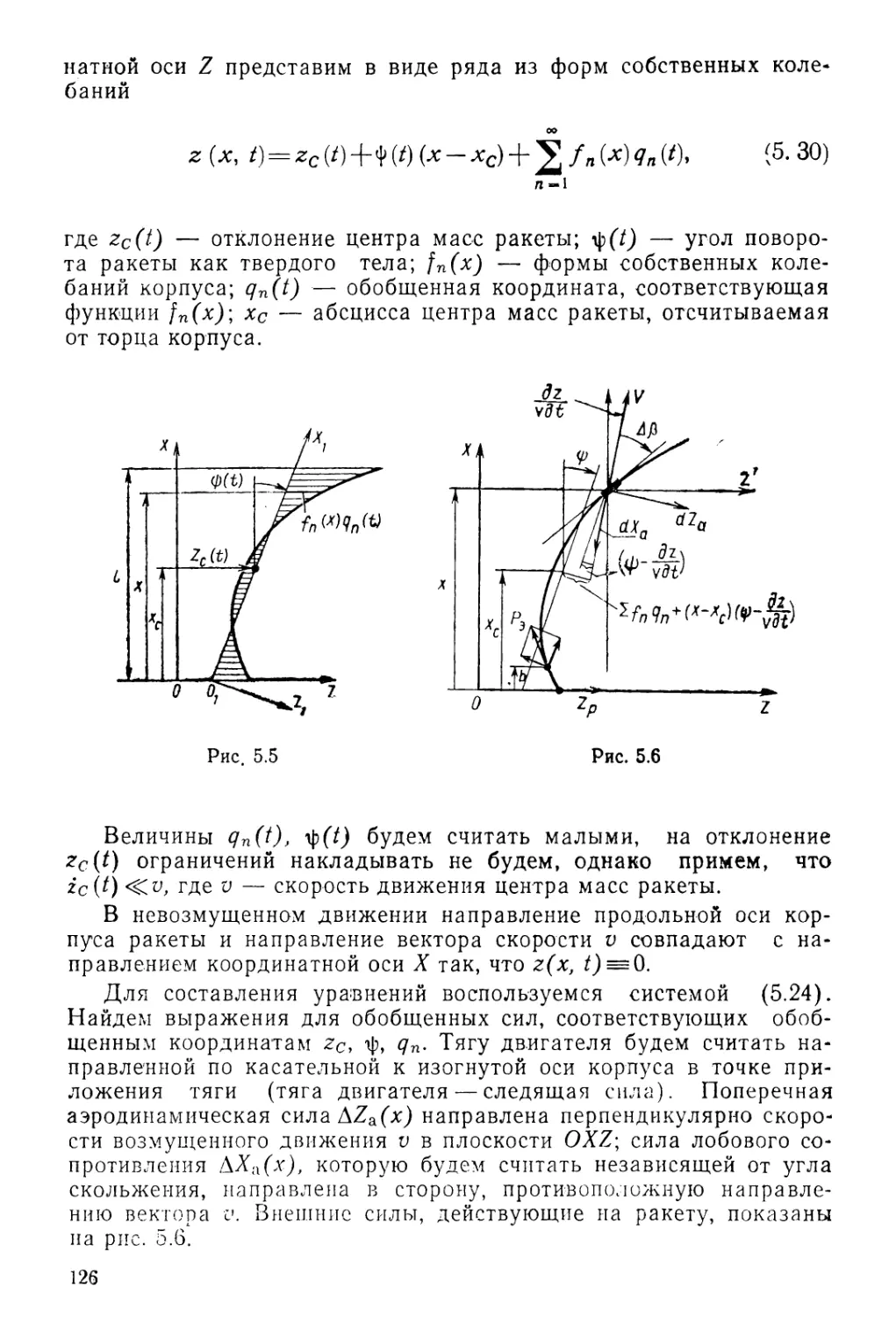
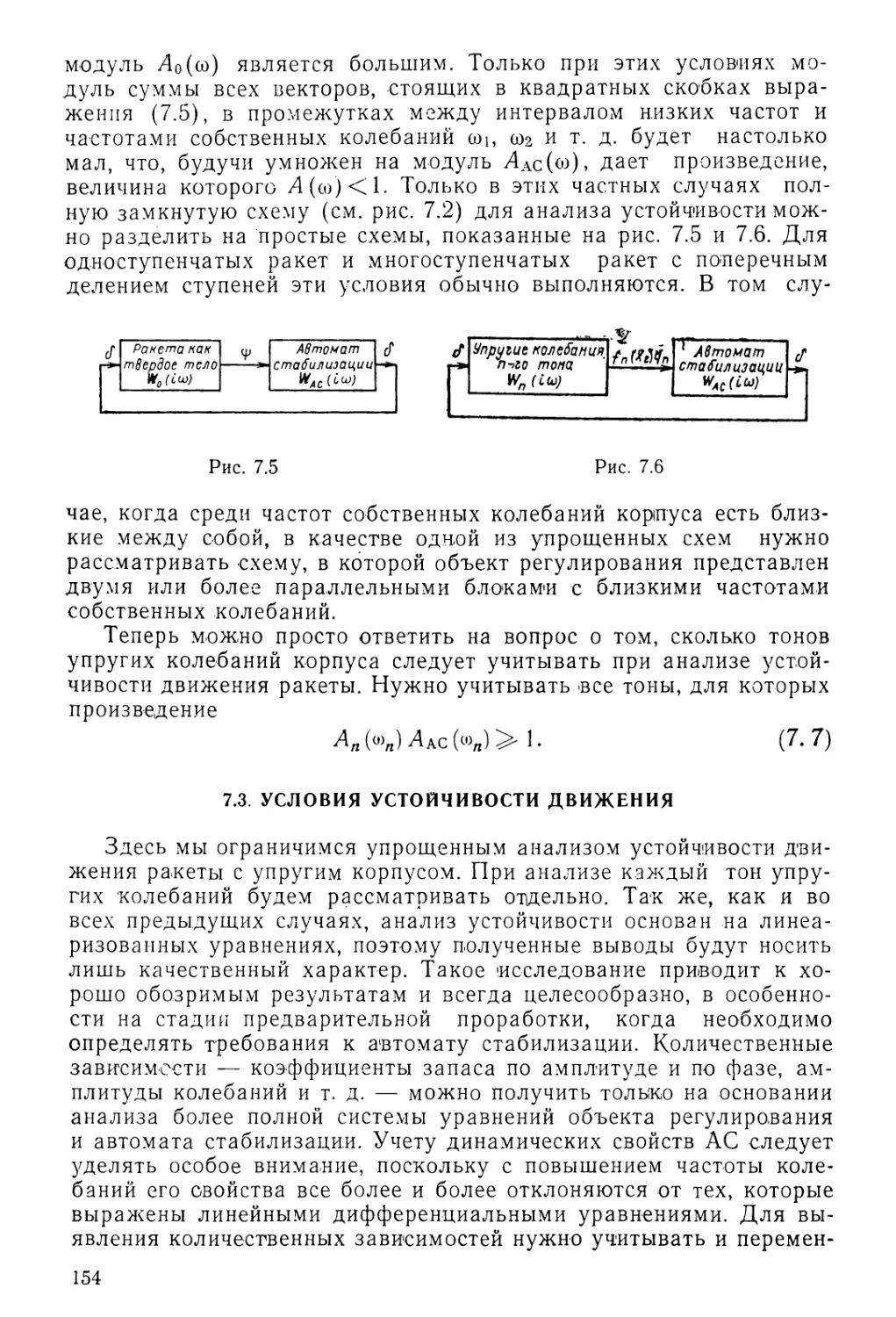
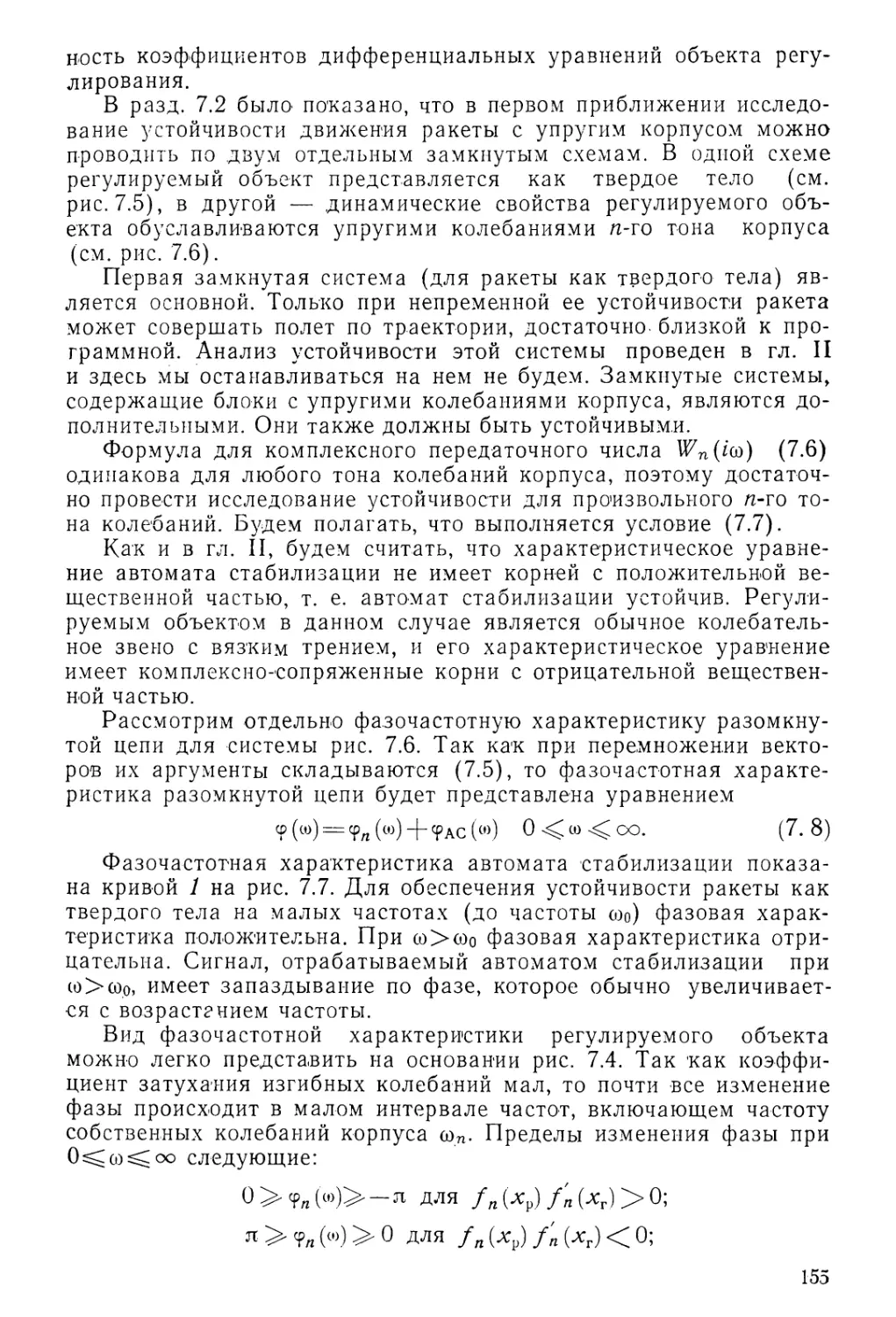
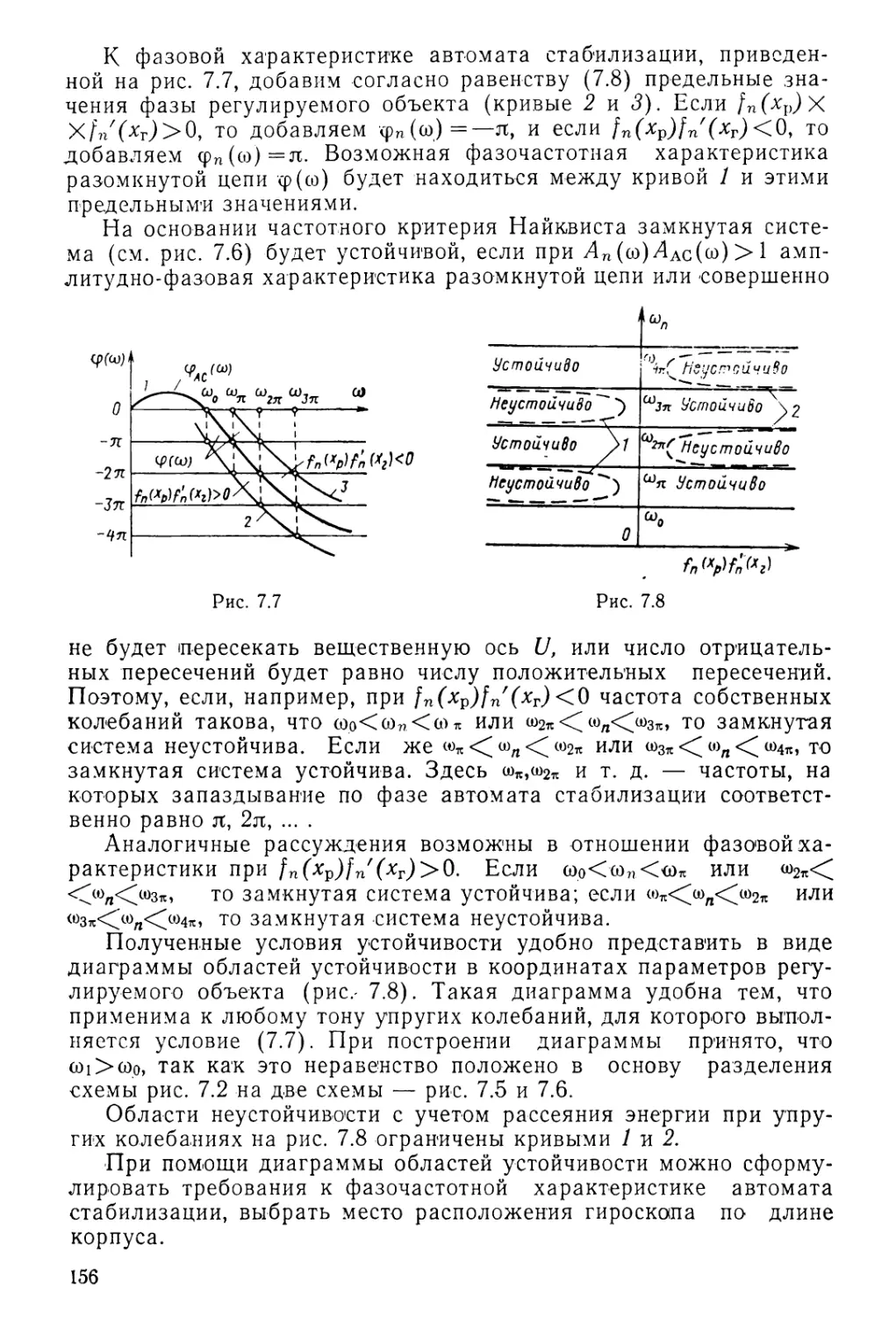
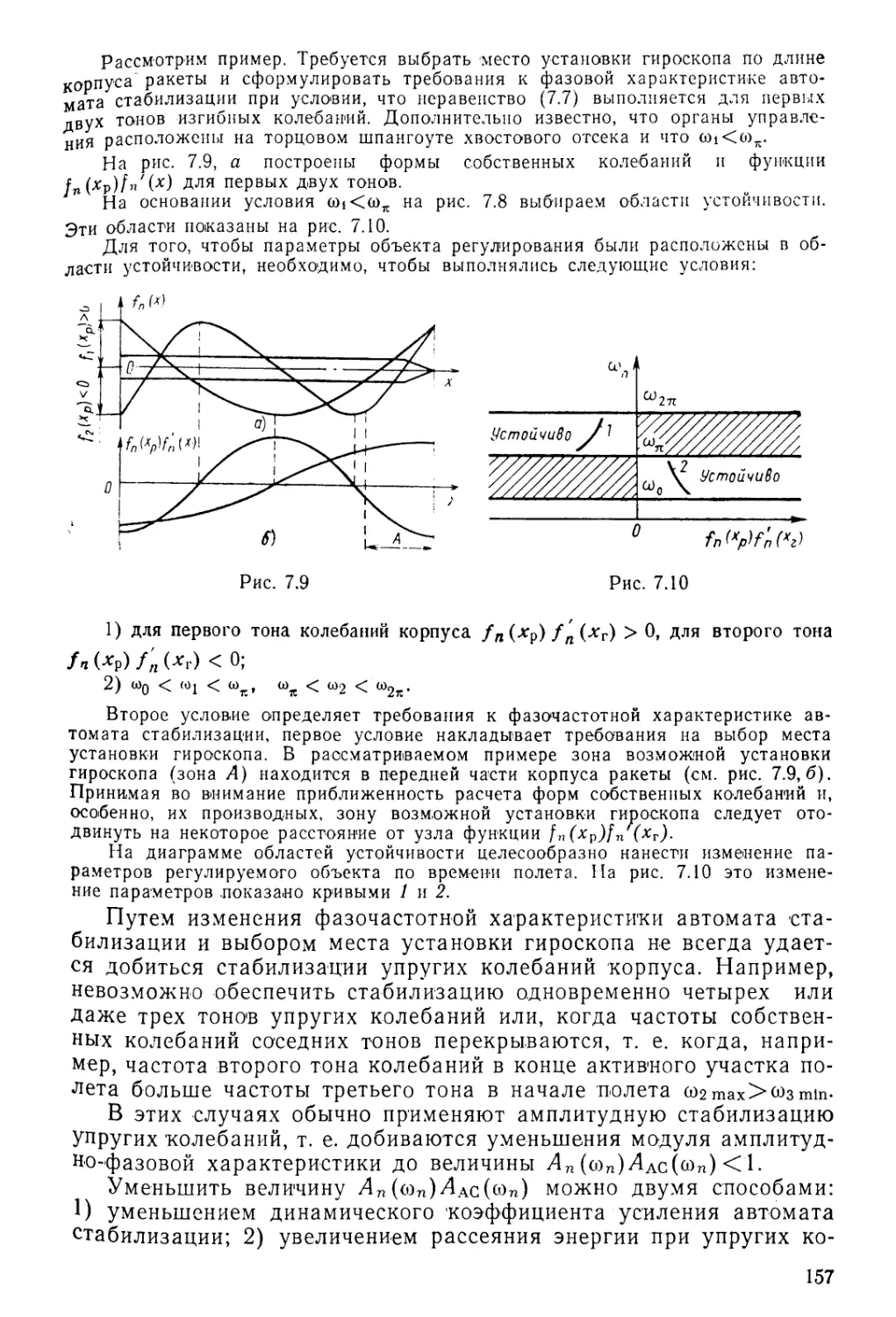
/



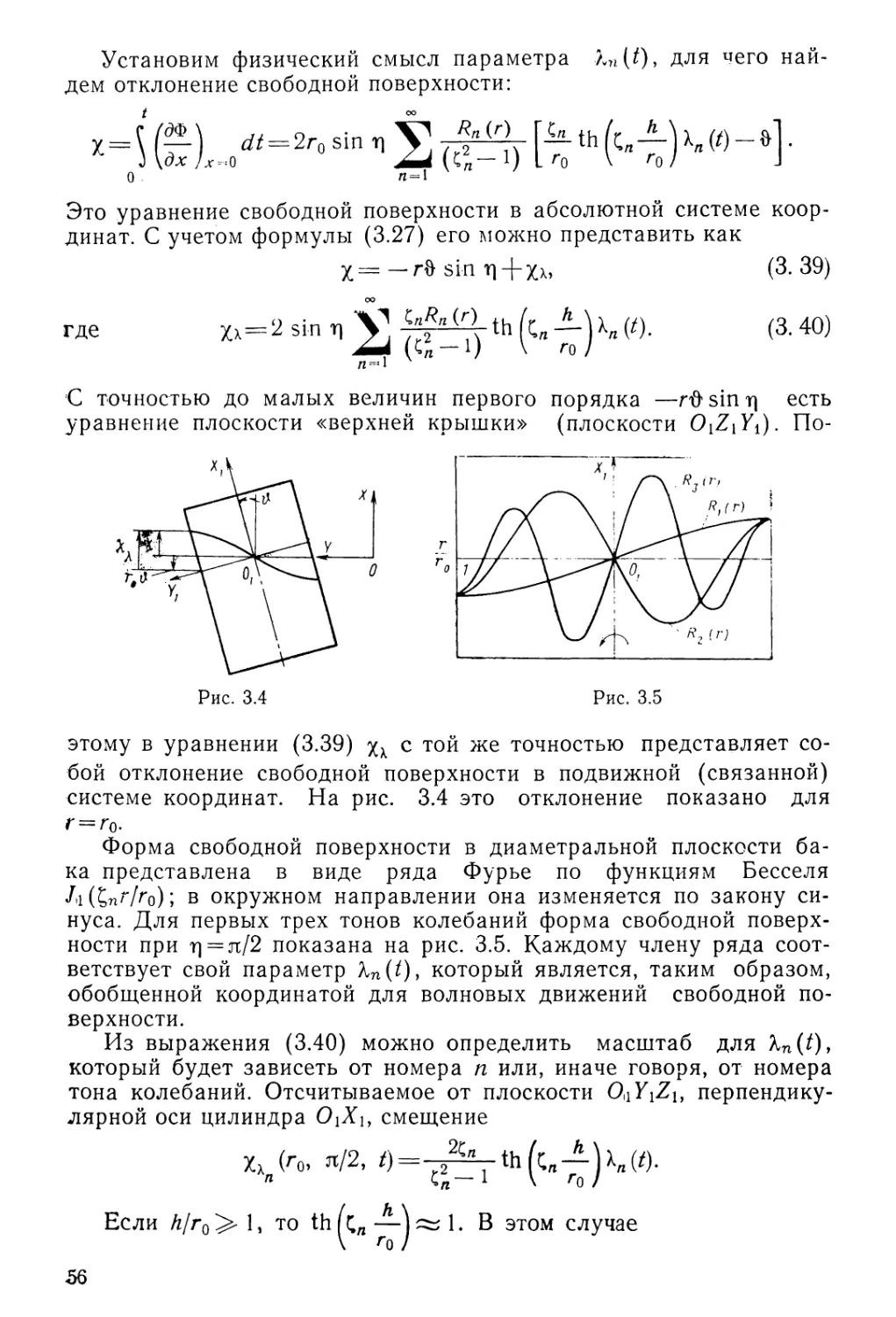

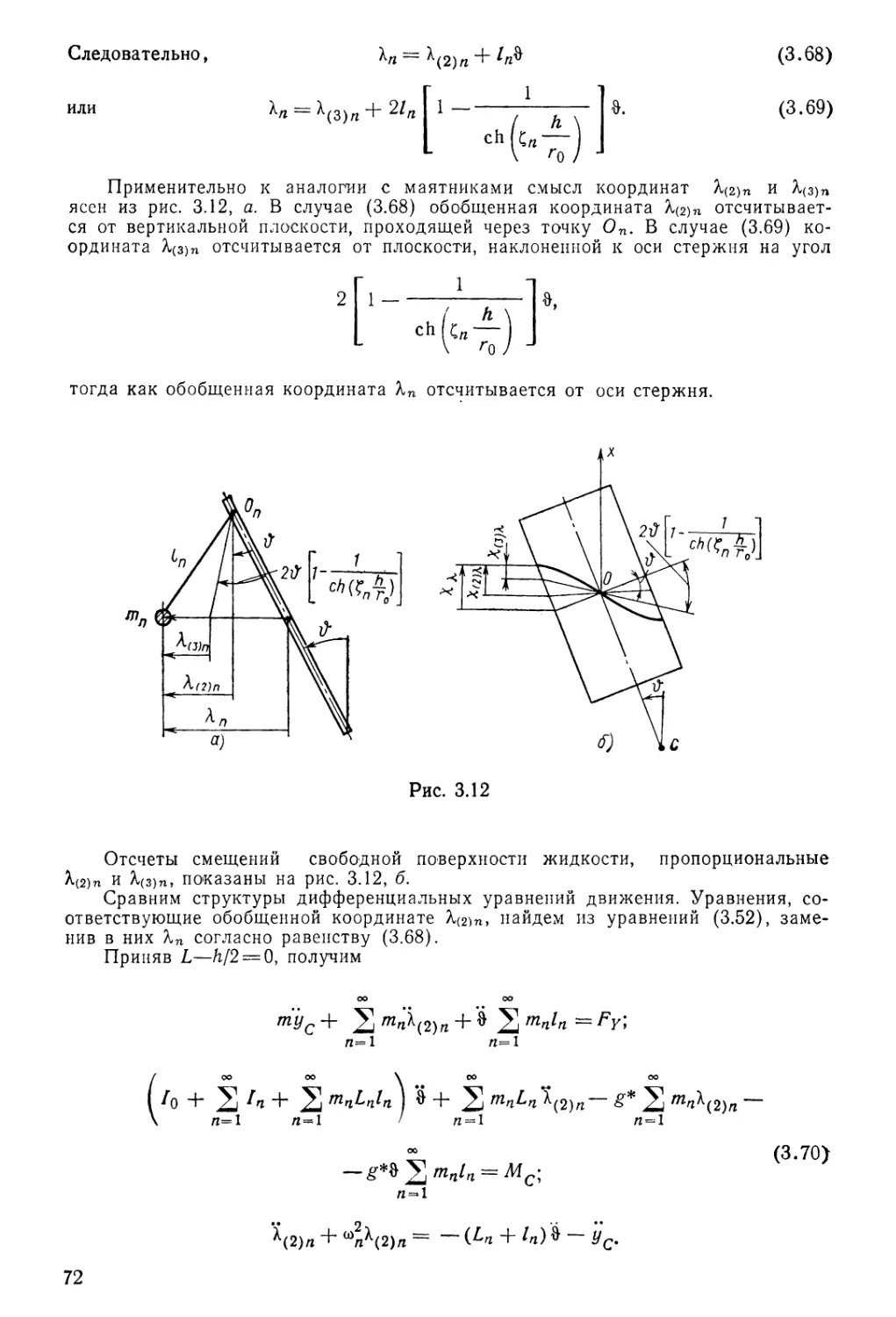

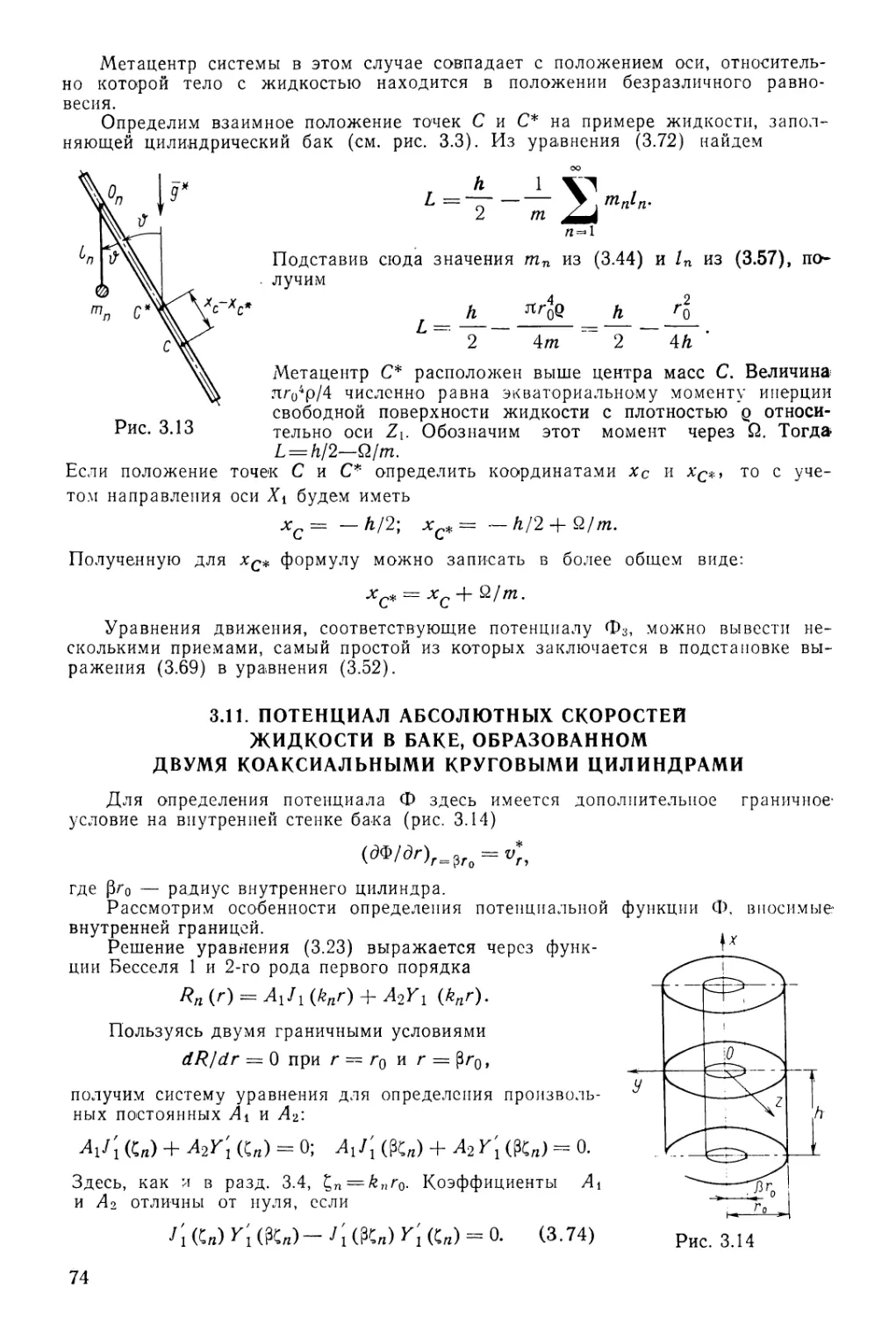
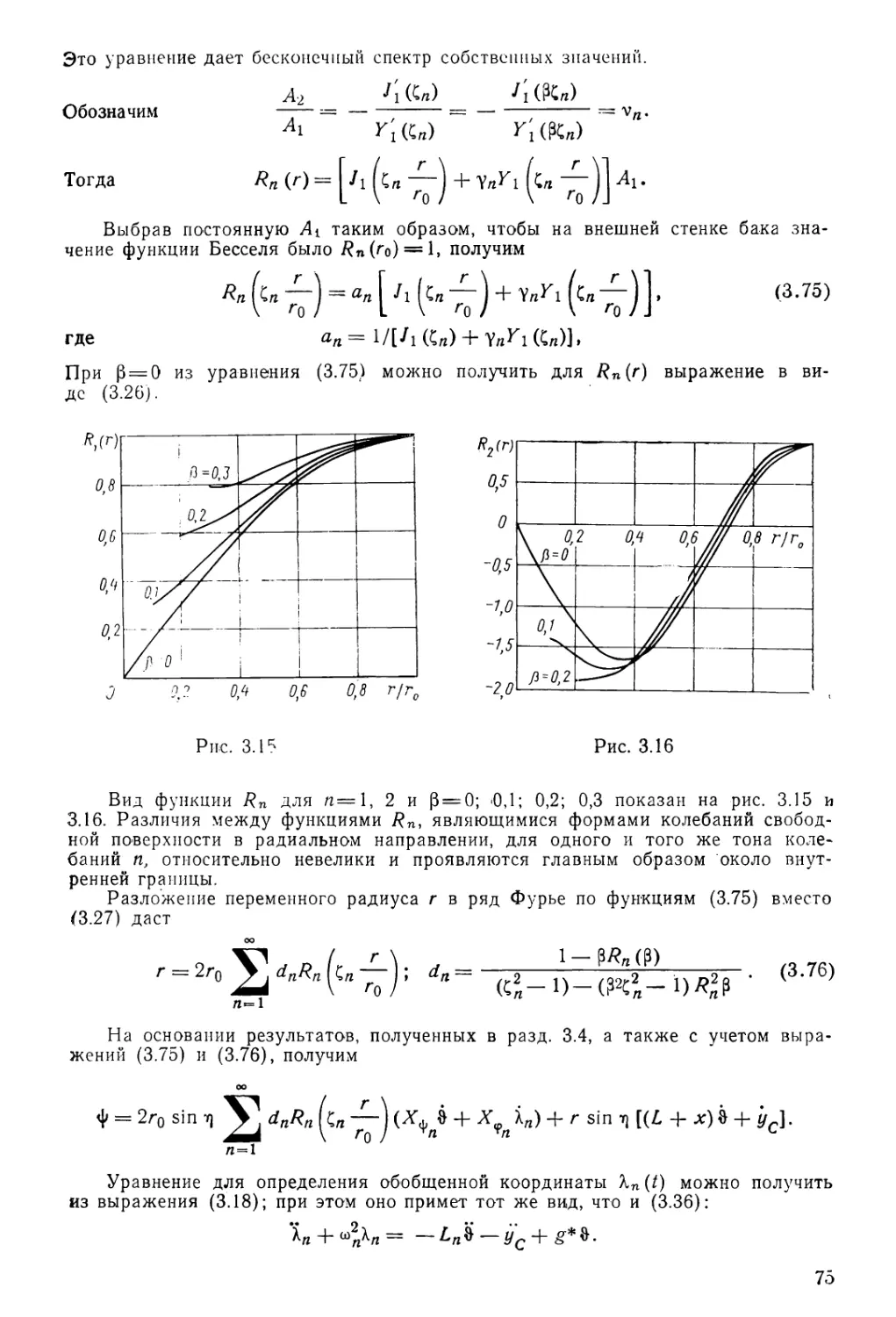
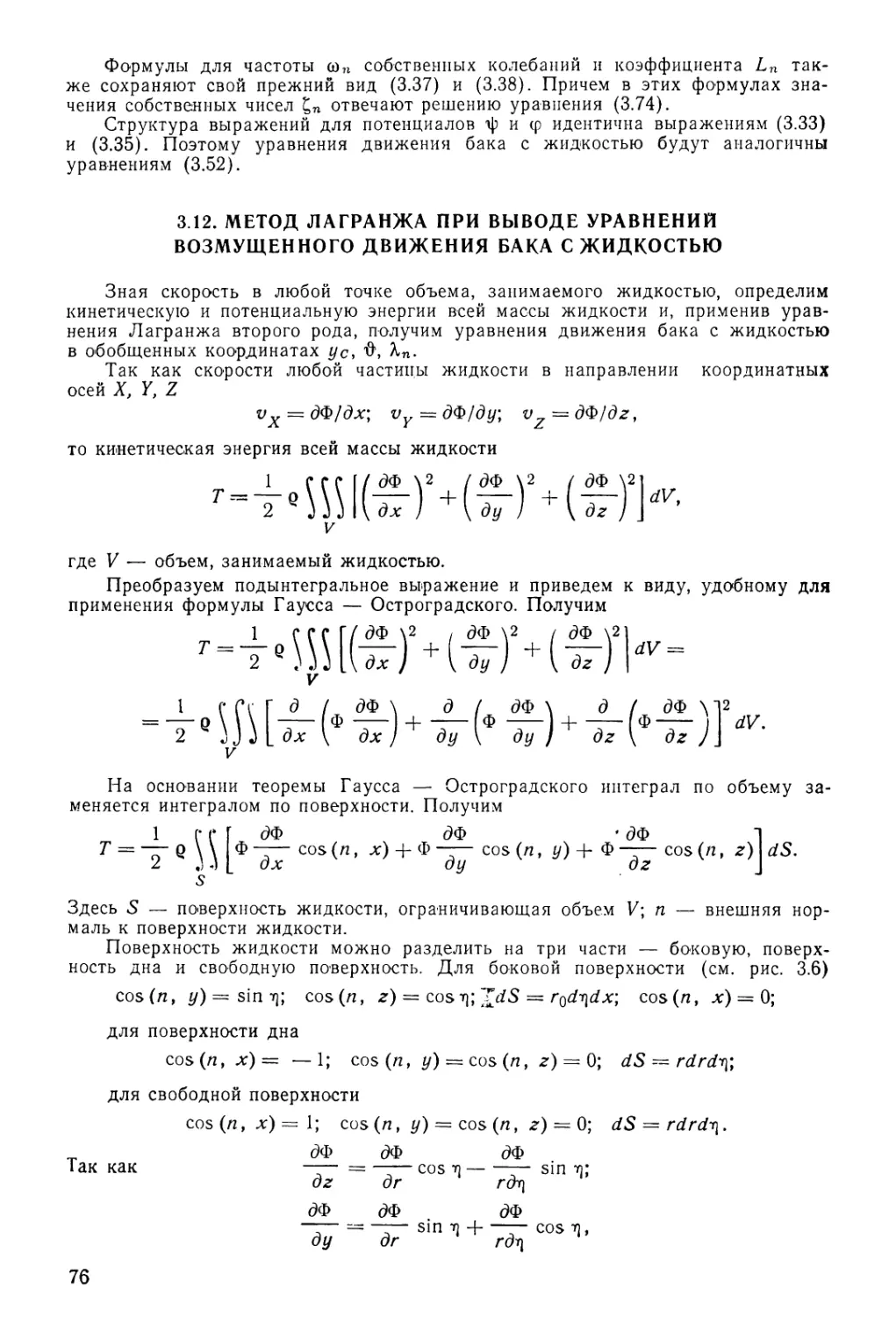




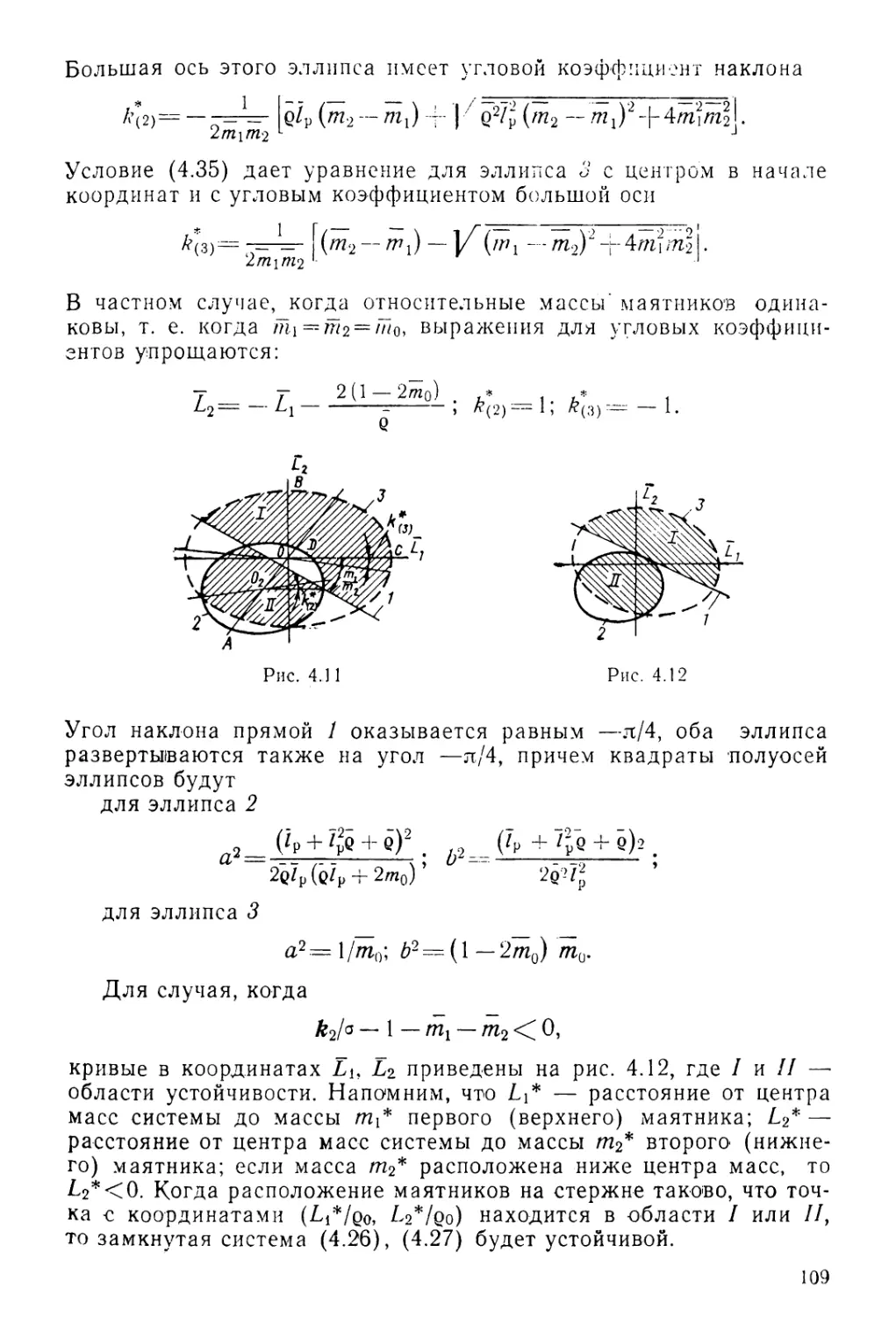
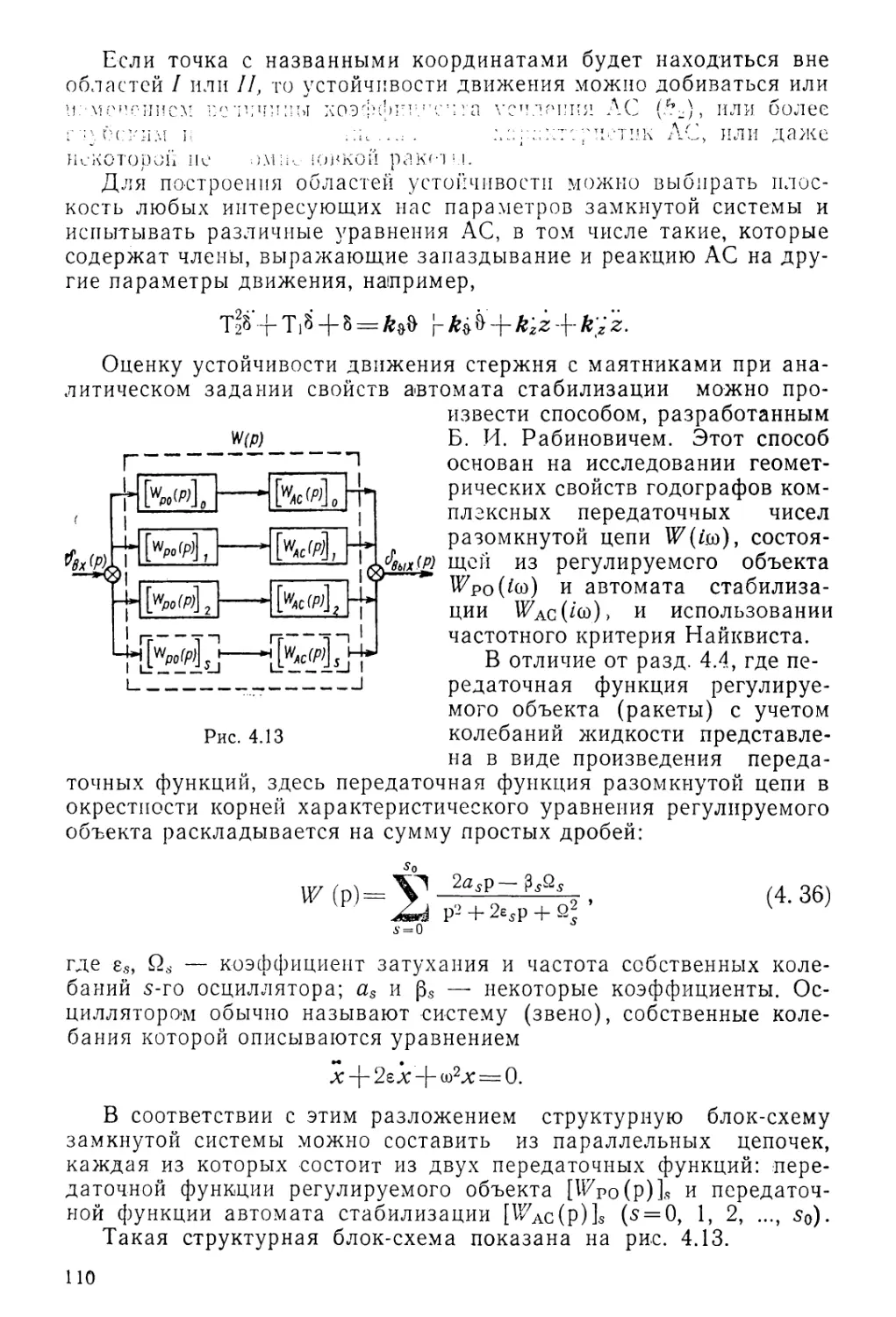


























Text
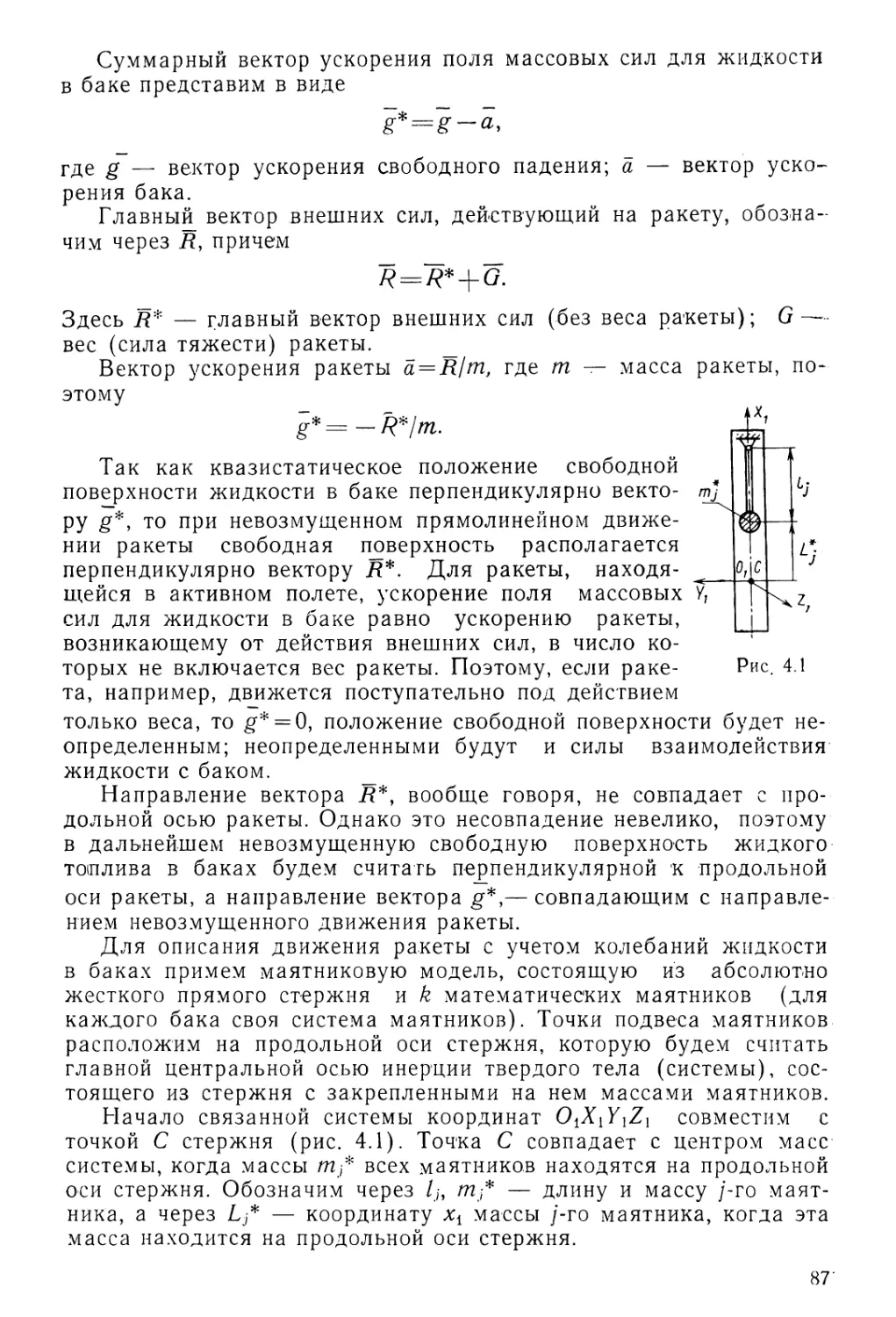
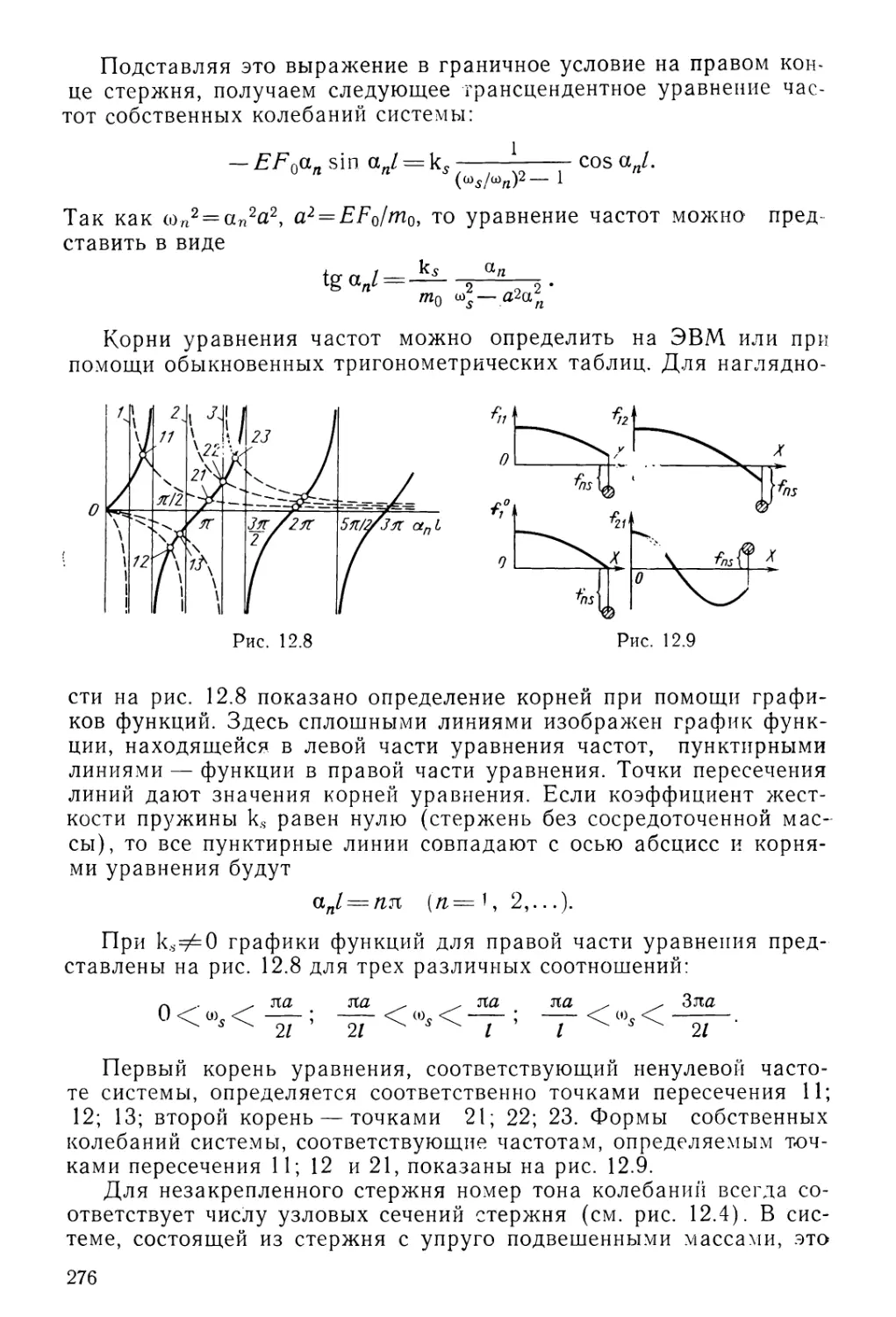
ДИНАМИКА
РАКЕТ
К.С. КОЛЕСНИКОВ
К.С КОЛЕСНИКОВ
ДИНАМИКА
РАКЕТ
Допущено
Министерством высшего и среднего специального образования СССР
в качестве учебника для студентов
высших технических учебных заведений
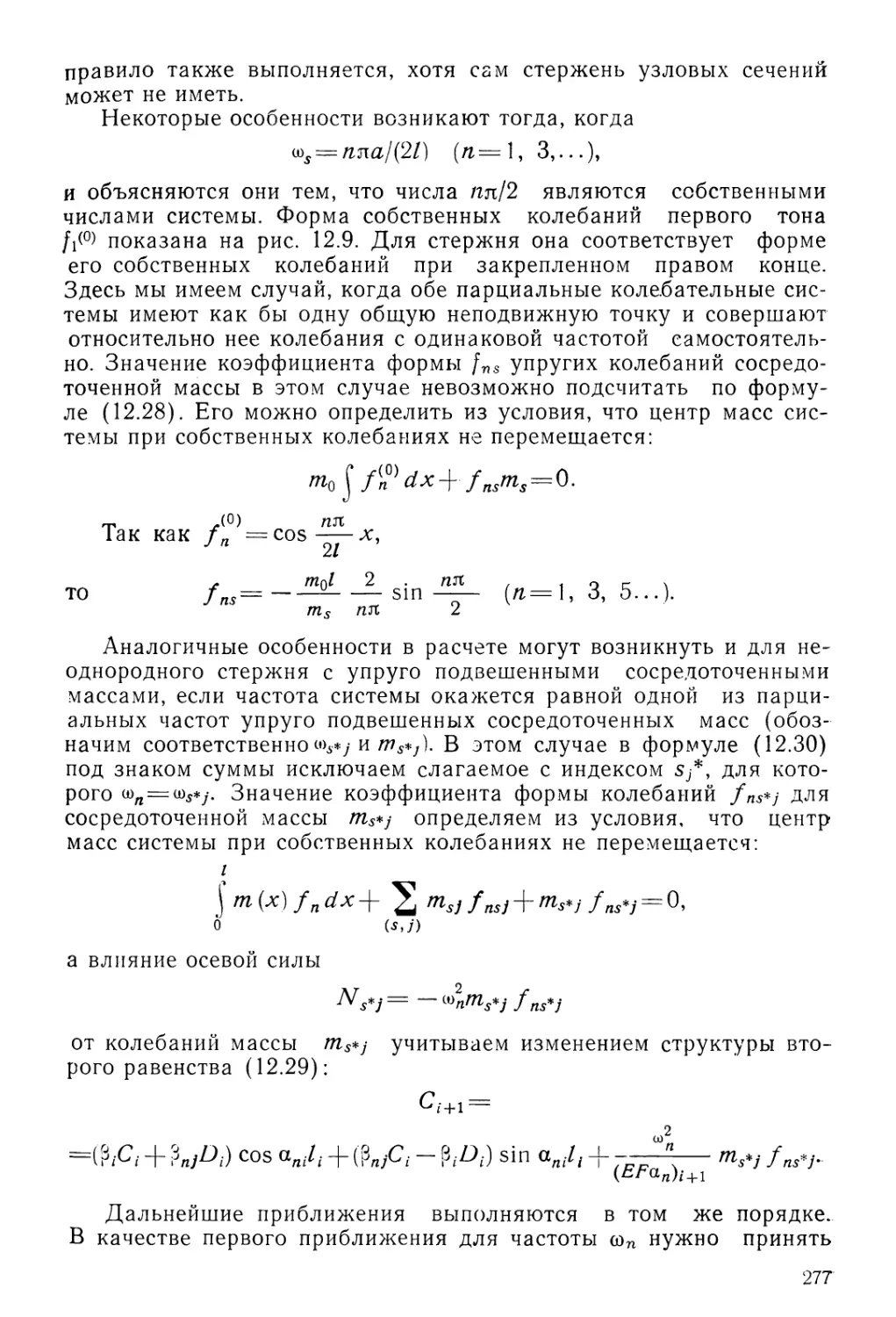
МОСКВА* МАШИНОСТРОЕНИЕ • 1980
ББК 34.42
К 60
УДК 629.7.015.4
Рецензенты: академик В. П. Мишин,
докт. физ.-мат. наук М. С. Галкин
Колесников К. С.
К60 Динамика ракет. Учебник для вузов. — М., Машино-
строение, 1980. с. 376, ил.
В пер.: 1 р. 10 к.
31902-216
К -------------216-80. 3607000000
038(01)-80
ББК 34.42
6Т6
© Издательство «Машиностроение», 1980 г.
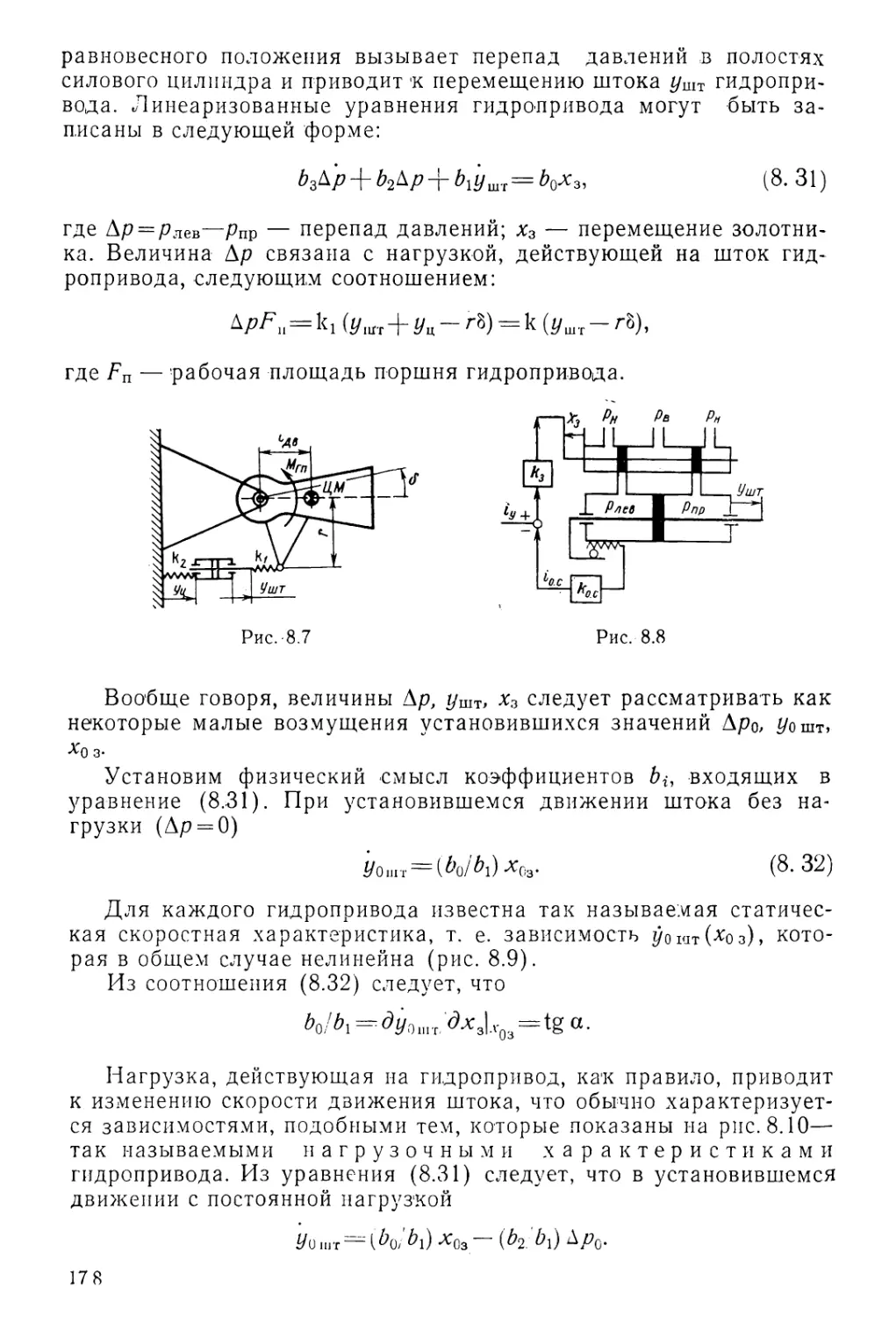
ПРЕДИСЛОВИЕ
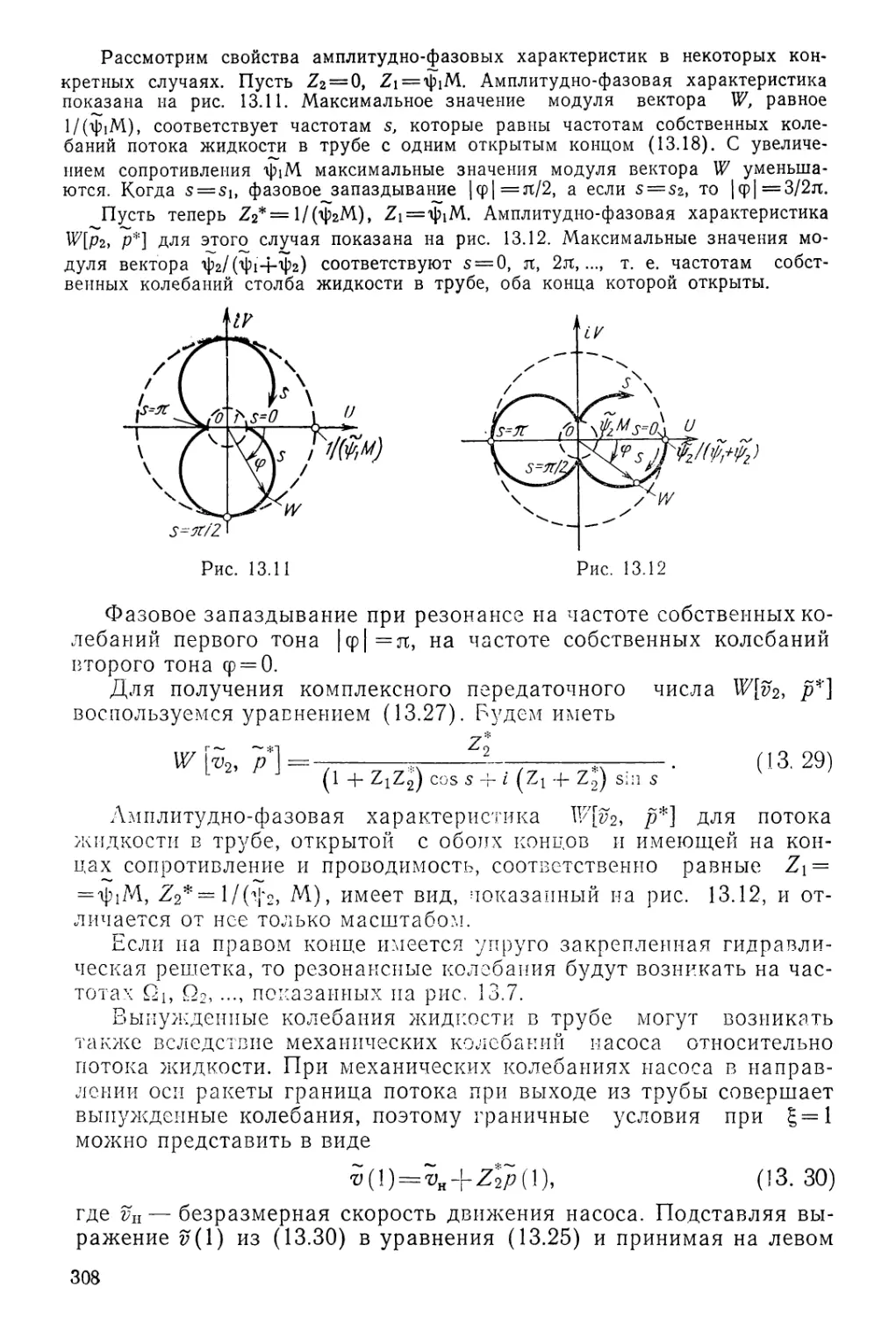
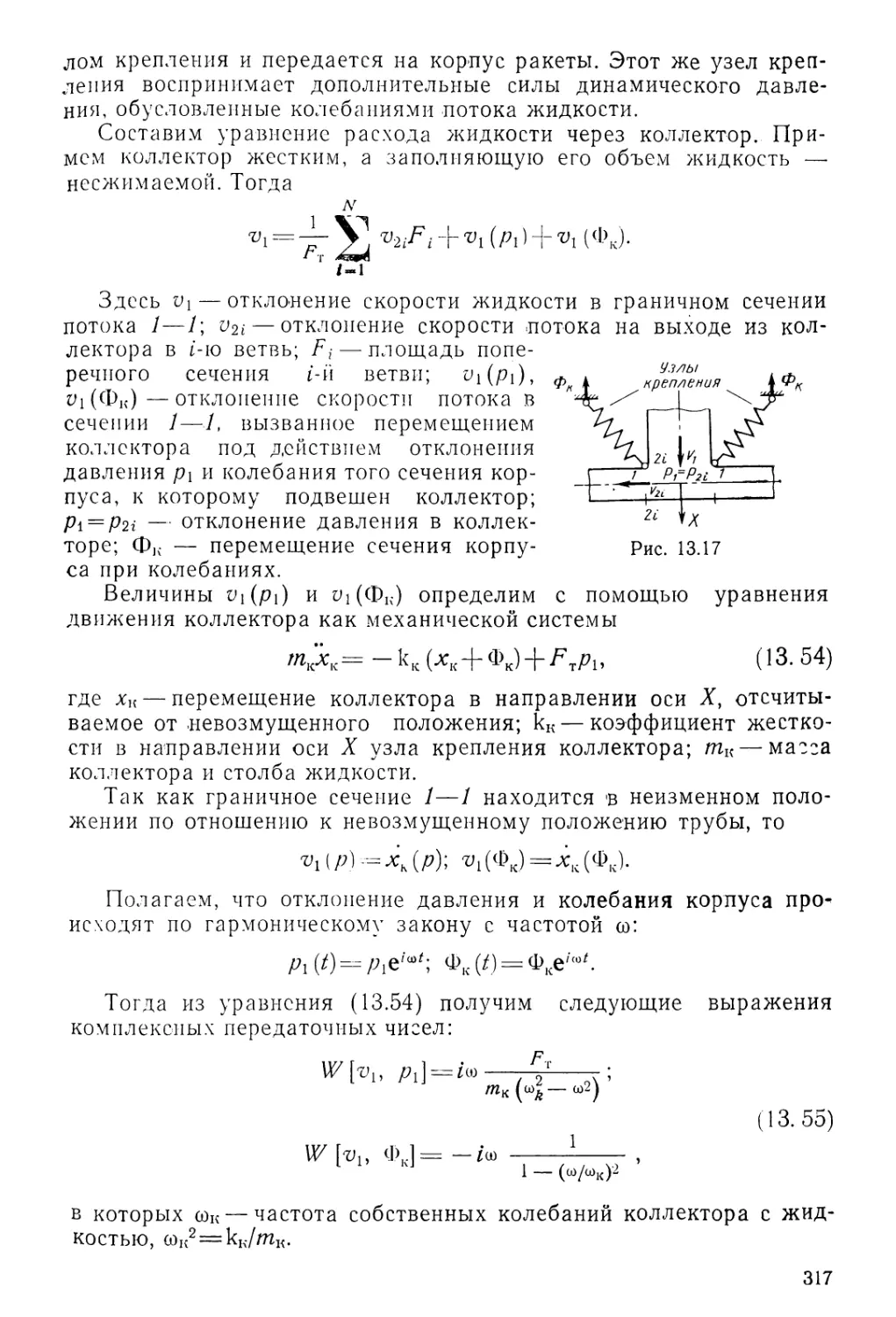
Жидкостная ракета представляет собой сложную управляемую
механико-гидравлическую систему, в которой могут возникать уп-
ругие колебания корпуса, жидкости в баках и трубопроводах, ко-
лебания отдельных агрегатов. Упругие колебания взаимодейству-
ют с колебаниями жидкости, с системой управления полетом и с
жидкостным ракетным двигателем (ЖРД), на работу которого, в
частности, непосредственное влияние оказывают колебания жид-
кости в трубопроводах. В связи с высокими требованиями к надеж-
ности и точности полета при наличии источников энергии большой
мощности особую важность приобретают вопросы устойчивости
движения ракеты.
Задачи динамики жидкостных ракет и самолетов как упругих
систем послужили основой для развития нового раздела механи-
ки — аэрогидроупругости.
Возмущенное движение жидкостной ракеты как системы с рас-
пределенными параметрами характеризуется системой дифферен-
циальных уравнений в частных производных высокого порядка.
Их анализ очень сложен и поэтому в данном учебнике значитель-
ное внимание уделено методам построения адэкватной системы
обыкновенных дифференциальных уравнений и определения коэф-
фициентов этих уравнений. Для этого проведены решения ряда до-
полнительных задач, связанных с определением частот и форм уп-
ругих колебаний корпуса, сил и моментов, действующих на ракету
при колебаниях жидкости в баках, динамических характеристик
системы топливоподачи ЖРД, динамических характеристик систе-
мы управления.
Динамические характеристики ракеты и отдельных ее частей
представлены в виде передаточных функций и амплитудно-фазо-
вых частотных характеристик.
Учебник состоит из двух частей. В первой части изложены ме-
тоды исследования и проведен анализ динамических свойств упру-
гой жидкостной ракеты как объекта регулирования. Здесь рассмот-
рены поперечные колебания ракеты как замкнутой системы.
Вторая часть посвящена исследованию продольных колебаний
замкнутой системы, состоящей из упругого корпуса с жидкостью в
баках, системы подачи топлива и жидкостного ракетного двига-
теля.
3
Автор стремился сложные явления расчленить ио возможности
на простые составные части, более доступные студенческой аудито-
рии. В связи с этим в книге основное внимание уделено раскрытию
физической картины явлений, их математическому описанию и ана-
лизу. Такое построение книги преследует цель дать будущему ин-
женеру основы динамики ракет, которые необходимы при анализе
сложных динамических систем с помощью ЭВМ.
Анализ динамических характеристик проведен на основе лине-
аризованных уравнений, что, вообще говоря, не исчерпывает всех
особенностей некоторых задач, а дает лишь первое приближение
их решения. В ряде случаев это оказывается достаточным.
Для изучения книги читатель должен обладать знаниями в
объеме втузовской программы высшей математики, физики, теоре-
тической механики и теории колебаний, сопротивления материа-
лов, основ теории автоматического регулирования, основ ракетной
техники и аэрогидродинамики.
Автор считает своим приятным долгом выразить благодарность
А. И. Ганичеву, В. Г. Кинелеву, В. И. Кожевникову, А. А. Пожа-
лостину и Ю. А. Цурикову за ценные замечания, сделанные ими
при ознакомлении с рукописью книги.
Автор будет признателен читателям за критические замечания
и пожелания по содержанию книги, кои следует присылать по ад-
ресу: 107076, Москва, Б-76, Стромынский пер., 4. Издательство «Ма-
шиностроение».
Часть первая
ЖИДКОСТНАЯ РАКЕТА КАК ОБЪЕКТ
РЕГУЛИРОВАНИЯ
Глава I
УРАВНЕНИЯ ДВИЖЕНИЯ РАКЕТЫ
КАК ТВЕРДОГО ТЕЛА
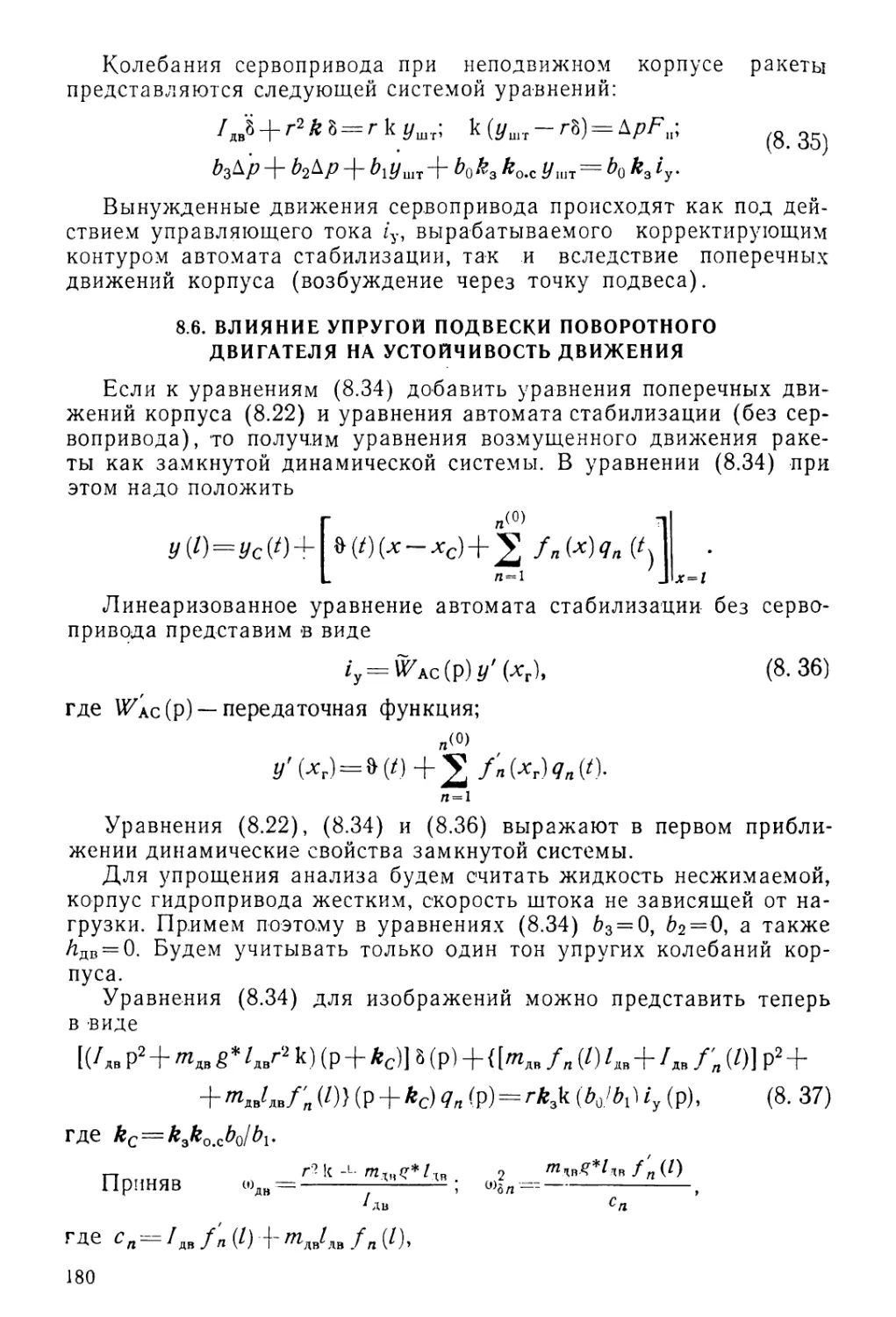
1.1. СИЛЫ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ В ПОЛЕТЕ
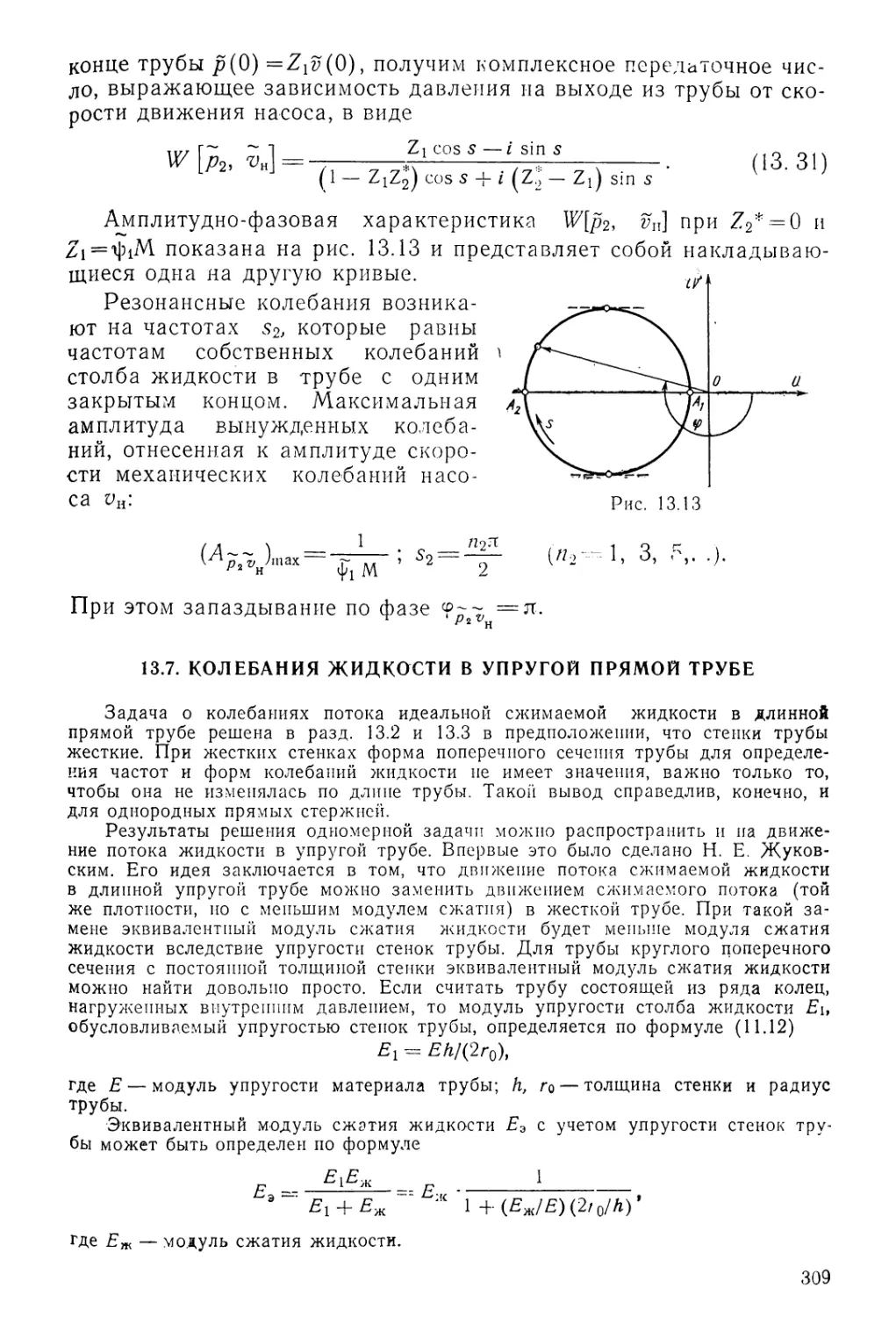
Силы, воздействующие на ракету в полете, можно разделить на
аэродинамические, силы тяжести и тягу двигателей.
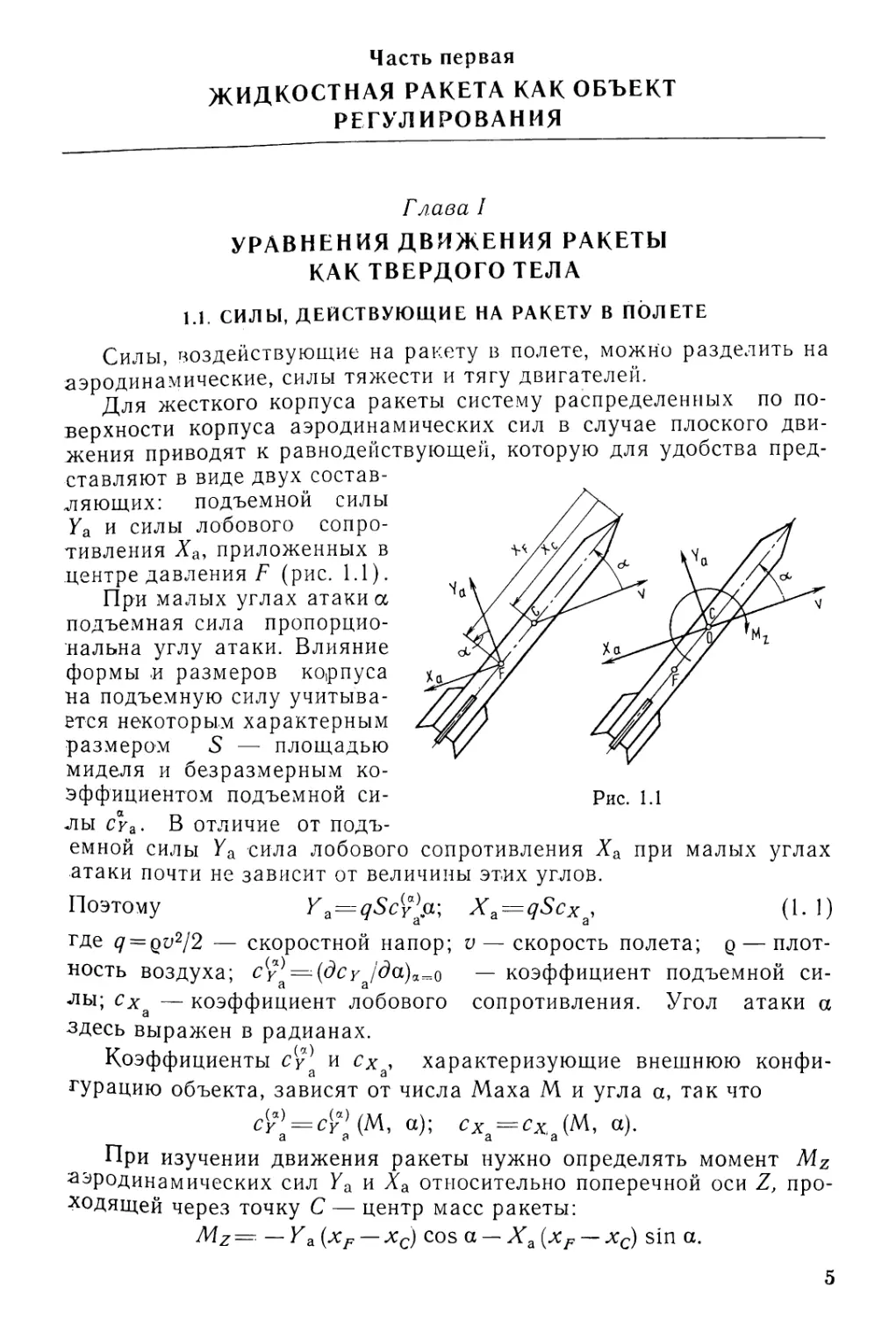
Для жесткого корпуса ракеты систему распределенных
верхности корпуса аэродинамических
жения приводят к равнодействующей,
ставляют в виде двух состав-
ляющих: подъемной силы
Уа и силы лобового сопро-
тивления Ха, приложенных в
центре давления F (рис. 1.1).
При малых углах атаки а
подъемная сила пропорцио-
нальна углу атаки. Влияние
формы и размеров корпуса
на подъемную силу учитыва-
ется некоторым характерным
размером S — площадью
миделя и безразмерным ко-
эффициентом подъемной си-
лы суа. В отличие от подъ-
емной силы У а сила лобового
атаки почти не зависит от величины этих углов.
по ПО-
СИЛ в случае плоского дви-
которую для
удобства пред-
Рис. 1.1
сопротивления
Ха при малых углах
Поэтому Ya = qSc{y[a', Xa=qScXa, (1. 1)
где q = Qv2/2 — скоростной напор; v — скорость полета; q — плот-
ность воздуха; c^ — ^dcyjda)^ — коэффициент подъемной си-
лы; Сха — коэффициент лобового сопротивления. Угол атаки а
здесь выражен в радианах.
Коэффициенты Су^ и Сха, характеризующие внешнюю конфи-
гурацию объекта, зависят от числа Маха М и угла а, так что
= а); Сха = сх.а(М, а).
При изучении движения ракеты нужно определять момент Mz
аэродинамических сил Уа и Ха относительно поперечной оси Z, про-
ходящей через точку С — центр масс ракеты:
Mz = —Уа (л> — хс) cos а — Ха (xF — хс) sin а.
5
Для малых углов атаки cos сс~ 1, sin а^аи тогда
Mz = qSlrn^z а,
(1.2)
где m>z =
— (е^а ~~ коэффициент момента аэродина-
мических сил; I — длина корпуса ракеты.
Момент Mz зависит, следовательно, как от аэродинамических
характеристик, так и от распределения масс ракеты, которое изме-
няется по мере выгорания топлива. Взаимное расположение центра
давления и центра масс важно для стабилизации ракеты в полете.
Если знак Mz (или m(z}) противоположен знаку a(^z)/a<0), то
момент Mz стремится уменьшить угол атаки. В соответствии с
этим различаются:
а) аэродинамически устойчивая ракета, когда xF^>xc, m{z
б) аэродинамически неустойчивая ракета, когда xF<^xc, m{z >0;
в) аэродинамически нейтральная ракета, когда xF = xc, =
Если центр давления находится впереди центра массы (m(z*
>0), то при отклонении оси ракеты от направления полета аэро-
Рис. 1.2
динамические силы создадут мо-
мент, отклоняющий ось ракеты на
еще больший угол.
Для обеспечения аэродинами-
ческой устойчивости или умень-
шения аэродинамической неустой-
чивости ракета снабжена хвосто-
вым оперением. Неоперенная ра-
кета обычно бывает аэродинами-
чески неустойчивой. Запас аэро-
динамической устойчивости опре-
деляется величиной
Кроме момента Mz, который при <CS> называется стави-
ли з и р у ю щ и м м о м е н т о м, при вращении корпуса ракеты от-
носительно поперечной оси, проходящей через точку С, с угловой
скоростью ft возникает демпфирующий момент. Этот момент скла-
дывается из аэродинамического демпфирующего момента, обус-
ловленного появлением дополнительных углов атаки
= (х — x^v,
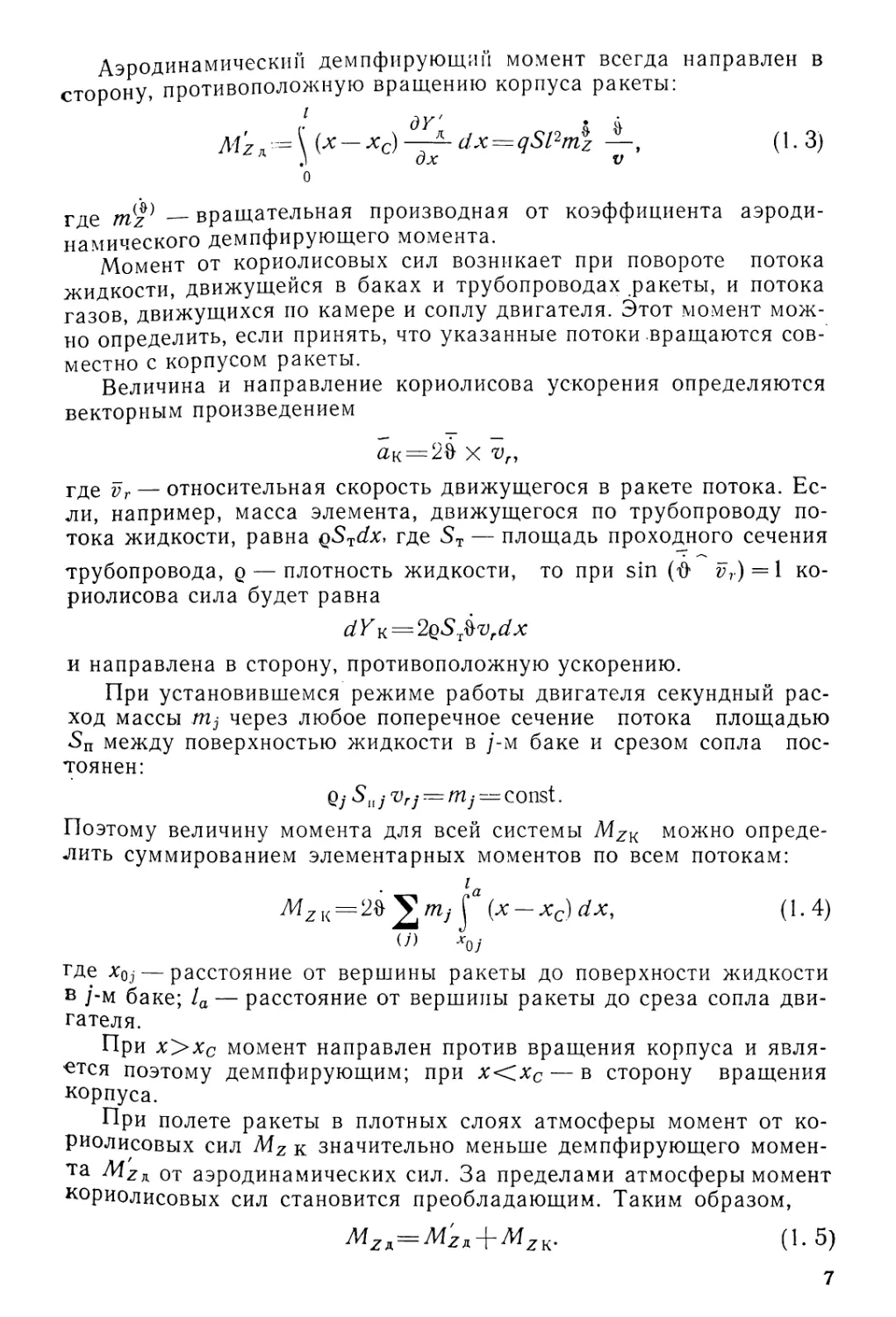
и момента от кориолисовых сил (рис. 1.2) (координата к для про-
извольного поперечного сечения отсчитывается от вершины кор-
пуса) .
6
Аэродинамический демпфирующий момент всегда направлен в
сторону, противоположную вращению корпуса ракеты:
. дУ' • ч
Л4Д (x-xc)-^dx=qSPmz , (1.3)
*0
где т(р _вращательная производная от коэффициента аэроди-
намического демпфирующего момента.
Момент от кориолисовых сил возникает при повороте потока
жидкости, движущейся в баках и трубопроводах ракеты, и потока
газов, движущихся по камере и соплу двигателя. Этот момент мож-
но определить, если принять, что указанные потоки вращаются сов-
местно с корпусом ракеты.
Величина и направление кориолисова ускорения определяются
векторным произведением
= X
где vr — относительная скорость движущегося в ракете потока. Ес-
ли, например, масса элемента, движущегося по трубопроводу по-
тока жидкости, равна qSTdx, где ST — площадь проходного сечения
трубопровода, q — плотность жидкости, то при sin (ft v1) = 1 ко-
риолисова сила будет равна
d Y к = ^S^Vrdx
и направлена в сторону, противоположную ускорению.
При установившемся режиме работы двигателя секундный рас-
ход массы mj через любое поперечное сечение потока площадью
между поверхностью жидкости в /-м баке и срезом сопла пос-
тоянен:
Q; Sn J Vrj = rrij = const.
Поэтому величину момента для всей системы MZK можно опреде-
лить суммированием элементарных моментов по всем потокам:
7WZK = 2fr J (х — xc)dx, (1.4)
(?) ^0;-
где xQj— расстояние от вершины ракеты до поверхности жидкости
в J-м баке; 1а — расстояние от вершины ракеты до среза сопла дви-
гателя.
При х>хс момент направлен против вращения корпуса и явля-
ется поэтому демпфирующим; при х<хс — в сторону вращения
корпуса.
При полете ракеты в плотных слоях атмосферы момент от ко-
риолисовых сил AIzk значительно меньше демпфирующего момен-
та от аэродинамических сил. За пределами атмосферы момент
кориолисовых сил становится преобладающим. Таким образом,
= “F^zk- (1-
7
Поперечной демпфирующей силой
вследствие ее малости в расчетах обычно пренебрегают.
В качестве основных управляющих органов в жидкостных ра-
кетах применяются поворотные двигатели и газовые рули. Иногда
в качестве дополнительных органов используются воздушные ру-
ли, эффективность которых существенна лишь при больших ско-
ростных напорах.
Газодинамические силы, воздействующие на поверхности ру-
лей, приводятся к подъемной силе Уг.р и силе лобового сопротивле-
ния Хг.р, приложенным к оси вращения руля, и шарнирному мо-
менту 7ИГ.Ш. Эти величины могут быть определены по обычным
формулам:
M.p^^^r.p^Sr.p; XT,v=qrSTcXr-, MTM=qTSTlTm^T,
где qr—скоростной напор обдувающего руль газового потока;
5г.р, 4.р — характерная площадь и длина газового руля; 6Г.Р — угол
поворота газового руля.
Углы поворота газовых рулей на активном участке траектории
изменяются в пределах |6Г.Р| < |6тах|, поэтому коэффициенты
сУг> схг> ^.[у зависят не только от формы руля и расположения
оси его вращения, но и от угла 6Г.Р. Лобовое сопротивление газо-
вых рулей приводит к некоторой потере тяги.
В случае воздушных рулей, по аналогии с предыдущим
^в.р=^в.р^гв8в.р; Xn.v = QSB.vcXB-, Mn.ul=qSB^n.fm^bB,v; q=QV2/2.
Здесь dB.p — угол поворота воздушного руля относительно корпуса;
v — скорость полета.
Кроме шарнирных моментов при отклонениях газовых и воз-
душных рулей возникают демпфирующие моменты, пропорцио-
нальные угловой скорости 8. Однако шарнирные и демпфирующие
моменты несоизмеримо малы по сравнению с моментом силы Уг.р
(или Уп.р) относительно центра масс ракеты, поэтому в уравнени-
ях движения ракеты обычно не учитываются. Величина шарнирно-
го момента руля имеет значение только для расчета работы руле-
вых машин.
Если органами управления являются поворотные двигатели, то
Ур = Р sin В; Хр = Р(1 - cos о);
при малых углах поворота
Ур^РВ; Хр^РВ2/2^0.
Независимо от типа органов управления будем в дальнейшехМ
полагать, что при малых углах поворота 6 сила лобового сопротив-
8
ления рулей Хр не зависит от угла б, а поперечная управляющая
сила Ур пропорциональна углу б.
В общем виде
(1-6)
где /?гР — градиент управляющей силы рулей.
Тяга ракетного двигателя при постоянном секундном расходе
топлива зависит от высоты полета. Эту зависимость можно пред-
ставить следующей формулой:
p=Pt) + Sa(p0-pff),
где р0 „ ТЯга двигателя у поверхности
Земли; Sa — площадь среза сопла; р0,
рн — статическое давление воздуха у по-
верхности Земли и на высоте Н. По ме-
ре набора высоты тяга плавно возрастает
соответственно падению атмосферного
двигателя.
В зависимости от характера запуска
двигателя тяга может нарастать быст-
рее или медленнее, непрерывно или сту-
пенями. Точно так же и при выключении
двигателя тяга исчезает не мгновенно, а
наблюдается, как гово-
рят, явление последействия. После отсечки двигателя вслед-
ствие догорания остатков топлива все еще продолжает создавать-
ся небольшая тяга. Однако как время выхода двигателя на режим,
так и, в особенности, период последействия составляют небольшую
долю от общего времени работы двигателя.
Ускорение ракете сообщается силой
РЭ = Р-Х^
которая называется эффективной тягой двигателя.
Вес ракеты G = mg во время полета изменяется как вследствие
изменения массы т ракеты, так и вследствие изменения ускоре-
ния свободного падения g.
1.2. СИСТЕМЫ КООРДИНАТ
Определим системы координат, с которыми придется встречать-
ся в дальнейшем. Все системы координат будем принимать прямо-
угольными и правыми.
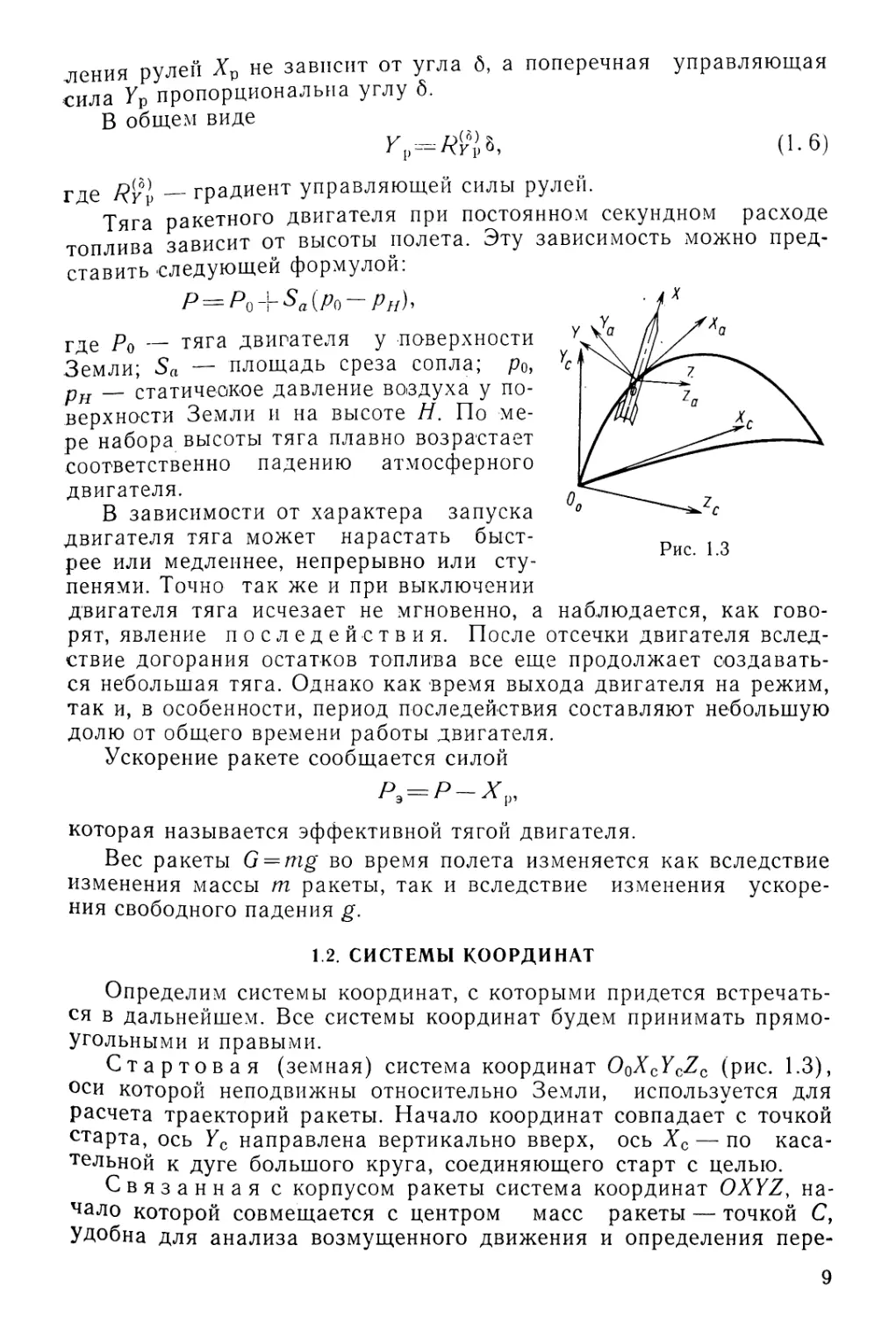
Стартовая (земная) система координат O0XcYcZc (рис. 1.3),
оси которой неподвижны относительно Земли, используется для
расчета траекторий ракеты. Начало координат совпадает с точкой
старта, ось Ус направлена вертикально вверх, ось Хс — по каса-
тельной к дуге большого круга, соединяющего старт с целью.
Связанная с корпусом ракеты система координат OXYZ, на-
пало которой совмещается с центром масс ракеты — точкой С,
Удобна для анализа возмущенного движения и определения пере-
9
грузок. Координатные оси X, У, Z направлены по главным цент-
ральным осям инерции ракеты, причем ось X направлена по оси
ракеты, называемой ее продольной осью. Координатная ось
У расположена так, чтобы в положении на старте плоскость OXY
совпадала с плоскостью О0ХсУс, а ось Z — с осью Zc.
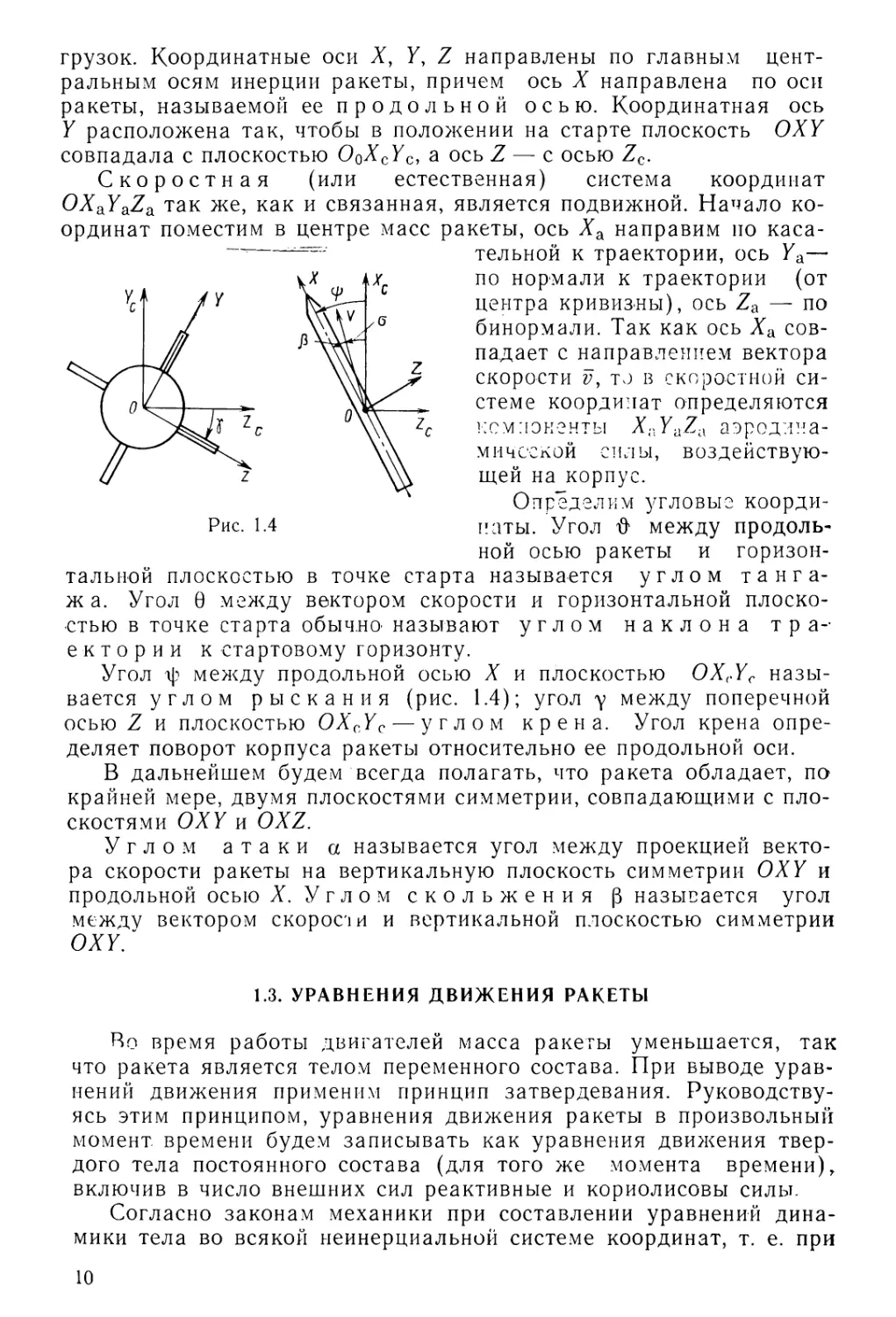
Скоростная (или естественная) система координат
OXaKaZa так же, как и связанная, является подвижной. Начало ко-
ординат поместим в центре масс ракеты, ось Ха направим по каса-
тельной к траектории, ось Уа—
по нормали к траектории (от
центра кривизны), ось Za — по
бинормали. Так как ось Ха сов-
падает с направлением вектора
Рис. 1.4
скорости v, то в скоростной си-
стеме координат определяются
ксмчэненты X[}YAZA аэродина-
мической силы, воздействую-
щей на корпус.
Определим угловые коорди-
наты. Угол Ф между продоль-
ной осью ракеты и горизон-
тальной плоскостью в точке старта называется углом танга-
жа. Угол 8 между вектором скорости и горизонтальной плоско-
стью в точке старта обычно- называют углом наклона тра-
ектории к стартовому горизонту.
Угол х|? между продольной осью X и плоскостью OXCYC назы-
вается углом рыскания (рис. 1.4); угол у между поперечной
осью Z и плоскостью ОХСУС— углом крена. Угол крена опре-
деляет поворот корпуса ракеты относительно ее продольной оси.
В дальнейшем будем всегда полагать, что ракета обладает, по
крайней мере, двумя плоскостями симметрии, совпадающими с пло-
скостями OXY и OXZ.
Углом атаки а называется угол между проекцией векто-
ра скорости ракеты на вертикальную плоскость симметрии OXY и
продольной осью X. Углом скольжения [3 называется угол
между вектором скорости и вертикальной плоскостью симметрии
ОХУ.
1.3. УРАВНЕНИЯ ДВИЖЕНИЯ РАКЕТЫ
Во время работы двигателей масса ракеты уменьшается, так
что ракета является телом переменного состава. При выводе урав-
нений! движения применим принцип затвердевания. Руководству-
ясь этим принципом, уравнения движения ракеты в произвольный
момент времени будем записывать как уравнения движения твер-
дого тела постоянного состава (для того же момента времени),
включив в число внешних сил реактивные и кориолисовы силы.
Согласно законам механики при составлении уравнений! дина-
мики тела во всякой неинерциальной системе координат, т. е. при
10
составлении дифференциальных уравнений относительного движе-
ния к внешним силам, действующим на твердое тело, необходимо
добавлять переносную и кориолисову силы инерции, возникающие
из-за ускоренного движения выбранной системы отсчета. Для под-
счета этих сил инерции надо установить закон движения выбран-
ной системы отсчета по отношению к какой-либо инерциальной сис-
теме что можно выполнить лишь приближенно в силу приближен-
ного выбора инерциальной системы.
Одним из приближений для инерциальной системы отсчета слу-
жит система координат с началом в центре Земли и осями, направ-
ленными на неподвижные звезды. Такой выбор инерциальной сис-
темы равносилен пренебрежению ускорением центра Земли в его
орбитальном движении, но с сохранением влияния собственного вра-
щения Земли. Это дает возможность с достаточной точностью рас-
считать движение спутника вокруг Земли.
Для анализа динамики возмущенного движения ракеты будем
пренебрегать силами инерции, обусловленными движением Земли,
и стартовую систему координат будем считать инерциальной.
Уравнения движения центра масс ракеты и вращения вокруг
центра масс в инерциальной системе отсчета в векторной форме
имеют вид
m(dfU'dt) = R\ dKc]dt = Lc, (1.7)
где т — масса твердого тела ракеты; v — вектор скорости центра
масс; Кс — кинетический момент твердого тела относительно цент-
ра масс; R — главный вектор внешних сил, приложенных к телу;
Lc — главный момент внешних сил, приложенных к телу, относи-
тельно центра масс.
Спроектируем векторные уравнения (1.7) на оси подвижных
систем координат. Обозначим через Q вектор угловой скорости
скоростной системы координат 0ХаУа2а относительно неподвиж-
ной системы OqXcYcZc.
Применив формулу Бура
dv'dt — dv'dt + 2 v,
где Svfdt— производная по времени от v в подвижной (скорост-
ной) системе координат OXa/aZa, спроектируем первое уравнение
(1.7) на оси скоростной системы 0ХаУа7а. Получим
/ х \
т ( ~~ ^z VY = Rx ;
\ at а а / а
(dvy \
—л + Qzvx - Qx Vz = Ry ;
at a a у a
(dvZ \
-7- + - ЙУ VX = Rz
at a a / a
(1-8)
11
Здесь vx, Wa, ^z — проекция вектора скорости центра масс на
подвижные оси; 2^а, 2ка, 2za — проекции вектора 2 на те же оси
координат.
Второе уравнение (1.7) вращательного движения запишем в
форме Эйлера, приняв за подвижную систему координат связан-
ную с корпусом систему OXYZ. Имеем
/] (б/(')| ^//) — (/2 — /3) ^2^'3 ==
12 (d^2! dt) — (/3 — 71) о)^7,^;
/3 (rfo)3/ lib ) (11 72) — 7,2,- (1*9)
Здесь /1, /2, Л — главные центральные моменты инерции твердого
тела относительно осей X, У, Z; ом, <о2, <о3— проекции вектора со уг-
ловой скорости связанной системы координат OXYZ относительно
неподвижной О0^сУVZC на оси X, У, Z.
Программный полет предусматривает движение баллистической
ракеты в вертикальной плоскости OqXcYc, с которой совпадает
вертикальная плоскость симметрии ракеты OXY. Таким образом, в
программном движении обычно ф = |3 = у = 0. Движение ракеты в
вертикальной плоскости будем называть движением в плос-
кости тангажа.
По некоторым причинам действительное движение будет всег-
да отличаться от программного, так что кроме продольного дви-
жения может одновременно существовать и боковое движение с
координатами ф и р, которое называется движением в плоскости
рыскания или движением рыскания. Движение с координа-
той у называется вращением относительно продольной оси ракеты
или движением крена.
Наличие плоскостей симметрии ракеты и малые движения рыс-
кания и крена дают возможность разделить общее движение, опи-
сываемое уравнениями (1.8) и (1.9), на продольное, движение в
плоскости рыскания и вращение относительно продольной оси.
Пусть стабилизация ракеты осуществляется раздельно по тан-
гажу, рысканию и крену. Тогда уравнения, описывающие работу
системы управления в плоскостях тангажа, рыскания и крена, бу-
дут независимыми. В этом случае уравнения движения управляе-
мой ракеты в плоскости тангажа можно получить и проанализиро-
вать независимо от уравнений движения в плоскости рыскания.
Однако исследование движения рыскания и движения крена можно
провести лишь после того, как будут определены параметры про-
дольного движения.
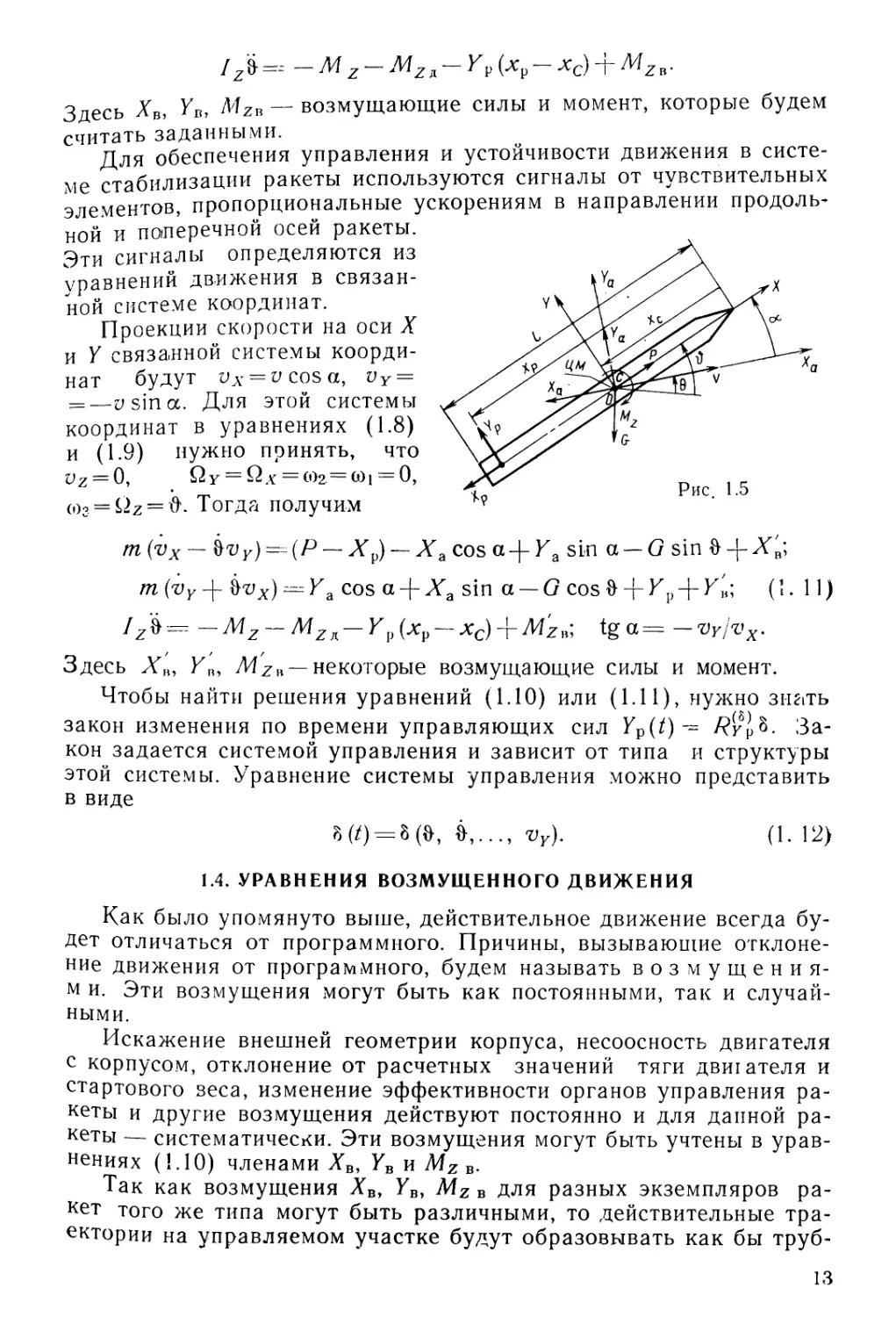
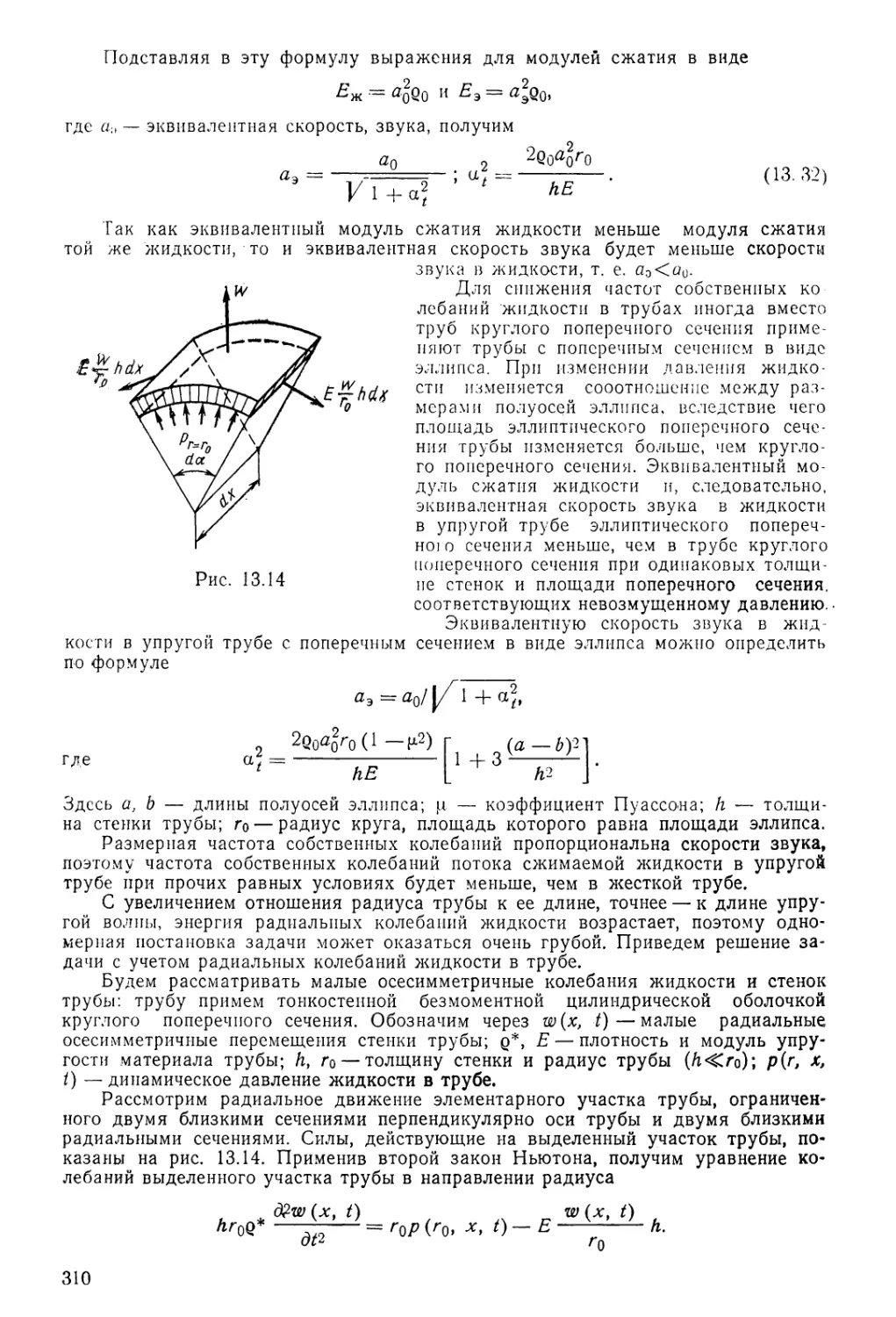
На рис. 1.5 показаны силы, действующие на ракету, причем
аэродинамический момент Mz показан с учетом его знака. Пола-
гая, что в уравнениях (1.8) и (1.9) Vx ~v, Vy =^vz =0, 2x =^2y =
= (01:=(d2—0, (o3=-4, Qza:=01 получим уравнения движения ракеты
в вертикальной плоскости в скоростной системе координат:
tnv = (P — Хр) cosa — Ха — G sin 6 — Кр sin
mvf) (Р — X sin а-(-Иа — О cos 6-(-Хр cos а (1. 10)
12
Izb^ -Mz-MZt-Yf(xt-xc)iMz,
Здесь Хв, Кв, XfZB — возмущающие силы и момент, которые будем
считать заданными.
Для обеспечения управления и устойчивости движения в систе-
ме стабилизации ракеты используются сигналы от чувствительных
элементов, пропорциональные ускорения
ной и поперечной осей ракеты.
Эти сигналы определяются из
уравнений движения в связан-
ной системе координат.
Проекции скорости на оси X
и Y связанной системы коорди-
нат будут Vx = v cos a, vY =
=—v sin а. Для этой системы
координат в уравнениях (1.8)
и (1.9) нужно принять, что
У/ = 0, Q у — — о)2 = о)1 = О,
(,)3 = Qz = ft. Тогда получим
м
в
направлении продоль
/п (vx — ftTiy) =^(Р — Хр) — Ха cos а~рУа sin a —G sin ft -{-А"/,
т (vY ft^x) Ка cos а + Ха sin а — G cos ft + Кр + К»; (1. 11)
/zft — -^z-MZjl-Yp(xp-xc)-]-Mzn; tga= -vy/vx.
Здесь Xfi, Kn, MZn — некоторые возмущающие силы и момент.
Чтобы найти решения уравнений (1.10) или (1.11), нужно знать
закон изменения по времени управляющих сил Yp(t)-= RyI%. За-
кон задается системой управления и зависит от типа и структуры
этой системы. Уравнение системы управления можно представить
в виде
&(/) = & (ft, ft,..., vY). (1. 12)
1.4. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Как было упомянуто выше, действительное движение всегда бу-
дет отличаться от программного. Причины, вызывающие отклоне-
ние движения от программного, будем называть воз му щен и я-
м и. Эти возмущения могут быть как постоянными, так и случай-
ными.
Искажение внешней геометрии корпуса, несоосность двигателя
с корпусом, отклонение от расчетных значений тяги двигателя и
стартового веса, изменение эффективности органов управления ра-
кеты и другие возмущения действуют постоянно и для данной ра-
кеты — систематически. Эти возмущения могут быть учтены в урав-
нениях (1.10) членами Хв, Ув и Mz в.
Так как возмущения Хв, Ув, Mz в для разных экземпляров ра-
кет того же типа могут быть различными, то действительные тра-
ектории на управляемом участке будут образовывать как бы труб-
13
ку траекторий, в которой будет находиться программная траекто-
рия.
Движение ракеты в трубке траекторий будем называть номи-
нал ь и ы м движение м. По характеристикам возмущений мож-
но установить размеры трубки траекторий, которые являются ис-
ходными для расчета рассеивания.
Кратковременные возмущения, такие как порывы ветра, кратко-
временные изменения тяги двигателя, помехи и ложные сигналы в
системе управления, обычно случайны и их невозможно учесть в
уравнениях движения, хотя они и оказывают влияние на движение
ракеты.
Под воздействием этих кратковременных возмущений изменя-
ются параметры движения, поэтому величину любого из них мож-
но представить состоящей из номинального значения и некоторого
малого отклонения:
^=^4-^; ftB=ftH-Fft; 9в=9н+^ ^в^н4-5- 0-13)
В п I 7 В п I ' В п ( ' Н Н ( 7 В И | х /
Уравнения (1.10) и (1.11) справедливы для произвольных функ-
ций цв, фв, 0В, бв; в частности, они справедливы и для функций но-
минального движения уп, дн, 0п, бп.
Значения переменных из равенств (1.13) подставим в уравнения
(1.10) и из полученного результата вычтем уравнения (1.10), соот-
ветствующие параметрам номинального движения. Примем, что
cosan^l, sinaH~an. Полагая отклонения v, f>, 0, а и б малыми й
оставляя только члены первого порядка, получим следующие урав-
нения в скоростной системе координат относительно отклонений:
mv = — P3aHa — QVHScx,v~G cos — Ryl (aH8 8Ha);
2
mvfi = Рэа + G sin 0H0 -L- S4e) a -|_ег»н5с^ aHz» R^ (8 - 8HaHa);
2, d d r
(1.14)
Slm^a — QV^Slniz )«нг’ —4 —
t
- R$l (xp - xc) 8 —- 2 rrtj (x — xc}dx$.
Здесь неизвестными являются отклонения параметров движения
v, 0, ft, а, б. Функции vn, 0П, -Он, ан и бы, характеризующие номи-
нальное движение, считаются известными, их можно определить
из решений уравнений (1.10) и уравнения (1.12). Заменив а = Ф—0,
уравнения (1.14) запишем в виде
'Ц -г cvv^ 4~ -Ксг/gS = 0;
6 _F^06® 4-<W ”F^e®^ 4“^es^== 0; (1. 15)
& 4“ & 4~* -f- 4~ c$vv 4~ =o.
14
Здесь введены следующие обозначения коэффициентов:
в первом уравнении —
= — qv„Scx ; Cvt=— (G cos 6H — Рэая — RyX):
т а т
Cv^ =— (Рэая + Л’РХ); = — <> ан;
т т
(1.16)
во втором и третьем уравнениях —
(2
P3-G sin 0Н+-^=- -/#’8ная
2 а
(2 \
-р*-^sM+R^] ;
2 /
1 с*(а) 1 г>(&)
=---QVHScy 'ан; с^ =-А?гр;
mvH а mvH
J_ _в£н_ 2 т. (х _ хс) dх
См = ±^LSlm^=-c^ ;
= 2- Ryр Up — хс); I = Iz.
В отличие от уравнений (1.10) уравнения (1.15) называются
уравнениями возмущенного движения или уравнениями для отк-
лонений. Это линейные дифференциальные уравнения с перемен-
ными коэффициентами. Коэффициенты уравнений определяются
через характеристики ракеты /?г, /, Рэ, 7?уР’ хр’ парамет-
ры невозмущенного движения уп, 4н, 0н, ан, 6ц, плотность воздуха
и аэродинамические коэффициенты могут быть вычислены. Так
как номинальное движение мало отличается от программного, то
в формулах (1.16) и (1.17) вместо номинальных значений можно
принять программные значения иПр, 0пр, аПр, Фпр, известные из рас-
чета программного движения.
Теперь найдем уравнения возмущенного движения ракеты в ско-
ростной системе координат в плоскости рыскания.
Невозмущенное движение ракеты происходит в плоскости тан-
гажа, поэтому в плоскости рыскания все параметры номинального
движения и внешние силы тождественно равны нулю. Возмущения
в плоскости рыскания будем считать малыми и определять их бу-
дем через угол рыскания ф, угол скольжения (3, угол поворота тра-
ектории а по отношению к плоскости невозмущенного движения и
угол поворота управляющих органов б.
Ввиду малости возмущений и наличия плоскостей симметрии
ракеты возмущенное движение в плоскости рыскания не будет за-
висеть от возмущений в плоскости тангажа.
15
С появлением угла скольжения возникает боковая аэродина-
мическая сила Z^=qSc{z\$ и аэродинамический момент
MY = qSlm{y }В. При этом вследствие осевой симметрии корпуса ра-
кеты при ап = 0 производная cza=cy^ а ту -~—mz .
При вращении корпуса ракеты с угловой скоростью ф возника-
ет демпфирующий момент в плоскости рыскания. На основании
уравнений (1.3) и (1.4)
MYSl2m^} — -|-2ф mj (x — xc)dx.
(7) л'0;-
Уравнения возмущенного движения в плоскости рыскания мож-
но получить из уравнений (1.14), заменив в них отклонения 0, ft, а
отклонениями о, ф, 0 соответственно и приняв G = 0, 0И = фп = дп = 0.
В этом случае второе и третье уравнения не будут связаны с пер-
вым уравнением. Итак, уравнения возмущенного движения в ско-
ростной системе координат будут иметь такой вид:
°-|-“4““I-=0; 0 ig)
*4* -1_ с ффФ -р “I- в о,
(2 \
гч I Qvh е (3)1 1 /л(6)
Рэ + —— ; саЬ =-----Rz^
2 а/
1а
Сфф = — ГSl2m$} -J- 2 mj \ (х — хс) dx \ ; (1-19)
/ L 2 J J
Ло/
L c^ = -^-Rz\ax? — хс);
/ = /r = /z.
При принятых ранее допущениях малое отклонение у в плоско-
сти крена будет зависеть только от возмущений углов поворота уп-
равляющих органов. Момент управляющих сил рулей относитель-
но продольной оси ракеты
mXv=m^x,
tj\$ — обобщенный угол поворота управляющего органа отно-
сительно продольной оси X; ТИхр — градиент управляющего мо-
мента.
Уравнение возмущенного движения относительно продольной
оси будет
y+chy+Mx=0; СТ8 = -4-/л^₽; п-2°)
*х
16
Рис. 1.6
Здесь через /хсп\ обозначен демпфирующий момент относитель-
но продольной осп, который может возникать, например, при нали-
чии на корпусе ракеты оперения.
