/





























































































































































































































































































































































































































































































Text
Б. А. ГАВРИЛЕНКО, В. А. МИНИН,
С. Н. РОЖДЕСТВЕНСКИЙ
ГИДРАВЛИЧЕСКИЙ
ПРИВОД
Издательство «/ЛАШИНОСТРОЕНИЕ)
Москва 1968
УДК 621-82
Гидравлический привод. Гавриленко Б. А., М и н и и В. А.,
Рождественский С. Н. М.. «Машиностроение», 1968, 502 с.
В настоящее время гидропривод применяется во всех отраслях
народного хозяйства.
В дайной работе освещаются теория, расчет, характеристики,
принципы регулирования и конструкции динамического и статиче-
ского приводов.
Стационарные и переходные процессы в приводе рассматри-
ваются на основании материалов исследований, проведенных ав-
торами. В этой связи излагаются, например, методы повышения
стабильности работы привода с гидромуфтой.
Наряду с оригинальными отечественными материалами, книга
содержит большое количество сведений по гидроприводам, при-
меняемым за рубежом.
Книга предназначена для инженерно-технических работников,
занятых расчетом, проектированием и эксплуатацией гидроприво-
дов во всех отраслях машиностроения.
Табл. 36, нлл. 307, библ. 73 иаим.
Рецензент канд техн наук Ю. Л. Кирилловский
3-3-6
287-67
ЧАСТЬ ПЕРВАЯ
КЛАССИФИКАЦИЯ, ОСОБЕННОСТИ
И ОБЛАСТИ ПРИМЕНЕНИЯ ГИДРОПРИВОДА
Глава I. ОБЩИЕ СВЕДЕНИЯ О ГИДРОПРИВОДАХ
§ 1. ОСНОВНЫЕ ВИДЫ ГИДРОПРИВОДОВ
Основным элементом гидропривода является гидропередача.
Гидропередачей называется устройство, предназначенное для пе-
редачи механической энергии посредством жидкости. Рабочей
жидкостью для гидропередач служат минеральные масла, а так-
же специальные жидкости. В гидродинамических передачах упот-
ребляется также вода.
Гидравлические передачи, входящие в систему гидропривода,
подразделяются на две основные группы: гидродинамические и
гидростатические или объемные передачи.
В гидродинамический привод входят гидродинамические пере-
дачи, а в объемный — объемные гидропередачи.
Таким образом, гидродинамический привод состоит из гидро-
динамической передачи, устройства управления, вспомогательных
линий и устройств.
Гидростатический привод состоит из объемной гидропереда-
чи, устройства управления, вспомогательной линии и устройств,
причем в понятие объемной гидропередачи включается объемный
насос, объемный, гидродвигатель и магистральная линия.
Принятой в СССР терминологией допускается при необходи-
мости охарактеризовать гидропривод и по типу приводящего дви-
гателя включать в термин, определяющий гидропривод, назва-
ние этого двигателя, например: электрогидропривод, дизельгид-
ропривод, турбогидропривод и т. д.1
§ 2. ГИДРОДИНАМИЧЕСКИЕ ПРИВОДЫ
Гидродинамические приводы устанавливают только силовые
связи. Это значит, что данное передаточное отношение i поддер-
1 Гидропривод. Часть 2. Объемный гидропривод. Терминология. М., изд-во
«Наука» Вып. 66, 1964.
5
живается постоянным только при определенном соотношении на-
грузок ведомой и ведущей частей.
При увеличении нагрузки на ведомом валу автоматически
уменьшается скорость вращения этого вала, если число оборотов
ведущего вала поддерживается постоянным, и, наоборот, при
уменьшении нагрузки скорость увеличивается. Это свойство гид-
родинамических передач используется в тяговых машинах, где
требуется автоматическое изменение усилия от скорости.
Плавность трогания с места и перехода с одного режима на
другой, большой диапазон регулирования скорости ведомого вала
при сохранении постоянного числа оборотов ведущего вала, огра-
ничение крутильных колебаний и защита от толчков, возни-
кающих во всем приводе, отсутствие износа деталей — все эти
свойства обусловили широкое распространение привода с гидро-
динамической передачей.
Гидродинамические передачи (гидротрансформаторы) позво-
ляют создавать при высоком к. п. д. (0,8—0,9) передаточные от-
ношения 0,125—0,65, а их комплексный тип до 0,97. При умень-
шении к. п. д. эти передаточные отношения могут быть снижены
вплоть до точки трогания с места.
В гидродинамических передачах зазоры между деталями, вра-
щающимися с различной скоростью, относительно большие, класс
точности изготовления машин в основном третий и четвертый, де-
тали изготовляются из типовых стандартных конструкционных
материалов без каких-либо высоких требований к тех-
нологии.
Таким образом, организация производства гидродинамических
передач не представляет затруднений; они могут строиться на
любом насосном или турбинном заводе, но лучше предусмотреть
организацию производства их на специализированном заводе или
в специализированном цехе.
Создателем гидродинамических передач является проф.
Г. Феттингер.
В настоящее время гидродинамические передачи получили
широкое распространение в нашей стране и за рубежом. Мощ-
ность гидромуфт, строящихся за рубежом, составляет 5—
35 000 л. с.
Колесо центробежного насоса ', непосредственно связанное с
ведущим валом, и колесо реактивной турбины, связанное с ведо-
мым валом, являются главными элементами гидродинамической
передачи. Энергия от насоса к турбине передается гидродинами-
ческим взаимодействием потока и лопастных систем рабочих ко-
лес; таким образом, в этих передачах в основном используется
кинетическая энергия жидкости.
1 В дальнейшем для простоты вместо терминов колесо насоса, колесо тур-
бины будем писать — насос, турбина.
6
Все гидродинамические передачи, когда они, кроме насоса и
турбины, имеют неподвижный реактивный элемент — реактор
(рис. 1), могут, помимо создания разницы в числе оборотов ведо-
мого и ведущего валов, трансформировать и передаваемый кру-
тящий момент.
При отсутствии реактивного элемента моменты на обоих ва-
лах равны, такая гидравлическая система является гидравличе-
ской муфтой (рис. 2), способной при равенстве моментов изме-
нять передаточное отношение по числу оборотов.
Рис. 1. Конструктивная схема гидротрансфор-
матора:
а — реактор расположен перед насосом; б — реак-
тор находится после насоса; 1 — ведущий вал;
2 — насос; 3 — реактор (направляющий аппарат);
4 — турбина; 5 — ведомый вал
Рис. 2. Конструктивная
схема гидромуфты:
/ — насос; 2 — турби-
на; 3 — вращающийся
кожух; 4 — ведомый
вал; 5 — ведущий вал
Из сказанного следует, что гидродинамические передачи мож-
но разделить на два вида: гидродинамические преобразователи
момента или гидротрансформаторы и гидродинамические муфты
(гидромуфты).
В гидротрансформаторах реактивным элементом является не-
подвижный реактор (направляющий аппарат); при этом можно
на ведомом валу получить изменение не только числа оборотов,
но и величины реализуемого крутящего момента по сравнению
с их значениями на ведущем валу:
М1±Мр — М2 = 0; (1)
± Мр = М2, (2)
где М-р — момент, воспринимаемый неподвижным реактором;
7И1 — момент на ведущем валу;
М2 — момент на ведомом валу.
7
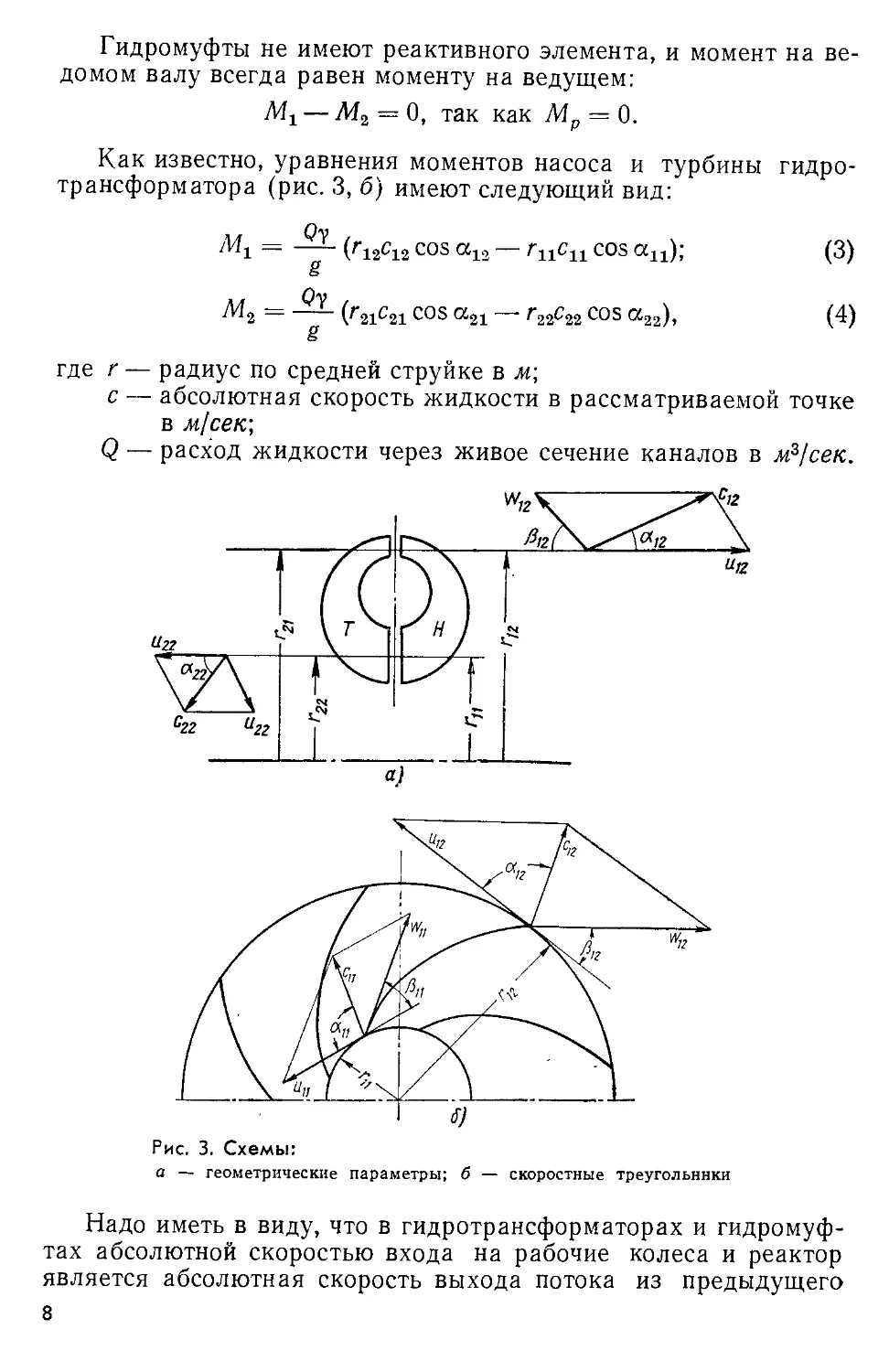
Гидромуфты не имеют реактивного элемента, и момент на ве-
домом валу всегда равен моменту на ведущем:
Л4Х — М2 = 0, так как Мр = 0.
Как известно, уравнения моментов насоса и турбины гидро-
трансформатора (рис. 3, б) имеют следующий вид:
ЛК = —— (r12c12 cos — ГцСц cos 7.n); (3)
g
ТИ2 = 21^21 COS tt21 Г22C22 COS (Z22), (4)
g
где r — радиус по средней струйке в м\
с — абсолютная скорость жидкости в рассматриваемой точке
в м/сек-,
Q — расход жидкости через живое сечение каналов в мР/сек.
а)
Рис. 3. Схемы:
а — геометрические параметры; б — скоростные треугольники
Надо иметь в виду, что в гидротрансформаторах и гидромуф-
тах абсолютной скоростью входа на рабочие колеса и реактор
является абсолютная скорость выхода потока из предыдущего
8
колеса. Тогда, принимая это во внимание, можно написать (см.
рис. 1, а) *
Г цСц COS = Г32^32 COS
Г21^21 COS (Z21 = Г 12^12 COS <%12.
Сделав в уравнениях (3) и (4) соответствующую замену, по-
лучим
Mi = — (r12c12 cos <х12 — r32c32 cos а32); (5)
§
Л12 = (Г 12^12 COS «12 г22^22 COS СХ22). (6)
g
Уравнение момента реактора получим следующим образом.
Исходя из равенства (1) можно написать, что момент реактора
равен
м„ = м2-М1,
подставляя сюда значения и М2 из уравнений (5) и (6), по-
лучаем
М_ = — [(г i2c12 cos <%12 г 22с22 cos ос22) If 12^12 cos <%12 ~~
g
г32С32 COS <Х32)]
ИЛИ
М = — (г32с32 cos <х32 г22с22 cos ос22). (7)
g
В гидромуфтах реактора нет, поэтому уравнение моментов (2)
имеет вид
Мг = М2.
Подставив сюда значения ЛЛ и М2, получим
Qy . . Qy ,
V 12^12 COS (%i2 ГцСц COS <Хц) — (f21^21 COS <Х21
g g
Г22^22 COS 0^22) •
Приняв во внимание, что для гидромуфт
Г 11с11 COS С4ц = Г22^22 COS (Х22
И
Г21^21 COS <Х21 = Г 12^12 COS <%12,
* Здесь и в дальнейшем индекс при буквенных обозначениях скоростей и
радиусов обозначает: первая цифра: 1 — насос; 2 — турбина; 3 — реактор; вто-
рая цифра: 1 — вход в колесо; 2 — выход из колеса.
9
имеем
Л1J — Л^2 — (^*12^12 COS (Х^2 ^*22^22 COS (Х22) (®)
g
Схема принятых обозначений скоростей и геометрических па-
раметров насоса приведена на рис. 3, б.
Принципиальная конструктивная схема и характеристика
гидротрансформаторов
В 1903 г. проф. Г. Феттингер, проектируя схему дифференци-
альной электрической передачи, осуществляющей передачу кру-
тящего момента от двигателя к гребному винту, решил заменить
дифференциальную электропередачу гидродинамической уста-
новкой, соединив центробежный насос и турбину одним общим
Рис. 4. Внешняя характеристика гидротрансфор-
матора
В гидротрансформаторе (см. рис. 1) ведущий вал 1 соединен
с двигателем. На вал насажен на шпонке насос 2. Турбина 4
жестко насажена на ведомый вал 5, который соединяется с ма-
шиной. Колесо 3 представляет собой неподвижный направляю-
щий аппарат. Внутри гидротрансформатора в качестве рабочей
жидкости находится вода или масло. Насос 2 при вращении соз-
дает напор, приводящий во вращение турбину гидротрансформа-
тора, а через нее механизмы приводимой машины. Внутри гид-
ротрансформатора устанавливается циркуляция жидкости, как
указано стрелками. Таким образом, ведомый вал не имеет жест-
кой связи с ведущим, а передача крутящего момента происходит
через поток жидкости. Насос делает такое же число оборотов,
что и двигатель, а турбина может иметь различное число оборо-
тов, меняющееся в зависимости от нагрузки.
Вначале при небольших числах оборотов п2 турбина создает
большой крутящий момент, больше, чем на насосе, в несколько
ю
раз (рис. 4). По мере того, как нагрузка на турбине уменьшается,
число ее оборотов увеличивается.
Таким образом, гидротрансформатор выполняет автоматиче-
ски и плавно работу коробки скоростей с бесконечным числом
ступеней.
На рис. 1, б показана схема гидротрансформатора, у которого
направляющий аппарат 3 расположен после насоса, а перед на-
сосом 2 находится турбина 4.
В СССР первый гидротрансформатор был спроектирован и
построен в 1932—1934 гг. в МВТУ им. Н. Э. Баумана. Это был
трехколесный гидротрансформатор мощностью 60 л. с. при П\ =
— 900 об!мин [7].
Принципиальная конструктивная схема
и характеристика гидромуфт
Типовая конструктивная схема гидромуфты приведена на
рис. 2.
Рабочие колеса гидромуфт имеют прямые радиальные лопат-
ки (рис. 5), но это необязательно, например, некоторые колеса
имеют изогнутые лопатки [7].
Гидромуфта является сочетанием в одной машине колеса
центробежного насоса 1 (см. рис. 2), колеса реактивной турби-
ны 2 и охватывающего ее вращающегося кожуха 3. Насос соеди-
нен с ведущим 5, а реактивная турбина — ведомым 4
валом.
Насос, вращаясь, передает работу двигателя жидкости,
заполняющей гидромуфты, и сообщает ей запас скоростной энер-
гии и энергии давления. Жидкость с этим запасом энергии посту-
пает на лопатки турбины, преобразует энергию в механическую
работу на ведомом валу и заставляет его вращаться. Выйдя
из турбины, жидкость вновь попадает в насос, и в гидромуфте
устанавливается замкнутая циркуляция по пути насос — турби-
на — насос и т. д. Отсюда следует, что связующим звеном в гид-
ромуфте между ведущим и ведомым валами является жид-
кость.
Такая передача энергии происходит с определенными потеря-
ми, внешне выражающимися в том, что ведомый вал отстает
от ведущего.
В СССР первая гидромуфта была спроектирована в 1929 г.
проф. А. П. Кудрявцевым [31].
Основные свойства гидромуфт и особенности их работы со-
стоят в следующем.
1. В гидромуфтах ведомый и ведущий валы вращаются неза-
висимо. Ведомый вал может быть неподвижным при вращении
ведущего или иметь промежуточные значения угловой скорости.
Однако предельная угловая скорость не может достигнуть вели-
11
чины скорости ведущего вала и должна быть меньше нее на
2-3%.
2. При помощи гидромуфт осуществляется плавное трогание
с места и плавный разгон.
3. В гидромуфтах нет трущихся пар и вследствие этого отсут-
ствует износ основных деталей.
4. Гидромуфты ограничивают крутильные колебания.
5. При помощи гидромуфт передачи работают бесшумно.
6. Гидромуфты обеспечивают высокий к. п. д. (0,96—0,98)"
при номинальном режиме.
7. Они надежны при эксплуатации.
8. Гидромуфты позволяют организовать дистанционное и ав-
томатическое управление.
Рис. 5. Рабочие колеса гидромуфты
Благодаря перечисленным свойствам гидромуфты устанавли-
ваются для выполнения следующих функций:
для регулирования числа оборотов ведомого вала при посто-
янном числе оборотов двигателя (мощные питательные насосы в
котельных агрегатах ТЭЦ, центрифуги на химических заводах,
вентиляторы шахтного и другого оборудования, турбовоздуходув-
ки в установках для аэродинамических труб, конвертеры бессе-
меровских цехов, регулирование скорости спуска и подъема шахт-
но-подъемных машин, регулирование скорости вращения моталок
прокатных станов, машин центробежного литья и др., поддержа-
ние постоянного числа оборотов бортового генератора при изме-
нении числа оборотов двигателя);
для разгона больших масс (подключение и отключение стар-
тера при пуске газовых турбин; для разгона масс при работе нож-
ниц; при пуске конвейеров и другого оборудования металлургиче-
ских заводов и заводов тяжелого машиностроения. В качестве
отключающего устройства и аппарата разгона гидромуфты в со-
12
четалии с механическими передачами широко применяются в
транспортных машинах);
для суммирования мощностей и реверса. На судах гидромуф-
ты применяют для суммирования мощностей при работе двух
двигателей на один гребной винт. Применение гидромуфт для
реверса корабля исключает установку специального двигателя
для заднего хода.
Перечисленные свойства и функции гидромуфт позволяют
применять их в различных отраслях техники.
§ 3. ОБЪЕМНЫЕ ГИДРОПРИВОДЫ. ПРИНЦИП ДЕЙСТВИЯ
И ХАРАКТЕРИСТИКА ОБЪЕМНЫХ ГИДРОПРИВОДОВ
Под объемным понимается такой гидропривод, основой кото-
рого является объемная гидропередача. Как уже было сказано,
объемная гидропередача определяется как гидравлическая пере-
дача, составленная из объемного насоса, объемного гидродвига-
теля и магистральной линии. В объемном насосе перемещение
жидкости осуществляется путем вытеснения ее из рабочих камер
вытеснителями, а в объемном гидродвигателе движение ведомого
звена осуществляется в результате наполнения жидкостью рабо-
чих камер и перемещения вытесняемых тел (поршней, плунжеров,
пластин и т. п.).
Объемные передачи устанавливают кинематические связи
между ведущей и ведомой частями. Это значит, что они могут
поддерживать на ведомом валу любую заданную скорость неза-
висимо от изменения нагрузки.
Не имея жесткой механической связи между ведущей и ведо-
мой частями, объемные передачи допускают расположение ва-
лов на значительном расстоянии друг от друга, под углом и в
разных плоскостях, допускают изменение вращательного движе-
ния в поступательное и обратно. Все это вместе взятое позволяет
при помощи объемного гидропривода решить многие задачи, ко-
торые не могут быть решены электроприводом и зубчатым редук-
тором.
Мы уже отмечали быстродействие гидропривода, в том числе
и объемного, а также его малую инерционность. Это объясняется
тем, что отношение крутящего момента к маховому у гидродви-
гателя значительно больше, чем у электродвигателя. Для созда-
ния крутящего момента электродвигателя (при отсутствии воз-
душных зазоров) можно реализовать максимальное электромаг-
нитное напряжение в 15— \6кГ/см2. Это ограничено магнитным
насыщением материалов.
В гидродвигателях для реализации крутящего момента мож-
но использовать давление жидкости 100, 200, 500 кГ/см2. Таким
образом, в гидродвигателях отношение Л—- в 10 раз больше,
GD2
чем у электродвигателей.
13
Для сравнения в табл. 1 приведены основные параметры гид-
родвигателей и шунтового электродвигателя постоянного тока.
Таблица 1
Основные параметры гидродвигателей и электродвигателей
Параметры Шунтовой электро- двигатель постоянного тока Гидромотор нормального исполнения Регулируемый гидромотор (авиационный тип)
Мощность в л. с Давление в кГ/см? Крутящий момент в кГ-м Число оборотов в минуту Момент инерции вращающейся части в кГм-сек2 Отношение крутящего момента к моменту инерции в 1 /сек? .... Вес в кг Отношение веса к мощности в кг/л. с Габаритные размеры в мм 12 8,6 ~1000 7,55-10-2 111 190 15,8 640X395 12 40 8,6 1000 9.1-10-4 9400 21 1,75 240x120 11 210 1,76 4440 1,28-Ю- 5 137 000 2,2 0,2 137X104
§ 4. РАБОЧИЕ ЖИДКОСТИ ДЛЯ ГИДРОПРИВОДОВ
Одним из важнейших вопросов при решении задач по гидро-
приводу является правильный выбор и создание новых рабочих
жидкостей для гидропередач, которые более полно удовлетворя-
ли бы возникающим требованиям.
Простые минеральные масла во многих случаях не могут счи-
таться годными, поэтому создаются смеси с минеральными мас-
лами и специальные жидкости.
В настоящее время уже наметилась специализация в приме-
нении жидкости в зависимости от типа и вида гидропередач, от
условий, в которых им приходится работать.
Среди специальных требований к рабочим жидкостям для от-
дельных передач можно некоторые выделить как общие для гид-
родинамических и объемных передач.
1. Жидкость должна обладать малой вязкостью в целях
уменьшения потерь на трение, но она обязательно должна обла-
дать способностью смазывать подшипники. Унификация рабочей
жидкости со смазкой подшипников предопределяет простоту кон-
струкции гидропередачи.
2. Жидкость должна быть устойчива против ценообразования.
3. Жидкость должна обладать высокой температурой
вспышки.
Это требование вызывается пожарной безопасностью, так как
часто гидропередачам приходится работать при высокой темпе-
ратуре рабочей жидкости.
14
4. Жидкость должна иметь пониженную кислотность. Сопри-
косновение жидкости с деталями гидропередачи не должно вы-
зывать их коррозии.
5. Жидкость должна быть стойкой против эмульгирования,
вода, попавшая в нее, должна отделяться.
6. Жидкость не должна оказывать вредного влияния на здо-
ровье человека.
Рабочие жидкости для гидродинамических передач. Применя-
емые на электростанциях, тепловозах, автомобилях, самолетах
и т. д. гидромуфты и гидротрансформаторы работают на масле,
причем для этой цели применяются различные сорта масел, а в
последнее время создаются специальные смеси жидкостей.
Для большинства гидромуфт, работающих в нормальных ус-
ловиях, у нас применяется турбинное масло 22 (Л), имеющее
температуру вспышки 180° и удовлетворительную вязкостно-тем-
пературную характеристику. Отношение кинематической вязко-
сти при 80° С к кинематической вязкости при 100° С для этого
масла не выше 3,2. К маслу часто добавляют антивспенивающие
присадки, например, силикон.
Для гидротрансформаторов, как правило, применяется масло
менее вязкое, чем для гидромуфт.
Гидротрансформаторы ГТК, предназначенные для транспорт-
ных машин, работают на смеси масел, состоящей из 65% АУ и
35% МС-14, при температуре НО—130° С.
Фирма Крупп для эксплуатации своих гидротрансформаторов
на тепловозах употребляет специальные смеси, способные рабо-
тать при очень высоких температурах.
Так, при эксплуатационных испытаниях немецкого тепловоза
2000 л. с. с гидродинамической передачей температура рабочей
смеси масла составляла 120—140° С при допустимой расчетной
200° С.
Горьковский автозавод применяет для своих гидротрансфор-
маторов масло ВНИИ-НП-1. Это масло отвечает требуемым
условиям и при температуре 125° С имеет незначительное вспе-
нивание.
Масло в процессе работы претерпевает изменения, портится,
поэтому во время эксплуатации гидропередач следует время от
времени брать пробы работающего масла для определения его
загрязнения.
После непрерывной работы в течение 6000 ч или не позднее
как через год следует рабочее масло исследовать на химические
и физические изменения и на старение. При значительных изме-
нениях масло следует менять.
Рабочие жидкости для объемных гидропередач. Жидкости
для объемных передач, как правило, более вязкие, чем применяе-
мые в гидродинамических передачах, хотя многие сорта масел
применяются и в тех, и в других.
15
Физико-химические свойства масел, изготовляемых в СССР и употребляемых
Физнко-хнмнческне свойства Турбин- ное 22(Л) АУ АМГ-1 0 Индуст
12 20
Удельный вес 0,901 0,888— 896 — 0,876— 0,891 0,881— 0,901
Вязкость при 20°С'.
кинематическая в сст — 49,0 — — —
условная в °Е .... — 6,68 — — —
Вязкость при 50° С:
кинематическая в сст 20—23 12—14 Не менее 10 10—14 17—23
условная в °Е .... Кислотное число, в мг КОН 2,9-3,2 2,05— 2,26 — 1,86— 2,26 2,6—3,3
на 1 кг мыла (не более) Количество золы в % (не 0,02 0,07 0,05 0,14 0,14
более) Механические примеси в % 0,005 0,005 — 0,007 0,007
(не более) Температура вспышки в за- крытом приборе в °C (не — —- — — —
ниже) Температура вспышки в от- крытом приборе в °C (не — — —
ниже) Температура застывания в 180 163 92 165 170
°C (не выше) Количество кокса в % (не —15 -45 —70 —30 —20
более) Технические условия по — — — — —
ГОСТу 32—53 1642—50 982—56 1707—51 1707—51
Примечание. Анализ масел должен показать отсутствие воды, водора створи
В табл. 2 приведены физико-химические свойства масел, при-
меняемых в гидропередачах. Для объемных передач исполь-
зуют масло АУ (ГОСТ 1642—50), которое обеспечивает работу
гидропередачи при температуре окружающей среды —20 4-
+ 50° С, и масло АГМ (ТУ М НП 457—53), позволяющее ра-
ботать гидропередаче при температуре —40 4- +50° С.
В гидравлических системах станков и станочных автоматиче-
ских линий применяют турбинное и индустриальные масла (ин-
дустриальное 20 и индустриальное 30, а в гидравлических следя-
щих системах с малым периметром утечек — индустриаль-
ное 12).
В гидроприводе получили широкое распространение минераль-
ные масла. К недостаткам этих масел можно отнести слабую
16
Таблица 2
для гидропередач
риальное АТ-1 Трансформа- торное Велосит Приборное (МВП)
30 40
0,886-0,916 0,886—0,926 0,892—0,895 0,805 0,865—0,885
.— — — Не более 30 —
— — — — —
27—33 38—52 — Не более 9,6 4,0—5,1 6,3—8,5
3,81—4,59 5,74—7,07 5,0—6,5 Не более 1,8 1,29—1,4 1,51—1,72
0,2 0,35 0,20 0,05 0,04 0,14
0,007 0,007 Следы 0,0015 0,005 0,005
— — — — — —
— — — 135 112 120
180 90 180 — — —
—15 —10 —28 —45 —25 —60
— 0,3 0,4 — — —
— 1707—51 — 982—56 1840—51 1805—51
мых кислот и щелочей.
(по сравнению с маслом на касторовой основе) смазывающую
способность, воспламеняемость, значительное изменение вязко-
сти с увеличением температуры, максимальную эксплуатацион-
ную температуру ~ 150° С.
ЧАСТЬ ВТОРАЯ
ГИДРОДИНАМИЧЕСКИЙ ПРИВОД
Глава II. НЕРЕГУЛИРУЕМЫЕ ГИДРОТРАНСФОРМАТОРЫ
§ 1. СВОЙСТВА И ХАРАКТЕРИСТИКИ
НЕРЕГУЛИРУЕМЫХ ГИДРОТРАНСФОРМАТОРОВ
Гидродинамические передачи, трансформирующие момент
двигателя, могут выполняться либо в виде раздельно стоящих
насоса и турбины, соединенных трубопроводами, либо в виде на-
соса и турбинных ступеней, расположенных соосно и сближенных
настолько, что рабочая жидкость, пройдя одно колесо, непосред-
ственно попадает по межколесному зазору на следующее. Пере-
дачи, выполненные по второй схеме, называются гидротрансфор-
маторами.
На рис. 6, а представлена схема раздельной гидродинамиче-
ской передачи, в которую входит насос 1, турбинная ступень, со-
стоящая из турбины 2 с предшествующим ей направляющим
аппаратом 3, и трубопроводы, соединяющие эти раздельно стоя-
щие элементы.
На рис. 6, б показана схема простейшего гидротрансфор-
матора.
Основным достоинством раздельной схемы гидропередачи яв-
ляется возможность произвольно размещать двигатель и испол-
нительный (приводимый) механизм. В последнее время такие
гидродинамические передачи получают все более широкое рас-
пространение.
Вторая схема передачи — собственно гидротрансформатор —
имеет более высокую экономичность, чем раздельно стоящие на-
сос и турбина.
Различие в к. п. д. объясняется не только потерями в трубах,
которые составляют 1—2%, иногда 3% от передаваемой мощно-
сти, но и потерями, связанными с преобразованием энергии в от-
воде насоса и потерями с выходной скоростью в турбине.
К. п. д. насоса как агрегата, т. е. насоса с направляющим ап-
паратом, лежит в пределах 0,85—0,75 и менее, а к. п. д. колеса
насоса может составлять 85—95% и более.
18
К- п. д. насоса можно определить по формуле
Пн
ст Нд^н-а
Нет + Нд
ЛобЛлгх>
где Нст и На — статическая и динамическая составляющие на-
пора, создаваемого насосом.
Объемные потери в насосе в среднем составляют 4%, т. е.
Лоб = 0,96. В некоторых случаях в отдельно стоящем насосе эти
потери могут составить и большую величину, поскольку система
уравновешивания осевых сил (гидростатические пяты) требует
для своей работы 1—2% расхода, а 3—4% составляют внутрен-
ние утечки в насосе. Таким образом, лучшее значение т]об = 0,96,
а 0,94 — худшее. Механические потери, включая потери и на ди-
сковое трение, составляют 1—2%, т. е. т]лгех = 0,99 -4- 0,98.
В связи с этим общий к. п. д. насоса т]и можно принять в сред-
нем равным 0,82, а к. п. д. отводящего устройства насоса т]я.а-'
Пн.Я
Пн
ПобПлм
Нст
нд
2;
19
По определению степени реактивности запишем
- Ндин-— = 1 — р,
Нет 4“ Нд
где р — степень реактивности.
Степень реактивности р можно найти из известной формулы
P=l-—1—fl-^-ctg А
2 (1 + Р) \ «2 J
Н ТОО
где р = ---- — отношение теоретического напора колеса с бес-
Нт
конечным числом лопаток к теоретическому напору колеса с опре-
деленным числом лопаток.
Q
Для часто встречающихся значений —— р = 0,78-4-3,1 • 10-3 р2,
откуда при р2 = 25°, что имеет место в большинстве центробеж-
ных насосов, получим р = 0,7. Итак, для распространенных кон-
струкций центробежных насосов
т]«.я =----------(2,33 + 1) — 2,33 = 0,6,
1 0,95 • 0,98 v ’
следовательно, 40% динамического напора колеса в насосном
агрегате идет на потери.
Для повышения экономичности раздельной гидродинамиче-
ской передачи целесообразно применять насосы с высокой сте-
пенью реактивности. Поскольку возможное уменьшение величины
угла р2 ограничено значениями 25 4-22°, постольку увеличение
стг
реактивности возможно лишь за счет увеличения значения —- ,
«2
что означает переход ко все более быстроходным — пропеллер-
ным насосам. Действительно, удельная быстроходность ns = ——,
но Q = ст, а Н = «2 , поэтому ns =—1 /
ы2 |/ и2
Если задаться рядом значений угла выхода р2 и величиной р,
ст
то можно найти величину потребного отношения -—- и значе-
Wo
ние ns. При этом следует иметь в виду, что К- Пфлейдерер реко-
мендовал
t
p = 0,18 (1 + sin |32)------------
s'n (Pi 4“ Pa)
где t и L — шаг и размах лопаток.
20
Рис. 7. Новая схема раздельной гидро-
динамической передачи:
1 — турбина; 2 — насосы; 3 — двигатели;
4 — гребные соосные винты
высокую экономичность, однако с
Применение при заданной мощности передачи насоса с боль-
шим значением ns потребует применения трубопроводов больших
диаметров и малой длины.
На рис. 7 представлена схема раздельной передачи для при-
вода соосных корабельных винтов, в которой турбина 1 питается
рабочей жидкостью от осевых насосов 2.
Насосы не соосны с турбиной 1 и соединены с ней трубами
больших размеров.
Указанная конструкция раздельной передачи может приме-
няться в корабельных установках, поскольку, допуская произ-
вольное расположение
двигателей 3 относитель-
но турбины 1, она позво-
ляет просто решать зада-
чу суммирования мощнос-
тей нескольких двигате-
лей на одном валу, и на-
оборот —- расщепление
мощности двигателя на
несколько валов. Схема
такой передачи с переда-
точным числом 30 описа-
на в патенте № 1178269
кл. F06h от 6 мая 1965 г.
При небольшом изме-
нении числа оборотов гид-
ротрансформаторы имеют
уменьшением i их экономичность падает.
На рис. 8 представлен график вероятных наибольших значе-
ний к. п. д. гидротрансформаторов с различным расчетным зна-
чением передаточного числа. Гидротрансформаторы с турбиной,
вращающейся в другую сторону, чем насос, имеют величины
к. п. д. на 15—12% меньше значений, приведенных на рис. 8 (для
равных/).
В гидротрансформаторе нет необходимости преобразовывать
в специальном устройстве, аналогичном отводу насоса, динами-
ческую часть напора в статическое давление, что и определяет
главным образом высокий к. п. д. этих передач. Однако с умень-
шением i возрастает изогнутость турбинных решеток, что опре-
деляет собой падение к. п. д. в области, где происходит большое
изменение момента.
На рис. 6, б представлена схема простейшего гидротрансфор-
матора с одним насосом, турбиной и направляющим аппаратом.
Каждое из перечисленных рабочих колес снабжено лопатками,
которые вместе с чашей колеса и крышкой, прикрывающей их из-
нутри, образуют каналы, по которым циркулирует жидкость, за-
полняющая всю рабочую полость, ограниченную снаружи корпу-
21
сом передачи, имеющим специальные уплотняющие узлы в ме-
стах выхода валов.
При вращении насосного колеса жидкость, заполняющая его
межлопаточные каналы, начинает двигаться от точки а к б и да-
лее в, г, д, е, ж и снова к точке а. При этом возникают две си-
стемы сил: силы, лежащие в плоскости вращения колеса, и силы,
перпендикулярные к ним. Первая система сил обусловливает пе-
редачу энергии от насосного вала к турбине.
Вследствие осевой симметрии каналов колес рабочий процесс
Рис. 8. График примерных наибольших
значений к. п. д. гидротрансформаторов
С различными (опт
Секундный расход в рабочей i
определяется из уравнения
нагрузки на подшипники. По-
этому в гидропередаче, в от-
личие от зубчатой, нагрузка
опорных подшипников не
связана с мощностью пе-
редачи. Вторая из упомяну-
тых систем сил требует для
восприятия применения упо-
рных (осевых) подшипни-
ков. Величина этой силы за-
висит от размеров передачи.
Для определения сил,
возникающих в плоскости
колес, предположим, что в
рабочей полости расход на-
соса составляет Q мъ)сек.
юлости гидротрансформатора
Q — F — F2Cm2,
где Fx и F2 — площади цилиндрических поверхностей с радиуса-
ми Г] и г2.
Треугольник скоростей (рис. 9) позволяет установить следую-
щие соотношения:
си = с cos а и ст = с sin а.
Силы Pi и Р2, возникающие в результате изменения количе-
Qy
ства движения массы — жидкости, действуют в плоскости вра-
g
щения насоса и турбины в направлении абсолютной скорости.
Они складываются из окружной Pu — Р cos а — — си и ради-
альной Рт = Psin а = — ст составляющих,
g
Радиальные составляющие этих сил из-за идентичности кана-
лов взаимно уравновешиваются, т. е. 2Рт = 0; окружные же со-
ставляющие складываются:
2Р, = РИ1 + Ри2.
22
Если принять, что сила PUt отрицательна, то PU2 положи-
тельна. Выбор знаков произволен и означает только, что на вхо-
де сила Ри направлена по направлению скорости, а на выходе —•
в обратную сторону.
Под влиянием моментов Мг=Ри1Г1 на входе и M2 = PUir2
на выходе из лопаточного канала центробежное колесо приво-
дится во вращение. Здесь и и г2 — радиусы входа и выхода ло-
паточного колеса.
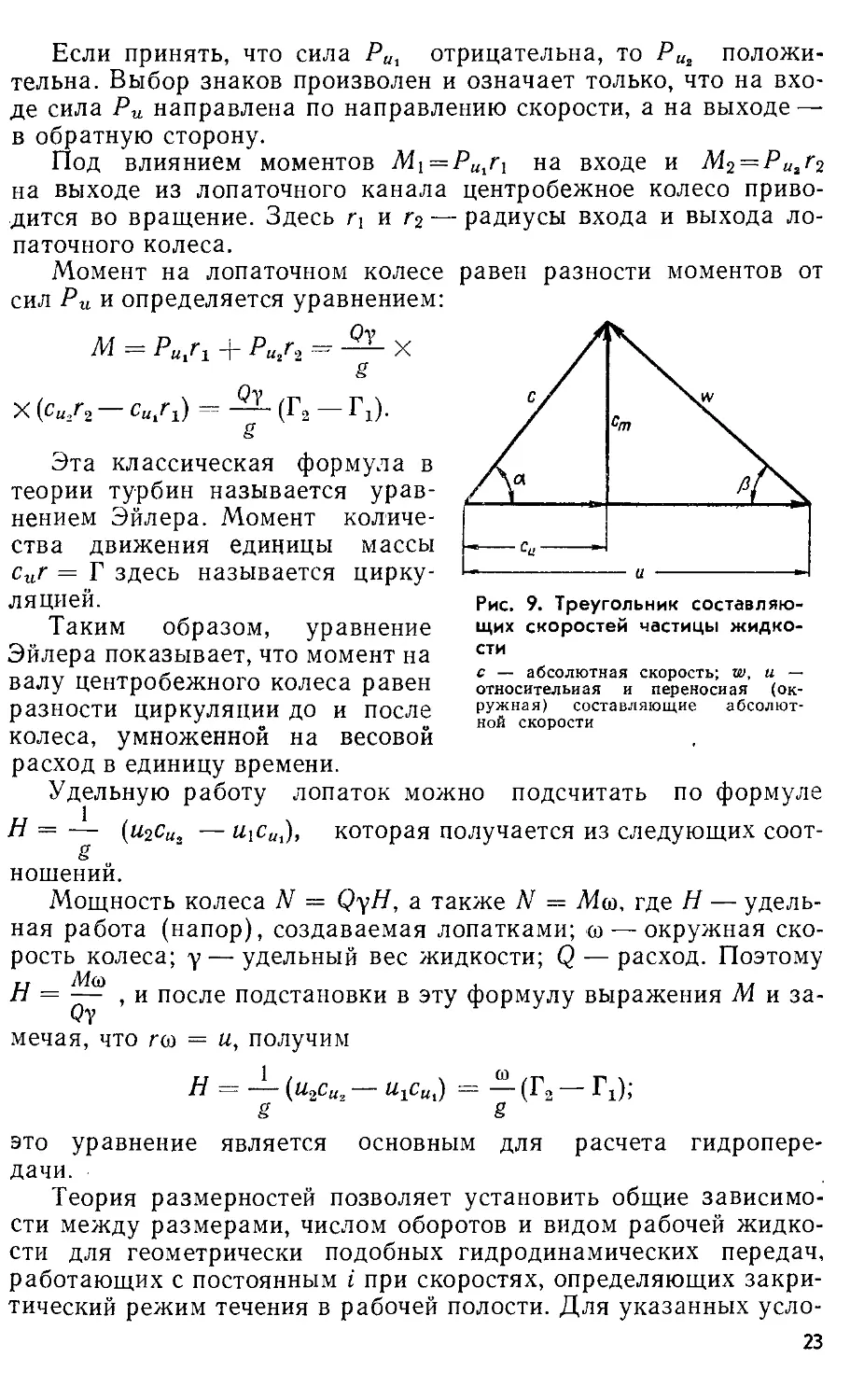
Момент на лопаточном колесе
сил Ри и определяется уравнением:
М = Ри71 + Р„/2 - X
g
X (с„.г2 — с«/1) = — (Г2 — ГД
g
Эта классическая формула в
теории турбин называется урав-
нением Эйлера. Момент количе-
ства движения единицы массы
сиг = Г здесь называется цирку-
ляцией.
Таким образом, уравнение
Эйлера показывает, что момент на
валу центробежного колеса равен
разности циркуляции до и после
колеса, умноженной на весовой
равен разности моментов от
Рис. 9. Треугольник составляю-
щих скоростей частицы жидко-
сти
с — абсолютная скорость; w, и —
относительная и переносная (ок-
ружная) составляющие абсолют-
ной скорости
расход в единицу времени.
Удельную работу лопаток можно подсчитать по формуле
Н = — (и2си, — UiCUt), которая получается из следующих соот-
g
ношений.
Мощность колеса N = QyH, а также N = Mid. где Н — удель-
ная работа (напор), создаваемая лопатками; w — окружная ско-
рость колеса; у — удельный вес жидкости; Q — расход. Поэтому
л = — , и после подстановки в эту формулу выражения М и за-
мечая, что га = и, получим
н = — (ы2с„2 — и^,) = — (Г2 — ГД
g g
это уравнение является основным для расчета гидропере-
дачи.
Теория размерностей позволяет установить общие зависимо-
сти между размерами, числом оборотов и видом рабочей жидко-
сти для геометрически подобных гидродинамических передач,
работающих с постоянным i при скоростях, определяющих закри-
тический режим течения в рабочей полости. Для указанных усло-
23
вий передаваемый момент является функцией только размеров
г. . , кГ-сек2
передачи и м, угловой скорости со 1/сек и плотности р -------
рабочей жидкости, т. е. Л1=/(р; Z); и).
Можно считать, что искомая функция f = (р; Z); со) есть про-
изведение этих величин, т. е. М == nxDyd)z. В связи с тем, что раз-
мерность правой и левой части выражения должна быть одина-
кова, получим
[р]х • [О]3’ • [<о]г = кГх сек2х~г му~4х,
откуда х — у = 1; у — 4х = 1; 2х — z = 0.
Решением этой системы будет х = 1; у = 5; z = 2.
Таким образом, М = pZ)5w2 или N == Мы = pZ)5w3. В качестве
величины D может быть взят любой размер проточной части пе-
редачи.
Обычно в качестве размера D берут наибольший (актив-
ный) размер меридионального сечения рабочей полости. Посколь-
ку считается, что i задано, то в качестве м в этой формуле может
быть выбрана угловая скорость (число оборотов в минуту) лю-
бого вала передачи. Обычно при расчетах передач в качест-
ве со принимают угловую скорость вала насоса. Для того чтобы
можно было вести расчет по полученной выше зависимости, ее
Таблица 3
Коэффициенты мощности трансформаторов
Наименование гидротранс- форматора Расчетное передаточное i отношение Наибольший к. п. д. Число сту- пеней Коэффициент мощности Q А • 10 Последовательность расположения колес
ГТК-Х1 0,85 0,92 1 3,89 Р—Н—Т (комплексная пере-
дача)
«Фойт» 0,8 0,86 1 1,2 Н—Т—Р—Р
ТРЭ-325 «Тило к» 0,65 0,85 1 3,14 Н—Т—Р (комплексная пере-
дача)
04, U ТО6 —- внити 12 0,6 0,86 1 1,67 Н—Т—Р
ГТК-н 0,53 0,85 1 2,867 Р—Н—Т (комплексная пере-
дача)
НАМИ 0,53 0,846 2 1,82 Н—Т—Р
480 ТО — (Коломен- 0,4 0,84 1 0,56 Н-Т—Р
ский завод)
«Висбаден» 0,282 0,91 2 0,763 Н-Т—Р
«Тирпиц» 0,19 0,91 2 0,141-12 Н-Т—Р—т
24
записывают в виде уравнения, для чего вводят коэффициент мо-
мента X: М = Xp-DW и коэффициент мощности A: N = ApZ)5w3
(табл.3).
Одним из возможных ограничений при выборе числа оборо-
тов насоса передачи может оказаться величина допустимой
окружной скорости. С увеличением числа оборотов двигателя не
только увеличивается напряжение от центробежных сил, но рез-
ко увеличиваются вибрационные нагрузки, величину которых
трудно учесть. В связи с этим по мере роста числа оборотов на-
соса следует снижать допустимые напряжения в деталях пере-
дачи. Величина снижения допустимых напряжений зависит от
материала и конструкции деталей. Приводимые ниже рекомен-
дации по выбору допустимой окружной скорости учитывают эти
соображения.
Материал колес
Скорость
в м/сек*
Чугун ......................................... 28—35
Стальное литье................................. 35—50
Сталь легированная............................. 60—200**
Сплав алюминия................................. 40—85
* Зависит от металла (<JS) и типа конструкции (центробежное колесо
или тонкостенный лопаточный венец радиального нли осевого типа).
* * Основание колеса из цельного металла и лопатки профрезероваиы и
приклепаны к венцу.
Итак, момент на валу центробежного колеса изменяется про-
порционально квадрату, а мощность пропорционально третьей
степени числа оборотов; эти величины изменяются пропорцио-
нально пятой степени активного диаметра (характерного раз-
мера).
Величины А и А определяются при iMOd = inar и зависят от
конструкции и особенностей проточной части передачи и ее раз-
меров.
Для сохранения значений к. п. д. (а значит, Л и А) у модели
и натуры необходимо подобие зазоров и шероховатости в этих
объектах.
Общая тенденция изменения и влияние этих величин таковы,
что с увеличением размеров и мощности передачи должен расти
и к. п. д. машины.
На рис. 10 представлены кривые изменения к. п. д. передач,
построенных Феттингером, с увеличением их размеров и мощ-
ности.
Предварительную оценку этого обстоятельства дает формула
Муди
-1 -<1 - w (" —}''
г инат \ п наш /
25
Формула Рючи для оценки возрастания к. п. д. при переходе
от модели к натуре, основывающаяся на опыте с центробежными
насосами, записывается так:
1 -
\ инат /
„ п2 \0,1
пмод имод \
n /
"нат^нат /
Эта формула учитывает уменьшение потерь трения с увеличе-
нием числа Re в случае, если течение в модели находится в об-
ласти, где потери трения оцениваются по Блазиусу.
Область автомодельности устанавливается, если Remin >
> 4-105 5-105, причем Re = — , где I — хорда лопатки; w —
относительная скорость; v — кинематическая вязкость жидкости.
Рис. 10. Зависимости к. п. д. различных судовых гидротрансформаторов от их
размеров D и мощности N (по данным феттингера)
Ориентировочно можно считать, что Re > ReKP, если скорость
на ободе насоса передачи, работающей на горячей воде (более
60° С), больше 10 м)сек.
Другим ограничением со стороны рабочего процесса для ис-
пользования формул подобия является возможность кавитации.
Бескавитационный режим обеспечивается, если давления
Рподп.нат — Рподп.мод
(пР)нат 2
. (п^)мод .
Кроме того, что «ипах не должно вызывать перенапряжения
конструкции из-за чрезмерной мощности Nlt точнее наибольшее
число оборотов «imax выбирается таким, чтобы обеспечить тре-
буемую длительность работы подшипников, срок службы которых
должен быть для стационарных машин не ниже 4500 ч.
Для стационарных процессов привода момент на валах рабо-
чих колес можно рассматривать как изменение циркуляции АГ.
26
На рис. 11 изображены диаграммы изменения циркуляции вдоль
линии потока.
После насосного колеса (между контрольными плоскостя-
ми б и в) величина АГ не изменяется, так как на этом участке
нет рабочего канала лопаток. Предполагая, что нет потерь, мож-
но считать, что рабочая жидкость в точке в поступает в колесо
турбины, имея тот же напор, с каким она покинула колесо
насоса. Турбина жестко связана с рабочим валом машины, по-
этому момент на ее валу со стороны венца равен моменту приво-
димой машины, т. е. М2=МТ — моменту, созданному работой ло-
паток. Величина этого момента соответствует напору турбины.
Созданный колесом турбины момент Мт зависит от нагрузки
рабочей машины. При этом турбина автоматически приспосабли-
Рис. 11. Изменение циркуляции вдоль струйки потока в рабочей полости гид-
родинамической передачи:
а — ж — участки рабочей полости (см. рис. 1); а) теоретическая диаграмма; б) дей-
ствительная диаграмма, пунктиром показана кривая при отсутствии потерь
вается к колебаниям нагрузки (т. е. с возрастанием нагрузки чис-
ло оборотов п2 уменьшается и наоборот).
На участке г — б, т. е. в межколесном зазоре АГ = 0, измене-
ние циркуляции вновь происходит лишь в каналах направляюще-
го аппарата, который доводит момент количества движения жид-
кости до величины, соответствующей точке е. Затем на участ-
ке е — ж поток при АГ = const попадает вновь в насос, где запас
энергии возрастает (отрезок а—б). Процесс обмена повторяет-
ся. Так протекает теоретический процесс. Как влияют потери на
изменение циркуляции видно из рис. 17, б где сплошной линией
показан действительный график изменения циркуляции вдоль
линии тока. При отсутствии потерь в цикле (в любом режиме по
передаточному отношению) мощность, полученная колесом насо-
са, должна быть равна мощности на валу турбины, отданной ра-
бочей машине:
Если мощность 2V] = N2 = const, то кривая М2 = f(/?2) пред-
ставит собой гиперболу. В действительности же кривая М2 =
= f(n2)— fi(i) отличается от теоретической гиперболы.
27
Вторичный момент М2 при малых числах оборотов п2 не мо-
жет стать бесконечно большим потому, что при заданных углах
лопаток колеса турбины не может быть превышена величина мак-
симально возможного угла поворота потока рабочей жидкости
на лопатках (изменение циркуляции ДГ = Дгси), вследствие чего
значение пускового момента получается ограниченным величиной
M2o»2M2opt, где Alzopt — момент турбины при расчетном i.
При определенном числе оборотов n2max вторичный мо-
мент М2 становится равным нулю, это происходит потому, что по
мере роста п2 увеличивается величина Г2 на выходе из турбины
и в некотором режиме наступает равенство Г1 = Гг, при этом
М2 = 0. Это равенство наступает обычно при Пгтах ~ 2n2opt.
Таким образом, зависимость момента на валу турбины от его
числа оборотов представляет собой некоторую линию, изображен-
ную на рис. 12, пересекающую ось абсцисс в точке п2 — Папах и
ось ординат в точке М2 = ЛДтах ~ 2M2opt.
В зависимости от изменения I при постоянных числах оборо-
тов величина нагрузки двигателя может изменяться по-разному.
Для оценки влияния нагрузки на валу турбины на нагрузку дви-
гателя вводят величину прозрачности:
ц _ Мн, *10Ф5 _ _Xio_
ми *н
где Л4ю и Хю—момент на валу насоса при остановленной тур-
бине и коэффициент момента;
Л1ц и Хп — те же величины в режиме, когда наступает ра-
венство моментов на валу турбины и насоса и
гидротрансформатор становится гидромуфтой.
Величина П может изменяться в пределах 2 П 0,7.
Непрозрачным гидротрансформатором считается передача,
у которой П = 1 4- 1,2. В таких передачах изменение нагрузки
на ведомом (турбинном) валу во всем рабочем диапазоне не ска-
зывается на режиме работы двигателя. Такой гидротрансформа-
тор защищает двигатель от перегрузки. Для стационарных мощ-
ных установок с синхронными двигателями непрозрачный
гидротрансформатор является надежным средством, предотвра-
щающим опрокидывание двигателя. Непрозрачный гидротранс-
форматор исключает возможность чрезмерного увеличения числа
оборотов двигателя.
Это обстоятельство может оказаться очень важным для энер-
гетических установок кораблей. При сильной волне, когда винты
полностью или частично оголяются и нагрузка, создаваемая ими,
резко падает, благодаря наличию непрозрачного гидротрансфор-
матора аварийного увеличения числа оборотов двигателей не
происходит. В транспортных колесных установках (автомобили,
тракторы) и специальных машинах с синхронными двигателями
28
{дробилки) непрозрачный гидротрансформатор ограничивает воз-
можность использования перегрузочных свойств двигателя. Для
автомобиля это приводит к необходимости увеличивать число
оборотов двигателя, т. е. вызывает повышенный износ двигателя
на этих режимах работы; для стационарных машин означает не-
обходимость увеличения установочной мощности двигателя.
Гидротрансформаторы, у которых П> 1,2-4-2, называются
прозрачными. Эти передачи в режимах, когда нагрузка на ведо-
мом валу велика и он вращается медленно, нагружают двигатель
моментом большим, чем в режиме, когда коэффициент трансфор-
мации k = = 1. Такой трансформатор уже неполностью за-
щищает двигатель, однако он обладает важным достоинством —
позволяет максимально использовать тяговые свойства двигателя.
Известны конструкции гидротрансформаторов, обладающих
обратной прозрачностью, т. е. по мере увеличения нагрузки на
валу турбины нагрузка на валу двигателя уменьшается.
На рис. 12, а кривые характеризуют первичный момент.
Работа гидротрансформатора, как и любого механизма, свя-
зана с потерями энергии. Величина этих потерь оценивается
к. п. д. передачи. Эта величина может быть подсчитана по фор-
муле т) = — , где N2 и N] — мощности на вторичном и первич-
ном валах передачи. Если в эту формулу подставить выражения
для мощности через момент и скорость, то получим
= м^ = kL
Mfr
С точностью до законов подобия величина k зависит только
от режима работы. Поскольку М2 = , а = AiZ)| п® , то
k = — . Наибольшее значение коэффициент трансформации при-
нимает при полностью остановленной турбине. В этом случае ко-
эффициент трансформации обозначается буквой k0; его значения
находятся в пределах 2==С/со==Сб- В гидротрансформаторе-ре-
дукторе рабочей является область, где 1 k 4С k0. В точке
k = 1 гидротрансформатор обращается в гидромуфту, а к. п. д.
п,
равен т) = i = — .
Гидротрансформаторы-мультипликаторы строятся с таким
расчетом, чтобы при i = 0 k = k0 = 2,3 4- 2,7, при i = 1,4 -ь 1,6
к = 0.
О свойствах гидротрансформатора можно судить по его раз-
мерным Mt; М2; ni; п2; ц или безразмерным Xi; fo; t; k; -q харак-
теристикам, которые более удобны, так как позволяют оценить
нагрузку независимо от размеров и режима работы дви-
гателя [33].
29
При этом следует иметь в виду, что для данного размера пе-
редачи существует оптимальная область чисел оборотов первич-
ного вала, где к. п. д. и соответственно все остальные характери-
стики имеют наивыгоднейшие значения.
Об ограничениях, наступающих в связи с уменьшением актив-
ного диаметра D и другими явлениями, говорилось выше. Увели-
чение п не может быть неограниченно. При числе оборотов дви-
гателя выше некоторого оптимального значения для данного
Рис. 12. Характеристики гидропередачи при = const:
а — схематическая характеристика; 1 — характеристика выхода; 2 — характеристика
входа; 3 — зависимость к. п. д. передачи от передаточного числа; б — безразмерная
характеристика гидротрансформаторов типа: 7 — одноступенчатого: // — двухступенча-
того с реактором, расположенным перед насосом; III — с турбиной, находящейся перед
насосом
размера и конструкции может наблюдаться уменьшение к. п. д.
На рис. 13 представлены кривые постоянного к. п. д. Из графика
видно, что, например, оптимальным гидротрансформатором дан-
ного типа будет такой, который будет работать eft = 1750 об/мин.
Ограничение числа оборотов объясняется вспениванием жидко-
сти, кавитацией, увеличением степени турбулентности при увели-
чении П1 > nIopt.
Оси координат, в которых строятся характеристики передачи
/и — й; ?.2— й; Ц— Й k — i или им эквивалентные М] —
Л42— «г (при «1 = const); т] — п2, делят плоскость на четыре
квадранта — области возможной работы гидротрансформатора.
Чаще всего пользуются характеристиками, расположенными
в первом квадранте, где ось абсцисс лг2(д) направлена вправо,
а ось ординат М вверх (см. рис. 12).
30
В области первого квадранта различают следующие режимы.
Пусковой режим: i = 0, т] = 0, /гтах = ko- Величина k0 и соот-
ветственно Мю, Л42о зависят не только от пь но и от давления
жидкости.
Как происходит изменение величин и k0, показано на
рис. 14, причем при Ру < Р2 теоретическая парабола = f («0
(показана пунктиром) несколько искажается.
На рис. 14 видно, что по мере возрастания числа оборотов пг
абсолютная разница между ординатами теоретической и дейст-
вительной зависимости увеличивается. Это различие можно об.ъ-
Рис. 13. График изменения к. п. д. т]
передачи в зависимости от первично-
го момента М, и числа оборотов П',
яснить ценообразованием и ка-
витацией. Вероятность возник-
новения этих процессов может
Рис. 14. График влияния давления
питания на характеристики гидропе-
редачи
быть предсказана расчетом с использованием критерия кавита-
ции о = —--------, где pcm a hynp — статическое давление и уп-
+ hynp
ругость паров рабочей жидкости (или парциальное давление га-
за, чаще всего воздуха, вызывающего ценообразование в усло-
виях работы передачи), a w— любая скорость в потоке. В част-
ности, это может быть ы12 = nj)2 .
Поскольку на приведенном рисунке теоретические и действи-
тельные кривые пересеклись при Л410 = 20 кГм 1300 об/мин,
можно считать, что при этом обеспечивается бескавитационная
работа. Для обеспечения бескавитационной работы необходимо,
Чтобы (ТлсоЭОнат ИЛИ
Pcm ное > (Pcm—'K) + hHoe.
\ ncm /
31
Если h = huoe (температура в новом режиме остается преж-
ней), то необходимое давление питания, например в точке пх =
= 2000 об!мин, должно увеличиться в (^7755)2 ~ Раза-
В пусковом режиме вся подводимая к гидротрансформатору
энергия, соответствующая мощности Nt, превращается в тепло.
По определению к. п. д. ti = ki или — = k, поэтому tg 6 —
di
угла касательной к кривой к. п. д. в точке п2 = 0 численно равен
коэффициенту трансформации (см. рис. 12, а).
Режим разгона. Область этого режима ограничена слева
осью ординат, а справа — вертикалью, проходящей через п2 =
= п2р. Величина этого числа оборотов п2р условна. Считается,
что к. п. д., равный 70%, является допустимым при длительной
работе привода, включающего гидротрансформатор. В режиме
разгона происходит уменьшение коэффициента трансформации
, ,0,7 .
передачи от д0 до к = —, где tp = — .
ip ni
Режим длительной работы. Этому режиму соответствует
область первого квадранта характеристик, где к. п. д. превыша-
ет 70%. В середине этой области находится точка, где т] = т)тах-
Передаточное отношение, соответствующее этой точке n2opt, яв-
ляется расчетным параметром для передачи. В этой же обла-
сти характеристик находится и точка, где гидротрансформатор
обращается в гидромуфту. Графически ее можно найти так. Из
точки «2 = восстанавливают перпендикуляр АВ (рис. 12, а) к
оси абсцисс. На нем откладывают в масштабе отрезок, соответ-
ствующий г) = 100%. Конец этого отрезка (точку 4) соединяют
с началом ординат (точкой О). Тогда точка D пересечения от-
резка АО с кривой к. п. д. будет иметь абсциссу и2л, при которой
гидротрансформатор обращается в гидромуфту.
Действительно, для гидромуфты т) =— (так как Mi = М2)
ni
и прямая АО характеризует изменение к. п. д. гидромуфты.
В точке D к. п. д. гидромуфты равен к. п. д. гидротрансформа-
тора. По построению у них одинаковое передаточное отношение.
Следовательно, у них равны и коэффициенты трансформации k.
Обычно область длительной работы ограничена двумя перпен-
дикулярами к оси абсцисс, опущенными из точки пересечения
кривой к. п. д. с горизонталью т) = const = 70%.
Режим обгона. На поле характеристик ему соответствует
область от i > iopt до i, при котором k = 0. В этом режиме в
случае использования прозрачного гидротрансформатора дви-
гатель разгружается, что может привести к чрезмерному увели-
чению числа его оборотов. При этом возрастает подводимая
мощность, что должно быть учтено при выборе холодильников
для охлаждения рабочей жидкости.
32
3 Заказ 1076
Таблица 4
Возможные конструктивные схемы проточной части комплексного гидротрансформатора
С двухступенчатым реактором
С двухступенчатой турбиной
Областями характеристик, соответствующими использованию
гидротрансформатора, могут стать и другие квадранты.
Например, при торможении машины двигателем, в случае
применения в трансмиссии гидротрансформатора, момент на ва-
лу турбины становится отрицательным. В этом случае характе-
ристики размещаются в IV квадранте. При этом валы турбины
и насоса вращаются в ту же сторону, что и в режиме обгона.
Однако знак момента на валу турбины меняется на обратный.
Рис. 15. Характеристики гидротрансформаторов:
а — одноступенчатых; б — двухступенчатых
Вся энергия, подводимая к гидротрансформатору со стороны
двигателя, и энергия на валу турбины обращаются в тепло.
Можно предположить, что независимо от типа передачи харак-
теристика М2 = f(i) должна представлять собой в этом квадран-
те параболу М2 = Мо — ai2, где а = const.
При использовании гидротрансформатора в схемах, допуска-
ющих реверсирование, в некоторых режимах областью размеще-
ния характеристик гидротрансформатора становится II квад-
рант. Вал турбины передачи вращается в направлении, обрат-
ном тому, что в режиме обгона. При этом подводимая энергия
со стороны двигателя и турбины превращается в тепло.
Такой режим имеет место, например, при реверсировании
корабельного винта двухполостным гидротрансформатором.
В некоторых случаях работы гидротрансформатора в системе
привода крана или подъемной машины также может быть ре-
жим, называемый режимом противовращения. В этом случае вид
характеристики М2 = f(i) зависит от конструкции передачи и мо-
3* 35
жет быть поднимающейся, т. е. М2 будет продолжать увеличи-
ваться при i < 0, а может быть падающей.
Свойства гидротрансформаторов зависят от типа и последо-
вательности расположения колес в рабочей полости. На рис. 12,6
представлены безразмерные характеристики передач трех типов.
Одноступенчатые гидротрансформаторы также могут быть
разных типов. В табл. 4 представлены схемы комплексных, од-
ноступенчатых и двухступенчатых передач, а на рис. 15 пока-
заны их характеристики. Конструктивной особенностью этих
передач является наличие муфты свободного хода в ступице од-
ного или нескольких направляющих аппаратов или турбин. Бла-
годаря этому колеса по мере разгона передачи разгружаются,
чем и достигается сохранение высокого значения к. п. д. в широ-
кой области изменения i.
Из рассмотрения характеристик этих передач видно, что из-
меняя параметры проточной части и применяя различные колеса
в различной последовательности, можно создавать передачи с
разнообразными преобразующими свойствами.
§ 2. РАБОЧИЙ процесс гидротрансформаторов
При рассмотрении рабочего процесса гидротрансформатора
будем поступать так, как это делают в теории всех турбома-
шин — насосов, компрессоров, турбин, детандеров.
Анализ кинематики потока и энергообмен в потоке рабочей
жидкости будем производить, рассматривая некоторую среднюю
струйку. Эта условная струйка наделяется тем свойством, что
ее кинематика считается кинематикой всего потока. Другими
словами, скорость частицы, движущейся со средней струйкой (по
величине и направлению), определяет силовое взаимодействие
потока и лопатки. Такое упрощение, обычное для теории турбо-
машин, оказывается тем более допустимым и точным, чем на
большее число струек будет разбит поток и с чем большей тща-
тельностью затем при профилировании лопаток будет учтена
разница скоростей по размаху лопасти колеса. Предполагается,
Q
что вся масса потока с расходом— сосредоточена на средней
п
струйке (п— число делений потока).
Рабочие колеса заменим плоскими решетками с бесконечно
большим числом тонких лопаток, что позволит считать поток в
области колеса плоскопараллельным и осесимметричным. Влия-
ние конечного числа лопаток, проявляющееся в том, что углы
выхода потока отличаются от углов, задаваемых лопатками,
учитывается также по формулам, обычно применяемым в теории
турбомашин.
Считаем, что условия входа в рабочее колесо определяются
условиями выхода из предыдущего колеса; условия выхода из
любого колеса не зависят от условий входа.
36
В действительности оба эти условия полностью не выполня-
ются, причем, если говорить об условиях входа на колесо, то оп-
ределяющее влияние прерыдущего колеса имеет место, а если
говорить о средней струйке, то это несправедливо применительно
к отдельным струйкам, так как пространственный характер по-
тока зависит от кривизны стенок проточной части гидротранс-
форматора и, в частности, в межлопастных зазорах. Условия же
выхода потока из колеса даже при большой густоте решетки не
зависят от условий входа только при малых углах атаки.
В гидротрансформаторе с двигателем соединен вал одноко-
лесного одноступенчатого насоса центробежного или диагональ-
ного типа. Однако это могут быть и многоступенчатые насосы.
Может также применяться и осевой насос. Тип насоса определя-
ется параметрами проектируемого трансформатора — передаточ-
ным отношением и числом оборотов двигателя. Подробно о вы-
боре параметров проточной части будет сказано дальше.
В насосе механическая энергия двигателя преобразуется в
кинетическую и потенциальную энергию жидкости.
При движении жидкости по колесу насоса происходит, как
было показано выше, увеличение запаса энергии в каждом кило-
грамме жидкости. Запас энергии (напора) складывается из двух
частей — из запаса кинетической энергии и статического давле-
ния жидкости. Возрастание кинетической энергии Нд обусловли-
вается возрастанием абсолютной скорости частиц жидкости сн
на входе в насос до скорости Cj.2 — на выходе из колеса:
Статическая составляющая приращения напора обусловлена
переносным и относительным движениями: за счет того, что ча-
стицы жидкости, вращаясь с колесом, переместились по нему из
точки, где окружная скорость ип, в точку с окружной скоростью
ц12, статическое давление, под которым будут находится эти ча-
и2 —и2
стицы, возрастет на величину ——---------. При относительном
движении поток, протекающий по колесу, замедляется, его от-
носительная скорость в начале канала ш1Ь а в конце канала ш12,
поэтому статическое давление в относительном движении возра-
9 2
Ш12 — W\ 1
стает на величину ----------- . Таким образом, статическая
часть приращения напора жидкости при протекании потока по
колесу с бесконечным числом лопаток может быть подсчитана
по формуле
9 2 2 2
“12 —“11 , ш12~ш11
П ст. со — I
2g 2g
37
Вся работа, совершенная лопатками, т. е. соответственно за-
пас энергии давления и кинетической энергии, полученный жид-
костью при протекании ее по колесу, равна
„ и , и “12 ~“11 +ш12 — Ш11 +с12 ~~ С11
Нтеор оо — *1 cm оо j ** д сс> •
Величина Нтеор<х, как видно из вышесказанного, не зависит
от величины потерь энергии и определяется только достигнуты-
ми жидкостью скоростями.
