/
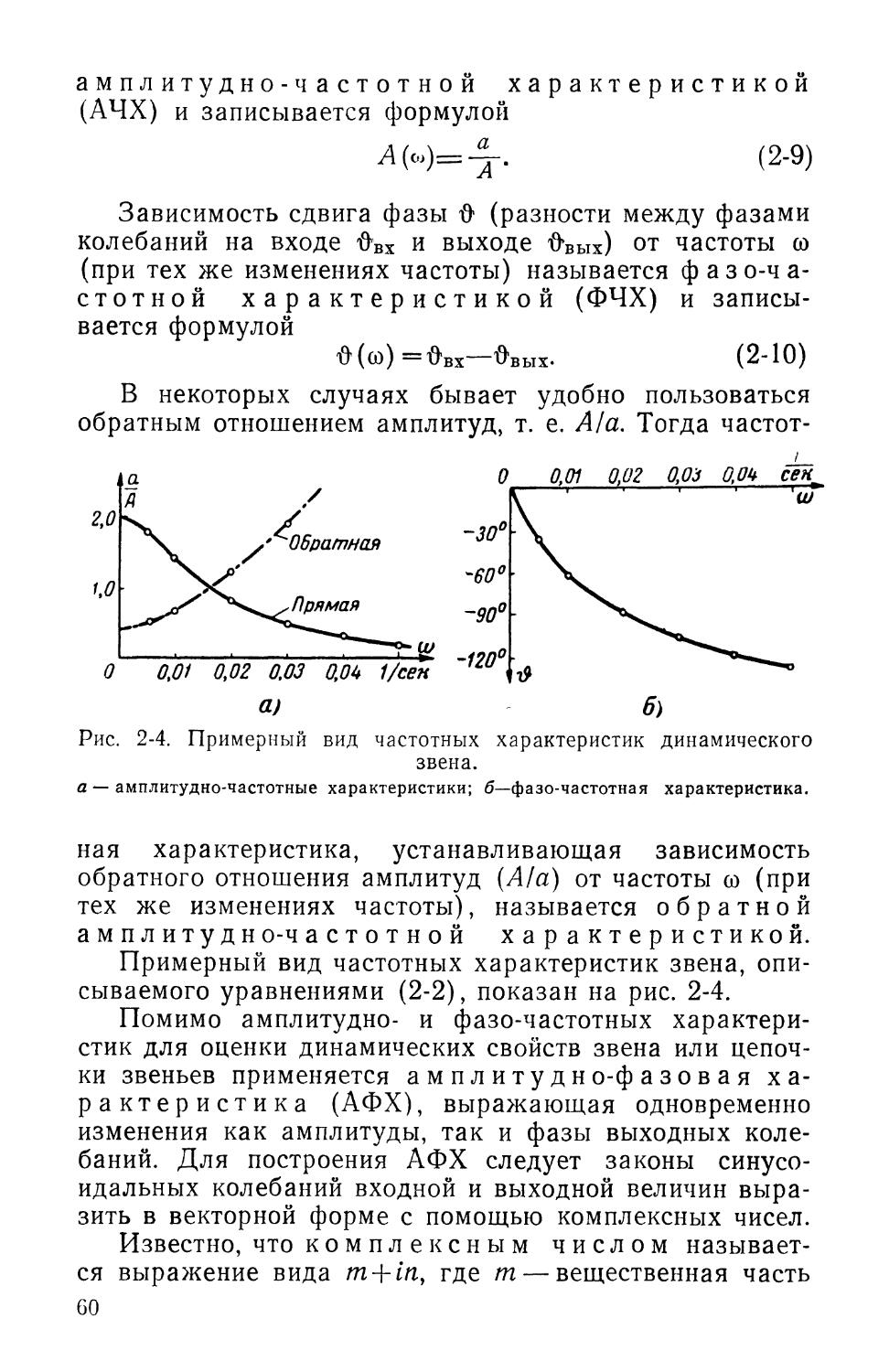
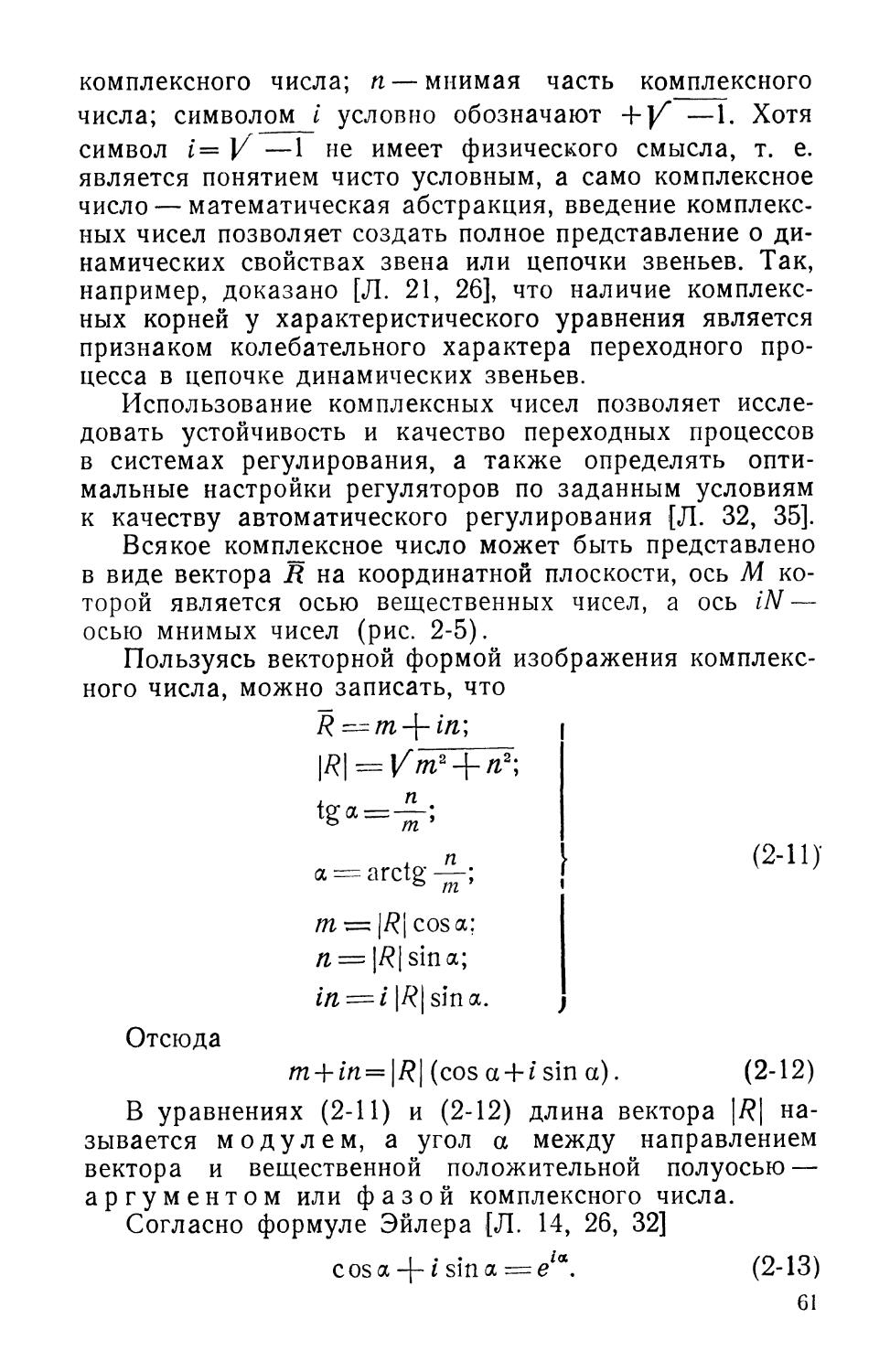
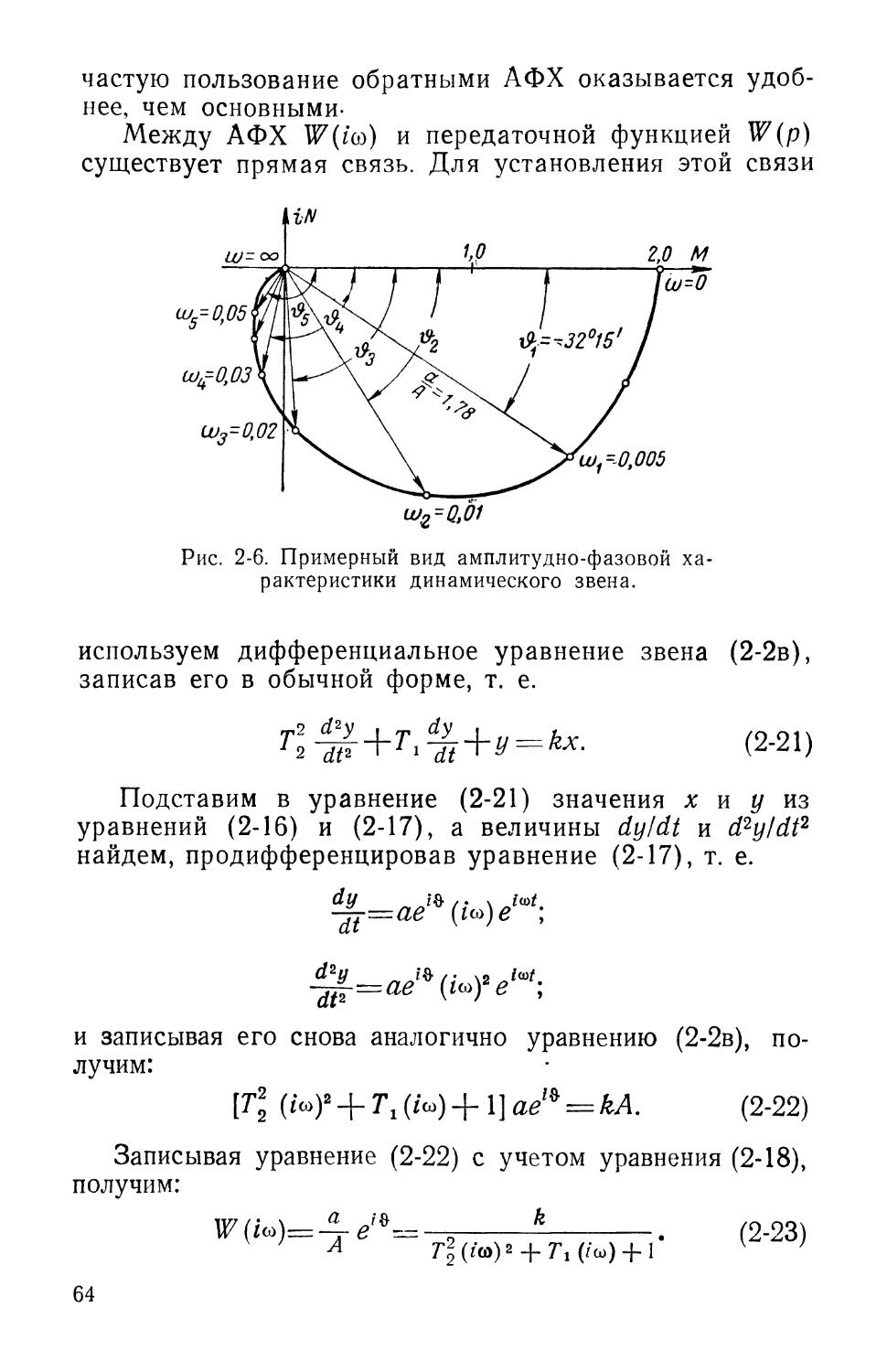
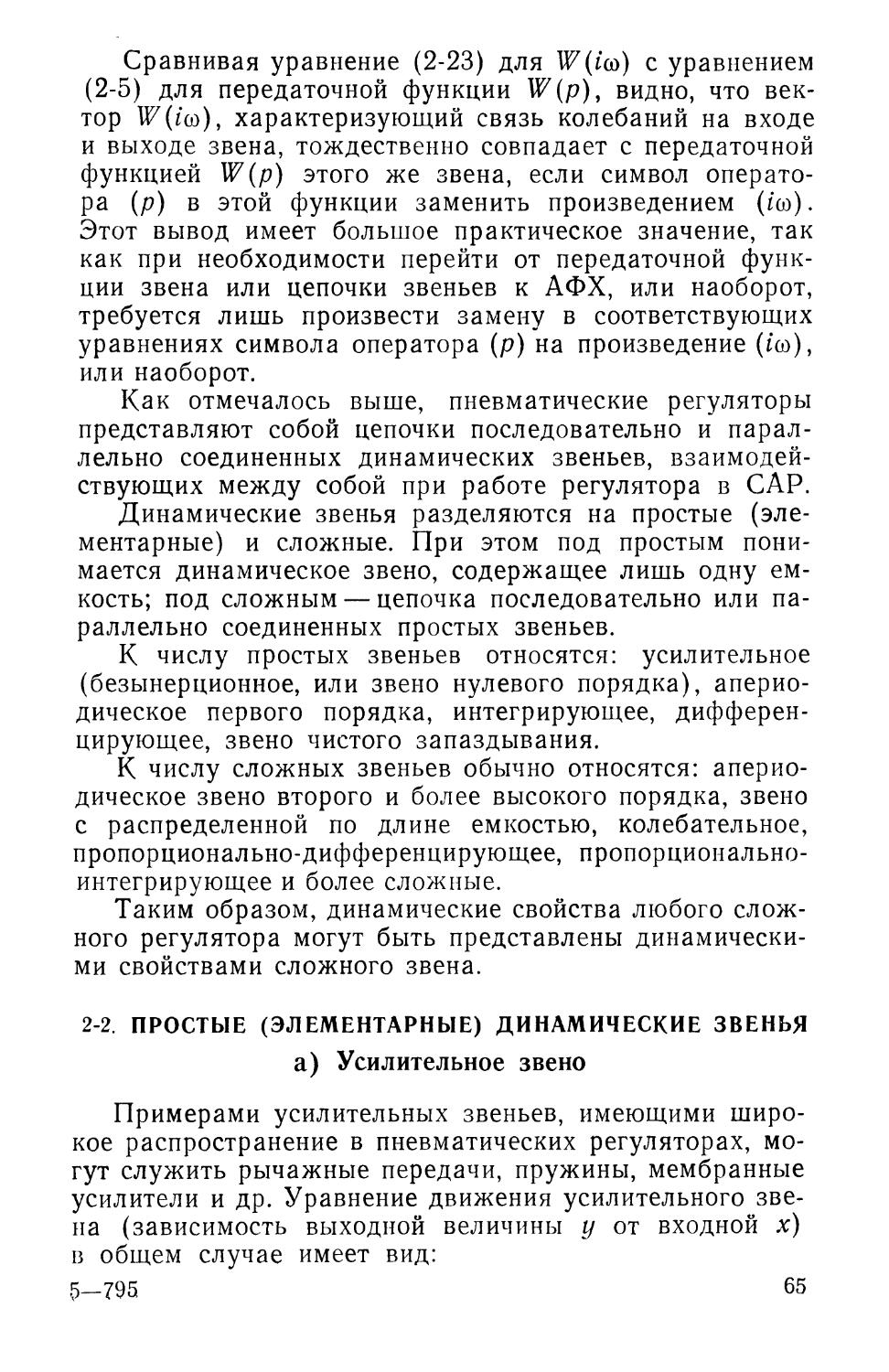
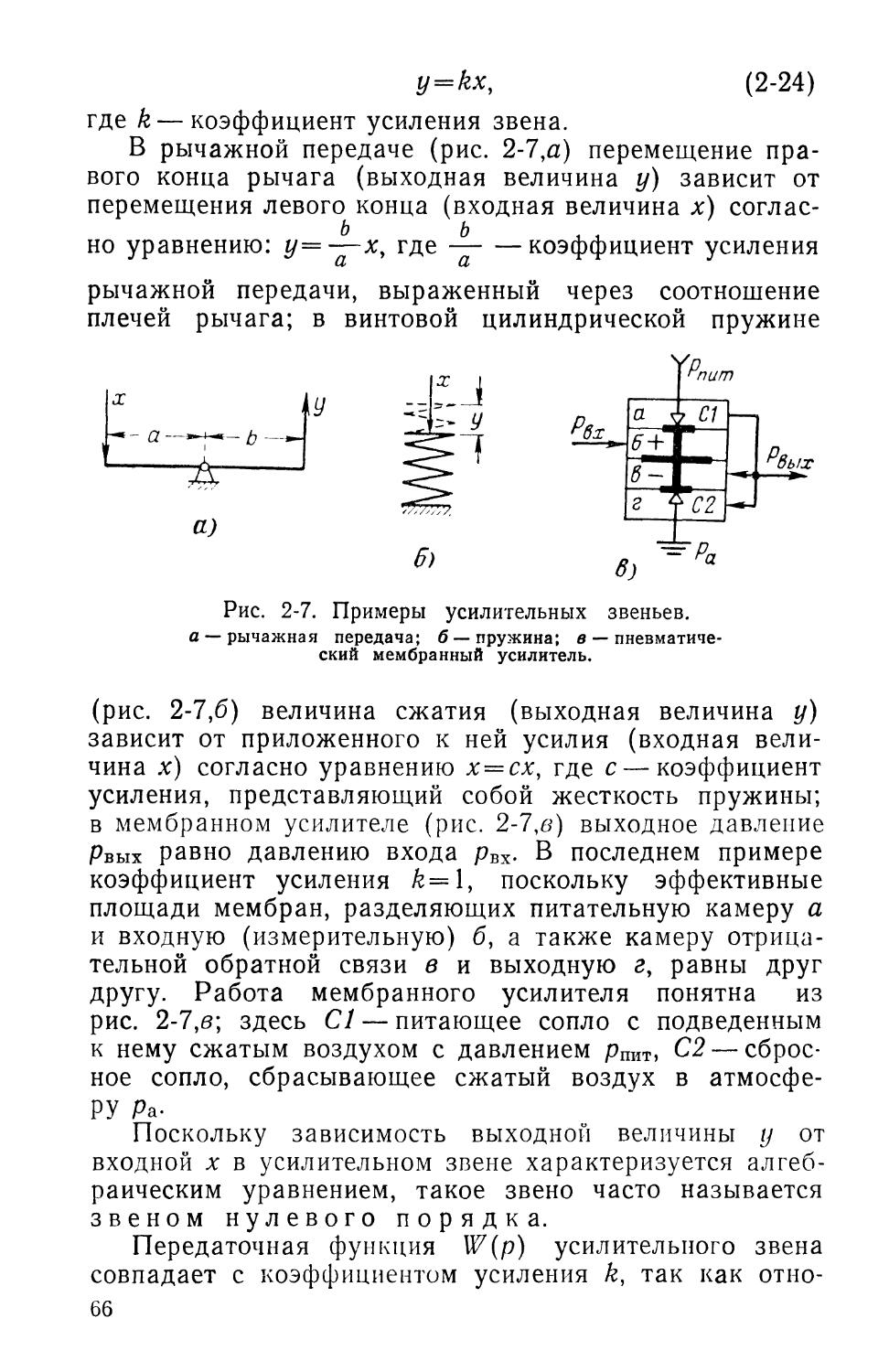
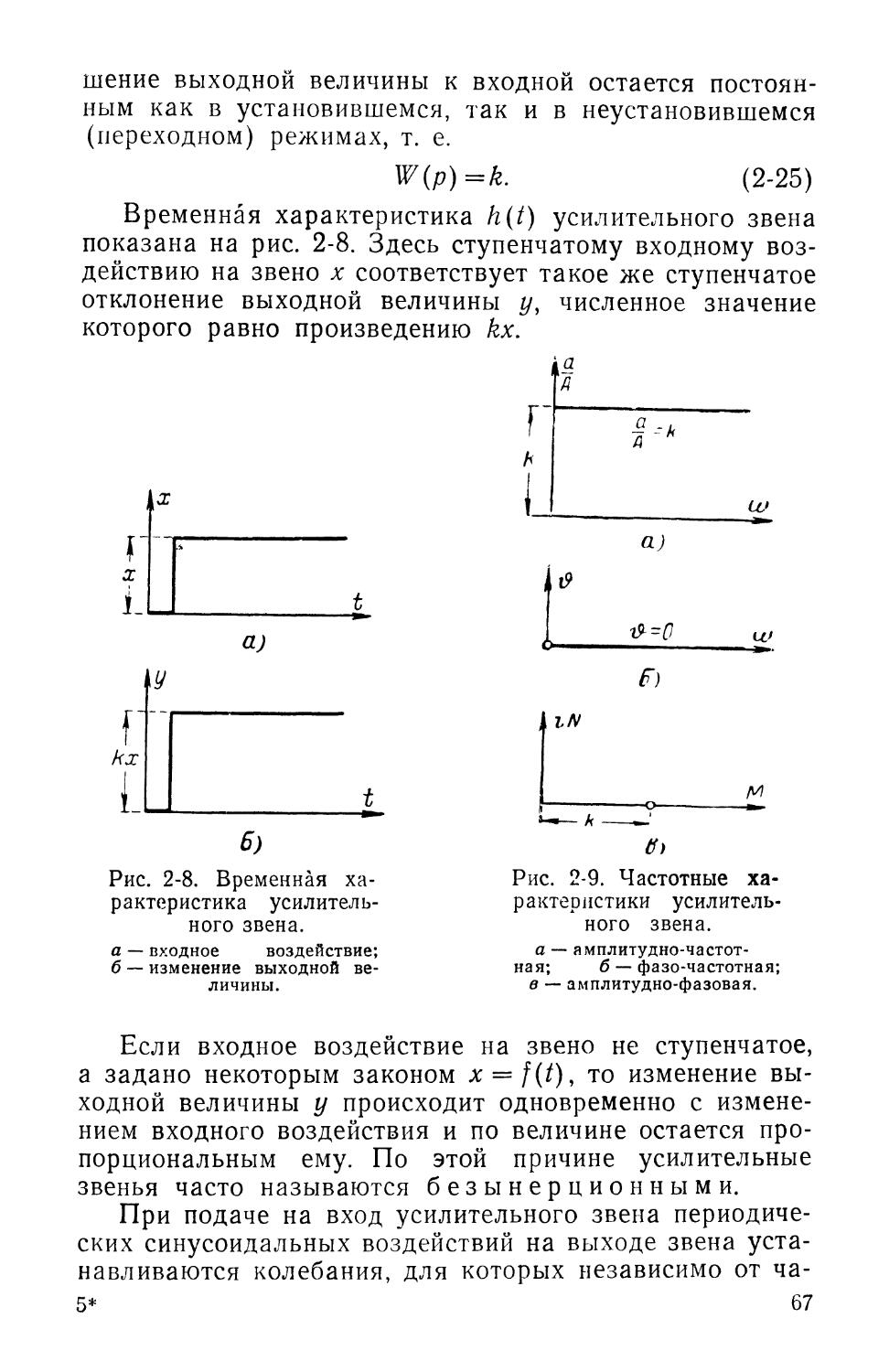






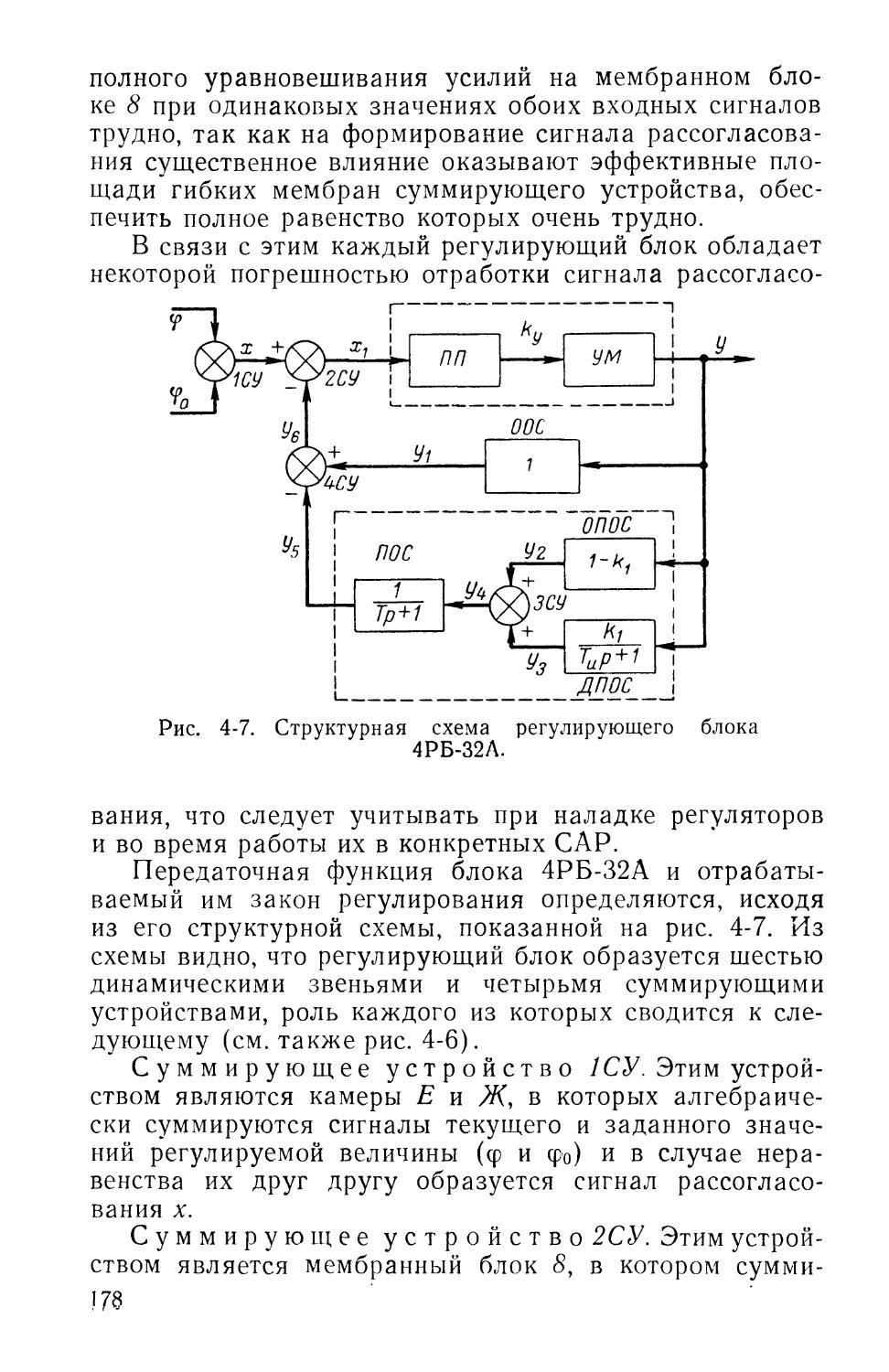











Text
БИБЛИОТЕКА ПО АВТОМАТИКЕ
Выпуск 174
В. С. ПРУСЕНКО
ПНЕВМАТИЧЕСКИЕ
РЕГУЛЯТОРЫ
ВТОРОЕ, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ ИЗДАНИЕ
ИЗДАТЕЛЬСТВО «Э Н Е Р Г VI Я»
МОСКВА 1966 ленинград
Редакционная коллегия:
И. В. Антик, А. И. Бертинов, С. Н< Вешеневский, Л. М. Закс,
Н. Е. Кобринский, В. С. Кулебакин, В. Э. Низе, В. С. Малов,
Б. С. Сотсков, А. С. Шаталов
УДК 62.525
П 85
В книге рассматриваются технические требования,
условия работы, принципы действия, устройство и
основные характеристики пневматических регуляторов
(регулирующих и вычислительных устройств,
исполнительных механизмов, регулирующих органов и
источников (Питания сжатым воздухом). Дается
сравнительный анализ регуляторов различных конструкций и их
отдельных элементов.
Книга рассчитана на инженеров и техников,
занимающихся разработкой, наладкой и эксплуатацией
средств и систем пневмоавтоматики в различных
отраслях промышленности, а также студентов
институтов и техникумов, специализирующихся в области
автоматизации.
Прусенко Владимир Сидорович.
Пневматические регуляторы, М.—Л., издательство „Энергия",
1966, 280 с. с черт. (Библиотека по., автоматике, вып. 174)
3-3-13
281-66
Редактор A. Z/. Червяковский Техн. редактор А М. Фридкин
Сдано в набор 20/XIT 1965 г. Подписано к печати 14/Ш 1966 г.
Т-01029 Бумага 84х108'/39 Печ. л. 14,7 Уч.-изд. л. 14,29
Тираж 15 000 экз. Цена 71 коп. Зак. 795
Московская типография № 10 Главполиграфпрома
Комитета по печати при Совете Министров СССР,
Шлюзовая наб., 10
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Настоящая книга является вторым, переработанным
и дополненным изданием соответствующих глав книги
автора «Элементы пневмоавтоматики для регулирования
тепловых процессов», изданной Госэнергоиздатом
в 1961 г.
В книге рассматриваются технические требования,
условия работы, принципы действия, устройство и
основные характеристики пневматических регуляторов
(регулирующих и вычислительных устройств, исполнительных
механизмов, регулирующих органов и источников
питания сжатым воздухом). В книге не рассматриваются
такие элементы и устройства пневмоавтоматики,
как чувствительные органы, пневмопреобразователи,
датчики, вторичные измерительные приборы,
электропневматические и пневмоэлектрические
преобразователи. Эта важная группа элементов пневмоавтоматики
представляет самостоятельный интерес и поэтому им
посвящена отдельная книга автора «Пневматические
датчики и вторичные приборы», выпущенная издательством
«Энергия» в 1965 г. Учитывая, что перечисленные
элементы входят в состав большинства современных
пневматических регуляторов, а также в связи с тем, что такие
вопросы, как принцип действия и характерные
особенности различных типов пневмопреобразователей
(являющихся основой пневматических регуляторов),
рассмотрены в составе датчиков, данную книгу следует
рассматривать как логическое продолжение книги автора
«Пневматические датчики и вторичные приборы».
По сравнению с первым второе издание книги
дополнено сведениями по динамическим звеньям, образующим
пневматические регуляторы, а также краткими сведения-
3
Ми по основным типам пневматических регуляторов,
Построенных по элементно-модульному принципу.
Указанные дополнения знакомят читателей с последними
достижениями в области пневматических регуляторов,
вышедшими за пределы лабораторных исследований и
получившими широкое распространение в
промышленности.
Сознавая, что во втором издании книга также не
лишена некоторых недостатков, автор будет весьма
благодарен читателям, которые пришлют свои критические
замечания по этой книге в редакцию издательства
«Энергия» по адресу: Москва, Ж-114, Шлюзовая наб., 10.
Автор
СОДЕРЖАНИЕ
Предисловие ко второму изданию 6
Глава первая. Требования к пневматическим
регуляторам, классификация, основные свойства и условия