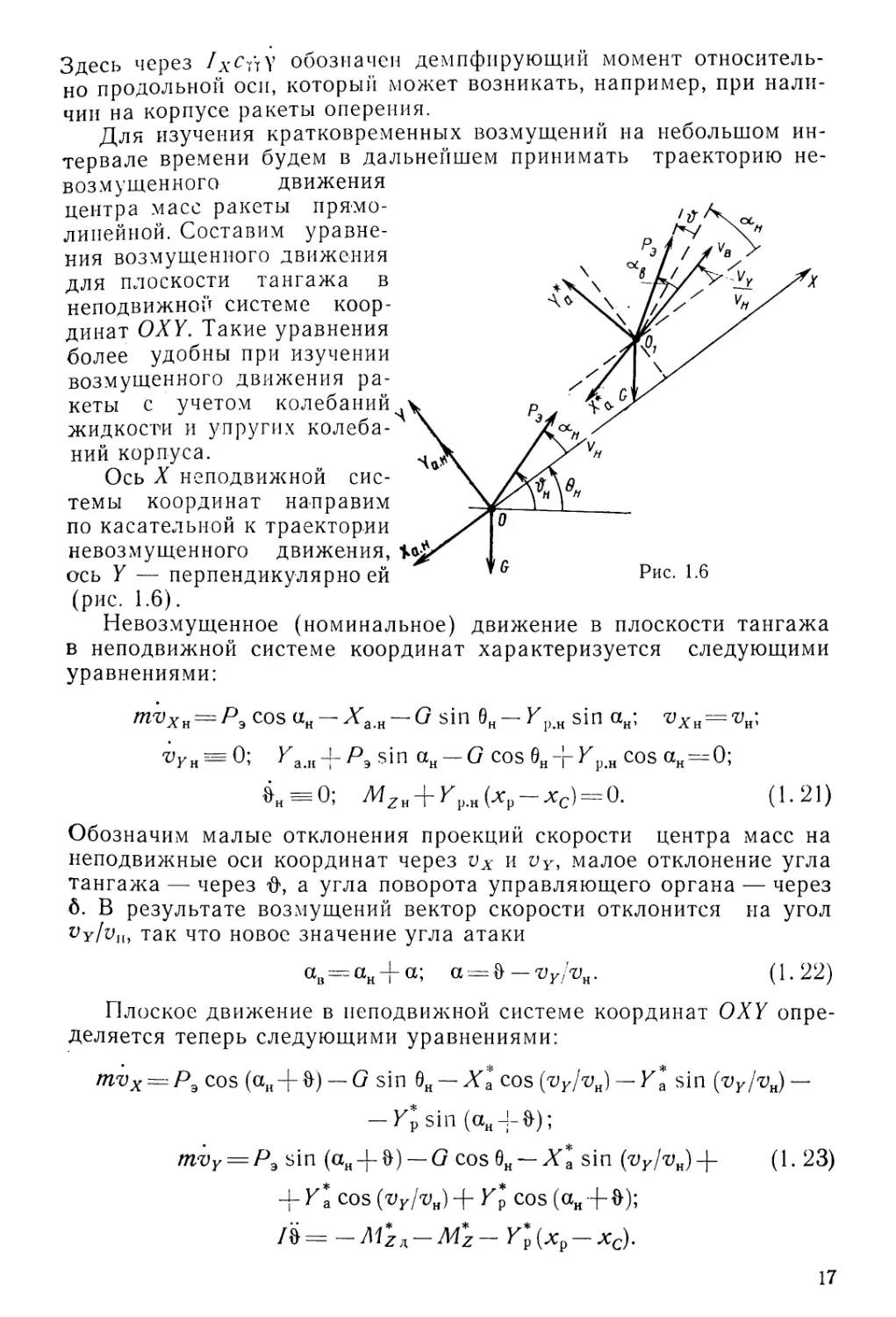
Для изучения кратковременных возмущений на небольшом
тервале времени будем в дальнейшем принимать траекторию
возмущенного движения
центра масс ракеты прямо-
линейной. Составим уравне-
ния возмущенного движения
для плоскости тангажа в
неподвижной системе коор-
динат OXY. Такие уравнения
более удобны при изучении
возмущенного движения ра-
кеты с учетом колебаний
жидкости и упругих колеба-
ний корпуса.
Ось X неподвижной сис-
темы координат направим
по касательной к траектории
невозмущенного движения, $&£
ось Y — перпендикулярно ей
(рис. 1.6).
Невозмущенное (номинальное)
в неподвижной системе координат характеризуется
уравнениями:
ин-
не-
движение в плоскости тангажа
следующими
= cos ан — Ха н — G sin 9Н — Kt)H sin а • -у =
ли э п. а • Н п р.Н п ’ ух п. п ’
vFh = 0; sin ан — G cos 9Нн cos ан = 0;
1 л. 7 <Д.Н | Э Н. п. I л. 7
aH = 0; MZH + rp.H(xp-xc) = 0. (1.21)
Обозначим малые отклонения проекций скорости центра масс на
неподвижные оси координат через vx и vY, малое отклонение угла
тангажа — через -О', а угла поворота управляющего органа — через
б. В результате возмущений вектор скорости отклонится на угол
vYlvib так что новое значение угла атаки
— + z»H. (1.22)
Плоское движение в неподвижной системе координат OXY опре-
деляется теперь следующими уравнениями:
mvx = P3 cos (ан+&) — G sin 6Н — Х'а cos (vylvH) — Ya sin (vy/vK) —
— Yp sin (ан-!-$>);
tnvy = P3 sin (aH-j-&) — G cos 9H — Xa sin (г»у/г>н) + (1. 23)
+ Ya COS (ur/t»„) + Yp cos(a„+&);
/» = Yp(xp-xc).
17
VX, vY,
(1.24)
(1.25)
Выразив возмущенные силы и моменты Ха, Y\, Кр, /Wza, Afz
через величины, описанные равенствами (1.13), и произведя вычи-
тание (1.21) из (1.23), получим уравнения движения ракеты в не-
подвижной системе координат относительно отклонений
ф и 6:
vx 4- ?vXvX Vx -К CvxvY vy -г Cvxt & -Т cv^ о = 0;
Сvyvy У ~~Г Cvyvх VX CVy$ О’ 4~ г/у-оО 0?
& 4“ vx 4~ с^у VY ~i~ QoB = 0.
В первом уравнении коэффициенты
C^X^X=~QV"SC'Xa' C^X^Y=~~^~Sc(yaaa»;
с„х* — (P9aH + ; CVX. = — < *ан.
m m
Во втором и третьем уравнениях
1 0 н с» / («) i \ 1 о(а)
CvyVy ~ $ (^Щ Т" ^^а ’ ^Vy v Х ССн,
Y Y т 2 а а /Л т а
2
1 / г~\ । (^) \
Cvyb | Р3 П ~ К ^ТрВнан | ,
Y т \ 2 а /
„ ____ 1 />(*). г __________1
— Рур> oliTiz •>
Y т Y IvH 2
Остальные коэффициенты и вычисляются по формулам
(1. 17).
Глава II
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ РАКЕТЫ
КАК ТВЕРДОГО ТЕЛА И ОБЕСПЕЧЕНИЕ
УСТОЙЧИВОСТИ ДВИЖЕНИЯ
2.1. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Устойчивости движения ракеты придается большое значение. Для обеспече-
ния устойчивости движения ракета снабжается автоматом стабилизации. Авто-
мат стабилизации должен обладать такими свойствами, чтобы случайно возника-
ющие малые отклонения параметров движения ракеты через некоторое время
были сведены к нулю или к очень малым допустимым величинам.
Классическим является определение устойчивости по Ляпунову.
Любая система линейных дифференциальных уравнений, в том числе и ли-
неаризованных уравнений возмущенного движения, например (1.15), может быть
приведена к нормальному виду
dys!dt ----Y s{t, Уп) (s^l, 2,..., и),
где ys — отклонения координат.
.18
Определение устойчивости по Ляпунову формулируется следующим обра-
зом. „ _
Невозмущенное движение устойчиво, если для всякого положительного чис-
ла е, как бы мало оно ни было, можно подобрать другое положительное число
nfeL такое, что для всех возмущенных движений ys = ys(t), для которых в на-
чальный момент времени t = t0 выполняются неравенства | ys(tQ) | =^т]5, при всех
t>t0 будут выполняться неравенства \ys(t)\<zs.
Если невозмущенное движение устойчиво и если число r)s можно выбрать на-
столько малым, что для всех возмущенных движений, удовлетворяющих нера-
венствам |j/s(/o) I будут выполняться условия
lim ys (0 — О,
то нсвозмущенное движение называется асимптотически устойчивым.
Можно ли судить об устойчивости реальной системы по линеаризованным
уравнениям? Ответ на этот вопрос дают следующие три теоремы Ляпунова.
I. Если характеристическое уравнение линеаризованной системы имеет все
корни с отрицательными вещественными частями, то действительная система бу-
дет такой же устойчивой, как и линеаризованная, т. е. никакие добавки в виде
членов второй и высшей степеней переменных и их производных не могут в этом
случае нарушить устойчивость системы.
2. Если характеристическое уравнение линеаризованной системы имеет хотя
бы один корень с положительной вещественной частью, то действительная сис-
тема будет неустойчива, т. е. никакие добавки в виде членов второй и высших
степеней переменных и их производных нс могут придать системе устойчивость.
3. При наличии нулевых и чисто мнимых корней по линеаризованным урав-
нениям нельзя сделать заключение об устойчивости или неустойчивости действи-
тельной системы. Отброшенные члены второй и высших степеней переменных и
их производных в некоторых случаях могут коренным образом изменить вид ди-
намической характеристики системы.
Сформулированное определение асимптотической устойчивости относится к
системам с неограниченным временем движения, т. е. 0</<оо. Поскольку вре-
мя движения ракеты ограничено, следует говорить о так называемой устойчиво-
сти на конечном интервале времени (/0<^Л), в котором совершается про-
цесс движения.
Если для всякого положительного числа е, как бы мало оно ни было, мож-
но подобрать такое другое положительное число т)(е), что Для вссх возмущен-
ных движений, для которых в начальный момент времени выполняются усло-
вия I ys(to) | ^Т]з И В любой момент между /0 и ti будут выпол-
няться условия | ys (/) | < es, то движение будет устойчивым на конечном интер-
вале времени. Устойчивость на конечном интервале времени называют также
технической устойчивостью.
В некоторых случаях требования к системе стабилизации из условий техни-
ческой устойчивости могут быть более мягкими, чем требования из условий
асимптотической устойчивости. Это обстоятельство имеет немаловажное значе-
ние и его в некоторых случаях целесообразно использовать, поскольку время
движения ракеты на активном участке траектории невелико.
2.2. МЕТОДЫ ОЦЕНКИ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Пусть мы имеем систему однородных линейных дифференциальных уравне-
ний п-го порядка с постоянными коэффициентами. Решение такой системы мож-
но искать в виде x = Cxe[}t, где х — любая координата. Для нетривиального ре-
шения определитель системы, составленный из коэффициентов при неизвестных
Сх, должен быть равен нулю. Раскрыв его, получим характеристическое уравне-
ние системы дифференциальных уравнений в виде
L (р) = рл + #i р 1 + • •. + ап—1 Р ап — 0. (2.1)
19
Определив все корни р/< (/г=1, 2, . . п) характеристического уравнения (2.1),
найдем, что любая координата будет изменяться по закону
п t
^Ck^, (2.2>
ft: 1
где Сь — произвольная постоянная.
Если все корни характеристического уравнения рЛ вещественные числа, то
все Сь также вещественные числа и х — сумма экспоненциальных функций.
Если все рл отрицательные, то при t—>-оо х—^0; если хотя бы одно из значений
Ра положительно, то х__>оо.
Пусть теперь характеристическое уравнение имеет комплексно-сопряженные-
корни рл, /{ + 1 — аь±/о)а. Каждую пару слагаемых в выражении (2.2), соответст-
вующую корням рА, и Ра + 1, на основании тожде.лва Эйле-
ра можно представить в виде
а. f
° е й (А^ sin -г cos
где Ah, Bh — вещественные числа.
0 ос* Решение (2.2) стремится к пулю, если все веществен-
ные части а а комплексно-сопряженных корней характерно*
о тического уравнения отрицательны. Наличие пары мнимых
корней характеристического уравнения (остальные корни,
например, отрицательны), будет свидетельствовать о том,.
Рис. 2.1 что система будет совершать неограниченно долго колеба-
ния с постоянной амплитудой, зависящей от начальных
условий.
Таким образом, необходимое и достаточное условие устойчивости движения
в линейном приближении состоит в том, чтобы все вещественные корни харак-
теристического уравнения были отрицательны, а все комплексно-сопряженные
корни имели отрицательную вещественную часть.
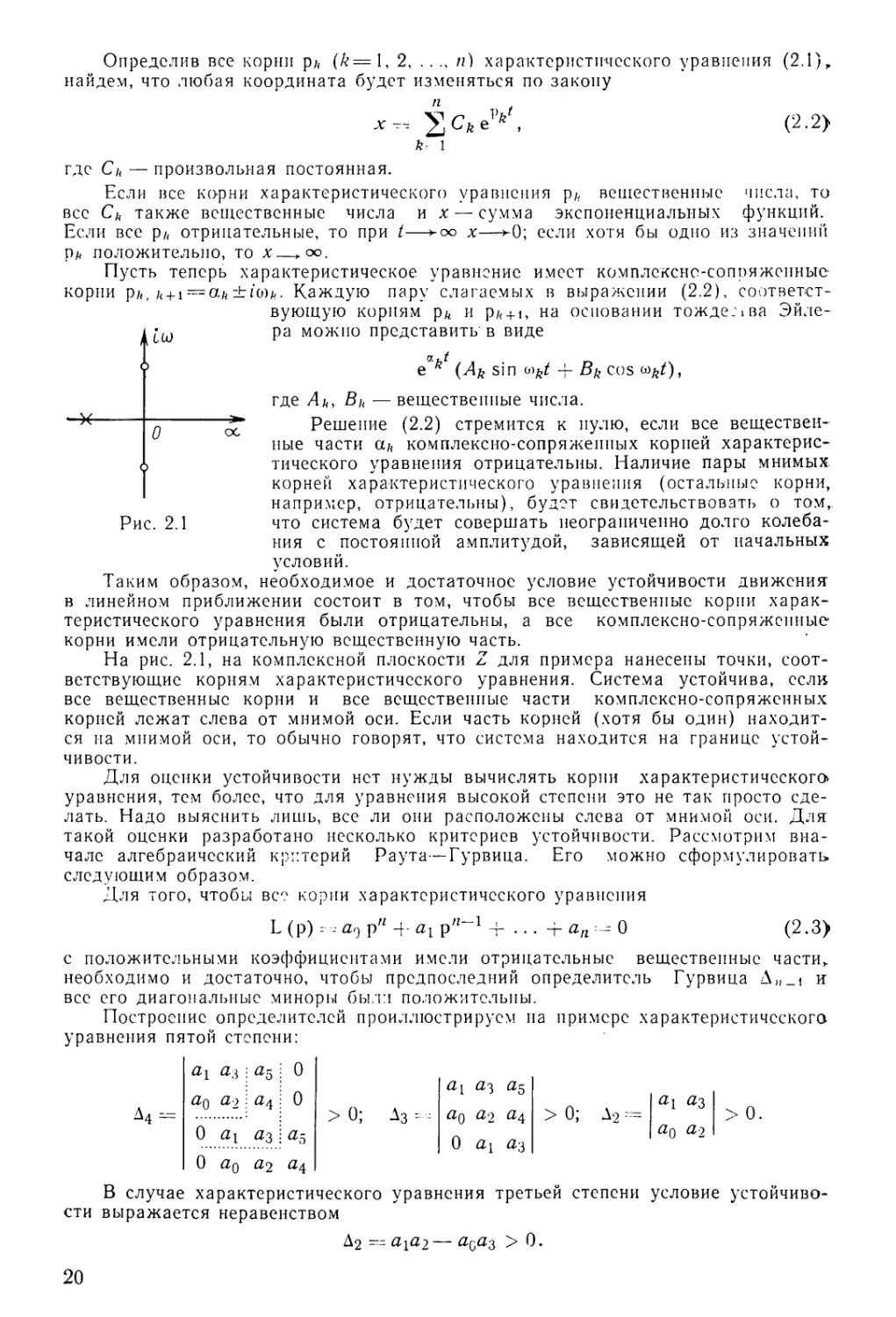
На рис. 2.1, на комплексной плоскости Z для примера нанесены точки, соот-
ветствующие корням характеристического уравнения. Система устойчива, если
все вещественные корни и все вещественные части комплексно-сопряженных
корней лежат слева от мнимой оси. Если часть корней (хотя бы один) находит-
ся на мнимой оси, то обычно говорят, что система находится на границе устой-
чивости.
Для оценки устойчивости нет нужды вычислять корни характеристического»
уравнения, тем более, что для уравнения высокой степени это не так просто сде-
лать. Надо выяснить лишь, все ли они расположены слева от мнимой оси. Для
такой оценки разработано несколько критериев устойчивости. Рассмотрим вна-
чале алгебраический критерий Раута—Гурвица. Его можно сформулировать,
следующим образом.
Для того, чтобы вс? корни характеристического уравнения
L (р) = - р" 4- ах р"'* 1 4- ... + ап 0 (2.3>
с положительными коэффициентами имели отрицательные вещественные части,
необходимо и достаточно, чтобы предпоследний определитель Гурвица An_i и
все его диагональные миноры были положительны.
Построение определителей проиллюстрируем на примере характеристического
уравнения пятой степени:
^3 ^5
л0 ^2
0 а$
Г1 ЙЗ|>0
I <20 I
В случае характеристического уравнения третьей степени условие устойчиво-
сти выражается неравенством
^2 =-
20
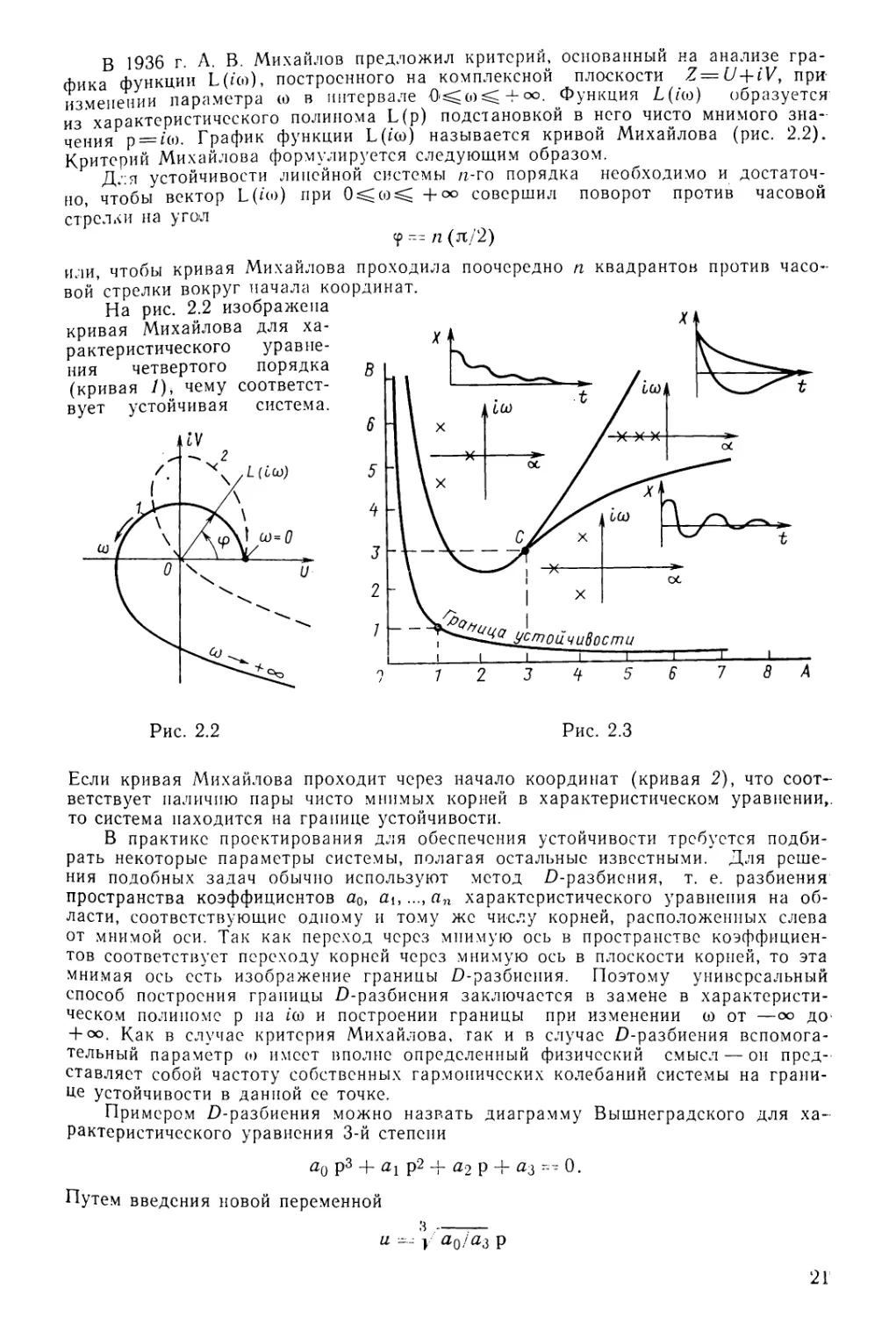
В 1936 г. А. В. Михайлов предложил критерий, основанный на анализе гра-
фика функции L(tco), построенного на комплексной плоскости Z=U+iV, при
изменении параметра со в интервале 0^со^4-оо. Функция L(z’co) образуется
из характеристического полинома L(p) подстановкой в него чисто мнимого зна-
чения р = /(•). График функции L(ico) называется кривой Михайлова (рис. 2.2).
Критерий Михайлова формулируется следующим образом.
Для устойчивости линейной системы /г-го порядка необходимо и достаточ-
но, чтобы" вектор L(cco) при О^со^ +°° совершил поворот против часовой
стрелки на угол
ср -- п (л/2)
или, чтобы кривая Михайлова проходила поочередно п квадрантов против часо-
вой’стрелки вокруг начала координат.
На рис. 2.2 изображена
кривая Михайлова для ха-
рактеристического
ния четвертого
(кривая /), чему
вует устойчивая
урав не-
порядка
соответст-
система.
Рис. 2.2
Если кривая Михайлова проходит через начало координат (кривая 2), что соот-
ветствует наличию пары чисто мнимых корней в характеристическом уравнении,,
то система находится на границе устойчивости.
В практике проектирования для обеспечения устойчивости требуется подби-
рать некоторые параметры системы, полагая остальные известными. Для реше-
ния подобных задач обычно используют метод D-разбисния, т. е. разбиения
пространства коэффициентов а0, ..., ап характеристического уравнения на об-
ласти, соответствующие одному и тому же числу корней, расположенных слева
от мнимой оси. Так как переход через мнимую ось в пространстве коэффициен-
тов соответствует переходу корней через мнимую ось в плоскости корней, то эта
мнимая ось есть изображение границы D-разбиспия. Поэтому универсальный
способ построения границы D-разбисния заключается в замене в характеристи-
ческом полиноме р на /со и построении границы при изменении со от —оо до-
4-00. Как в случае критерия Михайлова, гак и в случае D-разбиения вспомога-
тельный параметр со имеет вполне определенный физический смысл — он пред-
ставляет собой частоту собственных гармонических колебаний системы на грани-
це устойчивости в данной се точке.
Примером D-разбиения можно назвать диаграмму Вышнеградского для ха-
рактеристического уравнения 3-й степени
Р3 + а\ Р2 4- Д-2 Р 4- Дз О.
Путем введения новой переменной
з -----
и у а0/а3 р
21
характеристическое уравнение можно привести к нормированному виду:
и3 -г Аи2 + Ви -у 1 — 0.
Из условия устойчивости
> О
получаем границу устойчивости в виде уравнения гиперболы
АВ = 1 при А > О, В > 0.
В плоскости параметров А и В гипербола Выпшеградского изображена на рис.
2.3. Она дает исчерпывающий ответ о влиянии коэффициентов А и В на устой-
чивость движения.
2.3. АНАЛИЗ УРАВНЕНИЙ ВОЗМУЩЕННОГО
ДВИЖЕНИЯ РАКЕТЫ
Коэффициенты уравнений возмущенного движения (1.15),
(1.18), (1.20), (1.24) определяются через массовые и геометриче-
ские характеристики ракеты, плотность воздуха и кинематические
параметры невозмущенного движения, т. е. являются известными
функциями времени. Несмотря на то, что перечисленные системы
уравнений линейны относительно возмущений, их анализ затруд-
нен наличием переменных коэффициентов. Решать такие уравнения
обычно можно методами численного интегрирования на электрон-
ных вычислительных машинах (ЭВМ) или используя моделирую-
щие устройства.
Для предварительного анализа при проектировании ракеты и ее
системы управления обычно используется так называемый прием
«замораживания» коэффициентов уравнений, при помощи которого
можно получить хотя и грубые, но более общие и обозримые ре-
зультаты.
Сущность приема замораживания коэффициентов заключается
в следующем. Пусть, например, коэффициенты системы уравнений
возмущенного движения (1.15) cvv(t),..., (/) определены для
некоторой траектории невозмущенного движения. На этой траекто-
рии выбирают несколько характерных точек и вместо системы урав-
нений (1.15) с переменными коэффициентами рассматривают сово-
купность аналогичных систем с постоянными коэффициентами
с vv (/*),..., представляющими собой значения коэффициен-
тов уравнений (1.15) в фиксированные моменты времени th. Дру-
гими словами, время полета разбивают на небольшие промежутки,
включающие точки thy и в этих промежутках коэффициенты урав-
нений считают постоянными.
Прием замораживания коэффициентов позволяет применять
широко известные в инженерной практике методы решения линей-
.ных дифференциальных уравнений с постоянными коэффициента-
ми, методы оценки устойчивости решений, частотные методы тео-
рии автоматического регулирования. Вместе с тем исследования
при помощи приема замораживания коэффициентов следует рас-
сматривать как предварительные, носящие в основном качествен-
ный характер. Они должны быть дополнены исследованиями сис-
22
тем уравнений при помощи других методов, в частности, при помо-
щи моделирующих устройств и ЭВМ. В этих исследованиях обычно
учитываются специфические особенности систем, например нели-
нейности систем управления, вследствие чего представляется воз-
можным уточнить результаты, полученные на основании линейных
уравнений.
Рассмотрим свободное возмущенное движение ракеты (без
системы управления) в плоскости тангажа, которое описывается
уравнениями (1.15) при 6 = 0. Для упрощения примем, что невоз-
мущенное движение представляет собой прямолинейный устано-
вившийся полет и что коэффициенты уравнений постоянны. Харак-
теристическое уравнение для системы (1.15) при 6 = 0 будет
Р4 + «1 Р3та2р2 + «зР-г«4 = 0- (2-4>
Коэффициенты а2, а3 и а4 — вещественные, поэтому корни урав-
нения (2.4) могут быть вещественными и комплексно-сопряжен-
ными.
Как показывают расчеты статически устойчивой ракеты, характеристическое
уравнение имеет две пары комплексных сопряженных корней, причем веществен-
ная и мнимая части одной пары корней по абсолютной величине во много раз
превышают вещественные и мнимые части другой пары корней. Это значит, что
свободное возмущенное движение можно представить в виде суммы двух дви-
жений — короткопериодического, соответствующего паре больших по модулю-
комплексных корней, и длиннопериодического, соответствующего парс малых по
модулю комплексных корней.
Например, для гипотетической статически устойчивой ракеты в некоторый
момент времени tk корни уравнения (2.4) имеют следующие значения:
Р1,2— —0,684 ± Z• 1,387; р,м = —0,0066 ± I-0,0623;
периоды колебаний соответственно равны 4,54 с, Т2~ 100,83 с. Для откло-
нений v, 0, %) получим выражение вида х -- - т40 4- А е—°’ 84< cos (1,387/-h34) 4-
+ Д2е—°‘006б/ cos (0,0623/+-а2) (x~~v, 0, &), причем для отклонения v всегда
Й11 < |^2|. Следовательно, изменение v определяется главным образом медленно
затухающим слагаемым и является длиннопериодическим.
В выражениях для углов Д и 0 как медленно затухающие, так и
быстро затухающие слагаемые имеют существенное значение. Из-
менение угла атаки ц = Д—9 определяется, в основном, быстро зату-
хающим слагаемым и относится к короткопериодическому движе-
нию.
Такой характер изменения параметров возмущенного движения
во времени не зависит от типа ракеты. Ракета может быстро изме-
нять угол атаки, вращаясь относительно центра масс. В то же вре-
мя скорость полета ракеты изменяется по величине сравнительно
медленно, так как очень малы продольные ускорения и, обуслов-
ленные изменением сил вследствие изменения угла атаки.
Таким образом, возмущенное движение ракеты условно можно
считать состоящим из двух этапов. Первый этап — короткоперио-
дический. Этот этап поперечных движений ракеты и быстрого из-
менения угла атаки [второе и третье уравнения системы (1.15)].
В конце этого этапа момент аэродинамических сил относительно
2а
поперечной оси будет практически уравновешен моментом управ-
ляющих сил, а угловая скорость О будет близка к нулю. Второй
этап движения — длиннопериодический, медленно затухающий
[первое уравнение системы (1.15)]. Это этап медленного изменения
скорости V.
Управление полетом в основном заключается в изменении нап-
равления вектора силы тяги двигателей Эта сила направлена
по продольной оси ракеты и, следовательно, направление ее опре-
деляется углом тангажа. Так как угол атаки и угол тангажа изме-
няются практически только на короткопериодическом этапе возму-
щенного движения, то именно этот этап и является определяющим
при проектировании системы стабилизации углового движения.
Вместе с тем при анализе систем регулирования скорости v опре-
деляющим этапом будет длиннопериодический.
В малом влиянии скорости v на отклонения ft и О нетрудно убе-
диться, если сравнить значения коэффициентов связей второго и
третьего уравнений (1.15). Так, во втором уравнении
а в третьем
|c9o/c90| |2ан/т)н|.
Только в начале полета, когда скорость ии мала, а угол атаки
значителен, связь уравнений может быть существенной.
Таким образом, для короткопериодического этапа возмущенно-
го движения во втором и третьем уравнениях системы (1.15) при-
нимают £ = 0. Тогда
6 б’одб + -L — 0; ft-L £^49=0. (2.5)
Уравнения (2.5) обычно называют уравнениями возмущен-
ного движения в плоскости тангажа. Из анализа формул
(1.17) следует, что значения коэффициентов практически не изме-
нятся, если малые величины бп и ап положить равными нулю, т. е.
считать, что невозмущенное движение происходит с углом атаки
ап = 0. При таком предположении уравнения (2.5) будут отличать-
ся от уравнений возмущенного движения в плоскости рыскания
(1.18) всего лишь на величину одного коэффициента. Формула для
£оо содержит проекцию веса ракеты на нормаль к траектории
(Gsin 0П), тогда как на движение рыскания вес влияния не оказы-
вает, поэтому коэффициент cacs от него не зависит.
Уравнения короткопериодического возмущенного движения в
плоскости тангажа в неподвижной системе координат получим из
выражения (1.24) при vx = 0‘
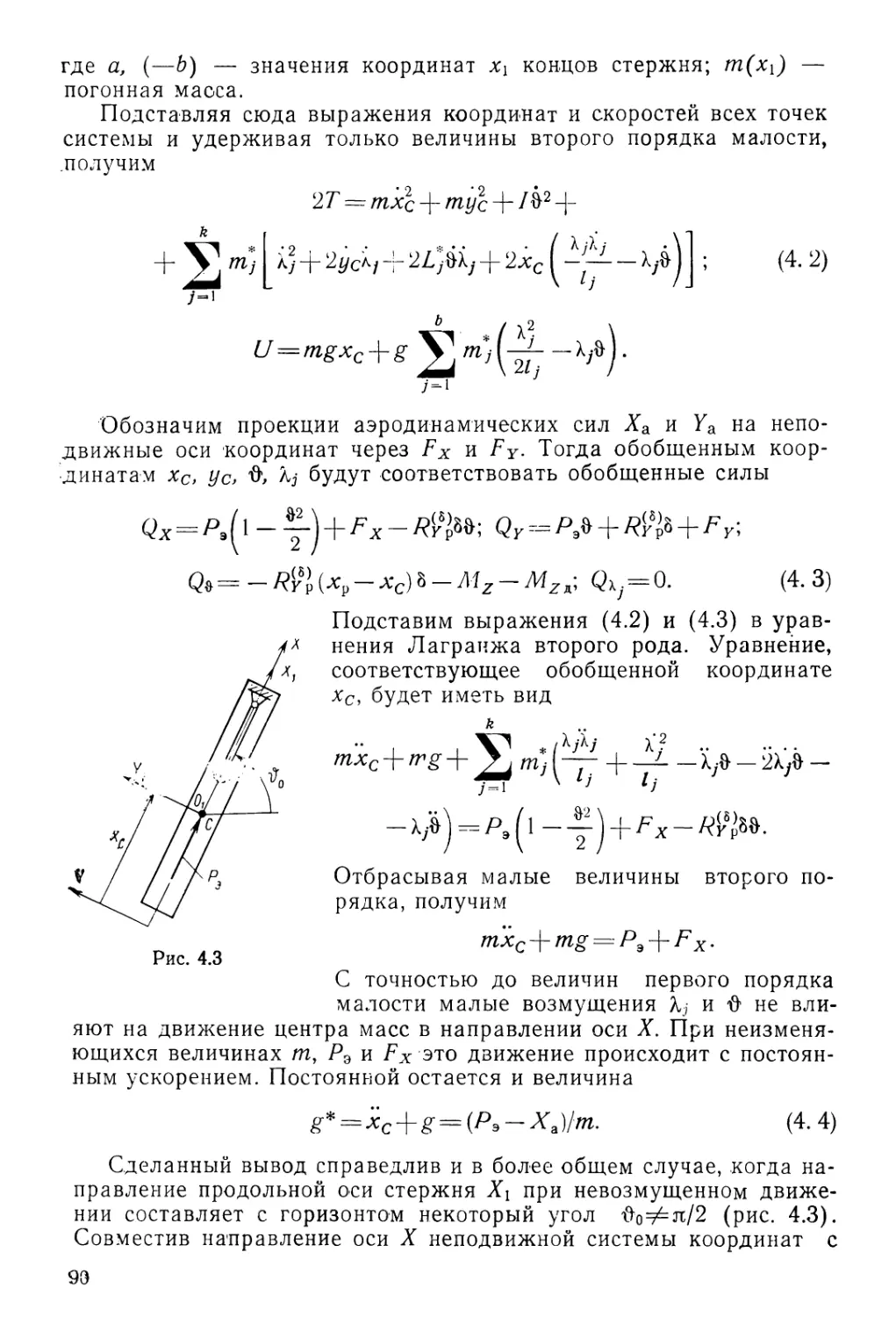
+ + 6)
& 4" 4“ ~г c^VyVy = 0.
24
Уравнения короткопериодического возмущенного движения в
плоскости рыскания в скоростной системе координат на основании
выражения (1.18) примут такой вид:
i 4- 4- с-4 -|-8 °; 3 -г о -= 0. (2. 7)
При сделанных допущениях уравнения (2.6) тождественны
уравнениям (2.5), в чем нетрудно убедиться из сравнения их коэф-
фициентов.
Положим, что уравнение системы управления (1.12) допускает
линеаризацию. Проведя ее, получим уравнение системы управле-
ния относительно вариаций
S=rF (ft, 4,..., vY,-.(2. 8)
Каждое из уравнений (2.5), (2.6), (2.7) образуют совместно с
уравнением (2.8) однородную линейную систему дифференциаль-
ных уравнений, описывающих возмущенное движение твердой ра-
кеты как замкнутой системы автоматического регулирования.
2.4. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ И ИХ СВОЙСТВА
При исследовании динамики летательных аппаратов как объек-
тов автоматического регулирования широко используют переда-
точные функции и частотные характеристики, которые характеризу-
ют свойства объекта регулирования в области комплексного пере-
менного р и частотной области. При этом оперируют не обобщен-
ными координатами 7»(/), являющимися функциями времени, а
так называемые изображением этих функций по Лапласу
qn (р), которое определяется следующим образом:
сю
L [qn (/)] = р„ (0 dt=qn (р),
О
где L[^n(/)] — оператор преобразования Лапласа, а р — комплекс-
ная величина, параметр этого преобразования.
Существует следующая связь между изображением производ-
ной и изображением самой функции:
dnqm (/)
dtn
L
=pnqm (р)- р"-1 qm (0) -... - pn— qkm (0) -... -
где 9m(0) и 7mk(0) —значения функции и ее производных при
<=0.
Используя изображения функций по Лапласу, дифференциаль-
ные уравнения возмущенного движения ракеты с замороженными
коэффициентами при нулевых начальных условиях можно заменить
алгебраическими уравнениями для изображений
Q(P) *1 (Р) = А'(р)х2(Р),
fAeQ(p),/?(p) — полиномы от р; %i(p) — может быть изображени-
ем любой из интересующих нас величин; 0, Ф, vY и т. д.;
25
х2(р)=д(р). В дальнейшем %г(р) будем называть входной! величи-
ной, а %1(р) —выходной.
Отношение изображений! при нулевых начальных условиях вы-
ходной! величины к входной носит название передаточной
функции:
(p):=fL(P) = *(£)..
MP) Q(P)
Нетрудно видеть, что передаточная функция разомкнутой цепи,
состоящей из последовательно соединенных звеньев, равна произ-
ведению передаточных функций звеньев:
^(p) = U71 fp) UZ2 (Р) UZ3 (р)- - -
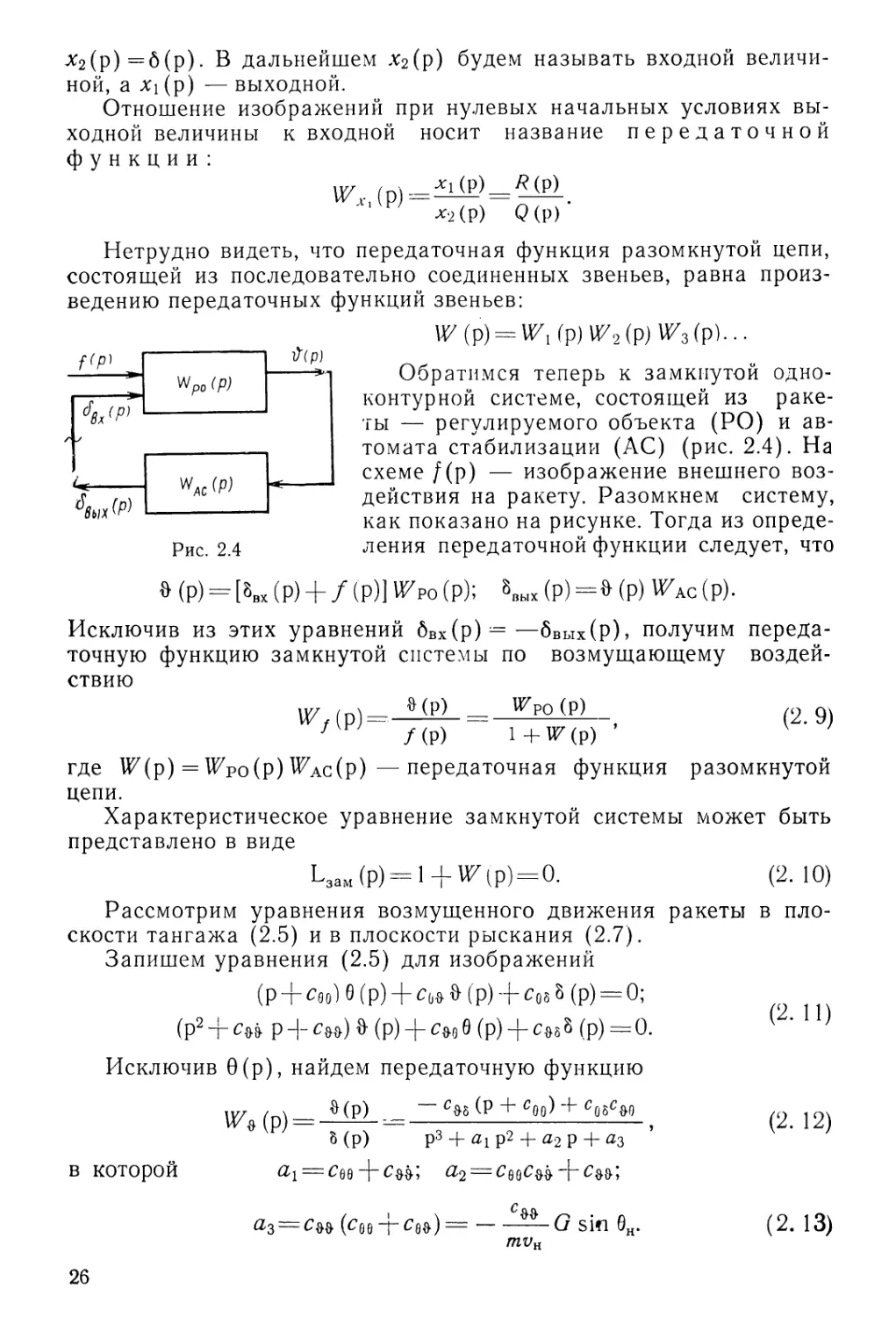
Обратимся теперь к замкнутой одно-
контурной системе, состоящей из раке-
ты — регулируемого объекта (РО) и ав-
томата стабилизации (АС) (рис. 2.4). На
схеме /(р) — изображение внешнего воз-
действия на ракету. Разомкнем систему,
как показано на рисунке. Тогда из опреде-
ления передаточной функции следует, что
& (р) = [8вх (Р) + / (р)] 1^РО (р); 8ВЫХ (р) =& (р) 1Гас (р).
Исключив из этих уравнений 6BX(p):=—6Вых(р), получим переда-
точную функцию замкнутой системы по возмущающему воздей-
ствию
W. (р) =- а(р) = WZpo(p) (2. 9)
f /(р) 1+1Г(р)
где IF(p) = IFpo(p) Wac(p) —передаточная функция разомкнутой
цепи.
Характеристическое уравнение замкнутой системы может быть
представлено в виде
Ьзам(р) = 1 + «/(р)-0. (2.10)
Рассмотрим уравнения возмущенного движения ракеты в пло-
скости тангажа (2.5) и в плоскости рыскания (2.7).
Запишем уравнения (2.5) для изображений
(р + Оо) 9 (р) + С(Н & (р) + Оз В (р) = 0;
(р2 + р + Он) & (р) + См 6 (р) + см & (Р) = °.
Исключив 9 (р), найдем передаточную функцию
(р) = Щр)_ _ -саг(Р + ^) + ^ , (2. !2)
8 (р) р3 + ах р2 + я2 р 4- а3
в которой <Ti = Cee-|-саа; =
а3=саа(^0 + М=-— G sin 9Н. (2.13)
mvn
26
Исключив из уравнения (2.11) 'О'(р), найдем передаточную
функцию
.„/ , , 9(р) — сйг(Р2 +Р + ,9 1ЛЛ
--------+ 1 ’
Знаменатель передаточной функции является характеристиче-
ским полиномом систем уравнений (2.5) и (2.6):
Ь(р) = р3+«1Р2 + а2Р+«з- (2.15)
Для системы уравнений (2.7), выражающих возмущенное дви-
жение в плоскости рыскания, коэффициент а3 = 0, так что
L (р) = р (p2 + ^i р + а2)« (2- 16)
Корнями этого полинома будут
р! 2= — (Саа £фф) + (^аа ^фф)2 4б?фф, рз 0.
При упрощении уравнений (1.15) степень характеристического
уравнения понизилась на единицу, поэтому вместо пары комплекс-
но-сопряженных корней, характеризующих длиннопериодическое
движение, появился один нулевой корень. Благодаря нулевому
корню отклонения а и ф в возмущенном движении, описываемом
уравнениями (2.7) при 6 = 0, не затухают.
В зависимости от знака коэффициента Сфф^корни pj и р2 могут
быть или вещественными или комплексно-сопряженными с отри-
цательными вещественными частями.
Если ракета аэродинамически устойчива (£фф>0) и если еще
(саа — Сфф)2<4б?фф, то
Pi,2 — ~ (^*аа ~i" ^фф), Сфф £2, (2. 17)
где со — частота собственных угловых колебаний аэродинамически
устойчивой ракеты в потоке воздуха. Если же (с^ — Сфф)2 > 4сфф, то
корни Pi и р2 будут вещественными:
Pi,2 = — £ ± ]/е2 — Сфф
и переходный процесс будет апериодически затухающим.
Если ракета аэродинамически неустойчива (Сфф<0), то корни
Рь Р2 будут вещественными, причем
Р1>0; р2<0; |р2]>|Р1|- (2.18)
Величины pi, р2 являются, кроме того, корнями знаменателя
передаточных функций, найденных из уравнений (2.7):
W; (р) = я (р)/в (р); Р/ф (р)=Ф (р)/8 (р).
Поэтому для статически устойчивой ракеты переходный процесс
для скоростей о» и ф является колебательными и затухающим, а для
статически неустойчивой ракеты переходный процесс характеризу-
ется неустойчивостью апериодического характера.
27
Когда то Pi^—с0з, р?~—с^ и отклонения скоростей
•о и ф затухают. Когда (саа — Сф-Д2 —4с^----^0, корни р1? р2 будут ве-
щественными, отрицательными и равными, а отклонения скоростей
•а и ф также затухающими.
Рассмотрим теперь свойства характеристического полинома
(2.15). Если гм 0, то
Pi-— q,o; р2= — Рз=0. (2.19)
При заданных начальных условиях переходный процесс для коор-
динат 0 и # незатухающий, а для скоростей 9 и ft он затухает апе-
риодически.
Когда центр давления аэродинамических сил не совпадает с
центром масс ракеты (Гм ф 0), при анализе коэффициентов поли-
нома (2.15) возникают два основных варианта:
а) если См>0, то ai>0, 6Z2>0, а3<0 и полином (2.15) будет
иметь один действительный положительный корень и пару комп-
лексно-сопряженных корней с отрицательной вещественной частью:
Р1,2 = £ ± М£<°); р3 > 0; (2.20)
б) если См<0, то ai>0, а2<0, а3>0 и все три корня полинома
(2.15) вещественные, причем два из них положительные, а один
отрицательный:
Pi >0; р2>0; р3<0. (2.21)
Таким образом, свободное движение в плоскости тангажа при
Гм ф 0’ неустойчиво.
2.5. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ И ЧАСТОТНЫЙ
КРИТЕРИЙ УСТОЙЧИВОСТИ
Для решения задачи устойчивости и оценки качества переходных процессов
ракет как объектов автоматического регулирования широко используются их час-
тотные характеристики.
Пусть задано движение органа управления ракеты, имеющее гармонический
характер. Например,
б (/) = Во sin t.
Через некоторое время (после того, как затухнут собственные колебания)
ракета будет совершать вынужденные колебания с частотой со. Колебания кор-
пуса ракеты вызывают на входе системы стабилизации сигнал
3 (/) = 30 Sin (u>z + <р).
При фиксированной величине б0 амплитуда колебаний р0 и сдвиг по фазе ф яв-
ляются функциями частоты со. Функцию
д (со) = Зо (w)Ao
называют амплитудно-частотной характеристикой, а ф(со)—
фазочастотной характеристикой ракеты. Функции Л (со) и Ф (со)
определяют амплитудно-фазовую частотную характеристику (АФЧХ) или прос-
то частотную характеристику.
Одним из преимуществ методов, основанных на использовании частотных
характеристик, является то, что частотные характеристики могут быть опреде-
лены из эксперимента с макетом изделия, когда его свойства выразить достовер-
но дифференциальными уравнениями еще не удается.
28
Если известна передаточная функция ракеты У7(р), то, подставляя р /со,
получим выражение амплитудно-фазовой частотной характеристики
W (/о) . А (ю)е/с?((,,).
В ряде случаев частотные характеристики представляются в виде годографа на
комплексной плоскости причем
W (/ю) и (со) -у iV (со) .. А (со) е/с?(о));
U (со) — А (со) COS ср (со); V (со) ----- А (со) sin ср (со).
Любая точка годографа функции W(но) характеризует комплексное передаточ-
ное число, в котором А (о))—модуль комплексного числа, ср((о)—аргумент
комплексного числа.
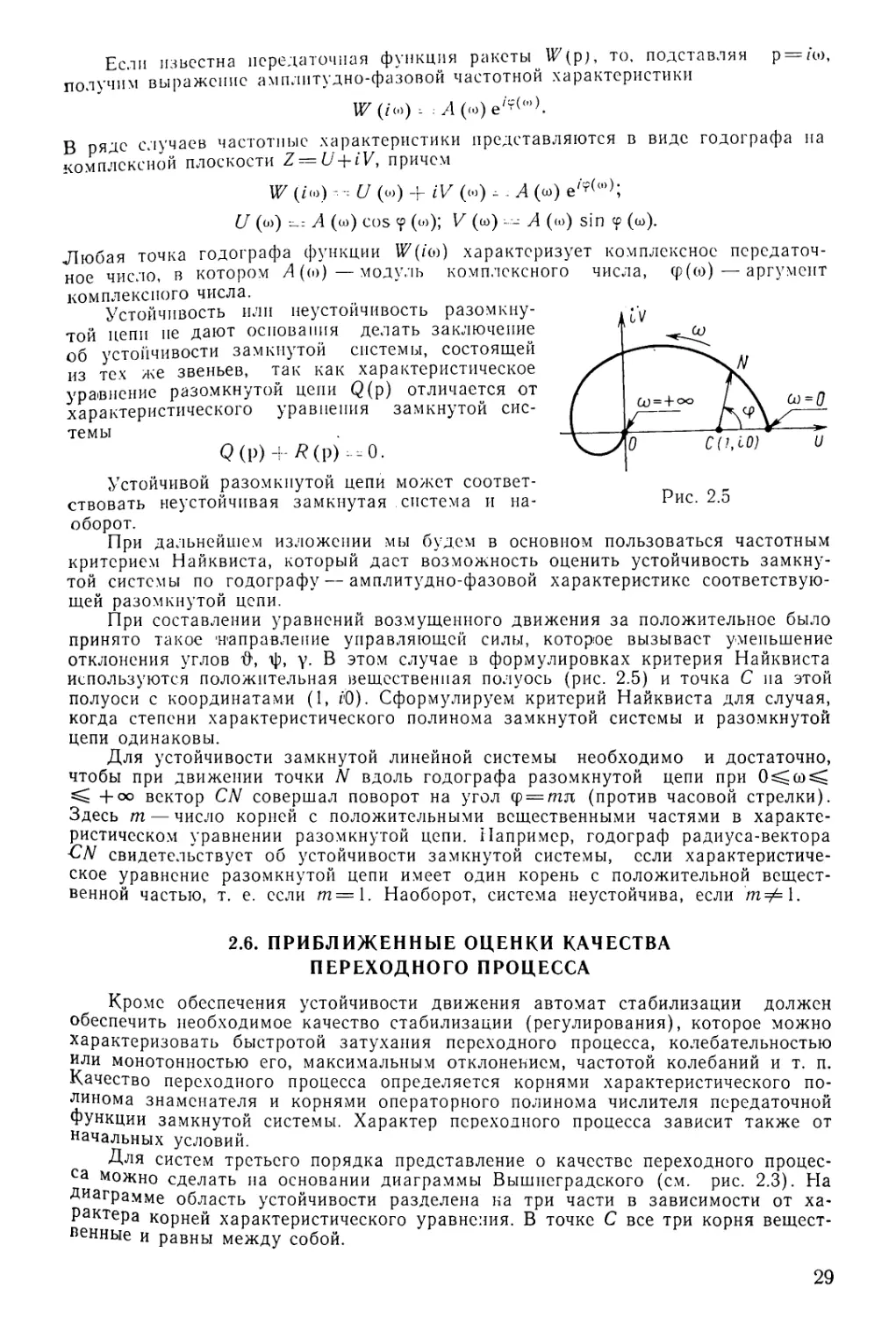
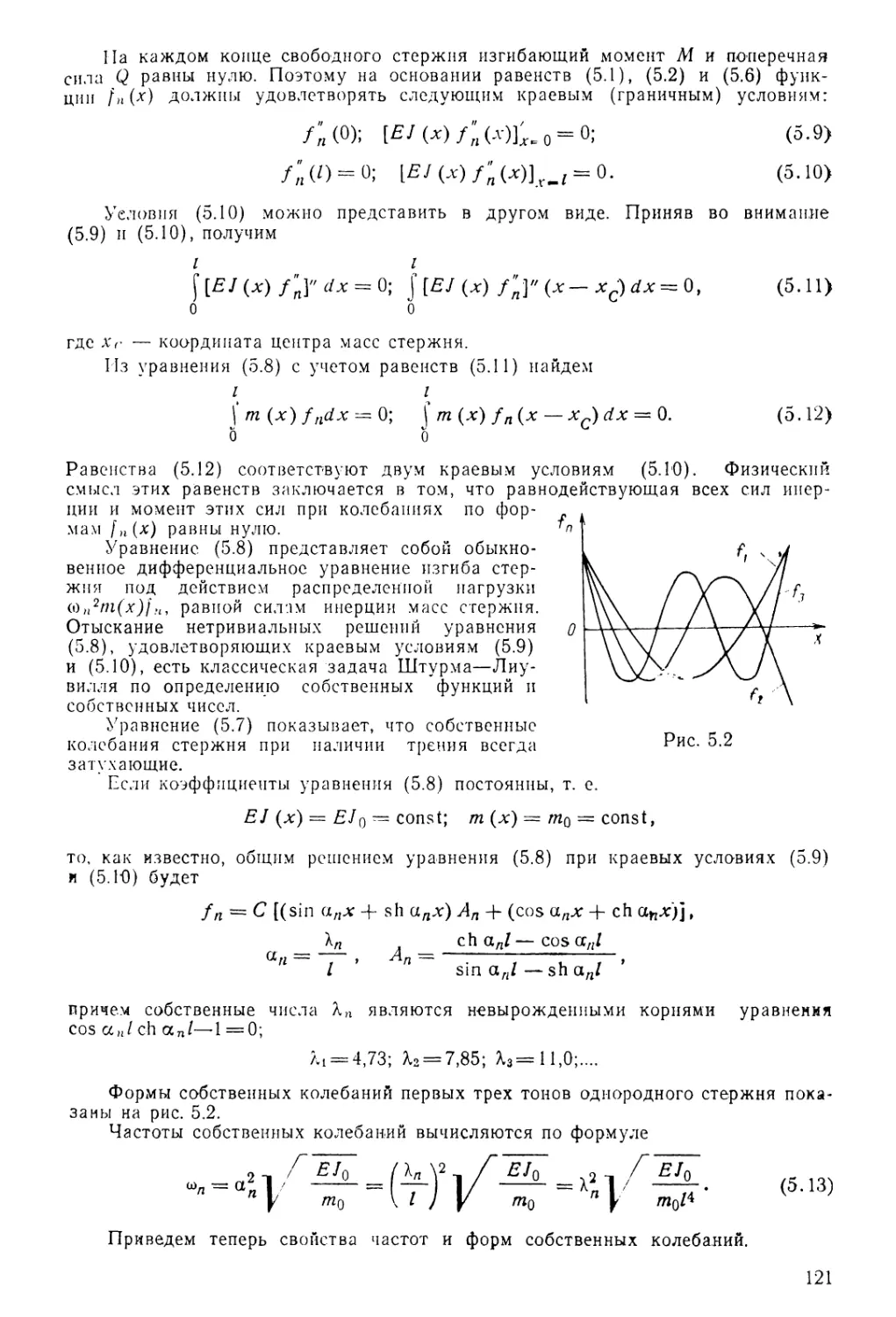
Устойчивость или неустойчивость разомкну-
той цепи не дают основания делать заключение
об устойчивости замкнутой системы, состоящей
из тех же звеньев, так как характеристическое
уравнение разомкнутой цепи Q(p) отличается от
характеристического уравнения замкнутой сис-
темы
Q(р) W) -0.
Устойчивой разомкнутой цепи может соответ-
ствовать неустойчивая замкнутая система и на- Рис. 2.5
оборот.
При дальнейшем изложении мы будем в основном пользоваться частотным
критерием Найквиста, который даст возможность оценить устойчивость замкну-
той системы по годографу — амплитудно-фазовой характеристике соответствую-
щей разомкнутой цепи.
При составлении уравнений возмущенного движения за положительное было
принято такое 'направление управляющей силы, которое вызывает уменьшение
отклонения углов О, ф, у- В этом случае в формулировках критерия Найквиста
используются положительная вещественная полуось (рис. 2.5) и точка С на этой
полуоси с координатами (1, Ю). Сформулируем критерий Найквиста для случая,
когда степени характеристического полинома замкнутой системы и разомкнутой
цепи одинаковы.
Для устойчивости замкнутой линейной системы необходимо и достаточно,
чтобы при движении точки N вдоль годографа разомкнутой цепи при О^со^
+оо вектор CN совершал поворот на угол ф = тл (против часовой стрелки).
Здесь т — число корней с положительными вещественными частями в характе-
ристическом уравнении разомкнутой цепи. Например, годограф радиуса-вектора
-CW свидетельствует об устойчивости замкнутой системы, если характеристиче-
ское уравнение разомкнутой цепи имеет один корень с положительной вещест-
венной частью, т. е. если т=\. Наоборот, система неустойчива, если ш=#1.
2.6. ПРИБЛИЖЕННЫЕ ОЦЕНКИ КАЧЕСТВА
ПЕРЕХОДНОГО ПРОЦЕССА
Кроме обеспечения устойчивости движения автомат стабилизации должен
обеспечить необходимое качество стабилизации (регулирования), которое можно
характеризовать быстротой затухания переходного процесса, колебательностью
или монотонностью его, максимальным отклонением, частотой колебаний и т. п.
Качество переходного процесса определяется корнями характеристического по-
линома знаменателя и корнями операторного полинома числителя передаточной
Функции замкнутой системы. Характер переходного процесса зависит также от
начальных условий.
Для систем третьего порядка представление о качестве переходного процес-
са можно сделать на основании диаграммы Вышнеградского (см. рис. 2.3). На
Диаграмме область устойчивости разделена на три части в зависимости от ха-
рактера корней характеристического уравнения. В точке С все три корня вещест-
венные и равны между собой.
29
В теории автоматического регулирования используется понятие о степени
у ст о йчивости. Степенью устойчивости называется наименьшее из абсолют-
ных значений вещественных частей всех корней характеристического уравнения
системы. В том случае, когда ближайшей к мнимой оси является пара комплек-
сно-сопряженных корней, степень устойчивости называется колебательной.
Если ближайшим к мнимой оси является вещественный корень, то степень устой-
чивости называют апериодической. Степень устойчивости может служить
приближенной оценкой быстроты затухания переходного процесса.
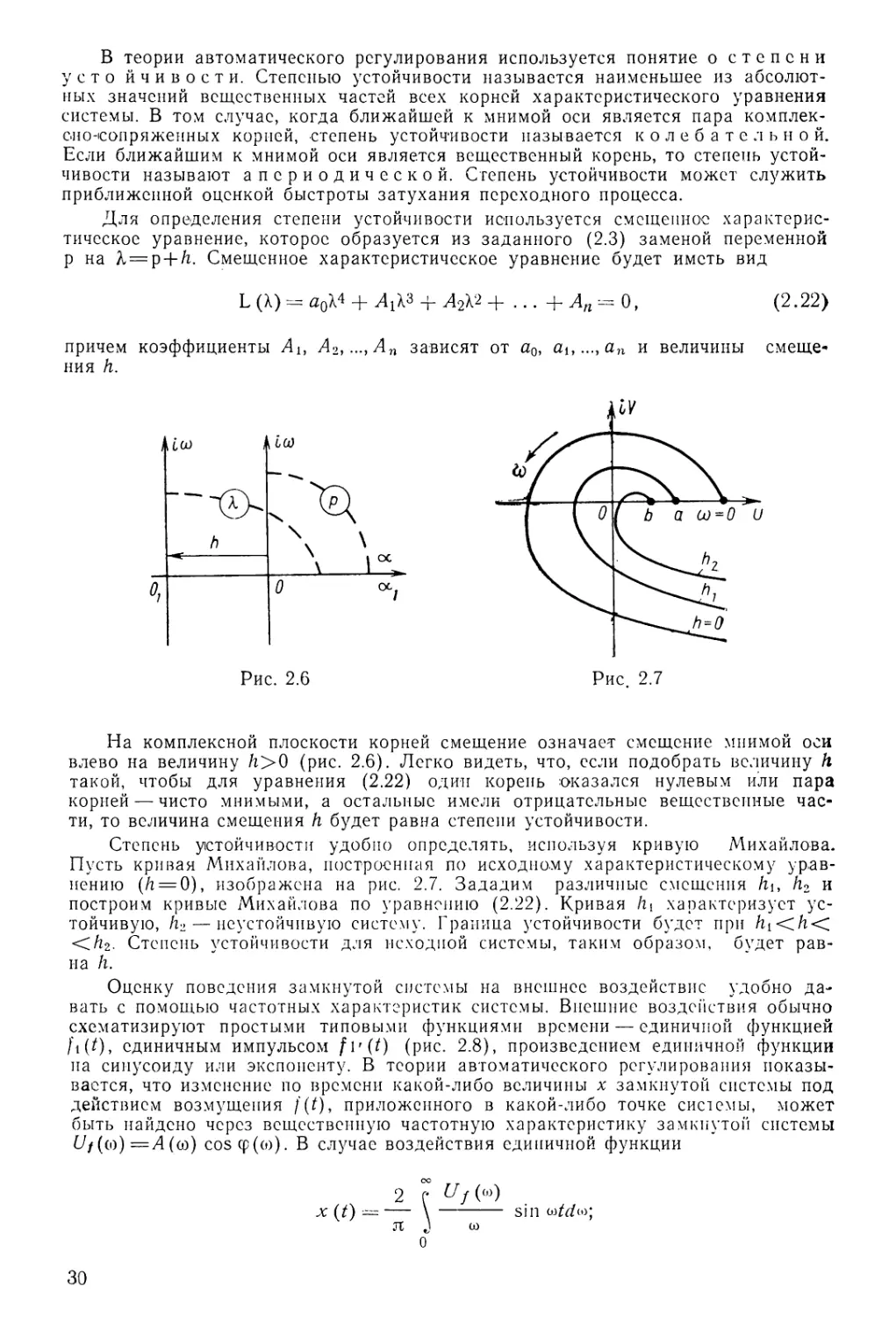
Для определения степени устойчивости используется смещенное характерис-
тическое уравнение, которое образуется из заданного (2.3) заменой переменной
р на Л=р + ^. Смещенное характеристическое уравнение будет иметь вид
L (X) = а0Х4 + + л2Х2 + ... (2.22)
причем коэффициенты Л2, ...,ЛП зависят от а0, ai,..., ап и величины смеще-
ния h.
На комплексной плоскости корней смещение означает смещение мнимой оси
влево на величину /г>0 (рис. 2.6). Легко видеть, что, если подобрать величину h
такой, чтобы для уравнения (2.22) один корень оказался нулевым или пара
корней — чисто мнимыми, а остальные имели отрицательные вещественные час-
ти, то величина смещения h будет равна степени устойчивости.
Степень устойчивости удобно определять, используя кривую Михайлова.
Пусть кривая Михайлова, построенная по исходному характеристическому урав-
нению (/1 = 0), изображена на рис. 2.7. Зададим различные смешения hi, 1и и
построим кривые Михайлова по уравнению (2.22). Кривая hi характеризует ус-
тойчивую, h->— неустойчивую систему. Граница устойчивости будет при
<Zh2. Степень устойчивости для исходной системы, таким образом, будет рав-
на h.
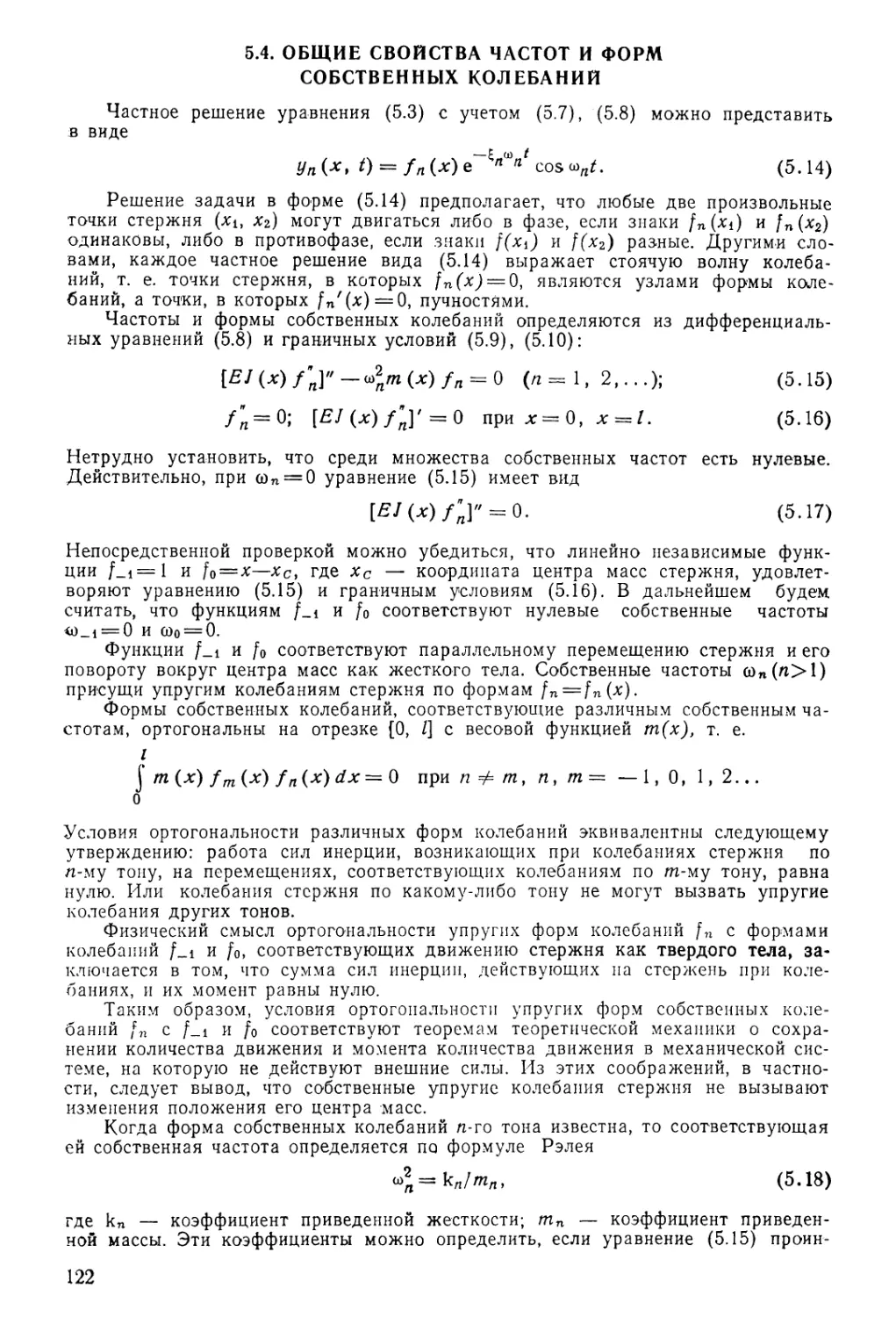
Оценку поведения замкнутой системы на внешнее воздействие удобно да-
вать с помощью частотных характеристик системы. Внешние воздействия обычно
схематизируют простыми типовыми функциями времени — единичной функцией
fi(t), единичным импульсом fi'(t) (рис. 2.8), произведением единичной функции
на синусоиду или экспоненту. В теории автоматического регулирования показы-
вается, что изменение по времени какой-либо величины х замкнутой системы под
действием возмущения j(t), приложенного в какой-либо точке системы, может
быть найдено через вещественную частотную характеристику замкнутой системы
Uf (со) = А (со) coscp(co). В случае воздействия единичной функции
2 г иf (w)
х (f) —------ \-----------sin oj/c/w;
Л J W
0
30
в случае воздействия единичного импульса
х (Z) \ и г (<>) cos utdu.
л ,
о
При рассмотрении устойчивости замкнутых систем с помощью частотного
критерия используются такие условные понятия, как запас устойчивости по фа-
зе запас устойчивости по амплитуде или, что то же самое, запас устойчивости
по коэффициенту усиления. Эти понятия поясним с помощью рис. 2.9, на кото-
ром изображена амплитудно-фазовая харак-
теристика разомкнутой цепи.
Характеристическое уравнение разомкну-
той цепи имеет один положительный корень,
так что согласно критерию Найквиста соответ-
О
Рис. 2.8
I О
t
£
ствующая замкнутая система устойчива. Запас устойчивости по фазе характери-
зуется углом опережения ф*((о) при А(<о) = 1, запас устойчивости по амплиту-
де — отношением длины отрезка ВС (так же, как и длины отрезка АС) к дли-
не отрезка ОС, равного единице. Чем больше отрезок ВС (или АС), тем боль-
ше запас устойчивости по амплитуде. Запас устойчивости дает возможность су-
дить о допустимых пределах изменения параметров системы без нарушения ее
устойчивости. В некоторой мере он может характеризовать и качество переход-
ного процесса.
2.7. СТРУКТУРА АВТОМАТА СТАБИЛИЗАЦИИ
В функции системы управления ракетой входят: 1) наведение
ракеты на цель путем вырабатывания и ввода управляющих сиг-
налов; 2) предотвращение случайного отклонения ракеты от задан-
ной траектории. Поэтому система управления делится на две час-
ти— систему наведения, которую для баллистических ракет
называют также системой управления, и систему стабилиза-
ции.
Идеальная расчетная траектория баллистической ракеты — это
плоская кривая, лежащая в вертикальной плоскости — плоскости
тангажа. Чтобы обеспечить полет ракеты по заданной траектории,
нужно управлять поворотом вектора силы тяги двигателей ракеты
в плоскости тангажа, иначе говоря, управлять поворотом корпуса.
В зависимости от программы и условий полета к автомату ста-
билизации предъявляются различные требования. На активном
участке полета главным является требование точности. Здесь, как
правило, применяется непрерывное управление. На пассивных уча-
стках полета используются законы управления, оптимальные по
расходу рабочего тела или быстродействию. В обоих случаях закон
управления имеет релейный характер.
31
Исходными уравнениями для решения задачи управления слу-
жат уравнения (1.10).
Система стабилизации предназначена для обеспечения устойчи-
вого углового движения корпуса ракеты и сведения к минимуму
отклонения центра масс ракеты от расчетной траектории. Эти зада-
чи решаются при помощи установленных на борту ракеты автома-
тов угловой стабилизации относительно центра масс и автоматов
стабилизации центра масс. Автоматы стабилизации центра масс
относительно расчетной траектории можно устанавливать для ста-
билизации как в плоскости тангажа, так и в плоскости рыскания.
Угловая стабилизация обычно осуществляется раздельно в каждой
из трех плоскостей — тангажа, рыскания и крена.
Исходными уравнениями для решения задач стабилизации слу-
жат уравнения возмущенного движения (1.15), (1.18), (1.20),
(1-24).
Схема автомата стабилизации ракеты аналогична схеме само-
летного автопилота. В автомат входят чувствительные элементы
для измерения сигналов рассогласования (свободные гироскопы,
датчики угловых скоростей, датчики ускорений и т. д.), счетно-ре-
шающие устройства (или корректирующий контур) и усилители,
предназначенные для изменения фазы сигнала рассогласования и
усиления его, и исполнительные органы (рулевые машины) для
привода рулей или управляющих двигателей.
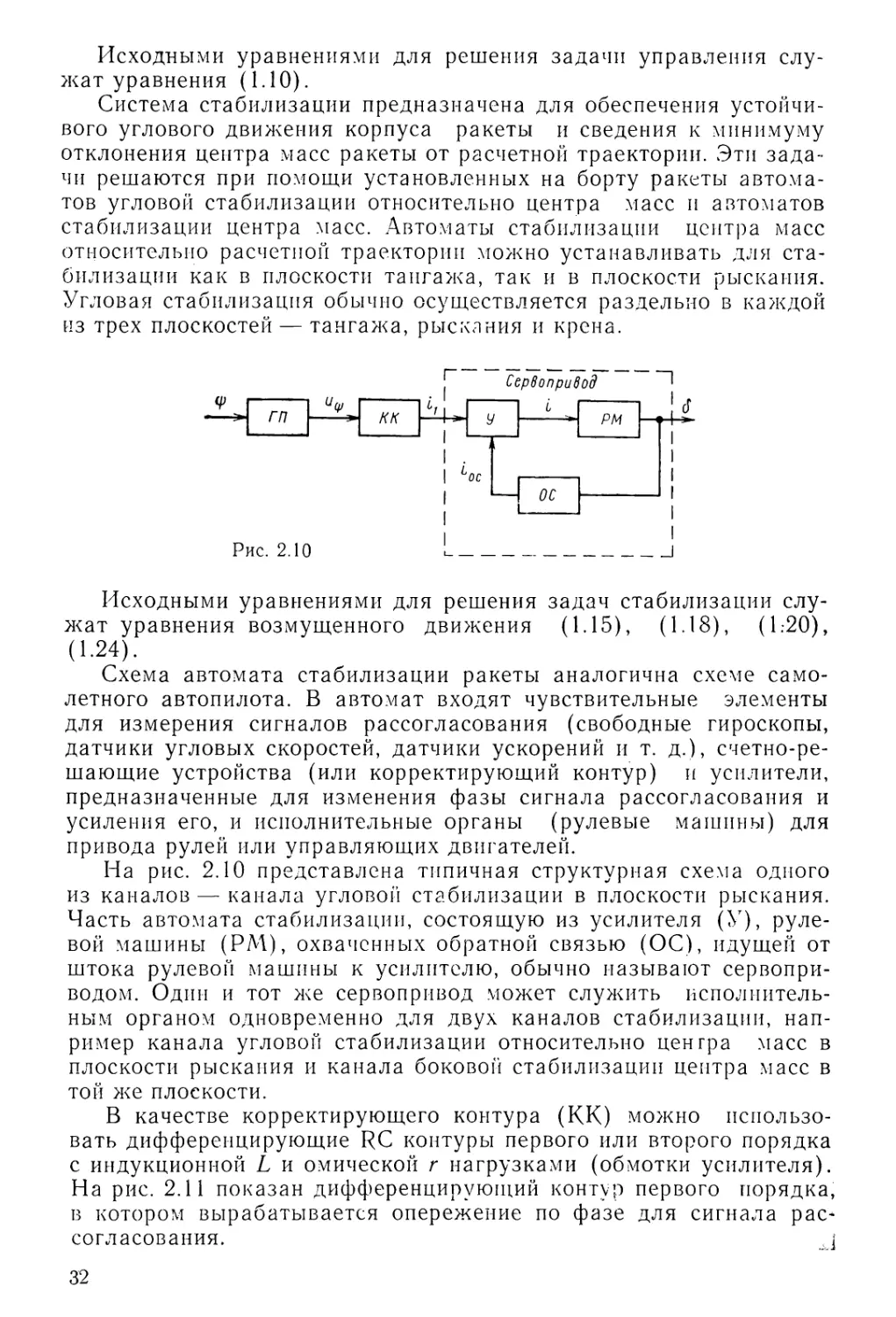
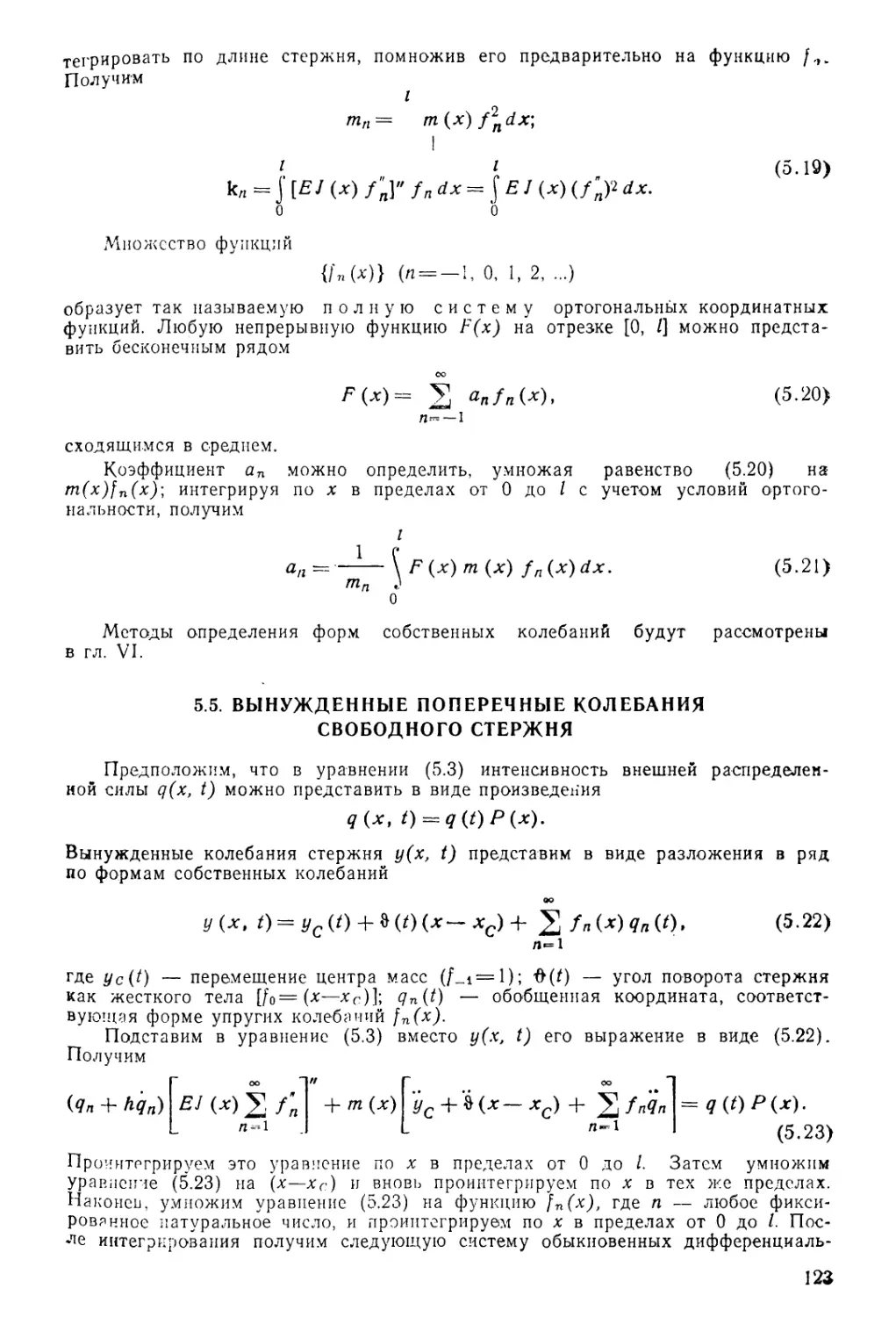
На рис. 2.10 представлена типичная структурная схема одного
из каналов — канала угловой стабилизации в плоскости рыскания.
Часть автомата стабилизации, состоящую из усилителя (У), руле-
вой машины (РМ), охваченных обратной связью (ОС), идущей от
штока рулевой машины к усилителю, обычно называют сервопри-
водом. Один и тот же сервопривод может служить исполнитель-
ным органом одновременно для двух каналов стабилизации, нап-
ример канала угловой стабилизации относительно центра масс в
плоскости рыскания и канала боковой стабилизации центра масс в
той же плоскости.
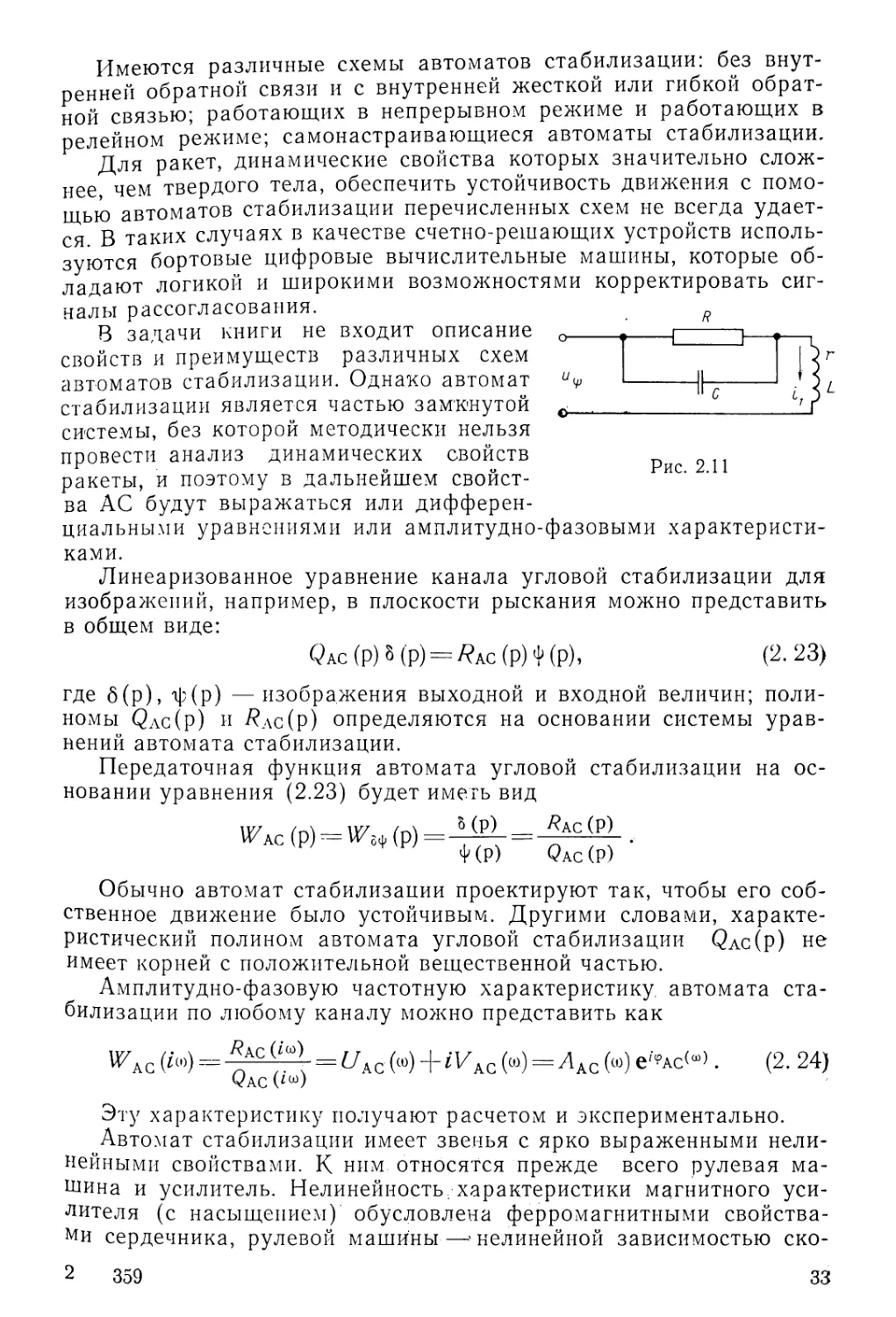
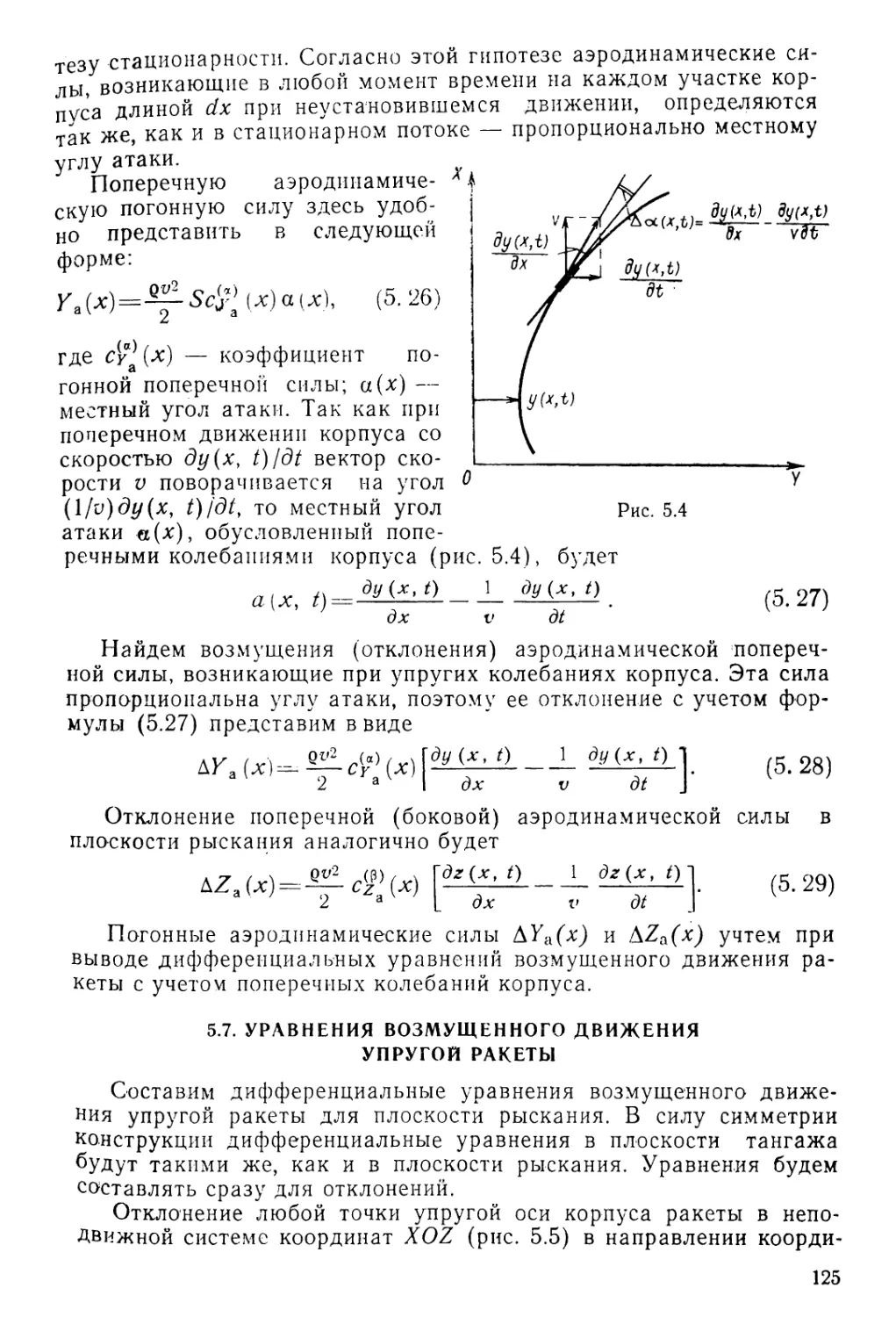
В качестве корректирующего контура (КК) можно использо-
вать дифференцирующие RC контуры первого или второго порядка
с индукционной L и омической г нагрузками (обмотки усилителя).
На рис. 2.11 показан дифференцирующий контур первого порядка,
в котором вырабатывается опережение по фазе для сигнала рас-
согласования. 1
32
Имеются различные схемы автоматов стабилизации: без внут-
ренней обратной связи и с внутренней жесткой или гибкой обрат-
ной связью; работающих в непрерывном режиме и работающих в
релейном режиме; самонастраивающиеся автоматы стабилизации.
Для ракет, динамические свойства которых значительно слож-
нее чем твердого тела, обеспечить устойчивость движения с помо-
щью автоматов стабилизации перечисленных схе^м не всегда удает-
ся. В таких случаях в качестве счетно-решающих устройств исполь-
зуются бортовые цифровые вычислительные машины, которые об-
ладают логикой и широкими возможностями корректировать сиг-
налы рассогласования. R
В задачи книги не входит описание о j - -|___
свойств и преимуществ различных схем I jr
автоматов стабилизации. Однако автомат иу ---------Ц-^--- /
стабилизации является частью замкнутой о . Др
системы, без которой методически нельзя
провести анализ динамических свойств Рис 2П
ракеты, и поэтому в дальнейшем свойст- ис‘
ва АС будут выражаться или дифферен-
циальными уравнениями или амплитудно-фазовыми характеристи-
ками.
Линеаризованное уравнение канала угловой стабилизации для
изображений, например, в плоскости рыскания можно представить
в общем виде:
С?ас(р)В(Р) = /?ас(р)Ф(р), (2.23)
где 6(р), ф(р) —изображения выходной и входной величин; поли-
номы Qac(p) и /?лс(р) определяются на основании системы урав-
нений автомата стабилизации.
Передаточная функция автомата угловой стабилизации на ос-
новании уравнения (2.23) будет иметь вид
1Гас (Р) = ^(р) = 4т^
^АС (P)
Qac (р)
Обычно автомат стабилизации проектируют так, чтобы его соб-
ственное движение было устойчивым. Другими словами, характе-
ристический полином автомата угловой стабилизации Qac(p) не
имеет корней с положительной вещественной частью.
Амплитудно-фазовую частотную характеристику, автомата ста-
билизации по любому каналу можно представить как
^АС (*«>) = = ^АС Н + *VAC И = ЛАС (ш) е'>дс«“>. (2. 24)
Qac(M
Эту характеристику получают расчетом и экспериментально.
Автомат стабилизации имеет звенья с ярко выраженными нели-
нейными свойствами. К ним относятся прежде всего рулевая ма-
шина и усилитель. Нелинейность, характеристики магнитного уси-
лителя (с насыщением) обусловлена ферромагнитными свойства-
ми сердечника, рулевой машины—’нелинейной зависимостью ско-
2 359 33
рости истечения жидкости от перепада давления и ограниченно-
стью мощности привода. Кроме того, в механических соединениях
рулевой машины с органами управления могут быть люфты. По-
этому окончательное заключение о свойствах автомата стабилиза-
ции делается по его амплитудно-фазовым характеристикам, полу-
ченным экспериментально при различных амплитудах входного
сигнала.
2.8. ЭФФЕКТИВНОСТЬ ОРГАНОВ УПРАВЛЕНИЯ
На активном участке полета для стабилизации ракеты требу-
ются значительные по величине управляющие силы и моменты.
Стабилизация может осуществляться с помощью воздушных и га-
зовых рулей, вспомогательных двигателей, поворотных сопел, деф-
лекторов, поворотом маршевых двигателей и т. п. На пассивном
участке полета для стабилизации углового положения летательно-
го аппарата требуются меньшие по величине силы и моменты. Для
их создания используются микроре активные двигатели, двигате-
ли — маховики, гироскопические исполнительные органы, момент-
ные магнитоприводы.
Несмотря на разнообразие средств стабилизации, управляющие
силы в проекциях на оси связанной с корпусом системы координат
могут быть записаны одинаково:
Гр=/$>8; Zp=/$>8.
Выбор наиболее эффективных органов управления является од-
ной из важных задач проектирования системы управления. От эф-
фективности органов управления зависят величины отклонений па-
раметров движения — линейных и угловых координат, скоростей,
ускорений, зависит качество регулирования. На эти отклонения
накладывается ряд ограничений, связанных с необходимостью
обеспечения заданной точности траектории, и ограничения попе-
речных перегрузок. В связи с этим эффективность органов управ-
ления необходимо определять на основе анализа решений системы
дифференциальных уравнений возмущенного движения замкнутой
системы. Отклонения параметров движения в этих уравнениях
должны отсчитываться не от номинальных, а от программных зна-
чений; правая часть уравнений должна содержать возмущающие
силы и моменты. Таким образом, вместо уравнений (1.15) и (1.18)
будем иметь следующие:
в плоскости тангажа —
О 4’^080 4"<W 4" ^8^ = гв;
& 4- 4" Cbv® 4" = Z В’ (2. 25)
В=В(&, &)
34
в плоскости рыскания —
(5 —J— “ I- £(?фф I Zb.
ф -ф- С ффф -|- Сффф Ч~ ~Р Cps^ = ^Ув’у (2. 26)
В = В(ф, ф).
Уравнения автомата стабилизации здесь представлены в виде
В = 8 (&, &); 8 = 8(ф, ф).
Эффективность органов управления зависит от градиента управ-
ляющей силы /?р8), геометрических и массовых характеристик ра-
кеты. Например, для плоскости тангажа она характеризуется ко-
эффициентами
/?^(xp-xcV/z и
Момент, создаваемый органами управления, условно можно
разделить на три части:
Л^упр = + Мв + „б’
Здесь Л4пр — программный управляющий момент, необходимый
для ведения ракеты по программной траектории; если и ^пр
малы, то Л4пр также невелик; Л4В — момент для парирования посто-
янно действующих возмущений от ветра, несоосности камеры дви-
гателя, аэродинамической несимметрии и т. д. Этот момент может
быть значительным; Л4СТб — момент, развиваемый органами управ-
ления в процессе стабилизации, определяемый с учетом обеспече-
ния требуемых качеств по быстродействию, точности, колебатель-
ности переходных процессов.
В любой момент времени полета максимальный момент, кото-
рый может быть создан системой управления, должен быть боль-
ше потребного момента управления:
(^Tfyup)max (|-^upl + И^в| + |-Мстб|)тах-
Например, для плоскости тангажа
Itfl (xv - хс) 8тах > (|<р[+ 1Л/В| + |^ст6|)тах.
Так как правая часть неравенства может быть известна из ана-
лиза возможных траекторий, условий полета, величин возмущений
и т. д., а угол бтах определяется конструкцией устройств, ограни-
чивающих поворот органов управления, то из последнего неравен-
ства можно определить минимальный градиент управляющей силы:
а^нр| 4- |А1В| + |Мстб|) шах
AVp .
^тах (-^р
2*
35
Это неравенство должно выполняться в любой момент полета.
Величину /?ур, определяемую из равенства
(lAlnpl + |Л4В| + |Мстб|)ц1ах
^шах (-^р -^^)
принимаем в качестве начального значения и вычисляем коэффи-
циенты Соз и г$5. Дальнейший анализ заключается в решении урав-
нений (2.25) при заданных возмущениях Ув и AfZB. Из решения
уравнений находим интересующие нас параметры движения 9, 0,
О, '9, ..., 6 и сравниваем их с их максимально допустимыми величи-
нами. В случае необходимости эффективность органов управления
увеличивают и расчет повторяют снова.
Таким образом, эффективность органов управления должна быть
такой, чтобы система управления могла парировать все возмуще-
ния и вести ракету по траектории с заданной точностьро, а система
стабилизации могла обеспечить устойчивость движения ракеты от-
носительно центра масс и стабилизацию центра масс относительно
заданной траектории.