Таким образом, механическая энергия двигателя, приводя-
щего насос, преобразуется работой лопаток в энергию жидко-
сти. Возрастание кинетической энергии жидкости на колесе на-
соса связано с увеличением абсолютной скорости частиц жидкости
при прохождении по колесу насоса. Статическое давление в пото-
ке жидкости, которая проходит через насос, возрастает, во-пер-
вых, за счет увеличения центробежных сил по мере продвиже-
ния жидкости с малого радиуса входа гн на больший — выхо-
да и вследствие замедления потока в относительном движении
по межлопаточному каналу насоса. Все приращение энергии мо-
жет быть подсчитано как величина, пропорциональная угловой
скорости колеса и приращению циркуляции до и после колеса.
Высота треугольников скоростей (см. рис. 9) есть меридио-
нальная или расходная составляющая ст абсолютной скорости,
тт Q Q
На входе ст1! =-----, а на выходе из насоса ст!2 = ——, где
Q— расход (в м?1сек) рабочей жидкости; d — диаметр, на кото-
ром определяется скорость ст, a bi — размах лопаток на этом
диаметре.
Из тех же треугольников скоростей можно установить зави-
симости
Cull ~ U11 Cmll tg Р11;
Cul2 = Ы12 cml2 tg P12-
Если подставить это выражение в формулу для напора на-
соса, то получим
Нтеор оо —
g
,,2 Ci ! “12 Hg Р12
12
\ ла12012
“11 — Ctg рп
nd11b11
Можно считать, что величина угла выхода мало изменяется
с изменением расхода. В том случае, если на входе в насос рас-
положен направляющий аппарат, то угол Рп есть величина по-
стоянная, поэтому уравнение для Нтеор есть уравнение прямой
Нтеор со “ -ДJ । Q,
где А и В — коэффициенты, постоянные для данного насоса.
38
Эта прямая отсекает на оси ординат отрезок H—Anf, а на
оси абсцисс Q =^L
В
В зависимости от соотношения коэффициентов А и В теорети-
ческая кривая насоса H = f(Q) может иметь различный угол
наклона к осям координат.
Если считать углы входа в насос заданными, то легко уста-
новить, что по мере увеличения угла р12 коэффициент В начнет
убывать, а теоретический напор, развиваемый насосом, будет ра-
сти, и наоборот — по мере уменьшения угла fJi,2 величина коэф-
фициента В будет возрастать, а величина теоретического напо-
ра насоса — уменьшаться.
Таким образом, уменьшение угла выхода из насоса умень-
шает его напор, увеличивает быстроходность и, как было пока-
зано ранее, увеличивает реактивность колеса.
Величина удельной быстроходности насоса сказывается на
преобразующих свойствах передачи.
На рис. 16 изображены кривые изменения важнейших харак-
теристик одноступенчатого гидротрансформатора с разным
удельным числом оборотов насоса, т. е. с разной реактивностью:
коэффициента загрузки двигателя П= М1<! , где индекс
Miopt \ пю /
opt относится к расчетному, а 0 — к стоповому режиму, к. п. д.
tj и коэффициента трансформации k. Каждый из графиков пост-
роен для гидротрансформаторов с передаточными отношениями
0,4; 0,6; 0,8 (рис. 16, а, б, в).
Из этих графиков следует, что для данной схемы существует
оптимальная по экономичности реактивность насоса.
Правильно выбранная реактивность насоса для данной схе-
мы обеспечивает наивысшее значение k0 для iopt, изменяющегося
в широких пределах.
Величина реактивности насоса передачи влияет на ее эконо-
мичность и степень прозрачности. Важно отметить, что эта же
закономерность повторяется для одноступенчатых гидротран-
сформаторов разных схем, рассчитанных на iOpt = 0,65. Правда, в
зависимости от схемы у них оказываются различные значения
Tjmax,' k0 И П (СМ. рИС. 16, 2, д, в).
Работами С. С. Руднева было установлено, что для любого
лопастного колеса справедлива формула, связывающая изме-
нение циркуляции колесом с его геометрией:
Г2 = + (1 — k) i0Q + 2л (1 — k) aR2a,
где Г] и Г2 — циркуляции перед и за рабочим колесом, осреднен-
ные по моменту количества движения; Q — объемный расход
жидкости; со — угловая скорость колеса; k, i0, Ra— геометриче-
ские параметры решетки.
39
Ю. В. Прокофьев предложил использовать эту зависимость
для вычисления размеров проточной части передачи, обеспечи-
вающих заданные преобразующие свойства.
После преобразования уравнение С. С. Руднева, записанное
для плоской решетки, можно записать и для пространственной,
Рис. 16. Характеристики одноступенчатых гидротрансформаторов с различной
реактивностью насоса:
а — = Z(n'): б — nmax“fi(ns'); в— П = /2(п'); г — k„ == /3(n's); д — цтах=
= Л(«4; е — П = Мп')
а S
но при этом необходимо произвести осреднение величин, входя-
щих в уравнение.
После соответствующих преобразований Ю. В. Прокофьевым
получено
Г12 = Ui + ki (*з — li)J Q + (1 — &i) 2n7?ai2<o1;
Г*22 “ [^2 4" ^2 (^1 4)1 Q 4" (1 ^г) 2л/?а22^2 4" &2^лс/?а1 2^15
Г32 = [£3 4" ^3 (4 4)1 Q 4" ^3 ‘ 2л/?д22^2»
Л12 = 4 4" (4 4), ^22 ~ ^2 4" ^2 (G ^2);
40
^32 — ^'з 4~ ^3 О'г «З);
Г12 = a12Q + (1 — fei)2n^ai2®i;
Г22 = ИцО. 4~ (1 &г) 2л;/?а22®2 4~ ^г2л^а!2®1^
Г32 = ^згО. 4" ^з2л:/?а22®2>
где а — параметр решетки.
Опытами Ю. В. Прокофьева установлено, что в гидротранс-
форматоре, где решетки работают с очень большими углами ата-
ки, постоянные k, io, Ra зависят от режима работы, причем для
одноступенчатых трансформаторов были получены следующие
пределы изменения этих величин:
для насоса fei = 0; Л и Ri2 от режима не зависят; для турби-
ны k20 = 0,1 -и 0,3; k2p = 0,05-4- 0,1; для реактора k30 = (—0,3) -4-
0,1; k3p = (—0,1)4-0,1.
Кроме этого, установлено
a120 a320 = S! (я12р а32р);
а120 a220 = S2 (a12p a22p)>
где Sj = 0,9 и s2 = 1,4 — постоянные величины.
Теоретический напор насоса
Я1=^-(Г12-Г32);
2ng
2лАх = (й12— ^32)^7 4" (1 ^1)2л^?п12
Принимая во внимание сделанные допущения, получим:
для режима * трогания с места (£21 = 0)
2лЛю = (^120 ^320) Яо 4" 2л/?й12 ~ (ai2 ^32) Яо 4- 2xiRai2,
для расчетного режима
2лй’1 = (a*2 — а’2)<7* 4- ^Ral2 —• k3 2лЯа22«21 •
Коэффициент прозрачности можно найти из равенства
Д _ 9о Ко _ Яо ____________S1 (а12 ~ а32)?0 4- _______
Я* h\ q* (a12 — “32)9* + 2n7?aI2 —fe32n7?a22/21
Гидравлический момент, действующий на насос, равен:
— Р (Г 12 Г32) = р — 1(^12 а2г) Q +
2л 2л
+ (1 ^i) 2®1 ~ ks2nR^22a>2]-
* Величины с индексом * относятся к оптимальному режиму работы гидро-
Q о*
трансформатора, причем ; о* = ;.
w10 СО]
41
Гидравлический момент, действующий на турбину:
^2 = Р V- (Г12 - Г22) = р [(ап - аг2) Q + (1 - k, - k2) X
2л 2п
X 2?t/^q12G)i 2^2]"
Коэффициент трансформации при трогании с места:
__ Л4г2о (а120 а22о) Чо + (I fe2o) 2n7?g] 2
Мг1° (Я120 — аз2о)Чо +2л^12
__ «2 (<*12— a22)‘7o + (l —^2о)2л7?д12
sl(a12 —a3i) % + 2л^а!2
Коэффициент трансформации на расчетном режиме:
_ Мг2 _ (а12 ~ a2i) ?* + (!— k2) 2л7?д12 —(1 — fe2) 2л^а2 2 *21
Мг1 (а12 — “зг)*?* + 2л^а12 — &32л^а22 *21
Из приведенных выше уравнений можно определить значе-
ния активных радиусов насоса и турбины:
Яа12=Й*
Чо
— % ——
ч
ч*
+ (1 -- &2о)
S2?tl.
1 -- k?f --
s2
Если принять гипотезу бесконечного числа лопастей, то
Ra22 =
ч*
п —
Чо
h*.
*21
Si — S-2 — 1; /^2 — /г3 — ^2о —
ч* ч
<7*
Уо \ ( S1
— Si ------ —
1 }\
Чо
~~ si“T
Ч
-о
$2 -s2 ЧО 4(>S2 ' 7
Чо
Ч*
\ч \S2 /
Si ч* > q*
4~
S2 «2 Qq Чо$2
42
l\(k0-l) + k0-k* .
<7o
При расчетах по гипотезе бесконечного числа лопастей
2 Л1
Ra22 = —
*21
Эти формулы можно использовать как исходные для оценки
возможностей выбранной схемы проточной части.
Для использования этих выражений при определении коэф-
фициента прозрачности П необходимо знать величину расхода
Qo в режиме трогания. Эту величину можно предварительно за-
дать в долях от номинального расхода.
§ 3. ПОСТАНОВКА ЗАДАЧИ РАСЧЕТА
ГИДРОТРАНСФОРМАТОРА
При расчете гидротрансформатора задаются формой и раз-
мерами круга циркуляции, а также размерами, определяющими
размещение решеток отдельных колес, кроме этого, определяют
значения расхода жидкости, протекающей по проточной части,
и напор Н, развиваемый насосом. Профилирование лопастей
рабочих колес и определение внешних и внутренних характери-
стик гидротрансформатора также входит в расчет.
Исходя из требований, изложенных в задании на проектиро-
вание трансмиссии, выбирают определенный тип гидротрансфор-
матора. При этом число ступеней берется ориентировочное в за-
висимости от требуемого расчетного передаточного отношения.
Если i’opt = 0,4 4- 0,8, то выбирают одноступенчатый гидро-
трансформатор; если «opt = 0,2 4- 0,3, то двухступенчатый, при
меньших iOpt — трехступенчатый и более.
Эти величины, установленные практикой могут быть уточ-
нены. Для этого воспользуемся критерием—, где с0 = ]/2gH —
со
характерная скорость. По мере уменьшения — увеличивается
со
изогнутость решеток турбинных ступеней. Физически это связано
с тем, что при относительном уменьшении окружной скорости
на лопатках величина напора не меняется. Установлено, что
0,4 < — < 0,6, так как при ——>-0,6 уменьшается напор, сраба-
со со
тываемый ступенью. Окружная скорость турбины и = uai (1,06 +
+ k), где k — коэффициент, учитывающий расположение турби-
ны по отношению к насосу. Для одноступенчатого трансформа-
тора k = 0; при числе ступеней z 2 & ~ 0,15.
Выражая напор насоса и турбины через окружные скорости,
получим
. { UH у
'l-'н ( I ^гидр
Z = ___V с°.2-----.
^pt(1.06-kfe)2
43
Если коэффициент напора насоса принять равным 0,7—1,7
„ ос- п п 0,065 0,5 ,,
и г]гмэр = 0,85 ч- 0,9, то получим Zmm -- и zmax =----. Меж-
'opt 'opt
ду этими значениями и находятся приведенные выше значения
числа ступеней в зависимости от передаточного отношения. Нуж-
но иметь в виду, что величины Ли! уменьшаются с увеличением
1
Определение расчетных значений Q и Н (совпадение с за-
данным вначале), а также установление суммы потерь напоров
производится по уравнению
Нг +Н2 + ~£Нп = 0,
где Hi и Н2 — напоры насоса и турбины, а — суммарная
потеря напоров в круге циркуляции.
Размеры и другие параметры круга циркуляции намечаются
предварительно исходя из размеров близких прототипов проточ-
ной части — по коэффициенту момента А. = ——— и коэффици-
енту мощности А = ———, а также с учетом сказанного в § 1—3.
yrtjD5
Лопасти профилируют при помощи треугольников скоростей.
Анализ совместной работы колес проводится при помощи рас-
ходно-напорных характеристик колес и кривых, характеризую-
щих изменение потерь напора с изменением расхода. При этом
обычно предполагается, что расход везде одинаков. Все эти во-
просы описаны в литературе [32], [47].
Точность этих операций зависит от точности определения по-
терь энергии в рабочих колесах и определения отклоняющей
способности лопаток рабочих колес.
Наиболее сложной является первая задача.
Задача расчета значительно упрощается, если можно исполь-
зовать геометрически подобный прототип передачи. При этом
расчет проточной части сводится к определению размеров круга
циркуляции и его элементов по формулам коэффициентов мощ-
ности А или момента А, а углы лопаток и их профилировку вы-
бирают одинаковыми для модели и проектируемой передачи.
§ 4. СПОСОБЫ РАСЧЕТА ПОТЕРЬ ЭНЕРГИИ
В ГИДРОТРАНСФОРМАТОРЕ
Сложность расчета гидравлического к. п. д. гидротрансфор-
матора объясняется спецификой процессов, происходящих в его
проточной части. Применяемые методы расчета гидротрансфор-
матора основаны на использовании опытных коэффициентов,
44
найденных экспериментально и оценивающих лопаточную систе-
му трансформатора в целом или на использовании геометриче-
ского и кинематического подобия.
Одна из первых методик расчета потерь, предложенная
А. П. Кудрявцевым {33], основана на введении понятия общего
коэффициента сопротивления лопастной системы, представляю-
щего собой отношение потерь напора Д/г к среднему скоростно-
му напору —Потери напора по А. П. Кудрявцеву состоят из
2g
L
потерь на трение Ahmp = л1пр---.-У- и потерь на удар, при-
4г2Ср 2g
чем, если для определения потерь на трение А. П. Кудрявцев
считает возможным, правда в первом приближении, пользовать-
ся коэффициентами сопротивления, найденными для изогнутых
труб различных поперечных сечений, без введения каких-либо
поправок, то для расчета ударных потерь А. П. Кудрявцев пред-
/
лагает в формулу Карно и Борда ^Д/гиэ = J вводить попра-
вочные коэффициенты, найденные по действительной характери-
стике выполненной передачи. По методике А. П. Кудрявцева
расчет преобразователя состоит из двух этапов: первого, при-
ближенного, с использованием теоретических коэффициентов
потерь и второго, уточненного, с введением поправок, найденных
при анализе результатов испытаний передачи.
А. Я. Кочкарев [28] делит потери в проточной части гидро-
трансформатора на несколько видов:
потери от трения частиц друг о друга и о стенки проточной
части; от поворота потока; диффузорности; внезапного суже-
ния и расширения каналов;
потери, связанные с углом атаки; от срыва индуктивных вих-
рей и образования кольцевых вихрей.
Учитывая особенности гидропередачи (длину каналов, обра-
зованных лопастными системами проточной части, сложность
процессов внутри проточной части, влияние рабочих элементов
и самих потерь друг на друга), А. Я. Кочкарев рассматривает
потери, которые можно выявить в результате опытов и для
которых можно получить соответствующие коэффициенты
потерь.
Для этого потери условно делятся на:
потери, зависящие от расхода и пропорциональные квадрату
расхода Д/tj;
потери, зависящие от угла атаки и определяемые квадратом
разности окружных составляющих абсолютной скорости до ло-
патки и на лопатке и^л , т. е. Ди^ ;
потери от диффузорности в каналах рабочих колес.
45
К первой группе относятся потери на трение, поворот, вне-
запное сужение и расширение:
= X L
4f zcp
Q2
Ср
Обобщая накопленный экспериментальный материал по ис-
следованию гидротрансформаторов, А. Я. Кочкарев рекоменду-
ет коэффициент сопротивления в этой формуле принимать л =?
= 0,064-0,085.
Потери второй группы определяются по формуле
ЛЙ2 =
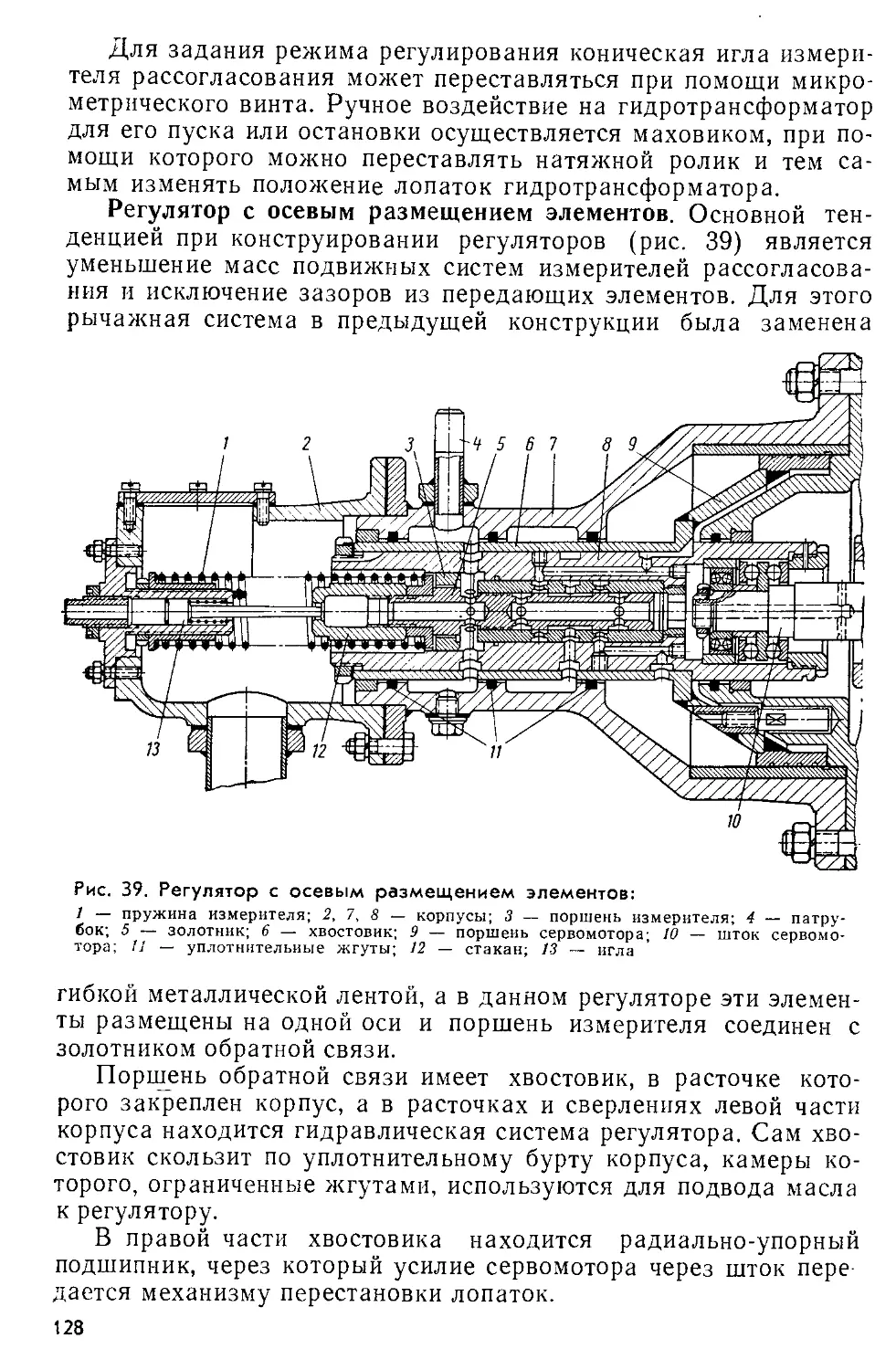
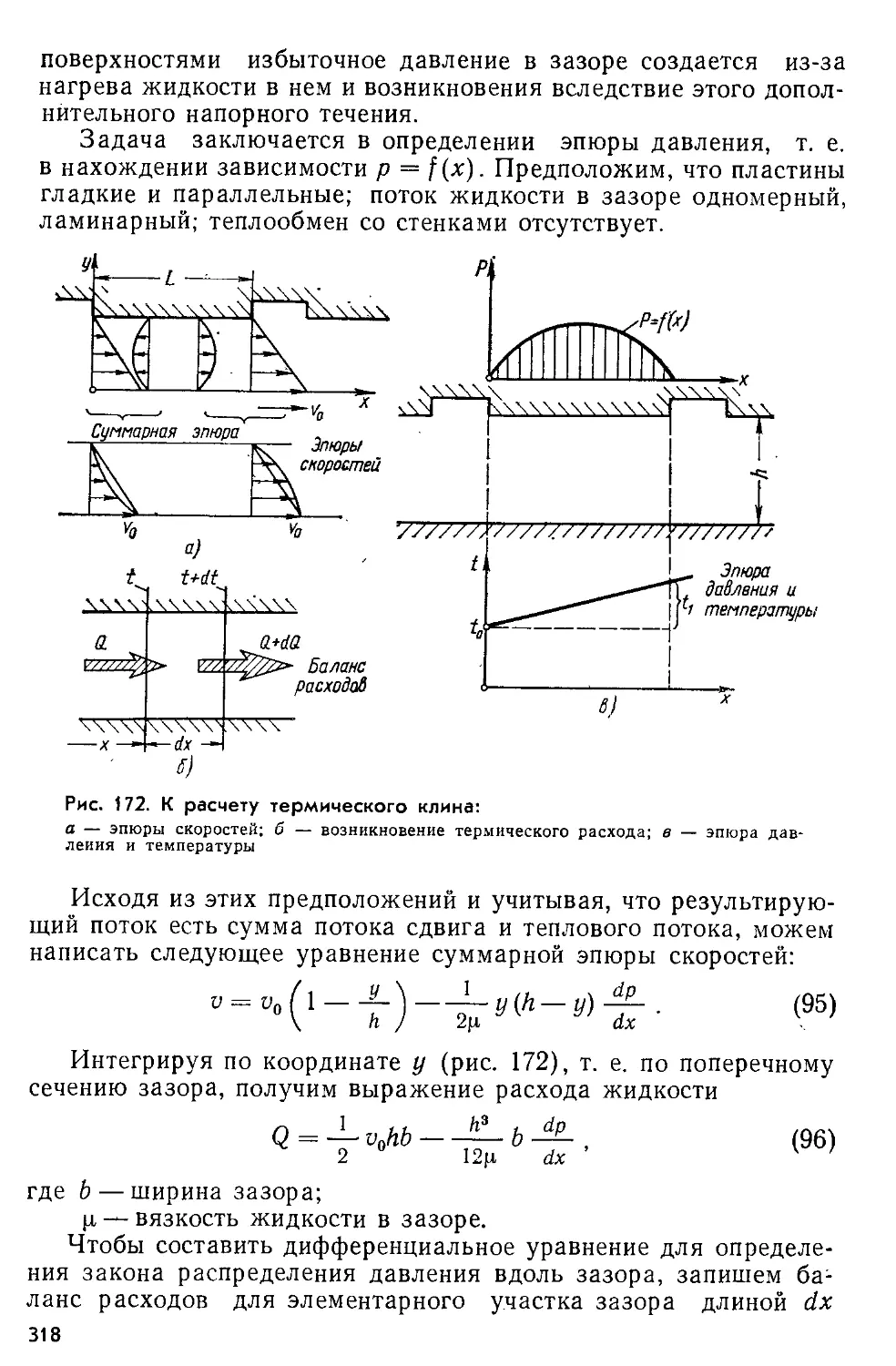
Коэффициент ударных потерь рекомендуется брать для гид-
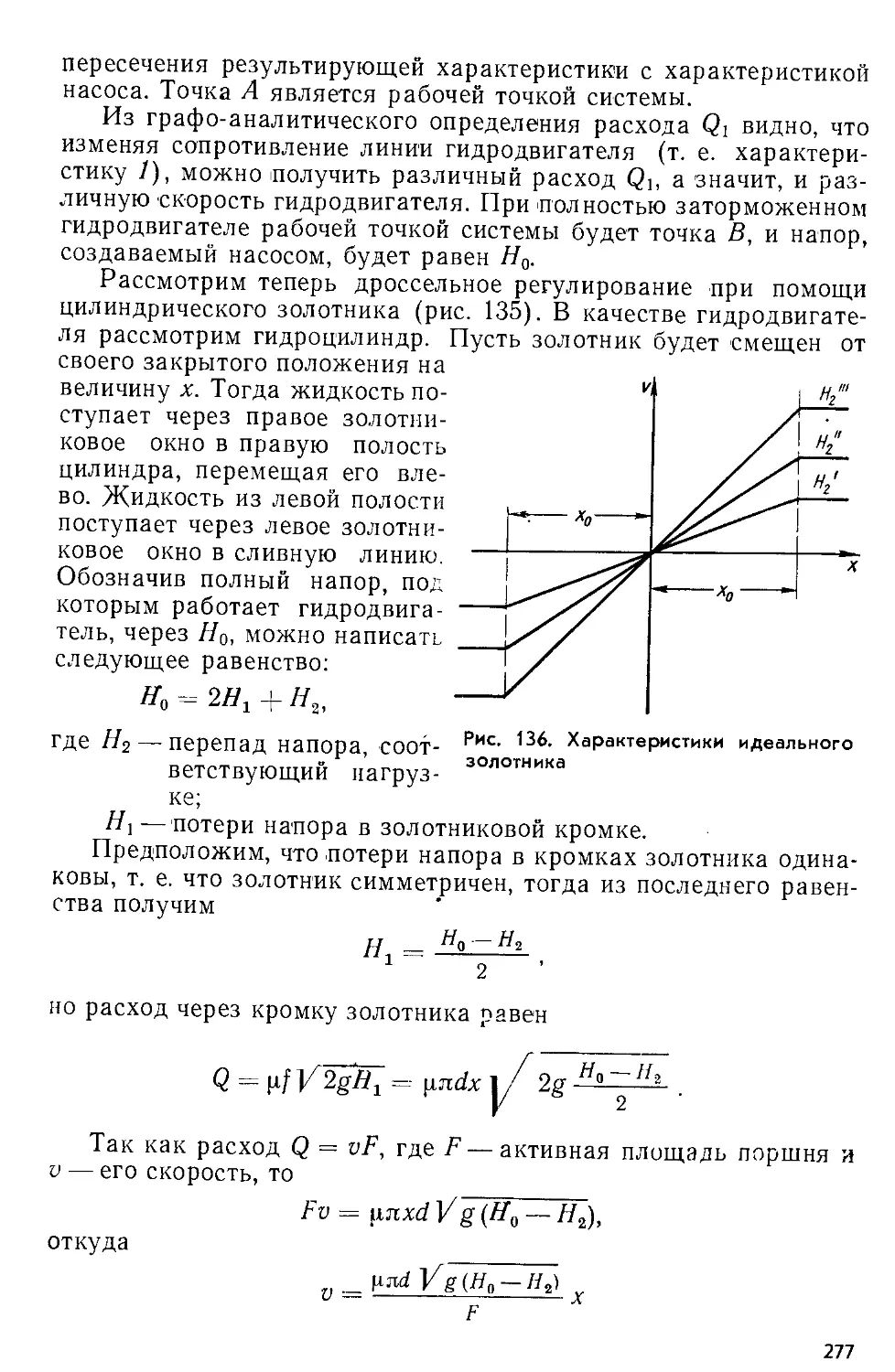
ропередач с центробежной турбиной <р1/э= 1, с центростреми-
тельной турбиной <руа = 0,3 -т- 0,5 в зависимости от угла атаки.
Потери третьей группы Дй3 можно определить по формуле
3 'диф н\ F2W J 4gF\w
F\wn F2w—площади на входе и выходе из канала, опреде-
ленные в сечениях, перпендикулярных к вектору относительной
скорости.
Коэффициент диффузорных потерь принимают таким же, как
для труб (по данным Н. С. Идельчика), а коэффициент нерав-
номерности потока изменяется в пределах kH = 1 ч- 2, зависит
от угла расширения диффузора и отношения максимальной ско-
рости к средней скорости потока.
Предлагая описанный выше метод, А. Я. Кочкарев указы-
вает в то же время на приближенность получаемых значений, по-
скольку коэффициенты потерь получены из анализа конкретных
проточных частей с определенными геометрическими и кинема-
тическими соотношениями. Возможность их использования в
других случаях требует специальных исследований.
Предлагаемая Д. Я- Алексапольским методика расчета по-
терь сводится к их разделению на потери трения и потери от
местных сопротивлений.
Д. Я. Алексапольский [1] указывает, что формула Ай =
г w
. с* ср
= к-л------, учитывающая суммарные потери на трение и в ме-
4r2cp 2g
стных сопротивлениях — поворот, внезапное сужение и расшире-
ние, пригодна лишь для ограниченного числа гидротрансформато-
ров. При этом величину X он рекомендует принимать равной
0,06—0,085, т. е. в 3—3,5 раза большей, чем она обычно полу-
чается по графику для труб с естественной шероховатостью.
46
Д. Я. Алексапольский считает, что при такой трактовке коэф-
фициент А. в этой формуле имеет тот же смысл, что и коэффициент
сопротивления проточной части гидротрансформатора и рекомен-
дуемая величина А приемлема только для гидротрансформаторов
тех типов, на основании испытания которых она дается.
При раздельном определении потерь коэффициент потерь на
трение А можно определять по графику для труб с естественной
шероховатостью.
Потери от диффузорности определяются как потери в кониче-
ском диффузоре с эквивалентным углом расширения. Потери от
поворота потока в меридиональной плоскости и в межлопаточном
канале в неподвижных и вращающихся колесах считаются про-
порциональными квадрату меридиональной скорости, причем
коэффициент пропорциональности рекомендуется брать равным
0,1—0,15.
Баланс энергии записывается в виде уравнения [1]
Нн — Нт = AAj + A/i2 + A/i3 + A/i4,
где АЛ1 — потери на трение с поверхностью каналов;
Ай2 — потери при изменении направления движения поворо-
та потока;
Айз — потери при изменении скорости движения (диффузор-
ные потери);
Ай4 — потери на удар;
ААХ + Ай2 + А/г3 = 5
и
А/г„ = ;
принимаем <ру9 = 1,0 (однако есть и другие рекомендации:
Фг/Э = 0,5 ч-12).
В отличие от Д. Я. Алексапольского, И. ф. Семичастнов [47]
при определении потерь на поворот потока не разделяет их на по-
тери от поворота в двух плоскостях (в меридиональной плоскости
и в межлопаточном канале), но в то же время вводит новые кате-
гории потерь, связанные с внезапным сужением и расширением
потока на кромках колеса при входе и выходе из межлопаточно-
го канала. Таким образом, И. Ф. Семичастнов предлагает сле-
дующую классификацию потерь.
1. Потери напора на удар при входе в колесо, возникающие
при несовпадении относительной скорости жидкости при входе
в колесо с касательной к лопатке:
ДИц
&Ьуд = (Руд '
где коэффициент удара <руа рекомендуется принимать равным 1.
47
2. Напор, теряемый на внезапное сужение канала колеса на
входе из-за стеснения:
^hcgX = ^fcyOK 2g ’
причем коэффициент <рс-уж принимается равным 0,4—0,5.
3. Потери напора на трение в межлопаточных каналах колеса:
w2
ср
~2g~'
™ 2Ср
Коэффициент трения X И. Ф. Семичастнов рекомендует опре-
делять для гладких поверхностей по формуле Блазиуса X =
= 0,316 Re-0’2j\_а для шероховатых — по формуле Мизеса А. =
= 0,01 + "рЛ’ где Г2ср — средний гидравлический
радиус; 1гш— абсолютная шероховатость.
И. Ф. Семичастнов подчеркивает, что еще не найдена форму-
ла, по которой можно было бы определить коэффициент Л для
вращающихся каналов, т. е. для каналов гидротрансформатора.
В связи с этим важно иметь близкий прототип проектируемой
передачи.
4. Потери напора на искривление межлопаточных каналов
в колесе Ahnoe = ^пов ——, где коэффициент сопротивления gnoe
считается как коэффициент местного сопротивления для
трубы.
5. Напор, теряемый на внезапное расширение при выходе из
колеса, А1грасш =
Баланс энергии И. Ф. Семичастнов подсчитывает по форму-
ле Av^ + Bvm + С — 0, причем при расчете коэффициентов А, В
и С последовательно определяются коэффициенты потерь на всех
колесах гидротрансформатора с учетом их геометрических осо-
бенностей.
Г. М. Хуршудян [55] предполагает, что потери на поворот свя-
заны с неравномерностью распределения скорости по сечению
канала и пропорциональны квадрату расхода, он рекомендует
учитывать их при помощи коэффициента А (вместе с потерями на
трение), причем для определения коэффициента А нужны соответ-
ствующие поправки, учитывающие специфику течения жидкости
в каналах гидротрансформатора.
В связи с такой постановкой задачи все гидравлические поте-
ри Г. М. Хуршудян делит на:
потери на трение AhTp и потери на поворот струи;
потери на расширение струи ДАрасш;
48
потери, связанные с натеканием струи на лопатку с некоторым
углом атаки, т. е. потери на удар Д/^д.
При расчете потерь на трение принимаются следующие допу-
щения: вращение колеса не влияет на величину потерь; распре-
деление скорости поперек каналов равномерное; канал рассчи-
тывается как участки трубы бесконечной длины, т. е. потери на
трение определяются, как для труб и каналов с различными
геометрическими формами.
Коэффициент потерь можно определять по формулам: Л =
= (3,14-3,7) 7 вти или (в среднем) К = 3,4 7ВТИ , где /,вти опре-
деляется по графикам ВТИ для коэффициентов потерь в трубах
и вычисленным значениям Re и относительной шероховатости.
Увеличение коэффициента потерь /. в 3 раза по сравнению
с лвти (для труб) объясняется спецификой течения жидкости
в
гидротрансформаторах.
Потери на расширение в диффузорных участках проточной
части Г. М. Хуршудян предлагает определять по формуле
. < Дну2 , ,
ДЛрасш=<р--- , а коэффициент <р — по имеющимся зависимостям
2g
для круглых и квадратных диффузоров.
Потери на удар Г. М. Хуршудян находит по формуле
Ду2
причем для определения коэффициента фуэ можно пользоваться
таблицей (для непрофилированных лопаток постоянной толщи-
ны), в которой в зависимости от угла атаки коэффициент (pvg ме-
няется от 0,3 до 1,3, а также графиком для лопастных систем
с профилированными лопатками, согласно которому фуа меняет-
ся от 0,2 до 0,9. Указывая на сложность учета явлений, связанных
с ударным обтеканием лопасти, Г. М. Хуршудян подчеркивает,
что рекомендации А. П. Кудрявцева и К. Пфлейдерера не всегда
подтверждаются испытаниями гидротрансформаторов.
Все изложенные методики можно, таким образом, разделить
на две группы: методики, в которых потери вычисляются при по-
мощи объединенного коэффициента потерь канала, и методики,
где потери вычисляются, как сумма потерь от местных сопротив-
лений. В первом случае оказывается затрудненным использова-
ние опыта, поскольку общий коэффициент потерь канала может
быть перенесен только на близкий по параметрам объект. В слу-
чае же раздельного определения коэффициентов потерь для каж-
дого вида сопротивлений в канале не учитывается их взаимное
влияние, что также должно ограничивать область использования
этих значений близкими конструкциями.
Обобщая вышесказанное, можно утверждать, что известные
методы расчета потерь в проточной части гидротрансформаторов
4 Заказ 1076 49
основаны на использовании коэффициентов потерь, полученных
при экспериментальном исследовании каналов различной конфи-
гурации.
Специфику течения жидкости в гидротрансформаторе авторы
учитывают введением соответствующих поправок к этим коэффи-
циентам.
Поправки определяются на основании опыта исследования
определенных (но различных) проточных частей, поэтому вели-
чины коэффициентов потерь получаются различными, хотя во
всех случаях наблюдается удовлетворительное совпадение ра-
счетных и экспериментальных кривых.
В. И. Лапидус [34] считает, что изложенный А. П. Кудрявце-
вым метод расчета можно использовать в случаях, когда имеется
готовый трансформатор, близкий по своим свойствам к проекти-
руемому. При различном расчете потерь, вызванных на одном и
том же участке различными причинами, не может быть учтено
взаимное влияние различных видов потерь, проявляющееся в со-
ответствующем перераспределении скоростей в потоке. Подбирая
различные коэффициенты сопротивления и удара, можно полу-
чить желаемую точность совпадения напорного баланса с данны-
ми испытаний. Однако такое совпадение не является подтверж-
дением справедливости метода расчета, поскольку может ока-
заться, что для гидротрансформатора другой конструкции напор-
ный баланс сходится лишь при других значениях поправочных
коэффициентов.
Описанные методы расчета, учитывающие специфику различ-
ных проточных частей гидротрансформатора, имеют определен-
ные достоинства, связанные с относительной простотой и надеж-
ностью результатов расчета для данного гидротрансформатора,
и применяются при их совершенствовании и доводке.
К числу недостатков, общих для всех методов расчета потерь
в гидротрансформаторе, следует отнести отсутствие общеприня-
той методики выбора на основании опыта коэффициентов потерь
и как следствие этого — невозможность использования опытных
данных при расчете новой проточной части, не имеющей близкого
прототипа.
Одним из методов расчета, широко применяемых в практике
турбостроения, является метод теории решеток, основанный
на использовании результатов продувки плоских пакетов
профилей.
Процесс преобразования гидравлической энергии в механиче-
скую на лопатках рабочих колес сопровождается потерями:
профильными, связанными с явлениями на поверхности про-
филя;
концевыми, возникающими на поверхностях, ограничивающих
лопатки по концам (по размаху);
50
объемными; это утечки жидкости через зазоры между лопа-
точными венцами и корпусными деталями;
потерями, связанными с нерациональной организацией потока
в ступени.
Профильные потери. При обтекании профиля плоским пото-
ком вязкой жидкости возникают потери энергии, обусловленные
вязкостью. У поверхности профиля образуется пограничный слой,
где скорость потока изменяется от некоторого значения величины
скорости w до 0. В этой области потока есть скольжение слоев
жидкости относительно друг друга и возникают потери трения,
которые составляют большую часть профильных потерь.
Пограничный слой может быть ламинарным и турбулентным.
В последнем случае потери оказываются большими.
При увеличении числа Re пограничный слой становится тонь-
ше. При этом при определенных соотношениях вязкости и скоро-
сти потока поверхность становится гидравлически шероховатой:
высота неровностей становится больше толщины пограничного
слоя и величина шероховатости оказывает влияние на величину
профильных потерь.
Если течение в межлопаточном канале диффузорное, то мо-
жет наступить отрыв потока, сопровождающийся особенно боль-
шими потерями. Физическую картину явлений, приводящих к от-
рыву, можно представить как результат торможения потока. При
этом величина кинетической энергии потока падает, и возросшее
давление вниз по потоку приводит к его отрыву.
Связанные с этим явлением потери на профиле особенно ве-
лики. Известны случаи, когда отрыв потока на деталях, ограни-
чивающих лопатку по размаху (тор, чаша), не приводили к за-
метному снижению экономичности колеса, хотя расход и умень-
шался. К профильным потерям относятся также кромочные
потери, порождаемые конечной толщиной выходной кромки и
видом пограничного слоя в этой выходной области. Коэффициен-
ты профильных потерь можно представить в виде суммы
I = Е 4- Е
^лр -тр ~ -кр>
где %ТР и 1кР — коэффициенты, учитывающие трение на поверх-
ности профиля и кромочные явления.
При отрывном обтекании %пР = %тР + %отР.
Существенное влияние на величину потерь оказывает место
расположения минимума давления на профиле. Чем ближе к вы-
ходу эта точка на спинке профиля, что приводит к увеличению
диффузорной области и области отрыва, тем ниже экономичность
профиля. Чем больше падение давления на профиле, тем больше
на нем потери.
Величина кромочных потерь является функцией относитель-
ной толщины выходной кромки б =—, где б — толщина кромки
Ь
4* 51
лопатки, а b — хорда профиля. Обычно для механически обрабо-
танной лопатки гидротрансформатора принимают б = 0,5ч-0,3 мм,
для литых лопаток б ~ 0,5 мм. Выходную кромку лопатки закруг-
ляют радиусом, относительная величина которого влияет на ве-
личину коэффициента сопротивления профиля. Кромочные потери
зависят не только от толщины кромки профиля, но и от отноше-
ния этого размера к размеру горла решетки, а ~ (0,18 4-
0,2) —.
а
Шаг решетки. Шаг решетки t влияет на величину профильных
потерь. Это влияние видно на эпюре давления, которая опреде-
ляет протяженность диффузорных участков канала между лопат-
ками. По мере увеличения шага точка минимума давления сме-
щается к входной кромке и увеличивается абсолютная величина
разряжения.
Однако с увеличением шага поверхность трения уменьшается.
Вязкость жидкости также влияет на скорость, которая у по-
верхности профиля становится равной нулю. По мере удаления от
поверхности скорость возрастает, асимптотически приближаясь
к величине скорости при свободном скольжении идеальной жид-
кости. Это явление наблюдается на небольшом удалении от стен-
ки в области тонкого пограничного слоя.
В пограничном слое развиваются значительные силы вязкого
трения, и в нем касательные напряжения трения изменяются от
максимального значения на стенке почти до нуля на небольшом
расстоянии от нее. За профилем сбегающий пограничный слой
взаимодействует с внешним потоком и образует область подтор-
моженной жидкости, в которой поле скоростей постепенно вырав-
нивается. Эта область называется аэродинамическим следом.
Вихревые потери обусловлены наличием местных диффузорно-
стей на профиле. Отрыв потока на профиле, связанный с натека-
нием, чаще всего происходит вблизи входной кромки.
Величина зоны отрыва зависит, в частности, от величины угла
атаки. Поскольку на поддержание вихревого движения в зонах
отрыва расходуется часть энергии, эти зоны являются источником
дополнительных потерь, которые и называются вихревыми.
Кромочные потери связаны с конечной толщиной выходной
кромки и с отрывом пограничного слоя при сходе с нее.
В результате отрыва и взаимодействия слоев, стекающих
с вогнутой и выпуклой поверхностей, с внешним потоком за вы-
ходной кромкой возникают вихри. На поддержание вихревого
движения за кромкой и на перемешивание вихревого следа с яд-
ром потока затрачивается часть кинетической энергии.
Профильные потери характеризуются коэффициентом
Этот коэффициент определяется траверсированием потока при
испытаниях прямых или кольцевых решеток в аэродинамических
трубах.
52
Для определения %пр продувается решетка с большим относи-
тельным размахом. При этом коэффициент профильных потерь
1пр определяется как отношение потерь полного давления в сред-
К)2
нем сечении лопатки к скоростному напору— и, следовательно,
характеризует потери от трения, вихревые потери на профиле и
кромочные потери.
Значительную часть потерь энергии в решетках составляют
концевые и вторичные потери, связанные с кривизной межлопа-
точных каналов, а также наличием поперечных градиентов дав-
лений в канале, вызывающих вторичное вихревое движение в по-
граничных слоях от вогнутой поверхности по плоским стенкам
к спинке.
Энергия, затрачиваемая на поддержание вторичного (вихре-
вого) движения и на преодоление дополнительного трения на пло-
ских стенках, составляет концевые потери.
Их величина зависит от геометрических и режимных парамет-
ров: относительной высоты лопаток, угла поворота потока в ре-
шетке (изогнутость профиля), конфузорности канала, шага, угла
выхода и величины Re (или М).
Любые изменения геометрических и режимных параметров,
вызывающие увеличение поперечных градиентов давления в ре-
шетке, утолщение пограничного слоя и появление диффузорных
участков на выходе увеличивают концевые потери. Коэффициент
концевых потерь 1конЧ определяется в результате продувок реше-
ток как разница между коэффициентом суммарных потерь icyM и
коэффициентом профильных потерь
>конц ^сум ^>пр
Принятое в теории решеток разделение потерь на концевые
и профильные не только правильно отражает физическую приро-
ду их возникновения, но и позволяет определить каждую из этих
составляющих экспериментально при продувке профилей.
Рассмотрим, как учитывается в теории решеток влияние от-
дельных режимных и геометрических параметров на их характе-
ристики.
Условия течения потока вязкой жидкости учитываются чис-
лом Re:
Re = ^,
V
причем за характерную скорость w принимается относительная
скорость выхода (для диффузорных решеток — скорость входа),
а за линейный размер I принимается длина хорды лопатки, так
как она характеризует протяженность пограничного слоя, опреде-
ляющего потери трения на профиле.
53
Данные испытаний решеток получены при диапазоне чисел
Де = 105-4-107, причем, как показали опыты, режим автомодель-
ности имеет место при Re=105 для диффузорных потоков и при
Re = 3 -105 для конфузорных потоков.
Характер изменения потерь в решетках и углов выхода потока
от числа Re зависит от геометрических размеров (конфузорности
и кривизны обводов каналов, толщины выходной кромки, формы
профиля, шероховатости) и режимных параметров (угла входа,
степени турбулентности, числа М).
К настоящему времени наибольшее число опытных данных по-
лучено для дозвуковых скоростей (М 0,4) при малых степенях
турбулентности (Ео = 0,5ч-1,5%).
При дозвуковом безотрывном обтекании с увеличением Re
профильные и концевые потери в решетках непрерывно уменьша-
ются, особенно интенсивно в зоне малых Re (для профилей с от-
носительно малой толщиной выходной кромки). С увеличением
Re пограничный слой становится тоньше, область перехода лами-
нарного слоя в турбулентный смещается против потока и увели-
чивается наполнение профиля скорости в турбулентном участке
слоя. Смещение области перехода уменьшает интенсивность сни-
жения потерь с ростом Re, однако начало зоны практической
автомодельности сдвигается в сторону больших Re = (6ч-10) • 105.
Угол выхода из решетки непрерывно уменьшается с увеличением
Re < ReKP,
Влияние вязкости проявляется в связи с отрывом погранично-
го слоя, который возникает на тех участках профиля, где гра-
диент возрастающего по потоку давления превосходит критиче-
скую величину, которая зависит от вида пограничного слоя и
местных условий обтекания профиля.
В общем случае при обтекании решетки имеют место два
диффузорных участка: на входе вблизи критической точки пере-
хода ламинарного слоя в турбулентный и на выходной кромке,
где поток отрывается из-за конечной толщины выходной
кромки.
Влияние вязкости ввиду образования пограничного слоя и
отрывов сглаживает теоретическое распределение скоростей,
определенных для той же решетки в потоке невязкой жидкости.
Исследование плоского потока вязкой жидкости через решет-
ку производится методами теории пограничного слоя и теории
турбулентных струй.
Однако из-за турбулентного течения в решетке расчетные ме-
тоды носят полуэмпирический характер, поэтому большое значе-
ние приобретают экспериментальные исследования.
При Re>105 влияние вязкости проявляется вблизи профилей
только в пределах тонкого пограничного слоя с толщиной 6 ~
54
~ Re 2 (если слой ламинарный) и Re(если слой тур-
булентный) .
Вне пограничного слоя поток можно считать невязким. Давле-
ние в каждом поперечном сечении можно считать постоянным и
равным давлению в потоке невязкой жидкости. Это давление со-
ответствует обтеканию решетки профилей, утолщенных на вели-
чину толщины вытеснения $вЫт-
Величина ЪвЫт обычно настолько мала, что ее влиянием на
распределение скорости невязкого потока можно пренебречь.
Особенно велико влияние числа Re на потери напора и угол
выхода потока при отрывном обтекании спинки и для профиля
с относительно толстой выходной кромкой, когда отрыв потока на
спинке или на кромке происходит до точки перехода ламинарно-
го слоя в турбулентный. В этом случае при увеличении Re проис-
ходит турбулизация слоя в зоне отрыва и отрыв смещается по
потоку: потери резко уменьшаются.
Начало зоны практической автомодельности по числу Re зави-
сит от многих геометрических и режимных параметров. В частно-
сти, с ростом начальной турбулентности потока и уменьшением
угла входа Pi < fiipacn значение ReKJ> уменьшается.
Приближенная оценка влияния числа Re может быть произве-
а
дена по формуле, рекомендуемой Н. М. Марковым: £ = £о1/ — >
у Re
где g — коэффициент потерь при Re, а |о— при Reo. В области ма-
лых чисел Re, т. е. при ламинарном пограничном слое, а = 2, при
больших Re (что соответствует турбулентному пограничному
слою) а = 5. Насколько велика разница, можно судить по тому,
что в первой области изменение Re вдвое означает изменение В
на 41%, а во второй — на 12%. Это можно учесть и при помощи
графика (рис. 17).
Имеющиеся в атласах аэродинамические характеристики ре-
шеток профилей получены в аэродинамических трубах при малой
степени турбулентности (Ео = 0,005^-0,15). Под степенью турбу-
лентности Ео подразумевается отношение средней квадратичной
пульсационной скорости Ду к средней скорости течения v. Изме-
нение степени турбулентности приводит к смещению зоны пере-
хода ламинарного пограничного слоя в турбулентный на обте-
каемой поверхности и тем самым влияет на сопротивление про-
филя.
Ориентировочное определение влияния степени турбулент-
ности Ео на профильные и концевые потери может быть произ-
ведено при помощи графика (рис. 18).
Теоретически определить степень турбулентности потока и ее
влияние на характеристики решеток невозможно.
55
Экспериментальные данные по турбулентности потока в гид-
ротрансформаторах отсутствуют, поэтому рекомендуемые
С. Ф. Врублевской зависимости по влиянию степени турбулентно-
сти на коэффициенты потерь в решетках не могут быть использо-
ваны при расчете гидротрансформаторов. В то же время есть
основание предполагать, что в проточной части гидротрансформа-
тора поток турбулизирован (особенно на оптимальном режиме)
так же, как и в проточной части многоступенчатой турбины или
компрессора.
Поскольку расчеты многоступенчатых турбин проводятся на
основе результатов продувок пакетов профилей в аэродинамиче-
Рис. 18. Влияние степени турбулент-
ности на профильные (кривые 1, 2)
и концевые (кривые 3, 4, 5) потери
для реактивных (кривые 2, 5) и актив-
ных (кривые 1, 3, 4) решеток
Рис. 17. Влияние числа Re на про-
фильные потери:
1 — в активных решетках; 2 — в реак-
тивных решетках
ской трубе, где степень турбулентности составляет 1,5—2% без
введения каких-либо поправочных коэффициентов, то и при ра-
счетах гидротрансформаторов (до проведения специальных ис-
следований) также можно не вводить какие-либо поправки
к коэффициентам потерь.
Важно отметить, что в турбомашинах степень турбулентности
гораздо больше и достигает 20—30%. При этом, как указывают
некоторые авторы, коэффициент потерь может увеличиться (в 1,5
и даже 2 раза). Наибольшее увеличение коэффициентов потерь
наблюдается на тонких, мало изогнутых реактивных профилях.
Возрастание степени турбулентности меньше сказывается на ве-
личине коэффициентов потерь активных* сильно изогнутых, т. е.
хуже обтекаемых и имеющих большие коэффициенты потерь, про-
филях.
Переход от характеристик решеток, полученных для сжимае-
мых рабочих тел (воздуха, пара, газа), к характеристикам реше-
ток для практически несжимаемых сред (воды, масла) связан
с введением поправки на число Маха, равное отношению относи-
тельной скорости на профиле к скорости звука.
56
На основании результатов многочисленных экспериментов,
проведенных различными авторами с решетками, можно утвер-
ждать, что коэффициенты потерь не зависят от числа Маха при
числах М<0,3 ч- 0,4.
В осевой ступени с цилиндрическими лопатками неравномер-
ность поля скоростей обусловлена вихревым движением за кром-
кой, вторичными течениями у концов лопаток предыдущей ре-
шетки и изменением относительного шага по высоте лопаток.
Имеющиеся сведения по влиянию веерности и высоты на по-
тери в кольцевых решетках [52] свидетельствуют о том, что при
встречающихся в гидротрансформаторах значениях —— <0,1
&ср
поправкой на веерность можно пренебречь (здесь h — размах ло-
патки, Dcp — средний диаметр
размещения лопаток).
Неравномерность поля ско-
ростей, обусловленная погра-
ничным слоем на торцовых по-
верхностях, может в отдельных
случаях влиять на экономич-
ность решетки.
Зная действительный ха-
рактер неравномерности пото-
ка по размаху лопасти и опре-
делив коэффициенты профиль-
Рис. 19. Зависимость общего ко-
эффициента потерь в модельном
насосном колесе от угла входа
ных потерь по отдельным сече-
ниям, можно расссчитать суммарные потери напора на профиле.
Погрешность такого расчета связана лишь с неточностью в оп-
ределении концевых и вторичных потерь, с чем приходится сог-
ласиться, тем более что основная доля потерь в решетке прихо-
дится на профильные потери.
Возможность расчета потерь по средней струйке обусловлена,
таким образом, возможностью расчета пространственного потока
и профилированием лопасти в соответствии с действительным
законом изменения скорости по ее размаху.
Имеющиеся многочисленные теоретические и эксперименталь-
ные работы по исследованию потока в гидротрансформаторе поз-
воляют считать такую задачу выполненной и профилировать ло-
пасть таким образом, чтобы избежать резких отличий в условиях
обтекания ее отдельных участков.
Изменение угла натекания и появление углов атаки учиты-
вается в теории решеток не введением новой категории потерь —
потерь на удар, а соответствующим изменением коэффициентов
профильных и концевых потерь. Теоретический расчет профиль-
ных потерь при переменных углах входа затруднен, так как на
структуру потока в решетке при переменных углах входа Pi
влияет большое число геометрических и режимных параметров:
57
относительный шаг, форма и толщина входной кромки, степень
конфузорности канала, число Re и др. Приведенные в атласах за-
висимости коэффициентов потерь от углов натекания построены
в достаточно широком интервале.
На основании обработки экспериментальных данных построе-
ны графики, по которым можно ориентировочно определить уве-
личение профильных и концевых потерь при изменении угла вхо-
да Р1 (рис. 19).
§ 5. ВЛИЯНИЕ ГЕОМЕТРИИ РЕШЕТКИ НА ПОТЕРИ В НИХ
Рассмотрим теперь влияние некоторых геометрических пара-
метров на потери в решетке.
Полученные при продувке плоских пакетов профилей расчет-
ные и экспериментальные характеристики относятся к аэродина-
мически гладким поверхностям.
Для характеристики состояния поверхностей лопаток вводит-
ся относительная шероховатость km = , где кш— абсолютная
шероховатость в мм.
Ориентировочные значения абсолютной шероховатости по-
верхностей лопаток приведены в табл. 5.
Профильные и суммарные потери в решетках возрастают
с увеличением относительно шероховатости km.
В зависимости от шероховатости лопаток может меняться ха-
рактер течения. При малых скоростях бугорки шероховатости по-
гружены в ламинарный подслой и поверхность лопатки можно
считать гладкой. Такой режим сохраняется до тех пор, пока
Re = kuw. к.0Гда бугорки шероховатости выходят за преде-
У
лы ламинарного подслоя, наступает резкое увеличение коэффи-
циента потерь, который при дальнейшем увеличении скорости не
зависит от числа Re. Наступает режим автомодельности по числу
Re. Сопротивление трения для этих режимов зависит от величины
относительной шероховатости кш. Если бугорки шероховатости
имеют почти такой же размер, что и толщина ламинарного под-
слоя, то имеют место переходные режимы.
Имеющиеся опытные данные недостаточны для разработки
надежного метода расчета с учетом шероховатости. Влияние
шероховатости можно видеть из формулы
Показатель степени т, как показывают исследования, равен
0,25—0,3.
Изменение толщины выходной кромки профиля решетки при-
водит к изменению величины потерь и, в частности, кромочных.
58
Таблица 5
Чистота поверхности лопаток
Способ обработки поверхнос- ти лопатки (способ получения] Лопатки грубого литья Шлифованные лопатки, повреж- денные коррозией Точное литье Строгание
Средняя высота неров- ностей 100-5-250-10-3 (Юн-30) • 10~3 (20-5-30) -10~3 (20-5-40) • 10~3
Обозна- чение класса чистоты поверх- ности VI — V4-S-V5 V4-5-V5
Способ обработки поверхнос- ти лопатки (способ получения) Точение Фрезерование по копиру (отделочное) Шлифование Отделка протяги- ванием
Средняя высота неров- ностей kui (10-5-20) -10—3 (10-5-32) • 10=3 (Юч-6,3) -10-3 (6,3—3,2) -Ю-3
Обозна- чение класса чистоты поверх- ности V6-5-V6 V6-5-V8 V6-1-V7 V7-S-V8
Обобщение многочисленных опытных данных показывает, что
коэффициент кромочных потерь зависит от относительного шага t
и толщины выходной кромки 6кр и может быть определен по фор-
муле
^ = 0,01 + 0,088-^-
а/2
ИЛИ
t ___ (19 ^кр
59
Если пользоваться значениями коэффициентов кромочных по-
терь Iskp по атласу и пересчитывать их для решеток с другой
ТОЛЩИНОЙ ВЫХОДНОЙ кромки 6кр1, то коэффициент профильных
потерь решетки с новой толщиной выходной кромки равен
= ЪКР + 0,088 -Ц®.
Одной из важнейших геометрических характеристик решетки
является относительный шаг t где I — хорда лопатки.
При изменении шага меняются распределение скоростей па
профилю и соответственно структура пограничных слоев, потери
на трение, а также кромочные потери.
Так, например, увеличение шага приводит к уменьшению доли
кромочных потерь, но вызывает смещение точки минимума давле-
ний на спинке профиля
против потока, что увели-
чивает потери на трение.
Величина оптимально-
го шага зависит от раз-
личных режимных пара-
метров и в первую оче-
редь от углов входа и вы-
хода потока, чисел ИеиМ.
Для решеток турбин и
направляющих аппаратов,
рассчитанных на числа
М. < 0,3 ~ 0,4, при рас-
четных углах входа опти-
ного относительного шага от угла выхо-
да для решеток турбин и направляющих
аппаратов:
1 — для реактивных решеток; 2 — для ак-
тивных решеток
мальная величина относительного шага в зависимости от угла
выхода может быть выбрана по кривым, которые построены
на основании обработки многочисленных опытных данных
(рис. 20).
__ Большое влияние оказывает относительный размах лопаток
/г, от которого прямо пропорционально зависит коэффициент
концевых потерь. При сильном сужении меридионального сече-
ния канала может произойти смыкание вторичных течений и
значительное увеличение концевых потерь.
Многочисленные эксперименты, проведенные на паровых и га-
зовых турбинах и компрессорах, показывают, что смыкание вто-
ричных_течений происходит при /imm = 0,4 (для реактивных реше-
ток) и /imin = 1 (для решеток активного типа), КШ1П = 2 (для диф-
фузорных компрессорных решеток) [22, 49].
Однако чрезмерное увеличение размаха (уменьшение хорды
лопатки) приводит к уменьшению числа Re и, как следствие это-
го, к увеличению коэффициентов потерь. Имеющиеся в атласах
данные позволяют достаточно обоснованно подойти к выбору оп-
60
тимальной (с точки зрения потерь) относительной высоты ло-
патки.
Для приближенной оценки влияния относительной высоты ло-
патки на концевые потери для активных и реактивных решеток
в зависимости от угла поворота потока можно пользоваться гра-
фиком (рис. 21).
В том случае, когда опытных данных недостаточно, можно
воспользоваться для определения коэффициентов потерь расчет-
ными полуэмпирическими зависимостями, полученными на осно-
ве теоретических предпосылок и экспериментальных данных по
исследованию пограничного слоя
[22, 49].
Для расчета пограничного слоя
на профиле решетки необходимо оп-
ределить распределение скоростей
невязкой жидкости w = w(s). Для
определения w (s) следует решить
прямую задачу теории решеток в по-
токе невязкой жидкости. Затем про-
изводится расчет пограничного слоя,
причем обратное влияние погранич-
ного слоя на распределение скорости
внешнего потока при реальных-чис-
лах Re и безотрывочном обтекании
обычно не учитывается, так как тол-
щина вытеснения очень мала. По-
Рис. 21. Зависимость коэффи-
циента концевых потерь от от-
носительной высоты лопаток
(при оптимальном шаге и угле
входа)
граничный слой в реальных решетках можно считать полностью
турбулентным. Такое допущение несколько упрощает расчеты,
так как не приходится определять точку или область перехода
ламинарного слоя в турбулентный.
В то же время расчеты всего слоя, как турбулентного, всегда
дают завышенные и, следовательно, более надежные значения
коэффициентов потерь в решетках [22, 49].
Интегрируя уравнение импульсов для несжимаемой жидкости
и задаваясь полуэмпирической функцией tTP = /lRe т , мож-
но получить следующую приближенную формулу для определе-
ния коэффициента потерь на трение [22, 49]:
f _ 0,072 / S \0,8 Г/ Шспин 'З.ОЭ | / \3'09~
тр Re0,2 sin \ t / Д ш2 / \ ш2 /
где Re = ;
v
WcnUH 1 Г 2s р , t sin (Pj + Р2)1 .
— о I. Ра “г . „ >
ш2 2 L о s sin щ
weos = 1 [2s . „ £ sin (Pl + p2)~
61
Приведенные формулы справедливы для аэродинамически
гладкой поверхности лопаток при расчете пограничного слоя на
профиле с постоянной относительной шероховатостью .
Полученную выше формулу можно привести к виду
, _ 0,0326 ТО,2 / S X 0,8 Г / WcnuH \2.25 / Weos \ 2,251
-mp ш . Q , “т ----- I >
sin р2 \ t ) |_ \ w2 / \ Ш2 /
причем |грш не зависит от вязкости жидкости (числа Re). В свя-
зи с этим учет влияния шероховатости по этим формулам ведется
при Re>ReKp, которое определяется равенством 1трш = 1Тр-
Для профилей, имеющих Pi ~ 90°, особенно неблагоприятным
является режим с малыми углами входа (р < 45°), когда на вход-
ном участке спинки появляется заметный диффузорный участок,
а для профилей с рi > 120° более неблагоприятными оказываются
режимы с большими углами входа (pi>140°).
При отклонении угла входа от расчетного изменяются эпюры
распределения давлений по профилю, появляются диффузорные
участки, на протяжении которых интенсивно растет толщина по-
граничного слоя, а в некоторых случаях возникает отрыв потока.
Для приближенного определения потерь при нерасчетных уг-
лах можно 'воспользоваться формулой [49]
е л + д У +с ддАЕ ¥.
Р \ w2 / \ sinAPj /
По опытным данным А = (0,4ч-0,6) В, что позволяет найти
значения А и В из предыдущего уравнения, зная па расчетном
режиме. Член с I£j_.sin^ учитывает потери отрыва. При стати-
стической обработке характеристик ряда турбинных решеток бы-
ло получено С=0,265.
Коэффициент концевых потерь зависит от геометрических и
режимных параметров: относительного размаха лопатки, угла
поворота в решетке, конфузорности канала, шага, угла входа 01,
числа Re, неравномерности потока на входе, турбулентно-
сти и т. д.
Для приближенной оценки концевых потерь в зависимости от
угла поворота потока при оптимальных р, и t можно пользовать-
ся обобщенными графиками (см. рис. 21).
Для осевых турбинных решеток можно воспользоваться более
простыми формулами Флюгеля:
^конц = v ( при у > 3 ~ 4^
h \ h /
или
^ = 0,07-^- (при JL<3-4),
62
где а — величина горла межлопаточного канала на выходе из
решетки.
В приведенных выше формулах принято, что угол pi — дейст-
вительный угол набегающего потока.
Для расчета коэффициентов потерь слабоизогнутых решеток
с углом установки 10° 45° и углом изгиба профиля 0 до
50° коэффициент профильных потерь может быть найден по фор-
муле [21]
/
где т =
Коэффициент профильного сопротивления в зависимости от
геометрических параметров можно определить по формуле
Сх = 0,012 + 0,048/ + 0,0023т.
При углах изгиба 0 < 25°
Сх = 0,014 -=-0,016.
Для решеток с разными площадями поперечного сечения на
входе и выходе wT и vT могут быть найдены по формулам
+ + Л
t sin 4- w2 sin v2
m иц cos Vj -|- ш2 cos v2
где v — угол потока.
Для определения коэффициента концевых потерь ?коич для
компрессорных профилей при Re > Renp можно воспользоваться
формулой ^конц = ( ~ + тв т £2) , где опытные
\ й / \a»l /COS 0m
коэффициенты тк = 0,0184-0,022; mg = 0,0174-0,019 и коэффи-
циенты подъемной силы [48]
2 Wi sin Vj — w2 sin v2
C .
T Wm
Для учета влияния угла атаки на потери в таких решетках не-
обходимо иметь опытные данные (особенно для больших углов
атаки).
§ 6. ОСОБЕННОСТИ ТЕЧЕНИЯ В РАДИАЛЬНЫХ КОЛЕСАХ
ГИДРОПЕРЕДАЧИ
Возникающее в межлопаточных каналах радиальных турбо-
машин относительное циркуляционное движение накладывается
на поле скоростей, связанное с движением в неподвижном колесе.
При малых расходах жидкости составляющая скорости цир-
куляционного относительного движения может оказаться на-
63
столько большой, что в рабочем канале вблизи передней его стен-
ки могут возникать обратные движения, с которыми связан отрыв
потока.
Рассмотрение циркуляционного движения в радиальном коле-
се показало, что в центробежной ступени под влиянием относи-
тельного вихря увеличиваются скорости на вогнутой стороне про-
филя и уменьшаются на выпуклой, а в центростремительной сту-
пени относительный вихрь приводит к уменьшению скоростей на
вогнутой стороне профиля и к их увеличению на выпуклой. Иначе
говоря, в центробежном колесе происходит выравнивание скоро-
стей поперек межлопаточного канала, а в центростремительной —
наоборот, поперечный градиент скоростей возрастает. Это приво-
дит, например, к тому, что удельная работа жидкости в центро-
стремительной турбине получается больше, чем в осевой, и тем
более, чем в центробежной, при тех же размерах и той же скоро-
сти вращения, если при этом сохранить одинаковыми относитель-
ные скорости потока. Соответственно получение одной и той же
удельной работы сопровождается из-за разной кривизны лопаток
в турбине центростремительного типа меньшими потерями, чем
в осевой, и тем более, чем в центробежной. Особенности течения
жидкости в радиальной ступени (например, турбине) связаны
с возникновением сил Кориолиса.
В относительном движении силы Кориолиса не могут совер-
шать работу, так как (со X w) =0. Однако эти силы способны
совершать работу в переносном движении, если u(co X w) =# 0,
что имеет место в радиальной машине.
При движении жидкости в полости, перпендикулярной к оси
вращения, со±w, а кориолисово ускорение jK = 2(со X w) = 2cow.
При движении к центру сила Рк, действующая со стороны элемен-
та жидкости на лопатку, направлена в сторону вращения колеса.
При движениии от центра сила Рк, действующая на лопатку, на-
правлена в сторону, обратную вращению колеса, т. е. в центро-
стремительном колесе на лопатках возникает движущая сила,
а в центробежном на лопатках возникают силы сопротивления
движению.
В центростремительной ступени мощность, обусловленная ко-
риолисовыми силами, передается от жидкости колесу, а в центро-
бежной, наоборот, рабочее колесо передает энергию жидкости.
Кориолисово ускорение можно рассматривать состоящим из
двух слагаемых, каждое из которых равно со X w, первое из них
возникает под влиянием переносного ускорения во время переме-
щения жидкости вдоль радиуса вращающегося колеса, а второе
появляется как следствие поворота вокруг оси массы жидкости,
заключенной в колесе.
При движении потока по цилиндрическим поверхностям и рав-
номерном вращении (п = const) кориолисово ускорение тем боль-
64
ше, чем больше относительная скорость отклоняется от оси турбо-
машины; в этом случае кориолисово ускорение направлено вдоль
радиуса и не оказывает поэтому влияния на течение жидкости
в колесе.
Из сказанного выше следует, что в некоторых случаях, особен-
но для лопаток большой радиальной протяженности, использова-
ние в радиальных колесах гидротрансформаторов профилей осе-
вых решеток нецелесообразно, так как условия течения жидкости
в плоской и радиальной решетках различны. Это различие может
привести к неблагоприятному перераспределению скоростей на
обводах профиля и, как следствие, к увеличению потерь. При по-
мощи конформного отображения можно по известным координа-
там профиля прямой решетки построить соответствующий ему
профиль радиальной решетки.
Для радиальных ступеней гидротрансформаторов с короткими
лопатками (малой радиальной протяженности) можно использо-
вать профили осевых решеток.
Величины коэффициентов профильных потерь для плоской и
круговой решеток в общем случае различны. Однако в большин-
стве случаев, встречающихся при расчете гидротрансформаторов,
этим можно пренебречь.
Количественная оценка концевых потерь в радиальных решет-
ках может быть произведена по формуле, предложенной
Г. Ю. Степановым [49], только для турбулентного течения в по-
граничном слое и учитывающей геометрию решетки и кинематику
потока (углы входа):
'понц
0,06
1 4- ( Ctg^ _|_ 1 Г~2 COS2|32
\ ctgp2 )
Знак + относится к центробежной решетке, а знак — к цент-
ростремительной.
Приведенная зависимость позволяет учесть изменение коэф-
фициента концевых потерь при переходе от осевой к радиальной
решетке, при этом концевые потери в центробежной решетке
больше концевых потерь в осевой и больше, чем в центростре-
мительной.
Практически для определения коэффициента концевых потерь
радиальной решетки удобнее пользоваться графиком, показан-
ным на рис. 21, причем найденное при помощи этого графика
& / 1 , Ь V/,
значение 4K0«u следует умножать на величину 1± — , учи-
\ г /
тывающую радиальную протяженность лопатки.
При переходе к решетке с криволинейными торцовыми
стенками из-за возникновения центробежных сил от поворотов
происходит искажение поля скоростей и меняется характер пе-
ретекания жидкости от вогнутой стороны профиля к выпуклой
5 Заказ 1076 6 5
(вторичного течения), а также меняется структура замкнутых
вихревых областей у концов лопаток.