работы 9
1-1. Общие замечания 9
1-2. Функциональная структура одноконтурной САР 11
1-3. Классификация пневматических регуляторов в
зависимости от отрабатываемых ими законов
регулирования 15
1-4. Основные свойства пневматических регуляторов
и условия их работы в одноконтурных САР . 16
а) Регуляторы, отрабатывающие релейный закон
регулирования 13
б) Регуляторы, отрабатывающие П-закон
регулирования 19
в) Регуляторы, отрабатывающие ПД-закон
регулирования 24
г) Регуляторы, отрабатывающие И-закон
регулирования 28
д) Регуляторы, отрабатывающие ПИ-закон
регулирования 32
е) Регуляторы, отрабатывающие ПИД-закои
регулирования 36
1-5. Условия работы пневматических регуляторов
в многоконтурных САР 38
Глава вторая. Динамические звенья, образующие
пневматические регуляторы 54
2-1. Свойства динамических звеньев 54
2-2. Простые (элементарные) динамические звенья . 65
а) Усилительное звено 65
5
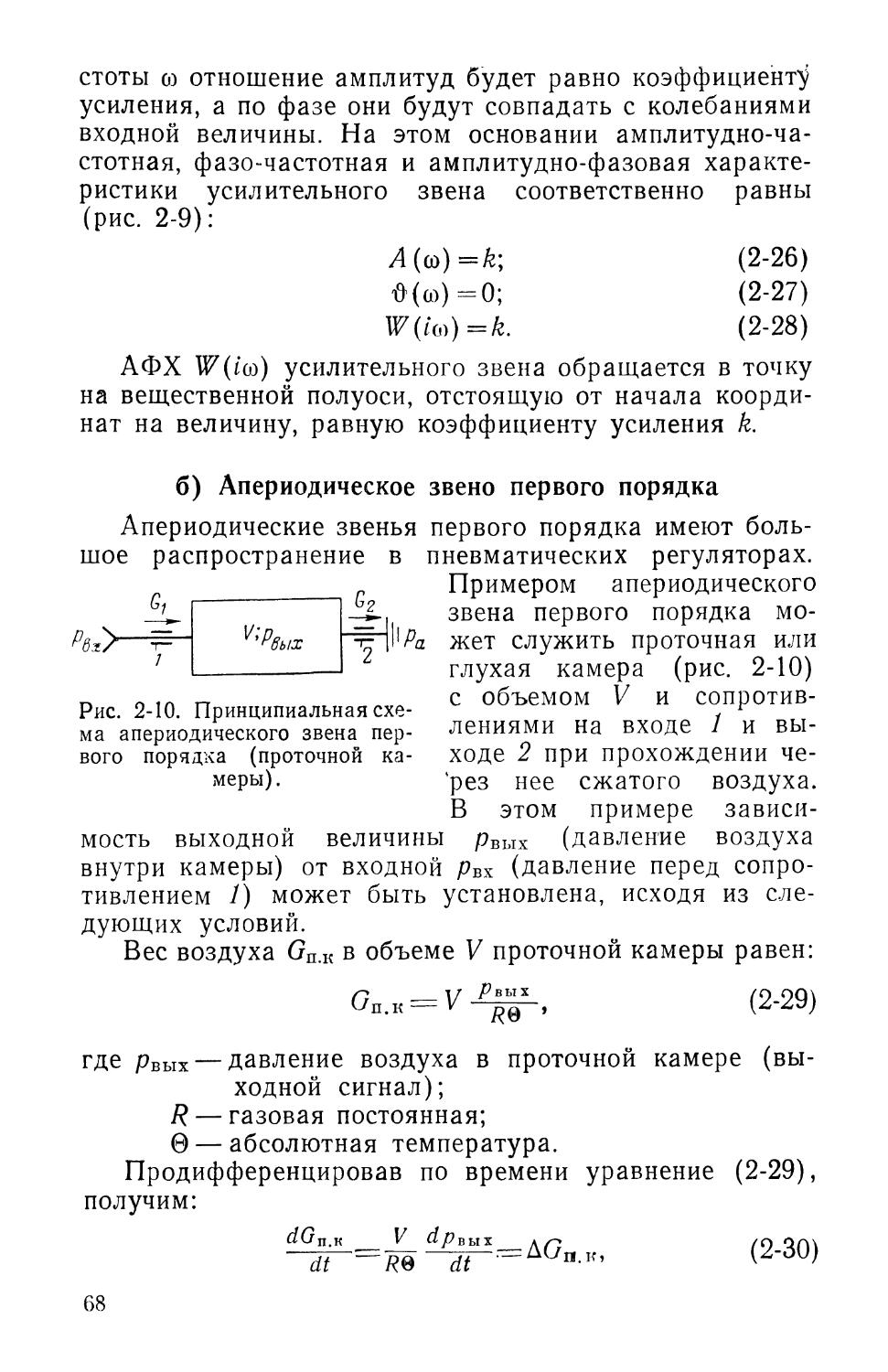
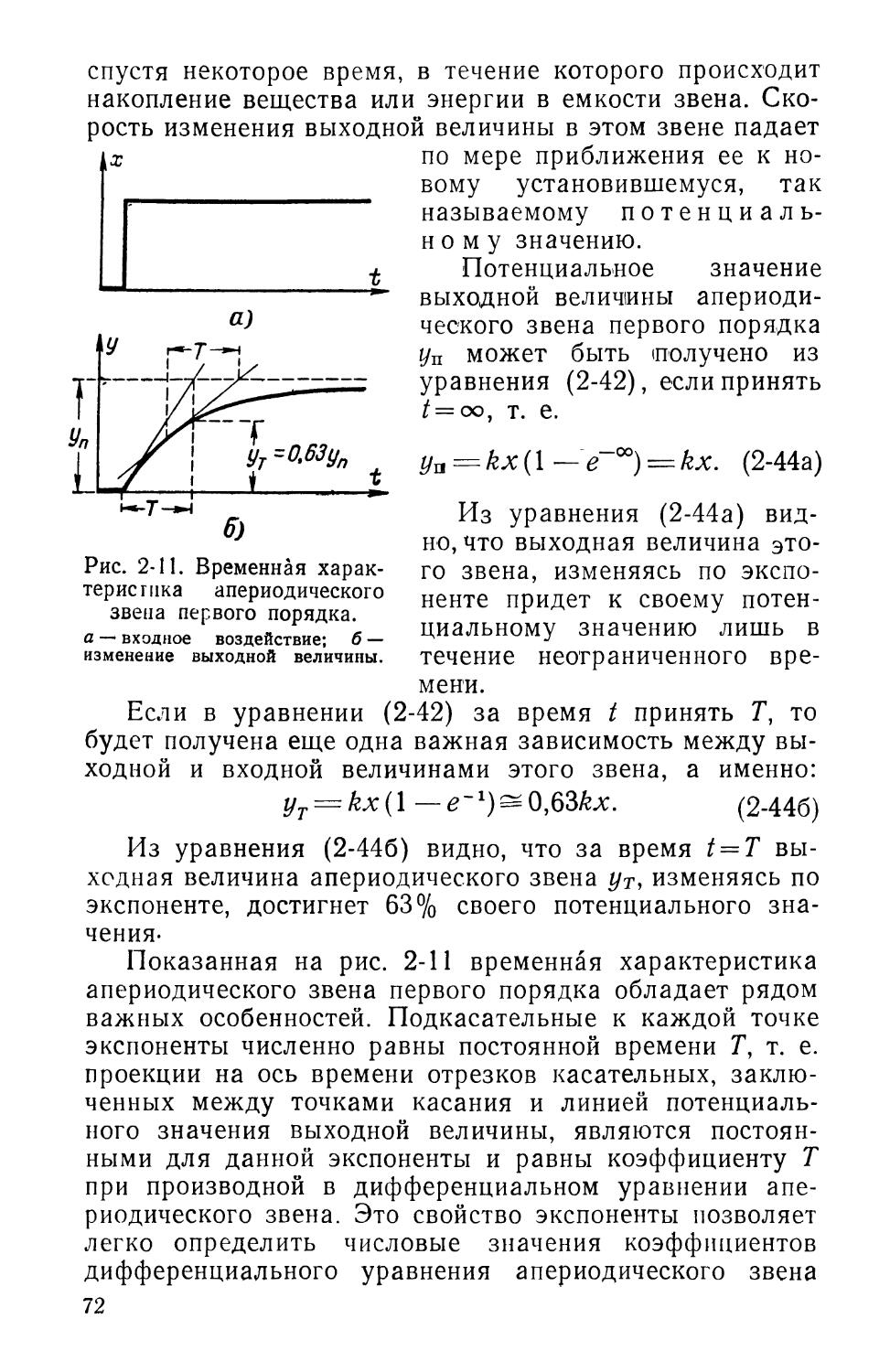
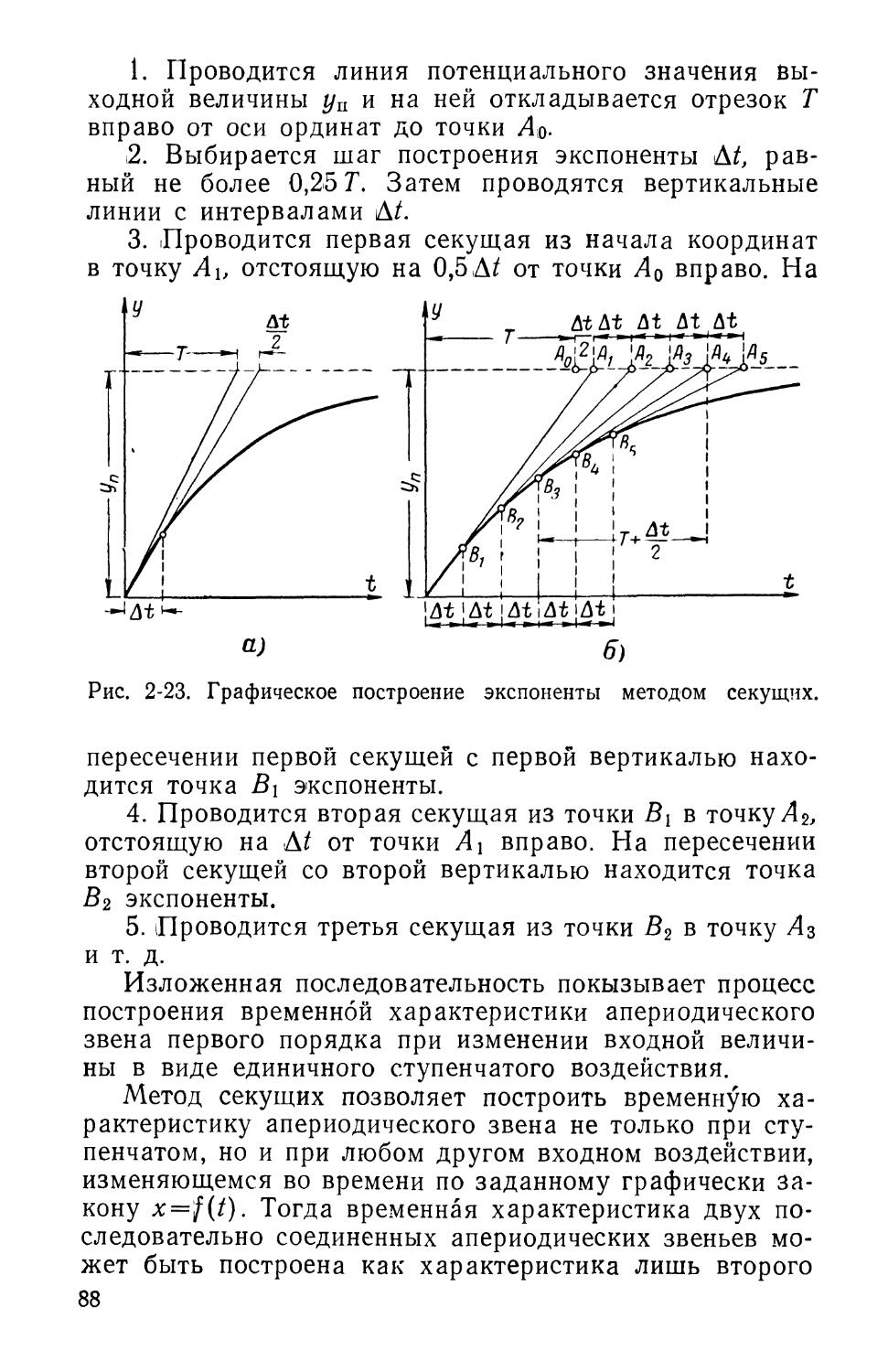
б) Апериодическое звено первого порядка . . . ■ 68
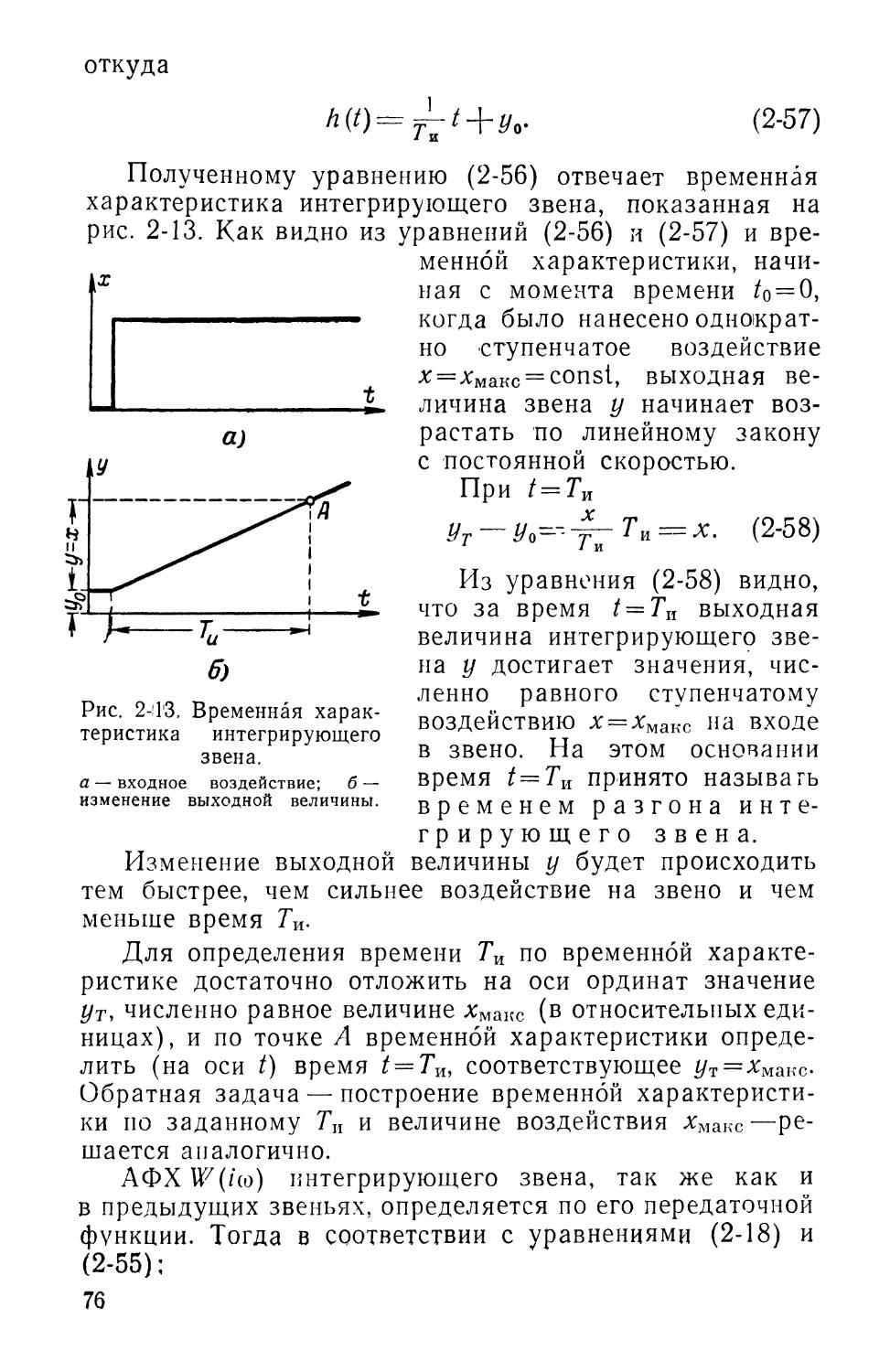
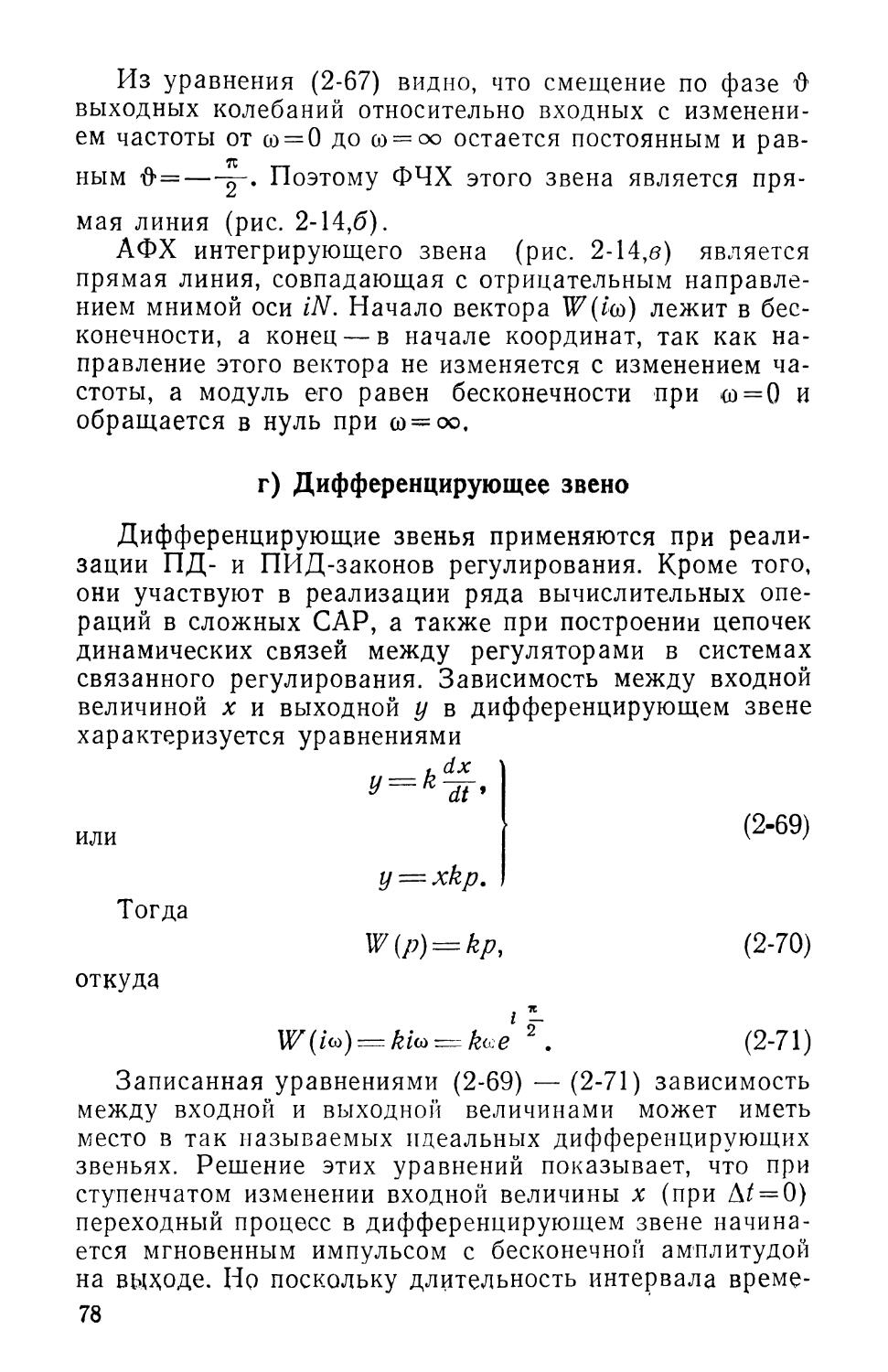
в) Интегрирующее звено 74
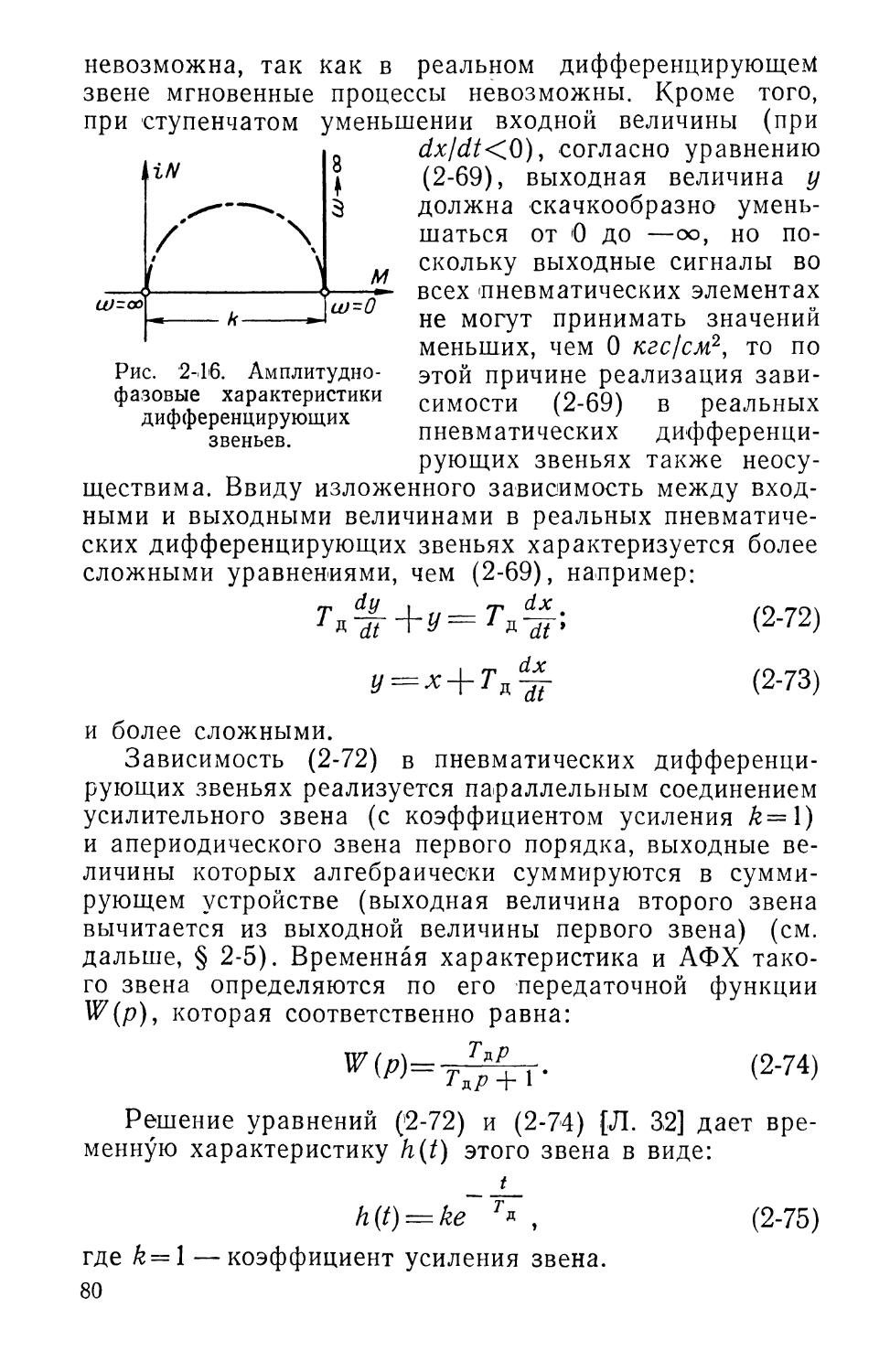
г) Дифференцирующее звено 78
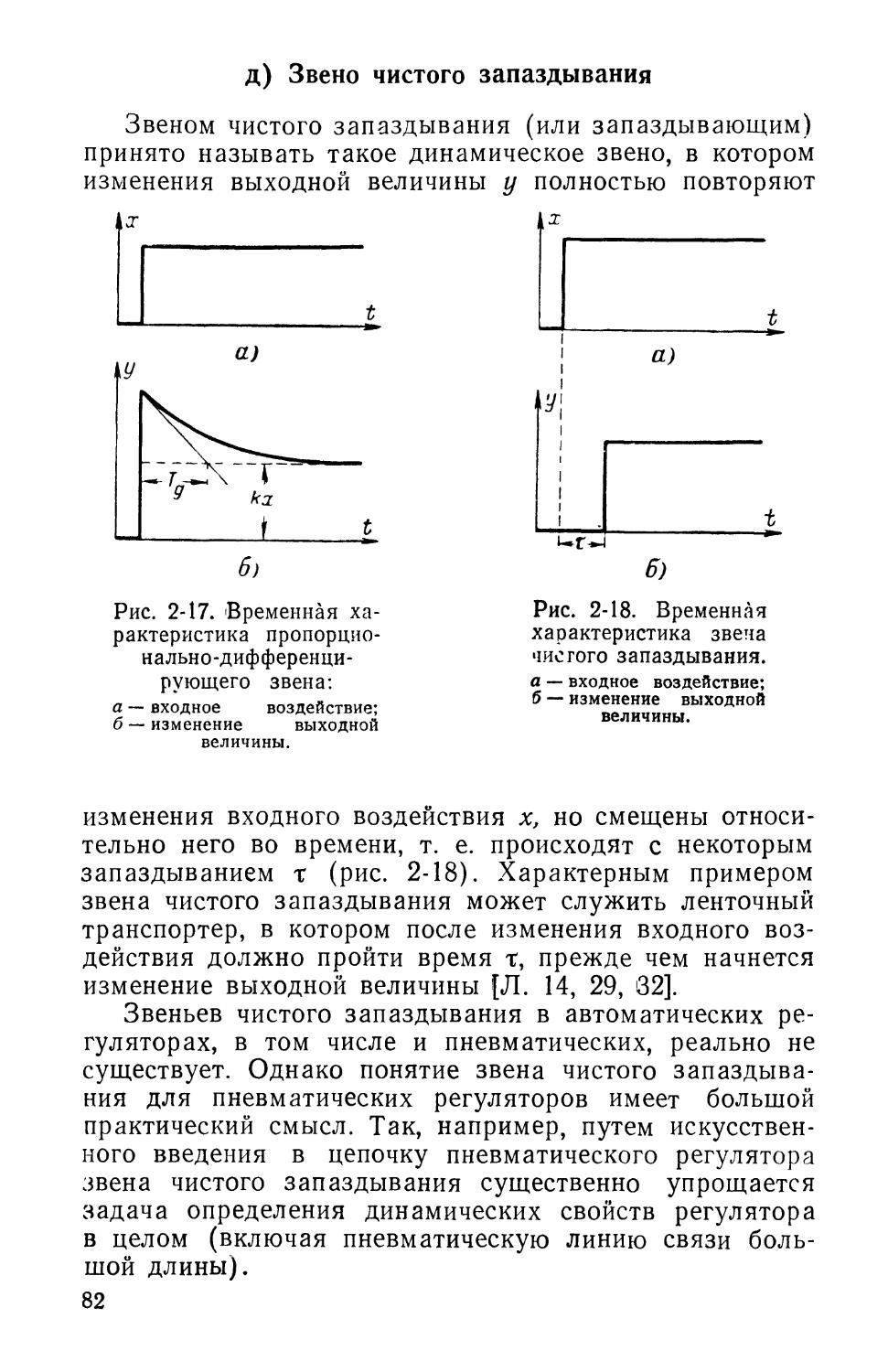
д) Звено чистого запаздывания 82
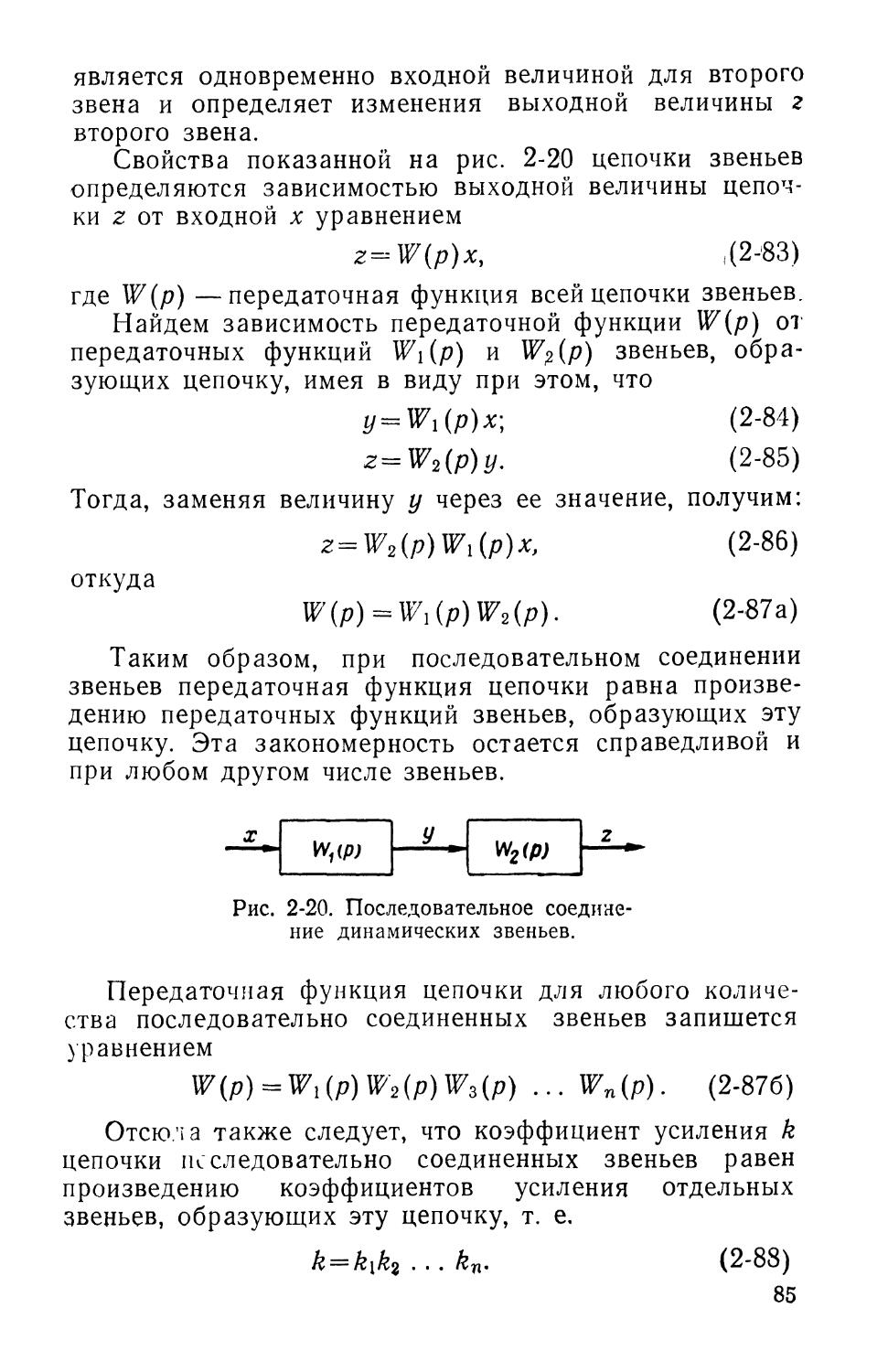
2-3. Соединения звеньев 84
2-4. Образование сложных звеньев последовательным
соединением простых 84
а) Общие сведения 84
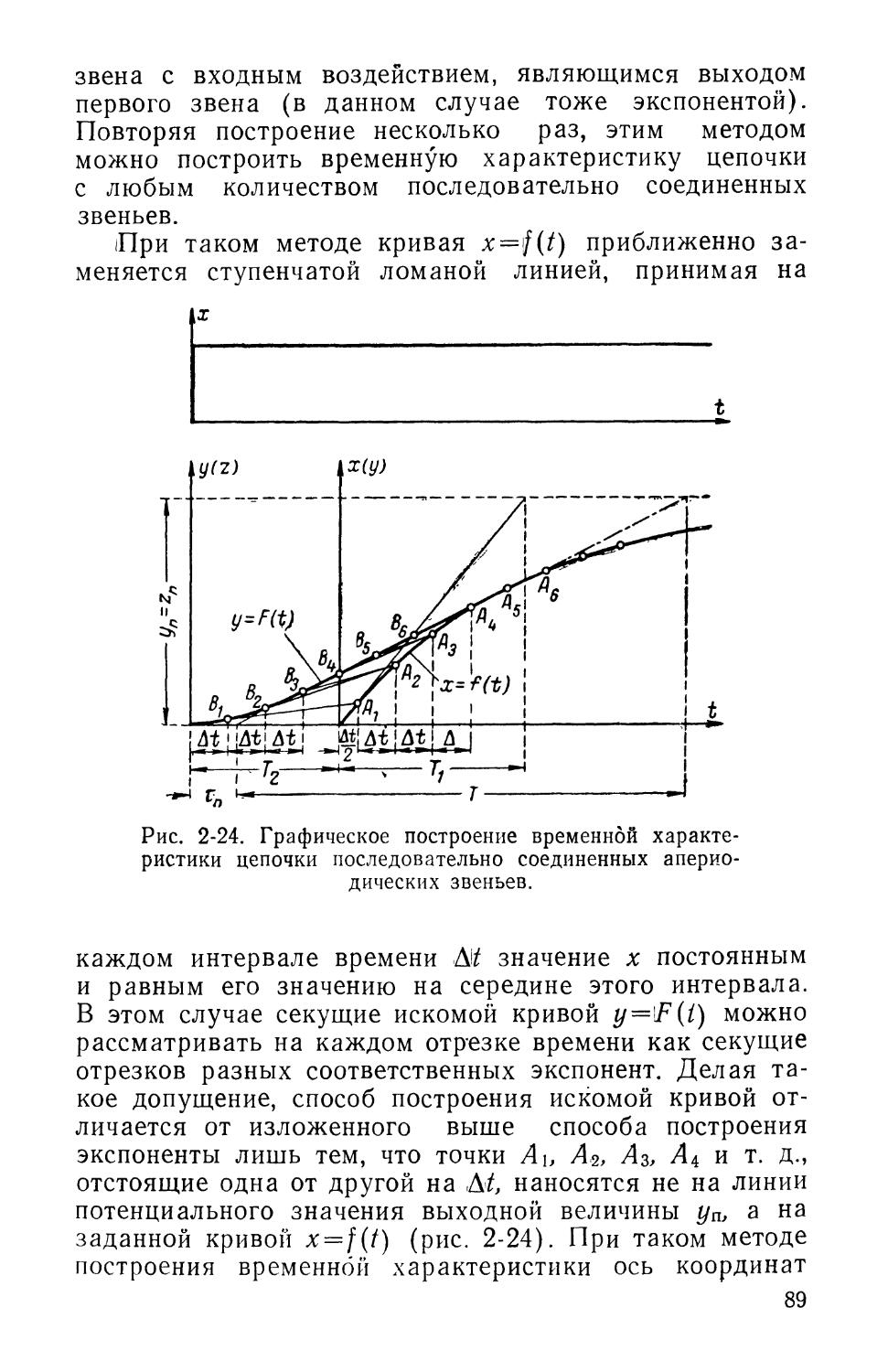
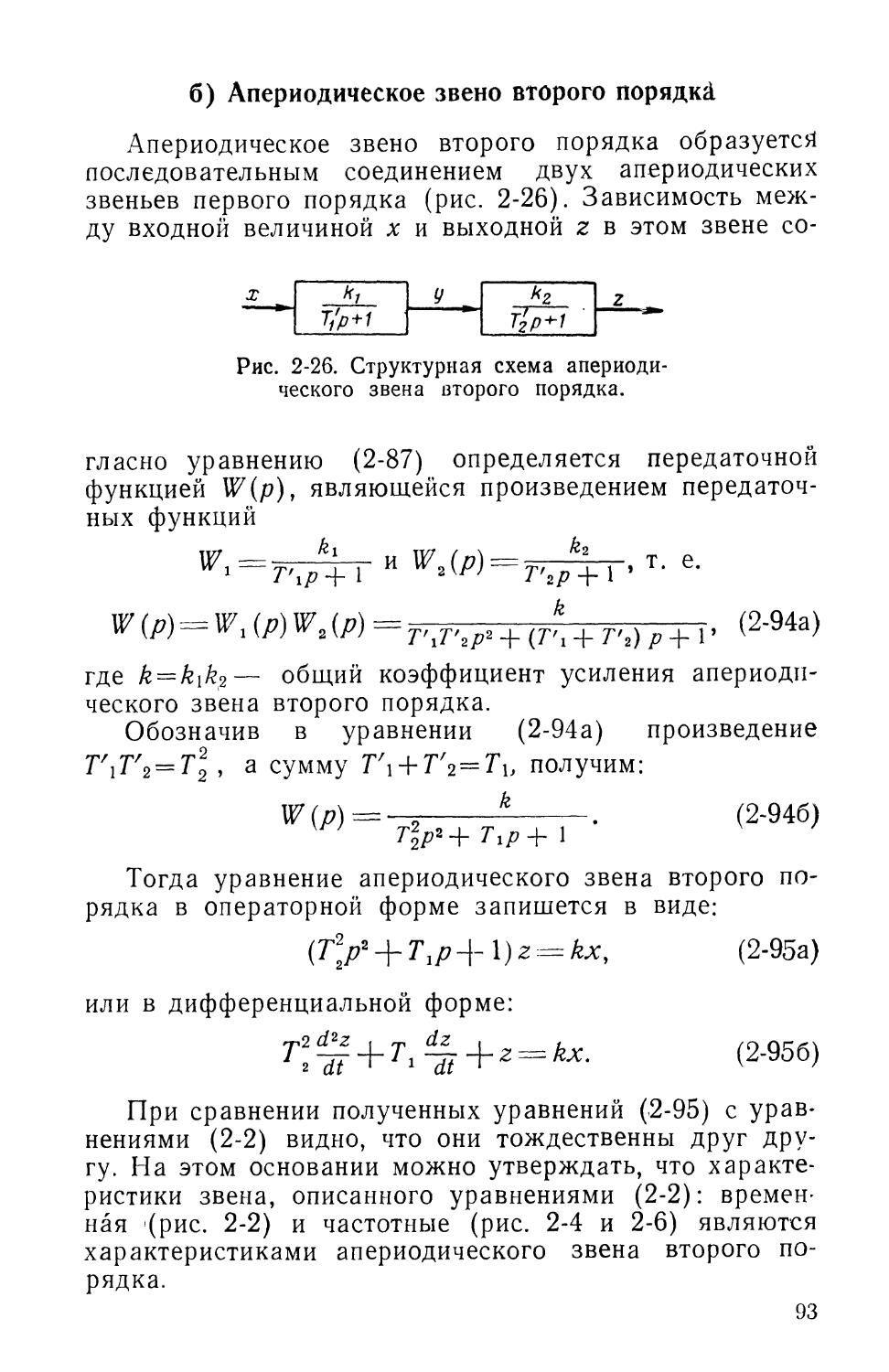
б) Апериодическое звено второго порядка ... 93
в) Апериодическое звено с распределенной по
длине емкостью 94
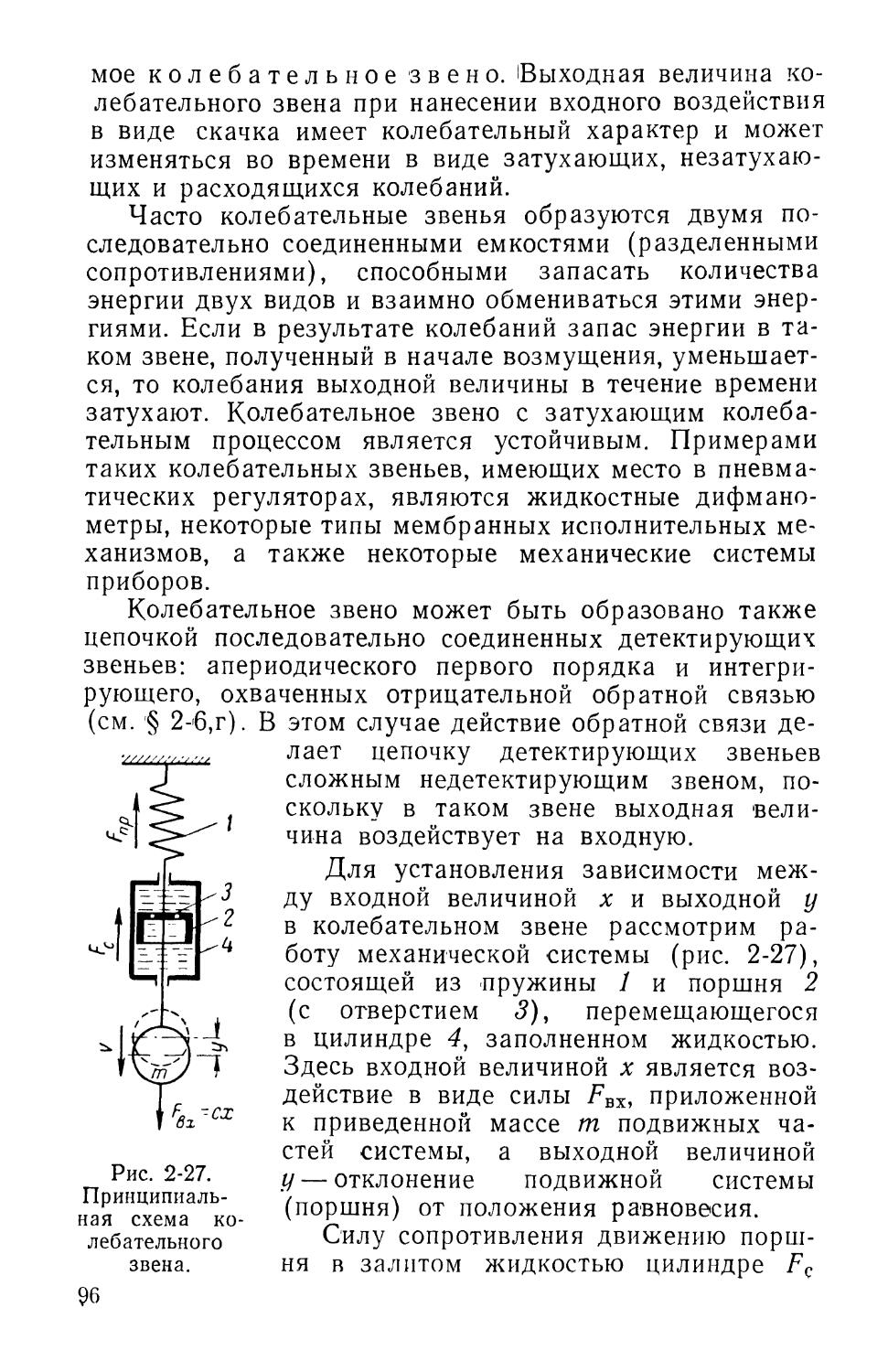
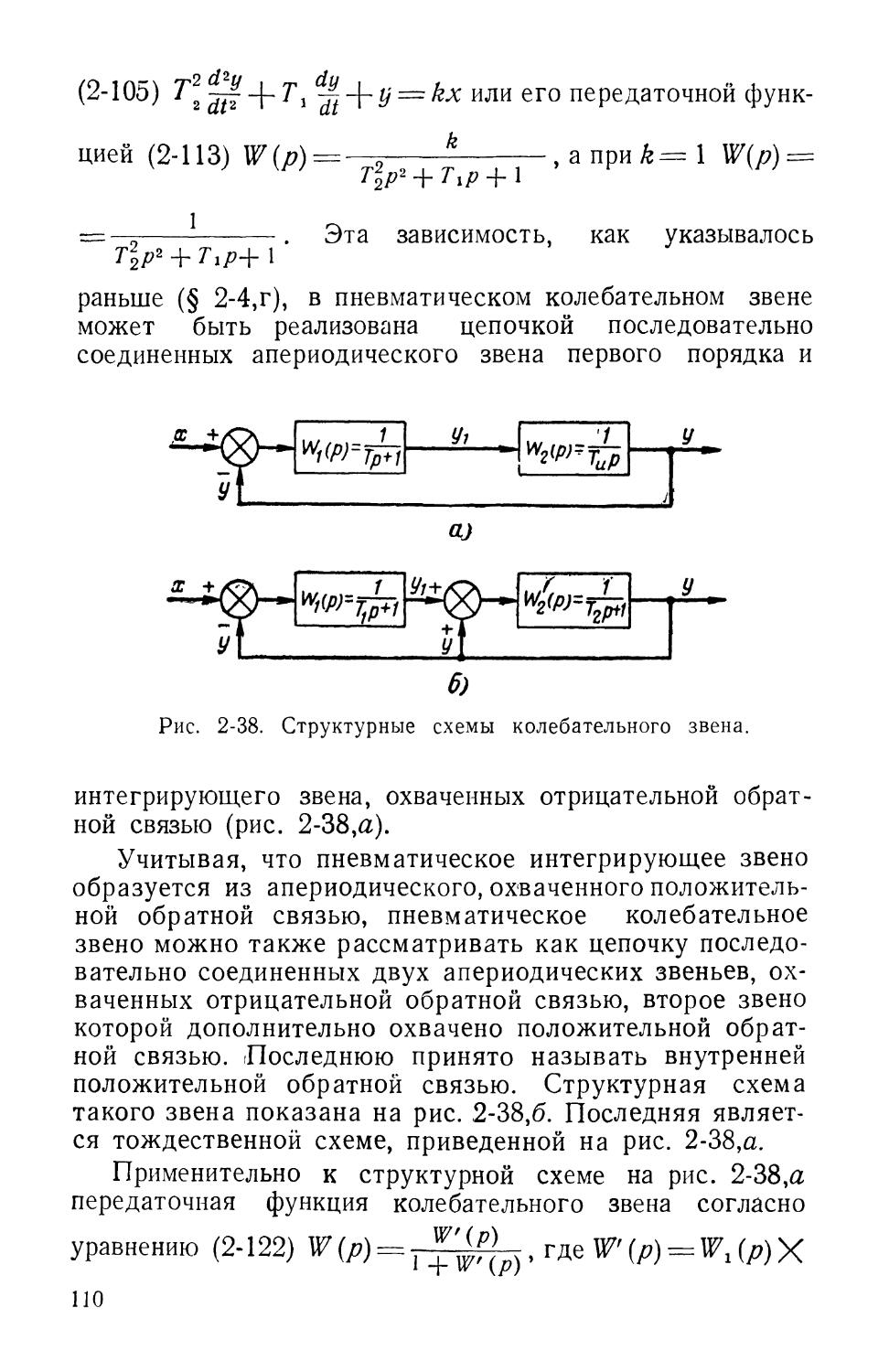
г) Колебательное звено 95
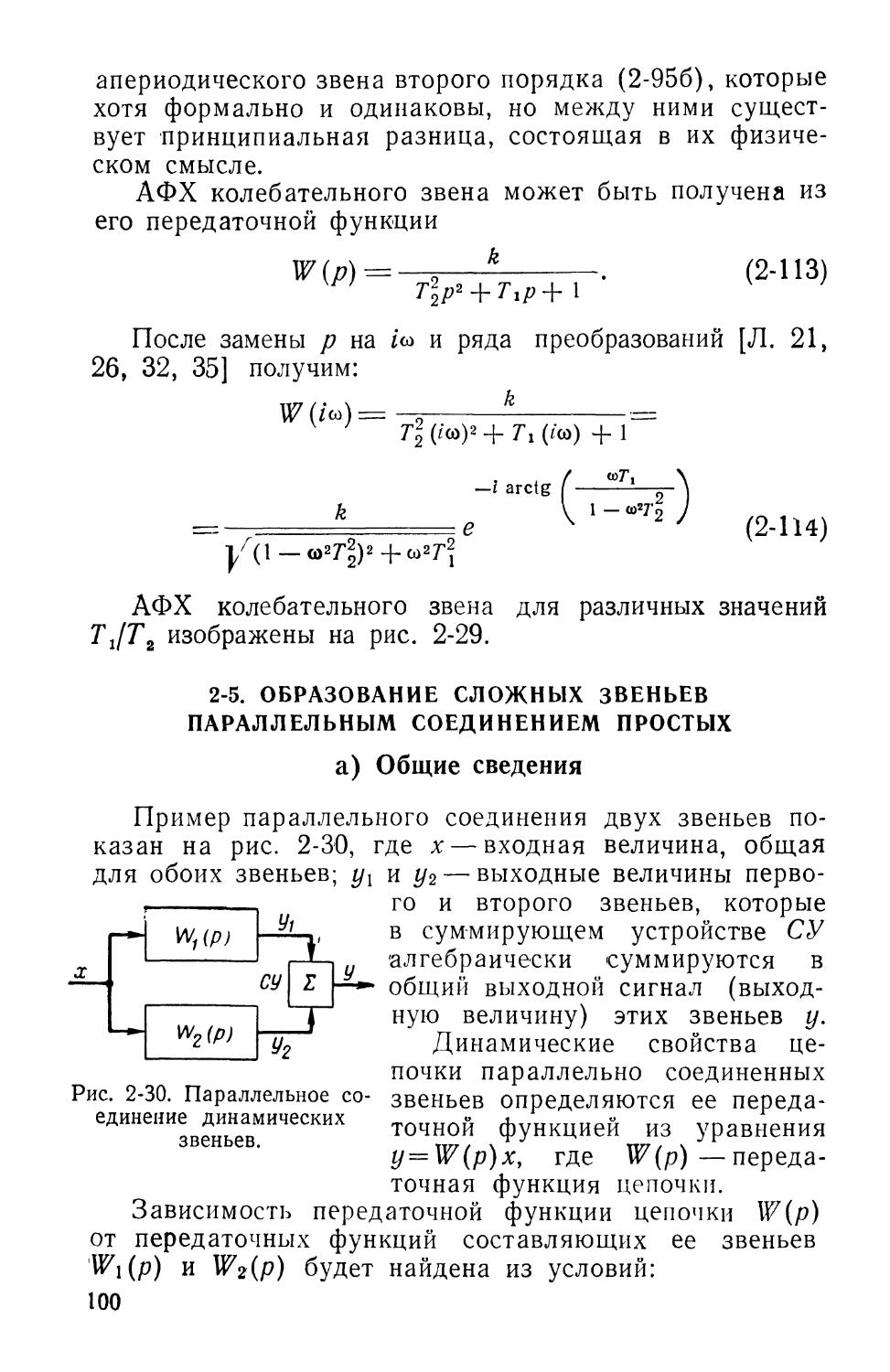
2-5. Образование сложных звеньев параллельным
соединением простых 100
а) Общие сведения 100
б) Реальное дифференцирующее звено .... 102
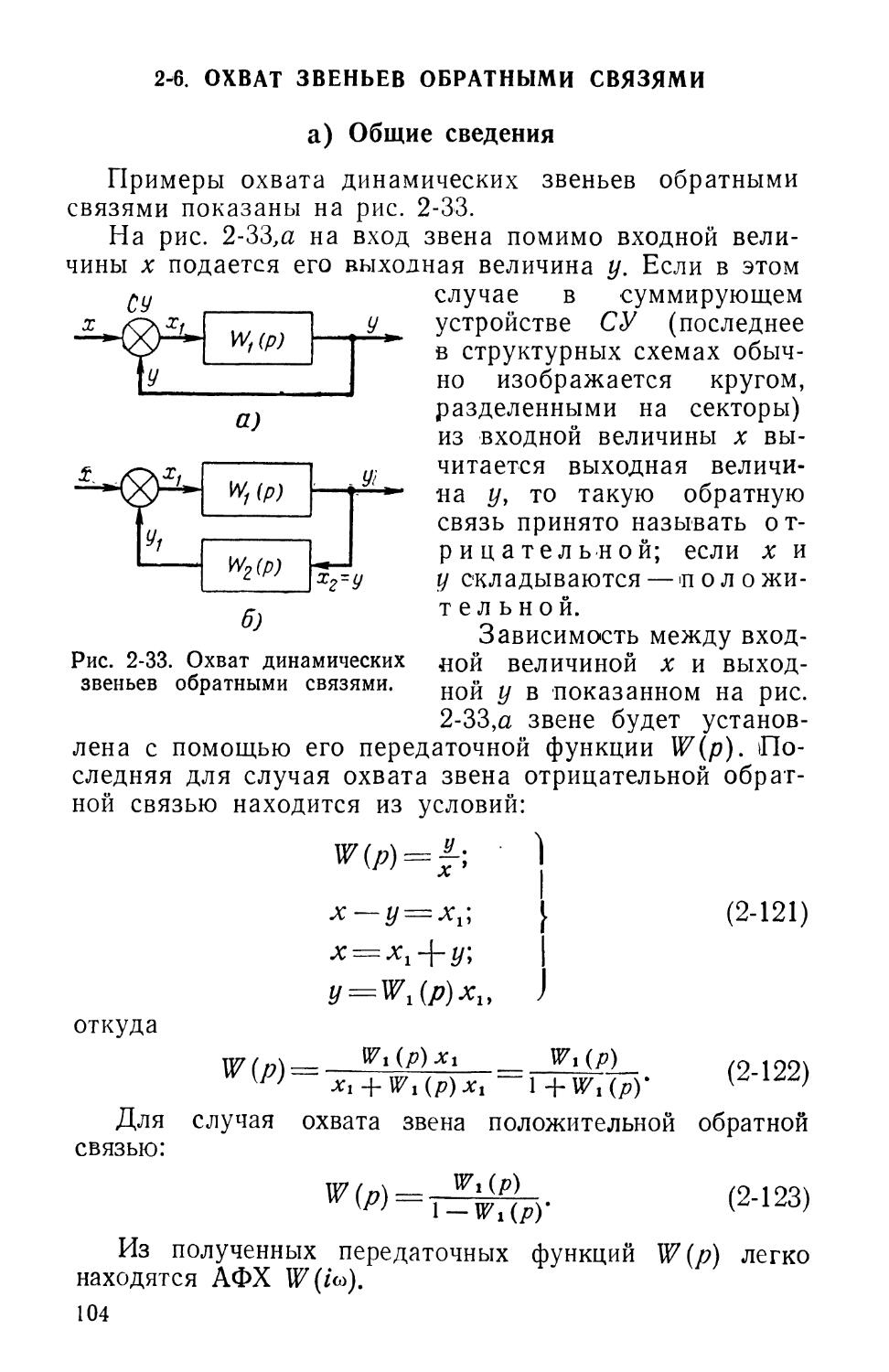
2-6. Охват звеньев обратными связями . . . . 104
а) Общие сведения .104
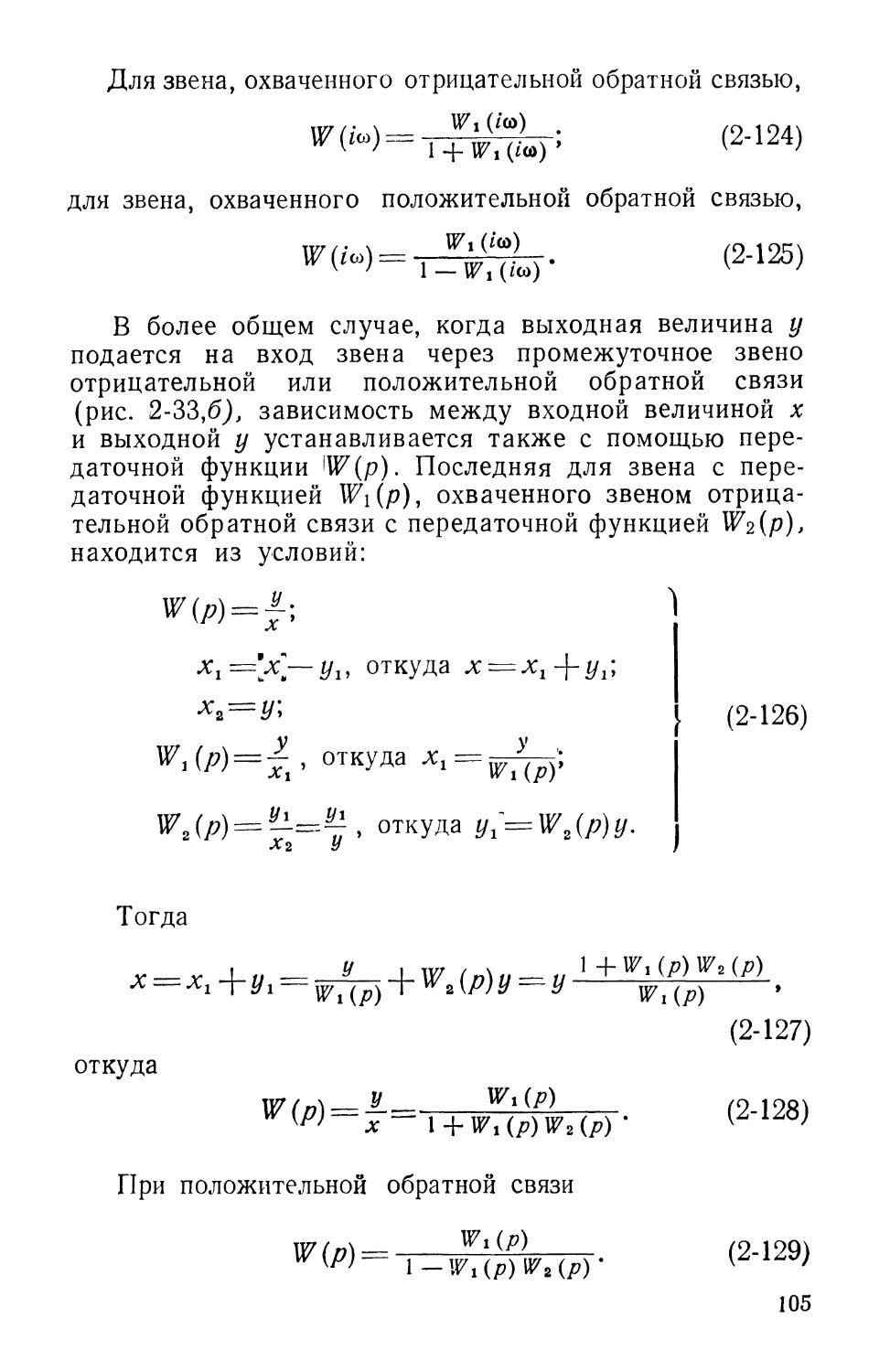
б) Реальное интегрирующее звено 106
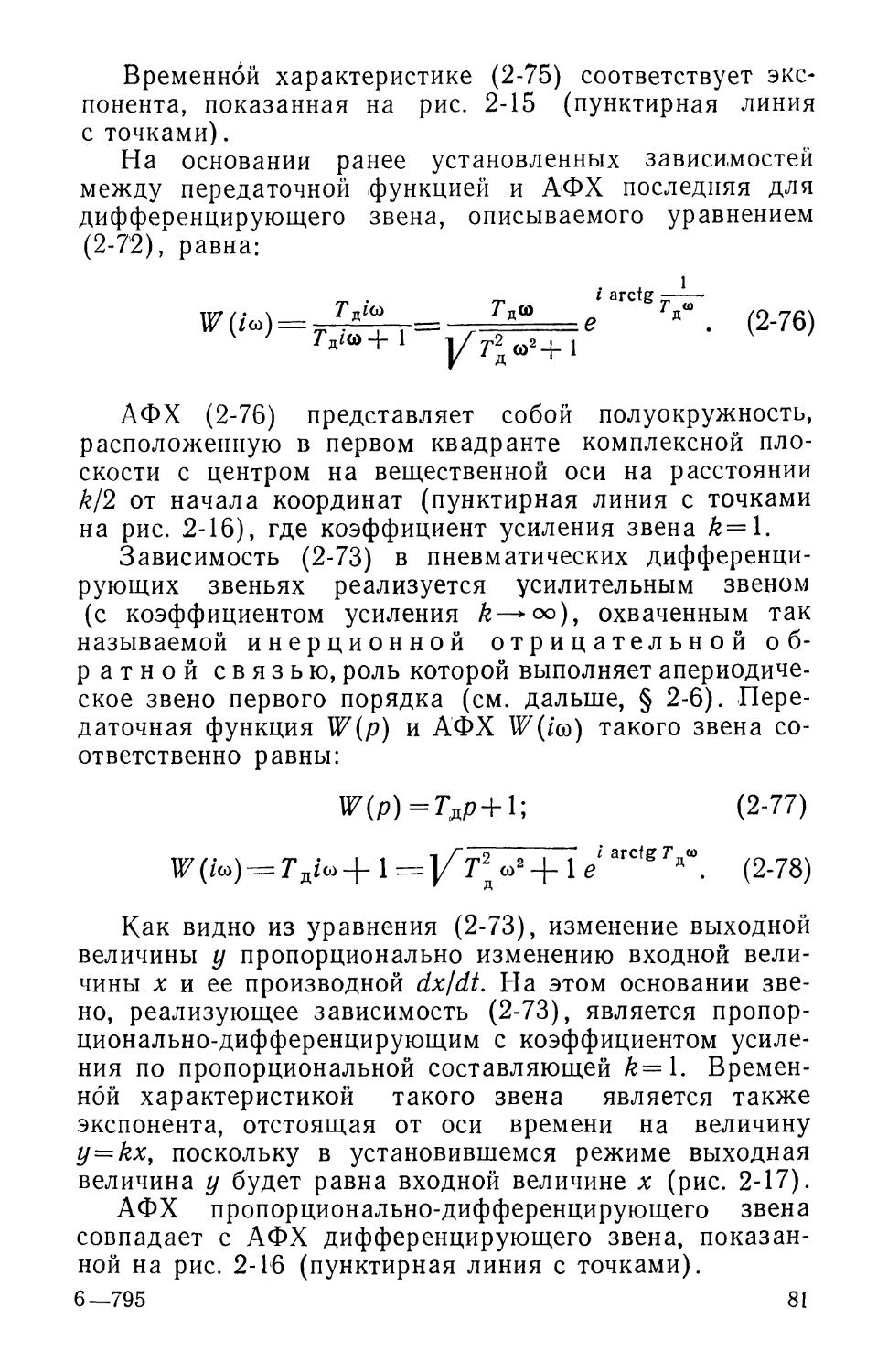
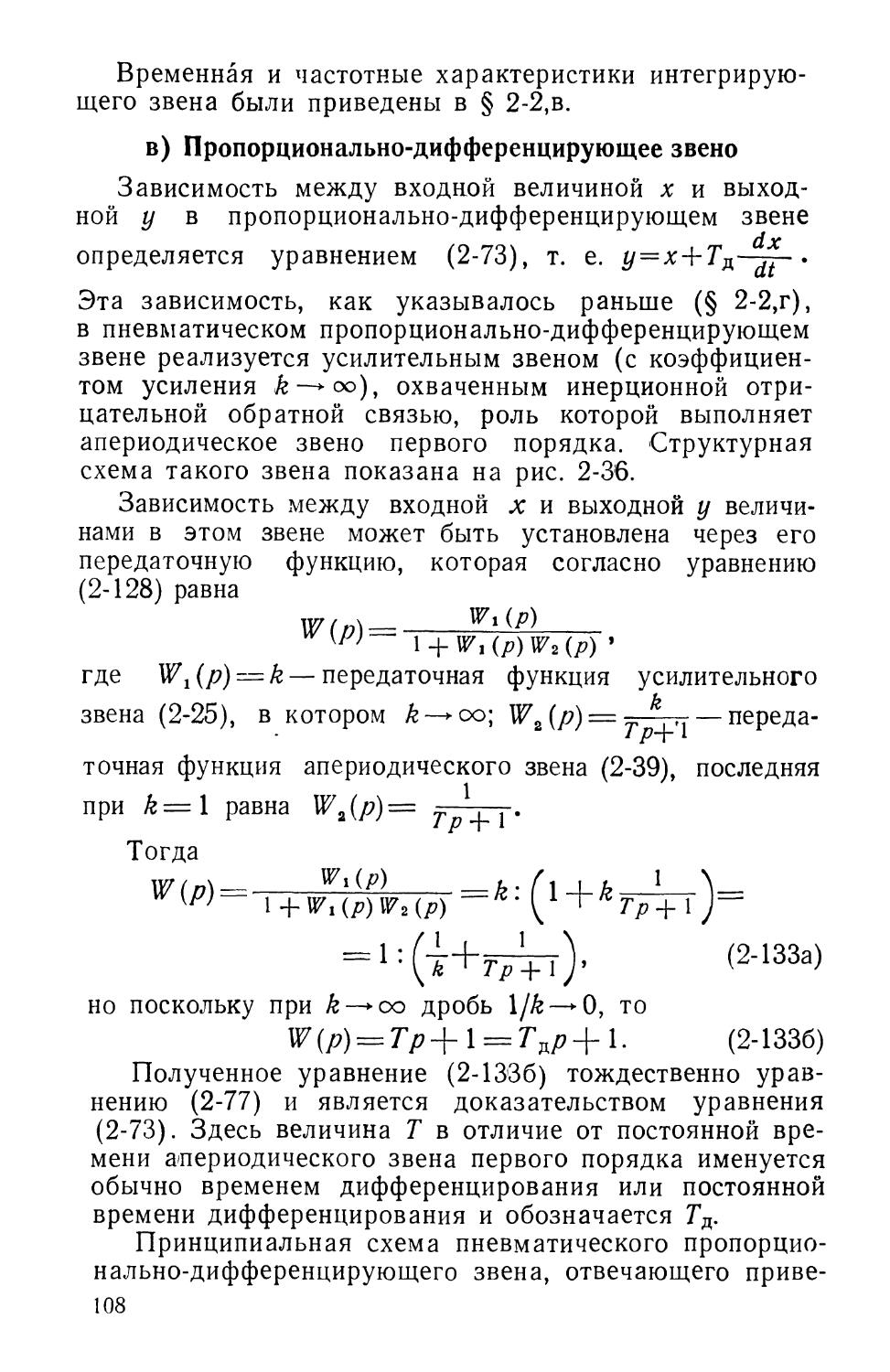
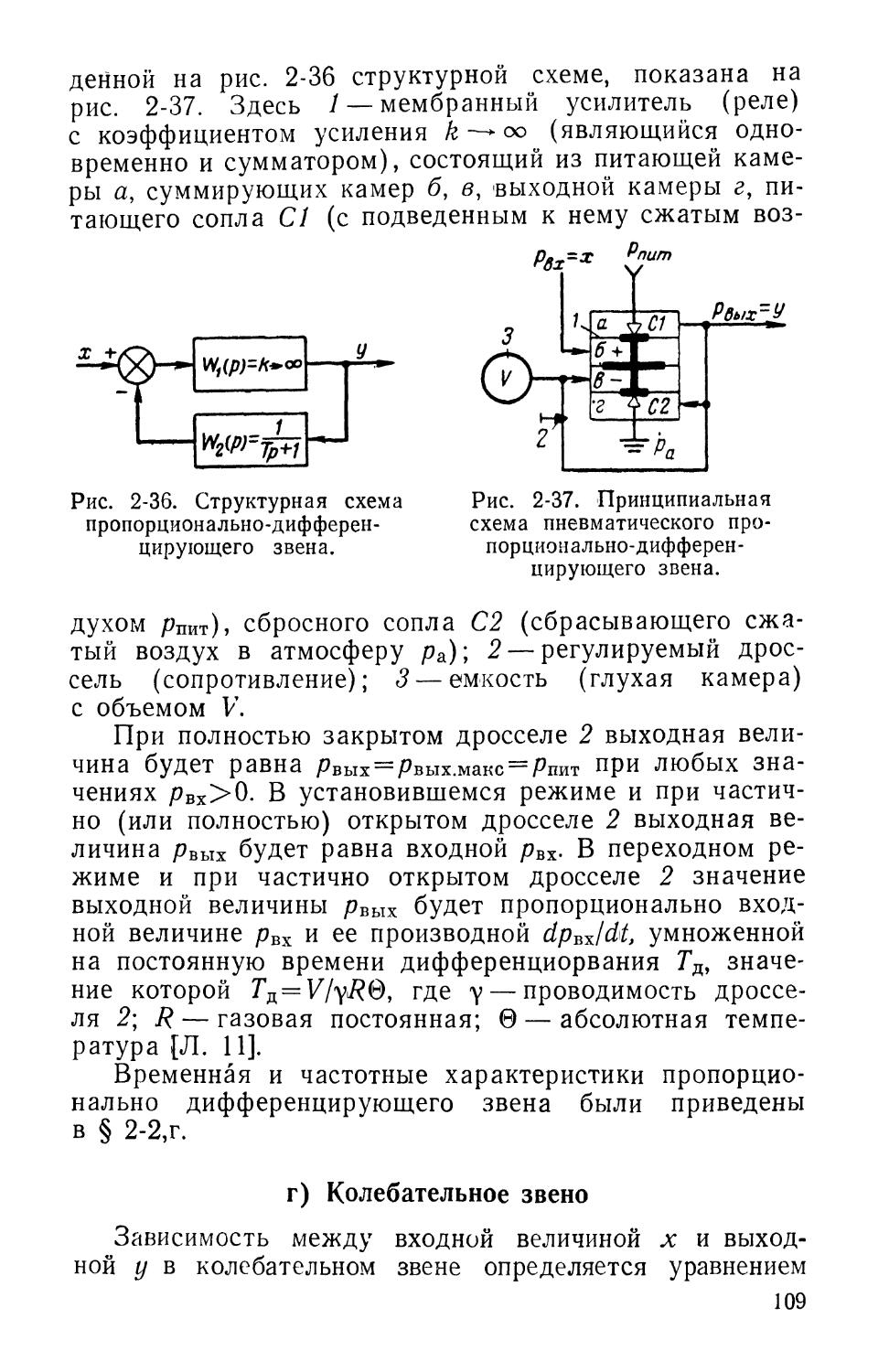
в) Пропорционально-дифференцирующее звено . 108
г) Колебательное звено 109
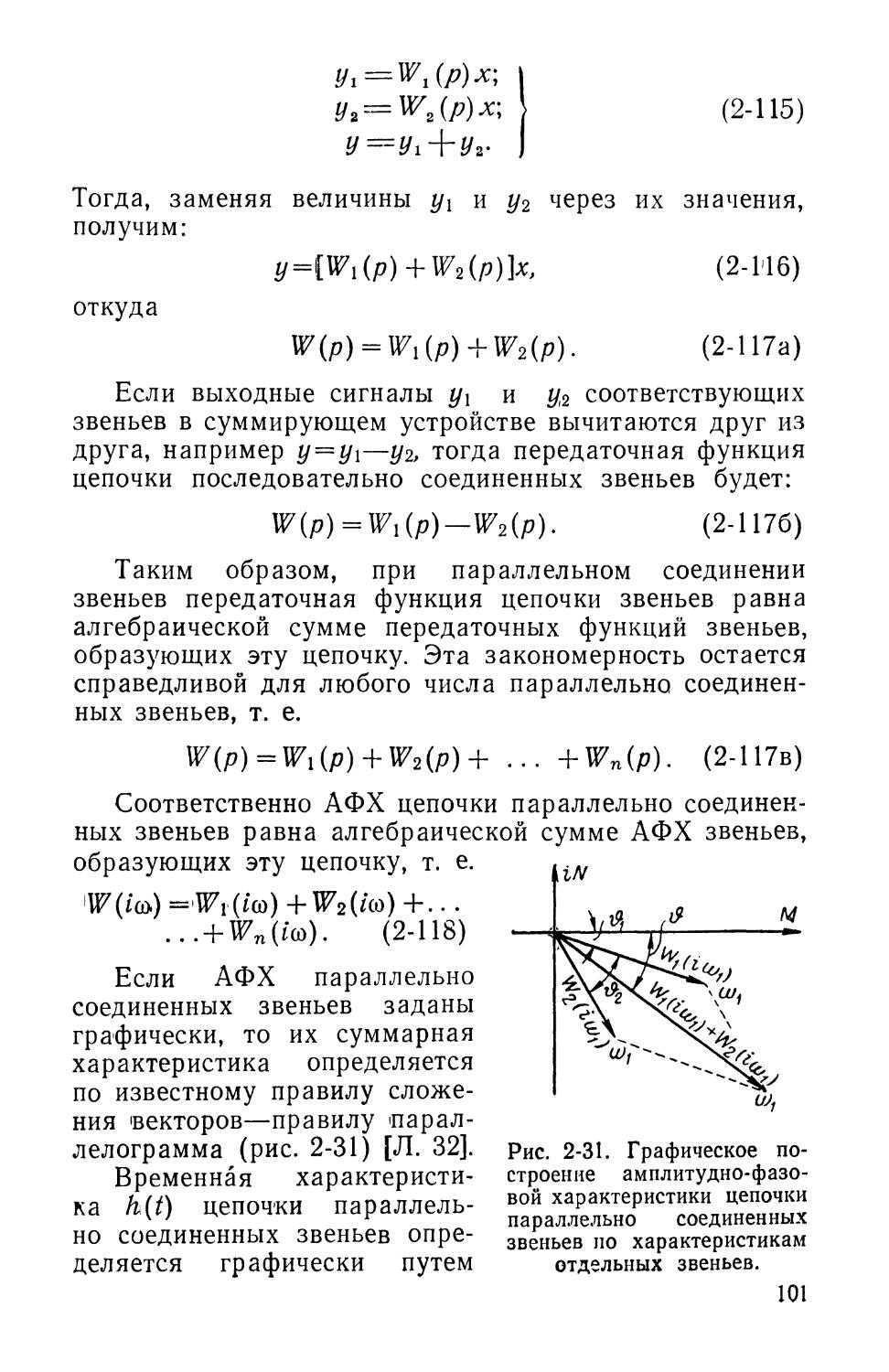
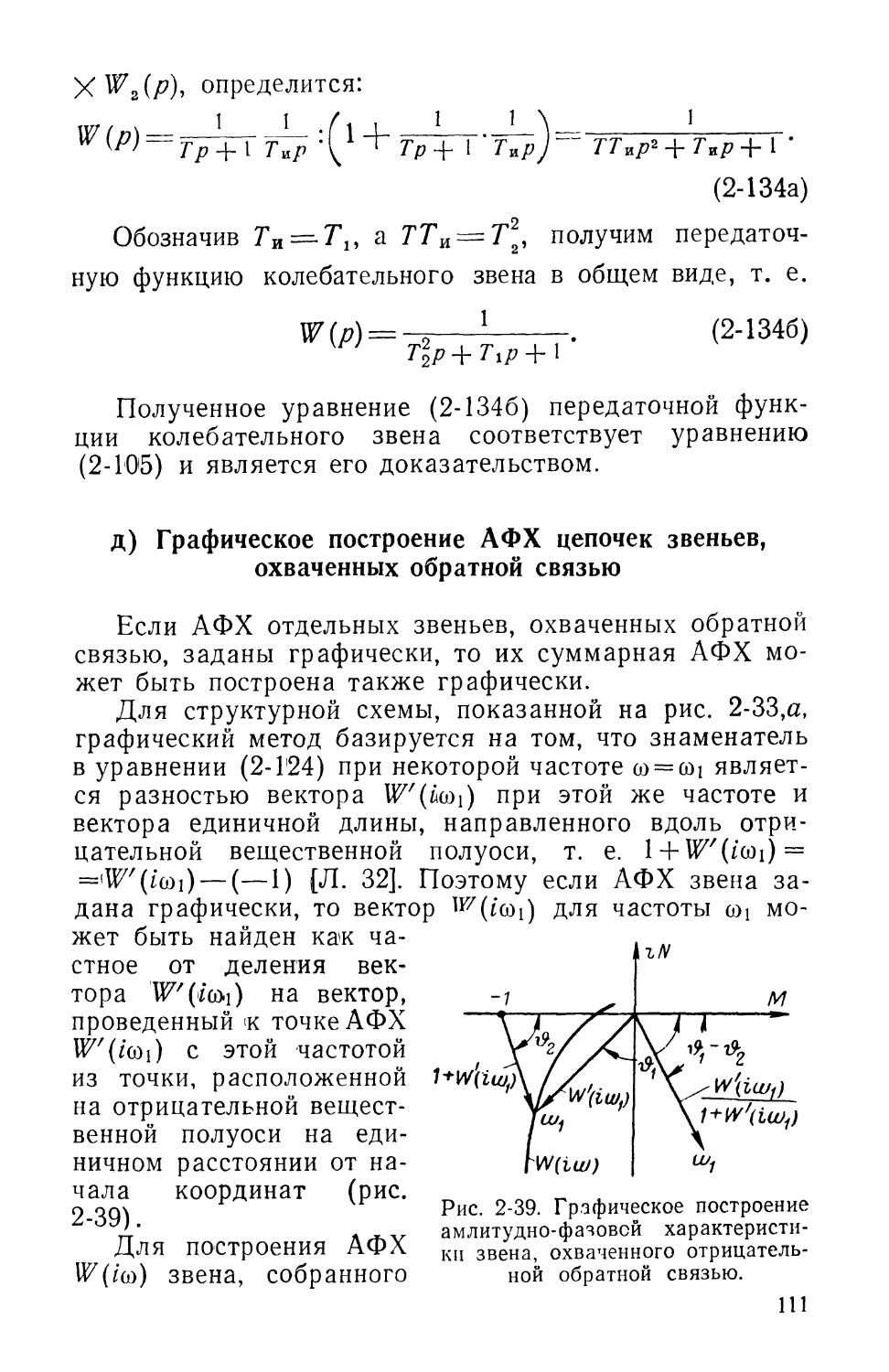
д) Графическое построение АФХ цепочек звеньев,
охваченных обратной связью 111
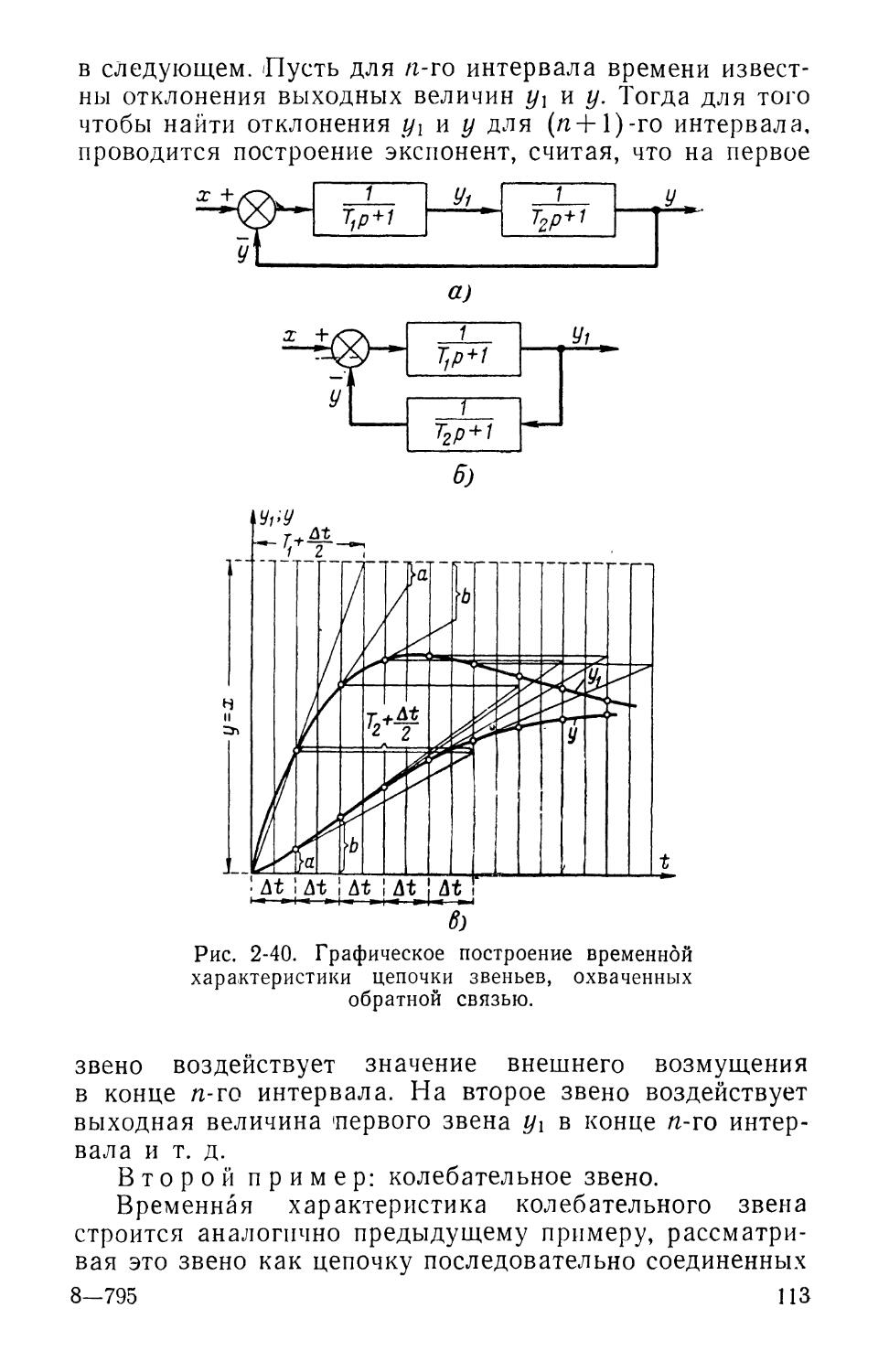
е) Графическое построение временных
характеристик цепочек звеньев, охваченных обратной
связью 112
Глава третья. Регуляторы, построенные на базе
измерительных приборов (Регуляторы приборного типа) . 115
3-1. Общие замечания 115
3-2. Регуляторы, обрабатывающие П-закон
регулирования 116
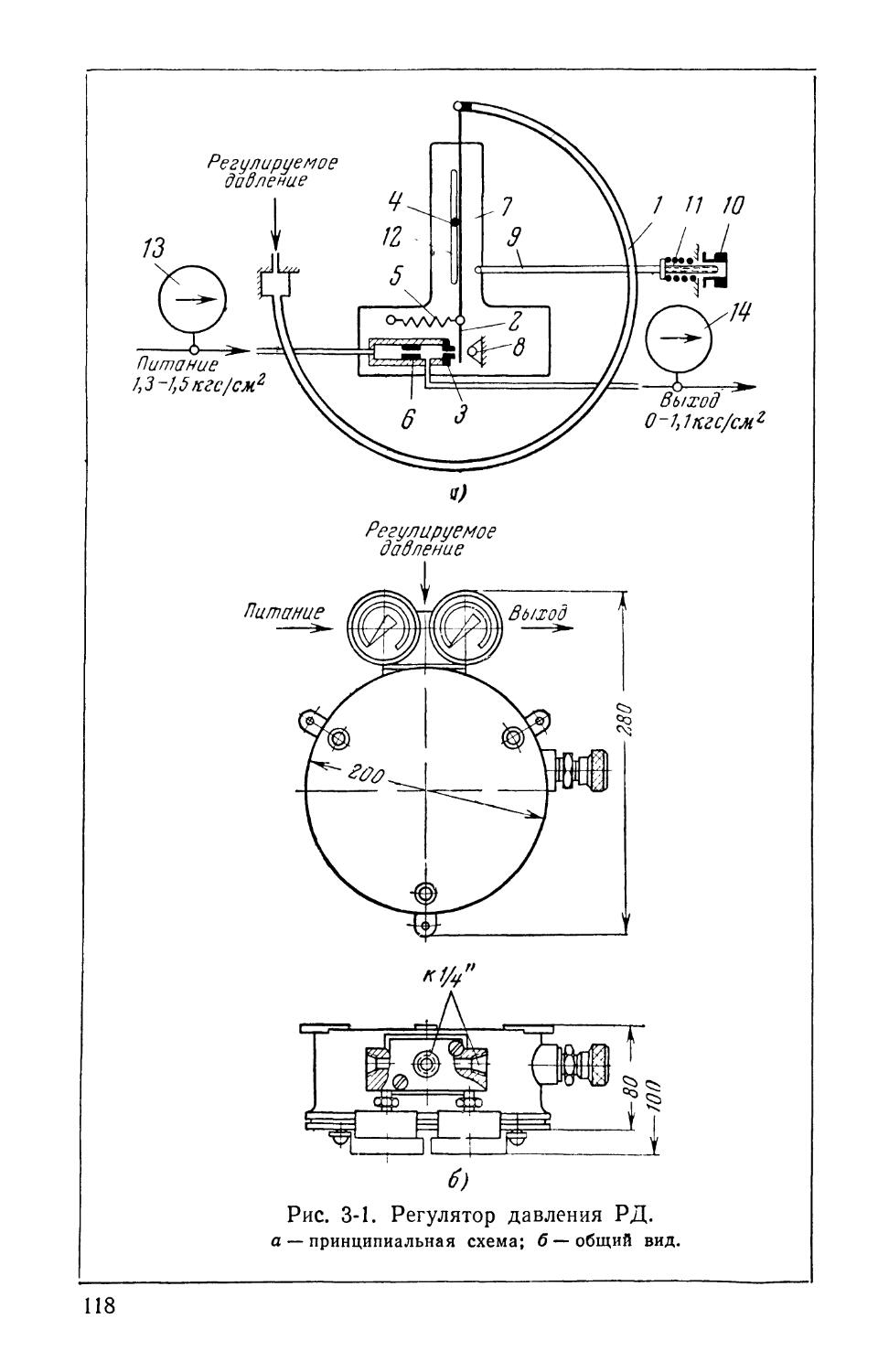
а) Регуляторы давления РД 116
б) Регуляторы температуры дилатометрические . 120
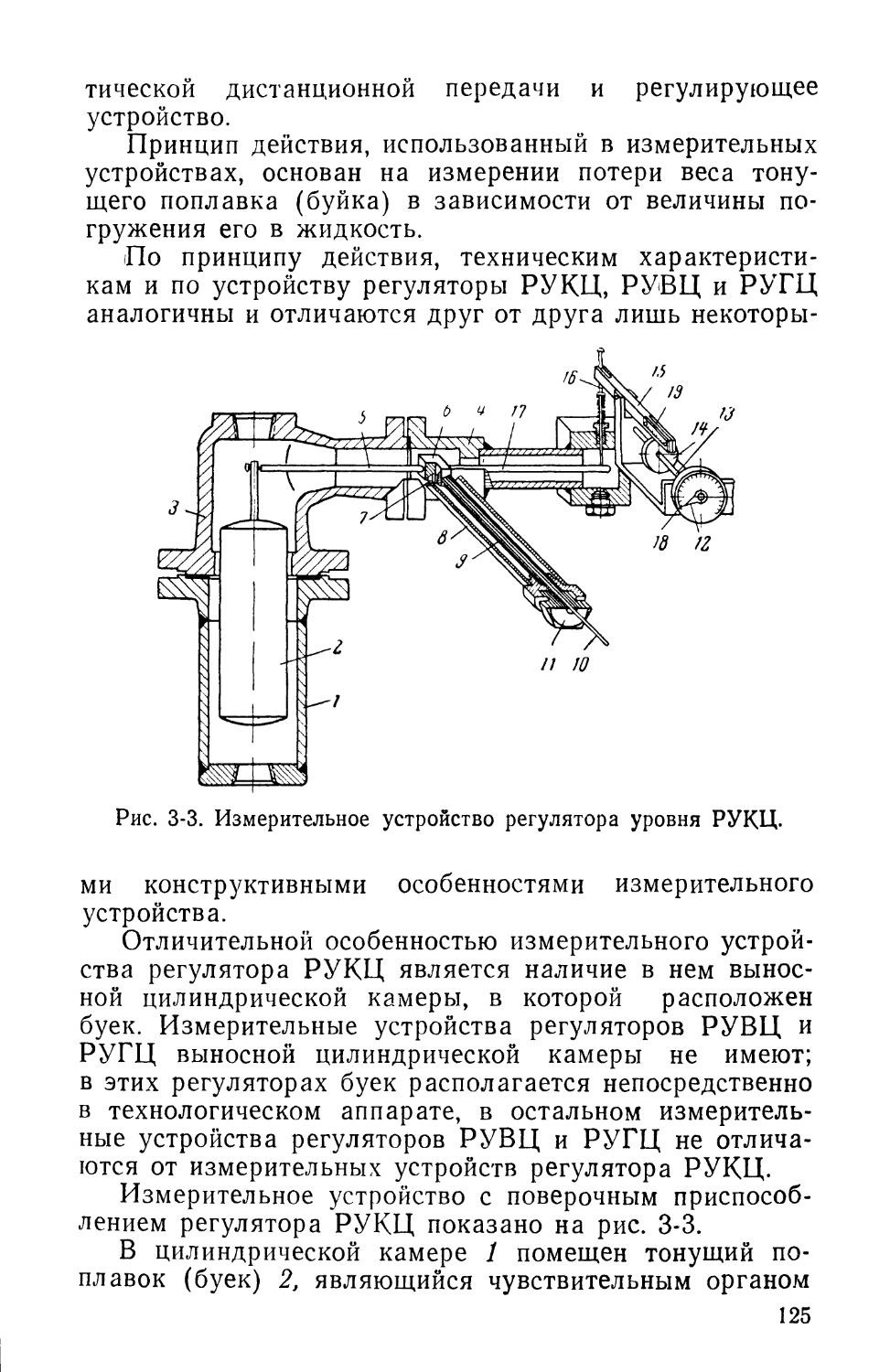
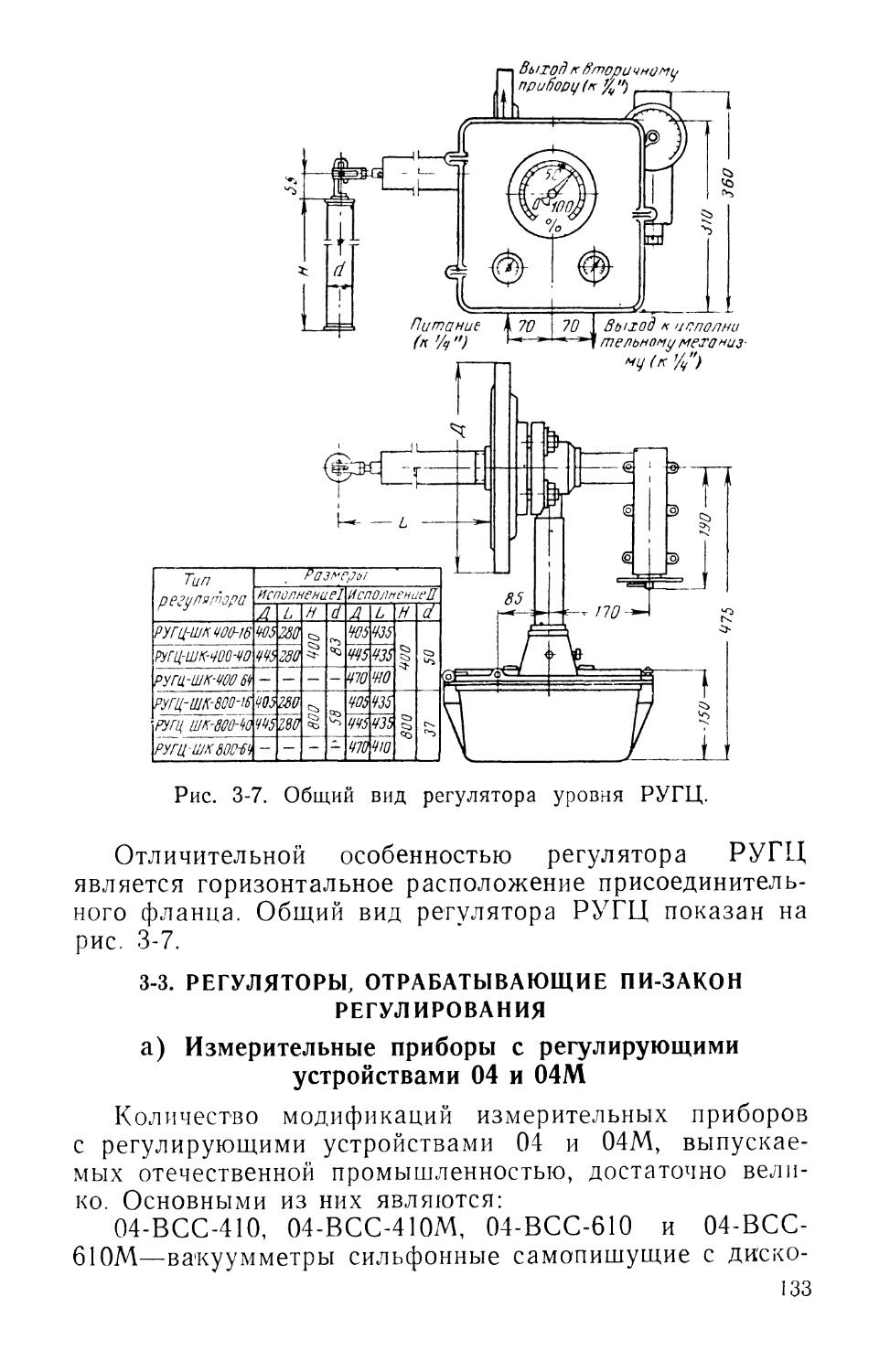
в) Регуляторы уровня поплавковые . . . . 124
3-3. Регуляторы, отрабатывающие ПИ-закон
регулирования 133
а) Измерительные приборы с регулирующими
устройствами 04 и 04М 133
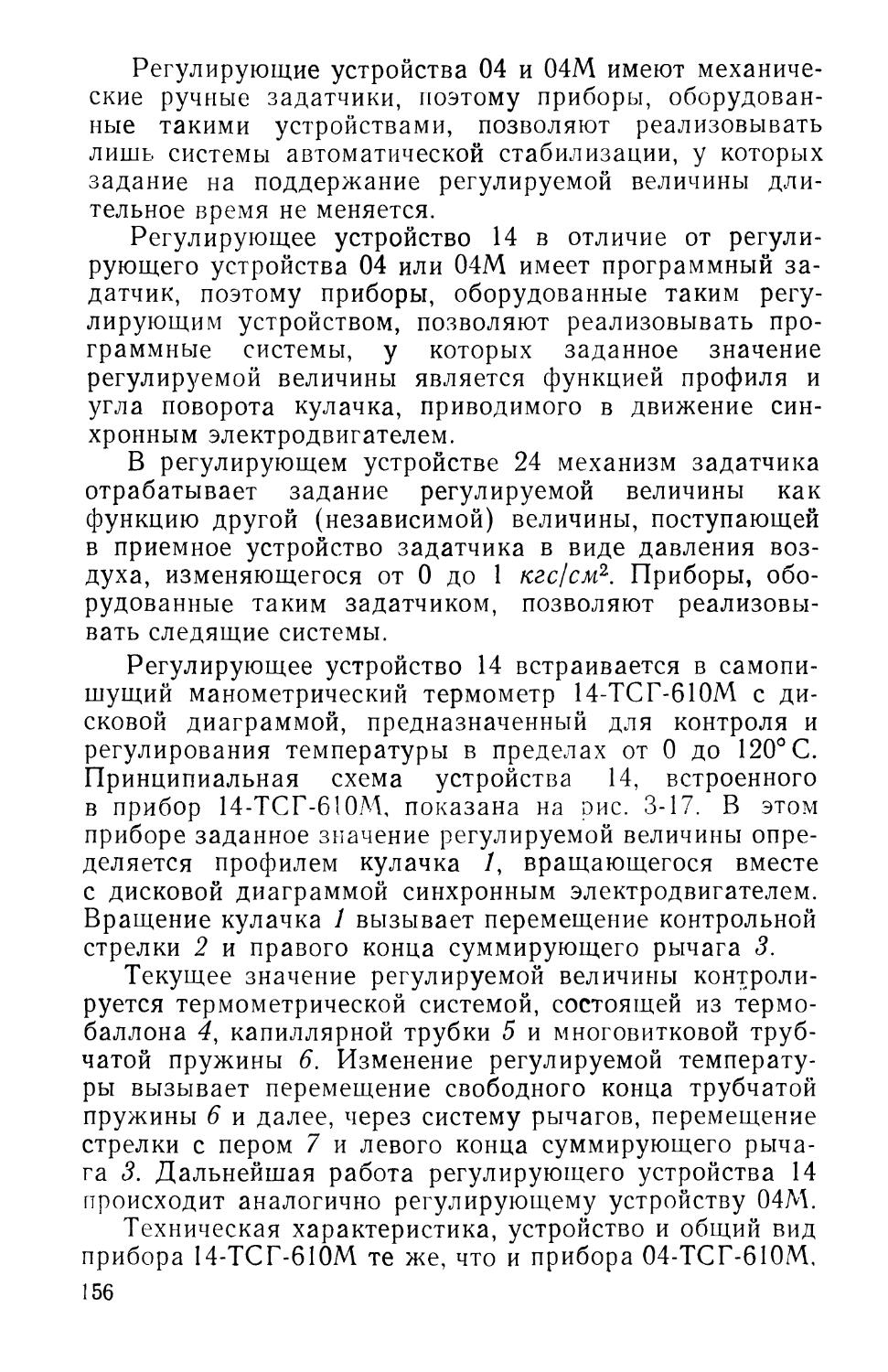
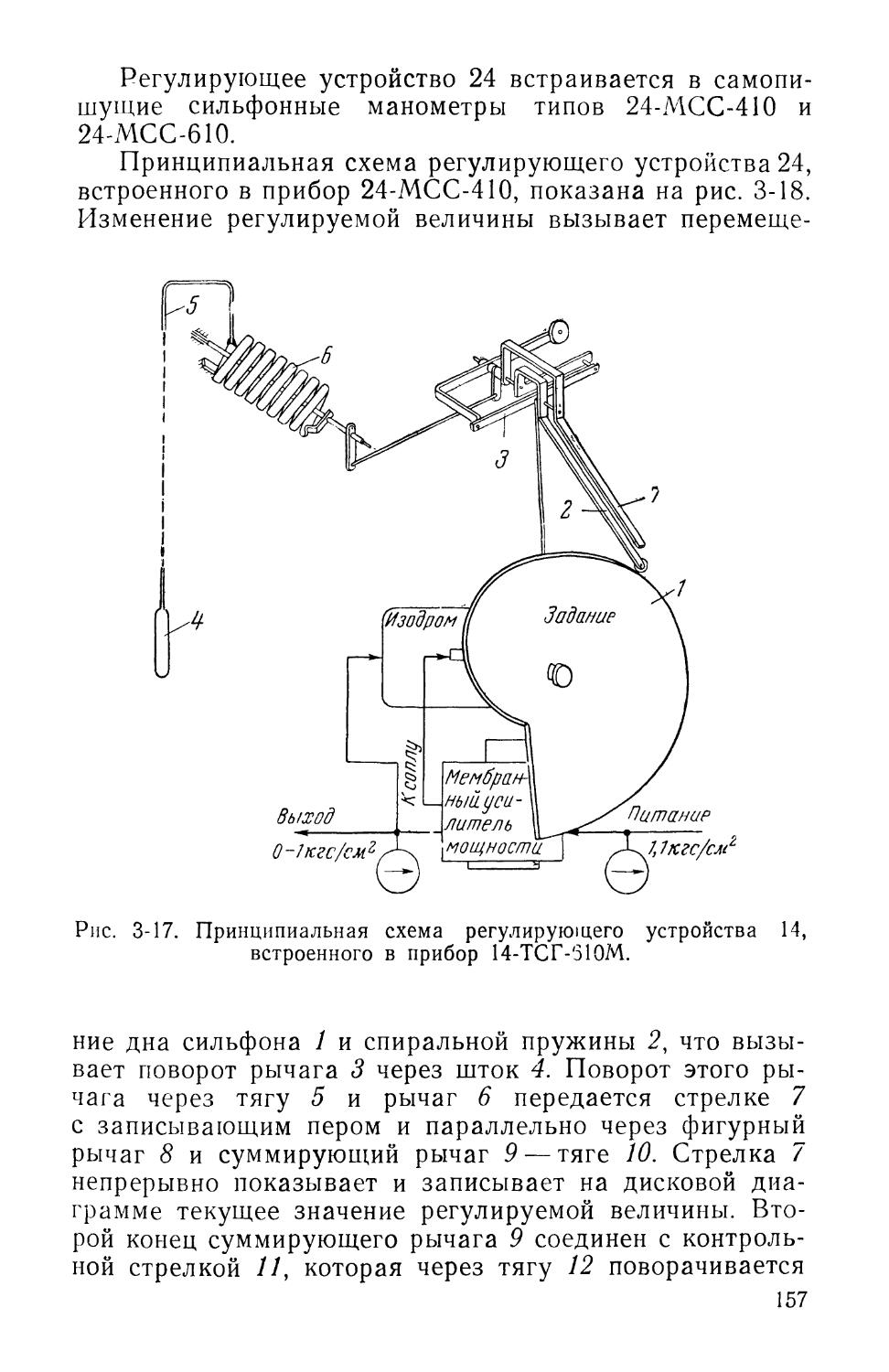
б) Измерительные приборы с регулирующими
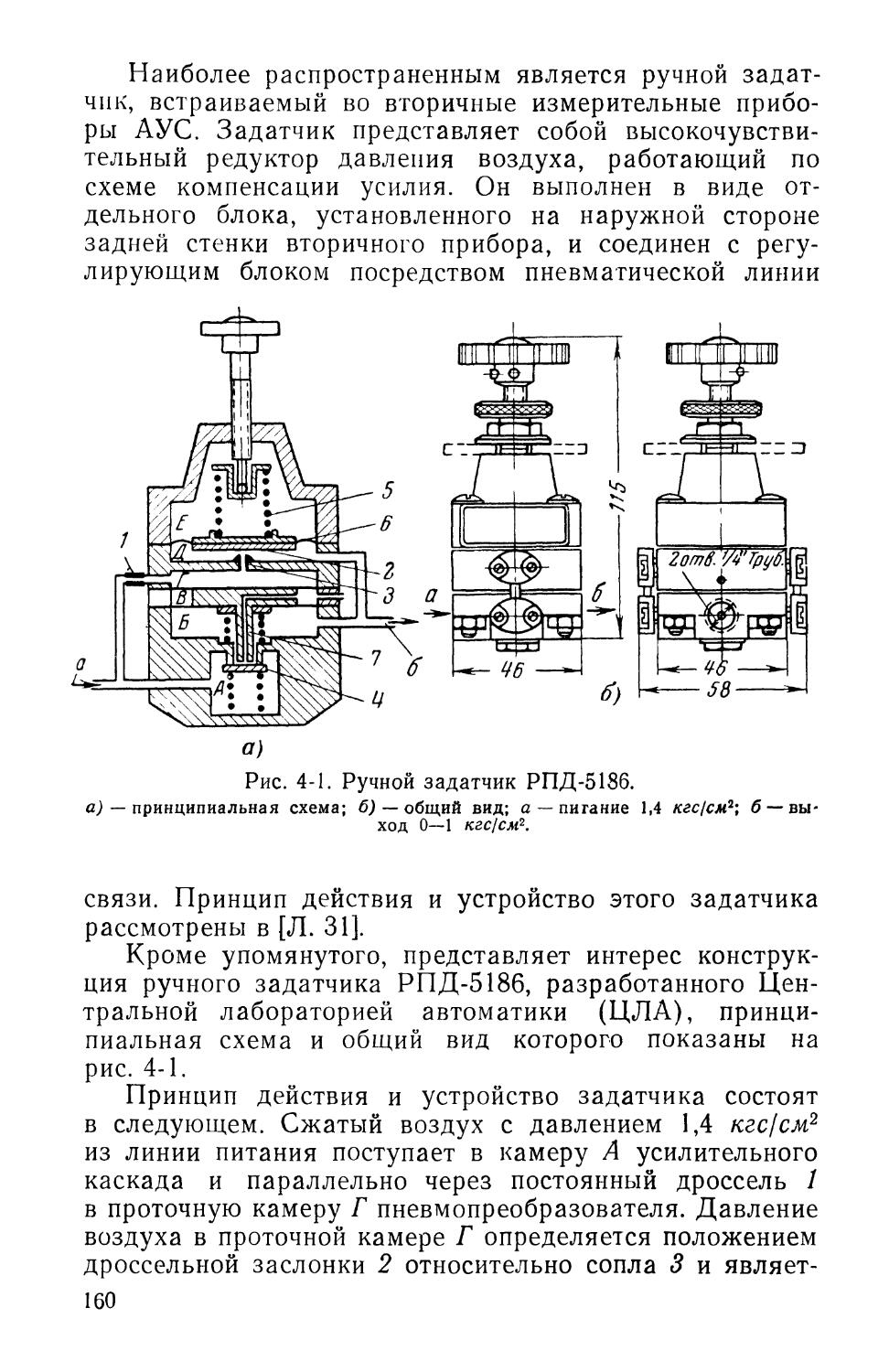
устройствами 14 и 24 155
б
Глава четвертая. Регуляторы, построенные по блочному
принципу (Регуляторы АУС) 159
4-1. Общие замечания 159
4-2. Пневматические задатчики 159
а) Ручные задатчики 159
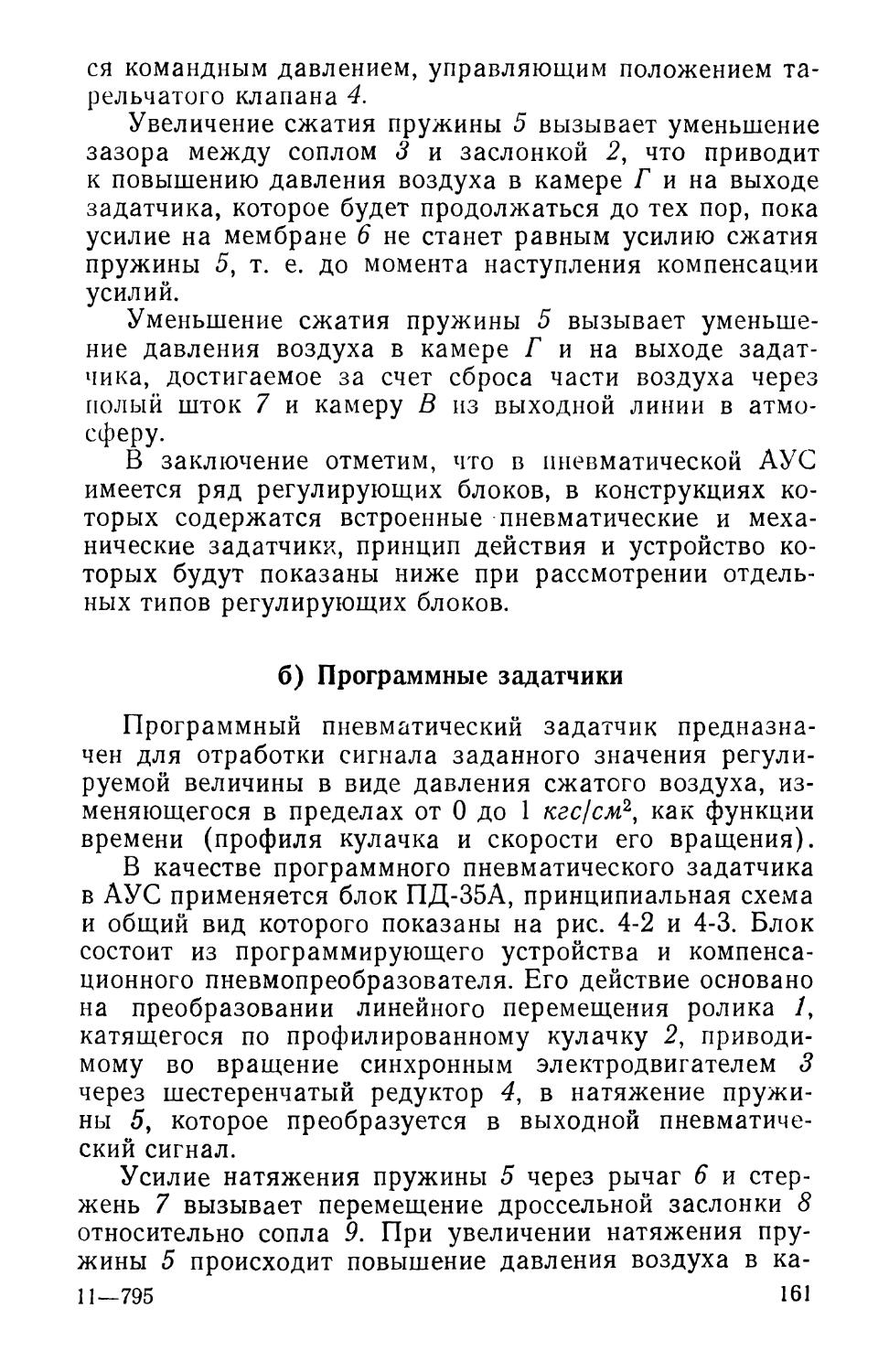
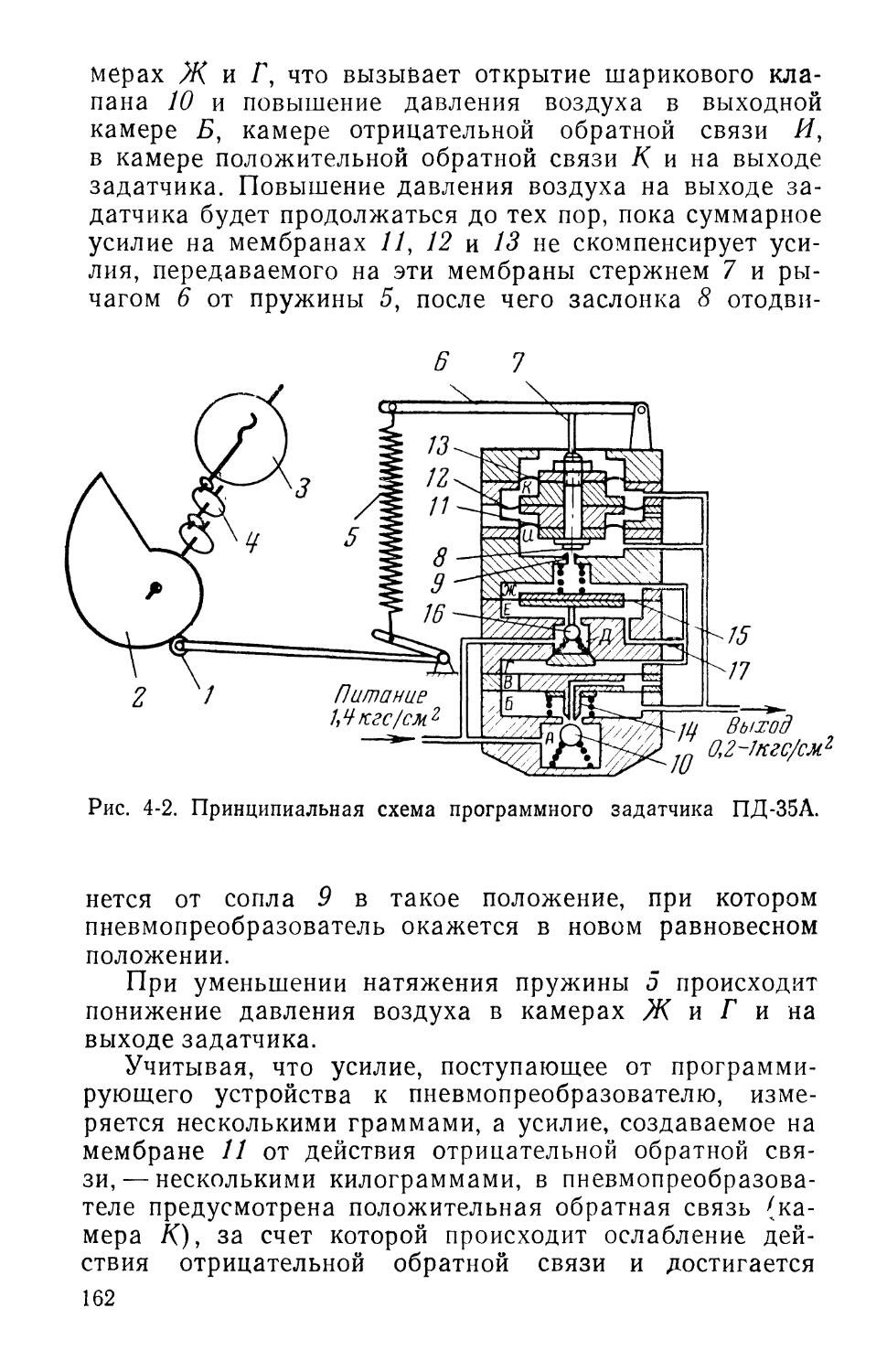
б) Программные задатчики 161
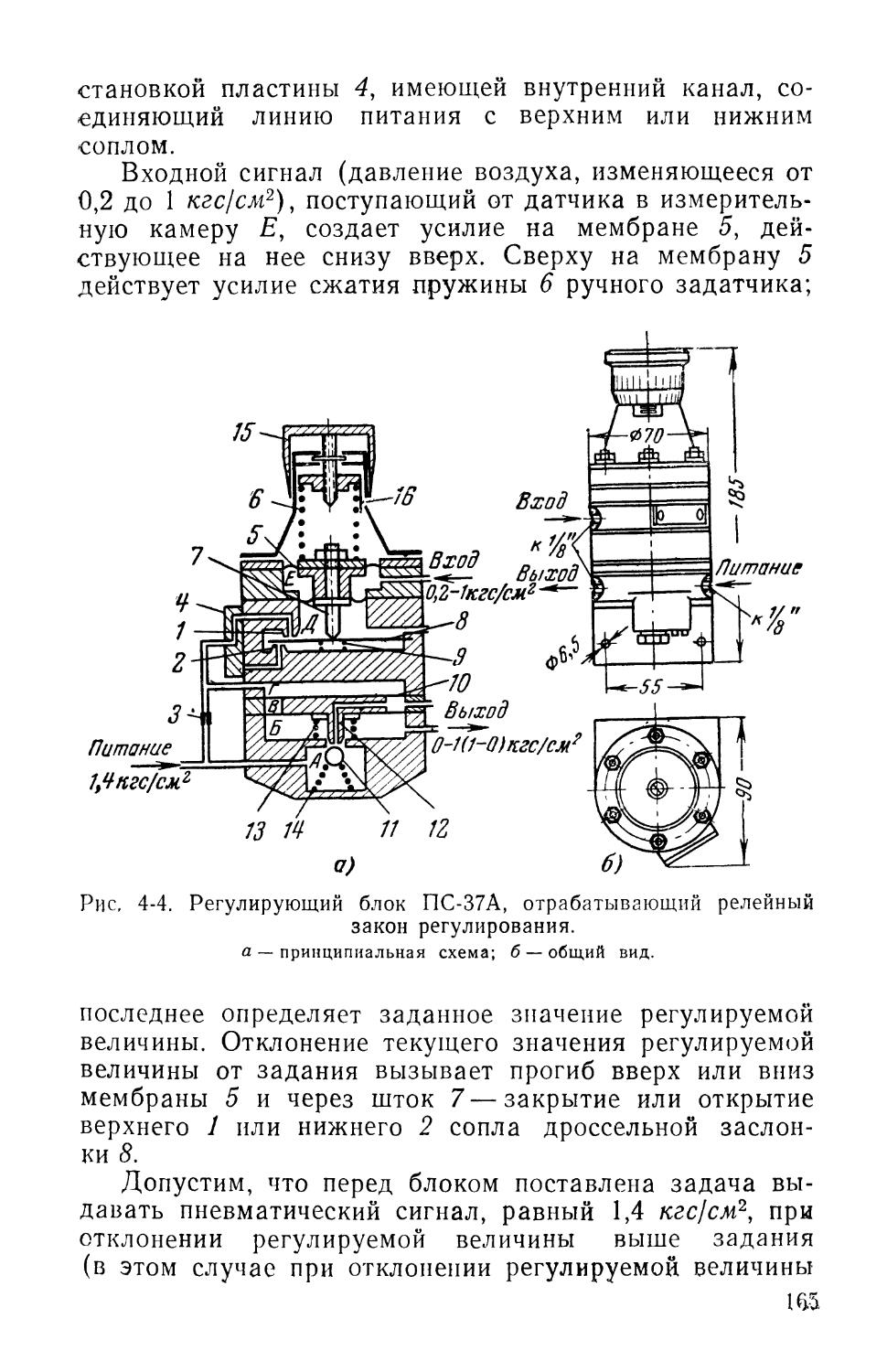
4-3. Регулирующие блоки 164
а) Блоки, отрабатывающие релейный закон
регулирования 164
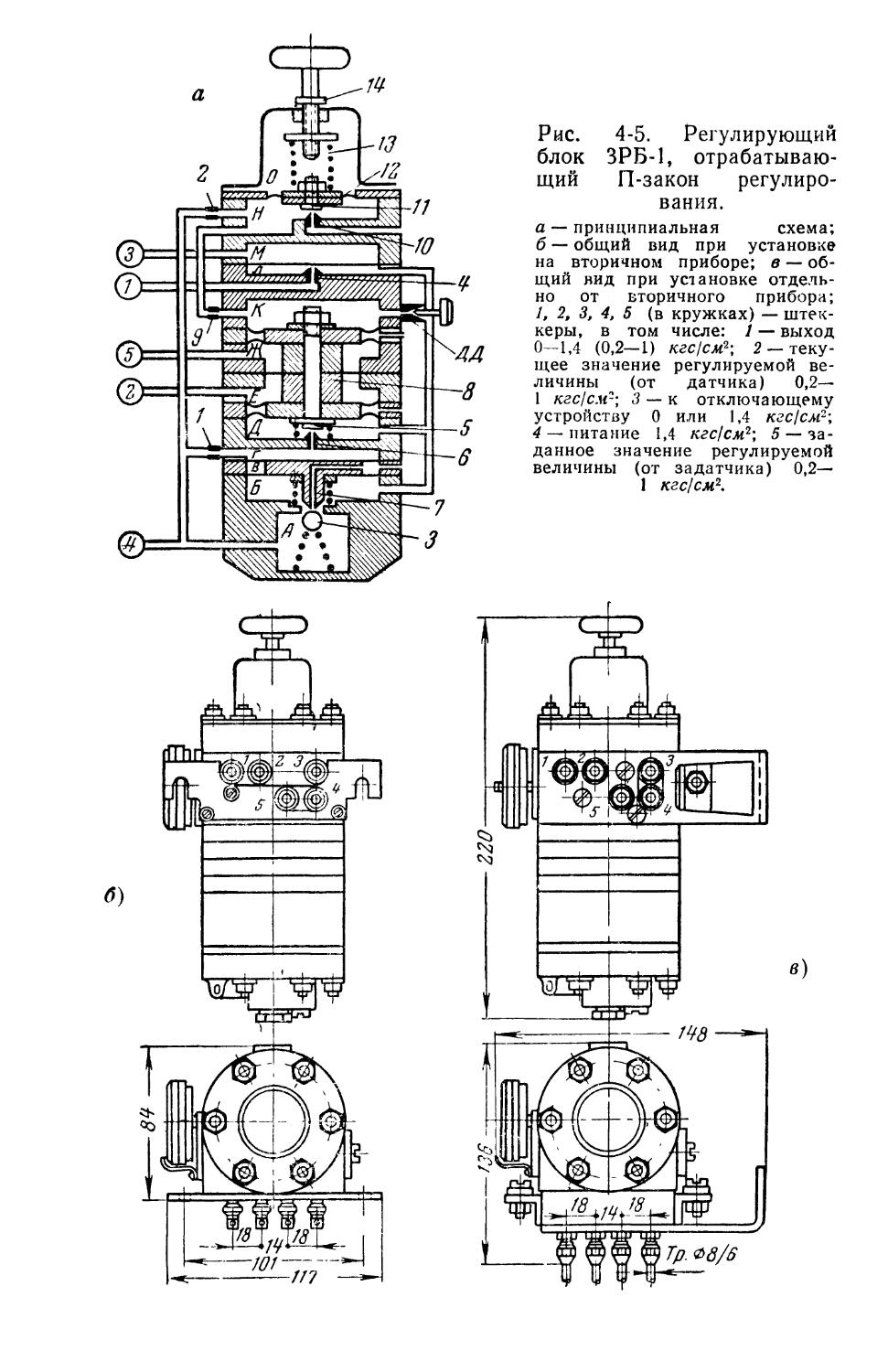
б) Блоки, отрабатывающие П-закон регулирования 167
в) Блоки, отрабатывающие ПИ-закон регулирования 173
г) Дифференцирующие блоки (Блоки предварения) 185
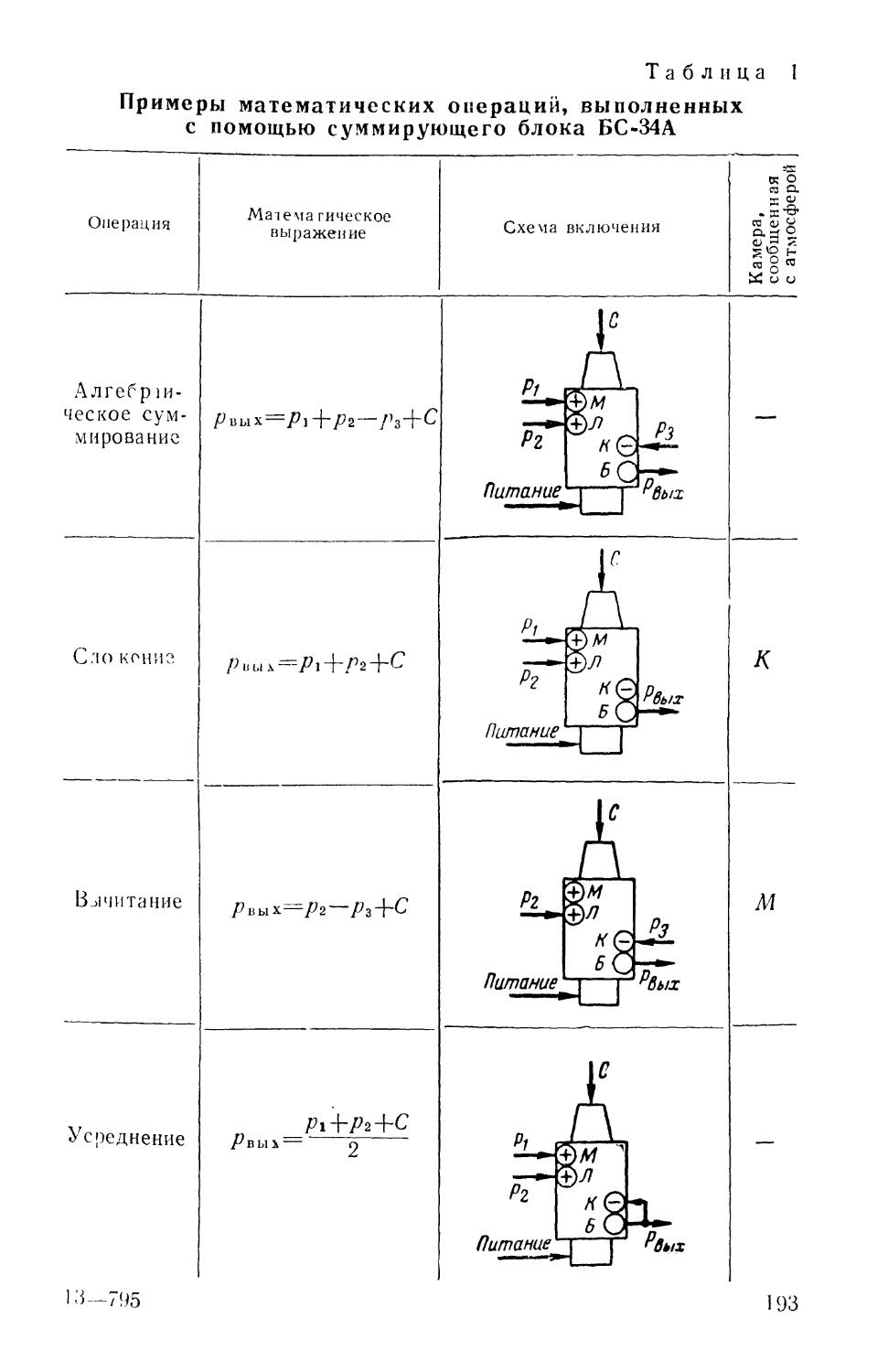
