/














































































































































































































































Text
’.‘Л
6П4.6.08
Л54 УДК 621.9.62- 82
Рецензент инж. А. Н. Липатов
Лещенко В. А.
Л54 Гидравлические следящие приводы станков с про-
граммным управлением. М. «Машиностроение», 1975.
288 с., с ил.
В книге изложены принципы действия и построения схем гидравлических следящих приводов; показаны основные узлы гидравлических следящих приводов, их статические и динамические характеристики; рассмотрены вопросы повышения точности и устойчивости приводов, особенности формирования структуры электрогидравлических следящих приводов объемно-дроссельного регулирования.
Книга предназначена для инженерно-технических работников, занятых в области создания и эксплуатации станков с программным управлением.
„ 31303-140 л------------
038(01)-75
140-75
6П4.6.08
Виктор Андреевич Лещенко
ГИДРАВЛИЧЕСКИЕ СЛЕДЯЩИЕ ПРИВОДЫ СТАНКОВ
С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
Редакторы издательства В. В. Глебова, А. И. Коновалов Технический редактор Л. А. Макарова. Корректор О. Е. Мишина Художественный редактор В. В. Лебедев Переплет художника А. Я. Михайлова
Сдано в набор 24/VII 1974 г. Подписано к печати 14/1 1975 г. Т-00419
Формат 60 X 90V16. Бумага типографская № 1. Усл. печ. л. 18,0. Уч.-изд. л. 19,9. Тираж 10 000 экз. Заказ 1919. Цена 1 р. 54 к. Отпечатано с применением новой технологии изготовления текстовых диапозитивов электрографическим способом для офсетной печати
Издательство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., дом 3 Экспериментальная тип. ВНИИ полиграфии Госкомиздата Совета Министров СССР Москва, К-51, Цветной бульвар, 30
Л
31303-140
038(01)-75
140-75
© Издательство «Машиностроение», 1975 г.
ОГЛАВЛЕНИЕ
Введение ........................................................... 5
Глава I. Принцип действия гидравлического следящего привода . . 7
1. Принцип действия простейшего гидравлического следящего привода с копировальным управлением ... 7
2. Погрешность воспроизведения, нечувствительность и устойчивость привода. Основные понятия .... 9
3. Принцип действия электрогидравлического следящего привода с копировальным управлением .................. 14
4. Принцип действия гидравлического следящего привода с ЧПУ..................................................17
5. Классификация гидравлических следящих приводов . 24
Глава II. Построение схем гидравлических следящих приводов дроссельного регулирования с копировальным управлением . . 27
6. Однокоординатные однокаскадные приводы .... 27
7. Однокоординатные многокаскадные приводы ... 42
8. Многокоординатные приводы. Масштабное копирование 44
Глава III. Построение схем гидравлических следящих приводов с ЧПУ 51
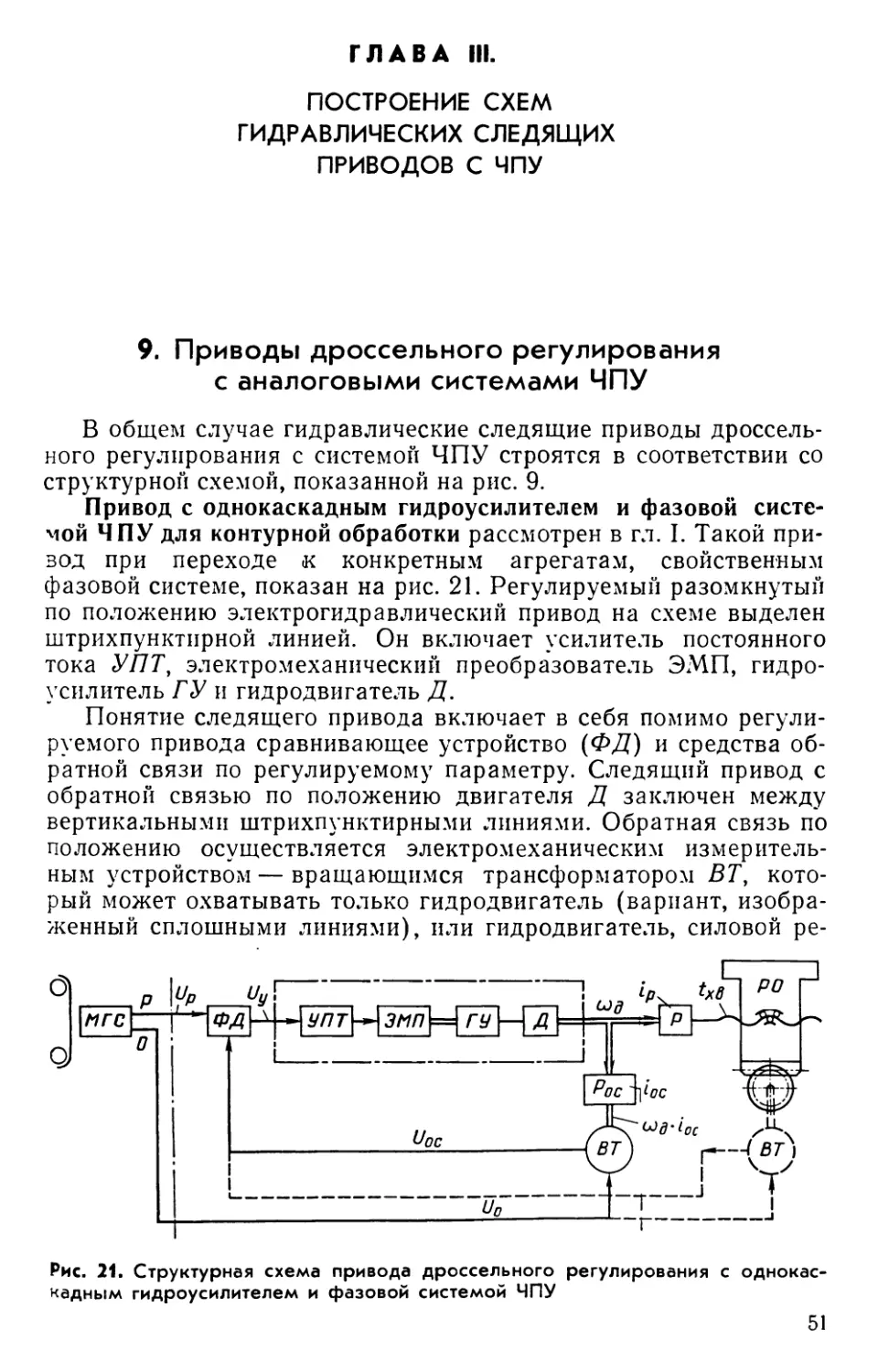
9. Приводы дроссельного регулирования с аналоговыми
системами ЧПУ........................................51
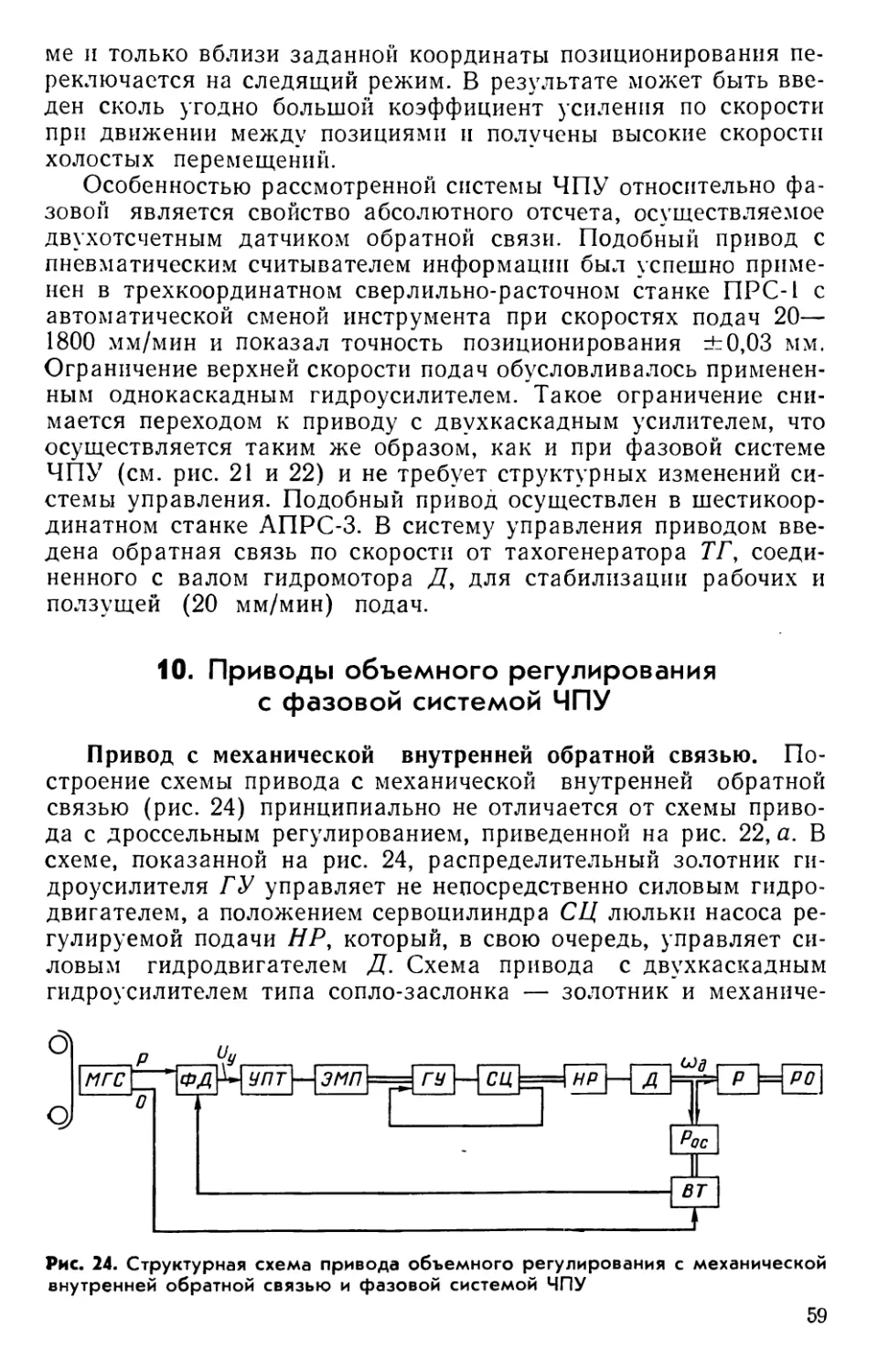
10. Приводы объемного регулирования с фазовой системой ЧПУ.....................................................59
11. Приводы дроссельного регулирования с импульсной системой ЧПУ...............................................67
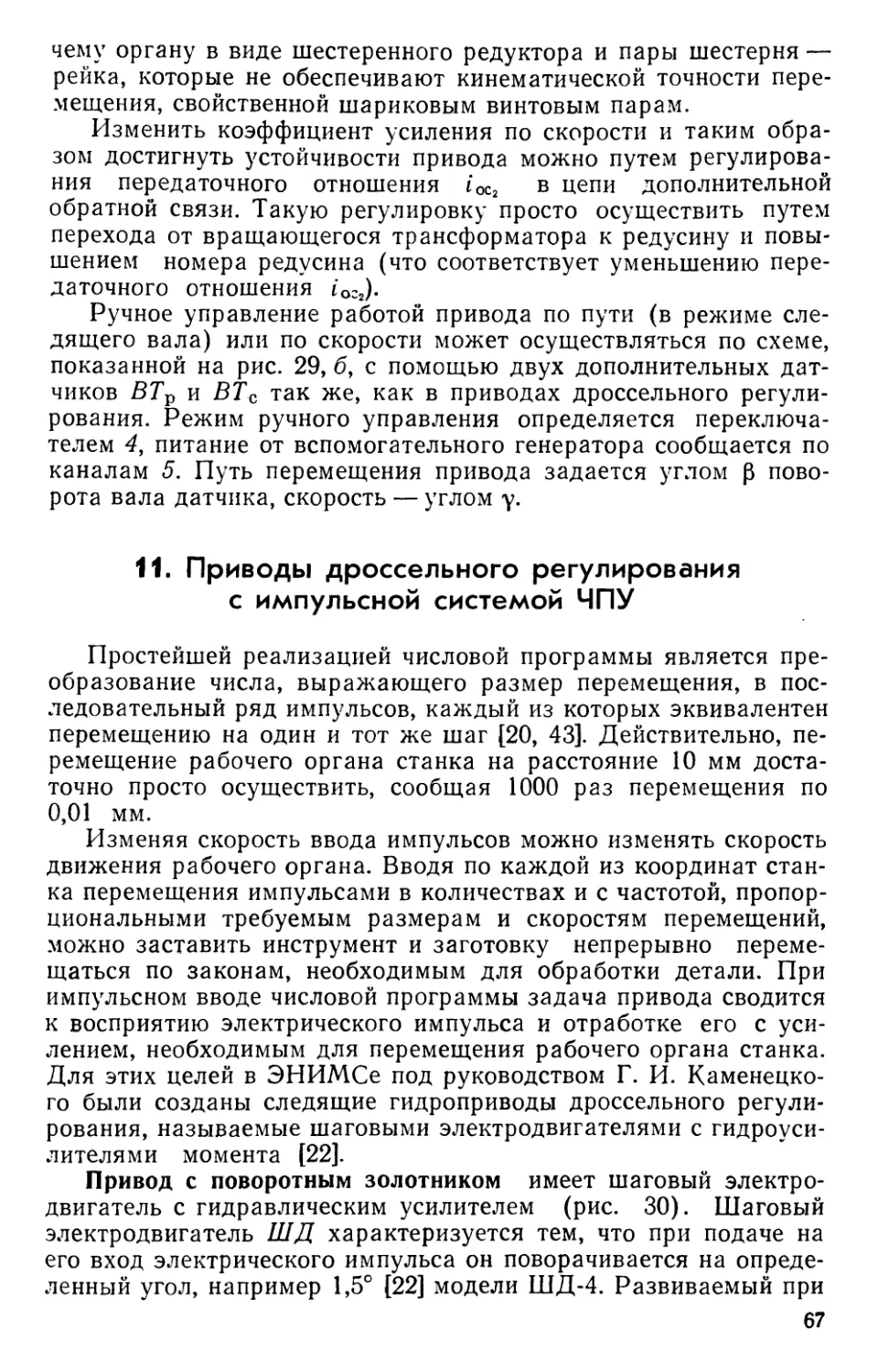
12. Приводы дроссельного регулирования релейного управления с кодовой системой ЧПУ............................73
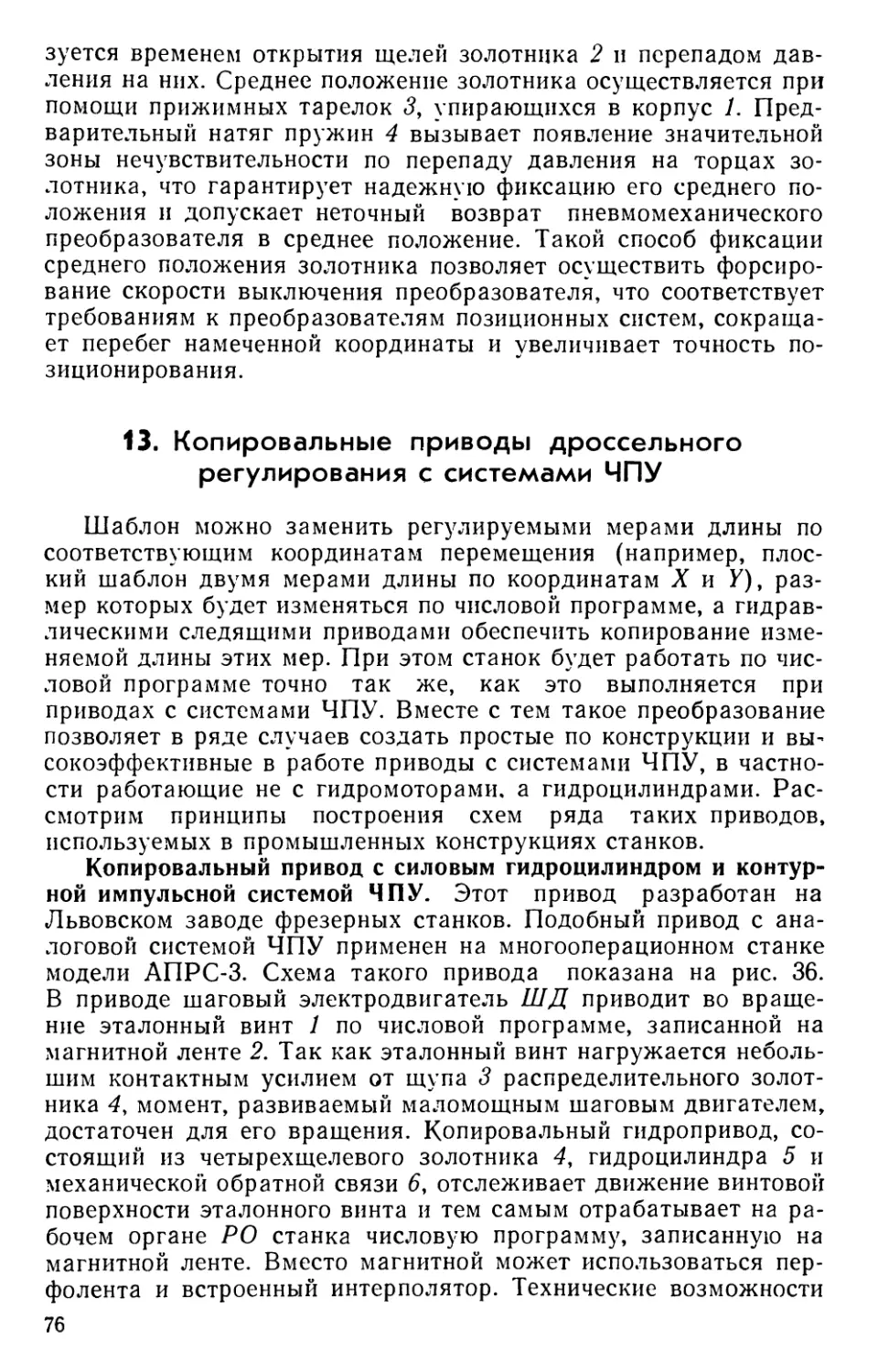
13. Копировальные приводы дроссельного регулирования с системами ЧПУ.........................................76
Глава IV. Золотниковые элементы управления в гидравлических следящих приводах......................................................82
14. Основные виды статических и динамических характеристик гидропривода и его элементов........................82
15. Однокаскадные золотниковые гидравлические усилители. Конструкция и основные характеристики ... 87 16. Конструкции электрогидравлических преобразователей — усилителей, построенных на основе однокаскадных золотниковых гидроусилителей. Электрогидравличе-ские усилители момента..................................122
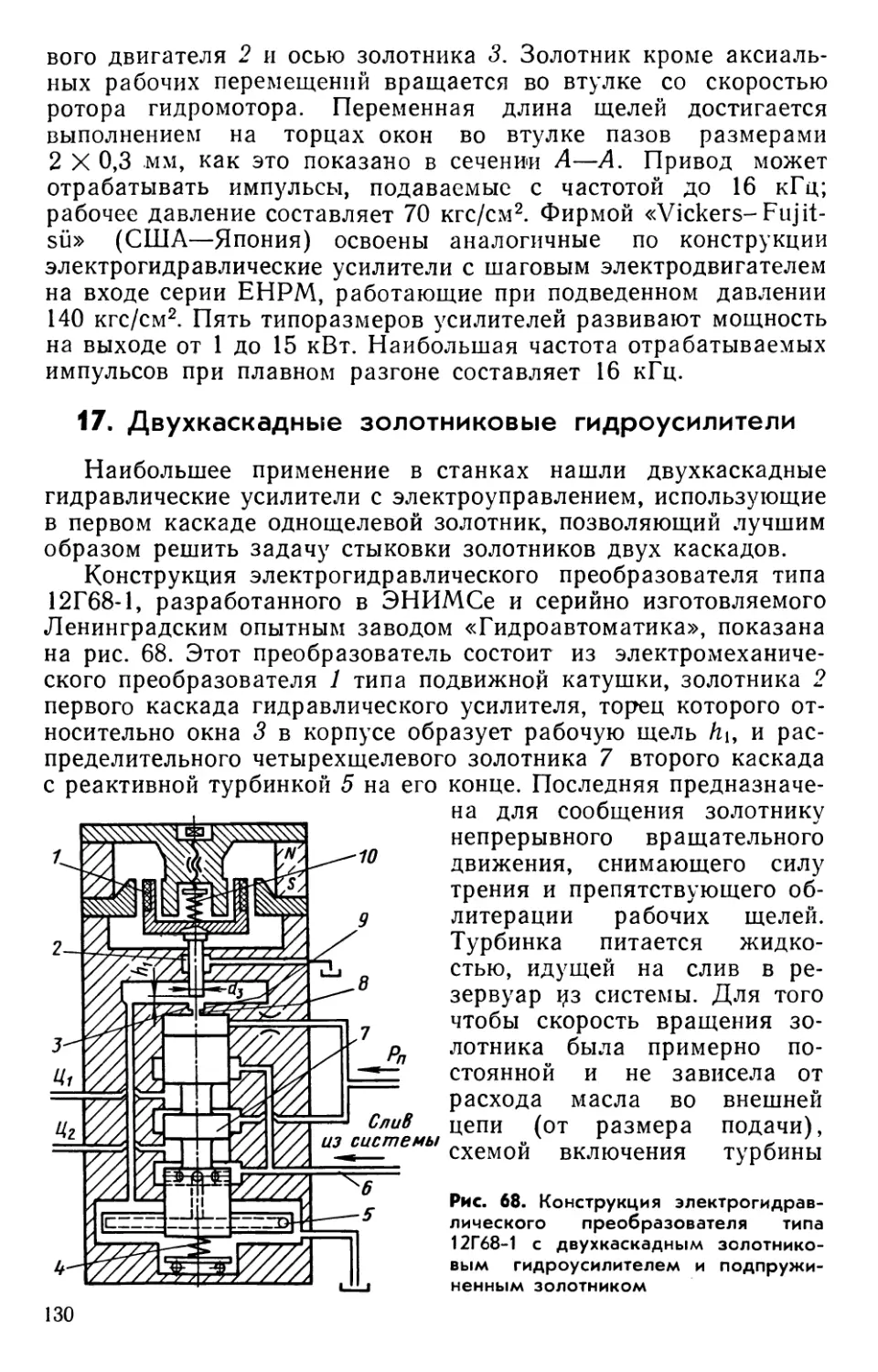
17. Двухкаскадные золотниковые гидроусилители . . .130
Глава V. Элементы управления с сопло-заслонкой в первом каскаде усиления...........................................................133
18. Гидроусилитель сопло-заслонка.......................133
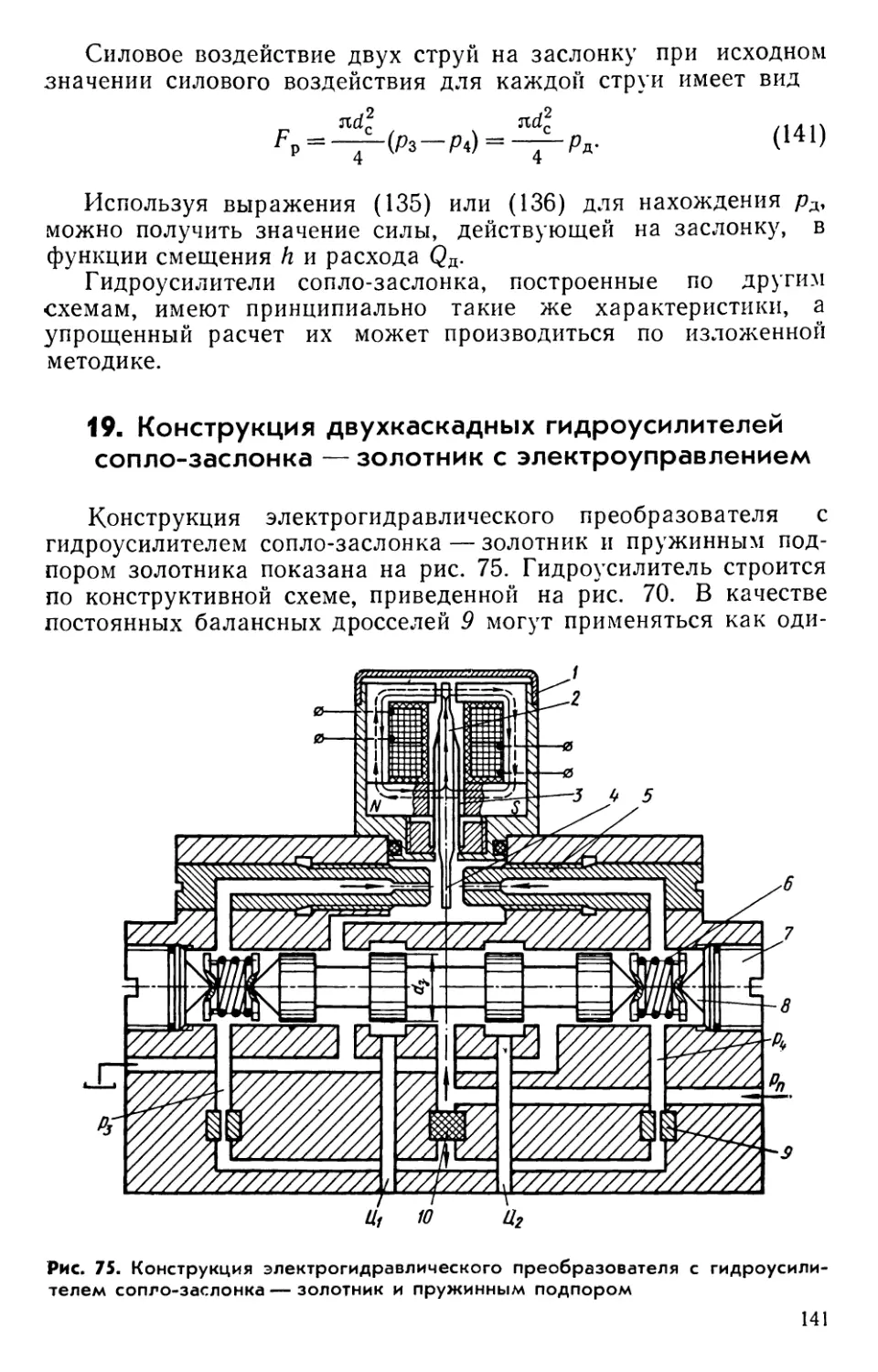
19. Конструкция двухкаскадных гидроусилителей сопло-заслонка— золотник с электроуправлением . . .141
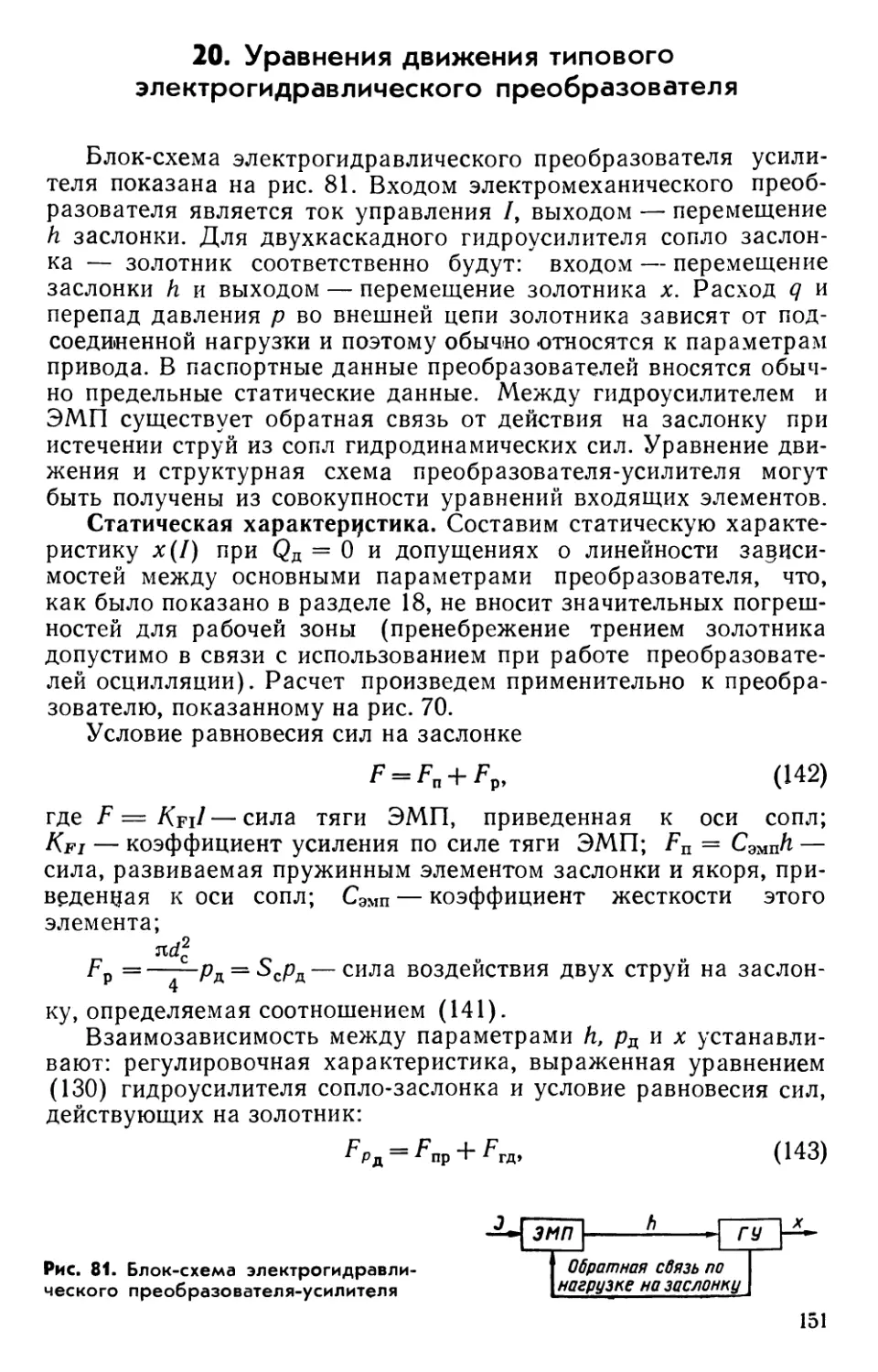
20. Уравнения движения типового электрогидравлического преобразователя.........................................151
21. Основные характеристики электрогидравлических преобразователей ..........................................156
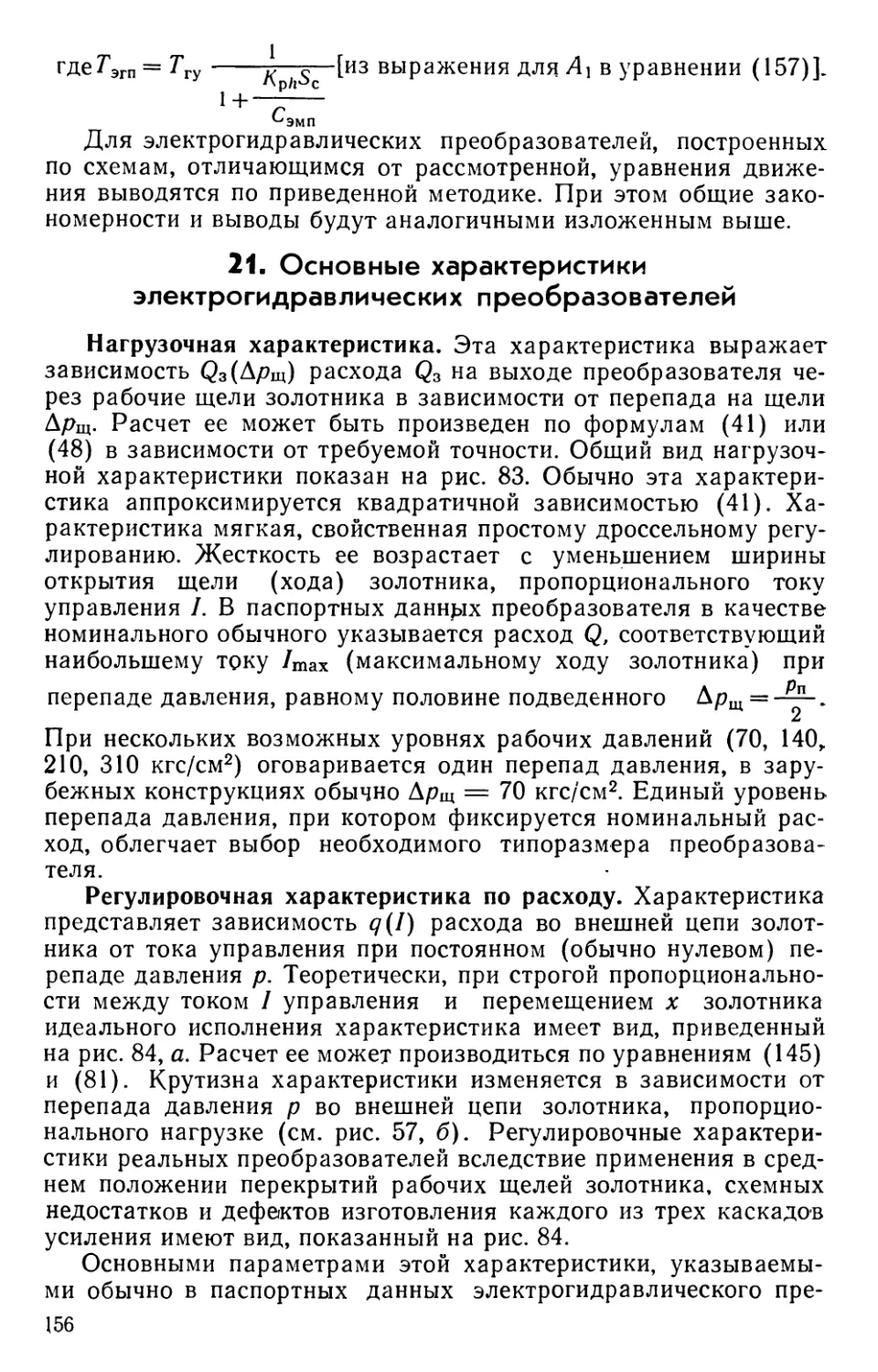
Глава VI. Силовые элементы гидравлических следящих приводов . 163 22. Гидроцилиндры. Модуль объемной упругости реальной жидкости ...........................................................163
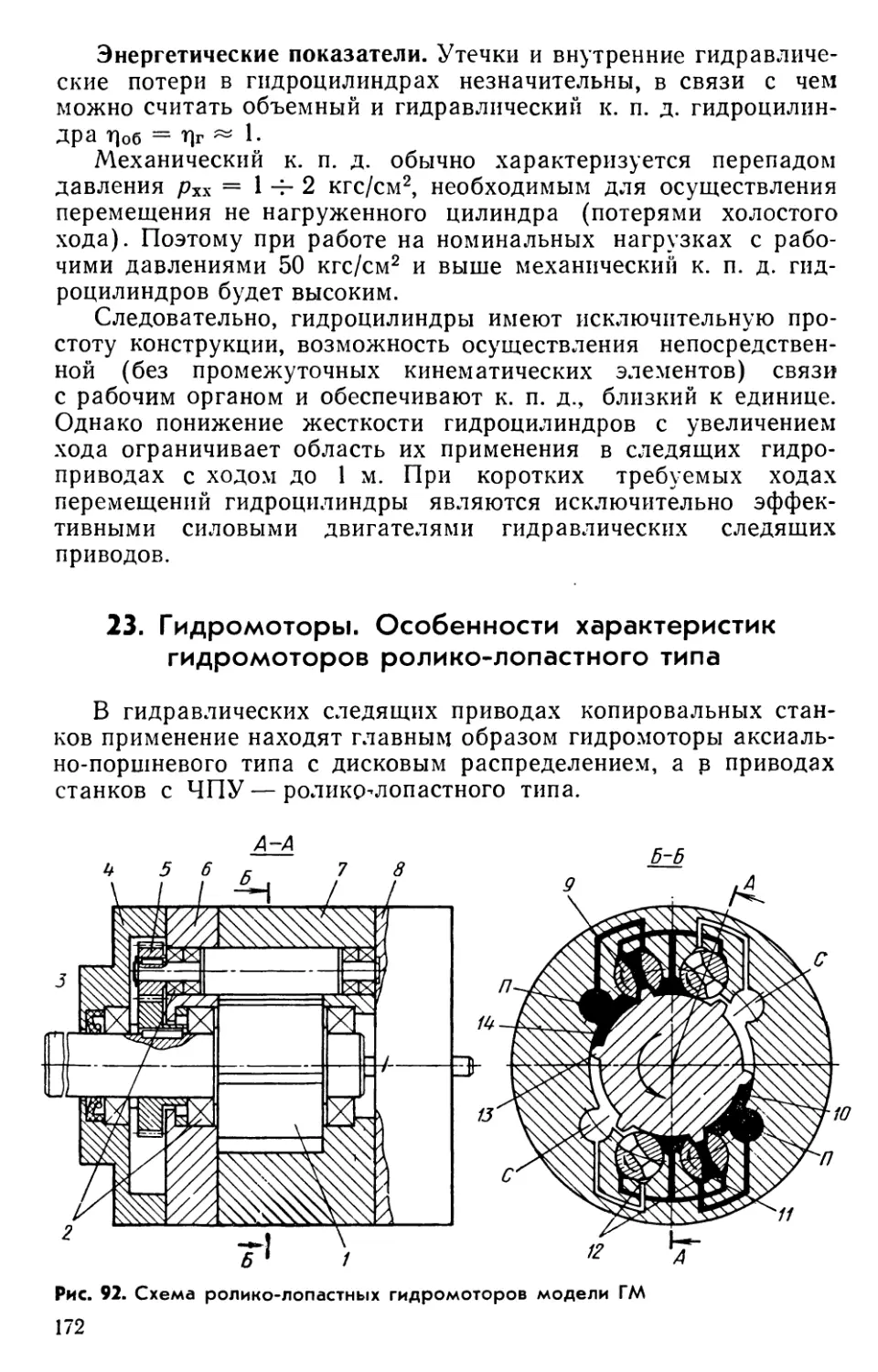
23. Гидромоторы. Особенности характеристик гидромоторов ролико-лопастного типа..................................172
24. Насосные установки для приводов дроссельного регулирования. Автоматическое регулирование подачи насоса при постоянном давлении ...............................186
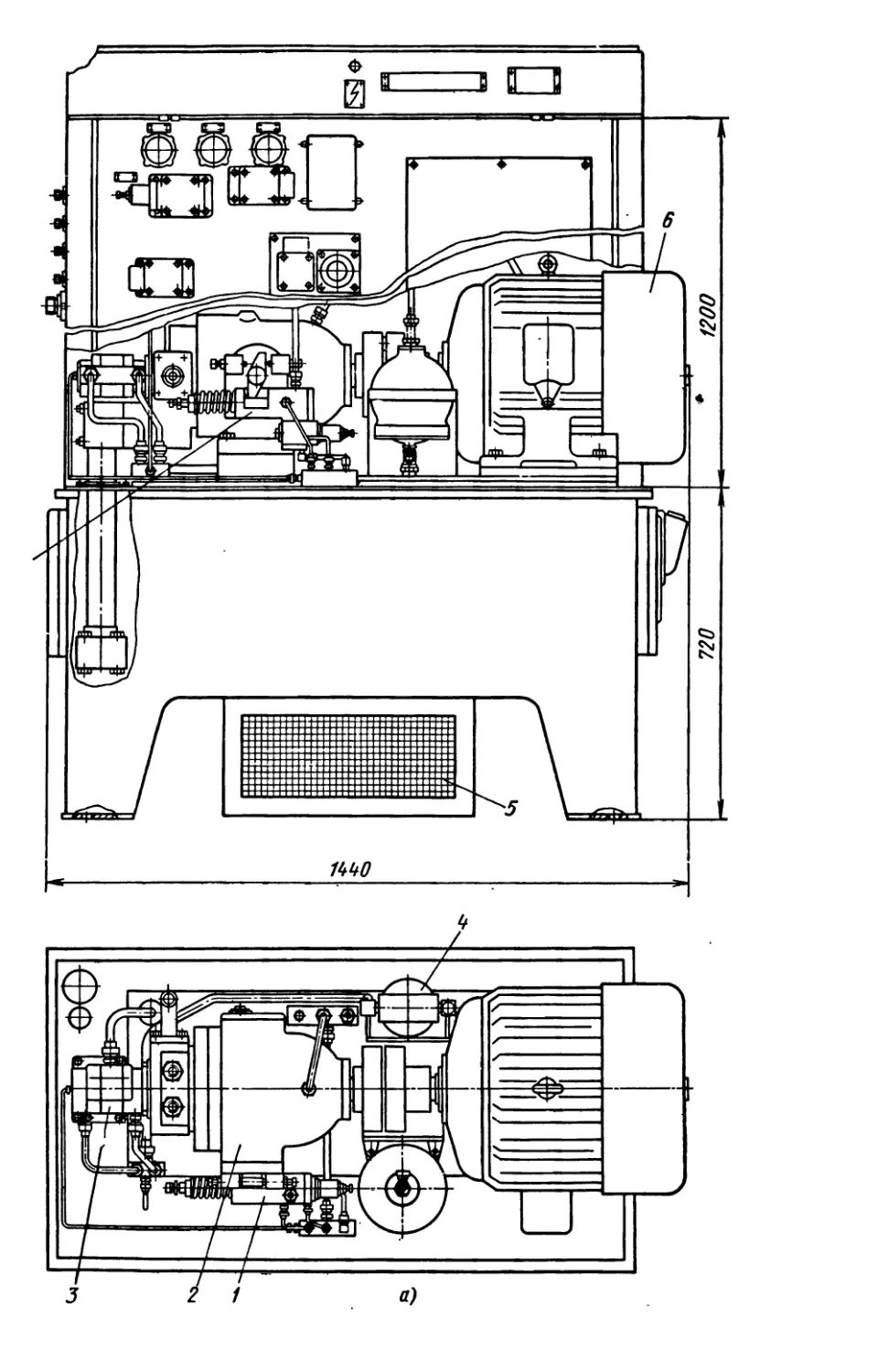
25. Насосные установки для приводов объемного регулирования ................................................194
Глава VII. Точность воспроизведения и устойчивость одноконтурных гидравлических следящих приводов дроссельного регулирования .............................................................199
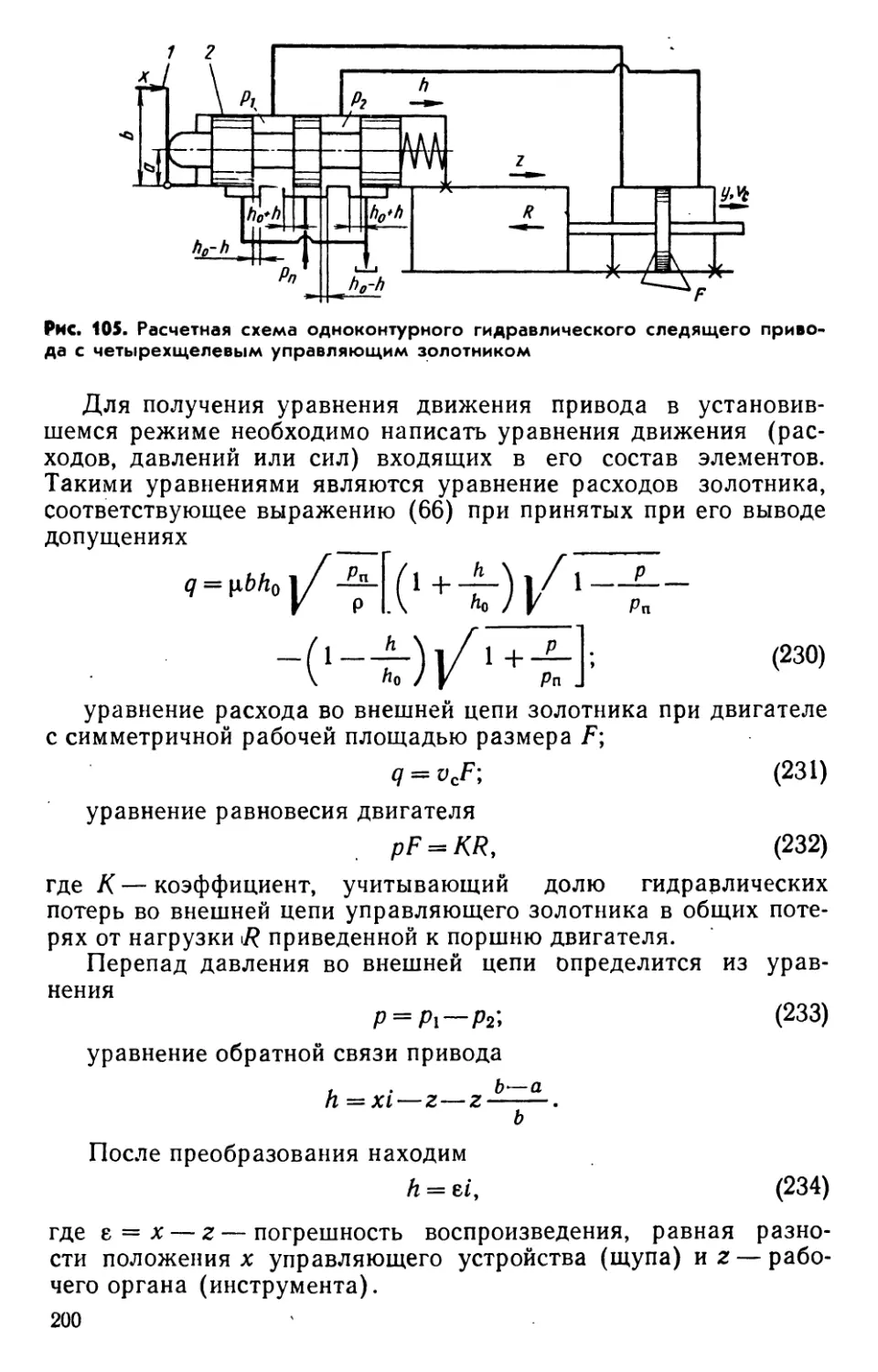
26. Погрешность воспроизведения и нечувствительность в установившемся режиме движения. Коэффициент полезного действия........................................199
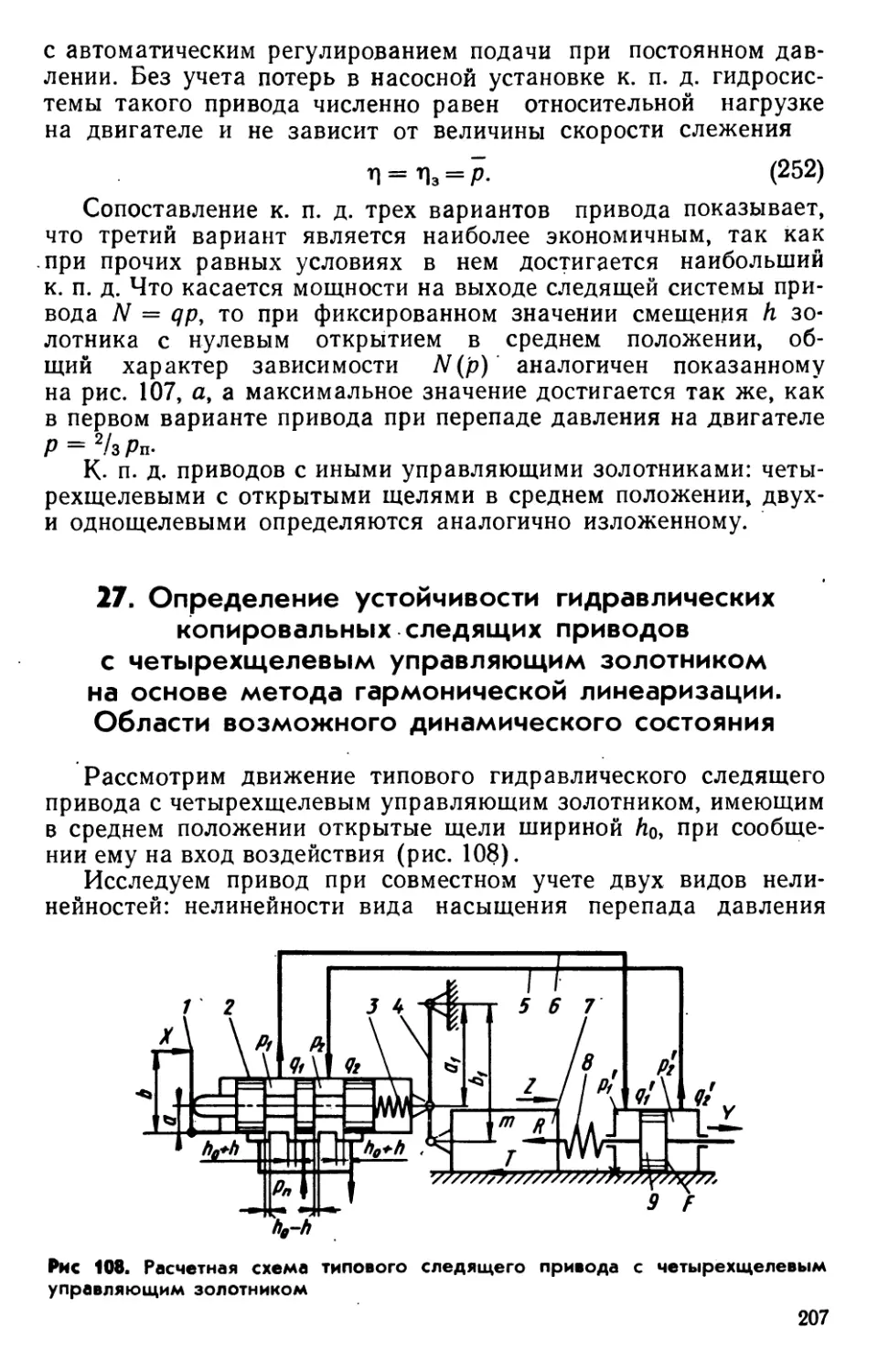
27. Определение устойчивости гидравлических копировальных следящих приводов с четырехщелевым управляющим золотником на основе метода гармонической линеаризации. Области возможного динамического состояния ....................................................207
28. Влияние основных параметров на устойчивость гидравлических следящих приводов..............................223
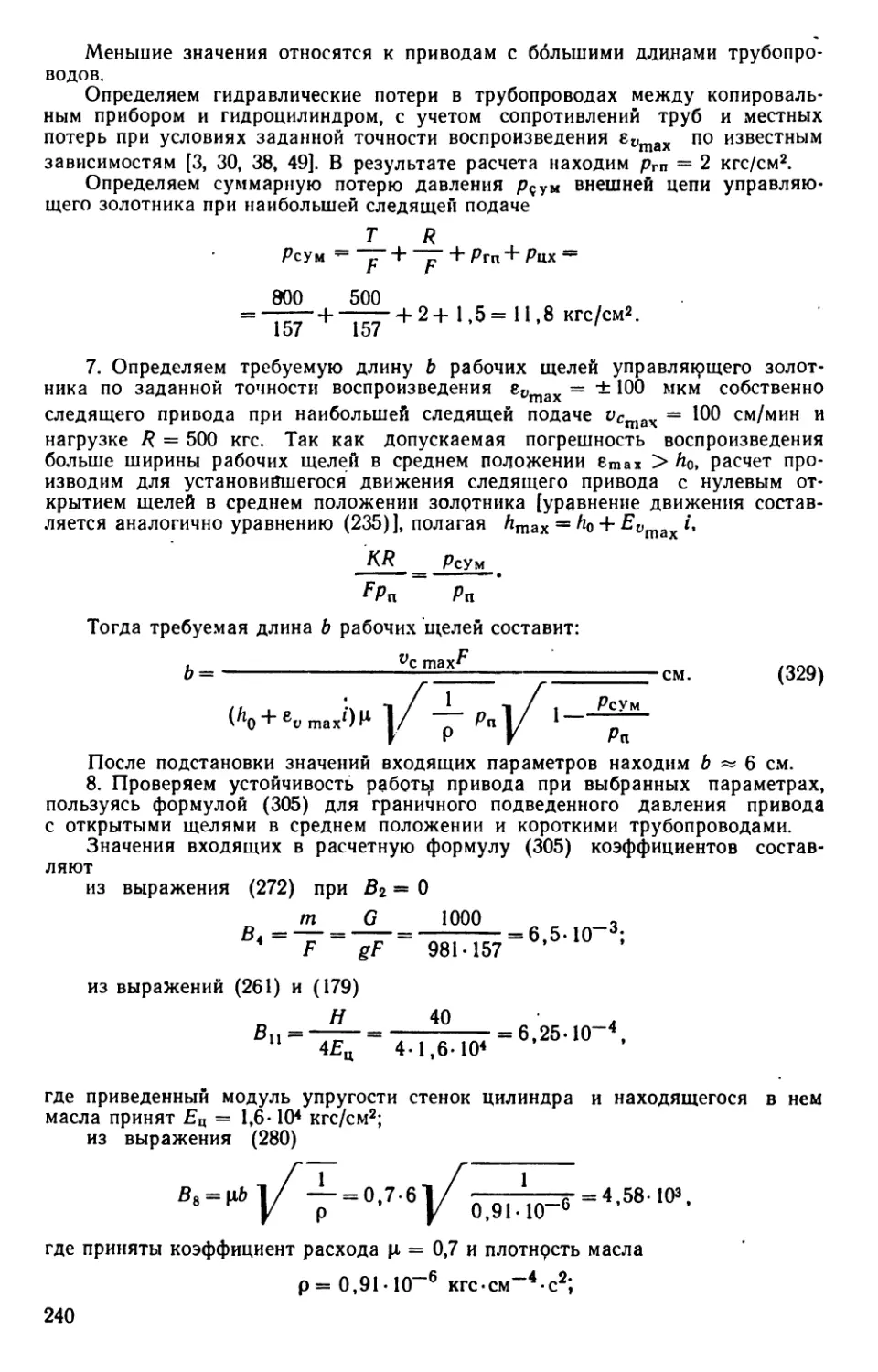
29. Сравнение качества приводов, построенных по различным схемам. Особенности применения гидромоторов . 232 30. Методика расчета основных параметров одноконтурных гидравлических следящих приводов........................235
Глава VIII. Пути улучшения статических и динамических свойств гидравлических следящих приводов. Безредукторные приводы станков с ЧПУ......................................................243
31. Методы повышения точности и устойчивости одноконтурных гидравлических следящих приводов. Введение нелинейностей...........................................243
32. Повышение точности и жесткости гидравлических следящих приводов введением обратной связи по скорости 249 33. Некоторые вопросы динамики гидравлических следящих приводов с обратной связью по скорости .... 34. Особенности безредукторных гидравлических следящих 261 приводов с гидромоторами и конструирование электрогидравлических приводов для станков с ЧПУ . . • 270
35. Выбор основных параметров электрогидравлических следящих приводов с обратной связью по скорости . • 280
Список литературы ................................................. 286
ВВЕДЕНИЕ
Начало промышленного применения следящего привода в станках относится к 1940—1950 гг. В этот период на основе следящего привода были разработаны автоматизированные копировальные станки, которые по сравнению с обычным универсальным оборудованием позволили значительно снизить трудоемкость изготовления деталей. К этому времени относится также разработка основ теории гидравлических следящих приводов в сочетании с копировальными системами управления.
Применение следящих приводов значительно расширилось в 1950—1960 гг. в связи с появлением станков с числовым программным управлением (ЧПУ). При переходе от копировального к числовому программному управлению в системе управления изменился программоноситель (шаблон заменила магнитная лента или перфолента) и вид устройств, преобразующих заданную программу во входные сигналы управления следящим приводом.
Количество внедренных в промышленность СССР и США станков с ЧПУ начало быстро возрастать начиная с 1958— 1960 гг., причем они получили широкое распространение практически во всех отраслях машиностроения. Применение станков с ЧПУ дало значительный экономический эффект и позволило высвободить большое количество универсального оборудования. Эффективность станков с ЧПУ по отечественным и зарубежным данным характеризуется следующим: рост производительности— на 200—600%; количество заменяемых универсальных станков 3—8; повышение времени резания в общем времени обработки до 50—80% (универсальные 15—35%); сокращение сроков подготовки производства и технологической оснастки; уменьшение брака; обеспечение взаимозаменяемости.
Опыт использования станков с ЧПУ в промышленности показал, что рациональная область их применения расширяется при усложнении характера обработки: повышении точности, ухудшении условий обрабатываемости и т. п. Важным аспектом эффективности использования станков с ЧПУ является сокращение потребности в высококвалифицированных станочниках — универсалах.
Применение оборудования с ЧПУ позволяет по-новому организовать производство. Можно выделить три основных направления научной организации труда при внедрении станков и обо
рудования с ЧПУ— привлечение инженерного состава к непосредственному процессу изготовления деталей на станке, коренное изменение характера многостаночного обслуживания, осуществление управления цехом станков с ЧПУ от одного пульта и обеспечение круглосуточного использования оборудования при работе обслуживающего персонала главным образом в одну, наиболее продуктивную смену на основе создания автоматических линий из станков с ЧПУ и т. п. Числовое программное управление, элементом которого является следящий привод, стало универсальным средством автоматизации станков и оборудования широкого применения. В результате этого следящий привод из специального устройства относительно немногочисленных копировальных станков превратился в настоящее время в универсальное средство приведения в движение рабочих органов станков и оборудования. Можно ожидать, что следящий привод станет доминирующим приводом станков и оборудования.
Из известных следящих приводов (электрического, гидравлического, пневматического) в отечественных копировальных станках с числовым программным управлением наиболее широкое применение нашел гидравлический привод (термин «гидравлический привод» включает понятие привода с исполнительным гидродвигателем, который может иметь различные средства управления: механические, электрические, пневматические и др,).
Гидропривод обладает малой инерционностью подвижных частей, что обеспечивает его высокое быстродействие и дает возможность быстро реверсировать и тормозить станок. Кроме того, привод имеет небольшие массу и габаритные размеры (в 3—10 раз меньше электропривода); обеспечивает плавный ход рабочих органов машин, особенно при использовании силовых гидроцилиндров; отличается долговечностью механизмов вследствие самосмазываемости; имеет простую и надежную конструкцию гидромеханических устройств, позволяющую произвести его отладку или устранить неисправности, возникающие в процессе эксплуатации. Подобно тому, как переход от шаблона к числовой программе кардинально изменил структуру системы управления, переход от следящего копировального к следящему приводу с числовым программным управлением повлек изменение структуры привода, связанной с введением преобразователей видов энергий, новых внутренних связей, новых конструктивных решений и т. п. При общем принципиальном подобии работы следящего привода в условиях копировального и числового программного управления изменились методы выбора основных параметров, расчета оптимальных условий работы и т. п.
В связи с новыми требованиями к следящим гидроприводам металлообрабатывающих станков в данной работе особое внимание уделяется средствам повышения точности, быстродействия, экономичности приводов и надежности их работы, а также созданию прямых безредукторных приводов подач.
ГЛАВА I.
ПРИНЦИП ДЕЙСТВИЯ ГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА
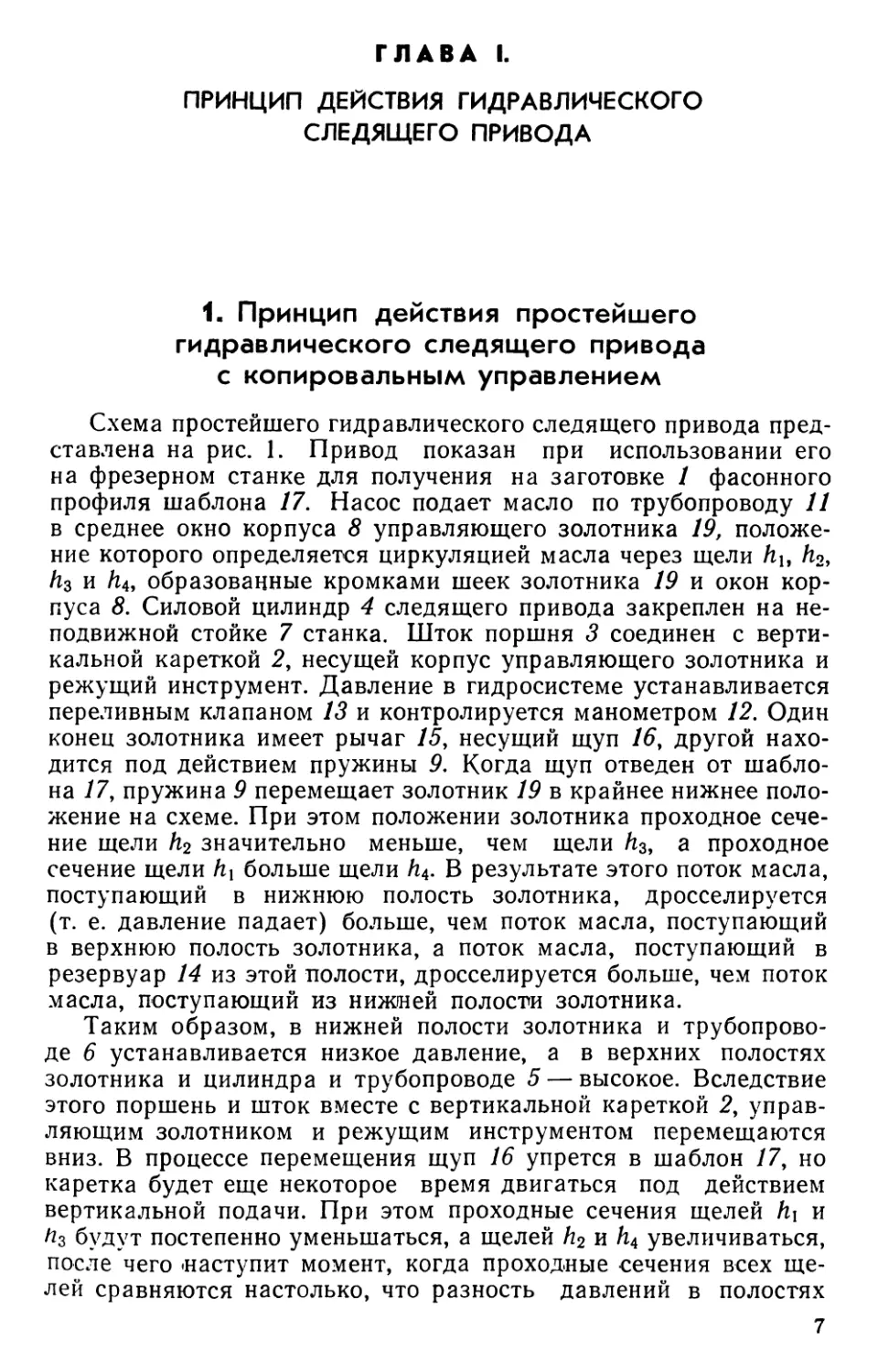
1- Принцип действия простейшего гидравлического следящего привода с копировальным управлением
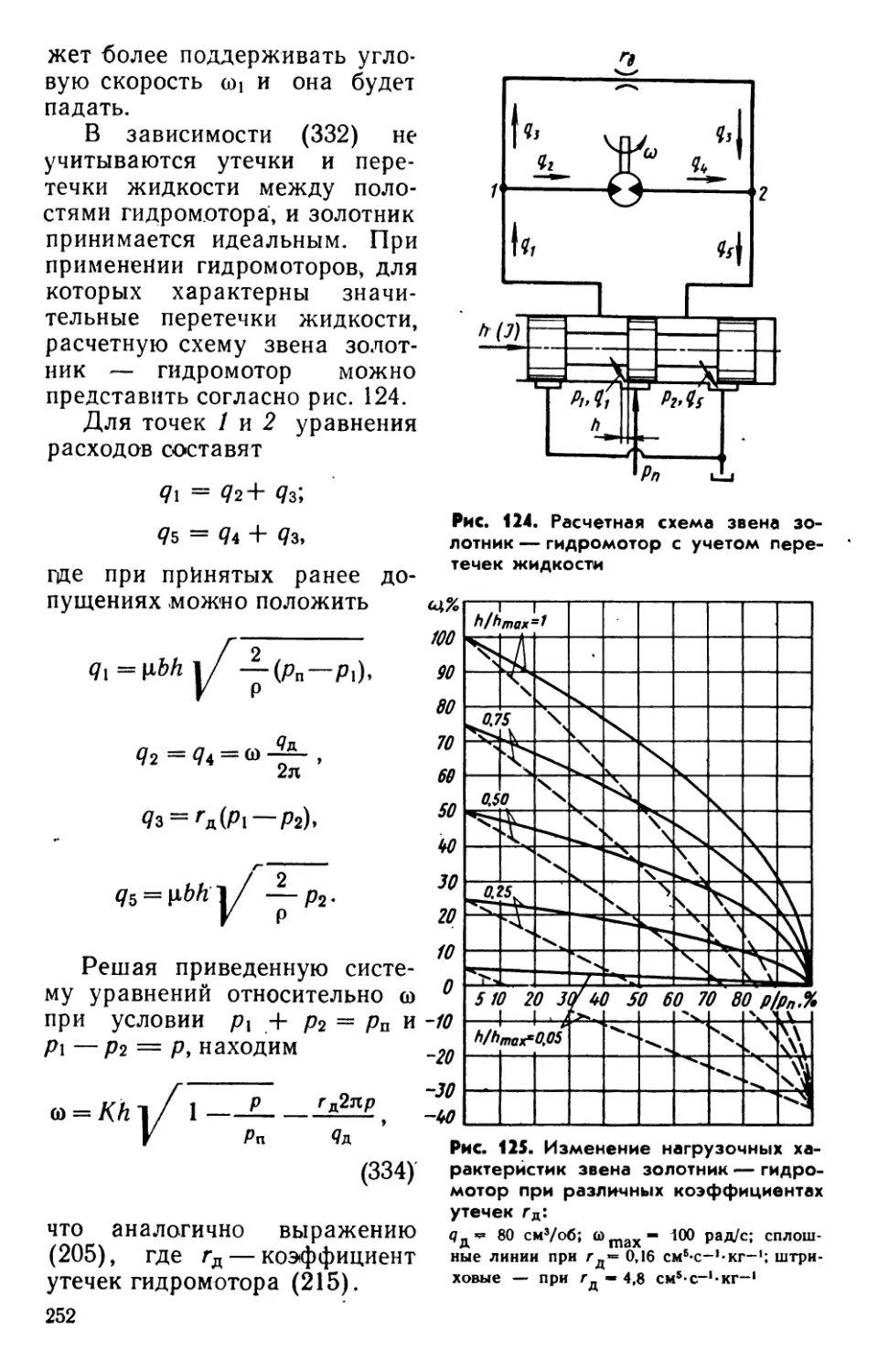
Схема простейшего гидравлического следящего привода представлена на рис. 1. Привод показан при использовании его на фрезерном станке для получения на заготовке 1 фасонного профиля шаблона 17. Насос подает масло по трубопроводу 11 в среднее окно корпуса 8 управляющего золотника 19, положение которого определяется циркуляцией масла через щели йь й2, й3 и й4, образованные кромками шеек золотника 19 и окон корпуса 8. Силовой цилиндр 4 следящего привода закреплен на неподвижной стойке 7 станка. Шток поршня 3 соединен с вертикальной кареткой 2, несущей корпус управляющего золотника и режущий инструмент. Давление в гидросистеме устанавливается переливным клапаном 13 и контролируется манометром 12. Один конец золотника имеет рычаг 15, несущий щуп 16, другой находится под действием пружины 9. Когда щуп отведен от шаблона 17, пружина 9 перемещает золотник 19 в крайнее нижнее положение на схеме. При этом положении золотника проходное сечение щели h2 значительно меньше, чем щели й3, а проходное сечение щели h\ больше щели й4. В результате этого поток масла, поступающий в нижнюю полость золотника, дросселируется (т. е. давление падает) больше, чем поток масла, поступающий в верхнюю полость золотника, а поток масла, поступающий в резервуар 14 из этой полости, дросселируется больше, чем поток масла, поступающий из нижней полости золотника.
Таким образом, в нижней полости золотника и трубопроводе 6 устанавливается низкое давление, а в верхних полостях золотника и цилиндра и трубопроводе 5— высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 2, управляющим золотником и режущим инструментом перемещаются вниз. В процессе перемещения щуп 16 упрется в шаблон 17, но каретка будет еще некоторое время двигаться под действием вертикальной подачи. При этом проходные сечения щелей ftj и /?з будут постепенно уменьшаться, а щелей й2 и й4 увеличиваться, после чего наступит момент, когда проходные сечения всех щелей сравняются настолько, что разность давлений в полостях
Рис. 1. Схема простейшего гидравлического следящего привода с копировальным управлением
золотника и гидроцилиндра окажется недостаточной для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится.
Если столу 18 сообщить от гидроцилиндра 20 постоянную скорость Уз, то шаблон, при повышающемся профиле, будет перемещать щуп и золотник через среднее положение вверх до тех пор, пока проходные сечения щелей h2 и h4 не увеличатся, а щелей /?1 и йз не уменьшатся настолько, что разница давлений в полостях гидроцилиндра станет достаточной для преодоления силы сопротивления движению. Это перемещение, совершаемое по команде управляющего золотника, немедленно передается ему же с помощью обратной связи, осуществленной в данном случае закреплением корпуса управляющего золотника непосредственно на вертикальной каретке. Обратная связь ослабляет командный сигнал золотника, снижая его до нуля при среднем положении золотника.
При понижении профиля шаблона щуп и золотник под действием пружины 9 будут перемещаться вниз от среднегр положения до тех пор, пока проходные сечения щелей h\ и Аз не увеличатся, а щелей h2 и h4 не уменьшатся настолько, что в полостях гидроцилиндра разница давлений станет достаточной для преодоления сопротивления движению,, и тогда вертикальная каретка начнет перемещаться вниз. Таким образом, совокупность продольной скорости Уз шаблона и заготовки и вертикальной скорости ус
(скорость слежения) щупа и режущего инструмента обеспечивает воспроизведение профиля шаблона на заготовке. При этом щуп, обкатывая контур шаблона, находится с ним в постоянном контакте.
Для ручного управления отводом вверх фрезы от заготовки и щупа от шаблона служит рукоятка 10.
2. Погрешность воспроизведения, нечувствительность и устойчивость привода.
Основные понятия
Из принципа действия схемы, показанной на рис. 1, следует, что чем круче подъем профиля шаблона, определяемый углом р между касательной к профилю шаблона в данной точке и направлением скорости задания, и больше скорость задания, тем больше вертикальная скорость слежения и, следовательно, тем больший поток масла будет направляться золотником, например, в верхнюю полость гидроцилиндра и отводиться из нижней полости в резервуар, а значит, тем большими должны быть разность проходных сечений щелей й2, йз и й4, йь а также величина смещения золотника от нейтрального положения. Таким обра* зом, силовой гидроцилиндр следящего привода приходит в движение только тогда, когда управляющий золотник выходит из нейтрального положения, в результате чего возникает погреш* ность воспроизведения (копирования).
Величина погрешности воспроизведения зависит от расстояния, на которое должен сместиться золотник от нейтрального положения, для того чтобы создались необходимая разность давлений в полостях гидроцилиндра и необходимая скорость его перемещения, так как в процессе обработки на такое же расстояние смещаются друг относительно друга щуп и режущий инструмент, что вызывает отличие профиля обработанной поверхности от контура шаблона. Следовательно, чем больше скорость слежения vc и нагрузка R на двигателе, тем больше величина погрешности следящего привода, а значит и погрешность копирования, кроме того, сила сухого трения в исполнительном органе изменяется в зависимости от величины и знака скорости слежения, что обусловливает образование зоны нечувствительности следящего привода, существенно влияющей на качество (огранку, ступенчатость) копируемой поверхности.