Можно предположить, однако, что действующее в этом слу-
чае на частицу силы инерции будут малы по сравнению с сила-
ми трения вязкой жидкости, и в первом приближении для оп-
ределения коэффициента концевых потерь колеса с пространст-
венными лопатками можно воспользоваться имеющимися
данными по осевым и радиальным решеткам с цилиндрическими
лопатками.
Поворот потока в меридиональной плоскости приводит к по-
явлению неравномерности в распределении скоростей по раз-
маху лопатки и, как следствие этого, к различию в картине вто-
ричных течений у торцовых стенок.
Однако, как показала практика турбостроения, расчет сум-
марных потерь энергии из-за концевых и вторичных течений,
отнесенных к колесу в целом, по интегральному значению коэф-
фициента концевых потерь, зависящего от отношения длины хор-
ды к ширине канала, и к среднему значению относительной ско-
рости, довольно точен (если, конечно, профилирование лопасти
выполнено с учетом действительного характера изменения ско-
ростей и обеспечивает отсутствие резкой разницы течения по
отдельным струйкам).
За решеткой вблизи ее выходных кромок поток получается
неоднородным. Неоднородность потока можно характеризовать
коэффициентом
_ vm max vm min
cp
(скорости берутся на некотором расстоянии от кромок колеса).
Обтекание профиля второй решетки неоднородным потоком вы-
зывает изменение в распределении давления на его поверхности.
Чем меньше расстояние между решетками, тем сильнее влияет
первая решетка на обтекание второй.
В неоднородном поле скоростей обтекание профиля ухудша-
ется, так как профиль обтекается при различных углах атаки.
Проведенные эксперименты [49] показали, что максимальные
потери энергии имеют место, когда профиль второй решетки по-
падает непосредственно в аэродинамический след профилей пер-
вой решетки. Однако средняя величина потерь энергии при этом
меняется незначительно. Так, при изменении зазора от 2 до
30 мм к. п. д. ступени не изменялся.
В гидротрансформаторе лопатки турбин и насоса пересека-
ют неоднородное поле скоростей, создаваемое предыдущей ре-
шеткой (в частности, направляющим аппаратом).
При быстром изменении поля скоростей, в котором оказы-
вается профиль вращающейся лопатки, не успевает произойти
существенной перестройки структуры пограничного слоя.
66
При относительном зазоре-у-= 0,4 поток успевает выров-
няться, т. е. при расположении последующей решетки от преды-
дущей на расстоянии, равном горлу, влиянием закромочного
слоя на характеристику решетки можно пренебречь. Это спра-
ведливо для решеток с углом выхода большим 25—30°.
Испытания решеток с малыми углами выхода (9—10°) пока-
зали, что сглаживание кромочного следа происходит на мень-
шем расстоянии, чем при больших углах выхода. Это объясня-
ется тем, что при уменьшении угла выхода потока увеличива-
ется его пробег до данного сечения на одном и том же
расстоянии от выходных кромок лопатки. Этот пробег можно
характеризовать относительной величиной
t sin сс
Проведенные опыты показали, что большая неоднородность
потока наблюдалась до б = 1. При дальнейшем увеличении за-
зора выравнивание происходило медленно, однако сама вели-
чина неоднородности не превышала 3—5%.
Чрезмерное увеличение зазора может отрицательно сказаться
на габаритах ступени. Потери на трение в межлопаточном про-
странстве незначительные.
§ 7. РАСЧЕТ ПОТЕРЬ ЭНЕРГИИ В ГИДРОТРАНСФОРМАТОРЕ
Этот расчет ведут в следующей последовательности.
1. Определяют по атласу или по расчетным зависимостям
для режима автомодельности по числу Re коэффициент про-
фильных потерь плоской решетки 5пр.
2. По формулам определяют коэффициенты профильных по-
терь круговой неподвижной или вращающейся решетки.
3. Находят по атласу или рассчитывают коэффициент конце-
вых потерь плоской решетки ^КОнЧ-
4. По формуле рассчитывают коэффициент концевых потерь
для радиальной решетки.
5. Находят суммарный коэффициент потерь.
6. В зависимости от режима работы (значения числа Re) и
состояния поверхности лопатки по графикам находят соответст-
вующие поправки для определения действительного коэффици-
ента потерь а-
7. По наибольшему значению относительной скорости в ре-
. , f. w2
щетке рассчитываются потери напора ^п=^ум д—.
8. Потери в межлопаточных зазорах, объемные и дисковые
потери определяют по общеизвестным зависимостям.
5* 67
9. При расчете характеристики преобразователя ц = f(i) де-
лается несколько приближений. В первом приближении при пе-
реходе к новому передаточному отношению i принимают, что
расход в круге циркуляции не меняется, т. е. QiP = Q. Для этого
случая рассчитывают кинематику потока и определяют коэффи-
циенты потерь по атласу или по графику. Рассчитывают потери,
составляют баланс энергии, уточняют значение расхода в круге
циркуляции (Q'. =# Qi) и делают, если это необходимо, новое
приближение.
При помощи изложенной выше последовательности были рас-
считаны некоторые конструкции гидротрансформаторов.
Рис. 22. Экспериментальные и расчетные характеристики гидро-
трансформаторов:
а — гидротрансформатор с центробежной турбиной; б — гидротрансфор-
матор конструкции НАМИ с двухступенчатой турбиной; в — комплексный
гидротрансформатор ГТК-1 с лопатками постоянной толщины;
---------экспериментальные кривые; О — расчетные точки
На рис. 22 показаны экспериментальные и расчетные харак-
теристики; там же показаны круги циркуляции рассчитанных
гидротрансформаторов.
§ 8. ПОСТРОЕНИЕ ВНУТРЕННИХ ХАРАКТЕРИСТИК
ГИДРОТРАНСФОРМАТОРА
При доводке передачи часто бывает важно установить внут-
ренние ее характеристики. Для построения внутренних характе-
ристик полости необходимо построить в зависимости от расхода
кривую сопротивления системы. Сопротивление системы, на ко-
торую работает насос, складывается из теоретического напора
турбин, потерь в реакторе и потерь в тракте:
Нcucm турб "Т ^^р "Т тракта’
Теоретический напор турбины определяется по формуле
Нт турб ~ Hdr AhT \hp,
где Ндт — действительный напор турбинной ступени;
68
&hp — потери в реакторе соответствующей турбинной сту-
пени;
Дйг — потери турбины данной ступени.
Действительный напор турбины можно определить следую-
щим образом:
по углам выхода потока, выбранным по данным продувок
плоских решеток, определяют треугольники скоростей;
по построенным треугольникам скоростей определяют коэф-
фициенты потерь и потери в решетках;
по найденным коэффициентам потерь определяют коэффи-
циенты скоростей <р = У 1 — g;
по коэффициентам скоростей строят действительные тре-
угольники скоростей;
по действительным треугольникам скоростей и по уравнению
Эйлера определяют действительный напор турбины:
Н дт = (UlVuld + U2Vuld)-
g
Теоретический напор турбины:
Нт/т == НИ- -ф \hp.
Для построения зависимости расхода действительного напо-
ра насосного колеса можно воспользоваться данными аэродина-
мических испытаний насосного колеса на специальном аэроди-
намическом стенде.
При аэродинамических испытаниях модельного колеса за-
меряются момент и числа оборотов ведущего вала, расход воз-
духа через коллектор, полные и статические давления на входе
и выходе из колеса.
По результатам этих испытаний в зависимости от расхода
строится (с пересчетом по размерам и числам оборотов) харак-
теристика потребляемой мощности N = Л(<2), кривая к. п. д. ц =
= fs(Q) и напорная характеристика насоса Н = fs(Q)-
В первом приближении точку совместной работы находят,
предположив, что к. п. д. насоса модели равен к. п. д. насоса в
проектируемой передаче.
Зная потребляемую насосом мощность, находят для каждого
расхода значение теоретического напора и затем умножают ве-
личину Я„ на величину к. п. д. насоса цда=о • После этого находят
(рис. 23) точку пересечения кривой Ницда=о =f(Q) с кривой
Hcucr = f(Q), которая будет в первом приближении точкой сов-
местной работы системы насос — турбина. Затем делают второе
приближение, связанное с различием к. п. д. насоса в передаче
и при аэродинамических испытаниях, обусловленное несовпа-
дением углов потока на входе в колесо в условиях аэродина-
мического эксперимента.
69
Для дальнейших рассуждений используют треугольники ско-
ростей, построенные по данным аэродинамических испытаний
для средней струйки. Напор этой струйки, подсчитанный по тре-
угольникам скоростей, равен интегральному напору колеса. По-
лагают также, что режимы с одинаковым к. п. д. у натурного и
модельного насосов имеют место при равенстве углов а.
Различие углов а означает, что режимы с одинаковыми коэф-
фициентами потерь для натурного и модельного насосов
Рис. 23. Совмещение характеристик насоса
и турбины при «1 = 2800 об/мин
несколько различны из-за расхода. Зависимость коэффициента
потерь от угла входа потока находят по результатам испытаний
модельного колеса, разделив величину потерянного напора Дй
«. &h-2g
на относительную скорость на входе, т. е. § =-
W2;
Для каждого расхода Q, имея зависимость мощности мо-
дельного насоса тУда =/(Q) и величину мощности насоса пере-
дачи NH, находят величину Дл =------.
yQ
Зная величину Д/f, определяют соответствующее ей измене-
ние окружной составляющей скорости жидкости при входе в
насос:
л
Ауи1 = :----
Ulg
70
Имея величину этого изменения составляющей, определяют
действительную ее величину при входе в колесо:
Чл = У1иДа=0 Н* &VU1.
Зная меридиональную скорость vmi и окружную составляю-
щую скорости vu}, определяют угол потока на входе в насос
передачи Pi= ———и величину относительной скорости на вхо-
и1 — vui
де Wi = Vm^~.
Sin Pi
Определив (при помощи графика) по углу р значение коэф-
фициента потерь, рассчитывают потери напора в насосном ко-
U)]
лесе передачи Д/г = 5 . К. п. д. насоса передачи
2g
. Дй
Т1 = 1-----.
1 Н
Умножив полученное таким образом значение к. п. д. насоса
на величину Нн , строят кривую Ннх\ — f(Q), точка пере-
yQ
сечения которой с кривой Нсист — f(Q) дает во втором прибли-
жении точку совместной работы. Разделив действительный на-
пор насоса на его к. п. д., получают величину теоретического
напора насоса передачи.
§ 9. ВЫБОР ПАРАМЕТРОВ РАБОЧЕГО ПРОЦЕССА
И ГЕОМЕТРИЧЕСКИХ СООТНОШЕНИЙ РАБОЧЕЙ ПОЛОСТИ
В этом разделе приводится методика выбора внутренних ха-
рактеристик (расхода и напора) и геометрических параметров
проточной части гидротрансформатора, обеспечивающих наи-
высшее значение к. п. д.
Для выбора оптимальных величин требуется выполнить боль-
шой объем счетных операций. Для упрощения процесса выбора
при помощи методики может быть составлен алгоритм решения
задачи на электронной цифровой вычислительной машине, на-
пример, «Минск-1».
В качестве характеристик, от которых зависят другие пара-
метры гидротрансформатора, могут быть приняты критерии по-
добия, общие для турбомашин: число Re, безразмерные коэффи-
циенты — расхода:
и напора:
Q
<р =---------
лР2
--------и
4
, н
2g
71
v U Cffr
или заменяющие их отношения скоростей, например, —; —
с0 и
и др.
При расчете гидротрансформаторов значение диаметра D и
окружной скорости будем принимать на выходе из насоса, т. е.
И = 1-)п.2> Ц ~ Цн2*
Геометрию решеток гидротрансформатора будем определять
относительно выхода из насосного колеса. При этом относитель-
V £ Di
ныи диаметр решетки составит: о, =—а относительная ее
Оцг
ширина h = —J- .
Для определения оптимальных расходно-напорных и геомет-
рических характеристик возможны две задачи.
1. Прямая задача. Заданы схема проточной части, число и рас-
положение рабочих колес; необходимо исследовать заданную
схему и найти оптимальные характеристики проточной части
(расход и напор), параметры рабочих колес (геометрию и углы
решеток), т. е. для заданной схемы найти зависимость
л = л (<₽; Ф; г 6,; Pi/; р2/; fy),
где / — номер рабочего колеса:
t — передаточное отношение;
h — ширина рабочего колеса;
Pi, ₽!2 — соответственно углы входа и выхода из рабочего колеса.
Прямая задача должна решаться при доводке работающих
схем проточной части и их модификаций.
2. Обратная задача. В этом случае заданы требуемые внеш-
ние характеристики гидротрансформатора — мощность, число
оборотов, передаточное отношение; неизвестны схема его проточ-
ной части, число ступеней и геометрические соотношения, обеспе-
чивающие экономичную работу гидротрансформатора.
Обратная задача возникает при создании новых проточных
частей. Очевидно, что ввиду сложности такой постановки обрат-
ную задачу целесообразно разбить на несколько прямых, т. е.
предварительно наметить ряд схем проточной части, решить для
каждой из них уравнение, выбрать наиболее экономичную схему
и параметры гидротрансформатора и его рабочих колес.
Очевидно, что прямая задача решается по схеме, в которой
вначале определяются кинематические и геометрические пара-
метры, а затем вычисляется к. п. д. как функция этих парамет-
ров. Обратимся сначала к расчету геометрических параметров
рабочей полости, т. е. углов и других геометрических характе-
ристик решеток.
В проектных расчетах гидротрансформатора вначале опре-
деляют интегральные по ширине и окружному направлению па-
раметры потока, называемые параметрами средней струйки. За-
72
тем эти параметры рассматриваются, как заданные, и определя-
ются параметры пространственного потока C(h, t); р(Л, /);
p(/i, /), а также геометрические характеристики рабочих
колес.
Рассмотрим уравнения для определения углов решеток пе-
редачи с одной, двумя и более ступенями турбины, т. е. уравне-
ния моментов рабочих колес (уравнение Эйлера) и баланса
энергии гидротрасформатора.
Для одноступенчатого гидротрансформатора, выполненного по
схеме насос — турбина — реактор, в случае когда заданы отно-
сительные геометрические размеры рабочих колес и hj, а так-
же коэффициент расхода ср, можно составить следующую систе-
му уравнений (потерями в первом приближении пренебрегаем):
Ч = fl (Рр2> Рнг);
= fz (Рн2,’ Рт2 ) ,’
= fa (Ртг; Ррг);
^р К •
Приведенная система состоит из четырех уравнений с шестью
неизвестными: коэффициентами момента кт', кР', углами вы-
хода из решеток риг; ртг; ₽р2- Для определения параметров про-
точной части одноступенчатого гидротрансформатора требуется
задать дополнительно еще два параметра или два уравнения,
связывающие неизвестные величины.
Вопрос о том, какие неизвестные или уравнения целесооб-
разно задавать в качестве дополнительных условий, будет рас-
смотрен ниже.
Рассмотрим при тех же исходных данных и допущениях (по-
тери принимаются равными нулю) систему уравнений, связы-
вающих кинематические параметры двухступенчатого гидро-
трансформатора:
= fi (РрП21 риг);
^ri — fz (Рн2> Рпг);
^pl = /з (Рыг', рргг);
^тП = ft (Ppi2j ртпг);
^рП = h (Ртпг; ррпг);
п п
2^-24 = х-
I I
Из системы этих уравнений видно, что для двухступенчатого
гидротрансформатора число неизвестных составляет 10 в шести
уравнениях, следовательно, необходимо задать четыре дополни-
тельных условия.
73
Система уравнений для определения геометрических пара-
метров трехступенчатого гидротрансформатора имеет вид
Ч = Л(РРш2; Р„2); '
^т-1 = fz (Риг! рпг);
^pi = fs (Pri2; рР12);
= /«(PPi2; рт-пг);
^•Рп = А (Ргпг; рРп);
^гш = f« (PPii2j рт-шг);
А>ш = fi (рппг; Рршг);
III III
2 —2 — Ki-
I I
В системе уравнений для трехступенчатого гидротрансформа-
тора 14 неизвестных.
В общем случае число неизвестных параметров составляет:
v = 4г + 2,
где z— число ступеней турбины,
а число уравнений
X = 2г + 2;
откуда число дополнительных условий
v — % = (4г + 2) —(2г + 2) = 2г.
Из практики создания турбомашин и гидротрасформато-
ров известны дополнительные условия, позволяющие решить эти
системы. К этим условиям относятся требования конфузорности
потока в решетках турбин и реакторов, ограниченный диапазон
критериев— и коэффициент расхода ср, рекомендации по геомет-
рическим соотношениям в насосе и в некоторых случаях техно-
логические требования, например, унификация параметров от-
дельных решеток. Применение этих рекомендаций позволяет, с
одной стороны, задавать при расчете некоторые определенные
значения неизвестных величин (например,— ; угол выхода из
насоса р„2 и т. д.) в определенном интервале, благодаря чему
сокращается число неизвестных. С другой стороны, можно зада-
вать дополнительные условия, связывающие неизвестные, т. е.
увеличить число уравнений. Благодаря этому разность между
числом уравнений и числом неизвестных может быть сокра-
щена.
Однако в этом случае задача расчета геометрических пара-
метров рабочей полости гидротрансформатора остается неопре-
деленной.
74
Как было сказано выше, оптимальные геометрические пара-
метры гидротрансформатора так же, как и для других турбо-
машин, целесообразно находить из условия минимума потерь.
Принципиально такая задача может быть решена численным
методом.
Для этого необходимо рассчитать максимально возможное
количество вариантов с разными углами решеток, удовлетворя-
ющих приведенным выше системам уравнений, и выбрать вари-
ант с лучшим к. п. д. Однако такая схема решения может ока-
заться слишком трудоемкой даже в случае применения БЭСМ,
особенно для многоступенчатых гидротрансформаторов.
Рассмотрим другую задачу.
Гидравлические потери в решетках гидротрансформатора
можно определить по формуле
» I м U)2
AAj =?—,
2g
где 5 = gnj> + ^конц — сумма коэффициентов профильных и кон-
цевых потерь;
w — максимальная скорость потока в решетке.
Так как турбинные и реакторные решетки в гидротрансфор-
маторе выполняются конфузорными, то на выходе скорость по-
тока в них максимальная.
Выразив w в функции угла выхода, получим
с2
Д/г = к + £ )-------^2—-
V пр КОНЦ) 2g sin2
или, используя безразмерные коэффициенты, получим
с2
A f /J- < - \ W12
АФ — (?пр + ;КО«(() . 2 О •
«2 Siu рз
Следовательно, углы выхода из решеток рабочих колес, обес-
печивающие минимум гидравлических потерь, могут быть най-
дены из условия минимума функции и:
wmin ^конц.'Г, Ра/; cmj) =
/ / с2
= 2 Аф/ ИЛИ Wmin — min 2 ^npI + u ~jn2 p”.
Коэффициенты потерь c,np и %>Конц являются сложными функ-
циями угла (3,2j и геометрических параметров проточной части,
что затрудняет определение «ты, даже если представить эту ве-
личину в функции одного переменного. Поэтому рассмотрим вна-
чале приближенный способ определения umin, заключающийся
в том, что коэффициент потерь принимается независимым от уг-
75
лов p2j-. Это позволяет условие минимума функции u(£; ст}-; р2з)
заменить условием минимума функции Ui(cm3; Ряу), равной:
Отметим, что это допущение касается только определения
углов решеток гидротрансформатора при заданных интеграль-
ных характеристиках ф и ф. Выбор же самих коэффициентов
Ф и ip производится из условия минимума потерь, определенных
с учетом изменения скоростного напора и коэффициентов потерь.
Значение углов р2з, обеспечивающих минимум функции и,
можно получить, если использовать приближенные зависимости
коэффициента потерь от углов входа и выхода, например, фор-
мулу
0,01
Ф —----------,
sin sin Pi
которая хорошо совпадает с опытными данными в случае, если
решетка имеет оптимальную густоту, размах и т. д. Выполнен-
ные расчеты p2j-u = «min показали, что экстремальные величины
углов iPi2j, найденные приближенным способом (из условия и =
= «илы) и более точным способом, в котором учитывалась за-
висимость £ = f(рц р2), близки друг к другу, однако минимум
функции Umin (Ец rriij, р2з) более ярко выражен, чем umm(cm3;
p2J. Это можно объяснить тем, что и коэффициент потерь, и ве-
личина скоростного напора w2 являются однотипными функция-
ми углов В2з. Так, wl; ~!—, а ~——-——. Поэтому
sin2p3y sin р2у- sin ply-
для сокращения трудоемкости в программе расчета на БЭСМ
можно находить минимум приближенной зависимости и((ст/,
fM-
Таким образом, из сказанного выше следует задача расчета
углов решеток гидропередачи: заданы передаточное отношение,
коэффициент расхода и относительные геометрические размеры.
Требуется найти углы выхода из решеток по уравнениям момен-
тов и баланса энергии или условию минимума потерь и допол-
нительным условиям, число которых для двухступенчатого гид-
ротрансформатора равно 2т, а для трехступенчатого — 4m.
Приведенная последовательность расчета кинематики и
к. п. д. гидротрансформатора на ЭВМ разработана для двух-
и трехступенчатого гидротрансформатора.
Возможные при этом варианты проточной части показаны на
рис. 24. Нумерация решеток не совпадает с последовательно-
стью их расположения в круге циркуляции. Это сделано для по-
лучения общей блок-схемы расчета решеток реактора первой
ступени Р[, турбины второй ступени Т2 и реактора второй сту-
пени Р2 для двух- и трехступенчатых передач.
76
6j 1,2 и hj (,2: 6j = -—; hj —
В схеме расчета гидротрансформатора предусматривается,
что числа рабочих колес турбины и реактора равны. В данном
случае эти числа не равны, так как из конструктивных сообра-
жений в круг циркуляции введено рабочее колесо турбины,
расположенное перед насосом. Однако рабочее колесо, распо-
ложенное перед насосом, передает малые крутящие моменты, и
поэтому незначительно влияет на геометрию остальных колес,
что позволяет применить схему расчета передач с равными чи-
слами рабочих колес турбин и реакторов.
Расположение и относительные размеры рабочих колес за-
даются при помощи коэффициентов
= — . При этом для центробеж-
hj2
ных колес д]2>Ьц, для центро-
стремительных 6;2<бц и осе-
вых 6ц = б;2-
В данном случае задаются
двумя значениями передаточного
отношения i для турбинных колес
iT и для колес реакторов ip. Для
передач переднего хода iT > 0;
ip = 0; заднего хода iT = 0;
ip > 0, а для соосного трансфор-
матора iT > 0; ip < 0.
Чтобы написать уравнение на-
пора или момента рабочего коле-
са в функции углов ₽2(j-i); РгЬ
необходимо, помимо относительных
колеса, задать коэффициент стн2, характеризующий расход цир-
куляции в гидротрансформаторе.
Указанные коэффициенты должны быть всегда заданы при
решении прямой задачи расчета передачи. Однако, как было
показано выше, необходимо задать дополнительно коэффициен-
ты (или уравнения): два в случае расчета двухступенчатого и
четыре — для трехступенчатого гидротрансформатора.
В качестве дополнительных условий целесообразно задать па-
раметры насоса. Обычно эти параметры задаются по известным
прототипам.
В качестве параметров насоса могут быть заданы углы вхо-
да и выхода (Зи(; (Зи2. Для насосов гидротрансформатора углы
выхода увеличиваются с уменьшением быстроходности. Соотно-
шение между (3( и р2 характеризует степень диффузорности по-
тока в межлопаточных каналах насоса. Задание параметров на-
соса полностью определяет кинематику двухступенчатого гидро-
трансформатора, так как заданы геометрические соотношения
6; и hj, передаточные отношения iT и ip, коэффициенты стн2 и
77
а) б)
Рис. 24. Схемы проточных ча-
стей гидротрансформаторов:
а — двухступенчатого; б — трех-
ступенчатого (Н — насос; Tj 2,3 —
турбины первой, второй, третьей
ступени; 2 3 — реакторы пер-
вой, второй, третьей ступени)
геометрических размеров
углы Р1н и $2Н. Однако при расчете потерь в передаче, и в част-
ности концевых потерь в решетках, необходимо знать еще один
коэффициент, связывающий размах и диаметр в какой-либо ре-
шетке, например, отношение ширины насоса на выходе к его
И-ЫЪ
диаметру —.
^«2
В связи с этим нужно задать величину коэффициента расхо-
да <р:
— —-—, так как hHi =---------.
Т?к2 ^Стнг ^^нгстнг
Для расчета кинематических соотношений трехступенчатого
гидротрансформатора необходимо задать еще два условия, в ка-
честве которых зададим степень конфузорности потока в решет-
ках турбины и реактора, расположенных за насосом.
Так как эти решетки в большинстве случаев центробежные,
то поток в них для уменьшения потерь должен быть конфузор-
ным со степенью конфузорности К = — 1,05-е-1,2. Коэффици-
ент К не должен быть очень велик, чтобы не увеличивалась
вследствие изогнутости решетки окружная составляющая ско-
рости потока на выходе, поэтому значение коэффициента кон-
фузорности в этих решетках можно принять равным 1,1.
Расчетные уравнения. Используя уравнение Эйлера и треу-
гольники скоростей, получим выражение безразмерного коэф-
фициента теоретического напора насоса:
. - _ ^Ннтеор _ 2 |?1 — 6:
теор — 2 Z \1 °'
“м2
| стн2 стн1
\ ин2 tg Paw ин2 tg Ря
Коэффициент напора для турбины первой ступени, располо-
женной за насосом, можно найти по формуле
(1 OT21lT) 4"
стн2
^т21 tg₽r21
стнг
tg ₽Н2
Для всех последующих решеток турбин и реакторов
Фт(Р) = 2i„ [-т-e—-----------------------82H2in-6(2„_1)2Чп-1)21,
L P(n —1) 2Л(П—1) 2 tg Р„2ЛК2 J
где n— порядковый номер колеса.
В случае, если передаточное отношение iT(P) = 0, напор
фт(р) = 0, что может привести к неопределенности в формулах
для определения углов р„2 из уравнения напоров. Удобнее урав-
нение Эйлера записывать для коэффициента момента
X =----------= 2,005
7^2 °«2 Z
или пропорционального ему отношения —*—.
2ir(p)
78
Уравнение баланса энергии запишем в виде
Фи теор А Фиг Фнд = Фт теор’
где Дфнг; Д'фна — относительные гидравлические и дисковые по-
тери напора в насосе.
Определение углов выхода решеток. Рассмотрим формулы для
определения углов выхода из решеток гидротрансформатора. Из
условия минимума потерь будем определять углы выхода из ре-
актора первой ступени, турбин второй ступени и первой ступени
для двухступенчатого гидротрансформатора, а также второй и
третьей ступеней для трехступенчатой передачи. Углы выхода
из остальных решеток определяются по исходным данным: угол
рР22 в функции угла входа в насос а углы фт!2 и ррц2 (для
трехступенчатого гидротрансформатора) в зависимости от степе-
ни конфузорности в этих решетках.
Функция и, пропорциональная гидравлическим потерям, для
названных выше углов в случае, если коэффициент потерь при-
нят не зависящим от углов fe, имеет вид
с2 с2 с2 с2
,, /о .о . о \ _ тх | ''ту . 'ту , тг
(Р2Х, Р2#, P2z) sjn2p3* -t- sin2p2y sin2(j^ sin2(J2z ’
где индексы соответствуют элементам: х — реактора /; у — тур-
бины II\ z — турбины I для двухступенчатого и турбины III для
трехступенчатого гидротрансформаторов.
Решая приведенные выше системы уравнений для названных
решеток, получим уравнение, связывающее углы ₽2ж, i₽2y, fe:
_d_ _|_ _2_ = о.
tgx tg*r tgz
Коэффициенты, входящие в последние два выражения, явля-
ются функциями исходных данных и приведены ниже.
Минимум функции трех переменных и(Ргх; fe; ₽2z) при од-
ном добавочном условии, связывающем эти переменные, найдем
по методу Лагранжа. Введем неопределенный множитель % и
рассмотрим функцию четырех переменных:
нч /ft .ft .ft . У. \ ьтх с2 с2 1 ту . znz .
Ф (н2х, ₽2z/> p2z> ““ sin2 р2х sin2 sin2 f2z
+ В + — D\.
\ tg₽2X tg Рзг )
Необходимые условия минимума функции Ф могут быть най-
дены из уравнений
Фр = 0; Фр = 0; Фр =0; Ф' = 0.
Р2Х ’ Р2у ’ Н22 ’ х
79
При дифференцировании функции Ф получим
дФ _ _ 2 cos $2Хс2тх дх _ (
ар2х sin3 р2х sin2 р2х
дФ _ 2 cos с2ту вх _ (
ар2г/ sin3 sin2 р2г/
дФ =_ А В С
ах tg₽2x tgp24, tgp,2
Решая эту систему подстановкой значения X, найденного из
первого уравнения, в последующие, найдем необходимые усло-
вия экстремума функции и:
tg Р2х = -А-
Можно показать, что полученные выражения определяют со-
бой точку min функции и. Принятые выше упрощения, хотя и
снижают точность результата, но позволяют использовать эти
формулы для подсчетов.
Более точное решение при определении экстремальных углов
может быть получено, если учесть зависимость коэффициента
потерь S, от углов входа и выхода решетки.
Тогда функция и ( fax]', fW; Pazj) представляет собой сумму
гидравлических потерь в решетках турбины I, реактора II и тур-
бины II:
__ 1 ст ________1 сту । 1 cmz
sin sin2 р2Л sin р1г/ sin3 р2г/ sin flz sin3fJ2z
Из этого выражения определим величину углов входа (3(ж; р(у;
₽iz в зависимости от углов выхода из предыдущих решеток. Для
трехступенчатого гидротрансформатора соотношения треуголь-
ников скоростей позволяют определить угол входа в решетку
турбины II р1т.2 в функции от угла выхода из реактора I:
^72
ст 1т2
си1т2~ и1т2
С,
ст2р\ А г2р1
— и2р\ ) ~ — “1 72
Г&Р2р1 / '172
80
откуда в безразмерных коэффициентах, принятых в настоящем
расчете, следует
стн2
tg ₽1Т2=—=---------------------
Ч P2pl“2pi
Если ввести обозначения
А = -%™ ; Вх = ; G = 62р1гр + 6U’T
Л2р1 hw
и использовать индексы х; у, z, примененные при нахождении эк-
стремума, то
tg = ~А ctg R С '
•A ctg pspG
Аналогичные выражения для углов p]z; Р1Ж имеют вид
tg₽u = ^-;
tePu- г Л, „ .
с Ctg р22£ ,
где С = -Стм- ; Дх==_£^_; Сх = —;
^2тЗ(1) Л1Р1 Л1тЗ(1)
F = --..С^а--------б1Рзгр-61т1Ш-т.
^2p3 Р2рШ
Индекс 1, взятый в скобках, также соответствует двухступен-
чатому гидротрансформатору.
Таким образом, подставив в уравнение для и выражения уг-
лов Р1Ж; Pip; Piz и приняв во внимание дополнительное условие,
можно найти экстремальные значения углов выхода р2ж; ₽2у; ₽2z-
Ввиду громоздкости преобразований эту задачу следует ре-
шать на ЭВМ.
Последовательность расчета на ЭВМ
В случае, когда параметры рабочих колес, определяемые в
ходе расчета, удовлетворяют условиям конфузорности потока
во всех решетках, все операции выполняются в следующем по-
рядке.
1. Задают машине исходные данные.
2. Определяют коэффициент теоретического напора насоса
фн теор’
5 Заказ 1976 81
3. Определяют гидравлические и дисковые потери в насосе
и коэффициент действительного напора
4. Вычисляют действительный угол выхода из насоса (с уче-
том потерь в насосе) р^2 .
5. Определяют суммарные коэффициенты момента турбин и
реакторов и .
6. Вычисляют параметры входа в турбину первой ступени:
— WII
коэффициент относительной скорости ам =-----и угла п по
ИЯ2
параметрам выхода из насоса.
7. Вычисляют параметры выхода из турбины первой ступе-
ни: коэффициент wTi2, угол Pri2 Для двухступенчатого гидро-
трансформатора при условии минимума потерь, а для трехсту-
пенчатого по заданному коэффициенту конфузорности
Лт1 = -----•
wrll
8. Определяют коэффициент момента турбины первой ступе-
Фт-!
ни ----.
2/т
9. В случае расчета трехступенчатого гидротрансформатора
далее определяют параметры реактора и турбины третьей сту-
пени: _
а) параметры входа в реактор III: ррш i и i по условиям
выхода из турбины первой ступени;
б) параметры выхода из реактора третьей ступени i и
Wpni ]ПО заданному коэффициенту конфузорности
т т т
в) отношение—— (коэффициент момента реактора);
2(р __
г) параметры входа в турбину ₽гпп; ®тШ1 по условиям выхо-
да из реактора третьей ступени;
д) параметры выхода из турбины III ртш2 и wTni2 при усло-
вии минимума гидравлических потерь;
. тип’
е) отношение--.
Далее расчет двух- и трехступенчатой передачи вновь ведет-
ся по общей схеме.
10. Определяют углы входа pPi ih выхода рР12 реактора пер-
вой ступени. Угол рР12 определяют из условия минимума гидрав-
лических потерь в реакторе / и турбине II.
I
11. Определяют отношение—— как разность суммарного
2(т
напора и напоров турбин первой и третьей ступеней (для трех-
82
ступенчатого гидротрансформатора), деленную на величину удво-
енного передаточного отношения 2iT.
12. Вычисляют угол входа в турбину второй ступени ртп i по
параметрам выхода из предыдущей решетки.
13. Вычисляют угол выхода из турбины второй ступени ртц 2
ip
как функцию угла рР12 и отношения —:—.
2(т
ф I
14. Определяют отношение —у— как функцию углов рт (ш) 2,
2('р
Ppi 2и как разность суммарного напора и напора реакто-
ров I и III (в случае трехступенчатого гидротрансформатора),
деленное на удвоенное передаточное отношение реак-
торов.
15. Определяют угол выхода из последнего реактора рр п 2
как функцию напора фр11 и угла выхода из предыдущей решет-
ки РтП 2-
16. Определяют угол входа реактора II ррц j по углу выхода
из предыдущей решетки ртц 2.
Углы решеток, определенные выше, могут не удовлетворять
условию конфузорности потока во всех решетках, что должно
привести к дополнительным, неучтенным в расчете диффузор-
ным потерям. Ввиду этого в расчете должны быть предусмотре-
ны дополнительные операции сравнения коэффициентов относи-
тельной скорости шгц и Wj2, а также углов входа и выхода Рд
и ₽j2.
Если условие конфузорности не выдерживается, то рассчитан-
ные ранее решетки заменяются новыми активными или конфу-
зорными, в которых при том же срабатываемом напоре угол вы-
хода не превышает угла входа, что может быть осуществлено
при одновременном изменении входного и выходного угла ре-
шетки. В некоторых случаях может оказаться необходимым по-
новому распределить напоры между ступенями.
Так как расположенные после насоса решетки турбины I и
III являются в большинстве случаев центробежными, то для
уменьшения потерь при расчетах задаются коэффициентом кон-
фузорности К = ~~ >1, для остальных рабочих колес в случае,
а>1
когда решетка при расчете получается диффузорной, задаются
= pj2j т. е. принимают активную решетку. Так как эти решет-
ки являются или осевыми, или центростремительными, то этого
равенства достаточно для получения конфузорности потока
1. Замена в расчете диффузорной решетки на активную или
конфузорную влечет за собой изменение параметров предыду-
щих рабочих колес.
6* 83
В том случае, когда при заданных исходных данных нельзя
выполнить условие конфузорности потока во всех решетках, не-
обходима корректировка исходных данных при помощи увели-
чения коэффициента сти2-
Последовательность расчета потерь в гидротрансформаторе
Второй частью данного расчета является определение потерь
в гидротрансформаторе. Соображения, обосновывающие приме-
нимость некоторых результатов теории решеток, были приведе-
ны выше. В этом разделе будет изложена последовательность
расчета потерь в гидротрансформаторе.
Величина гидравлических потерь в каждой из решеток со-
ставляет Л/г = g — или в безразмерных величинах
2g
дф = —-—•
\ «2/ / Sin-p2/
Коэффициент потерь в рабочих колесах g = gnp + gK можно
выразить как функцию безразмерных коэффициентов, заданных
в расчете, используя зависимости, полученные при продувке
плоских пакетов решеток. При этом будем считать течение во
всех решетках автомодельным, т. е. не зависящим от числа Re.
Для насоса коэффициент g найдем по формулам, применяе-
мым для расчета компрессорных решеток:
е = ( СЖТ -J--р tnexL,y ) - ) -----•
\ П /\^j У COS
Примем значение коэффициента лобового сопротивления
Сх = 0,016, (для оптимального режима обтекания решетки), а ко-
эффициент тп, учитывающий концевые потери, примем тк =
= 0,02. Ввиду малой величины пренебрегаем коэффициентом
вторичных потерь, т. е. примем твхс2у = 0.
Средний угол потока в насосе, отсчитываемый от оси, со-
ставит
vm = 90 —рот = 90 — Ь.-.I'-.
Тогда получим следующее выражение для определения коэф-
фициента потерь в насосе:
£н = 5 • 1СГ3 (т + -L-V 1 + .
\ Л / k sin р„2 / рн1 + рнз
sin------
2
Как видно из этой формулы, коэффициент потерь gM зависит
от густоты т и размаха h решетки. При конформном отображе-
84
нии радиальной решетки на плоскость густота может быть най-
дена по формуле.
V - ------- •
2л sin у
Для определения числа лопаток насоса используем эмпири-
ческую формулу, рекомендуемую Пфлейдерером, которая в слу-
чае применения безразмерных коэффициентов имеет вид
г = 6,5 -1 +--^1 sin ,
1-6к1 2
где pi„ и ргк — конструктивные углы входа и выхода из решетки
насоса.
При определении угла установки у будем считать, что сред-
няя линия лопатки насоса образована дугой окружности. В этом
случае получим
__ 1 — 8hi cos (Pin ~Ь Рак)
6Н1 sin (Р1л. р2ж)
К вышеприведенным формулам, используемым для вычисле-
ния, не предъявляется больших требований точности, поэтому
примем Р1К=Р1, т. е. угол атаки отсутствует (Ргк = 1,25 р2, что
соответствует значению коэффициента уменьшения напора):
р. = -~теор 0,75 ч-0,8.
п теор со
Отсюда получим значение густоты:
s.n рх4-1,25рг
т = ?----1п Л .
1 — 8Н1 sin у <5,
Относительный размах решетки h = -у-.
Длина хорды I зависит от относительной радиальной протя-
женности решетки (1 — б) и угла установки у:
2 sin у
Размах решетки насоса найдем как среднеарифметическое
Айо Ф
значение —~~—— ; так как —— = -Д-— , то получим
2 Рнз 4стн2
Jl = 1 . ф
2 4стн2
где hH1 =
85
Отсюда найдем значение безразмерного коэффициента h (от-
носительный размах решетки):
т~ 1 Ф 1 /1 4“ кил \ •
h =------------------( —! — I sin V.
2 С/ПН2 1 \ 2 /
Сначала по приведенным выше формулам вычисляют коэф-
фициент потерь в насосе 5Н, а затем определяют относительные
потери напора в насосе:
2
ДФнг = и——)
I ПС п I £ f ; д I
\ 0н1“н1 sln Phi /
Для турбинных профилей, применяемых в колесах турбин и
реакторов, значения коэффициента профильных потерь в зави-
симости от углов решетки Ри; p2j принимают по табл. 6, состав-
ленной по данным атласов ЦКТИ, ЦИАМ и МЭИ.
Таблица 6
Ориентировочные значения в зависимости от углов
решетки (по данным ЦКТИ) при Re >3,5 • 105
Угол входа Угол выхода (3°
ДО 17 17—20 20—24 24—30 30—35 >35
18—20 0,07 0,065
Св. 20—25 0,055 0,05 0,045 — — —
Св. 25—30 0,05 0,045 0,04 0,035 — —
Св. 30—45 0,045 0,04 0,035 0,035 0,035 —
Св. 45—60 0,045 0,035 0,030 0,030 0,03 0,025
Св. 60—120 0,03 0,025 0,025 0,025 0,025 0,02
Поправки на радиальную протяженность решетки и на ее
вращение обычно малы, при расчете профильных потерь их не
учитывают.
Для определения коэффициента концевых потерь ^К0Нц вос-
пользуемся графиком (по атласу МЭИ), согласно которому для
осевой решетки
? - А
^КОНЦ Д Фпр,
эта формула аналогична известной формуле Г. Ю. Степа-
нова:
? = 9?
^конц ^пр •
86
По опытам МЭИ при определении коэффициента концевых
потерь следует учитывать поправку на радиальную протяжен-
/, , D« \*/г
ность решетки /1 + ^-1 , с учетом которой можно написать
у = А /
'КОНЦ h \ Ь )
Коэффициент Д является функцией угла изгиба решетки. Его
значения (определенные по атласу МЭИ) в функции Др•=
= 180— (pi + р2) приведены ниже.
Д₽ . . . До 80° Свыше Свыше Свыше Свыше Свыше Свыше
80—100° 100—110° 110—120° 120—130° 130—140° 140°
К ... 0,625 0,689 0,78 0,84 0,914 1,03 1,25
Относительный размах решетки h является функцией угла
установки у. Для вычисления оптимального угла используем
формулу, полученную при обработке результатов продувок пло-
ских пакетов профилей:
у = 85,95 — 1,277 (рг — р2) + 0,0084 (рг — р2)2.
Для осевых решеток (при б3-; = б3-2) можно принять (из опы-
та проектирования проточных частей гидротрансформатора), что
относительный размах равен удвоенной осевой протяженности
решетки:
h = 2 sin у.
Для центробежных и центростремительных решеток (д31 =#
=/= 6j2) их относительная радиальная протяженность равна
^/1 + 6/2 £ учетом этого после несложных преобразований по-
лучим
__ Л/2 Ф^у'2^/2 sin у/
2 стнг 6/1 — 6/2
В приведенной формуле hj2 = -^2- , а величина относитель-
Щн
ного размаха h = —где Ц — длина хорды.
Ь
Приведенные соотношения позволяют определить гидравли-
ческие потери напора в решетках насоса, турбины и реактора
гидротрансформатора, а также гидравлический к. п. д. насоса:
Пгн=1-----
VH теор
турбин и реакторов
_ , Дфгт + Дфгр
'1г(т+р) — .
87
а также общий гидравлический к. п. д.:
Л г — ЛенНгСг+р)-
Потери напора на трение жидкости по гидравлическому
тракту в зазорах между рабочими колесами не учитываются вви-
ду их малой величины.
Потери на дисковое трение для трущихся поверхностей гид-
ротрансформатора могут быть выражены через потери напора
следующим образом:
w3D2
Дй = 75К^—,
где коэффициент Д' = 0,4-10^6 для одностороннего трения при
числах Re =
В насосном колесе гидротрансформатора имеется две поверх-
ности трения: диск на стороне чаши с наружным диаметром Ь-,л
(величиной внутреннего диаметра пренебрегаем) и диск со сто-
роны тора с наружным диаметром DHi и внутренним Ds = DH1 +
+
Величина относительных потерь на дисковое трение:
Аф„а = 0,75 • 1СГ3 (1 - iT)* — [2 -
‘Р \ 4стн2 / .
эта формула выведена с учетом того, что в гидротрансформато-
ре доля момента дискового трения, равная irMa, передается на
ведомый вал и, следовательно, является полезной, а величина
(1 — iT)Md является моментом сопротивления для насоса.
Максимальный диаметр поверхностей трения турбин опреде-
ляется размерами решетки, наиболее удаленной от оси враще-
ния. В случае, если эта решетка имеет осевой поток (т. е. б] =
= 62), максимальный относительный диаметр турбины со-
ставит
бттах = б](2)т 4* ^1(2) ,
где индекс m соответствует решетке с максимальным диаметром.
Если же эта решетка радиальная, то для определения бттах
достаточно выбрать наибольшую величину 6Т23- из заданных в
расчете. В общем случае система турбин имеет два трущихся ди-
ска — левый и правый с двумя трущимися поверхностями каж-
дый. С учетом сказанного формула для определения потерь дис-
кового трения в турбине примет вид
= 3 • 10“3 г363тах —.
Ф
В случае, если рассчитывается гидротрансформатор заднего
хода или соосный гидротрансформатор, передаточное отношение
88
реактора ip > 0, а величину потерь на дисковое трение в реакто-
рах определяют по последней формуле с заменой индекса т
на р.
Аналитическое определение объемных потерь в гидротранс-
форматоре затрудняется тем, что утечки рабочей жидкости зна-
чительно зависят от его конструкции.
В связи с этим зависимость объемных потерь от интеграль-
ных характеристик установим, сравнивая рассчитываемую про-
точную часть с прототипом, для которого известны объемные по-
тери Ат] о ПРИ интегральных характеристиках <р* и ф*.
В гидротрансформаторе, как правило, применяются щелевые
уплотнения, расход жидкости через которые определяется по
формуле
AQ = pF У2gMtcmam, где р =
Так как относительные размеры уплотнений (отношение-^- ,
а I — ее длина) в гидротрансформаторах
другу, можно считать коэффициент исте-
от интегральных характеристик.
где b — ширина щели,
обычно близки друг к
чения р не зависящим
Можно записать
. AQ VHF
или, применяя безразмерные коэффициенты, получим
д-п . _L
ф о2У
Площадь поперечного сечения уплотнений F пропорциональ-
на D2 , поэтому
ф
Такое же соотношение запишем для прототипа:
/ф1
дПо
ф*
откуда найдем
Дт]0 = Лц’
Ф_
/ф*
Фа'
89
Из опыта расчета проточных частей гидротрансформатора во
ВНИИМЕТМАШе можно считать, что при ср* = 0,192 ф* = 0,74,
потери к. п. д. вследствие утечек составляют Ат)'о = 0,025. Под-
ставляя эти величины в последнюю формулу, получим зависи-
мость для вычисления объемных потерь:
Лт]0 = 0,0050-^3-.
Таким образом, определены зависимости для объемных гид-
равлических потерь и потерь на дисковое трение в гидротранс-
форматоре. Общий к. п. д. рассчитываемых гидротрансформато-
ров составляет
П = ПгПЛ-
Глава III. РЕГУЛИРУЕМЫЕ ГИДРОТРАНСФОРМАТОРЫ
§ 1. СПОСОБЫ РЕГУЛИРОВАНИЯ ГИДРОТРАНСФОРМАТОРОВ
Программное изменение выходной мощности гидродинами-
ческого трансформатора может совершаться четырьмя способа-
ми: изменением числа оборотов двигателя, изменением степени
заполнения его рабочей полости, изменением формы проточной
части и комбинацией первого способа с другими двумя.
Первый способ имеет наибольшее значение для транспорт-
ных средств (автомобили, тепловозы), применительно к кото-
рым такое регулирование хорошо изучено. Иногда этот способ
применяется и для стационарных установок. Известно, что при
таком регулировании экономичность передачи (ее к. п. д.) ока-
зывается тем выше, чем ближе закон изменения нагрузки (вто-
ричного момента) с изменением вторичных чисел оборотов к
квадратичной параболе. В случае, если М2 = Кп2 , то теорети-
чески во всем диапазоне регулирования к. п. д. передачи изме-
няется мало.
Наблюдающееся изменение к. п. д. передачи при таком ре-
гулировании и названном выше характере зависимости М2 =
— f(n2) может быть объяснено снижением величины числа Re
потока в рабочей полости передачи.
Нужно считать, что для турбинных решеток величина ReKp ~
~ (5 ч-8) • 105. С изменением числа оборотов двигателя сущест-
венно изменяется относительная величина механических потерь.
В больших (по мощности) передачах величина механических
потерь сказывается мало, так как 0,95 (здесь имеются
в виду потери, момент которых изменяется с числом оборотов
менее существенно, чем по n2t ).
При другом характере зависимости М2 от п2 экономичность
передачи при таком регулировании определяется видом кривых
т] = f2(i) и М2 = f3(n2).
Регулирование величины выходной мощности за счет измене-
ния заполнения рабочей полости передачи сопровождается, как
правило, уменьшением ее экономичности.
Во ВНИИМЕТМАШе были экспериментально получены ха-
рактеристики гидротрансформаторов, регулирование которых
91
совершалось за счет изменения количества жидкости в рабочей
полости. При этом было установлено, что любой режим работы по
числам оборотов тем менее экономичен, чем больше момент на-
грузки в этом режиме отличается от момента на турбине при
полном заполнении рабочей полости.
Причина снижения экономичности передачи при уменьшении
заполнения рабочей полости, вероятно, объясняется тем, что
при частичном заполнении реактивно-активные турбины переда-
чи начинают работать, как активные. При этом величина пере-
даваемой мощности падает, а величина потерь напора, разви-
ваемого насосом в проточной части передачи, не уменьшается, а,
может быть, даже увеличивается.
Характеристики передачи при таком регулировании имеют
такой же вид, как в случае регулирования передачи изменением
числа оборотов двигателя. Жесткость статических выходных ха-
рактеристик передачи при этом остается для всех величин за-
полнения примерно одинаковой. Это обеспечивает возможность
устойчивого регулирования по числам оборотов при постоянном
моменте в диапазоне изменения вторичных чисел оборотов а =
= 5 ч-6, где а=
n2min
Когда говорится о скорости реакции гидротрансформатора
на команду, то рассматривается не случай совершения простей-
ших операций — включение или выключение ее, а более слож-
ные случаи перехода с одного режима на другой (частичный).
В этом более сложном случае время реакции передачи на
команду складывается не только из времени, затрачиваемого на
изменение заполнения, но к этому времени добавляется время,
потребное на ассимиляцию жидкости, на установление потока
по рабочим колесам передачи и на установление режима при-
вода.
Во всех случаях время становления режима работы приводи-
мого механизма включает время становления режима механи-
ческой системы двигатель — передача — приводимая машина и
время становления режима в передаче, причем в зависимости от
характера приводимого механизма процессы могут идти после-
довательно или накладываясь друг на друга.
Время изменения степени заполнения при подаче жидкости
в передачу в основном определяется производительностью насо-
са, подающего жидкость. При опорожнении это время во мно-
гом зависит от параметров передачи и конструктивного оформле-
ния места отвода жидкости. Для трансформаторов с Da 1,5 м
это время составит 10—12 сек, для меньших машин это время
меньше.
Время становления режима в передаче условно можно пред-
ставить в виде двух отрезков: времени становления характери-
стики передачи и времени становления рабочей точки на этой
92
характеристике. Влитая в передачу порция жидкости не сразу
вступает в работу. Проходит некоторое время, пока это но-
вое количество жидкости в передаче будет ассимилировано.
Опыт показывает, что чем меньше заполнение передачи, тем
больше это время, условно называемое временем становления
характеристики.
Становление характеристики можно представить себе как
сумму времени, необходимого для того, чтобы жидкость, вве-
денная в передачу, приобрела устойчивую траекторию в ее ра-
бочей полости, и времени, необходимого для установления опре-
деленного количества жидкости, совершающей постоянную цир-
куляцию в рабочей полости передачи. Во многих случаях второй
процесс так и не устанавливается до тех пор, пока не установит-
ся режим привода, т. е. эти процессы, накладываясь друг на
друга, определяют время становления друг друга, причем все эти
процессы становятся существенно более длительными при час-
тичном заполнении по сравнению со временем, потребным для
изменения заполнения. При включении передачи полностью, т. е.
в случае, когда регулирование (управление) сводится к полно-
му заполнению, время запаздывания между заданием и исполне-
нием команды определяется только временем заполнения и вре-
менем, определяемым управлением движения системы:
at
где Мдв — момент на валу двигателя;
Мст — статическая нагрузка;
К — коэффициент трансформации, являющийся функцией
передаточного отношения;
7 — момент инерции приводимой машины;
со — угловая скорость приводимой машины.
В заполненной полностью передаче с некоторыми допуще-
ниями можно не учитывать инерции потока в рабочей полости
передачи и пренебречь различием в статических и динамических
ее характеристиках.
Такой способ регулирования не обеспечивает достаточной
скорости исполнения команд, что существенно затрудняет при-
менение регулирования за счет изменения заполнения даже в тех
случаях, где можно было бы пренебречь уменьшением к. п. д.
Важным случаем использования гидродинамических транс-
форматоров, регулируемых за счет изменения заполнения, явля-
ются судовые установки с дизелями, где на передачу, как прави-
ло, возлагается задача включения и выключения.
Одним из недостатков судового дизеля является его малая
глубина регулирования по числам оборотов. В сочетании с вин-
товой нагрузкой, создаваемой корабельным движителем — вин-
том, это свойство дизеля не позволяет при гидродинамическом
93
трансформаторе обеспечить требуемую глубину изменения ско-
рости судна: она оказывается равной эластичности двигателя.
При работе на режимах весьма малых мощностей и малой
длительности этих режимов вопрос экономичности (т. е. к. п. д.)
передачи не является решающим. В этом случае гидротран-
сформаторы, регулируемые наполнением, могли бы также найти
применение. Однако несовершенство существующих способов уп-
равления заполнением их рабочих полостей не позволяет широ-
ко распространить эти передачи и на судах '.
Регулирование изменением формы проточной части может
осуществляться при помощи различных шиберных устройств,
перегораживающих поток на выходе из насоса или за счет пово-
рота лопаток одного или нескольких решеток рабочих колес гид-
ротрансформатора.
Регулирование гидротрансформаторов при помощи шиберных
устройств по своим характеристикам (моментным и к. п. д.) на-
поминает регулирование изменением заполнения рабочей поло-
сти передачи.
По сравнению с этим способом регулирования шиберное ре-
гулирование отличается значительно более высокой маневрен-
ностью. Однако при таком способе регулирования полностью от-
ключить двигатель от приводимой машины не удается.
Наиболее экономичным способом регулирования, особенно
если речь идет о стационарных машинах, т. е. машинах, работаю-
щих с нерегулируемыми по числам оборотов двигателями, явля-
ется регулирование поворотом лопаток рабочих колес пере-
дачи.
Этот способ регулирования был предложен применительно к
поворотно-лопастным гидравлическим турбинам. На рис. 25 пред-
ставлена конструктивная схема передачи, изготавливаемой фир-
мой Крупп. Однако широкого распространения эта передача
в таком исполнении не получила, хотя фирма опубликовала ее
характеристики, превосходящие по экономичности регулировоч-
ные характеристики электропередач, выполняемые по схеме
Г — Д. На рис. 26 показаны эти зависимости.
Можно предположить, что причиной этому была сложность
конструкции узла перемещения лопаток. Этот узел представляет
собой клиновой механизм, при помощи которого поступательное
движение поршня сервомотора превращается в поворотное дви-
жение лопаток. Это обстоятельство является до сих пор основ-
ным препятствием к широкому применению таких передач, могу-
щих во многих случаях заменить приводы постоянного тока.
По сравнению с приводами постоянного тока эти приводы не
только более дешевы, но, что самое главное, требуют меньше ме-
1 В судовых установках изменением заполнения осуществляется реверс
винта, для этого одна полость передачи опорожняется, а другая заполняется.
94
Рис. 25. Конструкция гидротрансформатора фирмы Крупп:
1 — поршень сервомотора, перемещающего лопатки насоса; 2 — клиновой механизм поворота лопаток насоса; 3 — реакторы; 4 — тур-
бинные ступени; 5 — поворотные лопатки насоса; 6 — золотник сервомотора перемен^еиия лопаток насоса
Ь!ткГм
ста, так как имеют малогабаритное вспомогательное оборудова-
ние (холодильники) и могут изготовляться на любую мощность
при любых числах оборотов. Так, например, если осуществление
привода постоянного тока на мощность 5000 кет при 1500 об]мин
уже является проблемой, то привод,
состоящий из синхронного двигате-
ля и регулируемого гидротрансфор-
матора, и на большую мощность
может быть просто осуществлен.
Поэтому исследовательские работы
по таким передачам продолжаются,
например, фирмой Фонт. Эти пере-
дачи имеют другую конструкцию,
чем передачи «Крупп».
Схема одного из первых отечест-
венных гидротрансформаторов, уп-
равляемых изменением формы про-
точной части и спроектированного
во ВНИИМЕТМАШе, показана на
рис. 27.
320
280
240
200
160
120
80
40
регулировании; Mt (кривые
Г) (кривые 1—6) — к. п. д.
1200 1400 пТ об/мин
поворотными лопатками
О 200 400 600 800 1000
Рис. 26. Характеристики гидротрансформатора с
насоса:
М2 (кривые 1—6) — характеристики выхода передачи при
1—6) — характеристики входа передачи при регулировании;
передачи при регулировании поворотом лопаток
В этой конструкции предусматривались два исполнения: ли-
бо применение поворотно-лопастного осевого насоса, либо такой
же турбины. В обоих случаях этим колесам предшествовал реак-
тор с поворотными лопатками. Как и в случае работы турбин
В. Каплана, откуда заимствована эта схема регулирования, пово-
рот лопаток реактора и рабочего колеса должен быть различным
для того, чтобы обеспечить сохранение высокого к. п. д. в боль-
96
шой области изменения нагрузки. Оба исполнения передачи не
позволяют снять момент с насоса.
Если поворотно-лопастной выполнена турбина, то остаточный
момент на валу насоса будет составлять такую величину, кото-
рая определяется моментом на валу насоса при уменьшенном
расходе и положительной циркуляции, т. е. примерно 0,25-г-0,4
номинального значения. Экономичность такого регулирования
должна быть высокой.
При применении поворотно-лопастной турбины «чистота» вы-
ключения будет большей, но и в этом случае момент на насос-
Рис. 27. Схема конструкции гидротрансформатора с осевым насосом
и направляющим аппаратам с поворотными лопатками:
1 _ насос; 2 — реактор с поворотными лопатками
ном валу не может быть снят полностью, поскольку величина мо-
мента дискового трения не может быть уменьшена, так как на-
ружный размер насоса при регулировании не изменится.
На рис. 28 показана первая опытная передача, в которой на-
сос 1 имеет поворотные лопатки. В этой опытной машине была
предусмотрена также возможность регулирования шибером 2,
снабженным направляющим козырьком 3.
Неэкономичное регулирование шибером в сочетании с изме-
нением первичных чисел оборотов может обеспечить широкую
область высоких к. п. д. при большом диапазоне изменения на-
грузки.
На рис. 29 в координатах —------— (где индекс 20 отно-
4^20 W20
сится к номинальному режиму) представлены сплошными ли-
ниями 2 характеристики входа передачи при регулировании чис-
лом оборотов двигателя. Линии 3 изображают т^ же характери-
стики передачи при изменении открытия шибера. Цифры на них
7 Заказ 1076 97
00
Рис. 28. Схема лабораторного гидротрансформатора, управляемого по программе:
1 — насос; 2 — шибер; 3 —направляющий козырек
показывают долю открытия. Семейство кривых / характеризует
постоянный к. п. д. (в долях от наибольшего значения).
Во ВНИИМЕТМАШе был построен гидротрансформатор
(рис. 30), предназначенный для привода волочильного стана. Ло-
патки насоса в нем могут поворачиваться относительно осей,
параллельных оси передачи. Благодаря такой схеме в сложенном
положении лопатки образу-
ют гладкий цилиндр с на-
ружным диаметром, мень-
шим выходного диаметра
насоса, что обеспечивает
большую глубину регулиро-
вания.
Необходимость обеспе-
чить полное отключение
трансмиссии от приводимой
машины заставило обра-
титься также к трансформа-
тору с поворотными лопат-
-пг
пго
Рис. 29. Характеристики передачи при смешанном регулировании:
J — кривые постоянных к. п. д. (в долях от Лтах); 2— характеристики вхо-
да передачи при регулировании числом оборотов двигателя; 3 — характери-
стики входа передачи при регулировании открытием шибера
ками насоса и в случае привода конусной дробилки. На рис. 31
показан такой гидротрансформатор мощностью 130 л. с. Особен-
ность работы конусной дробилки — возможность ее полной раз-
грузки и опасность работы двигателя вразнос. В этом случае
в трансформаторе устанавливают регулятор числа оборотов. Ха-
рактеристика такой передачи с регулятором изображена на
рис. 32.
Регулирование поворотом лопаток насоса позволяет полно-
стью разгрузить двигатель при выключенной передаче.
Диапазон регулирования (с сохранением устойчивой работы
по моменту р = ^гтах для этих передач составляет 15—20 длд
п2 = const.
7* 99
g
сэ
В том случае, если не требуется полностью разгружать дви-
гатель и возможно допустить при регулировании большее паде-
ние к. п. д. (чем в первом случае), предпочтительнее применять
передачи с поворотными лопатками реактора.
На рис. 33 показан гидротрансформатор с поворотными ло-
патками реактора 2, расположенного на входе в насос 1 пере-
дачи. Поворот этих лопаток осуществляется сервомотором 3. Ха-
рактеристики передачи, подобной этой, представлены на рис. 34,
Рис. 32. Характеристика гидротранс-
форматора при включенном регуля-
торе
регулировании экономичность
уменьшается более заметно,
чем при регулировании ло-
патками насоса.
Большое разнообразие
конструкций управляемых
трансформаторов объясняет-
ся стремлением применить
эти передачи в разных усло-
виях работы.
Для удовлетворения
требования сохранения эко-
номичности при регулирова-
нии небезразлично как меня-
ется момент нагрузки с из-
менением числа оборотов
вторичного вала.
Эти обстоятельства важ-
ны при выборе типа передачи
и способа ее регулирова-
ния.
Например, если момент
нагрузки меняется так же, как момент на турбине трансформа-
тора, то для обеспечения приемлемого диапазона сохранения
к. п. д. по числам оборотов необходимо применить не регули-
руемый трансформатор, а обычный многоступенчатый с толстыми
лопатками.
Если же момент нагрузки с уменьшением числа оборотов па-
дает, требуется значительно изменять характеристики проточ-
ной части, чтобы обеспечить процесс изменения выходной мощ-
ности и поддерживать требующуюся экономичность.
На рис. 34 приведены характеристики одного из управляемых
трансформаторов. Кривые к. п. д., соответствующие частичным
мощностям, лежат внутри поля, ограниченного кривой к. п. д. при
наибольшем нагружении, причем кривая к. п. д. проходит тем
ниже, чем более глубоко происходит изменение момента нагруз-
ки. Такое расположение кривых к. п. д. объясняется неодинако-
вым изменением мощностей на валах насоса и турбины передачи
при регулировании. Если рассматривать режим при определен-
102
ном значении передаточного числа, то для сохранения постоянст-
ва к. п. д. необходимо, чтобы отношение = const, так как
к. п. д. передачи
„ _ ^2 __
Ni Mj/jj ’
при = const условие т] = const приводит к требованию
ni
Л12 ,
---= const.
Рис. 33. Гидротрансформатор для привода волочильного стана
с поворотными лопатками реактора:
1 — насг>с; 2 — реактор; 3 — сервомотор
103
Это условие тем труднее выполнить, чем больше требуемый
диапазон регулирования, поэтому вид кривой М = f(n2) сущест-
венно влияет на величину диапазона регулирования, при кото-
ром сохраняется экономичность привода.
Рис. 34. Характеристики гидротрансформатора с поворотными
лопатками реактора (по данным фирмы):
а — изменение k — f(i); б — изменение первичного момента; в — из-
менение Т) = f (г)
§ 2. ВЫБОР ТИПА НАСОСА РЕГУЛИРУЕМОГО ГИДРОТРАНСФОРМАТОРА
Как показывают исследования, гидравлический к. п. д. пере-
дачи является функцией от расхода (ns насоса) и заданного пе-
редаточного отношения I. Наличие максимума у этой функции
можно объяснить тем, что по мере увеличения расхода и умень-
шения напора лопатки турбины становятся все менее изогнуты-
ми. При этом коэффициент потерь и напор насоса падают.
В результате обработки многочисленных экспериментов по
продувке профилей, выполненных в МЭИ, ЦКТИ и др., было вы-
яснено, что коэффициент профильных потерь на реактивных ло-
патках при оптимальном шаге и угле установки определяется
по формуле
Е =______5____
. О . Q •
Sin Pi Sin р2
Из нее видно, что до некоторых предельных значений вели-
чин р> и р2 чем менее изогнута лопатка, тем меньше коэффициент
104
потерь. Однако после некоторого предела значений углов входа и
выхода межлопаточный канал становится диффузорным и вели-
чина £ вновь начинает увеличиваться. Это увеличение ограничи-
вается тем, что по мере роста величины Q увеличивается размах
лопаток и, значит, уменьшается коэффициент концевых потерь.
Кроме того, с увеличением расхода увеличивается объемный
к. и. д. передачи, однако все эти величины меняются так, что кри-
вая p=f(₽) при заданной мощности имеет оптимум.
Если требуется полностью выключить приводимый механизм,
то регулирование должно совершаться за счет поворота лопаток
насоса.
При этом быстроходность насоса определяется конструктив-
ными требованиями, т. е. условиями «складывания» и обеспече-
ния прочности закрепления лопаток. Под «складыванием» пони-
мается возможность поворачивать лопатки вокруг осей, парал-
лельных оси передачи, так, что в пределе они образуют цилиндр.
Для обеспечения минимального момента на валу двигателя и на
турбинном валу необходимо, чтобы при повороте лопаток насо-
са не только прекратился ток жидкости в круге циркуляции, но и
уменьшился диаметр насоса. Этого можно достичь, если лопат-
ки насоса поворачивать вокруг осей, параллельных оси переда-
чи, например так, как это сделано в гидротрансформаторе, пока-
занном на рис. 31. Здесь каждая лопатка насоса имеет ось и
может поворачиваться на шарикоподшипниках. Поворот совер-
шается при помощи шестерен, находящихся в зацеплении с вен-
цом. Венец посажен на вал, который может при помощи клино-
вого механизма поворачиваться относительно оси вала насоса.
Клиновой механизм преобразует поступательное движение порш-
ня сервомеханизма во вращательное движение вала, зубчатый
венец которого находится в зацеплении с шестернями, закреплен-
ными на цапфах лопаток.
При такой схеме насос должен быть радиальным и иметь ло-
патки постоянной ширины, что и определяет его тип по ns, по-
Р2
скольку каждому ns соответствует оптимальное отношение----,
Di
где D\ и Z>2 — выходной и входной диаметры насоса.
Гидротрансформаторы с поворотными лопатками насоса по
сравнению с передачами, регулируемыми поворотом лопаток ре-
актора, оказываются более сложными. В связи с этим их не
строят мощностью более 2000 л. с., в то время как вторые исполь-
зуются для передачи мощности до 60 000 л. с. Поворот лопаток
насоса обеспечивает большую глубину регулирования и приме-
ним для многоступенчатых конструкций.
В тех случаях, когда можно ограничиться снижением момен-
та турбины в 10—12 раз (по сравнению с номинальным), следу-
ет использовать регулирование за счет поворота лопаток направ-
ляющего аппарата.
105
Задача о выборе последовательности расположения колес
сводится к задаче о выборе типа турбины, которая может быть
центробежной, осевой или центростремительной.
§ 3. ВЫБОР ТИПА ТУРБИНЫ РЕГУЛИРУЕМОГО ГИДРОТРАНСФОРМАТОРА
Размер зоны (по передаточному числу) допустимых значений
к. п. д. при регулировании зависит от характера нагрузки.
Рассмотрим два случая работы передачи:
а) при постоянной нагрузке и переменной скорости на валу
приводимой машины (М2 = const; п2 = var; ni = const);
б) при переменной нагрузке и постоянной скорости на валу
приводимой машины (М2 = var; п2 — const; П\ = const).
В обоих случаях регулирования выходная мощность меняет-
ся так, что становится меньше номинальной. Для сохранения
при регулировании экономичности передачи необходимо, чтобы
мощность на валах насоса и турбины N2 менялась в одинако-
вое число раз или чтобы относительная величина потерь остава-
лась неизменной. При этом к. п. д. передачи
поэтому можно записать N2 = — Нпотеръ, и так как N = QH,
то
/Л —
Т] = -i----- = 1-------,
Н. ’
гд.е Hi — напор, развиваемый насосом;
5/г — суммарные потери энергии на выходе из насоса.
Утечками здесь пренебрегаем.
Будем считать, что все потери напора в круге циркуляции пе-
редачи могут быть записаны как потери трения и потери, связан-
ные с появлением угла атаки.
Обычно в расчетной точке характеристики нет ударных по-
терь, поэтому можно считать, что в этом режиме все потери про-
порциональны квадрату расхода. Известные гидротрансформа-
торы имеют в расчетной точке к. п. д. 0,85—0,88.
Значит, в этом режиме ~15% мощности двигателя расходу-
ется на преодоление трения в проточной части гидропередачи.
Механические потери настолько малы, что ими можно прене-
бречь.
Если в результате регулирования вторичная мощность умень-
шится при неизменном расходе (предполагаемый случай), то
потери трения относительно увеличатся пропорционально диа-
пазону регулирования и составят, например, 30% полезной мощ-
ности (если передаваемая мощность в новом режиме уменьшит-
ся в 2 раза).
106
Поэтому при регулировании величины передаваемой гидро-
трансформатором мощности в сторону уменьшения необходимо
уменьшать и расход в круге циркуляции гидротрансформатора.
Поскольку можно считать, что потери трения пропорциональ-
ны квадрату расхода, постольку следует стремиться максималь-
но изменять при регулировании расход.
Однако этого достичь трудно из-за возможного возрастания
ударных потерь, но можно установить необходимый диапазон
изменения расхода при заданном диапазоне регулирования |3 =
= ~^, где N20 и N2— величины мощности на границах диа-
пазона.
В написанной выше формуле, определяющей гидравлический
к. п. д. передачи, под 2й понималась сумма потерь на трение и
удар, т. е. 2й = hr + hyd, где hT и hyd — потери напора на тре-
ние и удар. Обозначим пт = J\Q2 и а =---, где а — относитель-
//1
ная потеря напора насоса на трение.