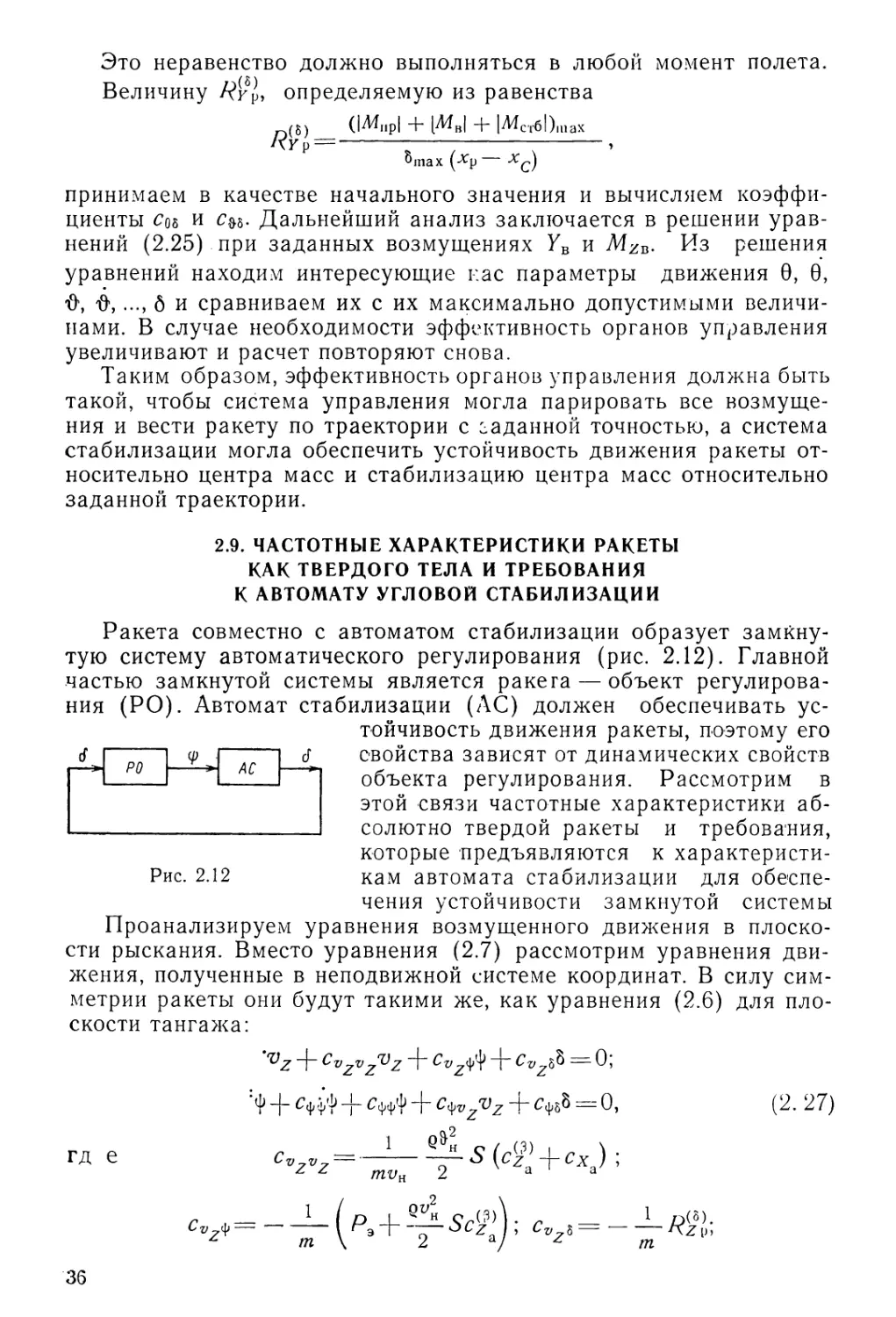
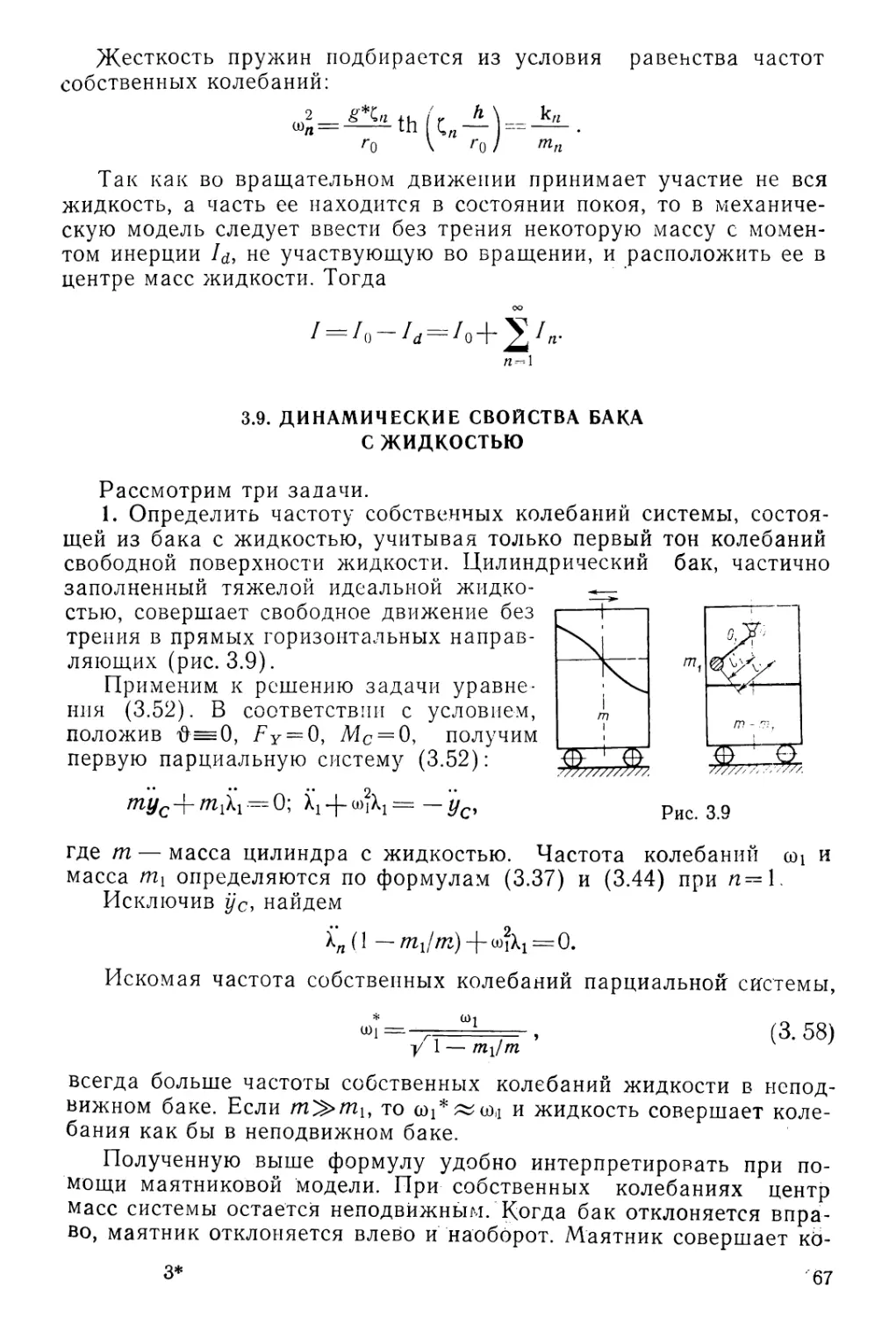
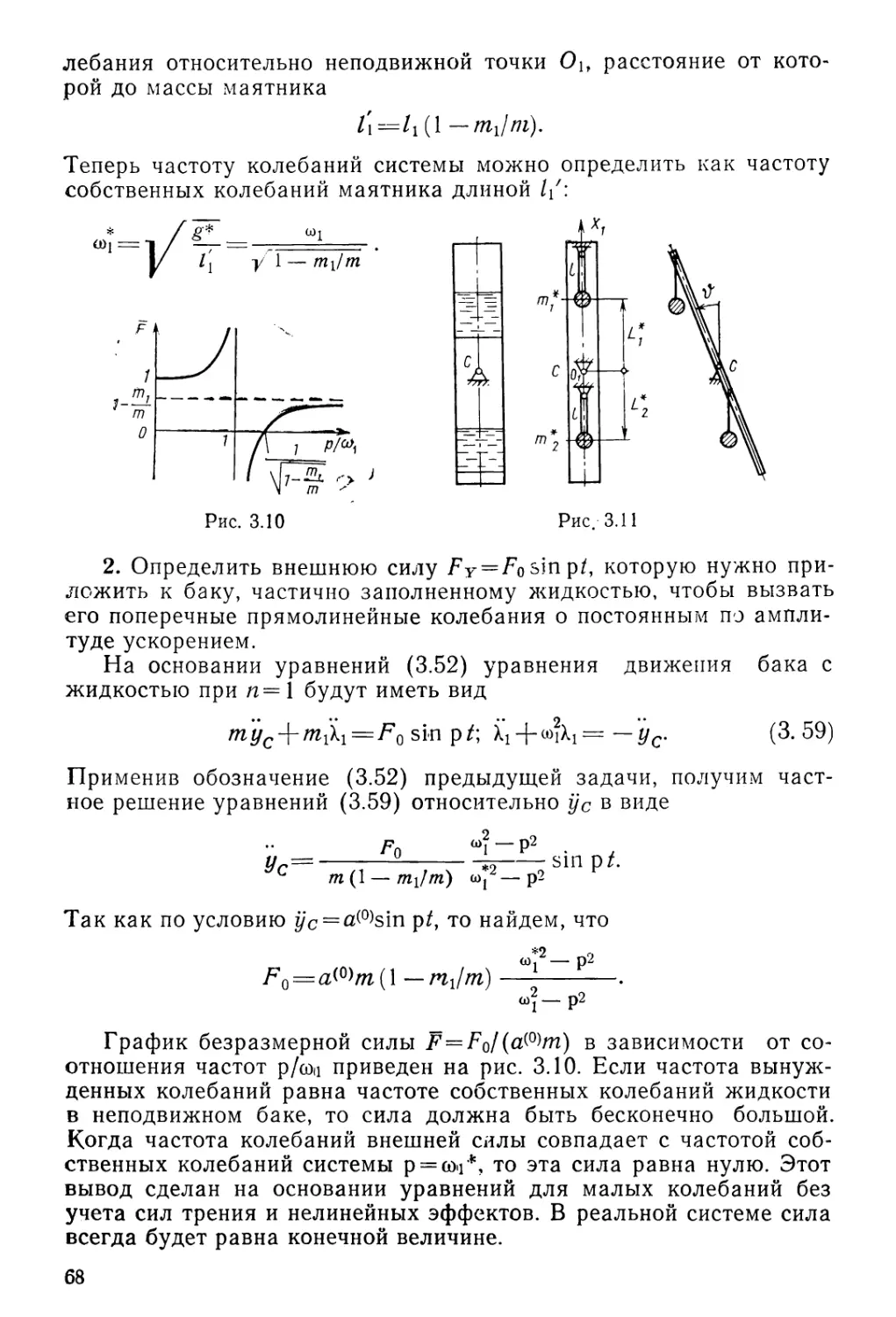
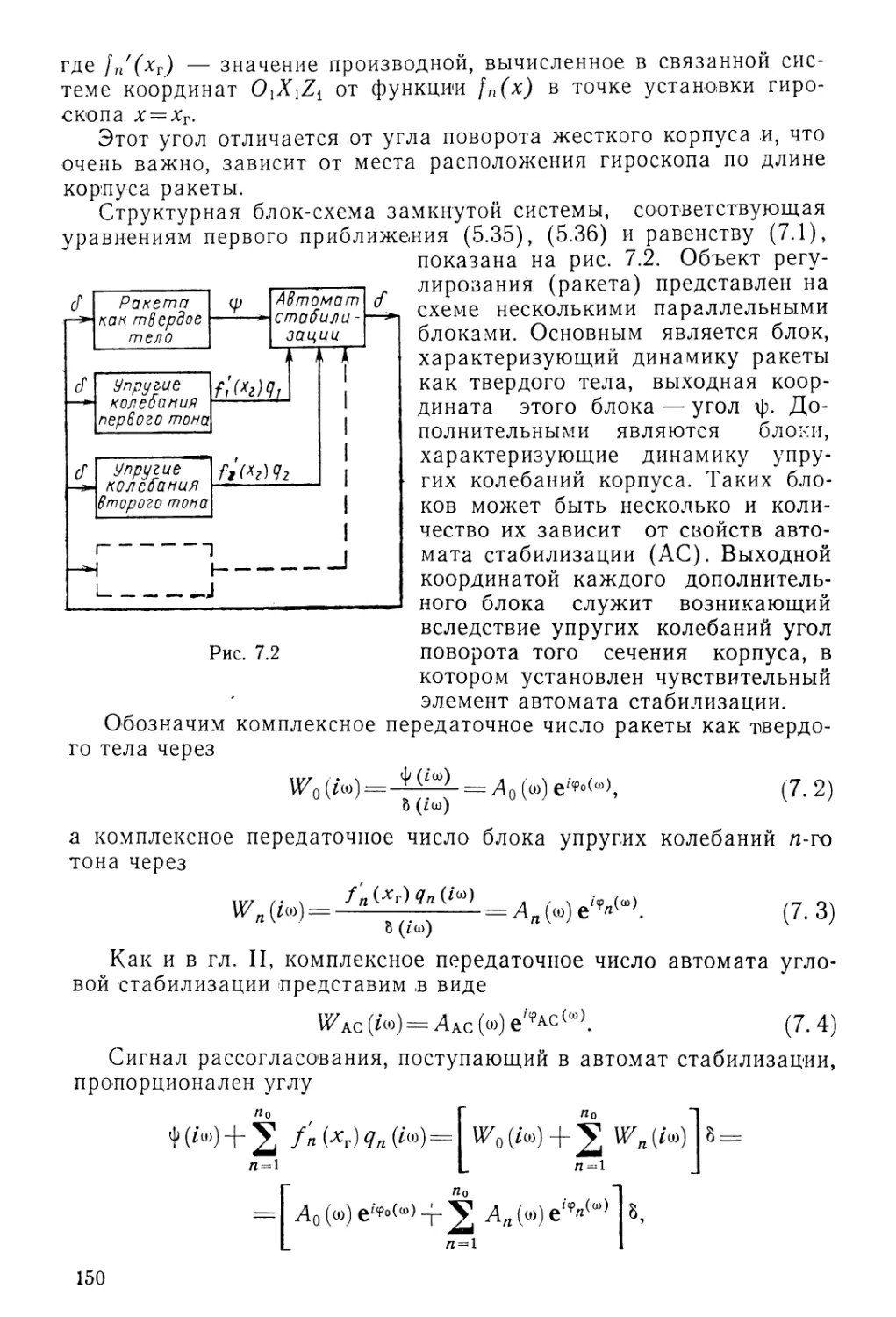
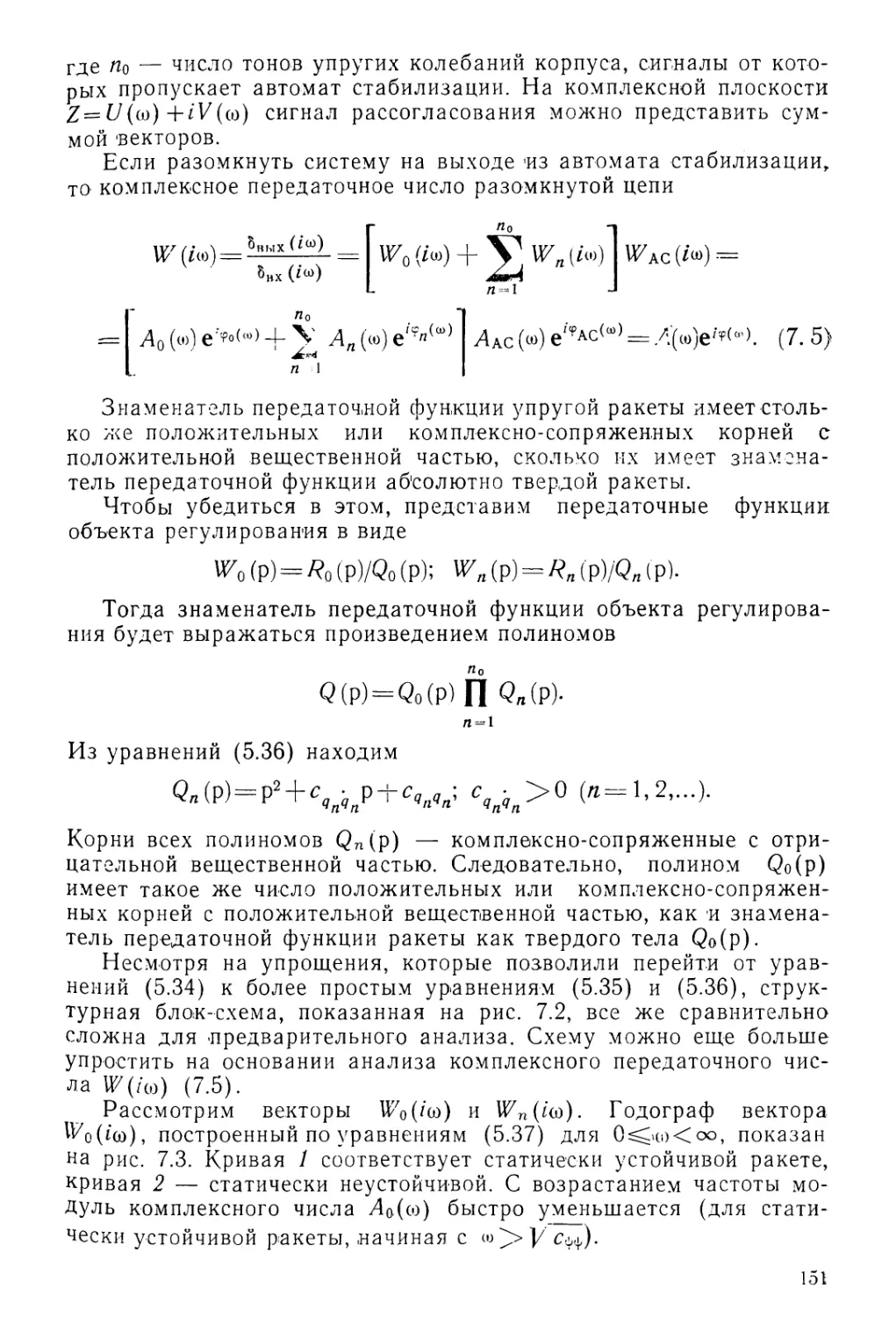
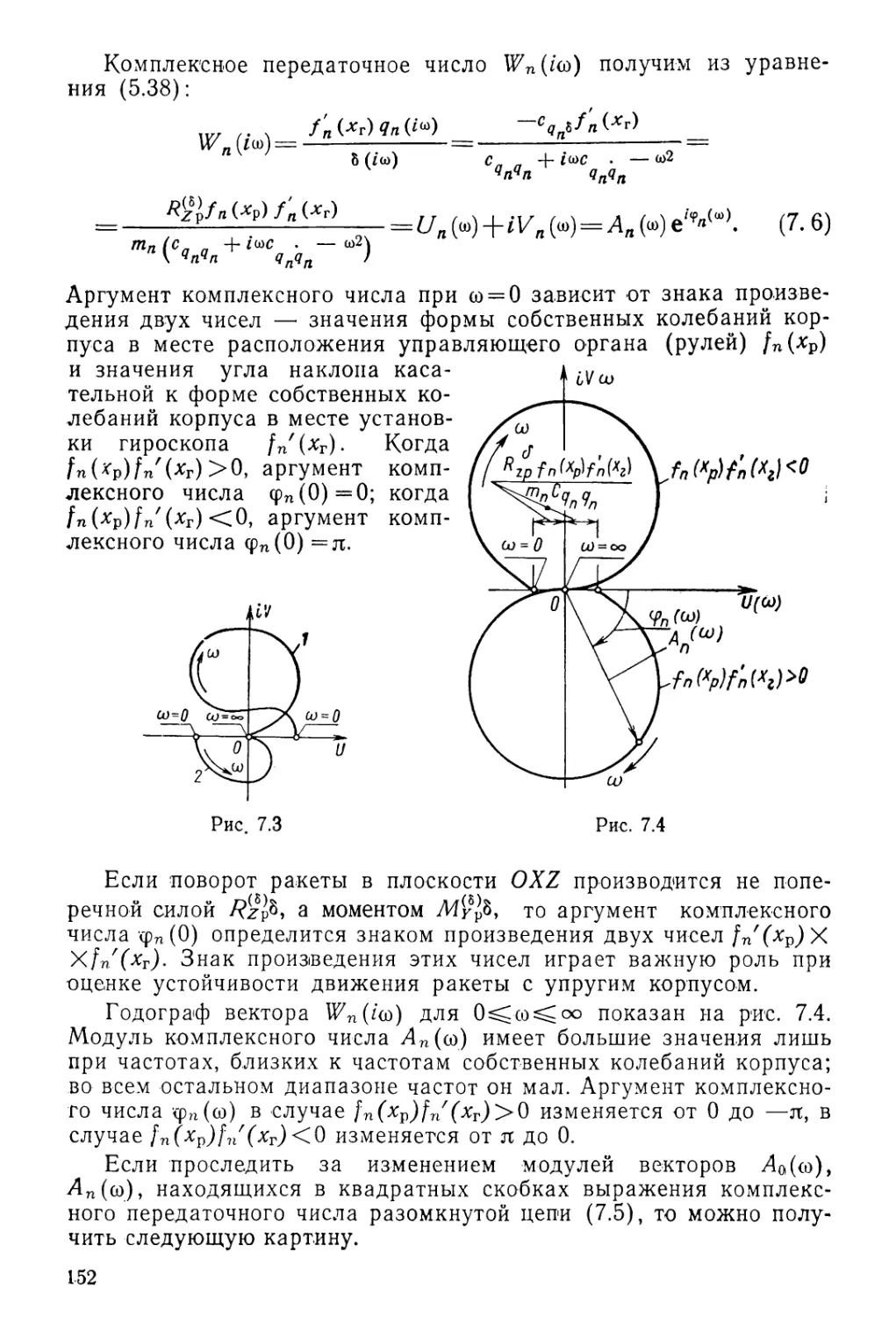
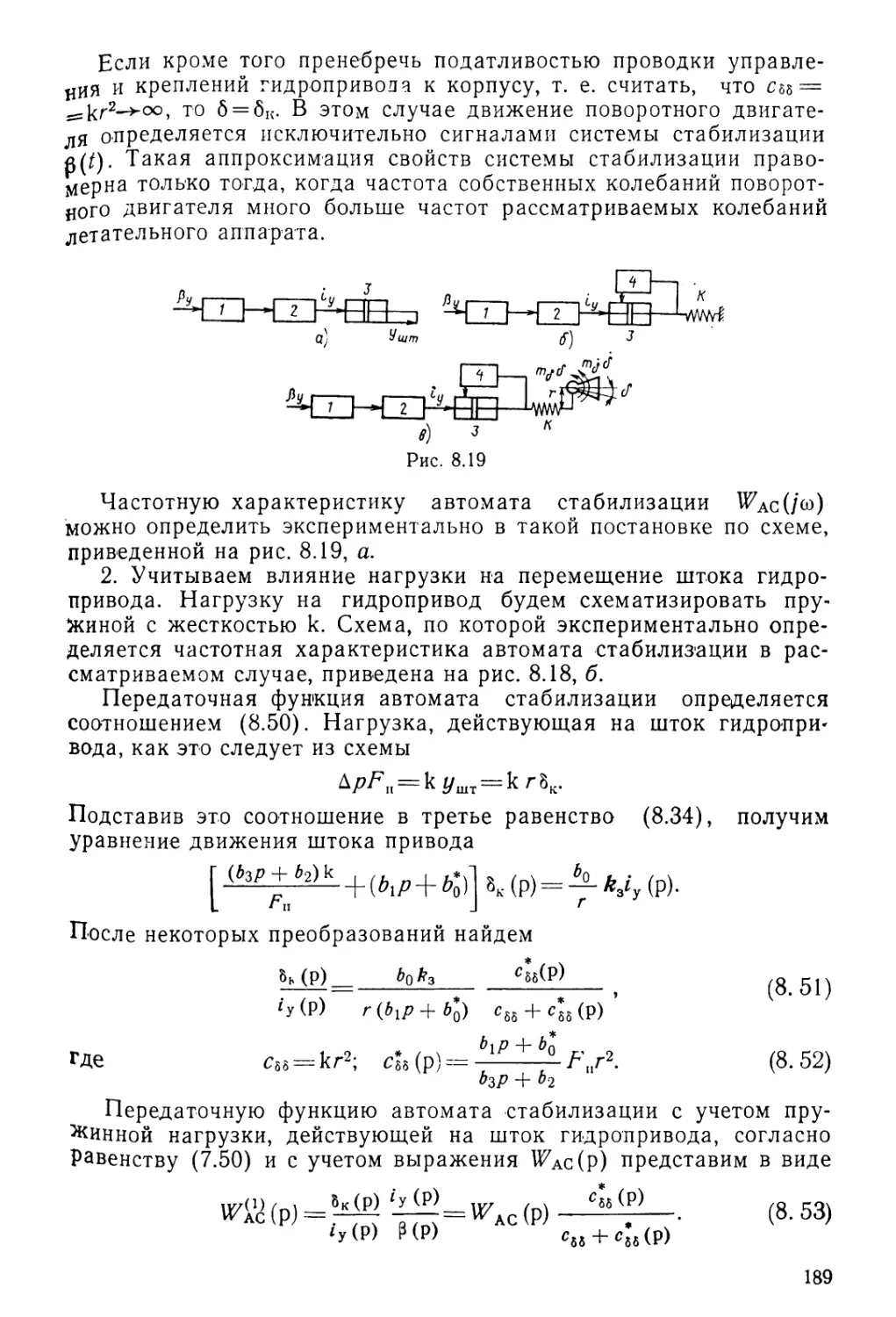
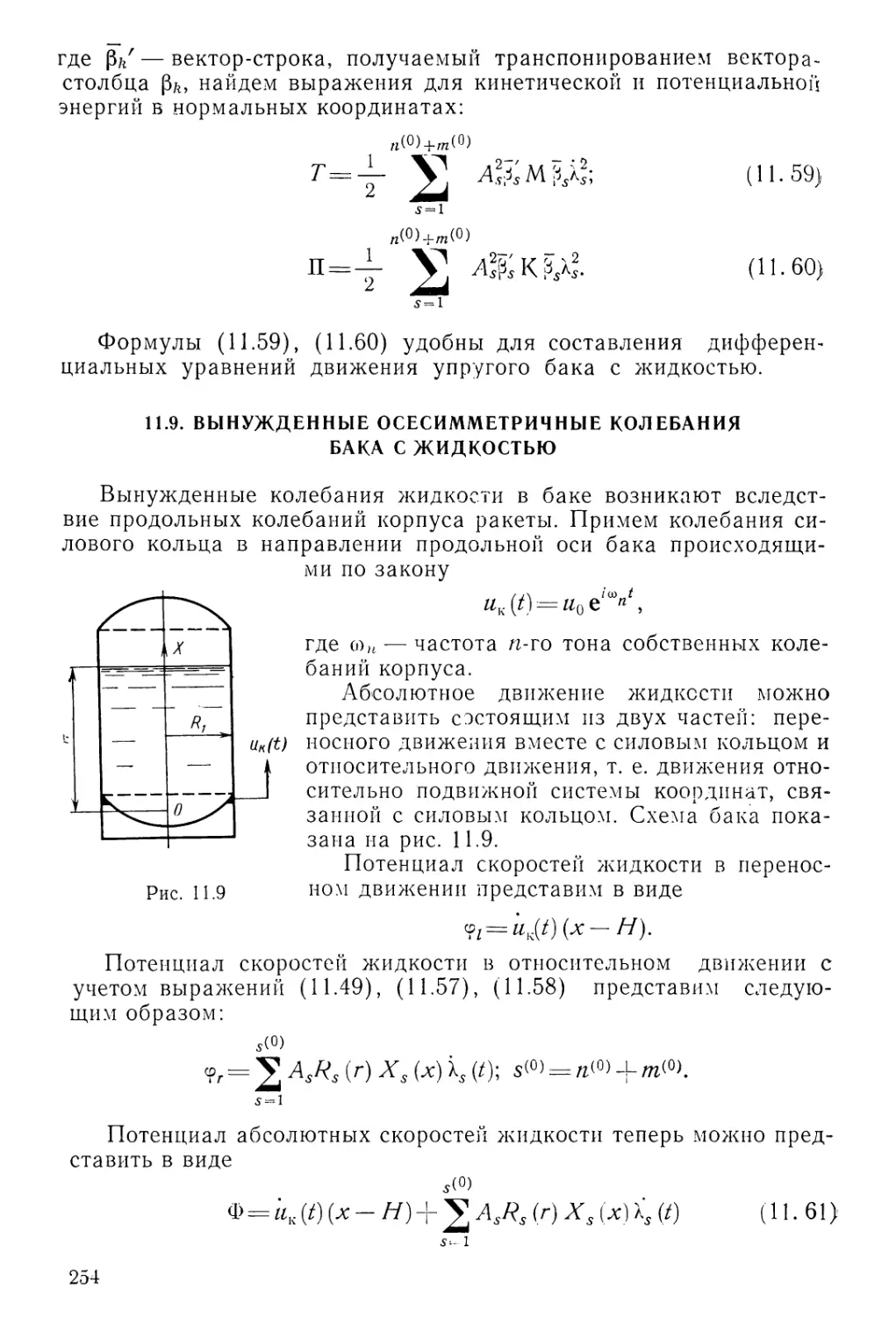
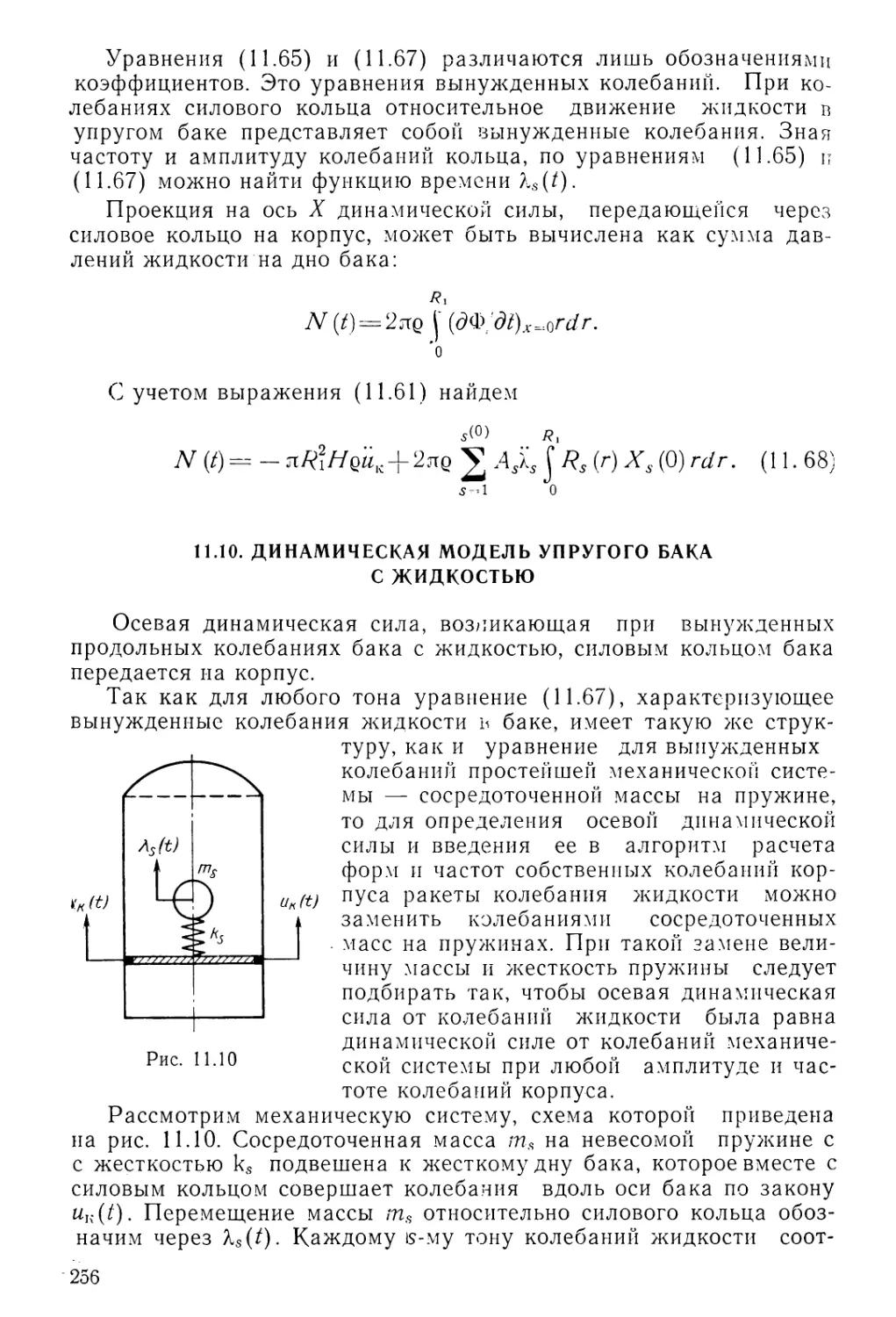
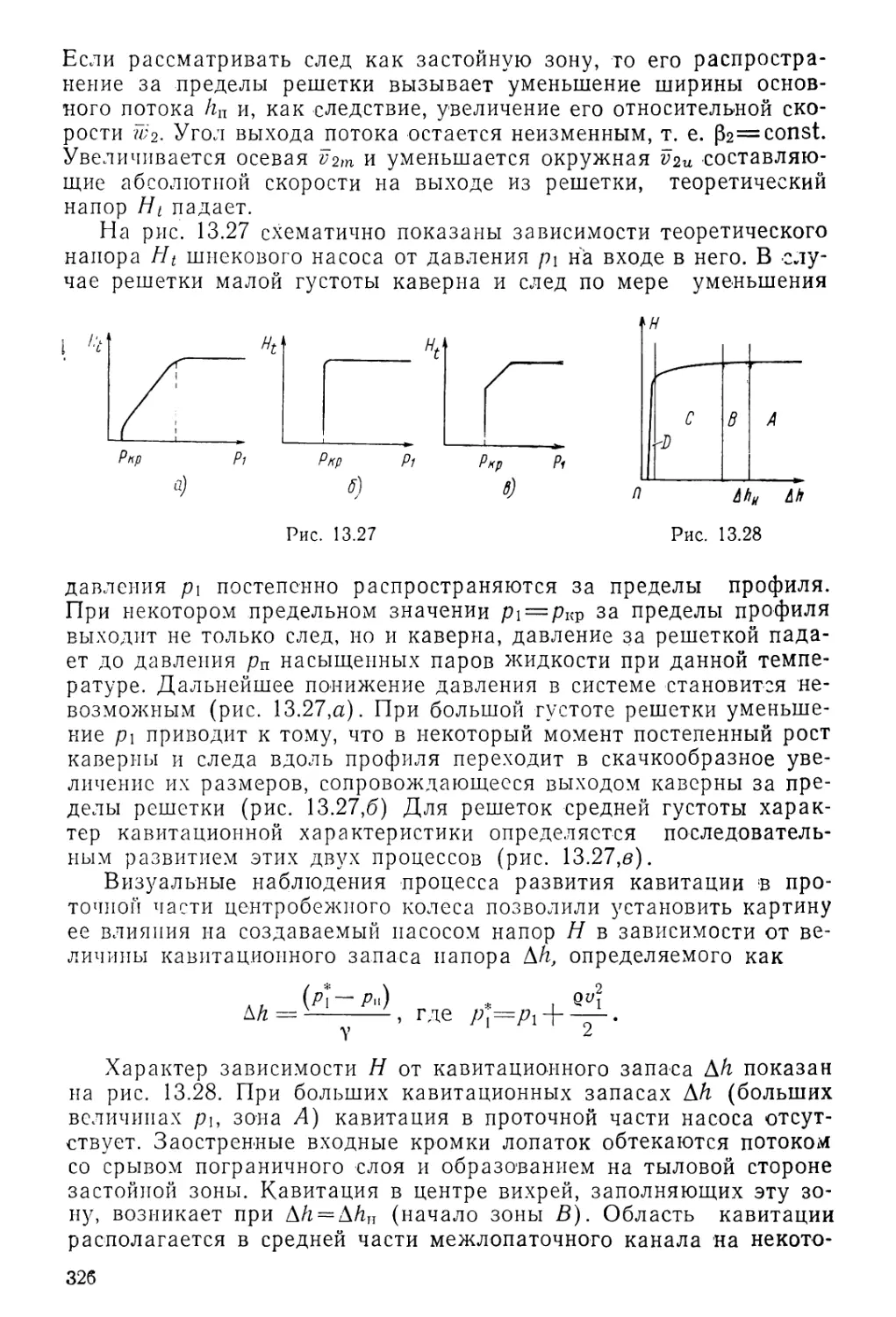
2.9. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ РАКЕТЫ
КАК ТВЕРДОГО ТЕЛА И ТРЕБОВАНИЯ
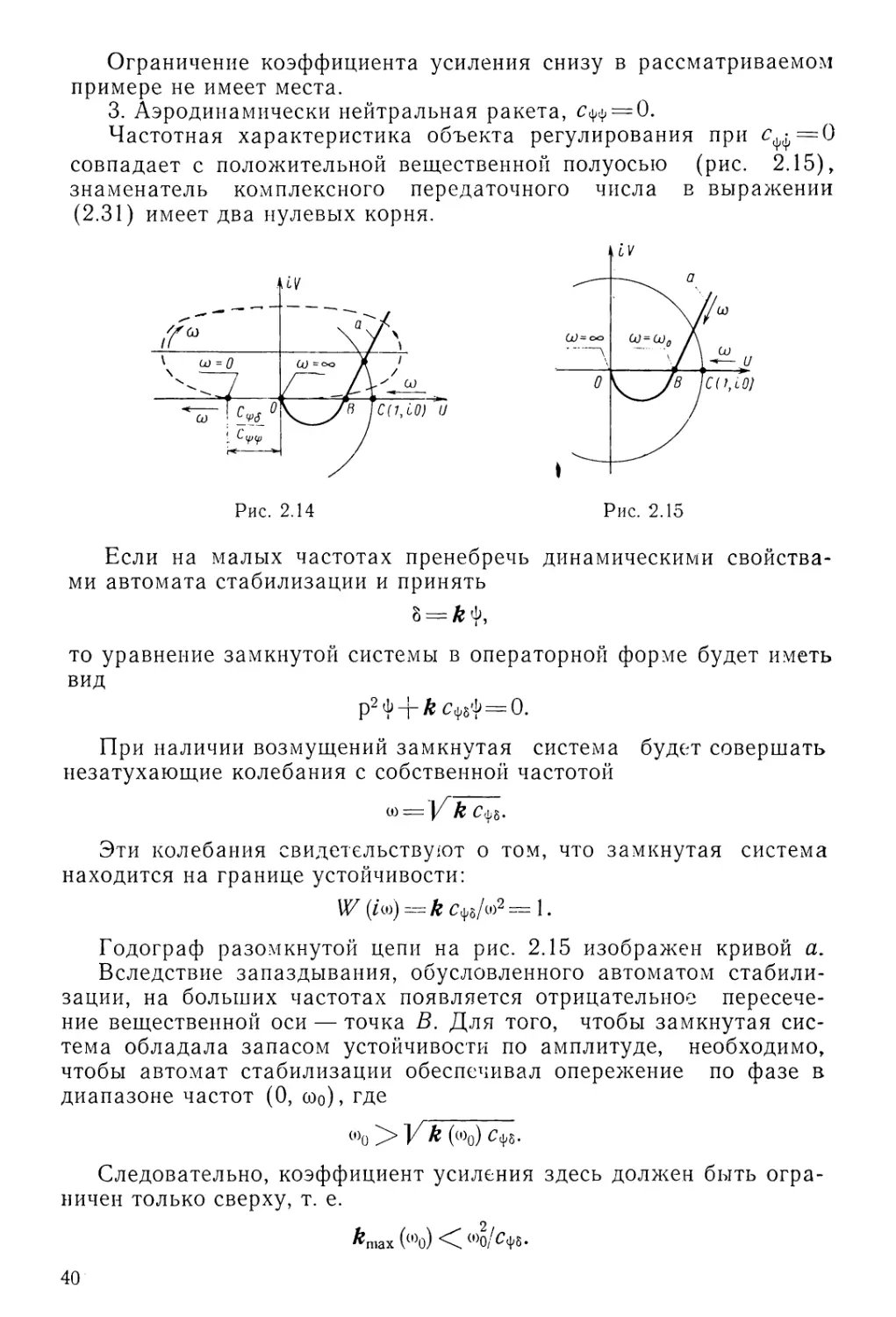
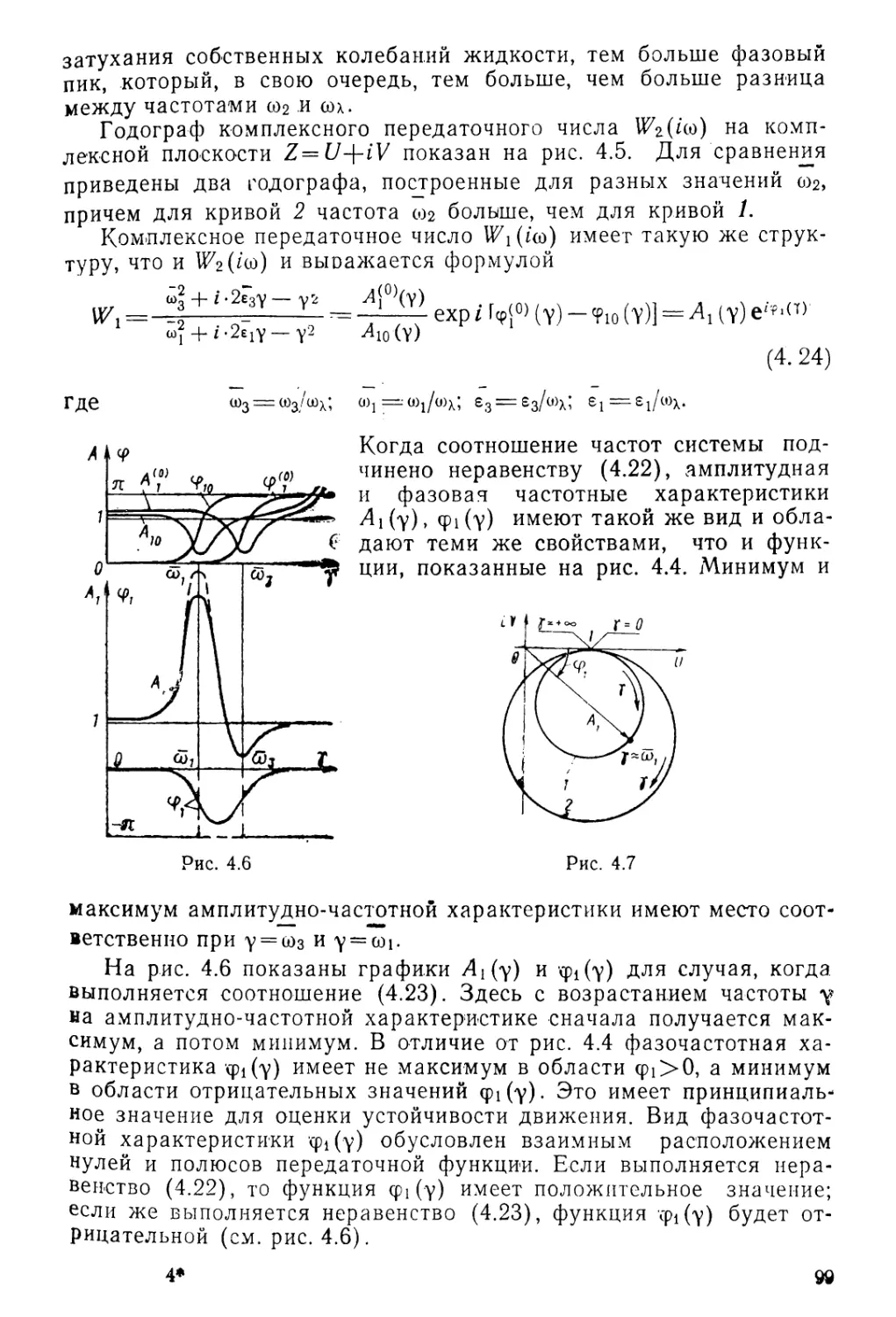
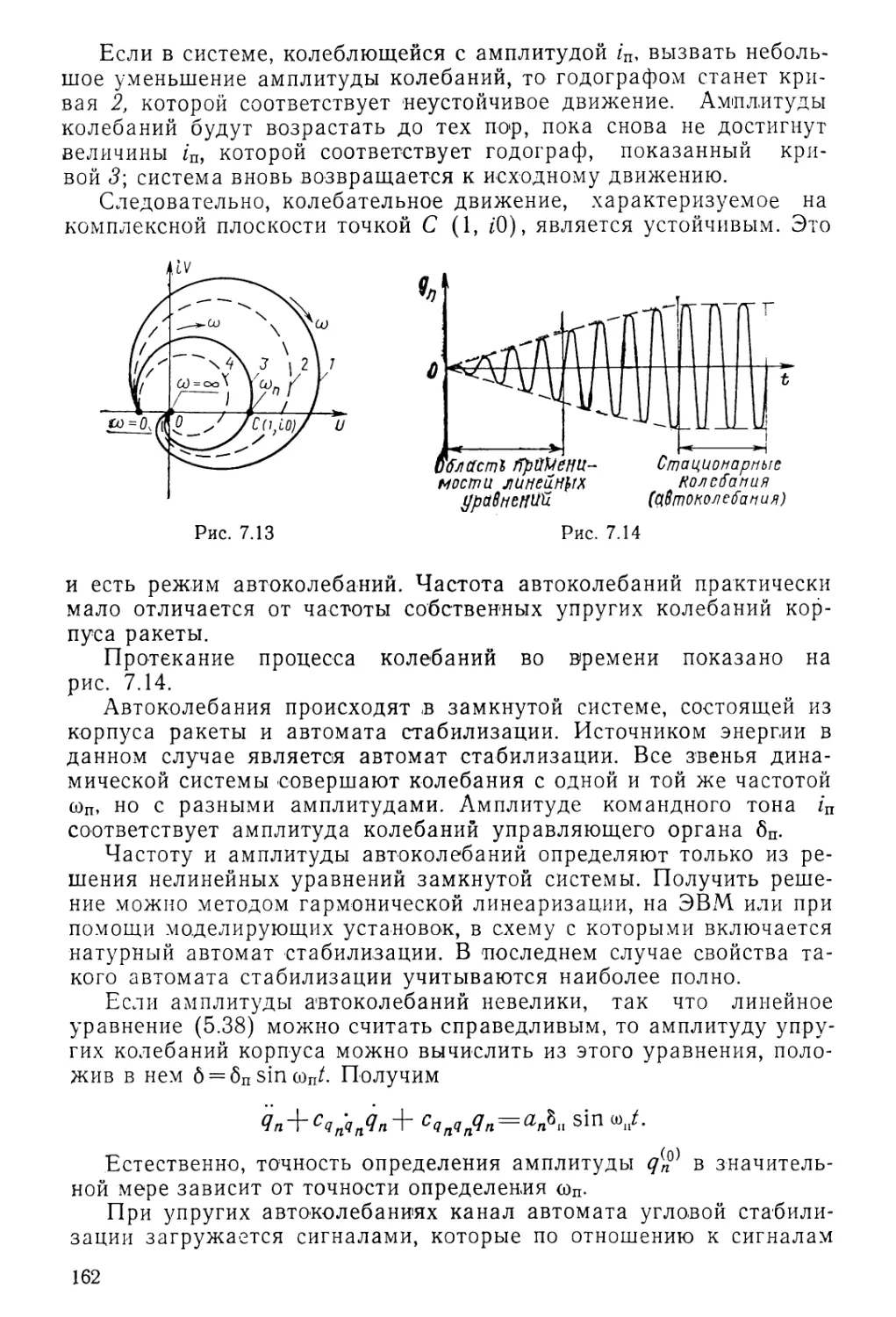
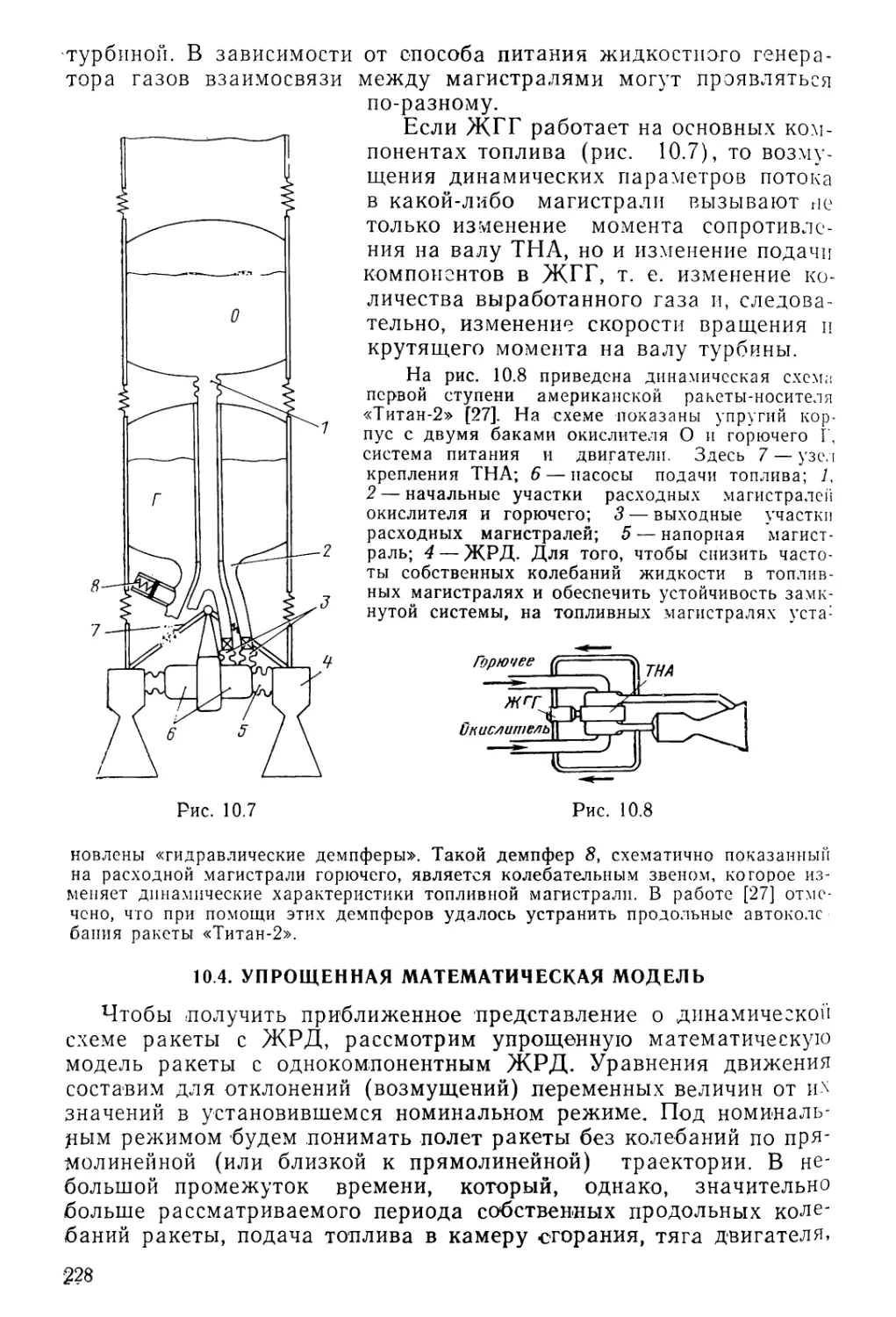
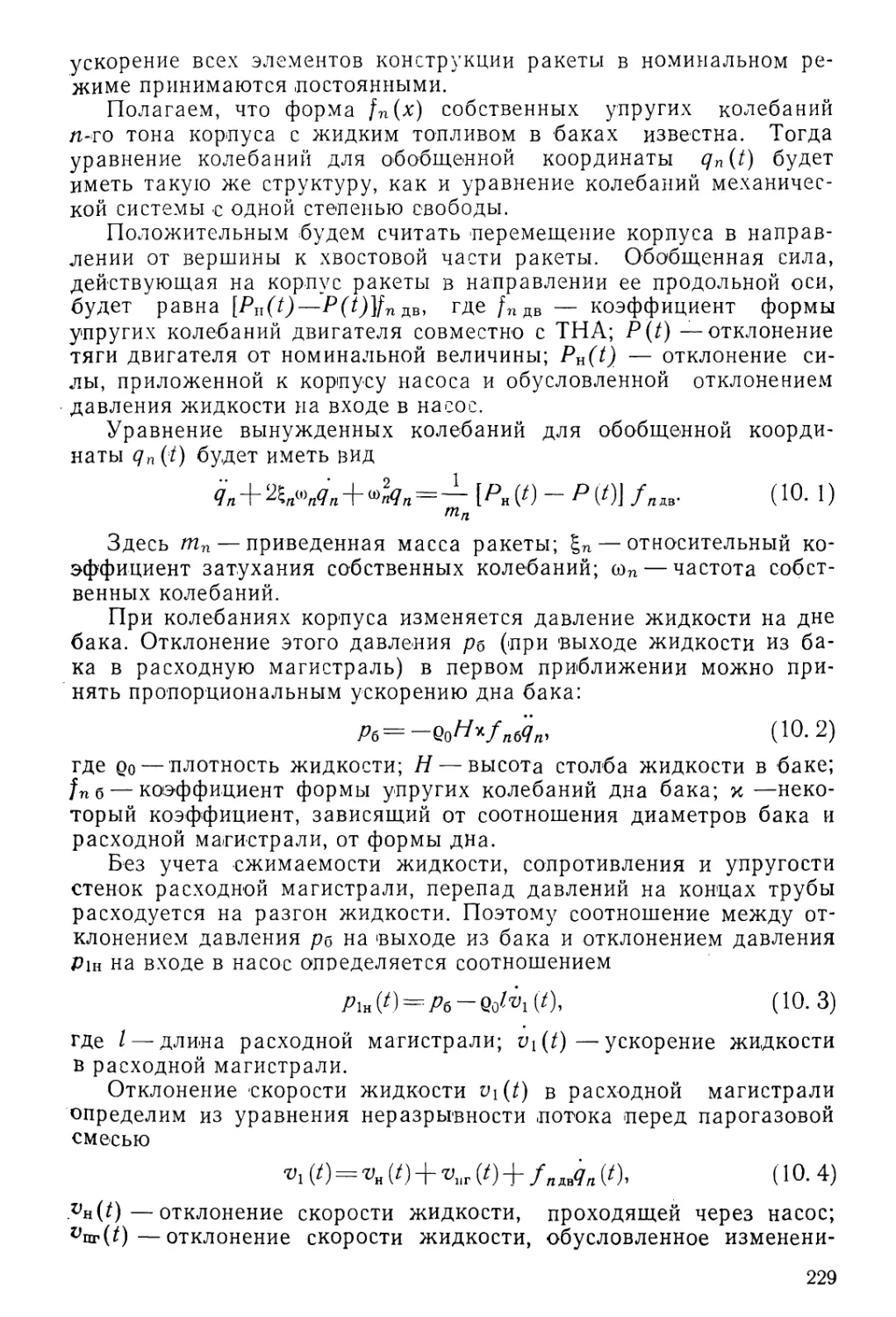
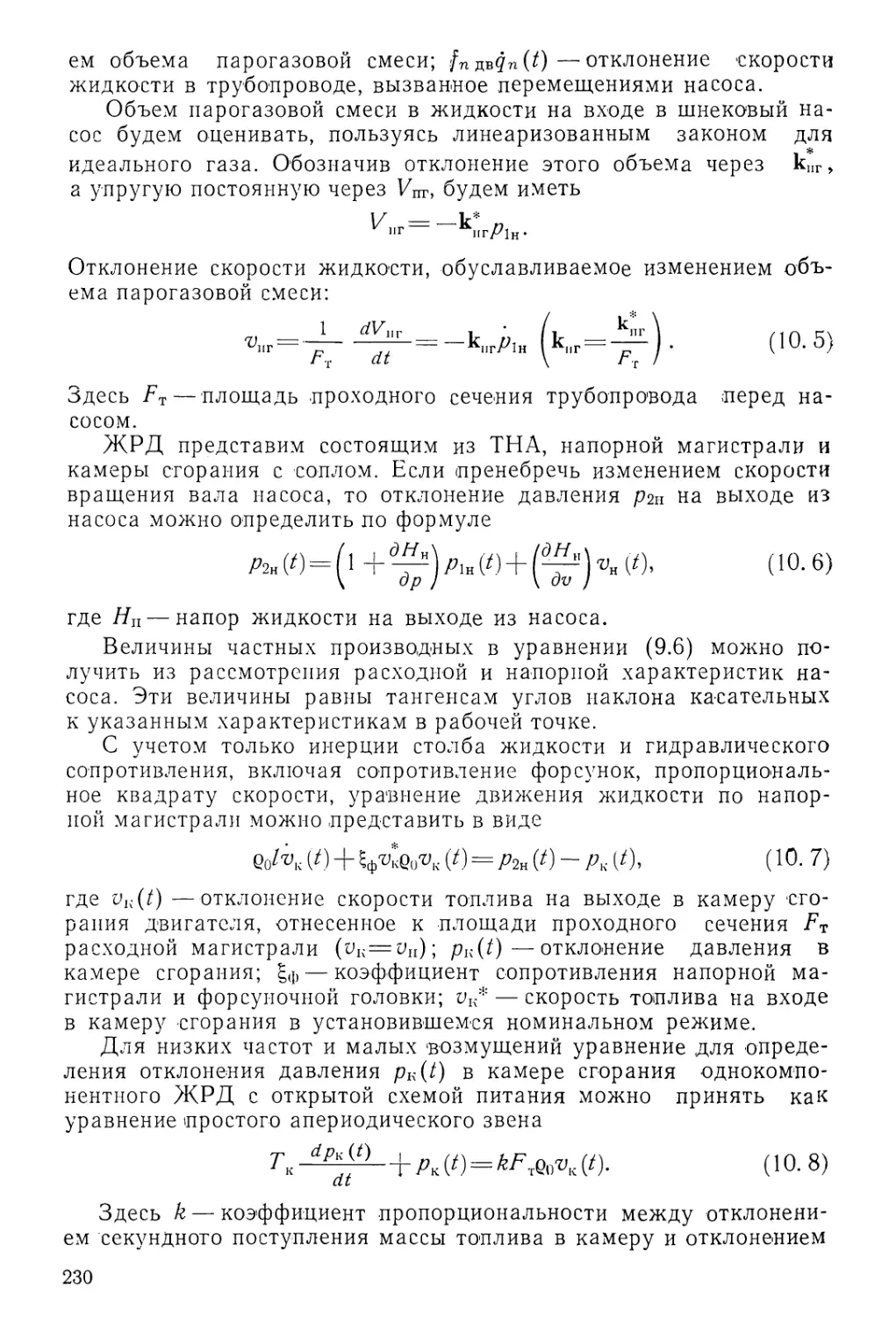
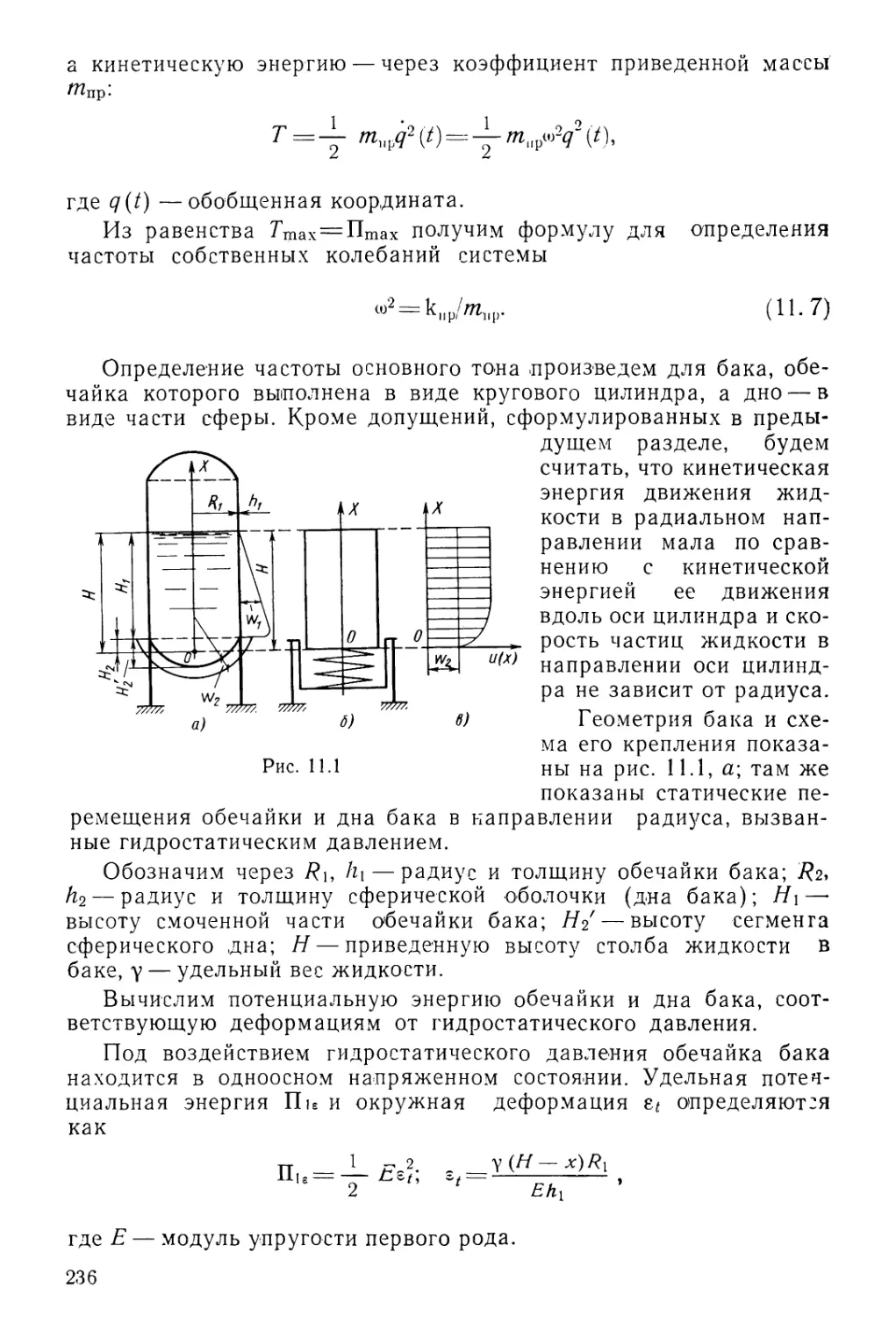
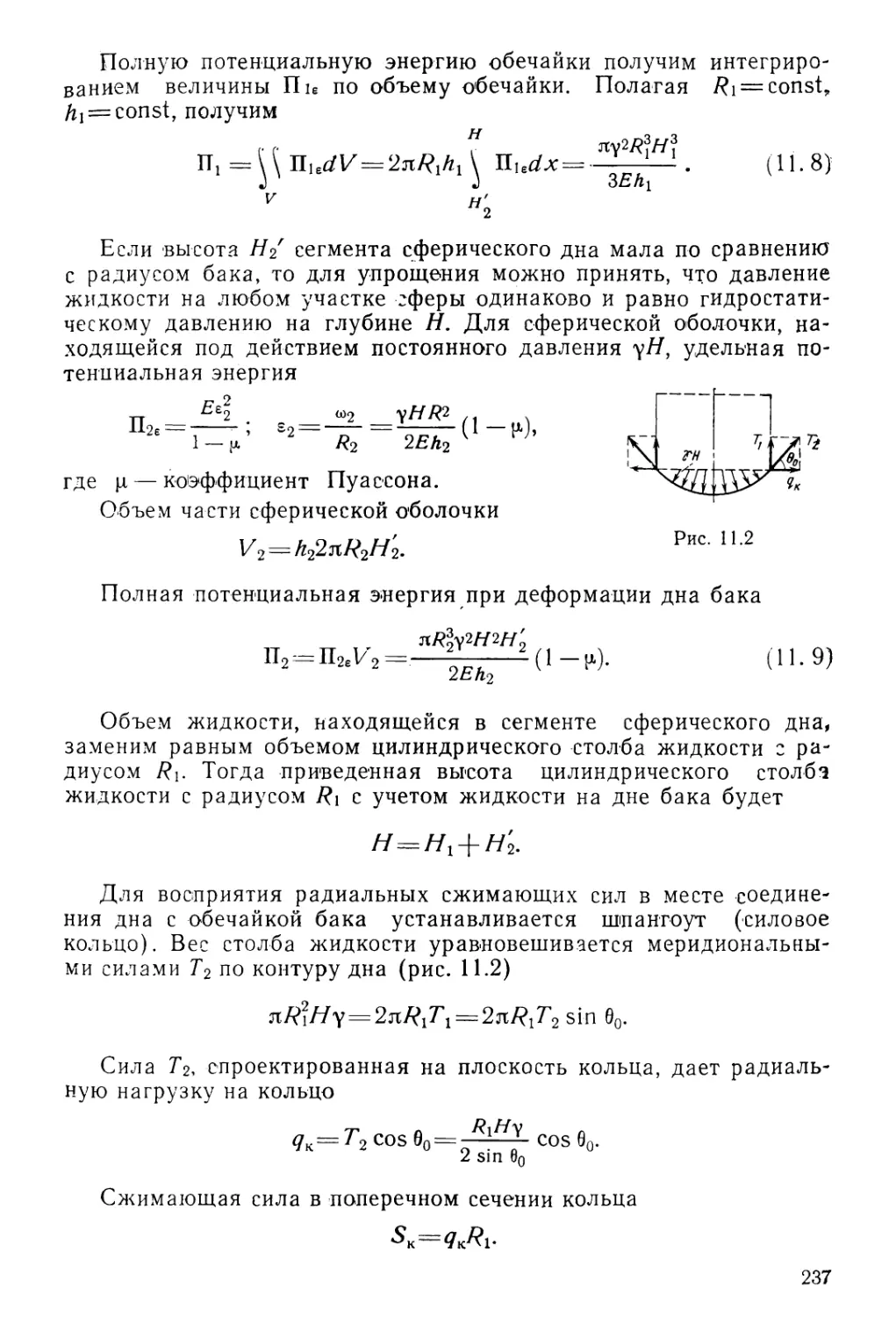
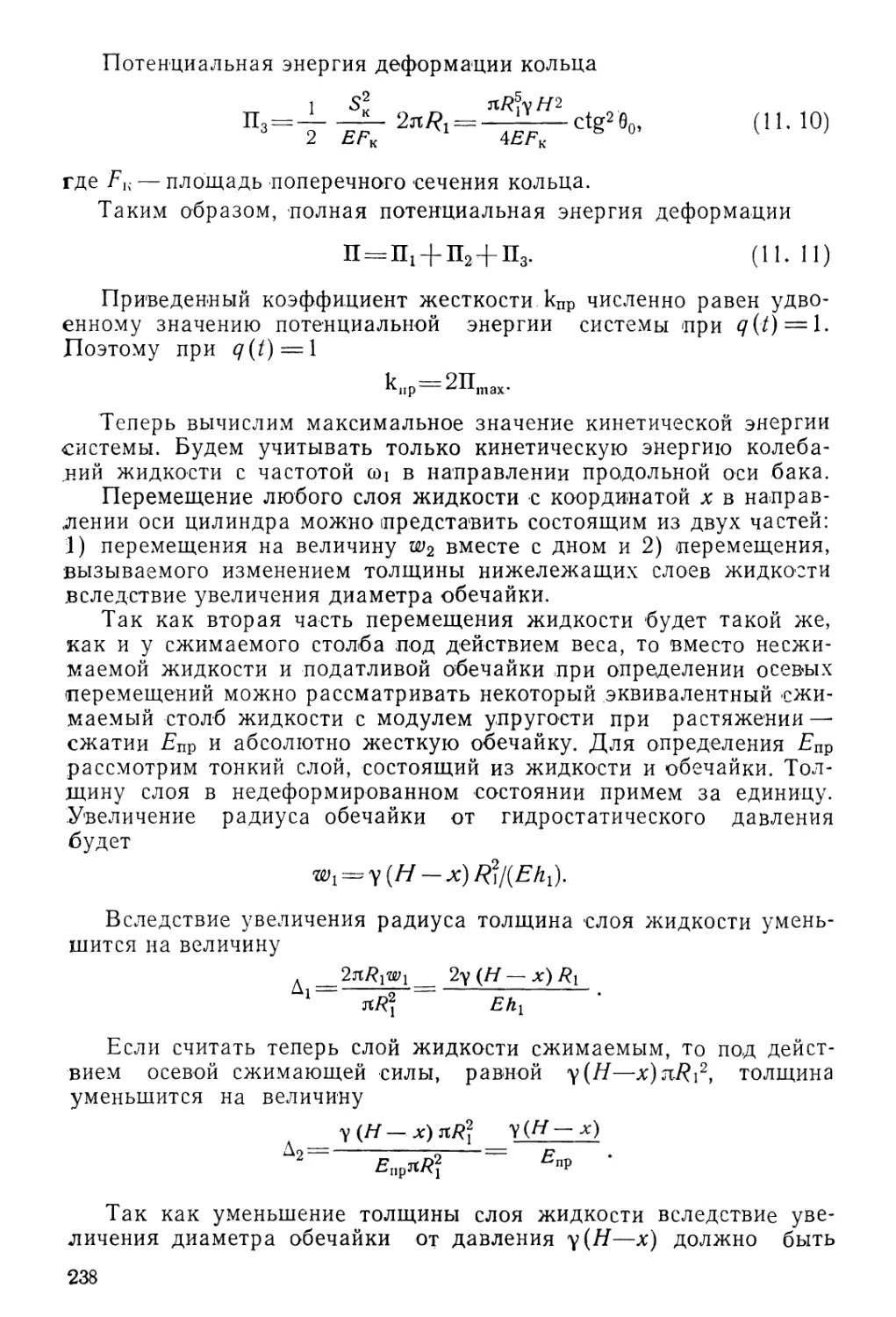
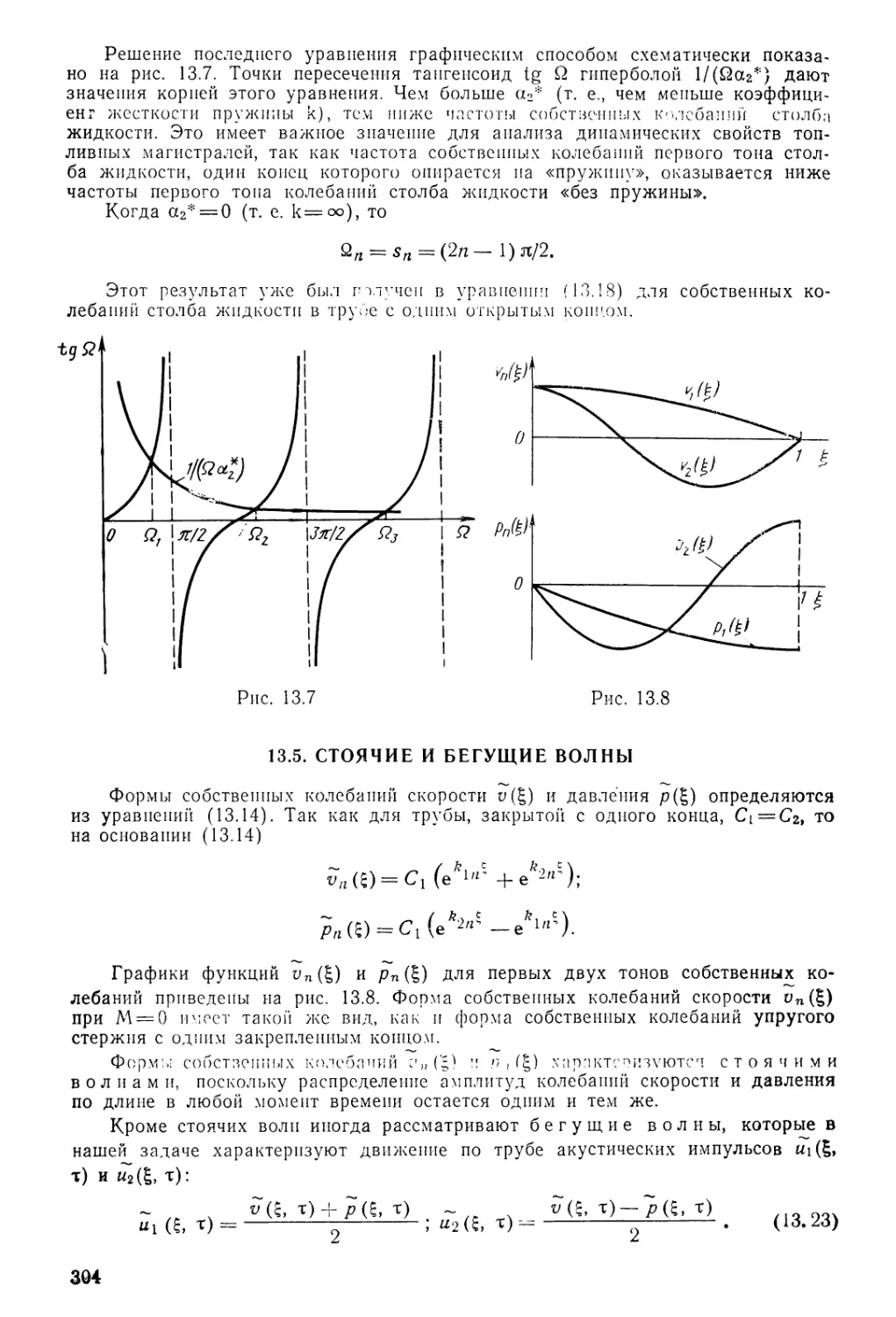
К АВТОМАТУ УГЛОВОЙ СТАБИЛИЗАЦИИ
Ракета совместно с автоматом стабилизации образует замкну-
тую систему автоматического регулирования (рис. 2.12). Главной
частью замкнутой системы является ракега — объект регулирова-
ния (РО). Автомат стабилизации (АС) должен обеспечивать ус-
тойчивость движения ракеты, поэтому его
свойства зависят от динамических свойств
объекта регулирования. Рассмотрим в
этой связи частотные характеристики аб-
солютно твердой ракеты и требования,
которые предъявляются к характеристи-
Рис. 2.12 кам автомата стабилизации для обеспе-
чения устойчивости замкнутой системы
Проанализируем уравнения возмущенного движения в плоско-
сти рыскания. Вместо уравнения (2.7) рассмотрим уравнения дви-
жения, полученные в неподвижной системе координат. В силу сим-
метрии ракеты они будут такими же, как уравнения (2.6) для пло-
скости тангажа:
гд е
'vz 4" cvzv^Vz "4 cvz$ 4" cvz$ = 0;
4 + + C'VvzVZ 4- = 0,
С’Л= —+
z z 2 a a
r .___ * ( p I 1 £>(s).
\' э I n ^Cz , Cv7S— Kzyy
z tn \ 2 a/ z tn
(2. 27)
36
J_ Sl2m^> -j- 2^ tn, (x — xc) dx
(2. 28)
1 _£4 о/ (3). r _ . r 1 p(s) / v r \
Q<p=“j—o/ztz/ , c^z— , c^Q л/р^ xc).
Боковое движение центра масс относительно номинальной тра-
ектории более медленное, чем угловое движение относительно цен-
тра масс. Поэтому при исследовании углового движения в первом
приближении можно пренебречь смещениями центра масс, а при
исследовании бокового движения центра масс пренебречь угловым
ускорением ар и угловой скоростью ар. Тогда вместо уравнений
(-2.27) получим две упрощенные независимые системы уравнений;
уравнение углового движения относительно центра масс
ф “Г = 0 (2.29)
и уравнения бокового движения центра масс
-J- c^Vzvz 4- = 0. (2. 30)
Передаточная функция по углу рыскания на основании упро-
щенного уравнения (2.29) будет
W* (р) = ------
5 (Р) Р2 + Р
(2.31)
Положив р = /со, получим выражение амплитудно-фазовой час-
тотной характеристики
(z\o) =-------------=и (со) + zV (со). (2. 32)
Знак коэффициента G14 определяется знаком коэффициента
^к₽). Для аэродинамически устойчивой ракеты Сфф^>0, для аэро-
динамически неустойчивой Сфф<^0, для аэродинамически нейтраль-
ной Сфф = О.
Для определения свойств, какими должен обладать автомат стаби-
лизации, чтобы угловое движение относительно центра масс замк-
нутой системы было устойчивым, проведем анализ свойств частот-
ной характеристики W/ф (/(о) регулируемого объекта, описанной
Уравнением (2.32). Для простоты пренебрежем демпфированием,
т- е. примем с^ = 0. Рассмотрим три разных случая.
1. Аэродинамически неустойчивая ракета, Сфф < 0.
Частотная характеристика W\ (zco) на плоскости Z = U (со) -\-iV (со)
показана на рис. 2.13. Это отрезок положительной вещественной
полуоси [0, |гф54фф|], причем, как следует из сравнения коэффици-
ентов и Сфф, на некоторых участках траектории может быть
Гфб/Сфф<^1, а на других участках
37
Знаменатель передаточной функции (р) имеет один положи-
тельный корень р=К — Сфф, поэтому согласно критерию Найкви-
ста для устойчивости замкнутой системы необходимо и достаточ-
но, чтобы частотная характеристика всей разомкнутой цепи
U7 (Ло) = (/«>) М7ас (/«>) = До (<•>) ^ас Не* ‘° (“)+с?АС (w)1 = Д (<») е‘> <4
делала один положительный полупереход оси U правее точки
С (1, 10). С учетом запаздывания автомата стабилизации на боль-
ших частотах такая характеристика представлена на рис. 2.9.
Для обеспечения устойчивости движения амплитудно-фазовые
характеристики автомата стабилизации должны обладать следую-
щими свойствами.
Рис. 2.13
лых частотах должен
фаза разомкнутой цепи
Во-первых, на малых частотах, в том
числе обязательно и при со = 0, автомат ста-
билизации должен усиливать сигнал, т. е.
обладать коэффициентом усиления fe>L
Это необходимо для того, чтобы точка А на
оси U была расположена правее точки С
(М’О).
Во-вторых, автомат стабилизации на ма-
вырабатывать опережение по фазе, чтобы
®0) = ?оН + 'Рас((0)
на малых частотах была положительной. Это опережение по фазе
обеспечивается дифференцирующим контуром-
В-третьих, для того, чтобы частотная характеристика W(ко)
делала один положительный полупереход оси U правее точки
С (1, 10), необходимо опережение по фазе в диапазоне частот
[О, соо]. Здесь соо — частота, при которой опережение по фазе авто-
мата стабилизации переходит в запаздывание, т. е. Фас(соо) =0,
Чем больше коэффициент усиления к, тем до больших частот дол-
жно осуществляться опережение по фазе, чтобы точка В на оси U
всегда была расположена левее точки С.
Следовательно, коэффициент усиления k должен быть не менее
некоторой определенной величины (обозначим ее femin), чтобы точ-
ка А (при со = 0) на оси U была правее точки С, и не более fe:max>
чтобы точка В (при со = со0) была левее точки С. Другими словами,
коэффициент усиления должен быть ограничен сверху и снизу:
^min fe feinax- (2. 33)
Если точка В будет совпадать с точкой С, то замкнутая систе-
ма будет находиться на границе устойчивости, и даже малые воз-
мущения будут вызывать в системе незатухающие колебания.
Так как флс(<оо) =0, то б = й(соо)ф и для этого случая
W (/0)) = - k (<о0) с^/(с^ - со2). (2. 34)
Характеристическое уравнение замкнутой системы имеет вид
l+UZ(Z(o)-_-O.
38
Из этого выражения можно найти частоту собственных колеба-
ний замкнутой системы
0)зам — \ k ((0о) " F ^<14-
Для устойчивости замкнутой системы точка В должна распола-
гаться левее точки С, поэтому автомат стабилизации должен обес-
печивать опережение по фазе до частот
о)0 > V (%) ’ I
(2. 35)
Для того, чтобы замкнутая система имела запас устойчивости
по амплитуде, необходимо, как это видно из соотношений (2.33) и
(2.34) для статически неустойчивой ракеты (£<{4<0), чтобы вы-
полнялись следующие неравенства:
|^(И > 1 =>*ininH>
при (о = О;
Г(М1<1=>^ахЬ)<
при (о = <о0. (2.36)
Для того, чтобы замкнутая система имела запас устойчивости
по фазе, необходимо, чтобы автомат стабилизации по каналу ф
имел опережение по фазе в диапазоне частот [0, (о0].
2. Аэродинамически устойчивая ракета, ^>0.
Частотная характеристика регулируемого объекта показана на
рис. 2.14. Годограф расположен на вещественной оси комплексной
плоскости Z. Там же пунктиром показан годограф с учетом коэф-
фициента демпфирования При с<рф — 0 знаменатель комплекс-
ного передаточного числа в выражении (2.31) имеет два чисто мни-
мых корня, а регулируемый объект находится на границе устойчи-
вости; при <?44>0объект устойчив, но с малым запасом устойчиво-
сти по фазе. Присоединение к регулируемому объекту автомата
стабилизации, обладающего запаздыванием на больших частотах,
приводит к тому, что годограф пересекает вещественную ось в
точке В (на рис. 2.14 часть годографа разомкнутой цепи изображе-
на кривой а).
Для того, чтобы замкнутая система имела запас устойчивости
по фазе, необходимо, чтобы автомат стабилизации обладал опере-
жением по фазе до частот (о0, определяемых неравенством (2.35) <
Величина со0 является важной характеристикой автомата стабили-
зации. Как будет показано дальше, эта величина используется при
оценке устойчивости движения ракеты с учетом колебаний жидко-
сти в баках.
Замкнутая система будет иметь запас устойчивости по ампли-
туде, если коэффициент усиления автомата стабилизации будет ог-
раничен сверху, т. е.
^гпах (%) (^0 £фф)/
39
Ограничение коэффициента усиления снизу в рассматриваемом
примере не имеет места.
3. Аэродинамически нейтральная ракета, Сфф = О.
Частотная характеристика объекта регулирования при 6*^=0
совпадает с положительной вещественной полуосью (рис. 2.15),
знаменатель комплексного передаточного числа в выражении
(2.31) имеет два нулевых корня.
Если на малых частотах пренебречь динамическими свойства-
ми автомата стабилизации и принять
то уравнение замкнутой системы в операторной форме будет иметь
вид
р2ф + А сф8Ф = 0.
При наличии возмущений замкнутая система будет совершать
незатухающие колебания с собственной частотой
= \/~k
Эти колебания свидетельствуют о том, что замкнутая система
находится на границе устойчивости:
W (Zco) = k Сф5/(О2 = 1.
Годограф разомкнутой цепи на рис. 2.15 изображен кривой а.
Вследствие запаздывания, обусловленного автоматом стабили-
зации, на больших частотах появляется отрицательное пересече-
ние вещественной оси — точка В. Для того, чтобы замкнутая сис-
тема обладала запасом устойчивости по амплитуде, необходимо,
чтобы автомат стабилизации обеспечивал опережение по фазе в
диапазоне частот (0, соо), где
О>0 > Vk (<о0)
Следовательно, коэффициент усиления здесь должен быть огра-
ничен только сверху, т. е.
^тах ((,)о) < 0)о/^ф5*
40
Присоединение к аэродинамически нейтральной ракете автома-
та стабилизации, обладающего указанными свойствами, приводит
к тому, что замкнутая система становится колебательным звеном
с демпфированием.
Величина коэффициента зависит от скоростного напора qy
момента инерции ракеты, взаимного расположения центра масс и
центра давления, которые во время полета изменяются. Поэтому
даже для одной и той же ракеты в разные моменты времени могут
иметь место ситуации, когда q<p>0, — Во всех
этих случаях автомат стабилизации должен обеспечить устойчи-
вость движения.
Подводя итог, можно 'сформули-
ровать два следующих основных
требования к автомату угловой
стабилизации: 1) автомат стабили-
зации должен обеспечивать опереже-
ние по фазе в диапазоне частот
(0, оо); 2) коэффициент усиления
автомата стабилизации должен быть
ограничен и сверху и снизу.
Амплитудно-частотная и фазоча-
стотная характеристика автомата стабилизации, отвечающие пере-
численным требованиям, показаны на рис. 2.16. Увеличение коэф-
фициента k (со) =ААС (со) по сравнению со статическим в некото-
ром диапазоне частот обусловлено наличием в цепи АС диффе-
ренцирующего контура.
Чтобы решить, каким должен быть диапазон частот (0, соо) и
какие ограничения должны быть наложены на коэффициент уси-
ления Л-max(<оо). Лтт, надо провести анализ частотных характерис-
тик регулируемого объекта и всей разомкнутой цепи для всех воз-
можных моментов времени полета.
Хорошую информацию для выбора коэффициентов усиления
автомата стабилизации можно получить с помощью £>-разбиения.
Рассмотрим в этой связи уравнения замкнутой системы, состоящие
из уравнений объекта регулирования (2.27) и уравнения автомата
стабилизации. Уравнения объекта запишем без учета демпфирую-
щих сил:
z Cv “h ~—0» Ф -j- — 0. (2.37)
Уравнение автомата стабилизации (2.23) можно представить в
виде
ТЬ‘+Т18 + 5=М + *Й-
(2.38)
где Ti, Т2 — постоянные времени; Лф, — коэффициенты усиле-
ния АС.
41
Характеристическое уравнение системы (2.37) и (2.38) будет
(«о р4 + й1 Р3 + «2 P2-H3 р + а4) = 0, (2. 39)
где а0 = Т2; 4Z1 = T1; а2 = 1 ГгСфф;
&з = Аф 4- Т\ = kb -|- C-р-р. (2.40)
Применим критерий Раута—Гурвица. Замкнутая система (2.37)
и (2.38) будет устойчивой, если все коэффициенты уравнения (2.39)
и определитель Д3 положительны, т. е.
а0>0; ах > 0; а2>-0; а34>0; я4>0;
Д3 — а3 (а — а0^3) — я4Я1 > 0.
Коэффициент q5>0. Поэтому нетрудно подобрать значения
аэродинамически неустойчивой ракеты (г^<С0)
коэффициенты (2. 40) были положительными.
Определим границы области устойчиво-
сти. Определяющими являются условия для
Д3 и а4. Условие а4 = 0 выражает границу апе-
риодической устойчивости.
Найдем уравнение границы устойчивости,
определяемое равенством Л3 = 0. Подставляя
в это равенство значения коэффициентов
(2.40), получим
М$+^+'Мф + <;4=& (2-41)
есть уравнение параболы в координатах
, k^\ парабола проходит через начало координат, ось параболы
параллельна координатной оси Ok. (рис. 2.17). Для совокупности
значений лежащих в области, которая ограничена парабо-
лой и осью абсцисс, Д3 = 0.
Неравенство я4<0 определяет область апериодической неустой-
чивости системы. Границу апериодической устойчивости найдем
из равенства
CL^ —{— б’фф =: 0
или = — с^/с^ (2. 42)
Следовательно, область устойчивости заключена между пара-
болой (2.41) и прямой (2.42). Для статически неустойчиво?! раке-
ты (<^><0) эта область показана на рис. 2.17. Для того, чтобы
движение ракеты было устойчивым, необходимо условие
Это условие совпадает с первым условием (2.36), которое было по-
лучено из анализа системы частотным методом.
42
Вершина параболы До находится в точке с координатами
/ Ti(i-Tb^) О-'ФнЛ
°\ 21^ ’ 4Т2Сф8 )'
Обычно 1 ^>Тг^фф. Поэтому ордината вершины параболы практи-
чески не зависит от степени аэродинамической неустойчивости, а
определяется эффективностью органов управления (^б) и пара-
метром автомата стабилизации Т22.
Можно условно считать, что абсцисса вершины параболы опре-
деляет ширину области устойчивости. Она пропорциональна Ti и
обратно пропорциональна произведению
На основе рассмотрения семейства частотных характеристик
(см. рис. 2.13, 2.14) и области устойчивости (см. рис. 2.17) можно
установить более конкретный диапазон частот (0, соо) и верхнюю и
нижнюю границы для коэффициента усиления автомата стабилиза-
ции. Однако выбрать эти величины окончательно и назначить
запасы устойчивости по коэффициенту усиления (по амплитуде) и
по фазе на основании таких характеристик еще нельзя. Выбор за-
пасов устойчивости — задача более сложная. Здесь нужно прини-
мать во внимание возможные разбросы параметров ракеты, откло-
нения параметров и характеристик автомата стабилизации, зави-
симость характеристик от температуры, вибраций и других факто-
ров. Величины этих параметров можно определить на основе опы-
та эксплуатации ракет и систем их стабилизации.
2.10. ТРЕБОВАНИЯ К АВТОМАТУ БОКОВОЙ
СТАБИЛИЗАЦИИ ЦЕНТРА МАСС
Рассмотрим теперь динамические свойства автономной системы
стабилизации бокового движения центра масс относительно задан-
ной траектории. Уравнения бокового движения центра масс (2.30)
запишем с правыми частями
Vz + CVzVzVz + Cvz^ + Cvz$ = zjnr,
Ctyv^Vz ~i-“I- (2.43)
Здесь ZB и Л4Ув — длительно действующие возмущения, обуслов-
ленные ветром, несовпадением вектора силы тяги двигателей с про-
дольной осью корпуса и т. д.
Система стабилизации центра масс должна компенсировать
действие возмущений. Пусть, например, сила ZB и момент А4Ув воз-
никли в результате действия на ракету ветра. Тогда автомат угло-
вой стабилизации повернет рули на некоторый угол 6, чтобы урав-
новесить возмущающий момент и держать корпус ракеты парал-
лельно плоскости стрельбы (ф = 0). Кроме поперечной аэродинами-
ческой силы, на корпус ракеты будет действовать еще и попереч-
ная управляющая сила Zp, причем в случае аэродинамически ус-
тойчивой ракеты (£<рф ^>0) силы ZB и Zp будут направлены в раз-
43
ные стороны (рис. 2.18, а) а в случае аэродинамически неустойчи-
вой ракеты эти силы будут направлены в одну сторону (рис.
2.18, б). Под действием сил Z„ и 2Р центр масс ракеты будет пере-
мещаться в боковом направлении.
Чтобы компенсировать действие сил ZB и Zp, автомат стабили-
зации центра масс должен повернуть корпус ракеты (вектор силы
тяги двигателей) так, чтобы сумма проекций на ось Z сил ZB, Zp и
Рэ была равна нулю или, точнее, чтобы скорость vz центра масс
была равна нулю. Для аэродинамически неустойчивой ракеты угол
поворота должен быть больше, чем для аэродинамически устойчи-
вой.
Рис. 2.19
Таким образом, система угловой стабилизации стремится дер-
жать ось ракеты в плоскости стрельбы, а система стабилизации
центра масс должна выводить эту ось из плоскости стрельбы.
Одним из возможных законов формирования сигнала в канале
стабилизации центра масс будет
— kxvz — k^z, (2. 44)
где z— координата смещения центра масс. Так как стабилизация
центра масс и угловая стабилизация осуществляется одними и те-
ми же исполнительными органами, то одна из возможных струк-
турных блок-схем автомата стабилизации в плоскости рыскания
будет иметь вид, показанный на рис. 2.19. Здесь ГП — гироприбор;
КК — корректирующий контур; У — усилитель; РМ — рулевая ма-
шина, ОС — обратная связь, А — акселерометр, uz, uVz, Uvz —
напряжения, пропорциональные соответствующим отклонениям;
z’i, i — сила тока.
Определим некоторые требования к выбору коэффициентов уси-
ления kx и fe2, Для чего из уравнений (2.43) и (2.44) установим за-
висимость между координатой z смещения центра масс и возмуща-
ющей силой ZB. Приняв <?z = pz, Л4Ув = 0, получим
Р^ (б7фф k Сфб) р k £фб) Д" k —|—
~F ^1 (Cv“I- k<2, (Суz'^C ' 6 ) X
x z = Zn (сФФ + k c^/m.
44
При соответствующем выборе коэффициентов kx и k2 можно обес-
печить хорошее качество переходного процесса. Чем больше коэф-
фициент k2, тем меньше статическое смещение центра масс, т. е.
т ^2 (ev^C^8
и тем больше частота собственных колебаний центра масс
/^2 (сv ф£ф8
----------------------•
Но с увеличением коэффициента k2 может несколько уменьшиться
запас устойчивости по каналу ф.
Как видно из уравнения смещения центра масс, коэффициент
k\ определяет затухание системы. Чем больше k\, тем быстрее за-
тухают колебания центра масс.
Выбирать значения коэффициентов усиления kY и k2 канала
стабилизации центра масс можно следующим образом: задаваясь
возмущениями ZB и Л4Ув, решить уравнения (2.43) и (2.44) для
разных фиксированных моментов времени полета и найти зависи-
мости vz и z от коэффициентов kx и k2, причем, если значения kx и
Й2 будут большими, то в уравнении моментов следует учитывать и
ф. Руководствуясь требованиями к точности полета, на основании
полученных зависимостей можно выбрать приемлемые значения
коэффициентов kx и k2.
Анализ уравнений с постоянными коэффициентами дает лишь
качественное представление о том, как будет осуществляться ста-
билизация центра масс. В реальных условиях коэффициенты урав-
нений и возмущающие силы во время полета изменяются и полу-
чить представление о максимальной скорости vz и максимальной
накопленной ошибке в отклонении координаты z можно из реше-
ния уравнений с переменными коэффициентами на ЭВМ или на
электронной моделирующей установке. Только после этого можно
сделать окончательный выбор коэффициентов kx и k2.
Структура уравнений возмущенного движения в плоскости тан-
гажа (2.86) такая же, как и в плоскости рыскания (2.27), поэтому
требования к автоматам угловой стабилизации и стабилизации
центра масс практически такие же, как и к автоматам стабилизации
движения в плоскости рыскания.
Более простым является уравнение (1.20) возмущенного дви-
жения относительно продольной оси
Y + ^Y + c768 = 0. (2.45).
Коэффициент обусловлен аэродинамическими силами; коэф-
фициент —управляющими силами, которые при наличии воз-
душных рулей будут зависеть и от скоростного напора.
45
Комплексное передаточное число по углу крена
ATi (*“>) = — — со2).
Структура уравнения (2.45) аналогична структуре уравнения
моментов в плоскости рыскания приСфь = 0. Поэтому и требования
к автомату стабилизации по каналу крена аналогичны требовани-
ям к каналу угловой стабилизации при Сфф —0. Частота собствен-
ных колебаний ракеты с автоматом стабилизации относительно
продольной оси —
= (%) <?73>
где Л(соо) — коэффициент усиления автомата стабилизации;
Ск=М%,Цх.
Динамическая схема жидкостной ракеты в виде абсолютно твер-
дого тела является схемой первого приближения. На основании
этой схемы можно произвести расчет траектории полета и сформу-
лировать основные требования к системе управления и стабилиза-
ции. В некоторых случаях такая схема является достаточной. Од-
нако с увеличением удлинения ракеты допущение о жестком кор-
пусе становится все более условным. При поперечных возмущени-
ях длинный корпус перемещается не как твердое тело, а как гиб-
кий стержень. Учет упругости корпуса позволяет выявить дополни-
тельные динамические свойства, которые существенны, например,
для угловой стабилизации ракеты. Кроме того, содержащиеся в
баках ракеты значительные массы жидкого топлива могут переме-
щаться относительно стенок и создавать дополнительные силы.
Прежде чем перейти к динамике ракеты с учетом колебаний
жидкости, рассмотрим сначала динамические свойства бака с жид-
костью как составной части ракеты.
Глава III
КОЛЕБАНИЯ ЖИДКОСТИ В БАКАХ
3.1. ПОСТАНОВКА ЗАДАЧИ
Ракета с жидкостным ракетньпм двигателем (ЖРД) содержит
большие массы жидкого топлива в баках. При возмущенном поле-
те ракеты колебания стенок баков вызывают колебания жидкого
топлива, которые, в свою очередь, воздействуют на стенки баков.
В дополнение к степеням свободы ракеты как твердого тела появ-
ляются дополнительные степени свободы, характеризующие коле-
бания жидкости. Поэтому под действием одних и тех же внешних
сил движение ракеты, содержащей жидкое топливо, может корен-
ным образом отличаться от движения аналогичной ракеты как
твердого тела. Чтобы понять, как влияют колебания жидкости в
баках на движение ракеты, познакомимся вначале с колебаниями
жидкости в одном баке.
Изучение колебания жидкости в баках является одной из задач
классической гидродинамики, где для описания движения жидко-
46
сти используются или переменные Лагранжа, или переменные
Эйлера.
Переменные Эйлера характеризуют состояние частиц жидкости,
находящихся в разные моменты времени t в заданной точке прост-
ранства с координатами х, у, z. Иначе говоря, различные вектор-
ные и скалярные элементы движения рассматриваются как функ-
ции точки пространства и времени, т. е. как функции четырех ар-
гументов: х, у, z, t. Мы будем пользоваться переменными Эйлера.
При изучении колебаний жидкости примем следующие допуще-
ния:
1) жидкость в баке идеальная и несжимаемая;
2) перемещения и скорости всех частиц жидкости и стенок бака
в возмущенном движении суть малые величины в том смысле, что
произведениями и квадратами их можно пренебречь по сравнению
со значениями любой из этих величин;
3) движение жидкости в баке является потенциальным и про-
исходит в потенциальном поле массовых сил (гравитационных или
инерционных), связанных с невозмущенным полетом;
4) суммарный вектор ускорения поля массовых сил невозмущен-
ного движения g* во все время движения совпадает с осью бакз
или составляет с этой осью малый угол.
В невозмущенном движении свободная поверхность жидкости
расположена перпендикулярно вектору g*.
3.2. УРАВНЕНИЕ ЛАПЛАСА
Движение жидкости в любой точке объема должно удовлетво-
рять условиям неразрывности.
На рис. 3.1 показан элементарный объем в виде прямоугольно-
го параллелепипеда со сторонами dx, dy, dz. Пусть скорости жид-
кости в направлении главных координатных осей на площадках
х = 0, у = 0, z = 0 будут vx, vY, vz. Тогда на площадках, располо-
женных на расстояниях dx, dy, dz, скорости жидкости будут
dvy dvy dv
vx-r — dx; vz+~dz.
dx dy dz
В случае несжимаемости объемы жидкости, втекающей в парал-
лелепипед и вытекающей из него, должны быть равны. Из этого
условия получаем уравнение неразрывности
dvv dvv dv_
— + — + -^-=0, (3.1)
dx dy dz
которое должно удовлетворяться в любой точке жидкого объема.
Свойство безвихревого (потенциального) движения жидкости
характеризуется некоторой потенциальной функцией ф, называемой
потенциалом абсолютных скоростей; скорости жид-
кости в направлении координатных осей определяются по форму-
лам
ЭФ
dx
дФ
^Г = —
ду
VZ
ЭФ
dz
(3. 2)'
47
Подставляя зависимости (3.2) в выражение (3.1), получим для
функции Ф уравнение Лапласа
ДФ
^2ф <Ж> . <5>2ф _0
дх-2 "Г ду* ' дг2 “
(3.3)
Если бак цилиндрический, то решение задачи о колебаниях
жидкости удобно проводить не в прямоугольных, а в цилиндриче-
ских координатах. Располагая ось X вдоль оси бака и вводя вмес-
то переменных у и г переменные г и ц (рис. 3.2)
у — г sin т); z = г cost],
Рис. 3.2
получим из уравнения (3.3) уравнение Лапласа в цилиндрических
координатах
дф — ^2ф । 1 дф J L д2ф I д‘2ф
дг% г дг дтр дх^
0.
(3.5)
Решение уравнения Лапласа должно удовлетворять краевым и
начальным условиям.
3.3. ДАВЛЕНИЕ ЖИДКОСТИ
Обратимся к рис. 3.1. Предположим, что движение жидкости
происходит только в направлении оси У. Обозначим давление жид-
кости на левой грани параллелепипеда через р, тогда на правой
грани оно будет P~Y~~dy.
Уравнение движения выделенного элемента жидкости
или
dvv др
Qdxdydz ——= —— dxdydz
dt ду
d^==^P
dt ду
48
получим
Принимая во внимание, что
dvv dvv dv дФ
---£- =-— -\~Vy--~ И Vy = ,
dt dt dy dy
d (дФ , 1 2\ dp
Q -----------Vy =------— .
dy \ dt 2 / dy
Интеграл этого уравнения запишем без индекса У, так как направ-
ление движения (линии тока) выбрано произвольным:
6 \ dt 2 )
где Г — константа интегрирования, сохраняющая постоянное зна-
чение на данной линии тока. Если давление газа над жидкостью
ро, то Г = р0.
К полученному надо добавить давление, обусловленное ускоре-
нием свободного падения g*. Если ось ОХ бака направлена верти-
кально вверх (см. рис. 3.2). то это давление равно — g*x.
Таким образом, давление р в любой точке объема, занятого
жидкостью, при малых скоростях колебаний можно определить из
следующего равенства:
Р—Ро = __ о-*
q dt g '
(3.6)
3.4. КРАЕВЫЕ И НАЧАЛЬНЫЕ УСЛОВИЯ
На смоченной поверхности S* краевые (граничные) условия
могут быть выражены исходя из равенства скоростей жидкости и
стенки бака:
дф/д/i^Vn,
где — скорость граничной поверхности в направлении норма-
ли к этой поверхности.
Пусть уравнение возмущенной свободной поверхности в момент
времени t имеет вид
X = X(i/- Z, /).
Из уравнения (3.6) и условия, что на свободной поверхности р =
= Ро, заключаем, что
(d®!dt)x^g\ = Q.
Кроме того имеем
t
Х = [ (дФ/дх)х~г dt.
о
Так как колебания жидкости приняты малыми, то значения произ-
водных дф/д/ и дф/дх можно брать на невозмущенной свободной
49
поверхности, т. с. при х = 0 (вместо % = х)- Тогда краевое условие
на свободной поверхности получим в виде
t
С (д<\)[дх) ^dt=---— (дФ'д/) v_:0. (3.7)
J g*
о
Функция Ф должна удовлетворять еще начальным условиям.
Эти условия могут быть выражены, в частности, через возмущения
свободной поверхности в начальный момент времени.
Из начальных условий определяются произвольные постоянные
общего решения однородного дифференциального уравнения
ЛФ = 0.
Для установившихся вынужденных колебаний начальные усло-
вия не имеют значения.
В дальнейшем будем оценивать устойчивость движения систе-
мы с помощью частотных методов, которые основаны на анализе
динамических свойств системы при установившихся гармонических
воздействиях.
Таким образом, задача о возмущенном движении жидкости в
баке сводится к определению потенциальной функции Ф(х, г, т), /),.
удовлетворяющей уравнению Лапласа и краевым условиям. Если
функция Ф найдена, то найдено движение жидкости, а давление в
любой точке объема жидкости подсчитывают по формуле (3.6).
Теперь перейдем к определению функции Ф.
3.5. ОПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА АБСОЛЮТНЫХ
СКОРОСТЕЙ ЖИДКОСТИ В ЦИЛИНДРИЧЕСКОМ БАКЕ
Введем две прямоугольные системы координат — абсолютную
XYZ и подвижную (неинерциальную), связанную с цилиндром
(рис. 3.3). Перемещение связанной системы координат от-
носительно абсолютной будет опре-
делять возмущенное движение бака.
Расположим начало связанной
системы координат в центре невоз-
мущенной свободной поверхности,,
ось Xi направим по оси бака вверх.
Положение абсолютной системы
координат XYZ выберем таким, что-
бы системы XiYiZ{ и XYZ совпада-
ли при отсутствии смещения бака.
Задачу об определении потенци-
альной функции Ф рассмотрим
Рис. 3.3
применительно к случаю плоского'
движения бака. За обобщенные координаты выберем такие, кото-
рые логичны для бака, находящегося в составе корпуса ракеты. За-
фиксируем на продольной оси бака на расстоянии L ниже невоз-
мущенной свободной поверхности некоторую точку С (полюс), и
50
возмущенное движение бака определим поступательным переме-
щением на г/с(0 вдоль оси Y и углом поворота О1 (У) оси бака.
Потенциал абсолютных скоростей Ф должен удовлетворять
уравнению Лапласа
АФ = 0; (3.8)
граничным условиям на стенках бака
дФ{дг = ^г= [ус + & (А + %)] sin т) при г = г0; (3.9)
d^!dx = vx= — ft г sin т) при х = —h. (3. 10)
и условию постоянства давления на свободной поверхности
t
С дФ ,, 1 дФ А /о ii\
\ — dt=-----------при х = 0. (3. 11)
.) дх g* dt
о
Чтобы легче отыскать потенциал Ф, представим его в виде
суммы двух функций-
Ф(х, г, Т], /) = ф(х, г, Г|, ^)-)-ср(х, г, Т], /). (3. 12)
Выберем выражение для функций ф и ср таким образом, чтобы гра-
ничные условия (3.9) и (3.10) удовлетворялись с помощью функ-
ции ф, а (3.11) — с помощью суммы функций ф и <р.
В структуру функции ф целесообразно включить выражение
(3.9), определяющее радиальную скорость переносного движения.
Тогда ф(х, г, л» t)==F (х, г, т]) ft-[-r sin т] [г/с + ®+ (3.13)
Функция ф(х, г, т], 0 будет отвечать условиям (3.9) и (3.10), если
dFfdr = Q при г = г0; (3. 14)
dF)dx= sin т] при x——h. (3.15)
Граничными условиями для функции ср(х, г, т], t) на смачива-
емых стенках будут
д^'дг = 0 при r = rQ; (3. 16)
ду)дх = 0 при х= —h. (3. 17)
Сумма функций ф+<р должна удовлетворять граничному условию
на свободной поверхности (3.11):
с dt=__ <т + т) л=0. (318)
J дх g* dt
о
Найдем сначала функцию У7 (%, г, ц), которая должна удовлет-
ворять уравнению Лапласа
+ + (3.19)
дг^ г дг 1 г2 дт? dx2 v }
и граничным условиям (3.14) и (3.15).
51
Уравнение (3.19) решим методом Фурье (методом разделения
переменных). Функцию F(x, г, т]) представим в виде произведения
трех функций:
F (х, г. n)--X(*)H(i])/?(r). (3.20)
Подставляя выражение функции F(%, г, т]) в уравнение Лапласа
и разделяя переменные, получим следующие уравнения для опре-
деления функций Н (г]), R (г) и Х(х):
— |т2Н=0; (3.21)
<Л)2 '
)/? = 0; (3.22)
dr? г dr Д г2)
J^—k2nXn=0, (3.23)
dx%
где k„, т — некоторые неопределенные параметры.
Нахождение нетривиальных решений уравнений типа (3.21) — (3.22), удовлет-
воряющих однородным граничным условиям, называется задачей Штурма—Лиу-
вилля или задачей о собственных значениях. Эта задача имеет нетривиальное
решение не при всех значениях kn и т. Те значения kn, т, при которых суще-
ствует нетривиальное решение, называются собственными значениями (числами)
этой задачи, а само нетривиальное решение называется собственной функцией,
соответствующей данному собственному значению. Совокупность всех собствен-
ных значений называется спектром данной задачи.
Решение уравнения (3.21) имеет вид
H(T]) = sin (/пп + По)-
В силу периодичности функции Н(т|), характеризующей волны в
окружном направлении, число т должно быть целым (т=1, 2,
3,... ), причем для определения функции F(x, г, г|) достаточно рас-
смотреть наиболее простую форму, когда т=1, а т]0 = 0. Эта фор-
ма — одна волна в окружном направлении с наибольшими откло-
нениями в плоскости OXY—вызывается движением бака в этой
плоскости [см. граничные условия (3.9), (3.10)].
Следовательно, в дальнейшем будем полагать, что
Н (т])--= sin т]. (3. 24)
Уравнение (3.22) для определения функции R (г) является ли-
нейным дифференциальным уравнением с переменными коэффици-
ентами— уравнением Бесселя. Решение уравнения (3.22) при
= 1 можно представить в виде
(И = + A2Yi (knrY
где A2 — произвольные постоянные; Ji(kn, г), Yi(krt, г) —функ-
ции Бесселя 1 и 2-го рода первого порядка (т=1). Функция
У10М при г = 0 обращается в бесконечность. Поэтому следует по-
ложить А2 = 0, так как в противном случае смещение жидкости при
г = 0 будет бесконечно большим.
52
Из граничного условия (3.14) будем иметь
^(0 или ПрИ г = г0.
dr d (knr)
Корни этого уравнения:
= A’iTq = 1,8412; ^2 ^2^*0== 5,3315;
£3z=£3r0 = 8,5363; ^4 = k4rQ = 11,7060;.
Функции Rn(r)=J1 кп —) (я=1, 2, 3,.....),
\ ''о '
являющиеся решением уравнения (3.22), удобно пронормировать,
приняв, например, их значения равными единице при г = г$.
Получим (Сл^АЛО (3.25}
Общее решение уравнения (3.23) при вещественных значениях
kn выражается через гиперболические функции
X n{x)=Cxz\\knx-\-C23hknx, (3. 26}
причем произвольные постоянные С{ и С2 должны быть выбраны
так, чтобы удовлетворялись граничные условия на свободной по-
верхности и на дне бака.
Для того, чтобы удовлетворить условию (3.15), разложим пе-
ременную г в обобщенный ряд Фурье по функциям Бесселя.
Положим г = 2 В Mr),
I
где В и — коэффициенты разложения, для определения которых
умножим левую и правую части равенства на произведение rRn(r)
и проинтегрируем по радиусу.
Из условий ортогональности имеем
[° /?,г (г) Rm (г) rdr~Q (пфт).
о
Выполнив интегрирование с учетом свойств функций Бесселя, по-
лучим
г° г2 (г2 — 1 Nn=\Mr)rdr= o(;2 0 Вп= — оо Таким образом, r=\'BnRn(r)- ) Р° г3 — > Dn=ARn(r}r2dr*. 0 п 2г0 <л~1’ (3.27)
53
С учетом формулы (3.27) и выражений (3.20) и (3.24) граничное
условие (3.15) тождественно равенству
dXn!dx = — 1) при x=—h. (3.28)
Таким образом, для определения двух произвольных постоян-
ных Ci и С2 в решении (3.26) имеется пока только одно условие
(3.28), относящееся к дну бака. Второе условие на свободной по-
верхности задано для суммы двух функций Ф=ф+ф [см. (3.18)],
одна из которых — функция ф — еще не найдена. Поэтому при
назначении граничного условия для функции ф при х = 0 можно
допустить некоторый произвол, который следует потом устранить
на основании выражения (3.18) при определении функции ф.
Пусть, например, для функции ф при х = 0 краевое условие бу-
дет таким же, как при х= —hy т. е.
(<?Ф/<?х)Х;.0= — 4г sin т]. (3. 29)
Нетрудно видеть, что условие (3.29) соответствует случаю, ког-
да свободная поверхность жидкости фиксирована — как бы при-
крыта крышкой, жестко соединенной с баком. Потенциал ф для
этого случая носит название потенциала Жуковского. Дру-
гие возможные варианты краевых условий при х = 0 рассмотрим
позже, в разд. 3.10.
Из условия (3.29) с учетом выражения (3.13) будем иметь
(—) = —2rsin п; (—) =------Л2-- (3.30)
к<?х 1х=о \ дх Л-=о t?n — 1
С учетом краевых условий (3.28) и (3.30) решение (3.24) будет
где
с^п—2^о/ 1);
Х,= - (2r0/Q sh Р (Л + П1/сЬ м .
" L г0 \ 2 /J \ 2г0 /
(3.31)
(3. 32)
Объединяя результаты решений, получим следующее выраже-
ние для функции ф(х, г, п, t):
V R'^r>)
sin
^Ф„ + Г(Л + Л) & + г^с|-
(3. 33)
Функция ф (потенциал Жуковского) является решением уравне-
ния Лапласа и удовлетворяет краевым условиям на стенках бака.
Перейдем теперь к определению функции ф(х, г, т], /). Эта
функция должна быть решением уравнения Лапласа, удовлетво-
рять нулевым граничным условиям на стенках и дне бака (3.16),
(3.17) и совместно с функцией ф(х, г, т], t) удовлетворять условию
постоянства давления на свободной поверхности (3.18).
<54
Представим функцию ср в виде
ф(х, г, Л, /) = Н(Т])У c4XVn^Rn(r)\n(f),
п= I
где г<рл—постоянный коэффициент; %„(/)—неопределенный пока
параметр времени.
Разделение переменных приводит к уравнениям (3.21) — (3.23).
Условия выбора функций II (т]) и /???(г) здесь такие же, как и для
функции ф. Поэтому
H(T]) = sin л; ^n(r) = Jlk„— V/JQ.
\ Го /
Функция Хрл должна быть решением уравнения (3.23) и поэтому
может быть образована из линейной комбинации гиперболических
функций аргумента £лх/го. На основании равенства (3.17) эта
функция должна удовлетворять условию на дне бака
dX(?Jdx=Q при x=~h. (3.34)
Уравнению (3.23) и условию (3.34) удовлетворяет функция
Х>) = ch )/chL —)•
п к Го ' \ г0 '
Для придания параметру Xn(f) наиболее простого физического
смысла выберем коэффициент с^п таким, чтобы в функциях ф и qr
он был общим множителем.
Положим ^ = 2г0/(Сд— 1).
Тогда получим
<p = 2r0 sin n V
п=1
( 3. 35}
Теперь воспользуемся условием постоянства давления на сво-
бодной поверхности и найдем неизвестный до сих пор параметр
После подстановки выражений (3.33) и (3.35) в равенство
(3.18) получим следующее уравнение для Х?7(/):
Л — Ус + &
Здесь приняты обозначения
_ 2го
Уравнение (3.36) есть уравнение вынужденных колебаний.
(3. 36)
(3. 37)
(3. 38)
55
Установим физический смысл параметра Лп(0, для чего най-
дем отклонение свободной поверхности:
О -
уч
ithL-41мо-»
.Го \ Го)
Это уравнение свободной поверхности в абсолютной системе коор-
динат. С учетом формулы (3.27) его можно представить как
х = — г» sin п + Хх> (3- 39)
где
С точностью до малых величин первого порядка —rO'siniq есть
уравнение плоскости «верхней крышки» (плоскости OiZiKi). По-
этому в уравнении (3.39) с той же точностью представляет со-
бой отклонение свободной поверхности в подвижной (связанной)
системе координат. На рис. 3.4 это отклонение показано для
Г = Го.
Форма свободной поверхности в диаметральной плоскости ба-
ка представлена в виде ряда Фурье по функциям Бесселя
Л (£,пг/го); в окружном направлении она изменяется по закону си-
нуса. Для первых трех тонов колебаний форма свободной поверх-
ности при т] = л/2 показана на рис. 3.5. Каждому члену ряда соот-
ветствует свой параметр Хп(0, который является, таким образом,
обобщенной координатой для волновых движений свободной по-
верхности.
Из выражения (3.40) можно определить масштаб для Хп(^),
который будет зависеть от номера п или, иначе говоря, от номера
тона колебаний. Отсчитываемое от плоскости Oo¥iZlf перпендику-
лярной оси цилиндра О[Х^ смещение
Хх (г0, л/2, /)=
Если /z/r0^ 1, то thfC/j—В этом случае
\ го /
56
для первого тона колебаний
ХХ1(г0, л/2, /) = 1,54Х1(/);
для второго тона
ХхДго, л/2, /)=0,39Х2(/).
В движении, потенциал которого представлен функцией ф, уча-
ствуют все частицы жидкости. Однако скорость частиц очень быст-
ро уменьшается по мере удаления от свободной поверхности
вглубь бака.
Уравнение (3.36) показывает, что собственные, колебания сво-
бодной поверхности жидкости всегда гармонические. Квадрат час-
тоты этих колебаний пропорционален ускорению g*, корню произ-
водной функции Бесселя соответствующего номера и обратно про-
порционален радиусу бака. При глубине заполнения бака более
радиуса частота собственных колебаний жидкости практически
не зависит от этой глубины. Если Л/г0<1, то частота колеба-
ний уменьшается с уменьшением глубины. С повышением номера
тона колебаний частота увеличивается.
Вынужденные колебания свободной поверхности возбуждаются
движениями стенок бака [см. уравнение (3.36)].
3.6. ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ
МОМЕНТ ГИДРОСТАТИЧЕСКИХ
И ГИДРОДИНАМИЧЕСКИХ СИЛ
Если потенциал Ф известен, то по формуле (3.6) можно найти
давление р в любой точке объема жидкости, а затем перейти к ин-
тегральным величинам — главному вектору и главному моменту
относительно поперечной оси, проходящей через точку С (см. рис.
3.3), которые необходимо определить для составления уравнений
движения ракеты.
На основании уравнений (3.6) и (3.12) имеем
Потенциалы скоростей определены в уравнениях (3.33) и (3.35):
sin
Суммировать элементарные силы и моменты нужно по всей
смачиваемой поверхности. С точностью до величин первого поряд-
ка малости для боковой поверхности координата х (рис. 3.6) изме-
няется в пределах от х = х0* = — h— rQ ftsin т] до х = х(г0, ц, t); для
Дна бака х* = —h—rft sin тр
57
Силу Fy0) и момент сил будем вычислять, удерживая только ве-
личины первого порядка малости. Так как давления Qd'^dt,
пропорциональны малым ускорениям 4, ус, и значения /, xq и
%* также содержат малые первого порядка, то для функций d^.dt
и d^’dt можно положить / = 0, x'q = x* = — h.
Элементарной площадкой на боковой поверхности бака являет-
ся rQdy\clx\ на дне бака элементарной площадкой будет rdx\dr. Про-
Рис. 3.6
екция на ось У элементарной силы, действующей на боковую по-
верхность бака, равна
sin T\di\dx.
Проекция на ту же ось элементарной силы, действующей на дно
бака, равна (см. рис. 3.6)
Рх :x^rdv\dr.
Проекция на ось У всех сил давления жидкости на стенки бака
2к х 2тс г0
М0) = \ Pr. sin i\di\dx-\- j’ j1 px.-x^rdrdr\. (3.42)
О * 6 6
Ло
В соответствии со структурой формулы (3.41) суммарную силу
г~> (0)
гу представим в виде суммы трех сил:
F^=F^F4+Fg.
Силу и момент от гидростатического давления р£*х можно оп-
ределить по формуле (3.42), если верхний предел для х считать
равным нулю, а нижний x = xQ* и х=--х*.
58
Принимая во внимание, что проекции на ось У сил давления
Qdq/dt и Qdty/dt, действующих на дно бака, величины второго по-
рядка малости, получим
2тс О
/>= — Q [ J ГО sin r\dr\dx;
*0 -h
2к 0
F<?= — Q [ (<?ф/<?/)г=Го r0 sin v\dx\dx\
О -Л
0 2z r0
Fg = — Q J J g*^r0 sin T]rfx4-Q j (g^x}X:.^brdv[dx,
0 F об
-vo
Выполнив интегрирование и учитывая равенство
п -1
L —
1 1
-----— — , на идем
— 1--2
— т\ L —
2 th
Л,- _я^е -2j тЛ;
п - 1 п 1
Fg = nro/zpg*& — л r|/?Qo*ti = 0;
(3.43)
где
F^ = — т
т^п,
tl = \
Л ! h \
2tg С/г —
2 , 3 \ Г0 /
т = nr dig, тп = лгор ——у- •
\^11~ 0
(3. 44)
В формулах (3.44) т—масса всей жидкости; тп — приведен-
ная масса колеблющейся жидкости, соответствующая обобщенной
координате лп.
Теперь вычислим момент сил давления относительно попереч-
ной оси, проходящей через точку С и параллельной OZ:
2к у 2тс г0
М0) = f * Pr^r. {L + r0& sin n + x) r0 sin t\dt\dx-\- J J px„x* X
6 ' * о 0
x0
Xr2 sin т]</т]б/г, (3. 45)
где (L + roO sin tj + x)—расстояние от элементарной площадки на
боковой поверхности бака до оси вращения (см. рис. 3.6).
59
Для удобства вычислений примем
Л4ф = М]<рМ.2ф\ /Иср-= -j-М2({)', A4g-=A4ig--[-A42g-'
причем индекс 1 будет соответствовать моменту сил, действующих
на боковую поверхность, а индекс 2 — моменту сил, приложенных
к дну бака.
На том же основании, что и при вычислении силы Fy(0), при вы-
числении моментов /Иф и в выражении (3.45) будем прини-
мать х = 0; х0* = х* = —h, расстояние от оси вращения до элемен-
тарной площадки на боковой поверхности равным (L + х). Момент
Мё от гидростатических сил будем определять на основании фор-
мулы (3.45), положив только % = 0. Получим
2г. О
7И1Ч,= —е j J (дф/Л)г^Го (Афх) r0 sin т]«!т]£/х,
О —Л
2г Го
М2^ = — е j | (<?ф/д/)х—А Г2 sin v\dr\dr\
о 6
2г О
Mv?= — Q J J (<??/^)r=r0 (^ + *) ro sin x\dY[dx;
Q —h
2г г о
M2<f= — е J (d^ldt)x~-h г2 sin T]tZT]rfr;
о б
2тс О
Л11г= — q J J g*x(L-\-rob sin ’пфх) r0 sin ^d^dx;
0 *
Л'о
2г r0
M2g= — q J J (g*x)x^x*r2 sin Y]dT]dr.
о 0
Проинтегрировав и приняв во внимание равенство
1
—, получим
Л4ф=-и0-Ь^ zn(A-/z/2) + ^wX
\ п^-1 / L
/Ис? --
П -- -1
оо
= m.g* (L — h/2) § ф g*& mnln>
/г-1
(3.46)
60
где
/0 = лгоЛе (А2 — Lh + h'2/3 — го/4);
12г0
(3. 47)
4 Г 8Л — 2L
— лгл1
В первой формуле (3.47) /0 — момент инерции массы всей жидко-
сти относительно оси, проходящей через точку С и параллельной
OZ, если считать жидкость «затвердевшей» и свободную поверх-
ность, совпадающей с плоскостью O^Zx.
Произведем некоторые преобразования. Рассмотрим третье
уравнение (3.36), в котором положим &n2=glln’'
К + (£*4«) =~Ус +
Умножим левую и правую части этого уравнения на произведение
тп1п и произведем суммирование. Получим
00 оо оо
g^y^mnln-yc^mnln = ^mnln (х„+^-k„ + £j). (3.48)
Л-1 Л-1 Л—1
Слагаемые, стоящие в левой части равенства, содержатся в выра-
жениях для и Mg (3.46). Заменим их в (3.46) правой частью
равенства (3.48). После некоторых преобразований получим
(оо \
/о + 2/л Г’
Л- 1 /
М₽= ~^mnLnin^ g*^m„kn- Mg=mg*(L-fi/2)&,
л-1 п -1
_ г 5 г А 8 । 16 ,, ( h \-i
(3.49)
(3. 50)
Ln — соответствует значению (3.38). Объединив все три выраже-
ния, получим
М0) = ~ ро + У Л,) & - т (L - /г/2) у{ - j? mnLnin +
\ п -л ' п^\
4- ё* 2 т'^‘ -г (L — h['2ж (3.51)
п-- 1
Составим теперь уравнения движения бака.
61
3.7. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
БАКА С ЖИДКОСТЬЮ
Полагаем, что действующие на бак внешние силы приводятся к
поперечной силе FY, направленной параллельно оси У, и к паре
сил с моментом Мс относительно оси, проходящей через точку С и
параллельной OZ (см. рис. 3.3).
Кроме силы Fy и момента Мс на стенки бака со стороны жид-
кости действуют сила /7у0) и момент которые по отношению
к стенкам бака являются также внешними. Направления Fy- и
Мс} совпадают с направлениями FY и Мс.
Для того, чтобы отчетливее уяснить движение жидкости, при-
мем пока массу стенок бака равной нулю. Получим
+ = /Ис + Л40) = 0.
Подставляя сюда значение Fy} из соотношения (3.43), а значение
Мс} из равенства (3.51) и добавляя уравнение (3.36) для коорди-
наты колебаний жидкости, получим систему дифференциальных
уравнений возмущенного движения в плоскости OXY\
тус + m (Л - А/2) & + = FY\
п = \
(оо \
п=Л )
оо оо
+ ^imnL^n-g*^mn\n = Aic, (3.52)
/г-1 п^\
К + — Ус +
Проанализируем полученные результаты. Если бак полностью
залить жидкостью, то все координаты Хп = 0 и уравнения (3.52) бу-
дут обыкновенными уравнениями плоского движения твердого те-
ла с массой т и эквивалентным моментом инерции
(3-53)
/г-Л
который отличается от момента инерции /0 затвердевающей жид-
кости. Это различие объясняется тем, что частицы жидкости могут
перемещаться относительно стенок бака, и поэтому траектории их
движения в абсолютной системе координат не совпадают с траек-
ториями движения частиц затвердевшей жидкости.
Движение твердого тела с полостями, целиком заполненными
жидкостью, было впервые подробно исследовано Н. Е. Жуковским.
В 1885 г. Н. Е. Жуковский показал, что прямолинейное движение
такого тела ничем не отличается от прямолинейного движения аб-
62
солютно твердого тела, масса которого равна сумме масс тела и
жидкости.
Вращательное движение твердого тела с полостями, целиком
заполненными жидкостью, эквивалентно вращательному движению
абсолютно твердого тела с некоторым приведенным или эквива-
лентным моментом инерции. Эквивалентный момент инерции всег-
да меньше момента инерции тела с затвердевшей жидкостью [см.
уравнение (3.53)]. Это отличие зависит от формы полостей и от
расположения этих полостей с жидкостью относительно оси враще-
ния. Например, если бак имеет форму сферы, а ось вращения про-
ходит через центр сферы, то при отсутствии трения жидкость не
будет участвовать во вращении. Момент инерции будет равен мо-
менту инерции оболочки сферы. Если емкость имеет форму куба и
ось вращения проходит через его центр, то нетрудно представить,
что значительная часть жидкости, расположенной в центре, не бу-
дет увлекаться стенками. Эквивалентный момент инерции будет
равен моменту инерции стенок куба и небольшой части момента
инерции затвердевшей жидкости.
Если жидкость имеет свободную поверхность, то поверхность
деформируется — на ней возникают волны. Форма волны в ради-
альном направлении характеризуется функцией Бесселя (3.40).
Каждому члену ряда соответствует своя обобщенная координата
Лп(0 и своя частота собственных колебаний соп.
Причиной колебаний является движение стенок бака. Обоб-
щенная координата колебаний Хп определяется из третьего урав-
нения (3.52).
Как видно из равенства (3.43), в результате колебаний жидко-
сти возникает дополнительная поперечная сила
оо
п=Л
В случае собственных колебаний каждый член ряда изменяется по
гармоническому закону с частотой ац. Силу Fy\ можно понимать
как сумму произведений приведенных масс жидкости тп на обоб-
щенные ускорения Хп.Приведенная масса жидкости, участвующая
в колебаниях с обобщенным ускорением Хп, уменьшается с увели-
чением номера п тона колебаний (3.44). Для первого тона колеба-
ний масса численно равна массе такого объема цилиндра, высота
которого ~О,45го; Для второго тона колебаний масса в 30 раз
меньше.
На основании равенства (3.51) можно заключить, что момент
от колебаний жидкости состоит из динамического момента, пропор-
ционального обобщенному ускорению %п, и статического момента,
пропорционального обобщенной координате Хп:
оо оо
ЛТсл = - 2 mnLSn + g* 2 т^-
63
С физической точки зрения статический момент возникает в ре-
зультате отклонения свободной поверхности и его можно считать
моментом, возникающим от поперечного смещения центра масс
жидкости по отношению к оси бака. Динамический момент равен
поперечной силе Fn , умноженной на расстояние Ln от центра
вращения до этой силы. Как уже отмечалось на основании форму-
лы (3.35), наибольшую скорость колебаний имеет жидкость, рас-
положенная в верхних слоях. По мере удаления от поверхности в
глубину эта скорость быстро уменьшается. Поэтому приведенная
масса тп колеблющейся жидкости располагается недалеко от не-
возмущенной свободной поверхности:
хп Ln - L — - th (С„ . (3. 54)
При /г/г0^1 для первого тона колебаний приведенная масса рас-
положена на глубине около радиуса; с повышением номера п тона
колебаний эта масса приближается к свободной поверхности.
Как и сила момент уИсх сильно уменьшается с увеличением
номера п тона колебаний.
3.8. МЕХАНИЧЕСКАЯ МОДЕЛЬ КОЛЕБАНИЙ
ЖИДКОСТИ В БАКЕ
Так как уравнения колебаний свободной поверхности аналогич-
ны уравнениям колебаний математических маятников с кинемати-
ческим возбуждением, то при анализе динамики ракет естественно
возникает вопрос о замене колеблющейся жидкости системой ма-
тематических маятников.
Для решения задачи срав-
ним плоское движение си-
стем — заданной и искомой.
Дифференциальные уравнения
движения заданной системы
представлены в виде (3.52).
Искомую механическую си-
стему представим в виде твер-
дого тела (стержня) с п мате-
матическими маятниками. Точ-
ки подвеса математических ма-
ятников расположены на одной
прямой, которая является од-
ной из главных центральных
осей инерции твердого тела с
закрепленными на этой оси массами маятников (рис. 3.7). Эту пря-
мую будем считать продольной осью стержня, а положение масс
маятников на этой оси — невозмущенным.
Обозначим через /п* массу твердого тела с п маятниками,
mn* — массу n-го маятника, /* — момент инерции твердого тела с
закрепленными в невозмущенном положении массами маятников
64
относительно поперечной оси Zb проходящей через центр масс сис-
темы (точку С), Ln* — расстояние от точки С до массы п-го маят-
ника, 1п — длину и-го маятника.
На заданную и искомую системы действуют в направлении
осей У одинаковые поперечные силы FY и относительно осей Zi —
моменты Л1С.
Найдем параметры искомой системы, при которых дифферен-
циальные уравнения ее движения будут такими же, как (3.52). За
обобщенные координаты примем ус(1)—линейное отклонение в
направлении координатной оси У точки С стержня; Ф — угол пово-
рота оси стержня; уп*(0 —линейное отклонение массы я-го маят-
ника от оси стержня.
Для составления дифференциальных уравнений движения маят-
никовой системы применим теорему об изменении количества дви-
жения и теорему об изменении кинетического момента.
Проекции на оси У количества движения системы
Qy = т* [ус4- & (L — Л/2)] + j? тпУп-,
л = 1
кинетический момент системы относительно оси Z\
KZl = /*4 + т*ус (L - Л/2) +2 тпУпС-,
п-1
момент внешних сил относительно оси Zi
AZl = М с + m*g* (L — h/2) & + J? т*п^У*п-
пЛ
На основании теорем имеем
dQyldt=FY\ dKzJdt=Lzl
или т*ус [- т* (А — Л/2) & = г! (3.55)'
п= 1
оо
/*» _ m*g* о -f- zra* (z — 'ус 4- тпСуп —
п = 1
оо
— тпу*п=Мс.
/1=1
Кинетический момент маятника относительно оси его подвеса
Коп=гпп (ус 4- £$ 4- Уп) 1п-
3
359
65
Применяя теорему об изменении кинетического момента, полу-
чим
тп1п ( ус + + Уп) = -- tnng* (у*п — 1п&)
или Уп~[~Уп= — L^~ z/c + g*&. (3.56)
•'ll
Из сопоставления выражений (3.52), (3.55) и (3.56) заключа-
ем, что параметры маятниковой системы должны быть равны сле-
дующим значениям:
* з 2 / h '
тп = тп = л гое ——2—-у th —
С» (<«—4 \ го.
Ул=Х„; m*=m = nrohQ-, /*=/ =
п=\
Таким образом, бак, частично заполненный жидкостью, в плос-
ком движении динамически эквивалентен твердому телу с присое-
диненными маятниками. Момент инерции
твердого тела с закрепленными в невозму-
щенном положении маятниками должен
быть равен эквивалентному моменту инер-
ции жидкости.
Длина маятников, их масса и располо-
жение относительно центра вращения С оп-
ределяются выражениями (3.57).
Каждый тон колебаний жидкости ими-
тируется колебаниями математического ма-
ятника. Масса маятника равна приведенной
массе колеблющейся жидкости, она умень-
Рис- 3-8 шается с увеличением номера п тона колеба-
ний. С возрастанием номера п тона частота
собственных колебаний жидкости увеличивается, поэтому длина
маятника уменьшается.
Линейное отклонение маятника ст оси подвеса равно обобщен-
ной координате колебаний жидкости уп* = кГ1-
Вместо математических маятников механическим аналогом ко-
лебаний жидкости могут быть колебания грузов, подвешенных на
невесомых пружинах. В этом случае каждому тону колебаний жид-
кости соответствуют колебания груза с массой mn, который двумя
пружинами с жесткостью kn/2 прикреплен к стенкам бака на рас-
стоянии хп (3.54) от свободной поверхности (рис. 3.8).
Вязкое трение, при помощи которого учитываются демпфирую-
щие свойства колебаний реальной жидкости, вводится в механиче-
скую модель установкой двух демпферов с коэффициентом вязко-
го трения hn/2 между массой тп и стенкой бака.
66
Жесткость пружин подбирается из условия равенства частот
собственных колебаний:
Так как во вращательном движении принимает участие не вся
жидкость, а часть ее находится в состоянии покоя, то в механиче-
скую модель следует ввести без трения некоторую массу с момен-
том инерции Ц, не участвующую во вращении, и расположить ее в
центре масс жидкости. Тогда
/ — Л) — +
3.9. ДИНАМИЧЕСКИЕ СВОЙСТВА БАКА
С жидкостью
Рассмотрим три задачи.
1. Определить частоту собственных колебаний системы, состоя-
щей из бака с жидкостью, учитывая только первый тон колебаний
свободной поверхности жидкости. Цилиндрический бак, частично
заполненный тяжелой идеальной жидко- ±=_
стыо, совершает свободное движение без г--1--- !
трения в прямых горизонтальных направ- i '
Применим к решению задачи уравне- • \ —-
ния (3.52). В соответствии с условием, 7
положив ^=0, Fy = 0, Л1с = 0, получим |
первую парциальную систему (3.52):
тУс+тА1 ~ 0; ^'1 + = — z/с» Рис. з.9
где т — масса цилиндра с жидкостью. Частота колебаний о)! и
масса определяются по формулам (3.37) и (3.44) при /2=1.
Исключив ус, найдем
Ml — mjtri) + онМ = 0.
Искомая частота собственных колебаний парциальной системы,
всегда больше частоты собственных колебаний! жидкости в непод-
вижном баке. Если т^>т{1 то и жидкость совершает коле-
бания как бы в неподвижном баке.
Полученную выше формулу удобно интерпретировать при по-
мощи маятниковой модели. При собственных колебаниях центр
масс системы остается неподвижным. Когда бак отклоняется впра-
во, маятник отклоняется влево и наоборот. Маятник совершает ко-
3*
67
лебания относительно неподвижной точки Оь расстояние от кото
рой до массы маятника
(1 —mjni).
Теперь частоту колебаний системы можно определить как частоту
собственных колебаний маятника длиной //:
l\ у 1 — mjm
2. Определить внешнюю силу Fy = Fosmp/, которую нужно при-
ложить к баку, частично заполненному жидкостью, чтобы вызвать
его поперечные прямолинейные колебания о постоянным по ампли-
туде ускорением.
На основании уравнений (3.52) уравнения движения бака с
жидкостью при п = 1 будут иметь вид
+ sin р/; M + cAi = ~Ус' (3.59)
Применив обозначение (3.52) предыдущей задачи, получим част-
ное решение уравнений (3.59) относительно ус в виде
Fn —Р2 . ,
У Г—------У--------*9--Sin Р«-
с w(l— mjm.) Ш| —р2
Так как по условию yc = a(°)sin р/, то найдем, что
<о:2-р2
F0=a<°)/n(l -tn-Jm)-----------.
<о2—р2
График безразмерной силы F=FQ/(a^m) в зависимости от со-
отношения частот p/соц приведен на рис. 3.10. Если частота вынуж-
денных колебаний равна частоте собственных колебаний жидкости
в неподвижном баке, то сила должна быть бесконечно большой.
Когда частота колебаний внешней силы совпадает с частотой соб-
ственных колебаний системы p = tdii*, то эта сила равна нулю. Этот
вывод сделан на основании уравнений для малых колебаний без
учета сил трения и нелинейных эффектов. В реальной системе сила
всегда будет равна конечной величине.
68
3. Определить частоту собственных колебаний системы, пред-
ставляющей собой корпус ракеты с двумя одинаковыми цилиндри-
ческими баками, частично заполненными идеальной жидкостью,
принимая во внимание только первый тон колебаний жид-
кости. СчитаелМ ракету твердым телом, шарнирно подвешенным в
точке С (рис. 3.11) и совершающим плоские колебания. Точка С
лежит на продольной оси ракеты и совпадает с центром масс твер-
дого тела с жидкостью, когда свободные поверхности в обоих ба-
ках перпендикулярны продольной оси.
Решение задачи проведем при помощи маятниковой модели.
Выражения кинетической и потенциальной энергий системы
можно представить в виде
Здесь I — момент инерции (относительно точки С) стержня с зак-
репленными на продольной оси маятниками; -0 — угол поворота
стержня; Kj — линейное отклонение массы маятника от про-
дольной оси стержня.
Подставляя выражения кинетической и потенциальной энергий
системы в уравнения Лагранжа второго рода, получим
2 2
/» + 2 — g* 0;
/=1 /-1
4+Ъ-= - tjb+g*b. (3.60)
Приняв ^ = ^0 COS со/, —хо; cos (о/
и подставив эти выражения в уравнения (3.60), получим следую-
щее уравнение для частот системы:
(3.61)
Обозначив
2 2 2
ao=/-VmX/; а2 = / ^ -|- 2g* a4=g*2 VJ mh
перепишем уравнение (3.61) в виде
а0о)4 — а2со2 — а4=0.
69
Обозначим частоты системы через <о2 и со3. Найде^м
(3. 62)
Произведение я0й4>0, поэтому при л2>0 частота g)22>0, а со32<О.
Система имеет только одну частоту собственных колебаний g)2-
Приняв (о3 = ш, найдем
cos о)3/ = cos iut = ch ut.
Движение по закону ch ui будет неколебательным, т. е. отклонения
системы непрерывно будут возрастать. Положение равновесия
системы в вертикальной плоскости неустойчиво.
Сравним частоту <п2 с частотой собственных колебаний маятника
_______ 2
0); = ]/g*)lj для случая, когда nijL}^=0.
7 = 1
Из формулы (3. 61) имеем
2 / __ 2 \
J /
Частота собственных колебаний системы при угловых движениях
тем больше частоты собственных колебаний маятников, чем боль-
шую долю составляют моменты инерции маятников в суммарном
моменте инерции I.
ЗЛО. ДРУГИЕ ФОРМЫ ПОТЕНЦИАЛА АБСОЛЮТНЫХ
СКОРОСТЕЙ жидкости
Представление потенциальной функции Ф = ф+ф выражением
Ф = 2/-о sin т) + *?>) + r sin + ’ <3-63>
n^-\ n
где
не является единственным. Это объясняется некоторым произволом выбора гра-
ничных условий для функции ф (или Х^ ) на свободной поверхности. Можно по-
добрать множество комбинаций из гиперболических функций для Х^ , которые
будут решением уравнения (3.23) и удовлетворять условию на дне бака. Изме-
няя содержание функции ф, мы изменяем содержание функции ф.
70
„Вместо Xj.
в формуле (3.63) можно, например, принять выражения
или
(3.64)
(3.65)
которые также являются решениями уравнения (3.23) и удовлетворяют гра-
ничному условию (3.28) на дне бака.
На свободной поверхности будем иметь:
в случае (3.64)
dX(i)n!dx= — 2го/(Сп —О при х = 0;
в случае (3.65)
dX(V)n]dx= — 4го/ (с„— l)chk„—1 при х = 0.
Из условия на свободной поверхности (3.18) найдем уравнения для обоб-
щенной координаты Хп. В случае (3.64) получим
(3.66)
где
^(2)л + w^(2)/z — — ^(2)гЛ —
В случае (3.65) получим
\з)п + “лх(3)П = Ус—
(3.67)
Из сравнения уравнений (3.36), (3.66) и (3.67) видно, что обобщенные коорди-
наты лп, %(2)п, А,(з)п во всех трех случаях имеют разный смысл.
Установим количественные различия между ними. Для этого путем замены
переменных получим из уравнения (3.36) уравнения (3.66) и (3.67). Так как во
всех трех уравнениях коэффициент при ус одинаков, то Zn, Х(2)п, ^(3)п связаны
между собой только через угол -О'. Положим = X(2)n+a2,fr; = \з)п + ^з6’.
Подставляя поочередно эти соотношения в уравнение (3.36) и сравнивая полу-
ченные коэффициенты с коэффициентами при одинаковых переменных в урав-
нениях (3.66) и (3.67), придем к выводу, что
1
, ( h \
ch(Сд I
\ г0 /
71
Следовательно,
или
Ki — \2)п +
(3.68)
(3.69)
Применительно к аналогии с маятниками смысл координат Х(2)П и Х(3)П
ясен из рис. 3.12, а. В случае (3.68) обобщенная координата Х(2)7г отсчитывает-
ся от вертикальной плоскости, проходящей через точку Оп. В случае (3.69) ко-
ордината Z(3)n отсчитывается от плоскости, наклоненной к оси стержня на угол
тогда как обобщенная координата Хп отсчитывается от
оси стержня.
Отсчеты смещений свободной поверхности жидкости, пропорциональные
Х(2)п и %(з)п, показаны на рис. 3.12, б.
Сравним структуры дифференциальных уравнений движения. Уравнения, со-
ответствующие обобщенной координате Х(2)п, найдем из уравнений (3.52), заме-
нив в них %п согласно равенству (3.68).
Приняв L—h[2 — 0, получим
оо оо
тУс + S + & 2 mtln =
п—1 п=1
оо оо \ оо оо
Л) 4“ । п 4" 2 тп^п^п | $ 4" 2 —
л=1 л=1 /
00
-g*^mnln = Mc-
п=*1
(3.70)
(2)л 4- ш^(2)п = ~ (Ln 4- In) & — Ус.
72
Если во втором уравнении переменную к(2)п заменить ее значением, найденным
из третьего уравнения, получим
оо оо
тУс + 2
п=--1 п=>1
/ оо \ оо оо оо
I Л) 4“ 2^(2)/? । т^(2)г^(2)п 4" 1 2 (3.71)
\ 77=1 / п^=1 77 = 1 77=1
^(2)77 + ^(2)77 = — ^(2)77^ “ ^С’
/ / h \ х
/ ch I £77 I ~ 2\
Г 7 I 7 Т I 1 Г0 \ r0 J |
где ^(2)77 — Ln + In — £ fr h \ I»
\ V, 1 r n \ I
\ sh C77 /
x \ ) z
^(2)77 ~ I П~У тП^П (2Ln + ln) =
= л^е
Одному и тому же потенциалу соответствуют различные по структуре диффе-
ренциальные уравнения, например (3.70) и (3.71). Но эти различия чисто внеш-
ние, и возникают они вследствие линейного преобразования уравнений.
Уравнения (3.70) и (3.71) получены из (3.52) при условии L—h/2 = 0, т. е.
когда точка С совпадает с центром масс невозмущенной жидкости.
Если положение точки С* (центра приведения сил) выбрать из другого усло-
вия, а именно
m (L — h/2) + У] mnln = 0,
77=1
(3.72)
то вместо уравнения (3.71) получим уравнения такой же структуры, что и в ра-
боте [16]:
тус* + ^тп\2)п=Ру;
п = 1
оо \ оо
7о+ 2Z(*2)/ll & + 2 mnZ,(*2)n'X'(2)n =
77=1 / 77=1
(3.73)
~(2)л + “лХ(2)л — ~ ^(2)л® — Ус*-
Здесь L*2)n = Lnc* + 1гй LnC*—расстояние от точки С* до массы маятника.
Центр приведения (точка С*), определяемый равенством (3.72), называется
метацентром системы. Выясним его физический смысл.
Пусть стержень с маятниками, находящийся в поле массовых сил интен-
сивностью g*> может вращаться вокруг оси, проходящей через точку С*
(рис. 3.13). При отклонении стержня на угол 'О’ от направления вектора g*
массы тп сместятся от оси стержня на расстояния ln sin О'.
Суммарный восстанавливающий момент массовых сил относительно оси,
проходящей через точку С*, будет
оо
т(хс— хс.)—
77=1
g* sin $ = 0.
73
Метацентр системы в этом случае совпадает с положением оси, относитель-
но которой тело с жидкостью находится в положении безразличного равно-
весия.
Определим взаимное положение точек С и С* на примере жидкости, запол-
няющей цилиндрический бак (см. рис. 3.3). Из уравнения (3.72) найдем
¥ I’-
Подставив сюда значения тп из (3.44) и 1п из (3.57), по
A Vv-x лучим
тп с* % V с* - h h г°
2 4/и 2 4/г
Метацентр С* расположен выше центра масс С. Величина
лг04р/4 численно равна экваториальному моменту инерции
свободной поверхности жидкости с плотностью <Э относи-
Рис. 3.13 тельно оси Обозначим этот момент через Q. Тогда
L = h{2—Q[m.
Если положение точек С и С* определить координатами хс и хс*, то с уче-
том направления оси будем иметь
хс = — h/2\ хс* = — h/2 + Q./m.
Полученную для хс* формулу можно записать в более общем виде:
ХС* = ХС +
Уравнения движения, соответствующие потенциалу Ф3, можно вывести не-
сколькими приемами, самый простой из которых заключается в подстановке вы-
ражения (3.69) в уравнения (3.52).
3.11. ПОТЕНЦИАЛ АБСОЛЮТНЫХ СКОРОСТЕЙ
ЖИДКОСТИ В БАКЕ, ОБРАЗОВАННОМ
ДВУМЯ КОАКСИАЛЬНЫМИ КРУГОВЫМИ ЦИЛИНДРАМИ
Для определения потенциала Ф здесь имеется дополнительное граничное-
условие на внутренней стенке бака (рис. 3.14)
(дФ/дг)г=?Го = tv,
где рг0 — радиус внутреннего цилиндра.
Рассмотрим особенности определения потенциальной
внутренней границей.
Решение уравнения (3.23) выражается через функ-
ции Бесселя 1 и 2-го рода первого порядка
Rn (.г) = л 1Z1 (knr) + A2Y1 (knr).
Пользуясь двумя граничными условиями
dR]dr — 0 при г — г0 и г = |3го,
получим систему уравнения для определения произволь-
ных постоянных Ai и Л2:
AJ'i (Си) + Л2г; (С„) = 0; (KJ + Л2 (Кп) - 0.
Здесь, как я в разд. 3.4, tsn = knrQ. Коэффициенты Л1
и Л2 отличны от нуля, если
Л go г; (&„)- j\ (к„) г; (с„) = о. (з.74)
74
Это уравнение дает бесконечный спектр собственных значений.
А-2 Л Кл) Л (Кя)
Обозначим —— = —----------= —------------— vn.
л1 П«;„) гдри)
Г / г \ ( г \“|
Тогда Rn (г) = Л С я — + ynY 1 Сл — А •
L \ <0 / \ П) /J
Выбрав постоянную А таким образом, чтобы на внешней стенке бака зна-
чение функции Бесселя было /?п(го) = 1, получим
Rfl (^п ) — ап. [ Л ( ) I >
\ ''о / L \ го / \ ro J J
(3.75)
где
ап= 1/[/1О4-УиП (Сп)Ь
При Р = 0 из уравнения (3.75) можно
де (3.26).
получить для /?п (г) выражение в ви-
Рис. 3.15
Рис. 3.16
Вид функции Rn для я=1, 2 и (3 = 0; >0,1; 0,2; 0,3 показан на рис. 3.15 и
3.16. Различия между функциями Rn, являющимися формами колебаний свобод-
ной поверхности в радиальном направлении, для одного и того же тона коле-
баний п, относительно невелики и проявляются главным образом около внут-
ренней границы.
Разложение переменного радиуса г в ряд Фурье по функциям (3.75) вместо
(3.27) даст
r = 2r0^rfA(^^); • <3-76>
На основании результатов, полученных в разд. 3.4, а также с учетом выра-
жений (3.75) и (3.76), получим
оо
+ = 2г0 sin 1) dnRn k„) + г sin т] [(Z. + х) & + ус].
П = 1
Уравнение для определения обобщенной координаты Хп (/) можно получить
из выражения (3.18); при этом оно примет тот же вид, что и (3.36):
"Ь — У £ + & •
75
Формулы для частоты о)п собственных колебаний и коэффициента Ln так-
же сохраняют свой прежний вид (3.37) и (3.38). Причем в этих формулах зна-
чения собственных чисел отвечают решению уравнения (3.74).
Структура выражений для потенциалов ф и (р идентична выражениям (3.33)
и (3.35). Поэтому уравнения движения бака с жидкостью будут аналогичны
уравнениям (3.52).
3.12. МЕТОД ЛАГРАНЖА ПРИ ВЫВОДЕ УРАВНЕНИЙ
ВОЗМУЩЕННОГО ДВИЖЕНИЯ БАКА С ЖИДКОСТЬЮ
Зная скорость в любой точке объема, занимаемого жидкостью, определим
кинетическую и потенциальную энергии всей массы жидкости и, применив урав-
нения Лагранжа второго рода, получим уравнения движения бака с жидкостью
в обобщенных координатах ус, 'О', %п.
Так как скорости любой частицы жидкости в направлении координатных
осей X, Y, Z
ух = дФ/дх; уу=дФ/ду; Уг = дФ}дг,
то кинетическая энергия всей массы жидкости
1 f Г Г [ / дФ \2 / дФ \2 / дФ \21
г-=теШ1Ы +Ы
V
где V — объем, занимаемый жидкостью.
Преобразуем подынтегральное выражение и приведем к виду, удобному для
применения формулы Гаусса — Остроградского. Получим
1 С С С Г/ дФ \2 / дФ \2 / дФ \21
Г = + ч- иу==
2 [\ дх / \ ду / \ dz ) |
1 С fi Г д / дФ \ д / дФ \ д / дФ \Л2
= — Q \ \ \ ---- Ф -- + ----- Ф ----- 4---- Ф----- dV.
2УШ1<Ь:\ дх ду [ ду Г dz \ dz J ]
v
На основании теоремы Гаусса — Остроградского интеграл по объему за-
меняется интегралом по поверхности. Получим
1 Г С Г дФ * дФ "1
Т = — Q \ \ Ф —— cos (п, х) 4- Ф —— cos (п, у) 4- Ф ~— cos (п, z) dS.
2 J.) L дх dy dz J
5
Здесь 5 — поверхность жидкости, ограничивающая объем V; п — внешняя нор-
маль к поверхности жидкости.
Поверхность жидкости можно разделить на три части — боковую, поверх-
ность дна и свободную поверхность. Для боковой поверхности (см. рис. 3.6)
cos (л, у) = sin tj; cos(n, z) = cos *q; ~TdS = r$di\dx\ cos(л, x) = 0;
для поверхности дна
cos (л, x) = —1; cos(л, г/) = соэ(л, z) = 0; dS = rdrdr^
для свободной поверхности
cos(tt,x)=l; cos (л, y) = cos (n, z) = 0; dS = rdrdi\.
дФ дФ дФ
Так как —— = —— cos -n —------ sin -n;
dz dr rdx\
дФ дФ дФ
-г- -= —- sin т] + —- cos т],
dy dr гдт[
76
то, произведя преобразования, получим
2к г0 ГО
т - т«Ш (ф ~ 5 (ф гШ>+
0 0 о
о
I / дФ \
+ \ ФТ" rd^dx
И дг Jr~Fo
-h
Выражение для потенциальной функции Ф имеет вид
оо
Ф = 2r0 sin т] (Л\^ $ 4- + г sin т] [(£ + х) # -f- z/cj.
п= 1 п
На основании свойства функций Бесселя имеем
о _(С2-1)Л«П)
2
rdf
2С2„(^-1)
(С2-1)Л(С«)
Выполнив интегрирование по х (значения определенных интегралов приведены
для справок в конце главы) и сгруппировав все коэффициенты при одноимен-
ных переменных, с учетом обозначений (3.38), (3.44) и (3.47) получим
п--= 1
оо
П = 1
(3.77)
/л = лф
Теперь составим выражение потенциальной энергии массы жидкости. Значе-
ние потенциальной энергии, соответствующее невозмущенному состоянию жидко-
сти, когда ус = Ф = 0 и все координаты Хп = 0, примем равным нулю.
Потенциальная энергия возрастает, если частицы жидкости отклоняются в
направлении оси X, и уменьшается, если они отклоняются в противоположном
направлении.
Рассмотрим столбик жидкости с поперечным сечением rdx\dr.
Расстояние от столбика до плоскости OXZ равно г sin г| (см. рис. 3.6).
При невозмущенном состоянии жидкости высота столбика равна h, а рас-
стояние центра столбика от плоскости OYZ равно hfo. При возмущенном сос-
тоянии жидкости высота столбика равна Л+Хх» а расстояние от плоскости
Gi/iZi до центра столбика равно hf2—%х/2.
77
Отклонение центра массы столбика жидкости в абсолютной системе коор-
динат в направлении оси X складывается из отклонения, вызванного поворотом
цилиндра на угол
— (£ — h/2) (1 — cos ft) — г sin v] sin ft,
и дополнительного отклонения от увеличения высоты столбика, равного
Полное смещение
Д == хх/2 — (£ — Л /2) (1 — cos &) — г sin т] sin
'Потенциальная энергия элементарного столбика жидкости в возмущенном сос-
тоянии
dU — (h + хх) g*Qrdi\dr.
Суммируя по всему объему, найдем
2к г0
U = (Д J- Х\) G — cos — r sin sin rdr\dr.
о o'
Принимая во внимание, что
(1 — cos4)^ft2/2; sinft^ft;
[ Rn (г) г 2d г = r%/C2n; Rn (r) rdr =
b b
и учитывая свойства функций Бесселя, получим выражение потенциальной энер-
гии всей массы жидкости:
/ h \ & 2 1 ЧН 2 2
и = — — — ) ms* — — .?*» 2j ,ПпКп + у Z-1 шпт^п-
п<=1 п<=1
Кинетическая и потенциальная энергии жидкости выражены, таким образом,
через обобщенные координаты системы ус, О, и их скорости. В выражения
для Т и U не включены кинетическая и потенциальная энергии бака. При ре-
шении задач динамики кроме массы т и момента инерции /0 жидкости, следу-
ет, конечно, учитывать массу и момент инерции стенок бака.
Если на бак воздействуют внешние силы, приводящиеся в точке С к попе-
речной силе Fy и паре сил с моментом Мс, то они будут обобщенными силами
системы, соответствующими координатам ус и б.
Применяя уравнения Лагранжа
d
dt
( дТ \ дТ dU
( л • )— л + -) ~Qq (q — Уг\ ^л),
\ dq / dq dq с
в которых в обобщенную силу Qq не включена сила тяжести, составим уравне-
ния возмущенного движения жидкости:
myc + m(L — h/2) S + У, тп\п = Fy;
п = 1
( А> + У [п ) ft— rng* (£ — h/2)§ + т (L — h/2) ус +
\ н--= 1 /
+ У, mnLn\n — g* У тп\п = Мс-,
п=>1
\п + + Ус — g*$ = 0 (и = 1, 2,...
Как и следовало ожидать, полученные уравнения аналогичны уравнениям
(3.52).
78
3.13. РЕШЕНИЕ ЗАДАЧИ О КОЛЕБАНИЯХ ЖИДКОСТИ
ВАРИАЦИОННЫМ МЕТОДОМ
Выражение кинетической энергии жидкости (см. разд. 3.12)
1 г с Г дФ дФ дФ 1
Т — —— Q \ \ Ф-----cos (п, х) + Ф----cos (и, у) 4- Ф---cos (п, z)\dS
2 ; J L дх ду dz j
5
справедливо для бака любой формы. Если удается в аналитической форме най-
ти потенциальную функцию Ф и проинтегрировать выражение для Т, то пара-
метры маятников и коэффициенты уравнений возмущенного движения станут
известны. Однако в аналитическом виде задачу о колебаниях жидкости удается
решить только для весьма немногих форм баков. Например, для баков сфе-
рических, тороидальных и конических получить решение методом Фурье не уда-
ется.
Для решения задачи о колебаниях жидкости в баке сложной формы широко
применяются вариационные методы, для использования которых требуются
ЭВМ.
Бак, частично заполненный идеальной жидкостью, представляет собой кон-
сервативную систему, к которой применим принцип Гамильтона — Остроград-
ского. Интеграл действия по Гамильтону
О
где L = T—U — функция Лагранжа.
Здесь Т, U — кинетическая и потенциальная энергии жидкости. Согласно прин-
ципу Гамильтона для действительных движений интеграл действия принимает
стационарное значение, т. е. вариация б/ = 0.
Интеграл действия по Гамильтону J на постоянный множитель лр/(2со) от-
личается от функционала
Г(Ф) = ^* |‘(v$)2rfV—ш2|ф2й(5, (3.78)
V So
где (о — частота собственных колебаний; V, So — объем жидкости в невозму-
щенном состоянии и площадь ее свободной поверхности;
д - д - д _
V = —— i + ~— J + —— k— оператор Гамильтона
дх ду dz
Здесь i, j, k — единичные векторы.
Таким образом, задача о собственных колебаниях жидкости в объеме V
сводится к вариационной задаче для функционала (3.78). Для решения этой
задачи удобно воспользоваться методом Ритца. Идея метода заключается в сле-
дующем.
Выбираем систему координатных функций ср7;, полную в объеме V, и при-
ближенное решение задачи ищем в виде конечной суммы
k
Ф = у a,,<fn.
п- 1
Если эту сумму подставить в функционал (3.78), то он превратится в функ-
цию k переменных:
k k
F (а1» • • • » ak) = £* 2 Pnmanam 0)2 У Qnmanam'
n,m~l n,m — l
79
Из условия экстремума функции F(ait аь) получаем k однородных уравне-
ний для определения неизвестных ai, aft:
k k
'У । Pnmam । Qnmam ~ 0 («=1, 2,..., k). (3.79)
tn -= 1 m = 1
Для того, чтобы однородная система имела решение, отличное от нуля, необхо-
димо и достаточно, чтобы определитель системы был равен нулю:
\g*Pnm — = О-
Рис. 3.18
Из решения этого уравнения можно определить первые k частот собственных
колебаний жидкости. Каждой собственной частоте соответствует решение сис-
темы (3.79), которое дает нам n-ю форму собственных колебаний жидкости.
И собственная частота, и собственная форма определяются при этом прибли-
женно. При k—>оо решение будет стремиться к точному.
Воспользуемся результатами численных решений, полученных при помощи
вариационного метода [16]. Параметры маятниковой системы в этой работе вы-
ражены через некоторые безразмерные величины ып, vn, von и рп следующим
образом:
Рис. 3.19
Рп
V2
tl
Z
Ч2)«
= ''О -----------.
V/2
Здесь q— плотность жидкости; Го — ха-
рактерный размер бака; Z* 2)П — рассто-
яние до точки подвеса маятника от не-
которой характерной точки О полости
(рис. 3.17).
Па рис. 3.17 и 3.18 показаны графи-
чески зависимости собственных частот
и приведенных масс жидкости от глу-
бины заполнения h для полости между двумя соосными круговыми баками с
тороидальным дном (кривые 1). В расчете принято: радиус внешнего бака г0 =
= 1, радиус внутреннего бака /оР = О,4, радиус кривизны дна в диаметральной
плоскости R = 0,3. Кривые 2 на рис. 3.18 соответствуют коэффициентам, рассчи-
танным для соосных баков с плоским дном. Из графиков видно, как быстро
уменьшается влияние тороидального дна по мере увеличения глубины жидкости.
На рис. 3.19 приведены результаты расчетов для сферического бака. Кри-
вые 1 соответствуют значениям, полученным вариационным методом с использо-
80
ванием сферических функций Лежандра, кривые 2 — значениям, полученным
вариационным методом с использованием функций Бесселя; кривые 3 соответ-
ствуют значениям, полученным для бака эквивалентного цилиндрического с
плоским дном.
3.14. ЭКСПЕРИМЕНТАЛЬНОЕ ИЗУЧЕНИЕ КОЛЕБАНИЙ
ЖИДКОСТИ В БАКЕ
Экспериментальное изучение колебаний жидкости целесообраз-
но как для проверки исходных предпосылок, принимаемых при
аналитических решениях, так и для определения значений коэффи-
циентов дифференциальных уравнений возмущенного движения,
когда это невозможно сделать теоретическим путем из-за сложно-
сти формы бака или по каким-либо другим причинам.
В уравнениях возмущенного движения имеются четыре коэффи-
циента, связанных с колебаниями жидкости: соп — частота собст-
венных колебаний жидкости в баке (маятника); Лп* — расстояние
от некоторой характерной точки — центра приведения — до оси
подвеса маятника; тн — приведенная масса-колеблющейся жидко-
сти (масса маятника); / = /04-^^л— момент инерции жидкости.
1
Эти коэффициенты можно определять с помощью эксперимен-
тов различными способами: измерением сил и моментов, действую-
щих на бак со стороны жидкости; по соотношениям между ампли-
тудами колебаний жидкости и стенок бака; измерением частот пар-
циальных систем, соответствующих поступательному и вращатель-
ному движениям полости. Для упрощения обработки получаемых
данных эксперимент целесообразно проводить так, чтобы в каж-
дом случае приходилось рассматривать колебания только одной
парциальной системы: 1) колебания бака при f) = 0 и 2) колеба-
ния бака при z/c = O.