4-4. Вычислительные блоки 190
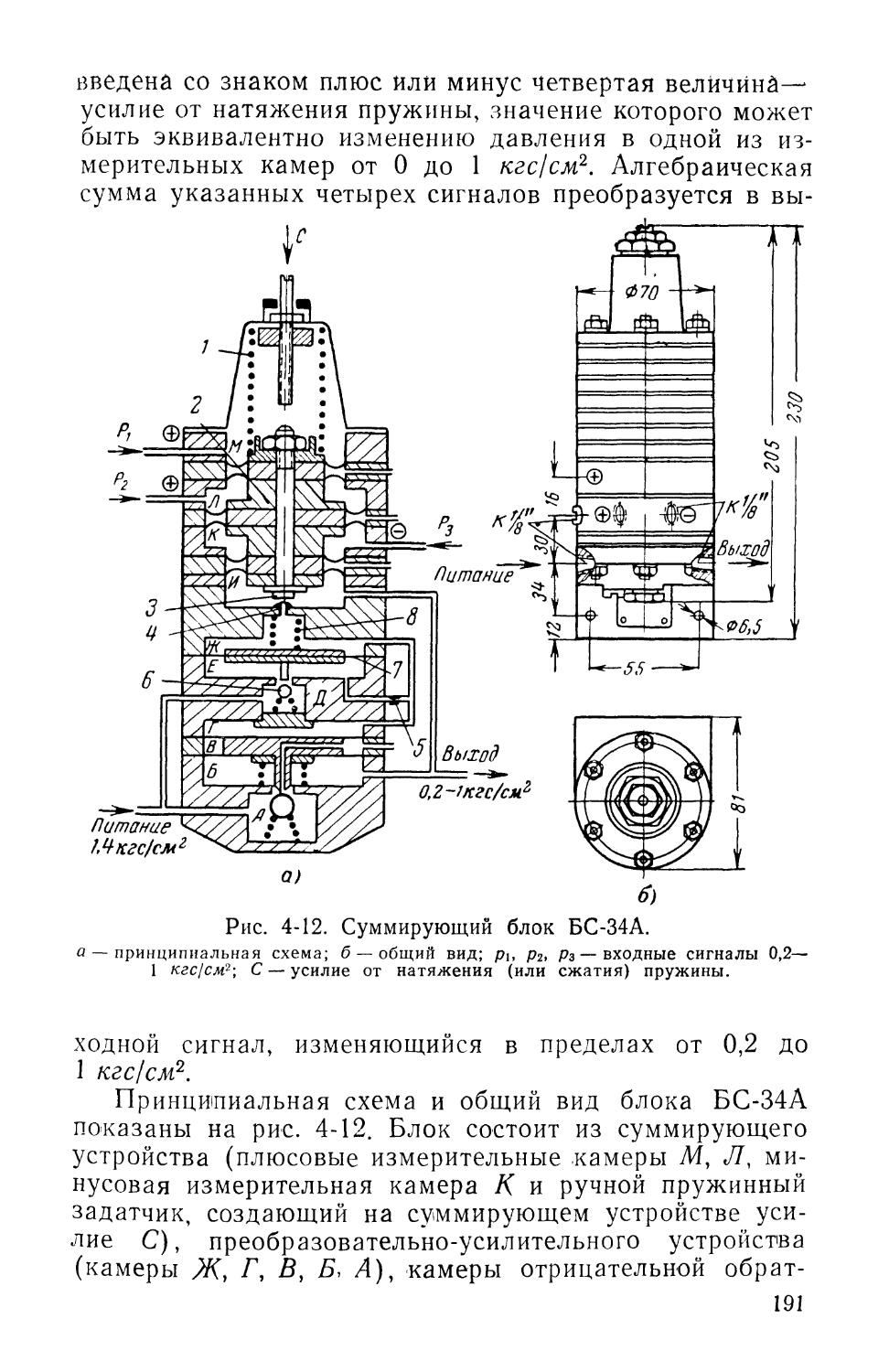
а) Суммирующий блок БС-34А 190
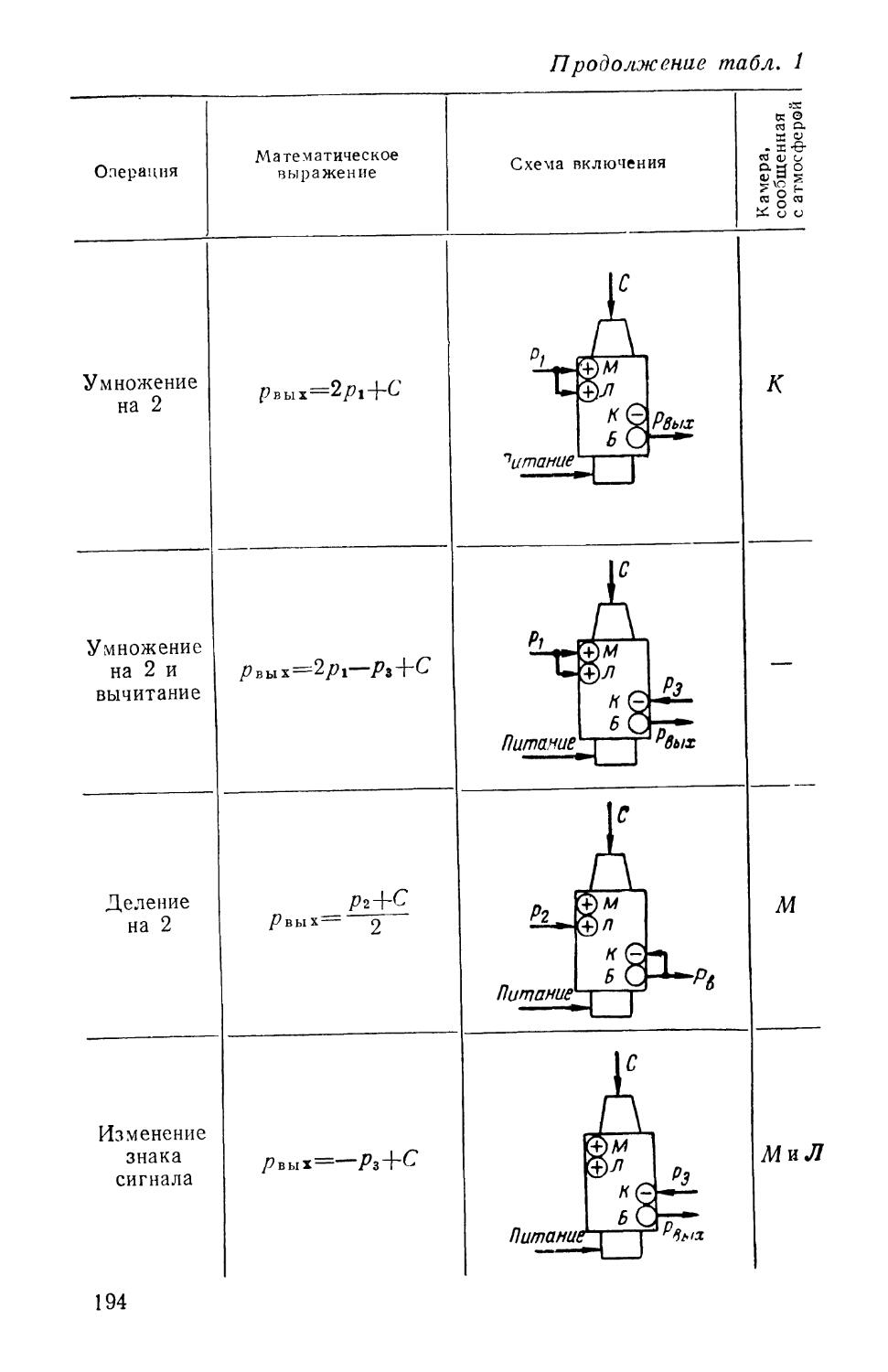
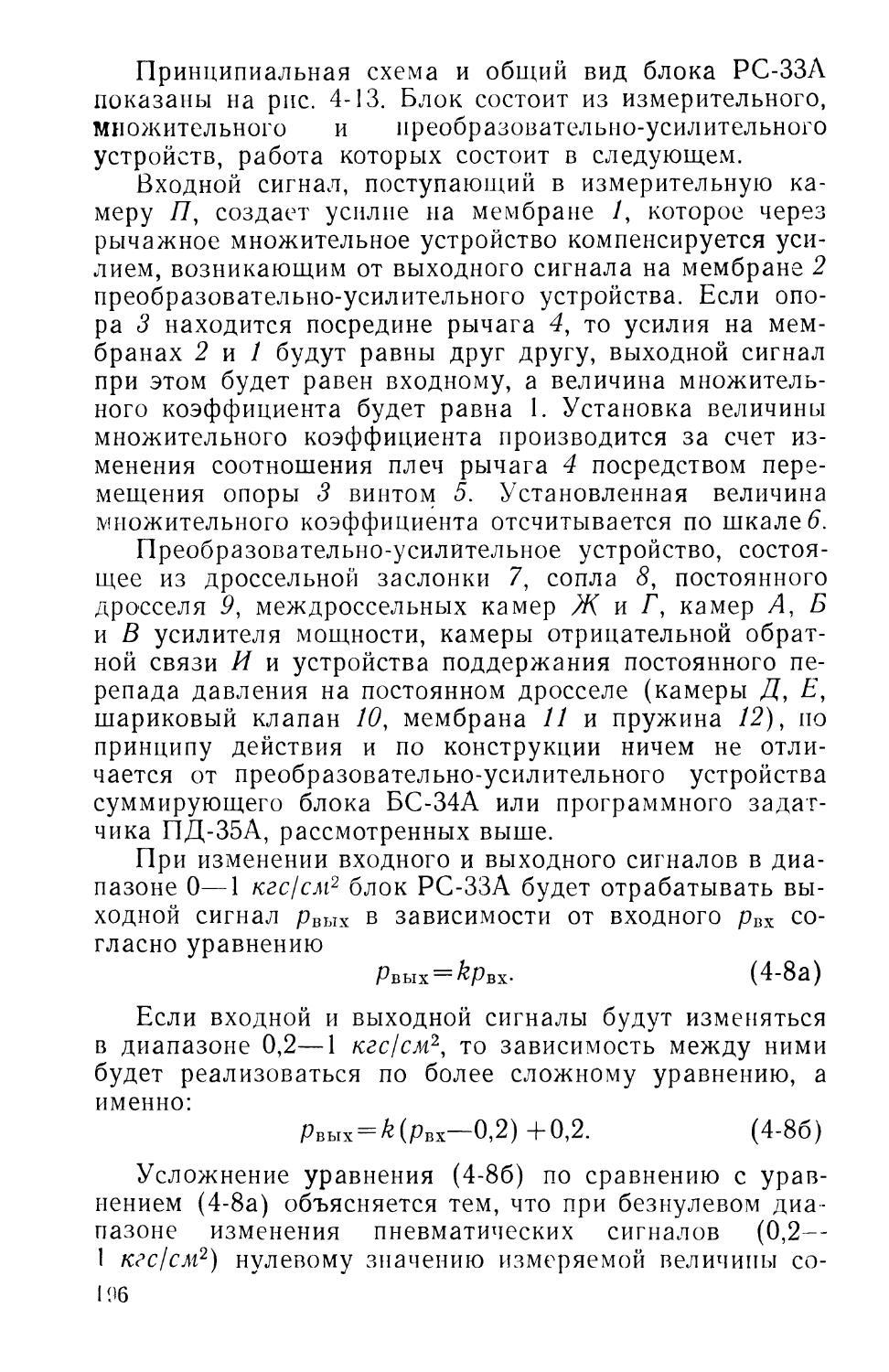
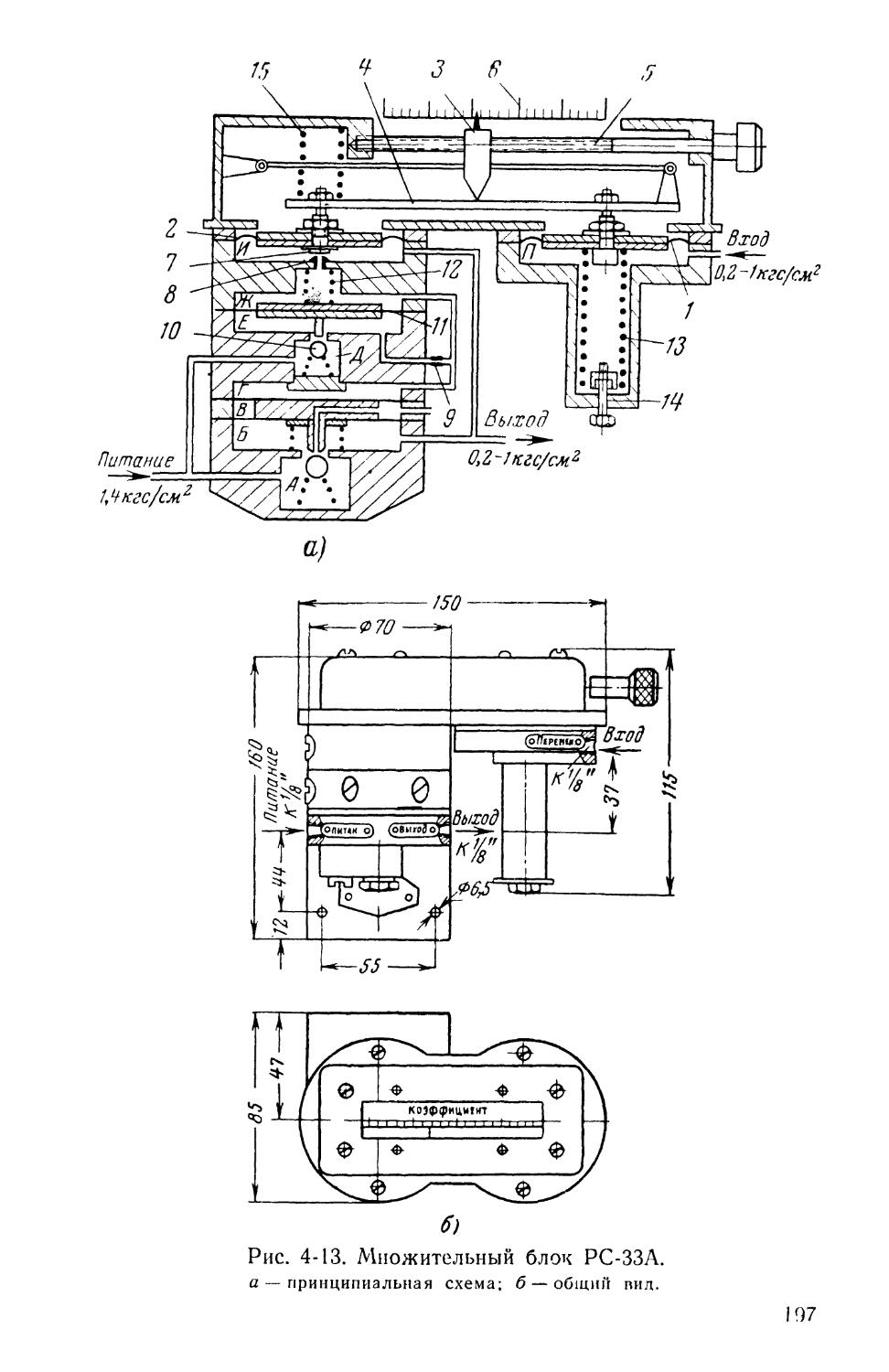
б) Множительный блок РС-ЗЗА 192
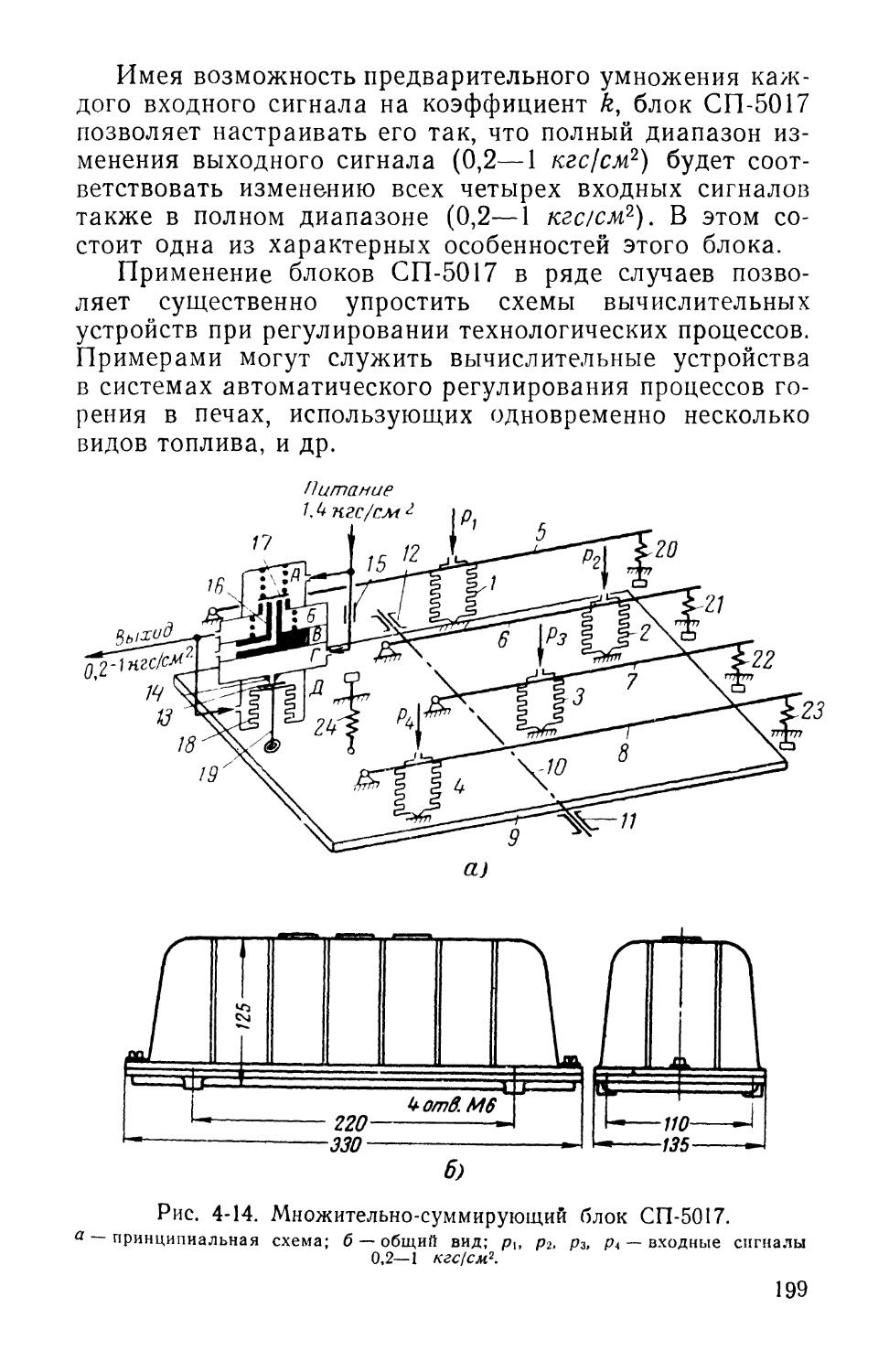
в) Множительно-суммирующий блок СП-5017 . . 198
г) Вычислительный блок БФ-2 200
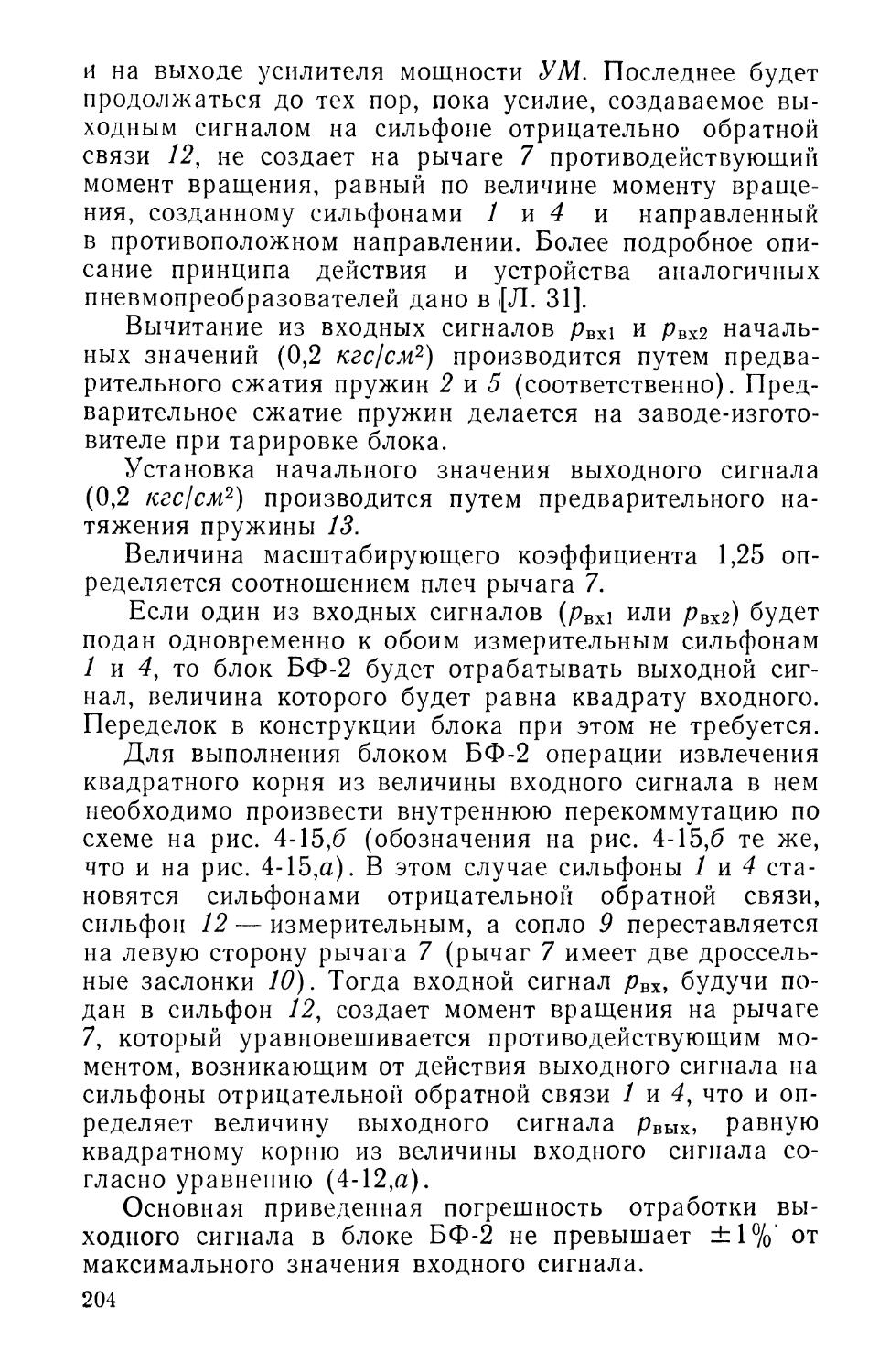
д) Преобразовательный блок ПД-36А .... 205
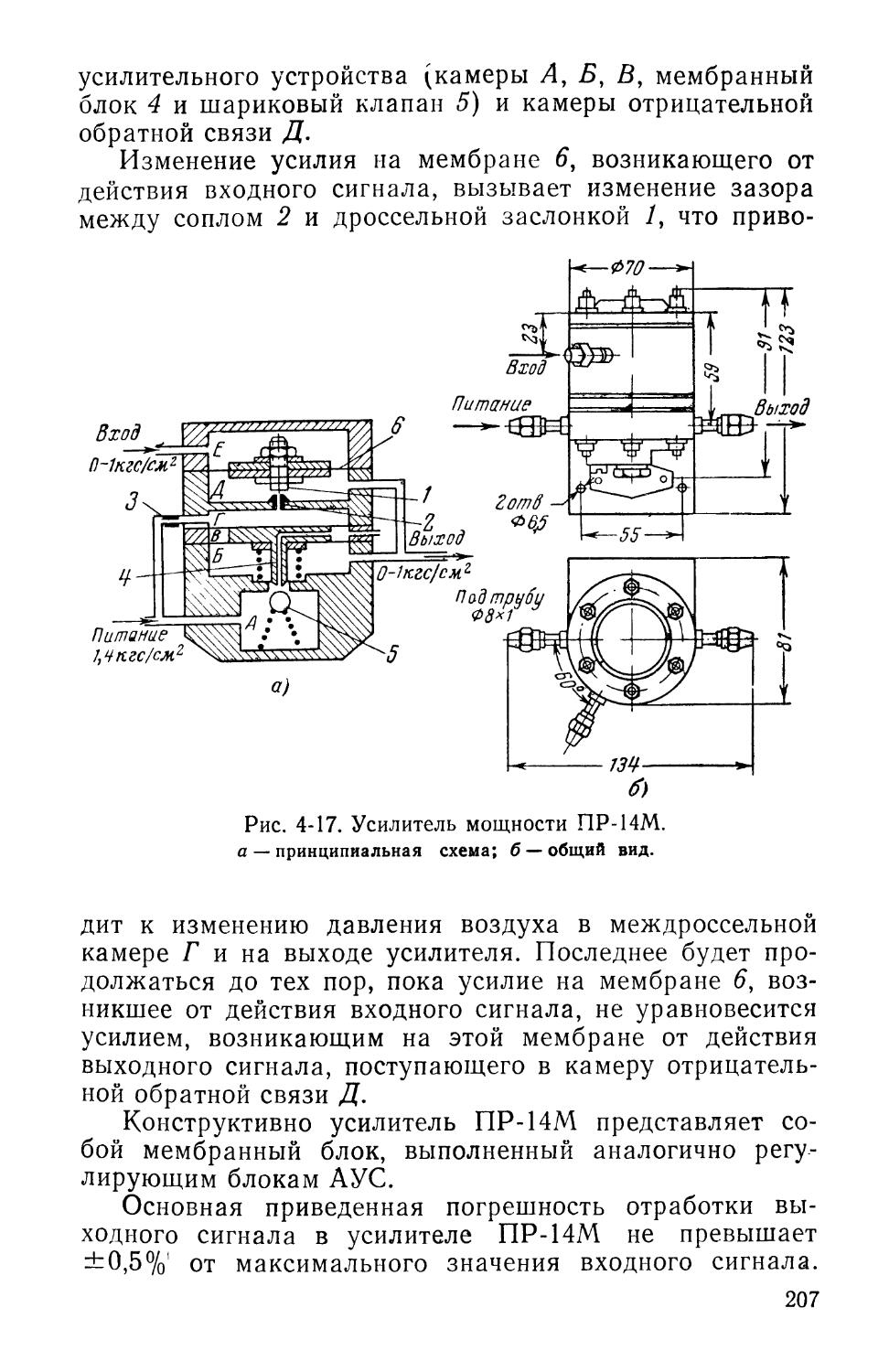
4-5. Усилитель мощности ПР-14М 206
Глава пятая. Регуляторы, построенные по
элементно-модульному принципу (Регуляторы УСЭППА) . . . 208
5-1. Общие замечания 208
5-2. Основные модули непрерывного действия . . 209
а) Пневмосопротивления и пневмоемкости . . . 209
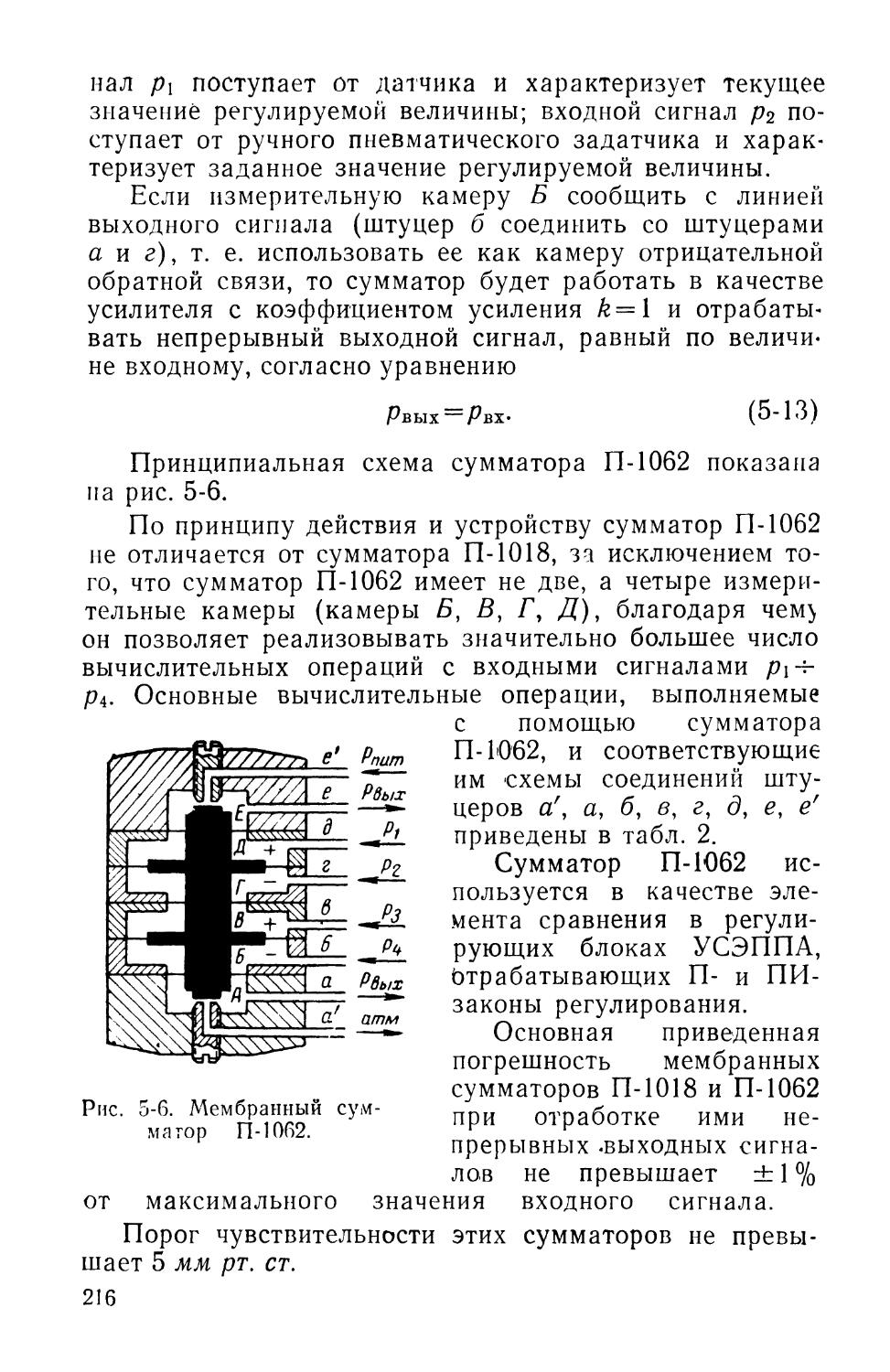
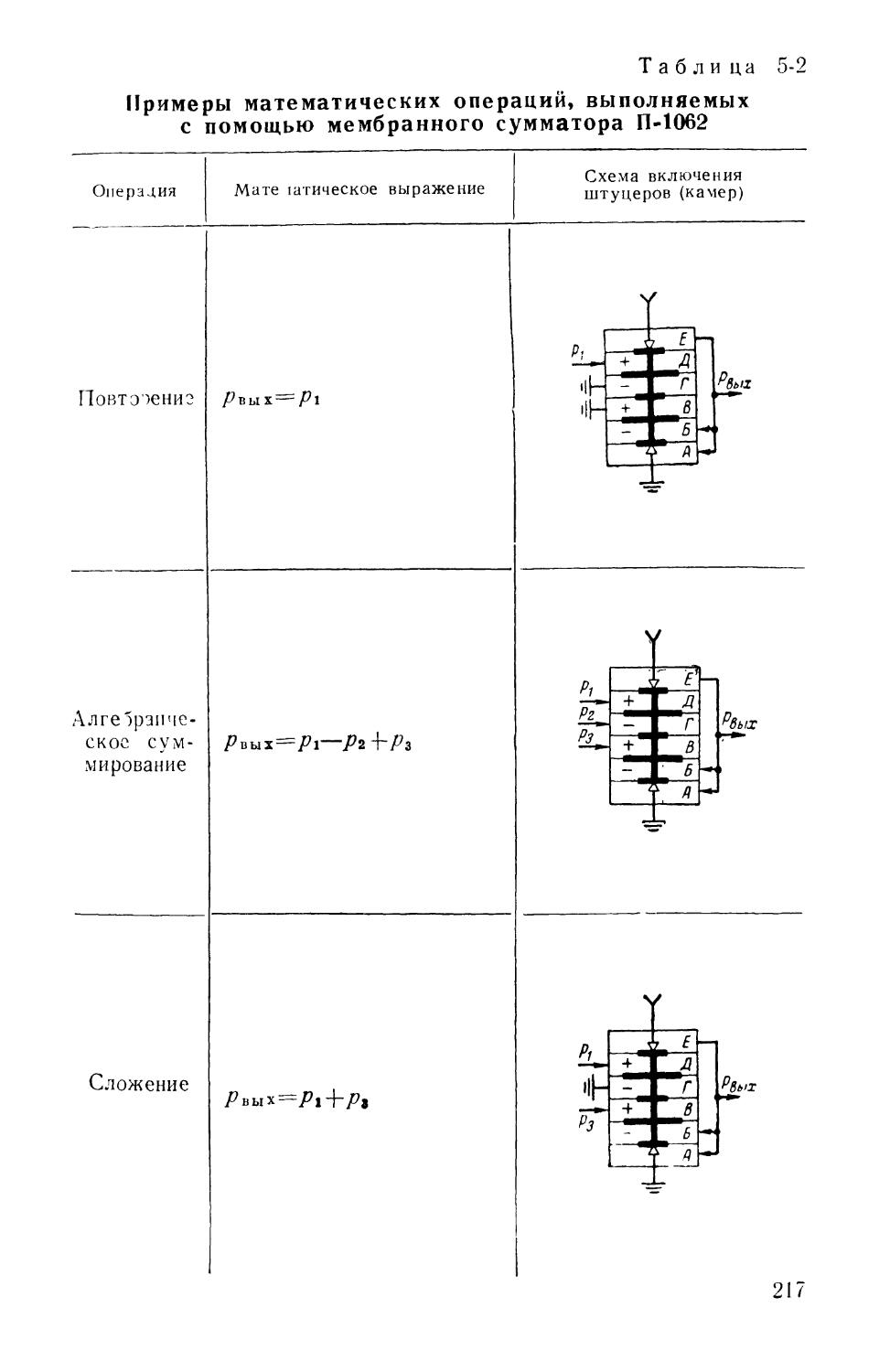
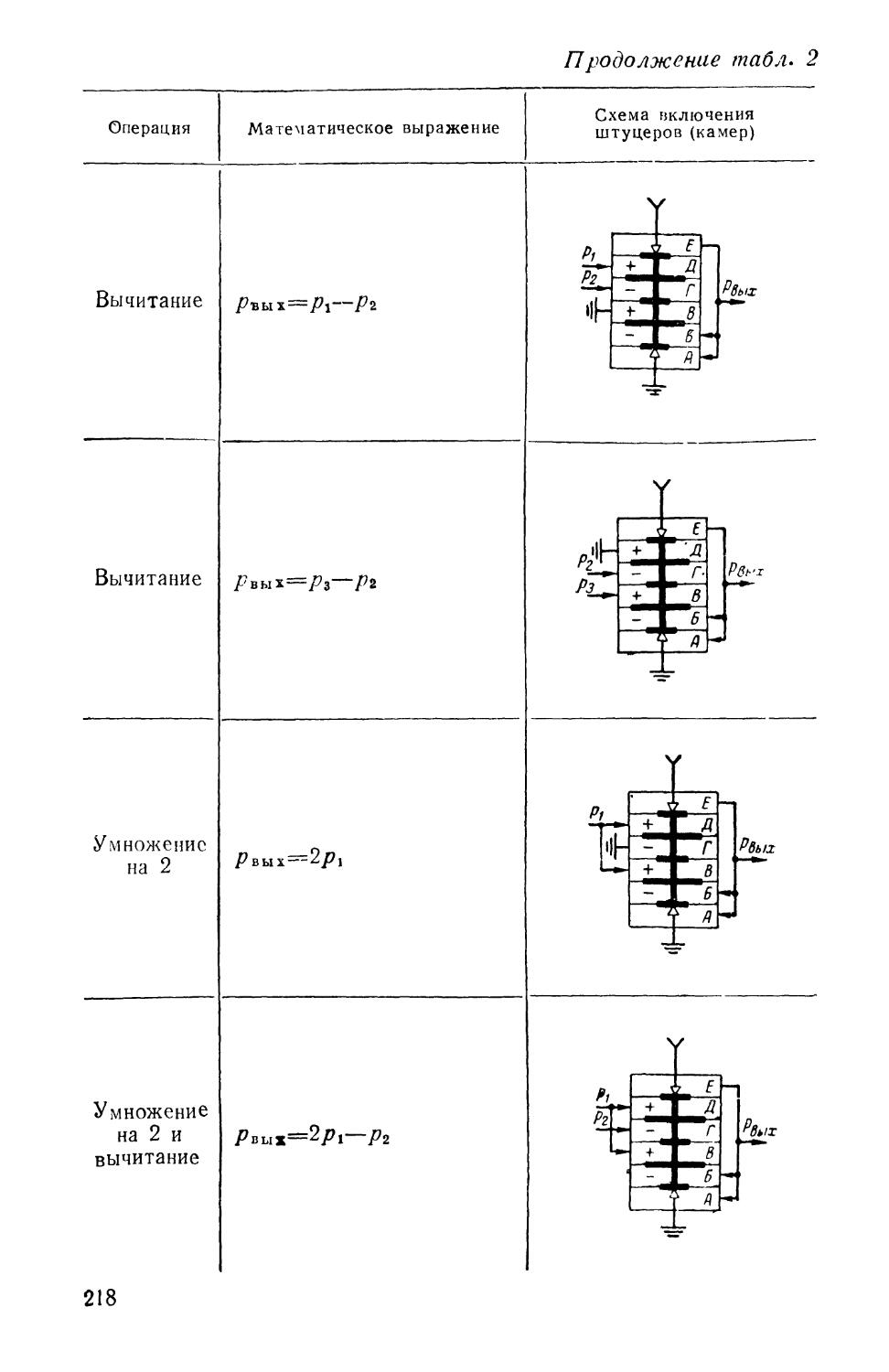
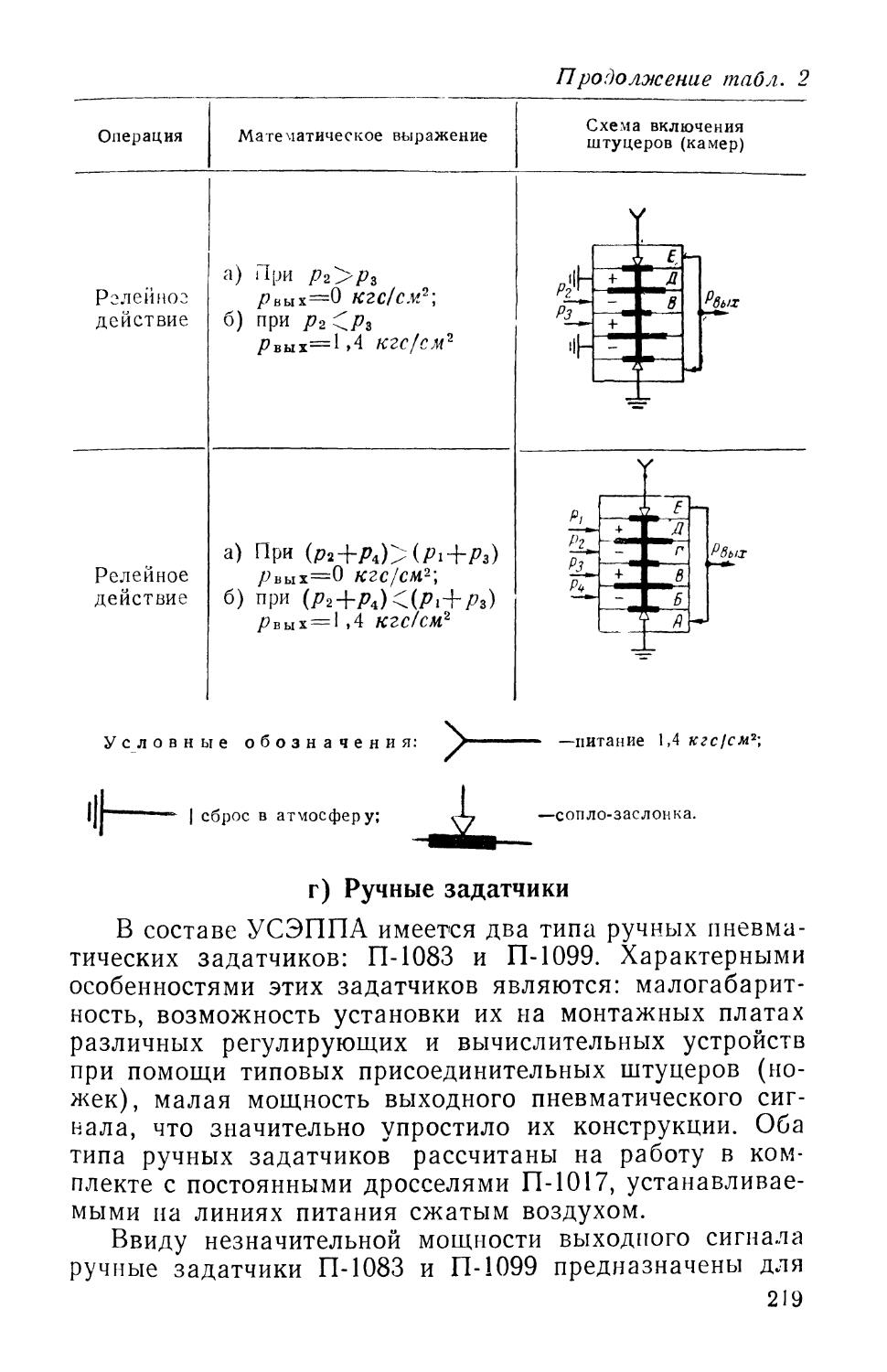
б) Дроссельные сумматоры 211
в) Мембранные сумматоры 214
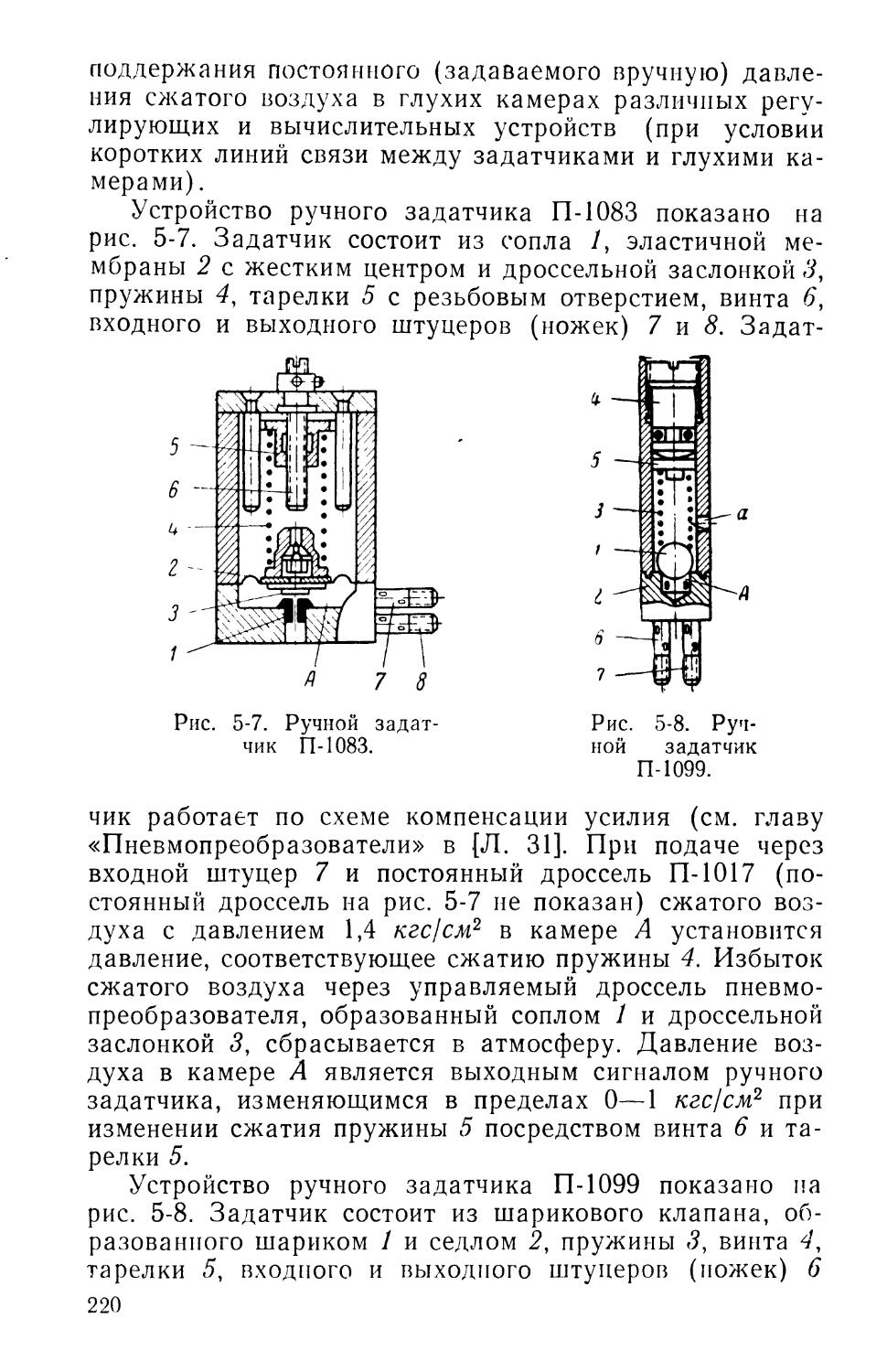
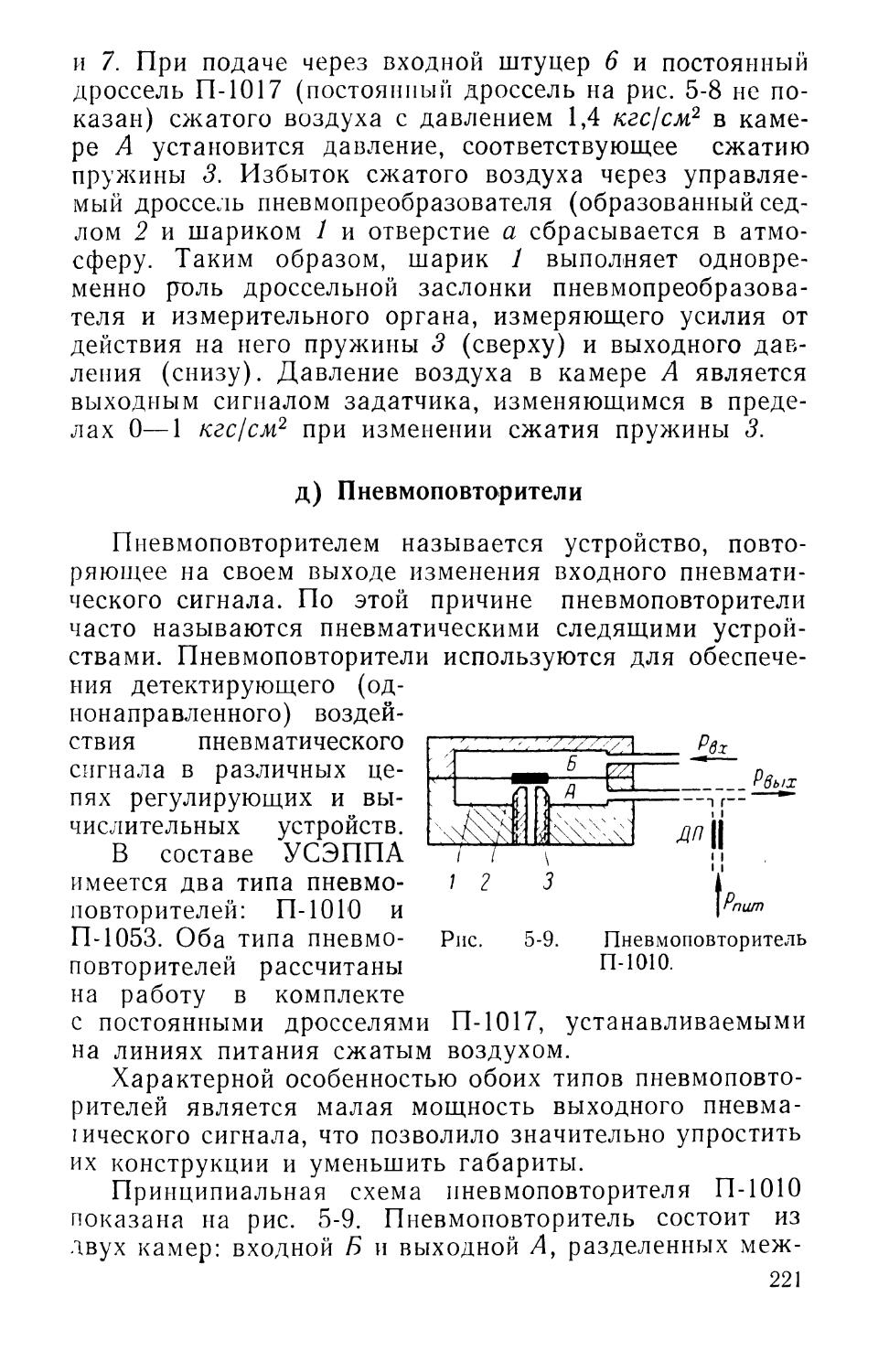
г) Ручные задатчики 219
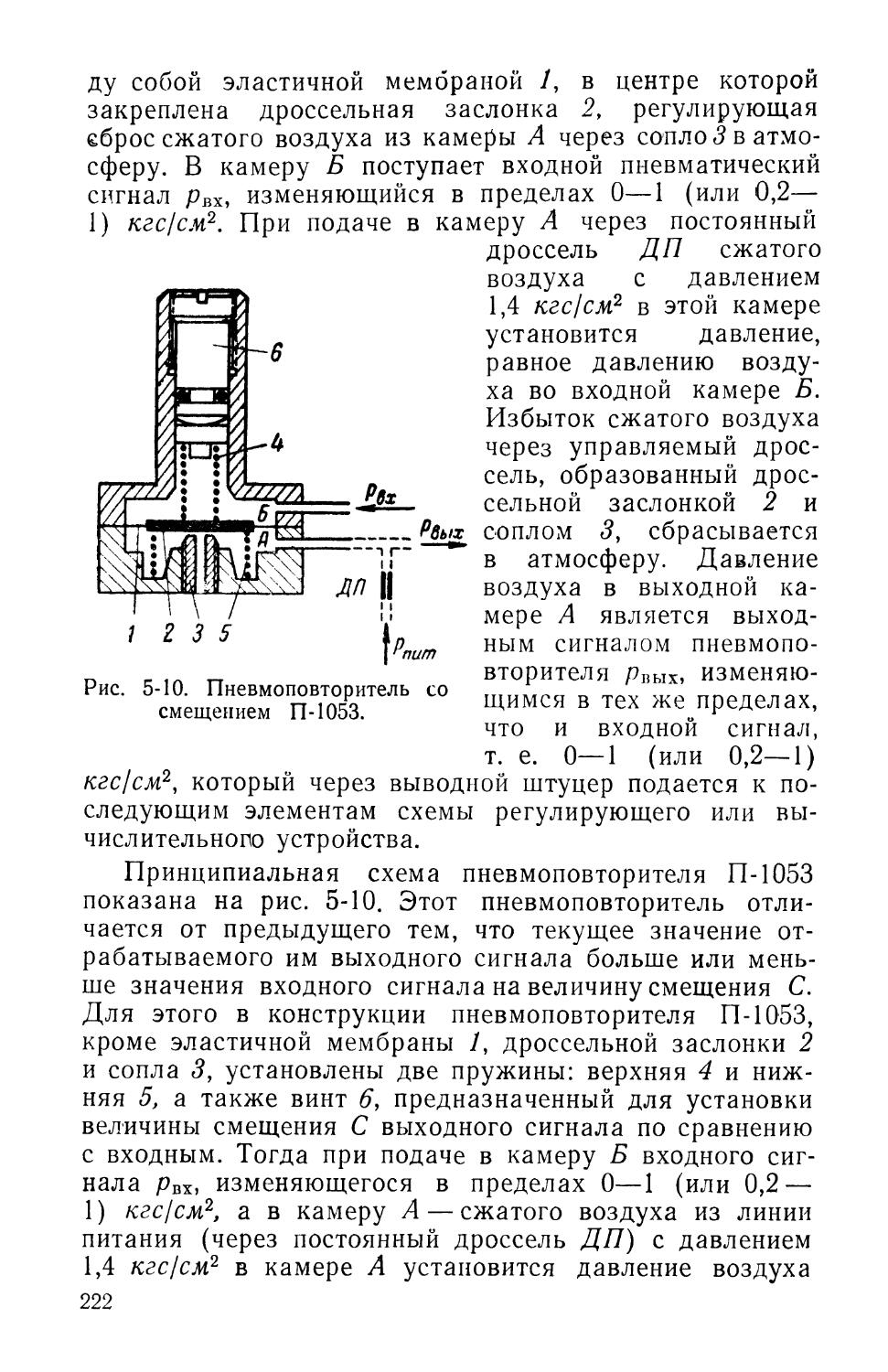
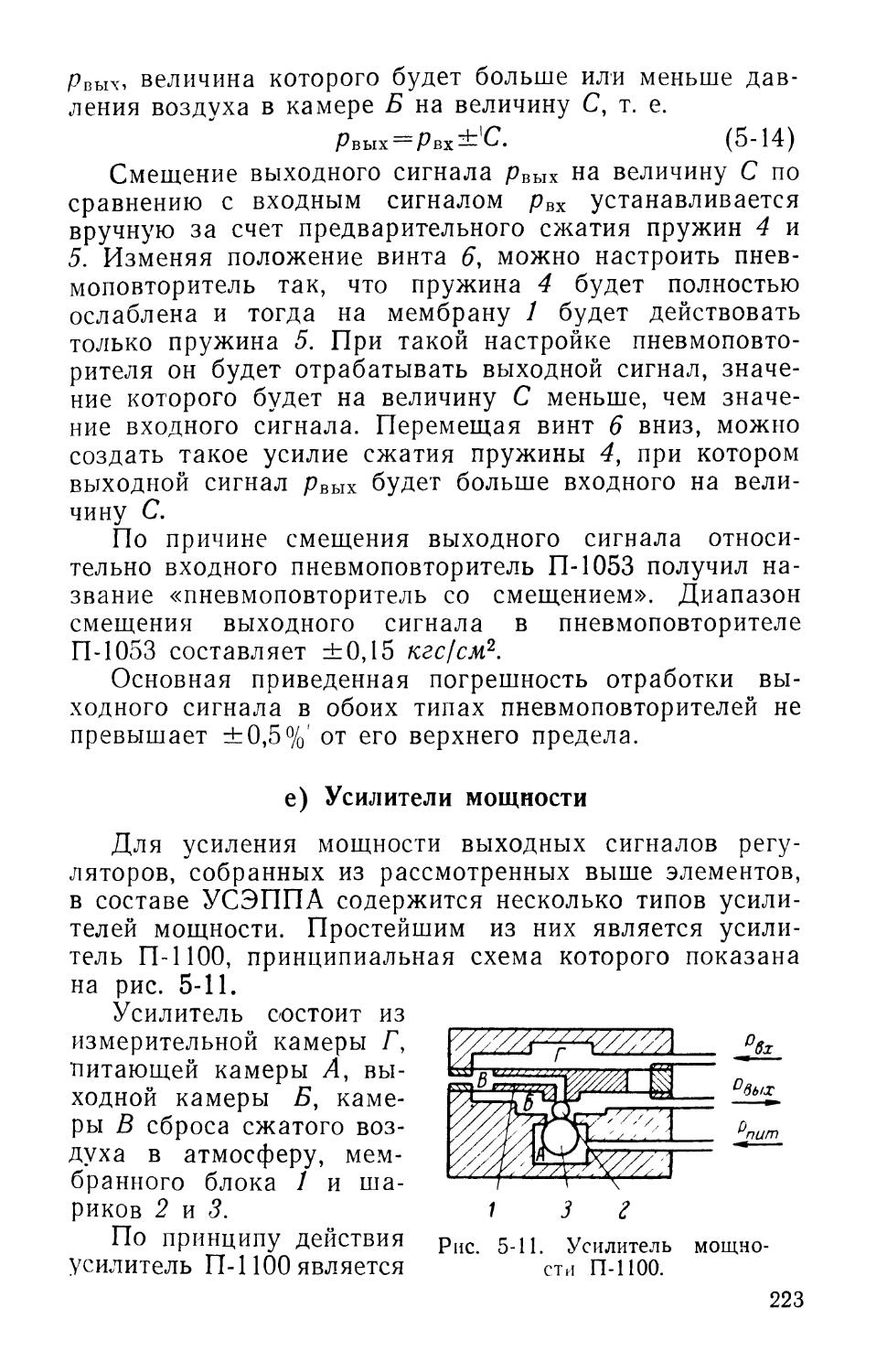
д) Пневмоповторители 221
е) Усилители мощности 223
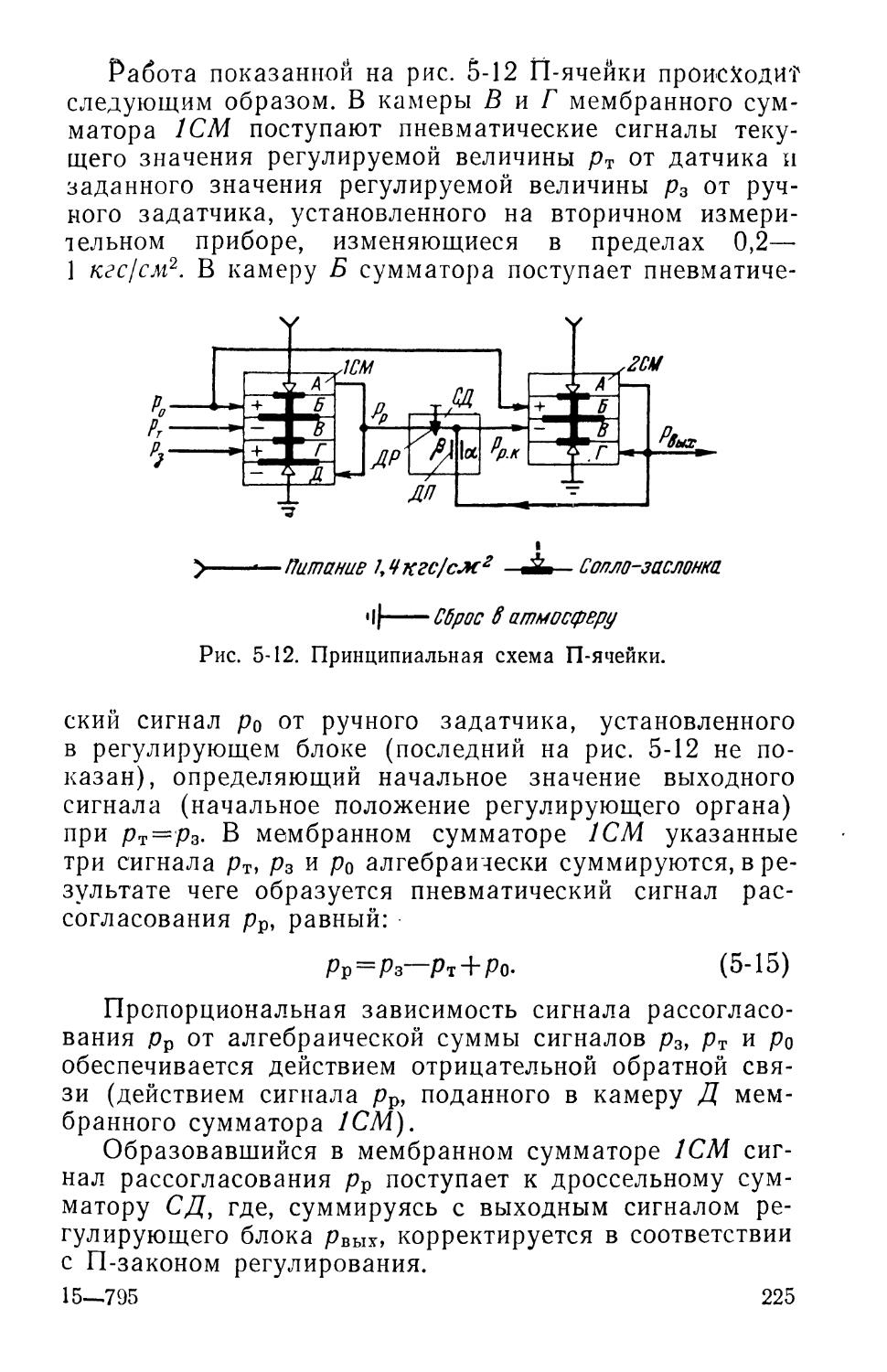
5-3. Регулирующий блок, отрабатывающий П-закон
регулирования 224
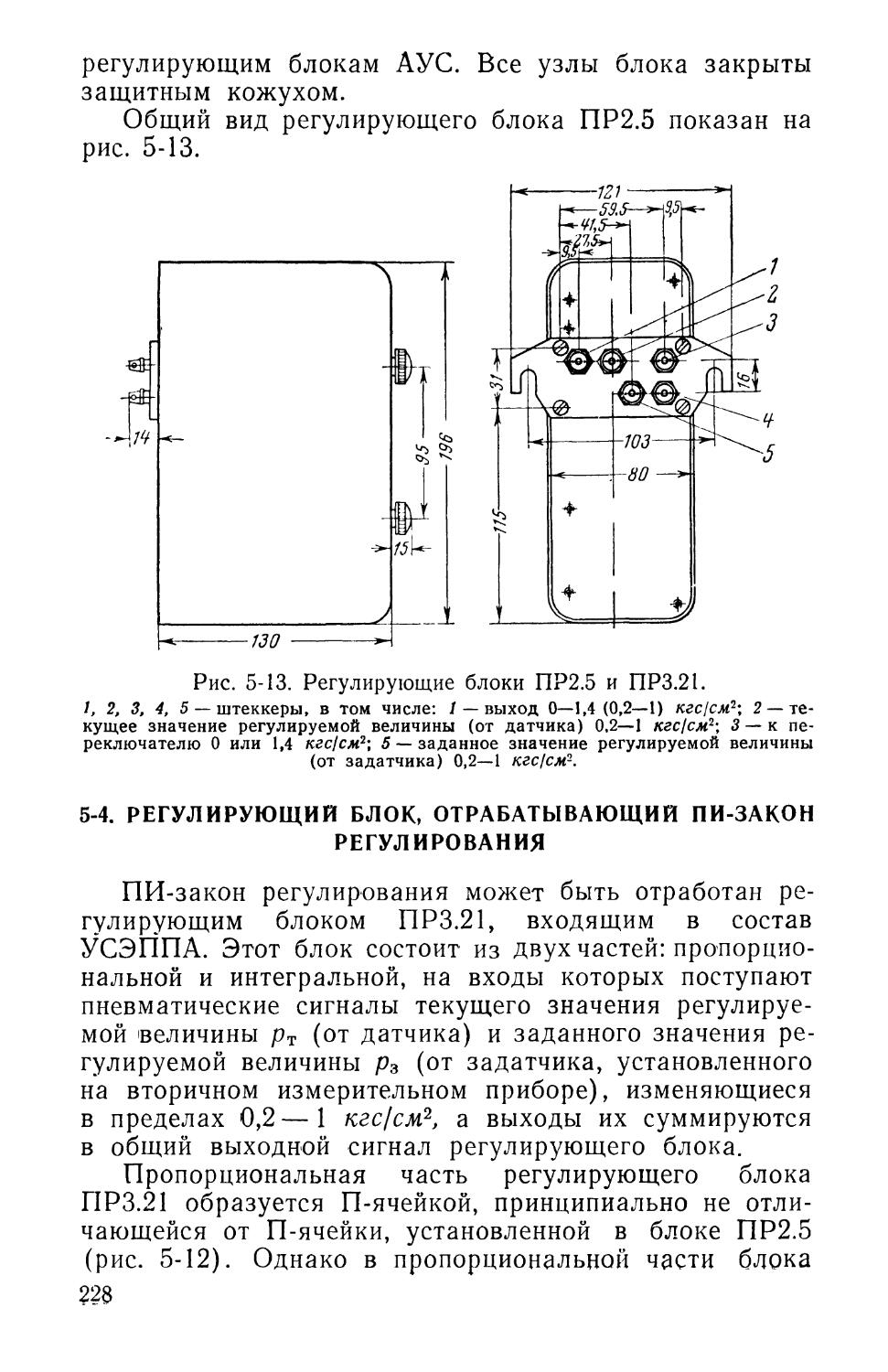
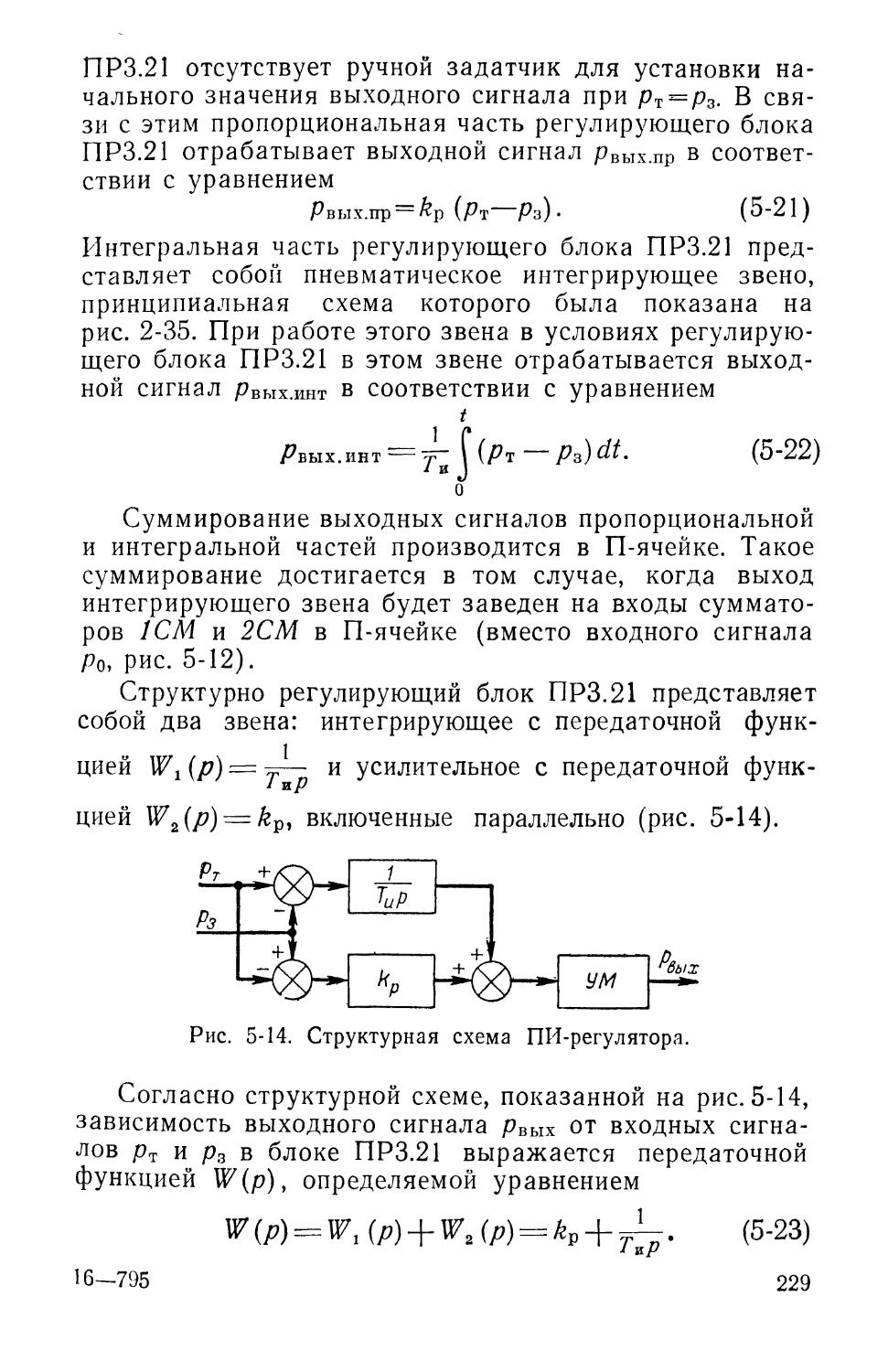
5-4. Регулирующий блок, отрабатывающий ПИ-закон
регулирования 228
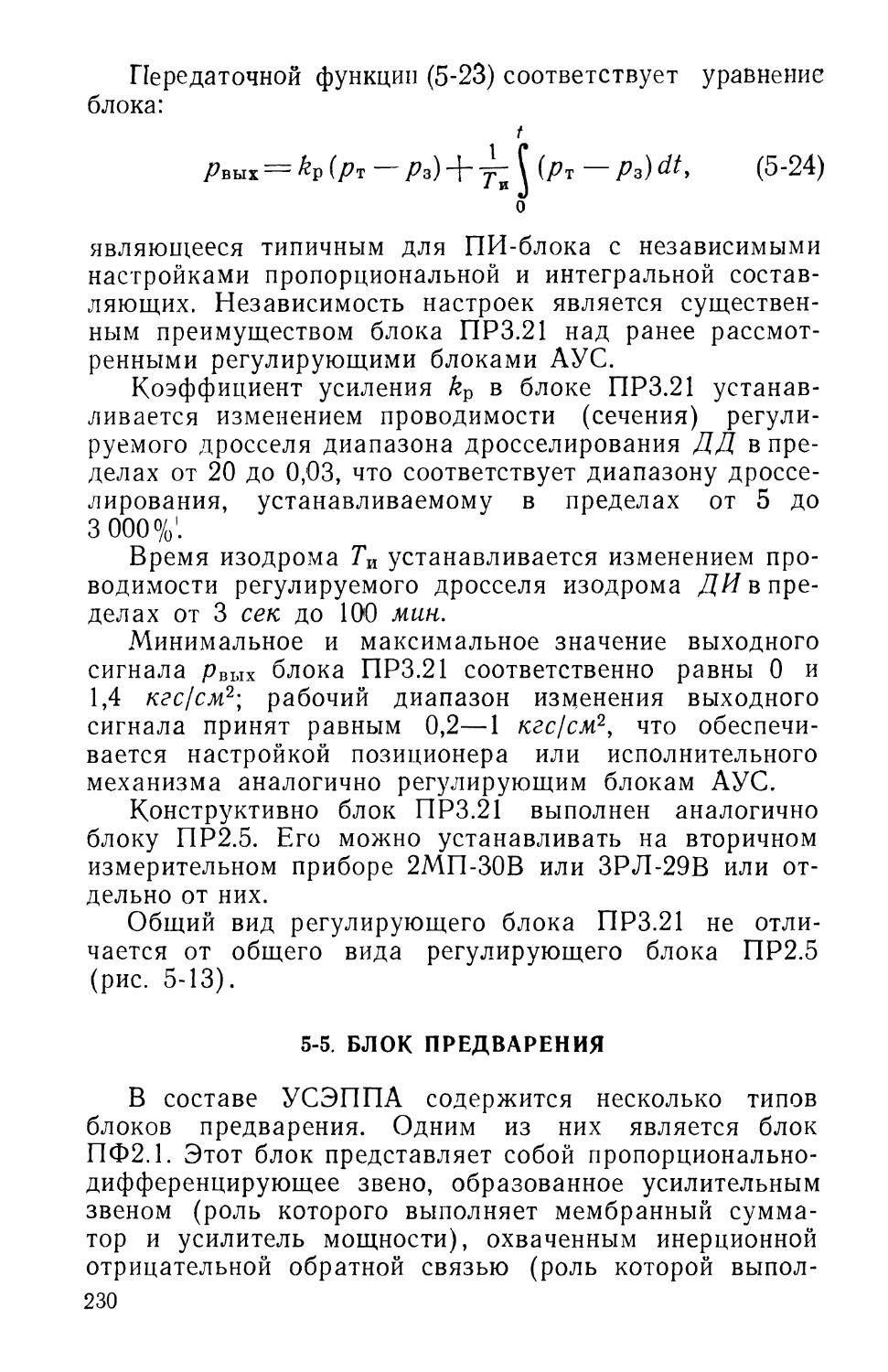
5-5. Блок предварения 230
Глава шестая. Исполнительные механизмы,
позиционеры, регулирующие органы, линии связи . . . 231
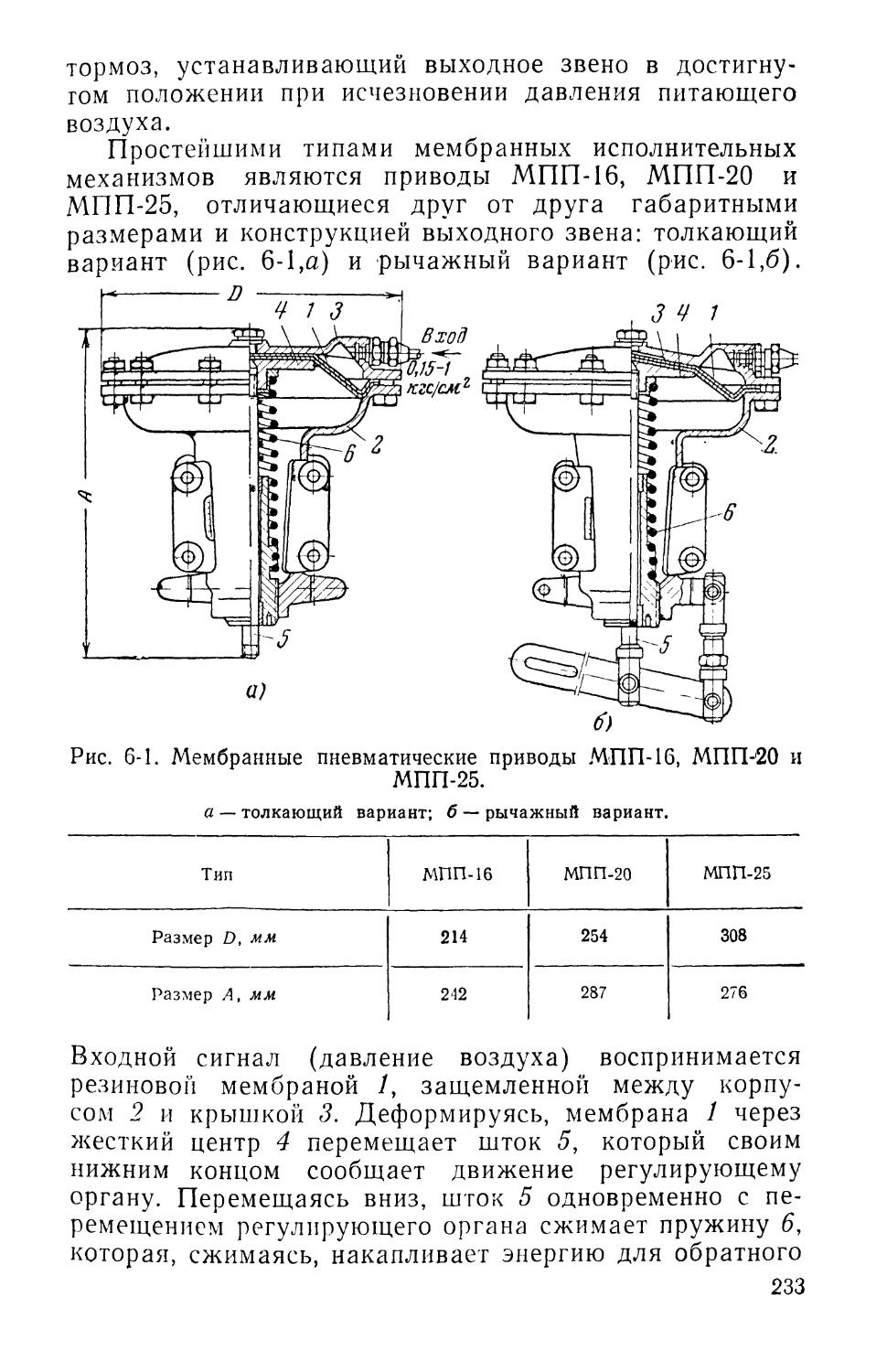
6-1. Пневматические исполнительные механизмы . . 231
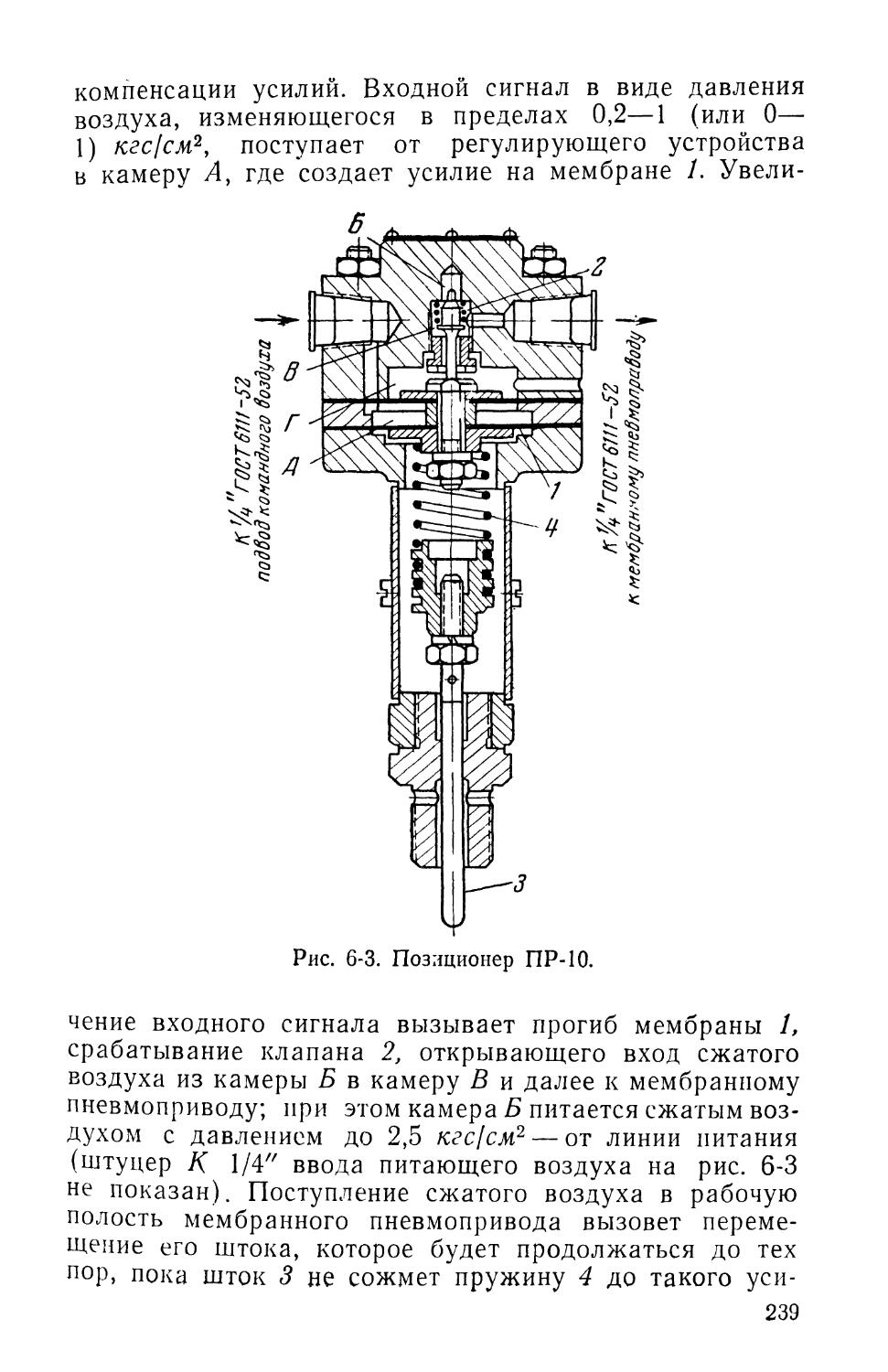
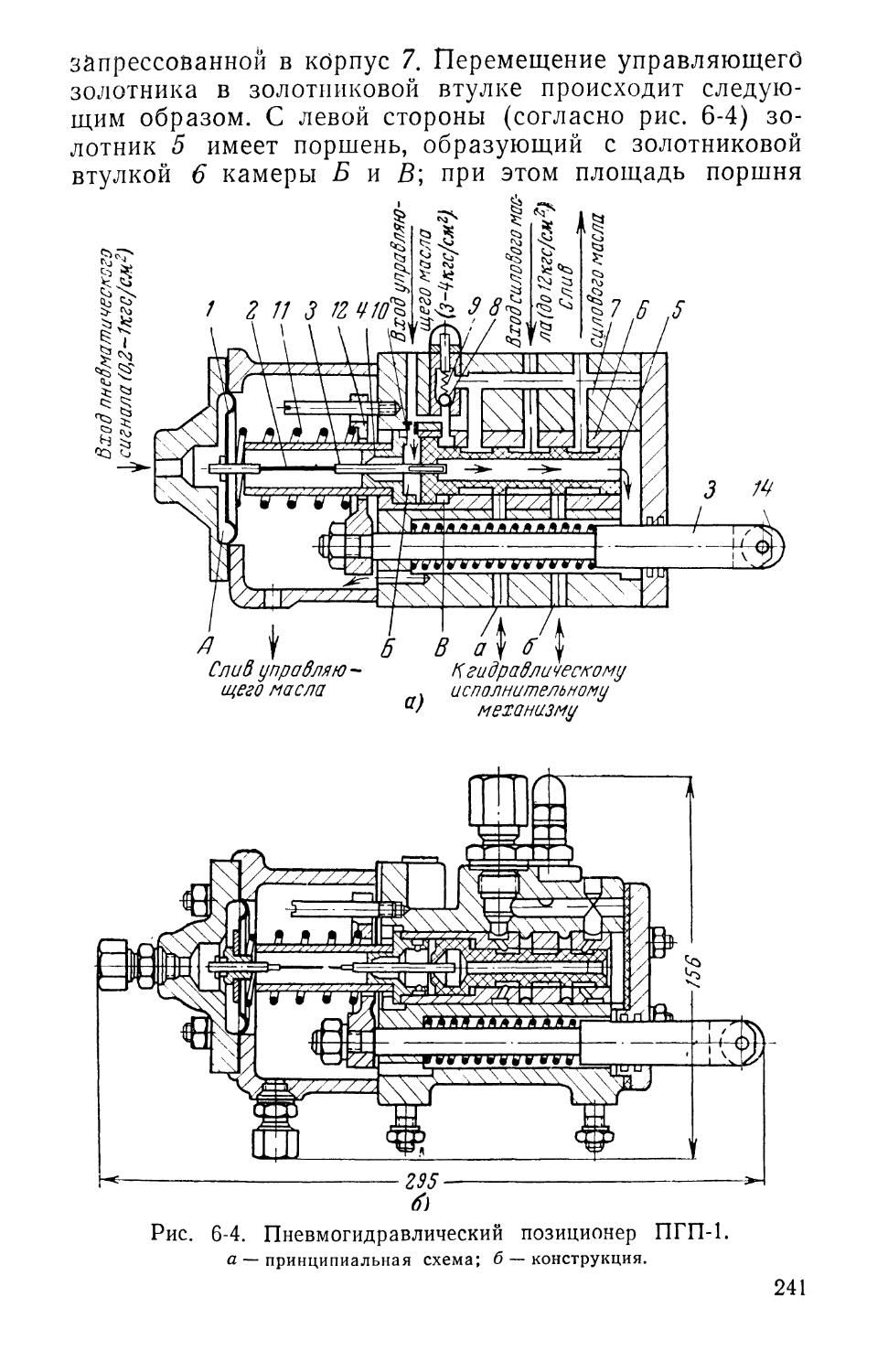
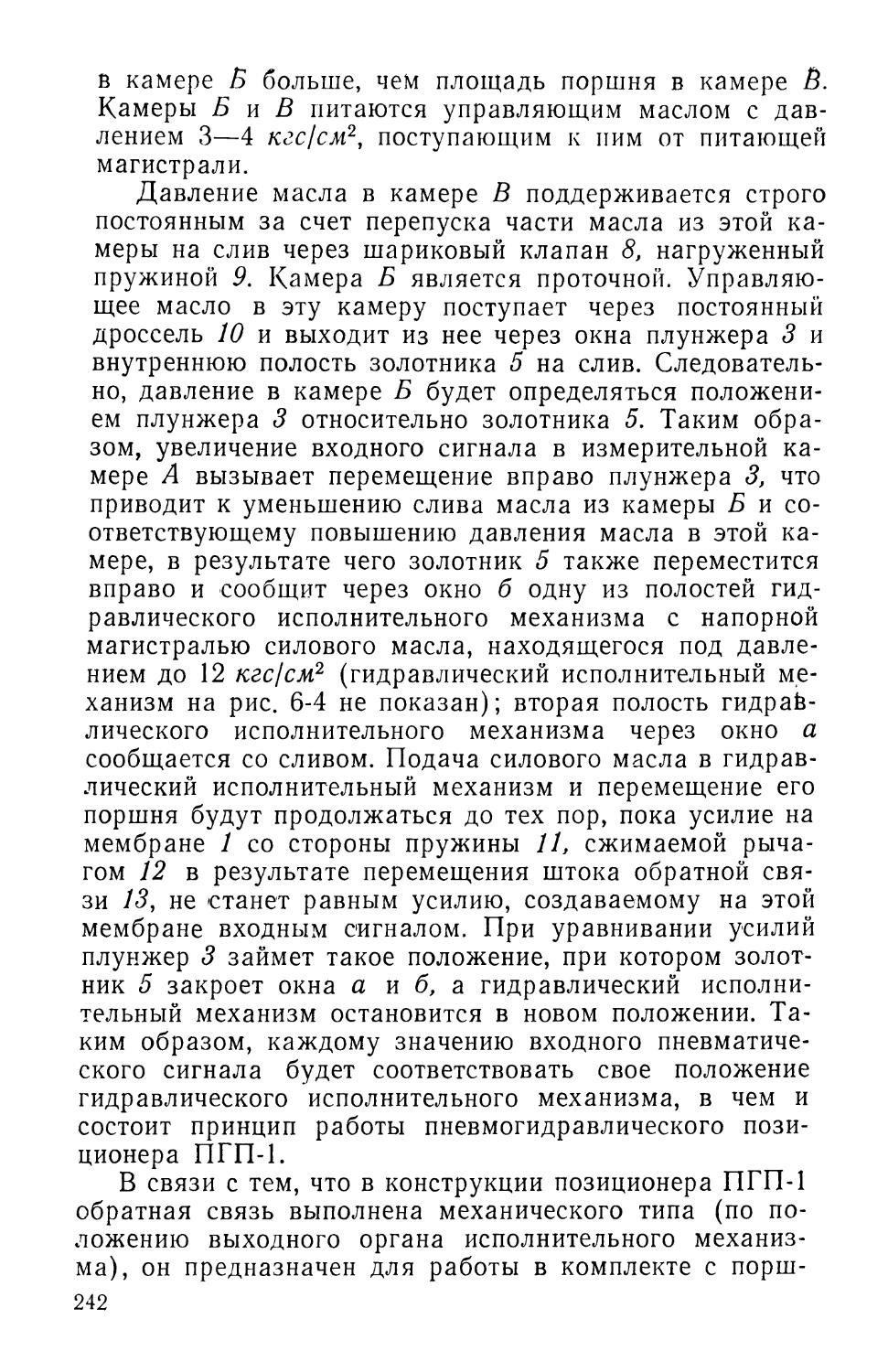
6-2. Пневматические и пневмогидравлические
позиционеры 237
7
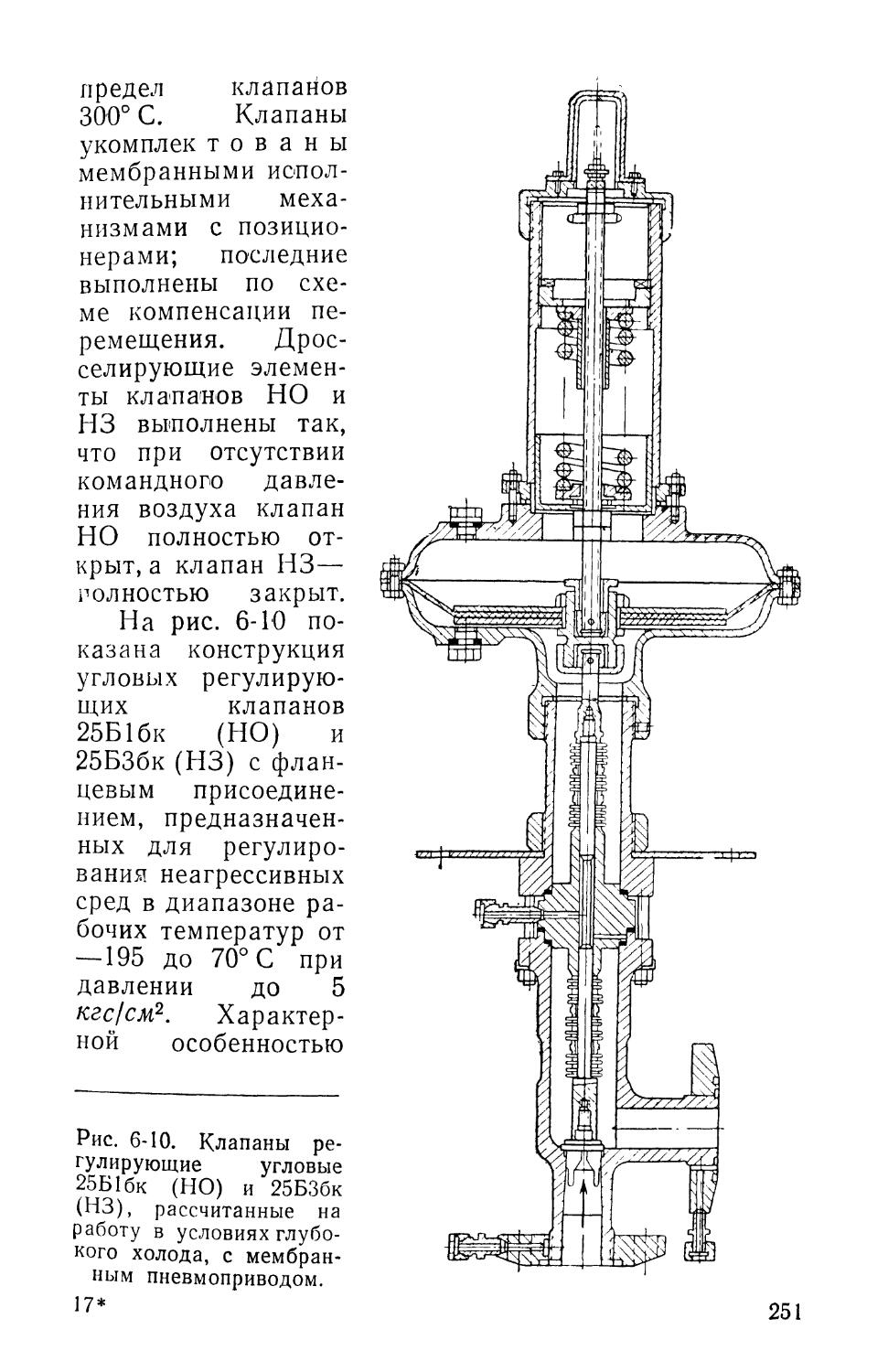
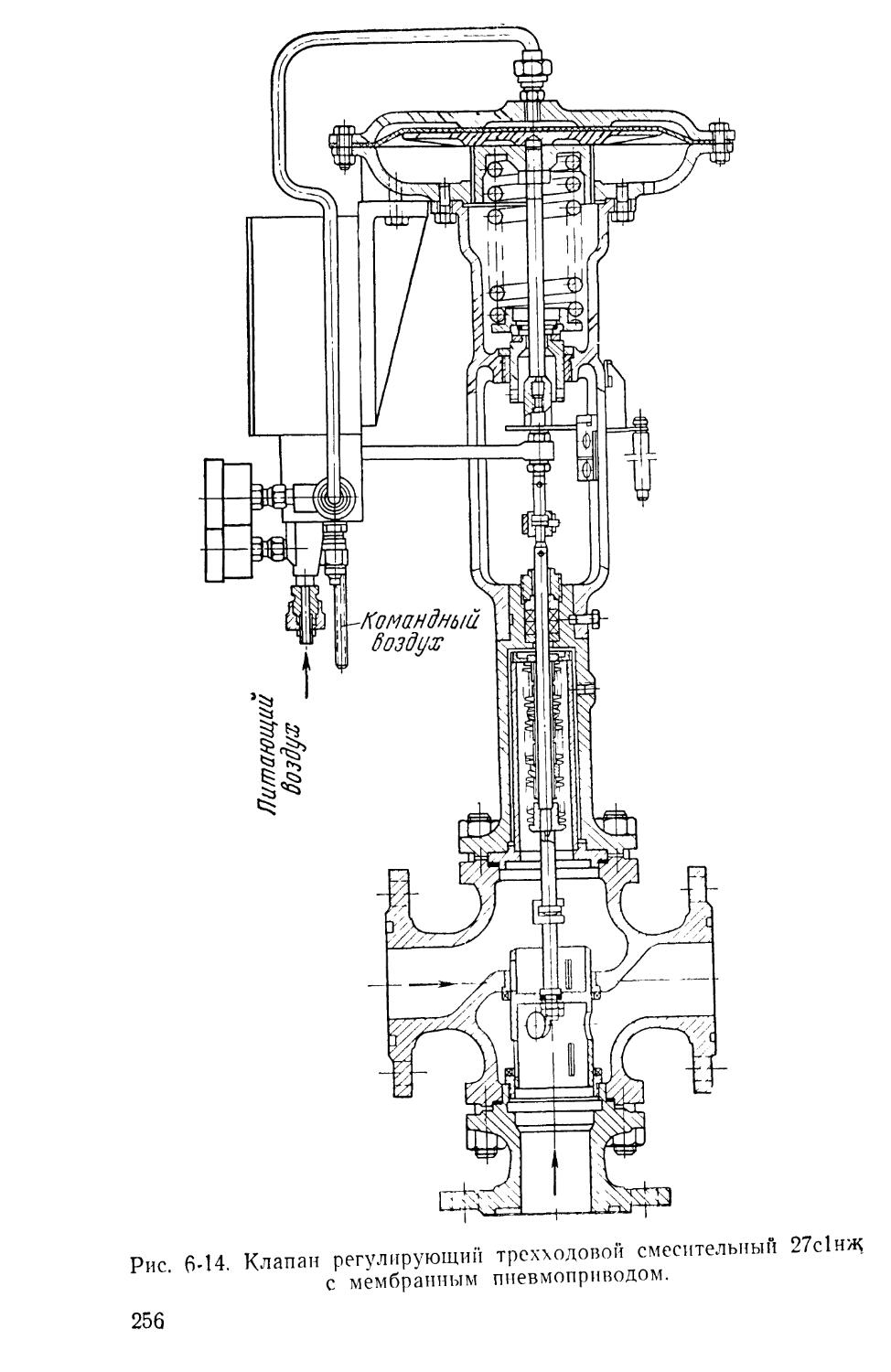
6-3. Регулирующие клапаны с мембранными
исполнительными механизмами 243
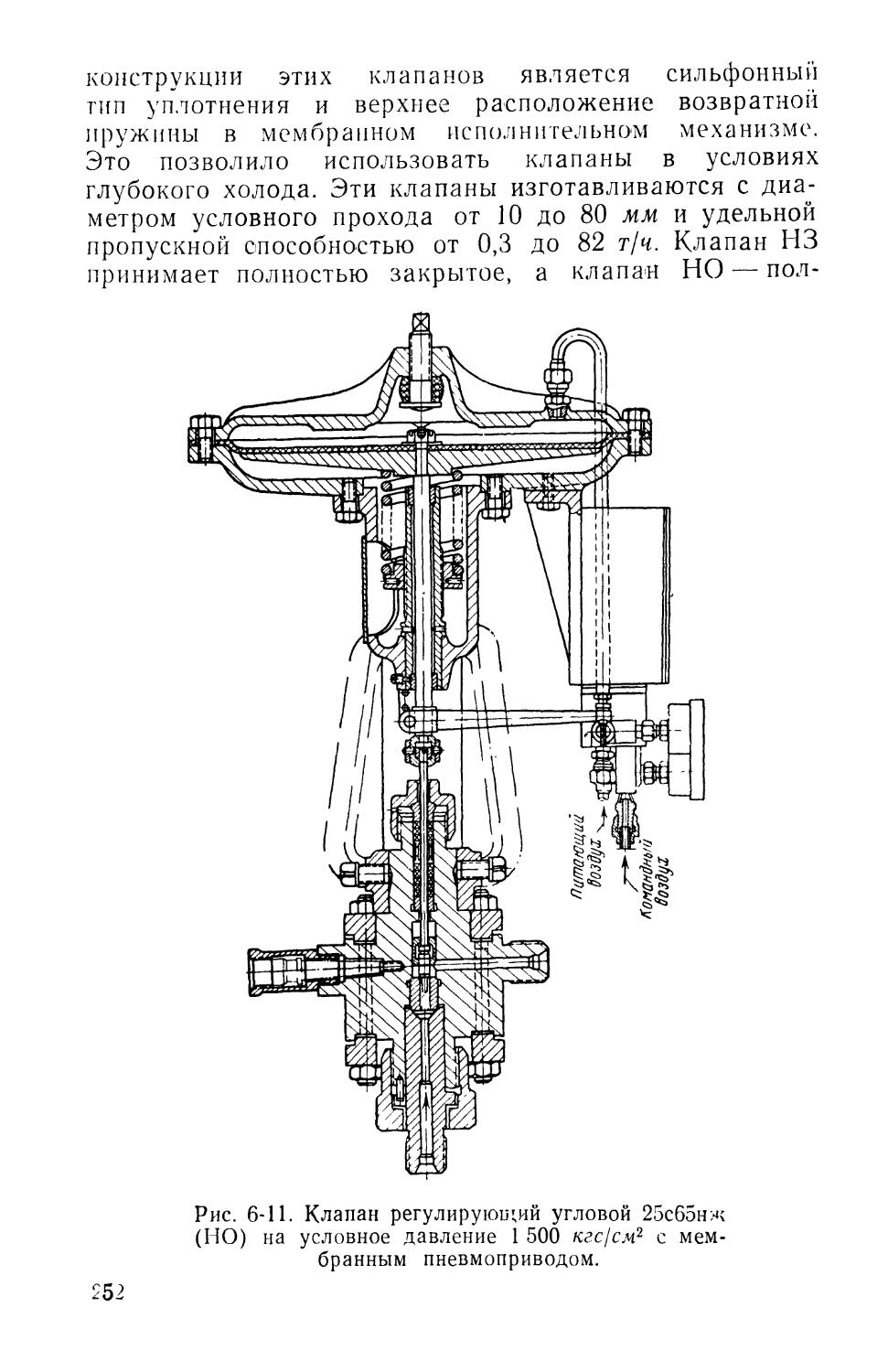
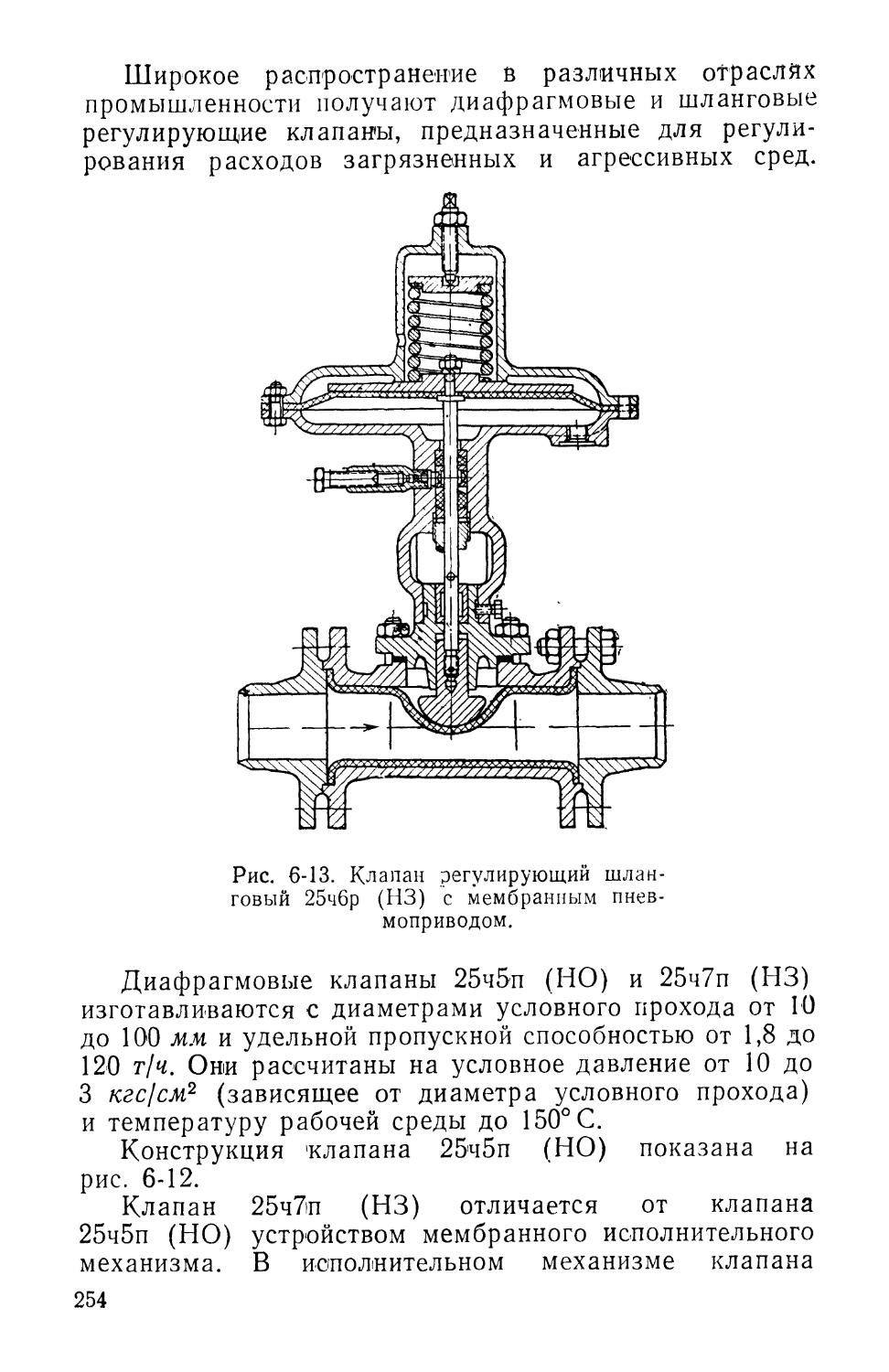
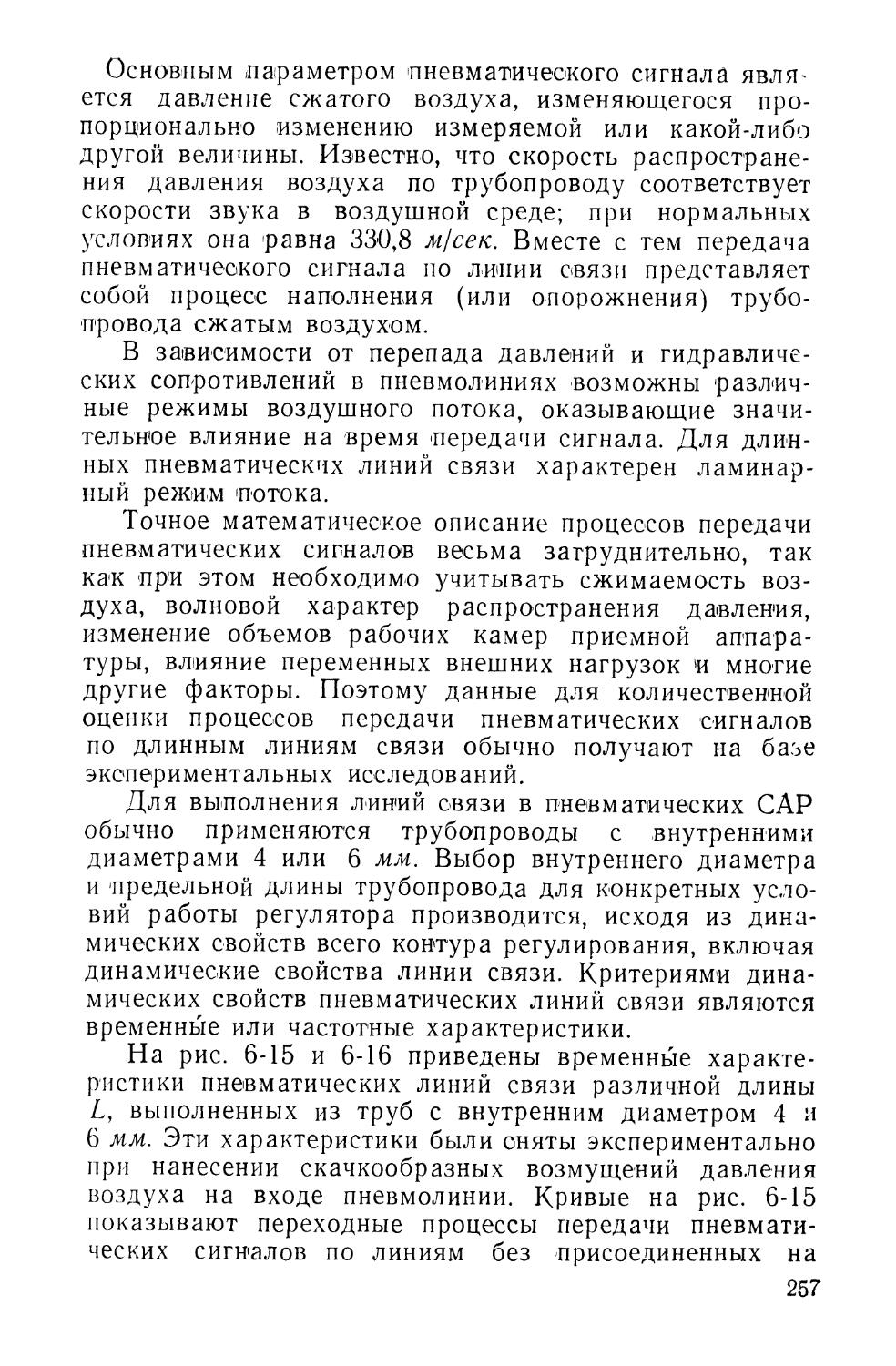
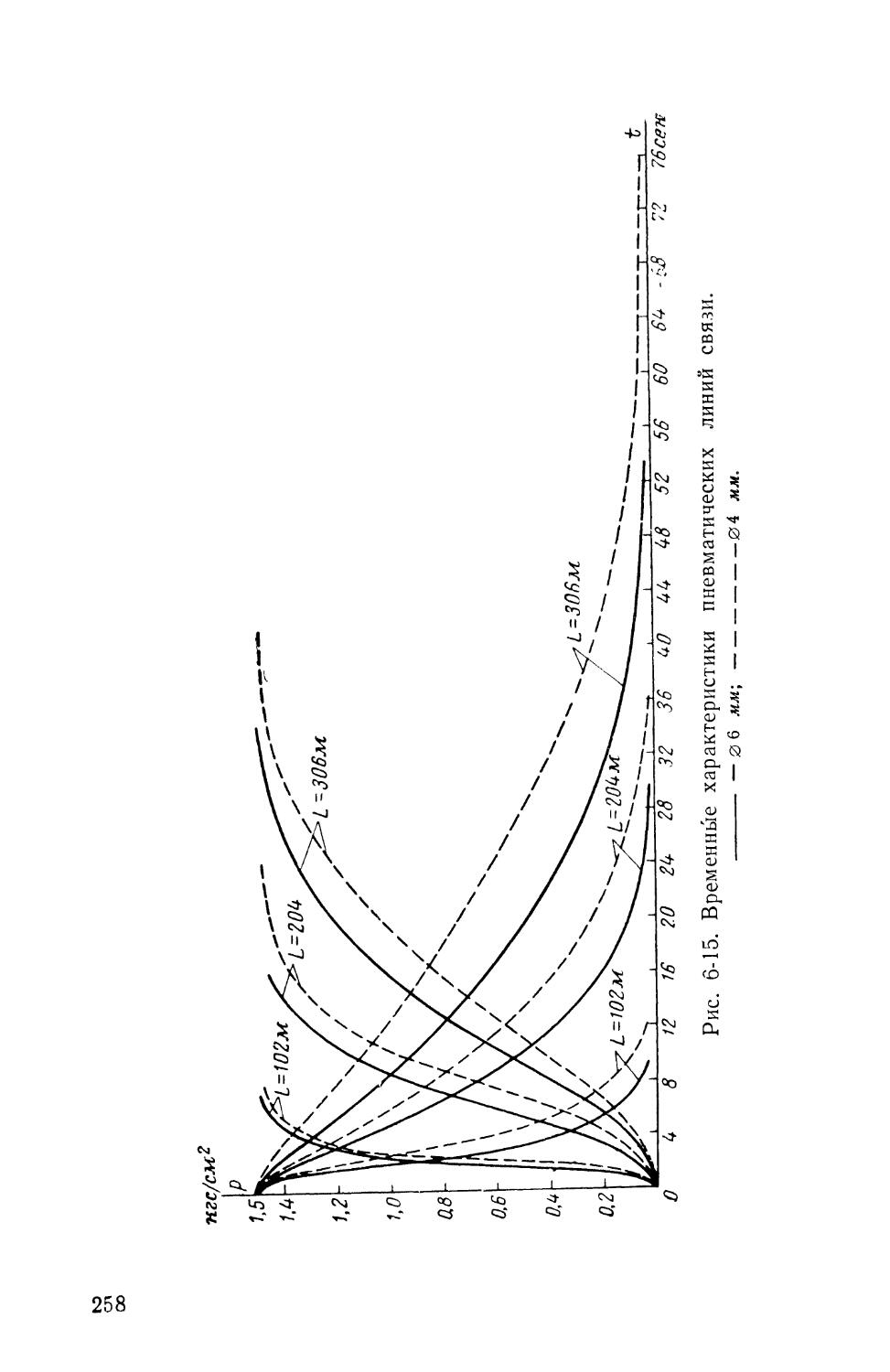
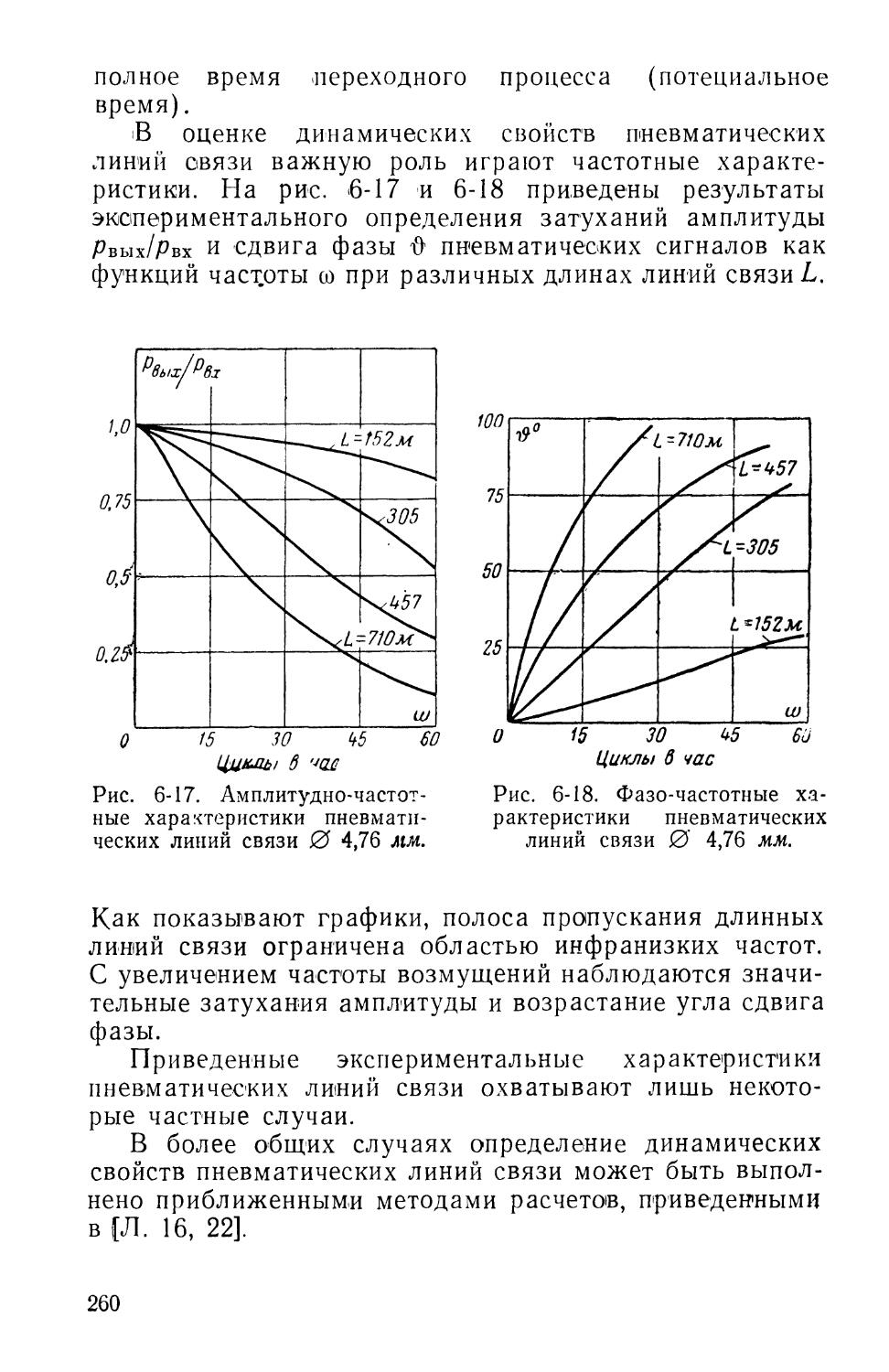
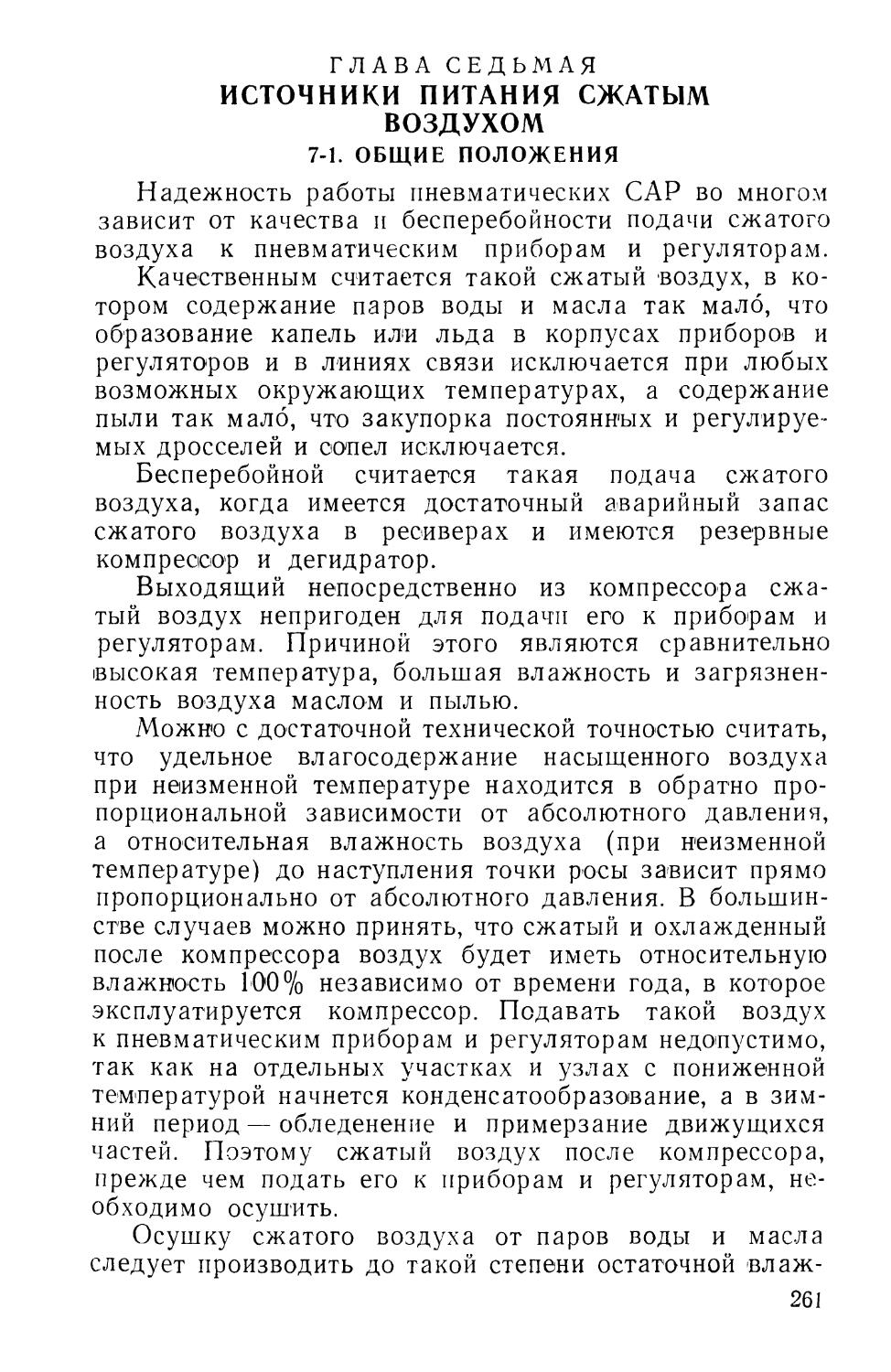
6-4. Пневматические линии связи 255
Глава седьмая. Источники питания сжатым воздухом . 261
7-1. Общие положения 261
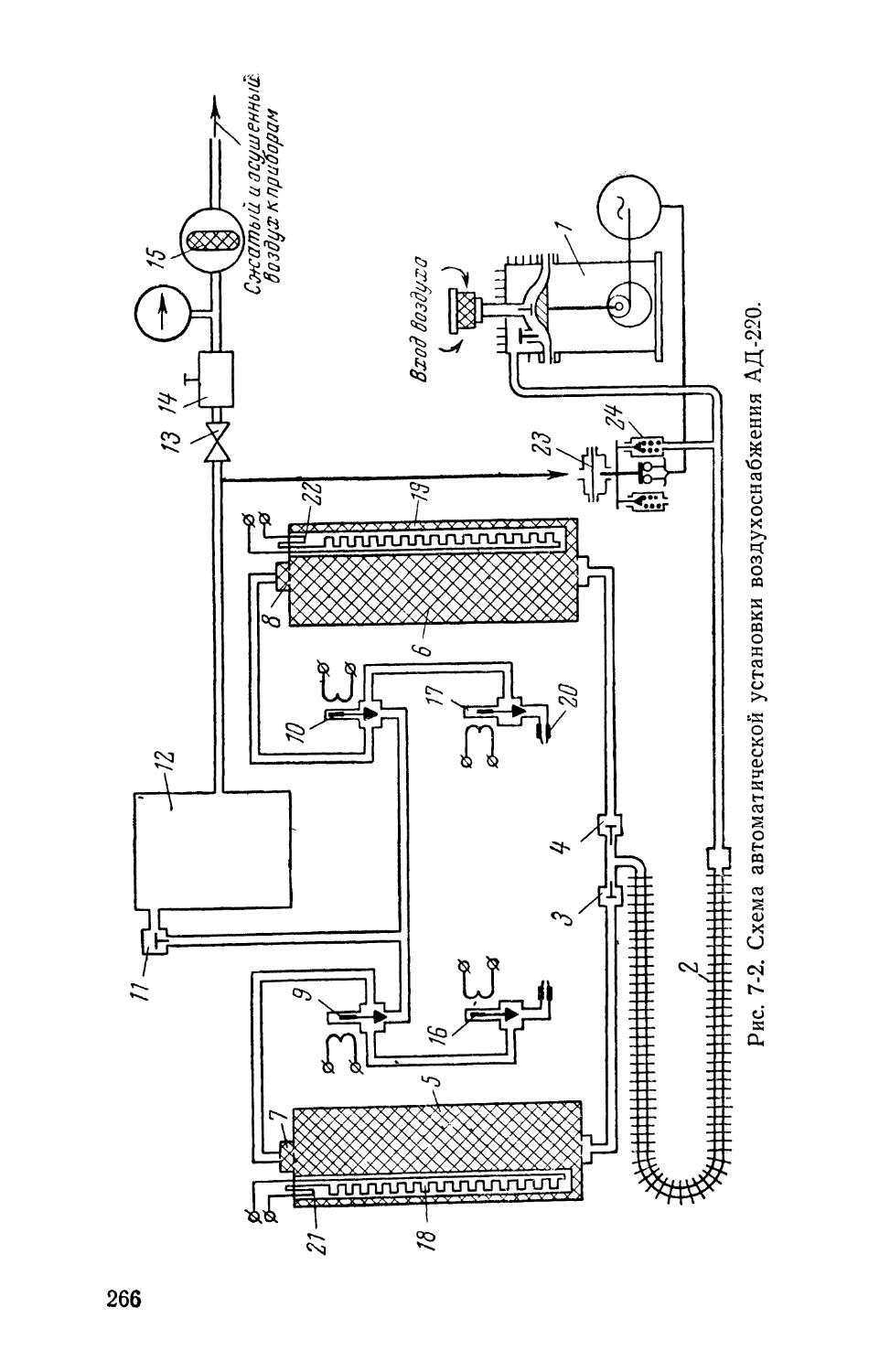
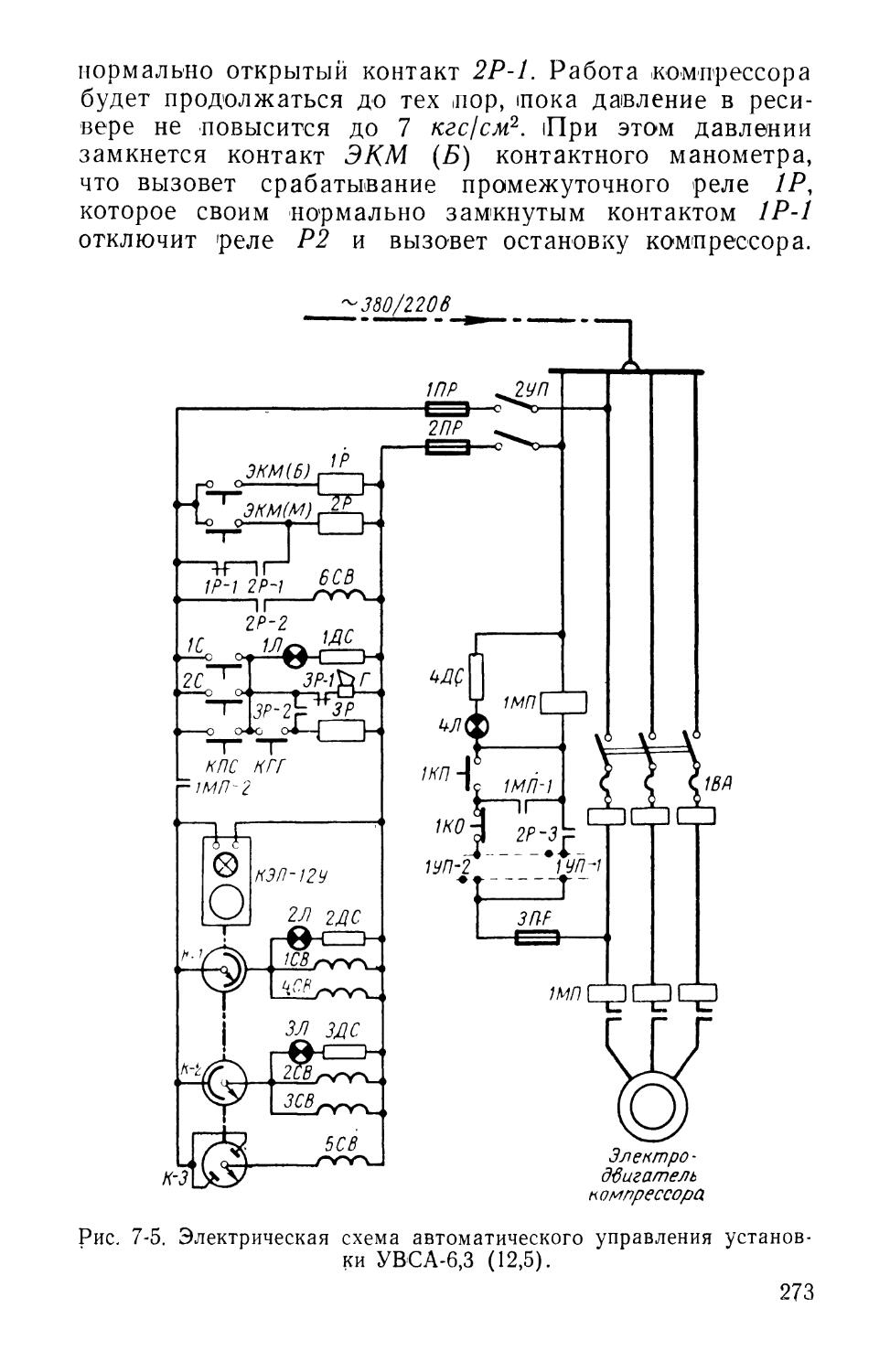
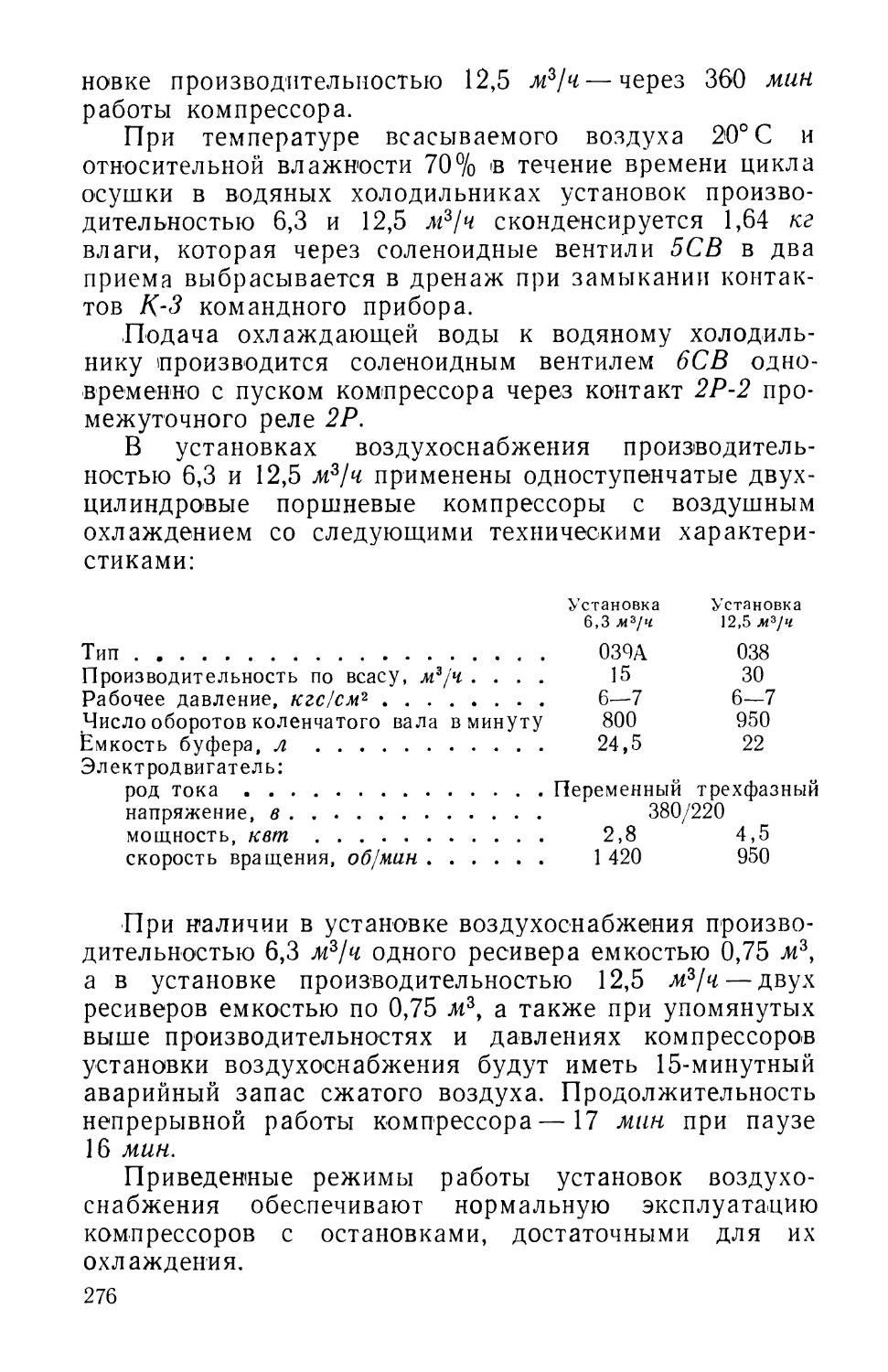
7-2. Автоматическая установка воздухоснабжения
АД-220 265
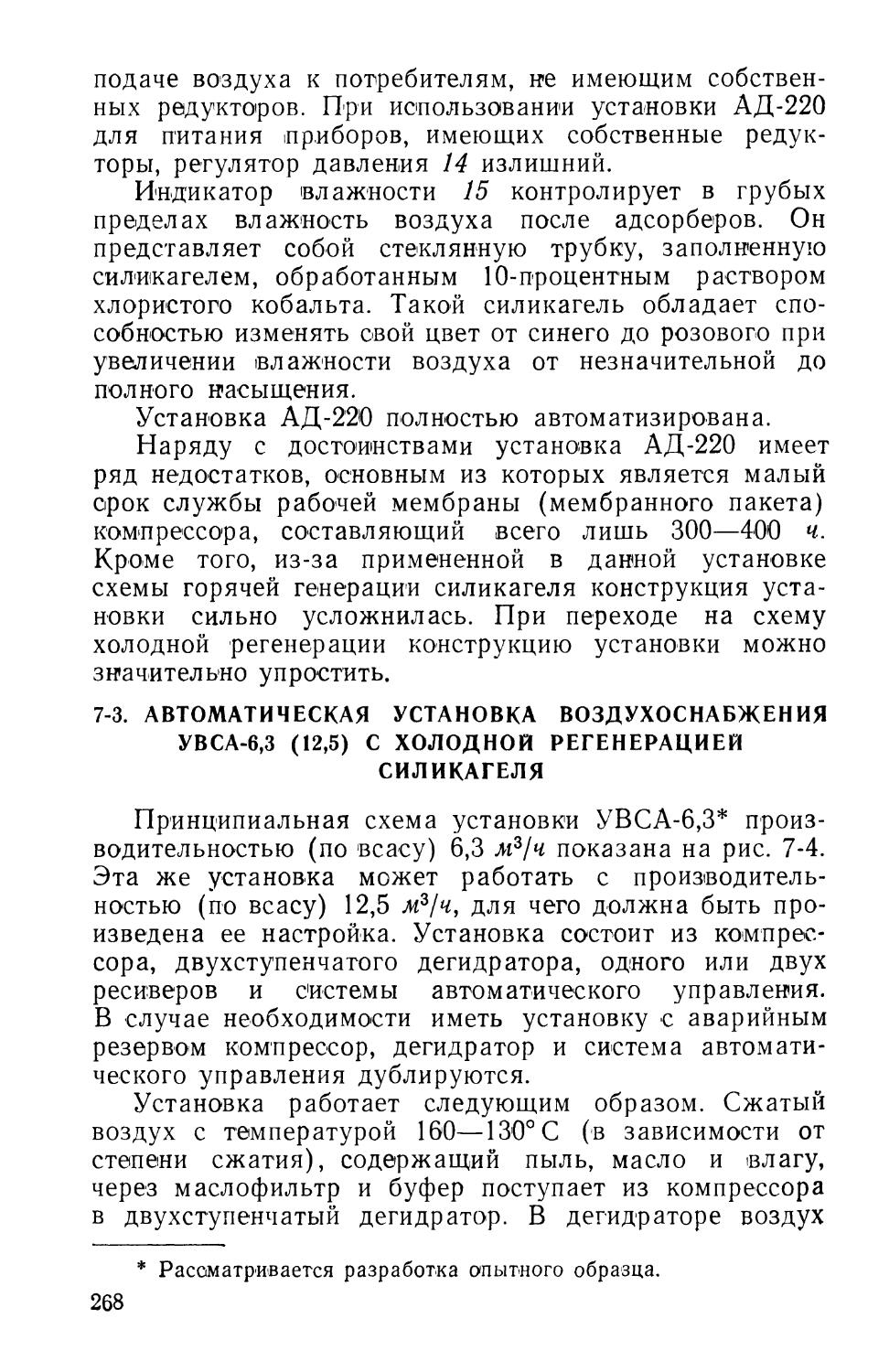
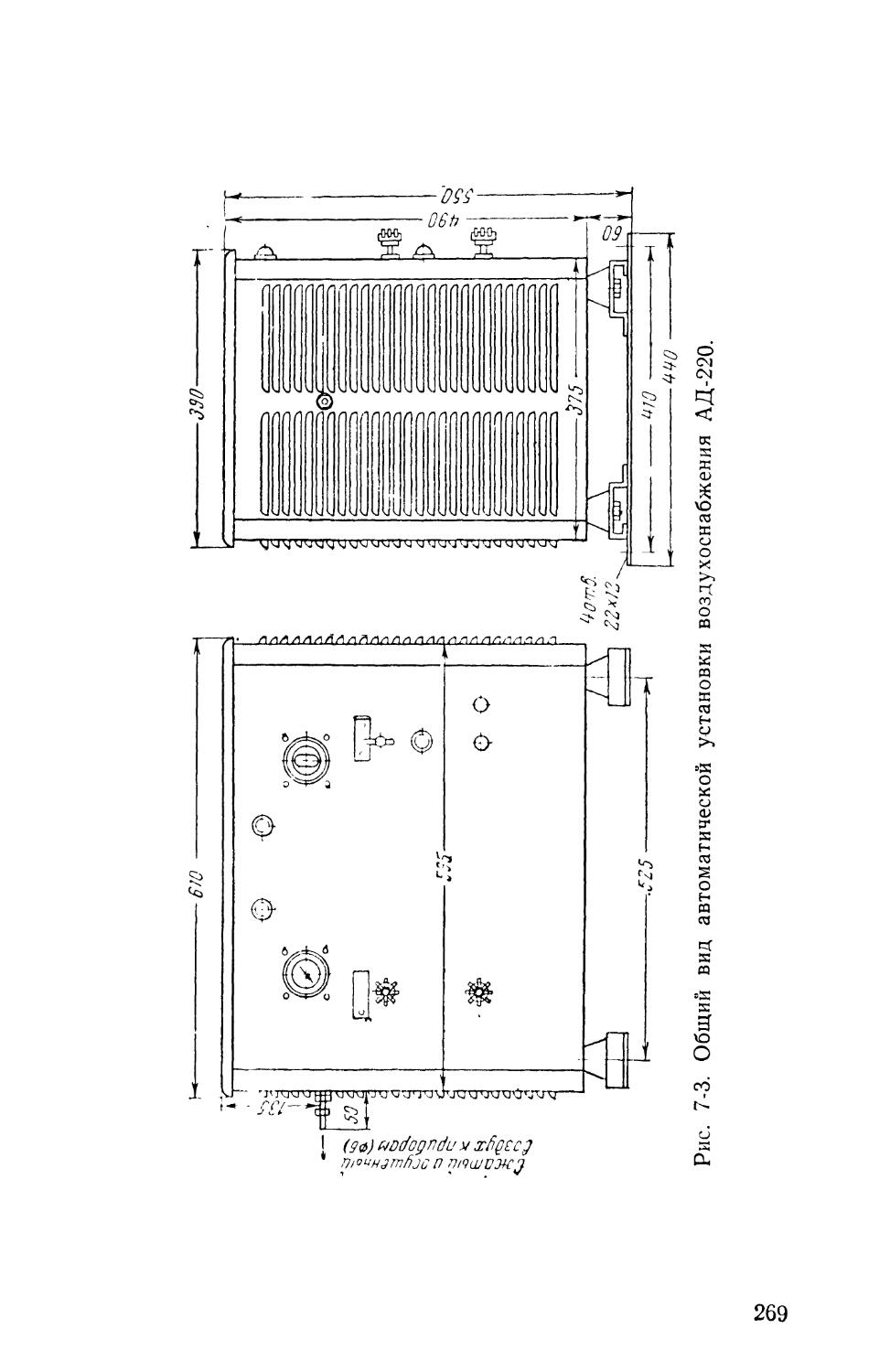
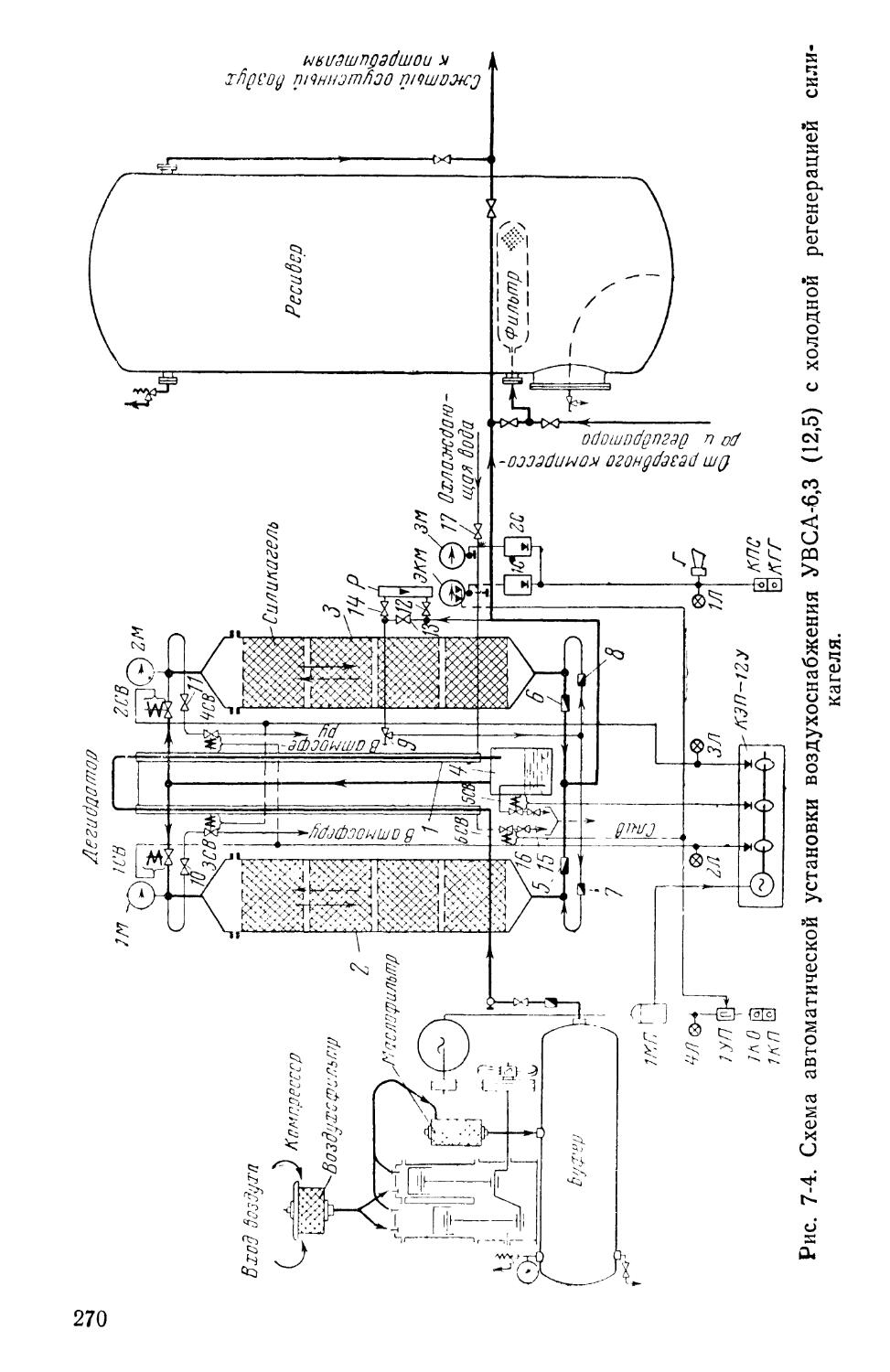
7-3. Автоматическая установка воздухоснабжения
УВСА-6,3 (12,5) с холодной регенерацией сили-
кагеля 268
Литература 278
ГЛАВА ПЕРВАЯ
ТРЕБОВАНИЯ
К ПНЕВМАТИЧЕСКИМ РЕГУЛЯТОРАМ,
КЛАССИФИКАЦИЯ, ОСНОВНЫЕ СВОЙСТВА
И УСЛОВИЯ РАБОТЫ
1-1. ОБЩИЕ ЗАМЕЧАНИЯ
Основные требования, предъявляемые к
автоматическим регуляторам, и пневматическим в частности,
определяются теми задачами, которые должны выполнять
регуляторы при работе в совокупности с регулируемыми
объектами, т. е. при работе их в системах
автоматического регулирования (САР). Сложность задач, стоящих
перед автоматическими регуляторами, определяется
особенностями регулируемых объектов, в частности:
а) характером технологического процесса,
проходящего в регулируемом объекте — его физической
сущностью, статикой и динамикой;
б) параметрами, характеризующими ход
технологического процесса — их природой, предельными
значениями, требуемой точностью поддержания в
установившемся и переходном режимах;
в) конструктивными особенностями оборудования,
участвующего в технологическом процессе и
подлежащего автоматическому управлению;
г) условиями эксплуатации технологического
оборудования и регуляторов (включая условия пуска и
остановки, а также противоаварийную защиту);
д) требованиями экономической эффективности,
получаемой от автоматизации объекта.
