/







































































































































































































































Author: Челомей В.Н.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника машиностроение гидравлика авиастроение
Year: 1978




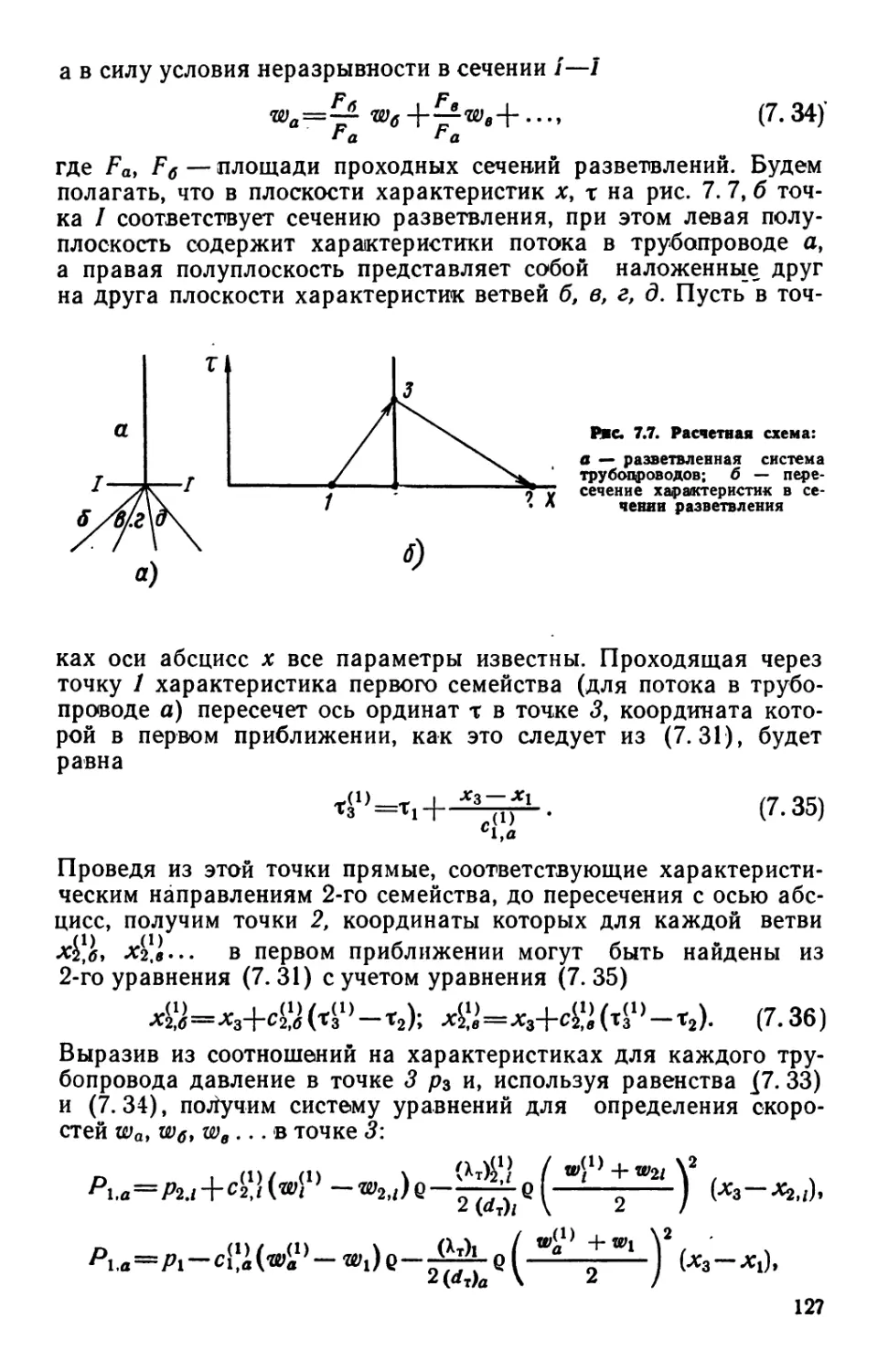
Text
ПНЕВМО-
ГИДРАВЛИЧЕСКИЕ
СИСТЕМЫ
двигательных установок
с жидкостными ракетными
двигателями
Под редакцией академика В. Н. ЧЕЛОМЕЯ
Москва
«МАШИНОСТРОЕНИЕ»
1978
УДК 629.7.036.001.2@82)
Авторы:
В. Н. ЧЕЛОМЕИ, Д. А. ПОЛУХИН, Н. Н. МИРКИН,
В. М. ОРЕЩЕНКО, Г. Л. УСОВ
Рецензент
Т. А. СЫРИЦЫН
Пневмогидравлические системы двигательных установок с жидкостными
ракетными двигателями. Под редакцией академика В. Н. Челомея. М.,
«Машиностроение», 1978,240 с.
В книге изложены вопросы проектирования и испытания агрегатов
и пневмогидравлических систем жидкостных ракетных двигательных установок.
Предложена классификация пневмогидравлических систем, рассмотрены
их принципиальные схемы, приведены методики расчета и описание
основных агрегатов и систем.
Значительное внимание уделено описанию внутрибаковых процессов,
выбору основных параметров пневмогидравлических систем, их статическим
и динамическим характеристикам, динамике работы при запуске жидкостного
ракетного двигателя, а также испытаниям жидкостных ракетных
двигательных установок. Систематизированы материалы по чшевмогидравлическим
системам ракет-носителей и космических аппаратов.
Книга может служить пособием для инженеров, работающих в области
ракетной техники, а также для студентов старших курсов высших учебных
заведений.
Табл.,11, ил. 124, список лит. 76 назв.
_ 31808-348 —,
п aoq/aiv -о 348-78 (С)Издательство «Машиностроение», 1978 г.
Uoo(UlO8 v-^
ОТ РЕДАКТОРА
Предлагаемая читателю книга освещает широкий круг
вопросов, оказывающих одно из решающих влияний на
работоспособность машин и агрегатов, оснащенных пневмогидравлическими
системами.
Материалами для написания книги послужили многолетние
теоретические, экспериментальные и конструкторские
разработки, а также практическое применение пневмогидросистем на
различных установках.
Использование пневмогидросистем и отдельных их элементов
с каждым годом расширяется в разнообразных машинах и
оборудовании, применяемых в народном хозяйстве.
Если опыт, изложенный в книге, окажется полезным
читателю в его практической работе, то цель, которую преследовали
авторы и редактор, готовя этот труд к опубликованию, они
будут считать достигнутой.
Академик В. Н. Челомей
ПРЕДИСЛОВИЕ
В связи с бурным развитием ракетно-космической
техники в последние годы появилось достаточно много работ,
посвященных жидкостным ракетным , двигателям (ЖРД) и их
основным агрегатам, термодинамике процессов, происходящих
в камерах сгорания, устойчивости работы, статическим и
динамическим характеристикам двигателя, вопросам теории
надежности и экспериментальной отработки. ЖРД является основным
элементом жидкостной ракетной двигательной установки
(ЖРДУ), в которую входят топливные баки с агрегатами
наддува, расходные магистрали, соединяющие двигатели с баками,
рулевые приводы и целый ряд других систем и вспомогательных
устройств.
До настоящего времени пневмогидравлическим системам
(ПГС) жидкостных ракетных двигательных установок,
обеспечивающим заправку топливных систем, хранение и подачу топлива
в двигатели с заданными параметрами, не уделялось должного
внимания в отечественной литературе.
Авторы монографий по основам теории расчета и
проектирования ЖРД чаще всего рассматривали системы,
обеспечивающие подачу топлива в ЖРД, в самом общем виде. Однако
сложность процессов, происходящих в топливных баках при
заправке, при наддуве баков, особенно газогенераторном, а также
влияние систем подачи на запуск ЖРД, на статические и
динамические характеристики двигателя, двигательной установки и
всего объекта в целом, приводят к необходимости рассмотрения
пневмогидравлических систем подачи как самостоятельной
системы ЖРДУ и к необходимости изложения основ их
проектирования в отдельной монографии.
В предлагаемой читателю книге три раздела.
В первом разделе рассмотрены агрегаты и элементы
пневмогидравлических систем, топлива и топливные баки, системы
регулирования опорожнения баков и контроля заправки топливных
систем.
Во втором разделе изложены процессы, происходящие в
пневмогидравлических системах ЖРДУ при подготовке к пуску
и при запуске ЖРД.
В третьем разделе приведены виды и объем испытаний
агрегатов и отдельных систем, входящих в ПГС.
При написании книги авторами были систематизированы
сведения, опубликованные в открытой периодической печати,
а также использованы самостоятельные разработки.
Авторы приносят искреннюю благодарность д-ру техн. наук,
проф. Т. А. Сырицыну за ряд ценных замечаний, сделанных при
рецензировании рукописи будущей книги.
Авторы просят читателей сообщить свои отзывы и
замечания по адресу: Москва, Б-73, 107885, 1-й Басманный пер., 3,
издательство «Машиностроение».
Раздел первый
СИСТЕМЫ, АГРЕГАТЫ И ТОПЛИВА ЖРДУ
Глава 1
ОБЩИЕ СВЕДЕНИЯ
О ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМАХ ЖРДУ
Реактивный аппарат, использующий для работы только
вещества или источники энергии, имеющиеся в запасе на самом
аппарате, должен иметь двигатель, который принято называть
ракетным двигателем (РД), независимо от назначения
перемещающегося аппарата [25]. Такой аппарат может быть летательным (в
воздушном или космическом пространстве), наземным,
надводным (подводным).
Аппарат, использующий ракетные двигатели и способный
доставлять объект в заданную точку космического пространства
с заданной скоростью, называют ракетой-носителем (РН).
i Аппарат, летающий в космическом пространстве по орбите и
имеющий средства для изменения орбиты полета, принято
называть космическим аппаратом (КА).
В дальнейшем будут рассматриваться только летательные
аппараты с ракетными двигателями и работающие только на
жидком ракетном топливе (ЖРТ), т. е. аппараты с
жидкостными ракетными двигателями.
Силовую установку такого аппарата называют жидкостной
ракетной двигательной установкой. Так как рабочей средой
жидкостной ракетной двигательной установки являются жидкости и
газы (жидкие компоненты топлива, газообразные продукты
сгорания, жидкие и газообразные продукты наддува баков, газы
пневмоуправления и т. д.), то в ЖРДУ можно выделить пнев-
могидравлическую часть.
Под пневмогидравлической системой понимают совокупность
тшевмопидравлтесюих устройств ЖРДУ, состоящих из ПГС
одного или нескольких ЖРД, топливных баков, расходных
магистралей и вспомогательных устройств и систем,
обеспечивающих заправку баков компонентами топлива и зарядку
аккумуляторов давления, хранение рабочих продуктов без изменения
их свойств в заданном диапазоне параметров, предпусковой и
основной наддувы баков, непрерывную подачу топлива с
заданными параметрами в камеры сгорания двигателей во время их
работы, а также работу агрегатов автоматики и регулирования
в соответствии с циклограммой работы и программой полета.
5
Иногда из ПГС ЖРДУ выделяют пневмогидравлическую
систему подачи (ПГСП ЖРДУ), в которую не зходит пневмо-
гидравлическая часть собственно двигателя и которая
обеспечивает все выше перечисленные операции и подачу топлива на
вход в жидкостные ракетные двигатели с заданными
параметрами.
Необходимо отметить, что понятие входа в двигатель
является условным, зависящим от комплектации (состава)
двигателя, особенностей его компоновки на аппарате, условий его
стендовой отработки и определяется обычно договоренностью между
разработчиками аппарата и двигателя.
Комплектация двигателя существенно зависит от назначения
аппарата (ракета-носитель, космический аппарат и т. д.) и
задач, выполняемых двигательной установкой. Так, ЖРД,
предназначенные для установки на ракеты-носители, имеют узкий
круг задач, связанный в основном с разгоном и стабилизацией
ракеты на активном участке полета. Здесь наиболее часто
применяются двигатели с однократным запуском в полете с
насосной подачей компонентов топлива, в состав которых входят тур-
бонасосный агрегат (ТНА), газогенераторы (ГТ) привода ТНА
и наддува топливных баков, камеры сгорания двигателя,
регуляторы расхода и давления, различные пневмогидравлические
или пиротехнические клапаны, служащие для осуществления
различных операций при пуске или остановке двигателя. Одним
из характерных элементов комплектации ЖРД,
предназначенных для установки на ракеты-носители, является наличие в
них устройств для изменения направления вектора тяги
двигателя, j.
Комплектации двигателей для космического аппарата могут
существенно отличаться друг от друга. От того, служит ли
двигатель задачам обеспечения маневрирования аппарата в кос*ми-
ческом пространстве или только его стабилизации и ориентации,
меняется не только структурная схема двигателя и конструкция
его агрегатов, но и режимы его работы. Как правило, на
космических аппаратах применяются двигатели многократного
запуска в полете как с насосной, так и с вытеснительной
системами подачи топлива.
В дальнейшем под параметрами на входе в двигатель
(давление, температура, расход, сплошность и т. п.) будем понимать
параметры, замеренные в местах подсоединения двигателя к
ПГСП.
Современные ракеты-носители и космические аппараты
проектируются в многоблочных вариантах. Каждый блок
предназначен для выполнения определенной задачи на заданном актив*
ном участке траектории полета и поэтому имеет свою
автономную двигательную установку. В литературе часто смешиваются
понятия блока и ступени. Обозначение ракетных блоков и
ступеней показано на рис. 1.1.
6
Ракетный блок — это часть многоступенчатой ракеты,
обеспечивающая движение полезной нагрузки и последующих
ракетных блоков на заданной части активного участка траектории и
отделяемая в конце ее.
Под ступенью ракеты понимают
часть многоступенчатой ракеты,
продолжающую активный полет по
траектории после отделения предыдущего
ракетного блока.
Структура ПГС ЖРДУ и
конструкция входящих в нее элементов
существенно зависят не только от назначения
аппарата в целом или его отдельного
блока, но и от рода топлива, вида
старта, видов системы подачи топлива и
бортового наддува, длительности
эксплуатации в заправленном состоянии
и т. п. Это многообразие признаков
создает чрезвычайные трудности для
классификации пневмогидравлических
систем ЖРДУ.
Очевидно, что для изучения
проблем, связанных с созданием ПГС
ЖРДУ, необходимо прежде всего
иметь четкое представление не только
о функциональном составе и
назначении систем, входящих в нее, но и об
основных требованиях, предъявляемых к
этим системам, об определении
основных элементов и параметров,
употребляемых при проектировании ПГС.
1.1. ФУНКЦИОНАЛЬНЫЙ СОСТАВ ПГС
ПГС ЖРДУ радсет-носителей и
космических аппаратов щешеттся по
функциональному назначению на
следующие комплексные системы:
— топливную систему;
— систему заправки;
— систему наддува;
— систему ограничения давления;
— систему управления состоянием
топлива;
— вспомогательные системы.
Каждая из этих комплексных систем, как правило, состоит
из нескольких более простых функциональных частей, которые
7
Рис. 1.1. Наименование ракетных
блоков и ступеней:
/, 2, 3, 4—первый, второй,
третий, четвертый — ракетные
блоки; /. //, ///, IV - первая,
вторая, третья, четвертая ступени
можно определить с классификационной точки зрения как
подсистемы комплексных систем.
Топливная система — комплекс пневмогидравлических
устройств (в том числе топливных баков), обеспечивающих
хранение топлива, а также питание компонентами топлива
жидкостных ракетных двигателей для их нормального
функционирования при старте и в полете.
Топливная система включает следующие подсистемы:
а) расходные магистрали — совокупность трубопроводов,
узлов и агрегатов, обеспечивающих транспортировку компонентов
топлива в ЖРД;
б) заборные устройства — совокупность внутрибаковых
устройств, обеспечивающих организованный забор компонентов из
топливных емкостей с минимальными остатками незабора;
в) подсистемы управления положением топлива и
разделения жидкой и газовой сред — совокупность устройств,
обеспечивающих непрерывную подачу (сплошность потока, жидкого
топлива в ЖРД);
г) подсистемы перелива — совокупность устройств,
обеспечивающих перекачку компонентов топлива из одной емкости в
другую;
д) подсистемы демпфирования колебаний топлива —
совокупность устройств и приспособлений, позволяющих уменьшить
амплитуды колебаний топлива в баках и магистралях;
е) подсистемы подпитки — совокупность устройств, обеспе-ч
чивающих питание ЖРД компонентами топлива из небортовых
емкостей.
Система заправки — комплекс устройств,
обеспечивающих заправку (слив) и зарядку (сброс) емкостей топливом и
газом.
Система заправки может состоять из следующих подсистем:
а) заправки топливом — совокупности устройств,
обеспечивающих заправку, насыщение газом, дозаправку, слив и
повторную заправку компонентами топлива;
б) зарядки газом — совокупности устройств,
обеспечивающих зарядку и сброс газа;
в) дренажа — совокупности устройств, обеспечивающих
дренаж емкостей при заправке.
Система наддува — комплекс устройств, обеспечивающих
необходимые давления в топливных баках.
Система наддува может состоять из следующих подсистем:
а) предпускового наддува — совокупности устройств,
обеспечивающих наддув (поднаддув) топливных баков до выхода
на режим системы основного наддува;
б) основного наддува — совокупность бортовых устройств,
обеспечивающих наддув топливных баков при работающих
двигателях.
8
Система ограничения давления — комплекс устройств,
предохраняющих ПГС от разрушения и разгерметизации в
процессе эксплуатации.
Такая система может состоять из следующих подсистем:
а) обеспечения давления в топливных баках в требуемых
пределах при хранении и транспортировке в незаправленном
состоянии — совокупности устройств, обеспечивающих
допустимый перепад давления между топливными баками и
окружающей средой;
б) обеспечения давления в топливных баках в требуемых
пределах при хранении в заправленном состоянии —
совокупности устройств и мероприятий, обеспечивающих необходимый
диапазон давления в топливных баках в процессе хранения в
заправленном состоянии;
в) предохранения топливных баков при пуске и в полете —
совокупности устройств, обеспечивающих ограничение давлений
в баках при наддуве.
Система управления состоянием топлива — комплекс
устройств, обеспечивающих требуемые характеристики и
параметры компонентов топлива при эксплуатации ПГС.
Система управления состоянием топлива и контроля
параметров может состоять из следующих подсистем:
а) терморегулирования — совокупности устройств и
мероприятий, обеспечивающих поддержание заданных значений
температур топлива в период эксплуатации;
б) контроля параметров рабочей среды (в баках) —
совокупности устройств, обеспечивающих «измерение характеристик
рабочего тела в ПГС и выдачу соответствующих сигналов в
системы регулирования ЖРДУ;
<в) изменения аттрегатаого состояния топлива — «совокупности
устройств, обеспечивающих перевод компонентов топлива из
разных агрегатных состояний в жидкое с требуемыми
характеристиками, необходимыми для нормальной работы двигателей.
Вспомогательные системы:
а) нейтрализации;
б) продувки;
в) пневмоуправления агрегатами;
г) аварийного слива и т. п.
Состав ПГС, разбитый по функциональному назначению на
системы и подсистемы, представлен на рис. 1.2.
В зависимости от назначения ракеты и от вида старта пнев-
могидравлические системы располагаются как на борту, так и
вне борта: ¦
— на земле (ракета-носитель),
—< на космическом корабле-носителе и т. д.
Вне борта располагаются в основном системы первых
ракетных блоков (система подпитки топливом двигателей 1-го ракет-
9
Система ограничения давления
Подсист емы
3
111!
IIll
Система наддува
Подсистемы
Система управления
состоянием топлива
и контроля параметр
Подсистемы
I
1
I
н
15
Топливная система
Подсистемы
поло
ива и.
тидп
Перелива
Подпитки
J
3
ос
1
i
Система
топливом
1
заправки
Подсистемы
Зарядки
газом
Дрената
Вспомогательные с a cm емы
Подсистемы
I
f
h
|
I*
Рис. 1.2. Функциональный состав ПГС
10
ного блока и т. п.), а также системы заправки, дренажа и
предпускового наддува всех ракетных блоков.
Внебортовые системы до старта соединены с бортовыми
системами герметичными соединениями, которые при старте
расстыковываются либо соответствующим образом разделяются.
1.2. ОПРЕДЕЛЕНИЯ
1.2Л. Агрегаты и узлы пневмогидравлической системы
подачи ЖРДУ
Клапан
предохранительный (ПК)
Клапан дренажно-пре-
дохранительный (ДПК)
Клапан заправочно-
сливной (ЗСК)
Клапан дренажный
Клапан заправочно-
дренажный
Клапан пусковой
Клапан отсечной
Клапан сливной
Газораспределитель
Демпфер
Устройство заборное
<ЗУ)
Пневмогидроразъем
Компенсатор
Магистраль расходная
Автодроссель
Клапан свободного
прорыва
Клапан регулируемый
— предназначен для ограничения давления в
системе и срабатывающий от избыточного
давления рабочего тела.
— предохранительный клапан, снабженный
устройством, обеспечивающим принудительное
открытие клапана с целью дренажа системы.
— сообщает полости топливных систем изделия с
внебортовыми системами.
— обеспечивает сброс газа, паров топлива или
их смеси из ПГСП при его принудительном
открытии.
— сообщает полости пневмосистем ПГСП с
внебортовыми системами зарядки и дренажа
газов.
— обеспечивает соединение двух смежных пнев-
мо- или гидромагистралей при подаче
управляющего сигнала.
— обеспечивает перекрытие двух смежных пнев-
мо- или гидромагистралей при подаче
управляющего сигнала.
— предназначен для слива топлива.
— устройство, обеспечивающее ввод газа
наддува в газовый объем топливной емкости.
— устройство, обеспечивающее снижение
собственной частоты колебании жидкого топлива в
магистралях.
— обеспечивает максимальную выработку
топлива из бака без нарушения сплошности
потока в расходной магистрали.
— устройство, предназначенное для разъема
трубопроводов с обеспечением герметичности
разъединенных концов.
— устройство, предназначенное для компенсации
изменения объема рабочего тела и элементов
конструкции ПГСП.
— трубопровод, предназначенный для
транспортировки топлива к ЖРД.
— устройство, изменяющее свое гидравлическое
сопротивление с изменением давления рабочего
тела, проходящего через это устройство.
— устройство, содержащее мембрану,
перекрывающую газовую или гидравлическую
магистраль и прорываемую давлением рабочего
тела.
— имеет несколько режимов настройки и
работающий в любом из них.
11
Вытеснительное
ройство
Блок наддува
уст-
Свободный газовый
объем (газовая подушка)
Рабочее давление
Рабочий запас
(жидкого) топлива
Гарантийный
топлива
запас
Коэффициент
сплошности топлива
Концентрация газа в
топливе
Состав газа в
топливной емкости
Масса ПГСП
Гидравлические потери
Конструктивные
остатки незабора
Гидравлические
остатки незабора
Тепловые остатки
незабора
Время предпускового
наддува
Массовый расход газа
на наддув
Массовый расход
топлива при заправке
— отделяет газовый объем от жидкого топлива
в топливной емкости в процессе хранения и
вытеснения топлива из нее.
— совокупность пневмоустройств и клапанов,
смонтированных в едином корпусе.
1.2.2. Параметры
— разность между полным объемом топливной
системы и объемом заправленного в нее жид-
* кого топлива.
— номинальная величина давления рабочей
среды в системе при эксплуатации.
— максимально гарантированная масса топлива,
расходуемого на основном режиме и режиме
переходной ступени ЖРДУ при номинальных
условиях эксплуатации.
— масса топлива, необходимая для компенсации
отклонений параметров и внешних факторов
от номинальных при эксплуатации.
— относительное объемное содержание газовой
фазы в жидком топливе.
— масса газов, растворенных в единице объема
жидкого топлива.
— процентное содержание сотавляющих газов
в газовом объеме топливной емкости.
— суммарная масса конструкции всех систем,
входящих в ПГСП.
— перепад давлений, обусловленных
гидравлическим сопротивлением и изменением скорости на
расчетном участке ПГСП. (Включение
скоростного напора в гидравлические потери
имеет условный характер и сделано в целях
упрощения расчета).
— масса топлива, остающаяся в топливной
системе ПГСП, не используемая для работы ЖРД
по конструктивным ограничениям.
— масса топлива, остающаяся в топливной
системе в момент нарушения сплошности потока
жидкого топлива на входе в ЖРД.
— масса топлива с температурой, превышающей
предельно допустимую, остающаяся в
топливной системе в момент окончания подачи в
ЖРД.
— время от подачи команды на начало наддува
до достижения заданного давления в
топливной емкости.
— масса газа, расходуемого на наддув в
единицу времени.
— масса топлива, расходуемого в единицу
времени при заправке.
1.3. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ПГС
Общие технические требования к ПГС обусловлены
тактико-техническими, конструктивными и эксплуатационными
признаками.
Пневмогидравлические системы должны отвечать следующим
основным требованиям:
12
— иметь минимальную массу при обеспечении заданной
надежности функционирования;
— размещение максимально возможного количества
агрегатов и систем вне борта;
— иметь минимально необходимое количество разъемных
соединений и обеспечивать требуемую герметичность;
— исключать случайный контакт компонентов топлива друг
с другом;
— иметь достаточную прочность и минимальную стоимость
при оптимальной массе;
— обладать необходимой коррозионной стойкостью и не
вызывать изменения состава компонентов топлива;
— иметь минимально возможные гидравлические
сопротивления при оптимальной массе;
— должны быть технологичны в изготовлении и при
испытаниях на герметичность, функционирование и т. п.
— состоять по возможности из недефицитных материалов,
соответствовать действующим стандартам и нормалям;
— обладать вибропрочностью и вибростойкостью при
эксплуатации;
— иметь минимально возможное количество пневмо- и
гидросвязей с внебортовыми системами, исключать возможность
неправильного подключения к ним в процессе выполнения
технологических операций (в том числе при сборке на
заводе-изготовителе и при эксплуатации);
— должны обеспечивать максимально возможный полный
слив компонентов топлива без остатка и возможность
проведения нейтрализации и повторной заправки топливом;
— обеспечивать автоматические и дистанционные проверки
различных подсистем на заводе-изготовителе и во время
эксплуатации;
— предусматривать блокировки систем, исключающие
возможность самопроизвольного запуска двигателей в процессе
эксплуатации;
— обеспечивать максимальную автоматизацию управления
в процессе подготовки и старта;
— обеспечивать минимально возможные сроки и
материальные затраты на разработку и изготовление.
В за-в'исимоюти от назначения ра(кетьиносителя и вила старта
к ПГС ЖРДУ 1предъя(вляют1ся шециальные требовашя:
— минимально возможное время предстартовых операций;
— минимально необходимое количество операций контроля
за состоянием ПГС ъо "время хранения и эксплуатации;
— иметь резервирование наиболее ответственных узлов и
агрегатов ПГС ракет-носителей и космических аппаратов;
13
— иметь возможность многократного включения двигателей
и обеспечение работы ПГС космического аппарата в условиях
невесомости и знакопеременных перегрузок.
1.4. ОСНОВНЫЕ ПАРАМЕТРЫ ПГС
Исходными данными для проектирования ПГСП являются:
— технические требования на разработку изделия;
— физико-химические характеристики компонентов топлива;
— параметры окружающей среды;
— действующие нагрузки;
— потребные минимальные и максимальные величины
входных параметров двигателей.
Основными параметрами разрабатываемой пневмогидравли-
ческой системы подачи являются:
— давление на входе в двигатели;
— температура на входе в двигатели;
— концентрация растворенного газа в баке;
— количество свободного газа в топливе на входе в забор-
ник;
— концентрация растворенного газа и содержание
свободного газа в топливе на входе в двигатели;
— рабочие запасы компонентов топлива;
— неиспользуемые остатки компонентов топлива;
— гидравлические потери в системах подачи;
— давления в газовых объемах баков;
— величины свободных газовых объемов баков;
— масса сухой пневмогидравлической системы подачи;
— характеристики надежности и их среднеквадратичные
отклонения.
Перечень основных параметров может дополняться или
уточняться в зависимости от назначения объекта.
Методики расчета по определению величин основных
параметров, а также величины допусков на эти параметры, зависят
от назначения объекта, конкретных условий работы и
требуемой надежности выполнения задания.
В последующих разделах книги будут изложены соображения
по выбору величин этих параметров или методики их расчета.
1.5. КЛАССИФИКАЦИЯ ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМ
ЖРДУ
Выше отмечалось, что в связи с большим количеством
признаков, влияющих на конструкцию и структурную схему ПГС
ЖРДУ, чрезвычайно трудно создать ее единую
классификационную схему.
Существующие схемы в основном отражают изменения
функционального состава пневмогидравлических систем от какого-
либо признака (по способу подачи топлива или его агрегатно-
14
му состоянию, по типу старта, по типу основного бортового
наддува и т. д.). Однако все эти классификационные схемы,
облегчающие изучение особенностей ПГС, больше не находят
никакого практического применения.
В последние годы большое внимание уделяется вопросам
автоматизированного проектирования, т. е. проектирования с
помощью машин, непременным этапом которого является
разработка системы кодирования (сокращенной записи) общего
состава ПГС.
Автоматизированные системы проектирования (АСП) не являются
предметом рассмотрения настоящей работы, однако можно предложить в качестве
примера один из вариантов кодирования.
Это можно сделать, если все признаки, влияющие на конструкцию и
структурную схему ПГС, разделить на три основные группы:
— тактико-технические (Т);
— конструктивные (К);
— эксплуатационные (Э).
Назовем их комплексными признаками. Каждый комплексный признак
может состоять из ряда конкретных признаков.
Таким образом, каждую пневмогидравлическую систему можно
классифицировать по комплексным и конкретным признакам, которые можно
обозначить в виде буквенных и цифровых индексов.
Тогда в тактико-технический комплексный признак входят следующие
конкретные признаки:
а) назначение объекта:
а=\-:-п
1 — космический аппарат;
2 — ракета-носитель космического объекта;
б) род топлива:
б«=1 -ч-п
1 — высококипящее;
2 — низкокипящее и т. д.
в) вид старта:
в=1-т-/г
/ — стационарный;
2 — подвижный и т. д.
В конструктивный признак входят:
а) принадлежность к ракетному блоку:
/ — первый ракетный блок;
2 — второй ракетный блок;
3 — третий ракетный блок и т. д.
б) вид основного наддува:
1
/ — газобаллонный;
2 — газогенераторный;
3 — химический;
4 — пороховой и т. д.
в) вид подачи топлива:
1 — вытеснительная;
2 — насосная и т. д.
В эксплуатационный комплексный признак входят:
15
а) хранение топлива в составе объекта:
1 — ампулизированное;
2 — неампулизированное.
б) кратность запуска камер ЖРД:
3=1-4-3
/ — одноразовый;
2 — многоразовый с заменой элементов разового действия;
3 — многоразовый.
В общем случае ПГС ЖРДУ определяется совокупностью трех
комплексных признаков и может быть записана в следующем виде: Т(ап, бп, вп),
К(гп, дп, еп), Э(жп, зп, и„).
Такое сокращенное обозначение схемы ПГС, характеризующееся
указанными комплексными и конкретными признаками, позволит подойти к единой
системе кодирования, составлению единых классификаторов, единым
чертежным обозначениям агрегатов и систем ПГС и, наконец, к стандартизации и
унификации пневмогидравлических систем.
1.6. О ПРИМЕНЕНИИ ГРАФОВ К АНАЛИЗУ
И СИНТЕЗУ ПГС
В настоящее время в связи с появлением ЭВМ третьего поколения,
оснащенных гибкими операционными системами, ведется широкий круг работ
по автоматизации различных операций проектирования. В этом разделе
помещены некоторые результаты исследования возможности применения графов
для представления ПГС, а также автоматизации операций их анализа и
синтеза.
Основные понятия и определения
Геометрически граф изображается как некоторое множество точек,
каждая из которых соединена дугами с одной или несколькими другими точками.
Причем точки могут соответствовать объектам произвольной природы, а дуги,
соединяющие их, соответствуют произвольным связям, существующим между
объектами. Как абстрактное математическое понятие граф имеет следующее
определение.
Пусть есть некоторое множество X, состоящее из элементов х, t/el
Графом G=G(X) на множестве X называется множество пар V*=(x, y)f где
х, у<=Х.
По аналогии с геометрическим изображением графа V называется
ребром графа, а элементы х, у^Х — вершинами графа из множества его
вершин X.
Эквивалентным предыдущему является следующее определение графа
Если за произведение ХУ^Х принять множество всевозможных пар V==
1=3 (х> У) * гДе х> У^%> те графом G называется некоторое подмножество
произведения ху^х.
Наиболее существенным признаком, разбивающим все графы на три
класса, является вид связей между его вершинами.
Говорят, что ребра графа ориентированы, если (х, у)Ф(у, х). Это
соответствует случаю, когда связи между вершинами направленные. Граф, у
которого все ребра являются направленными, называется ориентированным
графом.
Если (х, у)—(у, х), то ребро называется неориентированным. Граф, все
ребра которого являются неориентированными, называется
неориентированным.
Граф, который имеет как ориентированные, так и неориентированные
ребра, называется смешанным.
Вершины в графе разделяются на инцидентные и неинцидентные.
Вершина х инцидентна вершине у, если, выходя из вершины х, можно попасть в
вершину у.
16
Утверждение: если х инцидентна у, то и у инцидентна х — справедливо
только для неориентированных графов. В остальных случаях это
утверждение может быть и неверно.
Геометрически один и тот же граф можно изображать самыми
различными способами, причем некоторые из- этих изображений будут совершенно не
похожи друг на друга. В связи с этим введено следующее определение.
Два графа С и С изоморфны, если существует такое взаимно
однозначное отображение их вершин X на X'', при котором вершины х, у^Х,
соединенные ребрами графа G, отображаются только в вершины хг, у'^Х',
соединенные ребрами графа G'.
Важнейшими характеристиками графов являются: размерность графа
(число его вершин); смежность графа (среднее число ребер, выходящих из
одной вершины графа). Следует заметить, что произвольность природы
вершин графа и их связей делает применение графов универсальным средством
представления сложных систем как взаимосвязи их отдельных частей.
Связь ПГС и графов
Обычная схема ПГС является графом, где различные элементы и
агрегаты связаны трубопроводами. Однако на функционирование такой схемы
существенное влияние оказывают различные электрические связи между
датчиками, приводами, системой управления и т. д. Таким образом, если
множество вершин (элементов и агрегатов ПГС) дополнить вершинами
(основными частями системы управления) и пневмогидравлические связи дополнить
электрическими, то получится граф схемы ПГС. Такой граф, как правило,
является смешанным. При представлении ПГС графами целесообразно
придерживаться следующих правил: вершинами назначать сложные агрегаты,
части системы управления, трубопроводы, емкости и точки разветвления;
ребрами — элементы, представляющие местные сопротивления, простые
мембраны, клапаны (которые можно считать местными сопротивлениями, не
учитывая их протяженность) и различные связи. В связи с тем, что ПГС обычно
насыщены клапанами, соблюдение упомянутых правил может привести к
значительному уменьшению размерности ее графа. В общем случае при
функционировании ПГС в некоторый момент времени пневмогидравлические процессы
протекают не во всех ее элементах и агрегатах, а только' в некоторой части.
Поэтому граф ПГС можно рассматривать как некоторое множество, на
котором определена последовательность подмножеств, являющихся
последовательностью графов пневмогидравлических процессов. Последовательность
графов процессов может следовать в строгой последовательности, как это бывает
в ПГС ракет-носителей, а может иметь случайный характер, определяемый
взаимодействием человека или системы управления с внешней средой, как это
бывает в ПГС космических аппаратов. Графы процессов следует выбирать
ориентированными, где каждая связь представлена двумя
противоположно-ориентированными ребрами. Это объясняется тем, что скорость распространения
возмущений в таких системах невелика и несимметрична по направлению,
что оказывает существенное влияние на протекание процесса. Граф ПГС
порождает так же надежностный граф ПГС. В надежностном графе
целесообразнее всего в качестве вершин выбирать элементы и агрегаты ПГС, а в
качестве ребер их связи в выполнении той или иной задачи. Если вершины
(элементов или агрегатов) соединены в надежностном графе в
последовательную цепочку, то это означает необходимость их одновременного
функционирования при выполнении задачи. В случае наличия двух параллельных
цепочек для выполнения задачи достаточно, чтобы функционировали все
агрегаты хотя бы одной из них. Надежностные графы являются неориентирован»
ными.
Представление графов на ЭВМ
Наиболее общим естественным представлением графов в ЭВМ является
квадратная матрица А[1, У] размерностью п, где п^—чиеле—-еврвнш-* графа.
17
Элементами матрицы A[I, J] являются переменные или константы,
характеризующие ребра графа. Отсутствие связи между вершинами / и / определяется
равенствами a{,j=aj,i«O. Когда a*,j=G), где со — некоторая переменная, то
это соответствует наличию связи, зависимой от параметров переменной. При
at\j=0j.te=3l между вершинами i и / существует постоянная связь.
При большом числе вершин и малой связности графа такое
представление не экономично, так как большинство элементов матрицы будут равны
нулю. Целесообразно попытаться такие графы хранить в ЭВМ некоторыми
более компактными частями (подграфами).
В этом случае необходим еще один граф связи отдельных подграфов.
Наиболее естественное разложение графа ПГС на отдельные подграфы дает
разбиение ПГС на подсистемы. Графы отдельных подсистем будут иметь
среди своих вершин такие, которые будут соответствовать одним и тем же
агрегатам (емкостям и т. д.) ПГС, которые как раз и определяют множество
вершин связи отдельных подграфов (подсистем) в едином графе ПГС. Граф
связи нескольких подграфов (подсистем) можно представить в ЭВМ в виде
квадратной матрицы B[I, J] размерностью т, где т — число подграфов.
Элементами матрицы B[It J] являются номера общих вершин различных
подграфов, причем bi,j равен номеру вершины в i-ом подграфе, общей с вершиной
bj,i в /-ом подграфе. Такое представление подграфов связи справедливо для
разбиения, когда два различных подграфа имеют не больше одной общей
точки, что и справедливо для подсистем ПГС. Однако система управления может
иметь несколько общих вершин с некоторыми из подсистем ПГС. Для
подграфа (подсистемы), имеющего несколько общих точек с некоторыми из
подграфов, необходимо отводить количество вершин в матрице связи В[1, /},
равное максимальному числу общих вершин с каким-либо из подграфов. Следует
заметить, что и в общем случае любой граф допускает разбиение на граф
связи и подграфы, являющиеся отдельными неразветвленными цепями или их
произвольными комбинациями.
Анализ и синтез схем ПГС
Основными задачами анализа схем ПГС являются:
— исследование на функциональное выполнение поставленных задач;
— исследование параметров процессов, происходящих в системе при ее
функционировании;
— исследование надежности выполнения поставленных задач;
— сравнение основных показателей схемы с другими возможными ее
вариантами (если есть необходимость, то и с любыми другими схемами).
Синтез схем ПГС с применением ЭВМ, наряду с задачами анализа,
включает следующее:
— формализованную постановку задач, подлежащих выполнению при
функционировании схемы ПГС (в виде логической системы уравнений);
— преобразование поставленных задач к одному или нескольким типовым
видам (каждый типовой вид соответствует некоторому типовому составу
подсистем);
— синтез (по преобразованному виду поставленных задач) некоторого
набора схем ПГС типового состава;
— выбор по заданному критерию из произвольного набора схем ПГС
(типовых и прочих) наиболее оптимальной.
Для автоматизированного анализа и синтеза схем ПГС необходимо
прежде всего решить задачу формализации постановки задач, подлежащих
выполнению проектируемой или исследуемой схемой. Наиболее приемлемым
аппаратом для описания обширного круга задач, которые решают и будут решать
ПГС различных изделий, являются логические уравнения взаимосвязи
функционирования их основных агрегатов. Для ПГС ЖРДУ ракет-носителей
основными агрегатами являются камеры сгорания двигателей одной или
нескольких ЖРД. В зависимости от назначения и общих задач ракет-носителей
всегда можно задать систему логических уравнений функционирования ее в
ЖРДУ в процессе эксплуатации. На практике в настоящее время, как пра-
18
вило, эта система заменена циклограммой работы ПГС РН. Если присвоить
каждой из ДУ свою логическую переменную со* и условиться, что при 0)»*=]
ДУ работает, а при о),=0 не работает, то необходимо со» задать как
функцию некоторых временных интервалов т и начального момента времени /0,
которое, как правило, зависит от внешних условий и задается человеком через
систему управления, т, — обусловлены по минимуму и максимуму задачами
каждой из ДУ. Взаимосвязь работы ДУ связывает логические переменные
Of в соответствующие уравнения.
Внутренняя логика функционирования различных подсистем ПГС в
обеспечении работы двигателей образует соответствующие системы логических
уравнений некоторого дополнительного множества логических переменных.
Количество переменных в этом множестве определяется сложностью
поставленных задач, подлежащих выполнению, необходимостью управления двумя
компонентами топлива, а также наддувом и надежностью, так как
некоторые подсистемы или элементы необходимо резервировать.
Глава 2
УСТРОЙСТВО ПНЕВМОГИДРАВЛИЧЕСКИХ
СИСТЕМ
2.1. ТОПЛИВНЫЕ СИСТЕМЫ
Топливные системы ракет-носителей и космических
аппаратов по выполняемым задачам и условиям работы отличаются
друг от друга.
Характерной особенностью работы двигательных установок
ракет-носителей является запуск двигателей на каждом блоке
лри наличии положительных перегрузок. Эти перегрузки
обеспечивают постоянный контакт заборных устройств в баках с
компонентами топлива и вместе с этим бесперебойную подачу
компонентов топлива к двигателям. Заборные устройства
являются одними из основных устройств топливных систем ракет-
носителей.
Основной задачей при проектировании заборных устройств
является сведение к минимуму воронкообразования при
окончании выработки компонента топлива из бака, исключение захвата
газа и механических загрязнений, способных привести к срыву
работы двигательной установки и большим остаткам незабора.
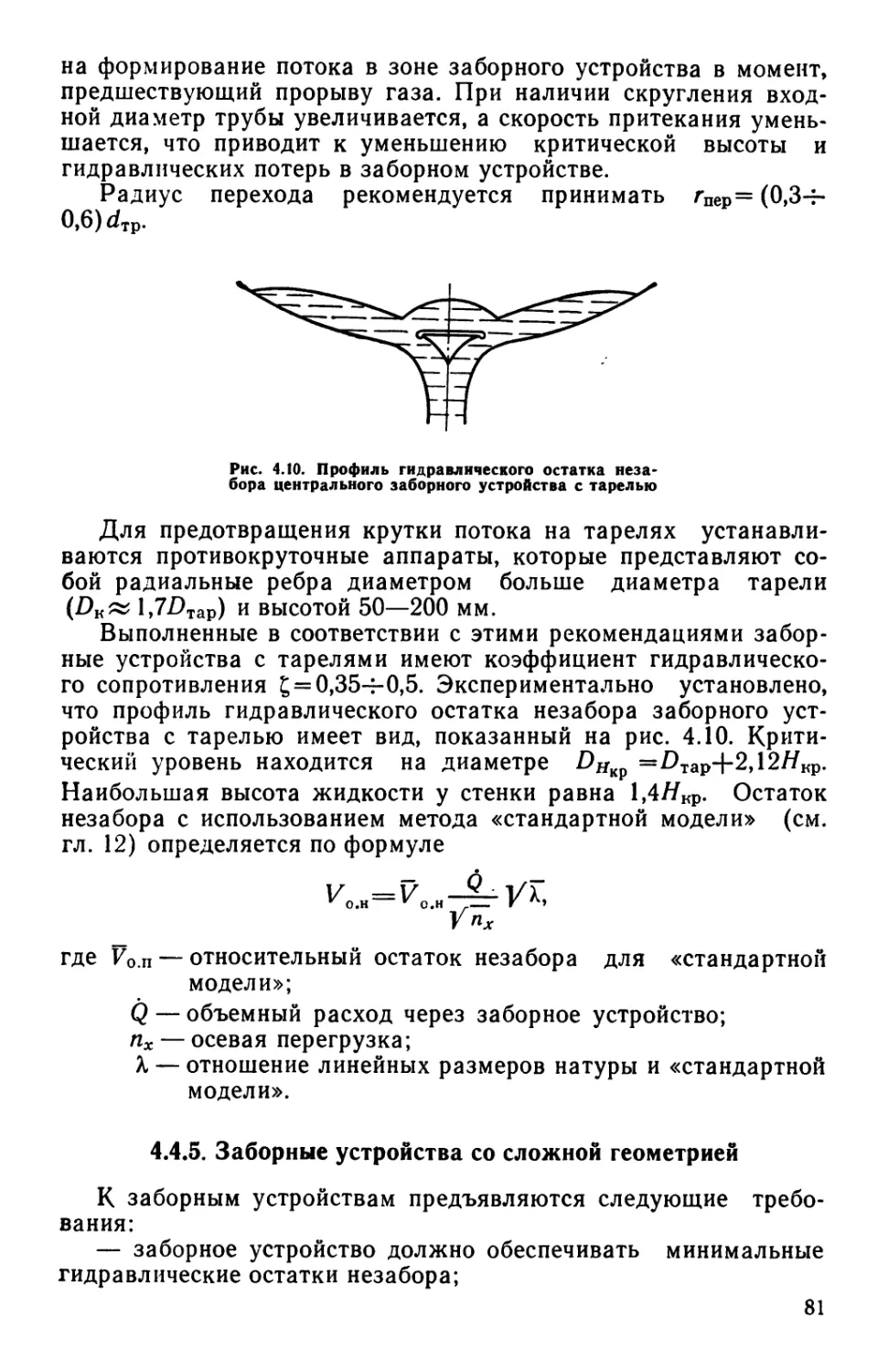
Заборные устройства могут быть выполнены с тарелью, с
направляющими ребрами, конические, сильфонные и др.
Наименьшие остатки незабора обеспечивают сильфонные и
конические заборные устройства (см. гл. 4).
Для управления движением космического аппарата в
пространстве широко используются двигательные установки,
представляющие системы иногда с несколькими десятками
двигателей малой тяги, установленными по различным каналам
стабилизации, и общей системой питания. К этим системам предъяв-
19
Таблица 2.1
Системы подачи
Поршневая
С эластичными
мешками
С
металлическими сильфонами
С эластичной
диафрагмой
С металлической
диафрагмой
Устройства для вы тесни тельных систем подачи топлива
из баков
Преимущества
Простота управления,
возможность регулирования
начального объема
газовой подушки; небольшие
объемы невырабатываемых
остатков топлива
Значительный опыт
разработки; универсальность
применения
Полная герметичность;
долговечность применения;
многократность повторных
циклов заполнения
Высокая эффективность
вытеснения; возможность
повторных заполнений
баков
Хорошая совместимость с
топливом;
нечувствительность к колебаниям
топлива
Недостатки
Система тяжелая и не
обеспечивает полной
герметичности между
полостями; возможны отказы
вследствие перекоса или
коррозии; применение
ограничено цилиндрическими
баками
Трудность изготовления
калиброванных баков
большой длины
Недолговечность при
контакте с топливом;
значительные невырабатываемые
остатки; невозможность
повторного заполнения
бака из-за неконтролирован-
ного складывания и
появления негреметичности в
результате образования
складок
Большая масса, наличие
перекосов при вытеснении;
высокая трудоемкость при
изготовлении
Недолговечность при
контакте с топливом;
применение ограничено баками
сферической формы
Применение ограничено
формой бака и количеством
срабатываний; малое
число повторных циклов
заполнения
ляются весьма жесткие требования, во многом отличные от тех,
которые предъявляются к двигательным установкам ракет. Это
объясняется прежде всего необходимостью многоразового
включения всех двигателей или части двигателей космического
аппарата как в условиях невесомости, так и в условиях
отрицательных и боковых перегрузок, а также импульсным режимом
работы с высокими динамическими характеристиками.
Эти условия накладывают дополнительно ряд специальных
требований к организации вытеснения и забора топлива из
баков космических аппаратов. Так, топливная система КА должна:
20
1) обеспечивать управление положением топлива и
разделение жидкой и газообразной сред в баках;
2) обеспечивать постоянный контакт всего компонента или
его части с заборным устройством бака при любых
направлениях перегрузок;
3) предотвращать попадание газа в заборное устройство при
запуске и во время работы двигательной установки.
Рис. 2.1. Вытеснительные устройства с промежуточной перегородкой:
а—устройство с эластичной перегородкой: У—заборное устройство; 2—металлическая
диафрагма; 3—редуктор; 4—аккумуляторы давления; 5—сжимающая эластичная полость;
6—расширяющаяся эластичная полость; 7—топливный бак; 5—перфорированная труба;
3—мешок разделительный; /0—эластичный разделительный мешок;
б—поршневые вытеснительные устройства: /—труба направляющая; 2—поршень с
зазором; 3—поршень с уплотнением; 4—поршень сферический; 5—бак торовый; 6—поршень
сферический;
в—сильфонные вытеснительные устройства: /-^топливный бак сферический: 2—сильф он
сферического бака; 3—наддув бака; 4—сильф он цилиндрического бака; 5—топливный бак
цилиндрический; 6—эластичный телескопический мешок; 7—топливный бак
Для удовлетворения этих требований в топливных системах
космических аппаратов применяются следующие устройства,
основанные на различных способах разделения жидкости и газа:
1) устройства с промежуточной перегородкой для вытесни-
тельной подачи топлива из баков (табл. 2.1);
21
2) центробежные разделительные устройства;
3) капиллярные устройства и др.
В качестве перегородки в вытеснительных системах подачи
иапользуются "эластичные мешки или диафрагмы, поршни или
сильфоны (рис. 2.1, а, б и в)-
Эластичные диафрагмы (мембраны) изготавливаются из
металла с концентрическими гофрами или из полимерной пленки,
армированной металлической фольгой.
Эластичные мешки изготавливаются из пленки, стойкой в
жидком и газообразном компонентах топлива [43]. Материал
должен быть пригоден для изготовления изделий необходимой
формы.
Под давлением газа наддува, подаваемого внутрь мешка,
последний расправляет и вытесняет жидкое топливо,
находящееся между мешком и баком, в расходную магистраль.
Топливо можно располагать и внутри эластичного мешка.
Самым надежным средством разделения является
металлический сильфон. Металлические сильфоны изготавливаются из
тонкого металлического листа, сваренного по окружности гофров,
или прессованных гофров из тонкостенной металлической трубы.
Сильфоны могут иметь коническую или цилиндрическую форму.
Жидкое топливо можно .располагать как внутри, так и снаружи
сильфона. Внутреннее расположение топлива более экономично
с точки зрения 'меньших останков незабора, однаноо появляется
опа/сноють нерасчетной деформащии (удлинения сильфона) при
осевых -перегрузках (во время выведения иа орбиту, при
включении маршевого двигателя КА.
J 2
Рис. 2.2. Поршневое герметичное вытесннтельное устройство:
/—цилиндрический бак; 2—вытеснительный поршень; 3—эластичное
уплотнение; 4—клапан наддува; 5—дренажный клапан; 6—реле минимального
давления; 7—реле максимального давления; 8—топливный клапан
Схема поршневой вытеснительной системы подачи может
быть улучшена использованием вытеснительного поршня 2 с
эластичными уплотнениями 3 (рис. 2.2). В герметичном поршне
предварительно создается давление несколько меньшее, чем
рабочее давление в баке /. При рабочем давлении поршень
становится подвижным. При сбросе давления через клапан 5 до
22
на
настройки реле минимального давления 6 поршень становится
неподвижным и хорошо разделяет компонент от газовой
полости.
Центробежные разделительные устройства основаны -на
принципе сепарации топлива от газа. На рис. 2.3, а и б
показаны центробежные разделительные устройства, основанные —
закрутке всего топлива в
баке.
Наиболее перспективны
для высококипящих топлив,
обладающих значительными
силами поверхностного
натяжения, капиллярные
системы, которые обладают
простотой, обусловленной
отсутствием движущихся частей,
а также не требуют внешних
источников энергии для
своей работы.
Существуют два способа
реализации капиллярных
систем:
1) удержание части
топлива в районе заборного
устройства (рис. 2.4,а);
2) стабилизация основной
массы топлива (рис. 2.4,6).
Первый способ
используют для двигательных
установок одноразового запуска,
после чего все топливо
стабилизируется. Второй
способ применяется для систем подачи многоразового запуска
двигателей. На рис. 2.4,в показаны некоторые схемы реализации
таких систем.
Так, например, для обеспечения многоразового запуска
маршевой двигательной установки космического корабля «Аполлон»
используют капиллярное накопительное устройство,
изображенное на рис. 2.5.
В топливной системе лунного экспедиционного отсека
космического корабля «Аполлон» используется капиллярное
накопительное устройство в виде перевернутого колпака с
перфорированной перегородкой (рис. 2.6, а). Сплошная оболочка
накопительного устройства сохраняет топливо при отрицательных
ускорениях, в то время как перфорированная перегородка
предотвращает переток жидкости при боковых ускорениях.
Стабилизация всей массы топлива осуществляется с помощью двига-
2а
Рис. 2.3. Центробежные разделительные уст-
ройства:
а—центробежное разделительное устройство с
механической закруткой топлива: /—топливный,
бак; 2—лопасти; 3—гидротурбина; 4—труба,
питающая гидротурбину; 5—тангенциальное
заборное устройство;
б—центробежное разделительное устройство
с закруткой активной жидкостью: /—клапан
отбора жидкости от ТНА: 2—тангенциальный
подвод активной жидкости; 3—топливный бак;
4—тангенциальное заборное устройство; 5—
ТНА; 6—отсечной клапан; 7—двигатель
Риь. *.4. Капиллярные системы управления топливом в баке:
а—удержание части топлива; б—стабилизация основной массы топлива: /—нестабилизи-
рованное топливо; 2—удерживающий экран; 3—стабилизированное топливо; 4—заборник;
5—основная масса топлива; б—(Пристеночный экран;
в—схемы реализации капиллярных систем: /—«капиллярный зазор; 2—перфорированная
проставка; 3—наддув бака; 4—сетка -экран; 5—сетчатый стакан; 6—сетка-экран
Рис. 2.5. Устройство удержания топлива в
баках маршевой двигательной установки
космического корабля «Аполлон»:
1—центральный коллектор; 2—датчик
уровня; 3 — капиллярные перегородки с
отверстиями диа«метром 1,5 мм; 4 —
зонтичные экраны с отверстиями диаметром
0,5 мм; 5 — гаситель скорости потока; 6 —
заправка топлива и подвод газа наддува;
7 — подача топлива к двигателю; 8 —
перфорированный лист с отверстиями
диаметром 0,6 мм
24
тельной реактивной системы управления перед запуском
основного двигателя.
