401 t 0 0504 2 0 1507 1402 0012
м 1 1 п+ 0402 вп 0403 t ВП 0402
0507 о 2 СК 0515 ЗП 0404 п+
0601 X3 п+ 0602 f вп 0404 X 1 п+
0603 вп 0404 X п+ 0604 ВП 0404 t
ВП 0201 0508 1403 0006 1 п+ 0001 Ч> 1
вп 0202 0508 1403 0006 1 п+ 0002 > 1
вп 0203 0508 1403 0006 1 п+ 0003 о 1
вп 0204 0508 1403 0006 1 п+ 0004 о 1
вп 0205 0508 1403 0006 1 п+ 0005 О 1
вп 0206 0508 1403 0006 1 п+ 0006 > 1
вп 0207 0508 1403 0006 1 п+ 0007 о 1
вп 0208 0508 1403 0006 1 п+ 0008 > 1
вп 0209 0508 1403 0006 1 П4- 0009 о 1
вп 0300 0508 1403 0006 1 п+ 0010 > 1
вп 0301 0508 1403 0006 1 п+ 0101 о 1
вп 0302 0508 1403 0006 1 П+ 0102 о 1
вп 0303 0508 1403 0006 1 П+ 0103 о 1
вп 0304 0508 1403 0006 1 П+ 0104 О 1
вп 0305 0508 1403 0006 1 П+ 0105 о 1
вп 0306 0508 1403 0006 1 П+ 0106 о 1
вп 0307 0508 1403 0006 1 п+ 0107 1
вп 0308 0508 1403 0006 1 П+ 0108 > 1
вп 0309 0508 1403 0006 1 П+ 0109 L
вп 0400 0508 1403 0006 1 П+ 0200 > 1
м 2 ВП 0601 t ВП 0403 4- 1 ЗП
0701 х2 зп 0705 X2 ЗП 0707 ВП 0705 t
ВП - 0701 X 1 ЗП 0706 ВП 0602 t ВП
0403 - ™ ЗП 0702 ВП 0603 t ВП 0403
— зп 0701 ВП 0604 t ВП 0403 —
зп 0704 ВП 0702 t ВП 0705 —
зп 0802 ВП 0701 t ВП 0702 X 3 X
1 ЗП 0801 ВП 0706 t 2 X вп 0801
ВП 0703 + 1 зп 0803 ВП 9701 f
ВП 0703 X 4- X 1 ЗП 0708 ВП 0705
t ВП 0702 X 6 X 1 ЗП 0709 ВП
0707 t 3 X вп 0708 + ЗН t
ВП 0709 + ВП 0704 + 1 ЗП 0804 ВП
0403 t 1 — 1 ЗП 0805 ВП 0802 t
ВП 0403 X вп 0805 -4- Ух ЗП 0902
вп 0701 t _ вп 0902 0515 ВП 0802 t X2
X 1 Ух 1/х t ВП 0803 , X 1 ЗП
0903 ВП 0802 X2 1/х t ВП 0804 X 3
— ЗП 090' ВП 0903 н 0515 вп 0403
1 -—- 1 ЗП 0405 X2 ЗП 0406 1
зп 0407 1 — 1 ЗП 0408 4
+ 1 зп 0409 2 + 1 ЗП 0410 2
+ 1 зп 0411 6 t вп_ 0405 X ВП
0409 вп 0410 — 1 Ух ЗП 0412 2
4 t вп 0403 X вп 0407 X ВП 0408
X вп 0406 -Г- ВП 0410 ВП 0411
1 ~\/х t вп 0412 ч 0515 0512
Инструкция. После ввода массива xj = xN получаем к — PY и о = РХ.
Нажав клавишу S, получаем S = PY и Е — РХ. Еще раз нажав клавишу S,
получаем as = PY и aB = РХ. Моменты пц ...mi заносятся в ЯП 0701 ...0704,
моменты М2 — в ЯП 0802 ...0804, данные для гистограммы (число по-
паданий чисел в заданный промежуток) заносятся в ЯП 0001 ...0200, пределы
Вон гистограмм заносятся в ЯП 0201 ...0400.