Особенности регулируемого объекта являются
основными факторами, определяющими выбор типа регуля-
9
fopa, а также схему взаимодействия регулятора с
объектом (структуру САР).
При всем разнообразии регулируемых объектов их
можно распределить на две основные группы: простые
и сложные [Л. 29].
К простым объектам обычно относятся такие, у
которых ход технологического процесса при различных
возмущающих воздействиях определяется лишь одной
регулируемой величиной.
К сложным объектам относятся такие, у которых ход
технологического процесса при различных возмущающих
воздействиях определяется несколькими регулируемыми
величинами, разделяемыми на главные и
вспомогательные. К сложным объектам относятся и такие, у которых
отклонение регулируемой величины зависит от скорости
возмущающего или регулирующего воздействия, а
также объекты с распределенной по длине емкостью.
Многие задачи автоматического регулирования могут
решаться путем использования регуляторов
сравнительно простых конструкций, взаимодействующих
с регулируемыми объектами по простым схемам. Такие
задачи часто встречаются в различных отраслях
промышленности при автоматизации простых объектов.
Требования к автоматическим регуляторам в таких случаях
обычно сводятся, в основном, к отработке сравнительно
простых законов регулирования и простоте
обслуживания.
Наряду с простыми существуют более сложные
задачи автоматического регулирования, связанные с
автоматизацией объектов, характеризующихся несколькими
взаимозависимыми регулируемыми величинами и
высокими требованиями к точности поддержания их на
заданных значениях. Значительное усложнение задач
автоматического регулирования может происходить так же
из-за воздействия одного регулируемого объекта на
другой при совместной работе их в цепи сложного
технологического процесса. Эти задачи возникают в связи
с освоением новых технологических процессов и
комплексной их автоматизацией, а также интенсификацией
существующих. Указанные обстоятельства вызывают
необходимость расширения функциональных возможностей
регуляторов и улучшения их характеристик. Эти
требования могут удовлетворяться за счет усложнения кон-
10
струкций регуляторов и за счет рационального
построения схем взаимодействия регуляторов с регулируемыми
объектами.
Расширение функциональных возможностей
регуляторов за счет конструктивного их усложнения связано
с преодолением значительных трудностей, что в ряде
случаев нецелесообразно. Кроме того, в практике
автоматического регулирования технологических процессов
существует много задач, решение которых путем
конструктивного усложнения регуляторов невозможно.
Последнее обстоятельство привело к созданию различных
вариантов систем автоматического регулирования,
отличающихся друг от друга различием схем взаимодействия
универсальных регуляторов с регулируемыми
объектами. Это позволило существенно расширить
функциональные возможности регуляторов и открыло пути решения
задач автоматического регулирования большой
сложности.
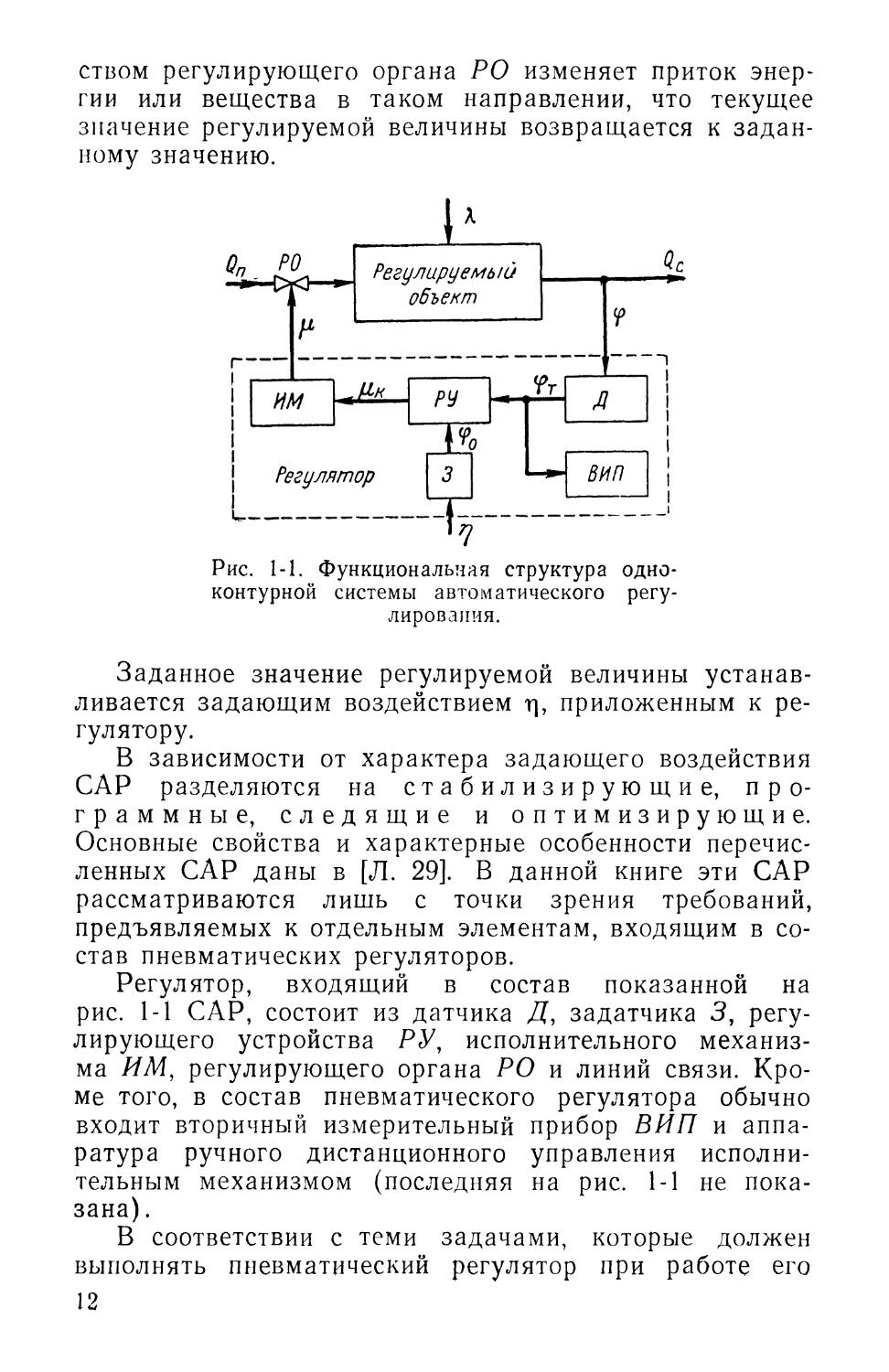
1-2. ФУНКЦИОНАЛЬНАЯ СТРУКТУРА ОДНОКОНТУРНОЙ САР
Функциональная структура одноконтурной САР1
в общем виде показана на рис. 1-1. Система
представляет собой совокупность регулируемого объекта и
регулятора, образующих замкнутый контур регулирования.
Объектом в данной САР является простой объект,
ход технологического процесса в котором
характеризуется состоянием лишь одной регулируемой величины.
Во время работы в регулируемом объекте
вследствие возмущающего воздействия Я, а также изменения
нагрузки на притоке Qn или стоке Qc происходит
отклонение регулируемой величины ер от заданного значения,
что вызывает воздействие объекта на регулятор.
Регулятор, измеряя текущее значение регулируемой
величины и сравнивая его с заданным, отрабатывает
регулирующее воздействие \х на объект, которое посред-
1 Одноконтурным пневматическим САР посвящена отдельная
книга автора [Л. 29]. В данной книге эти системы рассматриваются
лишь с точки зрения требований к пневматическим регуляторам,
обусловливающих принципы их действия, устройство и основные
характеристики. Вопросы выбора типов регуляторов, их настроек и
другие вопросы, связанные с анализом и синтезом одноконтурных
пневматических САР, а также примеры их построения в различных
отраслях промышленности освещены в указанной книге.
11
ством регулирующего органа РО изменяет приток
энергии или вещества в таком направлении, что текущее
значение регулируемой величины возвращается к
заданному значению.
V It
Регулируемый
объект
ИМ
РУ
Регулятор
Wo
д
ВИП
Рис. 1-1. Функциональная структура
одноконтурной системы автоматического
регулирования.
Заданное значение регулируемой величины
устанавливается задающим воздействием ц, приложенным к
регулятору.
В зависимости от характера задающего воздействия
САР разделяются на стабилизирующие,
программные, следящие и оптимизирующие.
Основные свойства и характерные особенности
перечисленных САР даны в [Л. 29]. В данной книге эти САР
рассматриваются лишь с точки зрения требований,
предъявляемых к отдельным элементам, входящим в
состав пневматических регуляторов.
Регулятор, входящий в состав показанной на
рис. 1-1 САР, состоит из датчика Д, задатчика 3,
регулирующего устройства РУ, исполнительного
механизма ИМ, регулирующего органа РО и линий связи.
Кроме того, в состав пневматического регулятора обычно
входит вторичный измерительный прибор ВИП и
аппаратура ручного дистанционного управления
исполнительным механизмом (последняя на рис. 1-1 не
показана).
В соответствии с теми задачами, которые должен
выполнять пневматический регулятор при работе его
12
в - совокупности с регулируемым объектом, основные
функции отдельных его элементов сводятся к
следующему.
Датчик производит непрерывное измерение
текущего значения регулируемой величины, преобразует его
в выходной сигнал фт и подает к регулирующему
устройству.
Задатчик вырабатывает сигнал заданного
значения регулируемой величины фо и также подает его к
регулирующему устройству.
Регулирующее устройство производит
алгебраическое суммирование сигналов текущего и
заданного значений регулируемой величины, в результате
чего образуется сигнал рассогласования Лф = фт—фо,
который усиливается, корректируется в соответствии
с принятым для данного регулятора законом
регулирования и в виде командного сигнала jwK подается к
исполнительному механизму.
Исполнительный механизм преобразует
командный сигнал \iK (поступающий к нему от
регулирующего устройства) в регулирующее воздействие \х
и в соответствующее перемещение регулирующего
органа. Величина ji в дальнейшем изложении
рассматривается как выходной сигнал регулятора.
Регулирующий орган осуществляет
воздействие на регулируемый объект путем изменения
количества вещества или энергии на его притоке.
Вторичный измерительный прибор
контролирует текущее и заданное значения регулируемой
величины.
Линии связи соединяют отдельные элементы
регулятора друг с другом.
Исходя из вышеизложенного, регулятором вообще
и пневматическим в частности принято называть
совокупность устройств, которые, измеряя текущее значение
регулируемой величины и сравнивая его с заданным,
воздействуют на технологический процесс в
регулируемом объекте таким образом, что текущее значение
регулируемой величины автоматически поддерживается
равным или близким заданному. Характерным признаком
пневматического регулятора является то, что в нем
в качестве вспомогательной энергии при отработке и
передаче сигналов используется сжатый воздух.
13
В зависимости от конструктивного выполнения
пневматического регулятора входящие в его состав
датчик, задатчик, регулирующее устройство, вторичный
измерительный прибор и аппаратура ручного
дистанционного управления могут выполняться в виде
комплектного многофункционального устройства или они
могут быть самостоятельными функциональными
элементами (блоками). Исполнительный механизм и
регулирующий орган выполняются как в виде общей
конструкции, так и отдельно. Ниже, а также в последующих
главах будет показано, какое влияние оказывает схема
компоновки перечисленных выше устройств на
конструкцию пневматического регулятора и функциональные
его возможности.
Учитывая, что пневматические датчики и вторичные
измерительные приборы широко используются не только
в системах пневматического регулирования, но и
отдельно (например, в системах автоматического контроля),
они представляют самостоятельный интерес для
изучения. Исходя из этого, принцип действия, конструкции и
основные характеристики пневматических датчиков
и вторичных измерительных приборов рассмотрены
в отдельной книге автора [Л. 31] и в данной книге не
рассматриваются. Устройства, входящие в состав
пневматических регуляторов, рассматриваются ниже и в
последующих главах.
При работе пневматического регулятора в
одноконтурной САР он воздействует на объект, используя при
этом один или несколько показателей хода
технологического процесса, а именно:
а) величину и знак отклонения текущего значения
регулируемой величины от задания, т. е. срт—фо=±Л<р;
б) производную отклонения текущего значения
регулируемой величины от задания во времени (скорость
отклонения), т. е. dAxp/dt;
в) интеграл отклонения текущего значения
регулируемой величины от задания за время / и направление
этого отклонения, т. е. ± ^Acpdt.
6
Из приведенного можно заметить, что все
перечисленные выше показатели хода технологического процесса
в регулируемом объекте имеют общий признак: все они
И
в той или иной мере определяют отклонение текущего
значения регулируемой величины от задания. По этой
причине одноконтурные САР принято называть
системами регулирования по отклонению.
Разность между текущим и заданным значением
регулируемой величины (Дф) принято называть
рассогласованием или — по терминологии ряда
авторов— ошибкой. Величина рассогласования, ее
интеграл и производная используются в качестве
входных сигналов (входных величин) пневматических
регуляторов, работающих в одноконтурных САР.
1-3. КЛАССИФИКАЦИЯ ПНЕВМАТИЧЕСКИХ РЕГУЛЯТОРОВ
В ЗАВИСИМОСТИ ОТ ОТРАБАТЫВАЕМЫХ ИМИ ЗАКОНОВ
РЕГУЛИРОВАНИЯ
В зависимости от характера входного сигнала, т. е.
от того, какой показатель хода технологического
процесса используется регулирующим устройством, регулятор
отрабатывает тот или иной вид выходного сигнала,
используемого для регулирующего воздействия на
объект. Характер регулирующего воздействия принято
называть законом регулирования, представляющим
собой функциональную зависимость выходного сигнала
регулятора от входного.
Математически закон регулирования выражается
алгебраическим или дифференциальным уравнением.
При этом выражение закона регулирования обычно
относится к так называемому идеальному регул я-'
тору, т. е. такому, у которого формальный закон
регулирования при работе его в САР строго соблюдается.
В реальных условиях эксплуатации закон регулирования
соблюдается обычно лишь с известными ограничениями
и только в нормальных (расчетных) режимах работы.
Нормальные режимы работы пневматических
регуляторов характеризуются допустимыми частотами
возмущения, подаваемыми на их вход. Пределы допустимых
частот будут приведены в последующих главах, при
рассмотрении отдельных типов регуляторов.
Формирование различных законов регулирования,
отрабатываемых пневматическими регуляторами,
производится в регулирующих устройствах. Последние в за-
15
висимости от характера закона регулирования
подразделяются на:
1) релейные — отрабатывающие релейный (двух-
позиционный) закон регулирования;
2) пропорциональные (П)—отрабатывающие
пропорциональный закон регулирования;
3) пропорционально -
дифференциальные (ПД) — отрабатывающие
пропорционально-дифференциальный закон регулирования;
4) интегральные (И)—отрабатывающие
интегральный закон регулирования;
5) пропорционально - интегральные
(ПИ) — отрабатывающие
пропорционально-интегральный закон регулирования;
6) пропорционально -
интегрально-дифференциальные (ПИД) — отрабатывающие
пропорционально-интегрально-дифференциальный закон
регулирования.
Основные свойства пневматических регуляторов,
отрабатывающих различные законы регулирования,
рассматриваются ниже, а также в последующих главах.
1-4. ОСНОВНЫЕ СВОЙСТВА ПНЕВМАТИЧЕСКИХ
РЕГУЛЯТОРОВ И УСЛОВИЯ ИХ РАБОТЫ
В ОДНОКОНТУРНЫХ САР
а) Регуляторы, отрабатывающие релейный закон
регулирования
Из всех перечисленных ранее законов регулирования
релейный закон является простейшим. Он может быть
отработан пневматическим регулятором, использующим
лишь сам факт наличия отклонения текущего значения
регулируемой величины от задания при условии, что
величина рассогласования Дер больше зоны
нечувствительности регулятора е.
Релейный закон регулирований пневматического
регулятора записывается уравнениями вида:
см)
16
где (х — выходная величина регулятора
(регулирующее воздействие);
М-мин и (Хмакс — минимальное и максимальное значения
выходной величины регулятора;
dAq/dt — скорость отклонения текущего значения
регулируемой величины от заданного
(величина, указывающая направление
отклонения).
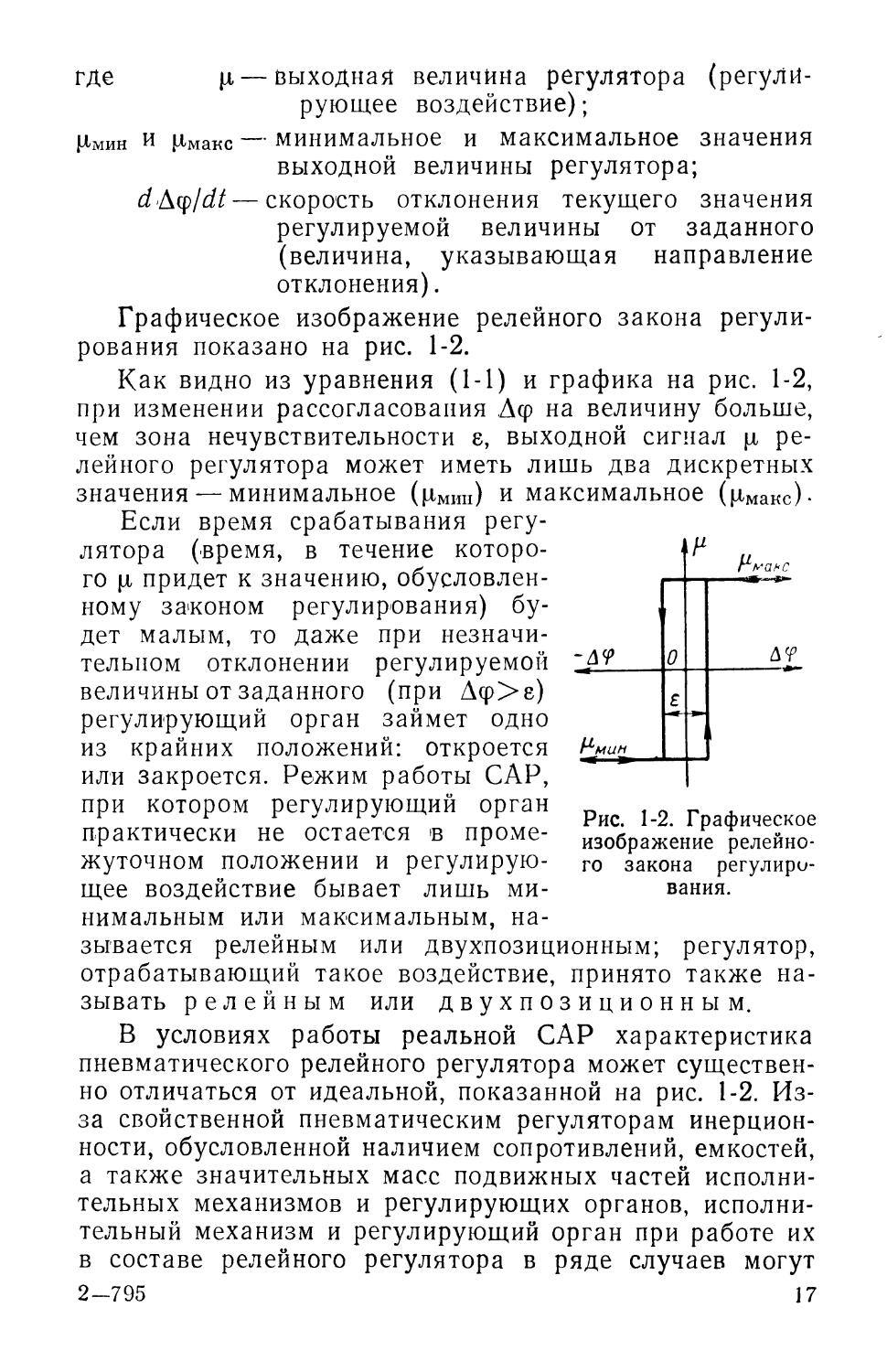
Графическое изображение релейного закона
регулирования показано на рис. 1-2.
Как видно из уравнения (1-1) и графика на рис. 1-2,
при изменении рассогласования Дф на величину больше,
чем зона нечувствительности е, выходной сигнал \х
релейного регулятора может иметь лишь два дискретных
значения — минимальное (|лМин) и максимальное ([хМакс)>
Если время срабатывания
регулятора (время, в течение
которого [I придет к значению,
обусловленному законом регулирования)
будет малым, то даже при
незначительном отклонении регулируемой
величины от заданного (при Дф>е)
регулирующий орган займет одно
из крайних положений: откроется
или закроется. Режим работы САР,
при котором регулирующий орган
практически не остается в
промежуточном положении и
регулирующее воздействие бывает лишь
минимальным или максимальным,
называется релейным или двухпозиционным; регулятор,
отрабатывающий такое воздействие, принято также
называть релейным или двухпозиционным.
В условиях работы реальной САР характеристика
пневматического релейного регулятора может
существенно отличаться от идеальной, показанной на рис. 1-2. Из-
за свойственной пневматическим регуляторам
инерционности, обусловленной наличием сопротивлений, емкостей,
а также значительных масс подвижных частей
исполнительных механизмов и регулирующих органов,
исполнительный механизм и регулирующий орган при работе их
в составе релейного регулятора в ряде случаев могут
2-795 17
г макс
-л?
0
£
Рис. 1-2. Графическое
изображение
релейного закона
регулирования.
Занимать не крайние положений (минимальное и
максимальное), а промежуточные, т. е. они могут находиться
в автоколебательном режиме при неполном
перемещении.
Такой режим работы пневматического релейного
регулятора обычно имеет место при относительно малой
инерционности регулируемого объекта и сравнительно
большой инерционности регулятора. Такое сочетание
характеристик в большинстве случаев является
нежелательным, так как оно приводит к недопустимому
ухудшению переходного процесса регулирования. Учитывая
вышеизложенное, пневматические релейные регуляторы
рекомендуется применять для статических объектов
(объектов с самовыравниванием), динамические
свойства которых характеризуются отношением запаздывания
т к постоянной времени Т меньше, чем 0,2, т. е. при
т/Г<0,2 [Л. 29].
Поскольку инерционность пневматических
регуляторов увеличивает х всего контура регулирования, то в
целях расширения области применения пневматических
регуляторов вообще и релейных в частности, а также
в целях улучшения 'переходных процессов
регулирования при реализации пневматических САР следует
стремиться прежде всего к уменьшению инерционности
пневматических регуляторов. Методы и средства
уменьшения инерционности пневматических регуляторов будут
рассмотрены ниже.
Существенное влияние на характер работы
пневматической САР имеет зона нечувствительности релейного
регулятора е.
Увеличение е приводит к увеличению т контура
регулирования. Поэтому в целях расширения области
применения пневматических релейных регуляторов и
улучшения переходных процессов регулирования величину s
желательно иметь по возможности минимальной. Однако
в практике автоматического регулирования встречаются
задачи, где зона нечувствительности релейного
регулятора должна быть достаточно большой (доходит иногда
до 100%). Такие задачи встречаются, например, при
регулировании уровней в больших емкостях. Исходя из
этого, в пневматических релейных регуляторах
желательно иметь устройства, позволяющие настраивать
величину е в широких пределах.
18
Если же в процессе проектирования пневматической
САР окажется, что динамические свойства объекта и;
требования к качеству процесса регулирования такие,,
что релейный регулятор при всех условиях не может
решить поставленной задачи, то в этих случаях следует
пользоваться другими показателями хода
технологического процесса и применять регуляторы непрерывного
действия (П, ПД, И, ПИ или ПИД), основные свойства
и характерные особенности которых рассматриваются
ниже.
б) Регуляторы, отрабатывающие П-закон
регулирования
Отработать П-закон регулирования пневматический
регулятор может при использовании им в качестве
показателя хода технологического процесса в регулируемом
объекте величины и знака рассогласования, т. е. ±Дф.
П-закон регулирования пневматического регулятора
записывается уравнением вида:
|а = —£рДф, (1-2)
где kv — коэффициент пропорциональности.
Знак минус в правой части уравнения (1-2)
указывает на то, что во время работы САР изменение
входного сигнала регулятора Дф приводит к изменению
величины jit в обратном направлении.
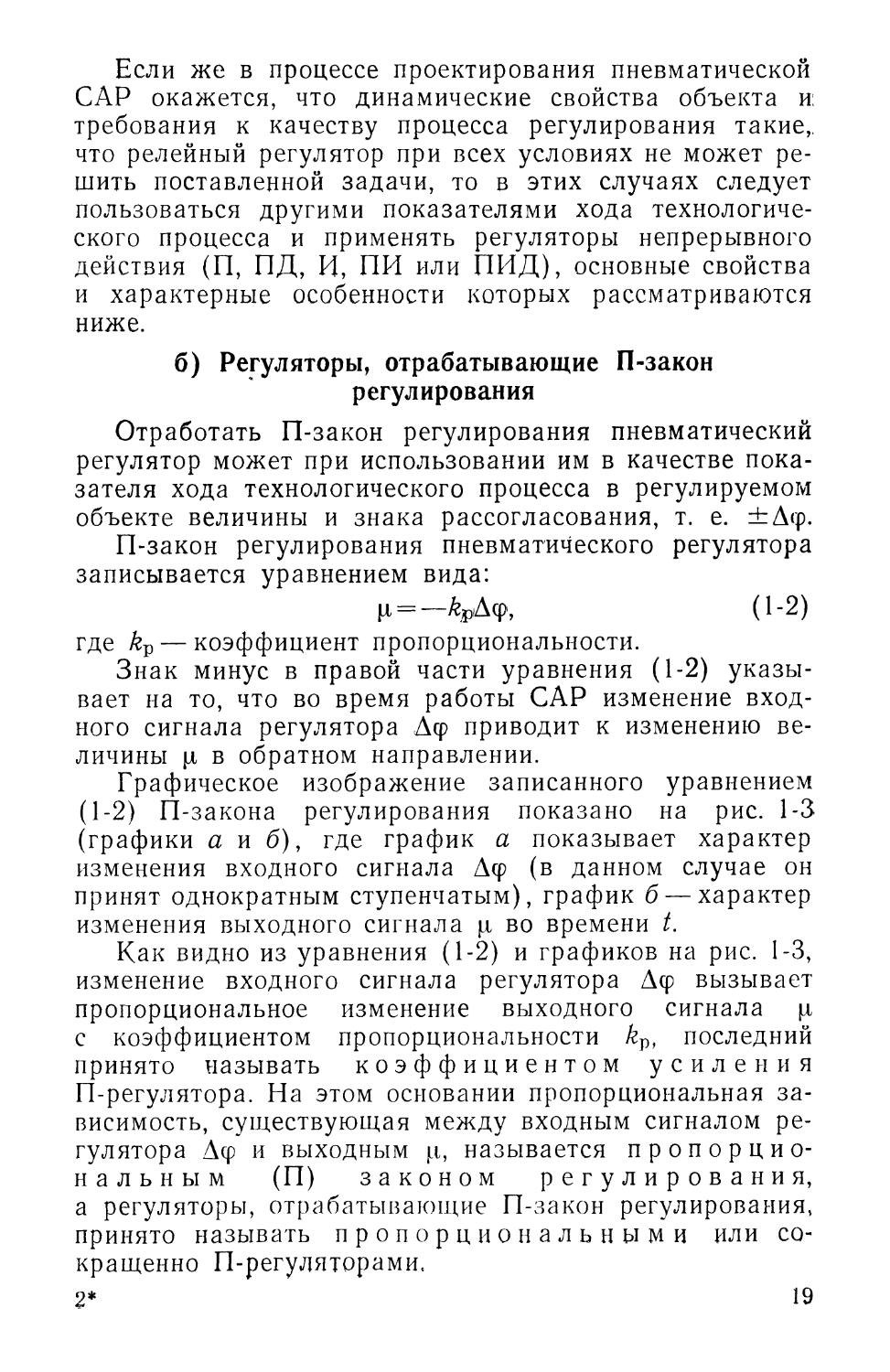
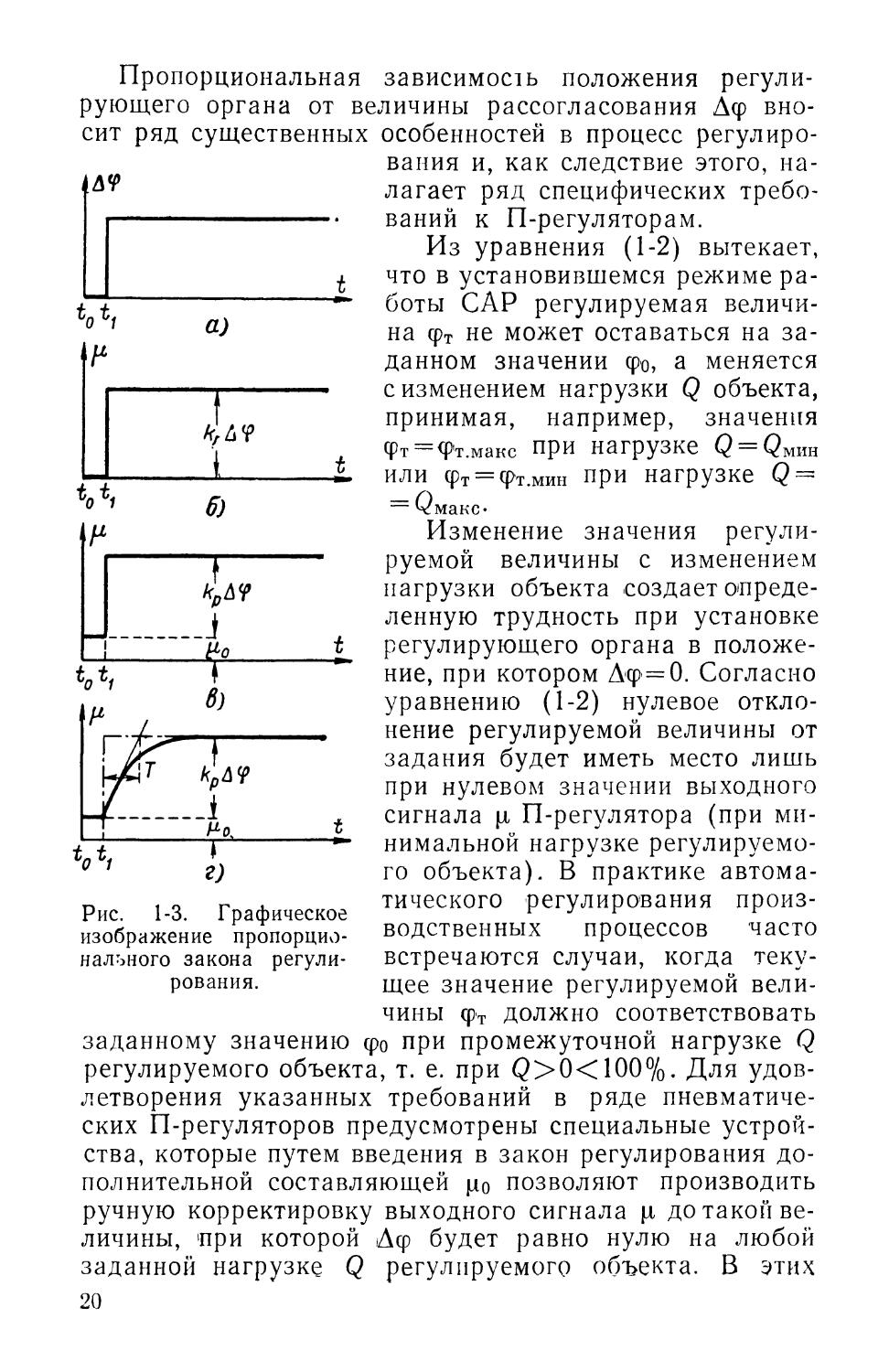
Графическое изображение записанного уравнением
(1-2) П-закона регулирования показано на рис. 1-3
(графики а и б), где график а показывает характер
изменения входного сигнала Дф (в данном случае он
принят однократным ступенчатым), график б — характер
изменения выходного сигнала \х во времени t.
Как видно из уравнения (1-2) и графиков на рис. 1-3,
изменение входного сигнала регулятора Дф вызывает
пропорциональное изменение выходного сигнала \х
с коэффициентом пропорциональности kv, последний
принято называть коэффициентом усиления
П-регулятора. На этом основании пропорциональная
зависимость, существующая между входным сигналом
регулятора Дф и выходным jli, называется
пропорциональным (П) законом регулирования,
а регуляторы, отрабатывающие П-закон регулирования,
принято называть пропорциональными или
сокращенно П-регуляторами.
2* 19
t
a)
V,
6)
t
J
Mo
Пропорциональная зависимость положения
регулирующего органа от величины рассогласования Дф
вносит ряд существенных особенностей в процесс
регулирования и, как следствие этого,
налагает ряд специфических
требований к П-регуляторам.
Из уравнения (1-2) вытекает,
что в установившемся режиме
работы САР регулируемая
величина фт не может оставаться на
заданном значении фо, а меняется
с изменением нагрузки Q объекта,
принимая, например, значения
фт = ф'т.макс При Нагрузке Q = QMira
или фт = фт.мин при нагрузке Q =
— Омане»
Изменение значения
регулируемой величины с изменением
нагрузки объекта создает
определенную трудность при установке
регулирующего органа в
положение, при котором Дф'=0. Согласно
уравнению (1-2) нулевое
отклонение регулируемой величины от
задания будет иметь место лишь
при нулевом значении выходного
сигнала \х П-регулятора (при
минимальной нагрузке
регулируемого объекта). В практике
автоматического регулирования
производственных процессов часто
встречаются случаи, когда
текущее значение регулируемой
величины фт должно соответствовать
заданному значению ф0 при промежуточной нагрузке Q
регулируемого объекта, т. е. при Q>0<100%. Для
удовлетворения указанных требований в ряде
пневматических П-регуляторов предусмотрены специальные
устройства, которые путем введения в закон регулирования
дополнительной составляющей ji0 позволяют производить
ручную корректировку выходного сигнала \х до такой
величины, 'при которой Аф будет равно нулю на любой
заданной нагрузке Q регулируемого объекта. В этих
Рис. 1-3. Графическое
изображение
пропорционального закона
регулирования.
20
условиях П-закон регулирования пневматического
регулятора записывается уравнением вида:
М- = — (ЛрАф+М-о), (1-3)
где juo — начальное значение выходного сигнала, при
котором фт = фО.
Графическое изображение записанного уравнением
(1-3) П-закона регулирования показано на рис. 1-3
(график в).
При выборе регулятора для реальной пневматической
САР следует иметь в виду, что оба уравнения (1-2)
и (1-3) относятся к идеальному (безынерционному)
П-регулятору. Реальный пневматический П-регулятор
характеризуется инерционностью, вследствие чего
значение его выходного сигнала отстает во времени от
значения выходного сигнала идеального П-регулятора.
Инерционность пневматического П-регулятора
характеризуется постоянной времени Г, величина которой (при
некоторых допущениях) равна времени, в течение
которого выходной сигнал [х достиг бы значения fx='&p'A<p,
если бы изменялся с максимальной скоростью,
соответствующей начальному моменту времени t\.
Графическое изображение отработки закона регулирования
(характер изменения выходного сигнала \х) для реального
пневматического П-регулятора показано на рис. ГЗ
(график г).
Из приведенного следует, что П-закон регулирования
в пневматическом регуляторе может соблюдаться лишь
при условии, когда инерционность регулятора будет
значительно меньше инерционности регулируемого объекта,
что необходимо учитывать при проектировании и
наладке пневматических САР.
Уменьшение инерционности пневматических
регуляторов вообще и П-регуляторов в частности достигается
несколькими путями: конструктивным, схемным,
действием эффекта предварения, повышением мощности
усилителей выходных пневматических сигналов и т. п.
Вопросы, связанные с уменьшением инерционности
пневматических регуляторов конструктивным путем, частично
рассмотрены в [Л. 31]; дополнительно эти вопросы будут
рассмотрены в последующих главах данной книги при
рассмотрении отдельных типов регуляторов.
21
Схемный путь уменьшения инерционности [Л. 29]
сводится к построению таких схем воздействия
регуляторов с объектами, при которых пневматические
сигналы проходят в контуре регулирования по кратчайшим
линиям связи.
Уменьшение инерционности пневматического
регулятора может быть достигнуто также путем
дополнительного введения в отрабатываемый им закон
регулирования дифференциальной составляющей и получения в
результате этого так называемого эффекта предварения.
Более подробно об этом будет сказано при
рассмотрении ПД- и ПИД-регуляторов.
Важным показателем П-регулятора является
величина коэффициента усиления kv. Коэффициент усиления
пневматического П-регулятора часто выражается его
обратной величиной, выраженной в процентах.
Последняя называется статизмом или диапазоном
дросселирования П-регулятора и записывается
уравнением вида:
или
Д== ' lOOVo,
ь — 10®
(1-4)
где Д — величина статизма или диапазона
дросселирования П-регулятора.
Числовое значение статизма определяется в виде
интервала изменения регулируемой величины
(выраженного в процентах), вызывающего изменение выходного
сигнала П-регулятора от одного крайнего значения до
другого или перемещение исполнительного механизма из
одного крайнего положения в другое. Зная числовое
значение Д, пользуясь уравнениями (1-4), можно легко
определить числовое значение &р.
Коэффициент усиления kv (или диапазон
дросселирования Д) является параметром настройки П-регулятора
при работе его в САР и зависит от величины
отрицательной обратной связи (называемой иногда жесткой
обратной связью), устанавливаемой вручную (при
наладке регулятора) путем изменения проходного
сечения (сопротивления) дросселя. По этой причине П-регу*
22
ляторы иногда называются регуляторами с
жесткой обратной связью или статическими.
Принцип действия и устройство жесткой обратной связи
будут рассмотрены в последующих главах.
Величина kv в пневматических П-регуляторах обычно
задается в виде интервала изменения Д. Для серийных
регуляторов величина Д находится в пределах от 250
до 10%, что соответствует величине kv = 0,4 -=-10.
Кроме показателей kv и Д, П-регулятор
характеризуется величиной абсолютной и относительной
статической неравномерности АфСт и б соответственно; при этом
между &р, Д, Афст и б существует прямая зависимость.
Под абсолютной статической
неравномерностью П-регулятора принято понимать разность
между установившимися значениями регулируемой
величины ф! и ф2 при нагрузках регулируемого объекта
Qi и Q2 соответственно.
Абсолютная статическая неравномерность Афст
П-регулятора при изменении нагрузки объекта от Q{
До Q2 равна:
A9ct(qi-q2) = ф<?1—q>Q2, (1 -5а)
где <p-Qi и ф'<22 — текущие значения регулируемой
величины при нагрузках Qi и Q2.
Максимальное значение абсолютная статическая
неравномерность П-регулятора имеет при изменении
нагрузки объекта от QMHh до <2макс, т. е.
Афст.макс = ф(? мин—tyQ макс- (1-56)
Статическую неравномерность П-регулятора удобно
выражать в относительных (безразмерных) величинах.
В этих случаях абсолютное значение статической
неравномерности обычно относят к заданному значению
регулируемой величины ф0. Тогда относительная статическая
неравномерность П-регулятора б при изменении
нагрузки регулируемого объекта от Qi до Q2 будет равна:
8 —!QLZi2Lf (1-6а)
(Q1-Q2) <?о
а при изменении нагрузки от QMHH ДО Омакс-
„Уфмин Ус>макс (1-66)
'макс f§
23
'мим
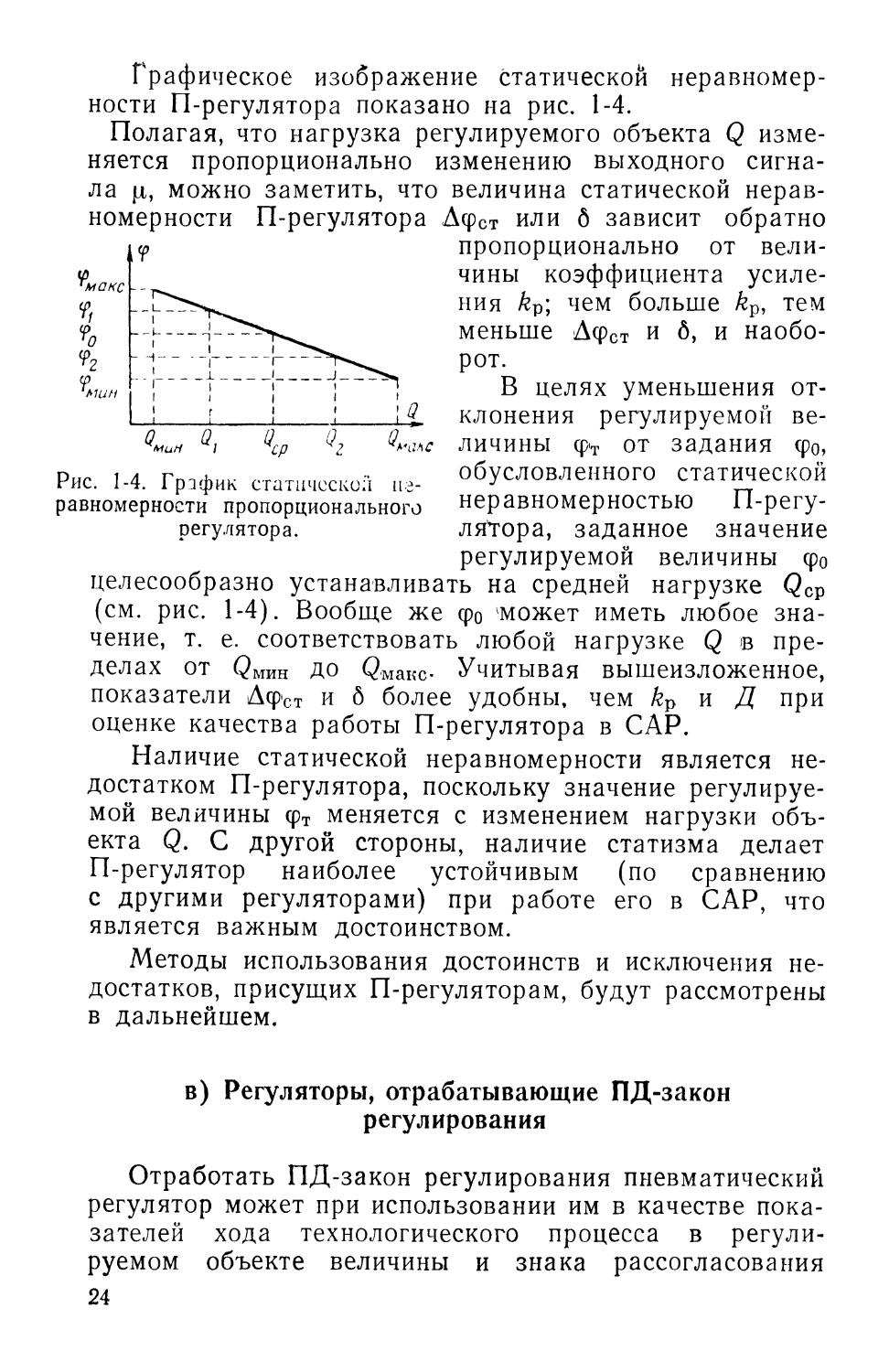
Графическое изображение статической
неравномерности П-регулятора показано на рис. 1-4.
Полагая, что нагрузка регулируемого объекта Q
изменяется пропорционально изменению выходного
сигнала jx, можно заметить, что величина статической
неравномерности П-регулятора Дфст или б зависит обратно
пропорционально от
величины коэффициента
усиления kv\ чем больше &р, тем
меньше ДфСт и 6, и
наоборот.
В целях уменьшения
отклонения регулируемой ве-
•нс личины фт от задания фо,
обусловленного статической
неравномерностью
П-регулятора, заданное значение
регулируемой величины ф0
целесообразно устанавливать на средней нагрузке QCp
(см. рис. 1-4). Вообще же ф0 может иметь любое
значение, т. е. соответствовать любой нагрузке Q в
пределах от QMHH до <2мако Учитывая вышеизложенное,
показатели Дф'СТ и б более удобны, чем kp и Д при
оценке качества работы П-регулятора в САР.
Наличие статической неравномерности является
недостатком П-регулятора, поскольку значение
регулируемой величины фт меняется с изменением нагрузки
объекта Q. С другой стороны, наличие статизма делает
П-регулятор наиболее устойчивым (по сравнению
с другими регуляторами) при работе его в САР, что
является важным достоинством.
Методы использования достоинств и исключения
недостатков, присущих П-регуляторам, будут рассмотрены
в дальнейшем.
Рис. 1-4. График статической
неравномерности пропорционального
регулятора.
в) Регуляторы, отрабатывающие ПД-закон
регулирования
Отработать ПД-закон регулирования пневматический
регулятор может при использовании им в качестве
показателей хода технологического процесса в
регулируемом объекте величины и знака рассогласования
24
(±Дф) и скорости (производной) этого рассогласования
(dAtp/dt).
Сочетание в пневматическом ПД-регуляторе
пропорционального воздействия по величине рассогласования
(Аф) с дополнительным воздействием по производной
рассогласования {dAxp/dt) делает его менее
инерционным по сравнению с П-регулятором. Объясняется это
тем, что в момент возникновения рассогласования
скорость отклонения регулируемой величины от задания
проявляется более значительно, чем само
рассогласование.
Использование скорости отклонения регулируемой
величины от задания в качестве дополнительной
составляющей входного сигнала регулятора означает введение
в закон регулирования предваряющего воздействия. По
этой причине пневматические регуляторы с
дополнительным воздействием по скорости отклонения
регулируемой величины от задания принято называть
регуляторами с предварением.
ПД-закон регулирования, отрабатываемый
пневматическим регулятором, представляет собой сумму
воздействий пропорциональной и дифференциальной
составляющих и записывается уравнениями вида:
для регулятора с независимыми настройками:
ц=_(*рД?-Кд^-); 0-7а)
для регулятора с зависимыми настройками:
*р(а*-К»^)]: (1-76)
или с учетом соображений, изложенных при записи
уравнения (1-3), уравнениями вида:
для регулятора с независимыми настройками:
р=_^рд9 + Гд^ + рву; (1-8а)
для регулятора с зависимыми настройками:
(1-86)
25
где Гд—коэффициент пропорциональности
дифференциальной составляющей, называемый
постоянной времени
дифференцирования или временем предварения.
В уравнениях (1-7) и (1-8) величина &рДср является
пропорциональной составляющей ПД-закона
регулирования; величина Гд дифференциальной
составляющей; [io — начальное значение выходного сигнала,
при котором фт=Фо; знак минус указывает на то, что во
время работы САР изменение входного сигнала
регулятора Аф приводит к изменению величины \i в обратном
направлении.
Коэффициент усиления kp и время предварения Гд
являются параметрами настройки ПД-регулятора при
работе его в САР.
Числовые значения коэффициента усиления kp
у пневматических ПД-регуляторов обычно находятся
в тех же пределах, что и у П-регуляторов,
рассмотренных выше.
Числовые значения Гд для пневматических
регуляторов обычно находятся в пределах от 3 сек до 30 мин.
Время предварения Гд в пневматических
регуляторах обычно настраивается путем изменения скорости
воздействия так называемой инерционной отрицательной
обратной связи и устанавливается вручную при наладке
регулятора изменением проходного сечения дросселя.
Устройство инерционной отрицательной обратной связи
в пневматических регуляторах будет рассмотрено в
последующих главах.
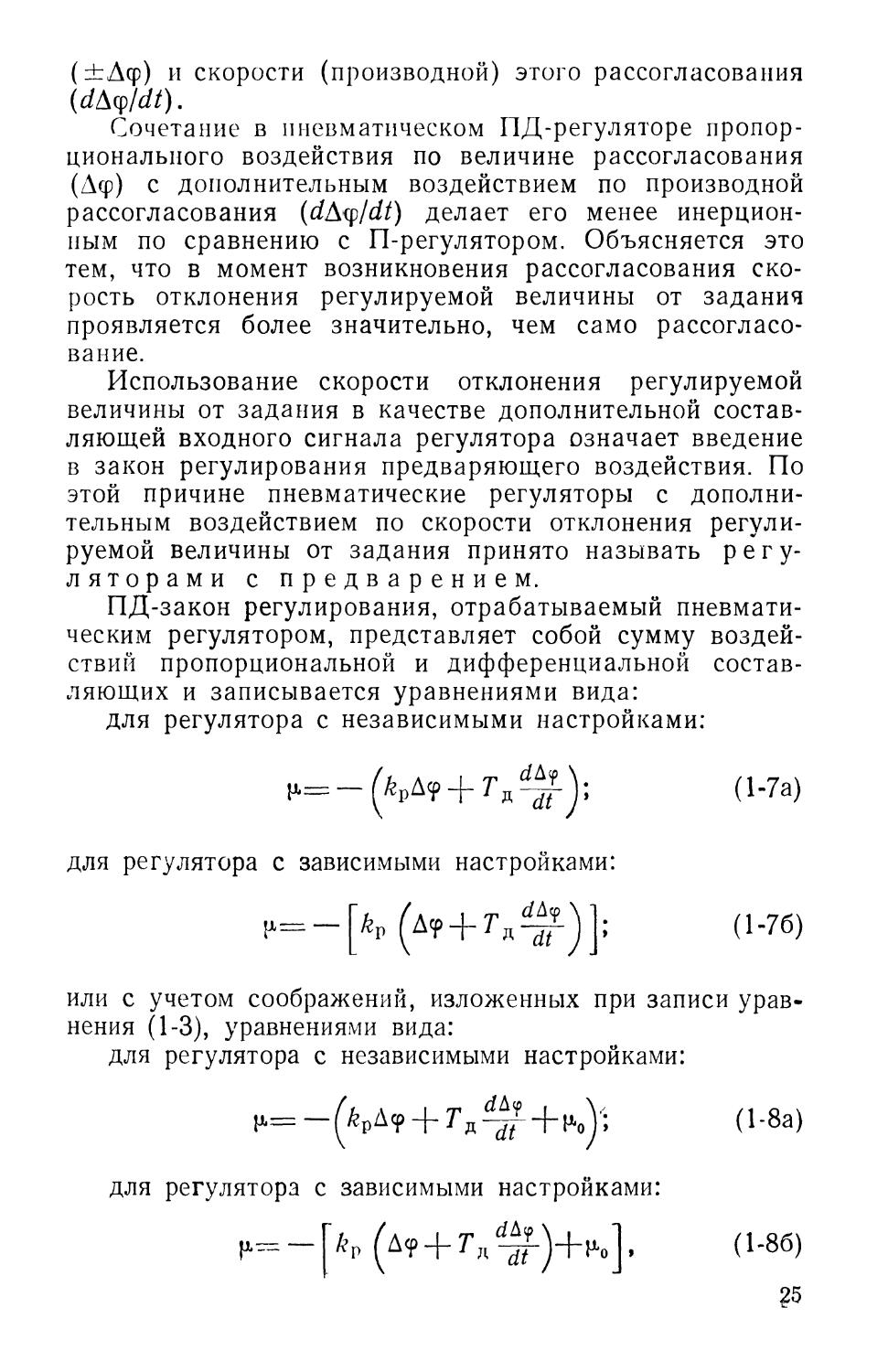
Графическое изображение записанного уравнениями
(1-7) и (1-8) ПД-закона регулирования показано на
рис. 1-5, где график а показывает характер изменения
входного сигнала Дф в момент времени t\ (в данном
случае он принят однократным ступенчатым), графики б
и в — характер изменения выходного сигнала \х согласно
уравнениям (1-7а) и (Г8а), график г — характер
изменения выходного сигнала в реальном пневматическом
ПД-регуляторе.
Как видно из графиков на рис. 1-5, за счет
дополнительного введения в П-закон регулирования
дифференциальной составляющей значение выходного сигнала (д
за
В переходном режиме существенно увеличивается но
сравнению с выходным сигналом П-регулятора.
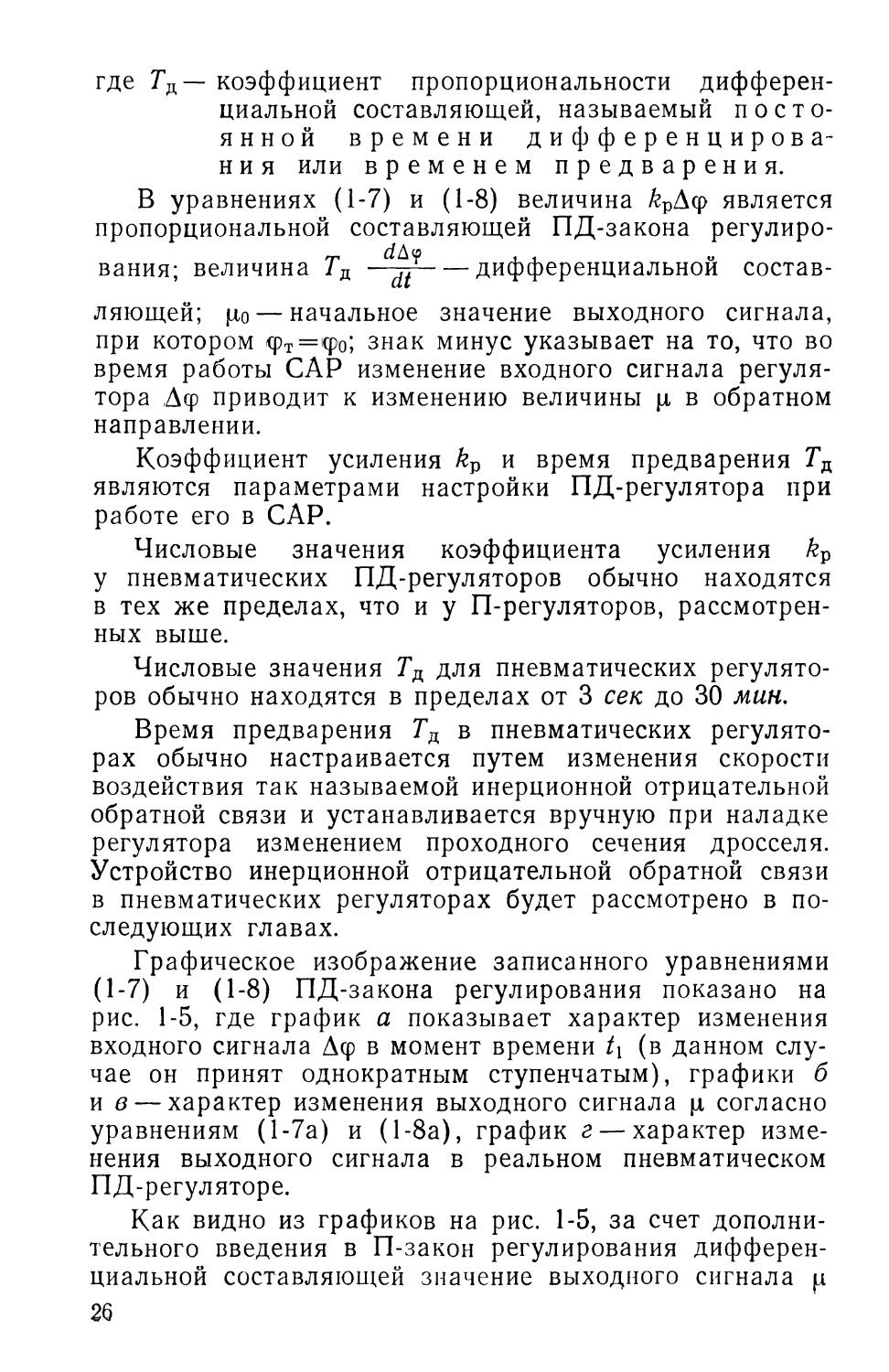
Более наглядно эффект предварения в ПД-регулято-
ре показан на рис. 1-6, где изменение входного сигнала
Дф имеет плавный характер (график а). На этом
рисунке (график б) показаны кривые изменения выходного
д<р сигнала \х ПД-регулятора
(сплошная линия) и
П-регулятора (пунктирная линия с
точками). Как показано на рис.
£ 1-6 (график б), значение
выходного сигнала \х
ПД-регулятора предваряет (опережает)
значение выходного сигнала \i
П-регулятора на время Гд.
а)
Vddt
Рис. 1-5. Графическое
изображение
нально-дифференциального закона регулирова-
вания.
Рис. 1-6. Эффект
предварения в
пропорционально-дифференциальном регуляторе.
Опережение выходного сигнала \х в ПД-регуляторе
по сравнению с П-регулятором имеет важное
положительное значение при регулировании технологических
процессов в объектах, обладающих существенным
запаздыванием в проявлении отклонения регулируемой
величины после нанесения возмущающего воздействия.
27
В ряде случаев обеспечить устойчивость и удовлетво*
рительное качество процесса регулирования удается
лишь за счет использования эффекта предварения, т. е.
введения в закон регулирования Д-составляющей.
Недостатком ПД-регулятора является наличие в нем
статической неравномерности в установившемся режиме,
отрицательное влияние которой на качество
регулирования такое же, как и в рассмотренном выше П-регуляторе.
Конструктивно пневматические ПД-регуляторы
выполняются в виде двух параллельно или
последовательно соединенных блоков: пропорционального (П) и
дифференцирующего (Д); последний обычно называется
блоком предварения. При параллельном соединении П-
и Д-блоков образуется ПД-регулятор с независимыми
настройками величин kv и Гд; при последовательном —
с зависимыми.
г) Регуляторы, отрабатывающие И-закон
регулирования
Отработать И-закон регулирования пневматический
регулятор может при использовании им в качестве
показателя хода технологического процесса в регулируемом
объекте интеграла отклонения текущего значения
регулируемой величины от задания за время / и направле-
И-закон регулирования пневматического регулятора
записывается уравнением вида:
где 1/Ги — коэффициент пропорциональности,
характеризующий скорость исполнительного
механизма через его постоянную времени Ги.
Величину Ти в уравнении И-закона регулирования
принято называть также постоянной
времени интегрирования.
Уравнение (1 -9а) показывает, что регулирующее
воздействие И-регулятора пропорционально интегралу из
отклонения регулируемой величины от задания.
Выходной сигнал jli И-регулятора будет иметь тем большее
значение, чем больше отклонится регулируемая величи-
28
(1-9а)
о
па фт от задания ф0 и чем длительнее будет это
отклонение.
Дифференцируя уравнение (1 -9а) и записывая
результат относительно Дф, И-закон регулирования,
отрабатываемый пневматическим регулятором, может быть
записан уравнением вида:
Ги-^-Д?- (1-10а)
Уравнение (1 - 10а) показывает, что в И-регуляторе
изменение входного сигнала Дф вызывает
пропорциональное изменение скорости выходного сигнала
(d[i/dt), а не величины этого сигнала, как в П-регуля-
торе. В И-регуляторе скорость изменения выходного
сигнала тем больше, чем больше величина входного
сигнала. По этой причине пневматические регуляторы,
отрабатывающие И-закон регулирования, являются р е-
гуляторами с переменной скоростью
регулирующего воздействия.
Знак минус в уравнениях (1 -9а) и (1-10а)
указывает на то, что во время работы САР изменение
входного сигнала регулятора Дф приводит к изменению
величины (1 в обратном направлении.
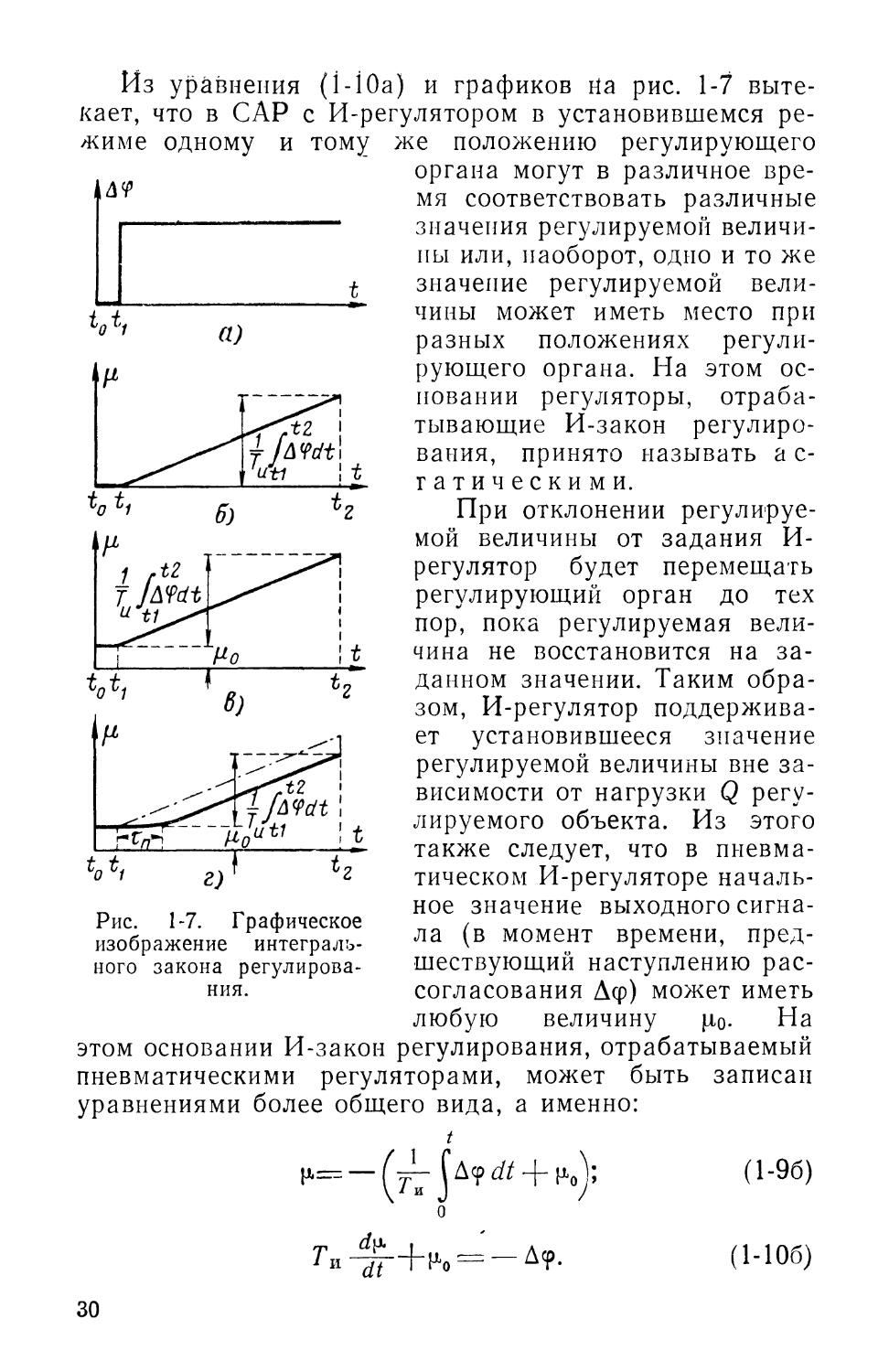
Графическое изображение записанного уравнениями
(1 -9а) и (1-10а) И-закона регулирования показано на
рис. 1-7 (графики а и б), где график а показывает
характер изменения входного сигнала (Дф) в момент
времени t\ (в данном случае он принят однократным
ступенчатым), график б — характер изменения выходного
сигнала \х во времени t. Как видно из графика б
(рис. 1-7), кривая изменения выходного сигнала |i при
ступенчатом изменении Дф представляет собой прямую
линию, угол наклона которой к оси / зависит от
величины Дф. При плавном изменении Дф выходной сигнал \х
пневматического И-регулятора также изменяется плавно
со скоростью изменения, пропорциональной величине Дф
в данный момент времени.
Постоянная времени интегрирования Ги является
параметром настройки И-регулятора при работе его
в САР. Числовое значение Ги равно времени, в течение
которого исполнительный механизм переместится из
одного крайнего положения в другое при максимальном
значении Дф (при Дф= 1 в относительных величинах)
29
Из уравнения (i-Юа) и графиков на рис. 1-7
вытекает, что в САР с И-регулятором в установившемся
режиме одному
Ш
и тому
а)
же положению регулирующего
органа могут в различное
время соответствовать различные
значения регулируемой
величины или, наоборот, одно и то же
значение регулируемой
величины может иметь место при
разных положениях
регулирующего органа. На этом
основании регуляторы,
отрабатывающие И-закон
регулирования, принято называть а с-
гатическими.
При отклонении
регулируемой величины от задания И-
регулятор будет перемещать
регулирующий орган до тех
пор, пока регулируемая
величина не восстановится на
заданном значении. Таким
образом, И-регулятор
поддерживает установившееся значение
регулируемой величины вне
зависимости от нагрузки Q
регулируемого объекта. Из этого
также следует, что в
пневматическом И-регуляторе
начальное значение выходного
сигнала (в момент времени,
предшествующий наступлению
рассогласования Аф) может иметь
любую величину ji0. На
этом основании И-закон регулирования, отрабатываемый
пневматическими регуляторами, может быть записан
уравнениями более общего вида, а именно:
t
V.= -^^9dt + v,y (1-96)
Рис. 1-7. Графическое
изображение
интегрального закона
регулирования.
dp.
~~аТ
(1-106)
30
р в уравнениях (1-96) и (1-106) является постоянной
величиной, не зависящей от Аф. Графическое
изображение записанного уравнениями (1-96) и (1-106) И-закона
регулирования показано на рис. 1-7 (график в).
Записанный уравнениями (1-9) и (1-10) И-закон
регулирования справедлив лишь для идеального
(безынерционного) регулятора. Из-за наличия инерционности
в реальном пневматическом И-регуляторе значение
выходного сигнала \х в переходном режиме будет отставать
(запаздывать) на время тп от значения выходного
сигнала идеального И-регулятора. Характер изменения
выходного сигнала для реального пневматического
И-регулятора показан на рис. 1-7 (график г). На указанном
графике показана также кривая изменения выходного
сигнала идеального И-регулятора (пунктирная линия
с точками).
Положительной особенностью И-регулятора является
то, что значение регулируемой величины в
установившемся режиме поддерживается этим регулятором на
заданном уровне независимо от нагрузки Q
регулируемого объекта, т. е. в И-регуляторе отсутствует
статическая неравномерность.
Недостатки И-регуляторов обусловлены их
динамическими свойствами. Как бы ни было мало отклонение
регулируемой величины от задания, И-регулятор будет
(хотя и медленно) продолжать перемещать
регулирующий орган вплоть до крайнего положения. Перемена
направления движения регулирующего органа наступает
лишь тогда, когда текущее значение регулируемой
величины, изменяясь, переходит через заданное значение.
Пневматические И-регуляторы могут применяться
для регулирования технологических процессов только
в статических объектах с большим самовыравниванием
[Л. 29]. В САР, в которых объекты характеризуются
малым самовыравниванием и значительным
запаздыванием, применение И-регуляторов приводит к
колебательным, а в некоторых случаях даже к неустойчивым
процессам регулирования.
Пневматические И-регуляторы как самостоятельные
устройства в настоящее время не изготавливаются. Эти
регуляторы получили широкое распространение в
совокупности с устройствами, отрабатывающими ПИ- и
ПИД-закоп регулирования,
31
д) Регуляторы, отрабатывающие П И-закон
регулирования
Сравнение пропорциональных (П) и интегральных
(И) регуляторов показывает, что первые обладают
преимуществом по динамическим свойствам и
обеспечивают лучший переходной процесс регулирования, а
преимущества вторых обусловлены отсутствием статической
неравномерности, т. е. лучшими статическими
свойствами в установившемся режиме. Исходя из этого,
логически вытекает целесообразность выполнения
пневматических регуляторов, которые отрабатывают
комбинированный пропорционально-интегральный (ПИ) закон
регулирования.
Отработать ПИ-закон регулирования пневматический
регулятор может при одновременном использовании им
в качестве показателей хода технологического процесса
в регулируемом объекте величины и знака
рассогласования (±Аф) и интеграла от этого рассогласования
t
Д<р dt
1 о
ПИ-закон регулирования, отрабатываемый
пневматическим регулятором, представляет собой сумму
воздействий пропорциональной и интегральной
составляющих и записывается уравнениями вида:
для регулятора с независимыми настройками:
t
|x^-(v^+t7JA?^/, (1-1 la)
(I
для регулятора с зависимыми настройками:
t
(1-116)
или, с учетом соображений, изложенных при записи
уравнений (1-3), (1-96) и (1-106), уравнениями вида:
для регулятора с независимыми настройками:
t
t*= - ^рД9+J- |д9 dt + ^, (1-12а)
32
для регулятора с зависимыми настройками:
t
»*= — [Лр (At J АЧ> Л) +»*•] - (1-126)
о
В уравнениях (1-11) и (1-12) &рД<р является
пропорциональной (П) составляющей ПИ-закона регулирования;
t
величина ^-^A(fdt— интегральной (И) составляющей;
рассмотренных
t
а)
'И
/но — начальное значение выходного сигнала, при
котором фт=-<ро; знак минус имеет тот же смысл, что и
в уравнениях законов регулирования,
ранее.
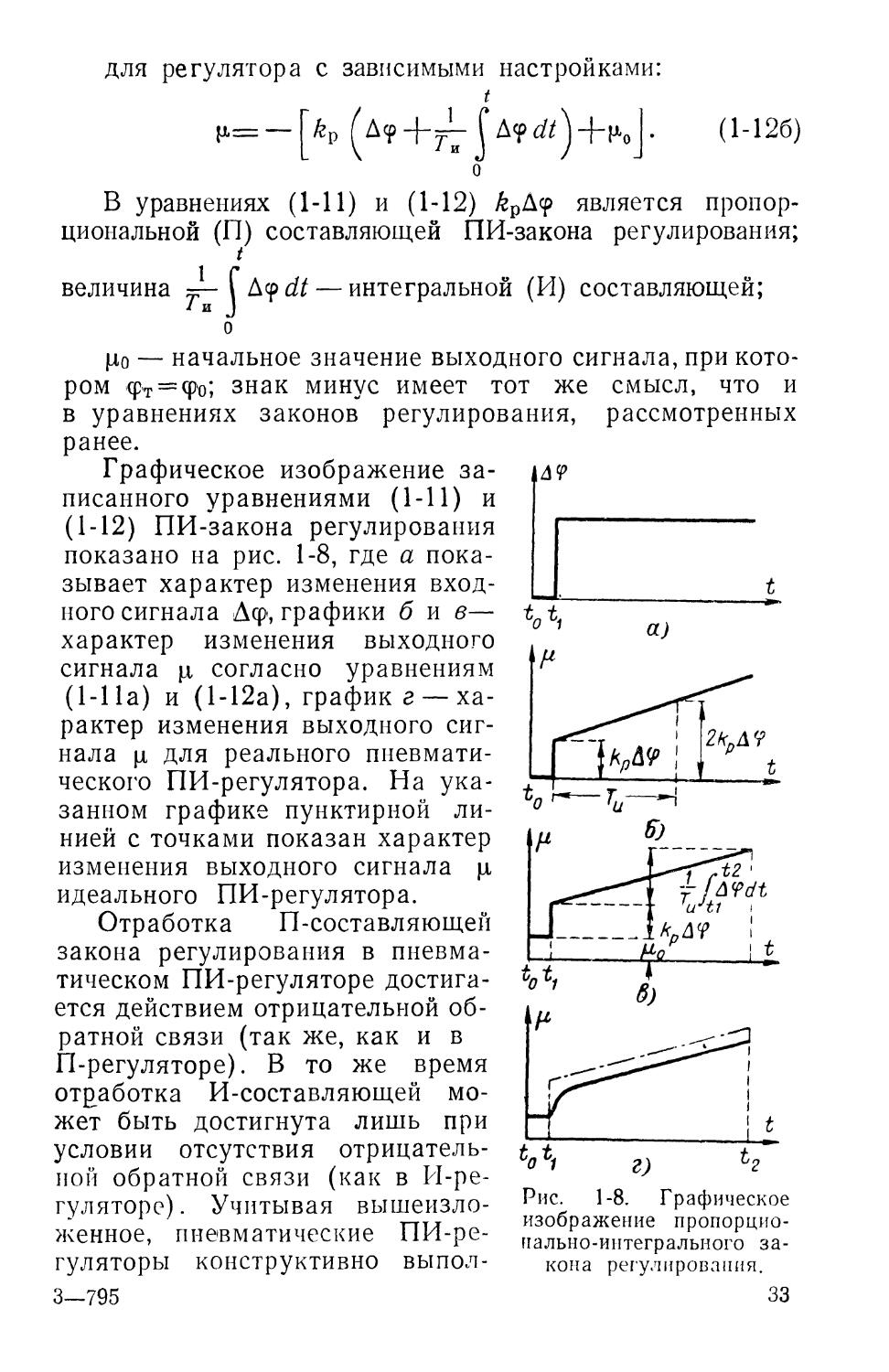
Графическое изображение
записанного уравнениями (1-11) и
(1-12) ПИ-закона регулирования
показано на рис. 1-8, где а
показывает характер изменения
входного сигнала Дф, графики б и в—
характер изменения выходного
сигнала \х согласно уравнениям
(1-11а) и (1-12а), график а —
характер изменения выходного
сигнала (л для реального
пневматического ПИ-регулятора. На
указанном графике пунктирной
линией с точками показан характер
изменения выходного сигнала jm
идеального ПИ-регулятора.
Отработка П-составляющей
закона регулирования в
пневматическом ПИ-регуляторе
достигается действием отрицательной
обратной связи (так же, как и в
П-регуляторе). В то же время
отработка И-составляющей
может быть достигнута лишь при
условии отсутствия
отрицательной обратной связи (как в
И-регуляторе) . Учитывая
вышеизложенное, пневматические ПИ-ре-
гуляторы конструктивно выпол-
3—795
г) °2
Рис. 1-8. Графическое
изображение
пропорционально-интегрального
закона регулирования.
33
няются так, что отрицательная обратная связь в них
имеет максимальное воздействие лишь в начальный
момент времени, а затем она постепенно (с
течением времени) снимается действием так
называемой инерционной положительной обратной связи.
Воздействие инерционной положительной обратной
связи в пневматическом ПИ-регуляторе выбирается
таким, что в конце переходного процесса действие
отрицательной обратной связи полностью исчезает. Такое
взаимодействие отрицательной обратной связи с
инерционной положительной обратной связью делает ПИ-
регулятор лишенным остаточной статической
неравномерности и в то же время придает ему высокие
динамические свойства.
Совокупность в регуляторе отрицательной и
инерционной положительной обратных связей называется
упругой или изодромной обратной связью,
а регуляторы, работающие по этому принципу,
называются регуляторами с упругой обратной
связью или изодромными. Устройство упругой
обратной связи в пневматических регуляторах будет
рассмотрено в последующих главах.
Уравнения (1-11) и (1-12), а также графики на
рис. 1-8 показывают, что регулирующее воздействие
ПИ-регулятора пропорционально отклонению
регулируемой величины от задания и интегралу от этого
отклонения во времени. На рис. 8 (график б) выделен
участок, на котором за время / = ГИ интегральная
составляющая регулирующего воздействия достигает величины,
равной пропорциональной составляющей, т. е. \х =
= 2&рДф. Соответственно этому сигнал регулирующего
воздействия jut ПИ-регулятора в результате действия
упругой (изодромной) обратной связи за время t = Tw
удвоится по сравнению с выходным сигналом
пропорциональной составляющей. На этом основании время 7И
в уравнениях (1-11) и (1-12) принято называть
временем удвоения или временем изодрома.
Таким образом, пневматический ПИ-регулятор
аналогично И-регулятору поддерживает постоянное
установившееся значение регулируемой величины вне
зависимости от нагрузки Q регулируемого объекта. При
отклонении текущего значения регулируемой величины от
задания ПИ-регулятор в начальный момент времени пе-
34
реместит регулирующий орган на величину,
пропорциональную величине отклонения (Аф), но если при этом
регулируемая величина не придет к заданному
значению, ПИ-регулятор будет продолжать перемещать
регулирующий орган до тех пор, пока регулируемая
величина не достигнет своего заданного значения.
Коэффициент усиления kv и время изодрома 7И
являются параметрами настройки ПИ-регулятора при
работе его в САР.
Время изодрома Ги в пневматических ПИ-регулято-
рах обычно настраивается путем изменения скорости
воздействия инерционной положительной обратной
связи и устанавливается при наладке регулятора вручную
(изменением проходного сечения дросселя). Числовые
значения 7И в пневматических регуляторах обычно
находятся в пределах от 3—10 сек до 50—100 мин.
Числовые значения коэффициента усиления kv (или
диапазона дросселирования Д) в пневматических ПИ-
регуляторах находятся в более широких пределах, чем
в П-регуляторах, что позволяет существенно расширить
область их применения. Величина Д в этих регуляторах
обычно находится в пределах от 1—10 до 250 и даже до
1 000—1 500%, что соответствует величине kv от 100—10
до 0,1—0,06.
При большом значении kv (или малом значении Д)
ПИ-регулятор может успешно работать с
малоинерционным объектом. Большое значение Д улучшает
динамические свойства ПИ-регулятора и вместе с тем не
вызывает затруднений в обеспечении высокого качества
процесса регулирования, так как этот регулятор лишен
остаточной статической неравномерности.
При малом значении kv (или большом значении Д)
ПИ-регулятор может успешно работать с объектом,
имеющим существенное запаздывание. Малое значение
Ар обусловливает также и малое регулирующее
воздействие регулятора на объект, что предотвращает
нежелательное перерегулирование. Вместе с тем благодаря
наличию изодрома регулирующее воздействие
ПИ-регулятора при малом значении kv будет, хотя и медленно,
продолжаться до тех пор, пока текущее значение
регулируемой величины не станет равным заданному.
Если же запаздывание в регулируемом объекте так
велико, что ПИ-регулятор при всех возможных настрой-
3* 35
ках &р и Ти не может обеспечить удовлетворительного
качества регулирования, следует применять ПИД-регу-
лятор, преимущества которого над ПИ-регулятором
состоят в отработке предваряющего воздействия.
е) Регуляторы, отрабатывающие ПИД-закон
регулирования
При рассмотрении пневматических ПД- и ПИ-регу-
ляторов были показаны методы формирования
комбинированных ПД- и ПИ-законов регулирования, а также
преимущества ПД-регуляторов над пропорциональными
и ПИ-регуляторов над пропорциональными и
интегральными.
Рассматривая преимущества ПД- и ПИ- регуляторов,
логически вытекает целесообразность выполнения
пневматических регуляторов, отрабатывающих
комбинированный ПИД-закон регулирования. Отработать этот закон
регулирования пневматический регулятор может при
использовании им в качестве показателей хода
технологического процесса в регулируемом объекте величины и
знака рассогласования (н= А?), а также производной
(dAy/dt) и интеграла ^JfAy'd^ от этого
рассогласования.
ПИД-закон регулирования, отрабатываемый
пневматическим регулятором, представляет собой сумму
воздействий пропорциональной, интегральной и
дифференциальной составляющих и записывается уравнениями
вида:
для регулятора с независимыми настройками:
t
,1= - (м?+т7 J A? dt + Т д ), (1- 13а)
для регулятора с зависимыми настройками:
t
г, /\ ,1
б
или уравнениями вида:
36
i= - [*р (A? +± J Д9 dt + Гд ^)] , (1-136)
для регулятора с независимыми настройками:
t
(1-14а)
и
для регулятора с зависимыми настройками:
- [Ар ( д?+£ j д9 at+гд ^+р/.
(1-146)
о
Аналогично уравнениям (1-7), (1-8), (1-11) и (1-12)
в уравнениях (1-13) и (1-14) величина АрД<р является
пропорциональной (П) составляющей ПИД-закона
регулирования; величина =— \ Д? dt — интегральной (И) составляю-
р.0 — начальное значение выходного сигнала, при котором
cpff—<р0; знак минус имеет тот же смысл, что и в
уравнениях ранее рассмотренных законов регулирования.
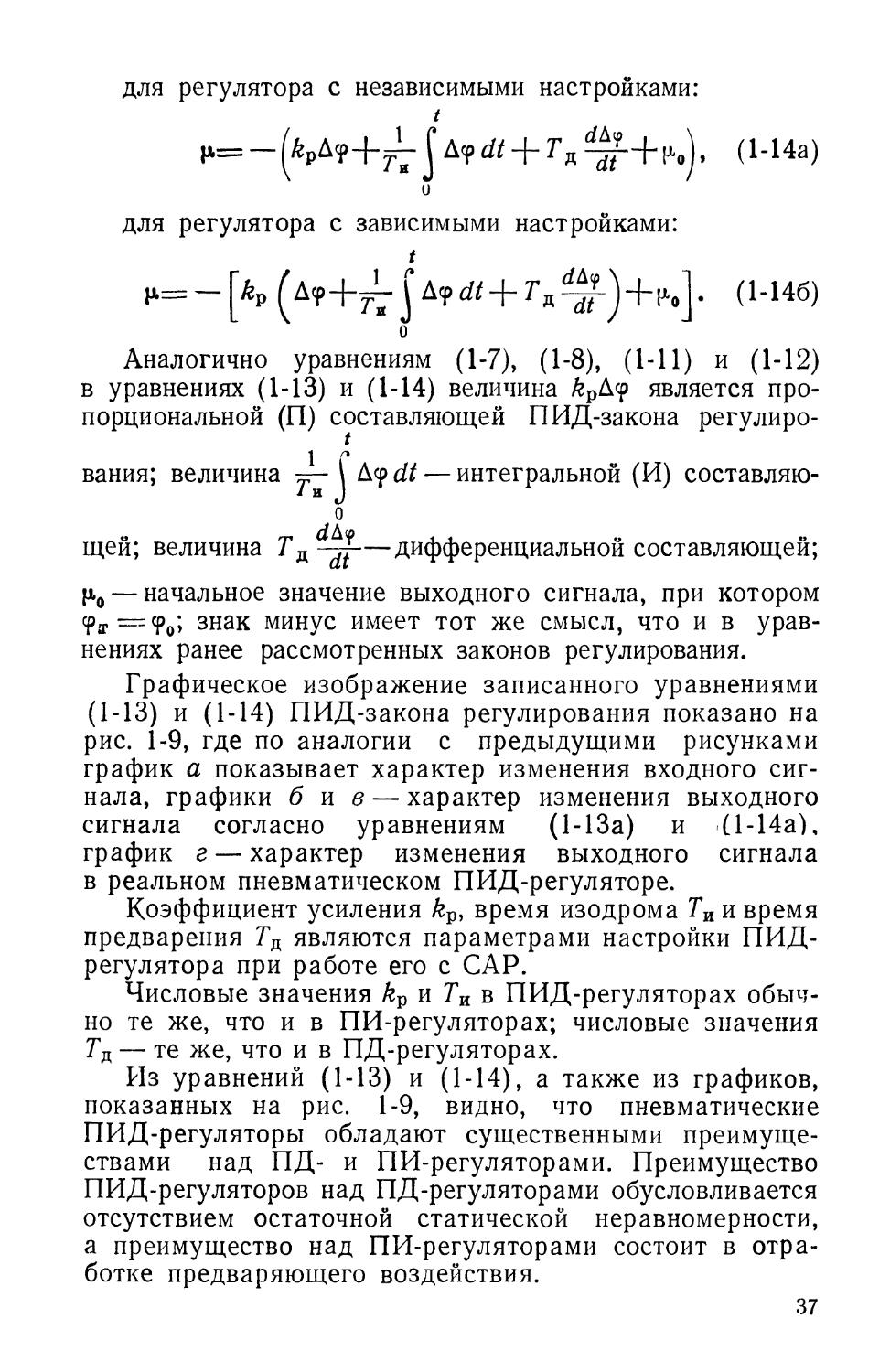
Графическое изображение записанного уравнениями
(1-13) и (1-14) ПИД-закона регулирования показано на
рис. 1-9, где по аналогии с предыдущими рисунками
график а показывает характер изменения входного
сигнала, графики б и в — характер изменения выходного
сигнала согласно уравнениям (1-13а) и (1-14а),
график г — характер изменения выходного сигнала
в реальном пневматическом ПИД-регуляторе.
Коэффициент усиления &р, время изодрома Ти и время
предварения Гд являются параметрами настройки ПИД-
регулятора при работе его с САР.
Числовые значения kv и Ги в ПИД-регуляторах
обычно те же, что и в ПИ-регуляторах; числовые значения
Гд — те же, что и в ПД-регуляторах.
Из уравнений (1-13) и (1-14), а также из графиков,
показанных на рис. 1-9, видно, что пневматические
ПИД-регуляторы обладают существенными
преимуществами над ПД- и ПИ-регуляторами. Преимущество
ПИД-регуляторов над ПД-регуляторами обусловливается
отсутствием остаточной статической неравномерности,
а преимущество над ПИ-регуляторами состоит в
отработке предваряющего воздействия.
о
щей; величина Г
дифференциальной составляющей;
37
По принципу действия ПИД-регуляторы являются
регуляторами с упругой обратной связью (изодромны-
ми) с предварением.
Конструктивно пневматические ПИД-регуляторы вы-
ч>ь полняются в виде двух
параллельно или последовательно
соединенных блоков:
пропорционально-интегрального (ПИ)
и дифференцирующего (Д).
Последний, как указывалось
выше, обычно называется
блоком предварения.
Из всех рассмотренных
выше пневматических
регуляторов ПИД-регуляторы наиболее
сложны как по принципу
действия, так и по устройству, в
связи с чем их целесообразно
применять лишь для
регулируемых объектов с большим
запаздыванием, в которых по
условиям ведения
технологического процесса не допускается
остаточное отклонение
регулируемой величины от задания.
1-5. УСЛОВИЯ РАБОТЫ
ПНЕВМАТИЧЕСКИХ
РЕГУЛЯТОРОВ
В МНОГОКОНТУРНЫХ САР
Рис. 1-9. Графическое
изображение
пропорционально-интегрально-
дифференциального
закона регулирования
Выше было показано, как
путем усложнения законов
регулирования можно
улучшать статические и
динамические свойства пневматических регуляторов и этим
расширять их функциональные возможности. Дальнейшее
усложнение регуляторов, например за счет введения
воздействий по производным более высокого порядка, не
целесообразно, так как это приводит к неоправданному
их усложнению. В связи с этим дальнейшее
расширение функциональных возможностей пневматических
регуляторов идет не по пути усложнения отрабатываемых
38
pfми законов регулирования, а по пути рационального
построения схем взаимодействия регуляторов с
объектами.
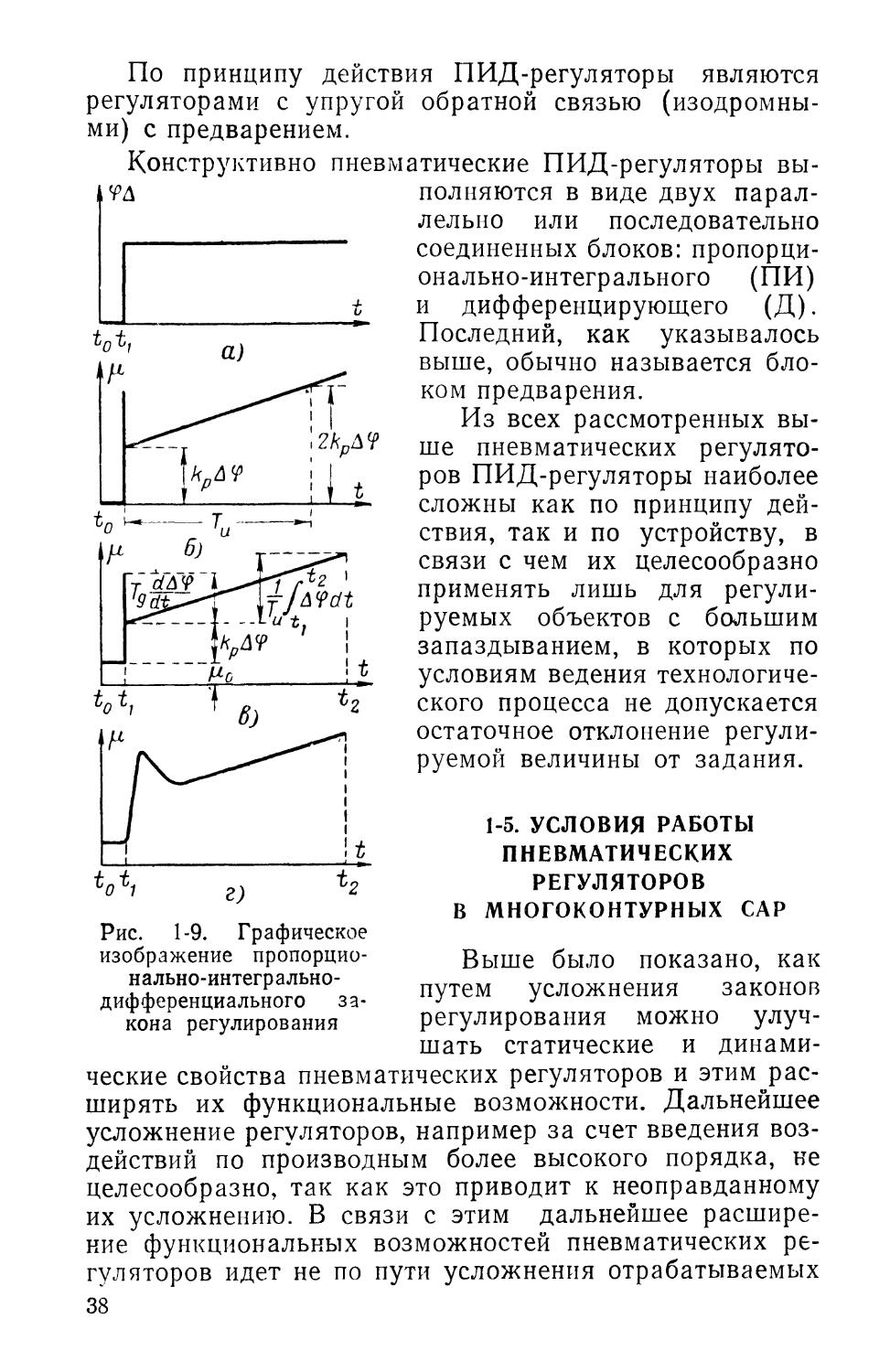
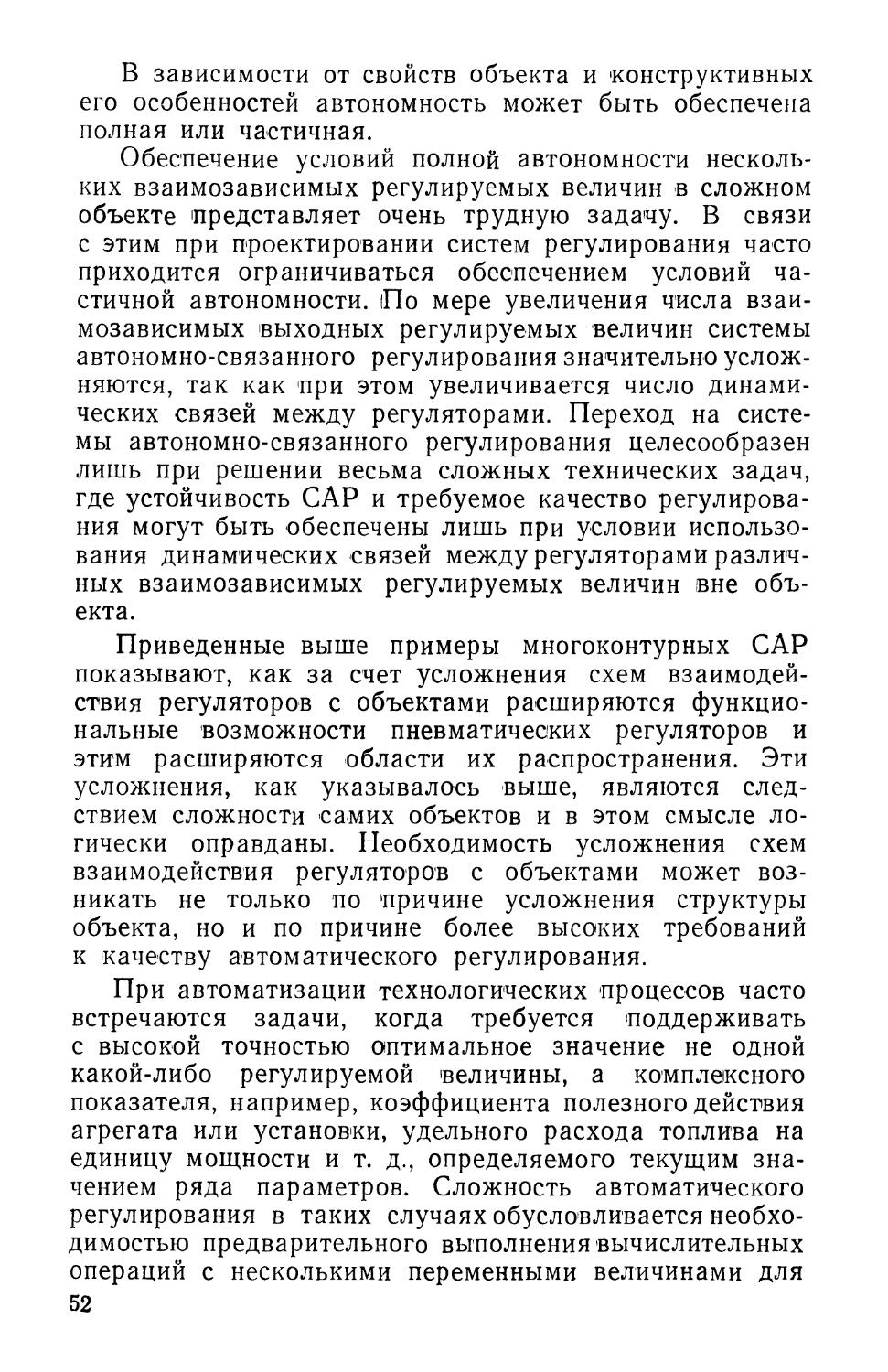
Многие технологические агрегаты, подлежащие
автоматическому управлению, представляют собой сложные
объекты, состоящие из цепи последовательно
(рис. 1-10,а) и параллельно (рис. 1-10,6) соединенных
звеньев. Ход технологического процесса в сложном
объекте обычно характеризуется не только одной
(главной) регулируемой величиной <р, но также и
промежуточными ф', ф" и т. д., выполняющими роль
вспомогательных.