На рис. 2.6, б показаны схемы реализации сильфонных
накопительных устройств.
В США капиллярные элементы, использующие силы
поверхностного натяжения, применяются на беспилотных мишенях с
рис. 2.6. Накопительные устройства топливных
баков:
а—капиллярное наполнительное устройство:
/—перфорированный лист с отверстиями
диаметром 0,87 мм; 2—днище бака; 3—выходной
патрубок;
б—сильфонное накопительное устройство: 1—
магистральный кран; 2—кран накопителя; 3—
наддув бака; 4—топливный бак; 5—сильфон-
накопитель; 5—из накопителя
одноразовым включением двигателей (рис. 2.7). Во время
работы капиллярные элементы действуют подобно газовым
обратным клапанам. Элементы размещены у переднего и заднего днищ
топливного бака для того, чтобы обеспечить контакт с жид*
костью в период подъемов и спусков мишени. Перевернутые кол-
паки, установленные сверху капиллярных элементов, создают
топливные резервуары во время маневров, вызывающих отри-
25
/ /
/ 6
дательные ускорения. Капиллярные элементы изготовляются из
нержавеющей стальной проволочной сетки. Сетка имеет
гофрированную форму, чтобы увеличить площадь проточной части и,
следовательно, получить конструкцию с малыми потерями
давления. Удерживающая спо-
2 J собность смоченной сетки
достаточна для
предотвращения прорыва паров при
рабочих ускорениях среды.
Интересно отметить, что силы
поверхностного натяжения
также приводят к задержке
воды (которая может
попасть в бак в качестве
примеси) и не допускают ее
попадания на вход в двигатели.
Кроме устройств,
обеспечивающих разделение
жидкой и газовой сред и
расходных магистралей с
заборными устройствами, в состав
топливных систем
ракет-носителей и космических
аппаратов могут входить
подсистемы перелива топлива из
одной емкости в другую, демпфирования колебаний, подпитки
топливных баков из внебортовых емкостей и другие системы,
характеристики которых в данной книге не рассматриваются.
Рис. 2.7. Схема системы стабилизации
топлива в баках мишени МОМ-74А:
/—металлические колпаки, удерживающие
топливо при отрицательных ускорениях:
2^перегородка; 3 — топливный бак; 4—
дренаж бака: 5—магистраль подачи топ-
ли<ва к насосу; 6—капиллярные элементы
2.2. СИСТЕМА ЗАПРАВКИ
Структура системы заправки компонентами топлива и зарядки
газом определяется эксплуатационными требованиями к ракет-
но-коамическим комплексам.
Средства заправки должны обеспечивать хранение
компонентов топлива и газа в стационарных хранилищах или
передвижных емкостях, термостатирование и насыщение (рассыще-
ние) компонентов топлива газом, подачу компонентов топлива и
газа из хранилища в бши и баллоны ракеты-носителя и 1кюсми-
чекжого ашгарата с (Необходимыми расходами и давлениями,
наддув баков после кшжчания заправки до заданных давлений
храшшия и т. п.
Конструктивно система заправки тесно связана с топливной
системой и подразделяется на бортовую и наземную.
Ракетно-космические системы заправляются от
стационарных средств заправки, пневмогидравлическая система которых
иногда сложнее ПГС ракеты.
26
В настоящее время все большие требования предъявляются
к точности заправки, а следовательно, и к средствам,
определяющим точность заправми. Точность затравки ракег-ноюителей
и космических аигпаратов находится в (пределах 0,1—0,5% от за-
дравляамой дозы. Залравка может быть весовой и объемной.
Для весовой залрааки требуется нал'ичие сложных весов или
епецкальных загрузочных устройств, которые дают «такую
точность, так как (ракета «а стартовом устройстве жекггко связана
с наземными средствами 'болышим количествам электро-, пне©мо-
и гидрошммушгааций.
Обычно используют объемный способ заправки. В этом
случае необходимо точное измерение температуры компонентов
топлива для оценки количества заправляемого компонента,
которое в течение всего времени заправки может существенно
изменяться. При объемной заправке контроль заправляемой
объемной дозы осуществляют либо с помощью датчиков контроля
уровня, стационарно устанавливаемых в баках, либо
используют съемные системы контроля, например, радиационные, не
требующие контакта с контролируемой средой. Применение
съемных датчиков контроля уровня наиболее целесообразно,
так как они обладают рядом преимуществ перед остальными, а
именно:
— не входят в общую массу объекта;
— позволяют контролировать объем компонента при
заправке, сливе и повторной заправке, а также при регламентных
работах.
2.3. СИСТЕМА НАДДУВА ТОПЛИВНЫХ БАКОВ
Система наддува топливных баков обеспечивает
предпусковой наддув баков до давлений, необходимых для безаварийного
запуска двигателей, а также основной наддув баков в полете от
бортовых подсистем наддува. Система наддува взаимосвязана
со многими системами, улучшение ее характеристик оказывает
существенное влияние на повышение эффективности
двигательной установки и ракеты в целом.
Для наддува топливных баков перед пуском и в полете
обычно применяют газобаллонные, испарительные или
газогенераторные системы, использующие жидкие или твердые компоненты
топлива (рис. 2.8, 2.9, 2.10, 2.11).
Известны также системы наддува баков с газофицированны-
ми основными компонентами топлива. Такие системы
целесообразно применять на ракетах-носителях, использующих в
качестве основных компонентов криогенные топлива, например,
жидкий кислород+жидкий водород (рис. 2.12).
В стадии разработки находятся химические системы
наддува, «эснованные на впрыске реагирующего компонента в бак.
В газобаллонных системах наддува (см. рис. 2.8) рабочее
тело представляет собой газ (обычно воздух, азот или гелий),
27
Рис. 2.8. Газобаллонные системы наддува:
а—система наддува баков сжатым газом без подогрева:
/—разъем: 2—баллон с газом; 3—редуктор: 4—соленоидный клапан; 5—обратный клапан;
б—предохранительный кла<пан; 7—окислитель; Я—горючее; 9—к камере сгорания;
б—система наддува баков сжатым газом с подогревом:
/—разъем; 2—баллон с газом: 3—редуктор; 4—соленоидный клапан; 5—теплообменник;
?—обраташй клапан; 7-^редохранительный клапан; 8—окислитель; 9—горючее; /0—к
камере сгорания
Рис. 2.9. Схема управляющей двигательной
установки с использованием летучих
веществ для наддува баков:
/—топливный бак; 2—теплоизоляция бака;
3—электронагревательные элементы; 4—
вытеснительный сильфоя; 5—батарея
/—подача
газогенераторы
Рис. 2.10. Газогенераторная система наддува топливных баков:
окислителя в газогенераторы; 2-подача горючего в газогенераторы: 3, 10-
горы наддува; 4, 9—разделительные мембраны; 5—<5ак горючего; 6,
в—коллекторы яаддува; 7—бак окислителя
28
рис. 2.11. Система наддува баков от
газогенератора на твердом топливе:
/—газогенератор; 2—воспламенитель; 3—фильтр;
4—разрывная диафрагма; 5—калиброванный
жиклер; 6—предохранительный клапан; 7—обратный
клапан; 6—Фытеснительный мешок; 9—окислитель;
10— горючее; //—к камере сгорания
От дана
—— с кислородом
От дат
с водородом
выброс газоб
3ii борт
Турбонасосный
агрегат
Рис. 2.12. Схема системы наддува баков основными компонентами топлива (О2 и Н2):
1—двигатель; 2, 14, 23—насосы; 3, S—дренажный и предохранительный клапаны; 4, 5—
датчики давления в баке; 7, 22—теплообменники; 8, 16—обратные клапаны; 9.
19—клапаны регулирования расхода водорода; 10, 18—воспламенители; //, 17—клапаны
регулирования расхода кислорода; 12, 20-~камеры сгорания двухкомпонентного топлива; 13,
21—датчики температуры; 15, 24—турбина
29
который хранится в баллонах под высоким давлением, что
является серьезным источником ненадежности.
Известные системы наддува, использующие летучие
жидкости, работают следующим образом. В процессе перехода
летучего вещества из жидкого состояния в газообразное в
ограниченном объеме происходит повышение давления, которое может
быть использовано для вытеснения топлива из баков (см. рис.
2.9). В отличии от описанных систем такую систему
целесообразно применять в двигательных установках малой тяги.
Постоянное давление наддува в такой системе поддерживается путем
стабилизации температуры летучего вещества. В качестве
источников тепловой энергии для нагрева летучего вещества могут
использоваться электрические батареи, теплопоглотительные
системы и т. п. Теплонагреватели включаются по командам
сигнализаторов давления в топливном баке. Такие системы
применяются на управляющих двигательных установках. Для
вытеснения топлива из баков применяются герметичные сильфоны,
а в качестве летучего вещества используются аммиак, фреон
и т. д.
Преимуществом газогенераторной системы наддува (см. рис.
2.10) является возможность использования в качестве
источника газа жидких или твердых топлив, которые занимают мало
места и удобны в хранении. Рабочие характеристики газа
выбираются с учетом обеспечения максимальной эффективности
такой системы. Для наддува баков окислителя и горючего
необходимо две отдельные газогенераторные системы (во избежание
неконтролируемых реакций между компонентами топлива в
баках), что в конечном итоге приводит к усложнению
двигательной установки.
Наиболее компактным источником рабочего газа обычно
являются твердые топлива (см. рис. 2.11), у которых
температура продуктов сгорания лежит в пределах 1370—1470 К. В
течение многих лет для этих целей использовались топлива двух
типов — двухосновные с большим недостатком окислителя
(жидкие нитроэфиры) и смесевые топлива на основе нитрата
аммония. Жидкие нитроэфиры могут диффундировать к
границам заряда, уменьшая его прочность. Продукты сгорания этих
топлив имеют чрезмерно высокую температуру или содержат в
большом количестве твердые частицы углерода. С другой
стороны, составы на основе нитрата аммония имеют относительно
низкую плотность, гигроскопичны и сравнительно плохо
воспламеняются.
Если для наддува используется сжатый газ, то с целью
экономии в габаритах системы его удобно хранить при криогенной
температуре (см. рис. 2.12.). В ракетах, работающих на
криогенных компонентах топлива (Титан-1, Сатурн-1В, Сатурн-5) для
этой цели баллоны с сжатым газом помещают в тошшвные баки
и топливо играет роль теплопоглотителя.
30
В двигательной установке лунного экспедиционного корпуса
космического корабля «Аполлон», где используются высококи-
пящие компоненты топлива (четырехокись азота и аэрозин-50),
а для наддува применяется гелий, естественная среда с
криогенной температурой отсутствует, поэтому для нее разработана
специальная криогенная система, последующие испытания
которой показали ее высокую эффективность и надежность. Гелий,
применяемый для наддува топливных баков, хранится в
сферическом сосуде Дьюара с вакуумной рубашкой при
сверхкритическом давлении и криогенной температуре.
Можно получать газ наддува в процессе контролируемой
реакции, протекающей непосредственно в баках между одним
компонентом топлива и дополнительным компонентом (так
называемый химический наддув). Такая система наддува особенно
привлекательна для ракеты длительного хранения на
самовоспламеняющихся компонентах топлива и является предметом
интенсивных исследований [32, 33]. Дополнительный реагент
можно впрыскивать на свободную поверхность жидкости в баке
или в массу жидкости ниже ее поверхности. Установлено, что в
первом случае дополнительный реагент необходимо впрыскивать
в виде сплошной струи; при этом следует избегать дробления
струи в процессе впрыска и разбрызгивания при ее контакте со
свободной поверхностью жидкости в баке, поскольку
увеличение глубины проникновения струи в массу жидкости
способствует снижению температуры получаемого газа до приемлемого
уровня, а дробление и разбрызгивание может привести к
интенсивному горению капель. Горящие капли не должны попадать
на стенку бака. Лучше впрыск осуществлять подальше от
стенки и под большим углом для лучшего проникновения струи
D0^7^90°). При поверхностном впрыске требуется меньший
расход дополнительного реагента. Впрыск на свободную
поверхность обеспечивает большой удельный объем продуктов
реакции, меньшие засорение и меньшее повышение температуры
массы основного компонента топлива и более высокую температуру
газа. При экспериментальных исследованиях получали
температуру газа в подушке 9204-1070 К. Температура топлива через
15 с повышалась на 1 —1,5 К, при этом реакции в баке
протекали с соотношениями компонентов 0,14—0,42 (все данные
приведены для бака горючего, заправленного гидрозином). В
качестве реагента использовался пятифтористый хлор.
Опыты по наддуву окислителя не дали положительных
результатов, а привели к разрушению конструкций. Вследствие
комплексной природы явления точный расчет коэффициентов
соотношения компонентов топлива не представляется
возможным и является главной причиной ошибок при расчете
характеристик наддува. Данные по составу газов после химических ре*
акций, полученные экспериментально, отличаются на 10—15%
°т данных, рассчитанных известными методами теории химичес-
31
кого равновесия для соответствующих значений коэффициентов
соотношения компонентов топлива. Установлено, что такие
параметры, как характер распыла, расход реагента и давление,
влияют на колебания характеристик наддува. Основные
преимущества химического наддува: возможность точного
регулирования давления и приемлемый уровень температур стенок баков
и топлива, а также высокая эффективность.
Реагент хранится под давлением в небольшом баке и
периодически впрыскивается в главный топливный бак при помощи
клапана, которым управляет реле давления. Существенным
недостатком химического способа наддува является сложность
организации одинаковых условий впрыска топлива при
перемещении уровня в процессе выработки топлива из баков.
Экспериментально установлено, что такая система наддува
может регулировать давление в баке с точностью ±1% при
частоте впрыска от 2 до 5 Гц при начальном объеме газовой
подушки, составляющей 5% полного объема бака. Химический
наддув можно использовать при наддуве закольцованных
газовых подушек окислителя и горючего, однако в этом случае
требуются устройства для поддержания стабильности разных
величин давлений в каждом баке.
В настоящее время изучается возможность использования
химического наддува для криогенных и тиксотропных топлив, а
также для наддува баков высокого давления [32, 33].
2.4. ОПИСАНИЕ ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМ
РАКЕТ-НОСИТЕЛЕЙ И КОСМИЧЕСКИХ АППАРАТОВ
Как уже отмечалось выше, схема пневмогидравлической
системы существенно зависит от назначения изделия, условия
старта, длительности хранения в заправленном состоянии,
требуемой надежности и т. п.
На рисунках 2.13, 2.14 и 2.15 представлены схемы пневмо-
гидравлических систем маршевой, посадочной и взлетной
двигательных установок космического корабля «Аполлон» [31].
В качестве компонентов топлива используются: окислитель —
азотный тетраксид N2O4, горючее — смесь A:1 по массе)
безводного гидразина с несимметричным диметилгидразином.
Соотношение компонентов — 1:6.
В маршевой двигательной установке (см. рис. 2.13) гелий
для наддува баков хранится при температуре окружающей
среды в двух сферических баллонах высокого давления 7. Через
нормально закрытые электропневмоклапаны 8, блоки
регуляторов расхода 99 блок обратных клапанов 20 и теплообменники IS
гелий поступает в баки хранения топлива 6 и 10. Из баков
хранения топлива компоненты поступают в расходные баки 5 и 11,
32
а затем через теплообменники — в двигатель. Система
опорожнения баков (СОБ), в которую входят датчики, установленные
внутри баков 12 и 13, измеряет количество оставшихся в баках
компонентов топлива и определяет величину рассогласования.
Одновременность выработки компонентов из баков регулируется
Рис. 2.13. Схема пневмогидравлической системы подачи маршевой двигательной установки
космического корабля «Аполлон»:
/—предохранительный клапан с регулируемой прорывной мембраной в магистрали гелия;
2—быстроразъемное соединение дренажа окислителя; 3—быстроразъемнэе
соединение заправки и слива окислителя; 4—заборное устройство; 5—расходный бак
окислителя; 6—бак хранения окислителя; 7—баллоны с гелием; 8—электропневмо-
клапаны гелия; 9—блоки регуляторов расхода гелия; 10—бак хранения горючего;
//—расходный бак горючего; 12—точечный датчик уровня; 13—емкостной датчик
уровня; 14—успокоитель; 15—быстроразъемное соединение заправки гелия; /5—быстро-
разъемное соединение дренажа горючего; 17—быстроразъемное соединение заправки и
слива горючего; 18—теплообменник; 19—сильфэн; 20—обратные клапаны; 2/—дроссель
системы опорожнения баков; Р—датчик давления; Г—датчик температуры
дросселем СОБ. В расходных баках имеются заборные
устройства с внутренним и наружным сетчатыми экранами; они
предназначены для предотвращения попадания пузырей гелия в
топливные магистрали, особенно в период запуска двигателя,
когда возможны значительные колебания уровня компонентов.
Тяга двигательной установки — 97500 Н, давление в камере —
0,686 МПа, время работы ЖРДУ — 750 с [31].
Для наддува баков посадочной двигательной установки (см.
рис. 2.14) используется газообразный гелий, который хранится
в криогенном состоянии. Теплообменники горючее — гелий
2 3205 33
(поз. 12) и гелий —гелий (поз. И) служат для обеспечения
необходимых давлений и температур в баке гелия и в
магистралях наддува топливных баков. Топливо содержится в попарно
закольцованных баках. Датчики СОБ емкостного типа, такие же
как в маршевой двигательной установке; как и у маршевой
Рис 2 14 Схема пневмогидравлической системы посадочной двигательной установи кос
мического корабля с Аполлон»:
34
двигательной установки топливные клапаны двигателя
представляют блок шаровых клапанов в последовательно-параллельном
соединении. Тяга двигательной установки 47500—4750 Н,
давление в камере 0,76—0,76 МПа, время работы ЖРДУ — 910 с
[31].
Взлетная двигательная установка (см. рис. 2.15) имеет тягу
15800 Н, давление в камере 0,828 МПа, время работы 600 с.
Конструкция аналогична конструкции маршевой двигательной
Рис. 2.15. Схема пневмогидравлической системы взлетной двигательной установки космя*
ческого корабля «Аполлон»:
- » ~.ww-.^ реактивного управления; 2—к системе приводов; 3—настроечная шайба; #—
фильтр горючего; 5—бак горючего; б^блок редукторов; 7—управляющий электропневмо-
клапан; 8—баллон гелия; 9—пироклапан; 10—фильтр гелия; //—блок обратных
клапанов; /2—-пир оклад ал; 13—предохранительный клалан; /4~-41рорывная мембрана;
окислителя; 16—фильтр окислителя
2*
35
3f
Стапый воздух от (
наземного иомпрессора
36
Рис. 2.16. Схема пневмогидравлической системы двигательной установки ракеты V-2:
/—клапан подпитки жидким кислородом; 2—бачки с самовоспламеняющимися
компонентами топлива; 3, 4—пятиштуцерная разъемная колодка; 5,
18—сливные клапаны спирта; 6—форсуночная головка зажигательного устройства; 7—главный
спиртовой клапан; 8—теплообменник; 9—дренажный кислородный клапан; 10—главный
кислородный клапан; //, 14—насосы; 12—«лапан заправки жидким кислородом:
13—турбина; 15, 16—обратные клапаны; 17—датчик уровня жидкого кислорода; 19—клапан
заполнения спиртовой магистрали; 20—заправочный патрубок спиртового бака;
21—электродатчик уровня спирта; 22—трехбаллонная батарея; 23—электропневмоклапан;
24—клапан наддува спиртового бака скоростным напором атмосферного воздуха; 25,
27—управляющие электропневмоклапаиы системы наддува и заполнения спиртового бака; 26—
заборник для наддува спиртового бака; 28—дроссель; 29—семибаллоиная батарея; 30—
ручной запорный вентиль; 31—манометр: 32—редуктор ПГГ; 33—клапан настройки
редуктора; 34—вентиль сброса давления; 35—блокирующий манометр; 35—главный клапан
ПГГ; 37, 38—обратные клапаны перманганата и перекиси; 39—управляющий
электропневмоклапан; 40—дренажный клапан бака перекиси; 41, 43—дренажные патрубки; 42—
дренажный клапан бачка перманганата натрия; 44—реле давления в системе подачи
перманганата натрия; 45—заправочный патрубок бачка перманганата натрия;
46—заправочный патрубок бака перекиси; 47—электропневмоклапан управления главной
ступенью; 4в—клапан конечной ступени; 49—клапан главной ступени; 50—парогазогенера-
тор (реактор); 51—электропневмоклаланы управления главными клапанами
компонентов; 52—электропневмоклапан пневмощитка; 53—-блокирующие реле; 54—реле наддува
бака жидкого кислорода; 55—электропневмоклапан; 56—главный клапан пневмощитка; 57—
клапан настройки редуктора; 55—клапан наддува бачков системы зажигания; 59—элект-
ролневмэклапан управляющий
установки. Гелий хранится при температуре окружающей среды.
Редукторы и обратные клапаны — в
последовательно-параллельном соединении. Датчики СОБ отсутствуют. Вместо них в
баках установлены датчики остатков топлива, которые выдают
сигнал за 10 с до полной выработки.
В качестве примера на рис. 2.16 представлена схема
пневмогидравлической системы ЖРДУ ракеты-носителя V-2. Наддув
бортовых баллонов и спиртового бака производится от
наземного компрессора через пневмощиток. Жидкий кислород и спирт
подаются в камеру сгорания с помощью турбонасосного
агрегата 11, 13 и 14у раскрутка которого осуществляется с помощью
парогазогенератора 50, работающего на перекиси водорода и
перманганате натрия. Схемой предусмотрен наддув спиртового
бака в полете скоростным напором через заборник 26.
Стратегической ракетой-носителем США является «Титан-3».
Рабочими компонентами двигательных установок ракеты
являются азотный тетроксид N2O4 и аэрозин-50.
Основные характеристики двигательных установок ракеты-
носителя «Титан-3» приведены в табл. 2.2.
Таблица 2.2
Параметры двигательной
установки
Количество камер
сгорания
Тяга, мН
Соотношение
компонентов топлива
Время работы, с
Давление в камере,
Первый
ракетный блок
2
0,955X2
1,93
165
5,3
Второй
ракетный блок
1
0,44
1,8
220
5,64
Третий
ракетный блок
2
0,35X2
2,0
500
0,7
37
Двигательная установка первой ступени (рис. 2.17) состоит
из двух автономных ЖРД с турбонасосной (ТНА) системой
подачи топлива. Газогенератор работает на компонентах топлива,
подаваемых в ТНА. Отбор компонентов топлива для этой цели
производится из магистралей за клапанами подачи топлива в
камеру сгорания. Для наддува бака с N2O4 используются пары,
разьемод
Рис. 2.17. Пневмогидравлическая схема двигательной установки первой ступени ракеты
«Титан III»:
/—испаритель; 2—газогенератор; 3—клапан горючего газогенератора; 4—клапан
окислителя газогенератора; 5—датчик числа оборотов турбины: 6—пиростартер;
7—теплообменник для охлаждения продуктов сгорания; 8—теплообменник для смазочного масла; 9—
резервуар и насос для смазочного масла; 10—клапан окислителя; //—клапан горючего;
12—сервопривод; 13—управляющий клапан; 14—забортный слив; /5—реле давления
получаемые путем нагрева в испарителе части окислителя,
отобранного за насосом. Наддув бака с горючим осуществляется
выхлопными газами турбины после их охлаждения в
теплообменнике. Запуск турбины производится при помощи пиростарте-
ра, рассчитанного на горение «1 с (до выхода ТНА на
номинальный режим). На стартовом режиме клапаны подачи
компонентов топлива в камеру сгорания ЖРД открываются при
повышении давления горючего в магистрали за насосом. Это
обеспечивается путем закрытия управляющих клапанов под
давлением горючего и срабатывания привода топливных клапанов.
Заданный уровень тяги ДУ поддерживается постоянным с по-
мощью трубок Вентури, находящихся в системе питания
топливом газогенератора. Оба ЖРД укреплены на карданном
подвесе и при отклонении обеспечивают управление ракетой в трех
плоскостях. Камера и сопло изготовлены из трубок
(нержавеющая сталь), расположенных в продольном направлении,
спаянных между собой и обмотанных снаружи проволокой.
прорыднаа
мембрана
быстрорьзъемное
соединение
Рис. 2.18. Пневмогидравлическая схема двигательной установки второй ступени ракеты
«Титан III»:
/—испаритель; 2—теплообменник для охлаждения продуктов сгорания; 3—газогенератор:
*—клапан окислителя газогенератора; 5—клапан горючего газогенератора; б—датчик
числа оборотов турбины; 7—пиростартер; 5—резервуар и насос для смазочного масла; 9—
теплообменник для смазочного масла; 10—поворотное выхлопное сопло (для управления
по крену); /7—кладан окислителя; 12—клапан горючего; /3—реле давления;
/#—сервопривод; 15—управляющий клалан; 16—забортный слив
39
Пневмогидравлическая схема двигательной установки второй
ступени приведена на рис. 2.18 и в значительной степени
подобна схеме двигательной установки первой ступени. ЖРД на
карданном подвесе обеспечивает управление двигателя в
плоскостях тангажа и рысканья. Для управления по крену
используются выхлопные газы турбины, истекающие через отклоняющиеся
Подача
оиислителя
9/
Рис. 2.19. Пневмогидравлическая схема двигателя третьей ступени ракеты «Титан III»:
/—настроечная шайба в системе подачи горючего; 2—двухкомпонентный клапан-.
3—настроечная шайба в системе управляющего клапана; 4—управляющий клапан; 5—дренаж;
б—соленоидный клапан; 7—потенциометр; 8—настроечная шайба в системе подачи
окислителя
сопла. Поддержание соотношения компонентов топлива
осуществляется с помощью настроечных шайб в топливоподаю-
щих магистралях за насосом.
Пневмогидравлическая схема двигательной установки
третьей ступени показана на рис. 2.19. При запуске электрический
сигнал поступает на соленоид, который открывает
управляющий клапан. Горючее из бака под давлением наддува
поступает к сервоприводу, который открывает двухкомпонентный
топливный клапан. Клапаны для окислителя и горючего жестко
связаны, это обеспечивает одновременный подход компонентов
к форсуночной головке. С помощью настроечных шайб в
системе поддерживается заданное соотношение компонентов и
расход топлива. Для отсечки двигателя выключается электро-
40
питание соленоида, после чего клапан закрывается с помощью
пружины.
Самой мощной ракетой-носителем США является «Сатурн-5».
Основные характеристики двигательных установок ракеты-
носителя представлены в табл. 2.3.
Таблица 2.3
Параметры ракеты
Длина, м
Диаметр
корпуса, м
Масса, т
Масса
топлива, т
Топливо
Двигатели
Тяга, МН
Время работы, с
Ракета
в целом
85,8
10,06
2707
Блоки
Первый
ракетный блок
S-1C
42,06
10,06
2126
1995,8
RPl-f-O2
5ЖРДР-1
33,8
150
Второй
ракетный блок
S-2
24,84
10,06
465
427,3
Н2-ЬО2
5ЖРДЛ-2
5
390
Третий
ракетный блок
S-4B
17,91
6,58
114,3
104,35
Н2+О2
1ЖРДЛ-2
1
480
Глава 3
АГРЕГАТЫ И КОММУНИКАЦИИ
ПНЕВМОГИДРАВЛИЧЕСКОИ СИСТЕМЫ
3.1. ОСНОВНЫЕ ТРЕБОВАНИЯ
Пневмогвдравли'ческая система ракеты-носителя с
жидкостным двигателем .представляет из себя разветвленную сеть
трубопроводов с управляющими «агрегатами, оказывающими
воздействие .на «пара'метры движения <и состояния компонентов
топлива, газа и вспомогательных жидкостей-
Требования, (предъявляемые к ашреггтам, определяются
характером их работы и условиями акшлуатащ-ии и должны
обеспечивать получение задаишых характеристик: раюхода, давления,
температуры и т. д. Поскольку степень надежности системы и
всего изделия в целом равна произведению степеней
надежности составляющих элементов, требование получения этого
параметра равным единице является основным.
Кроме того, все агрегаты должны:
— обладать малой массой;
— иметь низкую стоимость, предпосылкой чему является
минимальное время проектирования и отработки;
— не накладывать жестких ограничений на компоновку
системы; J
41
— быть совместимыми с окружающими условиями, т. е.
работать при вибрациях, перегрузках, температурах и давлениях,
определяемых условиями работы всей ракеты в целом;
— иметь малое гидравлическое сопротивление (что
противоречит требованиям малых габаритов и массе);
— не создавать колебаний в потоке движущейся среды,
которые могли бы ухудшить работу системы;
— в закрытом положении быть герметичными по
уплотняющим парам;
— не реагировать с рабочей средой.
Пневмогидравлическая система может включать агрегаты и
коммуникации различного наименования, наиболее
распространенными из которых являются клапаны, жесткие и гибкие
трубопроводы, сильфоны, соединения трубопроводов.
3.2. КЛАПАНЫ
3.2.1. Классификация клапанов
Характер работы силовой установки и режимы подачи
рабочей среды во многом определяются работой агрегатов систем
управления и регулирования, к числу которых относятся
клапаны, воздействующие на количественные характеристики среды
(скорость, давление, расход и т. д.).
По назначению клапаны можно разделить на запорные,
распределительные, предохранительные и регулирующие.
Запорные клапаны включают в работу или отключают в
заданный момент времени соответствующий участок
трубопровода.
Распределительные клапаны — это агрегаты,
предназначенные для управления потоком жидкости и для подачи среды в
одну или несколько магистралей при одновременном
прекращении выдачи среды в другие магистрали.
Предохранительные клапаны предотвращают повышение или
понижение давления в системе за пределы установленных
величин и обеспечивают движение среды в заданном направлении.
Регулирующие клапаны предназначены поддерживать
заданные значения расхода и давления в системе.
По принципу основного действия (перекрытия потока среды)
клапаны можно разделить на две категории: с затвором,
перемещающимся вдоль оси потока, и с затвором, движущимся
поперек оси потока.
По роду силового воздействия клапаны делятся на
электромагнитные, гидравлические, пневмоклапаны, пироклапаны,
мембранные клапаны и ручные вентили. В клапанах для
уменьшения мощности привода может быть применена разгрузка и
движение запорного или регулирующего органа будет происходить
как за счет внешнего воздействия, так и за счет энергии рабочей
среды.
42
По способу уплотнения подвижных соединений и корпуса
клапаны подразделяются на сальниковые, сильфонные и
мембранные.
Клапаны могут быть одноразового или многоразового
действия.
3.2.2. Запорные клапаны
Как правило, все запорные клапаны выполняются с внешним
приводом и могут быть отнесены к одному из двух типов:
нормально-открытый или нормально-закрытый.
Нормально-открытым клапаном (рис. 3.1, а) называют
агрегат, который при отсутствии управляющего усилия на штоке /
открыт усилием пружины 2. Под воздействием управляющего
Рис. 3.1. Схемы запорных клапанов:
а—нормально-открытый клапан; б—нормально-закрытый клапан; в—нормально-
закрытый клапан с электромагнитом
усилия клапан закрываемая, причем величина силы,
действующей на шток, должна быть выбрана так, чтобы обеспечивалась
герметичность клапана при заданном входном статическом
давлении.
Нормально-закрытый клапан (рис. 3.1, б) при отсутствии
управляющего усилия на штоке 1 усилием пружины 2 закрыт и
должен быть герметичен при давлении на входе рвх. Под
воздействием внешнего усилия на шток клапан открывается.
В зависимости от направления движения штока с запорным
органом различают клапаны прямого и обратного действия.
В клапанах прямого действия направление движения запорного
органа противоположно направлению потока среды, а в
клапанах обратного действия — совпадает с направлением потока.
Управляющее внешнее воздействие на шток клапана
производится автоматически дистанционно и может быть
электромагнитным, гидравлическим или пневматическим.
Основные узлы и принцип работы клапана с
электромагнитным приводом можно проследить на примере функционирования
нормально-закрытого клапана, приведенного на рис. 3.1, в.
В обесточенном состоянии клапан закрыт усилием пружины 2.
При подаче напряжения на электромагнит 5 якорь втягивается
43
внутрь и приподнимает тарель клапана 3 над седлом 4. В таких
клапанах движение штока с тарелью происходит только за счет
воздействия усилия электромагнита, при выборе габаритов и
мощности которого необходимо учитывать воздействие на
тарель клапана полного гидростатического давления среды при
движении штока. Поэтому для уменьшения усилия внешнего
привода на штоке клапана применяется разгрузка затвора либо
механическим путем, либо рабочей средой с помощью обвода.
б)
Рис. 3.2. Запорные клапаны с механической разгрузкой:
а—двухседельный клапан; б—двухседельный клапан с раздельными тарелями; в—
мембранный клапан
Под механической разгрузкой понимается уменьшение
перепада давлений на подвижные части клапана, что может быть
достигнуто введением дополнительных полостей с поршнями,
мембранами или сильфонами. В частности, применение двухсе-
дельной конструкции клапана, схема которого приведена на
рис. 3.2, а, обеспечит разгрузку затвора от одностороннего
воздействия среды ввиду равенства давлений на верхнюю половину
тарели 4 и нижнюю половину тарели 2 и равенства диаметров
в седлах / и 3. Тяговое усилие электромагнита 6 будет
определяться жесткостью пружины 5 уплотняющей тарели.
Существенным недостатком данной конструкции является то, что для
обеспечения полной герметичности в седлах требуется высокая
точность изготовления деталей и узлов, чтобы расстояние между
седлами было равно расстоянию между тарелями.
• Такой недостаток может быть устранен удалением жесткой
связи между тарелями и введением пружины 7 (рис. 3.2, б).
Для газообразных сред разгрузку можно осуществить при
помощи клапана с мембранами 8 или сильфонами, эффективная
площадь которых равна площади прохода в седле (рис. 3.2, в).
В клапанах с разгрузкой при помощи обвода энергия
давления рабочей среды используется как для перемещения
подвижных частей, так и для обеспечения необходимой герметичности
посадки тарели на седло. В таких клапанах исполнительное уст-
44
ройство содержит кроме основного затвора, перекрывающего
проход клапана, дополнительный разгрузочный затвор,
перекрывающий обводное отверстие. В приведенном на рис. 3.3
нормально-закрытом топливном клапане разгрузка осуществляется
посредством вспомогательного клапана 3 [67]. Если
электромагнит 6 обесточен, то главный клапан 2 через вспомогательный
клапан 3 прижат к седлу пружиной 1 и давлением жидкости,
находящейся в полости Я, куда она прошла по диаметральному
зазору между клапаном 2 и корпусом
4. В момент подачи напряжения на
электромагнит его якорь
передвинется вниз и воздействует на шток 5 а
клапан 3, опуская его до упора в
стопорное кольцо 7. На клапане 3
выполнены продольные прорези, по
которым жидкость из полости Я уйдет
через центральное отверстие в
клапане 2 после того, как клапан 3 отойдет
от своего седла. В результате давление
под клапаном 2 упадет и жидкость,
находящаяся над клапаном 2, переместит
его вниз.
Клапаны с электромагнитным
приводом устанавливаются в пневмогид-
равлической системе на магистралях
наддува баков, продувки двигателей,
управления пневмоагрегатами, на
топливных магистралях и т. д.
В тех случаях, когда для
управления запорным клапаном требуется
приложение больших усилий, электромагнитное устройство
привода становится слишком громоздким и в этом случае
целесообразно применять агрегаты, движение управляющего органа
которых происходит за счет воздействия давления жидкости или
газа, подводимого в специальную полость управления.
В пневмогидравлических системах ракет широкое
распространение получили пневмоклапаны, управление которыми
осуществляется сжатым газом, действующим на поршень
управляющей полости. Принципиальная схема пневмоклапана приведена
на рис. 3.4. При подаче газа в полость Я поршень 2 и
соединенный с ним шток 3 тарели клапана 4 перемещаются в крайнее
правое положение, преодолевая усилие пружины /. В исходное
состояние подвижные элементы клапана возвращаются под
действием пружины /, для чего стравливают газ из полости Я.
Широко применяются также пневмоклапаны двойного
управления, в которых тарель в исходное состояние возвращается
под действием управляющего газа. Как и при электромагнит-
45
7-
Рис. 3.3. Запорный клапан с
разгрузкой при помощи обвода:
/ — пружина; 2 — главный
клапан: 3 — вспомогательный
клапан; 4 — корпус; 5 — штэк; 6 —
электромагнит; 7 — стопорное
кольцо; Я — полость
ном управлении, пневмоклапаны могут быть выполнены с
разгрузкой, аналогично агрегатам, приведенным на рис. 3.2.
Пневмоклапаны функционируют при заправке баков
топливом, наддуве их газом, при стравливании газа и жидкости из
баков, управляют движением топлива в расходных магистралях
и т, д. В частности, для операций заправки и слива применяют
агрегат, управляемый сжатым газом, который называется за-
правочно-сливным клапаном (ЗСК). Приведенный на рис. 3.5
ЗСК в режимах слива и заправки в открытом состоянии может
баг по
Рис. 3.4. Схема пневмоклапана
3 М у 2 1 С
Рис. 3.5. Заправочно-слнвной клапан
иметь два положения: частичное открытие и полное открытие.
Для частичного открытия газ высокого давления поступает в
клапан через штуцер с, давит на поршень / и поднимает шток
3 и тарель клапана 4 над седлом 5. Ход поршня 1 в данном
случае определяется расстоянием его до плоскости а корпуса.
Топливо подается в горловину 5 и через зазор между тарелью и
седлом поступает в бак. Для полного открытия клапана
подается газ через штуцер г в полость П, откуда он через отверстия о
в поршне / поступает под поршень 2 и передвигает его вместе
со штоком 3 и тарелью 4 до тех пор, пока поршень 2 не упрется
в плоскость корпуса. Закрытие клапана осуществляется подачей
газа в полость М через штуцер q.
Так как агрегат установлен на топливном баке, то
естественно требовать от него полной герметичности и стойкости к
компонентам ракетного топлива. При этом конструкция ЗСК
должна удовлетворять двум противоречащим требованиям. С одной
стороны, для уменьшения массы габариты агрегата необходимо
выбирать минмальными. С другой стороны, чем меньше
габариты, тем меньше проходное сечение щели клапана между
тарелью 4 и седлом 5, больше его сопротивление и тем больше
должны быть мощности заправочных насосов, тем
продолжительнее время заправки и слива.
Широкое применение пневмоклапаны с дистанционным
управлением нашли в системах дренажа и подачи топлива в дви-
46
гатели. Дренажные клапаны предназначены для сброса газа из
емкостей и топливных баков. Поскольку время подготовки
изделия к пуску регламентировано, то для обеспечения сброса
среды за заданный промежуток времени сопротивление клапана в
открытом положении желательно иметь минимальным.
Сообщенный с баком дренажный клапан должен быть герметичным
как в статическом состоянии, так и при вибрациях в диапазоне
частот, которые могут наблюдаться в летных условиях.
Топливные клапаны должны исключать возможность
попадания компонентов топлива в камеру сгорания до запуска и после
выключения двигателя, обладать по возможности минимальным
гидравлическим сопротивлением, быть стойкими в агрессивных
компонентах топлива. Конструктивное выполнение ряда
топливных клапанов приведено в работе [67].
Для топливных клапанов конструкция силового привода
имеет большое значение, поскольку она определяет скорость
срабатывания клапана, являющуюся одной из определяющих
характеристик. С одной стороны, для уменьшения импульса
последействия и разброса параметров двигателя (тяги, времени
выхода на режим и т. д.) желательно время срабатывания
клапана иметь минимальным, но в то же время увеличение
скорости подвижных частей клапана может привести к недопустимому
увеличению давлений гидроудара. Оптимум в этом случае будет
определяться удовлетворением требований как к двигателю, так
и к системам питания. При выборе силового привода
необходимо иметь в виду, что разнородные компоненты в момент запуска
должны поступить в газогенератор или в камеру сгорания в
строго определенное время и в заданном соотношении, что
также определяется скоростью срабатывания топливных клапанов.
Малое время работы при относительно невысокой массе и
габаритах может быть получено в агрегатах, силовым
приводом которых являются пиропатроны. В этом случае движение
запорного органа клапана осуществляется газом высокого дав-
л^ия, который образуется при сгорании пиротехнического
состава пиропатрона, и для каждой операции (открытия или
закрытия) должен применяться отдельный агрегат. При наличии
пироклапанов разброс параметров индивидуальных систем
значительно ниже, чем при применении пневмоавтоматики
вследствие быстроты действия силового привода (пиропатрона). Кроме
того, применение пироклапанов сокращает время подготовки
изделия к пуску, так как контроль работы агрегатов на
стартовом устройстве осуществляется в основном лишь визуально и
проверкой электрической цепи пиропатрона.
Недостаток пироклапанов состоит в том, что все они, как
правило, одноразового действия, осуществляют только
импульсное воздействие и не дают возможности в широком диапазоне
варьировать временем срабатывания клапана. Нежелательно
47
Рис. 3.6. Схемы запорных пироклапанов
(нормально открытых):
а—пироклапан непосредственного действия; б—
пироклапан с чековым устройством
использование пироклапанов на стендовом оборудовании, в
связи с необходимостью их замены.после каждого испытания.
Пироклапаны по воздействию на запорный орган делят на
две группы: пироклапаны непосредственного действия и
пироклапаны с чековым уст-
2 ?? / 7 ройством. В приведенном
на рис. 3.6,а пироклапане
непосредственного дейст
вия давление газов при
сгорании пиропатрона /
действует на поршень 2 и
срезает мембрану 3. В
результате запорный
орган 4, перемещаясь,
заклинивается в седле 5 и
отделяет входную
магистраль от выходной. На
рис. 3.6,6 приведена
схема пироклапана с
чековым устройством. В
процессе горения
пиропатрона / давлением пороховых газов освобождается чека 7, в
результате запорный орган 4 садится на седло 5 под действием
усилия пружины 6 и давления среды.
3.2.3. Распределительные клапаны
Назначение распределительных клапанов или
распределителей — управлять потоком среды, переключая в заданный
момент времени направление движения.
В зависимости от типа силового привода эти агрегаты, как и
запорные клапаны, могут быть электромагнитными,
пневматическими, гидравлическими, механическими, пироклапанами. Для
уменьшения усилия привода клапан может быть.выполнен с
разгрузкой запорного органа.
По конструктивному выполнению исполнительного
устройства распределители делят на золотниковые, крановые и
клапанные. В первОхМ типе распределение осуществляется с помощью
осевого смещения цилиндрического плоского
распределительного элемента, во втором — поворотом пробки крана, и в
третьем — посредством последовательного открытия и закрытия
рабочих окон с помощью клапанов.
Исполнительным органом золотникового распределителя
является перемещающийся в осевом направлении в корпусе
симметричный относительно своей оси плунжер, на котором
выполнено соответствующее количество кольцевых проточек. Подвод и
отвод производится через окна 'питания в корпусе
распределителя и соответствующие проточки его плунжера. По количеству
48
входных и выходных каналов, между которыми происходит
распределение возможного направления прохождения среды,
распределители бывают трех-, четырех- {и многоходовые. На ри<с. 3.7
приведена схема трехходового золотникового распределителя, у
которого в зависимости от положения плунжера / соединение
входного окна а осуществляется либо с окном б, либо с окном
в. По числу фиксируемых положений исполнительного органа
различают двух- и трехпозиционные
золотники. Если исполнительный орган не
задерживается в среднем положении, то
такой золотник называется двухпозици-
онным, если задерживается с помощью
каких-либо устройств, то такой золотник
относят к трехпозиционным.
В крановых распределителях
исполнительный орган выполняется, как
правило, цилиндрическим или коническими
совершает поворотные движения
относительно своей оси. В приведенном на
рис. 3. 8,а крановом распределителе канал / сообщен с
каналом 4 проточкой 3 в поворотном кране 5, а проточка 7
сообщает каналы 6 и 2. После поворота крана 5 сообщение каналов
будет таким, как на рис. 3. 86.
При проектировании таких распределителей необходимо
обращать внимание на условие равновесия исполнительного
органа при действии статических сил давления для отсутствия
одностороннего срабатывания его.
Рис. 3.7. Схема трехходового
золотникового
распределителя
Рис. 3.8. Крановый распределитель
Рис. 3.9. Клапанный
распределитель
На рис. 3.9 приведен клапанный распределитель с приводом
от рабочей среды. При низком давлении среды жидкость из
входного штуцера / поступает в радиальные сверления а
клапана 3, проходит по центральному сверлению и из радиальных
отверстий б выходит в штуцер 5. При повышении давления сре-
49
ды поршень 6 смещается вниз, перекрывает отверстия б и,
воздействуя на торец гильзы 4, смещает клапан 3 вниз, соединяя
входной штуцер / с выходным штуцером 2.
Клапанные распределители широко применяются в пневмо-
гидравлических системах, так как могут облегчить высокую
герметичность посадки клапана на седло.
3.2.4. Предохранительные клапаны
Предохранительные клапаны предназначены для
ограничения возможности выхода давления в системе за заданные
границы и являются одним из самых распространенных видов
аппаратуры защиты и предохранения, отличающимся
универсальностью применения и входящим в состав каждой пневмогидрав-
лической системы жидкостной ракеты.
Принцип действия клапанов, применяемых в пневмо- и
гидросистемах, основан на уравновешивании внешней силой
(пружиной) давления среды, действующего на клапан, который под
действием этой силы перекрывает проходное сечение.
При проектировании и выборе размеров клапана площадь
проходного его сечения должна быть такой, чтобы пропустить
заданный расход среды при определенных давлениях до и после
клапана, при этом на клапан накладывается ограничение по
обеспечению стабильного давления в системе для различных
расходов среды.
Одной из характеристик, определяющих качество клапанов в
статическом (установившемся) режиме, является
чувствительность к изменениям давления д=Ар/р, где Ар — превышение
давления над номинальным значением р [9]. Чувствительность
предохранительного клапана зависит от силы трения
подвижных частей, от формы седла и конструкции запорного органа.
Работа предохранительного клапана определяется его
расходной характеристикой, представляющей зависимость давления
в системе от расхода через клапан. На рис. 3.10 связь между
расходом G и давлением р при подъеме клапана над седлом
(при увеличении расхода) выражается кривой а и при посадке
клапана на седло (при понижении расхода) — кривой б.
Причем давление рн.о, соответствующее началу открытия клапана
при повышении давления, выше значения рСу при котором
клапан садится на седло в процессе снижения давления. Разница
в давлении определяет гистерезис, причинами которого
являются, в основном, жесткость пружины и трение подвижных
деталей, а также изменения на переходных режимах действующих
на запорный орган сил давления среды, в том числе сил инерции
и сил гидродинамического происхождения.
Предохранительные клапаны подразделяются:
— по выполнению запорного органа на шариковые,
конические, с элементом растяжения, разрывные, тарельчатые;
50
— по величине подъема клапана на низкоподъемные с
ходом клапана ft^0,05dc (где dc — диаметр отверстия в седле)
и высокоподъемные с ходом клапана /*^0,25dc;
— по характеру нагрузки на рычажно-грузовые, пружинные
и с импульсным приводом;
— по направлению воздействия
давления среды на запорный орган на
клапаны прямого и обратного действия.
Наиболее простым из
предохранительных клапанов является шариковый,
который может быть выполнен в двух
вариантах: клапан с нецентрированным
Рс
Рн.о
Рис. 3.10. Расходная
характеристика
предохранительного клапана
Рис. 3.11.
Шариковые
паны:
а — клапан с
нецентрированным шариком-, б —
клапан с шариком, центриро-
ванньш в опоре
шариком /, удерживаемым пружиной 2 (рис. 3. 11,а) и клапан
с шариком, центрированным в опоре 3 (рис. 3.11,6). В таких
клапанах шарик при длительной работе вследствие вибраций
может неравномерно вырабатывать гнездо, поэтому они приме-
Рис. 3.12. Конический клапан:
/ — запорный конус: 2 —
пружина
Рис. 3.13. Клапан с трубкой
растяжения:
/ — корпус клапана; 2 —
эластичная трубка растяжения
няются в системах лишь при относительно небольших
давлениях и кратковременном действии.
Несколько совершеннее конические клапаны (рис. 3.12), у
которых конус центрирован и не может поворачиваться, благо-
51
даря чему уменьшен износ опорной поверхности. Однако, при
перепуске среды такие клапаны склонны к вибрациям.
Иногда в системах, работающих на низком давлении,
например, для аварийного слива жидкости, устанавливают клапаны
с трубкой растяжения, выполненной из эластичного материала
или пластмассы (рис. 3.13). Такие клапаны в пневмогидравли-
ческих системах применяют довольно редко из-за плохой
герметичности, повышенных допусков на
давление открытия, установки
относительно дефицитных эластичных
материалов, противостоящих
агрессивным ракетным компонентам. Эти
агрегаты отличаются малыми
габаритами и применяются в тех случаях,
когда затруднительно использование
клапанов другой конструкции.
К простейшим клапанам относятся
и устройства с разрушаемой
диафрагмой или с элементом для ее
принудительного разрыва в случае
превышения давления в системе выше
допустимого.
Наиболее широкое
распространение в пневмогидравлических системах
получили предохранительные
клапаны, запорный орган которых
выполнен в виде тарели, прижатой к седлу
упругим элементом (пружиной). На
рис. 3. 14 приведены схемы
тарельчатых низкоподъемных пружинных клапанов прямого и обратного
действия. В клапане прямого действия (рис. 3. 14,а) при
превышении давления в системе выше заданного, определяемого
усилием пружины 5, тарель клапана 2 поднимается над седлом /,
выпуская через образовавшуюся щель среду из системы. Такие
клапаны довольно просты по конструкции и герметичность их
определяется лишь силой пружины, прижимающей клапан к
седлу.
Герметичность может быть повышена выполнением клапана
по схеме обратного действия (рис. 3.14, б). Если давление в
системе не превышает заданного, определяемого усилием
пружины 3, то клапан прижат к седлу. При повышении давления
в системе на сильфон 4 начинает воздействовать сила,
направленная в сторону открытия, величина которой определяется
разностью эффективных площадей сильфона и тарели клапана
2. Движение тарели при открытии происходит в направлении,
противоположном потоку газа через клапан. Такие клапаны
сложнее агрегатов прямого действия и требуют применения
пружин с большим усилием затяжки.
52
Рус. 3.14. Схемы тарельчатых
низкоподъемных клапанов:
а—клапан
б—клапан
прямого действия;
обратного действия
Рис. 3.15. Обратный клапан
Особенностью и достоинством низкоподъемных клапанов
является возможность получения пропорциональной зависимости
расхода от давления при подъеме тарели над седлом.
Высокоподъемные предохранительные клапаны, как
правило, применяют при относительно большом расходе среды и
там, где можно допустить различие в давлениях открытия и
закрытия клапана. Эти агрегаты по
принципу работы можно разбить на
следующие типы: активного действия,
реактивного действия и с импульсным
управлением. В предохранительных
клапанах активного действия
увеличенный подъем тарели достигается
выполнением площади тарели
большей, чем проходная площадь седла,
благодаря чему увеличивается
рабочая площадь, воспринимающая
давление. Закрытие такого клапана
произойдет при меньшем давлении в
системе, чем его открытие, из-за возникновения дополнительной
силы, действующей на тарель в открытом положении.
В клапанах реактивного действия увеличение подъема
осуществляется путем использования кинетической энергии газа,
создающей реактивное действие на соответствующие
дополнительные поверхности, расположенные на тарели на некотором
расстоянии от седла по потоку выходящей среды.
В ряде конструкций высокоподъемных предохранительных
клапанов используется принцип одновременного совмещения
активного и реактивного действий.
Предохранительные клапаны с импульсным управлением
срабатывают при возникновении импульса, созданного
вспомогательным органом управления (пилотным клапаном,
электромагнитом и т. д.), при этом рабочая среда направляется в
соответствующий привод, который производит открывание основного
клапана, предназначенного, как правило, для больших рабочих
давлений и расходов. Пропускная способность
предохранительного клапана с импульсным управлением определяется только
размерами и сопротивлением основного клапана.
Для предотвращения обратного перетекания среды и
обеспечения герметичности при отсутствии движения в магистралях
по течению среды устанавливают предохранительные агрегаты,
называемые обратными клапанами. Основными элементами
любого обратного клапана являются корпус с седлом /,
запирающее устройство — тарель 2, пружина 3 (рис. 3.15).
Так как обратный клапан установлен непосредственно в
движущейся среде, то при определении потерь напора в магистрали
от источника до потребителя необходимо учитывать и потери
давления Ар на обратном клапане, которые зависят от конст-
53
рукции агрегата и могут составлять значительную часть от
полных потерь давления по магистрали. При проектировании их
определяют по обычным формулам гидравлики (для случая
отсутствия вибраций подвижных частей клапана) в зависимости
от скорости w и ллоттности (потока р
где ? — коэффициент сопротивления клапана, зависящий от его
конструктивного выполнения [30].
3.2.5. Регулирующие клапаны
Регулирующие клапаны обеспечивают поддержание расхода
среды или давления в магистралях, емкостях и в баках в
заданных пределах и в качестве основных элементов включают
регулирующее устройство, исполнительный механизм и
исполнительную связь, соединяющую регулирующее устройство и
исполнительный механизм.
Регулирующие клапаны обычно выполняются в виде
дроссельного устройства с регулируемым сечением отверстия для
прохода среды и относятся к одной из групп непосредственного
или косвенного действия. Клапаны непосредственного действия
работают с использованием энергии, транспортируемой по
трубопроводу среды, т. е. перемещение исполнительного органа в
корпусе происходит благодаря воздействию на его привод
рабочей среды.
Ко второй группе относятся регулирующие клапаны, в
которых положение исполнительного органа фиксируется приводом,
действующим от постороннего источника энергии, управляемого
реагирующими элементами, и не зависит от непосредственного
воздействия давления транспортируемой по трубопроводу среды
на привод и исполнительный орган.
Регулирующие клапаны, предназначенные для понижения
давления газа и обеспечения в заданных пределах постоянства
давления на выходе при изменении расхода газа и давления на
входе в клапан, получили название редукторов. Понижение
давления газа в редукторе происходит вследствие дросселирования
потока при протекании его из полости высокого давления в
полость низкого давления через проходное хечение малой
площади, образованное клапаном и его седлом. Вследствие резкого
изменения сечения газ приобретает в зазоре большую скорость,
кинетическая энергия увеличивается, а давление, соответственно,
падает. Далее газ поступает в полость низкого давления, где
скорость потока гасится благодаря значительному увеличению
сечения. Кинетическая энергия потока расходуется на трение, на
образование вихревых течений и на преодоление гидравлических
сопротивлений. Величина понижения давления при дросселиро-
54
вании определяется размером зазора между клапаном и седлом.
По принципу действия редукторы подразделяют на
редукторы прямого и обратного действия в зависимости от того,
совпадают или нет направления движения клапана при открытии и
усилия от газа высокого давления.