Если N2 = QH2 и N20 = Q20H20 — мощности на вторичном
(турбинном) валу передачи в режиме уменьшенной мощности м
в номинальном режиме, то
о _ Ср/До
~ QH2
Заметим, что
Т
Для сохранения при регулировании относительной величины
потерь на трение запишем, что аа = а, но
ао = „ ; Ло = 1 ао, “10
поэтому /Со (1 ао) а0 ~~ ГТ “20
или „ _ „ _ KQ2 _ № (Лп W • н, Н2
отсюда Н2 = (Д|] ^20 Q()Ko О
По определению ₽ = ^20 H20Q0 /^2 — или = , N2 H2Q Hw PC
поэтому Qo = j KnP Q V K0(i~a0)‘
107
Если считать, что гидравлический к. п. д. в оптимальном ре-
жиме р = 1 —а0 У гидротрансформаторов равен 0,9, а при ми-
нимальной мощности 0,75, то принимая, что К = 1,2 Ко, получим
Для того чтобы относительные потери напора на трение
в крайней точке области регулирования были не больше, чем
в точке оптимального к. п. д., расход должен при регулировании
уменьшаться пропорционально кубичному корню из диапазона
изменения мощности на вторичном валу передачи.
В данном случае потери в передаче разделяются на потери
на удар и потери на трение. Такое разделение упрощает анализ
выбора типа колес проточной части гидропередачи, хотя и не ис-
пользуется нами при расчете проточной части передачи (см. гл. II
и [38]).
Выражение для подсчета потерь напора на удар при регули-
ровании поворотом лопаток насоса, которому предшествует на-
правляющий аппарат, имеет вид
h«d = (ы2« ( 1 у-') [ 1 + (г’о — 1’)]2 + Х*0Ы2« +
2g ( \ Vo / \ *о vo /
+ ( 1 - 4"Y + -S- (Ctg - Cfg ₽2»o) + -S- -
- ctg ₽1H0)a - Q (1 - -y-) [1 + (io - 0](ctg ₽2;i - Ctg рзн0) -
_ a q л _ (ctg _ ctg p1K0)|.
Fih \ Qo / J
Установим, как изменяется величина потерь на удар с изме-
нением расхода. Будем считать, что при исследовании зависимо-
сти hy = f (—'(можно полагать, что коэффициент потерь на удар
\ Qo /
есть величина постоянная и одинаковая для всех колес. Ограни-
чимся случаем, когда n2 = var и п2<п20 при i0=ai, где а>1 —
диапазон регулирования по числу оборотов.
Заметим также, что поскольку регулирование (управление)
совершается в сторону уменьшения скорости при постоянном
моменте, постольку лопатки насоса должны поворачиваться так,
чтобы
Р1М0 > ₽1н И РгнО О Ргм-
Минимум функции hVd при определенных значениях углов
насоса, например, в крайней точке диапазона регулирования по
числу оборотов определяется из условия —— = 0.
’о
108
После дифференцирования имеем
...(с + d + е + g) — (с + h + g),
д..Q°
\ Со /
где
С = "iU1 + /(<Х — Hl2 + «1Н>‘
ft2 t2 \
d = Q2 + _М;
\ F2 F2 I
^i = ctg₽1K —ctgp1K0;
h = Ctg₽2M— Ctg₽2«0;
p — •
e u
g = + тН {[(1 + «•(«-1)] 4 + M (1 + Co);
\ Fih F2H )
h = a2i2u2H.
Эти коэффициенты не зависят от — 1.
V Со /
В точке, где функция hv = f имеет оптимум,-^ = 0. По-
'0
этому I— =--------— .
Co, opt c-f-d -|- e 4- g
Ho d + e > h, т. e. все три числа d, e й h положительны, a e
> h, так как
е «2tp“L
h ai‘2u2H
2 = a2
где а > 1 по определению.
В связи с этим
С
шение — должно
Из отношения
d + eZ> h. Следовательно, оптимальное отно-
быть меньше 1.
~-v— видно, что - hyd— > 0.
\ W0 / \ Vo >
Значит, экстремум функции hvd -= f(—'\ есть ее минимум.
( с \
Если вдоль оси относительных расходов I — j построить не-
сколько кривых hyS = f(—Y соответствующих различным i, то
\ Со /
их особенностью будет являться следующее: если кривая для
109
i _ 2 2С;: Q
Qo
вые с экстремумами, соответствующими меньшим
( Q \ '
I—), бУДУТ иметь абсолютную величину в точке минимума,
возрастающую от одной кривой к другой. На рис. 35 показан
характер изменения этих кривых. По оси ординат отложены ве-
личины потерь на удар, а по оси абсцисс 1 — I — ).
\ Qo /
Проведенный анализ можно повторить и для другого случая
регулирования, например, поворотом лопаток реактора.
i = i0 будет в точке минимума касаться оси — , то другие кри-
величинам
ударных
расхода
потерь в функции относительного
Q
Qo
Уравнение потерь напора в этом случае имеет вид
(1 - [1 + о» - о)2 + ^л — j-Y -
V х Vo / \ “-Qin. Vo ‘
— 2 Q(L----------(ctg а1а — ctg а1а0) + (ctg а1а —
i’la \ lo Qo / F2la
— Ctg «iao)2 + «L f 1 — У" Y + (Ctg 0^— ctg a20o)2 —
\ Vo / * 2a
~ Q / i _ _g_\ (ctg Q,2a _ ctg a2ao)} .
Можно показать, что и для этого случая потери напора на
удар при изменении передаточного числа будут наименьшими
при— < 1.
Qo
Рассмотрение треугольников скоростей позволяет установить
эту зависимость и для случая М = var; п2 = const.
Таким образом, для уменьшения потерь напора на трение и
удар при программном управлении или регулировании гидро-
трансформаторов выгодно, чтобы эти процессы, ведущиеся в сто-
110
рону уменьшения передаваемой мощности, сопровождались
уменьшением расхода.
Естественно предположить, что характер изменения расхода
при регулировании или управлении по программе в круге цир-
куляции гидротрансформатора должен меняться по-разному в
зависимости от типа колес его проточной части и вида нагрузки.
В качестве первой попытки решения задачи рассматривается
одноступенчатый гидротрансформатор.
Рассмотрим способ регулирования поворотом насосных ло-
паток. При этом тип проточной части гидротрансформатора оп-
ределяется типом турбины — центробежной, осевой или центро-
стремительной.
Напор, срабатываемый турбиной, пропорционален разности
циркуляции до и после колеса:
Нт—(Г1 — Гг).
2ng
По определению циркуляции на входе в турбину
Г1 = 2лг12си12
и на выходе из турбины
Г2 = 2лг 22^«22»
где Г12 — радиус выхода из насоса;
с“12—проекция абсолютной скорости на выходе из насоса
на направление окружной скорости.
Следовательно,
Нт = (®2^ 12Г«12 ^2^22^022)
g
И
Г
(В9Л 12 = ^2т •
Г21
Полагая, что в межколесном зазоре циркуляция не изменя-
ется, т. е.
С«12 Г12 = С«21Г21>
можно записать
с = с —.
«12 «2 1 Г12
Значит
Нт ” (^21Г«21 ^22Г«а2)*
g
Воспользовавшись соотношениями, следующими из треуголь-
ников скоростей на входе и выходе из турбины, можно записать
Tr 1 Г/ 9 . 9 \ ( Cm21U21 СШ22Ц22 \
Нт= --- (W21~W22)— “-------------ЕГй--- '
g 15 \ tg ₽21 tg Р22 /J
111
Заметив, что и = л—, а ст = —— , перепишем это выраже-
ние:
где b — размах (ширина) лопатки.
Если обозначим
лР21 ____ / Л/?22 \21
60 ) \ 60 / J
1 / ctg р21 _ ctgfl22 \)
g \ 60621 60622 /) ’
А = —
g
то уравнение напора, срабатываемого турбиной, приобретет вид
Нт — Аг^2 5Q/22.
Коэффициент A =f(Dlx —D%2) характеризует тип турбины.
Действительно, если А > 0, то это значит, что диаметр входа на
турбину больше диаметра выхода из нее. Такое соотношение
размеров характерно для центростремительной турбины.
Когда А = 0, диаметры входа и выхода равны, т. е. турбина
осевая, а если А < 0, то турбина центробежная.
Коэффициент В характеризует профилировку лопаток и для
всех типов турбин он отрицателен, так как 022 < ₽2i-
Регулировочная характеристика изменения расхода в рабо-
чей полости гидротрансформатора может быть получена как ре-
шение системы трех уравнений:
уравнение турбины
Н2 = Ап22 — BQn2;
уравнение мощности на валу турбины
-- — -- /гкт'^Т - .
75 716,2
уравнение нагрузки
Л1Т = f (n2) = const.
Рассмотрим случай нагрузки Мг = const при п2 — var.
Из уравнения мощности найдем
_ QyH2 716,2
Пг ~~ 75Л4т
75Л1т QH2
Обозначим с —---- или п2 = ---.
716,2? с
Подставив в уравнение турбины это значение м2, получим
Я2=~—+ —.
Д<22 А
112
Это регулировочная характеристика изменения расхода, в
данном случае нагрузки (М2 = const; п2 = var).
Для центробежной турбины последнее уравнение с учетом
знаков постоянных коэффициентов принимает вид
Н2
Вс
А
так как В<0 и ?1<0. При осевой
Q2 =-----— = const.
В
При центростремительной тур-
бине В < 0 и А > 0, поэтому
регулировочное уравнение запи-
сывается в форме
TJ с1 Вс
11 2 — .
AQ2 А
Построим в координатах Q —
Н2 две гиперболы (рис. 36). Ги-
пербола 1 соответствует номи-
нальной снимаемой мощности
<2оЯоу, а гипербола 2 имеет это
произведение в а раз меньшим
(для случая нагрузки п2 = var,
Л42 = const).
с-
Аф ’
турбине В<0 и А = 0, поэтому
Рис. 36. Внутренние’характеристи-
ки гидротрансформатора:
1; 2 — гиперболы постоянной наи-
большей и наименьшей мощности;
3 — характеристика центробежной
турбины; 4 — характеристика центро-
стремительной турбины; 5 — характе-
ристики осевой турбины
Если предположить, что в но-
минальном режиме течение в
трансформаторах с центробеж-
ной, осевой и центростремитель-
ными турбинами характеризуется
точкой А, то на краю диапазона
регулирования, т. е. на гиперболе 2, у каждого типа трансфор-
матора будет своя рабочая точка.
Очевидно, что для осевой турбины второй (крайней) рабочей
точкой трансформатора будет точка В, потому что регулирован-
ная характеристика трансформатора с осевой турбиной в коор-
динатах Q—Н2 представляет собой вертикаль Q = const.
В тех же координатах регулировочная характеристика для
центростремительной турбины имеет вид гиперболической кри-
вой 4, смещенной относительно оси абсцисс Q. При Q = О Н2^>-
—> сю, а п
кривая пересекает ось абсцисс. Характе-
ристика центробежной турбины гидротрансформатора пересечет
3 Заказ 1076
113
гиперболу 2 в точке/), так как регулировочная кривая вэтомслу-
чае есть гипербола, у которой npnQ = 0^2-f---°°- При Q= —
В
эта кривая пересекает ось абсцисс.
Таким образом, в рассматриваемом случае нагрузки наиболь-
шее уменьшение расхода при уменьшении передаваемой мощ-
ности достигается при использовании центробежной турбины.
Для нахождения параметров турбины, от которых зависит
изменение расхода при регулировании, воспользуемся безраз-
мерными коэффициентами напора ф = 2 - g и расхода ф =
“12
=---------. Обозначим р2 = —— и 09=------, положив <^21 = ^22 =
ЯО]2 U12 ^12 ^22
= &12 = Ьц, где Ь — ширина колес в направлении их оси вращения.
Если в уравнении турбины ее напор Н2 заменить коэффициентом
ф, то получим (в предположении, что = 6)
ф = 2р1 (62 — 1) z2 — Зф/ (ctg р21 — ctg р22)
01
или
ф = ai2 — byi,
где
а = 2р1 (61 - 1); Ь = 3 (ctg р31 - ctg р22).
о
Введем также безразмерную величину, характеризующую ра-
боту машины (Q; Я; п). Эта величина пропорциональна числу
оборотов п в первой степени:
Поскольку левая часть безразмерна, то безразмерна и пра-
вая часть этой формулы:
поэтому
2х -4 Зу = 0 |
— 2х — у — 1 -- Q I
1 3~
у = — ; х =-------
2 4
и
_ 3 1
К„ = (^Я) 4Q2h.
114
Если вместо Q и Н ввести коэффициенты расхода и напора,
то
1 _ 3
Кп = с<р 2 ф 4,
где с — постоянная, с = 27,9.
По аналогии найдем коэффициент момента:
1 ___з_
Км = -TiL =-------------— = 0,0358<р2 ф 4.
27,9<р ф
Для получения безразмерной регулировочной характеристи-
ки рассмотрим систему трех безразмерных уравнений, анало-
гичных тем, что рассматривались при получении размерной регу-
лировочной характеристики:
уравнение турбины
цф = ai2 — bqi, где ц = ;
Hi
уравнение мощности
KKMiKn = Фф, где Д - — ;
Ki
уравнение нагрузки (для рассматриваемого случая постоянного
момента и переменных чисел оборотов)
ККмКп = const.
Из приведенного выше уравнения
i = 'р|'
‘ К.КмК.п КАп ’
где Ап = КмКп — коэффициент мощности.
Подставив выражение i в формулу для определения ф, по-
лучим
а ср45 а
Для центробежной турбины имеем
а = 2р2 (622 - 1); Ь = 3 -L (ctg р21 - ctg р22); < 1,
01 о22
поэтому бг 1 и а < 0; p2i > Р22 и b < 0.
Уравнение, описывающее процесс регулирования центробеж-
ной турбины, имеет вид
где КАп = с — характеристика нагрузки.
8* 115
Целью данного анализа является нахождение функции —
Фо
где индекс «о» относится к величинам номинального режима.
Запишем систему уравнений:
Ьс
ПФ = —
а а
с*
0 ’
<p-
L = -^~
a
(9)
где a — диапазон регулирования по числам оборотов.
Используя уравнение мощности, запишем
сЬ — ферт]; 1
сЛ0 = ФоФоПо- J
Разделив обе части второго уравнения на а и приравняв пра-
вые части этих уравнений, получим
Wk.. (Ю)
a
Умножим обе части первого уравнения системы (9) на <р, и
вместо его левой части подставим равную ему по значению пра-
вую часть равенства (10):
Ьс_ __ с2 1 \ = фрфоНо
а а ф2 / а
Разделим обе части уравнения на <р0:
ф \ Ьс__/Ф \ с2 J фоЦо _ q
Фо / а \ фо / а ф2 a
Умножим это выражение на [ — !, тогда получим
\ Фо ;
/ ф \2 ЬС_ / ф \ фрЦо___с2 1 _ q
\ Фо / а \ Фо ' а а
Решим это уравнение относительно (—
______\ Фо
Фо Но J 4 Ьс*
а2 а2фд
Фо Ьс
а
Так как фо = 1; а 24-4; т]о = 0,85; = 20-4-30; с3 = 0,1 -г-
0,15; а2» 1,1; <р2 = 0,1, то первым членом под корнем можно
пренебречь, поэтому
116
ф
Фо
гт^ + -1/ г-
Ьс 2а <р0 г b
Заметим, что при а= 1 ф = фОили
<р0 у b 2Ьс
Если подставить в предыдущий результат это выражение,
то получим
ф = 1 _ ФоПо Q / 1__________
<р0 2 Ьс \ а /
По определению с = Афф; фо = ——
АоФо
----Зо_.А/1_±\ но -^ = i0.
фо 2Kufpo Ь \ а / /Со
Окончательно получим ;
ф = । Д А 1_\
фо 26 Фо \ а /
Таким образом, чтобы при заданном диапазоне регулирова-
ния а получить большее изменение расхода, нужно иметь боль-
шие значения а и малые Ь, так как а = 2р| (6? — 1), причем
р = -5^-; б2= Величина а будет тем больше, чем больше
012 О22
£>22
отношение р2 = —— , т. е. чем дальше от выхода из насоса на-
012
ходится выход из турбины и чем больше протяженность лопа-
ток турбины, характеризуемая величиной 62 = ——•
О22
Целесообразно также применение гидротрансформаторов с
большим значением расчетного передаточного отношения I.
Выше было получено выражение для определения величины
изменения расхода, обеспечивающего сохранение относитель-
ной величины потерь напора на трение.
Если бы удалось получить такое же отношение для величины
потерь напора на удар, то последняя формула могла бы слу-
жить расчетным соотношением. Однако для этого еще потребу-
ются специальные исследования.
§ 4. ПРИМЕР ВЫБОРА ВНУТРЕННИХ ПАРАМЕТРОВ РЕГУЛИРУЕМОГО
ГИДРОТРАНСФОРМАТОРА
Рассмотрим пример расчета гидротрансформатора для при-
вода конусной дробилки.
Для выбора параметров колес гидротрансформатора в слу-
чае нагрузки по закону и2 = const при М2 = var, что соответст-
117
вует, в частности, условиям работы гидротрансформатора в при-
водах дробилки, редукционного стана и т. п., используем несколь-
ко иной прием выбора параметров проточной части.
Как известно, к. п. д. гидротрансформатора можно найти по
формуле
п = j^ = н° = +
Nt Mjfij
где М3 — момент на направляющем аппарате.
Следовательно,
По = —
«1
/ЛЛ + МзХ =
\ J \ М± J
где п2о и io — расчетное число оборотов турбины и расчетное пе-
редаточное отношение.
Поскольку в рассматриваемом случае /г2о = const и io = const,
то к. п. д. гидротрансформатора меняется вместе с изменением
Л13— момента на направляющем аппарате.
В большинстве случаев (как, например, привод дробилки)
i0 имеет такое значение, что можно принять на краю диапазона
регулирования rjmin = io- Следовательно, гидротрансформатор
на границах диапазона регулирования может обратиться в гид-
ромуфту, т. е. АД = 0.
Для обеспечения полного отключения двигателя от привода
дробилки был выбран трансформатор с поворотными лопатка-
ми насоса. Этим самым была предопределена его форма — ра-
диальный центробежный насос с постоянной шириной канала Ь.
Если в расчетном режиме обеспечен безударный вход потока
на все решетки, то
2Л = 2
i=l
где п — число решеток;
k — коэффициент потерь.
Если бы коэффициенты потерь не менялись с изменением
формы лопаток, то с увеличением напора насоса Hi увеличивал-
ся бы к. п. д., так как при заданной мощности = QiHiy вы-
бор большего напора Hi соответствует выбору меньшего расхо-
да Qi и, следовательно, меньшим скоростям и потерям.
Однако увеличение Hi связано с изменением профилей рабо-
чих колес. В связи с этим коэффициенты потерь увеличиваются,
а к. п. д. уменьшается.
Для обеспечения высокой экономичности следует удельную
быстроходность насоса выбирать в пределах ns = 150 -т- 200,
причем величина диаметра выхода из насоса Du должна состав-
лять 1,2—1,8 от величины диаметра входа Du. Меридиональная
118
скорость на выходе из насоса ст12 = 0,25 4- 0,28 и12 при условии
складывания лопаток.
Из этих предпосылок выбраны параметры насоса рассчиты-
ваемого гидротрансформатора.
Напор Ну и расход Q найдены по известным зависимо-
стям:
Ну = - (^«,2^12 ~
g
Результаты определения параметров гидротрансформатора
при повороте лопаток насоса приведены в табл. 7. Окончательно
был принят четвертый вариант.
Таблица 7
Внутренние параметры гидротрансформатора конусной
дробилки при регулировании
Радиус входа Гц в м Радиус выхода г 12 в м 03*^ X сз S Ч Я я 3 та Я X к Угол входа Ри в град Угол выхода р12 в град Число лопаток z £ Ct о с § та X Й Расход Q в мР/сек Расчетный к. п. д.
0,235 0,345 0,06 84 60 22 19 0,803 0,7
0,235 0,38 0,06 70 60 22 23 0,6 0,8
0,22 0,36 0,06 45 45 22 27 0,58 0,85
0,22 0,36 0,06 35 45 22 32 0,485 0,88
Для того чтобы получить наибольшую производительность
дробилки при возрастании нагрузки от попадания более плотных
дробимых материалов, нужна большая крутизна характеристи-
ки М2 = f(ti2), т. е большой коэффициент трансформации при
страгивании системы. Это можно получить, применяя многосту-
пенчатую турбину.
В двухступенчатой (и вообще многоступенчатой) турбине
можно уменьшить угол атаки при входе на реактор, а следова-
тельно, и потери на удар.
Действительно, при повороте лопаток насоса, т. е. уменьше-
нии угла выхода (и диаметра), напор насоса будет уменьшаться.
Турбина, вращающаяся с постоянной скоростью, и весь осталь-
ной тракт круга циркуляции представляют собой неизменное или
увеличивающееся гидравлическое сопротивление. Значит, и рас-
ход при повороте насосных лопаток будет уменьшаться. Поэтому
уменьшится величина cU12 и угол входа на турбину будет ме-
няться мало. Следовательно, скорость выхода с турбины при
уменьшающейся нагрузке и постоянном числе оборотов п2 имеет
величину и направление, отличающиеся от нормального режима
тем заметнее, чем больше изменяется момент на данной ступени
турбины.
119
Если применять двухступенчатую турбину то, предполагая,
что циркуляция на выходе в турбину первой ступени при поворо-
те насосных лопаток не изменилась, можно значительно умень-
шить угол атаки при входе на направляющий аппарат.
Размеры элементов круга циркуляции приведены в табл. 8.
Таблица 8
Параметры элементов круга циркуляции
Элементы Углы выхода в град Радиус входа в м Радиус выхода в м Число лопаток
Турбина I ступени 20 0,37 0,415 60
Турбина II ступени 22 0,41 0,37 46
Реактор (осевой) 30 0,5 0,5 50
Исследуем работу направляющего аппарата.
Для данной схемы круга циркуляции можно записать
= —— (\132Г32 р2 ,12r2,12Сц2 _ J 2 J
или
м = ®-(и г clgp32(? и Г и + и г CtgP2’12 п)
- Н32'32 р Ч Г2,12'2,12ы2,12 л ^2,12'2,12 „ р Ч1'
s ' х32г32 х2,12г2,12 z
Обозначим
р2 12Г2 12Ы2 12 = С = const ПРИ П2 = const;
р32г32 • ct-~ —— = а = const;
32
C*S?2,12 , .
Иг, 12Г2,12 ~ р — b — const.
х2, 12 г2,1 2
Тогда получим
=(a + b)Q2_cQ>
V
В координатах М — Q это будет падающая кривая.
Наибольшее значение ее ордината будет иметь при Q = QpaC4-
При Q =—— М3 = 0. В этой точке, очевидно, к. п. д. трансфор-
а + b
матора будет равен передаточному отношению z0. При дальней-
шем уменьшении расхода величина М3 станет меньше нуля, что
приведет к дальнейшему уменьшению к. п. д. передачи, поэтому
120
характеристики проточной части гидротрансформатора должны
быть такими, чтобы весь диапазон изменения нагрузки
Р Маглах N2max
A42niin Alimin
происходил при изменении расхода в пределах Qo Q = .
Для того чтобы к. п. д. сохранял высокое значение возмож-
но дольше, желательно, чтобы интервал изменения расхода при
изменении нагрузки был большим, иначе нужно иметь величину
Q =—-— минимальной. Достигнуть этого можно, уменьшая ве-
fl: + b
личину коэффициента с, т. е. уменьшая радиус выхода из турби-
ны первой ступени, или увеличивая а и Ь.
Для нашего случая cmln = 6,3 мР/сек. При этом a + b =
= 17,3 мг1, поэтому расход, при котором момент на реакторе ра-
вен нулю (Л4з = 0), Q = 6,0 = 0,364 м^/сек.
17,3
Таким образом, суммарная характеристика турбины должна
проходить так, чтобы момент на ее валу при расходе Qo =
= 0,485 мЧсек был равен номинальному моменту, а при Q =
= —-— = 0,364 мЧсек его величина составляла Д” где Д19„ _
a + b ₽
номинальный (наибольший) момент на валу турбины при номи-
нальном числе оборотов.
Если бы переход от режима работы с расходом Qo =
= 0,485 мг1сек к Q = 0,364 мЧсек совершался при неизменных
условиях входа на турбины, то найти требуемую форму суммар-
ной характеристики турбин не составляло бы труда, так как это
была бы прямая, проходящая через две точки, координаты ко-
торых определялись бы следующим образом. В осях Q — Н кри-
вая Л42 = М20 = = const представляет собой гипербо-
Ш20
лу. Поскольку ого задана, так же как задана величина Q2o =
= 0,485 мР/сек, следовательно, задана величина напора, срабаты-
ваемого в этом режиме турбиной:
^20 —
A4go<o2o
Q20Y
Аналогично можно найти и напор, срабатываемый турбина-
ми, при Q = 0,364 мЧсек, т. е. при М2 = Мгтш =
М20
Д2
/И2<о.2о
Qy
Однако, из-за влияния на характеристику турбины поворота
лопаток насоса через точку А с координатами (Qo, Но) и В с ко-
121
ординатами (Q, Н) проходит не прямая, а кривая, являющаяся
геометрическим местом точек пересечения совокупности харак-
теристик турбин, меняющихся при повороте насоса, и характе-
ристик насоса. Выше были приведены профили турбин, получен-
ные предварительно при расчете номинального режима.
Построим в системе координат Q — Н теоретические харак-
теристики насоса и турбины при = 590 об/мин и га2 = const =
= 350 об/мин.
Характеристика насоса
Н.
При Q — 0 напор насоса равен:
TJ _ 1 / 2 Г2,22
П0 ~ „ P’l W12 Р-2 , U12U2,22
S \ Г11
Характеристика первой ступени турбины:
Я21 = —-
S
P1W2 U12-^~
2’И Г2.И \ tg₽12
___ Ст2•12
. 2J2 tg₽2,I2
При Q = 0 напор турбины первой ступени:
^2l ~ g ( Pl U2, 12 U12 P2,12W2,12^-
Характеристика второй ступени турбины:
(Н)
(12)
(13)
(И)
(15)
Проверка соответствия выбранных профилировок колес во
всем диапазоне изменения нагрузок и, значит, расходов прово-
дится в следующей последовательности.
Графически (рис. 37) задаемся законом изменения к. п. д. при
изменении нагрузки в диапазоне р. При этом полагаем, что при
номинальной нагрузке к. п. д. наибольший, а при минимальной
нагрузке к. п. д. не должен быть меньше передаточного отно-
шения.
122
Рис. 37. График совмещения характеристик
турбины и насоса регулируемого гидро-
трансформатора:
1 — кривая измерения вторичного момента пере-
дачи; 2 — характеристика турбии передачи в
диапазоне регулирования Q; 3 — характеристика
насоса в диапазоне регулирования Q; 4—к. п. д.
передачи; 5 — момент на реакторе; Н р —
крайние положения характеристики насоса при
регулировании; кРа^иие положения
характеристик турбин при регулировании; //jy;
^2 11— крайние положения характеристик турби-
ны второй ступени при регулировании; (3 — диа-
пазон регулирования
Пользуясь графиком, устанавливаем ряд значений ц — М2. По
этим значениям М2 определяются соответствующие им значения
расхода.
Установив зависимость М2 = f (Q), определяют напор турби-
ны Н2 = —. Зная функции T]=f(Af2) и M2 = f(Q), находят
Т] = f(Q).
Затем, зная Q и при
каждом Q положение ло-
паток насоса, находят его
напор.
При Q = 0 напор вто-
рой ступени турбины
г j 1 2
Суммарная характе-
ристика турбин:
Н 2L = Н21 + н2Ц.
Поворот лопаток насо-
са изменяет зависимость
Hi = f(Q) и, воздействуя
на вход в турбину первой
ступени, меняет ее харак-
теристику: H2i = f(Q).
Теоретические харак-
теристики второй ступени
турбины Я2п = f(Q) и
реактора М3 = f(Q) не
меняются при регулиро-
вании.
Так как характеристи-
ка H21I = f(Q) при регу-
лировании не меняется,
то можно найти напор на турбине первой ступени
Н21М,=0 = ^2ЕЛХ,=О —H2nMi^Q.
В уравнении (13) обозначим:
12 tgpi2 / г2,п
тогда
^2Ш3=0 = —
g
Cm2,12
Ы2,ИХ Р"2 , 12Ы2 , 12 I U2 , 12
₽2,X2 /.
123
/ 2,12 \
>*!!»«,,! +И>. Irtjil “!.l I - (е« )
-^7Гг.> =-----------------------------------:—е. (16)
и1,11
где х — окружная составляющая абсолютной скорости потока
на входе в турбину первой ступени.
При заданной оси поворота лопаток насоса величина х одно-
значно определяет их положение. Найдя х из уравнения (16),
мы задаем положение лопаток насоса.
По уравнению (11) подсчитываем значение при М3 = 0.
Зная свойства элементов круга циркуляции гидротрансформато-
ра, можно записать
В данном случае
Q = Qm,=o = 0,364 м^сек;
Нъъ = 12 м; //2ш3=о — 12 м — 4,2 м = 7,8 м,
откуда х = 14,15 м/сек.
Этому значению х соответствует положение лопатки насоса,
определяемое параметрами: р12 = 32°; rI2 = 0,333 м; гн = 0,24м.
Подсчитав по уравнению (11) напор насоса, получим Н1л/,=о =
^2ВМ.= 0 12 _ „ . п л
= 20 м и ------2---=------ = 0,6 м; n = i = 0,6.
Я1Л1з=0 20
Параметры проточной части передачи являются исходными
данными при проектировании и расчете профиля проточной
части.
Аналогичные рассуждения могут быть использованы при по-
строении алгоритма задачи для решения ее на ЭВМ. В этом слу-
чае наиболее точно можно найти оптимальные соотношения про-
точной части.
§ 5. РЕГУЛЯТОРЫ ДЛЯ ГИДРОЭЛЕКТРОПРИВОДА
С ГИДРОТРАНСФОРМАТОРОМ
Гидродинамические трансформаторы момента, управляемые
по программе изменением формы проточной части (например,
поворотом лопаток одного из колес), могут применяться в ком-
бинации с нерегулируемым по числам оборотов двигателем вме-
сто электродвигателей постоянного тока.
Такой гидроэлектропривод будет иметь характеристики, ана-
логичные характеристикам привода постоянного тока.
Из рассмотрения этих графиков видно, что число оборотов
вторичного вала передачи зависит от величины нагрузки.
124
Поэтому для ряда технологических процессов использование
такого гидроэлектропривода возможно только в случае введения
в систему регулятора, обеспечивающего требуемый характер из-
менения (скорости вторичного вала при изменении нагрузки).
На регулятор могут быть возложены различные задачи. На-
пример, можно построить такую систему, которая преобразовала
бы податливые характеристики выхода передачи в более жесткие,
например, такие, как у приводов постоянного тока.
Более простая система может обеспечить поддержание (или
ограничение) числа оборотов вала турбины передачи.
Первая задача возникает, например, при приводе волочильно-
го стана или драги.
Действительно, при волочении прутков и труб скорость воло-
чения зависит от марки стали, поэтому, привод стана должен обе-
спечивать возможность настройки на определенную (для данной
марки стали) скорость и поддержания ее, что важно для сохра-
нения заданной производительности. При приводе черпательной
цепи драги задача аналогична: наибольшая скорость под нагруз-
кой устанавливается в зависимости от производительности тех-
нологической части драги и должна поддерживаться для сохра-
нения производительности установки.
При работе гидротрансформатора в приводе конусной дро-
билки регулятор должен ограничивать скорость вала турбины
передачи при разгрузке дробилки.
Возможны такие системы, когда требуется, чтобы привод обе-
спечивал определенную закономерность изменения нагрузки на
вторичном вале. Такая задача возникает при осуществлении при-
вода моталки стана. В этом случае требуется поддержать по-
стоянным натяжение полосы (или ленты). При возрастании диа-
метра бунта и неизменной скорости подката необходимо менять
скорость барабана.
Таким образом, эта задача по поддержанию постоянной ве-
личины натяжения полосы сводится к проблеме регулирования
скорости.
Полагая, что задача регулирования скорости является общей
для гидроэлектропривода, ниже рассмотрим конструкции регу-
ляторов скорости.
Регулятор скорости гидроэлектропривода должен состоять из
следующих элементов: датчика скорости вторичного вала, изме-
рителя рассогласования (между требуемым и имеющим место
значениями скорости), обратной связи, сервомотора, привода
лопаток и устройства для перенастройки регулятора на новый
режим.
В качестве измерителя скорости может применяться любой
тахометр, в том числе и насос, давление и расход которого есть
однозначные функции числа оборотов вторичного вала передачи.
Измеритель рассогласования проще всего выполнить в виде
125
поршня, положение которого определяется давлением жидкости
с одной стороны и усилием пружины — с другой. С этим порш-
нем должен быть связан золотник обратной связи, управляющий
перемещением поршня сервомотора.
Рассмотрим несколько конструкций регуляторов скорости,
предназначенных для работы с гидротрансформаторами с пово-
ротными лопатками.
Регулятор с жестким коромыслом. На рис. 31 показан попе-
речный разрез гидротрансформатора с поворотными лопатками
насоса. Здесь поворот лопаток совершается за счет перемещения
поводка 1 при помощи двух сервоцилиндров. Масло к этим сер-
воцилиндрам подается от масляного насоса через золотник 2.
Насос, питающий сервоцилиндры, имеет привод от отдельного
насоса. Положение золотника 2 определяется коромыслом 3,
нижний конец которого связан с поршнем 4 измерителя рассо-
гласования. Поршень 4 нагружен пружиной 5. Масло к нему по
трубке 6 подается от зубчатого насоса 7 — измерителя числа обо-
ротов, приводимого цепной передачей 8 от турбинного вала 9
гидротрансформатора. Масло, подаваемое по трубке 6, сбрасы-
вается через дроссель 10, в который входит игла 11, имеющая
коническую форму. Благодаря этому можно настраивать регу-
лятор на поддержание различных чисел оборотов.
Действительно, при некотором числе оборотов турбины гидро-
трансформатора п0 подача импульсного насоса 7 равна q0. При
этом при данном положении иглы 11 давление, развиваемое на-
7 л d 9° Р ГТ
сосом /, будет Р =—. Поскольку эта сила уравновешивается
силой пружины Р = kx, где х — смещение конца пружины, то
определенному q0 соответствует определенная величина х, т. е.
положение лопаток. Однако сила Р есть функция не только рас-
хода, но и площади дросселя F, которая определяется положе-
нием иглы 11. Поэтому одно и то же положение лопаток может
быть достигнуто при разном числе оборотов. Таким образом, иг-
ла 11 есть устройство для перенастройки регулятора на поддер-
жание различных значений чисел оборотов.
Данный регулятор допускает и ручное управление гидротран-
сформатором. Для этого предусмотрена возможность переме-
щать золотник 2 при помощи тяги 12. При неизменном положе-
нии поршня 4 возможно различное положение золотника 2 и со-
ответственно лопаток насоса.
Регулятор с гибкими связями. В регуляторе, изображенном на
рис. 38, поршень измерителя рассогласования связан с золотни-
ком сервомотора, переставляющего лопатки гидротрансформато-
ра при помощи металлической ленты. Сам золотник в этом ре-
гуляторе размещен в расточке хвостовика поршня серво- ,
мотора.
126
Рис. 38. Регулятор числа оборотов с гибкими связями
Для задания режима регулирования коническая игла измери-
теля рассогласования может переставляться при помощи микро-
метрического винта. Ручное воздействие на гидротрансформатор
для его пуска или остановки осуществляется маховиком, при по-
мощи которого можно переставлять натяжной ролик и тем са-
мым изменять положение лопаток гидротрансформатора.
Регулятор с осевым размещением элементов. Основной тен-
денцией при конструировании регуляторов (рис. 39) является
уменьшение масс подвижных систем измерителей рассогласова-
ния и исключение зазоров из передающих элементов. Для этого
рычажная система в предыдущей конструкции была заменена
Рис. 39. Регулятор с осевым размещением элементов:
1 — пружина измерителя; 2, 7, 8 — корпусы; 3 — поршень измерителя; 4 — патру-
бок; 5 — золотник; 6 — хвостовик; 9 — поршень сервомотора; 10 — шток сервомо-
тора; 11 — уплотнительные жгуты; 12 — стакан; 13 — игла
гибкой металлической лентой, а в данном регуляторе эти элемен-
ты размещены на одной оси и поршень измерителя соединен с
золотником обратной связи.
Поршень обратной связи имеет хвостовик, в расточке кото-
рого закреплен корпус, а в расточках и сверлениях левой части
корпуса находится гидравлическая система регулятора. Сам хво-
стовик скользит по уплотнительному бурту корпуса, камеры ко-
торого, ограниченные жгутами, используются для подвода масла
к регулятору.
В правой части хвостовика находится радиально-упорный
подшипник, через который усилие сервомотора через шток пере
дается механизму перестановки лопаток.
128
Измеритель в данной конструкции выполнен в виде порш-
ня, размещенного на золотнике с зазорами. Это сделано для то-
го, чтобы снизить требования к соосности расточек под золотник
и поршень.
Поршень измерителя нагружен пружиной и давлением масла,
поступающего от импульсного насоса через патрубок и сбрасы-
ваемого через дроссель. Этот дроссель прикрыт концом иглы.
При некотором расходе q масла, поступающего от импульсно-
го насоса, в камере перед поршнем устанавливается давление,
определяемое расходом q и площадью F дроссельного отверстия
в стакане. Соответственно этому давлению р = на поршне
возникает сила Р = pf, где f — кольцевой участок площади порш-
ня, на который действует давление.
При любом числе оборотов устанавливается равенство уси-
лия пружины и силы Р. Смещение (в статике) поршня проис-
ходит ио закону
где Ро — сила предварительного натяжения пружины;
хоих — начальное и текущее смещение конца пружины.
В связи с тем, что расход импульсного насоса q = kn2, где
«2 — число оборотов турбины, изменение п2 должно вызывать из-
менение положения золотника, сервомотора и штока, т. е. лопа-
ток передачи.
Таким образом, если лопатки управляемого рабочего колеса
при установившемся (и заданном) режиме работы гидротранс-
форматора находятся в некотором положении, то при изменении
по каким-либо причинам заданного режима их положение изме-
нится. Система регулятора начнет действовать так, переставляя
лопатки, чтобы вернуть систему с определенной скоростью к
прежнему состоянию.
Точной отработке сигнала измерителя рассогласования ме-
шают трение и реактивная сила от потока масла, возникающие
в золотнике сервомотора; они уменьшают чувствительность из-
мерителя и увеличивают ошибку слежения. Одним из способов
уменьшения трения и реактивной силы является, как известно,
сообщение золотнику вращения вокруг продольной оси.
Регулятор с вращающимся золотником обратной связи. Кон-
струкция регулятора с вращающимся золотником похожа на
конструкцию регулятора, изображенную на рис. 39. Отличие со-
стоит в том, что золотник в нем имеет винтовые канавки, по ко-
торым часть масла, поступающего от насоса, питающего ци-
линдр сервомотора, сливается. Благодаря этому золотник полу-
чает вращательное движение, резко уменьшающее трение при пе-
ремещении золотника вдоль оси.
9 Заказ 1076 129
Для того чтобы передать усилие от поршня измерителя рас-
согласования, в золотнике смонтированы два шарикоподшипни-
ка, через которые усилие от тяги, соединенной с поршнем, пере-
дается золотнику.
Такое устройство может быть применено во всех описанных
выше регуляторах.
§ 6. РЕГУЛИРОВАНИЕ СКОРОСТИ СИСТЕМЫ
С ГИДРОТРАНСФОРМАТОРОМ
Комплекс, состоящий из нерегулируемого электродвигателя,
приводимой машины и регулируемого гидротрансформатора, не
представляет каких-либо принципиальных особенностей для по-
строения и расчета системы регулирования.
Регулирование такого комплекса может совершаться:
1. По независимому параметру, например привод различно-
го оборудования химической и пищевой промышленности. При
этом требуется работать по определенному графику скоростей с
выдержкой определенных значений этого параметра в течение
заданного времени.
Регулирование по независимому параметру совершается
в зависимости от параметра, на который сам процесс регулиро-
вания не влияет. Это регулирование производится тогда, когда
сам процесс определяет какую-то величину, которая является
отображением независимого параметра. В случае регулирова-
ния, например химического процесса, этой величиной является
готовность продукта.
Если рассмотреть диаграмму изменения скорости при работе
сахарной центрифуги, то можно заметить, что каждая из состав-
ляющих площадок этой диаграммы есть функция каких-то осо-
бенностей процесса — количества продукта, равномерности его
укладки в корзине, влажности и т. п.
Форму этих площадок диаграммы можно устанавливать каж-
дый раз по показаниям датчиков, замеряющих эти величины.
В этом случае система регулирования была бы настолько слож-
ной, что применять ее было бы нецелесообразно.
В связи с этим при многократно повторяющихся циклах удоб-
нее вести регулирование по одному параметру, например, време-
ни, причем в этот параметр входит вся информация, которая бы-
ла собрана о необходимых .средних значениях регулируемого па-
раметра на каждом участке диаграммы.
Это приводит к резкому упрощению системы регулирования и
сводит ее к системе регулирования по независимому параметру.
2. При регулировании по зависимому параметру ведется не-
посредственное слежение за величиной, на которую сам процесс
регулирования влияет. Например, при поддержании заданного
130
значения скорости система регулирования может строиться так,
чтобы первичным датчиком был тахометр. В этих системах мо-
жет использоваться в качестве задающего параметра как сама
величина, так и ее производные. При этом система регулирова-
ния будет отвечать на отклонение регулируемого параметра от
заданного значения.
3. Программное регулирование представляет собой комбина-
цию двух первых способов. В этом случае процесс регулирования
зависит от величины, на которую он сам влияет. Эта величина
меняется по закону, устанавливаемому независимым третьим
параметром.
Например, такое регулирование осуществляется в приводе
шахтной подъемной машины. График скорости в функции от глу-
бины или времени — независимые параметры, а на каждом из
участков этого графика величина скорости регулируется, чтобы
выдержать наиболее приемлемую среднюю скорость для обеспе-
чения производительности и безопасности работы.
В действительности путь (или время) является величиной,
зависимой от скорости, однако при рассматриваемой схеме ре-
гулирования, когда путь принят независимой величиной, резко
снижаются требования к точности поддержания выбранных зна-
чений регулируемой величины — скорости.
4. Экстремальное регулирование напоминает программное
регулирование, но отличается от него тем, что программа изме-
нения зависимого параметра от независимого не задается в виде
графика (или функции), построенного на основании опыта про-
ектировщика, а составляется самой системой во время выполне-
ния процесса.
Примером системы с таким регулированием может служить
система, обеспечивающая наибольшую дальность полета само-
лета с оптимальной скоростью. Из-за ряда причин (обледенение,
встречный ветер и т. д.) может оказаться, что наиболее выгодная
скорость полета, обеспечивающая при данных условиях наиболь-
шую дальность полета при наименьшем времени, иная, чем была
до изменений условий полета.
Эти изменения должна учитывать система, задающая про-
грамму скорости.
Если в системе регулирования предусмотреть, например, ре-
гулирование подачи топлива на единицу пройденного пути, при-
чем эта система будет стремиться обеспечить наименьшее значе-
ние интеграла для какого-то отрезка пути, то это будет система
экстремального регулирования.
Расчет многих систем регулирования может быть проведен
по зависимому параметру. Такое регулирование обычно называ*
ется регулированием по замкнутому циклу.
Ниже рассмотрен пример составления и анализа уравнений
для одной из таких систем.
9* 131
Рассмотрим электрогидравлический регулятор с тахогенера-
тором и электромагнитным сервомотором.
В первом приближении уравнение измерителя скорости тахо-
генератора имеет вид
и =- ka2,
где и и cog — напряжение на клеммах генератора и число его обо-
ротов;
k — конструктивный параметр прибора.
Напишем уравнение электромагнитного сервомотора, обла-
дающего сопротивлением R, индиктивностью L и реостатом на-
стройки с сопротивлением Rd-
(RRd) J + L-~ = и.
at
Если обозначить Тэл =
RFRd
— время электросервомотора,
А/ и Ап — приращения величины тока и напряжения, то по-
лучим
Тэ.с—- AJ + AJ = йАи2.
dt
Если не принимать во внимание индуктивность электросер-
вомотора, то Тэ.с = 0 и последнее выражение ^преобразуется к ви-
ду А/ = йАсо2-
Обозначим силу сопротивления пружины Р = й2х; силу трения,
dx
возникающую в демпфере, Prp = k^—тяговую силу электросер-
dt
вомотора Рз.с = 1г^2 или через приращения
J2 = (/0 + AJ)2 = Jo + 2А JJ0 + А./2;
АРЭ с = 2kAJ- &Pmo = k&— Ax; AP = k,Ax.
i mpJdt
Поскольку
AP — &2Ax,
TO
P3_c = Pmp+P + M^,
где M — масса.
В отклонениях эта формула запишется в виде
2ktAJ = М Ах Ц- k3 — Ах -f- /?2Ах = 2й4йАсо.,;
dt'2 di
это уравнение характеризует работу регулятора.
Рассмотрим гидравлический регулятор (см. рис. 39).
Поршень измерителя справа нагружен силой давления pF =
— Рдав, где р — давление, создаваемое импульсным насосом; F —
1.32
активная площадь поршня, воспринимающая давление р. Слева
на этот поршень действует сила пружины
Рпр = Ro ( 1 + —= kox + R,
\ х0 /
где Ro — сила предварительного сжатия пружины (при мон-
таже) ;
%о — смещение конца пружины при монтаже;
х — текущее смещение поршня.
Сила инерции (от массы подвижных частей измерителя рас-
согласования М)
р __ дл
1 дин 1У1изм ,,.у •
dt2
Сила трения
n dx
df ,
где р — коэффициент, учитывающий площадь и вязкость на по-
верхностях трения.
Следовательно,
р р р р
•* дин 1 див 1 пр 1 тр'
Пусть давление перед иглой измерителя будет Рх, тогда рас-
ход при этом давлении [если насос (тахометр) центробежный]
Q = Qoi/ 1- = р
V Ро У Ро
Здесь величины с индексом 0 соответствуют Qo = 0 и Ро = 0.
Принимая, что Q = co2, а р = (о%, получим
Q = ~l/Ро(—Y — Рх,
V Р0 V \ ®20 /
где иго — угловая скорость при отсутствии возмущения.
Можно записать, что расход через сливное отверстие пло-
щадью f составляет
где ц — коэффициент расхода, равный -~0,8.
р
Поскольку в статике Рпр = Рдав, то Рх = -di£- и площадь, че-
F
рез которую происходит слив, будет
jz:.
ц у 2g (kox + R)
133
Подставив в это уравнение выражение для расхода, пред-
ставленного в виде функции параметров режима и импульсного
насоса, получим
f = -=^=: \/ Ро (-^М2-----—------- —, где р = -X.
P'V Ро V \ ®20 / 2 (kx -j- R) 2 g
Величина отклонения скорости турбины
__ О)2 — С02о __ Ct>20 -j- Л со2 — (020 _ ДС02
G>20 0*20 О>20
С учетом полученного соотношения обозначим
/_^_\2 = (j 5)2 j 2§( так как 6 0,1 и 62 <$С 26.
X ®20 /
Подставляя этот результат в выражение для f, получим
f = Ро(1+26)—----
V 2(kx + R)
Р
Чтобы воспользоваться полученным выражением для на-
хождения величины площади сливного отверстия, определим
влияние конструктивных параметров, которыми нужно задавать-
ся при проектировании, на свойства регулятора.
Жесткость пружины К выбирается из конструктивных сооб-
ражений, причем чем больше К, тем больше статистическая
ошибка регулирования при заданных размерах (по длине) пру-
жины. Величина предварительного сжатия (натяжения) пружи-
ны R не может быть малой, так как регулятор должен вернуть-
ся под действием пружины в среднее положение, причем чем
больше R, тем больше должна быть пружина по длине. Величи-
на R должна быть такой, чтобы поршень измерителя рассогла-
сования начинал двигаться при новом значении угловой скоро-
сти (о2 = (о2о (1 — А) Обычно 0,56 А 0,256.
Величина А есть зона нечувствительности регулятора, поэ-
тому
R = P0
(i-2A)_m2-
\ чо / _
F.
Нужно иметь в виду, что ход поршня измерителя рассогласо-
вания должен быть наименьший, чтобы не увеличивать габарит-
ных размеров и инерционных сил.
В начале расчета можно задаться следующими величинами:
R = 5 н- 15 кГ; К 12,5 кГ1см\ Qo > 8,5 л/мин-,
Ро 2,5 кГ/см2; А 2,5 %; хтах = 40 мм.
134
Наибольшая площадь сливного отверстия будет при номи-
нальном режиме, при этом 6 = 0; х = 0, поэтому
На краю диапазона регулирования, когда х = Хшах, необхо-
димо иметь площадь
Гл - V1/ ' 0+26) /р - f.
И f х {кхтах т К) Z
Если игла не будет иметь цилиндрическую форму, то можно
снизить неравномерность по всему диапазону отклонений на-
грузки и уменьшить статическую ошибку.
Рассмотрим уравнение динамики регулятора.
Если подача насоса QH, a Q — расход через дроссель, то
можно записать
F^ = QH-Q = AQ,
at
dx
где--------скорость поршня измерителя.
dt
Разница QH — Q есть объем, освобождаемый поршнем изме-
рителя. Скорость перемещения поршня зависит от давления пе-
ред сливным отверстием Рх и рассогласования Ли = иг — сого:
Р^- Дсо2) = а<2-
В общем случае давление Рх зависит от масс и ускорений де-
талей измерителя, но эти величины малы и этим влиянием мож-
но пренебречь. Кроме этого, можно пренебречь и конусностью иг-
лы измерителя.
С учетом сказанного можно записать
F — Л г = — f 1 _ 1 ( 2Р°Р
dt ' 2 ' |/ у PV~PX _P!L_1 \ k
_ Рх
®20
обозначим v = хтахР — емкость измерителя; Ти =—----время
____ Qx
/2р
—
Тогда уравнение измерителя будет иметь вид
р d _____ fe^max Рх t РрР g_ &Х \__Ах
dt Ти [ Ра~ Рх \ k 2 ) 2 _ ‘
Это уравнение вместе с уравнением машины и сервомеханиз-
ма регулятора позволяет исследовать движение системы.
135
Рассмотрим уравнение движения сервомотора регулятора.
Если М — приведенная масса всех подвижных деталей, приводи-
мых сервомотором (включая жидкость), то
l,2P-Fc(Po-P3) = 0,
где Р — усилие перестановки лопаток; коэффициент 1,2 учиты-
вает силы трения; Fc— площадь поршня; Ро — давление насоса,
питающего сервомотор; Р3 — давление слива.
Идеальная скорость масла в отверстии золотника:
/ 9
«0= у ^(Л-Ро-АхР).
Если же течение в подводящих трубках серводвигателя лами-
нарное, то при вязкости жидкости v:
АгР =
f тр dt
По аналогии запишем:
®3= 1/ — (Р3 —Д2Р); А2Р = Л>/2-^.-^-.
у Р Imp dt
Используя условие неразрывности потока в подводящих и от-
водящих трубах, подставим выражение для скорости в уравне-
ние движения серводвигателя
Г г 2
М — + 1,2Р — Fc Pi — ili + lA —-------------------(—V = 0.
dt* с 1 1 1 27 f dt Рр k dt / J
Это уравнение можно записать и для обратного движения
поршня сервомотора (с учетом величины Р).
Если пренебречь инерционными силами и потерями напора
в трубах, то уравнение примет вид
X / [3
Величина Т0.с = --тах 1/ ---------£______ называется време-
/тах у p(Pif с — 1>2Р)
нем открытия сервомотора; хтах и /тах — наибольшее смещение
золотника и площадь отверстия золотника.
Чем меньше время сервомотора, тем больше скорость его пе-
ремещения.
Величину Feopt найдем из выражения
dFc
= о
136
При этом время сервомотора оказывается минимальным. Из
статического расчета следует, что
р 1,2Р0
с р _____р
При выборе размеров сервомотора можно пользоваться гра-
фиками зависимости Тс = f(Fc)-
График этой зависимости не симметричен относительно точки
Fc = -Fcopt, причем левее этой точки кривая возрастает быстрее,
чем справа от нее. Если нельзя выбрать размер поршня таким,
чтобы Гс = Гс opt, то следует выбирать его размеры так, чтобы
Fc > Fc opt-
В качестве измерительного устройства (датчика) в системе
регулятора могут применяться объемные и центробежные на-
сосы.
Кроме надежности, центробежные насосы имеют запас про-
изводительности, позволяющий использовать их одновременно
как датчик системы регулирования и насос системы смазки и ох-
лаждения установки. Эти насосы обладают равномерностью по-
дачи, что особенно важно при требовании обеспечения регуля-
тором малой степени неравномерности. По этим причинам си-
стемы регулирования мощных турбин имеют центробежные на-
сосы — тахометры.
В установках малых мощностей используют объемный насос,
так как мощность регулятора не должна составлять более 1 %
передаваемой мощности. При этом оказывается выгоднее иметь
три насоса (как в описанной выше системе), чем один.
Кроме этого, при объемном насосе система более чувствитель-
на к изменению числа оборотов.
Глава IV. РАСЧЕТ ГИДРОМУФТ
§ 1. ОСНОВНЫЕ УРАВНЕНИЯ ГИДРОМУФТ
В гидромуфтах крутящий момент с ведущего вала на ведо-
мый передается тремя способами:
обменом моментов количества движения при внутренней цир-
куляции жидкости из насоса в турбину и снова в насос;
трением жидкости, находящейся между ведомой и ведущей
частью;
механическим трением в сальниках, уплотнениях, во внутрен-
них подшипниках и т. п.
При работе гидромуфты на номинальных режимах, т. е. при
малых скольжениях, двумя последними факторами можно пре-
небречь, однако второй фактор приобретает влияние только при
режимах большого скольжения.
В таком случае основным средством передачи энергии с ве-
дущего на ведомый вал, при рассматриваемых режимах, являет-
ся циркуляционный поток, образующийся в проточной части гид-
ромуфты, поэтому с учетом его и будут в основном рассматри-
ваться явления, происходящие в гидромуфте.
Итак, момент передаваемый гидромуфтой, равен
М = Мц + Мтр, (17)
где M4 — циркуляционная составляющая момента, обусловлен-
ная изменением количества движения;
Л1тр — составляющая момента, передаваемая трением.
Так как большинство гидромуфт имеет прямые, радиальные
лопатки (угол (32 = 90° и (31 = 90°), то уравнение (8) можно перепи-
сать в виде
Л4г( = Qp (г12п12 ^22^22)» (18)
V
имея в виду, что р = —.
Уравнения (8) и (18) можно отнести и к насосу, и к турбине.
Отличие состоит в том, что для насоса оно показывает увеличе-
ние момента количества движения массы жидкости, а для тур-
бины — уменьшение.
138
Торможение жидкости на колесе турбины (так же как и ее
разгон на насосе) происходит как бы в два приема. Сначала,
как только частицы жидкости попадают на колесо турбины, про-
исходит резкое с ударом торможение их от скорости «12 до ско-
рости ц21 (Для плоских радиальных лопаток). Это торможение
жидкости создает активную составляющую циркуляционного
момента Л4Ч; обозначим ее Ма. Принимая во внимание, что тор-
можение происходит на радиусе г2 = г12 = г2ь можно записать
Л4а = Qpr2(l —0«»1, (19)
где
=
ал и а>2 — угловые скорости соответственно ведущего и ве-
домого валов в сек-1.
Протекая по турбине, жидкость тормозится вследствие пе-
рехода частиц с большего радиуса на меньший (уменьшается
абсолютная скорость с из-за падения окружной скорости»). При
этом лопатки турбины нагружаются силами Кориолиса. Момент,
определяемый ими и называемый здесь реактивным, можно най-
ти из уравнения
Л1р = Qp («21/21 ^22^22) = Qpm2 (r2 rt) • (20)
Следовательно,
M4 = Ma-/Mp = QpM1(l-ai)rl, (21)
где
/ \2 . . . , ,
а = ( — ) ; а < 1; t < 1.
\ г2 )
Из формул (19) и (20) следует, что в зависимости от режима
работы гидромуфты доля активной и реактивной составляющей
Мц меняется. При трогании с места (т. е. при большом скольже-
нии) активная составляющая велика, а реактивная мала и нао-
борот— по мере разгона турбины, т. е. с уменьшением величины
скольжения S, увеличивается Мр с одновременным убывани-
ем Ма.
На рис. 40 представлены зависимости Ма и Мр от передаточ-
ного отношения i и скольжения S для гидромуфты с плоскими
радиальными лопатками. При I = 0,97 активная составляющая
момента Ма равна только 7% от всего передаваемого момента,
в то время как реактивная часть Мр составляет 93%, т. е. в рас-
четной точке характеристики гидромуфты крутящий момент пе-
редается в основном за счет реактивной составляющей ее цирку-
ляционного момента.
На рис. 41 приведена внешняя (теоретическая) характери-
стика гидромуфты, работающей при постоянном числе оборотов
ведущего вала.
139
Характеристика показывает, что гидромуфты относятся к
классу передач, у которых кинематические параметры зависят от
приложенной нагрузки. Это является особенностью гидродина-
мических передач, так как их жидкостные звенья устанавливают
силовые связи. Если в расчетной точке гидромуфта передает но-
минальный крутящий момент, равный М = 1, при передаточном
отношении i = 0,98, то при нагрузке пятикратным моментом она
перейдет на работу с i = 0,5. Для того же, чтобы затормозить
Рис. 40. Зависимость активного
Л4а и реактивного момен-
тов гидромуфты от передаточ-
ного отношения I
ведомый вал (i = 0), необходимо
его загрузить почти семикратным
моментом по отношению к номи-
нальному. И наоборот, если ведо-
мый вал разгружать, то скорость
его будет увеличиваться, пока пере-
и 0J 0,2 0,3 0,4 0,5 0,6 0,1 0,8 0,8 1,0^
Рис. 41. Внешняя характеристика гид-
ромуфты при работе ее с постоян-
ным числом оборотов ведущего вала
= 0,98 при номинальной нагрузке. Дальнейшее уменьшение на-
грузки не вызывает увеличения скорости вала турбины.
Теперь выведем уравнение баланса энергии гидромуфты.
В общем виде выражение теоретического напора насоса гидро-
муфты имеет следующий вид:
Нн = — (u12c12 cos а13 — cos а22), (22)
а теоретический напор, срабатываемый турбиной,
Нт = ~ (иг1с12 cos а12 — u22c22 cos а22), (23)
где и — окружная скорость жидкости в рассматриваемой точке
в м!сек.
Как правило, гидромуфты строятся с плоскими радиальными
лопатками, имеющими 0 — 90°. Для таких гидромуфт, принимая
140
во внимание, что « = с cos а, уравнение баланса энергии сле-
дующее:
1 / 2 2 *\ 1 / 2 2 , I — г)2 + “1 1) , у* Ш2 ,9.«
— (uj2- U^i) = — (Ы22- U^i) 1+-------------------+ 2;—, (24)
где w — относительная скорость жидкости в рассматриваемой
точке в м!сек.
Левая часть этого уравнения представляет собой энергию
(напор), созданную насосом; первый член правой части — энер-
гию, реализованную турбинной;
второй член правой части вы-
ражает собой энергию, поте-
рянную на удар при входе в
насос и турбину; третий —
суммарные потери на трение и
завихрение.
Решая уравнение (24) от-
носительно w и произведя при
этом алгебраические преобра-
зования, получим следующее
выражение для относительной
скорости:
ю = (25)
О 0,1. 0,2 0,3 0,4 0J5 0,6 0,7 0,8 0,3 I
Рис. 42. Зависимость суммарного ко-
эффициента потерь SE; от переда-
точного отношения I, полученная при
испытании гидромуфты D = 533 мм
при П] = 500 об/мин
г»
где т — —— отношение радиуса средних струек выхода и входа
ri
в насос;
с = ——величина постоянная для данной гидромуфты.
30
Формула (25) показывает, что относительная скорость w
пропорциональна числу оборотов ведущего вала и при i = 1 ско-
рость w — 0, а при i = 0 она достигает максимального значения.
Необходимо отметить, что суммарный коэффициент потерь
—величина переменная и зависит от i. На рис. 42 приведена
зависимость = f(i) для гидромуфты с D = 533 мм при П1 =
= 500 об1мин. При малых скольжениях в пределах i = 0,8 н- 0,98
суммарный коэффициент потерь изменяется, достигая значитель-
ной величины при минимальном скольжении.
Определив по уравнению (25) относительную скорость w, ко-
торая при углах р = 90° равна меридиональной скорости, и зная
проходное сечение проточной части гидромуфты F, можно под-
считать расход:
Q ---- wF. (26)
Подставив значение Q в уравнение (8), можно определить
величину момента, передаваемого гидромуфтой для различных/.
141
Зависимость передаточного отношения от передаваемого мо-
мента, расхода и числа оборотов двигателя следующая:
(27)
cQhj
луг?
где с =--------величина постоянная.
30 g
При М = const формула (27) преобразуется:
i = m2-------------------------— ,
Q'h
М 30Mg „ „
причем Ci =—=--------- является величиной постоянной [9].
с луг2
При уменьшении числа оборотов ведущего вала, как показы-
вает формула (28), передаточное отношение уменьшается, а
скольжение гидромуфты увеличивается.
Из уравнения (28) следует, что увеличение значения т, т. е.
увеличение в гидромуфте разности радиусов входного и выход-
ного сечения, ведет к увеличению i, следовательно, гидромуфта
делается жестче. Этому способствует также уменьшение постоян-
ной Ci, что может быть сделано только за счет увеличения удель-
ного веса у жидкости. Формула (28) позволяет построить кри-
вую S = f(ni).
§ 2. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ ПРОТОЧНОЙ ЧАСТИ ГИДРОМУФТ
Расчет по подобию. Определение активного
диаметра гидромуфт
Одним из самых простых, а поэтому и самых распространен-
ных методов расчета гидромуфт является расчет по подобию.
Этот метод предполагает наличие уже испытанных и хорошо от-
работанных моделей проточной части. О возможности такого
расчета сказано ниже.
Гидромуфты относятся к лопастным машинам. К таким как,
например, центробежные насосы, гидравлические турбины, тур-
бовоздуходувки, вентиляторы и т. п. Машины этого класса имеют
общие характеристики, представляющие закономерные зависи-
мости отдаваемых или поглощаемых мощностей и моментов от
чисел оборотов машины и от величины характерного диаметра
ее проточной части.
Многолетняя практика проектирования и изготовления этих
машин позволила разработать, исходя из характеристик, основ-
ные положения применения закона подобия для их расчета и
моделирования.
Простота конструкции рабочих колес, имеющих полную осе-
вую симметрию проточной части, взаимное расположение колес
142
(28)
и условия их взаимодействия позволяют широко применить для
расчета гидромуфт закон подобия с достаточной точностью.
Для этого должны быть выполнены следующие требования:
1. Геометрическое подобие натурной, проектируемой гидро-
муфты с моделью или прототипом при одновременном сохранении
относительной шероховатости каналов проточной части.
2. Кинематическое подобие, из которого вытекает подобие
планов скоростей у проектируемой гидромуфты и модели.
I—/Ц/У —4
Рис. 43. Соотноше-
ние размеров гид-
ромуфты типа
«Вулкан»
Рис. 44. Соотношение
размеров гидромуфт
без тора
Рис. 45. Соотношение раз-
меров гидромуфты «Твин-
Диск»
3. Динамическое подобие, что влечет за собой требование ра-
венства чисел Рейнольдса у проектируемой гидромуфты и моде-
ли. Число Рейнольдса в данном случае можно определить по
формуле
Re = — , (29)
V
где с — скорость движения потока в м!сек;
I — характерный линейный размер в м;
v — кинематический коэффициент вязкости жидкости в
м2!сек.
Все гидромуфты можно разделить на несколько типов. Разме-
ры каждого типа гидромуфт выражаются одной характерной ве-
личиной, за которую принимают активный диаметр гидромуфты
D. Под активным диаметром понимается диаметр, определяю-
щий габаритный размер насоса гидромуфты по выходным кром-
кам его лопаток.
На рис. 43 показано соотношение размеров проточной части
судовой гидромуфты типа «Вулкан» с внутренним тором, а на
143
рис. 44 — гидромуфты без тора. На рис. 45 и 46, с — в показаны
гидромуфты некоторых зарубежных образцов.
Для определения величины активного диаметра служит сле-
дующее равенство:
Л\--Л НГМ^5, (30)
где Ni — мощность на ведущем валу в л. с.;
Пу — число оборотов ведущего вала в минуту;
D — активный диаметр гидромуфты в м;
А—коэффициент мощности.
Рис. 46. Соотношение размеров гидромуфт некоторых
зарубежных образцов
Под коэффициентом мощности А понимается мощность гид-
ромуфты подобно рассматриваемой (проектируемой) с активным
диаметром, равным единице, и числом оборотов, равным 100.
Коэффициент А определяется экспериментально. Его можно так-
же определить как коэффициент, связывающий мощность на ве-
дущем валу, число оборотов ведущего вала и активный диаметр
гидромуфты по формуле
л • Ю6
Если коэффициент мощности не зависит от жидкости, то эта
формула примет вид
144
Уравнение (30) выведено из общего выражения мощности
гидромуфты
дг (31)
Решая уравнение (30) относительно Л, получим
Пользуясь формулой (32), можно выполнить требования гео-
метрического и кинематического подобия, но не динамического,
так как при условии соблюдения первых двух требований у про-
ектируемой гидромуфты и у модели разного диаметра или рабо-
тающих с различным числом оборотов не будут равны числа
Рейнольдса [17].
Однако опыт расчета гидромуфт на основе подобия показы-
вает, что изменение чисел Re в границах, охватываемых практи-
кой применения гидромуфт (имеются в виду большие значения
числа Re), не оказывает существенного влияния, и этими измене-
ниями числа можно пренебречь. Формирование потока в этих
условиях обеспечивает наступление режимов автомодельности.
Сказанное не относится к гидромуфтам небольшой мощности,
имеющим значение числа Re < 1000; они выходят из области ав-
томодельности, и коэффициенты мощности у них меньше.
Для гидромуфт, как показали работы В. Зеелига, существен-
ное значение имеет скоростной коэффициент <р = —, т. е. отно-
шение относительной скорости к окружной. От этого соотноше-
ния зависит величина потерь, ^создаваемых в каналах осевыми
вихрями, образовавшимися вследствие изменения скорости w по
ширине канала.
Для уменьшения потерь рекомендуется коэффициент ср иметь
по возможности большим, иначе говоря, увеличивать w и умень-
шать и. Этот вид потерь при малых скольжениях гидромуфт име-
ет большое значение [17].
Обратим внимание на то, что при расчете по формуле (30) вы-
полняется условие кинематического подобия. Следовательно,
скоростной коэффициент <р = — при расчете по формуле (30) у
проектируемой гидромуфты равен скоростному коэффициенту
модели, иначе говоря, относительная величина потерь от осевого
вихря у них одинакова.
Вернемся к формуле (30). Для определения активного диа-
метра требуется знать AG, пх и А.
Передаваемая мощность Ni и число оборотов ведущего вала
Mi задаются техническими условиями.
Ю Заказ 1076 1 45
Коэффициент мощности А зависит от величины скольжения
гидромуфты S, от вида рабочей жидкости и конструктивного ти-
па гидромуфты.
Скольжение, как правило, задается техническими условиями,
иногда техническими условиями бывает задан и вид жид-
кости.
Располагая этими данными, конструктор задается коэффици-
ентом А. Для гидромуфт без тора (см. рис. 44) при работе на
минеральном масле турбинное 22 со скольжением S = 2%, коэф-
фициент мощности равен А = 1,2. Для тех же гидромуфт с поро-
гом коэффициент/! = 1,0.
Для гидромуфт типа «Вулкан» (см. рис. 43) при работе на
масле и скольжении S = 4% коэффициент мощности А = 1,74.
На рис. 47, а приведены кривые изменения коэффициента
мощности для судовых гидромуфт с внутренним тором при рабо-
те на масле, а на рис. 47, б — при работе на воде.
Для гидромуфт [7], испытанных на масле из смеси автолов,
значения коэффициента мощности А показаны на рис. 48, а для
гидромуфт ГДР — на рис. 49.
Приведенные значения коэффициента А недостаточно точны,
так как не учитывают численных значений границ изменения
числа Re, при которых они были экспериментально получены.
Наличие таких границ позволило бы точнее оценить пределы об-
ласти автомодельности, а следовательно, с большим основанием
произвести выбор коэффициента А. Кроме того, они не отража-
146
ют влияния числа лопаток г, которое изменяет величину переда-
ваемой мощности.
Коэффициент мощности А, принятый при расчете гидромуфт,
л.с. А кГ сек2
имеет следующую размерность: --------—- или ----— —— .
(об/лши)3л5 0,086 л4
Часто при анализе характеристик и расчете гидромуфт удоб-
нее вести расчеты не с передаваемой мощностью, а с передавае-
мым моментом.
В этом случае вместо коэф-
фициента мощности пользуют-
ся коэффициентом момента А,
который связывает следующие
величины:
(33)
Рис. 48. Коэффициент мощно-
сти гидромуфт при работе их
на масле из смеси автолов
1 — при у = 1 кг/дм3, Е = Г;
2 — при у •= 0,870
3 — при у = 0,965
4 — при у = 0,935
5 — при у — 0,902
6 — при у = 0,890
7 — при у «» 0,896
кг!дм3, Е = 1,16°;
кг! дм3, Е = 4,20°;
кг! дм3, Е = 2,25J;
кг!дм3, Е = 4.20°;
кг[дм3, Е = 4,20°;
кг!дм\ Е = 16°
Коэффициент мощности А
ент момента
можно выразить через коэффици-
4 =
716,2
(34)
Поскольку в формулу (33) введена величина веса единицы
объема жидкости у, то коэффициент момента /,г становится неза-
висимым от вида жидкости.
Рассмотрим пример определения активного диаметра.
Дано: Передаваемая мощность Nj = 1600 кет-, число оборотов двигателя
«1 = 3000 в минуту. Рабочая жидкость — минеральное масло Турбинное 22.
Выбираем конструкцию гидромуфты без внутреннего тора. Для такого
типа гидромуфт принимаем коэффициент мощности А = 1,2.