1Л/
izL м/ Jill
1 у'_ г
13
I *
I
_ J
If 0С
Рис. 1-10. Структурные схемы сложных объектов с
одним регулируемым притоком и одной главной
регулируемой величиной.
Вспомогательные регулируемые величины могут
быть использованы в качестве дополнительных сигналов,
подаваемых на вход регулятора. Это позволяет
регулятору начать регулирующее воздействие на объект
раньше, чем наступит отклонение главной регулируемой
величины, т. е. тогда, когда нарушение установившегося
режима технологического процесса лишь создало
предпосылки для будущего отклонения главной регулируемой
величины. По этой причине опережающее отклонение
промежуточной (вспомогательной) регулируемой
величины по сравнению с отклонением главной принято
называть упреждением, а сигналы, характеризующие
текущее значение промежуточных величин, —
упреждающими сигналами.
39
Условием, при котором регулятор может
воздействовать на объект, используя в качестве дополнительных
показателей хода технологического процесса
упреждающие сигналы, является переход от одноконтурной схемы
взаимодействия регулятора с объектом к
многоконтурной, т. е. переход от одноконтурной САР к
многоконтурной 1.
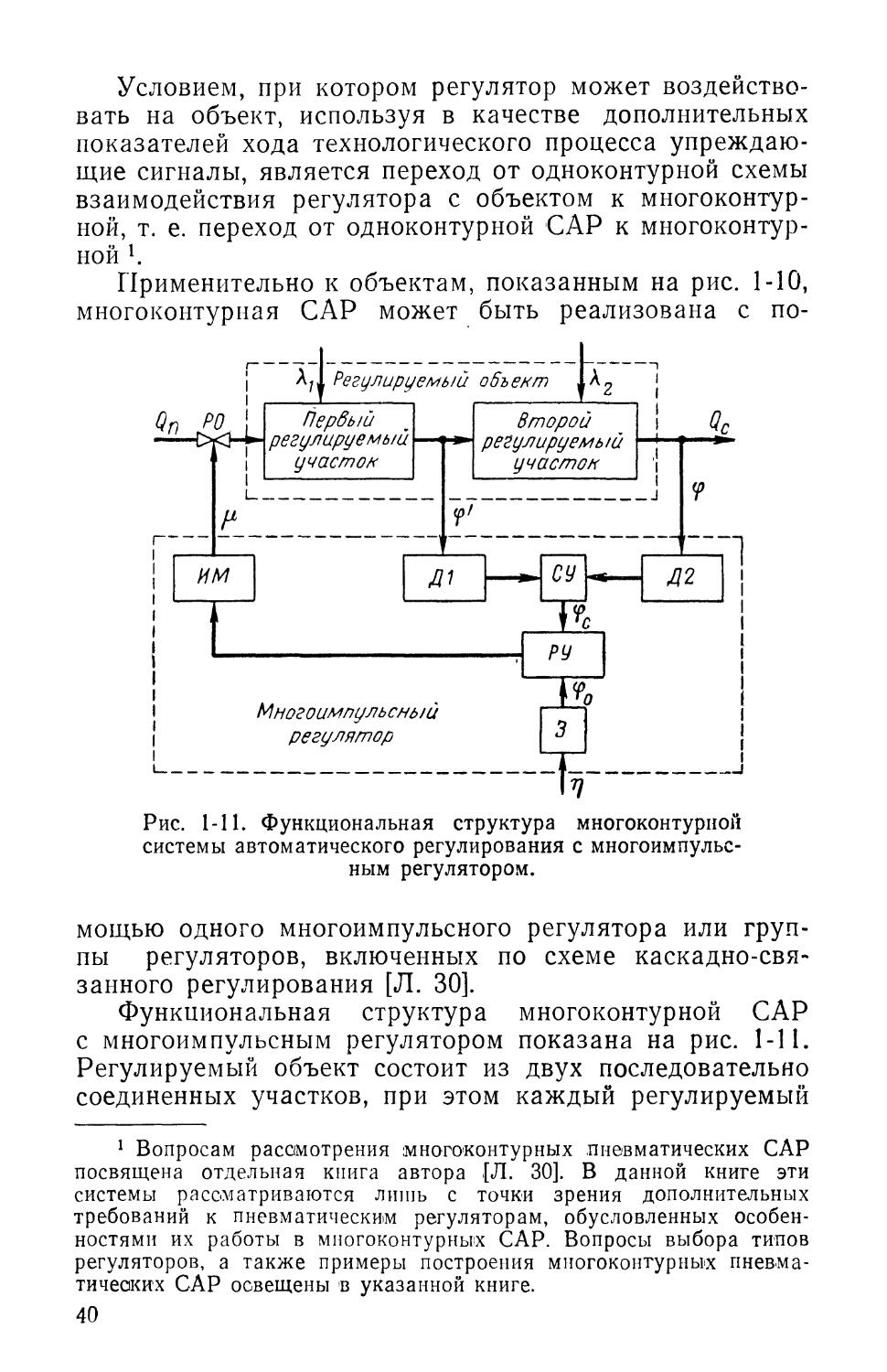
Применительно к объектам, показанным на рис. 1-10,
многоконтурная САР может быть реализована с по-
АЛ Регулируемый объект IA
Первый
регулируемый
участок
Второй
регулируемый
участок
Д1
СУ
Многоимпульсный
регулятор
РУ
Д2
Рис. 1-11. Функциональная структура многоконтурной
системы автоматического регулирования с
многоимпульсным регулятором.
мощью одного многоимпульсного регулятора или
группы регуляторов, включенных по схеме каскадно-свя-
занного регулирования [Л. 30].
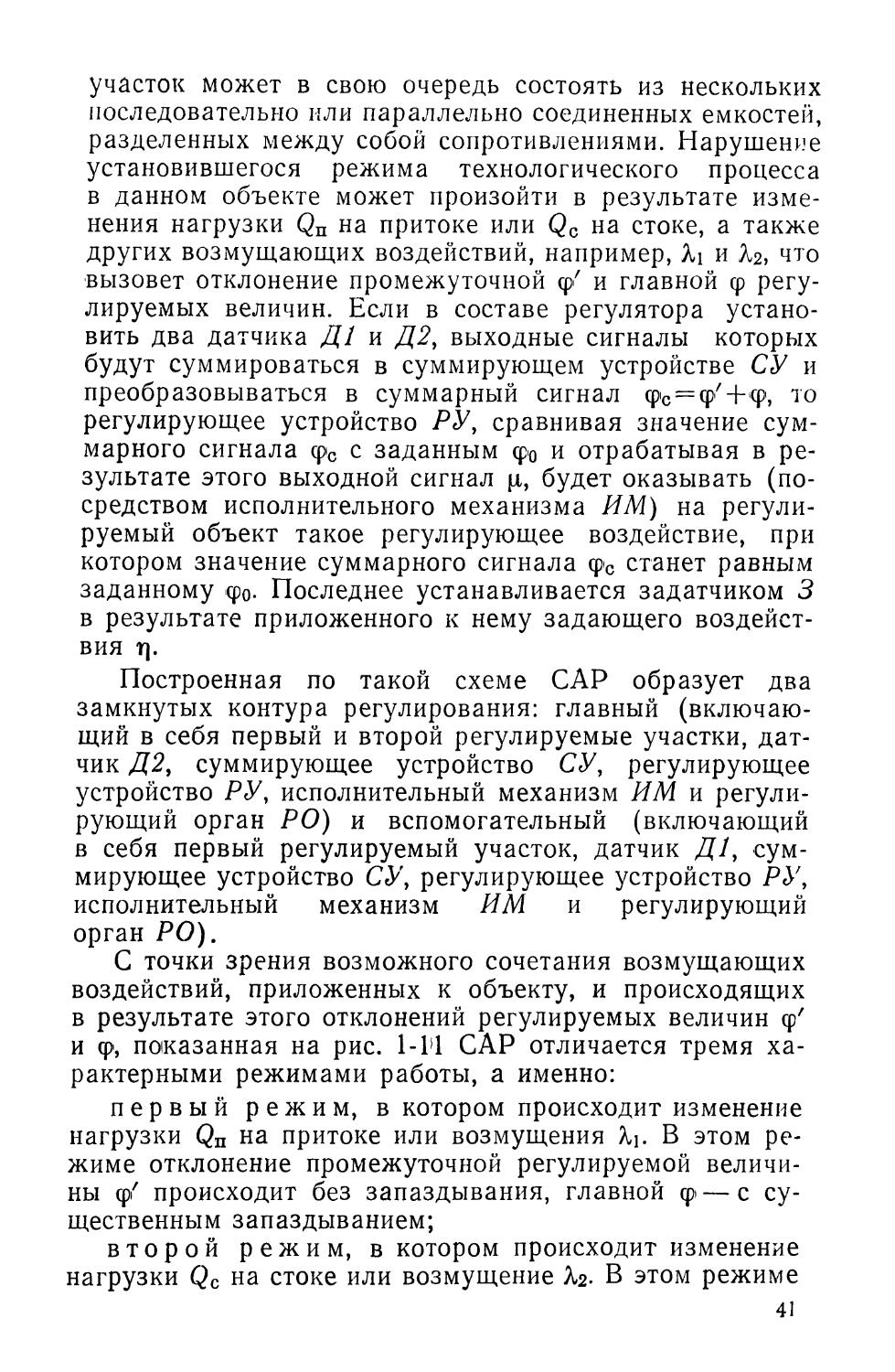
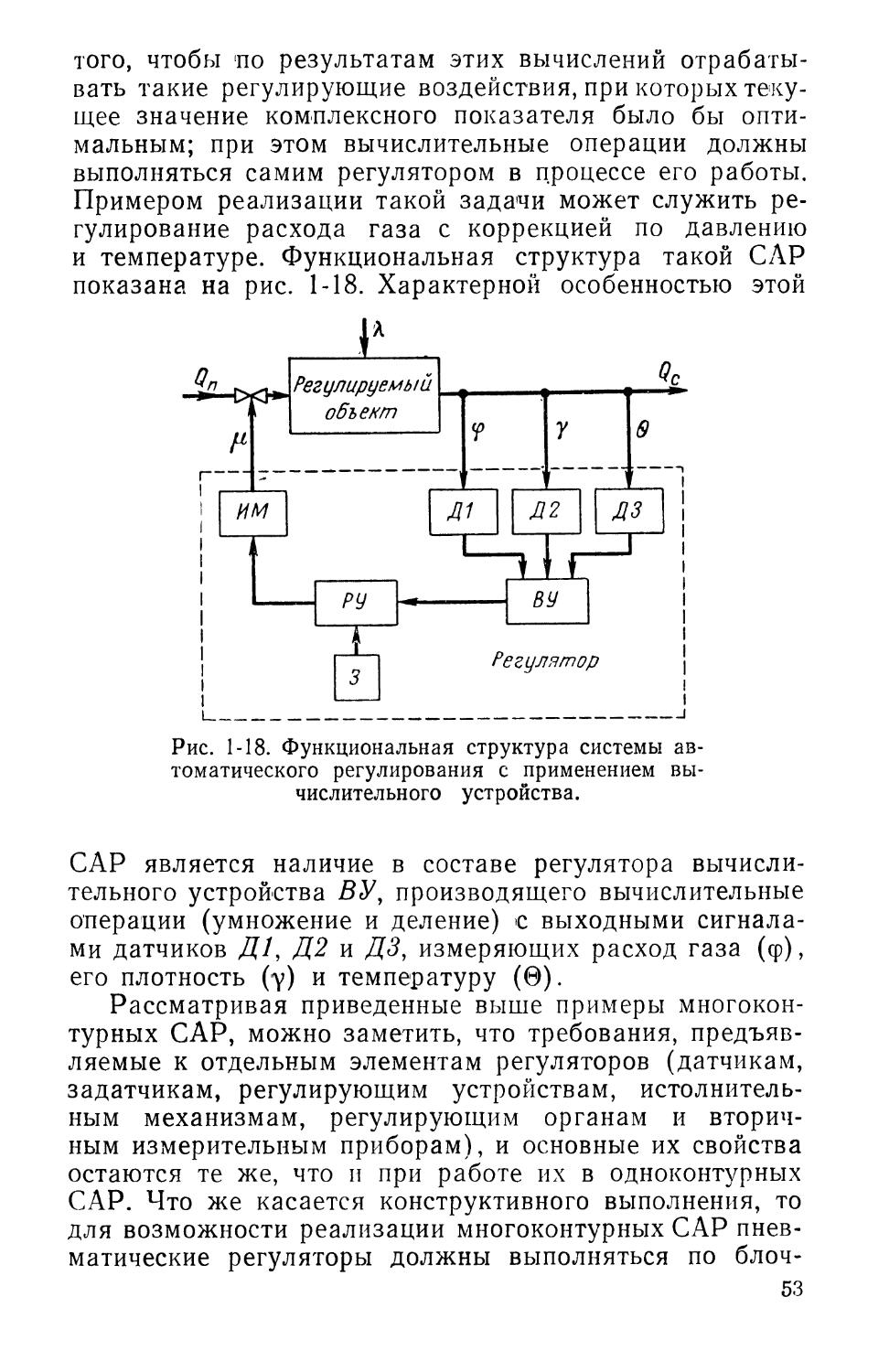
Функциональная структура многоконтурной САР
с многоимпульсным регулятором показана на рис. 1-11.
Регулируемый объект состоит из двух последовательно
соединенных участков, при этом каждый регулируемый
1 Вопросам рассмотрения многоконтурных пневматических САР
посвящена отдельная книга автора [Л. 30]. В данной книге эти
системы рассматриваются лишь с точки зрения дополнительных
требований к пневматическим регуляторам, обусловленных
особенностями их работы в многоконтурных САР. Вопросы выбора типов
регуляторов, а также примеры построения многоконтурных
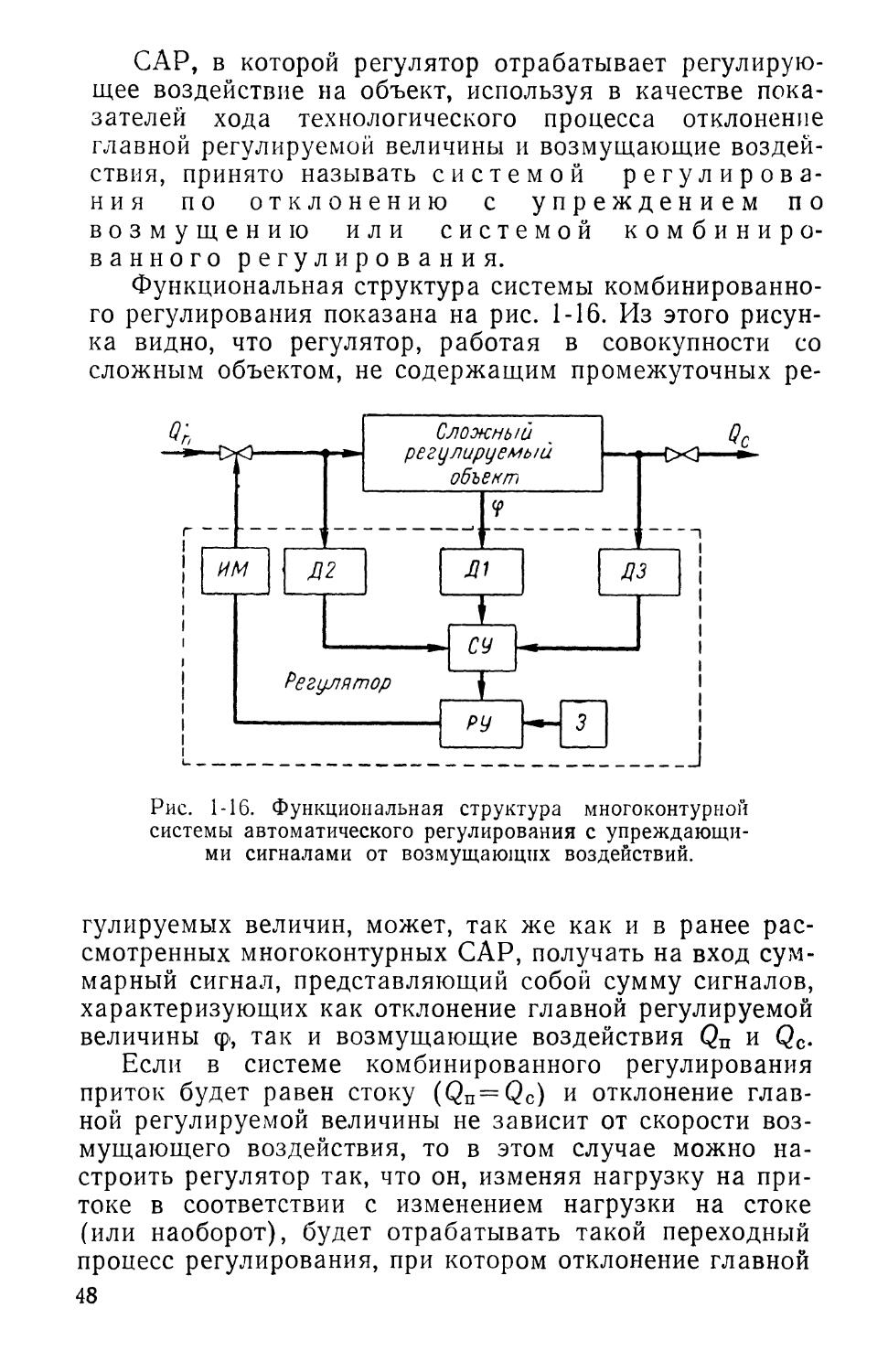
пневматических САР освещены в указанной книге.
40
участок может в свою очередь состоять из нескольких
последовательно или параллельно соединенных емкостей,
разделенных между собой сопротивлениями. Нарушение
установившегося режима технологического процесса
в данном объекте может произойти в результате
изменения нагрузки Qn на притоке или Qc на стоке, а также
других возмущающих воздействий, например, Х\ и Ад, что
вызовет отклонение промежуточной q/ и главной <р
регулируемых величин. Если в составе регулятора
установить два датчика Д1 и Д2, выходные сигналы которых
будут суммироваться в суммирующем устройстве СУ и
преобразовываться в суммарный сигнал <pc=q/+q>, то
регулирующее устройство РУ9 сравнивая значение
суммарного сигнала ф>с с заданным q>0 и отрабатывая в
результате этого выходной сигнал |х, будет оказывать
(посредством исполнительного механизма ИМ) на
регулируемый объект такое регулирующее воздействие, при
котором значение суммарного сигнала <рс станет равным
заданному фо. Последнее устанавливается задатчиком 3
в результате приложенного к нему задающего
воздействия Т).
Построенная по такой схеме САР образует два
замкнутых контура регулирования: главный
(включающий в себя первый и второй регулируемые участки,
датчик Д2, суммирующее устройство СУ, регулирующее
устройство РУ, исполнительный механизм ИМ и
регулирующий орган РО) и вспомогательный (включающий
в себя первый регулируемый участок, датчик Д/,
суммирующее устройство СУ, регулирующее устройство РУ,
исполнительный механизм ИМ и регулирующий
орган РО).
С точки зрения возможного сочетания возмущающих
воздействий, приложенных к объекту, и происходящих
в результате этого отклонений регулируемых величин ф'
и ф, показанная на рис. 1-11 САР отличается тремя
характерными режимами работы, а именно:
первый режим, в котором происходит изменение
нагрузки Qn на притоке или возмущения Х\. В этом
режиме отклонение промежуточной регулируемой
величины ф' происходит без запаздывания, главной ф> — с
существенным запаздыванием;
второй режим, в котором происходит изменение
нагрузки Qc на стоке или возмущение Ад. В этом режиме
41
промежуточная регулируемая величина q/ может не
отклониться, а главная величина q> будет отклоняться без
запаздывания;
третий режим, в котором происходит
неблагоприятное изменение всех возмущающих воздействий
(Qn> Qc, ta). В этом режиме происходит отклонение
как промежуточной, так и главной регулируемых
величин без запаздывания.
Из всех перечисленных режимов первый является
наиболее неблагоприятным, так как здесь отклонение
регулируемой величины ф проявляется с наибольшим
запаздыванием. Использование же упреждающего
сигнала (отклонения промежуточной регулируемой
величины п/) в качестве дополнительного входного сигнала
регулятора устраняет отрицательное влияние
запаздывания и этим способствует повышению качества
автоматического регулирования.
При некоторых неблагоприятных свойствах сложного
объекта использование отклонений промежуточных
величин в качестве дополнительных входных сигналов
регуляторов является необходимым условием не только
высокого качества, но и самой возможности
автоматического регулирования. В этом смысле использование
упреждающих сигналов представляет собой очередной
этап развития пневматических регуляторов,
расширяющий область их применения.
Число упреждающих входных сигналов в
пневматических регуляторах не ограничено. Поэтому показанный
на рис. 1-11 пример использования лишь одного
упреждающего сигнала следует рассматривать как простейший
случай.
Введение в пневматический регулятор упреждающих
сигналов от промежуточных регулируемых величин в
некоторых случаях представляет существенные
трудности и поэтому налагает на многоконтурную САР ряд
ограничивающих условий.
Дело в том, что многоимпульсный регулятор при
работе его по схеме, показанной на рис. 1-11, будет
поддерживать не заданное значение главной регулируемой
величины, как это чаще всего требуется по условиям
ведения технологического процесса, а суммарное
значение главной ф и промежуточной ф^ величин. В силу
этого установившееся значение главной регулируемой вели-
42
чины может быть различным при различных нагрузках
объекта. Указанный недостаток многоимпульсного
регулятора может быть устранен, если в качестве
упреждающего сигнала использовать не величину ф', а ее
производную, т. е. dy'/dt. В этом случае упреждающий сигнал
d<p/dt будет оказывать максимальное воздействие
лишь в начале процесса регулирования; в конце же про-
*1 |Регулируемый объект
Первый
регулируемый
участок
ИМ
Второй
регулируемый
участок
Д1
РУ1
Вспомогательный
регулятор
СУ
31
Д2
I
РУ2
32
ll
si
ll
7)2
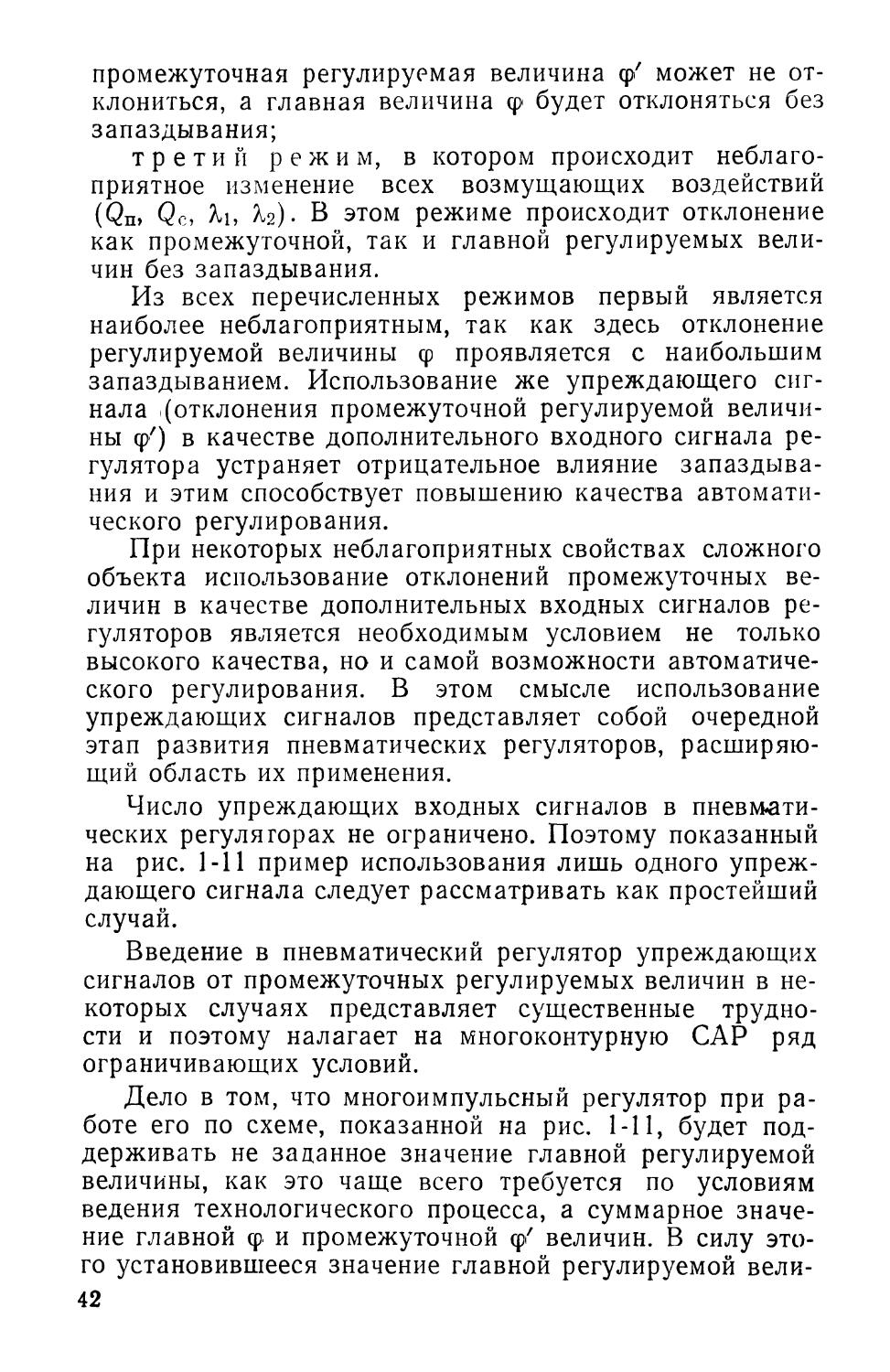
Рис. 1-12. Функциональная структура двухконтурной
системы каскадно-связанного регулирования.
цесса регулирования величина сигнала dqfjdt будет
равна нулю и регулятор установит главную регулируемую
величину <р на заданном значении (<р=фо), независимо
от значения промежуточной величины ф'.
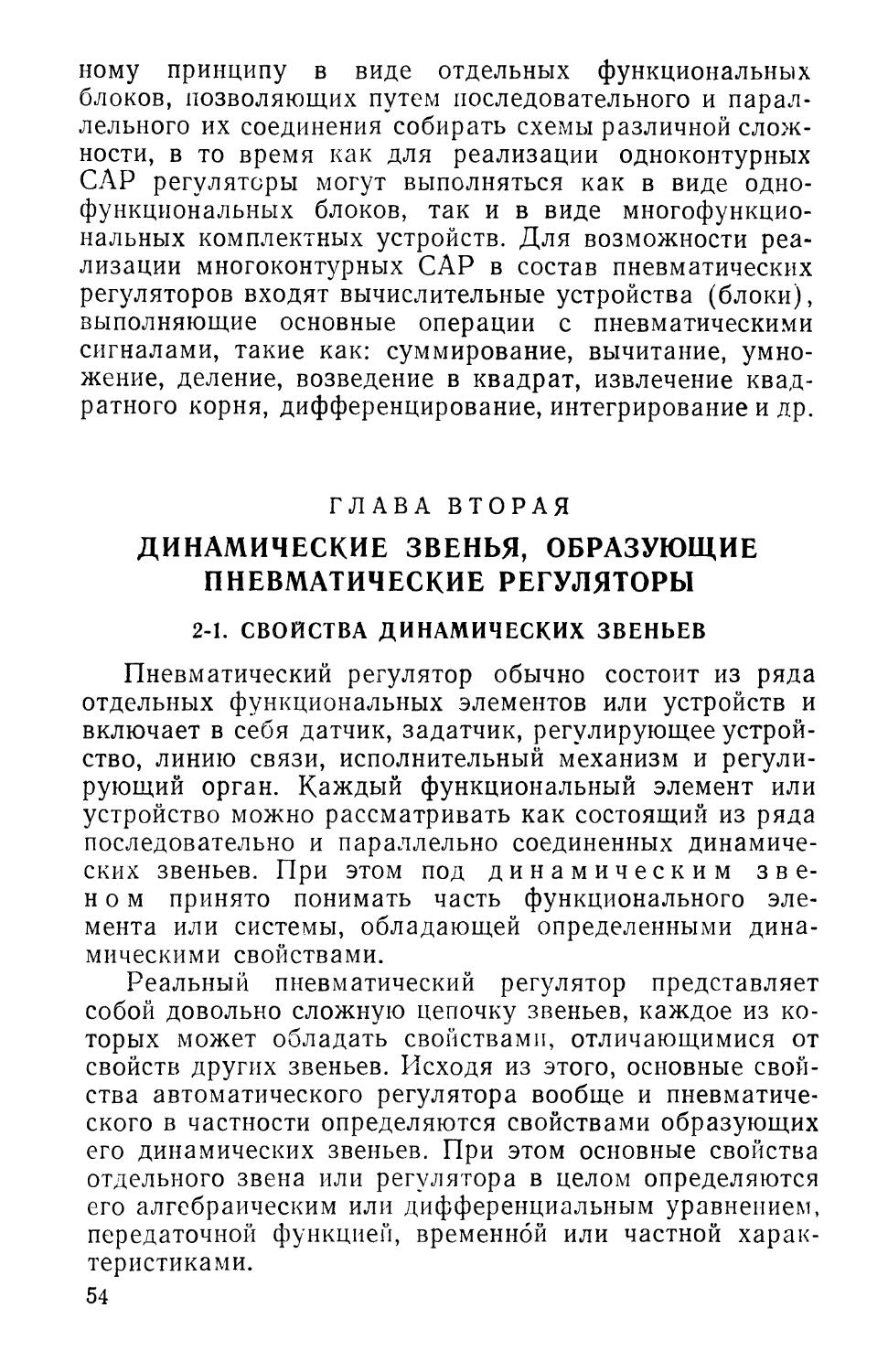
Существенными преимуществами обладает
многоконтурная САР, в которой воздействия на объект от
промежуточных регулируемых величин осуществляются не
через многоимпульсный регулятор, а посредством
вспомогательных регуляторов, работающих совместно с
регулятором главной регулируемой величины по схеме
каскадно-связанного регулирования.
Функциональная структура такой САР показана на
рис. 1-12. Здесь в целях упрощения и удобства
сравнения структура объекта и буквенные обозначения
приняты те же, что и на рис. 1-11.
43
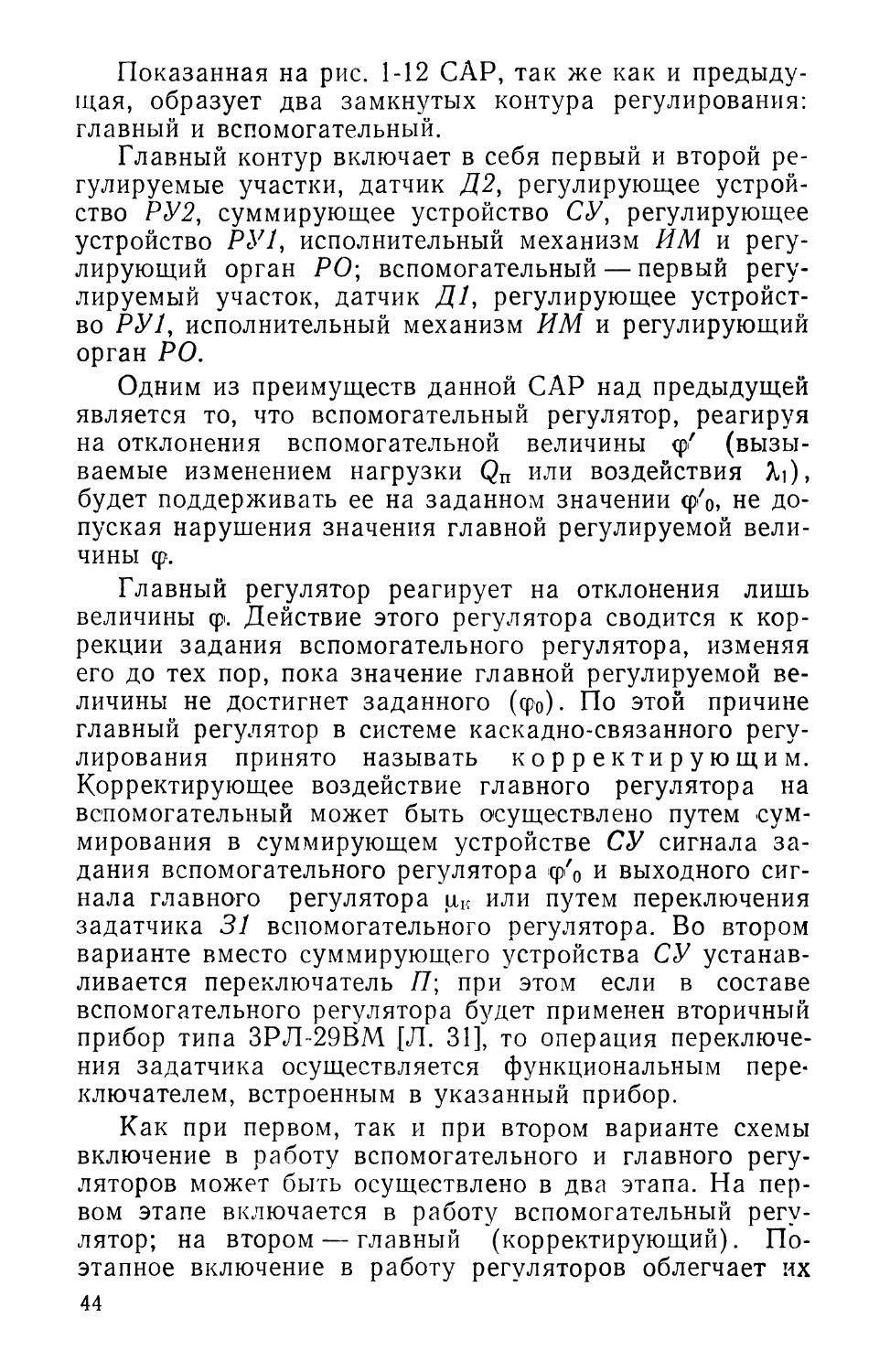
Показанная на рис. 1-12 САР, так же как и
предыдущая, образует два замкнутых контура регулирования:
главный и вспомогательный.
Главный контур включает в себя первый и второй
регулируемые участки, датчик Д2, регулирующее
устройство РУ2, суммирующее устройство СУ, регулирующее
устройство РУ1, исполнительный механизм ИМ и
регулирующий орган РО; вспомогательный — первый
регулируемый участок, датчик Д1, регулирующее
устройство РУ1, исполнительный механизм ИМ и регулирующий
орган РО.
Одним из преимуществ данной САР над предыдущей
является то, что вспомогательный регулятор, реагируя
на отклонения вспомогательной величины <р'
(вызываемые изменением нагрузки Qn или воздействия ЯО,
будет поддерживать ее на заданном значении q/0, не
допуская нарушения значения главной регулируемой
величины ф.
Главный регулятор реагирует на отклонения лишь
величины ф'. Действие этого регулятора сводится к
коррекции задания вспомогательного регулятора, изменяя
его до тех пор, пока значение главной регулируемой
величины не достигнет заданного (ф0). По этой причине
главный регулятор в системе каскадно-связанного
регулирования принято называть корректирующим.
Корректирующее воздействие главного регулятора на
вспомогательный может быть осуществлено путем
суммирования в суммирующем устройстве СУ сигнала
задания вспомогательного регулятора ф'о и выходного
сигнала главного регулятора ик или путем переключения
задатчика 31 вспомогательного регулятора. Во втором
варианте вместо суммирующего устройства СУ
устанавливается переключатель Я; при этом если в составе
вспомогательного регулятора будет применен вторичный
прибор типа ЗРЛ-29ВМ [Л. 31], то операция
переключения задатчика осуществляется функциональным
переключателем, встроенным в указанный прибор.
Как при первом, так и при втором варианте схемы
включение в работу вспомогательного и главного
регуляторов может быть осуществлено в два этапа. На
первом этапе включается в работу вспомогательный
регулятор; на втором — главный (корректирующий).
Поэтапное включение в работу регуляторов облегчает их
44
наладку и эксплуатацию и этим повышает надежность
САР в целом. В этом состоит второе важное
преимущество данной САР над предыдущей.
Как видно из рис. 1-12, динамические свойства
вспомогательного и главного контуров регулирования могут
существенно отличаться друг от друга. Наличие в
системе каскадно-связанного регулирования двух (а
иногда и больше) регуляторов позволяет выбирать законы
регулирования и параметры настройки для каждого
регулятора раздельно: для вспомогательного — в
соответствии с динамическими свойствами вспомогательного
контура, а для главного — в соответствии с
динамическими свойствами главного контура. Благодаря этому
качество регулирования и условия наладки регуляторов
существенно улучшаются по сравнению с многоконтурной
САР с одним многоимпульсным регулятором. В этом
состоит третье, наиболее важное, преимущество данной
САР над предыдущей.
Рассмотренные выше многоконтурные САР
отличаются двумя характерными признаками: 1) регулируемые
объекты имеют лишь один приток (Qn) и один сток
(Qc); 2) в качестве упреждающих сигналов
используются отклонения промежуточных регулируемых величин.
На практике существует много сложных объектов,
имеющих не один, а несколько (два и более) притоков
при одном стоке. Если в таком объекте регулируется
лишь один из притоков, а остальные не регулируются, то
в этом случае схема взаимодействия регулятора с
объектом остается такой же, как на рис. 1-11 или 1-12;
нерегулируемые притоки рассматриваются как
нерегулируемые возмущающие воздействия Я.
Если же по условиям ведения технологического
процесса необходимо одновременно регулировать несколько
(два или более) притоков и между ними в процессе
регулирования должно поддерживаться заданное
соотношение, то в этом случае схема взаимодействия
регулятора (или регуляторов) с объектом существенно
изменяется. Примером такого регулируемого объекта может
служить химический реактор (нейтрализатор), как объект
регулирования соотношения расходов кислоты и щелочи
с коррекцией соотношения по составу выходного
продукта. Структурная схема такого объекта показана на
рис. 1-13. Регулирование технологического процесса
45
в таком объекте может быть осуществлено также по
схеме каскадно-связанного регулирования (с
использованием отклонения промежуточной регулируемой
величины), но в отличие от предыдущего примера, здесь в
качестве вспомогательного регулятора используется регу-
Рис. 1-13. Структурная схема объекта с двумя
регулируемыми притоками и одной главной регулируемой
величиной.
Регулируемый объект
Первый
регулируемый
участок
1
Второй
регулируемый
у частой
BP
ГР
Рис. 1-14. Функциональная структура следящей системы
с автоматической коррекцией соотношения притоков.
лятор соотношения расходов на притоках Qni и Qn2, т. е.
следящая САР. По этой причине систему
каскадно-связанного регулирования, содержащую в качестве
вспомогательного регулятора регулятор соотношения, принято
называть следящей системой с
автоматической коррекцией соотношения.
Функциональная структура такой САР (в упрощенном изображении)
показана на рис. 1-14; здесь BP — вспомогательный
регулятор, ГР — главный (корректирующий) регулятор;
ИМ — исполнительный механизм; РО — регулирующий
орган. Характерные особенности этой САР и условия
46
Пароперегреватель
Водяной
экономайзер
работы в ней пневматических регуляторов те же, что и
в предыдущем примере.
При регулировании технологических процессов
в сложных объектах, кроме отклонений промежуточных
регулируемых величин в качестве дополнительных
(упреждающих) сигналов, подаваемых к регуляторам,
могут быть использованы также и сами возмущающие
воздействия или их
производные. Более то- _?с Пар
го, в некоторых
сложных объектах
промежуточные
регулируемые величины могут
вовсе отсутствовать или
они по каким-либо
причинам не могут быть
измерены. В этих
случаях в качестве
упреждающих сигналов
могут быть использованы
лишь сами
возмущающие воздействия.
Примером сложного
регулируемого объекта, в
котором отсутствуют промежуточные регулируемые
величины, является барабан мощного парового котла при
регулировании в нем уровня воды (рис. 1-15).
Сложность регулирования уровня воды в барабане
парового котла обусловливается тем, что после
возникшего возмущающего воздействия (изменения расхода
воды или пара) главная регулируемая величина (уровень
воды) в начале отклоняется в обратном направлении,
и лишь спустя некоторый промежуток времени уровень
воды начинает отклоняться в нужном направлении, при
этом величина отклонения уровня в обратном
направлении тем больше, чем больше величина и скорость
возмущающего воздействия. В связи с этим уровень воды
в барабане мощного парового котла обычно
регулируется регулятором, использующим на входе как сигнал
отклонения уровня, так и сигналы изменения расходов
воды (расход на притоке Qn) и пара (расход на стоке
Qc). Последние в данном случае являются
упреждающими сигналами от возмущающих воздействий.
вода
Рис. 1-15. Барабан парового котла
как сложный объект регулирования
уровня воды.
47
САР, в которой регулятор отрабатывает
регулирующее воздействие на объект, используя в качестве
показателей хода технологического процесса отклонение
главной регулируемой величины и возмущающие
воздействия, принято называть системой
регулирования по отклонению с упреждением по
возмущению или системой
комбинированного регулирования.
Функциональная структура системы
комбинированного регулирования показана на рис. 1-16. Из этого
рисунка видно, что регулятор, работая в совокупности со
сложным объектом, не содержащим промежуточных ре-
им
Сложи ьш
регулируемый
объект
Д2
М1
ДЗ
Регулятор
СУ
РУ
Рис. 1-16. Функциональная структура многоконтурной
системы автоматического регулирования с
упреждающими сигналами от возмущающих воздействий.
гулируемых величин, может, так же как и в ранее
рассмотренных многоконтурных САР, получать на вход
суммарный сигнал, представляющий собой сумму сигналов,
характеризующих как отклонение главной регулируемой
величины ф, так и возмущающие воздействия Qn и Qc.
Если в системе комбинированного регулирования
приток будет равен стоку (Qn=Qc) и отклонение
главной регулируемой величины не зависит от скорости
возмущающего воздействия, то в этом случае можно
настроить регулятор так, что он, изменяя нагрузку на
притоке в соответствии с изменением нагрузки на стоке
(или наоборот), будет отрабатывать такой переходный
процесс регулирования, при котором отклонение главной
48
величины ф может отсутствовать. Условия, при которых
возмущающее воздействие на стоке компенсируется
регулирующим воздействием на притоке (или наоборот),
в результате чего значение главной регулируемой
величины как в установившемся, так и в переходном режиме
не зависит от величины и характера возмущающего
воздействия, принято называть инвариантностью.
В зависимости от свойств объекта, характера и
величины возмущающих воздействий инвариантность может
быть обеспечена полная или частичная.
Обеспечение условий полной инвариантности главной
регулируемой величины в сложном объекте
представляет очень трудную задачу. Дело в том, что многие
сложные регулируемые объекты могут иметь несколько
притоков и несколько стоков. Часть притоков или
стоков, а иногда и весь приток или сток по каким-либо
причинам не могут быть измерены. В таких случаях при
проектировании систем комбинированного
регулирования часто приходится ограничиваться обеспечением
условий частичной инвариантности, так как условия
полной инвариантности бывают невыполнимыми или их
выполнение связано со значительным усложнением САР
и становится нецелесообразным.
Возможность обеспечения условий полной или
частичной инвариантности является важным
преимуществом систем комбинированного регулирования над
системами регулирования по отклонению, благодаря чему
эти системы получают все большее распространение
в различных отраслях промышленности.
Наиболее сложными с точки зрения автоматического
регулирования являются объекты, технологические
процессы которых характеризуются несколькими
зависимыми друг от друга выходными величинами, находящимися
между собой в такой зависимости, что отклонение одной
из них (вызванное каким-либо возмущающим
воздействием) вызывает отклонение остальных. К числу таких
объектов относятся технологические установки,
состоящие из нескольких отдельных аппаратов и машин,
участвующих в общем непрерывном технологическом
процессе. Сложность регулирования технологических
процессов в таких объектах обусловливается требованиями,
чтобы отклонение одной регулируемой величины не
вызывало отклонений остальных. В таких объектах регу-
4—795 49
лирование обычно осуществляется несколькими
регуляторами, взаимодействующими между собой вне объекта
так, что отклонение одной из регулируемых величин не
вызывает в процессе регулирования отклонений
остальных величин. Таким образом, объект с несколькими
взаимозависимыми регулируемыми величинами
искусственно превращается в объект с независимыми
(автономными) регулируемыми величинами. САР,
обеспечивающая в сложном объекте условия независимости
(автономности) нескольких взаимозависимых
регулируемых величин, принято называть системой автономно-
связанного регулирования. Функциональная
структура системы автономно-связанного регулирования
показана на рис. 1-17. Здесь в упрощенном изображении
представлен сложный регулируемый объект с двумя
притоками Qni и Qn2, двумя стоками Qci и Q.C2 и
возмущающим воздействием Л. Ход технологического процесса
в объекте характеризуется отклонением регулируемых
величин ф! и ф^, которые поддерживаются на заданных
значениях двумя регуляторами: регулятором 1-й
регулируемой величины, состоящим из датчика Д1,
задатчика 31, регулирующего устройства РУ1,
исполнительного механизма ИМ1 и регулирующего органа РО/,
и регулятором 2-й регулируемой величины, состоящим
из датчика Д2, задатчика 32, суммирующего
устройства СУ, устройства динамической связи УДС,
регулирующего устройства РУ2, исполнительного
механизма ИМ2 и регулирующего органа Р02.
Как показано на рис. 1-17, изменение притока Qu\
вызывает отклонение как первой (ф^), так и второй (ф^)
регулируемых величин. Изменение притока Qn2
вызывает отклонение лишь второй регулируемой величины.
Таким образом, в данном примере имеет место
зависимость регулируемой величины ф2 от регулируемой
величины фь В связи с этим рассматриваемая САР построена
так, что регулятор первой регулируемой величины,
реагируя на ее отклонения и отрабатывая воздействие |хь
одновременно подает управляющий сигнал (на схеме
этот сигнал показан пунктирной линией с точкой) к
регулирующему устройству регулятора второй
регулируемой величины, который вызывает срабатывание
исполнительного механизма ИМ2 и перемещение
регулирующего органа Р02 в такое положение, при котором
50
величина q>2 не будет отклоняться от своего заданного
значения.
Связь регулятора первой регулируемой величины
с регулятором второй регулируемой величины осуще-
\Т)1
гг
ИМ1
Регулятор
первой
регулируемой величины
Р01
Р02
fl2
Сложный
рРгулируемъ ш
объект
ИМ2
УДС h
РУ2
СУ
т 1
РУ1
Д1
_j
I
32
Д2
ЧС2
•т,2
i Регулятор второй регулируемой величинь^
Рис. 1-17. Функциональная структура системы
автономно-связанного регулирования.
ствляется посредством устройства динамической связи
УДС и суммирующего устройства СУ. Посредством этой
связи происходит воздействие только в переходных
режимах. В установившемся режиме это воздействие
отсутствует, так как в противном случае это могло бы
привести к остаточному отклонению зависимой
регулируемой величины.
Динамические связи между регуляторами различных
регулируемых величин могут быть как односторонними,
так и двусторонними. В рассматриваемом примере
динамическая связь осуществлена односторонняя, так как
здесь имеет место зависимость лишь второй
регулируемой величины от первой.
4* 51
В зависимости от свойств объекта и конструктивных
его особенностей автономность может быть обеспечена
полная или частичная.
Обеспечение условий полной автономности
нескольких взаимозависимых регулируемых величин в сложном
объекте представляет очень трудную задачу. В связи
с этим при проектировании систем регулирования часто
приходится ограничиваться обеспечением условий
частичной автономности. По мере увеличения числа
взаимозависимых выходных регулируемых величин системы
автономно-связанного регулирования значительно
усложняются, так как при этом увеличивается число
динамических связей между регуляторами. Переход на
системы автономно-связанного регулирования целесообразен
лишь при решении весьма сложных технических задач,
где устойчивость САР и требуемое качество
регулирования могут быть обеспечены лишь при условии
использования динамических связей между регуляторами
различных взаимозависимых регулируемых величин вне
объекта.
Приведенные выше примеры многоконтурных САР
показывают, как за счет усложнения схем
взаимодействия регуляторов с объектами расширяются
функциональные возможности пневматических регуляторов и
этим расширяются области их распространения. Эти
усложнения, как указывалось выше, являются
следствием сложности самих объектов и в этом смысле
логически оправданы. Необходимость усложнения схем
взаимодействия регуляторов с объектами может
возникать не только по 'причине усложнения структуры
объекта, но и по причине более высоких требований
к качеству автоматического регулирования.
При автоматизации технологических процессов часто
встречаются задачи, когда требуется 'поддерживать
с высокой точностью оптимальное значение не одной
какой-либо регулируемой величины, а комплексного
показателя, например, коэффициента полезного действия
агрегата или установки, удельного расхода топлива на
единицу мощности и т. д., определяемого текущим
значением ряда параметров. Сложность автоматического
регулирования в таких случаях обусловливается
необходимостью предварительного выполнения вычислительных
операций с несколькими переменными величинами для
52
того, чтобы по результатам этих вычислений
отрабатывать такие регулирующие воздействия, при которых
текущее значение комплексного показателя было бы
оптимальным; при этом вычислительные операции должны
выполняться самим регулятором в цроцессе его работы.
Примером реализации такой задачи может служить
регулирование расхода газа с коррекцией по давлению
и температуре. Функциональная структура такой САР
показана на рис. 1-18. Характерной особенностью этой
Регулируемый
объект
ИМ
Д1 \\ Д2 \\ ДЗ
РУ
ВУ
Регулятор
Рис. 1-18. Функциональная структура системы
автоматического регулирования с применением
вычислительного устройства.
САР является наличие в составе регулятора
вычислительного устройства ВУ, производящего вычислительные
операции (умножение и деление) с выходными
сигналами датчиков Д1, Д2 и ДЗ, измеряющих расход газа (ср),
его плотность (у) и температуру (0).
Рассматривая приведенные выше примеры
многоконтурных САР, можно заметить, что требования,
предъявляемые к отдельным элементам регуляторов (датчикам,
задатчикам, регулирующим устройствам, истолнитель-
ным механизмам, регулирующим органам и
вторичным измерительным приборам), и основные их свойства
остаются те же, что и при работе их в одноконтурных
САР. Что же касается конструктивного выполнения, то
для возможности реализации многоконтурных САР
пневматические регуляторы должны выполняться по блоч-
53
ному принципу в виде отдельных функциональных
блоков, позволяющих путем последовательного и
параллельного их соединения собирать схемы различной
сложности, в то время как для реализации одноконтурных
САР регуляторы могут выполняться как в виде одно-
функциональных блоков, так и в виде
многофункциональных комплектных устройств. Для возможности
реализации многоконтурных САР в состав пневматических
регуляторов входят вычислительные устройства (блоки),
выполняющие основные операции с пневматическими
сигналами, такие как: суммирование, вычитание,
умножение, деление, возведение в квадрат, извлечение
квадратного корня, дифференцирование, интегрирование и др.
ГЛАВА ВТОРАЯ
ДИНАМИЧЕСКИЕ ЗВЕНЬЯ, ОБРАЗУЮЩИЕ
ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
2-1. СВОЙСТВА ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Пневматический регулятор обычно состоит из ряда
отдельных функциональных элементов или устройств и
включает в себя датчик, задатчик, регулирующее
устройство, линию связи, исполнительный механизм и
регулирующий орган. Каждый функциональный элемент или
устройство можно рассматривать как состоящий из ряда
последовательно и параллельно соединенных
динамических звеньев. При этом под динамическим
звеном принято понимать часть функционального
элемента или системы, обладающей определенными
динамическими свойствами.
Реальный пневматический регулятор представляет
собой довольно сложную цепочку звеньев, каждое из
которых может обладать свойствами, отличающимися от
свойств других звеньев. Исходя из этого, основные
свойства автоматического регулятора вообще и
пневматического в частности определяются свойствами образующих
его динамических звеньев. При этом основные свойства
отдельного звена или регулятора в целом определяются
его алгебраическим или дифференциальным уравнением,
передаточной функцией, временной или частной
характеристиками.
54
Всякое динамическое звено характеризуется законом
преобразования в нем входной величины в выходную,
т. е. уравнением, связывающим его входную и выходную
величины. Последовательное и параллельное соединения
динамических звеньев образуют динамическую
структуру. Графически структура изображается структурной
схемой, на которой динамические звенья обычно
изображаются в виде прямоугольников с указанием стрелками
и буквами их входных и выходных величин. Схема
простейшей динамической структуры, состоящей из двух
последовательно соединенных звеньев, показана на
рис. 2-1, где х, у, z — входные и выходные величины.
X
Первое
У
Второе
звено
звено
Рис. 2-1. Структурная схема цепочки из
двух последовательно соединенных
динамических звеньев.
Характерной особенностью взаимодействия между
входной и выходной величинами динамического звена
является однонаправленность в передаче воздействия,
т. е. входная величина влияет на выходную, а обратное
воздействие выходной величины на входную отсутствует.
Приводимые ниже выводы относятся к так
называемым линейным звеньям и линейным цепочкам,
составляющим основу пневматических регуляторов. При этом
цепочку звеньев с одним входом и одним выходом вне
зависимости от конструкции звеньев, их принципов
действия и физических процессов в них принято называть
линейной, если связь между входной величиной х и
выходной у описывается линейным дифференциальным
уравнением, т. е.
dny . dn~1y i d-У i
an dtn -1 dtn'1 "I""* r^i ~~м~Т~аоУ —
и dmx I * dm~lx . I i dx I i /n 1 \
=b™ -5^+^-1 dt^r+ • • • +b> -3T+box- (2"la)
Иногда принимают более общее определение,
называя цепочку динамических звеньев линейной, если для
нее справедлив принцип суперпозиции [Л. 19], т. е. если
55
реакция этой цепочки на входное воздействие ах' + Ьх"
есть ау' + Ьу", где у' и у" — реакции на хг и х"
соответственно. Так, например, «запаздывающее» звено, для
которого y(t)=x(t—т), в этом случае также является
линейным, хотя и не может быть описано уравнением
вида (2-1а). Заметим, что реальное звено или цепочка
звеньев может описываться уравнением вида (2-1 а)
лишь приближенно и в ограниченном диапазоне
изменений входной и выходной величин. Однако, несмотря
на это, реальные звенья, составляющие пневматические
регуляторы, в дальнейшем в целях упрощения выводов
будем считать линейными при любых диапазонах
изменений входных и выходных величин.
Уравнение (2-1а) может быть записано также в
операторной форме, т. е.
(апрп + ап-1рп-1 + . • . + ахр + а0)у=
(2-16)
= (bmpm+bm^p^ + .. . + Ьгр + Ь0)х,
где p = d/dt— оператор дифференцирования.
Записывая уравнения звеньев или цепочек звеньев
в операторной форме, используются символы: p = d/dt;
p2^=d2/dt2;...; pn=dnjdtn; х\р= J х dt\ х/р2 =^dt^xdt,
и далее символ р рассматривается как величина, на
которую распространяются правила алгебраических
действий.
Исходя из дифференциального уравнения линейного
звена или цепочки звеньев, можно определить его
передаточную функцию, переходную функцию (временную
характеристику), частотные характеристики. При этом
здесь ограничимся уравнениями с постоянными
коэффициентами.
Для примера рассмотрим дифференциальное
уравнение 2-го порядка следующего вида:
В операторной форме записи уравнение (2-2а) будет
иметь вид:
(а2р2 + щр -\~а0)у = Ьщх. (2-26)
56
Разделив уравнение (2-26) на а0 и обозначив а2/а0 =
=^Т\\ ах\а^ = Тх\ bja^ — k, дифференциальное уравнение
звена (2-26) примет вид:
(T22p> + TlP+l)y = kx. (2-2в)
В полученном уравнении коэффициент
пропорциональности k называется коэффициентом усиления
звена и показывает, во сколько раз отклонение
выходной величины у в установившемся режиме превышает
обусловившее его отклонение входной величины х.
Действительно, в установившемся режиме у=у0 —
= const; д; = .х;0 = const; г/0/7 = 0; у0р2 = 0; тогда
уравнение (2-2в) примет вид:
У. = кх„ (2-За)
откуда
k=^. (2-36)
Уравнение (2-2в) может быть формально представлено
также в виде:
У=—9 х. (2-4)
Приняв обозначения
W(P)= У2 * _^ > (2-5)
Цр2 + Tip + \
получим:
y=W(p)x, (2-6)
где функция W(p) называется передаточной
функцией звена.
Таким образом, если коэффициент усиления звена
устанавливает зависимость между входной и выходной
величинами звена в установившемся режиме, то
передаточная функция отражает связь между этими
величинами в более общем случае, в том числе для
неустановившихся (переходных) режимов. В этом смысле
передаточная функция является важнейшей характеристикой
звена. Как будет показано дальше, зная передаточные
функции, можно определить и проанализировать дина-
57
мические свойства сколько угодно сложной цепочки
звеньев.
Кроме передаточной функции, динамические свойства
звена (или цепочки звеньев) могут быть представлены
также и графически — кривой изменения выходной
величины во времени. При этом необходимо учитывать, что
изменение выходной величины зависит не только от
свойств звена, но также и от характера изменения
входной величины. Поэтому для оценки динамических
свойств звена или цепочки звеньев принято
рассматривать изменения выходной величины при совершенно
определенном изменении входной, а именно, при
мгновенном однократном ступенчатом воздействии. Кривая
изменения выходной величины при таком изменении
входной называется кривой разгона.
Для всех звеньев, свойства которых описываются
линейными дифференциальными уравнениями, отклонение
выходной величины пропорционально входному
воздействию (изменению входной величины). Поэтому,
располагая кривой разгона, соответствующей одному какому-
либо ступенчатому воздействию, можно найти для этого
же звена или цепочки звеньев характеристики,
соответствующие другим по величине ступенчатым
воздействиям.
Кривую разгона, соответствующую максимальному
ступенчатому воздействию (единичному в безразмерных
величинах [Л. 14, 29]), принято называть временной
характеристикой или переходной
функцией. Временную характеристику принято обозначать
также символом h{t). Примерный вид временной
характеристики звена, описываемого уравнениями (2-2),
показан на рис. 2-2.
Наряду с временными характеристиками для оценки
динамических свойств звеньев или цепочек звеньев и
исследования процессов регулирования широкое
применение находят частотные характеристики. В отличие от
рассмотренного выше однократного ступенчатого
воздействия для построения частотных характеристик на
входе звена создаются периодические воздействия.
Частотные характеристики устанавливают
зависимость колебаний выходной величины от заданного
синусоидального колебательного воздействия на входе
звена.
58
Пусть входная величина х непрерывно изменяется по
синусоидальному закону, т. е.
x=Asinco/, (2-7)
где А — амплитуда колебаний входной величины;
со — угловая частота колебаний;
i — время.
Спустя некоторое время после начала колебательного
воздействия на выходе звена или цепочки звеньев тоже
установятся синусоидальные вынужденные колебания
выходной величины у с той же частотой со, но с другой
t
\У
а)
-— г ~~—
t
6)
Рис. 2-2. Временная
характеристика динамического звена.
а — входное воздействие; б —
изменение выходной величины.
Рис. 2-3. Графики
синусоидальных воздействий на
динамическое звено.
а — входное воздействие; б —
изменение выходной величины.
амплитудой а и отстающие по фазе от колебаний
входной величины (рис. 2-3), т. е.
y=asin(coi—f}), (2-8)
где а — амплитуда колебаний выходной величины;
f>—отставание по фазе (f)<0).
Отношение амплитуд а/А и отставание по фазе f>
будут меняться с изменением частоты колебаний со.
Величина отношения амплитуд и сдвига фазы при разных
частотах зависят от динамических свойств звена или
цепочки звеньев и характеризуют эти свойства.
Зависимость отношения амплитуд а/А от частоты со
(при изменениях частоты от со = 0 до со = оо) называется
59
амплитудно-частотной характеристикой
(АЧХ) и записывается формулой
А (*>)=■!-. (2-9)
Зависимость сдвига фазы f} (разности между фазами
колебаний на входе f>BX и выходе #Вых) от частоты со
(при тех же изменениях частоты) называется ф а з о-ч а-
стотной характеристикой (ФЧХ) и
записывается формулой
*(©)=*вх—«вых. (2-Ю)
В некоторых случаях бывает удобно пользоваться
обратным отношением амплитуд, т. е. А/а. Тогда частот-
Обратная
0,03 0,0k сен^
0,01 0,02 0,03 ОМ 1/сен
а)
Рис. 2-4. Примерный вид частотных характеристик динамического
звена.
а — амплитудно-частотные характеристики; б—фазо-частотная характеристика.
ная характеристика, устанавливающая зависимость
обратного отношения амплитуд (Л/а) от частоты со (при
тех же изменениях частоты), называется обратной
амплитудн о-ч астотной характеристикой.
Примерный вид частотных характеристик звена,
описываемого уравнениями (2-2), показан на рис. 2-4.
Помимо амплитудно- и фазо-частотных
характеристик для оценки динамических свойств звена или
цепочки звеньев применяется амплитудно-фазовая
характеристика (АФХ), выражающая одновременно
изменения как амплитуды, так и фазы выходных
колебаний. Для построения АФХ следует законы
синусоидальных колебаний входной и выходной величин
выразить в векторной форме с помощью комплексных чисел.
Известно, что комплексным числом
называется выражение вида m + m, где т — вещественная часть
60
комплексного числа; п — мнимая часть комплексного
числа; символом / условно обозначают +у —1. Хотя
символ i = У —1 не имеет физического смысла, т. е.
является понятием чисто условным, а само комплексное
число — математическая абстракция, введение
комплексных чисел позволяет создать полное представление о
динамических свойствах звена или цепочки звеньев. Так,
например, доказано [Л. 21, 26], что наличие
комплексных корней у характеристического уравнения является
признаком колебательного характера переходного
процесса в цепочке динамических звеньев.
Использование комплексных чисел позволяет
исследовать устойчивость и качество переходных процессов
в системах регулирования, а также определять
оптимальные настройки регуляторов по заданным условиям
к качеству автоматического регулирования [Л. 32, 35].
Всякое комплексное число может быть представлено
в виде вектора R на координатной плоскости, ось М
которой является осью вещественных чисел, а ось iN—
осью мнимых чисел (рис. 2-5).
Пользуясь векторной формой изображения
комплексного числа, можно записать, что
R — m-\-in\
ь т
+ п \ (2-11)'
a = arctg—; [
m — \R\ cos а:
n = \R\sm<x;
in = i\R\sina.
Отсюда
m + in=\R\ (cos a+isin a). (2-12)
В уравнениях (2-11) и (2-12) длина вектора \R\
называется модулем, а угол а между направлением
вектора и вещественной положительной полуосью —
аргументом или фазой комплексного числа.
Согласно формуле Эйлера [Л. 14, 26, 32]
сos a -j- i sin a — eia. (2-13)
61
На этом основании комплексное число может быть
также записано в виде показателей функции с мнимым
показателем степени, т. е.
m + in = \R\eia, (2-14)
или
, / arctg —
m + in^/m' + n'e т . (2-15)
Закон синусоидальных колебаний можно представить
в виде закона изменения проекции вектора на мнимую
ось при его вращении против
часовой стрелки вокруг начала
координат с угловой скоростью со.
[Л. 14].
Пользуясь векторной формой
для выражения синусоидальных
колебаний, можно законы изменения
Рис. 2-5. Векторная входной и выходной величин звена
форма изображения
комплексного числа
на плоскости.
или цепочки звеньев [см. уравнения (2-7) и (2-8)]
представить в виде показательной функции с мнимым
показателем степени, а именно [Л. 14]:
х = Аем\ (2-16)
]fe=aeHmt+b) = aeimtel*. (2-17)
Зависимость между установившимися вынужденными
колебаниями на выходе и колебаниями на входе в
звено или цепочку звеньев для каждой частоты со можно
характеризовать отношением векторов у и х, которое
представляет собой также вектор, обозначаемый:
ВГ(|6)) = Х=-^- е1*. (2-18)
При изменении частоты от со = 0 до со=оо вектор
будет изменяться и по величине и по направлению, а конец
его опишет кривую (годограф вектора), которую
называют амплитудн о-ф азовой
характеристикой (АФХ).
62
Вектор W(m) может быть записан также в виде
уравнения
1?{1<*) = А{ь>)е**{"\ (2-19)
где Л (ш.)—АЧХ, т. е. зависимость модуля вектора
W(m) от частоты;
0(<d)—ФЧХ, т. е. зависимость аргумента вектора
W(ico) от той же частоты.
Вектор W(ico) представляет собой также комплексное
число. Поэтому в соответствии с формулами (2-11) он
может быть представлен в виде уравнения
W (ico) =М (со)+iN (со), (2-20)
где М(со) — вещественная частотная
характеристика (вещественная часть АФХ).
т. е. зависимость действительной
составляющей вектора W(ico) от частоты,
характеризующая изменение проекции этого вектора
на вещественную ось М при изменении со;
N(co) — мнимая частотная
характеристика (мнимая часть АФХ), т. е. зависимость
мнимой составляющей вектора W(ico) от
частоты, характеризующая изменение
проекции этого вектора на мнимую ось iN при
изменении о.
Таким образом, уравнения (2-19) и (2-20)
показывают связь между амплитудно-частотными, фазо-частот-
ными и амплитудно-фазовыми характеристиками и
в этом смысле имеют большое практическое значение
при построении АФХ по АЧХ и ФЧХ.
При построении АФХ угол f> откладывают от
горизонтальной оси по часовой стрелке или против в
зависимости от знака отставания. Если вынужденные
колебания на выходе отстают по фазе от колебаний на входе
(f><0, что чаще всего встречается в пневматических
регуляторах), угол f) откладывают по часовой стрелке,
а при опережении по фазе (f»0)—соответственно
в обратном направлении. Примерный вид АФХ звена,
описываемого уравнениями (2-2), показан на рис. 2-6.
Наряду с основной АФХ применяется также
обратная. В этом случае модулем вектора служит обратное
отношение амплитуд, т. е. А/а, а аргумент откладывается
в противоположную сторону от горизонтальной оси. За-
63
частую пользование обратными АФХ оказывается
удобнее, чем основными-
Между АФХ W(m) и передаточной функцией W(p)
существует прямая связь. Для установления этой связи
ьо
2,0 М
1 / 1
%=0,05yJ
1
J Jiu^O
q=-32°t5' J
и>3=0,02
"3>
w2=Q,01
Рис. 2-6. Примерный вид амплитудно-фазовой
характеристики динамического звена.
используем дифференциальное уравнение звена (2-2в),
записав его в обычной форме, т. е.
г2 d2y
2 dt*
\-Tx% + y = kx.
(2-21)
Подставим в уравнение (2-21) значения х и у из
уравнений (2-16) и (2-17), а величины dyldt и d2y/dt2
найдем, продифференцировав уравнение (2-17), т. е.
%=ae»(U>)eM;
%=ае1*{ш)>ем;
и записывая его снова аналогично уравнению (2-2в),
получим:
(2-22)
[Т\ (шу + 7\ (/о) + 1] ае1Ь = kA.
Записывая уравнение (2-22) с учетом уравнения (2-18),
получим:
k (2-23)
л е -
64
Сравнивая уравнение (2-23) для W(m) с уравнением
(2-5) для передаточной функции W(p), видно, что
вектор W(i(o), характеризующий связь колебаний на входе
и выходе звена, тождественно совпадает с передаточной
функцией W(p) этого же звена, если символ
оператора (р) в этой функции заменить произведением (ш).
Этот вывод имеет большое практическое значение, так
как при необходимости перейти от передаточной
функции звена или цепочки звеньев к АФХ, или наоборот,
требуется лишь произвести замену в соответствующих
уравнениях символа оператора (р) на произведение (ш),
или наоборот.
Как отмечалось выше, пневматические регуляторы
представляют собой цепочки последовательно и
параллельно соединенных динамических звеньев,
взаимодействующих между собой при работе регулятора в САР.
Динамические звенья разделяются на простые
(элементарные) и сложные. При этом под простым
понимается динамическое звено, содержащее лишь одну
емкость; под сложным — цепочка последовательно или
параллельно соединенных простых звеньев.
К числу простых звеньев относятся: усилительное
(безынерционное, или звено нулевого порядка),
апериодическое первого порядка, интегрирующее,
дифференцирующее, звено чистого запаздывания.
К числу сложных звеньев обычно относятся:
апериодическое звено второго и более высокого порядка, звено
с распределенной по длине емкостью, колебательное,
пропорционально-дифференцирующее, пропорционально-
интегрирующее и более сложные.
Таким образом, динамические свойства любого
сложного регулятора могут быть представлены
динамическими свойствами сложного звена.
2-2. ПРОСТЫЕ (ЭЛЕМЕНТАРНЫЕ) ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
а) Усилительное звено
Примерами усилительных звеньев, имеющими
широкое распространение в пневматических регуляторах,
могут служить рычажные передачи, пружины, мембранные
усилители и др. Уравнение движения усилительного
звена (зависимость выходной величины у от входной х)
в общем случае имеет вид:
5-795 65
y = kx, (2-24)
где k — коэффициент усиления звена.
В рычажной передаче (рис. 2-7,а) перемещение
правого конца рычага (выходная величина у) зависит от
перемещения левого конца (входная величина х) соглас-
Ь b
но уравнению: у=—где — коэффициент усиления
рычажной передачи, выраженный через соотношение
плечей рычага; в винтовой цилиндрической пружине
Рис. 2-7. Примеры усилительных звеньев.
а — рычажная передача; б — пружина; в —
пневматический мембранный усилитель.
(рис. 2-7,6) величина сжатия (выходная величина у)
зависит от приложенного к ней усилия (входная
величина х) согласно уравнению х = сх, где с — коэффициент
усиления, представляющий собой жесткость пружины;
в мембранном усилителе (рис. 2-7,в) выходное давление
Рвых равно давлению входа рвх. В последнем примере
коэффициент усиления &=1, поскольку эффективные
площади мембран, разделяющих питательную камеру а
и входную (измерительную) б, а также камеру
отрицательной обратной связи в и выходную г, равны друг
другу. Работа мембранного усилителя понятна из
рис. 2-7,в; здесь С1 — питающее сопло с подведенным
к нему сжатым воздухом с давлением рт1Т, С2 —
сбросное сопло, сбрасывающее сжатый воздух в
атмосферу Ра-
Поскольку зависимость выходной величины у от
входной х в усилительном звене характеризуется
алгебраическим уравнением, такое звено часто называется
звеном нулевого порядка.
Передаточная функция W(p) усилительного звена
совпадает с коэффициентом усиления k, так как отно-
66
шение выходной величины к входной остается
постоянным как в установившемся, так и в неустановившемся
(переходном) режимах, т. е.
W(p)=k. (2-25)
Временная характеристика h(t) усилительного звена
показана на рис. 2-8. Здесь ступенчатому входному
воздействию на звено х соответствует такое же ступенчатое
отклонение выходной величины у, численное значение
которого равно произведению kx.
а
'/7
Г
к х
а)
6)
Рис. 2-8. Временная
характеристика
усилительного звена.
а — входное воздействие;
б — изменение выходной
величины.
а
д '
W
а)
F)
№
Рис. 2-9. Частотные
характеристики
усилительного звена.
а —
амплитудно-частотная; б — фазо-частотная;
в — амплитудно-фазовая.
Если входное воздействие на звено не ступенчатое,
а задано некоторым законом х = /(/), то изменение
выходной величины у происходит одновременно с
изменением входного воздействия и по величине остается
пропорциональным ему. По этой причине усилительные
звенья часто называются безынерционными.
При подаче на вход усилительного звена
периодических синусоидальных воздействий на выходе звена
устанавливаются колебания, для которых независимо от ча-
5* 67
стоты о) отношение амплитуд будет равно коэффициенту
усиления, а по фазе они будут совпадать с колебаниями
входной величины. На этом основании
амплитудно-частотная, фазо-частотная и амплитудно-фазовая
характеристики усилительного звена соответственно равны
(рис. 2-9):
Л(со)=£; (2-26)
Ф(о>)=0; (2-27)
Г(/о))=£. (2-28)
АФХ W(i(d) усилительного звена обращается в точку
на вещественной полуоси, отстоящую от начала
координат на величину, равную коэффициенту усиления k.
V;p0
Г -J— "
7
'ивых
б) Апериодическое звено первого порядка
Апериодические звенья первого порядка имеют
большое распространение в пневматических регуляторах.
Примером апериодического
звена первого порядка
может служить проточная или
глухая камера (рис. 2-10)
с объемом V и
сопротивлениями на входе / и
выходе 2 при прохождении че-
*рез нее сжатого воздуха.
В этом примере
зависимость выходной величины рВЫх (давление воздуха
внутри камеры) от входной рвх (давление перед
сопротивлением 1) может быть установлена, исходя из
следующих условий.
Вес воздуха Gn.K в объеме V проточной камеры равен:
Рис. 2-10. Принципиальная
схема апериодического звена
первого порядка (проточной
камеры).
г* V Рвых
(2-29)
где Рвых — давление воздуха в проточной камере
(выходной сигнал);
R — газовая постоянная;
в — абсолютная температура.
Продифференцировав по времени уравнение (2-29),
получим:
б^п.к v_ dpBbl7
dt — #e '
(2-30)
68
где Л(5п.к — приращение веса воздуха в проточной
камере за единицу времени, равное разности
весовых расходов воздуха через входной 1 и
выходной 2 дроссели, т. е.
AGn.K= G\~~G2.
Тогда
Полагая, что потоки воздуха через дроссели 1 и 2
будут находиться в ламинарных режимах, зависимость
расходов Gj и G2 от перепадов давлений на дросселях
будет линейной, т. е.
Gi = с{ (Рвх—Рвых); (2-32а)
G2 = c2(pbbix-/7a), (2-326)
где С\ и с2 — коэффициенты пропорциональности
(расходов) дросселей / и 2;
ра — атмосферное давление.
Подставляя значения G{ и G2 в уравнение (2-31) и
произведя ряд преобразований, получим
дифференциальное уравнение проточной камеры:
Введя обозначения:
с2
С\ +с2
= *•, (2-36)
получим:
т = kpn + Кр^ (2_37)
где Г—коэффициент при производной выходной
величины, называемый постоянной времени
апериодического звена первого порядка;
k и k0 — коэффициенты усиления звена соответственно
на входе и выходе.
69
Если выходной дроссель 2 будет полностью закрыт,
то проточная камера превратится в глухую
(являющуюся частным случаем проточной), при этом коэффициент
пропорциональности дросселя 2 станет с2 = 0, в
результате чего коэффициенты усиления станут k=l, /е0 = 0,
а уравнение (2-37) упростится до
Т^Р+Рът = крлх=р„. (2-38а)
Принимая Рвых = У, Рвх=ху уравнение
апериодического звена первого порядка (2-38а) может быть записано
в общем виде, т. е.
T-4*+y = kx, (2-386)
или в операторной форме:
(Tp+l)y=kx, (2-38в)
где k — коэффициент усиления звена;
р — оператор дифференцирования.
Тогда передаточная функция этого звена запишется
уравнением
Таким образом, уравнения (2-38) и (2-39)
апериодического звена первого порядка выражают
функциональную зависимость выходной величины и скорости ее
изменения в зависимости от изменения входной величины.
Из этих уравнений, а также из уравнений (2-34) — (2-36)
видно, что постоянная времени Т при производной
выходной величины характеризует инерционность
апериодического звена и является ее мерой. Постоянная
времени Т тем больше, чем больше объем камеры и чем
меньше коэффициенты расходов с\ и с2 (чем больше
сопротивления дросселей); коэффициенты k и k0
показывают, во сколько раз отклонение выходной величины
в установившемся режиме превышает обусловившее его
отклонение входной величины.
Для установления временной характеристики h(t)
апериодического звена первого порядка найден закон
изменения выходной величины у при максимальном сту-
70
пенчатом изменении входной величины (л: = xM3iKC = const).
Для этого проинтегрируем уравнение (2-386),
представив его в виде:
dy kx — у
~df~ Т #
Произведя замену переменных kx— у = и, —
и подставляя их в записанное выше уравнение, получим:
~= jrdt. (2-40а)
После интегрирования уравнения (2-40а) получим:
1пи + С = —(2-406)
или
_ t_
и = Се г, (2-40в)
откуда
_ £
y=kx—u = kx — Ce т. (2-41)
Значение постоянной интегрирования С найдем из
начальных условий: при t=0 и у=0 согласно уравнению
(2-41) C = kx.
Подставив в уравнение (2-41) значение С, получим:
t_
y = kxfKl — e Ту (2-42)
Тогда временная характеристика апериодического
звена первого порядка запишется уравнением
h(t) = k(l — e Ту (2-43)
Кривая, отвечающая уравнению (2-42), называется
экспонентой и является временной
характеристикой апериодического звена
первого порядка, примерный вид которой показан
на рис. 2-11. Характер этой кривой показывает, что при
ступенчатом изменении входной величины выходная
величина апериодического звена первого порядка (в
отличие от усилительного звена) изменяется не мгновенно,
а достигает нового установившегося значения лишь
71
спустя некоторое время, в течение которого происходит
накопление вещества или энергии в емкости звена.
Скорость изменения выходной величины в этом звене падает
по мере приближения ее к
новому установившемуся, так
называемому
потенциальному значению.
Потенциальное значение
выходной величины
апериодического звена первого порядка
уи может быть (получено из
уравнения (2-42), если принять
/ —оо, т. е.
ya=kx(l — е °°) = kx. (2-44а)
>—7-
6)
Рис. 2-11. Временная
характеристика апериодического
звена первого порядка.
а — входное воздействие; б —
изменение выходной величины.
Из уравнения (2-44а)
видно, что выходная величина
этого звена, изменяясь по
экспоненте придет к своему
потенциальному значению лишь в
течение неограниченного
времени.
Если в уравнении (2-42) за время t принять Г, то
будет получена еще одна важная зависимость между
выходной и входной величинами этого звена, а именно:
yT = kx(l —e'^^OfiSkx. (2-446)
Из уравнения (2-446) видно, что за время t = T
выходная величина апериодического звена ут, изменяясь по
экспоненте, достигнет 63% своего потенциального
значения-
Показанная на рис. 2-11 временная характеристика
апериодического звена первого порядка обладает рядом
важных особенностей. Подкасательные к каждой точке
экспоненты численно равны постоянной времени Г, т. е.
проекции на ось времени отрезков касательных,
заключенных между точками касания и линией
потенциального значения выходной величины, являются
постоянными для данной экспоненты и равны коэффициенту Т
при производной в дифференциальном уравнении
апериодического звена. Это свойство экспоненты позволяет
легко определить числовые значения коэффициентов
дифференциального уравнения апериодического звена
72
первого порядка по ее временной характеристике и,
наоборот, построить временную характеристику, если
известно числовое значение коэффициента Т в
дифференциальном уравнении.
Для того чтобы определить постоянную времени Т по
временной характеристике, достаточно провести
касательную к начальной или любой другой точке
экспоненты и определить, какой отрезок (в масштабе времени t)
эта касательная отсекает на линии потенциального
значения выходной величины.
Коэффициент усиления звена k находится как
отношение полного (потенциального) отклонения выходной
величины уи к вызвавшему его входному воздействию х,
т. е.
k=2±, (2-45)
Амплитудно-фазовая характеристика W(m)
апериодического звена первого порядка может быть определена
из его передаточной функции W(p) в соответствии
с уравнениями (2-18), (2-23) и (2-39), т. е.
y(fa>=-T«^n'«* + i ' (2'46)
Для построения амплитудно-частотной и амплитудно-
фазовой характеристик найдем модуль а/А и
аргумент Ф вектора W(i<o), выделив в нем вещественную и
мнимую части. При этом проще воспользоваться
обратной АФХ, т. е.
1 Ae-^ + i^. (2-47)
W (i<o) а ~ k 1 k
Модуль этого комплексного числа равен:
(2-48)
Обратная величина, т. е. искомое отношение
амплитуды на выходе к амплитуде на входе (АЧХ), будет
равна:
А (g>)=4- = г k (2"49)
; л у т*о>* + 1 v ;
Аргумент обратной функции 0у>бр =—ft может быть
найден по формуле (2-11), как отношение мнимой части
вектора W{m) к вещественной, т. е.
73
(2-50)
Соответственно этому искомая разница фаз
колебаний на выходе и входе (ФЧХ), будет равна:
#(о>)=Овх—*вых=-arctg (озГ). (2-51)
На основании полученных значений Л (со) и Ф(со)
АФХ рассматриваемого звена согласно уравнению
(2-19) может быть записана также в виде:
W(i<*) = A(<*)ex
—/ arctg (<оТ)
(2-52)
При (о = 0 конец вектора W(ixo) лежит на
положительной вещественной полуоси на расстоянии к от
начала координат. При изменении частоты от со = 0 до о>=оо
конец вектора описывает АФХ, представляющую собой
полуокружность с диаметром к (доказательство см.
[Л. 14, 26]). Таким образом,
в апериодическом звене
первого порядка с ростом
частоты со величина сдвига фаз О
стремится к предельному
значению 0= —.
2
Примеры графического
изображения АЧХ, ФЧХ и
АФХ апериодического звена
первого порядка даны на
рис. 2-12.
в) Интегрирующее звено
Интегрирующие звенья
входят в состав И-, ПИ- и
ПИД-регуляторов.
Зависимость между входной
величиной х и выходной у в
интегрирующем звене характеризуется
уравнениями
Рис. 2-12. Частотные
характеристики апериодического
звена первого порядка.
а — амплитудно-частотная;
б — фазо-частотная; в —
амплитудно-фазовая.
Т ^ — kx
у и dt — /ех,
или при k= 1
Т —jt
1* dt — х,
(2-53а)
(2-536)
74
тогда
У =
(2-54)
Из уравнения (2-53) видно, что в интегрирующем
звене изменение входной величины х вызывает
пропорциональное изменение скорости отклонения выходной
величины у (т. е. dy/dt)9 а из уравнения (2-54) видно, что
отклонение выходной величины у пропорционально
интегралу отклонения входной величины х, вследствие чего
такие звенья получили название интегрирующих.
В уравнениях (2-53) и (2-54) Ги — .постоянная времени
интегрирования; у0 — начальное значение выходной
величины.
Сравнивая уравнения (2-53) интегрирующего звена
с уравнениями (2-38) апериодического звена, можно
заметить между ними разницу, состоящую в том, что в
левой части уравнения интегрирующего звена отсутствует
постоянная составляющая выходного сигнала у. Из
этого следует, что уравнения (2-53) интегрирующего звена
могут быть реализованы апериодическим звеном
(глухой или проточной камерой с сопротивлениями на входе
и выходе), если в уравнении последнего (2-386)
подавить (снять) в левой части постоянную составляющую
выходной величины у, что обычно осуществляется
охватом апериодического звена положительной обратной
связью (см. дальше, § 2-6,6).
Тогда Т ~-\-у=^х-\-у или Ти^- — х, что
соответствует уравнению (2-536).
На основании уравнения (2-536) передаточная
функция интегрирующего звена может быть записана
уравнением
Для установления временной характеристики
интегрирующего звена произведем дальнейшее решение
уравнения (2-54), которое после интегрирования
представится в виде:
W{p) =
(2-55)
(2-56)
75
откуда
(2-57)
Полученному уравнению (2-56) отвечает временная
характеристика интегрирующего звена, показанная на
рис. 2-13. Как видно из уравнений (2-56) и (2-57) и
временной характеристики,
начиная с момента времени /о = 0,
когда было нанесено
однократно ступенчатое воздействие
х = Хмжс = const, выходная
величина звена у начинает
возрастать по линейному закону
с постоянной скоростью.
При / = ТИ
Ут — У<>=■-■ у- Тп = х. (2-58)
Из уравнения (2-58) видно,
что за время / = ГИ выходная
величина интегрирующего
звена у достигает значения,
численно равного ступенчатому
воздействию х = хмакс на входе
в звено. На этом основании
время t = TlI принято называть
временем разгона
интегрирующего звена.
Изменение выходной величины у будет происходить
тем быстрее, чем сильнее воздействие на звено и чем
меньше время Ти.
Для определения времени Ги по временной
характеристике достаточно отложить на оси ординат значение
ут, численно равное величине лгмакс (в относительных
единицах), и по точке А временной характеристики
определить (на оси /) время / = ГИ, соответствующее ут=*макс.
Обратная задача — построение временной
характеристики но заданному Т„ и величине воздействия
хмакс—решается аналогично.
АФХЙ7(/со) интегрирующего звена, так же как и
в предыдущих звеньях, определяется по его передаточной
функции. Тогда в соответствии с уравнениями (2-18) и
(2-55);
Рис. 2-(10. Временная
характеристика интегрирующего
звена.
а — входное воздействие; б —
изменение выходной величины.
76
Для построения частотных характеристик
интегрирующего звена модуль вектора W{m) и его аргумент
найдем, выделив вещественную и мнимую части
обратной АФХ, записав ее в виде:
= 4г = (Ч = I (7». (2-60)
Вещественная часть полученной обратной АФХ равна:
Мобр(а>)=0, (2-61)
а мнимая
#обр(<о)=7>. (2-62)
Тогда модуль обратной АФХ будет:
откуда АЧХ будет:
Аргумент обратной и прямой АФХ определим по
формуле (2-11) из условий:
<S<W=Sa£j- = ^r=-, (2-68)
откуда
или
»обр = -Ь (2-66)
& («) = &вх - &вьгх = - -f. (2-67)
Тогда на основании уравнений (2-19) и (2-59) АФХ
интегрирующего звена может быть записана также в виде:
WM=-bUSr = T*e~,J. (2-68)
Из формулы (2-64) видно, что отношение амплитуд
а/А в интегрирующем звене изменяется обратно
пропорционально частоте со. Поэтому ДЧХ этого эвена
является гипербола (рис. 2-14,а).
77
Из уравнения (2-67) видно, что смещение по фазе О
выходных колебаний относительно входных с
изменением частоты от со = 0 до (о = оо остается постоянным и
равным Ф= |-. Поэтому ФЧХ этого звена является
прямая линия (рис 2-14,6).
АФХ интегрирующего звена (рис. 2-14,в) является
прямая линия, совпадающая с отрицательным
направлением мнимой оси iN. Начало вектора W(m) лежит в
бесконечности, а конец — в начале координат, так как
направление этого вектора не изменяется с изменением
частоты, а модуль его равен бесконечности при ш = 0 и
обращается в нуль при о) = оо.
г) Дифференцирующее звено
Дифференцирующие звенья применяются при
реализации ПД- и ПИД-законов регулирования. Кроме того,
они участвуют в реализации ряда вычислительных
операций в сложных САР, а также при построении цепочек
динамических связей между регуляторами в системах
связанного регулирования. Зависимость между входной
величиной х и выходной у в дифференцирующем звене
характеризуется уравнениями
, dx
или
Тогда
откуда
(2-69)
y — xkp.
W(p) = kp, (2-70)
W(i<*) = ki<* = k<*e *. (2-71)
Записанная уравнениями (2-69) — (2-71) зависимость
между входной и выходной величинами может иметь
место в так называемых идеальных дифференцирующих
звеньях. Решение этих уравнений показывает, что при
ступенчатом изменении входной величины х (при А/ = 0)
переходный процесс в дифференцирующем звене
начинается мгновенным импульсом с бесконечной амплитудой
на выходе. Но поскольку длительность интервала време-
78
ни, в течение которого dx/dt—+Ot равна нулю, то сразу
же после момента dx/dt = 0 и у = 0. Временная характе-
д ристнка h(f) такого звена
хД показана на рис.
(сплошная линия).
Г
-Л/2
2-15
а)
б)
М
OJ=CO
ii
3
6)
Рис.
2-114.
Частотные харак
теристчки
интегрирующего
звена.
а — амплитудно-частотная;
б — фазо-частотная; в —
амплитудно-фазовая.
Рис. 2-15. Временные
характеристики
дифференцирующих звеньев.
а — входное воздействие;
б — изменение выходной
величины.
АФХ дифференцирующего звена, отвечающая
уравнению (2-71), показана на рис. 2-16 (сплошная линия).
Она имеет форму прямой, идущей вдоль положительного
направления мнимой оси. При этом начало вектора
W(m) (при (о=0) лежит на вещественной оси на
расстоянии k от начала координат, а конец (при со = оо)
бесконечно удален от начала координат.
Дифференцирующее звено, отвечающее уравнению
(2-69), создает постоянное опережение по фазе на
* = л/2.
Анализ приведенных выше характеристик приводит
к выводу, что реализация уравнений (2-69) практически
79
iN
/
\
м
w-0
невозможна, так как в реальном дифференцирующем
звене мгновенные процессы невозможны. Кроме того,
при ступенчатом уменьшении входной величины (при
dx/dt<0), согласно уравнению
(2-69), выходная величина у
должна скачкообразно
уменьшаться от 0 до —со, но
поскольку выходные сигналы во
всех -пневматических элементах
не могут принимать значений
меньших, чем 0 кгс/см2, то по
этой причине реализация
зависимости (2-69) в реальных
пневматических
дифференцирующих звеньях также
неосуществима. Ввиду изложенного зависимость между
входными и выходными величинами в реальных
пневматических дифференцирующих звеньях характеризуется более
сложными уравнениями, чем (2-69), например:
Рис. 2-16. Амплитудно-
фазовые характеристики
дифференцирующих
звеньев.
dt '
У-
(2-72)
(2-73)
и более сложными.
Зависимость (2-72) в пневматических
дифференцирующих звеньях реализуется па'раллельным соединением
усилительного звена (с коэффициентом усиления k=\)
и апериодического звена первого порядка, выходные
величины которых алгебраически суммируются в
суммирующем устройстве (выходная величина второго звена
вычитается из выходной величины первого звена) (см.
дальше, § 2-5). Временная характеристика и АФХ
такого звена определяются по его передаточной функции
W(p), которая соответственно равна:
(2-74)
Решение уравнений (2-72) и (2-74) [Л. 3:2] дает
временную характеристику h(t) этого звена в виде:
t
h(t) = ke г* ,
где k=l —коэффициент усиления звена.
80
(2-75)
Временной характеристике (2-75) соответствует
экспонента, показанная на рис. 2-15 (пунктирная линия
с точками).
На основании ранее установленных зависимостей
между передаточной функцией и АФХ последняя для
диффеоенцирующего звена, описываемого уравнением
(2-72),' равна:
АФХ (2-76) представляет собой полуокружность,
расположенную в первом квадранте комплексной
плоскости с центром на вещественной оси на расстоянии
k/2 от начала координат (пунктирная линия с точками
на рис. 2-16), где коэффициент усиления звена k=l.
Зависимость (2-73) в пневматических
дифференцирующих звеньях реализуется усилительным звеном
(с коэффициентом усиления k—►<*>), охваченным так
называемой инерционной отрицательной
обратной связью, роль которой выполняет
апериодическое звено первого порядка (см. дальше, § 2-6).
Передаточная функция W{p) и АФХ W(i<o) такого звена
соответственно равны:
W (ш) = Тд*со + 1 = YT\ "2 + 1 е arCfg Гд*. (2-78)
Как видно из уравнения (2-73), изменение выходной
величины у пропорционально изменению входной
величины х и ее производной dx/dt. На этом основании
звено, реализующее зависимость (2-73), является
пропорционально-дифференцирующим с коэффициентом
усиления по пропорциональной составляющей k=l.
Временной характеристикой такого звена является также
экспонента, отстоящая от оси времени на величину
y = kx, поскольку в установившемся режиме выходная
величина у будет равна входной величине х (рис. 2-17).
АФХ пропорционально-дифференцирующего звена
совпадает с АФХ дифференцирующего звена,
показанной на рис. 2-16 (пунктирная линия с точками).
6—795 81
(2-76)
Г(р)=7>+1;
(2-77)
д) Звено чистого запаздывания
Звеном чистого запаздывания (или запаздывающим)
принято называть такое динамическое звено, в котором
изменения выходной величины у полностью повторяют
а)
\У
*
Ъ
6)
Рис. 2-17. -Временная
характеристика
нально-дифференцирующего звена:
а — входное воздействие;
б — изменение выходной
величины.
У
а)
6)
Рис. 2-18. Временная
характеристика звена
чистого запаздывания.
а — входное воздействие;
б — изменение выходной
величины.
изменения входного воздействия х, но смещены
относительно него во времени, т. е. происходят с некоторым
запаздыванием т (рис. 2-18). Характерным примером
звена чистого запаздывания может служить ленточный
транспортер, в котором после изменения входного
воздействия должно пройти время т, прежде чем начнется
изменение выходной величины [Л. 14, 29, 82].
Звеньев чистого запаздывания в автоматических
регуляторах, в том числе и пневматических, реально не
существует. Однако понятие звена чистого
запаздывания для пневматических регуляторов имеет большой
практический смысл. Так, например, путем
искусственного введения в цепочку пневматического регулятора
звена чистого запаздывания существенно упрощается
задача определения динамических свойств регулятора
в целом (включая пневматическую линию связи
большой длины).
82
Из определения звена чистого запаздывания
зависимость между входной х и выходной у величинами может
быть записана уравнением
y(t)=x(t-x). (2-79)
Из уравнения (2-79) видно, что изменение выходной
величины у для любого момента времени / соответствует
величине входного воздействия х, которую это звено
имело в момент времени /—т, т. е. на величину
времени т раньше.
Для определения передаточной функции W(p) и
частотных характеристик вначале определим
характеристику W(m), исходя из следующего. Если на вход этого
звена подать синусоидальные воздействия х= Ле
[см. уравнение (2-16)], то согласно уравнению (2-79)
его выходные колебания будут определяться
уравнением
у = Аеы ('~т) = W,et =
=xe"imx. (2-80)
Тогда согласно
уравнению (2-18), поделив
вектор у на вектор х, будет
получена АФХ W(m) звена
чистого запаздывания в
виде:
ЛИ
а)
Ц7(/<о) = -4-=е
х
-loot
(2-81)
Графически АФХ звена
чистого запаздывания
представляется в виде
окружности единичного радиуса
с центром в начале
координат (рис. 2-19,а). При о) = 0
начало вектора W(ixo)
располагается на
положительной вещественной полуоси;
с увеличением частоты он
поворачивается по часовой
стрелке и при о>=2я/т
возвращается в исходное
положение, При бесконечном
6*
-2п
ш
6)
ш
в)
Рис. 2-19. Частотные
характеристики звена чистого
запаздывания.