В редукторе прямого действия (рис. 3.16, а) газ высокого
давления входит в полость Яв через штуцер А, дросселируется
в зазоре между тарелью клапана / и седлом 2, поступает в по-
Рис. 3.16. Схемы редукторов:
а — редуктор прямого действия;
б — редуктор обратного
действия; / — тарель клапана; 2 —
седло; 3 — шток; 4 — пружина;
5 — регулировочный винт; 6 —
мембрана; 7 — пружина; Яв —
полость высокого давления;
ния;
, Б — штуцеры
лость низкого давления Пю а оттуда — к потребителю через
штуцер Б.
При работе редуктора обратного действия (рис. 3.16, б)
клапан 1 отведен от седла 2 суммарным воздействием на шток 3
усилия пружин 4, 7, регулировочного винта 5 и давления газа
в полости высокого давления Пв и в полости низкого давления
#н на мембрану 6. Газ высокого давления, поступающий в
полость Яв, дросселируется в зазоре между тарелью клапана /
и седлом 2 и поступает к потребителю через штуцер Б. Чем
больше затяжка пружины 4 регулировочным винтом 5, тем
больше зазор, меньше дросселируется газ и выше давление за
редуктором.
Работа редуктора на различных режимах оценивается
соответствием теоретической и действительной характеристик,
представляющих зависимость давления на выходе от давления на
входе.
При отсутствии расхода газа такая характеристика
называется статической, при наличии расхода — динамической
характеристикой редуктора.
Методы определения характеристик редукторов прямого и
обратного действия и расчета его основных параметров
(проходных сечений, затяжки пружины и т. д.) подробно изложены
в работе E4].
55
3.3. ТРУБОПРОВОДЫ
Пневмогидравлическая система любой ракетной установки
представляет разветвленную сеть трубопроводов, по которой
компоненты топлива, жидкости и газ транспортируются от
источников давления (насосов, баков и т. д.). Поэтому надежность
всей системы и изделия в целом зависит от надежности и
прочности трубопроводов и их соединений. Большие длины и
диаметры трубопроводов и, как следствие, масса современных
установок с жидкостным ракетным двигателем накладывают
существенные ограничения на выбор материала и толщины стенок
трубопроводов и их крепежных элементов. Поэтому этап
проектирования и конструкторской разработки изделия должен
включать в себя тщательный и обоснованный подход к выбору
трубопроводов, конструкция которых в оптимальной степени
удовлетворяла бы всем техническим и экономическим
требованиям.
Суть технических требований заключается в том, чтобы
трубопроводы пневмогидравлической системы при минимальной
массе обеспечивали получение приемлемых гидравлических и
прочностных характеристик, которые определяют расчетным
путем и подтверждают экспериментально в процессе натурных
или модельных испытаний.
В процессе гидравлического расчета находят то минималь
ное значение диаметра проходного сечения трубопровода dT, при
котором гидравлические потери давления Ар не превышают
разности давлений за источником /?i и у потребителя р2,
соединенных данным трубопроводом. Используя эту разность Ар =
==/?!—р2 и подставляя в формулу Дарси — Вейсбаха (см. гл.7)
для потерь напора значение скорости w при заданном массовом
расходе среды G = Fqw, где q — плотность потока, F — площадь
сечения трубопровода диаметром rfT, получим следующее
выражение для определения отношения коэффициента
гидравлического сопротивления трубопровода ? к квадрату площади
проходного сечения F2:
C.1)
Задаваясь рядом значений dT, по известным зависимостям
определяют коэффициенты гидравлического сопротивления ?
трубопровода (см. гл. 7) и находят отношение ?/М Значение
диаметра dT, для которого это отношение равно величине,
определенной из формулы C.1), будет являться искомым
параметром.
Масса системы, ее герметичность, количество рабочей среды
в трубопроводах зависят от габаритов, поэтому может
возникнуть необходимость корректировки по этим факторам
найденного значения dT.
56
Трубопроводы пневмогидравлических систем подвергаются
действию различных статических и динамических нагрузок.
К статическим нагрузкам можно отнести собственную массу
трубы с агрегатом, реакции опор крепления, массу
транспортируемой среды, внутреннее давление.
Динамические нагрузки возникают от пульсации давления
движущейся по трубопроводу среды, а также от вибрации
корпуса изделия и опор крепления к нему трубопровода.
Из-за колебаний температуры окружающей среды и
транспортируемой по трубопроводу жидкости длина трубопровода
меняется и в нем возникают большие термические напряжения.
Если коэффициент линейного расширения материала
трубопровода а, то при изменении температуры на Д/° его длина /
изменится на величину Al = alAt. Для уменьшения термических
напряжений применяют либо специальные компенсаторы, либо
используют принцип самокомпенсации. Использование
компенсаторов в некоторых случаях ограничивается величиной
внутреннего давления и предполагает деление трубопровода на
отдельные элементы. Для самокомпенсации трубопровод
изгибают так, чтобы образовалась петля или несколько петель и
удлинения от изменения температуры в этом случае будут
восприниматься главным образом за счет упругих деформаций
изгиба элементов трубопровода.
Усилия, возникающие в трубопроводе от статических
нагрузок и разного рода воздействий, определяются известными
методами механики стержневых систем [3].
Основным этапом проектирования элементов трубопровода
является расчетное определение толщины стенки трубы 6.
Величина 6 для трубопроводов, находящихся под давлением,
определяется по предельной нагрузке, в качестве которой принято
предельное значение внутреннего давления рПр, определенное по
условию пластичности Сен — Венана — Треска следующим
выражением:
где От — предел текучести материала при осевом растяжении;
dc — диаметр поперечного сечения срединной поверхности
трубы.
Используя значение допускаемого напряжения ад,
определенного на основании коэффициентов запаса прочности, введенных
в механические характеристики материала при расчетной
температуре, толщину стенки бесшовной трубы можно определить по
формуле C.2) [3]:
где р — максимальное статическое давление /рабочей жидкости;
С — постоянный коэффициент.
57
Величина коэффициента С определяется в зависимости от
предполагаемого коррозионного износа стенки трубы, а также
от минусового допуска на толщину стенки. Для кривых труб
величина С, кроме того, зависит от наибольшего уменьшения
толщины стенки, возникающего в процессе гибки [3].
Толщина стенки трубы с продольным швом рассчитывается
с учетом коэффициента прочности сварного шва:
Значение ф в практически реализуемых случаях не превышает 1.
В общей оценке надежности пневмогидравлической системы
вопросы расчета трубопровода на устойчивость являются не
менее важными, чем вопросы прочности.
Устойчивость конструкции — способность мало отклоняться
от исходного состояния равновесия при малых возмущениях [3].
Потеря устойчивости участка трубопровода как элемента
стержневой системы отождествляется с выполнением условий
существования новых форм равновесия, сколь угодно близких к
исходной. Нагрузка, при которой эти условия выполняются,
носит название критической.
3.4. СИЛЬФОНЫ И ГИБКИЕ ТРУБОПРОВОДЫ
Сильфоны — тонкостенные устройства с концентрическими
волнообразными складками-гофрами, устанавливаемые в
трубопроводах для компенсации неточности изготовления и
температурных изменений труб и агрегатов.
Волнистая стенка сильфона вызывает дополнительные потери
напора на преодоление гидравлических сопротивлений, и для их
уменьшения внутрь сильфонов монтируют вставки (рис. 3.17),
обеспечивающие относительную гладкость гидравлического
тракта.
В пневмогидравлических системах применяют, как правило,
металлические сильфоны, обладающие хорошей жесткостью и
упругостью. Однако не исключена возможность установки
устройств из пластмасс, в частности, из фторопласта-4, который по
химической стойкости превосходит все материалы. Он не горюч,
не смачивается, но его существенный недостаток —
возможность появления остаточных деформаций.
По классификации, приведенной в работе [14], металлические
сильфоны делят на две группы, принципиально различные по
способу изготовления и по роду исходной заготовки:
1) поперечношовные, сварные из мембран;
2) бесшовные или продольношовные, формованные из
тонкостенных заготовок.
Поперечношовные сильфоны выполняют из набора
кольцеобразных мембран фасонного профиля, соединенных между
собой по периметрам наружных и внутренних окружностей свар-
58
кой (рис. 3.18). Диаметр и длина таких сильфонов неограниче-
ны, что дает возможность в широких пределах варьировать
величиной осевого перемещения и жесткостью.
В пневмогидравлических системах жидкостных ракет
наибольшее распространение получили бесшовные и продольно-
шовные сильфоны. Как
показал анализ [14], размеры этих
сильфонов выбирают так,
чтобы отношение наружного
диаметра dB к внутреннему dB
(рис. 3. 19) находилось в
пределах 1,3—1,5 (большее
значение для малых сильфонов).
ВаЖНЫМИ Параметрами ЯВЛЯ- Рис. ЗЛ7. Сильфон со вставкой:
ЮТСЯ Шаг ГОфрОВ t И Ширина ВЫ- / - сильфон; 2 - гладкая вставка
ступа а. Относительные
значения этих параметров не только обобщены (см. работу [14]), но
и приведены в нормалях на сильфоны. В частности, отношение
шага t к диаметру dH у зарубежных сильфонов составляет
значение 0,07—0,08, в нормалях на сильфоны отечественного
производства это отношение равно 0,12 для rfH^40 мм и составляет
значения 0,07—0,08 при 40<rfH^100 мм.
/ 2
Рис. 3.18. Поперечношовный сильфон:
/ — фланец; 2 — кольцеобразные
мембраны
Рис. 3.19. Основные
размеры бесшовных сильфонов
Сильфоны отечественного производства выполняют так,
чтобы соблюдались отношения
для dH<40 мм — <0,085,
d
для dH<W0 ци -f <0,056,
а
Для работы при высоких давлениях применяют
многослойные сильфоны, состоящие из набора концентрических тонко-
59
стенных оболочек, либо сильфоны, армированные наружными и
внутренними кольцами (рис. 3.20).
Если трубопровод и все установленные на нем агрегаты
должны быть теплоизолированными, например, при работе с
криогенными компонентами, то используются сильфоны с двойной
оболочкой (рис. 3.21). Пространство между наружной и
внутренней оболочкой может быть либо отвакуумировано через
специальный штуцер 3, либо заполняется хладагентом, темпе-
Рис. 3.20. Схемы армированных силь-
фонов:
а — с наружными кольцами; б — с
внутренними кольцами; / — сильфон;
2 — кольца
Рис. 3.21. Спиральный сильфон с двойной
оболочкой:
/ — внутренняя оболочка; 2 — наружная
оболочка; 3 — штуцер
ратура которого ниже, чем температура основного компонента.
Эффективность хладагента может быть увеличена его
непрерывной прокачкой в пространстве между оболочками. Во всех
случаях основныхми характеристиками сильфона являются
жесткость, эффективная площадь и величина гистерезиса.
Жесткость — постоянная величина, выражающая отношение
нагрузки к осевому перемещению и определяющаяся
свойствами материала и геометрическими характеристиками. Для
установления соответствия между характеристиками, выражающими
зависимость осевого перемещения от нагрузки и от избыточного
давления, вводится понятие эффективной площади, которое
выражает отношение силы к избыточному давлению в том случае,
когда они вызывают одинаковые перемещения сильфона.
Гистерезис выражается в неоднозначности деформации
сильфона при нарастании и уменьшении нагрузки и определяется
максимальной величиной разности между прямым и обратным
ходом, отнесенной к наибольшей величине хода сильфона (ход
до соприкосновения гофров).
Широкое распространение в пневмогидравлических системах
получили гибкие трубопроводы (шланги). Они
устанавливаются для соединения ракетных магистралей с двигателем, когда
60
управление изделием в полете осуществляется качанием всего
двигателя. Иногда бывает целесообразно наземные
коммуникации соединить с изделием, находящимся на стартовом
устройстве, через гибкие трубопроводы, которые позволяют уже после
отрыва изделия от стартового устройства в течение некоторого
времени осуществлять связь с наземными коммуникациями и
емкостями.
Такие трубопроводы применяют там, где происходит
значительное взаимное перемещение частей корпуса и трубопроводов
из-за тепловых расширений, а в гидравлических системах их
используют как демпферы пульсаций давления вследствие
большой податливости к изменению конфигурации и формы.
Эти трубопроводы выполняются резиновыми, резино-ткание-
выми с металлическим каркасом, полутомпаковыми, стальными,
тефлоновыми (фторопластовыми) с оплеткой из нержавеющей
стали и др. Наиболее широкое распространение получили
гибкие металлические трубопроводы с тонкостенной
гофрированной оболочкой, конфигурация гофров которой зависит от
способа изготовления и назначения трубопровода. Снаружи
выполняется проволочная оплетка, которая может быть силовой или
экранирующей. Силовая проволочная оплетка предохраняет
гофрированную оболочку от разрушения и обеспечивает
работоспособность трубопровода в поле переменных осевых и
радиальных нагрузок.
Экранирующая оплетка изготовляется из проволоки и
предназначается для защиты от механических повреждений,
воздействия влаги, а также для экранирования возникающего
магнитного поля.
Конструктивные особенности и характеристики гибких
трубопроводов в зависимости от назначения, их классификация
довольно полно изложены в работе [37].
При проектировании пневмогидравлической системы и
выборе размеров ее отдельных элементов возникает необходимость
расчета гидравлического сопротивления гибкого трубопровода,
волнистая форма проточной части которого вызывает
дополнительные потери напора. Эксперименты показывают [37], что
потери напора в гофрированных трубопроводах в 1,2—4 раза выше
потерь напора в гладкостенных трубах, что связано со
значительным увеличением коэффициента сопротивления в формуле
Дарси — Вейсбаха. Установлено также, что при увеличении
числа выступов (гофров) на единицу длины гибкого
трубопровода гидравлическое сопротивление уменьшается, приближаясь
при большом числе выступов к сопротивлению гладкого
трубопровода равного диаметра.
Зависимость коэффициента гидравлического сопротивления
от числа Рейнольдса для различных режимов течения
приведена на рис. 3.<22. Здесь так же, как и у гладкокггенных труб, яа-
61
блюдаются три области течения [37]: ламинарная (lgRe^3,17),
переходная C,17<lgRe<3,4) и турбулентная (lgRe>4).
0,22
0,10
0,18
0,16
0,14
0,12
0,10
0,08
0,06
от
\
\
\
\
\
\
\
\
\
1
/
Рис. 3.22. Зависимость
коэффициента гидравлического
сопротивления от числа
Рейнольд с а
2fi 2,6 2,6 3,0 3,2 3,4 3,6 3,8 4,0 t,2 ty LgRe
В области турбулентного течения величина Хт в основном
определяется значением относительной волнистости а и не
зависит от числа Рейнольдса.
3.5. СОЕДИНЕНИЯ ТРУБОПРОВОДОВ
Отдельные участки трубопроводов вместе с агрегатами
(запорная регулирующая арматура и т. д.) объединяются в пнев-
могидравлическую систему элементами, которые носят название
соединений трубопроводов.
При всем своем конструктивном разнообразии соединения
трубопроводов могут быть отнесены к одной из трех групп:
1) неразъемные соединения;
2) разъемные соединения;
3) быстроразъемные соединения.
При этом все группы объединены единым требованием
обеспечения герметичности и прочности трубопроводов, входящих в
систему.
К первой группе относятся соединения трубопроводов,
выполняемые сваркой или пайкой, как правило, по торцам
соединяемых участков трубопроводов. Такие соединения просты, удобны,
легко выполнимы на практике, обеспечивают необходимую
прочность и полную герметичность. Их недостаток — нарушение
качества исходного материала в области сварных швов, плохая
взаимозаменяемость отдельных участков и агрегатов,
установленных на трубопроводе, и некоторая трудность в монтаже, так
62
Рис. 3.23. Фланцевое соединение
как при сборке трубопровод на изделие устанавливается в
собранном виде.
Такие соединения применяют при массовом производстве
изделий, когда не требуется индивидуальная подгонка участков
трубопровода и их замена.
К числу наиболее распространенных разъемных соединений
относятся фланцевые, которые могут выполняться как с
приварными, так и со свободными фланцами. В качестве примера
на рис. 3.23 приведено фланцевое
соединение с приварными
фланцами. Такие соединения просты в
изготовлении и эксплуатации и их
применяют там, где отсутствует
угловое смещение соединяемых
трубопроводов.
Если в процессе монтажа оси
соединяемых трубопроводов будут
расположены под углом друг к
другу, то в этом случае желательно
использовать разъемные соединения,
обеспечивающие отсутствие изгиб-
ных напряжений после стыковки.
В таких устройствах сопряжение
может производиться между
конусной и сферической поверхностями
или между сферическими и другими
профилированными поверхностями. В качестве примера на
рис. 3. 24 приведено соединение такого типа со сферическими
сопрягаемыми поверхностями, затягиваемое накидной гайкой.
Такие соединения, как правило, устанавливают на
трубопроводах небольшого диаметра (<не 'более 20 м:м).
При осевом и линейном смещении концов трубопроводов
возможно применение соединений с промежуточным звеном 4 (рис.
3.25), имеющим две сферические ниппельные законцовки,
прижимаемые к штуцерам / накидными гайками 2.
Для трубопроводов большого диаметра (более 16 мм)
концевые патрубки 1 и 2 (рис. 3.26) могут быть выполнены кон-
центрично и соединяться друг с другом шаровыми вкладышами
3, которые при монтаже вводят через штуцер 4, закрываемый
пробкой 5.
Из-за технологических допусков или неточности изготовления
оси соединяемых патрубков могут не совпадать. Поэтому для
соединения концов трубопроводов / и 2 без дополнительных
напряжений могут применяться регулируемые вставки (рис. 3.27),
содержащие помещенные друг в друга муфты а и б с
эксцентрично расположенными концевыми патрубками 3, 4 и 5, 6 с
эксцентриситетами ei и 8$. Поворотом муфты а относительно
63
трубопровода / и муфты б относительно муфты а можно
добиться совпадения осей патрубка 6 и трубопровода 2.
К быстроразъемным относится класс соединений,
предназначенных для разъединения или соединения трубопроводов ракеты
и наземного оборудования или трубопроводов отдельных
ступеней многоступенчатой ракеты. Они являются самоконтрящимися
и могут быть отнесены к одной из двух групп:
3 г
Рис. 3.24. Соединение с
накидной гайкой:
/ — ниппель; 2 — гайка
накидная; 3 — штуцер
Рис. 3.25. Соединение с промежуточным звеном:
/ — штуцер; 2 — гайка накидная; 3 — пружина; 4-
промежуточное звено
— соединения со вторичным фиксатором;
— соединения без вторичного фиксатора.
Первая группа характерна тем, что для разъединения (или
соединения) трубопроводов необходимо предварительно
приложить осевое или радиальное усилие к вторичному фиксатору,
сдвинуть его в сторону, а затем развести трубопроводы.
Рис. 3.26. Соединения с шаровыми
вкладышами
2 1
Рис. 3.27. Регулируемая вставка
Применение второй группы соединений позволяет
расстыковать (или состыковать) трубопроводы только выполнением
одной операции — приложением осевого усилия к трубопроводам.
К соединениям со вторичным фиксатором относятся
устройства, в которых основной фиксатор, осуществляющий
соединение трубопроводов, может быть выведен из зацепления только
за счет воздействия на него вторичного фиксатора, например,
муфты. В приведенном на рис. 3.28, а быстроразъемном соеди-
64
нении такого типа (показанном в состыкованном положении)
гпри расстыковке трубопроводов движением (втори|чж>го
фиксатора (муфты) 3 выводят из зацепления с соединительными
патрубками / и 2 подпружиненные сухари 4 и затем разводят
трубопроводы. В соединениях первой группы вторичный фиксатор
(муфта) может выполнять и противоположную функцию —
освобождать основной фиксатор при расстыковке и стыковке. Так,
Рис. 3.28. Соединение со
вторичным фиксатором:
а — соединение с фиксирую- _
щи ми сухарями; б — соеди
нение с упругими пластина-
ми
а)
в соединении, показанном на рис. 3.28, б, при расстыковке
отводят в осевом направлении муфту 3 против действия пружины 5.
освобождая основной фиксатор — упругие пластины 4. Далее
после освобождения фиксаторов разводят в стороны
трубопроводы 1 и 2. Соединения первой группы надежны в работе,
гарантируют отсутствие случайной расстыковки трубопроводов, но
требуют наличия дополнительного приводного механизма для
осуществления движения вторичного фиксатора и, как правило,
используются либо в наземном оборудовании, либо при
стыковке трубопроводов ракеты и наземного оборудования.
При стыковке трубопроводов отдельных ступеней
многоступенчатой ракеты широко используют быстроразъемные
соединения второй группы без вторичного фиксатора. Конструктивное
их выполнение разнообразно, но все они позволяют
расстыковывать соединенные трубопроводы отдельных ступеней ракеты
лишь разводом в противоположные направления этих ступеней.
Соединения такого типа конструктивно могут быть выполнены
так же, как устройство, изображенное на рис. 3.28, б, но без'
вторичного фиксатора 3 и пружины 5. При расстыковке под
воздействием осевых усилий, приложенных к патрубкам / и 2,
упругие пластины 4 разводятся в стороны выступами на пат*
рубках 1, чем и осуществляется разъединение.
К быстроразъемным соединениям относят также устройства,
предназначенные в заданный момент времени разделить
магистраль при помощи пиросредств. В таких соединениях
разделитель может быть выполнен в виде пирошнура, помещенного в
заранее выполненную канавку на наружной поверхности
магистрали в плоскости расстыковки. В соединениях другого типа
пирошнур отсутствует, но канавка на наружной поверхности
«* 3205 65
магистрали заключена в камеру с пирозарядом, продукты
сгорания которого при разделении воздействуют на стенки камеры
и разрывают магистраль по месту выполнения канавки.
Иногда разъемные соединения выполняют с клапанными
механизмами, герметизирующими концы магистралей после
расстыковки.
Глава 4
ТОПЛИВНЫЕ БАКИ
4.1. ОБЩИЕ ТРЕБОВАНИЯ К ТОПЛИВНЫМ БАКАМ
Отсеки ракеты, в которых размещаются баки с основными
компонентами топлива (окислителем и горючим), называются
топливными отсеками. В топливных отсеках с несущими баками
стенки баков являются одновременно внешней оболочкой
ракеты и силовым элементом, воспринимающим продольные
силовые нагрузки и изгибающие моменты, действующие на корпус
ракеты.
Вопрос о выборе типа топливных баков и их размещении на
ракете или другом летательном аппарате является очень
сложным и решается при общей компоновке изделия, причем
учитывается его назначение. Взаимное расположение баков окислителя
и горючего часто определяется условиями центровки. Требования
обеспечения центровки, а также требования создания напора на
входе в ТИА для обеспечения бескавитационной работы насоса
окислителя, потребное давление у которого обычно больше чем
для горючего, обусловливает на многих ракетах расположение
баков окислителя выше баков горючего. На выбор конструкции
топливных баков существенное влияние оказывают свойства
применяемых компонентов топлива, его температура, сроки
хранения в заправленном состоянии, а также давление в баках.
В зависимости от способа подачи компонентов топлива в
камеру сгорания ЖРД баки можно разбить на два основных
тиота:
нагруженные баки — баки, находящиеся под высоким
давлением; применяются в вытеснительной системе подачи;
разгруженные баки — баки, не находящиеся под высоким
давлением; применяются в системах подачи с ТНА.
Давление в разгруженных баках обычно не превосходит
величины 1 МПа и определяется условием обеспечения
устойчивости баков и бескавитационной работы ТНА двигателя.
К топливным бакам предъявляется ряд требований,
основным из которых является требование минимальной массы бака,
которая достигается применением высокопрочных материалов
и выбором рациональных форм. Вместе с тем баки должны быть
коррозионностойкими, что особенно важно для длительнохрани-
мых изделий, учитывая то обстоятельство, что ракетные топли-
66
ва обычно являются агрессивными жидкостями. Баки должмы
быть просты в изготовлении и удобны в эксплуатации.
Наиболее распространенной формой баков является
цилиндрическая, так как позволяет получить бак большого объема при
сравнительно небольшом поперечном сечении. Широко приме-
Рис. 4.1. Некоторые случаи расположения баков в ракете:
а—раздельное; б—объединенное; в—концентрическое; г—связка;
5—«утопленное»
няются сферические баки, которые обладают наилучшими
массовыми характеристиками и имеют наименьшую поверхность,
что особенно важно для баков с криогенным топливом. Исходя
из требований компоновки изделия применяются тороидальные
и чечевицеобразные баки. С целью лучшего использования
объема изделия применяются баки и более сложных форм, в том
числе и так называемые «утопленные» конструкции, в которых
двигатель как бы «утоплен» в баке [27]. Некоторые наиболее
распространенные в практике случаи расположения топливных
баков в ракете представлены на рис. 4.1.
Баки должны быть оснащены следующими
дополнительными системами и устройствами.
1. Устройствами для забора топлива,
2. Дренажным клапаном сброса из бака газов и паров
компонента топлива при заправке.
3. Предохранительным устройством для сброса избыточного
давления из свободной подушки бака при повышении
температуры компонента топлива в процессе хранения заправленного
бака, а также сброса избыточного количества газа наддува при
работе двигательной установки. Часто дренажно-предохрани-
тельные системы объединяют в единую систему.
4. Системой для предохранения бака от потери устойчивости
(складывание бака) из-за разряжения давления внутри бака
при колебаниях температуры окружающей среды. Как правило,
3* б
выполненные конструкции топливных баков допускают
разряжение не более 0,01—0,02 МПа. Эти системы иногда называют
системами «дыхания».
5. Устройствами для ввода в бак газа наддува.
6. Люком для монтажа систем внутри бака и ремонта.
7. Часто баки оснащаются тоннельной трубой для прохода
трубопровода подачи второго компонента.
8. Несущие баки в своей конструкции дополнительно имеют
силовой набор: шпангоуты, стрингеры и другие силовые
элементы.
9. Иногда дополнительно устанавливаются специальные
устройства (демпферы) для ограничения подвижности топлив в
баках, которые служат для устранения динамической
неустойчивости ракет на активном участке полета. Демпферами могут
быть радиальные перегородки в баках, перфорированные
диафрагмы, сетки, которые эффективны при малых частотах, которые
близки к частотам первого тона колебаний поверхности
жидкости. Для демпфирования колебаний с более высокими
частотами, частот упругих колебаний стенок бака, заполненного
жидкостью, может быть использована газовая полость в топливе,
заключенная в упругую оболочку [35].
4.2. РАСЧЕТ ЗАПРАВКИ БАКА ТОПЛИВОМ
Топливо, заправляемое в ракету, состоит: а) из
используемого топлива — топлива, которое создает полезную тягу; б) из
неиспользуемого топлива, которое не создает полезную тягу.
Рассмотрим типовую циклограмму работы двигательной
установки ракеты (рис. 4.2). Обычно вначале двигатель
выводится на предварительную ступень тяги, которая меньше стартовой
массы ракеты, хотя возможен запуск без промежуточной
ступени тяги. Это не является принципиальным, так как и в том, и в
другом случае до отрыва ракеты от стартового стола
расходуется некоторое количество топлива. Затем по команде от
системы управления двигатель переводится на основной режим.
Когда тяга двигателя достигнет массы ракеты, ракета
отрывается от стартового стола (контакт подъема КП) и начинается
режим полета ракеты по траектории. При достижении ракетой
заданной скорости по команде от системы управления
происходит останов двигателя. Топливо, имеющееся в трактах
двигателя за отсечными клапанами, испаряется в охлаждающей
рубашке двигателя и создает дополнительную тягу — так называемый
импульс последействия. Затем включается дополнительная
тормозная система для гашения части импульса последействия и
происходит разделение ступеней ракеты или отделение полезной
нагрузки.
Топливо, используемое для работы двигательной установки
ракеты, как видно из циклограммы, представленной на рис. 4.2,
расходуется на следующих режимах.
а) На маршевом режиме. Обычно этот режим отсчитывается
от момента времени, при котором тяга достигает 90-^97% от
номинальной величины, так как этот момент легче фиксируется,
чем момент достижения полной тяги.
б) На переходных режимах. При выходе двигателя на режим
это время отсчитывается от контакта подъема до набора
двигала
100
№7
50
у
Маршевый режим
* полета ракеты
Рис. 4.2. Типовая циклограмма работы двигательной установки
ракеты:
/ — включение двигателя; 2 -—команда на перевод двигателя на
основной режим; 3 — контакт подъема; 4 — останов двигателя; 5—
включение тормозной системы, разделение ступеней; 6 — режим
предварительной ступени; 7 — основной режим работы; 8 — используемый
импульс последействия; 9 — полный импульс последействия; 10 —
тормозной импульс
телем тяги 90—97% от номинальной величины; при спаде тяги
при выключении — это время от команды на выключение до
разделения ступеней ракеты.
Соотношение компонентов топлива на переходных режимах
может отличаться от номинального на маршевом режиме.
Используемое топливо на маршевом режиме и на переходных
режимах можно называть собственно рабочим запасом
топлива — Gpa6- В используемое топливо необходимо включить и так
называемый гарнтийный запас топлива — Gr<3. Гарантийный
запас топлива — это дополнительное количество топлива,
которое необходимо заправить в баки ракеты, чтобы
скомпенсировать возможное увеличение по сравнению с рабочим запасом
расхода топлива на маршевом режиме полета, в условиях
возмущенного полета и при отклонении основных параметров
ракеты (массы, тяги двигателя, соотношения компонентов топлива)
от номинальных значений. Обычно гарантийный запас топлива
не превышает 2—3% от рабочего запаса.
Неиспользуемое топливо складывается из следующих
составных частей.
1. Топлива, расходуемого двигателем до набора тяги,
равной массе ракеты (до контакта подъема) — Од (у двигателей
верхних ступеней ракеты топливо, расходуемое двигателем при
наборе тяги, может создавать полезную тягу, в таких случаях
его необходимо относить к используемому топливу).
2. Топлива, остающегося в двигателе после его отсечки —
^зал.дв-
3. Остатков незабора топлива в баках — G0.h.6-
4. Остатков в магистралях питания для обеспечения бескави-
тационной работы насосов ТНА двигателя — G0.H.Mar-
5. Топлива, идущего на наддув баков — GHa№
6. Одного из компонентов топлива, остающегося в баке из-за
недостатка другого компонента топлива (при отсутствии
системы одновременного опорожнения баков) — G0.uKm.
7. Топлива, необходимого для захолаживания двигателя и
магистралей перед пуском и на выкипание до закрытия
дренажного клапана (в случае криогенного топлива) — бВыюш-
У ЖРД, даже точно настроенного на определенное
соотношение компонентов топлива, в полете в составе ракеты под
действием различных внешних воздействий, состав которых
рассмотрен в гл. 5, соотношение компонентов по времени полета
изменяется.
Для обеспечения выработки компонентов топлива с
минимальными остатками существуют два метода заправки баков
топливом:
— заправка в соответствии с рассчитанным средним за
время полета ракеты программным коэффициентом соотношения
компонентов;
— заправка в соответствии с номинальным соотношением
компонентов у ракет, имеющих систему автоматического
регулирования соотношения компонентов.
В соответствии с вышеизложенньш топливо, подлежащее
заправке в бак, складывается из следующих составных частей:
где
^о.н == ^о.н.б ~Ь ^0#н,Маг 4" Ф).н Кт-
Объем топлива, заправляемого в бак, равен
v заир
G3anp
заир -j-ёлу погр.запр»
где АКдогр.запр — погрешность заправки; q — плотность
компонента топлива в зависимости от сортности и температуры.
При расчете максимального объема необходимо брать
минимальное значение плотности компонента топлива при
максимальной температуре заправки, при расчете минимального
объема — максимальное значение плотности при минимальной
температуре.
70
Погрешности заправки включают:
1) погрешности изготовления топливных баков (при
контроле заправки системой контроля уровня — СКУ), которые
состоят из погрешности изготовления диаметра и длины бака, а
также неточности изготовления днищ. Для уменьшения этой
погрешности в производственный процесс изготовления бакое
часто включается операция тарировки баков по объему. В этом
случае остается только погрешность самой тарировки;
2) погрешности измерения плотности и температуры
компонентов топлива при заправке;
3) погрешности заправочного оборудования;
4) погрешности вертикальной установки ракеты при
заправке на стартовом столе (при контроле системой СКУ). Если
датчик уровня установлен по оси бака, то эта ошибка
незначительна;
5) погрешности определения поправок на изменение объема
баков при изменении температуры стенок бака, а также из-за
деформации бака# от гидростатического давления при заправке.
Полный объем топливного бака КПОлн определяется
максимальным объемом заправленного топлива VTanp и
минимальным газовым объемом в верхней части бака V™ln (подушкой):
1/ ушах , i/min
При расчете объема бака при номинальных условиях
необходимо учитывать, что в эксплуатационных условиях бак
изменяет объем из-за температурных деформаций и из-за
растяжения от внутреннего давления и других силовых воздействий
соответственно на величины ДУТ и К
Изменение объема бака при изменении температуры
определяется из выражения
А»/Т~О(Х (/ ном У ЭКСпл] * ном'
где Уном — объем бака при номинальной температуре; а —
коэффициент линейного расширения материала бака; Тпом —
номинальная температура стенок бака; ТЭКСпл — температура
стенок бака при эксплуатации.
Для большей точности необходимо учитывать изменение
коэффициента линейного расширения в зависимости от
температуры. Изменение объема бака от давления и других сил в
эксплуатационных условиях вычисляется по известному модулю
упругости материала бака и рассчитанным деформациям от
осевых, меридиональных и окружных напряжений в
заправленном баке.
71
4.3. ВЫБОР ОБЪЕМА ГАЗОВОЙ ПОДУШКИ БАКА
Газовый объем в верхней части бака называется свободным
объемом или просто подушкой. Вопрос о выборе объема
газовой подушки довольно сложен. Объем подушки должен быть
минимальным, так как увеличение его ухудшает массовые
характеристики топливного бака из-за увеличения объема,
неиспользуемого для заправки топлива. Но уменьшение объема
подушки ограничивается рядом факторов.
Необходимость иметь газовую подушку в баке диктуется
следующими требованиями.
1. Обеспечить объем в случае ошибки в выдаче заправочной
дозы компонента топлива наземными средствами заправки.
2. Компенсировать расширение топлива при увеличении
температуры окружающей среды при хранении и от
аэродинамического нагрева у верхних ступеней ракет в (полете.
3. Обеспечить объем в случае выделения растворенных в
топливе газов и продуктов разложения топлива.
4. Обеспечить в заданных диапазонах давление в баке при
колебаниях температуры окружающей «среды. Верхняя граница
давления в баке определяется допустимьши напряжениями из
условия (ползучести материала бака, «нижняя граница
определяется устойчивостью бадка ори низких давлениях.
5. Во время запуска двигателя необходимо поддержать
определенное давление в свободной подушке.
6. Дренажно-предохранительная система требует
определенного начального объема газовой подушки для
удовлетворительной работы.
7. Компенсировать возможное травление через
предохранительный клапан из баков верхних ступеней ракеты во время
полета предшествующих ступеней. Это травление может быть
существенным на резонансных частотах предохранительных
клапанов.
8. В некоторых случаях подушка определяется условиями
размещения газораспределителя наддува, дренажно-предохра-
нительных устройств, датчиков систем контроля заправки и
выработки топлива и др.
Объем подушки в баках ракет может изменяться в широком
диапазоне, l-r-5% 0T полного объема бака в зависимости от
требований, предъявляемых к ракете.
Необходимость подушки в соответствии с требованием п. I
определяется тем обстоятельством, что в верхней части бака
выше максимального уровня топлива при заправке следует
разместить дополнительный чувствительный элемент датчика
системы контроля уровней, который выдает аварийную команду на
прекращение заправки. В некоторых случаях при
конструктивных трудностях размещения датчика системы СКУ это
требование бывает определяющим при выборе объема подушки.
72
Объем подушки для обеспечения заданных техническими
условиями максимального р™ах и минимального р™Хп давлений в
баках в эксплуатационном диапазоне температур без учета
растворимости газов и разложения компонента топлива (пп. 2 и 4)
определяется совместным решением следующих соотношений.
1. Давление в свободной подушке определяется давлением
газа «наддува (после заправки (^воздуха, азота, гелия и др.) рг и
давлением упругости naipoe компонента топлива ps: Рб=Рг+Р«.
2. Давление упругих паров компонента топлива зависит
только от температуры топлива:
_ GqRT
где R — газовая постоянная газа наддува свободной подушки
после заправки; Go= Рг'° п<о начальное количество газа в
RT
0
свободной подушке (Go=const, так как бак считается
герметичным; индекс «О» — характеризует начальное состояние).
4. 1/;=Кпт0ЛН-^пР = ^
(индекс «Г» характеризует состояние параметров при текущей
температуре Т).
- ,/Т __°запр , д1/
О. V запр —"-" Г &V погр.запр»
в первом приближении ЛУпогр.запр можно считать независимой
от температуры компонента.
При малом изменении плотности от сортности компонента
где рт — коэффициент объемного расширения компонента
топлива; Кз1пр—объем топлива, заправленного в бак при
температуре 7V
При длительном хранении для обеспечения давления в
заданных пределах объем газовой подушки в некоторых случаях
можно уменьшить подбором газа наддува с соответствующими
характеристиками его растворимости и выделения из
компонента топлива при изменении температуры и давления. Для этого
к вышеперечисленным пяти соотношениям необходимо добавить
уравнение динамического массообмена газа наддува свободной
подушки с компонентом топлива
73
где р — коэффициент массообмена, зависящий от критерия Ре-
лея Ra; F — поверхность массообмена (зеркало топлива в
баке); Ас — изменение средней концентрации растворенного газа.
На рис. 4.3 показано изменение давления в подушке во
время запуска двигателя. Перед запуском двигателя бак наддува-
ется до определенного начального давления /?зап от специальных
стартовых систем. В начальный момент запуска двигателя
начинается расход компонента из бака и начальное давление в
подушке проваливается, так как газ в подушку еще не
подается. Это явление свойственно как для систем газобаллонного
наддува, где оно определяется задержкой срабатывания
регулятора и временем транспортировки газа, так в еще большей мере
для систем с газогенераторным наддувом, у которых эта
задержка может составлять несколько секунд. Величина провала
зависит от начального объема подушки и расхода компонента из
бака до начала работы основной системы наддува. Провал
давления перед ТНА может привести к срыву запуска двигателя, а
в свободной подушке может привести к потере устойчивости
стенок бака. Чтобы этого не произошло, необходимо иметь
подушку соответствующего объема и некоторое превышение
начального давления в подушке перед запуском над рабочим
давлением. Однако и увеличение объема подушки, и увеличение
начального давления перед запуском нежелательны, так как они
приводят к увеличению массы бака. Более эффективными могут
быть усовершенствования конструкции элементов системы
регулирования давления наддува, подбор наиболее эффективных
циклограмм начала запуска двигателя и систем наддува. В
частности, провал давления или объем подушки при заданном провале
при газогенераторном наддуве можно существенно снизить
путем наддува газовой .подушки от 'специальной системы на
участке от начала запуска двигателя до «выхода на режим
основной газогенераторной системы /наддува.
Параметры дренажно-предохранительной системы также
накладывают определенные требования к объему начальной
свободной подушки в баке. Давление газа в магистрали наддува
обычно существенно больше давления в баке. Инерционность
дренажно-предохранительных устройств из-за инерционных сил
и трения в механических системах может быть значительной.
Поэтому при малых подушках величина максимального
давления в подушке может приближаться к давлению в системе
(рис. 4.4). На рис. 4.5 показаны зависимости максимального
давления в свободной подушке от объема подушки при
различных расходах газа в бак [26].
При расчете количества заправляемого топлива при
заданном объеме бака определение минимального потребного объема
газовой подушки является ответственной операцией. Необходимо
учитывать все погрешности, влияющие на объем газовой
подушки: 1) погрешность изготовления баков по объему; 2) ошиб-
74
Время
Рис. 4.3. Типовое изменение давления в подушке
во время запуска двигателя
Расход газа постоянный
Время
Рис. 4.4. Изменение давления в подушке
при наддуве различных объемов
«8
I
/Максимально_допусти-
~~мое "давлениеВ'5а не
Обьем подушки
Рис. 4.5. Зависимость между максимальным
давлением и объемом подушки
75
ка в дозе при заправке; 3) изменение температуры
компонентов; 4) изменение плотности компонента в зависимости от
температуры и сортности; 5) температурные и силовые деформации
бака и др. Для рационального выбора минимального объема
подушки необходимо провести анализ всех этих погрешностей
для выявления систематической и случайной составляющих
погрешностей.
4.4. ЗАБОРНЫЕ УСТРОЙСТВА
Заборные устройства являются одним из важнейших
элементов топливных баков и систем подачи компонентов топлива к
двигателю, которые должны обеспечивать максимальную выра-
Рис. 4.6. Схема заборных устройств топливных баков:
в—беспровальное; б—с тарелью; в—коническое; г—сифонное; д—качающийся заборник
ботку компонента топлива из бака без нарушения сплошности
потока. Уменьшение неиспользуемых остатков топлива в баках,
входящих в .конечную массу, является существенным совершенст-
вюваиием гидравлических систем ракет-носителей.
Специальные заборные устройства двигательных установок с
ЖРД, работающих в условиях невесомости, рассмотрены в
гл. 2.
На ракетах-носителях, которые не имеют значительных
боковых инерциадьных сил, обычно (применяются заборные
устройства в виде сливмых отверстий в дашних днищах ба«ко® с
различными ворон-когасящими устройствами и (протавопроваль-
ными тарелями, а также сифонные заборные устройства.
На рис. 4.6 приведены схемы некоторых наиболее
распространенных заборных устройств, применяющихся для обеспечения
бесперебойной подачи компонентов топлива к двигателю.
4.4.1. Гидравлические и тепловые
невырабатываемые остатки топлива
Компонент топлива, который остается в топливном баке и в
магистрали питания в момент нарушения сплошности потока на
входе в насос двигателя, называют гидравлическим невыраба-
тываемым остатком топлива (остатком незабора).
Нарушение сплошности потока может являться следствием
следующих трех основных процессов в заборных устройствах:
76
кавитации, воронкообразования, динамического провала
уровня свободной поверхности.
Скорость потока в заборном устройстве бака увеличивается,
а статическое давление уменьшается. Кавитация наступает
тогда, когда статическое давление в потоке падает ниже давления
насыщенных паров компонента топлива. При этом
гидравлические потери в заборном устройстве возрастают. Поэтому
заборное устройство должно быть спроектировано так, чтобы в нем
не возникала кавитация. Даже при значительной высоте уровня
компонента топлива в баке над заборным устройством может
образоваться вихревая воронка с круткой жидкости.
Образующийся при этом газовый жгут проникает в магистраль питания
и нарушает сплошность потока. Причиной возникновения
вращательного движения жидкости над заборным устройством
могут явиться кориолисовы силы, кавитационные явления з
заборном устройстве, различные загромождения в баке, приводящие
к несимметричному притеканию жидкости к заборному
устройству, а также различные начальные возмущения. Несмотря на
сложность механизма возникновения вихревой воронки она
может быть ликвидирована установкой в зоне заборного
устройства направляющих радиальных ребер, экранов и других
устройств. При устранении крутки к концу выработки топлива из
бака при некоторой высоте уровня жидкости над заборным
устройством происходит искривление свободной поверхности. Это
явление называют динамическим провалом уровня свободной
поверхности жидкости. Образуется так называемая провальная
воронка без крутки жидкости. Подход этой воронки к
заборному устройству вызовет попадание газа в магистраль
питания.
Гидравлические остатки незабора топлива могут быть
существенно уменьшены применением на заборных устройствах раз-»
личных тарелей и других устройств, уменьшающих высоту
уровня компонента топлива, при которой происходит прорыв газа в
магистраль питания.
В результате теплообмена с окружающей средой топливо в
баках нагревается и расслаивается. Температурное расслоение
топлива происходит также и в полете. За счет нагрева от газа
наддува и аэродинамического нагрева в баках возникает сво-
бодноконвективное движение топлива, которое образует у
свободной поверхности слой с повышенной температурой по
сравнению со всем объемом бака. Это явление имеет место как у
высококипящих компонентов топлива, так и у криогенных топ-
лив, где оно проявляется еще в большей степени. Перегретый
слой топлива не может быть подан в двигатель из-за
возникновения кавитации. Та часть топлива, которая к концу работы
двигательной установки имеет температуру выше допустимой
Для нормальной работы насоса при заданном давлении на
входе, называется тепловым остатком неззбора.
77
Уменьшение тепловых остатков при сохранении принятых
величин давления наддува баков связано с проведением сложных
работ по улучшению кавитационных характеристик насосов или
с организацией.перемешивания «теплых» и «холодных» слоев
топлива в баках.
4.2.2. Профилирование беспровального заборного устройства
Для предотвращения неравномерного понижения уровня
топлива в баке над заборным устройством оно должно быть
спроектировано таким образом, чтобы осевая составляющая вдоль
линии тока, примыкающей к стенке заборного устройства, была
равна средней скорости снижения уровня жидкости (рис. 4.7).
Для заборного устройства, расположенного в центре днища
бака, в работе [26] получено решение, которое определяет
профиль заборного устройства, обеспечивающий равномерное
понижение уровня жидкости в баке:
Q2 \d
где г—радиус поперечного сечения заборного устройства; h —
высота от уровня отсчета; g—
ускорение свободного падения; с — константа
Чези, которая зависит от чистоты
обработки поверхности заборного
устройства; пх — перегрузка; Q — расход
жидкости через заборное устройство. я =
= 3,141.
Решение этого нелинейного
дифференциального уравнения можно получить
численной аппроксимацией.
Определенная по этому уравнению длина
заборного устройства может оказаться
неприемлемой по конструктивным
соображениям.
Рис. 4.7. Профиль
беспровал ьности заборного
устройства
4.4.3. Динамический провал уровня над донным заборным
устройством с острыми кромками (рис. 4.8)
В настоящее время нет точного теоретического обоснования
для определения глубины динамического провала уровня в
зависимости от физических свойств жидкости (плотности,
вязкости), геометрической формы топливного бака, размера
заборного устройства, действующей перегрузки. Экспериментально
установлено, что при относительно больших глубинах жидкости
78
(H/d) над сливным отверстием глубина провала уровня
практически не зависит от относительной глубины. С уменьшением
глубины жидкости наблюдается резкое возрастание
динамического провала уровня свободной поверхности h. Форма свободной
поверхности принимает вид каверны с заостренным концом.
Высота уровня, при котором конец каверны достигает входа в
питающий трубопровод, называется критическим уровнем Якр.
Величина HKV = HKV/d называется относительным критическим
уровнем. В практике для определения критического уровня
пользуются следующей полуэмпирической формулой:
где Fr=
— число Фру да;
v — скорость в трубе;
d — диаметр трубы;
g — ускорение свободного падения;
пх — перегрузка;
А и К — эмпирические коэффициенты.
По данным (различных «авторов, .коэффициенты А и К имеют
значения, указанные в табл. 4.1.
Таблица 4.1
Источник
[38]
[60]
[44]
[72]
[76]
А
0,26
0,40
0,50
0,43
0,69
к
0,54
.0,57
0,55
0,50
0,40
Рис. 4.8. Заборное устройство с
острыми кромками
В работе [6] рекомендуется формула
В работе [10] рекомендуется эмпирическая формула для
определения /?кр с учетом сил вязкости и поверхностного натяжения
77Kp=0,42(l,23-6,65We) f 1+—) Fr0'275,
где We=— число Вебера;
q
а — коэффициент поверхностного натяжения;
q — плотность;
Re = число Рейнольдса;
V
v — кинематический коэффициент вязкости.
79
4.4.4. Заборные устройства с тарелью
ВеличинаЧфитического уровня может быть уменьшена
установкой тарели над заборным отверстием. В настоящее время
накоплен большой экспериментальный материал, который
позволяет сделать некоторые рекомендации по выбору основных
конструктивных элементов заборных устройств с тарелью в
зависимости от диаметра магистрали питания.
Принцип работы заборного устройства с тарелью основан на
выравнивании поля скоростей с одновременным уменьшением
Рис. 4.9. Заборные
устройства с тарелью:
а — центральное; б —
боковое
величины скорости на подходе к заборнику. Профиль тарели
выбирается таким образом, чтобы обеспечить плавное поджа-
тие проходных площадей в канале заборного устройства.
Преимуществами заборных устройств с тарелями являются
простота их конструкции, малая масса, малые габариты,
надежность. Заборные устройства на нижнем днище топливного бака
могут быть центральными (рис. 4.9, а) или боковыми (рис.
4.9,6). Бокшые заборные устройства характеризуются углам р,
для центрального заборного устройства угол р = 0. Для
центрального и бокового заборного устройства тарель должна
располагаться горизонтально, это уменьшает остатки незабора, так
как у заборного устройства, установленного в наклонном
положении, прорыв газа происходит неравномерно по уровню.
Тарель представляет собой коноид вращения, диаметр
тарели
Установочный размер тарели рекомендуется брать равным
Площадь входа в заборное устройство /7Bx=2,lFTp, где FTV —
площадь сечения расходного трубопровода. Наличие радиуса
перехода от днища бака к магистрали питания значительно
снижает потери энергии вследствие уменьшения или полного
устранения сжатия потока в трубе. Радиус перехода влияет также
80
на формирование потока в зоне заборного устройства в момент,
предшествующий прорыву газа. При наличии скругления
входной диаметр трубы увеличивается, а скорость притекания
уменьшается, что приводит к уменьшению критической высоты и
гидравлических потерь в заборном устройстве.
Радиус перехода рекомендуется принимать гпер= @,3-г-
0,6) dTp.
Рис. 4.10. Профиль гидравлического остатка
незабора центрального заборного устройства с тарелью
Для предотвращения крутки потока на тарелях
устанавливаются противокруточные аппараты, которые представляют
собой радиальные ребра диаметром больше диаметра тарели
(DK« 1,7/)Тар) и высотой 50—200 мм.
Выполненные в соответствии с этими рекомендациями
заборные устройства с тарелями имеют коэффициент
гидравлического сопротивления ? = 0,35—0,5. Экспериментально установлено,
что профиль гидравлического остатка незабора заборного
устройства с тарелью имеет вид, показанный на рис. 4.10.
Критический уровень находится на диаметре DHkp =?тар+2,12//Кр.
Наибольшая высота жидкости у стенки равна 1,4#кр. Остаток
незабора с использованием метода «стандартной модели» (см.
гл. 12) определяется по формуле
где Fo.n — относительный остаток незабора для «стандартной
модели»;
Q — объемный расход через заборное устройство;
пх — осевая перегрузка;
X — отношение линейных размеров натуры и «стандартной
модели».
4.4.5. Заборные устройства со сложной геометрией
К заборным устройствам предъявляются следующие
требования:
— заборное устройство должно обеспечивать минимальные
гидравлические остатки незабора;
81
— гидравлическое сопротивление должно быть
минимальным;
— устройство должно быть устойчиво при максимальных
механических нагрузках;
Рис. 4.11. Сильфонные забор*
ные устройства:
—нормальное; б—с
тоннельной трубой
— быть простым в изготовлении и монтаже в баке;
— по возможности иметь минимальную массу.
На выбор типа заборного устройства определяющее влияние
оказывает геометрия нижних днищ топливных баков.
Применение боковых заборных устройств с большими р (см.
рис. 4.9) приводит к существенному росту остатков незабора.
В этом случае целесообразно (применение сильфонных заборных
устройств, которые дают возможность организовать забор
топлива из центра днища при наличии
бокового сливного отверстия из бака
(рис. 4.11,а). Гидравлические
остатки неза)бор,а для сильфонных
заборных устройств такие же, как и для
данных заборных устройств с таре-
лями, три одинаковой геометрии
входного участка.
Применение сильфонного
заборного устройства позволяет
организовать центральный забор при
наличии в баке тоннельной трубы, ось
которой совпадает с осью бака
(рис. 4. 11,6). Такое заборное
устройство особенно целесообразно
применять для питания нескольких
двигателей, так как обеспечивается
равномерное течение на входе в
заборное устройство.
Примером нижнего днища
сложной формы является торовый бак,
который имеет сравнительно
широкое л^именение. На торовых баках
Рис. 4.12. Желобковое заборное
устройство:
/ — торовый бак; 2 — жолоб;
3 — перфорированная
диафрагма; 4 — расходная труба
82
применяются желобковые заборные устройства, представляющие
собой кольцевые желобы переменного сечения (рис. 4. 12).
Над желобом устанавливается перфорированная диафрагма,
закон распределения отверстий в которой обеспечивает
равномерное опускание уровня в топливном баке. Угол охвата
периметра нижнего днища желобом «345°. Площадь сечения
желоба определяется скоростью притекания топлива, которая не
должна превышать «2,5 м/с.
Особенности геометрии нижнего днища топливного бака
могут потребовать применения заборных устройств более сложной
формы.
Глава 5
СИСТЕМЫ ИЗМЕРЕНИЯ УРОВНЕЙ ТОПЛИВА
В БАКАХ
5.1. ЗАДАЧИ СИСТЕМ. ПРИНЦИП ДЕЙСТВИЯ
Информация о количестве топлива, находящегося в баке,
необходима:
1) для контроля уровней топлива в баках при заправке,
сливе, хранении (система СКУ);
2) для построения систем одновременного опорожнения
баков;
3) для измерения остатков топлива, которое в дальнейшем
используется в системах выключения двигателя по полной
выработке компонентов топлива либо для телеметрического
контроля.
Задача измерения количества топлива в баке проще всего и
в то же время наиболее точно решается замером уровня
топлива от какой-нибудь базы, хотя в принципе можно измерить
и объем, например, с помощью объемных резонаторов.
Все системы измерения уровня топлива в баках можно
разбить на два класса:
— дискретное измерение уровня;
— непрерывное измерение уровня.
Датчик дискретной системы указывает уровень топлива
только в момент прохождения его через чувствительный элемент.
Система непрерывного измерения уровня позволяет следить за
изменением уровня топлива по всей длине бана или в пределах
части бака. Системы, построенные по дискретному принципу,
как правило, более просты; это позволяет сделать их более
надежными.
По принципу действия чувствительного элемента датчики
могут быть [69]:
1) индукционными;
2) емкостными;
3) ультразвуковыми;
83
4) с чувствительным элементом в виде нагретой проволоки и
построенными на других принципах.
Принцип действия индуктивного датчика основан на
изменении электрических параметров чувствительного элемента при
прохождении около него поплавка с магнитопроводом.
Поплавковый индуктивный датчик представляет собой штангу с
чувствительными элементами (катушками индуктивности с разомкну-
Уровень
срабатывания
релейного
преобразователя
*^ Рис- 5'2- ГРафик вменения выходного напря-
ствительного элемента индуктивного
датчика:
ч.э — чувствительные элементы;
Rl; R2 — сопротивления;
Rl=R2
жения от положения поплавка относительно
чувствительного элемента индуктивного
датчика
тыми магнитопроводами), заключенную в герметическую трубу,
по которой перемещается поплавок, выполненный из материала
с высокой магнитной проницаемостью. Электрическая схема
чувствительного элемента датчика дана на рис. 5. I. При
перемещении уровня топлива поплавок охватывает чувствительный
элемент и замыкает магнитопроводы. При этом меняется
индуктивность чувствительных элементов, мост разбалансируется и на
выходе мостиковой схемы вырабатываются электрические
сигналы. График изменения выходного напряжения от положения
поплавка относительно чувствительного элемента показан на
рис. 5. 2. Сигналы с чувствительного элемента поступают в
релейный усилитель-преобразователь, где они преобразуются в
релейные сигналы. К недостаткам поплавкового индуктивного
датчика уровня можно отнести наличие в конструкции
подвижных частей. От этого недостатка свободен емкостной датчик.