Контрольный пример: см. в § 9.3.
СПИСОК ЛИТЕРАТУРЫ
1. Гильде В., Альтрихер 3. С микрокалькулятором в руках: Пер. с нем. Ю. А.
Данилова. — М.: Мир, 1980. — 222 с.
2. Трохименко Я. К., Любич Ф. Д. Инженерные расчеты на микрокалькулято-
рах. — Киев: Техника, 1980. — 381 с.
3. Трохименко Я- К., Любич Ф. Д. Радиотехнические расчеты на микрокальку-
ляторах: Справочное пособие. — М.: Радио и связь, 1983. — 256 с.
4. Иванов В. И., Иванов Е. А., Муренко Л. Л., Филимонов А. Н. Вычисли-
тельные и управляющие микросистемы индивидуального пользования. —
Электронная промышленность, 1979, № 11, с. 22.
5 Прокофьев В. А. Программирование для мини-ЭВМ. — М,- Сов. радио,
1979. — 80 с.
6. Корн Г., Корн Т. Справочник по математике для научных работников и ин-
женеров: Пер. с англ /Под ред. И. Г Арамасовича — Мл Наука, 1973.—
832 с.
7. Яремчук Ф. П., Дудченко П. А. Алгебра и элементарные функции. — Киев.’
Паукова думка, 1976. — 688 с.
8 Ильин В. Н. Основы автоматизации схемотехнического проектирования. —
М.: Энергия, 1979. —383 с.
9. Лившиц В. М., Литвин В. Ф. Приближенные вычисления и программирова-
ние на ЭВМ «Наири-2». —Лл Машиностроение, 1977, — 240 с. .
10. Горинштейн А ЛЕЧисленное решение задач радиотехники и техники
связи на ЭЦВМ. — М. Связь 1972. — 209 с.
11. Герсковеи Д. Д. Машинный расчет интегральных схем- Пер. с англ./ Под ред.
К. А. Валиева, Г. Г. Казеннова, А. П. Голубева. — М.: Мир, 1971.—408 с.
12. Бахвалов Н С. Численные методы. — М.: Наука, 1975. — 631 6.
13. Демидович Б. П., Марон И А Основы вычислительной математики. — Мл
Наука. 1980 - 664 с.
14. Дьяконов В П. О рациональном численном методе расчета нелинейных
схем с помощью программируемых микрокалькуляторов. — Изв вузов
СССР. Приборостроение 1982, № 1, с. 42.
15. Шуп Т. Решение инженерных задач на ЭВМ: Пер с англ./ Под ред. В Б.
Миносцева. — М.: Мир, 1982. — 281 с.
16 Анго А Математика для электро- и радиоинженеров: Пер. с франц. /Под
ред К. С Шифрина. — М.: Наука, 1964. —772 с.
17. Носов Ю. Р., Петросянц К. О., Шилин В. А. Математические модели.эле"
ментов интегральной электроники. — М.: Сов. радио, 1976.— 304 с.
18. Калахан Д. Методы машинного расчета электронных схем. Пер. с англ./
Под ред. С. И. Сирвидаса. — М.: Мир, 1971. — 344 с.
19. Чахмахсазян Е. А., Бармаков Ю. Н., Гольденберг А. Э. Машинный анализ
интегральных схем: Вопросы теории и программирования. — М.: Сов. ра-
дио, 1974. — 272 с.
20. Сигорский В. П., Петренко А. И. Алгоритмы анализа электронных схем.
— М.: Сов. радио, 1976. — 608 с.
21. Степаненко И. П. Основы теории транзисторов н транзисторных схем. —
М.: Энергия* 1977. — 671 с.
22. Моругин Л. А. Импульсные схемы на туннельных диодах. — М : Сов. ра-
дио, 1966. — 272 с.
23. Сидоров А. С. Теория и проектирование нелинейных импульсных схем на
туннельных диодах. — М.: Сов. радио, 1971. — 264 с.