Практическая реализация колебания бака при й=0 осущест-
вляется при помощи экспериментальной установки, схема которой
показана на рис. 3.20. Бак в вертикальном положении закреплен
на достаточно жесткой и легкой раме, которая, в свою очередь,
шарнирно в двух точках присоединена к неподвижному основанию.
Можно считать, что при малых углах вращения рамы бак соверша-
ет прямолинейные перемещения.
Вращательные колебания -бака (//с = 0) можно воспроизвести
при помощи установки рис. 3.21.
Для получения соотношений между коэффициентами восполь-
зуемся, например, дифференциальными уравнениями (3.73).
Учитывая только первый тон колебаний жидкости, при Ф=0 и
у с* =0 будем соответственно иметь
тус*^\- 1 =F у; Х(2) 1 -г <*цХ(2) 1 -г ус*=0; (3.80)
/*&-р ^1^(2) А(2) 1—714с*; ^(2) 1Д- с°х^(2) 1 "г ^(2) — 0. (3.81)
Здесь т — масса бака с жидкостью; I — момент инерции бака с
присоединенной жидкостью.
81
Каждая из парциальных систем (3.80) и (3.81) имеет по одной
нетривиальной частоте собственных колебаний. Обозначим эти час-
тоты через (Di* для первой системы и со2* — для второй. Для соб-
ственных колебаний из уравнений (3.80) и (3.81) можно получить
следующие соотношения:
mjm =1 — (оцДо*)2; (3. 82)
^1^(2) 1//— 1 — (<»>х/<°2)2- (3. 83)
Частоты парциальных систем со/, со2* определяются из экспе-
римента по записи свободных колебаний бака с жидкостью. Часто-
Рис. 3.21
та собственных колебаний жидкости сох определяется по записи
свободных затухающих колебаний жидкости в неподвижном баке.
Таким образом, правые части равенств (3.82) и (3.83) можно
определить из данных эксперимента. Если момент инерции I изве-
стен, то из этих равенств можно определить коэффициенты т{ и
^*2)1- Момент инерции 1 можно определить экспериментально, ес-
ли в установку (см. рис. 3.21) ввести дополнительно угловую же-
сткость.
Как и всякая реальная система, жидкость не является идеаль-
ной, при движении появляются силы трения. Поэтому и при резо-
нансе амплитуда колебаний жидкости остается конечной величи-
ной. В наличии сил трения в жидкости можно убедиться, наблюдая
затухание ее собственных колебаний.
На рис. 3.22 точками показаны амплитуды гидродинамического-
давления жидкости р на стенку цилиндрического кругового бака
82
при г| = л/2 в зависимости от безразмерной частоты вынужденных
колебаний у = р/сох. Здесь же показано изменение фазы -<р этого
давления по отношению к движению бака. Эксперимент проводился
на кинематическом стенде, причем баку (г0= 15 см) задавалось
плоскопараллельное движение по гармоническому закону с ампли-
тудой //с = £/сЛо = О,133-10~2. Датчик для измерения давления был
расположен от свободной поверхности жидкости на глубине xi =
= xjKq = 0,233.
На том же рис. 3.22 построена теоретическая резонансная кри-
вая для значения относительного коэффициента затухания
5=ех/(ох=0,0135. Из рис. 3.22 видно, что, ограничившись линейной
постановкой задачи, в практических
расчетах вместо уравнения (3.36)
для первого тона колебаний! можно СгГТ
использовать следующее: 6 ~V •
Xi --j-2exk1 -j-^x^i = — Lfi — у с
(3. 84)
4
2
Экспериментальные исследова- о о,ч о,г 7,2 h/r0
ния показывают, что наиболее су-
щественным является резонанс, со-
Рис. 3.23
ответствующий основному тону ко-
лебаний жидкости.
Давление жидкости на стенки р при втором резонансе значи-
тельно меньше, чем при первом. Это объясняется тем, что согласно
выражению (3.44) для второго тона приведенная масса колеблю-
щейся жидкости составляет всего лишь 3% от массы первого тона,
поэтому в некоторых практических расчетах колебания высших
тонов жидкости можно не учитывать.
Значение коэффициента затухания 8х в уравнении (3.84) можно
определить на основе анализа собственных колебаний жидкости в
неподвижном баке. Для этого нужно возбудить колебания первого
тона свободной поверхности жидкости и построить график измене-
ния амплитуды колебаний жидкости по времени.
При малых коэффициентах затухания связь между логарифми-
ческим декрементом колебаний жидкости 6 и значением коэффи-
циента затухания 8х выражается формулой
ех/^х = S/2 л.
На рис. 3.23 для цилиндрического бака со сферическим дном
(радиус сферы равен радиусу цилиндра) показана полученная экс-
периментальным путем для первого тона колебаний зависимость
логарифмического декремента 6 от относительной глубины жидко-
сти h/rQ. Принято, что
1,84g*
''о
где vo — коэффициент кинематической вязкости жидкости; Re —
число Рейнольдса.
Когда высота столба жидкости меньше радиуса бака, логариф-
мический декремент колебаний увеличивается с уменьшением вы-
соты столба.
При оценке экспериментально полученных значений логариф-
мических декрементов б следует иметь в виду, что коэффициент
затухания ех зависит от материала бака и качества отделки сма-
чиваемой поверхности. Эта зависимость особенно существенна для
баков малых поперечных размеров. Поверхностное натяжение уве-
личивает коэффициент затухания при малых радиусах бака, при
больших радиусах его влияние незначительно.
Экспериментальное изучение колебаний жидкости обычно про-
водят па физических моделях, изготовленных в малом масштабе.
Формы полостей и их расположение относительно центра масс гео-
метрически подобны исходной системе. Результаты экспериментов,,
полученные на моделях, можно перенести на натурные системы при
условии выполнения подобия:
1) по числу Фруда
Fr='uo/(gr*ro);
2) по числу Струхаля
Sh=cor0H;
3) по числу Рейнольдса
Re = 4Vo/vo;
4) по числу Бонда
B=eg*ro/a.
Здесь t>0, ''о, — характерная скорость, линейный размер и часто-
та колебаний; vo — коэффициент кинематической вязкости жидко-
сти; а — коэффициент поверхностного натяжения.
При достаточно больших размерах модели влияние поверхност-
ного натяжения на колебания жидкости незначительно', поэтому
число Бонда при моделировании обычно не учитывается. Из чисел
Fr, Re, Sh можно составить новые безразмерные комбинации, ис-
ключив из них v0:
Fr (Sh)2 = w2r0/g*; Fr Sh/Re = (ov0/(g*-r0).
Вводя масштабы моделирования (отношение соответствующих па-
раметров модели к натуре) kro> kg, кш , kv, можно получить следую-
щие соотношения:
WkJ?; к, = 4/2кг3'2.
Первое соотношение дает масштаб пересчета частот колеба-
ний, полученных на модели, на натурные условия. Второе соотно-
шение определяет выбор вязкости моделирующей жидкости, необ-
84
ходимой для выполнения подобия по числу Re. Однако на практике
в большинстве случаев полное подобие по числам Re обеспечить
невозможно.
Невыполнение подобия по числам Re и В обычно приводит лишь
к увеличению коэффициента затухания в уравнениях для колеба-
ния жидкости.
Колебания свободной поверхности жидкости можно считать ли-
нейными только 'при небольших амплитудах. Результаты экспери-
ментальных исследований показывают, что если амплитуда колеба-
ний свободной поверхности будет более
0,1 го, то колебания жидкости нельзя счи-
тать линейными.
На рис. 3.24 показана экспериментальная зависимость (кривая
/) полуразмаха волны Хо = Хо/го °т амплитуды вынужденных коле-
баний при резонансах первого тона. Из графика видно, что отно-
шение у$1ус с увеличением ус уменьшается. С увеличением ампли-
туды колебаний увеличивается коэффициент затухания колебаний
жидкости. Волна сохраняет упорядоченный вид, пока ее полураз-
мах не достигнет « (0,6 ... 0,65) rQ, При дальнейшем увеличении
амплитуды вынужденных колебаний волна начинает разрушаться.
В гидродинамике такая предельная волна называется волной Сток-
са (для линейных колебаний — прямая 2, для нелинейных — кри-
вая 5). При более высоких тонах колебаний волны на поверхности
жидкости разрушаются при значительно меньших амплитудах, чем
амплитуды первого тона.
Результаты экспериментов показывают, что при некоторых амп-
литудах плоские колебания жидкости становятся неустойчивыми.
Волна может повернуться в плоскость, перпендикулярную движе-
нию бака, и даже начать вращаться в направлении по окружно-
сти.
Исследования нелинейных колебаний жидкости показывают, что
с увеличением амплитуды уменьшается резонансная частота коле-
баний соц, что показано на рис. 3.25.
Таким образом, если амплитуда колебаний жидкости Xmax^O,lro,
то колебания жидкости можно считать линейными. При Хтах>
>0,1 rQ следует учитывать нелинейные эффекты.
85
Формулы для некоторых определенных интегралов
о
1. Lshf^-f—+ х'|Ъ/х = 0.
J L го \ ) \
2. \ ch I — (Л-|--х)| dx== —sh —'j.
J L Го J tn \ r0J
—h
0
M Sh= fit (X+x 11 Sh k„ Ch I c, ^1 -± .
j L V 2 /J <*n \ 2ro ) ' 2^o / 2
—h
0
4. ( Ch2[^(/z + x)4/x = ^ShL— )ChL-^+ *
«) L ro 2£и \ . ro / \ ro / 2
—h
° 2 2
5. t Sh|M4+x)U + x)rfx=^Chk„^-^Sh(c„ A-V
J L ^*0 \ 2 /I \ 2^0 ' \ 2r0 f
—h
0 2
6. \Chf^(A + x)l(A + x^x = ^ZShLAp MchC„A_ i'i
J L r0 J \ r0 / Сл \ f'Q /
0
—h
Глава IV
УРАВНЕНИЯ ДВИЖЕНИЯ И ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ЖЕСТКОЙ РАКЕТЫ
С УЧЕТОМ КОЛЕБАНИЙ ЖИДКОСТИ В БАКАХ
4.1. ДИНАМИЧЕСКАЯ МОДЕЛЬ
В гл. II были рассмотрены динамические свойства абсолютно
твердой ракеты и установлены основные требования, предъявляе-
мые к автомату стабилизации. Однако представление жидкостной
ракеты в виде твердого тела является, конечно, упрощенным. На-
личие жидкого топлива в баках, как было показано в гл. III, при-
водит к появлению дополнительных сил, влияние которых на дина-
мические свойства ракеты в диапазоне частот собственных коле-
баний жидкости может быть значительным. Учтем поэтому в урав-
нениях движения ракеты силы, возникающие от колебаний жидко-
сти в баках.
На небольшом интервале времени траекторию невозмущенного
движения ракеты принимаем прямолинейной, совпадающей с не-
подвижной координатной осью X.
•86
Суммарный вектор ускорения поля массовых сил для жидкости
в баке представим в виде
g* = g-a,
где g — вектор ускорения свободного падения; а — вектор уско-
рения бака.
Главный вектор внешних сил, действующий на ракету, обозна-
чим через Я, причем
Здесь R* — главный вектор внешних сил (без веса ракеты); G —
вес (сила тяжести) ракеты. _
Вектор ускорения ракеты a = Rlm, где т — масса ракеты, по*
этому
g* = — F^FL_
Так как квазистатическое положение свободной
поверхности жидкости в баке перпендикулярно векто- т] - Lj
ру g*, то при невозмущенном прямолинейном движе- —••
нии ракеты свободная поверхность располагается Т д*.
перпендикулярно вектору Л*. Для ракеты, находя- оуК [ J
щейся в активном полете, ускорение поля массовых У, P\z
сил для жидкости в баке равно ускорению ракеты, | ।
возникающему от действия внешних сил, в число ко-
торых не включается вес ракеты. Поэтому, если раке- Рис. 4.1
та, например, движется поступательно под действием
только веса, то g* = 0, положение свободной поверхности будет не-
определенным; неопределенными будут и силы взаимодействия
жидкости с баком. _
Направление вектора Я*, вообще говоря, не совпадает с про-
дольной осью ракеты. Однако это несовпадение невелико, поэтому
в дальнейшем невозмущенную свободную поверхность жидкого
топлива в баках будем считать перпендикулярной к продольной
оси ракеты, а направление вектора g*,— совпадающим с направле-
нием невозмущенного движения ракеты.
Для описания движения ракеты с учетом колебаний жидкости
в баках примем маятниковую модель, состоящую из абсолютно
жесткого прямого стержня и k математических маятников (для
каждого бака своя система маятников). Точки подвеса маятников
расположим на продольной оси стержня, которую будем считать
главной центральной осью инерции твердого тела (системы), сос-
тоящего из стержня с закрепленными на нем массами маятников.
Начало связанной системы координат (\X\Y\Z\ совместим с
точкой С стержня (рис. 4.1). Точка С совпадает с центром масс
системы, когда массы т* всех маятников находятся на продольной
оси стержня. Обозначим через />, — длину и массу /-го маят-
ника, а через L* — координату массы /-го маятника, когда эта
масса находится на продольной оси стержня.
87'
В каждом баке обычно учитывают только первый тон колеба-
ний жидкости, в некоторых случаях следует учитывать и высшие
тоны колебаний.
В частном случае для кругового цилиндрического бака с плос-
ким дном параметры маятниковой системы следует определять по
формулам
у r07 * з
/у - , > ЛЬ] ЛГоуфу
, I \
Gthkzz-------
\ f'Qj 1
г 5 Г 8 . 16 / *4 И
* nj 2 (Л ]\ “Ь г3 /г2 1\ \ л 2г •/ '
где hj, rQj и Qj — глубина заполнения, радиус и плотность жидко-
сти в /-м баке; /0 — момент инерции относительно поперечной оси,
проходящей через центр масс физической системы с жидкостью,
если считать жидкость «затвердевшей» в положении, когда ее
свободная поверхность перпендикулярна продольной оси бака;
Lj — расстояние от центра масс физической системы до свободной
поверхности жидкости в у-м баке. В соответствии с принятой в
гл. III системой отсчета L?>0, если свободная поверхность нахо-
дится выше центра масс, и £j<0, если свободная поверхность нахо-
дится ниже центра масс.
4.2. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
Пусть к стержню маятниковой системы в плоскости OXY будет
приложена совокупность следующих сил (рис. 4.2):
эффективная тяга двигателей Ро, направленная по продольной
оси стержня X];
управляющая сила рулей Ур, направление которой всегда па-
раллельно поперечной оси стержня УА (здесь УР = /?у S, где S —
угол поворота управляющего органа);
подъемная аэродинамическая сила Уа, сила лобового сопротив-
ления Ха и момент Mz этих сил относительно центра масс систе-
мы (точки С);
сила тяжести G = mg\
момент демпфирующих сил Л4ид относительно точки С.
Рассмотрим плоское движение маятниковой системы в непод-
вижной системе координат OXY (ось X направлена вертикально
вверх). За обобщенные координаты примем: xc(t), yc(t) — коор-
динаты точки С; ^(t) — угол между осями X и Хь kj(t) — откло-
нение массы т* в г^лравлении оси У1 связанной системы коор-
динат О1Х1У!.
88
Без ограничения общности будем считать xc(t) конечной вели-
чиной, a yc(t), 'b(t), kj(t) — малыми возмущениями.
Если все возмущения тождественно равны нулю
г/с=0; Ь=0; лу=0 (7=1, 2,...£),
то угол поворота управляющего органа 6н=0 и угол
В этом случае на стержень дей-
ствуют только три внешние силы:
Рэ, Ха, G, и стержень движется в
направлении координатной оси
X с ускорением
" _ P3-Xa-G _Рэ~Ха
где т — масса стержня с маят-
никами; — ускорение сво-
бодного падения.
Если на небольшом интервале
времени массу т и силы и Ха
считать неизменяющимися, то ус-
корение хс будет постоянным.
Такое движение будем назы-
вать н своз му щен н ы м.
Координаты х, у любой точки
продольной оси стержня и
координаты Xj, у^ массы /-го ма-
ятника в системе координат OXY
Рис. 4.2
будут
*=*c+*i(i — &2/2); у=Ус+^1&;
ху = хс + А*(1 -F/2) + X2/(2/;)-k7&;
У)—Ус + Lft +
Дифференцируя по времени, найдем
х=хс — у=ус-\-х&
X)—Xq — Lfofy j—
У)=Ус + 4" V
Формулы для кинетической и потенциальной энергий системы име-
ют вид
a k
u=g ^m^xdx^g^nijXj,
-Ь 7 = 1
89
где а, (—b) — значения координат х^ концов стержня; т(х{) —
погонная масса.
Подставляя сюда выражения координат и скоростей всех точек
системы и удерживая только величины второго порядка малости,
.получим
2Т = тхс + тус + /$2 +
Обозначим проекции аэродинамических сил Ха и Уа на непо-
движные оси координат через Fx и FY- Тогда обобщенным коор-
динатам хс, Ус, fy hj будут соответствовать обобщенные силы
Рис. 4.3
Qx = 1 - у) + Fx - Qr = Л& + + Fy-,
^=-R^xv-xc^-Mz-Mz^ Qx. = 0. (4.3)
Подставим выражения (4.2) и (4.3) в урав-
нения Лагранжа второго рода. Уравнение,
соответствующее обобщенной координате
хс, будет иметь вид
k
/М; х2
тхс + trg + т* — + —
ли ' l> li
- m)=p3 (i - у)+fx - да».
Отбрасывая малые величины второго по-
рядка, получим
m'xc-\-mg=^P3-\-Fx.
С точностью до величин первого порядка
малости малые возмущения и О не вли-
яют на движение центра масс в направлении оси X. При неизменя-
ющихся величинах т, Рэ и Fx это движение происходит с постоян-
ным ускорением. Постоянной остается и величина
S*=*с + g = (рэ - X^lm.
(4-4)
Сделанный вывод справедлив и в более общем случае, когда на-
правление продольной оси стержня при невозмущенном движе-
нии составляет с горизонтом некоторый угол -0-o#=n;/2 (рис. 4.3).
Совместив направление оси X неподвижной системы координат с
90
направлением связанной оси при невозмущенном движении,
найдем, что
g* = xc+g sin Ь0={Рэ — Ха)/т.
Таким образом, при малых отклонениях координат 'fl и X; вели-
чина ускорения g* не изменяется.
Теперь найдем уравнения движения для обобщенных координат
Ус, ft, с помощью уравнений Лагранжа 2-го рода. Удерживая ве-
личины только первого порядка малости и пользуясь обозначения-
ми (4.4), получим следующие уравнения возмущенного движения:
k
ту с+~ = Py р8 + Ру <
k k
/4 + 2 mjl^j ~ g*2 mfa = - Z^ZpB - Mz - MZa, (4. 5)
>1 j~\
+ = 0 0 = 1.
a k
где Zp=xp — xc; m= m(xl) lix^'^mf,
-b j, -1
a k .
/ = J m (x,) x\dx-, -j- mjL'j\
-b j~i
a k
j m (xj (— b < xT <a).
-b j-\
Если по каким-либо причинам необходимо учитывать несколько
тонов колебаний жидкости, то в уравнениях (4.5) следует учиты-
вать соответствующее число маятников, т. е. принять
k k По k k По
v =22 m'jnkp' 2 =2 2 т^1п'
i = \ 7=1 /2=1 У = 1 7=1 /2 = 1
7 = 1 7=1 п = \
где п0 — подлежащее учету число тонов колебаний жидкости.
Уравнение для Xjn будет иметь вид
^п + (^* Д/л) \п + + yc-g** = Q
(j= 1, 2, ..., k; n= 1, 2, ..., n0).
Рассмотрим теперь частоты собственных колебаний.
91
43. ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ СИСТЕМЫ
Рассмотрим упрощенную динамическую систему, когда аэроди-
намическими силами можно пренебречь. Это даст возможность
определить частоты собственных колебаний ракеты, обусловливае-
мые колебанием жидкости в баках. Положив в уравнениях (4.5)
Гу = MZ = /И2д=0, получим уравнения возмущенного движения ра-
кеты в безвоздушном (пространстве.
Для простоты анализ уравнений (4.5) будем проводить для ча-
стного случая, когда все маятники имеют одинаковую длину lj = l*
и одинаковый коэффициент затухания -8j = 8x, уравнение для X;
примем в форме (3.84). Равенство длин маятников означает, что
частота рассматриваемого тона собственных колебаний жидкости
во всех баках одинакова; плотность жидкости в разных баках мп-
жет быть различной.
Введем безразмерные параметры маятниковой системы
k k
|‘!=тХ'п> '•
к
Нз=-^-
mQ()
7 = 1
(4.6)
где
Безразмерные параметры ц2, Цз имеют следующий физический
смысл: pi представляет собой отношение суммы масс всех маятни-
ков к массе всей системы (стержня с маятниками); |ы2 — отноше-
ние суммы моментов инерции масс всех маятников относительно
поперечной оси стержня, проходящей через точку С, к моменту
инерции стержня с закрепленными на нем маятниками относитель-
но той же оси; ц3 — отношение суммы статических моментов ма-
ятников относительно поперечной оси стержня, проходящей через
точку С, к произведению массы системы на ее радиус инерции q0,
соответствующий закрепленным маятникам.
Согласно формулам (4.6) пределы изменения параметров будут
О < Pi < 1; 0 < [i2 < 1; — 1 Оз < 1; < НР'г; ° < Qo <°°-
Исключив координаты ус и Xj, приведем уравнения (4.5) к виду
Q(p)» = Z?(p)d. (4.7)
Здесь Q (р) =• р2 (я0Р4 + «1Р3+«2р2+«зР + а4) (р);
К (Р) = - (Р) (р2 [ (। - ] +2s»p+«> (I +
Il <„J \ Р (4.8)
/(p) = P2 + 2exP + “t
92
При этом приняты следующие обозначения:
Яо = (1 — uj ('1 — |Л2) —— (if; а1=2ех (2 —(J-! —а2);
a2 = o>f (2 — р.[ — р2 Нз/*) 4“4г\; б?з = 2®х<*>х (2 -Тр-з^*):
(4. 9)
a4=4ci +^*);
/*=/*/Qo; Zp=Zp/Qo);
Известно, что всякий многочлен четной положительной степени
с действительными коэффициентами можно представить в виде
произведения многочленов второй степени с действительными ко-
эффициентами. Поэтому многочлен Q(p) представим в виде
Q(p) = aJp2(p2 + 2pe1-f-(Bf) (p2-H2ps2 + o)2)/ft~2(p). (4. 10)
Здесь сон W2 — частоты собственных колебаний системы без учета
затухания; 8Ь е2 — соответствующие им значения коэффициентов
затухания.
Вычислим oh и 0)2 Для случая, когда ех=О. Уравнение частот
получим из равенства Q(p)=O путем подстановки р=1’о). Много-
член f(p) рассматривать не будем, так как из равенства f (/со) =0
определяются собственные частоты колебаний жидкости в непо-
движном баке. Будем иметь
(о2 (А4 - а2«>2 + со4) = 0. (4. 11)
При одинаковой длине маятников наибольшая степень уравнения
(4.11) равна шести и при /г^2 не зависит от числа маятников.
Значение корня о2 = 0 в уравнении (4.11) соответствует такому
движению системы, когда все Х; = 0 и 0 = 0 .или 0 = OqZ4-Oo, где
Фо = const, O0 = const.
В этом случае малому углу О соответствует малое поперечное
ускорение центра масс:
ту с = РФ.
Поперечное смещение ус центра масс, однако, может быть сколь
угодно большим и в этом смысле движение системы с нулевой ча-
стотой неустойчиво. При наличии системы стабилизации должно
быть '6'о = 0, Фо = 0.
Рассмотрим второй сомножитель уравнения (4.11)
а0со4 —а2со2-]-а4 = 0. (4. 12)
При малых значениях Z* = /*/q0 (большая длина стержня по срав-
нению с длиной маятника) дискриминант уравнения (4.12)
D = а2 — 4аса4
является положительным и система имеет две частоты собственных
колебаний:
o)2=fl2-+.l<D; а>2=Д2~^Р. (4.13)
1 2а0 2 2а0 v 7
93
Случай, когда маятники на стержне расположены гак, что сумма
их статических моментов относительно точки С равна нулю (ц3 = 0),
представляет особый интерес. Для ракеты с двумя баками это зна-
чит, что
Ш\L\ П12^2 = О (А2<0).
В этом случае уравнение (4.12) можно представить в виде
[(0)2(1—Р-1) —0)х] Р (1 — Ы —с°х] =0,
откуда частоты системы
= 1 — (о2= о)Х/|/ 1 — р2- (4. 14)
И первая и вторая частоты системы, обусловленные колебаниями
жидкости в баках, больше частоты собственных колебаний жидко-
сти в неподвижном баке, причем эта разница тем больше, чем
больше коэффициенты щ и ц2. Любопытно отметить, что формула
для совпадает с формулой (3.58), полученной при решении за-
дачи о собственных поступательных колебаниях цилиндрического
бака с жидкостью ('&=0). Частота системы совпадает с парциаль-
ной частотой. Формула для о.)2* несколько отличается от формулы,
полученной в разд. 3.9 для случая, когда yc = Q. Вместо знака
«больше» формула (4.14) содержит знак равенства. Это отличие
является следствием того, что в первом уравнении (4.5) содержит-
ся слагаемое Р^', которое представляет собой проекцию на ось Y
силы Рэ. Аналогичное слагаемое в уравнениях (3.52) отсутствует.
Для ракеты малого удлинения длина Z* маятника сравнительно
большая, а радиус инерции р0 мал, так что у них Г* = /*/р0 значи-
тельно больше, чем у ракет большого удлинения. С увеличением
Z* при цз>0 уравнение (4.12) сохраняет свои прежние свойства.
С увеличением ц3/* увеличивается лишь разница между частотами
0)1 И 0)2.
При больших значениях Z* и ц3<0 дискриминант D уравнения
(4.12) может стать отрицательным и тогда система будет обладать
принципиально другими свойствами.
Рассмотрим характеристическое уравнение, полученное прирав-
ниванием к нулю второго сомножителя многочлена Q(p) при
&х = 0.
Будем иметь
я()р4 + а2р2 + я4==0. (4. 15)
Когда дискриминант уравнения (4.15) равен нулю, корни урав-
нения кратные.
При D<0 корни р2 2 биквадратного уравнения (4.15) комплекс-
но-сопряженные с отрицательной вещественной частью.
91
Для р получим следующие значения:
Р1,2== —£ 4~ р3,4== "4“ £ ± (4. 16)
где & = У b/(2a0y, w = ]/с/(2а0); D=—bc',
__________ ____ (4.17)
b = 2 YaQa4 — а2; с = 2 ]/я0&4 а2.
Особенностью решений (4.16) является наличие у двух комп-
лексно-сопряженных корней положительной вещественной части,
что свидетельствует о том, что собственные колебания будут на-
растающими.
Таким образом, случай, когда D = 0 (равенство’ собственных ча-
стот), соответствует границе области устойчивости, системы.
Так как цз2^Ц1М2, то возможно, что D<0, если а4>0. Это зна-
чит, что решение (4.16) может существовать, если величина пара-
метра р3/* находится в пределах
Условие b>Q может быть выполнено, когда
ji3/* ~ — (н +u2); p-ip-2 > р-з.
Коэффициент нарастания колебаний будет тем больше, чем боль-
ше величины (Ц1Ц2—Цз2) и (ц1 + ц2)-
В дальнейшем, если не оговорено особо, будет рассматривать-
ся случай, когда дискриминант D>0.
Отметим случай, когда к стержню подвешен только один маят-
ник (/?=1). Это значит, что физическая система имеет свободную
поверхность только в одном баке. Уравнение собственных колеба-
ний получим из (4.5), положив fy = 0: Afz = O, Л42д = 0, 6 = 0. Так
как P^tn=g*, то, выразив из первого и второго уравнений (4.5)
ус~ё^= -нЛл
tnl] .. g*m*
& =—^х..+ ^k,-
I 1 ' I 1
и подставив их в третье уравнение, получим
Х.(1 ^Г(| +!Аз7*) = О.
Эта система имеет одну ненулевую частоту собственных колебаний
(()2 = JL* 1 +
I* 1 — Н — Р2
4.4. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ РЕГУЛИРУЕМОГО
ОБЪЕКТА И ЕЕ СВОЙСТВА
Дифференциальные уравнения (4.5), записанные для изображе-
ний, можно переписать в виде
&(p)/8(p) = U7(p) = /?(p)/Q(p),
95
предварительно исключив из них переменные ус и Х?-. Здесь изо-
бражение отклонения г<}(р) — выходная координата, изображение
6(р) — входная координата. Степени многочленов /?(р), Q(p) за-
висят от числа баков.
Для простоты предположим, что частоты и коэффициенты зату-
хания собственных колебаний жидкости во всех баках одинаковы,
так что
Л(р) = /(р) = Р2+2ехр-Ь<ох (7=1, 2,..., k\ (4. 18)
Аэродинамические силы учитывать не будем. Это несколько упро-
щает задачу и дает возможность более наглядно выявить особен-
ности динамических свойств ракеты, обусловленные колебаниями
жидкости в баках. Многочлены Q(p), /?(р) в этом случае выра-
жаются формулами (4.8).
Преобразуем многочлен /?(р) из (4.8). Введем обозначения
Ех
63 —-----------------------— ,
1 — Р-1 — Р-3/Zp
1 + |Х1/*//р .
1 — Р-1 — Р-зДр ’
(4. 19)
<о2=<о2
/
N,
Запишем многочлен /?(р) с учетом этих обозначений в виде
R (Р)= — М (Р2 + 2глр + ‘йх)*-' (р2 + 2е3р -1-“з).
Многочлен Q(p) представим в форме равенства (4.10):
Q (р) = «оР2 (Р2 + 2sjp + ад2) (р2 + 2е2р + о4) (р2 + 2ехр + ю2)6-2.
где
Тогда передаточную функцию системы можно выразить в виде
произведения трех передаточных функций
W (р) =R (p)/Q (p) = AZU7(J (р) W, (р) W2 (р),
Г0(р) = -/?’Гр/р/(р2/);
W/ P2+l2e3P + “з ф . .___ Р2 + 2ехр + “2
W 1 (Р) —-----------™ 2 (Р) —----------------Т >
Р2+ 2&iP + Wj р- 4- 2е2р + w2
1 — И1 — ИзДр
-----------------7 — постоянное число.
(1-Н)(1-^2)-^з
(4. 20)
N
WQ (р) есть передаточная функция абсолютно твердого тела,
т. е. стержня с закрепленными маятниками, W\(p) и 1Г2(р) можно
считать передаточными функциями «присоединенных» колебатель-
ных звеньев (маятников).
При е1)2)3х = 0 значения частот собственных колебаний о)Ь
(о2 являются полюсами передаточной функции, а величины сох, о)з —
нулями передаточной функции. Частоты сод, со2, соз, сох в дальней-
шем будехМ называть характерными частотами сис-
темы.
96
Проанализируем свойства амплитудно-фазовых частотных ха-
рактеристик lFo(Zco), №2 (/со).
Величина Wo (/со) представляет собой действительное число, об-
ратно пропорциональное со2.
Для рассмотрения амплитудно-фазовой частотной характерис-
тики №2 (М введем обозначения
у = о)/о)Х; со2 = (о2/сох; ех = ех/0)х; e2 = e2/ojX,
где оц, ех — частота собственных колебаний и коэффициент зату-
хания первого тона колебаний жидкости в баке.
1 Ч- / «2уех — у2
Получим IF2(Ao)==5-------=----. (4.21)
«о Ч- I 2уе2 — у2
Выражение Wzfja) можно представить и в другой записи:
w2(Zee) = U(у) + ZIZ (у)-- expi ?(°) (у) -<p20 (у)]=Л(у)e'^>,
Л20 (У) L
где ?Ц0)(у), ?20) (Y)— модуль и аргумент комплексного передаточ-
ного числа в числителе выражения (4.21), а Д2о(у), Ф2о(у) — мо-
дуль и аргумент комплексного передаточного числа в знаменателе
того же выражения. Соответственно
А{20) (у) = /(1-у2)2+(2£'хуТ2; Ao (У) = К(“2~ У2)Ч (2ё2у)2;
т(0) (Y) = а гсtg ; ?20 (у)=a rctg -22e2Y ;
1 — у2 о,2 _ у2
^д(°) /.у\
A (y) = ^2-- ;'-—; Т2 (У) = 'Р^0) (У) — <?2о(У)-
Ао (У)
Вещественная и мнимая части комплексного передаточного числа
VP? (/со) будут
U (Y) = Л (Y) cos ?2 (у); V (у) = А2 (у) sin у2 (Y)-
Модуль Л2(у) и аргумент <р2(у) комплексного передаточного
числа являются функциями частоты у. Графическое изображение
зависимости Л2(у) называется амплитудно-частотной ха-
рактеристикой (или резонансной кривой), а графическое изобра-
жение зависимости фг(у) называется ф а з о ч а с т от н о й харак-
теристикой.
Для дальнейшего уточним соотношения между характерными
частотами сох, coi, со?, со3. Ограничимся рассмотрением случая, когда
Для уравнения (4.12) дискриминант £)>0.
При ех = 0 на основании выражений (4.13) и (4.14) имеем
<*)Х 0)2
4 359
97
Для малых 8а это неравенство обычно допускает обобщение, при
котором вместо парциальных частот ом* и (о2* можно взять часто-
ты системы см и 0)2- Тогда получим
О)д <Д (Ор
Из сравнения формул (4.14) и (4.19) можно заключить, что воз-
можны случаи, когда co3>coi и о)з<о)ь Поэтому в дальнейшем бу-
дем рассматривать два неравенства, которые в безразмерном виде
можно записать так:
1 0)2 "С (Оз С01 (4. 22)
или 1 <С (02 toi 0)з- (4. 23)
Здесь G)3 = (o3/(nx.
Неравенство (4.22) встречается гораздо чаще, чем неравенство
(4.23).
Рис. 4.5
Графики функций ^20)(y) и c?20)(y), Л2о(у) и ф2о(у) приведены
на рис. 4.4; там же представлены и частотные характеристики
Л2(у) и ф2 (у) ♦ Пунктирными линиями показаны характеристики для
случая, когда коэффициент затухания колебаний жидкости не учи-
тывается (ех=О).
Амплитудно-частотная характеристика Д2(у) имеет максимум и
минимум. Минимум соответствует нулю, а максимум — полюсу
передаточной функции. Чем больше о)2 отличается от единицы, тем
больше максимум характеристики. Кроме того, величины макси-
мальных значений характеристик обратно_пропорциональны коэф-
фициенту затухания колебаний жидкости ех (в2).
Фазочастотная характеристика <р2 (у) имеет один максимум в
области положительных значений кр2. При наличии затухания коле-
баний величина максимума меньше л, причем этот максимум рас-
положен примерно на середине между максимумом и минимумом
амплитудно-частотной характеристики. Чем меньше коэффициент
98
затухания собственных колебаний жидкости, тем больше фазовый
пик, который, в свою очередь, тем больше, чем больше разница
между частотами сс>2 и ох.
Годограф комплексного передаточного числа ^(/со) на комп-
лексной плоскости Z=t7+iV показан на рис. 4.5. Для сравнения
приведены два годографа, построенные для разных значений ю2,
причем для кривой 2 частота со2 больше, чем для кривой 1.
Комплексное передаточное число Wi(ia) имеет такую же струк-
туру, что и IF2 (/со) и выоажается формулой
= + г ~Г~ГТ ехР1 Ы0) (Y)— Т1°= е<> 1(П
+ i .2e1Y - № Лю (у)
(4. 24)
где
о)] е3 = е3/0)Х; =
Когда соотношение частот системы под-
чинено неравенству (4.22), амплитудная
и фазовая частотные характеристики
Ai (у), ф1 (у) имеют такой же вид и обла-
дают теми же свойствами, что и функ-
ции, показанные на рис. 4.4. Минимум и
максимум амплитудно-частотной характеристики имеют место соот-
ветственно При у = (Оз И у = С01-
На рис. 4.6 показаны графики Л1(у) и <pi(y) для случая, когда
выполняется соотношение (4.23). Здесь с возрастанием частоты у?
на амплитудно-частотной характеристике сначала получается мак-
симум, а потом минимум. В отличие от рис. 4.4 фазочастотная ха-
рактеристика ф1(у) имеет не максимум в области cpi>0, а минимум
в области отрицательных значений q?i(y). Это имеет принципиаль-
ное значение для оценки устойчивости движения. Вид фазочастот-
ной характеристики <pi (у) обусловлен взаимным расположением
нулей и полюсов передаточной функции. Если выполняется нера-
венство (4.22), то функция (pi (у) имеет положительное значение;
если же выполняется неравенство (4.23), функция cpi(y) будет от-
рицательной (см. рис. 4.6).
4*
99
Годограф комплексного передаточного числа IFi(tu)) на комп-
лексной плоскости Z=U-\-iV показан на рис. 4.7. Кривые приведе-
ны для случая, когда соз>чи, причем отношение оз/ом для кри-
вой 2 больше, чем для кривой 1.
Амплитудно-фазовые частотные характеристики W1 (Ао),
1Г2(/о)) в основном сходны с частотными характеристиками прос-
тых колебательных звеньев. Так же как и у простых колебатель-
ных звеньев, амплитудно-фазовые частотные характеристики пре-
терпевают значительные изменения в небольшой зоне собственных
частот.
Рис. 4.8
Однако частотные характеристики IFi(Ao) и IF2(Ai)) обладают
особенностями, которые отличают их от простых колебательных
звеньев. Эти характеристики в координатах U, IV образуют кри-
вые. близкие к окружностям, которые касаются оси OU в точке
U=]. Основная особенность заключается в том, что за пределами
небольшой зоны собственных частот как на малых, так и на боль-
ших частотах, модуль комплексного числа близок к единице, а ар-
гумент близок к нулю.
Рассмотрим теперь суммарную амплитудно-фазовую частотную
характеристику (fo) l^z2(z(o). Она соответствует той части пере-
даточной функции (4.20), которая отличает передаточную функцию
жесткой ракеты с полостями, частично заполненными жидкостью,
от передаточной функции абсолютно твердой ракеты.
Так как i.Ao) W2 (М Aj (у) А2 <у) то указанные харак-
теристики легко изобразить графически, если для каждого значе-
ния у перемножить модули А (у) =А1(у)А2(у) и сложить аргументы
ф(у) ='Ф1 (у)+ф2(у)> как это сделано на рис. 4.4 и 4.6. Вид функций
А (у) и ф(у) показан на рис. 4.8 и 4.9.
На рис. 4.8 представлены частотные характеристики для соотно-
шения характерных частот (4.22), а на рис. 4.9 — для соотношения
частот (4.23). Пунктирными линиями показаны возможные вари-
анты характеристик.
Амплитудно-фазовые характеристики имеют по два максимума,
которые расположены в зонах собственных частот coi, ш системы.
В зависимости от соотношения характерных частот сод, о)2, <о3 боль-
100
шую величину может иметь как первый максимум, так и второй»
Например, применительно к рис. 4.8 величина первого максимума
амплитуды возрастает € увеличением интервала (1, gj2) и убываете
уменьшением интервала (gj2, g)3). Высота второго максимума амп-
литуды будет тем больше, чем больше ом по сравнению с w3.
Между фазочастотными характеристиками, приведенными на
рис. 4.8 и 4.9, есть принципиальное различие. Оно заключается в
том, что наряду с_положительными значениями во втором случаев
промежутке (<хн, gj3) фазоча-стотная характеристика ср (у) принима-
ет отрицательные значения.
Оценим величину диапазона частот, в котором модуль произведения
НУ (/со) Uz/2 (йо) заметно отличается от единицы. Для оценки примем следующие
значения параметров системы:
р.1 =0,2; р<2—0,1; у-3 = —0,05;
Z* = /*/о0 = 0,05; Z!;. = Zp/Qg = 1,5.
-г 1 Ж p.iZ^’/Zf)
Тогда оф =------------^1,21.
1— уч — р-зДр
Положим о/у -------= 1,25; ------= 1.11.
1 — р.; - 1 — р.-2
Соотношения характерных частот удовлетворяют неравенству (4.22). Разность
между крайними значениями
ац — 1 =0,12.
Учитывая, что при у 0.95 и у>Л,05 ом изменение частотных характеристик прак-
тически отсутствует [см. формулы (4.21), (4.24) при ^0], получим зону час-
тот, в которой влияние колебаний жидкости может быть значительным. Эта зона
находится в промежутке
0,95 ' у l,iS.
Если принять сох =10 1/с, то в рассмотренном примере динамические характе-
ристики жесткой ракеты с учетом колебаний жидкости будут отличаться от ха-
рактеристики абсолютно твердой ракеты в небольшой зоне частот
9,5 1/с < < 11,8 1. с.
Вне указанной зоны частот, например при у = 0, на основании формул (4.21) и
(4.24) получим
«I 1 (1 У-НР/Z" ) (1 —у.0 (1 —р.2)
Так как ^Д*Др< 1; «4 С 1»
ТО A(O)/42(O)^ 1/W.
На основании проведенной оценки можно сделать вывод, что
если собственные частоты колебаний жидкости в разных баках
ракеты значительно различаются между собой, то влияние колеба-
ний жидкости на амплитудно-фазовые характеристики ракеты
можно оценивать, учитывая эти колебания каждый раз только в
одном баке.
101
С учетом аэродинамических сил передаточную функцию F'(p)
можно представить, как и в случае (4.20), в виде произведения
трех передаточных функций
w/' (pi = = N' \у/(1; р! (р) W7, (р),
где ИД ip)- - RyUv~----------;
а(] р3 — р- -- а\ р 4- л3
Р2 — 2-1 Р — Р2 ~ 2г2 р - г
Когда частота собственных колебаний абсолютно твердой ракеты
в набегающем потоке воздуха значительно меньше частоты собст-
венных колебаний жидкости в баках, связь между этими колеба-
ниями будет слабой. В этом случае передаточная функция
lIV(p) будет мало отличаться от передаточной функции абсолют-
но твердой ракеты F4 (р) (2.12), передаточные функции F/(p) и
F/(p) будут соответствовать передаточным функциям F/(p) и
F2z(p) из выражения (4.20).
4.5. ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ К АВТОМАТУ
УГЛОВОЙ СТАБИЛИЗАЦИИ
Характеристический многочлен Q' (р) уравнений возмущенного
движения ракеты с учетом колебаний жидкости в баках имеет та-
кое же число корней с положительной вещественной частью, как
и характеристический многочлен (2.15) уравнений абсолютно твер-
дой ракеты. При учете колебаний жидкости добавляются лишь
комплексно-сопряженные корни с отрицательной вещественной
частью.
’В разд. 4.4 было показано, что при учете колебаний жидкости
в баках значительно изменяется амплитудно-фазовая частотная
характеристика регулируемого объекта в небольшом диапазоне ча-
стот, близком к частотам собственных колебаний жидкости. Вне
этого диапазона амплитудно-фазовая характеристика при учете
колебаний жидкости практически не отличается от амплитудно-фа-
зовой характеристики абсолютно твердой ракеты.
Вид логарифмической амплитудно-частотной характеристики
ракеты (регулируемого объекта) с учетом колебаний жидкости
Lpo(co) приведен на рис. 4.1 Ощ.
Если соотношение между характерными частотами отвечает не-
равенству (4.22)
1 Юо <4 (,)з <4 (01’
то фазочастотная характеристика регулируемого объекта будет
иметь вид, приведенный на рис. 4.10,6. Изменение фазочастотной
характеристики, обусловленное колебаниями жидкости в баках, по
сравнению с характеристикой абсолютно твердой ракеты происхо-
дит в сторону опережения по фазе (срро>0).
102
На рис. 4.10, в показана фазочастотная характеристика регу-
лируемого объекта в случае неравенства (4.23)
1 (П2 <01 (О3.
Изменение характеристики, обусловленное колебаниями жидкости,
происходит не только в сторону опережения, но, что очень важно,
и в сторону запаздывания.
Представим комплексное передаточное число разомкнутой цепи,
состоящей из регулируемого объекта и автомата стабилизации
(АС), в-виде
W (до) = Лр0 и Аас (ш) exp I [<РРО (со) + <РАС (<о)] — А (<о) exp (со);
А (со) = Ар0 (со) ААс (со); ср (со) срр0 (со) -j- срАС (со).
В диапазоне частот собственных колебаний жидкости модуль
комплексного передаточного числа разомкнутой цепи может быть
больше единицы: А (со) >1.
Сформулируем требование к фазочас-
тотной характеристике автомата стаби-
лизации, обеспечивающей устойчивость
замкнутой системы.
В главе II (разд. 9) было показано,
что для обеспечения устойчивости абсо-
лютно твердой ракеты необходимо, чтобы
фазочастотная характеристика автомата
стабилизации имела опережение по фазе
в диапазоне частот (0, соо)- Частоту соо
нужно выбирать так, чтобы
А ((о)=АРО((о) А АС(со) < 1 при со = со0. (4. 25)
Характеристический полином разомк-
нутой цепи при учете колебаний жидко-
сти имеет столько же корней с положи-
тельной вещественной частью, сколько их
имеет характеристический полином для
уравнений абсолютно твердой ракеты,
поэтому и требования к фазочастотной
характеристике автомата стабилизации
Рис. 4.10
аналогичны. Из этого, однако, совершенно не следует, что автомат
стабилизации, спроектированный для абсолютно твердой ракеты,
может обеспечить устойчивость движения ракеты при колебаниях
жидкости в баках. Если для устойчивости абсолютно твердой ра-
кеты нужно, чтобы автомат стабилизации обеспечивал опережение
по фазе, например, до частоты o)0z (см. рис. 4.10, а), то для устой-
чивости ракеты с колеблющейся жидкостью опережение по фазе у
автомата стабилизации должно быть до частоты co0/z-
Когда фазочастотная характеристика регулируемого объекта
имеет вид, приведенный на рис. 4.10, б, то опережения автомата
стабилизации по фазе в диапазоне частот (0, o)Ozz) достаточно для
103
того, чтобы суммарная фазоазая характеристика (р(со) не пересекала
ось ф = 0 в отрицательном направлении при А (со) 1[Л (о) ^0].
В этом случае замкнутая система будет устойчивой.
Частота о)0" больше частоты собственных колебаний жидкости в
баках, которая, как известно, обратно пропорциональна корню
квадратному из диаметра бака. Для ракет, диаметры баков кото-
рых сравнительно невелики, (обычно Поэтому при оценке
устойчивости ракеты с учетом колебаний жидкости в баках к авто-
мату стабилизации предъявляются дополнительные требования,
кроме тех, которые предъявляются к автомату стабилизации аб-
солютно твердой ракеты. Эти требования относятся к расширению
диапазона частот от [0, coozJ до [0, оо"], на котором должно быть
обеспечено опережение по фазе.
Если же фазочастотная характеристика фро(а>) имеет запазды-
вание -ф3, как показано на рис. 4.10, в, то условие опережения по
фазе до частоты необходимо, но недостаточно. Нужно выпол-
нить дополнительное условие, заключающееся в том, чтобы на ча-
стотах, предшествующих соо", опережение по фазе, создаваемое ав-
томатом стабилизации, было более т. е. суде(о/) ><p3(<oz).
В этом случае фазовая характеристика разомкнутой цепи будет
пересекать ось ф = 0 в отрицательном направлении при выполнении
условия (4.25), и замкнутая система будет устойчива..
4.6. АМПЛИТУДНАЯ И ФАЗОВАЯ СТАБИЛИЗАЦИЯ
В разд. 4.5 рассмотрен способ стабилизации ракеты путем
некоторого изменения фазочастотной характеристики автомата ста-
билизации в небольшом диапазоне частот, где А (о) =Лро((о) X
ХДдс(со)>1 вследствие большого коэффициента динамичности ре-
гулируемого объекта. К амплитудно-частотной характеристике
АС в этом диапазоне частот дополнительных требований не предъ-
являлось, так как характеристический полином дифференциальных
уравнений ракеты с учетом колебаний жидкости не имел дополни-
тельных корней с положительной вещественной частью. Обеспече-
ние устойчивости ракеты путем выбора фазочастотной характе-
ристики автомата стабилизации принято называть фазовой стаби-
лизацией.
Возможны случаи, когда обеспечить устойчивость движения
ракеты при помощи фазовой стабилизации невозможно. Тогда при-
меняют амплитудную стабилизацию, смысл которой заключается в
уменьшении модуля амплитудно-фазовой характеристики АС в не-
котором диапазоне частот до такой величины, чтобы Аро (о) X
ХАас(со)<1 при условии, что разомкнутая цепь в этом диапазоне
частот не имеет корней с положительной вещественной частью.
Амплитудно-фазовая характеристика при этом не охватит точку С
(1, /0), и замкнутая система будет устойчива.
Уменьшить Аас(<о), что равносильно уменьшению динамическо-
го коэффициента усиления автомата стабилизации, сравнительно
не сложно на больших частотах. На малых частотах, которые ха-
104
рактерны для низших тонов колебаний жидкости, уменьшить ЛАС
практически невозможно. Иногда приходится прибегать к установ-
ке узкополосных фильтров, которые в небольшом диапазоне частот
практически .не пропускают сигналов.
Понятия фазовая стабилизация так же, как и амплитудная, яв-
ляются условными, поскольку изменение фазочастотной характери-
стики может сопровождаться изменением амплитудно-частотной ха-
рактеристики и наоборот. Они основаны на разделении средств,
с помощью которых достигается изменение частотной характерис-
тики АС путем введения запаздывания (опережения), или путем
изменения динамического коэффициента усиления.
4.7. УСТОЙЧИВОСТЬ ЗАМКНУТОЙ СИСТЕМЫ
С ИДЕАЛЬНЫМ РЕГУЛЯТОРОМ
На стадии проектирования целесообразно применять D-разбие-
ние и в упрощенной постановке выявить зависимость границ обла-
стей устойчивости от каких-либо параметров, которые можно из-
менять, добиваясь устойчивости системы. Пример такого D-разбие-
ния представлен на рис. 2.17 для абсолютно твердой ракеты.
Рассмотрим движение ракеты в безвоздушном пространстве.
Уравнения возмущенного движения ракеты с учетом колебаний
жидкости в баках имеют вид
k
ту с+—
* 'А
/» + 2 rnjCjkj—mj\j= - R^v
7=1 j=l
(4. 26)
+ + = 0 (7=1, 2,..., k).
Здесь положено, что частота собственных колебаний всех маятни-
ков одинакова: <&£=£* II*. В этих уравнениях все обозначения со-
ответствуют принятым в разд. 4.2.
Для простоты примем, что на малых частотах автомат стабили-
зации является идеальным, т. е. его дифференциальное уравнение
не содержит производных б, б, ... . Угол поворота б управляющего
органа в этом случае можно определить из уравнения
5 = (4.27)
где fe2 — коэффициенты усиления автомата стабилизации.
Уравнения (4.26), (4.27) образуют систему линейных однород-
ных дифференциальных уравнений замкнутой динамической систе-
мы, состоящей из регулируемого объекта и автомата стабилиза-
ции.
Положим ус = Уер/; & = Аер/; 'kj — Bjtf*.
105
Характеристическое уравнение замкнутой системы (4.26), (4.27)
будет иметь вид
p2(p2 + <Bx)ft~2(a0P6 + ^iP5-|-a2p',+«3p3+«4P2 + «5P + a6) = 0. (4.28)
Корни этого уравнения р2=0 соответствуют такому возмущенному
движению, когда й=0; Xj = O, а ус= (yc)o+t(vc)o- Это установив-
шееся поступательное движение стержня с закрепленными маятни-
ками с постоянной скоростью (^с)о- Оно возможно потому, что ав-
томат стабилизации не реагирует на скорость ус. Возникающее
рассогласование по смещению (по скорости) у с (у с) должно устра-
няться автоматом стабилизации центра масс. Здесь мы определим
только те условия, при которых замкнутая система будет устойчи-
ва по координатам О и Х?-.
Обозначим, как и ранее,
k k k
I*1=—Vw/ |42=-j-V]/n*Cy2; p3=—
j=l ;=1 /=1
Zp/eo=^P; Qo = /W’ Q = (4-29)
Кроме того, положим Ру1 = <зРэ, где а — некоторый коэффициент,
меньший единицы.
Тогда коэффициенты третьего множителя характеристического
уравнения (4.28) можно выразить следующими формулами:
#o = Q2 (^з +Р-2—0 + [(1 “ РчШ ~Р^) — Нз]);
(—)ё [-из+М1 —и)];
а2 = u)2q 2q — Qp-! — Qp.2 + -у- Ср — ^pP-i— 2|»3 -|-
+ вРг+е^з —2q) (Zp — /рРя — |л3)1; (4.30)
Q J
а3=(о< A ((j.1 + 2Zpq- QZp|h- Q|*3);
а4=®х [ё2 + P3Q + -у- (р-i + 2ZpQ - 2q,3 —TpQJ*, - Q2) +
+ — (Pi + 2ZpQ — Qp.3 — ZPQ|X1)];
a
^5=«®-y-(ZpQ + p.1);
(z7e + tx1)(^ + -^).
Будем считать, что
*i>0; #2>0; а>0; /^>0;
9<СР'1<\К <С Р-2 С Н — 1<СР'з<СК 0<^Q<bo.
105
Для оценки устойчивости движения и определения границ об-
ластей устойчивости воспользуемся алгебраическим критерием ус-
тойчивости Раута — Гурвица.
0 п p e :i с л и т e л ь Г у р в и п а для третьего СОХ! 1ложптеяя и з уравнения
uveei вид A) :ij 0 0
Яз «2 ; : 6Z0 0 0
й4 ^3 : ^2 «1 Ло = 0. (4.31)
Дб— 0 ^5 ^4 «3 ^2
0 0 о а6 а5
0 0 0 0 0 Лб
Диагональные миноры отмечены пунктирными чертами.
Найдем границы областей устойчивости. Они будут определять-
ся уравнениями
&о = О; ^5 — 0.
Ю. А. Цуриков показал, что, пользуясь методом исключения
Эйлера, определитель Гурвица можно привести к произведению
сравнительно простых многочленов. Например, диагональный ми-
нор Л5 можно представить в виде
^5=
где С — положительная константа;
Ф1=Н1*2—р-з;
Ф2= —(Р1+вРз-т-/рёР1) + рч — Pl —QP3? (4. 32)
а
Фз = -Ср + ZP (QP1 — QР2 — Рз) — (Р1 р-2 — Р-1 — QP-3 — Рз)-
Условия -фо>О и i|h>0 выполняются всегда, поэтому границы об-
ластей устойчивости определяются равенством нулю какой-либо из
величин -ф2., *фз, На основании равенств (4.32) и с учетом обозна-
чений (4.29) и (4.30) эти условия можно представить в виде
_ k____
— qV rrtjLj = Q\ (4.33)
7=1
k _ \ k____/_ _ _ л _ _ \ /г __ _
+ zp6 + Zp~ 0 —
7 у-' \ /=i /7-1
-(?рё+02^=°; (4.34)
7 = 1
k
к
к \ к
)\
/ k _ \2 к __
- 2 m}Ln -2/ra>+I==0-
/ J=1
(4. 35)
Здесь Lj = Lj*lQQ, mj = m^lm. Условие a3>0 будет выполнено, если
Условие а5>0 вытекает из принятого ранее условия #i>0.
Если -в третьем множителе характеристического уравнения (4.28)
положить p = f<o и построить вещественную и мнимую части функ-
ции Михайлова, то из условия перемежаемости корней веществен-
ной и мнимой частей функции следует, что должно выполняться не-
равенство
Н UpQ-t" и+Р'зО J>u,
которое следует учитывать, если ц3<0.
В области устойчивости должно быть: аб>0; ф2>0; ф3>0 или
<2б>0; ф2<0; фз<0.
Границы областей устойчивости, определяемые условиями
(4.33) — (4.35), будем рассматривать как поверхности в ^-мерном
пространстве координат Lj, характеризующих расположение масс
маятников по отношению центра масс ракеты. Величины q, mj, Zp
будем считать фиксированными. Важно отметить, что в уравнения
этих поверхностей не входят коэффициенты #0 и Эти поверхно-
сти зависят от параметра fe2, т. е. от коэффициента усиления при
Ус в уравнении автомата стабилизации (4.27).
Из детального рассмотрения уравнений (4.33) — (4.36) видно,
что одна поверхность, определяемая уравнением (4.34), не остает-
ся неподвижной в пространстве Lj. Поверхность, определяемая
уравнением (4.33), представляет семейство плоскостей с парамет-
ром ^2- Уравнение (4.35) определяет семейство поверхностей вто-
рого порядка с тем же параметром й2- Изменяя его, можно зна-
чительно деформировать области устойчивости системы.
Рассмотрим более подробно случай, когда ракета имеет два ба-
ка. В этом случае пространство Lj вырождается в плоскость, а гра-
ницы областей устойчивости представляют собой плоские кривые.
Границы областей устойчивости I и II в координатах Lj и при
k о = 2 и #2 = 2 показаны на рис. 4.11.
Условие (4.33) дает следующее уравнение для прямой /:
4=-^Л-
/И2
7П1 I 1 \ (^1 4- /П2)2
---Г—-------—------ •
Q m2 Q / Q m2
Условие (4.34) дает уравнение для эллипса 2 с координатами цент-
ра О2
Z1==I2-q lp.l>
2qZp
108
Большая ось этого эллипса имеет угловой коэффициент наклона
А’(2)= —-=J=- IqZ’p (т2 — mJ г |7 Q2/p (т2 — m J2-|-4mim2|.
2,т\Ш'2 J
Условие (4.35) дает уравнение для эллипса 3 с центром в начале
координат и с угловым коэффициентом большой оси
^•(3)=:- - [(«2 — mJ — 1/(mi — mJ2-;--4mTm2j.
2,т\т2 ' 1
В частном случае, когда относительные массы’ маятников одина-
ковы, т. е. когда т\ = т2 = то, выражения для угловых коэффици-
ентов упрощаются:
у __ г 2(1 2/тг0) , г * 1. г* I
L<2= — Al---------т----, ^(2)=1, £(3)— — 1.
Q
Рис. 4.11 Рис. 4.12
Угол наклона прямой 1 оказывается равным —л/4, оба эллипса
развертываются также на угол —л/4, причем квадраты полуосей
эллипсов будут
для эллипса 2
а2 = (h + + q)2 t _ (Zp + ZpQ 4- q)2 .
2qZp(qZp-У 2/и0) ’ 2Q-7p
для эллипса 3
a2=\/m^ d2=(l—2/n0) m^.
Для случая, когда
й2/° — 1 — — m2 < О,
кривые в координатах L2 приведены на рис. 4.12, где / и II —
области устойчивости. Напомним, что Li* — расстояние от центра
масс системы до массы тх* первого (верхнего) маятника; А2*—
расстояние от центра масс системы до массы т2* второго' (нижне-
го) маятника; если масса т2* расположена ниже центра масс, то
jL2*<0. Когда расположение маятников на стержне таково, что точ-
ка с координатами (Л*/с)о, ^2*/qo) находится в области I или //,
то замкнутая система (4.26), (4.27) будет устойчивой.
109
Если точка с названными координатами будет находиться вне
областей / или II, то устойчивости движения можно добиваться или
в.-мрсоиисм те -Тичивы коэффит/тн га усчлрвии АС (.\), или более
с •; 2. беги м и ж: . : и it : '/ тт?ти к АС, или даже
НсКОТОрОЙ 110 OMik ЮНКОЙ раКЮ’.!.
Для построения областей устойчивости можно выбирать плос-
кость любых интересующих нас параметров замкнутой системы и
испытывать различные уравнения АС, в том числе такие, которые
содержат члены, выражающие запаздывание и реакцию АС на дру-
гие параметры движения, например,
Т2^ ~г Тф f- kzZ -ф- k z
Оценку устойчивости движения стержня с маятниками при ана-
литическом задании свойств автомата стабилизации можно про-
извести способом, разработанным
ад Б. И. Рабиновичем. Этот способ
основан на исследовании геомет-
рических свойств годографов ком-
плексных передаточных чисел
разомкнутой цепи состоя-
^вых(Р) щей из регулируемого объекта
№ро(М и автомата стабилиза-
ции Wac(ko)> и использовании
частотного критерия Найквиста.
В отличие от разд. 4.4, где пе-
|------------------1 редаточная функция регулируе-
мого объекта (ракеты) с учетом
Рис. 4.13 колебаний жидкости представле-
на в виде произведения переда-
точных функций, здесь передаточная функция разомкнутой цепи в
окрестности корней характеристического уравнения регулируемого
объекта раскладывается на сумму простых дробей:
W
5 = 0
2^5?
Р' + 2eiP + Q2 ’
(4. 36)
где 8S, Qs — коэффициент затухания и частота собственных коле-
баний s-ro осциллятора; as и [3S — некоторые коэффициенты. Ос-
циллятором обычно называют систему (звено), собственные коле-
бания которой описываются уравнением
x4-2ex-f- оАг = 0.
В соответствии с этим разложением структурную блок-схему
замкнутой системы можно составить из параллельных цепочек,
каждая из которых состоит из двух передаточных функций: пере-
даточной функции регулируемого объекта [lEP0(p)]s и передаточ-
ной функции автомата стабилизации [IFAc(p)L ($ = 0, 1, 2, ..., s0).
Такая структурная блок-схема показана на рис. 4.13.
НО
На комплексной плоскости примем, как и раньше, характерную
точку С (1, /0). Тогда характеристическое уравнение замкнутой
системы для s-й цепочки будет
w;(p)+i=o.
С учетом (4.36) получим
Р2 -И 2 (е, - а,) р + сП 3 А = о (s - 0, ?, 2,...,
Корни этого уравнения
р,.,= (l-b) ± j/m-4-5^#-
Если устойчивость каждой цепочки блок-схемы можно рассмат-
ривать независимо, то условия устойчивости замкнутой системы
будут иметь вид
as/ss < 1 при > 0;
(4. 37)
as^s > 1 при г, < 0
(s = 0, 1, 2,..s0).
При заданном регулируемом объекте величину a,s/es можно из-
менять только путем изменения свойств автомата стабилизации,
поэтому условия (4.37) можно рассматривать как некоторые тре-
бования к фазочастотным и амплитудно-частотным характеристи-
кам автомата стабилизации. Если эти требования можно обеспе-
чить путем выбора фазочастотной характеристики <рдс(со) для всех
s = 0, 1, 2, ..., so, то фазовая стабилизация осуществима.
4.8. СТРУКТУРНАЯ НЕУСТОЙЧИВОСТЬ
РЕГУЛИРУЕМОГО ОБЪЕКТА
Обеспечение устойчивости движения в разд. 4.5 и 4.6 рассмот-
рено в простейших случаях. За основу брался автомат стабилиза-
ции, предназначенный для абсолютно твердой ракеты, и к его ха-
рактеристикам предъявлялись некоторые дополнительные требова-
ния. Если требования к фазочастотной характеристике автомата
стабилизации <рАс(со), сформулированные из условий устойчивости
ракеты, можно реализовать, то фазовая стабилизация осуществи-
ма. В этом случае регулируемый объект принято называть струк-
турно устойчивым.
Однако динамические свойства регулируемого объекта могут
быть довольно сложными. На1пример, как показано в разд. 4.3, при
некоторых соотношениях параметров дискриминант уравнения
(4.15) становится отрицательным и кроме обычных положительных
корней, обусловленных динамикой абсолютно твердой ракеты, в
характеристическом уравнении регулируемого объекта появляется
дополнительно два комплексно-сопряженных корня с положитель-
ной вещественной частью. Возникает собственная динамическая
111
неустойчивость регулируемого объекта, обусловленная подвиж-
ностью жидкости в баках и имеющая колебательный характер. Для
обеспечения устойчивости движения обычного опережения по фазе
здесь недостаточно, к фазовой характеристике автомата стабилиза-
ции в таком случае предъявляются принципиально другие требо-
вания.
При наличии близких характерных частот, обусловленных коле-
баниями жидкости, к фазовой характеристике автомата стабилиза-
ции могут предъявляться противоположные требования: на одной
частоте может требоваться опережение «по фазе, а на другой близ-
кой частоте — запаздывание.
По мере расхода топлива и возрастания ускорения ракеты из-
меняются коэффициенты дифференциальных уравнений движения,
изменяются их соотношения. Может оказаться, что требования к
характеристикам автомата стабилизации во время полета будут
коренным образом изменяться и поэтому их нельзя удовлетворить.
Регулируемый объект принято называть структурно не-
устойчивым, если требования к фазочастотной характеристике
•фле(«О, сформулированные из условий устойчивости ракеты, реа-
лизовать нельзя и, следовательно, фазовая стабилизация невозмож-
на. Чтобы обеспечить устойчивость движения ракеты, необходимо в
таких случаях изменять ее динамические свойства конструктивны-
ми способами.
4.9. КОНСТРУКТИВНЫЕ СПОСОБЫ УЛУЧШЕНИЯ
УСТОЙЧИВОСТИ
В разд. 4.5 было показано, что обеспечить устойчивость движе-
ния ракеты с жидким топливом в баках средствами фазовой ста-
билизации иногда бывает затруднительно. В таких случаях при-
меняется амплитудная стабилизация, при которой в некотором диа-
пазоне частот должно выполняться условие (4.25)
А (о>) = Др0 (ш) ДАС (ю) < 1.
Если о)х>соо, где <оо — частота, при которой запаздывание ав-
томата стабилизации по фазе равно нулю, то условие (4.25) долж-
но выполняться на частотах . Иными словами, при сох>о)о
необходимо, чтобы в диапазоне собственных частот жидкости мо-
дуль комплексного передаточного числа всей разомкнутой цепи
Д((о) был меньше единицы. При этом на фазочастотную харак-
теристику при (j)>coo никаких ограничений не накладывается.
Рассмотрим конструктивные способы, при помощи которых мож-
но уменьшить значения Дро(со) в диапазоне частот собственных ко-
лебаний жидкости. Эти способы могут быть предложены на осно-
вании решения гидродинамических уравнений и эксперименталь-
ных исследований и касаются главным образом изменения конст-
рукции топливных баков.
Все конструктивные изменения, направленные на обеспечение
устойчивости ракеты с учетом колебаний жидкости в баках, пре-
112
следуют три цели: 1) увеличение рассеяния энергии колеблющей’
ся жидкости; 2) изменение частоты собственных колебаний жидко-
сти; 3) уменьшение приведенной массы для ослабления суммарного
динамического эффекта от колебаний жидкости. Обычно уменьше-
ние приведенной массы сопровождается повышением частоты собст-
венных колебаний жидкости.
Увеличение рассеяния энергии колеблющейся жидкости можно
достигнуть при помощи различных устройств, которые в виде по-
плавков помещают на свободную поверхность жидкости. Чаще все-
го эти яоплавки имеют вид колец (торов). Они разбивают свобод-
ную поверхность на малые участки, чем увеличивают рассеяние
энергии колебаний. Рассеяние энергии происходит вследствие дви-
жения жидкости относительно стенок плавающих поплавков.
Для примера на рис. 4.14 приведены расчетные и эксперимен-
тальные зависимости амплитуды поперечной силы FY^\ возникаю-
щей при вынужденных поперечных колебаниях цилиндрического
бака с амплитудой ус и различными частотами. Эксперименталь-
ные значения показаны точками для двух различных плавающих
на поверхности демпферов — кольцевого и в виде тела с боль-
шим числом отверстий. Расчетные кривые (сплошные линии) по-
лучены при разных значениях относительного коэффициента зату-
хания g=i8x/(0x. Там же для сравнения показан график силы (кри-
вая /), .которая возникла бы, если бы считать жидкость затвердев-
шей
l^r0)/'f/cl = P2w.
Как видно, при значениях коэффициента относительного зату-
хания £^0,2 на резонансной частоте первого тона амплитуда силы
ограничивается величиной, немного превышающей силу от затвер-
девшей жидкости. Таким образом, при использовании эффективных
плавающих демпферов амплитудно-частотные характеристики жид-
113
костной ракеты будут мало отличаться от частотных характерис-
тик абсолютно твердой ракеты.
Величина приведенной массы колеблющейся жидкости и ее рас-
положение зависят от геометрии бака и уровня заполнения жид-
кости. Из формул (3.57) и (3.37) для приведенной массы и собст-
венной частоты жидкости следует, что с уменьшением радиуса бака
уменьшается масса и одновременно увеличивается частота собст-
венных колебаний жидкости.
С уменьшением приведенной массы колеблющейся жидкости
уменьшается динамическое воздействие жидкости на корпус раке-
ты и при прочих равных условиях диаметр «.окружности» ампли-
тудно-фазовой частотной характеристики будет меньше. Создают-
ся более благоприятные условия для амплитудной стабилизации.
Увеличение частоты собственных колебаний жидкости и связан-
ное с этим изменение частоты системы может затруднить фазовую
стабилизацию. Поэтому в результате изменения геометрии баков
оптимальные результаты достигаются не всегда.
Геометрию бака можно изменять несколькими способами:
1) один бак большого диаметра заменить несколькими баками
меньшего диаметра; 2) внутри бака большого диаметра установить
цилиндрические перегородки — сделать «бак в баке»; 3) разделить
бак на отдельные отсеки радиальными или радиальными и цилинд-
рическими перегородками — секторный бак.
Если, например, цилиндрический бак с радиусом rj заменить
четырьмя цилиндрическими баками с радиусами г^" с той же об-
щей площадью поперечного сечения (/о,,=л//2), то приведенная
масса колеблющейся жидкости в четырех баках будет в два раза
меньше, чем в одном баке с радиусом rof. Частота собственных ко-
лебаний жидкости при этом увеличивается в 1,41 раз.
Если разделить бак круговой цилиндрической перегородкой, то
наименьшее влияние колебаний жидкости будет в том случае, ког-
да приведенные массы в кольцевом и в круговом (внутреннем) ба-
ках примерно равны, а фазы их вынужденных колебаний противо-
положны. В этом случае динамические воздействия жидкости на
кольцевой и круговой цилиндрические баки взаимно уравновеши-
ваются. При отношении диаметра внутреннего и внешнего цилинд-
ров р = 0,77 приведенные массы приблизительно равны, однако зна-
чения частот собственных колебаний жидкости в баках таковы, что
фазы вынужденных колебаний приведенных масс жидкости не очень
благоприятны. Взаимное уравновешивание не достигается. При
отношении диаметров £ = 0,5 фазы вынужденных колебаний бла-
гоприятны, но приведенные массы колеблющейся жидкости нахо-
дятся .в соотношении 1 : 5.
Гораздо выгоднее разделить бак радиальными перегородками.
На рис. 4.15 показаны для сравнения графики приведенных масс
колеблющейся жидкости для трех форм цилиндрических баков.
Бак с круговым поперечным сечением наиболее невыгоден. Здесь
приведенная масса для первого тона колебаний составляет 1,43рг03,
что приблизительно соответствует массе жидкости в цилиндричес-
114
ком баке высотой 0,5го. При концентрической перегородке диа-
метром, равным половине диаметра бака ((3 = 0,5). приведенная
маска гавна С,96рг03 при заполнении только внешнего бака и
1,1-^/гЛ если заполнены оба бака. При ралигльпых по'о-.-го жщках
(четырехсекторный бак) приведенная м;сса первого тс.на колеба-
ний жидкости составляет только ОЛбщо’- Если приведенные массы
первого тона колебаний во всех четырех секторах сложить и срав-
нить с приведенной массой тп первого топа колебаний в цилиндри-
ческом баке с круговым поперечным
сечением, то эта сумма составила бы
меньше половины массы тп.
В случае четырехсекторного бака
приведенная масса, соответствующая
второй частоте собственных колебаний
жидкости, составляет почти полови-
ну приведенной массы первого тона ко-
лебаний и должна учитываться при
анализе устойчивости движения.
Для увеличения рассеяния энергии
колеблющейся жидкости баки чаще
всего разделяют не сплошными пере-
городками, а перфорированными, т. е.
с большим количеством отверстий.
Вследствие перепада давления между
отдельными секторами бака, возника-
ющего при колебаниях, жидкость пе-
Рис. 4.15
ретекает через перфорированные перегородки, вследствие чего
происходит рассеяние кинетической энергии жидкости.
При установке перфорированных перегородок собственная час-
тота и приведенная масса колеблющейся жидкости изменяются.
Однако главный эффект от перфорированных перегородок заклю-
чается в значительном увеличении коэффициента затухания собст-
венных колебаний жидкости.
Иногда стабилизацию жидкого топлива в баках при помощи ав-
томата стабилизации трудно обеспечить только на небольшом от-
резке времени. В таких случаях облегчить стабилизацию конст-
руктивными средствами можно сравнительно просто. Для этого
нужно установить в баке перегородку с отверстиями — промежуточ-
ное перфорированное дно — перпендикулярно продольной оси
бака. С приближением свободной поверхности жидкого топлива к
промежуточному дну приведенная масса и собственная частота
жидкости быстро уменьшаются, а рассеяние энергии колебаний
жидкости возрастает. На небольшом отрезке времени эффект от
колебаний свободной поверхности жидкости практически можно
свести к нулю.
4.10. АВТОКОЛЕБАНИЯ РАКЕТЫ
В разд. 4.5 были сформулированы дополнительные требования
к автомату стабилизации, обеспечивающие устойчивость замкнутой
115
системы. Амплитудно-фазовая частотная характеристика разомк-
нутой цепи, показанная на рис. 4.16, а, соответствует устойчивой
замкнутой системе. Такой вид имеет характеристика для статичес-
ки устойчивой ракеты.
Так как характеристический многочлен Q(p) статически устой-
чивой ракеты имеет один положительный корень, то точка А (о =
= 0) расположена правее точки С (1, t’0), а точка В (со = (оо) — ле-
вее точки С. Частотная характеристика полуохватывает точку С в
положительном направлении; замкнутая система устойчива.
Рис. 4.16
Рис. 4.17
Точка D на частотной характеристике находится в интервале
частот, в котором проявляются динамические свойства колеблю-
щейся жидкости. В этом интервале находится частота собственных
колебаний жидкости в баках. Вместо двух колец, как это пока-
зано на рис. 4.5, здесь (чтобы не затемнять рисунка) изображено
только одно кольцо частотной характеристики, соответствующее
соотношению частот (4.22). На частоте собственных колебаний
жидкости при таком соотношении частот опережение по фазе <р*
не уменьшается.
На рис. 4.16, б приведена амплитудно-фазовая частотная ха-
рактеристика разомкнутой цепи, соответствующая неустойчивой
замкнутой системе. Частотная характеристика пересекает вещест-
венную ось в отрицательном направлении правее точки С (1, Ю).
Это объясняется тем, что здесь не выполнено дополнительное тре-
бование, предъявляемое к автомату стабилизации. Автомат стаби-
лизации должен обеспечить опережение по фазе до более высоких
частот, чем частота собственных колебаний жидкости. Данная ча-
стотная характеристика этому требованию не отвечает, так как ча-
стота в точке D больше, чем частота в точке В (со = (0о).
Пусть рассматриваемая нами система (см. рис. 4.16, б) неус-
тойчива. Анализ устойчивости проведен на основании линейных
дифференциальных уравнений. Он позволяет сделать вывод лишь
о затухании или возрастании со временем случайно возникших ко-
лебаний. Реальная динамическая система значительно сложнее
расчетной схемы.
116
Главное различие заключается в том, что уравнения автомата
стабилизации и колебаний жидкости являются нелинейными. Ка-
нал автомата угловой стабилизации в плоскости тангажа отраба-
тывает командный сигнал по управлению поворотом вектора силы
гяги. Этот сигнал изменяется по времени, поэтому, строго говоря,
линеаризация характеристик автомата стабилизации должна про-
изводиться в различных рабочих точках.
Динамические характеристики автомата стабилизации в значи-
тельной степени зависят также от условий эксплуатации — темпе-
ратуры, вибраций, напряжения источников питания и др. Потен-
циометрические датчики, с которых снимается ступенчатый сигнал,
различные сглаживающие фильтры усложняют свойства автомата
стабилизации и затрудняют описание их дифференциальными урав-
нениями и линеаризацию этих уравнений.
Кроме того, свойства автомата стабилизации изменяются от из-
делия к изделию из-за конструктивных и технологических разбро-
сов параметрон. По этой причине частотные характеристики авто-
мата стабилизации, даже при фиксированной амплитуде входного
сигнала, представляются не одной кривой, а целой полосой, в ко-
торой может находиться действительная характеристика.
Перечисленных причин достаточно, чтобы система, имеющая
небольшой запас устойчивости, в реальных условиях оказалась не-
устойчивой. Поэтому необходимо обеспечивать достаточно большие
запасы устойчивости.
Случайно возникшие в системе колебания начнут возрастать,
существенными становятся отброшенные -при линеаризации нели-
нейные члены, и анализировать дальнейшее движение системы
можно только с учетом этих нелинейных членов.
Как было указано, одним из основных нелинейных звеньев в
автомате стабилизации является рулевая машина, скоростная ха-
рактеристика которой показана на рис. 4.17. Это типичная харак-
теристика с насыщением. Если командный ток f<z0, то характери-
стика линейна, коэффициент усиления по скорости, определяемый
углом наклона характеристики, оавен k.
В рассматриваемом случае при коэффициенте усиления k ли-
неаризованная система неустойчива.
При возрастании амплитуды колебаний наступит момент, когда
гок Z>z0 и рулевая машина будет работать в нелинейном режи-
ме. Если при f>z0 характеристику рулевой машины линеаризовать,
то эквивалентный (средний за период колебаний) коэффициент
усиления рулевой машины йп будет меньше k.
Чем больше амплитуда колебаний, тем сильнее неравенство
i<i0 и тем эквивалентный коэффициент усиления рулевой маши-
ны меньше /г.
С увеличением амплитуды колебаний увеличивается эквива-
лентный коэффициент затухания собственных колебаний жидко-
сти в баках. Это значит, что с увеличением амплитуд колебаний
модуль комплексного передаточного числа разомкнутой цепи будет
уменьшаться до тех пор, пока частотная характеристика не прой-
117
дет через точку С (1, Ю) — пунктирная кривая. Дальнейшее воз-
растание амплитуды колебаний прекратится, в системе установят-
ся с.ационаркые шгршщлчсские колебания с частотой соп и ампли-
уды: ;п, ко’ ор! :а шшаются а в т о к о л е б а и и я м и. Частота ,г^-
рчодических к •лсоанчн с-к находится в интервале частот точки I)
п поэтому мало отличается от частоты собственных колебаний жид-
кости <dx.
Можно убедиться в том, что автоколебания с амплитудой
при малых возмущениях являются устойчивыми. В самом деле,
если воздействовать на систему так, чтобы амплитуда колебаний
стала больше in, то рассеяние энергии колебаний жидкости уве-
личится, а коэффициент усиления рулевой машины уменьшится.
Уменьшится модуль комплексного передаточного числа, и частот-
ная характеристика в окрестности частоты сох не будет пересекать
вещественную ось правее точки С (1, Ю). Система станет устойчи-
вой, амплитуда колебаний будет уменьшаться, а модель комплекс-
ного передаточного числа будет возрастать до тех пор, пока коль-
цо частотной характеристики не пройдет через точку С (1, Z0), со-
ответствующую периодическим колебаниям.
При автоколебаниях все звенья колебательной системы совер-
шают колебания с одной и той же частотой соп. Амплитуды коле-
баний звеньев (обобщенных координат) — командного тока, орга-
нов управления, корпуса ракеты, жидкости в баках — различны
и их можно определить только с учетом нелинейных свойств сис-
темы. Обычно это делается на моделирующих устройствах. Амп-
литуды колебаний корпуса бывают невелики, однако вопрос о том,
можно ли допускать автоколебания, следует решать, учитывая
прочность корпуса ракеты.
Глава V
УРАВНЕНИЯ ДВИЖЕНИЯ УПРУГОЙ РАКЕТЫ
5.1. СХЕМАТИЗАЦИЯ СВОЙСТВ УПРУГОГО
КОРПУСА РАКЕТЫ
Задача о движении ракеты как упругого тела под действием
внешних сил в общей постановке является довольно сложной. В за-
висимости от целей исследования делаются те или иные упрощаю-
щие предположения, которые позволяют перейти от реального объ-
екта к расчетной модели, пригодной для анализа только опреде-
ленных явлений.
Для изучения характеристик упругой ракеты как объекта регу-
лирования корпус ракеты обычно заменяют прямым неоднородным
упругим стержнем (стержневая или балочная модель).
Колебания жидкости относительно стенок баков в расчет при-
нимать не будем, т. е. будем считать жидкость как бы затвердев-
шей. Это здесь означает только то, что ее свободная поверхность
не имеет колебаний. Затвердевшая жидкость не увеличивает из-
118
гибкую жесткость корпуса. Модель затвердевшей жидкости можно
представить в виде пакета тонких абсолютно гибких и гладких
стержней, заполняющих целиком бак от свободной поверхности до
его дна. Модель затвердевшей жидкости может быть принята толь-
ко тогда, когда рассматриваемые частоты упругих колебаний кор-
пуса значительно отличаются от учитываемых частот собственных
колебаний жидкости в баках.
Расчетная модель в виде прямого неоднородного упругого
стержня, удовлетворительно описывающая деформации упругого
корпуса ракеты в целом под действием внешних сил, как правило,
неприемлема для анализа местных деформаций и напряжений в
конструкции. Точность представления расчетной моделью тех или
иных характеристик действительного объекта и пределы примени-
мости данной расчетной модели определяются сравнением резуль-
татов расчета с результатами испытаний натурного объекта.
Принципиальные особенности, вносимые упругим корпусом в
динамические характеристики ракеты как объекта регулирования,
рассмотрим вначале на простейшей балочной модели. В дальней-
шем, в гл. VII и VIII эта модель будет усложнена, она будет учи-
тывать подвижность жидкости в баках и упругую подвеску дви-
гателей.
5 2 УРАВНЕНИЯ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ
ПРЯМОГО НЕОДНОРОДНОГО СТЕРЖНЯ
Обозначим через EJ(x) — изгибную жесткость; т(х) — погонную массу;
I — длину стержня. Пренебрегая смещениями в направлении продольной оси
и полагая, что колебания происходят в плоскости симметрии стержня, соста-
вим уравнение поперечного движения
элемента стержня длиной dx в непод-
вижной системе координат XOY (рис.
5.1). Получим
, х &У dQ
'И(Х)Т^==-ДГ + ?(Х’ °’
где q(x, I) — интенсивность внешней
поперечной распределенной силы, дей-
ствующей на стержень в плоскости XOY\
У~У(х, t) — смещение в направлении
OY, перпендикулярном недеформирован-
ной оси стержня; Q — поперечная сила
в сечении, абсцисса которого х.
Пренебрегая инерцией вращения
элемента стержня, составим равенство
моментов сил, действующих на выделен-
ный элемент. Удерживая только члены
первого порядка малости, получим
(дМ/дх) dx — Qdx. (5.1)
Здесь М — изгибающий момент в поперечном сечении, абсцисса которого рав-
Применим гипотезу Фогта, согласно которой напряжение о зависит не толь-
ко от деформации е, но и от скорости деформации d&ldt, т. е.
а = Е [е + h (de/d/)].
119
Здесь h — коэффициент трения, который будем считать постоянным.
Изгибающий момент
Л1 —- [1 -р h (d/dt)] EJ (х) (d'ly/dx^). (5.2)
Исключив из уравнений поперечную силу Q и изгибающий момент М, получим
дифференциальное уравнение поперечных колебаний стержня
I д \ д' Г д?у “I д?у
г # "и Д<5 3)
Гипотеза Фогта, вообще говоря, опытом не подтверждается, по удобна для
качественного анализа поведения системы.
Рассеяние энергии при упругих колебаниях конструкций происходит глав-
ным образом в силу трения между соприкасающимися частями узлов конст-
рукции. Такое трение принято называть конструкционным. Для учета конструк-
ционного трения в дифференциальных уравнениях Е. С. Сорокиным предложе-
на гипотеза, согласно которой внутреннее трение при упругих гармонических
колебаниях пропорционально упругой восстанавливающей силе, но сдвинуто по
фазе относительно этой силы на угол л/2. Если пользоваться комплексным пред-
ставлением простого гармонического колебательного движения, то вместо урав-
нения (5.2) изгибающий момент можно выразить следующей формулой:
/ Ф \
М = 1 4- i ~~~ \EJ (х) —— , (5.4)
\ 2л I v с)х2 ’ v '
где ф — коэффициент поглощения энергии при колебаниях, равный отношению
поглощенной за один цикл энергии Д1Е к полной энергии системы IF. При гар-
монических колебаниях коэффициент поглощения равен удвоенному значению
декремента свободных колебаний 6, так что
ф = \W/W
Формула (5.4) оказывается достаточно точной, когда ф является малой ве-
личиной. Область применения этой формулы должна быть, по-видимому, огра-
ничена вынужденными колебаниями от гармонической силы.
Дифференциальное уравнение поперечных колебаний стержня с учетом ги-
потезы Сорокина вместо (5.3) будет иметь вид
(Ф \ 52 Г 52z/ "| д-и
1+1 ^ЫЛБЦх)^\+т(х)^=Р(х)е ’ (5-5)
где Р(х) — погонная нагрузка.
5.3. СОБСТВЕННЫЕ ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ
СВОБОДНОГО СТЕРЖНЯ
Общее решение уравнения (5.3) при q(x, t)=0 можно представить в виде
у(х> *) = (5.6)
11= 1
где fn(x)> Чп(1) — суть частные решения уравнения (5.3), которые можно опре-
делить методом Фурье. Подставив (5.6) в (5.3) и разделив переменные, получим
или [£У(Х)/"Г= (п, ,,
т (*) fn qn + hqn Уп + + Jnqn = 0 (n=l, |£J(x)o?nm{x) fn = 0 (ra=l, 2,...); 2,...); (5.7) (5.8)
где d ax
120
Па каждом конце свободного стержня изгибающий момент М и поперечная
сила Q равны нулю. Поэтому на основании равенств (5.1), (5.2) и (5.6) функ-
ции fn (х) должны удовлетворять следующим краевым (граничным) условиям:
4(0); [£/(л)/;(л-)По = О;
/;,(/) = 0;
(5.9)
(5.10)
Условия (5.10) можно представить в другом виде. Приняв во внимание
(5.9) и (5.10), получим
l I
[[£/(л-) f"n\' rfx = 0; j'[£/(x)/;]"(x-xc)dx=0, (5.11)
о b
где xr — координата центра масс стержня.
Из уравнения (5.8) с учетом равенств (5.11) найдем
z z
| т (х) fndx — 0; ( т (х) fn (х — хс) dx = 0. (5.12)
б б
Равенства (5.12) соответствуют двум краевым условиям (5.10). Физический
смысл этих равенств заключается в том, что равнодействующая всех сил инер-
ции и момент этих сил при колебаниях по фор-
мам /У (х) равны нулю.
Уравнение (5.8) представляет собой обыкно-
венное дифференциальное уравнение изгиба стер-
жня под действием распределенной нагрузки
Mll2ni(x)jравной силам инерции масс стержня.
Отыскание нетривиальных решений уравнения
(5.8), удовлетворяющих краевым условиям (5.9)
и (5.10), есть классическая задача Штурма—Лиу-
вилля по определению собственных функций и
собственных чисел.
Уравнение (5.7) показывает, что собственные
колебания стержня при наличии трения всегда
затухающие.
Если коэффициенты уравнения (5.8) постоянны, т. е.
EJ (х) = EJq — const; т (х) = mQ = const,
то, как известно, общим решением уравнения (5.8) при краевых условиях (5.9)
и (5.10) будет
fn = C [(sin aZIx + sh олх) An + (cos a/zx H- ch ahx)j,
\n я ch a J—cos ccnZ
~ 1 ’ ~ 1 U 1 ’
I sin aril — sh anl
причем собственные числа An являются невырожденными корнями уравнения
cos an / ch anl—I = 0;
/ч = 4,73; 7.2 = 7,85; Х3= 11,0;....
Формы собственных колебаний первых трех тонов однородного стержня пока-
заны на рис. 5.2.
Частоты собственных колебаний вычисляются по формуле
Приведем теперь свойства частот и форм собственных колебаний.
121
5.4. ОБЩИЕ СВОЙСТВА ЧАСТОТ И ФОРМ
СОБСТВЕННЫХ КОЛЕБАНИЙ
Частное решение уравнения (5.3) с учетом (5.7), (5.8) можно представить
в виде
Уп (*» 0 = Л (*) е cos <*nt. (5.14)
Решение задачи в форме (5.14) предполагает, что любые две произвольные
точки стержня (хь х2) могут двигаться либо в фазе, если знаки fn(xi) и fn(x2)
одинаковы, либо в противофазе, если знаки f(xi) и f(x2) разные. Другими сло-
вами, каждое частное решение вида (5.14) выражает стоячую волну колеба-
ний, т. е. точки стержня, в которых fn(x) = 0, являются узлами формы коле-
баний, а точки, в которых fn'(x)=0, пучностями.
Частоты и формы собственных колебаний определяются из дифференциаль-
ных уравнений (5.8) и граничных условий (5.9), (5.10):
[^/(х)/’п]"-«>(х)/я = 0 (n= 1, 2,...); (5.15)
/" = 0; [£/(х)/’]' = 0 прих=0, х = 1. (5.16)
Нетрудно установить, что среди множества собственных частот есть нулевые.
Действительно, при (оп = 0 уравнение (5.15) имеет вид
[^W/n]" = 0. (5.17)
Непосредственной проверкой можно убедиться, что линейно независимые функ-
ции /_1= 1 и f0 = x—хС} где хс — координата центра масс стержня, удовлет-
воряют уравнению (5.15) и граничным условиям (5.16). В дальнейшем будем
считать, что функциям f_i и f0 соответствуют нулевые собственные частоты
<o_i = 0 и соо = 0.
Функции /_1 и fo соответствуют параллельному перемещению стержня и его
повороту вокруг центра масс как жесткого тела. Собственные частоты con(n>l)
присущи упругим колебаниям стержня по формам fn = fn(x).
Формы собственных колебаний, соответствующие различным собственным ча-
стотам, ортогональны на отрезке [0, I] с весовой функцией т(х), т. е.
I
j т (х) fm (х) f п (х) dx = 0 при п ф т, п, т = — 1,0, 1,2...
о
Условия ортогональности различных форм колебаний эквивалентны следующему
утверждению: работа сил инерции, возникающих при колебаниях стержня по
/г-му тону, на перемещениях, соответствующих колебаниям по /n-му тону, равна
нулю. Или колебания стержня по какому-либо тону не могут вызвать упругие
колебания других тонов.
Физический смысл ортогональности упругих форм колебаний fn с формами
колебаний f_i и f0, соответствующих движению стержня как твердого тела, за-
ключается в том, что сумма сил инерции, действующих на стержень при коле-
баниях, и их момент равны нулю.
Таким образом, условия ортогональности упругих форм собственных коле-
баний fn с f_i и /о соответствуют теоремам теоретической механики о сохра-
нении количества движения и момента количества движения в механической сис-
теме, на которую не действуют внешние силы. Из этих соображений, в частно-
сти, следует вывод, что собственные упругие колебания стержня не вызывают
изменения положения его центра масс.
Когда форма собственных колебаний п-го тона известна, то соответствующая
ей собственная частота определяется по формуле Рэлея
<^=kn/m„, (5.18)
где kn — коэффициент приведенной жесткости; тп — коэффициент приведен-
ной массы. Эти коэффициенты можно определить, если уравнение (5.15) проин-
122
тегрировать по длине стержня, помножив его предварительно на функцию .
Получим
I
тп= m(x)f2ndx;
I
1 ‘ (5-19)
k„ = j [£/ (х) f"n]" fndx=\EJ (х) (/;)2 dx.
о b
Множество функций
{МО} (п = -1, 0, 1, 2, ...)
образует так называемую полную систему ортогональных координатных
функций. Любую непрерывную функцию F(x) на отрезке [О, I] можно предста-
вить бесконечным рядом
F(x)= 2 /«(•*)>
л~ —1
(5.20)
сходящимся в среднем.
Коэффициент ап можно определить, умножая равенство (5.20) на
m(x)fn(x)-, интегрируя по х в пределах от 0 до Z с учетом условий ортого-
нальности, получим
I
an = -^—\F(x)m(x) f„(x)dx. (5.21)
о
Методы определения форм собственных колебаний будут рассмотрены
в гл. VI.
5.5. ВЫНУЖДЕННЫЕ ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ
СВОБОДНОГО СТЕРЖНЯ
Предположим, что в уравнении (5.3) интенсивность внешней распределен-
ной силы q(x, t) можно представить в виде произведения
?(А t)=q(t)P(x).
Вынужденные колебания стержня у(х, t) представим в виде разложения в ряд
по формам собственных колебаний
у(х, 0=Ус(0 + &(0О-хс)+ 2 fn(x)qn(t), (5.22)
л-1
где yc(t) — перемещение центра масс (f_t = l); #(/) — угол поворота стержня
как жесткого тела [/0=(х—хс)]; 7п(0 — обобщенная координата, соответст-
вующая форме упругих колебаний fn(%)-
Подставим в уравнение (5.3) вместо у(х, t) его выражение в виде (5.22).
Получим
(qn + hqn) EJ(x)^\f’n
п 1
л-1
+ т(х) yc + S(x— хс) + ^fnin =9(()Р(х).
(5.23)
Проинтегрируем это уравнение по % в пределах от 0 до I. Затем умножим
Уравнение (5.23) на (х—хс) и вновь проинтегрируем по х в тех же пределах.
Наконеи, умножим уравнение (5.23) на функцию fn(x), где п — любое фикси-
рованное натуральное число, и проинтегрируем по х в пределах от 0 до I. Пос-
-ле интегрирования получим следующую систему обыкновенных дифференциаль-
123
ных уравнений с постоянными коэффициентами для определения обобщенных ко-
ординат ус, Q(t), qn(t):
myc=Qy- = (5.24)
тп (q„ + 2e„^n + u2q„) = Qn (« = 1,2,...),
где обобщенные силы Qy, Q&) Qn вычисляются из выражений
z l. 1
Qy= Я (Oj P (x) rfx; Q#= q (t) J’P(x)(x — xc)dx; Qn=q(t)\ P (x) fndx.
oo 0
Первые два уравнения представляют собой уравнения движения центра масс и
вращения вокруг поперечной оси, проходящей через центр масс абсолютно твер-
дого стержня. Из последней группы уравнений при заданных внешних силах
q(t) Р(х) можно найти обобщенные ко-
ординаты 7п(0 поперечных колебаний
стержня.
Когда на стержень действует систе-
ма поперечных сил, как показано на рис.
5.3, правую часть уравнения (5.23) мож-
но представить в виде
q (х, t) = (t) Р (х) + qr (i) QrH (х—
dM (х)
dx
Я2 Ц)~
— qs(t)Ms [8' (х— х5)],
где д(х—/) — дельта-функция Дирака, обладающая следующими свойствами;
f (ср (Z) х > Z;
х</;
t ( —<р' (/) X >Z;
b(x)8'(x-/)rfx=j о х<1
I
Вычислив интеграл f q (х, t) fn(x)dx, получим обобщенную силу
б
z I
Qn (0 = Ч\ (0 f Р (*) fndx 4- qr (Z) Qr (xr) fn (xr) + q2 (t) [ M (x) fn (x) dx +
o b
+qs (t)Ms fn(xs). (5.25)
Достоинство изложенного способа определения вынужденных колебаний
стержня заключается в наглядности решения и простоте его интерпретации. Вы-
нужденные колебания системы с распределенными параметрами представляются
в виде бесконечной суммы колебаний простых осцилляторов.
5.6. АЭРОДИНАМИЧЕСКИЕ СИЛЫ, ДЕЙСТВУЮЩИЕ
НА УПРУГУЮ РАКЕТУ
Определение аэродинамических сил, действующих на упругую
ракету в ее возмущенном движении, представляет сложную мате-
матическую задачу, методы решения которой зависят от режима
обтекания. В качестве первого приближения для расчета аэроди-
намических сил в нестационарном потоке обычно используют гипо-
124
тезу стационарности. Согласно этой гипотезе аэродинамические си-
лы, возникающие в любой момент времени на каждом участке кор-
пуса длиной dx при неустановившемся движении, определяются
так же, как и в стационарном потоке — пропорционально местному
углу атаки.
Поперечную аэродинамиче-
скую погонную силу здесь удоб-
но представить в следующей
форме:
Га (Х) = ^ ( Л) ° , Л)’ (5' 26)
где (№ (•*) — коэффициент по-
тонной поперечной силы; а(х) —
местный угол атаки. Так как при
поперечном движении корпуса со
скоростью dz/(x, t) /dt вектор ско-
рости v поворачивается на угол
(1/и)йу(х, t)jdty то местный угол
атаки а(х), обусловленный попе-
речными колебаниями корпуса (рис. 5.4), будет
а(х, (5.27)
дх v dt
Найдем возмущения (отклонения) аэродинамической попереч-
ной силы, возникающие при упругих колебаниях корпуса. Эта сила
пропорциональна углу атаки, поэтому ее отклонение с учетом фор-
мулы (5.27) представим в виде
teJLl (5.28)
2 а I дх v dt J
Отклонение поперечной (боковой) аэродинамической силы в
плоскости рыскания аналогично будет
AZa(x)=-^M’(x) Г^О 5
2 а L dx V dt I
Погонные аэродинамические силы ДУа(х) и AZa(x) учтем при
выводе дифференциальных уравнений возмущенного движения ра-
кеты с учетом поперечных колебаний корпуса.
5.7. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ
УПРУГОЙ РАКЕТЫ
Составим дифференциальные уравнения возмущенного движе-
ния упругой ракеты для плоскости рыскания. В силу симметрии
конструкции дифференциальные уравнения в плоскости тангажа
будут такими же, как и в плоскости рыскания. Уравнения будем
составлять сразу для отклонений.
Отклонение любой точки упругой оси корпуса ракеты в непо-
движной системе координат XOZ (рис. 5.5) в направлении коорди-
125
натной оси Z представим в виде ряда из форм собственных коле-
баний
оо
Z (х, /) = zc(/)+<p(/)(x-xc) + 2/n(x)^W>
п -1
(5. 30)
где zc(t) — отклонение центра масс ракеты; ty(t) — угол поворо-
та ракеты как твердого тела; fn(x) — формы собственных коле-
баний корпуса; qn(t) — обобщенная координата, соответствующая
функции fn(x)-, хс — абсцисса центра масс ракеты, отсчитываемая
от торца корпуса.
Величины qn(t), будем считать малыми, на отклонение
Zc(t) ограничений накладывать не будем, однако примем, что
z*c(/) где v — скорость движения центра масс ракеты.
В невозмущенном движении направление продольной оси кор-
пуса ракеты и направление вектора скорости v совпадают с на-
правлением координатной оси X так, что z(x, t) = 0.
Для составления уравнений воспользуемся системой (5.24).
Найдем выражения для обобщенных сил, соответствующих обоб-
щенным координатам zc, ip, qn- Тягу двигателя будем считать на-
правленной по касательной к изогнутой оси корпуса в точке при-
ложения тяги (тяга двигателя — следящая сила). Поперечная
аэродинамическая сила XZ^(x) направлена перпендикулярно скоро-
сти возмущенного движения v в плоскости OXZ; сила лобового со-
противления ДЛа(Х), которую будем считать независящей от угла
скольжения, направлена в сторону, противоположную направле-
нию вектора о. Внешние силы, действующие на ракету, показаны
на рис. 5.6.
126
Составляющие обобщенных аэродинамических сил, соответст-
вующие обобщенным координатам zc, гр, q^ можно получить, поль-
зуясь схемой рис. 5.6 и выражением (5.25). Они будут равны
i
q; ЦГ дга (х) - дха (%)дг (^-1 dx-,
J L vdt
о
I | 00
с4 = ( дга(х)(л--хс)+дха(х) ^fnqn+
"о I Ln = l
+ dx-
Qq= \ [Д2а(х)-Д.¥а (х) —fndx.
п j L vdt J
о
(5.31)
Так как отклонение любой точки оси корпуса состоит из отклоне-
ния корпуса как жесткого тела и отклонений, обусловленных упру-
гими колебаниями, то соответственно этому и обобщенные аэро-
динамические силы можно разделить на две группы: 1) силы и мо-
менты, пропорциональные углу рыскания л|? и скоростям гр и zc, та-
кие же, как и в случае жесткого корпуса ракеты; 2) силы и мо-
менты, пропорциональные обобщенным координатам qn и скоро-
стям qn и обусловленные упругими поперечными колебаниями кор-
пуса.
Слагаемые, составляющие обобщенную силу Qqn, представля-
ют собой работу распределенных аэродинамических сил на -воз-
можных перемещениях fn(x)-
Составляющие обобщенных сил от управляющей силы Zp будут
Q; = Zp; Q;=Zp(xp-xc); Q;=Zp/„(xp). (5.32)
Здесь fn(Xp) — значение формы собственных колебаний корпуса в
точке, к которой приложена поперечная управляющая сила рулей
Zp. Величина (хр—хс) есть расстояние от точки приложения попе-
речной управляющей силы до центра масс ракеты.
Отметим, что производная fn'(x) вычисляется в связанной сис-
теме координат OiX^Z^ ось которой направлена от хвостовой
части к вершине ракеты. Производная dzldx берется в абсолютной
системе координат OXZ, направление оси X которой совпадает с
направлением невозмущенного движения (см. рис. 5.5). Между эти-
ми производными имеет место следующее соотношение:
dz(x, /)/<?x = 'H/) + 2 Л(х)?„.
п =1
В обобщенную силу включим также момент от кориолисо-
вых сил инерции топлива и газов. Влиянием упругих поперечных
колебаний на величину кориолисовых сил пренебрежем. Тогда мо-
127
мент кориолисовых сил инерции относительно центра масс ракеты
будет пропорционален угловой скорости ф и подсчитывается по
формуле (1.4). Этот момент объединим с аэродинамическим демп-
фирующим моментом, так что суммарный демпфирующий момент
будет выражаться формулой:
М
Уд —
Ф 9£iLlS/2/n(J)_2
‘ 2 г
\а
(5. ?3)
Кроме обобщенных сил Q' и Q", следует добавить обобщение
силы Q//z от следящей силы PQ. Это
(5. 34)
Подставив в правые части уравнений (5.24) выражения обоб-
щенных сил, получим
= “hQz-rQz; /Ф=4~^уд^
тп (qn Л 2znqn + <о^„)=Q'„ + Q" д + Q”;j. (5. 35)
Объединим в этих уравнениях коэффициенты при одноименных
обобщенных координатах и положим Zq = vz\ Zp=Rzi$. Прини-
мая во внимание равенства (5.29) — (5.35), получим уравнения
возмущенного движения ракеты с учетом упругих поперечных ко-
лебаний корпуса в виде
ои оо
vz~V c^z^zVz ~t~Cvz(inC!n~\~ Cvzqrfln~Jir
n -Л л-1
Cvz$=9;
C^Z^Z +2 c^qrfln C^n^n 4
л — 1 n -1 П
— 0;
тЛ гл«1
т^п т±п
+ C<lnvzVZ + + сV8 = °- (5- 36)
128
Для коэффициентов приняты следующие обозначения:
в первом уравнении
Cv
2 I
Cv^ = ~^ S \ ЮХ) + МЛ)] (x-xc)dx;
н о
. Г 1 '1
c°7«n=—“ S\C^X) /^х + Рэ/пЫ ;
z n tn 2 J a
2
1 ^S\c^(x)fndx-, <7 3 = —!-^);
2 J а z tn
о
во втором уравнении
1а
-^-5/2mPb-2^
L (/> x07
2
= —--S (cz} + cx ) (x
tt z о ' а Ла' 4
2 I
~ S [cza’(x) + Cxa(x)] (x-xc) dx-,
0
_ 1 1
C^„— , { 9
Иа} (х) Л (X - хс) + Сх^ (X) / J dx +
о
2 1
s J W+Сх* W)
н о
6*^5 = — Pz р (Хр Хс),
в третьем уравнении
1
2
Q I 1
c n =z£/z“T
Qn^ii n 1
mnvH
I
s (4a W + ^a w) fndx-,
0
C4(<n~^
(0)а 1
"hi
S Cz> (x) f nf ndx P3f'n (Хдв) f n <Лдв) >
VZ(iti mvn
1
1
2
О
2
0
I
2
5 359
12^
C(Wrn
-у- 5 e(/> (x) fmfndx- P3fm (хдв) /„ (хдв)
О
j Ha’(x) + c%a(x)] fmfndx-,
Q
2 I
Cqn.=- —- -^-5 *i (x) fn dx-,
n mn 2 J a
о
2 I
C4nvZ = ~^~ ^T~S\ fn^X<
n z mnvH 2 J a
о
2 1
cq ф=— -^-s f ^(x) fn(x — xc)dx;
mnvn 2 J a
о
l
Cq i = —— /$> f (x ); rnn = \ m (x) fndx.
n mn J
О
Здесь (o>n(O) — частота собственных колебаний корпуса. Когда пово-
рот корпуса ракеты осуществляется не поперечной силой /?zpS, и
управляющим моментом ТИкрЗ, обусловленным управлением рас-
согласования сил тяги двигателей, то
<^8=0; сф5 = —cqni = -—M^f'n(xp),
z I тп
где fn(x$) — угол наклона касательной к форме собственных ко-
лебаний в точке х = хр.
В отличие от уравнений для абсолютно твердой ракеты (2.6) в
первые два уравнения (5.36), кроме сил и моментов, обусловлен-
ных движением жесткого корпуса, входят силы и моменты, зави-
сящие от упругих поперечных колебаний корпуса. Каждый тон
колебаний корпуса вызывает появление поперечной составляющей
силы Р;) и момента этой силы относительно центра масс ракеты.
Возникают также аэродинамические силы и моменты.
Аэродинамические силы оказывают влияние на величину часто-
ты собственных колебаний корпуса и обычно вызывают затухание
упругих колебаний. Эти силы создают также некоторые дополни-
тельные связи между движением ракеты как твердого тела и упру-
гими колебаниями корпуса. Однако эти связи, как правило, несу-
щественны.
При предварительном анализе уравнений возмущенного движе-
ния обычно принимают, что: 1) аэродинамические силы не зависят
от упругих поперечных колебаний корпуса; 2) аэродинамические
силы, обусловленные движением жесткого корпуса, не вызывают
упругих поперечных колебаний; 3) поворот вектора силы тяги
130
(5. 37)
вследствие упругих колебаний корпуса не оказывает влияния на
движение ракеты как твердого тела. При учете этих допущений
оказываются равными нулю все коэффициенты связей между ко-
ординатами vz и ф, с одной стороны, и qn (п= 1; 2; ...), с другой,,
а также между координатами qn и qm так что уравнения
(5.36) распадаются на две группы независимых уравнений: урав-
нения возмущенного движения ракеты как твердого тела
'Vz + ^zVz'Vz + + CVz$ + CvZ^ = 0;
Ф + T T c^vzVz “I" = 0’
уравнения для обобщенных координат, выражающих упругие попе-
речные колебания корпуса
4n~VCqnqQn ~Г CQnQfl4n~\~ cqn^ = 0 (/Z — 1,2,...). (5.38)
Уравнения (5.37) отличаются от полученных ранее уравнений
для абсолютно твердой ракеты (2.6) только тем, что в первом
уравнении (5.37) содержится член фф, который учитывает сос-
тавляющую аэродинамической силы, обусловленную вращением
корпуса с угловой скоростью ф. Эта сила, вообще говоря, мала и
потому при выводе уравнений (2.6) не учитывалась.
Глава VI
МЕТОДЫ ОПРЕДЕЛЕНИЯ ФОРМ И ЧАСТОТ
СОБСТВЕННЫХ КОЛЕБАНИЙ
6.1. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
Формы и частоты собственных упругих колебаний ракеты явля-
ются основными параметрами при анализе динамических свойств
упругих ракет как объектов автоматического регулирования. Ана-
литические методы их определения приводят к цели только в том
случае, если стержень однороден: EJ(x) =const, m(%) = const. В слу-
чае неоднородного стержня приходится использовать различные
приближенные методы.
Одним из наиболее распространенных методов (уже десятки лет
используемом в расчетах) является метод последовательных при-
ближений, позволяющий решить задачу самыми простыми вычис-
лительными средствами. Благодаря единообразию используемых
операций на основе данного метода созданы экономичные, облада-
ющие высокой точностью, алгоритмы решения задачи об упругих
колебаниях на ЭВМ.
.5*
131
Рассмотрим сущность метода последовательных приближений.
Уравнения поперечных колебаний п-го тона свободного стержня и
граничные условия имеют вид
(х) fn (х)]" = «?пт (х) fn (х); (б д}
EJ (х) Д(х)=0; [£V(x) f"n (х)]' = 0 при х = 0, х=1.
Интегрируя дважды дифференциальное уравнение (6.1) по х
и учитывая граничные условия при х=0, получим
X X
EJ{x) f”n{x) = ^n \dx^m(x) fn[x)dx.
6 о
Разделив это уравнение на EJ(x) и проинтегрировав дважды пох,
найдем
fn{x)=4^dx \—±_^dx
0 0 0 0
(6.2)
Здесь Ап, Вп — константы интегрирования; хс — координата цент-
ра масс стержня.
Соотношение (6.2) выполняется тождественно, если fn(x) явля-
ется собственной функцией, а сол — собственной частотой упругих
колебаний стержня.
В*ведем функцию fn(x) =fn(x)l(tin2, которая определяется из
следующего соотношения:
/„ (х)=Н (/„) + А„ (х - хс) + Вп, (6.3)
, т (х) /_ (х) dx + 4 [А„ (х - хс) + 5.1.
в котором ЕЦ/п) = dx ^dx/[EJ(x)] jdx J/n(x) fn(x)dx. (6.4)
0 0 0 0
Константы интегрирования An и Bn определяются из граничных ус-
ловий при х = 1, которые равносильны условиям равновесия свобод-
ного стержня
z _ 1 _
J т(х) fn(x)dx — Q\ j* т(х) f я(х)(л — xc}dx=Q. (6. 5)
о о
Если нормировка форм собс_твенных колебаний стержня выбрана
так, что /п(0) = 1, то соп2= 1//п(0). Для определения форм и частот
собственных колебаний процесс последовательных приближений
строится следующим образом.
В качестве нулевого приближения формы колебаний первого
тона возьмем произвольную функцию /ю(х), причем fio(0) = 1. Для
быстроты сходимости процесса вычислений эту функцию целесооб-
разно выбрать наиболее близкой к искомой, например, принять
форму изгибных колебаний стержня постоянного сечения.
Следует отметить, что нулевое приближение fw(x) также долж-
но удовлетворять равенствам (6.5), в противном случае не будут
132
удовлетворены граничные условия при х = 1. Поэтому нулевое при-
ближение выбирается в виде
/ю (*) = /1 (X) + А10 (х — хс) + В10,
где Л*(Х) — форма собственных колебаний свободного стержня
постоянного поперечного сечения, а постоянные коэффициенты на
основании (6.5) равны
z I
j т(х) /*(х)(х — хс) dx J т (х) f[(x)dx
Q—------------------; B1Q=~^—r--------------.
j* т (х) (х — хс)2 dx J т (х) dx
о о
Подставив EJ(x), т(х), fw(x) в уравнение (6.2) и проинтегри-
ровав, получим первое приближение /ц(Х). Так ка‘к fw(x) =
=/п(х)(оц2л то первое приближение для собственной частоты ко-
лебаний будет (оц2= l/Ун (0). Для дальнейших расчетов через
fi\(x) обозначим первое приближение формы колебаний, нормиро-
ванной на конце стержня, к единице:
/п (х)=47п (х)=7и W/711 (0)-
Произвольное /n-е приближение решения задачи определяется че-
рез (т—1)-е приближение следующим образом:
71m (*) = Н (/1(т-1)) + Л1т (X - ХС) + В1т. (6. 6)
Функция //(/i(m-i)) определяется из уравнения (6.4), а постоян-
ные коэффициенты Aim и Bim вычисляются на основании равенств
(6.6) по формулам
j m (х) Я (Л^-!)) (х— хс) dx
А\т= - ;
[ /и(х)(х — хс)2 dx
о
(6. 7)
\т(х)Н dx
----J------------ •
J m (x) dx
о
После определения функции f\m(x) легко вычислить частоту и
форму собственных колебаний m-го приближения
«>1т= 1//1т (°): /1т W = wlm/im (х).
В результате решения получаем последовательность собствен-
ных функций fim(x) и собственных частот coim:
/юИ» /п /12W—,/im(x);
133
Обе эти последовательности являются сходящимися, и пределы
их есть собственная функция и собственная частота упругих по-
перечных колебаний первого тона. В расчетах для получения ре-
шения с приемлемой точностью обычно достаточно 3 или 4 при-
ближений.
Для получения форм и частот собственных колебаний высших
тонов процесс последовательных приближений должен сопровож-
даться выполнением условий ортогональности по всем низшим гар-
моникам. Для расчета второго тона колебаний выражение (6.6)
приобретает следующий вид:
f2m=H (/2(m-l)) + ^2OT('r~Xc)’rj52Z7z + GZn/l W*
Постоянные А2т и В2т определяются по формулам (6.7), а для
С2.7п имеем
z
$т(х)Н (/2(гтг-1)) /i(x) dx
С ____ 0
°2Ш —---------j
т(х) f\(x)dx
о
Прежде чем определить форму /-го тона собственных колеба-
ний, надо определить все ('/—1) собственные формы, с которыми
функция fi(x) должна быть ортогональна. В этом заключается- не-
достаток метода последовательных приближений при определении
высших гармоник, например, третьей, четвертой и т. д. Метод по-
следовательных приближений можно применить и для расчета ко-
лебаний стержней с упруго подвешенными массами, и для расчета
колебаний пакета стержней, однако наличие близких частот силь-
но затрудняет сходимость решений.
6.2. МЕТОД ПРОГОНКИ
Разобьем стержень на k участков, для каждого из которых из-
гибную жесткость и погонную массу
EJ (x) = EJс, rn{x) = mi
примем постоянными.
Дифференциальное уравнение (6.1) для любого Z-го участка
будет иметь постоянные коэффициенты
/Г -<xf/( = 0, (6.8)
где а) = -^-<»2; о — частота колебаний — произвольный началь-
ЕЕ
ный параметр. (Индекс п, указывающий номер тона колебаний, в
выражении (6.8) опущен).
Уравнение (6.8) имеет точное решение:
fi = Cu sin ^iXi-rC2i cos azxz + C3zsh ch azxz; (6. 9)
его произвольные постоянные можно определить через произволь-
ные постоянные интегрирования предыдущего участка из условий
134
сопряжения при Xi = li и xi+i = 0 (здесь /г- — длина z-го участка
стержня).
На границе f-го и (/4-1)-го участков имеем условия сопряжения
Zz=/(/h-i); (W")z=(Wz')z+i;
(£’//'")/ = (W'"Z-i. (6. Ю)
Подставив сюда выражения (6.9) для /-го и (/4-1)-го участков, по-
лучим четыре уравнения, из которых найдем зависимость постоян-
ных (/4-1)-го участка от постоянных /-го участка:
Ci(i+i)=yV;[Ci;(l + v*3z) cos «,<• —C2, (l Tv??z) sin a,Zz +
+ C3;(1 — v?3z)chaz/z-|-C4;(l —v^.isha,
C2(1+i) = ^-[Clz(l +v??i) s>n “Л + Ог/Ч +v??z) cos az/z +
+C3Z(l-v??z)shaz/zH-C41(l-v^)chaz/z]; (6. 11)
C3(;+i) = 4v' Ю' П ~vhO cos aili~^2/(1 — vz,3z) sin a,/z +
+ C3Z (1 + v^z) ch azZz + C4; (1 +vfo) sh azZz];
c4(1+1) = -Г- [C1Z (1 — vZ13z) sin azZz -j- C2i (1 — v? 3Z) cos a,Z, +
+ C3i (1 + v?3zl sh azZz -|-C4Z (1 + v??z) ch azZz],
/ mi EJ[,i o EJ[
причем vz= / —!---------±b; ₽,=——•
V m^ EJi £// + 1
Решение проводим следующим образом. Задаем значение час-
тоты собственных колебаний со и вычисляем все коэффициенты аг-.
Используя два граничных условия на левом конце первого участка
стержня
(/;)Х1^ = 0; (/'")Х1.,о = О
и положив, кроме того, (Л)х=о=1, выразим все произвольные по-
стоянные решения (6.9) для первого участка через какую-либо од-
ну постоянную, например через Си:
j\ = Cn (sin сх1лг14~sh «^1) 4—(cos сцл^ + сЬ
Затем «прогоняем» решение (6.9) от одного участка к другому
по всей длине стержня, в результате чего через постоянную Сц по
формулам (6.11) получим выражения коэффициентов С; для всех
Участков.
Имеющиеся на правом конце последнего участка еще два гра-
ничных условия
Л(У=о, Л(^)=о
135
используются для определения последней постоянной (в приведен-
ном примере Си) и контроля правильности заданной частоты со.
Если принятая в расчете частота о) является частотой собственных
колебаний стержня, то оба условия на правом конце будут выпол-
нены и расчет форм упругих колебаний можно считать точным.
Однако, ввиду того, что частота со задается сначала весьма ори-
ентировочно, одно из граничных условий, например второе, заве-
домо удовлетворяться не будет и
Л = ?(«>) = Oft (—cos aklk + С2к sin 4-
“h ch ак1к -J- Cik sh Ф 0.
В этом случае расчет повторяют при нескольких близких зна-
чениях частоты со и методом проб находят такое ее значение со?ъ
при котором равенство (р((оп)~0 выполняется с достаточной точ-
ностью.
В первоначальном расчете за частоту со можно принять частоту
однородного стержня, который по своим параметрам близок к за-
данному стержню. После определения частоты собственных коле-
баний con и всех коэффициентов Сг- форму собственных колебаний
определяют последовательно для всех участков по уравнениям
(6.9).
В заключение целесообразно проконтролировать самоуравнове-
шенность формы собственных колебаний. Для этого самоуравнове-
шенную форму собственных колебаний стержня представим в виде
суммы
/ = /* + Д(х-хс) + В,
где /* — форма собственных колебаний, полученная из расчета.
Коэффициенты А и В здесь имеют тот же смысл, что и в уравне-
нии (6.2). При вычислении этих коэффициентов по формулам (6.7),
в которых функции следует использовать функцию
получатся величины, близкие к нулю.
Одним из преимуществ метода прогонки является возможность
рассчитать форму и частоту собственных колебаний любого тона.,
не определяя предварительно формы собственных колебаний пре-
дыдущих тонов. Однако не всегда можно заранее сказать, для ка-
кого тона определена частота собственных колебаний. Чтобы дать
ответ, нужно построить форму собственных колебаний и найти
число узлов, т. е. число точек оси стержня, в которых f(x)=O.
Численная реализация метода прогонки требует применения
ЭВМ; в последнее время этот метод широко начал использоваться
в практике расчетов.
6.3. МЕТОД ПРОГОНКИ В МАТРИЧНОЙ ФОРМЕ
Сведем дифференциальное уравнение поперечных колебаний стержня (6.1)
к системе четырех уравнений первого порядка. Для этого введем новые пере-
менные:
^1 = /(•*); и2^/'(х); EJ (х) f" (ху u^~[EJ (х) /" (х)]'. (6.12)
136
Первое уравнение (6.1) эквивалентно следующей системе уравнений:
dti\ du2 1 dut du4
——=«2; —— = 'g,, ;“з; —— = «4: ——=«2m(x)u1.
dx dx EJ (x) dx dx
(6.13)
где
Используя матричную форму записи, представим уравнения поперечных колеба-
ний стержня (6.13) в виде
< “1 \ du/dx = А (<о, х)и, / 0 1 0 0\ (6.14)
и = I “2 I , / 0 0 ; Л (ш, х) = I 1/[Е/ (х)] 0 | (6.15)
“3 1 10 0 0 1 г
“4 / \<о2/и (х) 0 0 0/
Предположим, что частота колебаний со известна. Тогда система уравнений
(6.14) будет иметь известные коэффициенты. С учетом обозначений (6.12) гра-
ничные условия для свободного стержня могут быть представлены в следующей
форме:
и3(0)=0; u3(Z) = 0; и4 (0) = 0; a4(Z)^0.
Система дифференциальных уравнений (6.14) имеет четыре линейно-неза-
висимых частных решения иг (:=1, 2, 3, 4). Эти решения можно найти, интег-
рируя уравнения (6.14) при следующих начальных условиях:
Интегрирование системы дифференциальных уравнений (6.14) при фиксиро-
ванном значении со, начальных условиях (6.16) и соотношениях (6.15) можно
провести любым стандартным методом численного интегрирования, например ме-
тодом Рунге-Кутта.
Общее решение системы (6.14) может быть представлено в виде суммы че-
тырех линейно-независимых частных решений
U = -f- С*2“2 + С3“3 4* C4W4
или в скалярной форме для компонента вектора и:
Uk = CiUki + C2Uk2 + Сз“йЗ + ^4“ft4-
Здесь uki означает &-ую компоненту вектора и в Z-ом частном решении.
С учетом граничных условий ц3(0)='0 и ц4(0)=0 постоянные С3 = 0,
С4 = 0 и общее решение системы (6.14) будет иметь вид
« = +С2Н2- (6.17)
Граничные условия в сечении х = 1 эквивалентны следующим равенствам:
Ci“3i G) + C2u32 (О = 0; С^41 (Z) + С2и42 (Z) = 0. (6.18)
Нетривиальное решение будет в случае, если
ч /“31(0 “32 (0 \ п
D (w) = 1 = 0.
\“41(О “42 (Z)'
Поскольку величины Uki(l) зависят от значения со, то и величина определителя
О(со) является функцией со.
Задавая различные со и повторяя при этом весь процесс решения, вычислим
значения функции />(<о), после чего можно определить корни этой функции, ко-
137
торые будут частотами собственных колебаний. Для каждой собственной часто-
ты (о?г из уравнений (6.18) находим
ч-л\ (шп, I)
«32 (“п, О
После этого форма собственных колебаний может быть представлена в виде
fn{x) =С1 «и (х)
«31 (шп,
«32 (шп, 1)
«12 (X)
(6.19)
Метод прогонки может быть распространен и на более сложные упруго-мас-
совые системы.
6.4. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
ПОПЕРЕЧНЫХ КОЛЕБАНИЙ КОРПУСА РАКЕТЫ
Корпус ракеты для простоты схематизируем тонким неоднородным стержнем.
Тонким в том смысле, что при изучении поперечных колебаний явлением сдвига
и инерцией вращения поперечных сечений можно пренебречь. Такая схематиза-
ция возможна при расчете низших гармоник стержня большого удлинения.
Воспользуемся методом прогонки в матричной форме. Разобьем стержень
на k участков, причем так, что для каждого t-ro участка изгибную жесткость
EJi и погонную массу mt можно осреднить и считать постоянными:
li li
1Г If
mi------\ т (х) dx ~ const; EJ i = — \ EJ (х) dx = const,
li li J
0 0
где Ц — длина t-го участка.
Дифференциальное уравнение для любого t-го участка стержня будет иметь
постоянные коэффициенты:
EhfY = Q (i = l,2,..., k)
(О « x < li)
или /!-V(x)—l>^fi(.x) — 0; b\ = ‘ o>2 (j=l, 2,..., k). (6.20)
E J i
Решение системы (6.20) должно удовлетворять граничным условиям и усло-
виям сопряжения участков стержня. Как известно, данная задача разрешима
только для тех значений со, которые являются частотами собственных колеба-
ний системы.
Решение дифференциального уравнения (6.20) проведем операторным ме-
тодом.
Применим преобразование Лапласа — Карсона
оо
f(p)-L [/(/)] - Р| f(t)<Tvtdt,
о
где f(t) — функция — оригинал действительной переменной /; ср(р) — функ-
ция — изображение комплексной переменной р.
Преимущество операторного метода заключается в том, что действия над
изображениями оказываются более простыми, чем действия над оригиналами.
Это, в частности, относится и к решению линейных дифференциальных уравне-
ний. Чтобы найти решение дифференциального уравнения, надо преобразовать
его и получить уравнение для изображения (оно будет алгебраическим). После
этого разрешить полученное уравнение относительно изображения, и по спра-
вочным таблицам по изображению найти оригинал. Операторный метод особен-
но удобен для интегрирования дифференциального уравнения с начальными зна-
чениями.
133
Допустим, что при х=0 известна функция ft (х) и три ее производные
/•(х), /”(•*) и /"(*)• Обозначим “ц (х) =/,• (х); и2/ (х) = /• (х); а3/(х) =
= £Л/;(х); uil{x) = EJlf"i (х). (6.21)
Тогда уравнение (6.20) согласно построению Лапласа—Карсона с учетом началь-
ных значений функции и ее производных, как известно, можно представить в
таком виде:
л им (0) Ua[ (0) .
P4?Z (P) ~ P4 “Н (0) — P3 u2l (0) — p2 — p (p) = 0.
J [ Lj J £
Разрешив это уравнение относительно изображения фг(р), получим
1 Г им (0) ilai (0) 1
?i= —7л~ p4“iz(°) + p3“2Z+ р2 pi + р pi. • 22>
р * —о £ 1 J [ J I I
Перейдем теперь от изображения к оригиналу. Функции в (6.22) являются стан-
дартными и поэтому, обратившись к справочным таблицам, получим формулы
для перехода от изображений к оригиналам:
р4 1
—-----г-2 — (ch bix + cos bix) = S (6/x);
6/p3 1
—-----74“ — (sh b[X 4- sin b[x) = T (bix);
P L (6. 23)
*?P2 1
—-----7T“ “ (ch bix — cos bix) = U (bix);
p4 — b? 2
1
—------4- r-2 — (sh bix — sin bix) — V (bix).
p4 2
Функции S, V, U, T являются известными балочными функциями Крылова. Они
связаны между собой следующими простыми соотношениями:
5'(^x)-^V(^x); V' (bix) = biU(bixy,
Z7'(6zx)= ^Т(^х); T'(bix)= biS(biX). 1 '
На основании формул (6.22) и (6.23) оригинал решения можно представить в
виде
“11 (х) — S (bix) иц (0) + -7- Г (Й/Х) u2i (0) +
U(biX) V{bLx) „
b^.EJ- Uzi (°) b^.EJ- (6. 2o)
Так как схематизированные участки стержня имеют постоянную изгибную же-
сткость, то условия их сопряжения будут следующими:
“1/(0 = “1((+D (0); u2z(/) = “2(/+1) (0); “з/(О = “з(1+1)(°);
“41 (Л = “4(1 + 1) (0). (6.26)
Перейдем к матричной форме записи решения и условий сопряжения (6.26).
Будем иметь
UI (х) = Avt (0); (6.27)
Й1 Ю = “1+1(0). (6.28)
139
Здесь Ui(x) — вектор-столбец, имеющий четыре компоненты
(«Н (*)\
u2i(x)
“3i (х) I
иц (х)/
Матрица Ai фундаментальных решений уравнения (6.20) имеет вид
л=
S (Ь{х) .Ti-bix) .2P,U(.bix) b £ b Zx J i 1 b*EJi{blX} \u
btV(bix) S(M) — T (bix) bi ^7УХ)
b]u (biX) by (bix) S (bix) i -r-T(bix) b i
b]T (bix) b^W^bix) by (bix) S (bix)
(6. 29)
Для следующего (t-f-l) участка получим
“i+i(-*) = Ai+i(x) й(+1(0).
Поскольку (0) = ui (Z) = Ai (l) u-t (0),
то й/+1 (х) = Ai (Z) (х) Hi (0).
Решение (6.27) для любого f-го участка выразим теперь через начальные пара-
метры первого участка. Оно будет следующим:
“<(*) = П At (I) Ai(x)ui(O).
(6. 30)
Для конца стержня, т. е. при х = 1 (или хЛ = /*) будем иметь
и. (/) = Pu] (0),
i—k
Р=П Al (II).
где матрица
(6. 31)
(6. 32)
Соотношение (6.31) в скалярной форме имеет вид
5=4
ur(l)^^ brsus(0) (г= 1,2, 3,4),
(6. 33)
где brs — коэффициенты матрицы Р, зависящие от частоты колебаний со.
Принятые до сих пор начальные параметры ws(0) были произвольными.