Принцип действия емкостного датчика основан на изменении
емкости (комплексного сопротивления) чувствительных
элементов при переходе из жидкой среды в газовую и наоборот. Чув*
ствительный элемент представляет собой конденсатор. Обычно
датчики уровня емкостного типа выполняются в виде
полумоста, в каждое плечо которого параллельно включается
половина чувствительных элементов. Конструкция емкостного датчика
приведена на рис. 5. 3. Работают датчики от переменного тока
84
частотой 60 Гц. При выходе жидкости из полости
чувствительного элемента изменяется балансное состояние полумоста.
Емкостные датчики имеют серьезный недостаток при использовании
их для измерения уровня компонента топлива в полете в
условиях воздействия газов наддува, полученных в газогенераторах,
которые могут содержать в своем составе частицы углерода и
других соединений. Эти вещества, оседая на пластинах
конденсаторов измерительных точек, которые вышли из компонента,
Рис. 5.3. Чувствительный
элемент емкостного датчика:
/ — пластины конденсатора;
2 — плата с втулками
могут изменить их емкость, что приведет к разбалансу мостовой
схемы. Для исключения этого требуются усложнения
конструкции датчика, которые исключали бы попадание на пластины
конденсаторов вредной фазы газов наддува, либо усложнения
вторичной аппаратуры.
Принцип действия ультразвукового уровнемера основан на
разнице величин коэффициентов отражения ультразвуковых
колебаний на границе раздела сред жидкость — газ, металл — газ
по сравнению с границей жидкость — металл, металл —
жидкость. Отражение ультразвуковых колебаний на границе
раздела двух сред характеризуется коэффициентом отражения
— C2Q2
где
C1Q1 4- C2Q2
Qi, Q2 — плотность сред;
Си С2 — скорость распространения ультразвуковых
колебаний в средах;
C\Q\, C2Q2 — акустическое сопротивление сред.
Излучателем и приемником ультразвуковых колебаний
служат пьезоэлементы, отделенные от среды металлическими
мембранами-волноводами. Пьезоэлемент излучателя возбуждается
импульсным генератором. Колебания излучателя через
компонент передаются пьезоэлементу приемника и далее
преобразуются в полезный сигнал. В момент появления между
излучателем и приемником газовой прослойки сигнал с приемника
практически исчезает.
8S
Кроме вышеперечисленных принципов в чувствительных
элементах датчиков уровня могут быть использованы и другие,
которые позволяют определить границу раздела жидкость — газ.
В этих направлениях большой интерес представляют принципы,
которые позволят контролировать уровни компонента топлива
датчиками, установленными вне бака, в частности, принципы,
основанные на определении границы раздела жидкость — газ
радиоизотопными методами [49]. Такие системы могут
существенно повысить надежность герметизации баков, а
следовательно, и эксплуатационную надежность всей ракеты.
5.2. ТРЕБОВАНИЯ К СИСТЕМАМ
1. Одним из главных требований, предъявляемых к системам
измерения топлива, является точность измерения уровня,
которая обеспечивается точностью измерения уровня
чувствительным элементом датчика и точностью вторичной аппаратуры.
Датчики должны измерять уровни с точностью ±A—2) мм во
всех эксплуатационных условиях при изменении скорости
движения уровня топлива в баках в широких пределах: от 2—4 мм
в секунду при заправке до 50 мм в секунду в полете.
2. Большие дополнительные трудности возникают при,
замере уровней криогенных топлив из-за расслоения топлива по
плотности, которое в свою очередь является следствием
расслоения температурного поля. Свободная поверхность топлива
находится в возмущенном состоянии и область раздела жидкой и
газообразной сред при заправке перегретого топлива может
достигать по высоте бака 15—30 см — в этих условиях возможно
преждевременное срабатывание чувствительного элемента
датчика. Это обстоятельство необходимо учитывать при
проектировании систем введением временных задержек, либо установкой
чувствительного элемента датчика выше расчетного уровня.
3. Надежность систем должна быть высокой. Высокая
надежность обеспечивается правильным выбором проектных
параметров системы, решением конструкторских и технологических
вопросов, а также выбором программы испытаний,
подтверждающих правильность функционирования системы. Дублирование
и троирование системы или ее отдельных элементов является
обязательным требованием.
4. Система должна проектироваться так, чтобы отказ
контроля уровня не приводил к аварии всего комплекса.
5. Инерционность датчика к моменту прохождения уровня
топлива должна быть минимальной. Это необходимо учитывать
при выборе принципа действия чувствительных элементов
датчика измерения уровня. Датчики, быстро срабатывающие при
погружении в жидкость, необходимо применять для контроля
заправки, датчики, быстро срабатывающие при выходе из
жидкости — для измерения в системах одновременного опорож-
86
нения баков, измерения остатков топлива. Особенно
малоинерционными должны быть датчики, устанавливаемые в расходных
магистралях, где скорость движения жидкости большая — до
10—15 м/с.
6. Системы, работающие в полете, подвергаются
воздействию вибраций, которые могут вызвать возмущение свободной
поверхности топлива. Особенно необходимо обратить внимание,
чтобы на чувствительных элементах датчиков из-за вибраций не
развивалась кавитация, которая может вызвать ложные
сигналы с датчика.
7. Конструктивные требования. Чувствительные элементы
системы должны находиться в баке в контакте с топливом,
которое, как правило, является либо химически агрессивной
жидкостью, либо криогенной жидкостью, а провода или трубки
должны быть выведены наружу. Для высокой надежности
герметичности число выводов необходимо иметь минимальным.
Датчики в баках с криогенным топливом должны обладать
сопротивлением к тепловому удару, на них не должно оказывать
влияния образование инея и льда. Датчики, устанавливаемые в
трубопроводы, должны иметь минимальные гидравлические
сопротивления и вносить минимальные возмущения в поток. При
установке датчиков в бак следует учитывать их нагрев от газов
наддува баков и колебания, всплескивания и возможное
кипение свободной поверхности топлива. Установкой успокоителя
можно свести воздействие этих явлений к минимуму.
5.3. СИСТЕМА КОНТРОЛЯ УРОВНЕЙ ПРИ ЗАПРАВКЕ
Раюеты-носители требуется заправлять (постоянным
массовым количеством топшива. При изменение температуры и
сортности ('плотности) топлива объем заправляемого топлива
изменяется, а следовательно, меняются и уровни топлива в баках.
Непосредственный 'контроль «массы топлива, заправленной в бак,
является трудной задачей. Во многих случаях оптимальное
решение этой задачи с учетом точности и надежности получается
гири применении метода измерения уровней топлива в баке
с использованием дискретных многоточечных датчиков.
Система контроля уровней предназначена для
дистанционного измерения уровней компонентов в 'баках, выдачи
командных сигналов на заправочные средства, а также для
определения уровней 'комптонентов. С датчиков должны сниматься
мощные электрические сигналы, что исключает необходимость иметь
на борту усилительную аппаратуру и увеличивает
помехоустойчивость системы.
Система контроля уровней во время заправки должна
выдавать четыре сигнала. По первому сигналу на определенном
расчетном уровне уменьшается скорость заправки путем умень-
87
шения производительности наземных средств заправки. По
второму сигналу производится контроль исполнения перевода
наземных средств заправки на уменьшенный расход. Это
необходимо для повышения точности определения уровня, на котором
выдается третий сигнал, прекращающий заправку. Четвертая
команда аварийная и выдается на выключение насосных
наземных станций при непрохождении третьей команды.
И, мм
Рис. 5.4. Расположение в баке датчика СКУ:
/ — чувствительные элементы*. 2 — поплавок; 3 —
гермовывод
Рис. 5.5. Изменение объема верхней
части бака по высоте
На рис. 5. 4 и 5. 5 показаны расположение в баке датчика
СКУ и изменение объема верхней части бака по высоте.
Каждому уровню соответствует свой чувствительный элемент.
Число чувствительных элементов и расстояние между ними
определяются потребным диапазоном измерения и допустимой
погрешностью измерений. Диапазон измерения уровней лежит в
пределах 200—-1500 мм, дискретность измерений — в пределах 10—
60 мм.
Наибольшее распространение в СКУ получил
электромеханический метод измерения уровня поплавковым дискретным
индуктивным датчиком. Форма сигналов с расположенных рядом
катушек в зависимости от положения движущегося пояска
приведена на рис. 5. 6. В случае, когда поплавок находится на
равном расстоянии от катушек, его воздействие на обе катушки
одинаково. При смещении поплавка от среднего положения
индуктивность одной катушки резко возрастает, а другой —
падает. Максимальное значение индуктивности при нахождении
поплавка точно на уровне точки. Усилитель-преобразователь
срабатывает на определенном уровне сигнала с катушки. Для
обеспечения возможности получения сигналов при определении
уровня заправленного изделия в случае, если поясок поплавка
находится на середине расстояния между катушками, точка
пересечения кривых, изображающих сигналы с соседних кату-
шек (?), должна лежать выше, чем уровень срабатывания
усилителя-преобразователя. Выполнение этого требования
обеспечивается подбором ширины поплавка. Ширина поплавка при
этом зависит от расстояния между катушками датчика. При
движении поплавка сигнал от выбранной катушки датчика (я-ой) в
определенный момент достигает уровня срабатывания релейного
преобразователя (точка А). Срабатыванию релейного
преобразователя соответствует определенное положение ватерлинии
поплавка и уровня компонента в баке (Нп). При подключении к
Рис. 5.6. Характеристика
сигнала от индуктивного
датчика:
L — расстояние от мапнито-
п ров од а до ватерлинии
поплавка; Т — расстояние
между осями соседних
катушек
схеме соседней катушки (я+1) срабатывание релейного
преобразователя произойдет при достижении уровнем компонента
положения Нп+и сдвинутого по отношению к уровню #п, на
величину расстояния между катушками (Г). Отсюда видно, что
методическая погрешность измерения (погрешность
дискретности) будет равна половине расстояния между катушками
датчика (Т/2). Этому методу присущи еще и следующие
инструментальные погрешности:
1) смещение положения магнитопровода относительно
ватерлинии поплавка за счет неточности изготовления;
2) смещение ватерлинии поплавка за счет разброса массы
его конструкции;
3) неточности установки катушек в датчике и самого
датчика в баке;
4) изменение формы огибающей сигнала за счет
неидентичности катушек и магнитопроводов поплавков;
5) смещение ватерлинии поплавка за счет изменения
плотности компонентов;
6) наличие некоторой зоны срабатывания
усилителя-преобразователя;
7) изменение формы огибающей сигнала за счет изменения
частоты и напряжения питания измерительной схемы.
Первые четыре погрешности можно исключить тарировкой
каждого бака совместно с конкретным датчиком. Пятую
погрешность можно исключить введением температурной поправки в
номограмму заправки. Шестая и седьмая погрешности сводятся
к минимуму за счет выбора такой крутизны фронта сигнала и
стабилизации параметров питания, при которых эти факторы
могут дать погрешность, не превышающую заданной величины.
5.4. СИСТЕМА ОДНОВРЕМЕННОГО ОПОРОЖНЕНИЯ БАКОВ
Жидкостный ракетный двигатель при изготовлении
настраивается на соотношение компонентов топлива с точностью
it B—4)%. В полете под действием различных возмущений
соотношение компонентов топлива двигателя может изменяться в
еще большем диапазоне. Это может привести к
преждевременному израсходованию одного из компонентов топлива до
момента , выключения двигателя. Чтобы этого не произошло,
необходим гарантийный запас топлива. Для уменьшения гарантийного
запаса топлива целесообразно применение систем управления
соотношением компонентов топлива. Эти системы основываются
на измерении уровней компонентов в баках или на измерении
секундных расходов топлива через двигатель.
Наиболее широкое практическое применение получила
система автоматического одновременного опорожнения баков
(СОБ) [20, 53]. Система СОБ обеспечивает одновременное
израсходование компонентов топлива из баков ракеты к моменту
выключения двигателя путем изменения в допустимых пределах
коэффициента соотношения компонента через двигатель.
Система СОБ существенно снижает потребные гарантийные
запасы компонентов топлива, что дает возможность увеличить
полезную нагрузку или дальность полета ракеты несмотря на
дополнительное увеличение массы ракеты из-за массы бортовой
аппаратуры системы СОБ. Кроме того, применение системы
СОБ позволяет снизить требования к точности поддержания
соотношения компонентов в двигателе и к точности заправки
топливных баков ракеты. Эффективность применения системы СОБ
зависит от рассогласования уровней в баках окислителя и
горючего в момент окончания работы двигателя (Л/к), которое
может обеспечить система, и от массы системы СОБ (AGco б)
Характер изменения массы полезной нагрузки AGn. H в
зависимости от Д/к и AGcob представлен на рис. 5. 7. В общем случае
системы СОБ могут быть построены на различных принципах
измерения количества компонентов топлива и отличаться
многообразием, которое определяется особенностями конструктивной
компоновки изделия, назначением системы, требуемой точностью
системы и рядом других факторов.
Большинство разработанных систем представляют собой
дискретные системы автоматического регулирования, состоящие из
датчиков уровня дискретного типа, расположенных в баках
ракеты, усилительно-преобразовательных устройств (УПУ),
счетно-решающих устройств (СРУ), исполнительных органов. При
наличии на борту ракеты вычислительной машины (БЭВМ) она
может взять на себя функции счетно-решающего устройства
системы СОБ. Структурная схема СОБ показана на рис. 5.8 [20].
Уровни, а следовательно, и объемы компонентов в баках
контролируются дискретными датчиками уровней. При прохождении
90
зеркалом топлива i-ой контрольной точки датчиков
вырабатываются сигналы /го и UГ. В усилительно-преобразовательном
устройстве (УПУ) по сигналам ti0 и tir формируются сигналы
временного рассогласования уровней
Эти сигналы поступают в счетно-решающее устройство,
которое вычисляет необходимый угол поворота привода исполнитель-
iff,
7ПИ
6С06<6Ш
Рис. 5.7. График зависимости
эффективности системы СОБ от точности системы
Рис. 5.8. Структурная схема системы СОБ:
/, 2—датчики СОБ;
3—усилительно-преобразовательное устройство; 4—счетно-решающее устройство; 5—
турбонасосный агрегат; 6—привод; 7—дроссельный
регулятор
ного органа. Исполнительным органом системы является
дроссель, установленный в линии подачи одного из компонентов, чаще
всего линии горючего, и приводимый в действие электрическим
приводом. Дроссель изменяет соотношение компонентов расхода
топлива в соответствии с командами системы регулирования.
К системам регулирования одновременного опорожнения
баков предъявляются следующие основные требования.
1. Временное рассогласование уровней компонентов топлива
в баках в момент окончания работы двигателя Д/к должно быть
минимальным.
2. Изменение коэффициента соотношения расхода
компонентов топлива через двигатель от номинального значения в
процессе регулирования системой не должно превышать допустимо-
91
го значения (/Сщдоп), определяемого работоспособностью
двигателя.
3. Масса системы должна быть минимальной.
4. Система должна выполнять задачу с высокой вероятностью
и быть надежной.
Чувствительные элементы датчиков системы СОБ
расставляются так, чтобы одновременное их срабатывание происходило в
случае, когда действуют только
расчетные программные
возмущения. Это значит, что при действии
всех прочих возмущений система
осуществляет регулирование
относительно программной кривой
изменения /Стпрогр, а не
относительно Km ном- Это необходимо
учитывать три оценке выполнения
требований технического задания
на отклонение Кт от его
номинального значения. Программное
изменение /Стпрогр (поврем<ен'И
может иметь самый различный
характер в зависимости от
характера воздействия внешних факторов
на двигатель. Наиболее
характерные Кривые ИЗМенеНИЯ /Стпрогр ПО
времени полета представлены на
рис. 5.9.
При расчете параметров системы СОБ необходимо также
учитывать ряд ошибок измерения уровня топлива в баках:
1) ошибки из-за изменения температуры и плотности
компонента топлива;
2) ошибки из-за разброса установки чувствительных
элементов датчиков;
3) ошибки из-за нестабильности срабатывания
чувствительных элементов датчиков, в том числе при изменении расхода;
4) ошибки осреднения уровня топлива в успокоителе
датчика;
5) ошибки из-за среднечастотных колебаний уровня
топлива в баках и низкочастотных боковых перегрузок.
Для работы системы необходима информация о количестве
(уровнях) компонентов топлива в баках. По принципу действия
датчики могут быть емкостными, индуктивными,
ультразвуковыми и высокочастотными. Конструктивно датчик представляет
собой штангу / (рис. 5. 10), которая закрепляется внутри бака
и на которой на различных уровнях закрепляются
чувствительные элементы 2. Для уменьшения ошибок из-за низкочастотных
колебаний свободной поверхности топлива в баках в полете
датчик должен устанавливаться по оси бака или по возможности
92
1 т прогр
Рис. 5.9. График изменения
программного соотношения компонентов по
времени полета:
/ — первый характерный случай: 2 —
второй характерный случай
A-A
ближе к ней. Геометрическое положение чувствительных
элементов определяется временной расстановкой, программными
возмущениями по траектории полета и зависит от
геометрической формы бака. Количество чувствительных элементов
определяется при выборе параметров системы и исследованиями
динамики и точности системы. Верхний чувствительный элемент
датчика должен
находиться на определенном
расстоянии от уровня
заправки и определяется
следующими факторами:
1) допуском на
заправку;
2) разбросом
сортности топлива;
3) разбросом по вре- д|
мени выхода двигателя на
номинальный режим;
4) расстоянием,
необходимым для успокоения
разгонных колебаний в
успокоителе, которые
возникают из-за неодновре- ,
менности начала движе- б 1
ния топлива в баке и
успокоителе во время
запуска двигателя;
5) конструктивными
Рис. 5.10. Схема расположения
баках:
датчиков СОБ в
/ — штанга; 2 — чувствительные элементы-. 3—
труба успокоителя; 4 — демпфер; 5 — растяжки
крепления; 6 — герметичный электрический
разъем
соображениями.
Во время полета
ракеты свободная поверхность
топлива в баке может
колебаться. Колебания
уровня топлива вызываются пульсацией перегрузок и давления
наддува, боковыми перегрузками, упругими колебаниями
ракеты, колебаниями ракеты относительно (продольной и поперечной
осей. Вследствие этого положения уровня жидкости в месте
установки чувствительного элемента датчика может не совпадать со
средним значением уровня топлива в баке в этот момент времени.
Для замера Усредненного уровня чувствительные элементы
датчика устанавливаются в специальном устройстве — успокоителе.
Успокоитель представляет трубу 3, открытую сверху и
сообщающуюся с баком внизу с помощью специальных отверстий —
демпферов 4. Волнение топлива в баке передается в успокоитель со
значительно меньшими амплитудами. Крепится датчик в баке с
помощью системы силовых растяжек 5. Вывод электрического
кабеля от датчика из бака производится через специальный
герметичный разъем 6.
93
5.5. ТАРИРОВКА БАКОВ
Геометрические размеры каждого бака и датчика уровня
отличаются от расчетных, поэтому для обеспечения большей
точности необходимо проводить тарировку бака совместно с
датчиком.
Тарировка баков производится:
1) для определения фактического полного объема
топливного бака;
2) с датчиками СКУ для определения фактических объемов
баков, соответствующих уровням, отсекаемым чувствительными
элементами датчиков;
3) с датчиками СОБ для определения фактического
положения датчиков и их взаимного смещения в баках окислителя и
горючего одной ступени; в зависимости от величины смещения
регулируется положение датчиков по высоте баков;
4) с датчиками остатков компонентов для определения
фактических объемов под «ими.
Тарировка баков проводится на специальных гидростендах,
оборудованных весами с точностью взвешивания 0,05—0,1%.
Стенды должны быть оборудованы гидросистемами для
заполнения и слива баков, отсечными клапанами со временем
срабатывания не более 0,5 с. Производительность систем заполнения и
слива должна обеспечивать штатные скорости подхода уровня
жидкости к измерительным точкам датчиков. Тарировка
проводится на дистиллированной воде или другой технологической
жидкости. Стенд должен быть оборудован системой для
измерения температуры технологической жидкости не менее чем в трех
уровнях с точностью замера ±0,1° С, температуры окружающего
воздуха с точностью ±0,5° С, барометрического давления с
точностью ±5 мм рт. ст. Плотность технологической жидкости
измеряется с точностью ±0,00005 г/см3, в практике часто
пользуются таблицами зависимости плотности технологической
жидкости от температуры и концентрации.
Тарировка баков может проводиться либо со штатными
датчиками, либо с технологическими датчиками, в соответствии с
этим стенды оборудуются штатными или технологическими
пультами управления и усилительно-преобразовательной
аппаратурой. Тарировку баков с технологическими датчиками
можно проводить в тех случаях, когда чувствительные элементы
штатных и технологических датчиков могут быть установлены
с большой точностью от базовой плоскости бака. Тарировка
заключается во взвешивании бака, заправленного до
определенных уровней с последующей обработкой результатов тарировки.
Тарировку проводят при заполнении или сливе жидкости. Для
повышения точности тарировку проводят несколько раз (п=3).
Обработка результатов тарировки баков с датчиками СКУ
проводится следующим образом.
94
1. Определяется среднеарифметическое значение массы
пустого сухого бака по результатам п тарирбвок:
ух = G^CT' с?* + С72пуст-сух +... 4- Gn/CT- сух
п
2. Определяется масса технологической жидкости на
каждой чувствительной точке датчика:
где Gcp— среднеарифметическое значение массы на каждой
точке по результатам п тарировок:
t — несливаемый остаток.
3. Объем, соответствующий тарируемой точке, вычисляется по
уравнению
бж.ср — Qb *
где qb — плотность воздуха в зависимости от температуры и
атмосферного давления, при которых проводилась
тарировка;
Qm ср — среднеарифметическое значение плотности
технологической жидкости по п тарировкам:
4. Определяется объем жидкости при стандартной
температуре (Г=+288К):
ктар
~к7'
где Kt — коэффициент приведения объемной дозы;
ДУдеф — поправка, учитывающая деформации бака от
массы тарировочной жидкости.
5. Объем рабочего компонента топлива:
где ДКпдав — поправка, учитывающая разность погружения
поплавка в технологическую и рабочую жидкости.
По данным тарировки строится график зависимости объема
бака по высоте, показанный на рис. 5. 5.
При обработке результатов тарировки баков с датчиками
СОБ проводятся нижеследующие дополнительные вычисления.
95
6. Определяется отклонение объема, полученного при
тарировке, от расчетного:
расч*
7. Определяется отклонение чувствительного элемента по
высоте
где F — площадь поперечного
сечения бака в плоскости
установки чувствительного
элемента.
8. Строится график ЛА=/Г
(№ точки). Разброс случайных
составляющих не должен
превышать ±B-^4) мм.
9. Вычисляется высота, на
которую необходимо
отрегулировать датчик СОБ, по трем
последним точкам:
Рис. 5.11. Схема регулировки датчика СОБ:
/ — датчик СОБ; 2 - регулировочный 10. Регулировку ПОЛОЖеНИЯ
винт; 3 - базовая ™оскость: 4 - нижнее датчиков ОКТСЛИТеЛЯ И ГОрЮЧе-
ро мож!но (производить в любом
порядке. Если величина ААрег не превышает 2—3 мм, то
регулировку можно не производить, если превышает, то производится
регулировка установки датчика от базовой плоскости (рис. 5.11):
Л=ЛНом—АЛрег, и баки вновь тарируются.
11. Определяется относительное смещение баз датчиков
окислителя и горючего одной ступени по формуле:
Если +B—3)<бДА< — B-1-3) мм, то необходимо
отрегулировать положение базы датчика СОБ бака горючего на величину
А=Л1Юм — 6А/г и баки вновь оттарировать.
Глава 6
ЖИДКИЕ РАКЕТНЫЕ ТОПЛИВА
Жидкое ракетное топливо (ЖРТ) —это вещество или
совокупность веществ в жидком состоянии, способных в результате
экзотермических химических реакций образовывать высокотемпе-
96
ратурные продукты, создающие реактивную силу при истечении
их из ракетного двигателя [25].
При реакции окисления — восстановления тепло выделяется
при химической реакции между окислительными и горючими
элементами топлива, при реакции разложения тепло выделяется в
процессе разложения сложного вещества на более простые, а при
реакции рекомбинации тепло выделяется при соединении
одноименных атомов или радикалов в молекулы. Каждое из таких
жидких веществ, раздельно хранимых и раздельно подаваемых
в камеру сгорания ЖРД, называют компонентом топлива.
Компонент топлива, подвергающийся окислению в процессе сгорания,
называется горючим, а компонент топлива, окисляющий горючее,
называется окислителем. Окисление понимается в широком
смысле: реакции горючих с кислородом, фтором, хлором и т. п.
Процесс окисления условно может быть представлен как обмен
электронами на внешней электронной оболочке атомов,
участвующих в этом процессе. При этом атомы горючих элементов
отдают свои электроны, а атомы окислительных элементов
приобретают их.
Окислитель и горючее в общем случае могут быть сложными
соединениями, в состав которых входят как окислительные, так
и горючие элементы.
В состав горючего в преобладающем количестве входят
горючие элементы: углерод С, водород Н, бор В, алюминий А1,
литий Li, бериллий Be и др. Горючее может быть элементарным,
т. е. состоять только из одного горючего элемента, например,
жидкого водорода, и сложным, состоящим из нескольких
горючих и негорючих элементов. В общем случае горючим является
такое вещество, которое независимо от того, содержатся в нем
окислительные элементы или нет, для полного окисления своих
горючих элементов требует окислитель извне.
В состав окислителя в преобладающем количестве входят
окисляющие элементы. Окислители также могут быть
элементарными, например, жидкие кислород и фтор, и сложными,
представляющими собой соединение друг с другом элементарных
окислителей, раствор окислителей друг в друге, а также
некоторые соединения окисляющих элементов с горючими элементами
(углеродом, водородом и т. п.). В общем случае окислителем
может быть вещество, в котором могут быть и горючие
элементы, но окисляющих элементов значительный избыток, так что при
полном окислении его собственных горючих элементов остается
свободное количество окислительных элементов, которые могут
быть использованы для окисления другого горючего.
6.1. КЛАССИФИКАЦИЯ ЖИДКИХ РАКЕТНЫХ ТОПЛИВ
Общая классификация жидких ракетных топлив
представлена на рис. 6.1. Ниже даны некоторые комментарии к
классификации.
4 3205 97
Низкокипящие I
Высоко-
кипящие
1
Долго-
1 хранимые
Криогенные
(сжиженные
газы)
1
Недолго-
хранимые
По токсичности.
Токсичные
Нетоксичные
По характеру
воспламенения
Самовоспламеняющиеся
Несамовоспламеняющиеся
По физико-химической,
стабильности
ракетные
топлива
По характеру использования
Основное
Топливо,
используемое
непосредственно
в камере
сгорания
МРД
Пусковое
Используется в
период
запуска ЖРД
для
первоначального
воспламенения
основного
топлива
Вспомогательное
Рабочее
тело ГГ
ТНА,ЖЛД
s
Молекулярно
го состава.
Однокомпо-
нентные
По способу подачи.
Горючее и
окислитель
объединены
в одном
жидком веществе
Раздельной, подача.
Многокомпонентные
Свободные
радикалы
Двухкомпонентные
Горючие
Окислители
Элементарного
состава
^^»—
Элементарного соста6а
Сложные
Растворы
На окислительной основе
Кислородные - жидкий кисло-
роду озон и т.п.
Азотнокислотные - азотная
кислота, окислы азота
Шторные-фтор, фторо содержа-
оцие соединения
Хлорные -хлор, окислы хлора
Жидпииь
водород
Азотоводороды -
аммиак, НДМГи др.
бороводорсдные -
пентаборан
Рис. 6,1. Классификация жидких ра-
Металлосодертщие-1
порошки, жим.
тачциеЦ
vr. coed, j
Углеводороды-
керосин
Аислородоуглевс -
аороды - cnupmoi
Азотоиглеводороды-
Все жидкие ракетные топлива по физическому состоянию
можно разделить на два больших класса: криогенные топлива
(сжиженные газы), имеющие низкую температуру кипения,
и высококипящие топлива, которые при обычных температурах
и давлениях представляют собой жидкости. Криогенные
топлива, примером которых могут служить жидкие кислород,
водород, фтор, при хранении интенсивно испаряются и требуют
применения теплоизолированных емкостей. Это так называемые
недолгохранимые топлива. Высококипящие, или, как их еще
называют, топлива длительного хранения допускают длительное
хранение при обычных температурах без существенных потерь.
Существует ряд ракетных топлив, имеющих относительно
низкую температуру кипения, но которые можно отнести к долго-
хранимым топливам. Таким топливом, в частности, является
широко применяемый в настоящее время окислитель — четырех-
окись азота, который хотя и имеет невысокую температуру
кипения, но небольшое повышение давления в баке ликвидирует
это неудобство.
Применение в ЖРД самовоспламеняющихся компонентов
топлива дает существенные выгоды по сравнению с
несамовоспламеняющимися, так как упрощаются система запуска
двигателя и пневмогидравлическая система двигательной установки,
уменьшается опасность взрыва в камере сгорания при запуске
и останове двигателя, а также уменьшаются объем и масса
камеры сгорания. Самовоспламеняющиеся топлива должны
обладать небольшой длительностью периода задержки
самовоспламенения, который должен быть не более 0,03 с. Основным
недостатком самовоспламеняющихся топлив является их более
высокая стоимость (особенно это относится к горючим) по
сравнению с несамовоспламеняющимися топливами.
Однокомпонентное топливо молекулярного состава
является, в основном, либо окислителем, либо горючим. Энергия
разложения выделяется благодаря неустойчивому расположению
атомов в молекуле. Такими соединениями являются: гидразин
N2H4, перекись водорода Н2О2, нитрометан CH3NO2,
нитроглицерин C3H5N5O9, изопропилнитрат C3H7ONO2, окись этилена
СгН4О и др. Однокомпонентное топливо может представлять
собой искусственные смеси (растворы) двух и более различных
горючих и окислителей: растворы органических веществ в
азотной кислоте и тетранитрометане, смеси метилнитрата CH^ONO2
и метилового спирта СН3ОН, тройная смесь перекись
водорода — этиловый спирт — вода и др.
Следует отметить, что однокомпонентные топлива не нашли
широкого применения, так как они уступают двухкомпонентным
топливам по энергетическим характеристикам, а также, как
правило, они взрывоопасны, хотя конструктивно двигательная
установка при использовании однокомпонентного топлива
существенно упрощается. Однокомпонентное топливо используется
100
главным образом как вспомогательное топливо, а также в
двигателях малой тяги для управления и стабилизации космических
летательных аппаратов.
Наиболее широкое применение в настоящее время получили
двухкомпонентные жидкие ракетные топлива. Основные двух-
компонентные топлива представлены в табл. 6. 1 [7, 51].
Таблица 6.1
Окислитель
Кислород
*
я
»
щ
ш
Четырех-
окись
азота
п
и
»
Перекись
водорода
ш
т
Фтор
1»
я
Окись фтора
•
Озон
Перхлорил
фтора
Горючее
Водород
Керосин
Этиловый
спирт
Несимметричный ди-
метилги-
дразин
Гидразин
Пентаборан
Пентаборан
Гидразин
НДМГ
Керосин
Пентаборан
Гидразин
Керосин
Водород
Гидразин
Аммиак
Гидразин
Керосин
Керосин
Гидразин
Коэффи-
циент
избытка
окислителя
0,6
0,8
о,8
0,7
0,9
0,7
0,8
1,0
0,95
0,9
0,35
1,0
1,0
0,4
1,0
1,0
0,8
0,7
0,8
1,0
Соотношение
компонентов
4,76
2,726
1,669
1,496
0,9
2,128
3,496
1,437
2,919
4,36
2,308
2,169
7,393
7,54
2,374
3,347
1,348
3,98
2,696
1,598
Плотность
смеси,
г/см*
0,319
1,079
0,976
0,99
1,09
0,9
1,12
1,22
1,189
1,27
1,024
1,261
1,317
0,45
1,312
1,18
1,27
1,297
1,15
1,338
Удельный
импульс,
м/с
4222,2
3288,3
3109,77
3327,55
3385,43
3526,69
3286,35
3153,91
3116,63
2795,85
3404,07
3068,56
2992,05
4385,07
3953,43
3879,85
3717,99
3688,56
2854,71
2943
Характер
воспламенения
—
—
+
4-
+
+
4-
+
6.2. ВЫБОР И ТРЕБОВАНИЯ К ЖИДКИМ
РАКЕТНЫМ ТОПЛИВАМ
Выбор компонентов топлива является одним из самых
сложных вопросов и вызывает много дискуссий. Тип используемого
топлива в значительной степени определяет характеристики
двигателя, летательного аппарата и всего комплекса в целом^
определяет выбор материалов ,и конструкции, весовые данные,
накладывает значительный отпечаток на условия эксплуатации.
К топливам предъявляются различные требования, часто
противоречивые. В большинстве случаев их удовлетворить не удается.
101
На практике выбор топлива производится на основании
компромиссных решений с учетом всех требований, предъявляемых к
комплексу.
Основным показателем, определяющим качество топлива,
являются развиваемые им массовый и объемный удельные
импульсы тяги. Это значит, что топливо должно обладать
высокими энергетическими характеристиками и иметь возможно
большую плотность, которая позволяет иметь баки меньшего
объема, а следовательно, уменьшить массу ракеты и, как
следствие, снизить аэродинамическое сопротивление. Масса системы
топливоподачи также снижается. В каждом конкретном случае
при выборе типа топлива необходимо исследование
оптимального соотношения между удельным импульсом тяги и
плотностью топлива.
Кроме удельного импульса тяги и плотности на выбор
компонентов топлива влияют другие физико-химические свойства
топлив, эксплуатационные характеристики, а также стоимость
и техническая доступность.
Требования к жидким ракетным топливам
1. Упругость паров должна быть минимальной в рабочем
диапазоне температур при хранении и полете ракеты, так как
при этом достигаются наилучшие кавитационные характеристики
систем топливоподачи, минимальные давления наддува
топливных баков, а следовательно, и минимальная их масса.
2. Температура замерзания топлива должна быть такой,
чтобы топливо было в жидком состоянии при минимальных
температурах, которые могут встретиться в условиях эксплуатации.
Для ракет эта температура должна быть не выше 233 К.
Однако этому требованию не отвечают некоторые широкоприменяе-
мые в настоящее время топлива, в особенности окислители
(табл. 6.2 и 6.3). Приходится применять различные системы
подогрева, чем усложняется их эксплуатация, или налагать
определенные ограничения.
3. Температура кипения должна быть возможно высокой и
желательно, чтобы она была не ниже 323 К. Это требование
особенно важно для компонента, которое используется для
охлаждения двигателя.
4. Температура разложения для компонента, применяемого
для охлаждения двигателя, должна быть высокой.
5. Вязкость должна быть возможно низкая, так как при этом
будут минимальные потери давления при движении топлива по
трубопроводам. Вязкость не должна сильно возрастать при
низких температурах.
6. Требования к коэффициенту поверхностного натяжения
жидкого ракетного топлива зависят от назначения летательного-
аигпарата. Пове|рхно<ггаое натяжение тошлив для ракет-огосите-
102
Таблица 6.2
Окислитель
8
h
«а
ш
8
ч
h
Кислород
Озон
Перекись водорода
Азотная кислота
Четырехокись
азота
72,8Р/& азотной
кислоты + 26% четырех -
окиси азота +1,2 %
воды
Фтор
Окись фтора
Трифторид хлора
Пентафторид брома
Перхлорил фтора
Хлорная кислота
Тетранитрометан
О2
О3
Н2О2
HNQs
N2O4
OF2
CIF3
BrF5
CIO3F
НСЮ4
32
48
34,02
63,016
92,016
38
54
92,457
174,916
102,457
100,465
196
1,144
1,353
1,442
1,52
1,442
1,6
1,507
1,521
1,8
2,5
1,691
1,772
1,64
55
80,3
272,11
231,41
201,8
213
53,38
49,2
196,68
210,5
125,26
161
286,6
90
161,1
423,2
357,1
294,15
343
84,87
127,7
284,75
313,3
226,33
403
400
0,02
0,16
0,13
0,082
0,044
0,026
0,028
0,048
0,038
0,013
0,043
0,03
0,015
0,024
0,02
700
0,00003
0,005
0,005
0,005
0,00003
0,00001
0,00001
Токсичен
0,005
154,62
260,9
730
431,2
143,8
213,3
426,5
470
368,17
40,17
53,54
33,36
98,03
53,94
48,54
31,67
51,98
1700
795
2430
1765
1530
0,21
0,13
1505
1270
930
760
760
2,0
65
760
213,5
306
1520
625
415
760
760
1292
450
760
172,5
205,5
298,5
188,2
Таблица 6.3
Горючее
Керосин
Этиловый спирт
Гидразин
Несимметричный
диметилгидразин
Аэрозин-50
Монометилгидразин
Аммиак
Водород
Триэтиламин
Ксилидин
50%> ксилидина +
+50% триэтиламина
Пентаборан
Формула
с7 21н13 w
С2Н5ОН
N2H4
N2H2(CH3J
N2H2(Cri3J
ело/ _i_
0W/0 +
+N2H4 50%
CH6N2
NH3
н2
C6H15N
C8HnN
B5H9
Молекулярна!
масса
100
46,7
32,05
60,1
45,584
46,075
17,032
2,016
101,2
121,12
63,17
и
1 ^
0,82
0,785
1,004
0,786
0,899
0,874
0,682
0,07097
0,723
0,977
0,85
0,618
i
Температура
ния, К
228
158,9
274,5
215,8
265,7
220,6
195,24
13,79
158,2
219
203
226,19
кипения,
Температура
К
423
351,32
386,5
336,1
343,1
360,5
239,58
20,03
362,5
483
360
335
&
Si
юЕ
0,15
0,12
0,097
0,059
0,078
0,026
0,0013
0,035
0,49
0,03
1
*
Поверхности*
жение, Н/м
0,023
0,067
0,022
0,0023
0,021
пдк,
Токсичность
мг/л
0,3
1,0
Токсичен
0,0025
Токсичен
Токсичен
0,02-^0,05
Не токе.
Токсичен
0,005
0,00001
темпе-
Критическая
ратура, К
516,1
653
523
607
405,4
33,03
535
497
давле-
а
ll
61,88
142,2
52,46
113,17
109,83
12,56
29,42
г
Теплоемкосп
Дж/кг^рад
2430
3070
2720
2940
4770
9420
2400
1ОСТЬ,
Теплопровод»
Вт
1
s
0,16
0,17
0,209
0,5
0,12
я
Давление пар
мм рт. ст.
44
10,6
130
131
57
760
53
279
рения,
1 Теплота испа
кДж/кг
837
1335
583
877
1370
452
311
379
481
лей должию !быть «небольшое, так как при этом улучшается
распыл топлива при подаче его в камеру сгорания двигателя.
К топливам космических аппаратов, имеющих двигательные
установки, в которых применяются топливные баки с
использованием капиллярных систем удержания топлива, предъявляются
прямо противоположные требования — коэффициент
поверхностного натяжения должен быть большим,
7. Краевой угол б, являющийся константой,
характеризующей смачивание жидким топливом твердых поверхностей,
меняется в интервале от 0 до 180° и зависит от сочетания
конкретного компонента топлива с конкретной твердой поверхностью.
Если 0 <90°, то компонент топлива смачивает твердую
поверхность, если 9>90°, то не смачивает. Смачивание влияет на
гидравлическое сопротивление в трубопроводах и фильтрах. В
случае смачивающей жидкости гидравлическое сопротивление
больше, но это сказывается только при числах Рейнольдса Re>104.
Решающую роль смачиваемость играет при выборе компонентов
топлива для двигательных установок космических аппаратов с
топливными баками, в которых используются капиллярные
силы для удержания топлива. В таких системах компонент
топлива обязательно должен смачивать конструктивные элементы
бака.
8. Компоненты топлива, которые применяются в качестве
охлаждающей жидкости в ЖРД, должны обладать высокими
теплопроводностью и теплоемкостью.
9. Топливо должно быть химичеоки стойким и не должно
подвергаться значительному разложению в эксплуатационном
диапазоне температур в течение всего требуемого срока хранения, т. е.
не должно выделять твердые и смолистые осадки, а также
газообразные продукты разложения. Последнее требование
особенно важмощшя ампулширшанных ракет.
10. Механические примеси в компонентах топлива. Наличие
механических примесей может привести к засорению фильтров,
жиклеров, форсунок двигателя, а также к сильному износу
насосов. Компоненты ракетных топлив должны содержать не более
0,005% механических примесей. Кроме того предъявляются
определенные требования и к величине отдельных частиц твердых
примесей в топливе. Размер твердых частиц должен быть менее
20 мкм. При таких размерах твердые частицы под действием
броуновского взаимодействия остаются во взвешенном
состоянии в топливе и не коагулируются в течение длительного
времени. Это исключает скапливание их в трубопроводах на входе
в двигатель.
11. Коррозионные свойства и химическая активность. Жидкие
ракетные топлива, особенно окислители, как правило, являются
химически активными веществами. Одни (фтор, азотная
кислота) вступают в интенсивную реакцию с конструкционными
материалами, другие (перекись водорода) сами претерпевают
1
химические изменения под действием металлов, не разрушая их.
Поэтому правильный выбор конструкционных материалов
(металлических и неметаллических) для топливных баков, систем
подачи, ЖРД и комплекса наземного оборудования является
важнейшей (проблемой отри разработке ракетно-космических
комплексов.
12. Токсичность. Многие жидкие ракетные топлива являются
легко летучими веществами, пары которых оказывают
отравляющее действие на дыхательные пути. Показателем токсичности
обычно служит предельно допустимая концентрация (ПДК)
ядов/итого вещества в воздухе (в мг/л). Токсичность компонента
топлива должна быть минимальной, но при соответствующих
мерах безопасности токсичность высокоэффективного
компонента топлива не является препятствием для его применения.
Предельно допустимые концентрации окислителей и горючих
представлены в табл. 6.2 и 6.3.
13. Компоненты топлива должны быть достаточно взрыво- и
огнебезопасны при хранении, транспортировке и эксплуатации в
случае соединения с атмосферным воздухом, возможных
проливах, ударах и загрязнениях. Гигроскопичность должна быть
небольшая, так как она приводит к снижению концентрации
компонентов и, как следствие, к увеличению агрессивности по
отношению к металлам, к засорению кристаллами. Для криогенных
компонентов топлива должны быть разработаны специальные
безопасные методы обращения, хранения и транспортировки,
а также мероприятия по сведению к допустимому уровню его
испарения.
14. Ракетные топлива, предназначенные для широкого
использования, должны быть пригодны для изготовления в
больших количествах в промышленных условиях, должны быть
обеспечены исходным отечественным сырьем.
15. Стоимость топлива, отнесенная к удельной тяге
топливной смеси, должна быть минимальной.
В ряде случаев свойства топлив (химическую стойкость,
коррозионную активность и некоторые другие свойства) можно
существенно улучшить, добавляя в основное топливо небольшие
количества другого вещества (ингибитора).
Характеристики комплекса в 'большинстве случаев
определяются характеристиками окислителя, а вьпбор пригодных
окислителей ограничен, причем ни один из существующих
окислителей не является идеальным с точки зрения
вышеприведенных требований. Выбор горючего имеет более широкие
возможности. В настоящее время наиболее широкое применение
получили два типа окислителей: жидкий кислород и окислители на
основе азотной кислоты и окислов азота. Проводятся
исследования по применению в качестве окислителей жидкого фтора и
перекиси водорода. Из горючих широко применяются керосин,
Юб
водород, несимметричный диметилгидразин, гидразин, аэрозин,
триэтиламин, ксилидин, скипидар.
Основные физико-химические параметры окислителей и
горючих (представлены в табл. 6.2 и 6.3 соответственно.
6.3. ПЕРСПЕКТИВНЫЕ ЖИДКИЕ РАКЕТНЫЕ ТОПЛИВА
В настоящее время широко освоены жидкостные ракетные
двигатели, источником тепловой энергии в которых является
химическая реакция окисления — восстановления или разложения
жидких компонентов топлива.
Как перспективные химические топлива изучаются сочетания
жидких компонентов топлива, порошков металлов (алюминия,
лития, бериллия, бора, циркония) и желирующего вещества. Это
так называемые тиксотропные топлива. Такие топлива имеют
большую плотность в сочетании с высокими энергетическими
характеристиками. Недостатком таких топлив является большая
вязкость, трудности длительного хранения и подачи к
двигателю, а также трудности организации рабочего процесса в ЖРД
Таблица 6.4
Свободный
радикал
н
С;Н
N; Н
N
ОН, Н
Продукт
реакции
н2
сн4
NH3
N2
н2о
Количество
выделившейся
тепловой
энергии, Дж/кг
218,0-106
104,7-106
69,2-106
33,91-106
27,63-106
Свободный
радикал
СН3;Н
NH2; H
СН3
О
F
Продукт
реакции
сн4
NH3
с2нб
о2
Количество
выделившейся
тепловой
энергии, Дж/кг
26,37-106
25,53-106
12,14-106
15,49-106
4,1868-106
Другим перспективным путем повышения в ЖРД удельной
тяги является применение жидких топлив со свободными
радикалами [70]. Свободный радикал —это электрически
нейтральный атом или группа атомов с неустойчивым расположением
электронов. Свободный радикал может .вступать во
взаимодействие с другим свободным радикалом или молекулой, образуя
устойчивую молекулу. При этом выделяется большое количество
тепла. Реализация этого вида источника энергии заключается
в получении и стабилизации свободных радикалов в жидком
ракетном топливе и инициировании в двигателе реакции
рекомбинации. Однако свободные радикалы очень неустойчивы.
Время существования свободного радикала пропорционально
экспоненте (-E/RT), где ? —энергия активации; /^ —
универсальная газовая постоянная; Т — абсолютная температура. При
нормальной температуре время существования свободных
радикалов равно 10~3-М0~8 с. Чтобы обеспечить время существо-
107
вания свободных радикалов достаточно длительное,
необходимо иметь очень низкие температуры (~5° абс.) или магнитные
поля порядка 70-М00 кгс. В табл. 6.4 приведены
энергетические характеристики некоторых свободных радикалов.
Наибольший интерес представляет система 2Н—>~Н2.
6.4. НАСЫЩЕНИЕ (АБСОРБЦИЯ) ТОПЛИВА ГАЗАМИ
В гл. 3 показано, что над свободной поверхностью топлива
в баке всегда имеется свободный объем, который заполняется
газом: воздухом, азотом или другим газом. Топливо в той или
иной степени может растворять (поглощать) газ из свободной
подушки [47]. Процесс растворения газа жидкостью называют
абсорбцией. Обратный процесс — выделение растворенного
газа из жидкости — называют десорбцией. Различают физическую
абсорбцию и хемосорбцию. При физической абсорбции
растворение газа не сопровождается химической реакцией, при хемо-
сорбции абсорбция сопровождается химической реакцией.
Абсорбционные процессы являются одним из видов массопередачи,
при котором происходит переход вещества из газовой фазы в
жидкость (при абсорбции) или, наоборот, из жидкости в
газовую (при десорбции). Протекание процесса растворения газа иа
подушки в топливо характеризуется статикой и кинетикой.
Статика абсорбции, т. е. равновесие между жидкой и
газовой фазами, определяет состояние, которое устанавливается при:
весьма продолжительном соприкосновении фаз. Растворимость
газа в жидком топливе подчиняется закону Генри, который
устанавливает, что растворимость газа прямо пропорциональна
парциальному давлению газа над жидкостью:
с=Кр,
где с — объемная концентрация газа в жидкости;
р — давление газа;
К—коэффициент растворимости Генри, который п?и
низких давлениях является функцией температуры
жидкости.
Закон Генри применим к газам, поведение которых близко
к поведению идеального газа, и при условии, что растворимость
газа невелика. В общем случае коэффициент Генри зависит от
температуры и давления, но при давлениях, характерных для
параметров ПГС ЖРДУ, зависимость от давления ничтожно
мала и ею можно в большинстве случаев пренебречь.
Кинетика абсорбции, т. е. скорость процесса массопе^едачи,
определяется степенью отклонения системы от равновесного
состояния, свойствами жидкого топлива и газа, способом
соприкосновения фаз.
Процесс растворения газа в компоненте топлива
складывается из процессов переноса молекул газа через границу раздела
108
фаз и в пределах газовой подушки и в топливе. Считается, что
сопротивление переходу молекул газа на границе фаз
отсутствует, т. е. в каждый момент времени на свободной поверхности
топлива концентрация растворенного газа соответствует
равновесной. Уравнение массоотдачи к поверхности соприкосновения
газа с топливом можно записать в виде
dv
где р — коэффициент массоотдачи;
F_— поверхность массоотдачи;
Ас — разность концентраций растворенного газа.
Перенос молекул газа в топливе происходит путем
молекулярной или турбулентной диффузии. Молекулярная диффузия
является переносом газа в топливе вследствие беспорядочного
движения молекул. Количество диффундирующего газа в
топливо при молекулярной диффузии в соответствии с законом Фика
описывается уравнением
dz
где D — коэффициент молекулярной диффузии, м2/с;
— — изменение концентрации растворенного газа по
dz
длине.
Знак минус указывает, что диффузия происходит в
направлении уменьшения концентрации. Растворение газа в топливе
при молекулярной диффузии происходит очень медленно. В
реальных условиях хранения ракет за счет подвода или отвода
тепла от стенок бака топливо в баке имеет некоторую скорость
циркуляции. Если эта скорость имеет определенную величину, то
наряду с общим движением потока топлива в баке происходят
также турбулентные пульсации. В этих случаях реализуется
турбулентная диффузия, которая описывается уравнением
где ed — коэффициент турбулентной диффузии.
Экспериментально показано, что е<* превосходит значение D
в 105 и более раз. Величина е<* пропорциональна критерию Re.
Данные по статике растворения конкретного газа в конкретном
компоненте топлива можно найти в справочной литературе или
определить опытным путем. Если растворимость газа в топливе
прямо пропорциональна давлению газа над ним, то зависимость
растворимости от температуры носит более сложный характер.
Для многих сочетаний газ — жидкость растворимость газа
уменьшается с ростом температуры, но существуют и такие сочетания
109
газов и компонентов топлива, у которых растворимость растет с
ростом температуры.
Кинетика растворимости газа в топливе носит
чрезвычайно сложный характер. В настоящее время нет надежного метода
для определения коэффициента массопередачи на основе
теоретических данных, либо экспериментальных данных
лабораторных и модельных опытов. Наиболее надежные результаты по
кинетике растворимости газа в топливе можно получить только
при экспериментах, проведенных в условиях, близких к
натурным. Хотя растворенный в топливе газ и не оказывает заметного
влияния на энергетические характеристики топлива,
газонасыщение компонентов топлива оказывает существенное влияние на
величину давления в топливных баках, особенно при
эксплуатации долгохранимых ракет, а также на кавитационные
характеристики магистралей питания и насосы двигателя
Газ, растворенный в компоненте топлива, может выделиться
из топлива при движении по магистралям питания на участках,
где давление падает ниже равновесного давления. Наличие
газовых включений в топливе ускоряет процесс возникновения
кавитации в насосах [64]. Статическое давление в зоне
кавитации повышается по сравнению с давлением насыщенных
паров, так как кавитационные каверны при этом заполнены не
только парами топлива, но и газом. Таким образом, топливо,
насыщенное газом, может ухудшить кавитационные
характеристики лопаточных насосов двигателя. Подбором газа с
соответствующими характеристиками (коэффициентом растворимости
Генри, характером растворимости от изменения температуры,
кинематическими характеристиками) можно уменьшить
колебания давления в баках при изменениях температуры компонентов
топлива.
Раздел второй
ПРОЦЕССЫ В ПНЕВМОГИДРАВЛИЧЕСКИХ
СИСТЕМАХ
Гл ава 7
ГИДРОДИНАМИКА ТОПЛИВНЫХ МАГИСТРАЛЕЙ
7.1. ДВИЖЕНИЕ ЖИДКОСТИ ПО ТРУБОПРОВОДАМ.
L. РАСЧЕТ ГИДРОСОПРОТИВЛЕНИЯ
При расчете параметров, характеризующих установившееся
движение жидкости в топливных магистралях, полагают, что
поток является одномерным, все его характеристики в
рассматриваемом сечении трубопровода одинаковы, а для взаимосвязи
скорости w и давления р в сечениях 1—/ и 2—2 (рис. 7. 1)
пользуются уравнением Бернулли
2
где h — расстояние от сечения 1—1 до сечения 2—2 в
направлении действия перегрузки;
Пх — перегрузка в направлении х\
g — ускорение свободного падения;
q — плотность;
Ар — гидравлические потери давления на длине магистрали
от сечения /—/ До сечения 2—2.
Опыт показывает, что при движении жидкости могут
наблюдаться два существенно различных режима течения:
ламинарный и турбулентный. Если жидкость движется со скоростью
меньше некоторого определенного для данных конкретных
условий значения, то частицы жидкости будут двигаться по кривым,
параллельным образующим трубопровода, само движение
слоистое, и такой режим движения без перемешивания частиц
назван ламинарным. При движении со скоростью выше названной
отдельные струйки теряют свою резко очерченную форму, весь
поток представляется в форме движения множества
мельчайших водоворотных образований, имеющих общее
поступательное движение в направлении потока, а вся масса жидкости
непрерывно перемешивается. В ламинарном потоке
распределение скоростей по сечению трубопровода параболическое и
обусловливается влиянием вязкости. В гидравлике показано, что
при ламинарном движении потока от сечения /—1 до сечения
2—2, расстояние между которыми /, а разность полных напоров
Др, распределение скоростей жидкости, имеющей плотность q,
ill
по радиусу сечения трубопровода г может быть представлено в
виде
где \л — коэффициент динамической вязкости жидкости;
г0 — радиус трубы.
При этом нетрудно показать, что среднерасходная скорость
Q „ wmax
w = — равна половине максимальной скорости w= ,
где Q — расход;
F — площадь проходного сечения трубопровода;
a — СКОРОСТЬ на ОСИ Трубы.
Детальное изучение величины энергии, теряемой при
ламинарном движении, показало, что при окоростях ниже
критической потери напора пропорциональны первой степени средней
скорости. Как известно, потери напора на длине трубопровода /,
имеющего диаметр dTy могут быть найдены из формулы Дарси
^-тЛ6- ' GЛ)
Здесь Ят — коэффициент сопротивления трения единицы длины
трубопровода.
Можно показать, что в ламинарном движении Хт = — ,
Re
где Re= Qw T— число Рейнольдса.