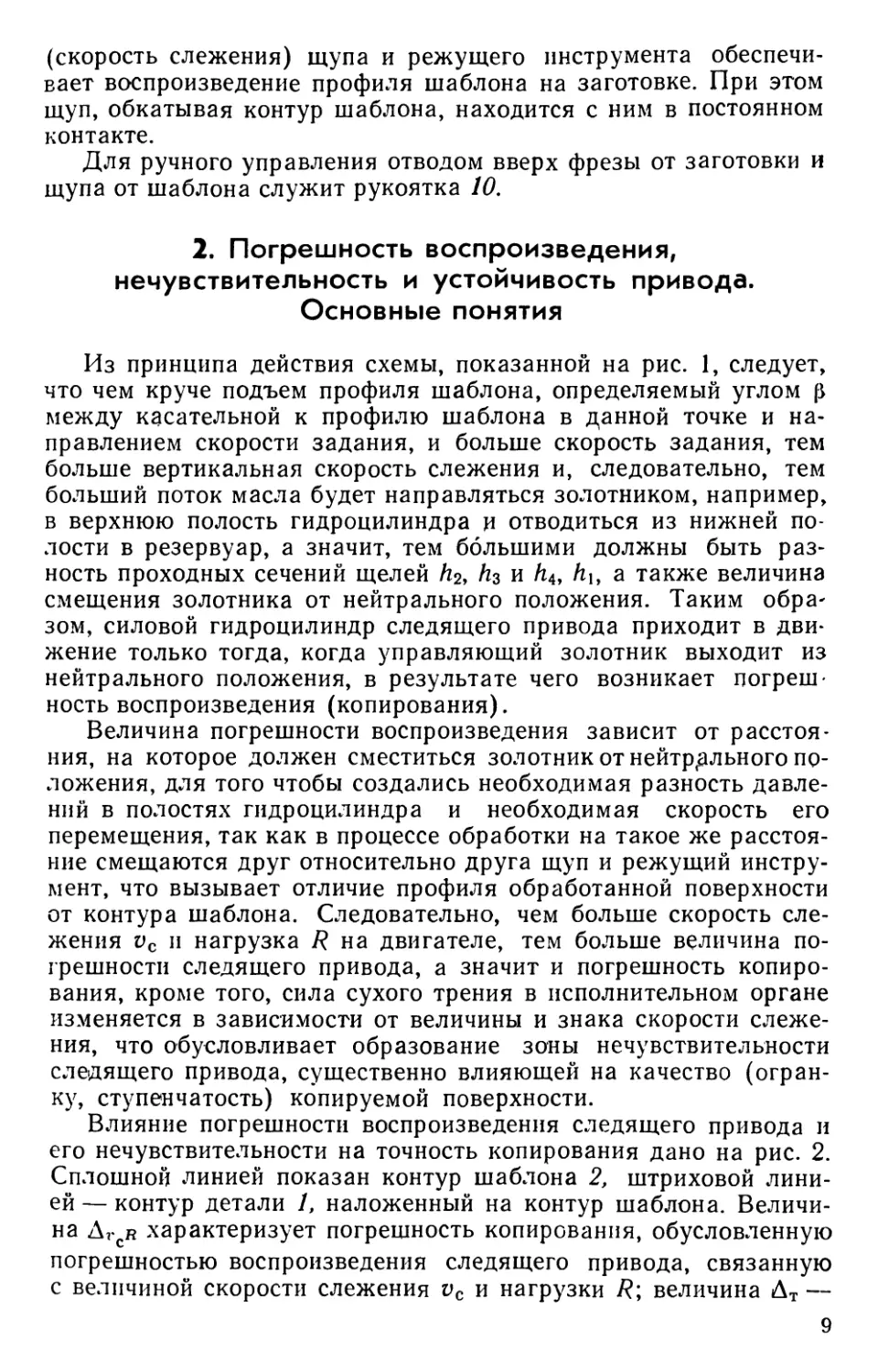
Влияние погрешности воспроизведения следящего привода и его нечувствительности на точность копирования дано на рис. 2. Сплошной линией показан контур шаблона 2, штриховой линией — контур детали 1, наложенный на контур шаблона. Величина Лгся характеризует погрешность копирования, обусловленную погрешностью воспроизведения следящего привода, связанную с величиной скорости слежения vc и нагрузки R; величина Дт —
Рис. 2. Отличие профиля изделия от профиля .шаблона в результате погрешности воспроизведения следящего привода и его нечувствительности
погрешность копирования, обусловленная нечувствительностью следящего привода в результате силы сухого трения.
Таким образом, в результате погрешности следящего привода, пропорциональной величине скорости слежения, контур детали получается как бы сдвинутым относительно контура шаблона в направлении, обратном направлению скорости задания и$. Правильный выбор следящего привода заключается в том, чтобы при заданных режимах работы станка ограничить погрешность воспроизведения и нечувствительность привода требуемыми пределами.
В описанной выше работе простейшего гидравлического следящего привода не учитывалась инерция подвижных элементов привода, например вертикальной каретки, а также упругость пе-редающих движение звеньев, например масла в гидросистеме привода. Однако силы инерции и упругость существенно влияют на движение привода в процессе восстановления равновесия и обусловливают возможность возникновения колебаний относительно положения равновесия. Рассмотрим работу следящего привода, учитывая влияние упругости и сил инерции.
Как уже указывалось, при автоматической вертикальной подаче на шаблон наступает такой момент, когда щуп упирается в шаблон и управляющий золотник занимает нейтральное положение. При этом положении золотника проходные сечения щелей /г2, йз и Ль /г4, а также давление в полостях гидроцилиндра уравниваются и движение вертикальной каретки должно было бы прекратиться (см. рис. 1). Однако вследствие инерции масс и упругости масла в гидроцилиндре вертикальная каретка может продолжать опускаться, несмотря на то, что давление в нижней полости будет возрастать, а в верхней полости уменьшаться.
Движение вертикальной каретки прекратится, когда золотник сместится выше нейтрального положения. В результате смещения золотника выше нейтрального положения давление в трубопроводе 6 и нижней полости гидроцилиндра увеличится, а в трубопроводе 5 и верхней полости уменьшится, вследствие чего к поршню гидроцилиндра будет приложена сила, направленная вверх, которая заставит поршень и шток вместе с вертикальны-10
ми салазками и корпусом копировального прибора перемещаться вверх. При этом управляющий золотник вновь подойдет к нейтральному положению, однако вследствие упругости масла в гидроцилиндре и инерции перемещаемых масс вертикальная каретка будет продолжать движение вверх и золотник расположится ниже нейтрального положения. В этом случае давление в верхней полости гидроцилиндра возрастет, а в нижней полости уменьшится, и к поршню гидроцилиндра будет приложена сила, направленная вниз, которая заставит поршень и соединенные с ним узлы перемещаться вниз. Управляющий золотник опять подойдет к нейтральному положению, а затем расположится выше его, вследствие упругости масла и инерции массы вертикальной каретки. Вновь к поршню гидроцилиндра будет приложена сила, направленная вверх, которая заставит поршень и соединенные с ним узлы перемещаться вверх и т. д.
Таким образом, следящий привод не останавливается в положении равновесия, а начинает совершать колебательные движения, которые могут перейти в автоколебания. Автоколебания следящего привода возникают в тех случаях, когда количество энергии, поступающей в привод с рабочей жидкостью при переходе его через положение равновесия, превышает количество энергии, рассеиваемой при движении привода. Рассеяние энергии происходит в результате гидравлических потерь в рабочих щелях золотника, потерь трения в направляющих каретки, уплотнениях поршня и штока цилиндра, вязкого трения жидкости в трубопроводах и т. п. При определенном ограничении количества энергии, подаваемой с жидкостью в приводив результате соответствующего выбора величин параметров управляющего золотника и других элементов привода, генерации колебаний не происходит.
Изложенное позволяет изобразить структурную схему рассмотренного следящего привода в форме, показанной на рис. 3. и сформулировать следующие понятия, относящиеся к его работе.
Источник воздействия ИВ, приводящий в действие программу, сообщаемую следящему приводу для воспроизведения (рис. 1 — механизм образования скорости задания — продольной подачи).
Задающее устройство ЗУ содержит программу (рис. 1 — шаблон 17), сообщаемую следящему приводу для воспроизведения.
Сравнивающее (чувствительное) устройство СУ, воспринимающее программу от задающего устройства, сопоставляющее ее с программой, воспроизведенной приводом, и выдающее сигна-
Рис. 3. Структурная схема простейшего гидравлического следящего привода с копировальным управлением
лы рассогласования между ними (управляющий золотник 19, рис. 1).
Гидродвигатель (гидроцилиндр или гидромотор) Д, получающий команды от сравнивающего устройства и развивающий необходимую скорость слежения.
Рабочий орган РО — сборочная единица (узел) машины или оборудования, которому от гидродвигателя передаются движения, воспроизводящие программу, вводимую задающим устройством (рис. /, каретка 2 с инструментом).
Обратная связь по отработке ОС — цепь управления, связывающая рабочий орган со сравнивающим устройством (выход привода со входом) и служащая для измерения результата действия следящего привода. Обратная связь по отработке превращает следящий привод в замкнутый (на рис. 1 привод имеет жесткую механическую обратную связь, образованную закреплением корпуса золотника на рабочем органе).
Источник питания — насосная установка или другое устройство, подающие жидкость (масло) под давлением.
Кроме того, на основе схем рис. 1 и 3 можно выделить следующие основные понятия, относящиеся к следящему приводу.
Входная величина или «вход» (управляющий входной сигнал) X — величина воздействия (перемещения, скорости), сообщаемого сравнивающему устройству от задающего.
Выходная величина или выход Y — величина действия (перемещения, скорости) развиваемого рабочим органом.
Прямая цепь воздействия — цепь управления от источника воздействия до рабочего органа.
Следящий привод—автоматический привод, в котором выходная величина Y воспроизводит изменение входной величины X, причем привод реагирует на рассогласование Ху между входной и выходной величинами.
Скорость слежения (следящая подача) — скорость рабочего органа, автоматически управляемая сравнивающим устройством по величине и знаку (в приводе, показанном на рцс.1, под скоростью слежения понимается скорость вертикального перемещения).
Скорость задания (задающая подача) — постоянная или регулируемая по величине скорость, сообщаемая от источника воздействия задающему устройству.
Скорость воспроизведения (копирования) — суммарная скорость (скорость вдоль контура копира), представляющая геометрическую сумму скоростей слежения и задания.
Погрешность воспроизведения (рассогласование) — расхождение положений рабочего органа и щупа следящего привода в процессе отработки программы, поступающей от задающего устройства.
Зона нечувствительности — наименьшая величина смещения щупа золотникового механизма, необходимая для осуществления 12
реверсирования рабочего органа привода при возможно меньшей скорости слежения.
Устойчивый следящий привод — следящий привод, который после приложения, а затем снятия управляющего или внешнего возмущающего воздействия возвращается с течением времени в положение равновесия.
Неустойчивый следящий привод — следящий привод, который после приложения, а затем снятия управляющего «или внешнего возмущающего воздействия не возвращается с течением времени в положение равновесия, а совершает вокруг него незатухающие колебания, называемые автоколебаниями.
Применительно к золотниковому механизму устанавливается следующая терминология.
Подведенное давление (давление питания, давление на входе) — давление рабочей жидкости, подводимой к золотнику, под которым, если это специально не оговорено, подразумевается разность давлений в нагнетательной и сливной магистралях золотника (в приводе, показанном на рис. 1, это давление обозначено рп).
Внешняя цепь золотника — гидравлическая цепь, включающая магистрали, идущие от золотника к управляемому им гидродвигателю, и полости гидродвигателя (на рис. 1 внешняя цепь золотника состоит из магистрали 5, гидродвигателя 4 и магистрали 6).
Рабочее окно (щель, проходное сечение) золотника — пространство, образованное кромками шеек золотника и окон в корпусе золотникового механизма, в котором осуществляется дросселирование потока проходящей жидкости, обеспечивающее процесс управления гидродвигателем [золотники различаются по количеству рабочих окон, например могут быть четырех- двух- и однощелевые (кромочные) золотники].
Открытие окна или открытие щели (проходного сечения) золотника — ширина рабочего окна (щели), равная расстоянию между кромками шеек золотника и окон в корпусе, замеренному параллельно оси золотника (на рис. 1 размеры hx—h4).
Начальное открытие окна (щели, проходного сечения), открытие в среднем положении — размер открытия рабочего окна золотника в среднем (нейтральном) положении.
Радиальный зазор б (рис. 1) —половина разности диаметров золотника и цилиндрической поверхности корпуса.
Перекрытие окна (щели, проходного сечения) золотника — величина захода кромки щейки золотника за кромку окна в корпусе, измеренная параллельно оси золотника, при котором окно переходит в радиальный зазор.
Длина рабочего окна (щели, проходного сечения) прямоугольной формы — размер его, замеренный по внутренней цилиндрической поверхности корпуса золотника, в плоскости, перпендикулярной к оси золотника.
3. Принцип действия электрогидравлического следящего привода с копировальным управлением
В комбинированных электрогидравлических приводах сочетается электрическое управление с гидравлическими исполнительными механизмами. В результате такого сочетания облегчается дистанционность управления, что особенно удобно в крупных станках, введение дополнительных корректирующих устройств, улучшающих работу следящего привода, что обычно необходимо выполнять для получения требуемых характристик приврда и т. п.
Схема простейшего электрогидравлического следящего привода с копировальным управлением приведена на рис. 4. Привод показан при использовании его на фрезерном станке. Щуп 3 кинематически связан с якорем 2 индуктивного датчика 1, а четырехщелевой золотник 13, подающий жидкость в полостц гидроцилиндра 10, с электромеханическим преобразователем 15. Электрическая связь между индуктивным датчиком и электромеханическим преобразователем осуществляется через фазо-чув-
Рис. 4. Схема простейшего электрогидравлического следящего привода с копировальным управлением 14
ствительный выпрямитель ФВ и усилитель постоянного тока У
Вследствие подключения катушек 9 к источнику 5 переменного тока между корпусом и якорем индуктивного датчика циркулируют магнитные потоки т\ и т2 (обозначены штриховыми стрелками), которые индуктируют в катушках 21 э.д.С1 и э.д.с.2, сдвинутые по фазе на 180°. При равных зазорах (h{ = h2) между якорем и корпусом магнитные потоки т\ и т2 и э.д.с.1 э.д.с.2 также равны между собой, в результате чего на входе и выходе ФВ напряжения будут равны нулю. Когда щуп смещается, например, ниже среднего положения, зазор h\ между якорем 2 и корпусом 22 становится меньше зазора h2.
Вследствие повышения магнитной проницаемости в зазоре /ц и уменьшения ее в зазоре h2 происходит соответствующий рост магнитного потока гщ и индуктируемой э.д.с.1, а также уменьшение магнитного потока т2 и э.д.Сг относительно среднего положения. Разность э.д.с.1 и э.д.с.2 подается (после усиления) на вход ФВ, на выходе которого образуется пропорциональное этой разности напряжение управления постоянного тока (сигнал управления) иу. Знак его определяется в результате сопоставления фазы переменного тока на входе в ФВ с фазой опорного напряжения, подводимого по линии 19, и изменяется в зависимости от направления отклонения якоря 2 от среднего положения.
Пружины 16 электромеханического преобразователя стремятся установить сердечник 17 в среднее положение, при котором зазоры //1 и Н2 между сердечником и торцами корпуса равны. При дифференциальной схеме включения катушек 18 преобразователя 15 и сигнале управления Uy=0 напряжения и токи на обеих катушках 18 равны и составляют половину напряжения питания усилителя У. Вследствие этого магнитные потоки М19 М2 и встречные силы, действующие по зазорам и Н2 между сердечником и корпусом, будут также равны (при симметричной конструкции), а сердечник и золотник 14 будут занимать среднее положение.
При появлении сигнала управления L/y, возникающего от смещения щупа 3 и якоря 2, например, ниже среднего положения, напряжение в нижней катушке 18 будет возрастать пропорционально Uy, а в верхней катушке 18 соответственно уменьшаться, в результате чего пропорционально изменятся магнитные потоки All, М2 и возникнет электромагнитная сила, стремящаяся сместить вниз сердечник преобразователя. Вследствие действия пружин 16 это смещение будет пропорциональным величине электромагнитной силы, а значит величине смещения якоря индуктивного датчика. При смещении щупа и якоря выше среднего положения описанный выше процесс повторяется, причем сигнал управления Uy меняет знак и соответственно электромагнитная сила действует на сердечник преобразователя в противоположном ранее указанному направлению — вверх. Таким образом, золотник
14, жестко соединенный с сердечником, повторяет в определенном масштабе перемещения якоря и щупа индуктивного датчика. Масштаб повторения зависит от параметров элементов, находящихся в цепи между щупом и золотником.
Схема золотника и питающей его насосной установки аналогичны показанным на рис. 1.
Поэтому, с учетом описанного выше порядка работы цепи щуп — золотник, когда щуп не касается контура шаблона 4 и под действием пружины 20 смещается в крайнее нижнее на рис. 4 положение, такое же перемещение осуществляет золотник 14. В результате, в полости А, трубопроводе 11 и полости Г устанавливается низкое давление, а в полостях Б и В и трубопроводе 12 — высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 8, индуктивным датчиком и режущим инструментом перемещается вниз. В процессе перемещения щуп 3 упрется в шаблон 4, но каретка будет еще некоторое время двигаться под действием вертикальной подачи. При этом зазор hi будет постепенно увеличиваться, а зазор h2 уменьшаться; соответственно будет уменьшаться величина сигнала управления Uy, а значит разность магнитных сил, действующих на сердечник электромеханического преобразователя и смещение золотника 14 от среднего положения. Наконец, наступит момент, когда величины зазоров hi и h2 и соответственно проходные сечения всех щелей золотника сравняются и разность давлений в полостях Б и А, а также В и Г станет недостаточной для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится. Если столу 6 сообщить задающую подачу, то будет так же, как в простейшем приводе, показанном на рис.1, осуществляться обвод контура шаблона и его воспроизведение на заготовке 7.
Следовательно, принцип действия и структура построения электрогидравлических следящих приводов аналогичны приводам с механическим управлением и отличаются только средствами передачи команд от задающего устройства к золотнику, управляющему работой гидродвигателя. Так, если в следящем приводе (см. рис. 1) щуп с помощью механической передачи непосредственно воздействовал на управляющий золотник, то в электрогидравлическом следящем приводе (см. рис. 4) механические перемещения щупа преобразуются в электрические сигналы индуктивного датчика, которые усиливаются и преобразуются электромеханическим преобразователем в перемещения, сообщаемые управляющему золотнику. Таким образом, механическая передача в этом случае заменена цепочкой преобразователей, выполняющих ее функции.
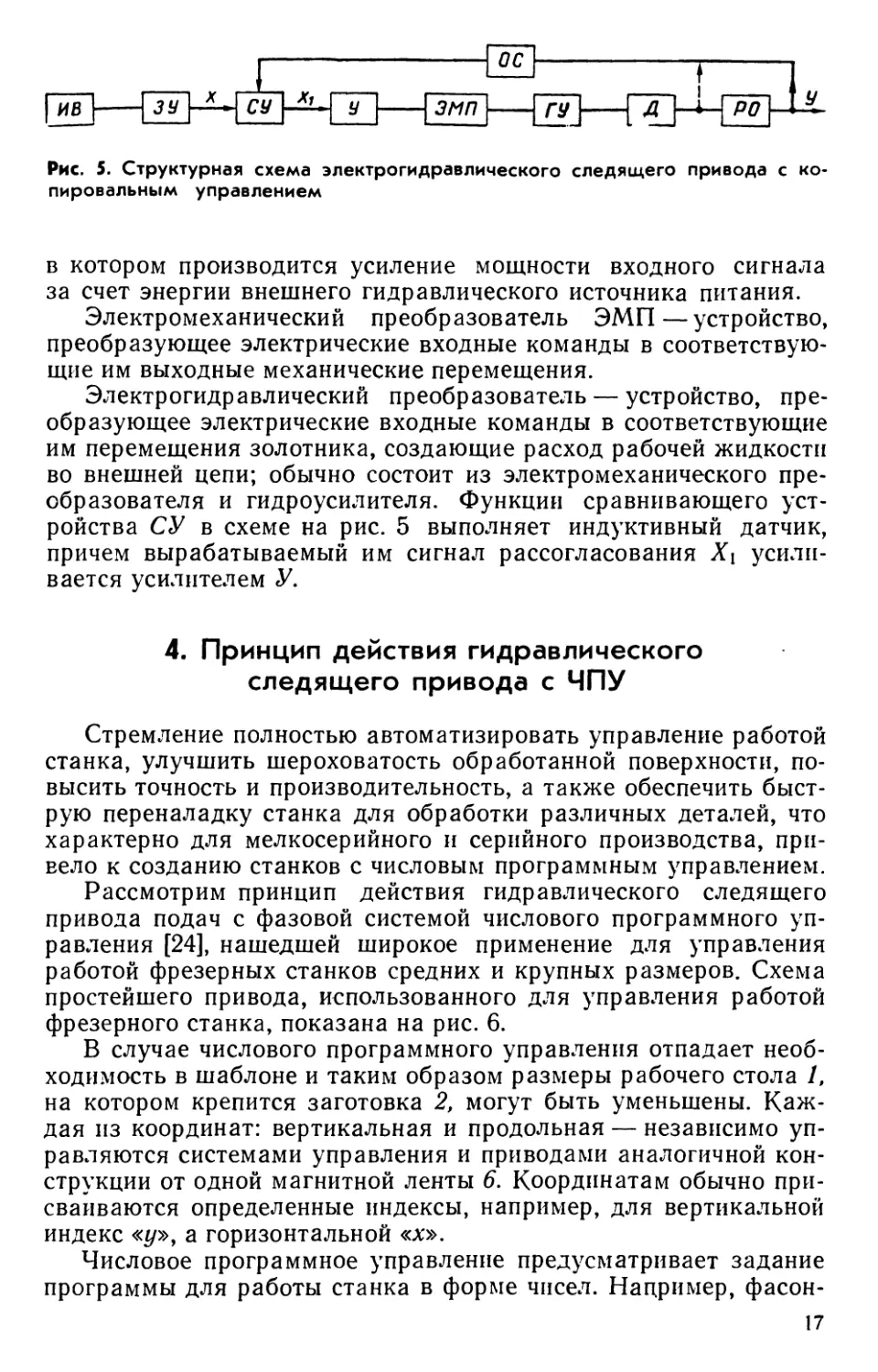
Структурная схема электрогидравлического следящего привода с копировальным управлением показана на рис. 5. В этой схеме дополнительно вводятся следующие понятия.
Гидроусилитель ГУ — гидравлическое устройство управления,
Рис. 5. Структурная схема электрогидравлического следящего привода с копировальным управлением
в котором производится усиление мощности входного сигнала за счет энергии внешнего гидравлического источника питания.
Электромеханический преобразователь ЭМП —устройство, преобразующее электрические входные команды в соответствующие им выходные механические перемещения.
Электрогидравлический преобразователь — устройство, преобразующее электрические входные команды в соответствующие им перемещения золотника, создающие расход рабочей жидкости во внешней цепи; обычно состоит из электромеханического преобразователя и гидроусилителя. Функции сравнивающего устройства СУ в схеме на рис. 5 выполняет индуктивный датчик, причем вырабатываемый им сигнал рассогласования усиливается усилителем У.
4. Принцип действия гидравлического следящего привода с ЧПУ
Стремление полностью автоматизировать управление работой станка, улучшить шероховатость обработанной поверхности, повысить точность и производительность, а также обеспечить быструю переналадку станка для обработки различных деталей, что характерно для мелкосерийного и серийного производства, привело к созданию станков с числовым программным управлением.
Рассмотрим принцип действия гидравлического следящего привода подач с фазовой системой числового программного управления [24], нашедшей широкое применение для управления работой фрезерных станков средних и крупных размеров. Схема простейшего привода, использованного для управления работой фрезерного станка, показана на рис. 6.
В случае числового программного управления отпадает необходимость в шаблоне и таким образом размеры рабочего стола 1, на котором крепится заготовка 2, могут быть уменьшены. Каждая из координат: вертикальная и продольная — независимо управляются системами управления и приводами аналогичной конструкции от одной магнитной ленты 6. Координатам обычно присваиваются определенные индексы, например, для вертикальной индекс «у», а горизонтальной «х».
Числовое программное управление предусматривает задание программы для работы станка в форме чисел. Нацример, фасон-
Um’ Sin GO()t
Рис. 6. Схема гидравлического следящего привода с фазовой системой числового программного управления
Рис. 7. Схема перемещения инструмента при обработке фасонного контура
Рис. 8. Характеристики отдельных элементов фазовой системы ЧПУ:
а — характер записи сигналов на магнитной ленте; бив — характеристики вращающегося трансформатора ВТ
ный контур детали BCDEF1KL (рис. 7) можно обработать на станке (рис. 6), если сообщить центру фрезы движение относительно заготовки по траектории, обозначенной буквами BxCxDxExFxlxl{\L\ (рис. 7), эквидистантной относительно профиля обрабатываемой детали. Законченный цикл движения может быть получен при начале движения фрезы из точки Ах, находящейся на некотором расстоянии от обрабатываемой поверхности, и возвращении в эту точку, например, по траектории LXMXAX по окончании обработки.
Переход фрезы из точки Ах в точку которая соответствует началу обработки, можно осуществить за счет хода (перемещения) вертикальной каретки 17 станка (рис. 6). Величина этого хода может быть выражена в миллиметрах. Единицей перемещения может быть также импульс, составляющий часть миллиметра или несколько миллиметров. В этом случае расстояние АХВХ может быть выражено числом импульсов, представляющим частное от деления расстояния АХВХ на цену импульса /и (например, распространено значение tH = 0,01 мм). Иногда может быть удобно числовую форму выразить через какой-либо аналог, например величину ср фазового сдвига, причем фазовому сдвигу ср = 2л будет соответствовать определенное число импульсов пИо (распространено значение пПо = 64). Перемещение, соответствующее Ф = 2л составляет цену оборота фазы /ф. Таким образом, числовое выражение размера в сантиметрах (миллиметрах) или импульсах перемещения может быть однозначно выражено величиной фазового сдвига.
Переход от числа к фазе обычно автоматизируется и совершается специальным импульсно-фазовым преобразователем.
Работа гидравлического следящего привода с фазовой системой числового управления осуществляется следующим образом. На магнитную ленту, движущуюся со строго определенной скоростью, например, 50 мм/с, наносится опорный сигнал Ос (рис. 8, а) синусоидальной формы определенной частоты соо» например, 250 Гц. Тем самым образуется дорожка опорного сигнала Ос. На других, параллельных, дорожках наносятся рабочие сигналы Рх и Ру для каждой из управляемых по числовой программе координат X и У. Магнитная головка МГС (см. рис. 6) считывает величины сигналов на каждой дорожке по линии А—А (рис. 8, а). Движение магнитной ленте сообщается тонвалом 7 (см. рис. 6), приводимым во вращение электродвигателем 4. Для исключения проскальзывания ленты и повышения силы трения между магнитной лентой и тонвалом служит подпружиненный ролик 8. Магнитная лента наматывается на бобины 3 и 5, причем электродвигатели, соединенные с их осями, осуществляют непрерывную подмотку ленты, не допуская ее ослабления. Опорный Ос и рабочие сигналы Рх и Ру, считанные с магнитной ленты, после усиления по амплитуде до величины Um поступают соответ-
ственно во вращающиеся трансформаторы ВТХ и ВТУ и фазовые дискриминаторы ФДХ и ФДУ.
Рассмотрим работу гидравлического следящего привода по вертикальной координате у при равных частотах сор = а)о и разности фаз фу сигналов (рис. 8, а) на рабочей и опорной дорожках магнитной ленты. Опорный сигнал Ос от магнитной головки считывания МГС поступает в фазовый дискриминатор ФДУ не непосредственно как рабочий сигнал Ру, а пройдя через вращающийся трансформатор ВТУ. Последний представляет собой синусный датчик положения, электрический угол <р (рис. 8, б) на выходе которого изменяется пропорционально углу а поворота его вала. При подаче на обмотки статора вращающегося трансформатора синусоидального напряжения с частотой соо и угле поворота ротора а = 0, на обмотках ротора будет трансформироваться напряжение той же частоты без фазового сдвига а=0 (рис. 8, в). При повороте ротора вращающегося трансформатора на угол а выходное напряжение будет сдвигаться на пропорциональный этому повороту электрический угол фвт у- Вал вращающегося трансформатора с помощью шестерни 11 (см. рис. 6) зацепляется с рейкой /2, скрепленной со штоком силового цилиндра 14. При нулевом положении вала вращающегося трансформатора ВТУ опорный сигнал без изменений поступает по каналу 9 в фазовый дискриминатор ФДУ, на выходе которого формируется управляющий сигнал—напряжение Uy и ток 1У, величина которого пропорциональна сдвигу фазы фу или его синусу—в зависимости от устройства фазового дискриминатора между опорным и рабочим сигналом, а знак определяется знаком сдвига фазы. Увеличенный в усилителе постоянного тока УПТу управляющий сигнал поступает в электрогидравлический преобразователь 10, аналогичный по конструкции доказанному на рис. 4. В результате золотник 15 гидроусилителя смещается вниз (см. рис. 6) от среднего положения на величину, пропорциональную величине входного сигнала t/у, а значит разности фаз фу между рабочим и опорным сигналами на магнитной ленте. При этом в полости А золотника, трубопроводе 16 и полости Г гидроцилиндра устанавливается низкое давление, а в полостях Б и В и трубопроводе 13 — высокое. Вследствие этого поршень и шток вместе с вертикальной кареткой 17, рейкой 12 и режущим инструментом начнет перемещаться вниз. В процессе перемещения рейка 12 с помощью шестерни 11 поворачивает вал вращающегося трансформатора ВТУ, в связи с чем в канал 9 поступает опорный сигнал Ос, сдвинутый на угол фвт у. По мере увеличения угла фвт У и приближения его к величине фу соответственно будет уменьшаться управляющий сигнал на выходе фазового дискриминатора, а значит и смещение золотника 15 от среднего положения. В итоге наступит момент, когда величины сдвигов фаз фу и фВТу и соответственно проходные сечения всех щелей золотника сравняются настолько, что разность давлений в полостях Б и А, а также В и Г станет недостаточной 20
для продолжения движения поршня гидроцилиндра, и вертикальная подача прекратится. Таким образом, величина пути, который пройдет вертикальная каретка, будет пропорциональна сдвигу ф^ фаз его рабочего и опорного сигналов.
Можно записать на магнитной ленте рабочий сигнал таким образом, чтобы непрерывно изменялся сдвиг фаз фу рабочего и опорного сигналов при протягивании магнитной ленты относительно магнитной головки считывания, например, путем изменения частоты рабочего сигнала с соо до <dp (сдвиг фаз между рабочим и опорным сигналами будет изменяться во времени пропорционально разности этих частот (<ор — соо)0- В результате поршень гидроцилиндра и вертикальная каретка с инструментом будут перемещаться со скоростью, пропорциональной разности величин указанных частот, причем направление перемещения будет определяться знаком разности частот рабочего и опорного сигналов: например, при сор > соо движение будет идти вниз, а при G)p<G)o — вверх.
Рассмотрим снова обработку контура, показанного на рис. 7. Для записи перемещения фрезы на расстояние А\В\ необходимо знать цену оборота фазы /ф привода. В приводе вертикального перемещения (рис. 6) цена оборота фазы составляет, очевидно, длину начальной окружности шерстерни 11, так как на такое расстояние перемещается вертикальная каретка при одном обороте вращающегося трансформатора ВТУ, установленного в цепи обратной связи привода. Следовательно, суммарный сдвиг фазы рабочего сигнала на магнитной ленте за время движения вертикальной каретки на расстояние ABi = S должен составить
фу(5)= "7ф72л’
а для того, чтобы перемещение осуществлялось со скоростью холостого хода vxxy необходимо, чтобы разность частот рабочего (ор и опорного соо сигналов составила
<0р Юр __ Ухху ,£4
2 л t$y '
Для прекращения движения вертикальной каретки при достижении координаты В] после получения суммарного сдвига фазы рабочего сигнала величиной ф^) относительно опорного следует записывать рабочий сигнал с частотой соо опорного сигнала. Очевидно, что на участке магнитной ленты, соответствующем одному перемещению вертикальной каретки, на дорожке рабочего сигнала продольного перемещения по координате х должен быть записан сигнал, равный опорному. Для осуществления перемещения центра фрезы относительно заготовки по горизонтальной траектории В\С\ на рабочей дорожке координаты у следует записать сигнал, равный опорному, а по рабочей дорожке координаты х — сигнал с частотой, отличающейся от опорного при сум
марном сдвиге фазы, определяемые согласно выражениям (1) и (2).
Движение по наклонному участку (см. рис. 7) траектории центра фрезы достигается при записи на обеих дорожках магнитной ленты рабочих сигналов Рх и Ру с частотами, разность которых относительно частоты опорного сигнала пропорциональна слагающим vx и vy общей рабочей скорости подачи вдоль контура.
Очевидно, что варьируя сдвиги фаз фх и сру по обеим координатам в соответствии с требуемыми величиной и скоростью перемещения вертикальной и продольной кареток в каждый момент времени, можно обеспечить строго определенный обвод инструментом, укрепленным на вертикальной каретке, заданного профиля на заготовке, укрепленной на продольной каретке.
Следовательно, принцип действия и структура построения гидравлического следящего привода с числовым программным управлением аналогичны гидравлическим приводам с механическим и электрическим копировальным управлением, а отличаются от них характером задающего устройства и средствами передачи команд от задающего устройства к золотнику, управляющему работой гидродвигателя, и от гидродвигателя к сравнивающему устройству по цепи обратной связи. Привод задающей подачи в этом случае заменен лентопротяжным механизмом, выполняющим его функции.
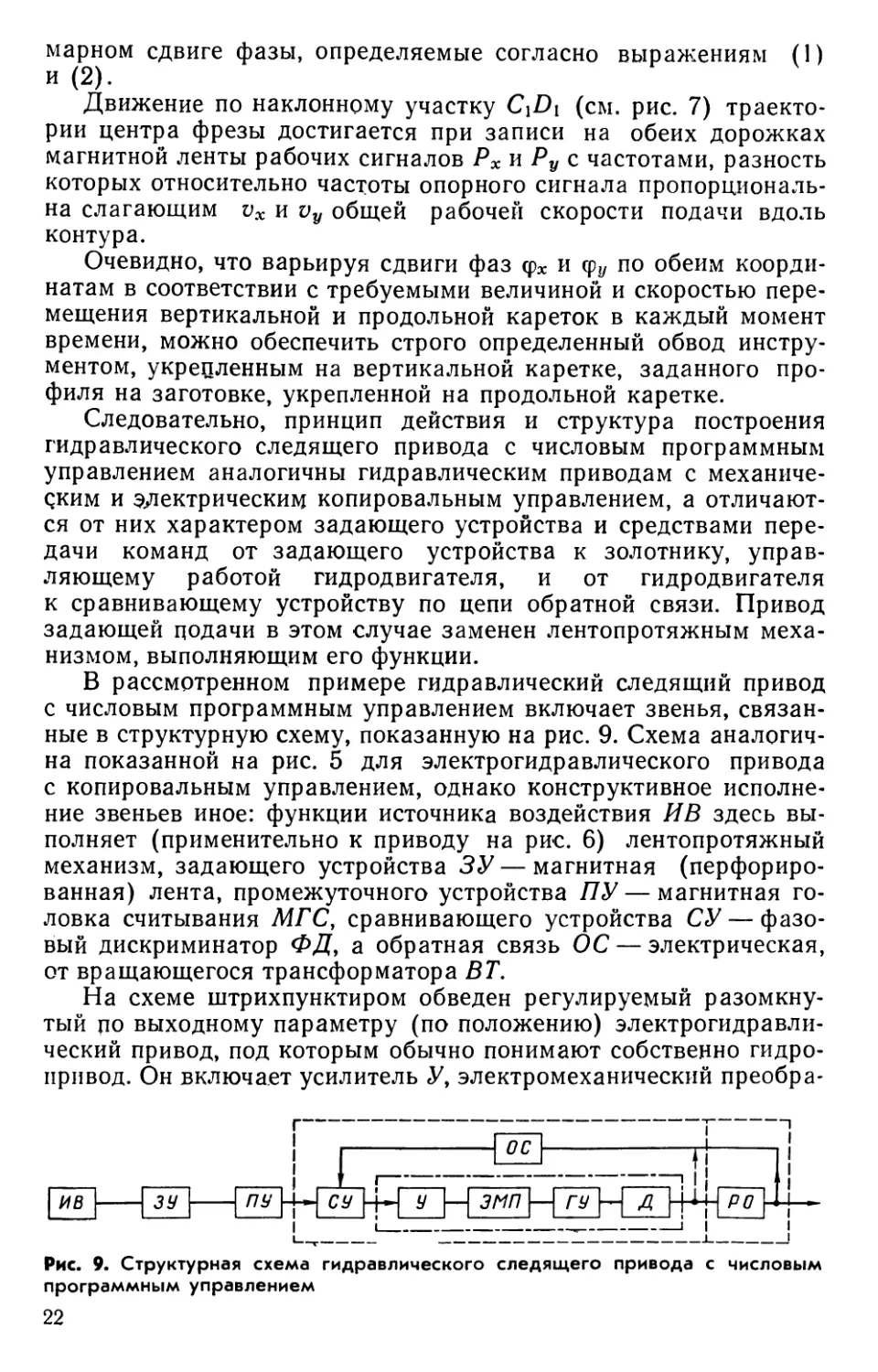
В рассмотренном примере гидравлический следящий привод с числовым программным управлением включает звенья, связанные в структурную схему, показанную на рис. 9. Схема аналогична показанной на рис. 5 для электрогидравлического привода с копировальным управлением, однако конструктивное исполнение звеньев иное: функции источника воздействия ИВ здесь выполняет (применительно к приводу на рис. 6) лентопротяжный механизм, задающего устройства ЗУ—магнитная (перфорированная) лента, промежуточного устройства ПУ — магнитная головка считывания МГС, сравнивающего устройства СУ — фазовый дискриминатор ФД, а обратная связь ОС — электрическая, от вращающегося трансформатора ВТ.
На схеме штрихпунктиром обведен регулируемый разомкнутый по выходному параметру (по положению) электрогидравли-ческий привод, под которым обычно понимают собственно гидропривод. Он включает усилитель У, электромеханический преобра-
Рис. 9. Структурная схема гидравлического следящего привода с числовым программным управлением
Рис. 10. Отличие профиля изделия от теоретического контура при обработке на станке с ЧПУ
зователь ЭМП, гидроусилитель ГУ и гидродвигатель Д, а также может иметь внутренние обратные связи. Следящим является привод, замкнутый по регулируемому выходному параметру, который включает помимо регулируемого привода также сравнивающее устройство СУ и средства обратной связи ОС по регулируемому параметру (в рассмотренном примере по положению двигателя Д или рабочего органа РО). На схеме следящий привод обведен штриховой линией.
Произведенный анализ показывает, что рассмотренные выше положения относительно образования погрешности воспроизведения, нечувствительности и устойчивости гидравлического следящего привода с копировальным управлением, действительны также для привода с числовым программным управлением. В последнем случае погрешность воспроизведения определяется отличием детали от теоретического контура, определенного числовой программой, а не от профиля шаблона.
Отличительной особенностью приводов с числовым программным управлением является то, что задающее и следящее перемещения (скорости) сосредоточены у них в каждой координате, в то время, как в однокоординатных приводах с копировальным управлением эти перемещения разнесены на две различные координаты: задающую и следящую (рис. 1 и 4). В результате картина распределения погрешностей на изделии относительно теоретического контура при числовом программном управлении будет отличаться от показанной на рис. 2.
Действительно, при обработке участка ВС контура (рис. 10) центр фрезы по вертикальной координате у может смещаться от теоретического положения О]Т, заданного числовой! программой, на величину hHy нечувствительности привода по координате у, а по продольной координате х— на величину hVx скоростной (точнее — суммарной: скоростной и нагрузочной) погрешности привода по координате х, В результате центр фрезы будет фактически располагаться в точке О1ф, а на детали останется припуск величиной Дя нечувствительности привода по ко-
У
ординате у. При обработке наклонного участка DE контура центр фрезы по координате у может смещаться от теоретического положения Огт на величину hv скоростной погрешности привода У и по координате х — на величину hVx скоростной погрешности привода X. В результате фактическое положение центра фрезы будет в точке Огф. Если приводы по координатам х и X выбраны таким образом, что при равных скоростях погрешности у них также равны, причем размер погрешности изменяется пропорционально величине скорости, то смещение центра фрезы Огф будет направлено по касательной к обрабатываемой поверхности и контур детали будет точно совпадать с теоретическим контуром. Таким образом, в результате существования погрешности воспроизведения в приводах пропорционального управления фактическое положение инструмента будет как бы отставать от теоретического, задаваемого числовой программой, смещаясь приблизительно по касательной к контуру в теоретически обрабатываемой точке, а погрешность обработки будет тем больше, чем меньше радиус контура и больше несоответствие между погрешностью и скоростью приводов по координатам, участвующим в обработке детали.
Общая картина отклонения контура детали от теоретического контура будет характеризоваться заштрихованным участком, по-казаным на рис. 10. Несмотря на возможные значительные величины погрешностей воспроизведения по каждой из координат, обработанная деталь может весьма близко совпадать с теоретическим контуром, заданным числовой программой.
Применительно к приводу с фазовой системой ЧПУ устанавливается следующая терминология.
Цена оборота фазы — величина перемещения в сантиметрах (миллиметрах) рабочего органа машины, соответствующая обороту фазы измерительного устройства в обратной связи привода по перемещению на угол 2л.
Количество импульсов в одном обороте фазы — количество импульсов унитарного кода системы ЧПУ, соответствующих обороту фазы измерительного устройства в обратной связи привода по перемещению на угол 2л.
Цена импульса — размер перемещения в см (мм) рабочего органа машины, соответствующий одному импульсу унитарного кода системы ЧПУ.
5. Классификация гидравлических следящих приводов
Применяемые гидравлические следящие приводы можно разделить на семь групп.
1. По количеству рабочих щелей в управляющем золотнике. Следящие приводы можно разделить на приводы с четырех-, 24
двух- и однощелевыми золотниками. Другое количество рабочих щелей практически не применяется.
2. По количеству и взаимосвязи следящих перемещений, осуществляемых рабочим органом, следящие приводы можно разделить на однокоординатные, двухкоординатные и комбинированные. Однокоординатный следящий привод осуществляет следящее перемещение рабочего органа по одной координате, при приложении задающей скорости постоянной или регулируемой по величине, независимо от работы других следящих приводов; двухкоординатный следящий привод осуществляет перемещение рабочего органа привода одновременно по двум координатам со взаимосвязанными и взаимообусловленными скоростями слежения, управляемыми от одного входа; комбинированный следящий привод — это привод, составленный из нескольких одно- или двухкоординатных следящих приводов.
3. По характеру управления следящие приводы можно разделить на приводы непрерывного, дискретного (прерывистого) и комбинированного дискретно-непрерывного или непрерывно-дискретного управления (следящий привод непрерывного управления — это такой привод, в котором непрерывному изменению входной величины соответствует непрерывное изменение выходной величины; следящий привод дискретного, прерывистого управления осуществляет релейное, широтно-импульсное или импульсное управление).
4. По виду средств, с помощью которых осуществляется регулирование скорости слежения, следящие приводы можно разделить на приводы с дроссельным, объемным и комбинированным объемно-дроссельным регулированием (следящий привод с дроссельным регулированием — такой, в котором изменение объемов жидкости, поступающей в исполнительные гидродвигатели, осуществляется дросселированием в рабочих щелях гидравлических усилителей; следящий привод с объемным регулированием — такой, в котором изменение объемов жидкости, поступающей в исполнительные гидродвигатели (изменение скорости движения гидродвигателей), осуществляется изменением рабочего объема насоса или гидродвигателя; следящий привод с комбинированным объемно-дроссельным регулированием — такой, в котором изменение объемов жидкости, поступающей в исполнительные гидродвигатели, осуществляется дросселированием в рабочих щелях гидроусилителей и автоматически соответственно регулируется рабочий объем насоса, питающего привод.
5. По количеству каскадов усиления, участвующих в осуществлении воспроизведения гидродвигателем программы, сообщаемой задающим устройством, гидравлические следящие приводы можно разделить на одно-, двух- и многокаскадные; в однокаскадном следящем приводе золотник (или другое устройство), управляемый механически (от щупа), непосредственно управляет гидродвигателем; в двух- и многокаскадном следящем
приводе управление гидродвигателем осуществляется с помощью нескольких усилителей. К этому виду приводов относятся также все электро- и пневмогидравлические приводы.
6. По количеству в схеме замкнутых контуров управления гидравлические следящие приводы можно разделить на одноконтурные и многоконтурные (в одноконтурном следящем приводе существует только один замкнутый контур, т. е. одна цепь прямого воздействия и обратной связи; в многоконтурном следящем приводе в работе участвуют два замкнутых контура или более, образуемых несколькими цепями прямого действия или обратной связи).
7. По виду устройства ввода задания гидравлические следящие приводы можно разделить на следящие приводы с копировальным и с числовым программным управлением. В следящем приводе с копировальным управлением программа для воспроизведения сообщается от шаблона или аналогичного источника механического воздействия; в следящем приводе с числовым программным управлением программа для воспроизведения сообщается в форме чисел или их аналогов.
ГЛАВА II.
ПОСТРОЕНИЕ СХЕМ ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С КОПИРОВАЛЬНЫМ УПРАВЛЕНИЕМ
6. Однокоординатные однокаскадные приводы
Однокоординатные однокаскадные гидравлические следящие приводы дроссельного регулирования с независимой задающей скоростью строятся в соответствии со структурной схемой, показанной на рис. 3. В качестве источника воздействия в этих приводах применяется обычно механизм подачи, создающий относительное перемещение задающего устройства (шаблона) или сравнивающего устройства (копировального прибора) по координате, расположенной перпендикулярно или под некоторым углом к направлению следящей подачи. Управление гидродвигателем следящей скорости осуществляется управляющими четырех-, двух- и однощелевыми золотниками.
Привод с четырехщелевым золотником. Этот привод наиболее широко применяется в копировальных станках вследствие того, что он обеспечивает по сравнению с другими схемами большую точность копирования, обладает высокой чувствительностью и позволяет осуществлять разнообразные схемные варианты, расширяющие эксплуатационные качества оснащенного им оборудования (рис. 11).
В приводе с четырехщелевым золотником могут использоваться в качестве силовых двигателей кроме гидроцилиндров с двухсторонним штоком, гидроцилиндры с односторонним штоком (рис. 11, а) и гидромоторы (рис. 11, б). При использовании гидроцилиндра с односторонним штоком привод будет находиться в равновесии при некотором смещении золотника от среднего положения относительно окон во втулке, например, вверх на схеме, показанной на рис. 11, а, при котором в штоковой полости Г гидроцилиндра устанавливается более высокое давление, чем в полости В, так что силы, действующие по обеим сторонам поршня цилиндра, уравновешиваются.
В схеме, изображенной на рис. 11, а, гидравлический цилиндр неподвижен (он закреплен на стойке станка), а поршень и шток приводят в движение вертикальные салазки станка. Иногда бывает удобней выполнять компоновку станка таким образом, что-
Рис. 11. Варианты схем однокоординатных следящих приводов с управляющим четырехщелевым золотником
бы приводить в движение цилиндры, а шток с поршнем закреплять неподвижно. При этом для устранения перекрещивания трубопроводов, идущих от золотника к полостям цилиндра, удобно применять четырехщелевой золотник с несколько измененным расположением рабочих кромок (рис. 11, в), сосредотачивая их
на двух средних буртах 1 золотника. Принципиально эта схема аналогична предыдущим. Конструкцию золотника с расположением четырех рабочих кромок на двух средних буртах иногда предпочитают также в связи с тем, что в этом случае в корпусе золотника необходимо выполнять не три, а два мерных окна или расточки 2.
При применении гидромотора принцип действия гидравлического следящего привода, а также образование погрешности воспроизведения и достижение устойчивости равновесия сохраняются такими же, как было рассмотрено выше.
Преобразование вращательного движения вала мотора в поступательное перемещение рабочего органа осуществляется при длине хода до 3—4 м с помощью редуктора и пары винт — гайка, а при большей длине — пары шестерня — рейка. В тяжелых станках с большой длиной хода широко применяются винтореечные передачи. Переход от гидроцилиндра к гидромотору обычно осуществляется при длинах ходов свыше 0,5—1 м, при этом учитываются особенности применения гидромоторов в следящих приводах.
Скорость подвода рабочего органа к детали и отвода его можно регулировать с помощью дросселя 3 или дросселя с регулятором, установленного на сливе из управляющего золотника (рис. 11, г). После постановки щупа на шаблон, до включения задающей подачи, дроссель полностью открывается. Если рабочий орган перемещается от гидроцилиндра по вертикальным направляющим и не уравновешен контргрузом, в приводе с четырехщелевым золотником можно автоматически предотвратить быстрое самопроизвольное опускание вертикального ползуна при выключении насоса путем установки (рис. 11, д) в трубопроводе, соединяющем нижнюю полость гидроцилиндра с управляющим золотником, напорного золотника с обратным клапаном 4, настроенного на давление, достаточное для создания в нижней полости цилиндра силы, поддерживающей неуравновешенный вес. При работе привода напорный золотник не препятствует проходу масла. При выключении насоса и падении давления в гидросистеме напорный золотник под действием пружины 5 перемещается влево, преграждая выход маслу из нижней полости гидроцилиндра. При этом ползун может медленно опускаться в результате утечки масла через зазоры в поршневых кольцах.
Привод с четырехщелевым золотником позволяет осуществлять следящие подачи большой величины при пропорциональном увеличении погрешности воспроизведения. При кратковременном режиме копирования с высокими следящими подачами в качестве источника питания в приводе с четырехщелевым золотником можно применять пневмогидравлический аккумулятор, который включается в нагнетательный трубопровод, соединяющий насос с управляющим золотником копировального прибора (рис. 11, е).
6)
Рис. 12. Схемы одноко-ординатах гидравлических следящих приводов с двухщелевым управляющим золотником
Для предотвращения разрядки аккумулятора 6 через насос (при выключении его работы) или предохранительный клапан с переливным золотником 7 (в результате инерционности клапана) перед аккумулятором обычно устанавливается обратный клапан 8.
Привод с двухщелевым золотником. Стремление упростить конструкцию четырехщелевого золотника, уменьшить его габаритные размеры и снизить трудоемкость изготовления вследствие уменьшения количества мерных шеек на золотнике и окон в корпусе привело к созданию приводов с двухщелевым золотником.
Двухщелевой управляющий золотник часто применяется в однокоординатных следящих приводах (рис. 12). Нагнетаемое насосом 1 масло подается по трубопроводу 7 в нижнюю штоковую полость Г силового цилиндра 9, а по трубопроводу 4 в полость А золотника 5. Полость Б золотника соединена со сливом. Давление масла рп в нагнетательной магистрали, подводимого к управляющему золотнику копировального прибора, регулируется переливным клапаном 2 и контролируется манометром 3. Силовой цилиндр — с односторонним штоком дифференциального действия, т. е. при работе используется разность рабочих площадей в его штоковой и поршневой полостях. Корпус золотника имеет 30
окно 13, которое выполняется несколько шире средней шейки золотника. В исходном положении золотника, когда щуп 15 не касается контура шаблона 14, под действием пружины золотник смещается ниже равновесного положения, увеличивая щель и перекрывая щель h2. При этом масло из полости А золотника по трубопроводу 8 свободно, без потери давления поступает в верхнюю полость В силового цилиндра; в обеих полостях устанавливается приблизительно одинаковое давление.
Поскольку рабочая площадь поршня в верхней полости больше, чем в нижней, возникает избыточная сила, под действием которой поршень, шток, каретка 10 и связанный с ней жестко корпус золотника начинают двигаться вниз. Когда щуп достигнет поверхности шаблона, его движение вниз прекратится, а продолжающееся перемещение каретки будет осуществлять перемещение корпуса относительно золотника. При этом проходное сечение щели h\ будет постепенно уменьшаться, а щели h2 — увеличиваться, в результате чего давление в окне 13, трубопроводе 8 и поршнево?! полости В цилиндра будет понижаться, пока не наступит такой момент, когда силы, действующие по обе стороны поршня, настолько уравняются, что избыточная сила окажется недостаточной для продолжения движения поршня гидроцилиндра и автоматическая вертикальная подача прекратится.
Если столу сообщить задающую продольную подачу, то шаблон при повышающемся профиле переместит щуп и золотник через нейтральное положение вверх (на схеме). При этом проходное сечение щели h2 увеличится, а щели h\ уменьшится настолько, что давление в полости В цилиндра понизится до такой величины, при которой сила, действующая на поршень со стороны нижней штоковой полости цилиндра, станет больше таковой со стороны верхней полости, и избыточная сила, направленная вверх, станет достаточной для преодоления сопротивления подачи. При этом вертикальные салазки начнут перемещаться вверх, а щуп будет обкатывать поверхность шаблона. Когда щуп движется по понижающемуся профилю шаблона, золотник под действием пружины перемещается через равновесное положение вниз (по схеме) до тех пор, пока проходное сечение щели hx не увеличится, а щели h2 не уменьшится настолько, что давление в полости В цилиндра возрастет и сила, действующая на поршень со стороны верхней поршневой полости цилиндра, станет больше таковой со стороны нижней полости, а избыточная сила, направленная вниз, станет достаточной для преодоления сопротивления подачи. При этом вертикальные салазки начнут перемещаться вниз в соответствии с наклоном контура шаблона. Таким образом, щуп обведет контур шаблона, не отрываясь от него, а инструмент И воспроизведет контур шаблона на заготовке 12.
Из описания работы схемы очевидно, что выводы, сделанные в разделе 2 относительно погрешности, нечувствительности и устойчивости следящего привода с четырехшелевым управляющим
золотником относятся к следящему приводу с двухщелевым управляющим золотником.
Как отмечалось выше, основным достоинством привода с двухщелевым управляющим золотником является относительная простота изготовления корпуса и золотника. Вместе с тем, этот привод уступает приводу с четырехщелевым золотником по возможностям варьирования схемы (с двухщелевым приводом невозможно осуществить большинство схем, показанных на рис. 11) и главным образом по развиваемой силе при равных диаметрах цилиндров. Действительно, для обеспечения одинаковых сил, развиваемых цилиндром в обе стороны, диаметр d его штока выбирается таким, чтобы рабочая площадь поршня со стороны поршневой полости была в 2 раза больше таковой со стороны штоковой полости, т. е. принимается:
где D — диаметр поршня.
При соотношении (3) и движении поршня вверх наибольшая сила развивается при падении давления в поршневой полости до нуля и составляет
_ я(р2_^2) ~ лО2
. Рп Q Рт
4 о
рп — подведенное давление.
Эта сила равняется примерно половине силы, развиваемой гидроцилиндром недифференциального действия с диаметром D.
При движении поршня вниз наибольшая сила развивается при подъеме давления в поршневой полости до давления рп, развиваемого насосом, и составляет
п л£>2 л (О2 — d2) лО2
= -Г- Рп------------ Рп = -Z- Рп-
4 4 о
Приведенная на рис. 12, а схема следящего привода является наиболее распространенной из схем с двухщелевым управляющим золотником и применяется в копировальных станках, где нет больших и знакопеременных нагрузок, например в токарно-копировальных станках «70S» (ЧССР) и др.
Иногда применяются двущелевые золотники с несколько измененным расположением рабочих кромок, при котором золотник имеет только два бурта 16 (рис. 12, б). Такая конструкция позволяет избежать перекрещивания трубопроводов, идущих к цилиндру, что может быть в некоторых случаях удобным, обеспечивает более простое устройство золотника, однако усложняет конструкцию корпуса, в котором необходимо выполнять не одно, а два окна или две расточки 17. Принципиально схема, показанная на рис. 12,6, аналогична схеме, приведенной на рис. 12, а.
С двухщелевым золотником можно выполнить систему с цилиндром недифференциалыного действия при условии, что подача масла в полости цилиндра будет осуществляться двумя отдельными насосами (рис. 12, в). Масло с помощью двух насосов Н\ и Я2 одинаковой подачи поступает в обе полости цилиндра и одновременно к двум рабочим щелЯхМ золотника. Если проходные сечения hx и h2 щелей золотника равны между собой и нет внешней нагрузки на поршень, то в обеих полостях цилиндра устанавливается одинаковое давление, определяемое одинаковыми подачами насосов и размерами проходных сечений щелей золотника. При этом поршень и вертикальная каретка будут неподвижными. Клапаны 18 в этой системе являются предохранительными и настраиваются на наибольшее допустимое давление в системе. При смещении золотника от среднего положения вверх или вниз одна из щелей увеличивается, а вторая уменьшается и соответственно изменяется давление в полостях цилиндра, причем начинается движение поршня и рабочего органа станка — вертикальной каретки в направлении смещения золотника. Жесткая обратная связь, осуществляемая закреплением корпуса золотника на вертикальной каретке, обеспечивает воспроизведение контура шаблона на обрабатываемой заготовке.
Следящий привод с двухщелевым управляющим золотником и двумя насосами обладает высокой чувствительностью, обеспечивает высокую точность копирования, однако конструкция его сложнее предыдущих. Недостатком привода является также то, что утечки в насосах влияют на точность копирования. Применяется он в токарно-копировальных станках фирмы VDF (ФРГ).
Привод с однощелевым золотником. Этот привод позволяет еще больше упростить конструкцию золотника и полностью исключить согласование расстояний между буртами золотника и окнами в корпусе. Однощелевой управляющий золотник наиболее часто применяется в однокоординатных следящих приводах, схемы которых приведены на рис. 13. Нагнетаемое насосом 1 (рис. 13, а) масло по трубопроводу 4 подается в нижнюю штоковую полость Г силового цилиндра S, которая дросселем 7 соединена с верхней поршневой полостью В цилиндра. Давление рп, нагнетания масла регулируется переливным клапаном 2 и контролируется манометром 3. Силовой цилиндр — с односторонним штоком дифференциального действия. Верхняя полость цилиндра соединена трубопроводохм 6 с управляющим золотником, из которого масло по трубопроводу 13 сливается в бак насосной установки. В золотнике масло проходит через одну щель h между рабочей кромкой шейки золотника и торщхм окна в корпусе. Ширина рабочей щели зависит от положения золотника относительно корпуса. Когда щуп 12 не касается контура шаблона 11, золотник под действием пружины 5 сдвигается вниз, щель полностью перекрывается, прекращается выход масла из верхней
Рис. 13. Схемы однокоординатных гидравлических следящих приводов с од нощелевым управляющим золотником
полости цилиндра и в обеих полостях устанавливается одинаковое давление, определяемое настройкой переливного клапана. Так как рабочая площадь поршня в верхней полости больше, чем в нижней — штоковой, поршень вместе с кареткой и корпусом золотника будет двигаться вниз на шаблон 11 и заготовку 9. Когда щуп достигнет поверхности шаблона, золотник остановится, а каретка будет двигаться вниз до тех пор, пока рабочая щель h не откроется настолько, что давление в верхней полости цилиндра упадет, избыточная сила в верхней полости станет недостаточной для продолжения движения каретки вниз, и она остановится. Поступление масла из нижней полости в верхнюю определяется дросселем 7.
Если столу 10 сообщить задающую продольную подачу и3, то шаблон при повышающемся профиле переместит щуп и золотник через положение равновесия вверх (по схеме), пока проходное сечение щели h и количество масла, проходящего через нее из верхней полости, не возрастет до такой величины, что сила, действующая на поршень со стороны нижней штоковой полости 34
цилиндра, станет больше таковой со стороны верхней полости и избыточная сила, направленная вверх, станет достаточной для преодоления сопротивления подачи. При этом вертикальная каретка начнет перемещаться вверх в соответствии с контуром шаблона.
Соответственно, при понижающемся профиле шаблона, золотник под действием пружины 5 смещается ниже положения равновесия, пока проходное сечение щели h не уменьшится, а давление в верхней полости цилиндра не возрастет до такой величины, что сила, действующая на поршень со стороны верхней полости цилиндра, станет больше таковой со стороны нижней полости и под действием избыточной силы, направленной вниз, вертикальные салазки начнут перемещаться вниз в соответствии с крутизной контура шаблона. Таким образом, привод с управляющим золотником, имеющим одну рабочую щель в схеме с дросселем, соединяющим две полости цилиндра, работает аналогично приводу с двухщелевым золотником. Диаметр d штока силового цилиндра выбирается так же, как и в приводе с двухщелевым золотником. Обычно соотношение рабочих площадей в штоковой и поршневой полостях составляет 1 : 2.
Привод с однощелевым золотником и дросселем, соединяющим две полости цилиндра, уступает приводам с четырех- и двухщелевыми управляющими золотниками по точности копирования, возможности варьирования схемы. Недостатком привода является ограниченность скорости слежения вследствие небольшой пропускной способности постоянного дросселя 7, установленного в магистрали между полостями цилиндра.
В схеме следящего привода с однощелевым золотником, приведенной на рис. 13, б, постоянный дроссель отсутствует. Управление перемещениями поршня силового цилиндра осуществляется путем изменения ширины щели h между кромками золотника и окна в корпусе, при котором регулируется давление в нижней полости Г силового цилиндра. Клапан 14 в этом приводе является предохранительным и настраивается на наибольшее допустимое давление. Верхняя полость цилиндра соединяется с дренажем, а сила, действующая на поршень в направлении вниз, создается вследствие несбалансированного веса каретки 15, смонтированной на вертикальных направляющих.
В схеме, приведенной на рис. 13, в, постоянная сила, действующая на поршень в направлении вниз, создается в результате присоединения верхней полости цилиндра к нагнетательной магистрали специального насоса 19, давление в которой устанавливается отдельным переливным клапаном 18,
При подводе щупа к шаблону или перемещении щупа по снижающемуся участку контура шаблона золотник под действием пружины смещается относительно корпуса ниже положения равновесия, в результате чего проходное сечение щели h возрастает, облегчается слив масла, подаваемого насосом 20 по трубо
проводам 16 и 17 в нижнюю полость цилиндра и к корпусу золотника, давление в нижней полости цилиндра при этом уменьшается. Образуется избыточная сила, действующая на поршень вниз. Эта сила преодолевает сопротивление подачи и осуществляет перемещение поршня, штока и каретки вниз. Наличие жесткой обратной связи, осуществляемой закреплением корпуса золотника на вертикальной каретке, обеспечивает воспроизведение контура копира на обрабатываемой заготовке.
Следящие приводы, построенные по схемам, показанным на рис. 13, бив, просты по конструкции.
Однако такие приводы дают пониженную точность копирования, которая зависит также от вязкости (температуры) масла и его утечки в насосе.
В приводе, схема которого показана на рис. 13, г, применяемом в копировальных устройствах фирмы «Магдебург», давление в поршневой полости цилиндра дифференциального действия определяется подпорным клапаном 21, который отрегулирован на давление, значительно меньшее, чем предохранительный клапан 22.
Подпорный клапан установлен в сливной магистрали, идущей от поршневой полости цилиндра и рабочей щели h золотника, управляющей давлением в штоковой полости силового цилиндра дифференциального действия. При смещении щупа вниз и увеличении проходного сечения щели h давление масла, подаваемого насосом, падает и в предельном случае может снизиться до давления подпорного клапана. При этом вследствие разности площадей поршень, шток и каретка будут перемещаться вниз (по схеме). Наоборот, при смещении щупа вверх и уменьшении проходного сечения щели золотника давление масла, подаваемого насосом, возрастает до предельного, определяемого настройкой предохранительного клапана, и давление в штоковой полости цилиндра превышает давление в поршневой полости настолько, что поршень и каретка будут перемещаться вверх. Воспроизведение контура шаблона на обрабатываемой заготовке в этом случае, как и в предыдущих, обеспечивается вследствие наличия обратной связи.
Рис. 14. Изменение скорости копирования при различных видах скорости задания
На базе четырех-, двух- и однощелевых дроссельных золотников теоретически можно построить кроме рассмотренных большое количество других схем следящих приводов, которые приведены в работе [48].
Характерной особенностью всех рассмотренных однокоординатных следящих приводов с постоянной скоростью задания является зависимость величины скорости копирования — геометрической суммы задающей v3 и следящей vc скоростей от крутизны профиля шаблона. На рис. 14, а линия 1 характеризует изменение скорости копирования ик (перемещение конца вектора скорости копирования) при постоянной скорости задания для различных углов р (см. рис. 1) наклона профиля шаблона. Как следует из графика, скорость копирования определится из выражения
К о ’
COS р
Таким образом, при угле наклона профиля р = 45° скорость копирования возрастает в 1,4 раза, а при р = 60° в 2 раза по сравнению со скоростью копирования на участках, параллельных скорости задания (₽ = 0).
Поэтому однокоординатные следящие приводы с постоянной скоростью задания обычно применяются при угле р наклона-профиля шаблона не более 45°.
При необходимости обвода с помощью однокоординатного следящего привода шаблона с углами наклона профиля более 45° применяется переменная скорость задания, изменяемая ступенчато или бесступенчато.
Ступенчатое изменение скорости задания осуществляется обычно от двух- или четырехскоростного электродвигателя или от электродвигателя постоянного тока с бесступенчатым изменением оборотов.
График изменения скорости копирования при четырех ступенях задающей скорости показан на рис. 14, б (прямые 2); рь Рг и р3 — углы наклона профиля шаблона, при которых следует производить переключение скорости задания, определяются исходя из наибольшей допускаемой скорости копирования иктах. Изменение величины скорости задания позволяет значительно повысить крутизну копируемого контура. Наибольший угол наклона профиля р4 в этом случае также не может достигать 90,° он обычно составляет 75—80°.
Для получения постоянной величины скорости копирования и возможности воспроизведения профилей с углами подъема до 90° применяются однокоординатные следящие приводы с автоматически регулируемой задающей подачей.
Схема следящего привода с автоматическим регулированием задающей скорости специальным регулятором разработана Б. Л. Коробочкиным [13].
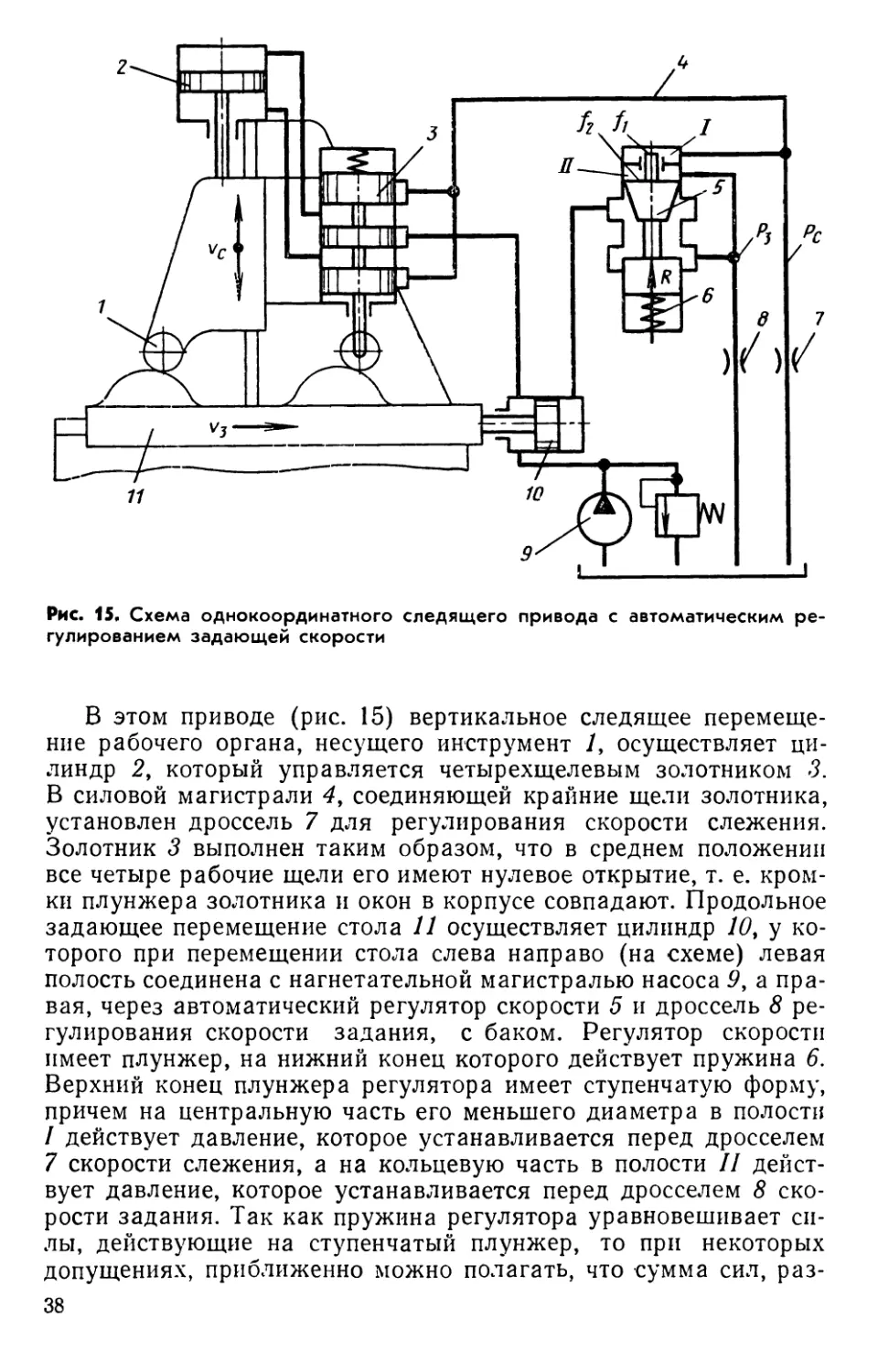
Рис. 15. Схема однокоординатного следящего привода с автоматическим регулированием задающей скорости
В этом приводе (рис. 15) вертикальное следящее перемещение рабочего органа, несущего инструмент /, осуществляет цилиндр 2, который управляется четырехщелевым золотником 3. В силовой магистрали 4, соединяющей крайние щели золотника, установлен дроссель 7 для регулирования скорости слежения. Золотник 3 выполнен таким образом, что в среднем положении все четыре рабочие щели его имеют нулевое открытие, т. е. кромки плунжера золотника и окон в корпусе совпадают. Продольное задающее перемещение стола 11 осуществляет цилиндр 10, у которого при перемещении стола слева направо (на схеме) левая полость соединена с нагнетательной магистралью насоса 9, а правая, через автоматический регулятор скорости 5 и дроссель 8 регулирования скорости задания, с баком. Регулятор скорости имеет плунжер, на нижний конец которого действует пружина 6. Верхний конец плунжера регулятора имеет ступенчатую форму, причем на центральную часть его меньшего диаметра в полости I действует давление, которое устанавливается перед дросселем 7 скорости слежения, а на кольцевую часть в полости II действует давление, которое устанавливается перед дросселем 8 скорости задания. Так как пружина регулятора уравновешивает силы, действующие на ступенчатый плунжер, то при некоторых допущениях, приближенно можно полагать, что сумма сил, раз-38
виваемых в полостях / и // постоянна и определяется силой пружины последнего:
Pcf 1 + PJ2 = R, (4)
где рс — давление перед дросселем 7 скорости слежения; р3 — давление перед дросселем 8 скорости задания; f\ и f2 — площади ступенчатого плунжера соответственно в полостях I и II регулятора; R — сила пружины 6 регулятора.
При обводе какого-либо профиля вытесняемое из цилиндров 2 и 10 скорости слежения и скорости задания масло проходит через дроссели 7 и 8.
Для дросселей типа диафрагмы квадратичный закон истечения определяется соотношением
Фдр — ‘^дрР'др ^Рдр » (5)
где Здр— площадь проходного сечения дросселя; цдр— коэффициент расхода; р — плотность; Дрдр — перепад давления на дросселе.
Давление рс и р3 перед дросселями и в полостях I и II регулятора будут пропорциональны приблизительно квадратам расходов в них масла, т. е.