а — амплитудно-фазовая; б —
амплитудно-частотная; в —■ фазо-ча-
стотна*^
увеличении частоты вектор W(m) бесчисленное
количество раз оборачивается вокруг начала координат.
По АФХ легко определить АЧХ и ФЧХ. Так, АЧХ
Л(со.)=а/Л (рис. 2-19,6) представляет собой прямую
линию, параллельную оси со на расстоянии от нее а]А = \у
поскольку отношение а/А с изменением частоты остается
постоянным. ФЧХ f>((o)='v>Bx—#вых = -core (рис. 2-19,в)
представляет собой также прямую линию,
расположенную наклонно к оси со и удаляющуюся вниз до
бесконечности, поскольку сдвиг по фазе с увеличением
частоты о) непрерывно увеличивается с постоянной
скоростью.
Заменив в уравнении (2-81) iw на будет получена
передаточная функция W(p) звена чистого
запаздывания в виде:
К(Р) = е~рх. (2-82)
Временная характеристика h{t) звена чистого
запаздывания была показана на рис. 2-18.
2-3. СОЕДИНЕНИЯ ЗВЕНЬЕВ
В системах автоматического регулирования и в
отдельных регуляторах простые (элементарные)
динамические звенья могут соединяться между собой в самых
различных сочетаниях. Существуют три основных вида
соединений звеньев, комбинируя которые, можно
построить любой сложный регулятор или систему
автоматического регулирования. К таким соединениям
относятся: последовательное и параллельное соединения
звеньев и охват их обратной связью. Ниже будет
показано, как образуются сложные динамические звенья
и как определяются их свойства при различных
соединениях,
2-4. ОБРАЗОВАНИЕ СЛОЖНЫХ ЗВЕНЬЕВ
ПОСЛЕДОВАТЕЛЬНЫМ СОЕДИНЕНИЕМ ПРОСТЫХ
а) Общие сведения
Пример последовательного соединения двух звеньев
показан на рис. 2.20. Здесь на первое звено действует
входная величина х. Выходная величина этого звена у
84
является одновременно входной величиной для второго
звена и определяет изменения выходной величины г
второго звена.
Свойства показанной на рис. 2-20 цепочки звеньев
определяются зависимостью выходной величины
цепочки z от входной х уравнением
z=W(p)x, ((2-83)
где W(p) —передаточная функция всей цепочки звеньев.
Найдем зависимость передаточной функции W(p) от
передаточных функций W\(p) и W${p) звеньев,
образующих цепочку, имея в виду при этом, что
y=Wx(p)x\ (2-84)
z=W2(p)y. (2-85)
Тогда, заменяя величину у через ее значение, получим:
z=W2(p)Wi(p)x, (2-86)
откуда
W{p)=W](p)W2(p). (2-87а)
Таким образом, при последовательном соединении
звеньев передаточная функция цепочки равна
произведению передаточных функций звеньев, образующих эту
цепочку. Эта закономерность остается справедливой и
при любом другом числе звеньев.
У
Рис. 2-20. Последовательное
соединение динамических звеньев.
Передаточная функция цепочки для любого
количества последовательно соединенных звеньев запишется
уравнением
W(p)=Wl(p)W2(p)W3(p) ...Wn(p). (2-876)
Отсюла также следует, что коэффициент усиления k
цепочки последовательно соединенных звеньев равен
произведению коэффициентов усиления отдельных
звеньев, образующих эту цепочку, т. е.
k = kxk% ... kn. (2-88)
85
Учитывая взаимосвязь между передаточной
функцией W(p) и АФХ W(/co), можно заключить, что вектор
W(ib)) для группы последовательно соединенных
звеньев равен произведению соответствующих векторов
отдельных звеньев, образующих цепочку, т. е.
W(m)==W{(m)W2{iu) ... Wn(fa). (2-89)
Используя формулу (2-18) для выражения вектора
W(m) показательной функцией с мнимым показателем
степени, получим:
W = 4 е* = *L е**г £L J* =
...ап !*<*. + ** + ...+ *п)
АгАш...Ап Г • ( }
Из формулы (2-90) следует, что АЧХ цепочки
последовательно соединенных звеньев можно получить,
перемножая соответствующие ординаты АЧХ
составляющих звеньев, а ФЧХ — складывая ординаты ФЧХ
этих звеньев, т. е.
(2-91)
А Ах Аг Ап v '
ft=di+,dl2+ ... (2-92)
Если АФХ отдельных последовательно соединенных
звеньев заданы графически, то их произведение
находится по известному правилу перемножения векторов
[Л. 32]: модули векторов перемножаются, а аргументы
складываются (рис. 2-21).
Графически может быть построена также и
временная характеристика h(t) цепочки последовательно
соединенных звеньев, используя метод, разработанный
Д. А. Башкировым [Л. 7, 14].
Рассмотрим графические методы построения
экспоненты. При этом рассмотрим два метода:
приближенный и более точный (метод секущих).
Приближенно экспоненту можно построить по
отдельным точкам (рис. 2-22), отстоящим друг от друга
на интервал времени At = T, пользуясь уравнением
(2-446), показывающим, что за отрезок времени, равный
Т, выходная величина апериодического звена первого
порядка у изменяется на величину, равную 63% своего
потенциального значения уп = Н.
$6
На первом отрезке времени At{ = T выходная
величина у, изменяясь по экспоненте, не дойдет до своего
потенциального значения на величину (1—0,63) yu=Q,37 Н.
На следующем отрезке времени Т выходная величинам/
не дойдет до уп уже на 0,37 hu т. е. на 0,372#. На
третьем отрезке времени точка величины у будет ниже
линии уп уже на 0,373# и т. д. Через найденные точки
проведем плавную кривую, которая в начальной точке
и всех промежуточных будет иметь крутизну,
совпадающую с углом наклона соответствующих касательных.
последовательно
соединенных звеньев.
Более точно экспонента может быть построена
методом секущих (по Д. А. Башкирову). Построение
экспоненты по этому методу основано на следующем: если
к некоторой точке экспоненты (рис. 2-23,а) проведена
касательная, то проекция отрезка касательной на ось
времени равна Т; если теперь через две точки экспоненты,
отстоящие друг от друга на At, провести секущую, то
проекция отрезка этой секущей на ось времени с
достаточной для практики точностью будет равна Г+-^.
Для уменьшения ошибки шаг построения At следует
выбирать равным не более 0,25 Т.
Исходя из этих основ метода, построение
экспоненты производится в следующей последовательности
t
Рис. 2-21. Графическое
построение
амплитудно-фазовой характеристики цепочки
Рис. 2-22. Графическое
построение экспоненты
приближенным методом.
(рис. 2-23,6).
87
1. Проводится линия потенциального значения
выходной величины уи и на ней откладывается отрезок Т
вправо от оси ординат до точки Лю-
2. Выбирается шаг построения экспоненты At,
равный не более 0,25 Т. Затем проводятся вертикальные
линии с интервалами At.
3. Проводится первая секущая из начала координат
в точку Ль отстоящую на 0,5 от точки Л0 вправо. На
Рис. 2-23. Графическое построение экспоненты методом секущих.
пересечении первой секущей с первой вертикалью
находится точка В\ экспоненты.
4. Проводится вторая секущая из точки Вх в точку Л 2,
отстоящую на At от точки А\ вправо. На пересечении
второй секущей со второй вертикалью находится точка
В2 экспоненты.
5. Проводится третья секущая из точки В2 в точку Л3
и т. д.
Изложенная последовательность покызывает процесс
построения временной характеристики апериодического
звена первого порядка при изменении входной
величины в виде единичного ступенчатого воздействия.
Метод секущих позволяет построить временную
характеристику апериодического звена не только при
ступенчатом, но и при любом другом входном воздействии,
изменяющемся во времени по заданному графически
закону x=f(t). Тогда временная характеристика двух
последовательно соединенных апериодических звеньев
может быть построена как характеристика лишь второго
88
звена с входным воздействием, являющимся выходом
первого звена (в данном случае тоже экспонентой).
Повторяя построение несколько раз, этим методом
можно построить временную характеристику цепочки
с любым количеством последовательно соединенных
звеньев.
При таком методе кривая x=f(t) приближенно
заменяется ступенчатой ломаной линией, принимая на
t
каждом интервале времени At значение х постоянным
и равным его значению на середине этого интервала.
В этом случае секущие искомой кривой y={F(i) можно
рассматривать на каждом отрезке времени как секущие
отрезков разных соответственных экспонент. Делая
такое допущение, способ построения искомой кривой
отличается от изложенного выше способа построения
экспоненты лишь тем, что точки А\, А2, Аъ, АА и т. д.,
отстоящие одна от другой на At, наносятся не на линии
потенциального значения выходной величины уп, а на
заданной кривой x = f(t) (рис. 2-24). При таком методе
построения временной характеристики ось координат
89
выходной величины y(z) располагается влево от оси
входного воздействия х(у) на величину Т2, равную
постоянной времени второго звена. Значение тп будет
пояснено в дальнейшем.
Описанный выше метод построения временной
характеристики цепочки последовательно соединенных
звеньев остается в силе также и тогда, когда входным
воздействием апериодического звена является выход
звена другого типа: интегрирующего,
дифференцирующего и т. д., или цепочки звеньев. В этих случаях
последовательность построения временной характеристики
остается той же.
При построении временных характеристик цепочек
последовательно соединенных звеньев порядок
расположения звеньев в исследуемой цепочке не играет роли.
Однако в случае необходимости построения
временной характеристики цепочки последовательно
соединенных звеньев, выходным звеном которой является
интегрирующее звено, на вход которого подается
переменное воздействие, порядок построения временной
характеристики такой цепочки методом секущих имеет
некоторые особенности и сводится к построению
временной характеристики интегрирующего звена с
переменным входным воздействием вида x = f(t). В этом случае
для построения временной характеристики исходным
является уравнение интегрирующего звена (2-536).
Для того чтобы свести задачу к рассмотренной выше
методике построения экспоненты, прибавим к правой и
левой частям уравнения (2-536) у, тогда получим:
Ти Чг +У = х+У^г- (2-93)
Искомую кривую y=F{t) можно найти методом
секущих, как временную характеристику апериодического
звена первого порядка, входной величиной для которого
в данном случае служит вспомогательная функция 2,
равная сумме заданной функции x=f(t) и искомой у.
Последовательность этого построения следующая
(рис. 2-25):
1. В системе координат t строится функция
входного воздействия x = f(t). Отступив от оси х влево на
отрезок времени Т„, проводится ось у. При этом если
начальное значение у0 не равно нулю, то отрезок у0 от-
90
кладывается по оси у и находится точка Во, из которой
начинается построение искомой кривой y=F(t).
2. Выбирается шаг построения Л/=0,1 -г-0,25 Ги и
проводятся вертикальные линии с интервалом 0,5 At.
3. Отрезок уо (ордината точки В0) откладывается
вверх от точки А0 по оси х, и находится точка С0 —
начальное значение вспомогательной функции г.
У 1*
Рис. 2-25. Графическое построение временной
характеристики интегрирующего звена при
переменном входном воздействии вида #=/(')•
4. Из точки В0 в точку С0 проводится первая
секущая. На пересечении первой секущей с первой и второй
вертикалями находятся точки В\ и В2. Полученная
ордината точки В2 откладывается вверх от точки А2, и
находится точка С2 функции г.
5. Из точки В\ в точку С2 проводится вторая
секущая (расстояние между этими точками в соответствии
с правилом метода секущих составляет ГИ+0,5Л!/). На
пересечении второй секущей с третьей вертикалью
находится точка В3. Ордината точки Вг откладывается
вверх от точки Л3, и находится точка С3.
6. Проводится следующая секущая В2СЪ и на
пересечении ее с четвертой вертикалью находится точка В±
и т. д.
Искомая кривая y = F(t) получается путем плавного
соединения точек В0, Ви B2l В3 и т. д.
При последовательном соединении звеньев чистого
запаздывания и апериодического звена первого порядка
временная характеристика такой цепочки представляет
91
Собой экспоненту, отстоящую от начала координат на
величину чистого запаздывания т. Временная
характеристика цепочки последовательно соединенных звеньев
чистого запаздывания и интегрирующего представляет
собой прямую линию, отстоящую от начала координат
на величину т.
В некоторых случаях временная характеристика
сложной цепочки последовательно соединенных звеньев
может быть представлена в упрощенном изображении.
Так, для цепочки последовательно соединенных
апериодических звеньев она может быть представлена
временной характеристикой апериодического звена первого
порядка и звена чистого запаздывания (рис. 2-24). Здесь
искусственно выделенное запаздывание принято
называть переходным запаздыванием тп. Его
значение определяется как отрезок на оси t, образованный
касательной (пунктирная линия с точками),
проходящей через точку перегиба кривой y = F(t). Проекция
этой касательной на линию потенциального значения
выходной величины определяет постоянную времени Т,
заменяющего апериодического звена первого порядка.
Такая замена действительной временной
характеристики упрощенной называется аппроксимацией, а
полученная в результате такой замены временная
характеристика — аппроксимированной.
Последовательно могут соединяться элементарные
звенья любых типов, в любом количестве и в любой
последовательности, образуя в результате этого
различные сложные звенья. Так, чпри последовательном
соединении двух апериодических звеньев первого порядка
образуется апериодическое звено второго порядка; при
последовательном соединении апериодического звена
первого порядка с интегрирующим или
дифференцирующим звеньями образуются соответственно
пропорционально-интегрирующее или
пропорционально-дифференцирующее звенья и т. д.
При последовательном соединении элементарных
звеньев образованные в результате этого сложные
звенья могут преобретать свойства, существенно
отличные от свойства образующих их элементарных звеньев.
Некоторые наиболее характерные сложные звенья,
образованные последовательным соединением простых,
рассматриваются ниже.
92
б) Апериодическое звено второго порядки
Апериодическое звено второго порядка образуется
последовательным соединением двух апериодических
звеньев первого порядка (рис. 2-26). Зависимость
между входной величиной х и выходной z в этом звене со-
к,
У
Кг
Т/р + 1
Рис. 2-26. Структурная схема
апериодического звена второго порядка.
гласно уравнению (2-87) определяется передаточной
функцией W(p), являющейся произведением
передаточных функций
W (р) = Г, (р) W2 (р) = T,iT,2p2 + (т\ + T,t) p + v (2.94а)
где k = kik2— общий коэффициент усиления
апериодического звена второго порядка.
Обозначив в уравнении (2-94а) произведение
Т\Т'2^Т\, а сумму Т/\ + Т/2=Т\, получим:
W (р) = — - . (2-946)
Т2Р2+ Tip+ 1
Тогда уравнение апериодического звена второго
порядка в операторной форме запишется в виде:
(Ty-\-TlP+\)z = kx, (2-95а)
или в дифференциальной форме:
7*,% + Tl%+z = kx. (2-956)
При сравнении полученных уравнений (2-95) с
уравнениями (2-2) видно, что они тождественны друг
другу. На этом основании можно утверждать, что
характеристики звена, описанного уравнениями (2-2):
временная (рис. 2-2) и частотные (рис. 2-4 и 2-6) являются
характеристиками апериодического звена второго
порядка.
93
Частотные характеристики апериодического звена
второго порядка могут быть получены на основании
передаточной функции, записанной уравнением (2-94а)
или (2-946), пользуясь теми же правилами, что и при
определении частотных характеристик апериодического
звена первого порядка, или же графическим методом
(путем перемножения модулей и сложения аргументов
векторов АФХ отдельных звеньев).
Ранее было показано, что для апериодического
звена первого порядка с ростом частоты со величина сдвига
фаз стремится к предельному значению 0 = ^- .
Поэтому на основании условия (2-92) можно сделать
вывод, что для апериодического звена второго порядка
предельное значение для сдвига фаз будет равно 0 =
Таким образом, АФХ апериодического звена второго
порядка лежит уже не в пределах одного квадранта,
как это имело место для апериодического звена
первого порядка (рис. 2-12), а в пределах двух квадрантов
(рис. 2-6).
Графическое построение временной характеристики
апериодического звена второго порядка показано на
рис. 2-24.
в) Апериодическое звено с распределенной по длине
емкостью
Характерным примером апериодического звена с
распределенной по длине емкостью, имеющим место во всех
пневматических регуляторах, является пневматическая
линия связи (трубопровод, соединяющий датчик с
регулирующим устройством или регулирующее устройство
с исполнительным механизмом).
По динамическим свойствам такое звено
представляет собой цепочку бесконечно большого количества
последовательно соединенных одноемкостных
апериодических звеньев.
Зависимость между входной величиной х и выходной
у в апериодическом звене с распределенной по длине
емкостью определяется, как правило, упрощенными
уравнениями. Наиболее распространенный способ со-
94
ставления упрощенного уравнения апериодического
звена с распределенной по длине емкостью состоит в
замене этого звена двумя последовательно соединенными
элементарными звеньями: апериодическим звеном
первого порядка и звеном чистого запаздывания.
Исходя из этого, передаточная функция W(p)
такого звена может быть записана в виде произведения
передаточных функций апериодического звена первого
порядка W\ (р) (2-39) и звена чистого запаздывания W2(p)
(2-82), т. е.
У(/0 = 1М/0У.(/0 = -^^ (2-96)
Тогда упрощенное уравнение апериодического звена
с распределенной по длине емкостью запишется в
операторной форме в виде:
(Tp-\-l)y = kxe~p\ (2-97а)
или в дифференциальной форме:
T%+y = kxt_z. (2-976)
Постоянная времени Т заменяющего
апериодического звена первого порядка в приведенных уравнениях
имеет тот же смысл, что и в апериодическом звене
второго порядка, рассмотренном выше.
Временная и частотные характеристики
апериодического звена с распределенной по длине емкостью могут
быть определены по его передаточной функции
описанными выше методами.
г) Колебательное звено
В рассмотренных выше примерах последовательного
соединения звеньев последние характеризовались
свойством детектирования (однонаправленным действием,
или независимостью входной величины от выходной).
Выходные величины таких цепочек при нанесении
входных воздействий в виде скачков, достигая своих
предельных значений, изменяются монотонно.
Однако наряду с детектирующими в пневматических
регуляторах имеют место также и недетектирующие
звенья, последовательное соединение которых (или
наличие в цепочке одного из них) образует так называе-
95
мое колебательное звено. Выходная величина
колебательного звена при нанесении входного воздействия
в виде, скачка имеет колебательный характер и может
изменяться во времени в виде затухающих,
незатухающих и расходящихся колебаний.
Часто колебательные звенья образуются двумя
последовательно соединенными емкостями (разделенными
сопротивлениями), способными запасать количества
энергии двух видов и взаимно обмениваться этими
энергиями. Если в результате колебаний запас энергии в
таком звене, полученный в начале возмущения,
уменьшается, то колебания выходной величины в течение времени
затухают. Колебательное звено с затухающим
колебательным процессом является устойчивым. Примерами
таких колебательных звеньев, имеющих место в
пневматических регуляторах, являются жидкостные дифмано-
метры, некоторые типы мембранных исполнительных
механизмов, а также некоторые механические системы
приборов.
Колебательное звено может быть образовано также
цепочкой последовательно соединенных детектирующих
звеньев: апериодического первого порядка и
интегрирующего, охваченных отрицательной обратной связью
(см. § 2-6,г). В этом случае действие обратной связи
делает цепочку детектирующих звеньев
сложным недетектирующим звеном,
поскольку в таком звене выходная
величина воздействует на входную.
Для установления зависимости
между входной величиной х и выходной у
в колебательном звене рассмотрим
работу механической системы (рис. 2-27),
состоящей из пружины 1 и поршня 2
(с отверстием 3), перемещающегося
в цилиндре 4, заполненном жидкостью.
Здесь входной величиной х является
воздействие в виде силы FBX, приложенной
к приведенной массе т подвижных
частей системы, а выходной величиной
Рис. 2-27. у — отклонение подвижной системы
ная™емТЛко- (поршня) от положения равновесия,
лебательного Силу сопротивления движению порш-
звена. ня в залитом жидкостью цилиндре Fq
96
можно считать (с некоторым приближением) прямо
пропорциональной скорости его движения v и
направленной ей навстречу, т. е.
Fc = —Aiv, (2-98)
где А\ — постоянный коэффициент.
Усилие Fnp, развиваемое пружиной, прямо
пропорционально отклонению подвижной системы (поршня) от
положения равновесия у и направлено в сторону
положения равновесия, т. е.
Fn» = -A2y, (2-99)
где А2 — коэффициент жесткости пружины.
Если рассматриваемая система связана с
измерительным устройством прибора, имеющего равномерную
шкалу, то можно полагать, что на поршень действует
сила .FBX, прямо пропорциональная изменению
измеряемой величины. Эта сила направлена от положения
равновесия. На этом основании можно записать, что
FBX = cx, (2-100)
где х — изменение измеряемой величины, являющееся
входной величиной звена;
с — коэффициент пропорциональности.
Согласно второму закону Ньютона силы Fc, Fj^ и
FBX сообщают массе т подвижных частей
рассматриваемой системы ускорения а, т. е.
FC+F^+FBX = та. (2-101)
В свою очередь скорость v и ускорение а являются
соответственно первой и второй производными от
выходной величины у по времени, т. е.
а = % (2-103)
Решая совместно уравнения (2-98) — (2-103), получим:
т % + А* Ж + А^ = сх- <2-104)
Тогда, введя обозначения 72= |/'^1 = ^7* ^ =
—-г-, будет получено уравнение колебательного звена
7—795 97
в общем виде:
Уравнение (2-105) представляет собой линейное
дифференциальное уравнение второго 'порядка. Его
характеристическое уравнение
7>2 + 7>+1^0 (2-106)
имеет следующие корни [Л. 35]:
—Ti + V't2,— 471
А., = - щ • (2-Ю7)
Если 7^<47^, то корни характеристического
уравнения (2-107) будут комплексными, т. е.
л=а + *'°>;
р2= — а — /со, j
где
а = Ii_
2Т\ 9
(2-108)
4Ti
При Тх=0 получим а = 0, (о=-^- = соо.
Переходный процесс в колебательном звене при
комплексных корнях характеристического уравнения
в общем случае может быть записан уравнением [Л. 35J
у = Ae~at sin (erf + Р) + *уст. (2-109)
Зная, что xyCT=kx0 при нулевых начальных
условиях, получим:
= arctg-£-. (2-110)
а
98
Тогда можно записать:
y = kx0 1 — ^МН^^^У e""'sin + arcte
(2-Ш)
Уравнение (2-111) характеризует колебательный
переходный процесс с частотой со и затуханием а,
стремящийся к установившемуся значению y=(kx0 при /—*оо
(рис. 2-28).
Колебательный переходный процесс будет возникать
лишь тогда, когда соблюдается неравенство Т2%—
—4Г22<0 или 7i/72<2. Если же Т2— 47^ >0 или
TJT2>2, то корни pi, р2 характеристического уравнения
получаются действительными. Тогда уравнение
переходного процесса может быть записано в виде (Л. 35]:
у = схе^ + C2e~pit + kx0, (2-112)
где с\ и с2— постоянные интегрирования.
t
а)
6)
Рис. 2-28. Временные
характеристики колебательного звена
при различных значениях
TJT2.
а — входное воздействие; б —
изменение выходной величины.
,7.л/
м
Jm
~<csn<
^ х1л
-in
8
Рис. 2-29.
Амплитудно-фазовые характеристики
колебательного звена при
различных значениях Т]/Т2.
В этом случае переходный процесс уже не будет
иметь колебательного характера и такое звено может
быть представлено как два последовательно
соединенных апериодических звена. Отсюда видна также
разница между уравнениями колебательного звена (2-105) и
7* 99
апериодического звена второго порядка (2-956), которые
хотя формально и одинаковы, но между ними
существует принципиальная разница, состоящая в их
физическом смысле.
АФХ колебательного звена может быть получена из
его передаточной функции
W(P)= Т2 * ■ , - (2-ПЗ)
цр* + тгр+ 1
После замены р на /со и ряда преобразований [Л. 21,
26, 32, 35] получим:
W(i<*)=-*-t k
- »17*)» + со*7Ч
ц (/(0)2 + тг (/со) + 1
(2-114)
АФХ колебательного звена для различных значений
Т1[Т2 изображены на рис. 2-29.
2-5. ОБРАЗОВАНИЕ СЛОЖНЫХ ЗВЕНЬЕВ
ПАРАЛЛЕЛЬНЫМ СОЕДИНЕНИЕМ ПРОСТЫХ
а) Общие сведения
Пример параллельного соединения двух звеньев
показан на рис. 2-30, где х — входная величина, общая
для обоих звеньев; ух и у2— выходные величины перво-
го и второго звеньев, которые
—J w (р) —^-i/ в суммирующем устройстве СУ
—I |-j—* алгебраически суммируются в
СУ е —общий выходной сигнал (выход-
, L_jl н^ю величинУ) этих звеньев у.
^ \ w2(р) у2 Динамические свойства
цепочки параллельно соединенных
Рис. 2-30. Параллельное со- звеньев определяются ее переда-
единение^динамических ХОЧной функцией из уравнения
звеньев. y=W(p)x9 где W (р) —
передаточная функция цепочки.
Зависимость передаточной функции цепочки W(p)
от передаточных функций составляющих ее звеньев
W\ (р) и W2(p) будет найдена из условий:
100
yt=W2{p)x\
У^Уг+У*-
(2-115)
Тогда, заменяя величины ух и у2 через их значения,
получим:
y=Wi(p)+W2(p)]x, (2-М6)
откуда
W(p) = Wl(p) + W2(p).
(2-117а)
Если выходные сигналы ух и у2 соответствующих
звеньев в суммирующем устройстве вычитаются друг из
друга, например у = у\—у2, тогда передаточная функция
цепочки последовательно соединенных звеньев будет:
W(p) = Wl(p)-W2(p).
(2-1176)
Таким образом, при параллельном соединении
звеньев передаточная функция цепочки звеньев равна
алгебраической сумме передаточных функций звеньев,
образующих эту цепочку. Эта закономерность остается
справедливой для любого числа параллельно
соединенных звеньев, т. е.
W(p)=Wx(p)+W2(p) + ... +Wn(p). (2-117В)
Соответственно АФХ цепочки параллельно
соединенных звеньев равна алгебраической сумме АФХ звеньев,
образующих эту цепочку, т. е.
W(m) =Wi (ш) +W2(ко) + ...
... + В7я(£ю). С2"118)
Если АФХ параллельно
соединенных звеньев заданы
графически, то их суммарная
характеристика определяется
по известному правилу
сложения векторов—правилу
параллелограмма (рис. 2-31) [Л. 32]. рис. 2-31. Графическое по-
Временная характеристи- строение амплитудно-фазо-
ка h(t) цепочки параллель- вой характеристики цепочки
v 7 г параллельно соединенных
но соединенных звеньев опре- ЗВеНьев „0 характеристикам
деляется графически путем отдельных звеньев.
101
суммирования временных характеристик отдельных
звеньев. Построение временных характеристик цепочек
параллельно соединенных звеньев графическим методом
будет показано на приводимом ниже примере реального
пневматического дифференцирующего звена.
Так же, как и последовательно, параллельно могут
соединяться элементарные звенья любых типов, в любом
количестве и в любой последовательности, образуя в
результате этого различные сложные звенья.
б) Реальное дифференцирующее звено
Зависимость между входной величиной х и
выходной у в реальном дифференцирующем звене определяется
уравнением (2-72), т. е. Т ^-^~\-у=-Т ~^г- Эта
зависимость, как указывалось ранее (§ 2-2, г), в пневматическом
дифференцирующем звене может быть реализована
параллельным соединением усилительного звена (с
коэффициентом усиления k=l) я апериодического звена
первого порядка, выходные сигналы которых алгебраически
суммируются в суммирующем устройстве.
Уравнение такого звена будет получено из его
передаточной функции W (/?), которая в данном случае равна
алгебраической сумме передаточных функций
усилительного звена W1(p)~l и апериодического звена первого
порядка Wt(p)= Tpl+l ,т. е.
W(p) = W1(p)-W2(p) =
Тогда уравнение звена в операторной форме запишется
в виде:
(Тдр + 1)у = Тхрх, (2-120)
что соответствует уравнению (2-72), записанному в
дифференциальной форме. При этом величина Т в
уравнениях (2-72) и (2-120) в отличие от постоянной времени
апериодического звена именуется обычно временем
дифференцирования или постоянной
времени дифференцирования и обозначается Гд.
Временная и частотные характеристики дифферен-
102
а)
У,
t
цирующего звена показаны пунктирными линиями
с точками на рис. 2-15 и 2-16 соответственно.
Графически временная характеристика
рассматриваемого звена определяется путем вычитания
ординат у2 временной характеристики апериодического
звена из ординат у\
временной характеристики
усилительного звена (рис. 2-32).
Это положение относится не
Только к рассмотренному
здесь примеру, но и к
любой цепочке параллельно
соединенных звеньев.
По аналогии с
временной характеристикой для
рассматриваемого звена
может быть построена также
и кривая изменения
выходной величины y = F(t) при
изменении входного
воздействия в виде функции х =
=\f(t). Для этого вначале
определяется методом
секущих кривая изменения
выходной величины звена у2 =
= F2(t), а затем ординаты
искомой кривой y = F(t)
определяются вычитанием
ординат найденной кривой
из заданной х=уи т. е.
у=х—у2.
Как было указано раньше (§ 2-2,г) чисто
дифференцирующие пневматические звенья не реализуются,
поскольку при dx/dt<0 выходной сигнал пневматического
звена не может принимать значения меньше нуля.
Поэтому пневматические дифференцирующие звенья
обычно реализуются в совокупности с пропорциональными
в виде пропорционально-дифференцирующих звеньев.
Образование дифференциальной составляющей в
пропорционально-дифференцирующем звене путем
параллельного соединения усилительного и апериодического
звеньев широко используется в пневматических блоках
предварения, рассматриваемых в последующих главах.
Рис. 2-32. Графическое
построение временной характеристики
цепочки параллельно
соединенных звеньев.
а — входное воздействие; б —
изменение величин у\ и у2\ в —
изменение выходной величины у*=У\—Уг-
103
2-6. ОХВАТ ЗВЕНЬЕВ ОБРАТНЫМИ СВЯЗЯМИ
а) Общие сведения
Примеры охвата динамических звеньев обратными
связями показаны на рис. 2-33.
На рис. 2-33,а на вход звена помимо входной
величины х подается его выходная величина у. Если в этом
СУ
случае в суммирующем
устройстве СУ (последнее
в структурных схемах
обычно изображается кругом,
разделенными на секторы)
из входной величины х
вычитается выходная
величина уу то такую обратную
связь принято называть
отрицательной; если х и
у складываются — положи-
тел ьной.
Зависимость между
входной величиной х и
выходной у в показанном на рис.
2-33,а звене будет
установлена с помощью его передаточной функции W{p).
Последняя для случая охвата звена отрицательной
обратной связью находится из условий:
W,(p)
у t
а)
Г
Щр)
хг~-
У
6)
Рис. 2-33. Охват динамических
звеньев обратными связями.
-у-
' х '
откуда
х = х1-\-у;
Wi (p)xi
(2-121)
У(в) = _™ Eii£L_ (2-122)
WW xl + Wl{p)xl—l+Wl(py (Z
Для случая охвата звена положительной обратной
связью:
W(p)
wt (р)
(2-123)
Из полученных передаточных функций W(p) легко
находятся АФХ W(iu).
104
Для звена, охваченного отрицательной обратной связью,
W (/со)
_ Wi (/со)
— \ + Wx (/со) '
(2-124)
для звена, охваченного положительной обратной связью,
»<*■>■= тЗр?&р <2"125>
В более общем случае, когда выходная величина у
подается на вход звена через промежуточное звено
отрицательной или положительной обратной связи
(рис. 2-33,6), зависимость между входной величиной х
и выходной у устанавливается также с помощью
передаточной функции W(p). Последняя для звена с
передаточной функцией W\(p), охваченного звеном
отрицательной обратной связи с передаточной функцией W2{p)>
находится из условий:
*i=X— yt, откуда л: = .*,-[-«/,;
Х* = У> [ (2-126)
■Л, откуда ^ = ^;
w*(p)=t-=t > откУда Vi'=w*(p)y-
л2 У
Тогда
. и . W (D)u-U l+W>(p)W*(p)
x — x1-i-y1 — Wi(p)-\-w2(p)y — y Wi{p)
(2-127)
откуда
При положительной обратной связи
*(Р)= i-rTffkw (2"129)
105
Соответственно АФХ такого звена W (ш) будут равны:
при отрицательной обратной связи:
+ (2"130)
при положительнсй обратной связи:
wV») = i-waw.w (2431)
Приведенные выводы справедливы для звеньев
любой сложности, охваченных обратной связью, т. е. таких,
у которых передаточные функции W\{p), W2(р)
характеризуют переходные процессы как в одном
элементарном звене, так и в цепочке как угодно большого
количества последовательно или параллельно соединенных
элементарных звеньев.
Примеры реализации наиболее характерных
пневматических звеньев, образуемых путем охвата других
звеньев обратной связью, рассматриваются ниже.
б) Реальное интегрирующее звено
Реальное 'пневматическое интегрирующее звено, как
указывалось раньше (§ 2-2,в), образуется путем охвата
апериодического звена
первого порядка (с коэффи-
циентом усиления k=\)
положительной обратной
связью. Структурная схема
Рис. 2-34. Структурная схема такого звена показана на
интегрирующего звена. рис. 2-34. Зависимость
между входной величиной х и
выходной у в этом звене может быть установлена
через его передаточную функцию, которая согласно
уравнению (2-123) равна W(р) = 1 Zw^(P)' где W^P)^
= fy+~\ передаточная функция апериодического звена
первого порядка (2-39); последняя при k = 1 равна W (рУ=
=7>тт- Тогда
w(p)=f^il-fp^)=rP=iiF- (2"132)
ЩРГ-
Тр+1
106
Полученное уравнение (2-132) определяет
передаточную функцию интегрирующего звена. Оно тождественно
уравнению (2-55) и является его доказательством. Здесь
величина Т в отличие от постоянной времени
апериодического звена именуется обычно временем
интегрирования или постоянной времени интегрирования и
обозначается Ги. Полученной передаточной функции
соответствует уравнение интегрирующего звена (2-53).
Пример реального пневматического интегрирующего
звена, отвечающего показанной на рис. 2-34
структурной схеме, приведен на рис. 2-35. Здесь 1 — мембранный
усилитель с коэффициентам усиления &=1
(являющийся одновременно и сумматором), состоящий из
питающей камеры а, суммирующих камер б, в, г, выходной
камеры д, питающего сопла С1 (с подведенным к нему
сжатым воздухом /яПИт), сбросного сопла С2
(сбрасывающего сжатый воздух в атмосферу /?а); 2 —
регулируемый дроссель (сопротивление); 3— емкость (глухая
или проточная камера) с объемом V.
При увеличении входной величины Рвх = * больше,
чем ро, и при отсутствии положительной обратной
связи на выходе усилителя установится давление х' =
= Рвх—р<ь В этом случае хг будет являться входной
величиной апериодического рпит
звена, образованного
емкостью 3 и дросселем 2\
зависимость между вы-
Рбь,
Рис. 2-35. Принципиальная схема
пневматического интегрирующего
звена.
и входной хг будет под- ^7
чиняться уравнениям апе-
риодического звена
(2-38). При подаче в
камеру б выходной
величины рвых = у
апериодическое звено превращается
в интегрирующее,
реализующее уравнения (2-53), так как положительная
обратная связь своим действием подавляет (снимает)
постоянную составляющую рВых=У в уравнении (2-38а).
Объем V емкости 3 и проводимость у регулируемого
дросселя 2 будет определять постоянную
интегрирования 7И, значение которой Ги=У/у#в, где ^ — газовая
постоянная; 0 — абсолютная температура [Л. 11].
107
Временная и частотные характеристики
интегрирующего звена были приведены в § 2-2,в.
в) Пропорционально-дифференцирующее звено
Зависимость между входной величиной х и
выходной у в пропорционально-дифференцирующем звене
определяется уравнением (2-73), т. е. # = х + ^д~4г~'
Эта зависимость, как указывалось раньше (§ 2-2,г),
в пневматическом пропорционально-дифференцирующем
звене реализуется усилительным звеном (с
коэффициентом усиления k—*oo)1 охваченным инерционной
отрицательной обратной связью, роль которой выполняет
апериодическое звено первого порядка. Структурная
схема такого звена показана на рис. 2-36.
Зависимость между входной х и выходной у
величинами в этом звене может быть установлена через его
передаточную функцию, которая согласно уравнению
(2-128) равна
УР) 1 + Wt (р) W2 (р) 9
где Wx (p)~k — передаточная функция усилительного
звена (2-25), в котором k~^oo\ W2 (р) = — переда-
точная функция апериодического звена (2-39), последняя
при k=l равна Wt(p)= f^+T'
Тогда
= 1:(!+7>тт> <2-133а>
но поскольку при k-^oo дробь l/k—+0, то
У(/>) = 7>+1 = 7>+1. (2-1336)
Полученное уравнение (2-1336) тождественно
уравнению (2-77) и является доказательством уравнения
(2-73). Здесь величина Т в отличие от постоянной
времени апериодического звена первого порядка именуется
обычно временем дифференцирования или постоянной
времени дифференцирования и обозначается Гд.
Принципиальная схема пневматического
пропорционально-дифференцирующего звена, отвечающего приве-
108
денной на рис. 2-36 структурной схеме, показана на
рис. 2-37. Здесь 1 — мембранный усилитель (реле)
с коэффициентом усиления k —> оо (являющийся
одновременно и сумматором), состоящий из питающей
камеры а, суммирующих камер б, в, выходной камеры г,
питающего сопла С1 (с подведенным к нему сжатым воз-
Рпит
Рбх=х
Рбых=У
Рис. 2-36. Структурная схема
пропорционально-дифференцирующего звена.
Рис. 2-37. Принципиальная
схема пневматического
порционально-дифференцирующего звена.
духом рпит), сбросного сопла С2 (сбрасывающего
сжатый воздух в атмосферу ра); 2 —регулируемый
дроссель (сопротивление); 3 — емкость (глухая камера)
с объемом V.
При полностью закрытом дросселе 2 выходная
величина будет р авна Рвых = Рвых.макс = Рпит при любых
значениях рвх>0. В установившемся режиме и при
частично (или полностью) открытом дросселе 2 выходная
величина рвых будет равна входной рвх. В переходном
режиме и при частично открытом дросселе 2 значение
выходной величины рвых будет пропорционально
входной величине рвх и ее производной dpBX/dt, умноженной
на постоянную времени дифференциорвания Гд,
значение которой Гд = К/у7?в, где у— проводимость
дросселя 2\ R — газовая постоянная; в — абсолютная
температура [Л. 11].
Временная и частотные характеристики
пропорционально дифференцирующего звена были приведены
в § 2-2,г.
г) Колебательное звено
Зависимость между входной величиной х и
выходной у в колебательном звене определяется уравнением
109
(2-105) ^2^~b^i ^Л-У — кх или его передаточной
функцией (2-113) W(p) = —9 , апри£=1 W(p) =
= —^ - . Эта зависимость, как указывалось
Ар* + ТгР+ 1
раньше (§ 2-4,г), в пневматическом колебательном, звене
может быть реализована цепочкой последовательно
соединенных апериодического звена первого порядка и
♦/Г
У;
а.)
6)
Рис. 2-38. Структурные схемы колебательного звена.
интегрирующего звена, охваченных отрицательной
обратной связью (рис. 2-38,а).
Учитывая, что пневматическое интегрирующее звено
образуется из апериодического, охваченного
положительной обратной связью, пневматическое колебательное
звено можно также рассматривать как цепочку
последовательно соединенных двух апериодических звеньев,
охваченных отрицательной обратной связью, второе звено
которой дополнительно охвачено положительной
обратной связью. Последнюю принято называть внутренней
положительной обратной связью. Структурная схема
такого звена показана на рис. 2-38,6. Последняя
является тождественной схеме, приведенной на рис. 2-38,а.
Применительно к структурной схеме на рис. 2-38,а
передаточная функция колебательного звена согласно
уравнению (2-122) W (р) = , где W (р) = Wx (р) X
ПО
XW2(p), определится:
w(P) = Tp + { -(l + Tp + i •7^)= гги/>2 + Тш.р + 1 '
(2-134a)
Обозначив Ги — 7\, а ТТЯ = Т2, получим
передаточную функцию колебательного звена в общем виде, т. е.
W(p)=r2 * . (2-1346)
Полученное уравнение (2-1346) передаточной
функции колебательного звена соответствует уравнению
(2-105) и является его доказательством.
д) Графическое построение АФХ цепочек звеньев,
охваченных обратной связью
Если АФХ отдельных звеньев, охваченных обратной
связью, заданы графически, то их суммарная АФХ
может быть построена также графически.
Для структурной схемы, показанной на рис. 2-33,а,
графический метод базируется на том, что знаменатель
в уравнении (2-124) при некоторой частоте со = coi
является разностью вектора W'(mi) при этой же частоте и
вектора единичной длины, направленного вдоль
отрицательной вещественной полуоси, т. е. 1 + W'(m\) =
='W/(tcoi) —(—1) [Л. 32]. Поэтому если АФХ звена
задана графически, то вектор ^(uoi) для частоты щ
может быть найден как
частное от деления
вектора W'(m\) на вектор,
проведенный к точке АФХ
W'(i(di) с этой частотой
из точки, расположенной
на отрицательной
вещественной полуоси на
единичном расстоянии от
начала координат (рис.
2 оп\ Рис. 2-39. Графическое построение
1' a/isv амлитудно-фазовсй характеристи-
для построения АФА ки звеН2ц охваченного отрицатель-
W(ico) звена, собранного ной обратной связью.
111
в соответствии со схемой 2-33,6, по Wi(/g>) и W2(iio)t
заданным графически, необходимо предварительно построить
характеристику W\(iw) ^(ico), которая является
характеристикой разомкнутой цепочки. При этом
разомкнутая цепочка получается из исходной замкнутой после
размыкания канала обратной связи. Далее вектор
W(m) строится описанным выше методом.
е) Графическое построение временных характеристик
цепочек звеньев, охваченных обратной связью
Графическое построение временной характеристики
цепочки динамических звеньев, охваченных обратной
связью, может быть выполнено методом секущих как по
заданным графически временным характеристикам
отдельных звеньев, так и по их уравнениям. Порядок
построения временных характеристик таких звеньев виден
из приводимых ниже примеров.
Первый пример: цепочка последовательно
соединенных двух апериодических звеньев, охваченных
отрицательной обратной связью (рис. 2-40,а). Эта
цепочка может рассматриваться также в виде одного
апериодического звена, охваченного инерционной
отрицательной обратной связью, роль которой выполняет второе
апериодическое звено (рис. 2-40,6). В рассматриваемом
примере (рис. 2-40,а) временные характеристики
первого и второго звена (изменение выходных величин у\
и у в результате скачкообразного изменения входной
величины х) строятся одновременно (рис. 2-40,в).
Временная характеристика для второго звена
строится по ранее рассмотренным правилам, т. е.
считая, что на его вход подается переменное воздействие
^/('Непоследовательность построения временной
характеристики для первого звена существенно отличается от
рассмотренной ранее. Здесь на вход первого звена в
качестве возмущения для (/2+1)-го интервала
принимается разность между величиной входного воздействия х
в конце п-то интервала и выходной величиной у второго
звена в конце (п—1)-го интервала.
Одновременное построение временных характеристик
первого и второго звеньев (или любого другого
количества последовательно соединенных звеньев) состоит
112
в следующем. Пусть для я-го интервала времени
известны отклонения выходных величин у\ и у. Тогда для того
чтобы найти отклонения у\ и у для (n-fl)-ro интервала,
проводится построение экспонент, считая, что на первое
X +
а)
6)
Т,Р+1
У> .
/
Т2р+1
1
1,р+1
У1 .
1
Тгр + 1
Рис. 2-40. Графическое построение временной
характеристики цепочки звеньев, охваченных
обратной связью.
звено воздействует значение внешнего возмущения
в конце я-го интервала. На второе звено воздействует
выходная величина 'первого звена У\ в конце я-го
интервала и т. д.
Второй пример: колебательное звено.
Временная характеристика колебательного звена
строится аналогично предыдущему примеру,
рассматривая это звено как цепочку последовательно соединенных
8—795 113
двух апериодических звеньев, охваченных
отрицательной обратной связью с дополнительной (внутренней)
положительной обратной связью, охватывающей второе
звено (рис. 2-38,6).
При построении временной характеристики такой
цепочки учитывается (из-за наличия обратных связей),
что на вход первого апериодического звена действует
разность между входной величиной х и выходной
величиной у второго апериодического звена, уменьшенной
Рис. 2-41. Графическое построение временной характеристики
колебательного звена.
в k раз (в общем случае), а на вход второго
апериодического звена — сумма выходной величины ух первого
апериодического звена для д-го интервала времени и
выходной величины у второго апериодического звена
для (п—1)-го интервала.
Порядок построения временной характеристики
колебательного звена при входном воздействии на первое
звено х=1 (в относительных величинах) показан на
рис. 2-41.
Из приведенных двух примеров видно, что,
пользуясь методом секущих, можно графически представить
переходный процесс какой угодно сложной цепочки
динамических звеньев, в том числе и системы
автоматического регулирования в целом (включая регулируемый
114
объект), поскольку любой контур (цепочка звеньев)
может быть представлен соответствующим числом
апериодических звеньев первого порядка и дополнительными
внутренними положительными и отрицательными
обратными связями.
Простота и наглядность графического метода
построения переходных процессов в динамических звеньях
является существенным его достоинством, благодаря
чему этот метод широко используется в инженерной
практике исследований различных элементов и САР.
ГЛАВА ТРЕТЬЯ
РЕГУЛЯТОРЫ, ПОСТРОЕННЫЕ НА БАЗЕ
ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
(РЕГУЛЯТОРЫ ПРИБОРНОГО ТИПА)
3-1. ОБЩИЕ ЗАМЕЧАНИЯ
Развитие пневмоавтоматики исторически
складывалось так, что в начале создавались конструкции
регуляторов, построенных на базе измерительных приборов.
Значительно позже, в связи с усложнением задач
автоматизации и в связи с повышением требований к
качеству регулирования, развитие пневмоавтоматики пошло
по пути создания конструкций регуляторов, построенных
по блочному и элементно-модульному принципам.
Однако несмотря на это, регуляторы, построенные на базе
измерительных приборов, не утратили своего значения
и до настоящего времени.
В основе конструкций регуляторов, построенных на
базе измерительных приборов, лежит принцип
многофункциональности. Конструкции регуляторов,
построенных по этому принципу, объединяют в себе датчик, за-
датчик, регулирующее устройство и показывающий или
самопишущий механизмы 1 (некоторые конструкции
регуляторов показывающего или самопишущего
механизма не содержат). Регуляторы, построенные на базе
измерительных приборов, часто называют
регуляторами приборного типа.
1 В настоящей главе под регулятором подразумевается
комплекс устройств без исполнительного механизма.
8* 115
Регуляторы приборного типа имеют ряд достоинств
и поэтому продолжают широко использоваться в
различных отраслях промышленности как самостоятельно,
так и в совокупности с регуляторами блочных
конструкций. Их достоинства заключаются в том, что функции
контроля и регулирования объединены в одном изделии,
благодаря чему в ряде случаев удается существенно
уменьшить количество аппаратуры, упростить монтаж
и обслуживание системы автоматического контроля и
регулирования в целом.
Наряду с этим сам принцип построения регуляторов
■в виде комплектных устройств имеет существенный
недостаток. Этот недостаток состоит в том, что с помощью
регуляторов приборного типа могут быть реализованы
лишь одноконтурные САР. Реализация же
многоконтурных САР возможна лишь при условии использования
регуляторов, построенных по блочному принципу.
Однако регуляторы приборного типа могут быть
использованы также и в многоконтурных САР; при этом они
могут выполнять роль корректирующих при работе в
комплекте с блочными, что расширяет область их
распространения и создает предпосылки для дальнейшего их
развития.
При рассмотрении принципов действия и
особенностей работы регуляторов приборного типа важное
значение имеют такие вопросы, как основные требования
к датчикам, особенности работы датчиков в различных
условиях, а также сведения по основным типам
чувствительных органов и пневмопреобразователей,
применяемых в элементах пневмоавтоматики. Указанные
вопросы рассмотрены в книге автора [Л. 31] и в данной
книге не рассматриваются.
3-2. РЕГУЛЯТОРЫ ОБРАБАТЫВАЮЩИЕ П-ЗАКОН
РЕГУЛИРОВАНИЯ
а) Регуляторы давления РД
Регуляторы РД предназначены для автоматического
регулирования давления неагрессивных по отношению
к стали и латуни газов, паров и жидкостей. В
зависимости от модификации регуляторы рассчитаны на следую-
U6
щие пределы настройки регулируемого давления: РД-4—
от 1 до 3; РД-6 —от 1 до 5; РД-8 —от 2 до 6; РД-16 —
от 3 до 12; РД-25 —от 5 до 20; РД-30 — от 6 до
24 кгс/см2.
По характеру регулирующего воздействия
регуляторы являются непрерывного действия, отрабатывающие
пропорциональный (Л) закон регулирования, с
коэффициентом усиления, устанавливаемым в пределах от
20 до 2 (или диапазоном дросселирования,
устанавливаемым в пределах от 5 до 50%).
П-закон регулирования отрабатывается за счет
пропорционального перемещения дроссельной заслонки
относительно сопла встроенного пневмопреобразователя,
что позволило выполнить конструкцию регулирующего
устройства предельно простой.
Регуляторы выполнены бесшкальными, поэтому для
контроля величины регулируемого давления должен
быть установлен показывающий или самопишущий
манометр.
Принципиальная схема и общий вид регулятора РД
показаны на рис. 8-1.
Регулятор состоит из трех основных узлов:
измерительного устройства, чувствительным органом которого
является одновитковая трубчатая пружина, ручного
задатчика и пневмопреобразователя.
Изменение регулируемого давления вызывает
перемещение вправо или влево свободного конца
измерительной трубчатой пружины 1, что создает перемещение
дроссельной заслонки 2 относительно сопла 3; при этом
дроссельная заслонка поворачивается вокруг
передвижной оси 4 и прижимается к соплу пружиной 5.
Сопло 3 через постоянный дроссель 6 питается
сжатым воздухом, очищенным от пыли, масла и влаги, с
постоянным давлением 1,3—1,5 кгс/см2, поддерживаемым
редуктором. Поскольку проходное сечение сопла 3
в несколько раз больше проходного сечения
постоянного дросселя 6, давление в междроссельном
пространстве (в камере между постоянным дросселем 6 и соплом
3) пропорционально зависит от величины зазора между
соплом 3 и дроссельной заслонкой 2.
Давление в междроссельном пространстве является
выходным сигналом регулятора, величина которого
изменяется от нуля до 1 кгс/см2, и по командному трубо-
117
118
проводу с внутренним диаметром 4—6 мм подается
к исполнительному механизму.
Узел сопла и постоянного дросселя, а также
передвижная ось 4 закреплены на плате 7,
поворачивающейся вокруг оси 8 рычагом 9. Последний перемещается
вправо или влево рукояткой 10 и винтом 11 ручного
задатчика.
Зазор между соплом 3 и дроссельной заслонкой 2
зависит как от величины давления, подводимого к
измерительной трубчатой пружине 1, так и от положения
оси 4, закрепленной на плате 7 (от величины задания).
Таким образом, дроссельная заслонка 2 является
одновременно суммирующим устройством, посредством
которого производится алгебраическое суммирование
перемещений свободного конца измерительной трубчатой
пружины 1 и рычага 9 ручного задатчика. В результате
алгебраического суммирования дроссельная заслонка 2
перемещается относительно сопла 3 на величину,
пропорциональную рассогласованию между регулируемым
давлением и его заданием (с учетом заданного
коэффициента усиления), что вызывает пропорциональное
изменение давления воздуха на выходе регулятора.
Коэффициент усиления регулятора определяется
положением оси 4 в продольной прорези 12 платы 7.
В крайнем верхнем положении оси 4 в прорези 12
коэффициент усиления регулятора kv = 2 (что соответствует
диапазону дросселирования Д=б©%), при крайнем
нижнем положении &р=20 (что соответствует Д = 5%).
Из принципиальной схемы и описания видно, что
в регуляторах РД зависимость между величиной Лср
(разницей между текущим и заданным значениями
регулируемого давления) и выходным сигналом \х
реализуется в соответствии с уравнением (1-2), т. е. [х =
= —&рД!ф. Как указывалось ранее (§ 1-4,6), такая
зависимость вызывает определенные затруднения во время
настройки регулятора. Затруднения, в частности,
возникают при установке начального значения выходного
сигнала [х0, соответствующего рассогласованию Дф=0
при заданной нагрузке регулируемого объекта. В этом
смысле желательно, чтобы регулятор отрабатывал
выходной сигнал в соответствии с уравнением (1-8), т. е.
\х = —&рД'ф + |1о. Однако регуляторы РД такой
возможности не имеют, что является существенным их недостат-
119
ком. При настройке этих регуляторов минимальное
рассогласование (Дср = 0) устанавливается при
максимальной нагрузке регулируемого объекта; рассогласование
увеличивается при уменьшении нагрузки, что приводит
к увеличению статической неравномерности
регулирования (см. § 1-4,6).
Второй важной особенностью регуляторов РД
является отсутствие в них усилителей мощности
выходного сигнала. В связи с этим регуляторы
характеризуются большой инерционностью и могут применяться
лишь для регулирования технологических процессов
в объектах с большой постоянной времени.
Для улучшения условий работы и повышения
качества регулирования эти регуляторы следует
устанавливать непосредственно возле исполнительных механизмов,
а последние оборудовать позиционерами.
Регулятор РД может быть настроен на прямое или
обратное действие. На рис. 3-1 показана
принципиальная схема регулятора прямого действия. Здесь
увеличение давления регулируемой среды вызывает увеличение
давления сжатого воздуха в выходной линии
регулятора. Если узел сопла 3 с постоянным дросселем 6, а
также передвижную ось 4 и пружину 5 переставить на
правую сторону платы 7 (дроссельная заслонка 2 при этом
будет находиться слева от сопла 5), то регулятор будет
перестроен с прямого на обратное действие и тогда
увеличение давления регулируемой среды будет
вызывать уменьшение давления воздуха в выходной линии
регулятора.
Давление питающего воздуха контролируется
манометром 13, а величина давления воздуха в выходной
линии — манометром 14.
б) Регуляторы температуры дилатометрические
Дилатометрические регуляторы температуры
изготавливаются двух типов: ДТДП и ДР-3. Оба типа
рассчитаны на регулирование температуры в пределах от
О до 40° С и предназначены для работы в установках
кондиционирования воздуха, а также в других
установках с аналогичными условиями работы.
Принцип действия, заложенный в регуляторах,
основан на использовании разницы в коэффициентах ли-
120
немного расширения различных твердых материалов,
в данном случае латуни и инвара (железо-никелевого
сплава).
600
Рис. 3-2. Регулятор температуры дилатометрический
ДТДП.
По принципу действия, техническим
характеристикам и по устройству регуляторы ДТДП и ДР-3
аналогичны и отличаются друг от друга лишь некоторыми
конструктивными особенностями.
Устройство регулятора ДТДП показано на рис. 3-2.
121
Измерительная система состоит из латунной трубки
имеющей высокий коэффициент линейного
расширения, и инварного стержня 2, коэффициент линейного
расширения которого близок к нулю. Латунная трубка
1 одним концом жестко соединена с втулкой 3,
запрессованной в пластмассовом корпусе 4. Во втором
(свободном) конце трубки с помощью гайки 5 и штифта 6
закреплен конец инварного стержня 2. Второй
(свободный) конец инварного стержня входит во втулку 3 и
воздействует на дроссельную заслонку — клапан 7,
седлом которого является торец сопла — втулки §,
ввернутой в резьбовой шток 9. Последний передвигается по
внутренней резьбе втулки 3, изменяя положение втулки
8 относительно дроссельной заслонки — клапана 7, что
приводит к изменению величины зазора между соплом
и заслонкой, определяя этим величину заданного
значения регулируемой температуры. Шток 9 уплотнен
во втулке 3 четырьмя резиновыми кольцами 10.
Заслонка 7 прижимается к соплу 8 пружиной 11.
Заданное значение регулируемой температуры
устанавливается поворотом штока 9 в резьбе втулки 3
(с помощью специального ключа) и показывается
стрелкой 12 (насаженной на шток 9) по шкале 13.
Регулятор ДТДП может работать как по схеме
прямого действия, так и обратного.
При работе регулятора по схеме прямого действия
сжатый воздух с постоянным давлением 1,1 кгс/см2 из
линии питания через штуцер 14 и постоянный дроссель
15 поступает в кольцевую камеру А, а затем через
штуцер 16 по трубопроводу с внутренним диаметром 4—
6 мм — к исполнительному механизму. Давление
воздуха в камере А контролируется манометром 17. Часть
сжатого воздуха из камеры А через управляемый
дроссель (сопло 8 и дроссельную заслонку 7) проходит
в кольцевую камеру Б и далее через отверстие В во
втулке 3 и корпусе 4 сбрасывается в атмосферу/ С
увеличением регулируемой температуры удлиняется
латунная трубка 1, что приводит к перемещению жестко
связанного с ее свободным концом инварного стержня 2.
Перемещение последнего вызывает уменьшение зазора
между дроссельной заслонкой 7 и соплом 8, что
приводит к пропорциональному увеличению давления
воздуха в кольцевой камере Л и на выходе регулятора.
122
Приг уменьшении регулируемой температуры зазор
между заслонкой и соплом увеличивается, а давление на
выходе регулятора уменьшается.
Регулятор обратного действия отличается от
прямого действия направлением движения сжатого воздуха.
При работе регулятора по схеме обратного действия
штуцер подвода сжатого воздуха 14 переставляется в
отверстие В, и тогда сжатый воздух из линии питания
с постоянным давлением 1,1 кгс/см2 поступает в
кольцевую камеру Б, откуда через управляемый дроссель
(сопло 8 и заслонку 7) проходит в кольцевую камеру А,
а затем через штуцер 16 — в линию к исполнительному
механизму и через постоянный дроссель 15 — в
атмосферу. В этом случае с увеличением регулируемой
температуры зазор между дроссельной заслонкой и соплом
уменьшается, что приводит к уменьшению давления
командного воздуха, поступающего от регулятора к
исполнительному механизму. При уменьшении
регулируемой температуры зазор увеличивается, давление
воздуха на выходе регулятора также увеличивается.
Из рисунка 3-2 и описания видно, что по характеру
регулирующего воздействия регулятор ДТДП является
пропорциональным непрерывного действия.
Пропорциональный закон регулирования
отрабатывается за счет пропорционального перемещения
дроссельной заслонки — клапана 7 относительно сопла —
втулки 8.
Коэффициент усиления регулятора &р = 20 (что
соответствует диапазону дросселирования Д=5%).
Следовательно, при отклонении температуры регулируемой
среды от задания на 2° С выходной сигнал регулятора
изменяется от минимального (0,1 кгс/см2) до
максимального (1,0 кгс/см2) значения. При этом коэффициент
усиления регулятора не настраивается, что существенно
ограничивает область его применения.
В регуляторе ДТДП нет усилителя мощности,
поэтому его следует устанавливать непосредственно возле
исполнительного механизма, а последний оборудовать
позиционером.
Погрешность настройки заданного значения
регулируемой температуры не превышает ±0,5% диапазона
шкалы задатчика.
123
Регулятор не имеет шкалы для отсчета текущего
значения регулируемой температуры. Поэтому для
облегчения условий наладки рядом с регулятором необходимо
устанавливать показывающий или самопишущий
термометр.
в) Регуляторы уровня поплавковые
В качестве регуляторов уровня, отрабатывающих
П-закон регулирования, широкое распространение в
различных отраслях промышленности получили
пневматические регуляторы типов РУКД-ШК, РУВЦ-ШК и
РУГЦ-ШК. Эти регуляторы объединяют в себе функции
измерительных приборов с пневматической
дистанционной передачей и пневматических регуляторов.
Они предназначены для автоматического контроля и
регулирования уровня неагрессивных жидкостей (главным
образом нефтепродуктов, в которых содержание
сероводорода не превышает 2%) с температурой от —40 до
+1200° С и плотностью от 0,7 до 1,2 г/смъ в
технологических аппаратах, работающих под давлением.
Регуляторы этой группы позволяют измерять и
регулировать уровень жидкости в следующих пределах:
Модификация
Уровень,
мм
Давление»
кгс/см*
Модификация
Уровень,
мм
Давление,
! кгс/см*
РУКЦ-ШК-400-16
0-
-400
16
РУВЦ-ШК-800-16
0-
-800
16
РУКЦ-ШК-400-40
0-
-400
40
РУВЦ-ШК-800-40
0-
-800
40
РУКЦ-ШК-400-64
0-
-400
64
РУВЦ-ШК-800-64
0-
-800
64
РУКЦ-ШК-800-16
0-
-800
16
РУГЦ-ШК-400-16
0-
-400
16
РУКЦ-ШК-800-40
0-
-800
40
РУГЦ-ШК-400-40
0-
-400
40
РУКЦ-ШК-800-64
0-
-800
64
РУГЦ-ШК-400-64
0-
-400
64
РУВЦ-ШК-400-16
0-
-400
16
РУГЦ-ШК-800-16
0-
-800
16
РУВЦ-ШК-400-40
0-
-400
40
РУГЦ-ШК-800-40
0-
-800
40
РУВЦ-ШК-400-64
0-
-400
64
РУГЦ-ШК-800-64
0-
-800
64
Каждый из рассматриваемых регуляторов состоит из
двух частей: измерительной, включающей в себя
измерительное устройство и поверочное приспособление, и
пневматической, включающей в себя механизм пневма-
124
тической дистанционной передачи и регулирующее
устройство.
Принцип действия, использованный в измерительных
устройствах, основан на измерении потери веса
тонущего поплавка (буйка) в зависимости от величины
погружения его в жидкость.
По принципу действия, техническим
характеристикам и по устройству регуляторы РУКЦ, РУВЦ и РУГЦ
аналогичны и отличаются друг от друга лишь некоторы-
Рис. 3-3. Измерительное устройство регулятора уровня РУКЦ.
ми конструктивными особенностями измерительного
устройства.
Отличительной особенностью измерительного
устройства регулятора РУКЦ является наличие в нем
выносной цилиндрической камеры, в которой расположен
буек. Измерительные устройства регуляторов РУВЦ и
РУГЦ выносной цилиндрической камеры не имеют;
в этих регуляторах буек располагается непосредственно
в технологическом аппарате, в остальном
измерительные устройства регуляторов РУВЦ и РУГЦ не
отличаются от измерительных устройств регулятора РУКЦ.
Измерительное устройство с поверочным
приспособлением регулятора РУКЦ показано на рис. 3-3.
В цилиндрической камере 1 помещен тонущий
поплавок (буек) 2, являющийся чувствительным органом
125
измерительного устройства. Продолжением
цилиндрической камеры / являются угловой патрубок 3 и
переходный патрубок 4, составляющие вместе корпус
измерительного устройства. Буек 2 подвешен к свободному
концу рычага 5, второй конец которого жестко
прикреплен к призме 6, установленной на керне 7. Последний
жестко закреплен в переходном патрубке 4. От
переходного патрубка 4 в горизонтальной плоскости под углом
90° отходит патрубок 8, внутри которого находятся
торсионная трубка 9 и ось 10, приваренные торцами к
призме 6. Второй конец торсионной трубки 9 прикреплен
к торцу патрубка 8, а свободный конец оси 10 через
гайку // проходит наружу измерительного устройства.
Поворот рычага 5 и призмы 6 вызывает
закручивания торсионной трубки 9 (относительно ее конца,
прикрепленного к торцу патрубка 8) и поворот оси 10.
Торсионная трубка 9 при этом выполняет роль
пружины, уравновешивающей вес буйка 2, и является бессаль-
никовым уплотнением при выводе оси 10 из полости
высокого давления.
Таким образом, изменение уровня жидкости в
цилиндрической камере / вызывает большее или меньшее
погружение буйка 2, что вызывает соответственно
уменьшение или увеличение силы веса этого буйка,
а это в свою очередь вызывает через рычаг 5 и призму
6 пропорциональный поворот оси 10. Следовательно,
ось 10 является выходным звеном измерительного
устройства, передающим перемещение буйка механизму
пневматической дистанционной передачи и
регулирующему устройству.
Измерительное устройство регулятора снабжено
поверочным приспособлением, позволяющим производить
периодическую ручную проверку фактического
положения буйка 2 и исправности работы механизма
пневматической дистанционной передачи и регулирующего
устройства. Принцип действия и устройство
поверочного приспособления состоят в следующем. Поворот
стрелки 12 через оси 13 и кулачок 14 вызывает
перемещение рычага 15 и штока 16 до соприкосновения
последнего со свободным концом рычага 17, второй конец
которого приварен к призме 6. Момент соприкосновения
штока 16 с рычагом 17 определяет фактическое
положение буйка 2 (а следовательно, и уровень жидкости
126
в технологическом аппарате) и контролируется по
шкале 18, отградуированной в единицах уровня. При
проверке уровня жидкости (положения буйка), плотность
которой отличается от тарировочной, кулачок 14
должен быть передвинут по оси 13 вдоль шкалы 19,
отградуированной в единицах плотности.
Принципиальная схеме пневматической части
регулятора уровня показана на рис. 3-4.
Пневматическая часть регулятора состоит из
механизма пневматической дистанционной передачи и
регулирующего устройства.
Механизм пневматической дистанционной передачи
работает по схеме компенсации перемещения1,
выходной сигнал которого изменяется от 0,2 до '1 кгс/см2 при
изменении уровня жидкости от минимального до
максимального предела измерения. Он состоит из узла
управляемого дросселя (образованного дроссельной
заслонкой 20 и соплом 21), постоянного дросселя 22,
мембранного усилителя уровня и мощности выходного сигнала
1МУ, одновитковой трубчатой пружины 23
(выполняющей роль узла отрицательной обратной связи) и узла
ручной корректировки значения выходного сигнала. Как
показано на рис. 3-4, сопло 21 установлено на свободном
конце трубчатой пружины 23, внутри которой
проложена трубка 24, соединяющая сопло 21 с постоянным
дросселем 22; при этом сопло 21, постоянный дроссель 22,
трубка 24 и камера Г усилителя 1МУ образуют
проточную камеру пневмопреобразователя, питающуюся
сжатым воздухом из линии питания.
Поворот выходной оси 10 измерительного узла
вызывает перемещение закрепленной на ней дроссельной
заслонки 20 относительно сопла 21. Вызванное этим
изменение зазора между соплом и заслонкой приводит
к изменению давления воздуха в проточной камере
(в том числе и в камер Г усилителя), что вызывает
срабатывание (посредством полого штока 25) двойного
клапана 26 и изменение давления воздуха в камере Б
усилителя, на выходе механизма и внутри трубчатой
пружины 23 узла отрицательной обратной связи. Изме-
1 Более подробные сведения по механизмам 'пневматической
дистанционной передачи, работающим по схеме компенсации
перемещения, даны в [Л. 31].
127
нение давления воздуха на выходе прибора будет
продолжаться до тех пор, пока трубчатая пружина 23 (под
действием выходного давления воздуха) не передвинет
сопло 21 (вслед за дроссельной заслонкой 20) в новое
равновесное положение, соответствующее новому зна-
Рис. 3-4. Пневматическая часть регулятора уровня РУКЦ (является
продолжением рис. 3-3).
128
чению уровня жидкости, т. е. пока не будет достигнута
компенсация перемещений дроссельной заслонки и
сопла.
Установка начального значения выходного сигнала
(0,2 кгс/см1 при начальном значении уровня жидкости)
производится путем изменения начального зазора
между соплом 21 и заслонкой 20, достигаемого за счет
поворота платы 27 (вместе с трубчатой пружиной 23 и
соплом 21) вокруг оси 28 при помощи винта 29,
резьбовой стойки 30 и пружины 31.
При измерении уровня жидкости, плотность которой
отличается от тарировочной, должна быть произведена
соответствующая настройка механизма пневматической
дистанционной передачи, т. е. должна быть произведена
корректировка пропорциональности выходного сигнала
в соответствие с изменением плотности измеряемой
жидкости. Указанная корректировка производится
путем перемещения стойки 32 (вместе с трубчатой
пружиной 23 и соплом 21) по пазу 33 вдоль шкалы 34,
отградуированной в единицах плотности измеряемой
жидкости. При такой корректировке сопло 21 перемещается
вдоль дроссельной заслонки 20, что приводит к
изменению передаточного отношения рычажной передачи,
а вместе с этим — и к изменению пропорциональности
выходного сигнала.
Механизм пневматической дистанционной передачи
питается сжатым воздухом с давлением 1,4 кгс/см2.
Давление питающего воздуха контролируется по
манометру 35. Значение выходного сигнала контролируется
по манометру 36 (отградуированному от 0 до 100%
величины уровня), установленному на корпусе
регулятора.
КЬ рассмотренном механизме пневматической
дистанционной передачи мембранный усилитель усиливает
выходной сигнал по уровню и по мощности, что улучшает
его статические и динамические свойства; при этом
усиление уровня выходного сигнала достигается за счет
разности эффективных площадей верхней и нижней
мембран, управляющих полым штоком 25.
Регулирующее устройство по принципу действия и
по конструкции почти не отличается от механизма
пневматической дистанционной передачи. Оно состоит из
тяги 37 (передающей перемещение оси 10 регулирующе-
9-795 129
му устройству), дроссельной заслонки 38, сопла 39,
трубчатой пружины 40 (выполняющей роль узла
отрицательной обратной связи), мембранного усилителя
уровня и мощности выходного сигнала 2МУ, ручного
задатчика и дроссельного клапана 41,
предназначенного для изменения коэффициента усиления (диапазона
дросселирования) регулятора. Таким образом,
регулирующее устройство отличается от механизма
пневматической дистанционной передачи наличием в линии
отрицательной обратной связи дроссельного клапана 41.
Роль ручного задатчика выполняет механизм
установки начального зазора между дроссельной заслонкой
38 и соплом 39, состоящий из платы 42, винта 43,
пружины 44 и оси 45.
Регулирующее устройство, собранное по схеме 3-4,
работает по принципу прямого действия, т. е.
увеличение уровня жидкости вызывает пропорциональное
увеличение выходного сигнала. Если узел сопла 39 вместе
с трубчатой пружиной 40 повернуть на 180°, то
регулятор уровня будет перестроен с прямого на обратное
действие, т. е. увеличение уровня жидкости будет
вызывать пропорциональное уменьшение выходного сигнала.
Из рис. 3-3 и 3-4 и описания видно, что по характеру
регулирующего воздействия регулятор уровня является
пропорциональным непрерывного действия.
Пропорциональный закон регулирования в этом регуляторе
подчиняется уравнению (1-2) и отрабатывается за счет
действия отрицательной обратной связи.
Коэффициент усиления регулятора может
настраиваться в пределах от 20 до 1 (что соответствует
диапазону дросселирования Д = 5-М00%). Изменение
коэффициента усиления достигается за счет выпуска в.
атмосферу части сжатого воздуха, поступающего
в трубчатую пружину 40 через дроссельный клапан 41,
величина открытия которого устанавливается вручную.
Давление сжатого воздуха, поступающего от
регулятора уровня к исполнительному механизму,
изменяется от 0 до 1 кгс/см2 и контролируется по манометру 46,
установленному на корпусе регулятора.
Благодаря наличию в регуляторе уровня усилителя
мощности выходного сигнала значительно улучшились
его динамические свойства по сравнению с
рассмотренными выше регуляторами давлений и температуры. Так,
130
при длине пневматической линии связи 60 м,
соединяющей регулятор с исполнительным механизмом,
постоянная времени регулятора (вместе с линией связи) не
превышает 3 сек, а при длине линии связи 300 м при
внутреннем диаметре трубопровода 6 мм— не более
Выход a ffmopu чному прибору {к//ц ")
-430
реголятира
Размеры
А
И
РУКЦ'ШК-ЧОО-16
г/5
680
400
рущ-шк-т-и
230
рукц-шк-т-бь
150
тц-шшо-w
215
W8L
800
230
РУКЦ-ШК-800-6Ч
250
Рис. 3-5. Общий вид регулятора уровня РУКЦ.
25—30 сек (без учета инерционности исполнительного
механизма).
Общий вид регулятора РУКЦ показан на рис. 3-5.
По рассмотренной схеме работают также и
регуляторы уровня типов РУВЦ и РУГЦ. В отличие от
регуляторов РУКЦ регуляторы РУВЦ и РУГЦ не имеют
поплавковой камеры. В этих регуляторах тонущий по-
9* 131
плавок (буек) размещается непосредственно в
технологическом аппарате, что в ряде случаев вполне
допустимо. Благодаря этому регуляторы РУВЦ и РУГЦ
несколько проще по конструкции, чем регуляторы РУКД.
Однако, если технологический аппарат не позволяет
430
Рис. 3-6. Общий вид регулятора уровня РУВЦ.
разместить в нем буек регулятора, следует применять
регулятор уровня РУКД (с вынесенной поплавковой
камерой) или другой тип регулятора.
Отличительной особенностью регулятора РУВЦ
является вертикальное расположение
присоединительного фланца, посредством которого он монтируется на
технологическом аппарате. Общий вид регулятора
РУВЦ показан на рис. 3-6.
132
Вы 10 ft к ft тор и чномц
npufoptf
Тип
регулятора
Размеры
Исполнение!
Исполнение!!
А
L
Н
d
А
L
Н
d
РУГЦШШО-16
405
280
S3
405
435
1 os i
445
280
т
435
ругц-шк-т-м
-
-
470
т
РУГЦ-ШК-800-W
w
280
405
435
ругц-шк-вомо
w
180
435
РУГЦ-ШК-80Ш
-
-
-
410
4/0
Рис. 3-7. Общий вид регулятора уровня РУГЦ.
Отличительной особенностью регулятора РУГЦ
является горизонтальное расположение
присоединительного фланца. Общий вид регулятора РУГЦ показан на
рис. 3-7.
3-3. РЕГУЛЯТОРЫ, ОТРАБАТЫВАЮЩИЕ ПИ-ЗАКОН
РЕГУЛИРОВАНИЯ
а) Измерительные приборы с регулирующими
устройствами 04 и 04М
Количество модификаций измерительных приборов
с регулирующими устройствами 04 и 04М,
выпускаемых отечественной промышленностью, достаточно
велико. Основными из них являются:
04-ВСС-410, 04-ВСС-410М, 04-ВСС-610 и 04-ВСС-
610М—вакуумметры сильфонные самопишущие с диско-
133
вой диаграммой, предназначение для контроля и
регулирования вакуума в пределах от 0 до 760 мм рт. ст.;
04-ВСС-430М и 04-ВСС-630М —вакуумметры двух-
сильфонные самопишущие с дисковой диаграммой,
предназначенные для контроля двух величин и
регулирования одной из них в пределах от 0 до 760 мм рт. ст.;
04-МСС-410, 04-МСС-410М, 04-MGC-610 и 04-МСС-
610М— манометры сильфонные самопишущие с
дисковой диаграммой, предназначенные для контроля и
регулирования давления неагрессивных газов, паров и
жидкостей в пределах от 0 до 0,6; 1; 1,6; 2,5 и 4 кгс/см2;
04-МСС-430М и 04-МОС-630М —манометры двух-
сильфонные самопишущие с дисковой диаграммой,
предназначенные для контроля двух величин и
регулирования одной из них в пределах от 0 до 0,6; 1; 1,6; 2,5 и
4 кгс/см2'
04-МСТМ-410, 04-МСТМ-41 ОМ, 04-МСТМ-610 и
04-МСТМ-610М — манометры с многовитковой
(геликоидальной) трубчатой пружиной самопишущие с
дисковой диаграммой, предназначенные для контроля и
регулирования давления в пределах от 0 до 6; 10; 16;
25; 40; 60; 100 и 160 кгс/см2;
04-ДП-410, 04-ДП-410М, 04-ДП-610 и 04-ДП-610М —
дифманометры поплавковые с ртутным заполнением
самопишущие с дисковой диаграммой,
предназначенные для контроля и регулирования перепада (разности)
давлений в пределах от 0 до 630; 1 000; 1 600;
2 500 кгс/м2, а также от 0 до 0,4; 0,63; 1,0 и 1,6 кгс/см2
при избыточном давлении измеряемой среды до
160 кгс/см2)
04-ТСГ-410,04-ТСГ-410М, 04-ТСГ-610 и 04-ТСГ-610М—
термометры манометрические самопишущие с дисковой
диаграммой, предназначенные для контроля и
регулирования температуры в пределах от 0 до 120; 160; 200
и 300° С при избыточном давлении измеряемой среды
до 160 кгс/см2;
ЭМД — электронный мост самопишущий с дисковой
диаграммой без сигнального устройства (модель 4806)
или с дополнительным трехконтактным сигнальным
устройством (модель 4821), предназначенный для
работы в комплекте с медным или платиновым термометром
сопротивления;
ЭМП-209М2 и ЭМ1П-209МЗ — электронные мосты само-
134
пишущие с ленточной диаграммой, предназначенные
для работы в комплекте с медными или платиновыми
термометрами сопротивления;
ЭМП-109ИМЗ — электронный мост самопишущий
с ленточной диаграммой в искробезопасном исполнении,
предназначенный для работы в комплекте с медным
или платиновым термометром сопротивления;
ЭПД — электронный потенциометр самопишущий
с дисковой диаграммой без сигнального устройства
(модель 4803) или с дополнительным трехконтактным
сигнальным устройством (модель 4823), предназначенный
для работы в комплекте с хромель-копелевой, хромель-
алюмелевой, платинородий-платиновой термопарой или
с датчиком радиационного пирометра;
ЗПП-09М2 и ЭПП-09МЗ — электронные
потенциометры самопишущие с ленточной диаграммой,
предназначенные для работы в комплекте с хромель-копелевы-
ми, хромель-алюмелевыми или платинородий-платино-
выми термопарами;
ЭПП- 16АМЗ — электронный потенциометр
самопишущий с ленточной диаграммой, предназначенный для
работы в комплекте с датчиком радиационного
пирометра;
ЭМП-68М1—электронный двойной мост
самопишущий с ленточной диаграммой, рассчитанный для работы
в комплекте с датчиком ДВП электрического
психрометра ПЭ и предназначенный для контроля и
регулирования относительной влажности воздуха в пределах от
20 до 100% с температурой в пределах 10—40, 40—70
и 70—100° С;
ЭПИД — вторичный электронный дифференциально-
трансформаторный прибор самопишущий с дисковой
диаграммой без интегратора (модель 4703) или с
интегратором (модель 4706).
В числе перечисленных приборов вакуумметры,
манометры, дифманометры и манометрические термометры
с шифрами 410 и 430 имеют привод дисковой
диаграммы от часового механизма с шестисуточным заводом;
с шифрами 610 и 630 — от синхронного
электродвигателя 220 в переменного тока.
Буква М в шифрах приборов указывает на
модернизацию конструкции регулирующего устройства или
прибора в целом.
135
Основная приведенная погрешность измерения для
приведенных выше приборов составляет: для приборов
ВСС ±2,5%; для приборов МСС, МСТМ, ДП и ТС Г
±1,5%; для приборов ЭМД, ЭПД и ЭПИД ±0,5% по
показывающей шкале и ± 1 % по дисковой диаграмме;
для приборов ЭМП и ЭПЛ с широкими пределами
измерения ±0,5% по показывающей шкале и по
ленточной диаграмме и ±1% для приборов с узкими
пределами измерения.
Манометрические термометры ТСГ имеют капилляр,
соединяющий термобаллон с измерительным
устройством, длиной 10, 25 или 40 ж, а также термобаллон
диаметром 22 мм и длиной 255 мм, рассчитанный на
наружное давление до 64 кгс/см2, с передвижным штуцером
с резьбой МЗЗХ2 и хвостовиком длиной 200, 300 или
500 мм.
Различие между электронными мостами ЭМП-109 и
ЭМП-209 состоит в питании измерительных цепей. В
мосте ЭМП-109 измерительная цепь питается постоянным
током, в мосте ЭМП-209 — переменным. Кроме того,
измерительная цепь моста ЭМП-109ИМЗ выполнена
в искробезопасном исполнении, что позволяет
устанавливать термометр сопротивления (работающий в
комплекте с мостом) во взрывоопасном помещении.
Общее питание электронных мостов и
потенциометров осуществляется от сети переменного тока 220 в; при
этом для мостов и потенциометров с узкими пределами
измерения общее питание осуществляется через
разделительные трансформаторы 220/220 в.
Измерительные устройства приборов с встроенными
в них пневматическими регулирующими устройствами
в данной книге не рассматриваются. Сведения по
измерительным устройствам вакуумметров, манометров,
дифманометров и манометрических термометров
читатели могут найти в книге автора [Л. 31]; по
измерительным устройствам электронных мостов, потенциометров
и вторичных дифференциально-трансформаторных
приборов— в литературе по электронным приборам.
Исходя из этого, ниже рассматриваются принципы действия
и характерные особенности лишь пневматических
регулирующих устройств, встраиваемых в перечисленные
выше приборы.
Регулирующие устройства 04 и 04М выполнены по
136
схеме компенсации перемещения. Эти устройства, как
будет показано ниже, отличаются друг от друга
принципом действия и конструкцией усилителя мощности
выходного сигнала. Последний в регулирующем
устройстве 04 выполнен сильфонного типа с тарельчатым
клапаном, характеризующимся сравнительно малой
пропускной способностью сжатого воздуха; в
регулирующем устройстве 04М — мембранного типа с
шариковыми клапанами со значительно большей пропускной
способностью сжатого воздуха, что позволило существенно
улучшить динамические свойства этого регулирующего
устройства по сравнению с регулирующим устройством 04.
В приборах 04-ВСС-410 и 610, 04-МСС-410 и 610,
04-МСТМ-4Ю и 610, 04-ДП-410 и 610, 04-ТСГ-410 и 610,
ЭМД, ЭМП, ЭПД, ЭПП и ЭПИД встроено
регулирующее устройство 04; в приборах 04-ВСС-410М и 610М,
04-МСС-410М и 610М, 04-МСТМ-41ОМ и 610М,
04-ДП-410М и 610М, 04-ТСГ-410М и 610М —
регулирующее устройство 04М.
Кроме разницы в усилителях мощности,
регулирующие устройства отдельных приборов отличаются друг от
друга механизмами отработки сигналов
рассогласования, характерные особенности конструкций которых
будут рассмотрены ниже.
Регулирующее устройство 04
Принципиальная схема регулирующего устройства
С4, встроенного в самопишущий манометр с многовит-
ковой трубчатой пружиной, показана на рис. 3-8.
Изменение регулируемого давления вызывает
раскручивание или закручивание свободного конца многовит-
ковой трубчатой пружины 1, что вызывает через
поводок 2 поворот оси 3 и жестко сидящего на ней рычага 4.
Поворот этого рычага через тягу 5 и рычаг 6
передается стрелке 7 с записывающим пером и параллельно
через фигурный рычаг 8 и суммирующий рычаг 9 —
тяге 10.
'Стрелка 7 показывает и регистрирует на дисковой
диаграмме текущее значение регулируемой величины.
Перемещение тяги 10 вызывает поворот трехплечего
рычага 11 и перемещение вправо или влево
укрепленного на среднем его плече штифта 12. Вместе с этим штиф-
137
том перемещается прижатая к нему пружиной 13
дроссельная заслонка 14 относительно сопла 15 пневмопре-
образователя.
Рис. 3-8. Принципиальная схема регулирующего устройства 04,
встроенного в самопишущий манометр.
Присоединяя тягу 10 к левому или правому плечу
рычага //, можно по желанию изменить знак
зависимости между перемещением свободного конца
чувствительного органа и выходным сигналом регулирующего
устройства. В положении, изображенном на рис. 3-8,
повышение регулируемой величины вызывает увеличе-
138
ние зазора между соплом 15 и заслонкой 14, что
приводит к пропорциональному уменьшению давления
воздуха на выходе регулирующего устройства. Если тягу 10
присоединить к левому плечу рычага 11, то повышение
регулируемой величины будет вызывать уменьшение
этого зазора и соответственно увеличение давления
воздуха на выходе регулируемого устройства.
В отличие от механизма пневматической
дистанционной передачи пневмопреобразователь регулятора
реагирует не на изменение текущего значения регулируемой
величины, а на величину рассогласования, т. е. на
разность между текущим значением регулируемой
величины и ее заданием.
Для получения сигнала рассогласования
регулирующее устройство снабжено ручным задатчиком,
состоящим из головки 16 с системой рычагов и стрелки 17,
указывающей на дисковой диаграмме прибора
заданное значение регулируемой величины. Стрелка 17 через
рычаг 18 соединена шарнирно с суммирующим
рычагом 9 и тягой 10.
Соединение суммирующего рычага 9 с механизмами
стрелок 7 и 17 выполнено так, что перемещение
стрелки 7 вызывает через рычаг 8 перемещение левого конца
рычага 9 и тяги 10; при этом рычаг 9, поворачиваясь
вокруг своего правого шарнира, не передает движение
механизму стрелки 17. Перемещение же стрелки 17
вызывает через рычаг 18 перемещение правого конца
рычага 9 и тяги 10; при этом рычаг 9, поворачиваясь
вокруг своего левого шарнира, не передает движение
механизму стрелки 7.
Поскольку точка закрепления тяги 10 на рычаге 9
совпадает с осью стрелок 7 и 17, то перемещение тяги 10
будет происходить только при наличии рассогласования
между стрелками 7 и 17. Если же стрелки 7 и 17
перемещаются вместе в одну и ту же сторону и на одну и ту
же величину, тяга 10 перемещаться не будет и на входе
пневмопреобразователя не произойдет никакого
изменения давления.
Таким образом, дроссельная заслонка 14
пневмопреобразователя получает от суммирующего рычага 9
(через тягу 10 и рычаг И) сигнал рассогласования,
равный разности между текущим и заданным значениями
регулируем^! величины. Последний (сигнал рассогласо-
139
вания) является входным сигналом пневматической
части регулирующего устройства 04.
Работа пневматической части регулирующего
устройства происходит следующим образом. Допустим, что
дроссель 19 узла обратной связи (изодрома) закрыт и
перетока жидкости (толуола) из полости А,
образованной сильфонами 20 и 21, в полость Б, образованную
сильфонами 22 и 23, или наоборот, не происходит.
Тогда понижение текущего значения регулируемой
величины по сравнению с заданным приводит к уменьшению
зазора между соплом 15 и дроссельной заслонкой 14,
что вызывает увеличение давления воздуха в линии
перед соплом 15 и в коробке 24 усилителя мощности
выходного сигнала (куда он поступает из линии питания
через постоянный дроссель 25), поскольку управляемый
дроссель (образованный соплом 15 и дроссельной
заслонкой 14), постоянный дроссель 25 и пространство
между ними (включая пространство внутри коробки 24)
образуют проточную камеру пневмопреобразователя,
давление в которой зависит от величины зазора между
соплом 15 и заслонкой 14 (более подробно см. главу
«Пневмопреобразователи» в [Л. 31]). Повышение
давления воздуха в коробке 24 вызовет сжатие сильфона 26
и перемещение вниз клапана 27, в результате чего
сопло 28 (подводящее сжатый воздух из линии питания
в камеру 29) откроется, а сопло 30 (сообщающее
камеру 29 с атмосферой) закроется, что вызовет повышение
давления воздуха в камере 29, а также на выходе
усилителя и в левой коробке изодрома (над сильфоном 20).
Повышение давления воздуха на выходе усилителя
вызовет сжатие сильфонов 20 и 21 и перемещение вправо
штока 31; при этом сильфоны 22 и 23 растянутся, а
усилие, возникшее в сильфоне 20, скомпенсируется
усилением сжатия пружины 32. Перемещаясь вправо, шток 31
посредством штифта 33 будет поворачивать вправо
рычаг 34, который посредством передвижного штифта 35,
рычага 36, трехплечевого рычага 11 и штифта 12 будет
отодвигать дроссельную заслонку 14 от сопла 15; при
этом люфты в рычажном механизме устраняются
пружиной 37. Повышение давления воздуха на выходе
регулирующего устройства будет продолжаться до тех
пор, пока механизм обратной связи не отодвинет
заслонку 14 от сопла 15 в новое равновесное положение,
140
т. е. до момента компенсации перемещения. Величина
установившегося давления воздуха на выходе
регулирующего устройства будет пропорциональной сигналу
рассогласования, умноженному на коэффициент
усиления. Последний обычно выражается величиной
диапазона дросселирования.
В регулирующем устройстве 04 диапазон
дросселирования зависит от соотношения плеч рычагов 34 и 36
и может устанавливаться любым в пределах от 1 до
150% путем изменения положения штифта 35,
перемещаемого вверх или вниз от руки с помощью привода
с зубчатой передачей. Диапазон дросселирования может
быть увеличен до 300 и 600% путем перестановки
штифта 12 в более низкие отверстия на среднем плече рычага
11. Установленное значение диапазона дросселирования
отсчитывается на шкале, помещенной на корпусе
изодрома.
При повышении текущего значения регулируемой
величины по сравнению с заданием зазор между
дроссельной заслонкой 14 и соплом 15 увеличивается, что
приводит к уменьшению давления воздуха в проточной камере
пневмопреобразователя и на выходе регулируемого
устройства. Работа узла обратной связи при этом
происходит в соответствии с вышеизложенной
последовательностью.
Таким образом, при полностью закрытом дросселе 19
регулирующее устройство 04 отрабатывает П-закон
регулирования. Этот закон реализуется действием узла
обратной связи. Последний в данном случае выполняет
роль отрицательной обратной связи.
Для того чтобы регулирующее устройство 04
отрабатывало ПИ-закон регулирования, необходимо, чтобы
действие отрицательной обратной связи постепенно
исчезало, т. е. необходимо жесткую обратную связь
превратить в упругую (изодромную). Исчезающее
действие отрицательной обратной связи, т. е. перевод
жесткой обратной связи на упругую, в регулирующем
устройстве 04 достигается за счет введения инерционной
положительной обратной связи и реализуется путем
полного или частичного открытия дросселя 19.
При полностью или частично открытом дросселе 19
левая и правая полости изодрома А и Б сообщены друг
с другом. Это обеспечивает переток жидкости из поло-
141
сти А в полость Б (или наоборот) со скоростью,
зависящей от степени открытия дросселя 19, а также от
разности давлений в камерах А и Б. В момент, когда
текущее значение регулируемой величины равно
заданному, давления жидкости в полостях А и Б изодрома
одинаковы. При нарушении равенства между текущим и
заданным значениями регулируемой величины давление
воздуха на выходе регулирующего устройства начнет
изменяться, допустим — увеличиваться. Увеличение
давления воздуха, как было указано выше, будет
продолжаться до тех пор, пока механизм обратной связи не
отодвинет заслонку 14 от сопла 15 в новое равновесное
положение. При этом давление жидкости в камере А станет
больше давления жидкости в камере Б; кроме того,
пружина 38 получит дополнительный натяг, а пружина 39
ослабится. Образовавшееся в результате этого
неравенство усилий в механизме обратной связи вызовет
переток жидкости из камеры А (находящейся под большим
давлением) в камеру Б (находящуюся под меньшим
давлением), а также перемещение штока 31 в
первоначальное его положение (влево), что в свою очередь
вызовет перемещение заслонки 14 относительно сопла 15
в сторону увеличения давления воздуха на выходе
регулирующего устройства. Таким образом, при открытом
дросселе 19 вводится в действие положительная
обратная связь, в результате чего выключающее действие
отрицательной обратной связи на механизм
пневмопреобразователя с истечением времени исчезает и
регулирующее устройство 04 отрабатывает ПИ-закон
регулирования. Дополнительное увеличение давления воздуха на
выходе регулирующего устройства за счет действия
положительной обратной связи будет продолжаться до тех
пор, пока текущее значение регулируемой величины не
придет к заданному. Только в этом случае механизм
упругой обратной связи будет находиться в равновесном
положении, а выходной сигнал регулирующего
устройства придет к своему установившемуся значению.
При возникновении сигнала рассогласования,
вызывающего уменьшение давления воздуха на выходе
регулирующего устройства, упругая обратная связь будет
работать в той же последовательности.
Из приведенного описания видно, что при полностью
или частично открытом дросселе 19 регулирующее
142
устройство отрабатывает сигнал регулирующего
воздействия, значение которого слагается из пропорциональной
составляющей, величина которой равна сигналу
рассогласования (в относительных единицах), умноженному на
коэффициент усиления, и дополнительной
(интегральной) составляющей, величина которой зависит от
скорости нарастания дополнительного давления и времени,
в течении которого действует упругая обратная связь.
Величина интегральной составляющей выходного
сигнала зависит от степени открытия дросселя 19.
Последний принято называть дросселем изодрома.
Степень открытия дросселя изодрома определяет скорость
нарастания дополнительного давления воздуха на
выходе регулирующего устройства, т. е. величину
временного коэффициента Ти интегральной составляющей
выходного сигнала. Мерой коэффициента Ти является время,
в течение которого значение интегральной составляющей
выходного сигнала достигнет значения
пропорциональной составляющей (см. § 1-4,д). Время Ги настраивается
(при наладке регулятора) вручную в пределах от 30 сек
до бесконечности и отсчитывается по шкале, помещенной
на корпусе изодрома.
Работа регулирующего устройства 04 может быть
успешной лишь при подаче к нему сжатого воздуха,
очищенного от пыли, масла и влаги. Давление питающего
воздуха поддерживается равным 1,1 кгс/см2 с помощью
редуктора (на принципиальной схеме не показан).
Стабильность давления питающего воздуха контролируется
по манометру 40.
Рабочий диапазон изменения выходного сигнала
(давления воздуха на выходе усилителя мощности) в
регулирующем устройстве 04 составляет 0—1 кгс/см2,
однако давление воздуха на выходе в этом устройстве
может возрастать до давления питания, т. е. до
1,1 кгс/см2.
Давление воздуха на выходе контролируется по
манометру 41. По показанию этого манометра
контролируется также и положение регулирующего органа.
Закон регулирования, отрабатываемый
регулирующим устройством 04, выражается дифференциальным
уравнением и определяется, исходя из его структурной
схемы, показанной на рис. 3-9. Из этой схемы видно, что
регулирующее устройство 04 образуется пятью динами-
143
ческими звеньями и тремя суммирующими устройствами,
роль каждого из которых сводится к следующему
(см. также рис. 3-8).
Суммирующее устройство 1СУ. Этим
устройством является суммирующий рычаг 9, на котором
алгебраически суммируются перемещения выходного звена
измерительного устройства, измеряющего текущее
значение регулируемой величины ф, и выходного звена
ручного задатчика, устанавливающего заданное значение
регулируемой величины <pi0. Образовавшийся сигнал
/7/7
ч
УМ
г
!
оос
Рис. 3-9. Структурная схема регулирующего устройства 04.
рассогласования х посредством тяги 10 передается
суммирующему устройству 2СУ в качестве входного сигнала
регулирующего устройства.
Суммирующее устройство 2СУ. Этим
устройством является трехплечий рычаг 11, на котором
алгебраически суммируются (сравниваются) входной
сигнал х и выходной сигнал узла обратной связи у4.
Последний представляет собой перемещение среднего плеча
рычага //, вызванного перемещением штока 31
изодрома. Образовавшийся в 2СУ сигнал рассогласования хь
представляющий собой перемещение дроссельной
заслонки 14 относительно сопла /5, вызывает изменение
давления воздуха в проточной камере
пневмопреобразователя ПП и на выходе усилителя мощности УМ.
Пневмопреобразователь ПП и
усилитель мощности УМ. Два последовательно
соединенные звена ПП и УМ представляют собой
пневматический элемент релейного действия или усилитель
с большим коэффициентом усиления с насыщением. Пе-
144
редаточной функцией W(p) этого усилителя является
коэффициент усиления kY, величину которого можно
принять kj-^oo. Давление воздуха на выходе
усилителя мощности является выходным сигналом у
регулирующего устройства 04.
Звено отрицательной обратной с в я-
з и ООС. Это звено образуется сильфонной камерой Л,
штоком 31 и пружиной 32. Перемещение штока 31,
вызванное действием давления воздуха на выходе
усилителя мощности, является выходным сигналом у\ этого
звена. По принципу действия это звено является
усилительным, передаточной функцией которого является
коэффициент усиления k\.
Звено положительной обратной связи
ПОС. Это звено образуется сильфонными камерами Л
и Б (с залитой в них жидкостью), дросселем 19,
штоком 31 и пружинами 32, 38, 39. Перемещение штока 31,
вызванное действием пружин 32, 38 и 39 (при открытом
дросселе 19), является выходным сигналом у2 этого
звена. По принципу действия это звено является
апериодическим первого порядка, передаточная функция
которого W(p) = k\ 1 , где k\ — коэффициент усиления;
Тл— постоянная времени, величина которой зависит от
сопротивления дросселя 19 и объемов камер Л и Б.
Суммирующее устройство ЗСУ. Этим
устройством является шток 31, результирующее перемещение
которого (от действия отрицательной и положительной
обратных связей) представляет собой выходной
сигнал уз этого устройства, поступающий через рычаг 34
к механизму настройки диапазона дросселирования.