При увеличении скорости и значения числа Рейнольдса
нарушается слоистая структура течения, что происходит при
некотором значении Re=Rei, а при дальнейшем увеличении
скорости и достижении значения числа Рейнольдса Re=Re2
возможно только одно турбулентное движение, как бы гладки ни были
стенки трубы и как бы спокойно жидкость ни входила в трубу.
В промежутке между этими двумя пределами возможны как
ламинарный, так и турбулентный режимы движения.
При турбулентном режиме движения потерянный напор
пропорционален я-й степени скорости, причем значение п меняется
в пределах от я=1,75 до 2,0. Для турбулентного потока в
общем случае !кюэффи1циент
сопротивления Хт в формуле Дарси G.1)
является не только функцией числа
Рейнольдса, но и шероховатости
стенок трубы. Для гидравлически
шероховатых труб в этом случае
можно воспользоваться одной из
многочисленных эмпирических формул
при определении А^. В частности.
Рис 7.1. Установившееся движение МОЖНО ВОСПОЛЬЗОВаТЬСЯ формулой
112
А. Д. Альтшуля
,25
где 6 — так называемая эквивалентная шероховатость.
Для очень больших чисел Рейнольдса Re>106 часто
рекомендуют формулу Никурадзе
где г — радиус трубы;
е — абсолютная шероховатость (высота выступов).
На практике при определении Ят часто также пользуются
табличными значениями, определенными в широком диапазоне
величин шероховатости й числа Рейнольдса и обобщенными в
гидравлических справочниках (см., например, [30]).
В применяемых на практике расходных трубопроводах, как
правило, равномерность или параллельность движения на всей
длине от источника (бака) до потребителя (двигателя)
практически не соблюдается. При своем движении поток жидкости
может менять площадь своего поперечного сечения, поворачивать
на заданный угол, проходить через клапаны, диафрагмы и т. д.
Все эти особенности способствуют образованию в потоке
мертвых пространств, занимаемых вихрями, поглощающими
значительное количество энергии. Эти дополнительные вихри
изменяют распределение скоростей в поперечном сечении и вообще
характер движения и тем увеличивают потери энергии.
Подобного рода потери, имеющие местный характер, зависящие от
изменения скорости течения по величине и направлению, носят
название местных сопротивлений. Потери напора от всех этих
сопротивлений принято считать пропорциональными скоростному
напору и выражать формулой
Здесь ?м — коэффициент местных сопротивлений.
Числовые значения этого коэффициента определяются
опытным путем для каждого отдельного вида сопротивления, так как
теоретические решения предложены лишь для немногих случаев.
Довольно полная информация по коэффициентам местных
сопротивлений обобщена в справочнике [30]. Здесь можно
отметить лишь несколько случаев, характерных для топливоподаю-
щих магистралей ЖРД. При входе жидкости в трубопровод в
зависимости от большей или меньшей плавности входа
величина коэффициента местного сопротивления колеблется в
пределах ?м=0,06-^-0,5. При внезапном расширении трубопровода и
изменении площади от F{ до F2 из теоремы Борда — Карно
следует, что потерянный напор равен скоростному напору потерян-
ПЗ
ной скорости, откуда, воспользовавшись уравнениями
неразрывности и изменения количества движения, можно получить
следующее выражение для коэффициента местного сопротивления
при расширении:
Если труба внезапно сужается, то происходит внезапное
увеличение скорости. В данном случае удара в плоскости перехода
не существует, но на некотором расстоянии ниже по течению
происходит сжатие струи и затем переход из сжатого сечения
обратно в нормальное, что и служит причиной потери напора.
В табл. 7. 1 приведены значения ?м для этого случая в
зависимости от F2/Fi.
Таблица 7.1
См
0,01
0,5
0,1
0,5
0,2
0,42
0,4
0,38
0,6
0,25
0,8
0,15
1.0
0 ,
Потери давления «а длине трубопровода от источника до
потребителя будут равны сумме потерь давления на трение и
на местные сопротивления.
При расчетах иногда бывает удобнее суммировать не потери
давления, а коэффициенты сопротивлений, и по ним определять
полные потери давления A/?s . Пусть трубопровод имеет /
последовательно соединенных участков разного диаметра, причем
диаметр входного сечения обозначим dBX, а выходного — dBblx.
Так как
Лп Г 0W« VI Л„ An Г Q*? Г "« V Г "'
то, используя уравнение неразрывности dn'Wn=d*wl9 можно
получить выражение для расчета суммарного коэффициента
сопротивления ?вх, приведенного к диаметру входного сечения
трубопровода:
Если Аръ рассчитывается по скорости в выходном сечении
трубопровода
то
114
7.2. НЕУСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ПО ТРУБОПРОВОДАМ
И ЯВЛЕНИЕ ГИДРОУДАРА
Характерной особенностью ашрег-атов ПГС ЖРДУ является
жесткое требование к времши (переходного режима работы.
В частности, при запуске двигателей для (выдерживания
определенного закона изменения тяги по времени компоненты
топлива должны прийти в камеру сгорания в строго
определенном соотношении и в заданный момент времени, что
определяется не только параметрами системы (давлением, разводкой и
т. д.), но и темпом изменения проходного сечения пускового
клапана, установленного на топливной магистрали. Аналогично
при выключении двигателя для отсутствия нежелательного
импульса последействия скорость закрытия клапана должна быть
строго регламентирована. Так как время функционирования
этих агрегатов мало, процессы, происходящие в топливной
магистрали при изменении режима работы клапанов, будут
нестационарными по давлению и расходу. Эта нестационарность и ее
волновой характер могут оказать существенное влияние не
только на режим течения в данной магистрали, но и
воздействовать иа динамические характеристики вюей двигательной
установки из-за резоманоных явлений.
Кроме того, быстродействие срабатывания агрегатов,
установленных на топливной магистрали, вызывает значительные
изменения количества движения жидкости, что приводит к
существенным колебаниям (параметров. Возникающие при этом
пики давления носят ударный характер и это явление называют
гидроударом.
Пусть в момент времени т=0 произошло мгновенное
закрытие расходного клапана в сечении 2—2 (рис. 7.2), причем до
этого момента давление было равно р, а скорость жидкости w.
В этот момент времени останавливаются слои жидкости,
прилегающие к клапану, и сжимаются поступающими соседними
слоями. Это сжатие сопровождается увеличением давления на
значение Ару. Такая последовательная остановка слоев
жидкости и ее сжатие «а величину Ару распространяется по трубе от
клапана в сторону бака к сечению 1—1 со скоростью с.
Последовательная послойная остановка продолжается до тех пор,
пока она не захватит слой, непосредственно прилегающий к
баку. К этому моменту вся жидкость останавливается и по всей
трубе устанавливается повышенное (ударное) давление. При
этом часть жидкости из бака войдет в трубопровод, заполняя
освободившееся пространство при сжатии. Так как давление в
баке имеет определенное неизменное значение, то в
последующий момент жидкость в трубопроводе начнет расширяться.
Сначала расширяются слои у бака, приходя при этом в
движение в обратном направлении (в сторону бака), затем этот
процесс последовательно охватывает и остальную массу жидкости,
115
причем давление при расширении падает. Время движения
первой положительной волны удара от клапана к баку при длине
трубопровода / будет равно — ; таким же будет время прохож-
с
дения волны отрицательного удара.
Поскольку в момент прохождения волны отрицательного
удара падение давления происходит на величину Дру, скорость
-I-
Рис. 7.2. Схема бака с
трубопроводом
Рис. 7.3. Диаграмма давлений и скорости после гидроудара
жидкости будет равна первоначальной, но направлена в
противоположном направлении. Следовательно, к моменту %=21/с
заключенная в трубе масса жидкости приобретет всюду
начальные объем и давление, находясь однако в состоянии движения
со скоростью w в сторону от клапана. Повторяя рассуждения,
приведенные для первоначального момента времени, придем к
заключению, что в момент т=21/с давление на клапан должно
понизиться на величину Ару. Понижение давления,
сопровождаемое остановкой жидкости, будет распространяться вверх от
клапана и в момент т=3//с достигнет бака. Поскольку в этот
момент в трубопроводе давление на величину Ару ниже, чем в
баке, то вновь начнется движение жидкости в сторону клапана со
скоростью w и к моменту х=41/с вся жидкость будет в
первоначальном состоянии.
На рис. 7.3, а, б, в представлена диаграмма давлений у
клапана, а также скорости и давления в сечении трубопровода на
расстоянии х от клапана.
116
7.3. ОСНОВНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ.
ФОРМУЛА Н. Е. ЖУКОВСКОГО ДЛЯ ГИДРОУДАРА
Нестационарные процессы движения жидкости и явление
гидроудара для различных случаев течения отражены в
различных источниках, которые перечислить не представляется
возможным. Но общепризнано, что основополагающими работами
по теории гидравлического удара и переходным процессам в
движущейся жидкости являются исследования великого
русского ученого Н. Е. Жуковского.
Не вдаваясь в подробности вывода, приведем основные
уравнения сохранения массы и количества движения, которые
обычно используются при исследовании неустановившегося
одномерного движения капельной жидкости в трубопроводах
постоянного проходного сечения:
±dp_ + djw=0 G.2)
*?1?+^+Хт —= 0, G.3>
дг ~дх ~ т 2dT K У
где под р подразумевается сумма статического давления в
данном сечении и давления от силы тяжести столба жидкости,
расположенного выше рассматриваемого сечения; с — приведенная
скорость звука в движущейся по трубопроводу жидкости.
В левой части уравнения сохранения количества движения
G.3) опущено выражение w -^—, как это обычно делается,.
ох
поскольку можно показать, что для реальных жидкостей,
движущихся в магистралях питания двигателей, величина этого
выражения представляет не более 0,005 величины -^ .
01
Если принять обычные для теории гидравлического удара
предположения Н. Е. Жуковского, что инерция стенок
трубопровода при деформациях может не учитываться, а деформация
жидкости и стенок трубопровода подчиняется закону Гука, то
приведенную скорость звука можно представить в следующем
виде:
'=
где Cq — скорость распространения звука в жидкости;
б — толщина стенки трубопровода;
/С, ? — соответственно модуль объемного сжатия жидкости
и модуль упругости первого рода материала
трубопровода.
Прежде чем обратиться к общему решению уравнений G. 2)
и G.3), рассмотрим, как связаны между собой давление и око-
117
рость потока при мгновенном изменении скорости течения
жидкости.
Пусть при принятом на рис. 7. 4 направлении оси х жидкость
движется со скоростью — w0 по трубопроводу, площадь сечения
которого равна единице. В момент времени т=0 в сечении /—/
происходит резкое изменение скорости, обусловленное,
например, закрытием клапана, и скорость принимает значение w.
Возникшее в момент т=0 возмущение в сечении /—/ будет
перемещаться влево со скоростью с и за
бесконечно малый промежуток
времени dx распространится на длину
(с—wQ)dx. Масса т жидкости,
которую при этом захватит возмущение,
будет равна m=Q(c—wo)d%, а
проекция изменения количества
движения на ось трубопровода объема,
захваченного возмущением,
изменится на величину d(mw)=p(o
Рис. 7.4. Схема Движения волны
возмущения
у ()p(
—Wo)dx- (w + Wo). Это изменение количества движения
происходит под действием имчтульса сил fdx, равного fdx=(p—^po)dx—
—ondT {c—Wq) dx • dxy
где /?o, p — давление в потоке до и после возмущения;
/ — силы, действующие на выделенный объем;
о — «касательные напряжения на стенке трубопровода от
сил вязкости.
Приравнивая изменение количества движения импульсу сил
и отбрасывая члены второго порядка малости, получим
P-Po=Q{c — wo){w+wo). G.5)
Если закрытие клапана в сечении 1—/ происходит
мгновенно, т. е. ш=0, а начальной скоростью потока Wq можно
пренебречь по сравнению со скоростью распространения возмущения
с (для компонентов ракетных топлив значение с находится в
диапазоне «500-Г-1500 м/с, а скорость жидкости ш<>, как
правило, не превышает 10 м/с), то придем к формуле Н. Е.
Жуковского для вычисления значения превышения давления над
начальным при гидроударе
P—Po=Qcwo. G.6)
При заданных значениях ро, §, с вопрос об определении
давления гидроудара р сводится к нахождению скорости потока соо
перед сечением, в котором жидкость тормозится.
7.4. ОПРЕДЕЛЕНИЕ СКОРОСТИ ФРОНТА ДВИЖУЩЕЙСЯ
жидкости
На схеме, приведенной на рис. 7. 5, после открытия клапана
в сечении 2^2 три аатгуске двигателя жадкюють тюд действием
давления /?п« гидрюютатическолостюлба Q(h+x0)nxgустремляется
118
где т — масса жидкости между
сечениями 1—/ и х\
w — скорость фронта жидкости,
лостоянгаая доя всех частиц
между сечениями /—/ и х;
г
3
—_-
1
X
3
\
У
д
1
1
45:1
1
по расходной магистрали к двигателю. Так как объем
магистрали между сечениями 2—2 и 3—3, как правило, существенно
меньше объема газовой подушки в баке, то для упрощения
выкладок будем полагать, что при заполнении объема между
сечениями 2—2 и 3—3 изменением давления в подушке рп по
сравнению с самим давлением можно пренебречь. Кроме того,
поскольку в современных ЖРД с турбонасооной системой подачи
уровень давления в расходных магистралях практически не
оказывает какого-либо существенного
влияния на сжимаемость, то можно
считать компонент топлива несжимаемым
и пользоваться для описания
движения столба жидкости, ограниченного
сечениями /—/ и движущимся
фронтом х, уравнением 2-го закона
Ньютона
~~ " * G.7)
Рис 7.5. Схема движения
фронта жидкости
/— сумма всех сил, действующих на выделенный столб
i ЖИДКОСТИ.
В трубопроводе, площадь проходного сечения которого равна
s, на выделенный объем жидкости в сечении /—/ действует сила
давления /ь равная fi=s(pn-\-Qhng — 55LJ, а в сечении х —
сила /х, равная fx=—s-pXj где рх — давление газа в объеме»
ограниченном сечениями х и 3—3, при этом сила тяжести
учитывается членом fQ=Q-xs-nxg. При своем движении столб
жидкости преодолевает сопротивление от сил вязкости,
пропорциональное перепаду давлений на гидравлических сопротивлениях
где ? — суммарный коэффициент гидравлического
сопротивления, зависящий от расстояния, пройденного фронтом жидкости.
dx -v. G.8)
Обозначим
dv
Продифференцируем почленно левую часть уравнения G. 7) и
приравняем ее сумме всех сил, действующих на выделенный
объем, после чего получим
dv
qx
G.9)
119»
При заданной функциональной зависимости ?=?(*) система
уравнений G.8), G.9) может быть решена для любого х, если
известна зависимость противодавления рх от скорости фронта
жидкости или от пространственной переменной х. Движущийся
столб жидкости сжимает газ в объеме магистрали перед
фронтом и одновременно газ истекает через отверстие F,
имитирующее площадь проходного сечения агрегата, где происходит
резкое торможение жидкости. Если количество тепла, вышедшее
за время dx с газом, обозначить через dQ = cpTGdx, а работу
сжатия газа жидкостью через dL=pxdvy то уравнение первого
закона термодинамики dQ=dU+dL без учета теплоотдачи в
окружающую среду, с учетом уравнения состояния, можно
привести к виду
dpx = kpx dx kRTG ,j щ
d% I — x dx I — x0*
где T — температура газа в магистрали;
G — секундный расход газа через сечение F, зависящий от
температуры 71, давления рх и давления окружающей
среды рпу куда происходит истечение.
Уравнения G.8) — G. 10) и уравнение баланса массы газа в
расходной магистрали
\T)
6
R dv
дают следующую систему уравнений для определения
изменения скорости фронта по длине расходной магистрали:
?L= *т / RTq+EL.q) , G.13)
dv Pxi!—x)\* s r ks j У '
—=w, G.14)
dv
G=O (T9 Px,pa\ C=C(x). G.15)
Эта система уравнений позволяет определить значение скорости
w0 в сечении 3—3, а следовательно, из уравнения G. 6)
давление гидроудара для случая полного торможения фронта
жидкости.
Пусть изменение противодавления по длине трубопровода
задано, т. е. рх=рх(х), а коэффициент сопротивления ?
является линейной функцией расстояния, пройденного фронтом, т. е.
120
?=Хэх (например, при использовании зависимости Дарси —
х. 1 \
Вейсбаха С=АТ — и тогда ХЭ = ХТ —1 . Из уравнения G.11)
d dj)
скорость w можно выразить явно в квадратурах. Так как
dw dw dx dw
—= =— <w,
dx dx dv dx
то из выражения G. 11) следует, что
+ Qhgp] G.16)
++9w \
dx x |_ QX
Обозначим w2=Y(x)Z(x) и подставим в уравнение,
приведенное выше:
'V=2\ ^" + Q^-^-|-g] • G. 17)
Найдем частное решение уравнения
Г'+З — +ХЭ
х
Разделив переменные и проинтегрировав, получим
— +ХЭГ=О.
х
G.18)
Подставив выражение G. 18) в G. 17), получим уравнение,
интеграл которого можно получить, разделив переменные
dx+Cx. G.19)
Используя уравнения G. 18) и G. 19), получим из выражения
G. 16) следующее уравнение для определения скорости
движения столба жидкости:
C,
x
Постоянная интегрирования С\ находится из начальных
условий. Воспользуемся тем фактом, что в сечении 2—2 при х=х0
при открытии клапана скорость скачком возрастает от нуля до
значения дон, которое может быть найдено из выражения G.6),
если под р подразумевать сумму p=pn+Q(fi+Xo)gy а ро=рхн*
) — Рхн
CQ
Таким образом, для нахождения С\ имеем условие:
при х=х0 w=wH. G.2I)
121
Если в процессе заполнения магистрали жидкостью
противодавление рх меняется незначительно и его можно считать
постоянным, пренебрегая изменениями давления по сравнению с
самой абсолютной величиной рХу то из уравнения G. 20) с
учетом начального условия G.21) получим следующее выражение
для скорости движения фронта жидкости:
w=
G.22)
А-[х ~к+
Бели коэффициент сопротивления магистрали считать
постоянным и равным среднему значению ?', то из формулы G. 11)
при помощи квадратур можно получить более простое
выражение для скорости движения фронта жидкости при постоянном
значении рх:
^4 + C U
Выражения G.20) — G.23) позволяют определить значение
скорости w=Wo при х=/ в момент подхода фронта жидкости
К рассматриваемому сечению, гидроудар в котором при
торможении среды может быть определен из формулы Н. Е.
Жуковского G.6) для случая мгновенной остановки жидкости в
сечении 3—3.
Если в сечении 3—3 трубопровода проходная площадь
живого сечея'ия меняется от значения 5 до значения F, то при
расчетах следует пользоваться формулой G.5), для чего из
системы уравнений G. 12) —G. 15) или из формул G. 20)— {7. 23)
следует определить скорость w в сечении 3—3 трубопровода,
имеющего проходную площадь s, а затем из следующих
соображений следует найти скорость w в момент подхода фронта к
сужению. В момент гидроудара давление в сечении 3—3
повышается до значения р, которое устанавливается по всей
плоскости сечения, а из уравнения неразрывности следует, что w =
где w' — скорость частиц жидкости в суженном сечении.
122
Следуя уравнению Бернулли, скорость wf можно выразить
через перепад давлений Ар=р — рх во фронте жидкости и
перед ним в момент гидроудара, если известен коэффициент
гидравлического сопротивления от внезапного сужения ?:
. G.24)
с A + С)
Подставляя G. 24) в G. 5), получим
где
Волна повышения давления, возникшая в сечении 3—3, со
скоростью с будет распространяться против движения жидкости
в сторону бака, постепенно захватывая все новые слои
жидкости. В результате давление и скорость жидкости в
трубопроводе будут со временем меняться и для их определения
следует воспользоваться уравнениями сохранения массы,
количества движения и энергии, которые для одномерного
изотермического движения гомогенной жидкости обычно применяются в
виде уравнений G.2), G.3). Методы решения этих уравнений
для случая движения капельной жидкости в настоящее время
достаточно хорошо разработаны, в частности, для нахождения
параметров потока можно использовать метод
распространяющихся волн (метод Д'Аламбера), метод характеристик, методы
теории функций комплексного переменного [39, 59].
7.5. ПРИМЕНЕНИЕ МЕТОДА ХАРАКТЕРИСТИК К РАСЧЕТУ ЯВЛЕНИЯ
ГИДРОУДАРА И НЕСТАЦИОНАРНОГО ДВИЖЕНИЯ ЖИДКОСТИ
При исследовании явления гидроудара наибольшее
распространение получил метод характеристик, применение которого
в настоящее время при использовании ЭВМ затруднений не
вызывает. Когда фронт волны или фронт возмущения приходит в
какую-либо точку среды, он возмущает существовавшее ранее
движение частицы, и в течение бесконечно малого промежутка
времени значения производных от параметров по координатам
(при постоянном времени) или по времени (при постоянных
координатах) изменяются на конечную величину.
Следовательно, эти производные в момент прихода фронта волны в данную
точку среды однозначно найти нельзя. Это положение и
является основой при выводе метода характеристик. Характеристикой
123
в теории дифференциальных уравнений в частных производных
называют проекцию на плоскость х, х кривой, на которой по
значениям искомых функций (в частности, давления р и расхода
qw) нельзя однозначно определить частные производные
решения. Если кривая L, расположенная в некоторой области
плоскости х, т, является траекторией движения фронта возмущения, то
значения частных производных на ней связаны соотношениями
G.2), G.3) и двумя очевидными дифференциальными
соотношениями
/3 -л Jj^M J>J лл ^Чл^
dx
dv
dx
dv
Предполагая, что в рассматриваемой точке кривой L с1тфО,
систему G. 25) можно переписать в виде
dp dp dp дх Oqw dQw dgw dx_
dv dv дх dv ' dv dv dx dv
—
,~ пс\
Подставляя значения — и -^— из системы G. 26) в выражения
dv dv
G.2), G.3), получим следующую систему уравнений для оты-
dp dow
екания производных — , -^— , считая известными полные про-
dx dx
изводные:
2 dQw dx dp dp
dx
dx dp
dv dx
dp
dv
G.27)
«*_ t/цш , dp __ tfQW XT 2
(Предполагалось, что в рассматриваемой точке кривой
Если это не так, то йхФ§\ из системы G. 25) следует найти
— , -^ и подставить их в G.2), G.3).) В результате получим
ох ох
систему, определитель которой отличается, может быть только
знаком, от определителя системы G.27), который равен
2 dx
dv
А=
» 1
dv l
Для того, чтобы система G. 27) имела бесконечно много
решений, определитель Д, очевидно, должен быть равен нулю, т. е.
Д=0 и, следовательно,
G.28)
dvj
Получаем два уравнения направления характеристик
cdx-dx=0; cdx+dx=Q.
124
Так как система G. 27) совместна, то и оба определителя,
получающиеся заменой в А 1-го и 2-го столбцов столбцом
правых частей системы G.27), должны также обращаться в нуль,
т. е.
dp
dx '
_dQw_± 2
dx 2dT
dx
dx
1
=0, Дг =
dx
dx dx 2dT
=0.
Отсюда получаем следующие два дифференциальных
соотношения на характеристиках G. 28):
dp+cdQW + Ь- QW2dX =0; tf/? - crfQ w+^QW2dx=0. G.29)
2rfT 2dT
Первое соотношение справедливо на первом направлении
характеристик G.28), а второе,
соответственно,— на втором.
Для численного решения задач
нестационарного движения
жидкости и распространения
гидравлического удара может быть применен
метод Массо, в основе которого
лежит замена дифференциальных
уравнений характеристик G.28) —
G.29) соответствующими конечно-
разностными уравнениями. Метод
изложен в работе [13]. Идея в том,
что в плоскости х, х рассматривают две близкие точки / и 2
(рис. 7.6). Координаты этих точек (хи ti), (х2у Тг). Пусть в этих
точках известны значения искомых функций р и w,
удовлетворяющих системе уравнений (так как сжимаемость жидкостей
проявляется при давлениях 50,0 МПа и выше, что в практике
ЖРД не наблюдается, то при исследовании плотность жидкости
можно считать постоянной и вынести ее за знак
дифференциала)
? ?, G.30)
/ 2 X
Рис. 7.6. Плоскость
характеристик
дг
dv
дх
т 2dT
Значения этих функций в точках 1 и 2 обозначим
соответственно ри w\9 /?2, о>2- Рассуждая так, положим, что значения с и
Хт являются переменными и зависят от аргументов и искомых
функций \т=\{х, т, /?, w); с = с (*, х, /?, w).
Через точку 1 проведем прямую в направлении
характеристики первого семейства характеристик G.28), выходящей из
точки У, а через точку 2 — прямую в направлении
характеристики второго семейства, выходящей из точки 2. Эти прямые пере-
125
секутся в некоторой точке 3. Координаты xil\ т31} этой точки
являются решением системы
j^-x^cFW-t,), Л"-х2=сB"(ъ-г(Л G.31)
где С11}—угловой коэффициент касательной к характеристике
первого семейства в точке /; с^ — угловой коэффициент
касательной к характеристике второго семейства в точке 2. С^1) и
С2@ — являются соответствующими корнями уравнений G.28) &
точках / и 2.
Уравнения G.31) получаются из уравнений направления
характеристик в точках 1 и 2 заменой входящих в них
дифференциалов конечными разностями. (Если значения приведенной
скорости звука неизменны, то угловые коэффициенты в
уравнениях G.31) остаются постоянными в плоскости дс, т и
координаты точки 3 находятся непосредственно из G.31)). Далее,
заменяя дифференциалы, входящие в дифференциальные
соотношения на соответствующих характеристиках, конечными
разностями, получим систему уравнений для определения значений
ришв точке 3, которые обозначим через р{г\ wi1*:
Решая эту систему относительно pil\ ^з!), найдем первое
приближение функций р м w ъ точке 3. Это приближение может
оказаться -недостаточно точным, так как характеристики,
выходящие из точек 1 и 2, были заменены отрезками прямых, в то
время как точка 3 должна быть точкой пересечения
криволинейных характеристик и, кроме того, дифференциалы всюду
заменены конечными приращениями. Для уточнения координат
точки 3 и значений ришв этой точке можно повторить расчет,
используя, например, среднеарифметические значения в точках
/, 2, 3. Переходя от точки к точке, последовательно
определяются значения параметров во всей плоскости ,v, т. Следует
также указать, что в концевых сечениях трубопроводов или в месте
их разветвления число уравнений может быть больше двух.
На примере одной точки покажем, как производится расчет
параметров в разветвлении трубопроводов. Пусть жидкость
движется по трубопроводу а до сечения /—/ (рис. 7.7, а), где
трубопровод разветвляется на ряд магистралей б, в, г, д. Так как
изменения скоростных напоров в уравнении G. 3) не
учитывается, то пьезометрические напоры в сечениях ветвей,
непосредственно примыкающих к точке разветвления, нужно считать
одинаковыми, т. е.
Ра = Рб = Рв...=Р* G.33)
126
а в силу условия неразрывности в сечении /—I
G.34)'
где Fa, F6 — площади проходных сечений разветвлений. Будем
полагать, что в плоскости характеристик х, т на рис. 7. 7, б
точка / соответствует сечению разветвления, при этом левая
полуплоскость содержит характеристики потока в трубопроводе а,
а правая полуплоскость представляет собой наложенные друг
на друга плоскости характеристик ветвей б, в, г, д. Пусть в точ-
г х
Рмс. 7.7. Расчетная схема:
а — разветвленная система
трубопроводов; б —
пересечение характеристик в
сечении разветвления
ках оси абсцисс х все параметры известны. Проходящая через
точку / характеристика первого семейства (для потока в
трубопроводе а) пересечет ось ординат т в точке <?, координата
которой в первом приближении, как это следует из G.31), будет
равна
G.35)
С1,а
Проведя из этой точки прямые, соответствующие
характеристическим направлениям 2-го семейства, до пересечения с осью
абсцисс, получим точки 2, координаты которых для каждой ветви
Л]б> ЛI.-. в первом приближении могут быть найдены из
2-го уравнения G. 31) с учетом уравнения G. 35)
^-т,). G.36)
Выразив из соотношений на характеристиках для каждого
трубопровода давление в точке 3 р3 и, используя равенства {7. 33)
и G.34), поЛучим систему уравнений для определения
скоростей Way We, we ... в точке 3:
«1 /I ~-~ i
— Wl)Q —
127
i принимает значения: i = 6, /=#, i = z,....
Подставляя полученные значения скорости в соотношения
G.32), можно получить значения давления pil) в месте
разветвления. Если точность первого приближения недостаточна,
расчет следует повторить по уточненным значениям сlifl, с2,б» Г2,в---
7.6. ИСПОЛЬЗОВАНИЕ КВАДРАТУР ДЛЯ РАСЧЕТА ГИДРОУДАРА
И ИССЛЕДОВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ
В ТОПЛИВНЫХ СИСТЕМАХ
Приведенный выше метод характеристик является довольно
громоздким, дает приближенные результаты, применим
практически лишь при наличии современных ЭВМ. Поэтому вполне
естественным кажется стремление получить аналитическое
решение без использования ЭВМ, для чего систему уравнений {7. 30)
следует представить в линейном виде. На практике при
исследовании нестационарных движений капельных жидкостей
широко используют метод линеаризации, предложенный И. А. Чар-
ным и заключающийся в том, что переменный комплекс Хт —
в выражении G. 30) заменяют некоторым надлежаще
подобранным постоянным коэффициентом 2а, равным его среднему
значению по длине трубопровода и времени процесса [63].
Заменим отрезок кривой у=К~ на интервале изменения w в не-
установившемся движении отрезком прямой так, чтобы площадь
под кривой у была равна площади, ограниченной на том же
интервале изменения w отрезком прямой. В пределах изменения
скорости от Wo до wK и при известном среднем значении
коэффициента трения ЛСр в неустановившемся движении (который для
оценочных расчетов в зависимости от Re принимается таким же,
как и при установившемся движении) значение 2а И. А. Чарным
рекомендовано считать равным
2"o.
SdT wK—w0
В результате замены переменного комплекса Хт — постоянным
2dT
коэффициентом 2а, рассчитанным по зависимости G.37),
систему уравнений G. 30) можно переписать в виде
?1г
0* _1_<^ =0> G-38)
дх q дх
28
При движении жидкости по трубопроводу постоянного сечения
температура среды практически не меняется, поэтому при
исследованиях значение приведенной скорости звука с обычно
принимают неизменным и тогда G. 38) будет представлять систему
линейных дифференциальных уравнений в частных производных.
В настоящее время методы решения таких систем для
определения параметров нестационарного движения жидкости в простом
трубопроводе постоянного проходного сечения достаточно
хорошо разработаны и изложены в ряде работ по гидроудару и
переходным процессам. В частности, в работе [63] приведено
решение для определения давления гидроудара р в трубопроводе при
мгновенном закрытии клапана, установленного в выходном
сечении магистрали. Это решение соответствует моменту
прекращения подачи топлива в двигатель и при постоянном давлении
на входе в магистраль за баком р0 может быть записано в виде
i-i-e-Y I
я 2al jiU Bл-1)соэ6я
где w0 — скорость жидкости на установившемся режиме;
Результаты работы [63] позволяют найти решения для изме^
нения давления в магистрали и при других законах изменения
режима течения. Однако эти решения, как правило, даются в
общем виде и часто их непосредственное применение
затруднено.
Во многих случаях, наблюдающихся на практике,
изменение расхода жидкости или скорости w на выходе из топливопо-
дающей магистрали может быть описано экспоненциальной
зависимостью вида
w=wo+A (l-e-"»), G.39)
где А — градиент изменения скорости от начального значения
Wq до конечного значения wK, A = wK — о>0;
т — показатель экспоненты, характеризующий темп
изменения режима.
В частности, такой характер изменения расхода топлива или
скорости на входе в насос в сечении х=1 (сечение с
координатой х=0 расположено на входе в магистраль непосредственно
у бака) может наблюдаться при запуске двигателя или его
форсировании. Изменение скорости приведет к изменению
давления, которое при определенных условиях может быть столь
существенным, что нарушит нормальную работу насоса и всего
двигателя. Поэтому для правильного выбора топливоподающих
магистралей и назначения режима течения (который может
определяться постоянными Лит), обеспечивающего нормаль-
5 3205 129
ный запуск, важно знать изменение давления в топливоподаю-
щей магистрали при изменении скорости в ее выходном сечении.
Для выбора граничных условий, определяющих режим
течения, будем считать, что во входном сечении магистрали при х=0
на выходе из бака давление за весь период переходного режима
(запуска двигателя) остается неизменным и равным его
значению ро на стационарном режиме течения. (Под давлением
понимается величина, соответствующая пьезометрическому
напору, равная сумме статического да'вления и давления от действия
силы тяжести.)
Положим также, что до начала изменения режима течения
давление р по длине магистрали было различным и в сечении на
расстоянии х от бака оно равно
Р=== Ро " х9
I
где pi—*давление в сечении х=1 в выходном сечении
трубопровода перед насосом;
/ — длина магистрали.
Таким образом, задача сводится к решению системы
уравнений G. 38) со следующими начальными и граничными
условиями:
при г <0 /7=/70— p-±=lL Хщ G.40)
w=w0; G.41)
при х=0 р=р0; ' G.42)
при x=l w=wo-\-A{l — e-~mx). G.43)
Изменения давления и скорости жидкости в сечении
трубопровода на расстоянии от бака, равном х, будем считать
происходящим от постоянного уровня, соответствующего
параметрам на стационарном режиме при т<0, определяемым по
формулам G.40), G.41) и обозначать их соответственно w, p:
(^4 G.44)
Так. что при т^О
^=0, р=0. G.45)
Так как система уравнений G.38) и краевые условия
G.40) — G.45) линейны, то имеет место принцип суперпозиции,
заключающийся в том, что решение общей задачи может быть
представлено в виде суммы решений частных краевых
задач [59].
130
Обозначая
G.46)
и подставляя эти значения в G.38), с использованием G.44)
получим следующие две частные краевые задачи (учитывая
принцип суперпозиции):
1) решить систему уравнений
G#47)
G.48)
с граничными
при
при
2) решить
с
dwi ,
ох
условиями:
х=(
х=1
¦ 2awi ~г
п dw\ I
fsi 1_ _|_
дх '
) /?р
систему уравнений
)Wl _!_ 9,770} 4-
дх
с2тН
Q дх
1
Q
Q
=0,
= A
P
дх
lh~
A—6
о— Pi
Ql
с граничными условиями:
при х = 0 /?2=0, G50)
ПрИ Х = 1 ^2 = 0.
Для обеих систем начальные условия являются однородными,
т. е. при т=0
Для решения системы уравнений G. 47) с граничными
условиями G.48) и начальными условиями G.51) воспользуемся
методами операционного исчисления, в основе которых лежат
интегральные преобразования Лапласа. Обозначим через г|? (s)
изображение в комплексной плоскости s скорости W\, а через
O(s) — изображение отношения Pi/q,
оо оо
. Г Г* р* __
J Э ) Q '
0 0
Уравнениям G.47) для оригинала функций будут, очевидно,
соответствовать следующие обыкновенные дифференциальные
Уравнения и зависимости для изображений (здесь s
рассматривается как параметр):
5* 131
G.52)
dx
при x=0 Ф=0,
при х=1 ф=Л— . G.53)
Общее решение системы уравнений G. 52) очевидно:
,-гх. ф = с1?
s
•J s(s 4- 2a)
где Си С2 — постоянные, подлежащие определению;г=1—^ -.
с
Подставив сюда граничные условия G.53), определим значения
постоянных Си с2 и вид функций ф и Ф:
¦ = Аа ch rx ф= Aac2r shrx ? ^
s(s+a) chr/'
s(s+a) chr/' s*(s+a) ch rl ' V' ]
Для перехода от изображений к оригиналу функций,
воспользуемся второй теоремой разложения, которая для отношения
Pi/q может быть записана в виде [39]:
ds l(s+a)chrl
где sn — бесчисленное множество корней знаменателя
(sn+a)chrnl, при этом гп= ^5яE/| +—I.
с
После преобразований выражения G. 55) можно прийти к
следующему виду формулы для вычисления р\\
ах^
сехр( — ах) 2ах — 4аъЛ—\ ехр( — ах)
cos —
с
G.56)
^ Bл- 1J sin Bл-1)-?--р
где ^D»'2
=(а2—Шд) cos (в„т—2ашя sin o)nt,
132
Аналогично может быть получено решение системы уравнений
G.49) с однородными краевыми условиями G.50) — G.51),
которое для давления р2 выражается следующей
зависимостью:
А=(Ро — Р\ — %WwJ) %. G-57)
где
2 \n) ' 2UK
a sin <*nv + со„ cos i*nv
2n - 1 nx
Полученные зависимости G. 56) и G. 57) для частных
решений составляющих р\ и рг с учетом выражений G. 44) и G. 46)
дают возможность определить изменение давления в любом
сечении магистрали в процессе запуска двигателя или на
переходном режиме изменения расхода на входе в насос:
G.58)
7.7. ИСПОЛЬЗОВАНИЕ КВАДРАТУР ДЛЯ ИССЛЕДОВАНИЯ
РАЗВЕТВЛЕННЫХ СИСТЕМ ПИТАНИЯ
В двигательных установках с лекжэлькими жидкостными
двигателями, шмокишнты топлива ik которым «подаются из одою-го
бака, применяют разветвленные системы
питания, как приведено на рис. 7.8.
Очевидно, внезапное изменение
режима течения в магистрали питания
какого-либо двигателя окажет влияние и на
режим течения в других магистралях.
Степень этого влияния зависит от
конструктивных параметров, рода
компонента топлива, скорости жидкости и
т. д. и может быть определена при
решении уравнений неустановившегося
движения жидкости G.38),
записанных для каждой магистрали а, б, в, г
(см. рис. 7.8).
Пусть на установившемся режиме
работы компонент из бака входит в
общий трубопровод а, имеющий длину
/а и площадь сечения Fai подходит к
емкости v и из нее распределяется на
ряд магистральных трубопроводов б, в,
г... с площадью проходного сечения
F6> Рву Рг> в концевых сечениях
которых на расстояниях/$, /вэ... от емкости
v установлены клапаны,
регулирующие расход на двигатели. В момент Рис* 7*8< Ра3пИетмнГая система
133
времени т=0 прошло возмущение в одном из трубопроводов,
например, закрылся клапан на трубопроводе б. В результате
передачи возмущения по жидкой среде изменится режим течения во
всей системе, что может привести к срыву работы двигателей,
установленных на магистралях в, г,.....
Для определения изменения параметров в концевых
сечениях магистралей (перед двигателями) после закрытия клапана в
магистрали б положим, что на установившемся режиме работы
изменение давления по длине каждого ответвления и общего
трубопровода а было линейным, а скорости по длине не
изменялись. Тогда для каждой магистрали начальные условия можно
записать в виде выражения G.40), где под р0 подразумевается
давление в начальном сечении трубопровода (у бака для
магистрали айв емкости v для остальных ответвлений), при этом
расстояние х отсчитывается от начального сечения
рассматриваемого трубопровода.
Для постановки граничных условий воспользуемся тем
условием, что давление и плотность жидкости в выходном сечении
магистрали а равны давлению и плотности в емкости v и во
входных сечениях магистралей б, в, г,..., а изменение плотности
жидкости в емкости и в вышеназванных сечениях трубопроводов
равно разности расходов жидкости, входящей в емкость из
трубопровода а и выходящей из емкости в ответвлении б, в,.. .>
т. е.:
— для трубопровода а
, dQ I dp dQWa
при x=L — = —. —= —-=—- — ;
v a dx c2 dx dx v
(i=6, в, г и т.д.).
— для трубопроводов п (под п подразумеваются
ответвления п=в, гит. д.):
при х=0
dQ = 1 dp = dQwn== \ / ) G.59)
dx с2 dx dx v
В левой части уравнений G.59) значения—.— заменены
с2 dx
величинами — из первого уравнения G.38). Будем считать
при этом, что при т^О давление во входном сечении
магистрали а остается неизменным и равным давлению в баке /??,
скорость жидкости в выходном сечении магистрали б отсутствует
(клапан закрыт), а в концевых сечениях остальных
ответвлений скорость жидкости остается равной скорости движения на
установившемся режиме течения шп = ауПуст, где п=в, г... или
134
— для трубопровода а
0
— для трубопровода б
прих=1б ^6 = 0
— для трубопроводов п (л=в, г...) G.60)
ПрИ X = ln Wn = Wn уст.
Таким образом, для нахождения параметров (давления и
скорости) в разветвленной системе трубопроводов необходимо
решить систему уравнений, состоящую из уравнений сохранения
массы и количества движения G. 38), записанных для каждого
трубопровода а, б, в, г..., с начальными условиями типа (J. 40)
(записанных также для каждого трубопровода) и с граничными
условиями G.59), G.60).
Как правило, на практике все ответвления выполняют
идентичными. Поэтому положим, что 1б = 1в=1г= ..., F6 = Fe=
=FZ = ... При этом будем считать скорость распространения
малых возмущений с во всех магистралях также одинаковой,
равной некоторому ее среднему значению. Коэффициент 2а,
характеризующий сопротивление, также можно положить равным
по всем магистралям.
Применяя рассуждения, приведенные выц1е для вывода
формулы G.58), с использованием методов операционного
исчисления и принципа суперпозиции, получим следующие выражения
для расчёта давления рб в магистрали б:
[+^^-], G.61)
где Рб.уст — давление на установившемся режиме течения,
Рб.уст^ Рб.н — (Рб.н—Рб.к)>
Рб.н, Рб.к — давления соответственно в начале и конце
магистрали на установившемся режиме течения (до
Ли = (Рб.н—Рб.к — 2^С^б.усЛ) h\
<ч>
p62=2w6.yn-QF6c (-j-Y em
-3„Уп (
135
sin2P(,i4. + 2^sin|i,cos 2^
л-^^- sin ft,));
aT — число ответвлений трубопроводов (без учета
трубопровода а);
fin — корни характеристического уравнения
ъ0.
la
Аналогичное выражение получено и для давления в 1-х
магистралях (i=0, г ...),
т-'. 71 • G' 62)
где /?г,уст — давление на установившемся режиме течения,
P P iP Л);
Рг, н, /?г, к — давления соответственно в начале и конце
магистрали на установившемся режиме течения;
1 \«j_i # Sin со/Т ¦+- to; COS (O;*C . 2/1 — 1 JC
-1Л+1 ' . — sin—-— я — ;
X
)
$ sin «„-в + —-у cos <ont (а2_ „8)
136
Глава 8
ПРОЦЕССЫ В СИСТЕМАХ ПРЕДВАРИТЕЛЬНОГО
НАДДУВА И ДРЕНАЖА БАКОВ
Системы н/ацщува топливных баков с ЖРДУ оо назначению,
как «правило, подразделяют на системы (предварительного и
основного (или 1полетн«ого) .наддува. Необходимость
наддува баков перед стартом диктуется требованиями обеспечения
потребного пускового давления в баках и расходных
магистралях, достаточного для безкавотационной работы насосов
двигателя. Кроме того, избыточное над атмосферным давление в
тонкостенных баках придает им устойчивость, особенно во
время роста перегрузок, действующих на элементы конструкции
при запуске двигателей и движении ракеты-носителя. С (ростом
давления в баках уменьшается также достартовъгй расход
компонентов топлива, так как уменьшается время выхода насосов
на номинальный режим [17]- Системы предстартового наддува
весьм.а разнообразны ino ювоей номенклатуре, «выбор типа
системы определяется юомшемсом требований, поставленных
в технических заданиях, а рабочее тело 'может быть горячим или
холодным -газом, смесью газов или паров, жидким реагентом
и т. д. В настоящее время широкое распространение нашли
газобаллонные «системы предстартового наддува, ,в которых в
качестве рабочего тела используется воздух, азот, гелий и т. д.
Указанные газы обладают сравнительно высокой
работоспособностью, недифицитны, технология их изучения относительно
проста, а системы наддува такого типа просты © изготовлении
и отработке и обладают высокой степенью надежности.
При проектировании и отработке систем наддува их
параметры (конструктивные и термодинамические) должны
выбираться так, чтобы при минимальной массе и габаритах за
заданный промежуток времени было обеспечено необходимое
давление в баках с компонентами топлива, при этом в
некоторых случаях должно выполняться требование непревышения
расхода газа наддува больше заданного, о чем будет сказано
ниже. Естественно, при этом необходимо наиболее тщательно
подходить к расчету газобаллонов, являющихся
аккумуляторами давления, которые, в основном, определяют массу системы
наддува.
8.1. РАСЧЕТ АККУМУЛЯТОРОВ ДАВЛЕНИЯ
При выборе оптимальных параметров аккумуляторов
давления необходимо руководствоваться двумя основными
требованиями. Во-первых, система наддува и аккумулятор давления
при минимальных габаритах должны обеспечить заданное
давление в топливных баках. Во-вторых, заданное давление должно
13
быть получено за промежуток времени, отведенный по
циклограмме подготовки на данную операцию.
На этапе проектирования объем газового баллона
(аккумулятора давления) для системы наддува может быть найден,
если воспользоваться условием равенства изменения внутренней
энергии в баллоне uq и внутренней энергии газа в подушке
бака ип по времени наддува т:
dv d%
Здесь не учтен теплообмен с окружающей средой, поскольку
при относительно невысоких (до 400 К) температурах газа
наддува ошибка в расчетах не превышает 10% и приводит к
несколько завышенному значению искомой величины объема. Как
правило, в системах наддува баков с аккумуляторами давления
применяются газы, далекие от условий насыщения, а
взаимосвязь их термодинамических параметров — давления р,
температуры Ту плотности q достаточно хорошо описывается
уравнением состояния идеального газа:
P=Q^-T. ' (8.2)
Здесь [i — молекулярная масса газа; R — универсальная
газовая постоянная.
Для массы газа G, находящейся в объеме V баллона или
бака, уравнение (8. 2) принимает вид
Р=у*Т, (8.3)
где /?= —.
и-
Если считать, что в процессе наддува теплоемкость газа при
постоянном объеме cv остается неизменной, а внутренняя
энергия массы G зависит лишь от температуры
u=QcvT, (8.4)
то равенство (8.1) с учетом (8.3) и (8.4) можно привести к
виду
I/ dpt -г dpa
6 dx ~ lldv '
Здесь индексы б и п относятся к параметрам соответственно
в баллоне и в газовой подушке бака.
Отсюда, если известны начальные (с индексом «н») и
конечные (с индексом «к») параметры газа, то необходимое
минимальное значение объема газового баллона легко определяет-
138
ся с использованием заданного объема газовой подушки в баке
(8. 5)
Рб.н — Рб.к
Объем газовой подушки Vu обычно -известен, та,к как равен
разности объемов бака и компонента топлива. Начальное
давление в подушке /?п. н также известно, так как определяется тем-
перату|р.ными условиями, а да;вление рп.к равно потребному
давлению IB заданный момент времени. Варьируя разлостью
Рб.н — Рб.к,можио определить и выбрать .различные значения Уб-
Следует кроме того учесть, что энергетическая отдача аикуму-
лятора давления тем выше, чем ниже конечное давление в
баллоне рб.к (естественно не юиже давления рп.к), а увеличение
давления рб.н иакладьивает определенные требогваиия ас повышению
герметичности системы, ухудшению ацроч-ностаых характеристик,
повышению энергетики зашр^вочмото оборудования и т. д.
Однако, ,ка;к 'будет показано .ниже, увеличение рб.н способствует
уменьшению времени наддува баков.
Реальность газа и отличие его от идеального для условий
эксплуатации таких газов наддува, как азот, воздух, гелий и
т. д., можно учесть введением в уравнение состояния (8. 2) и
(8. 3) коэффициента сжимаемости z [48]:
P=Q——7\ р=—zRT. (8.6)
Коэффициент сжимаемости z может быть определен (см.
работу [19]) из графиков на рис. 8. 1, 8.2 по приведенным
значениям температуры 6 = и давления я=—, где !~
'кр
Ркр
ркр —
критические значения температуры и давления. Для некоторых
газов значения ГКр, Ркр приведены в табл. 8. 1 с размерностью
(/2) МКГСС
р, Рр р рр
для давления (кгс/см2) в системе МКГСС и с размерностью
[Па] в системе СИ.
Таблица 8.1
Газ
Азот
Аммиак
Водород
Водяной пар
Гелий
Кислород
Метан
Окись углерода
Углекислый газ
Хлор
кгс/см2
33,49
112,3
12,8
217,96
2,261
49,713
45,8
72,72
76,1
МПа
3,30
11,00
1,26
21,38
0,22
4,90
4,50
0,49
7,14
7,61
гкр, к
136,03
416,06
33,25
647,16
5,25
154,34
191,06
134,16
304,12
417
13 9
О 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 М.5 5,0 5,5 6,0 6,5 71
Рис. 8.1. Изменение коэффициента сжимаемости для низких
давлений
2.5
10 15 20 25 30 35 ^0 **5 7Т
Рис. 8.2. Изменение коэффициента сжимаемости для
высоких давлений
140
В этом случае для расчета объема аккумулятора давления
предварительно следует найти значение температуры газа Tq. ,<
в конце процесса наддува из уравнения политропического
расширения газа в баллоне аккумулятора давления с
показателем п:
. (8.7)
Значение показателя политропы расширения п зависит от
времени процесса, конструктивных параметров и, как правило,
находится в пределах от п=1 (показатель изотермического
Ср
процесса) до n=k=— (показатель адиабатического про-
цесса).
Здесь ср — удельная теплоемкость при постоянном давлении;
cv — удельная теплоемкость при постоянном объеме.
Далее, используя уравнения баланса массы и энергии в
начале и конце процесса наддува
G6.H-G6M=Qn.K-Qu^ иб.н-Иб.к=Ип.к-Ил.н (8.8)
и приняв во внимание зависимости (8.4) и (8.6), легко найти
выражение для определения температуры газа в баке в конце
процесса наддува:
Рп.к (Рб.н __ РЬлЛ
Рп.к (Рб.н Р6.к\ (Рп.к _ Рп.к \ t Рб.н _ Рб.к \
2п.н'ТП.я \Z6.h *б.к/ Х^п.к ^п.н/ \ ^б.н'^б.н Зб.мТб.к)
(8.9)
При расчетах сначала по графикам на рис. 8. 1, 8. 2
необходимо определить значения zo. п» 2П.Н, далее, задаваясь
значением 2П. к, например, гп. К^1А можно определить по формуле
(8.9) значение Гп. к в первом приближении. Затем по
найденному Тт к следует определить гп.к во втором приближении и вновь
найти Ти. к. Если точность не удовлетворяет, то продолжить
расчет до получения заданной точности. Используя зависимости
(8.6), (8.8), (8.9), можно прийти к выражению для расчета
объема баллона аккумулятора давления:
\Г у (Рп.К* 2„,н /?п.Н>-гп.к)'г>б.Н>'г>б.К /О 1QV
(Рб.н • *б.к — Рб.к • *б.н) * *п.н • г1ЬК
Полученное значение объема при выбранных начальном и
конечном давлениях должно удовлетворять требованию
достижения потребного давления в баке рп. к за время, которое бы
было не более промежутка, отведенного по циклограмме
подготовки на данную операцию. Проверка этого условия и задача
14!
нахождения минимального объема, обеспечивающего процесс
наддува за заданный промежуток времени т, в общем виде
является вариационной, а представление решения ее в
аналитическом виде возможно лишь в исключительных случаях. Для
расчетов используются уравнения сохранения массы и энергии,
а метод нахождения минимального значения объема баллона
аккумулятора давления заключается в том, что проводится ряд
расчетов при различных значениях V& и выбирается то
значение, которое удовлетворяет заданному значению времени
наддува бака от /?п.н До рп. к. Метод расчета времени наддува
приведен ниже.
8.2. РАСЧЕТ РАСХОДА ГАЗА И ВРЕМЕНИ НАДДУВА БАКОВ
Если геометрические характеристики системы наддува
выбраны или заданы, то расчет, как правило, сводится либо к
определению расхода газа, протекающего через элементы
системы, либо к нахождению времени наддува бака. Знание расхода
газа необходихмо для выбора характеристик агрегатов систем
наддува. В частности, на топливных баках, как правило,
устанавливаются дренажно-предохранительные клапаны (ДПК),
предназначенные для перепуска газа из подушки бака в
атмосферу (или в специальную дренажную систему) в случае
несрабатывания по какой-либо причине клапана отсечки газа
наддува. Если производительность (по расходу газа) ДПК меньше
расхода газа, поступающего из системы наддува в бак, то
давление в газовой подушке может превысить максимально
допустимое значение из условий прочности или безаварийного
запуска двигателя. Как известно [1], если отношение давлений рп
и /?б в системе больше критического значения ркр,
определяемого показателем адиабаты к:
k
то расход газа G в единицу времени через трубопровод с
проходным сечением F без учета потерь давления в магистрали
может быть определен из формулы
/ г I fe+i и
Q=Fpby ^ №\* _(?=Л * . (8.11)
J (k—l)RT& \_\Рб ] \Рб I J
Если воспользоваться газодинамическими функциями, то
выражение для расхода газа можно записать через коэффициент
скорости
X— —
акр
142
где w — скорость газа;
/ , f 2k п ~ \
Дкр — критическая скорость звука якр= 1 / /?• Тб ):
V V k+l )
m. (8. 12)
Здесь т=Л/ Лркр* \q{X)—коэффициент приведенной
плотности, который может быть определен по отношению давлений
П=— из газодинамических таблиц или из формулы
Рь
2
В случае сверхкритического перепада давлений, когда
—<СРкр» коэффициент скорости Х=1 и q(X) = l, а расход газа,
Рб
как это следует из выражения (8. 11), не зависит от
противодавления рПу а определяется лишь давлением на входе в систему
наддува рб.