(6)
где Qc» Оз — расходы соответственно через дроссели 7 и 8 регулирования следящей и задающей скоростей; Sc, S3— площади проходных сечений дросселей 7 и 8; цс, Цз— коэффициенты расходов в дросселях 7 и 8.
При
Qc = Q3 ^3>
где цс, 273 — соответственно скорости слежения и задания; Fc« F3 — площади поршней соответствующих цилиндров, совместное решение уравнений (4) и (6) дает
наибольшие величины скоростей слежения и задания при обводе контуров с углом р наклона соответственно 90° и 0° (см. рис. 1).
Рис. 16. Схема вибрационного доводочного пресса модели ГДП-16
При равенстве наибольших скоростей слежения и задания, которое достигается выбором соответствующих размеров площадей дросселей, плунжеров и цилиндров, соотношение (7) приобретает вид
г?с 4- v з = у к = const. (9)
Таким образом, в результате действия регулятора сумма квадратов скоростей слежения и задания может быть постоянной (кривая на рис. 14, в), а следовательно, будет постоянной скорость копирования независимо от угла наклона копируемого профиля. Может быть получен эллиптический закон изменения скорости копирования. Величина скорости копирования определяется проходными сечениями дросселей 7 и 8. Исследования, выполненные Б. Л. Коробочкиным, показали, что параметры регулятора скорости задания существенно влияют на работу привода скорости слежения [13].
Рассмотренный следящий привод применяется в токарно-копировальных полуавтоматах, выпускаемых московским станкостроительным заводом им. С. Орджоникидзе и др. Применяются также другие типы следящих приводов с автоматической регулировкой скорости задания.
Рассмотренные гидравлические приводы при исключительной простоте конструкции позволяют осуществить широкие техноло-40
гические возможности оснащенного ими оборудования, в ряде случаев практически недоступные для приводов других видов (электрических, пневматических). Примером может служить гидропривод вибрационного доводочного пресса модели ГДП-16, построенный на основе однокаскадного гидравлического копировального следящего привода и разработанный А. И. Махряе-вым.
Гидромеханическая часть пресса состоит (рис. 16) из станины /, рабочего цилиндра 18, закрепленного в станине, вибратора 5, корпус которого закреплен на рабочем цилиндре, и рычага обратной связи 14. Рабочий цилиндр имеет поршень 17 с двумя штоками. На нижнем силовом штоке закрепляется верхняя часть инструмента 3 (боек). Нижняя часть инструмента 2 (наковальня) крепится в станине 1. Верхний шток упирается через промежуточный плунжер 16 в рычаг обратной связи 14, который имеет опору 13, устанавливаемую или перемещаемую в вертикальном направлении винтом 15 (задающим устройством). Вибратор 5 включает четырехщелевой золотник 6, верхняя часть которого упирается в рычаг обратной связи 14 и несет грузы 12, подпружиненные пружинами 11.
Пресс работает следующим образом. В исходном положении рычаг обратной связи 14 винтом 15 отведен в крайнее верхнее положение. При этом поршень 17 также занимает крайнее верхнее положение, упираясь в крышку рабочего цилиндра; производится установка заготовки. При перемещении вниз опоры 13 рычага обратной связи 14 происходит замыкание верхнего штока поршня 17 через плунжер 16 на управляющий золотник 6 и опускание последнего. При переходе через среднее положение и открытии щелей 7 и 10 начинается движение вниз поршня 17. Вследствие этого с помощью рычага 14 перемещается вверх золотник 6 вплоть до перехода его через среднее положение, при котором изменяется направление движения поршня 17. В результате устанавливаются устойчивые автоколебания управляющего золотника 6 и соответственно изменение давления в полостях цилиндра 18.
Следовательно, этот гидропривод имеет двухконтурную схему построения с осуществлением обратной связи: при движении золотника от крайнего верхнего до среднего положения от рабочего поршня 17 (внешний контур перемещения центра колебаний) и при движении золотника от среднего положения вниз и далее от крайнего нижнего до крайнего верхнего положения от поршня 4 (внутренний автоколебательный контур). Переключение обратной связи с внешнего на внутренний контур осуществляется плунжером 16.
При замыкании внешнего контура существует жесткая связь между опорным буртом плунжера и крышкой штока, при замыкании внутреннего контура образуется зазор а; автоколебания внутреннего контура достигаются выбором соответствующих
параметров золотника 6, поршня 4 и массы грузов 12. При соприкосновении инструмента 3 с деталью 19 происходит ее деформирование пульсирующей рабочей силой, которая создается колебанием давлений в полостях цилиндра 18. По окончании деформирования с помощью устройства 15 установка становится в исходное положение. Величины рабочей силы и обжатия регулируются устройством 15 и подводимым давлением рп.
Частота и амплитуда автоколебаний регулируются изменением массы грузов 12, дросселями 8 и 9 и жесткостью пружин 11. Гидропривод обеспечивает резкое снижение шума и передачи вибрации на руки рабочего.
Техническая характеристика привода
Ход рабочего органа.......................... 100 мм
Рабочее давление рп ......................... 64 кгс/см2
Сила деформирования.......................... до 16 тс
Регулирование амплитуды колебаний рабочего органа в пределах............................0,2—10 мм
Регулирование частоты колебаний рабочего органа в пределах................................ 20 — 2 Гц
Диаметр рабочего поршня......................£)п = 180 мм
Диаметр подпорного поршня....................dn= 10 мм
Диаметр плунжера .............................t/njI=12 мм
Lj
Передаточное отношение рычага обратной связи ioc =------= 3
L2
Масса груза на золотнике......................... 30 кг
7. Однокоординатные многокаскадные приводы
Вследствие гидростатической неуравновешенности, возникающей в результате погрешностей изготовления золотниковых пар, действия реактивных сил от потоков жидкости и других явлений, связанных с работой дроссельных золотников, сила, необходимая для перемещения дроссельного золотника относительно корпуса, возрастает с увеличением его диаметра, подведенного давления и величины протекающего потока. Поэтому при значительных скоростях копирования и нагрузках в однокаскадных приводах для обеспечения надежной работы сила натяжения пружины, действующей на золотник, должна быть значительной. В результате контактная сила между щупом и шаблоном может •составлять 1—3 кге и более.
Стремление значительно уменьшить действие щупа на шаблон и ограничить его силами в десятки грамм привело к созданию многокаскадных гидравлических приводов, в которых между золотником, кинематически связанным с щупом, и силовым двигателем устанавливается дополнительный гидравлический
Рис. 17. Схемы однокоординатных двухкаскадных гидравлических следящих приводов с гидроусилителями:
а — в форме двух-четырехщелевых золотников; б — в форме одно- и четырехщелевых золотников
усилитель. Необходимость обеспечения незначительной величины силы управления гидроусилителем характерна также для всех комбинированных электро- и пневмогидравлических приводов.
Рассмотрим несколько типовых схем двухкаскадных приводов. Схема двухкаскадного привода показана на рис. 17, а. Перемещения щупа 7, задаваемые шаблоном S, сообщаются управляющему четырехщелевому золотнику 3 малого диаметра, корпусом для которого является распределительный четырехщелевой золотник 4 большого диаметра. Масло под давлением к среднему бурту управляющего золотника подводится через канал 6, слив у крайних буртов осуществляется по каналам 5, а проточки между буртами соединены каналами 2 и 9 с торцовыми полостями распределительного золотника. Нетрудно проследить, что благодаря такой конструкции распределительный золотник полностью повторяет перемещения управляющего золотника, а значит и щупа. При обводе щупом 7 контура шаблона 8 распределительный золотник управляет работой силового цилиндра 1 так же, как в однокаскадном приводе. Этот привод (рис. 17, а) позволяет осуществлять перемещения щупа от незначительных сил.
По подобной схеме с применением двух- и однощелевых управляющих золотников может быть построено множество вариантов многокаскадных приводов. Например, на рис. 17, б показана схема привода с управляющим однощелевым и распределительным четырехщелевым золотниками. В этом приводе щуп 14 жестко соединен с однощелевым управляющим золотником 13 малого диаметра, распределительный золотник 18 — четырехщелевой и жестко связан с поршнем 12 дифференциального действия. Масло от насоса 17 низкого давления поступает в полость
Н9 а через дроссель 16— в полость 15 по сторонам поршня, откуда, пройдя через щель h сливается в бак. При среднем положении управляющего золотника в полости 15 устанавливается пониженное давление, так что силы, действующие по обе стороны поршня, уравновешиваются и распределительный золотник остается неподвижным.
При смещении щупа и управляющего золотника, например, вниз (по схеме) проходное сечение щели h между кромками управляющего золотника и поршнем увеличивается, давление в полости 15 понижается и распределительный золотник перемещается до тех пор вниз, пока вновь не установится равновесие сил по сторонам поршня. Таким образом, распределительный золотник повторяет перемещения управляющего золотника, а значит и щупа. При обводе щупом 14 контура шаблона распределительный золотник управляет работой силового цилиндра 10 так же, как и в однокаскадном приводе.
Многокаскадные схемы в однокоординатных следящих приводах станков применяются ограниченно главным образом вследствие их сложности (по сравнению с однокаскадными схемами), а также в связи с изготовлением шаблонов из материалов (сталь, бакелит, пескомасса), допускающих значительные контактные силы со стороны щупа. Кроме того, контактные силы в однокаскадных приводах можно несколько снижать введением круговой осцилляции золотника.
8. Многокоординатные приводы. Масштабное копирование
Для обработки поверхностей с замкнутыми контурами, при обводе которых направление перемещения инструмента изменяется в пределах 360°, применяются двухкоординатные следящие приводы [30]. Сопоставление схем одно- и двухкоординатных следящих приводов показывает, что при переходе от первых ко вторым сложность привода возрастает во много раз. Естественно, что при создании приводов, в которых от одного щупа следящее управление осуществляется одновременно и взаимосвязано по трем или более координатам перемещения, неизбежно еще большее усложнение конструкции. Поэтому для автоматизации обработки пространственных поверхностей целесообразно комбинировать одно- и двухкоординатные следящие приводы для получения многокоординатных следящих приводов. Преимуществами таких приводов являются простота их конструкции и однотипность, что обеспечивает простоту отладки, а также удобство и надежность в эксплуатации. При устойчивой работе каждого из составных следящих приводов обеспечивается устойчивая работа и всего комбинированного привода. Вместе с тем ощупывающие устройства комбинированных приводов имеют сложную 44
Рис. 18. Гидрокинематическая схема комбинированного двухкоординатного следящего привода копировально-фрезерных станков моделей ПКФ-8 и ПКФ-12
конструкцию, требующую взаимного согласования и наладки отдельных элементов, так как каждый из составных приводов имеет самостоятельный щуп (единого щупа у привода нет).
Управлять комбинированным следящим приводом можно от макета копируемой поверхности и от набора плоских копиров по каждой из координат.
Гидрокинематическая схема комбинированного двухкоординатного следящего привода копировально-фрезерного станка модели ПКФ-8 (модернизированным станкам присвоен шифр КУ-191) производства Коломенского завода тяжелого станкостроения показана на рис. 18. Этот привод позволяет производить автоматическое копирование поверхностей с переменным углом подъема и наклона. Кинематическая схема перемещений, осуществляемых приводом, образуется из однокоординатных следящих приводов вертикального и углового перемещений при продольной задающей подаче. Для наглядности схема каждого однокоординатного привода показана на фоне отдельного поперечного сечения станка.
Следящее вертикальное перемещение фрезы 5, укрепленной в шпинделях, установленных в люльке 4, смонтированной на каретке 2, которая может перемещаться по вертикальным направляющим портала И, осуществляется от цилиндра <3. Цилиндр управляется от копировального прибора, состоящего из четырехщелевого золотника 8 и щупа 6, рычаг которого шарнирно закреплен на оси 7. При продольном перемещении портала от чер
вяка 10 и червячной рейки, щуп скользит по поверхности плоского шаблона 9. Обратная связь в следящем приводе осуществляется путем жесткого соединения корпуса копировального прибора с вертикальной кареткой.
Следящее угловое перемещение фрезы осуществляется от цилиндра /, который с помощью рейки, скрепленной с его штоком, пары зубчатых колес z ~ 25, z = 15 и зубчатого сектора z = 298, закрепленного на люльке, осуществляет поворот последней по круговым направляющим, выполненным на передней стороне вертикальной каретки. Цилиндр управляется от копировального прибора, состоящего из четырехщелевого золотника 12 и щупа 13. При продольном перемещении портала щуп скользит по поверхности плоского шаблона 14, закрепленного рядом с шаблоном управления вертикальным перемещением.
Обратная связь в приводе углового перемещения осуществляется с помощью зубчатого сектора z = 298, закрепленного на правой стороне люльки, цилиндрического зубчатого колеса z = = 21, конических зубчатых колес z = 50, z = 25 и винта t = 24, сообщающего суппорту, на котором закреплен корпус копировального прибора, вертикальные перемещения, пропорциональные углу поворота люльки.
На примере следящего привода станка ПКФ-8 можно отметить преимущества управления сложным пространственным перемещением от отдельных шаблонов по каждой из координат.
1. Конструкция шаблонов проста, изготовляют их из листовой стали толщиной 3—4 мм и, если возникает необходимость обрабатывать на детали несколько поверхностей, шаблоны собирают в съемные пакеты.
2. Возможен выбор удобного места расположения шаблонов (в станке ПКФ-8 они закрепляются вдоль станины станка).
3. По каждой из координат копирования возможен подбор необходимой точности и конструктивно-удобного масштаба копирования. В станке ПКФ-8 угол поворота люльки с фрезой задается от плоского шаблона, причем одному градусу поворота люльки соответствует 1,9 мм высоты шаблона. Нечувствительность следящего привода, замеренная на щупе, составляет zr0,015 мм, что соответствует нечувствительности по углу поворота фрезы ±30". Изменяя передаточное отношение в обратной связи привода, можно менять соотношение между изменением высоты шаблона и углом поворота люльки, а значит, точность копирования и чувствительность следящего привода.
4. Достигается независимое управление каждым составляющим приводом.
5. Копировальные приборы и органы управления ими рассредоточены, поэтому их можно выполнить конструктивно просто, удобно для эксплуатации и однотипно.
Однако существенным недостатком такого способа управления является то, что изготовление набора специальных шабло
нов по каждой из координат слежения является, очевидно, весьма трудоемким процессом, и иногда трудно осуществимым. Поэтому управление комбинированным следящим приводом от набора плоских шаблонов по каждой из координат целесообразно главным образом при серийном или массовом изготовлении копируемых деталей.
В рассмотренных ранее станках со следящими приводами размеры деталей были идентичны размерам шаблона, по которому они обрабатывались. В приводе, показанном на рис. 18, возникла необходимость перевода линейных размеров шаблона в угловые перемещения инструмента. В общем случае может возникнуть потребность по данному шаблону обработать деталь в более крупном или мелком масштабе.
Масштабное копирование позволяет изготовлять крупные детали по небольшим шаблонам, что значительно удешевляет изготовление шаблонов и сокращает размеры станков, получать детали небольших размеров высокой точности по крупным шаблонам и изготовлять подобные по размерам детали по одному шаблону в результате переналадки кинематических цепей станка. Масштабом копирования называется отношение величины размера хд на детали к величине аналогичного размера хш на шаблоне, т. е. масштаб копирования равен—. Если деталь боль-ше шаблона, то масштаб копирования больше единицы, и, наоборот, если деталь меньше шаблона, то масштаб копирования меньше единицы. Достигается требуемый масштаб копирования в следящих приводах вследствие установки соответствующего передаточного отношения в цепи обратной связи от инструмента (рабочего органа станка) к щупу копировального прибора (сравнивающему устройству).
Рассмотрим конкретный пример привода с масштабным копированием. Схема однокоординатного следящего привода масштабного копирования, примененного в копировально-фрезерном станке модели КФЛ-1, показана на рис. 19. Фрезе 1, укрепленной в шпинделе на вертикальной каретке 2, сообщаются от шаблона 6 с помощью щупа 7, четырехщелевого золотника 5, гидромотора 10, червячной пары 11 и винта 12 следящие перемещения по вертикальным направляющим колонны <3. Колонне сообщается задающее перемещение по продольным направляющим станины 8 от винта 9. Обратная связь от вертикальной каретки к управляющему золотнику осуществляется по кинематической цепи, состоящей из двух пар конических колес z = 34 X Х2 и винта 4, перемещающего в вертикальном направлении суппорт, на котором закреплен корпус золотника.
Особенностью следящего привода является то, что высота шаблона в 4 раза меньше длины вертикального перемещения инструмента, т. е. масштаб копирования -^- = 4. Это достигает-
Рис. 19. Схема однокоор-
N~10kBt динатного следящего п-3000 од/мин привода масштабного ко-пирования копировально-фрезерного станка модели КФЛ-1, оснащенного комбинированным трехкоординатным следящим приводом
>///////////,
11
10
1
W\
-W
9
L
8
t=16 m=3 2-k зах.
i =3^*2
ся выбором величины передаточного отношения в цепи обратной связи Ц) = —, так как шаг винта 4, перемещающего корпус уп-равляющего золотника, в 4 раза меньше шага t= 16 мм винта /2, перемещающего каретку с инструментом.
Применение в станке КФЛ-1 привода с масштабным копированием позволило осуществить следящее управление перемещением инструмента на длине вертикального хода в 1500 мм по шаблонам небольшой высоты (до 375 мм), которые удобно крепятся с внешней стороны низкой станины станка. Наибольшая следящая скорость вертикального перемещения инструмента в станке КФЛ-1 составляет 1500 мм/мин.
В приводах для масштабного копирования часто применяются пантографные и другие устройства. Масштабное преобразование может осуществляться не только по одной, но и двум и более координатам, что рассматривается в следующем примере привода. При выборе масштаба копирования следует всегда иметь в виду, что чем больше масштаб копирования, тем больше будут погрешности и нечувствительность привода и наоборот.
Гидрокинематическая схема комбинированного двухкоординатного следящего привода копировально-токарного станка марки ТКБ-1 производства московского завода «Красный Пролетарий» показана на рис. 20. Этот привод позволяет производить автоматическое копирование поверхностей, не являющихся телами -48
А-А
Рис. 20. Принципиальная гидрокинематическая схема комбинированного двухкоординатного следящего привода токарно-копировального станка модели ТКБ-1 с масштабным копированием
вращения. Кинематическая схема перемещений, осуществляемых приводом, состоит из однокоординатных следящих приводов поперечного и углового перемещений при продольной задающей подаче. Ввиду больших размеров обрабатываемых деталей (наибольший диаметр составляет 3000 мм и длина 11 500 мм) в станке предусмотрено масштабное копирование, при котором шаблон изготовляется в 10 раз меньше детали.
Поперечное перемещение резца и резцедержателя 4, укрепленного на поперечной каретке 2 суппорта, осуществляется от жестко связанного с ним цилиндра 1. Цилиндр управляется от четырехщелевого золотника 20 копировального прибора 14. Щуп 21, жестко соединенный с золотником 20, прижимается пружиной к поверхности шаблона 16. Обратная связь от резца к щупу осуществляется кинематической связью 11, соединяющей поперечную каретку 2 суппорта с кареткой 13 копировального прибора, перемещающейся в поперечном направлении со скоростью, уменьшенной в 10 раз.
Следящее угловое перемещение резца вокруг горизонтальной оси, обеспечивающее установку его по нормали к обрабатываемой поверхности в поперечном сечении, осуществляется от поршня цилиндра 8 с помощью жестко связанной с ним рейки 7, двух цилиндрических зубчатых колес и зубчатого сектора 3. Цилиндр 8 управляется от четырехщелевого золотника 27 копировального прибора 14, который перемещается от специального ощупываю
щего устройства. Это устройство выполнено в виде двух упоров 23, закрепленных на коромысле 22, которые прижимаются к поверхности шаблона пружиной 24. К прямолинейной стороне коромысла пружиной 18 через золотник 27 и шарнирный рычаг 26 прижимается ролик 25.
При такой конструкции ощупывающего устройства на золотник 27 передаются только перемещения, связанные с поворотом коромысла 22, когда щуп 21 поперечного копирования отклоняется от нормали к поверхности шаблона в поперечном сечении. Перемещения коромысла и упоров вдоль оси щупа 21, связанные, например, с изменением радиуса копируемого сечения, на золотник 27 углового копирования не передаются. Обратная связь от резца к щупу по каналу углового копирования осуществляется через кинематическую цепь 10 и зубчатый сектор 19, на котором укреплен копировальный прибор, с передаточным отношением 1:1, что обеспечивает масштаб копирования 1:1.
В приводе станка ТКБ-1 вращение детали 6 и копира 16 осуществляется синхронно с помощью кинематической цепи 5, а перемещение вдоль оси кареток 13 и 14 — в масштабе 1 : 10 — с помощью кинематической цепи 15 и 17.
На примере следящего привода станка ТКБ-1 видно, что управление по всем координатам слежения от одного шаблона, имеющего форму макета обрабатываемой поверхности, имеет то существенное преимущество, что оно не требует изготовления специальных шаблонов. Так, при масштабе копирования 1 : 1 можно использовать в качестве шаблона непосредственно эталонную деталь, что существенно при небольшой серии копируемых деталей, а при масштабном копировании — использовать макет детали. При работе по одному шаблону внимание оператора сосредоточено на одном участке и поэтому он может наблюдать сразу за процессом копирования одновременно всеми щупами.
Вместе с тем, существенным недостатком способа управления от макета обрабатываемой поверхности несколькими следящими приводами является относительная скожность и оригинальность конструкции ощупывающего устройства в связи с необходимостью сосредоточения щупов в одном месте. Поэтому такой способ управления особенно эффективен в единичном и мелкосерийном производстве.
ГЛАВА III.
ПОСТРОЕНИЕ СХЕМ ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ С ЧПУ
9. Приводы дроссельного регулирования с аналоговыми системами ЧПУ
В общем случае гидравлические следящие приводы дроссельного регулирования с системой ЧПУ строятся в соответствии со структурной схемой, показанной на рис. 9.
Привод с однокаскадным гидроусилителем и фазовой системой ЧПУ для контурной обработки рассмотрен в гл. I. Такой привод при переходе <к конкретным агрегатам, свойственным фазовой системе, показан на рис. 21. Регулируемый разомкнутый по положению электрогидравлический привод на схеме выделен штрихпунктирной линией. Он включает усилитель постоянного тока УПТ, электромеханический преобразователь ЭМП, гидроусилитель ГУ и гидродвигатель Д.
Понятие следящего привода включает в себя помимо регулируемого привода сравнивающее устройство (ФД) и средства обратной связи по регулируемому параметру. Следящий привод с обратной связью по положению двигателя Д заключен между вертикальными штрихпунктирными линиями. Обратная связь по положению осуществляется электромеханическим измерительным устройством — вращающимся трансформатором ВТ, который может охватывать только гидродвигатель (вариант, изображенный сплошными линиями), или гидродвигатель, силовой ре-
Рис. 21. Структурная схема привода дроссельного регулирования с однокаскадным гидроусилителем и фазовой системой ЧПУ
дуктор Р и рабочий орган РО (вариант, изображенный штриховыми линиями).
При обратной связи от гидродвигателя, осуществляемой механическим соединением вала ВТ непосредственно с валом гидродвигателя Д или через дополнительный редуктор обратной связи Рос, погрешность воспроизведения определяется суммой погрешностей собственного следящего привода и погрешностей редуктора и пары винт—гайка.
Погрешности механической части привода при разгрузке направляющих рабочего органа станка от сил трения, беззазорном редукторе и шариковом исполнении винтовой пары на длине хода до 3 м не превышают ±0,03 мм. Этим объясняется наиболее широкое распространение такой схемы привода во фрезерных станках средних размеров нормальной точности, например, модели ПФП-1. При прецизионном исполнении редуктора, винтовой пары с предварительным натягом, небольшой длине хода и малой цене оборота фазы привод, построенный по схеме, показанной на рис. 21, и обратной связи от двигателя может обеспечивать воспроизведение с более высокой точностью, что подтверждается опытом эксплуатации токарно-фрезерного станка ФОК-1. При обратной связи от рабочего органа, осуществляемой точной передачей шестерня — рейка — вращающийся трансформатор (редусин), погрешность воспроизведения определяется главным образом погрешностью привода и реечной передачи. Такая схема привода нашла ограниченное применение, так как достигаемый в этом случае эффект повышения точности относительно варианта с обратной связью от гидродвигателя в станках средних размеров с приводом от шарикового винта незначителен.
Преимуществом привода по рис. 21 является простота конструкции. К недостаткам можно отнести ограниченные возможности электрогидравлического преобразователя с однокаскад-дым гидравлическим усилением. Так как распределительный золотник преобразователя, управляющий силовым двигателем (см. рис. 6), непосредственно перемещается электромеханическим преобразователем, он выбирается малого диаметра (не 5олее 10—12 мм), а рабочее давление ограничивается 30— Ю кгс/см2. В результате привод с однокаскадным усилителем эбеспечивает низкие скорости перемещения. Так, в станке ПФП-1 наибольшая скорость перемещения не превышает 300 мм/мин, а в станке ФОК-1 150 мм/мин. Кроме того, электромеханический преобразователь должен развивать значительные силы на перемещение золотника, поэтому он должен иметь больную мощность (в указанных станках мощность должна быть до 0 Вт, что требует дополнительных электрических каскадов силения).
Привод с двухкаскадным гидроусилителем и фазовой системой ЧПУ для контурной обработки имеет тот же принцип работы, что и привод с однокаскадным гидроусилителем, а струк-2
Рис. 22. Структурные схемы приводов дроссельного регулирования с двухкаскадным гидроусилителем и фазовой системой ЧПУ:
— гидроусилитель золотник-золотник; б — гидроусилитель сопло-заслонка — золотник
турная схема построения отличается от показанной на рис. 21 внутренней структурой привода. При использовании двухкаскадного гидроусилителя типа золотник — золотник привод имеет структуру, показанную на рис. 22, а, а при использовании гидроусилителя типа сопло-заслонка — золотник,— показанную на рис. 22, б, В первом варианте привода распределительный золотник РЗ с помощью сервоцилиндра СЦ отслеживает перемещения управляющего золотника УЗ в масштабе 1 : 1; во втором варианте с увеличением, определяемым передаточным отношением ioc внутренней обратной связи ОС гидроусилителя. Введение второго каскада гидравлического усиления позволяет получить большие расходы масла для управления работой гидродвигателя, что разрешает увеличить скорости перемещений рабочего органа. Возможная величина этой скорости определяется из выражения
Утах =«Ухв. (Ю)
где Qry — расход масла через гидроусилитель; qyl — рабочий объем гидромотора; ip — передаточное отношение редуктора; tXB — шаг ходового винта привода рабочего органа станка.
Однако при данной схеме привода возможности увеличения скорости ограничиваются фазовой системой ЧПУ.
В приводах пропорционального управления, к которым относятся все рассмотренные ранее однокоординатные приводы дрос-
седьмого регулирования, скорость гидродвигателя пропорциональна величине смещения распределительного золотника от среднего положения, а значит, величине сигнала управления (7У (рис. 21) на выходе фазового дискриминатора (сравнивающего устройства), равного разности между сигналами на входе и выходе привода, т. е. погрешности воспроизведения. При фазовой системе управления эта погрешность выражается разностью фаз Ф— Фвт рабочего сигнала (7Р = t7?nsin(G)p/ + <р) и сигнала обратной связи по пути Uoc = [7rnsin(cop/ + срвт). Электронный фазовый дискриминатор выделяет рассогласование срр = = Ф — фвт- При рассогласовании |фр| > л или л/2 в зависимости от схемы фазового дискриминатора наступает срыв с рабочей характеристики фазового дискриминатора и переброс на оборот фазы, что влечет за собой образование на рабочем органе некомпенсированной погрешности размером в цену оборота фазы. Для надежной работы обычно допускается рассогласование |фРшах| 2/Зл. Другим ограничением, которое вытекает из условий устойчивости привода, является величина коэффициента усиления по скорости, представляющая собой отношение скорости на выходе к погрешности воспроизведения, так как это отношение характеризует интенсивность подвода энергии к приводу.
При фазовой системе ЧПУ коэффициент усиления по скорости может быть выражен отношением (при установившемся движении)
Фвт
(11)
где совт— угловая скорость вращающегося трансформатора (измерительного устройства в цепи обратной связи по пути).
Расчеты и эксперимент показывают, что устойчивая работа приводов, построенных по схемам, показанным на рис. 21 и 22, достигается при /G<50-^- 100 с”1. Следовательно, наибольшая допускаемая фазовой системой ЧПУ скорость вращения вала гидромотора сод max составит
max Фр тах^п
(12)
где foe — передаточное отношение редуктора Рос между гидро-котором и вращающимся трансформатором; а наибольшая скорость итах перемещения рабочего органа определится из выражения
(13)
где соВт max — наибольшая допускаемая фазовой системой ЧПУ ссорость вращения вращающегося трансформатора, установлен
ного в цепи обратной связи привода по перемещению; — цена оборота фазы.
Величины фазового рассогласования фртах и коэффициента усиления привода по скорости Kv ограничиваются соответственно характеристикой фазового дискриминатора и устойчивостью привода. Таким образом, возрастания скорости можно достигать путем увеличения цены оборота фазы /ф. Однако на этом пути также существуют ограничения, определяемые чувствительностью привода. Один оборот фазы измерительного устройства в цепи обратной связи привода, например один оборот вращающегося трансформатора соответствует строго определенному числу импульсов, определяемому разрешающей способностью этого устройства. Так, в отечественных фазовых системах, работающих от пультов управления типа ПФСТ [24], один оборот вращающегося трансформатора содержит пИо = 64 (26) импульсов. Для фрезерных станков нормальной точности с шероховатостью поверхности, соответствующей 5—6-му классам чистоты, цена одного импульса, равная перемещению рабочего органа при подаче сигнала соответствующего одному импульсу должна составлять величину не более /и = 0,01 ч-0,02 мм. Таким образом, для подобных станков цена оборота фазы составляет:
= ^И^Ио» .(14)
или в числовом выражении /ф = 0,64 4- 1,28 мм/об = 0,064 ч--н 0,128 см/об, а наибольшая скорость перемещения рабочего органа согласно выражению (13) с учетом определенных выше ограничений в зависимости от конкретной конструкции станка составит (не более):
^таХ < Фр тах^ф = 4 Л ' <50 10°) (°’°64 °’ 128> =
2л 2л 3
= 1,06 — 4,26 см/с 600 н-2500 мм/мин.
Очевидно, при повышении цены импульса, если это разрешает требуемая точность станка, можно получить большие скорости перемещений. Проведем сопоставление схем построения привода дроссельного регулирования с двухкаскадными гидроусилителями, показанных на рис. 22, отличающихся передаточными отношениями в цепи обратной связи гидроусилителя.
Наибольшая скорость итах перемещения рабочего органа осуществляется при фазовом рассогласовании q)p шах, которому соответствует число импульсов
= “7 Фр тах^и0« (15)
2Л
Для рассмотренного примера при
Фртах = 4Л И Пц„=64
О
это составляет /г„ = 21 импульс. Так как управление приводом пропорциональное, то наибольшей скорости итах соответствует наибольший ход /гтах распределительного золотника РЗ, а одному импульсу соответствует смещение hn распределительного золотника от среднего положения
/ги = 2Ьлах.. (16)
пи
Для того чтобы привод отрабатывал каждый импульс, необходимо выдержать условие
Ли > Лн, (17)
где 1ги — зона нечувствительности привода, отнесенная к распределительному золотнику.
Исходя из условия (17) следует дать предпочтение схеме, показанной на рис. 22, имеющей при прочих равных условиях больший ход распределительного золотника РЗ.
Таким образом, применение двухкаскадного гидроусилителя в приводе для контурной обработки с фазовой системой ЧПУ позволяет повысить скорости перемещений рабочего органа станка относительно аналогичного привода с однокаскадным гидроусилителем; однако при данной схеме построения привода сохраняются ограничения как по скорости, так и чувствительности привода, а погрешность воспроизведения пропорциональна скорости и нагрузке на рабочем органе. Привод, построенный по схеме, показанной на рис. 22, применяется в четырехко-ординатных фрезерных станках с ЧПУ модели ФП-8М, где обеспечиваются скорости перемещений цШах = 1200 мм/мин при цене оборота фазы /ф = 1,28 мм и коэффициенте усиления по скорости Kv = 70 1/с.
В приводе с фазовой системой ЧПУ просто осуществляется ручное управление работой привода по пути (в режиме следящего вала) или по скорости. При этом используются два дополнительных датчика В7р и ВТС аналогично рис. 29,6. Выбор режима работы определяется переключателем 4. При работе в ручном режиме на входы датчиков ВТ0 и ВТС и фазовый дискриминатор ФД через усилители подается сигнал 5 от вспомогательного генератора частотой 250 Гц.
Датчик ВТР соединен последовательно с датчиком обратной связи ВГ0, находящимся на редукторе двигателя Д. В результате на второй вход фазового дискриминатора ФД может подаваться сигнал, фаза которого равна сумме углов срВт + Р либо у. В первом случае привод отрабатывает угол р, задаваемый вручную путем поворота вала датчика ВГР, во втором — осуществляет подачу со скоростью, пропорциональной углу у поворота вала датчика ВТС.
Рис. 23. Схема привода с однокаскадным гидроусилителем и амплитудной системой ЧПУ абсолютного отсчета для позиционной обработки
Привод с однокаскадным гидроусилителем и амплитудной системой ЧПУ абсолютного отсчета для позиционной обработки L Схема привода одной координаты показана на рис. 23. Числовая информация, записанная в кодированном виде на перфоленте /7, считывается считывателем информации СИ, проходит устройство ввода УВ, дешифратор ДШ и преобразуется в каждом из двух цифроаналоговых преобразователей ЦАП грубого и точного отсчетов в два напряжения, модулированные по амплитуде синусом и косинусом заданного угла щ положения ротора вращающихся трансформаторов грубого ВТт и точного ВТ? отсчетов.
Между вращающимися трансформаторами установлен редуктор с передаточным отношением 1 : 100, в результате чего образуется двухканальная система отсчета, позволяющая в 100 раз увеличить длину рабочего хода при заданной точности отсчета. С помощью ЦАП примененного трансформаторного типа задающий суммарный вектор магнитного потока ВТ можно повернуть на 360° через каждые 0,36°, что и определяет разрешающую способность каждого канала привода, а именно: при принятии для точного отсчета /т min = 0,01 мм, для грубого отсчета он составит /rmin = 1 мм. Для согласования работы привода по двум каналам с учетом погрешностей изготовления необходимо, чтобы младший разряд ЦАП грубого отсчета перекрывал старший разряд ЦАП точного отсчета. Практически это перекрытие делается в пределах одного десятичного разряда. В результате охват координаты перемещения каждым из двух каналов может характеризоваться следующей записью:
1 Описание излагается применительно к системе ЧПУ мод. ПТС, разработанной под руководством Е. В. Харитонова.
В этой записи сплошной линией обведены разряды размеров перемещения, охватываемые системой точного, а штриховой — грубого отсчетов. Электрическая редукция между соответствующими разрядами ЦАП грубого и точного отсчетов равна механической редукции между ВТГ и ВТ? и составляет 100. ВТт присоединен непосредственно к ходовому шариковому винту привода рабочего органа РО станка. С роторных обмоток ВТГ и ВТт сигналы /7рг и (7рт поступают через контакты у\ и у2 селекторного переключателя С, усилитель переменного тока УП на амплитудный дискриминатор — выпрямитель ФД, дающий на выходе постоянный ток £/Пост = К sin е, где е — погрешность привода. Сигнал выхода ФД усиливается в усилителе постоянного тока УПТ и поступает на электромеханический преобразователь ЭМП гидравлического усилителя ГУ, управляющего работой гидромотора Д. Дополнительными устройствами системы управления являются: Го — генератор опорного сигнала, подающий напряжение питания t/0 = Uon sin g)/(co = 400 Гц) на ЦАП и ФД; нуль-орган НО — измеряет сигнал на выходе ФД и осуществляет через селектор С переключения контактов У1—Уъ, управляющих характером работы привода. Выходящие сигналы схемы означают:
Ух — включение датчика грубого отсчета и заданной скорости перемещения (в том числе холостого хода);
У2 — включение датчика точного отсчета и переключение заданной скорости перемещения (холостого хода) на ползущую;
z/з — отключение ползущей скорости и подключение привода к датчику обратной связи по положению (переход на следящий режим);
Уь у$ — определяют направление движения.
Заданная скорость перемещения устанавливается по команде с перфоленты задатчиком скорости ЗС, который представляет собой обычный магазин сопротивлений, каждое из которых определяет необходимую скорость перемещения.
Работа привода, координируемая нуль-органом НО, осуществляется в следующем порядке: при рассогласовании свыше младшего разряда ЦАП грубого отсчета включены сигналы у\ и £/4 (г/5), привод работает в разомкнутом режиме и перемещается со скоростью, определяемой выбранным сопротивлением ЗС; при рассогласовании меньше младшего разряда ЦАП грубого отсчета включены сигналы у2 и f/4(f/5) —привод работает в разомкнутом режиме на ползущей скорости; при рассогласовании менее заданного (0,01 мм — 0,05 мм) включены сигналы У2 и у$— привод работает в следящем режиме и осуществляет выход на заданную позицию.
Таким образом, привод, управляемый рассмотренной амплитудной системой ЧПУ, обладает той особенностью, что при значительных рассогласованиях он работает в разомкнутом режи-58
ме и только вблизи заданной координаты позиционирования переключается на следящий режим. В результате может быть введен сколь угодно большой коэффициент усиления по скорости при движении между позициями и получены высокие скорости холостых перемещений.
Особенностью рассмотренной системы ЧПУ относительно фазовой является свойство абсолютного отсчета, осуществляемое двухотсчетным датчиком обратной связи. Подобный привод с пневматическим считывателем информации был успешно применен в трехкоординатном сверлильно-расточном станке ПРС-1 с автоматической сменой инструмента при скоростях подач 20— 1800 мм/мин и показал точность позиционирования =t0,03 мм. Ограничение верхней скорости подач обусловливалось примененным однокаскадным гидроусилителем. Такое ограничение снимается переходом к приводу с двухкаскадным усилителем, что осуществляется таким же образом, как и при фазовой системе ЧПУ (см. рис. 21 и 22) и не требует структурных изменений системы управления. Подобный привод осуществлен в шестикоординатном станке АПРС-3. В систему управления приводом введена обратная связь по скорости от тахогенератора ТГ, соединенного с валом гидромотора Д, для стабилизации рабочих и ползущей (20 мм/мин) подач.
10. Приводы объемного регулирования с фазовой системой ЧПУ
Привод с механической внутренней обратной связью. Построение схемы привода с механической внутренней обратной связью (рис. 24) принципиально не отличается от схемы привода с дроссельным регулированием, приведенной на рис. 22, а. В схеме, показанной на рис. 24, распределительный золотник гидроусилителя ГУ управляет не непосредственно силовым гидродвигателем, а положением сервоцилиндра СЦ люльки насоса регулируемой подачи HP, который, в свою очередь, управляет силовым гидродвигателем Д. Схема привода с двухкаскадным гидроусилителем типа сопло-заслонка — золотник и механиче-
Рис. 24. Структурная схема привода объемного регулирования с механической внутренней обратной связью и фазовой системой ЧПУ
Рис. 25. Схема гидропривода объемного регулирования с двухкаскадным гидроусилителем типа сопло-заслонка — золотник и механической внутренней обратной связью
ской внутренней обратной связью показана на рис. 25. При подаче на вход электромеханического преобразователя 1 сигнала управления, пропорционального разности <рр фаз на входах фазового дискриминатора, заслонка 2 поворачивается на угол, например, р от среднего положения. При этом уменьшается зазор между заслонкой и левым соплом и увеличивается зазор между заслонкой и правым соплом преобразователя. В результате при показанной схеме питания от насоса подпитки 11 и включении постоянных дросселей 3 соответственно возрастает давление за левым торцом распределительного золотника 4 и падает за правым торцом. Подпружиненный золотник 4 смещается от среднего положения вправо на размер, пропорциональный разности давлений под левым и правым торцами, и подает масло в полости сервоцилиндра 7, кинематически связанного с люлькой 8 насоса 9 регулируемой производительности. Сервоцилиндр начинает поворачивать люльку насоса против часовой стрелки, увеличивая производительность насоса. Одновременно рычаги 6 и 12, осуществляющие механическую внутреннюю обратную связь, перемещают распределительный золотник 4 с помощью пружины 5 в среднее положение. Движение сервоцилиндра прекратится, когда люлька, повернувшись на угол у, поставит распределительный золотник 4 в среднее положение.
При новом изменении входного сигнала соответственно будет изменяться угол р поворота заслонки, люльки насоса, произво-60
дительность насоса, а значит, и скорость движения гидродвигателя 10. Таким образом, вследствие введения механической внутренней обратной связи привод осуществляет управление скоростью движения, пропорциональное величине входного сигнала, что также имело место в приводах дроссельного регулирования. Следовательно, все закономерности для рассмотренного привода объемного регулирования в отношении наибольшей скорости перемещения, точности воспроизведения и чувствительности сохраняются такие же, как и для приводов дроссельного регулирования с фазовой системой ЧПУ.
Привод объемного регулирования имеет ряд преимуществ по сравнению с аналогичным приводом дроссельного регулирования. Вследствие жесткости механической характеристики погрешность, вызываемая нагрузкой на рабочем органе, у привода объемного регулирования будет меньше. Распределительный золотник гидроусилителя управляет перемещениями не силового двигателя, а малонагруженного и имеющего небольшие утечки сервоцилиндра разворота люльки насоса, вследствие чего зона нечувствительности hn привода, приведенная к оси (перемещению) распределительного золотника, у привода объемного регулирования будет меньше.
К недостаткам привода объемного регулирования относится его относительно сложная конструкция, меньшее быстродействие п несколько меньшая устойчивость, в результате чего в приводе можно реализовать меньший коэффициент Kv усиления по скорости. Расчеты и экспериментальные исследования показывают, что устойчивая работа приводов, построенных по схеме на рис. 24, достигается при ^< 70— 100 с-1.
Привод с электрической внутренней обратной связью. Особенностью построения схемы привода (рис. 26) является введение дополнительной электрической обратной связи по положению люльки насоса регулируемой производительности, путем соединения оси ее поворота с измерительным устройством типа вра-
Рис. 26. Структурная схема привода объемного регулирования с электрической внутренней обратной связью и фазовой системой ЧПУ:
Up e Uin sin (copf + = Utn sin Uoc = Um sin - <Pbt0 + <Рвту ^ос0 =
“ Um sin “ W’ U7==I^T>
Рис. 27. Конструктивная схема гидропривода объемного регулирования с однокаскадным гидроусилителем и электрической внутренней обратной связью
щающийся трансформатор (на схеме обозначен ВТЛ) или реду-син. Это дополнительное устройство включается последовательно с измерительным устройством BTG в цепи основной обратной связи привода по положению, так что фазы их суммируются.
Рассмотрим работу разомкнутого по положению привода, в котором отсутствует вращающийся трансформатор BTG.
Схема такого гидропривода объемного регулирования с однокаскадным гидроусилителем и электрической внутренней обратной связью показана на рис. 27. При подаче на вход фазового дискриминатора ФД и в канал питания вращающегося трансформатора ВТЛ напряжений L/p и (70 с частотой о)0, отличающихся по фазе на величину ср (рис. 28, а), на вход электромеханического преобразователя ЭМП в начальный момент будет поступать сигнал управления, пропорциональный сдвигу фаз <р, а именно, Uy = Ку. При этом четырехщелевой дроссельный золотник 2 (рис. 27) гидроусилителя сместится от среднего положения, например влево, и подаст масло в полости сервоцилиндра 3, кинематически связанного с люлькой 4 насоса 6 регулируемой 62
производительности. Сервоцилиндр начинает поворачивать люльку насоса от среднего положения на угол у, увеличивая производительность насоса. Одновременно через редуктор 5 движение сообщается вращающемуся трансформатору 7, на выходе электрической цепи которого образуется напряжение /70С, пропорциональное углу поворота вращающегося трансформатора. Если присоединить выход вращающегося трансформатора 7 к фазовому дискриминатору 1 таким образом, чтобы сигнал Uoc обратной связи вычитался из входного сигнала t7p, то по мере поворота люльки разность этих сигналов (7У будет уменьшаться и при достижении определенного угла поворота, когда сигнал управления Uy станет близким к нулю, золотник гидроусилителя возвратится в среднее положение, а гидромотор 8 будет вращаться со скоростью, определяемой величиной сдвига фазы <р входного сигнала (7Р. Если уменьшить сдвиг фазы ср входного сигнала, то вначале вследствие превышения величины сигнала обратной связи относительно входного сигнала, сигнал управления [7У изменит знак, электромеханический преобразователь 9 переместит золотник 2 вправо и сервоцилиндр 3 начнет разворачивать люльку насоса в направлении уменьшения расхода (уменьшения угла у), и будет возвращать вращающийся трансформатор 7 в исходное положение. Движение прекратится при равенстве фаз входного сигнала и сигнала обратной связи. Изменяя передаточное отношение редуктора 5, можно при одном и том же сдвиге фаз <р входного сигнала t/p получать различные углы по-
б)
Рис. 28. Структурные схемы разомкнутого привода объемного регулирования с фазовой системой ЧПУ с управлением:
а — от магнитной головки; б — от звукового генератора ^р = ^0 = ^т sin
ворота люльки, а значит, скорости гидромотора. 2Механическая редукция часто заменяется электрической в результате перехода от вращающегося трансформатора ВГЛ к редусину. Номер ре-дусина указывает на размер передаточного отношения эквивалентного редуктора. Например, для редусина Р4 эквивалентное передаточное отношение составляет £р = 4 : 1. Очевидно, что при замене в цепи обратной связи вращающегося трансформатора 7 на редусин Р4 и прочих равных условиях угол поворота люльки и скорость двигателя уменьшится в 4 раза. Таким образом, увеличение передаточного отношения редуктора между осью люльки насоса и вращающимся трансформатором приводит к снижению скорости и загрублению (снижению коэффициента усиления по скорости) привода.
Схема гидропривода объемного регулирования с однокаскадным гидроусилителем и электрической внутренней обратной связью (см. рис. 27) аналогична схеме гидравлического следящего привода с фазовой системой числового программного управления (см. рис. 6). Различие состоит в регулируемом параметре (в схеме, показанной на рцс. 27 вследствие наличия регулируемого насоса осуществлен переход от перемещения к скорости).
Управление скоростью разомкнутого привода объемного регулирования удобнее практически осуществить другим способом (рис. 28, б). При такой схеме управления на вход фазового дискриминатора ФД и в канал питания вращающегося трансформатора ВТС от звукового генератора ЗГ подаются напряжения равной частоты соо, а образование управляющего сдвига фазы <р достигается путем соответствующего поворота ротора вращающегося трансформатора ВТС. При этом рассмотренный выше порядок действия привода сохраняется.
Последовательное соединение вращающихся трансформаторов ВТо (см. рис. 26) обратной связи привода по положению вала двигателя и ВТЛ — обратной связи от оси люльки насоса приводит к суммированию фаз положения каждого из них с опорным сигналом сооЛ поступающим от магнитной головки считывания. В результате, на выходе из вращающегося трансформатора ВТо угол а, эквивалентный сигналу обратной связи по положению составит
а = «с/ + Соросе/—<Рвт0, (18)
где <рВТо—сдвиг фазы на входе ВТ0, связанный со сдвигом фазы фд на валу двигателя соотношением
<РвТ0 = Фд^ОСо» (19)
а на выходе вращающегося трансформатора ВТл эквивалентный суммарный сигнал обратной связи определяется из выражения
₽ = а + у/сс = ((о0 + содгОСоК—фвт0 + Ykc, (20)
• I •1
причем yl’oc = (Рвт^
Разность между рабочим сигналом сорг -г ф и суммарным сигналом обратной связи р составит управляющий сдвиг фаз фазового дискриминатора
фр = <Ор/ +ф — Р = (&>р—«о—<Од(сс0) < + [ф — (фвто— Т»осл)]. (21)
Как было показано выше (см. рис. 27), при установившемся движении с постоянной скоростью управляющий сигнал на выходе фазового дискриминатора фр = 0 и, следовательно, из выражения (21) для случая установившегося движения, принимая Ф = О,
((Ор COqK = фвт0 Т^осл« (22)
Учитывая, что при установившемся движении скорость на валу двигателя
(Ор —(00 = :------
4ОС0
из соотношения (22) получаем, что фвто =
(23)
(24)
или, с учетом соотношения (19), угловое отставание вала двигателя составит
*ОСЛ
*ocq
Фд = Т
(25)
Последнее выражение показывает, что привод отрабатывает заданную скорость од с погрешностью фд, несмотря на то, что управляющий сигнал на выходе фазового дискриминатора равен нулю. Коэффициент усиления привода по скорости согласно выражению (И) составит:
Ко=^2-. (26)
Т1осл
Таким образом, привод объемного регулирования, построенный по схеме рис. 26, так же как и предыдущий, является приводом пропорционального управления. Особенность его в том, что погрешность воспроизведения установившегося движения, выделяемая фазовым дискриминатором, компенсируется в нем дополнительной внутренней электрической обратной связью. В результате снимаются ограничения по скорости согласно выражениям (12), (13), определяемые опрокидыванием фазового дискриминатора, и привод в установившемся режиме может работать при любой скорости, определяемой производительностью насоса. Во избежание опрокидывания фазового дискриминатора в переходных режимах, ускорения привода при разгонах и торможениях должны выбираться таким образом, чтобы раз-
Рис. 29. Структурная схема привода объемного регулирования:
а — с обратной связью от рабочего органа станка; б — с обратной связью от двигателя и элементами ручного управления
ность фаз на выходе фазового дискриминатора удовлетворяла 2
условию фр max— Я- Рассмотренный привод успешно эксплуа-3
тируется во многих фрезерных станках, намоточных установках и другом технологическом оборудовании при скоростях до 3500 мм/мин, коэффициентах усиления по скорости Kv = = 40-4-50 1/с и цене оборота фазы /ф = 0,64 мм.
Высокая жесткость привода объемного регулирования позволяет при равном коэффициенте усиления и цене оборота фазы по всем координатам получить, несмотря на значительные скоростные погрешности, высокую точность воспроизведения числовой программы на изделии.
Структурная схема привода, в котором обратная связь по положению осуществляется не от гидромотора, а от рабочего органа станка, показана на рис. 29, а. Такая обратная связь выполнена во многих крупных фрезерных станках (мод. ФП-9М, ФП-11, ПФП-5) за счет применения рейки /, шестерни 2 и реду-сина 3.
Особенно большой эффект повышения точности при обратной связи от рабочего органа станка достигается в приводах при длине ходов более 2—3 м с передачей от гидромотора к рабо-66
чему органу в виде шестеренного редуктора и пары шестерня — рейка, которые не обеспечивают кинематической точности перемещения, свойственной шариковым винтовым парам.
Изменить коэффициент усиления по скорости и таким образом достигнуть устойчивости привода можно путем регулирования передаточного отношения i0C2 в цепи дополнительной обратной связи. Такую регулировку просто осуществить путем перехода от вращающегося трансформатора к редусину и повышением номера редусина (что соответствует уменьшению передаточного отношения гОс2)-
Ручное управление работой привода по пути (в режиме следящего вала) или по скорости может осуществляться по схеме, показанной на рис. 29, б, с помощью двух дополнительных датчиков ВТР и ВТС так же, как в приводах дроссельного регулирования. Режим ручного управления определяется переключателем 4, питание от вспомогательного генератора сообщается по каналам 5, Путь перемещения привода задается углом р поворота вала датчика, скорость — углом у.
11. Приводы дроссельного регулирования с импульсной системой ЧПУ
Простейшей реализацией числовой программы является преобразование числа, выражающего размер перемещения, в последовательный ряд импульсов, каждый из которых эквивалентен перемещению на один и тот же шаг [20, 43]. Действительно, перемещение рабочего органа станка на расстояние 10 мм достаточно просто осуществить, сообщая 1000 раз перемещения по 0,01 мм.
Изменяя скорость ввода импульсов можно изменять скорость движения рабочего органа. Вводя по каждой из координат станка перемещения импульсами в количествах и с частотой, пропорциональными требуемым размерам и скоростям перемещений, можно заставить инструмент и заготовку непрерывно перемещаться по законам, необходимым для обработки детали. При импульсном вводе числовой программы задача привода сводится к восприятию электрического импульса и отработке его с усилением, необходимым для перемещения рабочего органа станка. Для этих целей в ЭНИМСе под руководством Г. И. Каменецкого были созданы следящие гидроприводы дроссельного регулирования, называемые шаговыми электродвигателями с гидроусилителями момента [22].
Привод с поворотным золотником имеет шаговый электродвигатель с гидравлическим усилителем (рис. 30). Шаговый электродвигатель ШД характеризуется тем, что при подаче на его вход электрического импульса он поворачивается на определенный угол, например 1,5° [22] модели ШД-4. Развиваемый при
Рис. 30. Конструктивная схема гидропривода с шаговым электродвигателем и гидроусилителем момента поворотного типа
этом момент на выходном валу 1 шагового двигателя невелик, однако достаточен для поворота золотника 4, жестко с ним соединенного. Этот золотник работает так же, как четырехщелевой дроссельный золотник с осевым перемещением (см. рис. 1), однако для гидростатической уравновешенности в нем выполнено удвоенное количество всех элементов: два подвода 7 масла под давлением, два слива 8 в резервуар, по паре отводов 5 и 6 к гидродвигателю Д и четыре пары рабочих щелей (по две у каждого подвода и слива). При повороте шаговым двигателем золотника на импульс, например по часовой стрелке (рис. 30), масло под давлением поступает в отвод 6, а отвод 5 соединяется со сливом. Под действием разности давлений в отводах 5 и 6 гидродвигатель начинает вращаться, увлекая за собой втулку 3, которая жестко соединена с ротором гидродвигателя. Вращение втулки по часовой стрелке будет продолжаться до тех пор, пока окна во втулке не займут среднего положения относительно рабочих кромок золотника. При этом уравняется дросселирование масла в щелях, ведущих к отводам 5 и 6 и давление в самих магистралях. При подаче последовательного ряда импульсов вал шагового двигателя будет вращаться со скоростью, определяемой частотой ввода импульсов. С такой же скоростью будет вращаться ротор гидродвигателя, отставая по углу поворота на величину, определяемую размером открытия окон во втулке, требуемым для пропуска количества масла, необходимого для вращения гидродвигателя с заданной скоростью. Тем самым при работе привода образуется погрешность воспроизведения, пропорциональная скорости движения. Очевидно, все рассуждения, приведенные в разделе 2 относительно образования зоны нечувствительности, погрешности от скорости и нагрузки, достижения устойчивости остаются в силе для данного исполнения при
вода дроссельного регулирования. Конструктивно корпус 2 гидроусилителя выполнен таким образом, что при повороте втулки 3 на любой угол сохраняется связь между соответствующими каналами в корпусе и втулке. Корпус гидроусилителя непосредственно присоединяется к корпусу гидродвигателя, чем достигается компактность конструкции и малая длина трубопроводов между усилителем и гидродвигателем.
Структурная схема привода с гидроусилителем момента и импульсной системой ЧПУ для одной координаты приведена на рис. 31. Магнитная головка считывания МГС считывает с магнитной ленты импульсы, которые в электронном кодовом преобразователе ЭКП усиливаются и перерабатываются в форму, необходимую для управления шаговым электродвигателем ШД. Введенные в шаговый двигатель импульсы преобразуются приводом в поворот вала гидродвигателя Д на определенный угол и с заданной скоростью. Вращение вала гидродвигателя через редуктор Р и шариковый винт сообщается рабочему органу РО станка. Штрихпунктиром обведен собственно электрогидравли-ческий привод, имеющий внутреннюю обратную связь по положению.
Гидроусилитель момента с импульсной системой ЧПУ образуют разомкнутый привод, у которого выходное перемещение гидродвигателя или рабочего органа не сравнивается с заданной на магнитной ленте программой. Поэтому при пропадании отдельных импульсов на магнитной ленте или в электроагрегатах до шагового двигателя они в дальнейшем не отрабатываются и на детали образуется невосполнимая погрешность, размер которой пропорционален количеству пропавших импульсов. Это обстоятельство явилось причиной того, что приводы с импульсной системой применяются главным образом при непродолжительной программе обработки — в пределах 20—30 мин на станках небольших и средних габаритных размеров. Для повышения надежности работы станка, оснащенного таким приводом, часто повторяют начало каждой операции от одной и той же начальной точки, при котором сбрасывается программа предыдущей обработки (токарные станки модели АТПР). Для обеспечения высокой надежности считывания импульсов служит большая скорость протягивания магнитной ленты 200 мм/с, что в 4—8 раз повышает ее расход относительно фазовой системы управления, где скорость протягивания составляет 50—25 мм/с.
Рис. 31. Структурная схема привода с гидроусилителем момента поворотного типа и импульсной системой ЧПУ
Рассмотрим некоторые кинематические особенности привода с импульсной системой ЧПУ.
Размер угла поворота <ри шагового двигателя, соответствующего одному импульсу, а также цена одного импульса /и являются строго обоснованными величинами. Цена импульса определяется из соотношения
'- is- -'/»• <27>
где /р — передаточное отношение редуктора; /хв — шаг ходового винта; <ри имеет размерность в градусах.
Наиболее часто применяемая цена импульса /и = 0,005 -4--ч—0,01 мм (станки 6Н13ГЭ-2).
Для того чтобы единичный импульс отрабатывался приводом, смещение золотника, соответствующее одному импульсу, должно быть больше зоны нечувствительности привода. Выбранный из этих соображений угол <рп поворота должен предусматривать ухудшение условий работы при износе гидродвигателя и рабочих кромок золотника.
Вращательное движение распределительного золотника при непосредственном соединении втулки с ротором гидродвигателя создает большое открытие h3 рабочего окна по диаметру d3 (рис. 30), что при небольшом рабочем объеме гидродвигателя делает большим подвод энергии, способствующий неустойчивости привода. Действительно, если в приводе на рис. I с осевым перемещением золотника рассогласованию по цепи обратной связи, например йп = 0,01 мм, соответствует открытие рабочих окон золотника h3 = hn = 0,01 мм, то в рассматриваемом приводе с поворотным золотником при фи = 1,5°, tu = 0,01 мм и диаметре золотника d3 = 12 мм (указанные величины соответствуют приводу станка 6Н13ГЭ-2) й3 = — 12^0,1 мм и, сле-
360 360
довательно, h3 10/гц. Таким образом, передаточное отношение в цепи обратной связи рассмотренного привода с поворотным золотником в 10 раз выше, чем в приводе, показанном на рис. 1. Поэтому рабочие окна в поворотном золотнике необходимо выбирать небольшой длины, а значит, расход масла через поворотный золотник небольшого диаметра будет рграни-ченным.
Наибольшая скорость перемещения привода ограничивается расходом масла, пропускаемым распределительным золотником, и частотой импульсов, которые может надежно отработать шаговый электродвигатель. Из двух допускаемых скоростей по этим ограничениям следует выбрать меньшую. В приводах с системой управления «Контур 4МИ» или «Контур ЗП-68», применяемых в станках, лимитирующей явилась частота импульсов, отрабатываемая шаговым двигателем. Так, двигатели типа ШД-4 отрабатывают импульсы, подаваемые с частотой 800 Гц при набросе
Рис. 32. Схема гидропривода с шаговым электродвигателем и гидроусилителем момента осевого типа
скачком и до 2000 Гц при плавном увеличении частоты (в течение 2—3 с).
Скорость перемещения приводов рабочего органа составляет у = taf, (28)
где f — частота импульсов, отрабатываемых системой ЧПУ и шаговым двигателем.
При цене импульса /и = 0,01 мм скорость рабочего органа составляет: при набросе скачком t'pa6max = 0,001 -800 = 0,8 см/с, при плавном разгоне uyCh-max = 0,001 • 2000 = 2 см/с. При уменьшении цены импульса скорость привода пропорционально падает.
Работа привода не изменяется при переходе от программоносителя в виде магнитной ленты к перфоленте и встроенному интерполятору.
Привод с золотником осевого перемещения разработан в ЭНИМСе [43] и рядом зарубежных фирм Японии, ФРГ в целях повышения скорости перемещений. При этом изменению подверглась схема и конструкция как гидравлического усилителя моментов, так и электронной управляющей части с шаговым двигателем.
Конструктивная схема привода, состоящего из шагового электродвигателя и гидравлического усилителя момента показана на рис. 32. Шаговый двигатель ШД отрабатывает импульсы, поступающие из системы ЧПУ. При отработке импульса вал /, поворачиваясь, через редуктор 2, заставляет вращаться винт 3, ввернутый в гайку 4, жестко соединенную с ротором гидромотора 5. При неподвижном гидромоторе поворот винта заставит с ним соединенный золотник 6 переместиться, например, вправо от среднего положения, в результате чего в магистрали 7, идущей от золотника к гидромотору, повысится, а в магистрали 8 — понизится давление и образовавшийся перепад давлений создаст крутящий момент на гидромоторе. Поворачиваясь, ротор гидромотора повернет гайку 4, которая через винт 3 возвратит золотник в среднее положение. При непрерывной подаче импульсов на шаговый двигатель вал гидромотора будет вращаться со ско-
Рис. 33. Структурная схема привода с гидроусилителем момента осевого ти па и импульсной системой ЧПУ
ростью, пропорциональной частоте импульсов, а золотник будет смещен от среднего положения на величину, обеспечивающую пропуск расхода масла, необходимого для вращения мотора.
В приводе с золотником осевого перемещения исключен ряд недостатков конструкции гидроусилителя момента с поворотным золотником. Так, вследствие изменения передаточного отношения редуктора и шага винтовой пары представляется возможным в широких пределах изменять коэффициент усиления в прямой цепи воздействия и в обратной связи привода. В результате длину рабочего окна и его проходное сечение можно выполнить достаточными для пропуска больших расходов масла к гидродвигателю и таким образом гидравлическая часть при золотнике осевого перемещения не лимитирует скорость привода.
Структурная схема привода с импульсной системой ЧПУ приведена на рис. 33. Эта схема аналогична схеме, показанной на рис. 31 для привода с поворотным золотником и отличается только дополнительными агрегатами (редуктор РШд шагового двигателя и винтовая-пара ВГГ).
Цена одного импульса
= - .Ун../ i t
и 360 шдр хв’
(29)
где гшд — передаточное отношение редуктора РШд между шаговым двигателем и винтовой парой (золотником).
Передаточное отношение редуктора шагового двигателя должно быть таким, чтобы перемещение шагового двигателя на один импульс создавало перемещение золотника, заведомо большее зоны нечувствительности привода.
Наибольшая скорость перемещения привода лимитируется частотой импульсов, отрабатываемой шаговым электродвигателем. В новом приводе с системой ЧПУ модели НЗЗ-1 применен шаговый электродвигатель типа ШД-5Д1 и отрабатываются импульсы, подаваемые с частотой: при набросе скачком 2000 Гц, при плавном увеличении (в течение 2—4 с) до 8000 Гц.
Наибольшая скорость движения привода определится из выражения
^max = ^uf max (30)
и при цене импульса tu = 0,01 мм составляет при набросе скорости СКачКОМ Up max = 1200 мм/мин, при плавном разгоне 72
Ууск max == 4800 мм/мин, что близко к требованиям, предъявляемым к приводам современных станков. Приводу с золотником осевого перемещения и импульсной системой ЧПУ также свойственны отмеченные выше недостатки привода с поворотным золотником: ограниченная точность в связи с тем, что привод разомкнут (нет обратной связи по перемещению от рабочего органа) и возможна потеря импульсов.
В станках новой конструкции с импульсной системой ЧПУ применяется обычно привод с золотником осевого перемещения.
12. Приводы дроссельного регулирования релейного управления с кодовой системой ЧПУ
Одним из перспективных видов приводов являются гидравлические следящие приводы, управляемые позиционной струйнопневматической системой числового управления. В подобных системах все логические действия управления и измерение положения осуществляются пневматическими струйными элементами, которые обладают достаточным быстродействием для решения многих задач дискретного управления приводом. Струйные элементы нечувствительны к вибрациям, магнитным полям, температуре и зарекомендовали себя в качестве эффективных средств автоматизации управления оборудованием, работающим в тяжелых условиях. Важным достоинством струйных элементов является то обстоятельство, что правильно сконструированная система при надлежащем уходе, вследствие отсутствия подвижных трущихся частей, обеспечивает теоретически неограниченный ресурс работы [33, 54, 55, 56].
Конструктивная схема привода со струйной кодовой системой
сгс
Рис. 34. Конструктивная схема привода дроссельного регулирования со струйной релейной системой ЧПУ
Рис. 35. Структурная схема привода со струйной релейной системой ЧПУ
ЧПУ показана на рис. 34, а его структурная схема — на рис. 35.
Программа работы привода, представляющая собой кодированную информацию об абсолютной величине перемещения, записывается на перфоленте, которая с помощью лентопротяжного устройства подается в бесконтактное струйное считывающее устройство СГС параллельного типа. Считывание числовой программы осуществляется пневматическими струями. Информация из считывающего устройства поступает в блок сравнения БС. Одновременно в блок сравнения поступает кодированная информация от датчика обратной связи ПК о фактическом положении рабочего органа. Блок сравнения представляет собой однотактный вычислительный блок, в котором производится сравнение по модулю заданного и фактического перемещений с выдачей сигнала знака рассогласования, который определяет направление движения рабочего органа. С выхода блока сравнения струйные сигналы знака рассогласования поступают в пневматические усилители мощности УП и далее в пневмомеханический преобразователь ПМП пневмогидравлического преобразователя, управляющего гидромотором. Пневмогидравлический преобразователь имеет два каскада усиления: первый — сопло-заслонка, второй — четырехщелевой золотник. Для регулирования величины скорости привода служит стандартный дроссель с редукционным клапаном Г PC. Логический преобразователь ЛП необходим для обеспечения однозначности считывания шкал датчика обратной связи ПК и преобразования информации в код записи на перфоленте. Если после ввода программы на выходах блока сравнения появляется сигнал */#=£, рабочий орган станка перемещается в соответствующую сторону со скоростью, определяемой настройкой ГРС. Движение продолжается до тех пор, пока не появится сигнал у = г, который выводит пневмогидравлический преобразователь в среднее положение. Если по инерции или в силу других причин рабочий орган перейдет заданную координату, то блок сравнения выдает сигнал знака рассогласования обратной полярности и рабочий орган будет перемещаться в обратном направлении, пока не придет в заданное положение.
При заданной разрешающей способности л привода, под которой понимается наименьший размер перемещения рабочего ор-74
гана, соответствующий одному отсчету низшего разряда датчика обратной связи, емкость N датчика обратной связи можно определить по выражению
W = -^-, (31)
где tXB — шаг ходового винта; i — передаточное число редуктора, соединяющего датчик обратной связи с ходовым винтом (в схеме на рис. 34 i = 1).
В свою очередь, максимальная величина перемещения рабочего органа
Lmax = AZX. (32)
Так как на периферии кодового диска ПК, используемого в качестве датчика обратной связи, возможно разместить ограниченное число перфораций (определяющих емкость N датчика), величина перемещения при высокой разрешающей способности л будет небольшой. Увеличить длину перемещений можно путем применения не одного, а двух дисков в датчике обратной связи, соединенных между собой редуктором таким образом, что одному (или части) оборота датчика точного отсчета (соответствующего показанному на рис. 34) будет соответствовать поворот на один отсчет в низшем разряде датчика грубого отсчета.
При такой схеме общая емкость датчика составит
AZ06 = (33)
где N? и Я— соответственно емкости датчиков грубого и точного отсчета.
Помимо этого целесообразно ввести перемещение между позициями на увеличенных скоростях, что можно осуществить путем установки, например, двух пневмогидравлических преобразователей, управляемых от блоков сравнения по грубому и точному отсчету. Осуществление такого привода [33] позволяет иметь разрешающую способность 0,05—1 мм при ускоренных перемещениях до 10 м/мин, причем общая емкость датчика обратной связи составляет до 20000 ед. Давление питания струйной логической системы составляет 200 кгс/м2.
Опыт эксплуатации указанного привода в сверлильно-фрезерном станке показывает, что целесообразно в этом случае отказаться от преобразователей, построенных на базе пропорциональных двухкаскадных гидроусилителей и перейти к преобразователю с увеличенной надежностью фиксации среднего положения и возможностью регулирования времени срабатывания и отпускания. При этом можно значительно упростить конструкцию и снизить требования к точности изготовления и настройке отдельных элементов преобразователя. Конструктивная схема такого преобразователя показана на рис. 34. В релейной следящей системе он играет роль трехпозиционного реле и характери-
зуется временем открытия щелей золотника 2 и перепадом давления на них. Среднее положение золотника осуществляется при помощи прижимных тарелок <?, упирающихся в корпус /. Предварительный натяг пружин 4 вызывает появление значительной зоны нечувствительности по перепаду давления на торцах золотника, что гарантирует надежную фиксацию его среднего положения и допускает неточный возврат пневмомеханического преобразователя в среднее положение. Такой способ фиксации среднего положения золотника позволяет осуществить форсирование скорости выключения преобразователя, что соответствует требованиям к преобразователям позиционных систем, сокращает перебег намеченной координаты и увеличивает точность позиционирования.
13. Копировальные приводы дроссельного регулирования с системами ЧПУ
Шаблон можно заменить регулируемыми мерами длины по соответствующим координатам перемещения (например, плоский шаблон двумя мерами длины по координатам X и У), размер которых будет изменяться по числовой программе, а гидравлическими следящими приводами обеспечить копирование изменяемой длины этих мер. При этом станок будет работать по числовой программе точно так же, как это выполняется при приводах с системами ЧПУ. Вместе с тем такое преобразование позволяет в ряде случаев создать простые по конструкции и высокоэффективные в работе приводы с системами ЧПУ, в частности работающие не с гидромоторами, а гидроцилиндрами. Рассмотрим принципы построения схем ряда таких приводов, используемых в промышленных конструкциях станков.
Копировальный привод с силовым гидроцилиндром и контурной импульсной системой ЧПУ. Этот привод разработан на Львовском заводе фрезерных станков. Подобный привод с аналоговой системой ЧПУ применен на многооперационном станке модели АПРС-3. Схема такого привода показана на рис. 36. В приводе шаговый электродвигатель ШД приводит во вращение эталонный винт 1 по числовой программе, записанной на магнитной ленте 2. Так как эталонный винт нагружается небольшим контактным усилием от щупа 3 распределительного золотника 4, момент, развиваемый маломощным шаговым двигателем, достаточен для его вращения. Копировальный гидропривод, состоящий из четырехщелевого золотника 4, гидроцилиндра 5 и механической обратной связи 6, отслеживает движение винтовой поверхности эталонного винта и тем самым отрабатывает на рабочем органе РО станка числовую программу, записанную на магнитной ленте. Вместо магнитной может использоваться перфолента и встроенный интерполятор. Технические возможности 76
зкп
Рис. 36. Структурно-конструктивная схема копировального привода с контурной импульсной системой ЧПУ станков ЛФ-66
Рис. 37. Конструкция стандартного копировального привода фирмы «Rexrouth» для станков с ЧПУ
привода определяются техническими возможностями импульсной системы ЧПУ и копировального гидропривода.
Привод хорошо зарекомендовал себя в производстве на трехкоординатных фрезерных станках модели ЛФ-66-ФЗ производства Львовского завода фрезерных станков. Применение гидроцилиндра снизило стоимость привода и при небольшой длине хода обеспечило беззазорный реверс, что позволило повысить качество обработки деталей на участках с переменой знака скорости по одной из координат.
В приводе многооперационного станка АПРС-3 электродвигатель малой мощности управляется позиционной амплитудной системой ЧПУ и приводит во вращение эталонный винт, перемещения резьбовой нитки которого отслеживаются гидроприводом аналогично тому, как это имело место в приводе, показанном на рис. 36.
Конструкция копировального привода фирмы «Rexroth» (ФРГ) модели ТС, предназначенного для применения в оборудовании с ЧПУ, показана на рис. 37.
Маломощный шаговый электродвигатель, управляемый от импульсной системы ЧПУ, присоединяется к выходному валу 1 винта 2. Нарезка последнего в сочетании с двумя окнами 3 и 4 в поршне образуют следящий привод с двухщелевым управляющим золотником, который отслеживает линейные перемещения резьбы винта.