Подчиним их граничным условиям, которые для свободного стержня
дующими:
будут еле-
и.з (0) — 0; и4 (0) =-- 0; (Z) = 0; и$ (Z) = 0.
С учетом граничных условий соотношения (6.33) представим в виде
ui (Z) = ьпиг (0) + £12^2 (0); ^2 (О = ^21^1 (0) + z>22^2 (0);
0- Z>31U1 (0) 4- ^32^2(0);
0= £41^1 (°) + ^42^2 (0).
Нетривиальное решение соответствует равенству
ч /^31 h 2\ п
^(to)==L h =0-
\041 2/
(6. 34)
(6. 35)
(6. 36)
140
Так как коэффициенты brs зависят от частоты со, то и величина определителя
£)(ш) является также функцией (о. Корни функции Z)(co) будут собственными
частотами. Для каждой собственной частоты соп, например, из третьего урав-
нения (6.35) находим
И 2 (0) = —[^31 (wrt)/*32 (wn)] Ui (°)- (6- 37)
Теперь форма собственных колебаний на основании (6.30) и граничных условий
(6.34) может быть представлена в виде
fn (*) = *11 (*) "1 (0) + *12 (х) и2 (0)
или с учетом соотношения (6.37) и положив ц1(0) = 1, получим
fn(x)= Ъп (х) — [/>31 (<*>л)/632 (<*>«)] *12 (х),
где &ц(хД *1г(Х) — коэффициенты матрицы
(6. 38)
Р(“д,х)= П Ai(»>n,x).
(6. 39)
Коэффициенты b^(x) и Ь^2(х) должны вычисляться для каждого участка стерж-
ня, построение формы собственных колебаний /п(х) по уравнению (6.38) от на-
чала стержня (%! = 0) по участкам до конца (xft = Zft).
Функции производных, изгибающих моментов и поперечных сил и скаляр-
ной форме будут следующими:
/ч < / х *31 (wn) » z ч
«2 (-V) = *21 (X) — *22 (ХУ,
* 32 (“л)
«з (X) *3! (X) - -^4- *32 (X); (6. 40)
* 32 (“л)
«4 (X) = *41 (х) - -3-1- -Я *42 (X).
* 32 ("л)
Таким образом, определение форм и частот собственных колебаний может
быть проведено следующим путем:
1) корпус ракеты делим на k участков, для каждого Z-го участка определя-
ем погонную массу тг и .изгибную жесткость EJi\
2) задаемся частотой колебаний со и для всех участков вычисляем коэф-
фициенты bi\
3) согласно (6.29) составляем матрицы Ai(l) и на основании (6.32) вычис-
ляем коэффициенты 63i, b32, bti2 матрицы Р;
4) из (6.36) определяем величину функции Z)(w), повторяем расчет при но-
вом значении со и ,вычисляем новую величину Р(о));
5) строим функцию jD(co) и определяем ее корни Р(соп)=0 — частоты соб-
ственных колебаний соп;
6) для найденного значения соп находим коэффициенты &3i(con), Ь32((йп)
матрицы Р и коэффициенты Ьц(х), bi2(x) матрицы Р(о)п> х);
7) по уравнению (6.38) строим форму собственных колебаний;
8) при необходимости определяем другие коэффициенты матрицы Р(о)п, х)
и строим функции производной, изгибающего момента и поперечной силы (6.40).
Для определения форм и частот более высоких тонов колебаний необходимо
учитывать сдвиг и инерцию вращения поперечных сечений корпуса. При рас-
чете следует уделить особое внимание креплению рам и стыкам между отсеками.
Дифференциальное уравнение поперечных колебаний Z-го участка стержня с
учетом сдвига и инерции вращения поперечных сечений можно представить
в виде
~---- + ТП; ------
dxi dt-
£7,
, I », E/‘\ д4у‘ -|_ш J°‘
Ql 1 kGFi / dxW + x kGFi
dtyi
dt*
= 0,
141
где Joi — момент инерции массы участка стержня единичной длины относитель-
но поперечной оси, проходящей через его центр масс; G — модуль упругости
второго рода; Fi — площадь поперечного сечения; k — коэффициент формы
поперечного сечения.
6.5. МЕТОД ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
В разд. 5.5 изложен метод, согласно которому внешние силы и
вынужденные колебания разлагают в ряд <по собственным функ-
циям. Поэтому сначала решают задачу о собственных колебани-
ях — находят собственные функции и собственные частоты. Метод
наиболее удобен, когда величины частот собственных колебаний
корпуса ракеты значительно различаются между собой и анализ
устойчивости можно проводить для каждого тона колебаний от-
дельно.
Рассмотрим другой метод, когда вынужденные колебания опре-
деляются в виде функции Ф(х, p)e£’pZ без разложения в ряд по соб-
ственным формам.
Для простоты примем, что стержень имеет постоянное попереч-
ное сечение, внешняя поперечная сила приложена на конце стерж-
ня (х = 1) и изменяется по гармоническому закону с частотой р:
Р(/) = Рое£р'.
Дифференциальное уравнение поперечных колебаний стержня
с учетом вязкого трения имеет вид
(1 + А EJ0 + /п0 ^^.=0. (6. 41)
\ ' dt ] ° дх* 0 д& v ’
Функция у(х, t) должна удовлетворять следующим краевым усло-
виям:
д'2У (x,Q I =0. дЗу (x,t) I
Ах2 |х=0 ’ дхз |д._0
<^2 L=Z k dt) ° дх* |x=z
Решение уравнения (6.41) будем искать в виде
у(х,/) = Ф(х)е£р/. (6.42)
Подставляя (6.42) в (6.41), получим обыкновенное дифференци-
альное уравнение для функции Ф(х)
(1+4Ар)соФ1У-р2Ф = О, (6.43)
где Co—EJolmo.
Воспользуемся подстановкой Ф(х)=е’х. Из характеристического
уравнения
(1+/Ар)С^-р2 = 0,
142
в котором р — частота колебаний внешней силы; Со — произволь-
ная постоянная, найдем четыре корня для г:
rm = V(т= 1,2, 3, 4),
где Q = р2/(Со V1 + /z2p2); = (? + 2 лтп)/4;
^р; — л/2<ср<о.
Общий интеграл уравнения (6.43) будет состоять из суммы четы-
рех частных решений:
Ф(х) = С1еГ1-г + С2е^-г + С3ег’-г + С4ег<< (6.44).
Краевые условия для функции Ф(х) будут
Ф"(0) = 0; Ф"'(0) = 0; -(1 +/Лр) Ф'" (Z) = Po/(^o); Ф"(/) = 0. (6.45)
Приняв эти условия к решению (6.44), найдем произвольные по-
стоянные Сь ..., С4.
Функция Ф(х) является комплексной, зависящей от частоты
внешней силы:
Ф(х, р) = £7 (х, p) + *v (х, р).
Запаздывание по фазе между движением стержня и внешней силой
заключено в функции Ф(х), а не в функциях времени qn(t), как
это было в уравнениях (5.22).
Найдем решение дифференциального уравнения (6.43) для слу-
чая h = 0. Обозначим р2/С02 = а4. Тогда общий интеграл уравнения
(6.43) будет иметь вид
Ф(х) = С! sin ах + С2 cos ax~pC3sh ax + C4ch ах.
С учетом краевых условий (6.45) получим
Ф(х) = С1 (sin ax-psh ах)-]-С2(c°s ax-p-ch ах);
р
=----2— (cos а/ — ch а/);
D^EJq v
=--—— (—sin aZ + sh aZ);
Da^EJ о
D= cos aZ ch aZ — 1 0.
При некоторых значениях р величина D может быть равной
нулю. Это значит, что частота колебаний внешней силы совпадает
с одной из частот собственных колебаний стержня, т. е. система
будет находиться в резонансном режиме.
Можно говорить о форме вынужденных колебаний Ф1(%, р), ко-
торая от функции Ф(х, р) будет отличаться только масштабом, за-
висящим от силы Ро.
С2
143
На рис. 6.1 показаны такие формы колебаний для трех различных значений
частоты р:
р/ос»! = 0, 2; p/(oi = 0,95; р/оц = 1,05.
о /4,73x2 ЛёТГ „ о
Здесь = ------- I/ ------—частота первого тона собственных колебании
\ I J У
стержня.
При p/(Di=O,2 упругие колебания незначительны, стержень перемещается в
основном как твердое тело. Когда р/со1 = 0,95 или 1,05, форма вынужденных ко-
лебаний близка к форме собственных колебаний первого тона. Для первого тона
вынужденные колебания с частотой p/(Oi = 0,95 совершаются до резонанса, а с
частотой p/coi == 1,05 — после резонанса.
, В отличие от формы собственных ко-
1Ф (ХР) Р = 0,2
' лебании /п(х) форма вынужденных ко-
лебании ФДх, р) несамоуравновешена, и
X. J>05 поэтому использование ее для анализа
динамических свойств ракеты иногда
--------------вносит некоторые неудобства. Для устра-
X-------------нения этих неудобств выделим из ФДх,
р) линейную функцию, характеризую-
Рис. 6.1 щую движение стержня как твердого те-
ла. Для этого положим
у (х, /) = Ф (х, р) е'Р' = [ус (р) -н (р) (х-хс) + у (х, р)] е'Р', (6.46)
где хс — координата центра масс стержня; Ус(р) и Ф(р) — амп-’
литуда колебаний центра масс и угол поворота стержня как твер-
дого тела при вынужденных колебаниях с частотой р.
Выберем рс(р) и Ф(р) такими, чтобы два первых слагаемых
выражали вынужденные колебания стержня как твердого тела под
действием внешней гармонической силы PQe[v* l. Тогда получим
i
—р2^с(р) j modx=— р2Ус($)гп.=Ро\
t° (6- 47)
—р2&(р) ( т0(х—xc)2dx= — р2д(р)/=Р0(/ — хс).
о
Интегрируя дифференциальное уравнение
Е УоФ1 v (х) — р2/п0Ф (х) = 0
при краевых условиях (6.45), полагая в них й = 0, находим
i i
—р2 Jm^(x)dx = Po, — р2 Jт0Ф(х)(х — xc)dx = Po{l — хс). (6.48)
о о
На основании равенств (6.46) — (6.48) получим
i i
—р2 j у(х, p)/n0rfx = O; — р2 j* /поу(х, р) (х — xc)rfx = 0.
о о
Равнодействующая сил инерции и момент сил инерции при по-
перечных колебаниях по форме у(х, р) равны нулю, т. е. колеба-
144
ния по этой форме самоуравновешены. Разделение функции
Ф1(х, р) -на три функции (6.46) схематически показано на рис. 6.2.
Сравним теперь два различных представления вынужденных
колебаний (5.22) и (6.46). В обоих случаях вынужденные попе-
речные колебания 'представляются в виде суммы трех колебаний—
колебаний центра масс, колебаний относительно центра масс и
изгибных самоуравновешенных колебаний. В этом заключается
сходство решений. Различие между ними в том, что в выражении
(5.22) упругие колебания представлены в виде бесконечного ряда
по собственным функциям, а в формуле (6.46) они характеризуют-
ся одной функцией у (к, р), зависящей от координаты и частоты
внешней силы.
В дальнейшем нас будут интересовать величины упругих пере-
мещений в местах установки чувствительных элементов системы
стабилизации, например угол наклона касательной в месте уста-
новки гироскопа, угловая скорость и др.
Угол наклона касательной в месте установки гироскопа равен
у' (хг,/) = Ф' (хг, p)eZp'=[& (р)+/(хг, р)]е‘р/.
Комплексное передаточное число для углов поворота попереч-
ных сечений вследствие упругих колебаний будет иметь вид
Ф' (х, p)/P0=t/ (р) + IV (р) = Л (р) е^р).
Годограф этого комплексного числа при изменении частоты р и
h=^Q показан на комплексной плоскости Z=U+iV (рис. 6.3).
При собственных частотах модуль комплексного числа достига-
ет максимального значения.
Изложим теперь порядок определения формы вынужденных
колебаний неоднородного стержня. Для любого z-го участка стерж-
ня будем иметь дифференциальные уравнения с постоянными ко-
эффициентами подобные (6.8):
ф)7 (х) — а?Ф; (х) = 0; а|=——р2 (i = 1, 2,..., k). (6.49)
EJi
Принципиальное отличие уравнений (6.8) от (6.49) заключается
в том, что в уравнениях (6.8) коэффициенты аг- зависят от иско-
мой частоты собственных колебаний соп, а в уравнениях (6.49) они
зависят от частоты вынужденных колебаний р и потому являются
известными.
П5
Решение уравнения для z-ro участка стержня будет
Ф; (%) = C1Z sin a,xz + C2z COS axxz + C3zsh azxz4-C4Zch azxz. (6. 50)
Произвольные постоянные последующего участка определяются
через постоянные предыдущего участка на основании равенств
Ф^) = Ф/+1(0); Ф;.(/а = Ф;+1(0);
[£\/Ф" (/)]. = [EJWr (0)]т; [£7Ф"' (Z)]z = [EJW" (0)]Z44. (6. 51)
Из двух первых краевых условий (6.45) находят две произволь-
ные постоянные первого участка, например C3i и С4Ь Две другие
произвольные постоянные Си и С2], через которые по формулам
(6.11) будут выражены произвольные
постоянные всех участков, определяют
из двух вторых краевых условий (6.45).
Таким образом будет найдено решение
(6.50) для всех участков стержня, и фун-
кция Ф(х) для неоднородного стержня
станет известной.
Для расчета форм вынужденных ко-
лебаний с применением матриц можно
воспользоваться уравнениями (6.27) —
(6.33), в которых надо положить о = р.
Уравнения (6.33) с учетом граничных
условий
zz3(0) = 0; zz4(0) = 0; zz3(Z) = 0; zz4(Z) = P0
представим в виде
z/i (Z) = Ьпщ (0) + Z>12zz2 (0); и2 (Z) = Ь21иг (0) + Ь22и2 (0);
0 = Z?31zz1(0) + Z?32zz2(0);
Р0=^41^1 (0) + ^42^2 (0).
Из последних двух уравнений находим
И1(0)=-Р0-^; «2(О) = Ро-^-,
где D=b3ib42 — b32b41.
Форма вынужденных колебаний на основании (6.30)
(6.53) будет
-Ф =—— Z?h(x) + -^lZ?12(jc\
Pq D 1U 1 D 12
(6. 52)
(6. 53)
и с учетом
Отметим особенности определения форм вынужденных колеба-
ний в случае, когда внешняя сила приложена не на конце стержня,
а в некотором селении хР. Эти особенности проявляются лишь в
условиях сопряжения участков стержня в месте приложения си-
лы Ро.
Сечение х = хр включают в самостоятельный участок бесконеч-
но малой длины, массой которого можно пренебречь, а его изгиб-
146
ную жесткость считать бесконечно большой. Тогда для сопряже-
ния участков, расположенных слева и справа от сечения хр, послед-
нее равенство (6.51) заменяется следующим:
\EJ®"' (/)],• + Р0 = [^Ф'" (0)]1+1. (6. 54)
На правом конце последнего £-го участка краевые условия будут
Ф"(/Л) = 0; Ф'"(4) = 0.
(6. 55)
Таким же способом можно решать задачу о вынужденных по-
перечных колебаниях, когда в некоторых сечениях к стержню упру-
го подвешены сосредоточенные массы, в том числе и имитирую-
щие часть колеблющейся жидкости.
Таким образом, преимущество изложенного метода заключает-
ся в том, что вынужденные колебания характеризуются лишь од-
ной функцией Ф(х, р), что важно при анализе устойчивости дви-
жения, когда частоты некоторых форм колебаний корпуса близки
между собой. Метод наиболее целесообразно применять также на
заключительных этапах исследований, когда ракета как объект
регулирования уже спроектирована, построена и требуется прове-
сти проверочное исследование устойчивости и получить количест-
венные оценки.
Глава VII
ВЛИЯНИЕ УПРУГИХ СВОЙСТВ КОРПУСА
НА УСТОЙЧИВОСТЬ ДВИЖЕНИЯ РАКЕТЫ
7.1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Упругие свойства корпуса влияют на устойчивость движения
управляемых ракет особенно сильно, когда ракета имеет большое
удлинение. Важное значение этот вопрос приобретает для ракет-
ускорителей, при помощи которых
запускаются и разгоняются до боль-
ших скоростей космические лета-
тельные аппараты. На активном
участке полета ракета проходит че-
рез плотные слои атмосферы, где
особенно существенны аэродинами-
ческие силы, действующие на кор-
пус ракеты.
В случае, когда корпус ракеты
нежесткий, возникают задачи, ос-
новными из которых являются: стабилизация упругих поперечных
колебаний корпуса ракеты, учет влияния упругой проводки орга-
нов управления и упругой подвески двигателей на устойчивость
ракеты, компенсация навигационных погрешностей, вызываемых
поворотом вектора силы тяги. На рис. 7.1 показана трехступен-
чатая ракета в деформированном состоянии.
147
Для осуществления полета ракеты по расчетной траектории
программный механизм (счетно-решающее устройство) системы
управления задает по времени поворот вектора силы тяги. Автомат
угловой стабилизации определяет ошибки в угловом положении
ракеты и вырабатывает противодействующие управляющие сигна-
лы. При наличии упругих поперечных колебаний корпуса ошибка
Фь которую измерит автомат стабилизации, состоит из двух час-
тей:
&1 = & + (^из/<?х)х=,Хг,
где 0* — отклонение угла тангажа; (дуиз/дх)х=Хг — угол между ка-
сательной к изогнутой оси корпуса в месте установки измеритель-
ного прибора — гироскопа и осью корпуса, когда ракета представ-
ляет собой абсолютно' твердое тело.
Эту ошибку автомат стабилизации будет сводить к нулю, при-
чем отклонение органов управления ракетой будет зависеть от уг-
ла О:, который отличается от угла Ф на величину (дукз/дх)х^.Хг.
Взаимодействие упругих поперечных колебаний корпуса с на-
бегающим потоком воздуха иногда называют аэроупругими
колебаниями. Частота этих колебаний обычно близка к частоте
собственных колебаний корпуса. Колебания вызывают нежела-
тельные поперечные инерционные нагрузки на корпус, в особенно-
сти, если они достигают больших амплитуд. Задача стабилизации
поперечных колебаний заключается в том, чтобы возникшие коле-
бания были всегда затухающими .или, по крайней мере, соверша-
лись с небольшими амплитудами, допускаемыми прочностью кор-
пуса.
При медленном повороте ракеты во время полета по програм-
мной траектории -происходит изгиб корпуса и, как следствие, пово-
рот вектора силы тяги. При наличии поперечных упругих колеба-
ний вектор силы тяги будет повернут на дополнительный угол
(дуиз/дх)х==х между касательной к изогнутой оси корпуса в месте
крепления двигателя и осью корпуса, когда ракета представляет
собой абсолютно твердое тело. Если счетно-решающее устройство
«не учитывает» изгиба корпуса в сечении х = хдв, то автомат стаби-
лизации «не может устранить» ошибки в направлении вектора
силы тяги, вследствие чего возникают навигационные погрешно-
сти.
В этой главе рассмотрим только один вопрос — влияние упру-
гих поперечных колебаний корпуса ракеты на устойчивость замк-
нутой системы, состоящей из корпуса и автомата стабилизации.
Как и в случае, когда ракета представляет собой абсолютно
твердое тело или когда она имеет жесткий корпус с жидким за-
полнителем, будут рассматриваться лишь малые возмущения пара-
метров движения. Это позволяет относительно возмущений полу-
чить линейную систему дифференциальных уравнений с коэффици-
ентами, зависящими от параметров невозмущенного движения.
148
Небольшие повороты вектора тяги, вызванные поперечными ко-
лебаниями корпуса, с точностью до величины первого порядка ма-
лости не изменяют ускорения ракеты в продольном направлении.
Как по величине, так и по направлению это ускорение остается
таким же, как и при невозмущенном движении. По этой причине
при малых возмущениях поперечное движение можно рассматри-
вать независимо от продольного.
В -небольшом промежутке времени траекторию управляемой
баллистической ракеты можно считать плоской кривой, мало от-
личающейся от прямой линии. Поэтому невозмущенное движение
ракеты в небольшом промежутке времени будем считать прямоли-
нейным. Так как нас будет интересовать лишь возмущенное дви-
жение ракеты, то для изучения его можно принять неподвижную
прямоугольную систему координат, продольная ось X которой сов-
падает с направлением продольной оси ракеты в невозмущенном
движении. Поперечная ось Y лежит в плоскости запуска, ось Z
направлена так, чтобы система OXYZ была правой. Таким образом,
мы будем рассматривать лишь поперечное движение в неподвиж-
ной прямоугольной системе координат, имея в виду, что сумма
проекций на ось X всех внешних сил, действующих на ракету, всег-
да уравновешивается силами инерции.
Для изучения упругих поперечных колебаний корпус ракеты
схематизируют прямым неоднородным стержнем, имеющим две
плоскости симметрии. Такая схема значительно упрощает теорети-
ческое исследование, однако применима только для корпуса ракет
с большим удлинением. В случае малого удлинения корпуса глав-
ную роль могут играть местные колебания элементов конструкции,
например, колебания двигателя на упругих элементах подвески,,
колебания различных приборов, в том числе и чувствительных эле-
ментов с упругими элементами конструкции, на которых они уста-
новлены.
Что касается возможных колебаний свободной поверхности
жидкости в баках, то во многих случаях удается использовать то
обстоятельство, что частота собственных колебаний жидкости зна-
чительно ниже частоты упругих колебаний корпуса. На этом осно-
вании при анализе упругих колебаний корпуса колебания жидкости
в подобных случаях обычно не учитываются.
Если частоты собственных колебаний жидкости и корпуса близ-
ки, то связь между колебаниями жидкости и упругими колебания-
ми корпуса существенна и ее следует учитывать.
7.2. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ УПРУГОЙ
РАКЕТЫ И ЕЕ СВОЙСТВА
Угол поворота корпуса в месте установки чувствительного эле-
мента автомата стабилизации (гироскопа) в плоскости рыскания
равен
и л р
(7. 1}
149
Рис. 7.2
где fn'(Xr) — значение производной, вычисленное в связанной сис-
теме координат O\X}Z{ от функции fn(x) в точке установки гиро-
скопа х=хг.
Этот угол отличается от угла поворота жесткого корпуса и, что
очень важно, зависит от места расположения гироскопа по длине
корпуса ракеты.
Структурная блок-схема замкнутой системы, соответствующая
уравнениям первого приближения (5.35), (5.36) и равенству (7.1),
показана на рис. 7.2. Объект регу-
лирования (ракета) представлен на
схеме несколькими параллельными
блоками. Основным является блок,
характеризующий динамику ракеты
как твердого тела, выходная коор-
дината этого блока — угол ф. До-
полнительными являются блоки,
характеризующие динамику упру-
гих колебаний корпуса. Таких бло-
ков может быть несколько и коли-
чество их зависит от свойств авто-
мата стабилизации (АС). Выходной
координатой каждого дополнитель-
ного блока служит возникающий
вследствие упругих колебаний угол
поворота того сечения корпуса, в
котором установлен чувствительный
элемент автомата стабилизации.
Обозначим комплексное передаточное число ракеты как твердо-
го тела через
(7.2)
5 (Zu>)
а комплексное передаточное число блока упругих колебаний п-го
тона через
wn (М = = Ап н е'М“». (7. 3)
о \1^>)
Как и в гл. II, комплексное передаточное число автомата угло-
вой стабилизации представим в виде
^Ас(йо)=ДАс(ю)е,¥лс(“». (7.4)
Сигнал рассогласования, поступающий в автомат стабилизации,
пропорционален углу
До(а))е'>°(“)-Ь2 8,
л = 1
150
где По — число тонов упругих колеоании корпуса, сигналы от кото-
рых пропускает автомат стабилизации. На комплексной плоскости
Z= (7(a)) +-ZГ(со) сигнал рассогласования можно представить сум-
мой -векторов.
Если разомкнуть систему на выходе -из автомата стабилизации,
то комплексное передаточное число разомкнутой цепи
Wz(/<o)
^вых (w)
^нх (га))
п~1
^AC(ZO))-
По I
Aq И + V Ап (со) Лас(<*>) е ас<“> = /.(«>>'>(“’. (7. 5)
п 1 I
Знаменатель передаточной функции упругой ракеты имеет столь-
ко же положительных или комплексно-сопряженных корней с
положительной вещественной частью, сколько их имеет знамена-
тель передаточной функции абсолютно твердой ракеты.
Чтобы убедиться в этом, представим передаточные функции
объекта регулирования в виде
Ж, (р)=(p)/Qo(р); w„ (р)=/?„ (p)/Qn (р).
Тогда знаменатель передаточной функции объекта регулирова-
ния будет выражаться произведением полиномов
По
Q(p)=Qo(p) П Qn(P)-
Из уравнений (5.36) находим
3Л(Р)=Р2+^ЛР+Ч^ С?Л>°
Корни всех полиномов Qn(p) — комплексно-сопряженные с отри-
цательной вещественной частью. Следовательно, полином Qo(p)
имеет такое же число положительных или комплексно-сопряжен-
ных корней с положительной вещественной частью, как и знамена-
тель передаточной функции ракеты как твердого тела Qo(p).
Несмотря на упрощения, которые позволили перейти от урав-
нений (5.34) к более простым уравнениям (5.35) и (5.36), струк-
турная блок-схема, показанная на рис. 7.2, все же сравнительно
сложна для -предварительного анализа. Схему можно еще больше
упростить на основании анализа комплексного передаточного чис-
ла U7(/oj) (7.5).
Рассмотрим векторы Wz0(/w) и Wn(ia)). Годограф вектора
(ио), построенный по уравнениям (5.37) для 0^до<оо, показан
на рис. 7.3. Кривая 1 соответствует статически устойчивой ракете,
кривая 2 — статически неустойчивой. С возрастанием частоты мо-
дуль комплексного числа Л0.(со) быстро уменьшается (для стати-
чески устойчивой ракеты, начиная с
151
Комплексное передаточное число №п(ко) получим из уравне-
ния (5.38):
(хг) qnG'w) cq„bfn\xA
W„ (/со) = г) Чп\ J =---------=
В (/со) сп п + . — <*>2
W* Qnqn
=и° м+/1/п м_м е%м. (7.6)
Аргумент комплексного числа при со = 0 зависит от знака произве-
дения двух чисел — значения формы собственных колебаний кор-
пуса в месте расположения управляющего органа (рулей) fn(xp)
и значения угла наклона каса-
тельной к форме собственных ко-
лебаний корпуса в месте установ-
ки гироскопа fn(Xrh Когда
/п(*р)/п'(*г) >0, аргумент комп-
лексного числа фп(0)=0; когда
/п(*р)/п'(*г) <0, аргумент комп-
лексного числа фп(0) = л.
Если поворот ракеты в плоскости OXZ производится не попе-
речной силой а моментом ТИурВ, то аргумент комплексного
числа фп(0) определится знаком произведения двух чисел fn'(xp)X
Xfn(xr). Знак произведения этих чисел играет важную роль при
оценке устойчивости движения ракеты с упругим корпусом.
Годограф вектора IFn(zco) для О^со^оо показан на рис. 7.4.
Модуль комплексного числа Ап(со) имеет большие значения лишь
при частотах, близких к частотам собственных колебаний корпуса;
во всем остальном диапазоне частот он мал. Аргумент комплексно-
го числа ф?г(со) в случае fn(xp)fn(xr)>0 изменяется от 0 до —л, в
случае /п(*р)//(хг)<0 изменяется от л до 0.
Если проследить за изменением модулей векторов Ao(co),
Ап (со), находящихся в квадратных скобках выражения комплекс-
ного передаточного числа разомкнутой цепи (7.5), то можно полу-
чить следующую картину.
152
При малых частотах (до частот, несколько превышающих
модуль вектора 40((о) имеет большую величину, а мо-
дули Лп (со) всех остальных векторов очень малы, так что сумма
всех векторов, находящихся в квадратных скобках (7.5), практиче-
ски равна вектору До (ш) независимо от значения аргументов
остальных векторов. Это равенство является следствием того, что
на малых частотах, значительно меньших сщ, упругие колебания
корпуса незначительны и частотная характеристика ракеты с уче-
том упругих колебаний корпуса такая же, что и ракеты, принимае-
мой как твердое тело.
При возрастании частоты модуль вектора А0(<о) уменьшается
и становится тем меньше, чем больше частота со. Все модули век-
торов 4п(со) остаются малыми до тех пор, пока частота со не при-
близится к coi — частоте первого тона собственных упругих коле-
баний корпуса. В небольшом интервале частот, включающих час-
тоту coi, модуль вектора XJco) будет большим, а модули всех ос-
тальных векторов — малыми. Сумма в'сех векторов в этом интер-
вале частот практически будет равна вектору Xi (<о) eZt?i(w). Ампли-
тудно-частотная характеристика ракеты с упругим корпусом в этом
интервале частот определяется частотной характеристикой перво-
го тона упругих колебаний корпуса.
Если продвигаться дальше по оси частот, то в следующем ин-
тервале, включающем частоту собственных колебаний второго тона
(02, сумма всех векторов будет мало отличаться от вектора
А2(^)е/(р2(о,) и т. д.
Так как рассеяние энергии упругих колебаний невелико, то ин-
тервалы частот, в которых модули векторов (со) и А2(со) стано-
вятся большими, достаточно узки.
В дальнейшем для краткости вместо выражения «в интервале частот,
включающем собственную частоту (о/», мы будем иногда говорить «на собст-
венной частоте (оп"», понимая, конечно, условность такого выражения.
Из приведенных рассуждений следует, что на малых частотах в
автомат стабилизации поступает сигнал, в основном, только от уг-
ловых движений жесткого' корпуса ракеты; на частоте coi преобла-
дающим является сигнал от упругих колебаний первого тона кор-
пуса; на частоте со2 — от упругих колебаний второго тона корпу-
са и т. д. Значит, в структурной схеме, приведенной на рис. 7.2,
на малых частотах можно пренебречь всеми блоками, выражаю-
щими динамику упругих колебаний, на частоте coi можно прене-
бречь всеми блоками регулируемого объекта за исключением блока
упругих колебаний первого тона и т. д.
Таким образом, структурную блок-схему (см. рис. 7.2) можно
представ'ить в виде отдельных простых одноконтурных схем — схе-
мы для ракеты как твердого тела (рис. 7.5) и однотипных схем
для упругих колебаний корпуса (рис. 7.6).
Отметим, что отождествление суммы векторов в определенном
интервале частот с одним вектором справедливо только тогда, ког-
да частоты собственных упругих колебаний корпуса не близки и
частота первого тона coi значительно больше частот, на которых
153
модуль До(со) является большим. Только при этих условиях мо-
дуль суммы всех векторов, стоящих в квадратных скобках выра-
жения (7.5), в промежутках между интервалом низких частот и
частотами собственных колебаний <х>1, 02 и т. д. будет настолько
мал, что, будучи умножен на модуль Дас (оз), дает произведение,
величина которого А (со) < 1. Только в этих частных случаях пол-
ную замкнутую схему (см. рис. 7.2) для анализа устойчивости мож-
но разделить на простые схемы, показанные на рис. 7.5 и 7.6. Для
одноступенчатых ракет и многоступенчатых ракет с поперечным
делением ступеней эти условия обычно выполняются. В том слу-
Рис. 7.5 Рис. 7.6
чае, когда среди частот собственных колебаний корпуса есть близ-
кие между собой, в качестве одной из упрощенных схем нужно
рассматривать схему, в которой объект регулирования представлен
двумя или более параллельными блоками с близкими частотами
собственных колебаний.
Теперь можно просто ответить на вопрос о том, сколько тонов
упругих колебаний корпуса следует учитывать при анализе устой-
чивости движения ракеты. Нужно учитывать все тоны, для которых
произведение
ДлЫДасЫ>1. (7.7)
7.3. УСЛОВИЯ УСТОЙЧИВОСТИ движения
Здесь мы ограничимся упрощенным анализом устойчивости дви-
жения ракеты с упругим корпусом. При анализе каждый тон упру-
гих колебаний будем рассматривать отдельно. Так же, как и во
всех предыдущих случаях, анализ устойчивости основан на линеа-
ризованных уравнениях, поэтому полученные выводы будут носить
лишь качественный характер. Такое исследование приводит к хо-
рошо обозримым результатам и всегда целесообразно, в особенно-
сти на стадии предварительной проработки, когда необходимо
определять требования к автомату стабилизации. Количественные
зависимости — коэффициенты запаса по амплитуде и по фазе, ам-
плитуды колебаний и т. д. — можно получить только на основании
анализа более полной системы уравнений объекта регулирования
и автомата стабилизации. Учету динамических свойств АС следует
уделять особое внимание, поскольку с повышением частоты коле-
баний его свойства все более и более отклоняются от тех, которые
выражены линейными дифференциальными уравнениями. Для вы-
явления количественных зависимостей нужно учитывать и перемен-
154
ность коэффициентов дифференциальных уравнений объекта регу-
лирования.
В разд. 7.2 было' показано, что в первом приближении исследо-
вание устойчивости движения ракеты с упругим корпусом можно
проводить по двум отдельным замкнутым схемам. В одной схеме
регулируемый объект представляется как твердое тело (см.
рис. 7.5), в другой — динамические свойства регулируемого объ-
екта обуславливаются упругими колебаниями n-го тона корпуса
(см. рис. 7.6).
Первая замкнутая система (для ракеты как твердого тела) яв-
ляется основной. Только при непременной ее устойчивости ракета
может совершать полет по траектории, достаточно- близкой к про-
граммной. Анализ устойчивости этой системы проведен в гл. II
и здесь мы останавливаться на нем не будем. Замкнутые системы,
содержащие блоки с упругими колебаниями корпуса, являются до-
полнительными. Они также должны быть устойчивыми.
Формула для комплексного передаточного числа И7п(/а>) (7.6)
одинакова для любого тона колебаний корпуса, поэтому достаточ-
но провести исследование устойчивости для произвольного я-го то-
на колебаний. Будем полагать, что выполняется условие (7.7).
Как и в гл. II, будем считать, что характеристическое уравне-
ние автомата стабилизации не имеет корней с положительной ве-
щественной частью, т. е. автомат стабилизации устойчив. Регули-
руемым объектом в данном случае является обычное колебатель-
ное звено с вязким трением, и его характеристическое уравнение
имеет комплексно-сопряженные корни с отрицательной веществен-
ной частью.
Рассмотрим отдельно фазочастотную характеристику разомкну-
той цепи для системы рис. 7.6. Так как при перемножении векто-
ров их аргументы складываются (7.5), то фазочастотная характе-
ристика разомкнутой цепи будет представлена уравнением
tW^^M + tacW 0<со<оо. (7.8)
Фазочастотная характеристика автомата стабилизации показа-
на кривой 1 на рис. 7.7. Для обеспечения устойчивости ракеты как
твердого тела на малых частотах (до частоты соо) фазовая харак-
теристика положительна. При со>со0 фазовая характеристика отри-
цательна. Сигнал, отрабатываемый автоматом стабилизации при
со>соо, имеет запаздывание по фазе, которое обычно увеличивает-
ся с возрастанием частоты.
Вид фазочастотной характеристики регулируемого объекта
можно легко представить на основании рис. 7.4. Так как коэффи-
циент затухания изгибных колебаний мал, то почти все изменение
фазы происходит в малом интервале частот, включающем частоту
собственных колебаний корпуса <рп. Пределы изменения фазы при
О^со^оо следующие:
—л для fn (Хр) fn (хг) > 0;
я >?«(<•))> О для /л(хр)/;(хг)<0;
155
К фазовой характеристике автомата стабилизации, приведен-
ной на рис. 7.7, добавим согласно равенству (7.8) предельные зна-
чения фазы регулируемого объекта (кривые 2 и 3). Если fn(xv)X
X/nZ(*r)>0, то добавляем <рп(о))=—я, и если fn(xp)fn(xr) <0, то
добавляем <рп(со)=л. Возможная фазочастотная характеристика
разомкнутой цепи <р(со) будет находиться между кривой 1 и этими
предельными значениями.
На основании частотного критерия Найквиста замкнутая систе-
ма (см. рис. 7.6) будет устойчивой, если при Ап (со) АЛс(со) > 1 амп-
литудно-фазовая характеристика разомкнутой цепи или 'совершенно
Рис. 7.7
Устойчиво
Неустойчиво"
Устойчиво >/
Неустойчиво
Неустойчиво
^Зя Устойчивому
Ф х —--~ 1
Неустойчиво
шя Устойчиво
Рис. 7.8
не будет пересекать вещественную ось U, или число отрицатель-
ных пересечений будет равно числу положительных пересечений.
Поэтому, если, например, при fn(xp)fn'(xr) <0 частота собственных
колебаний такова, что соо< оь<со к или w2tc < сол<\о3тс, то замкнутая
система неустойчива. Если же или со31С<< w4n, то
замкнутая система устойчива. Здесь и т. д. — частоты, на
которых запаздывание по фазе автомата стабилизации соответст-
венно равно л, 2л, ... .
Аналогичные рассуждения возможны в отношении фазоной ха-
рактеристики ПрИ fn(xv)fn'(xr)>0- ЕСЛИ СОо<СОп<<Ок ИЛИ
<3°л<?°зк, то замкнутая система устойчива; если а)к<^а)л<^со2тс или
то замкнутая система неустойчива.
Полученные условия устойчивости удобно представить в виде
диаграммы областей устойчивости в координатах параметров регу-
лируемого объекта (рис.* 7.8). Такая диаграмма удобна тем, что
применима к любому тону упругих колебаний, для которого выпол-
няется условие (7.7). При построении диаграммы принято, что
со1>сор, так как это неравенство положено в основу разделения
схемы рис. 7.2 на две схемы — рис. 7.5 и 7.6.
Области неустойчивости с учетом рассеяния энергии при упру-
гих колебаниях на рис. 7.8 ограничены кривыми 1 и 2.
При помощи диаграммы областей устойчивости можно сформу-
лировать требования к фазочастотной характеристике автомата
стабилизации, выбрать место расположения гироскопа по длине
корпуса.
156
рассмотрим пример. Требуется выбрать место установки гироскопа по длине
корпуса ракеты и сформулировать требования к фазовой характеристике авто-
мата стабилизации при условии, что неравенство (7.7) выполняется для первых
двух тонов изгибных колебаний. Дополнительно известно, что органы управле-
ния расположены на торцовом шпангоуте хвостового отсека и что coi<o)K.
На рис. 7.9, а построены формы собственных колебаний и функции
/п(хР)Л/М Для первых двух тонов.
На основании условия (Oi<a)TC на рис. 7.8 выбираем области устойчивости.
Эти области показаны на рис. 7.10.
Для того, чтобы параметры объекта регулирования были расположены в об-
ласти устойчивости, необходимо, чтобы выполнялись следующие условия:
1) для первого тона колебаний корпуса /л(хр) f'n (хг) > 0, Для второго тона
fn (*p) fn (х>) < °;
2) Wq < (Oj < й>г_, < «2 < <o2l:.
Второе услов-ие определяет требования к фазочастотной характеристике ав-
томата стабилизации, первое условие накладывает требования на выбор места
установки гироскопа. В рассматриваемом примере зона возможной установки
гироскопа (зона Л) находится в передней части корпуса ракеты (см. рис. 7.9,6).
Принимая во вынимание приближенность расчета форм собственных колебаний и,
особенно, их производных, зону возможной установки гироскопа следует ото-
двинуть на некоторое расстояние от узла функции fn(xp)fn'(xr).
Па диаграмме областей устойчивости целесообразно нанести изменение па-
раметров регулируемого объекта по времени полета. На рис. 7.Ю это измене-
ние параметров показано кривыми 1 и 2.
Путем изменения фазочастотной характеристики автомата ста-
билизации и выбором места установки гироскопа не всегда удает-
ся добиться стабилизации упругих колебаний корпуса. Например,
невозможно обеспечить стабилизацию одновременно четырех или
даже трех тонов упругих колебаний или, когда частоты собствен-
ных колебаний соседних тонов перекрываются, т. е. когда, напри-
мер, частота второго тона колебаний в конце активного участка по-
лета больше частоты третьего тона в начале полета <О2тах><озтш.
В этих случаях обычно применяют амплитудную стабилизацию
упругих колебаний, т. е. добиваются уменьшения модуля амплитуд-
но-фазовой характеристики до величины Ап (con)т!ас ((On) < 1.
Уменьшить величину Ап (соп)^ас(соп) можно двумя способами:
1) уменьшением динамического коэффициента усиления автомата
стабилизации; 2) увеличением рассеяния энергии при упругих ко-
157
лебаниях. Второй способ трудно реализуем, первый сравнительно
несложно осуществить на больших частотах. На малых частотах,
которые характерны для низших тонов колебаний больших ракет,
уменьшить йлс практически невозможно. При необходимости воз-
можна установка узкополосных фильтров.
Если применяется амплитудная стабилизация упругих колеба-
ний, то, чтобы быть уверенным в невыполнении условия (7.7), сле-
дует возможно надежнее знать декремент упругих колебаний кор-
пуса ракеты.
7.4. МЕТОДЫ ГАШЕНИЯ УПРУГИХ КОЛЕБАНИЙ
Ставится задача обеспечить такие свойства замкнутой системы,
состоящей из упругого корпуса и системы стабилизации, чтобы
возникшие колебания всегда затухали.
В разд. 7.3 был рассмотрен вопрос о гашении упругих колеба-
ний при помощи того же автомата стабилизации, который стаби-
лизирует угловое движение раке-
ты как твердого тела.
Однако способ гашения упру-
гих колебаний при помощи авто-
мата угловой стабилизации не
является единственным. Па уп-
ругие колебания можно воздей-
ствовать, вызывая их интенсив-
ное затухание при помощи специ-
альной следящей системы. Для
этого применяются датчики, рас-
положение которых зависит от
формы упругих колебаний корпу-
са ракеты и в значительной мере
определяет эффективность сис-
темы.
Рассмотрим для примера уп-
ругие гармонические колебания корпуса по форме первого тона
(рис. 7.11, а). Все точки, расположенные выше оси X, имеют сдвиг
по фазе на 180° по отношению к точкам, расположенным ниже этой
оси. Для каждой точки изогнутой оси стержня можно построить
временную диаграмму, описывающую поперечное движение этой
точки.
Выберем на упругой оси корпуса произвольную точку 5. Изме-
нение по времени отклонения t) в этой точке показано на
рис. 7.11, б; на рис. 7.11, в, г показаны соответственно изменения
скорости yi(s, t) и ускорения y\(s, t). Для гармонических колеба-
ний сдвиг по фазе между ускорением, скоростью и отклонением
составляет 90°. Такие временные диаграммы можно получить, раз-
местив датчики ускорения, скорости и отклонения в выбранной
точке.
158
Наиболее очевидный способ гашения упругих колебаний корпу-
са заключается в компенсации их другими колебаниями, имеющи-
ми ту же частоту и амплитуду, но противоположными по фазе.
Эффект гашения колебаний таким способом можно практичес-
ки осуществить несколькими путями. Например, противодействую-
щее колебание можно вызвать, если в качестве чувствительного
элемента системы стабилизации использовать акселерометр, сиг-
нал от которого вводится в исполнительный сервомеханизм, управ-
ляющий рулями или вектором силы тяги. Если в качестве датчика
использовать измеритель скорости, то для получения аналогичного
результата сдвиг по фазе должен быть на 90° (или 270°).
Рассмотрим эффект гашения колебаний более подробно. Урав-
нение для обобщенной координаты qn, характеризующей упругие
колебания корпуса, имеет вид
Чп 4“ ^п('упЯп 4~ ">пЯп = &rfi (^)•
В качестве чувствительных элементов системы стабилизации мож-
но применять одновременно датчики ускорения, скорости и откло-
нения, сигналы с которых используются как сигналы отрицатель-
ной обратной связи с определенными коэффициентами усиления
Л- , kq , kqn. Подставив выражения для этих сигналов в уравне-
ние для qn, получим дифференциальное уравнение замкнутой сис-
темы
Чп 4~ ^п^пЯ 4“ ^пЧ п = Чп k*n Чп kqn4rv
4 п чп п
Группируя коэффициенты при одинаковых переменных, получим
(1 + Яп -Г Яп + + ^Чп) Яп=^- (7. 9)
Уравнение (7.9) можно записать в виде
Яп^‘^пшпЯп~\-(шпУ Яп = ®, (7- 10)
‘^пшп + к. ы2 + Ь
где 2^п= - ~ п , ы2= /л • (7.11)
1 + к.. 1 + к..
Чп Чп
Уравнение (7.10) совпадает с уравнением собственных упругих ко-
лебаний корпуса
Чп- ^>nwn4n “И ^пЧп~ 0-
Однако коэффициенты этого уравнения отличаются от коэффици-
ентов уравнения (7.10). Соотношение между этими коэффициента-
ми определяется формулами (7.11). Частоту собственных колеба-
ний системы со/ (7.11) можно увеличить или уменьшить по сравне-
нию с частотой собственных колебаний корпуса <оп.
Вновь образованная динамическая система имеет и новый отно-
сительный коэффициент затухания £/ (7.11), который можно уве-
личить до критической или сверхкритической величины. Возмож-
159
ность увеличения затухания системы путем добавления сигналов
обратной связи дает большие преимущества.
Если при амплитудной стабилизации подавление колебаний
осуществляется установкой датчика в местах наименьших сигналов
или при помощи фильтров ((пассивный метод), то при активном
Канал рыскания
Сглаживающий фильтр
Свободный
гироскоп
Скоростной
гироскоп
Угловой,
акселерометр
Линейный
Уиз
^U3
Скоростной
гироскоп
Свободный
гироскоп
Линейный
' акселерометр
Угловой
^акселерометр
Сглаживающий фильтр
Рис. 7.12
акселерометр
/7^Ыб/Ц
к ГП ускоритель —
^3
ангажа
методе датчики помещают в тех
местах, где можно получить мак-
симальные сигналы, которые за”
тем используют для уменьшения,
колебаний, вызвавших эти сигна-
лы. Если датчики выдают сигна-
лы колебаний всех тонов, то мес-
то расположения датчиков имеет
еще большее значение. Правиль-
но выбрать место расположения
датчика можно на основании
уравнения (7.9) с учетом форм
собственных колебаний корпуса
и места расположения управляю-
щих органов на корпусе ракеты.
Для выработки сигналов об-
ратной связи можно использо-
вать датчики не только линейных
величин уп, у„, уп. С таким же
успехом можно применить и дат-
чики угловых величин
. д^уп '
dxdfi ’ dxdt
дУп
, так как
дх
W UJ
Z
Я
„ из
а’ &У п f ' л ' Ч
из ~ дхд& ~ J n4tv из
dxdt J пЧп
A ____ дУп ___ f'
^ИЗГ л J пЯrr
дх
На рис. 7.12 показана структурная блок-схема стабилизации упру-
гих поперечных колебаний большой ракеты — ускорителя, в кото-
рой наряду с линейными сигналами используются и угловые.
Активный метод может предусматривать установку дополни-
нительных органов управления. На корпус ракеты устанавливают
управляющий реактивный двигатель (верньерный) с небольшой
тягой. В том же сечении, где закреплен верньерный двигатель, ус-
танавливают скоростной гироскоп (или датчик угловой скорости—
ДУС), измеряющий угловую скорость ракеты. Подвижное сопло
верньерного двигателя (или вектор тяги, действующий по нормали
к оси ракеты) управляется по сигналу скоростного гироскопа,про-
порциональному угловой скорости ракеты. Таким образом, в кон-
тур стабилизации вводится дополнительная обратная связь в виде
верньерного двигателя и скоростного гироскопа, при помощи кото-
рой создается поперечная сила, пропорциональная угловой скоро-
сти поперечных колебаний корпуса ракеты.
160
Надлежащим выбором места установки скоростного гироскопа
можно достичь того, что поперечная сила будет гасить упругие ко-
лебания. Гашение этих колебаний будет тем эффективнее, чем боль-
ше коэффициент
/?в fn (хв) f'n (хв)/тп,
где Rb — сила тяги верньерного двигателя; /п(*в), !п(хв) — зна-
чения формы собственных колебаний и угла наклона касательной к
ней в месте установки верньерного двигателя и скоростного гиро-
вкопа; тп — приведенная масса корпуса при колебаниях по фор-
ме /i-го тона.
Применительно к уравнению (7.10) здесь увеличивается толь-
ко относительный коэффициент затухания.
Описанный способ активного подавления упругих колебаний
основан на определенных фазовых соотношениях, реализация ко-
торых связана со значительными трудностями. Однако в системах
стабилизации иногда целесообразно использовать как активные, так
и пассивные методы.
7.5. УПРУГИЕ ПОПЕРЕЧНЫЕ АВТОКОЛЕБАНИЯ
В разд. 7.3 было показано, что обеспечить устойчивость одно-
временно нескольких тонов упругих колебаний корпуса затрудни-
тельно. Во всяком случае, запасы устойчивости для некоторых то-
нов колебаний могут быть очень небольшими, поэтому даже при
малом отклонении параметров системы от номинальных значений
возможно возникновение неустойчивого движения.
Пусть в случае неустойчивости амплитудно-фазовая характе-
ристика имеет вид, показанный на рис. 7.13 кривой 1. При возрас-
тании амплитуд колебаний будут проявляться нелинейные свойства
системы. Будет уменьшаться эквивалентный коэффициент усиления
рулевой машины, чему соответствует амплитудно-фазовая характе-
ристика, изображенная кривой 2.
Пусть амплитуде командного тока /п (см. рис. 4.17) соответст-
вует годограф разомкнутой цепи, показанный на рис. 7.13 кривой 3.
Годограф проходит через точку С (1, /0), и это показывает, что
система находится на границе устойчивости.
Можно убедиться в том, что колебания с амплитудой in являют-
ся устойчивыми периодическими колебаниями, которые на-
зываются автоколебаниями. В самом деле, если в ко-
леблющейся системе вызвать небольшое увеличение амплитуды
колебаний, то при i>in эквивалентный коэффициент усиления руле-
вой машины уменьшится и годограф разомкнутой цепи будет пред-
ставлен кривой 4. Этот годограф соответствует устойчивой систе-
ме, колебания которой будут затухать до тех пор, пока амплитуда
командного тона не станет равной /п. Годограф снова будет прохо-
дить через точку С (1, /0); система возвращается к исходному не-
смущенному движению.
• 359 161
Если в системе, колеблющейся с амплитудой /п, вызвать неболь-
шое уменьшение амплитуды колебаний, то годографом станет кри-
вая 2, которой соответствует неустойчивое движение. Амплитуды
колебаний будут возрастать до тех пор, пока снова не достигнут
величины /п, которой соответствует годограф, показанный кри-
вой 3; система вновь возвращается к исходному движению.
Следовательно, колебательное движение, характеризуемое на
комплексной плоскости точкой С (1, Z0), является устойчивым. Это
Рис. 7.13
।
Ufa tic ml ffptWeHtt- Стационарные
мости линейных колебания
драВнсний (цвтоколебания)
Рис. 7.14
и есть режим автоколебаний. Частота автоколебаний практически
мало отличается от частоты собственных упругих колебаний кор-
пуса ракеты.
Протекание процесса колебаний во времени показано на
рис. 7.14.
Автоколебания происходят в замкнутой системе, состоящей из
корпуса ракеты и автомата стабилизации. Источником энергии в
данном случае является автомат стабилизации. Все звенья дина-
мической системы совершают колебания с одной и той же частотой
(оп> но с разными амплитудами. Амплитуде командного тона iu
соответствует амплитуда колебаний управляющего органа бп.
Частоту и амплитуды автоколебаний определяют только из ре-
шения нелинейных уравнений замкнутой системы. Получить реше-
ние можно методом гармонической линеаризации, на ЭВхЧ или при
помощи моделирующих установок, в схему с которыми включается
натурный автомат стабилизации. В последнем случае свойства та-
кого автомата стабилизации учитываются наиболее полно.
Если амплитуды автоколебаний невелики, так что линейное
уравнение (5.38) можно считать справедливым, то амплитуду упру-
гих колебаний корпуса можно вычислить из этого уравнения, поло-
жив в нем 6 = 6П sin соп/. Получим
Qn~\~ CqflnQn~V С q nq flп~ а rfi п
Естественно, точность определения амплитуды в значитель-
ной мере зависит от точности определения (оп-
При упругих автоколебаниях канал автомата угловой стабили-
зации загружается сигналами, которые по отношению к сигналам
162
стабилизации ракеты как твердого тела можно рассматривать как
помеху. Так как характеристики автомата стабилизации нелиней-*
ны, то эта помеха может увеличивать постоянные времени и сни-
жать коэффициент усиления автомата стабилизации, что приведет
к нарушению устойчивости по другим степеням свободы.
Упругие автоколебания вызывают поперечные инерционные на-
грузки на корпус и поэтому вредны. Но если амплитуды и частоты
автоколебаний невелики, то инерционные нагрузки будут малыми,
и следовательно, не опасными для прочности корпуса. Такие авто-
колебания можно допустить и это будет разумнее, чем, преодолевая
огромные трудности, обеспечивать сложными средствами устойчи-
вость упругих колебаний. Однако такое решение нужно принимать
в каждом случае отдельно, руководствуясь соотношениями проч-
ности конструкции и точности полета.
Глава VIII
ВЛИЯНИЕ СЖИМАЮЩИХ СИЛ И УПРУГОСТИ
ПОДВЕСКИ ПОВОРОТНОГО ДВИГАТЕЛЯ
НА УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
8.1. ВЛИЯНИЕ ОСЕВОЙ СЛЕДЯЩЕЙ СИЛЫ НА ПОПЕРЕЧНЫЕ
КОЛЕБАНИЯ УПРУГОГО СТЕРЖНЯ
В гл. V и VI формы и частоты собственных колебаний ракеты
определялись по схеме неоднородного стержня. Здесь мы проведем
дальнейшую детализацию расчетной схемы. Примем в качестве схе-
мы для изучения попереч-
ных колебаний корпуса ра-
кеты прямой неоднородный
упругий стержень со следя-
щей сжимающей силой на
конце. Упругий стержень со
следящей силой представля-
ет собой неконсервативную
систему. В результате воз-
действия сжимающей силы
динамические характеристи-
ки стержня (частоты и фор-
мы собственных колебаний)
могут несколько изменяться.
При силе Р, превышающей
Рис. 8.1
некоторое критическое значение, может возникнуть динамическая
неустойчивость.
На рис. 8.1 показан неоднородный стержень в изогнутом сос-
тоянии, нагруженный осевой следящей силой Р; там же показан
вырезанный в сечении х элемент стержня длиной dx с действую-
щими на него силами. Сила трения, принята пропорциональной пер-
вой степени скорости.. Здесь т(х),- -h(x) — погонные масса и коэф-
6*
163
фициент вязкого трения; q(x, t) — внешняя распределенная сила;
N — нормальная сила в поперечном сечении; g* — ускорение, ха-
рактеризующее интенсивность массовых сил в направлении оси х.
На движение центра масс стержня нс будем налагать никаких
ограничений, величины ду!дх, д2у)дх2 будем считать малыми.
Применяя принцип Даламбера, составим уравнения равновесия
для показанного на рис. 8.1 элемента стержня длиной dx. Спроек-
тируем силы на неподвижные оси координат X, Y и возьмем сум-
му моментов всех сил относительно центра массы элемента. Учи-
тывая величины первого порядка малости, получим
— — dx-\-m (х) g*dx--^ 0;
дх
dQ , dN (х) , ду кг/ д2У
—^dx-------—dx -------N (х) dx —
дх дх дх дх%
т(х) h {х, t)dx=G\ (8.1)
dtz dt J
(d.M/dx)dx-[-Qdx=0.
Принимая во внимание, что
EJ (х)(д2у/дх2) = М,
из второго .и третьего уравнений (8.1) найдем
£ w 5-]+77 [" w 1г]+“ w g+4 « =’
(8. 2)
Краевыми условиями для нормальной силы будут
7V(0)=0; N (1) = Р. (8.3)
Следовательно,
i
tn(x)dx-, g* = Pjm\ /га=J m(x)dx. (8.4)
о 0
N(x)=g*\
Отсюда, в частности, видно, что величина ускорения g*, харак-
теризующая интенсивность массовых сил, не изменяется при малых
изгибных колебаниях стержня.
Уравнение (8.2), выражающее поперечные колебания стержня,
не зависит от первого уравнения (8.1), которое характеризует про-
дольное движение. Другими словами, малые поперечные -колеба-
ния стержня можно рассматривать независимо от продольного
движения, полагая, что на стержень в направлении оси X действует
ускорение массовых сил g* = P!m. Проекция силы Р на ось X урав-
новешивается силами инерции стержня, т. е. P = mg*.
164
При h(x)lm(x) = 2ie = const и q(x, /)=0 возможно разделение пе-
ременных, и общее решение уравнения (8.2) можно представить в
виде
у(х, /)=2 ЧпМЯпУ)' (8-5)
где ’фп(^)?п(0 являются частными решениями уравнения (8.2).
Подставляя (8.5) в (8.2) и разделяй переменные, получим
+ + = 0 (гл = $люл); (8.6)
[EJ + ^пт(х)^ = о (п=1, 2,...). (8.7)
Функции фп(х) должны удовлетворять следующим краевым ус-
ловиям:
ср; (0) = 0, [EJ (х)ср; (х)]^0 = О; (8. 8)
?n(z) = 0’ (*)]x=z = 0- (8.9)
Функции фп(х), являющиеся решениями уравнения (8.7) и удов-
летворяющие краевым условиям (8.9), неортогональны. В самом
деле, зафиксируем в уравнении (8.7) индекс п, умножим это урав-
нение на функцию фт(х), причем п^т, и проинтегрируем его пох
в пределах от 0 до I. Запишем уравнение (8.7) для индекса т, ум-
ножим его на функцию фп(х) и также проинтегрируем по х на от-
резке [0, /]. Вычитая из первого равенства второе, получим
(0) л — j т W dx = Р [<f>; (Z) (Z) — <f'm (Z) <р„ (Z) ]
о
(/n, п= 1, 2,..п ф т).
Силы инерции, возникающие при колебаниях по формам фп(х),
несамоуравновешены. В этом можно убедиться, если проинтегри-
ровать уравнения (8.7) по х на отрезке [0, /]. Принимая во внима-
ние условия (8.3), (8.8) и (8.9), найдем
i
Ч J ™ (*) ?n (*) dx=P<f'n (Z).
о
Силы инерции уравновешиваются составляющей силы Р (ее
проекцией на ось У).
Рассмотрим уравнение (8.7) для однородного стержня. Приве-
дем его к виду
4v+?(^)'-&X=o, (8.Ю)
165
Приведем краткое решение уравнения (8.10), предложенное В. И. Феодосьевым:
Vn(6)= S c>Ak •
6 = 0
Из краевых условий следует, что
С2 = С3 = 0; 2 Ckk(k- 1)(й—2) = 0
k=3
2с^(а-1) = о.
6=2
Для определения коэффициентов ряда справедлива рекуррентная формула
Ф(8„,р)
к А (£—1) (Jfe—2) (Л—3) ’
где Ф(8л,₽)=52С’а_4-₽Са_з(^-3)2.
Коэффициенты Со и Ci остаются неопределенными. Они входят линейно в вы-
ражения (8.11), которые можно переписать в виде
-416*1 = 0; BqCq 4- В\С\ = 0.
Условие существования ненулевых решений дает
ДА — -4 А = 0.
На рис. 8.2 показана зависимость формы и безразмерной частоты собст-
венных колебаний первого и второго тонов от величины параметра р, получен-
ная расчетом на ЭВМ. Безразмерная частота колебаний б связана с размер-
ной частотой собственных колебаний соотношением
(8. 11)
При р = 0 для первого тона колебаний 6i = 4,732 = 22,37; для второго тона б2 =
= 7,852 = 61,62. Критическое состояние наступает при ркр = 109,69, что соответ-
ствует критической силе, превышающей Эйлерову критическую силу Ркр =
= л2Е7о//2 для стержня, шарнирно опертого и подверженного сжатию осевой
сосредоточенной силой, примерно в 11 раз, а шарнирно опертого и нагруженного
собственным весом стержня — примерно в 18,6 раз.
Дальнейшее увеличение силы Р приводит к тому, что уравнение для вы-
числения собственных частот имеет комплексный корень. Возникает неустойчи-
вое колебательное движение.
Заметим, что для ракет коэффициент р обычно не превышает нескольких
единиц, поэтому явление неустойчивости, возникающее при ркр= 109,69, пред-
ставляет лишь теоретический интерес.
По аналогии с выражением (6.46) из функции фп(х) можно вы-
делить линейную функцию к так, 'чтобы оставшаяся часть fn(x)
была самоуравновешенной формой, характеризующей изгибные ко-
лебания:
?п (*)=Ус п + &„ (х- хс) + /„ (х);
I
т (х) fn (x)dx = &,
6
i
J m (x) fn (x) (x — xc) dx = 0#
о
166
Чтобы последние два равенства были справедливы, числа уСп и
нужно определять из следующих уравнений:
- =pf (О=р +fn (01;
- [Д (Л (/-хс)
На рис. 8.3 приведено сравнение графиков функций fn(x) соб-
ственных колебаний первого и второго тонов однородного стержня
при разных значениях пара-
метра р.
При малых значениях
параметра р функции fn(x)
первых тонов колебаний
стержня, находящегося под
воздействием следящей си-
лы, мало отличаются от
форм собственных колеба-
ний стержня без следящей
Рис. 8.3
Рис. 8.2
силы (р = 0). Расчеты показывают, что частоты собственных коле-
баний можно считать уменьшающимися пропорционально р. По-
этому в качестве грубого приближения для первых двух тонов ко-
лебаний можно рекомендовать использовать формы собственных
колебаний стержня без следящей силы, а влияние следящей силы
на собственную частоту при р^20 можно оценить линейной до-
бавкой
= b = Pl2l(EJ^ 0<?<20. (8.12)
Здесь соп(О) — частота собственных колебаний, вычисленная при
^ = 0; соответственно р-(10)~ 0,007, [л<°>0,01. Величину I2/(EJq),
входящую в параметр р, можно 'приближенно вычислять, разбивая
стержень на k участков с постоянными массой mi и изгибной же-
сткостью EJi. Тогда получим
167
Применение форм собственных колебаний стержня, не нагру-
женного следящей силой, к решению задачи о колебаниях стерж-
ня, нагруженного следящей силой, будет рассмотрено в следующем
разделе.
8.2. ПРИБЛИЖЕННЫЙ УЧЕТ ВЛИЯНИЯ ОСЕВОЙ
СЛЕДЯЩЕЙ СИЛЫ НА ПОПЕРЕЧНЫЕ
КОЛЕБАНИЯ СТЕРЖНЯ С ПОМОЩЬЮ МЕТОДА
БУБНОВА—ГАЛ ЕРКИНА
Как уже было отмечено в разд. 8.1, функции <рп(Х), характеризующие попе-
речные колебания стержня с осевой следящей силой, неортогональны и поэтому
их определение является достаточно' трудоемкой задачей.
В этом разделе мы изложим приближенный метод Бубнова — Галеркина
для решения задачи о вынужденных поперечных колебаниях неоднородного
стержня с учетом следящей силы.
Вынужденные поперечные движения у(х, t), определяемые уравнением (8.2),
представим в виде ряда
Н*.0=</с(0 + &(0(*—*с) +s
и=-1
(8. 13)
где yc(i) и — обобщенные координаты стержня как твердого тела;
qn(t) — обобщенная координата, соответствующая функции fn(x)\ хс — коор-
дината центра масс стержня; х — координата произвольного поперечного сече-
ния стержня.
В качестве функций fn(x) используются формы собственных колебаний,
стержня со свободными концами без следящей силы (Р = 0). Таким образом,
функции fn(x) удовлетворяют дифференциальному уравнению (5.8) и краевым
условиям (5.9) и (5.10). В уравнении (5.8) а)п — частота собственных колебаний
n-го тона стержня со свободными концами при Р=0.
Заметим, что все краевые условия (8.8) и (8.9) удовлетворяются каждой
из функций, входящих в ряд (8.13), что является необходимым условием при-
менения метода Бубнова — Галеркина. При помощи этого метода мы от урав-
нения .(8.2) переходим к системе обыкновенных дифференциальных уравнений,
при решении которых обычно используется конечное число членов ряда (8.13).
При подстановке ряда (8.13) в уравнение (8.2) неизбежно будет иметь ме-
сто некоторая ошибка, поскольку выражение (8.13) не является решением
(8.2). В соответствии с методом Бубнова — Галеркина эту ошибку следует ум-
ножить на каждую из аппроксимирующих функций из (8.13), проинтегрировать
по х в пределах от 0 до I и значение интеграла приравнять нулю. В результата
получим следующую систему уравнений:
I
с ( д? Г d2Z/l । Г ду 1 д'2у t ду )
1 w «J+r w d+” w f «<* '>)
0
= 0, (8.14)
где h — коэффициент трения; k ——1, 0, n, причем i (x) = 1; «0 (x) =x x —
— *c; an(x)= fn(x); n= 1, 2,...,n°.
В выражения, стоящие в фигурных скобках, вместо у(х, t) следует подставить
конечное число членов ряда (8.13).
Чтобы облегчить получение окончательных уравнений, выпишем некоторые
промежуточные результаты интегрирования.
Будем иметь
I I
С д? Г г д2 Г д?у!
\ ---- £J(x) —— ^х=0; \ —— Е/ (х)-— I (х— х~) dx= 0.
J дх? L дх? J J dx2 L 4 дх? J4 С'
о 0
168
Интегрируя по частям и учитывая (5.9) и (5.10), находим
i I
г д^и 1 г / »\9
\ — \EJ (х) -f \fn (х) dx = qn (О \ EJ (x) (/n)2 dx.
J uX^ [_ OX~ J J
0 0
Будем учитывать силы вязкого трения, возникающие только при упругих коле-
баниях стержня; кроме того, примем h(x)[m(x) = 2&. Получим
l 1
г ди г ди
\ h (х) —— dx = \ h (х) —— (х — xr) dx — 0;
.) dt J dt L
о о
i i
h (x) fn (x) dx = qn h (x) f\dx = qnhn\
о 0
I I
г d^u г
\ m ^x~~ xc)dx = ft m (x) (x— x^ftdx = ft/;
о о
I I
[ №y .. r
\ m(x) ——dx=yc \ m(x)dx~y m;
j d& J u
о о
I i
Г &y •• V 2
\ m <*> dx= qn\m (x) f*dx = qnmn.
J Ol* J
0 0
Интегрируя по частям и принимая во внимание равенства (8.3) и (8.4)»
наедем
I г л(°> -]
0 L п.1
I л(0)
f-7- [лг (х) (X- хс) dx = Р V qn [/;(Z) (/- хс)- /я (Z)] .
t/ I С/«Лк |
0 7Z-1
/ п(0)
\ Г" тЯ dx = W У1 f 'п W -
J дх L dx j 4вжя
0
I п(0) х
^п(Х) Чп \ т (Х) dX2'
0 ZZ-1 о
Объединяя все промежуточные результаты интегрирования и вводя обозна-
чения, получим следующие (п(0)+2) обыкновенных дифференциальных уравнения
Для обобщенных координат ус, ft, q^
л(0) I
тус + Р& + Р 2 f 'n (О Яп = j q (X, t) dx;
л = 1 0
16 9
n(0) Z
I* + P 2 A"qn = \ q ^X' {x~ Xc} dx' <8- 15)
n = l 6
„(0) i
Mn<in +hnqn + knqn+ Bnmqm= ( q(x,t) fn(x)dx (n,m=l,2..........n(0)).
m - 1 6
m^n
Здесь =/„(/) (Z — xc) — fn (I);
I X
0 0
I
mn — f m (x) f2ndx — приведенная масса;
b
z
hn = (* h (x) f2ndx —коэффициент приведенного трения;
о
i i X
Vn=\EJ (x) (f’n)2 dx + Pf'n (Z) fn (Z) - J (4)2 W m Wdx2 (»• 17)
о о 0
— приведенная жесткость.
Формулы для коэффициентов приведенной массы такие, же, как и в случае
стержня, не нагруженного осевой следящей силой. Формулы для коэффициентов
приведенной жесткости оказываются различными. В случае стержня, нагру-
женного осевой следящей силой, коэффициент приведенной жесткости kn зави-
сит дополнительно от работы составляющей силы Pf„'(l) на перемещении fn(l)
и работы (со знаком минус) осевых сжимающих сил на перемещениях, вызван-
ных поперечными прогибами:
I х I
~ (4)2 <х) т W dx2 = 77 О) (/л)2 dx•
6 6 о
Как показывают расчеты, работа сжимающих сил по величине больше, чем ра-
бота поперечной составляющей, поэтому частота собственных поперечных коле-
баний стержня при нагружении осевой следящей силой ниже собственной часто-
ты колебаний стержня, не нагруженного следящей силой.
Правые части уравнений (8.15) представляют собой обобщенные силы, дей-
ствующие на стержень. Сила Р не входит в обобщенные силы, а является в
данном случае частью системы стержня со следящей силой.
Уравнения упругих колебаний в (8.15) не зависят от первого и второго урав-
нений и образуют систему из /г(0) уравнений. Эту систему более компактно
можно представить одним матричным уравнением
[?*) + [^1 ЙН + [<Ъ>] Ш = ИИ,
(8. 18)
170
[H k] и [Gja] — квадратные матрицы порядка /г(0). Выражения для элементов
матриц [Я,Л], [Gm] и [Fa] имеют вид
НУй =---(/,*=1,2......п<°>);
mt
kj р
G jk — ®/Л +
mj т
I х
fj (О fk (0 - — \ f'j W fk (*) \ ™ W dx2
т j J J
о о
(/, k= 1, 2,..., и(0));
1
Fk = — \ q (*, О fk(x) dx (£=1,2,..., n<°>).
mk J
o
Здесь б;* — символ Кронекера (д5л= 1
при /=£; 6м = 0 при /=/=£).
Разрешив систему (8.18) и подставив
результаты решения в первое и второе урав-
нения (8.15), найдем поперечное ускорение
центра масс стержня ус и угловое уско-
рение О*.
При помощи метода Бубнова—Галер-
кина можно проанализировать частоты соб-
ственных колебаний системы, состоящей из
стержня со следящей силой. Характеристи-
ческое уравнение для определения частот
собственных колебаний будет иметь вид
det {[Gjk]_ о>2 [£]} = о, (8. 19)
где Е — единичная матрица.
Детальный анализ уравнения (8.19)
показывает, что при д(х, /)=0 для всех
значений Р=#0 существуют две формы соб-
ственных колебаний системы с нулевой частотой. Одной из таких форм соответ-
ствует поступательное движение под действием силы Р стержня как твердого
тела, наклоненного к оси X. Другой форме соответствует вращательное движе-
ние стержня как твердого тела с постоянной начальной угловой скоростью. Так
что система неустойчива независимо от того, устойчивы или неустойчивы упругие
колебания стержня. В дальнейшем применительно к управляемым ракетам будем
полагать, что устойчивость движения стержня как твердого тела всегда обеспе-
чивается автоматом стабилизации, поэтому главное внимание будет уделено ус-
тойчивости упругих колебаний стержня.
Ыа рис. 8.4 показаны результаты решения уравнения (8.19) для нескольких
Членов ряда fn (х) /г(0)=1; 2; 3, 4; 5; причем по оси ординат отложена величина
° = где — собственная частота колебаний первого тона при [3 = 0.
Если принять значение ц(0)=1, то основная и единственная частота собственных
колебаний обращается в нуль при |3 = F/2/(EV0) =81,4. При п(0)>2 первый ко-
рень, соответствующий неустойчивости, появляется в результате слияния первой
и второй характеристических частот.
Из рис. 8.4 следует, что формы собственных колебаний, отвечающие урав-
нениям (5.8) — (5.10), дают хорошие результаты при определении частот первого
и второго тона собственных колебаний стержня, нагруженного следящей силой.
Для значений параметра [3 < 20 достаточно взять всего лишь один или два чле-
на ряда. Эти результаты хорошо согласуются с выводами предыдущего пара-
графа.
Метод Бубнова — Галеркина без предварительного обоснования был при-
менен при выводе уравнений в гл. V.
171
8.3. УРАВНЕНИЯ ПОПЕРЕЧНЫХ КОЛЕБАНИЙ КОРПУСА
РАКЕТЫ С УЧЕТОМ УПРУГОСТИ ПОДВЕСКИ
ПОВОРОТНОГО ДВИГАТЕЛЯ
Если управление .и стабилизация осуществляются поворотом ос-
новных двигателей, то инерционные характеристики этих двигате-
лей будут оказывать влияние на динамические свойства ракеты.
Чтобы выявить динамические свойства ракеты, найдем уравнения
поперечных колебаний упругого корпуса ракеты с поворотным дви-
гателем. Положим, что двигатель закреплен на заднем срезе раке-
ты и является жестким телом. Введем следующие дополнительные
обозначения: тдв — масса поворотного двигателя; /дв — расстоя-
ние от центра масс двигателя
до его оси вращения (ось вра-
щения расположена впереди
центра масс); /дв — момент
инерции двигателя относитель-
но оси вращения; кдв — коэф-
фициент угловой жесткости
крепления двигателя к корпу-
су при застопоренной рулевой
машине; Ру — сила тяги уп-
равляющего поворотного дви-
гателя; Р — полная сила тяги
двигателей; 6 — угол поворота двигателя относительно касатель-
ной к изогнутой оси корпуса в точке подвеса; I — длина ракеты без
двигателя, Адв — коэффициент вязкого трения в подвеске двига-
теля.
Корпус ракеты имитируется в данном случае упругим неодно-
родным стержнем длиной I, на правом конце которого шарнирно
подвешено и фиксировано пружиной твердое тело (двигатель).
Схема показана на рис. 8.5.
Уравнение поперечных колебаний стержня, нагруженного сле-
дящей силой, имеет вид
Д[£/(х)-^-1+-А.^(х)-^-]+7П(х)-^ + й(х)^- = ^(Х, /).
дх^ L дх* J дх L дх | д/2 dt
В рассматриваемом случае к правому концу упругого стержня
присоединено твердое тело. Силы инерции, возникающие от движе-
ния твердого тела совместно со стержнем при 6 = 0, включим в
уравнение движения стержня. Воспользуемся для этого дельта-
функцией Дирака А (см. стр. 124). Получим
(£J « S ['V «77 ] + т « -fr -
" tofe)“ J lie о -
- «лв'лп Д'(*-*) + *(*) ““Г
Э'2 ... , dt
<h (х, t). (8. 20)
т
Силы, обусловленные отклонением твердого тела на угол 6, а
также составляющую РУЬ, будем считать внешними силами, кото-
рые в уравнении (8.20) включены в qz(x, t).
Применив дельта-функцию Дирака, получим
<7£(х, t)=q(x, г') — Ру8Д(х — /) — отдв/дв8Д(х — /) + /дв8Д,(х — /) +
+ >пдв/дв(?*8Д'(х-/), (8.21)
где q(x, t) — погонная аэродинамическая сила; g* — ускорение,
характеризующее интенсивность массовых сил в направлении оси
X. Силы Кориолиса здесь не учитываем.
К уравнению (8.20) применим метод Бубнова — Галеркина.
Представим решение в виде ряда
и(0)
у(.х, 0 = z/cW-W)(*--*c) + 2 fnWQntt')’
n-1
где yc(t), $(t) — обобщенные координаты жесткого стержня;
qn(t) — обобщенная координата упругих колебаний; fn(x) — фор-
ма собственных колебаний стержня со свободными концами при
отсутствии силы тяги; хс — координата центра масс стержня без
твердого тела (без двигателя).
Выполнив преобразования, необходимые для получения систе-
мы обыкновенных дифференциальных уравнений по методу Бубно-
ва — Галеркина, получим
"(0) "(0)
т*ус + РЪ + Р f'n (0 Яп + 2 суяп Чп + ру8 + =
п~1 л*=1
I
= ^q(x, t) dx\
о
пт »(0)
/*& +Д»)) t/c+^2 + 2 А*чпЯп~*\' Аы 8 + =
л«=1 Л=1
I
= ^q(x, t)(x — xc)dx; (8.22)
о
"(0) «(0)
т*п<]п + ЬпЯп + кпЯп-\-Р вчпятЯт+^ ВЯпЯтЯт+В<1пуУс +
m=l т=1
тп=£п т^=п
-Г--в<7л9& + £?л«8 + В9П^= f Я(X, t)fndx
6
{п= 1, 2,..., п(°)),
173
I
где = j m (x) dx — масса стержня и твердого тела;
о
i
7* = J т (х) (х — хс)2 dx 4- 7ДВ Ц- ^Ав G — хс)2 + 2/пдвАв хс) “
*— момент инерции стержня и твердого тела относительно попереч-
ной оси, проходящей через центр масс стержня;
i 2 2
т', = j т (х) fn dx + т„ fn (I)+2тпдв/дв fn (I) fn (/) + /дв (/«)2 (/) -
О
— приведенная масса стержня и твердого тела.
Коэффициенты hn и кп определяются по формулам (8.17), а
A%qm=An. Bqnqm = Bnm — по формуле (8.16). Для остальных коэф-
фициентов уравнений (8.22) приняты следующие обозначения:
Cyi = Mn(l Хс4~ Ав4 Cyq \f n (/) 4“ Ab f n (AL
— ^c4“ Ав)’
A^qn = Iдв/п (0 + ^дв [G ““ XC 4" Ab) f n (A 4“ G ~ Xc) Ab f n (A]•
= P у (I — xc) 4~ ^двй** Ав’, -A&8 ~ ^дв 4" ^ДвАв Xc) ’
Um (A fn (А 4-Ab fm (A f'n (A 4-
4-Ab/UA Л(А1 + 4вЛ WAG);
^=/п-[/л(04-АвЛ(0];
=Лв/п (0+^дв W - XC+Аз) fn (l)+(/ - ^c) Ab fn (/)];
^л5=РуЛ(/)4-^дв^*АвД(0;
=/Дв f'n fn (0,
где fn(l)f fn (I) — значения формы собственных колебаний и ее про-
изводной в точке подвеса двигателя; (/—хс) — расстояние между
точкой подвеса двигателя и центром масс стержня.
Составим уравнение угловых колебаний двигателя относитель-
но оси вращения. Момент трения, возникающий при отклонениях
двигателя, примем пропорциональным угловой скорости 6, коэф-
фициент пропорциональности обозначим через Лдв.
При составлении уравнения (в подвижной системе отсчета) не-
обходимо учитывать силы инерции переносного движения двига-
теля вместе с осью вращения —и Эти силы при-
ложены к центру масс двигателя и .показаны на рис. 8.5. Считая
угловые колебания малыми, получим
/дв (5+~£~\x^i+
+т„К*1ю(*+-Т- ) + ЖЖкда8 = 0 (8.23)
\ иХ Х = 1/
174
ИЛИ Лв^ + ^дв^дв^сЧ-[Лв + ^дв^дв^
н<°) t . n(°)
+ 2 [Лв/И/)-!-^/^/^/)] ^^-^^^*/^^ ЛЮ^+
/г-----1 n=\
+ ^дв £* ^дв» + (^дв^дв g* + кдв) 5 + hj> = 0. (8. 24 j
Рассмотрим теперь собственные колебания системы.
8.4 СОБСТВЕННЫЕ ПОПЕРЕЧНЫЕ КОЛЕБАНИЯ КОРПУСА
РАКЕТЫ С ПОВОРОТНЫМ ДВИГАТЕЛЕМ
Полагая, что частоты собственных колебаний упругого корпуса
достаточно «разнесены», рассмотрим систему, с двумя степенями
свободы — упругие колебания корпуса по форме n-го тона и по-
ворот двигателя. Для упрощения анализа примем hn = h^B = O. На
основании (8.22) и (8.24) получим
^ + ^л + Л(И^5В) = 0; б + ц)2вв + -^(^ + а)ил) = 0. (8.25)
тп /дв
Здесь со„ — парциальная частота упругих колебаний корпуса ра-
кеты с жестко закрепленным двигателем; (одв — парциальная час-
тота угловых колебаний двигателя при неподвижном корпусе;
тп* — приведенная масса ракеты:
< = к п ’т < = (кдв+mJ ,,£*)/1Ю;
en=iMfn(l)+mJ„fn(l); (8.26)
2 РУ f П (J) ^дв/дв^* f „(О 2 ^дв Gb^*/л G)
=---------------------- ; СО§п =-----------.
сп с п
Если двигатель совершает гармонические колебания с частотой
о)«5, то на основании первого уравнения (8.25) можно сделать вы-
вод, что колебания не будут оказывать влияния на упругие коле-
бания /i-го тона корпуса. Такой вывод означает, что поперечная со-
ставляющая вектора силы тяги уравновешивается силами инерции
двигателя. Это свойство имеет важное значение для оценки устой-
чивости и управляемости ракеты.
В литературе <ол5 называется частотой нулевой реакции"
двигателя. На основании (8.26) каждому тону упругих колебаний
корпуса соответствует своя частота зависящая от значения
формы и ее производной в точке подвеса двигателя fn(l), fn(l)-
Из второго уравнения (8.25) следует, что если упругие коле-
бания корпуса будут совершаться с частотой о)ои, то они не будут’
в ы з ы в a i ь к о л е и а н и и д и i a i ’Cui я. О д н а ко , со , содв, вследст-
вие чего это свойство системы не имеет практического значения.
175
Полагая колебания корпуса гармоническими, получим из (8.25)
уравнение для определения частот собственных колебаний в виде
с2
(сол — со2) (со^з —(О2)--— (со|л —со2) (сол5 —со2)=0. (8. 27)
Дв
Если управление ракетой производится поворотом основных
двигателей (сила PY большая), то Поэтому в первом при-
ближении в уравнении (8.27) положим со5л = 0. Получим
(1 — ь\) О)4 — ((1)Л + О)дВ — bn^ni) со2 -р (О^в = о,
Рис. 8.6
где bn2 = cn2/(mfJ^) — коэффи-
циент инерционной связи между
двумя парциальными системами.
Из этого уравнения можно оп-
ределить две собственные часто-
ты системы. Кратные частоты бу-
дут определять границу устойчи-
вости. Условие кратности частот
можно найти из равенства
4" <одв — — 2сод(1)Д1| 1 — Ь2п = 0.
Это равенство можно преобразовать и получить уравнение гра-
ницы устойчивости в виде
= У 1 — Ьп ± Ьп ]/*солз/<ол — 1. (8. 28)
Границы областей устойчивости показаны на рис. 8.6. Границы
построены по уравнению (8.28) в координатах содв/(оп—Ьп для раз-
личных значений ^д=о)д5/(о2. Большим частотам нулевой реакции
двигателя соответствуют большие значения коэффициен-
тов еп. Каждому значению еп соответствуют две границы неустой-
чивости — верхняя и нижняя. Между ними находится область не-
устойчивости. С увеличением коэффициента еп область неустойчи-
вости расширяется. При еп=1 область неустойчивости сжимается
в линию, при еп<1 система всегда устойчива.
С повышением номера тона возрастает 'частота упругих колеба-
ний корпуса, так что отношение (одв/соп уменьшается. Для низких
тонов колебаний это отношение может быть сод/соп>1, для высоких
тонов (одв/(оп<1. При еп>1 для всех тонов колебаний корпуса от-
ношения (ОдВ/(оп должны быть такими, чтобы они располагались
в областях устойчивости (см. рис. 8.6).
Соотношения между парциальными частотами, отвечающие ус-
ловиям устойчивости, можно выразить и по-другому. Предположим,
что частоты упругих колебаний суть заданные числа. Тогда усло-
вия УСТОЙЧИВОСТИ будут СОЛ8< (On. Если 0>л8 > ТО Д0ЖН0 быть О)Л6 <
Одв-
Таким образом, система, имеющая две степени свободы — один
тон упругих колебаний корпуса и поворот двигателя,— будет устой-
176
чивой, если частота нулевой реакции двигателя меньше хотя бы
одной из парциальных частот соп или о)дв.
Рассмотрим некоторые особенности динамических свойств сис-
темы с рулевой машиной.
8.5. УРАВНЕНИЯ ОРГАНОВ УПРАВЛЕНИЯ С УЧЕТОМ
УПРУГОСТИ ИХ ПРИВОДОВ
На рис. 8.7 показана схема привода поворотного двигателя, ко-
торую наиболее часто применяют для управления ракетами.
Из-за недостаточной жесткости проводки гидропривода и его
креплений к корпусу частота собственных колебаний системы ока-
зывается достаточно низкой и ее, как показывают данные летных
испытаний, необходимо учитывать при исследовании устойчивости
упругих летательных аппаратов. Упругость проводки будем схема-
тизировать пружиной с жесткостью кь а упругость крепления
гидропривода к корпусу пружиной с жесткостью к2.
Момент, развиваемый гидроприводом вокруг оси двигателя, мо-
жет быть представлен в следующем виде:
Mr^rkJ^ + ^-rS), (8.29)
где {/шт — перемещение штока относительно цилиндра гидроприво-
да; уп — перемещение цилиндра гидропривода относительно кор-
пуса ракеты.
Из равенства сил, развиваемых пружинами с жесткостями ki
и к2, следует, что
к20ц=к1(г6-{/шт — г/ц).
Отсюда у =—±1— (Г8 - ушт).
ki +к2
Уравнение (8.29) теперь приведем к виду
МГ1=гк(ушт-гЪ), (8.30)
где k = kik2/(ki + k2) — суммарная жесткость двух последовательно
соединенных пружин.
Уравнение собственных колебаний поворотного двигателя при
неподвижном корпусе ракеты и запертом гидроприводе (уШт = 0)
будет иметь вид
/дв^ + кг^ = 0,
а частота собственных колебаний подвешенного двигателя равна
= Г2/1ЛВ,
гДе /дв — момент инерции двигателя относительно оси вращения.
Чтобы получить уравнение движения поворотного двигателя при
#шт=^0, рассмотрим уравнение движения гидропривода, общая схе-
Ма которого представлена на рис. 8.8. Полости силового цилиндра
через распределительное устройство (золотник) связаны с источни-
ком высокого рв и низкого давления рн. Перемещение золотника из
177
равновесного положения вызывает перепад давлений в полостях
силового цилиндра и приводит к перемещению штока £/шт гидропри-
вода. Линеаризованные уравнения гидропривода могут быть за-
писаны в следующей форме:
Ь^'р + Ь^Р + Ьху шт = Ьох3,
(8.31)
где Др = Рлев—Рпр — перепад давлений; х3 — перемещение золотни-
ка. Величина Др связана с нагрузкой, действующей на шток гид-
ропривода, следующим соотношением:
ДрЛи = k! уи - гЪ) -= к (ушт- гВ),
где Fn — рабочая площадь поршня гидропривода.
РН Рв Рн
Рис. 8.7
Рис. 8.8
Вообще говоря, величины Др, ушт, х3 следует рассматривать как
некоторые малые возмущения установившихся значений Дро, Рошт,
3-
Установим физический смысл коэффициентов входящих в
уравнение (8.31). При установившемся движении штока без на-
грузки (Др = 0)
= -*Сэ-
(8. 32)
Для каждого гидропривода известна так называемая статичес-
кая скоростная характеристика, т. е. зависимость рошт(^оз), кото-
рая в общем случае нелинейна (рис. 8.9).
Из соотношения (8.32) следует, что
bjb, =<fy01I1.r. <?x3|.Vo3==tg а.
Нагрузка, действующая на гидропривод, как правило, приводит
к изменению скорости движения штока, что обычно характеризует-
ся зависимостями, подобными тем, которые показаны на рис. 8.10—
так называемыми нагрузочными характеристиками
гидропривода. Из уравнения (8.31) следует, что в установившемся
движении с постоянной нагрузкой
Уошт~ (>о/Ь) *0з~ (А,’Ь) ±Ро-
178
На основании графиков, изображенных на рис. 8.10, легко най-
ти, что
bi __ дуо
ШТ (х0эДр0)
bi дкр
х0зАрв
Коэффициент Ь3 характеризует скорость установления давления
в полостях цилиндра при перемещении золотника. Этот коэффици-
ент зависит от сжимаемости рабочей жидкости и упругости собст-’
венно гидроцилиндра, соединительных трубопроводов, уплотнений.
Перемещение золотника х3 в электрогидравлическом приводе
определяется электрическими сигналами системы управления и
обратной связью. Обшая схема замкнутого электрогидравлического
Рис. 8.9
Х03 Х03
привода показана на рис. 8.8. В предположении, что сам золотник
является идеальным элементом и что сигнал обратной связи фик-
сирует перемещение штока относительно гидроцилиндра, имеем
(Zy ZOtC) k3 (lу ^o.cl/шт)»
где zy — ток, характеризующий сигнал управления; Z0.c — ток, ха-
рактеризующий сигнал обратной связи; k3 и fe0.c — коэффициенты
усиления прямой цепи и обратной связи соответственно.
Исключив из уравнения (8.31) х3, получим
МР + М/?Н-^шт + Мз%о.с1/шт= МУу- (8- 33)
Уравнения малых колебаний двигателя при движении ракеты
получим из (8.23), положив кдвб = —Л4гп = —г/((ушт—гб).
Уравнения, выражающие динамические свойства сервопривода,
состоящего из поворотного двигателя и замкнутого электрогидрав-
лического привода, теперь можно представить в виде
н
I /
дв \ dt'2
дхдР J
дв
&у (О
dt'2
ду(1) \ ।
дх )
-j-m
-Млн 4г-гк(^шт-.г8)=0;
at
(8. 34)
к(г/шт — г8) = Д/2Г„;
Г7Г + Ь^р + bl + ^оМо.с^шт = Ьйк31у.
at at
179
Колебания сервопривода при неподвижном корпусе ракеты
представляются следующей системой уравнений:
/д»3 + г2£8 = гк#шт; к — гВ) = AjP.F',,; 3
Ь3^р + Ь2Ьр + Ьгушт + bQk3 k0.c y,ar=b0 k3 ir
Вынужденные движения сервопривода происходят как под дей-
ствием управляющего тока zy, вырабатываемого корректирующим
контуром автомата стабилизации, так и вследствие поперечных
движений корпуса (возбуждение через точку подвеса).
8.6. ВЛИЯНИЕ УПРУГОЙ ПОДВЕСКИ ПОВОРОТНОГО
ДВИГАТЕЛЯ НА УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Если к уравнениям (8.34) добавить уравнения поперечных дви-
жений корпуса (8.22) и уравнения автомата стабилизации (без сер-
вопривода), то получим уравнения возмущенного движения раке-
ты как замкнутой динамической системы. В уравнении (8.34) при
этом надо положить
Г
у(1)=усЩ± & О') (*—•*<?)+2
п = 1
Линеаризованное уравнение автомата стабилизации без серво-
привода представим -в виде
/у = ЙДс (р) у' (хД (8. 36)
где НДс (р) — передаточная функция;
п<°>
у' (хг)=»(/) + 2 f t (Хг) Яп ( Д
п = 1
Уравнения (8.22), (8.34) и (8.36) выражают в первом прибли-
жении динамические свойства замкнутой системы.
Для упрощения анализа будем считать жидкость несжимаемой,
корпус гидропривода жестким, скорость штока не зависящей от на-
грузки. Примем поэтому в уравнениях (8.34) 63 = 0, 62 = 0, а также
Адв = 0. Будем учитывать только один тон упругих колебаний кор-
пуса.
Уравнения (8.34) для изображений можно представить теперь
в виде
[(/«в Р2 + ОТдв £* Дв^2 Ю (Р + М 8 (р) + {[/Плв fn Ю /дв + /дв f'n (/)] Р2 +
+ ^дв/дв/п(/)}(р + Лс)^Лр) = гЛ3к(адь-у(р), (8.37)
где kc=k3k0Xbfbx.
Приняв (»)дв
сп
2 _ « /Д/)
~ 1
Л; в
где с„ = /дв/л(/) ф отлДв/„(/),
180
и добавляя к (8.37) уравнения для обобщенной координаты qn пер-
вое уравнение (8.25) и для автомата стабилизации — уравнение
(8.36), получим уравнения замкнутой системы для изображений
(р2+<4)s (р)+77 (р2+яп (р) = /дв4У+^с) 4 (р);
Л (р2+8 (р)+(р2+(р)=°; (8- 38>
тп
f (Р) = ^ас (р) f'n (хг) qn (р).
Из первых двух уравнений находим
Wpo(p)
Д — (р2-^0^--------- (р2 + 1Олб)(р2 + с°6л)-
>Jдп
Определим передаточную функцию основной части разомкнутой
цепи системы (8.38), состоящей из одного тона упругих колебаний
корпуса и сервопривода:
_ /д(^г)^(Р) _ /?(р)
*у(р) <?(Р)
Числитель передаточной функции
х 7ДВ / (/) +/пдв/дв/л (Z) /•# Мп у / ч / о 1 2 ч
Я(р)=-----------;----------------т^~-Л(^г)(Р2 + М-
тп 'дни
Знаменатель Q(p) представим в виде двух сомножителей:
Q (р) = (р + ^с) [(Р2 шя) (Р24~(Ояв) — Ьп (р2-Ьшлб) (р2 + а)5л)]-
Так как fec>0, то корень первого сомножителя отрицательный.
Второй сомножитель является характеристическим полиномом сис-
темы (8.25); его свойства были рассмотрены ранее.
Пусть второй сомножитель Q(p) относительно р2 имеет два
различных вещественных отрицательных корня (система имеет две
различные собственные частоты ол и шг):
Q (р) = (р + Лс) (1 - Ь2) (р2+4) (р2+Ц).
Полагая р = ко, получим выражение амплитудно-фазовой характе-
ристики регулируемого объекта в виде
^РО (/<»)=- fn (/)/'ЦГ)-^
2 о
со ----СО-
--------------------------, (8. 39)
(со2 — со2) (со2 — со2)
rk3 k bQ
где
ДВ /• / f \ ’ Дп До / л
fnW ' —ь2п)
!81.
Для стержня со свободными концами отношение при
любом тоне колебания. Поэтому всегда вещественное число
Nn>0.
В зависимости от знака произведения двух 'чисел fn(l) и fn(*r)
годограф комплексного передаточного числа 1Гро (/«>) на комплекс-
ной плоскости Z=U+iV может брать начало (при <о=О) или с
положительной полуоси U, если это произведение отрицательное,
или с отрицательной полуоси U, если это произведение положитель-
ное. В первом случае фазовый угол?ро (0)=0, во втором случае
?;о(0) = л.
Функция Nn/ (kc + ia) есть комплексное передаточное число
сервопривода. Объединим сервопривод с автоматом стабилизации
как два последовательно расположенных звена
Где (Z<o) = Гас (i«>) - = ЛдС (и) е'^»).
Оставшуюся часть уравнения (8.39) будем считать комплексным
передаточным числом регулируемого объекта, которое имеет вид
^PO (*Y)= Л СО fn (Xr) г;о (Zy), (8.40)
где у = (0/(1)!;
/• х (%S/W1)2—Y2 л’ / х Vpo(i)
U7P0(4y)=-----------—--------------= ДР0(у)е ро ,
<o2[(o)2/coi)2^y2](1-Y2)
а сод, «г — собственные частоты упругого корпуса с упруго подве-
шенным поворотным двигателем; условимся считать, что o)i>(i)2.
В разд. 8.4 было показано, что собственные частоты (щ и со2 сис-
темы будут вещественными и различными, если выполняется соот-
ношение (пл8<Д(Ол.
Когда <вл8>(о„, то должно быть
Предположим, что парциальные частоты (оп и (одв не близки
между собой и частоты системы мало отличаются от парциальных.
Не нарушая общности, примем (Oi>g)2. Тогда между частотой нуле-
вой реакции двигателя и частотами системы возможны два соот-
ношения:
(ол§ <Д о)2 < (Oj (8.41)
И ^2 (8. 42)
Рассмотрим теперь свойства комплексного передаточного числа
(8.40). Частотные характеристики функции UZpo(Zy) для соотноше-
ния (8.41) приведены на рис. 8.11, а для соотношения (8.42) — на
рис. 8.12. В первом случае фазочастотная характеристика <рр"0(у)
начинается со значения <р"о(0) = л, на частоте (о/г5 она возрастает
до 2л, а на собственных частотах (о2 и o)i происходит убывание фа-
зовой характеристики до нуля. Во втором случае запаздывание че-
редуется с опережением, вследствие чего фазочастотная характери-
стика находится в пределах между л и нулем.
182
Из-за трения, перетекания жидкости в гидроцилиндре и сжимае-
мости жидкости частоты системы <oi и «2 несколько изменяются, и,
что самое важное, модуль комплексного передаточного числа
Дро(у) на собственных частотах будет иметь конечное значение.
Амплитудно-фазовые характеристики Wo(/y) О^у^оо с уче-
том рассеяния энергии при 'колебаниях изображены на комплекс-
ной плоскости Z=U + iV на рис. 8.13 и 8.14; рис. 8.13 соответствует
неравенству (8.42), рис. 8.14 — неравенству (8.41)
График функции Fpofiy) с точностью до постоянного множи-
теля в уравнении (8.40) выражает амплитудно-фазовую частотную
характеристику регулируемого объекта, состоящего из упругого
корпуса и упруго подвешенного поворотного двигателя.
Постоянный множитель из (8.40) изменит масштаб годографа;
если произведение fn(l)fn(xr) <0, то изменятся и знаки у вещест-
венной U и мнимой V частей комплексного передаточного числа.
На основании графика функции Wo ^’у) можно сформулировать
требования к фазочастотной характеристике автомата стабилиза-
ции Fac(/(i)) так же, как это сделано в гл. VI. Воспользуемся час-
тотным критерием Найквиста, для чего рассмотрим фазочастотную
характеристику всей разомкнутой цепи
?РО (y) + ?ac (y) = ?(y)-
Положим, что фазочастотная характеристика автомата стабили-
зации имеет вид, показанный на рис. 2.16. Фазочастотные характе-
ристики регулируемого объекта для различных соотношений ха-
рактерных частот приведены на рис. 8.11 и 8.12.
Если выполняется неравенство (8.41) и fn (l)fn'(xr) >0, то систе-
ма будет устойчивой, когда соотношения между характерными час-
тотами следующие:
(,)о (,)1 (,)2- е)1 0)3-> С '°2 \ 0)2“- (8- 43)
183
Если fn(l)fn(xr)<09 ТО система будет устойчивой, когда
% < <С <С С02тс’ <С со2 <С ^Зте- (8. 44)
Области устойчивости, соответствующие неравенству (8.41) и
соотношениям (8.43) и (8.44) в координатах fn(l)fn (хг) — по-
казаны на рис. 8.15. Там же показаны и области неустойчивости,
соответствующие частотам <х>1 и <02- Для обеспечения устойчивости
движения частоты системы coi и сог должны располагаться между
различными характерными частотами автомата стабилизации.
Рис. 8.13
Неустойчиво (су) Устойчиво f(J2) 6)3* Устойчиво (со,) Неустойчиво^)
Устойчиво (иТ) Неустойчиво (uz) Неустойчиво (со,) Устойчиво f(Jz)
Неустойчиво (иу) Устойчиво fcuz) Устойчиво (су) Неу стой чиво (су)
О frWrM
Рис. 8.15
Рис. 8.14
^4?
Устойчиво (су,су) Неустойчиво (су, су )
Неустойчиво /си,, су) Устойчиво(су,су)
Устойчиво fey, су ) Hey cm ou чиво (су, су )
CJq
О fntt)fr(xr}
Рис. 8.16
На рис. 8.16 области устойчивости соответствуют неравенству
(8.42). В отличие от соотношения (8.41) здесь частоты системы coi
и (02 могут располагаться между одними и теми же характерными
частотами автомата стабилизации. Например, система будет устой-
чивой При fn(l)fn(xr) <0, еСЛИ oj2 о)2к, 0)к < (1)2я.
Выше всюду рассматривалась линеаризованная система уравне-
ний с дополнительными упрощениями и поэтому полученные ре-
зультаты имеют лишь качественный характер. В действительности
свойства реальной системы могут значительно отличаться от
свойств системы линеаризованной, и в каждом конкретном случае
нужны более полные исследования.
184
8.7. МЕТОДЫ СТАБИЛИЗАЦИИ СЕРВОПРИВОДА
Если сервопривод как замкнутая система оказывается неустой-
чивым или на его амплитудно-частотной характеристике в рабочем
диапазоне частот имеется большой резонансный пик, то необходи-
мо применять специальные меры по улучшению его динамических
характеристик. Необходимо отметить, что частота собственных
колебаний сервопривода — величина, трудно определяемая. Вели-
чины подвижной массы и, особенно, массы жидкости имеют суще-
ственные разбросы от экземпляра к экземпляру одного и того типа
конструкции. Жесткость может из-
меняться также по времени полета
главным образом из-за изменения
жесткости мест крепления серво-
привода. Даже при эксперименталь-
ном изучении разброс величины
собственной частоты может дохо-
дить до 3 Гц. Все это усложняет
стабилизацию сервопривода.
Для стабилизации сервопривода
используется несколько методов. Можно применять электрические
корректирующие контуры, типичная АЧХ которых схематично по-
казана на рис. 8.17. Они располагаются перед сервоприводом. На-
ибольшее подавление амплитудной характеристики АС будет про-
исходить на частоте соф. Такие фильтры требуют весьма тщатель-
ной настройки.
В некоторых случаях динамические характеристики сервопри-
вода можно улучшить механическими средствами. Уменьшением
люфтов или увеличением жесткости можно повысить частоту соб-
ственных колебаний, увеличением трения можно снизить коэффици-
ент динамичности при резонансе.
Однако наибольших результатов можно достичь посредством
коррекции амплитудно-частотных характеристик сервопривода.
Особенно перспективным в этом отношении следует считать созда-
ние и применение специальных гидромеханических устройств (дем-
пферов), включаемых в контур сервопривода. Они обладают опре-
деленной гибкостью, свойств и позволяют сформировать требуемые
ФЧХ сервопривода.
8.8. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ УПРУГОЙ РАКЕТЫ
Сформулированные в гл. II определения передаточных функций
^дс(р) и U7po(p) базируются на некоторой идеализированной од-
ноконтурной блок-схеме замкнутой системы летательный аппарат—
автомат стабилизации. В действительности рассматриваемая сис-
тема является более сложной, характеризуется наличием несколь-
ких каналов передачи информации о движении летательного аппа-
рата и нескольких обратных связей. Более детальная блок-схема
замкнутой системы летательный аппарат — автомат стабилизации
приведена на рис. 8.18. Для такой системы понятия ^лс(р) и
185
Wo(p) нуждаются в некоторых уточнениях, которые обсуждаются
ниже.
Чувствительные элементы системы стабилизации, обычно ис-
пользуемые на летательных аппаратах, бывают двух типов: одни
измеряют угловое положение ракеты (угловые скорости и ускоре-
ния), другие — линейные ускорения. Конструкции этих чувстви-
тельных элементов могут быть различными.
Для измерения углового положения используют гировертикаль
либо гиростабилизироваиную платформу. Угловая скорость может
Рис. 8.18
быть получена либо дифференцированием сигнала угла, либо не-
посредственным измерением с помощью датчика угловых скоростей
(ДУС), устанавливаемого на корпусе.
Обозначим сигнал датчика, измеряющего угловое положение,
через РУ(0, величина которого зависит от места расположения
датчика на корпусе. В общем случае величину ру(/) для датчика
углов, например в плоскости тангажа, можно представить в виде
гг > гг '
%=*+%/»мqnю = 2 (/)> (8-45)
п^~1
где хг — координата гироскопического датчика углового положе-
ния; /11(лг^-1 W = 0; /о (хг)?0 (/) = &.
Введем в рассмотрение вектор-столбец размерности (п(°> + 2)
следующего вида:
{/' (*г)} =
(8. 46)
186
Тогда выражение для ру(/) можно представить в следующей ком-
пактной форме:
?у (С = Ог))Т<
где №)}т— транспонированный вектор {f(xr)}- Формула для
ру(/), записанная в изображениях, имеет вид
Ф) = {/' (а)}т<7(р)«
Входной сигнал датчика угловых скоростей РУ.с(О, расположен-
ного в точке с координатой лдус, будет
Mo- У ^>4^4 •
’ дх Идус
/2=0
Используя введенные обозначения, получим для изображения сле-
дующее соотношение:
[5У.с(Р) = {/'(^ДУс)}ТР^(Р).
Рассмотрим теперь выражение входного сигнала для датчика
линейных ускорений (акселерометра), обычно называемого датчи-
ком перегруз'к и. В первом приближении датчик перегрузки
можно представить в виде некоторой массы на пружине. При дви-
жении летательного аппарата на массу датчика действуют силы
инерции, которые вызывают перемещение ее вдоль измерительной
оси. По этим перемещениям можно судить об ускорениях аппарата.
Пусть датчик .перегрузки установлен на корпусе ракеты. При
поперечных колебаниях ракеты кроме поперечного ускорения он
будет воспринимать также составляющуя вектора g*, направлен-
ную вдоль измерительной оси датчика. Поэтому входной сигнал
датчика линейных ускорений рл.у(0 можно записать так:
гг ' пУ ’
?Л.У (0 = У qn (/) /„ (хдлу) + <7* У qn (/) ,
дх Идлу
л =—1 1
где хдлу— координата расположения датчика линейных ускорений
на корпусе.
Переходя к изображениям, получим
Рл.у (р) = [{/(*длу)}т р2 + g* {/' (*длу)}т] Я (р)-
Как следует из приведенных соотношений, входные сигналы датчи-
ков системы стабилизации ру(/), ру.с(О, ₽л.у(0 могут быть одно-
значно определены, если известна зависимость от времени векто-
ра q(t).
Из уравнений возмущенного движения объекта можно получить
передаточные функции
?(Р) f ?-i(P) ?о(Р) ?i(P) ) /8 47х
&(р) | Цр) ’ Мр) ’ S(p) '
где б(р) — выходной сигнал системы стабилизации.
187
(8. 48)
Определим передаточные функции объекта по угловому поло-
жению №у(р), угловой скорости Wy.c(p) и линейному ускорению
^л.у(р) следующим образом:
IV/ / \ МР) Г /V/ ИТ ^(Р)
^у(р) б(р) —</ (хг)} цр) ,
^у.с(р)— Цр) — {/ (Хдус)} S(p) ’
V.., (Р) = = < / (* ДЛу) >т -ту^г - S' < /' (-1 дду»т 4®-
Таким образом, под термином передаточной функции объекта
регулирования будем понимать некоторую совокупность пе-
редаточных функций типа (8.48).
Под выходным сигналом системы стабилизации обычно понима-
ют отклонение управляющего органа б(/) или смещение штока гид-
равлического привода //шт=,бкГ. Однако величины б(/) и бк = бк(^)
зависят не только от входных сигналов системы стабилизации р(/),
но и от движения самого летательного аппарата. Это объясняется
наличием обратных связей между отклонением управляющего ор-
гана и движением собственно летательного аппарата, а также вли-
янием нагрузки на перемещение штока гидравлического привода.
Поэтому передаточная функция автомата стабилизации может за-
висеть от характеристик летательного аппарата.
При определении передаточной функции автомата стабилиза-
ции широко используют экспериментальные данные, которые зави-
сят от схемы проведения эксперимента. Рассмотрим наиболее ха-
рактерные способы определения передаточной функции автомата
стабилизации, когда органом управления является поворотный
двигатель. В этом случае передаточную функцию автомата стаби-
лизации целесообразно определить так, чтобы она не зависела от
характеристик летательного аппарата:
Ц7ас (р) = — J'hhIEL — ME)
(8.49)
(8. 50)
₽(Р) ?(Р) ’
где р(р) — изображение одного из входных сигналов датчиков
системы стабилизации.
Соотношение (8.49) можно представить в следующей форме:
W(р) = 1 (р) Zy (р> .
г iy(p) Ир)
1. Пренебрегаем влиянием нагрузки на перемещение штока при-
вода. Вычислив из третьего уравнения (8.34) г/Шт(р)Л’у(р) при усло-
вии /?з=^2 = 0, получим передаточную функцию автомата стабили-
зации без учета нагрузки:
uz.r(р) = 1 b°k3 (р) ,
г blP + b* ₽(Р)
ГДв bQ — ^о.с-
188
Если кроме того пренебречь податливостью проводки управле-
ния и креплений гидропривода к корпусу, т. е. считать, что c?j5 =
то б = 6к. В этом случае движение поворотного двигате-
ля определяется исключительно сигналами системы стабилизации
*Ш). Такая аппроксимация свойств системы стабилизации право-
мерна только тогда, когда частота собственных колебаний поворот-
ного двигателя много больше частот рассматриваемых колебаний
летательного аппарата.
Рис. 8.19
Частотную характеристику автомата стабилизации WAC(ju)
можно определить экспериментально в такой постановке по схеме,
приведенной на рис. 8.19, а.
2. Учитываем влияние нагрузки на перемещение штока гидро-
привода. Нагрузку на гидропривод будем схематизировать пру-
жиной с жесткостью к. Схема, по которой экспериментально опре-
деляется частотная характеристика автомата стабилизации в рас-
сматриваемом случае, приведена на рис. 8.18, б.
Передаточная функция автомата стабилизации определяется
соотношением (8.50). Нагрузка, действующая на шток гидропри<
вода, как это следует из схемы
Д^5п=к1/шт=кг8к.
Подставив это соотношение в третье равенство (8.34), получим
уравнение движения штока привода
г (6 ЗР + + {bip + ^-1 8к (Р) = k (р)
L г п J г
После некоторых преобразований найдем
(Р) ^0 *з (g 51)
l'y (Р) Г (biP + b*0) с№ + (р)
й.р + Ьп
где c65 = kr2; d5(ph= °F/. (8.52)
ь$р + Ь2
Передаточную функцию автомата стабилизации с учетом пру-
жинной нагрузки, действующей на шток гидропривода, согласно
Равенству (7.50) и с учетом выражения IFAC(p) представим в виде
'у(Р) ₽(Р)
4 (р)
с55 + CS8 (Р)
(8. 53)
189
Как указывалось, с&ь есть эквивалентная жесткость проводки
управления и крепления привода к корпусу, приведенная к углу
поворота органа управления. Покажем, что величина с1ь (р) есть
динамическая жесткость электрогидравлического привода.
Пусть к штоку привода при отсутствии входного сигнала (zy = 0)
приложена сила Ф(/), под действием которой шток перемещается
на величину ушт. Тогда динамическую ж-есткость можно определить
из выражения
Ф(р№шт(Р) = с«(Р)/''2.
Учитывая, что Ф(р)=—Ар(р)Еп? из второго и третьего уравнений
(8.35) найдем соотношение, аналогичное (8.52):
(р) &1Р +
г2 ЬзР + Ь2
Исследуем более подробно выражение для с£а(р). Пусть сила
ф(/)=ф0, т. е. является постоянной. Установившееся значение
Ф///шт при t-^oo определяет величину статической жесткости при-
вода (rss)CT. Используя методы операционного исчисления, можно
показать, что
(С»)ст = (^о/^2)ЛЛ
Экспериментальное измерение статической жесткости привода
дает возможность определить соотношение коэффициентов bo/b2>
входящих в уравнение гидропривода.
Представим выражение для ^а(р) в следующей форме:
d6(p)=AFnr2bB±l, (8.55)
Т2р -h 1
где Ti и Т2 — постоянные времени, равные
Т1 = ^/&*; Т2 = ^2.
Если внешняя сила изменяется по гармоническому закону
ф(/) =фоз1П(о^, то при установившихся колебаниях штока уШт =
= Уо шт sin ((0^+6) • Назовем отношение Фог2/у^шт = А (со) амплитуд-
но-частотной, а 0(со) — фазо-частотной характеристикой электро-
гидравлического привода. Легко видеть, что
VТ?о>2 4- 1
А (со)=— г2 —=2=7-; 9 (со) = a rctg Т^о — a rctg Т2со.
Ь2 /Т2и2 + j
Если Ti>T2, то 0 (оз) >0 и внешняя сила опережает по фазе пере-
мещения штока, а при Ti<T2, 0(со)<0 внешняя сила отстает по фа-
зе относительно перемещения штока. Физически это означает, что
при 0(со) >0 привод работает как демпфер и рассеивает подводи-
мую к нему энергию, а при 0 (со) <0 привод сам является источни-
ком энергии.
190
3. Принимаем угол отклонения поворотного двигателя (управ-
ляемого стабилизатора) за сигнал выхода системы стабилизации.
Взаимодействием отклонений поворотного двигателя с движением
аппарата при этом пренебрегаем. Схема для экспериментального
определения частотных характеристик автомата стабилизации в
рассматриваемом случае показана на рис. 8.19, в. Для имитации
нагрузки, действующей на поворотный двигатель, вокруг оси дви-
гателя прикладывается внешний момент ( — — /ПбВ).
Уравнения движения рассматриваемой системы в изображени-
ях имеют вид
(Язз р2 4-mi p + 8 (р) = с58 Вк(р);
с5ь [В (р) - Вк (р)] = А/; (р) Fu г\ (8. 56)
(Ь3 р + Ь2) Ьр (р) - {^р + йо) гВк (р) = й0 k3iy (р);
где ^тзз 1дВ, сб8— кг .
Исключив из уравнений (8.56) 6к(р) и Др(р), получим уравнение
движения поворотного двигателя
(я55 р2 + пц р + + с58) В (р) = —----------, (8. 57)
г \J>iP + *о)
С88 + С88
Определим и/дс(р)— передаточную функцию автомата стабили-
зации с учетом динамических характеристик поворотного двигате-
ля и внешней нагрузки на шток привода следующим образом:
^АС (Р) = ^
8(Р)
*у (Р)
г у (Р)
?(Р)
Из (8.57) следует, что
W(ac (р) = - t y(P)____кзЬ°__________—_________________—________— •
Р (р) ''(61р + *о) C5S + c85 flosP2 + mi P+ + CS5
(8. 58)
Передаточная функция U^ac(p) связана с й/дс(р) и IFac (p) соотно-
шениями
UZ$ (Р) = UZAC (Р)------------------------------— ;
CS8 + С88 а№ Р2 + mi Р + тЬ + С68
UZ& (р) = (р)-----------------— • (8. 59)
^88 Р2 + ^8 Р + ^8 + С88
Таким образом, в соответствии с различными способами опреде-
ления передаточных функций автомата стабилизации можно на-
звать четыре типа передаточных функций, характеризующих упру-
гую ракету как объект регулирования.
191
1. Передаточные функции 1Гу(р), И^у.сСр), ^л.у(р) определяют
в предположении абсолютно жесткого крепления органа управле-
ния к штоку привода (ci5 = oo) и отсутствия влияния нагрузки на пе-
ремещение штока привода _
2. Передаточные функции IFy(p), ^у.с(р), ^л.у(р), для которых
входным сигналом является 6к(р), определяют с учетом динамики
органа управления и пренебрегая влиянием нагрузки на перемеще-
ние штока привода.
3. Передаточные функции IFy(p), IFy.c(p), ^л.у(р), для которых
входным сигналом является бк(р), определяют с учетом динамики
поворотного двигателя и влияния нагрузки на перемещение штока
привода.
4. Передаточные функции IFy(p), U7y.c(p), М7л.у(р), для которых
входным сигналом является 6(р), а свойства автомата стабилиза-
ции определяются передаточной функцией ^/до(р).
8.9. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ СИЛ
ВНУТРЕННЕГО ТРЕНИЯ, ФОРМ И ЧАСТОТ
СОБСТВЕННЫХ КОЛЕБАНИЙ КОРПУСА РАКЕТЫ
До сих пор мы не ставили вопроса о величине силы внутреннего
трения. Более того, если частота вынужденных колебаний корпуса'
значительно отличается от его частоты собственных колебаний, то
силы трения в корпусе принимать в расчет вообще нет необходи-
мости. Силы трения существенны при резонансе, без них нельзя
определить амплитуду колебаний и поэтому нельзя надежно при-
менять амплитудную стабилизацию упругих колебаний и опреде-
лять нагрузки.
В обширной литературе, посвященной исследованиям внутреннего трения в
стержнях, имеются рекомендации различных способов учета трения. Предлагают-
ся формулы, выражающие зависимость сил внутреннего трения от величины де-
формации, ее скорости, от характера и способа нагружения стержня. Некоторые
из этих формул в линейных задачах о колебаниях однородных стержней при-
водят к удовлетворительным результатам.
Значительно сложнее обстоит дело с неоднородными стержнями и, тем бо-
лее, с машиностроительными конструкциями, для которых не имеется сколь-ни-
будь строгих и вместе с тем достаточно простых и надежных методов учета сил
внутреннего трения.
Существует три основных варианта учета сил трения, основан-
ных на различных гипотезах.
Первый вариант основан на гипотезе Фогта, согласно которой
сила внутреннего трения пропорциональна скорости деформации.
В уравнении поперечных колебаний сила внутреннего трения пред-
ставляется выражением
-^-1.
" dtdxi L дх^ J
Уравнение для обобщенной координаты имеет вид
Чп + 2ея«)я<7я+=ап q (/),
192
причем относительный коэффициент затухания упругих колебаний
=
пропорционален частоте собственных колебаний корпуса ракеты.
Гипотеза Фогта удобна для решения уравнений, но плохо подт-
верждается опытными данными.
Согласно второму варианту сила трения предполагается пропор-
циональной скорости перемещения и называется силой вязкого тре-
ния. В уравнении поперечных колебаний эта сила представляется
величиной h(x)dyldt. Уравнение для обобщенной координаты имеет
тот же вид, что и в первом варианте:
Я П “Ь ^П^пЯп “Ь о)« Яп = я и)»
но в нем величина относительного коэффициента затухания об-
ратно пропорциональна частоте собственных колебаний корпуса ра-
кеты:
i
. е„=-Цй(х)Л^
о
Третий вариант основан на гипотезе Е. С. Сорокина, согласно
которой сила трения при гармонических колебаниях не зависит от
скорости, но сдвинута по фазе относительно упругой силы на угол
л/2. Гипотеза Сорокина неплохо подтверждается опытными дан-
ными.
В уравнении поперечных колебаний (5.5) сила трения по гипо-
тезе Сорокина представлена слагаемым
• д2 г „ , д?у ’I
2 л дх'1 L дх?- J
Коэффициент относительного затухания и коэффициент по-
глощения энергии при колебаниях ф, равный отношению поглощен-
ной за один цикл энергии &W к полной энергии системы U7, для
корпуса ракеты обычно расчетным путем определить не удается.
Эти коэффициенты являются интегральными величинами и их зна-
чения проще всего определять непосредственно опытным путем.
Особенно это относится к корпусам ракет, в которых конструкци-
онное трение является преобладающим.
Для обеспечения стабилизации и для расчета нагрузок необхо-
димо достоверно знать также формы и особенно частоты собствен-
ных упругих колебаний ракеты. Поскольку расчетные схемы для их
определения обычно не учитывают многих особенностей конструк-
ции (наличие упруго подвешенных грузов, изменение местной же-
сткости и др.), то результаты расчета целесообразно подтверждать
экспериментально.
Таким образом, уже на стадии проектирования проводятся экс-
периментальные исследования по определению сил трения, форм и
Частот собственных колебаний корпуса ракеты. При необходимости
7 359 193
организуются экспериментальные исследования взаимного влия-
ния колебаний жидкости в баках и упругих колебаний корпуса.
Эксперименты проводятся на конструктивно подобных моделях,
выполняемых в масштабах 1:5, 1:10, или на натурных образцах.
Так как все причины, вызывающие рассеяние энергии, смодели-
ровать практически невозможно, то величина коэффициента трения,
полученная для модели, может применяться при исследовании ко-
лебаний ракеты лишь как ориентировочная.
Испытуемая модель подвешивается па мягких шнурах (тросах) в вертикаль-
ном положении (рис. 8.20). Длина тросов подбирается так, чтобы частоты вер-
тикальных или маятниковых колебаний модели как твердого тела были значи-
тельно ниже частоты первого тона упругих . поперечных колебаний. Подвеска
корпуса в горизонтальном положении может не дать правильных результатов
вследствие того, что
Рис. 8.20
не будут соблюдаться условия работы конструкции при
сжатии, что особенно важно для стыков. Для регистрации
колебаний по длине корпуса устанавливается система дат-
чиков перемещений, скоростей или ускорений, на сжатых
и растянутых волокнах наклеиваются тензодатчики.
Существует два метода экспериментального
определения сил трения. Первый основан на изу-
чении затухания собственных колебаний корпу-
са ракеты, второй — на изучении вынужденных
колебаний. Интересующие нас коэффициенты
трения можно определить путем обработки ре-
зультатов эксперимента, учитывая допущения о
характере сил трения. Частота собственных ко-
лебаний определяется по резонансной кривой,
форма собственных колебаний — непосредствен-
ным построением по показаниям датчиков, расположенных по дли-
не корпуса.
Вынужденные гармонические колебания корпуса вызываются
вибраторами или электрогидравлическими силовозбудителями. Для
получения резонансной кривой эксперимент проводится при раз-
личных отношениях частоты вращения вибратора к частоте собст-
венных упругих колебаний корпуса.
Если на корпус ракеты (от вибратора) действует сосредоточен-
ная поперечная внешняя силаРое/р/, то правые части уравнения
обобщенной координаты соответственно
ап
Р® f п. (хр}
тп
где fn(xp) — значение формы собственных колебаний корпуса в
точке приложения внешней силы.
Амплитуда вынужденных гармонических колебаний
qW =__________ -Р7 ___
m«“2„V(l-Y^)2 + 462„Y2„
у„=—
“i
194
При резонансе для малых значений коэффициента относительного
затухания
(^0))тах
Л)f п(хр)
мп
(8.60)
Л) f п [хр)
Определив экспериментально максимальную амплитуду, можем
вычислить искомый коэффициент £п.
По литературным данным для ракеты £п^0,02.
Если трение считать конструкционным, то амплитуда вынужден-
ных гармонических колебаний на основании уравнения (5.5) равна
^(0)=________Р° fn ;
Г (1 - Y*)2 + 1Ф/(2-п)]2
При резонансе для малых значений коэффициента ф
Р°2Лг(Хр) - ; -^= P\f'l^p} (8.61)
т^2п [ф/(2л)] 2л ил«>2я(^0))max
В зависимости от принятой гипотезы из анализа эксперимен-
тальных данных можно определить или коэффициент относительно-
го затухания g, или коэффициент поглощения ф. Если принять ги-
потезу Фогта или гипотезу вязкого трения, то по формуле (8.60)
найдем коэффициент относительного затухания Если принять
гипотезу Сорокина, то по формуле (8.61) найдем коэффициент по-
глощения ф.
Зависимость силы трения в корпусе ракеты от характера коле-
баний (частоты и амплитуды) в действительности сложнее, чем это
предполагается гипотезами Фогта, Сорокина или гипотезой вязкого
трения. Об этом, в частности, свидетельствует большой разброс
экспериментальных данных по определению коэффициентов затуха-
ния, а также зависимость этих коэффициентов от частоты и амп-
литуды колебаний.
Для анализа задачи об устойчивости поперечных упругих коле-
баний в первом приближении достаточно знать амплитуды вынуж-
денных колебаний корпуса в резонансном режиме колебаний. Эти
амплитуды можно определить путем расчета, пользуясь любой из
гипотез о силах трения, если известны коэффициенты и ф.
Если коэффициенты и ф определяются экспериментально ре-
зонансным методом, то из одного и того же эксперимента на ос-
новании формул (8.60) и (8.61) получим соотношение
5„=Ф/(4л).
Следовательно, амплитуды вынужденных упругих колебаний, вы-
численные для уп=1, не будут зависеть от выбора гипотезы, если
Принять £п=ф/(4л). В этом смысле для резонансных колебаний
выбор гипотезы о силе трения не имеет значения. Первостепенное
значение имеют сами величины коэффициентов gn или ф.
7* 195
Глава IX
УРАВНЕНИЯ ДВИЖЕНИЯ И ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ УПРУГОЙ РАКЕТЫ С БАКАМИ,
ЧАСТИЧНО ЗАПОЛНЕННЫМИ ЖИДКОСТЬЮ
9.1. ДИНАМИЧЕСКАЯ МОДЕЛЬ
Влияние упругих свойств корпуса и колебаний жидкости в ба-
ках па динамические характеристики ракеты как объекта регулиро-
вания до сих пор рассматривалось раздельно. Раздельное рассмот-
рение выгодно тем, что позволяет четко выяснить физические при-
чины изменения динамических характеристик и получить сравни-
тельно простые уравнения для их определения. Качественные и в
некоторых случаях количественные зависимости дают правильное
представление о динамических свойствах объекта только в том слу-
чае, когда частоты собственных колебаний ракеты, обусловленные
подвижностью жидкости в баках и упругими свойствами корпуса,
•не являются близкими.
Термин «близость собственных частот» количественно не опре-
делен и его надо рассматривать в связи с точностью анализа, ко-
торая, в свою очередь, зависит от точности исходных данных. Не-
которое представление об этом можно сделать из рассмотрения-
амплитудно-частотных характеристик ракеты с учетом колебаний
жидкости в баках и упругих колебаний корпуса.
Одной из важнейших характеристик летательных аппаратов как
объектов регулирования является спектр собственных частот коле-
баний (частоты управляемых движений аппарата как жесткого
тела вокруг центра масс, частоты колебаний топлива в баках, ча-
стоты колебаний конструкции). От соотношения этих частот зави-
сит степень трудности обеспечения устойчивости соответствующих
видов движения, а следовательно, и степень сложности системы
•стабилизации.
По мере роста размеров ракет-носителей наблюдается сближе-
ние собственных частот упругих колебаний с частотами колебаний
топлива в баках и частотами колебаний ракет вокруг центра масс.
Для примера на рис. 9.1 представлен спектр собственных частот
колебаний для трех ступеней ракеты-носителя «Сатурн-5»: а — пер-
вой ступени; б — второй ступени; в — третьей ступени. На рисун-
ке обозначено I — частота колебаний ракеты с системой управле-
ния по тангажу и рысканию; II — частота колебаний ракеты с сис-
темой управления по крену; III — частота системы управления век-
тором тяги; IV, V, VI, VII — частоты первого, второго, третьего и
четвертого тонов изгибных колебаний корпуса; VIII — частота ко-
лебаний жидкого топлива в баках; IX — частота нулевой эффек-
тивности поворотного двигателя; X, XI, XII — частоты первого, вто-
рого и третьего тонов крутильных колебаний корпуса.
Наибольший интерес представляет спектр частот собственных
колебаний первой ступени. В диапазоне частот от 0 до 4 Гц рас-
196
положены частоты четырех первых форм изгибных колебаний кор-
пуса. Диапазон частот первого тона изгибных колебаний пересека-
ется с частотами колебаний жидкости, что имеет принципиальное
значение при компоновке системы стабилизации. Собственные час-
тоты четвертого тона колебаний по времени полета изменяются поч-
ти в два раза. Эта особенность характерна и для высших форм ко-
лебаний последующих ступеней ракеты.
Рис. 9.1
Следует обратить внимание на то, что имеет место довольно
низкая (4 Гц) частота собственных колебаний системы привод —
поворотный двигатель, свидетельствующая о том, что в этом диа-
пазоне частот необходимо учитывать динамические характеристики
органа управления (поворотного двигателя).
Динамическая модель может быть представлена в виде прямо-
го неоднородного упругого стержня, на котором подвешены мате-
матические маятники (или укреплены грузы на пружинах) и физи-
ческий маятник — ЖРД (рис. 9.2).
Стержень с маятниками совершает движение в поле массовых
сил с интенсивностью g* и подвержен действию системы внешних
сил — аэродинамических и реактивных.
9.2. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ УПРУГОЙ
РАКЕТЫ С УЧЕТОМ КОЛЕБАНИЙ ЖИДКОСТИ В БАКАХ
Невозмущенным движением будем считать прямолинейный по-
лет ракеты со скоростью v в поле массовых сил с интенсивностью
g*. Вектор g* направлен против движения ракеты, а его величина
g*=(Pa-Xa)/m,
где эффективная тяга Р3 = Р—Хр; Ха — сила аэродинамического со-
противления; т — масса ракеты.