Из выражений (8. И) и (8. 12) следует, что для определения
значения расхода газа в каждый момент времени т должны быть
известны давление в системе р& и ри и температура газа Tq в
аккумуляторе давления. Изменение этих параметров и время
наддува баков от начального давления /?п.н до заданного
давления ри, к, как это будет показано ниже, в общем случае
требует нахождения решения системы дифференциальных уравнений
и не поддается аналитическому представлению. Однако,
довольно часто для уменьшения влияния изменения давления в баке
при наддуве на параметры газа в аккумуляторе давления
системы наддува -выполняют так, что за все время работы
соблюдается неравенство /?ir/p6<pi<p. В этом случае на входе в бак
скорость газа устанавливается равной скорости звука, а для
определения времени наддува можно использовать аналитическую
зависимость. Считая газ совершенным, подчиняющимся
уравнению состояния (8.3), из равенства (8.5) можно определить
значение давления в аккумуляторе в конце процесса наддува без
учета теплообмена с окружающей средой:
п —п V"(n п 1
Рб.к — Рб.н 7Г УРп.к Рим)9
Если воспользоваться уравнением изменения массы газа в
баллоне G«
где G определяется из выражения (8. 12) при q(K) = l9 то мож-
143
но прийти к следующему равенству, полагая расширение газа в
баллоне политропическим [с учетом уравнений (8.7) и (8.3)]:
я+1
=Р62П
dv
2n
Разделив переменные и проинтегрировав т от 0 до т, а р§ от
Рб. н До Рб. к, получим
т= 2Убг l(^) w -II. (8.14)
(л1)«/лг/^ LUJ J
Зависимость (8. 14) значительно упрощается, если в процессе
всего времени наддува давление в баллоне Рб и расход G не
меняются, т. е. наддув производится из рампы неограниченного (по
отношению к подушке бака) объема, а pn/p6<fW В этом
случае, используя уравнение энергии в виде ОсрТ^х=ип,к — ии,н и
зависимости (8.3) и (8.4), получим, что время наддува будет
определяться давлением газа в баке:
t=^(A,K~/U. (8.15)
Здесь G вычисляется из формулы (8. 12) при q(X) = l. При этом
температура газа в баке равна
Ти.к= Щ* —. (8.16)
Если предположить, что температура жидкости Тт и стенок бака
ГсТ в процессе наддува неизменны, то для случая постоянного
расхода газа G на входе в бак также можно получить
аналитическое выражение для определения времени наддува при
наличии теплоотдачи от газа в жидкость и к стенке бака. Пусть
значения коэффициентов теплоотдачи от газа к жидкости аж и к
стенке бака <хст являются постоянными и средними величинами
за время процесса наддува. Уравнения баланса массы газа Gu
и .внутренней энергии ип в баке можно представить в виде
^=0, (8.17)
dx
^=Qi-aMFM(Tu-TM)-aCTFCT(T,-Tcr). (8.18)
аи
Здесь / — энтальпия входящего газа наддува,
рассчитанная по 7V i=cpTq\
Fm, FCT — соответственно площадь поверхности зеркала
144
жидкости и стенок бака, ограничивающих
газовую подушку.
Интегрируя уравнение (8. 17) и выражая массу газа Gn
через ри и Ти по уравнению состояния, получим зависимость
Та = Тал-Е2- 1 . (8.19)
Л ?
п.н
Используя уравнения (8.19) и (8. 17), уравнение (8. 18) можно
привести к виду, удобному для интегрирования:
dTu 1 =Тим 1
dx а — ЬТп рим Q
где
д=.О-}-аж/?ж+ас1/7ст ; Ъ = kT6(д + a*F*T* + встает \
cv \ ЬсуТб )
После интегрирования получим выражение для определения
изменения температуры в баке по времени наддува
С другой стороны, изменение Гп по времени можно определить
из уравнения (8. 19), считая рп как параметр. Если рп. к задано,
то точка пересечения графиков 7"n=7n(t) даст искомое время
наддува бака до заданного давления рп. к с учетом теплоотдачи
от газа в стенку и зеркало жидкости. По полученному значению
Тп в момент т можно уточнить коэффициенты теплоотдачи аж
и аст и провести расчет заново..
При дозвуковом вводе газа в бак, когда рп/Рб>ркр для
случая рб=const и Tq=const (неограниченный объем баллона
аккумулятора давления), время наддува до заданного давления
Рп. к можно найти в квадратурах, если пренебречь
теплообменом с внешней средой. Подставляя в уравнение (8. 17) значения
G и Gn из (8. 11) и (8.3), получим изменение давления в баке
по времени в виде
dx
После интегрирования получим
1 г
V
Vn У k-\^ 6U/ У \Рб)
я получим
ЗГЛ г ЗГЛ
{к) :v u
где а=У kRT6 — скорость зв)ка в газе наддува.
145
В формулах (8.11), (8.12), (8.14), (8.21) под F
подразумевается минимальная площадь проходного сечения
магистрали наддува. В частности, если в системе перед баком
установлен жиклер, то F=:/7ee, где Fe —площадь проходного сечения
жиклера, а е — его коэффициент расхода, значение которого
зависит от формы жиклера и перепада давлений на нем.
В общем случае, когда давление в процессе наддува
меняется как в баке, так и в
аккумуляторе давления, а
процессы теплообмена газа с
окружающей средой
оказывают влияние на параметры
среды наддува, необходимо
рассматривать как
уравнения сохранения массы газа и
энергии его, так и уравнения
теплообмена с окружающей
средой. Используя уравне-
Рис. 8.3. Схема системы наддува с газе НИв ЕЛОВОГО баланса, УРаВ-
вым баллоном: нение теплообмена стенки
/ - баллон с газом; 2 - клапан; 3 - тру- бака С Окружающей СреДОЙ
бопровод; 4 — бак; 5 — свободный газо- мпжнп оапмгятк r rmttp
вый объем (газовая подушка) МОЖНО ЗаПИСЗТЬ В ВИДе
TJ^ (S> 22)
Здесь ?Ст, Уст, бет — соответственно теплоемкость, плотность и
толщина материала стенки бака;
(Хок — коэффициент теплообмена стенки с
окружающей средой;
Ток — температура окружающей среды.
Аналогичное уравнение записывается и для баллона
аккумулятора давления.
Таким образом, задача расчета изменения параметров по
времени в системе наддува, изображенной на рис. 8. 3, и
определение времени наддува бака до заданного давления сводится
к решению следующей системы обыкновенных
дифференциальных уравнений, полученной из законов сохранения массы и
энергии в аккумуляторе давления и в подушке бака:
— kRT6G — — ас
— Гст.б)
dv
dT6 _Тв (dP6 | RT6 ^
dv /?б \ dv Ve
kRTfjG — — [аст.п^с
dPn • \f
~dv~
146
ц ~ Тж)]
Vn
со
00
!jl_ t" ldP" RTuG\-
it Pn \ dx Vn /'
¦ +1
при
00
U
Здесь индексы «б» и «п» относятся соответственно к баллону и
к подушке бака.
Система уравнений (8.23), (8.24) может быть решена на
ЭВМ при использовании стандартных программ решения
обыкновенных дифференциальных уравнений, например, методом
Рунге — Кутта. Эта система решается совместно с известными
функциональными зависимостями от температуры и давления
коэффициентов теплоотдачи.
Зависимости, приведенные выше, справедливы для систем
наддува, в которых сопротивлением трубопровода,
соединяющего бак с аккумулятором давления, можно пренебречь. Если
это сопротивление оказывает влияние на параметры потока и
давления на входе и выходе из трубопровода в сечениях /—/ и
2—2 (см. рис. 8.3) не равны, то систему уравнений (8.23),
(8. 24) следует решать совместно с зависимостями потерь
давления по длине трубопровода, сопротивление которого
характеризуется коэффициентом сопротивления ?я. Здесь & включает
в себя как сумму коэффициентов местных сопротивлений ?м*
агрегатов управления потоком газа, установленных на
трубопроводе, так и коэффициент сопротивления трения ?тр
трубопровода, имеющего длину / и диаметр dT, т. е.
Из уравнений сохранения количества движения, энергии и
неразрывности для стационарного потока газа, движущегося без
теплообмена с окружающей средой, в работе [1] получена
зависимость между коэффициентами скорости во входном и
выходном сечениях трубопровода наддува:
±-±—2\п±=-?-Ь:. (8.25)
Ц Ц h k + 1
Эта зависимость была решена на ЭВМ для различных
значений коэффициента сопротивления Cs, а результаты расчета
для k= 1,4 приведены на рис. 8. 4.
147
Если использовать газодинамическую функцию
(8.26)
то секундный расход газа в t-м сечении (где /=1, 2) можно
выразить через статическое давление рс
(*i). (8.27)
200 WO 60 JO 15 8 O,t
?=300 150 80 40 20 10 6 M
i
Ш
11//Л
ш
i
0.05 0,10 0,15 A,
0.1
C.2
0,3
0,4
0,5 0,6
0,7
0.8 A,
Рис. 8.4. Зависимость между коэффициентами скорости и коэффициентом
гидравлического сопротивления
Для определения q(X) можно воспользоваться выражением
(8.13). Отсюда
Р2У (^2)=/W (^i)« (8.28)
Если ^2<1, то Р2=Рп и в этом случае при известных
значениях ри и рб из уравнений (8.25) и (8.28) [учитывая (8. 13) и
(8. 26)] можно определить Х\у к2 и, следовательно, расход из
уравнения (8.27). Таким образом, систему (8.23) следует
решать совместно с зависимостями (8. 25) — (8. 28).
При установлении в выходном сечении трубопровода
скорости потока, равной скорости звука, когда Х2=1, зависимости
упрощаются, так как h из уравнения (8.25) определяется
непосредственно, а расход газа G —из уравнения (8. 12). Далее
148
при найденном значении расхода решается система
уравнений (8.23).
Режим течения в выходном сечении трубопровода
определяют следующим образом. Задавшись А,2=1, находят Х\ из
уравнения (8.25) и q(h)—из (8.13). Так как для A,i=l
у(Я2)=Ркр [-см. зависимость (8.26)], то из уравнения (8.28)
следует, что дозвуковой режим течения существует лишь до
момента, когда выполняется неравенство
¦?*¦> . (8.29)
/>п M(xi)
Легко показать, что для случая наддува без теплообмена,
определяемого зависимостями (8. 5) и (8. 14) при звуковом
вводе газа в бак, с учетом сопротивления магистрали зависимость
(8. 14) преобразуется к виду
х=
где К\ определяется из уравнения (8. 25) или по графикам рис.
8.4 для Л2=1,0, a q(K\) находится из выражения (8. 13).
Если в магистрали наддува на входе в бак установлен
дозирующий жиклер, площадь проходного сечения которого Ft>
а коэффициент расхода е, то для определения расхода газа G
уравнения (8.25) и (8.28) дополняются уравнениями
неразрывности течения между сечением 2—2 в трубопроводе и
сечением Fz в узком сечении трубопровода
q(h)=<!(K)^f. (8.30)
В этом случае при дозвуковой скорости газа в узком сечении
жиклера X* < 1
АЛ (8.31)
Считая рб и рп известными, из уравнений (8.25), (8.28), (8.30),
(8.31), например, методом подбора [что легко предусмотреть в
программе при решении систем уравнений (8.23)], задаваясь
различными значениями Хе, можно определить qCk\), */(^i), P2
и из уравнения (8. 27) — G.
Если перепад на жиклере критический, т. е. ри-П(К2)IР2^
^Ркр, то в узком сечении жиклера скорость потока будет
равна скорости звука, Хе = 1, a q(X2)=Fes/F. Зная 9(^2) и ta> из
уравнения (8.25) легко определить Х\ и q(K\)> а из уравнения
(8. 27) — G.
В некоторых случаях при дозвуковом движении газа по
трубопроводу наддува расход газа G можно рассчитать и непо-
149
средственно по давлениям р\ и р2. Если процесс движения
среды происходит политропически с показателем я, то для
параметров давления рх и плотности qx в сечении х можно записать
/>,=А-(-У- (8-32)
Полагая зависимость коэффициента сопротивления по длине
магистрали линейной и обозначая коэффициент сопротивления
единицы длины трубопровода через ?*, а скорость потока в
данном сечении wx, можно определить потери полного давления
dp* на участке трубопровода dx как по потерям скоростного
напора dp=^x-dx —, так и по уравнению импульсов dp* =
=d(px+Qxw2x), так что
d (px+Qxwl) = l. ^p dx. (8.33)
Так как при установившемся движении газа по трубопроводу от
сечения 1—/ до сечения 2—2 можно положить, что
то подставляя в (8.33) зависимость (8.32), после
интегрирования с пределами по длине от 0 до / и по давлению от р\ до р2
получаем
Выражение (8. 34) позволяет получить аналитическое
решение для определения времени наддува при дозвуковом вводе
газа в бак с учетом сопротивления магистрали без теплообмена
с внешней средой, когда давление на входе в трубопровод
наддува р\ и температура газа Т\ неизменны.
Нетрудно показать, что при дозвуковом движении газа по
трубопроводу слагаемое —In— существенно меньше Са и им
п Р2
можно пренебречь. Тогда, полагая, что давление в выходном
срезе трубопровода равно давлению в баке рп=р2 и подставляя
выражения (8. 16) и (8,34) в (8. 17), после несложных
преобразований с учетом (8. 3)
получим — dX =Fna.v (Vn V^)'1 dx, (8.35)
150
Для решения уравнения (8. 35) с разделяющимися переменными
представим [1 — X п J 2 в виде ряда
(л+1\ 1_ п+1 - 2 (я+1) _ „ 3 (л+1)
"" ' ~ '"Т '2^4 "*" 2.4-6 +•••
(8.36)
Подставляя уравнение (8.36) в (8.35), после интегрирования
получим
Vn V С« IГ л.. .. л_ „1 . 1 л I / л„ ..ч ~ ' - к " - '
t =
Г 2/r+l 2д+1|
а aJT2 2n + lLUJ I Pi / Г
Г З/г+2 вл+2-j \
Ь3 п 1Щ n (p^\ n hi (8>37)
2.4 3л+2 L\Pi / U/ Г )
Ряд в правой части при — <С1>0, как это видно из уравнения,
Pi
быстро сходится и поэтому при расчетах бывает достаточно 2—
3 членов разложения.
8.3. ВЛИЯНИЕ ГАБАРИТОВ ТРУБОПРОВОДА НАДДУВА
НА КОНЕЧНОЕ ДАВЛЕНИЕ В БАКЕ
К числу требований, предъявляемых к системам
предстартового наддува, как уже отмечалось, относится требование
обеспечения давления в топливных баках в заданном диапазоне,
определяемом нормальной работой двигателя при запуске. Выход за
минимальную границу диапазона может привести к кавитации
насосов двигателя, а превышение максимальной границы может
не обеспечить заданное расчетное количество компонентов
топлива, приходящих из бака в камеру сгорания, что повлияет на
процесс запуска. При предстартовом наддуве баков по схеме,
приведенной на рис. 8. 3, выключение клапана отсечки газа
производится, как правило, автоматически от реле, настроенного
на заданное давление. Длина трубопровода от клапана до бака
может быть весьма значительной в зависимости от габаритов
ЖРДУ, так как этот млжпа» работает только во (время
предстартовых операций, и поэтому желательно размещать его в
наземном оборудовании, а не на ЖРДУ. Газ, оставшийся в
трубопроводе, поступит в бак и давление в нем будет,
очевидно, выше давления настройки реле, что необходимо учитывать
при проектировании систем наддува.
Пусть в момент выключения наддува расход газа,
движущегося по трубопроводу длиной / и диаметром D, известен и
равен (/.Предположим, что коэффициент потерь на трубопроводе
длиной х равен сумме Сдг=^Тр"^-+См и пропорционален расстоя-
151
нию от клапана, т. е.
Здесь Х% —эквивалентный коэффициент сопротивления трения,
равный ^?р=^тр+ —-См- В трубопроводе, где газ движется от
сечения 1—/ к сечению 2—2 (см. рис. 8.3), направим ось х
противоположно движению потока. Для нахождения скорости
wx в сечении х воспользуемся определением критической
скорости звука по параметрам во входном сечении трубопровода
R\. (8. 38)
В длинных трубопроводах при дозвуковом движении или при
больших значенияхАтр— можно пренебречь членом 2In— (по
D h \
сравнению с С] в уравнении (8.25) и считать, что
коэффициент скорости Хх равен
В принятой системе координат выражение для скорости
газа в сечении х можно записать в виде
wx=-—. (8.40)
dv
Подставив сюда выражения (8.38) и (8.39), получим
уравнение с разделенными переменными
^ +J^.JL .dx. (8.41)
Поскольку расход таза и распределе/ние давления по
трубопроводу в момент выключения наддува известны, то известно и
значение коэффициента скорости в выходном сечении %%•
После интегрирования (8.41) в пределах по длине
трубопровода от х=0 до х=1у получим время прохождения газом
магистрали перед выключением наддува
Здесь С=^Тр ЬСМ —сумма коэффициентов сопротивления
всего трубопровода от аккумулятора давления до бака.
Так как расход газа в единицу времени равен G, то общее
152
количество рабочего тела, находящегося в трубопроводе, будет
определяться произведением GTp=G-t.
Используя уравнения баланса массы и энергии вида (8. 8)
для системы трубопровод — бак получим следующее выражение
для давления рп в подушке после закрытия клапана и
перетекания газа из трубопровода объемом Ктр в газовую подушку бака
объемом Уп* '
Здесь рп. к — давление в баке в момент закрытия клапана.
8.4. НЕКОТОРЫЕ ВОПРОСЫ ДИНАМИКИ СИСТЕМ
НАДДУВА И ДРЕНАЖА
Особенность проектирования систем наддува ампулизирован-
ных ракет приводит к необходимости соблюдения некоторых
условий, основными из которых являются:
— расположение основных элементов системы наддува
(предохранительных клапанов (ПК) и реле давлений) в неампули-
зированной зоне с целью изоляции их от контакта с парами
агрессивных компонентов;
— своевременное соединение полости, в которой находятся
указанные выше элементы наддува, с ампулизированной
полостью подушки перед началом наддува;
— обеспечение надежного наддува газовых подушек до
заданных значений через дренажные коммуникации, проходящие
через полости предохранительных клапанов, т. е. обеспечение
одинакового давления в газовой подушке и полости корпуса
предохранительного клапана при наддуве л дренаже газовой
подушки через один и тот же канал.
Кроме того, наличие вибраций и ударных перегрузок
оказывает существенное влияние на статические и динамические
характеристики агрегатов систем наддува и дренажа, особенно при
малых газовых подушках в баках.
При выборе места расположения систем наддува и дренажа
необходимо учитывать также условия истечения газа в
атмосферу на начальном активном участке полета. Динамические
явления, возникающие при предпусковом наддуве, а также на
активном участке полета, должны рассматриваться в комплексе
при исследовании всей системы в целом. При этом необходимо
учитывать объемы газовых подушек, динамические
характеристики подвижных элементов предохранительных клапанов,
конструктивное выполнение и параметры подводящих газ систем
наддува и отводящих газ магистралей дренажа.
Необходимость кратковременного наддува газовых подушек
приводит к созданию систем наддува с такими располагаемыми
153
перепадами давлений, которые не срабатываются полностью на
жиклерах, местных сопротивлениях, трубопроводах. При этом
образуется недорасширенная сверхзвуковая струя. Характерной
особенностью нерасчетной сверхзвуковой струи является
существенная неравномерность потока: параметры газа сильно
меняются как по длине струи, так и по радиусу поперечных сечений.
В зависимости от начального давления на срезе сопла при
входе в полость клапана, угла среза сопла и отверстия в газовую
подушку картина истечения газа может быть различной. При
определенном соотношении этих параметров давление в
полости предохранительного клапана, куда подсоединено реле
давления предпускового наддува, может не совпадать с давлением
в газовой подушке бака. Для определения давлений в полости
ПК и в баке необходимо знать в каждый момент времени
наддува распределение расхода в эти полости. Расположение в
полости предохранительного клапана специальных отражателей
позволяет выравнять давления в полости ПК и в баке.
В зависимости от длины магистралей предпускового
наддува, величин давлений в баллонах наддува, объема газовой
подушки бака и разности давлений настройки
предохранительного клапана и реле давления происходит передув отсеков до
давлений, часто превышающих величину давления начала открытия
предохранительного клапана. В связи с наличием трения и
конечной массы подвижных элементов клапана имеет место
запаздывание в открытии и затем в закрытии клапана после сброса
избытка газа. Это приводит к нерасчетному снижению давления
в баке.
Существенными факторами, способствующими надежному
функционированию предохранительного клапана, является
правильный выбор места его установки на ра:кетечносителе, их
взаимное расположение с (подвижными элементами
клапана, оптимальное соотношение внутренних полостей агрегата с
размерами магистралей и мест их вывода за борт. Расположение
их вблизи носовой конусной части ракеты-носителя приводит к
ситуации, способной вызвать нерасчетное падение давления в
газовой подушке цри (переходе ракеты-носителя через скюрость
звука или, вернее, !Шгда скорость газа на конусной части станет
равной местной скорости звука. Величина падения давления в
баке при этом будет зависеть от того, в каком положении в
данный момент находилась тарель клапана и каково значение
давления в данном объеме газовой подушки отсека.
Одним из существенных факторов, влияющих на
работоспособность ПК, является действие возрастающей перегрузки на
подвижную часть ПК (тарель и шток), ось перемещения
которого расположена перпендикулярно действию перегрузки. Для
выявления функциональной связи между величиной перегрузки и
параметрами предохранительного клапана необходимо
рассматривать его пневматическую схему работы, так как с ростом вели-
154
чины перегрузки может наступить такой момент, когда момент
несбалансированных массовых сил становится равным или
может быть больше момента аэродинамических и других сил, что в
конечном итоге может привести к нерасчетному повышению
давления в баке.
8.5. ПАРАМЕТРЫ ГАЗА В БАКЕ ПРИ ПРЕДПУСКОВОМ
НАДДУВЕ С УЧЕТОМ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
СИСТЕМ
Выполнение систем наддува по схеме, где дренажно-предо-
хранительный клапан (ДПК) установлен на магистрали
наддува, как приведено на рис. 8. 5, дает определенные
конструктивные преимущества. Во-первых, уменьшено число сверлений на
баке, что повышает его герметичность и прочностные
характеристики. Во-вторых, наличие патрубка
ввода дает возможность заправить бак
без опасения попадания компонента в
ДПК и систему наддува, что особенно
нежелательно при применении токсичных
агрессивных компонентов. В-третьих,
выполнение дренажной системы наддува в
одном агрегате дает определенные
преимущества с точки зрения эксплуатации,
ремонтных работ, монтажа и др. Однако
для такой схемы выполнения характерно
наличие существенных недостатков,
заключающихся в том, что давление в баке
в процессе наддува в определенные
моменты может существенно отличаться от
расчетных значений, особенно при малых
подушках, вследствие колебательных
явлений в патрубке, полости клапана и
динамическом звене, определяемых
инерционностью этих элементов. Поэтому при
проектировании таких систем конструктор должен располагать
определенными рекомендациями по выбору параметров
элементов: длины патрубка ввода, его диаметра, объема полости
клапана, жесткости пружины, массы подвижных систем и пр. Эти
рекомендации могут быть получены только после проведения
расчетов по изменению параметров в системе и влиянию на эти
изменения особенностей конструкции.
Для решения поставленной задачи следует определить не
только параметры в баке, но давление рк и температуру Тк газа
в полости клапана, имеющего объем VK, которые могут быть
найдены из уравнений баланса массы и энергии (8. 17), (8. 18),
если расход газа G и его температура Гвх заданы.
(Теплоотдачей в окружающую среду для упрощения можно пренебречь
155
Рис. 8.5. Схема системы
наддува с дренажно-предо-
хранительным клапаном
(ДПК):
/ — бак; 2 — патрубок
ввода: 3 — дренажно-предохра-
нительные клапаны; 4 —
трубопровод наддува
ввиду относительно короткой продолжительности процесса)
а^ ^ (8.43)
где бб, GK — расход газа в единицу времени из полости
клапана, соответственно в бак и в окружающую среду, давление
которой рок-
Если обозначить высоту подъема тарели клапана над
седлом— К диаметр проходного сечения — DK, то для GK можно
записать выражение, аналогичное зависимостям (8.24):
при
Р
при
radter-frn (8-45)
Величина подъема тарели h находится из уравнения
колебательного процесса груза, подвешенного на пружине:
приА<0 h=0
при А>0 d2L=^.P!LZl™ e-h-g. (8.46)
dx* 4 mM /и„.ч s к ;
Здесь рн. о — давление, соответствующее началу движения
тарели (характеризует предварительную затяжку
пружины);
g — ускорение свободного падения;
апп. ч — приведенная масса подвижных частей;
с — жесткость пружины.
Если под Fu понимать площадь проходного сечения
патрубка, коэффициент сопротивления которого ?п, то расход газа Gq
можно определить из уравнения (8. 34) со следующими
условиями смены направления движения:
при Рк>Рп Ра=Рю Pb=Piv Та=Тю Об=Оь;
Рк<Рп Pa = Pn> Pb = Pv Та=Тю Об=-(?б,
pJ-pj) Л1
I/ (k + l)RTa
r
где Ол= I/ /fe + l)/?rfl 2 j^~'иа • vv-"r<;
k Рь
Из'меивние параметров (рп, Ти) в батсе тт:ри его даддуве с
учетом влияния динамического звена может быть найдено при ре-
156
шении на ЭВМ системы уравнений баланса массы и энергии
газа в (баке [ом. три (последних уравнения системы (8.23) с
учетом уравнений (<8.43) — (8.47)]. При этом попользуется один из
известных методов решения системы обыкновенных
дифференциальных уравнений, например, метод Рунге — Кутта, Эйлера
и т.д.
8.6. РАСЧЕТ ДРЕНАЖНЫХ СИСТЕМ
Дренажные системы баков являются вспомогательными и
предназначены для сброса излишков газа при заправке,
предстартовых операциях и в полете, чтобы давление не вышло за
допустимые пределы, определяемые прочностью или
работоспособностью двигателя и агрегатов. Дренажные системы
функционируют, например, при продувке баков и в аварийных случаях
при незакрытии клапана наддува после достижения давления,
равного настройке реле предстартового наддува.
При расчете системы дренажа, как правило, возникают два
основных вопроса: 1) какой расход газа может пропустить
система при заданном конструктивном исполнении; 2) какую
минимально возможную площадь проходного сечения системы
можно допустить при заданных давлениях в баке и на выходе из
дренажной системы.
Первый вопрос возникает на стадии проектирования
системы, когда заданы расход дренажного газа, давление в баке и в
среде, куда сбрасывается дренируемый газ. Второй случай
характерен для расчетного обоснования выбора параметров
систем наддува, заправки, продувки и т. д. В обоих случаях для
ответа на поставленные вопросы можно воспользоваться
формулой (8. 34), где под р\ и Т\ следует понимать давление и
температуру на входе в дренажную магистраль (параметры в
баке) , р2 — давление в выходном сечении.
В некоторых случаях критерием оценки достаточности
пропускной способности дренажной системы служит время падения
давления в баке при принудительном открытии дренажно-предо-
хранительного клапана. При критическом режиме истечения,
когда скорость газа в выходном сечении дренажной магистрали
равна скорости звука и Яг=1, время падения давления в баке
может 'быть опредвленоаю'фор«муле (8.29а), еслилодрблонимать
давление в газовой подушке. Такой режим существует лишь до
тех пор, пока выполняется неравенство (8.29), где рп — давление
окружающей среды. При дальнейшем уменьшении давления в
баке устанавливается дозвуковой режим течения по дренажной
магистрали. В этом случае, используя зависимости (8. 17), (8.34),
(8.3), (8.7), можно прийти к такому соотношению между
давлением в подушке бака рп и в выходном сечении дренажной
магистрали рОк, которое равно давлению окружающей среды,
куда происходит истечение:
157
dX== ^-=г-**?*ЛХ*)~<1х* (8.43)
i_ i_
/2nRTu и \r t Рок \n \s (Рок \п
П + 1 \ Pn I \Рп.я I
1
Представим {Xn+l— 1) 2 в виде ряда
(* \)х+ X
и после интегрирования будем иметь
Я—
[л-
зп+1-
Ряд (8. 49) быстро сходится и поэтому в практических расчетах
вполне достаточно 2—3-х членов разложения.
Глава 9
ГАЗОВАЯ ПОДУШКА ТОПЛИВНОГО БАКА
9.1. ПРОЦЕССЫ В БАКЕ ПРИ ЗАПУСКЕ ДВИГАТЕЛЕЙ
В момент запуска двигателей открываются пусковые
клапаны в расходных магистралях, объем газовой подушки в баке
увеличивается за счет истечения компонентов топлива и при
анализе процессов уравнения баланса массы и энергии это
изменение объема должно учитываться. Поскольку период запуска
двигателей характеризуется наличием градиентов основных
параметров, то процессы в пневмогндравлических системах
ракеты будут носить также нестационарный характер.
В ракетных установках, использующих турбонасосную
систему подачи компонентов топлива в камеры сгорания, как
правило, для наддува баков в полете устанавливают специальные
газогенераторы. Рабочее тело наддува, получаемое ,сжиганием
основных компонентов топлива или каких-либо других
реагентов в камерах газогенераторов, имеет более высокую
температуру, чем компоненты в баке и является смесью газов и паров.
При наддуве относительно холодной подушки горячим газом
существенную роль в изменении параметров играют теплообмен-
ные процессы и могут создаться благоприятные условия для
158
фазовых переходов (конденсации или испарения), если рабочее
тело наддува содержит пары с высокими критическими
значениями температуры и давления. В общем случае для любого
фазового перехода требуется время, однако исследования,
проведенные различными авторами [15, 16], показали, что время
это мало и поэтому в настоящее время при исследовании внут-
рибаковых процессов вводят упрощающие предпосылки,
полагая изменение состояния вещества в баке квазистатическим,
т. е. в каждый момент времени все фазы считаются
находящимися в термодинамическом равновесии. Изменение температуры
газа в баке может способствовать также прохождению
различных химических реакций, если рабочее тело наддува в своей
смеси содержит химичекжи активные составляющие. В
частности, возможны реакции диссоциации, рекомбинации и др.
9.2. РАСЧЕТ ПАРАМЕТРОВ ГАЗА В БАКЕ
ПРИ ЗАПУСКЕ ДВИГАТЕЛЕЙ
При расчете параметров и исследовании процессов в баках
обычно полагают, что как смесь газов, так и ее отдельные
составляющие подчиняются уравнению состояния идеального газа
вида (8.3) [17, 26]. При этом под газовой смесью
подразумевают механическую смесь, в которой составляющие ее газы
неизменно сохраняют свою химическую индивидуальность. Если
смесь занимает объем Vm температура в котором Гш то для
выделенного t-ro газа, имеющего массу G*, уравнение может
быть представлено в виде
РУП=О^ТП. (9.1)
Давление газовой смеси /?п на основании закона Дальтона
равно сумме парциальных давлений
Если массовое содержание /-го компонента в смеси, имеющей
массу Gn, обозначить gi=Gi/Gn, то из уравнений (9. 1) и (9.2)
можно получить выражение для газовой постоянной смеси /?п
Л- (9.3)
Используя свойство аддитивности, аналогичные зависимости
можно найти и для теплофизических характеристик cPf Cv, k
и т. д.:
(9.4)
159
Здесь т — молекулярная масса омеси;
rrii — молекулярная масса компонента;
Фг — объемная доля.
Для нахождения функций, выражающих условие
совместного существования пара и жидкости /-х компонентов смеси в
термодинамическом равновесии и для фазовых переходов, будем
считать, что система пар — жидкость для каждого компонента
гетерогенной смеси в баке подчиняется уравнению Клапейрона —
Клаузиуса, основанному на предположении, что давление паров
Pi найдено для плоской поверхности жидкости при температу-
ре Г. [15]:
Здесь г,- — теплота фазового перехода /-го компонента.
Под скоростью изменения парциального давления будем
понимать выражение
dx RjTl dx
Если известна зависимость давления упругости паров /-го
компонента от температуры р^=}(Ти), то скорость фазового
перехода (С;)ф можно записать в виде
Если газ наддува содержит компоненты, между которыми
могут проходить химические реакции, то при расчете изменения
параметров газовой подушки бака следует учитывать
тепловыделение и изменение массы отдельных составляющих
компонентов. Пусть в баке между газовыми составляющими
компонентами А, В, D, E, S, Y происходят реакции двух типов с выделением
тепла ^Qa на 1 моль вещества А и Qe на 1 моль вещества Е:
(9.7)
(9.8)
где a, b, s, w, е, у — число молей соответствующих реагентов.
Предположим, что время установления равновесия в реакции
(9. 7) соизмеримо со временем наддува. Тогда скорость прямой
реакции их может быть найдена из 'закона действующих масс
реагирующих компонентов по изменению мольной концентрации
cD вещества D (или любого другого реагента) [681:
их = кгсаА 'CbB — k2cdD- csSi (9. 9)
где k\ и k2 — константы скорости соответственно прямой и
обратной химических реакций.
Обозначив через m и q .с соответствующим нижним индексом
молекулярную массу и плотность реагентов, из уравнения (9. 9)
160
можно получить выражение для массовой скорости изменения
веществ в виде
dx Al \тА } \тВ ) \mD ) \ mS) \ к '
^1^Д (9.11)
dx a mA dx
. (9.)
dx a mA dx
dJs-=—L.!!±^A-. (9.13)
dx a mA dx
В реакции (9. 8) время установления равновесия будем считать
бесконечно малым и несравнимым со временем нгддува. Тогда
уравнение кинетики химической реакции может быть записано с
использованием константы равновесия &р, определенной по
парциальным давлениям реагентов
(9Л4)
Пусть для гетерогенной смеси наддува индекс «н» относится к
нейтральным компонентам смеси, т. е. не участвующим в
химических реакциях и фазовых переходах, индекс «/» относится к
компонентам, способным при определенных условиях
участвовать в фазовых переходах (конденсации или испарения), а
индекс «/» характеризует параметры компонентов, участвующих в
химических реакциях. Для общности рассуждений будем также
полагать, что компонент «?» может изменять свое агрегатное
состояние при изменении температуры и давления. При приня!ых
обозначениях уравнения баланса массы Gn и энергии газовой
смеси ии в подушке бака можно записать в виде
22= =6-Ог-(О,)ф-@?)ф, (9.15)
^ Qa/n^) (9Лб)
dx dx
где Gg — расход газа через ДПК в единицу времени;
(О)(О)ф — масса газовых компонентов, соответственно
/ и ?, выпадающих в конденсат в единицу
времени;
Qa — суммарное количество тепла, подводимое к
газу в единицу времени.
Для >чета изменения количества отдельных газовых
компонентов смеси в подушке бака используются уравнения баланса
массы составляющих
6 3205 161
(9.17)
(9.18)
х, (9.19)
^ g{^^ (9.20)
где индекс «с» — обозначает расход соответствующего
компонента в бак в единицу времени с газом наддува; индекс «g>\
характеризует секундный расход составляющей смеси из бака
через ДПК; индекс «ф» — выпадение в конденсат; индекс «х» —
изменение массы компонента смеси вследствие химических
реакций.
Расход газа из подушки бака через ДПК Gg может быть
найден с использованием дроссельной характеристики ДПК в
зависимости от суммарного давления рп и давления начала
открытия ДПК — рн. с
При Pn>Pn,0Gg=Q(Pn)> при Pn<Pa.oGg=0. (9.21)
Для каждой газовой составляющей «q» смеси (где под q
подразумеваются индексы компонентов, составляющих смесь)
расход через ДПК определяется в предположении аддитивности
свойств компонентов в смеси
W<=ir-P?0'- (9-22>
Здесь pq — парциальное давление компонента «q» газовой
смеси;
т— молекулярная масса смеси.
Скорость фазового перехода (С;)ф и {GE)$ в уравнениях
(9. 18), (9. 19), как уже отмечалось, находится по
зависимостям (9.6) или (9. 5) с учетом уравнения состояния.
Для определения скорости изменения газовой фазы
(—-) , (—-) при прохождении химических реакций (9. 7),
V dv /х \ dv lx
(9.8) используются уравнения кинетики химических реакций
(9. 10) — (9. 14) и уравнения состояния (9. 1):
()9 (9.24)
а тА \dx )x
(<?*) =-1.ЭД, (9.25)
V dv /х а тА \ dx /х
162
Здесь Л — универсальная газовая постоянная.
Будем считать, что суммарное количество тепла Qa,
подводимое в газовую подушку, сключает следующие составные
части:
Qbx — тепло, входящее в бак с газом наддува (при
известных значениях температуры газа Гвх и скорости ивх во
входящем устройстве):
(9-30)
Qg — тепло, уносимое с газом через ДПК:
где К—показатель изоэнтропы, К=ср1су\
С?Ф — тепло, выделяемое при фазовых превращениях:
Q*=rj(Oj)t+rB(QE)^ (9.32)
Qx — тепло, выделяемое в результате химических реакций:
Qct, Qm — тепло, отданное в стенку бака и зеркалу
жидкости:
Qcr=-acfcr(Tn-Tcl), (9.34)
Зж^-аЛР'п-Т1»). (9.35)
Для определения средней температуры стенки Тст бака
используется уравнение теплового баланса:
с^у„Ь ^=асЛТп-ТС1)-а0К(Тсг--Т0К\ (9.36)
гДе Ток, аок — соответственно, температура окружающей среды
и коэффициент теплоотдачи от стенки в окружающую среду,
б» 163
Коэффициенты теплоотдачи aCi, a0K и аж могут быть
определены либо экспериментально в зависимости от температуры и
давления, либо по известным зависимостям в определенном
промежутке температур и давлений для определенных обобщенных
параметров: числа Прандтля, числа Нуссельта и т. д. Изменение
температуры верхнего слоя компонента 7Ж, как правило, мало,
особенно в начальный период работы, поэтому при расчетах
значение Тт можно принять постоянным. Для цилиндрической
обечайки бака текущее значение поверхности стенки FCT,
ограничивающей объем газовой подушки, будет равно:
dFc2L=±dVJL (937)
dx D6 d-Q v '
где D6 — внутренний диаметр бака.
Для удобства написания дальнейших выкладок под
функцией ер* (где ф=рп, Тп и т. д.) будем подразумевать
вектор-функцию составляющих газовых компонентов смеси, где / пробегает
значения /=#, /, Л, В, S.
Одновременно под множителем щ будем подразумевать
число молей соответствующих компонентов, участвующих в
реакциях. При этом для компонентов Я и / /iH=/ii=0, а для
компонентов А, В, S, П{ равно соответственно а, 6, —s.
Введем также множитель v, который будем считать равным
нулю для всех компонентов, кроме /=/. Для компонента у
v=l.
Используя полученные зависимости (9.5), (9.14), (9.21) —
(9. 37), уравнения баланса массы и энергии (9. 15)—(9. 20^
можно преобразовать к виду, удобному для определения давления,
температуры и парциальных давлений в газовой подушке б»ка
для данного момента времени т:
*?(9-38)
(9.39)
7
(здесь R — универсальная газовая постоянная),
d п л
(9.42)
(9.43)
dv A
dv А
164
d% A
dpw= Aw
d% A
dFC
dx Pav» I ^ nn m J
(здесь n=A, B, D, S, W, E, У, Н, j),
dx %— 1 ,
(9.44)
,9.45)
(9.46)
(9.47)
(9.48)
(9.49)
X F,, (Г, - Г„) - a, •
(ОЕ)Ф],
(здесь я=И, 5, D, S, W, E, У, Н, j),
(G.,)c Ol
РалР%
PdDP%
W
-h ~h f-pf l
(9.50)
165
0
-* Jtv -—У
_1_
Рз="Т Т" ШР1]Е А 'Ру'Р^\
a ikp J
1
Q « Г 1 e-w „у ,,-rfl"*
Р4=— Т~'^? -PvPd
Ое=Ое(р„) при />„>/>„.„,
Og=0 при А,</>н.о-
Определители Д„, Д^, Д„, получаются из определителя (9.50)
последовательной заменой в нем столбцов следующим столбцом:
/е
/=
где
/у
/о
U
/i —
{i=E' к«W)
Значения входящих параметров G, Гвх, UBXf (Gn)ci где /г =
=Л, В, D, S, W, Е, У, Н, j, считаются известными в течение
всего времени наддува и могут быть заданы либо численно, либо
функциональными временными зависимостями.
Система дифференциальных уравнений первого порядка
(9.38) — (9.49) является- линейной, разрешена относительно
первых производных, и решение ее может быть легко получено
с использованием ЭВМ одним из известных методов, например,
Рунге — Кутта, причем для получения однозначного решения
достаточно иметь одну вектор-функцию начальных условий.
Этими начальными условиями являются известные значения
искомых параметров рш Гш р%... /п, х, входящих в систему
уравнений (9.38) — (9.49), при т-=0, т. е. до момента поступления
газа наддува в бак.
При использовании метода Рунге — Кутта вначале из
известных зависимостей по значениям функций рш Тп определяют
значения хь г*... аст, аж, аок в момент т=0. Далее находят
комплексы /q, /x,..., A,..., /t,..., Id и вычисляют правые ча-
166
сти уравнений (9.38) — (9.49). Затем, используя стандартную
программу Рунге — Кутта, определяют значения искомых
функций рш Гп... во все последующие моменты времени при
заданных значениях входящих параметров G, TBX, UBXt (Gn)c.
9.3. АНАЛИТИЧЕСКИЕ ЗАВИСИМОСТИ ИЗМЕНЕНИЯ
ДАВЛЕНИЯ В ПОДУШКЕ БАКА ПО ВРЕМЕНИ
При проведении оценочных расчетов систему уравнений
(9.38) — (9.50) можно существенно упростить и в некоторых
случаях получить аналитическую зависимость для изменения
давления в баке по времени наддува. Пусть состав газа
наддува известен, идентичен газу подушки, травление через, ДПК
отсутствует (что справедливо при рп^Рн.о), г эффектами от
фазовых превращений, химических реакций и от теплообмена с
окружающей средой можно пренебречь. Используя уравнение
состояния (8. 3) и уравнение Прандтля — Майера ср — cv=R,
из (9. 16) можно получить зависимость для давления в виде
<*?»= W /^"й-Л (9.51)
Если изменение параметров газа на входе в бак G, Твх и
расхода компонента топлива из бака vc известно, то задача
сводится к интегрированию обыкновенного дифференциального
уравнения
(9.52)
где
-, /2(т)=-
В результате решения уравнения (9. 52) (которое легко может
быть найдено, например, подстановкой рп=Х (x)Z(x)), получим
выражение
А,=ехр (- J /я (г) ах) {J Л (т) [ехр (J /2 (т) rft)] dx +
(9.53)
Если параметры G, TBXy Vc считать постоянными и равными их
средним значениям за время т, то из (9. 53) получим
Рп=(/>,н--^)A + ^Г+-^ • (9.54)
167
9.4. РЕКОМЕНДАЦИИ ПО ВЫБОРУ НАЧАЛЬНОГО ОБЪЕМА
ГАЗОВОЙ ПОДУШКИ
Свободный от топлива газовый объем в баке (или подушку)
с точки зрения энергетики иметь нежелательно, ^ так как
при уменьшении заправляемого количества топлива снижается
суммарный импульс работы двигателей. Но наличие газовой
подушки продиктовано рядом причин, которые должны
приниматься (во внимание «при проектировании ПГС.
Во-первых, подушка служит демпфером при изменении
объема .компонентов топлива в процессе изменения температуры
в естественных условиях. Боли известен диапазон изменения
температуры компонентов топлива от tH до t, то минималыно
допустимый объем газовой подушки УП.д, обеспечивающий
демпфирование растущею давления жидкости ,на стенки бака, может
быть определен по формуле
где VK — объем компонента топлива в баке при температуре tn;
Уб — обьем бака при t=tn, рк, рб — соответственно
коэффициенты объемного расширения компоненту и материала бака.
Во-вторых, подушка уменьшает провал давления при
запуске двигателя, когда агрегаты наддува еще не вышли на режим,
а расход из бака уже существует. В этом случае минимально
допустимый объем газовой подушки Уп.д, обеспечивающий
устойчивую работу двигателей при запуске, может быть
определен только после решения системы уравнений (9.38) — (9.50).
Для этого, задаваясь несколькими значениями Vm можно
определить изменение давления рп по времени. То значение 1/п, для
которого кривая давления касается кривой минимально
допустимого давления рп.д, определяющего бескавитационную
работу двигателя, и будет минимально допустимым значением
объема газовой подушки Кп.д-
Обычно при оценочных расчетах для определения
минимально допустимых значений газовьТх подушек пренебрегают
влиянием тепловых процессов на давление в баке в период запуска
двигателя из-за того, что время запуска, как правило,
невелико (не превышает 2—3 с), а скорость тепловых процессов
конечна. Кроме того, минимальные значения давления в
подушке наблюдаются именно в период запуска, когда система
бортового наадува еще не вышла на режим, а расход на двигатель
из бака существует. Поэтому дренажный клапан в этот период
закрыт и Gg=0.
Принимая вышеизложенное во внимание, можно рассмотреть
ряд частных случаев, допускающих аналитическое
представление для определения Vu. д.
168
а) Если расход газа наддува в бак до момента ти при
запуске двигателей отсутствует, то значение минимально
допустимого объема газовой подушки может быть найдено из уравнения
политропического расширения подушки в баке с показателем
политропы
Здесь AV — объемный расход топлива из бака к моменту
времени тн;
Ра. в — давление в подушке в момент открытия пусковых
клапанов на расходных магистралях;
Рп.д — минимально допустимое давление в момент тн.
б) Полагая значения параметров G, fBX, Vc в промежутке
времени от т=0 до т=Тн постоянными и равными их средним
значениям
из уравнения (9. 54) получим следующую зависимость для
определения минимально допустимого значения объема газовой
подушки:
Двигатели второй, третьей и т. д. ступеней ЖРДУ, как
правило, включаются в работу по истечении некоторого времени
после старта. Из-за негерметичности дренажных клапанов,
обратных клапанов и других агрегатов, установленных на бакег
возможна утечка газа из подушки за время тс. з от момента
старта до запуска двигателей соответствующих ступеней и, как
следствие, падение давления в баке. Поэтому объем газовой
подушки перед стартом должен быть таким, чтобы при заданной
норме негерметичности агрегатов давление перед запуском
двигателя не упало ниже потребного. В этом случае минимально
допустимое значение объема газовой подушки в баке можно
найти из уравнения изотермического процесса расширения газа
у
пд—
п.д— Т~ ~ Г итр тс.з»
где GTP — расход газа в единицу времени из-за негерметичности
агрегатов. Как правило, значение GTp является заданной
величиной, так как находится в процессе автономных испытаний.
169
Глава 10
ПОВЕДЕНИЕ ТОПЛИВА В БАКАХ
В УСЛОВИЯХ НЕВЕСОМОСТИ
Полет космического аппарата на орбите искусственного
спутника Земли, а также в условиях космического полета под
действием притяжения Солнца и планет представляет по существу
свободное падение в гравитационном поле. В этих условиях
жидкое топливо в баках на борту космического аппарата
находится в условиях невесомости. Строго говоря, вероятность
полного отсутствия перегрузок на космическом корабле очень мала,
так как на него могут действовать силы, вызванные
аэродинамическим сопротивлением, солнечным давлением, электрическим
сопротивлением при прохождении радиационных поясов,
геомагнитным полем и другими внешними воздействиями. Кроме
того, ускорения могут возникать от вращения космического
аппарата вокруг его центра тяжести. Наиболее вероятно для
условия космического полета наличие очень малых ускорений,
имеющих порядок 10"* и менее от ускорения силы тяжести
Земли [26].
Условия практической невесомости могут проявляться и при
некоторых режимах полета, например, 'при выходе ракетъинснси-
теля из стартовых устройств, охри разделении ступеней до залу-
ска маршевого двигателя, при полете по траектории.
Топливные емкости ракет-носителей и космических аппаратов
дред>ставляют собой замкнутые системы жидкость — газ с
твердыми стенками. При отсутствии значительных массовых грашй-
тационных сил поведение жидкого топлива ib баках начинают
определять силы поверхностного натяжения на границе
раздела жидкость — газ и межмолекулярные силы взаимодействия
между молекулами жидкости (когезия) и молекулами
жидкости и твердого тела (адгезия). Однако эти силы незначительны,
в то же время на космических аппаратах, особенно сложных,
при их свободном полете могут возникать существенные
импульсы перегрузок при работе системы ориентации, коррекции
траектории полета, перемещениях космонавта, механических
ударах (например, при стыковке), ударах метеорных частиц и т. п.
Эти возмущения могут нарушить целостность массы топлива в
баке и разбить ее на многочисленные частицы и капли. В этих
сложных условиях космического полета возникает трудная
проблема по обеспечению надежного питания двигателя топливом
на всех режимах.
10.1. МЕЖМОЛЕКУЛЯРНЫЕ СИЛЫ
Межмолекулярные силы — поверхностное натяжение,
адгезия и когезия — определяются взаимодействием' между молеку-
170
лами двух сил: короткодействующими валентными силами и
дальнодействующими ван-дер-ваальсовыми силами. Хотя
механизм действия этих сил сложен, их статистически усредненные
эффекты поддаются описанию.
На поверхности раздела жидкости и газа действует сила,
называемая поверхностным натяжением. Эта сила
обусловливается тем, что силы межмолекулярного взаимодействия в
жидкости больше, чем в насыщенном паре этой жидкости. Сила
поверхностного натяжения неправлена внутрь жидкости по
нормали к поверхности. Слой жидкости на границе с ее паром,
в котором равнодействующие сил, действующих на молекулы,
отличны от нуля, называется поверхностным слоем.
Поверхностный слой оказывает давление на весь объем жидкости и создает
так называемое внутреннее давление в жидкости. Поверхностный
слой обладает по сравнению с остальным объемом жидкости
избыточной внутренней энергией, которая называется
поверхностной энергией. Толщина поверхностного слоя мала — несколько
мономолекулярных слоев, поэтому энергия поверхностного слоя
считается постоянной по толщине слоя, а так как объем
поверхностного слоя ничтожно мал по сравнению со всем объемом
жидкости, то можно считать, что поверхностный слой имеет
нулевую толщину, а поверхностная энергия пропорциональна
поверхности жидкости. Величина поверхностного натяжения,
называемого еще коэффициентом поверхностного натяжения <т,
по существу является работой, которую необходимо затратить
для изотермического переноса молекулы изнутри к поверхности
жидкости в случае, когда площадь этой поверхности возрастает
на единицу
VT
где Wc — работа обратного изотермического процесса
образования новой поверхности.
Коэффициент поверхностного натяжения имеет размерность
силы на единицу длины или энергии на единицу поверхности
(Н/м;МДж/м2).
Величина поверхностного натяжения для данной жидкости
зависит только от температуры. С повышением температуры
величина а уменьшается. Строгой научной теории температурной
зависимости а не существует и формулы зависимости а от
температуры носят эмпирический или полуэмпирический характер.
На поверхностное натяжение оказывает влияние наличие в
жидкости примесей, растворенных веществ; характер
окружающих паров мало влияет на величину а. Коэффициенты
поверхностного натяжения основных ЖРТ приведены в табл. 6. 2, 6. 3
гл. 6. В табл. 10. 1 приведены коэффициенты а некоторых
жидкостей, применяемых при модельных испытаниях.
171
Поверхностное натяжение действует не только на границе
раздела жидкости и пара, но также и на границе раздела
твердой и жидкой фаз, твердой и газообразной фаз. К точке К со-
Таблица 10.1
Жидкость
Азот
Парафин
Этиловый спирт
Этиловый эфир
Глицерин
Четырех хлористый
углерод
Вода — воздух
Вода — бензин
Вода — масло
Ртуть — воздух
Ртуть — пары
Ртуть — вакуум
Температура, К
77,1
327
293
293
291
293
298
293
293
291
288
288
Коэффициент
поверхностного
натяжения а,
Н/м
0,0083
0,030
0,022
0,0165
0,0645
0,0257
0,0719
0,035
0,020
0,4812
0,4870
0,4360
Газ
Твердое
тело
Жидкость
Рис. 10.1. Диаграмма сил
поверхностного нъ.1яжьннп на границе
раздела сред
прикосновения поверхности жидкости с твердой стенкой на эту
поверхность действуют три силы (рис. 10. 1).
стж.г—сила поверхностного натяжения между жидкостью и
газом;
Ож.ч — сила поверхностного натяжения между жидкостью и
твердой поверхностью;
о>. т — сила поверхностного натяжения между газом и
твердой поверхностью.
Поверхность жидкости будет находиться в равновесии,
когда равнодействующая этих сил будет равна нулю, т. е.
выполняться условие
<VT+<VpCOse-ar#T=0, A0.1)
где 6 — краевой угол, являющийся константой,
характеризующей взаимодействие данной жидкости с конкретным твердым
телом.
Из уравнения A0. 1), которое в литературе называют
уравнением Дюпре, следует, что
cos 6= «™-«ж.т , A0.2}
«ж. г
6=arccos g™-««.T . A0.3)
Площадь контакта жидкости с твердой поверхностью
определяется способностью жидкости смачивать твердые
поверхности. Смачивание происходит на границе трех фаз, одна из кото-
172
рых является твердым телом, а две другие —либо жидкость и
газ, либо несмешивающиеся жидкости. Взаимодействие между
жидкостью и поверхностью твердого тела называют адгезией,
которая оценивается работой, совершаемой для отрыва
жидкости от твердой поверхности, и измеряется в МДж/м2. Адгезия и
смачивание — это две стороны одного и того же явления.
Взаимодействие между молекулами в объеме жидкости
называют когезией.
Для объяснения явления смачивания уравнение A0. 1)
можно преобразовать следующим образом [73]:
°г.т — аж.т = аж.г' COS 6 -f /С,
где К — коэффициент растекания Харкинса, К= (<?г. т — Тж. т) —
— от. г cos 8.
Жидкость растекается при /С>0, т. е. когда адгезия (аг. т—
—аж.т) больше когезии (сгж.г-cose ), и не растекается при /«0.
Величину W9=Gm.r'C0S б называют энергией смачивания или
адгезионным напряжением. Адгезионное напряжение на
гидрофильной поверхности препятствует растеканию жидкости, на
гидрофобной — способствует растеканию. Более полно
взаимодействие жидкости с твердой поверхностью характеризует
работа адгезии, которая равна 1Га=аж.г+аг. т — от или W&=
= cbK.r(l+cos6). Для одной и той же жидкости работа адгезии
зависит от краевого угла, с увеличением краевого угла работа
адгезии уменьшается.
При когезионном разрыве разрушается граница жидкость —
жидкость, при этом образуются две поверхности раздела фаз
жидкость — газ, работа когезии равна удвоенному значению
свободной поверхностной энергии — поверхностного натяжения
образовавшихся жидких фаз:
На основе теории межмолекулярных взаимодействий
жидкости и твердого тела можно вычислить ориентировочные
значения величин №а, стж.г, аж.т cos в ого уравнениям [29]
а я-//2 '
где А — константа Ван-дер-Ваальса;
Я — расстояние между контактируемыми фазами;
°ж.г- 2'w*— 24.*-//?f
cos0=-l+2
173
Отношение
называется относительной работой адгезии. Из уравнения
A0.4) видно, что работа адгезии всегда меньше работы коге-
зии и только при полном смачивании (8=0) работа адгезии
может быть равна работе когезии, т. е. когезионно-адгезионный
отрыв может произойти только в условиях полного
смачивания. Во всех других случаях га<1, т. е. W&<Wk, и реализуется
адгезионный отрыв жидкости.
10.2. КРАЕВОЙ УГОЛ
Краевой угол cos 8=
аж.г
а)
гвердое тЫ0
является мерой смачивания
г
жидкостью твердой поверхности. Величина угла 6 зависит от
сочетания различных жидкостей с различными твердыми
веществами и меняется в интервале от 0 до 180° (рис. 10. 2).
Если 9 <90°, то жидкость хорошо смачивает поверхность
твердого Тьла — такие поверхности называются
гидрофильными. При 6>90° происходит
д<доо д*до° ограниченное смачивание
поверхностей — такие
поверхности называются
гидрофобными. В
инженерной практике жидкости в
сочетании с твердым
веществом классифицируются па
значению краевого угла,
который определяется экспе-
рИМеНТаЛЬНЫМ Путем ДЛЯ ИН-
ТеРеСУеМОЙ СИСТеМЫ ЖИД-
кость — твердое тело — газ.