Копировальный привод с силовым гидроцилиндром и пневмогидравлической кодовой системой ЧПУ. Пневмогидравлический позиционный привод основан на гидравлическом следящем приводе, схема которого показана на рис. 38, а. Рабочий орган станка, например стол 2, приводится в движение штоком 1 поршня гидроцилиндра. Рабочее давление Р\ во внештоковой полости цилиндра регулируется двухщелевым дроссельным золотником 3, который присоединен к столу станка. При сообщении втулке 4 золотника движения от постороннего источника поршень гидроцилиндра, стол станка и золотник точно повторяют перемещения втулки.
Если во втулке золотника сделать не одно рабочее окно 5, а несколько окон 8 (рис. 38, б) и соединить их выборочно, например с управляемой полостью цилиндра, то можно осуществить несколько дискретных положений стола станка и таким образом создать основу позиционной системы. В многопозиционном золотнике селектор 6 с управляющим окном 7 может перемещаться согласно числовой программе к одному из идентичных окон 8 в корпусе золотника. При этом масло подается в цилиндр и стол перемещается так, что бурт 10 плунжера золотника занимает нейтральное положение относительно окна, которое соединяется с цилиндром с помощью селектора. Точность позиционирования стола в этом случае определяется главным образом точностью расположения окон в корпусе золотника. Если шири-78
Рис. 39. Схема золотникового дешифратора на восемь позиций
на окон строго согласована с шириной бурта золотника, то возможна точная многократная повторяемость установки стола.
На этом же принципе можно создать самоустанавливающий-ся гидродвигатель-позиционер (рис. 38, в). Любое из окон в корпусе 14 двигателя-позиционера может быть соединено со сливной магистралью с помощью такого же селектора с управляющим окном, какой показан на рис. 38, б. Полости по обе стороны от буртов плунжера соединены через дроссели 12 с нагнетательной магистралью И. При такой схеме включения плунжер 13 перемещается до тех пор, пока не займет среднее положение относительно выбранного селектором отверстия. Аналогичную конструкцию имеет круговой самоустанавливающийся гидродвигатель-позиционер. Для автоматического позиционирования от числовой программы селектор с управляющим окном заменяется устройством, названным дешифратором. Дешифратор по командам извне (со считывающего устройства) соединяет любое из: отверстий в корпусе золотника (или в корпусе двигателя-позиционера) с одним выходным отверстием, которое в дешифраторе золотника соединено с полостью цилиндра, а в дешифраторе двигателя-позиционера — со сливом.
Схема золотникового дешифратора на восемь позиций с пневматическим управлением при вводе команд в двоичном коде показана на рис. 39. Такой дешифратор прост по конструкции и надежен в работе. При увеличении числа позиций круглые золотники 1 заменяются плоскими, причем положительной особенностью такого вида дешифратора является то. что в нем одним переключателем может осуществляться до 100 логических операций. Это позволяет получить высокую надежность работы устройства с малыми габаритными размерами.
Рис. 40. Схема двухотсчетной пневмогидравлической позиционной системы ЧПУ
Осуществление большого количества позиционирований с небольшими приращениями, исчисляемыми сотыми долями миллиметра, выполняется с помощью двухотсчетной системы (рис. 40), которая построена на рассмотренных выше принципах. В этой системе точное позиционирование рабочего органа 9 с крупным шагом (например, в 1 мм), определяемым расстояниями между соседними отверстиями И во втулке 7 (шаговая шкала), задается дешифратором 10. Внутришаговая интерполяция (например, в пределах 0,01 мм) осуществляется от двигателя-позиционера 2 с помощью рейки 3, шестерни 4, шлицевого валика 12 и микрометрической резьбы 5, которой плунжер 6 соединен со штоком золотника 8. Тонкость интерполяции определяется количеством отверстий 13 в корпусе двигателя-позиционера, а ее точность — точностью исполнения расстояния между осями этих отверстий (точностью внутришаговой шкалы) и точностью передачи по кинематической цепи от плунжера двигателя-позиционера к плунжеру 6 шагового позиционера. Внутришаговая интерполяция задается дешифратором 1.
Позиционная система программного управления наиболее эффективна на сравнительно небольших длинах перемещений (до 100—250 мм). При простоте конструкции она позволяет получить до 3000 точных позиционирований.
На этом же принципе создана пневмогидравлическая позиционная система числового программного управления перемещениями на большие расстояния [29].
Система числового программного управления рассчитана на позиционирование на длинах ходов до 4000 мм, цене отсчета в 0,02 мм при точности позиционирования в пределах цены отсчета. Она представляет собой трехсчетную систему, основная из-80
мерительная шкала которой закрепляется непосредственно на рабочем органе станка, чем достигается высокая точность позиционирования.
На основе гидропривода с пневмогидравлической системой ЧПУ, подобного показанному на рис. 40, фирмой «Moog» (США) изготовляется ряд моделей станков для позиционной обработки, в том числе модели 1000 М/С с автоматической сменой инструмента.
Положительные особенности станков, созданных на основе пневмогидравлического привода с системой ЧПУ [57], заключаются в простоте системы, высоких скоростях перемещений, возможности введения вибрационных режимов движения шпинделя, небольших затратах и др.
При размерах перемещений 500x250x125 мм станки имеют ускоренные хода до 7 м/мин, обеспечивают точность позиционирования ±0,025 мм, повторяемость позиционирования ±0,008 мм и регулирование положения нуля ±5 мм.
Проведенный разбор схем гидравлических следящих приводов с числовым программным управлением показывает, что все они строятся на сочетании однокоординатных приводов. Взаимная связь между приводами по разным координатам устанавливается через программоноситель. В результате достигается простота конструкции приводов и их идентичность по координатам перемещения как в одном, так и различных станках.
ГЛАВА IV.
ЗОЛОТНИКОВЫЕ ЭЛЕМЕНТЫ УПРАВЛЕНИЯ В ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДАХ
14. Основные виды статических и динамических характеристик гидропривода и его элементов
Статические характеристики элементов гидропривода и в целом гидравлического следящего привода представляют собой аналитические или графические зависимости величины одного определенного параметра при изменении второго в установившемся режиме, соответствующем движению с постоянной скоростью, в том числе нулевой. Обычно различают следующие статические характеристики: характеристика изменения определяющего параметра, например давления, в различных частях элемента (привода) при изменении скорости установившегося движения или нагрузки; нагрузочная характеристика, представляющая зависимость скоростного (или какого-либо другого характерного) параметра элемента (привода) от нагрузки, например, расхода через щель золотника от изменения давления на выходе; регулировочная характеристика, представляющая зависимость скоростного (или какого-либо другого характерного) параметра элемента (привода) от регулирующей величины, например, расхода через щель золотника от изменения его положения относительно корпуса; характеристика изменения мощности на входе и выходе элемента (привода), к. п. д. при различных условиях работы.
Динамика элемента гидропривода и в целом гидравлического следящего привода характеризуется обычно тремя критериями качества: запасом устойчивости, точностью и быстродействием [7]. При этом имеется в виду, что качество работы следящего привода в конечном счете определяется величиной ошибки, равной разности между требуемыми и фактическими значениями регулируемой величины (положения выходного органа двигателя привода). Критерий запаса устойчивости определяет, насколько далеко от границы устойчивости, на которой возникают незатухающие колебания, находится привод; критерий точности используют для оценки качества, величины ошибки в различных типовых режимах: при движении по гармоническому (синусоидальному) закону, при сообщении на вход единичного воздей-82
ствия с постоянной скоростью, ускорением и т. п.; критерий быстродействия определяет быстроту реагирования привода на управляющие и возмущающие воздействия.
Различают линейный и нелинейный следящий привод или элемент. У линейного следящего привода во всех звеньях существует линейная зависимость выхода от входа во всем возможном диапазоне их изменения. Динамика линейного следящего привода (элемента) описывается линейными уравнениями. У нелинейного следящего привода в звеньях нет линейной зависимости выхода от входа. Обычно динамика большинства звеньев нелинейного следящего привода (элемента) описывается линейными уравнениями, а одно или несколько (ограниченное число) звеньев описываются нелинейными уравнениями.
Экспериментальные исследования и практика показывают, что гидравлические следящие приводы станков являются существенно нелинейными приводами, в которых могут происходить автоколебания с устойчивой и неустойчивой амплитудами. Нелинейными элементами в этих приводах являются управляющие дроссельные золотники, так как расход жидкости на их выходе одновременно является функцией таких двух независимых переменных, как смещение золотника от среднего положения и перепад давления (нагрузка) во внешней цепи золотника, причем влияние этих переменных на расход жидкости взаимосвязано. Зависимость силы трения в перемещаемых узлах привода может иметь нелинейный характер как функция величины и знака скорости слежения. Изменения перепада давления и расхода во внешней цепи управляющего золотника могут иметь характер насыщения. На работу ряда приводов существенное влияние оказывают несимметричные нелинейности, приводящие к несимметричным автоколебаниям, усложняющим динамику привода. Кроме того, работа следящих приводов станков, как правило, происходит при наличии на входе постоянных или переменных воздействий. Таким образом, даже простейший гидравлический следящий привод представляет сложную нелинейную систему регулирования.
Для гидравлических следящих приводов станков характерны значительные веса подвижных частей и упругость кинематических звеньев, определяемая сжимаемостью рабочей масляной среды. Поэтому движение этих приводов описывается дифференциальными уравнениями третьего и выше порядков. Точному математическому решению с использованием метода фазовой плоскости или фазовой поверхности поддается лишь небольшое количество нелинейных задач теории автоматического регулирования, причем для нелинейных дифференциальных уравнений выше второго порядка, даже если решение и получено, оно обычно оказывается слишком сложным для применения в инженерных расчетах. Поэтому целесообразно для исследования устойчивости гидравлических следящих приводов использовать прибли-
а) б)
Рис. 41. Структурные схемы различных нелинейных систем
женные методы расчета и, в частности, метод гармонической линеаризации нелинейностей, предложенный Н. М. Крыловым и Н. Н. Боголюбовым и развитый Е. П. Поповым [7]. Приближенные методы расчета позволяют эффективно и с вполне достаточной для инженерных расчетов степенью точности исследовать устойчивость гидравлических следящих приводов с учетом не только одной, но и одновременного влияния нескольких нелинейностей без значительного упрощения исходных уравнений [13].
При расчете нелинейных автоматических систем принято выделять нелинейное звено, а все остальные линейные звенья объединять условно в один блок, называемый линейной частью системы (рис. 41, а). Если в системе не одно, а два или больше нелинейных звеньев, то, выделив нелинейные звенья, получают соответственно несколько отдельных линейных частей (рис.41, б). В схеме, показанной на рис. 41, в, выделяется нелинейность (нелинейная функция) и приведенная линейная часть.
Цель метода гармонической линеаризации состоит в том, чтобы исследовать нелинейную систему в значительной мере линейными методами, которые наиболее просты и изучены.
При обычной линеаризации реальных статических характеристик, большинство которых отклоняется от прямых линий при достаточно больших значениях входной величины, производится замена реальной кривой на прямую, которую проводят обычно по касательной к кривой в средней ее точке (прямая ОД на рис. 42, а).
Этот способ линеаризации аналитически соответствует разложению нелинейной функции у = F(x) в ряд Тейлора с отбрасыванием всех высших членов ряда, кроме первого, т. е. в этом слу-dF
чае производится замена у = kx, где k = — . Коэффициент k
dx х=о
является коэффициентом усиления звена, которое будет вести себя как линейное при достаточно малых отклонениях от точки 0. При возрастании переменной х (являющейся, например, входной величиной) коэффициент k может существенно отличаться от фактического коэффициента усиления звена, соответствующего этому состоянию. Таким образом, при обычной линеаризации нелинейные свойства пропадают.
При гармонической линеаризации также производится замена нелинейной функции у = F (х) на линейную вида у = kQx (рис. 42,6), однако при этом эквивалентный гармонический коэффициент усиления подбирается так, чтобы колебания переменной у при линейной зависимости у = Лл sin Q/ точно соответствовали первой гармонике сложных нелинейных колебаний переменной у = F(x) при синусоидальном изменении переменной у = = f(x).
Иными словами, гармонической линеаризацией называется такой способ линеаризации, когда обеспечивается равенство амплитуды колебаний, получающейся для линейной зависимости у от х и амплитуды первой гармоники нелинейных колебаний у = = F(x) при х — A sin Qt. Тем самым предполагается, что первая гармоника нелинейной функции играет основную роль, а колебания высоких частот практически не пропускаются линейной частью системы (она является фильтром нижних частот). Этим свойством обычно обладают механические и гидромеханические
приводы.
Эквивалентный коэффициент усиления /?э =
зависит от
амплитуды колебаний переменной х, т. е. он принимает различные постоянные значения для синусоидальных колебаний переменной с различными амплитудами А. В этом принципиальное отличие гармонической линеаризации от обычного способа линеаризации. В этом случае нелинейная характеристика заменяется не одной прямой, как при обычной линеаризации, а пучком прямых (рис. 42,6), наклон которых зависит от амплитуды колебаний переменной х, т. е. от размера участка кривой ^(х), охватываемого в процессе колебаний. Для каждого данного периодического процесса (т. е. при данной амплитуде А колебаний переменной х) эквивалентная характеристика линейна (/гэ= = const), но от процесса к процессу (для разных Л) наклон прямой меняется, т. е. после гармонической линеаризации нелинейные свойства все же в известном смысле сохраняются.
Рис. 42. Линеаризация нелинейной статической характеристики:
а—обычная; б — эквивалентная гармоническая
Нелинейная функция в более общем случае может включать не только переменную х, но и ее производную sx = Упри \ dt I этом принятое при гармонической линеаризации условие, при котором эквивалентная линейная зависимость от переменной х должна давать синусоиду, равную первой гармонике нелинейных колебаний функции у = F (х, sx) при х = A sin Qt приводит в общем случае к следующему результату [7]:
y = F(x, sx)
q(A, Q) +
Q) о
(34)
При этом учитывается только первая гармоника разложения в ряд Фурье периодической функции аргумента Q/ = ф, т. е. принимается F(x, sx) = F(A sinxp, /Шсоэф). Коэффициенты q и q' гармонической линеаризации в этом случае определяются по формулам 2л
q(A, Q)=—!— I FMsinxp, /IQcos ф) sin фйф; (35)
лД J
о
2л
q'(A, Q) = —!—f /?(Дз1пф, 4Q cos^cos-ip dip. (36) лД J
о
Если нелинейная функция не зависит от скорости изменения входной величины, то коэффициенты гармонической линеаризации зависят только от амплитуды колебаний и формулы (35) и (36) примут вид
2л
q (Д) = —J— С F (Д sin ф) sin ф t/ф; (37)
лД J
о
2л
q' (А) = —i— Г F (Д sin ф) cos ф t/ф. (38)
лД J
о
При однозначных нелинейностях, не зависящих от скорости, результат гармонической линеаризации будет
y = qx, q = q(A). (39)
Следовательно, расчет гармонического коэффициента усиления существенно упрощается.
Многократное сопоставление расчетных данных по устойчивости однокаскадных приводов, выполненных на основе метода гармонической линеаризации нелинейностей, с практическими и экспериментальными данными, показало их близкое совпадение при правильном учете количества и величин основных параметров. 86
Приближенные методы исследования нелинейных автоматических систем не позволяют еще достаточно просто и наглядно проводить анализ устойчивости и качества сложных многокаскадных и многоконтурных приводов. Решение этих задач хорошо отработано по частотным характеристикам методом передаточных функций [47], предполагающим допустимость линеаризации нелинейных зависимостей в изучаемом объекте.
Во многих случаях исследования динамики структурно-сложных гидравлических следящих приводов и элементов их управления, а также синтеза этих приводов метод передаточных функций позволяет выполнить анализ и получить не только качественные, но и количественные данные, подтверждаемые экспериментом.
15. Однокаскадные золотниковые гидравлические усилители. Конструкция и основные характеристики
Конструкции золотниковых гидроусилителей различаются по следующим признакам: по количеству рабочих щелей, кинематике рабочего движения плунжера относительно корпуса золотника, форме рабочих щелей золотника, форме концевых шеек плунжера золотника, конструкции корпуса, в которой заключен плунжер золотника L
Количество рабочих щелей в золотнике гидроусилителя определяется построением схемы следящего привода. В наиболее распространенных случаях применяются четырех-, двух- и однощелевые золотники. В отдельных конструкциях у золотников бывает до восьми рабочих щелей. С увеличением числа рабочих щелей усложняется изготовление золотников, в связи с чем следует стремиться к возможно меньшему числу рабочих щелей в золотнике.
Рабочее движение золотника относительно корпуса может быть поступательным (аксиальным) или вращательным. В первом случае рабочие щели образуются торцовыми кромками кольцевых шеек золотников и окон в корпусе (см. рис. 1); во втором — кромками, расположенными параллельно оси золотника. Типовая конструктивная схема четырехщелевого золотника с вращательным ^рабочим движением и схема включения его в следящем приводе показана на рис. 30. В разделе 11 было показано, что золотник с вращательным рабочим движением по существу работает также, как обычный золотник с аксиальным движением. Помимо гидроусилителей момента, золотники с вращательным рабочим движением применяются также в сочетании с гидроцилиндрами поступательного перемещения [49].
1 В дальнейшем в тех случаях, когда в тексте будет идти речь только о плунжере золотника, будем его называть просто золотником.
Рис. 43. Конструкция круглого четырехщелевого золотника
Форма поперечного сечения золотника чаще всего принимается круглой, что обеспечивает простоту подгонки сопряженных цилиндрических поверхностей золотника и корпуса, а также позволяет уравновесить конструкцию от гидростатических сил. Конструкция круглого четырехщелевого золотника показана на рис. 43.
Сопряжение золотника с корпусом выполняется по радиальному зазору 6, величина которого зависит от диаметра, длины и принятой технологии их изготовления. Обычно имеют место следующие соотношения: при d3 < 20 мм 26 = 6 4- 12 мкм; при d3 = 20 4- 40 мм 26 = 8 4- 15 мкм.
Необходимо стремиться к тому, чтобы радиальный зазор был меньше, однако достаточный для обеспечения свободного перемещения золотника при отключенном давлении питания. Радиальный зазор выбирается соизмеримым с тонкостью фильтрации масла в гидросистеме, что препятствует возникновению заедания при попадании в зазор механических примесей.
Недостатком конструкции гидроусилителей с золотниками круглой формы является то, что в случае попадания механических примесей масла в радиальный зазор, вследствие жесткости корпуса, может наступить заклинивание золотника, приводящее к аварийной ситуации. Главным образом по этой причине разработаны плоские гидроусилители (рис. 44). Гидроусилитель состоит из золотника 3 (повортного диска), помещенного между распределительной плитой 1 и опорной пятой 5, поворачивающегося на некоторый угол вокруг оси 8. Пята 5 прижимается к опорному кольцу давлением, действующим на плунжеры 6, и силой пружин 7.
Распределительная плита 1 имеет отверстия 2 (со вставными втулками) и пазы 9 и И. Золотник имеет пропускные окна 10 и полости 12 для гидростатической разгрузки.
В среднем (нейтральном) положении золотник 3 разобщает отверстие 2 и полости 9 и 11, соединенные с цилиндром. При повороте золотника образуются четыре окна дросселирования: два окна на входе и два на выходе (см. сечение Б — Б). Разгрузочные фасонные пазы, выполненные в золотнике на сливе жидкости, служат для уменьшения момента, необходимого для поворота золотника. Вследствие этого при рабочем давлении до 210 кгс/см2 момент управления на оси 8 не превышает 3—4 кгс-см. Основные параметры гидроусилителя с плоским золотником регламентированы ГОСТ 17698—72.
При попадании механических включений на рабочие поверхности золотник, преодолевая силу пружины, отжимается от корпуса, масло уносит механическое включение и заклинивания не происходит.
Работа плоского золотника и включение его в схему следящего привода такие же, как и для типовых цилиндрических золотников. Неуравновешенность конструкции золотника вследствие наличия сил, разъединяющих обе пластины, а также переменная ширина щели при смещении из среднего положения, повышенная сложность изготовления обусловили ограниченное применение плоских золотников.
Рабочие щели золотников круглой формы обычно образуются кромками шеек плунжеров золотников и окон в охватываю-
Рис. 44. Конструкция плоского четырехщелевого золотника
Рис. 45. Геометрия рабочих щелей золотниковых гидроусилителей
щих их втулках или корпусах (рис. 45). Рабочие щели, как и остальные элементы золотников, выполняются строго симметричными для обеспечения гидростатического уравновешивания от действия сил давления жидкости в радиальном направлении.
Чаще всего окна имеют прямоугольную форму. Длина b окна по окружности диаметра dE втулки равна pdB, причем угол 2р может достигать 360°, образуя кольцевую рабочую щель. Золотник диаметром d3 имеет шейки, на которых может выполняться прямой торец (рис. 43 и 45, а) или конусный переход (рис. 45, б). Золотниковые гидроусилители работают как при открытых рабочих щелях (на рис. 45, а и б это положение показано сплошными линиями), так и перекрытых. Ширина h открытой щели и размер перекрытия I обычно не превышают 1—1,5 мм.
Все более широкое распространение получают окна с переменной длиной щели (рис. 45, в). При ширине открытия щели h d длина окна составляет размер при h>d длина окна увеличивается до 62 и обеспечивает повышенный расход масла при таком же, что и на участке d осевом смещении золотника.
Электрофизические методы обработки способствовали изменению формы окна во втулке. Окна, образуемые методом фре-зеррвания и шлифования, показаны на рис. 45, а, б и в, а на рис. 45, г — электроимпульсной обработкой, перемещением инструмента перпендикулярно оси втулки. Вследствие этого стало возможным выполнять длину b рабочих щелей не-90
ограниченно малого размера и исключить нетехнологичные лепестковые переходы 1, способствовавшие образованию заусенцев на поверхности сопряжения с золотником и образованию сил прихвата золотника втулкой. Электрофизическими методами удобно образовывать окна с переменной длиной щелей (штрихпунктирные линии на рис. 45, в).
Форма концевых шеек золотника должна обеспечивать большую легкоподвижность золотника. Действительно, при конструктивной симметричности всех элементов золотниковой пары плунжер-втулка уравновешенность плунжера золотника от действия сил давления жидкости в радиальном направлении возможна только при геометрически правильном исполнении плунжера и втулки золотника и строго соосном и параллельном их расположении. В этом случае поверхности плунжера и втулки будут отделены масляным слоем и трение плунжера во втулке будет вязким (жидкостным), т. е. сила трения для данного радиального зазора будет пропорциональна вязкости жидкости и скорости перемещения плунжера золотника.
Детали золотников всегда имеют эллипсность, конусность, непрямолинейность и другие дефекты, в результате которых возникают несимметричность радиального зазора и давления жидкости между плунжером и втулкой золотника и на плунжер золотника действуют неуравновешенные радиальные силы, прижимающие его к той или иной стороне поверхности втулки и как бы защемляющие его во втулке. Эти радиальные нагрузки могут достигать настолько больших величин, что для преодоления силы трения плунжера о втулку требуется большая сила.
Практика показывает, что для страгивания с места плунжера, находящегося некоторое время в покое под давлением жидкости, требуется приложить большую силу, чем силу, необходимую для дальнейшего его перемещения, причем величина начальной силы будет зависеть от длительности плунжера в покое под давлением жидкости.
пребывания
Рис. 46. Концевые шейки золотника с самоцентрирующими лысками
А
Наиболее распространенные формы исполнения концевых шеек плунжера золотника для уменьшения трения от неуравновешенных радиальных гидростатических сил показаны на рис. 43 и 46.
В конструкции, показаной на рис. 43, на шейках выполняются разгрузочные канавки. В золотниках малых размеров, диаметром менее 12 мм, разгрузочные канавки могут иметь сечение а X е =0,5 X 0,5 мм или 0,25 X 0,25 мм при расстоянии между ними с = 1 4- 0,5 мм. В золотниках средних и крупных размеров диаметром до 30 мм кольцевые разгрузочные канавки выполняются крупнее: сечением 1 X 0,5 мм и удаляются одна от другой на расстояние 2—4 мм. Эффект от разгрузочных канавок подробно рассматривается в работах Т. М. Башта [38]. Неуравновешенная гидростатическая сила при наличии одной канавки уменьшается наполовину, а при шести-семи канавках до 5—8% ее значения на том же плунжере, не имеющем канавок.
Для уменьшения радиальных гидростатических сил в четырехщелевых золотниках давление нагнетания подводится к окну и средней шейке, а окна у концевых шеек соединяются со-сливом.
В конструкции, показанной на рис. 46, на крайних шейках плунжера золотника выполяются самоцентрирующие лыски. На некотором расстоянии а\ от торца 1 фрезеруются четыре симметрично расположенные лыски 2, которые каналами 3 соединены с противолежащими лысками 5, расположенными на некотором расстоянии (обычно равном щ) от первых лысок и имеющими примерно в 2 раза большую площадь. Вторые лыски заканчиваются на расстоянии а2 от специальной проточки 4 отвода утечек или от торца 7, входящего в сборник утечек. К проточкам 6 шеек, на которых выполнены самоцентрирующие лыски, масло подводится под рабочим давлением рп.
Между плунжером и втулкой золотника существует радиальный зазор, по которому масло из проточек 6 перетекает в сборники утечек; причем при одинаковой ширине tzi и а2 круговых поясков в лысках устанавливается давление, равное по-Рп ловине подведенного давления, т. е. .
2
Самоцентрирование осуществляется следующим образом. Если под действием внешней силы R ось плунжера сместилась вниз относительно втулки, так что радиальный зазор 61 снизу между плунжером и втулкой золотника стал меньше зазора бг сверху, то перетекание масла из проточки 6 с давлением рп в лыски 2 с нижней стороны плунжера затруднится, а с верхней облегчится, в результате чего в нижней лыске 2 и верхней лыске 5 давление станет меньше-^1- , а в верхней лыске 2 и нижней
лыске 5 больше -у-. Эта разница, очевидно, будет тем больше, чем больше сместится ось плунжера относительно оси втулки.
Вследствие разности площадей левых и правых лысок результирующая сил Т, действующих на плунжер золотника от давлений масла в полостях, образованных этими лысками, будет направлена вверх, уравновесит внешнюю силу R и будет стремиться сцентрировать ось плунжера с осью втулки золотника. Аналогично будет совершаться самоцентрирование плунжера золотника относительно втулки при любом другом радиальном направлении внешней силы. Следовательно, для осуществления эффекта самоцентрирования необходимо, чтобы в радиальном зазоре между плунжером и золотником непрерывно протекало масло. Поэтому при применении таких лысок золотнику необходимо сообщать осциллирующие перемещения от специального вибратора. Кроме того, эффект самоцентрирования может осуществляться до тех пор, пока внешняя смещающая сила R меньше центрирующей силы Т, наибольшая величина которой не превышает
rmax~-4-(F4-F2)Pn, (40)
О
где F2 и F4 — площади соответственно лыски 2 и лыски 5 в см2; рп — подведенное давление в кгс/см2.
В сечении А—А золотника (см. рис. 46) показаны фактические размеры лысок, выполняемых в командном золотнике копировального прибора станков модели КФГ-1.
Плунжеры золотников редко помещаются непосредственно в корпус, как это практикуется, например, в токарно-копировальных станках TOS (ЧССР), где окна для подвода и отвода масла выполняются в виде кольцевой расточки корпуса, или в электрогидравлических преобразователях фирмы «Moog» (США). При этом достигается исключительная компактность конструкции. Обычно плунжер золотника помещается в промежуточную втулку, которая может быть цельной (см. рис. 43) или состоять из колец.
При наличии цельной втулки проще достигается прямолинейность оси по внутреннему диаметру, что обеспечивает более высокое качество работы золотника в сборе, возможность извлечения втулки из корпуса для доводочных работ и устранения заусенцев, притуплений и выкрашиваний на кромках К (см. рис. 43), образующих рабочие щели, внутренний диаметр втулки, а также ширина с перемычки или длина Ь окна назначаются конструктором в зависимости от параметров проектируемого следящего привода. При этом диаметры золотников следует выбирать в пределах 8—40 мм, если диаметры меньше 8 мм, то усложняется изготовление внутреннего отверстия втулки, а если диаметры более 40 мм, трудно согласовать с доста-
точной точностью втулку и плунжер золотника. Наименьший размер С перемычки в окнах прямоугольной формы из условий жесткости втулки составляет 5—10 мм в зависимости от диаметра золотника.
При наличии втулки, составленной из плоских колец, запрессованных в корпус, рабочие щели обычно выполняются круглыми. Наборная втулка позволяет получить наибольшую длину рабочих щелей для данного диаметра золотника, кроме того, возможно изготовлять втулку и золотник по допускам вследствие высокой точности изготовления каждого кольца (± 0,002 мм). Недостатком конструкции наборной втулки является необходимость производить притирку внутреннего диаметра втулки в сборе с корпусом (при выполнении этой операции заусенцы на рабочих кромках колец не допускаются) и необходимость особо тщательной запрессовки, так как в противном случае соответствие расстояний между рабочими кромками втулки и плунжера золотника может быть нарушено. Обычно в золотниковых усилителях требуется с высокой точностью (0,005— 0,01 мм) выдержать ширину h0 (см. рис. 43) всех рабочих щелей, что достигается методом гидравлического испытания.
Изготовлять и производить термическую обработку золотника и втулки можно по двум вариантам.
I. Золотник и втулку изготовляют из малоуглеродистых хромоникелевых легированных сталей 18ХНВА (для исключения доводки), цементуют и производят закалку до твердости HRC 60—62.
II. Золотник изготовляют из малоуглеродистой хромоникелевой стали, цементуют и производят закалку до твердости HRC 60—62, а втулку изготовляют из легированной стали 40ХНМА и подвергают улучшению до получения твердости HRC 29—33. Вариант II особенно удобен при цельной втулке, так как позволяет производить все виды обработки после термической обработки. При обоих вариантах для улучшения структуры металла и исключения последующего разбухания проводится обработка холодом перед окончательным шлифованием^ Серийное Производство золотниковых Ъар требует тщательной отработки технологического процесса их изготовления.
Движение минерального масла через рабочие щели золотников гидроусилителей. Как уже отмечалось, при работе золотников гидроусилителей ширина h открытой щели и размер перекрытия I (см. рис. 43 и 45) обычно находятся в пределах 0—1,5 мм. В управляющих дроссельных золотниках с прямым торцом копировальных приводов эти пределы составляют 0—0,15 мм.
Зависимость расхода масла Q от величины открытия h или перекрытия I рабочего окна золотника показана на рис. 47. Открытые щели золотников с прямыми торцами имеют форму % 94
диафрагмы. Расчет расхода масла, проходящего через дроссель, производится по формуле (рис. 47, кривая 1)
(41)
Г р
где |i — коэффициент расхода; f — площадь рабочего окна дросселя в см2; р — перепад давления на рабочем окне дросселя в кгс/см2; р — плотность кгс • см-4 • с2.
В области перекрытых щелей (/ > 0) дроссельных золотников геометрическая форма щелей соответствует кольцевым щелевым уплотнениям. Расчет расхода Q через щелевые уплотнения обычно рекомендуется производить по формуле (рис. 47, кривая 2)
(42)
Q = _b&P_ 12vZp
где b — длина рабочей щели в см; б—радиальный зазор (ширина щели) в см; v — коэффициент кинематической вязкости в см2/с; I — величина перекрытия щели в см.
При перекрытии /, приближающемся к нулю, формула (42) теряет смысл.
Изучение процесса прохождения минерального масла через узкие рабочие щели дроссельных золотников в отмеченной области проводилось автором экспериментальным путем. Определялись также условия стабильного прохождения масла через рабочие щели дроссельных золотников. Результаты исследований показывают, что расход масла, проходящего через рабочие щели дроссельных золотников при стационарном режиме (золотник неподвижен относительно втулки), уменьшается с течением времени как при открытых, так и перекрытых щелях и, как правило, постепенно (через 12—15 мин) стабилизируется (рис. 48). Причиной нестабильности расхода является облитерация рабочей щели [3, 26].
В золотниках с углом кромки а = 90° расход масла уменьшается значительно больше, чем в золотниках с углом кромки а = 6°. Наибольшее уменьшение расхода масла (до 10% первоначального расхода) наблюдается в зоне от h = 0,03 мм до / = 0,05 мм при б <0,015 мм и а = 90°. По мере увеличения открытия или перекрытия щели или увеличения радиального зазора этот эффект ослабляется.
Стабилизация расхода масла, проходящего через узкие щели, во времени достигается при соответствующем режиме относительного движения (перемещения) поверхностей, образующих щель, например при наличии аксиальных колебаний золотника относительно втулки (корпуса), имеющих амплитуду больше 0,01 мм и частоту больше 10 пер/с или вращательных колебаний с амплитудой более 90° и частотой более 1,7 пер/с. Кроме того, стабильность расхода масла достигается только 95
Рис. 47. Зависимость расхода Q масла от величины открытия h или перекрытия / рабочего окна золотника. Условия испытаний: р = 10 кгс/см2, б = 0,0015 см, b = 2,75 см, у = 0,9 X X Ю-3 кг/см3, а = 90°
Рис. 48. Изменение во времени расхода масла, проходящего через рабочие окна дроссельных золотников. Условия испытания: р = 5 кгс/см2, t = 30 -Ь 35° С, b = 2,75 см, а = 6°, б = 0,0014 см
при соответствующей комбинации величин амплитуды и частоты колебаний, причем их увеличение способствует стабилизации. Для стабилизации расхода масла режим колебаний (частота и амплитуда) в золотниках с углом кромки а = 90° при прочих равных условиях должен быть выше, чем в золотниках с конусными кромками. В общем виде зависимость расхода масла, проходящего через рабочие щели дроссельных золотников с углом кромок а = 90° и а = 6°, от основных переменных параметров выражается формулой
KbSKspKP 1 + CZK/
(43)
где К, С — постоянные коэффициенты; S — ширина щели;
Кр, Ki — показатели степени при соответствующих параметрах.
При исследованиях был получен следующий диапазон изменения показателей степени:
(44)
Общий характер истечения масла (расход — функция величины открытия h или перекрытия / щели) через рабочие щели 96
дроссельных золотников с углом кромки а = 90° при различных перепадах давления показан на рис. 49.
При движении вязкого масла через рабочие щели золотников с углом кромок а = 90° можно различить три области.
I. Область ламинарного движения, охватывающая всю зону перекрытых щелей. Потери давления в золотнике в этом случае пропорциональны первой степени расхода масла, т. е. показатель степени кр = 1.
Ширина щели S в зоне перекрытых щелей равна радиальному зазору 6. Сопоставление результатов испытаний золотниковых пар, имеющих разные радиальные зазоры, показало, что влияние величины радиального зазора на расход масла при различной величине перекрытия щели не остается постоянным, а зависит от последней:
Q = kbKs>
(45)
где ks = f(/). При перекрытиях 0—0,1 мм показатель степени к8 ~ 4/з- В случае дальнейшего увеличения перекрытия показатель степени ks быстро возрастает и при перекрытии, равном 1 мм, приближается к 3.
Показатель степени Ki также является функцией перекрытия щели и постепенно уменьшается от Ki = 3/г в зоне малых перекрытий (/ < 0,2 мм) до Ki — 1 в зоне перекрытий, где I > 2 мм.
II. Область, в которой нарушается ламинарный поток, охватывающая зону открытых щелей приблизительно в диапазоне от 0 до 0,15 мм. Потери давления в этом случае пропорциональ-
Рис. 49. Зависимость расхода масла от величины открытия или перекрытия щели для дроссельного золотника с углом кромки а = 90°. Условия испытания: b — 2,75 см; д = 0,0015 см; t = 40° С (золотнику сообщались вращательные колебания с частотой 1,7 Гц и амплитудой 90°)
о с < >
ОС ( L s 7 С
0,0Z 0,0b 0,06 0,08 OJO 0,12 0,1bh,MM
Рис. 50. Зависимость показателя степени /гр от величины открытия h щели (график построен по данным рис. 49)
ны расходу масла в степени 1 <-------< 2 в зависимости от раз-
/?Р
мера h открытия щели. Для данной ширины щели показатель
степени кр остается практически постоянным при изменении
перепада давления.
График функции кр = /(/г), построенный по данным испытаний, показан на рис. 50. Графическим методом (методом выбранных точек) приближенно определена математическая фор
ма этой зависимости (кривая 1):
, 2 + а№
=, р 2 4- 2a/i2
(46)
где а = 7,5-102; h — величина открытия щели золотника в мм.
Влияние ширины щели на расход масла определялось по формуле
(47)
где Уй2 + б2 — фактическая ширина щели.
Экспериментальные точки в зоне открытия щелей до h ^0,15 мм соответствуют показателю степени ks ~ 4/з- При большем открытии щелей показатель степени ks стремится к 1.
III. Область турбулентного движения, охватывающая зону открытых щелей при ширине их h >0,15 мм. Потери давления в золотнике в этом случае пропорциональны примерно второй степени расхода масла, т. е. показатель степени кр = V2.
Таким образом, уравнение расхода масла, проходящего через рабочие щели дроссельных золотников с углом кромки а = 90° при h <0,15 мм и Z<0,2 мм может быть записано в следующем виде:
2+ah2
где b — в см; h, pg — в гс/см3.
п _ 0,87/>(/i2 + 62)2/3p2+2<Tft2 60pg (1 + 2,94-10—3/3/2) ’
I, 6 — в мкм; р — в кгс/см2;
(48)
а = 7,5-10"4;
Для области открытых щелей, если pg = 0,9 гс/см3, уравнение (48) будет иметь вид
2 + ah2
Q = 1,61 • 10-2b(h2 + 62)2/3p2+2a/i2 См3/с. (49)
Для дроссельных золотников с углом кромки а = 6° обработка экспериментальных данных позволила вывести следующее эмпирическое уравнение расхода масла, проходящего через рабочие щели дроссельных золотников с углом кромки а~6°* при h и I < 0,8 мм и длине конусных кромок ~ 3 мм:
7,29-10“2b(h sin а -I- 6)5'3р
О = —-------------------—— см3/с. (50)
60pg(l 4-9,62 • 10“4 /3'2)
Сравнение экспериментальных и расчетных данных для золотников с углом кромки а = 90° показано на рис. 49, где штриховыми линиями показан расход масла, вычисленный по формуле (48). Аналогичную картину можно наблюдать и для золотников с углом кромки а = 6° [30]. Следовательно, можно сделать следующие выводы:
а) физический смысл изменения закона истечения вязкого масла в зоне малых открытых щелей золотников при изменении ширины проходного сечения щели заключается в изменении режима движения масла;
б) без определенного режима осциллирования, даже при весьма тщательной фильтрации масла, невозможно получить постоянный во времени расход масла, проходящего через щели шириной менее 0,1 мм;
в) несмотря на то, что установленные закономерности не учитывают вязкость масла, применяя дроссельные золотники, работающие при турбулентном режиме, можно довести до минимума влияние вязкости масла на характеристику следящего привода. При испытаниях золотника с углом кромки а = 90° при ширине щели h = 0,1 мм изменение коэффициента кинематической вязкости в 2,2 раза вызывало изменение расхода масла в среднем только на 15%.
Метод гидравлических испытаний при доводке рабочих окон золотников. Полученные эмпирические зависимости показывают, что рабочие окна дроссельных золотников являются точным дозатором расхода масла и величина расхода может служить высокочувствительным средством для измерения ширины окна. При этом формулы (49) и (50) целесообразно использовать для статических расчетов.
* Знак ~ ставится ввиду того, что настоящие выводы без существенной ошибки могут быть применены к золотникам с углом кромки а ¥= 6°, но близким к этой величине.
Пример. Необходимо изготовить золотниковую пару, у которой ширина всех четырех щелей при среднем положении золотника hx = /г2 = Лз = tu = = h0 = 60 мкм, угол кромок, золотника а = 90°, длина щелей b = 5,2 см и радиальный зазор между золотником и втулкой 6 = 5 мкм.
Привод, в котором используется золотниковая пара, работает на масле «Турбинное 22» при подведенном давлении рп = 30 кгс/см2. Требуемая точность исполнения ширины щелей Д/г = ±5 мкм. Используя уравнение (49), определяем расход масла через рабочее окно золотника при предельных допустимых размерах. Перепад давления на щели принимаем равным половине подведенного давления. Верхний предел расхода масла, проходящего через каждую рабочую щель при среднем положении золотника, определится как
2+a(/i0 + ah)2
QB = Kb [(Ло + Д/г)2 + S2]2/3 р2+2а <Л»+ЛЛ>!; (51)
24-7,5 • 10~4(60 + 5)2
<?в= 1,61 • 10-2-5,2 [(60 + 5)2 + 52]2'3-152+2 •7-5 • ,0“ 4<60+5)> =
— 118 см3/с = 7,1 л/мин.
Нижний предел расхода масла:
2+a(h0—Д/02
QH = Kb [(Йо-Д/г)2 + 62]2/3-р2+2а('1»“д'”2; (52)
24-7,5- 10—4(60—5)2
QH = 1,61 • IO"2 -5,2 [(60 —5)2 + 52]2/3.15 2+2'7-5 •1 °"4 (60—5 )• =
= 102 см3/с = 6,1 л/мин.
Таким образом, изменению ширины рабочего окна на 0,0 мм соответствует изменение расхода на 1 л/мин, причем оно составляет примерно 15% среднего значения расхода. Такие величины расходов могут быть просто замерены и использованы как средство точного измерения.
Метод гидравлических испытаний широко применяется при доводке рабочих окон золотников. Ценность метода заключается в прямом измерении фактического размера рабочих окон. В этом случае доводка ширины рабочих щелей золотника может производиться в следующей последовательности (30, 21].
Втулка изготовляется окончательно, причем к плоскостям К (см. рис. 43) предъявляются лишь требования строгой перпендикулярности к оси отверстия и попарной соплоскостности, что обеспечивается технологией изготовления этих плоскостей, а расстояние между плоскостями К выполняется с точностью до 0,1 мм.
Золотник изготовляется окончательно по всем размерам, за исключением расстояний между торцами М шеек, причем торцы предварительно шлифуются с припуском 0,1—0,15 мм. Изготовленные таким образом втулку и золотник собирают и испытывают на установке, показанной на рис. 51. Золотнику 4 специальным вибратором или вручную с помощью ключа, накладываемого на грани <?, сообщаются круговые колебания с частотой и амплитудой, обеспечивающими постоянство рас-100
z
сельных золотников на расход масла, проходящего через рабочие ок-
хода масла, проходящего через щель (например, с частотой два периода в секунду и амплитудой 90°).
Эксцентриком 5 через поворотный рычаг «6 золотник перемещается вдоль оси в положение, при котором через щель, образованную шейкой / золотника и окном во втулке 3, по каналу 14, при выбранном перепаде давления р, за 1 мин проходит количество масла Q, соответствующее требуемой ширине щели h\. В этом случае масло под давлением р, отрегулированным по показаниям манометра AlifAlg) переливным клапаном 15, через трехходовой кран 2 по каналу 1 направляется в левую выточку в золотнике, откуда, пройдя рабочую щель у шейки I золотника, по каналу 14 через кран 16 выливается в мерную колонку. При этом канал 10 соединен со сливной магистралью. Индикатор 7 с ценой деления 1—2 мкм, измеряющий осевое перемещение золотника, устанавливается на нуль.
Затем кран 16 переключают, соединяя канал 10 с колонкой, а канал 9 — со сливной магистралью. Эксцентриком 5 золотник перемещается вправо до тех пор, пока через щель, образованную шейкой // золотника и окном во втулке, по каналу 10 пройдет за 1 мин количество масла Q2, соответствующее требуемой ширине щели /12 при перепаде давления р. При этом индикатор показывает требуемую величину подшлифовывания торца шейки II. В такой же последовательности фиксируются показания индикатора при установлении необходимого расхода масла, проходящего через щели у шеек III и IV и повторяется проверка расхода масла, проходящего через щели у шейки I.
При этом вновь должно фиксироваться нулевое показание индикатора, свидетельствующее, что в процессе испытания он не получил отклонения. По показаниям индикатора составляется эскиз на дополнительное шлифование торцов шеек золотника, после дополнительного шлифования опять проверяется ширина щелей по расходу жидкости и, в случае необходимости, торцы снова шлифуют.
Шлифование торцов шеек золотника производится на кругло- или резьбошлифовальном станке, имеющем тонкую (до 0,001—0,002 мм) подачу камня вдоль оси шпинделя. Заусенцы, образующиеся при шлифовании на рабочих кромках шеек, удаляются притиром, предназначенным для притирания поверхности золотника, и бруском из дерева твердой породы.
При испытании дроссельных золотников температура масла измеряется термометром /2, установленным на сливе, а двухходовой кран 13 служит для слива мерной колонки. Для удобства измерения расхода масла свыше 25 л/мин вместо мерной колонки могут применяться датчики расхода, например, в виде поршневого гидродвигателя, обороты которого, пропорциональные расходу, измеряются тахометром или вольтметром. В последнем случае вал гидродвигателя соединяется с тахогенератором. Необходимость применения гидравлического контроля возрастает при исполнении золотниковых пар с нулевыми или перекрытыми щелями в среднем положении, что широко применяется в электрогидравлических преобразователях, работающих на повышенных давлениях и с осцилляцией золотника. При таком исполнении большое влияние на статические характеристики преобразователя оказывают величины радиального зазора на рабочих кромках и качество исполнения (притупление) последних. Поэтому обычно кроме геометрического перекрытия в среднем положении в паспорте на золотниковую пару указываются параметры гидроконтроля, соблюдение которых гарантирует требуемое качество изготовления. Например, для золотниковой пары электрогидравлического преобразователя ПЭГ-ПМ-10/160, выполняемой с геометрическим перекрытием по всем четырем щелям в пределах 0,01—0,03 мм, параметрами гидроконтроля являются следующие величины.
1. Величины гидравлических перекрытий, которые выдерживаются в пределах 0,00—0,02 мм по всем кромкам. При этом под гидравлическими перекрытиями понимается величина хода золотника из гидронейтрали до открытия или закрытия щели. Гидронейтраль характеризуется равенством давлений в заглушенных отводах Ц1 и Ц% (см. рис. 43) при рабочей схеме включения золотника; открытием щели считается образование струйной течи вместо капельной при гидронейтрали, а закрытием щели — образование капельной течи вместо струйной при гидронейтрали. Для замера гидравлических перекрытий к измеряемой рабочей щели подводится под давлением рабочая 102
жидкость, которая после прохождения щели поступает на слив (подобно показанному на рис. 51). Перемещая золотник от гидронейтрали на открытие щели по индикатору определяется величина хода золотника при появлении тонкой струи рабочей жидкости вместо капельной течи. Измеренные величины по всем кромкам являются гидравлическими перекрытиями. При рабочей жидкости (масло АМГ-10) с температурой +50° С переход от капельной течи к струе соответствует расходу 20—25 см3/мин. Перепад давления на щели выбран равным 0,8 кгс/см2, в общем случае применяется до 5 кгс/см2 [21].
2. Величины давлений в заглушенных отводах Ц\ и Ц2 при гидронейтрали, которые выдерживаются в пределах 0,35—0,65 от подведенного давления рп = 160 кгс/см2.
3. Изменение перепада давления р во внешней цепи золотника при заглушенных отводах и И2 и смещении золотника от гидронейтрали вправо и влево на заданные расстояния. В золотнике преобразователя ПЭГ-ПМ выдерживается [±р]^ ^/2 Рп при рп = ±0,010 мм.
4. Утечки из сливной магистрали С при гидронейтрали золотника, которые при рп = 160 кгс/см2 должны быть не более 4 л/мин.
Указанный гидроконтроль гарантирует, что ошибки изготовления рабочих кромок золотниковой пары находятся в допустимых пределах.
Изготовление рабочих щелей дроссельных ‘золотников по методу гидравлических испытаний в сравнении с изготовлением их по системе допусков позволяет получить более высокую точность геометрии щелей благодаря точным измерениям не косвенных параметров (линейных размеров), а прямых (соотношений потоков масла), непосредственно интересующих нас при работе'золотника. При изготовлении рабочих щелей по системе допусков точность самого измерения обычно равна и даже ниже требуемой точности изготовления.
Формулы расхода для динамических расчетов гидропривода. Эмпирические зависимости (48) и (50) для расчета расхода жидкости через рабочие окна золотников дают хорошее совпадение с экспериментом, однако мало приемлемы для сложных динамических расчетов, так как они не только нелинейны, но содержат в показателе степени одну из основных переменных — перепад давления р на рабочем окне. Поэтому естественным является стремление использовать для динамических расчетов квадратичную зависимость (41) расхода масла через рабочее окно от перепада давления.
Как было показано выше, такая зависимость справедлива только при ширине щели h > 150 мкм. При меньшей ширине щелей по мере приближения ее к нулю зависимость (41) дает все увеличивающуюся ошибку, так как в реальном потоке квадратичная зависимость уступает место линейной. Зависимость 103
Рис. 52. Изменение коэффициента расхода ц минерального масла через рабочее окно золотника при расчете расхода по формуле (41) и данным экспериментов на рис. 49
(41) вовсе непригодна для перекрытых щелей. Считая возможным применить зависимость (41) для вывода уравнения золотников, исходим из того, что при переходных процессах и автоколебаниях реальных гидравлических следящих приводов в управляющих золотниках происходит значительное открытие рабочих окон, расход масла в перекрытых щелях вследствие обычно малой величины радиального зазора д 3 4- 7 мкм незначителен и им можно пренебречь, а результаты расчета, в связи с широким диапазоном изменения параметров, допускаются приближенными. Корректируя коэффициент ц расхода масла в проходном сечении окна, можно в некоторой степени уменьшить погрешность в зависимости (41). В. А. Хохлов [53] на основании обработки экспериментальных данных (см. рис. 49) установил, что при использовании зависимости (41) коэффициент расхода ц должен изменяться (рис. 52). При ширине h окна более 0,012 см коэффициент расхода ц для различных перепадов давления выравнивается и составляет величину ц = 0,57, что указывает на установление турбулентного режима течения, которому свойственна зависимость (41). Практическое пользование графиком весьма затруднительно.
Иногда зависимость можно преобразовать (12]:
Q = G /р, (53)
где6=ц/'1/ —-------проводимость окна золотника, зависящая
У р
от площади f проходного сечения и коэффициента расхода ц. При применении метода электрогидравлической аналогии сопротивление рабочего окна золотника можно выразить в форме
Рис. 53. Расчетная схема четырехщелевого золотника с открытыми щелями
При динамических расчетах гидропривода следует иметь в виду возможность значительного влияния неустано-вившихся процессов движения жидкости на гидравлическое сопротивление различных элементов. По данным Д. Н. По-
h
Pi
Дч ^з\
//////л
h0-h
h0-h
Pn, Qex
h0+h
j иисйси Ы Г//////А
пова [39], при синусоидальном характере возмущенного течения сопротивление трубопроводов возрастает в 2 раза и более при частотах 12 Гц, сопротивление золотниковой щели возрастает на 14—18% при частоте 100 Гц, а сопротивление трубопровода с диафрагмой снижается в 1,5 раза при частоте 50 Гц.
Уравнение расходов и статические характеристики золотника с четырьмя открытыми щелями в среднем положении. На основании зависимости (41), при прямоугольной форме окон во втулке, считая острыми рабочие кромки золотника и втулки, пренебрегая радиальным зазором между золотником и втулкой (полагаем, что он значительно меньше ширины рабочих щелей), всеми гидравлическими сопротивлениями в золотнике* кроме его рабочих щелей, и принимая коэффициент расхода р по-
стоянным во всем диапазоне изменения ширины окна, расходы масла в рабочих окнах, согласно расчетной схеме на рис. 53, можно выразить уравнениями:
Q2 = h(/z0—h)b~\/ — (рп—р2); Г р
Сз = Н(Йо + h) b 1/ -Z-(р„—Pi);
Q< = p(h0—h)b \ / —Pi. » Р
(55)
(56)
(57)
(58)
Уравнения расходов для левой и правой проточек золотника при равенстве расходов q в обеих ветвях внешней цепи золотника, что соответствует отсутствию утечек в гидродвигателе, соответственно имеют вид
Сз— Q4—q — 0; Qi + q— Qi —0.
После подстановки в эти уравнения уравнений (55) — (58) получим
р.(А0 + А)А'|// -у-(рп—р,)—р,(й0—й)А |/ ~-pi — q = O-,
р(й0—h)bl/ (Рп—Рг) + q—р.(А0 + Л)А|/ -уР2 = 0-
Введем величину перепада давления р во внешней
золотника
P==Pi — Р2-
(59)
(60)
цепи
(61)
Таким образом, имеем три уравнения с тремя неизвестными р\ и р2.
Определим из уравнений (59) и (60) соотношение между давлениями рп, Pi и р2. Для удобства рассмотрим вначале частные случаи. При нулевом расходе q во внешней цепи золотника уравнение (59) после сокращений приобретает вид
(А0 + й)]/рп — Pi— (ho—h)V Pi =0. (62)
Соответственно уравнение (60) преобразуется:
(hQ—/i)Vpn—р2 — (h0 + h) Ур2 = 0. (63)
Перенеся члены со знаком минус в правую часть и перемножив левые и правые части уравнений (62) и (63), после преобразований получаем
Рп = Pl + р2- (64)
Решим уравнения (59) и (60) относительно q и приравняем их правые части. После сокращения подобных членов получаем
(Ао + Л) Vpn — Pl — (ho—h) /Pl = (h0 + h) Vp2 — (Ao—h) Vpn—p2.
(65)
При наибольшем расходе ^max, когда золотник смещается на величину h = уравнение (65) приобретает вид уравнения (64). В любом промежуточном значении смещения при подстановке решения рп = р\ + рг уравнение (65) обращается в тождество. Таким образом, равенство (64) считаем справедливым для всех значений расхода q.
Из совместного решения уравнений (59), (61) и (64) после преобразований получаем
При отсутствии нагрузки на двигателе (р = 0) последнюю формулу можно представить в следующем виде:
q = K3h, (67)
где Кз — коэффициент усиления золотника по расходу,
К3 = 2р,& |/ — рп см2/с.
V р
Имея в виду, что наибольший расход масла gmax во внешней цепи золотника при р = 0 и наибольшем допустимом смещении золотника |Л| = ho из уравнения (66) составляет:
Чmax = 2Н 1/ у ра (68)
можем получить следующее уравнение расходов во внешней цепи золотника:
q = — (1 + 1г) V 1 —р—(1 —h) V* 1 + р , (69)
где q = ——; h = —— и р = —-----безразмерные величины Соот-
*7тах Рп
ветственно расхода, смещения золотника и перепада давления во внешней цепи.
Решая последнее уравнение относительно рассогласования h, получаем
Нагрузочная характеристика q(p) золотника при различных Л, построенная по уравнению (69), показана на рис. 54, а. Аналогичная экспериментальная характеристика приведена на рис. 54, б. Характеристики показывают, что в золотнике с откры* тыми щелями отсутствует зона нечувствительности, а в интервале нагрузок |р| ^0,6 зависимость q(p) близка к линейной. Сопоставление характеристик, показанных на рис,. 54,д щ б, показывает, что расчет правильно отражает существующие зависимости между основными параметрами золотника.
Регулировочная характеристика золотника по расходу q(h) приведена на рис. 55, а, а по давлению р(й) — на рис. 55, б. Характеристики построены по уравнению (69). Характеристика q(h) указывает на пропорциональность расхода q внешней цепи золотника его смещению h от среднего положения; при изменении знака нагрузки с изменением знака расхода (скорости) образуется зона нечувствительности йн (показана штриховой линией на рис. 55, а).
a)
Рис. 54. Нагрузочная характеристика четырехщелевого золотника с открытыми щелями в среднем положении:
а — расчетная, б — экспериментальная. Условия испытания: h0 = 23 мм, b = 7 см; = 20 кгс/см2; масло «турбинное 22» ; t = 45 -г 50° С
б)
Характеристика p(h) весьма показательна для выявления погрешностей от нагрузок. При расходе q = 0 решение уравнения (69) приводит к соотношению
Р?=о =
2Л
1+^2
(71)
Последнее соотношение указывает на нелинейный, типа насыщения, характер изменения перепада давления р во внешней цепи от смещения h золотника. Зависимость р(А) близка к линейной в интервале нагрузок |р| ^0,3 4-0,5; чем круче характеристика p(/z), тем меньше будет реакция на нагрузку привода, управляемого таким золотником.
Мощность на входе и выходе золотника, а также его к. п. д. характеризуются следующими соотношениями:
ALX = QbxP вл viJAr
п>
ГД6 Qbx = Q3 + Q2— расход в нагнетательной магистрали на входе в золотник (см. рис. 53).
Учитывая соотношения (56), (57) и (68), получим
Qbx = V ^тах [О + Л) Z1 — р + (1— Л) К 1+р. .
(72)
Следовательно, мощность на входе в относительных величинах составит
/VBX=-^ = 4-[(1 + /z)K1-p + (l-A)/I+p], (73)
^*max 2
где A/max = ^maxPn — мощность, подводимая к золотнику при h = hQ и р = 0.
Мощность на выходе /УВых = QP, где из соотношения (69)
9 = 4’^х[(> +л) / 1— р—(1— ~h)V 1+р .
Следовательно, мощность на выходе в относительных величинах составит
= = К1 +Л)1/ 1-р-(1-й)/1 +/J, (74)
N max 2
к. п. д. золотника примет вид
Пз = ^вых = - (l+ft)/T^p-(l-W? + p (1 +h)V 1—р + (1 — Н)У1 + р
(75)
Выражение (75) указывает на рост к. п. д. золотника с увеличением нагрузки р.
На основании изложенного можно отметить недостатки
золотников с открытыми щелями в среднем положении: значительный расход рабочей жидкости в среднем положении и, как следствие его — значительные потери мощности на входе при
Рис. 55. Регулировочные характеристики четырехщелевого золотника с открытыми щелями в среднем положении: а — по расходу; б — по давлению
преодоления нагрузки, возможности
Рис. 56. Расчетная схема четырехщелевого золотника с нулевым открытием щелей в среднем положении
нулевой полезной мощности и значительный наклон регулировочной характеристики по давлению и, как следствие этого — большие требуемые смещения золотника для образования значитель
ных зон нечувствительности при нагрузке типа сухого трения.
Уравнение расходов и статические характеристики четырехщелевого золотника с нулевым открытием щелей в среднем положении. Отмеченные выше недостатки золотников с открытыми щелями обусловили создание золотников, имеющих близкое к нулевому открытие щелей в среднем положении — так называемых идеальных золотников (рис. 56).
Расходы масла в рабочих щелях золотника при допущениях, принятых выше для золотника с четырьмя открытыми щелями,
можно выразить уравнениями:
Qi = fxhb 1/ ~ Р2>
Qz = \x.hb I / -у(рп—Pi)-
(76)
(77)
Уравнения расходов для левой и правой проточек золотника соответственно имеют вид: Q3 — q = 0; q — Qi = 0; и после под-
становки в них выражений (76) и (77) и зований
q = \khb 1/ -у(Рп—Pi)’-
небольших
преобра-
q = phb
(78)
Равенство правых частей последних двух уравнений дает
Рп = Pi + Р2-
(79)
Из совместного решения уравнений (78) и (79) и с учетом соотношения (61) получаем следующее уравнение расхода во внешней цепи золотника для случая смещения h в положительном направлении
q = \)M)~\/-^-1/ 1-----— •
V р V Рп
Поскольку конструкция золотника симметрична, функция Q(Р, Л) должна быть нечетной, т. е. должно удовлетворяться условие:
h)=—q[(—p), ( — Л)]. (80}
Следовательно, уравнение расходов четырехщелевого золотника с нулевым открытием в среднем положении для общего случая будет иметь вид
q — pJib р/ — или в безразмерной форме
h
— h
~р —
Pn
(81)
(82)
где q=—-— , причем qmax — H&Amax|/ ~----------наибольший
<7тах | р
расход при смещении золотника /гтах и нагрузке р = 0.
Рис. 57. Характеристики четырехщелевого золотника с нулевым открытием щелей в среднем положении: а — нагрузочная; б — регулировочная по расходу; в — регулировочная по давлению
Нагрузочная ?(р), а также регулировочные q(h) и p(h) характеристики золотника, построенные по уравнению (82), показаны на рис. 57. Нагрузочная характеристика при нулевом смещении золотника h = 0 совпадает с осью абсцисс и имеет неопределенность; в реальных условиях, вследствие наличия радиального зазора она будет иметь наклон, подобно нагрузочной характеристике золотника с открытыми щелями (см. рис. 54). С увеличением нагрузки р расход q во внешней цепи золотника падает.
Регулировочная характеристика q(h) линейна, причем пря-мые, соответствующие различным постоянным нагрузкам р, проходят через начало координат. Регулировочная характеристика p(h) при q = 0 носит релейный характер и имеет неопределенность при переходе через h = 0, что указывает на острое реагирование на нагрузку. Подобно нагрузочной характеристике, в реальных условиях регулировочная характеристика при расходе q = 0 имеет некоторый наклон. Степень отклонения характеристики от вертикали указывает на степень несовершенства изготовления золотника (размера радиального зазора д, скругления рабочих кромок и т. п.). К. п. д. т]3 золотника, составляет
^вых Р
^вх Рп
Сопоставление этой зависимости с выражением (75) показывает, что при равной мощности на выходе к. п. д. золотников
-с нулевыми щелями выше за счет исключения потерь мощности,
вызываемых внутренней циркуляцией
жидкости.
Уравнение расходов и статические характеристики двухщелевого золотника. Расчетная схема золотника с открытыми щелями в среднем положении показана на рис. 58. При /1 < Ло и выше оговоренных допущениях для четырехщелево-
Рис. 58. Расчетная схема двухщелевого золотника с открытыми щелями в среднем положении
го золотника уравнение расходов приобретает вид Qi—Q2—q= = 0, что после подстановки значений расходов через параметры золотника приводит к зависимости
H(h0 + h)b 1/ — (pn—Pl)—р,(/г0—h)b 1/ —pl — q = 0 V р Гр
(пренебрегая сопротивлением трубопровода между золотником и цилиндром). Выражаем давление pY через перепад давления р, создающий силу на поршне цилиндра, преодолевающем нагрузку /?. Из уравнения сил, действующих на поршень цилиндра, находим, что перепад давления р во внешней цепи золотника составляет
Р = -у = Pi —«Рп»
(83)
где а = ---отношение рабочих площадей цилиндра в штоко-
вой и поршневой полостях цилиндра.
При а = 0,5, что удовлетворяет условию равенства сил, развиваемых силовым двигателем при перемещении в обоих направлениях и наиболее часто применяется, уравнение расходов с учетом соотношения (83) приобретает вид
В относительных координатах, имея в виду, что наибольший расход при смещении золотника h = hQ и нагрузке р = 0 определяется выражением (68), уравнение расходов составит:
= +/г)/1-2р-(1-/г)/1 + 2р
£
(85)
Сопоставление уравнения (85) с аналогичным уравнением (69) для четырехщелевого золотника показывает, что влияние нагрузки возросло в 2 раза (при а = 0,5).
Нагрузочная и регулировочная характеристики двухщелевого золотника при а = 0,5 показаны на рис. 59. Они аналогичны таковым на рис. 54 и 55 для четырехщелевого золотника, однако при отношении рабочих площадей цилиндра а = 0,5 уровень воспринимаемой нагрузки в 2 раза ниже. Регулировочная характеристика p(h) при q = 0 и а = 0,5 из уравнения (85) приобретает значение
- __ h
Pq = 0 ~ 1 +ft2 ’
Рис. 59. Характеристики двухщелевого = 0,5:
а — нагрузочная; б — регулировочная
Р 0,8
-0,8 -i_L б)
золотника с открытыми щелями и а =
Сопоставление полученного значения с выражением (71) показывает, что у двухщелевого золотника крутизна регулировочной характеристики в 2 раза меньше, чем у четырехщелевого.
При нулевом открытии щелей в среднем положении и а = 0,5 уравнение расходов двухщелевого золотника составит
(86)
что аналогично соответствующему выражению (82) и характеристикам, приведенным на рис. 57 для четырехщелевого золотника и отличается достижимым уровнем нагрузки, характеризуемой давлением р.
Уравнение расходов и статические характеристики однощелевого золотника. Расчетная схема золотника, работающего в сочетании с приводом, имеющим дифференциальную схему включения, показана на рис. 60. При допущениях, оговоренных выше для четырехщелевого золотника, уравнение расходов приобретает вид
Q2 + Q1, (87)
где Q2 — расход через дроссель 1, соединяющий полости гидроцилиндра;
(88)
где цдР и /дР — соответственно коэффициент расхода и площадь проходного сечения дросселя, выполненного в виде диафрагмы; 114
Рис. 60. Расчетная схема однощелевого
золотника, работающего в сочетании с р1 приводом, имеющим дифференциальную схему включения
q = vF — расход, идущий на перемещение гидроцилиндра; Qi — расход через рабочее окно золотника;
Qi = ]xb(h0+ h)y -^-pt
(89)
(ц — коэффициент расхода через рабочее окно золотника, имеющего ширину й0 при q = 0 и р = 0).
Из уравнения сил, действующих на поршень цилиндра, находим выражение для перепада давления р, создающего силу на поршне цилиндра, преодолевающего нагрузку R:
р = -у-= рпа—р\, (90)
где а —отношение площадей в штоковой и поршневой
полостях гидроцилиндра.
Совместное решение уравнений (87) — (90) дает
Используя полученное значение для ширины й0 рабочего окна, уравнение (91) можно представить в следующем виде: q = p.bhsyf — ара 1---------1/ 1 + р
У Р IV Ло / У арп у (1—a)pnJ
(92)
При |—h\ = й0 и р = 0 расход во внешней цепи золотника, соответствующий движению гидроцилиндра влево, достигает
115
наибольшего значения
| Ртах I р (Рп ^Рп)»
причем из вышеприведенного выражения для Ло можно заменить |x„Df„D = [ibhQ 1 / —-— . Тогда наибольший расход
I <7max I = V-bhQ 1/ ~ apn. (93)
В относительных величинах, получаемых от деления левых и правых частей выражений (92) и (93), уравнение расходов имеет вид
при а = 0,5
q = (1 + h) 1 —2р— V" 1 + 2р.
(94)
(95)
Уравнения расходов (92) и стика однощелевого золотника
(94) показывают, что характери-не симметрична. При положи-
Рис. 61. Характеристики однощелевого золотника: а — нагрузочная; б и в — регулировочные
тельном открытии окна расход q во внешней цепи золотника не ограничен. При работе на перекрытие (—h) расход q ограничивается расходом через дроссель. Нагрузочная и регулировочные характеристики золотника показаны на рис. 61. Регулировочная характеристика по давлению p(h) (рис. 61, в) имеет пределы |ртах| = 0,5; при нулевом расходе q = 0 из уравнения (95)
1 (1 + fo-l
2 (l + ft)2+l.’
Уравнения расходов золотников в форме степенных рядов. Для получения линейного или гармонически линеаризованного выражения для расходов золотников, выведенные выше уравнения (66), (81), (84), (86) и (92) целесообразно разложить в степенные ряды по формуле Маклорена для функций двух переменных: —— и Разложение производим в точке
^0 Рп
---= 0 и ho ——= 0. Тогда уравнение расходов (66) золотника Рп
с четырьмя открытыми щелями в среднем положении при ограничении третьим членом разложения приобретает вид:
(96)
(97)
Аналогично, уравнение расходов (81) четырехщелевого золотника с нулевым открытием щелей в среднем положении составит:
q = C$h---— Cq
&
-----LcJ-P-Ya.
Рп I h | 8 \ Рп /
Уравнение расходов (84)двухщелевого золотника тыми щелями в среднем положении будет
q = 2С6/г—2С5 —----С6 f—Г Л.
Рп \ Рп /
(98)
с откры-
(99)
Уравнение расходов двухщелевого золотника с нулевыми щелями в среднем положении составит
= С6Л—С6 -^—h —------L С6 (h
Рп |Л| 2 6 \ рп /
и уравнение расходов (92) однощелевого золотника, работающего в сочетании с приводом, имеющим дифференциальную
схему включения, согласно рис. 60, и соотношение рабочих площадей цилиндра а = 0,5, приобретает вид
<7 = С6/г—2С5 —--C6h —-----l-C6h(-^Y. (101)
Уравнение осевых сил дроссельных золотников. Сила /?3, которую необходимо приложить вдодь оси золотника для его перемещения, определяется суммой сил сопротивления, к которым относятся: осевая гидродинамическая сила /?Гд, сила инерции /?и массы золотника, сила /?Ст сухого трения золотника о стенки корпуса и сила вязкого трения /?Вт, представляющая собой силу сопротивления движению, возникающую при перемещении плунжера золотника в корпусе, заполненном рабочей жидкостью.
Таким образом, равновесие сил, действующих в осевом направлении на золотник, выражается уравнением
R3 = Ягд + Кст + /?вт + (102)
Рассмотрим значение каждой из составляющих.
Осевая гидродинамическая сила вызывается реактивным действием потока жидкости, проходящего через рабочие щели золотников. Эти силы имеют большое значение в работе золотниковых механизмов, у которых управление перемещением золотников осуществляется от маломощных датчиков, например в электро- или пневмогидравлических преобразователях.
Схема течения жидкости в камере входа в рабочую щель дроссельного четырехщелевого золотника и при выходе из рабочей щели приведена на рис. 62, а, где эпюры сил, возникающих на буртах золотника [3], объясняют возникновение осевых сил 7?Гд, действующих в сторону закрытия золотника (стремятся вернуть золотник в нейтральное положение).
Вектор s скорости потока, проходящего через рабочую щель, направлен в плоскости течения под некоторым углом к оси золотника. Величина этого угла для случая острых прямоугольных кромок по мере увеличения ширины h щели изменяется от 0 до 69°. В результате реактивного действия потоков жидкости, проходящей через щель золотника, возникает давление жидкости на поверхность золотника (показано в виде эпюр на торцах шеек в проточках плунжера) — гидродинамическая сила. Появление осевой неуравновешенной силы вызвано изменением количества движения потока рабочей жидкости, протекающей через проходные сечения золотникового усилителя. Величина ее для установившегося потока рабочей жидкости может быть определена из уравнения [27]
ЯГд = Р<2(^2—^i), (ЮЗ)
где Q — объемный расход рабочей жидкости через проходное сечение; v\, V2 — составляющие по оси золотника скоростей nolle
Рис. 62. Определение осевой гидроди* намической силы, действующей на дроссельный золотник:
а — схема образования неуравновешенных осевых сил; б — зависимость безразмерного коэффициента осевой неуравновешенной силы F(x, р) от параметров х и р
тока соответственно во входном и выходном сечениях для правой (рис. 62, а) проточки золотника.
Имея в виду, что площадь поперечного сечения на выходе потока рабочей жидкости значительно меньше площади поперечного сечения, через которое рабочая жидкость втекает, можем положить
и ^i~0.
Кроме того,
(Э = иЬ-|/ (^ + 62)2-^-,
(Ю4)
cos a,
(Ю5)
где Др — перепад давлений на проходном сечении.
Полная неуравновешеная сила для четырехщелевого золотника должна быть удвоена в связи с наличием двух проходных сечений. Тогда выражение для осевой гидродинамической силы приобретает вид
/?гд = 4цДр& Уh2 + 62 cos a.
(106)
При значительных открытиях золотника, полагая Уh2 + 82 х /г, р = 0,673 и cos a = 0,358 (a = 69°), можно получить упрощенное выражение
/?гд = 2-0,482Др&й. (107)
Последняя зависимость может быть также представлена в виде
(Ю8)
где Сгд — жесткость гидродинамической силы потока жидкости, протекающей через окна распределительного золотника,
Сгд = 2 0,482Др&. (109)
При значительных расходах и перепадах давления осевая гидродинамическая сила может достигать нескольких килограмм. Уменьшение гидродинамической силы можно осуществить специальным профилированием шеек золотника [4]. Однако полной компенсации при этом достичь не удается, а фасонные формы золотника и втулки сложны в изготовлении, в связи с чем такой метод компенсации осевых гидродинамических сил применяется редко.
Неизбежное на практике отступление от оговоренных выше идеальных условий, закругление рабочих кромок золотника и втулки, образующих рабочие щели, вызывает изменение угла направления потока и видоизменяет величину осевой силы. Характер сил, действующих на золотники при протекании жидкости через рабочие щели, возможность в связи с этим нарушения устойчивости работы золотников, управляемых от преобразователей ограниченной мощности и жесткости, рассмотрен в работе [8].