197
При составлении уравнений возмущенного движения стержня
кроме сил инерции и упругих сил конструкции будехМ учитывать
следующие силы:
силы воздействия на корпус от колебаний жидкости в баках и
от движения поворотного двигателя;
силы Кориолиса, при вычислении которых считаем, что массо-
вый расход через произвольное поперечное сечение ракеты равен
1л(х) и определяется выработкой топлива из баков ракеты; тогда
действующая в каждом сечении ракеты погонная сила Кориолиса
реактивные силы: тяга двигателя Р; сила Р является следящей,
т. е. при упругих деформациях ракеты все время направлена вдоль
упругой оси корпуса; при отклонении поворотного двигателя на
угол б возникает поперечная составляющая этой силы Рб;
силы конструкционного демпфирования;
аэродинамические поперечные силы, действующие на упругий
корпус ракеты Za(x);
возмущающие силы FB(x) от действия ветра, от технологических
погрешностей в установке двигателя и т. п.
Используем полученное в гл. VIII уравнение движения упругого
неоднородного стержня под действием следящей силы (8.2):
— \ej (%)d2z(x’ °.l-i- — |уу (х) Щ
djfl L дх? J ' дх L дх J
(9.1)
dt2 dt
Здесь m(x) — погонная масса корпуса, включая «затвердевшую»
жидкость и массу поворотного двигателя; N(x) — погонная сжи-
мающая сила в поперечном сечении корпуса;
N (x) = g* j т(х)с1х-\- Г Xa(x)dx,
о о
где Хв(х) — погонная сила аэродинамического сопротивления.
В распределенные внешние для стержня силы q(x, t) включим:
аэродинамические силы (5.29)
AZa (X) = —сТ (М [ дг(х’() - — ;
а v J 2 k 7 |_ dx V dt J
силы Кориолиса
силы от колебаний математических маятников или грузов на
пружинах. Так как они сосредоточенные, то введем их с помощью
198
g-функции Дирака. Для /-го маятника распределенная поперечная
сила будет равна
— Гmi 8 (х — X;) --— Ъ (х — xj .
L dx J
Здесь mif Xi — масса и координата Z-го маятника.
К распределенным внешним нагрузкам относятся также силы и
моменты от поворотного двигателя, которые запишем с помощью
й-функции Дирака так:
8 (х хдв) F- 8 (х хдв) Л1 дв,
где Гдв; 7ИдВ — сосредоточенные сила и момент, передаваемые на
корпус от поворотного двигателя;
возмущающие силы FB(x, t).
Таким образом внешняя сила может быть 'представлена в сле-
дующем виде:
п( г л_ Qv2 Г((3)/ГД
Д dz(x, QI _ 9 . d*z (x, Q _
v dt J ' dxdt
Ъ (x — Xi) g* m^i + 8 (x — хдв) Гдв —
^-хдв)Л1дв + Гв(х, t).
(9. 2)
Здесь № — число учитываемых тонов колебаний жидкости во всех
баках, имеющих свободную поверхность жидкости.
Подставив выражение q(x, t) в уравнение (9.1), получим
L(z, x, +
dx? [ dx2 J dx L
+„и^>+4И^+^с?;м[^
dfi dt 2 a L dx
,(0)
+ ° + У! fOT-8 ~ — Xi) ё*т^
dxdt L dx
(х, О 1 I
дх J"1”
____dz (х, t)
v dt
- 5 (x - xj Fu + 8 (x - хдв) Mдв - FB (x, t) = 0. (9. 3)
dx
Это дифференциальное уравнение должно быть дополнено урав-
нениями колебаний жидкости в баках (маятников) для обобщенных
координат и уравнениями относительного движения поворотного
Двигателя, из которых должны быть определены силы Рдв и мо-
мент МдВ.
199
Уравнения колебаний жидкости в баках без учета диссипатив-
ных сил аналогичны (3.56). Они могут быть представлены в виде
(i = 1, 2,..., (9.4)
Уравнения движения поворотного двигателя относительно оси
вращения получены в гл. VIII. Воспользуемся уравнением (8.34) и
добавим в него силы Кориолиса. Получим
, . д3г(х,О| “I । 1 /* \ । к । j d^z (х, /)| .
/дв [8 3 ^~кдв ] + кг (8 “ + Лдв6 т Отдв/дв |лдв +
+ ™ДВ£%ф + ^£^1 + ] = 0’М
L dx । дв ] [ dxdt ^BJ
где /дВ— длина двигателя; цдв — массовый расход через сопло
двигателя.
Запишем теперь в явном виде выражения для сосредоточенной
силы ГдВ и момента 7ИДВ, передаваемых на корпус от поворотного
двигателя. Так как силы и моменты, зависящие от переносного дви-
жения корпуса, уже учтены в уравнении (9.3), то величины FflB и
Л4ДВ должны определяться из уравнений относительного движения
поворотного двигателя. Получим
^дв" ^дв^дв й “Г ФЛдв /двВ, (g g>
=W = Л.8+1ЮЪ + -1дв (/;в)2 8,
где Ру — тяга двигателей, используемых для управления. Таким
образом, система уравнений (9.3) — (9.6) определяет возмущенное
движение упругой ракеты с учетом колебаний жидкости в баках и
динамики поворотного двигателя.
Упругие колебания корпуса z(x, t) с учетом следящего характе-
ра тяги должны удовлетворять следующим граничным условиям:
EJ д1г<х' £) = 0; — при х = 0, х=1. (9.7)
дх дх L dxi J г
Функция z(x, t) должна также удовлетворять условиям сопря-
жения в местах скачков изгибной жесткости
EJ
d2z(x, QI =Ej d2z(x, QI
dx? |x*-о dx? L*+o ’
d rg7^(x,/)jl
dx * dx? JL*-O dx L dx? J|x*+0
(9.8)
Воспользуемся теперь методом Бубнова — Галеркина для све-
дения дифференциального уравнения в частных производных к сис-
200
теме обыкновенных дифференциальных уравнений. Полагаем, что
z(x, t) можно представить в виде
z(x, t)= fn(x)qn(t). (9.9)
п<=—1
В качестве функций fn(x) примем формы собственных колебаний
ракеты без учета колебаний жидкости, динамики поворотного дви-
гателя и сжимающих сил. Полагаем, что обобщенным координатам
q-x и 7о соответствуют движения ракеты как жесткого тела f_\(x) =
= 1 и fo(x) =хс—х. Такая система координатных функций является
полной; каждая из этих функций удовлетворяет граничным усло-
виям (9.7) и условиям сопряжения (9.8).
Подставив (9.9) в уравнения (9.3) — (9.5) и выполнив стандарт-
ные преобразования вида
1 Г "(0) 1
[Дре, t 2 ]/л^ = ° («= —1, о, 1,..., /г<°>),
б Л2--1
получим систему обыкновенных дифференциальных уравнений воз-
мущенного движения упругой ракеты в следующей форме:
«(0)
Ч п ~Т~ тп 4" $тп 4” &тп} Чп 4“^тп 4~ ^тп 4~ Smn) Чп\ 4“
п= —1
/(0)
+ 2 (ап«7+й'лА/) + ап6^Тйгп8^ + елб8 = ^:' л
Z=1
(та, л=-1, 0, 1, 2,..., п(°)); (9.10)
п<°)
2 + + = O (/ = 1, 2,..., /(»)); (9.11)
rt=—1
«(0>
2 1'а5'1?л“НИп4' 5’«л^л)4*а88 8 4~ (Л 4" е8б) 8 4“ (C6S "hS'Sj) 8 =
= М(/шт/г)> (9- 12)
I
где атп= \m(x)fm(x)f„(x)dx-,
о
ani = fn(xi)mi; а^т^, ain=aui= -rn„Jm fn(хдв)-1 лв dfn;
uX |-*дв
П ___ t . r _____ г рт$ fm f n(x) J r _____________V r2’ h ____
7 дв’ cmn dx, Сб8 КГ, Umn
J axz dx*
0
201
= dmn =
2 J a dx
о
l
^^~\C^zSx\f^x^^dx\ d^n=b3cmn; (9.13)
0
I
emn = 2\ fndx-,
J dx
о
епЪ = - 2/;вИдв /„ (x„) - !Sb <z;B)2 -^^-1 ;
dx Илв
*й=!ьХ)2; ^=-^(Q2^-l ;
dx |*дв
gmn = -\N (x) rf/m (x) df^x}- dx 4- Pfm (Z) ;
J dx dx dx \i
0
gm =-Pyfn K.) - g* df"(x> | ;
dx |<№
gbn= -g*mju df"(x) I ; g66 = g* wiBZ„; (.9.14)
dx Идв
gm=g* «,• —/f—x) I ; gi=«>?.
dx kz-
В последней формуле (ог- — частота собственных колебаний /-го
тона жидкости в баке.
Уравнения (9.10) соответствуют поперечным колебаниям упру-
гого корпуса, (9.11) — колебаниям жидкости в баках, (9.12) —
уравнение движения поворотного двигателя. Коэффициенты урав-
нений характеризуют взаимодействие между различными обобщен-
ными координатами, обусловленное силами различной физической
природы. Так, коэффициенты атп, аПъ характеризуют взаимо-
действие инерционных сил, стп — сил упругости, dmn — аэродина-
мического демпфирования, d*nm — конструкционного демпфирова-
ния, Ьтп — сил аэродинамической жесткости; етп — сил Кориоли-
са, gmn — сил, вызываемых ускорением g*.
Уравнения возмущенного движения (9.10) — (9.12) получены
при замене колебаний жидкости в баках колебаниями маятников.
Это вносит некоторую погрешность при определении коэффициен-
тов инерционного' взаимодействия атп <и особенно коэффициента
aQo, равного моменту инерции «затвердевшей» ракеты относительно
центра тяжести. Чем длиннее ракета, тем эта погрешность меньше.
В расчетах величину aG0 следует считать равной моменту инерции
ракеты с учетом движения жидкости относительно стенок баков, т. е.
а,м = 1. Для цилиндрического бака выражение для / дается в гл. IV;
для других форм баков значения / можно найти в работе [16].
202
При выводе уравнений пренебрегали также диссипативными си-
лами при колебаниях жидкости. Приближенно эти силы можно
учесть, если в уравнение (9.11) добавить слагаемое б/Дг-, которое
и будет характеризовать рассеяние энергии при колебаниях жид-
кости. С учетом сделанного замечания уравнение (9.11) можно
представить в виде
"(0)
2 ^niqn^gmq^ + ai^Ad^-^g^^O. (9.15)
п=—1
При выводе уравнений возмущенного движения в качестве точ-
ки приведения использовался центр массы тела, что выразилось в
том, что функция fo(x) бралась в виде fo(x)=xc—х. Вообще гово-
ря, в качестве точки приведения можно выбрать любую другую
точку. Если в качестве такой точки принять метацентр системы
то функция fo(x) задается в виде Мх)=хущ—х. Коэффициенты
уравнений возмущенного движения по-прежнему будут определять-
ся формулами (9.13), (9.14). Более того, если в качестве точки
приведения взять метацентр, то изменяются только коэффициенты,
содержащие индекс «О». Так, например, яОо — момент инерции
твердого тела с жидкостью относительно метацентра равен
®оо = ^ + "г(хмц —хс)2. (9.16)
Уравнения возмущенного движения можно несколько упростить,
если использовать в качестве точки приведения метацентр систе-
мы и ввести некоторые преобразования для координат Аг, характе-
ризующих волновые колебания жидкости в баках.
До сих пор величины Аг- отсчитывались от оси ракеты, что экви-
валентно отсчету волновых колебаний жидкости от плоскости, пер-
пендикулярной оси бака. Будем теперь отсчитывать волновые коле-
бания жидкости от плоскости, перпендикулярной направлению век-
тора g*. Это равносильно тому, что перемещения подвижной массы
mt будут отсчитываться от прямой, параллельной вектору g* и про-
ходящей через точку подвеса маятника (см. рис. 3.12). Новые ко-
ординаты тг- = А(2)п связаны с Аг^Ап следующим соотношением:
=K + li У (9. 17)
дх И/ dx
п~= —1
В качестве обоснования выбора новой системы отсчета можно
привести следующие соображения. Пусть ракета совершает мед-
ленное поперечное движение. Поместим на свободной поверхности
жидкости плавающую крышку, которая препятствует возникнове-
нию волновых колебаний. При медленных движениях ракеты кры-
шка в каждый момент будет находиться в положении, перпенди-
кулярном вектору g*. Естественно, отклонения свободной поверх-
ности, возникающие при волновых колебаниях, следует отсчитывать
от плоскости, совпадающей в каждый момент времени с плаваю-
203
щей крышкой. Таким образом удается разделить движения жидко-
сти, связанные с изменением ориентации вектора g* относительно
оси бака и волновыми колебаниями жидкости, возникающими при
возмущенном движении ракеты.
Используя значение коэффициента gni, соотношение (9.17) мож-
но переписать в виде
^qn.
gt
(9. 18)
Подставив выражение (9.18) в уравнение (9.10), получим
„(О)
п(0>
g' ^тп ^тп~\~ Яп +
л=—1
п(0)
тп Snl
п = — 1
-}-апъ В + епб& + Ъ) = Рп (т, п= — 1, 0, 1,..., п^). (9.19)
л=—1
/(0)
Заменим в уравнении (9.11) величину X; соотношением (9.18):.
л(0)
(ani - аг j qn + а/r,- + g,rг = 0.
h= —1
Уравнения возмущенного движения упругой ракеты с учетом ко-
лебаний жидкости в баках представим теперь в виде
"(0)
тпЯп + (^ тп -\-d*mn-\-eml^qn-\-(b
тп + +i тп )<7/г] +
п=—1
<(°) _ ..
+ 2 (ал<гl~\~gnir/) + ап6 ST^nsS-rgns S = Fп
i 1
(/n=-l, о, 1,..., П<°)). (9.20)
л<°>
2 aniQn-vaniri + giri = (} (9.21)
n e —1
Л(0)
2 n~i~ n~\~ ё^пЯп) ~T (^38 “h^ss) Ь —-рй’бб) = С^Уил/г ►
= — 1
(9. 22)
204
Здесь дополнительно к (9.13), (9.14) введены следующие обо-
значения:
п(0)
Sni .
gi
п--—\
^тп & пт: &тп
^jgmig in \ .
g2i ) ’
(9. 23)
“mi = ami - at ; ain =а1п- а,- ;
gi gi
ат1=-(1г^-, din=-di-^s-.
gl gl
Таким образом, уравнения возмущенного движения упругой ра-
кеты с учетом колебаний жидкости в баках представлены в двух
различных формах. Первая, когда в качестве точки приведения
используется центр массы системы и перемещения Лг подвижных
масс жидкости пц отсчитываются от оси ракеты, представлена сис-
темой дифференциальных уравнений (9.10) — (9.12). Вторая, ког-
да тонкой приведения является метацентр, а смещения подвиж-
ных масс жидкости отсчитываются от прямой, параллельной век-
тору g*> представлена системой дифференциальных уравнений
(9.20) — (9.22).
Эти системы уравнений равноценны, однако при анализе раз-
личных частных случаев каждая из них может давать некоторые
преимущества.
Представим теперь уравнения возмущенного движения упругой
ракеты в матричной форме. Воспользуемся уравнениями движения
(9.10) — (9.12). Аналогичные выкладки можно проделать и для
уравнений (9.20) — (9.22).
Введем в рассмотрение вектор-столбец обобщенных координат
размерностью (п(°)4-Л0)4-3) вида
Z Q-1 Л
Яо
q{t) =
qnW
Xz(0)
Из коэффициентов уравнений образуем матрицы коэффициен-
тов:
А — инерции;
С — жесткости конструкции;
205
Q — коэффициентов gmnt gnt и т д., зависящих от реактивных
и инерционных сил, обусловленных продольным ускорением;
В — аэродинамической жесткости;
D — аэродинамического демпфирования;
D* — конструкционного демпфирования;
Е —демпфирования, обусловленного силами Кориолиса;
F — возмущающих сил;
R — градиентов управляющих сил.
Теперь уравнения возмущенного движения упругой ракеты мо-
гут быть представлены в следующей матричной форме:
A^H-(D-rD* + E)^ + (C-hG + B)?---F + RB, (9.24)
где 6 =
9.3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ УПРУГОЙ
РАКЕТЫ ПАКЕТНОЙ СХЕМЫ
До сих пор корпус ракеты для анализа динамики представлялся в виде
(одного упругого стержня. Такая аппроксимация применяется для одноступенча-
тых ракет и (многоступенчатых ракет-носителей с поперечным делением ступеней.
Ракеты-носители пакетной схемы обычно имеют продольное деление ступеней.
Рис. 9.3
Динамическая модель ракеты-носителя пакетной схемы может быть пред-
ставлена в виде пакета упруго связанных неоднородных стержней (рис. 9.3).
В сечении А тяга от боковых блоков передается на центральный и поэтому здесь
боковые блоки соединяются с центральным жесткими сферическими шарнирами.
В сечении В соединение блоков и в радиальном, и в окружном направлениях,
как правило, является упругим.
На рис. 9.4 показана одна из возможных схем соединения блоков в сече-
нии В. При колебаниях в плоскости OXZ жесткость связей для блоков II и IV
будет одинаковой (к ), жесткость связей для блоков I и III будет также
одинаковой (квз) однако кВ2=^к53.
206
На центральном и боковых стержнях укреплены грузы на пружинах, кото-
рые имитируют колебания жидкости в баках, и физические маятники — по-
воротные ЖРД.
Для составления уравнений возмущенного движения стержней воспользуем-
ся уравнением (9.3). Для центрального стержня в плоскости рыскания будем
иметь
d2
дх2!
д2^! (*1, t)
dx2
дгКхьО
4- (-*1) . 4-
dt
5Z2
д Г ж д?1 (^1,0 "1
I дхх [ dxi J
^2 r(3) dz^x^t)
2 CVX14 дхх vdt
/(0)
d^Z] (x}, t) Г d
+ 24i — 4- ) , mil (*! — xi) Xi——I (X! — xi) g*mi\i —
dx^dt L dxi J
d
& (-*4 -^лв) /*дв1 4“ -Vhb) -Мдв 4“ & (•*! (2^*Д2 4~ Д3) 4~
4- & (Х1 — хв1) (2Лв2 + 2ЛВЗ) — ЛВ1 (^1,0 = 0-
(9. 25)
Рис. 9.4
Здесь сжимающая сила в поперечном сечении равна
N\ (хх) = g* f mx (%0 dxx + J -Vla (X!) dxx — 8 (xj — хЛ1) 4РД;
b о
4Pa — суммарная продольная сила от боковых стержней; РА = РЪ—tn2(t)g*,
где PQ — эффективная тяга двигателей бокового блока; m2(t) — масса боко-
вого блока; (2/7А24-2/;’аз), (27’в24-2/?вз) — сосредоточенные поперечные силы
реакций от боковых стержней; t(0) — число учитываемых тонов колебаний жид-
кости в баках центрального блока.
Уравнение возмущенного движения бокового стержня в плоскости рыска-
ния будет почти аналогичным:
д2 Г ^2(х2,О 1 д Г dz2(x2,Z) 1 &iz2(x2,t) ,
dx% L dx^ J dx<} [ dxz J dfi
, dzi(x),t) ldz-> dzAx^,t)\ dz2(x->,t)
+ *2 (x2) 2; + e v ck (^) - 2\; + 2M(x2) у ’ +
dz 2 2a \dx~2 vdt J dx2dt
/о d
+ 2_ J m/8 (Л2 — Xy) X;2 — — 8 (x2 — xy) g*m;• X/2 — 8 (x2 — хдв2) Рлв2 4-
L -^2 J
7=1
d
4 0 (X‘2 ^дв2) Мдв2 0 (-^2 ~^A2^ A2 & k-^2 B2 B2 ( Xo , t) = 0 .
(9. 26)
207
Здесь /о — число учитываемых тонов колебаний жидкости в боковом блоке.
Сжимающая сила в поперечном сечении бокового блока
N2 (х2) = РА + g* J т2 (х>) dx2 + J А"2а (*2) dx2.
ХА2 хА2
Уравнения для стержней II и IV одинаковы, для стержней I и III будут
отличаться от (9.26) величинами Л7-3, Люз, Мдв3, Лаз, Fв?,.
Изгибпые колебания пакета стержней z^Xi, t), z2(x2, t), z>(x3, t) должны
удовлетворять граничным условиям на концах, условиям сопряжения пакета
стержней и условиям сопряжения в местах скачков изгибной жидкости.
Граничные условия на концах стержней с учетом следящего характера тяги
имеют вид
дх2
д Г Г.Г д2г1 (Х1’0 1 О
— ЕЦ-----------9--- = 0 при %i = 0, х1 =
L J
д2г2(*2, О
дх2
= 0 при х2 = хА2,
(9. 27)
х2 = fe
д I dz2(x2, О 1 _ ( РА2 при х2 = хА.
дх2 L 2 дх2 ] I 0 при х2 = 12.
Условия сопряжения пакета стержней могут быть представлены в виде
(х1( о|Л1=жД1 = г-Лх2.01Х2=.хл2;
д Г_, dizifxr.t) ]| ДГр; 02*1(*i,O ]| _
дхД 1 дх] ]|*>”*Д1+0 0*11 1 0*1 _И1=*А1—°
= 2Лл2 + ЗЛдз; (9.28)
__0_Г„. d2zi (Х1’ II -СГр/ д'2*1 О1’ 1| =
dxi L 1 дх] j|*-=*Bi+° 0*iL 1 дх] ,||*>=*в1-°
= В2 + ? вз-
(9.29)
Силы реакций могут быть определены из уравнений
= ^В2 fZ2 (ХВ2 ’ <?1 (ХВ1 1
^ВЗ = kB3 [гз ““ Zi ^ХВ1 ’ ^1’ <
Z2 Z2
^А2 4- Ев2 =\ т2 {х2) д Z2£92, Z~" dx2 + \ рВ2 (*2, 0 dx2 4" F
хА2 ХА2
1г 13
^АЗ 4- =\ ^3, (*з) 3 ( 3 ’ - dx3 4- \ Рвз (Х3, 0 dx3 4- гдв3'
ХАЗ А'ЛЗ
Условия сопряжения в местах скачков изгибной жесткости стержней (в се-
чениях х*) аналогичны условиям (9.8). Например, для центрального стержня
02*1 (*1 Л)
= 1 Щ-?
дх^
02^1 (ХН/)
£J1 Г"9 *
дх]
0 Ю, 02^1 (Х1, О
dxi L
(9. 30)
02^-1 (Xi, t)
дх]
Для бокового стержня кроме того будем иметь
дХ'2 l ^х2 JkB2+0
д [Д, д2г2(х2, О
\ & •> 2 -----9-----
0x2 L дх%
= Лв2-
xB2~Q
(9.31)
Дифференциальные уравнения возмущенного движения стержней должны
быть дополнены уравнениями колебаний жидкости в баках и уравнениями дви-
жения поворотных двигателей. Здесь будет три группы уравнений колебаний
жидкости — для центрального блока, для бокового блока II (IV) и для боко-
вого блока III (I). Уравнения аналогичны уравнениям (9.4):
0=1,2.......
Г , £*> , ^z2(x-2, t) I dz-2 (x2, t) I
mj\j2 + mj — Xy2 + mj----—----- +g*m} ------—------- =0 (9.32)
Ot- Iх j 0X2 \xj
•i , 1 <52^3 (Аз, t) I ^3(x3,OI n
+ mj — x/3 + mj-----------. + g*mj-------—-----= 0
0=1, 2,..., /°>)
Полагаем, что двигатели и жесткости их крепления к корпусу одинаковы
для центрального и всех боковых блоков. Тогда уравнения движения поворот-
ных двигателей для различных блоков будут отличаться только различными
движениями блоков. Воспользуемся уравнением (9.5). Будем иметь для цент-
рального блока
, Г .. (xi, t) I • ^2^1 (хЛВ1, t)
^Дв 4“ “ ~ 4~ кг (61 — 1/шт) 4“ ^ДВ^1 + Т~2 4"
L дх^дР д&
Г dzi{xit 0 1 1 //' \?Г ^1(^1, 0 1 1
+'Идв^дв ” Н'Н'д(^дв) 4" 7 Т. =0.
L ^1 Илв1 J ' д ' L dx^dt кдв1]
(9.33)
Для боковых блоков II (IV) и III (I) уравнения можно получить из (9.33) за-
меной индекса I на индекс 2 и 3 соответственно.
В уравнениях (9.25) и (9.26) в mi(x) и т2(х) включена и масса двигате-
лей. Поэтому сосредоточенные силы Т'дв и моменты Л4ДВ, передаваемые на кор-
пус, определяются из уравнений относительного движения поворотного двига-
теля. Получим для центрального блока
FДВ1 ~ ^двГдв^! + Ру1&1 4- 2р.д/дв61,
Л4дв1 — кдв1^ — /дв^1 4~ ^Г*^дв^дв^14-Р'д (^дв) ^1* (9.34)
Для бокоВ|ЫХ блоков II (IV) и III (I) уравнения будут такими же, как (9.34),
но индекс 1 в них должен быть заменен на 2 и 3 соответственно.
Уравнения возмущенного движения упругой ракеты пакетной схемы с уче-
^м колебаний жидкости в баках и динамики поворотных двигателей в плос-
кости рыскания представляются, таким образом, системой (9.25) — (9.34).
Для ракеты-носителя пакетной схемы существенными оказываются изгибно-
крутильные колебания вокруг продольной оси X. Центральный блок в этой схе-
будет совершать крутильные колебания, а боковые блоки — крутильные
Колебания вокруг собственных продольных осей и изпибные колебания в ок-
ружном направлении.
209
Уравнение крутильных колебаний центрального блока можно представить
в виде
д („, (Xi, О \ ч (Xi, О
~ дх ( Х' дх, / '-ZX,(^) dt2 (xl~xAl)MAl~
(-*i х bi) Мbi & (-*4 -Vhb1) ^дв1 = 0 > (9.35)
где GJх — крутильная жесткость центрального блока; Iх — погонный мо-
мент инерции центрального блока относительно продольной оси МЛ1, —
моменты сил реакций связи в сечениях А и В\ МДП1 — момент от двигателей
центрального блока; 0i(Xi, t) — угол поворота поперечного сечения централь-
ного блока.
Условия связи всех боковых блоков с центральным одинаковые как в се-
чении А, так и в сечении В, поэтому уравнения крутильных и изгибных коле-
баний боковых блоков будут также одинаковыми. Полагаем, что в сечении А
связь выполнена в виде сферического шарнира, силами трения в котором мож-
но пренебречь. Тогда уравнение крутильных колебаний бокового блока будет
иметь вид
д К, дв2(х2, 0 1,, ч &fi2(x2, t)
— I J у I •* V (-^2/ —
дх2 I dx2 J cM2
— 8(x2— xb2)Mb2— B(x2—хдв2) MW2 = °. (9.36)
Уравнение изгибных колебаний бокового блока с учетом следящего харак-
тера тяги двигателей и колебаний жидкости в баках будет таким же, как
и (9.26).
Функции 01 (хь t), 0гСх2> О, z2(*2> t) должны удовлетворять граничным ус-
ловиям на концах стержней, условиям сопряжения пакета стержней и условиям
сопряжения в местах скачков крутильной и изгибной жесткостей.
Граничные условия на концах стержней можно представить в виде
<?0г (Xb t)
GJy -------------= О ири jq = 0, xi — If,
J дхх
г. (х2, t)
GJV -------------— 0 при х-> = Хл2, х>=1>’,
х, г Л '
— [g/2 С>2г2(Х22’ ° 1= 1ЛД2 при х2=хА2
Г1Ч дХ^ (0 при х2=12.
(9.37)
Условия сопряжения стержней в сечениях А и В можно представить в виде
гА^ Или Ч = -?2(хЛ2, Z);
д^г-2(х2, t) Л 2 дх^ д ,г2-.гв2+0 дх‘2 ej2 d2Z‘2(x-2, 0 = F’bi- Л^~ХВ2~°
\GJ .^(-^2 L Х* дх2 ) ]|Л’2==Л'В2 +0 Jgj д^2 (*2, 0 Xi дХ‘2 "Il п ||-г2“-гв2—°
210
Силы реакций связей могут быть определены из уравнений
^лв1 = 4г дВ Д2>
/?B2 = kB2^2(^2, t^-r^X /)];
(9.39)
= В2 гАЧ^Bl)'' ^В2 ~ кВ2^2 (хв2 > ^);
Z2
Р' , Р' I , ч ^2 (Х2, t)
FA2 + FB2 = ] ^2 (Х2) -----~---- dx2,
ХА2
где к52 — жесткость связи в сечении В по отношению к линейному перемеще-
нию бокового блока в окружном направлении; к^2 — угловая жесткость связи
в сечении В по отношению к вращению бокового блока; Га2, гВ2 — расстояния
между продольными осями центрального и боковых блоков в сечениях А и В.
Уравнения колебаний жидкости в баках бокового блока аналогичны (9.33):
V , £* . ^2^X2, 01 , * дг2(Х2, О I „
mj\j2 + mj —-\j2+mj---------—----- +.?*«;------------- =0. (9.40)
t i ut~ Py ox2 Py
Таким образом, система дифференциальных уравнений, характеризующих из-
гибно-крутильные колебания пакета упруго связанных стержней, представляется
уравнениями (9.26) и (9.36) — (9.40).
Если в крутильных колебаниях жидкость практически нс участвует, то при
изгибных колебаниях боковых блоков часть жидкости в баках совершает вол-
новые колебания, которые могут быть существенными при движении всей сис-
темы вокруг продольной оси.
9.4. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ РАКЕТЫ
И ИХ СВОЙСТВА
Рассмотрим передаточную функцию упругой ракеты по углово-
му положению с учетом колебаний жидкости в баках Ц7у(р), кото-
рая, согласно (8.48), может быть представлена в виде
I Их I S (p)
Воспользуемся уравнением возмущенного движения ракеты
(9.24), положив в нем вектор-столбец F = 0
[4p2 + (D+D*+D + E)p + C + Q + B]7(p) = /?S(p)- (9.41)
В уравнение добавлена матрица D — коэффициентов демпфи-
рования, обусловленных диссипацией энергии при колебаниях жид-
кости. Это матрица коэффициентов
(г=1,2,...Д(0); /г=-1,0, 1,..., п™).
Разрешив систему алгебраических уравнений (9.41), получим
<7/2 (р) /д ^2)
S(p) “ Д(р) 1 ’
211
Здесь А(р) — определитель вида
A(P) = Hp2 + (D + D* + D + E)p+C + Q + B|;.
A5/z (р) — есть алгебраическое дополнение, получаемое из опре-
делителя А(р) вычерчиванием строки, соответствующей 6(р) и
столбца, соответствующего ^п(р).
Подставив решение (9.42) в выражение передаточной функции
IFy(p), найдем
и(0)
_ 58 Д«"(р) дх
Wy (р) =----п-~'- . (9. 43)
•i(P)
Знаменатель этой функции есть полином от р порядка st =
= 2(n<°’+z<°) + 3), а числитель — полином от р порядка s2 =
= 2 (п(°>+/(0) + 2), т. е.
12a"p,s-
5 = 0 I 5=0
Если известны корни полинома А(р), которые называются по-
люсами передаточной функции, то этот полином можно разло-
жить на множители:
51 «(О /(0)
2^Р*МА)Р4 + Ар3 + А>Р2+АзР + А|) П (p2+2w + w*«)n (Р2т-
5 = 0 /2=1 Z = 1
H"2e*zp4"4) (р2Ч~ 2s*6p0)*б)- (9. 44)
Первый множитель определяет корни уравнения, соответствую-
щего движению ракеты как твердого тела; множители (р2 + 2е;|;/гр+
+ wjn) определяют корни, порождаемые упругими колебаниями
корпуса ракеты; (р2+2е*р + сод)—корни, порождаемые колеба-
ниями жидкости в баках, а (р24-2е;}:8р-4-%б) корни, соответствую-
щие колебаниям поворотного двигателя.
Корни числителя соответствуют нулям передаточной функции
и по аналогии выражением с (9.44)
sa и(°) /(°)
2 ^ = (5оР2 + 51Р + 52) П (p2 + 2s0„p + 4,)n (Р2 +
5=0 П=1 Z=1
“И2sq/P4"OJoz) (р2 + 2г06р + о)08). (9.45)
Передаточную функцию ракеты (с учетом динамики поворотно-
го двигателя) J¥y(p) можно теперь представить в виде произведе-
ния четырех сомножителей:
(Р) - ^у.Т (Р) ^у.у (Р) ^у.ж (Р) (Р), (9- 46)
где Гу.т (р) =-------воР2 + -61Р + в2-- (9 4Г)
+ ^1Р3 + ^2р2 + Азр + ^4
212
__ передаточная функция, обусловленная движением
твердого тела;
ракеты как
„(О) Л 2
W7 Ь П Р2 + 2е0«Р + “0л
II рг+2.„р+Л
71 = 1 "
(9. 48)
— передаточная
корпуса ракеты;
функция, обусловленная упругими
свойствами
‘•(0) „ 2
tv/ ь П P2 + 2eO‘'P + “oz
у .ж (Р) — *у.ж П 2 ш2
(9. 49)
— передаточная
баках;
функция, порождаемая колебаниями жидкости в.
U7y8(p) = feyS
Р2 + 2е0§р + coq5
Р2 + 2е*8 р 4- о)2§
(9. 50)
— передаточная функция, порождаемая колебаниями поворот-
ного двигателя.
Посмотрим, как изменится структура передаточной функции ра-
кеты, если частота собственных колебаний поворотного двигателя
много больше частот рассматриваемых колебаний ракеты. В этом
случае можно положить Сбг = оо. Тогда
lim
Q5+coA(p) Д'(р)
где Д'(р) есть минор, полученный из Д(р) вычерчиванием строки и
столбца, соответствующих координате б. Разложение Д'(Р) на
множители имеет вид (9.44), если в нем опустить последний со-
множитель, обусловленный колебаниями двигателя, однако значе-
ния коэффициентов о)*,, £*z будут уже иными, по-
скольку они определяются корнями уравнения Az(p) =0.
Так как передаточная функция
UZy (p) = lim UZy (р\
то структуру передаточной функции ракеты теперь можно пред-
ставить в следующехМ виде:
wy (р) = ry.T (р) U7y.y (р) 1ГУ.Ж (р) (р2 + S0Sp + <). (9.51)
Следует подчеркнуть, что нули передаточной функции №у(р) рав-
ны нулям передаточной функции РКу(р).
Используя приведенный метод, можно получить структуру пе-
редаточных функций TTy.c(p), T4Ci.y(p) или №у*(р) и ТГу(р).
213-
9.5. МЕТОД КОРНЕВОГО ГОДОГРАФА
Предварительный анализ устойчивости движения ракеты как сложной ди,
намической системы в зависимости от изменения каких-либо параметров, напри,
мер, коэффициента усиления автомата стабилизации, наряду с частотным мето,
дом удобно проводить методом корневого годографа.
Основные положения метода корневого годографа можно пояснить следую,
щим образом. Пусть мы имеем характеристическое уравнение замкнутой систе-
мы объект регулирования — автомат стабилизации
1 + ^ас (р) [^о (Р)] = 0» (9-52)
причем ТГдс (р) = ^асФас (р) ,
где kAc., Ф.\с(р) — коэффициент усиления н передаточная функция автомата
стабилизации.
Представим передаточную функцию разомкнутой цепи объект регулирова-
ния — автомат стабилизации в виде
т
П(Р— Poz)
Ьт i = \
Фас (Р) [ - (р)] = - — —-----------. (9.53)
ап П(Р-Р^)
/ = 1
Здесь р*/и рог — являются полюсами и нулями передаточной функции разомк-
нутой цепи. Коэффициенты при старших членах полиномов числителя (порядка
т) и знаменателя (порядка п) есть Ьт и ап. Порядок знаменателя в физичес-
ки реализуемых системах больше порядка числителя, т. е. п>т. Если —Ьт1ап">
>0. то корневой годограф называется нечетным, а при —Ьт/ап<® — чет-
ным.
Корпи характеристического уравнения замкнутой системы 1 —
т
П (р— Poz)
I-1
п
П (р— р*/)
/ = 1
т
-- * АГ -
АС н
С зависят от величины коэффициента &АС. При из-
менении коэффициента #АС в пределах они образуют некоторые
траектории (годографы) на комплексной плоскости Z, причем корневые траек-
тории начинаются в полюсах р*/ и оканчиваются в нулях р0, передаточной
функции разомкнутой цепи либо уходят в бесконечность.
Рассмотрим произвольную точку А комплексной плоскости Z и проведем
радиусы-векторы из нулей и полюсов передаточной функции разомкнутой цепи
в эту точку (рис. 9.5). Углы 0г- и аг- этих векторов с действительной осью бу-
дем называть фазовыми углами. Чтобы точка А принадлежала корневой
траектории, необходимо и достаточно выполнение следующих условий:
2 5«г= ±я ± 2лй (k =1,2,...)
(т) (и)
— для нечетного корневого годографа и
Vpz —2«/=±2л* (*=0,1,2,...)
(хтг) (п)
— для четного корневого годографа.
Угол выхода корней траектории из произвольного полюса, например р
для нечетного корневого годографа
СИ = — + 2 ₽* ± я ± 2я/г (^ = 1, 2»...); (9.54)
i = 2
214
лЯ четного корневого годографа
п т
а1 = 2 а/ + S $1 ± 2л£ (& = О, 1, 2,...).
/=2
В этих формулах под щ и Pi следует понимать фазовые углы векторов,
проведенных из всех полюсов и нулей передаточной функции разомкнутой цепи
в первый полюс.
Аналогичные соотношения имеют место для углов входа корневой траекто-
рии в нуль передаточной функции:
31 =2«i —2^'± я (£=1,2,...);
1=1 /=-2
п тп
При &АС —>оо (/г—ш) корневых траекторий уходят в бесконечность.
Асимптоты этих траекторий расположены под углом
J- те
а :---------------
11 — т
2 л/г
i
и — т
(^-1, 2,...);
2л 2л£
а =----- 4------
п—т 11 — т
(k = 0, 1, 2,...)
Для нечетного и четного годографов соответственно.
Нули и полюсы передаточной функции разомкнутой цепи могут быть как
действительными, так и комплексно-сопряженными. Корневые траектории на
Действительной оси для нечетного годографа располагаются на тех участках,
Де справа находится нечетное количество нулей и полюсов (см. рис. 9.5). При
215
слиянии двух корней они становятся комплексно-сопряженными, и корневая тра-
ектория пересекает действительную ось под прямым углом. Для четного корне-
вого годографа траектории расположены на тех участках действительной оси,
где справа либо расположено четное количество нулей и полюсов, либо они во-
обще отсутствуют.
Рассмотрим ряд приближенных методов определения корневых траекторий.
Пусть нуль и полюс передаточной функции, которые характеризуются координа-
тами Vo, йоо и v*, ico*, расположены близко друг к другу по сравнению с рас-
стоянием до других нулей и полюсов (рис. 9.6). Траектория, замыкающая рас-
сматриваемые нуль и полюс, расположена в ограниченной области плоскости Z,
поэтому вклад остальных нулей и полюсов в фазовый угол у и коэффициент
усиления k можно считать неизменным для всех точек рассматриваемой траек-
тории.
Для произвольной точки корневой траектории нечетного годографа имеем
Р 4- у — а = ± л ± ,
где
Поскольку
то
(О— (О0
tg 8 =------: tg а =-------.
V — VO V — V*
‘g(? + Y— а) = 0,
tg ? + tg Y — tg а + tg a tg ₽ tg у = 0.
Подставив в это соотношение значения tg a, tg |3, получим следующее уравнение
корневой траектории:
Г 1 ( . .v*—vo\l2 , Г 1 ( , “o-MV
“о + "*+—----- + V— — v0— V*+ —-------------- =
L 2 \ tgY Л L 2 \ tgy ./]
==4sin2Y “*)2 + (v0— v*)2]- (9.55)
Эта траектория является частью окружности радиусом
[(“0-“*)2 + (v0-v*)2]l/2 (9.56)
z sin у
с центром в точке О, координаты которой
1 I . , “0 —1 ( , , V* —v0\
-7- v0 + v*4— ------ , — «о + «*+—;-------- •
2 \ tgy / 2 \ tgy /
На рис. 9.6 приведены некоторые геометрические соотношения, определяющие
расположение окружности и ее параметры. Часть окружности между нулем и
полюсом является траекторией нечетного годографа, а другая часть, показанная
пунктиром, траекторией четного годографа.
Каждой точке траектории соответствует определенный коэффициент усиле-
ния автомата стабилизации. Действительно, на корневой траектории должно
выполняться соотношение
k
^ = 1.
#2
Здесь и R2 — расстояния от рассматриваемой точки траектории до нуля и по-
люса, которые данная траектория соединяет; k \Ьт!ап\—динамический коэф'
фициент усиления объекта регулирования без учета вклада, вносимого рассмат-
риваемым нулем и полюсом;
j, ___^2 1 I ап I
АС“/?1 k ы*
(9.57)
Практический интерес представляют также приближенные формулы, позво-
ляющие определить изменения корней замкнутой системы в зависимости от Z?Ac
Эти формулы могут быть получены из следующих простых соображений.
:216
Из характеристического уравнения и уравнения (9.53) следует, что
_ ап
АС а
ит
п
П(р— р*;)
I = 1
т
П (р -- Рог)
Z = I
Вычислим производную d kkQJdp
в одном из полюсов передаточной функ-
ции р — Р*й«
Будем иметь
n—tlk
П (Р*Л — Р*г)
i=\
m
П (P*fe — Por)
/ = 1
(9.58)
n~nk
Символ И показывает, что в произведении опущен сомножитель, соответству-
/=1
ющий i=k. Взяв величину, обратную величине, определяемой формулой (9.58),
найдем
dp I
dkKC I р*/г
т
П (P*fe— Ро/)
[ = 1
n~nk
П (Р*й Р*/)
(9.59)
Величина dp/d /?АС на комплексной плоскости Z может быть представлена
вектором, выходящим из полюса и совпадающим с касательной к корневой тра-
ектории.
Для корней замкнутой системы, которые лежат на траектории, выходящей
из Л-го полюса имеем
'«с - - -*+(ЧЧ1
(9.60)
dkAC _ Ъг
dp ~ bm
Следует отметить, что формулы (9.60) имеют приемлемую для практических
расчетов точность только при сравнительно небольших значениях #АС, в то вре-
мя как формула (9.55) может быть использована во всем диапазоне #АС>
представляющем практический интерес. При некоторых предположениях о дина-
мических свойствах объекта регулирования формулы (9.60) могут быть упро-
щены.
Пусть Zz-й полюс передаточной функции разомкнутой системы является сла-
бо демпфированным, тогда для приближенного определения величины dp/dk. \
по формуле (9.59) можно использовать значение
П (/<•>*& — P$i)
dp I dp I =bnL z,i_______________________
rf^Aclp*A d^AC an \ V*ft
11 P*i)
z = l
Правая часть этого выражения пропорциональна частотной характеристике ра-
зомкнутой системы, т, е.
217
Ф (Z<o)IT0 (Zw) = ЛАс(о) ло (ш) exp Z [?АС(«) +<Ро (")]. (9.61)
где Лдс(ю), Л0(<в) — амплитудно-частотные характеристики; флс(со), фо(со) —
фазочастотные характеристики автомата стабилизации и объекта регулирования
соответственно.
Учитывая соотношение (9.61), формулам (9.60) можно придать следующий
вид:
v = {1 + *асЛас (<>**) Ао (B#J) cos [<рАС + <Ро
“ = “** + v*kkkcAbc (“*'') ло('"*й) sin [<pAC + <PO (9.62)
Из первой формулы (9.62) определим критическое значение (&АС)( , при кото-
ром корневая траектория, выходящая из £-го полюса, окажется на мнимой оси
(v=0):
1
(*дс)кр =~ Лдс (<o»ft) Ло (ш**) cos [?АС (ш*Л) + <р0 (ч>АС)]’ (9,63)
Рассмотрим частный вид формулы (9.59) для случая, когда все нули и полюсы
передаточной функции объекта регулирования расположены на мнимой оси плос-
кости Z. При этих условиях
2 2
<Zp | Ьт “ол —
~dk— = ф ('“**) ------
“KAC ап
L = 1
—nk *
п «-О
/=>1
В этой формуле в произведениях опущены члены, соответствующие k-му нулю
и полюсу. Используя понятия частотной характеристики автомата стабилизации,
получаем
dp I
dkkC |Za)*Ai
л / \
= AAC
ап
2 2
X expZ jjAC(“**)— j- (9.64)
Из анализа полученного выражения можно установить, что угол выхода
корневой траектории из Л-го полюса ал = фдс((0*л)— —, если множитель перед
экспонентой в выражении (9.64) положительный, и = — 4- <рАС (^), если
названный множитель отрицательный.
9.6. АНАЛИЗ УСТОЙЧИВОСТИ ДВИЖЕНИЯ
Анализ устойчивости движения такой сложной замкнутой систе-
мы как упругая ракета — автомат стабилизации довольно сложен.
Этот анализ начинает проводиться еще на ранней стадии проекти-
рования ракеты и ее автомата стабилизации. При выборе схемы и
параметров автомата стабилизации должны быть, хотя бы грубо,
известны основные динамические характеристики ракеты: масса,
моменты инерции и изменение их по времени полета, частоты соб-
ственных упругих колебаний корпуса и колебаний жидкости в ба-
ках и др. В начале приходится ограничиваться анализом парци-
альных частот собственных колебаний.
218
, и на их основе
Рис. 9.7
разложении на множитель,
передаточной функции.
После выбора схемы автомата стабилизации и основных его па-
раметров для анализа устойчивости движения используется более
полная информация о динамических свойствах объекта регулиро-
вания. Здесь уже используются частоты системы, изменение дина-
мических характеристик по времени пс
точно формулируются требования к
автомату стабилизации.
После создания аппаратурного ма-
кета автомата стабилизации исследо-
вание устойчивости движения прово-
дится с помощью цифро-аналоговых
комплексов.
Задача обеспечения устойчивости
движения с помощью автоматической
системы стабилизации диктует опре-
деленные требования к свойствам пе-
редаточной функции упругого лета-
тельного аппарата и к точности опре-
деления параметров этих функций. По-
этому покажем, как с помощью метода
корневого годографа можно провести
приближенный анализ свойств переда-
точной функции и сделать некоторые
выводы об устойчивости движения
замкнутой системы.
Основная трудность заключается в
знаменателя (9.44) и числителя (9.45)
Характеристическое уравнение замкнутой системы объект — ав-
томат стабилизации может быть представлен в виде
14-*асФас(р) (р) = 0,
где Wy(р) определяется из выражений (9.46) — (9.50). Полагаем,
что нули и полюсы передаточной функции известны.
Рассмотрим вначале свойства передаточной функции 1^у.ж(р),
обусловленной колебаниями жидкости (9.49). Нули о)0г и полюсы
%:? расположены обычно близко друг от друга. Будем считать, что
они расположены далеко от остальных нулей и полюсов переда-
точной функции системы.
Если в баках отсутствуют специальные устройства, демпфи-
рующие колебания жидкости, то нули и полюсы передаточной функ-
ции (9.49) являются слабо демпфированными и на комплексной
плоскости Z расположены практически на мнимой оси. С точки зре-
ния устойчивости замкнутой системы следует различать два случая
распределения нулей и полюсов передаточной функции с учетом
колебаний жидкости. Первый случай (9.7, а) характеризуется пе-
Ремножаемостью нулей и полюсов, обусловленных колебаниями
Жидкости, т. е.
21 9
о)01 < (0*1 < со02 < с0*2 <• • • (9. 65)
•Угол выхода корневой траектории из полюса щ (см. рис. 9.5) мо-
жет быть вычислен по формуле (9.54). Принимая во внимание, что
для точек, лежащих на мнимой оси, сумма фазовых углов от нулей
и полюсов передаточной функции автомата стабилизации равна
значению фазочастотной характеристики фас(со), имеем
aft = n/2 + ?Ac KJ-
Для выхода корневой траектории из полюса, обусловленного
колебаниями жидкости, в левую полуплоскость достаточно, чтобы
О < «РАС И< Я,
т. е. фазочастотная характеристика автомата стабилизации долж-
на иметь опережение на частотах колебаний жидкости. Поскольку
это требование к фазочастотной характеристике автомата стабили-
зации не противоречит требованиям, необходимым для обеспечения
устойчивости движения ракеты как твердого тела, то объект регу-
лирования, имеющий распределение нулей и полюсов, аналогичное
равенству (9.65), как было уже отмечено в разд. 4.8, называется
структурно устойчивым.
Второй случай (рис. 9.7, б) характеризуется нарушением чере-
дования нулей и полюсов передаточной функции ракеты, обусловь
ленных колебаниями жидкости, например:
€О01 со*1 0)*2 СО02 <С (О03 <С ш*3 <С • • • •
Угол выхода корневой траектории из полюса (0*2’
«2= — я/2 + ?Ас(^2)-
При фазовом опережении автомата стабилизации Фас(<о)>0 корне-
вая траектория из полюса о)^2 выходит в правую полуплоскость,
т. е. замкнутая система теряет устойчивость при сколь угодно ма-
лом коэффициенте усиления k^c. Устойчивость системы может быть
обеспечена только в случае, если ?ас < 0. Однако это требо-
вание противоречит условиям устойчивости движения ракеты как
твердого тела и устойчивости колебания жидкости в баках, для ко-
торых нуль предшествует полюсу.
Поэтому объект регулирования, у передаточной функции кото-
рого имеется нарушение чередования нулей и полюсов, называет-
ся структурно неустойчивым.
Одним из возможных путей достижения устойчивости при зна-
чительных величинах коэффициента усиления &ас является уста-
новка демпферов колебаний жидкости в баках. При значительном
демпфировании колебаний жидкости приближенно можно считать,
что величины вОг и возрастают одинаково. Это приводит к сме-
щению нуля и полюса, обусловленному колебаниями жидкости, с
мнимой оси в левую полуплоскость (рис. 9.8).
Корневая траектория, соединяющая нуль и полюс, близка к
окружности, параметры которой в общем случае определяются по
уравнениям (9.55) и (9.56). В рассматриваемом случае легко ус-
тановить, что при v (а)*) = <рлс (%:) уравнение корневой траектории
имеет вид
_1_
2
(О —
T2
(WQ-j-U)*) +
(сор — со*) Т2
tg?AC(“*) J
foo — ц*)2
4 Sin2?AC^*)
Обратимся теперь к той части передаточной функции, которая
обусловлена упругими колебаниями корпуса (9.48). Это выраже-
ние имеет такую же
структуру, как и при
рассмотрении устойчи-
вости колебаний жид-
кости в баке. Однако
нуль и полюс переда-
точной функции, соот-
ветствующие упругим
колебаниям корпуса,
обычно сильно разне-
сены друг относитель-
но друга.
На рис. 9.9 показа-
Рис. 9.8
Рис. 9.9
ны углы выхода кор-
невой траектории из
полюсов передаточной функции упругих колебаний и связь этих уг-
лов с фазочастотной характеристикой автомата стабилизации. Кор-
невая траектория движется в левую полуплоскость, что гаранти-
рует устойчивость в отношении упругих колебаний при умеренных
значениях feAc, если fn(xr)fn(x^B) <0 и ? ас (/»*/)> 0 (рис. 9.9, а), или
если fn(xr)fn(x^B)>0 и ?ас^°*^<° (Рис- 9-9> б)-
Для первого тона упругих колебаний корпуса неравенство
fn (хг)}п(хдв)>0 выполняется, если датчик углового положения рас-
положен в носовой части, а орган управления — в хвостовой части
корпуса. Поэтому устойчивость по отношению к упругим колеба-
ниям первого тона корпуса будет гарантирована, если при распо-
ложении датчика угла в носовой части фазочастотная характерис-
тика автомата стабилизации имеет запаздывание [0 > срАс (%-i) > —
— 180е] на частоте упругих колебаний, а при расположении датчика
в хвостовой части корпуса — опережение [0<C?ac((O*i ) <180°] на
этой частоте.
Сформулированные условия иногда называют условиями
фазовой стабилизации упругих колебаний. Эти условия
не должны противоречить условиям стабилизации движения раке-
ты как твердого тела вокруг центра массы и колебаний жидкости
в баках, которые требуют наличия опережения по фазе у характе-
ристики автомата стабилизации в определенном диапазоне частот
10—соо]- Если частоты первого тона упругих колебаний корпуса зна-
чительно выше частот, характеризующих движение ракеты как твер-
дого тела, и частот колебаний жидкости в баках, то на частотах
221
упругих колебаний корпуса срдс(<х>) обычно имеет место запаздыва-
ние, и поэтому датчик угла целесообразно устанавливать в носовой
Г^^)Гл(хдв)<0
Ш
К
части корпуса.
Если частоты первого тона уп-
ругих колебаний близки к часто-
там колебаний жидкости в ба-
ках, то при расположении датчи-
ка угла в носовой части корпуса
функция фдс(со) должна менять
s ______________
0 1) 0 i)
Рис. 9.10
s знак в узком диапазоне частот,
о о который изменяется во времени.
Это представляет известные тех-
нические трудности Устойчи-
вость по отношению к упругим
колебаниям в этом случае можно обеспечить установкой датчика
угла в хвостовой части корпуса и фазовым опережением флс((о)>0
на частотах упругих колебаний. Легко видеть, что условия фазовой
стабилизации по отношению к упругим колебаниям корпуса и ко-
лебаниям жидкости в баках в этом случае будут совпадать.
Другим распространенным способом достижения устойчивости
по отношению к упругим колебаниям является метод амплитудной
стабилизации, особенно часто применяемый для обеспечения устой-
чивости по отношению к.высшим формам упругих колебаний. Сущ-
ность этого способа заключается в уменьшении величины ампли-
тудно-частотной характеристики как объекта, так и автомата ста-
билизации на частотах упругих колебаний.
Условия амплитудной стабилизации будут выполнены, если
Для уменьшения величины /о((0*/) на частотах упругих колебаний
датчик угла целесообразно устанавливать в месте пучности формы
упругих колебаний. При происходит взаимная компен-
сация нуля и полюса упругих колебаний, что приводит к резкому
уменьшению величины Так как формы упругих колебаний
корпуса ракеты изменяются при уменьшении количества топлива и
изменении веса полезной нагрузки, то полная компенсация нуля и
полюса не обеспечивается. Однако нуль и полюс располагаются
близко друг к другу (рис. 9.10). Любое показанное на этом рисунке
взаимное расположение нулей и полюсов вероятно, и может встре-
титься ситуация, аналогичная структурной неустойчивости колеба-
ний жидкости. Устойчивость упругих колебаний в этом случае мо-
жет быть гарантирована, т. е. соответствующая корневая траекто-
рия будет находиться целиком в левой полуплоскости только при
определенной величине демпфирования упругих колебаний. Поэто-
му обеспечение устойчивости упругих колебаний амплитудными ме-
тодами предъявляет повышенные требования к точности определе-
ния коэффициентов демпфирования корпуса ракеты.
Часть вторая
ПРОДОЛЬНЫЕ КОЛЕБАНИЯ РАКЕТЫ
С ЖИДКОСТНЫМ РАКЕТНЫМ ДВИГАТЕЛЕМ
Глава X
ПРОДОЛЬНЫЕ КОЛЕБАНИЯ РАКЕТЫ С ЖРД
10.1. МЕХАНИЗМ ВОЗНИКНОВЕНИЯ ПРОДОЛЬНЫХ
АВТОКОЛЕБАНИЙ РАКЕТЫ С ЖРД
Возмущения, действующие на ракету в полете, могут вызывать
не только поперечные колебания, но и продольные. Продольные
упругие колебания корпуса ракеты (колебания растяжения — сжа-
тия) сопровождаются продольными и радиальными колебаниями
жидкости в баках. Наибольший интерес представляют низкочас-
тотные (до 50 Гц) колебания, которые могут существенно взаимо-
действовать с колебаниями жидкого топлива в трубопроводах и
колебаниями давления в камере сгорания жидкостного ракетного
двигателя (ЖРД). Поэтому в инженерной практике под продоль-
ными колебаниями ракеты с ЖРД обычно понимают низкочастот-
ные колебания в замкнутой гидроупругой системе, состоящей из
упругого корпуса с жидким топливом в баках, топливных магист-
ралей и ЖРД. Устойчивость движения такой системы обычно при-
нято называть устойчивостью ракеты с ЖРД по отноше-
нию к продольным упругим колебаниям. Корпус ракеты, топливные
магистрали и ЖРД являются тремя главными составными частя-
ми замкнутой колебательной системы, которые схематически пока-
заны на рис. 10.1. Пользуясь этой схемой, можно пояснить меха-
низм возникновения низкочастотных продольных колебаний ра-
кеты.
Предположим, что возникли пульсации тяги двигателя. Эти воз-
мущения вызывают продольные колебания корпуса ракеты, в ре-
зультате чего возникают колебания давления топлива в топливных
магистралях. Колебания давления, в свою очередь, изменяют пода-
чу топлива в камеру сгорания и, следовательно, являются причи-
ной изменения тяги. Изменения тяги могут усиливать колебания
корпуса и колебания давления топлива в магистралях и, таким об-
разом, первоначальные малые возмущения могут привести к нарас-
танию по амплитуде колебаний во всей замкнутой системе.
Динамические процессы в звеньях реальной ракеты с ЖРД вы-
ражаются нелинейными дифференциальными уравнениями, из ко-
торых наиболее сложными являются дифференциальные уравнения
Для анализа динамических процессов в двигателе. Нелинейными
являются также зависимости давления на дне бака от амплитуды
колебаний дна, силы гидравлического сопротивления от скорости
потока жидкости и др.
223
С увеличением амплитуды колебаний заметнее проявляются
нелинейные свойства системы, и нарастающие колебания перехо-
дят обычно в стационарный автоколебательный процесс.
В отношении продольных колебаний ракета с ЖРД
является типичной автоколебательной системой. Прос-
тейшая блок-схема ракеты с однокомпонентным ЖРД
показана на рис. 10.2. Колебательной системой является
корпус ракеты, источником энергии служит жидкостный
ракетный двигатель, обратную связь осуществляет топ-
ливная магистраль. Кроме внешней обратной связи
между корпусом и двигателем, которая замыкает систе-
му, существует внутренняя обратная связь между
двигателем и топливной магистралью. Эта связь осу-
ществляется посредством воздействия давления в каме-
ре сгорания на скорость подачи топлива из топливной
магистрали через форсунки.
Автоколебания в замкнутой системе, показанной! на
рис. 10.2, обычно называют п р о до л ь н ы м и а в то к о-
Рис. 10.1 лебаниями ракеты.
Колебания подачи топлива в камеру сгорания проис-
ходят с такой же частотой, с какой совершаются продольные коле-
бания корпуса и топлива в трубопроводе; с этой же частотой изме-
няется и тяга двигателя. В автоколебательном процессе во всех
звеньях замкнутой системы происходят колебания с частотой, ко-
торая называется частотой автоколебаний.
При таком мощном источнике энергии как ЖРД автоколеба-
ния могут привести к возникновению больших динамических на-
грузок в конструкции ракеты-носителя, могущих вызвать повреж-
дения оборудования и приборов. Возможно также разрушение кон-
струкции ракеты еще до установления
стационарного автоколебательного про-
цесса.
Продольные автоколебания ракеты с
ЖРД возникают не всегда. Все зависит
от свойств колебательной системы, оп-
ределяемых соотношением ее парамет-
ров. Соответствующим изменением этих
параметров можно добиться того, что номинальный режим работы
системы будет устойчивым, и случайно возникающие колебания
будут затухать. Именно такими свойствами и должна обладать ра-
кета с ЖРД.
Расчет параметров системы, вывод и анализ уравнений, мате-
матическое описание взаимодействия отдельных элементов колеба-
тельной системы, анализ свойств замкнутой динамической системы
являются основной задачей II части книги.
10.2. АВТОКОЛЕБАНИЯ В ЗАМКНУТЫХ СИСТЕМАХ РАКЕТЫ
В автоколебательной системе, состоящей из корпуса ракеты,
топливных магистралей и ЖРД, можно выделить отдельные замк-
224
жрд ~Н~Н Кг,рп^~ н
\Топливная j
магистраль
Рис. 10.2
нутые системы, в которых могут возникать автоколебания. К та-
ким системам, например, относится система питания двигателя со
шнекоцентробежным насосом. При работе насоса в его всасываю-
щей части может возникать кавитация (образование парогазовой
смеси), которая вызывает изменение скорости потока жидкости в-
расходной магистрали, а изменение давления жидкости при выхо-
де из расходной магистрали оказывает влияние на образование
парогазовой смеси. Таким образом, образуется замкнутая система,
в которой возможно возникновение автоколебаний (рис. 10.3).
Рис. 10.3
Рис. 10.4
Топливная магистраль совместно с двигателем также образует
замкнутую систему, в которой возможны автоколебания (рис.
10.4). Колебания давления в топливной магистрали вызывают из-
менение подачи топлива в двигатель, а возникшее вследствие этого
изменение давления в камере сгорания способствует изменению
скорости потока жидкости и как следствие — колебаниям давления
в топливной магистрали. Автоколебания могут возникать в двига-
теле и его системах регулирования.
Упругий бак с топливом совместно с системой наддува газом
образует замкнутую колебательную систему (рис. 10.5). При воз-
никновении продольных колебаний бака с жидкостью объем газо-
вой подушки над жидкостью и давление в ней изменяются. Регу-
' I______________I
Рис. 10.5 Рис. 10.6
лятор давления получает сигнал об этом изменении давления и
воздействует на источник энергии с рабочим телом (например,
баллон со сжатым газом). В этой замкнутой системе также могут
возникать автоколебания.
При рассмотрении продольных колебаний корпуса ракеты сов-
местно с ЖРД и топливными магистралями принято, что корпус
совершает продольные колебания растяжения — сжатия. Но одно-
временно с колебаниями растяжения — сжатия могут возникать и
изгибные колебания корпуса.
8 359 225
При изгибных колебаниях вектор тяги будет отклоняться на
некоторый угол, как и хвостовой отсек корпуса, вследствие чего
составляющая тяги в направлении невозмущенной продольной оси
ракеты будет испытывать малые возмущения с частотой, в два ра-
за большей частоты изгибных колебаний корпуса. Если при этом
частота собственных продольных колебаний корпуса будет в два
раза больше частоты изгибных колебаний, то возникнут благопри-
ятные условия для возбуждения совместных продольно-попереч-
ных колебаний ракеты (рис. 10.6).
Если двигатели и их топливные магистрали расположены не на
оси ракеты, то при изгибных колебаниях корпуса топливные ма-
гистрали у одних двигателей будут удлиняться, а у других — уко-
рачиваться. Изменение длины топливных магистралей вызывает
изменение подачи топлива в камеру сгорания и изменение давле-
ния в этой камере. Здесь взаимосвязь поперечных и продольных
колебаний корпуса будет еще более сильной.
10.3. ЗАМКНУТАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА
РАКЕТЫ С ЖРД
Рассмотрим колебательную систему, состоящую из трех основ-
ных частей: корпуса ракеты, ЖРД и топливных магистралей.
Опуская некоторые детали, можно считать, что и корпус и топлив-
ные магистрали представляют собой гидроупругие колебательные
системы.
Корпус ракеты можно представить как упругую тонкостенную
осесимметричную конструкцию удлиненной формы. Продольные
колебания ракеты характеризуются прежде всего колебаниями
растяжения — сжатия корпуса. В этих колебаниях участвует и
жидкое топливо в баках. Так как колебания корпуса и топлива в
баках совместные, то при изучении низкочастотных продольных
колебаний корпуса необходимо учитывать и колебания жидкости
в баках.
Вес (сила тяжести) жидкого топлива передается на корпус
через упругое дно бака, поэтому жидкость по отношению к стен-
кам корпуса можно рассматривать как груз, подвешенный на пру-
жине. Жидкость перемещается относительно стенок корпуса в осе-
вом направлении не только из-за растяжения дна бака, но и до-
полнительно из-за изменения диаметра обечайки бака, вызываемо-
го гидродинамическим давлением. Упругую оболочку бака совмест-
но с жидкостью для изучения можно выделить из общей колеба-
тельной системы.
Двигатель крепится к корпусу при помощи рамы и в первом
приближении для расчета форм и частот собственных колебаний
включается в механическую колебательную систему корпуса как
упруго подвешенная масса. Перемещениям дна баков и двигателя
относительно корпуса ракеты при рассмотрении продольных коле-
баний придается особое значение, так как от колебаний дна и дви-
226
гателя зависит изменение давления жидкости в топливной магист-
рали и воздействие тяги на 'продольные колебания корпуса.
Динамическими характеристиками корпуса являются формы
и частоты собственных колебаний. Расчет форм и частот собствен-
ных колебаний корпуса с учетом особенностей его конструкции
составляет одну из главных задач в изучении продольных колеба-
ний ракеты. Расчет форм и частот следует производить для раз-
ных уровней заполнения топливных баков.
Тонкостенная оболочка корпуса ракеты имеет набор стрингеров
и шпангоутов. Формы и частоты собственных колебаний корпуса
можно достаточно точно рассчитать на ЭВМ и в этом отношении
корпус ракеты является самым простым эвеном замкнутой колеба-
тельной системы. Вначале решается задача об определении форм
и частот собственных осесимметричных колебаний упругого бака
с жидкостью. Результаты этого решения затем используются для
определения форм и частот собственных колебаний растяжения —
сжатия корпуса.
С точки зрения динамических процессов жидкостный ракетный
двигатель является самой сложной частью замкнутой системы. Под
ЖРД будем понимать двигательную установку, состоящую из дви-
гателя, турбонасосного агрегата (ТНА), жидкостного генератора
газов (ЖГГ) и магистралей высокого давления. ЖРД имеет до-
вольно сложную систему управления и регулирования: в нем про-
исходят гидродинамические, химические, тепловые, газодинамичес-
кие и вибрационные процессы. Однако для анализа продольных
колебаний ракеты, частоты которых не превышают 50 Гц, динами-
ческие процессы в двигателе можно представить в виде сравни-
тельно простой модели.
Под топливной магистралью будем понимать магистраль (тру-
бопровод) низкого давления или расходную магистраль. Она сое-
диняет бак с насосом и обычно состоит из сравнительно длинных
прямолинейных участков трубы небольшой жесткости, поворотов
и разветвлений, сильфонов, расходных шайб и т. п. Топливная ма-
гистраль крепится к корпусу ракеты в местах поворотов и разветв-
лений; через крепления вес столба жидкости над местом крепления
передается на корпус.
На входе в шнековый насос возникают кавитационные явле-
ния — разрывы сплошности жидкости и образование парогазовой
среды. Парогаз делает более податливым столб жидкости в ма-
гистрали и, следовательно, снижает частоты собственных коле-
баний.
Расходная магистраль образует самостоятельную колебатель-
ную систему, анализ которой можно провести отдельно. Изменение
Давления топлива в расходной магистрали вызывается колебания-
ми дна бака и корпуса, перемещениями двигателя и турбоиасосно-
го агрегата относительно потока жидкости, колебаниями давления
в камере сгорания. Насосы магистралей горючего и окислителя
обычно установлены на одном валу и приводятся во вращение
8* 227
турбиной. В зависимости от способа питания жидкостного генера-
тора газов взаимосвязи
Рис. 10.7
между магистралями могут проявляться
по-разному.
Если ЖГГ работает на основных ком-
понентах топлива (рис. 10.7), то возму-
щения динамических параметров потока
в какой-либо магистрали вызывают не
только изменение момента сопротивле-
ния на валу ТНА, но и изменение подачи
компонентов в ЖГГ, т. е. изменение ко-
личества выработанного газа и, следова-
тельно, изменение скорости вращения и
крутящего момента на валу турбины.
На рис. 10.8 приведена динамическая схема
первой ступени американской ракеты-носителя
«Титан-2» [27]. На схеме показаны упругий кор-
пус с двумя баками окислителя О и горючего Г,
система питания и двигатели. Здесь 7 — узел
крепления ТНА; 6 — насосы подачи топлива; Д
2 — начальные участки расходных магистралей
окислителя и горючего; 3 — выходные участки
расходных магистралей; 5 — напорная магист-
раль; 4 — ЖРД- Для того, чтобы снизить часто-
ты собственных колебаний жидкости в топлив-
ных магистралях и обеспечить устойчивость замк-
нутой системы, на топливных магистралях уста:
новлены «гидравлические демпферы». Такой демпфер 8, схематично показанный
на расходной магистрали горючего, является колебательным звеном, которое из-
меняет динамические характеристики топливной магистрали. В работе [27] отме-
чено, что при помощи этих демпферов удалось устранить продольные автокоде
бания ракеты «Титан-2».
10.4. УПРОЩЕННАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Чтобы получить приближенное представление о динамической
схеме ракеты с ЖРД, рассмотрим упрощенную математическую
модель ракеты с однокомпонентным ЖРД. Уравнения движения
составим для отклонений (возмущений) переменных величин от их
значений в установившемся номинальном режиме. Под номиналь-
ным режимом будем понимать полет ракеты без колебаний по пря-
молинейной (или близкой к прямолинейной) траектории. В не-
большой промежуток времени, который, однако, значительно
больше рассматриваемого периода собственных продольных коле-
баний ракеты, подача топлива в камеру сгорания, тяга двигателя,
228
ускорение всех элементов конструкции ракеты в номинальном ре-
жиме принимаются постоянными.
Полагаем, что форма fn(x) собственных упругих колебаний
n-го тона корпуса с жидким топливом в баках известна. Тогда
уравнение колебаний для обобщенной координаты будет
иметь такую же структуру, как и уравнение колебаний механичес-
кой системы с одной степенью свободы.
Положительным будем считать перемещение корпуса в направ-
лении от вершины к хвостовой части ракеты. Обобщенная сила,
действующая на корпус ракеты в направлении ее продольной оси,
будет равна [Pu(t)~P(t)]fn дв, где /пдв — коэффициент формы
упругих колебаний двигателя совместно с ТИА; P[t) — отклонение
тяги двигателя от номинальной величины; P^(t) — отклонение си-
лы, приложенной к корпусу насоса и обусловленной отклонением
давления жидкости на входе в насос.
Уравнение вынужденных колебаний для обобщенной коорди-
наты qn (Р) будет иметь вид
[зд-т/Ядв- (ю. о
Здесь тп— приведенная масса ракеты; — относительный ко-
эффициент затухания собственных колебаний; соп — частота собст-
венных колебаний.
При колебаниях корпуса изменяется давление жидкости на дне
бака. Отклонение этого давления (при -выходе жидкости из ба-
ка в расходную магистраль) в первом приближении можно при-
нять пропорциональным ускорению дна бака:
/’б=-6о^/Яб7я> (Ю.2)
где Qo — плотность жидкости; Н — высота столба жидкости в баке;
/пб — коэффициент формы упругих колебаний дна бака; х —неко-
торый коэффициент, зависящий от соотношения диаметров бака и
расходной магистрали, от формы дна.
Без учета сжимаемости жидкости, сопротивления и упругости
стенок расходной магистрали, перепад давлений на концах трубы
расходуется на разгон жидкости. Поэтому соотношение между от-
клонением давления ро на 'выходе из бака и отклонением давления
Pm на входе в насос определяется соотношением
Ah(z) = A-6o^i(z), (Ю.З)
где I — длина расходной магистрали; Vi(f)—ускорение жидкости
в расходной магистрали.
Отклонение скорости жидкости сц(/) в расходной магистрали
определим из уравнения неразрывности потока перед парогазовой
смесью
V1 (/) = vH (/) + (/) + fn^qn (/), (10. 4)
5>н(0—отклонение скорости жидкости, проходящей через насос;
^пг(/)—отклонение скорости жидкости, обусловленное изменени-
229
ем объема парогазовой смеси; /Пдв^п(0—отклонение скорости
жидкости в трубопроводе, вызванное перемещениями насоса.
Объем парогазовой смеси в жидкости на входе в шнековый на-
сос будем оценивать, пользуясь линеаризованным законом для
идеального газа. Обозначив отклонение этого объема через к11Г>
а упругую постоянную через Епт, будем иметь
^г=-КгАн.
Отклонение скорости жидкости, обуславливаемое изменением объ-
ема парогазовой смеси:
-ц1Г=— -к„гЛн (к||Г= — ). (10. 5)
г у at \ Гу /
Здесь Ft — площадь проходного сечения трубопровода перед на-
сосом.
ЖРД представим состоящим из ТНА, напорной магистрали и
камеры сгорания с соплом. Если пренебречь изменением скорости
вращения вала насоса, то отклонение давления р2п на выходе из
насоса можно определить по формуле
Ан О') =(1 + Ан (Г + (10.6)
\ op J \ OV )
где Яп — напор жидкости на выходе из насоса.
Величины частных производных в уравнении (9.6) можно по-
лучить из рассмотрения расходной и напорной характеристик на-
соса. Эти величины равны тангенсам углов наклона касательных
к указанным характеристикам в рабочей точке.
С учетом только инерции столба жидкости и гидравлического
сопротивления, включая сопротивление форсунок, пропорциональ-
ное квадрату скорости, уравнение движения жидкости по напор-
ной магистрали можно представить в виде
ео^к(г‘) + ^6оА<С) = Ан(г‘)-А;(/)> (10- 7)
где fK(/) —отклонение скорости топлива на выходе в камеру сго-
рания двигателя, отнесенное к площади проходного сечения FT
расходной магистрали (^к=уп); рк(0—отклонение давления в
камере сгорания; £ф— коэффициент сопротивления напорной ма-
гистрали и форсуночной головки; — скорость топлива на входе
в камеру сгорания в установившемся номинальном режиме.
Для низких частот и малых возмущений уравнение для опреде-
ления отклонения давления рк(/) в камере сгорания однокомпо-
нентного ЖРД с открытой схемой питания можно принять как
уравнение простого апериодического звена
Тк-^~+р^)=^^к^. (10.8)
at
Здесь k — коэффициент пропорциональности между отклонени-
ем секундного поступления массы топлива в камеру и отклонением
230
давления; Ти— время релаксации в камере, характеризующее
быстроту установления давления рк(1) при скачкообразном изме-
нении входной величины За время Тк выходная величина
достигает значения pK(t) = 0,63 kF^p^.
Если жидкостный ракетный двигатель имеет закрытую схему
питания, то при исследовании продольных автоколебаний его ди-
намические свойства можно выразить суммарной характеристикой.
Рис. 10.9
Отклонение силы Рп, вызывающей колебания корпуса, пропор-
ционально Ет; соотношение между отклонением давления рк(/) в
камере сгорания и отклонением тяги Р(/) двигателя выразим че-
рез коэффициент kT. Будем иметь
Р(/) = МК(/); Ph(/) = FtAh(/). (10.9)
Уравнения (10.1) — (10.9) выражают упрощенную математичес-
кую модель колебательной системы.
Блок-схема, показывающая взаимодействие между различными
звеньями модели ракеты с ЖРД на однокомпонентном топливе, с
указанием описывающих их уравнений, приведена на рис. 10.9.
Из анализа линеаризованных уравнений (10.1) — (10.9) можно
сделать заключение лишь об устойчивости системы, т. е. устано-
вить, будут ли случайно возникшие малые колебания затухать.
Амплитуды же и частоты автоколебаний можно определить только
из нелинейных уравнений. Тем не менее анализ линеаризованных
уравнений может дать достаточно полную информацию о влиянии
различных параметров и их комбинаций на устойчивость системы.
Более полная математическая модель, методы определения ее па-
раметров и анализ устойчивости замкнутой системы будут рас-
смотрены ниже.
231
10.5. СОСТАВНЫЕ ЧАСТИ ЗАДАЧИ О ПРОДОЛЬНЫХ
КОЛЕБАНИЯХ РАКЕТЫ С ЖРД
Как было указано, динамическая система ракеты с ЖРД со-
стоит из взаимосвязанных разнородных звеньев. При колебаниях
системы в этих звеньях имеют место отклонения давления, скорос-
тей и ускорений по отношению к значениям в установившемся
движении и происходят взаимные перемещения звеньев. Анализ
динамических свойств такой системы будем проводить в следую-
щем порядке.
1. Разделим динамическую систему па отдельные звенья, эле-
менты которых сравнительно однородны во протекающим в них
процессам. Такими звеньями являются: корвус ракеты с жидко-
стью в баках, топливные магистрали с упругими элементами и
сжимаемой жидкостью. Для каждого звена составим дифференци-
альные уравнения возмущенного движения с учетом краевых (гра-
ничных) условий, возникающих при разделении системы на от-
дельные звенья.
2. Найдем решения уравнений и проведем анализ собственных
и вынужденных колебаний каждого звена в отдельности методами
теории колебаний и частотными методами, получившими широкое
распространение в теории автоматического регулирования.
Прежде всего решим задачу об определении частот и приведен-
ных масс собственных осесимметричных колебаний упругих баков
с жидкостью. После этого найдем формы и частоты собственных
колебаний корпуса.
Затем решаем уравнения и определяем динамические характе-
ристики топливных магистралей с учетом кавитационных явлений
на входах в шнековые насосы.
Анализ динамических свойств ЖРД проводится специалистами
по двигателям. Они находят частотные характеристики ЖРД, ко-
торые используем при исследовании замкнутой системы.
3. Наконец, составляем структурную блок-схему замкнутой сис-
темы, на основании принятых при разделении системы на звенья
краевых условий производим «стыковку» (соединение) звеньев,
исследуем устойчивость движения всей системы. Исследование про-
водим при помощи передаточных функций и амплитудно-фазовых
частотных характеристик; при этом, как правило, используется
ЭВМ. Анализ позволяет выявить влияние различных параметров
системы на устойчивость и рассмотреть способы достижения устой-
чивости.
Глава XI
ОСЕСИММЕТРИЧНЫЕ КОЛЕБАНИЯ БАКОВ
С жидким ТОПЛИВОМ
11.1. ПОСТАНОВКА ЗАДАЧИ
Как уже было отмечено, продольные колебания корпуса ракеты
сопровождаются колебаниями жидкого топлива в баках. При этом
давление жидкости изменяется, вследствие чего возникают допол-
нительные деформации бака.
Упругая оболочка бака совершает колебания вместе с жид-
костью, так что жидкость и оболочка образуют единую колеба-
тельную систему с бесконечным числом степеней свободы.
При изучении колебаний упругого бака с жидкостью жидкость
будем считать идеальной и несжимаемой.
Установившееся движение жидкости будем полагать безвихре-
вым и, следовательно, потенциальным. Тогда движение жидкости
в любой точке объема должно удовлетворять уравнению Лапласа:
дх2 ду2 dz2
(11.1)
где <р — потенциал скоростей жидкости.
Дифференциальные уравнения колебаний оболочки можно
представить в виде
Lii« + L12t) + L13w + qoA ^-=Х\
ot2
L2iZZ Ц- L22^4- L23^ Ц-Qoh = Y; (11. 2)
L31ZZ Езг'У 4- L33w 4" РсЛ • — Z.
ot2
Здесь Ln, L12,... — некоторые дифференциальные операторы; и, v,
w — проекции вектора полного перемещения оболочки на оси ко-
ординат XYZ соответственно; qq — плотность материала оболочки;
h — толщина оболочки; X, Y, Z — проекции вектора внешних рас-
пределенных сил, действующих на оболочку на оси X, Y, Z.
Внешними для оболочки являются сила давления жидкости на
смачиваемую поверхность S, давление газов на несмачиваемой по-
верхности S, осевые сжимающие или растягивающие силы, дейст-
вующие на обечайку бака со стороны смежных отсеков корпуса.
Осевые силы и давление наддува газов будем считать известными
величинами. Давление жидкости на смачиваемую поверхность ps
определяется по формуле
Q \ 2 's
где ро — давление газов на свободной поверхности; q— плотность
жидкости; U — потенциал массовых сил.
233
Решения уравнений (11.1), (11.2) должны удовлетворять гра-
ничным (краевым) и начальным условиям. Для оболочки гранич-
ные условия задаются в виде геометрических или силовых условий
на некоторых контурах (линиях). Например, на некотором конту-
ре I может быть задано соотношение между перемещениями, ко-
торые в общем виде представим так:
Qz(zz, v, w) = 0, (11.4)
где Qi — некоторая функция. На другом контуре граничные усло-
вия могут быть иными.
Так как оболочка бака непроницаема, то на границе смачива-
емой (поверхности S нормальная составляющая скорости жидкости
должна быть равна нормальной составляющей скорости перемеще-
ния оболочки:
d?/'d/z|s = dwjdt, (Н-5)
где wn—перемещение оболочки по нормали к поверхности. Усло-
вие (11.5) является условием совместности колебаний оболочки
и жидкости.
На свободной поверхности X давление жидкости равно давле-
нию газов, поэтому
=о. (11.6)
В дальнейшем будем производить оценку устойчивости движе-
ния системы при помощи частотных методов, которые основаны на
анализе динамических свойств системы при установившихся гар-
монических воздействиях. При этом движения, обусловливаемые
начальными условиями, интереса не представляют и определять
их мы не будем.
Таким образом, задача о колебаниях жидкости в упругом баке
сводится к отысканию решения системы уравнений (11.2), удов-
летворяющих граничным условиям (11.4) на заданных линиях, и
решения уравнения (11.1), удовлетворяющего граничному условию
(11.6) на свободной поверхности. Оба решения, кроме того, долж-
ны удовлетворять условиям (11.3) и (П.5) на смачиваемой по-
верхности.
Решение задачи о колебаниях жидкости в упругом баке важно:
1) для определения форм и частот собственных продольных коле-
баний корпуса ракеты: 2) для определения возмущения давления
при выходе жидкости из бака. Введем следующие допущения.
1. Будем считать, что ракета имеет форму прямого осесиммет-
ричного удлиненного тела, так что в поперечном сечении распреде-
ление масс и жесткостей в любом радиальном направлении оди-
наково.
2. Положим, что ракета совершает прямолинейный полет и век-
тор действующих на ракету внешних сил направлен по продольной
оси ракеты. Тогда невозмущенное зеркало жидкости будет распо-
лагаться перпендикулярно продольной оси ракеты, и давление
234
жидкости на стенки баков будет обладать свойством осевой сим-
метрии. Если в полете возникнут колебания тяги, то упругий бак
с жидкостью будет совершать вынужденные колебания. Из боль-
шого разнообразия форм колебаний при исследовании продольных
колебаний системы можно рассматривать только осесимметричные
формы колебаний.
3. Продольное ускорение ракеты на небольшом участке траек-
тории можно считать постоянным. Под действием осевых сил дав-
ления наддува и гидростатического давления бак с жидкостью на-
ходится в состоянии «статического» равновесия. Примем, что коле-
бания бака с жидкостью происходят относительно этого состояния
равновесия.
4. Колебания корпуса ракеты, так же как и колебания бака с
жидкостью, будем считать малыми и что произведениями малых
перемещений и скоростей будем пренебрегать при сравнении с ве-
личинами самих перемещений и скоростей.
5. При продольных колебаниях, вообще говоря, изменяются и
поперечные размеры корпуса. Изменение радиуса бака, вызван-
ное растяжением или сжатием обечайки в осевом направлении,
оказывает некоторое влияние на колебания жидкости в баке. Од-
нако этим влиянием мы пренебрежем. Будем считать, что радиус
бака изменяется только от изменения давления жидкости. Это до-
пущение дает возможность отдельно изучать осесимметричные ко-
лебания жидкости в упругом баке и найти для них простую меха-
ническую модель.
6. Колебания свободной поверхности жидкости учитывать не
будем. Расчеты показывают, что в большинстве случаев эти коле-
бания оказывают незначительное влияние на частоты упругих ко-
лебаний бака с жидкостью.
7. Оболочку бака полагаем тонкостенной и безмоментной.
11.2. ОПРЕДЕЛЕНИЕ ОСНОВНОЙ ЧАСТОТЫ СОБСТВЕННЫХ
КОЛЕБАНИЙ БАКА С ЖИДКОСТЬЮ МЕТОДОМ РЭЛЕЯ
Если в расчетах можно ограничиться учетом только одного ос-
новного тона осесимметричных колебаний бака с жидкостью, то
частоту собственных колебаний можно сравнительно просто опре-
делять приближенно методом Рэлея. Чем точнее принятая форма
колебаний системы подходит к истинной, тем точнее будет полу-
ченное значение частоты собственных колебаний. Задаваться фор-
мой собственных колебаний нужно в соответствии с граничными
условиями. В частности, за форму колебаний основного тона мож-
но принять функцию перемещений при статической нагрузке.
В системах с распределенными параметрами потенциальную
энергию обычно выражают через коэффициент приведенной жест-
кости кпр:
п=^-М2(/),
235
а кинетическую энергию — через коэффициент приведенной массы
^пр-
где q(t) —обобщенная координата.
Из равенства Гтах = Птах получим формулу для определения
частоты собственных колебаний системы
<o2=k„p/zn,ip.
(И-7)
Определение частоты основного тона произведем для бака, обе-
чайка которого выполнена в виде кругового цилиндра, а дно — в
виде части сферы. Кроме допущений, сформулированных в преды-
Рис. 11.1
дущем разделе, будем
считать, что кинетическая
энергия движения жид-
кости в радиальном нап-
равлении мала по срав-
нению с кинетической
энергией ее движения
вдоль оси цилиндра и ско-
рость частиц жидкости в
направлении оси цилинд-
ра не зависит от радиуса.
Геометрия бака и схе-
ма его крепления показа-
ны на рис. 11.1, а; там же
показаны статические пе-
ремещения обечайки и дна бака в направлении радиуса, вызван-
ные гидростатическим давлением.
Обозначим через hi — радиус и толщину обечайки бака; Т?2,
Л2 — радиус и толщину сферической оболочки (дна бака); Hi—
высоту смоченной части обечайки бака; Н?,'— высоту сегмента
сферического дна; Н — приведенную высоту столба жидкости в
баке, у — удельный вес жидкости.
Вычислим потенциальную энергию обечайки и дна бака, соот-
ветствующую деформациям от гидростатического давления.
Под воздействием гидростатического давления обечайка бака
находится в одноосном напряженном состоянии. Удельная потен-
циальная энергия Ilie и окружная деформация определяются
как
и — _L f-2-
Ills — 2 ’
y{H-x)Rx
Ehx
где Е — модуль упругости первого рода.
236
Полную потенциальную энергию обечайки получим интегриро-
ванием величины П 1е по объему обечайки. Полагая = const,
hx = const, получим
П1=\\П1е<П/=2л/?1й1\ IWx= 1 '. (11.8)
Если высота Нъ сегмента сферического дна мала по сравнению
с радиусом бака, то для упрощения можно принять, что давление
жидкости на любом участке сферы одинаково и равно гидростати-
ческому давлению на глубине Н. Для сферической оболочки, на-
ходящейся под действием постоянного давления у/7, удельная по-
тенциальная энергия
П2е =
1 ---- [Л
Я2 2£ft2 К
где ц — коэффициент Пуассона.
Объем части сферической оболочки
И 2 = Л22 2-
Рис. 11.2
Полная потенциальная энергия при деформации дна бака
п2 = П2.1/2 = 2; (1 - И). (11.9)
Объем жидкости, находящейся в сегменте сферического дна,
заменим равным объемом цилиндрического столба жидкости г ра-
диусом Rx. Тогда приведенная высота цилиндрического столбэ
жидкости с радиусом R\ с учетом жидкости на дне бака будет
Н=Н^Н2.
Для восприятия радиальных сжимающих сил в месте соедине-
ния дна с обечайкой бака устанавливается шпангоут (силовое
кольцо). Вес столба жидкости уравновешивается меридиональны-
ми силами Т2 по контуру дна (рис. 11.2)
л/??//у = 2лА?1Г1 = 2л/?17"2 sin По-
била спроектированная на плоскость кольца, дает радиаль-
ную нагрузку на кольцо
^=^2 cos 90= COS 0О.
2 sin 0Q
Сжимающая сила в поперечном сечении кольца
5к = ^1-
237
Потенциальная энергия деформации кольца
1 S2 nl^yH2
Пз=Т 2jr/?1=-^^ctg20°’ (11.10)
Z сг к ^Ьг к
где FK — площадь поперечного сечения кольца.
Таким образом, полная потенциальная энергия деформации
П = П1 + П2 + П3. (11. И)
Приведенный коэффициент жесткости кпр численно равен удво-
енному значению потенциальной энергии системы при q(t) = l.
Поэтому при q(t) = \
к —9ТТ
^пр ^АХшах-
Теперь вычислим максимальное значение кинетической энергии
системы. Будем учитывать только кинетическую энергию колеба-
ний жидкости с частотой coi в направлении продольной оси бака.
Перемещение любого слоя жидкости с координатой х в направ-
лении оси цилиндра можно представить состоящим из двух частей:
1) перемещения на величину w2 вместе с дном и 2) перемещения,
вызываемого изменением толщины нижележащих слоев жидкости
вследствие увеличения диаметра обечайки.
Так как вторая часть перемещения жидкости будет такой же,
как и у сжимаемого столба под действием веса, то вместо несжи-
маемой жидкости и податливой обечайки при определении осевых
перемещений можно рассматривать некоторый эквивалентный сжи-
маемый столб жидкости с модулем упругости при растяжении —
сжатии £пр и абсолютно жесткую обечайку. Для определения ЕПр
рассмотрим тонкий слой, состоящий из жидкости и обечайки. Тол-
щину слоя в недеформированном состоянии примем за единицу.
Увеличение радиуса обечайки от гидростатического давления
будет
= Y {Н — х) ftf/tEhi).
Вследствие увеличения радиуса толщина слоя жидкости умень-
шится на величину
. _2ji7?1w1 2у(Н — x)R{
Zai ----5— ------------ .
Ehv
Если считать теперь слой жидкости сжимаемым, то под дейст-
вием осевой сжимающей силы, равной у (Я—х)л/?12, толщина
уменьшится на величину
у (Я — х) kR\ у(Н—х)
Л2— EnpnR2 = £"₽ '
Так как уменьшение толщины слоя жидкости вследствие уве-
личения диаметра обечайки от давления у (Я—х) должно быть
238
равно уменьшению толщины того же слоя вследствие сжимаемости
(Д1=.Д2), то
"Р 2/?j
(Н.12>
где Е — модуль упругости материала обечайки бака.
На рис. 11,1,6 приведена модель сжимаемого столба жидкости;
пружина имитирует упругость дна. Полное перемещение произ-
вольного слоя жидкости
и (х) — w2
\(Н— x)dx . ух(Н—х/2)
-------------= Т<У<2 " I --------
^ир----------^пр
причем
(И. 13)
(11. 14)
о
График функции и(х), представляющий форму колебаний жид-
кости, показан на рис. 11.1, в.
Максимальное значение кинетической энер-
гии продольных колебаний столба жидкости
при <?(/) = 1 будет
/7 2
Гтах = ^-\—— одм2(х)а1х=Д-/ппр<«>1, (11. 15)
/ J .if Z
О
где тнр
2W2Y//2
3£пр
2у2//4 \
1’^пр / ’
Если бак подвесной и подвешен за верхний силовой шпангоут
(рис. 11.3), то под воздействием гидростатического давления на-
пряженное состояние обечайки будет двухосным. Напряжения oi
в направлении оси обечайки и <yt в окружном направлении будут
3 __ Y^i . _y(H-x)R1
1 9 Q / - •
2hx f hx
Потенциальная энергия обечайки в этом случае может быть
вычислена по формуле
2
где S —смоченная поверхность обечайки; 50 — несмоченная по-
верхность обечайки. Так как
ni = — \ (з1+з7-2{хз1а/).2л/?1^Г-|-------------- . (11.16)
239
Вследствие растяжения обечайки в осевом направлении возни-
кает дополнительное перемещение всего столба жидкости на ве-
личину
Но
О
2^! 1 r 2Eh[
Если рассматривать, как и ранее, сжимаемый столб жидкости,
то приведенный модуль сжатия £Пр(х) здесь будет зависеть от ко-
ординаты х. Вычислим его
_ Ehx (Н — х)
/?! 2(Я— х) — у.Н'
Полное перемещение произвольного слоя жидкости
^(x) = w2 + ЛЯ dx = W£-j-А// +
(Н.17)
Здесь w2 определяется по формуле (11.14), а £пр— по формуле
(11.12). Таким образом, если бак подвесной, то в формулу (Н.П)
значение П1 нужно подставить из (11.16), а при определении кине-
тической энергии функцию и(х) взять в виде (11.17).
Частота собственных колебаний будет по-прежнему определять-
ся по формуле (11.7).
11 .3. ВЫНУЖДЕННЫЕ ПРОДОЛЬНЫЕ КОЛЕБАНИЯ БАКА
С ЖИДКОСТЬЮ НА ОСНОВЕ ПРИБЛИЖЕННОЙ МОДЕЛИ
Пусть силовое кольцо, к которому присоединено дно бака, со-
вершает вместе с корпусом ракеты малые колебания в направле-
нии продольной оси по закону
«к W=«oe,w,
где Цо, оз — амплитуда и частота вынужденных колебаний кольца
заданы. Если частота со будет меньше частоты собственных коле-
баний основного тона соь то обычно бывает достаточно учезть
только основной тон колебаний бака с жидкостью.
Как и в разд. 2, упругий бак с несжимаемой жидкостью заме-
ним сжимаемым столбом жидкости с модулем упругости £Пр
(11.12). Схема показана на рис. 11.4; здесь пружина имитирует
упругость дна бака.
240
Перемещение произвольного слоя жидкости в направлении оси
представим в виде
«(*> /) = «к (/) + f(x)q(t\
(П.18)
где f(x), q(t)—координатная функция и обобщенная координата
перемещения произвольного слоя жидкости относительно силового
кольца. Функцию f(x) выбираем в соответствии с уравнениями
(11.13) и (11.14). Имеем
/(x)=l+af-^
\ i~i
—У-
2Н1 )
a 2 4HR^
(X-^R^ '
(11.19)
где х — расстояние от нижнего сечения столба жидкости до произ-
вольного сечения в положении статического равновесия; переме-
щение, обусловленное деформацией дна бака
(на рис. 11.4 — деформацией пружины), при-
нято равным единице, т. е. /(0) = 1.
Для подвесного бака функция /(х) может
быть найдена из уравнения (11.17).
Чтобы получить уравнение вынужденных
колебаний, составим выражения кинетической
и потенциальной энергий системы и применим
уравнения Лагранжа второго рода
— (-^-1-— = Р„; L = T-n.
dt \ dq J dqn
Кинетическая энергия столба жидкости
н
т ~ \ |йк+ / {x)q]2dx = ^-muK-\-
£ Q *> в
о
н
+ л/е? — / (л) + Отн1^2,
& V В
0
где m — величина массы жидкости в баке; тпр — приведенная мас-
са жидкости
и
тп=nR\— С
1 g j
6
Потенциальная энергия системы может быть вычислена по ме-
тодике, изложенной в разд. 11.2. Выразим ее через коэффициент
приведенной жесткости
П=0,5к11Р^.
Обобщенная сила Рп в рассматриваемой задаче равна нулю.
241
Подставив выражения для Т и П в уравнение Лагранжа, по-
лучим
н
wlip? + к1)р<7— — /гкл7?Г -у f dx
О
н
J f (*) dx
или q~r^2\q= — buK, b=-^----- . (11.20)
f f:i(x)dx
b
Будем рассматривать только установившиеся колебания, кото-
рые выражаются частным решением уравнения (11.20):
#0)2 . , . , .
Ч = ~2---7 мое'ш/ («1 / ‘°1-
<О| — 0)2
Вынужденные колебания любого слоя жидкости согласно
(11.18) можно представить в виде
и (х, /) = Г1 + f (х) — 1
L tOj — gl>2 J
Вынужденные колебания нижнего сечения столба жидкости
(дна бака) выражаются уравнением
«(/)=( 1+—(11.21)
\ <О| — (1)2 )
Вынужденные колебания дна бака относительно силового
кольца
^ОТН (^) 9 ~ ^0^
СО У — (1)2
Приближенная модель, в которой статическая форма прогиба
принята в качестве формы колебаний, позволяет с удовлетвори-
тельной точностью учитывать первый тон колебаний. При необхо-
димости учета более высоких тонов надо определять потенциал
скорости жидкости в упругом баке. Рассмотрим вначале две част-
ных задачи.
11 .4. ОПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА СКОРОСТИ
ЖИДКОСТИ В УПРУГОМ ЦИЛИНДРИЧЕСКОМ БАКЕ
С ЖЕСТКИМ ДНОМ
Уравнение Лапласа в цилиндрических координатах для осесимметричных
колебаний имеет вид
dfyi 1 (toi д2ср,
- tv 4-------v 4- tv = 0. (10.22)
or- г or дх-
Рассмотрим сначала колебания упругого цилиндрического бака кругового попе-
речного сечения с упругой стенкой и жестким дном. В дальнейшем дно бака
также будем считать упругим. Схема бака приведена на рис. 11.5.
242
Запишем граничные условия на стенке и на дне бака
ду{/дг — dwn'dt при г = RY; (11.23)
d<tijdx ~ 0 при х = 0, (11.24)
где W\ = W\(x, t)—радиальное перемещение цилиндрической стенки бака.
На свободной поверхности давление жидкости равно давлению газов. По-
этому для отклонения давления на основании уравнения (11.6) граничное усло-
вие в линейной постановке можно записать как
= 0.
(11.25)
Уравнение (11.22) решим методом Фурье. Потенциал скоростей представим
в виде следующего ряда:
<Р1 = 2 DsXs (х) Rs (г) zwse<“s\
(S)
Подставив это выражение в уравнение (11.22) и раз-
делив переменные, получим следующие уравнения для оп-
ределения функций Xs(x) и 7?з(г):
d^Xs (х) 9
77, + фЦх)=0; (Н.26)
dlRs{p + — ~ (Г) - fefos (0 = 0. (И.27) Рис. 11.5
dri г dr
где ks — некоторый, пока неопределенный, параметр.
Для того, чтобы удовлетворить граничному условию (11.23), представим
функцию W[ в виде
W1 = 2 Gs*s О) ,
(Я
причем функция Xs(x) должна удовлетворять уравнению (11.26).
Здесь G8 — неопределенный коэффициент.
Для определения функции Rs(r) имеем линейное однородное дифференци-
альное уравнение второго порядка (11.27)—уравнение Бесселя. Так как функ-
ция Rs(f') при г=0 должна быть ограничена, то решение уравнения (11.27) дол-
жно состоять из функций Бесселя первого рода нулевого порядка.
Если коэффициент ks в уравнениях (11.26) и (11.27) является мнимым чис-
лом, то функция Rs(r) будет функцией Бесселя первого рода нулевого порядка:
Rs(r)= J0(ksr).
Здесь ks — модуль мнимого числа.
Если в уравнениях (11.26) и (11.27) ks является вещественным чис-
лом, то функции Rs(r) будут модифицированными функциями Бесселя первого
рода нулевого порядка:
Rs (0 = Л> (ksr).
Модифицированные функции Бесселя определяются из соотношения
Л) (*•$') = ^{iksr),
где ks — вещественное положительное число.
При мнимых значениях ks решение уравнения (11.26) выражается через
гиперболические функции sh ksx и ch£sx, а при вещественных значениях ks —
Через тригонометрические функции sin k&x и cos ksx, причем
sin iksx = i sh ksx\ cos iksx ~ ch ksx.
243
Из выражения для потенциала скоростей (pi и равенств (11.24) и (11.25)
находим
Г dXs (х) I
—=0; [Х5(^)]а. я=0. (11.28)
L dx Ja-^o
Так как равенства (11.28) могут быть выполнены одновременно только при
вещественных значениях ks, то решение уравнения (11.26), удовлетворяющее
граничным условиям (11.28), будет иметь вид
X 9 (х) = cos ksx,
где ks — (2s—1)л/(2Я) (s=l, 2,...).
При вещественных значениях ks решение уравнения (11.27) можно предста-
вить в виде
(И = /0 [vs (r//?i)], (И.29>
где vs = ksRl = (2s—})nRi/(2H') (s=l,2,...). (11.30)
Таким образом, для потенциала скоростей жидкости дц и функции w по-
лучим следующие выражения:
Wi
I vs
х \
(11.31)
Gs cos
/CD /
e 5
Для определения коэффициента Ds, Gs и частот собственных колебаний сов
нужно рассмотреть связь между радиальными колебаниями цилиндрической
стенки бака и радиальными колебаниями жидкости.
Рассмотрим часть кольца, вырезанного из
__________цилиндрической стенки бака (рис. 11.6). При
pr=R______осесимметричных колебаниях диаметр кольца
Fh /п увеличивается или уменьшается, в кольце воз-
/И/,/ 1 никают напряжения растяжения или сжатия.
* \Л / Ширину кольца примем равной единице. При
\\ / увеличении радиуса кольца на величину в
4Z кольце возникает растягивающая сила, равная
р Ehi (^i//?i). На внутреннюю стенку кольца
Иис’ ь действует давление
--е (<W4(п.32)
Уравнение радиальных колебаний кольца можно представить в виде
Wi
eo^i^i Ehi
ot t\\
Разделив все члены этого уравнения на получим
---1 + S2M-- = ----
^2 ' х боЛ1
Рг
Здесь ро — плотность материала стенки бака;
ственных радиальных колебаний кольца с радиусом /?ь Подставив
(11.33)
частота соб-
в уравнение
(11.33) значение из равенства (11.32) и заменив функции ац и cpi их
выражениями из (11.31), получим
Gs
(s
(11.34)
1, 2,...).
244
Из граничного условия (11.23) находим
Так как
то
Г d / г \1
Ds ~ (vs гГ/ ~GS-
L dr \
d
— Л) (ksr),
dr
Ds = RxGs![vsI Uv.)].
(11.35)
Подставив выражение для коэффициента Ds в уравнение (11.34), получим
формулу для определения частоты собственных осесимметричных • колебаний,
упругого цилиндрического бака с жидкостью
Л)(У*) \
y^l(Vi) .
(11.36)
Здесь vs — вещественные числа, определяемые по формуле (11.30). Если не учи-
тывать массу стенки бака, то частота собственных колебаний бака
2 EhxvsIi(ys)
's~ e^o(v.) ’
(11.37)
Рассмотрим теперь колебания жидкости в цилиндрическом баке с жесткой
стенкой и упругим дном.
11.5. ОПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА СКОРОСТЕЙ ЖИДКОСТИ
В ЦИЛИНДРИЧЕСКОМ БАКЕ С ЖЕСТКОЙ
ОБЕЧАЙКОЙ И УПРУГИМ ДНОМ
Поперечное сечение бака примем в виде круга с радиусом R\, дно бака—
в виде пологой сферической оболочки с радиусом Rz и толщиной hz. Схема бака
приведена на рис. 11.7. Прогиб дна бака в направлении радиуса сферы обозна-
чим через w2 = w2(r, t).
Так как глубина сферической оболочки мала по
сравнению с ее радиусом, то метрику пологой оболоч-
ки заменим метрикой плоскости, т. е. будем считать
днище круглой пластиной, а высоту столба жидкости —
равной
Н = Нг -гН2.
Потенциал скоростей
Уравнению Лапласа (11.22)
ср2 должен удовлетворять
и граничным условиям:
д^/дг = 0
дуудх = du^/dt
при г -- Rf, (11.38)
при х ~ 0; (11.39)
~ 0 при х = Н. (11.40)
Форма собственных осесимметричных колебаний i-ro
может быть представлена в виде
тона круглой пластинке
fi (r)=--CxJ0
4 F. {
Hi = £"-1 I Qo
^)+^o(W
Ehi
E R\ /’ D~ 12(1-p.2) ’
(11.4П
245
Е, Ро — модуль упругости и плотность материала оболочки; сог — частота собст-
венных колебаний сухой оболочки. Край оболочки считаем защемленным, поэто-
му функция (г) должна удовлетворять следующим граничным условиям:
ft (г) = 0; (г) = 0 при г = /?!.
Подставив в эти условия функцию fi(r)t получим характеристическое урав-
нение для определения коэффициента Цг:
h (w)11 (w) + Л) (w) 11 (w) = 0
и соотношение между коэффициентами С\ и С2
•Мн)
'7^
Представим перемещение дна бака в направлении радиуса сферы в виде
оо
(г,
i = 1
где qi(t)—обобщенная координата. Тогда, приняв в (11.41) коэффициент Ci =
= 1, получим
«M'S 0= V\z(O ро (н тт)—Vopi Б“)]. (11.42)
L \ Al / \ Ei / J
i = 1
Здесь 6Z = Ш)/ШР
Чтобы удовлетворить уравнению Лапласа (11.22) и граничному условию
(11.40), потенциал скоростей частиц жидкости представим в виде произведения
функций Бесселя, гиперболических и функций времени:
—Н\ . х—Н
(П.43)
условие (11.38), получим урав-
где A(t) — некоторые функции времени.
Подставив выражение (11.43) в граничное
некие для определения
(М=0’
Решив это уравнение, найдем, что Хо = О; = 3,8317; %2=7,0156; Хз =
= 10,1735. Функции qj(t) и Л(/) подберем таким образом, чтобы удовлетворя-
лось граничное условие (11.39). Подставив выражения (11.42) и (11.43) в усло-
вие (11.39), получим
00 1
J=1
МО
оо
= V <7/(0 ро (н 0^0 (н TpYl- (Н-44)
L \ ai / \ Ei /J
7 = 1
Из равенства (11.44) функции qj(t) и A(t) можно выразить через функции
qi(t). Для этого один раз обе части этого равенства надо умножить на rdr и
проинтегрировать по г в пределах от 0 до /?i; другой раз умножить на
/7o[A,j(r//?i)] и проинтегрировать по г в тех же пределах.
246
Окончательно выражение для потенциала скоростей ср2 можно записать в
виде
a-L (х—Н)
(11.45)
где коэффициенты аг- и bij выражаются через значения функций Бесселя при
Г==/?1, корни ЭТИХ функций Цг И Xj.
Так же, как это сделано в разд. 4, здесь можно определить частоту собст-
венных колебаний жидкости в баке с упругим дном.
Приступим теперь к решению задачи о колебаниях жидкости в упругом ци-
линдрическом баке, т. е. в баке с упругими стенками и упругим дном. Для pe-
ine ни я используем результаты, полученные в разд. 11.4 и 11.5.
11.6. ОПРЕДЕЛЕНИЕ ПОТЕНЦИАЛА СКОРОСТЕЙ ЖИДКОСТИ
В УПРУГОМ ЦИЛИНДРИЧЕСКОМ БАКЕ
Рассмотрим упругий цилиндрический бак кругового поперечно-
го сечения с радиусом /?i; дно бака выполнено в виде пологой сфе-
рической оболочки, радиус кривизны которой равен /?2. Потенциал
скоростей жидкости ср должен удовлетворять уравнению Лапласа
и граничным условиям:
dyjdr = dtwx)dt при r=Rx\ (11.46)
d^ldx — dw^dt при х = 0; (11.47)
d^jdt = Q при х = Н. (11.48)
Здесь Wi, w2— нормальные прогибы обечайки и дна бака соответ-
ственно; Н — приведенная высота столба жидкости в баке.
Потенциал скоростей представим в виде суммы двух функций
?=+ %,
каждая из которых является решением уравнения Лапласа. Кро-
ме того, функция epi удовлетворяет граничным условиям (11.23) —
(11.25), а функция ф2— граничным условиям (11.38) — (11.40). При
таком выборе функций cpi и ф2 потенциал скоростей будет удовлет-
ворять всем условиям (11.46) — (11.48).
Функции ф1 и ф2 определены в разд. 11.4 и 11.5. На основании
выражений (11.31), (11.35) и (11.45) получим
(11.49)
Здесь в выражении для ф1 по сравнению с (11.31) принято
^(/) = Gse^.
Через потенциал скоростей жидкости можно выразить давление
Жидкости и ее кинетическую энергию.
247
11.7, ОПРЕДЕЛЕНИЕ ПОЛНОЙ МЕХАНИЧЕСКОЙ
ЭНЕРГИИ СИСТЕМЫ
Кинетическая энергия колеблющейся жидкости
Г = »Т!Л'
где V — объем жидкости.
По формуле Грина интеграл по объему можно преобразовать
в интеграл по поверхности. Для безвихревого движения несжимае-
мой жидкости получим
или Т = Гф — cos(/z,+ ® — cos(/z,
2 .1J L dx dr J
5
где S — поверхность жидкости, ограничивающая объем V; п~
внешняя нормаль к поверхности жидкости.
Для боковой поверхности цилиндрического бака
cos (n, х) = 0; cos (/z, 1; d5 = 2n:/?1dx;
для дна бака
cos (п, х} = — 1; cos (/г, г) = 0; dS = '2nrdr.
На свободной поверхности фх=н = 0, поэтому
(11.50)
Потенциал скоростей жидкости
причем функции (pi и ф2 определяются по формулам (11.49).
Окончательное выражение для определения кинетической энер-
гии колеблющейся жидкости представим в виде
(ОО СО 00 оо
a4iQhQi<lkA-
S-l f=«l / = 1 fc=l
i=£k
(11.51)
В потенциальную энергию деформации бака входят потенциаль-
ная энергия деформации цилиндрической обечайки, сферического
дна и силового кольца.
Влияние давления наддува и гидростатического давления в ба-
ке учитывать не будем. Это значительно упростит формулы, одна-
248
ко величина потенциальной энергии при этом получится несколько
заниженной.
Определим потенциальную энергию цилиндрической обечайки
бака, которую будем считать безмоментной тонкостенной. Для не-
сущего бака будем учитывать только напряжения по окружности,
возникающие вследствие динамического давления жидкости. Осе-
вые напряжения будут учтены при расчете продольных колебаний
всего корпуса ракеты.
Потенциальная энергия деформации обечайки
и
j* s?rfx/2,
б
где Е — модуль упругости первого ро-
да; 8i — деформация оболочки по ок-
ружности; Н — высота заполнения
жидкостью. Деформация ег связана с
радиальным перемещением t)
соотношением
$Z=W! U, /)//?!•
При этом на основании выражения (11.31) можно принять, что
ОО
(%, /)=
-=1
ws(Z) cos V,
X
Подставляя величину ez в формулу для П1 и интегрируя, получим
5- = 1
Дно бака — безмоментная тонкостенная пологая сферическая
оболочка — находится в двухосном напряженном состоянии. Схе-
ма оболочки приведена на рис. 11.8. Зависимости деформаций от
перемещения пологой оболочки имеют вид
V W2 dv Wq
£t =---------’ гг =----------~ ,
' Г Г dr R2
где сС’2, v — перемещения оболочки в радиальном и меридиональ-
ном направлениях; 8/, гг— деформация оболочки в направлениях
по окружности и в меридиональном.
Величину потенциальной энергии деформации оболочки можно
вычислить из выражения
П2 = ^С (s^$2 + 2[ASA) rzZz-. (11.52)
1 — (J.~ J
О '
249
Радиальное перемещение оболочки можно определить по фор-
муле (11.42):
7^1
[ Л (рт - ел (р-. т-)] •
L \ А1 / \ Ki /J
Меридиональное и радиальное перемещения связаны соотно-
шением
v = ~(1 + 7“
Eh2 dr
где D
Eh32
12(1-ц2)
Подставив сюда выражение для ш2, найдем
^2^2 щ \ 3 Г т ( г \
12 (1-Ю
v
\ Al ,
После интегрирования правой части равенства (11.52) предста-
вим выражение потенциальной энергии в виде
оо со оо
П2 =— У]
i^k
Потенциальная энергия деформации растяжения — сжатия
кольца определяется по формуле (11.10):
1
П3 = ------2^,
3 2 EFK 1
где Sli = qKRi — сила в поперечном сечении кольца; 7К— погонная
нагрузка, действующая на кольцо в радиальном направлении. Наг-
рузку можно выразить через меридиональную силу Т2, действую-
щую на внешней границе дна бака (см. рис. 11.2):
к-|=|-Ц-|с°з 0О.
| sin 0О I
Силу ?! определим из условия равновесия дна бака
Яг
2лА?1Т1 = 2л j* px=$rdr,
б
где рх=о — отклонение давления жидкости на дно бака.
Теперь формулу для вычисления потенциальной энергии дефор-
мации кольца представим в виде
n3=^-Ctg2 0o
EFK
,/?i \ 2
\ px=Qrdr .
о
250
Отклонение давления жидкости на дно бака
„ _ пГ + 1
Аг=0 — “
L Jx=0
После интегрирования выражения для П3 получим
Полная потенциальная энергия деформации бака
Л = Ilj -j— U2 ~~Ь П-з
или в развернутом виде
11.8. ПРИМЕНЕНИЕ МЕТОДА РИТЦА ДЛЯ ОПРЕДЕЛЕНИЯ
ОСЕСИММЕТРИЧНЫХ КОЛЕБАНИЙ УПРУГИХ
БАКОВ С ЖИДКОСТЬЮ
(11.53)
Выражения кинетической и потенциальной энергий системы
можно записать в матричной форме:
Г^В-Z'MZ, n = ^-Z'KZ, (11.54)
где М — матрица инерции системы; К—матрица жесткости систе-
мы; Z, Z — векторы-столбцы обобщенных координат и обобщен-
ных скоростей, характеризующих совместные перемещения жидко-
сти и упругих стенок бака; Zz, Zz— соответствующие векторы
строки.
Исходя из выражений (11.50) и (11.53) и ограничивая в них
число обобщенных координат ws(w/j (s= 1, 2, ..., mW) qi9 (qk) =
= 1, 2, ..., nW), получим векторы обобщенных координат и обоб-
щенных скоростей.
где
251
Матрица инерции системы может быть представлена в виде
М =
/
\ A2i
а12
А22
где Ап — диагональная матрица, элементы которой на диагоналях
a™sws (5=1, 2,... zzz(0>);
^Wiq2 • • • л(0)\
^w2qt ^w2q2 • • • ^2(у0) I •
&wsqi ^wsq2 • • • O"Wsq'
J ^w^q-i &w2qi • • • &wsqi \
Д21 I ttwiqz &w2q2 • • • &wsq2 1 •
\^1Чп^т,Чп^у.. aWsqnW!
• • „(0)
• • -a^4nm
V>)’‘ Ч(’),!’"й’»(0)’«(0) J
Матрица жесткости системы имеет вид
Вп В12
В2! в22
где
j w2 • • • j W $
bw2W2 • • • bw2ws
bwsw2 • • •
Матрицы Bi2, B2i, B22 можно получить соответственно из мат-
риц А12, А2ь А22 путем замены в них элементов
aWsq. элементами bw q .
Для составления уравнений движения системы применим урав-
нения Лагранжа второго рода
d
dt
dL
0, где L = r-H.
Уравнение движения системы в матричной форме имеет сле-
дующий вид:
MZ + KZ = 0.
(11.55)
252
Считая колебания гармоническими с частотою cos, получим из
(11.55) характеристическое уравнение для определения квадратов
частот собственных колебаний системы:
|М-1К-<о*Е| = 0,
(1.1-6)
где Е — единичная матрица; М-1 — матрица, обратная по отноше-
нию к матрице М.
Определение частот и форм собственных колебаний жидкости
в упругом баке сводится к нахождению собственных значений и
собственных векторов матрицы М-1К. Соответствующие вычисления
проводятся на ЭВМ. В дальнейшем будем считать, что корни урав-
нения (11.56) простые.
Каждой частоте co.s собственных колебаний соответствует свой
вектор, компоненты которого суть формы собственных колебаний
системы. Связь между обобщенными координатами Z и нормаль-
ными координатами т] в матричной форме можно выразить как
Z = Rt],
(11.57)
где R [шиз-• • • • ^п(0)+/п(0)]
— матрица распределения амплитуд;
Здесь — собственный нормированный вектор-столбец уравне-
ния (11.56); I] — вектор нормальных координат системы, причем
£-я компонента этого вектора может быть представлена в виде
(О»
(11.58)
где ДДссц) —некоторая константа, зависящая от частоты собствен-
ных колебаний ks(t) —функция времени <s-ro тона колебаний.
Подставим выражение (11.57) в равенства (11.54). Используя
условия ортогональности собственных векторов.
рЛМ35 = 0; ?ftK85 = 0,
253
где Р// — вектор-строка, получаемый транспонированием вектора-
столбца Рь найдем выражения для кинетической и потенциальной
энергий в нормальных координатах:
т=±- яЖй (11.59)
5 = 1
п(0)+т(0)
п=ф ж к fa2- (и.60)
5=1
Формулы (11.59),
циальных уравнений
(11.60) удобны для составления дифферен
движения упругого бака с жидкостью.
11.9. ВЫНУЖДЕННЫЕ ОСЕСИММЕТРИЧНЫЕ КОЛЕБАНИЯ
БАКА С ЖИДКОСТЬЮ
Вынужденные колебания жидкости в баке возникают вследст-
вие продольных колебаний корпуса ракеты. Примем колебания си-
лового кольца в направлении продольной оси бака происходящи-
ми по закону
где о)н — частота n-го тона собственных коле-
баний корпуса.
Абсолютное движение жидкости можно
представить состоящим из двух частей: пере-
uK(t) носного движения вместе с силовым кольцом и
| относительного движения, т. е. движения отно-
сительно подвижной системы координат, свя-
занной с силовым кольцом. Схема бака пока-
зана на рис. 11.9.
Потенциал скоростей жидкости в перенос-
ном движении представим в виде
t?z = MK(/)(x- Н).
Потенциал скоростей жидкости в относительном движении с
учетом выражений (11.49), (11.57), (11.58) представим следую-
щим образом:
5<°)
<?г=2 (r)х° ws(0)=«(0)+от(0)-
5 = 1
Потенциал абсолютных скоростей жидкости теперь можно пред-
ставить в виде
5<°)
Ф = «к (/) (х - Н) + 2 (г) xs (А х; (/) (11.61)
5- 1
254
Подставив выражение (11.(51) в формулу (11.50) и учитывая,
что Xs(/) является обобщенной координатой нормальных колеба-
ний жидкости в упругом баке, получим выражение кинетической
энергии
5<°) 5<°) • 2
= + + (И-62)
5=1 5=1
где m =
Bs = 2xRlQ { Rs (RJ Rs (/?J X2S (x) dx -
0
-2.-TQ [/?52(г)ХД0)ХД0)г(/г; (11.63)
0
Cs = x/?iQ J (x — H) R's Xs (x) dx +
0
4- пЛ/q J (r) X's (0) rcir — np j Rs (r) Xs (0) rdr.
Потенциальная энергия деформации бака в нормальных коор-
динатах может быть представлена так:
(11.64)
5-1
Здесь As2ks* — коэффициент приведенной жесткости бака для
s-го тона колебаний.
Составим уравнения относительного движения системы. При-
менив уравнения Лагранжа второго рода, получим
Д^А + ^к*>.5=-АСЛ(5=1, 2,..., s(0))- (11-65)
Если применить обозначения матричного способа преобразова-
ния к нормальным координатам (см. разд. 11.8), то для кинети-
ческой энергии жидкости можно получить следующую формулу:
5(°) 5(0 -2
Т=4 2 м S +“V" ’ (11 •66)
5 = 1 5 = 1
Уравнения относительного движения системы с учетом выра-
жений (11.60) и (11.66) будут иметь вид
м k Fa = - a2 (рч «к. (11.67)
Здесь F — некоторый вектор, компоненты которого могут быть
вычислены из выражения для потенциала абсолютных скоростей
частиц жидкости
Ф = ИК (Х — Н) + <?! + %•
255
Уравнения (11.65) и (11.67) различаются лишь обозначениями
коэффициентов. Это уравнения вынужденных колебании. При ко-
лебаниях силового кольца относительное движение жидкости в
упругом баке представляет собой вынужденные колебания. Зная
частоту и амплитуду колебаний кольца, по уравнениям (11.65) и
(11.67) можно найти функцию времени Х$(/).
Проекция на ось X динамической силы, передающейся через
силовое кольцо на корпус, может быть вычислена как сумма дав-
лений жидкости на дно бака:
N (t)--=2nq (d$'dt)x^rdr.
'о
С учетом выражения (11.61) найдем
s(°) /?.
N (/) = - J #s (г) Xs (0) rdr. (11.68)
5-1 0
11.10. ДИНАМИЧЕСКАЯ МОДЕЛЬ УПРУГОГО БАКА
С жидкостью
Осевая динамическая сила, возникающая при вынужденных
продольных колебаниях бака с жидкостью, силовым кольцом бака
передается на корпус.
Так как для любого тона уравнение (11.67), характеризующее
вынужденные колебания жидкости ь баке, имеет такую же струк-
туру, как и уравнение для вынужденных
колебаний простейшей механической систе-
мы — сосредоточенной массы на пружине,
то для определения осевой динамической
силы и введения ее в алгоритм расчета
форм и частот собственных колебаний кор-
пуса ракеты колебания жидкости можно
а заменить колебаниями сосредоточенных
. масс на пружинах. При такой замене вели-
чину массы и жесткость пружины следует
подбирать так, чтобы осевая динамическая
сила от колебаний жидкости была равна
динамической силе от колебаний механиче-
ской системы при любой амплитуде и час-
тоте колебаний корпуса.
Рассмотрим механическую систему, схема которой приведена
на рис. 11.10. Сосредоточенная масса тя на невесомой пружине с
с жесткостью ks подвешена к жесткому дну бака, которое вместе с
силовым кольцом совершает колебания вдоль оси бака по закону
ик(/). Перемещение массы ms относительно силового кольца обоз-
начим через Xs(/). Каждому is-му тону колебаний жидкости соот-
256
ветствует своя масса ms на пружине. Так как скорость массы /??в
равна ziK + Xs, то кинетическая энергия динамической модели
со оо оо
т = -i- V -L hK V rns\s + 4" V} msti2. (11.69)
S-:l <?r-l S = 1
Уравнение вынужденных колебаний сосредоточенной массы
можно представить в виде
+ кЛ = — msuK (11.70)
или Х5-{-«>Х= —«к- (11.71)
Из условия тождественности уравнений (11.65) и (11.70) нахо-
дим
ms = A2sBs\ nzs = AsCs\ k^ = ks A2s = ^sm^
или CS = ASBS\ As = CsfBs.
Следовательно, жесткость пружины и сосредоточенная масса
механической системы для 5-го тона колебаний должны быть
к,=ю^; ms = C2sIBs. (11.72)
Здесь С8 и Bs — коэффициенты, определяемые по формулам
(11.63), a (Ds — частота собственных колебаний 5-го тона для уп-
ругого бака с жидкостью.
При таком выборе величин ms и ks частота собственных коле-
баний сосредоточенной массы на пружине будет равна частоте 5-го
тона собственных колебаний жидкости в упругом баке, и функция
Xs, найденная из решения уравнения (11.71), будет такой же, как и
функция Xs в уравнении (11.65).
Из сравнения выражений (11.62) и (11.69) получаем, что
ms = m = nR\H^. (11.73)
1
При выбранной нормировке собственного вектора |3S сумма всех
сосредоточенных масс, подвешенных на пружинах, равна массе
жидкости в баке. Если учитывать ограниченное число 5<0) тонов
колебаний жидкости в баке, то при 5>5<°) нужно положить все
ks = оо.
Убедимся теперь в том, что осевая динамическая сила N, пере-
дающаяся на корпус от колебаний жидкости, равна осевой силе,
возникающей при колебаниях механической системы. Так как
Фх=н = 0, то и XS(H) =0 и
н
J Х(х) dx=-Xs (0).
О
9
359
257
С учетом этого равенства выражение для коэффициента Cs пред-
ставим в виде
cs = — j R (г) Xs (0) г dr.
О
Проекция на ось X динамической силы от колебаний жидкости
может быть вычислена по формуле (11.68). Запишем эту формулу
через коэффициент Cs\
7V(/) = — Д5СД5.
5=-1
Принимая во внимание соотношение (11.73), а также равенст-
во ms=AsCs, получим
оо
7У(/)=_2/М«к + х;). (11.74)
5 = 1
Это и есть суммарная динамическая сила, передаваемая от сос-
редоточенных масс т$ на дно бака.
Расчеты показывают, что величина массы т9 быстро уменьшается с повы-
шением номера тона колебаний. Например, для бака с размерами: /?г = 2,25 м,
/?! = 1,5 м, Н—9 м, /ii = 2,5 мм, /i2 = 3 мм; ц = 0,3; q/qo = O,364; величины масс
механической системы, вычисленные при п(0) = 4 и т(0) = 3, будут mi = 0,808m: •
m2 = 0,06084m; m3 = 0,027m; m4 = 0,0119m. Здесь m — масса всей жидкости в ба-
ке. Отношение mslm зависит от уровня заполнения бака H/Ri.
Установим теперь связь между — перемещением массы т; механического
аналога и перемещением центра упругого днища X, дн-
Для этого запишем выражение потенциала скорости (11.49) через нормаль-
ные координаты T)j.
Подставим в равенство (11.57) выражения для Z, R, ц. Тогда
МЮ1(о>1) . . . vw, (“m(0)+„(0))
< • •V«n(0)(“;n(0)+n(0))
pi X
a,««»
’’mW + l
/ \ J
(11.75)
Воспользуемся правилом умножения матрицы на столбец и сравним левые
и правые части полученного равества, будем иметь
т(0) +п(0)
wi= 2 'чад vl = 1’"-•,n<0);
(11.76)
rn(0>+
qi~ 2 «(0)
258
Значения обобщенных координат wL
координаты т]у, подставим в выражение
(11.49) и получим
и qi, выраженные через нормальные
для потенциала скорости Ф = <Р1+ф2
/zz(O) + Л(0)
?= Ajk}
у=1
(11.77)
Здесь принято ть- = ЛД,, где — нормировочная константа; %,- — скалярная
функция времени (временной множитель); (юу) и (<оу)—коэффициенты
формы нормального колебания /-го тона или, как об этом говорится в разд. 11.8,
компоненты собственного вектора матрицы М“4 К. Они определяются численно
на ЭВМ.
Все остальные параметры Di, Gi, vi, fa, bu, сц определены выше в разд. 11.5
и 11.6.
Уравнение для определения Xj имеет вид, подобный (11.71):
lj + <fy)==-uK. (11.78)
Здесь ик — перемещение опорного кольца шпангоута
ик—f п (хк) Qп (0» (11.79)
л=1
где /п(хк) — форма колебания корпуса по n-му тону в месте расположения
опорного кольца.
Решение для вынужденных колебаний уравнения (11.78) с учетом (11.79)
только для ц-го тона корпуса имеет такой вид:
или
*£/« Дк)
^-ш2п qn(e>
<»2nfn (Лк)
Ъ(п) = kg(n) — ш2_ 2 •
} п
(11.80)
(11.81)
С учетом (11.81) выражение для ф(П) (11.77) (для n-го тона колебаний кор-
пуса) будет
т(°)+п(0) 'т(О)
Di I г \ I х \
2j Яп4 (V, — 1 cos(v, — j VWI(<Д +
1-1
Г “
+ У. v9. (<Д 2 b“J0 (XZ ^)sh(X' " H)
‘=1 l.1-1
(11.82)
Так как скорость центра днища
vx = — д^/дх при х = 0, г = 0,
то перемещение центра днища /-го тона Л; дн для n-го тона колебаний корпуса
^Лп)дн~ (11.83)
9*
259
Подставим в (11.83) выражение (11.82), тогда
7(«)дн Aikg{n\
(11.84)
Разделим Ху.(/1)дн в (11.84) на Ху.(д) в (11.81), получим
, ь 'KlH , I
4" V X
«(0)
^7(/г)дн AiKi(n)
(11.85)
Пример определения перемещения центра днища Хдн по известному переме-
щению массы механического аналога X на основе приближенной модели про-
дольных колебаний бака, рассмотренной в разд. 10.2.
В этом случае расчет Хдн упрощается, поскольку не требуется определять
коэффициенты v7/(co;). Формы колебаний днища и стенок заданы. Механичес-
кий аналог приближенно представляет собой в этом случае один осциллятор,
масса которого равна физической массе т жидкости в баке, а собственная час-
тота €01 определяется по формуле (11.7).
Уравнение для определения перемещения Xi массы осциллятора имеет вид
(Н.71)
X -|— = — Цк*
. . а>2
Так как ак = и0е7со\ то X = б----------г .
(о)| — 0)2)
На основании (11.21) перемещение центра днища
Хдн ~ Г2------Д“°е Ш
(азу — 0)2)
Я
J f(x)dx
^ДН г О
Отсюда — = b = —р------------.