Необходимо отметить, чта
краевой угол не зависит от гравитации, так как силы аг.т, <хж.т,
аж.г являются полностью межмолекулярными, но необходимо
учитывать, что в реальных условиях поверхности окружены
насыщенными парами жидкости, которые могут адсорбироваться
на твердой поверхности и изменять поверхностное натяжение н
краевой угол. В большинстве случаев наблюдается связь между
краевым углом и температурой, причем изменение краевого
угла от температуры зависит от абсолютного значения краевого
угла. Для 8>9СР (гидрофобная поверхность) краевой угол растет
с повышением температуры, для 6<90° (гидрофильная
поверхность) —(Краевой угол уменьшается с ростом темлературы.
С увеличением давления газа краевой угол растет.
Краевой угол обладает так называемым статическим
гистерезисом (или гистерезисом смачивания), который заключается
174
Рис. 10 2 Краеаой угол:
а - смачивающая жидкость; б - несмачиваю.
щая жидкость
в изменении краевого угла от начального значения 8Н при
контакте жидкости с твердой поверхностью до конечного значения
9К. Одной из причин гистерезиса является проникновение
жидкости в пористый монослой. При движении жидкости между двумя
поверхностями и в капиллярах проявляется динамический
гистерезис краевого угла, который определяет силу
капиллярного давления. Определить значение краевого угла 8 из
уравнений A0.2) и A0.3) практически невозможно, так как найти
расчетным или экспериментальным путем значения аг. т и аж.т
очень трудно. Для практических целей краевой угол находят
экспериментальным путем.
10.2.1. Методы определения краевого угла
Существует несколько методов определения краевого угла.
1. Непосредственное измерение краевого угла по форме
капли, находящейся на пластинке (рис. 10. 3).
Рис. 10.3. Определение краевого
угла по форме капли, находящейся на
пластинке:
/—экран; 2—увеличитель;
3—испытываемая поверхность с капчей
жидкости; 4—источник света
<Е
А
2. Методом наклона пластины, помещенной в жидкость
(рис. 10.4).
3. По высоте подъема слоя жидкости, примыкающей к
стенке (рис. 10. 5): sin 6=1— Ож^ •
аж.г
4. Методом погружения
твердого тела любой формы в
жидкость.
^___и Метод основан на измерении
у У^]~~- ~/l^cEjr-. массы твердого тела при погру-
r/r._-zr-;¦":"."- :Ts_?p_j_ жении ег0 в жидкость, когда про-
гилшугул я ' ~~ исходит втягивание или выталки-
futiuoou ниш р tiottepxi 4QL
Рис. 10.4. Определение краевого угла
методом наклона пластины, помещенной
в жидкость
Рис. 10.5. Определение краевого угла
по высоте подъема слоя жидкости,
примыкающей к стенке
175
вание твердого тела в зависимости от того, смачивается или не
смачивается оно жидкостью.
тт л g*(Q-At'S'h — Дш)
Для пластины cos 6= 6 —: — ,
где s — поперечное сечение пластины;
h — глубина погружения пластины;
Д/л — разность в массе между частично погруженной в
жидкость и сухой пластиной;
L — параметр смачинания.
Кроме этих основных методов определения краевого угла
существуют и другие, в частности, по форме прилипшей капли, по
малой капле, сажаемой на нить, по высоте подъема жидкости
в капилляре.
10.3. КАПИЛЛЯРНЫЕ ЯВЛЕНИЯ
Как было рассмотрено више, при контакте жидкости с
твердыми стенками на форму ее поверхности существенное влияние
оказывает смачивание, которое приводит к искривлению при-
, мыкающего к стенке
участка поверхности
жидкости. При достаточно
малых расстояниях
между стенками зоны искрив-
^— ления перекрываются и
i образуется мениск (рис.
щ
Смачивающая
тидиость
6<90°
несмпчиОакщия
пибносгпь
в>90°
Рис. 10.6. Капилляры
По периметру
поверхности жидкости,
находящейся в капилляре,
действуют силы
поверхностного натяжения,
направленные по касательной к этой поверхности. Так как поверхность
жидкости искривлена, то равнодействующая этих сил
приложена в центре и направлена по нормали в вогнутую сторону
поверхности. На границе раздела жидкости и газа давления в
сосуществующих фазах отличаются и определяются уравнением
Лапласа
где а — коэффициент поверхностного натяжения;
/?i и R2 — главные радиусы кривизны поверхности.
В частном случае сферической поверхности раздела (R\ =
=/?2=/?) уравнение Лапласа имеет вид Ajp=— .
R
Если поверхность раздела между газом и жидкостью
плоская, т. е. /?=оо, то Др=0.
176
В смачивающей жидкости под мениском капиллярное
давление отрицательное, под его действием жидкость всасывается в
щель до тех пор, пока вес столба жидкости (высотой h) не
уравновесит действующее капиллярное давление Ар.
В состоянии равновесия (и — 02)'%Ь=&Р= — °- »
где Qi; Q2 — плотности жидкости и газа; •
g — ускорение свободного падения.
Это формула Д. Жюрена.
Жидкость, не смачивающая поверхность, образует выпуклый
мениск, что вызывает ее опускание в капилляра ниже уровня
свободной поверхности (Л<0).
Высоту подъема жидкости в цилиндрическом капилляре
радиусом г можно определить из следующих соображений.
Сила, действующая по периметру капилляра, равна
Вес столбика жидкости в капилляре
a = nr2h(Ql — Q2
откуда
, 2<х cos 6
Qi — Q2
Высота подъема жидкости в капилляре тем больше, чем
меньше радиус капилляра, чем больше величина
поверхностного натяжения и чем меньше краевой угол. В капиллярах можно
двигать жидкость в необходимом направлении путем подбора
разности капиллярных давлений. Поток жидкости направлен в
сторону меньшего давления: для смачивающих жидкостей —
к мениску с меньшим радиусом кривизны (рис. 10.7)«
n^l-^ -
г > г Не смачивающая Смачивающая
1 жидкость жидкость
Рис. 10.7. Направление движения жидкости в капиллярах
10.4. КАПИЛЛЯРНЫЕ ЯВЛЕНИЯ НА СЕТКАХ
Каждую ячейку сетки можно представить как капилляр, на
котором образуется мениск. Рассмотрим случай,
представленный на рис. 10. 8. Работа сетчатого капиллярного разделителя
основана на явлении капиллярного давления, обусловленного
наличием поверхностного натяжения жидкости и силами
взаимодействия между жидкостью и сеткой. Так как большинство
7 3205 177
ракетных таплив смачивают сетки, то мениск образуется
выпуклостью в сторону жидкости. Сила капиллярного давления
А/7 направлена в сторону центра кривизны мениска, т. е. в
сторону газа, и стремится как бы «вытолкнуть» жидкость из
сетки. Но так как объем жидкости замкнутый, а жидкость
несжимаемая, то при уходе через сетку некоторого количества
жидкости из этого объема она должна быть замещена
соответствующим количеством газа. Однако силы капиллярного давления,
возникшие на поверхности пузырьков газа при их взаимодейст-
S
1
Рис 10.8. Удержание жидкости сеткой
вии с сеткой, препятствуют проникновению газа через сетку.
Удерживающая способность сетки, определяемая капи^лщжым
давлением на границе раздела газ — жидкость, равна
где R — радиус капилляра, образуемого сеткой с размером
ячейки б.
Удерживающая способность сетки может быть выражена
через высоту столба жидкости. Давление внутри жидкости вдоль
вертикальной сетчатой стенки изменяется по линейному закону
где q — плотность жидкости; пх — осевая перегрузка.
На некоторой высоте разница между давлением внутри
жидкости и давлением газа может стать меньше, чем перепад
давления на ячейках сетки за счет капиллярных сил. В этом
случае произойдет истечение жидкости и прорыв газа через
сетку. Эта высота жидкости называется «запирающей» высотой.
Таким образом, сетка удерживает жидкость до тех пор, пока
капиллярное давление больше разности гидростатических
давлений, действующих на наиболее удаленные друг от друга ячей-
178
ки сетки в направлении действия перегрузки. Это условие
записывается в виде
2а . ,.
где ф — угол между плоскостью сетки и направлением действия
перегрузки.
В первом приближении за радиус капилляра можно принять
радиус окружности, описанной вокруг ячейки с размером б,
тогда /?« 0,707 6 и уравнение принимает вид
Из этого условия можно определить «запирающую» высоту
сетки Язап, которая равна
или «запирающую» способность сетки, которая определяется
максимально допустимым размером ячейки,
. 2,83-а
^зап' Qnx- COS <p
Если замкнутый объем жидкости находится над сеткой,
расположенной нормально вектору действия ускорения (ф=90°),
то высота столба жидкости, удерживаемого сеткой,
определяется лишь условием превышения давления газа за сеткой над
суммой гидростатического напора жидкости и давления
насыщенных паров. Для сетчатых капилляров с размером ячеек 6=
= 80-т-140 мкм эта высота практически не зависит от размеров
ячеек и определяется соотношением
lj Po — Ps
"зап — —— •
Q-nx
Если же объем жидкости не замкнут (рис. 10.9), то сетка не
может удерживать жидкость. В этом случае сетка является лишь
обычным гидравлическим сопротивлением.
Из рассмотренных случаев можно сделать вывод, что
сетчатые устройства могут удерживать массу топлива в
определенных зонах топливного бака, например, в зоне заборного
устройства, в условиях невесомости и действия небольших
знакопеременных ускорений.
Кроме того, сетчатые устройства могут работать в режиме
сепарации. Рассмотрим случай, когда сетка установлена в
поток двухфазной смеси (рис. 10. 10). Газовые включения
скоростным напором прижимаются к сетке, в результате чего
возникают капиллярные эффекты. На пузырек газа со стороны
потока действует сила давления, определяемая потерями на сетке,
7* . 179
а со стороны сетки — капиллярное давление. Условие работы
сетки в сепарационном режиме можно выразить в виде
где ?с — коэффициент гидравлического сопротивления сетки.
Отсюда Яза„ > С^2 ,
где Q — расход через сетку; Fc — полная площадь сетки.
г/////////??
/7777//////
Рис. 10.9. Протекание жидкости сквозь
сетку
Рис. 10.10. Работа сетки в режиме
сепарации газовых пузырьков в
жидкости
Минимально потребная площадь хорошо смачивающейся
сетки F =0°; cose =1) определяется но формуле
7 _1 Ad
mm—J/ 2f
83<j.2
10.5. СТАТИКА ЖИДКОСТИ
В земных условиях при наличии гравитационного поля
маловязкие жидкости в достаточно большом объеме принимают
форму сосуда, в который они залиты. Свободная поверхность
топлива занимает положение, перпендикулярное действию
суммарных массовых сил. В общем случае это положение не обладает
минимумом свободной энергии. При отсутствии массовых сил
поведение жидкости будет определяться действием
межмолекулярных сил. При наступлении невесомости в системе будет
протекать процесс, ведущий к уменьшению свободной энергии
системы топливо — газ — стенки бака. В условиях невесомости
ограниченный объем жидкости, не соприкасающийся с твердыми
стенками и окруженный газом (паром), принимает под
действием поверхностного натяжения сферическую форму. Эта форма
отвечает устойчивому равновесию жидкости, так как сфера
обладает минимальной поверхностью при данном объеме и,
следовательно, минимальной свободной энергией системы.
180
При контакте жидкости с твердыми стенками на форму ее
поверхности существенно влияет явление смачивания.
Разумеется, решение задачи будет различным для емкостей различных
форм. Топливные емкости космических аппаратов чаще всего
имеют сферическую форму или форму цилиндра с сферическими
днищами. При наличии тяготения топливо находится в нижней
части бака, газ — в верхней (рис. 10.11, а). С наступлением
невесомости поверхность раздела смачивающей жидкости и газа в
точке соприкосновения с твердой стенкой образует краевой угол
пром*
Рис. 10.11. Положение смачивающей жидкости в сферическом баке:
а—равновесное состояние в гравитационном поле; б, в—равновесное состояние в
условиях невесомости
9, который равен краевому углу при наличии силы тяжести. На
границе раздела жидкость — газ создается разность давлений,
которая определяется условием Лапласа
Поверхность раздела принимает форму, при которой давление
во всех точках поверхности будет одинаковым, т. е. должно быть
выдержено условие—+— = const. Этому условию
удовлетворяет только сферическая поверхность. Так как в условиях
невесомости нет разницы между «верхом» и «низом», то жидкость
может располагаться в любой части бака (рис. 10.11, б). Кроме
рассмотренного случая возможны случаи, когда одна из фаз
отделится от стенок бака.
При б^О0 газ собирается внутри топлива, обволакивающего
всю внутреннюю поверхность бака, при 0=180° (топливо,
абсолютно не смачивающее поверхность стенок бака) топливо
оказывается окруженным газом. Эти положения соответствуют
минимуму свободной энергии системы. При 0<6<180° в
экспериментах наблюдаются положения, когда одна фаза находится
внутри другой (рис. 10.11, в), хотя анализ показывает, что
случай, когда сфеоическая поверхность топлива пересекается со
181
стенкой бака, соответствует минимуму свободной энергии систе- -
мы (Fm[n). Следовательно, положение, когда одна фаза целиком
располагается внутри другой, соответствует значению
свободной энергии большему, чем Fmin, но меньшему, чем исходное
значение свободной энергии при плоской поверхности раздела фаз
(^исх). Будем считать, что это положение обладает значением
СВОбоДНОЙ ЭНерГИИ ^щюм, ТОГДа /7исх>^пром>/7т1п.
Рассмотрим, в каких случаях возможны состояния, когда
одна из фаз находится внутри другой фазы. Если обозначить
через Аат.т, Даг.т, Ааж.т изменение площадей контакта топлива с
твердой стенкой бака, газа с твердой стенкой бака и топлива с
газом соответственно при переходе от исходного состояния к
промежуточному, то очевидно, что
Даж г= —Даг#т. A0. 5)
Изменение свободной энергии
\р — Р — Р ' — п До -J- п До -J— п До
*** * исх * пром иж.т" ж.т Т г.т" г.т Т "ж.г^ж.г»
или, используя A0.5),
Учитывая уравнение A0.2), получаем
I. (Ю.7)
Процесс перехода из исходного положения в промежуточное
считаем изотермическим. Из общих положений термодинамики
известно, что в изохорно-изотермической системе (v = const, Г =
== const) процессы подчиняются условию FO
Тогда а (Даж#г — Даж т • COS б)< 0
или cos6<^^l. A0.8)
Величины АсГж.г и Лсгж.т связаны между собой однозначно, если
известно, какую часть объема занимало топливо в условиях с
гравитацией. Введем соотношение HIR, где Н — высота, занятая
топливом в условиях с гравитацией, a R — радиус
сферического бака. Из уравнения A0.8) видно, что переход системы в
промежуточное состояние может иметь место только при таком
значении H/R, когда величина АсГж.г/ЛсГж.т не меньше, чем cos 8^
который является постоянной величиной для данной пары
жидкость — твердое тело.
Если же значение H/R таково, что
то переход из исходного состояния в промежуточное
невозможен, так как в этом случае /гпром>^'исх-
182
На рис. 10.12 приведены результаты расчета зависимости
предельных значений краевого угла в от заполнения H/R, при
которых выполняется условие A0.8) [56]. В области А
возможен переход в условиях полной невесомости из исходного
положения в состояние, при котором газ находится в виде сферы
внутри жидкости. Область Б соответствует возможности
отделения топлива от стенок бака и попадания его в виде сферы
160
140
120
100
80
60
40
20
is
/
{_
/
/
А '
i
в
/
У
/
А
/
1
/
О 0,5 1,0 1,5 H/R
Рис. 10.12. График
зависимости краевого угла 0 от
заполнения H/R
Рис. 10.13. Изменение поверхностей раздела
жидкости и газа в условиях невесомости в
зависимости от заполнения сферического бака:
/ — поверхность раздела жидкость — газ; 2—
поверхность раздела жидкость — твердое тело
внутрь газа. В области В отделение одной из фаз от стенок бака
за счет действия только поверхностных сил в принципе
невозможно. В противном случае имел бы место самопроизвольный
процесс с увеличением свободной энергии.
Уравнение A0.7) можно записать в безразмерном виде:
На рис. 10.13 показаны изменения поверхностей контакта
между фазами при переходе от исходного состояния в равновесное
в условиях невесомости при краевом угле 0 = 45°.
При изменении H/R от 0 до 0,293 поверхность раздела
жидкость — газ выпуклая в сторону газа, а радиус поверхности
раздела увеличивается от 0 до оо. При H/R = 0,293 поверхность раз-
183
дела плоская. При 0,293<H/R< 1,67 площадь поверхности
жидкость — газ возрастает, но возрастает и доля поверхности
твердого тела, занятого жидкостью. В целом, свободная энергия
системы уменьшается.
При изменении H/R от 0,293 до 2 поверхность раздела
жидкость — газ выпуклая в сторону жидкости, а радиус кривизны
поверхности раздела уменьшается от оо до 0.
Вышеприведенный анализ проведен применительно к
сферическому баку, заполненному топливом с значением краевого уг-
.0,2
О
-0,2
-0,4
-ОМ
N
\
У
/
0,2
0
-0,2
-0,1
-0,6,
в =135°
9=165°/
Ц
/
/
-1
2
/A
/2
О Ofi 0,8 1,2 1,6 H/R 0 0,4 0,8 1,2 1,6 H/ff
О) В)
Рис. 10.14. Изменение свободной энергии системы при наступлении невесомости:
/—отделение одной из фаз полностью от стенок; 2—состояние равновесия
ла 0 = 45°. Аналогичный анализ может быть проведен для баков
любой формы, заполненных жидкостями с любыми значениями
краевого угла в.
На рис. 10.14 показано изменение свободной энергии системы
при наступлении невесомости для различных краевых углов.
Часть линий / лежит выше абсциссы AF/nR2a = 0, что
соответствует невозможности перехода к рассматриваемому состоянию.
Начиная с некоторых значений HIR кривые 1 и 2 практически
совпадают, что особенно характерно для значений 6, близких к
0 и 180°. В этих областях очень мала разница в значениях
свободной энергии между состоянием равновесия и состоянием,
когда одна из фаз отделена от стенок. Поэтому, когда с
наступлением невесомости.начинается процесс, ведущий к уменьшению
свободной энергии системы, и топливо достигает положения
равновесия, оно обладает конечной кинетической энергией.
В конечном счете эта энергия рассеивается, т. е. затрачивается
на работу, совершаемую паром в поверхностном слое, и на
работу вязких напряжений в топливе. Этот процесс
сопровождается колебаниями жидкости около состояния равновесия и может
оказаться, что кинетическая энергия жидкости при прохождении
184
состояния с минимальной свободной энергией поверхности будет
достаточной, чтобы слои одной из фаз полностью отделили
другую фазу от стенок. К этому же могут привести и случайные
внешние возмущения.
10.6. ДИНАМИКА ТОПЛИВА В СОСТОЯНИИ НЕВЕСОМОСТИ
В предшествующем пункте было выяснено, что состояние
невесомости характеризуется минимальной свободной энергией
системы. Если начальная форма свободной поверхности
топлива не соответствует равновесной
конфигурации при невесомости, то под
действием поверхностного натяжения и
адгезии топливо начинает движение к
равновесному состоянию. Этому движению в
условиях невесомости будет
противодействовать только сила инерции жидкости,
если пренебречь из-за их малости
тепловыми и вязкостными эффектами в
жидкости. При этом свободная
поверхностная энергия переходит в кинетическую
энергию топлива. Для правильного
выбора проектных параметров необходимо
знать время, в течение которого топливо
перейдет из состояния в поле тяготения
в равновесное при невесомости. Так как
большинство ракетных топлив являются
смачивающими жидкостями, рассмотрим
эту задачу для бака сферической формы,
заполненного полностью смачивающей
жидкостью, при этом принято, что
топливо смачивает всю внутреннюю
поверхность стенки бака толщиной в несколько
молекулярных слоев (рис. 10.15) [74].
Свободная поверхностная энергия в
начальном состоянии невесомости (или в поле тяжести, что то
же самое) равна
На начальной стадии перехода
энергия равна
Рис. 10.15. Переход
жидкости в сферическом баке из
состояния равновесия в поле
тяготения в равновесное
состояние при невесомости
свободная поверхностная
Начальное приращение поверхностной энергии AFi=F0—Л-
Полагаем, что вытесненный объем топлива ve —
единственная часть топлива, испытывающая действие силы тяготения во
время перехода.
185
Приращение массы жидкости определяется уравнением
Приращение кинетической энергии массы движущегося
топлива
1 2g
Поскольку AF=Aw, то уравнение для приращения времени
принимает вид
Атд= (Аа) (*тЛ1/29
Полное время перехода
л=1
Разбивая процесс перехода на k последовательных состояний
можно вычислить полное время перехода топлива в равновесное
состояние при невесомости.
Ранее отмечалось, что на космические аппараты
практически всегда действуют незначительные ускорения. Придя в
первоначальное равновесное состояние при невесомости топливо
под действием возникшего ускорения начинает двигаться в
соответствии с этим ускорением и может расплескаться по баку и
разбиться на отдельные капли. Этому могут способствовать
возникшие на поверхности раздела жидкость — газ волны [71].
Вследствие этого при разработке пневмогидравлических
систем космических аппаратов возникают проблемы вытеснения
топлива из бака и подачи его к двигателю без газовых
включений. Для решения этой задачи могут быть рекомендованы
следующие способы.
1. Устройства, создающие перегрузки для разделения
топлива и газа:
— установка дополнительных вспомогательных двигателей.
Тяга двигателей сообщает ускорение космическому аппарату и
топливо приливает к заборным устройствам баков;
— закрутка бака или топлива; инерционные силы
обеспечивают сепарацию топлива и газа.
Эти устройства не являются оптимальными по
энергетическим показателям, а часто их применение является невозможным
из-за назначения космического аппарата. Необходимое время
работы вспомогательных двигателей складывается из времениг
необходимого для прилива компонента к заборному устройству
186
бака, и времени для поднятия в топливе пузырей газа и
определяется из уравнения [26]
t=l,414l/^_+l,012tf .. Г - ,
V Р 1/ /. Qr\
где М — масса космического корабля;
/б — длина бака;
р — тяга вспомогательных двигателей;
Я— высота подъема пузырей в топливе над заборным
устройством;
гп — радиус пузыря;
g—ускорение космического аппарата при работе
вспомогательных двигателей;
Qr, Qm — плотности газа и топлива соответственно.
2. Устройства с промежуточной перегородкой для
вытесните л ьной подачи топлива из баков.
3. Капиллярные устройства (трубчатые, сетчатые, щелевые).
Описание ряда конструкций таких устройств приведено в гл. 1.
В качестве перспективного способа разделения жидкости и
газа в условиях невесомости можно указать на электрофорезную
систему [75]. Принцип действия этой системы состоит в том, что
на жидкий диэлектрик, находящийся в неоднородном
электрическом поле, действует массовая сила
где е — диэлектрическая проницаемость жидкости;
Е — напряженность поля.
Под действием этой силы жидкость перемещается в
направлении возрастания напряженности электрического поля.
Глава 11
О ПНЕВМАТИЧЕСКИХ СЕРВОМЕХАНИЗМАХ
Управляемые агрегаты и клапаны ПГС ЖРДУ для
нормального функционирования требуют приложения значительных
усилий, которые могут быть обеспечены установкой различных
сервомеханизмов с распределителями управляющей среды,
например, с золотниковыми распределителями.
При проектировании и выборе сервомеханизмов их размеры,
площади проходных сечений, коэффициенты трения сопрягаемых
поверхностей золотниковой пары должны обеспечивать
устойчивость работы подвижных частей без вибраций и нежелатель-
187
ДаЗтиеЛрП)
ных колебаний, что может быть получено лишь после
тщательного теоретического и экспериментального исследования
сервомеханизма [66].
11.1. ОСНОВНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
Принципиальная схема пневматического сервомеханизма
представлена на рис. 11.1.
Введем обозначения: ть — приведенная масса золотника,
мембраны реле и пружины обратной связи; /n< — приведенная
масса силового поршня, штока, тяг и руля; сп — жесткость
пружины обратной связи;
см — жесткость мембраны
реле; i — передаточное
число рычага обратной
сзязи; F — площадь
силового поршня; fM —
эффективная площадь
мембраны пневмореле; Ар—
перепад давления на
пневмореле; plf Gj и /?2, Ог-
давление и масса воздуха
в полостях силового
цилиндра; Q\ И Q2 —
ПЛОТНОСТЬ воздуха в этих
полостях; б — перемещение золотника; ?— перемещение силового
штока, отсчитываемое от положения равновесия (х=Хо)
механизма; дго+? — положение силового штока; v — скорость полета.
Составим дифференциальные уравнения динамического
равновесия золотника и штока. Рассмотрим случай, когда
отсутствует перекрытие отверстий золотника, а окна золотника имеют
постоянную ширину.
Пренебрегая силой упругости пружины обратной связи,
получим
db ¦ A1.1)
Рис. 11.1. Схема пневматического сервомеханизма
dt
(П.2)
где а — коэффициент, зависящий от конструкции и площади
руля;
fa, *c — коэффициенты сил трения (силы трения принимаются
линейно зависящими от скоростей движения).
К этим двум динамическим уравнениям необходимо
присоединить уравнение состояния воздуха в'полостях силового
цилиндра. В реальных условиях можно считать, что параметры воздуха
связаны зависимостью
/(/M>)=const. A1.3)
188
Тогда, составляя производную df/dt для первой и второй
полостей цилиндра, получим
a dGi/dt и dG2/dt — мгновенные массовые расходы воздуха в
этих полостях;
/о — общая длина силового цилиндра (толщина днища
поршня принята равной нулю).
В общем случае секундные расходы dG\jdt и dG2/dt при ходе
золотника вправо и влево будут различными-и могут быть
выражены зависимостями
2> P~ fe. Qa) при 8>0;
{1L8)
i. л. ft. е«)
при 8<0;
где рб, Qb — давление и плотность воздуха в питающем
резервуаре;
Pa, Qa — давление и плотность воздуха в окружающей среде.
Вид функций Ль А,2, Fu ^2, Фь Фг зависит от характера
термодинамического процесса, имеющего место при заполнении и
опорожнении полостей цилиндра.
При небольших давлениях рабочего газа можно считать, что
имеет место адиабатический процесс
-?l-=const, X= —1г=
где g — ускорение свободного падения;
с — скорость звука.
Уравнения A1.4) и A1.5) в этом случае принимают вид
**С | Qi (*о + С) dpi _ 1 dGi a ц,
Л Л/>1 dt F dt '
) — л:0 — С) ^/^2 1 Д^<^2 /11
2 dt* kp2 dt F dt
891
Вид функций F\, ^2, Ф1 и Ф2 меняется в зависимости от
величины нагрузки, воспринимаемой рулевым приводом, а также
от абсолютных значений давлений ра и рь.
При малых нагрузках
Л)» ^2 = Ф7" 02^2 при &>0; A1. 11)
jr *2=^-Q^?(ft.ft) при 8<0. A1.12)
Здесь А— ширина окон золотника;
Си С2 и Сь — скорость звука в полостях цилиндра и в
питающем резервуаре;
<ф = 0,58 — коэффициент расхода.
J! •
При более значительных нагрузках могут иметь место
следующие зависимости:
Л = --гС»<*р(Л, />»). ^ф-^г при 8>0; A1. 14)
Наконец, при нагрузках, близких к предельным,
Л=—е»<УР(А. ft). /=12=y-C2^2cP(^. ft) при 8>0, A1.16)
*i=*-jWb ®*=*jWb при 8<0. A1.17)
Таким образом, система дифференциальных уравнений
A1.1), A1.2), A1.9) и A1.10) вместе с A1.3) и начальными
условиями позволяет определить искомые величины ?ь бь р\> Ръ
Qt и д2. Заметим, что эта система уравнений (основная в
излагаемой теории) является нелинейной и получить ее точное
решение в общем виде не представляется возможным.
В связи с этим возникают две задачи: 1) найти
приближенное выражение для перемещения силового штока при
заданном изменении давления на пневмореле и 2) установить условия
устойчивости состояния равновесия механизма.
11.2. НАЧАЛЬНОЕ ДАВЛЕНИЕ В НЕНАГРУЖЕННОМ МЕХАНИЗМЕ
Для дальнейшего исследования необходимо определить
начальное давление в полостях силового цилиндра в том случае,
когда отсутствуют внешние нагрузки. Равновесие штока может
иметь место при любых одинаковых давлениях в полостях
силового цилиндра (pi=/?2)- Однако произвольное начальное давле-
190
ние не будет устойчивым. При возникновении малых колебаний
силового штока относительно состояния равновесия (хо=1/21о)
и соответствующих им малых колебаний давления среднее
давление в полостях механизма не будет постоянным и равным
произвольному начальному давлению. Устойчивое среднее давление,
равное начальному, наступит лишь в том случае, когда при
указанных перемещениях расход воздуха через полости силового
цилиндра при втекании в них воздуха из питающего резервуара
и вытекании из них в окружающую среду будет одинаковым:
,80 0.
dt
Легко показать, что в этом случае течение из питающего
резервуара в полости цилиндров должно быть докритическим, а
течение из полостей в окружающую среду — сверхкритическим.
Если обозначим искомое начальное давление через р0, а
соответствующую ему плотность воздуха через q0, to указанные
выше соображения приводят к следующим соотношениям:
Р\ [Р& Р» ^0> Qb) = ^2 {Ро, Pa* Qo> Q^) = FQy /jj щ
Фх (Ро, Ра* Со> Qa) = Ф2 (А)> Ры Qo> Qb) = фо-
Для адиабатического процесса
Здесь со — скорость звука в полостях цилиндра
Выражая с0, с&, Qo, Qb через соответствующие давления, из
написанного соотношения найдем
Для воздуха получим
^=0,80/7,; Qo=O,86c,. A1.20)
11.3. ДВИЖЕНИЕ ПРИ МАЛЫХ ПЕРЕПАДАХ ДАВЛЕНИЯ
Если перемещения по сравнению с /0 малы, а механизм
рулевого привода не подвергается большим нагрузкам, то перепады
давления в полостях силового цилиндра, по сравнению с
начальным давлением, незначительны, и основная система
дифференциальных уравнений (ИЛ) — A15) может быть
линеаризована.
191
Исследуем движение в этом случае при начальном ненагру-
женном состоянии:
\=Рч=Р^ Qi = C2 = C0 *o=y'o пРи t=
Положим
где Дрь Ар2, Apt, Д{>2 — малые изменения давлений и
плотности.
Будем считать, что порядок малости ? и б будет такой же,
как и Ар\, Ар2-
Подставляя A1.21) в основную систему уравнений,
пользуясь разложениями в степенные ряды и удерживая только члены
первого порядка малости, получим
(П.22)
с-24»
Для движения при 6<0 правые части последних уравнений
должны быть заменены на —6Ф0 и 6Ф0.
Легко заметить, что Фо=/7о- Поэтому для 6<0 уравнения
A1.24) запишутся так:
dt
Следовательно:
dt 2kp0 dt °
(П.25)
aS6 a + &(>); A1.26)
dt dt ' dt * dt K ^ } K }
A1.27)
dt dt dt dt
где
a=2kp?±^ 6=2*A> . (lle28)
Qoh h
Таким образом, суммарный перепад давлений Ар=Р\—Рг =
=Ар\—Ар2, вызывающий движение штока силового цилиндра,
192
определяется в рассматриваемом случае одним
дифференциальным соотношением, пригодным как для 6>0, так и для 6<0:
3f*-«f. (П.29,
где
А=2а, В=2Ь. A1.30)
Из уравнения A1.29) следует, что
Lp=A Jw/-fic, (П. 31)
т. е. усилие на штоке пропорционально «время — сечению»
отверстий золотника и перемещению ?.
Подставляя A1.29) в уравнение A1.2), предварительно
продифференцированное по времени, и исключая перемещение
золотника б, найдем
где
icn
]; A1.33)
as=\.
Таким образом, при малых изменениях давлений ход штока
рулевого привода определяется дифференциальным уравнением
пятого порядка, общее решение которого имеет вид
где ^0@ — частное решение;
Ai — постоянные интегрирования;
\ii — корни характеристического уравнения
В том случае, когда перепады давлений не будут малы или
рулевой привод будет нагружен, линеаризация не может быть
выполнена и для определения хода штока следует применить
численные методы интегрирования исходной нелинейной
системы A1.1) — A1.5).
Из уравнения A1.32) следует, что способность
пневматических сервомеханизмов генерировать колебания зависит не от аб-
193
солютных значений параметров, определяющих коэффициенты
A1.32), а от отношений этих параметров; кроме того, если
сохранить неизменными отношения этих параметров, то декремент
затухания колебаний будет также неизменным, а период
колебаний будет возрастать или убывать.
Построенное выше приближенное решение позволяет
определить все искомые параметры пневматического ненагруженного
сервомеханизма при малых перемещениях штока и перепадах
давления воздуха и ответить на вопрос о динамической
устойчивости ненагруженного механизма.
Кроме того, основная нелинейная система уравнений A1.1) —
A1.5) дает возможность решить задачу о движении с большими
перепадами давлений и задачу об устойчивости нагруженного
механизма.
11.4. АНАЛИЗ ПОЛУЧЕННЫХ РЕЗУЛЬТАТОВ.
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
Случай статической работы сервомеханизма. Если
рассматривать случай весьма медленного изменения давления на пнев-
мореле (точнее, бесконечно медленного), то в уравнении A1.32)
можно пренебречь всеми членами, содержащими производные
по времени.
Таким образом, только в этом предельном (статическом)
случае ход штока рулевого привода будет пропорционален
давлению на пневмореле:
С=-?-Д/>(*), A1.34)
причем уменьшение передаточного числа i и жесткости пружины
обратной связи увеличивает коэффициент усиления. Ход
золотника при этом будет 6^0. Во всех других случаях возможных
движений простое конечное соотношение A1.34) не имеет места
и ход штока определяется более сложной дифференциальной
зависимостью.
Случай невесомого механизма без трения. Из соотношений
A1.33) следует, что при невесомости всех движущихся частей и
отсутствии сил трения движение сильного штока происходит
без колебаний:
u dt ' icn
где Го — постоянная времени, характеризующая эффект
запаздывания, равна
^о=-Л-A+— ){av2 + BF). A1.36)
194
Из этого выражения следует, что То не является величиной
постоянной, а увеличивается с увеличением скорости полета.
Это важное обстоятельство необходимо учитывать при
исследовании устойчивости аппаратов, снабженных такого рода
пневматическими рулевыми приводами.
Из выражения A1.36) следует, что постоянная времени То
уменьшается с уменьшением отношения см/сп (жесткости
мембраны к жесткости пружины обратной связи) и увеличением
числа L Кроме того, То не зависит ни от сил вязкого .трения, ни
от сил инерции движущихся масс.
Из уравнения A1.35) вытекает, что невесомый и лишенный
трения рулевой привод всегда динамически устойчив
независимо от выбранных параметров механизма и скорости полета.
Ход золотника в этом случае пропорционален скорости штока
*т « A1 37)
1 + См/Сп dt
Случай весомого механизма без трения. При отсутствии сил
трения (ai=a3 = 0) дифференциальное уравнение A1.32)
принимает вид
!r^^sW- AЬ38)
Здесь
аох=во, а$ = 7-L- [ть (а%? + BF) + тс (с„ + сп)], а4х = То. A1.39)
I СпАг
Члены с коэффициентами а? и а$ появились в результате
влияния сил инерции масс тс и ть. Для исследования
динамической устойчивости следует рассматривать характеристическое
уравнение ^0xX5+a2xX3+a4xX-f-l=0.
Анализ показывает, что в этом случае имеет место
неустойчивость при любых выбранных соотношениях параметров
механизма и скорости полета.
Таким образом, рулевой привод без трения и нагрузки
всегда динамически неустойчив, а сам механизм представляет собой
своеобразный генератор колебаний.
Случай невесомого механизма с трением. В этом случае
дифференциальное уравнение A1.32) принимает вид:
+ t,w> ,„.40,
где
= -*L; a3=a3. (И.41)
icnAF
Члены с коэффициентамиaxx и а?х появились в результате
влияния сил трения. Корни характеристического уравнения
195
1=0 будут иметь отрицательные
действительные части при условии
(сп + си) (av*
Следовательно, в этом случае можно всегда так подобрать
параметры механизма, чтобы имела место устойчивость.
Случай невесомого золотника. Во многих практических
важных случаях оказывается, что сила инерции приведенной массы
золотника по сравнению с силами упругости мембраны реле и
пружины обратной связи незначительна и ею можно пренебречь.
Кроме того, вычисление приведенной массы золотника (т8)
сопряжено с известными трудностями, которые могут привести
к ошибкам, и целесообразность учета сил инерции золотника
станет сомнительной.
Поэтому случай, когда принимается пгь = 0> для многих
сервомеханизмов должен отражать действительную динамическую
картину наиболее плотно.
Из уравнения A1.32) при ms=0 получим дифференциальное,
уравнение четвертого порядка:
где ао=-^-; а'2=а3; A1.44)
iAcnF
СП
Для устойчивости необходимо
а\пч—а'опь > 0; (а\пч — а'оа'г) а'з — #i2
Первое соотношение выполняется для любых соотношений
параметров механизма. Второе соотношение приведет к
условию
(cal — ah) hikl + (с2Мс — 2acm:) kfa + c2mc {cavk^ — am<.) > 0,
A1.45)
где
a = icnAF. A1.46
Условие A1.45) позволяет произвести анализ влияния всех
параметров мхеанизма на его динамическую устойчивость. При
коэффициенте трения
196
устойчивость обеспечивается и при отсутствии трения на
золотнике.
Вводя знак равенства в соотношение A1.45) и принимая
постоянными величины (за исключением ?с и kb)> получим
уравнение /(*с, ?«)=0, выражающее границу устойчивости на
плоскости параметров ?с, *« (рис. 11.2).
В практических случаях наиболее эффективным является
изменение коэффициента кь путем введения в механизм
золотника или мембраны пневматического демпфера. Из приведенно-
Одласть
успшяибоспи
Ойласть
Рис. 11.2. Область устойчивой работы
сервомеханизма
Рис. 11.3. Места установки дюз
го анализа видно, что пневматические сервомеханизмы
рассмотренного типа во многих случаях могут оказаться динамически
неустойчивыми, так как у них отсутствует элемент,
контролирующий и регулирующий величину вязкого трения, полное
устранение которого приводит к неустойчивости при любых
параметрах механизма.
В некоторых случаях эффективное влияние на устойчивость
могут оказать специальные дюзы, вставленные у трубки
пневматического реле. Однако при этом следует считаться с
возможностью искажения основного сигнала, подводимого в виде
давления Ар, действующего на упругую мембрану реле. Рассмотрим
последнее обстоятельство подробнее.
Влияние дюз. Пусть /д — длина дюзы; d — диаметр
отверстия дюзы (рис. 11.3).
Очевидно, для первой и второй полостей реле можно
написать соотношения, аналогичные соотношениям A1.4), A1.5):
dt kpm dt dt ' AL47)
at
Здесь Qr0, pro — начальные плотность и давление в полостях
реле при ненагруженном состоянии механизма; иг0 — начальный
197
объем полостей реле; /м' — некоторая «приведенная» площадь-
мембраны, выражающая изменения объема полости при
возникновении перемещения б золотника (/м'<|/м).
При появлении перед дюзами малого перепада давлений и
при наличии скорости золотника (db/dt) в полостях реле
возникают давления
Рп=Pro + ЬРп Pr2=Pro - Ьрп A1.48)
Для вычисления расходов воздуха через дюзы можно
применить закон Пуазейля
^Д/;га). A1.49)
Здесь Х=-^5— (^ — коэффициент динамической вязкости).
A1.50)
Вычитая из первого соотношения A1.47) второе, получим
зависимость, определяющую изменение перепада давлений в
полостях реле:
^ АЛ-р?, A1.51)
где
А/7Г=2А/?Г; A/7fl=2A/?ra;
р ^ ( )
r0 nd*kpr0 jtd* K J
Следовательно, перепад в реле при наличии дюз не следует
за перепадом управляющего давления, а имеет запаздывание,
выражающееся постоянной времени 7г0. Кроме того, в
выражении изменения давления появляется дополнительный член,
зависящий от скорости движений золотника.
Подставляя в соотношение A1.51) выражения для Apr и
db\dt, для определения хода штока при наличии дюз получим
уравнение
= ¦?;-). A1.53)
В результате постановки дюз порядок уравнения A1.32)
повысился на единицу, а коэффициенты существенно
изменились.
Оставляя в стороне подробный анализ написанного
уравнения, обратим внимание на то обстоятельство, что постоянная
198
времени всего механизма в этом случае увеличивается на
величину, равную постоянной времени реле при наличии дюз:
Т = Т0+Тг0. A1.54)
Характер образования коэффициентов уравнения A1.53)
показывает также, что подбором дюз можно достигнуть
устойчивости ценой некоторого увеличения общего запаздывания
механизма.
Общий случай. Здесь условия устойчивости могут быть
записаны так: а\п2— Ооа3>0, (а^2—аоаг) {аъак—а2аъ) — {а1аА—
—а0а5J>0.
Легко заметить, что первое условие выполняется при любых
значениях параметров сервомеханизма, поэтому нужно только
удовлетворить второму условию.
Как правило, наиболее простым и эффективным путем для
достижения устойчивости является подбор коэффициентов
трения kb и ?с на золотнике и штоке. Поэтому можно построить
кривую границы устойчивости в плоскости параметров ku &с
(считая все другие заданными и постоянными) по зависимости
?(*с, &)=0, A1.55)
по которой при заданной скорости полета v может быть всегда
выбрано необходимое h и ?с.
Аналогично решается задача при выборе других параметров,
например, си и см.
Таким образом, задачу о движении механизма с малыми
перемещениями и перепадами давления и задачу о динамической
устойчивости пневматического сервомеханизма в ненагружен-
ном состоянии можно считать решенной.
Если для пневматического сервомеханизма
рассматриваемого типа (рулевой привод) условия динамической устойчивое!и,
рассмотренные выше, выполнены, то при ненагруженном
механизме и плавных скоростях изменения давления на пневмореле
членами, содержащими вторую и выше производные в
уравнении A1.32), можно пренебречь. Тогда закон регулирования
принимает вид
7-^ + С=гАЛв@- A1-56)
Случай нагруженного сервомеханизма. В этом случае задача
становится значительно сложнее, так как уравнение A1.29)
будет равным для 6>0 и 6<0 (рис. 11.4):
*?L=A*-Bf при 8>0,
dt dt A1.57)
^-A'b-B^- при 8<0.
dt v
dt dt
Чем больше нагрузка, тем сильнее выражена нелинейность
системы. Наконец, при нагрузках, близких к максимально
возможным, правая ветвь (б>0) характеристики dAp/dt почти
ложится .на «прямую dAp/dt =
=—BdXjdt, создавая
максимальную (нелинейность.
Левая ветвь F<0)
увеличивает угол наклона к оси 6. Угол
между правой и левой ветвями
приближается к прямому.
Исследование устойчивости в
этих условиях хотя и не
вызывает принципиальных трудностей,
но сопряжено со значительной
вычислительной работой.
Из приведенного анализа вид-
Ряс. 11.4. Случай^нагруженного сер.о- ^ ^ ?невматическИе серВОМе-
ханизмы рассматриваемого типа
обладают нелинейными характеристиками, которые могут быть
линеаризованы при малых перемещениях и перепадах давления
только при отсутствии постоянной внешней начальной нагрузки.
Раздел третий
ИСПЫТАНИЯ ЖИДКОСТНЫХ
РАКЕТНЫХ ДВИГАТЕЛЬНЫХ УСТАНОВОК
Глава 12
ВИДЫ ИСПЫТАНИИ АГРЕГАТОВ
И ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМ ЖРДУ
Испытания ЖРДУ являются важным этапом создания ракет-
но-космичесюрт мамшлекса- Этот эта'п является
продолжением исследовательских и проектных работ и требует больших
материальных затрат для создания и испытания опытных
образцов. Специфика наземных испытаний опытных образцов в
стендовых условиях требует их существенной доработки — создания
дополнительных систем, обеспечивающих безаварийное
проведение испытаний.
Все испытания в процессе создания объекта можно разбить
на три стадии: наземные испытания, летные испытания и
испытания в процессе серийного производства — партионные
испытания.
Самый большой объем отработки занимают наземные
испытания, к ним относятся:
— автономные испытания агрегатов;
— автономные испытания систем и подсистем
(конструкторские и завершающие доводочные испытания);
— комплексные испытания ЖРДУ.
12.1. АВТОНОМНЫЕ ИСПЫТАНИЯ АГРЕГАТОВ И УЗЛОВ ПГС
Испытания агрегатов и узлов ПГС разделяются:
а) по назначению — отработочные и приемо-сдаточные;
б) по степени охвата испытаниями агрегатов и узлов —
индивидуальные и выборочные;
в) по характеру испытаний — автономные и комплексные.
Отработочные испытания — комплекс испытаний,
целью которых является отработка конструкции агрегата или
узла и технологического процесса изготовления, проверка
работоспособности агрегата или узла в условиях, максимально
приближенных к условиям его работы в составе объекта, а также
проверка соответствия параметров и характеристик заданным
значениям. Конечной целью отработочных испытаний является
подтверждение необходимой надежности агрегата или узла.
Приемо-сдаточные испытания — комплекс
испытаний, целью которых является проверка качества изготовле-
201
ния и соответствия изготовляемых агрегатов и узлов
требованиям технической документации, а также подтверждение в ходе
производства агрегатов и узлов уровня надежности,
достигнутого после отработки конструкции.
Индивидуальные испытания — испытания,
которым подвергается каждый экземпляр агрегата или узла в
процессе его сборки и после ее окончания для обеспечения
проверки правильности и качества сборки, а также для проверки
обеспечения основных параметров.
Выборочные испытания — испытания, которым
подвергается определенное количество агрегатов для проверки тех
параметров и характеристик, которые по каким-либо причинам
не могут быть проведены при индивидуальных испытаниях.
Автономные испытания — испытания, которым
подвергается агрегат или узел в технической оснастке или на
технологическом стенде.
Комплексные испытания — испытания, которым
подвергается несколько агрегатов (одинаковых или различных),
входящих в состав пневмогидравлической системы с
воспроизведением функционирования этой системы с заданными
параметрами.
12.2. ОБЪЕМ И ПОРЯДОК АВТОНОМНЫХ ИСПЫТАНИЙ
АГРЕГАТОВ И УЗЛОВ
Объем и порядок испытаний агрегатов и узлов ПГС
определяется на основе анализа их функционального назначения,
требований к их параметрам и характеристикам, условий их
эксплуатации при сборке, хранении, подготовке к основной работе
и при использовании их по основному назначению с учетом
аварийных ситуаций, которые могут возникнуть на любом этапе
эксплуатации.
При определении объема и порядка испытаний необходимо
учитывать конструктивные особенности агрегата или узла, а
также требования к его надежности.
Агрегаты и узлы ПГС должны обладать заданной
надежностью при следующих основных условиях:
— изменение температуры окружающей среды в заданном
диапазоне;
— воздействие динамических нагрузок, возникающих при
транспортировке и работе;
— хранение объекта в складоюих и других условиях.
12.3. АВТОНОМНЫЕ И КОМПЛЕКСНЫЕ ИСПЫТАНИЯ
СИСТЕМ И ПОДСИСТЕМ
Автономные испытания ПГС направлены на исследование или
подтверждение параметров, опытное определение характеристик
202
и доведение их до заданных техническим заданием. Проверка
и подтверждение работоспособности подсистем проводится при
номинальных и наиболее неблагоприятных сочетаниях внешних
и внутренних факторов.
Комплексные испытания ПГС проводятся для подтверждения
работоспособности бортовых систем как на имитаторах, так и
на штатных компонентах.
Глава 13
ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА
ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМ
При создании ракеты-носителя или космического аппарата
всегда .можно выделить (несколько основных этапов:
— выбор и расчет основных параметров и характеристик;
— разработка технической документации на объект;
— разработка технической документации на изготовление
агрегатов и систем для автономных и комплексных испытаний;
— автономные и комплексные наземные испытания;
— летные испытания;
— уточнение технической документации.
Таким образом, для подтверждения проектных параметров и
характеристик изготовляют необходимое количество агрегатов,
систем и стендовых изделий для автономной и комплексной
отработки пневмогидравлических систем в земных условиях.
Каждая система экспериментально отрабатывается либо
автономно, либо в процессе комплексных испытаний стендовых
или летных экземпляров изделий. Рассмотрим коротко
отработку некоторых из них.
13.1. СИСТЕМА ПРЕДПУСКОВОГО НАДДУВА
Существует несколько этапов наддува баков. Под
предварительным наддувом можно понимать следующие виды наддува
топливных баков:
— после заправки баков компонентами топлива для создания
избыточного давления в баке во время хранения в
заправленном состоянии;
— предстартовый наддув топливных баков всех ракетных
блоков от наземных источников перед стартом ракеты для
обеспечения надежного запуска двигателей до выхода на режим
системы основного (бортового) наддува;
— предпусковой наддув топливных баков ракетного блока
на активном участке полета от бортовых источников перед
запуском двигательной установки.
203
При дальнейшем изложении этого раздела второй или третий
этапы наддува, связанные с непосредственной подготовкой
двигательной установки к запуску, будем называть предпусковым
наддувом.
Для предпускового наддува можно использовать следующие
способы наддува:
— с помощью однокомпонентного или двухкомпонентного
газогенератора;
— пороховым аккумулятором давления;
Рис. 13.1. Схема системы
предпускового наддува:
/ — бак; 2 — обратный
клапан; 3 — блок разделения
трубопроводов; 4 — клапан
прекращения наддува; 5 —
клапан н&ддува; 6 —
баллоны наддува; 7 —
распылитель; 8 —
предохранительный клапан; 9 — реле
давления
— за счет впрыска разноименного компонента топлива, при
этом компоненты топлива должны быть
самовоспламеняющимися;
— газом из аккумуляторов давления.
Расчет систем предпускового наддува производится на этапе
проектирования по методике, изложенной в гл. 8.
Отработка систем предпускового наддува производится на
стендовых изделиях. Для получения проектных расходов газа,
давлений в баках и времен наддува на стенде монтируется
система предпускового наддува в натурном исполнении
(внутренние диаметры трубопроводов и жиклеров, длины
трубопроводов и т. д.). Система наддува подсоединяется ко всем
топливным бакам ракетных блоков, установленных, как правило,
раздельно.
Схема простейшей газобаллонной системы предпускового
наддува с наземными источниками показана на рис. 13.1. По
204
команде на включение наддува открываются пиро- или пневмо-
клапаны 5, и газ наддува под высоким давлением A0—20 МПа)
поступает в топливные баки. При достижении давления в баке
расчетного значения срабатывает реле давления 9, и подается
команда на закрытие соответствующего клапана прекращения
наддува. Отделение бортовой системы предпускового наддува
от наземной при старте ракеты производится с помощью блоков
разделения трубопроводов 3. Герметизацию трубопроводов
наддува обеспечивают обратные клапаны 2.
Целью испытаний системы предпускового наддува является
проверка ее функционирования по заданной циклограмме и
подтверждение расчетных параметров.
В процессе испытаний проверяются и определяются:
— работоспособность и оптимальные параметры системы;
— времена наддува баков во всем диапазоне изменения
свободных газовых объемов, давления в рессивере и начального
давления в баках;
— величина давлений при наддуве баков и во время запуска
двигателей;
— параметры жиклеров для обеспечения заданных режимов
наддува;
— наличие выплеска жидкости из предохранительных
клапанов при передуве баков;
— забросы давления перед сигнализаторами давления;
— динамические характеристики подвижных элементов
предохранительных клапанов;
— характеристики заполнения топливных систем при
имитации запуска двигателей и т. п.
При лабораторной отработке системы предпускового
наддува получают значительный материал по временам наддува в
зависимости от начальных давлений в баллонах наддува, баках
изделия и объемах газовых подушек. Иногда, используя
статистический материал, полученный в ходе отработки системы,
определяют зависимости параметров каждого бака с помощью
методов корреляционно-регрессионного анализа. Имея такую
зависимость, можно всегда определить время наддува бака при
заданных остальных параметрах. Кроме того, зная начальное
давление в баллонах наддува, начальное давление в баке и время
предпускового наддува, можно с достаточной степенью точности
определить объем газовой подушки бака, а, зная общий объем
бака, — и дозу заправленного компонента. Это особенно важно
для изделий, не имеющих датчиков контроля уровня.
13.2. СИСТЕМА ОСНОВНОГО НАДДУВА
Выбор режимов испытаний системы газогенераторного
наддува основывается на обеспечении потребного диапазона
давлений в баке.
205
Давление в баках является функцией трех параметров:
а) объемного расхода топлива из бака Vq;
б) секундного расхода массы генераторного газа в бак Grr;
в) работоспособности газовой смеси в баке (#Г)Ф,
зависящей от температуры генераторного газа /г.г и внутрибаковых
В нейтрализатор
Г12 В нейтрилизатор
Рис. 13.2.. Схема установки-
для отработки системы
основного газогенераторного
наддува баков:
/ — бак окислителя; 2 —
бак горючего; 3, 14 —
расходомеры; 4 — пусковой
клапан; 5 — дренажный клапан;
6 — клапан прэдувки; 7 —
дроссельная шайба
магистрали перепуска газа; 8 —
клапан перепуска; 9 —
испытываемый бак; 10 —
распылитель; // — датчик
давления; 12 — датчик
температуры; 13 — предохранительный
клапан; 15 — управляемый
дроссель; 16 — п не в мокла-
пан; 17 — сливная емкость;
18 — газогенератор
процессов и определяемой по ранее полученным эксперимен-
тальным данным рб=—=
Возможные комбинации вели-
чин Vq, GrT, ^г.г при испытании систем наддува баков выбирают
с учетом влияния внешних факторов на параметры
генераторного наддува и отклонений внутридвигательных факторов.
Для этого используются следующие данные.
1. Максимальная температура компонента в момент запуска
двигателей.
2. Максимальная температура компонента в момент
выключения двигателей.
206
3. Подогрев компонента за счет аэродинамического нагрева
и нагрева от газа наддува.
4. Диапазон регулирования двигателя по величине давления
в камере сгорания по системе РКС.
5. Диапазон регулирования двигателя по kG в системе СОБ
(максимально допустимый).
Схема типичной установки для отработки системы основного
газогенераторного наддува представлена на рис. 13.2.
Газогенератор наддува 18 питается компонентами топлива от стендовых
баков окислителя / и горючего 2. Параметры газа наддува
(давление и температура) регулируются изменением давлений в
баках 1 и 2, при этом газ через клапан перепуска 8 подается в
нейтрализатор. После получения заданных значений
параметров на выходе газогенератора включается клапан перепуска и
газ наддува через газораспределитель поступает в бак. В
соответствии с заданной циклограммой работы включается пнев-
моклапан 16 и с помощью управляемого дросселя 15
регулируется расход компонента (или имитатора) из
испытываемого бака 9.