На рис. 62, б дан график [27], который показывает, что в зависимости от величин соотношений
(110)
открытия h щелей золотника, радиального зазора 6 и глубине I проточки золотника изменение осевой гидродинамической силы от открытия рабочей щели золотника приобретает нелинейный характер, а при некоторых соотношениях гидродинамическая сила даже изменяет знак. График построен для безразмерного коэффициента F(x, р) на основании формулы
R^FfaWbpb. (1Н>
Силы /?ст сухого трения золотника о стенки корпуса возникают вследствие радиальной неуравновешенности сил, действующих на золотник, в результате несоосности расположения золотника относительно корпуса, неправильности геометрических форм плунжера золотника и отверстия в корпусе.
Т. М. Башта [3] рекомендует рассчитывать силу /?ст по выражению
/?CT = Wnf, (И2)
где К = 0,15 4- 0,3 — коэффициент, характеризующий точность изготовления деталей золотника (более высокие значения К соответствуют малым значениям d и /); d — номинальный диаметр плунжера; / — максимальная длина, на которой может действовать одностороннее давление жидкости; рп — максимальное давление; f = 0,05 — коэффициент трения.
Сила трения зависит также от продолжительности пребывания плунжера в покое под давлением. Практика изготовления копировальных приборов показывает, что сила, необходимая для перемещения золотника диаметром 30 мм при подведенном давлении жидкости рп = 40 4- 50 кгс/см2 после пребывания в неподвижном состоянии в течение 3—8 мин может составлять до 1—3 кгс.
Уменьшение и даже полное устранение сил сухого трения достигается введением разгрузочных канавок, специальных са-моцентрирующих лысок, конструкция которых рассматривалась выше, а также путем сообщения золотнику или его втулке осциллирующих перемещений.
Силы /?вт вязкого трения, возникающие при перемещении золотника, И. М. Крассов [27] рекомендует рассчитывать (с точностью до 10—15%) по формуле
R„ = Dh, ' (113)
где D = ^zaRo — коэффициент демпфирующей силы или коэффициент вязкого трения; ц— динамический коэффициент вязкости рабочей жидкости; z — число буртиков на плунжере золотника; а — ширина одного бурта
где Ri — радиус буртиков, Rz— внутренний радиус отверстия в корпусе (втулке).
Согласно экспериментальным данным В. К- Свешникова, коэффициент вязкого трения для золотника гидроусилителя типа 12Г68-1 составляет Z) = 7,3’10“3 кгс • с/см. Таким образом, уравнение (102) сил, действующих в осевом направлении на золотник с учетом соотношений (107), (112) и (ИЗ), имеет вид
R3 = 2 • 0,482Др6/г + Kdlpnf +Dh + m3h, (114)
|Л|
h
где т3 — масса плунжера золотника;----------знак скорости
\h\
перемещения золотника.
В зависимости от конструкции золотника может изменяться значение каждой из составляющих в общем балансе действующих на него осевых сил.
Конструкция копировальных приборов, построенных на основе однокаскадных золотниковых гидроусилителей, рассмотрена в работе [30].
16. Конструкции электрогидравлических преобразователей — усилителей, построенных на основе однокаскадных золотниковых гидроусилителей. Электрогидравлические усилители момента
Конструкция электрогидравлического преобразователя типа ЭГП-1 показана на рис. 63. Этот преобразователь состоит из электромеханического преобразователя 9 нейтрального типа и однокаскадного гидроусилителя 5 с четырехщелевым золотником 6. Электромеханический преобразователь устанавливается и закрепляется на корпусе гидроусилителя с помощью промежуточного стакана 7, сердечник 2 и золотник соединены связкой 3. При большом расходе рабочей жидкости втулка (гильза) 4 выполняется наборной из колец, а при ограниченном расходе — цельной, с длиной щелей, определяемой размерами окон.
Положительной стороной преобразователя является исключительная простота его конструктивной схемы. Однако реализация ее затруднительна, так как электромеханический преобразователь перемещает золотник, который непосредственно распределяет рабочую жидкость, поступающую в двигатель, и осевые силы на золотнике, определяемые уравнением (114), в процессе работы могут достигать значительных величин. Поэтому сила сухого трения устраняется путем сообщения золотнику осциллирующих осевых перемещений с частотой в 50 гЦ (или более высокой при использовании специального генератора) и амплитудой, достаточной для их стабильного поддержания, выполне-122
Рис. 63. Конструкция электрогидравлического преобразователя с однокаскадным золотниковым гидравлическим усилителем: а — до модернизации, б — после модернизации
ния на всех шейках разгрузочных канавок, подвода давления в центре и слива по краям золотника. Кроме того, для сокращения инерционных сил необходимо уменьшать диаметр золотника. Ограничителем расхода и уровня давления является также величина гидродинамических сил, сокращающих рабочий ход сердечника золотника. Сложную техническую задачу представляет исполнение связки 3, так как она должна обладать высокой жесткостью в осевом направлении, гибкостью в радиальном, допускать некоторый перекос осей сердечника и золотника и позволять производить тонкое регулирование нейтрального
положения золотника относительно электромеханического преобразователя. Конструкция связки, предложенная Л. Л. Золотаревым, показана на рис. 63, б. Сочетание четырех тонких ребер 14, расположенных в радиальных плоскостях, и прорезей 15, расположенных перпендикулярно ребрам, позволяет удовлетворить перечисленные выше требования. Тонкая регулировка осуществляется с помощью резьбовых соединений 12 с мелкой резьбой, контровка их гайками 13 за счет цанг с конической резьбой.
Ход сердечника электромеханического преобразователя, несмотря на значительную мощность (10 Вт), ограничивается требованиями к жесткости мембран 1 и 8 из условий обеспечения высокой чувствительности преобразователя, необходимостью их предварительного натяга и сохранения линейной зависимости сила — ход. Кроме того, уменьшение жесткости мембран может приводить к неустойчивости преобразователя и его автоколебаниям под действием осевых гидродинамических сил.
Техническая характеристика электрогидравлического преобразователя следующая: диаметр золотника в пределах 12 мм; рабочий ход золотника не более 0,2—0,3 мм; расход во внешней цепи при подведенном давлении рп = 50 кгс/см2 составляет « 18 л/мин; максимальная сила тока управления ±800 мА; сопротивление каждой обмотки 18 Ом; коэффициент усиления по мощности ~ 60.
В указанном диапазоне параметров преобразователь обеспечивает хорошую линейность регулировочной характеристики и высокую динамику, определяемую электромеханическим преобразователем с учетом дополнительной инерционной нагрузки и жесткости от веса золотника и возникающих на нем гидродинамических сил.
Недостатком этого преобразователя является то, что в процессе эксплуатации происходит постепенная вытяжка мембран 1 и 5, в результате чего снижается жесткость механической системы и нарушается нормальная его работа. Устранить этот недостаток можно путем введения дополнительных цилиндрических пружин 10 высокой жесткости (рис. 63,6), при этом мембраны служат только для центрирования сердечника. Практика показывает, что при использовании такой конструкции можно достигнуть повышения жесткости подвески сердечника до 250 кгс/см, увеличения хода до 0,3 мм и обеспечения длительной надежной работы.
Конструкция гидравлического усилителя момента с поворотным золотником, разработанная в ЭНИМСе под руководством Каменецкого Г. И. [22], показана на рис. 64. Этот гидравлический усилитель используется в приводах дроссельного регулирования с импульсной системой ЧПУ. Гидравлический усилитель момента показан в сборе с гидромотором 1 аксиально-поршневого типа Г15-2. Подвод рабочей жидкости к поло-124
о А-А Б-Б
о ----
Рис. 64. Конструкция гидравлического усилителя момента с поворотным золотником
стям гидромотора осуществляется от концевых проточек золотника 3, по сверлениям <?! и д2, на трассе которых от золотника к гидромотору установлены воздухоотводные устройства 2. Нагнетательная магистраль подсоединяется к проточке /7, а сливная — к проточке С, выполненным в корпусе гидроусилителя. Выходной валик 5 золотника гидроусилителя соединяется с помощью жесткой муфты с шаговым двигателем ШД-4Б.
Ограничение углового рассогласования золотника относительно втулки 4 в пределах ±35° от среднего положения осуществляется штифтом 6, помещенным в вырез 7, выполненный в форме сектора на торце втулки. Беззазорное соединение втулки с валом 10 ротора гидромотора осуществляется с помощью муфты 9, с пружинным захватом и штифтом, входящим в радиальные пазы на торце втулки.
Рабочие щели образуются между парами отверстий во втулке диаметром 4 ± 0,03 мм (разрезы А—А и Б—Б) и выступами на золотнике шириной 4 ± 0,03 мм. Для отвода и подвода жидкости к рабочим щелям служат пазы 8.
Положительной стороной рассмотренной конструкции гидроусилителя момента поворотного типа является исключительная 125
простота конструкции, ее компактность. Она является примером использования переменной длины рабочих щелей сегментного типа для достижения устойчивости в нейтральном положении. Короткие магистрали между золотником и двигателем, а также осуществление обратной связи следящего привода непосредственно от ротора гидромотора позволяют повысить жесткость привода. Недостатки конструкции заключаются в постоянном перемещении золотниковой пары относительно друг друга и корпуса со значительными скоростями, в результате чего возрастают утечки и понижается чувствительность гидравлического усилителя. Кроме того, небольшие проходные сечения подводных и отводных отверстий, а также пазов в золотнике, обусловлены как конструкцией, так и условиями обеспечения устойчивости работы привода.
Статические характеристики гидравлического усилителя моментов аналогичны рассмотренным однокаскадным золотниковым гидравлическим усилителям для четырехщелевых золотников осевого перемещения с учетом сегментной формы рабочих окон. Динамические характеристики определяются задающим устройством. Так, применяемый шаговый электродвигатель ШД-4Б в сочетании со схемой управления, разработанной применительно к импульсной системе ЧПУ типа «Контур 4МИ» производства ЛЭМЗ, обеспечивает поворот на 1,5° при подаче одного импульса, отработку импульсов с частотой до 800 Гц при набросе скачком (мгновенных пусках и остановах) и с частотой до 2000 Гц при постепенном повышении частоты. Минимальная допустимая частота без потери импульсов составляет 20 Гц.
Конструкция серийно изготовляемого электрогидравлического усилителя с золотником осевого перемещения типа Э32Г18-2 показана на рис. 65. Подвод рабочей жидкости к полостям гидромотора 1 модели Г15-2 осуществляется от проточек золотника 6 по каналам М\ и Л42. Нагнетательная магистраль Д под-
Рис. 65. Конструкция электрогидравлического усилителя с золотником осевого перемещения в комплекте с гидромотором типа Э32Г18-2
Рис. 66. Регулировочная характеристика гидропривода с электро-гидравлическим усилителем с шаговым двигателем типа Э32Г18-23
соединяется к проточке втулки 5, охватывающей средние шейки, а сливная магистраль С — крайние шейки золотника. Осевое перемещение золотника по цепи прямого воздействия осуществляется валиком 9 от шагового электродвигателя типа ШД-5Д1, соединяемых с помощью муфты. Входной вал 9 гидравлического усилителя монтируется во внутренней обойме шарикоподшипника 10 и заканчивается гайкой 11, имеющей резьбу с шагом 3 мм. Винт 7 вторым концом, с помощью штифта 12, жестко соединен с втулкой 3, во внутренние шлицы которой входит вал 2, соединенный с рото-
Отставание выходного вала от входного
ром гидромотора. 1
Винт 7 помещен внутри золотника 6, причем связь между
ними осуществляется с помощью упорных подшипников 4 и 8, зазор в которых выбирается пружиной 13. Такая конструкция способствует передаче золотнику только осевых перемещений винта 7, сообщаемых последнему через резьбовую пару от
шагового двигателя или гидромотора, при поворотах их валов.
Преимуществом этой конструкции гидроусилителя является возможность подачи больших расходов масла в гидромотор через круговые рабочие щели золотника и, следовательно, обеспечения большой частоты вращения гидромотора. Изменяя шаг резьбы винтовой пары гидравлического усилителя, можно варьировать передаточное отношение в цепи обратной связи следящего контура и добиваться устойчивости привода. Для этого же служит переменная длина щелей — небольшая вблизи
среднего положения, переходящая в максимальную круговую при некотором смещении золотника. В результате регулировочная характеристика привода по расходу получается нелинейной с пониженным коэффициентом усиления по скорости в области малых скоростей (рис. 66).
Технические возможности серийно изготовляемых комплектных гидроприводов на основе электрогидравлического усилите-
Таблица 1. Технические характеристики серийных гидроприводов
Типоразмеры
Параметры Э32Г1 8-22 Э32Г18-23 Э32Г18-24 Э32Г18-25
Номинальное давление, кгс/см2 Наибольший крутящий момент на выходном валу при номинальном давлении и числе им- 63 63 63 63
пульсов свыше 20 имп/с, кгс-м Наибольшая нагрузка, кгм: 1,6 3,2 6,4 12,8
при числе импульсов до 2000 вс .... 0,8 1,6 3,2 6,4
при наибольшем числе импульсов .... 0.6 1.2 2.4 80 4,8
Расход масла на 1000 об/мин, л/мин .... 20 40 160,
Цена импульса, град Наибольшее число импульсов при плавном 1,5 1,5 1,5 1,5
разгоне, имп/с Наибольшее число импульсов при пуске и оста- 8000 8000 4000 4000
новке (мгновенном набросе), имп/с .... 2000 2000 2000 2000
Наибольшая частота вращения, об/мин . . . Статическая неточность при максимальной на- 2000 2000 1000 1000
грузке, град Ошибка в угле поворота выходного вала при ±1,2 ±1.2 ±1,2 ±1.2
отработке отдельных импульсов, град . . . i 1 ± 1 ± 1 ± 1
Допускаемая инерционная нагрузка, кгс-м-с2 0,0005 0,0016 0,0038 0,0125
Надежность, ч 3 000 3 000 3 000 3 000
Долговечность, ч 10 000 10 000 10 000 10 000
Уровень шума не более, дБ 70 70 70 70
ля с золотником осевого перемещения характеризуются следующими данными, приведенными в табл. 1. Рекомендуемая наибольшая нагрузка в приводе составляет не более 38—50% от наибольшего крутящего момента, развиваемого гидромотором при номинальном давлении, что обусловливается возможностями простого дроссельного регулирования.
Коэффициент усиления усилителя, с учетом момента на валу шагового двигателя в пределах 2,5 кгс • см, составляет Ку = 24 4- 500, в зависимости от типоразмера гидродвигателя. Таким образом, по сравнению с гидравлическим усилителем поворотного типа эта конструкция обладает лучшими показателями. Исключение вращения золотника относительно втулки должно способствовать уменьшению износа по сопрягаемым поверхностям и тем самым предотвращению роста утечек и расширения зоны нечувствительности.
Аналогичную конструкцию имеют электрогидравлические усилители с шаговым электродвигателем, разработанные под руководством В. Е. Попова (рис. 67). Отличительной особенностью их является установка редуктора 1 между валом шаго-128
<Ь120С
вого двигателя 2 и осью золотника 3. Золотник кроме аксиальных рабочих перемещений вращается во втулке со скоростью ротора гидромотора. Переменная длина щелей достигается выполнением на торцах окон во втулке пазов размерами 2 X 0,3 мм, как это показано в сечении А—А. Привод может отрабатывать импульсы, подаваемые с частотой до 16 кГц; рабочее давление составляет 70 кгс/см2. Фирмой «Vickers-Fujitsu» (США—Япония) освоены аналогичные по конструкции электрогидравлические усилители с шаговым электродвигателем на входе серии ЕНРМ, работающие при подведенном давлении 140 кгс/см2. Пять типоразмеров усилителей развивают мощность на выходе от 1 до 15 кВт. Наибольшая частота отрабатываемых импульсов при плавном разгоне составляет 16 кГц.
17. Двухкаскадные золотниковые гидроусилители
Наибольшее применение в станках нашли двухкаскадные гидравлические усилители с электроуправлением, использующие в первом каскаде однощелевой золотник, позволяющий лучшим образом решить задачу стыковки золотников двух каскадов.
Конструкция электрогидравлического преобразователя типа 12Г68-1, разработанного в ЭНИМСе и серийно изготовляемого Ленинградским опытным заводом «Гидроавтоматика», показана на рис. 68. Этот преобразователь состоит из электромеханического преобразователя 1 типа подвижной катушки, золотника 2 первого каскада гидравлического усилителя, торец которого относительно окна 3 в корпусе образует рабочую щель fti, и распределительного четырехщелевого золотника 7 второго каскада с реактивной турбинкой 5 на его конце. Последняя предназначе
на для сооощения золотнику непрерывного вращательного движения, снимающего силу трения и препятствующего облитерации рабочих щелей. Турбинка питается жидкостью, идущей на слив в резервуар из системы. Для того чтобы скорость вращения золотника была примерно постоянной и не зависела от расхода масла во внешней цепи (от размера подачи), схемой включения турбины
Рис. 68. Конструкция электрогидравлического преобразователя типа 12Г68-1 с двухкаскадным золотниковым гидроусилителем и подпружиненным золотником
предусмотрено, чтобы через нее всегда проходило все масло, сливаемое из системы. Подвод такого масла со сброса предохранительного клапана осуществляется по магистрали 6.
Подвижная катушка электромеханического преобразователя в сочетании с пружиной низкой жесткости 10 осуществляет управление перемещением золотника пропорционально изменению рабочего сигнала, а также сообщает золотнику 2 первого каскада осцилляцию. В соответствии с величиной сигнала изменяется размер h\ ширины рабочей щели и давление над верхним (рис. 68) торцом золотника, определяемое соотношением сопротивлений указанной рабочей щели и постоянного дросселя S, установленного на входе. Положение распределительного золотника 7 определяется балансом сил, развиваемых по его торцам: от давления жидкости на верхний торец и пружины 4 высокой жесткости на нижний.
Электрогидравлические преобразователи изготовляют трех типоразмеров. Наибольшая мощность на входе (в электромеханическом преобразователе) составляет 3 Вт, осцилляция выполняется с частотой 50—500 Гц и амплитудой, достаточной для ее стабильного поддержания (0,01—0,1 мм). С целью улучшения динамики преобразователя диаметр золотника первого каскада составляет d3 — 3 мм, жесткость пружины 4 — 250 кгс/см. В результате в преобразователе частота при сдвиге фазы 90° составляет 55 Гц, а резонансный пик амплитуды не превышает 5 дБ (сокращен с помощью демпфера 9 диаметром 0,19 мм).
Преобразователи типа 12Г68-1 нашли широкое применение в следящих приводах станков для электрохимической обработки, копировальных и с числовым программным управлением. Наряду с отмеченными положительными данными конструкция обладает рядом органических недостатков. Применение одно-
136 Ч’ 41
Рис. 69. Конструкция электрогидравлического преобразователя типа ЭГП-2 с обратной связью по положению
щелевого золотника в первом каскаде не обеспечивает постоянства нейтрального положения при изменении температуры жидкости и давления в системе и не обеспечивает симметричности статической характеристики преобразователя в широком диапазоне регулирования. Низкая жесткость пружины ЭМП (2,5 кгс/см) даже при небольшом диаметре золотника d3 = 3 мм может приводить к неустойчивости первого каскада от действия реактивных сил, а в итоге всего преобразователя. Сообщение вращательного движения золотнику от турбинки представляется излишним при наличии осевой осцилляции и влечет за собой ряд отрицательных явлений: колебание состояния равновесия, взаимное влияние преобразователей от толчков давления в сливной магистрали при разгонах и торможениях, повышение массы золотника и т. п. Кроме того, применение схемы с подпружиненным золотником ограничивает возможности повышения мощности на выходе преобразователя и унификации давления в системе управления и силовой части.
На рис. 69 показана конструкция электрогидравлического преобразователя типа ЭГП-2 с обратной связью по положению между золотниками первого и второго каскадов. Электромеханический преобразователь (ЭМП) и связка управляют однощелевым золотником 1 первого каскада так же, как и в однокаскадном преобразователе, показанном на рис. 63. Принцип работы гидравлического усилителя аналогичен описанному в^нпе (см. рис. 17). Так как ЭМП перемещает в двухкаскадном гидравлическом усилителе золотник меньшего диаметра d3 = 6 мм, условия его работы относительно однокаскадного золотника облегчаются, а следовательно, проще обеспечить условия стабильной осцилляции, устойчивости от гидродинамических сил и расширить рабочий ход золотника. При номинальном давлении 50 кгс/см2 преобразователь с золотником 2 второго каскада диаметром D3 = 20 мм обеспечивает расход на выходе до 28 л/мин (при нулевой нагрузке).
Преобразователи типа ЭГП-2 успешно эксплуатируются на четырехкоординатных фрезерных станках с ЧПУ модели ФП-8. Однако эти преобразователи имеют недостатки, отмеченные выше для схем гидроусилителей с однощелевым золотником.
Таким образом, золотниковые гидроусилители несмотря на простоту конструкции обладают недостатками, проявляющимися в значительных силах, необходимых для перемещения гидроусилителей, вследствие возникновения осевых гидродинамических сил, сил сухого и вязкого трения, а также инерционности. Поэтому для золотниковых гидроусилителей требуются управляющие электромеханические преобразователи значительной мощности. Кроме того, наличие трущихся поверхностей и малых зазоров между золотником и корпусом понижает надежность работы золотникового гидроусилителя.
Глава V.
ЭЛЕМЕНТЫ УПРАВЛЕНИЯ С СОПЛО-ЗАСЛОНКОЙ В ПЕРВОМ КАСКАДЕ УСИЛЕНИЯ
18. Гидроусилитель сопло-заслонка
Рассмотрим принцип действия гидроусилителя сопло-заслонка на примере электрогидравлического преобразователя (рис. 70). Усилитель состоит из электромеханического преобразователя 4, подвижная система которого соединена с заслонкой 5, помещенной между двумя соплами 3 и 6, с зазорами hQ с каждой стороны в среднем положении. Рабочая жидкость поступает к соплам из магистрали управления с давлением через одинаковые дроссели 1 и 8. Магистрали между соплами и дросселями имеют отводы под торцы четырехщелевого распределительного золотника 7, подпружиненного с обоих концов пружинами 2. При нейтральном положении заслонки, соответствующем нулевому входному сигналу на ЭМП, схема гидроусилителя будет симметричной и по обоим торцам золотника устанавливаются равные давления; под действием пружин 2 золотник занимает нейтральное положение. При сообщении на вход ЭМП управляющего сигнала, пропорционально его величине и знаку отклоняется заслонка, например, влево. Вследствие этого дросселирование потока рабочей жидкости из левого сопла увеличится, а из правого уменьшится. Соответственно возрастет давление под левым торцом золотника и уменьшится под правым. Под действием образовавшегося перепада давления, пропорционально его величине, золотник сместится вправо, преодолевая сопротивление правой пружины. При изменении знака входного сигнала заслонка смещается вправо от нейтрального положения и пропорционально ему золотник перемещается влево. Таким образом, устройство, состоящее в рассмотренной схеме из двух сопел и двух постоянных дросселей, преобразует перемещения помещенной между соплами заслонки в перемещения золотника, управляющего работой гидродвигателя, и составляет первый каскад гидравлического усиления.
Рассмотрим кратко основные характеристики гидроусилителя сопло-заслонка. Элемент сопло-заслонка (рис. 71) представляет собой сложное гидравлическое сопротивление, состоящее из регулируемого сопротивления, создаваемого в зазоре z между 133
4
Рис. 71. Схема дросселя сопло-заслонка
Рис. 70. Конструктивная схема электрогидравлического усилителя с двухкаскадным гидроусилителем сопло-заслонка-золотник и пружинным подпором золотника
соплом и заслонкой, и ряда нерегулируемых сопротивлений, создаваемых в подводящем канале, в насадке сопла диаметра dc и в месте перехода из насадка в зазор между соплом и заслонкой. Таким образом, гидравлические потери Др в элементе сопло-заслонка можно рассматривать как сумму последовательно включенных гидравлических потерь:
Др = Дрг + Дрн, (115)
где Apz — гидравлические потери в зазоре z между соплом и заслонкой; Дрп — гидравлические потери на нерегулируемых местных сопротизлениях.
Удельный вес обеих потерь зависит от размера z зазора между заслонкой и торцом сопла: при малом z основное значение будут иметь потери Дрг, так как при небольшом расходе потери Дрн будут малы.
Рассмотрим кратко характеристики элемента и гидроусилителя сопло-заслонка, пользуясь обозначениями, изложенными в работе {13] и полагая Дрн = 0, что не вносит качественных изменений при практически применяемых соотношениях между диаметром dc сопла и зазором zmax между соплом и заслонкой. Что касается количественной стороны вносимой при таком допущении погрешности, то при рекомендуемых соотношениях
Zmax < 0, ldc (116)
оценку вносимой погрешности дает относительная величина потерь регулируемых и не регулируемых сопротивлений в выражении (115). Принимая квадратичную зависимость потерь от расхода, согласно выражению (41), имеем
(117)
&Рг =
______
/ _2_Y
Hzf C3 I / /
\ p /
где Q — расход жидкости в сопле; pz— коэффициент расхода для регулируемого дросселя сопло-заслонка.
Теоретически коэффициент расхода можно определить:
= (118>
Коэффициент гидравлического сопротивления gz щели определяется потерями на внезапное сужение и расширение потока жидкости и изменяется в пределах 1 < gz <1,5-
По экспериментальным данным {13], коэффициент расхода |ixz = 0,78 -4- 0,68 при изменении чисел Рейнольдса Re = 250-4- 800 Образованию близкого к турбулентному характера течения жидкости способствует обычно исполняемая форма конца торца сопла: острые кромки, узкая ширина кольцевого пояска (dH l,2dc), острый угол а наружного конуса. Такая форма обеспечивает также уменьшение силового воздействия струи на заслонку. Приближенно силу Fr, действующую на заслонку, принимают равной силе статического давления жидкости на площади внутреннего канала сопла:
Л = -^Дрг. (119)
При этом пренебрегают в связи с относительной малостью силой давления жидкости на заслонку между кольцевым срезом сопла и заслонкой и гидродинамической силой, возникающей при торможении потока жидкости заслонкой.
Площадь щели между торцом сопла и заслонкой, рассчитанная по боковой поверхности цилиндра диаметром dc и высотой z можно определить из выражения
fc3 = ^c^ (120)
Гидравлические потери на нерегулируемых местных сопротивлениях можно выразить формулой
2 , (121)
(|/ т)
где цп = 0,6 4- 0,9 — обобщенное значение коэффициента расхода для нерегулируемой части сопла [13]; fc — площадь поперечного сечения отверстия сопла;
Рис. 72. Расчетная схема гидроусилителя сопло-заслонка
Таким образом, отношение потерь нерегулируемых и регулируемых сопротивлений, исходя из выражений (121) и (117), составит
,,2 г2
Дрн __ ^2'СЗ
и с учетом соотношений (116), (120) и (122), принимая — цн,
АРн 0,16/72,
причем доля потерь в нерегулируемых сопротивлениях резко сокращается при рабочих зазорах 2, меньших максимальных zmax.
Регулировочная характеристика по давлению рд(Л). Эта характеристика представляет зависимость разности давлений
Рд = Рз— Pi (123)
в магистралях между балансными сопротивлениями и сопротивлениями сопло-заслонки от перемещения h заслонки от нейтрального положения (при котором /?3 = /?4 = рс) и определяет перепады давлений по торцам золотника. Расчетная схема гидроусилителя сопло-заслонка может быть представлена в виде гидравлического моста, показанного на рис. 72. Все давления принимаются как избыточные относительно давления в сливной магистрали, течение жидкости в дросселях турбулентным (что означает постоянство коэффициентов расхода), сопротивления балансных дросселей и сопло-заслонки при нейтральном положении заслонки (h = 0) равны между собой, что означает равенство проводимостей балансных дросселей:
г=/г0»
ДР
Р
(124)
Ндр/др
В качестве положительного перемещения будем принимать такое перемещение, при котором закрывается сопло 3 (см. рис. 70). При неподвижном золотнике, когда расход в Диагонале моста фд = 0, величина давления рз определяется из равенства расходов жидкости Qi, протекающего через балансный дроссель /, и ф3 — через сопло 3, причем:
г / 2
Ql Ндр/др |/ p (Рк Рз),
<2з = |x2Jtdc (h0—ti) у -у p3.
Соответственно:
С2 = Р'др/др^/ (Рк P4)» _____________________________
Q4 = |12то/с(/г0 + h) 1/
Следовательно, уравнение расходов будет иметь вид
Рдр?др р (Рк Рз) = Рг*^с(^0 р Рз-
Откуда, с учетом соотношений (124),
(125)
(126)
Рз = Рк------(127)
7— где п =---------относительное смещение заслонки.
<1о
Изменение относительного давления p3 = -^- = f(/z) пока-Рк
зано на рис. 73. При закрытии сопла заслонкой (/? = +1) давление в магистрали между балансным дросселем и сопло-заслонкой достигает максимальной величины и равно подведенному давлению рк. По мере открытия сопла давление падает, причем при максимальном открытии заслонки (h = —1) оно сохраняет некоторую величину (0,2 рк), а крутизна изменения давления уменьшается. Аналогично, величина давления р4 во второй ветви моста составит
<|28>
Тогда, относительный перепад давлений в диагонали моста
Рд = ——будет
Рк
Рис. 73. Регулировочная характеристика по давлению гидроусилителя сопло-заслонка
Рл =---------------------• (129)
[1 + (1—Л)2] [1 + (l+h)2]
Графически, регулировочная характеристика p^(h), построенная по уравнению (129), показана на рис. 73. В начале координат (h = 0) она имеет близкий к линейному участок, крутизна которого определяется производной (-~р3- \ = 1. Следова-
\ dh / h=o
тельно, на «практически линейном» участке регулировочная характеристика по давлению может быть выражена линейным уравнением
Рд _ h
Рк ^0
ИЛИ
Рд~КРЛ (130)
где h = —-------коэффициент усиления по давлению.
h0
Регулировочная характеристика по расходу Qx(h). Составляем характеристику при оговоренных выше допущениях и полагая рд = 0. Тогда расход <2Д жидкости в диагонали моста согласно рис. 72 составит
Qa = v(^-Q3), (131)
где Q3 и Q4 выражаются уравнениями (125) и (126), причем Р4 = Рз=-~---при принятых выше допущениях. Тогда из
соотношения (131) получаем следующее линейное уравнение регулировочной характеристики по расходу:
или
= W, (132)
где = 1/ Рк- — коэффициент усиления по рас-
I Р
ходу.
Последнее выражение показывает, что коэффициент усиления по расходу, а значит, и быстродействие усилителя сопло-заслонка возрастает с увеличением диаметра сопла и подведенного давления рк, а значит расхода жидкости через сопло.
Обобщенная статическая характеристика гидроусилителя сопло-заслонка СД(Л, рд). Этой характеристикой учитывается 138
суммарное влияние на расход Qn в диагонали моста усилителя смещения h заслонки и перепада давления рд.
Уравнения расходов для левой и правой ветвей моста, согласно рис. 72, будут
Qa — Qi — Q3
Од = Q4— 0.2- ,
(133)
При симметричной схеме давление
Рк+Рд
(134)
Тогда
Рз =
(135)
Обобщенная характеристика по уравнению (135) качественно аналогична показанной на рис. 54 и близка к линейной в диапазоне | Л | < 0,5 и |рд| < 0,5. Поэтому для динамических расчетов целесообразно пользоваться линеаризованной характеристикой, получаемой разложением правой части уравнения (135) в ряд Маклорена для функций двух переменных и ho Рк Разложение производим вокруг нулевых значений. Тогда уравнение (135) обобщенной характеристики при ограничении вторым членом разложения приобретает вид
(136)
где<2с= — Рк—расход через одно сопло гидроуси-
лителя при h = 0.
Уравнение (136) можно представить в виде
Фд — Kq рРд,
(137)
где
= *qp = ho
Расход жидкости в гидроусилителе сопло-заслонка при установившемся режиме работы и Qfl = 0 определяется равенством
Qk — Q3 + Q4.
Рис. 74. График изменения к. п. д. гидроусилителя сопло-заслонка
На основании значений Q3 и Q4 из уравнений (125) и (126)г а также соотношений (127), (128) и (136) получаем
QK = QC/2X
(138)
Анализ полученной зависимости показывает, что максимальный расход в гидроусилителе сопло-заслонка имеет место при нейтральном положении заслонки, т. е. h = 0 и составляет Qk = 2QC,
Коэффициент полезного действия гидроусилителя можно выразить отношением полезно используемой в диагонали моста гидроусилителя мощности МВых = СдРд, к подводимой к гидроусилителю МОЩНОСТИ 7VBX = QkPk.
Принимая линеаризованное выражение фд согласно равенству (136) и максимальное значение расхода QK = 2QC, к. п. д. цГу определится из выражения
— Рд)- О39)
Полученное выражение показывает, что к. п. д. возрастает с увеличением отклонения Л заслонки и достигает максимального значения при h = 1. Нагрузка рд оказывает сложное влияние на к. п. д.: при нулевой нагрузке к. п. д. равен нулю; при некоторой предельной нагрузке рдп, определяемой условием ^Рдп — Рдп =0, к. п. д. вновь приобретает нулевое значение. Общий характер изменения к. п. д. показан на рис. 74. В промежутке 0 < рд < рдп к. п. д. приобретает максимальное значение, которое можно получить из формулы (139), приравняв chirV — h
нулю первую производную —J , что соответствует рд =—• дрд 2
При этих условиях
_ h2
Лгу max g
(КО)
Таким образом, к. п. д. гидроусилителя не превышает 12,5%. Учитывая низкий к. п. д., гидроусилитель сопло-заслонка целесообразно применять только в каскадах усиления малой мощности.
Силовое воздействие двух струй на заслонку при исходном значении силового воздействия для каждой струи имеет вид
^р = -^-(Рз —Р4) = —Рд- О41)
Используя выражения (135) или (136) для нахождения рд, можно получить значение силы, действующей на заслонку, в функции смещения h и расхода <2Д.
Гидроусилители сопло-заслонка, построенные по другим схемам, имеют принципиально такие же характеристики, а упрощенный расчет их может производиться по изложенной методике.
19- Конструкция двухкаскадных гидроусилителей сопло-заслонка — золотник с электроуправлением
Конструкция электрогидравлического преобразователя с гидроусилителем сопло-заслонка — золотник и пружинным подпором золотника показана на рис. 75. Гидроусилитель строится по конструктивной схеме, приведенной на рис. 70. В качестве постоянных балансных дросселей 9 могут применяться как оди-
Рис. 75. Конструкция электрогидравлического преобразователя с гидроусили телем сопло-заслонка — золотник и пружинным подпором
ночные жиклеры, так и пакет дросселирующих шайб, позволяющий иметь дросселирующие отверстия большего диаметра по сравнению с одиночным жиклером, в результате чего повышается надежность работы и в меньшей степени сказывается влияние облитерации. Конструкция и расчет пакетов дросселирующих шайб рассмотрены в работах [12, 13, 53]. В электрогид-равлическом преобразователе используется электромеханический преобразователь 1 с подвижным якорем 2, закрепленным в пружинном элементе 5, представляющем собой тонкостенный (0,05—0,2 мм) стальной цилиндр. Заслонка 4, жестко соединенная с якорем, в процессе работы перемещается между соплами 5, имеющими осевую регулировку с помощью резьбы. В нагнетательной магистрали системы управления устанавливается фильтроэлемент 10. предохраняющий от засорения балансные дроссели. Пружины 6 по торцам золотника выполняются обязательно одинаковыми и помещаются в самоустанавливающихся шайбах с конусными опорами 8 для исключения радиальных сил на золотнике. Натяг пружин регулируется резьбовыми пробками 7. Для обеспечения легкой подвижности золотника и высокой чувствительности преобразователя служит режим осцилляции высокой частоты и небольшой амплитуды, сообщаемый золотнику по линии: электромеханический преобразователь — заслонка — гидравлические магистрали /?3, /?4. Параметры такого преобразователя следующие: ток управления /тах = = ±20 мА, наибольший ход заслонки ftmax = ± (0,05 4-0,1) мм, диаметр сопел dc = 0,5-4- 1,2 мм, диаметр золотника d3 = = 6 4- 10 мм, ход золотника хтах = 0,54-1 мм. Подобные преобразователи работают при давлениях 70, 140 и 210 кгс/см2.
Рассмотренный преобразователь имеет простую конструкцию. Однако пружинный подпор золотника, который сложен в исполнении, ограничивает возможности по мощности, так как жесткость пружин при прочих равных условиях пропорциональна квадрату диаметра d3 золотника, определяющего предельный расход жидкости на выходе преобразователя. Понижать давление в системе управления для уменьшения потребной жесткости пружин не рекомендуется, так как это ухудшает динамические характеристики преобразователя. Принятая схема гидравлического усилителя ограничивает его быстродействие. Поэтому в гидроприводах станков все шире начинают применяться преобразователи, в которых исключено подпружинивание золотника.
Конструкция электрогидравлического преобразователя с гидроусилителем сопло-заслонка—золотник и обратной связью по положению заслонки фирмы «Pegasus» (США) показана на рис. 76. В этом преобразователе сопла 18 и 14 помещены в четырехщелевой распределительный золотник 12 и вместе с ним перемещаются. Подвод жидкости к соплам осуществляется от общей нагнетательной магистрали П через фильтро-142
Рис. 76. Электрогидравлический преобразователь фирмы «Pegasus» а — конструктивная схема; б — золотник; в — корпус
элемент 16, постоянные балансные дроссели 13, магистрали 20 и 10, соединенные с полостями за торцами золотника, и проточки 11 и 19, выполненные в посадочном отверстии корпуса. Четырехщелевой золотник выполнен по схеме с четырьмя буртами, подводом давления по краям и сливом в центре, что позволяет сократить утечки в каналах подвода жидкости к соплам и объединить сливы из сопл и привода. Работает гидроусилитель следующим образом. При сообщении заслонке 17 от электромеханического преобразователя 7 перемещения, например влево от нейтрального положения, левое сопло прикрывается, а правое открывается шире, в результате чего давление возрастает в магистрали 10, а также за правым торцом золотника и уменьшается в магистрале 20, а также за левым торцом золотника. Под действием образовавшегося перепада давления золотник будет перемещаться влево до восстановления равных зозоров между заслонкой и соплами, т. е. будет отслеживать перемещение заслонки.
Рассмотренный преобразователь фирмы «Pegasus» конструктивно проще предыдущего, так как в нем отсутствуют силовые пружинные подпоры по торцам золотника, что снимает ограничения в части размеров золотника и позволяет выполнить с меньшим объемом камеры за торцами золотника. Показанные пружины мягкие и служат для фиксации среднего положения золотника. В результате при двухкаскадном гидроусилителе 143
мощность на выходе может составлять до 35 кВт, а в модификациях с трехкаскадным гидроусилителем — до 200 кВт.
Вместе с тем, введение обратной связи по положению заслонки потребовало увеличения хода последней, который составляет в преобразователе модели 161—0,4 мм. Перемещение заслонки осуществляется от ЭМП с подвижным якорем 4 (рис. 76, а), нулевое положение которого регулируется винтами 2 через пружины 5. ЭМП постоянного тока включается разъемом S, имеет постоянный магнит 3 и катушку управления 6. На этой же катушке подается напряжение переменного тока с частотой 250 Гц для осцилляции. Мощность на входе ЭМП в преобразователях различных типоразмеров может составлять от 0,07 до 1,9 Вт. В преобразователе мод. 161 наибольший ток управления в ЭМП составляет ±200 мА, сопротивление каждой катушки 22 Ом, индуктивность 0,022 Г. Якорь и заслонка укрепляются в пружинном элементе /, выполненном в виде тонкостенной металлической трубки.
Принятая технология изготовления всех деталей преобразователя позволила получить малые габаритные размеры при значительной мощности на выходе. Так, в преобразователе мод. 161, работающем при номинальном давлении 140 кгс/см2, наибольший расход составляет 60 л/мин. Золотник (рис. 76,6) помещается в корпус 2 (рис. 76, в) без промежуточной втулки, что позволяет резко сократить габаритные размеры. Рабочие окна в корпусе выполнены круговыми со шлифованными торцами, а подводные каналы от плоскости притычного присоединения преобразователя к посадочному отверстию и рабочим окнам — под различными углами (см. также рис. 76, а), без вспомогательных отводов и заглушек. В результате этого при золотнике диаметром d3 = 19 мм, длиной 68 мм размеры корпуса составляют 60 X 50 X 50 мм. Сопло 18 имеет отверстие dc = 0,4 мм зазоры между соплами и заслонкой в нейтральном положении составляют ft0 = 0,03 мм. Регулировка зазоров достигается резьбой, выполненной на соплах. Диаметр отверстий в дросселях 13 составляет б/др = 1,72 мм. Фиксация положения золотника относительно корпуса, что необходимо для ввода заслонки, достигается с помощью паза на торце золотника (рис. 76,6), в который входит специальный фиксатор. В питающем канале, под фильтром 16 (рис. 76, а) выполняется входное отверстие 15 диаметром dBX = 0,2 мм. Двойной радиальный зазор между корпусом и золотником составляет 10—12 мкм. Корпус стальной с термообработкой до HRC 34—35.
Электрогидравлический преобразователь с гидроусилителем сопло-заслонка — золотник и обратной связью по положению золотника типа ПЭГ-ПМ разработки ОКБ «Теплоавтомат» построен по схеме, показанной на рис. 77.
В этом преобразователе используются четыре сопла: два сопла 1 и 4 в цепи прямой связи и два сопла 5 и 7 — в цепи 144
Рис. 77. Схема электрогидравлического преобразователя типа ПЭГ-ПМ
обратной связи. Между первой парой сопл помещается заслонка 3, перемещение которой осуществляется электромеханическим преобразователем, а между второй парой сопл — заслонка 8, которая кинематически связана с золотником 11 и образует рычаг первого рода с поворотом вокруг опоры 10. Для выборки
возможного зазора служит пружина 9. При рабочем давлении > 63 кгс/см2 давление к гидроусилителю сопло-заслонка под-
водится от специальной магистрали с пониженным давлением Рк = 63 кгс/см2; при одинаковом уровне давлений нагнетательные магистрали управляющей и силовой частей могут быть объединены. Работа преобразователя осуществляется следующим образом. В нейтральном положении заслонок 3 и S, вследствие симметричности схем управления от сопл /, 5 и 4, 7, по торцам золотника устанавливаются одинаковые давления. Жид
кость в первом каскаде гидроусилителя направляется от нагнетательной магистрали рк, попадает в сопла 5 и 7 и через сопла 1 и 4 поступает на слив. При подаче на ЭМП сигнала управления заслонка 3 смещается от нейтрального положения, например, влево. При этом возрастает дросселирование потока жидкости, вытекающей из сопла /, и уменьшается дросселирование потока жидкости, вытекающей из сопла 4. В результате этого возрастает давление у левого торца золотника и уменьшается у правого. Под действием образовавшегося перепада давления золотник начинает смещаться вправо, поворачивая вокруг опоры заслонку 8, что увеличивает дросселирование потока жидкости, втекающего в сопло 5, и уменьшает — втекающего в сопло 7. Перемещение золотника будет происходить до выравнивания сопротивлений в соплах 1 и 5 и 4, 7, при которых выровняются давления по торцам золотника. Соотношение между перемещением заслонки от ЭМП и ходом золотника определяется передаточным отношением заслонки 8 в цепи обратной связи.
Конструкция электрогидравлического преобразователя ПЭГ-ПМ показана на рис. 78. Золотник помещается во втулке /, длина рабочих окон которой составляет часть
окружности.
В преобразователях типа ПЭГ-ПМ конструкция пружинной системы ЭМП выполнена в виде втулки 2, работающей как тор-
сион на скручивание. В средней части торсиона закреплен плоский якорь 3 электромагнитной системы ЭМП, а на свободном конце торсиона — заслонка 5. Нейтральное положение сопл можно регулировать с помощью резьбы 4. Основные конструктивные данные преобразователя типоразмера ПЭГ-ПМ 10/160: диаметр золотника d3 = 10 мм, номинальное давление рп = 160 кгс/см2 (определяют типоразмер преобразователя); ход заслонки ЭМП составляет /imax = 0,1 мм, ход золотника — *тах = 0,6 мм, длина щелей b = 26 мм, диаметр сопл dc = 1 мм. На катушки ЭМП подается переменный ток осцилляции с частотой 150—250 Гц. Золотник и втулка изготовляются из стали ШХ15 и подвергаются закалке до твердости HRC 58—62. Диаметральный зазор между золотником и втулкой составляет 8—12 мкм. Технические характеристики преобразователя приведены в табл. 2.
4 6 5 го преобразователя типа ПЭГ-ПМ
Преобразователь ПЭГ-ПМ имеет относительно простую конструкцию, небольшие габаритные размеры, хорошие статические данные, передаточную функцию, близкую к апериодическому звену (см. ниже), высокий коэффициент усиления. Преобразователи ПЭГ-ПМ изготовляются четырех типоразмеров, причем больший из них при входной мощности ЭМП 0,12 Вт может развивать мощность на выходе до 50 кВт (Рп = 160 кгс/см2, Qmax = 8,3 ДМ3/С).
Таким образом, коэффициент усиления по мощности может достигать Ку — 400 000. Однако преобразователь ПЭГ-ПМ имеет недостаток. Поворотная заслонка в цепи обратной связи имеет пружинный прижим, создающий нагрузку на золотник, что нарушает симметричность конструкции. ЭМП рассмотренной конструкции имеет значительную массу якоря. Для лучшего сочетания преобразователей с современными управляющими устройствами на операционных усилителях освоена новая серия преобр азователей ПЭГ-ПМ-10/160-100 и ПЭ Г-ПМ-16/160-100, имеющих ток управления до ± 100 мА. При этом индуктивность ЭМП снижена в 25 раз (см. табл. 2).
Таблица 2. Технические характеристики электрогидравлических преобразователей
Параметры ПЭГ-ПМ 10/160-100 УГЭ8 12 16 «Pegasus» мод. 141 Dowty «серия 4551»
Номинальное давление, кгс/см2 Минимальное рабочее давление, 160 160 140 (до 210) 140 (до 310)
кгс/см2 Расход при перепаде на щели, равном половине номиналь- 16±1,6 16 15 35
ного, л/мин Расход в среднем положении 40 40 40 40
(не более), л/мин 4 5 1,5 (первый каскад) 1,2
Зона нечувствительности, %• . 1 1 1 0,5
Дрейф по давлению, % . . . . 6 (от минимального до номинального) 3 1 (на 70 кгс/см2) 2 (изменение давления от 80 до 110%)
Дрейф по температуре, % . . 3 (изменение от 20 до 65° С) 4 2 (изменение на 50° С) 2 (на 40° С)
Гистерезис, % Мощность управляющего сиг- 2 5 1,5 3
нала, Вт 0,22 3,5 0,9 (1,9) 0,9 (0,1)
Активное сопротивление, Ом 2X11 360 2x22 (2х 1200) 2x22 (2X200)
Индуктивность, Г 2X0,2 * о.з 2x0,022 (2X1,2) 2x0,03 (2X1)
Частота при сдвиге фаз 90°, Гц 60 100 125 140
Нелинейность, % 10 6 — —
Масса, кг 3,5 5,3 1,25 0,76
Рис. 79. Схема электрогидравлического преобразователя типа УГЭ8
Электрогидравличе-ский преобразователе типа УГЭ8 с гидроусилителем сопло-заслонка — золотник и обратной связью по положению золотника показан на рис. 79, а. Принцип работы преобразователя аналогичен предыдущему. Отличительной особенностью является то, что обратная связь в первом каскаде усиления через сопла 1 и 4 осуществляется непосредственно от конусов 2 и 3, выполненных на специальных концевых буртах золотника. Кроме того, подвод питания в первый каскад
усиления сопло-заслонки осуществляется от магистрали с давлением рп через дроссель 5, представляющий собой пакет дроссельных шайб.
Габаритные размеры преобразователя УГЭ8 такие же, как и для преобразователя ПЭГ-ПМ. Втулка золотника (рис. 79,6) выполняется целиковой или наборной из колец, длина рабочих окон равна длине окружности шеек золотника. Для исключения возможности заедания по торцам рабочих шеек при осевых перемещениях золотника средняя проточка 6 выполняется специальной трехгранной формы, обеспечивающей центрирование золотника во втулке. Примененный ЭМП с подвижным якорем повышенной мощности в 3 Вт способствует повышению динамических характеристик преобразователя.
Преобразователи УГЭ8 изготовляются Ленинградским опытным заводом «Гидроавтоматика» четырех типоразмеров на номинальное давление 160 кгс/см2 и номинальные расходы от 12 до 160 л/мин (см. табл. 2). Отрицательным фактором преобразователя, вероятно, является конструкция обратной связи от конусных поверхностей шеек золотника, так как всякие перемещения золотника в радиальном направлении могут восприниматься как осевое перемещение, увеличенное в масштабе передаточного отношения конуса. В результате этого могут
ухудшаться статические характеристики преобразователя (зона нечувствительности, гистерезис и т. п.).
Электрогидравлические преобразователи с упругой обратной связью по положению золотника серии 4551 выпускаются фирмой «Dowty» (Англия). Конструктивная схема такого преобразователя показана на рис. 80, а. Отличительной ее особенностью является упругая механическая связь между золотником 6 и якорем ЭМП, осуществляемая пружинным стержнем 5, который верхним (на рис. 80, а) концом скреплен с якорем 2 и заслонкой 5, а нижним входит в калиброванный средний паз, выполненный на золотнике. При сообщении ЭМП сигнала управления, смещающего заслонку, например, влево от среднего положения, повышается дросселирование жидкости в сопле 1 и понижается в сопле 4, в результате чего возникает разность давлений под левым и правым торцами золотника. Золотник
Рис. 80. Конструктивные схемы электрогидравлических преобразователей с упругой обратной связью по положению золотника
будет перемещаться вправо до тех пор, пока момент, сообщаемый от пружинного стержня 5, достигает величины момента на якоре ЭМП, созданного сигналом управления, и восстановится нейтральное положение заслонки между соплами.
Положительным качеством преобразователя является простота конструкции, достигаемая вследствие особой технологии изготовления механизма упругой обратной связи; обеспечение работы преобразователя с небольшими отклонениями от нейтрального положения заслонки. Недостатком является сложность беззазорного соединения пружинного стержня с золотником и поддержания его в процессе эксплуатации.
Преобразователи изготовляют пяти типоразмеров на расходы в 4, 10, 20, 40 и 60 л/мин (при перепаде давления на щели в 70 кгс/см2) и номинальные давления до 310 кгс/см2 (см. табл. 2).
Электрогидравлические преобразователи с упругой обратной связью по положению золотника серии SH4 выпускаются фирмой «Vickers (Sperry rend)» (Англия). Конструктивная схема преобразователя показана на рис. 80, б. Принцип работы его аналогичен предыдущему, однако конструктивное исполнение существенно отличается. Заслонки 4 и 6 объединены единым стержнем 5 и подпружинены относительно золотника 7 пружинами 11 и 13. Стержень 5 соединен с якорем 1 ЭМП. В нейтральном положении между заслонками и соплами 3 и 8 образуются равные зазоры, с помощью которых в камерах 2 и 9 за торцами золотника устанавливаются равные давления.
Рабочая жидкость поступает в камеры из нагнетательной магистрали рп, через фильтроэлемент 12 и балансные постоянные дроссели 10 и 14. Пройдя в зазоры между заслонкой и соплом, жидкость сливается в камеры по торцам преобразователя. При сообщении ЭМП сигнала управления якорь 1 смещается, например, влево. При этом заслонка 4 прикрывает сопло 3, а заслонка 6 открывает сопло 8. В результате образуется перепад давлений в камерах 2 и 9 за торцами золотника. Золотник будет перемещаться вправо, сжимая пружину 11 до тех пор, пока сила, сообщенная от пружины 11 с помощью стержня 5 достигнет величины силы на якоре ЭМП, созданной сигналом управления, и восстановится нейтральное положение заслонок между соплами.
Положительные качества рассмотренной конструкции аналогичны предыдущей. Недостатком является значительное усложнение конструкции золотника преобразователя, расположение в нем пружинного механизма, сопло-заслонок, переход в соплах с круглого отверстия на кольцевую щель, значительная мощность ЭМП—до 3 Вт. Преобразователи серии SH4 изготовляются двух моделей на расходы 23 и 57 л/мин (при перепаде давлений на щели 70 кгс/см2) и номинальное давление до 210 кгс/см2.
20. Уравнения движения типового электрогидравлического преобразователя
Блок-схема электрогидравлического преобразователя усилителя показана на рис. 81. Входом электромеханического преобразователя является ток управления /, выходом — перемещение h заслонки. Для двухкаскадного гидроусилителя сопло заслонка — золотник соответственно будут: входом — перемещение заслонки h и выходом — перемещение золотника х. Расход q и перепад давления р во внешней цепи золотника зависят от подсоединенной нагрузки и поэтому обычно относятся к параметрам привода. В паспортные данные преобразователей вносятся обычно предельные статические данные. Между гидроусилителем и ЭМП существует обратная связь от действия на заслонку при истечении струй из сопл гидродинамических сил. Уравнение движения и структурная схема преобразователя-усилителя могут быть получены из совокупности уравнений входящих элементов.
Статическая характеристика. Составим статическую характеристику х(/) при Qa = 0 и допущениях о линейности зависимостей между основными параметрами преобразователя, что, как было показано в разделе 18, не вносит значительных погрешностей для рабочей зоны (пренебрежение трением золотника допустимо в связи с использованием при работе преобразователей осцилляции). Расчет произведем применительно к преобразователю, показанному на рис. 70.
Условие равновесия сил на заслонке
F = Fn + FP,
(142)
где F = KfiI — сила тяги ЭМП, приведенная к оси сопл; Kfi — коэффициент усиления по силе тяги ЭМП; Fn = C3yinh — сила, развиваемая пружинным элементом заслонки и якоря, приведенная к оси сопл; СЭмп — коэффициент жесткости этого элемента;
Fp =——рд = 5срд — сила воздействия двух струй на заслонку, определяемая соотношением (141).
Взаимозависимость между параметрами h, рд и х устанавливают: регулировочная характеристика, выраженная уравнением (130) гидроусилителя сопло-заслонка и условие равновесия сил, действующих на золотник:
(143)
ЭМП
ГУ
Рис. 81. Блок-схема электрогидравли-ческого преобразователя-усилителя
Обратная связь по нагрузке на заслонку
где Fp — сила от перепада давления рд по торцам золотника
с площадью S3 = • ; Fnp — Спрх — сила, развиваемая пружи-
нами с жесткостью Спр по торцам золотника; FT^ = Сгдх— сила, развиваемая осевой гидродинамической силой, вызываемой реактивным действием потока жидкости, проходящим через рабочие щели золотника с жесткостью Сгд, определяемой выражением (109).
Таким образом, уравнение (143) примет вид
Рд53=(Спр + Сгд)х. (144)
По этому уравнению можно определить жесткость пружины СПр исходя из максимальных перепада давления рд и хода золотника Хтах- Совместное решение уравнений (142), (130) и (144) позволяет определить статическую характеристику преобразователя:
х =------—Кр ----------/, (145)
(^ЭМП + рсз) (^пр
где
Рп
Ссз = —— ------жесткость гидравлической пружины за-
слонки.
Введем обозначение
W, hS3
^ЭГП’
Тогда
(146)
(147)
где Кэгп — статический коэффициент усиления электрогидравлического преобразователя-усилителя.
Динамические характеристики. Для анализа динамики ЭГП необходимо составить систему уравнений, описывающих движение входящих в его состав элементов: ЭМП, гидравлического усилителя сопло-заслонка и золотника. Вывод уравнений произведем с допущениями, оговоренными выше при выводе статической характеристики, пренебрегая в связи с относительной малостью массой золотника и утечками по золотнику. Тогда уравнение (изменения силы F тяги ЭМП, приведенной к оси сопл от тока / в катушках ЭМП с учетом их индуктивности Лк, сопротивления /?к и внутреннего сопротивления управляющего усилителя составит [15]
LK dF
RK “I" Ry dt
Уравнение сил, действующих на якорь ЭМП и заслонку, приведенные к оси заслонки, будет
F = F„ + Fp + Рия + FBT, (149)
где Fn и Fp — соответственно силы, развиваемые пружинным элементом заделки заслонки и якоря, и сила воздействия двух d2h
струй, определяемые соотношением (142); = т~т^----
dt2
сила инерции массы якоря, заслонки и жидкости, приведенная р dh ,
к оси сопл; FBT = f------сила вязкого демпфирования якоря
dt
и заслонки.
С учетом значений входящих величин уравнение (149) приобретает вид
F = C^h + Scp^m^- + f-^-. (150)
at* at
Уравнение расходов в диагонали моста усилителя сопло-заслонка
Qx + Фдм»
(151)
где (2д—расход, поступающий в диагональ моста, который определяется выражением (137) для обобщенной статической s-\ л dx характеристики гидроусилителя сопло-заслонка; ц/х = о-------
dt
расход, идущий на перемещение золотника; Рдм = —— ~— 2Е dt
расход, идущий на компенсацию деформации объема жидкости в камере за торцом золотника и магистрали, идущей от балансного дросселя к сопло-заслонке при приведенном значении объемного модуля упругости Е.
С учетом значений входящих величин уравнение (151) приобретает вид
KQhh-KQpPp = s3-^ + (152)
at Zb at
Уравнение сил, действующих на золотник, определяется выражением (144):
Рд$з (^пр + ^гд)^*
(153)
Преобразуем полученную систему уравнений (148), (150), (152) и (153) по Лапласу при нулевых начальных условиях.
Изложим подробнее порядок преобразования уравнения (148), в котором:
———= Тэ и Kfi — известные постоянные; I(t) —
Як + Яу ] V
известная, заданная функция на входе преобразователя (например, гармоническая или типа единичного скачка); F(t) неиз-
вестная функция времени на выходе преобразователя; /(0) = — 1(0) = 7(0) =0 — начальные значения входной величины.
Применим прямое преобразование к обеим частям уравнения (148), пользуясь правилами, изложенными в работе [47]. Обозначим изображение функции I(t) как /($), т. е. примем £[/(/)] = /($). Тогда.
L [W (/)] = W [(/(0] = W (s).
Обозначим изображение функции L[F(t)] =F (s), тогда
dF dt
L[Fl
где
dF ' dt
= sF(s)~F(0) =sF(s).
Подставляя полученные изображения в исходное уравнение, получаем
Кп1 ($) = T3sF (s) + F(s).
Последнее уравнение позволяет получить передаточную функцию по току и силе тяги ЭМП:
Г, ($) =
F(s) __
I(s) ~ 7>+ 1 ’
Подобно изложенному, преобразуем по Лапласу остальные уравнения электрогидравлического усилителя, в результате чего получаем следующую систему уравнений в изображениях:
F(s)=-^-/(S);
T3S + 1
F(s) —= (Tl„„s2 + 2£эмп7'эмп«+ l)Zt(s);
^эмп ^эмп
= (Лу8 + 1)Рд(5);
KxpPA(s) =X(s),
где
ЭМП
(154)
—----электромеханическая постоянная ЭМП;
ЭМП
3
ЭМП
ЭМП
хр - г ьпр
ГД
Структурная схема электрогидравлического преобразователя, соответствующая системе уравнений (154), показана на рис. 82, а передаточная функция составит
ЭГП /(S) l+ttMVWoc
где Wi — W4 — передаточные функции (см. рис. 82). 154
ЭМП
Гидроусилитель сопло -заслонка-золотник
Рис. 82. Структурная схема электрогидравлического преобразователя-усилителя
Подставив значение передаточных функций Wi — W4 жение (155), получим
в выра-
эгп
^эгп
(156)
где Кэгп — коэффициент усиления преобразователя,
iz ___
2'эгп
(157)
ЭМП
_ ^эмп^гу
3
\ '“'ЭМП /
Т2 ОТ Г Т . Д ____ ЭМП ~ ЭМП^ЭМП гу
’ 2 “ КрЛ5с
ЭМП
Д ___ 27эмп£эмп + 1
1 ~ Kpft.Sc
ЭМП
'“'ЭМП
Полученное значение передаточной функции электрогидравлического преобразователя позволяет произвести анализ устойчивости и построить переходный процесс преобразователя. Основным фактором, влияющим на устойчивость усилителя, является отношение сопрягаемых частот ЭМП и гидроусилителя, определяемых постоянными времени Тэмп и Try {13]; электрическая постоянная Тэ влияет на частотную характеристику преобразователя и переходный процесс. В современных электрогидравлических усилителях постоянные Тэ Тгу и 7ЭМП < Тгу. Выполнению первого неравенства способствует переход к применению операционных усилителей с внутренними обратными связями, которые обеспечивают высокие внутренние сопротивления усилителя на входе в ЭМП. В этих условиях передаточная функция электрогидравлического преобразователя обычно описывается зависимостью, близкой к апериодическому звену, и имеет вид
W = _ ЭГП m . 'ЭГП5 4
1
ГДе Гэгп ^гу
[из выражения для Д1 в уравнении (157)].
Для электрогидравлических преобразователей, построенных
по схемам, отличающимся от рассмотренной, уравнения движения выводятся по приведенной методике. При этом общие зако-
номерности и выводы будут аналогичными изложенным выше.
21. Основные характеристики электрогидравлических преобразователей
Нагрузочная характеристика. Эта характеристика выражает зависимость ф3(Дрщ) расхода Q3 на выходе преобразователя через рабочие щели золотника в зависимости от перепада на щели Дрщ. Расчет ее может быть произведен по формулам (41) или (48) в зависимости от требуемой точности. Общий вид нагрузочной характеристики показан на рис. 83. Обычно эта характеристика аппроксимируется квадратичной зависимостью (41). Характеристика мягкая, свойственная простому дроссельному регулированию. Жесткость ее возрастает с уменьшением ширины открытия щели (хода) золотника, пропорционального току управления /. В паспортных данных преобразователя в качестве номинального обычного указывается расход Q, соответствующий наибольшему току Zmax (максимальному ходу золотника) при перепаде давления, равному половине подведенного Дрщ = -у-. При нескольких возможных уровнях рабочих давлений (70, 140,. 210, 310 кгс/см2) оговаривается один перепад давления, в зарубежных конструкциях обычно Дрщ = 70 кгс/см2. Единый уровень перепада давления, при котором фиксируется номинальный расход, облегчает выбор необходимого типоразмера преобразователя.
Регулировочная характеристика по расходу. Характеристика представляет зависимость q(I) расхода во внешней цепи золотника от тока управления при постоянном (обычно нулевом) перепаде давления р. Теоретически, при строгой пропорциональности между током I управления и перемещением х золотника идеального исполнения характеристика имеет вид, приведенный на рис. 84, а. Расчет ее может производиться по уравнениям (145) и (81). Крутизна характеристики изменяется в зависимости от перепада давления р во внешней цепи золотника, пропорционального нагрузке (см. рис. 57, б). Регулировочные характеристики реальных преобразователей вследствие применения в среднем положении перекрытий рабочих щелей золотника, схемных недостатков и дефектов изготовления каждого из трех каскадов усиления имеют вид, показанный на рис. 84.
Основными параметрами этой характеристики, указываемыми обычно в паспортных данных электрогидравлического пре-156
Рис. 83. Типовая нагрузочная характеристика электрогидравлического преобразователя-усилителя
Рис. 84. Регулировочные характеристики по расходу электрогидравлического усилителя а — идеализированная, б — реальная образователя, являются максимальный расход рабочей жидкости, направляемой к исполнительному двигателю 9тах, коэффециент усиления Кд, нелинейность, несимметрия, зона нечувствительности, смещение нуля и гистерезис. Указанные отклонения характеристики от идеальной в условиях эксплуатации могут изменяться в зависимости от уровня подводимого давления рп, давления в сливной магистрали рСл, температуры (вязкости) рабочей жидкости в результате гидравлической несимметрии конструкции усилителя. Так, фирма «Vickers» для усилителей модели SH-4 указывает следующие предельные смещения нуля: 0,8% при изменении давления рп на 70 кгс/см2 и 0,03% при изменении температуры тна 1° С. Аналитические выражения перечисленных параметров приведены в табл. 3. Кроме того, приведены средние значения параметров в процентах, характерные для усилителей, применяемых в станочных гидроприводах. Стремление к обеспечению линейности регулировочной характеристики по давлению предопределяет размеры ширины щелей золотника в среднем положении, которые выбираются близкими к нулевым, с небольшим перекрытием, учитывая режим осевой осцилляции. Так, в электрогидравлических преобразователях фирмы «Indramat» 157
Таблица 3. Основные параметры статических и динамических характеристик электрогидравлических преобразователей, применяемых в станочных гидроприводах
Вид характеристики Параметры Аналитическое • выражение Среднее значение
Статическая, регулировочная по расходу жидкости при настройке (см. рис. 84) Наибольший расход во внешней цепи (зависит от 1 типоразмера) Plmax + (?2тах (/max ~ л с:к1 /с —
Коэффициент усиления по расходу ^=_Рта^ см3/с.мА ^тах —
Нелинейность Д(7 —— 100% Ртах <5—6%
Несимметрия Plmax Ргтах 1ППп, 1 Ртах <10%
Зона нечувствительности /зн 100% max <1%
Смещение нуля --с— 100% ^тах <2%
Г истерезис г 100% 'max <2%
Статическая, регулировочная по давлению при настройке (см. рис. 85) Наибольший перепад давления во внешней цепи Ртах = ± Рп кгс/см2 —
Коэффициент усиления по давлению (определяется по участку, близкому к линейному) Др Кр — кгс/см2-мА —
Относительный рост давления при Д/ 100 = 1% -'max Др —— 100% Ртах >30%
Г истерезис , г 100% 'max <2%
Динамическая, логарифмическая амплитудная и фазовая частотная при настройке (см. рис. 87) Частота при L = = —3 дБ (Ртах < 40 л/мин) при Др=70 кгс/см2 (01 >70 Гц
Частота при ср = — 90° <0р >125 Гц
Продолжение табл. 3
Вид характеристики Параметры Формулы Среднее значение
Динамическая, переходный процесс (см. рис. 88) Чистое запаздывание ч 3 мс
Время первого согласования перерегулирования те <15 мс
Перерегулирование Ад о = — 100% *7уст <10%
Нестабильность статических характеристик в условиях эксплуатации При изменении подведенного давления на ±25% от номинального: коэффициент усиления по расходу — <15%
зона нечувствительности — <0,5%
дрейф нуля — <3%
При изменении температуры рабочей жидкости в диапазоне 10—85° С: коэффициент усиления по расходу — <4%
зона нечувствительности <0,25%
дрейф нуля (0,03% на 1° С, данные фирмы «Vickers») 2,5%
Энергетические показатели Коэффициент усиления по мощности (зависит от типоразмера) ;^вых .VBX —
Размер утечек в статике QyT 100% Чтах <5%
Отношение веса к выходной мощности G ^вых max <100 г/кВт
(ФРГ) мод. 161 перекрытие рабочих щелей в среднем положении составляет 10—15 мкм.
Регулировочная характеристика по давлению. Характеристика представляет зависимость р(1) перепада давления во внешней цепи от тока управления при нулевом расходе q = 0. Теоретически, при нулевом открытии щелей в среднем положении золотника и регулировочной характеристике по расходу, зависимость р(7) носит релейный характер (см. рис. 57, в). В реальном усилителе вследствие погрешностей изготовления, радиального зазора между золотником и корпусом, притупления кромок образующих рабочие щели и режима осцилляции регулировочная характеристика по давлению имеет вид, показанный на рис. 85. Основными параметрами такой характеристики являются коэффициент усиления по давлению 7<р или изменение давления Др во внешней цепи в процентах к подведенному рп при токе управления Д7, составляющем 1—3% от максимального, и гистерезис 7Г. Аналитические выражения для этих параметров и средние характерные значения приведены в табл. 3.
Иногда вводится понятие о зоне нечувствительности преобразователя, под которой понимается суммарная величина изменения тока управления, необходимая для получения заданной величины перепада давления ± р во внешней цепи золотника при отклонении его от среднего положения (гидронейтрали).
Утечки. Эта характеристика устанавливает зависимость QyT(7) величины утечек QyT от тока управления. Утечки складываются из расхода в каскаде усиления сопло-заслонка и утечек в золотнике при расходе q = 0 во внешней цепи золотника. Общий вид зависимости приведен на рис. 86. Максимальное значение утечки приобретают при среднем положении золотника; аналитическое выражение для этого параметра и среднее характерное значение приведено в табл. 3.
Динамические возможности электрогидравлических преобразователей обычно представляются частотной характеристикой и переходным процессом.
Рис. 85. Регулировочная характеристика по давлению электрогидравлического усилителя
Рис. 86. Изменение утечек в электрогидравли-ческом усилителе фирмы «Vickers» Рп — = 210 кгс/см2, /масла = 38° С
Рис. 87. Типовые логарифмические амплитудная и фазовая частотные характеристики электрогидравлического усилителя
Частотная характеристика обычно представляется в виде логарифмической амплитудной и фазовой частотных характеристик и для типовых конструкций усилителей с высокими динамическими качествами имеет вид, показанный на рис. 87. Расчет частотной характеристики производится по передаточной функции, которая определяется в последовательности, изложенной, например, в работе [47]. Так как передаточная функция электрогидравлического преобразователя не содержит интегрирующего звена [см. выражение (156)], амплитудная характеристика L(co) в зоне низких и средних частот может быть аппроксимирована прямой, параллельной оси абсцисс. При дальнейшем росте частоты наклон амплитудной характеристики растет, составляя обычно вначале 20 дБ на декаду (при первой сопрягаемой частоте апериодического звена), затем 60 дБ на декаду и более. Фазовая частотная характеристика <р(со) имеет отрицательные значения, в зоне низких и средних частот величина ее близка к нулю, а в области частот, соответствующих крутому падению амплитудной характеристики, отставание по фазе быстро возрастает.
В паспортных данных по динамике привода обычно указываются частоты, соответствующие изменению амплитуды на —3 дБ и сдвигу фазы на —90° (или —45°) от начальных значений (при низких частотах). Первая характеризует частоту, при которой амплитуда на выходе уменьшается до 70% от начальной, вторая — резонансную частоту усилителя. При жестких требованиях к усилителю могут задаваться и фиксироваться иные показатели, например частоты при изменении амплитуды на — 1 дБ и сдвиге фазы на 30° и т. п. Амплитудные характеристики обычно не содержат ярко выраженные резонансные вспле-161
Рис. 88. Типовые характеристики переходного процесса в электрогидравличе-ском усилителе: а — колебательного сходящегося; б — апериодического
ски. Средние значения отмеченных частот, характерных для усилителей, применяемых в станочных гидроприводах, приведены в табл. 3.
В усилителях фирмы «Pegasus» частота при сдвиге фазы на —90° для моделей с различным наибольшим расходом изменяется следующим образом:
Расход q9 л/мин при Др =
= 70 кгс/см2 ........ 5—20 30 40 60 95 150
Частота сор, Гц при сдвиге
фазы (р = — 90° .... 150 140 125 ПО 50 40
Переходный процесс. Основные фиксируемые параметры колебательного сходящегося переходного процесса показаны на рис. 88, а, К ним относится чистое запаздывание ть время первого согласования перерегулирования тг, величина в % перерегулирования -о, полное время переходного процесса тп, при котором перерегулирование выходной величины (перемещения х золотника или расхода q во внешней цепи) не превышает допускаемой величины ДХдоп (Д^доп), и постоянная времени Т апериодического переходного процесса (рис. 88,6). С учетом чистого запаздывания Ti передаточная функция электрогидравлического преобразователя вида (158) приобретает значение
К
W = —_______
w ЭГП . •
В электрогидравлическом преобразователе ПЭГ-ПМ-10/160 чистое запаздывание составляет величину ti ~ 5 млс. Так как параметры переходного процесса могут быть получены из частотной характеристики (являются как бы производными)» они часто не входят в паспортные данные электрогидравлических усилителей. Построение переходного процесса производится в соответствии с уравнением движения по известным правилам теории автоматического регулирования [47].
Глава VI.