10* 147
Рис. 50. Соотношение
размеров гидромуф-
ты, полученное при
решении примера
Тогда
= 1/ ^О-1-36'106 = УОТООТЗ = 0,583 м.
пзА У 30003-1,2
Зная значение D, определяем по рис. 44 остальные размеры круга цир-
куляции гидромуфты и получаем соотношение размеров, показанное на рис. 50.
Для определения активного диаметра удобно пользоваться
номограммами.
На рис. 51 приведена номограмма для определения активно-
го диаметра гидромуфты по заданной мощности в кет, числу обо-
ротов в минуту и скольжению [10].
Номограмма построена для работы
гидромуфт на масле. По оси абсцисс от-
ложены три шкалы мощностей в кет для
различных скольжений 2, 3 и 4%, по оси
ординат — число оборотов ведущего ва-
ла. Прямые линии, идущие по диагонали
снизу вверх (читая слева направо), явля-
ются линиями равных активных диамет-
ров в пределах 250—1800 мм.
Прямые линии, идущие по диагонали
сверху вниз, являются линиями посто-
янных окружных скоростей.
Задавшись определенной мощностью
первичного двигателя, его числом оборо-
тов, а также величиной потерь в гидро-
муфте, определяемой величиной сколь-
жения, можно по номограмме опреде-
лить активный диаметр D.
Номограмма для определения актив-
ного диаметра стальных гидромуфт «Твин-Диск» показана на
рис. 52, а для алюминиевых гидромуфт — на рис. 53.
По оси абсцисс (рис. 52) отложены числа оборотов первично-
го вала, по оси ординат (на графике слева) — передаваемая мощ-
ность, а справа — передаваемые крутящие моменты.
Номограмма (рис. 52) подсчитана при скольжении S = 3%,
а для двухполостных и однополостных алюминиевых гидромуфт
(рис. 53) составлена при скольжении S = 4 и 5%.
На рис. 54 показана номограмма для определения активного
диаметра гидромуфт «Фойт» типа Т и Tv-
Пример пользования номограммой (см. рис. 51). Требуется определить
активный диаметр гидромуфты со следующими параметрами: мощность N =
— 450 квт\ число оборотов двигателя ni = 1500 в минуту; скольжение гидро-
муфты S = 3%. Рабочая жидкость — минеральное масло Л-22.
Находим по шкале мощностей, отложенных по оси абсцисс, в графе сколь-
жений, равных 3%, величину 450 кет. Проводим вверх ординату. На шкале чи-
сел оборотов находим значение П[ = 1500 об/лшн и проводим горизонтальную
148
149
У -Ограничение по теплу
t -Ограничение по /юмент^
^--Ограничение по скорости
Рис. 52. Номограмма для определения активного диаметра стальных
гидромуфт «Твин-Диск»:
Г — для стандартных гидромуфт; 2 — для гидромуфт с 16 блоками вытеснителей;
3 — для гидромуфт с 32 блоками вытеснителей; 4 — для гидромуфт с 48 бло-
ками вытеснителей
Рис. 53. Номограмма для определения активного диаметра алюми-
ниевых гидромуфт «Твин-Диск»:
------------ —4“/«-иое скольжение; ——— — — 5%-ное скольжение
150
линию до пересечения с ординатой. Получаем D = 675 мм, так как точка пересе-
чения проведенных линий лежит на равном расстоянии от значений D = 700 мм
и D = 650 мм.
Рис. 54. Номограмма для определения ак-
тивного диаметра предельных гидромуфт
типа Т и Ту
Рис. 55. Соотношение
размеров гидромуф-
ты, полученное при
решении примера
пользования номо-
граммой
Исходя из значения D = 675 мм определяем по рис. 43 остальные размеры
круга циркуляции заданной гидромуфты (рис. 55). Номограмма позволяет так-
же сразу определить окружную скорость и = 55 м/сек.
Выбор числа лопаток
Долгое время при проектировании гидромуфт выбор числа
лопаток рабочих колес производился по графику, разработанно-
му фирмой Вулкан (рис. 56). Кривые, определяющие зависи-
мость числа лопаток z от активного диаметра гидромуфты D,
были построены на основании опыта строительства и эксплуата-
ции судовых гидромуфт. Судовые гидромуфты имеют проточную
часть с тором определенного профиля.
С распространением гидромуфт в других областях и в связи
с совершенствованием их конструкций проточные части стали
выполняться без тора и с различными геометрическими разме-
рами.
Таким образом, при определении числа лопаток пользоваться
графиком фирмы Вулкан можно только в ограниченных слу-
чаях.
Опыты, проведенные в СССР с гидромуфтами, имеющими
различные проточные части, показывают, что увеличение числа
151
лопаток z ведет к повышению энергоемкости гидромуфты в зоне
ее малых скольжений (доЗ = 10 4- 15%) (рис. 57).
При больших скольжениях с приближением к стоповой точке
(рис. 58) передаваемый гидромуфтой момент с повышением чис-
ла лопаток уменьшается. Таким образом, энергоемкость гидро-
муфт в области малых скольжений с увеличением z растет, а в
области больших скольжений (S > 100%) понижается. В боль-
шинстве случаев нас интересует зона д/
малых скольжений гидромуфт, поэто-л/м
му желательно при конструировании 18
стремиться к увеличению числа лопа-
ток. 16
Это свойство гидромуфт можно 74
объяснить следующим.
В зоне больших скольжений отно- 12
сительные скорости потока в межло-
паточном пространстве достигают вы- '
сокого значения, а вследствие этого и в
потери трения имеют существенную
4
2
.0
0,88 0,90 0,92 0,94 0,96 0,98 1,01
Рис. 57. Зависимость переда-
ваемого гидромуфтой м^мен-
200 400 600 800 1000 120011мм та М при п-. = 1200 об/мин от
Рис. 56. Зависимость числа лопаток г от
величины активного диаметра D в гидро-
муфтах типа «Вулкана»:
1 — для насоса; 2 — для турбины
передаточного отношения 1
для различного числа лопаток
z в зоне больших передаточ-
ных отношений (по данным
К. Тимм)
величину. Поэтому сокращая число лопаток и, следовательно,
уменьшая поверхность трения, можно уменьшить потери в гид-
ромуфте. При малых скольжениях относительные скорости
жидкости невелики, поэтому этот вид потерь большой роли не иг-
рает. При этих режимах большое значение имеют различные вих-
ревые потери, и, как показал опыт, увеличение числа лопаток
улучшает работу гидромуфты и ведет к значительному увеличе-
нию ее энергоемкости. Однако увеличение числа лопаток имеет
свои пределы [30].
С точки зрения гидродинамики число лопаток не должно за-
висеть от активного диаметра D (размера гидромуфты), так как
хотя мы и рассматриваем гидромуфты различных размеров, но
все они работают в области автомодельности. Поэтому можно
152
было бы сказать, что для каждой формы проточной части долж-
но быть свое оптимальное число лопаток z, не зависящее от раз-
меров (от D). С. Н. Козлов [30] на основании своих опытов счи-
тает z = 60 ~ 68 наивыгоднейшим числом лопаток для регули-
руемых гидромуфт. Но в это чисто гидродинамическое положе-
ние вносят свои поправки технологические и конструктивные
требования. Так, например, в сварной конструкции гидромуфты
требуется соблюдать определенное минимальное расстояние
Рис. 58. Зависимость передаваемого гидромуфтой момента М
при П] = 800 об/мин от передаточного отношения i для различ-
ного числа лопаток г (по данным К. Тимм) на всем диапазоне
скоростей
между лопатками, чтобы можно было, приваривая их к чаше,
наложить двусторонние швы.
Это технологическое требование может заставить уменьшить
число лопаток по сравнению с тем, которое признано оптималь-
ным с гидродинамической точки зрения.
То же самое можно сказать и про литые лопатки. Кроме того,
размеры ступицы, форма чаши, прочность и жесткость конструк-
ции, способы крепления рабочих колес к валу вносят конструк-
тивные коррективы в определение возможного числа лопаток г.
Опыт строительства гидромуфт показывает, что, учитывая эти
технологические и конструктивные положения, в больших гидро-
муфтах можно разместить и размещают большее число лопаток,
чем в малых. Поэтому эмпирические формулы, в которых z зави-
сит от D, имеют смысл, но только для определенных конструк-
ций гидромуфт и в определенных пределах D.
153
Д. Я. Алексапольский в своей работе {1] приводит следующую
формулу для определения числа лопаток для гидромуфт с тором:
z = 1,39 • О0,52. (35)
И. Ф. Семичастнов [47] рекомендует определять число лопаток
для гидромуфт без тора по формуле
z = 8,65D0’279; (36)
в обеих формулах D в мм.
Этими формулами, а также графиками, рекомендуемыми фир-
мой «Вулкан», можно пользоваться для ориентировочных расче-
тов, для первого приближения, так как каждый тип проточной
части, как мы уже сказали, имеет свое оптимальное число лопа-
ток, которое должно быть определено и проверено опытами.
В зависимости от размеров гидромуфты в полученное экспе-
риментальное число z вносятся при проектировании поправки по
технологическим и конструктивным соображениям. Отметим, что
для уменьшения пульсации потока число лопаток в насосе и тур-
бине делается различным.
§ 3. ПОЛНЫЙ К. П. Д. ГИДРОМУФТЫ
Выражение р = — — I, определяющее значение к. п. д. гид-
"1
ромуфты, не совсем точно. Оно может применяться в большинст-
ве расчетов, но в тех случаях, когда гидромуфты устанавливают-
ся для повышения экономичности эксплуатации приводимой ма-
шины, вопрос о действительном значении к. п. д. приобретает
большое значение. В зависимости от конструкции гидромуфты
потери в ней могут быть больше, чем это характеризуется выше-
приведенным равенством, поэтому в него необходимо внести со-
ответствующие поправки. В частности, работы ЦНИИТМАШа и
ВНИИМЕТМАШа показали, что, например, потери в черпатель-
ной трубке достигают иногда большего удельного значения, так
как на сопротивление черпательной трубки затрачивается значи-
тельная энергия, что понижает к. п. д. гидромуфты.
Посмотрим, какие виды потерь учитываются передаточным
отношением г, т. е. характеризуются величиной скольжения.
Принимая во внимание, что мощность на ведущем валу равна
= (37)
а на ведомом валу
N2 = , (38)
75
154
можно написать, что к. п. д. гидромуфты определяется следую-
щим выражением:
П = — = . (39)
Nt Aboil v 7
Таким образом, потеря мощности происходит, во-первых, за
счет потери скорости на ведомом валу («>2<<oi) и, во-вторых, за
счет реализации меньшего момента (М2 < Mt) вследствие того,
что часть крутящего момента затрачивается на преодоление раз-
личных сопротивлений.
Как известно, величину i можно определить из соотношения
i = ”2 = -К2-
«1 а>!
Сравнивая это выражение с формулой (39), заключаем, что
передаточное отношение может учесть только часть потерь мощ-
ности, происшедших за счет падения скорости. При этом учиты-
ваются только следующие потери в гидромуфте: потери от тре-
ния жидкости при протекании по каналам рабочих колес, потери
на удар при переходе с одного рабочего колеса на другое, поте-
ри от вихреобразований, от нарушения устойчивой формы потока
вследствие внезапного расширения и от утечек.
Рассмотрим теперь, за счет чего может произойти разница
значений М2 и М\. Обратимся к аналитическим выражениям мо-
ментов насоса Мн и турбины гидромуфты Л1т, причем под Мн
мы здесь понимаем момент, потребляемый гидродинамической
частью насоса, а под Мг — момент, передаваемый гидродинами-
ческой частью турбины:
= — (r2cU12 — /&„); (40)
g
Ж = — (/'гс«21 — riCU22) (41)
g
Обозначим для удобства наших рассуждений расход насоса
через Q', а двучлен, стоящий в скобках, Дгси, вспомним при этом,
что двучлены в скобках в уравнениях (40) и (41) равны между
собой. Тогда выражения моментов запишутся в следующем виде:
/Ин= Дгс„;
g
Мг = -^ Дгси.
g
Отсюда следует, что равенство моментов Мн и Мт было бы
справедливо, если общий расход насоса Q' равнялся бы расходу,
принимающему участие в обмене моментами количества движе-
ния с турбиной.
155
На самом деле этого равенства может и не быть, и в зависи-
мости от конструкции гидромуфты эти расходы будут различны..
Весь непроизводительный с точки зрения передачи момента рас-
ход 1 обозначим через qnor- Таким образом, общий расход насо-
са может быть больше производительного расхода на величину
Япот< т. е.
Q = Q Ч- Япот •
За счет этого момент насоса больше момента турбины, и для
приближения выражения i к выражению р мы должны были бы
ввести в него первую поправку:
Q
1 Q + qn0T~^
или
«Лоб-» Л.
где т]об= —-------объемный к. п. д.
Q “Г Япот
Вторая поправка, вводимая нами, будет следующая. Некото-
рые гидромуфты имеют внешние опоры, и, следовательно, момент
трения, вызываемый этими опорами, будет увеличивать значе-
ние Afi по сравнению с кроме того, увеличение Л4[ будет вы-
зываться вентиляционными потерями от вращения гидромуфты
в воздухе; наконец, многие гидромуфты оборудованы черпа-
тельными трубками, поддерживающими внешнюю циркуляцию
жидкости, и в зависимости от конструкции этого устройства ра-
бота, затрачиваемая на эту операцию, будет иметь определен-
ную величину.
Перечисленные факторы увеличивают значения по срав-
нению с реализованным моментом М2, помимо первой поправки,
еще на величину, которую мы обозначим Мм. Следовательно, на
основании указанных рассуждений к. п. д. гидромуфты записы-
вается в общем случае в виде следующего выражения:
(42)
причем Л12 < Afp
Потери момента, обусловленные непроизводительным с точки
зрения передачи момента расходом дПот, можно найти из равен-
ства
Мн — Мнтг]об = Мн (1 — Т]об).
Следовательно, величину Mj определим из уравнения
= ТИ2 + Мн (1 — Лоб) + Ми> (43)
1 Например, выбрасывание в атмосферу части жидкости через отверстия
в канале насоса гидромуфты.
156
где Мм—момент, затраченный на преодоление механических
потерь и на работу черпательной трубки;
= Мтр,т + Мтр.н + Мд + Мн,
МТр.т—момент трения в подшипнике турбины, если она
имеет внешнюю опору;
Мтр. н — момент трения в подшипнике насоса, если насос
имеет внешнюю опору;
Мв — момент, затраченный на преодоление вентиляцион-
ного сопротивления при вращении гидромуфты в
воздухе;
Мч—момент, затраченный на работу черпательной
трубки.
Подставляя развернутое выражение Му в равенство (42), по-
лучаем
ц = i---------—---------, (44)
М2 + Мн (1 - цоб) + Мм
где М2 — реализованный момент на ведомом валу.
При qnoT = 0, а также при отсутствии внешних опор и черпа-
тельной трубки у гидромуфты и при настолько малом значении
Мв, что его можно принять равным нулю, знаменатель дроби ста-
новится равным М2.
Следовательно, можно записать
где П\ и п2 — числа оборотов в минуту на ведущем валу и на
ведомом.
Формула (44) позволяет конструктору оценить отдельные
конструктивные факторы с точки зрения их влияния на экономич-
ность гидромуфты.
Расчет гидромуфты нужно вести так, чтобы при номинальном
режиме к. п. д. ее составлял ц = 0,974-0,98, иначе говоря, чтобы
гидромуфта работала со скольжением S = 2 -г 3%.
На рис. 59 приведена зависимость к. п. д. гидромуфты от пе-
редаточного отношения.
§ 4. РАСЧЕТ ВЕЛИЧИНЫ ОСЕВЫХ СИЛ, НАГРУЖАЮЩИХ
ПОДШИПНИКИ ВАЛОВ ГИДРОМУФТЫ И ФЛАНЦЕВЫЕ БОЛТЫ
При проектировании и изготовлении гидромуфт необходимо
решать важную задачу по определению осевой нагрузки, дейст-
вующей на опоры гидромуфты или в зависимости от конструк-
тивной схемы на опоры двигателя или приводимой машины. Опо-
ры гидромуфты находятся под действием радиальной и осевой
нагрузки. Определению действующих осевых нагрузок посвяще-
но несколько работ [3, 28, 11, 42].
157
В. М. Богдан на основании своих опытов говорит, что осевое
давление на опоры не зависит от изменения нагрузки и наполне-
ния гидромуфты, а является только функцией давления питания.
А. Я. Кочкарев приводит экспериментальные данные, показанные
на рис. 60, из которых видно, какое влияние оказывают заполне-
ние и режим работы.
На основе современной теории турбомашин, в частности тео-
рии центробежных насосов [37], вопрос о расчете осевых сил
представляется в следующем виде. Осевые силы, возникающие
вследствие действия потока на дкр
рабочие колеса,
поверхностными
вующими как на наружные по- *80
верхности колеса, —...." .....' ~
хности протечной части (в нашем
I
Рис. 59. Зависимость к. п. д. гидро-
муфты от передаточного отношения
так и на повер-
определяются юо
силами, дейст-
20
лопат-
Рис. 60, Изменение осевого усилия в
гидромуфте с радиальными
ками:
S п
I
1-20
гI
вод. ст.
питания
сплош-
Пл
1 — напор питания ------ а* 20 м.
V
(заполнение сплошное); 2—напор
Ро 1 - т
-- » 1э м вод- ст. (заполнение
V
ное); 3 — напор питания 10 м вод. ст.
(заполнение сплошное); 4 — заполнение
частичное, нагрузка на ведомом валу ме-
няется по характеристике М = kn^
случае первыми являются внешняя поверхность колеса турбины
и внутреняя поверхность кожуха, вращающегося со скоростью
насоса, и другие поверхности, омываемые жидкостью, но не от-
носящиеся к проточной части, а вторыми — поверхности колеса,
образующие круг циркуляции, и поверхности лопастей (рис. 61).
Составляющая осевого усилия от сил, действующих на наруж-
ную поверхность, может быть определена из уравнения
Ан = J pdf cos (nz), (45)
где п — нормаль к элементу поверхности;
р — величина гидродинамического давления:
z — направление оси вращения гидромуфты;
158
df cos (nz) — проекция элемента поверхности на плоскость, нор-
мальную к оси вращения.
Эта составляющая состоит из двух частей. Первая определя-
ется гидродинамическим давлением, зависящим от скорости вра-
щения части жидкости вокруг оси:
Л„1 = С pdf cos (nz) = ( p2nrdr. (46)
Вторая часть составляющей возникает
питания на неуравновешенную площадку:
вследствие давления
Рис. 61. Расчетная схема
гидромуфты:
1 — ведущий вал; 2 — ве-
домый вал
ЛН2 = Pofo, (47)
где р0—-давление питания;
fo — неуравновешенная площадь.
Отсюда следует, что полное осевое
давление на наружную поверхность равно
Г
Ан = ЛН1 + Л„2 = J р 2лг dr + pnfl}.
(48)
Составляющую Л„ статического дав-
ления на поверхность Н гидромуфты, за-
висящую от скорости вращения вокруг
оси z — z жидкости, заключенной в этом
пространстве, можно определить следую-
щим образом.
Кривая распределения давления в
пространстве Н представляет собой пара-
болу. Так как турбина вращается медленнее, чем кожух, связан-
ный с насосом и с некоторым скольжением, то скорость частиц
жидкости у стенки кожуха ык будет больше, чем у задней стен-
ки турбины ы,.. Исходя из этого можно считать, что жидкость,
находящаяся в этом пространстве, должна получить среднюю
угловую скорость или среднюю арифметическую скорость вра-
щающихся элементов. Следовательно, средняя окружная ско-
рость частиц жидкости будет равна
U
ср —
ик + ит
2
UCD
Если величина h = —- будет иметь размерность кГ/см2,
9
Кр V
т. е. п = — , то суммарная осевая сила, возникшая вслед-
ствие давления вращающейся жидкости, будет равна объему
159
оси z— z пара-
параболоида, образованного вращением вокруг
болы распределения давления:
о
— — • г -------,
1 2 20g • 1000
где г — радиус вращения в см;
и — окружная скорость в м)сек;
у/1000— удельный вес жидкости.
Преобразуем формулу (49):
л у Л 2 4 г
AHl = -J- ЫсрГ кГ.
g 4
Уравнение (50) не совсем точно, так как дает завышенное
значение силы осевого давления. Оно выведено в предположении
заполнения жидкостью всего пространства Н вплоть до оси вра-
щения. На самом деле часть пространства остается незапол-
ненной.
Осевая составляющая сил гидродинамического давления на
поверхность проточной части не может быть получена непосред-
ственным интегрированием, так как неизвестен закон распреде-
ления гидродинамических давлений в проточной части рабочих
колес, куда входят поверхности лопастей. В этом случае для оп-
ределения осевой силы используется уравнение количества дви-
жения
Л = (Сг2 — Сг ) = (Стг COS 02 — Cmi COS 0Х) =
g g
_ Q2y / cos 02 cos0t\ ,0
— -— “₽--------- ~F- . P U
g \ гт2 гтх /
где cz — проекция абсолютной скорости на ось;
ст— меридиональная скорость;
Q — расход циркуляции;
F— площадь, перпендикулярная к направлению скорости
Ст\
0 — угол между осью z и касательной к линии тока.
Для рассматриваемых гидромуфт 0j = 0°; 02 = 180°, а мери-
диональная скорость входа Ст равна скорости выхода, а также
равна относительной скорости w, т. е.
Cm, = Ст2 ‘ •
Исходя из этого равенства получаем следующее уравнение
осевой составляющей сил гидродинамического давления на по-
верхность проточной части:
Ав = (щ cos 0° — w cos 180°) = w kF. (52)
g g
(49)
160
Отсюда следует, что полное осевое усилие равно
А = poh + — • V W. (53)
g 4 ср g
На основании некоторых экспериментальных работ можно
заключить, что при малых скольжениях осевая составляющая
2Qv
—- w незначительна по сравнению с силой, созданной давле-
g
нием питания, а поэтому ею можно пренебречь. Тогда уравнение
запишется в следующем виде:
Л = pofo + ~ (о?рг4. (54)
Таким образом, в гидромуфте осевое давление состоит из дав-
ления питания и давления на наружную поверхность, главным
образом в пространстве Я. При работе гидромуфты с незначи-
тельным 2—5%-ным скольжением давление на стенки в прост-
ранстве Я мало, и, следовательно, второй член в уравнении (54)
при малом скольжении можно принять также равным нулю.
С увеличением нагрузки, а следовательно, и скольжения допол-
нительный объем Я заполняется жидкостью, в результате чего
давление в пространстве Я распространяется на большую пло-
щадь. Таким образом, возникшая осевая сила становится боль-
шой, и, следовательно, при этом второй член в уравнении (54)
уже нельзя принимать равным нулю. В рассматриваемом случае
(рис. 61) давление питания разжимает рабочие колеса.
С изменением режима работы осевая сила, характеризующая-
ся вторым членом уравнения (54), начинает действовать в об-
ратном направлении, сжимая колеса. При определенных -соотно-
шениях давления питания, режима работы и наполнения дейст-
вующие в разных направлениях две составляющие осевой силы
могут быть как равны по величине, в результате чего осевое
давление исчезнет (А = 0), так и не равны друг другу. Это мож-
но видеть из графика А. Я- Кочкарева, приведенного нй рис. 60.
Влияние соотношения размеров и формы рабочих колес гид-
ромуфты на величину осевых сил подробно было исследовано
К. Тимм.
На рис. 62 приведены кривые изменения осевых сил в зави-
симости от передаточного отношения г. Исследования проводи-
лись для двух случаев: в первом случае в качестве ведущего ко-
леса был насос I, а во втором — турбина II. Кривые (рис. 62, а)
показывают, как отличаются значения осевых сил в этих двух
случаях. Разница в величине осевой силы объясняется различи-
ем размеров фактически выполненных активных диаметров, а
также разной формой рабочих колес I и II.
В результате некоторой переделки колес разницу в значениях
диаметров можно исключить. Кривые, показанные на рис. 62, б,
11 Заказ 1076 1 61
почти совпадают. Это можно объяснить тем, что при переделках
колес не удалось еще устранить различия в протяженности и
Рис. 63. Схема гид-
ромуфты, иссле-
дованной К. Тимм
Рис. 62. Зависимость осевого усилия А от передаточного отношения i при
«1 = 800 об/мин:
а — испытания при различии размеров активных диаметров: 1 — привод за колесо /
диаметром 295 6 мм; 2 — привод за колесо // диаметром 297,0 мм; б — испытания
после устранения разницы в диаметрах: 3 — привод за колесо / диаметром 295,6 мм;
4 — привод за колесо 11 диаметром 295,6 мм; в — испытание после дополнительной пе-
ределки с целью сближения формы колес: 5 — привод за колесо 1 диаметром 295,6 мм;
6 — привод за колесо 11 диаметром 295,0 мм
в форме каналов. Когда это было устранено, получили кривые,
изображенные на рис. 62, в. При этом значения осевых сил при
приводе через колесо // стали больше, чем
при приводе через колесо /.
Необходимо обратить внимание на то, что
при i = ± 1 (или при значениях, близких к
этому) величина осевых сил одинакова, не
зависит от того, при помощи какого колеса
гидромуфта приводится во вращение, и не за-
висит от диаметров и формы рабочих колес.
К. Тимм объясняет это отсутствием циркуля-
ции в проточной части гидромуфты (рис. 63).
Мы считаем, что основной причиной совпаде-
ния значений осевых сил при i = ±1, или при
I, близких к единице, является отсутствие раз-
личий в угловых скоростях вращения (а сле-
довательно, и в окружных скоростях) частиц
жидкости у стенки ведущего и ведомого коле-
са. Отсутствие же циркуляции является вто-
рой причиной,
сказанного можно сделать вывод, что осевое
давление в гидромуфте зависит от давления питания, неуравно-
162
На основании
вешенной площади, соотношения размеров и формы рабочих ко-
лес, распределения давления в наружной полости гидромуфты,
определяемого режимом работы и наполнением, физических
свойств рабочей жидкости, а также от числа оборотов ведущего
вала.
Конструкции гидромуфт разнообразны, поэтому разнообраз-
ны места расположения и способ установки упорных подшипни-
ков, место подвода и способ питания гидромуфт. Конструктор
должен учитывать разнообразие этих факторов при расчете осе-
вых сил. В частности, исходя из конструктивной схемы, приве-
денной на рис. 64, болты Б, стягивающие фланцы, должны быть
Рис. 64. Схема гидромуфты для расчета деталей на на-
грузку от осевых сил
рассчитаны на растяжение от осевой силы, определенной по фор-
муле
A^~-^^cPri + Pofo-
Упорный подшипник (рис. 64) следует рассчитывать на осе-
вую силу
Ae = ^w.
О
Если питание гидромуфты приводится к пространству между
двумя рабочими колесами, как это показано на рис. 61, то к ука-
занному значению Ав следует еще прибавить осевое усилие от
давления питания:
л 2Qv , .
Аупорн.под — -Щ “Г Pofo • (об)
g
Нужно помнить, что в гидромуфтах при малых скольжениях
произведение Qw имеет незначительную величину, поэтому упор-
ный подшипник нагружен в основном осевой силой, создаваемой
П* 161
давлением питания. С увеличением скольжения значения Qw
начинает возрастать, вследствие чего возрастает и составляю-
щая Ав.
Количество фланцевых болтов Б, устанавливаемых в гидро-
муфтах, часто бывает больше, чем требуется из условия расчета
на растяжение. Это делается для обеспечения плотности стыка,
что и должно учитываться при расчете болтов Б.
Из рассмотрения экспериментальных данных А. Я. Кочкаре-
ва, а также В. М. Богдана следует заключить, что наибольшую
по величине составляющую осевой силы создает давление пита-
ния на неуравновешенную площадку, поэтому конструктору при
расчете необходимо обратить на это внимание.
Для восприятия осевого давления конструкции гидромуфт
предусматривают соответствующее расположение роликов и ша-
рикоподшипников или упорных подшипников скольжения. Как
правило, в конструкциях осевые силы нейтрализуются внутри
гидромуфты. В этом случае в упорном подшипнике потери мень-
ше, а долговечность его больше, так как он работает не при пол-
ном числе оборотов ведущего вала гидромуфты, а только при
разнице чисел оборотов насоса и турбины. Как известно, при
нормальном режиме эта разница составляет 2—5% от полного
числа оборотов.
Глава V. РЕГУЛИРОВАНИЕ ГИДРОМУФТ
§ 1. РЕГУЛИРОВАНИЕ И УПРАВЛЕНИЕ ГИДРОМУФТАМИ
ЗА СЧЕТ ИЗМЕНЕНИЯ СТЕПЕНИ ЗАПОЛНЕНИЯ ПРОТОЧНОЙ ЧАСТИ
Прежде всего уточним основные виды регулирования, кото-
рые можно осуществить при помощи гидромуфт.
Регулирование числа оборотов ведомого вала можно произ-
водить при постоянном числе оборотов ведущего вала «i = const,
а также при переменном tii = var.
В свою очередь, если гидромуфта работает с постоянным чис-
лом оборотов ведущего вала, то регулировать число оборотов
ведомого вала можно тремя способами:
различной степенью заполнения проточной части гидромуфты;
изменением формы проточной части;
перегрузкой гидромуфты за счет прогрессирующего увеличе-
ния передаваемого момента или, наоборот, снятия нагрузки.
Наибольшее распространение получил первый способ регули-
рования.
Классификация систем управления
и примеры конструкций
Напомним, что гидромуфта относится к такому виду передач,
которые устанавливают только силовые связи, а не кинематичес-
кие, поэтому определенное передаточное отношение i обусловли-
вается не только данной величиной относительного заполнения
рабочего объема qo, но и вполне определенной величиной момен-
та, передаваемого гидромуфтой Af2, т. е. i = f (q0, Af2).
Таким образом, если при равном относительном заполнении
двух одинаковых гидромуфт передаваемые моменты М2 не рав-
ны, то различны будут и передаточные отношения г. Точно так
же при равенстве нагрузок, но при различии в заполнении пере-
даточные числа будут не равны. Только равенство qo и М2 обе-
спечивает равные I.
Для осуществления описываемого метода регулирования со-
здано несколько систем управления. Все системы должны изме-
нять величину относительного заполнения рабочей полости q0,
но методы решения этой задачи и протекание процесса регули-
рования у каждой системы различны.
165
Эти системы можно разделить на три группы, каждая из ко-
торых рассмотрена ниже.
Системы управления, относясь к одной группе, могут иметь
значительное конструктивное различие в отдельных узлах или
во всей компоновке в целом.
Система с регулированием потока жидкости
на входе в гидромуфту
Гидромуфта со свободным выбросом рабочей жидкости в не-
подвижный кожух. Примером этой системы может служить
сдвоенная гидромуфта ЛМЗ им. XXII съезда КПСС мощностью
4000 кет (п = 3000 об/мин), а также гидромуфта мощностью
500 кет (п = 960 об!мин) для дымососов и вентиляторов конст-
рукции ВНИИМЕТМАШа [14].
Регулирование гидромуфты ЛМЗ им. XXII съезда КПСС осу-
ществляется следующим образом.
Гидромуфта заполняется от постоянно работающего масля-
ного насоса через цилиндрическую щель, образованную вокруг
ведомого вала. Часть жидкости из проточной части для охлаж-
дения все время выбрасывается через жиклеры в кожух, откуда
сливается в масляный бак. Величина отверстий для выбрасыва-
ния масла из гидромуфты может регулироваться при наладке.
На питательном трубопроводе гидромуфты установлен регу-
лируемый клапан с колонкой дистанционного управления. Пита-
тельный трубопровод связан перепускной трубой с масляным ба-
ком. Регулируя колонкой управления, можно изменять величину
питания гидромуфты, перепуская часть масла через сливной кла-
пан в бак.
Так как выброс масла из гидромуфты все время продолжа-
ется, то при уменьшении питания меняется величина заполнения
проточной части гидромуфты. Как известно, в зависимости от из-
менения заполнения гидромуфты изменяется и число оборотов
ведомого вала.
Схема регулирования числа оборотов с выбросом рабочей
жидкости в неподвижный кожух получила незначительное рас-
пространение.
Гидромуфта с вращающимся резервуаром [17] состоит из сле-
дующих основных деталей: насоса, турбины, вала турбины, внут-
реннего кожуха, наружного кожуха и черпательной трубки. На-
сос жестко связан с ведущим валом, опирающимся на два
шарикоподшипника. Ведомый вал соединен с турбиной, а на-
ружный и внутренний кожухи образуют вращающийся резерву-
ар, в который все время через ниппели выбрасывается масло из
круга циркуляции. Между кожухами установлена черпательная
трубка, насаженная на ось, шарнирно закрепленную в коллекто-
ре. При помощи рычага и системы тяг черпательная трубка мо-
166
жет быть поставлена в положение полного подъема и отклонена
от него на 90°. В первом случае трубка введена во вращающееся
масляное кольцо, во втором случае выведена из кольца. Следо-
вательно, в первом случае черпательная трубка, используя ско-
ростной напор вращающегося масляного кольца, подает все
время масло в круг циркуляции. Так как расход масла через
ниппели значительно меньше производительности черпательной
трубки, то круг циркуляции будет всегда заполнен, вследствие
чего число оборотов турбины достигнет своего максимального
значения, отвечающего скольжению 2—3%. При втором положе-
нии трубка полностью выведена из масляного слоя, следователь-
но, масло больше не поступает, в то время как выброс через нип-
пели продолжается безостановочно, в результате рабочий круг
опоражнивается и турбина останавливается, при промежуточных
положениях трубки заполнение гидромуфты также раз-
личное.
Этот способ позволяет по желанию быстро увеличивать число
оборотов приводимой машины, однако уменьшение числа оборо-
тов ограничено расходом через калиброванные отверстия нип-
пелей.
Как на недостаток этой схемы можно указать на медленное
уменьшение числа оборотов, положительные ее свойства — про-
стота управления, определенность задаваемой дозировки, спо-
собность черпательной трубки легко преодолевать противодав-
ление.
Система с регулированием потока жидкости
на выходе из гидромуфты
Гидромуфты с клапанным управлением. Уже в первых конст-
рукциях судовых гидромуфт были применены устройства для уп-
равляемого изменения сечений отверстий, через которые выбра-
сывается из гидромуфты жидкость. Такими устройствами были
наружный шибер (при сдвиге его открывались большие проход-
ные сечения) и цилиндрические золотники, применяемые в уста-
новках Бауэр-Бах. Однако тем и другим ставилась ограниченная
задача, а именно: обеспечить два состояния — минимальное от-
крытие сечения и полное открытие сечения. Они предназначались
только для включения и выключения приводного вала, а для по-
лучения плавного регулирования числа его оборотов от нуля до
максимума были непригодны.
Гидромуфты с дополнительным объемом. Схема отличается
отсутствием вращающегося резервуара, а пространство, образо-
ванное внутренним и наружным кожухами, является небольшим
дополнительным объемом, в котором находится скользящая чер-
пательная трубка. Дополнительный объем сообщается с проточ-
ной частью отверстиями или окнами с большим проходным се-
167
чением, так что круг циркуляции и дополнительный объем мож-
но рассматривать как сообщающиеся сосуды.
Это является одним из главных отличий рассматриваемой
схемы от схемы гидромуфты с вращающимся резервуаром, где
отверстия в ниппелях делаются незначительными и изолируют
вращающийся резервуар, причем сами отверстия остаются все
время незатопляемыми.
Описанная схема регулирования позволяет быстро снижать
число оборотов ведомого вала, в то время как возможность бы-
строго повышения числа оборотов ограничена.
Система с регулированием потока на входе
и выходе из гидромуфты
Гидромуфта с регулированием при помощи шестеренчатого
насоса. В этой схеме изъятие из рабочего круга или добавление
в него определенной порции рабочей жидкости производится ше-
стеренчатым насосом, который подключен к каналу, проводяще-
му масло под давлением черпательной трубки.
В этом случае камера коллектора, находящаяся под напором,
создаваемым черпательной трубкой, соединена с камерой обрат-
ной подачи масла в гидромуфту. Назначение шестеренчатого на-
соса — изменять количество работающей в гидромуфте жидко-
сти, а следовательно, и число оборотов ведомого вала.
Несмотря на свои положительные качества, эта схема усту-
пает по простоте исполнения и быстроте реакции гидромуфты на
команду схемам с поворотной черпательной трубкой и схеме гид-
ромуфты с допонительным объемом, а поэтому установки гид-
ромуфт с шестеренчатым насосом выпускаются в ограниченном
количестве. Такие гидромуфты изготовляет фирма Фойт (ФРГ)
(тип SL) и фирма Мицубуси (Япония) (тип SA).
Гидромуфты с комбинированным управлением. Наиболее
распространенной является схема, состоящая из гидромуфты с
дополнительным объемом со скользящей черпательной трубкой и
питательного насоса с регулировочным клапаном на входе.
Такая комбинация позволяет быстро производить разгон ве-
домого вала и снижать число его оборотов. Однако недостатком
такой схемы является излишняя затрата мощности на питатель-
ный насос, помимо затраты энергии на работу черпательной
трубки, что снижает к. п. д. всей установки. К системе регулиро-
вания потока при входе и выходе из гидромуфты можно отнести
гидромуфты ГМ-600 и гидромуфту RK, оборудованные специаль-
ными распределительными колонками.
Наиболее распространенной системой регулирования величи-
ны передаточного отношения в современных конструкциях гидро-
муфт является система со скользящей или поворотной черпатель-
168
ной трубкой и вращающимся резервуаром, а также система
гидромуфты с дополнительным объемом и со скользящей
трубкой.
§ 2. ГЛУБИНА РЕГУЛИРОВАНИЯ ЧИСЛА ОБОРОТОВ
И ПЕРЕДАВАЕМОГО КРУТЯЩЕГО МОМЕНТА У ГИДРОМУФТ,
УПРАВЛЯЕМЫХ ИЗМЕНЕНИЕМ ЗАПОЛНЕНИЯ
Если мы рассмотрим все виды применения гидромуфт для ре-
гулирования числа оборотов ведомого вала, то увидим, что
в большинстве случаев эксплуатации требуемая глубина регули-
рования ограничивается 30—40% от номинального числа оборо-
тов. Между тем бывает необходимо и более глубокое регулиро-
вание, а именно: 50—60% скольжения, как, например, в установ-
ке шахтно-подъемных машин. Однако при скольжении свыше
50% в характеристике очень опорожненных гидромуфт появляет-
ся неустойчивая зона работы, выражающаяся в больших коле-
баниях скорости и передаваемого момента. Особенно сильно это
явление наблюдается, если ведомый вал гидромуфт нагружен по-
стоянным крутящим моментом, не зависящим от числа оборотов
(М2 = const). Значительно слабее колебания проявляются или
могут совсем не проявляться при нагрузке вторичного вала кру-
тящим моментом, который пропорционален квадрату числа обо-
ротов (например, при работе с нагнетателями, турбовоздуходув-
ками, вентиляторами и пр.).
Надо добавить, что возникновение колебаний в гидромуфте
наблюдалось не только в отмеченных случаях, но также и при
разгоне гидромуфтой приводимой машины. На неустойчивую ра-
боту и возникновение колебаний обратил внимание X. Синклер.
Они отмечены также при исследовании моделей гидромуфт
в ЦНИИТМАШе, ВНИИМЕТМАШе и ВУГИ и др.
Колебания, отмеченные выше, возникают благодаря тому, что
характеристики М — f(n2) у очень опорожненных гидромуфт
в зоне больших скольжений становятся мягкими. Кроме этого,
характеристика сильно опорожненной гидромуфты при работе с
большим скольжением способна внезапно изменяться, меняя
мгновенно при одной и той же скорости турбины величину пере-
даваемого момента. Такое изменение внешней характеристики
гидромуфты зависит от величины и характера приложенной на-
грузки и обусловливается специфическими преобразованиями
потока в частично заполненном круге циркуляции [13].
Описанное явление подтверждается и испытаниями прозрач-
ной модели, проведенными в ВУГИ.
Для устранения колебаний, а также неустойчивой зоны рабо-
ты гидромуфты были найдены следующие методы: изменение
формы тора, введение разрезного тора или исключение его, уста-
новка порога и т. д.
169
В описанных выше способах при решении задачи распростра-
нения устойчивой зоны характеристик гидромуфт на работу с
глубоким скольжением исходили главным образом из того, что
неустойчивость их является следствием неустойчивости формы
потока жидкости в рабочей полости гидромуфты.
Предполагалось, что при частичном заполнении жидкостью
рабочей полости гидромуфты направляющая роль стенок круга
циркуляции мала. Жидкость может образовывать различные по
форме пути циркуляции. В том случае, когда скольжение мало,
вся жидкость в виде компактной массы собирается у периферии
колес. По мере торможения турбины вследствие уменьшения за-
полнения гидромуфты или вследствие возрастания нагрузки на-
пор насоса, преодолевая сопротивление турбины, заставляет
жидкость огибать всю чашу турбины.
Переход с одной формы потока на другую совершается скач-
кообразно, вследствие чего и происходят изменения моментов.
Исходя из такого объяснения физической сущности процесса
во всех вышеописанных методах стремились увеличить направ-
ляющую роль стенок каналов круга циркуляции.
При создании различных модификаций тора старались полу-
чить такую форму каналов, при которой невозможно перестрое-
ние потока. Установкой порога разбивали поток, мешая образо-
вываться такой циркуляции, при которой жидкость огибает всю
чашу турбины (большой круг).
Испытания описанных конструкций показали, что неуправляе-
мые режимы такими методами полностью не устраняются, хотя
эти методы и вносят значительные улучшения в характеристику
гидромуфты при разгоне и при работе на больших скольжениях.
Здесь важно отметить, что устранение неустойчивых режимов
работы гидромуфты должно достигаться повышением результи-
рующей жесткости характеристик привода с гидромуфтой [17].
§ 3. ЗАВИСИМОСТЬ ЧИСЛА ОБОРОТОВ ВТОРИЧНОГО ВАЛА
ОТ ЗАПОЛНЕНИЯ ГИДРОМУФТЫ.
ЗАКОН ПОДОБИЯ ПРИ РАБОТЕ НЕЗАПОЛНЕННЫХ ГИДРОМУФТ
Для проектирования органов управления гидромуфт, регули-
руемых изменением заполнения, особенно для случаев автомати-
ческого регулирования, необходимо знать зависимость между
числом оборотов ведомого вала «2 и относительным заполнением
гидромуфты у0.
Теоретическими расчетами эта зависимость не может быть
установлена и решение надо искать опытным путем. На рис. 65 и
66 приведены экспериментальные кривые, полученные в ЦНИИТ-
МАШе и устанавливающие зависимость = f (i) для случаев,
когда нагрузка (крутящий момент) меняется пропорционально
М2 = f (i2) и когда нагрузка постоянна Af2 = const.
170
Экспериментальные кривые показывают, как от характера и
величины нагрузки зависит вид кривых.
Уменьшение заполнения рабочих каналов гидромуфт ведет
к перераспределению давления и скоростей в потоке, а также из-
менению его формы, что вызывает увеличение вихреобразования,
возникновение обратного течения и т. п. Энергия, затраченная на
образование вихрей, является потерянной. Таким образом, умень-
шение заполнения гидромуфты ухудшает структуру потока в гид-
ромуфте. Это влечет за собой уве-
личение потерь, а следовательно,
и проскальзывание гидромуфты.
Поэтому регулирование за счет
различного заполнения
быть охарактеризовано как ре-
гулирование посредством увели-
чения потерь.
Рис. 65. Зависимость относи-
тельного заполнения гидро-
муфты qa от передаточного
отношения i при изменении
передаваемого момента про-
порционально I2;
о — Л| — 1000 об/мин; ® — «I =
= 750 об/мин; X — = 500
об/мин; □ — л, = 1250 об/мин
должно
Рис. 66. Зависимость относитель-
ного заполнения гидромуфты qo
от передаточного отношения i
при передаче постоянного крутя-
щего момента
Посмотрим, при каких обстоятельствах в геометрически по-
добных гидромуфтах при работе их с различным числом оборотов
первичного вала «1 и незаполненным рабочим кругом могут воз-
никать подобные режимы работы, характеризующиеся равной ве-
личиной коэффициента мощности А.
Как уже было сказано, под коэффициентом мощности мы по-
нимаем коэффициент, связывающий следующие параметры гид-
ромуфты:
= А • 1(Г^О5,
где — мощность на первичном валу в л. с.;
D — активный диаметр гидромуфты в м.
171
Разделим величину коэффициента мощности А на у, сделав
его независимым от веса единицы объема жидкости:
Ло = —. (56)
V
Коэффициент Ао является функцией передаточного отноше-
ния i относительного заполнения гидромуфты q0, числа Рейнольд-
са Re и числа Фруда Fr:
A0 = f(i, <7о> Re, Fr). (57)
Подобные режимы определяются равными коэффициен-
тами Ао.
Из формулы (57) следует, что для получения указанных ре-
жимов у геометрически подобных гидромуфт разных размеров
при работе их с различным числом оборотов первичного вала тре-
буется сохранение равенства i, qo, Re, Fr. Как нами уже отмеча-
лось, большой опыт постройки гидромуфт показывает, что для
средних и больших гидромуфт, у которых число Re > 5000, изме-
нение последнего несущественно отражается на структуре потока
(режим автомодельности), поэтому при сравнении режимов рабо-
ты отдельных гидромуфт можно в первом приближении измене-
нием Re пренебречь.
Проф. Феттингер утверждает, что превалирующее значение
в гидромуфтах имеет коэффициент, выражающий отношение ок-
ружной скорости и к относительной скорости w. Этим коэффи-
циентом характеризуется сверхвихревое движение жидкости и
происхождение потерь. Как известно, при условии сохранения
коэффициента Ао постоянным отношение — остается неизмен-
W
ным. Обращаясь к требованию постоянства параметра Фруда для
сравниваемых режимов, необходимо заметить, что для гидро-
муфт, работающих с заполненным циркуляционным кругом, это
требование вообще не имеет никакого значения. Для гидромуфты
с незаполненным кругом, когда в каналах ее образуются свобод-
ные поверхности, изменение параметра Фруда в некоторых слу-
чаях могло бы сказываться на форме потока.
Параметр Фруда должен приниматься во внимание при рабо-
те гидромуфты с незначительной окружной скоростью, когда си-
лы тяжести могут оказывать существенное влияние на структуру
потока вследствие относительно большой величины их по срав-
нению с силами, идущими на увеличение кинетической энергии
жидкости и давления. В практике постройки гидромуфт такое со-
отношение сил пока не встречается.
Таким образом, пренебрегая влиянием параметров Рейнольд-
са и Фруда, получаем
Ao = f(i, q0)- (58)
172
Исходя из выражения (58) можно заключить, что для получе-
ния подобных режимов в геометрически подобных гидромуфтах
при работе их с различным числом оборотов первичного вала эти
гидромуфты должны иметь одинаковое относительное заполнение
q0, одинаковое соотношение чисел оборотов вторичного и первич-
По
ного валов h = — или одинаковое скольжение.
При выполнении этих условий сравниваемые гидромуфты бу-
дут иметь подобные структуры потоков и работать с одинаковым
коэффициентом мощности Ао.
Из сказанного вытекает, что при равных Ло и <70 будут равны
и передаточные числа i. Иначе говоря, при работе геометрически
подобных гидромуфт с разными числами оборотов ведущего ва-
ла, при соблюдении подобия их нагрузок и при одинаковом отно-
сительном их заполнении, структура потока в них будет одинако-
вой, а следовательно, и соотношение чисел оборотов вторичного
и первичного валов будет одинаково независимо от того, на каком
числе оборотов ведущего вала П\ гидромуфта работает, и незави-
симо от того, каков ее активный диаметр D.
Проведенное в ЦНИИТМАШе экспериментальное исследова-
ние модели гидромуфты [12] подтвердило высказанное поло-
жение.
Опытные точки (рис. 65) получены при условии, что переда-
ваемый гидромуфтой момент изменялся пропорционально г2,
а точки, показанные на рис. 66,— при условии сохранения по-
стоянства передаваемого момента. Экспериментальные точки
снимались при работе с различным числом оборотов первичного
вала, но с соблюдением следующего условия: любые точки при
одинаковом значении i имеют равные коэффициенты мощно-
сти Ао.
Из рассмотрения опытных кривых видно, что независимо от
числа оборотов первичного вала при равных коэффициентах До
одинаковому значению i соответствует одинаковая величина от-
носительного заполнения гидромуфты qQ. Иначе говоря, при ра-
боте гидромуфты с различным числом оборотов при равных Ао и
q0 передаточные отношения i также равны.
Опыты проводились на модели одного размера, поэтому поло-
жение, высказанное относительно значения величины D, экспери-
ментально в указанной работе проверено не было.
Для распространения полученных результатов на случай ра-
боты гидромуфты с любой произвольной характеристикой необ-
ходимо построить графики семейства кривых <70 = f(0 'при по-
стоянных крутящих моментах. Таким образом, каждая кривая на
этом графике будет отличаться от другой относительной величи-
ной передаваемого момента, например 0,25Л1; 0,5/И; 0.75Л1; Ш;
1,25М; 1,5М; 1,75М, где 1М — нормальный момент гидромуфты,
работающей с коэффициентом мощности А = 1,74.
173
Основываясь на экспериментальной кривой qo = f (i), получен-
ной при М = 1,0, мы построили график семейства таких кривых,
изображенный на рис. 67. Здесь по оси абсцисс отложено отноше-
ние чисел оборотов г, а по оси ординат — относительное заполне-
ние гидромуфты q0. Нанесенные кривые дают закон изменения
относительного заполнения гидромуфты qo при загрузке гидро-
муфты различными относительными моментами Мо.
Этот график позволяет построить кривую заполнения гидро-
муфты, для привода машины с любой характеристикой. Для это-
го необходимо только нанести на
семейство кривых (рис. 67) кри-
вую изменения крутящего момен-
та приводимой машины, и точки
пересечения этой кривой с кривы-
ми различных относительных мо-
ментов гидромуфты дадут вели-
чины относительного заполнения
qo- Такое построение может ока-
заться полезным при проектиро-
вании регулировочных устройств
гидромуфты, автоматизации уп-
равления ею и т. п.
В качестве примера на рис. 67
нанесена кривая зависимости q0 =
= f(i) при приводе лопастной ма-
шины, регулируемой изменением
числа оборотов. Эта кривая со-
Рис. 67. Семейство кривых q0 =
= f(t) для различных значений
передаваемого момента
ответствует первому случаю на-
грузки, т. е. тому случаю, когда
момент у приводимой машины, а
также у гидромуфты изменяется
пропорционально квадрату скорости вращения ведомого вала,
следовательно, в данном случае квадрату передаточного от-
ношения.
Таким образом, если орган управления гидромуфтой будет
менять ее заполнение по кривой 7—8—9—10, то при постоянном
числе оборотов ведущего вала момент на приводимой лопастной
машине будет изменяться пропроционально квадрату ее скорости
вращения, а именно: в точке 8 момент будет равным 0,75 номи-
нального момента при передаточном отношении i = 0,866, в точ-
ке 9 будет равен 0,5 от номинального момента при i = 0,708, в точ-
ке 10 — 0,25 при i — 0,5.
Приведем другой пример. Предположим, что приводимая ма-
шина имеет такую характеристику, при которой требуется, чтобы
скорость ее в зависимости от изменения крутящего момента из-
менилась так, как это показано на кривой 1—6, т. е. при нагрузке
0.25Л1 передаточное отношение равнялось бы i — 0,95, при 0,5Af
174
i = 0,83,5, при 0,75Af i = 0,76, при l,5M i = 0,685 и при 1,75М
I = 0,675.
При выполнении такой задачи орган управления гидромуфтой
должен изменить ее наполнение, следуя кривой 1—2—3—4—5—6,
иначе говоря, при нагрузке 0,25Л1 относительное заполнение гид-
ромуфты должно быть ^0=0,6, при 1,5jW ^о = 0,63 при Мн—q0=
= 0,71 и т. д.
Для режимов частичного заполнения можно сделать следую-
щие выводы.
1. При соблюдении подобия нагрузки (равенства коэффициен-
тов Ло) в геометрически подобных гидромуфтах и при одинако-
вом их заполнении отношение чисел оборотов ведомого и ведуще-
го валов будет одинаковым независимо от того, на каком числе
оборотов ведущего вала гидромуфта работает и независимо от
размера ее активного диаметра D.
2. Полученные при исследовании кривые, устанавливающие
функциональную зависимость между величинами Ао, qQ и i, име-
ют большое практическое значение для решения задач, возникаю-
щих при проектировании гидромуфт.
§ 4. ОБЛАСТЬ ПРИМЕНЕНИЯ ГИДРОМУФТ ,
РЕГУЛИРУЕМЫХ ЗАПОЛНЕНИЕМ
Гидромуфты применяются для плавного регулирования числа
оборотов приводимой машины при постоянном числе оборотов
двигателя в приводе таких машин, как турбовоздуходувки, венти-
ляторы, нагнетатели на самолетах, дымососы, центробежные на-
сосы, конвейеры, шахтно-подъемные машины и пр.
При этом могут быть следующие виды изменения нагрузки
у приводимой единицы машины: мощность ее изменяется пропор-
ционально кубу числа оборотов; квадрату числа оборотов; прямо
пропорционально числу оборотов.
На практике может встретиться и какая-либо комбинация из
этих видов нагрузки.
Гидромуфты с турбомашинами, имеющими первый вид на-
грузки, получили наибольшее распространение. Под турбомаши-
нами понимаются все лопастные машины, работающие по прин-
ципу изменения количества движения на рабочих лопастях, такие
как турбовоздуходувки, центробежные насосы, гидромуфты и т. п.
Построим характеристику гидромуфты при работе ее с турбо-
машиной (рис. 68). По оси абсцисс отложим число оборотов ведо-
мого вала гидромуфты п2. Приняв во внимание, что число оборо-
тов двигателя (ведущего вала) постоянно, мы можем отложить
для удобства пользования диаграммой вместо п2 передаточное от-
По ГТ
ношение i, так как в нашем случае t = —-пропорционально п2. По
175
оси ординат отложим мощность и к. и. д., который для гидромуфт
можно приближенно принять равным передаточному отноше-
нию I.
Мощность на ведомом валу изменяется пропорционально ку-
бу передаточного отношения, т. е. = (i)3NH, где NH — номи-
нальная мощность при полном числе оборотов турбомашины.
Обратив внимание, что к. п. д. гидромуфты изменяется при этом
пропорционально i, записываем, что мощность на ведущем валу
(потребляемая от электродвигателя) пропорциональна квадрату
передаточного отношения.
Мощность, теряемая в гидромуфте, равна разности между
мощностью, затраченной на ведущем валу, и реализованной на
ведомом:
Nn0T = (tfNH-(i)3NH = ^-i»)NH. (59)
Определим, при каком передаточном отношении потери в гид-
ромуфте будут наибольшими.
176
Для этого находим первую производную NnOT по I и прирав-
ниваем ее нулю:
(2г — Зг2) Nn0T = 0;
г (2 — Зг) Nn0T = 0;
2 — Зг = 0;
г = — = 0,666.
3
Таким образом, при п2 = 0,666 щ потерянная мощность‘будет
иметь максимальное значение, и ее можно определить из ра-
венства
N пот
2 \2 / 2 \»
3 / (.Т /
NH = 0,148WK. (60)
Из рассмотрения графика (рис. 68) и из сказанного следует,
что хотя у гидромуфты с уменьшением числа оборотов к. п. д. па-
дает по прямой линии, потери в гидромуфте при приводе турбо-
машины по абсолютному значению невелики, так как мощность
турбомашины с уменьшением «2 уменьшается быстрее по кубиче-
ской параболе. Это обстоятельство позволяет при помощи гидро-
муфт экономно регулировать турбомашины [14].
При работе гидромуфты с турбомашиной может наблюдаться
при определенных условиях и второй вид изменений нагрузки
(N2 = NhI2). Такие условия могут встретиться, например, на са-
молете, при работе нагнетателя на моторе при постоянном давле-
нии наддува (ри = const), т. е. при условии постоянства весового
расхода воздуха, подаваемого в мотор при изменении числа обо-
ротов крыльчатки нагнетателя в зависимости от изменения высо-
ты полета. Гидромуфта может приводить центробежный насос,
питающий паровой котел, причем характеристика работы потре-
бителя и сети будет такова, что напор насоса изменяется прямо
пропорционально числу оборотов. Так как мощность насоса равна
произведению QH, то мощность на ведомом валу гидромуфты
в данном случае будет изменяться пропорционально квадрату
числа оборотов, и потери выразятся следующим образом:
Nnor = (i- i2) Nn- (61)
Найдем первую производную по г и приравняем ее нулю:
(1 — 2i)Nnor = 0;
1 — 2г = 0;
г = — = 0,5;
2
N пот
NH = Q,25NH.
12 Заказ 1076
177
Итак, в этом случае максимальное значение потерянной мощ-
ности в гидромуфте равно 25 % от номинальной величины при пе-
редаточном отношении I = 0,5, т. е. при уменьшении числа оборо-
тов в 2 раза (рис. 68, б).
Регулирование скорости приводимой машины при помощи
гидромуфты, имеющей третий вид нагрузки, значительно уступает
по экономичности первым двум
видам. Поэтому установки
гидромуфт для этого случая
имеют небольшое распростра-
нение, и такое регулирование
применяется, когда это вызы-
вается какими-либо специаль-
ными условиями работы (на-
пример, требованием взрыво-
безопасности в шахтно-подъ-
емных машинах), а не эконо-
мичностью.
Однако регулирование гид-
ромуфтой при третьем виде на-
грузки не уступает по эконо-
мичности регулированию ско-
рости асинхронного электро-
к. п. д. г] от числа оборотов двигате-
лей П1 при At = const
двигателя реостатом в роторе,
а по сравнению с электродвигателем постоянного тока, работаю-
щим по схеме генератор — двигатель, регулирование гидромуфтой
по третьему виду более экономично при значениях i > 0,55—0,6
и менее экономично при значениях i <0,55, т. е. в пределах
i = 0,0 ч- 0,55.
На рис. 69 показаны кривые изменения к. п. д. и скольжения
гидромуфты при регулировании числа оборотов ее ведущего
вала.
Глава VI. ГИДРОМУФТЫ, РЕГУЛИРУЕМЫЕ ЗАПОЛНЕНИЕМ
§ 1. КОНСТРУКЦИИ ГИДРОМУФТ малой и средней мощности
(до 1000 квт]
Гидромуфты этой группы применяются в приводе центробеж-
ных насосов, вентиляторов, дымососов, конвейеров, центрифуг,
в шахтно-подъемных машинах, в приводе вспомогательного обо-
рудования металлургических заводов, вращающихся печей и ба-
рабанов, в ‘приводе вентиляторов градирен заводов большой хи-
мии, скрубберов-интеграторов, бортовых генераторов на самоле-
тах, в приводе тепловозов, кораблей и т. д.
Они предназначены для программного регулирования числа
оборотов приводимой машины при постоянном числе оборотов
двигателя, а также для разгона и остановки приводимой ма-
шины.
Прежде чем решить вопрос о применении гидромуфт для ра-'
боты с той или иной машиной, необходимо провести подробный
анализ характеристик этих машин и выгодность их сопряжения.
Советские гидромуфты. Размерный ряд
Нормалью, разработанной в СССР, предусматривается изго-
товление регулируемых гидромуфт мощностью 50—1000 квт.
Принята конструкция с вращающимся резервуаром (кожухом)
и со скользящей черпательной трубкой (рис. 70). К достоинст-
вам гидромуфт этого типа относятся: отсутствие масляного бака
и длинного трубопровода, простота управления, определенность
задаваемой дозировки, способность черпательной трубки легко
преодолевать противодавление. Все это обусловливает широкое
распространение гидромуфт с такой схемой управления. Мы не
будем останавливаться на описании принципа действия, так как
оно есть в литературе (17], а приведем основные величины, харак-
теризующие гидромуфты размерного ряда.
В качестве главного параметра ряда гидромуфт выбран
активный диаметр Da (максимальный диаметр проточной части
гидромуфты по выходным кромкам лопаток насоса) (см. рис. 44).
Активный диаметр определяет эксплуатационные параметры
гидромуфты — мощность и скольжение при заданном числе обо-
ротов ведущего вала, а также ее размеры.
12* 179
Параметрическим рядом предусматривается определенная
индексация гидромуфт. Обозначения отражают тип, исполнение
гидромуфты и значения главного параметра. Например, индекс
ГМРП-500 расшифровывается следующим образом: гидродина-
мическая муфта, регулируемая, исполнение II (с опорой ведомого
вала), с активным диаметром Da = 500 мм[15]. Помимо активного
диаметра, основными параметрами гидромуфт являются номи-
нальная передаваемая мощность, число оборотов ведущего вала,
к. in. д. или скольжение на номинальном режиме, а также глубина
регулирования.
Рис. 70. Схема работы гидромуфты:
/ — вращающийся резервуар; 2 — насос; 3 — ведомый вал; 4 — термомет-
ры; 5 — распределительный клапан; 6 — маслоохладитель; 7 — скользя-
щая черпательная трубка; 8 — ведущий вал; 9 — турбина; 10 — ниппель
Значения основных параметров для нормального режима, при-
веденные в табл. 9 и в номограмме основных параметров (рис. 71),
вычислены по формуле
Л\ = А • Ю-6П1О®,
где Wi — мощность на ведущем валу вл. с.-,
А — коэффициент мощности в л. с./об/мин3м5;
пх — число оборотов ведущего вала в минуту.
Размерным рядом предусмотрено, что номинальное скольже-
ние меняется от S = 2 ч-2,5% до S = 3ч-3,5% в зависимости от
выбора нагрузки (первое относится к Nmin, второе — к Атах).
Размерный ряд учитывает, что в большинстве случаев привод
гидромуфт осуществляется от асинхронных короткозамкнутых
двигателей. Числа оборотов и мощности гидромуфт соответству-
ют параметрам новой серии электродвигателей АО и АО2, а так-
же выпускаемых в настоящее время серий А и АТД.
180
Таблица 9
Основные параметры регулируемых гидромуфт
Обозначение типоразмера Активный диаметр в мм Числа оборотов ведущего вала пх в минуту
Исполнение 590 735 980 1480 2960
Без собственных опор С опорой ведо- мого вала С опорами ведущего и ведомого вала Мощность в квт\ Mmin при 5= 2%; Мтах при 5= 3%
"min "max "min "min "max "min Л\пах "min ^тах
ГМР 1-4 50 ГМР1-500 ГМР1-560 ГМР1-630 ГМР1-710 ГМР1-800 ГМР1-900 ГМР1-1000 ГМР1-1120 ГМР11-450 ГМР11-500 ГМР11-560 ГМР II-630 ГМРП-710 ГМР 11-800 ГМР11-900 ГМР11-1000 ГМРП-1120 ГМР II1-355 ГМРШ-400 ГМРШ-450 ГМРШ-500 ГМРШ-560 355 400 450 450 500 560 630 710 800 900 1000 1120 50 71 126 211 70 125 210 375 50 81 141 241 411 80 140 240 410 740 55 96 186 331 561 95 185 330 560 970 50 61 106 186 341 651 60 105 185 340 650 1000 85 156 281 471 841 155 280 470 840 1000
Пользуясь табл. 9, можно подобрать электродвигатель и регу-
лируемую гидромуфту при заданных мощности и числе оборотов
ведущего вала. В случае использования привода от электродви-
гателя внутреннего сгорания может быть использована номограм-
ма основных параметров (рис. 71). На номограмме дан пример
выбора гидромуфты мощностью = 100 кет при числе оборотов
Рис. 71. Номограмма для определения основных параметров гидро-
муфт параметрического ряда
= 1480 в минуту. В этом случае следует применить гидромуф-
ту ГМР1-500 или ГМРП-500; такая гидромуфта будет работать
на номинальном режиме со скольжением S = 2-=-2,5 %.
Принятая конструкция гидромуфты обеспечивает диапазон
регулирования скорости вращения, равный трем в приводе ма-
шин, у которых крутящий момент пропорционален квадрату ско-
рости, и равный двум — в приводах машин с постоянным крутя-
щим моментом.
Основные ориентировочные размеры, вес и маховые моменты
GD2 гидромуфт ГМР1 и ГМРП приведены в табл. 10.
182
Основные параметры гидромуфт ГМР1 и ГМРП
(размеры в мм)
Таблица 10
Типоразмер гидромуфты В Bi Сг D а'г 'Л Л2 /г з L l2 ь3 Тб h Вес вращаю- щихся дета- лей в кг Общий вес 1 муфты в кг Объем рабо- чей жидкости в л Маховой мо- мент GD2 । кГм2
ГМРП-450 785 270 но 115 630 70 55 18 150 150 285 810 625 220 160 270 260 120 100 145 240 18 31
1МР1 -450 560 230
ГМРП-500 820 270 но 115 700 70 55 18 150 150 285 810 625 220 160 270 260 120 100 175 270 21 40
1 Л1Р1-500 90 560 260
ГМРП-560 ГМР1-560 885 295 180 135 780 90 70 22 250 120 315 850 680 620 220 240 320 260 120 120 255 375 360 32 70
00
Продолжение табл. 10
Типоразмер гидромуфты В Ci с2 D d2 d, Л1 М Л8 L 7-2 L, М 7-в G /а Вес вращаю- щихся дета- лей в кг Общий вес муфты в кг Объем рабо- чей жидкости в л Маховой мо- мент GO* кГм2
ГМР II-630 ГМР 1-630 ГМРП-710 ГМР1-710 ГМР 11-800 ГМР 1-800 ГМРН-900 ГМР 1-900 ГМРП-1000 ГМР1-1000 ГМРП-1120 ГМР1-1120 Примем 2. Данные 3. В табли 4. Маховой связанных с вг 930 1005 1070 1360 1440 1525 а н и по ве ну не моме лом 295 320 320 350 350 365 я: I сам, вкл нт в авиг 180 200 200 330 330 330 В кол кеч ее едуг етел 135 155 155 200 200 215 исл нче< ы т цих я, в 870 970 1100 1220 1380 1520 ителе тву р дпора детал кГм2 70 100 70 90 НО 90 100 120 90 100 НО 100 НО 120 100 НО 120 указ абоче змеры ей му GD2 70 90 90 НО НО 130 аны п й жн, гидр фты — ма 22 22 22 27 27 27 араме 1KOCTI омуф' а рабе ховой 250 250 250 340 340 400 тры н ма ГМР >чей моме 120 80 80 ПО НО ПО ндро> ховы III с жидке нт ра 315 355 355 590 590 590 ауфт И МОМ числе )СТИ бочей 860 940 950 1395 1395 1460 ГМР1 ентам зм обе GD2 = Ж ИДК 680 620 830 720 830 720 1000 880 1000 880 ИЗО 970 , В 3 полу >рото остн 220 230 230 380 380 390 намен чены веду + GL кГм 240 260 260 390 390 400 ателе расче гщего >2- гд - 320 370 370 460 460 490 — гл тным вала е OD 260 260 260 300 300 300 1PI. путе П1 = 2-м 130 130 140 140 140 140 И И Я 2960 ахово 120 140 140 170 170 200 ЭЛЯЮТ В МИ Й МОЛ 305 450 540 820 1010 1445 ся opi еуту. еент 430 415 675 655 765 745 1180 1150 1370 1340 1900 1860 Аентир ,етале 43 64 88 130 182 235 овочн й, же 100 190 320 560 860 1280 ями. стко
Гидромуфты Фойт (ФРГ)
Фирма Фойт выпускает ряд типоконструкций гидромуфт сред-
них и малых мощностей (в основном до 1000 л. с.). К таким гид-
ромуфтам относятся следующие: типа Sflex; типа SL (рис. 72);
типа SdM (рис. 73); типа SdL (рис. 74 и 75).
Гидромуфта типа SL отличается от гидромуфты типа Sflex
только тем, что имеет собственные опоры и соединяется с двига-
телем и приводимой машиной простыми эластичными муфтами.
Гидромуфта типа Sflex монтируется консольно на шейке вала
электродвигателя. Гидромуфты состоят из насосного колеса
Рис. 72. Гидромуфта фирмы Фойт (тип SL):
1 — ведущий вал; 2 — ведомый вал
(рис. 72), жестко соединенного с ведущим валом, трубинного ко-
леса, ведомого вала, который при помощи гибкой муфты присое-
диняется к приводимой машине. С насосным колесом соединен и
вращается вместе с ним наружный и внутренний кожух. В прост-
ранстве между двумя кожухами находится неподвижная черпа-
тельная трубка. Это пространство сообщается с рабочей частью
гидромуфты через калиброванные ниппели и называется камерой
черпательной трубки. Черпательная трубка, захватывая масло,
гонит его через маслоохладитель снова в рабочую часть гидро-
муфты. К этому маслопроводу присоединен шестеренчатый насос,
связанный при помощи всасывающей трубы с масляным баком.
Назначение шестеренчатого насоса — изменять количество
жидкости, работающей в гидромуфте, а следовательно, и число
оборотов ведомого вала. Для увеличения числа оборотов шесте-
ренчатый -насос приводят во вращение, и он засасывает через кла-
185
Рис. 73. Гидромуфта фирмы Фойт (тип SdM):
1 — ведущий вал; 2 — ведомый вал
186
пан масло из бака, подавая его в гидромуфту. Для уменьшения
числа оборотов насос вращается в обратном направлении, и мас-
ло из камеры, находящейся под давлением черпательной трубки,
подается вновь в нижний бак.
Конструкция гидромуфты типа Sflex выполнена так, что ос-
новной ее вес воспринимается подшипниками вала ведущего дви-
гателя, а на приводимую машину ложится меньшая часть веса.
Рис. 75. Гидромуфта типа SdL
Гидромуфта снабжена специальным маслоохладителем фирмы
Фойт.
В табл. 11 приведены величины мощностей этих гидромуфт,
а в табл. 12 — гидромуфт типа SL.