24. Бачурин В. В., Дьяконов В. П., Солов О. В. Мощные высокочастотные
и сверхвысокочастотные МДП-транзисторы. — Электронная промышлен-
, ность. .1979, № 5. с 5.
25. Сопов О. В., Бачурин В. В., Дьяконов В. П., Зиенко С. И., Смердоь В. Ю.
Мощные ВЧ и СВЧ МДП-транзисторы — импульсные приборы наносекунд-
ного диапазона. — Электронная техника. Сер. 2. Полупроводниковые прибо-
ры, 1978, № 5. 6, с. 103
26. Дьяконов В. П. Лавинные транзисторы и их применение в импульсных уст-
ройствах — М.: Сов. радио, 1973. — 208 с.
27. Дьяконов В. П. Предельные возможности лавинных транзисторов в Импульс-
ных целях. — Радиотехника, 1976, № 7, с. 82.
28. Дьяконов В. П., Самойлова Т. А. Математическая модель биполярного тран-
зистора для обычного и лавинного режимов работы. — Радиотехника 1979
№ 10, с 13
29. Гариинов С. А., Абезгауз И. Д. Полупроводниковые приборы с отрицатель-
ным сопротивлением. — М.: Энергия, 1970. — 320 с.
30. Виноградов Ю В. Основы электронной и полупроводниковой техники. —
М.. Энергия 1468. — 624 с.
31. Козинцева Л. П. Усилители на полупроводниковых приборах — М.: Выс-
шая школа 1965. — 136 с.
32. Транзисторы для аппаратуры широкого применения: Справочник/ К. М.
Брежнева Е И. Гайтман Т. И. Давыдова и др.; Под ред. Т. Л Перельма-
на. — М.: Радио и свизь 1981. — 656 с.
33. Калихман С. Г., Левин Я. М. Радиоприемники на полупроводниковых при-
борах: Теория и расчет. — М.: Связь, 1979 — 352 с.
34. Вилконс. Программный анализ частотного спектра осциллограмм. — Элек-
троника 1977 № 3 с. 62.
35. Бессонов Л. А. Теоретические основы электротехники. — М..- Высшая шко-
ла 1964. — 752 с.
36. Горяиног В. Г., Журавлев А. Г., Тихонов В. И Статистическая радиотех-
ника; Примеры и задачи. — Мл Сов. радио, 1980. — 544 с.
37 Зернов Н. В., Карпов В. Г. Теория радиотехнических цепей — Л.: Энер
гия, 1972. - 812 с.
38. Гоноровский И С. Радиотехнические цепи и сигналы. — М.; Сов. радио,
1977. - 608 с.
39. Источники электропитания на полупроводниковых приборах: Проектиро
вание и расчет/ С. Д Додик, Ю. Я. Дусавицкий, К. Б. Мазель и др.; Пол
ред. С. Д. Додика, Е. И. Гальперина — М. Сов. радио, 1969. — 448 с.
40. Мейике X., Гундлах Ф. Радиотехнический справочник. В 2-х г: Пер. о
нем. Т. 1. — М.: Госэнергоиздат, 1961. — 416 с.
41. Хейес. Программа для расчета несимметричных и симметричных полоско
вых линий на микрокалькуляторе НР67. — Электроника 1978 № 2 с. 58.
42. Ицхоки Я. С., Овчинников Н И. Импульсные цифровые устройства. — М.:
Сов. радио 1972. — 592 с.
43. Самойлов Л. К. Устройства задержки информации в дискретной гехц-тке. —
ZT.: Сов. радио, 1973 — 256 с.
44. Питерс. Программа расчета параметров линий передач на калькуляторе. —
Электроника, 1978 № 3 с. 62.
45. Хейес. Программа расчета резонансных схем на калькуляторе. — Электро-
ника, 1977, №24. с. 44
46. Хейес. Программа расчета взаимно расстроенных резонансных цепей на
калькуляторе. — Электроника, 1977 № 25, с. 39.