СИЛОВЫЕ ЭЛЕМЕНТЫ ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ
22. Гидроцилиндры. Модуль объемной упругости реальной жидкости
Типовые схемы исполнения гидроцилиндров с двусторонним штоком показаны на рис. 89, а, с односторонним штоком — на 89, б, дифференциального действия, при котором в схеме управления используется разность площадей F поршневой и Fi штоковой полостей гидроцилиндра,— на рис. 89, в, и плунжерного на рис. 89, г.
При использовании в следящем приводе гидроцилиндров в качестве силовых двигателей обычно представляют интерес такие параметры, как сила, развиваемая цилиндром, скорость перемещения, количество перетекания масла (утечек ) между полостями цилиндра, потери холостого хода, жесткость, передаточная функция, энергетические показатели.
Сила, развиваемая на поршне цилиндра, при подводе жидкости под давлением в одну из полостей цилиндра с двусторонним штоком и соединении второй со сливом (с нулевым избыточным давлением) определяется уравнением
где рп—подводимое в полость цилиндра давление, в кгс/см2; Dn — диаметр поршня, см; dmT — диаметр штока, см.
Рис. 89. Типовые схемы исполнения гидроцилиндров
При подводе в каждую из полостей цилиндра давлений, разность которых составляет р = р\ — ръ, сила на поршне цилиндра определится из выражения
R = Fp= л (Рп-^шт) р (159)
Коэффициент усиления по нагрузке определится по формуле р
Аналогичные зависимости могут быть получены для цилиндров других типов.
Скорость перемещения поршня цилиндра в статике (при установившемся движении) определяется по уравнению
v=-^, (160)
где Q — расход масла, подводимого в полость цилиндра или отводимого из нее, см3/с; F — рабочая площадь поршня в полости цилиндра, к которой подводится масло, см2.
Коэффициент усиления по скорости
^=-^-=4- <1б1>
г
Утечки жидкости (перетекание) между полостями цилиндра зависят от величины зазоров между поршнем и стенками цилиндра, в замках поршневых колец, от неплотности прилегания поршневых колец к гильзе цилиндра, а также от разности давлений в полостях цилиндра. В гидроцилиндрах, используемых в следящих приводах, можно допустить перетекание масла «турбинного 22» или «индустриального 20», нагретого до 50° С при перепаде давления 60 кгс/см2 из одной полости цилиндра в другую для цилиндров диаметром до 125 мм — до 40 см3/мин и для цилиндров с диаметрами 125—180 мм — до 80 см3/мин. Такие пределы утечек легко достигаются при зазорах в замках поршневых колец до 0,1 мм, выполнении посадки поршня в гильзе цилиндра по ходовой посадке третьего класса, эллипсности и конусности зеркала цилиндра в пределах 0,02 мм на длине цилиндра.
Обычно полагают, что утечки жидкости QyT между полостями цилиндра имеют ламинарный характер течения и поэтому пропорциональны перепаду давления, т. е.
QyT ^утр i
(162)
где Кут в см5/с • кг — коэффициент утечек, определяющий величину утечки в см3/с при перепаде давления 1 кгс/см2, зависящий от размеров зазоров в элементах уплотнения поршня.
Потери давления на перемещение поршня цилиндра на холостом ходу (без нагрузки) должны быть возможно меньшими для
обеспечения высокой чувствительности следящего привода и плавности движения. Эти потери определяются силами трения в уплотнениях поршня и штока и зависят от качества сборки цилиндра. Для цилиндров меньших размеров требуется больший перепад давления для преодоления силы холостого хода. В среднем можно положить, что для цилиндров с диаметром поршня 90—180 мм давление масла, необходимое для перемещения поршня со штоком в обоих направлениях, не должно превышать 2 кгс/см2.
Жесткость гидроцилиндра как силового двигателя, воспринимающего внешние нагрузки при рациональной конструкции, определяется главным образом сжимаемостью жидкости, наполняющей его полости.
Обычно считают [49], что средняя величина объемного коэффициента сжатия = 0,000052 4- 0,000075 при давлениях до 100 кгс/см2 для масел, применяемых в станках, и при постоянной температуре, что соответствует объемному модулю упругости масла Ем = (1,34-4- 1,92) • 104 кгс/см2. Объемный коэффициент сжатия выше для бодее тяжелых масел; он незначительно увеличивается с увеличением температуры и уменьшается с увеличением давления масла. Воздушные включения и образование пены увеличивают значение объемного коэффициента сжатия. В работах [17, 51] разработаны методы экспериментального определения количества свободного воздуха в рабочей жидкости и установлено, что растворенный воздух не влияет на упругость жидкости.
Для масел марки «Индустриальное 20» или «Турбинное 22» при нормальных условиях работы гидросистемы можно приближенно принять модуль упругости Ем = —— 1,6-104 кгс/см2.
Количественное содержание свободного воздуха в жидкости работающего гидропривода зависит от герметичности гидросистемы, возможности возникновения в магистралях гидросистемы давления ниже атмосферного, от конструкции маслобака, обеспечивающего разделение воздуха и масла до поступления последнего в полость всасывания насоса, от количества воздуха, растворенного в масле, часть которого выделяется при дросселировании в рабочих щелях золотника и предохранительного клапана и других факторов. Расчет изотермического модуля объемной упругости двухфазной (масло с нерастворенным воздухом) жидкости можно произвести следующим образом.
Объем Кем двухфазной жидкости состоит из объема масла и объема нерастворенного воздуха Кв. Таким образом:
VCM=V« + VB. (163)
Принимая
Ув = -5^-, (164)
р
где VBo —объем воздуха в смеси при давлении р0, и дифференцируя уравнение (163) по р, получим
^Усм dV*
dp dp р2
Модуль упругости масла, выраженный в дифференциальной форме, определяется соотношением
£» = —— dVK
УвоРо
(165)
или
dVx Уж
dp Еж
Аналогично в приращениях для жидкостно-воздушной смеси в дифференциальной форме
dVcM _ ___ Усм
dp £см
(166)
где Есм — модуль упругости жидкостно-воздушной смеси.
Подставляя значения dV~ и —-с-- в уравнение (165) и
dp dp
решая его относительно Есм, находим
Есы = . (167)
УвоРо у ж г *-ж „
р2
Подстановка в последнее выражение значений VCM, VK из соотношений (163), (164) и имея в виду, что Уж = Ужо( 1-— ]
(V«o — объем масла при давлении ро), окончательно получаем
Ужо / , р—Ро \ Ро
р _р у во \ еж 7 р (168)
УЖ0 ( , Р—Ро \ , г Ро
Уво1 Ежо Л ЖР’
Учитывая, что изменение объема жидкости при изменении давления невелико, можем положить ~ Ужо- Тогда выражение (168) приобретает вид
Ужо j Ро
ЕСМ = ЕЖ-У^------В—. (169)
Ужо р Ро
Уво + Ж Р2
Полагая, что изменение от давления объемов Уж и Ув мало изменяет общий объем смеси УСм, можно в выражении (167) 166
предположить, что VCM ~ VCMo = Ужо + Уво и У» =» Ужо- Тогда
(170)
упрощенное значение для молуля упругости жидкостно-воздушной смеси определится следующим образом:
УжО 1
Уво
Ужо с Ро
Уво Р2
Есм = Еж
LM Ж
Сопоставление расчетных данных, полученных по формуле (170), с экспериментальными, дает хорошее совпадение. Исследование проводилось на установке, показанной на рис. 90 [34]. Масло через отверстие в верхней части бачка 2, сваренного из стали, заливалось в бачок и плотно закрывалось пробкой 3. Емкость бачка составляла 1870 см3. В бачок, в нижней его части, вмонтирована открытая сверху стеклянная трубка 1. Воздух из-под колпака откачивается форвакуумным насосом 6, давление под колпаком контролируется ртутным манометром 5. При таком методе исследования давление внутри емкости и снаружи одинаково, что исключает деформацию бачка и повышает точность замеров по сравнению с методами, при которых давление внутри и снаружи емкости не одинаково. При понижении давления под колпаком и, следовательно, в масле, объем масла увеличивается и оно вытесняется из емкости в трубку. Измерением повышения уровня масла в трубке определяется приращение объема при уменьшении давления и рассчитывается модуль упругости масла по формуле (166).
На этой же установке аналогично определяется модуль упругости масла при давлениях выше атмосферного. Для этого
служат магистраль 8 подвода давления от компрессора, клапан 7 настройки давления, манометр 4.
Результаты исследований масла «Индустриальное 20» показаны на рис. 91. Усредненные данные характеризуются кривыми: 1 — для отстоявшегося в течение
Рис. 90. Схема установки для определения изотермического модуля объемной упругости масла
£, кгс/снг
Рис. 91. Изменение модуля объемной упругости масла «Индустриальное 20» при различном содержании свободного воздуха
суток после работы в гидроприводе; 2 — для вакуумированного в течение 7 ч при рвак = 0,80 кгс/см2; 3 — для вакуумированного в течение 24 ч при рвак = 0,96 кгс/см2. Модуль объемной упругости масла значительно уменьшается при снижении абсолютного давления ниже 2 кгс/см2. Модуль упругости масла при абсолютном давлении 0,2 кгс/см2 (кривая 1) уменьшается примерно в 10 раз по сравнению со значением модуля при давлении 2 кгс/см2 и составляет величину ВСм=Ю00 кгс/см2. Испытанным пробам масла соответствует следующее содержание свободного воздуха, полученное расчетом с учетом соотношений (163) н (166): для кривой 1 —-у^-ЮО = 0,02%, для кривых 2 и 3 — •бко
0,002%. Кривые, данные на рис. 91, показывают значительное уменьшение модуля объемной упругости масла при увеличении количества свободного воздуха. Так, при содержании воздуха всего 0,1% модуль упругости смеси при атмосферном давлении примерно в 7 раз меньше, чем модуль упругости отстоявшегося масла, содержащего 0,02% свободного воздуха. При давлениях свыше 8—10 кгс/см2 влияние свободного воздуха на модуль упругости жидкости при нормальных условиях эксплуатации гидроприводов ( -ув0 0,1 % ^ невелико.
Статическая жесткость СЦст цилиндра с рабочей площадью поршня F и с объемом масла в сжимаемой полости W может 168
быть определена как отношение статической нагрузки R к вызываемому ей смещению А/ поршня цилиндра:
С = R
Цст м ’
где R = pF (р — давление масла, необходимое для уравновеши-
AIF / Wn
вания этой нагрузки); А/ =--------- ( AW = <—------уменьшение
F \ Ец *
объема масла в полости цилиндра).
Таким образом, статическая жесткость цилиндра
цст
Р2ЕЦ
(171)
где £ц — приведенный модуль упругости стенок цилиндра и находящегося в нем масла в кгс/см2.
Динамическая жесткость Сц цилиндра. При динамическом нагружении в режиме автоколебаний поршня цилиндра, находящегося по середине длины Н хода и имеющего равные рабочие площади F при реверсировании, когда давления р\ и ръ по обе стороны от поршня при управлении от дроссельного четырехщелевого золотника (см. рис. 1) колеблются относительно среднего
значения ( р} = -LE-± — и р2 = -221- -j- — 1, жесткость цилиндра:
\ 2 2 2 2 J
Сп = - = -^~, (172)
ц д/ н
т. е. равна четырехкратной жесткости такого же цилиндра в конце хода, включеного в общую схему подачи и нагруженного статической силой.
Приведенные выше данные о влиянии свободного воздуха на модуль объемной упругости масла следует учитывать в конкретных условиях анализа жесткости цилиндра. Смещение AZ поршня цилиндра с длиной полости £ = 50 см, нагружаемого силой /?, эквивалентной давлению р = 32 кгс/см2, составит: при учете постоянного значения модуля упругости Ец= 1,6 • 104 кгс/см2
А/ =----= —— =--------0,1 см = I мм;
F Ем 1,6-104
а при учете переменного значения, согласно формуле (170), и содержании свободного воздуха при атмосферном давлении (ро = 1 кгс/см2) в количестве 1 %
р р
М = С _А_ dp = С ——А-------- (^ + E.^\dp, (173)
J J E (——VB0 P /
Ро Ро VBo /
что после интегрирования и подстановки числовых значений дает Л1 ~ 0,6 см = 6 мм. Полученные результаты отличаются в 6 раз.
Передаточная функция гидроцилиндра представляет собой отношение
ад =
z(s)
Qu (s)
(174)
где z(s) и Q(s) —изображения по Лапласу соответственно перемещения штока цилиндра и расхода на входе в цилиндр.
Для составления передаточной функции необходимо вывести уравнение движения цилиндра. В качестве расчетной примем схему, показанную на рис. 89, а. Нагрузкой служат приведенные к оси штока цилиндра масса т рабочего органа, поршня, штока, жидкости и силы Т сухого и вязкого трения с коэффициентом t.
Тогда уравнение сил будет
pF = tnz + Т —---h fz
И
и уравнение расходов
Qu = Qn + QyT 4” Quu»
(175)
(176)
где Qn = Fz — расход, идущий на перемещение цилиндра; QyT = kyTp — расход, идущий на утечки в уплотнениях поршня, ^(Д1Гц) „ ,
Удц=—1—— —расход, идущии на компенсацию деформации dt
Д1Гц жидкости и стенок цилиндра,
£ц
w =-¥!— Ц О
(177)
при среднем положении поршня цилиндра. Суммарный модуль упругости Ец масла и стенок цилиндра полагаем постоянным.
Тогда
HF d(\p) __ Кц dp
2ЕЦ dt 2 dt
(178)
при изменении давлений р} и рг, согласно соотношениям (61) и (64), коэффициент упругости стенок цилиндра и находящегося в нем масла
= (179)
ц Ец2 ' ’
С учетом входящих величин уравнение (176) расходов определится из уравнения
Qu = Fz + KyrP f р. (180)
Единое уравнение движения линейной модели цилиндра можно получить из уравнений (175) и (180), исключая р и полагая Т = 0. Тогда, после небольших преобразований
Кц/П
ут
Кут/
(181)
Преобразовав по Лапласу при нулевых начальных условиях уравнение (181), можем получить передаточную функцию гидроцилиндра в следующем виде:
_ z(s) _____________Киц________
~ Qu(s) “ 5(Т^2 + 2£Гц5+1) ’
(182)
где
Kj =---------------коэффициент усиления гидроцилиндра
Ц Аут/
по скорости;
2(F2+KyTf)
постоянная времени гидроцилиндра;
КуТ/п 4- 0, SKyf „
с, = г — относительный коэффициент демпфи-
V 2/иКц(Г2+ дутд
рованця.
Таким образом, передаточная функция гидроцилиндра может быть представлена в виде интегрирующего и колебательного звеньев. Динамические свойства элемента, описываемого колебательным звеном, нагляднее характеризуются не постоянной времени, а резонансной частотой, являющейся величиной, обратной постоянной времени:
(орц = -5-. (183)
1 ц Для гидроцилиндра резонансная частота определится из выражения
/ 2(F2 + k /)
“рц=1/ • (184)
у /ПАц
При отсутствии утечек /Сут = 0 выражение для резонансной частоты гидроцилиндра с учетом соотношения (172) приобретает вид
Энергетические показатели. Утечки и внутренние гидравлические потери в гидроцилиндрах незначительны, в связи с чем можно считать объемный и гидравлический к. п. д. гидроцилиндра Цоб = Цг — 1.
Механический к. п. д. обычно характеризуется перепадом давления рХх =1-4-2 кгс/см2, необходимым для осуществления перемещения не нагруженного цилиндра (потерями холостого хода). Поэтому при работе на номинальных нагрузках с рабочими давлениями 50 кгс/см2 и выше механический к. п. д. гидроцилиндров будет высоким.
Следовательно, гидроцилиндры имеют исключительную простоту конструкции, возможность осуществления непосредственной (без промежуточных кинематических элементов) связи с рабочим органом и обеспечивают к. п. д., близкий к единице. Однако понижение жесткости гидроцилиндров с увеличением хода ограничивает область их применения в следящих гидроприводах с ходом до 1 м. При коротких требуемых ходах перемещений гидроцилиндры являются исключительно эффективными силовыми двигателями гидравлических следящих приводов.
23. Гидромоторы. Особенности характеристик гидромоторов ролико-лопастного типа
В гидравлических следящих приводах копировальных станков применение находят главным образом гидромоторы аксиально-поршневого типа с дисковым распределением, а в приводах станков с ЧПУ — ролико-лопастного типа.
Рис. 92. Схема ролико-лопастных гидромоторов модели ГМ 172
5 6 7 8
Рис. 93. К принципу работы ролико-лопастного гидромотора
Схема гидромотора модели ГМ производства Людиновского агрегатного завода показана на рис. 92. Гидромотор состоит из ротора /, четырех роликов-замыкателей 9, зубчатого механизма синхронизации вращения замыкателей 5, корпуса 7, передней 4, промежуточной 6 и задней 8 крышек. Ротор гидромотора выполнен заодно с валом 3 и имеет шесть лопастей 13, равномерно расположенных по окружности. Вращаются ротор и ролики-замыкатели на подшипниках качения 2. Четыре ролика разделяют полости разного давления двух рабочих камер 10 и 14. Гидромотор для обеспечения статической уравновешенности выполнен двойного действия. Ролики-замыкатели цилиндрической формы с вырезами 11, предназначенными для пропускания лопасти ротора. Ролики гидростатически разгружены в радиальном направлении с помощью дополнительных карманов 12, соединенных с соответствующими полостями.
Принцип работы гидромотора заключается в следующем. Жидкость под давлением подводится, например, к двум каналам П в корпусе и рабочим камерам 10 и 14, ограниченным лопастями ротора и роликами-замыкателями. Применение в гидромоторе принципа двойного двействия обеспечивает гидростатическую 173
разгрузку ротора и увеличивает развиваемый гидромотором крутящий момент. Сила, создаваемая давлением жидкости на лопасти в каждой рабочей камере, определяет крутящий момент на валу гидромотора. Слив жидкости осуществляется через каналы С по другую сторону лопастей.
Так как ротор имеет шесть лопаток, рабочий цикл в гидромоторе повторяется через каждые 60° поворота вала. Для определения степени равномерности крутящего момента на валу гидромотора по мере вращения ротора рассмотрим шесть промежуточных состояний через каждые десять градусов поворота вала (рис. 93). Рассмотрим изменение рабочего объема и крутящего момента в одной камере 4, имея в виду, что такая же картина будет иметь место в камере 10. В исходном положении, при угле поворота вала гидродвигателя а = 0, подведенное под давлением pi к каналу П масло поступает в камеру 4, которая ограничивается лопастью 3 и роликом-замыкателем 5. Уплотнение рабочей камеры осуществляется вследствие наличия малых зазоров между вершиной лопатки и корпусом по радиусу г2 и между ротором и роликом по радиусу Г\. В камере 4 жидкость находится под давлением в камерах 6 и 2 за уплотнениями существуют промежуточные давления, определяемые соотношениями утечек из камеры 4 и перетечек в камеры 1 и S, сообщенные с каналом С пониженного давления р2.
Из схемы на рис. 93 при а = 0 следует, что единственной неуравновешенной силой от давления жидкости, создающей на роторе крутящий момент, является сила R=pF, где р = Р\—Ръ— активный перепад давления на лопастях 3 и 9У равный разности давлений в подводящем и отводящем каналах гидромотора; F = (г2— г\)Ь — рабочая площадь лопатки шириной Ь.
Следовательно, сила R составляет величину
R'-APx-p^r2-rx)b. (185)
При повороте ротора гидромотора под действием силы R в пределах угла а = 0 ч- 10° объем рабочей камеры изменяется на величину
Д^ = л(г22-г|)^-&. (186)
obU
Такое же количество жидкости вытесняется лопастью 9 в канал С пониженного давления. Сила, создающая момент на роторе, определяется зависимостью (185), так как соединение камер 2 и 1 не изменяет активного перепада давления р на лопастях гидромотора.
При повороте ротора гидромотора в пределах угла а = = 10 ч- 20° рабочая камера 4 расширяется от лопасти 3 до ролика-замыкателя 7, причем камеры 1 и 6 свободно соединяются вследствие наличия зазоров между стенками выреза в ролике 5 174
и профилем лопасти 11. Изменение объема рабочей камеры Д^д и величина неуравновешенной силы R на роторе, создающей крутящий момент, определяются на этом переходе также соотношениями (185) и (186).
По мере дальнейшего поворота ротора до угла а = 30° из камеры 4 жидкость, вытесняемая лопастью //, перетекает в промежуточную камеру 6\ затем при переходе к углам а = 40 н- 50°, когда камера 4 вновь ограничивается лопастью 3 и роликом 5, лопасть 12 вытесняет такое же количество жидкости в камеру 8 и отводящий канал С. Таким образом, в течение всех шести стадий поворота ротора на угол а = 60° сохраняются постоянными приращение объема рабочей камеры гидромотора Д^д и величина силы 7?, создающей крутящий момент.
Следовательно, рабочий объем гидромотора, с учетом двойного действия,составит
<7д = 2л(г!-г?)&, (187}
а момент на валу гидромотора
мд = -^. (188}
При перемене подводящего П и отводящего С каналов изменяется направление вращения вала гидромотора.
Таким образом, конструктивная схема ролико-лопастных гидромоторов принципиально позволяет получить постоянство крутящего момента по углу поворота ротора при обоих направлениях вращения и малые потери момента, связанные с внутренним трением. Рассмотренная картина вращения ротора гидромотора была идеализирована. В действительности, в результате различия уплотняющих зазоров и неполной гидростатической уравновешенности может иметь место некоторая неравномерность.
Ролико-лопастные гидромоторы за рубежом выпускаются рядом фирм: «Hartmann Hydraulics Division» (США), «Rollstar AG» (Швейцария), «Stozz» (ФРГ), «Washington Scientific Industries Inc» (США) и др.
Отличаясь конструктивным исполнением, гидромоторы указанных фирм имеют аналогичный принцип работы. На рис. 94 приведена конструктивная схема нерегулируемого ролико-лопастного гидромотора фирмы «Hartmann» (США) модели PRV. Он состоит из ротора 3, четырех роликов-замыкателей Р, передней 6 и задней 1 частей корпуса. Ротор гидромотора выполнен заодно с валом и имеет две лопасти 8 и 11, расположенные диаметрально противоположно друг другу. Наружные поверхности лопастей сопрягаются при незначительных зазорах с поверхностями кольцевого паза 4 прямоугольной формы, внутренние поверхности — с фасонными углублениями роликов-замыкателей.
Рис. 94. Конструкция ролико-лопастного гидромотора фирмы «Hartmann» {США)
Последние разделяют полости высокого и низкого давления рабочей камеры гидромотора, которые соединяются с каналами 2 и 5 подвода и отвода рабочей жидкости с помощью отверстий 7 и 10 в роторе. Зубчатый механизм синхронизации вращения роликов-замыкателей осуществлен непосредственно на их периферии и окружности ротора.
Двойное действие гидромотора обеспечивает гидростатическую уравновешенность, а вывод концов вала на две стороны — возможность присоединения средств управления, например тахогенератора.
Стабильность характеристик гидромотора зависит от качества его изготовления, которое достигается применением совершенной технологии и соответствующих материалов. Поэтому при относительной простоте конструктивной схемы затраты на изготовление ролико-лопастных гидромоторов обычно несколько выше, нежели аксиально-поршневых аналогичных типоразмеров.
При использовании гидромоторов в следящих приводах в качестве силовых двигателей обычно представляют интерес скоростная и нагрузочная статические характеристики гидромотора, стабильность крутящего момента, зависимость потерь давления от скорости вращения вала гидромотора, а также параметры и характеристики, связанные с динамическими свойствами гидромотора (момент инерции, сжимаемый объем, передаточная функция, резонансная частота).
Идеализированный гидромотор. Расчетная схема для этого гидромотора без учета объемных, механических и гидравлических потерь, а также сжимаемости рабочей жидкости показана на рис. 95, а.
В этом случае уравнение расходов составит
г) _ Ял
2л dt ’
а уравнение давлений
м
Рл Рл\ Рл% 7=3 »
Ял
(189)
(190)
2л
где фд — расход на входе в гидромотор; <?д— рабочий объем гидромотора; рД] и рд2— давления соответственно в подводящей и отводящей магистралях; ф и М — соответственно угловое пе* ремещение и крутящий момент на валу гидромотора.
Из уравнений (189) и (190) получаем выходные данные гидромотора через основные параметры (без учета потерь)
где
Q = ---угловая скорость вала гидромотора в рад/с.
Введем понятие о коэффициентах усиления гидромотора по скорости Кд и по моменту Км, получим
(192)
При этом выходные данные гидромотора определяются соотношениями:
а = 1
М = *мРд. J
(193)
Скоростная и нагрузочная характеристики идеализированного гидромотора показаны на рис. 96 штриховыми линиями.
Передаточная функция гидромотора №д(<$) представляет отношение преобразованного по Лапласу углового перемеще-
Рис. 95. Расчетные схемы гидромотора
<Р^Н(Нц,Мбг. НТ.МС)
Рис. 96. Скоростная и нагрузочная характеристики гидромотора
(194)
ния q)(s) выходного вала гидромотора к преобразованному по Лапласу расходу на входе:
HZ (S) д <2д(4 которое может быть получено преобразованием по Лапласу левой и правой частей уравнения (189). С учетом обозначений (192) получаем
— $ф (S), Кд
откуда
(195)
1ГД(5)=-^
S
Таким образом, передаточная функция идеализированного гидромотора описывается интегрирующим звеном с передаточным коэффициентом Лд.
Реальный гидромотор. Расчетная схема реального гидромотора может быть показана в виде, представленном на рис. 95, б. Уравнение расходов для подводящей магистрали ./ в этом случае составит
(196)
где
Qc(j^ dq> и
в = ——------расход, идущии на вращение вала гидромо-
271 dt
тора; QyT = ГдРд— расход, идущий на компенсацию утечек между полостями гидромотора, пропорциональный перепаду давления рд = рд1 — рд2 и коэффициенту утечек гд;
УД01 =----——расход, идущии на компенсацию деформируе-
dt
мого объема жидкости 1Гдо1 в полостях гидромотора и подводящих каналах, изменение этого объема
АП7 _ ^Д01
аид01 — — £пр
где ДрД1 — приращение давления в магистрали 1\ — приве-
денный модуль упругости деформируемого объема жидкости.
Для трубопроводов с внутренним диаметром dQ и толщиной стенки д можно принять
—L. = _L_ + d° (198)
^Пр
где Еж и £тр — соответственно модули упругости жидкости и стенок трубопровода..
В этом уравнении не учитывается расход, идущий на компенсацию внешних утечек, пропорциональных величине давления Рдь что обычно допустимо в связи с их малостью относительно утечек QyT между полостями.
Таким образом, с учетом значений составляющих, уравнение расходов для магистрали 1 составит:
Q+ г р d(Apfll) . (199)
д 2л dt л* Епр dt '
Аналогично может быть составлено уравнение расходов фД2 для отводящей магистрали 2, причем при симметричной конструкции гидромотора и системы управления уравнения расходов для. подводящей и отводящей магистралей будут идентичными.
Уравнение давлений можно написать в следующем виде:
Рл = РдД Рд2 = Рдн (200)
м где рдн =-----потери давления, идущие на преодоление мо-
Км
мента нагрузки М.
Момент нагрузки может включать в себя сумму моментов от инерционной нагрузки 7Ии, нагрузки вязкого трения Л4ВТ, сухого трения 7ИТ, п внешней стационарной нагрузки Afc или часть из них:
М = Ми + Л4ВТ + Мт + Л1с; (201)
Дрг = Дрм + Арк — гидравлические потери, связанные с потерями Дрм вязкого трения в маслопроводах и местными потерями Дрк в каналах и камерах гидромотора. При написании уравнения давлений пренебрегаем явлениями гидравлического удара в связи с ограниченной обычно длиной труб.
Пользуясь рекомендациями Н. С. Гамынина [12], можно представить
Apr = -^- + (-^-V( (202)
Ом \ Ок /
где GM и GK— соответственно, проводимости маслопроводов и каналов (камер) гидромотора.
Таким образом, с учетом значений составляющих уравнение давлений будет:
(203)
Статические характеристики реального гидромотора могут быть получены из выражений (199), (201) и (203), если положить
<*(ЛрД1) dt
Тогда при симметричной = Од, п _ ?д , -
Ча~ 2л dt + А
= 0 и Ми = 0.
конструкции, полагая фД1 = фд2 ==
(204)
а угловая скорость вращения составит
Скоростную характеристику (рис. 96, а, сплошные линии) гидромотора Й(<2Д) можно определить из уравнения (205). В общем случае, при постоянной по величине нагрузке Мт типа сухого трения и наличии утечек (гд > 0) образуется зона нечувствительности, характеризуемая расходом фдн, необходимым для образования начального вращения вала гидромотора. С увеличением подводимого расхода фд возрастает скорость вращения гидромотора. Вследствие влияния местных потерь зависимость имеет нелинейный характер. При нулевых утечках или нагрузках (гд = 0, рд = 0) характеристика переходит в идеализированную (рис. 96, а, штриховая линия).
Нагрузочная характеристика гидромотора й (Л4) (рис. 96,6, сплошная линия) в общем случае характеризуется крутизной наклона 0; скорость при нулевой нагрузке определяется уменьшением оборотов Дйг в результате утечек от гидравлических потерь. Уравнение (205) при обозначениях, согласно рис. 96, б, приобретает вид
Й = Йо—Д&Г—КЭЛ4, (206)
где Лэ — коэффициент эластичности механической характеристики.
С учетом соотношений (192) получим
Кэ = -^ = -±^-Гд. (207)
Таким образом, жесткость механической характеристики гидромотора пропорциональна квадрату рабочего объема q? и обратно пропорциональна коэффициенту утечек гд. 180
Рис. 97. Изменение потерь давления рд от скорости вращения Q в гидромоторах различных типов
Рассмотрим изменение потерь давления от скорости вращения вала гидромотора рд£2, считая приближенно нагрузочный момент как сумму моментов от нагрузок сухого Л1Т и вязкого ЛТвт = трений, а рас-
ход— пропорциональным частоте вращения й. Тогда из уравнения (203) имеем
Рд =
±-(Мт + /й) + Лм,
Q
КдСм
(208)
Для гидромоторов ролико-лопастного типа характерна малая величина момента сухого трения, в связи с чем характеристика Рд(Й) соответствует кривой /, показанной на рис. 97. Троганье с места происходит при давлениях рднь близких к нулю;* затем по мере роста скорости вращения Q перепад давления рд в полостях гидромотора возрастает вследствие роста потерь вязкого трения и местных сопротивлений. Для гидромоторов аксиально-поршневого типа с торцовым распределением в области низких оборотов характерна падающая характеристика момента сухого трения (рис. 97, кривая 2). По мере роста частоты вращения зависимости рд(й) для обоих типов гидромоторов сближаются. При допущениях, принятых выше при написании уравнений расходов и давлений в гидромоторе, передаточная функция гидромотора симметричной конструкции может быть получена из уравнения (199) при подстановке значения давления рд и преобразовании по Лапласу левой и правой частей уравнения.
Из выражений (200) и (201), полагая нагрузку сухого трения Мт = 0, а гидравлические потери — пропорциональными вязкому трению, имеем:
Рд = 7? (А^и “1“ ^вт 4“ Af с), Дм
где Ми = 7-^-5----момент от суммарной инерционной нагруз-
dt2
ки 7, приведенной к валу гидромотора; Л1Вт — момент от суммарной (в гидравлических и механических элементах гидромотора) нагрузки с коэффициентом f вязкого трения; Мс = const — статическая нагрузка.
Таким образом, с учетом значений входящих величин
Рд =
d2(p 'dt2
(209)
Решая совместно уравнения (199) и (209), принимая во внимание, что
Фд1 — Фд2 — Qfl»
^(АРд1) = #д dt dt '
Ял __ 1 „ гдКд __ IZ
' *— И — 1'Э,
2л Кд Км
получаем уравнение движения гидромотора:
Введем следующие обозначения.
Обобщенная постоянная гидромотора
откуда коэффициент относительного демпфирования
Тогда уравнение движения гидромотора приобретает вид
d3q)
dt3
d2qp "dt*
1 + Кэ/
мс.
(211)
+ 2
Преобразование по Лапласу левой и правой частей полученного уравнения движения при нулевых начальных условиях и Мс = 0 позволяет получить передаточную функцию гидромо-
тора
^a(s) =
<p(s) _ Крд____________
<2д(«) s (Г® s2 + 2£д7> + 1) ’
(212)
К
где Кид = - f------коэффициент усиления гидромотора по
скорости.
Таким образом, передаточная функция реального гидромотора при учете утечек, деформируемого объема жидкости, инерционной нагрузки и нагрузки типа вязкого трения описывается произведением передаточных функций интегрирующего и колебательного звеньев. Резонансная частота гидромотора с учетом соотношений (192)
2л
Резонансная частота гидромотора пропорциональна рабочему объему ^д, приведенному модулю упругости fnp деформируемого объема (в половинной степени) и обратно пропорциональна приведенному моменту инерции J и величине деформируемого объема №д0 (в половинных степенях). Резонансная частота повышается вследствие наличия нагрузки вязкого трения.
Влияние отдельных параметров на' динамику гидромотора удобно проследить путем последовательного их введения в расчет. Ограничиваясь учетом утечек между полостями гидромотора, характеризуемых коэффициентом гд, и инерционной нагрузки /, полагая жидкость несжимаемой £пр = оо, и коэффициент вязкого трения f = 0 и Мс = 0 из выражения (210) получаем следующее уравнение движения гидромотора:
j_K^r _^L+_^L=q к
Км * dt dt' А д
откуда, после преобразования по Лапласу, передаточная функция гидромотора '
где
Гд — механическая постоянная
(214)
времени
гидромотора, пропорциональна приведенному моменту инерции вращающихся частей и коэффициенту эластичности нагрузочной „ Кл
характеристики гидромотора дэ= —
Механические постоянные времени гидромоторов, применяемых в станках, малы, что указывает на высокое быстродействие
гидромоторов.
Пример. Определим механическую постоянную времени гидромотора типа Г15-22.
Согласно [14] qn = 18 см3/об; J — 1,1-10-4 кгс-м-с2= 1,1 • 10-2 кгс*см-с2.
Коэффициент утечек гд может быть определен по данным для номинального режима работы гидромотора: .
Гд=—(1-Поб). (215)
Рдн где QHH и рДн — номинальные расход и давление гидромотора; т)Об—объемный к. п. д. при номинальном режиме.
Для указанного гидромотора при рдн = 50 кгс/см2, пн = 1000 об/мин, Лоб = 0,96. Тогда пн 1000
Одн — Ял gg = 18 ~ — 300 см3/с.
Следовательно, гд =---------------------(1—0,96) = 0,24 см5кгс -с 1
и
Тмех = J Гд = J —г„ = 1,1 • 16~2 ———0,24 « 0,3-10~3 с.
Am q2„ 182
Дополнительный учет деформируемого объема 1Гд0, имеющего приведенный модуль упругости Епр, приводит выражение (210) к уравнению:
j Кд И^до яРф , j К л d2(p с/ф /О1Л\
<216)
ИЛИ
гр d3q мех* г ,м dt6
мех
с/2ф
dt2
Д’
'Г W до
где /г = —---------гидравлическая постоянная времени гидро-
^пргд
мотора, отражающая влияние на динамику гидромотора объема жидкости №д0 конечной жесткости.
Наконец, дополнительный учет нагрузки вида вязкого трения, если принять во внимание введенные выше механическую ТМех и гидравлическую Тт постоянные времени, позволяет записать выражение (210) при Л4С = 0 в следующем виде:
1 гг 'г d3(p [ 1 /т* t гр ч d2(p [ dep
1 + K3f Мех Г dt3 + 1 + Мех+ ВТ dt2 ^'dT^
- <2I7>
К w
где Гвт = —----— f — постоянная времени, учитывающая вяз-
К„ ЕпР
кое трение в гидромоторе.
Следовательно, обобщенная постоянная времени гидромотора Тд и коэффициент относительного демпфирования могут быть выражены следующим образом:
Гмех + Гвт
(218)
Для определения динамических свойств гидромоторов различных типов рассмотрим сравнительные данные основных параметров аксиально-поршневых гидромоторов типа Г15-2 и ролико-лопастных гидромоторов модели PRV фирмы «Hartmann» (США) (табл. 4).
Гидромоторы ролико-лопастного типа имеют в несколько раз больший коэффициент относительного демпфирования вследствие повышенного коэффициента утечек гд и высокого положительного значения коэффициента f вязкого трения во всем диапазоне оборотов, в связи с чем они могут обеспечивать устойчивое движение как при весьма небольшой, так и большой частоте вращения. Гидромоторы аксиально-поршневого типа при малой частоте вращения могут иметь отрицательные значения коэффициента относительного демпфирования. Вследствие этого такие 184
Таблица 4. Сравнительные данные гидромоторов
Наименование параметра Аксиальнопоршневой Г15-23 Роликолопастной PRV-22
Рабочий объем, см3/об 35 36
Номинальное давление рн, кгс/см2 50 160
Максимальная частота вращения, об/мин .... 1800 2000
Момент инерции ротора Jp, кгс-см-с2 3,5-10—2 5,4-10—3
Заключенный рабочий объем жидкости 2М7яо, см3 60 43,4
Вес, кг 12 16,7
Коэффициент утечек гд, см5-кгс~*-с—1 . . . . u 0,233 0,6
Коэффициент вязкого трения f при трогании с места, кгс-см*с-рад-1 —2,27 0,67
Коэффициент вязкого трения при номинальной частоте вращения 0.7 0,67
Перепад давления при трогании с места в следящем режиме при номинальном давлении рт, кгс/см2 25* 1.0
рт Относительный перепад давления 100, % • • 35 0.6
р Резонансная частота (йр при /сум = 7р, 1/с- • • • 6,9-102 2,0-103
Относительный коэффициент демпфирования £д при /сум — Jp для зоны низких оборотов . . 0,034 0,127
♦ При рп — 70 кгс/см2 (данные эксперимента).
гидромоторы мало пригодны для безредукторных приводов подач в станках со следящим приводом, работа которых протекает при небольшой частоте вращения. Резонансная частота гидромоторов ролико-лопастного типа при прочих равных условиях несколько выше, чем для аксиально-поршневых гидромоторов, что также является их преимуществом.
Отмеченные преимущества гидромоторов ролико-лопастного типа особенно выявляются при следящем режиме управления, когда под давлением находятся обе полости: подводящая и отводящая рабочую жидкость, а также при повышении уровня давления в связи с отсутствием прижимаемых давлением рабочей жидкости механических трущихся частей типа распределительных дисков.
При работе при номинальных частоте вращения и давлении к. п. д. гидромоторов аксиально-поршневого и ролико-лопастного типов обычно примерно равны. При небольшой частоте вращения и нагрузках, соответствующих по перепаду давлениям, равным !/3—V2 номинального давления, характерным для условий работы следящего привода, к. п. д. гидромоторов роликолопастного типа, вследствие меньших потерь трения, будет выше. На всех режимах работы к. п. д. гидромоторов значительно ниже к. п. д. гидроцилиндров.
24. Насосные установки для приводов дроссельного регулирования.
Автоматическое регулирование подачи насоса при постоянном давлении
В гидравлических следящих приводах станков в качестве источников снабжения гидросистемы маслом' применяются насосные установки постоянной или регулируемой подачи, которые монтируются из нормализованных узлов гидроаппаратуры общего назначения. До появления станков с числовым программным управлением приводы дроссельного регулирования применялись главным образом на давления до 50 кгс/см2, а их суммарная мощность в одном станке не превышала 3—5 кВт. Насосные установки в таких приводах применяются постоянной подачи, с параллельной тонкой очисткой масла автомобильными суппер-фильтрами отстойника (АСФО) и стабилизацией температуры с помощью воздушных или водяных теплообменников. Вопросы конструирования и расчета таких насосных установок подробно освещены в работах [9, 18, 30, 49]. Широкое применение нашли серийно изготовляемые Елецким заводом «Гидропривод» насосные установки типа Г48-2 [14].
В станках с числовым программным управлением возросли суммарные мощности приводов до 10—50 кВт в результате роста скоростей перемещений, поднялся уровень давления до 160—210 кгс/см2, резко повысились требования к надежности работы всей гидросистемы, определяемой чистотой рабочей среды [5], уменьшились допустимые границы колебания температуры масла. Достижение перечисленных условий осуществляется путем применения насосных установок переменной подачи, вырабатывающих расход, равный потребляемому в гидросистеме и работающих при постоянном или мало изменяемом давлении.
Простейшая схема насосной установки с автоматическим рё-гулированием расхода при мало изменяемом давлении пока-
С)
Рис. 98. Простейшая схема насосной установки с автоматическим регулированием расхода при малоизменяемом давлении
зана на рис. 98, а. Установка состоит из насоса переменной подачи /, оснащенного автоматическим регулятором расхода. Пружина 2 регулятора устанавливает насос в положение максимальной подачи. Жидкость под давлением поступает из нагнетательной магистрали через дроссель 4, который демпфирует перемещение регулятора. С помощью поршня 3 регулятора давления величина подачи насоса устанавливается равной расходу жидкости в системе. Закон изменения подачи насоса Qh(Ph) определяется регулировочной характеристикой насоса и параметрами регулятора. Пользуясь расчетной схемой, приведенной на рис. 98, б, можно определить расходную характеристику насоса. При силе пружины больше силы, развиваемой поршнем регулятора:
^npf0 ^рРн»
где Спр — жесткость пружины 6, имеющей предварительное сжатие f0; Fp — площадь поршня регулятора.
Статор 5 насоса находится в положении максимального эксцентриситета е = етах и подача насоса QH = QHmax- Тогда давление в системе определяется неравенством
Рн<-^-Го = Рнт!п- (219)
При давлении в системе рн
На графике Qh(Ph) (рис. 99, а) характеристика насосной установки для этого нерабочего режима определяется кривой /, имеющей некоторый наклон вследствие наличия объемных потерь в насосе.
fo^PHmin условие рав-
новесия насоса и регулятора можно определить следующим равенством (пренебрегая силами трения в регуляторе и утечками в насосе)
ГрРн = Спр [fo + (emax—е)]. (220)
Имея в виду, что подача насоса <2н = (2нтах—-— с учетом ^тах соотношения (219), находим
Qh = Qh max
1-------7^-(Рн-Рнт|п)1- (221)
СтауСпп
На графике рис. 99, а такой режим работы насосной установки характеризуется кривой 2. С уменьшением расхода в системе давление растет, достигая Рншах при QH — 0. Из соотношения (221) получим
п п , етах^пР
Рн max гн min “ >
Р
Рис. 99. Характеристики насосных установок с автоматическим регулированием расхода
Рис. 100. Схема автоматического регулирования расхода в насосных установках со следящим устройством с механической обратной связью.
100%. (223)
а неравномерность регулятора по давлению д = гпах Рн min 100 = gfnax Рн min Fo
Очевидно, изменяя такие параметры регулятора, как Спр, Fp и fo, можно добиваться различной крутизны характеристики Qh(Ph)- Желательной для приводов подач дроссельного регулирования является вертикальная, так называемая «штыковая» характеристика, обозначенная штриховой линией (рис. 99. а), соответствующая нулевой неравномерности регулятора А = 0. Практически, при регулировании подачи (расхода) насоса по схеме, показанной на рис. 98, а, достигается неравномерность давления ?! 10 4- 15% в связи с ограниченными возможностя-
ми выбора размеров пружины регулятора в. результате значительных сил, необходимых для перемещения рабочего органа насоса, и больших величин перемещений етах- Ограниченными также являются возможности регулятора по быстродействию, характеризуемому временем (рис. 99, б) переходного процесса 188
(постоянной Т) при ступенчатом набросе (или сбросе) расхода в системе, так как сила на поршне регулятора определяется величиной отклонения давления рн от установившейся величины. В результате этого при изменении расхода в приводе появляются кратковременные падения (или повышение) давления, что недопустимо.
Сокращения неравномерности по давлению можно достигнуть путем введения в регулятор следящего устройства, например, с механической обратной связью по перемещению регулирующего органа насоса, как это показано на рис. 100.
При такой схеме давление рп на выходе насоса 1 переменной подачи подается под торец поршня 2 регулятора. Пружина 4 стремится повернуть рукоятку 3 регулятора и механически соединенный с ним следящий золотник 6 поворотного типа по часовой стрелке, которое отрабатывается исполнительным двигателем 5 неполно-поворотного типа. Выходной вал последнего соединен с регулирующим органом (например, люлькой) насоса /, который устанавливается в положение большей подачи. Принцип работы такого регулятора полностью аналогичен рассмотренному выше (см. рис. 98, а).
При сокращении расхода в приводе происходит рост давления рн в нагнетательной магистрали, в результате которого нарушается равновесие в регуляторе и плунжер 2, сжимая пружину 4, поворачивает рукоятку 3 против часовой стрелки, сокращая расход насоса QH до потребляемого в системе. Условие равновесия регулятора описывается выведенным ранее уравнением (220).
Вместе с тем введение промежуточного усилителя со следящим управлением позволяет уменьшить ход регулятора, размеры пружины, снизить силу трения. Кроме того, питание гидроусилителя можно осуществить от постороннего источника. В результате этого конструкция становится менее громоздкой, а неравномерность по давлению удается снизить до 5—10% (см. рис. 99, а, кривая 3). Регулятор со следящим устройством и гидравлической обратной связью (рис. 101) позволяет достигнуть качественно нового решения.
Работа регулятора осуществляется следующим образом. При отключенном двигателе привода насоса пружина 5 гидроцилиндра передвигает шток с поршнем 4 в крайнее левое положение, ставя люльку 2 насоса 1 в положение максимальной подачи. В то же время пружина 10 следящего золотника 9, настроенная на давление, которое необходимо поддерживать в нагнетательной магистрали, передвигает золотник в крайнее левое положение. При включении двигателя привода насоса рабочая жидкость поступает в штоковую полость А гидроцилиндра и через дроссель 7 и щель В быстрого возврата в поршневую полость Б гидроцилиндра. При повышении давления в системе золотник 9, сжимая пружину 10, перемещается впра-
Рис. 101. Схема регулятора со следящим устройством и с гидравлической обратной связью
Рис. 102. Теряемая мощность в насосных установках станка модели ФП-8М при насосах постоянной и
во, уменьшая щель В и открывая щель Г, которая соединяет внештоковую полость Б гидроцилиндра через следящий золотник со сливом.
В полости Б гидроцилиндра давление падает и поршень 4 перемещается вправо, поворачивая рычаг, жестко связанный с валом люльки 2, в положение уменьшения подачи насоса. Перемещение будет происходить до тех пор, пока не наступит равновесие, определяемое равенством (без учета гидравлических потерь, нагрузки на люльке и сил сухого трения)
ДА = p2F2 + К,
где рн и р2 — соответственно давление в нагнетательной магистрали поршневой полости цилиндра; Fr и Б2 — площади штоковой и поршневой полостей цилиндра; К — сила пружины 5. При медленном изменении расхода в гидросистеме (дросселе 11) и связанного с этим повышения или понижения давления .в нагнетательной магистрали изменяется отвод на слив рабочей жидкости из поршневой полости Б вследствие изменения проходного сечения щелей, образованных наклонными прорезями 6, выполненными на золотнике 9. При быстром уменьшении расхода в систёме и вызванном им кратковременном повышении давления пик давления сглаживается аккумулятором 12; кроме того, повышенное давление через демпфер 8 действует на золотник 9, перемещая его вправо до открытия кольцевой щели Л При этом давление в полости Б резко падает 190
и поршень 4 гидроцилиндра быстро перемещается вправо, поворачивая рычаг <3. Происходит быстрое уменьшение подачи насоса.
При быстром увеличении расхода в системе и вызванном им падении давления золотник 9 перемещается аналогичным образом влево, открывая кольцевую щель В и закрывая щели Г. Поршень 4 резко перемещается влево, что соответствует повороту люльки насоса на большую подачу. Таким образом, при незначительной жесткости пружины 5 работа насоса на всем диапазоне расходов в установившемся состоянии осуществляется при мало (в пределах сотых долей миллиметра) изменяющемся положении следящего золотника, результатом чего является практически постоянный уровень давления (см. рис. 99, а, кривая 4). Переменная длина щелей в следящем золотнике позволяет обеспечить устойчивость и ограничить погрешность при работе регулятора.
Энергетический эффект при переходе в приводах дроссельного регулирования от насосной установки постоянной подачи к автоматически регулируемой характеризует график, показанный на рис. 102, где показана теряемая мощность в насосной установке четырехкоординатного станка с числовым программным управлением модели ФП-8М при двух вариантах исполнения.
При работе насоса постоянной подачи потери мощности составляют (кривая /)
WnoT = ДМВН + ЛГКЛ, (224)
где AjVBh = /<PhQh(1 —Лэ) —потери мощности внутри насоса, состоящие из объемных, механических и гидравлических потерь, учитываемые эффективным к. п. д. насоса т]э; AfKJI -= = Kph(Qh—Qcnc)—потери мощности в переливном клапане вследствие сбрасывания лишней жидкости, равной разности подачи QH насоса и расхода в системе QCHC.
Потери мощности в насосной установке при регулируемом насосе (кривая 2) ограничиваются первым слагаемым в уравнении (224), дополнительными небольшими потерями, связанными с работой регулятора и мало изменяются при изменении расхода в системе. В результате значительно улучшается тепловой режим работы насосной установки (сокращение потерянной мощности характеризуется заштрихованным на рис. 102 полем). Типовая насосная установка с автоматически регулируемой производительностью для станков с приводами дроссельного, регулирования показана на рис. 103. Общий вид такой установки, выполненной на базе аксиально-поршневого насоса типа Г13-3 производства Гомельского завода гидроаппаратуры приведен на рис. 103, а. Основными элементами насосной установки являются: электродвигатель 6 мощностью до 22 кВт, насос 2 регулируемой подачи до 100 л/мин на давление
160 кгс/см2; сдвоенный пластинчатый насос 3, предназначенный для питания на пониженном давлении усилителей сопло-заслонка электрогидравлических преобразователей гидроприводов и вспомогательных функций, предохранительные клапаны 9 и 12 (рис. 103,6) с переливным золотником и обратные клапаны 8. Обеспечение высокой чистоты масла достигается включением последовательно в нагнетательную магистраль управления фильтра 4 десятимикронной очистки типа 15ГФ17 [5]. Такой же фильтр включается в магистраль 7 высокого давления, если не предусмотрена установка фильтров тонкой очистки на входе в каждый гидропривод. Регулятор 1 выполняется по рассмотренной выше схеме. Предусмотрен теплообменник 5 с воздушным радиатором, управляемый от терморегулятора 10 типа ПТР-2. Параметры теплообменника выбраны из условий отвода тепла, выделяемого как в насосной установке, так и в гидроприводах дроссельного регулирования. Последнее поступает с рабочей жидкостью по магистрали 11, в которой установлен теплообменник.
Техническая характеристика установки
Диапазон регулирования расхода в силовой магистрали, л/мин........................•............. 0—100
Наибольшее и наименьшее давления в силовой ма-
гистрали, соответственно кгс/см2.............. 160—100
Рис. 103. Типовая насосная установка для станков с приводами дроссельного регулирования
Изменение давления при регулировании расхода во всем диапазоне не более, кгс/см2................... 1
Время переходного процесса при изменении расхода от 0 до 100 л/мин (и наоборот), не более, с . . . . 0,2
Диапазон допустимого изменения температуры масла в гидробаке, °C..................................... ±5
Емкость бака, л..................................... 150
Приведенные данные показывают, что введение автоматического регулирования производительности позволяет выполнить насосные установки при значительной мощности небольших габаритных размеров. Конструирование и расчет теплообменников рекомендуется производить по данным, приведенным в работах {3, 9, 30, 49]. Наиболее широкое применение в гидроприводах станков нашли теплообменники с воздушными радиаторами в связи с простотой их конструкции и отсутствием необходимости оборудования специальных внешних коммуникаций. Вместе с тем, при требованиях поддержания температуры масла, близкой или равной температуре окружающей среды, переходят на водные или фреоновые теплообменники. Последние используются в гидроприводах прецизионных расточных станков фирмы «Dixi» (Швейцария), «Mitsui — Seiki» (Япония) и др.
Елецкий завод «Гидропривод» серийно изготовляет гидростанции типа Г-48-44 с автоматически изменяющейся подачей насоса в соответствии с количеством масла, потребляемым гидросистемой при мало изменяющемся давлении. Диапазон регулирования рабочего давления станции составляет 40—63 кгс/см2, наибольший расход масла 63 и 100 л/мин (два типоразмера), мощность приводного двигателя 7,5 кВт. Гидростанции комплектуются регулируемыми насосами типа 2Г15-14. Гидростанции предназначены главным образом для питания шаговых электрогидравлических приводов станков с ЧПУ.
25. Насосные установки для приводов объемного регулирования
Типовая насосная установка электрогидравлического привода объемного регулирования, применяемого в станках с числовым программным управлением, приведена на рис. 104. Основными элементами насосной установки являются: приводной, асинхронный электродвигатель 4 (рис. 104, а), насос 5 регулируемой подачи типа 11Д, электрогидравлический преобразователь 6 управления насосом, предохранительные клапаны 12 и подпитки 9 (рис. 104,6), насос подпитки /4, с предохранительными клапанами, устройство тонкой очистки 3, устройство аварийного выключения 1 и устройство внутренней обратной связи 2. В качестве последнего используется редусин, 194
Рис. 104. Типовая насосная установка для приводов объемного регулирования
который с помощью беззазорной муфты соединяется с осью поворота люльки насоса. При выполнении обратной связи по положению привода от вала гидромотора (см. рис. 26) рекомендуется применять редусин Р16, при обратной связи от рабочего органа (см. рис. 29) — редусин Р36. Электрогидравлический преобразователь 6 включает электромеханический преобразователь 7 нейтрального типа и однокаскадный золотниковый усилитель 8.
Промышленный опыт эксплуатации приводов объемного регулирования показал эффективность использования в качестве устройства 6 тонкой очистки бумажных фильтров типа 15ГФ17 большой пропускной способности (60—125 л/мин). При этом уменьшается износ по торцовому распределителю насоса, обеспечивается безотказность работы привода в течение нескольких тысяч часов, а замену бумажного фильтроэлемента и смену масла можно производить 1 раз в 500—1000 ч эксплуатации. Устройство аварийного выключения 1 состоит из двухпозиционного золотника И с электрогидравлическим управлением и предохранительных клапанов 12. При аварийном положении, когда погрешность (сигнал на выходе фазового дискриминатора) возрастает выше допустимой величины электромагнит 10 обесточивается, золотник И запирает полости гидромотора и закольцовывает насос. Предохранительные клапаны 12 гарантируют ограниченные перегрузки гидромотора. Применяются они в случаях значительных инерционных масс, приведенных к валу гидромотора.
К статическим и динамическим характеристикам насосной установки предъявляются требования, соответствующие таковым для следящего привода в целом, так как изменение расхода на выходе насосной установки определяет изменение скорости двигателя привода. Они формируются на основе характеристик отдельных элементов, входящих в структурную схему насосной установки.
Уравнение расходов для насоса регулируемой подачи можно написать в следующем виде:
Qh = Qht—Сут—AQnp, (225)
где QHT — теоретическая подача насоса.
Приближенно, в зависимости от размера регулируемого параметра у (угла наклона шайбы в аксиальных машинах, величины эксцентриситета в радиальных машинах) можно принять
Qht ~ ЯнТ. (226)
здесь Кн—коэффициент усиления насоса; для насоса типа ГЗ-13 с наклонной шайбой Кн = п^—Вг где d — диаметр поршня; D — диаметр окружности расположения поршней; z — число поршней; со — угловая скорость;
QyT = ГнРн — потеря подачи насоса за счет утечек, которые принимаются пропорциональными давлению рп, развиваемому насосом (гн — коэффициент утечек в насосе в см5/с-кгс);
AQnp = ГоРн — потеря подачи насоса, вследствие снижения под нагрузкой скорости приводного электродвигателя, (го — коэффициент, пропорциональный скольжению приводящего электродвигателя). На основании уравнения (225) следует, что регулировочная характеристика насоса Qh(y) при различных давлениях рн нагрузки качественно аналогична скоростной характеристике гидромотора, показанной на рис. 96, а.
Передаточная функция регулируемого насоса может быть представлена отношением преобразованных по Лапласу расхода QH(s) на выходе к регулируемому параметру y(s) на входе
Wa(s)
Qh (s) Y(s)
(227)
Значение QH(s) может быть получено преобразованием по Лапласу уравнения (225). Так как составляющие QyT и AQnp зависят от нагрузки, их обычно удобнее учитывать в уравнении двигателя путем суммирования всех видов утечек [см. уравнение (196)]. В этом случае изображение расхода насоса по Лапласу составит
оо оо
Qh(s) = J QHT(t)e-s‘dt = J KKy(t)e~st dt, О о
а изображение регулируемого параметра y(s) = J y(/)e-s/ dt.
о
Тогда
= h--------------= *«•
J y(f)e~stdt
(228)
Таким образом, передаточная функция идеализированного регулируемого насоса описывается передаточной функцией усилительного звена. Быстродействие насосной установки лимитируется временем изменения подачи от нулевой до максимальной. В установках рассмотренного типа с рабочими объемами насоса (при максимальном угле отклонения люльки) от 9 до 140 см3/об это время составляет соответственно 0,06—0,15 с.
Высокие энергетические показатели приводов объемного регулирования позволяют выполнять их насосные установки с небольшим объемом масла в резервуаре: для рассмотренных типоразмеров в пределах 50 л. Кроме того, вследствие высокого к. п. д. на всех режимах работы отпадает необходимость установки специальных теплообменников даже в условиях жаркого климата. В результате достигаются небольшие габаритные размеры насосной установки при значительных мощностях.
Перспективным является применение насосных установок регулируемой подачи для приводов главного движения станков, в особенности с числовым программным управлением. В этой связи интерес представляет опыт фирм «Olivetty» (Италия), «Braun & Sharp»(США). В четырехкоординатных обрабатывающих центрах модели «Горизон 3,4» фирмы «Olivetty» подобный привод мощностью около 9 кВт применен в сочетании с приводным регулируемым электродвигателем постоянного тока. В результате достигается широкий диапазон регулирования частоты вращения от 40 до 2000 об/мин в режимах как постоянного момента, так и мощности.
Глава VII.
ТОЧНОСТЬ ВОСПРОИЗВЕДЕНИЯ И УСТОЙЧИВОСТЬ ОДНОКОНТУРНЫХ ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ
В разд. 14 было показано, что одноконтурные следящие приводы подач станков являются существенно нелинейными приводами. Поэтому исследование динамики таких следящих приводов, включающих элементы с характеристиками типа сухого трения, рекомендуется проводить с учетом нелинейностей, на основе приближенного метода гармонической линеаризации. Применимость такого метода для аналитического исследования динамических свойств гидравлических следящих приводов доказана в работе [13]. Ниже анализ выполняется применительно к приводу, построенному по схеме, показанной на рис. 1, так как он является типовым и наиболее широко применяется в станках. При этом имеется в виду, что изложенная методика расчета и полученные выводы могут быть распространены на другие одноконтурные следящие приводы: с двух-и однощелевыми золотниками, с механическим или электрическим управлением.
26. Погрешность воспроизведения и нечувствительность в установившемся режиме движения. Коэффициент полезного действия
f
Примем в качестве расчетной схему привода, показанную на рис. 105. Управляющий золотник 2 имеет четыре рабочих щели, шириной hQ при среднем положений плунжера относительно корпуса. Перемещение х на входе сообщается от задающего устройства с помощью передачи / с передаточным отношением
Z = — = -Г ’ (229)
х Ъ
где h — перемещение золотника.
Рис. 105. Расчетная схема одноконтурного гидравлического следящего привода с четырехщелевым управляющим золотником
Для получения уравнения движения привода в установившемся режиме необходимо написать уравнения движения (расходов, давлений или сил) входящих в его состав элементов. Такими уравнениями являются уравнение расходов золотника, соответствующее выражению (66) при принятых при его выводе допущениях
уравнение расхода во внешней цепи золотника при двигателе с симметричной рабочей площадью размера F;
q = vcF-, (231)
уравнение равновесия двигателя
pF = KR, (232)
где К — коэффициент, учитывающий долю гидравлических потерь во внешней цепи управляющего золотника в общих потерях от нагрузки 7? приведенной к поршню двигателя.
Перепад давления во внешней цепи определится из уравнения
Р = Р\—Р2, (233)
уравнение обратной связи привода г . ь*—а
h = xi—z—z-------.
Ъ
После преобразования находим й = е/, (234)
где е = х— z — погрешность воспроизведения, равная разности положениях управляющего устройства (щупа) иг — рабочего органа (инструмента).
Решая совместно уравнения (230) — (234), находим уравнение движения следящего привода в установившемся режиме:
Введем понятие о коэффициентах усиления следящего привода по скорости и нагрузке. Под коэффициентом Kv усиления следящего привода по скорости понимается производная от скорости по погрешности воспроизведения при нулевой нагрузке:
Kv = (236)
де k =о
Коэффициент Kv характеризует зависимость погрешности воспроизведения от скорости. Из уравнения (235) находим
(237)
Под коэффициентом усиления следящего привода по нагрузке понимается производная от нагрузки по погрешности воспроизведения при нулевой скорости
KR = . (238)
де ис=о
Коэффициент Kr характеризует жесткость привода, так как он выражает силу, развиваемую двигателем на единицу рассогласования. Из уравнения (235) следует
При решении уравнения (235) относительно погрешности воспроизведения получаем
Анализ полученных выражений позволяет сделать следующие выводы.
£max*ha/l
Fanm F
a) 6)
Рис. 106. Влияние на погрешность воспроизведения размера нагрузки и рабочей площади двигателя
1. Погрешность воспроизведения следящего привода е возрастает пропорционально увеличению следящей скорости vc и нагрузки R [см. уравнение (240)].
2. Жесткость привода снижается с увеличением нагрузки R [см/уравнение (239)] и при ——>рп жесткость Лк->0, т. е. погрешность воспроизведения быстро растет (рис. 106, а).
3. Зона нечувствительности ео привода, равная двойной величине рассогласования ен, необходимого для начала движения привода, нагруженного силами сухого трения Т в направляющих рабочего органа, уплотнениях поршня, штока и т. п., приведенными к оси поршня цилиндра (при ис — 0 и К = 1) составляет [из уравнения (240)]
4. Увеличение длины b рабочих щелей и передаточного отношения i задающего устройства пропорционально снижает скоростную погрешность воспроизведения (см. уравнение (240)].
5. Увеличение подведенного давления рп снижает скоростную погрешность приблизительно пропорционально половинной, а нагрузочную — первой степени от его величины.
Размер площади F силового двигателя оказывает сложное влияние на погрешность воспроизведения. С увеличением рабочей площади F возрастает скоростная погрешность и падает нагрузочная [см. уравнение (240) и рис. 106, б]. Оптимальное значение рабочей площади FOnT может быть найдено из условия равенства нулю производной —т> е. из условия обеспечения dF
минимальной погрешности emin при заданных условиях работы: следящей скорости vc и нагрузке Л.
Обычно в следящих приводах станков ограничивается также размер зоны нечувствительности привода, соответствующий режиму vc = 0 и R = Т. Поэтому вторым условием выбора размера рабочей площади двигателя, которое можно получить из выражения (241):
F _______________ 1 (243)
енРп* / / Г \ 2
-p-U:;
Таким образом, выбор площади F двигателя представляет компромисс между величинами по выражениям (242) и (243).
7. Ширина йо щелей в среднем положении золотника влияет главным образом на величину нагрузочной погрешности (см. уравнение (240)]. Поэтому в приводах с большими нагрузками следует выбирать меньше й0, а в приводах с большими скоростями и небольшими нагрузками, выбирать больше йо для обеспечения работы привода во всем диапазоне в режиме четырех рабочих щелей.
Для следящих приводов с управляющими золотниками, имеющими нулевое открытие щелей в среднем положении, а также две или одну рабочую щель, соответствующие расчетные зависимости могут быть получены аналогично, при этом используются уравнения расходов золотника, приведенные в разделе 15.
Коэффициент полезного действия является одним из основных показателей привода, определяющим его эффективность. Под к. п. д. гидравлического следящего привода цп будем понимать отношение эффективной мощности Мэ, развиваемой силовым двигателем привода в установившемся движении, к выходной мощности NH насосов, питающих гидросистему привода, т. е.
где N—мощность, потребляемая силовым двигателем; т]э — эффективный к. п. д. двигателя.
Отношение ----= т) составляет к. п. д. собственно следящего
контура привода и показывает его энергетические возможности.
203
Рассмотрим к.п.д. следящей системы однокоординатного следящего привода с четырехщелевым управляющим золотником при нулевом открытии щелей в среднем положении, отсутствии утечек и потерь давления в трубопроводах. Тогда к.п.д. следящей системы привода можно представить в следующем виде:
П = — = — — = ЛэПсп» (244)
7VH Нз v
где
Пз = —-------К.П.Д.
золотникового механизма управления
работой следящего привода (N3 — мощность потока жидкости ч Мз
на входе в золотник); цсп =—----------к.п.д. системы питания.
Wh = QhPh> ^з = ЧРп и N = qp,
где QH и q — соответственно подача насоса и расход во внешней цепи золотника; рп и р — соответственно подведенное давление, равное давлению на выходе из насоса, и перепад давления во внешней цепи золотника.
Рассмотрим каждый из к.п.д., для чего выразим их через основные параметры привода: расход q и давление р соответствующее нагрузке на двигателе. С учетом последних соотношений к.п.д. имеют значения:
р ~ п3 = — = р; Рп
Псп = у- = ?•
(245)
Зависимость расхода q от перепада давления р во внешней цепи золотника описывается выражением (81). При нагрузке на двигателе, направленной против направления перемещения, и обозначении л / = С можем записать
q = Chy 1-----2L, (246)
где h — перемещение от среднего положения управляющего золотника.
Рассмотрим три варианта исполнения следящего привода.
Первый вариант. Подача насосов QH = const выбрана из условия обеспечения наибольшей скорости слежения при холостом ходе, которому соответствует перемещение золотника Лхх и перепад давления р = 0. Ход золотника в работе всегда сохраняется h йхх. Такой вариант часто используется в приводах с элек-трогидравлическими усилителями. При указанных условиях, используя зависимость (246), имеем
Qh = Chxx. (247)
6)
Рис. 107. Изменение к. п. д. следящей системы привода с насосом постоянной производительности с ограничением хода золотника h /?хх а) и без ограничения б)
С учетом зависимостей (245) — (247) к.п.д. системы питания выражается соотношением
Псп = 9 = -^-1/1----Р~, (248)
^ХХ f Рп
а общий к.п.д. следящей системы привода составит
П =ПзПсп= — “Л" 1/ 1------Р— (249)
Рп Лхх V Рп
Зависимости к. п. д. rj3, т]сп и т] от относительной нагрузки на двигателе р = -?— показаны на рис. 107.
Рп
Максимальное значение к. п. д. следящей системы привода и » ди
можно наити, приравняв нулю производную —L, что имеет
др
место при р = 2/3. При этом экстремальное значение к. п. д. составляет
Птах = 4 -4“ 1/1 —Т = 0’38 -Г— (25°)
** Лтах Г "max
Таким образом, максимальное значение к. п. д. следящей системы привода, построенного по первому варианту имеет место при перепаде р давления в полостях двигателя, составляющих ?/з подведенного давления, развиваемого насосом. При этом скорость движения двигателя составляет 57% скорости холостого хода. Максимальное значение будет при смещении золотника h = Лтах И составит т)шах = 0,38. Так как входная мощность NH, поступающая от насосной установки постоянна, полезная мощность /V на выходе следящего привода изменяется пропорцио-
нально к.п.д. следящей системы привода, достигает максимального значения при перепаде давления на двигателе, равном 2/з подведенного давления (рис. 107, а, заштрихованная часть).
Второй вариант. Подача насоса QH = const и выбирается так же как в первом варианте по наибольшей скорости холостого хода; смещение h золотника не имеет ограничения и определяется погрешностью воспроизведения в процессе работы следящего привода. Этот вариант обычно используется в копировальных устройствах, станков. Очевидно, что изложенный выше вывод остается в силе и значение к. п. д. описывается выражением (249), а максимальное значение — выражением (250). Имея в виду,- что расход в двигателе не может превышать производительности насоса, т. е. q =—— 1, определим относительное
Qh
смещение золотника --------, до которого при р = 2/3 относй-
_ ^хх
тельный расход q не превышает 1. Из уравнения с учетом значений q = 1 и р — 2/3 получим, что —— = 1,73. Подставив это ^хх
значение в сотношение (250) находим, что г]тах = 0,66.
Равенством (249) определяется к. п. д. следящей системы гидропривода как функция нагрузки р=—— и рассогласования h -
-----. В функции относительного расхода q к. п. д. можно выра-^тах
зить, использовав зависимость (248). После подстановки получаем
(251)
На рис. 107, .6 по последнему уравнению построены кривые изменения к. п. д. в зависимости от заданной скорости слежения (относительного расхода q) для различных фиксированных значений h. Линия а соответствует изменению максимальных значений к. п. д. При h = 1, т)шах = 0,38, которому соответствует q — 0,57, что соответствует выводам по первому варианту; при больших значениях h максимальный к. п. д. достигается при ? > 0,57.
Графики на рис. 107, б также показывают, что к. п. д. эффективно увеличивается до значений Л — 2 4- 2,5, а при дальнейшем росте погрешности воспроизведения рост к. п. д. незначителен [16]. Полезная мощность на выходе следящего привода изменяется пропорционально к. п. д.
Третий вариант. Производительность насоса определяется расходом в двигателе QH = Этот вариант используется в гидроприводах станков с ЧПУ при применении насосных установок 206
с автоматическим регулированием подачи при постоянном давлении. Без учета потерь в насосной установке к. п. д. гидросистемы такого привода численно равен относительной нагрузке на двигателе и не зависит от величины скорости слежения
П = Пз = Р- (252)
Сопоставление к. п. д. трех вариантов привода показывает, что третий вариант является наиболее экономичным, так как при прочих равных условиях в нем достигается наибольший к. п. д. Что касается мощности на выходе следящей системы привода /V = qp, то при фиксированном значении смещения h золотника с нулевым открытием в среднем положении, общий характер зависимости N (р) аналогичен показанному на рис. 107, а, а максимальное значение достигается так же, как в первом варианте привода при перепаде давления на двигателе Р = 2/з Рп-
К- п. д. приводов с иными управляющими золотниками: четырехщелевыми с открытыми щелями в среднем положении, двух-и однощелевыми определяются аналогично изложенному.
27. Определение устойчивости гидравлических копировальных следящих приводов с четырехщелевым управляющим золотником на основе метода гармонической линеаризации. Области возможного динамического состояния
Рассмотрим движение типового гидравлического следящего привода с четырехщелевым управляющим золотником, имеющим в среднем положении открытые щели шириной Ло, при сообщении ему на вход воздействия (рис. 108).
Исследуем привод при совместном учете двух видов нелинейностей: нелинейности вида насыщения перепада давления
Рис 108. Расчетная схема типового следящего привода с четырехщелевым управляющим золотником
Рис. 109. Нелинейные зависимости трения (а) и перепада давления (б), учитываемые при определении устойчивости привода
во внешней цепи управляющего золотника p(h, q) и нелинейности сухого трения в направляющих рабочего органа T(vc). Первую из них учиты-
ваем в виде статической характеристики, показанной на рис. рис. 109,6, а вторую — на рис. 109, а. Составляем систему урав-
нений, описывающих движение привода, последовательно рассматривая каждый составляющий элемент, входящий в замкнутый привод. Уравнения элементов составляем с учетом всех трех
видов нагрузок, присущих цепям переменного расхода — вязкого трения, инерционной и емкостной.
Уравнение движения для управляющего золотника 2. Под
управляющим золотником понимается узел гидравлического следящего привода, состоящий из дроссельного золотника 2 (см. рис. 108) и рычажной системы 1 со щупом, который при работе привода прижимается к копиру пружиной 3. Рычажная система передает управляющему золотнику воздействия X, поступающие от копира.
При выводе уравнения движения управляющего золотника копировального гидравлического следящего привода, имеющего жесткую механическую связь между копиром и золотником с помощью жесткой рычажной системы 1 со щупом исходим также из того, что в результате действия на задний торец золотника пружины 3 значительной жесткости можно пренебречь силами инерции и трения, возникающими при неустановившемся движении золотника и других механизмов копировального прибора, а также действующими на золотник реактивными силами, возникающими при прохождении жидкости через рабочие щели.