J fi(x)dx
о
С учетом (11.19) получим
^дн
X
1 4-сс/З
2 2
1 + — а -И — а 2
3 1 о
Здесь а определяется по формуле (11.19).
11.11. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
КОЛЕБАНИЙ УПРУГИХ БАКОВ С ЖИДКОСТЬЮ
МОДИФИЦИРОВАННЫМ МЕТОДОМ РИТЦА
Для баков сложной геометрической формы (конического, цилиндрического
со сферическим дном, торового и других) определение собственных форм и час-
тот колебаний может быть проведено методом Ритца в варианте, предложенном
Сто долой. Этот метод заключается в следующем:
260
1. Задается выражение потенциала скоростей (или перемещений) жидкости
® виде
Ф —2 r)cos/nv, (11.86)
л = 1
где т—число волн по окружности (/п = 0 в случае осесимметричных колебаний).
2. Задаются выражения для функций, аппроксимирующие перемещения сре-
динной поверхности оболочки в направлениях нормали w, меридиана и и окруж-
ности v в виде
оо
w — 2 (О wn ($) cos znv;
/1 = 1
и ~^Bn{t)un(s) Q.QS tnv\ (11.87)
п = 1
оо
v = 2 (О vn ($) cos
/г = 1
Используется условие непроницаемости оболочки, связывающее функцию w
с функцией Ф:
w — (дФ/дп). (11.88)
Оригинальность метода заключается в выборе функции <рп(х, г). В качестве
функций <рп(х, г) берутся решения уравнения Лапласа для простой области,
охватывающей область исследуемого бака. Например, такой областью может
быть круговой цилиндр радиуса R и длиной Ц в начале расчета принимается
L = 3 Н, где Н — высота столба жидкости в баке (рис. 11.11)
L плх !плг \ ,
?«(*.') =----Sin——-Т-) (n= 1, 2,..., пт). (11.89)
лг L \ L }
Здесь п(0) — число членов ряда, которым ограничиваются при конкретных вы-
числениях в выражении (11.86). В дальнейшем величина L варьируется.
После этого составляются выражения кинетической Т и потенциальной П
энергий исследуемого бака с жидкостью, составляются дифференциальные урав-
нения относительно неизвестных функций Ап, Вп, Сп и затем — уравнение для
определения собственных частот. Степень приближения будет зависеть от чис-
ла членов ряда /г(0) и выбранных аппроксимирующих функций Ф, w, и, v.
Решается частотное уравнение на ЭВМ, причем в процессе численного рас-
чета величина L = jt% выбирается из условия получения минимальных величин
собственных частот системы. Варьирование параметром % для получения comin
означает подбор таких размеров области определения функций Ф, w, и, v, при
которых эти функции наилучшим образом выражают движение исследуемого
упругого бака с жидкостью при ограниченном числе членов ряда
Приведем некоторые результаты численных расчетов баков с жидкостью по
методу Ритца—Стодолы.
На рис. 11.12 показаны формы нормальных перемещений для четырех тонов
осесимметричных колебаний конического бака, шарнирно закрепленного по верх-
нему краю. Расчет при п(0)=10 дает следующие значения квадратов безразмер-
ных частот (Di2: 1,61, 4,29; 7,ГО; 10,2. Квадрат размерной частоты
гДе В — радиус кругового опорного кольца; Е, h — модуль Юнга и толщина
стенки бака; q — плотность жидкости.
На рис. 10.13 изображены формы нормальных перемещений полностью за-
полненного жидкостью тора на подвеске малой жесткости. Форма иь первого
261
топа симметрична, w2 — второго тона антисимметрична относительно горизон^
талыюй плоскости.
Расчет проведен при п(0)=10 и задании потенциала скорости в виде
= I п (hnr) е±Хлх cos nv.
Рис. 11.11 Рис.11 12 Рис. 11.13
Для тора с внутренним радиусом 0,2 R (R — внешний радиус тора) получе-
но %i = 0,682; %2 = 0,510. Размерная частота собственных колебаний
О>? = 2Eh/(Q^i).
Модифицированный метод Ритца дает во многих случаях хорошие резуль-
таты.
Глава XII
ПРОДОЛЬНЫЕ КОЛЕБАНИЯ КОРПУСА РАКЕТЫ
12.1. ДИНАМИЧЕСКАЯ МОДЕЛЬ
При продольных колебаниях в поперечных сечениях корпуса
возникают напряжения растяжения и сжатия. Простейшей схемой
жидкостной ракеты (которую будем считать осесимметричной)
при определении форм и частот продольных колебаний может слу-
жить прямой неоднородный стержень. Схему неоднородного стер
жня для приближенного расчета можно принять только в том слу-
чае, когда перемещение жидкого топлива относительно стенок бака
при продольных колебаниях мало и его можно не учитывать.
У большинства жидкостных ракет и, в первую очередь, у круп-
ных ракет-носителей с насосной системой подачи топлива стенки
баков сравнительно тонкие. При продольных колебаниях прогибы
дна и раздутие обечаек баков значительны, вследствие чего значи-
тельны и перемещения жидкости относительно стенок баков в нап-
равлении оси ракеты. Схема неоднородного упругого стержня для
таких ракет может оказаться настолько грубой, что не даст пра-
вильного представления о формах и частотах собственных колеба-
ний корпуса, в особенности при высоком уровне топлива в баках.
Расчет упругих продольных колебаний корпусов таких ракет нуж-
но проводить с учетом деформаций дна и радиальных деформаций
обечаек баков.
262
Одну из возможных динамических схем можно представить в
виде пружинно-массовой модели.
На рис. 12.1 в качестве примера приведены пружинно-массовая модель двух-
ступенчатой ракеты «Титан-2» и форма первого тона собственных колебаний.
Сосредоточенными массами являются: т\ — масса полезного груза; /п2 — про-
ставки, дна и 0,5 обечайки бака окислителя; т3 — окислителя; т4 — дна и 0,5
обечайки бака окислителя; т5 — межбакового отсека; тб — дна и 0,5 обечайки
бака горючего; т7— горючего; т8— дна и 0,5 обечайки бака горючего; т9—
задней юбки двигателя второй ступени; mi0—
двигателя второй ступени; тц — передней обе-
чайки первой ступени; mi2 — дна и 0,5 обечайки
бака окислителя; mi3 — окислителя; mi4 — дна и
0,5 обечайки бака окислителя и 0,5 межбакового
отсека; mi5 — дна, 0,5 обечайки бака горючего и
0,5 межбакового отсека; /П1б — горючего; тп —
конуса и 0,5 обечайки бака горючего; /П18 —
ТНА; т)9 — нижней юбки двигателя первой сту-
пени; m2j — двигателя первой ступени.
Пружинно-массовая модель дает удовлетво-
рительные результаты при расчете форм и частот
собственных колебаний низших тонов.
Для более полного учета колебаний
жидкости в баках и распределения мас-
сы и жесткости по длине можно рекомен-
довать схему прямого неоднородного
стержня с упруго подвешенными груза-
ми (механическими осцилляторами). Ко-
лебания каждого осциллятора являются
механическим аналогом соответствующе-
го тона осесимметричных колебаний жид-
кости в упругом баке. Сумма масс всех
осцилляторов равна массе жидкости в
баке, частота собственных колебаний од-
ного осциллятора равна частоте собст-
венных колебаний соответствующего то-
на жидкости в упругом баке.
За точку приведения принимается
центр упругого дна бака, поэтому пере-
мещение массы осциллятора при колеба-
Рис. 12.1
ниях относительно жесткого дна будет ха-
рактеризовать перемещение центра упругого дна бака относитель-
но силового шпангоута. Такой выбор точки приведения упрощает
сопряжение колебаний дна бака с колебаниями топлива в трубах.
Так как двигатель и ТНА подвешиваются к корпусу на раме,
представляющей собой упругую конструкцию, то при продольных
колебаниях перемещения двигателя и ТНА относительно корпуса
можно заменить перемещением сосредоточенной массы на пружине.
ТНА, подвешенный на раме отдельно от двигателя, при про-
дольных колебаниях корпуса ракеты можно рассматривать также,
как сосредоточенную массу на пружине. В обоих случаях к массе
ТНА следует прибавлять массу столба жидкости, заключенную в
трубопроводах (между ТНА и свободной поверхностью в баках).
263
В практических расчетах форм и частот низших тонов колеба-
ний корпуса достаточно учитывать лишь несколько первых тонов
колебаний жидкости в баке, поэтому число осцилляторов может
быть небольшим (2—3). Пружины остальных осцилляторов можно
считать жесткими, а подвешенные на них сосредоточенные массы —~
присоединенными к массе силового шпангоута бака.
Таким образом, масса всей ракеты
i
т=[т(х} dx-^- ^msj,
о (Л s)
где mSj — масса s-ro осциллятора в у-м сечении корпуса.
Схема ракеты с двумя топливными баками показана на рис.
12.2; здесь двигатель представлен осциллятором с массой тдв и
пружиной с жесткостью кдв.
В настоящей главе изложены способы расчета собственных и
вынужденных продольных колебаний ракеты по схеме неоднород-
ного стержня с упруго подвешенными сосредоточенными массами.
В методических целях изложим расчет сначала для неоднород-
ного стержня, а затем для стержня с упруго подвешенными сосре-
доточенными массами.
12.2. УРАВНЕНИЕ ПРОДОЛЬНЫХ КОЛЕБАНИЙ
НЕОДНОРОДНОГО СТЕРЖНЯ
Пусть ось X совпадает с продольной осью стержня. Обозначим
через т(х) —массу единицы длины стержня, EF(x) —жесткость
стержня при растяжении — сжатии, q(x, t) —внешнюю распреде-
ленную нагрузку, u(x, t)—перемещение произвольного попереч-
ного сечения стержня в направлении оси X.
На рис. 12.3 показан элемент стержня длиной dx. Левая и пра-
вая части стержня действуют на выделенный элемент силами N и
дг-\--^-dx. Пользуясь принципом Даламбера, составим уравне-
дх
ние равновесия элемента стержня
dx=^0.
264
Примем гипотезу Фогта, согласно которой напряжения зависят
не только от деформации ди)дх, но и от скорости деформации
д ( ди \ _ , ч
------- . 1огда нормальная (осевая) сила в поперечном сече-
dt \дх
нии
N=EF (х) —J-6(x) —
17 дх 1 1 dtdx
где Ь(х) —параметр демпфирования; принимаем b(x)/[EF(x)] =
= 2g'= const.
Дифференциальное уравнение вынужденных продольных коле-
баний стержня будет иметь вид
, ч д^и д [„г?/ хди . , х дЪ1 J. , .х /л..
т'х,ее=~г 77 (xh—t). 0^- D
dti дх [ дх dtdx J
Рассмотрим сначала случай, когда q(x, Z)=0. Обшее решение
уравнения (12.1) можно представить в виде
и(х, t) = ^fn(x)qn(t), (12. 2)
п -1
где fn(x)qn(t) —суть частные решения уравнения (12.1), которые
можно найти методом Фурье. Подставив частные решения (12.2) в
уравнение (12.1) и разделив переменные, получим
[£FW4]' = =_w2
т (х) f,t qn + 2$*4„ "
или qn + 2$„<о^„ + ^nqn = 0; (12. 3)
[FF(x)/;]'=-Ws„m(x)A, (12.4)
где 5ЯМЧ.
Произвольные постоянные интегрирования уравнения (12.3)
должны определяться из начальных условий, произвольные посто-
янные интегрирования уравнения (12.4)—из краевых (гранич-
ных) условий.
На каждом конце свободного стержня сила N равна нулю. По-
этому функции fn(x) должны удовлетворять следующим гранич-
ным условиям:
/„(0)=0, Л(/)=0. (12.5)
Уравнение (12.4) можно рассматривать как обыкновенное диф-
ференциальное уравнение растяжения стержня под действием рас-
пределенной нагрузки con2m(x)fn. Уравнение (12.3) показывает,
что собственные колебания стержня при наличии демпфирования
всегда затухающие.
265
Если для учета трения принять гипотезу Е. С. Сорокина, то нор
мальную силу можно выразить так:
7V=( 1+z —,
\ 2л ) дх
где ф — коэффициент поглощения энергии при колебаниях, рав-
ный отношению поглощенной за один цикл энергии AW к полной
энергии системы W.
При гармонических колебаниях коэффициент поглощения ра-
вен удвоенному значению декремента свободных колебаний 6, так
что
ф=Д\Г/и/ = 28.
Дифференциальное уравнение продольных колебаний стержня
с учетом гипотезы Сорокина вместо (12.1) будет иметь вид
т (х)-S'=(1 +1 ЯЧ Т~ \EF (х) тЯ + р w e‘pt-
dfi \ 2jt / дх L дх J
Все формы собственных колебаний
fn(x) ортогональны между собой с весо-
вой функцией т(%).
Если стержень является однород-
ным, т. е. т(х) =т^=const, EF(х) =EF$=
= const, то уравнение (12.4) упрощается,
оно будет иметь постоянные коэффици-
енты
Рис. 12.4 /п + <4/л=°; а2п=о?пт01(ЕР0). (12.6)
Когда параметр ап будет найден, частоту собственных колеба-
ний con можно вычислить по формуле
<0„=ап V EF0/m0 = апа, (12. 7)
где a = ]FE/Q— скорость распространения упругой волны (ско-
рость распространения звука) в материале стержня, q — плотность
материала стержня.
Решение уравнения (12.6), как известно, имеет вид
fn (х) = Сх cos алх-рС2 sin апх.
В случае незакрепленного стержня
ап = пл/1 (п=1, 2, 3,...) или ал = 0.
Частота собственных колебаний при ап=7^0.
(ол = (/гд//)а. (12.8)
Если пронормировать функцию fn(x) так, чтобы /4(0) = 1, то
С[ = 1и форма колебаний, соответствующая значению ап=/=0, будет
fn (х) = cos алх.
Первые три формы собственных колебаний стержня показаны
на рис. 12.4. Условно будем считать, что положительному значению
266
fn(x) соответствует перемещение сечения стержня вправо, отрица-
тельному — перемещение влево. В узловых сечениях перемещения
отсутствуют, в них происходят максимальные сжатие или растяже-
ние материала.
Значению ап = 0 соответствуют частота собственных колебаний
(Оп = 0 и форма собственных колебаний, нормированное значение
которой равно единице. Это присуще движению стержня как твер-
дого тела.
Таким образом, для незакрепленного стержня система собствен-
ных функций полна и, как следует из предыдущего, представляет
собой множество {fn(x) =cos anx} (/2 = 0, 1, 2,...). Перемещение
произвольного сечения незакрепленного стержня вдоль продоль-
ной оси можно представить в виде
оо
t) = uc(t) + ^f n(x)qn(t\ (12.9)
/Г-1
Здесь цс(0—перемещение центра масс стержня или перемеще-
ние стержня как жесткого тела; fn(x)qn(t)—перемещение отно-
сительно центра масс, вызываемое растяжением или сжатием
стержня.
12.3. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
КОЛЕБАНИЙ НЕОДНОРОДНОГО СТЕРЖНЯ
МЕТОДОМ ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
Для определения форм и частот собственных колебаний нуж-
но проинтегрировать уравнение (12.4) с переменными коэффици-
ентами. Получим
[EF (*) /л]' = — (х)
При незакрепленном стержне полученное решение должно удов-
летворять граничным условиям (12.5). С учетом этих условий по-
лучим
ЕЕ (х) f'n = —о)д С щ (х) fndx\ (12. 10)
о
(12.11)
Где jVix = J^(x) fndx — осевая сила при ^я(/)=1 в сечении с ко-
о
ординатой х.
Из условий (12.5) и уравнения (12.10) имеем
i
т (х) fndx = Q. (12. 12)
6
267
Физический смысл этого равенства в том, что сумма всех сил
инерции при колебаниях свободного стержня по форме любого то-
на равна нулю.
Коэффициент D можно получить из формулы
I X I
D=-----— /п (х) ~ m=\^ni[x)dx.
т 6 о о
Алгоритм расчета формы собственных колебаний первого тона
заключается в следующем. В качестве исходной функции прини-
мается любая самоуравновешенная форма колебаний f(x) и от
распределенной нагрузки вычисляется функция
dx^-D.
о
Если отношение f(x)// не будет величиной, неизменной для
всех сечений стержня, то расчет следует повторить, приняв за
новую исходную функцию. Продолжая расчет, можно добиться
сколь угодно малой разницы между функциями двух последова-
тельных приближений и получить искомую функцию с нужной сте-
пенью точности. В большинстве случаев решение можно получить
быстрее всего, приняв в качестве исходной формы известную соб-
ственную форму /10) колебаний первого тона однородного стержня.
Для улучшения процесса сходимости к форме /10) целесообраз-
но ввести поправку D, чтобы исходная форма колебаний была са-
моуравновешенной для неоднородного стержня,
/1==/5оЧ^
Величина D определяется из равенства (12.12)
i
D=-----— т (%) /10)б/х. (12. 13)
о
Таким способом можно определить только форму собственных
колебаний первого тона. При определении формы собственных
колебаний второго и более высоких тонов необходимо дополнитель-
но выполнять условие ортогональности. Например, для второго то-
на надо принять
/2=Д0) + Д21/1 + ^ (12.14)
где /г0) — форма собственных колебаний второго тона для одно-
родного свободного стержня; Д21 — неизвестный пока коэффици-
ент, с которым введена уже известная из предыдущего расчета
функция fi.
268.
Из условий ортогональности найдем
Д21 —
----- \ т(х) J\f2}dx\ тх
mi J
о
т (%) f\dx.
о
Во многих случаях получаемая точность достаточна для реше-
ния практических задач. Однако в случае необходимости найден-
ную по выражению (12.14) функцию f2 можно более точно опреде-
лить рассмотренным выше методом последовательных приближе-
ний. Чтобы не нарушалось условие ортогональности, после каждо-
го приближения нужно снова вводить поправку согласно выра-
жению (12.14). Определив с необходимой точностью значения
функций f\ и f2 можно приступить к определению функции /3, для
чего нужно задаться этой функцией в виде суммы функций:
/з = /з0) + Д31 /1 + Д32/2 +
Здесь /30) — форма собственных колебаний третьего тона
для однородного свободного стержня.
Неизвестные коэффициенты A3i и Д32 определяются из условий
ортогональности. Получим
i i
Д31=-----— \ т (х) Д32 =----\ т (х) faf^dx-,
mi J т2 3
о о
i
rri2=^m (x) fldx.
6
Дальнейшее уточнение функции /3 производится в том же по-
рядке, как и функций fi и f2.
Если отношение fn/fn постоянно для всех сечений стержня, то
"n=~fn/7n-
Частоту собственных колебаний можно также определять из ус-
ловия, что для консервативной системы при собственных колеба-
ниях максимальное значение кинетической энергии равно макси-
мальному значению потенциальной энергии. При угг(/) = 1.
i
Тптах = — \)т(.х) (vnfn)2 dx = — «?птп,
О
I
тг 1 Г JV2 I 1 4 ,
4rtmax=-- \ ------dX=------К„ =--СОЛКЛ,
"тах 2 3 EF (х) 2 п 2
о
i i
где т„= т(х)/„о'х; k„= EF (х) (/„)2«'х;
6 6
р Л'2
N=«?nNlx- к„= —^-rfx. (12. 15)
269
Здесь тп, кп — приведенная масса и приведенная жесткость стер-
жня. Из равенства 7\тах = Пптах получаем формулы
ып = кп/тп\ w2n = mn/k'n. (12. 16)
12.4. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
КОЛЕБАНИЙ НЕОДНОРОДНОГО СТЕРЖНЯ
МЕТОДОМ ПРОГОНКИ
Метод прогонки решения изложен в гл. VI. Приведем здесь
алгоритм расчета форм и частот собственных продольных колеба-
ний неоднородного стержня, удобный для численного решения кра-
евых задач на ЭВМ.
Разобъем стержень на k участков, для каждого из которых ко-
эффициенты
EF (x} = EF (x)z; т (х} = т (x)z
считаются постоянными.
Дифференциальное уравнение (12.4) для любого /-го участка
=о (12. 17)
будет иметь постоянные коэффициенты
где (оп — произвольный начальный параметр.
На границе i-го и (Z-Hl)-ro участков имеем условия сопряже-
ния:
Л,• = /«(/+): FF,./„, = (FF/„)Z+1. (12.18)
Подставив сюда функцию fni = Ci sin aniXi + Di cos ani*i для
z-го и (/+1)-го участков, получим два уравнения, из которых най-
дем зависимость постоянных (/+1)-го участка от постоянных /-го
участка:
С/+1 = & (Ci cos anili — Di sin anZZz); (12.19)
Di+i = Ci sin anili^rDj cos artZZz,
где 3, = .
(a„£F)z+1 r (/n£/7)z+1J
Используя граничное условие на левом конце первого участка
(/Х=о=0 и положив, кроме того (/„1)^=0= 1, найдем ^ = 0^
£>i=l. По формулам (12. 19) будут определены коэффициенты С,
и Di для всех участков.
Имеющееся на правом конце последнего участка граничное ус-
ловие
fnk(lk)=0 (12.20)
используется для контроля заданной частоты соп.
270
В практическом расчете частота соп задается сначала ориенти-
ровочно, поэтому условие (12.20) обычно не выполняется. В этом
случае расчет повторяют при нескольких близких значениях час-
тоты и вычисляют fnk(lk) как функцию <оп:
/nl(/ft) = Cftcosanft/ft-sin anklk. (12.21)
Значение оэп, обращающее величину fnk(lk) в нуль и отвечаю-
щее условию (12.20), будет равно искомой частоте собственных
колебаний.
После того как найдена частота собственных колебаний, еще
нельзя сказать, какому тону она соответствует. Чтобы установить
номер тона колебаний, необходимо построить функцию fn(x) и оп-
ределить число ее узлов, т. е. число сечений, в которых fn(x)=O.
Для продольных колебаний стержня номер тона соответствует чис-
лу узлов (п = 1, 2, ...).
12.5. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
КОЛЕБАНИЙ НЕОДНОРОДНОГО СТЕРЖНЯ
МЕТОДОМ КОНЕЧНЫХ РАЗНОСТЕЙ
Одним из наиболее простых и универсальных методов численного решения
краевой задачи является сведение ее к системе конечно-разностных уравнений.
Метод конечных разностей широко используется для численного решения крае-
вых задач на ЭВМ, так как приводит к простому алгоритму расчета, а необхо-
димая точность достигается увеличением числа участков, на которые делится
основной отрезок интегрирования.
Чтобы перейти от дифференциального уравнения (12.4) к системе конечно-
разностных уравнений, нужно отрезок интегрирования I разбить на k равных
частей длиной h = l!k. Абсциссы точек деления стержня обозначим через х^ (i—
= 0, 1, 2, ...Д).
Проинтегрируем уравнение (12.4) по х в пределах от xa = Xi_Qi5 до хь =
= xi+Q>5 при 1>0:
х хь
J [EF (х) /„]' dx = — ш2п J т (х) fndx.
ха ха
Интеграл в правой части равенства вычислим приближенно и представим это
равенство в виде
EF (•*) /я|х6 — EF (*) /п|ха = — “лhm (xl) f пь (12.22)
где m(Xi) и fni— величина распределенной массы и значение формы собствен-
ных колебаний стержня в точке с абсциссой Xi.
Значения производных fn'(x) в точках, абсциссы которых х1+0>5 и хг-_0 5,
заменим их конечно-разностными выражениями:
, j fn(xi + i)~ fn\xiY
JnK '^+о,5 ~ h
/ z rj _ A(*z)-/n(*/-i)
'k-0.5 h
Подставив эти выражения в равенство (12.22), найдем
(*/+0,5) [fn (*/ + 1) - fn (*/)] - ЕР (*/-0,5) [fn (*/) -
— fn (*z—1)] = — 0)2 Л2/П (X/) fn (Xi).
271
После преобразования получим
f + —f n(xi) 1 +
^(•^Z-0,5)
^(^4-0,5)
bfy&m (Х[)
EF(xi+Q,5)
^(^•-0,5)
£^(*/+0,5)
(Z = 1, 2,...,£ — 1).
(12. 23)
Задавшись величиной (on2, по уравнению (12.23) можно вычислить коэффи-
циент формы собственных колебаний для любой точки деления хг-+1 по значе-
ниям коэффициентов в предыдущих двух точках Xi и xz<1. Расчет следует вести
от точки деления х0 до точки Xk.
Значения коэффициентов формы в первых двух точках деления получаем
из граничного условия при х—х0 и выбранного масштаба для функции fn(x).
Выбираем масштаб для fn(x) таким, чтобы fn (х0) = 1, и из первого граничного
условия (12.5)
fn <Л) = [fn (*1) — fn (*о)]М = О
находим fn (Xi) = 1.
Дальнейшее решение сводится к вариации параметра соп2, чтобы было удов-
летворено второе граничное условие (12.5) в точке Хъ\
fn (хк) = (/„* - fn = 0. (12.24)
Для ЭТОГО нужно ВЫЧИСЛИТЬ значения ф(С0п) = fnk—fn(A —I) и ф((0п+Д(0п) И,
наблюдая за знаком произведения ср(w7) 1 ср(wn + Дсо77), подбирать (о77 в такой же
последовательности, как это было рекомендовано в предыдущем разделе.
Последовательность решения уравнения (12.4) путем перехода к уравнениям
с постоянными коэффициентами и применения метода прогонки решения по
существу одинакова с расчетом по методу конечных разностей. В обоих мето-
дах нужно задаваться начальным параметром — частотой wn и отыскивать та-
кое его значение, при котором удовлетворялось бы граничное условие на правом
конце стержня. При применении метода прогонки решения число участков
может быть небольшим — оно определяется свойствами функций т(х) и EF(x).
Однако в процессе расчета надо вычислять функции sin anili и cos anili. Рас-
чет методом конечных разностей проще, но число участков обычно большое.
Если жесткость EF(x) или погонная масса т(х) стержня в некоторых сече-
ниях с абсциссами х^ x7_o.’>. Xi+0,5 изменяется ступенчато, то в расчете ме-
тодом конечных разностей значения EF(x) и т(х) в этих сечениях надо считать
равными полусуммам соответствующих ординат.
12.6. КОЛЕБАНИЯ ДВИГАТЕЛЯ КАК МЕХАНИЧЕСКОЙ СИСТЕМЫ
Двигатель как механическая система, обладающая массой и
упругостью, колеблется вместе с корпусом и, следовательно, ока-
зывает влияние на форму и частоту собственных колебаний кор-
пуса. Анализ механических колебаний двигателя имеет важное
значение как при расчете форм и частот собственных колебаний
корпуса, так и при определении работы силы тяги, которая тем
больше, чем больше перемещения точки приложения этой силы,
возникающие при колебаниях.
Простейшей схемой для учета механических колебаний двига-
теля может служить один механический осциллятор, сосредоточен-
ная масса которого тдв равна массе двигателя и рамы В этой схе-
ме двигатель считается твердым телом, а подвеска двигателя — не-
весомой пружиной. Частоту собственных колебаний двигателя от-
носительно корпуса ракеты определяем методом Рэлея. Считаем,
272
что рама двигателя выполнена из упругих стержней (балок), при-
чем двигатель подвешен на раме симметрично относительно опор.
Вследствие упругости оболочки корпуса ракеты опоры рамы, зак-
репленные на корпусе, являются упругими с общим коэффициен-
том жесткости к. Схема упругой системы для определения частоты
собственных колебаний приведена на рис. 12.5. Статическое пере-
мещение двигателя состоит из двух частей: статической просадки
опор Xq и статического изгиба рамы с упругой линией Мас-
штаб статического перемещения т) выбирается так, чтобы суммар-
ное перемещение массы двигателя было рав-
Частоту собственных колебаний упруго подвешенного двигателя
вычислим по формуле
(Одв = кдв//пдв.
При продольных колебаниях корпуса могут наблюдаться колебания растя-
жения — сжатия двигателя как упругого тела. Они будут значительными, если
собственные частоты таких колебаний будут близки к частотам колебаний кор-
пуса ракеты. Анализ этих колебаний представляет интерес для оценки прочности
двигателя и более точного определения приведенной силы тяги. Выбор схемы
для определения форм и частот колебаний растяжения — сжатия двигателя за-
висит от конструкции двигателя и способа его крепления к раме, а также от це-
лей расчета.
Колебания двигателя могут вызываться перемещением точки
подвеса. Амплитуда вынужденных колебаний двигателя при
?п(0 = 1:
f плв f п (-^дв) 7 ", Д (t0/2 -/- (Одв)’
1 — Кг/^дв)2
где fn (Адв) > со?? — амплитуда и частота колебаний точки подвеса
двигателя; содп — частота собственных колебаний двигателя.
При анализе устойчивости замкнутой системы ракеты с ЖРД
важное значение имеет не только величина, но и знак коэффици-
ента fn дв- Если частота собственных колебаний двигателя значи-
тельно выше частоты колебаний корпуса ракеты, т. е. (оДБ»о)п, то
при расчете продольных колебаний корпуса ракеты упругость под-
вески двигателя можно не учитывать, а массу двигателя и рамы
полагать сосредоточенной в поперечном сечении корпуса с коорди-
натой хдв.
Для первого тона собственных колебаний корпуса соотношение
частот (Одв»(оп, обычно, выполняется. Однако для более высоких
273
тонов частоты содв и юп могут быть близкими, и тогда при изуче-
нии продольных колебаний упругость подвески двигателя учиты-
вать нужно.
12.7. ОПРЕДЕЛЕНИЕ ФОРМ И ЧАСТОТ СОБСТВЕННЫХ
КОЛЕБАНИЙ КОРПУСА РАКЕТЫ
Для определения форм и частот собственных продольных коле-
баний корпуса ракеты принимается схема прямого неоднородно-
го стержня с упруго подвешенными сосредоточенными массами
(см. рис. 12.2.)
Применим метод прогонки реше-
ния, который был изложен выше в
разд. 12.4 для расчета форм и час-
тот собственных колебаний неодно-
родного стержня.
Рис. 12.6 Если между участками f-м и
(/4-.1)-м имеется сечение с упруго
подвешенными сосредоточенными массами, то при переходе от ?-го
к (/+1)-му участку будет наблюдаться скачок нормальной (осе-
вой) силы, равный сумме реакций пружин осцилляторов (рис..
12.6). Условия сопряжения таких участков
fni {li} = fn(i+i) (0);
s(0)
EF (Z.) f'm (Л) + Nsi=\EF (0) fn (0)],.+1,
9=1
(12. 25)
где Nsj — нормальная сила, приложенная к поперечному сечению>
через пружину s-ro осциллятора; — число осцилляторов.
Сила NSj численно равна силе инерции s-й сосредоточенной
массы. Чтобы согласовать знаки проекций сил EFfv' и Nsj, обра-
тимся к уравнению (12.10). Если известна функция fn, то по этому
уравнению можно вычислить осевую силу в любом поперечном се-
чении. На основании уравнения (12.10) можно установить, что при
J zn(%) fndx >0 в поперечном сечении возникает сжимающая сила
о
EF (х) fn=- «£ f т (х) fndx. (12. 26}
о7
Так как все сосредоточенные массы перемещаются с частотой
колебаний корпуса <оп, то сила
Ns)= — ^nmsjfnsj (12. 27)
направлена в ту же сторону, что и сила инерции конца стержня
длиною х.
В формуле (12.27) fnsj— значение коэффициента формы коле-
баний массы mSj, подвешенной в /-м сечении при п-м тоне коле-
баний корпуса.
274
Величину fnsj определяем по формуле
f nsj~~ f n
(12. 28)
1
где —значение коэффициента формы колебаний корпуса в
сечении с абсциссой Xf, e)Sj — частота собственных колебаний s-ro
осциллятора в у-м сечении.
Получим формулы для вычисления коэффициентов Z^+i и Ci+i
(/4-1)-го участка через коэффициенты и С{ /-го участка, когда
между этими участками расположено у-е
сечение с осцилляторами. Принимая
во внимание, что
о
Рис. 12.7
на основании равенств (12.19)
(12.25)— (12.28) найдем
Z9/+i = Cz sin ал,//-|-29/ cos а^/,;
с 1+1 = (С& + cos anil; + (8„ycz
?,£>-) sin anil:,
?n VI
(12.29)
где ?г = К(т£Л),./(/и^Г),.+1; 3„7- =
(ЕЕап)1 + 1
s=l
mSj
(12.30)
И
В остальном метод расчета ничем не отличается от изложенно-
го в разд. 12.4.
В качестве иллюстрации рассмотрим простейший пример — продольные ко-
лебания системы, состоящей из свободного прямого однородного стержня с од-
ной упругой подвешенной сосредоточенной массой на правом конце (рис. 12.7).
Значение коэффициента формы собственных колебаний массы
ms определим по формуле (12.28):
f nS — f п W “j "
где (оп — частота собственных колебаний системы; cos — частота
собственных колебаний массы tns при неподвижной точке подвеса
пружины; /п(0—значение коэффициента формы колебаний на
правом конце стержня.
Удлинение пружины равно разности перемещений
(оз5/и)л)2 — 1
Граничное условие на правом конце стержня можно предста-
вить в виде
^0Л(/)=к,Л(/) - ч
(<о5/юл)2 — 1
где к — коэффициент жесткости пружины.
С учетом граничного условия Л/(0) =0 находим
fn=Dcos апх.
275
Подставляя это выражение в граничное условие на правом кон-
це стержня, получаем следующее трансцендентное уравнение час-
тот собственных колебаний системы:
— fFna- sin a„Z = к.---------cos ап/.
Так как (оп2 = «712а2, a2 = EFJm^ то уравнение частот можно- пред-
ставить в виде
to-а 1 = ^-_______
g П ГП. со2- а2(Х2/
Корни уравнения частот можно определить на ЭВМ или при
помощи обыкновенных тригонометрических таблиц. Для наглядно-
сти на рис. 12.8 показано определение корней при помощи графи-
ков функций. Здесь сплошными линиями изображен график функ-
ции, находящейся в левой части уравнения частот, пунктирными
линиями — функции в правой части уравнения. Точки пересечения
линий дают значения корней уравнения. Если коэффициент жест-
кости пружины k.s равен нулю (стержень без сосредоточенной мас-
сы), то все пунктирные линии совпадают с осью абсцисс и корня-
ми уравнения будут
ап1 = пл (п= Ц 2,...).
При k.s#=0 графики функций для правой части уравнения пред-
ставлены на рис. 12.8 для трех различных соотношений:
л . ла Ttiz 'Г ла ла Зла
U <С а). <; ---; -----<Г ок <Г------; -----<Г <Г ----------.
5 2/ 2Z Z Z 5 2Z
Первый корень уравнения, соответствующий ненулевой часто-
те системы, определяется соответственно точками пересечения 11;
12; 13; второй корень — точками 21; 22; 23. Формы собственных
колебаний системы, соответствующие частотам, определяемым точ-
ками пересечения 11; 12 и 21, показаны на рис. 12.9.
Для незакрепленного стержня номер тона колебаний всегда со-
ответствует числу узловых сечений стержня (см. рис. 12.4). В сис-
теме, состоящей из стержня с упруго подвешенными массами, это
276
правило также выполняется, хотя сам стержень узловых сечений
может не иметь.
Некоторые особенности возникают тогда, когда
<о^ = /гла/(2/) (п=1, 3,...),
и объясняются они тем, что числа /гл/2 являются собственными
числами системы. Форма собственных колебаний первого тона
/1<°> показана на рис. 12.9. Для стержня она соответствует форме
его собственных колебаний при закрепленном правом конце.
Здесь мы имеем случай, когда обе парциальные колебательные сис-
темы имеют как бы одну общую неподвижную точку и совершают
относительно нее колебания с одинаковой частотой самостоятель-
но. Значение коэффициента формы /ns упругих колебаний сосредо-
точенной массы в этом случае невозможно подсчитать по форму-
ле (12.28). Его можно определить из условия, что центр масс сис-
темы при собственных колебаниях не перемещается:
тп0 J ло) dx-\- f nsms=G.
гр Д°) пл
Так как f„ =cos--------х,
2Z
л Шс\1 2 А?Л , 1 О гт \
то fns =----S-----Sin—— (/£=1,3,5...).
ms пл 2.
Аналогичные особенности в расчете могут возникнуть и для не-
однородного стержня с упруго подвешенными сосредоточенными
массами, если частота системы окажется равной одной из парци-
альных частот упруго подвешенных сосредоточенных масс (обоз-
начим соответственно и/77В этом случае в формуле (12.30)
под знаком суммы исключаем слагаемое с индексом Sj*, для кото-
рого сол = о)5*7-. Значение коэффициента формы колебаний fns*j для
сосредоточенной массы ms*j определяем из условия, что центр
масс системы при собственных колебаниях не перемещается:
z
| т (%) fndx-\- 2 + =
6 (*,/)
а влияние осевой силы
Ns*j = wntns*j f ns*j
от колебаний массы ms*j учитываем изменением структуры вто-
рого равенства (12.29):
C/+i =
to2
+ 3n;Dz.) cos ^nili + (₽„/?,• - !Ш) sin —— msV
(Eran)i+1
Дальнейшие приближения выполняются в том же порядке.
В качестве первого приближения для частоты соп нужно принять
277
значение, меньшее низшей из всех парциальных частот cds?-, и при-
ближение по частоте проводить с небольшим шагом ДсоЛ.
Рассмотрим теперь особенности определения форм и частот собственных ко-
лебаний методом конечных разностей, вносимые наличием упруго подвешенных
сосредоточенных масс. Значения коэффициента формы собственных колебаний в
(i-hl)-M сечении можно вычислить по формуле (12.23), полученной после инте-
грирования дифференциального уравнения (12.4) и замены производных конеч-
ными разностями:
f п (Z+1) ~ f ni 1 +
^Z-0,5
4-0>5
£Л'+0,5
^Z-0,5
^40,5
f п (Z—1)
(Z= 1, 2,..., k — 1).
(12.31)
Пусть, например, сосредоточенные массы mSj подвешены в j-м сечении меж-
ду i-й и (Z+ 1)-й точками деления стержня, подобно тому, как это показано на
рис. 12.6. Значения функции fni в i-й и всех предыдущих точках деления стерж-
ня вычислены по уравнению (12.31). Применив принцип Даламбера, составим
уравнение равновесия участка стержня, расположенного между i-й и (/+1)-й
точками деления. Получим
EFif ni + 2 Nsj = EFi + l f П (4’4-1) + rni^2nf
(*)
Заменив в этом уравнении производные конечными разностями
, + f , f п {1 + 1)—fni
fni 2h ’ fn(i+i)— 2Л
(12. 32)
получим
+ fn(i-\) . V ,, „„ fn(i+2)—fni
EFi----------------- + 2j Ns> = EFi+l----------2Л------+ mih<anfni-
(s)
Значение функции fna+2) вычислим по уравнению (12.31), считая fn«+i) из-
вестным:
fn (z’4-2) — fn (Z + l)
^Z+0,5
^Z + 3/2
^Z+3/2
^Л+0,5
^Z+3/2
Исключив из последних двух уравнений fn<i+2), найдем
f п (/-ы) = (а/&) f nt + cfn (Z—1) + 2 Nsjt (12.33)
(*)
^/ + 0,5 2А2о)2/П/
где а = 1 -4--------—----------:
^Z+3/2 EFi + 1
ь _ 1 EEi+0>5 - -
^Z+3/2 ^Л+3/2
1 EFi 1 2Л
c = —------------—; d =----------.
b EFi+x b EFi+x
Величина осевой силы Ntj вычисляется по формулам (12.27) и (12.28). Так
как шаг интегрирования h при расчете берется обычно небольшим, то в этих
278
формулах вместо коэффициента }п, можно принять коэффициент fni. Тогда по-
лу чим
~7~~v (12- 34>
1 — W^Sj)2
Рекомендуется такая последовательность расчетов. Задаемся частотой коле-
баний системы (оп и выбираем масштаб формы собственных колебаний так, что-
Рис. 12.10
бы на левом конце стержня fn0=l. Из граничного условия на левом конце
стержня находим fni=l, а по уравнению (12.31) вычисляем коэффициент fni
последовательно для всех точек деления, предшествующих первому j-му сечению
с упруго подвешенными сосредоточенными массами. Переход от i-й к (i+l)-fr
279
точке деления, между которыми находится /-е сечение с сосредоточенными мас-
сами, совершаем по формулам (12.33) и (12.34). И так до тех пор, пока не дой-
дем до правого конца стержня. Дальнейшее решение сводится к нахождению
такого значения соп, при котором удовлетворяется граничное условие на правом
конце стержня (12.24).
Для полученного значения частоты собственных колебаний соп находим зна-
чения коэффициентов формы собственных колебаний во всех точках деления.
Значения коэффициента формы fnaj для s-й сосредоточенной массы определяем
по формуле (12.28), в которой полагаем f п (xj) = fni.
Для примера приведем результаты определения форм и частот собственных
колебаний корпуса одноступенчатой ракеты. Расчетной схемой служит прямой
неоднородный стержень с тремя упруго подвешенными массами (рис. 12.10).
Сосредоточенные массы тА, тБ , /пд равны соответственно массам жидкости в
баках А и Б и массе двигателя.
Графики форм собственных колебаний для первых трех тонов показаны на
рис. 12.11. Частоты собственных колебаний системы в с-1 следующие: (Di =
==103,37; со2=151,27; со3 = 257. При расчете принято соа2 = 30 000 с-2, (оБ2 =
= 12 000 с-2, (Од = 25 000 с-2. Здесь можно наглядно проследить и число узло-
вых сечений и коэффициенты форм упруго подвешенных масс.
12.8. ВОЗМУЩЕНИЯ ОТ КОЛЕБАНИЙ ДВИЖЕНИЯ
ГАЗОВ В БАКАХ
Продольные колебания корпуса сопровождаются
следовательно, изменением объема газовой подушки,
давления газов на свободную поверхность жидкости
изменением объема бака и,
что приводит к изменению
и верхнее дно бака.
Если массу газа в бакс в
Рис. 12.12
данный момент времени счи-
тать постоянной, то при рас-
чете форм и частот собствен-
ных колебаний корпуса газо-
вую подушку можно заменить
невесомой пружиной, один ко-
нец которой прикреплен к
верхнему дну бака, а другой —
к эквивалентной массе nisj
(рис. 12.12). Коэффициент
жесткости такой пружины
можно вычислить из выраже-
ния
ky^l&p/dV)^,
где F$— площадь «эффективной» поверхности дна бака (для цилиндрического
бака /?Б=л/?12); р, V — давление и объем газовой подушки в баке; Vo — номи-
нальная величина объема газовой подушки. Для n-го тона колебаний корпуса
сила пружины
N sja — к у [f ns j f п (-*ya)]»
где fnsj — коэффициент формы упругих колебаний сосредоточенной массы
fn(Xja)—коэффициент форм колебаний верхнего дна бака.
Пружина с коэффициентом жесткости ку несколько повышает частоту соб-
ственных колебаний массы maj, так что
Так как коэффициент жесткости kv не зависит от номера тона колебаний,
а коэффициент жесткости kaj- с увеличением номера тона возрастает, то влия-
ние пружины, прикрепленной к верхнему дну бака, на частоту собственных ко-
.280
лебаний массы mSj уменьшается с увеличением номера тона. Значение коэффи-
циента жесткости ку значительно при малом Vo и большой
Пружину с коэффициентом жесткости к у при расчете форм и частот собст-
венных колебаний корпуса ракеты учесть нетрудно. Для этого нужно пользо-
ваться условием сопряжения (12.25) и при переходе через сечение с абсциссой
x = Xja, соответствующее верхнему дну бака.
Найдем коэффициент fn8j формы упругих колебаний сосредоточенной массы
m8j- Силы верхней и нижней пружин при qn (/) = 1 вычислим по формулам
NSja — ку [f ns j f п (хдг)] >
N sj ~ ksj [f ns j f n
Из условия равновесия сосредоточенной массы та
— msj^f nsj= ky[f nsj fn(xjn)] ksj(f nsj f n\(xj)]
получим fnsj = fn (xj) ~*2--2 + fn (xia) -------Г •
CO . — co co. — co •
SJ n SJ n
г де cojy = k5 j/ ms j\ = k^y nts j-
12.9. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ КОРПУСА РАКЕТЫ
Продольные колебания ракеты с ЖРД — это колебания замк-
нутой системы, основными физическими звеньями которой являют-
ся корпус ракеты, двигатель и топливоподающие магистрали. Ес-
ли из замкнутой системы выделить одно звено, в данном случае
корпус ракеты, то можно рассмотреть его вынужденные колебания
под действием отклонения тяги двигателя.
Рассмотрим вынужденные колебания корпуса ракегы, схемой
которого является неоднородный стержень с упруго подвешенными
сосредоточенными массами различной величины (см. рис. 12.2).
Уравнение вынужденных продольных колебаний корпуса ракеты
можно представить в виде
т (х) —------— [f/7 (^хУ——— -}-Ь(х) -^-1 =q (/) Р(х)Ц-
V } дР дх L дх k 7 dxdt J 4 V 7 k 1
+ 2 Nsj$(x — Xj), (12. 35)
(7,5)
где 6 (%—Xj) —функция Дирака, обладающая следующим свойст-
вом:
i
(-Г)З(Х — ху)о,х = <р(ху).
о
Сосредоточенная сила NSj, передаваемая стержню через пружи-
ну, численно равна силе инерции массы msf.
где uSj — перемещение массы mSj.
281
Перемещение стержня и(х, t) при вынужденных колебаниях
представим в виде разложения в ряд по формам собственных ко-
лебаний:
и(х, fn(x)qn(t).
П,— 1
(12.36)
Здесь ис(/)—перемещение центра масс системы; ^n(Z)—обоб-
щенная координата упругих колебаний; fn(x)—форма собствен-
ных колебаний n-го тона стержня с упруго подвешенными сосре-
доточенными массами
лм=Ия(х)
\fnsj x=xi (5=1, 2,...,
(12. 37)
При x = Xj функция fn(x) будет многозначной со значениями
fn(Xj), fnSj (s = 1, 2,s<0>). Для всех остальных х эта функция бу-
дет иметь одно значение — fn(x).
Введем функцию
т* (х) = т (х) + 2 8 (х — х,)
(М)
(12. 38)
и следующее правило интегрирования функций:
i i
J fn (х) т* (х) dx=\m (х) fn (х) dx + msj fnsj. (12. 39)
о о (7,s)
Теперь с учетом зависимостей (12.36) — (12.39) уравнение
(12.35) можно представить в таком виде:
W ^7— —рF W dU(f’ ° + b w °] = 7
dtz дх L dx dxdt J
(12. 40)
При b (x)/[£77(x)] = 2£z и q(t)p(x) =0 переменные в уравнении
(12.40) можно разделить и получить уравнение для определения
форм и частот собственных колебаний
[£F(x)/„(x)]'=—«М 7п*(х)/„(х) (/1=1,2,...). (12.41)
Функции /п(х), удовлетворяющие уравнению (12.41) и гранич-
ным условиям
/п(0) = 0; /л(/) = 0,
ортогональны с весовой функцией т*(х).
Условие ортогональности можно представить в виде
i
J т (х) fn (х) fm (х) dx + "hi fns) fms)=0.
o
Методика определения функций fn(x) и частот была изло-
жена в разд. 12.6; будем считать их известными и перейдем к рас-
282
смотрению задачи о вынужденных колебаниях. Подставив в урав-
нение (12.40) вместо и(х, t) его выражение из (12.36), получим
/ 00
от*(х)
\
^fnqn
- EF(x) ^fnqn
п<=1
=q(t)P(x). (12.42)
Проинтегрируем уравнение (12.42) по х на отрезке О—/. Затем
умножим уравнение (12.42) на fn(x), где п — произвольное фикси-
рованное число, и проинтегрируем его по х на отрезке О—I. С уче-
том равенств (12.37) — (12.39) и принимая во внимание, что
i
j /п* (х) fn (x}dx = 0,
о
получим следующую систему обыкновенных дифференциальных
уравнений для определения обобщенных координат uc(t) и qn(t)'-
i
uc = q — (x)dx\
m j
о
qn + (^nqn + ^nqn=-q{t} (12.43)
mn
I I
где m= C m*(x)dx= C m\x)dx~\- ^rnsj\
0 0 (7,-sr)
i i
m„ — ^m*(x)f2ndx= m (x) fndx-\- msj/t/
0 0 (j.s)
Pn=\P{x)fndx.
6
Несмотря на сложность колебательной системы такая простая
структура уравнений (12.43) достигается потому, что формы и час-
тоты собственных колебаний определены для корпуса с учетом ко-
лебаний жидкости в упругих баках как единой колебательной сис-
темы.
Вынужденные продольные колебания ракеты могут происхо-
дить под воздействием внешних сил — отклонения тяги двигателя
и отклонения аэродинамической силы лобового сопротивления.
Отклонение тяги двигателя оказывает значительно большее влия-
ние на продольные колебания корпуса ракеты, чем отклонение си-
лы лобового сопротивления. Поэтому в практических расчетах
отклонение силы лобового сопротивления обычно не учитывают.
Когда расходную магистраль выделяют в отдельное звено, откло-
нение давления жидкости перед входом в насос также будет созда-
вать внешнюю силу по отношению к корпусу. На корпус ракеты
эта сила передается через подвеску насоса (двигателя).
283
Для первого уравнения (12.43) внешняя сила
i
q{t) \P(X}dx=-P{t) + P^t).
Q
Для второго уравнения приведенная сила
^лЮ=[-^(^+Ли(/)]/йлв,
где P(t) —отклонение силы двигателя; РцДО —отклонение силы
давления жидкости перед входом в насос.
Знак минус перед силой P(t) обозначает, что за положитель-
ное перемещение принято перемещение корпуса от вершины к хвос-
товой части ракеты, т. е. против направления силы тяги.
12.10. ОПРЕДЕЛЕНИЕ ФОРМ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
Определение вынужденных колебаний путем представления их
в виде ряда по собственным функциям обладает наглядностью и
просто интерпретируется. Вынужденные колебания системы пред-
ставляются в виде суммы колебаний простых осцилляторов. Метод
наиболее удобен, когда частоты собственных колебаний корпуса
ракеты значительно различаются между собой и анализ устойчиво-
сти можно производить для каждого тона колебаний отдельно.
Можно применять и другой метод. Внешнюю гармоническую
силу включить в граничные условия и вынужденные колебания оп-
ределять в виде функции Ф(х, w)eza)^ без разложения в ряд по
собственным функциям. Здесь всего лишь одна функция Ф(х, со)
характеризует вынужденные колебания. Метод дает точное реше-
ние, выражаемое одной функцией, что имеет преимущество при
анализе устойчивости движения, когда частоты некоторых тонов
колебаний корпуса близки между собой.
Функцию Ф(х, со) можно назвать формой вынужденных коле-
баний. Определение функции Ф(х, со) и анализ ее свойств целесо-
образно произвести сначала для схемы неоднородного стержня.
Положим, что на правый конец стержня (x=Z) вдоль его оси
действует внешняя сосредоточенная сила Р (Z) = Ae/W, а внеш-
няя распределенная сила q(x, t) =0.
Частное решение уравнения (12.1) представим в виде
/) = Ф(х, (о)е/ш/ = Фе/со/. (12.44)
Подставив уравнение (12.44) в (12.1) и положив в нем
q(x, zJ=O, получим
—со2/п (х) Ф = — [Z:/7 (х) Ф' Ц- (X) А»Ф']-
дх
Для интегрирования этого уравнения можно применить метод
конечных разностей. Проинтегрировав уравнение по х в пределах
284
0T Xj-0,5 До Хг+о,5 и заменив производные конечно-разностными со-
отношениями
= Ф/ + 1 —ф/ . I =Ф/ — Ф/ !
/4-0,5 h I **7—0,5 Л
где h — длина участка интегрирования, найдем
— w2h2m (%,) Ф(- = (EFt4.0,5 + М1+о^ (Ф/+1 — Ф,) —
— (^'<-о,5 + ^^-0,5) (ф; — ф/-1)-
Разрешив это равенство относительно Фг+i, получим
Ф/+1 = н + id\) Ф, - (az + id^ Фг_р . (12. 45)
В уравнении (12.44) Фг-ы, Фь Ф.-i представляют собой комп-
лексные числа, поэтому это уравнение можно представить в виде
Ф(+1=^4-1+/И/+1, (12.46)
где Ui+i=aiUi diVi U d [V
V /4-1 = dt V t -|-di Ui -f- d{ HZ._1 — di Ui—i*
Так как левый конец стержня свободный, а к правому прило-
жена внешняя силаРое£а)^ то граничные условия для функции
Ф(х, со) будут следующими:
ф'(0, ш) = 0; Ф' (xki v)[EF(xk) + lvb(xk)]==PQ,
где хк — абсцисса правого конца стержня.
Заменив производные в этих равенствах конечными разностями
и разделив второе равенство на тк, где тк — значение функции
тх в сечении с абсциссой xh, представим граничные условия в виде
Ф1 —Фо = О; (Фй-Фй-1)(^ + ^^*) = ^>оЛМ, (12.48)
где c2 = EF (x*)/w», a eft = 6(xft)/(2/nft).
Определять комплексные числа Фг-н по формулам (12.46) бу-
дем в масштабе Лме/(Рм, который потом найдем из условия задан-
ной силы PQ на правом конце. На левом конце стержня примем
^о=1, Vo = O. Тогда из первого равенства (12.48) найдем СЛ = 1,
Vi = 0. Далее по формулам (12.47) вычислим U и V &ля каждого
сечения стержня, включая сечение на правом конце. Второе равен-
ство (12.48) используем для определения масштаба. Левую часть
второго равенства (12.48) представим в виде
[Uk - Uk^ + i (Ук - Vk_,)] (с2 + i. 2we4)=U*k + iV9k.
Отсюда находим
U9k = (Uk-Uk^cl-2^k(Vk-Vk_1)-,
У*к = 2<oeA (Uk - Uk_t) + с2 (У k - У k-i)-
285
Масштаб комплексных чисел представим в виде
AMe^ = t/M + zVM.
Так как все числа Uh Vh включая U*k и 1/фй, вычислены в
масштабе то второе равенство теперь запишем так:
(^м
Разделив вещественную и мнимые части, получим
D тк *
^и=—К—(12’50)
D nik R
D=U2*k+Vik; AM = /Z7F+VT; tg ?M = VJUa.
Из равенств (12.46) и (12.47) можно определить действитель-
ную и мнимую части комплексного числа для любого сечения стер-
жня:
которое в масштабе Дме*Фм характеризует вынужденные колебания
z-ro сечения стержня.
Форма вынужденных колебаний для неоднородного стержня мо-
жет быть представлена совокупностью векторов (комплексных ко-
эффициентов формы) для всех сечений стержня. Для произвольно-
го z-ro сечения стержня комплексный коэффициент формы
Ф = А(хм о))е/?(х‘’Ч (12.51)
где А (xz, ю) = Дф , Дм; <p(xz, о^) = <рф -)-срм. (12.52)
Независимо от того, изменяется ли внешняя сила как Pocosut
или как Р sin со^, при переходе к тригонометрической форме запи-
си в выражении (12.51) нужно сохранять вещественную и мни-
мую части.
Форма вынужденных колебаний Ф(х, со) в координатах х, U, iV
является пространственной кривой. Чтобы представить эту кривую,
нужно в каждом сечении z = 0, 1,2,..., k от оси стержня в плоскости,
параллельной плоскости Z=U + iV, построить вектор Ф(%г, (о) и
концы всех векторов соединить кривой (рис. 12.13). Получается как
бы спиралеобразная кривая с переменным радиусом. Чем выше
частота вынужденных колебаний, тем на больший угол повернется
вектор Ф(хг-, со) вокруг оси X при движении начала вектора вдоль
этой оси (0^z^£). По числу полуоборотов вектора Ф(л\-, со) —
= Azer<p/ вокруг оси X можно сделать заключение о том, к частоте
какого тона собственных колебаний соп наиболее близка частота
внешней силы со. Чем ближе эти частоты, тем больше амплитуда
формы вынужденных колебаний.
286
Для исследования колебаний какого-либо f-ro сечения стержня
достаточно знать сдвиг фаз в пределах 0^ф(х7-, со) =С2п.
Взаимное расположение вектора Дф., вектора Аме% характери-
зующего масштаб, и
коэффициент формы
рис. 12.14.
вектора Afei?z, представляющего собой
вынужденных колебаний, показано на
Рис. 12.14
и
Рис. 12.15
Для функции Ф(х, со) в случае однородного стержня можно получить ана-
литическое выражение. Если левый конец стержня свободен, а к правому при-
ложена внешняя сила
р (/) = Ро то ПРИ (х) = о
р \
Ф (х, w) = —-------------cos ах ( а=И= п 1, 2,... | ,
uEFq sin gcZ V L /
где a = оо д/mo/(£Fo)-
Графики функций Ф(х, со) при разных значениях а для одного стержня при-
ведены па рнс. 12.15. Это плоские кривые, при построении которых принято, что
Pol (£/?о) = 1. Кривая 1 соответствует а = 0,1 л//; кривая 2 — а2 = 0,9 л//, кривая
3 — а.з= 1,9 л//.
При а<Сл// форма колебаний по длине стержня изменяется мало. Стержень
совершает гармонические колебания почти как твердое тело. Колебания растя-
жения — сжатия, которые характеризуются перемещениями сечений стержня
друг относительно друга, почти отсутствуют, так как частота изменения внеш-
ней силы значительно меньше частоты первого тона собственных колебаний
стержня. При а2 = 0,9 л/Z и а3=1,9 л/Z форма вынужденных колебаний близка
к форме собственных колебаний первого и второго тонов соответственно. Объяс-
няется это тем, что частота внешней силы близка к частоте собственных колеба-
ний первого и второго тонов (для первого тона на ai = n/Z, для второго тона
а2 = 2л//).
12.11. АЛГОРИТМ РАСЧЕТА ФОРМ ВЫНУЖДЕННЫХ
КОЛЕБАНИЙ КОРПУСА РАКЕТЫ
Решим сначала две вспомогательные задачи: 1) найдем прави-
ло перехода через /-е сечение, которому передается сосредоточен-
ная сила от упруго подвешенных масс, имитирующих жидкость;
2) найдем правило перехода через сечение с абсциссой Х; = хдв, ко-
торому упруго подвешен двигатель.
Начнем с первой задачи. Пусть /-е сечение расположено между
сечениями I и i+1. Полагая перемещения близких сечений и х.
287
одинаковыми, т. е. (Xj, t)=u(xif /), определим перемещение щ.,(/)
массы mSj в неподвижной системе координат (рис. 12.16). Это зада-
на о вынужденных колебаниях массы msj, вызываемых гармониче-
ским перемещением точки подвеса.
t) = u,(xh /) = Ф(х;, (о) е“°' = Ф, е/ш/.
Положим usj = ®sj И еГа)/ = Ф5/-е/ш/.
со —I— Z 2е с /со
Тогда Ф,7=Ф,--------—, (12-53)
со^у — со2 I • 2&sj со
где ^. = \<s)/ms}; &sj=ltsjl(2msj).
Комплексный коэффициент формы OSJ, выражающий вынуж-
денные колебания масс msj, на основании выражения (12.53) пред-
ставим окончательно в виде
hsj
Рис. 12.16
^sj = Usj + iVsj. (12.54)
В сечении стержня, абсцисса которого
равна Xj, от каждой массы mSj стержню пе-
редается сосредоточенная сила 7Vs/(co), ко-
торая может быть определена по формуле
(fills]
или Nsj+\ = Nsl=msj^^sJ. (12.55)
Рассмотрим теперь равновесие участка, расположенного меж-
ду f-м и (i‘+1)-m сечениями стержня. С левой стороны стержня на
выделенный участок воздействует растягивающая сила
N-l = Ф' (xz) (EF L -J- 112. 56)
Справа действует растягивающая сила
N i+i Ф' (xi+x}[EF/+1 -\-№>bi+i). (12.57)
На выделенный участок стержня воздействуют также силы NSj
от упруго подвешенных сосредоточенных масс, число которых
Силами трения, возникающими внутри участка, для простоты бу-
дем пренебрегать.
Условие равновесия рассматриваемого участка стержня в лю-
бой момент времени будет иметь вид
+ (12.58)
(S)
Согласно (12.32)
ф.=ф, ф,,. ф^1= ф ф, . (12 5Э)
Zfl Zfl
На основании равенства (12.45) получим
Ф<+2=(ал-1Т^/) Ф/+1 — (а/+1 Т^/+1) Ф/.
(12.60)
288
На основании равенств (12.54) — (12.60) получим формулу для
определения комплексного коэффициента формы вынужденных ко-
лебаний (/+1)-го сечения стержня:
= + (12.61)
Теперь рассмотрим вторую задачу—найдем правило перехода
через сечение с абсциссой = к которому упруго подвешен
двигатель. Пусть Хг<х;-<Хг+ь где Хг— абсцисса сечения корпуса,
предшествующего сечению Xj. Будем считать, что на сосредоточен-
ную массу тдв действует внешняя сила Р (t) = PQelwt, представля-
ющая собой отклонение силы тяги двигате-
ля (рис. 12.17).
Сначала найдем вынужденные колеба-
ния массы тдв:
и ~-ф ((о)~ф ИЛ/
“"ДВ * дв г дв ,
вызванные внешней силой P(t), и
/) = Ф/ е/(о/,
кД«
^де
Рис.
вызванные перемещением точки подвеса.
Применив второй закон Ньютона, получим
- ^лв('>2Фл»=(клв + (Ф,- - Фдв) + Ро.
Из этого уравнения найдем
Л)
"де
12.17
P(t)
г- л . , шдв "Ь i •
Ф в =-------9----------------р Ф/ • 9 -----------
ЛВ ^дв (Ив — со2 4- z • 2едвсо) 1 со^в — <о2 -р / . 2еДвсо
Сила тяжести двигается, передаваемая на стержень,
^дв = (клп + Ло/гдв) (Фдв- Ф().
Подставив сюда выражение Фдв из (12.62), получим
со2 4- i -2елвсо
^.=(Po + v4)-лв
%1В
или ЛГДВ=[Ро + /пдв<о2Ф,.] 4- П/'дп) .
Рассмотрим равновесие участка, расположенного
(i+l)-M сечениями стержня. Силы, действующие на
показаны на рис. 12.18. Из условия равновесия участка стержня
найдем
— co2 —. 2еДвсо
(12. 62)
(12. 63)
(12.64)
между Z-м и
этот участок,
Ni+1 = - 7УДВ - mzWd)z. (12. 65)
Перейдем к изложению алгоритма расчета формы вынужден-
ных колебаний корпуса ракеты. Применим метод конечных разно-
стей.
Всю длину корпуса разбиваем на k участков одинаковой длины h = ljk. Но-
мерам поперечных сечений, непосредственно предшествующих /-му сечению с
упруго подвешенными сосредоточенными массами, будем в дальнейшем приписы-
Ю 359
289
вать индекс /, т. е. обозначать их через ij. Для схемы, соответствующей кор-
пусу ракеты с двумя последовательно расположенными баками, обозначения
характерных номеров сечений показана на рис. 12.19. Там же римскими цифра-
ми указаны четыре участка стержня, в пределах которых можно применять ме-
тод конечных разностей в «чистом виде».
Алгоритм расчета следующий.
1. Зная величины EF(x), т(х), b(x) в каждом сечении стерж-
ня, вычисляем коэффициенты at-, dt, a*, dt* уравнения (12.45) для
всех сечений.
Рис. 12.18
Рис. 12.19
2. По формулам (12.47) вычисляем действительные и мнимые
части комплексных чисел для всех сечений до номера гЛ включи-
тельно, принимая ФА=1, Ф1 = 1, и неизвестный пока масштаб
А/ е*'/м.
и
3. На основании равенств (12.61) переходим от сечения iA к се-
чению Сд+1, заменяя в этих равенствах индексы t, j индексами
г’а, А.
4. Рассчитываем формы вынужденных колебаний для участка
II при /а+1<^^б по формулам (12.47). Масштаб комплексных
чисел при этом не изменяется.
5. Переходим от сечения /Б к сечению /Б +1 так же, как от се-
чения /А к сечению /А +1.
6. Вычисляем комплексные числа для участка III при /Б +1<
<Д<Тд точно так же, как вычисляются комплексные числа для
участка II. Масштаб чисел остается прежним, т. е. А/ме <₽/м.
7. Вычисляем комплексные числа для сечений участка IV при
/д + KZ^fe, начиная с правого (свободного) конца стержня. По-
лучим для этого соответствующие формулы. Равенство, предшест-
вующее уравнению (12.45), разрешим относительно Фг-_ь Получим
Ф,-1 = (г’ + 4>/) Ф; — (г; + гр'.) Ф;+1 (12. 66)
(/ = #—1,..., /д+2, /д+1, /д).
Примем на правом свободном конце стержня коэффициент фор-
мы Фь=1. Из граничного условия на этом конце найдем ф^-^1.
Дальнейший расчет производится по уравнению (12.66). Сначала
находим Uh-2, Vk-2, затем все остальные числа до ZA/^+i, VC +i вклю-
чительно.
Так как комплексные числа для участка IV вычисляются неза-
висимо от вычислений для остальных участков, то для этого участ-
ка должен быть введен свой масштаб.
290
8. Два неизвестных масштаба А/ме*/м и Aiv^e определя-
ем из условий сопряжения участков III и IV. Силовое условие соп-
ряжения согласно формуле (12.65) представим в виде
(12.67)
Геометрическое условие сопряжения должно выражать совмест-
ность перемещений и может быть представлено следующей прибли-
женной формулой:
ф1д+1 = ф,д4-йф;д.
Применив соотношение конечных разностей
получаем Ф/д-ы — 2Ф/д-г'Ф/д-1-
С учетом принятых масштабов геометрическое условие сопря-
жения будет иметь вид
Л/Гме‘''Р/1/«Ф/д+1 = Д/ие'^(2Ф;д-Ф,д_1) . (12.68)
Из этого условия один масштабный коэффициент выразим через
другой. Заменяя комплексные числа Ф/д+1, Ф/д, Ф/д-1 их вещест-
венными и мнимыми составляющими, находим
e'W« = (1/ы+/Уы), (12. 69)
где +
К = 37 I - (2£/,.д - 67,.^) - 7/,:д+1 (21/,.д - У.-д^)]; (12. 70)
D' = ^7/д.1-14~ V i^+i-
Силовое условие (12.67) используем для определения послед-
него неизвестного — масштаба А/^е ?/м. Силы А//д и 2V; +ь вхо-
дящие в равенство (12.67), выражаем через силы инерции части
стержня, расположенной с одной стороны от сечения. Получаем
Мд+1=й«>2Д/ме'?7м(^м-|-/1/м) *2 ^Ф,-,
/ /Л-г х (12.71)
Nia=- ш2А'ы *v,u ।h 2 т‘ф‘ + 2 ) •
\ i«=0 (s) /
\ J-A,Б /
J0* 291
На основании (12.64) сила Л^дв с учетом масштаба определяет-
ся из следующего выражения:
Л\В = (Л, + тдв<о2Ф,дД/ме'¥/м) (^д + /1/д). (12.72)
Подставляя в силовое условие (12.67) вместо Nir] + i, 7У\Д, N\3 их
выражения в виде (12.70), (12.71) и учитывая масштаб для Ф/Дл
получаем
i~k-l
Л
= “ ш2/к е,1р/м IЛ 2 т‘ф‘ + 2 I
\ Z=0 (5) j "Л>Б /
- (ро + тедв(02ф.дл/%) (7/д + гУд).
Заменив все комплексные числа их вещественными и мнимыми
составляющими и разрешив это равенство относительно искомого
масштаба, находим
где
. __ _ ам^д + *>Уд _
'м~ < + ’
«м^д— Ьмиа
V'«=-----a2+b2 ’
м ~ хМ
aM = h( mA —К У ^а) +
\ z = 0 z / д 4-1 iiг д + 1 /
+ 2 ~ Ui^;
(о
;=А,Б
t>M=h f 2/n,v,+l/'’ 2 2 zn<v'') +
Z-0 Z - - Z д _r 1
+ 2 ^sjVs}++УдУ,д).
(12. 73)
(12.74)
Все величины, входящие в формулы для коэффициентов (12.74),
л ZtP/
известны, и масштабА/ме м можно считать определенным.
9. Получаем форму вынужденных колебаний с учетом масшта-
бов.
292
Для участков стержня I, II, III (0^Э’<Дд1 будем иметь
Ф (х(, 0>) А,Л е"» = Ро [(ид/м - ИУ/м) + / (Uy^ + UiVi).
Величины Uiy Vi вычисляются по формулам (12.47), величины
Ui , —по формулам (12.74).
Для участка IV при iд + 1<Э’^'Л с учетом выражения (12.68)
находим
Ф (X,., <») AIVm = Ро {[- уу1и) UK -
- V'H (иу,м + UfVi)] + i [К (U.U^ - V.ytj +
-1-^4^.^ + ^y,.)]).
Величины LJi, Vi для участка IV вычисляются по формулам
(12.66), величины UM', W— по формулам (12.70), величины
Z/zM, 1//м — по формулам (12.74). Форма вынужденных колебаний
зависит от частоты внешней силы, а масштаб формы пропорциона-
лен внешней силе Ро.
В заключение рассмотрим вкратце, сколько тонов собственных
колебаний жидкости в упругом баке нужно учитывать при расчете
форм вынужденных колебаний корпуса. Такой вопрос возникает и
при расчете форм и частот собственных колебаний корпуса.
Соотношение между коэффициентами форм вынужденных коле-
баний для точки подвеса Ф(х/, со) и упруго подвешенной массы
Ф«Дсо) при hsj = 0 определяется из формулы
ф5/ И = ф со) ;7(0)L’ ~ 0)2J>
где coSj — частота собственных колебаний упруго подвешенной мас-
сы msj\ со — частота вынужденных колебаний. Если масса mSj зак-
реплена на корпусе жестко, то амплитуда ее колебаний равна
Ф(х.ь со), а сила инерции равна т8до2Ф(Xj, со). Разность между си-
лами инерции упруго подвешенной и закрепленной массы равна
aSjinsju2& (xj, со),
где = <о2/(со^у — ш2).
Разность сил инерции можно считать ошибкой, которая появ-
ляется в расчете осевых сил Af(x), если масса ms(Q) жестко зак-
реплена. Эта разность велика, если частота вынужденных колеба-
ний близка к частоте собственных колебаний массы. Чтобы ошиб-
ки в расчете были незначительны, сосредоточенные массы нужно
закреплять, начиная с такого номера когда w5(0);-0)- Напри-
мер, если оз/cosj = 1,5; 2, то коэффициент ctSj/nSj, характеризующий
разность сил инерции, будет равен (1,8, 1,33) msj. С увеличением
номера s величина массы mSj быстро уменьшается, поэтому раз-
мер ошибки уменьшается не только вследствие уменьшения коэф-
фициента asj, зависящего от соотношения частот, но и вследствие
уменьшения величины массы mSj. Более точную оценку можно по-
10* 359
293
лучить из сравнения форм вынужденных колебаний (форм и час-
тот собственных колебаний) корпуса, определенных при упруго
подвешенных и закреплен пых массах mSj.
В качестве примера приведем результаты численного расчета амплитудно-
фазовых частотных характеристик одноступенчатой ракеты, динамическая схема
которой показана на рис. 12.10.
В численном расчете приняты: логарифмический декремент колебаний для
механических осцилляторе!: 6 = 0,1, г. с. f3J=0,1 cosj7(2jt), внешняя сила Р(/) =
= l-eZco/ приложена к сечению корпуса, N=30, (Од2 = 30 000 1/с2, св^ =
= 12 000 1/с2, ш*в=25 000 1/с2.
Рис. 12.20
Годограф вектора Ф(хд, со) на рис. 12.20 представляет амплитудно-фазовую
характеристику в небольшой окрестности частоты собственных колебаний соЛ
корпуса. Амплитуда вынужденных колебаний А(%д, со) с увеличением со быстро
возрастает и быстро убывает, а сдвиг фаз ср(хд, со) изменяется на величину л
За пределами этой окрестности амплитуда вынужденных колебаний мала. На
амплитудно-фазовой характеристике указаны значения частот вынужденных ко-
лебаний со 1/с.
На рис. 12.21 показана амплитудно-фазовая характеристика сосредоточен-
ной массы /пЛ.
Амплнтудно-фазовые характеристики, подобные изображенным на рис. 12.20,
12.21, могут быть рассчитаны и построены для любого поперечного сечения
стержня и для любой упруго подвешенной массы. Они дают полное представле-
ние о вынужденных колебаниях любого поперечного сечения стержня.
Глава XIII
КОЛЕБАНИЯ ЖИДКОСТИ В ТОПЛИВНЫХ
МАГИСТРАЛЯХ
13.1. СТРУКТУРА ТОПЛИВНЫХ МАГИСТРАЛЕЙ
Компоненты топлива подаются из баков к насосам двигателей
по топливным расходным магистралям — трубопроводам специаль-
ной конструкции и сравнительно большой длины. Для обеспечения
заданного давления топлива перед насосами при приемлемой ве-
личине давления наддува в баках гидравлическое сопротивление
в расходных магистралях должно быть незначительным, а отсюда,
и небольшой должна быть скорость потока жидкости. Трубопрово-
ды низкого давления, будучи большого диаметра при малой толщи-
не стенок, обладают, как и узлы их крепления, незначительной
жесткостью. Основная доля потерь давления в расходных магист-
294
Рис. 13.1
ралях приходится на местные сопротивления — повороты, стыки,
разветвления, пироклапаны и т. д.
Для компенсации изменения при работе длины трубопроводов,
устранения влияния технологических и температурных перекосов и
вибраций в разных местах расходной магистрали устанавливают-
ся сильфоны, обладающие малой (по сравнению с трубой) осевой
и угловой жесткостью. Известно также применение системы силь-
фонов специальной конструкции для обеспечения постоянства объ-
ема трубопровода при поворотах двигателя. . | "S—
Важным фактором, определяющим значи-
тельную податливость столба жидкости в рас-
ходной магистрали, является наличие парогазо-
вой смеси, возникающей вследствие кавитации
на тех участках, где локальное статическое дав-
ление меньше давления насыщенных паров жид-
кости и равновесного давления растворенных в
жидкости газов. Кавитация особенно развита в
струйных эжекторах и на входе в шнековые на-
сосы, которые устанавливаются для повышения 72
давления на входе в центробежные насосы. На-
личие парогазовой смеси на входе в насос сни-
жает частоту собственных колебаний столба
жидкости в расходной магистрали.
Для обеспечения устойчивости установивше-
гося режима работы замкнутой системы ракеты
с ЖРД конструкторы иногда сознательно стре-
мятся понизить частоту собственных колебаний
столба жидкости, искусственно уменьшая объем-
ную жесткость расходной магистрали. В даль-
нейшем этот вопрос будет рассмотрен подробно.
Здесь же упомянем лишь применяемые для этого
известные способы: снижение радиальной жесткости трубы, введе-
ние в жидкость пузырьков нерастворяющегося газа, подключение в
некоторых сечениях, например на входе в насос, гидравлических ак-
кумуляторов (гидравлических демпферов).
При анализе динамических свойств топливных магистралей
важное значение имеет учет граничных условий, которые выража-
ют связь между колебаниями давления и скорости потока. Харак-
тер этой связи можно установить из рассмотрения гидродинамиче-
ских свойств агрегатов и устройств, с которыми соединен трубопро-
вод. Ими могут быть баки, шайбы, дроссели, ресиверы, коллекто-
ры, участки труб с другими параметрами, наконец, сам ЖРД.
На рис. 13.1 приведена схема топливных магистралей ракеты «Тор—Адже-
на» с одним маршевым двигателем 8. Магистрали горючего и окислителя имеют
одинаковую структуру; бак горючего 1 расположен в верхней, а бак окислителя
3 — в нижней части ракеты. Расходная магистраль горючего состоит из длин-
ной трубы низкого давления 4, которая через колено и участок трубы, располо-
женный в поперечной плоскости, соединена с насосом для горючего 7. Труба
низкого давления проходит через бак окислителя в тоннельной трубе 5. На схе-
ме показаны также: расходная магистраль окислителя (короткая) 11, насос для
10*
295
окислителя 10, турбина 9, ЖГГ 12. Обе магистрали снабжены сильфонами 6,
установленными вблизи ТНА, и вороикогасителями 2 на выходе из баков.
Топливная система ракеты «Титан-2» с двумя маршевыми-двигателями по-
казана на рис. 10.8. Подача горючего из баков производится по двум сравни-
тельно коротким, одинаковым по длине расходным магистралям 2, на которых
установлены гидравлические демпферы 8. Расходная магистраль окислителя пе-
ред ТНА разделяется на две ветви, конструктивные параметры которых отлича-
ются от параметров магистрали до ее разветвления. Между узлом разветвления
(коллектором) и ТНА установлен сильфон и нагрузки на коллектор от давления
жидкости передаются затем непосредственно на корпус ракеты.
Приведенные примеры показывают сложность конструкции рас-
ходных магистралей жидкостных ракет. Для удобства дальнейше-
го исследования расчленим расходные магистрали на следующие
типовые элементы, обладающие специфическими свойствами:
относительно длинные прямые участки трубопровода с посто-
янными диаметром и то лциной стенки;
сильфоны:
элементы трубопровода, в которых поток жидкости претерпева-
ет на коротком участке такие изменения, как поворот, разветвле-
ние, изменение диаметра;
гидравлические аккумуляторы (гидравлические демпферы про-
дольных колебаний);
локальные участки магистрали с кавитирующим топливом;
элементы, обладающие сосредоточенным гидравлическим соп-
ротивлением.
13.2. ДИНАМИЧЕСКОЕ ВЗАИМОДЕЙСТВИЕ ТОПЛИВНОЙ
МАГИСТРАЛИ С КОРПУСОМ
При возникновении продольных колебаний (растяжения — сжа-
тия) корпуса будут возбуждаться и колебания топливной магист-
рали. Эти колебания будут вызываться теми частями корпуса, к
которым крепится топливная магистраль (дно бака, турбонасос-
ный агрегат, отдельные части корпуса). В зависимости от распо-
ложения и конфигурации топливной магистрали ее колебания бу-
дут оказывать различное воздействие на поток жидкости в ней.
Если ось трубы на всем протяжении совпадает или параллель-
па продольной оси (рис. 13.2), то при отсутствии трения колеба-
ния трубы не увлекают за собой жидкость. Дифференциальное
уравнение движения жидкости относительно трубы в этом случае
будет таким же, как если бы труба не колебалась, а двигалась с
постоянным ускорением g*. Колебания потока жидкости в трубе
(колебания давления и скорости) в подобном случае будут вызы-
ваться изменением условий на его концах: при колебаниях дна
бака возникают колебания давления жидкости на входе в трубу, а
колебания насоса относительно потока вызывают изменение дав-
ления и скорости при выходе жидкости из трубы.
Иная картина будет наблюдаться, если есть участки, где ось
трубы не параллельна оси ракеты, как, например, на рис. 13.3.
Здесь колебания трубы будут увлекать жидкость, и поэтому диф-
ференциальное уравнение движения жидкости относительно тру-
296
бы должно содержать силы инерции переносного движения (вмес-
те с трубой). Колебания потока жидкости в трубе будут вызывать-
ся также и изменениями условий на его концах.
На рис. 13.3 крепление трубы к корпусу схематизировано пру-
жиной с жесткостью 1<т, поэтому колебания трубы будут отличать-
ся от колебаний корпуса. Упруго подвешенная труба образует ко-
лебательную систему с одной степенью свободы, если трубу счи-
тать жестким телом. Если сечение корпуса, к которому ирикрепле-
Рис. 13 2
на труба, сов—миает колебания по закону (Е< е'-”\ то, как известно,
труба будет совершать вынужденные колебания ио закону
где сот2 = кт/^т; — масса трубы с находящейся в ней жид-
костью.
Сила инерции переносного движения жидкости, обусловленная
колебаниями трубы, в рассматриваемом случае будет пропорцио-
нальна ускорению Фт(о2е/ш/. Таким образом, выделяя из ракеты для
изучения колебаний топливную магистраль в качестве отдельной
гндроупругой системы, мы должны действие корпуса (и двигателя)
на нее заменить действием сил, которые по отношению к топлив-
ной магистрали будут внешними. Так как в потоке жидкости дав-
ление и скорость взаимосвязаны, то действие корпуса на топлив-
ную магистраль может быть выражено через изменение давления
жидкости при выходе из бака (при входе в трубу), через измене-
ние давления или скорости при входе жидкости в насос, через из-
менение скоростей характерных участков магистрали, содержащих
местные сопротивления.
За невозмущенное примем движение потока жидкости относи-
тельно трубы с постоянной скоростью труба при этом вместе с
корпусом движется прямолинейно с постоянным ускорением g* в
направлении продольной оси ракеты, давление жидкости в каждой
точке постоянно по времени, ио переменное по длине трубы (раз-
личные высоты столбов жидкости).
Рассмотрим динамические характеристики каждого из элемен-
тов топливной магистрали в отдельности с учетом возможного воз-
действия на ни?; со стороны корпуса. Начнем с длинной прямой
трубы.
297
13.3. УРАВНЕНИЯ ВОЗМУЩЕННОГО ДВИЖЕНИЯ СЖИМАЕМОЙ
ЖИДКОСТИ В ДЛИННОЙ ПРЯМОЙ ТРУБЕ
В случае длинной трубы (с диаметром, малым по сравнению с
длиной) детальный анализ сложных явлений, происходящих на
концах трубы, можно опускать и считать, что динамические про-
цессы на этих участках описываются теми же уравнениями, что
и процессы в самой трубе. Внутреннее трение в жидкости учиты-
вать не будем.
При малой вязкости скорость жидкости постоянна по всему се-
чению и быстро падает лишь при узком пограничном слое у стен-
ки. Если, кроме того, условиться рассмат-
ривать лишь низкие частоты колебаний (та-
кие, длина волны которых велика по срав-
нению с диаметром трубы), то можно счи-
тать, что в каждом поперечном сечении по-
тока жидкости все величины (скорость, дав-
ление и т. п.) постоянны, а поток жидкости
в трубе одномерный.
Получим линеаризованное динамиче-
ское уравнение возмущенного движения по-
тока жидкости в трубе, ось которой совпадает (или параллельна)
с осью ракеты. Мысленно выделим в трубе часть потока длиной dx
(рис. 13.4). В поперечном сечении возникает отклонение давления
(dp)dx)dx.
На основании второго закона Ньютона получим
-F ^-dx.
dt дх
dv dv t dv
= Г ^0->
dt--------------dt-dx
Рис. 13.4
Так как
окончательно будет
ди
dt
dv । 1 dp
dx Qq dx
(13. I)
где о0, v0 — плотность и скорость жидкости в невозмущенном
потоке (считаем их постоянными по длине трубы); v = v(x, t)\ р =
= р(х, t) —малые возмущения скорости и давления жидкости.
Динамическое уравнение (13.1) должно быть дополнено урав-
нением неразрывности жидкости, учитывающим изменение ее мас-
сы в выделенном объеме. Это уравнение можно получить, если
рассмотреть втекание и вытекание жидкости в выделенный объем
трубы. В единицу времени слева (условно) втекает масса жидкости,
равная FT(y0 + f) (oo + q), справа вытекает Дт + —X
\ дх /
X + -— dx\ Изменение массы жидкости в выделенном объ-
V дх )
еме будет равно разности между количествами втекающей и выте-
кающей жидкости. Ограничиваясь учетом только бесконечно малых
298
первого порядка и принимая площадь трубы неизменной, получим
следующее линеаризованное уравнение неразрывности жидкости:
d<i dt ' । до । " dv п , Тео , =°- дх дх (13. 2)
Введем безразмерные величины
М = Ло_; t = а0 >5 ал , _ х ~ _ ч v = —/; ; = —; ; 1 Z 1 До (13. 3)
где I — длина трубы; а0 — скорость звука в невозмущенном по-
токе.
Уравнения (13.1) и (13.2) в безразмерном виде будут
<W, г) । д dvfc т) . др^, т) = q.
др т) I М д~р г) 1 - — О
дт "Г "И di
Приведем эти уравнения к одному уравнению второго порядка
относительно переменной г(£, т):
(13.5)
к У д& д£дх дх2
Зная возмущение скорости г>(£, т), из первого уравнения (13.4)
найдем возмущение давления
PG, т)=-М^, Т)Щ т) dl. (13.6)
J бт
Решение уравнения (13.4) или уравнения (13.5) должны удов-
летворять краевым (граничным) и начальным условиям. В прос-
тейшем случае граничные условия могут сводиться к линейным од-
нородным соотношениям между переменными т) и v(^ т).
Поместим начало координат £ = 0 в левом конце трубы, тогда
для правого конца координата £=1. Граничные условия можно
представить в виде
bnv ($, T)-[-612/2(t т) = 0 при £ = 0;
62^ (В, t)622/^ (В, т) = о при $=1.
Здесь 6ц, 612... — некоторые дифференциальные операторы перво-
го порядка.
Начальные условия должны задавать распределение скоростей
и давлений ио длине трубы. Однако в дальнейшем нас будут инте-
ресовать только стационарные колебания жидкости, для которых
начальные условия значения не имеют.
299
В простейших случаях граничные условия будут следующими:
для открытого конца трубы р(£, т)=0;
для закрытого конца трубы v(g, т)=0.
Открытый и закрытый концы трубы следует понимать в акустическом смыс-
ле. Давление па открытом конце трубы сохраняется постоянным и равным ро,
т. е. возмущение давления р = 0. На закрытом конце трубы скорость постоянная
(у0 = const), т. е. возмущение скорости и = 0. В частном случае конец трубы мо-
жет быть гидравлически закрыт, тогда ио = 0, ио = О-
При входе в трубу и при выходе из трубы почти всегда проис-
ходит рассеяние энергии, что имеет принципиальное значение для
анализа резонансных режимов и устойчивости движения.
На основании уравнения (13.6) можно установить, что в лю-
бом поперечном сечении потока жидкости соотношение между воз-
мущением давления и возмущением скорости при колебаниях вы-
ражается через комплексное число. Поэтому для граничного сече-
ния отношение р(£, т)/г?(£, т) можно представить в виде
р(Ъ r) = Z = M^ + Za. (13. 7)
Комплексное число Z (комплексное сопротивление) обычно на-
зывают граничным импедансом. По аналогии с электро-
линией можно считать, что вещественная часть этого числа характе-
ризует «активное», а мнимая — «реактивное» сопротивление. В ра-
венстве (13.7) Мф— коэффициент активного сопротивления, отне^
сенный к скорости потока, a a — коэффициент реактивного сопро-
тивления. Иногда вместо комплексного сопротивления рассматри-
вают обратную величину — комплексную проводимость
Z*. Тогда вместо соотношения (13.7) будем иметь
т/($, r) = Z*.
Реактивное сопротивление или реактивная проводимость возни-
кают, например, вследствие наличия на концах потока жидкости
сосредоточенной упругости, обусловленной наличием сильфонов,
или некоторых объемов парогазовой смеси во всасывающей части
насоса. Получим решения уравнения (13.5) при разных граничных
условиях.
13.4. СОБСТВЕННЫЕ КОЛЕБАНИЯ ЖИДКОСТИ
В ОДНОРОДНОЙ ТРУБЕ
Уравнение (13.5) решим методом Фурье. Функции u(g, т) и p(g, т) пред-
ставим в виде
v (е, T) = ?(£)eZiT; р(Ц, т) = р(5)е'Л (13.8)
где s — безразмерная частота колебаний.
Подставив выражения функций v (£, т) и р(£, т) в уравнения (13.5) и (13.6)
и выделив множитель ez5T, получим следующие уравнения для определения функ-
ций V (О и р(£):
d%v (Е) dv(£)
(1 _ М2)---— i$2 М —— + s?v (£) 0. (13. 9)
d& d£
p(z) -- м v($) — is I‘v(6)rf₽. (13.10)
350
Полагая
из (13. 9) находим
v (£) = С
(13.11)
(1 — М2)/г'2—/s2M^ + s2 = 0. (13. 12)
Разрешив это уравнение относительно k, получим
is is
kx ; k2 = —--------. (13. 13)
1 1 — M ’ 2 1 + M v 7
Учитывая дополнительно соотношение (13.10), получим уравнения форм ко-
лебаний скорости v(£) и давление /7 (5):
v($) = C1eftlt + C2e*’f;
(13.14)
p(£) = (?2eft=£-C1e'!^.
Произвольные постоянные С\ и С2 могут быть определены из граничных ус-
ловий.
На основании (13.14) скорость и давление на концах трубы можно вычис-
лить по формулам
v(0) = Ci + C2; v(l) = Cie*> + С2е*’;
?(0) = C2-Ci; ?(l) = C2eft>-(?1 е*-.
Из этих формул получим соотношения между параметрами потока w(l),
р(1) в конце трубы и параметрами потока и(0), р(0) в начале трубы:
V (1) = V (0) -у- (е*’ + е*‘) + р (0) (е*’ — е*) 1
! j (13. 15)
Ml) = v (0) — (eft« - е*1) + р(0) — (е*‘ + е*’).
Соотношения типа (13.15) по аналогии с электросхемами обычно называют
уравнениями четырехполюсника. Эти уравнения удобны для опре-
деления давлений и скоростей потока на концах трубы, когда нас не интересу-
ют эти величины в промежуточных сечениях. Если известны любые две величи-
ны (два граничных условия), то из уравнений можно определить два неизвест-
ных па концах трубы. Например, задавшись гармоническим воздействием па по-
ток на одном из концов трубы, можно определить гармонические колебания по-
тока на другом ее конце и получить выражение амплитудно-фазовой частотной
характеристики.
Применим уравнение (13.15) для определения частот собственных колебаний
потока жидкости в трубе, ограничившись анализом случая, когда характеризу-
ющий трение жидкости о стенку коэффициент 0 = 0. Рассмотрим несколько воз-
можных граничных условий.
1. /?(0) = 0, v (1) = 0 — труба открыта с одного конца (5 = 0) и закрыта с
другого (§=1).
Подставив эти условия в уравнения (13.15) и учитывая, что е*2 #= 0, по-
лучим характеристическое уравнение в виде
е*1-** = 1# (13, 16)
Частота собственных колебаний, вообще говоря, является комплесным чис-
лом, поэтому положим
s = iv + 2, (13. 17)
где v и Q — вещественные числа.
С учетом выражений (13.13), (13.17) получим
391
/ — 2 v \
Поскольку ехр у
Запишем уравнение (13.16) в тригонометрической форме, приравняв нулю
отдельно вещественную и мнимую его части:
/ — 2v \ 22 / — 2v \ 22
ехр --------- cos---------= — 1; exp --------- sin---------= 0.
F \ 1 — М2 / 1 - М2 1 \ 1 — М2 ) 1 — М2
> 0, оба равенства будут выполняться одновре-
менно, если
22„
v=0 и ------— — (2/г — 1) л (/2= 1, 2,...).
1 — М2
Собственные колебания потока идеальной жидкости в трубе являются гар-
моническими; безразмерные частоты этих колебаний вычисляются по формуле
(2/2— 1) л
Sn=Qn = --------—-----О-М2) (/г=1, 2,-..) (13.18)
размерная частота — по формуле
а0 (2/2 — 1) л (1 — М2) а0
G) д = S у, ~ а
" п I 21
Если ио = О (М=0), то вместо потока будет иметь место неподвижный столб
жидкости, частота собственных колебаний которого выражается такой же фор-
мулой, как и частота собственных колебаний прямого однородного стержня.
Когда колебания возникают в потоке жидкости (М=/=0), частота собствен-
ных колебаний потока меньше, чем неподвижного столба жидкости. Отличие
будет тем больше, чем больше число М. Как известно, в сверхзвуковом потоке
(М>1) скорость движения частиц больше, чем скорость распространения упру-
гой волны, поэтому при М^1 собственные колебания существовать не могут.
Скорость движения топлива по трубам от баков к насосам в жидкостных
ракетах невелика, так что число Маха М<^1. Для таких потоков множитель
(1—М2) практически не отличается от единицы, поэтому при малых М можно
считать М2^0.
2. р(0) =0, р (1) = 0 — труба открыта с обоих концов.
Проделав аналогичные выкладки, получим
22
v = 0; —----== 2/2л (/2 — 0, 1, 2,. .).
Или, принимая во внимание только нетривиальные значения частот собст-
венных колебаний, найдем
sn = п (1 — М2) л; u)rt = sfl (а0/1) = /2(1 — М2) л (a0/Z), (13. 19)
Собственные колебания потока жидкости в трубе с открытыми концами
можно сравнять с собственными '-олсба ни я м и прямого упругого незакрепленного
стержня. Нулевой частоте соответствует движение потока жидкости без колеба-
ний, что имеет место при переходе потока на новую стационарную скорость те-
чения при том же давлении.
3. р(0)= — Мф1Ъ(0), р (1) = М (1)
— труба имеет на копнах решетки — гидравлические сопротивления. Здесь ф1 —
коэффициент сопротивления, огнессяпьл к скорости потока при входе в трубу;
ф2 — то же при выходе из трубы (рис. 13.5).
Подставив эти условия в уравнения (13.15), получим харакгерпетическое
уравнение
(1 + Ф1 М)(1 4-ф2М)ехр(/г1 _/e2) = (l-^ М)(1-ф,М) .
302
Разрешив его, найдем нетривиальные значения частот собственных коле-
баний
s/z=(l — М2) пл (п --- 1, 2,...) (13.20)
и безразмерный коэффициент затухания колебаний
1 - М2 к(1 + Ф1 М) (1 ,-? >М)
2 (1 _ М) (1 — Ф2М)
(13.21)
Частота собственных колебаний потока жидкости в трубе с сосредоточенны-
ми сопротивлениями на концах такая же, как и в трубе с обоими открытыми
концами без сопротивлений (13.19).
Так как is =—v-i-ZQ, то собственные колебания потока жидкости в трубе с
сопротивлениями на ее концах являются затухающими.
V9
Рис. 13.5
Рис. 13.6
4. р(0)=0, t, (1) = 2^ р (1)—один конец трубы открыт, на другом конце
имеется комплексная проводимость Z2* = 1/(фгМ) +ia2*. Такое граничное усло-
вие, например, будет иметь место, если гидравлическая решетка упруго закреп-
лена по отношению к потоку жидкости (рис. 13.6). Сосредоточенная упругость
на конце трубы возникает из-за наличия парогаза или упругого сильфона.
~ 1 _ F.^qO,) ~
Так как v (1) = — -• р (1) 4- is — ууу- р (1), где к —коэффициент жестко-
сти пружины, a Fr, I—площадь проходного сечения и длина трубы, то для
схемы, показанной на рис. 13.6, коэффициент a2 = s ———. Если
гидравлической решетки будет невесомый поршень, то = 00 и
X ———, если ф2 а к = со, то Z2 = 1/(ф2 М),
К I
Подставив выражения граничных условий в соотношения (13.15), получим
следующее характеристическое уравнение:
вместо
1 +
= Z2-
Приняв s в виде (13.17) и положив М2^0, приведем характеристическое
уравнение к виду
с th (v — Z12) Z9.
Применяя это уравнение отдельно для действительных и мнимых частей,
получим
sh v ch v 1 с.( s 12 sin 12 д
------------------- —-----;------------------= (13. 22)
sh2 v + sin2 ф2 M sh2 v -- sin2 12 2
Численным решением трансцендентных уравнений (13.22) можно определить
безразмерные коэффициенты затухания и :;<ктыд со жтвеиных :лсо::чин Qn.
Рассмотрим частный случай, когда ф2=°° (невесомый поршень). Тогда из
первого уравнения (13.22) следует, что \’--0 (затухание отсутствует). Из вто-
рого уравнения получаем
to-12 — l/(12a|).
303
Решение последнего уравнения графическим способом схематически показа-
но на рис. 13.7. Точки пересечения тангенсоид tg Q гиперболой l/(Qa2*) дают
значения корней этого уравнения. Чем больше (т. е., чем меньше коэффици-
ент жесткости пружины к), тем ниже частоты собственных К'-лсбаиий столба
жидкости. Это имеет важное значение для анализа динамических свойств топ-
ливных магистралей, так как частота собственных колебаний первого тона стол-
ба жидкости, один конец которого опирается па «пружину», оказывается ниже
частоты первого тона колебаний столба жидкости «без пружины».
Когда а2* = 0 (т. е. к=оо), то
Qn = sn = (2п — 1) л/2.
Этот результат уже был пэлучсн в уравнении (13.18) для собственных ко-
лебаний столба жидкости в трубе с одним открытым концом.
Рис. 13.7
13.5. СТОЯЧИЕ И БЕГУЩИЕ ВОЛНЫ
Формы собственных колебаний скорости и(£) и давления р(£) определяются
из уравнений (13.14). Так как для трубы, закрытой с одного конца, Ci = C2, то
на основании (13.14)
б1(5) = С1 (е*1"’ +е*2п’);
= (е*2'1’ — е*1"’).
Графики функций ип(£>) и рп (5) Для первых двух тонов собственных ко-
лебаний приведены на рис. 13.8. Форма собственных колебаний скорости цп(£)
при М = 0 имеет такой же вид, как и форма собственных колебаний упругого
стержня с одним закрепленным концом.
Формы собственных колебаний ?i?(g) н о ? (д) характеризуются стоячими
волнами, поскольку распределение амплитуд колебаний скорости и давления
по длине в любой момент времени остается одним и тем же.
Кроме стоячих волн иногда рассматривают бегущие волны, которые в
нашей задаче характеризуют движение по трубе акустических импульсов
т) и m2(L Т):
~ V а, т) + р (Z, X) ~ т)—р($, т)
«1(е, т) =-----------------1 «2(6. х)--=---------------. (13.23)
304
Определим из этих равенств v и р и подставим их в уравнения (13.4). За-
тем, взяв сумму и разность полученных уравнений, выведем вместо (13.4) два
следующих уравнения:
ди ди\ ди2 ди<2
— + (1 4- М)—L = 0; —- + (1 -М) —- = 0.
дт дх d'z
Каждое из этих уравнений интегрируется отдельно. Применив метод Далам-
бера, решение первого уравнения представим в виде
Мб, [е — (1 + М) т]\
где F\ — произвольная дифференцируемая функция.
При соотношениях моментов времени т и координат £, которые удовлетво-
ряют условию
£ — (14- М) х = — const,
величина Wi(g, т) будет равна Fi(^i) и ее можно наглядно представить мгно-
венной фотографией волны. Рассмотрим движение «гребня» этой волны. Если в
момент т = 0 гребень имел координату то соответствующее ему сечение (в
котором Fi достигает максимума) будет перемещаться по закону
6 = 61 4- (1 4- М)т.
Рассуждая аналогично, для функции w2(g, т) найдем, что
т)-Л2[;-(М- 1) т], е^2-г(М- 1)т-
Следовательно, найденные решения для r/i(g, т) и w2(g, т) описывают дви-
жение волны U[ и волны и2 без изменения их формы в положительном направ-
лении оси £ со скоростями (14-М) и (М—1) соответственно. Это означает, что
волна распространяется только в положительном направлении со скоростью
(14-М), а волна и2— только в отрицательном направлении (против потока) со
скоростью (1—М). Акустические импульсы движутся по потоку со скоростью
звука плюс скорость потока, а против потока со скоростью звука минус скорость
потока. По этой причине щ. и и2 называются бегущими волнами. При движении
вдоль оси g амплитуда (высота гребня) бегущих волн остается постоянной. Для
иллюстрации сказанного на рис. 13.9 и 13.10 показаны стоячие (v, р) и бегущие
(«1, и2) волны в разные моменты времени т.
305
Граничные условия для функций щ и и2 следующие. Для открытого конца
трубы р = 0; на основании (13.23) имеем и\—и2 = $ или «i = u2. Для закрытого
конца трубы и = 0. Из (13.23) получим «i + u2 = 0 или щ = —w2-
Бегущая волна от открытого конца трубы «отражается» для движения в
обратном направлении с тем же знаком (ui = w2), от закрытого конца — с об-
ратным знаком (^i = —и2). Если на конце трубы имеется активное сопротивле-
ние с коэффициентом Мф2, то на этом конце р2 = ф2Ми2. Из равенств (13.23}
найдем
1 — ~ ~ ~
'-- 7—у—- ^1 при р-2 = М Vo.
1 + Ф2 М
(13. 24)
При наличии сопротивления закон отражения волн выражается формулой
(13.24). Из формулы видно, что при ф2М< 1 волна отражается как от открыто-
го конца трубы, а при ф2М>1—как от закрытого конца. Интенсивность отра-
женной волны при 1[^<1 уменьшается (затухание увеличивается) с увеличением
ф2М. Когда ф2М=1, акустическая волна не отражается и система не имеет соб-
ственной частоты. В дальнейшем будем всегда считать, что ф2М<1.
13.6. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ЖИДКОСТИ В ОДНОРОДНОЙ
ТРУБЕ И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
В гл. XII задача о вынужденных колебаниях корпуса ракеты
решена двумя способами. По одному способу вынужденные колеба-
ния представляются в виде ряда по собственным функциям, по
второму способу вынужденные колебания определяются без пред-
ставления их в виде ряда. Вид решения, полученного по второму
способу, удобнее для сопряжения колебаний корпуса ракеты с ко-
лебаниями потока жидкости в топливной магистрали. Поэтому вы-
нужденные колебания жидкости в трубе будем определять по вто-
рому способу.
Вынужденные колебания жидкости в топливных магистралях
могут возникнуть по следующим причинам; возмущение давления
при входе жидкости в трубу вследствие колебаний дна бака, возму-
306
щение давления в камере двигателя, возмущение скорости жидко-
сти на выходе из трубы вследствие перемещения насоса по отно-
шению к потоку жидкости. Для сопряжения с корпусом и двигате-
лем мы должны знать колебания скорости и давления жидкости на
выходе из трубы в зависимости от возмущений, которые вызывают
эти колебания.
Для определения вынужденных колебаний применим уравнения
четырехполюсника (13.15). Влиянием малых чисел М на распреде-
ление скорости и давления по длине трубы при вынужденных коле-
бания?; пренебрежем, но влияние чисел М на границах трубы, где
имеются гидравлические сопротивления, будем^учитывать. Полагая
в (13.15) М = 0, получим
(1) = 77 (0) ch £ -]-/?(O)sh£;
Я1) = v (0) sh k + Я0) ch k, (13. 25)
где k — k2=~ is.
Определим вынужденные колебания давления и скорости на
выходе из трубы, вызванные изменением давления р* перед входом
в трубу. Примем, что на входе в трубу и на выходе из трубы име-
ются комплексные сопротивления и Z2 соответственно. Тогда
Я0) = Я-г^(0); (13.26)
v (l) = Zlp (!), (13.27)
где р*— возмущение давления перед входом в трубу; р(0), г?(0),
ЯО, Я О —возмущения давления и скорости потока в начале
(после сопротивления) и в конце трубы (перед сопротивлением);
Z2* — комплексная проводимость на выходе из трубы. Подставив
величины г(1) из (13.27) и г?(0) из (13.26) в уравнения (13.25) и
исключив ЯО), после несложных преобразований получим следую-
щее выражение комплексного передаточного числа (или частот-
ной характеристики):
W [К, F] = -----Ц-------, (13. 28)
р' (1 Ч- ZiZ2) cos s + i (Zi + Z2) sin s
где p?.^--p(\)—давление перед сопротивлением. Это комплекс-
ное передаточное число выражает зависящее от частоты s отно-
шение вынужденных колебаний давления р2 в конце трубы к ко-
лебаниям давления р* перед входом в трубу.
Каждому значению частоты s (при вынужденных колебаниях
Р имеет вещественное значение) соответствует комплексное пере-
даточное число. Совокупность комплексных чисел W при измене-
нии частоты s в промежутке +°о на комплексной плоско-
сти Z образует годограф вектора W—амплитудно-фазовую час-
тотную характеристику, которая дает полное представление о вы-
нужденны?; гармонических колебаниях давления на выходном
конце трубы.
307
Рассмотрим свойства амплитудно-фазовых характеристик в некоторых кон-
кретных случаях. Пусть Z2 = 0f Zi = i|)iM. Амплитудно-фазовая характеристика
показана на рис. 13.11. Максимальное значение модуля вектора W, равное
1/(ф1М), соответствует частотам s, которые равны частотам собственных коле-
баний потока жидкости в трубе с одним открытым концом (13.18). С увеличе-
нием сопротивления фчМ максимальные значения модуля вектора W уменьша-
ются. Когда s = si, фазовое запаздывание |ф|=л/2, а если s = s2, то |ф|=3/2л.
Пусть теперь Z2* = 1/СФ2М), Zi = ipiM. Амплитудно-фазовая характеристика
Ц/[р2, р*] для этого случая показана на рис. 13.12. Максимальные значения мо-
дуля вектора ф2/ (Ф1Ч-Ф2) соответствуют s = 0, л, 2л,..., т. е. частотам собст-
венных колебаний столба жидкости в трубе, оба конца которой открыты.
Фазовое запаздывание при резонансе на частоте собственных ко-
лебаний первого тона | ф | = л, на частоте собственных колебаний
второго тона ф = 0.
Для получения комплексного передаточного числа W[v2, р*]
воспользуемся уравнением (13.27). Будем иметь
W ft” 71 = ТГ-ТТп-------А7 - • 03. 29)
(1 -I- ZiZ2j cos s -г i (Zi --f- Z2) sin s
Амплитудно-фазовая характеристика V7[v2, p*] для потока
жидкости в трубе, открытой с обоих концов и имеющей на кон-
цах сопротивление и проводимость, соответственно равные Zi =
= ф1М, Z2* = 1/(ф2, М), имеет вид, показанный на рис. 13.12, и от-
личается от нее только масштабом.
Если на правом конце имеется упруго закрепленная гидравли-
ческая решетка, то резонансные колебания будут возникать на час-
тотах Qi, Q21 •••> показанных на рис, 13.7.
Вынужденные колебания жидкости в трубе могут возникать
также вследствие механических колебаний насоса относительно
потока жидкости. При механических колебаниях насоса в направ-
лении оси ракеты граница потока при выходе из трубы совершает
вынужденные колебания, поэтому граничные условия при £=1
можно представить в виде
^(1)=^ + Z2H1), (13. 30)
где ки — безразмерная скорость движения насоса. Подставляя вы-
ражение г?(1) из (13.30) в уравнения (13.25) и принимая на левом
308
конце трубы р(0) =Ziv(0), получим комплексное передаточное чис-
ло, выражающее зависимость давления на выходе из трубы от ско-
рости движения насоса, в виде
cos s — i sin s
[а, г-н] = -7-——---———— --------.
( 1 — ^1^2) C0S S "b 1 (^2 ~ ^1) Sin 5
(13. 31)
Амплитудно-фазовая характеристика W[p2, vn] при Z2* = 0 и
/1 = ф1М показана на рис. 13.13 и представляет собой накладываю-
щиеся одна на другую кривые.
Резонансные колебания возника-
ют на частотах s2, которые равны
частотам собственных колебаний
столба жидкости в трубе с одним
закрытым концом. Максимальная
амплитуда вынужденных колеба-
ний, отнесенная к амплитуде скоро-
сти механических колебаний насо-
са vH:
(Д^ =__1 . о
ф1М ’ 2 2
1, 3, 5,.
При этом запаздывание по фазе
‘р2^н
13.7. КОЛЕБАНИЯ ЖИДКОСТИ В УПРУГОЙ ПРЯМОЙ ТРУБЕ
Задача о колебаниях потока идеальной сжимаемой жидкости в длинной
прямой трубе решена в разд. 13.2 и 13.3 в предположении, что стенки трубы
жесткие. При жестких стенках форма поперечного сечения трубы для определе-
ния частот и форм колебаний жидкости не имеет значения, важно только то,
чтобы она не изменялась по длине трубы. Такой вывод справедлив, конечно, и
для однородных прямых стержней.
Результаты решения одномерной задачи можно распространить и на движе-
ние потока жидкости в упругой трубе. Впервые это было сделано Н. Е. Жуков-
ским. Его идея заключается в том, что движение потока сжимаемой жидкости
в длинной упругой трубе можно заменить движением сжимаемого потока (той
же плотности, но с меньшим модулем сжатия) в жесткой трубе. При такой за-
мене эквивалентный модуль сжатия жидкости будет меньше модуля сжатия
жидкости вследствие упругости стенок трубы. Для трубы круглого поперечного
сечения с постоянной толщиной стенки эквивалентный модуль сжатия жидкости
можно найти довольно просто. Если считать трубу состоящей из ряда колец,
нагруженных внутренним давлением, то модуль упругости столба жидкости Еь
обусловливаемый упругостью стенок трубы, определяется по формуле (11.12)
Ех = Eh](<2r^
где Е — модуль упругости материала трубы; h, го — толщина стенки и радиус
трубы.
Эквивалентный модуль сжатия жидкости Еэ с учетом упругости стенок тру-
бы может быть определен по формуле
е Е,ЕЖ е 1 ___
э ’ Е^Е* ~ ж 1 +(Еж/Е)(2/0/А)’
где Еж — модуль сжатия жидкости.
309
Подставляя в эту формулу выражения для модулей сжатия в виде
— #oQo и Еэ =
где а., — эквивалентная скорость, звука, получим
а. =------------------------ ; а; =-------------
1/1+а2 ‘ hE
(13. 32)
Так как эквивалентный модуль сжатия жидкости меньше модуля сжатия
той же жидкости, то и эквивалентная скорость звука будет меньше скорости
звука в жидкости, т. е. аэ<а0.
Для снижения частот собственных ко
лебаний жидкости в трубах иногда вместо
труб круглого поперечного сечения приме-
няют трубы с поперечным сечением в виде
эллипса. При изменении давления жидко-
сти изменяется сооотношенпе между раз-
мерами полуосей эллипса, вследствие чего
площадь эллиптического поперечного сече-
ния трубы изменяется больше, чем кругло-
го поперечного сечения. Эквивалентный мо-
дуль сжатия жидкости и, следовательно,
эквивалентная скорость звука в жидкости
в упругой трубе эллиптического попереч-
но] о сечения меньше, чем в трубе круглого
поперечного сечения при одинаковых толщи-
не стенок и площади поперечного сечения,
соответствующих невозмущенному давлению.-
Эквивалентную скорость звука в жид-
кости в упругой трубе с поперечным сечением в виде эллипса можно определить
по формуле
а-з = «о/|/1 + «?.
где
2 (1 — Р-2)
1+3
Д2 J
Здесь а, b — длины полуосей эллипса; р — коэффициент Пуассона; h — толщи-
на стенки трубы; г0 — радиус круга, площадь которого равна площади эллипса.
Размерная частота собственных колебаний пропорциональна скорости звука,
поэтому частота собственных колебаний потока сжимаемой жидкости в упругой
трубе при прочих равных условиях будет меньше, чем в жесткой трубе.
С увеличением отношения радиуса трубы к ее длине, точнее — к длине упру-
гой волны, энергия радиальных колебаний жидкости возрастает, поэтому одно-
мерная постановка задачи может оказаться очень грубой. Приведем решение за-
дачи с учетом радиальных колебаний жидкости в трубе.
Будем рассматривать малые осесимметричные колебания жидкости и стенок
трубы: трубу примем тонкостенной безмоментной цилиндрической оболочкой
круглого поперечного сечения. Обозначим через w(x, t)—малые радиальные
осесимметричные перемещения стенки трубы; q*, Е— плотность и модуль упру-
гости материала трубы; h, Го — толщину стенки и радиус трубы (/i<Cro); р(г, х,
/) — динамическое давление жидкости в трубе.
Рассмотрим радиальное движение элементарного участка трубы, ограничен-
ного двумя близкими сечениями перпендикулярно оси трубы и двумя близкими
радиальными сечениями. Силы, действующие на выделенный участок трубы, по-
казаны на рис. 13.14. Применив второй закон Ньютона, получим уравнение ко-
лебаний выделенного участка трубы в направлении радиуса
d?w(x, t)
hr°Q ----Ы2----= ðР^0’ Х' Е
w (х, t)
h.
310
Введем безразмерные параметры
г о* ~ Л r0 Е
т] = — , х =---------, h — — , а = — , v2 =----------------
Qo го Qo^o
г0
'о
х w (х, /)
* = -тЧ е = —, w(e, ?) = —
I I rQ
?(?. Т)|г) ,1
Р(Г0, X, t)
ао9о
Здесь I — длина трубы; q0, До— плотность невозмущенного столба жидкости и
скорость звука в нем.
Уравнение радиальных осесимметричных колебаний представим теперь в
безразмерном виде:
~ d-w ($, т) ~ ~
х/ш2 —— ------р V'2hw (£, т) = р (6, т)| ге1. (13. 33)
от2
Это уравнение является третьим уравнением системы (11.2). Вследствие
осевой симметрии и отсутствия продольных колебаний трубы дифференциальные
операторы Д31 = 0, Лз2 = 0, дифференциальный оператор Л3з представлен в урав-
нении (13.33) вещественным числом v2h, интенсивность внешних сил Z равна
давлению жидкости на стенку.
Потенциал скоростей <р(т), g, т) для сжимаемой жидкости может быть опре-
делен из уравнения, которое в цилиндрических координатах имеет такой вид:
d2<p d'ty 1 д2<р
д/2 дг2 + г дг 1 дх^ ’
В безразмерной форме это уравнение будет
d2<p 1 д<р / д2<р
дт]2 т] дт; \ д£2 дт2
любой точке объема жидкости в безразмерном виде выражается
д2<р
(13. 34)
Давление в
формулой
р(т], т)= — д^дх. (13.35)
открыта с одного конца, то граничными условиями для функции
Если труба
ср будут следующие:
д<р/дт ~ 0 при £ 0; ду}д^ — 0 при $ = 1.
Для трубы, открытой с обоих концов;
д^/’дг — 0 при 6 = 0, 6=1,
(13. 36)
(13.37)
Кроме того, на стенках трубы должно выполняться кинематическое гранич-
ное условие (11.5). В безразмерном виде оно может быть выражено равенством
dw д<р
-Д I’"1'- <'3-38'
Таким образом, задача заключается в том, чтобы найти решение уравнения
(13.34), удовлетворяющее граничным условиям (13.36) или (13.37), и найти ре-
шение уравнения (13.33), правая часть которого определяется через потенциал
согласно (13.35); при этом решения уравнений (13.33) и (13.34) должны допол-
нительно удовлетворять условию (13.38).
Решение уравнения (13.34) представим в виде
оо
<Р=2 iQnDnRn^)Xn(i)ei&n\ (13.39)
где Dn — произвольная константа; Qn—частота собственных колебаний систе-
мы, состоящей из упругой трубы и жидкости; /?п(т|)> (?) —искомые функции.
311
Радиальные колебания трубы, описываемые уравнением (13.33) также дол-
жны совершаться с частотой Qn, поэтому функцию со представим в виде
1 'V
W --у
(13. 40)
Коэффициент 1/сУ взят здесь для удобства удовлетворения равенству (13.38).
Подставив выражение потенциала скоростей (13.39) в уравнение (13.34) и
разделив переменные, получим следующие два уравнения для определения функ-
ций Хп (g) н Rn (р)':
^хаа) о
diRM 1
--------------+ О) = о,
(13.41)
(13. 42)
где
А 1
,2
'п'
при г) = О должна быть ограничена, то решение
(13. 43)
Так как функция Ra (г|)
уравнения (13.42) можно составить из функций Бесселя первого рода нулевого
порядка 7?о(ЦпЦ) ^=/о(РпТ|)-
Заменив в равенстве (13.38) функции w и ср их выражениями из (13.40) и
(13.39), определим произвольную константу
В п = 1//0 (Pvi)-
Л
п
Определив из формулы (13.35) безразмерное давление р при т] = 1 и под-
ставив его в уравнение (13.33), получим
~ 7 Л (pri) 1 9 v2/z.
'л/1+гГТ Qn=~T (« = ’. 2, 3,...). (13.44)
/q (pVz) Ct2
Ограничимся случаями, когда Qn2<v2/(xa2). Этому неравенству практически
удовлетворяют все технические приложения рассматриваемой задачи. На осно-
вании уравнения (13.44) заключаем, что корни |in функций Бесселя должны
быть мнимыми.
Так как а2 есть положительное число, a Qn2 для консервативной системы
также является положительным числом, то из (13.43) можно заключить, что
Оп<0 и an2>0. Решение уравнения (13.41) при an2>0 можно составить из
тригонометрических функций. С учетом условий (13.36) и (13.37) получим
Xn(O = sin(a,zO.
Условию (13.36) удовлетворяют значения
— 1) л/2 (/2=1, 2,...); (13. 45)
условию (13.37) удовлетворяют значения
ап — пя> (/? — 1, 2,...). (13.46)
Числа an имеют такие же значения, как и безразмерные частоты собствен-
ных колебаний сжимаемого столба жидкости в трубе с жесткими стенками.
Коэффициенты |дп являются корнями уравнения (13.44). Их можно опре-
делить численным методом, если в уравнении (13.44) частоту собственных ко-
лебаний Qn заменить ее выражением из (13.43):
Й« = 1х>2 + (1л- О3-47)
Получим /о (Н:) (^ + а'Ч) =У'(|лл)[у2й-хЛ(ц2 + а2а*)]. (13.43)
Величины a2, v2, h, к характеризуют параметры системы и в каждом кон-
кретном случае известны; коэффициент an в зависимости от граничных усло-
312
вий может быть вычислен по формулам (13.45) или (13.46). Каждому значению
собственного числа ап будет соответствовать только одно собственное число цп.
После того, как ]Li?l будет определено из уравнения (13.48), можно по формуле
(13.47) вычислить частоту собственных колебаний Qn. Так как собственные чис-
ла |Ып являются мнимыми, то Qn2<cin2.
Размерная со?г и безразмерная Q?i частоты связаны соотношением
= Qn (а0/Г),
где aQ— скорость звука в невозмущенной жидкости. Заменив в этой формуле
частоту Qn ее значением из (13.47), получим
Назовем эквивалентной скоростью звука, соответствующей n-му тону коле-
баний, величину
Лэ п = «о !+«?«; «/«= (13.49)
Тогда частоту собственных колебании сжимаемой жидкости в упругой тру-
бе, соответствующую двухмерной задаче, можно вычислить по обычной формуле
°Ег — (Лэ«/0
с той лишь разницей, что вместо скорости звука aQ в певозмущенной жидкости
нужно брать эквивалентную скорость жидкости аэ п, которая меньше aQ, так
как cz
Эквивалентная скорость звука, определенная Н. Е. Жуковским [формула
(13.3'2)], не зависит от номера тона колебаний, тогда как эквивалентная скорость
аэ п по формуле (13.49) зависит от номера тона колебаний.
В заключение приведем численный пример, из которого можно установить,
какие количественные уточнения в эквивалентную скорость звука вносит фор-
мула (13.49) по сравнению с формулой (13.32). Для расчета примем х = 2,8;
/г = 0,05; v = 6; а = 0,05. Тогда па основании (13.32) а/2=1,Н; аэ = 0,69 а0.
Для трубы, закрытой с одного конца,
а/г = (2/? — 1) л/2.
При /?=1; 5; 10; 20 будем иметь соответственно а^= — 0,525; а25 =
=—0,54; а210 = — 0,575; а220 =-_• — 0,652. Тогда аэ1 = 0,69 а0\ аэ5 = 68а>; аэ10 ==
= 0,65 а0; аЭ2о = О,59 а0.
Для примера взята труба длиной, равной ее 20 радиусам (а = 0,05). Длина
волны I первого тона колебаний для трубы, закрытой с одного конца, равна 4Z;
длина волны пятого тона колебаний составляет 0,44 I или 8,8 го; длина волны
десятого топа равна 0,21 I, что составляет 4,2 г0.
Из сравнения приведенных численных расчетов видно, что даже для срав-
нительно короткой трубы (а=С0,05) эквивалентная скорость звука аэ п, вычис-
ленная с учетом радиальных колебаний жидкости, до пятого тона собственных
колебаний включительно, практически пе отличается от эквивалентной скорости,
вычисленной по формуле Н. Е. Жуковского. Отсюда можно сделать вывод, что
вполне допустимо рассматривать одномерные колебания жидкости в трубах, со-
единяющих баки с насосами. По вместо скорости распространения звука а0 в
невозмущепном потоке в жесткой трубе нужно брать эквивалентную скорость
звука «□, вычисленную по формуле Н. Е. Жуковского (13.32).
11 359 313
13.8. ВЛИЯНИЕ СИЛЬФОНОВ НА КОЛЕБАНИЯ
ПОТОКА жидкости
Для компенсации изменения длины трубопроводов и несоосно-
сти фланцев дна бака и насоса па одном или на обоих концах
трубопроводов между баком и насосом устанавливаются сильфо-
ны— гофрированные короткие участки трубы с очень малыми осе-
вой и угловой жесткостями (рис. 13.15). Вследствие малой жест-
кости сильфон выполняет функцию компенсатора. Длина сильфона
мала по сравнению с длиной трубы, поэтому волновыми процесса-
ми внутри сильфона пренебрежем, а давление в любой точке объ-
ема жидкости в сильфоне будем считать в заданный момент вре-
Рис. 13.15
мели одинаковым. В схеме с трубой
сильфон будем считать сосредото-
ченным упругим звеном (сосредото-
ченной упругостью).
Изменение объема жидкости в
сильфоне зависит от изменения /с
длины сильфона и изменения дав-
ления рс внутри сильфона. В общем
случае эта зависимость может быть
пели и ейной.
Пусть невэзмущеиному движению -потока жидкости через силь-
фон соответствуют давление жидкости рсо, длина сильфона /со,
объем сильфона Усо- При продольных колебаниях корпуса ракеты
и жидкости в трубах давление рс, длина сильфона /с и объем силь-
фона Vc претерпевает малые изменения. Ограничиваясь учетом
только главных линейных частей приращения названных величин,
будем иметь
Pc = Pe)±dPc' lQ dZ i - dly Vc=^Vc^dVc.
Приращение объема можно определить по формуле
dVc -(дКЖ) dlc ~ (<?l/c/<?/7c) dpc, (13. 50)
где производные д¥сд/с и дУс;дрс нужно вычислять при /?с = /7с0,
/ = Zcq.
Приращение объема сильфона происходит по двум причинам:
1) вследствие изменения геометрии сильфона от перемещения од-
ного торца сильфона по отношению к другому; приращение объе-
ма по этой причине возрастает с увеличением отношения среднего
диаметра сильфона к диаметру трубы; 2) вследствие изменения
давления при неизменном
Введем два параметра,
ругие свойства сильфона:
>.с=-
Лг д1с
расстоянии между торцами.
характеризующие геометрические и уп-
1;
1 дУс
'г дрс
(13.51)
где г, г — размерный и безразмерный коэффициенты проводимости
сильфона; Хс — безразмерная геометрическая характеристика
сильфона.
314
Безразмерные коэффициенты г и Хс удобны при учете влияния
сильфона на граничные условия для потока жидкости в трубе. По-
кажем это применительно к рис. 13.15.
Продифференцируем равенство (13.50) по времени и разделим
все члены равенства на площадь сечения трубы Fy.
1 dVz _ 1 /дУс \ dlc | 1 / д7с
Лг dt Ат \ д/с ) dt 1 Fr \ дрс ) dt
r\^ 1 dVz die
Обозначив ------=^i; —~ = vcy
dt dt
где Oi — отклонение скорости жидкости при входе в- сильфон; ос—’
скорость перемещения правого торца сильфона (левый торец не-
подвижен), с учетом формул (13.51) получим
^1 = (ЦХс)^сН-г^-. (13.52)
dt
Полагая в этом уравнении величины оь ос, рс изменяющимися
по гармоническому закону с частотой s, получим следующую без-
размерную зависимость отклонения скорости жидкости при выходе
из трубы от скорости перемещения торца сильфона и от отклоне-
ния давления жидкости в сильфоне:
^ = (1 +\м+ isr~p,.. (13.53)
Скорость выхода жидкости из трубы представлена в виде трех
составляющих: vc — скорости перемещения торца сильфона (поток
должен заполнять внутреннюю часть сильфона, имеющую диаметр
трубы); Хс^с — скорости, необходимой для заполнения изменения
объема гофрированной А части сильфона, обусловленного измене-
нием расстояния между торцами; isrpc — скорости, необходимой
для заполнения изменения объема части А сильфона, обусловлен-
ного отклонением давления в сильфоне. Равенство (13.53) спра-
ведливо, когда ис^0, /Зс^О. При ус<0 и рс<0 величина будет
отрицательной, поэтому жидкость из сильфона будет вытесняться
в трубу.
Величину isr в уравнении (13.53) можно считать мнимой
частью комплексной проводимости Z2.
Уравнение (13.52) будет в дальнейшем применять для учета
влияния упругих свойств сильфонов на динамику потока жидкости
в расходных магистралях.
13.9. ВЛИЯНИЕ УПРУГИХ ПЕРЕМЕЩЕНИЙ УЗЛОВ
КРЕПЛЕНИЯ ТОПЛИВНЫХ МАГИСТРАЛЕЙ
Распространенным элементом конструкции расходных магист-
ралей является узел, в котором поток жидкости претерпевает зна-
чительные изменения — поворот направления, изменение площади
поперечного сечения, разделение на несколько ветвей (рис. 13.16).
В этих условиях возникают дополнительные силы давления, под
11*
315
действием которых происходят упругие деформации трубопроводов
и узлов крепления. При движении потока жидкости по криволи-
нейному участку трубы возникает перераспределение давления и
скорости в поперечном сечении. Однако, как показывает точный
гидродинамический расчет для случая движения идеальной жид-
кости в трубе, изогнутой под прямым углом, волновое сопротивле-
ние для акустической волны отличается от qciq незначительно
(меньше 0,5%), так что этим отличием можно пренебречь. Возни-
кает также изменение величины
центробежной силы жидкости. Это
изменение на участке криволиней-
ной трубы длиною ds, обусловлен-
ное изменением скорости потока,
равно 2Ftqo(^o//?) vds, где/? — ра-
диус закругления оси трубы. Если
отклонение скорости на криволи-
Рж. i3.16 нейн.ом участке принять риь"нм v
(среднее значение но сечению тру-
бопровода), то изменение центробежной силы, действующей на
весь криволинейный участок, можно определить довольно просто
<х0 2
v /? cos ad a sin ,
-Jo 2
криволинейного участка трубы.
где н0 —угол раствора
Узел крепления трубы к корпусу обладает упругостью и поэто-
му при колебаниях силы Рц труба будет совершать колебания от-
носительно корпуса. Колебания трубы будут возбуждаться также
и колебаниями корпуса. Поэтому в динамическом уравнении для
потока жидкости, движущегося по трубе, содержащей криволиней-
ные участки, необходимо учесть силы инерции от переносного дви-
жения трубы. При этом уравнение (13.1) принимает вид
ди I . , dv , 1 др
—-гЛ + ^) — г—
dt дх о0 дх
где /а — проекция на ось трубы вектора ускорения трубы относи-
тельно невозмущешюго движения.
Кроме изменения давления, в результате колебаний трубы от-
носительно корпуса изменяется объем расходной магистрали
(главным образом за счет изменения объема сильфонов), что не-
обходимо учитывать при анализе колебаний потока жидкости.
Характерным для топливных магистралей является налич ie
коллектора для подачи топлива из одной расходной магистрали к
нескольким двигателям. Схема коллектора показана на рис. 13.17.
Расходная магистраль (площадь поперечного сечения до коллек-
тора FT) разветвляется на N ветвей, вес столба жидкости (от кол-
лектора до свободной поверхности жидкости в баке) и сила, обус-
ловленная изменением направления потока, воспринимаются уз-
316
лом крепления и передается на корпус ракеты. Этот же узел креп-
ления воспринимает дополнительные силы динамического давле-
ния, обусловленные колебаниями потока жидкости.
Составим уравнение расхода жидкости через коллектор. При-
мем коллектор жестким, а заполняющую его объем жидкость —
несжимаемой. Тогда
N
V-ifi + О’к)-
Рис. 13.17
Здесь ^1 — отклонение скорости жидкости в граничном сечении
потока 1—/; v2i— отклонение скорости потока на выходе из кол-
лектора в Сю ветвь; —площадь попе-
речного сечения Сй ветви; Pi(pi),
МФк)—отклонение скорости потока в
сечении 1—1, вызванное перемещением
коллектора под действием отклонения
давления р\ и колебания того сечения кор-
пуса, к которому подвешен коллектор;
p\ = P2i — отклонение давления в коллек-
торе; Фк — перемещение сечения корпу-
са при колебаниях.