Механизм настройки диапазона
дросселирования ДД. Устройство этого механизма
описано выше. По принципу действия этот механизм
представляет собой усилительное звено, передаточной
функцией которого является коэффициент усиления k2,
величина которого настраиваете^ вручную в процессе
наладки регулятора при работе его в САР. Этот механизм,
выдавая сигнал уА (являющийся выходным сигналом
узла обратной связи), через суммирующее
устройство 2СУ воздействует на дроссельную заслонку 14 и
этим формирует ПИ-закон регулирования,
отрабатываемый устройством 04.
10-795 И5
На основании структурной схемы, представленной на
рис. 3-9, и полагая, что kY—+00, зависимость выходного
сигнала у регулирующего устройства 04 от входного х
(от сигнала рассогласования) определится в виде
передаточной функции:
l+kyk, (А.-уГ^р-,)
Произведя дальнейшие преобразования и принимая
1/&,&а = £Р, получим:
^(P) = *p(l + r^). (3-2)
где Ар — коэффициент усиления регулятора. Последний
может быть выражен в процентах диапазона
дросселирования Д по соотношению яр=~д-;
р — оператор дифференцирования.
Передаточной функции (3-2) отвечает уравнение
у = — я х
-^xdty (3-3)
Т
fo
где величина kx является пропорциональной
составляющей выходного сигнала регулирующего устройства, а ве-
и
k с
личина jr \ xdt — интегральной составляющей.
Уравнение (3-3) является типичным для ПИ-регу-
ляторов с зависимыми настройками, поскольку
коэффициент усиления kv входит как в пропорциональную, так
и в интегральную составляющие выходного сигнала.
Настройка и эксплуатация таких регуляторов усложнены
по сравнению с регуляторами с независимыми
настройками (см. § 5-4), что является существенным их
недостатком.
Записанный уравнением (3-3) ПИ-закон
регулирования регулирующее устройство 04 отрабатывает при
работе в диапазоне частот возмущающих воздействий до
146
0,1 рад/сек, а также при условии, что выходной сигнал
передается по пневматической линии связи не более
40—60 м (при внутреннем диаметре трубопровода
4—6 мм) и воздействует на исполнительный механизм
через позиционер. При работе регулирующего
устройства на частотах более низких, чем 0,1 рад/сек, длина
пневматической линии связи может быть увеличена до
150—200 м. Однако, учитывая, что длина линии связи
существенно влияет на динамические свойства
пневматического регулятора в целом, выбор регулятора для
работы его с конкретным объектом должен основываться
на результатах расчетов конкретной САР с учетом
динамических свойств всех звеньев контура регулирования.
Регулирующее устройство 04 (а также 04М) может
работать совместно с пневматическим блоком
предварения. В этом случае блок предварения может
устанавливаться на пневматической линии связи после
регулирующего устройства и выполнять роль пропорционально-
дифференцирующего звена. Тогда регулирующее
устройство 04 (а также 04М), работая совместно с блоком
предварения, будет отрабатывать ПИД-закон
регулирования (с зависимыми настройками как по &р, так и по
7И и по Гд). Принципы действия и устройства пневма-
ческих блоков предварения будут рассматриваться
в § 4-3 и 5-5.
Регулирующее устройство 04М
Принципиальная схема регулирующего устройства
04М, встроенного в самопишущий манометр с многовит-
ковой трубчатой пружиной, показана на рис. 3-10.
Регулирующее устройство 04М, как указывалось
выше, отличается от устройства 04 принципом действия и
устройством усилителя мощности. Последний в
устройстве 04М состоит из питающей камеры Л, впускной и
выпускной камер Б и Б\ управляющей
(междроссельной) камеры Б, впускного и выпускного шариковых
клапанов / и 2, разделительных мембран 3 и 4 с
жесткими центрами, постоянного дросселя 5, игольчатого
клапана 6 и пружин 7—10.
Отклонение значения регулируемой величины от
задания вызывает изменение зазора между дроссельной
заслонкой и соплом пневмопреобразователя, что приво-
10* 147
дит к изменению давления воздуха в управляющей
(междроссельной) камере В усилителя мощности,
питающейся сжатым воздухом из линии питания через
постоянный дроссель 5. В зависимости от направления
Рис. 3-10. Принципиальная схема регулирующего устройства 04М,
встроенного в самопишущий манометр.
отклонения регулируемой величины давление воздуха
в управляющей камере В будет увеличиваться или
уменьшаться, что вызовет срабатывание шариковых
клапанов / или 2 (посредством разделительных мембран 3
148
или 4) и повышение или понижение давления воздуха
на выходе усилителя мощности.
При закрытом дросселе изодрома изменение
давления воздуха на выходе усилителя мощности будет
продолжаться до тех пор, пока механизм обратной связи
не переставит дроссельную заслонку относительно сопла
в такое положение, при котором давление воздуха на
выходе усилителя станет равным сигналу
рассогласования, умноженному на коэффициент усиления.
^—200—^
Рис. 3-11. Приборы 04-ВСС, 04-МСС, 04-МСТМ и 04-ТСГ с
регулирующими устройствами 04 и 04М.
При полностью или частично открытом дросселе
изодрома изменение давления воздуха на выходе усилителя
мощности будет продолжаться до тех пор, пока
текущее значение регулируемой величины не придет к
заданному значению; в это время действие механизма упругой
обратной связи (изодрома) будет происходить в той же
последовательности, что и в устройстве 04.
Посредством игольчатого клапана 6 можно вручную
(при наладке регулятора) изменять давление воздуха
в управляющей камере Б и на выходе регулирующего
устройства. Во время нормальной работы регулятора
игольчатый клапан 6 должен находиться в плотно
закрытом положении.
Благодаря наличию в мембранном усилителе
впускного и выпускного клапанов шарикового типа
пропускная способность этого усилителя по сжатому воздуху
149
значительно выше, чем сильфонного. Это позволило
существенно улучшить динамические свойства
регулирующего устройства 04М по сравнению с устройством 04.
Так, при длине пневматической линии связи 300 м и
внутреннем диаметре трубопровода 6 мм постоянная
времени регулирующего устройства 04М составляет не
более 20—25 сек, в то время как в устройстве 04
аналогичная величина постоянной времени имеет место при
длине линии связи 150—200 м.
Благодаря изменению конструкции усилителя
мощности удалось существенно увеличить протяженность
пневматических линий связи и этим расширить область
распространения регуляторов приборного типа.
Общие виды приборов ВСС, МСС, МСТМ, ТСГ и ДП
с пневматическими регулирующими устройствами 04 и
04М показаны на рис. 3-11 и 3-12.
150
Особенности конструкций регулирующих
устройств 04, встраиваемых в электронные
мосты, потенциометры и вторичные
дифференциально-трансформаторные
приборы
Отличительными признаками регулирующих устройств,
устанавливаемых в приборы этой группы, являются
особенности конструкций механизмов отработки сигналов
рассогласования.
Принципиальная схема устройства 04,
встраиваемого в приборы ЭМД, ЭПД и ЭПИД, показана на
рис. 3-13,а.
Изменение текущего значения регулируемой
величины в этих приборах вызывает пропорциональное
изменение угла поворота кулачка 7, жестко закрепленного на
выходной оси редуктора реверсивного двигателя
(реверсивный двигатель и редуктор не показаны). Таким
образом, поворот кулачка / является сигналом текущего
значения регулируемой величины, поступающим от
измерительного устройства прибора к регулирующему
устройству. Поворот кулачка / посредством ролика 2
вызывает поворот рычагов 3 и 4, а также стрелки с
пером 5, жестко закрепленных на оси 6 и
поворачивающихся вместе с ней; при этом стрелка с пером 5
записывает на дисковой диаграмме прибора текущее
значение регулируемой величины (дисковая диаграмма
на принципиальной схеме не показана). Поворот
рычага 4 посредством тяги 7 вызывает перемещение левого
конца суммирующего рычага 8, поворачивающегося
вокруг оси 9, которая в данном случае будет
неподвижной.
Заданное значение регулируемой величины
устанавливается ручным задатчиком, состоящим из шестерен
10, 11, 12, сектора 13, оси 14, стрелки 15 и рычага 16.
Поворот шестерни 10 вызывает (через шестерни //, 12
и сектор 13) поворот оси 14 и жестко закрепленных на
ней стрелки 15 и рычага 16; при этом стрелка 15
показывает на дисковой диаграмме прибора заданное
значение регулируемой величины. Поворот рычага 16
вызывает перемещение правого конца суммирующего
рычага 5, поворачивающегося вокруг оси 17, которая
в данном случае будет неподвижной,
151
17 7 k 13 6 1k 16 8 9 1
9 W 12 11
Рис. 3-13. Механизм отработки входного сигнала (сигнала
рассогласования) регулирующего устройства 04.
а — регулирующее устройство 04, встроенное в приборы ЭМД, ЭПД и ЭПИД;
б — регулирующее устройство 04, встроенное в приборы ЭМП и ЭПП.
В отверстии 18 рычага 8 закреплен верхний конец
тяги 19, передающий перемещение этого рычага трех-
плечему рычагу 20 и далее дроссельной заслонке 21,
перемещающейся относительно сопла 22 пневмопреобразо-
вателя.
Рассматриваемый рычажный механизм
конструктивно выполнен так, что оси 6 и 14 совмещены друг с
другом и могут вращаться раздельно по одной
геометрической оси. Тогда при повороте стрелок 5 и 15 в одном
и том же направлении и на одинаковый угол
суммирующий рычаг 8 будет поворачиваться относительно
отверстия 18, не вызывая при этом перемещения тяги 19.
При повороте лишь одной стрелки (5 или 15)
суммирующий рычаг 8 получит такое перемещение, при
котором тяга 19 посредством рычага 20 изменит величину
зазора между соплом 22 и дроссельной заслонкой 21,
что приведет к изменению давления воздуха в
проточной камере пневмопреобразователя и на выходе
регулирующего устройства. Механизм упругой обратной
связи (изодром) и сильфонный усилитель мощности
работают в соответствии с рассмотренной выше
последовательностью.
Принципиальная схема механизма отработки сигнала
рассогласования регулирующего устройства 0,4
встраиваемого в приборы ЭМП и ЭПП, показана на
рис. 3-13,6.
В этих приборах изменение текущего значения
регулируемой величины вызывает пропорциональное
изменение угла поворота кулачка /, жестко закрепленного на
выходной оси реохорда. При этом поворот оси реохорда
посредством тросовой передачи передается стрелке с
пером, записывающим на ленточной диаграмме прибора
текущее значение регулируемой величины (реохорд,
стрелка с записывающим пером и ленточная диаграмма
на принципиальной схеме не показаны). Поворот
кулачка 1 посредством ролика 2 вызывает поворот рычагов
3 и 4, жестко закрепленных на оси 5 и
поворачивающихся вместе с ней. Поворот рычага 4 посредством
тяги 6 вызывает перемещение левого конца
суммирующего рычага 7, поворачивающегося вокруг оси 8,
являющейся в данном случае неподвижной.
Заданное значение регулируемой величины
устанавливается ручным задатчиком, состоящим из ролика 9,
153
троса 10, ролика 11, шестерен 12, 13, 14, сектора 15,
оси 16 и рычага 17. Поворот ролика 9 вызывает
(посредством тросовой передачи 10, ролика 11, шестерен
72—14 и сектора 15) поворот оси 16 и жестко
закрепленного на ней рычага 17. Поворот рычага 17 вызывает
Рис. 3-14. Приборы ЭМД, ЭПД и ЭПИД с регулирующим
устройством 04.
а — ввод измерительных проводов; б — ввод проводов электропитания- в —
питание 1,1 кгс/см2; г — выход 0—1 кгс/см2.
85
i
П)
— 302 *-
<ъ
1
\[
1 -
-1
1
-2от6.
1М10*1
вг
-507
-326
-184-
Рис. 3-I5. Приборы ЭМП-209М2, ЭМП-68М1 и ЭПП-09М2 с
регулирующим устройством 04.
в —питание 1,1 кгс/см2; г — выход 0—1 кгс/см2.
154
перемещение правого конца суммирующего рычага 7,
поворачивающегося вокруг оси 18, являющейся в
данном случае неподвижной.
Таким образом, на суммирующем рычаге 7
образуется сигнал рассогласования, который посредством
тяги 19 и трехплечевого рычага 20 передается пневмопре-
образователю. Дальнейшая работа регулирующего
(Г
3Z6
04—^ ]
Рис. 3-16. Приборы ЭМП-209МЗ, ЭМП-109ИМЗ, ЭПП-09МЗ,
ЭПП-16АМЗ с регулирующим устройством 04.
устройства 04 происходит в обычной последовательности.
Заданное значение регулируемой величины в
приборах ЭМП и ЭПП показывается на шкале стрелкой,
передвигаемой при помощи тросовой передачи,
связывающей эту стрелку с механизмом ручного задатчика.
Общие виды приборов ЭМД, ЭПД, ЭПИД, ЭМП и
ЭПП с пневматическим регулирующим устройством 04
показаны на рис. 3-14; 3-15 и 3-16.
б) Измерительные приборы с регулирующими
устройствами 14 и 24
Рассматривая приборы данной группы, заметим, что
регулирующие устройства 14 и 24 по принципу действия
и конструктивному выполнению аналогичны
регулирующим устройствам 04 и 04М и отличаются от них лишь
механизмами задатчиков.
155
Регулирующие устройства 04 и 04М имеют
механические ручные задатчики, поэтому приборы,
оборудованные такими устройствами, позволяют реализовывать
лишь системы автоматической стабилизации, у которых
задание на поддержание регулируемой величины
длительное время не меняется.
Регулирующее устройство 14 в отличие от
регулирующего устройства 04 или 04М имеет программный за-
датчик, поэтому приборы, оборудованные таким
регулирующим устройством, позволяют реализовывать
программные системы, у которых заданное значение
регулируемой величины является функцией профиля и
угла поворота кулачка, приводимого в движение
синхронным электродвигателем.
В регулирующем устройстве 24 механизм задатчика
отрабатывает задание регулируемой величины как
функцию другой (независимой) величины, поступающей
в приемное устройство задатчика в виде давления
воздуха, изменяющегося от 0 до 1 кгс/см2. Приборы,
оборудованные таким задатчиком, позволяют
реализовывать следящие системы.
Регулирующее устройство 14 встраивается в
самопишущий манометрический термометр 14-ТСГ-610М с
дисковой диаграммой, предназначенный для контроля и
регулирования температуры в пределах от 0 до 120° С.
Принципиальная схема устройства 14, встроенного
в прибор 14-ТСГ-610М, показана на рис. 3-17. В этом
приборе заданное значение регулируемой величины
определяется профилем кулачка /, вращающегося вместе
с дисковой диаграммой синхронным электродвигателем.
Вращение кулачка / вызывает перемещение контрольной
стрелки 2 и правого конца суммирующего рычага 3.
Текущее значение регулируемой величины
контролируется термометрической системой, состоящей из
термобаллона 4, капиллярной трубки 5 и многовитковой
трубчатой пружины 6. Изменение регулируемой
температуры вызывает перемещение свободного конца трубчатой
пружины 6 и далее, через систему рычагов, перемещение
стрелки с пером 7 и левого конца суммирующего
рычага 3. Дальнейшая работа регулирующего устройства 14
происходит аналогично регулирующему устройству 04М.
Техническая характеристика, устройство и общий вид
прибора 14-ТСГ-610М те же, что и прибора 04-ТСГ-610М,
156
Регулирующее устройство 24 встраивается в
самопишущие сильфонные манометры типов 24-МСС-410 и
24-МСС-610.
Принципиальная схема регулирующего устройства 24,
встроенного в прибор 24-МСС-410, показана на рис. 3-18.
Изменение регулируемой величины вызывает перемеще-
Рис. 3-17. Принципиальная схема регулирующего устройства 14,
встроенного в прибор 14-ТСГ-510М.
ние дна сильфона / и спиральной пружины 2, что
вызывает поворот рычага 3 через шток 4. Поворот этого
рычага через тягу 5 и рычаг 6 передается стрелке 7
с записывающим пером и параллельно через фигурный
рычаг 8 и суммирующий рычаг 9 — тяге 10. Стрелка 7
непрерывно показывает и записывает на дисковой
диаграмме текущее значение регулируемой величины.
Второй конец суммирующего рычага 9 соединен с
контрольной стрелкой 11, которая через тягу 12 поворачивается
157
сильфонным задатчиком1 состоящим из сильфона 13,
кожуха 14, пружины 15, штока 16 и углового рычага 17.
Таким образом, суммирующий рычаг 9
алгебраически суммирует перемещения стрелки 7 измерительного
устройства и контрольной стрелки // механизма
установки задания, в результате чего образуется сигнал рас-
Выход
0-1кгс/смг
Сильфонный
/усилитель
'^'мощности
^ ' Питание
11кгс/смг
Рис. 3-18. Принципиальная схема регулирущего устройства 24,
встроенного в прибор 24-МСС-410.
согласования, который посредством тяги 10 передается
пневмопреобразователю. Дальнейшая работа
регулирующего устройства 24 происходит аналогично
регулирующему устройству 04.
Технические характеристики, устройство и общие
виды приборов 24-МСС-410 и 24-МСС-610 те же, что и
приборов 04-МСС-410 и 04-МСС-610.
158
ГЛАВА ЧЕТВЕРТАЯ
РЕГУЛЯТОРЫ, ПОСТРОЕННЫЕ
ПО БЛОЧНОМУ ПРИНЦИПУ (РЕГУЛЯТОРЫ АУС)
4-1. ОБЩИЕ ЗАМЕЧАНИЯ
Блочный принцип построения пневматических
регуляторов состоит в том, что отдельные операции в
процессе получения, переработки, передачи и использования
информации о ходе технологического процесса в
регулируемом объекте (измерение текущего значения
регулируемой величины, отработка сигнала задания,
вычислительные операции, отработка сигнала регулирующего
воздействия и др.) выполняются не одним
многофункциональным (комплектным) устройством, как это имеет
место в регуляторах приборного типа, а отдельными,
преимущественно однофункциональными, блоками. При
блочном построении пневматических регуляторов такие
элементы, как датчики, вторичные измерительные
приборы, задатчики, вычислительные и регулирующие
устройства, усилители и др., представляют собой
конструктивно целостные устройства, выполненные в виде
унифицированных блоков. Набор таких блоков
составляет систему элементов пневмоавтоматики, получившую
название агрегатной унифицированной
системы (АУС).
АУС позволяет путем набора отдельных
функциональных блоков, связывая их между собой
пневматическими линиями связи, строить регуляторы с довольно
сложными законами регулирования, а также сложные
многоконтурные системы автоматического
регулирования. Блочный принцип построения пневматических
регуляторов позволил перейти к решению более сложных
задач автоматического регулирования и этим
существенно расширил область их распространения.
4-2. ПНЕВМАТИЧЕСКИЕ ЗАДАТЧИКИ
а) Ручные задатчики
Ручной пневматический задатчик предназначен для
отработки сигнала заданного значения регулируемой
величины в виде давления сжатого воздуха,
изменяющегося в пределах от 0 до 1 кгс/см2.
159
Наиболее распространенным является ручной задат-
чик, встраиваемый во вторичные измерительные
приборы АУС. Задатчик представляет собой
высокочувствительный редуктор давления воздуха, работающий по
схеме компенсации усилия. Он выполнен в виде
отдельного блока, установленного на наружной стороне
задней стенки вторичного прибора, и соединен с
регулирующим блоком посредством пневматической линии
о)
Рис. 4-1. Ручной задатчик РПД-5186.
— принципиальная схема; б) — общий вид; а — питание 1,4 кгс/см2; б —
выход 0—1 кгс/см2.
связи. Принцип действия и устройство этого задатчика
рассмотрены в [Л. 31].
Кроме упомянутого, представляет интерес
конструкция ручного задатчика РПД-5186, разработанного
Центральной лабораторией автоматики (ЦЛА),
принципиальная схема и общий вид которого показаны на
рис. 4-1.
Принцип действия и устройство задатчика состоят
в следующем. Сжатый воздух с давлением 1,4 кгс/см2
из линии питания поступает в камеру А усилительного
каскада и параллельно через постоянный дроссель /
в проточную камеру Г пневмопреобразователя. Давление
воздуха в проточной камере Г определяется положением
дроссельной заслонки 2 относительно сопла 3 и являет-
160
ся командным давлением, управляющим положением
тарельчатого клапана 4.
Увеличение сжатия пружины 5 вызывает уменьшение
зазора между соплом 3 и заслонкой 2, что приводит
к повышению давления воздуха в камере Г и на выходе
задатчика, которое будет продолжаться до тех пор, пока
усилие на мембране 6 не станет равным усилию сжатия
пружины 5, т. е. до момента наступления компенсации
усилий.
Уменьшение сжатия пружины 5 вызывает
уменьшение давления воздуха в камере Г и на выходе
задатчика, достигаемое за счет сброса части воздуха через
полый шток 7 и камеру В из выходной линии в
атмосферу.
В заключение отметим, что в пневматической АУС
имеется ряд регулирующих блоков, в конструкциях
которых содержатся встроенные пневматические и
механические задатчикк, принцип действия и устройство
которых будут показаны ниже при рассмотрении
отдельных типов регулирующих блоков.
б) Программные задатчики
Программный пневматический задатчик
предназначен для отработки сигнала заданного значения
регулируемой величины в виде давления сжатого воздуха,
изменяющегося в пределах от 0 до 1 кгс/см2, как функции
времени (профиля кулачка и скорости его вращения).
В качестве программного пневматического задатчика
в АУС применяется блок ПД-35А, принципиальная схема
и общий вид которого показаны на рис. 4-2 и 4-3. Блок
состоит из программирующего устройства и
компенсационного пневмопреобразователя. Его действие основано
на преобразовании линейного перемещения ролика /,
катящегося по профилированному кулачку 2,
приводимому во вращение синхронным электродвигателем 3
через шестеренчатый редуктор 4, в натяжение
пружины 5, которое преобразуется в выходной
пневматический сигнал.
Усилие натяжения пружины 5 через рычаг 6 и
стержень 7 вызывает перемещение дроссельной заслонки 8
относительно сопла 9. При увеличении натяжения
пружины 5 происходит повышение давления воздуха в ка-
11—795 161
мерах Ж и Г, что вызывает открытие шарикового
клапана 10 и повышение давления воздуха в выходной
камере Б, камере отрицательной обратной связи Я,
в камере положительной обратной связи К и на выходе
задатчика. Повышение давления воздуха на выходе
задатчика будет продолжаться до тех пор, пока суммарное
усилие на мембранах 11, 12 и 13 не скомпенсирует
усилия, передаваемого на эти мембраны стержнем 7 и
рычагом 6 от пружины 5, после чего заслонка 8 отодви-
Б 7
Рис. 4-2. Принципиальная схема программного задатчика ПД-35А.
нется от сопла 9 в такое положение, при котором
пневмопреобразователь окажется в новом равновесном
положении.
При уменьшении натяжения пружины 5 происходит
понижение давления воздуха в камерах Ж и Г и на
выходе задатчика.
Учитывая, что усилие, поступающее от
программирующего устройства к пневмопреобразователю,
измеряется несколькими граммами, а усилие, создаваемое на
мембране // от действия отрицательной обратной
связи,— несколькими килограммами, в пневмопреобразова-
теле предусмотрена положительная обратная связь
(камера К), за счет которой происходит ослабление,
действия отрицательной обратной связи и достигается
162
уравнивание усилий на стержне 7, поступающих к нему
со стороны программирующего устройства и со стороны
отрицательной обратной связи.
Мебрана 15 и шариковый клапан 16 обеспечивают
постоянство перепада давления воздуха на постоянном
дросселе 77, через который осуществляется питание
сжатым воздухом камер Ж и Г пневмопреобразователя.
■W0
285
/06
Рис. 4-3. Общий вид программного
задатчика ПД-35А.
Наличие такого устройства существенно повышает
точность и чувствительность пневмопреобразователя и
задатчика в целом (подробно об этом см. главу «Пневмо-
преобразователи» в [Л. 31]).
Порог чувствительности пневмопреобразователя
программного задатчика не превышает 0,05% максимальной
величины радиального перемещения ролика по
профилю кулачка. Основная приведенная погрешность
отработки выходного сигнала не превышает ±1% от его
максимального значения.
Максимально допустимый угол подъема профиля
кулачка составляет 67°,
11* 163
С помощью сменных шестерен редуктора 4 привод
профилированного кулачка может быть настроен на 1,2,
3 и 100 оборотов в сутки. Смена программы задания
осуществляется сменой одного профиля кулачка другим.
Корпус программного задатчика выполнен
прямоугольной формы с прозрачной крышкой. Все узлы
задатчика монтируются на выдвижном шасси. При
удалении шасси из корпуса задатчика плотность
пневматической линии связи не нарушается, что достигается
наличием в конструкции пневматического разъема
самозакрывающихся шариковых клапанов.
Программный задатчик ПД-35А рассчитан на
установку его во взрывобезопасном помещении с
температурой воздуха от 10 до 50° С.
4-3. РЕГУЛИРУЮЩИЕ БЛОКИ
а) Блоки, отрабатывающие релейный закон регулирования
Релейный закон регулирования может быть
отработан релейным блоком ПС-37А или суммирующим
блоком БС-34А, входящими в состав пневматической АУС.
Блок БС-34А предназначен в основном для выполнения
различных вычислительных операций и будет
рассмотрен в § 4-4.
Принципиальная схема и общий вид блока ПС-37А
показаны на рис. 4-4. Каждый блок позволяет
использовать его для работы по схеме прямого действия, когда
повышение значения регулируемой величины по
сравнению с заданным вызывает появление максимального
значения выходного сигнала (1,4 кгс/см2), — блок
«максимум», или по схеме обратного действия, когда
повышение значения регулируемой величины по
сравнению с заданным вызывает появление минимального
значения выходного сигнала (0 кгс/см2), — блок «м и н и-
мум». Для этого в камере Д имеются два сопла:
верхнее 1 и нижнее 2; в работе может находиться только
одно из них. Тогда в зависимости от настройки блока
по схеме прямого или обратного действия сжатый
воздух из линии питания, пройдя постоянный дроссель 5,
поступает только к одному соплу: верхнему или
нижнему. Переключение блока с прямого действия на
обратное или наоборот осуществляется соответствующей пере-
164
становкой пластины 4, имеющей внутренний канал,
соединяющий линию питания с верхним или нижним
соплом.
Входной сигнал (давление воздуха, изменяющееся от
0,2 до 1 кгс/см2), поступающий от датчика в
измерительную камеру Е, создает усилие на мембране 5,
действующее на нее снизу вверх. Сверху на мембрану 5
действует усилие сжатия пружины 6 ручного задатчика;
Рис, 4-4. Регулирующий блок ПС-37А, отрабатывающий релейный
закон регулирования.
а — принципиальная схема; б — общий вид.
последнее определяет заданное значение регулируемой
величины. Отклонение текущего значения регулируемой
величины от задания вызывает прогиб вверх или вниз
мембраны 5 и через шток 7— закрытие или открытие
верхнего 1 или нижнего 2 сопла дроссельной
заслонки 8.
Допустим, что перед блоком поставлена задача
выдавать пневматический сигнал, равный 1,4 кгс/см2, при
отклонении регулируемой величины выше задания
(в этом случае при отклонении регулируемой величины
т,
ниже задания значение выходного сигнала блока будет
равно 0 кгс/см2). Выполнить эту задачу может блок
«максимум» (когда пластина 4 установлена в
положение, при котором работает верхнее сопло). Тогда при
отклонении регулируемой величины выше задания
мембрана 5 прогнется вверх и вызовет закрытие сопла /
дроссельной заслонкой 8 при помощи пружины 9.
Давление воздуха перед соплом (в камере Г) при этом резко
повысится, что вызовет прогиб вниз мембранного
блока 10 и открытие шарикового клапана посредством
полого штока 12, а это в свою очередь вызовет подачу
сжатого воздуха из питающей камеры А в выходную Б
и повышение давления на выходе блока до 1,4 .кгс/см2.
Если после этого регулируемая величина понизится
ниже задания, мембрана 5 прогнется вниз, что вызовет
открытие сопла / и понижение давления воздуха в
камере Г и на выходе блока до 0 кгс/см2, так как при
этом пружина 13 поднимет шток 12 вверх, а пружина 14
закроет клапан 11, в результате чего камера Б через
отверстие в штоке 12 сообщится с атмосферой.
Если поставлена задача выдавать пневматический
сигнал, равный 1,4 кгс/см2, при отклонении
регулируемой величины ниже задания (или равный 0 кгс/см2 при
отклонении регулируемой величины выше задания), ее
может выполнить блок «минимум». В этом случае
пластина 4 устанавливается в положение, при котором с
линией питания сообщается нижнее сопло. Дальнейшая
работа блока «минимум» не отличается от работы блока
«максимум».
Установка заданного "значения регулируемой
величины производится поворотом лимба 15 ручного задатчика
относительно шкалы 16, отградуированной от 0 до
100%, что соответствует изменению входного сигнала от
0,2 до 1 кгс/см2.
Для срабатывания блока достаточно, чтобы значение
входного сигнала отклонилось от заданного не более чем
на 0,004 кгс/см2 (40 мм вод. ст.). Обратное изменение
входного сигнала на величину не более чем 0,01 кгс/см2
(100 мм вод. ст.) достаточно для того, чтобы блок
сработал в обратном направлении.
Основная приведенная погрешность настройки
задания (по шкале задатчика) не превышает ±1,5%
максимального значения входного сигнала блока.
166
Расстояние, на которое может быть передан
выходной сигнал блока ПС-37А (при заданном времени
передачи сигнала), обусловливается инерционностью
пневматической линии связи. Так, при скачкообразном
изменении входного сигнала от 0,2 до 1 кгс/см2 в конце линии
связи длиной 60 м с внутренним диаметром
трубопровода 6 мм выходной сигнал блока достигнет 63%
максимального значения за 3 сек; при этом имеется в виду,
что выходной сигнал блока поступает в измерительное
устройство позиционера. Если выходной сигнал блока
поступает непосредственно в рабочую полость
исполнительного механизма, инерционность регулятора в этом
случае существенно увеличивается за счет емкости
полости исполнительного механизма.
Исходя из этого, блок ПС-37А будет отрабатывать
релейный закон регулирования в соответствии с
уравнениями (1-1) в том случае, когда инерционность
регулируемого объекта будет гораздо больше инерционности
регулятора. Для объектов с большой инерционностью
(постоянная времени которых более 1 мин) и
практически не имеющих запаздывания длина пневматической
линии связи может доходить до 250—300 м.
Кроме целей автоматического регулирования, блоки
ПС-37А широко используются для целей
предупредительной и аварийной сигнализации нарушения хода
технологических процессов. По этой причине блок ПС-37А
в некоторых литературных источниках получил
название реле сигнализации.
б) Блоки, отрабатывающие П-закон регулирования
Пропорциональный (П) закон регулирования может
быть отработан регулирующим блоком ЗРБ-1 или двумя
последовательно соединенными блоками: суммирующим
БС-34А и множительно-делительным РС-ЗЗА,
входящими в состав пневматической АУС. Поскольку блоки
БС-34А и РС-ЗЗА предназначены в основном для
выполнения различных вычислительных операций с
пневматическими сигналами, они будут рассмотрены в § 4-4.
Принципиальная схема и общий вид регулирующего
блока ЗРБ-1 показаны на рис. 4-5. Этот блок состоит
из суммирующего устройства (камеры Е и Ж),
преобразовательно-усилительного устройства (камеры Г, В,
Б и А), камеры отрицательной обратной связи Д, каме-
167
Рис. 4-5. Регулирующий
блок ЗРБ-1,
отрабатывающий П-закон
регулирования.
а — принципиальная схема;
б — общий вид при установке
на вторичном приборе; в —
общий вид при установке
отдельно от вторичного прибора;
/, 2, 3, 4, 5 (в кружках) — штек-
керы, в том числе: / — выход
6—1,4 (0,2—1) кгс/см2; 2 —
текущее значение регулируемой
величины (от датчика) 0,2—
1 кгс/см2; 3 — к отключающему
устройству 0 или 1,4 кгс/см2;
4 — питание 1,4 кгс/см2; 5 —
заданное значение регулируемой
величины (от задатчика) 0,2—
1 кгс/см2.
б)
<
А А
1—н—*-
«)
ры положительной обратной связи К, отключающего
устройства (камеры Л и М) и устройства для установки
начального значения выходного сигнала (камеры Я и О).
Работа блока происходит следующим образом.
Сжатый воздух под давлением 1,4 кгс/см2 из линии питания
поступает через штуцер 4 (в кружке) в камеру А
усилительного устройства и одновременно через постоянные
дроссели / и 2 в камеру Г преобразовательного
устройства и камеру Н устройства установки начального
значения выходного сигнала (начального положения
регулирующего органа). Из камеры А через шариковый
клапан 3 сжатый воздух проходит в камеру Б
усилительного устройства, в камеру отрицательной обратной
связи Д, в камеру положительной обратной связи К
(через регулируемый дроссель диапазона
дросселирования ДД) и далее в камеру Л отключающего
устройства, а оттуда через сопло 4 и штуцер / (в кружке) —
на выход блока.
В измерительную камеру Е и задающую камеру Ж
суммирующего устройства через штуцера 2 и 5 (в
кружках) поступают пневматические сигналы текущего
значения регулируемой величины (от датчика) и задания
(от ручного или программного задатчика),
изменяющиеся в пределах от 0,2 до 1 кгс/см2. В суммирующем
устройстве указанные сигналы алгебраически
суммируются, и в случае неравенства их друг другу возникает
сигнал рассогласования, который вызывает
перемещение дроссельной заслонки 5 относительно сопла 6 и
изменение давления воздуха в проточной камере Г
пневмопреобразователя.
При повышении давления воздуха в камере Г
(происходящего в результате уменьшения зазора между
заслонкой 5 и соплом 6) полый шток 7 откроет
шариковый клапан 5, в результате чего сжатый воздух из
камеры А начнет поступать в камеру Б и на выход
регулирующего блока (к исполнительному механизму).
Проход сжатого воздуха к исполнительному механизму
и соответствующее повышение давления воздуха на
выходе блока будут продолжаться до тех пор, пока на
мембранном блоке 8 суммирующего устройства не
возникнет усилие от действия отрицательной и
положительной обратных связей, равное сигналу рассогласования
и направленное в противоположном направлении.
160
Таким образом, в блоке ЗРБ-1 каждому значению
входного сигнала (сигнала рассогласования)
соответствует свое, строго определенное значение выходного
сигнала. В этом смысле блок ЗРБ-1 отрабатывает
пропорциональный (П) закон регулирования. Коэффициент
пропорциональности (коэффициент усиления) является
переменной величиной, устанавливаемой вручную во
время наладки регулятора при работе его в САР.
Коэффициент усиления определяется диапазоном
дросселирования и зависит от степени обратной связи,
действие которой состоит в следующем. Мембранный
суммирующий блок 8 алгебраически суммирует усилия,
создаваемые сигналами текущего значения регулируемой
величины, задания, отрицательной и положительной
обратных связей. Алгебраическая сумма усилий от
действия сигналов текущего значения регулируемой
величины и задания определяет величину сигнала
рассогласования; алгебраическая сумма усилий от действия
сигналов отрицательной и положительной обратных связей
создает усилие обратной связи, величина которого
может быть различной в зависимости от давления воддуха
в камере положительной обратной связи /(. Как видно
из принципиальной схемы на рис. 4-5, давление воздуха
в камере отрицательной обратной связи Д всегда равно
давлению воздуха на выходе регулирующего блока.
Давление воздуха в камере положительной обратной
связи К будет всегда меньше, чем давление в камере Д,
и будет зависеть от степени открытия дросселя ДД
(и противодавления, создаваемого камерой Н через
постоянный дроссель 9). Следовательно, при изменении
степени открытия дросселя ДД соответственно будет
изменяться и степень обратной связи (диапазон
дросселирования). При полностью открытом дросселе ДД
диапазон дросселирования будет минимальным: 10%,
что соответствует коэффициенту усиления, равному 10;
при полностью закрытом дросселе ДД диапазон
дросселирования будет максимальным: 250%, что
соответствует коэффициенту усиления, равному 0,4.
Как следует из приведенного выше описания,
жесткая зависимость, существующая между значениями
входного и выходного сигналов, достигается обратным
действием выхода регулятора на его вход, т. е.
действием обратной связи. По этой причине рассмотренная
170
выше пневматическая обратная связь называется
жесткой, а регуляторы, отрабатывающие П-закон
регулирования, иногда называются регуляторами
с жесткой обратной связью.
Поскольку в регуляторах, отрабатывающих П-закон
регулирования, каждому значению входного сигнала
(сигнала рассогласования) соответствует определенное
значение выходного сигнала, здесь возникает
необходимость в обеспечении заданного начального значения
выходного сигнала (начального положения
регулирующего органа) при нулевом значении сигнала
рассогласования (см. § 1-4). Для этой цели в регулирующем
блоке ЗРБ-1 имеется устройство, состоящее из камер Я
и О, постоянного дросселя 2 сопла 10, дроссельной
заслонки 11, мембраны 12, пружины 13 и винта 14. По
принципу действия указанное устройство является
ручным пневматическим задатчиком, поддерживающим
давление воздуха в камере Я в соответствии с усилием
сжатия пружины 13. Поскольку камера Я сообщена
через постоянный дроссель 9 с камерой К, минимальное
давление воздуха на выходе регулирующего блока
будет равно давлению в камере Я, что и определяет
начальное значение выходного сигнала при нулевом
сигнале рассогласования.
Действие отключающего устройства, состоящего из
камер Л и М, сопла 4 и гибкой мембраны, разделяющей
камеры ЛиМ, заключается в том, что при подаче через
штуцер 3 (в кружке) в камеру М от функционального
переключателя вторичного прибора 2МП-30В (или
ЗРЛ-29В) давления воздуха, равного 1,4 кгс/см2, выход
регулирующего блока запирается мембраной, в
результате чего регулирующий блок отключается от
исполнительного механизма, управление которым в этом случае
осуществляется дистанционно с помощью ручного
задатчика, установленного на вторичном приборе.
Регулирующий блок ЗРБ-1 может быть настроен как
для прямого, так и для обратного действия, т. е.
выходной сигнал может увеличиваться или уменьшаться при
увеличении регулируемой величины по сравнению с
заданием. Перестройка блока с прямого действия на
обратное достигается перестановкой мест вводов
сигналов текущего значения регулируемой величины и
задания с соответствующей перетарировкой блока.
171
Конструктивно блок ЗРБ-1 выполнен в виде набора
цилиндрических шайб диаметром 70 мм, отделенных
друг от друга гибкими мембранами из прорезиненной
ткани и скрепленных шпильками и гайками. С
наружной стороны блока размещены органы его настройки:
головка винта задатчика начального значения выходного
сигнала и головка дросселя диапазона дросселирования
со шкалой (отградуированной в процентах ДД) и
стрелкой. Кроме того, с наружной стороны блока размещены
головки винтов с постоянными дросселями и пять
штырей для штеккерного подсоединения регулирующего
блока к гнездам функционального переключателя
вторичного прибора или к гнездам переходной колодки
в случае установки блока на специальном кронштейне
возле исполнительного механизма или в другом месте,
удаленном от вторичного прибора.
Действие регулирующего блока ЗРБ-1 основано на
принципе силовой компенсации, характеризующемся
отсутствием ощутимых механических перемещений.
Благодаря этому блок обладает высокой чувствительностью.
Порог чувствительности составляет величину не более
0,05% максимального значения входного сигнала. Такой
же высокой чувствительностью обладают и другие
регулирующие и вычислительные блоки АУС, работающие
на принципе силовой компенсации.
Минимальное значение выходного сигнала в блоке
ЗРБ-1 может доходить до 0 кгс/см2, а максимальное —
до 1,4 кгс/см2. Рабочий диапазон изменения выходного
сигнала составляет 0,2—1 кгс/см2. Последний зависит
от настройки исполнительного механизма или
позиционера.
Зависимость выходного сигнала от входного (от
сигнала рассогласования) в блоке ЗРБ-1 подчиняется
уравнению (1-3), т. е. р =— (йрЛф+рю), где р,— значение
выходного сигнала (в относительных единицах); kp —
коэффициент усиления; Аф — значение сигнала
рассогласования; ро — начальное значение выходного сигнала
при Дф=0. Эта зависимость соблюдается при условии,
что частота возмущающих воздействий на входе
регулирующего блока не превышает 0,3 рад/сек. При этой
частоте изменение выходного сигнала отстает по фазе от
изменения входного сигнала на величину не более
чем 10°. Изменение выходного сигнала по модулю при
172
~>той частоте не превышает 10% от значения модуля при
нулевой частоте.
Расстояние, на которое может быть передан
выходной сигнал регулирующего блока ЗРБ-1 (при заданном
времени передачи сигнала), обусловливается
инерционностью пневматической линии связи и исполнительного
механизма, а также частотой возмущающих воздействий
и инерционностью регулируемого объекта. При
сравнительно большой инерционности объекта (когда
постоянная времени объекта больше постоянной времени
регулятора) и низкой частоте возмущающих воздействий
(ниже чем 0,3 рад/сек) длина пневматической линии
связи может доходить до 250—300 м. При этой длине
инерционность линии связи (постоянная времени)
доходит до 20—25 сек (при внутреннем диаметре
трубопровода 6 мм).
Приведенные ориентировочные данные по
динамическим характеристикам регулирующего блока ЗРБ-1
относятся также и к другим регулирующим и
вычислительным блокам АУС.
в) Блоки, отрабатывающие ПИ-закон регулирования
Пропорционально-интегральный (ПИ) закон
регулирования может быть отработан регулирующими блоками
4РБ-32А или 4РБ-32Б, входящими в состав АУС, а
также регулирующим блоком РГИ-5190, разработанным
ЦЛА.
Регулирующий блок 4РБ-32А
Принципиальная схема и общий вид блока 4РБ-32А
показаны на рис. 4-6.
Блок состоит из суммирующего устройства (камеры
Е и Ж), преобразовательно-усилительного устройства
(камеры Г, В, Б и Л), камеры отрицательной обратной
связи Д, камеры основной положительной обратной
связи К, устройства дополнительной положительной
обратной связи (камеры Я, М и Л) и отключающего
устройства (камеры Я и О).
Ра-бота блока происходит следующим образом.
Сжатый воздух под давлением 1,4 кгс/см2 из линии питания
поступает через штуцер 4 (в кружке) в камеру А
усилительного устройства и одновременно через постоянные
173
Рис. 4-6. Регулирующий
блок 4РБ-32А,
отрабатывающий ПИ-закон
регулирования.
а—принципиальная схема;
б — общий вид при
установке на вторичном приборе;
в — общий вид при
установке отдельно от вторичного
прибора; 1, 2, 3, 4, 5 (в
кружках) — штеккеры, в том
числе: / — выход 0—1,4 (0,2—
1) кгс/см2; 2 — текущее
значение регулируемой
величины (от датчика) 0,2—
1 кгс/см2; 3 — к
отключающему устройству 0 или
4,4 кгс/см2; 4 — питание
1,4 кгс/см2; 5 — заданное
значение регулируемой
величины (от задатчика) 0,2—
1 кгс/см2.
дроссели / и 2 в камеру Г преобразовательного
устройства и в камеру Л дополнительной положительной
обратной связи. Из камеры А через шариковый
клапан 3 сжатый воздух проходит в камеру Б
усилительного устройства, в камеру отрицательной обратной
связи Д, в камеру основной положительной обратной
связи К (через регулируемый дроссель диапазона
дросселирования ДД) и в камеру О отключающего
устройства, откуда через сопло 4, камеру Н и штуцер /
(в кружке) —на выход блока. Часть сжатого воздуха из
камеры Н может проходить через регулируемый
дроссель изодрома ДИ в камеру М дополнительной
положительной обратной связи.
В измерительную камеру Е и задающую камеру Ж
суммирующего устройства через штуцера 2 и 5 (в
кружках) поступают соответственно пневматические сигналы
текущего значения регулируемой величины (от датчика)
и задания (от ручного или программного задатчика),
изменяющиеся в пределах от 0,2 до 1 кгс/см2. В
суммирующем устройстве указанные сигналы алгебраически
суммируются, и в случае неравенства их друг другу
возникает сигнал рассогласования, который вызывает
перемещение заслонки 5 относительно сопла 6 и
изменение давления воздуха в проточной камере Г
пневмопреобразователя.
При полностью закрытом дросселе изодрома ДИ и
при отсутствии избыточного давления в камере М блок
4РБ-32А работает аналогично блоку ЗРБ-1, т. е. при
повышении давления в камере Г полый шток 7
открывает шариковый клапан 3, что вызывает повышение
давления воздуха на выходе блока, которое будет
продолжаться до тех пор, пока на мембранном блоке 8
суммирующего устройства не возникнет усилие от действия
отрицательной и основной положительной обратных
связей, равное сигналу рассогласования и направленное
в противоположном направлении. В этом случае блок
4РБ-32А отрабатывает П-закон регулирования.
Настройка коэффициента усиления (диапазона
дросселирования) достигается изменением степени влияния
основной положительной обратной связи за счет
большего или меньшего открытия дросселя ДД. При полностью
открытом дросселе ДД диапазон дросселирования будет
равен 10%, что соответствует коэффициенту усиления,
!75
равному 10; при полностью закрытом дросселе ДД
диапазон дросселирования будет равен 250%, что
соответствует коэффициенту усиления, равному 0,4.
ПИ-закон регулирования блок 4РБ-32А отрабатывает
благодаря наличию в нем дополнительной
положительной обратной связи, введение в действие которой
осуществляется путем полного или частичного открытия
регулируемого дросселя ДИ. При полностью или
частично открытом дросселе ДИ давление воздуха в
камере М постепенно становится равным давлению на
выходе блока. Это давление будет повторяться также и
в камере Л, поскольку эта камера вместе с камерой М,
гибкой мембраной 9, постоянным дросселем 2 и
соплом 10 образуют пневмоповторитель (пневматическое
следящее устройство).
Как показано на рис. 4-6, камера Л дополнительной
и камера К основной положительной обратной связи
сообщены между собой через постоянный дроссель //.
Следовательно, при полностью или частично открытом
дросселе ДИ действие основной и дополнительной
положительных обратных связей суммируются в общий
сигнал положительной обратной связи (давление
воздуха в камере /(), величина которого равна сигналу
отрицательной обратной связи и направлена в
противоположном направлении.
Таким образом, при полностью или частично
открытом дросселе ДИ действие отрицательной обратной
связи постепенно снимается действием положительной
обратной связи, в результате чего при появлении
сигнала рассогласования выходной сигнал блока вначале
принимает значение, равное сигналу рассогласования,
умноженному на коэффициент усиления, а затем он
постепенно увеличивается (или уменьшается) со
скоростью, пропорциональной степени открытия дросселя
ДИ, и принимает установившееся значение лишь при
исчезновении сигнала рассогласования, т. е. тогда, когда
текущее значение регулируемой величины достигнет
заданного значения. Такое действие отрицательной и
положительной обратных связей, как указывалось выше
(§ 3-3), принято называть упругой (или изодромной)
обратной связью, а время обратной связи, в течение
которого значение выходного сигнала регулирующего
блока удваивается за счет действия упругой обратной
176
связи, принято называть временем удвоения или
временем изодрома (см. §1-4,б).
Время изодрома может изменяться путем изменения
степени открытия дросселя ДИ и является вторым
параметром настройки блока 4РБ-32А. Числовое значение
времени изодрома устанавливается вручную в пределах
от 3 сек (при полностью открытом дросселе ДИ) до
бесконечности (при полностью закрытом дросселе ДИ),
однако практически верхний предел времени изодрома
в блоке 4РБ-32А не превышает 100 мин.
Одним из достоинств схемы блока 4РБ—32А
является то, что камера М дополнительной положительно
обратной связи соединена с исполнительным
механизмом даже тогда, когда регулирующий блок отключен
от исполнительного механизма отключающим
устройством. Это позволяет регулятору быть всегда в фазе
с исполнительным механизмом и регулирующим
органом, что обеспечивает плавный переход с ручного
управления на автоматическое, и наоборот.
Отключающее устройство, расположенное в верхней
части блока 4РБ-32А, по принципу действия и по
конструкции не отличается от отключающего устройства
блока ЗРБ-1.
Путем переключения мест вводов сигналов текущего
значения регулируемой величины и задания,
осуществляемого перестановкой платы на корпусе, блок может
быть настроен для прямого или обратного действия.
Минимальное и максимальное значения, а также
рабочий диапазон изменения выходного сигнала в блоке
4РБ-32А те же, что и в блоке ЗРБ-1.
Одной из конструктивных особенностей блока
4РБ-32А является наличие в нем пластинчатой
пружины 12, предназначенной для уравновешивания усилий,
возникающих на мембранном блоке 8 суммирующего
устройства. Выполнение этой операции производится
посредством регулировочного винта (последний на
принципиальной схеме блока не показан), сжимающего
пружину 12, усилие которой компенсирует усилие сжатия
возвратной пружины 13 и вес мембранного блока 8.
Такая тарировка регулирующего блока обеспечивает
нулевое значение сигнала рассогласования при
равенстве входных сигналов (сигналов текущего и заданного
значений регулируемой величины). Однако достичь
12—795 177
полного уравновешивания усилий на мембранном
блоке 8 при одинаковых значениях обоих входных сигналов
трудно, так как на формирование сигнала
рассогласования существенное влияние оказывают эффективные
площади гибких мембран суммирующего устройства,
обеспечить полное равенство которых очень трудно.
В связи с этим каждый регулирующий блок обладает
некоторой погрешностью отработки сигнала рассогласо-
ПП
УМ
опое
У2
1-к,
*)ЗСУ
*/
дпос
Рис.
4-7. Структурная схема
4РБ-32А.
регулирующего блока
вания, что следует учитывать при наладке регуляторов
и во время работы их в конкретных САР.
Передаточная функция блока 4РБ-32А и
отрабатываемый им закон регулирования определяются, исходя
из его структурной схемы, показанной на рис. 4-7. Из
схемы видно, что регулирующий блок образуется шестью
динамическими звеньями и четырьмя суммирующими
устройствами, роль каждого из которых сводится к
следующему (см. также рис. 4-6).
Суммирующее устройство 1СУ. Этим
устройством являются камеры Е и Ж, в которых
алгебраически суммируются сигналы текущего и заданного
значений регулируемой величины (ф и ф0) и в случае
неравенства их друг другу образуется сигнал
рассогласования х.
Суммирующее устройство 2СУ. Этим
устройством является мембранный блок 8, в котором сумми-
17а
руютсй сигнал рассогласования х и суммарный сигнал
обратной связи у$. Алгебраическая сумма этих сигналов
создает перемещение х\ дроссельной заслонки 5
относительно сопла 6.
Пневмопреобразователь ПП и
усилитель мощности УМ. Первый из них образуется
проточной камерой Г, постоянным дросселем 1,
соплом 6 и дроссельной заслонкой 5; второй — камерами Ау
Б, В, шариковым клапаном 3 и мембранным блоком
с полым штоком 7. Два этих звена представляют собой
пневматическое реле или усилитель с большим
коэффициентом усиления (ky—+oo). Давление воздуха на
выходе усилителя мощности является выходным сигналом у
регулирующего блока.
Звено отрицательной обратной связи
ООС. Этим звеном является камера Д; последняя
представляет собой усилительное звено нулевого порядка,
передаточной функцией которого является коэффициент
усиления, равный 1.
Сложное звено положительной
обратной связи. Это звено образуется безынерционной
частью звена основной положительной обратной связи
ОПОС, функции которого выполняет камера К и
дроссель ДД; звеном дополнительной положительной
обратной связи ДЯОС, функции которого выполняет
камера Л и дроссель ДИ; суммирующим устройством ЗСУ,
функции которого выполняют камеры Л и К,
соединенные между собой дросселем //; инерционной частью
звена основной положительной обратной связи. Входные
и выходные сигналы и передаточные функции
перечисленных звеньев указаны на структурной схеме.
Суммирующее устройство 4СУ. Этим
устройством также является мембранный блок 8, в котором
суммируются выходные сигналы: ух — звена ООС и уъ —
звена ПОС, в результате чего образуется общий сигнал
обратной связи у&.
Два звена ПП и УМ, охваченные звеном
отрицательной обратной связи ООС, образуют безынерционное
звено нулевого порядка, передаточной функцией W\(p)
которого будет коэффициент усиления, равный /.
Тогда
Wi(p) = l. (4-1)
12* 179
Передаточная функция W2(p) звена ПОС из
представленной из рис. 4-7 структурной схемы будет равна:
(1-*.)
1
ki
Т«р+1
kiTBp
(Тлр+\){Тр+ 1)*
(4-2)
Рассматривая после этого регулирующий блок
4РБ-32А как звено с передаточной функцией W\{p),
охваченное звеном положительной обратной связи с
передаточной функцией W2(p), и пользуясь уравнением
(2-129), получим передаточную функцию блока W(p)
в виде:
*(Р)= , w7;\Pi < ^IFT±±-Iirr1- (4"3а)
vr/ 1 — Wi (p)-W2 (p) kiTnf k{Tp x '
Введя обозначение для коэффициента усиления & =
= 1/&!, получим:
^)=*Zt3JIW- (4"3б>
Записанная уравнением (4-36) передаточная
функция регулирующего блока состоит из двух частей.
Первая ее часть представляет собой передаточную функцию
идеального ПИ-регулятора с зависимыми настройками:
WM*(p) = k£$±L. (4-4)
Эта передаточная функция отвечает уравнениям (1-116)
и (1-126).
Вторая часть уравнения (4-36) представляет собой
так называемую поправочную передаточную функцию:
Появление поправочной передаточной функции и ее
физический смысл объясняются тем, что действие
основной положительной обратной связи, определяющей
величину коэффициента усиления регулятора, проявляется
с существенной инерционностью, зависящей от
постоянной времени Т камеры К.
180
Наличие поправочной передаточной функций влияет
Ца динамические свойства регулирующего блока,
ухудшающее действие которой проявляется тем сильнее, чем
выше частота входных воздействий. В связи с этим для
регулирующего блока 4РБ-32А и других аналогичных
блоков АУС существуют границы области нормальной
работы, в пределах которых отрабатываемые ими
ПИ-законы регулирования мало отличаются от
идеальных. Более подробные сведения по динамическим
характеристикам регулирующих блоков АУС приведены
в [Л. 9, 10].
Регулирующий блок 4РБ-32Б
По принципу действия, по устройству и по основным
техническим характеристикам регулирующий блок
4РБ-32Б аналогичен блоку 4РБ-32А и отличается от
последнего наличием встроенного ручного задатчика.
Такой вариант блока позволяет строить относительно
простые одноконтурные САР с минимальным
количеством аппаратуры и этим значительно снижать их
стоимость.
Принципиальная схема и общий вид блока 4РБ-32Б
показаны на рис. 4-8. Блок состоит из суммирующего
устройства (камеры Е и Ж),
преобразовательно-усилительного устройства (камеры Г, В, £ и Л), камеры
отрицательной обратной связи Д, камеры основной
положительной обратной связи К, устройства дополнительной
обратной связи (камеры М и Л) и ручного
пневматического задатчика.
Все узлы блока, кроме ручного задатчика,
принципиально и конструктивно не отличаются от
аналогичных узлов блока 4РБ-32А.
Встроенный ручной пневматический задатчик
представляет собой редуктор давления воздуха, устройство
и работа которого состоят в следующем. Сжатый воздух
под давлением 1,4 кгс/см2 из линии питания через
постоянный дроссель 1 поступает в камеру Я, а оттуда
через сопло 2 в атмосферу. Сопло 2 закрывается
дроссельной заслонкой 3, находящейся на измерительной
мембране 4, которая 'прогибается вверх или вниз в
зависимости от усилий, создаваемых на ней давлением воздуха
в камере Я и сжатием пружины 5. Таким образом, дав-
181
ление воздуха в камере Я определяется усилием сжатия
пружины 5 и служит выходным сигналом ручного
задатчика. Из камеры Я сжатый воздух поступает в
камеру Ж или в камеру Е суммирующего устройства в зави-
Ж
6)
Рис. 4-8. Регулирующий блок 4РБ-32Б с ручным задатчиком,
отрабатывающий ПИ-закон регулирования.
а) — принципиальная схема; б) — общий вид; ДИ — дроссель изодрома; ДД—
дроссель диапазона дросселирования; а — питание 1,4 кгс/см2; б — выход
О—1,4(0,2—1) кгс/см2; е — текущее значение регулируемой величины (от
датчика) 0,2—1 кгс/см2; ж — заданное значение регулируемой величины 0,2—
1 кгс/см2 (ко вторичному прибору); м — заглушка.
симости от того, работает ли регулирующий блок по
схеме прямого или обратного действия. Кроме того,
сжатый воздух из камеры Я может поступать ко
вторичному прибору контроля величины задания или
непосредственно к исполнительному механизму при ручном
дистанционном управлении.
182
Однако, учитывая, что рассматриваемый ручной за-
датчик не содержит усилителя мощности, он может
быть использован для ручного дистанционного
управления исполнительным механизмом лишь при
сравнительно короткой линии связи и наличии на исполнительном
механизме позиционера.
Регулирующий блок 4РБ-32Б не имеет
отключающего устройства. Поэтому для возможности перехода
с автоматического на ручное дистанционное управление
исполнительным механизмом в комплекте регулятора
должно быть предусмотрено переключающее устройство,
например, панель дистанционного управления или реле
переключения.
Регулирующий блок РГИ-5190
Регулирующий блок РГИ-5190 разработан ЦЛА.
Принципиальная схема и общий вид блока показаны на
рис. 4-9. По принципу действия этот блок аналогичен
регулирующему блоку 4РБ-32А и отличается от
последнего конструктивным выполнением.
Основное отличие конструкции блока РГИ-5190 от
4РБ-32А состоит в том, что ряд камер в блоке РГИ-5190
соединены между собой не внутренними каналами, как
в блоке 4РБ-32А, а наружными трубами; благодаря
этому существенно уменьшились размеры и упростились
геометрические формы основных деталей. Последние
выполнены штампованными из пластмассы АГ-4 марки В,
остальные — из нержавеющей стали и из коррозионно-
стойких материалов, что позволило устанавливать эти
блоки в помещениях с агрессивными средами.
Основными узлами блока РГИ-5190 являются
суммирующее устройство (камеры Е и Ж),
преобразовательно-усилительное устройство (камеры Г, В, Б и А),
камера отрицательной обратной связи Д, камера
основной положительной обратной связи К и устройство
дополнительной положительной обратной связи (камеры «/7,
МиН).
Работа основных узлов блока происходит так же, как
и регулирующего блока 4РБ-32А; при этом камера Н
является дополнительной емкостью, подключаемой к
камере М при необходимости значительного увеличения
времени изодрома.
183
В блоке РГИ-5190 нет отключающего устройства,
поэтому для возможности перехода с ручного
дистанционного управления на автоматическое, и наоборот, в
комплекте регулятора должна быть предусмотрена панель
дистанционного управления или другое переключающее
устройство.
г) Дифференцирующие блоки (Блоки предварения)
Дифференцирующие блоки предназначены, в
основном, для работы в комплекте с пропорциональными и
пропорционально-интегральными регулирующими
блоками. При этом дифференцирующий блок, будучи соединен
последовательно или параллельно с регулирующим
блоком, отрабатывает дифференциальную (Д)
составляющую в ПД- или ПИД-законах регулирования. Кроме
того, дифференцирующие блоки часто используются
в различных вычислительных устройствах и в
устройствах динамических связей между регуляторами в
системах связанного регулирования.
Как указывалось ранее (§ 2-2), чисто
дифференцирующие блоки в пневматическом исполнении не-
реализуемы. В связи с этим в пневмоавтоматике
дифференцирующие блоки изготавливаются в виде
пропорционально-дифференцирующих блоков с коэффициентом
усиления по пропорциональной составляющей &р=1.
Такие блоки получили название блоков предварения (см.
§ 1-4,в).
Блок предварения БП-28В
Принципиальная схема и общий вид блока БП-28В
показаны на рис. 4-10. Этот блок состоит из
измерительной камеры Е, преобразовательно-усилительного
устройства (камеры Г, В, Б и А), безынерционных
камер отрицательной и положительной обратных связей Д
и К и инерционной камеры отрицательной обратной
связи Ж.
Работа блока происходит следующим образом.
Сжатый воздух под давлением 1,4 кгс/см2 из линии питания
поступает в камеру А и одновременно через постоянный
дроссель 1 в камеру Г. Из камеры А через шариковый
клапан 2 сжатый воздух проходит в камеру Б, а затем
на выход блока и в камеры Д, Ж и К.
185
Если значение входного сигнала, поступающего
в измерительную камеру Е, не изменяется, то блок
предварения находится в равновесии, которое
обеспечивается тем, что усилия на мембранном блоке 3,
создаваемые давлением воздуха в камерах Д и /С,
уравновешивают друг друга, а усилие, создаваемое входным
сигналом, поступающим в камеру £, уравновешивается
—070-
Вход
0,2 ч(о-Т)
кгс/см
Питание
7, Ч кгс/см2.
■ДП
ggsr^fl) Вход-
Питание
ч Т
$ Выход
СП)
0,24(0-1)
6 кгс/см.2
г
Т
-ss-
ВыхооЛ
9*6,5
о)
Рис. 4-10. Блок предварения БП-28В.
а — принципиальная схема; б—общий вид.
усилием, создаваемым выходным сигналом,
поступающим в камеру Ж.
Если значение входного сигнала будет
увеличиваться, равновесие блока нарушится; при этом на
мембранном блоке 3 возникает усилие, направленное вниз, так
как эффективная площадь нижней мембраны камеры Е
больше эффективной площади верхней мембраны той
же камеры. Под действием этого усилия мембранный
блок 3 прогнется вниз; при этом заслонка 4 прикроет
сопло 5, что вызовет увеличение давления воздуха в
камере Г и перемещение вниз полого штока 6. Последнее
вызовет открывание шарикового клапана 2 и перепуск
сжатого воздуха из камеры А в камеру Б и далее на
186
выход блока и параллельно в камеры Д и К, а также
через регулируемый дроссель предварения ДП в
камеру Ж. Ввиду того что эффективная площадь
мембраны 7 выбрана так, что она лишь немного превышает
эффективную площадь мембраны <5, а давления в
камерах Д и К равны, изменение выходного сигнала
(давление воздуха на выходе блока) будет определяться
в основном только действием инерционной обратной
связи, зависящей от степени открытия дросселя ДП и
скорости изменения входного сигнала. Поскольку
действие инерционной отрицательной обратной связи
проявляется не мгновенно (оно нарастает с течением
времени), то сразу же после изменения входного
сигнала значение выходного сигнала становится
максимальным и лишь спустя определенный промежуток времени
становится равным значению входного сигнала. Таким
образом, при изменении входного сигнала значение
выходного сигнала опережает (предваряет) текущее
значение входного сигнала. Предварение будет тем больше,
чем больше скорость изменения входного сигнала и чем
меньше открыт дроссель предварения. С уменьшением
скорости изменения входного сигнала эффект
предварения уменьшается и полностью исчезает, когда входной
сигнал принимает постоянное значение.
При уменьшении входного сигнала эффект
предварения создается аналогичным образом.
Зависимость выходного сигнала у от входного х
в блоке БП-28В подчиняется уравнению (2-73) и
доказывается, исходя из следующих соображений.
Преобразовательно-усилительное устройство вместе с камерами
отрицательной и положительной обратной связи Д и К
образует усилительное звено. Коэффициент усиления
этого звена k — 10, величина которого обеспечивается
разностью эффективных площадей мембран 7 и 8. Для
дальнейших выкладок можно с достаточной
практической точностью принять, что k—+oo. Образованное таким
образом усилительное звено охвачено дополнительной
отрицательной обратной связью, роль которой выполняет
апериодическое звено первого порядка, образованное
глухой камерой Ж и регулируемым дросселем ДП.
Передаточная функция этого звеца согласно уравнения
(2-39) Г(р) =
щ
Таким, образом, блок предварения БП-28В в целом
представляет собой сложное динамическое звено,
образованное усилительным звеном, охваченным инерционной
отрицательной обратной связью. Структурная схема
такого звена была приведена на рис. 2-36 (см. § 2-6). Его
передаточная функция выражается уравнением (2-1336),
т. е. W(p) = TJlip+l, а закон зависимости выходного
сигнала у от входного х (в относительных единицах) —
dx
уравнением (2-73), т. е. у = х + Тд
Время предварения Гд является параметром
настройки блока БП-28В при работе его в САР. Это время
устанавливается вручную путем изменения открытия
регулируемого дросселя ДП. Диапазон настройки времени
Гд находится в пределах от 0,05 до 10 мин.
Конструктивно блок предварения БП-28В выполнен
аналогично регулирующим блокам АУС.
Блок предварения РГ-БП-5199
Блок предварения РГ-БП-5199 разработан ЦЛА.
Принципиальная схема и общий вид блока показаны на
рис. 4-11. Блок состоит из безынерционной
измерительной камеры Ж, инерционной измерительной камеры Е
(в объем которой входит также дополнительная
камера /С, предназначенная для увеличения диапазона
настройки времени предварения),
преобразовательно-усилительного устройства (камеры Г, В, Б и А) и камеры
отрицательной обратной связи Д.
Отработка Д-закона в блоке достигается за счет
параллельного соединения усилительного звена и
апериодического звена первого порядка (см. § 2-5).
Усилительное звено в данном блоке образуется
преобразовательно-усилительным устройством, охваченным
отрицательной обратной связью. Передаточной
функцией этого звена является его коэффициент усиления,
численное значение которого k = 2, поскольку эффективная
площадь гибкой мембраны 7 в 2 раза меньше
эффективной площади гибкой мембраны 2.
Апериодическое звено образуется камерами Е и К и
регулируемым дросселем предварения ДП. Передаточная
функция этого звена согласно уравнению (2-39) W(p)==>
18?
В установившемся режиме значение выходного
сигнала блока предварения равно значению входного
сигнала, поскольку усилие на мембранном блоке 3
(выполняющем функции суммирующего устройства),
создаваемое входным сигналом, поступающим в камеру Ж,
компенсируется суммой усилий, создаваемых входным
сигналом, поступающим в инерционную камеру £, и
выходным сигналом, поступающим в камеру отрицательной
обратной связи Д.
В переходном режиме (при изменении входной
величины) зависимость выходного сигнала у от входного х
определяется как разность выходных сигналов
усилительного звена, передаточная функция которого W\ (р) =
=•£ = 2, и апериодического звена первого порядка,
передаточная функция которого W2(р) =Тр_^у
Тогда передаточная функция блока предварения
РГ-БП-5199 в целом определится уравнением
W (р) = W, (р) -Wt(p) = k- yjj-v (4-6а)
но поскольку & = 2, то
W(P) = 2%ij- (4-61)
Записанной уравнением (4-65) передаточной функции
отвечает уравнение блока предварения:
У + Тя^ = х + 2ТЛ§. (4-7)
Диапазон настройки времени предварения Гд в блоке
РГ-БП-5199 находится в пределах от 15 сек до 30 мин.
Конструктивно блок предварения РГ-БП-5199
аналогичен регулирующему блоку РГИ-5190.
4-4. ВЫЧИСЛИТЕЛЬНЫЕ БЛОКИ
а) Суммирующий блок БС-34А
Суммирующий блок БС-34А позволяет алгебраически
суммировать до трех пневматических сигналов,
изменяющихся от 0,2 до 1 (или от 0 до 1) кгс/см2, два из
которых могут складываться и один вычитаться. Кроме того,
в операцию алгебраического суммирования может быть
190
введена со знаком плюс или минус четвертая величина-
усилие от натяжения пружины, значение которого может
быть эквивалентно изменению давления в одной из
измерительных камер от 0 до 1 кгс/см2. Алгебраическая
сумма указанных четырех сигналов преобразуется в вы-
070
Питание'
\Выход\
Выход
0,2-1 кг с/см2-
Рис. 4-12. Суммирующий блок БС-34А.
а — принципиальная схема; б — общий вид; р\, р2, Рз— входные сигналы 0,2—
1 кгс/см2; С — усилие от натяжения (или сжатия) пружины.
ходной сигнал, изменяющийся в пределах от 0,2 до
1 кгс/см2.
Принципиальная схема и общий вид блока БС-34А
показаны на рис. 4-12. Блок состоит из суммирующего
устройства (плюсовые измерительные камеры М, Л,
минусовая измерительная камера К и ручной пружинный
задатчик, создающий на суммирующем устройстве
усилие С), преобразовательно-усилительного устройства
(камеры Ж, Г, В, Б, А), камеры отрицательной обрат-
191
ной связи И и устройства поддержания постоянного
перепада давлений на постоянном дросселе пневмопреоб-
разователя (камеры Д и Е).
Подводимые в измерительные камеры М, Л и К
пневматические сигналы, а также усилие С, создаваемое
пружиной 1, алгебраически суммируются, что создает
на мембранном блоке 2 результирующее усилие,
перемещающее дроссельную заслонку 3 относительно
сопла 4. Это вызывает изменение давления воздуха в
камерах Ж и Г, питающихся сжатым воздухом из линии
питания через постоянный дроссель 5, а также на
выходе блока. Последнее будет изменяться до тех пор,
пока усилие на мембранном блоке 2, созданное входными
сигналами и пружиной /, не уравновесится усилием,
создаваемым выходным сигналом, поступающим в камеру
отрицательной обратной связи И.
Шариковый клапан 6, мембрана 7 и пружина 8
выполняют роль редуктора давления воздуха,
обеспечивающего постоянство перепада давлений на постоянном
дросселе 5, что повышает точность и чувствительность
блока (более подробно об этом см. главу «Пневмопре-
образователи» в [Л. 31]).
Основная приведенная погрешность суммирующего
блока не превышает ±1%, а порог чувствительности не
превышает 0,05% от максимального значения входного
сигнала.
Примеры математических операций, выполняемых
с помощью суммирующего блока БС-34А, приведены
в табл. 1.
б) Множительный блок РС-ЗЗА
Множительный блок РС-ЗЗА предназначен для
умножения входного пневматического сигнала,
изменяющегося от 0,2 до 1 (или от 0 до 1) кгс/см2, на постоянный
коэффициент k. Величина множительного коэффициента
может устанавливаться вручную в пределах от 4 до 0,2.
Входной сигнал, умноженный на постоянный
коэффициент, преобразуется блоком в выходной пневматический
сигнал, значение которого может изменяться также
в пределах от 0,2 до 1 (или от 0 до 1) кгс/см2. Увеличить
значение выходного сигнала выше 1 кгс/см2 блок РС-ЗЗА
не может, что следует учитывать при выборе его для
работы в конкретных условиях.
192
Таблица I
Примеры математических операций, выполненных
с помощью суммирующего блока БС-34А
Операция
Математическое
выражение
Схема включения
Камера,
сообщенная
с атмосферой
Алгебр 1и-
ческое
суммирование
Ptm
ЯГ
Питание
л
Ъл
"€
6С
-1 1
Рвых
—
С л о кони е
Pi я
рГ
Питание
Ъ-П
-и
К
м
Вычитание
Рвых-=р2~Рг+С
Ргж
Питание
А Г
Jl
^Рвьа
Усреднение
Pl+Рг+С
f вых 2
Pi я р
Питание
Л
IL
Рвых
—
13-795 193
Продолжение табл. 1
Операция
Математическое
выражение
Схема включения
Камера,
сообщенная
с атмосферой
Умножение
на 2
Рвых=2/?1+С
Pi j
fumamie
-и
Рвых
Л'
Умножение
на 2 и
вычитание
Рвых=2/?1—Рз+С
ч
Питание
©у7
IL
Л!
Деление
на 2
Р2+С
/?вых— 2
Питание
©м
©л
/с Р
* с
Изменение
знака
сигнала
/?вых=—РъЛ-С
Питаны
в С!
у1 I I
Ми Л
194
Продолжение табл. 1
Операция
Математическое
выражение
Охема включения
Камера,
сообщенная
с атмосферой
Корректирование
сигнала
Питание
*©Af
Л а К
Релейное
действие
а) При /?2+С>/?3
Рвых=1 кгс/см2;
б) при /?2+С</?3
рвых=0 кгс/см2
L
Питание
X
©^
-и
—
Релейное
действие
а) При /?2+С>0
/?вых=1 кгс/см2;
б) при /*2+С<0
/?вых=0 кгс/см2
Питание
мм
S
-1 1
^Вых
К
Релейное
действие
а) При /73 <С
/?вых=1 кгс/см2]
б) при /?3>С
/?вых=0 кгс/см2
1
Питание
-и
Рбых
л
Примечание. plt ря, р3—входные сигналы, изменяющиеся в пределах
0.2—1 (или 0—1) кгс/см*; С—усилие от натяжения пружины, эквивалентное
изменению входного сигнала в пределах от 0 до ±1 кгс/см3; Рвых—выходной
сигнал, изменяющиеся в пределах 0,2—1 кгс/см2; „Питание"—1,4 кгс/см*.
13* 195
Принципиальная схема и общий вид блока РС-ЗЗА
показаны на рис. 4-13. Блок состоит из измерительного,
множительного и преобразовательно-усилительного
устройств, работа которых состоит в следующем.
Входной сигнал, поступающий в измерительную
камеру Я, создает усилие на мембране /, которое через
рычажное множительное устройство компенсируется
усилием, возникающим от выходного сигнала на мембране 2
преобразовательно-усилительного устройства. Если
опора 3 находится посредине рычага 4, то усилия на
мембранах 2 и / будут равны друг другу, выходной сигнал
при этом будет равен входному, а величина
множительного коэффициента будет равна 1. Установка величины
множительного коэффициента производится за счет
изменения соотношения плеч рычага 4 посредством
перемещения опоры 3 винтом 5. Установленная величина
множительного коэффициента отсчитывается по шкале 6.
Преобразовательно-усилительное устройство,
состоящее из дроссельной заслонки 7, сопла 8, постоянного
дросселя 9, междроссельных камер Ж и Г, камер А, Б
и В усилителя мощности, камеры отрицательной
обратной связи И и устройства поддержания постоянного
перепада давления на постоянном дросселе (камеры Д, Е,
шариковый клапан 10, мембрана 11 и пружина 12), по
принципу действия и по конструкции ничем не
отличается от преобразовательно-усилительного устройства
суммирующего блока БС-34А или программного
задатчика ПД-35А, рассмотренных выше.
При изменении входного и выходного сигналов в
диапазоне 0—1 кгс/см2 блок РС-ЗЗА будет отрабатывать
выходной сигнал рВых в зависимости от входного рвх
согласно уравнению
Рвых = £рвх. (4-8а)
Если входной и выходной сигналы будут изменяться
в диапазоне 0,2—1 кгс/см2, то зависимость между ними
будет реализоваться по более сложному уравнению, а
именно:
Рвых = £(Рвх-0,2)+0,2. (4-86)
Усложнение уравнения (4-86) по сравнению с
уравнением (4-8а) объясняется тем, что при безнулевом
диапазоне изменения пневматических сигналов (0,2—
1 кгс/см2) нулевому значению измеряемой величины со-
I 96
15 Ч 3 в
б)
Рис. 4-13. Множительный блок РС-ЗЗА.
а — принципиальная схема; б — общий пил.
197
ответствует 0,2 кгс/см2, а 1 кгс/см2 соответствует
значению измеряемой величины, равному 100%. Поэтому при
безнулевом диапазоне изменения входных и выходных
сигналов в пневматических вычислительных устройствах
при реализации различных математических операций
необходимо предварительно вычитать из входного
сигнала начальное его значение (в данном случае 0,2 кгс/см2),
а после выполнения математической операции
прибавлять к выходному сигналу начальное его значение
(в данном случае также 0,2 кгс/см2).
Вычитание из входного сигнала начального значения
(0,2 кгс/см2) в блоке РС-ЗЗА производится путем
предварительного натяжения пружины 13 с помощью
винта 14. Прибавление к выходному сигналу начального
значения (0,2 кгс/см2) производится путем
предварительного сжатия пружины 15.
Множительный блок РС-ЗЗА заводом-изготовителем
настраивается на реализацию уравнения (4-86).
в) Множительно-суммирующий блок СП-5017
Блок СП-5017, разработанный ЦЛА, позволяет
алгебраически суммировать до четырех пневматических
сигналов, изменяющихся в пределах 0,2—1 кгс/см2,
каждый из которых предварительно умножается на
коэффициент k; алгебраическая сумма пневматических
сигналов преобразуется в выходной сигнал, изменяющийся
также в пределах 0,2—1 кгс/см2.
Блок СП-5017 отрабатывает выходной сигнал в
зависимости от входных сигналов согласно уравнению
рВых = [± (Pi—0,2)fci+ (р2—0,2) k2 +
(4-9)
+ (р3-0,2)*з± (р4-0,2)£4] + 0,2,
где рВых — выходной пневматический сигнал;
Рь р2, Рз, Pi — входные пневматические сигналы;
k\, kA — множительные коэффициенты при
входных сигналах р\ и р\, величины
которых могут устанавливаться
вручную в пределах от 0,8 до 1;
&2, &з — множительные коэффициенты при
входных сигналах рг и р3, величины
которых могут устанавливаться
вручную в пределах от 0 до 1.
198
Имея возможность предварительного умножения
каждого входного сигнала на коэффициент k, блок СП-5017
позволяет настраивать его так, что полный диапазон
изменения выходного сигнала (0,2—1 кгс/см1) будет
соответствовать изменению всех четырех входных сигналов
также в полном диапазоне (0,2—1 кгс/см2). В этом
состоит одна из характерных особенностей этого блока.
Применение блоков СП-5017 в ряде случаев
позволяет существенно упростить схемы вычислительных
устройств при регулировании технологических процессов.
Примерами могут служить вычислительные устройства
в системах автоматического регулирования процессов
горения в печах, использующих одновременно несколько
видов топлива, и др.
Питание
14 кгс/см, *
1
125 -
1
Ьотв.Мб
^ 330 -J
6)
Рис. 4-14. Множительно-суммирующий блок СП-5017.
Д — принципиальная схема; б — общий вид; р{, р2, рз, Ра — входные сигналы
0,2—1 кгс/см2.
199
Принципиальная схема и общий вид блока СП-5017
показаны на рис. 4-14. Блок состоит из четырех сильфон-
ных измерительных элементов 1—4, множительных
рычагов 5—8, суммирующей плиты 9, поворачивающейся
вокруг оси 10 в подшипниках 11, 12, и пневмопреобразо-
вателя, состоящего из дроссельной заслонки 13, сопла
14, постоянного дросселя 15, междроссельной камеры Г,
усилителя мощности (камеры А, Б, В, мембранный блок
16 и тарельчатый клапан 17) и камеры отрицательной
обратной связи Д с сильфоном 18.
Усилия, возникающие на измерительных элементах
1—4 от действия входных сигналов, создают крутящий
момент на суммирующей плите 9 и через шток 19
вызывают перемещение дроссельной заслонки 13
относительно сопла 14. Этот момент компенсируется
противодействующим моментом, возникающим на суммирующей
плите 9 от действия выходного сигнала, создающего
усилие в камере отрицательной обратной связи Д пневмо-
преобразователя.
Натяжением пружин 20—23 производится вычитание
из входных сигналов р\—р4 начальных значений
(0,2 кгс/см2). Прибавление к выходному сигналу
начального значения (0,2 кгс/см2) производится натяжением
пружины 24.
Изменение величины множительных коэффициентов
k\—kA производится передвижением измерительных силь-
фонов /—4 вдоль множительных рычагов 5—8
(соответственно). При этом измерительные сильфоны / и 4
могут перемещаться вдоль рычагов 5 и 8 как вправо, так
и влево относительно оси вращения суммирующей
плиты 9, чем достигается изменение знаков входных
сигналов р\ и Ра в уравнении (4-9).
Основная приведенная погрешность отработки
выходного сигнала не превышает ±2% от его верхнего
предела. Порог чувствительности не превышает 0,1% от
верхнего предела входного сигнала.
г) Вычислительный блок БФ-2
Блок БФ-2 предназначен для выполнения следующих
математических операций с входными сигналами:
1) умножение двух сигналов друг на друга, т. е.
Рвых=1,25(/?вх1—0,2) (рвх2—0,2) +0,2; (4-10а)
200
2) возведение величины входного сигнала в квадрат,
г. е.
рвых = 1,25 (рвх—0,2)2 + 0,2; (4-11 а)
3) извлечение квадратного корня из величины
входного сигнала, т. е.
Рвы*=У /?ВХ1~50,2+°-2; (4"12а)
где /?вх, Рвхь Рвх2, Рвых — входные и выходной
пневматические сигналы,
изменяющиеся в пределах 0,2—
1 кгс/см2;
1,25 — масштабирующий
коэффициент, обусловленный
безнулевым диапазоном изменения
входных и выходных сигналов
(0,2—1 кгс/см2).
При изменении входных и выходных сигналов в
пределах от 0 до 1 кгс/см2 и при условии специальной
настройки блока приведенные выше уравнения
упрощаются. Уравнение (4-10а) упрощается до
Рвых = Рвх1 'Рвх2; (4-106)
уравнение (4-11 а)—до
Рвых = Рвх2; (4-116)
уравнение (4-12а) —до.
/?вых==|/>вх. (4-126)
Первая и вторая вычислительные операции
выполняются блоками, собранными по одной и той же
принципиальной схеме (рис. 4-15,а).
Для выполнения третьей операции в блоке БФ-2
необходимо произвести внутреннюю перекоммутацию ряда
узлов и переставить сопло в противоположную сторону
множительного рычага (рис. 4-15,6).
Общий вид блока показан на рис. 4-15,в. Блок по
схеме, показанной на рис. 4-15,а, состоит из сильфонно-
го измерительного устройства первой измеряемой
величины (сильфон /, кольцевая пружина 2, шток б), силь-
201
Рис. 4-15. Вычислительный блок БФ-2.
а — схема блока при умножении двух сигналов друг на друга (или при
возведении величины сигнала в квадрат); б — схема блока при извлечении
квадратного корня из величины входного сигнала; в — общий вид.
202
фонного измерительною устройства второй измеряемой
величины (сильфон 4, пружина 5, шток 6),
множительного рычажного механизма (рычаг 7, закрепленный на
крестообразной подвеске и поворачивающийся вокруг
точки а, ленточная тяга 8), пневмопреобразователя
(сопло Р, дроссельная заслонка 10, постоянный дроссель 11,
мембранный усилитель мощности выходного сигнала УМ,
сильфон отрицательной обратной связи 12).
Операция умножения сигнала рвх\ на рВХ2
реализуется путем образования на рычаге 7 момента вращения
Мвр = Я/, (4-13)
где Р — усилие, создаваемое сильфонным
измерительным устройством первой измеряемой величины;
/ — плечо, создаваемой сильфонным измерительным
устройством второй измеряемой величины.
Усилие Р, изменяющееся пропорционально /?вх1, от
сильфона / передается к рычагу 7 посредством безмо-
ментной ленточной тяги 8. Последняя соединена со
штоком 3 в точке бис рычагом 7 в точке е. Точка б
перемещается вверх и вниз сильфоном 4 и штоком 6, образуя
при этом плечо, длина которого изменяется от 0 до /
пропорционально /7вх2.
Как показано на рис. 4-15,а, шток 6 проходит через
точку опоры а рычага 7. При давлении воздуха над
сильфоном 4, равном 0,2 кгс/см2, точка б будет
совпадать с точкой а; длина плеча / при этом будет равна
нулю. Тогда момент вращения Мвр на рычаге 7 будет
равен также нулю при любом усилии, создаваемом
сильфоном 1. Таким образом, момент вращения на
рычаге 7 создается одновременным действием входных
сигналов /?ВХ1 и /?ВХ2. Этот момент компенсируется
противодействующим моментом, образующимся на рычаге 7
усилием, создаваемым сильфоном отрицательной
обратной связи 12 от действия выходного сигнала при работе
пневмопреобразователя.
Пневмопреобразователь, применяемый в блоке БФ-2,
работает по схеме компенсации усилия. Образовавшийся
действием входных сигналов рпх\ и рНХ2 момент
вращения на рычаге 7 вызывает изменение зазора между
дроссельной заслонкой 10 и соплом 9, что приводит к
изменению давления воздуха в междроссельной камере В
203
и на выходе усилителя мощности УМ. Последнее будет
продолжаться до тех пор, пока усилие, создаваемое
выходным сигналом на сильфоне отрицательно обратной
связи 12, не создает на рычаге 7 противодействующий
момент вращения, равный по величине моменту
вращения, созданному сильфонами 1 и 4 и направленный
в противоположном направлении. Более подробное
описание принципа действия и устройства аналогичных
пневмопреобразователей дано в [Л. 31].
Вычитание из входных сигналов /?ВХ1 и рвх2
начальных значений (0,2 кгс/см2) производится путем
предварительного сжатия пружин 2 и 5 (соответственно).
Предварительное сжатие пружин делается на
заводе-изготовителе при тарировке блока.
Установка начального значения выходного сигнала
(0,2 кгс/см2) производится путем предварительного
натяжения пружины 13.
Величина масштабирующего коэффициента 1,25
определяется соотношением плеч рычага 7.
Если один из входных сигналов (рвх\ или рвх2) будет
подан одновременно к обоим измерительным сильфонам
/ и 4, то блок БФ-2 будет отрабатывать выходной
сигнал, величина которого будет равна квадрату входного.
Переделок в конструкции блока при этом не требуется.
Для выполнения блоком БФ-2 операции извлечения
квадратного корня из величины входного сигнала в нем
необходимо произвести внутреннюю перекоммутацию по
схеме на рис. 4-15,6 (обозначения на рис. 4-15,6 те же,
что и на рис. 4-15,а). В этом случае сильфоны 1 и 4
становятся сильфонами отрицательной обратной связи,
сильфои 12 — измерительным, а сопло 9 переставляется
на левую сторону рычага 7 (рычаг 7 имеет две
дроссельные заслонки 10). Тогда входной сигнал рвх, будучи
подан в сильфон 12, создает момент вращения на рычаге
7, который уравновешивается противодействующим
моментом, возникающим от действия выходного сигнала на
сильфоны отрицательной обратной связи 1 и 4, что и
определяет величину выходного сигнала /?Вых, равную
квадратному корню из величины входного сигнала
согласно уравнению (4-12,а).
Основная приведенная погрешность отработки
выходного сигнала в блоке БФ-2 не превышает ±1%' от
максимального значения входного сигнала.
204
д) Преобразовательный блок ПД-36А
Блок ПД-36А предназначен для преобразования
входного сигнала, изменяющегося в пределах 0,2—
i кгс/см2, в выходной сигнал, изменяющийся также в
пределах 0,2—1 кгс/см2 в соответствии с профилем кулач-
Jxod _ 10 11
205
ка; при этом профиль кулачка может иметь любую
заданную функциональную зависимость.
Принципиальная схема и общий вид блока ПД-36А
показаны на рис. 4-16. Блок состоит из сильфонного
измерительного устройства, профилированного кулачка и
компенсационного пневмопреобразователя.
Усилие на сильфоне /, возникающее от действия
входного сигнала, вызывает перемещение дна сильфона
и уравновешивается пружиной 2. Перемещение дна
сильфона через траверсу <?, ленточную передачу 4 и
ось 5 передается профилированному кулачку 6, угол
поворота которого при максимальном ходе дна сильфона
11 мм равен 240°. Поворот кулачка 6 вызывает через
ролик 7 перемещение углового рычага 8 и изменение
натяжения пружины 9. Последнее через рычаг 10 и
стержень // передается пневмопреобразователю ЯЯ, где
преобразуется в выходной пневматический сигнал.
Пневмопреобразователь блока ПД-36А по принципу
действия и устройству аналогичен
пневмопреобразователю программного задатчика ПД-35А, рассмотренному
в § 4-2,6.
Основная приведенная погрешность отработки
выходного сигнала в блоке ПД-36А не превышает ±1,5%' от
максимального значения входного сигнала.
Максимально допустимый угол подъема профиля
кулачка составляет 40°.
4-5. УСИЛИТЕЛЬ МОЩНОСТИ ПР-14М
Усилитель ПР-14М предназначен для усиления
мощности пневматического сигнала, изменяющегося в
пределах 0—1 (или 0,2—1) кгс/см2, при работе его в
комплекте с различными типами датчиков и регулирующих
устройств, где он позволяет существенно уменьшить
время передачи пневматического сигнала по длинной линии
связи.
Принципиальная схема и общий вид усилителя
ПР-14М показаны на рис. 4-17.
По принципу действия и по устройству усилитель
ПР-14М является пневмоповторителем с мощным
выходом. Он состоит из измерительной камеры Е,
преобразовательного устройства (дроссельная заслонка /, сопло 2,
постоянный дроссель 3 и междроссельная камера Г),
206
усилительного устройства (камеры Л, 5, fi, мембранный
блок 4 и шариковый клапан 5) и камеры отрицательной
обратной связи Д.
Изменение усилия на мембране 6, возникающего от
действия входного сигнала, вызывает изменение зазора
между соплом 2 и дроссельной заслонкой /, что приво-
—Н
и т—
б)
Рис. 4-17. Усилитель мощности ПР-14М.
а — принципиальная схема; б — общий вид.
дит к изменению давления воздуха в междроссельной
камере Г и на выходе усилителя. Последнее будет
продолжаться до тех пор, пока усилие на мембране 6,
возникшее от действия входного сигнала, не уравновесится
усилием, возникающим на этой мембране от действия
выходного сигнала, поступающего в камеру
отрицательной обратной связи Д.
Конструктивно усилитель ПР-14М представляет
собой мембранный блок, выполненный аналогично
регулирующим блокам АУС.
Основная приведенная погрешность отработки
выходного сигнала в усилителе ПР-14М не превышает
±0,5%' от максимального значения входного сигнала.
207
ГЛАВА ПЯТАЯ
РЕГУЛЯТОРЫ, ПОСТРОЕННЫЕ
ПО ЭЛЕМЕНТНО-МОДУЛЬНОМУ ПРИНЦИПУ
(РЕГУЛЯТОРЫ УСЭППА)
5-1. ОБЩИЕ ЗАМЕЧАНИЯ
Элементно-модульный принцип построения
пневматических регуляторов состоит в том, что основные
функциональные (регулирующие и вычислительные) блоки
строятся путем набора отдельных элементов,
представляющих собой конструктивные узлы (модули).
Комплекс таких модулей составляет универсальную
систему элементов промышленной
пневмоавтоматики (УСЭППА). В этом комплексе,
который непрерывно расширяется и усовершенствуется,
содержатся модули, на базе которых собираются все
основные типы регулирующих и вычислительных устройств
(блоков) непрерывного действия, а также модули, на
базе которых собираются управляющие устройства
дискретного действия, позволяющие реализовывать
различные логические операции. Элементно-модульный
принцип построения расширил область распространения
средств пневмоавтоматики также и на сложные системы
автоматического управления дискретного действия, где
до последнего времени задачи автоматизации решались
лишь средствами электроники и полупроводниковой
техники. В этом состоит одно из основных преимуществ
УСЭППА над АУС.
Универсальная система элементов промышленной
пневмоавтоматики, построенная на модулях
непрерывного и дискретного действия, включает в себя
постоянные и регулируемые пневмосопротивления, пневмоемко-
сти, пневмореле, пневмоусилители и другие аналоги
электромеханической, электронной и
полупроводниковой аппаратуры. Все эти элементы могут выполнять
лишь простейшие функции. Они не содержат внутренних
коммутаций и поэтому довольно просты по устройству,
имеют сравнительно небольшие габариты и легко
отлаживаются. Монтаж элементов в схемы ведется на
коммутационных платах, внутри которых проходят каналы,
необходимые для соединения элементов друг с другом.
Для крепления, коммутирования с платами и подключе-
208
мия во время наладки схем измерительных приборов все
элементы имеют коммутационные выводные штуцера
(ножки).
Сведения по модулям непрерывного действия, а
также описания некоторых типов регуляторов, собранных
на базе этих модулей, приводятся ниже К
Модули дискретного действия и собираемые на их
основе элементы и устройства, реализующие различные
логические операции, здесь не рассматриваются,
поскольку они представляют самостоятельный раздел
пневмоавтоматики, выходящий за пределы данной книги.
5-2. ОСНОВНЫЕ МОДУЛИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
а) Пневмосопротивления и пневмоемкости
Пневмосопротивления, применяемые в
пневмоавтоматике, подразделяются на постоянные и регулируемые
(постоянные и регулируемые дроссели).
В пневматических регуляторах они используются в
качестве устройств, связывающих расход сжатого воздуха
с перепадом давлений (разностью давлений до и после
дросселя). В качестве постоянного пневмосопротивления
широкое распространение получил дроссель П-1017; в
качестве регулируемого — дроссель П-1016.
Устройство постоянного дросселя П-1017 показано на
рис. 5-1. Капиллярная трубка / (с внутренним
диаметром 0,3 мм), покрытая снаружи фильтрующим слоем 2
из шерстяной пряжи, помещена в продольном канале
винта 3. Последний ввернут в корпус 4 и уплотнен в нем
резиновым кольцом 5. Вход и выход сжатого воздуха
осуществляются через штуцера (ножки) входной 6 и
выходной 7, служащие одновременно креплением при
установке дросселя на монтажной плате регулятора.
Устройство регулируемого дросселя П-1016 показано
на рис. 5-2. Дроссель состоит из корпуса 1 с
запрессованной в него оловянной втулкой 2, последняя
выполняет роль сопла с коническим отверстием переменного
сечения. Во втулке 2 помещена коническая игла <?,
которая может совершать продольное движение, изменяя тем
самым проходное сечение дросселя. Перемещение иглы 3
1 Даются краткие сведения по материалам, опубликованным
в [Л. 4, 11].
14—795
209
вниз осуществляется спиральной шайбой 4 при повороте
диска 5 вокруг оси 6\ вверх игла 3 перемещается
возвратной пружиной 7. Для исключения в
дросселирующей паре возможных перекосов игла 3 жестко
соединена с направляющей втулкой 8 и совершает возвратно-
поступательное движение вместе с последней. Со сторо-
Рис. 5-1. Постоянный Рис. 5-2. Регулируемый дроссель П-1016.
дроссель П-1017.
ны атмосферы игла 3 уплотнена гибкой мембраной 9.
Вход и выход сжатого воздуха осуществляется через
штуцера (ножки) входной 10 и выходной //.
В целях обеспечения стабильности заданной
статической характеристики регулируемого дросселя
(зависимости расхода сжатого воздуха от хода иглы), а также
учитывая, что зазор между втулкой 2 и иглой 3 очень
мал, коническое отверстие во втулке 2 для каждого
дросселя обжимается по профилю иглы. По этой
причине втулка 2 выполнена из олова.
210
В зависимости от применения каждый регулируемый
дроссель имеет свою градуировку, нанесенную на
шкале 12. Последняя градуируется в единицах тех величин,
изменение которых осуществляется изменением
проходного сечения (сопротивления) дросселя (например,
время изодрома, время предварения и др). Отсчет ведется
по неподвижной стрелке 13.
Для образования различных инерционных звеньев
(апериодического, интегрирующего, дифференцирующего
и др.)> составляющих основу пневматических регулято-
' ///
и
у^
ш
1
9
Рис. 5-3. Пневмо-
емкости П-1035 и
П-1036.
Рис. 5-4.
Дроссельные сумматоры
П-1087 и П-1015.
ров, кроме пневмосопротивлений, необходимо иметь
также и пневмоемкости. В составе УСЭППА содержится
два типа пневмоемкостей: П-1035, объем которой равен
50 сж3, и П-1036, объем которой равен 40 смг. По
устройству оба типа пневмоемкостей аналогичны друг другу.
Установка и крепление пневмоемкости на монтажной
плате регулятора производится с помощью входного и
выходного штуцеров (ножек). Устройство
пневмоемкостей П-1035 и П-1036 показаны на рис. 5-3.
б) Дроссельные сумматоры
Пневматический дроссельный сумматор (рис. 5-4)
представляет собой устройство, состоящее из регулируе-
14* 211
мого ДР и постоянного ЦП дросселей, выполненных
в одном блоке.
В составе УСЭППА имеется два типа дроссельных
сумматоров: П-1087 и П-1015, отличающихся друг от
друга тем, что в сумматоре П-1087 регулируемый
дроссель снабжен шкалой и стрелкой, в сумматоре П-1015
регулируемый дроссель шкалы и стрелки не имеет. В
остальном сумматоры аналогичны друг другу.
Конструктивно регулируемый и постоянный дроссели
в сумматорах П-1087 и П-1015 выполнены аналогично
дросселям П-1016 и П-1017 соответственно.
Дроссельный сумматор предназначен для
реализации операции суммирования двух пневматических
сигналов согласно уравнению
PBHx = ^iPi+fe2P2, (5-1)
выходной пневматический сигнал,
изменяющийся в пределах 0—1 кгс/см2-,
входные пневматические сигналы,
изменяющиеся в пределах 0—1 кгс/см2;
множительные коэффициенты при входных
сигналах, которые могут устанавливаться
в пределах от 0 до 1, в сумме оставаясь
равными 1, т. е. k\ + k2=\.
Записанная уравнением (5-1) операция
суммирования двух пневматических сигналов р\ и р2 реализуется
дроссельным сумматором при условии подачи выходного
сигнала рвых в глухую камеру и соблюдается с высокой
точностью лишь в пределах ламинарных потоков
сжатого воздуха, проходящего через регулируемый ДР и
постоянный ДП дроссели, т. е. в пределах линейности
этих дросселей. Для доказательства уравнения (5-1)
воспользуемся следующими зависимостями.