В этих условиях уравнение управляющего золотника с радиальным зазором между золотником и корпусом равным нулю и прямоугольной формой рабочих щелей длиной b может быть принято в виде зависимости (66), учитывая принятые при ее выводе допущения
? = иИ/ — (Ло + Л)1/ 1-р--(Ло-Л)1/ 1 +-2- .
FPL V Рп. V Рп 1
(253)
Уравнение движения для маслопроводов 5, 6 и двигателя 9. Это уравнение составляется в предположении симметричности (равенства) рабочей площади F в обеих полостях цилиндра и идущих к ним от копировального прибора маслопроводов; пор-208
шень рассматривается в среднем положении, при котором гидравлические емкости в обеих полостях цилиндра равны между собой, что обычно соответствует наиболее низкой устойчивости привода.
При пренебрежении волновыми процессами от гидравлического удара в связи с небольшими длинами трубопроводов, >а также трением в уплотнениях поршня и штока, массой поршня и штока (в связи с их малостью относительно таковых в исполнительном органе) перепад давления (р = р\ — Р2) во внешней цепи золотника составит
Р = Рн 4“ Рвт 4“ Риж> (254)
где рн, Рвт и Риж — перепады давления, расходуемые соответственно на преодоление нагрузки, сил вязкого трения и инерции жидкости в трубах. После подстановки их значений получим
Р = -у + Вху + В2у,
(255)
где Bj — коэффициент, учитывающий потери на вязкое трение жидкости в маслопроводах, пропорциональные расходу. Мож-
но, например, положить [30]
В, = 2- 7,2- 10-5-^ d2 тр
(256)
где /тр, dTp, f — соответственно длина ветви одного маслопровода (рис. 108, маслопроводы 5 или 6), диаметр проходного сечения и его площадь.
При исходном уравнении Пуазейля
В1 = 2 vp JlP- F. п <₽
(257)
Практика показывает, что зависимость (256) дает несколько завышенные результаты, а зависимость (257) — заниженные.
В2—коэффициент, учитывающий потери от инерционной нагрузки, создаваемой жидкостью в маслопроводах (трубах):
«2=2-^, (258)
где р — плотность масла, подвергающегося разгону в маслопроводах.
Уравнение расходов можно записать в виде
? = ?п 4“ 9ут 4* 9дц 4“ ?дм» (259)
где 9п, ?ут, 9дц и 9дМ — расходы, идущие соответственно на перемещение, компенсацию утечек рабочей жидкости и деформации стенок цилиндра и маслопроводов.
После подстановки их значений получим
У = Ру + — R + Bn# + В12Р,
(260)
где Fy — объем жидкости, расходуемый на перемещение порш-ня цилиндра 9 со скоростью у\ — R— объем утечек между по-F
лостями цилиндра, который принимается пропорциональным р' = р' — р' =— V, С — коэффициент, зависящий от размеров и формы щелей в уплотнении поршня; + В|2р — изменение объемов полостей цилиндра и маслопроводов вследствие упругости находящегося в них масла и стенок, причем в зависимости от конструкции маслом проводов коэффициенты Вн и В12 принимают следующие значения (см. раздел 22):
1) при очень коротких и жестких маслопроводах и пренебрежении изменениями объема масла в них
еп=2к; в12=о, (261)
где Кц — определяется соотношением (179);
2) при жестких маслопроводах значительной протяженности или выполнении всего маслопровода из гибких шлангов (полагая, приближенно, давление в них равным среднему арифметическому давлений на выходе из управляющего золотника п в полостях силового цилиндра) и пользуясь методикой расчета, изложенной в разделах 22 и 23:
, ^тр
4?" ’
1 2F
R ^тр
#12 =—
(262)
Суммарный коэффициент упругости стенок трубопровода и находящегося в них масла:
Ктр =~, ' (263)
£Тр
где Етр — суммарный модуль упругости стенок трубопровода (шлангов) и находящегося в них масла;
3) при включении гибких шлангов у силового цилиндра (полагая давление в шлангах приближенно равным давлениям в полостях силового цилиндра)
В =
2F ^12 = 0,
(264)
где и /<ш — коэффициенты упругости соответственно цилиндра и шлангов, определяемые пр формулам (179) и (263); •
210
4) при включении гибких шлангов у копировального прибора (полагая давление в шлангах приближенно равным соответствующим давлениям р\ и р2 на выходе из управляющего золотника)
fin fi>2=-^- (265)
Уравнение движения для связи между поршнем силового цилиндра и рабочим органом. Это уравнение составляется исходя из конечной жесткости связи, причем соотношение между перемещением у поршня цилиндра и перемещением z рабочего органа имеет вид
у—z = KcR, (266)
где Кс — упругость связи.
Уравнение рабочего органа 7 с учетом массы т его подвижных частей, силы Т сухого трения в направляющих и внешне приложенной силы резания S может быть написано в следующем виде:
R=>mz + T-±— + S. (267)
Уравнение движения для обратной связи 4 привода. Это уравнение с учетом передаточного отношения от рабо-
bi
чего органа к управляющему золотнику и передаточного отно-а 1
шения i = — рычага щупа 1 составит
h=xi—ziiQ. (268)
Таким образом, получены уравнения движения всех элементов, составляющих следящий привод. Следовательно, движение следящего привода в целом выражается следующей системой уравнений:
<7=ни/ -М(Л0 + Л)1/1—2— к р Г Рп
-(Ло-Л)1/1 + —];
Г Рп J
р = А + ^ + в2У; (2б9)
q = Fy + -у R + BnR + Bl2p;
y—z — KcR',R = mz+T—^— + S-,
И
h = xi—zHq.
Система уравнений (269) представляет собой шесть дифференциальных уравнений с шестью неизвестными й, у, z, q, р, R, которые являются функциями времени /. Первое и пятое — нелинейные уравнения. Решение этой системы сводится к определению, например, перемещений рабочего органа в функции времени, т. е. к нахождению функции z = z(t). Порядок решения примем в соответствии с методикой приближенного исследования нелинейных автоматических систем, изложенной в работе [7]. Исследование устойчивости привода производим при его свободном движении, когда внешние воздействия отсутствуют, т. е. S = 0 и х = 0. Произведем некоторые упрощения, не затрагивающие качественной стороны характеристики привода, а именно: примем, что поршень цилиндра достаточно надежно уплотнен и утечки между полостями цилиндра отсутствуют (С = 0); маслопроводы между копировальным прибором и силовым двигателем имеют достаточное проходное сечение, так что потерями на вязкое трение в них масла можно пренебречь (Bi = 0); упругость маслопроводов незначительна по сравнению с таковой в полостях цилиндра или расположена у полостей цилиндра (В12 = 0) и связь между силовым цилиндром и рабочим органом имеет высокую жесткость (Лс = 0), передаточные отношения i = i0 — 1. При этих условиях система уравнения (269) примет вид
(270)
Р^~Т + В2У, q = Fy + BnR;
F
у = z = — й; R — mz + T —.— l-г I
Из второго, четвертого и пятого уравнений системы (270) определяем передаточную функцию, связывающую переменные р и z. После небольших преобразований находим
(271)
откуда
В4=^- + В2.
(272)
Производим гармоническую линеаризацию нелинейности
F\ =---- (рис. ПО, а) в -правой части уравнения (271), пола-
1*1
Рис. 110. Характер изменения нелинейной функ-г - 'Z
ции Г1 при стацио-1*1
парном значении (a) t и гармоническом изменении (6) аргумента
гая, что перемещения в свободном приводе осуществляются с колебаниями, близкими к гармоническим, с амплитудой А и частотой Q:
z = A sin й/.
(273)
гг „ n z cos Qf
Тогда нелинейность ri =-------=-------- представляет со-
|z| |cosQ/|
бой однозначную четную функцию (рис. ПО, б). Так как синусная составляющая в этом случае отсутствует, то решение, согласно уравнениям (34) и (36), примет вид
q
2л
I Ft(A sinip, Д Q cos ip cos г|чЛ|.’=
лА о
2л
1 f COS ф , , . — \---------— cos фаф =
лА J | cos ф | о
л/2 3/2л
If* 1 P
--- I 1 COS фб/ф 4---I (—1)С05фб/ф +
лД J лД J
0 л 2
где
ф = Qt.
Таким образом, результат гармонической линеаризации:
Ft=—(274)
где множитель в коэффициенте гармонической линеаризации нелинейной характеристики сухого трения Т при принятой форме нелинейности (см. рис. 109, а) имеет вид:
К = —. (275)
Л
При подстановке зависимости (274) в уравнение (271) получим
или после обозначения
о ” . Т К • р = В4г Ч-----z
г 4 F Дй
(276)
КТ
= Вь
p = B4z + B$z.
(277)
(278)
Имея в виду, что решением предполагается режим автоколебаний, при котором перемещение z имеет значение согласно выражению (273), причем z = —ЛДОзтй / = —Q2z, окончательно находим
р = —B4Q2z + B5z.
(279)
Производим гармоническую линеаризацию нелинейностей в первом уравнении системы (270), для чего раскладываем его правую часть в ряд Маклорена по двум переменным и ло Рп и вводим обозначение
1/ — = ввРп/2 = С6; С6Л0 = С5. V р
(280)
В результате, ограничиваясь третьим членом разложения,-соответственно выражениям (96) и (97), можем написать первое уравнение системы (270) в виде.
^ = 2С6Л—С5 —------l-C'6(-2-Y h. (281)
Рп 4 \ Рп /
Индекс' при Се введен, как отличительный знак при третьем нелинейном члене разложения в степенной ряд.
Исключаем с помощью соотношения (279) из уравнения (281) переменную р, принимая во внимание, что h = —z. После преобразований получаем
Q2—2С6)г— .^^г + / Рп
С-в.Ве . cLbI .
—5-S-L Q2Z22 + _6_1 zz2.
2Рп 4Рп
(282)
Уравнение (282) содержит три нелинейности: F2 = z3; F3 = = z2z; F4 = zz2. Производим гармоническую линеаризацию этих нелинейностей, пользуясь изложенной выше методикой. При этом находим
F2 = z3^ — Л2/, 2 4
F3 = z2z z = — Л2г, d Q 4
F4 = zz2^ —Л2й2г. 4
(283)
Подстановка зависимостей (283) в уравнение (282) после группирования членов по z и z приводит к виду7
(284)
Определяем q(z) из третьего — пятого уравнений системы (270) с учетом зависимости (274). Тогда
q — Fz+ B}iT-^-z+ Bnmz. (285)
у4 £2
Исключаем из двух последних уравнений переменную q и производим замену В5 = —После этого получаем одно А £2
уравнение движения привода:
Bnmz + ВпТ
^*5^6 ।
Рп^
8Рп
4Q г +
+ (2С6—Q2--------C'6Bl х
\ Рв 16Рп
х Й4Д2---!_ С'6в1\г = 0.
'6Рп J
(286)
Решение уравнения (286) движения привода в гармоническом виде согласно уравнению (273) возможно получить в случае, когда характеристическое уравнение для этого уравнения имеет пару мнимых корней rif2 = ±/Q. Чтобы исключить возможность внутренних резонансов, все остальные корни характеристического уравнения, кроме указанной одной пары мнимых корней, должны иметь отрицательные вещественные части. Для уравнения третьего порядка это требование, как известно, удовлетворяется условием положительности всех коэффициентов характеристического уравнения. Последнее просто доказывает
ся подстановкой в уравнение (286) соотношения — Q2z = г, которое справедливо при принятой форме движения согласно уравнению (273) и при учете, что перепад давления Т/F, создаваемый в полостях силового двигателя для преодоления усилия трения, Т
не может превышать подведенного давления рп, т. е. — < рп.
Вводим в последнее уравнение параметр дифференцирования, заменяем его в полученном характеристическом уравнении на /й (имея в виду, что решением предполагается режим автоколебаний) и выделяем вещественную и мнимую части, которые приравниваем нулю. В результате получаем два следующих уравнения с неизвестными А и Й:
—— СбВ4В6Й2Л2+ (F— BnmQ2)QA + — X ’
8р2 Рп
X С$Вв = Oj
, /1 1 (287)
—Ц- с'6в№д3 + С5в^2 + —L- С’6в1—
16р2 \ Рп 16р2
— 2С6)Л + В117’№ = 0.
Числовое решение пары уравнения (287) в области больших значений подведенного давления рп дает две положительных величины амплитуды А. Характер зависимости амплитуды А пе
риодического решения от подведенного давления рп имеет вид полупетли (рис. 111) с верхней 1 и нижней 2 ветвями.
С уменьшением подведенного давления рп верхние и нижние ветви сближаются и при некотором давлении /?пг числовое решение уравнений (287) дает одну положительную величину амплитуды Аг. При рп < р^ уравнения (287) не дают положительных решений для амплитуды А, Следовательно, в этих условиях периодического решения нет, а значит и не может быть автоколебаний привода.
Таким образом, рт является граничным подведенным давлением, ниже которого не могут быть, а выше которого возможны автоколебания в гидравлическом следящем приводе.
Исследуем устойчивость полу-
А чаемых двух периодических ре-
/ шений путем последовательного
введения нелинейностей. При этом вначале исследуем гидрав-( лический следящий привод в ви-
4Г г линейной модели, затем с не-
Рис. 111- Характер зависимости ампли-туды А. периодического решения урав-.... нений (287) от подведенного давления
Рпг Рп
линейностью только в виде сухого трения T(vc), только с нелинейностью в виде насыщения по давлению p(h, q) во внешней цепи управляющего золотника.
Области динамического состояния привода в виде линейной модели. Уравнение гидравлического следящего привода в виде линейной модели можно получить из уравнения (286), положив Т = О, В6 = 0 (из условия отсутствия сухого трения в рабочем органе привода) и Cg = О [из условия отсутствия нелинейных членов в уравнении (281) управляющего золотника]. При зтом, имея в виду, что — Q2z = z, получаем следующее уравнение гидравлического следящего привода в виде линейной модели:
Bumz Ч—— C5B4z + Fz + 2C6z = 0. (288)
Рп
Характеристическое уравнение привода в линейном приближении будет иметь вид
Bi tms3 + — C5B4S2 + Fs + 2С6 = о, (289)
Рп
где s = —----параметр дифференцирования.
dt
Используя критерий Гурвица, определяем условие устойчивости привода в линейном приближении:
---C5B4F—Впт2Св ?> 0, Рп
откуда вытекает условие устойчивости привода
/ 1 CsFBt
Рп < —•—2——
2 C6mStl
(290)
Предельное значение подведенного давления рпл привода в линейном виде на границе устойчивости однозначно определяется из равенства
п — * 65ГВ4 _ 1 h0F В4 - /291)
Рпл 2 CernBn 2 m Вп ' ’
На плоскости А—рп (рис. 112, а) вертикальная штриховая линия, соответствующая предельному подведенному давлению рПл, выделяет две области динамического состояния привода: слева от нее находится область устойчивости равновесия / (абсолютной устойчивости), а. справа — неустойчивости //, в которой амплитуда колебаний привода неограниченно растет гпри сколь угодно малой амплитуде начального возмущающего воздействия. Выбор в качестве определяющего параметра подведенного давления Рп целесообразен в связи с тем, что величина его пропорциональна коэффициенту усиления привода по скорости и нагрузке [см. выражения (237) и (239)].
Сравнение величины предельного подведенного давления Рпл в линейном приводе, получаемой по формуле* (291), с граничным подведенным давлением /?пг в нелинейном приводе, которое находится из уравнений (287) при подстановке конкретных величин параметров привода, показывает, что при прочих равных условиях Риг > Рпл-
При коротких и жестких трубопроводах коэффициенты В4 = —, Вн = —— и предельное давление рПл привода в линей-
F 4ЕЦ
ном виде составит
Рпл = • (292)
п
В этом случае отсутствуют такие существенные параметры следящего привода, как длина b рабочих щелей, рабочая площадь F двигателя, масса т рабочего органа и другие, что характеризует ограниченные возможности применения линейной теории для исследования динамики подобных приводов.
Определим частоту Q колебаний, возникающих в линейном следящем приводе, для чего выделяем и приравниваем к нулю, например, мнимую часть характеристического уравнения (289) при подстановке $ = /Й. При этом получаем
F—BnmQ2 = 0,
откуда
Q - 1/-ГТ- <2"3)
Области динамического состояния привода с сухим трением в рабочем органе. Уравнение движения привода с нелинейностью только сухого трения в рабочем органе можно получить из уравнения (286), положив в нем = 0:
Находим периодическое решение этого уравнения, для чего составляем характеристическое уравнение, заменяем в нем параметр дифференцирования на /Q и разделяем вещественную и мнимую части, которые приравниваем нулю. При этом получаем следующие два уравнения:
Из первого уравнения (295) находим, что амплитуда периодических колебаний
А =------, (296)
pnQ(BnmQ2 — F) причем амплитуда имеет вещественные, положительные значения при условии
BHmQ2—F>0, (297)
так как все остальные множители в нем положительные. Подстановка в неравенство (297) значения Q2, которое находится из уравнений (295) при исключении параметра Л, приводит к следующему условию существования положительных значений амплитуды А периодических колебаний:
C5FB4 (298)
гСвтВи ' '
Сопоставление полученного значения подведенного давления, при котором возможны периодические колебания в следящем приводе с нелинейностью сухого трения в рабочем органе, со значением подведенного давления согласно неравенству (290), при котором в аналогичном приводе линейного вида сохраняется устойчивость, показывает, что пределы их совпадают. Таким образом, в обоих приводах совпадают области устойчивости равновесия.
При предельном значении подведенного давления, согласно выражению (291), амплитуда А периодических колебаний привода стремится к бесконечности, а по мере увеличения подведенного давления свыше предельного (рп > рПл) стремится к нулю. Таким образом, на плоскости А —Рп значение амплитуды периодических перемещений привода выражается кривой, показанной на рис. 112, б. Эта кривая приближается к оси абсцисс при рп~*°° и стремится к бесконечности вдоль оси ординат при рп-->Рпл-
Исследуем устойчивость найденного периодического решения уравнения движения привода по аналитическому критерию устойчивости [7, 13}. Подстановка значения соответствующих частных производных показывает, что критерии устойчивости не выполняются при всех вещественных значениях амплитуды А этого решения. Таким образом, периодическое решение, определяемое выражением (296) будет неустойчивым и имеет место граница устойчивости «в малом».
Стрелки, расходящиеся от кривой Дн на рис. 112, б, условно показывают неустойчивость периодического решения. Таким образом, можно различить три области динамического состояния привода с нелинейностью сухого трения в рабочем органе: область устойчивости равновесия, которая располагается слева от вертикальной линии, проходящей через предельное подведенное давление рПл привода в виде линейной модели; область устой-
Рис. 112. Возможные области динамического состояния различных моделей гидравлических следящих приводов:
а — линейного; б — с сухим трением в рабочем органе; в — с насыщением перепада давления во внешней цепи золотника; г — с сухим трением и насыщением во внешней цепи золотника; / — область устойчивости равновесия; 11 — область неустойчивости; /// — область неустойчивости «в большом>; IV — область устойчивости «в малом>; V — область автоколебаний
чивости «в малом», которая располагается ниже кривой амплитуд периодического решения, и область неустойчивости «в большом», которая располагается выше кривой амплитуд периодического решения.
Следовательно, сухое трение в рабочем органе гидравлического следящего привода демпфирует движение в приводе, в результате чего к области устойчивости привода, рассматриваемого в виде линейной модели, при учете сухого трения добавляется область устойчивости «в малом».
Области динамического состояния привода с насыщением перепада давления во внешней цепи управляющего золотника.
Уравнение свободного движения привода с нелинейностью только насыщения перепада давления во внешней цепи управляющего золотника можно получить из уравнения (286), положив Т = 0 и Bq = 0. При этом имеем следующее уравнение движения привода: 1
Bntnz + Fz + (2С6—
—С5В4Й2 — Рп
----— С6В4Й4Д2 ] z = 0. (299) 16₽п /
Находим периодическое решение этого уравнения, для чего составляем характеристическое уравнение, заменяем в нем параметр дифференцирования на /Q и разделяем вещественную и мнимую части, которые приравниваем нулю. При этом получаем два уравнения: 220
— Buzn23 +FQ = 0;
2C6----— C5B4Q2------C6BltfA2 =0.
Pn 16p2
(300)
Из первого уравнения определяем частоту Q периодических колебаний, которая совпадает с таковой для привода в линейном виде:
о = 1/ /-• (301)
D ц tn
Из второго уравнения системы (300) определяем амплитуду А периодических колебаний, подставляя полученное выше значение частоты Q:
д 1 f \6pnB\itnCs / ЯСьРпВцГп J \ (302)
- V 3C.B4F k c5b4f J' ' 7
Последнее выражение показывает, что вещественные, положительные значения амплитуды А периодических колебаний могут быть получены при
2С6рпВцт
1 > 0 или рп
c*b4f 2С6Впт
что совпадает с неравенством (298) и имеет пределом равенство (291).
Из выражения (302) следует, что при предельном значении подведенного давления рПл, определяемом равенством (291), амплитуда А периодических колебаний привода равна нулю, а по мере увеличения подведенного давления свыше предельного Рп > Рпл непрерывно возрастает. Таким образом, на плоскости А — рп значение амплитуды периодических перемещений привода выражается кривой, показанной на рис. 112, в. Эта кривая .начинается на оси абцисс при рп =Рпл и постепенно возрастает при увеличении > Рпл- Исследование устойчивости найденного периодического решения по аналитическому критерию устойчивости показывает, что оно выполняется при всех вещественных значениях амплитуды А этого решения.
Таким образом, периодическое решение, определяемое выражениями (301) и (302), устойчиво и образуется область устойчивых автоколебаний. Стрелки, сходящиеся к* кривой Ду на рис. 112, в, условно показывают устойчивость периодического решения. В результате можно различить две области динамического состояния привода с нелинейностью вида насыщения перепада давления во внешней цепи управляющего золотника: область устойчивости равновесия, которая располагается слева от вертикали, проходящей через предельное подведенное давление рпл привода в линейном виде, и область автоколебаний (устойчивого периодического решения), которая располагается
справа от указанной вертикали, проходящей через рпл- Следовательно, учет нелинейности насыщения перепада давления во внешней цепи золотника приводит к образованию за областью устойчивости равновесия привода в линейном виде области автоколебаний.
Исследование областей динамического состояния, привода с насыщением расхода жидкости, образуемым, например, в результате значительного сопротивления трубопроводов прохождению масла или наличия значительных местных сопротивлений, например, дроссельных шайб во внешней цепи золотника, показывает, что в этом случае также имеют место зависимости, характеризуемые графиком, приведенным на рис. 112, в.
Области динамического состояния привода с несколькими нелинейностями. Проведенные исследования областей динамического состояния гидравлических следящих приводов, построенных по схеме рис. 108, линейных и с учетом основных нелинейностей позволяют сделать следующие выводы относительно областей динамического состояния привода с несколькими нелинейностями.
1. При совместном учете сухого трения в рабочем органе привода и нелинейности вида насыщения по перепаду давления или расходу во внешней цепи управляющего золотника, выявленные выше эффекты от влияния каждой из нелинейностей в отдельности на области динамического состояния привода складываются. Если учет сухого трения дает ветвь А(рп), соответствующую неустойчивому периодическому решению (рис. 112, г, штриховая кривая), а учет нелинейности перепада давления или расхода дает ветвь, соответствующую устойчивым периодическим решениям (рис. 112, г, штрихпунктирная кривая), то вследствие суммарного воздействия указанных нелинейностей кривая А(рп) (показана сплошной линией), должна сместиться в сторону больших значений рп и вписаться в область между приведенными штриховой и штрихпунктирной кривыми, что и получено в результате исследования.
2. Аналитические исследования движения гидравлического следящего привода с одновременным учетом таких основных нелинейностей, как сухое трение в рабочем органе и насыщение перепада давления или расхода во внешней цепи управляющего золотника при их гармонической линеаризации, позволяют выделить три области динамического состояния привода на плоскости А — рп (рис. 112, г) : / — область устойчивости равновесия (абсолютной устойчивости) привода, располагающаяся между рп = 0 и граничным давлением Рпг, определяемым пределом кривой А(рп), обведенной сплошной линией. Устойчивость привода в этой области наблюдается при начальной амплитуде или возмущающем воздействии любой величины; IV — дополнительная область устойчивости «в малом», расположенная ниже кривой неустойчивых амплитуд Дн (когда начальные амплитуды или 222
внешние, возмущающие воздействия находятся в пределах области IV, привод сохраняет устойчивость при подведенных давлениях больше граничного Рпг); V — область автоколебаний, расположенная вправо от граничного подведенного давления рпг и вверх от кривой неустойчивых амплитуд 4Н (если начальные амплитуда или внешние возмущающие воздействия больше неустойчивых амплитуд 4Н, то в следящем приводе устанавливаются устойчивые автоколебания, амплитуда Лу у которых определяется верхней кривой).
3. Области динамического состояния гидравлического следящего привода, полученные при аналитическом исследовании его движения с учетом указанных основных нелинейностей при их гармонической линеаризации, совпадают с областями динамического состояния, выявленными экспериментально [13, 30], что потверждает принципиальную возможность применения метода гармонической линеаризации для расчета динамики и, в частности, устойчивости гидравлических следящих приводов.
4. Надежная устойчивая работа следящего привода возможна лишь в области / устойчивости равновесия. Поэтому в качестве критерия устойчивости привода следует принимать граничное подведенное давление Рпг.
28. Влияние основных параметров на устойчивость гидравлических следящих приводов
Выявление влияния основных параметров гидравлических следящих приводов на их устойчивость сводится к отысканию аналитической зависимости граничного подведенного давления Рпг от этих параметров. Отыскание граничного подведенного давления рГ1Г может быть осуществлено графическим способом в следующей последовательности:
1. Определяются два ряда амплитуд колебаний А{, А\, А\ и т. д. и А2, А2, А2 и т. д. из кубического уравнения системы (287) и ряд амплитуд Лз, Аз и т. д. из квадратного уравнения той же системы для различных частот Q колебаний при данном подведенном давлении рп > рпг, которые наносятся на график A (Q) и соединяются плавными линиями (см. рис. 113, а).
2. Графическим методом, как это показано на рис. ИЗ, а, находятся два общих решения амплитуд А\ и А2 (устойчивая и неустойчивая) для обоих уравнений (287) при данном подведенном давлении рпь Нахождение общих решений амплитуд 43, Д4 и т. д. повторяется при других рп, причем стремимся, чтобы рп было возможно ближе к рпг.
3. По данным общих решений строится график А(рп) (рис. ИЗ, б), причем верхняя ветвь устойчивых амплитуд и нижняя ветвь неустойчивых амплитуд колебаний продлевается до
4
Рис. 113. Графический метод нахождения общих периодических решений системы уравнений (287) и граничного подведенного давления
пересечения. По точке пересечения обеих ветвей определяется граничное подведенное давление р^.
Анализ графического метода определения граничного подведенного давления рПг показывает, что совпадение решений устойчивой и неустойчивой амплитуд при граничном подведенном давлении рпг соответствует совпадению обоих положительных корней кубического уравнения системы (287) — слиянию ветвей 1 и 2 амплитуд Ai и т. д. и Аг и т. д. в одну ветвь, как это показано на рис. 113, в, причем кривая 3 амплитуд Аз и т. д., определенных при тех же -условиях из квадратного уравнения системы (287), должна проходить через точку слияния ветвей 1 и 2,
Условие совпадения двух действительных корней кубического уравнения вида
. уз + 2ру + 2q = О, (303)
откуда
рз = _927с0в (304)
Последнее уравнение может быть использовано в качестве третьего уравнения, связывающего'переменные й, А и рп. При использовании соотношения (304) в совокупности с двумя уравнениями (287) осуществляется переход к величинам, соответствующим границам между областью автоколебаний и областью абсолютной устойчивости, т. е. к граничному подведенному давлению рпг, амплитуде Аг и частоте йг на границе устойчивости. При этом граничное подведенное давление, как функция заданных параметров следящего привода с открытыми щелями в среднем положении и короткими трубопроводами приобретает значение [13]:
З2 ВцКТ \2'3
23 ’ М/2 )
1 fb4
РпГ - л ' D
4 ВууШ
ЗВцВвВ^т ( hQ + I h\ \
F2B\'2B9\h0-2B9\'‘2
(305)
Амплитуда Аг колебаний привода на
1 з
В12 I 8П4 /
З2
2з
границе устойчивости
ВцХГ \ 2/311 2
B6B'f
(306)
частота
Рпг
(307)
З2 ВцХГ
з
Зг ВпКТ \ 2/з-
23 ’ м!/2)
(308)
Выражения (305) и (306) показывают, что с уменьшением силы трения до Т=0 амплитуда Аг колебаний на границе устойчивости стремится к нулю, а граничное подведенное давление
' I h^Bi
приобретает значение рпг =--------— , что согласно равенст-
2 гпВц
ву (291) соответствует предельному значению подведенного давления Рпл в линейном приводе на границе устойчивости.
Однако оценить влияние основных параметров привода на его устойчивость по выражению (305) сложно в связи с тем, что множителем, заключенным в квадратные скобки, является сумма двух членов, а весомость каждого без подстановки конкретных данных трудно определить. Указанную сумму можно было бы избежать, если уменьшить ширину открытия щелей золотника в среднем положении до hQ = 0. Поэтому для облегчения анализа, пользуясь изложенной выше методикой, определим граничное подведенное давление привода, построенного по схеме на рис. 108 и имеющего нулевое открытие в среднем положении щелей управляющего четырехщелевого золотника.
В этом случае исходная система уравнений движения будет соответствовать приведенной в (269) с заменой первого уравнения управляющего золотника на выражение (81). Учитывая передаточные отношения i — управляющего устройства, /о — обратной связи привода, а также упругость маслопроводов, находим [13] следующее значение граничного подведенного давления типового гидравлического следящего привода с четырехщелевым управляющим золотником, имеющим нулевое открытие щелей в среднем положении:
Рпг = 0,81
Г (BtiF + BI2)KTB< 12/3
Faeii0
1/ 1 + 0,84 (В8п0)4'3
(ВцШ 4- Bi2B4)B6
F2
(ВпГ + В12)/<ТВ4
(309)
амплитуды Аг периодических колебаний привода на границе устойчивости, как функцию параметров привода:
частоты
Лг= 1,47
(BhF + B12)
КТ 1 2/3
FB8"o^/2
см;
(ЗЮ)
(ЗН)
При очень коротких и жестких маслопроводах можно положить В2 = 0 и В12 = 0 согласно уравнениям (258) и (261). Тогда о т п н
п4—— и при использовании гидроцилиндра Вп =--------------------------•
4£ц При этом выражение (309) приобретает вид ^/з(ЛГ)2/з(4£ц)1/з ZX
1/3m1/3U2/3Z>2/3i2/3i2/3H1/3
,2 -2 -2 1 \ 2/3 . ,
Ъ I 1о— ) кгс/см2.
Р / J
(312)
Выражения (309) и (312) для граничного подведенного давления рпг позволяют выявить следующее влияние различных параметров на устойчивость следящего привода.
1. Увеличение рабочей площади F силового цилиндра способствует повышению устойчивости следящего привода. Из выражения (312) следует, что граничное подведенное давление Риг при коротких и жестких маслопроводах увеличивается- пропорционально — y/~F.
При значительной длине маслопроводов между копировальным прибором и силовым двигателем положительное влияние рабочей площади F на устойчивость привода сильно возрастает в связи с увеличением приведенной массы жидкости в маслопроводах с увеличением площади F, как это следует из выражения (309).
2. Увеличение силы трения 7\в рабочем органе способствует повышению устойчивости следящего привода. Из выражения (312) следует, что граничное подведенное давление рт увеличи-226
вается пропорционально силе трения Т приблизительно в степени 2/3.
При расчете устойчивости привода по формулам (309) и (312) должна подставляться величина силы трения Т, возникающей в рабочем органе в режиме автоколебаний привода на границе устойчивости, причем форма изменения силы трения Т во время этих колебаний учитывается коэффициентом Л. Так как обычно интерес представляет минимум устойчивости привода, следует подставлять наименьшую силу трения 7, возникающую при перемещениях рабочего органа привода, а коэффициент К = 1, что соответствует примерно синусоидальной форме 'Изменения силы трения Т во время автоколебаний. Последнее имеет место при автоколебаниях с высокой частотой и малой амплитудой при трении в направляющих, применяемых в станках [13].
Повышение силы сухого трения в рабочем органе для достижения устойчивости привода нецелесообразно, так как при значительных удельных давлениях получается падающая характеристика трения, способствующая нарушению плавности перемещения и, в конечном счете, нарушению устойчивости привода в состоянии движения. Демпфирующее влияние трения с увеличением скорости слежения уменьшается и может совсем исчезнуть [13].
3. Увеличение модуля упругости Ец гидравлических емкостей, включенных во внешнюю цепь управляющего золотника — рабочей жидкости, рубашки цилиндра, маслопроводов — способствует повышению устойчивости следящего привода. Из выражения (312) следует, что граничное подведенное давление рпг увеличивается пропорционально модулю упругости Ец гидравлических емкостей- приблизительно в степени 7з- Это подтверждает общеизвестный факт необходимости тщательного предохранения гидросистемы следящего привода от попадания в нее воздуха.
4. Увеличение массы m (веса С) перемещаемых узлов способствует снижению устойчивости привода. Из .формулы (312) следует, что граничное подведенное давление р1ГГ при коротких трубопроводах изменяется обратно пропорционально весу G (массе т) в степени 7з-
5. Увеличение длины Ь щелей управляющего золотника, а также передаточных отношений I рычага щупа и i0 в обратной связи привода способствует снижению устойчивости привода, причем граничное подведенное давление Рпг изменяется обратно пропорционально каждой из этих величин в степени 2/3. Эти выводы хорошо согласуются с данными экспериментальных исследований [30].
6. Ширина Ло рабочих щелей золотника в его среднем положении оказывает сложное влияние на устойчивость привода, что следует из сопоставления формул (305) и (309).
При h0 > Ат {условие применимости формул (305) и (306)] увеличение ширины Ао рабочих щелей‘способствует повышению устойчивости привода (это согласуется с практикой отладки высокожестких приводов с малым весом подвижных частей).
При Дг > h0 > 0, т. е. при условиях, которые по существу не удовлетворяют формулам (309) и (305), увеличение ширины ho рабочих щелей, с одной стороны, способствует увеличению коэффициента усиления привода по скорости, а значит способствует снижению устойчивости привода; с другой стороны, увеличение Ло, создающее утечки жидкости между полостями силового двигателя, способствует [в соответствии с формулой (305)} повышению устойчивости привода. Таким образом, в приводах со значительными амплитудами автоколебаний на границе устойчивости, когда Дг > > 0, изменение ширины ho рабочих
щелей золотника не оказывает значительного влияния на устойчивость привода. Как показывают эксперименты (30], при увеличении ширины h0 щелей устойчивость привода может несколько снижаться.
7. Увеличение длины Н хода поршня силового цилиндра способствует снижению устойчивости привода, причем граничное подведенное давление рт изменяется обратно пропорционально 1/Н, что согласуется с данными практики (успешное применение в станках с гидравлическими следящими приводами гидроцилиндров с длиной хода до 1500 мм).
8. Величина коэффициента р расхода жидкости через рабочие щели золотника существенным образом влияет на устойчивость привода. Поэтому правильный выбор коэффициента р определяет в значительной степени достоверность расчета на устойчивость следящего привода.
При нулевом открытии щелей в среднем* положении и амплитудах периодических колебаний Аг > 0,006 см можно принимать р ~ 0,6; при Дг < 0,006 см для надежности расчета следует принимать р = 0,8. Дри использовании формулы (312) для расчета граничного подведенного давления при некотором открытии ho рабочих щелей золотцика в его среднем положении, в соответствии с выводами п. 6, следует для надежности расчета увеличивать значение коэффициента расхода и принимать р = 0,7^-0,8.
9. Длина, диаметр маслопроводов между управляющими зо
лотником и силовым двигателем, а также наличие упругости
в них и место ее расположения вдоль маслопроводов существенным образом влияют на устойчивость следящего привода.
Рис. 114. Расчетная схема для определения приведенной массы жидкости в маслопроводах
Обозначим граничное подведенное давление привода с короткими и жесткими маслопроводами как р^г.
Тогда, при учете только приведенной массы жидкости в маслопроводах, выполненных целиком из труб или шлангов, выражение для граничного подведенного давления приобретает вид
/
Рпг = Рпг
(313)
где ттр — масса жидкости в маслопроводах, приведенная к поршню силового цилиндра (рис. 114).
Расчет этой массы производится из условий равенства перепада давления рм, расходуемого на разгон массы mM = p/TPf жидкости в трубе, и перепада давления ртр, расходуемого на разгон массы /итр, присоединенной к поршню цилиндра.
Имея в виду
где / = — у — ускорение жидкости в маслопроводах при перемещении поршня цилиндра с ускорением у, 21тр — суммарная тТр ••
длина двух’ветвей маслопроводов, а ргр=—^г~У> находим,
(314)
Пример. Определим величину приведенной массы. Внешнюю цепь золотника следящего привода составляет две трубы с диаметром проходного сучения dBH = 15 мм (f = 1.77 см2), длиной /тр = 300 см каждая; плопцдь пор шня цилиндра F = 150 см2.
В этом случае приведенная масса жидкости в трубах составит
'Птр — 2р/тр
В 1502 91
= 2-0,9-10“6-300---------= 7 кгс с2-см 1
1,77
что соответствует весу подвижных частей, соединенных с поршнем G =/иТр£ = 7-981 = 6850 кгс.
Рассмотренный пример показывает, что влияние массы жидкости в двух трубах длиной 300 см и диаметром 15 мм на динамические свойства следящего привода сопоставимо с влиянием рабочего органа привода массой 7 т. Однако характер влияния массы жидкости и массы рабочего органа различен.
Выражение (313) указывает на положительное влияние массы жидкости в маслоприводах (при абсолютной их жесткости) на устойчивость привода, причем устойчивость возрастает с уве-
личением длины /тр маслопроводов и особенно рабочей площади F силового двигателя и уменьшается с увеличением проходного сечения /, а следовательно, внутреннего диаметра труб или шлангов.
При учете только упругости, создаваемой в гидросистеме следящего привода маслопроводами, находящимися между управляющим золотником и силовым двигателем, выражение для граничного подведенного давления приобретает вид
— Рпг - 2Н Е ч 1 з * (315)
\ 1+ HF "Ё^)
Выражение (315) указывает на отрицательное влияние емкости (/7тр) маслопроводов и их упругости, характеризуемой модулем упругости Етр, на устойчивость привода. При этом влияние на устойчивость имеет не абсолютная величина емкости маслопроводов, а отношение ее к емкости полостей силового двигателя.
Таким образом, отрицательное влияние емкости маслопроводов на устойчивость привода особенно сильно сказывается при малых рабочей площади F и длине Н хода поршня силового цилиндра, а следовательно, при применении в качестве силового двигателя гидромотора, имеющего незначительный объем рабочих полостей.
Очевидно, что замена жестких трубопроводов на гибкие шланги того же размера, но обладающие значительно меньшим модулем упругости £тр, вызывает снижение устойчивости следящего привода.
Суммарное влияние на устойчивость приведенной массы жидкости в маслопроводах и их упругости зависит от конкретного сочетания размеров трубопроводов, силового двигателя и приводимой им в движение массы рабочего органа. Поэтому сокращение длины жестких трубопроводов может привести как к повышению устойчивости, так и к ее снижению, что подтверждают и экспериментальные данные [30]. Сокращение длины гибких шлангов большой упругости всегда приводит к повышению устойчивости.
В заключение рассмотрим влияние места расположения гибких шлангов в маслопроводах, соединяющих управляющий золотник с силовым двигателем.
При включении гибких шлангов у управляющего золотника устойчивость привода падает по сравнению с таковой при включении шлангов у двигателя. Причина влияния места расположения гидравлических упругостей в маслопроводах на устойчивость привода заключается в различном перепаде давления, под 230
которым находится гидравлическая упругость при автоколебаниях привода.
Гибкие шланги, включенные у силового двигателя, при автоколебаниях привода на границе устойчивости подвержены перепадам давления, создаваемым главным образом массой т подвижных частей рабочего органа. Те же шланги при подключении к трубопроводам у управляющего золотника подвергаются большим перепадам давления, создаваемым как массой т подвижных частей, так и приведенной массой ттр жидкости в трубопроводах.
10. Влияние упругости Кс связи <8 (рис. 108) между силовым двигателем и рабочим органом на устойчивость привода может быть учтено, если в исходной системе уравнений принять уравнение движения для связи 8 в виде зависимости (266).
В этом случае уравнение (312) приобретает вид
_______ 0,81(КТ)2/3__________
(— + —
Р / X. Сц Сс
1/ 1 + 0,84
тКТ
(316)
где гидравлическая динамическая жесткость цилиндра Сц определяется выражением (172), а механическая жесткость связи
Следовательно, граничное подведенное давление при коротких и жестких маслопроводах приблизительно обратно пропорционально кубическому корню от суммы упругостей гидравлической и механической систем следящего привода. Выражение (316) также показывает, что упругостью механических звеньев между силовым цилиндром и рабочим органом можно пренебречь при расчетах устойчивости следящего привода, если жесткость Сс этих звеньев в 8—10 и более раз выше гидравлической жест
кости гидроцилиндра.
11. Потери на трение жидкости в маслопроводах, соединяющих управляющий золотник с гидроцилиндром, а так
же утечки между полостями гидроцилиндра положительно вдияют на устойчивость привода, что можно выявить из решения исходной системы уравнений (269), если учесть коэффициенты Bt и С.
Проведенные широкие экспериментальные исследования указывают на хорошее качественное и количественное совпадение с результатами аналитического исследования как влияния основных параметров на устойчивость гидравлического следящего привода при использовании метода гармонической линеаризации, а также комплекса параметров и нелинейностей при правильном учете количества и величин основных параметров.
29. Сравнение качества приводов, построенных по различным схемам. Особенности применения гидромоторов
Анализ погрешностей воспроизведения, нечувствительности и устойчивости приводов с двух- и однощелевыми управляющими золотниками (см. рис. 12, 13), выполненный аналогично проведенному выше для приводов с четырехщелевым управляющим золотником показывает [13] следующее:
1. В приводах с двух- и однощелевыми управляющими золотниками существует зависимость граничного подведенного давления рпг от основных параметров такая же, как и в приводах с четырехщелевыми управляющими золотниками. Поэтому выводы разд. 28 о влиянии основных параметров на устойчивость привода с четырехщелевым золотником распространяются также на приводы с двух- и однощелевыми управляющими золотниками.
2. Граничное подведенное давление рпг в приводах с двух- и однощелевыми управляющими золотниками изменяется обратно пропорционально длине Н\ (см. рис. 12, а и 13, а) поршневой полости гидроцилиндра и достигает минимума, когда длина Н\ достигает полного хода Н цилиндра, т. е. при максимальном размере поршневой полости гидроцилиндра. В этом отношении следящие приводы с двух- и однощелевыми управляющими золотниками существенно отличаются от приводов с четырехщелевыми золотниками, у которых минимум устойчивости привода приходится посередине длины хода цилиндра.
3. Устойчивость приводов с двух- и одно- и четырехщелевыми управляющими золотниками при равных величинах основных параметров примерно одинакова.
4. Скоростные погрешности приводов с двухщелевым и четырехщелевым управляющими золотниками при равных величинах основных параметров одинаковы и резко отличаются при силовом нагружении.
При нагрузке KR на привод, направленной навстречу скорости, погрешности привода с двухщелевым золотником выше таковых для привода с четырехщелевым золотником. При воз-
РпгР
растании нагрузки до величиныпривод с двухщелевым золотником становится практически неработоспособным.
Вместе с тем, при нагрузке на привод, совпадающей по направлению со скоростью слежения, приводы с двухщелевым золотником дают даже несколько лучшие результаты по точности воспроизведения по сравнению с приводами с четырехщелевым управляющим золотником.
5. Скоростные погрешности в жестких приводах с однощелевым золотником в 2 раза больше таковых в приводах с четы-232
Рис. 115. Схема расчета гидравлического следящего привода с гидромотором
рехщелевым золотником. Нагрузочные погрешности в приводах с однощелевым золотником значительно выше.
Исходя из изложенного можно сделать следующие выводы.
Копировальные следящие приводы с четырехщелевыми золотниками целесообразно применять в станках со значительными нагрузками и скоростями перемещений при требованиях высоких точностей воспроизведения — например, во фрезерных, строгальных, тяжелых токарных станках и к п.
Копировальные следящие приводы с двухщелевыми золотниками целесообразно применять при высоких скоростях слежения и небольших нагрузках, в особенности, совпадающих с направлением скорости слежения — например, в токарных станках.
Копировальные следящие приводы с однощелевыми золотниками целесообразно применять при небольших скоростях и относительно невысоких нагрузках, например, в небольших токарных станках. При выборе типа привода следует также иметь в виду, что изменение вязкости масла не изменяет среднего положения первых двух и может вносить значительные изменения в положение привода с однощелевым золотником.
Применение гидромоторов в следящих приводах находит все более широкое распространение главным образом в связи с возможностью осуществления высокой гидравлической жесткости при значительных длинах перемещения. Расчетная схема типового копировального следящего привода приведена на рис. 115.
Применение гидромоторов в гидравлических следящих приводах связано с рядом особенностей.
Схемы с одно- и двухщелевыми управляющими золотниками практически неприемлемы. Значительное влияние на статические и динамические свойства привода оказывают утечки в гидромоторе и упругость подводящих маслопроводов. Важное значение приобретает момент инерции ротора гидромотора.и приведенный момент инерции вращающихся частей. При конструировании и расчете привода необходимо правильно учитывать такие параметры, как упругость механической передачи между гидромото
ром и рабочим органом, зазор, механические потери в гидромоторе и их характер.
Формулы для расчета статических и динамических характеристик следящих приводов с гидромоторами выводятся по такой же методике, как это было выполнено в разделах 27 и 28 для приводов с гидроцилиндрами. Так как принцип работы следящих приводов с гидромоторами и гидроцилиндрами аналогичен, для приближенных расчетов могут быть использованы ранее приведенные соотношения при соответствующем учете изменившихся параметров: приведенных рабочей площади, массы, сил трения, упругостей.
Так, приведенная рабочая площадь Fnp для следящего привода с гидромотором находится из условия равенства расходов q во внешней цепи управляющего золотника для аналогичных по схемам приводов с цилиндром и с гидромотором (рис. 108 и 115)
Я
<0
2Л
(317)
где <7д — рабочий объем гидромотора; со — угловая скорость. Имея в виду, что
У о ^р^хв» 2л
(318)
где tp — передаточное отношение редуктора, /хв — шаг ходового винта, из равенства правых частей выражений (317) находим:
= (319)
*р*хв
Приведенная масса т пр подвижных частей привода может быть найдена из равенства перепадов давлений р, идущих на преодоление инерционных нагрузок:
™пр ••
р =-----у—для привода с цилиндром;
Fnp
г 2лсо
p = Jc------для привода с гидромотором.
Ял
(320)
Суммарный момент инерции подвижных частей, приведенный к валу гидромотора,
(321)
причем /д,/в и /Про — соответственно момент инерции ротора гидромотора, вращающихся частей и масса рабочего органа.
Тогда
__ г / 2л \2
^пр ** с ( )
\ *р?хв /
(322)
Приведенная сила трения Тпр при беззазорной передаче между гидромотором и рабочим органом из равенства расходуемых перепадов давлений для обоих случаев может быть выражена зависимостью
Т 2л
г„р = —” + Л1тд—— , (323)
Чв ‘р‘хв
где Тро — сила трения в направляющих рабочего органа, приведенная к оси ходового винта; т|в — к. п. д. ходового винта и редуктора; Л1ТД — момент трения в гидромоторе.
Упругость гидравлической части двигателя может учитываться коэффициентами Вц и В>2, при этом в выражениях (261) — (265) можно положить Кс = 0, а коэффициент упругости трубопроводов Лтр несколько увеличить с учетом емкости камер гидромотора.
В связи с резким повышением гидравлической жесткости привода особое значение приобретает учет упругости механических элементов конструкции, который следует производить, пользуясь выводами, изложенными в разделе 28, и зависимостью (316).
30. Методика расчета основных параметров одноконтурных гидравлических следящих приводов
При проектировании станков, оснащенных следящим приводом, или автоматизации на базе следящего привода универсального оборудования, исходными данными обычно являются требуемая кинематика копировальных движений, величины копировальных подач и нагрузок на гидродвигатель, заданная точность и шероховатость обработанной поверхности.
Задача при конструировании сводится к разработке конкретной схемы следящего привода и определению необходимых величин основных его параметров, удовлетворяющих требуемой шероховатости обработанной поверхности и точности воспроизведения контура шаблона на изделии при заданных режимах резания. Вышесказанное относится также к проектированию станков с числовым программным управлением.
Практика проектирования копировальных станков показывает, что удобной является следующая последовательность разработки гидравлического следящего привода, которым оснащается станок.
1. Исходя из заданной кинематики следящих перемещений, а также нагрузок, скоростей подач, общей компоновки станка,
точности копирования и т. п. разрабатывается принципиальная гидрокинематическая схема следящего привода и выбирается тип его основных оригинальных узлов (копировального прибора, силовых двигателей, маслопроводов, механизмов обратной связи и т. п.). При этом следует руководствоваться рекомендациями, указанными в главах I, II, IV, VI, VII.
2. Определяется требуемая чувствительность следящего привода, в соответствии с заданным классом шероховатости и формой копируемой поверхности. При этом исходят из следующих соображений. При заданных 5—6-ом классах шероховатости и копируемых поверхностях, имеющих небольшой наклон относительно направления подач, зона нечувствительности следящего привода при реверсировании должна быть возможно меньшей и составлять величину порядка ±0,005—0,012 мм.
При копировании поверхностей, расположенных под значительными (более 10°) углами К направлениям подач зона нечувствительности следящего привода, применяемого в крупных фрезерных и строгальных станках, может быть увеличена до ±0,015—0,02 мм. В следящих приводах токарных станков не следует увеличивать зону нечувствительности свыше 0,015 мм.
3. Определяется допускаемая погрешность е собственно следящего привода исходя из требуемой общей точности воспроизведения и возможных величин остальных составляющих суммарной погрешности копирования: погрешности механической части станка, погрешности приспособления, погрешности инструмента [30].
4. Выбираются некоторые исходные параметры следящего привода, такие как давление рп в нагнетательной магистрали следящего привода, ширина йо щелей управляющего золотника, зависящие от скоростей и нагрузок, при которых работает привод.
В следящих приводах копировальных станков обычно используется гидроаппаратура общего назначения, работающая на давлениях до 63 кгс/см2. В слабонагруженных следящих приводах, например токарных, шлифовальных станках применяется рабочее давление рп = 164-25 кгс/см2, в сильно нагруженных следящих приводах фрезерных, строгальных и других станков применяется рабочее давление рп = 25-4-40 кгс/см2. Обычно следует стремиться к работе на возможно более низком давлении для обеспечения легкоподвижности управляющих и распределительных золотников и небольшого объема масляного резервуара насосной установки. При выборе ширины h0 открытия щелей управляющего золотника в среднем положении в однокоординатных следящих приводах исходят из влияния ее размера на точность копирования в зависимости от соотношения заданных нагрузки и наибольшей следящей подачи в соответствии с рекомендациями, приведенными в разделе 26.
В силовых приводах, при требовании высокой чувствительности, ширина й0 открытия щели выбирается близкой к нулевой, 236
в приводах со значительными нагрузками и скоростями слежения ширина Ло щелей увеличивается до 0,05—0,07 мм. Если управляющий золотник привода не имеет осциллирующих перемещений, ширину й0 его щелей в среднем положении для предотвращения заращивания следует выполнять более 0,04 мм.
5. Составляется расчетная схема привода. Для этого производится расчет рабочей площади F двигателя исходя из требуемой чувствительности ен, нагрузки Т на силовом двигателе при реверсировании и выбранных исходных параметрах (рп, ^о)- Расчет производится по одному из уравнений следящего привода в установившемся режиме, например (235). При этом под нагрузкой понимается суммарная нагрузка трения, приведенная к силовому двигателю (штоку гидроцилиндра), меняющая знак при реверсировании и включающая составляющую от силы резания, силы трения в направляющих от веса суппорта (стола, каретки), затяжки клиньев, прижимных планок и т. п.
6. Производится расчет других параметров привода, например длины Ь щелей управляющего золотника исходя из допускаемой погрешности et/max собственно следящего привода, конструктивных размеров трубопроводов и выбранных ранее параметров привода.
Расчет производится по одному из уравнений следящего привода в установившемся режиме, изложенных в разделах 26,29. <
7. Проверяется, могут ли выбранные параметры обеспечить устойчивую работу следящего привода. Проверка может производиться путем расчета граничного подведенного давления по методу гармонической линеаризации нелинейностей, используя методику, изложенную в разделах 27—29, или одну из формул: (305), (309), (312) и др.
Если проверка показывает, что при требуемых по чувствительности и точности воспроизведения параметрах следящий привод выбранной конструкции неустойчив, в него должны быть внесены изменения, повышающие устойчивость привода. Если после внесения изменений повторная проверка вновь показывает, что устойчивая работа привода не обеспечивается, следует использовать другую более устойчивую и быстродействующую схему привода.
8. Производится расчет параметров других узлов, входящих в следящий привод,— подачи насосных установок, объемов аккумуляторов, характеристик аппаратуры гидропанелей и т. д.
Пример расчета. Рассмотрим пример расчета основных параметров гидравлического следящего привода по изложенной выше методике (рис. 116). Предположим, что необходимо спроектировать следящий привод к продольному копировально-фрезерному станку, предназначенному для обработки поверхностей деталей с плавно меняющимся профилем, главным образом малонаклонным к направлению продольной задающей подачи, согласно следую-
каемая суммарная погрешность
Рис. 116. Расчетная схема привода
щим техническим требованиям: длина хода поршня гидродвигателя следящей подачи Н = 40 см, наибольшая скорость следящей подачи vc max = 1,66 см/с, вес перемещаемых гидродвигателем частей G = 1000 кг, суммарная нагрузка трения, приведенная к гидродвигателю (включая составляющую силы резания, трение в направляющих салазок от веса исполнительного органа, затяжки клиньев, прижимных планок и т. п.) Т — ±800 кгс, наибольшая внешняя сила, приведенная к поршнф, R — 500 кгс, допус-воспроизведения при наибольшей подаче и на
грузке Et»max= ±150 мкм, 5-й класс шероховатости обработанной поверхности, масштаб копирования m = 1, наибольший угол наклона профиля шаблона к направлению задающей подачи 0 = 30°.
1. Учитывая высокие требования к шероховатости обрабатываемой поверхности и точности воспроизведения при значительных скоростях следящей подачи и нагрузке, а также, имея в виду, что обработке подлежат незамкнутые поверхности с небольшими углами наклона профиля шаблона к направлению задающей подачи, выбираем в качестве следящего однокоординатный гидравлический привод с четырехщелевым управляющим золотником (см. рис. 11, а). Передаточное отношение рычага щупа 1=1; силовой двигатель, учитывая небольшую длину хода, выбирается в виде гидроцилиндра с односторонним штоком (рис. 89, б). Маслопроводы между копировальным прибором и цилиндром выполняются из жестких труб длиной /тр = 500 мм каждый и включают в каждой ветви по одному угольнику и внезапному сужению. Обратная связь—жесткая и достигается закреплением копировального прибора на рабочем органе, жестко скрепленном с силовым цилиндром; передаточное отношение обратной связи привода to = 1- Следящий привод работает на масле «турбинное 22» при температуре 40—50° С.
2. Определяем допускаемую нечувствительность следящего привода. Учитывая требуемый 5-й класс шероховатости копируемых поверхностей и их главным образом небольшой наклон относительно направления задающей подачи, принимаем зону нечувствительности следящего привода ен — ±10 мкм.
3. Определяем допускаемую погрешность еГтах собственно следящего привода. Учитывая жесткую связь копировального прибора, исполнительного органа и цилиндра, небольшой ход цилиндра, возможность компенсации износа фрезы в результате смены щупа, а также возможность изготовления профиля шаблона с точностью ±20 мкм, полагаем, что сумма погрешностей инструмента, кинематики и приспособления не должна превышать ±50 мкм. Таким образом, допускаемая погрешность собственно следящего привода при наибольшей следящей подаче не должна превышать е£,тах = ±100 мкм.
Определение допустимой доли погрешности собственно следящего привода в общей погрешности воспроизведения требует тщательного анализа технологии обработки изделия на станке, а также комплекса погрешностей всей системы СПИД [30].
4. Выбираем некоторые исходные параметры следящего привода. Принимаем ширину рабочих щелей управляющего золотника Ло — 50 мкм, учитывая заданные нагрузку и наибольшую следящую подачу, допускаемую зону нечувствительности следящего привода, а также отсутствие осциллирования управляющего золотника копировального прибора. Принимаем рабочее (подведенное к копировальному прибору) давление рп = 30 кгс/см2, учитывая значительную нагрузку на силовом двигателе, а также некоторый запас по давлению. который желательно иметь на случай необходимости повышения чувствительности или точности воспроизведения приводом профиля шаблона. 238
По выбранным данным составляем расчетную схему привода (см. рис. 116).
5. Определяем размер рабочей площади F гидроцилиндра, исходя из заданной чувствительности привода ен = ±10 мкм. Расчет удобно произвести по допускаемому давлению исходя из требуемой чувствительности еп, нагрузки Т при реверсировании и выбранных параметров Ло и рп. Тогда, используя в качестве исходного уравнение (235) движения следящего привода в установившемся режиме и полагая следящую подачу vc = 0, находим, что допустимый перепад давления составляет
= (fto + ец)2— (^0—ен)2
Р1-Рп (йо + ен)2+ (Ло—ен)2 ’
Подставляя числовые значения величин, находим р\ = 11,5 кгс/см2.
Получаемое по формуле (324) допустимое давление pi при реверсировании несколько завышено, так как при выводе исходной зависимости (235) не учитывался радиальный зазор между золотником и корпусом, а также практически неизбежное скругление рабочих кромок золотника и втулки. Уточненный расчет приведен в работе [30], который показывает, что при пользовании формулой (324) следует вводить поправочный коэффициент (0,6—0,8) при ширине щелей Ло 50 мкм и (0,5—0,7) при ширине щелей Ло « 30 мкм. Исходя из изложенных соображений принимаем фактически допустимый при реверсировании перепад • давления р1ф — 0,6 pi = 6,9 кгс/см2, что составляет « Рп-
Таким образом, для достижения высокой чувствительности одноконтурных гидравлических следящих приводов обычно следует выбирать перепад давления, расходуемый на преодоление нагрузок типа сухого трения,
(325)
Зная давление Р1ф, определяем рабочую площадь гидроцилиндра с учетом потерь холостого хода рцх = 1 4- 2 кгс/см2
Т 800
Р1ф Рцх 5,9 1,5
150 см2.
Принимаем диаметр поршня Dn = 150 мм, диаметр штока dmT — 50 мм. При этом фактическая рабочая площадь гидроцилиндра
Я(°п-4т) «(152 - 52)
----------------------- 157 СМ2
4 4
(326)
В тех случаях, когда не требуется высокая чувствительность следящего привода, выбор рабочей площади двигателя производится в соответствии с заданной наибольшей нагрузкой, причем расходуемый на ее преодоление перепад давления рр определяется из выражения
рр<(1/2-2/3)рп. (327)
6. Производим расчет других параметров привода.
Определяем расход масла в следящем приводе при наибольшей следящей подаче:
q — Fvc = 157-1,66 = 260 см3/с = 15,7 л/мин.
Определяем требуемый внутренний диаметр трубопроводов между копировальным прибором и гидроцилиндром по формуле
/21,23?
---^ = 12 мм, (328)
где q—расход масла в трубопроводе в л/мин., v = 2 3 м/с — допустимая
средняя скорость масла в трубопроводе.
Меньшие значения относятся к приводам с большими длинами трубопроводов.
Определяем гидравлические потери в трубопроводах между копировальным прибором и гидроцилиндром, с учетом сопротивлений труб и местных потерь при условиях заданной точности воспроизведения eVmax по известным зависимостям [3, 30, 38, 49]. В результате расчета находим рГп = 2 кгс/см2.
Определяем суммарную потерю давления pQyM внешней цепи управляющего золотника при наибольшей следящей подаче
Т R
РсУм ~ г + Ргп + Рцх ~
г г
800 500
= + 2+1,5= 11,8 кгс/см2.
157 157
7. Определяем требуемую длину b рабочих щелей управляющего золотника по заданной точности воспроизведения еУтах = ± 100 мкм собственно следящего привода при наибольшей следящей подаче иСтах = 100 см/мин и нагрузке R = 500 кгс. Так как допускаемая погрешность воспроизведения больше ширины рабочих щелей в среднем положении егаах > Ао, расчет производим для установившегося движения следящего привода с нулевым открытием щелей в среднем положении золотника [уравнение движения составляется аналогично уравнению (235)], полагая Лгаах = + £&тах
KR ___ Реум
Fpn ~ Рп
Тогда требуемая длина b рабочих щелей составит:
(329)
После подстановки значений входящих параметров находим b « 6 см.
8. Проверяем устойчивость работы привода при выбранных параметрах, пользуясь формулой (305) для граничного подведенного давления привода с открытыми щелями в среднем положении и короткими трубопроводами.
Значения входящих в расчетную формулу (305) коэффициентов составляют
из выражения (272) при Вг = 0
в,
1000
981-157
= 6,5-10- 3;
из выражений (261) и (179)
вп =
и
4£ц
40 4-1,6-10*
= 6,25-10-4,
где приведенный модуль упругости стенок цилиндра и находящегося в нем масла принят £ц = 1,6-104 кгс/см2;
из выражения (280)
7-------^ = 4,58 103,
0,91-10—6
где приняты коэффициент расхода ц = 0,7 и плотность масла р=0,91-10“6 кгс•см”'4-с2’,
из выражения (277)
КТ 1-800 бб= F = 157 =5Л
где множитель К в коэффициенте гармонической линеаризации принимается К — 1, учитывая рекомендации, изложенные в разделе 28 для жестких следящих приводов;
из выражения (308)
2/3*1
1 ®~ 2
З2 ВпКТ 23 ’ В-В*'2 о 4
/ 32 6,25- IO-4-1-800
0,005 + 1 ——-
\2з 4,58-1О3(6,5-1О-3) 1/2
2/3 “]
= 9,1-10“3
Следовательно, граничное подведенное давление привода без учета влияния трубопроводов между управляющим золотником и гидроцилиндром, согласно выражению (305), составит:
__L JL51
Р Л Rm
ВпКТ \2/3-
ЗВ 11 В6В6пг
F2B\,2B3\h0-2B9\112
= 7,3[1+ /1 + 0,17]= 15,2 кгс/см2. (330)
•
Эта величина ниже принятого в приводе подведенного давления рп — = 30 кгс/см2 и указывает, что привод неустойчив.
Числовые значения в выражении (330), а также выполнение расчетов других приводов показывают, что при обычно применяемых в станкостроении сочетаниях параметров гидравлических следящих приводов основное влияние на расчетную величину граничного подведенного давления рпг оказывает член, вынесенный за знак радикала. Таким образом, приближенно, с образованием некоторого запаса по устойчивости, подкоренное выражение можно принимать равным единице, что облегчает практическое выполнение расчетов.
9. Проверяем допустимость использования формулы (305) для расчета граничного подведенного давления из условия ho Аг. Согла-сно выражению (306) после подстановки числовых данных находим, что Аг = 0,0013 см
h0. При Л г > ho более достоверные данные по устойчивости привода можно получить, пользуясь уравнениями (309) или (312) для приводов с управляющими золотниками, имеющими нулевое открытие щелей в среднем положении.
Выше расчет граничного подведенного давления рпг был выполнен при предположении коротких и жестких трубопроводов.
Произведем коррекцию полученного в выражении (330) результата, учтя влияние на устойчивость привода только приведенной массы жидкости в трубопроводах по формуле (313), полагая рпг = 15,2 кгс/см2 и приведенную массу жидкости в трубопроводах, согласно выражению (314),
л^тр тс* 1,22
/тр = 50см, / =—-— =—-—=1,14 см2.
к 4 4
Следовательно:
V2 А 1572 . о
ттр = 2р—— = 2-0,91-10~6. 50 ——=1,97 кгс-см"1-с2.
I 1,14
Полученный результат показывает, что несмотря на небольшую длину труб между управляющим золотником и цилиндром приведенная масса находящейся в них жидкости почти вдвое превышает массу механических частей, перемещаемых цилиндром:
т =— = 1,02кгс-см !.с2.
g
Следовательно, с учетом влияния приведенной массы жидкости в трубопроводах, граничное подведенное давление составит
' / Готр \2'з / 1 97 \2'3
Рпг = Рпг(1+------) =15,2(1+—’--------- ) = 31,2 кгс/см2. (331)
\ т / \ 1,02 /
Следует еще скорректировать полученный результат, учтя влияние на устойчивость упругости, вносимой маслопроводами между управляющим золотником и силовым двигателем, что приближенно можно выполнить, используя зависимость (315). Полагая в (315) ЕТр = Ец и значение р-гп согласно полученному в выражении (331) находим,, что
р„„ = рпг------о77—р-----m = 31,2-----:-------------— = 31 кгс/см2.
I 1 +-------- ) ( 1 +----1----• 1 )
\ ЯЕЕтр / \ 40-157 /
Расчет показывает, что упругость примененных жестких трубопроводов оказывает незначительное влияние на устойчивость привода; это следовало ожидать, учитывая значительную емкость полостей цилиндра.
Результаты расчета показывают, что при принятом подведенном давлении рп = 30 кгс/см2 привод находится на границе устойчивости, поскольку Рпг ~ Рп. Рекомендуется обычно выбирать рпг = (1,5+2)рп, учитывая приближенность принимаемых в расчете величин параметров и желательность получения небольшой колебательности привода. Таким образом, необходимо повышать устойчивость привода.
В заключение определим эффективность учета нелинейностей при расчете устойчивости следящего привода в рассмотренном примере. При представлении гидравлического следящего привода в виде линейной модели расчет предельного давления потери устойчивости проводится по формуле (291), при пользовании которой параметр В4, согласно выражениям (272) и (258), для рассматриваемого примера составляет
т т fyl-rpF 1,02 2-0,91-10-6-50-157 ,
F F f 157 1,14
• Таким образом:
1 haF В4 1 0,005-157 1,9-10-2
P-=V — ’“ТБГ" • б,25.ю-” = “’7 кгс/см2;
что почти в 3 раза ниже полученного ранее граничного подведенного давле^ ния рпг = 31 кгс/см2.
Глава VIH. t
ПУТИ УЛУЧШЕНИЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ СВОЙСТВ ГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ. БЕЗРЕДУКТОРНЫЕ ПРИВОДЫ СТАНКОВ С ЧПУ
31. Методы повышения точности и устойчивости одноконтурных гидравлических следящих приводов. Введение нелинейностей
Увеличение устойчивости и точности работы приводов может достигаться в результате следующих изменений их параметров или характеристик (см. рис. 112). Изменение длины b рабочих щелей, передаточного отношения I задающего устройства, рабочей площади F двигателя и других позволяет в соответствии с зависимостями (305), (312) повлиять на точность и устойчивость привода. При этом следует иметь в виду, что повышение устойчивости, например, путем уменьшения длины b щелей обычно сопровождается соответствующим понижением точности. Основным методом повышения устойчивости без снижения точности является увеличение жесткости гидравлической и механической частей привода путем замены гибких шлангов на трубы, перехода при больших длинах ходов от гидроцилиндра к гидромотору, обеспечения жесткости крепления штока и корпуса цилиндра в несколько раз (до 8—10) выше гидравлической динамической жесткости гидроцилиндра, повышение жесткости механической передачи при гидромоторе. Смысл этих изменений в динамике привода — сдвиг вправо на рис. 112, г границы рцл линейной модели привода.
Применение дросселя, включенного параллельно полостям двигателя (рис. 117, поз /), эквивалентно образованию утечек между полостями двигателя или, в какой-то мере, расширению ширины Ао рабочих щелей. При этом увеличивается зона нечувствительности ен привода до eHi (рис. 118), а граничное подведенное давление рассчитывается по методике, изложенной в разделах 27—29, путем учета коэффициента утечек С [формулы (260), (269) и др.]. Применение параллельного дросселя является эффективным средством повышения устойчивости малонагруженных высокоскоростных следящих приводов, к которым не предъявляются высокие требования по чувствительности (30].
Применение дросселей, включенных последовательно полостям двигателя (рис. 117, поз. 2) сохраняет без изменения чув-
уствительность, однако повышает скоростную погрешность привода (рис. 118). Действие их на динамические свойства привода эквивалентно понижению кривой амплитуд Лу устойчивых колебаний на рис. 112, г, а расчет влияния на граничное подведенное давление выполняется введением в уравнение (254) значения дополнительного перепада давления, расходуемого на протекание- масла в полости двигателя через дроссель. Применение последовательных дросселей является эффективным средством повышения устойчивости сильно нагруженных тихоходных следящих приводов.
Демпфирование гидравлической цепочкой сопротивление — емкость, включенной параллельно полостям двигателя по предложению А. Н. Липатова и О. Д. Лещенко, проводится устройством 3 (рис. 117). Устройство подключается к полостям гидродвигателя и состоит из дросселя 4 и подпружиненного поршня 5. Методика выбора параметров устройства изложена в работе [35].х При таком способе демпфирования статическая характеристика привода (рис. 118) сохраняется такой же, как для случая, когда «нет дросселей» (кривая 7), а достигаемый динамический эффект иллюстрируют частотные характеристики по скорости разомкнутого привода (рис. 119). Резонансный пик (кривая /) цилиндра с размером поршня Dn = 115 мм и инерционной нагрузкой в 1300 кгс четко проявляется около 25 Гц (относительный коэффициент демпфирования составляет величину 0,15—0,2). Резонансный пик пропадает при включении демпфирующего устройства (кривая 2).
Увеличения граничного подведенного давления рпг возможно также достигнуть вследствие' повышения кривой амплитуд Ан ' неустойчивых периодических перемещений, однако, как отмечалось.в разделе 28, осуществление его вследствие увеличения срлы сухого трения не может рекомендоваться как средство повышения устойчивости: увеличение силы сухого трейия сопро-
Рис. 117. Схема включения дросселей для* повышения устойчивости привода
Рис. 118. Влияние способа включения дросселей на погрешность воспроизведения е привода
Рис. 119. Влияние дросселей на частотную
характеристику привода
вождается падающей характеристикой трения, создающей неравномерное перемещение, увеличивает нечувствительность привода, демпфирующее влияние трения с увеличением скорости слежения уменьшается и даже совсем исчезает. Вместе с тем целесообразным является применение демпфирующих средств, характеристики которых аналогичны характеристике сухого трения в гармонически линеаризованном виде и создающих в сочетании с нелинейной характеристикой золотника (насыщение по давлению или расходу) амплитудную характеристику периодических перемещений в форме полупетли, показанной на рис. 112, г. Большие возможности в этом направлении характеризуют следующие два способа введения нелинейностей.
Демпфирование вязким трением с переменным коэффициентом усиления. Осуществление такого демпфирования следящего привода проводится по сх^ме, показанной на рис. 120, а. Поток жидкости, направляемый от управляющего золотника 1 к силовому двигателю 2, проходит через сопротивления 7?i демпферного устройства при скоростях слежения ниже иС1; выше этой скорости при помощи специальных клапанов 3 включаются сопротивления /?2, установленные параллельно, которые понижают сопротивление прохождению жидкости. Сопротивление, создаваемое демпферным устройством, изменяется (рис. 120,6). Рассмотрение влияния на устойчивость привода вязкого трения с переменным коэффициентом усиления позволяет сделать следующие выводы.
Рис. 120. Применение для повышения устойчивости демпфирования вязким трением с переменным коэффициентом усиления: схема включения демпфирующего устройства (а), характеристика (б) области возможного динамического состояния (в)
1. Эффективное повышение устойчивости достигается при высокой степени демпфирования на небольших скоростях слежения и низкой степени демпфирования при высоких скоростях слежения.
2. Демпфирование гидравлических следящих приводов вязким трением с переменным коэффициентом усиления, согласно рис. 120,6, оказывает на динамику привода действие, близкое по своему характеру к действию сил сухого трения в направляющих рабочего органа, согласно рис. 109, а, что объясняется принципиальной общностью характеристик на указанных рисунках и близостью характера их изменения при гармонической линеаризации.