Гидромуфты типа SdM (рис. 73) оборудованы скользящей
черпательной трубкой, установленной в пространстве между дву-
мя вращающимися кожухами. Это пространство сообщается с ра-
бочей полостью калиброванными ниппелями, через которые про-
текает определенное количество масла. Масло, попадающее в ка-
меру черпательной трубки, увлеченное во вращение, образует
масляное кольцо, прижатое к периферии кожуха. Когда трубка
187
Таблица If
Мощность гидромуфт типа Sflex при S = 2-ь 3%
Активный Число оборотов ведущего вала в минуту
725 950 1450 2950
диаметр в мм Передаваема я мощность в л. с.
min max min max min max min max
316 1 1,5 2 3,2 7 11 60 95
384 2,5 4 5 8 19 30 — —
422 4 6,5 8 13 30 48 — —
464 6,5 11 13 22 48 78 — —
510 11 17 22 34 78 125 — —
562 17 28 34 56 125 200 — —
620 28 45 56 90 — — —. —
682 45 73 90 146 — —, — —
750 73 118 146 236 — —- —
826 118 190 236 380 — — — —
910 190 310 380 620 — —
1000 310 495 — — — — — —
Таблица 12
Мощность гидромуфт типа SL
Активный Число оборотов ведущего вала гц в минуту
750 950 1450 2950
диаметр в мм Передаваемая мощность в л. С.
min max min max min max min max
384 2,5 4 5 8 19 30 155 250
422 4 6,5 8 13 30 48 250 410
464 6,5 11 13 22 48 78 410 650
510 11 17 22 34 78 125 — —
562 17 28 34 56 125 200 —
620 28 45 56 90 200 330
682 45 73 90 146 330 530
750 73 118 146 236 530 860 -
860 118 190 236 380 860 1400 —
910 190 310 380 620 1400 2200 . —
1000 310 495 620 1000 2200 3500 — —
поднята в самое верхнее положение, считая от оси вращения, ра-
бочая полость заполнена полностью. Когда же трубка занимает
самое нижнее положение, то она выходит из масляного кольца,
следовательно, обратной подачи масла в рабочую полость нет и
она опоражнивается, в результате чего ведомый вал останавли-
вается. Промежуточные положения трубки соответствуют различ-
188
ной степени заполнения гидромуфты, и, следовательно, различ-
ным числам оборотов ведомого вала.
Гидромуфта оборудована клапаном для быстрого опоражни-
вания, который открывается при выводе черпательной трубки из
масляного кольца.
Конструкция не предусматривает подшипников, и вес ее вос-
принимается подшипниками валов двигателя и приводимой маши-
ны, с которой она связана гибкой муфтой. Гидромуфта оборуду-
ется специальным маслоохладителем.
Ниже приведены величины мощностей и чисел оборотов гид-
ромуфты типа SdM:
N в л. с. Hi в об!мин
2,5—190 ................... 750
5—380 ................... 950
19—330 ................... 1450
Гидромуфта типа SdL (рис. 75) отличается от гидромуфты
типа SdM только тем, что имеет свои внешние опоры.
Следует обратить внимание на то, что все описанные конст-
рукции гидромуфт фирмы Фойт не имеют порога.
Фирма Фойт, сохранив для гидромуфт малых и средних мощ-
ностей прежние формы рабочей части и прежние конструктивные
схемы регулировочных устройств, усовершенствовала технологию
изготовления, стандартизацию и нормализацию деталей, осуще-
ствив их взаимозаменяемость.
Эти конструктивные и технологические мероприятия позволи-
ли организовать крупное серийное производство гидромуфт и зна-
чительно снизить их стоимость. Особенно было обращено внима-
ние на усовершенствование конструкций соединений с валом дви-
гателя и приводимой машины, допускающих в гидромуфтах типов
Sflex и SdM значительный перекос валов. Это устранило много
механических неполадок, имевшихся при эксплуатации прежних
гидромуфт, как, например, недопустимый нагрев подшипников
двигателя или приводимой машины, вибрацию всего агрегата,
а также значительно облегчило монтаж.
Работая над усовершенствованием технологии, фирма Фойт
в настоящее время ведет большую исследовательскую и конструк-
торскую работу для изготовления методом электросварки свар-
ной гидромуфты.
Испытательная станция завода располагает 20 стендами,
половина которых используется для обкатки гидромуфт, а осталь-
ные для снятия характеристик. Большинство стендов оборудова-
но фрикционными тормозами, охлаждаемыми водой, а также
электрическими счетчиками чисел оборотов, работающими с точ-
ностью ±1 об! мин.
189
Гидромуфты английской фирмы Флюйдрайв Инжиниринг
Отличительными особенностями этих гидромуфт являются
применение скользящей черпательной трубки; применение порога
в рабочей части гидромуфты; применение вращающегося резер-
вуара.
Гидромуфты типа SCR выпускаются в следующих модифика-
циях: SCR4, SCR6 и SCR8 (эти гидромуфты не имеют внешних
Рис, 76. Гидромуфта «Флюйдрайв Инжиниринг» типа
SCR4
опор); SCR5, SCR7 и SCR9— имеют одну внешнюю опору на
стороне ведомого вала.
На рис. 76 показана гидромуфта типа SCR4, а на рис. 77 —
типа SCR5 с вращающимся резервуаром. Гидромуфты типа SCR,
как правило, применяются в работе с электродвигателем пере-
менного тока, но могут они работать и с дизелем.
Фланцевая муфта (рис. 76), насаживаемая жестко на шейку
вала электродвигателя, соединяется посредством гибкого сталь-
ного диска с ведущей частью гидромуфты. Ведомый вал центри-
руется в гнезде фланцевой муфты. В это гнездо входит втулка,
190
насаженная на ведомый вал, наружная поверхность ее обработа-
на по сфере.
У гидромуфт типа SCR4 и SCR5 колеса насоса и турбины от-
литы из высокопрочного алюминиевого сплава, а вращающийся
Рис. 77. Гидромуфта «Флюйдрайв Инжиниринг» типа SCR5:
/ — упругая пластина; 2 — втулка; 3 — промежуточный кожух; 4 — наружный ко-
жух; 5 — турбина; 6 — насос; 7 — внутренний кожух; 8 — порог; 9 — роликопод-
шипник; 10 — регулировочный рычаг; И — отражатель; 12 — опорный кронштейну
13 _ рычаг управления; 14 — шарикоподшипник; 15 — ведомый вал; 16 — черпа-
тельная трубка; 17 — муфта для присоединения к электродвигателю; 18 — ведущий
вал; 19 — ось черпательной трубки; 20 — коллектор; 21 — замок; 22 — штифт;
23 — пластина, запирающая штифты; 24 — вал; 25 — стопорная шайба; 26 — адап-
тер для соединения с дизелем; 27 — регулировочные ниппели
резервуар образован легкими, штампованными из стали внут-
ренним и наружным кожухами. Из рабочей части гидромуфты
масло попадает во вращающийся резервуар через калиброван-
ные ниппели. При выходе из турбины установлен порог. Установ-
ка порога благоприятно влияет на устранение колебаний в гид-
191
ромуфте при разгоне и при других переходных режимах. Однако
введение его требует соответствующего увеличения активного
диаметра гидромуфты [17].
Рис. 78. Гидромуфта типа SCM10:
1 — ведомый вал; 2 — гибкая муфта; 3 — коллектор; 4 — рычаг управления
трубкой; 5 — наружный кожух; 6 — шариковый клапан; 7 — круг циркуля-
ции; 8 — ведущий вал; 9 — скользящая черпательиая трубка; 10 — насос;
И — турбина; 12— зубчатый венец
В гидромуфтах, выпускаемых английскими фирмами, уста-
навливаются пороги с соотношением =0,3 -г- 0,45, где dn —
диаметр порога, a D — активный диаметр гидромуфты.
В табл. 13 и 14 приводятся данные по габаритным размерам,
весам, емкостям и маховым моментам гидромуфт типов SCR4 и
SCR6, а в табл. 15 и 16 — типов SCR5 и SCR7.
192
Таблица 13
Характеристика гидромуфт типа SCR4
13 Заказ 107b
Активный диаметр в мм Размеры в мм Q в л Маховой момент GD8 в кГм* Вес в кг
А В С D Е F 1 2 3 X Y
457 623 563,88 69,85 407 88,9 356 15,3 15,16 1,48 4,88 159,0 40,9 118,0
508 692 679,12 69,85 420 88,9 356 24,05 24,48 2,60 6,74 200 52,3 147,6
584 787 737 95,3 527 114,3 381 30,7 46,36 4,72 15,16 268 71,0 198,0
660 898 775 95,3 565 114,3 381 44,3 80,8 8,60 29,32 372,5 100,0 273,0
737 1016 831 114,2 584 133,5 457,5 61,4 122,20 15,16 48,8 518 136,5 382,0
812 1094 927 114,2 683 133,5 457,5 81,8 216,0 24,44 79,2 727,5 173,0 554,0
914 1246 1080 139,8 749 165 712 118 347,2 44,68 148,4 891 266,0 625,0
1041 1400 1118 139,8 813 165 712 177,2 606,4 85,2 294,8 1290 332,0 958,0
П р и м е ч а н е. W- вес вращающейся части, включая масло; X—реакция на опору от гидромуфты плюс вес многодисковой муф-
ты, воспринимается опорой ведомой машины; Y — реакция на опору от гидромуфты с учетом веса фланцевой полумуфты, восприни-
мается опорой двигателя или ведущей машины; 1 — первичной части, жестко связанной с двигателем; 2 — GD* масла в рабочей
части; 3 — ииг масла во вращающемся резервуаре при опорожненном круге циркуляции.
Характеристика гидромуфт типа SCRA
Табл и и а '4
Q в л GD2 в кГм2 Вес в кг Активный диаметр в мм Размеры в мм
1 2 3 X Y А В С D Е F
1,22 1,89 2,76 3,64 4,95 7,28 10,2 0,389 0,845 1,436 2,45 3,3 4,98 8,28 0,023 0,0473 0,0862 0,137 0,216 0,473 0,827 0,071 0,159 0,304 0,456 0,676 1,52 2,45 18,15 29 32,65 47,6 54,8 77,2 86,2 5,45 8,62 9,97 14,5 18,6 27,2 34 12,7 20,4 22,7 33,1 36,3 50 52,75 203 233 266 292 324 368 413 292 346 387 426 463,5 531 566 303 368 381 432 457 533 558 31,1 41,2 41,2 50,8 50,8 63,5 63,5 228,5 276,5 286,5 312 337,5 394 419 44,4 50,8 50,8 66,5 66,5 76,2 76,2 114,2 114,2 114,2 165 165 165 165
Таблица 15
Характеристика гидромуфт типа SCR5
Q в л GD2 в кГм2 Вес в кг Активный днаметр в мм Размеры в мм
1 2 3 W X Y А В С D Е F
15,3 15,0 1,47 4,9 159,0 40,8 118 457 628 642 88,8 556 88,8 216
24,0 24,5 2,60 6,75 200,0 52 147,5 508 692 670 88,8 572 88,8 216
30,0 46,5 4,73 15,2 268 70 198 584 787 800 109 687 114,2 228,5
44,3 81,0 8,6 29,4 373 100 273 660 898 837 109 724 114,2 228,5
61,4 122,5 15,2 49 518 136 382 737 1016 920 138,2 787 133,3 254
82,0 215 24,5 79,3 726 173 554 812 ИЗО 1020 138,2 887 133,3 254
118 348 44,8 149 890 266 625 914 1250 1180 171,5 1015 165 279
177,0 608 85,25 295 1290 332 958 1041 1400 1243 171,5 1080 165 279
Таблица 16
Характеристика гидромуфт типа SCR7
Q в л GD2 в кЛи2 Вес в кг Акт нвный диаметр в мм Размеры в мм
1 2 3 W X Y А В С D В F
1,89 0,845 0,0473 0,159 29 8,62 20,4 233 346 418 71,3 297 50,8 114,4
2,76 1,436 0,0862 0,304 32,65 9,97 22,7 266 388 432 71,3 309 50,8 114,4
3,64 2,45 0,137 0,456 47,6 14,5 33,1 292 426 490 76,2 348 66,7 165
4,95 3,30 0,216 0,676 54,8 18,6 36,3 324 463 516 76,2 373 66,7 165
7,28 4,98 0,473 1,52 77,2 27,2 50,0 368 530 588 95,2 417 76,2 165
10,2 8,28 0,827 2,45 86,2 34,0 52,25 413 568 613 95,2 442 76,2 165
Колеса насоса, турбины, наружный и внутренний кожухи у
гидромуфт SCR6 и SCR7 отлиты из высокопрочного алюминие-
вого сплава.
Фирма Флюйдрайв Инжиниринг изготовляет для кораблей и
других дизельных установок большой мощности гидромуфты ти-
па SCM и SCD. На рис. 78 и 79 показаны гидромуфта SCM10 и
ее детали.
Черпательная трубка выполнена
нием для быстрого наполнения
рабочей части; для быстрого же
опоражнивания при снижении
скорости ведущего вала преду-
смотрены шариковые клапаны
(рис. 79), число которых достига-
ет 6 и более.
При большой скорости вра-
щения ведущего вала шарик под
действием центробежной силы
сжимает пружину и закрывает
основное проходное отверстие
клапана.
При таком положении незна-
чительное количество жидкости
для охлаждения протекает все
время через небольшое отверстие,
показанное на рис. 79 пунктиром.
При снижении скорости ведущего
вала величина центробежной си-
лы, действующей на шарик,
уменьшается, пружина отжимает
его, открывая большое отверстие в
с большим проходным сече-
Рис. 79. Шариковый клапан гид-
ромуфты SCM10
корпусе клапана, через кото-
рое проходит жидкость.
При помощи регулировочного винта можно изменять степень
сжатия пружины и настраивать закрытие клапанов на опреде-
ленное число оборотов первичного вала. Например, в пусковых
приводах тяжелого типа центробежные клапаны можно отрегу-
лировать таким образом, что круг циркуляции гидромуфты будет
оставаться пустым, пока скорость вращения двигателя не достиг-
нет какого-либо заданного значения, например, 90% полного чис-
ла оборотов. Таким образом, разгон двигателя производится вхо-
лостую при включенном положении черпательной трубки. Такие
условия пуска электродвигателя позволяют использовать авто-
трансформаторный пускатель, обеспечивающий потребление пу-
сковых токов малой величины.
Объем вращающегося резервуара гидромуфты типа SCM10
несколько меньше, чем типа SCR5. Вследствие этого при остано-
ве гидромуфты SCM10 наружный кожух не может принять все
197
слившееся масло, и часть его, равную приблизительно 10% всего
объема, принимает небольшой, установленный на полу сливной
бак, которого в установке типа SCR5 нет. При пуске гидромуфт
специальный эжектор возвращает масло из сливного бачка об-
ратно в круг циркуляции. Эжектор действует, используя давле-
ние, создаваемое черпательной трубкой.
Во время работы гидромуфты сливной бачок остается пустым.
В табл. 17 и 18 приведены размеры и величины передаваемой
мощности гидромуфты типа SCD2.
Таблица 17
Приближенные максимальные значения мощности в л. с.
Размер гидро- муфты Число оборотов двигателя п в минуту
275 300 330 350 400 450 500 600 700 800
41 187 266 366 632 1000 1500
46 — —. 188 225 334 476 654 ИЗО 1800 2050
52 — 261 346 415 617 877 1210 2085 2430 2780
58 347 450 598 715 1050 1515 2080 3600 — —
64 500 735 980 1170 1742 2480 3400 — — —
70 890 1150 1535 1835 2730 3900 — — — —
77 1430 1855 2470 2950 4400 — — — — —
Таблица 18
Характеристика гидромуфт типа SCD2
Коли- чество масла в л Маховой момент GZ52 в к Г у* Распределение веса в кг Вес непод- вижной части в кг Полный вес, включая масло
первичный вторичный масла в круге цирку- ляции X У
182 1 164 79,2 92,8 2060 245 1297 707 2 767
250 1 940 131,6 154,4 2753 326 1735 940 3 693
363 2 664 256 264,8 3240 381 1890 940 4 180
567 5 240 422' 401,6 4536 476 2745 1657 6 193
748 8 360 898 852 5850 617 3520 1657 7 507
1020 13 520 1320 1088 7850 748 5020 2610 10 460
1295 18 800 1964 1772 9680 907 6080 2610 12 990
Французские гидромуфты
Во Франции пока не создано оригинальных конструкций гид-
ромуфт. Так, например, фирмой Нейрпик строятся по лицензии
английской фирмы Флюйдрайв Инжиниринг регулируемые гид-
ромуфты типа SCR.
198
Эти гидромуфты оборудованы скользящими или поворачиваю-
щимися черпательными трубками и описаны нами выше.
Кроме фирмы Нейрпик, гидромуфты типа ER2 изготовляет
фирма Феродо. Эти гидромуфты также английского типа со
скользящей черпательной трубкой. Они устанавливаются для
разгона и регулирования скорости в приводах различных машин.
В частности, гидромуфты Феродо применяются в изолировочных
машинах на обмотке кабеля. Такие установки, поставленные фир-
мой Феродо, работают и в СССР. Привод вала изолировочной
машины осуществляется через гидромуфты с двумя асинхронны-
ми электродвигателями с каждого конца вала. Гидромуфты про-
изводят разгон, останов приводимой машины и синхронизацию
приводных валов, расположенных по обоим концам главного
приводимого вала. Каждая гидромуфта передает мощность
50 л. с. при п.[ = 1450 об/мин ведущего вала, их активный диа-
метр D = 400 мм.
Применение гидромуфт в описываемых установках позволи-
ло снизить установочную мощность электродвигателей на 30%.
Японские гидромуфты
В Японии регулируемые гидромуфты средней и малой мощно-
сти типа UA и UAa (рис. 80) строятся фирмой Мицубиси. Вели-
чины активных диаметров
этих гидромуфт приведены в
табл. 19.
Гидромуфты типа UA ис-
полняются • подвесными, а
типа UAa — на внешних опо-
рах. Они оборудованы пово-
ротными черпательными
трубками, а в компоновке
основных деталей (насос,
турбина, наружный и внут-
ренний вращающиеся кожу-
хи) повторяют конструкцию
гидромуфты Фойт типа SL,
однако рабочие колеса их
выполнены с разрезным то-
ром.
Оригинальным в конст-
рукциях японских гидромуфт
является компоновка масло-
Рис. 80. Гидромуфта фирмы Мицуби-
си типа UA-25
охладителей с гидромуфта-
ми. В гидромуфтах типа UA холодильник устанавливается под
коллектором и используется в качестве его опорной плиты, а так-
же для расположения колонки управления, а в гидромуфтах ти-
199
Таблица 19
Некоторые параметры японских гидромуфт
Параметры Типы гидромуфт
UA-22 UA-25 со со э э UA-40 UA-45 os-vn UA-56 UA-64 UA-72 О О 00 О □ UA-100
Активный диа- метр в мм . . . Вес вращаю- щихся частей в кг Вес брутто в кг 220 250 20 30 30 50 320 360 65 100 95 150 400 125 175 450 160 225 500 290 480 560 475 745 640 625 895 720 800 900 1000 885 1070 1435 1700 1270 1455 1920 2185
па UAa — в качестве плиты под опорной подшипник и колонку
управления.
В гидромуфтах малой мощности, например типа UA-25, мас-
лоохладители не устанавливаются, а для интенсификации охлаж-
дения на наружном вращающемся кожухе приварены ребра под
некоторым углом к оси вращения. Это способствует повышенно-
му обмену тепла между гидромуфтой и окружающим ее воз-
духом.
§ 2. БЫСТРОХОДНЫЕ ГИДРОМУФТЫ БОЛЬШОЙ МОЩНОСТИ
[СВЫШЕ 1000 квт), РЕГУЛИРУЕМЫЕ ЗАПОЛНЕНИЕМ
Быстроходные гидромуфты мощностью свыше 1000.квт приме-
няются в энергетической промышленности для привода питатель-
ных насосов на тепловых электростанциях, для привода турбо-
воздуходувок (например, бессемеровских цехов) и других турбо-
машин. При установке гидромуфт при постоянном числе
оборотов двигателя можно по программе регулировать число обо-
ротов турбомашин, а тем самым их производительность и напор
(давление). Такой вид регулирования является очень экономич-
ным, а поэтому получает все большее распространение.
В настоящее время известны следующие схемы привода пи-
тательных насосов на теплоэлектростанциях через гидромуфты:
электродвигатель — гидромуфта — питательный насос;
электродвигатель — гидромуфта — ускоряющий редуктор —
питательный насос;
турбогенератор (от вала турбогенератора) — гидромуфта —
питательный насос;
главная турбина (от вала главной турбины) — гидромуфта —
питательный насос.
В СССР и в других странах наибольшее распространение по-
лучили первая и вторая схемы привода питательных насосов.
200
За последние годы в связи со значительным увеличением
мощности питательных насосов в США получает распростране-
ние также привод через гидромуфту непосредственно от вала
турбогенератора или от вала главной турбины. В этом случае
вспомогательное оборудование турбоагрегата размещается на
площадке под турбогенератором. Такие установки осуществле-
ны, например, на агрегатах электростанции Ревенсвуд, каждая
гидромуфта мощностью 13 500 л. с.
В настоящее время признается более целесообразным осу-
ществлять гидропривод питательных насосов непосредственно от
вала турбины, а не от вала генератора. Такая установка приме-
нена на агрегате № 3 электростанции Морро-Бэй. В результате
такого решения установка занимает мало места в машинном
зале и сокращаются капитальные затраты. Изучается возмож-
ность установки гидромуфты мощностью 25 000 квт.
При оценке экономичности привода питательных насосов надо
учитывать все потери на трассе: главная турбина — генератор —
электродвигатель — редуктор (или гидромуфта) — питательный
насос.
Если определить для различных схем привода общий к. п. д.
г]о, учитывающий все эти потери, и построить кривые к. п. д. каж-
дой схемы в зависимости от изменения мощности главной турби-
N
ны------ , то согласно Р. Мейле установка с гидромуфтой будет
Утах
значительно экономичнее,
дуктором или привод
схем т]о выше на 15% при
—-------- 0,8.
A max
чем установка электродвигателя с ре-
от главной турбины. У первых
отношении—-— = 0,3 и на 10% при
Утах
Результаты эксплуатации гидромуфт в Англии показали, что
регулирование производительности питательного насоса при по-
мощи гидромуфт экономичнее, чем существующее регулирование
питательным клапаном. По английским данным достигаемая при
этом экономия в расходе электроэнергии составляет 10—15%.
При работе двух насосов мощностью по 2000 л. с. на один котел
это составляет более 1000 т угля в год, если принять годовую ра-
боту насоса 8000 ч.
Помимо этого, экономия получается еще за счет улучшения
всего теплового процесса котельного агрегата благодаря высо-
кой чувствительности гидромуфты, работающей в общей системе
автоматики.
Конструкции советских гидромуфт
Гидромуфта ГМ-590-2 мощностью 2000 квт при 3000 об/мин
конструкции ВНИИМЕТМАШа создана для привода и регулиро-
вания скорости вращения питательного насоса 5Ц-10.
201
Изготовленные гидромуфты относятся к типу быстроходных с
большой удельной мощностью. Окружная скорость гидромуфты
на максимальном диаметре превышает 100 м!сек, ее активный
диаметр равен 590 мм; рассчитана она на передачу мощности
2000 кет при S = 3 % •
Гидромуфта (рис. 81) представляет собой двухполостную си-
стему.
Ротор насоса гидромуфты состоит из ведущего вала 1, соеди-
ненного с электродвигателем, двух насосов 3 и 7, связанных меж-
ду собой цилиндрической частью, и полого вала 8. Ротор насоса
опирается на внешние подшипники скольжения 9, располо-
женные в неподвижном корпусе 13 гидромуфты.
Смазка этих подшипников принудительная, а их температура
измеряется миниатюрными термометрами сопротивления.
Камеры подшипников отделены от рабочей полости. Такое
расположение препятствует проникновению тепла от гидромуфты
к подшипникам и этим улучшает их тепловой режим. Ротор тур-
бины состоит из ведомого вала И, соединенного с приводимым
насосом 5Ц-10, и двухполостной турбины 5. Ротор турбины вра-
щается в подшипниках качения 10, которые расположены в спе-
циальных гнездах вала ротора насоса. Колеса насоса и турбины
изготовлены из стальных поковок, а лопатки приварены. Кор-
пус 13 имеет горизонтальный разъем, так что верхняя часть
(крышка 4) может быть снята в случае необходимости осмотра
подшипников и других деталей.
Гидромуфта регулируется изменением заполнения ее проточ-
ной части, для этого имеется устройство со скользящей черпа-
тельной трубкой 12. Принцип регулирования заключается в сле-
дующем.
В пространстве (дополнительный объем), образованное на-
ружной стенкой колеса насоса 7 и вращающимся наружным ко-
жухом, установлена скользящая черпательная трубка. Указанное
пространство сообщается с проточной частью гидромуфты через
каналы 6 (проходное сечение каналов регулируется, что может
потребоваться при наладке гидромуфты). Под действием стати-
ческого напора, создаваемого колесом насоса, жидкость (масло)
из проточной части протекает через каналы 6 в дополнительный
объем и заполняет его. В результате вращения гидромуфты в до-
полнительном объеме образуется вращающееся масляное кольцо,
причем объем жидкости в дополнительном объеме уравновеши-
вает объем жидкости в проточной части гидромуфты. Таким об-
разом, можно считать, что уровень внутренней поверхности мас-
ляного кольца в дополнительном объеме приблизительно соответ-
ствует уровню внутренней поверхности масляного кольца в про-
точной части.
В масляное кольцо дополнительного объема введена черпа-
тельная трубка. Эта трубка загнута против вращения гидромуф-
202
Рис. 81. Гидромуфта ГМ-590-2 конструкции ВНИИМЕТМАШа:
I _ ведущий вал- 2 н 10 — подшипники качения; 3 и 7 — иасосы; 4 — крышка; 5 — турбина; 6 — проточные каналы; 8 — полый
вал- 9 — подшипник скольжения; 11 — ведомый вал; 12 — скользящая черпательная трубка; 13 — неподвижный корпус гидромуфты
ты так, что она, используя скоростной напор жидкости, прокачи-
вает ее через внешний маслопровод в бак. Черпательная трубка
установлена в специальных направляющих и может передвигать-
ся при помощи колонки управления КДУ-1, управляемой автома-
тически.
Если черпательная трубка оттянута к валу, то дополнитель-
ный объем весь заполнен маслом, а следовательно, заполнена и
вся проточная часть гидромуфты. Если трубка выдвинута на пе-
риферию, она полностью «вычерпывает» дополнительный объем,
а следовательно, и проточную часть. Промежуточные положения
трубки дают и промежуточные значения заполнения проточной
части.
Как известно, с уменьшением заполнения проточной части
уменьшается число оборотов ведомого вала при постоянном чис-
ле оборотов ведущего вала гидромуфты, и, наоборот, с увеличе-
нием заполнения гидромуфты число оборотов ведомого вала по-
вышается.
Таким образом, передвигая черпательную трубку, можно из-
менять уровень масла как в дополнительном объеме, так и в про-
точной части и тем самым регулировать число оборотов выход-
ного вала гидромуфты.
Гидромуфты этой серии имеют тепловую защиту. Две пробки
из легкоплавкого материала ввернуты в насос. В случае нагрева
масла в гидромуфте свыше 150° С пробки выплавляются и все
масло из гидромуфты выбрасывается в кожух. Во время нор-
мальной работы гидромуфты в нижнюю часть корпуса попадает
только масло из подшипников и зубчатых муфт. Сварной бак ем-
костью 1400 л подвешен под гидромуфтой.
Основной агрегат состоит из главного электродвигателя 1
(рис. 82), гидромуфты 2 и центробежного насоса 5Ц-10 3. На тор-
це вала главного двигателя установлен винтовой насос ВН-25 6,
который питает маслом гидромуфту, а также смазывает подшип-
ники двигателя, гидромуфты, насоса 5Ц-10 и зубчатые муфты.
Насос ВН-25 засасывает масло из бака и подает большую часть
его в гидромуфту через регулировочный клапан.
Из гидромуфты черпательная трубка все время направляет
масло по трубе через маслоохладитель МП-37 4 и трубу обратно
в бак. Меньшая часть масла, подаваемая насосом ВН-25, направ-
ляется по специальному трубопроводу в фильтры, а оттуда через
второй маслоохладитель МВ-8 5 на смазку подшипников и зуб-
чатых муфт, после чего самотеком сливается в бак. Изменение
положения черпательной трубки производится колонкой управ-
ления КДУ.
Для пуска агрегата, а также остановки его предусмотрен спе-
циальный пусковой масляный насос БГ-11-14, приводимый от от-
дельного электродвигателя (рис. 83). Пуск всего агрегата начи-
нается с работы насоса БГ-11-14, причем блокировка выполнена
204
Рис. 82. Агрегат питательного на-
соса 5Ц-10 с гидромуфтой
ГМ-590-2:
1 — главный электродвигатель; 2 —
гидромуфта; 3 — центробежный на-
сос 5Ц-10; 4 — маслоохладитель гид-
ромуфты; 5 — маслоохладитель под-
шипников; 6 — винтовой насос ВН-25
Рис. 83. Схема маслопровода насосного агрегата 5Ц-10 с гидромуфтой
ГМ-590-2:
/ — маслоохладитель МВ-8 системы смазки подшипников; 2 — труба питания гидро-
муфты; 3 — фильтры; 4 — маслоохладитель МП-37 всей системы маслопровода; 5 —
труба от черпательной трубки; 6 — труба из маслоохладителя в бак; 7 — центробежный
насос 5Ц-10; 8 — манометр; 9 — труба слива из подшипников и зубчатых муфт; 10 —
ртутный термометр; 11 — термометр сопротивления; 12 — общая труба слива из под-
шипников; 13 — трубопровод смазки подшипников и зубчатых муфт; 14 — пуско-оста-
новочиый шестеренчатый насос; 15 — гидромуфта; 16 — патрубок для залива масла в
маслоохладитель; 17 — винтовой насос ВН-25; 18 — главный электродвигатель
Рис. 84. Внешний вид гидромуфты ГМ-590-2
206
Рис. 85. Гидромуфта ГМ-600 конструкции ВНИИМЕТМАШа
8
так, что главный двигатель нельзя запустить до тех пор, пока
пусковой насос не поднял в смазочной системе давление до тре-
буемой величины 1 —1,5 атм. После того как насос ВН-25 принял
на себя всю работу, реле давления выключает пусковой насос.
При остановке операция проводится в обратном порядке. На
рис. 84 приведена фотография гидромуфты ГМ-590-2.
Во вновь выпущенных гидромуфтах ГМ-600 конструкции
ВНИИМЕТМАШа изготовления Бердянского механического за-
Рис. 86. Характеристика совместной работы гидромуфты
с насосом 5Ц-10, питающим котел:
1 — напор, создаваемый насосом при 2890 об/мин; 2 — напор наеоса
с учетом сопротивления сети; 3 — характеристика сопротивления сети;
4 — скольжение гидромуфты; 5 — мощность, потребляемая насосом
при 2890 об/мин; 6 — к. п. д. насоса при 2980 об/мин; 7 — мощность
иа ведущем валу гидромуфты; 8 — мощность на валу питательного
насоса, работающего с гидромуфтой; 9 — давление в котле
вода подпиточный насос встроен в гидромуфту и имеет привод от
ее ведущего вала. Гидромуфта ГМ-600 (рис. 85) имеет одну по-
лость и передает мощность 1400 квт при 3000 об/мин со сколь-
жением S = 2%. Рабочие колеса ее сварные; при увеличении
числа лопаток гидромуфта может передать при том же скольже-
нии 2000 квт. Гидромуфта оборудована распределительной ко-
лонкой.
Расчетная характеристика совместной работы гидромуфты
ГМ-590 с насосом 5Ц-10 (рис. 86) построена на основе данных,
полученных в результате подробного расчета, который здесь не
приводится. Из характеристики следует, что с изменением при
помощи гидромуфты числа оборотов насоса на 20% производи-
тельность его изменяется значительно больше, а именно от мак-
симума до нуля.
208
Разность ординат кривых 5 (при «1 = 2980) и 7 (рис. 86)
представляет экономию мощности при регулировании произво-
дительности изменением числа оборотов насоса гидромуфтой ио
сравнению с регулированием задвижкой. Гидромуфта находится
в эксплуатации и бесперебойно проработала уже свыше 8000 ч.
Промышленные испытания подтвердили ее расчетные параметры.
Гидромуфта хорошо и быстро реагирует на команды электрон-
ного регулятора. Были проведены испытания автоматического
регулирования по трем вариантам. При этом гидромуфта исполь-
зовалась:
Рис. 87. Экспериментальные кривые автоматического регулирования
насосного агрегата 5Ц-10 с гидромуфтой ГМ-590-2 (третий вариант):
1 — изменение нагрузки котла; 2 — перемещение черпательной трубки; 3 — из-
менение уровня в барабане котла; 4 — изменение расхода питательной воды;
5 — изменение давления питательной воды перед регулирующим клапаном
для поддержания постоянного давления воды в питательной
магистрали (характеристики снимались при параллельной рабо-
те питательных насосов на общую магистраль);
для поддержания постоянного перепада на регулирующем пи-
тательном клапане котла (характеристика снималась при выде-
ленном в блочную схему питательного насоса с гидромуфтой и
котла) ;
в качестве регулирующего устройства для подачи воды в ко-
тел (вместо регулирующего клапана) (рис. 87).
При испытании по первому варианту давление в питательной
магистрали поддерживалось электронным регулятором, воздейст-
вующим на гидромуфту. Испытания проводились при нормаль-
ной эксплуатационной схеме работы питательных насосов (па-
раллельная работа пяти насосов) при рк = 135 ата.
14 Заказ 1076 209
Опыты проводились следующим образом: давление в пита-
тельной линии понижалось посредством задвижки на нагнета-
тельном трубопроводе любого работающего питательного насо-
са со 135 до 130 ата.
При этом гидромуфта, получая команду от регулятора, долж-
на была восстанавливать заданное давление.
Испытания показали, что при изменении давления на 2 ата
регулятор поддерживал заданное давление в требуемых преде-
лах. При уменьшении давления на 5 ата регулятор и гидромуфта
этого выполнить не могли, так как из пяти насосов регулировал-
ся гидромуфтой только один, в результате чего не хватало диа-
пазона регулирования. Из пяти насосов необходимо иметь два
насоса, регулируемые гидромуфтой.
При испытании по второму варианту — при помощи гидро-
муфты поддерживался перепад давлений на регулирующем кла-
пане. Во время испытаний питательный насос с гидромуфтой был
выделен в блочную работу (по воде) с котлом № 5.
Во время испытания при постоянной нагрузке на котле пере-
пад давления поддерживался в заданных пределах (±1 ата),
при этом колебания по расходу воды составляли 15 т[ч. При из-
менении нагрузки на котле на 25—30 т/ч перепад давления на
клапане поддерживался также в заданных пределах, при этом
расход воды на котел менялся в соответствии с изменением на-
грузки на котле. Колебания уровня воды в барабане составляли
± 10 мм.
Также изменялся перепад давлений на регулирующем клапа-
не при изменении нагрузки котла на 55 т/ч.
При испытании по третьему варианту котел и питательный
насос были выделены в отдельный блок; нагрузка на котле со-
ставляла 175 т/ч. Регулирующий клапан регулятора питания был
полностью открыт.
Во время испытания нагрузка на котле изменялась на 20—
40 т/ч, при этом колебания уровня в барабане составляли
±10 мм. Расход воды соответствовал паровой нагрузке котла.
Записанные приборами кривые (рис. 87) наглядно показыва-
ют, как быстро реагирует гидромуфта на изменение нагрузки
котла. С изменением нагрузки (кривая 1) немедленно меняется
положение черпательной трубки (кривая 2), а следовательно, и
число оборотов питательного насоса 5Ц-10, что позволяет под-
держивать уровень в барабане котла почти неизменным (кри-
вая 3).
Проведенные испытания различных схем регулирования гид-
ромуфтой подтвердили возможность осуществления всех трех
вариантов автоматического регулирования подачи воды.
Гидромуфты ЛМЗ им. XXII съезда КПСС мощностью 4000 кет
предназначены для работы в питательных агрегатах прямоточ-
ных паровых котлов.
210
Агрегат состоит из питательного насоса высокого давления,
зубчатого редуктора, гидромуфты, электродвигателя, обратного
клапана со сбросным устройством и масляной системой
(рис. 88).
Основные параметры привода следующие:
Электродвигатель синхронный типа СТМ-6000, изготовляе-
мый заводом «Электросила», имеет мощность на валу 4000 квт;
число оборотов 3000 в минуту; напряжение 10 000 в; к. п. д. 0,954.
Передаваемая мощность гидромуфты 4000 квт, число оборо-
тов ведущего вала составляет 3000 в минуту; расчетное скольже-
ние S = 2-t3%;b качестве рабочей жидкости применяется тур-
бинное масло 22; максимальный расход масла при 100%-ном
наполнении 17 л/сек.
Передаточное отношение повышающего редуктора i = 2,354,
его передаваемая мощность 4000 квт, а к. <п. д. 0,97.
В гидромуфте ЛМЗ осуществлена схема регулирования со
свободным выбросом жидкости через жиклеры в неподвижный
кожух. Эта схема представляет собой дальнейшее усовершенст-
вование схемы ЦНИИТМАШа — ВНИИМЕТМАШа, выполнен-
ной в гидромуфтах мощностью 500 квт для дымососов [14].
Ведущий вал 1 (рис. 88) присоединен упругой муфтой к элек-
тродвигателю, ведомый вал 2 — к насосному агрегату. Как видно
из схемы, конструкция представляет собой сдвоенную гидромуф-
ту. Она имеет два параллельно включенных рабочих круга цир-
куляции, образованных двойным колесом турбины и двумя насо-
сами, соединенными между собой вращающейся цилиндрической
частью 5. Ведомый вал центрируется в ведущей части посредст-
вом роликоподшипника. Вся гидромуфта находится в литом не-
подвижном кожухе с двумя подшипниками скольжения. Рабочие
колеса выполнены из стали с вваренными в них прямыми ра-
диальными лопастями.
Регулирование гидромуфты ЛМЗ осуществляется следующим
образом.
Гидромуфта работает на турбинном масле 22. Она заполняет-
ся от постоянно работающего масляного насоса через цилиндри-
ческую щель, образованную вокруг ведомого вала. В дальней-
шем конструкция была модернизирована, в частности был осу-
ществлен двусторонний подвод масла в рабочие полости.
Часть жидкости для охлаждения все время выбрасывается
через жиклеры в кожух, откуда сливается в масляный бак. Вели-
чину отверстий для выбрасывания масла из гидромуфты можно
регулировать и подбирать опытным путем. На питательном тру-
бопроводе гидромуфты установлен регулируемый клапан с ко-
лонкой дистанционного управления. Питательный трубопровод
связан перепускной трубой с масляным баком. При помощи колон-
ки управления можно изменять величину питания гидромуфты,
перепуская часть масла через сливной клапан в бак.
14* 211
212
Рис. 88. Гидромуфта ЛМЗ
им. XXII съезда КПСС:
1 — ведущий вал; 2 — ведомый
вал; 3 — насос; 4 — турбина;
5 — цилиндрическая часть
Так как выброс масла из гидромуфты все время продолжает-
ся, то при уменьшении питания будет меняться величина запол-
нения рабочих кругов циркуляции. Как известно, в зависимости
от изменения заполнения гидромуфты изменяется и число оборо-
тов ведомого вала. Минимальное рабочее регулировочное число
оборотов должно составлять 0,4 от полного номинального числа
оборотов при снижении момента пропорционально квадрату от-
ношения чисел оборотов.
Схема регулирования числа оборотов с выбросом рабочей
жидкости в неподвижный кожух получила незначительное рас-
пространение, так как она не удовлетворяет одному из основных
требований, предъявляемых к системе регулирования — быстро-
действию. Медленная реакция объясняется следующими обстоя-
тельствами. Отверстия для выброса жидкости в кожух во избе-
жание значительных потерь делаются очень небольшими, из рас-
чета поддержания только протока, необходимого для охлажде-
ния гидромуфты. Так как отверстия эти неизменяемы, сечение их
постоянно, то и при регулировании приходится использовать тот
же незначительный проток.
Кроме того, в зависимости от величины нагрузки и заполне-
ния проточной части давление в ней распределяется иногда так,
что она оказывает сопротивление заполнению гидромуфты. Та-
ким образом, при одном и том же положении регулировочного
органа (в данном случае колонки управления) количество по-
ступающего в гидромуфту масла и быстрота заполнения ее меня-
ются. В результате часто возникают длительные процессы пере-
регулировки.
Отмеченные обстоятельства определяют медленное протека-
ние процесса регулирования.
Другим недостатком схемы являются большие потери на тре-
ние жидкости, увлекаемой во вращение гидромуфтой, о непод-
вижный корпус (кожух).
Однако данная схема отличается конструктивной простотой,
поэтому некоторые заводы применяют ее для гидромуфт боль-
шой мощности (4000 квт и больше), вращающихся с большой ок-
ружной скоростью.
Гидромуфты Фонт (ФРГ)
Фирма Фойт (ФРГ) выпускает гидромуфты для установки с
мощными питательными насосами в двух исполнениях: типа R-K,
которая встраивается в ускоряющий редуктор и работает с по-
вышенным, чем электродвигатель, числом оборотов, а также ти-
па SvL.
Гидромуфты типа SvL, выпускаемые фирмой Фойт, име-
ют максимальную мощность N — 5570 л. с. при П\ = 2990 об!мин,
213
а максимальную скорость вращения имеет гидромуфта типа
R-16K при jV = 3770 л. с. и «1 =4990 об/мин.
На рис. 89 приведены разрезы гидромуфты типа R-18K мощ-
ностью N = 3478 л. с. при = 2980 об/мин, предназначенной
Рис. 89. Гидромуфта фирмы Фойт типа R18K;
1 — вводной вал редуктора; 2 — зубчатое колесо; 3 — ведущая чаша гидромуфты;
8 — турбина; 9 — ведущий вал; 10 — рычаг регулировочного вала; 11 — указатель
14 — шестеренчатый насос
214
для регулирования числа оборотов центробежного питательного
насоса фирмы Зульцер.
Гарантированный диапазон регулирования 2:1. Размеры гид-
ромуфты выбраны так, что 'при полном заполнении она передает
номинальный крутящий момент при скольжении 2 ч- 3%. Регу-
лирование числа оборотов ведомого вала осуществляется за счет
изменения наполнения проточной части (круга циркуляции) гид-
ромуфты.
Крутящий момент от электродвигателя передается через зуб-
чатую муфту на вводной вал редуктора 1 и отсюда через уско-
4 — чаша черпательной трубки; 5 — насос; 6 — коллектор; 7 — ведомый вал;
положения черпательной трубки; 12 — черпательная трубка; 13 — насос питания;
215
ряющую пару зубчатых колес 2 на ведущий вал гидромуфты 9
(рис. 89). Передаточное отношение зубчатой пары i = 1, 2. К ва-
лу 9 глухо прикреплена ведущая чаша 3 гидромуфты, а к ее
фланцу — насос 5 и чаша 4 черпательной трубки.
Турбина 8 передает крутящий момент через ведомый вал 7
на приводимый центробежный насос. Колеса насоса и турбины
изготовлены из высококачественной электростали EL-GS-75.
Вал 7 соединен с центробежным насосом зубчатой муфтой. На-
сос 5 образует с чашами 3 и 4 вращающийся кожух гидромуфты.
Проточная часть, формируемая колесами насоса и турбины, сооб-
щается через отверстия а с камерой черпательной трубки. Каме-
ра образована колесом насоса 5 и чашей 4 черпательной труб-
ки.
Центробежный насос 13 питания, приводимый при помощи
цилиндрических и конических зубчатых колес от вводного вала 1,
подает масло через распределительную колонку, установленную
в неподвижном чугунном корпусе гидромуфты, в коллектор 6 и
затем в ее проточную часть. Масло, заполняющее гидромуфту,
образует под действием центробежных сил масляное кольцо как
в проточной части, так и в камере черпательной трубки. Отбор
масла из этой камеры производится скользящей черпательной
трубкой 12, которую можно передвигать радиально. Как только
внутренняя поверхность масляного кольца коснется черпающего
конца трубки, масло будет вычерпано. В результате давления,
создаваемого трубкой, вычерпнутое масло вновь направляется
через коллектор 6, маслоохладитель 1 и распределительную ко-
лонку в бак.
Бак емкостью 700 л, отлитый из чугуна, подвешен под гидромуф-
той и крепится к неподвижному ее корпусу. На черпательной труб-
ке 12, установленной в коллекторе 6, нарезана зубчатая рейка,
зубья которой сцепляются с зубчатыми сегментами регулировоч-
ного вала. Для поворота регулировочного вала служит рычаг 10,
глухо насаженный на вал. На рычаге имеется указатель, кото-
рый показывает место положения черпательной трубки на шка-
ле 11, укрепленной на масляном баке. При вращении регулиро-
вочного валика трубка поднимается или опускается. Высота
подъема трубки определяет толщину масляного кольца в камере
черпательной трубки, а также степень заполнения проточной ча-
сти круга циркуляции гидромуфты.
Данной степени заполнения гидромуфты соответствует опре-
деленное число оборотов ведомого вала, притом независимо от
количества масла, подаваемого насосом питания 13.
Поворот рычага управления 10 может осуществляться вруч-
ную или дистанционно от сервомотора. Как правило, управление
черпательной трубки автоматизировано.
1 Специальный маслоохладитель фирмы Фонт типа 0Ja X 2804.
216
Масло, выбрасываемое черпательной трубкой, направляется
через маслоохладитель и распределительную колонку (рис. 90)
в бак. Во время работы черпательной трубки золотник 6 подни-
мается под действием давления, создаваемого трубкой, при этом
ролик 5 прижимается к кулачку 2. Профиль кулачка подобран
так, что, при определенном положении золотника, в гидромуфту
Рис. 90. Распределительная колонка:
1 — регулировочный вал; 2 — кулачок; 3 — пружина; 4 — поршенек; 5 — ролик;
6 — золотник
направляется требуемое и наивыгоднейшее количество масла.
Кулачок закреплен на регулировочном валу 1 таким образом, что
когда требуется наибольший расход масла через гидромуфту
(при отводе наибольшего количества тепла), золотник 6 нахо-
дится в своем нижнем положении. При этом положении золотни-
ка все масло, подаваемое насосом, направляется в проточную
часть. При самом высоком положении черпательной трубки, т. е.
когда гидромуфта опорожнена, золотник передвигается в свое
217
верхнее положение. В этой позиции насос питания нагнетает
в гидромуфту только незначительную часть масла, в то время как
основная масса течет в бак. Таким образом, можно получить ми-
нимальное число оборотов ведомого вала гидромуфты.
Если черпательную трубку быстро вывести из масляного коль-
ца, то давление в ней упадет до нуля, в результате чего золот-
ник 6 опустится. Движению золотника вниз помогает также пру-
жина 3. При нижнем положении золотника все масло, подавае-
мое насосом питания, идет на заполнение гидромуфты. Как толь-
ко масляное кольцо в камере черпательной трубки достигает ее
вершины, в трубке вновь создается давление. Золотник снова на-
чинает подниматься вверх и остановится, когда ролик 5 коснется
кулачка 2. Таким образом, через проточную часть гидромуфты
будет вновь протекать только такое количество масла, которое
необходимо для отвода тепла, в то время как излишнее масло
направится из колонки обратно в бак. Внизу колонки расположен
поршенек 4, нагруженный пружиной. Этот поршенек открывает
выпускные окна для прохода в бак масла, подаваемого черпа-
тельной трубкой через холодильник, причем эти окна открывают-
ся только тогда, когда золотник под действием давления жидко-
сти прижимает ролик к кулачку.
Таким образом, поршенек с пружиной выполняет функции
предохранительного клапана, защищая черпательную трубку от
излишнего давления и перегрузки при переполнении маслом ее
камеры.
Ниже перечислены функции, выполняемые распределитель-
ной колонкой.
1. Колонка позволяет значительно улучшить маневровые и
динамические свойства гидромуфты. Она может в случае необхо-
димости повысить число оборотов, автоматически и значительно
увеличить подачу масла в проточную часть гидромуфты по срав-
нению с номинальным режимом.
2. Позволяет следить за тепловым режимом гидромуфты и
в зависимости от количества выделяемого тепла направляет че-
рез проточную часть гидромуфты соответствующее количество
масла.
3. Предохраняет черпательную трубку от чрезмерного повы-
шения давления в ее камере и этим защищает ее от поломки.
Смазка подшипников скольжения всей установки и зубчатых
колес при работе агрегата осуществляется специальным шесте-
ренчатым насосом. Этот насос установлен на том же валу, что и
насос питания.
На рис. 91 приведена схема масляной системы установки. Ше-
стеренчатый насос засасывает масло из бака и нагнетает его че-
рез сдвоенный фильтр 3 и маслоохладитель 1 (специальный для
1 Маслоохладитель типа 8S способен отводить до 36 600 ккал/ч.
218
масла подшипников) в подшипники и для смазки зубчатых колес.
При разгоне или останове агрегата работает вспомогательный
масляный насос 14, приводимый от отдельного электродвигателя.
Пуск и останов агрегата осуществляются в следующем по-
рядке.
1. Включается вспомогательный масляный насос 14.
2. Сигнал на включение главного электродвигателя подает
реле 17 давления DW1 при достижении определенного давления
Рис. 91. Схема масляной системы гидромуфты R18K:
1 — трубопровод смазки подшипников главного двигателя; 2 — предохранительный кла-
пан; 3 — фильтры; 4 — регулировочный рычаг; 5 — манометр; 6 — трубопровод для
смазки подшипников гидромуфты; 7 — трубопровод смазки подшипников рабочей маши-
ны; 8 — маслоохладитель гидромуфты; 9 — черпательная трубка; 10 — распределитель-
ная колонка; 11 — насос питания гидромуфты; 12 — шестеренчатый иасос для смазки
подшипников; 13 — маслоохладитель смазки подшипников; 14 — вспомогательный мас-
ляный насос; 15 — обратный клапан; 16 — реле давления DW2; 17 — реле давления DWJ
в маслопроводе от работы вспомогательного насоса, равного
1,5 ати.
3. Вспомогательный насос выключает реле 16 давления
DW2, когда давление, создаваемое специальным шестеренча-
тым насосом 12, достигает 2 ати.
4. Сигнал к выключению главного электродвигателя подает
реле давления DW2, когда давление в маслопроводе упадет до
~ 1 ати. Через 3 мин после подачи сигнала операция выключе-
ния должна быть закончена.
5. Включение вспомогательного насоса 14 при останове агре-
гата осуществляется реле давления DW1, когда давление падает
до 0,8 ати.
219
Гидромуфты имеют тепловую защиту на случай, если про-
изойдет авария с насосом питания 11 и поток масла прервется
Рис. 92. Внешний вид гидромуфты R-K с редук-
тором
Рис. 93, Гидромуфта типа SvL:
1 — ведущий вал; 2 —насос; 3 — турбина; 4 — вращающийся кожух; 5 — чер-
пательная трубка; 6 — ведомый вал; 7 — распределительная колонка; 8 — мас-
лоохладитель; 9 — насос питания гидромуфты
В таком случае оставшееся в гидромуфте незначительное коли-
чество масла может недопустимо перегреться. Во избежание это-
220
го ведущая чаша гидромуфты имеет две пробки из легкоплавко-
го материала. При нагреве до ~160°С сплав расплавляется и
через открывшиеся отверстия гидромуфта опоражнивается.
Фирма Фойт рекомендует для использования в гидромуфте
масло «Тигюла Ойл 17» фирмы Шелл или масло «Энергол Гид-
раулик 40ЕР» фирмы Ойлз.
В бак гидромуфты R18K заливается 750 л масла. Кроме того,
280 л заполняют главный холодильник и 60 л _— холодильник для
смазки подшипников.
Рис, 94. Внешний вид гидромуфты SvL
Вес гидромуфты R-18K с редуктором равен ~3300 кг. На
рис. 92 показан внешний вид гидромуфты R-K с редуктором.
Гидромуфты типа SvL отличаются от гидромуфт типа R-K
только тем, что исполняются без редуктора (рис. 93).
Ведущий вал гидромуфты соединяется с электродвигателем,
а ведомый — с питательным насосом. Оба вала имеют внешние
опоры, что создает большие удобства при монтаже, а также уп-
рощает технологию изготовления, так как отсутствует внутрен-
няя взаимная центровка валов. Насос заполнения имеет привод
от ведущего вала гидромуфты.
По данным фирмы глубина регулирования числа оборотов
ведомого вала при приводе машин, момент которых изменяется
пропорционально квадрату числа оборотов, равна 4 : 1, а при
приводе машин, момент которых остается постоянным, 3:1. На
221
рис. 94 показан внешний вид гидромуфты SvL, а в табл. 20 при-
ведены активные диаметры и значения мощностей.
Таблица 20
Размеры активных диаметров гидромуфт типа SvL
Активный Число оборотов ведущего вала в минуту
1450 2950
диаметр
в мм Передаваемая мощность в л. с.
min max min max
384 19 30 155 280
422 30 48 280 450
464 48 78 450 730
510 78 125 730 1180
562 125 200 1180 1900
620 200 330 1900 3100
682 330 530 3100 5000
Примечание. При передаче номинального момента скольжение принято рав-
ным 2 -4- 3%.
Английские гидромуфты
Для питательных насосов английская фирма «Флюйдрайв
Инжиниринг» выпускает гидромуфты типа ST.
Гидромуфты типа ST, так же как и вышеописанные типа SvL,
характеризуются тем, что камера черпательной трубки сообща-
ется с проточной частью (кругом циркуляции) большими про-
ходными отверстиями, поэтому уровень заполнения камеры чер-
пательной трубки непосредственно определяет уровень заполне-
ния и проточной части.
Гидромуфты типа ST изготовляются с одной полостью для
передачи мощности до 3000 л. с. и с двумя полостями (сдвоен-
ные) для передачи мощности свыше 3000 л. с.
Для насосов, работающих со скоростью вращения 4000 об)мин,
гидромуфты устанавливаются после ускоряющего редуктора.
Гидромуфты типа ST имеют следующие активные диаметры:
324; 368; 413; 457; 508; 565 мм.
На рис. 95 показан разрез однополостной гидромуфты ти-
па ST.
Колесо насоса 1 насажено на вращающуюся внутреннюю ча-
шу 2, которая соединена с наружной чашей 3 и с промежуточной
цилиндрической частью.
Цилиндрическая часть центрируется в шаровой опоре полу-
муфты 7, посаженной на шпонке на шейке вала приводного дви-
222
гателя. Передача вращения от полумуфты двигателя к цилиндри-
ческой части осуществляется через упругий диск, который сое-
динен с ними болтами и штифтами. Упругий диск компенсирует
небольшие перекосы осей, которые могут возникнуть при монта-
же установки. Колесо турбины 9 насажено на ведомом валу 6.
Вал центрируется с одной стороны шарикоподшипником в про-
Рис. 95. Гидромуфта типа ST с дополнительным объемом:
1 — насос; 2 — внутренняя чаша; 3 — наружная чаша, 4 — черпательная трубка;
5 — коллектор; 6 — ведомый вал; 7 — полумуфта ведущего вала; 8 — порог; 9 —
турбина; 10 — промежуточная часть
межуточной части 10 и с другой стороны роликоподшипником во
внутренней чаше. Гидромуфта имеет одну наружную опору —
двухрядный роликоподшипник, установленный в неподвижном
коллекторе черпательной трубки 4. Внутренняя и наружная ча-
ши образуют пространство, называемое дополнительным объе-
мом (или камерой черпательной трубки), в которое вставлена
скользящая черпательная трубка. Дополнительный объем сооб-
щается с проточной частью через большие окна, проделанные во
внутренней чаше. Колесо насоса выполнено без тора, а турби-
на — с тором, который сделан из частей разного диаметра
(рис. 96). Это, а также порог 8, установленный на выходе из тур-
бины, применены для устранения скачкообразного изменения
223
формы потока в круге циркуляции (в проточной части) и связан-
ных с этим колебаний системы.
Гидромуфта монтируется на жесткой плите, которая одно-
временно служит нижним сливным баком. В плите установлен
питательный насос, работающий от электромоторчика. Насос все
время подает масло через холодильник в круг циркуляции гидро-
муфты.
Как было сказано, в описываемых гидромуфтах уровень ра-
бочей жидкости в круге циркуляции почти совпадает с уровнем
Рис. 96. Насос и турбина гидромуфты типа ST
в дополнительном объеме. Изменяя уровень жидкости в этом
объеме, что выполняется скользящей черпательной трубкой,
можно изменять и уровень жидкости в круге циркуляции, т. е. ме-
нять его заполнение. При подъеме на полную высоту черпатель-
ная трубка выбрасывает все масло в нижний бак, круг циркуля-
ции опоражнивается, а при опускании трубки в нижнее положе-
ние заполнение гидромуфты наибольшее. Обратно в круг
циркуляции жидкость подается из нижнего бака постоянно ра-
ботающим питательным насосом. Положение скользящей трубки,
управляемой автоматически или вручную, определяет количест-
во масла в круге циркуляции и, следовательно, скорость ведомо-
го вала.
Теоретически производительность питательного насоса мож-
но выбрать сколь угодно большой, что позволит осуществить
быстрое заполнение гидромуфты, а следовательно, и быстрый
224
разгон вторичного вала. В действительности в целях повышения
к. п. д. всей установки мощность питательного насоса приходится
ограничивать, довольствуясь величиной производительности из
расчета требуемой для охлаждения гидромуфты, что обычно со-
ставляет 0,5— 1 % номинальной мощности. Этим лимитируется
скорость заполнения круга циркуляции.
Гидромуфта DST имеет две полости. Передаваемая ею мощ-
ность при активном диаметре 565 мм составляет 5000 л. с. при
«1 = 2980 об!мин.
Рис. 97. Гидромуфта типа DST:
1 — ведущий вал; 2 — вращающийся кожух; 3 — колесо насоса; 4 — цилиндрическая
часть; 5 — колеса турбины; 6 — наружный неподвижный корпус; 7 — ведомый вал;
8 — уплотнение; 9 — черпательиая трубка
Гидромуфты типа DST выпускаются мощностью 1500—
20 000 л. с. Описываемая гидромуфта (5000 л. с.) (рис. 97) пред-
назначена для регулирования числа оборотов мощного центро-
бежного насоса, приводимого через гидромуфту от короткозамк-
нутого асинхронного электродвигателя.
Вращающиеся части гидромуфты находятся в неподвижном
цилиндрическом корпусе 6, в котором размещены подшипники
скольжения валов гидромуфты. Нижняя часть корпуса представ-
ляет собой прочное чугунное основание. Снизу к нему подве-
шивается отдельный масляный бак, выполненный из мягкой
стали. В баке содержится масло, необходимое для работы гидро-
муфты.
Бак с большим количеством нагретого масла, находящийся
под гидромуфтой, вызывает нагревание всего неподвижного кор-
пуса. Однако цилиндрическая форма корпуса обеспечивает при
нагреве его симметричное расширение. Таким образом, считает-
ся, что смещение оси вала гидромуфты по отношению к оси валов
15 Заказ 1076 2 25
электродвигателя и питательного насоса из-за нагрева корпуса
в этой конструкции устранено.
Гидромуфта имеет два стальных колеса 3 насоса, первое ко-
лесо насоса присоединено болтами к ведущему валу 1, а между
собой колеса соединены промежуточной цилиндрической
частью 4. Каждое насосное колесо совместно с чашей образует
камеру черпательной трубки 9. Эти колеса изготовлены из цель-
ных стальных поковок. Два колеса турбины 5, выполненные из
Рис. 98. Схема маслопровода и маслосистемы гидромуф-
ты 'DST:
1 — насос питания; 2 — обратный клапан; 3 — смазка подшипни-
ков; 4 — тепловое реле; 5 — реле давления; 6 и 11 — манометры;
1 и 10 — термометры; 8 — маслоохладитель; 9 — фильтр; 12 —
черпательная трубка; 13 — гидромуфта; 14 — поплавковый кла-
пан; 15 — насос питания; 16 — бак
алюминиевого сплава, посажены на ведомый вал 7, который цен-
трируется в ведущем при помощи двойного роликового подшип-
ника. Осевое положение всей гидромуфты в целом фиксируется
упорным подшипником типа Митчелл.
Заполнение двух проточных частей гидромуфты регулируется
двумя скользящими черпательными трубками 9. Для осуществ-
ления синхронного движения трубки сблокированы. Питание гид-
ромуфты двустороннее.
Такие конструктивные меры, как две симметричные проточ-
ные части, две симметрично расположенные черпательные труб-
ки и двустороннее питание обеспечивают почти полную уравно-
вешенность гидромуфты в смысле действия осевых сил. При воз-
226
никновении незначительного осевого давления оно воспринимает-
ся двухрядным роликовым подшипником, причем этот подшипник
работает не при полном числе оборотов ведущего вала, а при
числе, равном только разнице чисел оборотов ведомого и веду-
щего валов. Однако такая центровка одного вала в другом вызы-
вает при изготовлении технологические трудности.
Нужно отметить, что у двухполостных гидромуфт, не имею-
щих двустороннего питания и двух черпательных трубок, в мо-
мент заполнения при разгоне и вообще при переходных режи-
мах могут возникнуть большие осевые давления.
Гидромуфта соединяется с электродвигателем муфтой типа
Бибби, а с центробежным насосом—-зубчатой муфтой.
На рис. 98 приведена схема маслопровода. Питание гидро-
муфты и смазка подшипников скольжения при работе агрегата
осуществляется насосом питания 1 центробежного типа. Этот на-
сос приводится через зубчатую передачу от ведущего вала гид-
ромуфты. Смазка подшипников при пуске агрегата производится
от вспомогательного насоса 15, приводимого от автономного элек-
тродвигателя.
Выключением этого насоса управляет реле давления 5. Мас-
ло, направляемое в гидромуфту, проходит через маслоохлади-
тель 8. Для этого используется стандартный охладитель типа
Серка с чугунным корпусом и латунными трубками. На рассмат-
риваемой схеме не показан маслоохладитель для линии смазки.
Очевидно, что для смазки подавать горячее масло (а в баке мас-
ло горячее) недопустимо, а следовательно, на смазочной маги-
страли должен быть предусмотрен специальный маслоохлади-
тель.
Холодное масло, подаваемое в гидромуфту, попадает в обе
проточные ее части (в оба круга циркуляции), а оттуда через
большие отверстия колеса насоса в камеры черпательных трубок.
Две трубки 12 направляют вычерпанное масло непосредственно
в бак 16.
Японские гидромуфты
Японская фирма Мицубиси выпускает быстроходные гидро-
муфты большой мощности типа UC. На рис. 99 показан разрез
такой гидромуфты. Цифры после букв обозначают величину ак-
тивного диаметра в сантиметрах.
Ведущий и ведомый валы разделены и не центрируются один
в другом так же, как и у быстроходных гидромуфт Фойт типа
SvL и R-K. Такая конструктивная схема очень технологична и по-
зволяет производить динамическую балансировку. Однако недо-
статком такой схемы является то, что действующие в гидромуфте
осевые силы нельзя свести к внутренним силам и замкнуть их во
внутреннем силовом контуре. Они являются в данной конструк-
15* 227
Рис. 99. Гидромуфта фирмы Мицубиси типа UC:
1 — ведомый вал; 2 — подшипник ведомого вала; 3 — черпательиая трубка; 4 —
вращающийся наружный кожух; 5 — турбина; 6 — насос; 7 — подшипник ведущего
вала; 8 — ведущий вал; 9 — иижияя часть неподвижного корпуса гидромуфты; 10 —
иасос питания; 11 — маслоохладитель, встроенный в корпус гидромуфты
ции внешними силами, воспринимаемыми упорными подшипни-
ками при полном числе оборотов вала, в результате механичес-
кие потери на трение в упорных подшипниках значительно уве-
личиваются.
Гидромуфта регулируется при помощи черпательной трубки;
масляный насос, питающий гидромуфту, установлен в неподвиж-
Таблица 21
Основные размеры японских гидромуфт в мм
Обозначения см. рис. 99 и 100) Тип UC Тип SA
36 45 64 105 125
А 980 1370 1420 980 1165
В 955 1200 1080 1230 1470
С 60 75 125 200 225
D 90 НО 125 200 225
Е — 451 546 720 955
Н 650 800 630 265 320
Вес вращающихся ча-
стей в кг 145 380 650 1700 2700
Вес брутто в кг . . . 970 1900 1700 2300 3500
228
ном корпусе гидромуфты, являющемся масляным баком, и при-
водится от ведущего вала гидромуфты. Интересна компоновка
маслоохладителей с корпусом гидромуфты. Установка маслоох-
ладителей и насоса в масляном баке, а снаружи на баке всех из-
мерительных приборов делает всю конструкцию автономной и
компактной.
Рис. 100. Гидромуфта фирмы Мицубиси типа SA:
1 — ведомый вал; 2 — подшипник ведомого вала; 3 — турбина; 4 — внут-
ренний кожух; 5 — наружный кожух; 6 — иасос; 7 — роликоподшипник; 8 —
шарикоподшипник; 9 — ведущий вал; 10 — черпательная трубка; 11 — масло-
охладитель; 12 — неподвижный корпус гидромуфты
В табл. 21 приведены основные габаритные размеры гидро-
муфт фирмы Мицубиси. Гидромуфты типа SA (рис. 100) имеют
более крупные размеры.
Американские гидромуфты
На рис. 101, а показана быстроходная гидромуфта, изготов-
ляемая американской фирмой Американ Блауер типа VS
(класс 4) мощностью 100—1850 квт при 1800 об/мин, а на рис. 101,
б — типа VS (класс 6) мощностью 200—9000 квт при 3600 об/мин.
Конструктивная компоновка маслоохладителей с корпусами
229
(баками) гидромуфты основана на тех же принципах, что и
в японских гидромуфтах.
В американских гидромуфтах большой мощности, устанавли-
ваемых на электростанциях и приводимых от генератора, роторы
а — класса 4; б — класса 6
выполняются из стальных поковок марки SAE 4340. Лопатки из-
готовляются из одной целой поковки с диском. Для уменьшения
концентрации напряжений ротор полируется до получения зер-
кальной поверхности.
Таким образом, конструирование быстроходных гидромуфт
большой мощности идет в направлении усовершенствования тех-
нологии изготовления и удешевления конструкции. В СССР име-
230
ются гидромуфты с приваренными лопатками (ВНИИМЕТМАШ,
ЛМЗ, СК.Б-ПН), в ФРГ осваивают технологию сварки лопаток.
Английские фирмы пока изготовляют лопатки фрезеровкой,
что, конечно, увеличивает по сравнению со сваркой стоимость
гидромуфты.
Фирмы Фойт и Мицубиси в быстроходных мощных
гидромуфтах отказываются от телескопического соединения ва-
лов, делая их автономными, механически раздельными. Это зна-
чительно облегчает технологию сборки и балансировку роторов
гидромуфты, но ведет к повышению потерь на трение в упорных
подшипниках.
Можно отметить еще тенденцию к значительному сокраще-
нию места, занимаемого вспомогательным оборудованием, и обе-
спечению автономности гидромуфт. В данном случае под авто-
номностью понимается то, что все механизмы (насосы, фильтры,
элементы управления и др.) находятся на плите самой гидро-
муфты и приводятся от ее ведущего вала.
Глава VII. ГИДРОМУФТЫ ПОСТОЯННОГО ЗАПОЛНЕНИЯ
Гидромуфты постоянного заполнения, работающие с неизмен-
ным количеством рабочей жидкости и поэтому отличающиеся
простотой конструкции, широко распространены в приводе раз-
личных машин.
Разнообразные виды гидромуфт постоянного заполнения по
принципу их работы могут быть объединены в две основные
группы: гидромуфты без внутреннего самоопоражнивания и гид-
ромуфты с внутренним самоопоражниванием.
Гидромуфты первой группы, выполненные с прямыми ради-
альными лопатками (жидкостный маховик), применяются в при-
воде машин, работа которых не связана с резкими перегрузками
и тяжелыми условиями пуска.
Гидромуфты без внутреннего опоражнивания, но изготовлен-
ные с наклонными лопатками, применяются в качестве защитных
и пусковых муфт.
В гидромуфтах второй группы, выполняемых с прямыми ра-
диальными лопатками, предусматривается возможность автома-
тического удаления из рабочей полости избыточного количества
жидкости при перегрузках, что обеспечивает наряду с высоким
к. п. д. (0,95—0,98) при номинальной нагрузке защиту двигателя
и рабочей машины.
По способу автоматического удаления части жидкости эти
гидромуфты делятся на гидромуфты с дополнительным объемом
на стороне турбины (тяговые), использующие при опоражнива-
нии рабочей полости статический напор жидкости, и на предель-
ные гидромуфты, использующие при опоражнивании скоростной
напор.
Гидромуфты с внутренним опоражниванием применяются в
качестве защитных и пусковых муфт в тех случаях, когда необ-
ходимо облегчить пуск двигателя при пуске нагруженной маши-
ны или разгоне больших маховых масс, а также защитить двига-
тель и машину от перегрузок. Они широко применяются в приво-
де вспомогательного оборудования металлургических цехов (мо-
талки, ножницы, рольганги и т. п.), дробильного оборудования
232
обогатительных комбинатов, машин угольной и химической про-
мышленности (конвейеры, врубовые машины, центрифуги, сепа-
раторы и т. п.).
§ 1. ГИДРОМУФТЫ БЕЗ ВНУТРЕННЕГО ОПОРАЖНИВАНИЯ.
ЖИДКОСТНЫЙ МАХОВИК
На рис. 102 показана конструкция нерегулируемой гидромуф-
ты постоянного заполнения фирмы Цёльнер (ФРГ).
Колесо насоса 1, непос-
редственно соединяемое с
валом двигателя, жестко
связано с вращающимся ко-
жухом 2. Колесо турбины 3
соединено с ведомым валом
4, который вращается в двух
подшипниках и соединяется
через зубчатую муфту с ва-
лом рабочей машины. Веду--
щая часть гидромуфты име-
ет внешнюю опору 5, распо-
ложенную на фундаменте.