Зависимость веса сжатого воздуха G в глухой
камере (на выходе дроссельного сумматора), имеющей
объем V, от давления рвых и температуры 6 при газовой
постоянной R выражается уравнением
0 = р*тщ (5-2)
где Рвых —
Pi и р2 —
k\ и k2 —
212
Изменение весового количества воздуха AG в глухой
камере за единицу времени определяется уравнением
дп dpbых V ,г оч
С другой стороны, расходы сжатого воздуха Gb
проходящего через ДР, и G2, проходящего через ДЯ,
соответственно равны:
Gi = P(Pi—/>вых); (5-4)
С2 = а(рвых—Р2), (5~5)
где р и а — проводимости дросселей ДР и ДП
соответственно.
Тогда
AG = Gi—G2 = &pi + ар 2— (а + р) рв ых • (5-6)
Подставляя в уравнение (5-6) значение AG из
уравнения (5-3) и введя обозначения
= К\ (5-7)
К (5-8)
получим уравнение дроссельного сумматора в виде:
Т />вых - Рг + V,, (5-10)
где Т — постоянная времени дроссельного сумматора,
работающего совместно с глухой камерой,
установленной на его выходе.
Полученное уравнение (5-10) показывает, что
дроссельный сумматор, работая в комплекте с глухой
камерой, представляет собой апериодическое звено первого
порядка (см. § 2-2,6).
213
В статическом состоянии, когда р\ и р2 не
изменяются, AG = 0, pJtblx = 0, дроссельный сумматор реализует
операцию суммирования двух пневматических сигналов
Рх и р2 согласно уравнения (5-1). Эта операция, как
указывалось выше, реализуется с высокой точностью лишь
при условии линейности дросселей ДР и ЦП. Это
вытекает из уравнения (5-10), так как вывод последнего
основан на уравнениях (5-4) и (5-5), где было принято,
что расходы G\ и G2 находятся в линейной зависимости
от перепадов давлений на дросселях ДР и ДП. Однако
практически доказано, что дроссельный сумматор
реализует операцию суммирования двух пневматических
сигналов р\ и р2 согласно уравнению (5-1) также и за
пределами линейности дросселей ДР и ДЯ, при этом
погрешность суммирования не превышает ±3%' от
максимального значения входного сигнала. Последнее
обстоятельство создало благоприятные условия для
широкого применения этого типа сумматора в различных
типах пневматических регуляторов.
Множительные коэффициенты k\ и k2 при входных
сигналах р{ и р2 в дроссельных сумматорах П-1087 и
П-1015, как указывалось выше, могут устанавливаться
в пределах от 0 до 1, оставаясь в сумме равными 1.
Установка числовых значений k\ и k2 производится
изменением проводимости р регулируемого дросселя ДР
согласно уравнениям (5-7) и (5-8).
Если регулируемый дроссель ДР сообщить с
атмосферой (р2 = 0 кгс/см2), то дроссельный сумматор будет
работать в качестве делителя пневматического сигнала
Ри поданного на вход постоянного дросселя ДЯ,
согласно уравнению
Рьых = Ь\Р\, (5-И)
где k\<l при любых промежуточных значениях р, и
лишь при р = 0 (при полностью закрытом ДР) k\ = l.
в) Мембранные сумматоры
Пневматический мембранный сумматор представляет
собой устройство, 'предназначенное для
алгебраического суммирования нескольких входных пневматиче-
214
ских сигналов, изменяющихся в пределах 0—1 (или
0,2—1) кгс/см2, и преобразования алгебраической
суммы в непрерывный пропорциональный выходной
пневматический сигнал, изменяющийся в пределах 0—1 (или
0,2—1) кгс/см2, или в дискретный выходной сигнал,
имеющий два дискретных значения: 0 или 1.
В составе УСЭППА имеется несколько типов
мембранных сумматоров, основными из которых являются
трехмембранный сумматор П-1018 и пятимембранный
сумматор П-1062.
Принципиальная схема сумматора П-1018 показана
на рис. 5-5. Сумматор состоит из питающего и сбросного
сопел 1 и 2 и мембранного блока 3 с дроссельными
заслонками 4 и 5 и тремя эластичными мембранами:
верхней 6, средней 7 и нижней 8. Установка сумматора на
монтажной плате
регулятора осуществляется
посредством штуцеров (ножек)
а\ а, б, в, г, г'. При этом
штуцер г' используется для
подачи питающего воздуха
с давлением 1,4 кгс/см2 —
в питающую камеру Г\ af—
для сброса сжатого
воздуха из камеры А в
атмосферу; штуцера в и б— для
подачи входных сигналов р\
и р2 в измерительные
камеры В и £; штуцера а и г
обычно сообщаются друг
с другом (внутренним каналом в монтажной плате) и
используются для вывода выходного сигнала рВых-
Если штуцера а и г соединены в общую выходную
линию, а к штуцерам бив поданы входные сигналы р\
и р2, то сумматор П-1018 будет отрабатывать дискретный
выходной пневматический сигнал согласно уравнениям
Рис. 5-5. Мембранный
сумматор П-1018.
Pbmx = Plht при р,>р2\
Pbux^Pztu При A</V
(5-12)
В таком виде сумматор П-1018 используется в
качестве регулирующего устройства, отрабатывающего
релейный закон регулирования. При этом входной сиг-
215
нал pi поступает от датчика и характеризует текущее
значение регулируемой величины; входной сигнал р2
поступает от ручного пневматического задатчика и
характеризует заданное значение регулируемой величины.
Если измерительную камеру Б сообщить с линией
выходного сигнала (штуцер б соединить со штуцерами
а и г), т. е. использовать ее как камеру отрицательной
обратной связи, то сумматор будет работать в качестве
усилителя с коэффициентом усиления k=l и
отрабатывать непрерывный выходной сигнал, равный по
величине входному, согласно уравнению
Рвых — Рв
(5-13)
Принципиальная схема сумматора П-1062 показана
на рис. 5-6.
По принципу действия и устройству сумматор П-1062
не отличается от сумматора П-1018, за исключением
того, что сумматор П-1062 имеет не две, а четыре
измерительные камеры (камеры £, б, Г, Д), благодаря чему
он позволяет реализовывать значительно большее число
вычислительных операций с входными сигналами р\-т-
р4. Основные вычислительные операции, выполняемые
с помощью сумматора
П-1062, и соответствующие
им -схемы соединений
штуцеров а\ а, б, в, г, d, е, ег
приведены в табл. 2.
Сумматор П-1062
используется в качестве
элемента сравнения в
регулирующих блоках УСЭППА,
Ьтрабатывающих П- и ПИ-
законы регулирования.
Основная приведенная
погрешность мембранных
сумматоров П-1018 и П-1062
при отработке ими
непрерывных «выходных
сигналов не превышает ± 1 %
от максимального значения входного сигнала.
Порог чувствительности этих сумматоров не
превышает 5 мм рт. ст.
Рис.
5-6. Мембранный сум
магор П-1062.
216
Таблица 5-2
Примеры математических операций, выполняемых
с помощью мембранного сумматора П-1062
Алгебраическое
суммирование
Сложение
Ръых=Р1—Р2+-Рз
Ршых=Рг+ Рг
Pi
Рвы
217
Продолжение табл. 2
Операция
Математическое выражение
Схема гжлючения
штуцеров (камер)
Вычитание
Рвы.
V
Вычитание
\Рвн
v
218
Продолжение табл. 2
Операция
Математическое выражение
Схема включения
штуцеров (камер)
Релейное
действие
Релейное
действие
а) При Р2>рг
Рвых=0 кгс/см2;
б) при р2СРг
/?вых=1.4 кгс/см2
а) При (p2+p4)'>(pi+p3)
Рвых=0 кгс/см2\
б) при (p2+Pt)<(Pi+pa)
Рвых=\ А кгс/см2
"У
+
б
Условные обозначе
н и я:
—питание 1,4 кгс/см2',
J сброс в атмосферу;
—сопло-заслонка.
г) Ручные задатчики
В составе УСЭППА имеется два типа ручных
пневматических задатчиков: П-1083 и П-1099. Характерными
особенностями этих задатчиков являются: малогабарит-
ность, возможность установки их на монтажных платах
различных регулирующих и вычислительных устройств
при помощи типовых присоединительных штуцеров
(ножек), малая мощность выходного пневматического
сигнала, что значительно упростило их конструкции. Оба
типа ручных задатчиков рассчитаны на работу в
комплекте с постоянными дросселями П-1017,
устанавливаемыми на линиях питания сжатым воздухом.
Ввиду незначительной мощности выходного сигнала
ручные задатчики П-1083 и П-1099 предназначены для
219
поддержания постоянного (задаваемого вручную)
давления сжатого воздуха в глухих камерах различных
регулирующих и вычислительных устройств (при условии
коротких линий связи между задатчиками и глухими
камерами).
Устройство ручного задатчика П-1083 показано на
рис. 5-7. Задатчик состоит из сопла /, эластичной
мембраны 2 с жестким центром и дроссельной заслонкой
пружины 4, тарелки 5 с резьбовым отверстием, винта 6,
входного и выходного штуцеров (ножек) 7 и 8. Задат-
Рис. 5-7. Ручной задат- Рис. 5-8. Руч-
чик П-1083. ной задатчик
П-1099.
чик работает по схеме компенсации усилия (см. главу
«Пневмопреобразователи» в [Л. 31]. При подаче через
входной штуцер 7 и постоянный дроссель П-1017
(постоянный дроссель на рис. 5-7 не показан) сжатого
воздуха с давлением 1,4 кгс/см2 в камере А установится
давление, соответствующее сжатию пружины 4. Избыток
сжатого воздуха через управляемый дроссель пневмо-
преобразователя, образованный соплом / и дроссельной
заслонкой 3, сбрасывается в атмосферу. Давление
воздуха в камере А является выходным сигналом ручного
задатчика, изменяющимся в пределах 0—1 кгс/см2 при
изменении сжатия пружины 5 посредством винта 6 и
тарелки 5.
Устройство ручного задатчика П-1099 показано на
рис. 5-8. Задатчик состоит из шарикового клапана,
образованного шариком 1 и седлом 2, пружины <?, винта 4,
тарелки 5, входного и выходного штуцеров (ножек) 6
220
и 7. При подаче через входной штуцер 6 и постоянный
дроссель П-1017 (постоянный дроссель на рис. 5-8 не
показан) сжатого воздуха с давлением 1,4 кгс/см2 в
камере А установится давление, соответствующее сжатию
пружины 3. Избыток сжатого воздуха через
управляемый дроссель пневмопреобразователя (образованный
седлом 2 и шариком 1 и отверстие а сбрасывается в
атмосферу. Таким образом, шарик 1 выполняет
одновременно рюль дроссельной заслонки
пневмопреобразователя и измерительного органа, измеряющего усилия от
действия на него пружины 3 (сверху) и выходного
давления (снизу). Давление воздуха в камере А является
выходным сигналом задатчика, изменяющимся в
пределах 0—1 кгс/см2 при изменении сжатия пружины 3.
д) Пневмоповторители
л
1
ш и у/
ft й ^
1ууУ1
дп ||
Пневмоповторителем называется устройство,
повторяющее на своем выходе изменения входного
пневматического сигнала. По этой причине пневмоповторители
часто называются пневматическими следящими
устройствами. Пневмоповторители используются для
обеспечения детектирующего
(однонаправленного)
воздействия пневматического
сигнала в различных
цепях регулирующих и
вычислительных устройств.
В составе УСЭППА
имеется два типа пневмо-
повторителей: П-1010 и
П-1053. Оба типа пневмо-
повторителей рассчитаны
на работу в комплекте
с постоянными дросселями П-1017, устанавливаемыми
на линиях питания сжатым воздухом.
Характерной особенностью обоих типов пневмоповто-
рителей является малая мощность выходного
пневматического сигнала, что позволило значительно упростить
их конструкции и уменьшить габариты.
Принципиальная схема пневмоповторителя П-1010
показана на рис. 5-9. Пневмоповторитель состоит из
двух камер: входной Б и выходной Л, разделенных меж-
/ 2
Рис.
5-9.
Пневмоповторитель
П-1010.
221
ду собой эластичной мембраной /, в центре которой
закреплена дроссельная заслонка 2, регулирующая
еброс сжатого воздуха из камеры А через сопло 3 в
атмосферу. В камеру Б поступает входной пневматический
сигнал рвх, изменяющийся в пределах 0—1 (или 0,2—
1) кгс/см2. При подаче в камеру А через постоянный
кгс/см2, который через выводной штуцер подается к
последующим элементам схемы регулирующего или
вычислительного устройства.
Принципиальная схема пневмоповторителя П-1053
показана на рис. 5-10. Этот пневмоповторитель
отличается от предыдущего тем, что текущее значение
отрабатываемого им выходного сигнала больше или
меньше значения входного сигнала на величину смещения С.
Для этого в конструкции пневмоповторителя П-1053,
кроме эластичной мембраны 1, дроссельной заслонки 2
и сопла 3, установлены две пружины: верхняя 4 и
нижняя 5, а также винт 6, предназначенный для установки
величины смещения С выходного сигнала по сравнению
с входным. Тогда при подаче в камеру Б входного
сигнала Рвх, изменяющегося в пределах 0—1 (или 0,2 —
1) кгс/см2, а в камеру А — сжатого воздуха из линии
питания (через постоянный дроссель ДП) с давлением
1,4 кгс/см2 в камере А установится давление воздуха
Рис. 5-10. Пневмоповторитель со
смещением П-1053.
Рвых
дроссель ДП сжатого
воздуха с давлением
1,4 кгс/см2 в этой камере
установится давление,
равное давлению
воздуха во входной камере Б.
Избыток сжатого воздуха
через управляемый
дроссель, образованный
дроссельной заслонкой 2 и
соплом 5, сбрасывается
в атмосферу. Давление
воздуха в выходной
камере А является
выходным сигналом
пневмоповторителя Рвых,
изменяющимся в тех же пределах,
что и входной сигнал,
т. е. 0—1 (или 0,2—1)
222
Рвых, величина которого будет больше или меньше
давления воздуха в камере Б на величину С, т. е.
Рвых = Рвх±,С. (5-14)
Смещение выходного сигнала рвых на величину С по
сравнению с входным сигналом рвх устанавливается
вручную за счет предварительного сжатия пружин 4 и
5. Изменяя положение винта 6, можно настроить
пневмоповторитель так, что пружина 4 будет полностью
ослаблена и тогда на мембрану / будет действовать
только пружина 5. При такой настройке пневмоповто-
рителя он будет отрабатывать выходной сигнал,
значение которого будет на величину С меньше, чем
значение входного сигнала. Перемещая винт 6 вниз, можно
создать такое усилие сжатия пружины 4, при котором
выходной сигнал рвых будет больше входного на
величину С.
По причине смещения выходного сигнала
относительно входного пневмоповторитель П-1053 получил
название «пневмоповторитель со смещением». Диапазон
смещения выходного сигнала в пневмоповторителе
П-1053 составляет ±0,15 кгс/см2.
Основная приведенная погрешность отработки
выходного сигнала в обоих типах пневмоповторителей не
превышает ±0,5%' от его верхнего предела.
е) Усилители мощности
Для усиления мощности выходных сигналов
регуляторов, собранных из рассмотренных выше элементов,
в составе УСЭППА содержится несколько типов
усилителей мощности. Простейшим из них является
усилитель П-1100, принципиальная схема которого показана
на рис. 5-11.
Усилитель состоит из
измерительной камеры Г,
питающей камеры Л,
выходной камеры Б,
камеры В сброса сжатого
воздуха в атмосферу,
мембранного блока / и
шариков 2 и 3.
По принципу действия Рнс 5_1L усилитель мощно-
усилитель П-1100 является сти П-П00.
223
пневмоповторителем с мощным выходом. Входной
пневматический сигнал, изменяющийся в пределах 0—1
(или 0,2—1) кгс/см2, поступает в измерительную
камеру Г и создает усилие на мембранном блоке 1. Это
вызывает перемещение вниз шариков 2 и 3 и переток
сжатого воздуха из камеры А (куда он поступает из линии
питания с постоянным давлением рПит=1,4 кгс/см2)
в камеру Б и далее на выход усилителя. Переток
сжатого воздуха из камеры А в камеру Б будет
продолжаться до тех пор, пока давление в камере Б не станет
равным давлению в камере Г. Таким образом, давление
сжатого воздуха в камере Б является выходным
сигналом рвых усилителя мощности, изменяющимся в тех
же пределах, что и изменение входного сигнала,
т. е. 0—1 (или 0,2—1) кгс/см2.
Простота конструкции усиления П-1100 является
существенным его достоинством. Вместе с тем точность
этого усилителя сравнительно невысокая, в связи с чем
этот усилитель как самостоятельный функциональный
блок в пневмоавтоматике не применяется. При работе
этого усилителя в комплекте с мембранным
сумматором П-1018 или П-1062 основная приведенная
погрешность отработки выходного сигнала таким комплектом
не превышает ±0,5%' от максимального значения
входного сигнала. Высокая точность отработки выходного
сигнала усилителем мощности П-1100 при работе его
в комплекте с мембранным сумматором достигается за
счет охвата этого усилителя отрицательной обратной
связью.
5-3. РЕГУЛИРУЮЩИЙ БЛОК, ОТРАБАТЫВАЮЩИЙ П-ЗАКОН
РЕГУЛИРОВАНИЯ
П-закон регулирования может быть отработан
регулирующим блоком ПР2. 5, входящим в состав УСЭППА.
Этот блок представляет собой набор элементов
(модулей) УСЭППА, установленных и скоммутированных
друг с другом на монтажной плате.
Основой блока ПР2.5 является пропорциональная
(П) ячейка (рис. 5-12), состоящая из двух
мембранных сумматоров 1СМ и 2СМ и дроссельного сумматора
СД, образованного регулируемым и постоянным
дросселями ДР и ДП соответственно.
224
Работа показанной на рис. 5-12 П-ячейки происходит
следующим образом. В камеры В и Г мембранного
сумматора 1СМ поступают пневматические сигналы
текущего значения регулируемой величины рт от датчика и
заданного значения регулируемой величины р3 от
ручного задатчика, установленного на вторичном
измерительном приборе, изменяющиеся в пределах 0,2—
1 кгс/см2. В камеру Б сумматора поступает пневматиче-
•|( Сброс 6 атмосфвру
Рис. 5-12. Принципиальная схема П-ячейки.
ский сигнал ро от ручного задатчика, установленного
в регулирующем блоке (последний на рис. 5-12 не
показан), определяющий начальное значение выходного
сигнала (начальное положение регулирующего органа)
при рт = Рз. В мембранном сумматоре 1СМ указанные
три сигнала рт, Рз и р0 алгебраически суммируются, в
результате чеге образуется пневматический сигнал
рассогласования рр, равный:
РР=Рз—Рт+Ро. (5-15)
Пропорциональная зависимость сигнала
рассогласования рр от алгебраической суммы сигналов р3, рт и р0
обеспечивается действием отрицательной обратной
связи (действием сигнала рр, поданного в камеру Д
мембранного сумматора 1СМ).
Образовавшийся в мембранном сумматоре 1СМ
сигнал рассогласования рр поступает к дроссельному
сумматору СД, где, суммируясь с выходным сигналом
регулирующего блока Рвых, корректируется в соответствии
с П-законом регулирования.
15—795 225
Образовавшийся в дроссельном сумматоре
откорректированный сигнал рассогласования рр.к поступает
в камеру В мебранного сумматора 2СМ, где
алгебраически суммируется с сигналом р0, поступающим от
ручного задатчика, установленного в регулирующем блоке.
Выходной сигнал мембранного сумматора 2СМ
поступает к усилителю мощности (последний на рис. 5-12 не
показан), где усиливается по мощности и далее
поступает на выход регулирующего блока в виде выходного
сигнала рВых.
(Зависимость выходного сигнала рВЫх от входных
сигналов рт и рз в П-ячейке может быть установлена,
исходя из следующих условий ее работы. П-ячейка
находится в равновесии в том случае, когда сигналы рр.к
и ро, поступающие в камеры Б и В мембранного
сумматора 2СМ, равны друг другу, т. е.
РР.к = Ро. (5-16)
При нарушении равновесия на постоянном и
регулируемом дросселях дроссельного сумматора возникают
перепады давлений, вызывающие прохождение через
них сжатого воздуха. Из условий баланса расходов
сжатого воздуха, проходящего через постоянный и
регулируемый дроссели дроссельного сумматора, а также
полагая, что расходы находятся в линейной
зависимости от перепадов давлений, имеем:
(рР—РР.к)р+ (Рвых—Рр.к) а = 0, (5-17а)
или после преобразований:
8 а
T+F ^p+T+f/?вых=Л.к, (5-176)
где аир — проводимости соответственно постоянного
и регулируемого дросселей дроссельного
сумматора.
Тогда, решая совместно систему уравнений (5-15),
(5-16) и (5-176), получим зависимость выходного
сигнала Рвых ячейки от входных сигналов рт и р3 в виде
следующего уравнения:
Лых = ^ (Рт — рв) + Л» (5-18)
или, введя обозначение
226
(5-19)
получим:
Рвых = *р(Рт—Рз) + Ро.
(5-20)
где kv — коэффициент усиления регулятора.
Выражая в относительных единицах рВых=|л; Ро — Мю,
а разность рт—р3=Дф, уравнение (5-20) преобразуется
в уравнение (1-3).
Из приведенного выше описания работы П-ячейки
видно, что при изменении величины входного сигнала
(рт—р3) на мембранном сумматоре 2СМ нарушается
баланс усилий, который может быть восстановлен
только за счет изменения выходного сигнала рвых в
соответствии с уравнением (5-20). Уравнение (5-20)
показывает, что, изменяя степень открытия регулируемого
дросселя ДД в дроссельном сумматоре, можно изменять
(настраивать) величину коэффициента усиления
регулятора &р. При этом числовое значение &р в
регулирующем блоке ПР2.5 может устанавливаться любым в
пределах от 20 до 0,03 (что соответствует величинам
диапазона дросселирования, устанавливаемым в пределах
от 5 до 3 000%').
Усиление уровня пневматического сигнала в П-ячей-
ке достигается за счет охвата мембранного сумматора
2СМ отрицательной обратной связью. Однако такая
структура ячейки склонна к автоколебаниям, для
подавления которой применена дополнительная так
называемая демпфирующая обратная связь,
действие которой проявляется лишь в переходных
режимах. Устройство демпфирующей обратной связи на
рис. 5-12 не показано.
Минимальное и максимальное значения выходного
сигнала рвых регулирующего блока ПР2.5
соответственно равны 0 и 1,4 кгс/см2; рабочий диапазон изменения
выходного сигнала принят равным 0,2—1 кгс/см2.
Последний обеспечивается настройкой позиционера или
исполнительного механизма аналогично регулирующим
блокам АУС.
Конструктивно регулирующий блок ПР2.5 выполнен
так, что он может быть установлен на вторичном
измерительном приборе 2МП-30В или ЗРЛ-29В или отдельно
от них с помощью кронштейна и гнезда ГА аналогично
15* ?27
регулирующим блокам АУС. Все узлы блока закрыты
защитным кожухом.
Общий вид регулирующего блока ПР2.5 показан на
рис. 5-13.
130
Рис. 5-13. Регулирующие блоки ПР2.5 и ПР3.21.
/, 2, 3, 4, 5 — штеккеры, в том числе: / — выход 0—1,4(0,2—1) кгс/см2; 2 —
текущее значение регулируемой величины (от датчика) 0,2—1 кгс/см2; 3 — к
переключателю 0 или 1,4 кгс/см2; 5 — заданное значение регулируемой величины
(от задатчика) 0,2—1 кгс/см2.
5-4. РЕГУЛИРУЮЩИЙ БЛОК, ОТРАБАТЫВАЮЩИЙ ПИ-ЗАКОН
РЕГУЛИРОВАНИЯ
ПИ-закон регулирования может быть отработан
регулирующим блоком ПР3.21, входящим в состав
УСЭППА. Этот блок состоит из двух частей:
пропорциональной и интегральной, на входы которых поступают
пневматические сигналы текущего значения
регулируемой величины рт (от датчика) и заданного значения
регулируемой величины р3 (от задатчика, установленного
на вторичном измерительном приборе), изменяющиеся
в пределах 0,2 — 1 кгс/см2, а выходы их суммируются
в общий выходной сигнал регулирующего блока.
Пропорциональная часть регулирующего блока
ПР3.21 образуется П-ячейкой, принципиально не
отличающейся от П-ячейки, установленной в блоке ПР2.5
(рис. 5-12). Однако в пропорциональной части блока
22§
ПР3.21 отсутствует ручной задатчик для установки
начального значения выходного сигнала при рт=р3. В
связи с этим пропорциональная часть регулирующего блока
ПР3.21 отрабатывает выходной сигнал рВых.пр в
соответствии с уравнением
Рвых.пр = &р (рт—рз). (5-21)
Интегральная часть регулирующего блока ПР3.21
представляет собой пневматическое интегрирующее звено,
принципиальная схема которого была показана на
рис. 2-35. При работе этого звена в условиях
регулирующего блока ПР3.21 в этом звене отрабатывается
выходной сигнал Рвых.инт в соответствии с уравнением
t
■p3)dt. (5-22)
'вых.инт ■
Суммирование выходных сигналов пропорциональной
и интегральной частей производится в П-ячейке. Такое
суммирование достигается в том случае, когда выход
интегрирующего звена будет заведен на входы
сумматоров 1СМ и 2СМ в П-ячейке (вместо входного сигнала
р0, рис. 5-12).
Структурно регулирующий блок ПР3.21 представляет
собой два звена: интегрирующее с передаточной
функцией Wx (р) = и усилительное с передаточной функ-
1 тар
цией W2(p) = kp, включенные параллельно (рис. 5-
14).
Рз
+1
/
ТиР
+1
HSH m г2
Рис. 5-14. Структурная схема ПИ-ретулятора.
Согласно структурной схеме, показанной на рис. 5-14,
зависимость выходного сигнала рвых от входных
сигналов рт и рз в блоке ПР3.21 выражается передаточной
функцией W{p), определяемой уравнением
W (р) = W1 (р) + W2(p) = kp + f^. (5-23)
16—795 229
Передаточной функции (5-23) соответствует уравнение
блока:
t
Рвых = h (Рт — Рз) + yi ^ (рт — Рз) dt, (5-24)
о
являющееся типичным для ПИ-блока с независимыми
настройками пропорциональной и интегральной
составляющих. Независимость настроек является
существенным преимуществом блока ПР3.21 над ранее
рассмотренными регулирующими блоками АУС.
Коэффициент усиления kv в блоке ПР3.21
устанавливается изменением проводимости (сечения)
регулируемого дросселя диапазона дросселирования ДД в
пределах от 20 до 0,03, что соответствует диапазону
дросселирования, устанавливаемому в пределах от 5 до
3 000%'.
Время изодрома Ги устанавливается изменением
проводимости регулируемого дросселя изодрома ДИ в
пределах от 3 сек до 100 мин.
Минимальное и максимальное значение выходного
сигнала рвых блока ПР3.21 соответственно равны 0 и
1,4 кгс/см2; рабочий диапазон изменения выходного
сигнала принят равным 0,2—1 кгс/см2, что
обеспечивается настройкой позиционера или исполнительного
механизма аналогично регулирующим блокам АУС.
Конструктивно блок ПР3.21 выполнен аналогично
блоку ПР2.5. Его можно устанавливать на вторичном
измерительном приборе 2МП-30В или ЗРЛ-29В или
отдельно от них.
Общий вид регулирующего блока ПР3.21 не
отличается от общего вида регулирующего блока ПР2.5
(рис. 5-13).
5-5. БЛОК ПРЕДВАРЕНИЯ
В составе УСЭППА содержится несколько типов
блоков предварения. Одним из них является блок
ПФ2.1. Этот блок представляет собой пропорционально-
дифференцирующее звено, образованное усилительным
звеном (роль которого выполняет мембранный
сумматор и усилитель мощности), охваченным инерционной
отрицательной обратной связью (роль которой выпол-
230
няет регулируемый дроссель и емкость). Для
повышения устойчивости блока в нем введена демпфирующая
обратная связь.
Учитывая, что аналогичное устройство,
пропорционально-дифференцирующее звено) было рассмотрено
в § 2-6 (см. рис. 2-37), здесь ограничимся лишь
сведениями об основных параметрах блока ПФ2.1.
Время предварения (постоянная времени
дифференцирования) в блоке настраивается изменением
проходного сечения регулируемого дросселя (последний обычно
называется дросселем предварения) и может быть
установлено любым в диапазоне от 3 сек до 10 мин.
Рис. 5-15. Блок предварения ЛФ2.1.
Диапазон изменения входного и выходного сигналов
составляет 0,2—1 (или 0—1) кгс/см2.
Минимальное и максимальное значения выходного
сигнала соответственно равны 0 и 1,4 кгс/см2.
Общий вид блока ПФ2.1 показан на рис. 5-15.
ГЛАВА ШЕСТАЯ
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ,
ПОЗИЦИОНЕРЫ, РЕГУЛИРУЮЩИЕ ОРГАНЫ,
ЛИНИИ СВЯЗИ
6-1. ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Исполнительный механизм предназначен для
преобразования входного сигнала, поступающего от
регулирующего устройства, в пропорциональное перемещение
16* 231
регулирующего органа. Последний, перемещаясь,
изменяет приток или сток вещества или энергии и этим
оказывает регулирующее воздействие на объект.
Исполнительные механизмы являются приводами регулирующих
органов.
В качестве приводов регулирующих органов в
пневмоавтоматике широкое распространение получили
мембранные исполнительные механизмы (МИМ) с вялой
мембраной, выполняемые в различных модификациях:
пружинные без позиционеров, пружинные с
позиционерами и беспружинные с позиционерами. Одной из
^разновидностей МИМ являются сильфонные
исполнительные механизмы. В последнее время в пневмоавтоматике
разработаны и начали применяться поршневые
следящие пневмоприводы и поршневые следящие
гидроприводы, работающие в комплекте с пневмогидравлически-
ми позиционерами.
Исполнительный механизм в пневматической САР
должен отвечать ряду требований, основные из которых
состоят в следующем.
1. Механизм должен развивать перестановочное
усилие, достаточное для преодоления реакции
(сопротивления) рабочих частей регулирующего органа на всем
диапазоне перемещения при наихудших допустимых
условиях эксплуатации.
2. Механизм должен обладать детектирующим
действием, т. е. он должен передавать воздействия только
в одном направлении: от регулирующего устройства
к регулирующему органу и регулируемому объекту.
3. Чувствительность, гистерезис и люфт
исполнительного механизма должны быть соизмеримы со
значениями аналогичных показателей других звеньев регулятора
(датчика, регулирующего устройства и др.).
4. Скорость перемещения выходного звена
исполнительного механизма при номинальной нагрузке должна
быть равна или больше скорости разгона
регулируемого объекта.
5. Конструкция исполнительного механизма должна
содержать дополнительные устройства, такие как:
ручной привод местного управления регулирующим
органом; местный указатель положения выходного звена;
устройство ручной подрегулировки начального и
конечного положений рабочих частей регулирующего органа;
232
тормоз, устанавливающий выходное звено в
достигнутом положении при исчезновении давления питающего
воздуха.
Простейшими типами мембранных исполнительных
механизмов являются приводы МПП-16, МПП-20 и
МПП-25, отличающиеся друг от друга габаритными
размерами и конструкцией выходного звена: толкающий
вариант (рис. 6-1,а) и рычажный вариант (рис. 6-1,6).
D
Вход
.15-1
кгс/см1
3 Ч 1
а)
Рис. 6-1. Мембранные пневматические приводы МПП-16, МПП-20 и
МПП-25.
а — толкающий вариант; б — рычажный вариант.
Тип
МПП-16
МПП-20
МПП-25
Размер D, мм
214
254
308
Размер А, мм
242
287
276
Входной сигнал (давление воздуха) воспринимается
резиновой мембраной /, защемленной между
корпусом 2 и крышкой 3. Деформируясь, мембрана / через
жесткий центр 4 перемещает шток 5, который своим
нижним концом сообщает движение регулирующему
органу. Перемещаясь вниз, шток 5 одновременно с
перемещением регулирующего органа сжимает пружину б,
которая, сжимаясь, накапливает энергию для обратного
233
перемещения регулирующего органа при уменьшении
входного сигнала. Ход штока 5 во всех типах МПП
составляет 30 мм.
Рассматривая МПП с точки зрения приведенных
выше требований к исполнительным механизмам, можно
отметить, что большинство из них не
удовлетворяется, в силу чего эти приводы могут быть
использованы лишь в САР с относительно невысокими
требованиями к качеству регулирования и благоприятными
свойствами регулируемых объектов.
Однако простота конструкции является
существенным достоинством мембранного исполнительного
механизма, в связи с чем аналогичные механизмы получили
широкое распространение в качестве приводов
регулирующих клапанов. Существенное улучшение работы
мембранного пневмопривода может быть достигнуто за
счет применения позиционера. В этом случае позиционер
обеспечивает пневмоприводу детектирующее
(однонаправленное) действие, повышает его чувствительность
и уменьшает инерционность.
Более совершенными пневматическими
исполнительными механизмами являются поршневые следящие
пневмоприводы ПСП-1 и ПСП-Т-1.
Пневмопривод ПСП-Т-1 (рис. 6-2) является
поршневым возвратно-поступательным исполнительным
механизмом с односторонним выходом силового штока
с механическим мембранно-золотниковым следящим
устройством, работающим по схеме силовой
компенсации. Он состоит из цилиндра /, внутри которого
размещен поршень 2 с пустотелым силовым штоком 3. В
полости штока расположена пружина 4, используемая для
получения жесткой обратной связи в механизме
следящей системы привода. Пружина 4 соединена со штоком 3
посредством натяжного механизма 5, обеспечивающего
плавную регулировку натяжения пружины. Во
избежание закручивания пружины при возможном вращении
штока с поршнем вокруг своей оси натяжной механизм
5 в месте соединения с пружиной 4 имеет упорный
шарикоподшипник. Второй конец пружины 4 соединен шар-
нирно с жестким центром измерительной мембраны 6
механизма следящей системы. Мембрана 6 зажата
крышками 7 и 8, а жесткий центр ее находится в
камере, образованной этими крышками. На крышке 7 (со
234
стороны поршня) установлен уплотнительный
мембранный пакет 9, предназначенный для предотвращения
воздействия давления рабочего воздуха со стороны полости
цилиндра на измерительную мембрану 6. В крышке 8
(с наружной стороны) помещается втулка 10 и
золотник 11 механизма следящей системы. Золотник 11
соединен шарнирно с жестким центром мембраны 6.
Таким образом, центр измерительной мембраны 6 с одной
стороны соединен с компенсационной пружиной 4, а
с другой стороны — с золотником 11. Уплотнение
поршня 2 и штока 3 осуществляется уплотнительными
кольцами из специальной резины.
Работа пневмопривода происходит следующим
образом. Сжатый воздух под давлением до 6 кгс/см2
поступает из линии питания в полость А золотникового
устройства и дальше в левую (заднюю) или в правую
(переднюю) полости цилиндра 2 (в зависимости от
положения золотника И относительно втулки 10). В
зависимости от положения жесткого центра измерительной
мембраны 6 золотник // может занимать три различных
положения относительно втулки 10: среднее, сдвинутое
влево, сдвинутое вправо. При этом положение жесткого
центра измерительной мембраны 6 (а следовательно, и
золотника /) относительно втулки 10) зависит от
величины входного сигнала, поступающего в измерительную
камеру Б, и от силы натяжения компенсационной
пружины 4.,
При среднем положении золотника // окна а и б
втулки 10 закрыты и сжатый воздух не проходит к
полостям цилиндра 1. Поршень 2 и шток 3 при этом
неподвижны.
В положении, когда золотник 11 сдвинут влево, окно
а сообщает полость А втулки 10 с левой (задней)
полостью цилиндра 1, а окно б сообщает правую
(переднюю) полость цилиндра 1 с атмосферой. В результате
этого поршень 2 и шток 3 будут перемещаться вправо,
т. е. шток будет выходить из цилиндра.
В положении, когда золотник 11 сдвинут вправо,
окно б сообщает полость А втулки 10 с правой
(передней) полостью цилиндра 1, а окно а сообщает левую
(заднюю) полость цилиндра 1 с атмосферой. В
результате этого поршень 2 и шток 3 будут перемещаться
влево, т. е. шток будет входить в цилиндр.
236
Движение поршня и штока будет продолжаться
вправо или влево до тех пор, пока усилие
компенсационной пружины 4 не сравняется с усилием на
измерительной мембране 6 и золотник 11 не вернется в
среднее положение относительно втулки 10.
Тормозное устройство (затормаживающее выходной
шток при уменьшении давления питающего воздуха
ниже 1,2 кгс/см2) состоит из корпуса 12, крышки 13,
мембраны 14, пальцев 15, стакана 16, кольца 17 с
внутренним конусом, разрезного кольца 18 с наружным
конусом, упорного шарикового подшипника 19, наружной и
внутренней пружин 20 и 21. При наличии давления
воздуха в камере В, куда он подводится от линии питания
через специальный штуцер, на мембране 14 возникает
усилие, которое через пальцы 15 и стакан 16 отодвинет
кольцо 17 от упорного шарикового подшипника 19 и
растормозит выходной шток привода, что создаст
условия нормальной его работы. При падении давления
воздуха в камере В ниже 1,2 кгс/см2 пружина 21 через
кольцо 17, упорный шарикоподшипник 19 и разрезное
кольцо 18 создаст тормозное усилие на выходном
штоке пневмопривода, который останется заторможенным
до тех пор, пока давление воздуха в питающей линии и
в камере В не повысится до 1,2—1,4 кгс/см2.
Благодаря применению силовой компенсационной
следящей системы рассмотренный пневмопривод
обладает высокой чувствительностью. Зона
нечувствительности составляет не более 0,5%! максимального значения
входного сигнала.
Минимальное время передвижения поршня из
одного крайнего положения в другое (при ненагруженном
штоке) составляет 4 сек.
Пневмопривод ПСП-1 отличается от рассмотренного
пневмопривода ПСП-Т-1 отсутствием тормозного
устройства. В остальном оба пневмопривода аналогичны друг
другу.
6-2. ПНЕВМАТИЧЕСКИЕ И ПНЕВМОГИДРАВЛИЧЕСКИЕ
ПОЗИЦИОНЕРЫ
Пневматические позиционеры используются при
совместной работе с мембранными исполнительными
механизмами. Они предназначены для отработки положения
237
(позиции) выходного штока исполнительного
механизма в соответствии с входным сигналом, поступающим от
регулирующего устройства. Позиционеры улучшают
статические и динамические свойства мембранных
исполнительных механизмов и этим расширяют область
распространения пневматических регуляторов.
В зависимости от принципа действия пневматические
позиционеры подразделяются на две разновидности:
1) работающие по схеме компенсации усилия;
2) работающие по схеме компенсации перемещения.
Кроме того, различные типы позиционеров
отличаются друг от друга следующими основными
показателями:
а) рабочим ходом присоединительного элемента
обратной связи;
б) конструкцией усилителя мощности выходного
сигнала (однокаскадные и двухкаскадные);
в) точностью перемещения присоединительного
элемента обратной связи (отклонением действительной
зависимости «давление — ход» от расчетной);
г) конструкцией присоединения подвижных
элементов обратной связи (непосредственное и рычажное);
д) пропускной способностью сжатого воздуха,
поступающего от позиционера к исполнительному
механизму.
Позиционеры, работающие по схеме компенсации
усилия, имеют значительно большую точность, нежели
позиционеры, работающие по схеме компенсации
перемещения.
Позиционеры с однокаскадными усилителями более
просты по конструкции, нежели позиционеры с двухкас-
кадными усилителями. Вместе с тем первые имеют
большую погрешность по сравнению со вторыми.
Позиционеры с рычажным присоединением
подвижных элементов обратной связи применяются в
основном для совместной работы с мембранными
исполнительными механизмами, имеющими большой ход штока
(от 25 до 100 мм).
В качестве примера рассмотрим принцип действия
и устройство позиционера ПР-10 (рис. 6-3),
получившего широкое распространение в пневмоавтоматике. По
принципу действия этот позиционер является
пневмомеханической следящей системой, выполненной по схеме
238
компенсации усилий. Входной сигнал в виде давления
воздуха, изменяющегося в пределах 0,2—1 (или 0—
1) кгс/см2, поступает от регулирующего устройства
в камеру Л, где создает усилие на мембране /. Увели-
-3
Рис. 6-3. Позиционер ПР-10.
чение входного сигнала вызывает прогиб мембраны /,
срабатывание клапана 2, открывающего вход сжатого
воздуха из камеры Б в камеру В и далее к мембранному
пневмоприводу; при этом камера Б питается сжатым
воздухом с давлением до 2,5 кгс/см2 — от линии питания
(штуцер К 1/4" ввода питающего воздуха на рис. 6-3
не показан). Поступление сжатого воздуха в рабочую
полость мембранного пневмопривода вызовет
перемещение его штока, которое будет продолжаться до тех
пор, пока шток 3 не сожмет пружину 4 до такого уси-
239
лия, которое будет равно усилию на мембране /
(созданному командным сигналом), в результате чего
клапан 2 закроет подачу сжатого воздуха к мембранному
пневмоприводу и тогда прекратится перемещение штока
пневмопривода. При уменьшении входного сигнала
клапан 2 закроет подачу сжатого воздуха из камеры Б
в камеру В и одновременно сообщит выходную линию
позиционера (а также рабочую полость мембранного
пневмопривода) с атмосферой (через камеру Г), что
вызовет перемещение в обратном направлении штока
пневмопривода, который остановится в новом
положении при наступлении равновесия усилий на мембране /.
Кроме пневматических позиционеров, в последнее
время разработаны и изготовляются пневмогидравличе-
ские позиционеры. Наличие в пневмоавтоматике пневмо-
гидравлических позиционеров позволяет создать
комбинированные пневмогидравлические САР, объединяющие
в себе положительные качества пневматических
регуляторов с достоинствами гидравлических исполнительных
механизмов, главными из которых являются: большие
перестановочные усилия, отсутствие лифтов и выбегов,
детектирующее (однонаправленное) действие,
исключающее обратное воздействие регулирующего органа на
положение исполнительного механизма.
Ниже рассматривается принцип действия и
устройство пневмогидравлического позиционера ПГП-1 (рис. 6-4),
предназначенного для преобразования входного
пневматического сигнала, изменяющегося в пределах 0,2—
1 кгс/см2, в пропорциональное перемещение
гидравлического исполнительного механизма, рабочей жидкостью
которого является трансформаторное масло,
поступающее к нему через позиционер от установки маслоснаб-
жения, с давлением 10—12 кгс/см2. Входной
пневматический сигнал поступает от регулирующего устройства
в измерительную камеру А, где создает усилие на
мембране 1. Увеличение входного сигнала вызывает прогиб
мембраны / и перемещение соединенного с ней струной
2 плунжера 5, который, перемещаясь в опоре 4 и седле
управляющего золотника 5 (плавающего типа),
дросселирует управляющую жидкость (перепускает масло
из камеры Б через внутреннюю полость золотника на
слив), вызывая тем самым перемещение в ту же
сторону управляющего золотника в золотниковой втулке 6,
240
запрессованной в корпус 7. Перемещение управляющего
золотника в золотниковой втулке происходит
следующим образом. С левой стороны (согласно рис. 6-4)
золотник 5 имеет поршень, образующий с золотниковой
втулкой 6 камеры Б к В; при этом площадь поршня
щего масла . исполнительному
механизму
в камере Б больше, чем площадь поршня в камере В.
Камеры Б и В питаются управляющим маслом с
давлением 3—4 кгс/см2, поступающим к ним от питающей
магистрали.
Давление масла в камере В поддерживается строго
постоянным за счет перепуска части масла из этой
камеры на слив через шариковый клапан 8, нагруженный
пружиной 9. Камера Б является проточной.
Управляющее масло в эту камеру поступает через постоянный
дроссель 10 и выходит из нее через окна плунжера 3 и
внутреннюю полость золотника 5 на слив.
Следовательно, давление в камере Б будет определяться
положением плунжера 3 относительно золотника 5. Таким
образом, увеличение входного сигнала в измерительной
камере А вызывает перемещение вправо плунжера 3, что
приводит к уменьшению слива масла из камеры Б и
соответствующему повышению давления масла в этой
камере, в результате чего золотник 5 также переместится
вправо и сообщит через окно б одну из полостей
гидравлического исполнительного механизма с напорной
магистралью силового масла, находящегося под
давлением до 12 кгс/см2 (гидравлический исполнительный
механизм на рис. 6-4 не показан); вторая полость
гидравлического исполнительного механизма через окно а
сообщается со сливом. Подача силового масла в
гидравлический исполнительный механизм и перемещение его
поршня будут продолжаться до тех пор, пока усилие на
мембране 1 со стороны пружины 11, сжимаемой
рычагом 12 в результате перемещения штока обратной
связи 13, не станет равным усилию, создаваемому на этой
мембране входным сигналом. При уравнивании усилий
плунжер 3 займет такое положение, при котором
золотник 5 закроет окна а и б, а гидравлический
исполнительный механизм остановится в новом положении.
Таким образом, каждому значению входного
пневматического сигнала будет соответствовать свое положение
гидравлического исполнительного механизма, в чем и
состоит принцип работы пневмогидравлического
позиционера ПГП-1.
В связи с тем, что в конструкции позиционера ПГП-1
обратная связь выполнена механического типа (по
положению выходного органа исполнительного
механизма), он предназначен для работы в комплекте с порш-
242
левым гидравлическим исполнительным механизмом
кривошипного типа, снабженным кулачковым
устройством обратной связи, которое воздействует на шток
обратной связи 13 через ролик 14; при этом ход штока 13
составляет 20 мм.
Зона нечувствительности позиционера ПГП-1
составляет не более 0,5% максимального значения входного
пневматического сигнала.
6-3. РЕГУЛИРУЮЩИЕ КЛАПАНЫ С МЕМБРАННЫМИ
ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ
В качестве регулирующих органов применяются
клапаны, заслонки, направляющие аппараты, форсунки,
горелки, гидромуфты, вариаторы, реостаты и др.
Клапаны и заслонки получили наибольшее
распространение. Регулирующие клапаны подразделяются на
клапаны с пробковыми золотниками (односедельные и двухсе-
дельные), клапаны со стаканообразными золотниками
(одноярусные и двухъярусные), мембранные и
шланговые. Регулирующие заслонки подразделяются на
одностворчатые и многостворчатые (жалюзи). В результате
сложившихся традиций такие регулирующие органы,
как направляющие аппараты, вариаторы, форсунки,
горелки, гидромуфты и др. обычно относятся к
технологическому оборудованию; регулирующие клапаны и
заслонки— к средствам автоматизации.
Среди множества регулирующих органов
регулирующие клапаны имеют наибольшее распространение
в системах автоматического регулирования
теплоэнергетических процессов. Регулирующие клапаны обычно
выполняются комплектно с пневматическими мембранными
исполнительными механизмами, оборудованными
позиционерами или без них. Ниже приводятся общие
сведения по регулирующим клапанам с мембранным
исполнительным механизмом, которые могут оказаться
полезными при выборе их в процессе проектирования
пневматических САР. При этом имеется в виду, что
сведения по отдельным типам регулирующих клапанов
читатели смогут найти в [Л. 23, 37].
При выборе типа (конструкции и размеров)
регулирующего клапана и исполнительного механизма для
243
работы их в конкретных условиях регулируемого
объекта обычно учитываются:
1) характер регулируемой среды (газ, жидкость,
пар), ее состав и рабочие параметры (давление,
температура, плотность, вязкость);
2) максимальный и минимальный расходы
регулируемой среды, проходящей через клапан;
3) максимально и минимально возможные перепады
давлений на клапане;
4) какое крайнее положение должен занять
регулирующий клапан (закрыться или открыться) при
аварийном исчезновении командного давления воздуха,
подаваемого к исполнительному механизму, или при выходе
из строя исполнительного механизма;
5) возможность осмотра и обслуживания клапана и
исполнительного механизма во время работы объекта
и регулятора;
6) при выборе конструкции клапана и
исполнительного механизма учитываются пульсации регулируемой
среды (частота и амплитуда), гидравлические удары,
а также склонность регулируемой среды к коагуляции,
кристаллизации, замерзанию, выпадению твердых частиц
и другие факторы, влияющие на работу клапана и
исполнительного механизма;
7) конструкция клапана должна быть рассчитана
на максимальное рабочее давление и на максимальную
(или минимальную) рабочую температуру
регулируемой среды;
8) материалы основных деталей клапана должны
быть химически стойкими к агрессивным воздействиям
со стороны регулируемой среды.
Наиболее трудной задачей при этом является выбор
диаметра условного прохода и расходной
характеристики клапана, определение которых производится
расчетным путем.
Расчет диаметра условного прохода регулирующего
клапана сводится к определению величины удельной
пропускной способности клапана С*, представляющей
* Удельная пропускная способность клапана в более поздней
литературе, в частности, в [Л. 37], называется коэффициентом
пропускной способности; последний обознача ется К\оо> где 100
означает, что К относится к полностью открытому клапану.
244
собой расход жидкости с плотностью 1 г/см3 через
полностью открытый клапан при перепаде давлений на нем
1 кгс/см2. После определения величины С по таблицам
размеров клапанов выбирается ближайший (больший)
диаметр условного прохода.
Расчетные формулы для определения удельной
пропускной способности С, а также примеры расчетов^
регулирующих клапанов даны в [Л. 23]. Там же даны
методы определения расходных характеристик
регулирующих клапанов, выражающих зависимость расхода
протекающего через клапан вещества от перемещения
его дросселирующего органа.
Необходимость определения расходной
характеристики регулирующего клапана вытекает из следующих
условий. В большинстве случаев линейная зависимость
расхода регулируемого вещества от хода
дросселирующего органа считается удовлетворительной. Однако
получить такую зависимость с помощью регулирующего
органа с линейной характеристикой на реальном
участке трубопровода невозможно, так как с изменением
нагрузки (хода регулирующего органа) изменяется также
и перепад давлений на регулирующем органе. По этой
причине в ряде случаев приходится выбирать
расходную характеристику регулирующего органа
логарифмическую или параболическую. Для этого необходимо
произвести путем расчета анализ гидравлических
сопротивлений как регулирующего органа, так и регулируемого
участка и на основании произведенного анализа
гидравлических сопротивлений выбрать оптимальную
расходную характеристику регулирующего органа, с тем
чтобы действительная зависимость расхода регулируемого
вещества от хода дросселирующего органа
приближалась к линейной.
Устройство наиболее распространенных типов
регулирующих клапанов с мембранным исполнительным
механизмом показаны на рис. 6-5—6-14.
На рис. 6-5 и 6-6 показаны регулирующие клапаны
ПРК, характерной особенностью которых является
малая пропускная способность. Эти клапаны
изготавливаются с диаметрами условного прохода 6 и 9 мм и
имеют соответственно С=0,5 и 1 т/ч. Они рассчитаны на
условное давление до 64 кгс/см2 при температуре
рабочей среды до 200° С. Клапаны укомплектованы мем-
245
бранными исполнительными механизмами,
работающими по схеме ВЗ (командный воздух закрывает, рис. 6-5)
или по схеме ВО (командный воздух открывает,
рис. 6-6).
Под6од командного боздухакУ^Труб*
^ Ф/65
Рис. 6-5. Клапан регулирующий ПР1<
(ВЗ) с мембранным пневмоприводом.
На рис. 6-7 и 6-8 показаны регулирующие клапаны
УКС, выполненные из углеродистой стали, и УКН,
выполненные из нержавеющей стали, характерной
особенностью которых является угловая конструкция корпуса
клапана и малая удельная пропускная способность.
Эти клапаны изготавливаются с диаметром условного
прохода от 6 до 25 мм и удельной пропускной
способностью от 0,1 до 2,5 т/ч. Они рассчитаны на условные
давления регулируемых сред до 64 и 160 кгс/см2
246
(рис. 6-7) и 320 кгс/см1 (рис. 6-8). Температурные
пределы этих клапанов составляют 200° С при нормальном
исполнении и 350° С при исполнении регулирующего
органа с ребристой крышкой. Регулирующие клапаны
Сообщение с атмосферой
—ФГ65
Рис. 6-6. Клапан регулирующий ПРК
(ВО) с мембранным пневмоприводом.
УКС и УКН, работающие при давлении до 64 кгс/см2,
укомплектованы мембранными исполнительными
механизмами ВО и ВЗ без позиционеров; работающие при
Давлении 160 и 320 кгс/см2 — мембранным
исполнительным механизмом ВО или ВЗ с позиционерами ПР-10.
247
Большая группа регулирующих клапанов с
фланцевым присоединением (рис. 6-9): 25ч30нж
(НО—нормально открытый), 25с30нж (НО), 25ч32нж (НЗ —
нормально закрытый) и 25с32нж (НЗ), 'предназначенные для
регулирования неагрессивных сред при давлении до
16 кгс/см2, 25нж30нж (НО) т 25нж32нж (НЗ), предна-
А ;/?''ГОСТ 5111-52
подвод питана*
Рис. 6-7. Клапаны регулирующие
угловые УКС (ВО) и УКН (ВО) на
условное давление 160 кгс/см2 с
мембранным пневмоприводом.
248
значенные для регулирования агрессивных сред при
давлении до 16 кгс/см2, 25с40нж (НО) и 25с42нж (НЗ),
предназначенные для регулирования неагрессивных сред
при давлении до 40 кгс/см2, 25нж40нж (НО) и
25нж42нж (НЗ), предназначенные для регулирования
агрессивных сред при давлении до 40 кгс/см2, 25с48нж
(НО) и 25с50нж (НЗ), предназначенные для
регулирования неагрессивных сред 1при давлении до 64 кгс/см2,
25нж48нж (НО) и 25нж50нж (НЗ), предназначенные
для регулирования агрессивных сред при давлении
до 64 кгс/см2, изготавливаются с диаметром
условного прохода от 15 до 300 мм и удельной
пропускной способностью от 4 до 1 600 т/ч. Температурный
Рис. 6-8. Клапаны регулирующие
угловые УКС (ВЗ) и УКН (ВЗ) на условное
давление 320 кгс/см2 с мембранным
пневмоприводом,
17—795 249
Рис 6-9 Клапаны регулирующие 25ч30нж (НО) 25с30нж (НО),
25ч32нж (НЗ) 25с32нж (НЗ), 25нж30нж (НО), 25нж32нж (НЗ).
25с40нж НО 25с42нж (НЗ), 25нж40нж (НО). 25нж42нж (НЗ).
25с48нж (НО)! 25с50нж (НЗ). 25нж48нж (НО). 25нж50нж (НЗ)
с мембранным пневмоприводом.
предел клапанов
300° С. Клапаны
укомплек т о в а н ы
мембранными
исполнительными
механизмами с
позиционерами; последние
выполнены по
схеме компенсации
перемещения.
Дросселирующие
элементы клапанов НО и
НЗ выполнены так,
что при отсутствии
командного
давления воздуха клапан
НО полностью
открыт, а клапан НЗ—
п о л ностью з а кр ыт.
На рис. 6-10
показана конструкция
угловых
регулирующих клапанов
25Б1бк (НО) и
25БЗбк (НЗ) с
фланцевым
присоединением,
предназначенных для
регулирования неагрессивных
сред в диапазоне
рабочих температур от
— 195 до 70° С при
давлении до 5
кгс/см2.
Характерной особенностью
Рис. 6-10. Клапаны
регулирующие угловые
25Б1бк (НО) и 25БЗбк
(НЗ),
рассчитанные на
работу в условиях
глубокого холода, с
мембранным пневмоприводом.
17*
251
конструкции этих клапанов является сильфонный
тип уплотнения и верхнее расположение возвратной
пружины в мембранном исполнительном механизме.
Это позволило использовать клапаны в условиях
глубокого холода. Эти клапаны изготавливаются с
диаметром условного прохода от 10 до 80 мм и удельной
пропускной способностью от 0,3 до 82 т/ч. Клапан НЗ
принимает полностью закрытое, а клапан НО — пол-
Рис. 6-11. Клапан регулирующий угловой 25с65нж
(НО) на условное давление 1 500 кгс/см2 с
мембранным пневмоприводом.
252
костью открытое положение при исчезновении давления
командного воздуха. Различие в клапанах НЗ и НО
состоит в конструкции упоров возвратной пружины
мембранного исполнительного механизма. На рис. 6-10
показан вариант кла/пана НЗ.
На рис. 6-11 показана конструкция углового
регулирующего клапана 25с65нж (НО), предназначенного для
регулирования расхода этилена и полиэтилена при
рабочей температуре до 200° С и давлении до 1 500 кгс/см2.
Эти клапаны изготавливаются с диаметрами условного
Рис. 6-12. Клапан регулирующий диа-
фрагмовый 25ч5п (НО) с
мембранным пневмоприводом.
прохода 6 и 10 мм. В корпусе клапана предусмотрены
специальные каналы для парового обогрева и
установки термопары. Мембранный исполнительный механизм
оборудован позиционером.
253
Широкое распространение ё различных отраслях
промышленности получают диафрагмовые и шланговые
регулирующие клапаны, предназначенные для
регулирования расходов загрязненных и агрессивных сред.
Рис. 6-13. Клапан регулирующий
шланговый 25ч6р (НЗ) с мембранным
пневмоприводом.
Диафрагмовые клапаны 25ч5п (НО) и 25ч7п (НЗ)
изготавливаются с диаметрами условного прохода от 10
до 100 мм и удельной пропускной способностью от 1,8 до
120 т/ч. Они рассчитаны на условное давление от 10 до
3 кгс/см2 (зависящее от диаметра условного прохода)
и температуру рабочей среды до 150° С.
Конструкция 'клапана 25ч5п (НО) показана на
рис. 6-12.
Клапан 25ч7п (НЗ) отличается от клапана
25ч5п (НО) устройством мембранного исполнительного
механизма. В исполнительном механизме клапана
254
25ч71п (НЗ) возвратная пружина и позиционер
установлены над мембраной.
Шланговые клапаны 25ч4р (НО) и 25ч6р (НЗ)
изготавливаются с диаметрами условного перехода от 25 до
100 мм и удельной пропускной способностью от 15 до
240 т/час. Они рассчитаны на условное давление до
3 кгс/см2 и температуру рабочей среды до 40° С.
Конструкция клапана 25ч6р (НЗ) показана на
рис. 6-13. Клапан 25ч4р (НО) отличается от клапана
25ч6р (НЗ) тем, что возвратная пружина установлена
под 'мембраной исполнительного механизма.
В качестве регулирующих органов большое
распространение в различных отраслях промышленности
получили также трехходовые сместительные клапаны 27с1нж
(рис. 6-14) .и 27ч5нж.
Клапаны 27с1нж изготавливаются с диаметрами
условного прохода от 15 до 70 мм. Они рассчитаны на
условное давление до 16 кгс/см2 и температуру
регулируемой среды до 350° С.
Клапаны 27ч5нж изготавливаются с диаметрами
условного прохода от 50 до 100 мм. Они рассчитаны на
условное давление до 6 кгс/см2 и температуру
регулируемой среды до 150° С.
6-4. ПНЕВМАТИЧЕСКИЕ ЛИНИИ СВЯЗИ
Пневматические линии связи представляют собой
трубные проводки из красной меди, алюминия,
углеродистой или нержавеющей стали или пластмассовые из
полиэтилена, полихлорвинила с соединительными и
присоединительными устройствами. В последнее время
в качестве пневматических линий связи начали
применять пневмокабели, представляющие собой
многоканальные пластмассовые трубы, состоящие из семи или
двенадцати труб, заключенных в общей защитной
оболочке.
В пневмоавтоматике линии связи играют особую
роль, поскольку они определяют в основном время
передачи пневматического сигнала от передающего
устройства к приемному и, как следствие этого, радиус
действия пневматических устройств, а также область их
распространения.
255
256
Основным параметром пневматического сигнала явля^
ется давление сжатого воздуха, изменяющегося
пропорционально изменению измеряемой или какой-либо
другой величины. Известно, что скорость
распространения давления воздуха по трубопроводу соответствует
скорости звука в воздушной среде; при нормальных
условиях она равна 330,8 м/сек. Вместе с тем передача
пневматического сигнала по линии связи представляет
собой процесс наполнения (или опорожнения)
трубопровода сжатым воздухом.
В зависимости от перепада давлений и
гидравлических сопротивлений в пневмолиниях возможны
различные режимы воздушного потока, оказывающие
значительное влияние на время передачи сигнала. Для
длинных пневматических линий связи характерен
ламинарный режим потока.
Точное математическое описание процессов передачи
пневматических сигналов весьма затруднительно, так
как при этом необходимо учитывать сжимаемость
воздуха, волновой характер распространения давления,
изменение объемов рабочих камер приемной
аппаратуры, влияние переменных внешних нагрузок и многие
другие факторы. Поэтому данные для количественной
оценки процессов передачи пневматических сигналов
по длинным линиям связи обычно получают на базе
экспериментальных исследований.
Для выполнения линий связи в пневматических САР
обычно применяются трубопроводы с внутренними
диаметрами 4 или 6 мм. Выбор внутреннего диаметра
и предельной длины трубопровода для конкретных
условий работы регулятора производится, исходя из
динамических свойств всего контура регулирования, включая
динамические свойства линии связи. Критериями
динамических свойств пневматических линий связи являются
временные или частотные характеристики.
На рис. 6-15 и 6-16 приведены временные
характеристики пневматических линий связи различной длины
L, выполненных из труб с внутренним диаметром 4 и
6 мм. Эти характеристики были сняты экспериментально
при нанесении скачкообразных возмущений давления
воздуха на входе пневмолинии. Кривые на рис. 6-15
показывают переходные процессы передачи
пневматических сигналов по линиям без присоединенных на
257
концах емкостей;
кривые на рис. 6-16—
с присоединенными
на концах
емкостями в виде рабочих
полостей
мембранных
исполнительных механизмов с
мембранами
диаметром 200 дж.
Сопоставл ение
графиков
показывает, что время
опорожнения линии
связи всегда несколько
больше времени
наполнения, что
объясняется более
высокой средней
плотностью воздуха в
режиме
наполнения.
Как видно из
графиков, любую
пневматическую
линию связи мюжно
представить как два
последовательно
соединенных
динамических звена: звено
чистого
запаздывания и
апериодическое звено первого
порядка (см. § 2-2).
Зная длину
линии связи и
внутренний диаметр
трубопровода, по
графикам можно
легко определить
время переходного
запаздывания,
постоянную времени и
259
полное время переходного процесса (потециальное
время).
В оценке динамических свойств пневматических
линий связи важную роль играют частотные
характеристики. На рис. 6-17 и 6-18 приведены результаты
экспериментального определения затуханий амплитуды
Рвых/Рвх и сдвига фазы f} пневматических сигналов как
функций частоты со при различных длинах линий связи L.
О 15 30 hb 60
Рис. 6-17.
Амплитудно-частотные характеристики
пневматических линий связи 0 4,76 мм.
О 15 SO 45 60
Циклы в час
Рис. 6-18. Фазо-частотные
характеристики пневматических
линий связи 0 4,76 мм.
Как показывают графики, полоса пропускания длинных
линий связи ограничена областью инфранизких частот.
С увеличением частоты возмущений наблюдаются
значительные затухания амплитуды и возрастание угла сдвига
фазы.
Приведенные экспериментальные характеристики
пневматических линий связи охватывают лишь
некоторые частные случаи.
В более общих случаях определение динамических
свойств пневматических линий связи может быть
выполнено приближенными методами расчетов, приведенными
в [Л. 16, 22].
260
ГЛАВА СЕДЬМАЯ
ИСТОЧНИКИ ПИТАНИЯ СЖАТЫМ
ВОЗДУХОМ
7-1. ОБЩИЕ ПОЛОЖЕНИЯ
Надежность работы пневматических САР во многом
зависит от качества и бесперебойности подачи сжатого
воздуха к пневматическим приборам и регуляторам.
Качественным считается такой сжатый воздух, в
котором содержание паров воды и масла так мало, что
образование капель или льда в корпусах приборов и
регуляторов и в линиях связи исключается при любых
возможных окружающих температурах, а содержание
пыли так мало, что закупорка постоянных и
регулируемых дросселей и сопел исключается.
Бесперебойной считается такая подача сжатого
воздуха, когда имеется достаточный аварийный запас
сжатого воздуха в ресиверах и имеются резервные
компрессор и дегидратор.
Выходящий непосредственно из компрессора
сжатый воздух непригоден для подачи его к приборам и
регуляторам. Причиной этого являются сравнительно
высокая температура, большая влажность и
загрязненность воздуха маслом и пылью.
Можно с достаточной технической точностью считать,
что удельное влагосодержание насыщенного воздуха
при неизменной температуре находится в обратно
пропорциональной зависимости от абсолютного давления,
а относительная влажность воздуха (при неизменной
температуре) до наступления точки росы зависит прямо
пропорционально от абсолютного давления. В
большинстве случаев можно принять, что сжатый и охлажденный
после компрессора воздух будет иметь относительную
влажность 100% независимо от времени года, в которое
эксплуатируется компрессор. Подавать такой воздух
к пневматическим приборам и регуляторам недопустимо,
так как на отдельных участках и узлах с пониженной
температурой начнется конденсатообразонание, а в
зимний период — обледенение и примерзание движущихся
частей. Поэтому сжатый воздух после компрессора,
прежде чем подать его к приборам и регуляторам,
необходимо осушить.
Осушку сжатого воздуха от паров воды и масла
следует производить до такой степени остаточной илаж-
261
ности, чтобы температура точки росы его была на 5—
10° С ниже наинизшей предполагаемой температуры
окружающей среды отдельных элементов регулятора,
в том числе и линий связи.
В большинстве случаев осушку сжатого воздуха
целесообразно проводить в две ступени. Первой
ступенью должен быть холодильник-конденсатор, в котором
будет конденсироваться большая часть влаги,
находящейся в воздухе. Второй ступенью должен быть
адсорбер, осушающий сжатый воздух до необходимой
относительной влажности; при этом лучшим адсорбентом
следует считать силикагель.
В некоторых случаях осушку сжатого воздуха от
влаги можно было бы ограничить только установкой
холодильника-конденсатора, например, в случае работы
приборов и регуляторов в отапливаемом помещении
или в местах, где в течение всего года температура не
понижается ниже 0°С. Для уменьшения относительной
влажности в этом случае после
холодильника-конденсатора следует производить небольшое редуцирование
воздуха (на 1,5—2 ат). Однако такая схема неудобна
тем, что ресиверы сжатого воздуха должны быть
установлены также в отапливаемом помещении; кроме того,
такой воздух будет хуже очищен от масла, чем при
двухступенчатой осушке с применением силикагелевых
адсорберов.
Силикагель характеризуется высокой
капиллярностью. Объем капилляров составляет 40—50% объема
собственно силикагеля, а поверхность капилляров 1 кг
силикагеля достигает 400 000 ж2. Благодаря этому
силикагель является весьма влагоемким адсорбентом,
позволяющим осушить воздух до остаточной
относительной влажности 2—3% при температуре воздуха 15—
20° С, что соответствует точке росы при температуре
минус 30—40° С.
Адсорбированная силикагелем влага легко может
быть удалена пропусканием через слой силикагеля
части осушенного воздуха (5—7% общего количества),
нагретого до 150—200° С — горячая регенерация,
или путем пропуска через слой силикагеля части
осушенного холодного воздуха (20—25% общего
количества) с пониженным давлением—холодная
регенерация.
262
Влагоемкость силикагеля для различных условий
его работы в среде влажного воздуха может быть
определена по кривым статического равновесного состояния
силикагеля, показанным на рис. 7-1.
При условии работы силикагеля в потоке воздуха
расчетную влагоемкость силикагеля следует принимать
намного меньшей, чем равновесная в статических
условиях. Кроме того, влажность силикагеля, равная 6%
его собственного сухого веса, является в
рассматриваемом случае нерегенерируемой, так как регенерация
происходит не под вакуумом.
Из графиков на рис. 7-1 видно, что в случае осушки
выходящего из адсорбера воздуха до относительной
Температура доздуха перед осушителем
Температура воздуха перед осуши/пеле/и, °С
Рис. 7-1. Кривые статического равновес
ного состояния силикагеля в среде
влажного воздуха.
влажности cp —2—3% (при температуре воздуха 20°С
и психрометрической разности температур 14—15° С)
статическое равновесие системы силикагель—воздух
может наступать при насыщении силикагеля до 25%
его собственного сухого веса. Поскольку осушка воздуха
будет проходить в потоке, осушку следует прекратить
при насыщении силикагеля до 15% его собственного
сухого веса. Если же учесть 6%' нерегенерируемой
влаги, то расчетная влагоемкость силикагеля составит
9% его собственного сухого веса.
Очистка сжатого воздуха от примесей масла
является еще более трудной задачей, чем очистка от паров
воды. Сжатый воздух должен быть очищен от масла
еще до поступления его в силикагелевые адсорберы,
так как масло будет снижать адсорбционную
способность силикагеля. Наилучшим решением этого вопроса
является применение беспоршневых компрессоров,
таких, как мембранные или водокольцевые. Хорошие
результаты могут быть получены также >и в случае
применения поршневых компрессоров с графитовыми уплот-
нительными кольцами. Однако, несмотря на трудности
очистки сжатого воздуха от масла, в большинстве
случаев применяются поршневые компрессоры с обычными
смазками со всеми вытекающими отсюда последствиями.
Очистка воздуха от пыли производится многократно.
Воздух должен быть очищен от пыли на всасе
компрессора для защиты последнего от преждевременного
износа; в этом случае следует считать наиболее
эффективными мокрые фильтры: масляные или водяные.
Воздух должен быть очищен от пыли после прохождения его
через силикагелевый адсорбер, где он может быть
загрязнен силикагелевой пылью. Кроме того, воздух
может быть загрязнен пылью и окалинами при
прохождении по трубопроводам; в этом случае эффективной
очисткой воздуха от пыли следует считать
индивидуальные фильтры, устанавливаемые перед каждым
прибором.
Предельным давлением сжатого воздуха следует
считать 5—7 кгс/см2, так как такое давление может быть
получено в одноступенчатом компрессоре. В установках
малой производительности (до 3 мг/ч) может быть
оправданным давление 2,5—3 кгс/см2, так как
аварийный запас сжатого воздуха в таких установках невелик
264
и мажет быть сравнительно легко обеспечен за счет
емкости ресиверов.
Емкости ресиверов в установках воздухоснабжения
должны обеспечивать как аварийный запас сжатого
воздуха на 10—15 мин работы лриборов и регуляторов,
так и нормальный режим эксплуатации компрессора,
чтобы примерно после 30—60 мин работы компрессор
имел минимум 10—15-минутную паузу для охлаждения.
7-2. АВТОМАТИЧЕСКАЯ УСТАНОВКА ВОЗДУХОСНАБЖЕНИЯ
АД-220
Принципиальная схема и общий вид установки
показаны на рис. 7-2 и 7-3. Эта установка предназначена
для питания пневматических приборов и регуляторов
сжатым воздухом с давлением 2,5—3 кгс/см2.
Максимальная производительность установки (по всасу) не
превышает 1,8 мг/ч, а эксплуатационная
производительность не превышает 1,6 м3/ч. Сжатый воздух, выходящий
из установки, очищен от пыли и ©лаги и не содержит
компрессорного масла.
Установка состоит из мембранного компрессора,
дегидратора и системы автоматического управления.
8 состав установки должен входить также и ресивер
(в комплекте установки АД-220 заводом не
поставляется). Все агрегаты установки собраны на общем шасси.
Установка работает следующим образом.
Засосанный атмосферный воздух сжимается в мембранном
компрессоре У, откуда проходит через радиатор 2 и
обратные клапаны 3 и 4 к силикагелевым адсорберам
5 и 5, а затем через фильтры 7 и 8, соленоидные вентили
9 и 10, обратный клапан И, буферную емкость 12,
вентиль 13, регулятор давления 14 и индикатор влажности
15 к ресиверу сжатого воздуха (на принципиальной
схеме не показан) и далее к потребителям.
Система автоматического управления через
программное реле времени (на схеме не показано)
управляет соленоидными вентилями 9, 16, 10 и 17 и
электронагревателями 18 и 19 таким образом, что если адсорбер
5 находится в режиме осушки, то адсорбер 6 в это
время находится в режиме регенерации (и
последующего охлаждения); при этом соленоидные вентили 9 и
17 открыты, соленоидные вентили 10 и 16 закрыты,
18—795 26
электронагреватель 18 обесточен, а электронагреватель
19 включен в электросеть.
В таком положении основное количество сжатого
воздуха в течение 12-часового рабочего цикла будет
проходить через адсорбер 5, где из него будет
адсорбироваться влага до точки росы при —30° С. Часть сжатого
воздуха (10—15% общего количества) будет проходить
через адсорбер 6У где он будет нагреваться до 200° С и
регенерировать влагу из силикагеля, а затем через
соленоидный вентиль 17 и дроссель 20 выбрасывается
в атмосферу. По истечении 7-часового цикла
регенерации электронагреватель 19 обесточивается и адсорбер 6
переходит © режим охлаждения, цикл которого
длится 5 ч.
По истечении 12-часового рабочего цикла адсорбер
5 переключается на цикл регенерации (и охлаждения),
а отрегенерированный и охлажденный адсорбер 6
переключается на рабочий цикл.
Время циклов регулируется программным реле
времени; при этом реле учитывает время, в течение
которого фактически работал компрессор, для чего
в системе автоматического управления предусмотрена
специальная блокировка.
Остальные узлы и агрегаты выполняют следующие
функции.
Биметаллические регуляторы температуры 21 и 22
ограничивают температуру воздуха при регенерации не
выше 200° С.
Радиатор 2 охлаждает сжатый воздух после
компрессора до окружающей температуры, что обеспечивает
нормальную работу адсорберов, так как при повышении
температуры воздуха выше 30° С активность силикагеля
сильно падает.
Реле давления 23 управляет работой компрессора;
при понижении давления воздуха ниже 2—2,5 кгс/см2
компрессор включается, а при повышении выше 2,5—
3 кгс/см2 — останавливается. При остановке
компрессора выпускной клапан 24 выпускает воздух из головки
компрессора в атмосферу, что облегчает последующий
пуск компрессора.
Регулятор давления 14 предназначен для
поддержания давления воздуха в выходной линии установки при
работе без ресивера. Этот регулятор необходим при
18* 267
подаче воздуха к потребителям, н»е имеющим
собственных редукторов. При использовании установки АД-220
для питания приборов, имеющих собственные
редукторы, регулятор давления 14 излишний.
Индикатор влажности 15 контролирует в грубых
пределах влажность воздуха после адсорберов. Он
представляет собой стеклянную трубку, заполненную
силижагелем, обработанным 10-процентным раствором
хлористого кобальта. Такой силикагель обладает
способностью изменять свой цвет от синего до розового при
увеличении влажности воздуха от незначительной до
полного насыщения.
Установка АД-220 полностью автоматизирована.
Наряду с достоинствами установка АД-220 имеет
ряд недостатков, основным из которых является малый
срок службы рабочей мембраны (мембранного пакета)
компрессора, составляющий всего лишь 300—400 ч.
Кроме того, из-за примененной в данной установке
схемы горячей генерации силикагеля конструкция
установки сильно усложнилась. При переходе на схему
холодной регенерации конструкцию установки можно
значительно упростить.
7-3. АВТОМАТИЧЕСКАЯ УСТАНОВКА ВОЗДУХОСНАБЖЕНИЯ
УВСА-6,3 (12,5) С ХОЛОДНОЙ РЕГЕНЕРАЦИЕЙ
СИЛИКАГЕЛЯ
Принципиальная схема установки УВСА-6,3*
производительностью (по всасу) 6,3 мг/ч показана на рис. 7-4.
Эта же установка может работать с
производительностью (по всасу) 12,5 мъ\ч, для чего должна быть
произведена ее настройка. Установка состоит из
компрессора, двухступенчатого дегидратора, одного или двух
ресиверов и системы автоматического управления.
В случае необходимости иметь установку с аварийным
резервом компрессор, дегидратор и система
автоматического управления дублируются.
Установка работает следующим образом. Сжатый
воздух с температурой 160—130° С (в зависимости от
степени сжатия), содержащий пыль, масло и влагу,
через маслофильтр и буфер поступает из компрессора
в двухступенчатый дегидратор. В дегидраторе воздух
* Рассматривается разработка опытного образца.
268
269
270
проходит через водяной холодильник / типа «труби
в трубе», где охлаждается до 15—20° С, вследствие чего
из него выпадает (конденсируется) значительная часть
влаги и компрессорного масла. Сконденсированная
влага и масло собираются в конденсатосборнике 4 и
периодически (выбрасываются в дренаж через
автоматически управляемый соленоидный вентиль 5СВ. Из
водяного холодильника сжатый воздух со 100%-ной
относительной влажностью поступает через соленоидный
вентиль 1СВ в левый адсорбер 2 или через соленоидный
вентиль 2СВ в правый адсорбер 3 (в зависимости от
того, какой из адсорберов в это время находится в
режиме осушки). В адсорбере сжатый воздух проходит
последовательно через четыре силикагелевых насадки,
где из него адсорбируются пары до относительной
влажности ф«=2—3% (при /=15—20°С). Из адсорберов
очищенный и осушенный сжатый воздух через ресиверы
поступает к потребителям.
Часть осушенного сжатого воздуха, составляющая
20—25% от общего количества, не поступает в ресивер,
а направляется через ротаметр Р, дроссельный вентиль9
и обратный клапан 8 в правый адсорбер 3 или через
обратный клапан 7 в левый адсорбер 2 и дальше через
соленоидный вентиль 4СВ или ЗСВ (в зависимости от
того, какой из адсорберов в это время находится в
режиме регенерации) выбрасывается в атмосферу. Сухой
воздух, проходя через регенерируемый адсорбер,
отбирает от силикагеля влагу, поглощенную им в период
рабочего цикла, подготавливая, таким образом,
регенерируемый адсорбер к следующему рабочему циклу
(циклу осушки).
Поскольку периоды циклов регенерации и осушки
равны друг другу, для осуществления холодной
регенерации силикагеля объем регенерируемого воздуха
должен быть равен объему осушаемого воздуха. Именно
равенство объемных расходов, а не весовых, должно
быть соблюдено для осуществления холодной
регенерации силикагеля. Это условие, лежащее в основе
принципа холодной регенерации, исходит из обратно
пропорциональной зависимости, существующей между
относительной влажностью и абсолютным давлением влажного
воздуха (до наступления точки росы) при постоянной
температуре.
271
Таким образом, объем сухого воздуха, идущего йй
регенерацию силикагеля, должен быть увеличен до
значения, при котором он будет равен объему
осушаемого воздуха; при этом увеличение объема воздуха
осуществляется за счет понижения давления при
прохождении его через дроссельный вентиль 9.
Воздух, поступающий на холодную регенерацию,
после прохождения регенерируемого адсорбера
выбрасывается в атмосферу, что понижает экономичность
установки воздухоснабжения.
Количество сухого воздуха, идущего на холодную
регенерацию, будет тем меньше, чем больше давление
в ресивере и чем меньше давление регенерации. При
наличии одноступенчатого компрессора с абсолютным
давлением нагнетания 7—8 ат давление воздуха в
ресивере может поддерживаться ib пределах 5,2—8 ат; тогда
при дросселировании воздуха до 1,5—1,8 ат количество
сухого воздуха, идущего на холодную регенерацию,
будет равно 20—25% от общего количества.
Работа установки полностью автоматизирована.
Система автоматического управления производит пуск
и остановку компрессора, переключение адсорберов из
рабочего цикла на регенерацию и обратно, выброс
конденсата, управление подачей охлаждающей воды и
предупредительную сигнализацию о падении давления
воздуха и охлаждающей воды.
Схема автоматического управления показана на
рис. 7-5.
Работа системы автоматического управления, выбор
и настройка режимов отдельных агрегатов и приборов
установки воздухоснабжения состоит в следующем.
Понижение давления воздуха в ресивере ниже
4,2 кгс/см2 вызывает замыкание контакта ЖМ (М)
контактного манометра и срабатывание промежуточного
реле 2РУ которое своим контактом 2Р-3 включает
в электросеть магнитный пускатель 1МП, что и
обеспечивает пуск компрессора. При этом контакт 1УП-1
ключа управления должен находиться в замкнутом,
а контакт 1УП-2 — в разомкнутом положении.
Как только компрессор начнет работать, контакт
ЖМ (М) разомкнётся, однако остановки компрессора
при этом не произойдет, так как реле 2Р будет
удерживаться во включенном положении через собственный
272
нормально открытый контакт 2Р-1. Работа компрессора
будет продолжаться до тех пор, шока давление в
ресивере не повысится до 7 кгс/см2. |При этом давлении
замкнется контакт ЖМ (Б) контактного манометра,
что вызовет срабатывание промежуточного реле 1Р,
которое своим нормально замкнутым контактом 1Р-1
отключит реле Р2 и вызовет остановку компрессора.
^380/2206
Элентро •
двигатель
компрессора
Рис. 7-5. Электрическая схема автоматического управления
установки УВСА-6,3 (12,5).
273
Для опробывания работы компрессора при ремонте
и наладке установки воздухоснабжения в системе
управления предусмотрены кнопка пуска 1КП и кнопка
остановки 1КОу с помощью которых можно запускать
и останавливать компрессор при условии, что контакт
1УП-1 ключа управления будет замкнут, а контакт
1УП-2 — разомкнут.
Запуск компрессора сигнализируется сигнальной
лампой 4Л.
Понижение давления воздуха ниже 4 кгс/см2, а
также понижение давления охлаждающей воды ниже
0,5 кгс/см2 через сигнализаторы 1С и 2С
сигнализируется сигнальной лампой 1Л и гудком Г; при этом
проверка исправности сигнализации производится
кнопкой КПСУ а гашение гудка — кнопкой КГ Г и
промежуточным реле ЗР, имеющим блок-контакты ЗР-1 и ЗР-2.
Переключение адсорберов из рабочего цикла на
регенерацию и обратно производится командным
электропневматическим прибором КЭП-Г2У и сигнализируется
сигнальными лампами 2Л и ЗЛ. Замыкание или
размыкание контактов К-1 и К-2 вызывает включение или
выключение соленоидных вентилей 1СВ, 4СВУ 2СВ и ЗСВ.
В положении, изображенном на рис. 7-4 и 7-5, вентили
1СВ и 4СВ открыты, а вентили 2СВ и ЗСВ закрыты.
В этом положении левый адсорбер 2 находится в
режиме осушки, а правый адсорбер 3 — в режиме
регенерации. Переключение контактов К-1 и К-2 происходит по
истечении заданного времени вращением кулачкового
вала, приводимого во вращение электродвигателем
командного прибора.
Полный оборот кулачкового вала соответствует двум
циклам адсорбера: циклу осушки и циклу регенерации.
При этом командный прибор КЭП-12У позволяет
изменять время оборота кулачкового вала в широких
пределах и выбирать его таким, чтобы время осушки
соответствовало адсорбционной возможности адсорбера.
Последняя зависит главным образом от объема
находящегося в нем силикагеля.
Количество воздуха, проходящего через адсорбер»
определяется производительностью и временем работы
компрессора, поскольку производительность
компрессора— величина постоянная, то количество воздуха,
прошедшего через адсорбер, однозначно определяется
274
временем работы компрессора. Учитывая, что влажность
воздуха, поступающего из водяного холодильника
в адсорбер,— величина тоже постоянная (ср=100%),
надо полагать, что время работы компрессора
однозначно определяет количество влаги, поглощаемой в
адсорбере. Таким образом, суммируя время работы
компрессора, командный прибор КЭП-12У будет переключать
своими контактами К-1 и К-2 адсорберы из цикла
осушки на цикл регенерации и обратно с учетом насыщения
влагой силикагеля, и, следовательно, с учетом
влажности выходящего из адсорбера воздуха, что является
одной из принципиальных особенностей схемы
автоматического управления данной установки.
Суммирование времени работы компрессора
осуществляется тем, что электродвигатель командного
прибора находится в работе столько же времени, сколько
и электродвигатель компрессора. Для этого оба
электродвигателя запускаются и останавливаются
магнитным пускателем 1МП одновременно.
На основании вышеизложенного следует, что объем
силикагеля, закладываемого в адсорбер, прямо
пропорционально зависит от времени цикла осушки. Чем
меньше время цикла осушки, тем меньше может быть объем
силикагеля. Однако уменьшать объем силикагеля можно
до определенного порядка. Желательно, чтобы
осушаемый воздух проходил последовательно через 3—5 сили-
кагелевых насадок и чтобы скорость прохождения
воздуха в насадках была по крайней мере в 10—15 раз
меньше, чем в трубопроводах.
По конструктивным соображениям объем силикагеля
для одного адсорбера в установках воздухоснабжения
призводительностью 6,3 и 12,5 мг/ч принят равным
17—18 л; при удельном насыпном весе 0,4—0,5 кг/л вес
сухого силикагеля для одного адсорбера составляет 8 кг.
Принятые размеры адсорбера равны: наружный диаметр
219 мму высота (без патрубков) 780 мм.
Ввиду того что в адсорбере из каждого килограмма
насыщенного воздуха будет поглощаться 2,2 г влаги и
что в нашем случае расчетная влагоемкость силикагеля
составляет 6—9 % от его сухого веса, переключение
адсорберов из цикла осушки на регенерацию и обратно
в установке производительностью 6,3 мъ/ч следует
производить через 720 мин работы компрессора, а в уста-
275
новке производительностью 12,5 м3/ч— через 360 мин
работы компрессора.
При температуре всасываемого воздуха 20° С и
относительной влажности 70% в течение времени цикла
осушки в водяных холодильниках установок
производительностью 6,3 и 12,5 м3/ч сконденсируется 1,64 кг
влаги, которая через соленоидные вентили 5СВ в два
приема выбрасывается в дренаж при замыкании
контактов К-3 командного прибора.
Подача охлаждающей воды к водяному
холодильнику производится соленоидным вентилем 6СВ
одновременно с пуском компрессора через контакт 2Р-2
промежуточного реле 2Р.
В установках воздухоснабжения
производительностью 6,3 и 12,5 м3/ч применены одноступенчатые
двухцилиндровые поршневые компрессоры с воздушным
охлаждением со следующими техническими
характеристиками:
Установка Установка
Тип 039А 038
Производительность по всасу, м3/ч .... 15 30
Рабочее давление, кгс/см2 6—7 6—7
Число оборотов коленчатого вала в минуту 800 950
Ёмкость буфера, л 24,5 22
Электродвигатель:
род тока Переменный трехфазный
напряжение, а 380/220
мощность, кет 2,8 4,5
скорость вращения, об/мин 1 420 950
При наличии в установке воздухоснабжения
производительностью 6,3 м3/ч одного ресивера емкостью 0,75 м3,
а в установке производительностью 12,5 м3/ч — двух
ресиверов емкостью по 0,75 ж3, а также при упомянутых
выше производительностях и давлениях компрессоров
установки воздухоснабжения будут иметь 15-минутный
аварийный запас сжатого воздуха. Продолжительность
непрерывной работы компрессора—17 мин при паузе
16 мин.
Приведенные режимы работы установок
воздухоснабжения обеспечивают нормальную эксплуатацию
компрессоров с остановками, достаточными для их
охлаждения.
276
Для охлаждения выходящего из компрессора
воздуха до 15—20° С в обоих установках применен водяной
холодильник типа «труба в трубе» с поверхностью
охлаждения 0,224 м2, выполненный из трубы 0 1",
длиной 2,2 м. При этом расход охлаждающей воды,
проходящей через водяной холодильник, составляет
50 aJh.
Выбор для установок воздухоснабжения поршневых
компрессоров с вышеприведенными техническими
характеристиками (и присущими этим компрессорам
недостатками, главными из которых являются загрязнение
сжатого воздуха компрессорным маслом и быстрый их
износ) является вынужденным. Вопросы разработки и
освоения серийного производства безмасляных
непоршневых компрессоров общепромышленного назначения,
например мембранных или водокольцевых, являются
актуальными.
Размещение агрегатов и аппаратуры
автоматического управления установки воздухоснабжения
производится следующим образом. Компрессоры
размещаются в машинных залах, насосных или других
производственных помещениях обслуживаемого
технологического объекта. Ресиверы размещаются на открытых
площадках. Остальные агрегаты и аппаратура
автоматического управления скомпонованы на общей раме
дегидратора.
Дегидратор рассчитан на установку его в
нормальном помещении возле оперативного щита управления
автоматизируемого объекта,
По рассмотренной выше схеме целесообразно строить
установки воздухоснабжения производительностью до
400 м3/ч.
ЛИТЕРАТУРА
1. Системы, устройства и элементы пневмо- и
гидроавтоматики, под ред. Айзермана М. А., Изд. АН СССР, 1959.
2. Вопросы пневмо- и гидроавтоматики, под ред. Айзерма-
на М. А., Изд. АН СССР, I960.
3. Новое в пневмогидравлической автоматике, под ред.
Айзермана М. А., Изд. АН СССР, 1962.
4. Пневмо- и гидроавтоматика, под ред. Айзермана М. А.,
изд-iBo «Наука», 1964.
5. Основы автоматического регулирования, под ред. Солодов-
никова В. В., Машгиз, 1954.
6. Автоматизация химических и коксохимических производств,
под ред. Феста Н. Я., Елшина Н. Н. и Герулайтиса Ю. Н., Метал-
лургиздат, 1958.
7. Айзерман М. А., Лекции по теории автоматического
регулирования, Физматгиз, 1958.
8. А у з а н Р. А., Николаев С. А. и Ш т е й н б е р г Ш. Е.,
Методы экспериментального определения динамических
характеристик регулирующей аппаратуры. Динамические характеристики
автоматических регуляторов и аппаратура для их исследования,
ЦНИИКА, Сборник трудов, 1959, вып. 1.
9. А у з а н Р. А. и X в и л е в и ц к и й Л. О., Динамические
характеристики регуляторов АУС и рекомендации по их настройке,
«Вопросы пневмо- и гидроавтоматами», Изд. АН СССР, 1960.
10. Берез овец Г. Т., Малый А. Л. и Наджафов Э. М.,
Приборы пневматической агрегатной унифицированной системы и их
использование для автоматизации производственных процессов, Гос-
топтехиздат, 1962.
11. Берендс Т. К., Ефремова Т. К., Та га ев ска я А. А.
и Таль А. А., Элементный принцип в пневмоавтоматике,
«Приборостроение», 1963, № 11.
1(2. Б рой до Н. Ф., Приборы пневматической унифицированной
системы в схемах автоматизации, Машгиз, 1963.
13. Дмитриев В. Н. и Чернышов В. И., Пневматические
вычислительные приборы непрерывного действия, Госэнергоиздат,
1962.
14. Добкин В. М., Дул ев Е. М. и Фельдман Е. П.,
Автоматическое регулирование тепловых процессов на
электростанциях, Госэнергоиздат, 1959.
15. Дудников Е. Г., Основы автоматического регулирования
тепловых процессов, Госэнергоиздат, 1956.
278
16. Залманзон Л. А., Проточные элементы пневматических
приборов контроля и управления, Изд. АН СССР, 1961.
17. Залманзон Л. А., Пневмоника, изд-во «Наука», 1964.
18. /Кривой Ц. П., Новиков А. А. и Шантурин П. М.,
Единая агрегатная система пневматических приборов,
«Приборостроение», 1958, № 2, Новые разработки пневматических приборов
АУС-ЦЛА, «Приборостроение», 1962, № 2.
(19. Круг Э. К. и Минина О. М, Электрические регуляторы
промышленной автоматики, Госэнергоиздат, 1962.
20. Л а н и н Н. Д., Пневматическая вычислительная машина
непрерывного действия, «Приборостроение», 1959, № 7.
21. Л ер н ер А. Я., Введение в теорию автоматического
регулирования, Машгиз, 1958.
22. Лукьянов Н. Г. и Зйгенброт В. М., Пневматическая
телемеханика, Гостоптехиздат, 1963.
23. М и р о н о в К. А. и Ш и п е т и н Л. И., Автоматические
регуляторы, Машгиз, 1961.
24. М и р о н о в В. Д. и Стефани Е. П., Электронные
автоматические регуляторы тепловых процессов, Госэнергоиздат, 1955.
25. Михайлов Н. Н., Козлов И. Ф. и В и р а б ь я н А. О.,
Новые малогабаритные вторичные приборы и регуляторы
пневматической системы общепромышленного назначения, НИИТеплопри-
бор, .«Научно-технический бюллетень», 1957, № 3.
26. Ордынцев В. М. и Ш е н д л е р Ю. И., Автоматическое
регулирование технологических процессов, Машгиз, 1960.
27. О с т р о в с к и й Ю. И., Пневматический экстремальный
регулятор, «Автоматика и телемеханика», 1957, № 11.
28. П р у с е н к о В. С, Элементы пневмоавтоматики для
регулирования тепловых процессов, Госэнергоиздат, 1961.
29. П р у с е н к о В. С, Одноконтурные пневматические системы
автоматического регулирования тепловых процессов, Госэнергоиздат,
1963.
30. Прусенко В. С, Многоконтурные пневматические
системы автоматического регулирования тепловых процессов,
Госэнергоиздат, 1963.
31. Прусенко В. С, Пневматические датчики и вторичные
приборы, изд-во «Энергия», 1965.
32. Ротач В. Я., Расчет настройки промышленных систем
регулирования, Госэнергоиздат, 1961.
33. Рузский Ю. Е., Солодовников В. В., Титов В. К.
и Топчиев Ю. И., Основы автоматического управления,
Автоматические регуляторы и следящие системы, Машгиз, 1963.
34. С а в и н В. А., Эксплуатационные испытания
малогабаритных вторичных приборов и регуляторов пневматической системы
общепромышленного назначения, НИИТеплоирибор,
«Научно-технический бюллетень», 1958, № 3.
35. С т е ф а н и Е. П., Основы расчета настройки регуляторов
теплоэнергетических процессов, Госэнергоиздат, 1960.
36. Щ е р б а к о в В. И., Померанцев Л. М. и Ю д и ц-
к и й С. А., Пневмоавтоматика в машиностроении, ЦНИИТМАШ,
1962.
37. Промышленная трубопроводная арматура,
«Каталог-справочник», ч. III, Госинти, 1963.
«БИБЛИОТЕКА ПО АВТОМАТИКЕ»
ГОТОВЯТСЯ К ПЕЧАТИ
Апокин И. А., Технология изготовления магнитных пленок.
Борцов Ю. А., Суворов Г. В., Методы исследования динамики сложных
систем электропривода.
Боярченков М. А. и др., Импульсные регуляторы на бесконтактных
магнитных элементах.
Булыга А. В., Полупроводниковые теплоэлектрические вакууметры.
Бунаков В. Л., Гаспаров Р. Г., Полупроводниковые регуляторы частоты и
напряжения электрических машин.
Веников Г. В., Сверхбыстродействующие вычислительные устройства.
Гиршберг В. В. и др., Единая серия полупроводниковых логических элементов
промышленной автоматики.
Дейнеко В. П., Макурин П. С, Чернобай В. В., Феррит-диодные
трехтактные элементы автоматики и вычислительной техники.
Дружинин Г. В., Реле времени.
Зимин Е. И., Преображенский В. И., Соколов Н. Г., Элементы и схемы
бесконтактного управления металлорежущими станками.
Ильинская Л. С, Подмарьков А. И., Полупроводниковые тензодатчики.
Ильинский Н. Ф., Михайлов В. В., Транзисторно-магнитные преобразователи
непрерывного сигнала в последовательность импульсов.
Карандеев К. Б., Гриневич Ф. Б., Новик А. И., Емкостные
самокомпенсированные уровнемеры.
Ключев В. И., Автоматизация реверсивных электроприводов.
Короткое А. М., Мочалов В. Д., Счетчики импульсов на переключающих
диодах.
Лабунцов В. А., Ривкин Г. А., Шевченко Г. И., Автономные инверторы и
преобразователи частоты.
Лисичкин Д. А., Транзисторные усилители с обратными связями для
следящих систем.
Макаров А. К., Свердлин В. М., Автоматические сигнализаторы уровня.
Овчаренко Н. И. и др., Применение гальваномагнитных элементов в
релейной защите и автоматике.
Образцов В. В., Релейные устройства с диодными сетк?ми.
Панкратьев Л. Д. и др., Следящий привод переменного тока с полупроводни
ковыми усилителями.
Поспелов Д. А., Игры и автоматы.
Пучкин Б. И., Приклеиваемые тензодатчики сопротивления.
Рейн А. М., Автоматика механического транспорта сыпучих грузов.
Темный В. П., Гидравлические регуляторы.
Сандлер А. С, Сарбатов Р. С, Частотное управление асинхронными
двигателями.
Тун А. Я., Тахогенераторы для управления электроприводами.
Туркельтауб Р. М., Методы исследования точности и надежности схем.
Тутевич В. И. и др., Временные системы телеуправления на магнитных
элементах.
Форейт И., Емкостные датчики неэлектрических величин.
Фролов Л. Б., Измерение крутящего момента.
Чугин Ю. И., Помехоустойчивость частотных систем телемеханики.
Шенброт И. М.у Машины централизованного контроля.
Шляндин В. М., Чернецов К. П., Автоматизация контроля электрических
цепей.
Эйгенброт Д, М.. Многоканальные регуляторы технологических процессов.