3. Преимуществом демпфирования вязким трением является то, что оно не уменьшает чувствительности следящего привода Кроме того, легко осуществляемым изменением величины коэффициентов Ki и Кг (см. рис. 120,6) и скорости Vci перехода от одного к другому коэффициенту можно формировать оптимальную характеристику привода, обеспечивающую лучшие устойчивость и точность воспроизведения.
В сочетании с нелинейной, типа насыщения, характеристикой управляющего золотника введение вязкого трения с переменным коэффициентом усиления (рис. 120, б) образует следующие области возможного динамического состояния, показанные на рис. 120, в [13]: / — область устойчивости равновесия линейной модели привода; // — дополнительная область устойчивости равновесия от линейного демпфирования вязким трением с коэффициентом усиления Кг*, III — дополнительная область устойчивости равновесия от нелинейного демпфирования вязким трением с коэффициентами Ki и К2; IV — область устойчивости в малом; V — область автоколебаний. По оси ординат на рис. 120,в отложена амплитуда скорости периодических перемещений привода.
Применение в станке КФГ-1 (30] демпфирования согласно схеме на рис. 120, а повысило устойчивость следящего привода в 2—3 раза, что позволило в 6—8 раз повысить его быстродействие. Вторым весьма эффективным вариантом осуществления демпфирования вязким трением с переменным коэффициентом усиления является устройство гидравлического буфера в виде второго двигателя, присоединенного к рабочему органу (показан штриховой линией на рис. 120, а). Сила на буфере изменяется согласно характеристике, показанной на рис. 120, б.
Применение управляющих золотников с переменным коэффициентом усиления. Схема следящего привода с четырехщелевым управляющим золотником, имеющим переменный коэффициент усиления и нулевое открытие щелей в среднем положении, показана на. рис. 121, а. При смещении золотника от среднего положения на h d длина рабочих щелей равна а при h > d изменяется до размера Ь2. В результате расход q во внешней цепи золотника в зависимости от смещения золотника относительно корпуса изменяется нелинейно (рис. 121, б).
Рис. 121. Применение для повышения устойчивости золотника с переменной длиной щели: а — схема привода и, б и в — характеристики
Рис. 122. Демпфирование перемещения управляющего золотника
Последнюю характеристику можно представить в координатах: погрешность воспроизведения е—скорость z (рис. 121, в). Так как погрешность воспроизведения эквивалентна нагрузке на привод, проявляется общность характеристики привода с управляющим золотником, имеющим переменную длину щелей, с соответствующей характеристикой на рис. 120,6 привода с вязким трением при переменном коэффициенте усиления и на рис. 109, а привода с силой сухого трения в направляющих рабочего органа. В результате достигается образование дополнительной области устойчивости равновесия и повышение устойчивости следящего привода. Общая картина зависимости амплитуды периодических перемещений от подведенного давления соответствует показанной на рис. 120, в.
Методика расчета граничного подведенного давления привода при применении управляющего золотника с переменным коэффициентом усиления изложена в работе (13]. Применение в копировальных приборах станков КСФ-20, производства Горьковского завода фрезерных станков [30], гидроусилителях момента типа Э32Г18-2, в электрогидравлических преобразователях, применяемых в промышленных работах и других устройствах золотников с переменной длиной щели показало их высокую эффективность как средств повышения устойчивости следящего привода при сохранении высокой чувствительности и обеспечения высоких скоростей перемещений с небольшими скоростными погрешностями.
Существует и еще один распространенный способ повышения устойчивости путем введения нелинейности.
Введение демпфирования перемещения управляющего золотника. Такое демпфирование осуществляется в копировальных приборах (рис. 122). При этом на следящем золотнике 1 выполняется бурт 2 увеличенного диаметра d§ = d3 + (8 -4-4- 10) мм. По обе стороны от бурта образуются полости, выход масла которых ограничивается дросселями 4. В результате скорость перемещения золотника от пружины 3, действующей на его торец, ограничивается проходными сечениями дросселей. Диаметр проходных отверстий в шайбах выполняется размером 0,3—0,5 мм. Пополнение камер демпфера маслом осущест-248
вляется за счет утечек. Возможны также другие конструктивные исполнения демпфирования золотника аналогичного принципа действия [30].
Демпфирующие устройства описанной конструкции не уменьшают чувствительности следящего привода и не увеличивают сил давления щупа на шаблон при плавном изменении копируемого контура. Вместе с тем в местах резкого изменения профиля шаблона, где следящая подача изменяется скачком, между щупом и шаблоном могут возникать значительные силы. Поэтому при применении в золотниках демпфирующих устройств на шаблонах следует выполнять переходы с внутренними радиусами, большими радиуса щупа. При качественном изготовлении и правильной эксплуатации демпфирование перемещения управляющего золотника позволяет повысить граничное подведенное давление рвг примерно в 1,5 раза.
Помимо отмеченных выше недостатков наличие демпферного бурта на золотнике усложняет его изготовление и требует тщательного выполнения соосности поверхностей разного диаметра. Для облегчения выполнения этих операций и обеспечения легкоподвижности золотника рекомендуется наружные поверхности демпферного бурта и хвостовика золотника притирать с диаметральным зазором, увеличенным по сравнению с зазором между золотником и корпусом на 10—15 мкм.
32. Повышение точности и жесткости гидравлических следящих приводов введением обратной связи по скорости
Достижимый коэффициент усиления по скорости одноконтурных гидравлических и электрогидравлических следящих приводов копировальных станков и станков с числовым программным управлением обычно не превышает Kv = 50— 100 с-1 из условий обеспечения устойчивости привода.* В станках с программным управлением вводится также ограничение на погрешность воспроизведения из условий, например опрокидывания фазового дискриминатора. Учитывая наличие радиального зазора между распределительным золотником и корпусом, притупление рабочих кромок, образующих щель, утечки и пере-течки между полостями двигателя, зона нечувствительности следящего привода по перемещению золотника принимается обычно йн = ±0,01 4- 0,03 мм. Так как общий ход распределительных золотников однокаскадных электрогидравлических усилителей не превышает /imax = 0,3 мм, а двухкаскадных ftmax
1 мм, возможный диапазон регулирования входного воздействия для изменения скорости разомкнутого по положению привода при постоянной нагрузке не превышает т = -- -ах =
Таблица 5. Технические возможности электрогидравлических следящих приводов подач дроссельного g регулирования, построенных по различным схемам, для оборудования с ЧПУ
Вид привода Структурная схема Коэффициент усиления по скорости * Нечувствительность Дб„, мм п Ошибка скоростная бс, мм Диапазон регулирования _ ^тах т_ Наибольшая скорость "max- м/мнн Примечание
С обратной связью по положению (см. рис. 9) 50—100 ±0,01—0,03 0,3 30—100 1-2 Скорость ограничивается величиной бс скоростной ошибки
С обратными связями по скорости и положению и стабилизирующей коррекцией (см. рис. 126) 50—100 ±0,0001—0,01 0,3 100—10000 1—2 То же
С обратными связями по скорости, положению, стабилизирующей коррекцией и со скоростным сигналом управления (см. рис. 133) 20—100 ±0,0001—0,01 0—0,03 1000—10000 5—10 Скорость ограничивается возможностями системы ЧПУ
Рис. 123. Изменение скорости со двигателя в зависимости от нагрузки р в приводе дроссельного регулирования, построенном по различным схемам: а — идеальном; б — при наличии утечек в двигателе
= 30 4-100. Технические возможности такого однокоординатного привода с обратной связью по положению, управляемого фазовой системой числового управления, приведены в табл. 5.
В зависимости от нагрузки скорость ю гидромотора, управляемого золотником (см. рис. 56), изменяется:
где
а = Kh \/ 1--------2-,
V Рп
(332)
(333)
ц, h — соответственно коэффициент расхода, длина рабочей щели и смещение от среднего положения управляющего золотника гидроусилителя; qa — рабочий объем гидромотора; р — перепад давления на гидромоторе от нагрузки.
График изменения ш(р) согласно выражению (332), построенный для максимального смещения золотника h = показан на рис. 123.
Для такого привода понятие устойчивой частоты вращения, в том числе минимальной, приобретает смысл ограниченного уровня их понижения (например, в 2 раза) при частичном изменении нагрузки (например, на */з от максимальной, развиваемой приводом). В приводе, замкнутом по положению, ' скорость перемещения при изменении нагрузки поддерживается постоянной в установившемся движении в результате роста погрешности воспроизведения, определяемой коэффициентом усиления привода по нагрузке. Штриховая горизонтальная линия соответствует поддержанию в приводе угловой скорости g)i = const ^comax- С ростом перепада давления р погрешность возрастает до /imaxi при перепаде давления р>р\ привод не мо
жет более поддерживать угловую скорость (Di и она будет падать.
В зависимости (332) не учитываются утечки и пере-течки жидкости между полостями гидромотора, и золотник принимается идеальным. При применении гидромоторов, для которых характерны значительные перетечки жидкости, расчетную схему звена золотник — гидромотор можно представить согласно рис. 124.
Для точек 1 и 2 уравнения расходов составят
Я\ = ?2+ ?з’,
Рис. 124. Расчетная схема звена зо-?3» лотник — гидромотор с учетом пере-
утечек гд:
80 см3/об; со тах — 400 рад/с; сплош ные линии при гд= 0,16 см5*с—^кг—*; штри ховые — при Гд — 4,8 см5-с~*«кг—1
что аналогично выражению (205), где гд — коэффициент утечек гидромотора (215).
Изменение нагрузочных характеристик привода с различными коэффициентами утечек показано на рис. 125. Рост утечек снижает жесткость разомкнутого привода и ограничивает максимальный момент, развиваемый приводом, особенно в зоне малых отклонений управляющего золотника (малых управляющих сигналов).
Внутренние утечки в гидромоторе увеличивают наклон регулировочной характеристики привода по давлению (см. рис. 55, 57) и делают ее нелинейной уже в зоне небольших перепадов давления.
Повышение жесткости нагрузочной Характеристики разомкнутого по положению привода и исключение вредного влияния утечек в гидромоторе может быть достигнуто путем введения обратной связи по скорости ОСС (рис. 126, а). Электромеханический преобразователь и гидроусилитель изображены на блок-схеме как одно звено — электрогидравлический преобразователь ЭГП.
При такой схеме построения привод реагирует на рассогласование U между входным сигналом UBX и сигналом обратной связи (7ТГ, пропорциональным скорости <о на выходе привода. Передаточные функции отдельных звеньев привода, принятые для статических расчетов привода, показаны на рис. 126, б, а динамических на рис. 128. Уравнения установившегося движения электрических и электрогидравлических звеньев привода принимаются линейными, а д звене Д, включающем золотник-гидродвигатель, влияние на скорость вращения со перепада давления р и перетечек гд учитывается согласно расчетной схеме на рис. 124 и выражению (334). При соответствующем выборе коэф-
Рис. 126. Блок-схема следящего электрогидравлического привода с обратными связями по скорости ОСС и положению ОСП: а — основные элементы; б — расчетные статические зависимости
Рис. 127. Образование погрешности отработки программы
фициентов Лупт, Кэгп и X усиления в цепи прямого управления и Косс — в Цепи обратной связи до скорости может быть достигнуто такое положение, при котором скорость со на выходе в установившемся движении будет поддерживаться с требуемой точностью во всем диапазоне нагрузки р, т. е. будет поддерживаться
требуемая жесткость (наклон) нагрузочной характеристики ф(р) (рис. 123). Предельной явится нагрузка pj, определяемая
достижением наибольшего смещения управляющего золотника ^тах (точка N на рис. 123). При нагрузках р > р\ скорость изме
няется по кривой Лтах дроссельного привода без скоростной обратной связи.
Действительно, полагая смещение h золотника гидроусилителя пропорциональным входному сигналу (см. рис. 126, б).
h = Xct7, (335)
где Хс = Хунт Кэгп — суммарный коэффициент усиления усилителя постоянного тока УПТ, электромеханического преобразователя и первого каскада гидроусилителя ЭГП, имея в виду, что при обратной связи по скорости
t/ = C/BX—1/тг, (336)
причем
Urr = Косс© (337)
и полагая, что утечки в гидродвигателе отсутствуют гд = 0, получаем следующее значение скорости со на валу двигателя
Ас^вх
0) =
j Рп
Так как произведение ХСХ = Хр составляет общий коэффициент усиления разомкнутого по скорости привода (при нулевых утечках и нагрузках), можем записать
Кр^вх /ООО\
Рп
Полученное выражение позволяет сделать следующие выводы.
Скорость привода при введении скоростной обратной связи при прочих равных условиях уменьшается. Восстановления скорости возможно достигнуть путем увеличения суммарного коэффициента усиления разомкнутого привода Лр, например, в результате увеличения коэффициента усиления Кут усилителя постоянного тока УПТ.
Жесткость привода возрастает (уменьшается влияние на скорость о) привода перепада давления р) с увеличением суммарного коэффициента усиления разомкнутого привода.
С увеличением суммарного коэффициента усиления Кр разомкнутого привода коэффициент усиления привода замкнутого по скорости Кзс стремится к величине, обратной коэффициенту усиления скоростной обратной связи Кзс—> —-—.
Косс
Действительно, для замкнутого по скорости привода
<о = K3CUB„ (339)
где Кзс из равенства правых частей выражений (338) и (339} составит
КЗС =
Р
КР
Рц
——, что обычно имеет место. Косс
(340)
(341)
Г, Лосс
Глубину вводимой скоростной обратной связи можно характеризовать коэффициентом Кг-
Кг = — ~ Кркосс.
Лзс
Измерение коэффициента практически просто и удобно производить путем сопоставления величин любого из параметров U, Ц Л, со, С7ТГ в скоростной цепи привода при ее размыкании и замыкании на участке I (рис. 126).
При учете перетечек в гидродвигателе скорость двигателя в приводе со скоростной обратной связью из уравнений (334) — (337) приобретает значение
(7ВХ —
гд2пр
Р
(О =
Рп
(342)
Рп
Р
или, учитывая соотношения (340) и (341),
„ п гд 2п_____________Р
*^ЗСи вх .
Кг Ял Г
р
со =
Рп
(343)
Р
Кг 1/ 1—у-
Последнее выражение показывает, что с ростом коэффициента Аг глубины скоростной обратной связи влияние утечек на скорость привода уменьшается (рис. 123,6, кривая ср). Выражение (343) позволяет определить зону нечувствительности привода- Полагая перепад давления р = рт =------где Мт —
Ял
момент трения на валу двигателя, и со = 0 находим, что нечувствительность привода по входному напряжению:
г д 2л Рт
(344)
вхн ~ КгКзс Ял
Рт
Рп может быть сколь угодно малой при выборе соответствующей величины коэффициента Кг глубины обратной связи по скорости. При конструировании станка обычно предъявляются требования обеспечения необходимой стабильности скорости в разомкнутом по положению приводе при колебаниях нагрузки, обеспечения заданно^ точности воспроизведения программы при обводе плавных контуров замкнутым по положению* приводом, а также необходимой чувствительности привода. Реализация перечисленных требований может достигаться путем введения обратной связи по скорости соответствующей глубины.
Стабильность скорости привода, разомкнутого по положению (такой привод называли ранее.регулируемым приводом), характеризуется величиной отношения
—100%-, (345)
где = Vq — vH — разность между скоростями v0 без нагрузки и цн по заданной нагрузкой на рабочем органе привода.
Обычно регламентируется нежесткость привода при нескольких величинах скорости w большая при нижнем значении скорости и меньшая при максимальных рабочих скоростях.
Имея в виду связь между скоростью v рабочего органа и частотой вращения двигателя
V = iptXB, (346)
отношение (345) может быть заменено отношением соответствующих частот вращения двигателя -----100%.
(до
Для выявления взаимосвязи между параметрами элементов привода составляем уравнение замыкания контура, охваченного обратной связью по скорости, полагая привод разомкнутым по положению на участке II (рис. 126):
^вх-^тг = ^ (347)
Идеализируя характеристики электрических и электрогидравлических элементов привода, принимаем зависимости между выходными и входными их параметрами линейными согласно (рис. 126,6), а в качестве факторов, влияющих на изменение скорости двигателя, учитываем перепад давления р в полостях двигателя от момента нагрузки и перетечки в двигателе, характеризуемые коэффициентом гд. Для получения необходимой скорости соо напряжение UBX можно подсчитать по формуле, полученной из зависимости (343) при р = гя = 0:
Сигнал обратной связи:
t/Tr = ^осс“н, (349)
где (он — фактическая скорость двигателя, отличающаяся от требуемой о)о в результате перепада давления р и утечек гд:
сон=(оо—Дсо. (350)
Связь между скоростью сон и рассогласованием (/, согласно расчетной схеме (рис. 126, б), составляет
<0н = ^уп Лэгп (к л/ 1-------------------— Р
У \ V Рп иХуптКэгп <?д И
откуда
Из совместного решения уравнений (347) — (351), с учетом соотношений (340) и (341), находим
Анализ полученного выражения позволяет сделать следующие выводы: повышения жесткости привода, стабилизации частоты вращения двигателя при изменении нагрузки можно достигнуть путем увеличения коэффициента Лг глубины обратной связи по скорости; при отсутствии перетечек в двигателе гд = 0 относи
тельное изменение скорости при прочих равных условиях не зависит от величины скорости; перетечки в двигателе наиболее существенно влияют на жесткость привода при низшем уровне скорости.
Выражение (352) позволяет определить требуемую величину коэффициента Кг глубины обратной связи по скорости для обеспечения заданной стабильности скорости привода:
(353)
Точность отработки программы замкнутым по положению (следящим) приводом характеризуется разностью Дф (рис. 127) между фактической величиной ошибки фош (приведенной к углу Ф поворота двигателя) и величиной ошибки фошо при строгой пропорциональности ее величине скорости <оо (прямая 1). Как было показано выше (см. рис. 10), отличие профиля изделия от теоретического контура при обработке плавных контуров на станке с ЧПУ наступает не от абсолютной величины погрешности положения фош, а от несоответствия Дф величин погрешности по различным координатам величинам скоростей со перемещений по этим координатам.
Таким образом, точность отработки программы приближенно определяется величиной:
Дф = Фош — Фош о (354)
или в линейных перемещениях рабочего органа Дб = бн— бо, где бн — фактическая погрешность положения нагруженного привода, бо — погрешность положения идеального линейного привода.
Определим влияние на точность отработки приводом программы перетечек в двигателе и нагрузки, считая характеристики всех остальных элементов привода идеальными. Составляем уравнение замыкания контура обратной связи по положению согласно расчетной схеме на рис. 126, б:
^зад-£/ф = Д^ (355)
где [/зад — сигнал, соответствующий заданному программой перемещению 5зад рабочего органа или углу фзаД поворота вала двигателя;
^зад = Фзад „ „ ’» (356)
АуЛзс
[/ф — сигнал, поступающий в сравнивающее устройство от датчика обратной связи по положению ОСП, соответствующий фактически отработанному перемещению фф($ф)
= ФфКосп; (357)
AU — сигнал, обеспечивающий в установившемся движении скорость двигателя (рабочего органа), строго равную заданной программе. Используя соотношение (342) и имея в виду, что UBX = AU • Ку, находим
Д£/ = +-------\ —-------Р —
М , /—V
I Л-pl/ i-— / \/ i-—
(358)
Из совместного решения уравнений (355) — (358), имея в виду, что погрешность положения б, приведенная к углу поворота двигателя, составляет
Фош Фзад Фф’ (?59)
причем при единичной обратной связи по положению при ФФ = Фзад сигналы 17ф = [/зад, находим
Введем параметр коэффициента усиления по скорости
Кео v
р =---- , который при принятых допущения^ из выра-
Фош Р — 0
жения (360) составит
Kv----= *уКоС-П- ~ WU (361)
фош0 „ ।
Досс + v Лр
Тогда
или приближенно с учетом соотношений (340) и (341)
Относительное несоответствие ошибки <рОш действительного нагруженного и ошибки фОшо идеального привода, определяющее 259
погрешность отработки программы при обводе плавных контуров, приведенное к углу поворота двигателя:
Дф = фош фошО*
Следовательно,
или приближенно с учетом соотношений (340) и (341),
Анализ полученного выражения позволяет сделать следующие выводы. Введение обратной связи по скорости позволяет повысить точнбсть обработки по заданной программе плавных контуров (статическую точность привода). Требуемая точность может быть достигнута путем применения соответствующей величины коэффициента Кг глубины обратной связи по скорости. При этом необходимо учесть величину принятого коэффициента Kv усиления по скорости (привода, разомкнутого по положению).
Несмотря на наличие утечек рабочей жидкости в двигателе и сил сухого трения в приводе, может быть достигнута требуемая чувствительность привода путем выбора определенных значений коэффициентов Кг и Kv-
Так как допускаемая погрешность воспроизведения Дбв или нечувствительность Дбн задаются обычно на рабочем органе, а связь между углом поворота двигателя и перемещением рабочего органа выражается соотношением
Д6 = Дф1р/хв, (366)
из выражения (365) находим требуемую величину коэффициента Кг по допускаемой погрешности воспроизведения Д<бв-
(367)
где р — перепад давления на двигателе, определяемый рабочей нагрузкой;
по допускаемой нечувствительности Дбн-
К \ ipGe г 2л_________Рт____
ДбЛ, д <7д / _21_
V рп
(368)
где рт — перепад давления трогания с места, определяемый моментом силы сухого трения.
Проведенный анализ показывает,, что введение обратной связи по скорости в гидропривод дроссельного регулирования позволяет практически исключить влияние на его работу (скорость, путь) таких существенных факторов, как перетечки рабочей жидкости в двигателе и мягкость нагрузочной характеристики дросселя. Очевидно, что аналогичное сглаживающее влияние она оказывает на другие нелинейности, присущие характеристикам элементов привода, охваченным обратной связью по скорости. Таким образом, введение обратной связи по скорости стабилизирует коэффициент усиления Кзс охваченного ею контура привода, и привод становится весьма близким к линейному. Возможность сокращения зоны нечувствительности и стабилизации скорости при переменной нагрузке позволяют существенно увеличить диапазон регулирования привода и доводить его до 10 000 и более. *
33. Некоторые вопросы динамики гидравлических следящих приводов с обратной связью по скорости
Динамические свойства электрогидравлического следящего привода с обратной связью по скорости (см. рис.'126, а) характеризует структурная схема, показанная на рис. 128. Передаточные функции отдельных элементов блок-схемы привода рассматривались выше. Они могут описываться следующими соотношениями.
Рис. 128. Структурная схема следящего электрогидравлического привода с обратной связью по скорости
Wi — Ку— передаточная функция усилителя; W2 = Купг^кс — передаточная функция усилителя постоянного тока У ПТ с корректирующим устройством, имеющим передаточную функцию №нс, зависящую от требуемой, формы и величины коррекции контура, охваченного обратной связью по скорости.
Приведенные выше передаточные функции усилителей идеализированы. В реальных условиях они описываются передаточными функциями апериодического, колебательного звеньев или их произведением, однако постоянные времени в усилителе обычно значительно меньше таковых гидромеханических элементов привода, в связи с чем такая идеализация допустима. Передаточная функция электрогидравлического преобразователя:
W7 _ _________________Кэгп________________
IV 2 — у
+ 1)(Гэ2мП^ + 2&эМЛнп* + 1)(^ + *)
/ к
где W3 =----!----передаточная функция обмоток электромеха-
Тэ«+ 1
нического преобразователя; /F If
W* ™:----------------------передаточная функция электромеха-
^ЭМП®2 + 2^ЭМП^ЭМП5 + 1
нического преобразователя;
W3 = —— передаточная функция гидроусили-TrS 4-1
теля сопло-заслонка — золотник.
Приближенно можно положить .—*эгп - (Т^ —. наи-
Тэгп$ 1
большая постоянная времени преобразователя, определяющая
первую сопрягаемую частоту его логарифмической амплитудной частотной характеристики — ЛАЧХ).
К
W4 =------------------— передаточная функция гидродвигателя,
5 as 1)
управляемого дроссельным золотником.
Для золотника с открытыми щелями в среднем положении линеаризованное уравнение расходов описывается первыми двумя членами выражения (96), а для четырехщелевого золотника с нулевым открытием щелей в среднем положении — выражения (98). В последнем случае размер перемещения золотника h во втором члене принимается постоянным в зависимости от исследуемых условий гармонических перемещений привода.
Таким образом, расход в подводящей магистрали гидродвигателя, управляемого от дроссельного четырехщелевого золотника, в общем случае составит
<2Д = <7л—ЯР = Cih—C2p. (369)
Производя вывод передаточной функции звена золотник — двигатель аналогично выполненному в разделе 23 с учетом вели-262
чины расхода QR в подводящей магистрали согласно выражению (369), полагая №д01 = №д02 = и d(Ap-n^- = 4 (что
at A at
соответствует симметричной схеме изменения давлений в подводящей и отводящей полостях гидромотора, при (которой сумма этих давлений остается постоянной), находим следующие значения основных параметров:
Обозначения соответствуют принятым в разделе 23:
^5 = Косс* — передаточная функция тахогенератора; 1Г6 =•= = Лосп^кп — передаточная функция датчика обратной связи по положению (вращающего трансформатора, редусина, индуктосина) с корректирующим устройством, имеющим передаточную функцию Гкп, зависящую от требуемой формы и величины коррекции контура, охватываемого обратной связью по положению.
Обычно для следящего привода станка техническим заданием оговариваются максимальная скорость (omax(^max), максимальное ускорение етах(атах) И допустимая ошибка фоштах(бтах) воспроизведения программы при максимальных скоростях и ускорениях или их комбинациях. При этом предполагается обеспечение устойчивости с регламентированной колебательностью М. Кроме тогб, могут оговариваться допускаемые максимальные отклонения скорости A<omax(A^max), максимальные ускорения Aemax(Aflmax) по отклонениям скорости и максимальные соответствующие им ошибки Аф(Дб). Перечисленные требования относятся к трем критериям качества динамических свойств привода: точности, быстродействию и запасу устойчивости.
Рассмотрим пути реализации перечисленных требований в следящих приводах с обратной связью по скорости. При этом воспользуемся методом логарифмических амплитудных частотных характеристик [6, 7]. Допустимость перехода к линеаризованной модели привода определяется высокими коэффициентами усиления разомкнутого привода, применяемыми при введении
обратной связи по скорости и реальной линеаризацией в связи с этим основных характеристик в замкнутом по скорости приводе.
Наиболее трудным моментом при расчете методом ЛАЧХ является установление связи перечисленных показателей качества переходного процесса с параметрами желаемой ЛАЧХ. Рассмотрим кратко некоторые связанные с этим вопросы. При этом будем иметь в виду, что при оценке точности по ошибкам при воспроизведении гармонического входного воздействия одновременно можно оценить и быстродействие по частоте этого воздействия. Тогда критерий точности и критерий быстродействия объединяются в один критерий динамической точности системы регулирования.
Требования к низкочастотной части желаемой ЛАЧХ, связанные с требуемой точностью. Уравнение замыкания контура обратной связи по положению для привода, имеющего структурную схему согласно рис. 128, можно записать в виде
д^(0=<4аД(0-ад. (371)
где выражает ошибку привода. Без учета внешних возмущающих воздействий
^ф(0=И7р(5)Д1/(0, (372)
где Wp(s) —передаточная функция разомкнутого по положению привода, причем Wp(s) — WiW3CW6.
Решая (371) и (372) совместно, получаем для ошибки привода
АС7(О =
t/зад (0
•+ГР(5) '
(373)
Точность привода можно оценить по воспроизведению гармонического входного сигнала с амплитудой фщах и частотой а>к
ф = Фтах Sin ®Kt. (374)
Тогда амплитуда ошибки фош шах может быть найдена с помощью модуля передаточной функции по ошибке (373), так как существует линейная связь между параметрами и ошибками по этим параметрам в цепи привода:
Фош max I 1 . то? / • \ I ’
I 1+ №р(/(дк)|
(375)
где U7p(j©K)—частотная передаточная функция разомкнутого привода.
Так как обычно фош max < фтах (соответственно Д{/тах < ^зад), то имеет место | Wv (/сок) | > 1.
Поэтому вместо выражения (375) можно приближенно положить
Фош max
Углах
1^р(/0>к)1 *
(376)
Полученная зависимость позволяет сформулировать требование к ЛАЧХ привода: для воспроизведения входного воздействия по выражению (374) с ошибкой, не превышающей фош max, ЛАЧХ привода должна проходить не ниже контрольной точки Ак (рис. 129) с координатами
(о = сок; L К) = 201g I Wp (/шк) | = 201g . (377)
Фош max
При требовании обеспечения максимальной скорости сотах, максимального ускорения еШах при ошибке, по положению не превышающей фошmax, эквивалентный режим гармонического входного воздействия может быть определен из соотношений
Шк = ; (378)
^тах
Фтах = (379)
®тах
и выражения (377) или коэффициента усиления по скорости
Kv = . (380)
Фош max
В последнем случае ордината контрольной точки Ак определяется прямой /, проходящей под наклоном — 20 дБ/дек и пересекающей ось частот в точке со значением Kv Прямая 1 соответствует постоянной амплитуде скорости с убывающей при движении влево, амплитудой ускорения. Прямая 2, проведенная из точки Ак под наклоном —40 дБ/дек, соответствует постоянной максимальной амплитуде ускорения и убывающей при движении вдоль прямой вправо от точки Ак амплитуде скорости. Пересечение прямой 2 с осью частот определяет базовую частоту соо, величина которой может быть определена из соотношения
(ло = уке. (381)
Коэффициент усиления по ускорению:
Ke = е-т^--. (382)
Фош max
Таким образом, если ЛАЧХ привода будет проходить не ниже запретной заштрихованной области, ошибки в следящем приводе не будут превышать фош шах при работе со скоростями и ускорениями в пределах <отах и етах. При применении указанных
Рис. 129. Построение запретной обла сти ЛАЧХ привода
Рис. 130. Формирование ЛАЧХ разом кнутого привода для обеспечения ус тойчивости
формул предполагалось, что ошибка в приводе определяется только задающим воздействием J73an(0- При действии на привод возмущений необходимо увеличение коэффициентов усиления привода. То же относится к условиям одновременного задания скоростей и ускорений. Поэтому выбор того или иного расположения ЛАЧХ относительно контрольной точки должен определяться конкретными условиями. В общем случае рекомендуется желаемую ЛАЧХ располагать относительно запретной зоны так, как это показано на рис. 129, т. е. первая сопрягаемая частота W1 ЛАЧХ привода совпадает с контрольной частотой сок. Вся ЛАЧХ при Qi = (1)к поднимается вверх на 3 дБ, что соответствует коэффициенту усиления:
Кр = /2 <°тах . (383)
Фош max
Базовая частота приобретает значение
Ыо = -|/Ке=|/ /2 6тах . (384)
Г Фош max
Требования к запасу устойчивости. Для оценки запаса устойчивости, т. е. степени удаления от колебательной границы устойчивости, при использовании частотных критериев применяется показатель колебательности М [7, 47]. Показатель колебательности М = 1,1 -т- 1,3 соответствует очень хорошему демпфированию системы, при котором перерегулирования весьма малы. Достаточным обычно считается показатель колебательности М = 1,3 4- 1,5, предельным М = 1,6 4- 1,8.
Условием устойчивости замкнутого следящего привода является прохождение асимптоты ЛАЧХ разомкнутого привода с единичной обратной связью оси частот (оси нуля децибелл) при наклоне — 20 дБ/дек, а величина запаса устойчивости определяется только протяженностью h этой асимптоты (рис. 130). 266
Из общей теории систем автоматического регулирования рекомендуется принимать при исходной базовой частоте too*.
Т2
1 (до
М
М— 1 ’
(385)
1 f М(М—1) ©о Af + 1
(386)
При этом имеется в виду, что соответствующие сопрягаемые частоты со2 = -— и (о3 = —. Если положение ЛАЧХ фиксиру-Т3
ет частота среза соСр, соответствующая точке пересечения асимптоты ЛАЧХ оси частот, тогда вместо выражений (385) и (386) можно пользоваться неравенствами:
со
(387)
(388)
ср
М— 1 ’
При невысоких коэффициентах усиления по скорости можно достичь желаемой ЛАЧХ без коррекции. При этом необходимо исследовать возможность доведения суммы всех постоянных времени разомкнутого по положению привода до значения, определяемого формулой
т т 1 т . / 1 Л!2 4-М ,кл . 1
Г1 + Г2 + Г3+ ... < —-------------------(М < 1,3).
Ап &
Для контура, охваченного обратной связью по скорости, расчет основных параметров ЛАЧХ проводится аналогично изложенному для контура с обратной связью по положению. При этом контур, охваченный обратной связью по скорости, представляет собой статическую систему, имеющую в низкочастотной области нулевой наклон (участок О на рис. 131). О общем случае передаточная функция разомкнутого скоростного контура имеет вид
№pc(s) -______________h______________
Р (Tos+ l)(TiS+ 1) (T3s +>)... •
(389)
Для такой функции условие обеспечения заданного показателя колебательности составляет [7J:
«'-bMrSP=T(M<13) (39О)
То 2
Это указывает на большое значение постоянной времени То как фактора, увеличивающего запас устойчивости привода. Повышение коэффициента усиления Кг при заданной колебательности может быть выполнено при одновременном увеличении по-
Рис. 131. Формирование ЛАЧХ разом- Рис. 132. Переходные процессы при кнутого контура с обратной связью приложении мгновенной нагрузки по скорости
стоянной времени Го. Эффективным средством увеличения Го может служить шунтирование полостей гидродвигателя дросселем.
Кроме того, коэффициент усиления разомкнутого контура с обратной связью по скорости равен коэффициенту Кг глубины скоростной обратной связи согласно выражению (341). Величина его должна удовлетворять условиям статики привода, изложенным в разделе 32.
Запретная область для разомкнутого контура с обратной связью по скорости может быть построена аналогично вышеизложенному исходя из максимальных допустимых отклонений скорости Дотах, ускорений Летах и динамических погрешностей Лфд max- Величина ускорения Детах определяется из условий обеспечения заданной динамической погрешности при внезапном изменении нагрузки и изменении скорости на Дсощах- Переходный процесс может иметь вид, показанный на рис. 132. Заданный программой путь соответствует прямой /. В момент времени t\ мгновенно увеличилась нагрузка, в результате которой скорость о)1 уменьшилась на До). При этом в начальный момент привод начнет двигаться по штриховой прямой 2. Под действием возрастающего рассогласования Д<рд между программой и фактическим положением возникнет ускорение, которое восстанавливает скорость, и привод по штриховой кривой 3 выйдет с течением времени на прямую 4.
Угловое перемещение вала двигателя привода будет совершаться по прямой 4 со статической ошибкой Д<р относительно заданного программой пути (прямая /). Динамическая ошибка может не превысить статическую при равноускоренном движении в переходном режиме с ускорением
де>^.
2Д<р
(391)
В этом случае переходный процесс закончится за время А/ и привод без перерегулирования выйдет на прямую 4.
Таким образом, в то время как контур привода, замкнутого по пути, обеспечивает величины максимальных требуемых скоростей (Отах, ускорений 8тах И ошибок В Пределах фош max, КОНТур привода, замкнутый по скорости, лимитирует отклонения скорости Д(Отах И ПОГреШНОСТИ ВОСПроИЗВеДеНИЯ Афош max программы перемещения в процессе работы привода.
В табл. 5 приведены эксплуатационные данные привода с обратной связью по скорости, которые значительно превосходят данные обычных одноконтурных приводов. Последующее совершенствование привода может быть достигнуто введением в управление привода скоростного сигнала (7С (рис. 133), пропорционального програмглируемой скорости v перемещения. Такой способ управления широко применяется в современных системах ЧПУ. При этом сохраняются все приведенные выше рекомендации по выбору параметров привода. Введение скоростного сигнала теоретически позволяет уменьшить скоростную погрешность фош о до нуля (см. рис. 127), вследствие чего может быть уменьшен коэффициент усиления привода по скорости Kv (например, по рекомендациям фирмы «Оливетти», Италия, до Kv = = 10 4- 40 1/с) и повышены скорости перемещений до 10 и более м/мин. Эксплуатационные данные привода со скоростным управляющим сигналом приведены в табл. 5. Они показывают, что такой привод позволяет в станках с системами ЧПУ достигнуть высоких чувствительности, точности воспроизведения и скоростей перемещения.
Эффективным средством повышения устойчивости гидравлических следящих приводов дроссельного и объемного регулирования является введение обратной связи по перепаду давления в полостях двигателя (по нагрузке, ускорению). Дополнительная отрицательная обратная связь при этом может вводиться от специального дифференциального датчика Дд, включенного в трубопроводы, идущие к исполнительному двигателю, например так, как это показано штрихпунктиром на рис. 27, или от устройства, вырабатывающего сигнал, пропорциональный производной от напряжения тахогенератора, соединенного с валом двигателя, что успешно осуществлено в работах А. И. Тихонова. Эффект отрицательной обратной связи по давлению (нагрузке) проявляется в демпфировании привода, снижении его колебательности (58].
Рмс. 133. Блок-схема привода с управляющим скоростным сигналом
34. Особенности безредукторных гидравлических > следящих приводов с гидромоторами
и конструирование электрогидравлических приводов для станков с ЧПУ
Первоначально в следящих приводах станков с ЧПУ вращение ходового винта обычно осуществлялось с помощью гидромотора с малым рабочим объемом, который работал на относительно высоких скоростях и приводил в движение винт через понижающий редуктор. Создание ролико-лопастных гидромоторов позволило соединить винт непосредственно с двигателем.
Безредукторные приводы имеют следующие преимущества: значительно меньшие габаритные размеры по сравнению с аналогичным приводом с редуктором; меньшую скорость, хотя стоимость редуктора частично компенсируется более высокой стоимостью более крупного гидромотора, требуемого для без-редукторного привода; большую надежность, чем привода с редуктором вследствие более низких скоростей и ускорений деталей и меньшего количества деталей.
Основные трудности, возникающие при переходе к безредук-торному приводу, связаны с обеспечением плавности движения на весьма небольшой (1 об/мин и даже ниже) частоте вращения, обеспечением устойчивости и быстродействия при высоких, приведенных к валу гидромотора инерционных нагрузках от шарикового винта и рабочего органа (превосходящих в 50— 100 раз момент инерции собственно гидромотора) и обеспечением беззазорной передачи между валом гидромотора и винтом.
Перечисленные трудности можно преодолеть при применении электрогидравлических следящих приводов с обратными связями по скорости и положению, построенных на основе быстродействующих электрогидравлических преобразователей и гидромоторов ролико-Лопастного типа.
Конструкция электрогидравлического следящего привода, разработанного В. В. Громовым, примененная в пятикоординатном фрезерном станке модели ФП-14МЛ с ЧПУ в безредук-торном исполнении, показана на рис. 134 и 135.
Привод состоит из ролико-лопастного гидромотора 1 типа ГМ-80 производства Людиновского агрегатного завода, электрогидравлического преобразователя 2 типа ПЭГ-ПМ, клапанной коробки 3, которая служит для предохранения привода от перегрузок и соединения электрогидравлического преобразователя с гидромотором. Эксперименты и расчеты показывают, что предохранительные клапаны при безредукторном приводе необходимы, учитывая возможность кратковременных увеличений давлений от значительных инерционных нагрузок при 270
3
2
Рис. 134. Конструкция электрогидравлического следящего привода, применяемого в станке ФП-14МЛ в безредукторном исполнении
быстрых остановах на рабочих и особенно холостых перемещениях.
На клапанной коробке 3 снизу укреплен дроссель 4, сообщающий полости гидромотора и устанавливающий необходимый уровень перетечек. Тахогенератор 5 (типоразмера ТД-103), соединенный с помощью специальной сильфонной муфты с валом гидромотора, устанавливается в стакан 6, закрепленный на задней крышке гидромотора. Горизонтальное расположение преобразователя позволяет уменьшить габаритные размеры привода, обеспечивает удобство монтажа присоединительных трубопроводов и дополнительной гидравлической аппаратуры. В табл. 6 приведены некоторые технические данные двух модификаций привода: в комплектации сэлек-трогидравлическими преобразователями моделей ПЭГ-ПМ-10/160-100 и ПЭГ-ПМ-16/160-100.
Данные показывают возможности регулирования скорости привода в широком диапазоне (до 6000—9000).
Соединение вала двигателя с ходовым винтом должно быть жестким на кручение и гибким в радиальном и осевом направлениях для ограничения
Рис. 135. Схема привода, показанного на рис. 134 ”
Таблица 6. Технические данные электрогидравлических следящих безредукторных приводов станка ФМ-14
Типоразмер электрогидравлического преобразователя
Параметры привода ПЭГ-ПМ-10/160-100 ПЭГ-ПМ-16/1 60-100
Рабочий объем гидромотора, см3/об. . 80 80
Номинальное давление, кгс/см2 . . . Диапазон регулирования при рабочем 160 160
ходе, об/мин .Наибольшая скорость холостого хо- 0,1—280 0,1—680
да, об/мин Наибольший крутящий момент 380 960 "
(р = 2/Зрп), кгс м Наибольшая мощность, кВт Момент инерции вращающихся ча- 13,5 13,5
4 9,5
стей, кгс-см с2 Деформируемый объем, см3 Входной сигнал, подаваемый на преобразователь, мА 0,02 0,02
50 65
±100 ±100
Вес привода, кг 30 33
радиальных и осевых нагрузок на ротор гидромотора (в пределах 25—50 кг для различных типоразмеров гидромотора). Для этих целей соединение вала гидромотора с ходовым винтом осуществляется специальной гибкой муфтой для беззазорной передачи, общий вид которой показан на рис. 136. Передача крутящего момента между входной 1 и выходной 3 полумуфтами осуществляется пластинами 2 ограниченной жесткости в поперечном направлении, через промежуточное плавающее кольцо 4. Муфта рассчитана на передачу крутящего момента до 10 кгс • м с крутильной жесткостью 9 • 103 кгс • м/рад. При допустимой радиальной силе на валу двигателя до 50 кгс допускается угол перекоса осей ходового винта и вала гидромотора до 15' и их смещение до 0,3 мм.
Рис. 136. Гибкая муфта для беззазорной передачи
272
Как было показано выше, высокая чувствительность гидромоторов ролико-лопастного типа (см. рис. 97), требующих для троганья с места в следящем режиме при подведенном давлении рп = 160 кгс/см2 перепада давления менее 1 кгс/см2 и обладающих устойчивой положительной характеристикой вязкого трения практически во всем диапазоне оборотов, в сочетании с системой управления со скоростной обратной связью обеспечивают плавность движения при небольшой частоте вращения (до 0,1 об/мин).
Расчеты и эксперимент показывают, что в условиях применения высоких коэффициентов усиления разомкнутого привода со скоростной обратной связью и демпфирующей коррекции динамические свойства безредукторного привода близки к динамическим свойствам редукторного, малоинерционного привода.
Анализ величин слагаемых в выражениях (370) для параметров передаточной функции гидродвигателя, управляемого четырехщелевым дроссельным золотником, применительно к безредукторным приводам, отличающимся повышенным рабочим объемом дд двигателя и приведенным к валу двигателя моментом инерции /, показывает, что без внесения существенной погрешности эти выражения могут быть записаны в следующем упрощенном виде:
Qu
В этих выражениях введение множителя 2 в подкоренных выражениях относится к следящему режиму управления двигателем, при котором перепад давления в полостях двигателя, необходимый для преодоления момента нагрузки, образуется в результате равного повышения давления в одной полости двигателя и снижения во второй таким образом, что сумма давлений в полостях остается постоянной^ и р авна подведенному давлению Рп, а параметр Ц7д0 составляет объем одной полости двигателя (половина общего объема жидкости в золотнике, двигателе и соединяющих их маслопроводах).
Резонансная частота о)р гидродвигателя даже при большой инерционной нагрузце обычно достаточно высокая. Так, для
станка ФП-14МЛ при инерционной нагрузке J = 100 /р = = 2 кгьс.см.с2 (ур = 0Q2 кгс-см*с2— момент инерции ротора двигателя), рабочем объеме дд = 80 см3, 1Гд0 = 50 см3 и £Пр = = Ь4-1104 кгс/см2 резонансная частота составляет (ор = 34 Гц. Вместе* с тем в структуре привода следует избегать колебательных зв!еньев с резонансами в диапазонах низких и средних частот (MieHee go—100 Гц). В звене золотник — двигатель этого
можно достигнуть вследствие обеспечения коэффициента демпфирование |д 1 путем соответствующего выбора множителя ('•д + О?2) в уравнении (392), например путем шунтирования двигателя дросселем. При £д 1 звено золотник — двигатель пре-образу^ется из колебательного в апериодическое второго порядка, постояг^ные времени которого Г3 и Г4 определяются по формулам, прриведенным в работе [7]. При этом перетечки обычно составляет сравнительно небольшую величину. Так, для привода станка ФП-14МЛ |д == 1 достигается при (гд + Сг) « 0,8 см5/сХ Хкгс, ччто близко к коэффициенту утечек ролико-лопастного гид-ромото|ра. Повышая перетечки, можно раздвигать постоянные времен^ и соответственно смещать сопрягаемую частоту со3 =—
Т3
в облаасть пониженных частот, а сопрягаемую частоту со4 = -у— в область высоких частот. Целесообразность образования большой пе *рВОй постоянной времени отмечалась выше при анализе динами 1ЧеСкИХ свойств контура с обратной связью по скорости
Возможность регулирования постоянных времени звена золотник — двигатель можно проследить по табл. 7.
Таблица 7. Относительное изменение постоянных времени ^Лри варьировании коэффициента демпфирования £д двигателя
Постоянцная времен11и £ д
1 1,2 1,5 2 3 4
£з_ 1 1,86 2,62 3,73 5,82 7,87
т_± Тл 1 0,54 0,38 0,27 0,18 0,13
На о основании изложенного следует, что в гидродвигателях, использ^уемЫх в безредукторных следящих приводах подач с обрат.тной связью по скорости, нет необходимости добиваться минима^льных коэффициентов гд перетечек.
В св^язи с высокими динамическими возможностями звена золотни(1к— двигатель, особое значение приобретают динамиче-274
ские характеристики электрогидравлического преобразователя, величина его постоянной времени, как апериодическое звено первого порядка (при сдвиге фазы 45°).
Рис. 137. ЛАЧХ разомкнутых по скорости контуров привода с ЭГЛ различного быстродействия: а — высокого; б — низкого
На рис. 137, а приведена ЛАЧХ разомкнутого по скорости контура привода одной из координат сверлильно-фрезерного станка с ЧПУ модели СФП-4 с местом размыкания I (см. рис. 128) на выходе датчика обратной связи по скорости. Первую сопрягаемую частоту сщ « 15 Гц дает гидродвигатель с рабочим объемом 9Д = 36 см3, а вторую сог ~ 80 Гц электрогид-равлический преобразователь с высокими динамическими качествами.
В результате применения коэффициента глубины скоростной обратной связи Кг = 32 (рис. 137, а) ЛАЧХ пересекает ось нуля децибелл с наклоном свыше — 20 дБ/дек, что указывает на неустойчивость замкнутого по скорости привода. На рис. 137 штриховой линией показана максимальная по частоте среза желаемая ЛАЧХ, у которой для обеспечения устойчивости замкнутого по скорости контура привода нулевая ось пересекается под наклоном — 20 дБ/дек с запасом по 10 дБ с каждой стороны от частоты среза, составляющей оэСр ~ 100 Гц. Разность амплитуд имеющейся и желаемой ЛАЧХ дает требуемую интегродифференцирующую ЛАЧХ корректирующего звена IFKC (рис. 137, а) усилителя постоянного тока, показанную штрих-пунктиром на рис. 137, а, которая может быть реализована соответствующей цепочкой из емкостей и сопротивлений [6, 7].
На рис. 137, б приведена ЛАФЧХ разомкнутого по скорости контура привода координаты станка модели ФП-14МЛ, построенного на основе ролико-лопастного гидродвигателя ГМ-80 и электрогидравлического преобразователя ПЭГ-ПМ-10/160-100, снятая при стократной инерционной нагрузке J = 100 /р = = 2 кгс • см • с2 и коэффициенте глубины обратной связи по скорости Кг = 130. Первую сопрягаемую частоту ом ~ 8 Гц дает гидродвигатель, вторую сог ~ 25 Гц — электрогидравлический преобразователь.
Введение интегро-дифференциальной коррекции позволяет получить желаемую ЛАЧХ с максимальной частотой среза СОср ~ 16 Гц.
Электрогидравлический привод является одним из наиболее перспективных видов приводов для станков с ЧПУ вследствие своих высоких статических и динамических качеств. Как рассматривалось выше, электрогидравлический привод успешно применяется в сочетании со всеми видами систем управления: импульсными, аналоговыми и кодовыми. Укрепненная блок-схема наиболее распространенного привода в комплексном исполнении показана на рис. 138. Привод включает насосную установку (в последних моделях обычно с автоматическим регулированием расхода) НУАРР, электрогидравлический привод дроссельного ЭГПДР или объемного регулирования, блок управления БУ и комплекс обратных связей ОС. Блок управления получает команды от системы числового программного управ-276
Рис, 138. Укрупненная блок-схема электрогидравлического следящего привода в комплексном исполнении
ления СЧПУ, привод дроссельного или объемного регулирования сообщает перемещения рабочему органу РО
станка через шариковый винт или другую передачу. Выше были
рассмотрены схемы и конструкции каждого агрегата привода, входящего в блок-схему. Однако в зависимости от вида системы управления и технических требований к станку, а значит и при
воду, конкретное исполнение отдельных агрегатов привода может быть различным. Так, электрогидравлический привод ЭГПДР может снабжаться рядом дополнительных узлов, которые расширяют его возможности или служат для улучшения его характеристик.
На рис. 135 была показана схема привода, примененного во фрезерном станке с ЧПУ модели ФП-14МЛ. Схема более полного комплекта, выполненного в разработках ВНИИГид-ропривод, а также рядом зарубежных фирм «Indramat» (ФРГ), «Moog» (США) и других показана на рис. 139, а и б. К гидромотору 1 (рис. 139,6) кроме электрогидравлического преобразователя 2, блока предохранительных клапанов 3 и дросселя 4 подсоединены золотник ускоренных ходов 6, управляемый золотником 7 с электроуправлением, и шунтирующий золотник 5. Золотник 6 обеспечивает холостые хода с повышенной скоростью
путем направления жидкости в гидромотор, минуя электрогидравлический преобразователь 2. Применение такого золотника возможно при кодовых и аналоговых системах ЧПУ с устройствами абсолютного отсчета и позволяет использовать для управления рабочими ходами электрогидравлические преобразователи небольшой пропускной способности, имеющие высокие динамические показатели. Золотник 5 соединяет полости гидромотора между собой, чем обеспечивается возможность перемещения рабочего органа вручную, и предохраняет от неуправляемого ухода двигателя с позиции при отключенной обратной связи по положению в результате дрейфа нуля электрогидравлического преобразователя.
Общий вид гидропривода, согласно схеме на рис. 139, б разработки ВНИИГидропривода показан на рис. 139, а. Размеры указаны для привода с рабочим объемом гидромотора qn = 80 см3/об. Увеличение количества агрегатов в приводе увеличивает его размеры и затраты на изготовление, а также приводит к росту объема жидкости, находящейся под давлением, и снижению надежности. Поэтому в каждом конкретном случае должно выбираться минимально необходимое количество агрегатов, входящих в привод.
б)
К вопросам синтеза электрогидравлического привода относится также выбор надлежащего усилителя постоянного тока с корректирующим устройством, составляющих основу блока управления БУ.
Ряд зарубежных фирм («Indramat» ФРГ, «Dowty», Англия) изготовляют вместе с приводом усилители, которые строятся на базе интегральных микромодулей. Укрепненная схема уси-278
Рис. 140. Укрупненная схема усилителя для управления электрогидроприво дом станка СФП-4
лителя, примененного в приводе станка СФП-4, приведена на рис. 140. Суммарный сигнал [/вх ошибки по положению управляемой координаты и требуемой скорости движения привода поступает на входное сопротивление /?вх, пройдя которое усиливается в операционном усилителе У и поступает на обмотку электрогидравлического преобразователя ЭГПУ пройдя которую через сопротивление /?д заземляется, а через сопротивление /?ос образует цепь обратной связи усилителя. Наличие обратных связей повышает стабильность характеристик усилителя и создает высокое выходное сопротивление, необходимое для снижения электрической постоянной времени катушек преобразователя [15]. Кроме суммарного сигнала на вход усилителя через сопротивление /?тг поступает сигнал обратной связи от тахогенератора ТГ, который вычитается из первого. Для предохранения от перегрузки служат ограничители напряжения ДЛД2. Сопротивление /?к и емкость Ск формируют сигнал кор-
Рис. 141. ЛАФЧХ усилителя постоянного тока с корректирующим устройством
рекции U7KC. При параметрах /?вх == 7,5 кОм, /?тг = 180 кОм, 7?ос = 1,5 кОм, /?к = 75 кОм, /?д = 15 Ом, Сь = 4,7 мФ, сопротивлении обмоток ЭМП 2 X 22 Ом, индуктивности Н = = 2 X 0,022 Г, логарифмическая амплитудная и фазовая частотные характеристики усилителя имеют вид, показанный на рис. 141. Расчет корректирующих звеньев усилителей рассмотрен в работах [6, 7].
35. Выбор основных параметров электрогидравлических следящих приводов с обратной связью по скорости
Станки с ЧПУ отличаются от обычных станков не только характером управления, но и способностью автоматически обрабатывать детали с высокими скоростями и большой точностью. Для этого перемещения их рабочих органов с требуемой точностью должны осуществляться независимо от величин нагру’ зок, скоростей и ускорений, что предъявляет соответствующие требования как к приводу, так и к механике станка. Поэтому при разработке привода необходимо учитывать собственную частоту механической системы привода, степень ее демпфирования, вид и массу характеристики трения в рабочем органе станка (28].
Собственная частота fMC в Гц механической системы привода, как известно, представляет собой частоту, с которой механическая система вибрирует, если приложить к ней нагрузку и внезапно ее снять и может быть определена по формуле
fMc = -7Ll/ —• (393)
2л у т
Обычно скорость, с которой станок может точно позиционировать или точно проходить путь, пропорциональна самой низкой собственной частоте, которая может быть ограничена конструкцией станка.
Типичные собственные частоты, которые имеют место в механических системах приводов станков с ЧПУ, по данным фирмы «Оливетти», Италия, следующие
Вес механической системы в кг 5000 10 000 25 000 50 000 Собственная частота в Гц . . 20—30 15—25 12—22 8—15
Общий смысл требований к жесткости: деформации станка под действием рабочих статических и динамических нагрузок должны быть во много раз меньше требуемой точности.
Демпфирующие свойства конструкции характеризуются скоростью затухания собственных колебаний. Повышение демп-280
фирования и обеспечение быстрого затухания колебаний обычно достигается выбором соответствующего отношения длины к поперечному сечению, предотвращением концентрации масс, исключением в конструкции участков и сечений, слабо работающих на изгиб.
Характеристики трения покоя и движения имеют решающее влияние на разрешающую способность станка, под которой понимается минимальная величина перемещения, которую может осуществить рабочий орган станка. Разрешающая способность, например салазок, представляет собой отношение разности усилий трения покоя и движения к жесткости привода. Поэтому станки снабжаются антифрикционными, роликовыми или гидростатическими направляющими.
Выбор основных параметров многоконтурных приводов принципиально производится в такой же последовательности, как одноконтурных. Общий смысл — выбор типа привода и его размеров соответственно требованиям момента (силы) и скорости с последующим контролем статических и динамических характеристик: чувствительности, точности, разрешающей способности, устойчивости и быстродействия. Если эти условия не выдерживаются, то типоразмер привода должен быть пересмотрен (обычно увеличен).
Тип привода (гидроцилиндр, гидромотор-винт или гидромо-тор-реечная передача) выбирается из следующих соображений. Цилиндр — в случаях коротких ходов (до 100—300 мм) или очень высоких скоростей (1—2 м/с), так как жесткость цилиндра в 100—150 раз ниже жесткости винта той же площади. Гидромотор-шариковый винт является наиболее часто применяемым приводом вследствие высокого к. п. д. шарикового винта, минимального зазора, низкого износа и постоянной точности шага. При длинах перемещений свыше 3000 мм инерция винта и его упругость становятся чрезмерно большими и лучшие характеристики можно получить от привода гидромотор — реечная передача при жесткой и беззазорной конструкции последней.
Выбор размеров привода можно производить в следующей последовательности. '
1. Установить максимальную силу /?тах на рабочем органе, включая силу трения.
2. Установить силу Г, требуемую для перемещения рабочего органа без рабочих нагрузок.
3. Определить проектную силу /?Пр, для этого умножить максимальное рабочее усилие на 1,5 и силу трения Т (без нагрузки) на 4. Большая из цифр 1,5 7?тах и 4Т составляет проектную силу.
4. Определить номинальную силу /?н путем увеличения проектной силы /?пр с учетом к. п. д. механической передачи (например, для шарикового винта делением на 0,9).
5. Определить необходимую приведенную площадь Fnp привода путем деления номинальной силы /?н на подведенное давление рп
Fnp = -^-. (394)
Рп
Приведенная площадь соответствует площади гидроцилиндра.
6. Определить рабочий объем двигателя 9Д из соотношения
Qл ~ ^пр^хв^р» (395)
где /Хв — шаг ходового винта; /р— передаточное отношение редуктора между гидромотором и винтом.
Для безредукторного привода ip = 1. Для винтов большого диаметра обычно является предпочтительным наименьший из имеющихся шагов; для винтов малого диаметра — может быть более крупный шаг — для получения более высоких скоростей. Шаг винта и передаточное отношение редуктора должны быть согласованы с применяемой измерительной системой в цепи «обратной связи привода (ценой импульса, ценой оборота фазы и т. п.).
7. По каталогу выбирается двигатель с ближайшим большим рабочим объемом. Если рабочий объем имеющегося двигателя значительно больше требуемого, то может быть соответственно снижено подведенное давление рп или изменено передаточное отношение редуктора или шаг винта.
8. Определить суммарный момент инерции Jc, приведенный к валу двигателя.
9. Проверить гидравлическую резонансную частоту привода, например по уравнению (370). Желательным является резонансная частота
50—25 Гц. (396)
2л
Если резонансная частота получается недостаточной, необходимо увеличить рабочий объем гидродвигателя.
10. Определить максимальную частоту вращения двигателя из соотношений
Uyv тах
^хх ~ ~ И max “ ~ ’
‘хв1? *хвгр
где vxx — максимальная скорость рабочего органа при ускоренных перемещениях и vpmax— при максимальной нагрузке.
11. Определить расходы, необходимые для осуществления ускоренных (холостых) перемещений Qxx и для рабочих перемещений при наибольшей скорости и максимальной нагрузке Фр max ИЗ соотношения
Q = пдл.
(398)
12. Выбрать компоновку электрогидравлического привода и, в частности, решить вопрос о возможности управления ускоренными перемещениями от параллельно включенного дополнительного золотника с позиционным управлением.
13. Определить требуемый типоразмер электрогидравлического преобразователя: при управлении от преобразователя ускоренными и рабочими перемещениями максимальный расход преобразователя Qnp должен быть
или
пр 1>3QXX 1 Д
пр 1 »$Qp max = 1,8Ир щах^/д-
(399)
Выбирается большая величина.
Под максимальным расходом преобразователя Qnp понимается расход во внешней цепи при максимальном токе управ-
Т л 1
ления /тах и перепаде на щели = — Рп •
2
14. Определить требуемый максимальный расход по приводу одной координаты
Q« = Qnp + Qyn + QyT, (400)
как сумму максимального расхода преобразователя Qnp, расхода в канале управления преобразователем (сопле-заслонке) Qyn и возможных утечек в системе QyT (5—10% от Qnp).
15. Определить требуемую производительность насосной установки по максимальной сумме расходов одновременно работающих приводов координат в станке.
16. Разработать гидрокинематическую схему следящего привода с учетом рекомендаций, данных в главах III, VI, и VIII, в том числе насосной установки, средств блокировки, очистки рабочей жидкости, установки аккумуляторов и др.
17. Определить желаемую (требуемую) ЛАЧХ разомкнутого по положению привода в соответствии с рекомендациями, приведенными в разделе 33. Рассчитываются параметры контрольной точки Ак (рис. 142) и запретной области по заданным наибольшим скоростям сотах, ускорениям 8Шах двигателя привода и допустимой погрешности <рОштах, например, по формулам (378) и (383). Рассчитывается базовая частота соо по формуле (384) и сопрягаемые частоты сог, соз из соотношений (385) — (388) с учетом заданного показателя колебательности М.
18. Определить возможную располагаемую ЛАЧХ (поз. 1 на рис. 142,6) по желаемой, путем суммирования ее с интегральной (поз. 2 на рис. 142,6) или интегро-дифференциальной коррекцией, вводимой в контур обратной связи по положению. При этом первая из них является предпочтительной по простоте реализации.
Рис. 142. Проектирование ЛАЧХ привода
19. Определить ЛАЧХ контура привода замкнутого скоростной обратной связью (рис. 142, в) по располагаемой ЛАЧХ разомкнутого привода по положению и заданному коэффициенту усиления Азе из соотношения (339). При переходе от ЛАЧХ по положению к ЛАЧХ по скорости наклон асимптот изменяется на + 20 дБ/дек.
20. Определить желаемую (требуемую) ЛАЧХ разомкнутого по скорости привода (рис. 142, г) в соответствии с рекомендациями, приведенными в разделе 33, по динамической жесткости привода. Особое внимание необходимо обратить на расчет требуемого коэффициента /<г глубины скоростной обратной связи по заданным чувствительности, жесткости, точности во всем заданном диапазоне скоростей в соответствии с рекомендациями, приведенными в разделе 32 — соотношения (353), (367) и (368). При этом выбирается большее из требуемых значений Аг. Формирование ЛАЧХ в зоне пересечения оси частот осуществляется так же, как и в желаемой ЛАЧХ разомкнутого по положению привода с использованием соотношений (385) — (388) и учетом заданного показателя колебательности М.
21. Рассчитать и построить располагаемую ЛАЧХ (поз. 3 на рис. 142) разомкнутого привода, входящего в скоростной контур по передаточным функциям звеньев. По желаемой (рис. 142, г) и располагаемой ЛАЧХ, путем их вычитания, определить ЛАЧХ коррекции (поз. 4 на рис. 142,5), которую необ^ ходимо ввести в усилитель скоростного контура. При этом обращается внимание на следующие обстоятельства. Желаемая ЛАЧХ должна как можно меньше отличаться от располагаемой ЛАЧХ, что нужно для упрощения корректирующих средств. Это 284
замечание особенно относится к низкочастотной и высокочастотной частям ЛАЧХ. Желательно, чтобы первая низкочастотная п последняя высокочастотная асимптоты обеих ЛАЧХ сливались вместе. При расчете и построении располагаемой ЛАЧХ следует иметь в виду возможность регулирования постоянных времени звена золотник — двигатель путем варьирования коэффициента перетечек.
При затруднениях с реализацией коррекции произвести перерасчет ЛАЧХ с учетом располагаемой ЛАЧХ разомкнутого скоростного контура привода. Проверить, что резонансная частота fyic механической системы привода (рис. 142, е) располагается справа от частот среза всех контуров привода.
22. Разработать схему усилителя постоянного тока с корректирующим устройством по условиям п. 21 и характеристике электрогидравлического преобразователя, разработать схему корректирующего устройства цепи обратной связи по положению по условию п. 18.
23. Произвести поверочный расчет других заданных характеристик привода: переходного процесса, динамических пргреш-ностей и др.
Изложенная методика не исчерпывает всех вопросов проектирования и оптимизации параметров электрогидравлических проводов и указывает элементарный способ определения основных параметров привода.
СПИСОК ЛИТЕРАТУРЫ
1. Аксиально-поршневой регулируемый гидропривод. Под ред. В. Н. Прокофьева. М., «Машиностроение», 1969, 496 с.
2. Барун В. А., Буднинский А. А. Станки с программным управлением и программирование обработки. Л., «Машиностроение», 1965, 348 с.
3. Башта Т. М. Машиностроительная гидравлика. Справочное пособие. М., Машгиз, 1963, 696 с.
4. Башта Т. М. Реактивные силы потока жидкости в плунжерных парах гидроагрегатов.— «Станки и инструмент», 1956, № 11, с. 12—13.
5. Белянин П. Н., Черненко Ж. С. Авиационные фильтры и очистители гидравлических систем. М., «Машиностроение», 1964, 294 с.
6. Бессекерский В. А. Динамический синтез систем автоматического регулирования. М., «Наука», 1970, 576 с.
7. Бессекерский В. А., Попов Е. П. Теория систем автоматического регулирования. М., «Наука», 1972, 768 с.
8. Блэкборн Дж., Ритхоф Г., Шерер Дж. Л. Гидравлические пневматические силовые системы управления. М., Изд-во иностр, лит., 1962, 614 с.
9. Брон Л. С., Тартаковский Ж. Э. Гидравлический привод агрегатных станков и автоматических линий JVL, «Машиностроение», 1974, 356 с.
10. Булгаков А. А. Программное управление металлорежущими станками. М—Л., Госэ.чергоиздат, 1959, 127 с.
11. Бычатин Д. А., Гольдман И. Я. Поворотный индуктосин. Л., «Энергия», 1969, 100 с.
12. Гамынин Н. С. Гидравлический привод системы управления. М., «Машиностроение», 1972, 376 с.
13. Гидравлический следящий привод. Под ред. В. А. Лещенко. М., «Машиностроение», 1968, 564 с.
14. Гидравлическое оборудование. Катало!-справочник, ч. 1—2, М., ВНИИГидролривод, 1967, ч. 1—400 с., ч. 2—350 с.
15. Гомельский Ю. С. Электрические элементы электрогидравлических устройств автоматики. М., «Энергия», 1968, 144 с.
16. Гудилкин Ю. И. К п. д. следящего гидропривода дроссельного регулирования.— «Станки и инструмент», 1966, № 4, с. 1.
17. Динамика гидропривода. Под ред. В. Н. Прокофьева, М., «Машиностроение», 1972, 292 с.
18. Ермаков В. В. Гидравлический привод металлорежущих станков. М., Машгиз, 1963, 324 с.
19. Зайченко И. 3., Мышлевский Л. М. Пластинчатые насосы и гидромоторы. Изд. 2-е перераб. и доп. М., «Машиностроение», 1970, 232 с.
20. Зусман В. Г. Программное управление станками с шаговым приводом.— «Электричество», 1962, № 10, с. 5—6.,
21. Ильин М. Г., Бекиров Я. А. Технология изготовления прецизионных деталей гидропривода. М., «Машиностроение», 1971, 160 с.
22. Каменецкий Г. И. Гидравлические усилители крутящих моментов — «Станки и инструмент», 1962, № 1, с. 3—8.
23. Касимов А. М., Вайсер И. В., Яроль В. М. Система модулей струйной техники СМСТ-2 (дискретная ветвь). М., «Институт проблем управления», 1971, 38 с.
24. Киселев В. М. Фазовые системы числового программного управления станками. М., «Машиностроение», 1966, 376 с.
25. Козлов Н. П., Крассов И. М. Электромагнитные пропорциональные управляющие элементы. М.— Л., «Энергия», 1966, 112 с.
26. Красников И. И. Облитерация капиллярных щелей при течении минеральных масел.— «Инженерно-физический журнал», 1971, № 2.
27. Крассов И. М. Гидравлические элементы в системах управления Изд. 2-е, перераб. и доп. М., «Машиностроение», 1967, 256 с.
28. Левина 3. М., Решетов Д. Н. Контактная жесткость машин. М., «Машиностроение», 1971, 264 с.
29. Лещенко В. А. Возможности создания числовых позиционных систем программного управления на основе гидравлических следящих приводов.— В кн.: Привод и управление точных перемещений. М., «Наука», 1969, с. 111—121.
30. Лещенко В. А. Гидравлические следящие приводы для автоматизации станков. М., Машгиз, 1962, 368 с.
31. Лещенко В. А. Актуальные задачи развития гидравлических следящих приводов.— В кн.: Пневматика и гидравлика. Приводы и системы управления. Вып. 1, М., «Машиностроение», 1973, с. 71—84.
32. Лещенко В. А., Почтарь Ю. С., Реэдик В. И. Струйные измерительные элементы для датчиков положения систем точного позиционирования.— «Приборы и системы управления», 1974, № 1, с. 40—42.
33. Лещенко В. А., Почтарь Ю. С. Опыт создания пневмогидравлической струйной системы числового программного управления станками.— § кн.: Пневматические средства и системы управления, М., «Наука», 1970, с. 306—316.
34. Лещенко В. А., Гудилкин Ю. И. О возникновении кавитации при автоколебаниях гидравлических следящих приводов.— «Станки и инструмент», 1967, № 6, с. 13.
35. Лещенко О. Д. Коррекция гидравлического привода цепью сопротивление — емкость, параллельной двигателю.— В кн.: Исследование, расчеты и конструирование тяжелых металлорежущих станков, М., НИИМАШ, 1970, с. 339—349.
36. Металлорежущие станки. М., «Машиностроение», 1965, т. 1 и 2, 764 с., 628 с.
37. Металлорежущие станки с числовым программным управлением. Каталог. М., НИИМАШ, 1972, 260 с.
38. Объемные гидравлические приводы. М., «Машиностроение», 1969, 628 с.
39. Попов Д. Н. Об особенностях нестационарных потоков в трубах.— «Известия вузов СССР. Машиностроение», 1972, № 7, с. 78—82.
40. Почтарь Ю. С. Некоторые вопросы исследования струйной системы числового программного управления.— В кн.: Автоматизация привода, управления и контроля в машиностроении. М., «Наука», 1974, с. 42—49.
41. Приводы объемно-дроссельного регулирования для оборудования с числовым программным управлением.— «Вестник машиностроения», 1973, № 11, с. 18—22.
42. Пульер Ю. М. Индукционные электромеханические элементы вычислительных и дистанционно-следящих систем. М., «Машиностроение», 1965, 295 с.
43. Ратмиров В. А., Чурин И. Н., Шмутер С. Л. Повышение точности и производительности станков с программным управлением. М., «Машиностроение», 1970, 344 с.
44. Сосонкин В. Л. Дискретная гидроавтоматика. М., «Машиностроение», 1972, 164 с.
45. Срибнер Л. А., Шраго Л. К. Проектирование позиционных систем программного управления. Киев, Машгиз, 1962, 308 с.
46. Современные методы проектирования систем автоматического управления. Анализ и синтез. Под общ. ред. Б. Н. Петрова, В. В. Солодовникова, Ю. И. Топчеева. М., «Машиностроение», 1967, 704 с.
47- Теория автоматического регулирования. Под ред. В. В. Солодовникова. М., «Машиностроение», 1967, Кн. 1, 346 с.
48. Тумаркин М. Б. Гидравлические следящие приводы. М., «Машиностроение», 1966, 296 с.
49. Хаимович Е. М. Гидроприводы и гидроавтоматика станков. М.— Киев, Машгиз, 1959, 556 с.
50. Честнат Г., Майер Р. I}. Проектирование и расчет следящих систем и систем регулирования. М.— Л., Госэнергоиздат, 1959, ч.1—487 с., ч. 2—392 с.
51. Экспериментальное исследование упругих свойств двухфазных рабочих жидкостей гидроприводов объемного типа.— «Известия вузов СССР. Машиностроение», 1968, № 2, с. 87—93.
52. Электрические измерительные преобразователи. М.— Л., «Энергия», 1967, 408 с.
53. Электрогидравлические следящие системы. Под ред. В. А. Хохлова. М., «Машиностроение», 1971, 432 с.
54. Fluidics in production engineering. «Mach, and Product. Engin.», 112, N 2886, 1968.
55. Foster K. & Parker G. A. Fluidics. Publisched by John Wilev & Sons, 1970.
56. Gwillim D. T., Mattison A. V. A fluidic — controlled coordinate table. «Syst. Technol.», N 10, 1970.
57. Hydro-Point /Bridgeport numerically controlled milling machine Moog pneumatic/ hydraulic control system. «Mach. Market», N 3406, 1966.
58. Miroslav Drazdil. The Application of Pressure Feedback for Damping at electro-hydraulic servo drived. «Hydraulic Pneumatic power». October 1972, p.p. 458—465.