Рабочие колеса выполнены
с прямыми радиальными ло-
патками. Гидромуфта имеет
воздушное естественное ох-
лаждение. Для этого на на-
Рис. 102. Гидромуфта постоянного за-
полнения с воздушным охлаждением
фирмы Цёльнер:
/ — насос; 2 — кожух', 3 — турбина; 4 —
ведомый вал; 5 — внешняя опора; 6 — ребра
ружной поверхности гидро-
муфты имеются радиальные
ребра 6, охваченные кожу-
хом. Кожух обеспечивает не-
обходимое направление ох-
лаждаемого воздуха. При
работе гидромуфты воздух, попадая к внутренним концам ребер,
отбрасывается к периферии и обтекает ребристую поверхность
гидромуфты. Гидромуфта работает при неизменном первоначаль-
ном количестве жидкости.
На рис. 103 показан разрез сдвоенной гидромуфты типа НСВ
конструкции фирмы Твин-Диск (США). Гидромуфта имеет два
параллельно работающих круга циркуляции, образованных двой-
ной турбиной 1 и двумя насосами 2, соединенными между собой
вращающейся цилиндрической частью 3. Рабочие колеса выпол-
нены штампованными из листовой стали с приклепанными пря-
мыми радиальными лопатками. Конструкция колес из штампо-
ванной листовой стали позволяет уменьшить вес, габариты и
маховой момент гидромуфты. Малая величина махового момен-
та, уменьшенная еще за счет (при сдвоенной конструкции)
233
-активного диаметра гидромуфты, облегчает пуск привод-
ного двигателя. Форма проточной части гидромуфт фирмы
Твин-Диск позволяет передавать повышенный крутящий мо-
мент за счет увеличенной разницы радиусов выхода и входа
насоса.
Описанные выше гидромуфты типа НСВ, а также незначи-
тельно отличающиеся от них по конструкции гидромуфты типов
НС, HCS и HU выпускаются с активными диаметрами 368, 445
и 533 мм.
Рис. 103. Разрез сдвоенной гидромуфты «Твин-
Диск» (США) типа НСВ:
7 — турбина; 2 — насос; 3—цилиндрическая часть;
^ — ведомый вал; 5 —фланец
Гидромуфты с наклонными лопатками
Гидромуфта, имеющая радиальные лопатки, при постоянном
заполнении рабочей полости с потерей скорости турбины способ-
на к работе с большими перегрузками.
Гидромуфты с наклоненными назад лопатками обладают
меньшим коэффициентом перегрузки и менее жесткой, особенно
в области больших скольжений, внешней характеристикой. Ис-
следования показали [19], что гидромуфты с лопатками, накло-
ненными назад под углом 45°, передают на режиме 3%-ного
скольжения момент на 5% меньший и на режиме 100%-ного
скольжения в 10 раз меньший, чем гидромуфты с радиальными
лопатками при одних и тех же условиях.
Экспериментальные исследования внешних характеристик
гидромуфт с наклонными лопатками
Для оценки пусковых и защитных качеств гидромуфт с на-
клонными лопатками была исследована модель гидромуфты, ро-
234
тор которой был выполнен из органического стекла. Активный
диаметр модели гидромуфты составлял 320 мм.
Лопатки турбины модели были выполнены наклоненными по
ходу вперед, а лопатки насоса — назад.
Угол наклона лопаток составлял с плоскостью вращения 45°.
Привод модели осуществлялся от асинхронного короткозамкну-
того электродвигателя типа АО 51:6 мощностью 2,8 кет при чис-
ле оборотов 950 в минуту.
В качестве нагружающего устройства применялся колодоч-
ный тормоз ТК-200, изготовленный в балансирном исполнении.
Рис. 104. Пусковые динамические характеристики совместной работы
гидромуфты, имеющей наклонные лопатки, с асинхронным коротко-
замкнутым электродвигателем:
1 и 4 — пуск системы вхолостую; заполнение гидромуфты q — 6,9 л (93%); 2 и
3 — пуск системы вхолостую; заполнение гидромуфты q = 7,4 л (100%); 5 и 6 —
кривые изменения числа оборотов электродвигателя при заполнении гидромуфты
q = 6,9 л (93%) н q = 7,4 л (100%)
Исследование внешних характеристик гидромуфты проводилось
при установившихся режимах и статической нагрузке, а также
при динамическом нагружении в переходных процессах пусков и
торможений системы.
Пусковые характеристики гидромуфты снимались при разго-
не системы, имеющей соотношение маховых моментов ведомой и
ведущей частей ф =-----=12,5; ф = 29.
GDeUi
На рис. 104 представлены пусковые характеристики совмест-
ной работы гидромуфты с наклонными лопатками и асинхронно-
го короткозамкнутого электродвигателя при пуске системы с ф =
= 29. В этих опытах момент инерции ведомых частей J =
= 0,186 кГм-сек2.
235
Рис. 105. Разгон системы гидромуфтой с
наклонными лопатками при нагружении
rf<o
по закону М = J——(J = 0,186 кГм • сек2)
dt
Из графика видно, что к. и. д. гидромуфты на номинальном
режиме (Мном = 2,4 кГм) составляет 93—94%. Коэффициент пе-
регрузки гидромуфты, равный отношению ----—? , при заполне-
МН0М
нии q = 93% и передаточном отношении I = 0,93 ч- 0,94 состав-
ляет 2,8, что позволяет гидромуфте защищать короткозамкнутый
асинхронный электродвигатель от опрокидывания. Если прини-
мать за максимальное передаточное отношение i = 0,97, что
обычно делают, то для той
же степени заполнения гид-
ромуфты коэффициент пере-
грузки составит К = 4,6, что
выше, чем у предельных гид-
ромуфт с самоопоражнива-
нием при тех же условиях.
С уменьшением степени за-
полнения наряду со сниже-
нием коэффициента пере-
грузки существенно снижа-
ется к. п. д. гидромуфты.
На рис. 105 показано из-
менение крутящих моментов
Mi и М2, чисел оборотов П]
и п2 первичного и вторично-
го валов гидромуфты, а так-
же силы тока статора JCT
электродвигателя в функции
времени при пуске привода
вхолостую.
В этих опытах коэффи-
циент системы ф = 29.
Как видно, гидромуфта разгоняет систему, имеющую значи-
тельные маховые массы, в течение 3 сек. При этом электродвига-
тель, работая на неустойчивой ветви своей характеристики, за
0,6 сек набирает скорость вращения, равную 800 об/мин, и далее
в течение 1,2 сек работает с устойчивой характеристикой.
Полное время разгона электродвигателя составляет 3 сек, из
них в течение 2 сек двигатель потребляет значительный пусковой
ток. При пусках крупных машин, имеющих в приводе
гидромуфту с наклонными лопатками, продолжительность
разгона электродвигателя возрастает по сравнению с приводом,
включающим предельную гидромуфту. При больших сопротивле-
ниях на рабочей машине пуск двигателя осуществляется в тяже-
лых условиях.
О нагрузке электродвигателя, работающего с гидромуфтой
в тяжелых условиях, можно судить по приведенным на рис. 106
графикам.
236
Исследования процессов пуска системы в тяжелых условиях
показывают, что гидромуфта, имеющая наклонные лопатки, пе-
регружает приводной дви-
гатель, а в некоторых слу-
чаях пуска крупных ма-
шин под тяжелой нагруз-
кой (например, пуски дро-
билок под завалом, мощ-
ных нагруженных конвей-
еров и т. п.) не обеспечи-
вает полный разгон элек-
тродвигателя и работу его
на устойчивой ветви ха-
рактеристики.
В тяжелых условиях
пуска гидромуфта с на-
Рис. 106. Пуск электродвигателя при за-
торможенной турбине гидромуфты с
наклонными лопатками (заполнение
гидромуфты q = 6,9 л)
клонными лопатками не
защищает электродвига-
тель от перегрузок и не
предотвращает его опро-
кидывания. Для оценки
быстродействия и инерционности гидромуфты, определяющих ее
защитные свойства, было проведено исследование динамики гид-
Рис. 107. Сравнение характеристик предельных гидромуфт
и гидромуфт с наклонными лопатками:
1 — внешние характеристики гидромуфты с наклонными лопатками;
2 — внешние характеристики предельных гидромуфт
ромуфты с наклонными лопатками в переходных режимах тор-
можений системы.
237
Испытания проводились при различном времени стопорения
ведомого вала колодочным тормозом.
На рис. 107 сплошными линиями показаны внешние характе-
ристики гидромуфты М2 = fi(n2) и М] = f2(n2), снятые при тор-
можении турбины за время 0,34 сек.
Из графика следует, что перегрузочная способность гидро-
муфты в динамическом режиме, определяемая соотношением
К = 2^, равна 4,8.
Мцом
Если принимать скольжение 97% за номинальное, то коэффи-
циент перегрузки К = —тах---- возрастает до величины, рав-
тном 0,97
ной 6,5. Коэффициент динамичности гидромуфты К = —— тах
Mg max
= 1,67.
Из изложенного следует, что гидромуфты с наклонными ло-
патками, являясь ограничивающими, не способны, однако, защи-
щать полностью двигатель и машину от перегрузок так, как это
делают предельные гидромуфты с внутренним самоопоражнива-
нием.
Это ограничивает применение гидромуфт с наклонными ло-
патками в приводе некоторых горных и металлургических машин,
работающих в режимах тяжелых пусков и переменной нагрузки.
§ 2. ГИДРОМУФТЫ С ВНУТРЕННИМ САМООПОРАЖНИВАНИЕМ
Гидромуфты с дополнительным объемом
на стороне турбины (тяговые)
Развитие нерегулируемых конструкций гидромуфт постоянно-
го заполнения началось с изготовления гидромуфт с внутренним
самоопоражниванием в дополнительный объем на стороне тур-
бины. Конструкция такой гидромуфты фирмы Фойт-Синклер по-
казана на рис. 108.
Насос 1 соединен через упругую муфту с валом двигателя и
с вращающимся кожухом 3. На стороне турбины 2, жестко сое-
диненной с ведомым валом, расположен дополнительный объем 4,
сообщающийся с тором гидромуфты через отверстия 5. Рабочие
колеса ‘выполнены с прямыми радиальными лопатками. При
внутреннем самоопоражнивании в гидромуфтах этого типа ис-
пользуется разность статического напора между вращающейся
дополнительной камерой и рабочей полостью. При работе гидро-
муфты в пределах скольжения от номинального и до критическо-
го, соответствующего предельной перегрузке, круг циркуляции
охватывает периферийную часть рабочей полости. При этом масло
в дополнительном объеме образует на уровне отверстий 5 тонкое
кольцо, прижатое к периферии камеры.
238
Рис. 108. Гидромуфта фирмы Фойт-
Синклер:
/ — насос; 2 — турбина; J — кожух; 4 — до-
полнительный объем; 5 — зазор
При увеличении скольжения выше критического жидкость,
отбрасываемая к ободу турбины, постепенно поступает из рабо-
чей полости в дополнительный объем, который заполняется пол-
ностью лишь только при остановленном ведомом вале, когда
давление на периферии турбины достигает максимального зна-
чения. Количества жидкости, оставшегося в рабочей полости, не-
достаточно для передачи большого момента при увеличении
скольжения. При разгоне ведомого вала рабочая полость авто-
матически заполняется
вновь жидкостью, посту-
пающей из дополнитель-
ного объема через отвер-
стия 5, и гидромуфта пе-
редает номинальную мощ-
ность с минимальным
скольжением. Подобные
гидромуфты, у которых
можно регулировать как
первичное, так и вторич-
ное число оборотов, пер-
воначально нашли при-
менение на подъемных и
транспортных машинах и
поэтому получили назва-
ние тяговых гидромуфт.
Позднее в тяговых гидро-
муфтах для уменьшения
при торможении остаточ-
ного момента, имеющего
существенное значение
особенно для транспортных машин, был введен порог, устанавли-
ваемый на выходе из турбины.
Порог позволяет тяговой гидромуфте при небольшом сниже-
нии скорости первичного вала останавливать вал турбины, а при
полном числе оборотов первичного вала передавать номиналь-
ный момент при 2—3%-ном скольжении. Помимо этого, порог,
заставляя поток формироваться все время по малому кругу цир-
куляции, препятствует внезапному образованию большого круга
и этим повышает устойчивость работы гидромуфты в области
больших скольжений. Установка порога целесообразна особенно
в тех случаях, когда тяговая гидромуфта используется в приводе
в качестве защитной. В таком случае порог позволяет значитель-
но улучшить защитные свойства гидромуфты.
На рис. 109 показан разрез, а на рис. НО представлены рабо-
чие характеристики гидромуфты ТМ-100 без порога. Из сравне-
ния этих характеристик следует, что установка порога позволяет
значительно снизить пусковой и перегрузочный момент гидро-
239
муфты. Гидромуфта ТМ-100 без порога теряет свои защитные
свойства. Степень снижения передаваемого гидромуфтой момен-
та при образовании большого круга циркуляции определяется ве-
личиной порога. Исследования показали, что для получения на
номинальном режиме высокого коэффициента мощности (не ни-
же единицы) отношение диаметра порога к диаметру турбины не
должно превышать значений 0,52—0,55 (— 0,52 ч- 0,55 Y
\ Dm /
Рис. 109. Разрез защитной гидромуфты ТМ-100
На рис. 111 представлена конструкция гидромуфт типа ТС
системы Мицубиси (Япония). В конструкции этих гидромуфт,
так же как и в гидромуфтах Синклера, для уменьшения остаточ-
ного момента при торможении предусмотрен порог.
Гидромуфты типа ТС и ранние конструкции типа ТД выпол-
нены с тором, из которого воздух в момент торможения и пуска
гидромуфты отводится по трубкам. В дальнейшем с усовершенст-
вованием гидромуфт типа ТД перешли на изготовление тяговых
гидромуфт сварной конструкции без тора, поскольку он снижает
энергоемкость гидромуфты.
Тяговая гидромуфта при медленном стопорении ведомого ва-
ла ограничивает передаваемый момент и этим защищает двига-
тель и рабочую машину от перегрузок.
240
Рис. 111. Гидромуфта фирмы Мицубиси:
1 — насос; 2 — турбина; 3 — кожух; 4 — веду-
щий вал; 5 — ведомый вал; 6 — трубка
16 Заказ 1076
241
Однако тяговая гидромуфта, использующая при внутренне.м
опоражнивании статический напор жидкости и поэтому не отли-
чающаяся быстродействием, не может служить защитой от мгно-
венных перегрузок. Момент, передаваемый гидромуфтой при
мгновенном торможении (при времени торможения менее
0,5 сек), значительно превышает момент при медленном тормо-
жении. Поэтому тяговые гидромуфты применяются лишь в при-
воде тех машин, при перегрузках которых время торможения не
менее 1 сек. В приводе более жестких систем, где требуется
мгновенное срабатывание при внезапном возрастании нагрузок
за время 0,5 сек и менее, используются гидромуфты с динами-
ческим опоражниванием в дополнительный объем.
Предельные гидромуфты
Для защиты рабочей машины и двигателя от мгновенных пе-
регрузок при времени торможения системы до 0,2—0,5 сек в на-
стоящее время применяют гидромуфты, использующие при внут-
реннем самоопоражнивании скоростной напор и поэтому в отли-
чие от тяговых обладающие значительно большей быстротой
действия. В таких гидромуфтах при перегрузках часть потока
жидкости, прижатого к направляющей стенке насоса вследствие
уменьшения числа оборотов турбины, с большой скоростью на-
правляется в предварительную камеру, расположенную в цен-
тральной части колеса насоса. В результате такого внутреннего
опоражнивания увеличение крутящего момента прекращается
(см. рис. 112).
Предельные гидромуфты работают с постоянным числом обо-
ротов двигателя. При работе гидромуфты в пределах скольже-
ния от номинального до критического, соответствующего момен-
ту опоражнивания, заполнение рабочей полости постоянно и рав-
но максимальному. При этом круг циркуляции охватывает толь-
ко периферийную часть рабочей полости (см. рис. 112, а). С та-
ким заполнением рабочей полости гидромуфта должна работать
по характеристике 1 (см. рис. 112, в).
При увеличении нагрузки скорость турбины падает, при этом
уменьшается и величина энергии, отдаваемой турбиной. Гак
как режим работы насоса остается прежним, то за счет избытка
напора со стороны насоса увеличивается скорость циркуляции
жидкости в рабочей полости гидромуфты. С увеличением сколь-
жения круг циркуляции распространяется все больше на обла-
сти, близкие к оси вращения гидромуфты, и, наконец, при опре-
деленном критическом скольжении, соответствующем предельной
перегрузке, происходит слив части жидкости из рабочей полости
в предкамеру (см. рис. 112, б). Гидромуфта с оставшимся запол-
нением должна работать с характеристикой 2 (см. рис. 112, в).
При прохождении всей области скольжений от номинального
242
значения до 100% получается характеристика 3 защитной гидро-
муфты. Итак, при внезапном возрастании нагрузки выше пре-
дельной величины гидромуфта, автоматически снизив скорость
ведомого вала, удерживает передаваемый момент на заданном
пределе и этим защищает двигатель, детали привода и рабочей
машины от перегрузок.
При снятии нагрузки скорость турбины увеличивается, что
вызывает заполнение круга циркуляции жидкостью из предкаме-
ры. Для облегчения пуска двигателей, в частности асинхронных
Рис. 112. Типовая конструктивная схема предельной гидромуфты
и ее характеристика:
а — работа гидромуфты при номинальном скольжении: 1 — насос; 2 — тур-
бина; 3 — предкамера; 4 — дополнительный объем; б — работа гидромуфты
при скольжениях выше критического; в — характеристика гидромуфты: 1 —
при максимальном заполнении рабочей полости; 2 — при частичном запол-
нении рабочей полости; 3 — изменение момента предельной гидромуфты
короткозамкнутых и двигателей внутреннего сгорания, в конст-
рукции гидромуфты предусматривают дополнительный объем,
который перед пуском при остановленном приводе принимает
часть общего заполнения.
При разгоне двигателя масло, образующее кольцо во вра-
щающемся дополнительном объеме, постепенно поступает через
калиброванные отверстия в стенке насоса в рабочую полость,
максимальное заполнение которой, а следовательно, и макси-
мальный передаваемый гидромуфтой момент достигаются лишь
после того, как двигатель стал работать с полным числом оборо-
тов. Для улучшения пусковых характеристик привода необходи-
мо уменьшать маховые массы ведущей части гидромуфты и уве-
личивать время заполнения рабочей полости при пуске.
16* 243
К особым свойствам предельных гидромуфт можно отнести
следующие.
1. Способность ограничивать крутящий момент (2,2 4- 2,7)-
кратной перегрузкой, что позволяет преодолеть встретившееся
сопротивление и обеспечить бесперебойную работу машины, а
также защитить детали привода и электродвигатель от мгновен-
ных перегрузок, если они превышают допустимые.
2. Способность облегчать пуск приводного двигателя. Это
свойство особенно важно в тех случаях, когда гидромуфта ис-
пользуется в приводе в сочетании с асинхронным короткозамкну-
тым электродвигателем или двигателем внутреннего сгорания.
Работа предельной гидромуфты с асинхронным
короткозамкнутым двигателем
На рис. 113 представлена характеристика совместной рабо-
ты предельной гидромуфты с асинхронным короткозамкнутым
двигателем.
Как видно, двигатель начинает работать не под нагрузкой и
далее, разгоняясь по своей характеристике 1, при максимальном
О Ж ~600 900 1200 п, об/мин О 300 000. 900 1200 пгоб/мин
Рис. 113. Характеристика совместной работы предельной гидромуфты с асин-
хронным короткозамкнутым электродвигателем:
1 — характеристика электродвигателя; 2 — момент иа двигателе при максимальном за-
полнении гидромуфты без дополнительного объема; 3 — момент на двигателе при мини-
мальном заполнении гидромуфты (или при гидромуфте с дополнительным объемом);
4 — кривая изменения момента гидромуфты
заполнении гидромуфты постепенно нагружается статическим
моментом, изменяющимся по параболе 2. При этом момент дви-
гателя (равный Мае = Мвин + Мст) увеличивается до точки К и
затем падает, а доля динамического момента в общей величине
момента двигателя уменьшается от максимальной величины
(равной в момент пуска Мпуск) до нуля в точке Л'. Такой харак-
244
тер изменения динамического момента позволяет двигателю при
разгоне под нагрузкой мгновенно пройти зону больших пусковых
токов и максимально нагрузиться только вблизи значений пол-
ных чисел оборотов, когда пусковые токи уже снижены, а венти-
ляционное охлаждение ротора стало существенным. Это исклю-
чает возможность перегрева ротора двигателя.
При предельной нагрузке рабочая машина начинает разго-
няться лишь после того, как двигатель начнет работать с полным
числом оборотов в точке А. Поэтому для разгона рабочей маши-
ны используется не пусковой момент двигателя, а значительно
больший момент, близкий к опрокидывающему. Это свойство гид-
ромуфты позволяет выбирать двигатель меньшей мощности и га-
баритов.
Гидромуфта с предкамерой без дополнительного объема
подбирается к двигателю так, чтобы при ее оптимальном за-
полнении характеристика насоса пересекала устойчивую часть
характеристики двигателя вблизи точки К- Для привода некото-
рых машин (например, конусных дробилок), для которых суще-
ственное значение имеет величина пускового момента привода
под нагрузкой, желательно применять специальные короткозамк-
нутые электродвигатели с большой перегрузочной способ-
ностью.
Предельная гидромуфта с минимальным заполнением или с
дополнительным объемом при разгоне нагружает двигатель по
кривой 3 до точки N' статическим моментом. При предельной на-
грузке на рабочей машине в точке N' характеристики двигателя
равновесное состояние нарушается (Мст>Мдв), и двигатель,
снижая скорость, переходит на работу в точку А установившего-
ся режима. В этом случае для разгона рабочей машины исполь-
зуется также момент, близкий к опрокидывающему моменту дви-
гателя. Однако при этом двигатель при разгоне располагает
большим динамическим моментом (на величину заштрихованной
площади), что позволяет ему пройти быстрее зону больших пус-
ковых токов.
Работа предельной гидромуфты с двигателем
внутреннего сгорания
Предельная гидромуфта с дополнительным объемом улучша-
ет пуск двигателя внутреннего сгорания.
На верхней части рис. 114 нанесены кривые изменения вто-
ричного числа оборотов гидромуфты с дополнительным объе-
мом 1, гидромуфт нормального исполнения с большим 2 и мень-
шим 3 активным диаметром, а также жесткой муфтой 4 в зави-
симости от числа оборотов двигателя внутреннего сгорания.
Внизу показано изменение момента торможения в зависимо-
сти от числа оборотов двигателя внутреннего сгорания.
245
Из графика видно, что при работе гидромуфты с большим ак-
тивным диаметром для полной остановки ведомого вала необхо-
димо значительно снизить скорость ведущего вала. Это возможно
не при всяком двигателе.
Гидромуфта с меньшим активным диаметром хотя и позволя-
ет осуществить полную остановку турбины при меньшем сниже-
Рис. 114. Сравнительные ха-
рактеристики совместной
работы различных типов
гидромуфт с двигателями
внутреннего сгорания:
1 — предельной гидромуфты,
2 н 3 — гидромуфт нормально-
го исполнения с различным
активным диаметром; 4 —
жесткой муфты
нии скорости двигателя, но в обла-
сти нормальных чисел оборотов ра-
ботает с низкими к. п. д.
Условиям пуска и торможения
двигателя внутреннего сгорания
удовлетворяет гидромуфта с допол-
нительным объемом. Она обеспечи-
вает наряду с наименьшим скольже-
нием в рабочей области чисел оборо-
тов двигателя высокое тормозное
число оборотов, т. е. нагружает дви-
гатель при числе оборотов холосто-
го хода наименьшим моментом. Это
позволяет, например, при примене-
нии гидромуфты в приводе транс-
портных машин (автомобилей, ло-
комотивов и др.) без выключениядви-
гателя только снижением его чис-
ла оборотов остановить машину,
полностью отсоединить передачу от
двигателя и быстро осуществить зад-
ний ход.
При пуске двигателя под нагруз-
кой предельная гидромуфта нагру-
жает его постепенно до полного чи-
сла оборотов. Ввиду этого двига-
тель внутреннего сгорания при пус-
ке под нагрузкой не глохнет.
Кроме того, малый интервал ре-
гулирования скоростей двигателя,
обеспечивающий полный диапазон
скоростей турбины, позволяет использовать предельную гидро-
муфту в приводе грузоподъемных устройств.
Гидромуфта защищает привод, в частности редуктор, от кру-
тильных колебаний, источником которых является двигатель
внутреннего сгорания. Это позволяет применять шестерни более
низкого класса, а также снижать напряжения в валах.
Наилучшей характеристикой предельной гидромуфты следует
считать такую, у которой при любом скольжении выше критичес-
кого момент педдерживается постоянным и равным Л4крит. Для
получения такой характеристики дополнительный объем
246
выбирается большой емкости, чтобы он обеспечивал допускаемый
пусковой момент, не превышающий Мкрит.
Однако в предельной гидромуфте при критическом скольже-
нии значительное количество жидкости мгновенно сливается в до-
полнительный объем, при этом опоражнивается рабочая полость,
что приводит к исчезновению момента на участке характеристики
при скольжении 30—50%.
Это явление можно было бы избежать уменьшением емкости
дополнительного объема. Однако при этом увеличивается пуско-
вой момент до 3 -г 4-кратного от номинального, что недопустимо
для защитных гидромуфт.
Провал момента замедляет разгон приводимой машины, а
в случае уменьшения момента ниже номинального значения не
позволяет при номинальной нагрузке на рабочей машине произ-
вести разгон до полной скорости ведомого вала.
По данным лаборатории гидроэлектропривода Института гор-
ного дела им. А. А. Скочинского устранить провал в характерис-
тике гидромуфты можно установкой порога или предкамеры, за-
медляющих процесс самоопоражнивания рабочей жидкости.
В табл. 22 указаны параметры защитных гидромуфт, разра-
ботанных лабораторией гидропривода ИГД им. А. А. Скочин-
ского совместно с Гидроуглемашем и выпускаемых серийно для
угольной промышленности.
Таблица 22
Некоторые параметры защитных гидромуфт
Тип гидромуфты Номинальная мощность в квт Число оборотов ведущего вала в минуту Область применения
ТМ-25 25 1480 Скребковые конвейеры
ТМ-85 85 1480 Ленточно-цепные конвей-
еры
Т-90 90 1480 Ленточные конвейеры
ТА-20 20 1480 То же
На рис. 115 показан первый промышленный образец предель-
ной гидромуфты с N = 400 квт при пх = 1480 об/мин конструк-
ции ВНИИМЕТМАШа для привода крупных конусных дробилок
Уралмашзавода.
Колесо насоса 1 жестко связано с ведущим валом 2, который
имеет опору и соединен с электродвигателем зубчатой муфтой.
Колесо турбины 3 насажено на ведомый вал 4, который центри-
руется в ведущей части двумя шарикоподшипниками и имеет
также свою опору.
Рабочие колеса, кожух 5 и корпус дополнительного объема 6
выполнены из алюминиевого сплава.
247
u_------------^g50----------------------- !
Рис. 115. Промышленный образец предельной гидромуфты ГМП-700 конструкции ВНИИМЕТМАШа (/V = 400 квт; п.\—
= 1480 об/мин) для привода дробилок: |Л»-
/ — насос; 2 — ведущий вал; 3 — турбина; 4 — ведомый вал; 5 — кожух; 6 — корпус дополнительного объема; 7 — предохранитель;
о — конечный выключатель
Подобная конструкция ротора гидромуфты из алюминиевого
сплава не только улучшает теплоотвод, но и за счет уменьшенно-
го махового момента ведущей части гидромуфты облегчает пуск
приводного электродвигателя.
Дополнительный объем соединен с рабочей полостью и пред-
камерой гидромуфты сменными ниппелями с калиброванными
отверстиями.
Во избежание опасного перегрева масла свыше 115° С при
завале конусной дробилки, когда вал турбины застопорен при
работающем электродвигателе, предусмотрен тепловой предохра-
нитель 7.
Предохранитель при перегреве масла срабатывает и, воздей-
ствуя своим бойком на конечный выключатель 8, отключает дви-
гатель.
'Конструкция гидромуфты, имеющей свои опоры, облегчает
частую сборку при испытаниях и наладке опытного образца.
С переходом к серийному выпуску предельных гидромуфт можно
рекомендовать конструкцию более компактной гидромуфты, под-
вешенную на редукторе и эластично связанную с электродвига-
телем.
За рубежом широко распространены предельные гидромуфты
фирмы Фойт следующих основных типов: Tv, Т и TD.
Эти гидромуфты выполняются подвесными.
Гидромуфты типа Tv и Т применяются с короткозамкнутыми
асинхронными электродвигателями в качестве нерегулируемых
пусковых и предохранительных муфт. Эти наиболее распростра-
ненные гидромуфты выполняются с дополнительным объемом и
предкамерой и применяются в тех случаях, когда необходимо об-
Таблица 23
Ряд мощностей предельных гидромуфт типа Tv-1 фирмы Фойт
Активный диаметр в мм Число оборотов ведущего вала в минуту
725 970 1450
274 До 2 л. с. До 6 л. с.
316 До 2 » 4 14
366 » 4 » 8 30
422 » 8 » 16 60
487 » 16 » 32 120
562 32 » 70 250
650 » 70 » 160 530
750 160 » 370 ——
866 350 — ——
1100 700 — —
Примечание. Величины мощности даны прн номинальном скольжении.
249
легчить пуск двигателя под нагрузкой или осуществить разгон
больших маховых масс рабочей машины.
Гидромуфты типа Т имеют предкамеру, но без дополнитель-
ного объема, и применяются там, где требуется только гашение
колебаний и защита машины и двигателя от перегрузок.
Гидромуфты типа TD с предкамерой и дополнительным объе-
мом применяются в качестве защитных и пусковых между двига-
телем внутреннего сгорания и трансмиссией рабочей машины.
Этот вид гидромуфт распространен в приводе транспортных и
подъемных машин.
В табл. 23 приведен ряд нормальных мощностей гидромуфт,
выпускаемых фирмой Фойт. Внутри указанного ряда мощностей
за счет изменения первоначального заполнения можно получить
любую промежуточную мощность гидромуфты.
§ 3. ОБЛАСТЬ ПРИМЕНЕНИЯ ГИДРОМУФТ ПОСТОЯННОГО ЗАПОЛНЕНИЯ
Гидромуфты постоянного заполнения широко распространены
в приводе различных машин.
В большинстве случаев применение гидромуфты позволяет
повысить экономичность и надежность установки, улучшить ди-
намику и управление всей системы, сократить производственную
площадь под привод.
Гидромуфта может выполнять в приводе следующие функции:
осуществлять пуск приводного двигателя при нагруженной
машине;
защищать двигатель рабочей машины и привода от перегру-
зок; при этом величина предельного момента, передаваемого
гидромуфтой, может быть изменена в широких пределах за счет
заполнения гидромуфты;
плавно включать и давать ускорение большим инерционным
массам рабочей машины, причем время разгона системы может
регулироваться степенью первоначального заполнения гидро-
муфты;
выравнивать нагрузку при многодвигательном приводе;
демпфировать крутильные колебания и ударную нагрузку;
компенсировать неточности монтажа.
В табл. 24 приведен перечень основных машин, в приводе ко-
торых применяются гидромуфты постоянного заполнения.
Применение предельных гидромуфт целесообразно в приводе
машин, режимы работы которых характеризуются тяжелыми ус-
ловиями пуска и резкими перегрузками. К числу этих машин от-
носятся дробилки всех видов, барабанные, стержневые и шаро-
вые мельницы, центрифуги, сепараторы, экстракторы, транспор-
теры всех видов и т. п.
Условия работы подобных машин требуют от приводного дви-
гателя большого пускового момента для преодоления повышен-
250
Области применения гидромуфт постоянного заполнения
Таблица 24
Типы машин Наименование машин
Технологическое обо- рудование различных отраслей промышленно- сти Транспортирующие и погрузочные машины Строительные машины Железнодорожный подвижной состав Автомобили Судовые машины Текстильные машины Дробилки всех видов, барабанные, стержневые и шаровые мельницы, центрифуги, центробежные литейные машины, сушильные барабаны, враща- ющиеся цементные печи, прессы, ковочно-штам- повочные машины, нефтебуровые установки (про- мывочные насосы и подъемники) Транспортеры всех видов, землечерпалки, эле- ваторы, рольганги, краны, лебедки, вороты, ав- топогрузчики, гусеничные машины Экскаваторы, бульдозеры, скреперы, бетоно- мешалки, катки, буровые установки Тепловозы, дизельпоезда, электропоезда, по- воротные круги, передвижные платформы Автобусы, грузовые и легковые автомобили Гребневые винты, землесосы Прядильные машины, крутильные, чесальные и отделочные машины
ного момента трогания или для ускорения значительных инер-
ционных масс.
В таких случаях приходится выбирать двигатель повышен-
ной мощности и больших габаритов по условиям пуска, что при-
водит к недостаточному использованию двигателя в период уста-
новившейся нагрузки и к ухудшению его эксплуатационных пока-
зателей (к. п. д. и коэффициента мощности).
Эта задача решается применением предельной гидромуфты
совместно с двигателем нормальной, не повышенной мощности.
Вместе с тем гидромуфта предельного типа обладает способ-
ностью автоматически отключаться при превышении нагрузки
определенного значения и при этом защищать машину от пере-
грузок.
Другим примером применения предельной гидромуфты может
служить установка их в конусных дробилках УЗТМ.
Режим работы привода крупной дробилки, имеющей произ-
водительность 1350 т руды в 1 ч и обслуживающей большую
часть комбината, характеризуется тяжелыми условиями пуска
вхолостую и под нагрузкой.
Гидромуфта позволяет применить для разгона больших ма-
ховых масс ротора дробилки вместо асинхронного двигателя с
фазовым ротором более дешевый, простой и надежный быстро-
ходный асинхронный короткозамкнутый двигатель.
При случайных остановках дробилки с рудой приходится пус-
кать ее в ход в заполненном состоянии. При этом гидромуфта,
постепенно нагружая двигатель, позволяет ему мгновенно на-
251
брать полное число оборотов, после чего начинает разгоняться
ротор дробилки, причем для его разгона используется не пуско-
вой, а значительно больший момент двигателя, близкий к опро-
кидывающему.
Предельная гидромуфта, ограничивая момент определенной
величиной, защищает двигатель, детали дробилки и привода от
мгновенных перегрузок, которыми характерен режим работы дро-
билки.
В случае превышения предельной нагрузки на дробилке вал
турбины гидромуфты, нагруженный предельным моментом, оста-
навливается при работающем двигателе. При перегреве масла
в гидромуфте срабатывает тепловой предохранитель и отключает
двигатель.
Осциллограммы (рис. 116) характеризуют работу гидропри-
вода при пуске дробилки вхолостую, при длительной работе на
режиме дробления, а также при застопоренном ведомом вале
гидромуфты.
На рис. 117 показано изменение момента, передаваемого гид-
ромуфтой ВНИИМЕТМАШа при заполнении ее полости 65 л, чи-
сел оборотов двигателя и турбины, а также тока статора элек-
тродвигателя в функции времени при пуске дробилки вхоло-
стую.
Как видно, для пуска дробилки гидромуфта полностью ис-
пользует перегрузочный момент двигателя, равный 2,5-кратной
величине от номинального значения, и легко в течение 10 сек
разгоняет значительные инерционные массы дробилки (GD2 —
= 20 тм2).
Двигатель набирает полное число оборотов за 3—4 сек при
одновременном падении пусковых токов.
Разгон ведомого вала начинается спустя 2 сек после пуска
двигателя по достижении им 800 об!мин.
Для получения маневренной и компактной гидромуфты в при-
воде дробилок используют быстроходный двигатель в сочетании
с понижающим редуктором. Такая система привода позволяет
передавать за счет шестеренной передачи в единице объема
в 10 раз больший крутящий момент, чем единица объема тихоход-
ного электродвигателя.
Гидромуфты фирмы Фойт мощностью 30 л. с. при П1 =
= 1450 об1мин устанавливаются в приводе моталок при произ-
водстве цветного проката. Здесь гидромуфта позволяет осущест-
влять разгон значительных инерционных масс моталки коротко-
замкнутым двигателем, а также поддерживать натяжение метал-
ла при его намотке постоянным.
В процессе намотки с наложением каждого витка натяжение
в полосе (кабеле) с увеличением диаметра бунта увеличивается
до тех пор, пока возросшая линейная скорость намотки не ста-
нет равной скорости выхода металла из валков.
252
Рис. 116. Осциллограммы работы гидромуфты ВНИИМЕТМАШа в приводе конусной дробилки:
а — пуск дробилкн вхолостую; б — пуск при застопоренном ведомом вале гидромуфты; в — длительная работа на режиме дробления
w
При этом характер и величина изменения натяжения опреде-
ляются технологическими факторами и свойствами привода мо-
талки.
С увеличением натяжения, а следовательно, и нагрузки на ба-
рабане моталки гидромуфта, автоматически снизив скорость,
передает увеличенный момент, соответствующий возросшему на-
тяжению полосы (кабеля).
Так как передаваемый гидромуфтой момент возрастает толь-
ко при уменьшении скорости турбины, то в начальной фазе про--
Рис. 117. Разгон гидромуфтой дробилки вхолостую
(заполнение 65 л):
1 — изменение числа оборотов электродвигателя; 2 — из-
менение числа оборотов ведомого вала гидромуфты (пм
3 — изменение крутящего момента М; 4 — изменение силы
тока статора электродвигателя 1ст
цесса при наложении каждого нового витка происходит разрядка
маховых масс системы привод — моталка с уменьшением угловой
скорости вращения.
При снижении скорости турбины момент гидромуфты увели-
чивается и в новом установившемся режиме уравновешивается
моментом натяжения.
За рубежом распространены приводы ленточного конвейера
от трех короткозамкнутых двигателей через предельные гидро-
муфты фирмы Фойт типа Ту-422.
В подобных многодвигательных приводах конвейеров и транс-
портеров всех видов используется способность гидромуфт к про-
скальзыванию, автоматическому выравниванию и перераспреде-
лению нагрузки и чисел оборотов между несколькими приводны-
ми двигателями.
Кроме этого, гидромуфты, сглаживая значительную динами-
ческую нагрузку, действующую на конвейерную ленту при пус-
254
ке, обеспечивают плавный пуск нагруженного конвейера, при
этом двигатели во избежание больших пусковых токов могут
включаться последовательно один за другим с выдержкой в 2—
3 сек.
Ввиду этого устраняются ударные нагрузки, дергание и про-
скальзывание конвейерной ленты, что значительно уменьшает из-
нос и поломки узлов машины.
За рубежом также распространен привод центрифуг от бы-
строходного короткозамкнутого двигателя через предельную гид-
ромуфту фирмы Фойт типа ТГ] и ременную передачу. Такая гид-
ромуфта своей ведущей частью консольно закреплена на валу
вертикального двигателя. Ведомая часть гидромуфты жестко
соединена со шкивом ременной передачи.
Глава VIII. КОМПЛЕКСНЫЕ ГИДРОПЕРЕДАЧИ
Если рассматривать внешнюю характеристику гидротрансфор-
матора, т. е. кривые зависимости к. п.д. г], мощности N и переда-
ваемого крутящего момента М от передаточного отношения z, то
увидим, что значение г] достигает своего максимального значе-
ния в точке, называемой расчетной и соответствующей опреде-
ленному передаточному отношению.
При отклонении величины крутящего момента на ведомом ва-
лу изменяется передаточное отношение и к. п. д. падает. В зави-
симости от лопастных систем гидротрансформатора и числа его
рабочих колес у одних гидротрансформаторов это падение кривой
к. п. д. происходит круто, у других более полого. Таким образом,
диапазон передаточных отношений (иначе говоря, скоростей ве-
домого вала), при которых к. п. д. имеет еще достаточно высокое
значение, например т] = 0,8 и выше, невелик.
Современные машины требуют значительно расширить интер-
вал скоростей с высоким к. п. д.
Для решения этой задачи и созданы комплексные гидропере-
дачи. Принцип действия комплексных передач основан на сочета-
нии гидротрансформатора с гидромуфтой или ц одним или двумя
гидротрансформаторами, имеющими другие внешние характери-
стики. Это сочетание гидротрансформатора с гидромуфтой де-
лается как в одной проточной части, так и в двух, трех проточных
частях.
Мы здесь несколько расширяем понятие комплексной переда-
чи. Обычно комплексный гидротрансформатор определяется как
гидродинамический трансформатор, предназначенный для работы
как в режиме гидродинамического трансформатора, так и в ре-
жиме гидродинамической муфты !.
В этом определении не оговаривается число полостей переда-
чи, но оно ограничивает работу комплексной передачи условием
перехода на режим только гидромуфты. Мы же относим к комп-
1 Гидропривод. Часть I. Гидродинамические передачи. Терминология.
Вып. 63. Изд-во АН СССР, 1964.
256
лексным передачам также такие многополостные передачи, кото-
рые могут работать на режимах гидротрансформаторов с различ-
ными характеристиками.
§ 1. КОМПЛЕКСНЫЕ ГИДРОТРАНСФОРМАТОРЫ
С ОДНОЙ ПРОТОЧНОЙ ЧАСТЬЮ
комплексного гидротрансформатора с од-
опишем на основе конструктивной схемы
первого гидротрансформатора
такого вида — гидропередачи
«Трилок», представленной на
рис. 118.
Принцип действия
ной проточной частью
Рис. 118. Комплексный гидротрансформатор «Трилок»:
/ — ведущий вал; 2 — ведомый вал
Гидротрансформатор заполнен маслом; при вращении насо-
са Н масло под влиянием созданного напора устремляется в тур-
бину Г, где на лопатках масло отдает запасенную им энергию,
которая, превращаясь в механическую, заставляет турбину вра-
щаться. Выйдя из турбины, масло проходит по лопаткам проме-
жуточной части и снова поступает в насос Н.
Из общей теории гидротрансформаторов известно, что крутя-
щий момент Mh создаваемый насосом, момент М2, отдаваемый
турбиной, и момент М3, воздействующий на реактор, связаны
зависимостью
М2 = М1 + Л13. (62)
При трогании с места момент ведомого вала (турбины) дол-
жен быть в несколько раз больше момента ведущего вала (насо-
са). Это наиболее распространенный случай в тяговых машинах.
При трогании с места момент, воздействующий на реактор гидро-
17 Заказ 1076 2 57
М2 промежуточная
потоком жидкости и
в одну сторону с вра-
трансформатора «Трилок» (промежуточную часть Р), имеет до-
статочно большую величину, причем знак его, обратный знаку
момента турбины, т. е. часть Р будет стремиться вращаться в сто-
рону, обратную вращению вала турбины. Этому препятствует сто-
порный механизм С, который связывает часть Р с неподвижным
корпусом. На этом этапе передача «Трилок» представляет собой
гидротрансформатор с насосом, турби-
ной и реактором, трансформирующий
крутящий момент двигателя.
По мере разгона турбины величина
момента Af2 уменьшается, приближаясь к
значению момента насоса а следова-
тельно, как показывает уравнение (62),
уменьшается и Мъ.
При М2 = Мх момент на промежуточ-
ной части равен нулю, = 0. При даль-
нейшем снижении
часть Р увлекается
начинает двигаться
щением турбины.
Однако обогнать ведомый вал она не
сможет, так как ее свяжет с ним специ-
альный стопорный механизм С. Таким
образом, промежуточная часть начнет
работать как турбина, являясь как бы ее
продолжением, и передача «Трилок» ав-
томатически превращается в гидромуфту,
состоящую только из насоса и турбины.
На рис. 119 приведена характеристи-
ка передачи «Трилок». По оси ординат
отложены момент ведущего вала Af1; мо-
мент ведомого вала М2, число оборотов
ведущего вала и к. п. д. в зависимости от
числа оборотов ведомого вала.
две основные ветви вторичного крутящего
О 20 ЦО 60 80%пг
Рис. 119. Внешняя харак-
теристика гидропереда-
чи «Трилок»
На графике видны
момента и к. п. д. Левая ветвь отвечает условиям разгона приво-
димой машины, когда передача «Трилок» работает как гидро-
трансформатор; правая же ветвь соответствует условиям работы
передачи как гидромуфты.
При трогании с места, когда двигатель делает 85% от нор-
мального числа оборотов, коэффициент трансформации kQ =
Ail
достигает значения 4,4. Там, где кривая момента турбины М2 пе-
ресекает кривую момента насоса происходит автоматический
переход с работы гидротрансформатором на работу гидромуфтой
при помощи указанного выше запирающего механизма.
258
В приведенной характеристике переход с гидротрансформато-
ра на гидромуфту происходит при пониженном до 80% числе обо-
ротов двигателя. Поэтому возможность работы на режиме гидро-
муфты (правая ветвь характеристики) обусловлена увеличением
числа оборотов двигателя п\ до нормального (100%), при этом
увеличивается и значение к. п. д. передачи до 0,98.
Но в комплексных передачах такого рода может быть и дру-
гой случай, когда возможность работы на режиме гидромуфты
обусловливается снижением нагрузки на ведомом валу. В этом
случае после того как моменты турбины и насоса стали равными
Л12 = All, т. е. наступил режим работы гидромуфты, продолжается
дальнейшее снижение нагрузки на валу турбины. Вследствие это-
го, несмотря на постоянное число оборотов двигателя nj = const,
число оборотов турбины увеличивается, скольжение понижается,
одновременно с этим, следовательно, увеличивается и к. п. д. гид-
ропередачи.
На режиме работы гидромуфты к. п. д. комплексной передачи
достигает значения 0,92—0,96; таким образом, к. п. д. такой пере-
дачи выше, чем у отдельного гидротрансформатора, а также зна-
чительно шире диапазон чисел оборотов ведомого вала с доста-
точно высоким к. п. д. (выше 0,8).
Укажем теперь на некоторые особенности расчета передачи
«Трилок» и подобных ей конструкций по сравнению с расчетом
обычного гидротрансформатора [16].
При расчете обычного гидродинамического преобразователя
момента все параметры, определяющие его размеры, берутся из
условия получения наивысшего к. п. д. и заданного коэффициен-
та трансформации момента k для рабочей точки, т. е. для расчет-
ного передаточного отношения.
Так как число оборотов ведущего вала пг обычно при расчете
принимается постоянным, то рабочая точка определяется числом
оборотов ведомого вала и2, Для которого и должны быть выполне-
ны приведенные выше условия. Это достигается как правильным
выбором входных углов лопаток рц; р21; Рзг (что возможно сде-
лать потому, что окружные и относительные скорости при по-
стоянных П1 и п2 будут определены), так и профилированием ло-
паток, создающим наилучшие условия для формирования потока
жидкости при данном состоянии поля скоростей. Надо иметь в ви-
ду, что все эти рассуждения мы ведем применительно к расчету
по средней струйке.
Всякое отклонение в ту или иную сторону от выбранного пере-
даточного отношения ip влечет за собой изменение поля скоро-
стей, появление потерь на удар при входе на лопатки и т. д.,
а следовательно, и понижение к. п. д.
При расчете обычной гидромуфты руководствуются также ее
рабочей точкой. При этом наивыгоднейшие условия у нее будут
при передаточном отношении, близком к единице.
17* 259
Отсюда ясно, что при расчете гидропередачи типа «Трилок»
конструктор может встретить ряд трудностей и противоречий. Эти
противоречия вызваны самой сущностью передачи, имеющей два
режима работы: гидротрансформатора и гидромуфты.
Например, входные углы 0ц; p2i; Рз1 обычно выбирают так,
чтобы обеспечить в рабочей точке безударный вход потока жид-
кости на лопатки.
Выполнить эти требования в передаче «Трилок» нельзя, так
как входные углы лопаток, выбранные для рабочей точки гидро-
трансформатора, не будут удовлетворять входным условиям при
работе на режиме гидромуфты, потому что входные условия из-
менятся: в первом случае реактор является неподвижным эле-
ментом, во втором он вращается, а, кроме того, когда передача
работает, как гидромуфта, увеличивается и окружная скорость
турбины.
На характеристику преобразователя в смысле величины коэф-
фициента трансформации момента влияет, как в этом легко убе-
диться из аналитических выражений моментов, направление вы-
ходных кромок рабочих колес (углы pi2; р2г; Рзг), в то время как
входные кромки этого влияния не оказывают. Основная функция
гидротрансформатора «Трилок» — это разгон локомотива или
какой-либо другой приводимой машины, поэтому для работы пе-
редачи «Трилок» в качестве преобразователя более важны вели-
чина и характеристика коэффициента трансформации момента,
чем значение к. п. д.
В то же время высокое значение к. и. д. важно получить при
работе передачи в режиме гидромуфты. Поэтому при расчете пе-
редачи «Трилок» и подобной ей другой комплексной передачи
в качестве первого правила может быть рекомендовано сле-
дующее.
Выходными углами £12; Р22; рзг следует задаваться примени-
тельно к рабочей точке преобразователя, а входными — примени-
тельно к рабочей точке гидромуфты для получения при работе на
втором режиме наивысшего к. п. д.
Это только общее положение, и возможно, что при выборе уг-
лов придется оставить частичные потери на удар при работе пере-
дачи в качестве гидромуфты, чтобы не слишком снижать к. п. д.
гидротрансформатора.
Из вышеизложенного следует, что передача «Трилок» при
каждом режиме будет работать с меньшим к. п. д., чем отдельный
гидротрансформатор или отдельная гидромуфта. К. п. д. передачи
при работе как преобразователя будет не выше 0,80—0,82, а при
работе ее как гидромуфты 0,92—0,96.
При переходе от работы передачи как преобразователя к ра-
боте ее в качестве гидромуфты моменты на обоих валах равны,
т. е. М2 = Мр
260
(63)
Момент реактора М3, который при этом, как видно из уравне-
ния (62), равен нулю:
А13 = —— (гпс32 cos a32 — Г22С22 COS a22) = 0.
g
Это равенство возможно, если выражение в скобках равно
нулю, так как Q =/=(). Отсюда следует
Г 11^32 COS СС32 ~ Г 22^22 cos сс22. (64)
Выражение момента насоса в точке перехода передачи к рабо-
те в качестве гидромуфты примет следующий вид:
(г12с1г cos a12 — rnc32 cos a32)
g
или
Рис. 120. Диаграмма скоростей
для направляющего аппарата
(65)
Alj — (г 12^12 COS СС12 Г22^22 COS 0С22) •
g
Затем процесс работы передачи «Трилок» протекает так: на-
сос работает с постоянным числом оборотов пх = const, ведомый
вал увеличивает число оборотов «2, реактор включается в работу
вместе с турбиной, представляя
с ней одно целое рабочее колесо.
К. п. д. передачи увеличивается.
Выше мы указывали, что ра-
счет обыкновенного гидротранс-
форматора ведется при нормаль-
ном постоянном числе оборотов
П\ = const. Проследим, как при
этих условиях будет работать на-
сос передачи «Трилок».
Как известно, с уменьшением скольжения гидромуфты расход
падает. С другой стороны, как видно из рис. 120, резкое увеличе-
ние скорости реактора увеличивает значение тангенциальной со-
ставляющей Сз2созаз2 так, что Гц C32COSCC32 после перехода пере-
дачи на режим гидромуфты и все дальнейшее время будет боль-
ше выражения г2г с22 cos а22, соответствующего моменту перехода.
Эти два фактора ведут к понижению момента насоса, так как
возможное незначительное увеличение Ci2 cos ai2 недостаточно для
нейтрализации их действия. Следовательно, в этих условиях пе-
редача может работать как гидромуфта только при понижении
передаваемого момента, т. е. при неполном использовании распо-
лагаемой мощности.
Это понижение мощности происходит как раз при режиме наи-
большего к. п. д., что во многих случаях весьма нежелательно.
Итак, мы видим, что работа передачи, как гидромуфты, начи-
ная с точки перехода, происходит при неизбежном понижении мо-
мента насоса. Этого можно избежать увеличением члена Cj2 cos ai2-
261
Незначительное увеличение его при углах р2 < 90° в насосе проис-
ходит за счет уменьшения расхода, т. е. скорости ст, как это вид-
но из рис. 121. Однако быстрее увеличение C]2cos ai2 будет проис-
ходить при увеличении окружной скорости и2, т. е. при увеличении
числа оборотов насоса пх.
Отсюда следует, что понижение момента насоса будет незна-
чительным, если с переходом на режим гидромуфты возрастет
число его оборотов.
Исходя из вышеизложенного можно рекомендовать второе
правило расчета комплексной трехколесной передачи при работе
ее с двигателями внутреннего сгорания: вести расчет передачи
Рис. 121. Треугольник скоростей при выходе
из насоса
при работе ее на режиме гидротрансформатора при несколько
пониженном (на —^20%) числе оборотов насоса.
Изложив принципиальную конструктивную схему однолопа-
стной комплексной гидропередачи и отметив особенности ее расче-
та, перейдем теперь к описанию некоторых современных конст-
рукций.
На рис. 122 представлен современный двухреакторный комп-
лексный гидротрансформатор ЛГ-340-43В конструкции НАМИ
[51]. В этом институте разработано семейство унифицированных
гидротрансформаторов для грузовых автомобилей и городских ав-
тобусов мощностью 100—320 л. с. В семейство входят гидротранс-
форматоры трех типоразмеров с активными диаметрами Da =
= 340, 400 и 440 мм (табл. 25). Внутри каждого типоразмера пре-
дусмотрены модификации.
Передний корпус 2 фрикциона при помощи пальцев, входящих
в запрессованные в маховике двигателя резиновые втулки, соеди-
нен с двигателем. С другой стороны корпус фрикциона жестко
связан с насосом 4 гидротрансформатора. Насос представляет со-
бой отливку с лопатками из алюминиевого сплава. Опорами на-
соса служат маховик двигателя и роликовый подшипник, поса-
женный на ступицу насоса. Этот роликовый подшипник допускает
некоторое осевое перемещение насоса для компенсации деформа-
ций, которые могут возникнуть.
262
Рис. 122. Комплексный гидротрансформатор
ЛГ-340-43В конструкции НАМИ:
1 — первый реактор; 2 — корпус фрикциона; 3 — турбина;
4 — насос; 5 — муфта свободного хода; 6 — ведомый вал;
7 н 9 — шарикоподшипники; 8 — второй реактор
Рис. 123. Комплексный трехколесный гидротранс-
форматор НАМИ:
1 — насос; 2 — турбина; 3 — реактор; 4 — роликоподшип-
ник; 5 — ведомый вал; 6 — муфта свободного хода
Таблица 25
Характеристика комплексных гидротрансформаторов типа ЛГ-340
Марка гидротранс- форматора Коэффициент трансфор- мации Максимальный к. п. д. в % Передаточное отношение Максимальный коэффициент момента Хтах • 10е в мин*!м об* Коэффициент прозрачности п ^1 шах 5? Коэффициент обратной пптпалил/’ти ГТ —. 1 ШЭХ
kQ при / = 0 О оо II as Q. С /*, соответствую- щее tj* 1 , соответствую- щее переходу на режим гидромуфты
ЛГ-340-ЗА 3,25 1,55 85 0,77 0,84 3,0 1,51 1,08
(серийный) ЛГ-340-43В 3,05 1,95 89 0,70 0,85 2,98 1,56 1,04
ЛГ-340-44В 3,50 1,9 88 0,68 0,84 2,98 1,42 1,10
ЛГ-340-35 3,05 2,0 90 0,68 0,85 2,23 1,37 1,11
ЛГ-340-35В 3,25 2,05 89 0,68 0,84 2,38 1,32 1,08
ЛГ-340-54 2,90 1,9 88 0,65 0,83 2,61 1,36 1,13
ЛГ-340-56 2,70 1,8 89 0,67 0,84 3,20 1,6 1,07
ЛГ-340-59 2,4 1,6 89 0,70 0,85 4,75 1,7 1,02
Турбина 3 также отлита из алюминиевого сплава. Она поса-
жена на ведомый вал 6. Ведомый вал опирается на шарикопод-
шипники 7 и 9.
Первое колесо реактора 1 и второе колесо реактора 8, отли-
тые из алюминиевого сплава, крепятся на неподвижном валу ре-
актора при помощи роликовых муфт 5 свободного хода (авто-
логов) .
264
В корпусе переднего фрикциона располагается сцепление, бло-
кирующее насос и турбину на определенных режимах работы.
Ступица сцепления установлена на шлицах вала турбины.
Избыточное давление в проточной части создается при помо-
щи масляного шестеренчатого насоса с внутренним зацеплением.
Давление, создаваемое этим насосом, используется как для соз-
дания избыточного давления в проточной части и прокачивания
жидкости через систему охлаждения, так и для управления сцеп
лением главного фрикциона и фрикционами коробки передач.
На рис. 123 показан трехколесный комплексный гидротранс
форматор с одним реактором.
Внешние характеристики двухреакторного и однореакторно
го комплексного гидротрансформатора ЛГ приведены на рис. 124
Из характеристик следует, что
к. п. д. комплексной передачи
на режиме гидротрансформа-
тора доходит до значения т] =
= 0,87, а на режиме гидро-
муфты до т] = 0,95. Помимо
гидротрансформаторов авто-
мобильного типа ЛГ, в СССР
строятся для различных транс-
портных машин подобные
комплексные гидротрансфор-
маторы типа ГТК.
Калужский машинострои-
тельный завод строит унифи-
цированные гидропередачи с
гидротрансформатором ГТК-П,
имеющим передаваемую мощ-
ность 150—230 л. с., активный
диаметр 466 мм. В качестве
жидкости применяется масло
индустриальное 12 или 20.
§ 2. КОМПЛЕКСНЫЕ
ГИДРОТРАНСФОРМАТОРЫ С ДВУМЯ
И ТРЕМЯ ПРОТОЧНЫМИ ЧАСТЯМИ
Комплексные гидротранс-
форматоры этого вида содер-
жат две или три отдельные
проточные части, которые ра-
ботают по очереди в зависимо-
Рис. 125. Внешняя характеристика
двухполостной гидропередачи (гид-
ротрансформатор и гидромуфта): .
j — момент на ведомом валу; 2 — число
оборотов ведущего вала; 3 — момент на
ведущем валу; 4 — к. п. д. гидропередачи
сти от того, какая проточная
часть заполнена рабочей жидкостью. Например, комплексный
гидротрансформатор, состоящий из гидротрансформатора и гид-
ромуфты, работает в левой ветви своей внешней характеристики
265
Рис. 126. Гидропередача тепловоза ТГМ-1:
1,3 — гидромуфты; 2, 5, 6, 9, 10, 12 — зубчатые колеса; 4 — гидротрансформатор; 7 — вал гидропередачи; 8 — вал; 11 — отбойный
вал
(рис. 125) как гидротрансформатор, а в правой, когда к. п. д.
его начинает падать, переходит на режим гидромуфты. Для осу-
ществления этого перехода полость гидротрансформатора опо-
ражнивается, а полость гидромуфты заполняется. С переходом
на работу гидромуфты к. п. д. передачи увеличивается.
На рис. 125 показана внешняя характеристика гидропередачи
«Фойт-Синклер». На режиме гидротрансформатора минимальный
к. п. д. передачи т] = 0,82 ч-0,83, с переходом на рабочую полость
гидромуфты к. п. д. увеличивается до значения т] = 0,97. Гидро-
передача имеет высокий коэффициент трансформации момента
при трогании с места k0 = 4,5, это позволяет быстро производить
разгон автомотрисы. При опоражнивании гидротрансформатора
и заполнении гидромуфты, т. е. при переходе с одного режима
на другой, число оборотов двигателя понижается на 30%.
Это делается для того, чтобы уменьшить во время перехода
скольжение гидромуфты. Если число оборотов двигателя не сни-
жать, предполагая, что двигатель вращается с числом оборотов
«1 = 100% (в точке перехода ведомый вал вращается с числом
оборотов п2 = 70%), то гидромуфта будет работать со скольже-
нием S = 30%. Это вызвало бы большую перегрузку двигателя
и он мог заглохнуть.
На рис. 126 представлена комплексная гидропередача для теп-
ловоза ТГМ-1 мощностью 400 л. с. Муромского тепловозострои-
тельного завода. Гидропередача состоит из гидротрансформатора
и двух гидромуфт.
Вал двигателя через упругую муфту и пару зубчатых колес 5
и 6 вращает вал 7, на котором насажен насос гидропередачи.
Колеса турбин гидротрансформатора 4 и первой гидромуфты 3
при помощи зубчатых колес 2 и 9 приводят во вращение вал 8.
Колесо турбины второй гидромуфты 1 вращает вал 8 через зубча-
тую пару 12 и 10. С вала 8 крутящий момент передается через
конические колеса на отбойный вал 11, а оттуда на колеса тепло-
воза.
ЧАСТЬ ТРЕТЬЯ
ГИДРОСТАТИЧЕСКИЙ ПРИВОД
Глава IX. ОБЩИЕ СВЕДЕНИЯ О ГИДРОСТАТИЧЕСКОМ
ПРИВОДЕ
§ 1. ГИДРОСТАТИЧЕСКИЙ ПРИВОД И ЕГО ЭЛЕМЕНТЫ
Гидравлический привод (или гидравлическая система) пред*
ставляет собой совокупность механизмов и устройств, служащих
для передачи энергии при помощи жидкости.
Как отмечалось выше, гидравлические приводы можно разде-
лить на два основных типа: гидростатические (или объемные) и
гидродинамические.
В отличие от гидродинамического привода, в котором переда-
ча энергии осуществляется главным образом изменением скоро-
сти жидкости в цепи, в гидростатическом приводе энергия пере-
дается давлением жидкости без значительного изменения ее ско-
рости.
Гидростатический привод составляют следующие основные
элементы:
источник гидравлической энергии — насос или аккумулятор;
приемник гидравлической энергии — гидродвигатель;
органы регулирования и распределения гидравлической
энергии;
органы защиты.
В гидростатическом приводе насос и гидродвигатель — гид-
равлические машины объемного типа.
На рис. 127 показана одна'из схем гидростатического привода,
на которой можно видеть все названные выше элементы.
Система работает следующим образом. Предположим, что
распределительный кран закрыт, так что гидродвигатель отклю-
чен от линии нагнетания насоса. При включении насоса жидкость
начнет поступать в аккумулятор, заполняя его. Давление в нем
повышается. Когда оно достигнет заданной величины р0, сраба-
тывает специальное регулирующее устройство, называемое авто-
матом разгрузки, которое переключает насос на линию слива,
почти полностью разгружая его. Линия, ведущая к исполнитель-
268
ным механизмам, оказывается, таким образом, подключенной
к другому источнику гидравлической энергии — аккумулятору.
Разрядиться же аккумулятор на бак через насос не может из-за
обратного клапана, установленного между ним и насосом.
Пусть теперь поворотом распределителя (на 45° в ту или дру-
гую сторону) включается гидроцилиндр. Тогда жидкость в него
будет поступать из аккумулятора, давление в котором начнет па-
дать. При достижении некоторого заданного давления р} автомат
разгрузки переключает насос с линии слива на аккумулятор, бла-
годаря чему начнется вновь заполнение аккумулятора и повыше-
ние давления в нем до ро, ког-
да насос вновь будет отключен
на слив. Таким образом, рас-
сматриваемая система рабо-
тает попеременно от двух ис-
точников давления — насоса
или аккумулятора, включение
которых определяется давлени-
ем в аккумуляторе.
5 Ч
'3 !.
4U
Рис. 127. Схема гидростатического привода:
1 — аккумулятор; 2 — распределитель; 3 — автомат разгрузки; 4 — обратный
клапан; 5 — фильтр; 6 — предохранительный клапан; 7 — насос; 8 — бак
При аварийной закупорке нагнетательной линии между насо-
сом и точкой подключения автомата разгрузки (например, при
закупорке фильтра) открывается предохранительный клапан,
пропуская всю подаваемую насосом жидкость на слив.
Как видно из описания работы схемы, к органам регулирова-
ния относится автомат разгрузки и распределитель, который име-
ет три позиции: позицию прямого хода, обратного хода и ней-
тральную позицию, при которой доступ жидкости в гидродвига-
тель закрыт. Таким образом, этот распределитель выполняет
функцию только регулирования направления потока жидкости,
но не регулирования скорости перемещения штока гидро-
цилиндра. Скорость перемещения штока гидроцилиндра в рас-
сматриваемой схеме определяется, как мы увидим ниже, характе-
ристикой насоса, характеристикой системы и законом изменения
нагрузки.
Гидросистема подобного типа является гидросистемой пози-
ционного действия.
К органам защиты гидросистемы относятся предохранитель-
ный клапан, обратный клапан и фильтры.
Кроме показанных на рис. 127 органов распределения и защи-
ты, имеются другие, не вошедшие в рассмотренную схему, а имен-
но: регуляторы расхода, регуляторы давления, дозаторы, гидрав-
лические реле, клапаны-гасители гидравлического удара и т. п.
§ 2. ХАРАКТЕРИСТИКА ОБЪЕМНОГО НАСОСА
Изучение свойств гидростатического привода начнем с рас-
смотрения характеристики объемного насоса.
Объемные насосы имеют характеристику, показанную на
рис. 128 в координатах р — Q, где р — давление, развиваемое
насосом, и Q—расход насоса. Характеристики насоса представля-
ют собой семейство линий, близких к прямым, проходящим с не-
большим наклоном к вертикали; вертикаль Q = const (пунктир-
ная линия) представляет собой характеристику идеально уплот-
ненного насоса, в котором нет никаких дополнительных органов
изменения расхода в зависимости от давления, т. е. так называе-
мого нерегулируемого насоса, иначе называемого насосом по-
стоянной подачи.
Рис. 128. Характеристики объ-
емного насоса
Рис. 129. Характеристика
объемного насоса с регуля-
то ром
Отклонение действительной характеристики объемного на-
соса влево от пунктирной прямой объясняется утечками в зазо-
рах, зависящими от давления в рабочей полости насоса, а также
механическими деформациями его элементов.
Таким образом, объемный насос представляет собой генератор
приблизительно постоянного расхода.
Из рис. 128 следует, что давление, создаваемое объемным на-
сосом, может достигнуть большой величины, определяемой со-
противлением нагнетательной линии.
270
Чтобы защитить насос от недопустимо высокого давления
(как это показано на рис. 127) в линии нагнетания уста-
навливают предохранительный клапан.
Характеристика насоса с предохранительным клапаном пока-
зана на рис. 129. При давлении р0 предохранительный клапан от-
крывается, сообщая линию нагнетания насоса с линией слива.
Расход, подаваемый идеально уплотненным объемным насо-
сом, может быть записан (без учета упругости жидкости) в виде
выражения
Q = qn,
где п — число оборотов в единицу времени, a q— литраж насоса,
т. е. геометрически измещенный объем за один оборот приводно-
го вала.
Если в поршневом насосе число поршней i, то его литраж
равен
q = fsiz,
где f — площадь поршня;
s — ход поршня;
i — число поршней;
г — число циклов «всасывание — нагнетание», совершаемых
поршнем за один оборот приводного вала.
§ 3. КЛАССИФИКАЦИЯ ГИДРОДВИГАТЕЛЕЙ И ИХ ЛИТРАЖ
По виду движения выходного элемента гидродвигатели разде-
ляются на:
гидродвигатели возвратно-поступательного движения или гид-
роцилиндры;
гидродвигатели вращательного движения или гидромоторы;
гидродвигатели возвратно-вращательного движения (рис. 130).
В показанной на рис. 130 конструкции возвратно-вращатель-
ное движение совершается при угле а = 100° (в конструкцию вве-
ден включающийся в конце хода демпфирующий клапан, кото-
рый на рис. 130 показан пунктиром).
Аналогично насосам гидродвигатели также характеризуются
литражом q, который равен:
для гидромоторов поршневого типа q = fsiz, где f — площадь
поршня; s — его ход; i — число поршней и z — число циклов за
один оборот;
для гидроцилиндров q = fs, где s — ход поршня гидро-
цилиндра;
для гидромоторов возвратно-вращательного типа q = fs, где
s — ход пластины, измеренный по дуге, описанной ее центром
тяжести.
Литраж q является важной характеристикой гидромотора.
Часто его вводят в маркировку гидромотора.
271
Ниж\приведены формулы для расчета основных параметров
насоса и гйдромотора.
Мощность, подводимая к валу насоса,
N = -^~
П
где р — давление, развиваемое насосом;
т] — полный к. п. д. насоса;
Q — действительный расход насоса.
6) г)
Рис. 130. Гидродвигатели возвратно-вращательного движения:
а — двухлопастной; б — трехлопастной; в — гидроцилиндр с винтовым преобразовате-
лем поступательного движения во вращательное; г — гидроцилиидры с реечным преоб-
разованием движения
Число оборотов в минуту
п = 60 ,
Q
где Но — объемный к. п. д. насоса; т]0 = —5
Qt
QT — теоретический расход насоса;
q — объемная постоянная насоса, его литраж.
Угловая скорость вращения вала насоса
2nQ
со =-----.
тм
272
Крутящий момент на валу насоса
ТИ = -А- . -^-pq.
2л 1]
Мощность, отдаваемая гидромотором (мощность на валу
гидромотора),
N = pQi),
где р — давление, срабатываемое на гидромоторе;
Q — расход, подводимый к гидромотору;
т] — полный к. и. д. гидромотора.
Число оборотов
п = 60 ,
<?
где т]0 — объемный к. п. д. гидромотора;
no=
18 Заказ 1076
273
QT — теоретический, т. е. геометрический расход гидро-
мотора;
q — литраж гидромотора.
Угловая скорость вращения вала гидромотора
щ =
<7
Крутящий момент на валу гидромотора
Для быстроты предварительных расчетов можно пользоваться
номограммой (рис. 131), связывающей N, М, q, Q, р и п.
Номограмма построена в предположении т] = Ло = КО.
§ 4. РЕГУЛИРОВАНИЕ СКОРОСТИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
В предыдущем параграфе мы получили, что число оборотов
гидромотора определяется выражением п = 60 т]0—. Следова-
9
тельно, изменение числа оборотов гидромотора может быть до-
стигнуто либо изменением расхода Q, подаваемого в гидромотор,
либо изменением его литража q.
Рассмотрим случай нерегулируемого гидромотора: q = const.
Тогда регулирование числа оборотов осуществляется изменением
расхода Q, направляемого в гидромотор,
В зависимости от способа, которым достигается это изменение
расхода направляемой в гидромотор жидкости, различают два
метода регулирования скорости: объемное и дроссельное.