Во время этих испытаний регистрируются:
— расходы компонентов, поступающие в газогенератор с
помощью расходомера 3\
— расход основного компонента из бака с помощью
расходомера 14\
— давления и температуры в газогенераторе;
— давления и температуры газа в баке;
— температура конструкции бака;
— температура основного компонента в баке и т. п.
По значениям экспериментальных данных, полученным на
различных режимах работы системы газогенераторного наддува
и слива компонентов из баков, уточняется работоспособность
газовой смеси в баке данного объекта (RT) и параметры
системы газогенераторного наддува.
13.3. ИМИТАЦИЯ ДАВЛЕНИЯ ГИДРОУДАРА И СКОРОСТЕЙ
ЗАПОЛНЕНИЯ ПРИ ХОЛОДНЫХ ИСПЫТАНИЯХ
Стендовые иагаыта-иия производятся иа имитаторе
«компонента (воде). Так как (плотность воды отличается от
плотности компонентов топлива, то для имитации истинных величин
гидроударов и времен заполнения с целью подтверждения
расчетных значений необходимы другие начальные давления в
баках. Максимальная величина гидроудара появляется после
вскрытия пусковой мембраны (клапана) в момент заполнения
компонентом топлива шнека насоса жидкостного ракетного
двигателя.
207
Величину давления гидроудара в топливной системе при
запуске двигателя с достаточной точностью можно определить по
формуле
PyA = QCWjf, A3. 1)
где if — коэффициент смягчения гидроудара (зависит от
конструктивных параметров и определяется
экспериментально) ;
q — плотность заполняющей жидкости;
с — скорость звука в жидкости, равная
V
где Ет — объемный модуль упругости жидкости;
Ем — модуль упругости материала трубопровода;
D и б — средний диаметр и толщина стенки трубопровода.
Используя формулу A2.1) и полагая коэффициенты
смягчения удара для воды и компонента топлива одинаковыми if>B = "i|?K,
получим
^УД-К _ QK CK WBX,K
Руд.в Qb Cb Wbx,b
Из условия имитации одинаковых давлений гидроудара /?уд.в =
=Руд.к следует
Ок.^к wBX.K==L ^13 2
Qb C W
В общем случае отношение скоростей воды и компонента на
W
р
X'B = 1/ -^^-
х.к У РкЯн
входе в насос будет /
«'вх.к У РкЯн
Подставляя отношение скоростей в уравнение A3.2), получим
выражение для давления воды перед пусковой мембраной,
которое необходимо задавать для получения тех же величин
давлений гидроудара в топливных магистралях, что и в натурных ус-
»qk (с* \2
ловиях/>в=-^ -^- рк.
Qb \CbJ
Имитация давлений гидроудара необходима для
подтверждения расчетных значений, а также для оценки прочностных
характеристик топливных систем (трубопроводы, сильфоны и т. п.) и
элементов крепления ЖРДУ. Погрешность определения величин
давления гидроудара не превышает 20%.
208
Для имитации скоростей заполнения топливных магистралей
при испытаниях ЖРДУ давление перед пусковой мембраной
(клапаном) должно быть равно рв-= рк — . Необходимо отме-
Qk
тить, что приведенные выражения пригодны для достаточно
простых топливных систем ЖРДУ.
13.4. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
ГИДРАВЛИЧЕСКИХ ПОТЕРЬ В РАСХОДНЫХ МАГИСТРАЛЯХ
ТОПЛИВНОЙ СИСТЕМЫ
Гидравлические потери состоят из местных потерь и потерь
на трение по длине трубопровода.
Потери давления в местных сопротивлениях определяются
по формуле Вейсбаха А/?м = С——•
Потери давления по длине как при ламинарном, так и при
турбулентном течении в трубах круглого сечения определяются
по формуле Дарси — Вейсбаха Д/?тр = Х— . .
Коэффициенты сопротивления ? и К определяются по
справочнику [30].
Так как при изготовлении трубопроводов существуют
технологические отклонения (кольцевые и продольные швы,
шероховатости труб и т. п.), то расчетные потери при расчете давления
наддува обычно увеличивают на 30%.
При расчете давления наддува каждого бака кроме
гидравлических потерь учитываются потери давления на создание
скоростного напора-^-.Таким образом, для обеспечения заданных
скоростей течения компонента в горизонтально расположенном
топливном трубопроводе давление в баке должно быть равно
При вертикальном расположении топливных систем для
обеспечения заданных давлений на входе в двигатель необходимо
учитывать высоту столба (q#), а в полете — и величину осевой
перегрузки пх. На этапе стендовой отработки пневмогидравли-
ческих систем проверяются и уточняются расчетные значения
гидравлических сопротивлений топливных систем.
При проливках топливных систем водой измеряют изменение
напора на испытываемом участке ДМИЗМ- Тогда потери напора
на этом участке будут А// = А//ИЗМ—— .
Суммарный коэффициент гидравлического сопротивления на
этом участке равен С=
8 3205 209
13.5. ЗАБОРНЫЕ УСТРОЙСТВА
Основной характеристикой заборных устройств является
величина гидравлических остатков незабора. Остатки незабора
определяются критической высотой уровня жидкости, при
которой происходит прорыв газов в сливную магистраль.
При сливе жидкости из емкости над донным сливным
отверстием при некоторой критической высоте уровня Якр происходит
искривление свободной поверхности, так называемый провал
уровня. Подход этой воронки к сливному отверстию вызывает
попадание газа в сливной трубопровод и переход течения из
однофазного в двухфазное. К настоящему времени имеется
значительное число полуэмпирических формул для определения
критической высоты уровня (Якр) при истечении жидкости из
емкости. При различных числовых коэффициентах эти формулы
имеют общую структуру Якр=Л(|/Рг) ,
где #кр= —;
А — изменяется от 0,26 до 0,69;
К — изменяется от 0,4 до 0,57.
Столь большая разница в этих коэффициентах не может быть
объяснена только погрешностями экспериментов, выполненных
различными авторами. Вероятно причина этих расхождений
лежит в недостатках самой принятой структуры формул, так как
в них нет учета соотношений между диаметрами емкости и
сливного отверстия. Наиболее полно критическую высоту
уровня характеризует следующая обобщенная формула:
где коэффициенты А, В и С зависят от соотношения диаметров
емкости и сливного отверстия. Так, например, для —>6 Л =
= 0,0017; В = — 0,0033 и С=0,289.
Однако величина Якр не определяет однозначно значения
гидравлических остатков незабора для емкостей, имеющих
различную геометрию днищ баков. Для расчета баллистических
характеристик ракет необходимо иметь закономерность,
характеризующую заборные устройства (остатки незабора v0M) в
зависимости от расхода и в то же время не связанную с размерами
объекта исследования. Такая аналитическая зависимость пока
не определена. Зависимость гидравлических остатков незабора
от расхода жидкости получают либо расчетным путем через
#кр, либо экспериментальным путем при проливках модельных
или натурных заборных устройств.
Как правило, величина гидравлических остатков незабора
на стадии проектирования задается, исходя из предварительных
расчетов и имеющегося опыта проектирования, а затем ее
уточняют по результатам гидравлических проливок.
210
Для предварительных оценок гидравлических остатков не*
забора и степени совершенства заборных устройств может быть
использован метод электрогидродинамической аналогии.
Вопросам электрического моделирования посвящено большое число
работ, в которых приведена как теория этого вопроса, так и
дано принципиальное описание применяемых моделирующих
устройств [18, 58, 62]. При электрическом моделировании
гидродинамических процессов исследуемая жидкость заменяется
проводящей средой, разность гидродинамических потенциалов
(возмущение) заменяется разностью электрических потенциалов,
гидродинамическая сетка (реакция) заменяется сеткой
напряжения (ток); потоку жидкости соответствует плотность тока.
Однако в настоящее время самым надежным способом
определения реальных остатков незабора является эксперимент.
В практике необходимо иметь возможность быстрого и удобного
сравнения результатов проливок различного типа заборных
устройств. Имеющиеся частные методики расчета, созданные на
основании обработки экспериментальных результатов, весьма
сложны и трудоемки. Результаты экспериментов, проведенных
различными авторами и на различных установках, в ряде
случаев не могут быть непосредственно использованы в проектной
работе.
13.5.1. Методика приведения основной характеристики
заборных устройств к стандартной модели
Для удобства использования результатов экспериментов и
расчетов по определению характеристик заборных устройств
необходимо представить в безразмерном (или относительном)
виде зависимость объемного гидравлического остатка незабора
от секундного объемного расхода и осевой перегрузки. Как
известно, в качестве параметра, характеризующего расход и
осевую перегрузку при истечении жидкости, используется число
Фруда. В качестве параметра, характеризующего остаток
незабора, целесообразно использовать «относительный остаток
незабора», равный отношению объемного остатка незабора к
соответствующему секундному объемному расходу г>ол=-^2р-\
Однако это отношение зависит от размеров объекта
испытания, т. е. оно различно для натуры и для геометрически
подобной ей модели при сохранении (в соответствии с критерием
подобия) равенства чисел Фруда
Fr
ГГН
4
Для преодоления этого затруднения введем «стандартную
модель», имеющую такую же геометрию, как и рассматриваемый
8* 211
•объект, но другие размеры. За основной фиксированный
линейный размер для «стандартной модели» целесообразно принять
диаметр расходного трубопровода, не зависящий от типа
заборного устройства. Для простоты расчета принимаем для
«стандартной модели» d=100 мм=1,0 дм. Коэффициент осевой
перегрузки для стандартной модели принят лж=1,0. Переход от
«натуры» к «стандартной модели» производится следующим
образом (при равенстве чисел Фруда FrH = FrCT.M):
1) QCTм= г— —объемный расход,
У Лдгн*5
где Х=— масштаб моделирования;
^ст.м
2) ^o.h<Ct.m= V°'n'n —объемный остаток незабора,
где «н» и «м» — индексы натуры и модели.
Значения QH и уо.н.н берутся из результатов эксперимента или
расчета по имеющимся эмпирическим методикам.
С введением «стандартной модели» предлагается следующая
форма представления зависимости остатков незабора от
расхода и осевой перегрузки:
где vOmH= у°-н-ст<м относительный остаток незабора для «стан-
Ост.м дартной модели»;
Fi*d — число Фруда в расходном трубопроводе
(или в ином характерном сечении,
связанном с размером трубопровода).
В соответствии с вышеприведенным числа Фруда для натуры
и стандартной модели равны. Поэтому при имеющихся
характеристиках стандартной модели характеристики подобной ей
натуры определяются следующим образом.
По известному натурному секундному объемному расходу и
осевой перегрузке определяется число Фруда в характерном
сечении
По графику (или аналитической зависимости) определяется
относительный остаток незабора для стандартной модели г;0.н.
Остаток незабора для натуры произвольных размеров будет
При использовании стандартных моделей с одинаковым
фиксированным характерным размером, облегчается сравнение раз-
212
личных типов заборных устройств и представляется
возможность полного и быстрого использования имеющихся расчетных
и экспериментальных данных.
13.5.2. Расчет гидравлических остатков незабора
с использованием метода стандартной модели
На основании обработки многочисленных экспериментальных
данных определены расчетные величины остатков незабора при
различных расходах для «стандартных моделей» данных
заборных устройств с тарелями с различным отношением — от 0,025
/v
до 0,35 и углов р от 0 до 25°,
где D — диаметр тарели (D = 2d)\
R — радиус сферического днища;
Р — угол между лучом, соединяющим центр сливного
отверстия с центром сферы днища, и осью бака.
Результаты расчета представлены в виде графиков в
Приложении.
Использование графиков позволяет проводить быстрое
сравнение различных вариантов заборных устройств с тарелями.
Например, одно центральное заборное устройство, имеющее D/R =
= 0,1, может быть заменено четырьмя боковыми заборными
устройствами, имеющими р = 5° и ?)//? = 0,05, без увеличения
величины остатков незабора.
Для учета объема газового конуса необходимо пользоваться
графиком рис. П.1, где показана зависимость объема газового
конуса от D/R.
Для определения фактической величины остатков незабора
для заборных устройств выбранных размеров используется
равенство чисел Фруда «натуры» и «стандартной модели».
Таким образом, для определения фактической величины
остатков незабора для выбранного варианта заборного устройства,
имеющего заданный угол р, D/R и свои размеры, подсчитывается
для_интересующего расхода Q значение j/Fr. Затем по
графику V ом=f {V^Jj) для соответствующей «стандартной модели»
по значению j/Fr^ находится F0.H, после чего определяется
фактическая величина остатков незабора.
Примеры расчета
А. Определим величину гидравлических остатков незабора (уо.н) для
центрального заборного устройства (Р«=0°) с диаметром сливного отверстия
d=200 мм=2 дм; с диаметром тарели D»2d=400 мм=4 дм; с радиусом
213
сферы днища /? = 4000 мм=40 дм, при расходе 600 л/с и коэффициентом
осевой перегрузки пх=4.
г 600
1. Определяем у Fr</ = — = 6,8.
^ 98,1 -4-2
4
D
2. Определяем отношение D = —— = 0,1.
/\
3. По графику рис. 13.4 для D=0,l при У Fr</ = 6,8 находим VOH — 1,L
4. По графикуjdhc. 13J3 определяем для D=0,l; VVk = 0,07.
5. Находим V0.h = ^к~^г.н = 1,1 — 0,07 = 1,03.
/~~5— /—2
Г7 = 1/ "л—^
"jc'bO у 4-1,0
Г7 = 1/ л^
"jc'bO у 4-1,0
= 0,71. _
7. Определяем величину гидравлического остатка незабора Ko.H=Vo HQa—
= 1,03 600 0,71=440 л.
Без учета Vr.K остаток незабора будет
V0.H=V'0H.Qa= 1,1-600.0,71 =470 л.
Б. Определим величину гидравлических остатков незабора для четырех
симметрично расположенных заборных устройств с р=10° и диаметром таре-
ли D=2 дм, с диаметром расходных трубопроводов d=\ дм и радиусом
сферы /? = 400 дм. Расход через каждое заборное устройство Qc=150 л/с,
коэффициент осевой перегрузки пх=4.
150
1. Определяем у Fr^ = = 9,6.
^98,1-4.1
D 2
2. Определяем отношение D = — = — = 0,05.
л? 4U
3. По графику рис. 13.8 для р=10° и Z)=0,05 находим Vo,Hv=^-
4. По графику рис. 13.3 определяем Кг.к для D=0,05, Vr.K=0,07 (для
одного заборного устройства). Для четырех заборных устройств 2Кп<=4Х
Х0,07*=0,3. _ _
5. Определяем V'0.h—2 Vr.K = 6—0,3 = 5,7.
6. Определяем переводной коэффициент
[•nx I/ 1-4
7. Определяем величину гидравлического остатка незабора
V0M = V0MQa = 5,7-150-0,5^430 л.
8. Без учета Уг.к
V^o.h = V'0.H'Qa = 6-150.0,5^450 л.
214
Глава 14
ИСПЫТАНИЯ ПНЕВМОГИДРАВЛИЧЕСКИХ
СИСТЕМ НА ГЕРМЕТИЧНОСТЬ
Пневмопидрашическая система (на разлмчиых этапах
изготовления ипроходит гидравлические и .пневматические испытания.
Гидравлические и пневматические испытания проводятся
с щелью определения соответствия (прочности и герметичности
ПГС или их составных частей требованиям, излагаемым в
технической документации. Обычно гидравлическим испытаниям
на (прочность шодвертаюпся отдельные агрегаггы или
трубопроводы лоше их сборки в .цехах-изготовителях (баки,
трубопроводы, клапаны и т. п.). После манта-жа ошевмогидравличес-
кой системы на изделии проводятся пневмоиспытания на
герметичность, а также комплексные испытания, при которых
проверяется функционирование агрегатов многоразового действия
(электро- и пневмоклапаны, дренажно-предохранительные
клапаны, реле давления и т. п.) по заданной циклограмме.
14.1. ТРЕБОВАНИЯ К УСЛОВИЯМ
И СРЕДСТВАМ ИСПЫТАНИЯ
1. Гидравлические и пневматические испытания проводятся в
закрытых помещениях, температура воздуха которых не должна
быть ниже +8° С и не должна превышать +35° С. Колебания
температур воздуха в процессе испытания не должны
превышать 5° С.
2. Испытания объектов на герметичность проводятся до
нанесения на них лакокрасочных покрытий после тщательной
подготовки поверхности (мойки, обезжиривания, сушки и др.).
3. Для гидравлических испытаний применяются водные
растворы или рабочие жидкости, указанные в технической
документации.
4. Трубопроводы, технологические емкости, фильтры и их
покрытия не должны изменять состава воды или раствора,
применяемых для гидравлических испытаний, не должны вызывать
засорения этих жидкостей.
5. Для очистки воздуха от механических примесей
рекомендуется устанавливать фильтры в подводящие магистрали на
входе в пневмопульты, а также на выходе из трубопроводов
.(шлангов) в местах присоединения их к испытываемым
объектам.
6. При испытаниях должны быть приняты меры,
исключающие попадание пыли, грязи и влаги в рабочие полости, а также
исключающие повреждения объекта и его уплотняющих
поверхностей.
215
7. После гидравлических испытаний перед пневматическими
испытаниями на герметичность объекты должны быть
высушены.
14.2. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Герметичность — свойство деталей, сборочных единиц и изделий не
пропускать рабочее вещество и вещества окружающей среды через соединения
или материал конструкции в количествах, нарушающих работоспособность
изделия или оказывающих недопустимо вредное воздействие на
обслуживающий персонал.
Общая негерметичность системы, так же как и негерметичность
отдельной детали, сборочной единицы или соединения характеризуется объемным»
или весовыми количествами вытекающих жидкостей, газов в течение задан-
^ ного времени при определенных условиях.
Степень герметичности — параметр, количественно характеризующий
возможные утечки рабочих веществ. Степень герметичности изделия или
отдельной детали назначается конструктором, исходя из условия обеспечения их
работоспособности. Чем выше степень герметичности, тем меньше ее численная
величина.
Объект испытаний считается герметичным, если при контроле
герметичности с чувствительностью выше или равной заданной степени герметичности
утечка из контролируемого объекта не обнаруживается или обнаруженная
утечка меньше заданной в технических условиях на проверку.
Поток — объемный расход контрольного газа через микронеплотности
сквозного характера, приведенный к определенному давлению. Поток
ныряла P'v
жается соотношением ц/г = —"— »
где р — давление; v — объем; t — время.
Рабочее вещество (рабочая среда) — жидкость или газ.
Контрольное вещество (контрольный газ) — газ или смесь газов,
которыми заполняется система или проверяемый объект при контроле
герметичности. Для гелиевых масс-спектрометрических течеискателей контрольным
газом служит гелий, гелиево-воздушная или гелиево-азотная смесь
(контрольная смесь).
Чувствительность метода контроля герметичности — минимальный поток
или концентрация гелия, надежно регистрируемые конкретным методом
испытаний.
Величины потоков гелия Qr и контрольной смеси QCM через течь связаны
Q
выражением Qr = Qcu- —,
где с — концентрация гелия в контрольной смеси, %.
Объем накопления — объем, создаваемый вокруг испытываемого изделия,
внутри изделия или на его части, в который проникает контрольное вещество.
Суммарная утечка — утечка через все микронеплотности контролируемой
поверхности.
Контрольная течь — поток контрольного вещества заданной величины.
Контрольная течь применяется для определения чувствительности течеиска-
теля.
Контрольная концентрация — концентрация гелия в смеси, по котороГт
эпределяется чувствительность течеискания при испытаниях методом
«накопления».
Время накопления — время, в течение которого происходит накопление
сонтрольного вещества в объем накопления.
Атмосферный гелий — гелий, содержащийся в атмосфере в количестве
1/200 000 по объему.
14.3. МЕТОДЫ ПНЕВМАТИЧЕСКИХ ИСПЫТАНИЯ
Существует несколько методов проверки герметичности пнев-
могидравлических систем. Каждый из этих методов обладает
различной чувствительностью. В зависимости от назначения
объекта, условий его эксплуатации, длительности его хранения
в заправленном или незаправленном состоянии зависит и выбор
метода проверки герметичности. Давление газа в испытываемом
объекте во время пневмоиспытаний обычно составляет 0,6—0,8
рабочего давления.
14.3.1. Метод спада давления
Пневматические испытания по методу спада давления
сводятся к созданию в испытываемом объекте избыточного
давления и к замеру давления в начале и в конце установленного
промежутка времени. Изменение первоначально замеренной
величины давления свидетельствует о негерметичности объекта. Места
течи при этом методе не определяются. Метод спада давления
рекомендуется применять при испытании объектов, объем
которых не превышает 0,5 л, так как с увеличением объема
испытываемых объектов значительно повышается продолжительность
испытания. При пневмоиспытаниях, особенно при использовании
метода спада давлений, необходимо учитывать изменение
температуры газа, заполняемого в испытываемую емкость. Так, при
заполнении большой емкости с низким давлением из баллонов
высокого давления газ при расширении охлаждается, а при
заполнении баллонов высокого давления газ нагревается. В том
и другом случае необходима достаточно большая выдержка для
выравнивания температур испытываемого объекта и
окружающей среды. Во время испытания объектов на герметичность
методом спада давления температура окружающей среды,
измеренная в начале испытания, не должна изменяться более, чем
на ±2° С. Число измерений должно быть не менее 3. По
полученным данным вычисляется среднее арифметическое значение
спада давления. На каждый испытываемый
объект'устанавливается не менее 2 приборов, измеряющих давление. Отбор
давления необходимо производить в точках с минимальными
скоростями газа во время заполнения.
14.3.2. Метод обмыливания
Метод обмыливания применяется для предварительной
проверки перед испытанием объектов высокочувствительным
методом с помощью галоидных или масс-спектрометрических тече-
искателей. Этот метод не позволяет оценить суммарную утечку
всего испытываемого объекта в отличие от метода спада
давления. Он позволяет обнаружить утечки более 2 мкммм рт. стХ
Хл/с. Определить величину утечки этим методом не представ-
217
ляется возможным. Пневмоиспытания по методу обмыливания
сводятся к покрытию мыльной эмульсией отдельных участков
внешней поверхности и соединений испытываемого объекта,
находящегося под избыточным давлением газа. В местах течи
происходит вздутие мыльной эмульсии, что и указывает на
негерметичность данного объекта.
Перед нанесением мыльной эмульсии испытываемый объект
выдерживается под испытательным давлением в течение 3—
5 мин. С момента нанесения мыльной эмульсии каждый участок
контролируемой на герметичность поверхности выдерживается
в течение 2 мин, после чего производится' осмотр с целью
обнаружения мыльных пузырьков (вздутий).
14.3.3. Метод «аквариума»
Пневматические испытания по этому методу сводятся к
погружению в жидкость.испытываемого объекта предварительно
заполненного газом. Негерметичность обнаруживается по
выделяющимся из объекта пузырькам газа. Отсчет количества
выделяющихся пузырьков производится визуально.
Метод «аквариума» целесообразно применять при
испытании объектов, объем которых не превышает 150 л, а их внешние
поверхности не имеют глубоких, плохо просматриваемых
впадин. Если после выдержки объекта в жидкости в течение 3—
5 мин не будут замечены выделяющиеся из него пузырьки газа,
объект считается герметичным.
14.3.4. Метод галоидных течеискателей
Галоидные течеискатели могут быть применены для
определения мест течей, значение которых не более Ы0~2 мкммм рт.
стл/с, если внутри объектов допустимо создавать избыточное
давление газа. Принцип работы галоидных течеискателей
сводится к следующему: чувствительным элементом галоидных
течеискателей является датчик, представляющий диод с
платиновыми электродами, анод которого подогревается до температуры
800—900° С. Накаленная платина имитирует положительные
ионы, которые могут регистрироваться. Присутствие в воздухе
газов, содержащих галоиды, приводит к резкому повышению
эмиссии ионов.
Испытываемый объект наполняется под избыточным
давлением галоидосодержащим газом. С помощью вентилятора через
межэлектродное пространство датчика непрерывно
протягивается воздух, а вместе с воздухом и галоидосодержащие газы,
вытекающие через течи испытываемого объекта. Усиленный ионный
ток регистрируется стрелочным прибором и подается на
телефон. Повышение частоты сигналов в телефоне свидетельствует
о наличии течи в испытываемом объекте.
128
Контроль герметичности объектов галоидными течеискателя-
ми может проводиться с применением в качестве пробного газа
фреона-22 или фреона-12, как в чистом виде, так и в смеси с
воздухом или газообразным азотом. При заполнении испытываемых
объектов контрольным газом избыточное давление их должно
быть ниже на 49033 Па давления насыщенных паров при
соответствующей температуре. Содержание фреона в смеси газов
должно быть не менее 10%. Испытываемую емкость вначале за-
лолняют галоидосодержащим газом, а затем газообразным
азотом до испытываемого давления. Отыскание течей
осуществляется с помощью щупа, входящего в комплект прибора ГТИ,
путем перемещения его по обследуемым поверхностям объекта,
который испытывают; для предупреждения повышения
концентрации галоидосодержащего газа в помещении, в котором
производятся испытания, рекомендуется объект предварительно
проверить более грубым методом: обмыливанием или методом
«аквариума». Проверка чувствительности течеискателей к
галоидосодержащим газам осуществляется путем перемещения
датчика (щупа) над эталоном контрольной течи. Сброс галоидо-
содержащих газов и их смесей из испытуемых объектов
производить по дренажным линиям обязательно за пределы помещения.
Помещение, в котором Ьроводятся испытания с применением
фреона, должно быть оборудовано вытяжкой и приточно-вытяж-
ной вентиляцией.
14.3.5. Метод «остаточных устойчивых деформаций»
Сущность метода «остаточных устойчивых деформаций»
заключается в том, что на поверхность контролируемого объекта
наносится специальная контрольная масса, которая фиксирует
утечки контрольного газа образованием отдельных пузырей,
пенных пятен и кратеров, позволяющих обнаруживать места
негерметичности даже после сброса давления из объекта испытания.
14.3.6. Метод устойчивых следов
Испытание объекта на герметичность по методу остаточных
устойчивых следов сводится к тому, что на объект наносится
чувствительная к аммиаку индикаторная масса, а в объект
подается под давлением контрольный газ (воздушно-аммиачная
смесь). Индикаторная масса под воздействием аммиака
изменяет свой цвет. В местах течей образуются пятна малинового
цвета, хорошо выделяющиеся на основном фоне покрытия.
При испытании объектов с помощью этого метода возможно
обнаружение мест течей после сброса давления из объекта, что
является важным условием для безопасности проведения
испытаний. Этот метод применяется для выявления небольших нару-
129
шений герметичности для объектов, изготовленных из
алюминиевых и жаропрочных сплавов, а также легированной и
нержавеющей сталей.
14.3.7. Контроль герметичности методом «щупа»
Этот метод используется для поиска мест течей в основном
металле, сварных швах, в ниппельных, фланцевых и других
видах соединений. Сущность метода заключается в перемещении
щупа-натекателя, соединенного шлангом с течеискателем типа
ПТИ, по соединениям испытываемой системы, находящейся под
давлением контрольного газа. Контрольный газ при наличии
негерметичности засасывается щупом-натекателем в течеискатель,
выносной прибор которого отклонением стрелки и изменением
тональности звукового сигнала фиксирует утечку контрольного
газа.
14.3.8. Контроль герметичности методом «вакуумирования»
Пневмоиспытания по методу «вакуумирования» заключаются
в создании разрежения над контролируемой поверхностью и
измерении гелиевым течеискателем контрольного газа, который
под действием разности давлений проникает через
микронеплотности из внутренних полостей испытываемого объекта в отва-
куумированную полость. По показанию выносного прибора тече-
искателя судят о степени герметичности проверяемого объекта.
Контроль герметичности по методу «вакуумирования»
можно производить любым из приведенных на рис. 14.1 способом.
При контроле герметичности в вакуумной и гелиевой камерах
определяется величина суммарной негерметичности изделий.
Контролю в вакуумной камере могут подвергаться объекты,
имеющие сложную и развитую внутреннюю поверхность,
большую протяженность и малое поперечное сечение, изделия,
имеющие закрытые двойные стенки и т. д.
Способом гелиевой камеры проверяются изделия, которые
по условиям эксплуатации должны нагружаться внешним
давлением. Целесообразность применения способа гелиевой камеры
определяется конструктивными и эксплуатационными
особенностями испытываемых изделий.
Способ обдувания изделий контрольным газом применяется
для определения локальных негерметичностей объекта
испытаний. Способом обдувания рекомендуется пользоваться при
контроле герметичности изделия с несложной внутренней
поверхностью и небольшой протяженностью. Способ обдувания изделий
контрольным газом по чувствительности ниже, чем способы
испытаний в вакуумной или гелиевой камере.
Сущность контроля герметичности методом
«вакуумирования» испытываемого объекта с последующим обдуванием его
220
?
I
f
«о
E
I!
3
I
5: ^
'2
5:
11 i
*4ё
С; Qj
I
1
1
I
I
221
контрольным газом заключается в следующем: в
контролируемом изделии создается разрежение, а его наружная поверхность
обдувается тонкой струей гелия. При наличии течи гелий
проникает в полость изделия, соединенную с масс-спектрометричес-
кой камерой течеискателя, что приводит к отклонению стрелки
выносного прибора течеискателя. Способ «обдувания»
применяется при контроле герметичности вновь изготовляемых
вакуумных установок и служит для поиска локальных течей. Способ
«обдувания» является индикаторным методом, в связи с чем
применять его для количественной оценки величин течей не
рекомендуется.
Испытание изделий с применением вакуумных присосок
целесообразно проводить при контроле герметичности днищ, сварных
швов емкостей, мест приварки кронштейнов, фланцев и т. п.
Способ контроля герметичности с применением вакуумных
присосок заключается в том, что на испытываемый участок
изделия устанавливается специальная герметичная
камера-присоска, соединенная с откачной системой и течеискателем.
Герметичность присоски осуществляется уплотнением из вакуумной
резины. Внутренняя полость вакуумируется до необходимого для
контроля давления, а в изделие подается контрольный газ под
избыточным давлением.
Метод вакуумирования с применением разъемных
вакуумных камер применяется в основном при контроле герметичности
кольцевых стыков трубопроводов.
Способ контроля герметичности с применением разъемных
вакуумных камер заключается в том, что на испытываемый стык
трубопровода устанавливается специальная герметичная
камера, соединенная с откачной системой и течеискателем.
Разъемная вакуумная камера вакуумируется до необходимого для
контроля давления, а в изделие подается контрольный газ под
избыточным давлением.
Конструкции вакуумных камер должны отвечать следующим
требованиям:
— обеспечивать испытания с заданной чувствительностью;
— быть простыми и удобными в эксплуатации;
— обеспечивать испытания широкой номенклатуры деталей,
агрегатов и элементов изделий;
— иметь возможно меньшие свободные объемы
вакуумирования;
— иметь минимальную площадь поверхности уплотнитель-
ных элементов.
Материалы, из которых изготовлена вакуумная камера, дол*
жны обладать:
— малой величиной газовыделения;
— малой величиной газопроницаемости;
— достаточной механической прочностью.
222
При выборе схемы испытаний методом «вакуумирования»
необходимо исходить из возможностей откачных средств течеие-
кателя и конструктивных особенностей контролируемого объекта
(габариты, величины газовыделения и натекания, допустимые
нормы негерметичности).
14.3.9. Метод накопления при атмосферном давлении
Метод накопления при атмосферном давлении применим для
контроля суммарной негерметичности соединений, агрегатов и
систем при условии, если вокруг них или части их
контролируемой поверхности можно создать замкнутый объем накопления,
причем в качестве объема накопления может быть использована
и внутренняя полость контролируемого агрегата или системы.
Сущность метода контроля герметичности заключается в том,
что вокруг проверяемого объекта создаётся замкнутый объем
накопления. Проверяемый объект заполняется контрольным
газом до избыточного давления. ,При наличии сквозных
микродефектов в проверяемом объекте контрольный газ, проникая че^ез
них, попадает в замкнутый объем накопления, повышая в нем
концентрацию гелия. Путем ввода в объем накопления щупа-
натекателя с иглой от шприца тапа «Рекорд», соединенного с
гелиевым течеискателем, регистрируется показание прибора,
которое соответствует определенной концентрации гелия. Снятое
показание сравнивается с показанием течеискателя по
контрольной смеси с известной концентрацией. Сравнивая величину
концентрации гелия в объеме накопления с допустимой для
данного испытания величиной, согласно техническим условиям
можно судить о герметичности изделия.
Метод «накопления при атмосферном давлении» позволяет
определить не только суммарную утечку, но и приблизительно
определить место течи при условии возможности отбора проб в
любом месте объема накопления, т. е. путем обнаружения в
объеме накопления зоны с максимальной концентрацией
контрольного газа. Метод «накопления при атмосферном давлении»
применим для контроля герметичности любых типовых
элементов систем, например, фланцевых и сварных соединений
трубопроводов, емкостей, межъемкостных пространств на собранно:^
изделии, днищ баков и т. д.
Основными параметрами контроля герметичности методом
«накопления при атмосферном давлении» являются: степень
герметичности — (?доп (величина максимально допустимой утечки,
задаваемая потоком по гелию Qr или потоком по контрольной
смеси Qcm), объем накопления — vH, время накопления — /н.
повышение (по отношению к нормальному содержанию в
атмосфере) концентрации гелия в объеме накопления Дс.
Фактическая чувствительность к концентрации гелия
зависит от фона гелия в помещении, где проводятся испытания.
223
В связи с этим в цеховых условиях максимальный фон гелия не
должен превышать 2,ЬЛЪ-А% Не. При этом, соответственно,
минимально обнаруживаемая концентрация гелия в объеме
накопления составляет более 2,510~4% Не.
Степень герметичности является основной исходной
величиной для выбора остальных параметров испытаний. Параметры
испытаний взаимосвязаны следующими соотношениями:
Дс=0,475-^; /„=2,1-^; Qr=2,l ^-; ^=0,475-^,
где Ас — повышение концентрации гелия в объеме
накопления, %;
#н — время накопления, ч;
Qt— суммарный поток по гелию, мкммм рт. стл/с;
v-д — объем накопления;
2,1 и 0,475 — коэффициенты, зависящие от выбранных единиц
размерности.
Эти формулы справедливы для замкнутых герметичных
объемов накопления.
ПРИЛОЖЕНИЕ
j —
j
^^
__.
1
\
1
\
¦¦ Mi
¦ ' —
t
1 4
" ¦
o?$o
^Jl?750~
T
^ ¦ ,. -*- . - * —-< 1 D^~nT?=,()
' '. i ! i L
j I
1
. ,
1 I
^c -' #
П.2.
225
v'
Y0.H
П.З.
w
8
6
U
г
•
\
¦
———.
-
- —
-
— —
—
— -
¦ ¦
OX
— —
1375
0,0500
1
0,0750
D=O,WOO
t* 6
П.4.
226
0,5
пи
- -
¦ I»
— —
— m
— —
=5°
- IM
1
ВгвжО
0f7
П 1
0 <.
125
•
50
15
?пп
i
0,Z25
0,2
—т,
5=0,
71 "
"од—
350
30
20
П.5.
\
\
—=
\
/3=
w
.
'
I
П. 05
007
y/s
'00
5=0,7000
к 6
П. 6.
V27
П.7.
228
1,0
0,5
\
\
\
\
\
\
ч^_^
р
\
^—
.
^^
*^
1 .
—-—
¦— ^.
г- ^
75
00
350
—*
П.10.
229
VO и
250
200
ISO —
JOO
\
\
\
\
ft'
>
*¦-"¦—
•16°50'
i
( ^N
1
¦—*^
— —
.
i
1
0,0375
*- i
D ,0500
<* 6
П.11.
8 \TrF7
f5
JO
1
\
ч
v
\
4
P> = 16°50'
p ^
——.
-^=
-¦ —
07S
194
I
4 6 8
П.12.
230
\
--¦
1
\
\
)
ч
V
\
\
ч
X
!
1
1—^>
Г
OQJ
7С
1
eon
600
MOO
700
П.14.
231
10
\
у
ч
\
\
л
\
ч
1
\
й
- 0,7
^?
300
^ —
^0,2'<
/50
Г"*
00
0J25 d=*Q.J50
2 ** б a
П.15.
\
к
\
А"
\
\
•25'
\
^^
^
— —
7*
/2S
О 2 ** 6 в ггга
П.16.
ЛИТЕРАТУРА
1. Абрамович Г. Н. Прикладная газовая динамика. М., «Наука», 1969,
824 с.
2. Агроскин И. И., Дмитриев Г. Т., Пи калов Ф. И. Гидравлика. М.—Л.,
«Энергия», 1964, 352 с.
3. Аксельрод Э. Л., Ильин В. П. Расчет трубопроводов. Л.,
«Машиностроение», 1975, 240 с.
4. Альтшуль А. Д., Киселев П. Г. Гидравлика и аэродинамика. М., Гос-
стройиздат, 1965, 274 с.
5. Аронович Г. В., Картвелишвили Н. А., Любимцев Я. К.
Гидравлический удар и уравнительные резервуары. М., «Наука», 1968, 247 с.
6. Балдина О. М., Байтина Ц. М. Образование вихревых* воронок над
опускными трубами.— «Теплоэнергетика», 1955, № 10.
7. Баррер М., Жомотт А., Вебек Б. Ф. Ракетные двигатели. (Пер. с англ.).
М., Оборонгиз, 1962, 799 с.
8. Башта Т. М. Гидропривод и гидропневмоавтоматика. М.,
«Машиностроение», 1972, 320 с.
9. Башта Т. М. Машиностроительная гидравлика. М., «Машиностроение»,
1971, 671 с.
^ 10. Беляев Н. М., Шандоров Г. С. К вопросу о воронкообразовании без
вращения при сливе жидкости через донные отверстия.—
«Гидроаэромеханика», вып. 2, изд. ХГУ, 1965.
11. Беляев Н. М., Уваров ?. И. Расчет и проектирование реактивных
систем управления космических летательных аппаратов. М.,
«Машиностроение», 1974, 199 с.
12. Бержерон Л. От гидравлического удара в трубах до разряда в
электрической сети. (Пер. с франц.). М., Машгиз, 1962, 348 с.
13. Березин И. С, Жидков Н. П. Методы вычислений. Т. II. М., Физмат-
гиз, 1962, 639 с.
14. Бурцев К. Н. Металлические сильфоны. М. — Л., Машгиз, 1963, 163 с
15. Вайсман М. Д. Термодинамика парожидкостных потоков. Л.,
«Энергия», 1967, 272 с.
16. Вегенер П. П., Мак Л. М. Конденсация в сверхзвуковых и
гиперзвуковых аэродинамических трубах.—В кн.: «Проблемы механики», вып. III,
ИЛ, 1961, с. 254—367.
17. Волков Е. Б., Головков Л. Г., Сырицин Т. А. Жидкостные ракетные
двигатели. М., Воениздат, 1970, 590 с.
18. Волынский Б. А. Аналоговые интегровычислители для решения
краевых задач. М., изд-во АН СССР, 1962, 152 с.
19. Герш С. Я. Глубокое охлаждение. Ч. I. M., Госэнергоиздат, 1957,
392 с.
20. Гликман Б. Ф. Автоматическое регулирование жидкостных ракетных
двигателей. М., «Машиностроение», 1974, 396 с.
21. Гуревич Д. Ф. Основы расчета трубопроводной арматуры. Изд. 2-е.
М., «Машгиз», 1962, 410 с.
233
22. Гуревич Д. Ф. Расчет и конструирование трубопроводной арматуры.
Изд. 4-е. Л., «Машиностроение», 1969, 887 с.
23. Гуревич Д. Ф. Трубопроводная арматура. Л., «Машиностроение»,
1975, 311 с.
24. Де Брок и др. Системы подачи топлива, использующие силы
поверхностного натяжения. — «Вопросы ракетной техники», 1967, № 2, с. 34—49.
25. «Двигатели ракетные жидкостные. Термины и определения». ГОСТ
17655—72, Государственный комитет стандартов СССР. М., 1972.
26. «Двигательные установки ракет на жидком топливе». (Под ред.
Э. Ринг). М., «Мир», 1966, 402 с.
27. Добровольский М. В. Жидкостные ракетные двигатели. М.,
«Машиностроение», 1968, 395 с.
28. Жуковский Н. Е. О гидравлическом ударе в водопроводных трубах.
Полное собр. соч. Т. VII. ОНТИ—НКТП. М.—Л., 1937, 410 с.
29. Зимон А. Д. Адгезия жидкостей и смачивание. М., «Химия», 1974,
413 с.
30. Идельчик И. Е. Справочник по гидравлическим сопротивлениям. Изд.
2-е. М., «Машиностроение», 1975, 559 с.
31. Иодис С. В. Двигательные установки космического корабля
«Аполлон».—«Вопросы ракетной техники», 1969, № 12, с. 17—29.
32. «Исследование и разработка перспективных систем наддува».—
«Вопросы ракетной техники», 1969, № 2, с. 36—54.
33. Кении и Фридман. Наддув топливных баков путем впрыска
реагирующего компонента.— «Вопросы ракетной техники», 1966, № 7, с. 13—27.
34. Киселев П. Г., Альтшуль А. Д., Данильченко Н. В. Справочник по
гидравлическим расчетам. М., «Энергия», 1974, 313 с.
35. Колесников К. С, Самойлов Е. А., Рыбак С. А. Динамика
топливных систем ЖРД. М., «Машиностроение», 1975, 171 с.
36. Комаров А. А., Сапожников В. М. Трубопроводы и соединения для
гидросистем. М., «Машиностроение», 1967, 232 с.
37. Крюков А. И., Глинкин И. М., Фионин В. И. Гибкие металлические
рукава. М., «Машиностроение», 1970, 204 с.
\к 38. Кутателадзе С. С, Стырикович М. А. Гидродинамика
газожидкостных систем. Изд. 2-е. М., «Энергия», 1976, 296 с.
39. Лаврентьев М. А., Шабат Б. В. Методы теории функций
комплексного переменного. Изд. 3-е. М., «Наука», 1965, 716 с.
40. Мошкин Е. К. Нестационарные режимы работы ЖРД. М.,
«Машиностроение», 1970, 336 с.
41. Махин В. А., Присняков В. Ф., Велик Н. П. Динамика жидкостных
ракетных двигателей. М., «Машиностроение», 1*969, 834 с.
42. «Невесомость. Физические явления и биологические эффекты». М.,
«Мир», 1966, 275 с.
43. Повицкий А. С, Любин Л. Я. Основы динамики и тепломассообмена
жидкостей и газов при невесомости. М., «Машиностроение», 1972, 252 с.
VJ 44. Поликовский В. И., Перельман В. Г. Воронкообразование в жидкости
с открытой поверхностью. М., Госэнергоиздат, 1959, 191 с.
45. Портер, Станфорд. Вытеснительные устройства для топливных систем
космических аппаратов.— «Вопросы ракетной техники», 1966, № 4, с. 57—65.
46. Пржиалковский А. Л., Шучинский С. X. Электромагнитные клапаны,
Л., «Машиностроение», 1967, 246 с.
47. Рамм В. М. Абсорбция газов и жидкостей. М., «Химия», 1966, 767 с.
48. Рид Р., Шервуд Т. Свойства газов и жидкостей. Л., «Химия», 1971,
702 с.
49. Рудановский А. А., Крез Д. П. Радиоизотопные методы контроля и
измерения уровней. М., Атомиздат, 1967, 135 с.
50. Сапожников В. М. Монтаж и испытания гидравлических и
пневматических систем на летательных аппаратах. М., «Машиностроение», 1972, 271 с.
51. Сарнер С. Химия ракетных топлив. М., «Мир», 1969, 488 с.
52. Сизонов В. С. О динамическом провале уровня свободной поверхнос-
234
ти жидкости конечной глубины над сливным отверстием.—««Известия АН
СССР». Сер. Механика жидкости и газа, вып. № К>, 1971, с. 72—75.
53. Стернин Л. Е. Основы газодинамики двухфазных течений в соплах.
М., «Машиностроение», 1974, 212 с.
54. Синярев Г. Б., Добровольский М. В. Жидкостные ракетные
двигатели. Изд. 2-е. М., Оборонгиз, 1957, 580 с.
55. Ситников Б. Т., Матвеев И. Б. Расчет и исследование
предохранительных и переливных клапанов. М., «Машиностроение», 1972, 129 с.
56. Сычев В. В. Сложные термодинамические системы. М., «Энергия»,.
1970, 232 с.
57. Тананаев А. В. Гидравлика магнитогидродинамических машин. М.,
Атомиздат, 1970, 271 с.
58. Тетельбаум И. М. Электрическое моделирование. М., Физматгиз, 1959,.
319 с.
59. Тихонов А. Н., Самарский А. А. Уравнения математической физики.
М., «Наука», 1972, 735 с.
\j 60. Токарев В. Е. Истечение жидкости из емкости с образованием
воронки.— Известия высших учебных заведений. Сер. Авиационная техника,.
1967, № 3.
61. Фезандье Ж. Гидравлические механизмы. М., Оборонгиз, 1960, 191 с.
62. Фильчаков Н. Ф. Численные и графические методы прикладной
математики. Киев, «Наукова думка», 1970, 800 с.
63. Чарный И. А. Неустановившееся движение реальной жидкости в
трубах. М., «Недра», 1975, 296 с.
64. Чебаевский В. Ф., Петров В. И. Кавитационные характеристики
высокооборотных шнеко-центробежных насосов. М., «Машиностроение», 1973,.
152 с.
65. Челомей В. Н. О вибрациях клапанных пружин и методах их
устранения.— «Труды Киевского авиационного института», вып. VII, 1936.
66. Челомей В. Н. О пневматических сервомеханизмах.— «Известия АН
СССР. ОТН», 1954, № 5.
67. Эдельман А. И. Топливные клапаны жидкостных ракетных
двигателей. М., «Машиностроение», 1970, 242 с.
68. Эмануэль Н. М., Кнорре Д. Г. Курс химической кинетики. М.,
«Высшая школа», 1969, 432 с.
69. Яковлев Л. Г. Уровнемеры. М., «Машиностроение», 1964, 191 с.
70. Astronautics and Aeronautics, 1973. И, N <12, р. 46—51.
71. Bowman Т. Е., Paynter. Weightless Liquids. Science Journal, 1966, N 9.
72. Distortion of a free surface during tank disharge. Journal of Spacecraft
and Rockets, 1966,3, N 11.
73. Harkins W. D. The physical chemistry of surface films. New York, Rein-
hold Publ. Co., 1952.
74. Paynter L. Time for a totally wetting liquid to deform from a gravity-
dominated to a nulled:gravity equilibrium state. AIAA Journal, 1964, 2, N 9.
75. Pohl H. A. Non-uniform electric properties of fields. Scientific American,
1960, N 12.
76. The formation of a dip on the surface of liquid draining from a tank.
Fluid Mechanics, 1967.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Раздел первый
СИСТЕМЫ, АГРЕГАТЫ И ТОПЛИВА ЖРДУ
Глава 1. Общие сведения о пневмогидравлических системах ЖРДУ б
1.1. Функциональный состав ПГС 7
1.2. Определения И
1.3. Основные требования, предъявляемые к ПГС .... 12
1.4. Основные параметры ПГС 14
1.5. Классификация пневмогидравлических систем ЖРДУ . 14
1.6. О применении графов к анализу и синтезу ПГС .... 16
Глава 2. Устройство пневмогидравлических систем 19
2.1. Топливные системы 19
2.2. Система заправки 26
2.3. Система наддува топливных баков 27
2.4. Описание пневмогидравлических систем ракет-носителей и
космических аппаратов 32
Глава 3. Агрегаты и коммуникации пневмогидравлической системы 41
3.1. Основные требования 41
3.2. Клапаны 42
3.3. Трубопроводы 56
3.4. Сильфоны и гибкие трубопроводы 58
3.5. Соединения трубопроводов 62
Глава 4. Топливные баки 66
4.1. Общие требования к топливным бакам .:.... 66
4.2. Расчет заправки бака топливом 68
4.3. Выбор объема газовой подушки бака 72
4.4. Заборные устройства 76
Глава 5. Системы измерения уровней топлива в баках ... 83
5.1. Задачи систем. Принцип действия 83
5.2. Требования к системам 86
5.3. Система контроля уровней при заправке 87
5.4. Система одновременного опорожнения баков .... 90
5.5. Тарировка баков . • 94
Глава 6. Жидкие ракетные топлива 96
6.1. Классификация жидких ракетных топлив 97
6.2. Выбор и требования к жидким ракетным топливам . . . 101
6.3. Перспективные жидкие ракетные топлива 107
6.4. Насыщение (абсорбция) топлива газами 108
236
Стр.
Раздел второй
ПРОЦЕССЫ В ПНЕВМОГИДРАВЛИЧЕСКИХ СИСТЕМАХ
Глава 7. Гидродинамика топливных магистралей 111
7.1. Движение жидкости по трубопроводам. Расчет
гидросопротивлений 111
7.2. Неустановившееся движение по трубопроводам и явление
гидроудара 115
7.3. Основные уравнения движения. Формула Н. Е. Жуковского
для гидроудара 117
7.4. Определение скорости фронта движущейся жидкости . . 118
7.5. Применение метода характеристик к расчету явления
гидроудара и нестационарного движения жидкости . . . . 123
7.6. Использование квадратур для расчета гидроудара и
исследования нестационарных процессов в топливных системах . 128
7.7. Использование квадратур для исследования разветвленных
систем питания 133
Глава 8. Процессы в системах предварительного наддува и
дренажа баков 137
8.1. Расчет аккумуляторов давления 137
8.2. Расчет расхода газа и времени наддува баков . . . . 142
8.3. Влияние габаритов трубопровода наддува на конечное
давление в баке 151
8.4. Некоторые вопросы динамики систем наддува и дренажа . 153
8.5. Параметры газа в баке при предпусковом наддуве с учетом
динамических характеристик систем 155
8.6. Расчет дренажных систем 157
Глава 9. Газовая подушка топливного бака 158
9.1. Процессы в баке при запуске двигателей 158
9.2. Расчет параметров газа в баке при запуске двигателей . 159
9.3. Аналитические зависимости изменения давления в подушке
бака по времени 167
9.4. Рекомендации по вы0ору начального объема газовой
подушки 168
Глава 10. Поведение топлива в баках в условиях невесомости . 170
10.1. Межмолекулярные силы 170
10.2. Краевой угол 174
10.3. Капиллярные явления 176
10.4. Капиллярные явления на сетках 177
10.5. Статика жидкости 180
10.6. Динамика топлива в состоянии невесомости . . . . 185
Глава 11. О пневматических сервомеханизмах 187
11.1. Основные дифференциальные уравнения 188
11.2. Начальное давление в ненагруженном механизме . . . 190
11.3. Движение при малых перепадах давления 191
11.4. Анализ полученных результатов. Устойчивость движения . 194
Раздел третий
ИСПЫТАНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
Глава 12. Виды испытаний агрегатов и пневмогидравлических
систем ЖРДУ . . 201
12.1. Автономные испытания агрегатов и узлов ПГС . . . . 201
237
Стр.
12.2. Объем и порядок автономных испытаний апрегатов и узлов 202
12.3. Автономные и комплексные испытания систем и подсистем 202
Глава 13. Экспериментальная отработка пневмогидравлических
систем 203
13.1. Система предпускового наддува 203
13.2. Система основного наддува 205
13.3. Имитация давления гидроудара и скоростей заполнения при
холодных испытаниях 207
13.4. Экспериментальное определение гидравлических потерь в
расходных магистралях топливной системы 209
13.5. Заборные устройства 210
Глава 14. Испытания пневмогидравлических систем на
герметичность 215
14.1. Требования к условиям и средствам испытания . . . 215
14.2. Основные понятия и определения 216
14.3. Методы пневматических испытаний . ...... 217
Приложение 225
ИБ № 2078
Дмитрий Алексеевич ПОЛУХИН, Николай Николаевич МИРКИН,
Владимир Михайлович ОРЕЩЕНКО, Генрих Леонидович УСОВ
ПНЕВМОГИДРАВЛИЧЕСКИЕ СИСТЕМЫ
ДВИГАТЕЛЬНЫХ УСТАНОВОК С ЖИДКОСТНЫМИ
РАКЕТНЫМИ ДВИГАТЕЛЯМИ
Редактор издательства Л. И. Коваленко Художник Е. В. Бекетов
Технический редактор Е. И. Смирнова Корректор Е. П. Карнаух
Сдано в «абор 23/VIII 1977 г. Подписало к печати 4/1 1978 г. Т-03202
Формат 60X9071в Бумага № 2
Печ. л 15,0 Уч.-изд. л. 15.15
Цена 1 р. 10 к. Тираж 1480 экз. Изд. зак. 356
Издательство «Машиностроение», 107865 Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8 Союзполиграфпрома
гари Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7. Тип. зак. 3205
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
НОВЫЕ КНИГИ ПО АВИАЦИОННОЙ ТЕХНИКЕ
ВЫПУСК 1978 г.
Волков Е. Б., Сырицын Т. А., Мазинг Г. Ю.
Статика и динамика ракетных двигательных установок.
В 2-х частях. Ч. 1. Статика. 16 л. Цена 2 р. 80 к.
В первой части монографии рассмотрены статические
характеристики ракетных двигательных установок, работающих
на жидком, твердом и жидко-твердом топливе. Изложены
методы анализа статических характеристик двигательных
установок и их агрегатов, дан анализ возмущающих
факторов. Рассмотрены точность работы границы
работоспособности, время работы и гарантийные запасы топлива
двигательных установок и их настройка на заданные режимы.
Волков Е. Б., Сырицын Т. А., Мазинг Г. Ю.
Статика и динамика ракетных двигательных установок. В 2-х
частях. Ч. 2. Динамика. 25 л. Цена 4 р. 20 к.
Во второй части монографии рассмотрены
неустановившиеся режимы работы двигательных установок, работающих
на жидком, твердом и жидко-твердом топливе. Изложены
методы анализа динамических характеристик ракетных
двигательных установок и их элементов (камера сгорания, турбо-
насосный агрегат, автоматика, газовые магистрали). Дан
анализ и приведены методы расчета устойчивости, границ
работоспособности, запуска и выключения двигательных установок.
239
Теория автоматического управления ракетными
двигателями. 21 л. Цена 3 р. 60 к. В пер. Авт.: А. А. Шевяков,
В. М. Кал нин, Н. В. Hay мен ков а, В. В. Дятлов.
В монографии изложены методы исследования
динамических процессов управления линейными и нелинейными
системами, принципы построения систем регулирования и даны
рекомендации по их проектированию.
Рассмотрены системы регулирования тяги, соотношения
компонентов, точность и быстродействие таких систем.
Приведены схемы и программы управления запуском и
остановом ракетных двигателей. Основное внимание уделено
методам численного решения задач для нелинейных систем с
помощью ЭВМ.
ПРИОБРЕТАЙТЕ КНИГИ ИЗДАТЕЛЬСТВА «МАШИНОСТРОЕНИЕ»
В МАГАЗИНАХ, РАСПРОСТРАНЯЮЩИХ
ТЕХНИЧЕСКУЮ ЛИТЕРАТУРУ