47. Мартин. Расчет фильтров при помощи программиру мого калькулятора. —
Электроника, 1976, № 24, с. 64.
48. Бойд Программа для вычисления передаточных функций цепей на кальку
ляторе. — ЭлектроЯйка 1977, № 6 с. 64.
49. Ли. Решение дифференциальных уравнений второго порядка на калькуля-
торе SR-52. — Электроника 1977 Ns 20, с. 62.
50. Роув, Смит. Калькуляторная программа для оптимизации коэффициента
шума системы. — Электроника, 1977 № 14 с. 58
51. Брайант Программа перерасчета децибел для калькулятора S72-56. —
Электроника 1977 №7 с. 63.
52 Албанс Программа Z-преобразования для получения характеристик дис-
кретных систем. — Электроника Ц178, № 10, с. 63.
53. Шульц. Расчет укороченных вертикальных антенн при помощи калькулято-
ра HP 25/НР-ЗЗЕ —Электроника, 1979, Ns 3. с 61.
54 Дьяконов В. П., Самойлова Т. А. Расчет и моделирование на ЭВМ каскада
с общим истоком на мощном МДП-транзисторе. — Изв вузов СССР. Радио-
электроника, 1980, №6, с. 97.
55 Лурье О Б. Усилители видеочастоты. — М.. Сов. радио 1961. — 678 с.
56 Фиш Программа ычисления интеграла свертки для калькулятора TI-59.
— Электроника, 1978 № 26 с. 57
57 Харкевич А А Основы радиотехники. — М.. Связьиздат, 1962 — 560 с.
58 Агаханян Т. М., Гаврилов Л. Е., Мищенко Б. Г. Основы наносекундной им-
пульсной техники — М.: Атомиздат, 1976. — 376 с.
59 Недолужко И. Г, Сергиенко Е. Ф Однопереходные транзисторы. — I..
Энергия, 1974. — 104 с.
60 Ерофеева И. А. Импульсные устройства на однопереходных транзисторах. —•
М : Связь, 1974. — 72 с.
61 Дьяконов В. П Анализ переходных процессов емкостного релаксатора на
лавинном транзисторе с учетом основных Факторов его инерционности. —
Радиотехника и электроника, 1979, №6, с. 1103.
62 Дьяконов В. П Импульсные устройства на интегральных микросхемах.''
— МЭИ, 1977. — 84 с.
63 Дьяконов В. П„ Лыков П. Г. Стабильный мостовой мультивибратор на ин-
тегральном операционном усилителе. — Изв. вузов СССР. Приборострое-
ние, 1979, № 4, с. 67.
64 Типонут, Стойциу. Импульсный генератор е внешним включением на одной
ИС. _____Электроника, 1978, №25, с. 68.
Кб Дьяконов в. П. Ждущие мультивибраторы на интегральных схемах. — При
боны и техника эксперимента, 1976, №3, с. 158.
56 А. с СССР № 539367. - БИ, 1976, № 46. о. 163.
61. Дьяконов В. П., Лыков П. Г. Высокостабильньк мультивибр 1торы на инте-
гральных микросхемах ТТЛ. — Приборы и техника эксперимента, 19^9.
№ 4, с. 141.
68. Шило В Л. Линейные интегральные схемы-. — M.i Gob. радио. 1979 --
368 с.
69. Дьякоиов В. П. Интегральные таймеры и их применение в импульсных уст-
ройствах. — Зарубежная радиоэлектроника, 1978, Ns 6, с. 48.
70. Алексенко А. Г. Основы микросхемотехники: Элементы морфологии микро-
электронной аппаратуры. — М.: Сов. радио, 1977. — 405 с.
71. Проектирование радиоэлектронных устройств на интегральных микросхе-
мах/ П. Ю. Астанин, В. И. Белицкий, В. В. Краскин и др.; Под ред. С. Я.
Шаца. — М.: Сов. радио, 1976. — 312 с.
72. Куценко А. В., Полосьянц Б. А., Широченков В. А. Импульсные устройства
на монолитных интегральных схемах. — Приборы и техника эксперимента,
1973, № 4, с. 7.