Величины щ(Р1) и гд(Фк) определим
движения коллектора как механической системы
«Л= -кк(хк+Фк) + 5тр1, (13.54)
с помощью уравнения
где хк — перемещение коллектора в направлении оси X, отсчиты-
ваемое от невозмущенного положения; кк — коэффициент жестко-
сти в направлении оси X узла крепления коллектора; тк — масса
коллектора и столба жидкости.
Так как граничное сечение 1—1 находится -в неизменном поло-
жении по отношению к невозмущенному положению трубы, то
(/7) (/?); Vi (Фк) = х,. (Фк).
Полагаем, что отклонение давления и колебания корпуса про-
исходят по гармоническому закону с частотой со:
Pi W = /^iе/со^; Фк (/) = Фке/(0/.
Тогда из уравнения (13.54) получим следующие выражения
комплексных передаточных чисел:
= —4г—г;
/Пк (^ — ш2)
(13. 55)
W ф 1 = —/(1) -------5--- ,
J l-ш2
в которых сок — частота собственных колебаний коллектора с жид-
костью, СОк2 = ккМк.
317
Уравнение расхода жидкости через коллектор представим те*
перь в виде
w
= A. ] + A] Pi + Vnvi, Ф,.]ФК, (13.56)
I- 1
где
Уравнение (13.56) выражает связь скорости потока на выходе
из расходной магистрали в коллектор со скоростями потока на
входе в отдельные ветви и перемещением коллектора, обусловлен-
ным колебаниями корпуса ракеты и давления жидкости в коллек-
торе.
13.10. ВЛИЯНИЕ ГИДРАВЛИЧЕСКИХ СОПРОТИВЛЕНИЙ
Рассмотрим дополнительно характерные участки топливных ма-
гистралей с гидравлическим сопротивлением, гидравлические акку-
муляторы.
Сосредоточенное гидравлическое сопротивление на рис. 13.18,а
схематически изображено в виде решетки. Решетка обычно связа-
а) б)
на с каким-либо агрегатом (в том числе :
трубой) и может совершать относительно
потока колебания со екорехтшо ар. Перепад
давлений на решетке можно поразить фор-
мулой
Р^-Рг^ ,
Рис. 13.18
ние жидкости после
где pm — возмущенное давление жидкости
перед решеткой; р2в— возмущенное давле-
решетки; £— коэффициент сопротивления ре-
шетки; —возмущенная скорость потока жидкости через решетку
Qo — плотность жидкости (полагаем постоянной). Произведя линеа-
ризацию, получим
где
Р1 = Р\— фМ (® —г»р),
Ф=Йо«о; М = г0/а0;
(13. 57)
pi — отклонение давления перед решеткой; р2— отклонение давле-
ния после решетки; — скорость невозмущенного потока; и— от-
клонение скорости потока; — скорость колебаний решетки по
отношению к невозмущенному потоку, при этом положительное
направление и и принято одинаковым.
Если вдоль потока колебания совершает гладкая труба посто-
янного диаметра, то эти колебания не будут вызывать возмущения
потока.
Установленная в трубе (рис. 13.18,6) расходная шайба оказы-
вает реактивное сопротивление движению потока. При движении
через расходную шайбу в потоке создаются искривленные линии
тока и возникают скорости, отличающиеся от скорости движения
плоской волны в трубе без перегородок. В плоскости отверстия
318
шайбы наибольшие скорости возникают у его краев. В дополнение
к кинетической энергии плоской волны потока здесь создается до-
бавочная кинетическая энергия, которая сообщается некоторой
приведенной массе тпр.ш, движущейся со средней скоростью в от-
верстии шайбы. На основании второго закона Ньютона
(13.58)
at
Здесь — среднее отклонение скорости жидкости- в отверстии
шайбы; Fd = nd2l^. Так как
Т7Ш = Т? (Z?/4Z)2,
где v — отклонение средней скорости плоской волны потока перед
шайбой (или после шайбы), то, заменив в (13.58) скорость иш и ее
выражением через D/d, получим для гармонических колебаний с
частотой со
Pz = Pi — (13. 59)
При этом коэффициент
Величину приведенной массы можно вычислить по формуле
m^^Fd/d f (d/D),
где функция Фока
/ (—)=----------------------•
\D ) 1—1,41dlD + 0,47rf3/£>3
Если отношение d/D стремится к единице, то величина функ-
ции Фока будет стремиться к бесконечности, а величина приведен-
ной массы — к нулю (в трубе без шайбы сосредоточенное реактив-
ное сопротивление отсутствует).
Перепад давлений возникает также при выходе жидкости из
бака в расходную магистраль. Здесь кроме активного сопротивле-
ния (воронкогаситель и др.) возникает еще и реактивное сопро-
тивление, обуславливаемое разгоном некоторой приведенной мас-
сы жидкости. Отклонение перепада давлений при выходе жидко-
сти из бака можно представить в виде
Р1^Рб~где Z6 = tp6M + Zcoa6. (13.60)
Коэффициент оса, характеризующий реактивное сопротивление
при выходе жидкости из бака, можно вычислить на основании
формул
^нр.б . Qo77?
аб =----1 ^иоб =------------1
f =_______________J_________•
J \Ri) 1-1,47/-0/Л1 4- 0,47rg/Z?f
319
Здесь р\ — отклонение давления на входе в трубу; рб— отклонение
давления на дне бака; г0— радиус трубы; — радиус бака. В вы-
ражении для Z6 величина фбМ представляет собой коэффициент
активного сопротивления при выходе жидкости из бака.
13.11. ВЛИЯНИЕ ГИДРАВЛИЧЕСКИХ АККУМУЛЯТОРОВ
Если в сечении 1—1
На рис. 13.19 приведены схемы некоторых гидравлических ак-
кумуляторов (гидравлических демпферов), применяемых для
уменьшения частоты собственных колебаний жидкости в расход-
ной магистрали. Схема 13.19,61 применяется на магистрали горюче-
го, схема 13.19,6 — на магистрали окислителя ракеты «Титан-2»,
схема 13.19,в - на магистрали окислите-
ля первой ступени одной из моделей ра-
кеты «Сатурн-5».
Расс.м стр им гидродинамические свой-
ства аккумулятора с жесткими стенками,
приняв количество и температуру газа в
аккумуляторе постоянным, а жидкость
несжимаемой. В объеме ча ^ти трубы ме-
жду сечениями 1—1 и 2—2 жидкость бу-
дем считать также несжимаем эй.
давление увеличится на величину р по
сравнению со стационарным значением, то объем газа уменьшится
и жидкость из трубы пойдет в аккумулятор. Отнесенная к площа-
ди поперечного сечения трубы Ет средняя скорость потока жидко-
сти, идущей в аккумулятор,
vaK=i^^- ра„ (13.61)
где рак— отклонение давления газа в аккумуляторе; как—коэф-
фициент пропорциональности между отклонениями объема и дав-
ления газа в аккумуляторе (коэффициент проводимости аккумуля-
тора); со — частота колебания.
Для схемы рис. 13.19,а
F2
= -Т7РГ- Ар
к гт
где Еп — площадь поршня; рп— давление жидкости на поршень;
kz — коэффициент пропорциональности между отклонением силы,
действующей на поршень, и перемещением поршня.
Для разгона жидкости, поступающей в аккумулятор (рис.
13.19,6) требуется некоторый перепад давлений, так что
Лк = i“>m*vvaK, (13. 62)
где рт— отклонение давления жидкости в трубе перед аккумуля-
тором; Еак — площадь «трубы» аккумулятора; тщ>*— приведенная
320
масса жидкости. Заменив в уравнении (13.61) величину рак ее вы-
ражением из (13.62), получим
^ак = /соа*к/2т, (13.63)
где
как/^т
СС —----------------------s----------------------
аК 1 - со'2/тг*р как/(ЛЛк)
(13. 64)
В формуле (13.64) произведение представляет
собой величину, обратную квадрату частоты собственных колеба-
нии некоторого осциллятора, состоящего из приведенной мас-
сы жидкости и упругого элемента аккумулятора. В-зависимости
от соотношения частоты со вынужденных колебаний жидкости в
трубе н частоты соак собственных колебаний аккумулятора коэф-
фициент а*ак, характеризующий реактивную проводимость акку-
мулятора, может быть положительным или отрицательным. При
(о/о)а1<--И коэффициент а*к—^со, т. е. в месте расположения гидрав-
лического аккумулятора труба оказывается в акустическом смыс-
ле «открытой». Уравнение (13.63) и формулу (13.64) можно при-
менять н к схеме рис. 13.19щ, положив в них как = /7т2/кх.
Если стенки гидравлического аккумулятора считать упругими,
то при повышении давления объем жидкости в аккумуляторе уве-
личится не только за счет сжатия газа, но и за счет увеличения
объема аккумулятора. Отнесенная к площади поперечного сечения
трубы средняя скорость потока жидкости, поступающей в аккуму-
лятор, уак будет состоять из двух частей: одна часть обусловлива-
ется изменением объема газа, другая — изменением объема акку-
мулятора. Тогда вместо уравнения (13.61) получим
+ Ак- (13.65)
\ К К /
где коэффициент, характеризующий упругость стенок аккумуля-
тора:
ky„p--(<?I/aK,W)p^o-
Здесь 1/ак — объем всего аккумулятора, а ро — невозмущенное дав-
ление жидкости в аккумуляторе.
Заменив в (13.65) отклонение давления рак его выражением из
(13.62), получим уравнение (13.63), в котором
(как + куцр)/^-
'а><— 1 _ w2/n*p (1<ак + kyiip)/(FTFaK) •
(13. 66)
Коэффициент /п1ф, входящий в формулы (13.64) и (13.66), за-
висит от конфигурации аккумулятора, массы жидкости в нем и
площади поперечного сечения трубы, и в этих формулах для каж-
дого аккумулятора он должен иметь свое значение.
Отклонение средней скорости жидкости Vi в сечении 1—1 свя-
зано с отклонением средней скорости v2 в сечении 2—2 уравнением
321
неразрывности, которое при наличии гидравлического аккумулято-
ра имеет вид
^1=^2 + ^ак- (13.67)
В первом приближении можно считать, что среднее давление
жидкости в сечении 1—1 равно среднему давлению в сечении 2—2,
В более точном приближении можно учесть перепад давлений,
обусловленный изменением скорости той массы жидкости, которая
поступает в аккумулятор. -
13.12. КАВИТАЦИОННЫЕ ЯВЛЕНИЯ В НАСОСАХ ЖРД
Кавитация есть явление нарушения сплошности капельной жид-
кости, сопровождающееся образованием в ней полостей, заполнен-
ных паром, выделившимся из жидкости газом или их смесью.
Кавитационные образования (каверны) возникают в тех участ-
ках потока, где давление в жидкости становится меньше некото-
рого критического значения ркр. Если давление снижается вслед-
ствие возрастания местных скоростей потока жидкости, то кавита-
ция называется гидродинамической.
Для характеристики степени развития кавитации используется
параметр К, называемый числом кавитации.
Выражение для К получается из уравнения Бернулли, устанав-
ливающего взаимосвязь между давлением и скоростью установив-
шегося потока идеальной несжимаемой жидкости на бесконечности
и в некотором сечении на обтекаемом теле, где давление и ско-
рость равны соответственно р\ и th:
/>- + —2
^оо —Р\_/ гц \2 j
qv^/2 \^oo /
где poo, Voo — давление и скорость в невозмущенном набегающем
потоке.
По мере увеличения скорости течения V\ давление р\ уменьша-
ется и достигает значения ркр. Поэтому
тг _ Роо Ркр
~ е^/2
или
Для жидкости, свободной от примесей, ркр равняется давлению
ее насыщенных паров рп.
Дальнейшее увеличение Voo или уменьшение роо приведет к па-
дению давления до критического значения и в других точках по-
верхности тела, вследствие чего зона кавитации увеличится в своих
размерах. Число К, при котором возникает кавитация, называется
начальным (Кнач).
Число кавитации, устанавливающее взаимосвязь между пара-
метрами потока, определяющими возникновение и развитие кави-
322
тации, является критериальным параметром подобия при модели-
ровании гидравлических процессов, связанных с кавитацией. Фор-
мы гидродинамической кавитации весьма разнообразны. В насосах
ЖРД наблюдаются две формы гидродинамической кавитации:
вихревая и струйная.
При вихревой кавитации каверны возникают в центре вих-
рей, где образуются области минимального давления жидкость
Каверны могут перемещаться вместе с потоком жидкости или ос-
таваться неподвижными, как бы присоединенными к поверхности
обтекаемого тела. Примером вихревой кавитации может служить
Рис. 13.20 Рис. 13.21
кавитация в центральных частях вихрей образующихся при срыв-
ном обтекании цилиндра потоком жидкости (рис. 13.20).
Вихревая кавитация в зонах отрыва потока может являться
предварительной стадией образования следующей формы кавита-
ции — струйной, которую иногда называют пленочной. Для струй-
ной кавитации характерным является существование ярко выра-
женной границы раздела фаз пар — жидкость (рис. 13.21).
Как показывают экспериментальные исследования, в насосах
ЖРД кавитация имеет вихревую природу. Она может возникать в
концевых вихрях, сходящих с лопастей осевых насосов, в областях
отрыва потока на лопастях как осевых, так и центробежных насо-
сов, в потоке через радиальный зазор между лопастями и корпу-
сом осевого насоса.
Кавитация в процессе развития проходит как бы три стадии:
начальную, частичную и развитую (суперкавитацию).
В последовательно расположенных шнековом и центробежных
насосах ЖРД кавитационное течение возникает в большей степени
в межлопаточных каналах шнекового насоса.
Рассмотрим основные структурные составляющие этого течения.
На рис. 13.22 изображено сечение межлопаточного канала шнекового насо-
са. При большой величине давления на входе в шнековый насос обтекание ло-
пастей насоса потоком вязкой несжимаемой жидкости с относительной скоро-
стью w\ при положительных углах атаки а сопровождается отрывом погранич-
ного слоя с острой входной кромки на всасывающей стороне лопасти и образо-
ванием зоны отрыва. Вследствие турбулентного перемешивания с ядром потока
высота зоны отрыва при продвижении по потоку постепенно уменьшается и при
достаточно длинном межлопаточном канале полностью исчезает до выхода из
него.
При снижении давления на входе в насос первые кавитационные образова-
ния возникают в центрах микровихрей, существующих в зоне отрыва погранич-
ного слоя. Это характеризует начальную стадию кавитации.
323
Дальнейшее уменьшение входного давления приводит к слиянию отдель-
ных кавитационных образований в единую каверну /. Возникает струйное кави-
тационное течение. Каверна 1, которую часто называют профильной, начи-
нается от входной кромки лопасти насоса и в некотором сечении замыкается
с образованием вихря. Наряду с каверной существует и зона отрыва потока
(след) 2, которая начинается в месте каверны. Каверна, замыкающаяся в пре-
делах лопасти, определяет частичную стадию развития кавитации.
____► Ядро потока
Рис. 13.22
Рис. 13.23
Для частичной кавитации свойственны две формы существования: квазиста-
ционарная и нестационарная. В случае квазистационарной формы течения разме-
ры каверны при постоянных входных давлении и скорости потока практически не
изменяются.
Нестационарная кавитация появляется при более низких входных давлениях
и характеризуется периодическими колебаниями размеров каверны и следа. В не-
которых случаях этот процесс сопровождается отрывом всего кавитационного
образования и последующим уносом его вниз по
, потоку. Исследования явления нестационарной кави-
тации на изолированных гидропрофилях показали,
г 1-^У что в этом случае за профилем существует течение
/ типа вихревой дорожки Кармана (рис. 13.23), кото-
—► /___________I рая представляет собой систему свободных вихрей-
А ( равной, по противоположной по направлению цирку-
*“ Л г ляции Г, расположенных как бы в шахматном по-
рядке. Верхнюю цепочку вихрей составляют отор-
Рис. 13.24 вавшиеся части кавитационного образования, ядра
которых заполнены паром и газом, а нижнюю — вих-
ри, возникающие около задней кромки профиля
после отрыва каверны в процессе роста нового кавитационного образования.
Кроме этой существует другая, более высокочастотная вихревая дорожка с
циркуляцией + у и —у, возникающая вследствие обтекания профиля с каверной,
аналогичная вихревым дорожкам, образующимся за цилиндрическими телами.
Вихри, составляющие эту цепочку, являются причиной возникновения обратной
струйки, которая постепенно заполняет каверну и в момент касания ее верхней
границы вызывает отрыв всей или значительной части каверны.
Рис. 13.25
Кавитационное течение в межлопаточных каналах шнекового пасоса, харак-
теризующееся распространением каверны на всю длину лопасти и за ее пределы,
называют обычно развитой или с у пер кавитацией.
Одной из наиболее характерных особенностей работы лопастных насосов на
режимах, пониженных по сравнению с расчетным значением расходов, является
возникновение на их входе обратных течений жидкости (обратных токов). Об-
ратные токи условно можно представить как кольцевой вихрь, охватывающий
32 4
все лопасти колеса насоса и делящий поток на активный А в вихревой В (рис.
13.24). С уменьшением расхода область, занятая кольцевым вихрем, увеличива-
ется. В режиме нулевого расхода кольцевой вихрь занимает все входное сече-
ние. Обратные токи выносят в подводящий трубопровод концевые вихри, сходя-
щие с лопастей шнека. Эти вихри являются областями развития кавитации в
зоне обратных токов. Длина области обратных течений и, следовательно, кавита-
ционной зоны в ней может быть весьма значительной и распространяться вверх
по потоку на расстояние, равное нескольким диаметрам трубы (рис. 13.25).
13.13. ВЛИЯНИЕ КАВИТАЦИИ НА НАПОР НАСОСА
Основной результат развития кавитации в проточной части на-
соса заключается в снижении создаваемого им напора. Вследствие
сложного характера течения среды в межлопаточных каналах как
шнекового, так и центробежного насосов, механизм влияния кави-
тации на создаваемый ими напор в настоящее время еще далеко
не полностью исследован.
Рис. 13.26
Снижение напора насоса условно можно объяснить двумя при-
чинами: уменьшением теоретического напора и уменьшением гид-
равлического коэффициента полезного действия насоса.
Влияние кавитации на теоретический напор шнекового насоса
удобно рассмотреть на примере плоской прямой решетки пластин,
получаемой путем развертки цилиндрического сечения шнека пос-
тоянного шага t на плоскость (рис. 13.26).
Если абсолютная скорость потока перед решеткой имеет лишь
осевую составляющую v\m, то теоретический напор такой решетки
Ht определяется следующим образом:
Нt=--uv2J^
где й — переносная скорость, создаваемая вращением вала насоса;
V2u = u—z72/nctgp2 — окружная составляющая абсолютной скоро-
сти на выходе из решетки; р2— угол выхода потока.
При некотором давлении в потоке перед решеткой на тыльной
стороне профиля возникает каверна длиной ZK и высотой йк, а так-
же след длиной /Сл, образующийся при обтекании каверны пото-
ком жидкости. Существование на лопаточном профиле каверны не
оказывает влияния на теоретический напор решетки до тех пор,
пока след заканчивается в пределах длины профиля. Начало паде-
ния Ht совпадает с моментом выхода следа за пределы решетки.
325
Если рассматривать след как застойную зону, то его распростра-
нение за пределы решетки вызывает уменьшение ширины основ-
ного потока /гп и, как следствие, увеличение его относительной ско-
рости w2- Угол выхода потока остается неизменным, т. е. 02=const.
Увеличивается осевая v2m и уменьшается окружная v2u составляю-
щие абсолютной скорости на выходе из решетки, теоретический
напор HL падает.
На рис. 13.27 схематично показаны зависимости теоретического
напора Ht шнекового насоса от давления р\ на входе в него. В слу-
чае решетки малой густоты каверна и след по мере уменьшения
Рис. 13.27
Рис. 13.28
давления р\ постепенно распространяются за пределы профиля.
При некотором предельном значении pi=pKp за пределы профиля
выходит не только след, но и каверна, давление за решеткой пада-
ет до давления рп насыщенных паров жидкости при данной темпе-
ратуре. Дальнейшее понижение давления в системе становится не-
возможным (рис. 13.27,а). При большой густоте решетки уменьше-
ние pi приводит к тому, что в некоторый момент постепенный рост
каверны и следа вдоль профиля переходит в скачкообразное уве-
личение их размеров, сопровождающееся выходом каверны за пре-
делы решетки (рис. 13.27,6) Для решеток средней густоты харак-
тер кавитационной характеристики определяется последователь-
ным развитием этих двух процессов (рис. 13.27,в).
Визуальные наблюдения процесса развития кавитации в про-
точной части центробежного колеса позволили установить картину
ее влияния на создаваемый насосом напор Н в зависимости от ве-
личины кавитационного запаса напора Д/г, определяемого как
(Р1 — Рп) * ,
у 2
Характер зависимости Н от кавитационного запаса Д/г показан
на рис. 13.28. При больших кавитационных запасах Д/г (больших
величинах pi, зона 4) кавитация в проточной части насоса отсут-
ствует. Заостренные входные кромки лопаток обтекаются потоком
со срывом пограничного слоя и образованием на тыловой стороне
застойной зоны. Кавитация в центре вихрей, заполняющих эту зо-
ну, возникает при Д/г = Д/ги (начало зоны В). Область кавитации
располагается в средней части межлопаточного канала на некото-
326
ром удалении от входной кромки. Наличие этой кавитации прак-
тически не сказывается на величине напора Н} поскольку располо-
женные в зоне отрыва вихри вызывают лишь незначительное из-
менение в характере течения основного потока.
Дальнейшее снижение кавитационного запаса — зона С обус-
ловливает возникновение в проточной части центробежного насоса
явления нестационарной кавитации, приводящей к некоторому
уменьшению создаваемого им напора.
По мере снижения величины кавитационного запаса интенсив-
ность нестационарной кавитации падает и при некотором значении
Д/г отрыв каверны прекращается и на лопасти образуется непод-
вижная относительно нее каверна с вихревым замыканием — зо-
на D. Дальнейшее уменьшение Д/г вызывает увеличение длины ка-
верны, что сопровождается сильным изменением кинематики по-
тока на выходе из рабочего колеса и, как следствие, значительным
падением напора насоса.
13.14. ВЛИЯНИЕ КАВИТАЦИИ НА ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ НАСОСА
Существование в проточных каналах насоса кавитационных яв-
лений приводит к изменению создаваемого им напора и обуслов-
ливает различие в колебаниях расхода жидкости на входе в насос
и выходе из него.
Для получения количественных соотношений составим уравне-
ния баланса энергии и массы жидкости в объеме, ограниченном
Рис. 13.29 Рис. 13.30
сечениями и 2п—2Н (рис. 13.29). Первое из этих уравнений
имеет вид
* * 2 * * 2
л-н*=—, (13.68)
Yi 2g У 2g
где Н* — напор насоса: р*н, ^*н, р*н, — давления и скорости
жидкости в сечениях /н — К и 2Н —2Н соответственно.
Принимая у 1 н=у2н=уо = const после линеаризации уравнения
(13.68) получим
Pin Т + Yu^ = Pin + Qo'iW’2н» (13. 69)
327
где t’nio, ^2по — скорости в установившемся режиме; рш, р2н, сИн,
^2н, /7 — отклонения давлений, скоростей, напора насоса.
Отклонение напора насоса представим в виде суммы отклоне-
ний напоров шнекового //ш.п и центробежного //ц.н насосов
Н = (13.70)
Отклонение напора Яш.н зависит от отклонения расхода, т. е. от
отклонения скорости v2m на выходе из насоса и давления рш перед
входом в насос. Если пренебречь изменением скорости вращения
вала насоса и инерционными свойствами заполняющей его среды,
то при постоянном давлении рш зависимость отклонения напора
Рис. 13.31
шнекового насоса от отклонения скорости v2m может быть опреде-
лена с помощью напорной характеристики (рис. 13.30). Будем
иметь
^ш.н ^/^/ш.н/^^27п|^2/ио’ (13.71)
Здесь kuru — тангенс угла наклона касательной к напорной ха-
рактеристике шнекового насоса, которая определяется экспери-
ментальным или расчетным путем; v2m — отклонение осевой сос-
тавляющей абсолютной скорости на выходе из шнека в сечении
/л 2ц,
Экспериментальные исследования показывают, что отклонение
манора шнекового насоса при постоянном расходе от изменения
входного давления рш при частичной кавитации приближенно мо-
жет быть выражено уравнением апериодического звена с запазды-
ванием:
Т> + /71Ц.П = 1<шрАн (/ - О. (13. 72)
где — постоянная времени; т3 — время запаздывания, обуслов-
ленное конечной скоростью протекания процессов вихреобразова-
ния и массопереноса в следе (рис. 13.31); кш =(д//ш/<?р1н) | —
Р1н0
тангенс угла наклона касательной к кавитационной характе-
ристике насоса, определяемой экспериментально (рис. 13.32).
При одновременном изменении давления перед входом в насос
и расхода жидкости на его выходе по гармоническому закону вы-
328
ражение для определения создаваемого шнековым насосом напо-
ра на основании (13.71) и (13.72) будет иметь следующий вид:
1 — /о>"з
Hm = kmvv2m + к'””е (13.73)
1 4- *0)11
Наличие перед центробежным насосом шнекового насоса при-
водит к тому, что центробежный насос вплоть до режима кавита-
ционного срыва работает при практическом отсутствии кавитации
в его проточных каналах. В силу этого выражения для /7ц.п будет
иметь такой вид:
ЛГп..к = 1<ц0°2н = кц0/72н'У2н- (13. 74)
где кцО = (<?//„h/<?G2h)|G2ho ~тангснс Угла наклона касательной к на-
порной характеристике центробежного насоса, которая определя-
ется экспериментальным или расчетным путем; — площадь
проходного сечения напорного трубопровода; ^2п — отклонение ско-
рости жидкости в сечении 2п—2И.
Уравнение баланса массы в объеме, ограниченном этими сече-
ниями, запишем в следующей форме:
dQ*]dt= ^(F\ н — ^2нг>2н). (13. 75)
Здесь Q*— масса среды, заполняющей выделенный объем; Fm —
площадь проходного сечения расходного трубопровода. Считаем,
что в сечениях /п—Л-i и 2Н—скорости имеют лишь осевые сос-
тавляющие.
Из уравнения (13.75) получим уравнение для отклонений
dQ/ldt = QQ(/?^iH~F2iiu2H\ (13.76)
Будем приближенно считать, что отклонение массы среды Q
пропорционально отклонению объема жидкости Уж между сечени-
ями 1 п /ц и 2\\ 2Н, т. е. ф = ()оУж. Так как Уж== Упг, где Упг
отклонение объема парогаза, которое принимаем пропорциональ-
ным отклонению давления, то отклонение Q можно представить в
следующей форме:
Оо^Эф/Йн’’ — (13.77)
где 60ф — эффективная податливость среды в объеме проточной
части насоса. С увеличением давления pm объем парогаза Упг
уменьшается, поэтому бЭф<0.
Отсутствие кавитации в объеме проточной части центробежно-
го насоса приводит к тому, что
(13.78)
Отклонение скорости на выходе из насоса ^2н связано с измене-
нием давления р2н через импеданс сечения Z2h(o)), зависящий ог
характеристик напорных трубопроводов, ЖГГ, камеры сгорания,
329
причем, p2n = Z2n (со) и2п- Из системы уравнений (13.69) — (13.74) и
(13.76) — (13.78) найдем выражения для импеданса ZiH[piH, *>1н] на
входе в насос и передаточной функции №[рн2, рш) насоса. Будем
иметь
^1Н [Р1н’
р2н
F 1н (Z'2h + Qo^2ho) — Qov1hO^2h
цО
III
'l
'2н Qo^2hO
r3.(13. 79)
: k G
1 + jwT;
1 —
W[P2„, A„b=
/(°9о^1нО^эф Yo^iupe 3
F 1h 1 4~ ^Ti
Ливорно ~ (kuG+ — 6ouIhO^S;
(13. 80)
Р1н^2н
Знание входного импеданса насоса ZiH[piH, ^in] необходимо для
определения динамических характеристик топливных магистралей.
Наличие в проточной части шнекового насоса кавитационных об-
разований приводит к тому, что даже в случае, когда импеданс на-
грузки Z2H является действительной величиной, входной импеданс
насоса Zm становится величиной комплексной.
Насос в топливной магистрали можно рассматривать как источ-
ник энергии — усилительное апериодическое звено с запаздывани-
ем (13.72). Будучи подсоединен к расходной магистрали он обра-
зует с последней замкнутую систему, которая в некотором диапа-
зоне частот может быть неустойчивой. Этот диапазон частот зави-
сит от соотношения периода собственных колебаний потока жид-
кости в магистрали и времени запаздывания т3.
Поскольку ТНА в большинстве конструкций образует единый
агрегат с камерой сгорания и другими устройствами ЖРД, то ди-
намические свойства ЖРД обычно выражают передаточными
функциями вида 1Г[рк, Р1н], где рк, рш— отклонения давлений в ка-
мере сгорания и перед насосом. В таком случае передаточная
функция Мр2н, Рш] входит в состав передаточной функции ^Трк,
Р1П]. Однако, если передаточная функция IF[pK, Рш] получена без
учета кавитации в насосе, то выражения (13.79) и (13.80) можно
использовать как бы для введения поправок в функцию U7{pK, рш].
Эти поправки несколько изменяют динамический коэффициент
усиления ЖРД, а главное — изменяют сдвиг по фазе между от-
клонениями давлений рк и рш- Эти поправки изменяют также вы-
ражение импеданса Zujp iH, thu] на выходе из трубы, что окажет
существенное влияние на снижение частоты собственных колеба-
ний потока жидкости в трубе.
330
13.15. ВЛИЯНИЕ КАВИТАЦИИ НА ДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ТОПЛИВНОЙ МАГИСТРАЛИ
Основные особенности, вносимые в динамику топливной ма-
гистрали кавитацией в шнековом насосе, состоят в уменьшении
собственных частот колебаний жидкости в топливной магистрали,
изменении фазовых соотношений между колебаниями давления и
скорости жидкости в различных ее сечениях, в возможности воз-
никновения неустойчивости в системе «топливная магистраль:—
шнекоцентробежный насос».
Количественная оценка этих особенностей связана с -определе-
нием эффективной податливости среды в объеме проточной части
шнекового насоса 6Э и времени запаздывания тя, входящих в выра-
жения (13.79), (13.80).
Влияние кавитации на динамические характеристики топлив-
ной магистрали удобно проиллюстрировать на примере тех режи-
мов работы насоса, при которых кавитационный след находится
в пределах его проточных каналов. Тогда кШр = 0 и формула для
входной проводимости насоса
согласно (13.79) будет иметь следующие выражения для гр2 и аг*:
~ F 1н (^2н Т Qo^2hq) Qo^IhO^-’h ^1h^2hY0 (KiG 1h)
7 2= И ’
Q'J^IhO-' 2h
(13. 82)
О* 1^2h + Qo^2hO Yg^Mi T Kig)]
^1h (^2h"tQov2ho) 2ov1hC^2h F 1h^2hYo ~h кш ^//Дн)
№ = ^0^.
Анализ влияния граничного условия с комплексной проводи-
мостью вида Zih на собственные частоты колебаний жидкости
в топливной магистрали проведен в примере 4 разд. 13.4.
На рис. 13.33 представлена, построенная с использованием
уравнения (13.28), амплитудно-фазовая частотная характеристика
некоторой топливной магистрали, граничное условие на входе в
которую эквивалентно акустически открытому концу, а на выход?
может быть записано в виде (13.27)
V ( 1 ) = Z]HP ( 1 ),
где Zih—входная проводимость кавитирующего шнекоцентро-
бежного насоса, определяемая из (13.81), (13.82).
331
Начало кривой при со = 0 находится в точке с координатами (1;
0). В рассматриваемом примере при увеличении частоты от 0 до
7 Гц вектор ON вращается по
часовой стрелке, при дальней-
шем увеличении о (до 24 Гц) ме-
няем направление своего враще-
ния на обратное, а затем с увели-
чением со вновь начинает вра-
щаться по часовой стрелке.
На рисунке пунктиром для
сравнения показана амплитудно-
фазовая частотная характеристи-
ка этой же системы в случае бес-
кавитацнонной работы шнеко-
центробежного насоса. Из срав-
нения амплитудно-фазовых ха-
рактеристик видно, какое боль-
шое влияние на динамику топ-
ливной магистрали оказывает ка-
витация в шнекоцентробежном
насосе.
13.16. ФОРМИРОВАНИЕ ДИНАМИЧЕСКИХ БЛОК-СХЕМ
ТОПЛИВНЫХ МАГИСТРАЛЕЙ
Для изображения динамической блок-схемы уравнения четы-
рехполюсника (13.25) представим в виде
р2 = ^2th k + Pi —-— ; = v2 ch k — sh A*, (13. 83)
ch k
где pi, v\ — отклонения давления и скорости на входе в трубу;
р2, v2 — отклонения давления и скорости на выходе из трубы.
Расходная магистраль обычно имеет сложную структуру, по-
этому сопрягать ее элементы в общую блок-схему удобно по раз-
мерным отклонениям параметров потока
2 ~ ~
р = а^р\ v = aov
и размерной частоте колебаний
<o=s(a0/l).
Для размерных отклонений параметров потока уравнения
(13.83) запишем через передаточные функции
№ = Pi}Pi + W[p2, ^2]^:
(13. 84)
/72] ^2+ [^1, ^2]^
где W[p2, А] = - J №[ръ v2] = -Z(zoqotg Н/а0);
ch (w//a0)
VP [»!, p2] = i sin (u>Z/a0); VP]vlt v2] = chw — .
aoQo a0
332
Динамическая блок-схема четырехполюсника, выражающего
зависимость между параметрами потока на входе в трубу и на вы-
ходе из нее, на основании уравнений (13.84) имеет вид, показан-
ный на рис. 13.34.
Гидродинамические свойства сильфона, встроенного в ма-
гистраль, при условии, что давление жидкости в любой точке объ-
ема сильфона одинаково, выражаются уравнением (13.52). При
размерных отклонениях параметров будем иметь
Р2=Ръ = Фс] Фс! (13.85)
где ^[^i, /?2] —W(%>], Фс)_tw(l Хс);
Vi — отклонение скорости потока на входе в сильфон; pi, ръ— от-
клонение давления жидкости на входе в сильфон и выходе из него;
Рис. 13.34 Рис. 13.35
Фс — амплитуда колебаний выходного сечения сильфона. Динами-
ческая блок-схема сильфона показана на рис. 13.35.
Соотношение между параметрами потока, проходящего через
сосредоточенное гидравлическое сопротивление типа решетки (ем.
рис. 13.18,а), определяется по уравнению (13.57), которое предста-
вим в таком виде:
P2 = P\ + W[P2, + фр]фр(^1 = ^2); (13.86)
где W[p2, 7?!]=—фМ; W \р2, Фр] = /юФМ;
Фр — амплитуда колебаний решетки по отношению к потоку. Ди-
намическая блок-схема, соответствующая уравнению (13.86), при-
ведена на рис. 13.36,(2.
Динамическую блок-схему расходной шайбы можно построить
но уравнениям
Л> = Pi + W\p2, uJt,; Vi = v2, (13.87)
где — г<»аш;
Pi, p2. Vi, v2— отклонение среднего давления и средней скорости
до шайбы и после шайбы (см. рис. 13.35). Такова же блок-схема
и для определения перепада давлении при выходе жидкости из
бака, но передаточная функция [см. уравнение (13.60)] будет дру-
гой, а именно:
W[p<2, ^]= — (фаМ + ^ао).
Здесь р2 — отклонение давления жидкости после воронкогасителя.
333
На основании уравнений (13.65) и (13.67) соотношение между
отклонениями давления рь р2 и отклонениями скорости потока tn,
v2 в трубе перед гидравлическим аккумулятором и после него мо-
жно представить в виде
А = ®1 = ^2+^ак> (13.88)
ГДе ^ак=^[^ак> А]/>2 = *1’аакА-
Динамическая
Рис. 13.36
блок-схема для гидравлического аккумулятора
показана на рис. 13.37.
Из блок-схем отдель-
ных элементов, показан-
ных на рис. 13.34, 13.37,
нетрудно составить дина-
мическую блок-схему всей
расходной магистрали.
Схему удобно составлять
начиная с элемента ма-
гистрали, который явля-
ется входным. Тогда вы-
ходные параметры этого
элемента будут входными
для последующего эле-
мента и так далее вплоть до нагрузочного агрегата. Для магистра-
ли, состоящей из трубы 1, сильфона 2 и нагрузочного агрегата 3
(рис. 13.38), динамическая блок-схема представлена па рис. 13.39.
Нагрузочным агрегатом для расходной магистрали является
ЖРД. Для двигателя соотношение между отклонениями давления-
ми и скорости потока перед насосом должна быть вполне опреде-
ленным и может быть выражено через комплексный импеданс или
Рис. 13.37
Рис. 13.38
комплексную проводимость двигателя. В общем случае это cooi но-
шение можно представить в виде
/’ihJAh- (13.89)
где рш, vin — отклонение давления и скорости потока на входе в
насос; ИДущ, рц.т]— комплексная проводимость двигателя. Откло-
нение давления рщ определяется динамическими свойствами рас-
ходной магистрали. Чтобы определить это отклонение, нужно знать
комплексный импеданс двигателя. После того, как определено от-
334
клонение давления перед насосом, по уравнению (13.89) можно
определить отклонение скорости потока ^iH на входе в насос, а по
отклонению скорости поступления топлива в двигатель найти от-
клонение давления в камере сгорания.
Рассмотренные примеры дают представление о методике сос-
тавления динамических блок-схем топливных магистралей — ма-
гистраль разбивают на отдельные типичные элементы, динамичес-
кие свойства которых выражаются уравнениями четырехполюсни-
ка, и затем соединяют блок-схемы последовательно расположен-
ных четырехполюсников.
13 17 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ ЖИДКОСТИ
В ТОПЛИВНЫХ МАГИСТРАЛЯХ
На активном участке траектории топливо в расходных магист-
ралях подвергается воздействию различных возмущений. Неко-
торые возмущения носят периодический характер и вызывают вы-
нужденные колебания жидкости. К числу наиболее важных пери-
одических возмущений следует отнести колебания давления жид-
кости на дне бака, колебания узлов крепления топливных магист-
ралей, обусловленные продольными колебаниями корпуса ракеты,
колебания давления в камере сгорания. Колебания прямой трубы
по потоку жидкости оказывают воздействие на поток через трение
о стенки. Однако ввиду малости эффект можно не учитывать. Вы-
нужденные колебания жидкости, например, в простейшей расход-
ной магистрали, схема которой приведена на рис. 13.38, могут воз-
никать под воздействием колебаний давления жидкости на дне ба-
ка рб, колебаний нагрузочного агрегата вдоль потока Фи.
В линейной системе результирующий эффект от вынужденных
колебаний определяется как геометрическая сумма вынужденных
колебаний, вызванных разными внешними воздействиями. Если
вынужденные колебания давления перед насосом от какого-либо
внешнего воздействия, например колебания давления рб, предста-
вить на комплексной плоскости в виде вектора
Ро\Ря,
335
то суммарное колебание давления перед насосом при продольных
колебаниях ракеты будет определяться суммой векторов
Ан= [Ан. А] а+М'ДАн. Фн]Ф„-
Годографы векторов (амплитудно-фазовые характеристики)
простых трубопроводов с сопротивлениями или сосредоточенной
упругостью на концах приведены на рис. 13.11 —13.13. Для слож-
ных расходных магистралей амплитудно-фазовые характеристики
целесообразно вычислять на ЭВМ, пользуясь для этой цели дина-
мическими блок-схемами. Вид амплитудно-фазовой характеристи-
ки зависит от устройства расходной магистрали и комплексной
проводимости двигателя, которая выражается передаточной функ-
цией Win, pin]-
Рис. 13.40
Рис. 13.41
На рис. 13.40 приведены для примера амплитудно-фазовые час-
тотные характеристики расходной магистрали аЬ кото-
рые выражают зависящие от частоты колебаний отношения откло-
нения давления перед насосом к отклонению давления на дне ба-
ка. Различие в характеристиках в основном определяется разными
свойствами комплексных проводимостей двигателей МАн, /энФ
присоединенных к расходным магистралям. На частотах cd = cdi и
со = (о3 проводимость двигателя небольшая, поэтому отклонение
давления pm большое; на частоте со = со2 проводимость двигателя
большая и потому отклонение давления pin малое (см. рис.
13.39,а). Амплитудно-фазовая характеристика, показанная на
рис. 13.39,6, этих особенностей не имеет.
На рис. 13.41 приведены амплитудно-фазовые характеристики
Фп] той же магистрали. Возмущения вызываются колебания-
ми (перемещениями) насоса. Резонансные колебания возникают
на тех же частотах, когда возмущением служит отклонение давле-
ния ра. Характеристики начинаются с отрицательной вещественной
полуоси. Перемещение насоса вдоль по потоку (Фп>0) при со = 0
уменьшает давление перед насосом (pin<0).
336
13.18. ЭКСПЕРИМЕНТАЛЬНОЕ ИЗУЧЕНИЕ
ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Для экспериментального изучения динамических характерис-
тик топливной магистрали пользуются натурной системой питания
двигателя или ее моделью. Для примера на рис. 13.42 показана
установленная на стенде модель системы питания двигателя ра-
кеты «Титан-2». Для возбуждения вынужденных колебаний на
каждой магистрали пе-
ред насосом установ-
лен пульсатор. Ампли-
туда возбуждения ре-
гулируется изменением
радиуса его кривоши-
па. Напорные магист-
рали спроектированы
так, чтобы они могли
имитировать сопротив-
ление и инерцию пото-
ка жидкости, идущей
от насосов к камере
сгорания. Напорная
магистраль горючего
имитирует, кроме того,
охлаждающий тракт
камеры сгорания. Не-
обходимо подчеркнуть,
что для получения дос-
товерных результатов
надо как можно пол-
h. ее им и тi i р о в а т ь с в о й с т
И зм е и е и и е м давлен)
разные кавитационные запасы насосов и определять резонансные
частоты и формы колебаний жидкости в магистралях, соответству-
ющие этим кавитационным запасам. Кавитацию жидкости на вхо-
де в насос можно через прозрачную вставку зафиксировать на ки-
ноленту. На этой экспериментальной установке можно получить
значения передаточных функций для разных частот колебаний и
сопоставить эти данные с результатами расчетов.
Пульсатор
за
Магистраль
окислителя
Прозрачная
вставка
'апан отсечки
окислителя
двигателя
наддува в
Рис. 13.42
-'бак
горючего
Клапан отсечки
горючего
как нагрузочного агрегата,
баках можно устанавливать
Глава XIV
ДИНАМИЧЕСКИЕ СВОЙСТВА ЖРД
14.1. ЖРД КАК СОСТАВНАЯ ЧАСТЬ ЗАМКНУТОЙ
КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ
Жидкостный ракетный двигатель является самым сложным
звеном замкнутой колебательной системы, образуемой ракетой с
ЖРД. Динамические процессы в ЖРД уже давно являются пред-
метом теоретических и экспериментальных исследований.
337
Обычно принято различать низкочастотную (от нуля цо
50 Гц) и высокочастотную (от 200 .до нескольких кило-
герц) динамику ЖРД. Подобное деление является условным,
но практически целесообразным, так как в каждом из этих диапа-
зонов частот при исследовании возможны свои упрощения и мето-
ды решения. Влияние низкочастотной и высокочастотной динамики
ЖРД на ракету и двигатель также неодинаково.
При низкочастотных колебаниях длина волны значительно пре-
восходит размеры камеры сгорания, поэтому можно считать, что
изменение давления в разных частях камеры происходит практи-
чески одновременно. Низкочастотные колебания появляются в ре-
зультате взаимодействия колебания давления в камере сгорания
с подачей топлива в камеру или с процессом горения.
При высокочастотных колебаниях длина волны соизмерима с
размерами камеры сгорания, поэтому изменение давления в раз-
ных частях камеры происходит в соответствии с распространением
волны давления по объему камеры. Высокочастотные колебания
поэтому часто называют акустическими. Они обусловлены
подачей топлива в камеру сгорания и процессом сгорания. В высо-
кочастотных колебаниях участвуют стенки камеры сгорания и го-
ловки двигателя.
В продольных колебаниях ракеты важную роль играет низко-
частотная динамика ЖРД, высокочастотная динамика практичес-
ки с ними не взаимосвязана.
Последние достижения в области низкочастотной динамики
ЖРД отражены в работе [4]. Здесь же, в основном, изложим физи-
ческую сущность явлений и приведем результаты, необходимые при
исследовании устойчивости замкнутой системы.
В колебаниях, которые возникают в ракете, роль двигателя
может быть различной. Если рабочий процесс двигателя неустой-
чив и колебания давления в камере сгорания возникают независи-
мо от продольных колебаний корпуса ракеты, то двигатель слу-
жит источником вынужденных колебаний корпуса ракеты и ее от-
дельных агрегатов. Если рабочий процесс двигателя устойчив, то
двигатель является источником энергии (усилителем) в замкнутой
системе, состоящей из корпуса ракеты, топливных магистралей и
двигателя. Вынужденные колебания подачи топлива в камеру сго-
рания вызывают колебания давления в камере и колебания тяги
двигателя. Динамические свойства двигателя как источника энер-
гии можно выразить комплескными передаточными числами
Рк [РкУ Ан.о] Ан.оТ [Z7^ /Йн.г] ЛЙн.г»
где рк— отклонение давления газов в камере сгорания двигателя
от стационарного значения; piH.o, рш.г — отклонение давления окис-
лителя и горючего перед входом в насосы.
Колебания давления в камере сгорания вызывают, кроме того,
колебания донного давления рдн (давления на кормовую часть
338
корпуса ракеты), которое связано с отклонением давления в каме-
ре сгорания через комплексное передаточное число
Для топливных магистралей двигатель является нагрузочным
агрегатом и его динамические характеристики оказывают влияние
на динамику топливных магистралей. Динамические свойства дви-
гателя как нагрузочного агрегата можно выразить также через
комплексные передаточные числа, которые имеют значения комп-
лексных проводимостей. Для двухкомпонентного двигателя будем
иметь
^Н.О [Чн.О> /^1н.о] [^Н.О’ ЛЙн.г] /Йн.Г’
.^Н.г [г'н.Г’ /Лн.г] ЛЙн.Г + [^н.г» /Йн.о] Айн.О’
где Уп.о, ^п.г — отклонение скорости потока окислителя и горючего
на входе в насосы. Комплексные передаточные числа 1ИАт.о, Pin.r]
и Pin.o] характеризуют взаимосвязь динамических процес-
сов в топливных магистралях, которая осуществляется через ка-
меру сгорания и ТНА.
Двигательная установка простейшего типа, состоящая только
из основных агрегатов, может устойчиво работать с допустимыми
отклонениями параметров лишь в узком диапазоне режимов и
внешних возмущений. Поэтому для поддержания режима работы
в дополнение к основным агрегатам и постоянным элементам на-
стройки в ЖРД вводятся автоматические регуляторы. Задачей ре-
гуляторов является поддержание заданного режима работы двига-
теля. Если, например, необходимо обеспечить постоянное давление
в камере сгорания, то при отклонении действительного давления
от заданного регулятор должен автоматически воздействовать па
подачу топлива и изменить количество или соотношение топлив-
ных компонентов, поступающих в газогенератор и камеру сгора-
ния. Динамические свойства регулятора можно выразить комп-
лексным передаточным числом
В—И/[8, /7К]Л..
Здесь б — малое перемещение регулирующего органа регулятора.
Двигатель может также иметь регулятор для изменения режи-
ма работы в соответствии с программой полета. Такой регулятор
обычно называют регулятором управления двигателем (РУД);
входная величина в регулятор может зависеть от параметров по-
лета ракеты, времени полета и пр.
Примем рабочий процесс двигателя устойчивым и проанализи^
руем его динамические характеристики при малых отклонениях
параметров рабочего процесса от некоторого установившегося
(стационарного) режима.
339
14.2. ОСНОВНЫЕ ЗВЕНЬЯ ДИНАМИЧЕСКОЙ СХЕМЫ ЖРД
По способу подачи горючего в камеру сгорания ЖРД подраз-
деляются на две основные группы — двигатели с турбонасосной
системой подачи и двигатели с вытеснительной системой подачи.
При вытеснительной системе подачи топливные компоненты вы-
тесняются из баков в камеру сгорания под давлением газа, превы-
шающим давление в камере сгорания. При турбонасосной системе
компоненты топлива подаются из баков к насосам под небольшим
Рис. 14.2
давлением, обеспечивающим работу насосов без кавитации жидко-
сти. Повышение давления и дальнейшая подача топлива в камеру
сгорания обеспечиваются ТИА, в который входят насосы и газовая
турбина, используемая для привода на госов.
На рис. 14.1 и 14.2 показаны принципиальные схемы ЖРД с ТНА, работаю-
щим на продуктах сгорания основных компонентов. Схемы различаются только
количеством и назначением регуляторов.
На рис. 14.1: 1—бак окислителя; 2—двухкомпонентпый газогенератор; 3—
рег\лирующнй орган регулятора; 4—регулятор рн; 5—бак горючего; 6—насос го-
рючего; 7—главные клапаны; 8—турбина ТНА; 9—насос окислителя; 10—камера
сгорания, Go.r.r, Gr.г.г-отклонения подачи окислителя и горючего в газогенератор.
В схеме рис. 14.2: 1—бак горючего; 2—регулятор; 3—регулирующий орган
регулятора; 4—датчик регулятора подачи горючего в газогенератор (ГГ); 5—
двухкомпонентный ГГ; 6—датчик регулятора подачи окислителя в ГГ; 7—регу-
лятор соотношения окислителя и горючего для ГГ; 8—регулирующий орган это-
го регулятора; 9—бак окислителя; 10—насос окислителя; 11—турбина ТНА;
12—главные клапаны; 13, 16—датчик подачи окислителя и горючего в камеру
сгорания; 14—камера сгорания; 15—регулятор соотношения компонентов топли-
ва для камеры сгорания; 17—регулирующий орган этого регулятора; 18—насос
горючего. Таким образом в этой схеме кроме регулятора давления в камере
сгорания 2 имеется еще два регулятора: регулятор 15 с регулирующим органом
17, датчиками 13 и 16 и регулятор 7 с регулирующим органом 8 и датчиками
4 и 6.
340
В системах питания с ТЫЛ процесс горения в газогенераторах, работающих
па основных компонентах топлива, осуществляется при значительном избытке
или недостатке окислителя, вследствие чего большая часть химической энергии
газа, расходуемого для привода насосов ТНА, не реализуется. Для последующе-
го использования этой энергии можно дожигать газ в камере дожигания или
непосредственно в камере сгорания двигателя. ЖРД, в которых дожигание это-
го газа производится в камере сгорания, называются двигателями с замкну-
той системой питания или двигатели с до-
жиганием генераторного газа.
В камеру сгорания ЖРД с замкнутой систе-
мой питания подаются жидкий окислитель и го-
рючее, а также газ, поступающий из турбины с
избытком пли недостатком окислителя. Возмож-
на схема г,рк которой все горючее (или весь
окщ,шгееь) проходит через турбину. В этом слу-
чае >> камеру сгорания поступает жидкий окис-
литель (пли жидкое горючее) и газ с недостат-
ком (ила щбытком) окислителя. Наконец, воз-
мзжпа также схема, когда весь объем как окис-
лителя, тек и горючего до поступления в камеру
сгорания проходит через соответствующие газо-
генераторы и турбины. В этом случае в камеру
сгорания вводится и дожигаются в ней газы двух
составов — один с избытком горючего, другой с
избытком окислителя. Смешение и дожигание в
камере сгорания газа с жидким топливом назы-
вается гетерогенным процессом, а смеше-
ние и дожигание газа с газом — гомогенным.
Как указывалось выше, процесс горения в
газогенераторе протекает при значительном из-
бытке одного из компонентов топлива и сводит
ся практически к высокотемпературной газифика- рис 14.3
ции этого компонента. Второй компонент топлива
(присадочный) вводится лишь в количестве, не-
обходимом для обеспечения заданной температуры газификации.
На рис. 14.3 приведена принципиальная схема ЖРД с замкнутой системой
питания с двухкомпонентным ЖГГ, работающим на основных компонентах. Как
видно, в газогенераторе газифицируется не все горючее; смешение и дожигание в
камере сгорания гетерогенное. В схему включены три регулятора. Здесь поз. 1—9
имеют те же значения, что и на рис. 14.2; 10, 19—датчики отклонения суммар-
ной подачи окислителя Go^ и горючего Gr^ ; 11, 18—насосы окислителя и го-
рючего; 12—регулирующий орган регулятора соотношения компонентов топлива
13; 14 — главный клапан магистрали окислителя; 15 — камера сгорания; 16 —
патрубок подвода генераторного газа в камеру сгорания; 17 — турбонасосный
агрегат (ТНА).
Принципиальные схемы регулирования н управления двигателем в значитель-
ной мерс зависят от схемы питания двигателя и определяются назначением ра-
кеты.
Обычно двигательная установка имеет несколько систем автоматического
регулирования. В качестве регулируемых величин для ЖРД принимают какие-
либо параметры, характеризующие тягу двигателя. Обычно используются систе-
мы автоматического регулирования давления в камере сгорания и регулирова-
ния соотношения компонентов топлива, причем последняя система очень часто
предусматривается для жидкостного газогенератора. Это объясняется тем, что
в области поминального режима камеры сгорания основные термодинамические
характеристики продуктов сгорания (температура 7\, газовая постоянная /?к)
изменяются очень мало. В ЖГГ, работающем при избытке одного из компонен-
тов, наблюдается обратная картина. Поэтому требования, предъявляемые к точ-
ности величины коэффициента соотношения компонентов в ЖГГ более жестки,
так как незначительное изменение этого коэффициента может вызвать резкое
изменение режима работы ТНА и даже прогар стенок ЖГГ.
341
Важным параметром надежной работы ЖРД является также величина дав-
ления на входе в насосы, поэтому на двигательных установках предусматрива-
ется система регулирования этого давления.
Дальность полета ракеты в основном зависит от отношения веса ракеты в
конце активного участка к стартовому весу. Поэтому естественно стремление
конструктора уменьшить в баках количество топлива, которое остается вслед-
ствие работы двигателя па нерасчетном соотношении компонентов. Для умень-
шения остатков топлива предусматривается система регулирования уровней,
компонентов в баках.
Рис. 14.4
Одна из возможных принципиальных схем автоматического регулирования
давления в камере сгорания приведена па рис. 14.4. Показаны основные взаи-
мосвязи между звеньями ЖРД и ЖГГ; регулирование давления в камере сго-
рания осуществляется путем изменения режима работы турбины через измене-
ние коэффициента соотношения компонентов в ЖГГ. На схеме: КС — камера
сгорания; МОК, МГК — магистраль окислителя и магистраль горючего камеры
сгорания; МОГ, МГГ — магистраль окислителя и магистраль горючего газогене-
ратора; /?к— отклонение давления в камере сгорания; Go.к, Сг.к— отклонения
подачи окислителя и горючего в камеру сгорания; Go.rr, Gr.rr — отклонения по-
дачи окислителя и горючего в ЖГГ; Р — регулятор рк; р? — отклонение давле-
ния на выходе из регулятора; ргг — отклонение давления газа на выходе из га-
зогенератора (на входе в турбину), р2н.о, Ргн.г — отклонения давления на выхо*-
дс из насоса окислителя н из насоса горючего.
Рис. 14.5
Схема регулирования коэффициента соотношения топливных компонентов в
ЖГТ х приведена на рис. 14.5. Регулятор (Рх) установлен на магистрали горю-
чего и предназначен для сведения к минимуму отклонения коэффициента х.
Здесь —отклонение давления на выходе из регулятора соотношения ком-
понентов.
На рис. 14.6 показана одна из упрощенных схем регулирования уровня
топливных компонентов в баках. Регулирование пропорционального опорожне-
ния баков осуществляется следующим образом: регулятор (Рн) определяет от-
342
клонелия уровней окислителя и горючего Но и Нг в баках и в зависимости от
этого отклонения изменяет расход одного из компонентов. На схеме рн — от-
клонение давления на выходе из регулятора уровня топливных компонентов в
баках.
Рис. 14.6
На рис. 14.7 приведена одна из возможных схем регулирования двигателя.
В схему включены регулятор соотношения топливных компонентов в ЖГГ (Рх),
регулятор уровня Н толивпых компонентов в баках (Рн), система управления
(СУ) и регулятор поддержания кажущейся скорости ракеты (РКС). Датчик,
измеряющий кажущуюся скорость ракеты ук, посылает сигнал о величине ско-
рости в счетно-решающее устройство, где вычисляется отклонение скорости от
программной. Сигнал рассогласования направляется в РКС, который изменяет
давление в камере сгорания (а значит и тягу двигателя). На рис. 14.7 показана
также система наддува баков при помощи жидкостных аккумуляторов давле-
ния (ЖАД); здесь (МОГ)7 и (МГГ)'— магистрали окислителя и горючего, иду-
щие к газогенераторам ЖАД.
(МОГ)"
-----------------------------! су
----*—----------------- Рк
Р'4 М0К Г"1
Рис. 14.7
Для ЖРД характерно большое количество динамических звень-
ев, взаимосвязь которых определяется принципиальной схемой
двигателя. Основными являются следующие:
камера сгорания двигателя, газогенератор, топливные насосы,
турбина, напорные магистрали для камеры сгорания, магистрали
для газогенератора, регуляторы.
343
14.3. УРАВНЕНИЕ КАМЕРЫ СГОРАНИЯ
В рабочий процесс камеры сгорания двигателя входят распы-
ление, смешение и испарение топлива, горение и истечение про-
дуктов сгорания из сопла.
В камере двигателя всегда имеет место некоторая неравномер-
ность процесса горения. Возможны также колебания температуры,
скорости, состава газов и других параметров. В камере сгорания
всегда имеется сильная турбулентность, являющаяся одной из
причин шума, производимого работающим двигателем. Процесс
горения с малой амплитудой колебаний называют практически
Время
пребращеният0
Однокомпонент-
ное или хорошо Приближенная
перемешанное f крибая
пере-
мешанное дбухкомп.з-
нентное то пл ибо
равномерным, с большой ам^
п л иту д о й — н ер а в 11 о м е р н ы м,
хотя этим терминам нельзя
дать точного определения.
Низкочастотными колеба-
ниями будем называть такие,
период которых несоизмеримо»
больше времени распростране-
ния волны давления по камере..
Для анализа низкочастотных
t
рис. 14.8 колебаний рабочий процесс в
камере сгорания идеализируют»
Идеализация заключается в замене процесса постепенного превра-
щения топлива в продукты сгорания (распыление, нагрев, испаре-
ние, диффузия, турбулентное смешение и многообразные химиче-
ские реакции) скачкообразным процессом, при котором частица
топлива не выделяет заметного количества энергии и не увеличи-
вается в объеме до некоторого момента времени, после которого оно
мгновенно превращается в конечные продукты реакции (рис. 14.8)»
Время То, одинаковое в данном случае для всех частиц топлива,
называется временем превращения (временем запаздыва-
ния горения). Так как время распространения волны давления по
камере несоизмеримо меньше периода низкочастотных колебаний,
то волновые процессы в камере можно во внимание не принимать
и считать, что давление и температура во всех точках камеры изме-
няются во времени по одинаковому закону.
Процесс накопления газообразных продуктов в камере сгора-
ния можно выразить дифференциальным уравнением
1/к^У|;/г//) = Ок(/-т0)-Д, (14.1)
где VK — объем камеры; ук—средний удельный вес газообразных
продуктов в камере; GK — отклонение секундной подачи топлива в
камеру; Ge— отклонение секундного расхода газа из камеры.
Продукты сгорания в камере будем считать идеальным газом,
для которого уравнение состояния можно представить в виде
/7-У.Ж, (И.2)
где р— давление; R — удельная газовая постоянная; Т — темпера-
тура.
344
При постоянном соотношении компонентов топлива в камере
температура и удельная газовая постоянная газообразных продук"
тов сгорания будут постоянными, поэтому после линеаризации
уравнения (14.2) при 7?Т=./?Ь*7,К* = const получим
__ 1 dpK
(it ~ dt
(14. 3)
Здесь величины 7?к*> ЛЛ определены для постоянного соотношения
компонентов (х= const), соответствующего установившемуся ре-
жиму работы двигателя.
Отклонение секундного расхода газа из камеры при постоян-
ных Гн* и 7?к* можно считать пропорциональным отклонению дав-
ления в камере рк, т. е.
(14. 4)
В выражении (14.4) учтено, что Ge* = GK*.
Отклонение секундной подачи топлива в камеру складывается
из отклонений подачи окислителя G0.K и подачи горючего Gr.K:
Ок-Оо.к + Ог.к. (14.5)
Заменяя в уравнении (14.1) величины ук, Ge, GK их выражени-
ями из (14.3) —(14.5), получим
Ч- -^- + Рк = ко.к°о.Л( — t0) + A;r.KGr.K(/ —т0), (14.6)
at
.и к
где тк ’ ^о.к ^г.к ’
якЛА gk
Gj< = GO.K —j- Gr.K’
Здесь тк есть постоянная времени (время релаксации) камеры сго-
рания; k0.K, &г.к — коэффициенты усиления камеры сгорания по
расходу окислителя и горючего.
Зная отклонения подачи окислителя и горючего в камеру, мож-
но из уравнения (14.6) определить отклонение давления в камере.
Уравнение (14.6) получено в предположении, что величины и
7К* постоянны. При этом предположении камера сгорания будет
обладать такими же динамическими свойствами, как и в случае
однокомпоиентного топлива. Изменение давления в такой камере
можно выразить через суммарное отклонение подачи топлива в ка-
меру.
Динамические характеристики камеры сгорания выразим через
комплексные передаточные числа. Так как отклонения подачи ком-
понентов топлива в камеру предполагаются происходящими по гар-
12 359
345
ионическому закону с частотой со, то с учетом времени превраще-
ния то будем иметь
<Л>.К (t — *0) = Оо.к Ц) е-‘“х» = О0.ке<"</_то)5
о^-^=от.ке^-^.
Приняв, кроме того, что
Л^) = ле‘т',
из уравнения (14.6) получим
Pk=W[P« Оо.к]Оо.к+^[Л,ОГ.к]ОГ.к; (14.7)
где W[рк, Оо>к] = W [рк, GrJ = . (14. 8)
1 4- zwrK
Отклонение коэффициента х приводит к изменению температу-
ры газа в камере, что, в свою очередь, влияет на величину давле-
ния в камере и на секундный расход газа из камеры. Поэтому в
общем случае комплексные передаточные числа №[рк, Go.k] и
Wk, Gr.K] будут различны. Таким образом, камера сгорания явля-
ется типичным апериодическим звеном с запаздыванием.
14.4. ДИНАМИЧЕСКИЕ СХЕМЫ ЖРД
Структура динамической схемы двигателя зависит от способа
подачи топливных компонентов в камеру сгорания и от схемы ре-
гулирования двигателя. Составим динамическую схему ЖРД с тур-
бонасосной подачей топливных компонентов, принципиальная
схема которого показана на рис. 14.1. Газогенератор работает на
основных компонентах, на линии горючего газогенератора нахо-
дится регулятор коэффициента соотношения топливных компонен-
тов; схема регулирования показана на рис. 14.5.
Динамические процессы двигателя описываются дифференци-
альным или алгебраическим уравнением, связывающим входную
и выходную координаты звена—величины, характеризующие фи-
зические процессы в двигателе. Полную систему уравнений, выра-
жающих динамические свойства ЖРД, можно найти, например, в
трудах [4, 14, 29]. Здесь мы динамические свойства отдельных
звеньев выразим комплексными передаточными числами.
На рис. 14.9 приведена структурная схема рассматриваемого
двигателя, показаны: 1, 3 — магистрали окислителя и горючего ка-
меры сгорания; 2—камеры .сгорания; 4—регулятор коэффициента
х соотношения компонентов топлива газогенератора; 5, 7—магист-
рали горючего и окислителя газогенератора 6.
Отклонения подачи окислителя G0.K и горючего Gr.K в камеру
сгорания зависят от входных координат — отклонения давлений на
выходе из насосов ргн.о, Р2н.г и отклонения давления в камере сго-
рания рк. Отклонение подачи окислителя Оо.гг и горючего Ог.гг в
346
газогенератор зависит от отклонения давления на выходе из насо-
са окислителя ргп.о, отклонения давления рх на выходе из регуля-
тора Рх и отклонения давления в газогенераторе ргг. От суммар-
ного отклонения подачи окислителя (G0.K-T Оо.гг) зависит откло-
нение давления на выходе из насоса окислителя ргн.о, а от суммар-
Рис. 14.9
кого отклонения подачи горючего (Gr.K+Gr.rr) зависит отклонение
давления на выходе из насоса горючего ргн.г’, от этих же отклоне-
ний подачи компонентов зависит и отклонение скорости вращения
п вала ТНА.
Входными координатами для двигателя являются рт.о, рт.г —
отклонения давления на входе в насосы для окислителя и горюче-
го. Выходной координатой двигателя как источника энергии явля-
ется отклонение давления в камере сгорания рк.
12*
347
Двигатель, является, кроме того, нагрузочным агрегатом для
расходных топливных магистралей. Выходными координатами дви-
гателя как/нагрузочного агрегата будут Уц.о и ун.г— отклонения
скоростей топливных компонентов на входе в насосы окислителя и
горючего. Эти отклонения пропорциональны отклонениям подачи
окислителя (Go.K4-G0.rr) и горючего (Gr.K+ Gr.rr)• Отклонение ско-
рости давления ип.о обусловливается не только отклонением давле-
Рис. 14.10
ния Рико,- но через камеру сгорания и газогенератор также и от-
клонением давления ргп.т- Отклонение скорости уп.г зависит от от-
клонения давления piILr и piH.o. Взаимосвязь двигателя с расход-
ными магистралями окислителя и го-
рючего показана на рис. 14.10.
Следует отметить, что структурные
схемы ЖРД с замкнутой системой пи-
тания имеют большее число внутрен-
них связей между звеньями по сравне-
нию со структурными схемами ЖРД с
открытой системой питания. В ЖРД с
замкнутой системой питания весь рас-
ход одного из компонентов осуществля-
ется через турбину, поэтому турбина в таком двигателе имеет зна-
чительно большую мощность, чем в двигателе с открытой систе-
мой питания, в силу чего постоянная времени ТНА для двигате-
ля с замкнутой системой питания меньше, чем для двигателя с от-
крытой системой. Так как в двигателе с замкнутой системой пи-
тания газ турбины поступает в камеру сгорания, то объем газо-
генератора и давления газа в нем значительно больше, чем в газо-
генераторе двигателя с открытой системой питания.
На основании структурной схемы (см. рис. 14.9) можно полу-
чить уравнение для определения отклонения давления в камере сго-
рания (отклонения тяги двигателя):
А<= [А<, Ан.о] Ан.о + [A- Лн.г] Ан.г>
и уравнения для определения отклонений скоростей топливных
компонентов на входах в насосы окислителя и горючего:
^н.о [^Н.СР АЙн.о] /Йн.О [^Н.О’ АЙн.г] АЙн.Г’
^Н.Г [^н.г» Р1Н.г] АЙн.Г [^Н.Г’ /Лн.о] АЙ.НО-
145. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЖРД
Годографы комплексных передаточных чисел (амплитудно-фа-
зовые характеристики) можно получить расчетом на ЭВМ или
снять экспериментальным путем. На рис. 14.11 показан примерный
вид амплитудно-фазовой характеристики 1Ирк, pin.о] двигателя г
открытой системой питания (кривая 1) и двигателя с замкнутой
системой питания — с дожиганием (кривая 2). При отклонении
расхода через насос окислителя амплитудно-фазовая характерис-
тика двигателя с открытой системой питания имеет сходство с
34&
амплитудно-фазовой характеристикой апериодического звена с за-
паздыванием. Двигатель с замкнутой системой питания проявляет
колебательные свойства и его амплитудно-фазовая характеристика
(кривая 2) имеет сходство с амплитудно-фазовой характеристикой
колебательного звена с запаздыванием.
Основной причиной колебательных свойств двигателя с замк-
нутой системой питания является уменьшение фильтрующего вли-
Рис. 14.11
Рис. 14.13
яния ТНА, поскольку колебания давления в газогенераторе здесь
непосредственно вызывают колебания поступления топлива в ка-
меру сгорания двигателя, а в двигателе с открытой системой пита-
ния— только через изменение скорости вращения турбины.
На рис. 14.12 показан примерный вид амплитудно-фазовой ха-
рактеристики №[рк, P1H.J двигателя с открытой системой питания
(кривая /) и двигателя с замкнутой системой питания (кривая 2).
Вид годографов примерно такой же, как и на рис. 14.11, однако
коэффициенты усиления для двигателя с замкнутой системой пи-
тания больше, чем для двигателя с открытой системой питания.
Примерный вид амплитудно-фазовой характеристики W>h.o,
pin.о], характеризующей динамические свойства двигателя как на-
грузочного агрегата, показан на рис. 14.13
(кривая 1 — для двигателя с открытой си-
стемой питания, 2 — для двигателя с за-
крытой системой питания).
Частотные характеристики двигателя с
замкнутой системой питания имеют ярко
выраженный колебательный характер.
Частотные характеристики двигателя
как источника энергии и как нагрузочного Рис. 14.14
агрегата для расходных магистралей пол-
ностью характеризуют его динамические свойства, необходимые
при анализе устойчивости замкнутой системы.
Вид амплитудно-частотных характеристик двигателя может
значительно измениться в зависимости от изменения динамических
свойств камеры сгорания, ТНА, газогенератора и регуляторов. На-
пример, путем подбора динамических свойств регуляторов можно
сильно изменить амплитудно-фазовые характеристики двигателя
и повлиять таким образом на устойчивость замкнутой системы, со-
349
стоящей из ракеты, расходных магистралей и двигателя. На рис^
14.14 представлены амплитудно-частотные Л (со) и фазочастотные
<р (со) характеристики Рк/рш.г одного и того же двигателя с разны-
ми регуляторами.
Глава XV
ДИНАМИЧЕСКИЕ СХЕМЫ И УСТОЙЧИВОСТЬ
15.1. ДИНАМИЧЕСКИЕ СХЕМЫ
В зависимости от структуры расходных магистралей и коли-
чества двигателей динамические схемы замкнутых систем раз-
личны.
Рис. 15.1
Укрупненная блок-схема обычной ракеты с двухкомпонентным
ЖРД, составленная из физических звеньев, приведена на рис. 15.1,
Здесь 1—ЖРД, 2—корпус ракеты, 3—магистраль горючего, 4—
магистраль окислителя.
Уравнения возмущенного движения
корпуса ракеты в направлении продольной
оси в гл. X представлены в двух вариан-
тах. В первом варианте вынужденные
продольные колебания корпуса представ-
ляются в виде ряда, составленного из соб-
ственных функций:
«(x,0=wc(z)+2 (15- О
п -!
где ис — колебания центра масс ракеты; fn(x) — форма собствен-
ных колебаний корпуса; qn (^) — обобщенная координата.
Наибольшую опасность представляют колебания с частотами,
близкими к собственным. В таких случаях колебания центра масс
значительно меньше упругих колебаний и мы их не будем прини-
мать во внимание.
Пусть ракета имеет один двигатель и возмущения давления
жидкости в одной расходной магистрали значительно большие,
чем в другой. Тогда уравнения вынужденных колебаний корпуса
можно представить в виде
Qn ^n^nQn Т.ДвУ ПЛвРк (/) FпнР\н (/)] ’ ( 1 5. 2)
где тп — приведенная масса ракеты; FT — площадь проходного се-
чения трубопровода низкого давления.
Знак минус перед отклонением давления рк в камере сгорания
поставлен потому, что в уравнениях (15.2) за положительное при-
нято перемещение корпуса в направлении от вершины ракеты к
хвостовому отсеку.
350
При установившихся гармонических колебаниях с частотой со
AW = Ae'w; Аи(/) = Аие'ш'; qn(t) = qneiu>t,
и решение уравнения (15.2) можно выразить через комплексные
передаточные числа:
<7n = \Яп> А] Рк + W kn. Ан] Ан. (15. 3)
где W [qn, а] =------7 ?т-дв/"*в ,9е-Г ;
тп (“>п— «2 + i2$nwnw)
Pf (15.4)
W [qn, А„] =--------.
(o>2 — ш2 + /ш2$пыл)
Во втором варианте вынужденные продольные колебания кор-
пуса выражаются комплексной функцией
и (х, /) = Ф (х, ш) е/ш/ = —Ак (х, и) е“Рк(х,<“) kraBpKeia>l +
+ Дн(х,<в)е‘^^тАяе^. (15.5)
Применив комплексные передаточные числа, представим выра-
жение для комплексной функции в виде
Ф = Г[Ф,а]а+^[Ф.Ан]Ан- (15.6)
Здесь и7[Ф,А] = -Лк(х,о))Лт.две'^ш,; (15 7)
^[Ф.Ан] = Л(^“>)Ле‘1р“(х’“>).
В первом варианте, когда вынужденные колебания корпуса вы-
ражаются в виде ряда (15.1), корпус ракеты в динамической схе-
ме представляется некоторым числом параллельных блоков с ком-
плексными передаточными числами (15.4). Во втором варианте
для каждого внешнего воздействия рк, рш корпус в динамической
схеме изображается одним блоком (15.6).
Отклонение давления на входе в насос piH зависит от струк-
туры расходной магистрали и свойства насоса. Будем считать, что
структура расходной магистрали соответствует схеме, показанной
на рис. 13.38, а ее динамическая схема—приведенной на рис. 13.39.
Продольные колебания корпуса воздействуют на поток жидкости
в магистрали через отклонение давления жидкости на выходе из
бака и через перемещения двигателя вместе с насосом относитель-
но потока. Если расходная магистраль имеет коллектор, то корпус
ракеты воздействует на поток жидкости в магистрали также и че-
рез перемещение коллектора.
Пренебрегая колебанием давления газов и образованием волн
на свободной поверхности жидкости в баке, в первом приближении
можно принять, что отклонение давления в баке равно силе инер-
ции столба жидкости:
351
Здесь Qo, Н — плотность и высота столба жидкости в баке; Иб(/) —
перемещение дна бака (в месте соединения с трубой) при продоль-
ных колебаниях корпуса; х— некоторый безразмерный коэффици-
ент, зависящий от формы колебаний дна.
При гармонических колебаниях с частотой со
А> = V fnsjqn, (15.8)
n,s
где fnSj — коэффициент формы колебаний дна бака (11.85), зави-
сящий от формы колебаний массы механического осциллятора mSj
при n-м тоне колебаний корпуса. Индекс «/» соответствует номеру
бака (/=А, Б), индекс «s» показывает номер механического ос-
циллятора, соответствующего колебаниям жидкости в упругом
баке.
Когда вынужденные продольные колебания корпуса выражают-
ся комплексной функцией (15.5), то отклонение давления жидко-
сти на выходе из бака можно представить в виде
Рв = во Ншо2 2 (15.9)
где O.sj — значение комплексной функции для дна бака, зависящее
от массы механического осциллятора mSj.
Если частоты coSj собственных колебаний механических осцил-
ляторов не близки между собой, то при определении отклонения
давления жидкости Рб на частотах, близких к (dsj, можно учиты-
вать только один s-й тон колебаний жидкости в упругом баке (s-й
механический осциллятор).
Отклонение скорости на выходе из трубы, обусловленное пере-
мещениями двигателя и дна бака,
f2 = zw (1 + Хс) Фдв — XcZw у Фо,
где Фдв — значение комплексной функции для двигателя (насоса) „
Ас-—геометрическая характеристика сильфона. Или
^2 = W [V2, Фдв] Фдв + W ^2’ ( 1 5’ 1 °)
где W [v2, Фдв] = Zco (1 + Хс); W [г»2, <1\у] = —йоХс.
Когда вынужденные колебания корпуса выражаются в виде
суммы колебаний по собственным функциям, то при учете только
одного тона колебаний корпуса получаем
v2=W\v2,qn\qn, (15.11)
где W [T>2. Чп\ = [ (1 “Нс) ЛдВ - 2 1 •
L (s) J
352
Отклонение скорости v2, обусловленное изменением объема
•сильфона и парогазовой смеси вследствие отклонения давления
р2 = р1н, можно определить из уравнения
^2 = i<')(l<llr + r)Jc'iH, (15.12)
где кпг, г — коэффициенты проводимости парогазовой смеси и
сильфона.
Динамическая схема замкнутой системы с учетом одного тона
колебаний корпуса и расходной магистралью только для одного
компонента приведена на рис. 15.2. Динамические свойства двига-
теля как силового агрегата выражены комплексным' передаточным
Расходная магистраль
Рис. 15.2
числом рш], как нагрузочного агрегата — комплексным пере-
даточным числом Р1н]. Эти комплексные передаточные числа
должны учитывать и кавитационные явления в шнекоцентробеж-
ном насосе.
Динамическая схема с двумя расходными магистралями при-
ведена на рис. 15.3. Расходные магистрали не показаны, показаны
только входные и выходные координаты для них.
Вследствие колебания жидкости в упругих баках частоты соб-
ственных колебаний корпуса двух или более тонов могут быть
иногда близкими. В этих случаях при анализе устойчивости дви-
жения следует учитывать одновременно несколько тонов упругих
колебаний корпуса ракеты. Воздействие отклонений давлений в
камере рк и на входе в насосы pm.o, pin.r на каждый тон колеба-
ний корпуса оценивается отдельно, отклонения давлений жидко-
сти на выходе из баков окислителя и горючего ро.о, Рб.г и отклоне-
ния скоростей потоков ^2о, ^2г должны суммироваться от каждого
353
тона колебаний корпуса. Для двух тонов колебаний £ обобщенны-
ми координатами qn и qm схема взаимодействия корпуса с расход-
ными магистралями показана на рис. 15.4.
При наличии близких частот собственных колебаний корпуса
целесообразно пользоваться комплексной функцией Ф(х, оо), ко-
торая учитывает как бы все тона колебаний (15.5). В этом случае
Рис. 15.4
отдельно определяют колебания характерных сечений — дна ба-
ков, коллекторов, двигателя от воздействия отклонений рк, р1н.о>
Р1н.г. Колебания дна баков окислителя и горючего определяются
354
через значения комплексных функций Ф5о, Фе г для масс механи-
ческих осцилляторов:
фб.о=2ф*°: фб.г=2ф-
S 5
Отклонение скоростей t>2o и ^2г согласно (15.10) равно сумме
отклонений, обусловленных колебаниями двигателя и дна баков.
Схема взаимодействия корпуса с расходными магистралями пока-
Р1НГ
Рис. 15.5
зана на рис. 15.5. Отклонение давления жидкости на выходе из
бака связано с колебаниями дна бака масштабным коэффици-
ентом
= (/ = 0. г).
При некоторых условиях может возникнуть связь продольных
колебаний ракеты с поперечными колебаниями. Такая связь может
возникнуть как вследствие наличия значительных асимметрично
расположенных масс в корпусе ракеты, так и вследствие того, что
чувствительные элементы системы угловой стабилизации могут
реагировать на продольные колебания корпуса. Если продольные
колебания сопровождаются пульсацией тяги двигателя, то при
определенных соотношениях частот может возникнуть параметри-
ческое возбуждение поперечных колебаний корпуса, т. е. попереч-
ные колебания будут взаимосвязаны с продольными.
355
Кроме замкнутых схем, включающих все остальные звенья ди-
намической системы, в ракете существует ряд частных, но не ме-
нее важных, замкнутых динамических схем, в которых может воз-
никать неустойчивость номинального режима работы, могут воз-
никать автоколебания. Такой замкну-
той системой, в частности, является си-
стема, состоящая из расходной магист-
рали и шнекоцентробежного насоса
(рис. 15.6). Расходная магистраль яв-
ляется колебательным звеном, насос —
источником энергии. Насос и нагрузка
ис ‘ (двигатель) формируют обратную
связь по давлению п скорости. Если
насос работает в кавитационном режиме, то передача возмущений
происходит с запаздыванием. При некоторых частотах возможна по-
теря устойчивости. Если прямая связь расходной магистрали с на-
сосом осуществляется по давлению, то обратная связь — по ско-
рости потока жидкости. Она может быть выражена с учетом про-
водимости на входе в насос \jZ][piy щ] [см. формулу (13.79)].
Система наддува топливных баков при наличии обратной связи
между давлением газа в баке и регулятором образует самостоя-
тельную динамическую систему. Эта система, вооб-
Рис. 15.7
ще говоря, связана с продольными колебаниями
корпуса, так как при колебаниях корпуса изменяет-
ся объем и, следовательно, давление газа в баке.
На рис. 15.7 приведена схема системы наддува баков ра-
кеты «Атлас»; Система наддува состоит из баллона со сжатым
гелием 1, теплообменника 2, регуляторов 3, которые регулиру-
ют расход гелия в каждый топливный бак при работе двига-
телей в соответствии с измеренным давлением в газовой по-
душке,, трубы наддува 4 и магистрали 5 замера давления газа
в баке. Магистраль 5 для замера давления газа представляет
собой трубку малого диаметра, в которой расход газа при
Рис. 15.8
установившихся условиях почти всегда равен нулю. Эта магистраль осуществля-
ет обратную связь по давлению между газовой подушкой в баке и регулятором
расхода гелия.
На рис. 15.8 показана блок-схема системы наддува одного из баков ракеты
«Атлас», составленная из физических звеньев. Основным колебательным звеном
системы наддува является звено бак — газ. При колебаниях подаваемого в бак
газа изменяется давление газа на свободную поверхность жидкости.
356
15.2. ОЦЕНКА УСТОЙЧИВОСТИ МЕТОДОМ
D-РАЗБИЕНИЯ
Как уже указывалось, в замкнутой системе, состоящей из кор-
пуса ракеты, расходных магистралей и ЖРД, может возникать
неустойчивость. Несмотря на то, что многие параметры системы
являются функциями времени, они очень мало меняются за время-;
многих периодов рассматриваемых колебаний. Анализ устойчиво-
сти поэтому можно производить, полагая в определенный момент
времени параметры системы постоянными величинами.
Рассмотрим динамическую схему рис. 15.2, приняв некоторые
упрощающие предположения, которые будем пояснять по ходу из-
ложения
Уравнения для обобщенной координаты n-го тона колебаний
корпуса запишем в виде
Яп V ^П^пЯп "Г" WnQtl = [^"т/Лн (/) кт.двРк (^)] fn ли* (15. 13)
Для двигателя как источника энергии примем
Рк кдвР1н* (1о. 14)
Для двигателя как нагрузочного агрегата интересующее нас
соотношение получим из уравнений перепада давлений
Ан ~ Рк = Р2п = М1н«
Заменив в этом уравнении величину рк ее выражением из (15.14),
получим формулу для определения отклонения скорости жидкости
через насос
4i = ZabP1h’ (15. 15)
где коэффициент проводимости двигателя
^Д» (кн кдв)/(Лдв9о^н)«
Отклонение давления жидкости на выходе из бака
p6=-hqn, (15.16)
где h^QoH-к^ fns).
(s)
Отклонение давления pi на входе в трубу несколько меньше от-
клонения давления рб вследствие потерь на преодоление местного
сопротивления и разгон некоторой массы жидкости:
Р\ = Рб~ —аб^, (15.17)
где
В первом приближении примем трубопровод жестким, а жид-
кость— несжимаемой. Будем считать, что между трубопроводом
низкого давления и входом в насос имеется сосредоточенная упру-
гость в виде сильфона и парогазовой смеси.
357
Так как жидкость несжимаема, то ^i=v2 и
Р\~~ P2 = Qq^ (15. 18)
где I — длина трубопровода.
Отклонение скорости жидкости в трубопроводе, обусловленное
изменением объема сосредоточенной упругости вследствие откло-
нения давления р2=р1н, определим на основании уравнения
(13.52):
^2упр ^yiipZ^iH’ где купр = кпг -р- г. (15. 19)
Отклонение скорости жидкости в трубопроводе, обусловленное
перемещением двигателя относительно потока жидкости, опреде-
лим с учетом зависимости (15.11)
(15.20)
•ГДе к^^ ( 1 4~ ^с) fnдв f nsi'
(*)
Чтобы система уравнений, описывающих движение жидкости
в расходной магистрали, была полной, нужно добавить еще соот-
ношение, связывающее отклонение скоростей потока жидкостей в
сечениях до и поеле сосредоточенной упругости:
'Уг^^унр + ^ + г’н- (15.21)
Исключив из уравнений (15.13) — (15.21) все переменные кроме
Р1н и qn, получим уравнения замкнутой системы
Яп “h ^п^пЧп Т- = k Piw (15 22)
Ан + 2£т0)тР1н + с0?Ан = —{аЧп + ^7/г)>
п 2 1+Й< , ет
где (О г =:----------; $т = — ;
купр (аб 4- QoO wr
7 * Р*
2ет=-^Ч--------—;
купр аб 4- Q(/
купр купр (аб 4- QoO
b =-----. (15.23)
купр (ci6 4- Qc/)
к*= — (кдвкт-дв—FT) /ядв.
Таким образом, исследуемая система сводится к двум гармо-
ническим осцилляторам, один из которых (корпус ракеты) имеет
частоту собственных колебаний соп, а другой (расходный трубо-
провод с двигателем как нагрузочным агрегатом) частоту сот.
Структурная схема замкнутой системы показана на рис. 15.9.
358
Частота собственных колебаний несжимаемого столба жидкос-
ти сот уменьшается с увеличением коэффициента проводимости
сосредоточенной упругости купр и массы колеблющейся жидкости
(a6 + Qo/). Относительный коэффициент затухания £т собственных
колебаний жидкости в трубопроводе зависит от коэффициента про-
водимости двигателя 2ДВ* и коэффициента активного сопротивле-
ния £б* на выходе из бака.
Максимальное значение динамического коэффициента усиления
первого осциллятора будет при частоте (о~о)п, а второго — при
частоте (о^ют. В случае выполнения равенства соп~(от на часто-
те (о^соп^сот коэффициент усиления системы достигает макси-
мального значения, и при этом воз-
никают наиболее благоприятные ус-
ловия для потери устойчивости.
При прочих равных условиях коэф'-
фициент усиления тем больше, чем
больше коэффициент форм собст-
венных колебаний двигателя и дна
бака.
Рис. 15.9
Из уравнений (15.22) и равенств (15.23) видно, что, если коэф-
фициент формы собственных колебаний двигателя /пдв = 0 (внеш-
няя сила приложена к корпусу в узловом сечении), цепь на рис.
15.9 как бы разрывается и замкнутая система перестает сущест-
вовать.
Когда коэффициент формы собственных колебаний дна бака /л6
равен нулю, т. е. fnsj = Q, то рб = 0, но система остается замк-
($)
нутой. Колебания корпуса воздействуют на поток жидкости в тру-
проводе через перемещение двигателя относительно потока (/ЛДВ^
^0). Возможность потери устойчивости увеличивается, если
/Ядв2Л5/>°> и уменьшается, если /„лв Л»7< °’ по сравне-
(S) (5)
нию со случаем, когда ^/Л5;.= 0.
(5)
На границе устойчивости система совершает гармонические ко-
лебания. Примем = и Р\Л^ = P\^iu>t и подставим эти
выражения в (15.22). После исключения переменных qn и рш и
разделения действительных и мнимых частей найдем связь между
параметрами системы и частотой колебаний со на границе устой-
чивости:
4<o2^(ortioT — (соп — (°2) ((0? — <»2) = k(Z(02;
((0? — (°2) + $т0)т (0)п — (°2) = £к*/2.
(15. 24)
Из этих двух уравнений можно исключить частоту колебаний
(о и найти соотношение между параметрами системы на границе
устойчивости— применить метод ^-разбиений. Например, зная
величины коэффициентов £т и (от, которые практически не изменя-
359
ются в процессе полета, и коэффициентов к*, а, Ь, в разные мо-
менты времени полета t, можно вычислить для двух моментов вре-
мени величины £п0) на границе устойчивости и сравнить их с дей-
ствительными значениями коэффициентов £п. В этом случае кри-
терий для оценки устойчивости системы достаточно прост: если
Ъг то система устойчива, если £;г то неустойчива.
Оценку устойчивости более сложных систем, чем описанные
уравнениями (15.22), целесообразно производить какими либо
методами, в частности частотными методами теории автоматическо-
го регулирования.
15.3. ОЦЕНКА УСТОЙЧИВОСТИ МЕТОДОМ ЧАСТОТНЫХ
ХАРАКТЕРИСТИК
Рассмотрим динамическую систему рис. 15.2. Объединив рас-
ходную магистраль с двигателем как нагрузочным агрегатом в од-
но звено с передаточной функцией Mpin, ^п], получим структуру
динамической системы, показанную на рис. 15.10. Предположим,
что звено, имеющее передаточную функцию IFfpin, Цп\ будет устой-
Рис. 15.10 Рис. 15.11
чивым. Двухконтурную систему рис. 15.10 преобразуем в однокон-
турную, устойчивость которой можно оценивать при помощи кри-
терия Найквиста. Структурная схема одноконтурной системы по-
казана на рис. 15.11.
Здесь W*\qn, p^] = W\qn, Piu\^-W[qn,pK]W[pK, рХп]. (15.25)
Представим уравнение амплитудно-фазовой характеристики
разомкнутой цепи в виде
VP = («>) -\-iV (w) = lF [Ан- qn} Лн] = Л И (15.26)
С учетом равенства (15.25) это уравнение можно представить
в виде
1Г(/<о) = [д,?РкДРк/,не/(^+?₽-л> +Л9Рне'>"/’н]д/’“'г (15.27)
где векторы комплексных передаточных чисел отдельных звеньев
имеют значения:
Aqp^=W[qn. Ан]; Aqp^=W [qn, AJ;
APKPe‘vp^«=w [/v AJ; аРнЧ^РкЧ=w [Ан, qn\-
360
Здесь и дальше динамические коэффициенты усиления Aqp^ Aqp ....
и фазовые характеристики ^qp^ с?^,,.. являются функциями часто-
ты (о.
Формулы для комплексных передаточных чисел, характеризую-
щие динамические свойства корпуса ракеты, получим на основании
уравнений (15.13):
Д рА^Рц____ FyfЯДВ
jTYn П V - 5 ,
Н ^П~ 0)2 +
qP^ ы2п— w2 ~
Вид амплитудно-фазовых характеристик корпуса ракеты при-
веден на рис. 15.12,а, б. Это характеристики обычных колебатель-
ных звеньев с демпфированием, пунктиром показаны характерис-
тики для случая, когда коэффициент формы собственных колеба-
ний двигателя /ддв<0. На рис. 15.12,в, г приведены возможные
амплитудно-фазовые характеристики расходной магистрали и дви-
гателя. В зависимости от структуры расходной магистрали и ее
параметров, а также от структурной схемы и параметров двигате-
ля вид этих характеристик может изменяться в значительной сте-
пени.
Произведя сложение и умножение векто-
ров в интересующем нас диапазоне частот со-
гласно уравнению (15.27) и воспроизведя по-
лученные результаты графически, получим ди-
аграмму Найквиста (рис. 15.13). Кривая 1
соответствует системе, в которой частота соб-
ственных колебаний корпуса ракеты близка
к частоте собственных колебаний жидкости в
расходной магистрали. Оба звена этой систе-
мы (см. рис. 15.11) устойчивы, и поскольку
кривая 1 пересекает вещественную ось U
один раз правее точки С(1, /0), то эта замк-
нутая система неустойчива.
Рис. 15.13
U
361
Кривая 2 соответствует системе, в которой частота собственных
колебаний жидкости в расходной магистрали значительно ниже
частоты собственных колебаний корпуса. Максимальный динами-
ческий коэффициент усиления разомкнутой цепи меньше единицы,
амплитудно-фазовая характеристика не может пересечь вещест-
венную ось правее точки С (1, Ю), и замкнутая система устойчива.
Кривая 3 характеризует динамические свойства разомкнутой
цепи, когда частота собственных колебаний корпуса и жидкости
в расходной магистрали близки между собой, однако подбором
динамических характеристик регуляторов двигателя в диапазоне
этих частот удалось значительно уменьшить коэффициент усиления
двигателя и таким образом обеспечить устойчивость замкнутой,
системы.
Уравнение амплитудно-фазовой характеристики разомкнутой цепи
наиболее просто, когда можно пренебречь вектором Aqp по
сравнению с произведением векторов Л<7РкДРкрнег(^Рк+е?;?кРн). При такой
разомкнутой цепи для амплитудно-частотной и фазочастотной ха-
рактеристик имеются уравнения
А (<о) = Aqp^A ркРнApp^q,
?Н=?9рк+?ркрн+?рн<7.
Как видно из рис. 15.13, при некоторой частоте <о = (оп будет
выполняться равенство
<Р (“>„)=+ ?ркрн + = 0.
Замкнутая система будет неустойчивой, если
(%) — AqPKAp^p^Ap^q 1 .
Наилучшие условия для такой ситуации имеются тогда, когдт
частота собственных колебаний жидкости в расходной магистрали
совпадает с частотой собственных колебаний корпуса. Из анализа
зависимостей коэффициентов AqP^ АРКР^ АРЛЧ от параметров си-
стемы можно сделать определенные выводы о влиянии на устойчи-
вость системы таких параметров, как /лдв, /пдв f ns)
(*)
и пр. Эти выводы были сформулированы в предыдущем разделе.
На рис. 15.14 приведены амплитудно-частотные характеристики разомкнутой
цепи системы наддува баков ракеты «Атлас» для момента запуска ракеты (мес-
то размыкания системы показано точкой а на рис. Г5.8). Кривая на рис. 15.14,а
представляет собой амплитудно-фазовую характеристику наддува бака горючего-
при отключенной системе наддува бака окислителя. С изменением частоты от О
до 4-оо при частоте со~40 1/с, которая равна частоте первого тона собственных
колебаний ракеты, кривая пересекает вещественную ось один раз правее точки
С(1, i 0) в направлении по часовой стрелке. Так как все звенья разомкнутой це-
пи (см. рис. 15.8) устойчивы, то система наддува бака горючего будет неус-
тойчива.
362
Кривая на рис. 15.14,6 представляет собой частотную характеристику ра-
зомкнутой цепи системы наддува бака окислителя; предполагается, что система
наддува бака горючего в это
время не работает. При изме-
нении частоты от 0 до 4- оо
кривая пересекает веществен-
ную ось правее точки C(l, i 0)
два раза в противоположных
направлениях, поэтому будет
устойчивой.
Из совместного анализа
устойчивости обеих систем
наддува установлено, что в
первые секунды после запуска
система неустойчива, граница
устойчивости достигается на
пятой секунде полета, после
чего устойчивость системы уве-
личивается. Это объясняется
увеличением объема газовой
подушки и соответственно
уменьшением коэффициента
усиления отклонения давления
рб газа в баке.
15.4. ОЦЕНКА УСТОЙЧИВОСТИ МЕТОДОМ КОРНЕВОГО
ГОДОГРАФА
Оценку устойчивости системы можно провести путем определения траекто-
рии корней 2 = е-н’со характеристического уравнения замкнутой системы. На
рис. 15.15, например, приведены результаты вычисления корней характеристичес-
кого уравнения для ракеты «Титан-2». График показывает изменение корней, со-
Второй тон
колебаний
1(л)
160
140
120
ответствующих первому и второму тонам
колебаний ракеты в функции времени поле-
та. Неустойчивость ракеты на частоте пер-
вого тона колебаний ее корпуса теоретиче-
ски предполагалась приблизительно между
105 и 140 с полета. Такие же примерно
данные были получены при телеметриче-
ских измерениях во время первых летных
испытаний ракеты «Титан-2». На рис. 15.16
показан график осевой перегрузки пх, по-
145
100
80
60
Лербый тон
колебаний
155
115^125
%05^
Время полета
___\-*>с 1
-5-2-10 1 2 Е
100 125 150 t,C
Рис. 15.16
Рис. 15.15
лученный при летных испытаниях. Колебания начались в момент времени
«100 с, достигли максимума в момент времени /«120 с и прекратились к кон-
цу полета. Колебания имеют почти синусоидальный характер с частотой, изме-
няющейся во времени полета от Ю до 15 Гц.
363
Для придания системе устойчивости на трубопровод низкого давления пе-
ред входом в насос был установлен пружинно-гидравлический демпфер. Схема
трубопровода с демпфером показана на рис. 15.17,я; амплитудно-частотная ха-
рактеристика трубопровода с демпфером при условии, что жидкость несжимае-
ма, приведена на рис. 15,17,6. Демпфер уменьшает колебания на входе в насос
и как бы разрывает цепь между топливной магистралью и двигателем. Жест-
кость пружины демпфера подбирают так, чтобы наименьший
но-фазовой характеристики трубопровода с
демпфером был при частоте, равной частоте
собственных колебаний корпуса. Для длинно-
го трубопровода расчет жесткости пружины
демпфера следует производить с учетом сжи-
маемости жидкости и сосредоточенной упру-
гости на конце трубопровода.
На рис. 15.J8 приведены результаты оп-
ределения траектории корней z = e4-tco харак-
теристического уравнения для первых двух
модуль амплитуд-
|-----1-----1------------1. . 1 »
-J -2 /7 / 2 6
Рис. 15 18
тонов колебаний ракеты «Атлас». Корни вычислены для двух значений относи-
тельного коэффициента затухания корпуса: § = 0,01 и § = 0,02. Как видно, для
очень малых коэффициентов затухания каждый тон колебаний в разные момен-
ты времени может стать неустойчивым.
Для промежутка времени перед разделением ступеней ракеты относитель-
ный коэффициент затухания для первых двух тонов колебаний определялся во-
время продольных динамических испытаний и составил § = 0,01 ... 0,03.
Во время полета на ракете «Атлас» в последние несколько секунд перед,
разделением ступеней возникает продольная неустойчивость по первому тону ко-
лебаний корпуса, но амплитуда колебаний не достигает существенной величины..
15.5. РОЛЬ ОБРАТНЫХ СВЯЗЕЙ
Согласно данным стендовых испытаний при работе ЖРД пуль-
сации тяги наблюдаются даже тогда, когда замкнутая система
(корпус ракеты, топливные магистрали, двигатель) устойчива. Эти
пульсации возникают от процессов, происходящих в двигателе.
Таким образом, возникновение пульсаций есть свойство, присущее.'
рабочему процессу ЖРД.
364
Пульсации тяги Р двигателя можно характеризовать функцией
спектральной плотности Sp(co) и дисперсией отклонения тяги дви-
гателя:
оо
— оо
На активном участке полета ракета как замкнутая система ис-
пытывает воздействие пульсаций тяги двигателя, которые отно-
сительно замкнутой системы являются внешними. Пульсации вы-
зывают вынужденные продольные упругие колебания корпуса и ко-
лебания давления в топливных магистралях. Сам двигатель во
Рис. 15.19
время полета испытывает влияние обратной связи, обусловленной
колебаниями корпуса ракеты и жидкости в топливных магистра-
лях. В зависимости от коэффициента усиления и фазовых соотно-
шений обратная связь может иметь большое значение, и, как было
показано, в замкнутой системе может возникнуть неустойчивость.
На рис. 15.19 показана схема внешнего воздействия на замкну-
тую систему. Здесь U?(Zco) —амплитудно-фазовая частотная харак-
теристика разомкнутой цепи, состоящей из корпуса ракеты, топ-
ливных магистралей и двигателя; Рвн— внешнее воздействие на
замкнутую систему флуктуаций тягл двигателя, не зависящих ог
колебаний корпуса и давления в топливных магистралях (напри-
мер, при стендовых испытаниях); РВЫх— флуктуации тяги двига-
теля, находящегося в замкнутой системе (на выходе из звена);
Рвх — флуктуации тяги, действующие на корпус ракеты в полете
(на входе в звено). Соотношения между флуктуациями выражают-
ся известными формулами
РвХ = “Г ^вых; ^вых = ^вх^
Считая флуктуации тяги стационарными, получим соотношение
между флуктуацией спектральной плотности SBX(co) тяги, воздей-
ствующей на корпус, и флуктуацией SBII((o) тяги при стендовых ис-
пытаниях:
5 х (<•>) = 5 н ((о)-i----.
V BHV 7 |1 — 1Г(/ш)|2
Определим в некотором поперечном сечении х отклонение про-
дольной перегрузки ракеты пх, вызванное воздействием флуктуа-
ции тяги на замкнутую систему. Представив
UZ (Ad) = WZK(fco) W\.y (Z(o),
365
где №K(uo), 1Гд.у(/ш)—амплитудно-фазовые характеристики кор-
пуса ракеты и двигательной установки (двигателя и топливных
магистралей), получим структурную схему системы, показанную
на рис. 15.19,6. Здесь двигательная установка выполняет роль об-
ратной связи относительно корпуса ракеты.
Так как спектральная плотность случайного процесса на вы-
ходе линейной системы равна спектральной плотности внешнего
воздействия на ее входе, умноженной на квадрат модуля частот-
ной характеристики этой системы, то спектральная плотность от-
клонения продольной перегрузки
5„М = 5вхИ1^к(/<.
Принимая во внимание соотношение между SBX(co) и Sbh(cd),
получим выражение для дисперсии отклонения продольной пере-
грузки:
(»)</«>= С 5 (w)-^к (—d^.
J J V 11 - Г (zo>)|2
— оо — оо
Полоса пропускания, определяемая частотной характеристикой
корпуса ракеты, невелика, поэтому в пределах этой полосы можно
считать, что функция SBH=const. Тогда
Если бы корпус не имел обратной связи, то дисперсия отклоне-
ния продольной перегрузки была бы
со
|WK(Z<o)|2rf(o.
В диапазоне частот, близких к частоте собственных колебаний
корпуса, величина |1—1У7(/со)| может оказаться меньше единицы,
и дисперсия отклонения продольной перегрузки корпуса при об-
ратной связи будет больше, чем без обратной связи. При гармо-
ническом внешнем воздействии Рвн отношение отклонений про-
дольных перегрузок будет равно
(лх) при обратной связи р j
(их) без обратной связи Рвн 1 — W (zoo)
Обратная связь вызывает увеличение отклонений продольной
перегрузки; она как бы уменьшает коэффициент демпфирования
корпуса.
Таким образом, в диапазоне частот собственных колебаний
корпуса, на активном участке полета даже в случае устойчивости,
могут возникать большие колебания продольной перегрузки и мед-
ленно затухать переходные процессы, возникающие, например, при
запуске двигателя.
366
15.6. МЕТОДЫ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ
Для того, чтобы динамическая система была практически Ус-
тойчивой, нужно, прежде всего, чтобы в процессе полета частоты
собственных продольных колебаний корпуса не совпадали с часто-
тами собственных колебаний жидкости в расходных магистралях.
Как корпус ракеты, так и жидкость в расходных магистралях, об-
ладают целым спектром частот собственных колебаний. Частоты
собственных колебаний жидкости в расходной магистрали зависят
от длины магистрали и упругости ее стенок, сжимаемости жидко-
сти и наличия парогазовой смеси (сосредоточенной упругости) пе-
ред входом в насос. Эти частоты в -процессе полета остаются пос-
тоянными, если не изменяются параметры сосредоточенной упру-
гости. Частоты собственных колебаний корпуса изменяются в про-
цессе полета, плавно возрастая по мере расхода топлива из баков.
Наиболее важно при этом, чтобы не совпадали частоты собствен-
ных колебаний низшего тона корпуса и жидкости в магистралях.
Так как магистраль для одного из компонентов топлива обычно
значительно длиннее, чем для другого, то наиболее вероятно, что
с низшей частотой собственных колебаний корпуса может совпа-
дать частота собственных колебаний жидкости в длинной расход-
ной магистрали.
Если в процессе полета в какой-либо момент времени эти час-
тоты становятся близкими, то динамические свойства расходной
магистрали следует изменить так, чтобы частота собственных ко-
лебаний жидкости в магистрали уменьшилась или, наоборот, уве-
личилась. Увеличить частоту собственных колебаний жидкости в
магистрали можно, главным образом, уменьшением коэффициента
проводимости сосредоточенной упругости купр. Для этого нужно
увеличить давление наддува в баке и таким образом улучшить
кавитационные характеристики насоса. Увеличение жесткости
сильфона также приводит к уменьшению коэффициента купр, но в
значительно меньшей степени, чем уменьшение или полное устра-
нение объема парогазовой смеси.
Уменьшить частоту собственных колебаний жидкости в расходной магистра-
ли можно несколькими способами. Можно установить на расходную магистраль
(преимущественно на входе в насос) гидравлический аккумулятор (демпфер
продольных колебаний). Гидравлический аккумулятор снижает частоту колеба-
ний и в этом отношении обладает свойствами сосредоточенной упругости. Не-
которые схемы гидравлических аккумуляторов представлены на рис. 12.19. Спо-
соб снижения частоты гидравлическим аккумулятором легко осуществим и на-
дежен, но осложняет компоновку и приводит к увеличению веса конструкции
ракеты.
Значительного уменьшения частоты собственных колебаний жидкости можно
добиться, если заменить трубу круглого поперечного сечения трубой некруглого-
поперечного сечения. В гл. XIII, например, было показано, что в трубе с попе-
речным сечением в виде эллипса приведенная скорость звука и, следовательно,,
частота собственных колебаний жидкости меньше, чем в круглой трубе. Частота
колебаний уменьшится еще более, если труба будет иметь крупные продольные
гофры. Применение трубы некруглого поперечного сечения незначительно увели-
чивает массу конструкции ракеты. Расчет на прочность и технология изготовле-
ния таких труб сложнее, чем труб кругового поперечного сечения.
367
В качестве одного из способов уменьшения частоты собственных колебаний
потока жидкости в магистрали можно применять вдувание в поток незначитель-
ного количества нерастворимого газа. Однородное распределение газа по потоку
в криогенных и некриогенных жидкостях осуществляется при помощи струйного
инжектора. Если пренебречь поверхностным натяжением жидкости (что спра-
ведливо при достаточно большом диаметре пузырьков газа) и пе учитывать яв-
ления массообмепа между газом и жидкостью, то эквивалентная скорость звука
газожидкостной смеси может быть определена по формуле
2 ^г^пр.ж
аэ [З^ир.ж + (1 - 3) Ег] [3Qj -в (1 - 3) 9ж] ’
где Ег—модуль упругости газа; Епр.ж — приведенный модуль упругости жид-
кости (с учетом упругости стенок трубы); р — объемное отношение газа и жид-
кости; ог, ож —плотность газа и жидкости.
Расчеты показывают, что даже небольшое количество нерастворенного газа
в потоке жидкости обеспечивает значительное уменьшение приведенной скорости
звука и, следовательно, снижение частоты собственных колебаний.
При уменьшении наддува бака кавитационные характеристики насоса ухуд-
шаются, образуется или значительно увеличивается объем парогазовой смеси, от
чего частота собственных колебаний жидкости в магистрали уменьшится. Но
этот способ наименее приемлем, так как с ухудшением кавитационных характе-
ристик коэффициент полезного действия насоса уменьшается. Кроме того, возни-
кает опасность появления неустойчивости и автоколебаний в системе, состоящей
из насоса и расходной магистрали.
Из данных анализа следует, что устойчивость движения систе-
мы можно повысить увеличением коэффициента сопротивления
магистрали. Одним из средств в этом направлении является уве-
личение перепада давлений на форсунках двигателя.
Для обеспечения устойчивости динамической системы можно
использовать также регуляторы двигателя. Это в особенности от-
носится к схемам, в которых двигатель имеет замкнутую систему
питания. Рабочий процесс двигателя с такой системой питания на
низких частотах обладает колебательными свойствами. Путем под-
бора характеристик регуляторов можно изменить диапазон частот,
в котором двигатель имеет максимальный коэффициент усиления,
и добиться значительного изменения фазочастотной характеристи-
ки двигателя в необходимом направлении.
15.7. ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ
ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Вследствие сложности ракеты как динамической системы в про-
цессе ее проектирования и летно-конструкторской отработки в до-
полнение к теоретическим расчетам проводятся эксперименталь-
ные исследования. Экспериментально отрабатываются ТНА, двига-
тели, топливные магистрали и др. При обработке исследуются и
динамические характеристики. Экспериментальное получение ди-
намических характеристик корпуса ракеты (частот и форм собст-
венных колебаний, коэффициентов демпфирования) может произ-
водиться как на конструктивно подобных моделях, так и на натур-
ных образцах.
Рассмотрим, как проводилось исследование динамических ха-
рактеристик ракетно-космической системы «Сатурн-5» — «Апол-
лон». Система состоит из четырех ступеней S-l, S-2, S-3, S-4 и
368
лунного экспедиционного отсека (ЛЭО), соединенных между
собой последовательно. В исследовательском центре им. Лэнгли
NASA для исследования продольных колебаний ракеты «Сатурн-5»
была разработана динамическая схема и физическая динамически
подобная модель системы в масштабе 1 : 10.
Силовая конструкция физической динамически подобной моде-
ли системы в основных чертах является точной геометрически по-
добной копией натурной конструкции. Длина модели ~11 м, диа-
метр первой ступени ~ 1 м. Элементы конструкции, расположен-
ные выше переходного конуса ЛЭО, геометрически подобны про-
тотипу, но отличны в отношении конструкции и использованных
материалов. Модель лунного экспедиционного отсека имеет подо-
бие только по массе, положению центра масс, инерционности и
подвеске. Для имитации горючего на ступени S = 1 и жидкости
кислорода на всех ступенях применялась вода. Для имитации жид-
кого водорода на ступенях S-2 и S-4 использовались малень-
кие пенопластовые шарики плотностью ~60 кг/м3. Наддув всех
баков осуществлялся азотом до давления 0,7-105 Па.
При испытаниях физическую модель подвешивали при помощи
специально спроектированной системы, состоящей из четырех сим-
метрично расположенных тросов, закрепленных сверху на жест-
кой опорной ферме. Длина и диаметр тросов были выбраны таки-
ми, чтобы частота колебаний модели ракеты как твердого тела
была .ниже, чем частота первого тона ее упругих колебаний. Воз-
буждение физической модели производилось через диаметр и цап-
фы центрального двигателя. Динамометр использовался в качестве
чувствительного элемента в сервосистеме с электродинамическим
вибратором для поддержания заданной величины возбуждения.
В табл. 15.1 приведены частоты со в 1/с собственных колебаний
ракеты «Сатурн-5», вычисленные для одномерной (стержневой) и
двухмерной (оболочечной) математических моделей, а также по-
лученные экспериментальным путем на динамически подобной фи-
зической модели в масштабе 1 : 10. Расчетные и эксперименталь-
ные данные соответствуют моменту старта ракеты и моменту пол-
ного выгорания топлива в ступени S=l.
Таблица 15.1
Старт Полное выгорание топлива
Тоны колебаний Экспери- ментальные дани ые физической модели Расчетные данные математической модели Экспери- ментальные данные физической модели Расчетные данные математической модели
одномер- ной двухмер- ной одномер- ной двухмер- ной
Первый 30,9 37,5 31,4 51,1 54,4 56,1
Второй 40,2 39,3 40,7 69,5 71,1 72,0
Третий 56,4 56,4 59,1 — 74,1 75,8
Четвертый 71,3 71,1 74,0
369
На рис. 15.20 приведены для сравнения формы fn собственных
колебаний первых четырех тонов, соответствующие моменту стар-
та ракеты. Треугольные значки показывают значения форм собст-
венных колебаний центра масс жидкости в баках. Эксперименталь-
ные данные представлены светлыми кружками, показывающими
значения форм собственных колебаний отдельных точек продоль-
ной оси корпуса ракеты.
В основном было получено хорошее совпадение эксперимен-
тальных и расчетных данных по одномерной математической мо-
дели. Исключением явился первый тон колебаний в условиях стар-
та, когда движение массы жидкости в баке окислителя первой сту-
пени происходило в противофазе с корпусом. Расчеты двухмерной
математической модели дают для этого случая хорошее совпадение
с экспериментом.
СПИСОК ЛИТЕРАТУРЫ
1. Абгарян К. А., Рапопорт И. М. Динамика ракет. М., Машиностроение,
1969. 378 с.
2. Аппазов Р. Ф., Лавров С. С., Мишин В. П. Баллистика управляемых ра-
кет дальнего действия. М., Наука, 1966. 270 с.
3. Бюшгенс Г. С., Студнев Р. В. Динамика пространственного движения са-
молета. М., Машиностроение, 1967. 340 с.
4. Гликман Б. Ф. Автоматическое регулирование жидкостных ракетных дви-
гателей. М., Машиностроение, 1974. 396 с.
5. Глушко В. П. Развитие ракетостроения и космонавтики в СССР. Изда-
тельство АПН, 1973, 56 с.
6. Динамика систем управления ракет с бортовыми цифровыми вычислитель-
ными машинами/Под ред. Хитрика М. С., Федорова С. М. М., Машиностроение,
1972, 230 с.
7. Жуковский Н. Е. О движении твердого тела, имеющего полости, наполнен-
ные однородной капельной жидкостью. Собр. соч., т. 2, вып. 1. М.—Л., ГНТИ.,
1931. 136 с.
8. Ишлинский А. Ю. Ориентация, гироскопы и инерциальная навигация. М.,
Наука, 1976. 670 с.
9. Колесников К. С. Жидкостная ракета как объект регулирования. М. Ма-
шиностроение, 1969. 298 с.
10. Колесников К. С. Продольные колебания ракеты с жидкостным ракетным
двигателем. М., Машиностроение, 1971. 260 с.
11. Колесников К. С., Сухов В. Н. Упругий летательный аппарат как объект
автоматического управления. М., Машиностроение, 1974. 267 с.
12. Колесников К. С., Самойлов Е. А., Рыбак С. А. Динамика топливных сис-
тем ЖРД. М., Машиностроение, 1975. 171 с.
13. Краснов Н. Ф. Аэродинамика. М., Высшая школа, 1976. ч. I, 383 с., ч. II,
368 с.
14. Кудрявцев В. М. и др. Основы теории и расчета жидкостных ракетных
двигателей. М., Машиностроение, 1975. 656 с.
15. Лурье А. И. Аналитическая механика. М., Госфизиздат, 1961. 824 с.
16. Микишев Г. Н. Рабинович Б. И. Динамика твердого тела с полостями,
частично заполненными жидкостью. М., Машиностроение, 1968. 532 с.
17. Микишев Г. Н., Рабинович Б. И. Динамика тонкостенных конструкций с
отсеками, содержащими жидкость. М., Машиностроение, 1971. 463 с.
18. Микишев Г. Н. Экспериментальные методы в динамике космических ап-
паратов. М., Машиностроение, 1978. 247 с.
19. Моисеев Н. Н., Румянцев В. В. Динамика тела с полостями, содержащи-
ми жидкость. М., Наука, 1965. 440 с.
20. Нариманов Г. С., Докучаев Л. В., Луковский И. А. Нелинейная динамика
летательного аппарата с жидкостью. М., Машиностроение, 1977. 208 с.
21. Натанзон М. С. Продольные автоколебания жидкостной ракеты. М., Ма-
шиностроение, 1977. 205 с.
22. Охоцимский Д. Е. К теории движения тела с полостями, частично запол-
ненными жидкостью. — ПММ, 1956, с. XX, вып. 1, с. 3—20.
23. Петров Б. Н. и др. Современные методы проектирования систем автома-
тического управления. М., Машиностроение, 1967. 703 с.
371.
24. Пилипенко В. В., Задонцев В. А., Наганзон М. С. Кавитационные авто-
колебания и динамика гидросистем. М., Машиностроение, 1977. 352 с.
25. Пожалостин А. А. Определение параметров механического аналога для
осесимметричных колебаний упругого цилиндрического сосуда с жидкостью. —
Инж. журнал МТТ, 1966. № 5, с. 157—159.
26. Попов Е. П. Динамика систем автоматического регулирования. М., Гос-
техиздат, 1954. 798 с.
27. Раушенбах Б. В. Вибрационное горение, М., Физматгиз, 1961. 222 с.
28. Роуз. Анализ продольной устойчивости ракет на жидком топливе. — ВРТ,
1967, № 8, с. 3—25.
29. Седов Л. И. Методы подобия и размерности в механике. М., Наука, 1972.
449 с.
30. Синярев Г. Б., Добровольский М. В. Жидкостные ракетные двигатели.
М., Оборонгиз., 1957, 580 с.
31. Феодосьев В. И., Синярев Г. Б. Введение в ракетную технику. М., Обо-
ронгиз. 1960. 506 с.
32. Феодосьев В. И. Основы техники ракетного полета. М., Наука, 1979.
494 с.
33. Челомей В. Н. О возможности повышения устойчивости упругих систем
при помощи вибраций. — ДАН СССР, 1956, т. ПО, № 3, с. 345—347.
34. Abramson Н. N., Silverman S. Dynamic behaviour of liquids in moving
containers NASA SP—106, Washington, D. C, 1966, p. Г05—143.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . 3
Часть первая.
Жидкостная ракета как объект регулирования
Глава 1. Уравнения движения ракеты как твердого тела 5
1.1. Силы, действующие на ракету в полете . 5
1.2. Системы координат .... . 9
1.3. Уравнения движения ракеты ... . 10
1.4. Уравнения возмущенного движения . . 13
Г лава II. Динамические характеристики ракеты как твердого тела и обес-
печение устойчивости движения ... . . . . 18
2.1. Понятие об устойчивости движения ... . 18
2.2. Методы оценки устойчивости движения .... . 19
2.3. Анализ уравнений возмущенного движения ракеты . . 22
2.4. Передаточные функции и их свойства..................... 25
2.5. Частотные характеристики и частотный критерий устойчивости 28
2.6. Приближенные оценки качества переходного процесса . . 29
2.7. Структура автомата стабилизации ... .31
2.8. Эффективность органов управления............................. 34
2.9. Частотные характеристики ракеты как твердого тела и требова-
ния к автомату угловой стабилизации .............................. 36
2.10. Требования к автомату боковой стабилизации центра масс 43
Г лава III. Колебания жидкости в баках . 46
3.1. Постановка задачи . . ... 46
3.2. Уравнение Лапласа . . ... 47
3.3. Давление жидкости ... . . . ... 48
3.4. Краевые и начальные условия.................................. 49
3.5. Определение потенциала абсолютных скоростей жидкости в ци-
линдрическом баке..................................................50
3.6. Главный вектор и главный момент гидростатических и гидроди-
намических сил.................................................... 57
3.7. Уравнения возмущенного движения бака с жидкостью .... 62
3.8. Механическая модель колебаний жидкости в баке.................64
3.9. Динамические свойства бака с жидкостью . 67
3.10. Другие формы потенциала абсолютных скоростей жидкости . 70
3.11. Потенциал абсолютных скоростей жидкости в баке, образован-
ном двумя коаксиальными круговыми цилиндрами...................... 74
3.12. Метод Лагранжа при выводе уравнений возмущенного движения
бака с жидкостью.................................................. 76
3.13. Решение задачи о колебаниях жидкости вариационным методом 79
3.14. Экспериментальное изучение колебаний жидкости в баке ... 81
Глава IV. Уравнения движения и динамические характеристики жесткой
ракеты с учетом колебаний жидкости в баках ........................... 86
4.1. Динамическая модель . . 86
373
Стр.
4.2. Уравнения возмущенного движения.............. . . 88
4.3. Частоты собственных колебаний системы........................ 92
4.4. Передаточная функция регулируемого объекта и ее свойства 95
4.5. Дополнительные требования к автомату угловой стабилизации 102
4.6. Амплитудная и фазовая стабилизация.......................... 104
4.7. Устойчивость замкнутой системы с идеальным регулятором 105
4.8. Структурная неустойчивость регулируемого объекта . . 111
4.9. Конструктивные способы улучшения устойчивости ... 112
4.10. Автоколебания ракеты....................................... 115
Глава V. Уравнения движения упругой ракеты . . 118
5.1. Схематизация свойств упругого корпуса ракеты.................118
5.2. Уравнения поперечных колебаний прямого неоднородного стержня 119
5.3. Собственные поперечные колебания свободного стержня . . . 120
5.4. Общие свойства частот и форм собственных колебаний . . . 122
5.5. Вынужденные поперечные колебания свободного стержня . . 123
5.6. Аэродинамические силы, действующие на упругую ракету . . 124
5.7. Уравнения возмущенного движения упругой ракеты . . . 125
Глава VI. Методы определения форм и частот собственных колебаний 131
6.1. Метод последовательных приближений...........................131
6.2. Метод прогонки.......................................134
6.3. Метод прогонки в матричной форме.....................136
6.4. Определение форм и частот собственных поперечных колебаний
корпуса ракеты....................................................138
6.5. Метод вынужденных колебаний.............................. . 142
Глава VII. Влияние упругих свойств корпуса на устойчивость движения
ракеты................................................................147
7.1. Предварительные замечания................................... 147
7.2. Передаточная функция упругой ракеты и ее свойства . . . 149
7.3. Условия устойчивости движения ... 154
7.4. Методы гашения упругих колебаний . . . . . . 158
7.5. Упругие поперечные автоколебания . . . . . . 161
Глава VIII. Влияние сжимающих сил и упругости подвески поворотного
двигателя на устойчивость движения.....................................163
8.1. Влияние осевой следящей силы на поперечные колебания упруго-
го стержня....................................................163
8.2. Приближенный учет влияния осевой следящей силы на попереч-
ные колебания стержня с помощью метода Бубнова — Галерки на 168
. 8.3. Уравнения поперечных колебаний корпуса ракеты с учетом упру-
гости подвески поворотного двигателя ................................ 172
8.4. Собственные поперечные колебания корпуса ракеты с поворотным
двигателем.......................................................175-
8.5. Уравнения органов управления с учетом упругости их приводов 177
8.6. Влияние упругой подвески поворотного двигателя па устойчи-
вость движения........................................... ... 180
8.7. Методы стабилизации сервопривода...................... . . 185
8.8. Передаточные функции упругой ракеты.........................185-
8.9. Экспериментальное определение сил внутреннего трения, форм и
частот собственных колебаний корпуса ракеты.......................192
Глава IX. Уравнения движения и динамические характеристики упругой
ракеты с баками, частично заполненными жидкостью .... 196
9.1. Динамическая модель......................................... 196
9.2. Уравнения возмущенного движения упругой ракеты с учетом ко-
лебаний жидкости в баках.....................„.................; 197
9.3. Уравнения возмущенного движения упругой ракеты пакетной
схемы........................................................... 2(к
374
Стр.
9.4. Передаточные функции ракеты и их, свойства 211
9.5. Метод корневого годографа................................... 214
9.6. Анализ устойчивости движения . . . 218
Часть вторая
Продольные колебания ракеты с жидкостным ракетным двигателем
Глава X. Продольные колебания ракеты с ЖРД............................223
10.1. Механизм возникновения продольных автоколебаний ракеты с
ЖРД........................................................223
10.2. Автоколебания в замкнутых системах ракеты............. 224
10.3. Замкнутая колебательная система ракеты с ЖРД ’. ... 226
10.4. Упрощенная математическая модель.......................228
10.5. Составные части задачи о продольных колебаниях ракеты с ЖРД 232
Глава XI. Осесимметричные колебания баков с жидким топливом . . . 233
11.1. Постановка задачи...........................................233
11.2. Определение основной частоты собственных колебаний бака с
жидкостью методом Рэлея..........................................235
11.3. Вынужденные продольные колебания бака с жидкостью на ос-
нове приближенной модели....................................... 24'0
11.4. Определение потенциала скорости жидкости в упругом цилиндри-
ческом баке с жестким дном.......................................242
11.5. Определение потенциала скоростей жидкости в цилиндрическом
баке с жесткой обечайкой и упругим дном..........................245
11.6. Определение потенциала скоростей жидкости в упругом цилинд-
рическом баке....................................................247
11.7. Определение полной механической энергии системы .... 248
11.8. Применение метода Ритца для определения осесимметричных ко-
лебаний упругих баков с жидкостью................................251
11.9. Вынужденные осесимметричные колебания бака с жидкостью . 254
11.10. Динамическая модель упругого бака с жидкостью .... 256
11.11. Определение форм и частот собственных колебаний упругих ба-
ков с жидкостью модифицированным методом Ритца . . . 260
Глава XII. Продольные колебания корпуса ракеты . 262
12.1. Динамическая модель.........................................262
12.2. Уравнение продольных колебаний неоднородного стержня . . 264
12.3. Определение форм и частот собственных колебаний неоднород-
ного стержня методом последовательных приближений . . . 269
12.4. Определение форм и частот собственных колебаний неоднород-
ного стержня методом прогонки....................................270
12.5. Определение форм и частот собственных колебаний неоднород-
ного стержня методом конечных разностей . . ... 271
12.6. Колебания двигателя как механической системы...............272
12.7. Определение форм и частот собственных колебаний корпуса ра-
кеты ........................................................... 274
12.8. Возмущения от колебаний движения газов в баках .... 280
12.9. Вынужденные колебания корпуса ракеты.......................281
12.10. Определение форм вынужденных колебаний....................284
12.11. Алгоритм расчета форм вынужденных колебаний корпуса
ракеты................................................... ... 287
Глава XIII. Колебания жидкости в топливных магистралях . 294
13.1. Структура топливных магистралей............................294
13.2. Динамическое взаимодействие топливной магистрали с корпусом 296
13.3. Уравнения возмущенного движения сжимаемой жидкости в длин-
ной прямой трубе ............................................... 298
13.4. Собственные колебания жидкости в однородной трубе . 300
13.5. Стоячие и бегущие волны....................................304
375
Стр.
13.6. Вынужденные колебания жидкости в однородной трубе и ча-
стотные характеристики.............................. . 306
13.7. Колебания жидкости в упругой прямой трубе . . 309
13.8. Влияние сильфонов на колебания потока жидкости . . . . 314
13.9. Влияние упругих переметший узлов крепления топливных ма-
гистралей .............................................. . 315
13.10. Влияние гидравлических сопротивлений . 318
13.11. Влияние гидравлических аккумуляторов . 320
13.12. Кавитационные явления в насосах ЖРД . 322
13.13. Влияние кавитации на напор насоса.......................... 325
13.14. Влияние кавитации на динамические характеристики насоса 327
13.15. Влияние кавитации иа динамические характеристики топливной
магистрали........................................................331
13.16. Формирование динамических блок-схем топливных магистралей 332
13.17. Вынужденные колебания жидкости в топливных магистралях 335
13.18. Экспериментальное изучение динамических характеристик 337
Глава XIV. Динамические свойства ЖРД.................................. 337
14.1. ЖРД как составная часть замкнутой колебательной системы 337
14.2. Основные звенья динамической схемы ЖРД 340
14.3. Уравнение камеры сгорания . . . 344
14.4 Динамические схемы ЖРД . . . 346
14.5. Частотные характеристики ЖРД 348
Глава XV. Динамические схемы и устойчивость . 350
15.1. Динамические схемы............................. . 350
15.2. Оценка устойчивости методом D-разбиения . . . 357
15.3. Оценка устойчивости методом частотных характеристик . 360
15.4. Оценка устойчивости методом корневого годографа . . 363
15.5. Роль обратных связей....................................... 364
15.6. Методы обеспечения устойчивости............................. 367
15.7. Экспериментальное исследование динамических характеристик 368
Список литературы 371
ИВ № 2227
Константин Сергеевич Колесников
ДИНАМИКА РАКЕТ
Редактор М. А. Колосов
Художественный редактор В. В. Лебедев Переплет художника £. В. Бекетова
Технический редактор В. И. Орешкина Корректор В. А. Воробьева
Сдано в набор 11.03.80. Подписано в печать 09.06.80. Т-08384.
Формат 60X90716 Бумага типографская № 2. Гарнитура литератур-!;1Я-
Печать высокая Усл. печ. л. 23,5. Уч.-изд. л. 26,55.
Тираж 3000 экз. Заказ 359. Цена 1 р. Ю к.
Издательство «Машиностроение» 107076, Москва, Б-76, Стромынский пер., 4.
Московская типография № 8 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7.