73. Трохименко Я. К., Каширский И. С., Ловкий В. К. Проектирование радио-
технических схем на инженерных ЭЦВМ. — Киев: Техника, 1976. — 272 с.
74. Чуа Л. О., Пен-Мин-Лин. Машинный анализ электронных схем.: Пер,.с
англ./ Под ред. В. Н. Ильина. — М.: Энергия, 1980. — 640 с.
75. Анисимов В. В., Белов Б. И., Норенков И. П. Машинный расчет элемен-
тов ЭВМ. — М.: Высшая школа, 1976. — 336 с.
76. Широков А. М. Надежность радиоэлектронных устройств. — М.: Высшая
школа, 1972. — 272 с.
77. Мартин Ф. Моделирование на вычислительных машинах. —М.: Сов. радио,
1972. — 28$ с.
78. Соучек В. Мини-ЭВМ в системах обработки информации: Пер. с англ./ Под
ред. Е. В. Дробова. — М.: Мир, 1976. — 520 с.
79. Сигорский В. П. Математический аппарат инженера. — Киев: Техника,.
1975. — 768 с.
80. Справочг и< по нелинейным схемам: Пер. с англ./ Под ред. Д. Шейнголда. -=
М.: Мир 1977. — 524 с.
КП. ДЬЯКОНОВ
РАСЧЕТ НЕЛИНЕЙНЫХ
И ИМПУЛЬСНЫХ
УСТРОЙСТВ
НА ПРОГРАММИРУЕМЫХ
МИКРОКАЛЬКУЛЯТОРАХ
Справочное пособие
МОСКВА «РАДИО И СВЯЗЬ» 1984
ББД 32.847.
ДЭЗ
УДК 621.374:681.321.0(035)
Дьяконов В. П.
ДЭЗ Расчет нелинейных и импульсных устройств на
программируемых микрокалькуляторах: Справ, посо-
бие. — М.: Радио и связь, 1984. — 176 с., ил.
70 к.
Описаны расчеты на микро-ЭВМ индивидуального пользования не-
линейных и импульсных устройств на современных полупроводниковых
приббрах и интегральных микросхемах. Дается программная реализация
таких расчетов на программируемых микрокалькуляторах «Электроника
БЗ-21», «Электроника БЗ-34», «Электроника МК-54», «Электроника МК-46»,
«Электроника МК-56» и настольной микро-ЭВМ «Электроника ДЗ-28». При-
ведено свыше 170 программ конкретных расчетов на этих ЭВМ.
Для широкого круга инженерно-технических работников.
2402020000-015 ББК 32.847
Д 046(01 )-84 6Ф2
РЕЦЕНЗЕНТЫ: ДОКТОР ТЕХН. НАУК ПРОФЕССОР Л. Я. НАГОРНЫЙ,
КАНД. ТЕХН. НАУК А. Я. АРХАНГЕЛЬСКИЙ
Редакция литературы по кибернетике и вычислительной технике
Владимир Павлович Дьяконов
РАСЧЕТ НЕЛИНЕЙНЫХ И ИМПУЛЬСНЫХ
УСТРОЙСТВ НА ПРОГРАММИРУЕМЫХ
МИКРОКАЛЬКУЛЯТОРАХ
Редактор И. И. Рюжииа
Обложка художника Г. С. Студеникиной
Художественный редактор Н. С. Шеин
Технический редактор Г. И. Колосова
Корректор А. Д. Халанская
ИБ № 621
Сдано в набор 27.05.83. Подписано а печать 9.04.84. Т-08539
Формат 60x907i6. Бумага кн.-журнальная. ~ Гарнитура литературная.
Печать высокая. Усл. печ. л. 11,0. Усл. кр.-отт. 11,25. Уч.-изд. л 14,28
Тираж 40 000 экз. Изд. № 20364. Зак. № 1639. Цена 70 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли
129041, Москва, Б. Переяславская ул., 46
© Издательство «Радио и связь», 1984