При объемном регулировании изменение расхода Q, посту-
пающего в гидромотор, достигается изменением литража или чис-
ла оборотов насоса, т. е. объемное регулирование означает при-
менение в схеме регулируемого насоса.
При дроссельном регулировании изменение расхода Q, на-
правляемого в гидромотор, осуществляется изменением гидравли-
ческого сопротивления линии, в которую он включен.
Дроссельное регулирование может быть осуществлено только
в схемах, в которых источником гидравлической энергии является
не генератор постоянного расхода, а генератор постоянного дав-
ления, т. е. аккумулятор (или центробежный насос), который мо-
жет быть представлен на гидравлической схеме гидросистемы как
высокорасположенный резервуар с постоянным (или мало меня-
ющимся) уровнем в нем. Иными словами, дроссельное регулиро-
вание может быть осуществлено в гидравлических системах, вы-
полненных по схеме р0 = const. Одна из таких схем, допускающих
дроссельное регулирование, показана на рис. 132. Эта схема со-
ответствует схеме, изображенной на рис. 127 в тот период ее ра-
274
боты, когда автомат разгрузки переключает насос на слив, а вся
цепь нагрузки подключена к аккумулятору. Пусть Но = — — пол-
ный напор, под которым работает гидросистема, т. е. напор, соот-
ветствующий давлению зарядки аккумулятора. Пусть Н] — поте-
ри напора в сопротивлениях (трубах, дроссельных отверстиях
органов распределения); Н2 — перепад напора в гидромоторе
Рис. 132. Схема дроссельного регулирования ско-
рости
(сопротивлением линии слива пренебрегаем), тогда можно
записать
tfo = /Л + Н.,,
или
Н1=Н0 — Н2.
Но расход Q в трубопроводе (а значит, и в гидромоторе, по-
скольку они соединены последовательно) связан с потерями на-
пора известным соотношением
"-гтёг=с<г’
где £— приведенный коэффициент сопротивления трубопровода
и местных сопротивлений (золотникового распределите-
ля и т. п.), a f — некоторая характерная площадь (на-
пример, площадь поперечного сечения проходного кана-
ла распределительного органа).
Из последнего равенства следует, что
«=]/ -г--/
Следовательно, меняя при заданных Но и Н2 коэффициент С,
т. е. изменяя сопротивление в цепи гидродвигателя, мы изменяем
тем самым и расход Q, поступающий в гидродвигатель, а значит,
18* 275
и скорость движения его выходного звена (скорость поступатель-
ного движения штока гидроцилиндра или число оборотов вала
гидромотора).
В этом состоит сущность дроссельного регулирования. В схе-
мах объемного регулирования изменение сопротивления в цепи
гидродвигателя не приво-
дит к изменению его ско-
рости, а вызывает только
изменение давления, раз-
виваемого насосом.
Другая гидравличе-
ская система, работаю-
щая по схеме р0 = const,
показана на рис. 133. Это
схема гидропривода без
аккумулятора, но с пере-
пускным клапаном, вклю-
ченным параллельно гид-
родвигателю. Скорость
гидродвигателя можно
определить графо-анали-
Рис. 133. Дроссельное регулирование ско-
рости в системе с перепускным клапаном:
/ — гидромотор (<7 = const); 2 — насос
тическим методом.
На рис. 134 в координатах Н— Q построены характеристики:
линии ведущей от точки разветвления к гидромотору (харак-
Рис. 134. Графическое определение ско-
рости исполнительного органа гидро-
привода:
1 — характеристика линии, ведущей к гидро-
мотору; 2 — характеристика перепускного
клапана; 3 — нагрузочная характеристика
гидромотора; 4 — характеристика насоса,
А — рабочая точка системы
Рис. 135. Дроссельное регулиро-
вание при помощи золотника
теристика /); линии £2, ведущей от перепускного клапана на слив
(характеристика 2); характеристика гидромотора 3, нагрузка на
который предполагается постоянной; характеристика насоса 4.
Суммируя по напорам характеристики 1 и 3, а затем склады-
вая с полученной характеристику 2 по расходам, найдем точку А
276
Рис. 136. Характеристики идеального
золотника
пересечения результирующей характеристики с характеристикой
насоса. Точка А является рабочей точкой системы.
Из графо-аналитического определения расхода Qj видно, что
изменяя сопротивление линии гидродвигателя (т. е. характери-
стику 1), можно получить различный расход Qb а значит, и раз-
личную скорость гидродвигателя. При полностью заторможенном
гидродвигателе рабочей точкой системы будет точка В, и напор,
создаваемый насосом, будет равен Но.
Рассмотрим теперь дроссельное регулирование при помощи
цилиндрического золотника (рис. 135). В качестве гидродвигате-
ля рассмотрим гидроцилиндр. Пусть золотник будет смещен от
своего закрытого положения на
величину х. Тогда жидкость по-
ступает через правое золотни-
ковое окно в правую полость
цилиндра, перемещая его вле-
во. Жидкость из левой полости
поступает через левое золотни-
ковое окно в сливную линию.
Обозначив полный напор, под
которым работает гидродвига-
тель, через Но, можно написать
следующее равенство:
Но = 2Н. + Нг,
где Н2 — перепад напора, соот-
ветствующий нагруз-
ке;
Hi —потери напора в золотниковой кромке.
Предположим, что потери напора в кромках золотника одина-
ковы, т. е. что золотник симметричен, тогда из последнего равен-
ства получим
Н =
1 2
но расход через кромку золотника равен
Q = uf 2gH1 = [indx
Так как расход Q = vF, где F—активная площадь поршня и
v — его скорость, то
Fv = iinxd Vg (Но — Н2),
откуда
_ Vg(H0 — H2)
277
или
V = kx,
т. е. скорость поршня является линейной функцией перемещения
золотника (или его открытия — при прямоугольных окнах). Гра-
фик этой зависимости называется характеристикой золотника.
Характеристики золотника при разных Н2, т. е. разных нагруз-
ках, показаны на рис. 136. В рассматриваемом золотнике мы
предполагаем кромки окон совпадающими с кромками золотника.
Такой золотник называется идеальным.
Рис. 137. Гидросистема с объемным регулированием:
1 — насос
На рис. 137 показана схема гидросистемы объемного регули-
рования. Управление подачей осуществляется регулятором в за-
висимости от давления в системе.
§ 5. ОПТИМАЛЬНОЕ СООТНОШЕНИЕ МЕЖДУ ПОТЕРЯННЫМ И ПОЛНЫМ
НАПОРОМ ДЛЯ ГИДРОСИСТЕМ С ДРОССЕЛЬНЫМ РЕГУЛИРОВАНИЕМ
Рассмотрим схему рис. 132 и выведем то соотношение между
напорами иН2, при котором мощность гидромотора будет мак-
симальной. Если расход в гидросистеме равен Q, то мощность
гидромотора
N = QH2yi],
где т| — к. п. д. гидромотора.
Однако расход
Q = С |/% = с Кя0-я2.
Следовательно,
N = ут]СУН0 — Н2Н2
278
или
W=C0(//0-//2)tf2.
Определим теперь экстремальное значение N:
— = о = ун0—н2-----------~2 —,
dH2 2уНа-Н2 ’
откуда
н2=^-н0.
О
Таким образом, мы получили оптимальное соотношение меж-
ду Н2 и Но. Практически это означает, что }/3 напора, создавае-
мого насосом, должна быть переведена в тепло.
Определим к. п. д. гидросистемы из формулы
^Icucm ~ ы ’
Qo“o
где Qo — расход при холостом ходе.
Так как
Q Я0-Н2
<?о И ’
то при дроссельном регулировании наибольший к. п. д. будет
равен: ________ _______________
Пейотах [/ • Но |/ з • з
Приведенный анализ позволяет сравнить системы объемного
и дроссельного регулирования. Поскольку в системе дроссельного
регулирования обязательно должны быть потери напора, то ее
следует применять для передачи малых мощностей. Система объ-
емного регулирования, которая имеет в пределе к. п. д., равный 1.
будет выгодна для передачи больших мощностей. Граница (по
мощности) различна для различных областей применения гидро-
привода. Для авиационного гидропривода можно указать в каче-
стве такой границы мощность, равную ~30 кет, а для мощностей,
больших 30 кет, применять дроссельное регулирование можно не
всегда из-за трудности теплоотвода.
§ 6. ОПРЕДЕЛЕНИЕ СКОРОСТИ ИСПОЛНИТЕЛЬНОГО ЗВЕНА
ГИДРОДВИГАТЕЛЯ ПРИ ЗАДАННОМ ЗАКОНЕ НАГРУЗКИ НА НЕГО
Рассмотрим простейшую схему привода, показанную на
рис. 138, и определим закон движения штока гидроцилиндра при
заданном законе нагрузки на него. Пусть закон нагрузки будет
таким, как показано на рис. 138.
Данную схему можно представить в виде простого контура,
состоящего из резервуара, насоса, двигателя и трубопроводов
279
(рис. 138, в). Местные сопротивления будем считать замененны-
ми эквивалентной трубой. Будем считать, что задана характери-
стика насоса (см. рис. 129); все размеры трубопроводов и коэф-
фициенты трения в них, т. е. характеристики трубопроводов,
а также закон нагрузки.
Расчет произведем графо-аналитическим методом, разбивая
весь процесс на ряд отрезков времени и считая режим движения
за каждый такой отрезок установившимся.
Решение заключается в построении общей характеристики
системы и наложении этой характеристики на характеристику
насоса.
Построение производится в следующей последовательности:
1) строим характеристики труб 1, 2, 3, т. е. зависимости
р2 = C2Q2; p3-C3Q-
(на рис. 138, г эти характеристики обозначены цифрами 1, 2, 3);
2) складываем эти характеристики по ординатам (поскольку
трубы соединены последовательно) и получаем суммарную ха-
рактеристику трубопроводов (кривая 1+2 + 3);
3) к этой характеристике прибавляем постоянную ординату —
давление р', соответствующее нагрузке в начальный момент дви-
жения. Это давление получим, взяв из графика нагрузки началь-
280
ную ординату Pj и разделив ее на активную площадь порш-
ня, т. е.
таким образом, мы получим общую характеристику системы
(кривая S на рис. 138, г);
4) накладываем теперь полученную характеристику на харак-
теристику насоса; получаем рабочую точку 1, абсцисса которой
дает расход Qi системы в первый момент движения;
5) задаемся отрезком времени A^i, в течение которого считаем
движение установившимся, т. е. с постоянным расходом через
гидроцилиндр (и, следовательно, с постоянной скоростью). Вы-
бирать этот отрезок времени нужно, учитывая особенности рабо-
ты привода (быстродействующий привод или же привод сравни-
тельно продолжительного действия), а также вид кривой нагруз-
ки. Имея расход Qj и отрезок времени A^i, получаем объем Awi
поступившей за это время в гидроцилиндр жидкости и, следова-
тельно, путь A«i, пройденный штоком за время А^. Отложив этот
путь As2 на графике нагрузки, мы получим следующую ординату
Р2, т. е. нагрузку, необходимую для следующего этапа расчета.
Итак, последовательно мы получаем следующую таблицу режи-
мов (точки 1, 2, 3 и т. д.);
Qj — А^ — Ао»! — AsL — Vj;
Q2 — А/2 — Аш2 — As2 — v2,
что позволяет построить ступенчатую (а по ней и плавную) кри-
вую движения поршня s = f(t) и др.
§ 7. НЕКОТОРЫЕ СХЕМЫ ВКЛЮЧЕНИЯ ГИДРОЦИЛИНДРОВ
Двухпозиционные схемы
На рис. 139 показаны наиболее простые и широко распростра-
ненные схемы включения гидроцилиндров.
Гидроцилиндр простого действия (рис. 139, а) управляется
трехходовым (нагнетание — слив — полость гидроцилиндра)
двухпозиционным распределительным краном. Обратный (влево)
ход осуществляется пружиной или, при ее отсутствии, действием
нагрузки на шток.
На рис. 139, б показана схема гидроцилиндра двойного дейст-
вия, управляемого четырехходовым распределительным краном.
Расход жидкости в линии слива отличается от расхода в напор-
ной линии из-за разницы активных площадей поршня (если ци-
линдр не имеет проходного штока).
281
Схема, показанная на рис. 139, в, отличается тем, что к што-
ковой полости цилиндра всегда подводится давление. Левая же
полость сообщается попеременно то с областью давления, то
Рис. 139. Простейшие схемы включения гидроцилиндров:
а — гидроцилиидр простого действия; б — гидроцилиидр двойного дей-
ствия; в — дифференциальный гидроцилиидр; г — дифференциальный
гидроцилиидр с аккумулятором
с областью слива, чем достигается движение поршня вправо или
влево. Соответствующим выбором площадей поршня и штока
в этой конструкции можно осуществить одинаковые усилия и оди-
наковые скорости в обоих направлениях. Для этого следует взять
d = —где d — диаметр штока и D — диаметр поршня.
282
Рис. 140. Исполнительная цепь с про-
ходным золотником
Схема, показанная на рис. 139, г, отличается тем, что нештоко-
вая полость гидроцилиндра подключена к пневматическому ак-
кумулятору. В этой схеме
необходимо рассчитать ак-
кумулятор на полное давле-
ние в линии нагнетания на-
соса, что может случиться
при прорыве уплотнения
поршня (другой способ за-
щиты аккумулятора — уста-
новка предохранительного
клапана).
Схема, показанная на
рис. 140, отличается установ-
кой проходных распредели-
телей, сообщающих при неработающих гидроцилиндрах насос со
сливом. При включении какого-либо распределителя начинает
работать соответствующий гидроцилиндр. Очевидно, что насос
должен быть рассчитан на суммарное Давление.
Схемы, обеспечивающие трехпозиционное
функционирование гидроцилиндров
Такие гидроцилиндры, обеспечивающие промежуточную уста-
новку поршня, применяются, например, в цепи управления за-
Рис. 141. Трехпозиционный гидроцилиндр:
а — с двумя параллельно-включенными поршнями; б — с бу-
стерным поршнем; 1, 2, 3 — возможные позиции
крылками самолета. На рис, 141, а показана конструкция двой-
ного гидроцилиндра с двумя подключениями, управляемого ше-
стиходовым трехпозиционным золотником.
283
Несколько иная схема, в которой для осуществления проме-
жуточной позиции использован вспомогательный поршень, пока-
зана на рис. 141, б.
Схемы, обеспечивающие заданную последовательность
работы гидроцилиндров, и схемы, обеспечивающие
синхронную работу гидроцилиндров
Такие схемы встречаются часто, так как имеется много ма-
шин, где надо скоординировать несколько видов движений. В ча-
стности требования последовательной работы предъявляются
Рис. 142. Цепь, обеспечивающая заданную последо-
вательность на обратном ходе
к гидравлическим цепям уборки и выпуска шасси и управления
створками шасси.
щая заданную последователь- Рис. 144. Цепь, обеспечивающая формулу
ность на прямом ходе последовательности 1—2—2—1
На рис. 142 показана простейшая цепь, в которой прямой ход
поршней совершается свободно и независимо, а обратный ход
в определенной последовательности: сначала движется нижний
поршень, а затем после включения специального клапана управ-
ления последовательностью — верхний. Отметим, что поршень
верхнего гидроцилиндра может возвращаться в первоначальное
положение также и внешним усилием (что может иметь место,
например, со створками шасси).
284
Во избежание этого устанавливают клапан управления после-
довательностью на возвратной линии, как это показано на
рис. 143. Здесь оба поршня совершают прямой ход так же сво-
бодно, как и в предыдущей цепи, но произвольный обратный ход
нижнего поршня не допускается: выход жидкости из его правого
цилиндрового пространства запирается клапаном управления по-
следовательностью, пока последний не будет выключен главным
цилиндром.
Рис. 145. Схема синхронизации
работы гидроцилиндров при
помощи гидромоторов
Рис. 146. Схема син-
хронизации работы
гидроцилиндров их
последовательным
включением
Двойная последовательность в обоих направлениях (такую
цепь удобно обозначать формулой 1—2—2—1) может быть полу-
чена установкой второго клапана, как это показано на рис. 144.
Однако эта цепь обладает тем же недостатком, что и цепь, пока-
занная на рис. 142, поэтому предпочтение следует отдать цепи,
показанной на рис. 143, где упомянутый недостаток устраняется
установкой клапана управления последовательностью на возврат-
ной линии.
Рассмотрим теперь схемы, обеспечивающие синхронизацию
гидроцилиндров.
Синхронная работа гидроцилиндров при различных нагрузках
на них может обеспечиваться:
жесткой механической связью штоков гидроцилиндров. Оче-
видно, что этот способ может быть применен только при близком
взаимном расположении гидроцилиндров;
285
применением сидящих на общем валу гидромоторов в качестве
дозаторов. Такая схема показана на рис. 145 (см. приложение).
Недостатком схемы является ее сравнительно высокая стоимость;
применением включенных последовательно гидроцилиндров
с проходным штоком (рис. 146). Недостаток схемы — большие
габариты для проходных штоков;
Рис. 147. Схема син-
хронизации при по-
мощи регуляторов
расхода:
1 — регулятор расхода;
2 — насос
Рис. 148. Синхро-
низация при помо-
щи делителя по-
тока:
1 — делитель потока
включением в линию каждого гидроцилиндра отдельного регу-
лятора расхода, поддерживающего расход в линии постоянным
независимо от колебаний нагрузки (рис. 147);
применением специального агрегата — дроссельного делителя
потока, распределяющего поток между гидроцилиндрами в за-
данном отношении независимо от колебаний нагрузки (рис. 148).
Конструкции регулятора расхода и делителя потока описаны
ниже.
Аварийные гидравлические цепи
В некоторых машинах, как, например, в самолетах, необходи-
мо иметь, кроме основной системы, еще и дублирующую, которая
должна включаться в случае аварии основной.
286
Общее требование к авиационным гидравлическим системам
заключается в том, что система в аварийном случае должна ра-
ботать от дублирующего источника энергии. Дополнительная ава-
рийная система подключается к гидроцилиндру через челночный
клапан.
На рис. 149 показана основная цепь с подключенной через
челночный клапан аварийной цепью. Челночный клапан 1 гидро-
цилиндра отключает аварийную цепь на все время, пока не вклю-
чится аварийный золотник 2, сообщающийся с ручным насосом
или каким-либо другим источником энергии. Аварийный кран 2
Рис. 149. Схема гидросистемы, состоящей
из основной и аварийной систем:
1 — челночный клапан переключения; 2 — золотник
включения аварийной системы; 3 — перепускной
клапан; 4 — клапан отключения основной системы
выполнен трехходовым, что необходимо для сообщения аварий-
ной цепи (при работе основной цепи) со сливом, иначе утечки
через кран постепенно переместят челночный клапан, который
отключит гидроцилиндр от аварийной системы. Чтобы не допу-
стить перемещения главного распределительного крана в положе-
ние «Подъем шасси», когда аварийный кран стоит в положении
«Выпуск», что может случиться из-за ошибки летчика или не-
исправностей электрической системы главного электромагнитного
крана, ставят перепускной клапан 3, сообщающий штоковую по-
лость цилиндра со сливом. Этот клапан представляет собой гид-
равлический замок, управляемый давлением аварийной системы.
Иногда включают в эту цепь еще один клапан 4, чтобы иметь
возможность отключить основную систему при открытии пере-
пускного клапана; в противном случае вся основная система сое-
динится со сливом и выключится из работы.
Питание жидкостью происходит тогда через клапан 4 из дуб-
лирующей линии. Клапан отключения может быть перемещен
287
в первоначальное положение вручную после осуществления ава-
рийной операции или в некоторых случаях (в двойных аварийных
системах) автоматически давлением в линии от аварийного кра-
на, когда кран возвращается в исходное положение.
Тормозная гидравлическая система
Тормозная гидросистема, показанная на рис. 150, имеет специ-
альный тормозной аккумулятор 1, который питается от основной
системы через обратный клапан 2, так что в случае аварии основ-
Рис. 150. Тормозная цепь и ее элементы:
1 — тормозной аккумулятор; 2 — обратный кла-
пан; 3 — тормозной клапан; 4 — тройной мано-
метр; 5 — клапан стояночного торможения; 6 —
тормозные пружины; 7 — тормозные секторы;
8 — тормозная камера; 9 — тормозная рубашка
ной системы в тормозной
системе будет достаточ-
ный запас жидкости для
торможения. Тормозные
клапаны 3, приводимые в
движение от педалей, соз-
дают в тормозных ци-
линдрах давление, про-
порциональное ходу пе-
далей (редукционные
клапаны переменного
давления). Тройной ма-
нометр 4 показывает ве-
личину тормозного давле-
ния и давления в системе.
Стояночное торможе-
ние осуществляется фик-
сированием тормозных
педалей в нижнем поло-
жении или применением
специального клапана 5.
§ 8. СЛЕДЯЩИЕ
ГИДРАВЛИЧЕСКИЕ
СИСТЕМЫ
В рассмотренных вы-
ше схемах исполнитель-
ный механизм не воспро-
изводил закона движения
управляющего органа: по-
ступательное движение
штока гидроцилиндра (или вращение вала гидромотора) не пере-
давалось на управляющий потоком жидкости распределитель, и,
таким образом, его открытие было независимым от перемещения
штока.
Ниже рассмотрены системы, в которых перемещение исполни-
тельного механизма (так называемый выходной сигнал) автома-
288
тически устраняет заданное (командное) перемещение управляю-
щего органа (так называемый входной сигнал), благодаря чему
исполнительный механизм воспроизводит, отслеживает, закон
движения управляющего органа.
Такие гидравлические системы называются следящими систе-
мами или сервосистемами (или сервомеханизмами, если входной
и выходной сигналы представляют собой перемещение или угол
поворота).
Следовательно, в следящей системе должна иметь место не-
прерывная связь между выходным и входным элементами. Эта
Рис, 151. Следящая система:
/ — ручка управления; 2 — руль высоты; 3 — распределитель; 4 — рычаг обрат-
ной связи; 5 — насос; 6 — автомат разгрузки; 7 — аккумулятор
связь называется обратной, и следящие гидравлические систе-
мы— это системы с обратной связью.
Пример следящей системы показан на рис. 151, где входным
элементом служит ручка 1 управления самолетом, а выходным —
руль высоты 2 самолета. Рычаг 4, связывающий перемещение
штока силового гидроцилиндра с ручкой управления, есть обрат-
ная связь.
При некотором, например влево, перемещении ручки 1 этот
рычаг поворачивается вокруг точки А и перемещает золотник рас-
пределителя 3 тоже влево, благодаря чему жидкость направляет-
ся в гидроцилиндр, перемещая его поршень влево и, следователь-
но, поворачивая руль 2.
Одновременно, автоматически при помощи рычага 4, повора-
чивающегося уже вокруг точки В, заданное открытие распреде-
лителя 3 уменьшается, т. е. снимается входной сигнал и скорость
поршня (пропорциональная, как указано на стр. 278, перемеще-
нию) соответственно уменьшается.
Таким образом, элементы, составляющие следящую систему,
функционально образуют по крайней мере одну замкнутую цепь,
19 Заказ 1076 2 89
которую можно изобразить в виде структурной схемы, показан-
ной на рис. 152. Величина входного перемещения х сравнивается
Рис. 152. Структурная схема
следящей системы:
1 — выявитель рассогласования; 2 —
исполнительный механизм; 3 — обрат-
ная связь
устройством обратной связи с
выходным перемещением у, и
по выработанному таким обра-
зом рассогласованию е между
сигналами определяется ско-
рость движения выходного эле-
мента:
е = х — ky,
где k—передаточное число обратной связи.
Рассмотрим несколько конструктивных схем следящих систем.
На рис. 153 показан авиационный сервомеханизм, в котором
золотник и цилиндр конструктивно объединены в одном блоке.
Рис. 153. Сервомеханизм с подвижным
цилиндром
Рис, 154. Сервомеханизм с дифференциальным
поршнем:
1 — внутренние каналы; 3 — полость цилиндра;
4 н 5 — сл-ив
Движущимся элементом в конструкции является цилиндр, что
требует применения гибких трубопроводов.
Более компактная конструкция гидравлического сервомеханиз-
ма с дифференциальным гидроцилиндром показана на рис. 154,
290
где золотник размещен непосредственно в штоке гидроцилиндра.
Давление постоянно подводится к штоковой полости.
При перемещении ручки управления (а следовательно, и зо-
лотника) вправо жидкость под давлением поступает по каналам 1
Рис. 155. Сервомеханизм с клапанным распределением
и 2 в полость 3 гидроцилиндра, перемещая поршень вправо. Этим
же перемещением осуществляется и обратная связь (закрытие
канала золотника).
При перемещении золотника влево полость 3 сообщается ка-
налами 2, 4 и 5 со сливом, благодаря чему силой давления на
поршень в штоковой полости он перемещается также влево.
В этом случае передаточное число (коэффициент) обратной свя-
зи k = 1.
Входной сигнал
Рис. 156. Сервомеханизм со слежением по производ-
ной:
1 — цилиндр изодрома; 2 — поршень изодрома; 3 — золотнико-
вый блок; 4 — пружина золотникового блока
На рис. 155 показана конструкция сервомеханизма с диффе-
ренциальным поршнем, отличающаяся клапанным распределе-
нием.
В рассмотренных выше схемах было осуществлено слежение
по перемещению, т. е. такое слежение, при котором шток гидро-
19* 291
цилиндра воспроизводит закон входного сигнала в зависимости
от величины перемещения управляющего органа.
Однако нередко по условиям динамической устойчивости (т. е.
по колебательным свойствам системы) требуется делать систему
более чувствительной к входному сигналу. Для этого применяют
следящую систему со слежением не только по перемещению зо-
лотника, но и по производной от этого перемещения, что дости-
гается введением в конструкцию линии управления катаракта,
т. е. добавочного гидравлического цилиндра /, поршень которо-
го 2 имеет дроссельное отверстие. Усилие на поршне катаракта
пропорционально перепаду давления в дроссельном отверстии,
т. е. зависит от расхода через него, а следовательно, от скорости
подачи входного сигнала. Такая следящая система показана на
рис. 156.
§ 9. СЛЕДЯЩИЕ ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ СИСТЕМЫ
В некоторых случаях входной сигнал представляет собой
электрический сигнал малой мощности (например, управление
самолетом от автопилота и т. п.). Тогда возникает необходимость
преобразования этого сигнала в механический, значительно уси-
Рис. 157. Электрогидравлическая следящая система:
1 — электронный усилитель; 2 — золотниковый распредели-
тель; 3 — электродвигатель; 4 — потенциометр
ленный сигнал, который мог бы перемещать золотник сервомеха-
низма. В гидросистему включается дополнительная электриче-
ская цепь, представляющая собой первую ступень усиления (пер-
вый каскад) сигнала. Гидросистема превращается в электрогид-
равлическую следящую систему. Схема такой системы показана
292
на рис. 157. Напряжение в точке А будет равно нулю, если сумма
— Н----— = 0, т. е. если Е2— — Е1 ,
где Е — электрическое напряжение и Е— сопротивление.
Если это условие нарушается, то в точке А появляется напря-
жение, которое после усиления приводит в движение командный
электродвигатель золотника, направляющий поток рабочей жид-
кости в нужную полость гидроцилиндра. Перемещение штока
гидроцилиндра, связанное с потенциометром, происходит до тех
пор, пока не будет уравновешено входное напряжение, т. е. пока
Рис. 158. Сервозолотник с усилите-
лем типа сопло — заслонка
Рис. 159. Сервозолотник со струй-
ным усилителем
напряжение в точке А вновь не станет равным нулю. Таким об-
разом, мы имеем здесь потенциометрическую обратную связь.
Усиление входного сигнала можно осуществить также при
помощи гидравлического усилителя типа «сопло — заслонка» или
при помощи струйного усилителя. Сервозолотник первого типа,
получивший в настоящее время наибольшее распространение,
показан на рис. 158, а второго типа — на рис. 159 (конструкция
фирмы Этли).
Глава X. СПЕЦИАЛЬНЫЕ ВОПРОСЫ ГИДРАВЛИКИ
И ГИДРАВЛИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ
ГИДРОСТАТИЧЕСКОГО ПРИВОДА
§ 1. СЖИМАЕМОСТЬ ЖИДКОСТЕЙ И НЕКОТОРЫЕ РАСЧЕТЫ,
СВЯЗАННЫЕ СО СЖИМАЕМОСТЬЮ
Изотермический и адиабатический модули
объемной упругости жидкости
Сжимаемость жидкости принято характеризовать коэффи-
циентом относительного сжатия или объемным модулем упруго-
сти. Эти величины определяются следующим образом.
Представим себе некоторый объем жидкости V, находящий-
ся под давлением р. Пусть, далее, давление возрастает до вели-
чины р + Др, что приводит к уменьшению объема на ДУ. Тогда
средний коэффициент относительного сжатия определяется сле-
дующим отношением:
0 = — — — (66)
Н V Др ’
или по абсолютной величине
(67)
V &р
Таким образом, коэффициент р есть относительная объемная
деформация, приходящаяся на единицу изменения давления.
Из уравнения (67) имеем
1 ДУ
IPI ' V
Последнее выражение отражает закон Гука для случая все-
стороннего сжатия жидкости, когда при изменении внешнего,
производимого на жидкость давления на Др изменение нормаль-
ных напряжений сжатия составляет До = Др, а относительная
объемная деформация при этом равна еу = . Следовательно,
роль объемного модуля В упругости жидкости играет выраже-
ние —
1₽1
294
или
B = (68)
Очевидно, что для различных расчетов, связанных с учетом
сжимаемости, необходимо знать численное значение модуля В
требуемых жидкостей, находящихся в заданных условиях.
Модуль В определяется по формуле (68) при помощи экспе-
риментального замера Ар и соответствующей ему деформации
А К Если в эксперименте деформация жидкости протекает стати-
чески, т. е. достаточно медленно, так что имеет место теплоотвод,
и температура поддерживается постоянной, то подсчитанный по
формуле (68) на основании такого эксперимента модуль В на-
зывается изотермическим модулем объемной упругости.
Рис. 160. Упругостные характеристики масел:
а — АМГ-10; б — трансформаторного
Однако, как показывают экспериментальные исследования,
объемный модуль упругости жидкости не является постоянной
величиной, а зависит от давления жидкости. На рис. 160 приве-
дены полученные Чензе [69] изотермы для масла АМГ-10 при
температурах t= 1°, 20° и 40° С; по оси абсцисс отложено отно-
сительное изменение объема где Vo — начальный объем при
атмосферном давлении, а по оси ординат — давление. Аналогич-
ный вид имеют изотермы и для других жидкостей. Характер кри-
вых показывает, что только на начальном участке кривых при
р < 300 ат можно принять модуль В = const. В связи с этим
формула (68) есть выражение среднего объемного модуля упру-
гости жидкости. При быстрых изменениях давления процесс
295
сжатия жидкости протекает адиабатически и, кроме того, не
охватывает всего ее объема.
Поэтому определить объемный модуль упругости в этом слу-
чае по формуле (68) невозможно. Следует воспользоваться фор-
мулой, определяющей скорость звука в упругой среде. Как из-
вестно, скорость звука в жидкости определяется
зависимостью
с =
где Во — адиабатический модуль упругости;
р — плотность жидкости;
с — скорость звука.
Рис. 161. Адиабатический и изотер-
мический модули объемной упруго-
сти жидкости АМГ-10 при t — 48° С
Следовательно, определяемый отсюда модуль упругости ра-
_________г—,__________ вен 8° = с2р’
' При помощи осцилллогра-
фа измеряется время 9 прохож-
дения импульса на длине I в ис-
пытуемой жидкости, откуда
можно найти с=—. Адиаба-
0
тический модуль упругости
- во
больше изотермического: =
= где ср и cv — теплоем-
Су
кости при постоянном давлении
и объеме.
Как показывают опыты, проведенные в МВТУ И. А. Лузано-
вой и В. Н. Прокофьевым для применяемых в гидросистемах ма-
сел и синтетических жидкостей в диапазоне давлений 50—200 ат,
можно полагать Во ~ 1,15 В (рис. 161). Таким образом, при ра-
счете быстропротекающих процессов в гидросистемах (напри-
мер, при расчетах динамических характеристик) необходимо
применять адиабатический модуль упругости; изотермический
же модуль упругости можно применять при расчетах сравни-
тельно медленных процессов. Числовые значения модуля для не-
которых жидкостей приведены ниже (стр. 298).
Факторы, влияющие на модуль упругости жидкости
Основными факторами, влияющими на модуль упругости
жидкости, являются температура, давление и нерастворенный
воздух. Как мы видели выше, модуль упругости зависит от дав-
ления, что говорит о том, что жидкость не подчиняется закону
Гука. По данным Конфельда [66]
В = х (р 4- рх),
где к и рх —константы, зависящие от вида жидкости.
296
Для минеральных масел, применяемых в гидросистемах,
х = 12,5 и Рх = 1000 кГ/см2. Как показывают вычисления в диа-
пазоне давлений р < 200 ат, это влияние сказывается незначи-
тельно, и поэтому при таких давлениях в расчетах можно пола-
гать в первом приближении В — const.
Обобщая наблюдения над изменением модуля в зависимости
от температуры, можно написать, что
Bt = В[1 - kt(t - /0)],
где kt — коэффициент, равный ~0,9 для воды и 0,85 для мине-
ральных масел, а В — значение модуля при t= 15°С.
Однако наиболее сильное влияние на величину модуля упру-
гости оказывает находящийся в жидкости нерастворенный
воздух.
Выведем зависимость В от количества нерастворенного
воздуха.
Очевидно, полный объем жидкости, содержащей воздух, будет
равен
V = V, + К2,
где V[ — объем жидкой фазы;
К2 — суммарный объем нерастворенного воздуха.
Пусть рассматриваемый объем находится под давлением р и
давление затем изменяется до величины р + dp.
Тогда изменение объема будет равно
dV = dV1 + dV2,
но согласно формуле (68) dVi = —1Л — и
В
dV2 = — V2
Р
(полагая процесс сжатия изотермическим).
Следовательно,
dV = — (vx-^- + V2
\ В ₽ /
или
dV = — f 1 + — — Y
В \ Vj p J
Полагая V) ~ К, можем записать
dV =---------------- .
В последней формуле роль модуля упругости смеси жидкости
и воздуха играет выражение в круглых скобках, стоящее в зна-
297
менателе. Обозначим этот модуль через В'. Тогда получим окон-
чательную формулу
В' =
--------= k2B.
У2 В
V Р
Если, например, В = 20 000 кГ1см2, р = 100 кГ/см2 и содержа-
ние воздуха = 0,005, то получим
* в,= ,20000
20 000
1 +0,005-------
10
Как видно, влияние нерастворенного воздуха на модуль упру-
гости воздуха весьма велико, поэтому и появляется обязательное
требование дегазации жидкости в гидросистемах. Отношение ~
не должно превышать 0,001.
Таким образом, при расчетах, связанных с учетом сжимаемо-
сти жидкости, следует как можно внимательнее выбирать ра-
счетное значение модуля упругости. Если расчетом затрагивают-
ся быстродействующие процессы, то необходимо брать адиаба-
тический модуль упругости, полагая
Во = М,
где, в свою очередь, изотермический модуль упругости В следует
брать с учетом температуры и возможного содержания нераство-
ренного воздуха, т. е.
В = kyk^B^,
где В15 — значение модуля при t= 15° С и klt k2 — поправочные
коэффициенты на температуру и нерастворенный воздух.
Ниже приводится средний изотермический модуль упругости
некоторых распространенных дегазированных жидкостей при
t = 15° С и р = 200 кГ/см2-.
Ви в кГ/см*
Керосий ............... 15 000
АМГ-10 ................ 12 500
Синтетическая жидкость
7-50С-3 ............ 16 000
Вода................... 21000
Жидкостная пружина и ее статическая
характеристика
В последнее время жидкостные пружины находят все более
широкое применение в промышленности.
В жидкостных пружинах используется свойство сжимаемости
жидкости.
298
Жидкостная пружина показана на рис. 162. В замкнутый, за-
полненный жидкостью сосуд входит поршень, который, воспри-
нимая внешнее усилие, сжимает находящуюся в сосуде жид-
кость.
Предположим, что предварительного сжатия пружины нет.
Пусть к поршню площадью f приклады-
вается сила Р. Тогда, если объем жидкости
V и ее модуль упругости В, то абсолютная
деформация сжатия, согласно формуле
(68), будет равна
A V = V — .
fB
Обозначив перемещение поршня буквой
х, будем иметь
X=_AV =_V£_ =
f f2B
1
где-----жесткость жидкостной пружины.
Рис. 162. Жидкостная пружина (ГДР):
1 — поршень; 2 — уплотнительное кольцо; 3 — фетровое
кольцо; 4 — уплотнительное кольцо; 5 — регулировочная
гайка; 6 — направляющая втулка; 7 — упорное кольцо;
8 — уплотнительная шайба; 9 — регулировочная шайба;
10 — уплотнительная шайба; И — регулировочная гайка
Полученная таким образом характеристика Р = Кх показана
на рис. 163 пунктирной прямой, а сплошной линией — экспери-
ментальная характеристика.
Рис. 163. Характеристики жидкостной пружины:
а — расчетная (при В — const и В — var); б — экспе-
риментальная
Расхождение расчета с экспериментом объясняется измене-
нием модуля В в зависимости от давления, что в проделанном
выше расчете во внимание принято не было. Для уточнения ра-
299
счета воспользуемся зависимостью Корнфельда (см. стр. 296).
Для элементарного перемещения поршня:
, VdP VdP
откуда
и, следовательно,
xf х
Р = fpK[eV Х- 1) • (69)
Полученное уравнение показывает, что жидкостная пружина
обладает переменной жесткостью. Это хорошо подтверждают
эксперименты [67].
На рис. 162 показан продольный разрез жидкостной пружи-
ны, сделанной ГДР (усилие 25 000 кГ/ход 20 мм), а в табл. 27
приведены данные пружин легкой серии. Промышленностью
ГДР выпускаются пружины трех конструктивных серий: легкой
средней и тяжелой. Пружины легкой серии имеют короткий
ход 20—100 мм, рассчитаны на нагрузку от 1000 до 6300 кГ; пру-
жины тяжелой серии рассчитаны на ход 20—200 мм и на на-
грузку 10 000—250 000 кГ. Наиболее распространенными являют-
ся пружины легкой серии с ходом 6—25 мм при нагрузке 250—
1000 кГ (см.табл. 26).
Таблица 26
Диаметр и общая длина жидкостной пружины легкой серии (ГДР]
в зависимости от нагрузки и длины хода пружины
Ход X в мм Нагрузка Р в кГ
250 400 630 1000 1600
6 18X43 18x49 18X58 36x53 36 х 59
10 18X53 18x62 36x57 36x63 36x72
16 18x68 36x63 36x69 36x78 36x93
25 36X72 36X78 36x87 36Х 102 —
На рис. 163, б показаны полученные экспериментально три ста-
тические характеристики пружины легкой серии, снятые при раз-
личных предварительных натягах, устанавливаемых вращением
гайки (см. рис. 162) на концах штока. На характеристиках
видна величина сил трения в уплотнениях.
зоо
Экспериментами установлено, что жидкостные пружины лег-
кой серии допускают частоту нагружения, равную 400 двойных
ходов в минуту непрерывно в течение 8 ч при окружающей тем-
пературе ''-30° С. Для приближенного подсчета частоты собствен-
ных колебаний можно воспользоваться выводами на стр. 314.
Существенным при динамическом нагружении является тот факт,
что процесс сжатия жидкости происходит по адиабатическому
Рис. 164. Вязкостные характеристики масел при t — 20° С:
а — в обычных координатах; б — в полулогарифмических координатах;
1 — трансформаторное масло; 2 — масло АМГ-10
закону, характеризуемому адиабатическим модулем упругости,
что несколько меняет ее характеристику по сравнению со стати-
ческой характеристикой.
Наиболее ответственным узлом в конструкции жидкостной
пружины является узел уплотнения.
§ 2. ВЯЗКОСТЬ ЖИДКОСТЕЙ
Коэффициент вязкости и его значение
для некоторых жидкостей
Как известно, вязкость жидкости представляет собой физиче-
ское свойство сопротивления деформациям сдвига.
При движении вязкой жидкости скорость ее слоев различна.
Между слоями жидкости возникает сила трения, которая опре-
301
деляется из следующего уравнения, выражающего закон жидко-
стного трения Ньютона:
T = uF—, (70)
dz
где р — абсолютный или динамический коэффициент вязкости;
F — площадь рассматриваемой поверхности жидкости или
стенки, соприкасающейся с жидкостью;
dv
-----градиент скорости, т. е. угловая скорость вращения ча-
dz
стиц жидкости.
Из формулы (70) видно, что динамический коэффициент вяз-
кости р численно равен силе трения, развивающейся на единич-
ной поверхности при градиенте скорости, равном единице.
Отношение динамического коэффициента вязкости к плотно-
сти жидкости называется кинематическим коэффициентом вязко-
сти v:
и
v = ——
р
Вязкость жидкостей изменяется в зависимости от температу-
ры: с увеличением температуры вязкость уменьшается. Оказы-
вается практически удобным изображать зависимость p = f(7)
в координатах у = lg 1g р и х= 1g Т', где Т — абсолютная темпе-
ратура.
В указанных координатах для распространенных масел зави-
симость р = f(T) имеет вид прямой, уравнение которой
У = У о = а (х0 — х)
или
Iglg И — Iglg Цо = a (lg То — lg 7),
где ро — вязкость при Т = То;
а — угловой коэффициент прямой.
После некоторых преобразований получаем
lg Mo Т \ 7/
lgp = lgp0-
или
р = е ;
в расчетах эту зависимость заменяют более простой:
—(3(Г — Го)
Н = IV
где коэффициент р, называемый термическим коэффициентом
вязкости, определяется для различных жидкостей из опытных
302
кривых. Например, для масла АМГ-10 в диапазоне температур
20—50° С р ~ 0,0156.
Вязкость жидкостей увеличивается с увеличением давления.
На рис. 164 показаны кривые зависимости р = f(p), получен-
ные Чензе [69] для двух жидкостей: масла АМГ-10 и жидкости
50 Hydro Т. Исследуя вязкость при высоких давлениях, Чензе на-
шел, что при t = +20°С и давлении р = 30 000 ат масло АМГ-10
превращается в твердое тело. На основании опытов Чензе можно
считать, что в диапазоне давления до 5000 ат жидкости, употреб-
ляемые в гидросистемах, достаточно далеки от точки затверде-
вания.
Зависимость вязкости от давления характеризуется выра-
жением
И = Иое“₽,
где щ) —вязкость при атмосферном давлении;
ц— вязкость при давлении р;
р — избыточное давление в ат;
а — пьезометрический коэффициент вязкости.
Зависимость а от давления р
Таблица 27
Цо В СПЗ при р = 1 ат р= 70 ат р = 350 ат р= 700 ат
Ц а • 103 и а • 10s Ц а 10’
28,3 33,4 2,35 60 2,12 121 206
46,4 56,6 2,83 119 2,68 293 259
83,1 101 2,83 215 2,72 522 2,59
122 151 3,06 345 2,96 933 2,89
288 351 2,83 714 2,56 1560 2,40
422 515 2,83 1050 2,56 2290 2,40
579 730 3,27 1630 3,07 4070 2,79
Как показывает табл. 27, коэффициент а зависит от вида мас-
ла, температуры и давления. Таблица дана для основных масел
гидросистем при /=35°.
Для масла АМГ в диапазоне давлений до р = 300 ат можно
принять а = 0,0023.
Значения вязкости в сст при атмосферном давлении наиболее
распространенных в гидроприводе жидкостей приведены ниже:
АМГ-10........................
Веретенное 2 (индустриальное 12)
Керосин Т-1 ..................
Синтетическая жидкость 7-50С-3
4-70° +50° +20° 0° С —20° —50°
6,0 10 16 42 130 1250
7,5 12 50 — — —
7,0 1,5 2,5 — — 20
8,0 12,5 24 220 700 —
—60°
1660
303
Как было сказано выше, вязкость зависит от температуры и
давления. Обобщая эту зависимость, можно записать
И = . (71)
Покажем, как можно найти коэффициенты а и р по табли-
цам вязкости.
1) Пусть t — t0. Обращаясь к справочным табличным данным,
видим, что для многих жидкостей при р = 300 ат ц = 2ц0, следо-
вательно,
о „300а
2|Х0 — >
откуда
— 1п2 — 1
~ 300 ~ 430
2) Пусть р = 0. Тогда
(3 (t—1„)
р = рое
Например, для жидкости АМГ-10 получим при
t = tо = 50 — 20 = 30,0 -^-= — ,
Ро 16
10 —зов „ 1
т. е. — Ио = Рое . откуда 0 =—.
10 04
§ 3. НЕКОТОРЫЕ ЗАДАЧИ ЛАМИНАРНОГО ДВИЖЕНИЯ ЖИДКОСТИ
В ЭЛЕМЕНТАХ ГИДРОПРИВОДА
Течение между параллельными пластинками при ц = var.
Эпюры давления
Рассмотрим течение жидкости в зазоре между двумя парал-
лельными пластинками (рис. 165) под действием избыточного
Рис. 165. К расчету течения жидкости в зазоре
при р. = var
давления pi. Пусть вязкость жидкости, соответствующая давле-
нию pi и температуре /0, равна ць а в некотором сечении потока
х — давление р и температура t. Следовательно, согласно форму-
304
ле (71) вязкость р, в этом сечении можно определить из урав-
нения
|х = |х1е(ар)-3
Так как при движении вязкой жидкости работа сил трения пе-
реходит в тепло, то между перепадом давления в каком-либо со-
противлении и увеличением температуры жидкости существует
связь, и мы можем последнюю формулу преобразовать таким
образом, что вязкость будет только функцией давления.
Вычислим нагрев жидкости при дросселировании. Так как
давление в рассматриваемом сечении равно р, то, следовательно,
потери давления на трение равны pi — р. Тогда при условии, что
работа сил трения переходит в тепло, полностью воспринимаемое
жидкостью, нагрев ее будет равен
t-tQ=P-^ = k(P1-p), (72)
где 1 — механический эквивалент тепла;
С — удельная теплоемкость жидкости;
у — удельный вес.
Таким образом.
и = Иог₽-^(р‘-р>,
но
api
Pl = >
следовательно, р, = p,ie(a + (3*)(p-P1)
или
р—pi
pt ,
где следуя Тома, напишем
_ 1
Pt ~ a + ffe ’
Выделив элементарный участок щели длиной dx и рассматри-
вая течение ламинарным и установившимся, можем записать
d? _ 12pQ 73.
dx bh3
где Q — расход жидкости;
b — ширина щели.
Интегрируя равенство (73), имеем
р—р<
С_^ = __^[б/хилиС_^_==_^_е V
J Н bh3 J J P^Pi p,
Hie P‘
20 Заказ 1076
305
Следовательно,
_ р~р» „
-PL-e pt = 12. —+ С,
ц1 bh3
При х = 0 р = р\, что дает С =—,
поэтому
Г — Р~Р‘ 1 -
-PL.\e Pt _ 1 = 12-^- .
Их L J Bh3
При х = L р = О, поэтому
-EL- [Л— 1] = 12-^- .
Цх bh3
Разделив одно выражение на другое, получим
_р—pt
е Р( — 1 _ х
Pi L
ept-l
откуда
(74)
Мы получили закон распределения давления вдоль зазора
(рис. 165). Этот закон отличается от линейного тем больше, чем
больше отношение —, т. е. чем больше давление р\, под которым
Pt
происходит истечение.
Вычислим теперь силу давления, возникающую на поверхно-
сти пластинки площадью b X L-.
L L ,
Р = (i pbdx = bpr f (1----—
J J I Po
о 0
После интегрирования этого равенства имеем
Р = — -Ptf f —V
где
(75)
ЗОб
Пусть, например,
-^- = 1,
Pt
тогда
р _ bLpr 2 е 2 _ q bLp\
2 е —1 ’ 2 ’
Таким образом, мы видим, что при p\>pt точность расчетов
увеличивается.
Течение в торцовом зазоре
Пусть задан торцовый зазор, образованный двумя плоскими
кольцевыми и неподвижными поверхностями (рис. 166); пусть по
внутреннему каналу, радиус которого R\, подводится жидкость
под избыточным давлением pY.
Определим закон распределе-
ния давления по радиусу коль-
цевой поверхности и вычислим
силу, действующую на эту по-
верхность, а также расход че-
рез зазор, полагая вязкость
жидкости цо = const при Ризб =
= 0 и t = 15°С.
Рис. 166. Течение в торцовом за-
зоре
Применим для бесконечно
малого элемента dr уравнение ламинарного течения между па-
раллельными пластинами. Учитывая симметрию задачи и прене-
брегая силами инерции по сравнению с силами давления и тре-
ния, можем написать
dp ____ ____0 P-oQ
dr nrh3
где Q — расход жидкости;
h — зазор.
Интегрируя это уравнение, получим
р =С-----1пг.
л/г3
Так как при г — R% р = 0, то
л/г3 г
Так как при г = R{ р = plf то, очевидно,
Pi =
л/г3 Pi ’
(76)
(77)
20*
307
отсюда найдем еще одну постоянную величину, т. е. расход
6ц
Pi
In------
/?1
Кроме того, разделив равенство (76) на уравнение (77), по-
лучим
. Rz г
In----
Ri
(78)
Таким образом, закон распределения давления по радиусу г,
используя который, можно вычислить силу давления жидкости на
торцовую поверхность, можно написать в виде уравнения
«2
«1
р 2лг dr = л
Pi
In-----
Ri
Rl - 1 + In
Ri /1 '
(79)
Рассмотрим теперь задачу, аналогичную предыдущей, но с вра-
щающейся поверхностью, и учтем влияние центробежных сил.
Пусть кольцевая поверхность вращается вокруг оси с постоянной
угловой скоростью со, а нижняя поверхность неподвижна. В этом
случае, учитывая поле центробежных сил, получим следующее
выражение закона распределения давления по радиусу:
Р = . (80)
лп1 г 2
При выводе принято, что угловая скорость вращения жидко-
сти равна половине угловой скорости вращения кольцевой по-
верхности.
Аналогично предыдущему вычислим силу давления на торцо-
вую поверхность, интегрируя уравнение давления по площади:
я.
Р = f р • 2лг -dr = — R2i( 1 + In^M
J Л3 \ /
R,
64
Разобранный случай может служить основой расчета гидро-
статических пят, торцовых уплотнений машин, а также дисковых
фрикционных насосов.
308
Определение попя давления в торцовом зазоре
гидростатической пяты с учетом влияния нагрева
на вязкость
Р
Рис. 167. К расчету гидростатиче-
ской пяты
Рассмотрим течение жидкости в зазоре, образованном двумя
плоскими торцовыми поверхностями, из которых одна движется,
относительно другой. Такой случай имеет место, например, в гид-
ростатической опоре с кольце-
вой камерой или же, с некото-
рым приближением, в торцо-
вом распределительном золот-
нике аксиально-поршневого на-
соса.
Предположим, что течение
жидкости ламинарное, размер
b (длина потока) мал по срав-
нению с D, поэтому считаем,
что относительная скорость пе-
лй.п,
ремещения равна и{ =
для всех точек наружного зазо-
ра и v2 = - для внутренне-
го зазора (л — число оборотов
вала в минуту); влиянием поля
центробежных сил пренебрега-
ем; теплоотвод через стенки
отсутствует.
Поместим начало коорди-
нат на входной кромке щели и
на рис. 167. Давление в центральной камере po = const.
Пусть в произвольной точке, координата которой х, давление
равно р, температура Т и динамический коэффициент вязкости р,.
Выделив элементарную щель длиной dx, можем записать выра-
жение для расхода q, отнесенного к единице ширины щели (раз-
мер, перпендикулярный к плоскости чертежа):
h3 dp
q — — ----. —— .
12g dx
направим ось ох, как показано
Трение, которое имеет место в жидком слое, благодаря пере-
мещению одной поверхности относительно другой приводит к на-
греву жидкости. Количество тепла, выделяемого в единицу вре-
мени на поверхности 1 - dx, равно
W^-^-dx-Vy. (81)
Полагая, что все выделяемое тепло поглощается жидкостью,
вычислим повышение ее температуры.
309
Уравнение баланса тепла имеет вид
— dx = gyCJdT,
(82)
где у— удельный вес жидкости;
С — теплоемкость;
J — механический эквивалент тепла.
Из уравнения (82) имеем
Приняв закон изменения вязкости с температурой в виде
имеем
1п-й- = -₽(Т-Т0)>
откуда
du
Н
— рб/Т
dT =
1 du
Р Н
(84)
Приравнивая правые части уравнений (83) и (84), получим
р2 hqyCJ
Интегрируя с учетом того, что при х = 0 р = pi (где pi =
= роер₽,)> получим
Обозначим, следуя де Рокуру [64],
v РУ1Н1*
hyCJ
(85)
тогда
(86)
Полученное выражение вязкости подставим в исходное диф-
ференциальное уравнение:
к h3
310
Интегрируя это равенство с учетом начального условия (при
х = 0 р = ро), получим
р = р0 - 1W1& In f 1 + —'i (87)
0 h3X \ qb J
При x = b p = 0, поэтому
Po= (88)
/гЛ \ q /
Из полученного уравнения можно найти утечки q при задан-
ном зазоре h.
Подставив формулу (88) в равенство (87), получим
Р = Ро
I X х
1п 1 + — • —
1 _ Ч b
( X \
In 1 + — )
\ Я /
(89)
Интегрируя последнее уравнение, получим силу давления на
торцовую поверхность одного пояска (на единицу его длины):
Проделав вычисления, получим
Р' =РоЬ
1 Я_~
, X \ X
In ( 1 -f- — )
\ Я / J
В найденном уравнении при заданном Р' неизвестными
ются h и q. Вторым уравнением, замыкающим систему,
уравнение (88).
Уравнения (88) и (90) можно решить графически.
Введем для удобства вычислений новую переменную:
У = -----1 Ро,
12уС
тогда уравнение (88) примет вид
(90)
явля-
будет
(91)
По уравнению (91) построено на рис. 168 семейство кривых
Y=f(X), что позволяет быстро решать подобные задачи [64}.
Расчет при этом ведется в следующем порядке. Пусть дана
жидкость (р, у, С, щ), давление р0, скорость yj и ширина опоры Ь.
311
Тогда, задаваясь зазором h, вычислим по формулам (85) и
(91) величины X и Y.
При помощи этих величин по графику (рис. 168), где по оси
абсцисс отложены X, по оси ординат У, находим в точке пересече-
Р'
ния координат ответы: силу р =---- и утечки q . Так, задаваясь
Ро&1
различными значениями зазора, можно получить соответствую-
щие значения Р' и q.
Рис. 168. Номограмма расчета гидростатической пяты
Полученное таким образом значение усилия можно еще уточ-
нить, учитывая влияние нагрева, вызванного дросселированием
(выше мы учитывали основной нагрев и нагрев от трения, обус-
ловленного перемещением).
Проведя рассуждения, аналогичные изложенным выше и про-
делав необходимые преобразования, получим формулу для опре-
деления силы:
(92)
где
6 =
yCJ
312
Основы расчета гидродинамической опоры
(жидкостного клина]
Рассмотрим (рис. 169) две плоские поверхности, расположен-
ные под некоторым углом друг к другу так, что между ними соз-
дается пространство в форме клина. При этом верхняя поверх-
ность неподвижна, а нижняя движется влево с постоянной
скоростью у0. Направим оси координат так, как показано на ри-
сунке. Выделим в жидкости, заполняющей зазор, элемент с разме-
рами dx, dy, скорость этого
элемента и, а р — давление,
приложенное к его грани,
имеющей координату х.
Напишем уравнение рав-
новесия этого элемента. На
него действуют следующие
силы:
а) силы давления (р +
+ dp)dy — p-dy (мы пред-
полагаем, что давление оди-
Рис. 169. К расчету гидродинамической
пяты
каково во всех точках сече-
ния зазора плоскостью х =
= const, т. е. давление есть
функция только х);
б) силы трения
dv . д / , dv , X ,
ц.----- dx — ц---( v Н—— dy\dx.
ду ду \ ау /
Приравнивая силы давления силам трения и пренебрегая
силами инерции, получим следующее уравнение:
dp d2v
—d~ = ц-----
dx ду2
Интегрируя его, получим
(93)
dv 1 dp
ду и dx
условия задачи: при у = 0 v = и0 и при у = h
,JP..jL-^ + ±.JP-.JL}y + Vo.
dx 2 \ h р, dx 2 J
Граничные
V = 0, поэтому
1
V = ---------
и
Л
Имеем далее для расхода жидкости Q = J v-dy
о
313
Обозначим через Н величину зазора в том сечении, где —— =
dx
= 0. Следовательно, расход
Q _ V(>H
2
Приравнивая правые части последних двух уравнений и ре-
dp
шая их относительно ——, получим
dx
dp _ 6р. (h — H)
dx h3
I
К
12
11
10
9
В
7
6
5
Ч
3
2
1
0
Рис. 170. Кривые расчета гидродинами-
I б \ I б \
ческой пяты: А = f —— ; В = f —— ;
Из геометрических со-
отношений получаем
(рис. 169)
Ло L L
и
tg « = .
Подставив в получен-
ное выше дифференциаль-
ное уравнение значение h,
получим закон распреде-
ления давления по х:
J л3
о
На графике (рис. 170) представлены коэффициенты А, В, С и
— в функции 6 (см. стр. 316). Для случая малых z выражения
для коэффициентов можно упростить, разлагая In (1+z) и —-—
Z
1+ 2
в ряд. Получим тогда следующие значения:
A = -bi-;
з
В = 0,7z 2;
С = 0,7 z и —
L
г
10 ’
314
Удобно выразить А и В в функции от С, приняв эту величину
за независимую переменную. Тогда получим
в = ^-
0,72
2С3;
^0
I
и, кроме того,
Л = J- и С =
С
Wo
IflVd
h0P
и
tga = 2-5-
& I3
Р
Pv0
Применение последних формул
мере [63].
Рассмотрим пяту типа Митче-
ла (рис. 171), несущую нагрузку
Р = 6000 кГ при скорости враще-
ния п = 3000 об!мин. Вязкость
жидкости 20 сст (при 55° С). Чис-
ло башмаков i = 10. Выберем
точку опоры башмака (точку его
поворота) так, что д = 0,1. Эта
точка соответствует
коэффициента трения
вую А на рис. 170) и
h0 (кривая С).
Задаемся средним
щадь одного башмака
поясним
следующем при-
на
К примеру
расчета гид-
Рис. 171.
родинамической пяты
минимуму
(см. кри-
максимуму
давлением р = 24 кГ!см2 и получаем пло-
F = 6000 = 25 сл12_
10 • 24
Выберем поверхность башмака в виде квадрата со сторонами
50 X 50 мм. Общая длина всех башмаков составит 500 мм. При-
мем средний диаметр пяты Do = 210 мм, тогда средняя скорость
при заданных d = 300 об]мин будет v0 = 33 м!сек.
Имеем
Р = = —— - = 12 - 103 кГ/м ж 12 104 н/м;
iB 10 • 0,05
-. /_М£о_ = -1 / °’0? • 33 = 23,5 • 10-4
|/ Р у 12-Ю1
315
Далее, взяв из графика (рис. 170) для —= 0,1 значения А =
— 1,82, В = 0,7 и С = 0,39, имеем
f = А = 1,82 • 23,5 1(Г 4 = 0,0043;
tg а = В Л = 0,7 • 23,5 • КГ4 = 0,00165;
А-= С1/-^- = 0,39-23,5- 10-4 = 0,001.
I у Р
Зная закон распределения давления, можем далее вычислить
силу давления жидкости на единицу ширины поверхности опоры
i
Р = J pdx,
о
а также координату 6 точки приложения этой силы.
Аналогично вычислим и силу трения на поверхности опоры
Т = f р (— dx,
J \ dy Д=о
а следовательно, и коэффициент трения
Т
Р ‘
Проделав определенные преобразования, получим
(94)
где
316
С = —
z
I
z = —
L
И JL =________L I f 1 \ (1 +z)(3 + z) ln(l + г)-Зг 4-2,5г2
Z 2 “Ц z2 J / 2 \
(— + 1 )1п(Ц-г) —2
\ г /
Следовательно, минимальный зазор в опоре равен
h0 = 0,001/ = 0,001 • 50 =50 мк.
Заметим в заключение, что в проделанном расчете не учтены
конечная ширина пяты (боковые утечки мы полагали отсутствую-
щими), а также нагрев жидкости в зазоре из-за трения. Поэтому
расчет следует считать приближенным.
Термический клин и термогидравлическая опора
Представим себе две параллельные и бесконечно широкие по-
верхности длиной L (рис. 172), одна из которых движется отно-
сительно другой с заданной скоростью v0. Зазор между этими
поверхностями h. Оси координат направлены так, как показано
на рисунке.
В зазоре между поверхностями возникают два потока жидко-
сти вдоль оси х: один — фрикционный поток (или поток сдвига),
обусловленный относительным движением поверхности и имею-
щий линейную эпюру скоростей, и второй — поток, обусловленный
термическим расширением жидкости вследствие ее нагрева и
имеющий параболическую эпюру скоростей. В результате воз-
никновения второго потока жидкости в зазоре появляется избы-
точное давление, распространяющееся по определенному закону
по поверхности и создающее на этой поверхности силу давления,
способную уравновесить внешнюю нагрузку.
Эпюры скоростей в зазоре в этом случае оказываются анало-
гичными эпюрам скоростей в гидродинамической опоре с жид-
костным клином, и можно сказать, что при опорах с параллель-
ными стенками несущая способность создается термическим,
клином.
Следовательно, возникает возможность создать опору с пло-
скими и параллельными опорными поверхностями, которая мо-
жет быть названа термогидравлической опорой.
В отличие от гидродинамической опоры, в которой избыточное
давление (обусловливающее его несущую способность) в слое
жидкости создается за счет наклона одной поверхности по отно-
шению к другой (жидкостный клин), и в отличие от гидростати-
ческой опоры, где несущая способность создается благодаря не-
прерывному нагнетанию жидкости под давлением в зазор между
поверхностями, в термогидравлической опоре с параллельными
317
поверхностями избыточное давление в зазоре создается из-за
нагрева жидкости в нем и возникновения вследствие этого допол-
нительного напорного течения.
Задача заключается в определении эпюры давления, т. е.
в нахождении зависимости р = f(x). Предположим, что пластины
гладкие и параллельные; поток жидкости в зазоре одномерный,
ламинарный; теплообмен со стенками отсутствует.
Рис. 172. К расчету термического клина:
а — эпюры скоростей; б — возникновение термического расхода; в — эпюра дав-
ления и температуры
Исходя из этих предположений и учитывая, что результирую-
щий поток есть сумма потока сдвига и теплового потока, можем
написать следующее уравнение суммарной эпюры скоростей:
~ У (Л — у)
dp
dx
(95)
Интегрируя по координате у (рис. 172), т. е. по поперечному
сечению зазора, получим выражение расхода жидкости
Q = ~vohb----~rb^, (96)
2 12ц dx
где b — ширина зазора;
ц — вязкость жидкости в зазоре.
Чтобы составить дифференциальное уравнение для определе-
ния закона распределения давления вдоль зазора, запишем ба-
ланс расходов для элементарного участка зазора длиной dx
318
(рис. 172, б). Пусть на длине зазора dx температура из-за трения
повысится на dt. Вследствие повышения температуры произойдет
расширение жидкости так, что объем элемента изменится на dQx.
Изменение объема элемента в единицу времени dQt вызывает
сжатие этого элемента dQp и добавочный расход жидкости dQ
через сечение с координатой х + dx. Таким образом, можем на-
писать следующий баланс расходов жидкости:
dQt = dQp 4- dQ,
где dQt — увеличение объема элемента жидкости в единицу вре-
мени вследствие повышения температуры;
dQp — сжатие объема элемента жидкости;
dQ — изменение расхода жидкости через поперечное сече-
ние зазора.
Увеличение объема dQt определяется работой силы трения,
перешедшей в тепло. В связи с этим имеем
dA = ц. (bvodx,
\ dy )у=о
(do \
— I =т—касательное напряжение на поверхности
dy Jy=o
элемента.
Энергия, перешедшая в тепло, может быть выражена и так:
dA = QyCJdt,
где у — удельный вес жидкости;
С — теплоемкость;
J— механический эквивалент тепла;
Q — расход жидкости через рассматриваемое сечение зазора.
Следовательно, приравняв правые части двух выражений для
dA, получим
ц. (vobdx = yQCJdt.
\ dy )j=o
Так как из равенства (95)
/ dv \ _ w0 h dp
\ dy /у=о h 2р. dx
то изменение температуры
dt = *P_\dx. (97)
JCyQ \ h 2u dx /
Если коэффициент объемного расширения жидкости равен а,
то термическое изменение объема dQt может быть записано
в виде
dQt = Qadt
319
или с учетом уравнения (97)
dQ, = а / А. + J_ . Jp_ \ dx .
JCy \ h 2p dx J
Таким образом, мы получили выражение для левой части
уравнения баланса расходов. Определим теперь величину dQp.
Обозначив объемный модуль упругости жидкости В, можно за-
писать [см. уравнение (68)]
dQ.,-^-dp
или, учитывая формулу (96), будем иметь
р \ .2 12р. dx J В
Изменение расхода dQ получим, взяв производную по х [см.
уравнение (96)]:
,/л dQ , h3b d2p ,
dx 12p dx2
Подставляя полученные значения dQt, dQp и dQ в уравнение
баланса расходов, получим следующее дифференциальное урав-
нение:
dx2 \ dx ) dx
где
1
а0 = —;
0 в
Ь У 6 6« \ .
0 h2 \ В JCy Г
С — / У 12а
\ h2 / JyC ‘
помощи полученного дифференциального уравнения
решить поставленную задачу об определении зави-
р = f (х). Однако это решение сложное, поэтому мы по-
При
можно
симости
пытаемся упростить уравнение. Сравнивая величины коэффи-
циентов а0, Ьо и Со, можно видеть, что коэффициенты а0 и Ьо малы
по сравнению с Со, и поэтому их можно положить равными нулю
(а0 — О, Ьо = 0), что значительно упростит дифференциальное
уравнение, которое примет вид
+ Со = °
dx
или
d2p
dx2
12ap.2i>o
h*JyC
(98)
320
Отбрасывая коэффициенты а0 и Ьо, мы пренебрегаем сжимае-
мостью жидкости и полагаем, таким образом, что все изменение
объема dQt нагревания дает увеличение расхода, т. е.
dQt ~ dQ.
Очевидно, что вязкость ц жидкости изменяется по длине за-
зора, поскольку изменяется и температура. Для учета этого при-
мем еще одно допущение, которое заключается в том, что темпе-
ратура изменяется линейно по длине зазора (рис. 172, в):
t = (1 + ox),
где 4 — температура в маслосборных канавках перед зазором;
о — константа, которую необходимо определить.
Кроме того, для упрощения дальнейших выкладок вместо за-
висимости (71) примем для рассматриваемого диапазона темпе-
ратур
I to \2
и = но [у),
где ро — вязкость при температуре По-
следовательно,
Н ==Но(1 тМ2
_^р_=_22ац1£
dx2 ЬЧСуо2 '
Дважды интегрируя с учетом граничных условий задачи (при
х = 0 р = 0 и при х = L р = 0), получим
2 2
р = 2-------
1______L_
(i + <w)2
1-----------------
(1 Да/,)2
Теперь вычислим полную силу давления на опорную поверх-
ность шириной Ь:
Р = b \ pdx = b----—--------; (100)
J /iVCy (1 ДаТ)2’
откуда величина зазора h:
, 1 / av2p20L3b
/1=1/ ---------------
г pJyC (1-j-oL)2 ’ (101)
Подставив полученное значение h в формулу (99), будем
иметь еще одно выражение для р\
-Р (1+oL)2 ( . 1 Н 1 1*1
Р Lb’ (cL)2 I (1 +<w)2 (1ДоД)3]Д)’
Определим теперь повышение температуры Ц на длине L слоя
и константу о.
21 Заказ 1076 221
Имеем очевидное равенство to + = to (1 + oL), откуда
Из уравнения (97) с учетом принятых допущений имеем
L L
f __ С di _ I dx
1 J JCyh2J (l-f-crx)2’
о о
что дает
/ = 2 L
1 JCyh2 ' 1 + oL
Подставив сюда значение h из формулы (101), получим
2 / Р
УJCya у Lb
(Ю2)
Нагрев масла не зависит от вязкости, скорости и величины
зазора. Это, как следует из рассмотрения приведенных зависимо-
стей, происходит вследствие того, что с ростом скорости одно-
временно с увеличением работы силы трения, повышающей тем-
пературу, происходит увеличение зазора, что приводит к умень-
шению температуры.
Итак, по формулам (98) — (102) можно произвести прибли-
женный расчет термического клина. Вычислим далее силу трения,
развиваемую на поверхности опоры, а также коэффициент тре-
ния, определяемый как отношение силы трения к силе давления.
Элементарная сила трения
dT = xbdx = — р (bdx =
\ dy / у—о
= ^bdx+ML(JP_\dXt
r h 2 \ dx J
где
р = р0(1 + ох) 2.
Интегрируя, получим
Г* _
h J (1 + сгх)“2
о
_ y„v„bL 4 Г JyC(l +cL)2P
1 + crZ, J/ abL3v^Q
Следовательно, коэффициент трения
г _ Т b3LJyCvQy,Q
' — ~Р у (1 +oL)=aP3’
(ЮЗ)
322
Движение жидкости в трубе при изменении
ее температуры
Рассмотрим задачу ламинарного движения жидкости в трубе
с учетом теплоотвода через стенки и вычислим потери напора
в ней.
Рис. 173. К расчету движения жидко-
сти с застыванием
Предположим, что в начальном сечении А (рис. 173) рассмат-
риваемого отрезка трубы температура жидкости tA (жидкость
горячая) и что температура окружающей среды равна t0. Расход
жидкости пусть будет равен Q.
Для определения потерь напо-
ра необходимо прежде всего
выяснить закон изменения тем-
пературы по длине трубы. Бу-
дем считать тепловой режим
установившимся. Выделим эле-
мент трубы длиной dx и соста-
вим баланс тепла на этом
участке.
1) Пусть на входе в выде-
ленный элемент трубы масло
имеет температуру t, а на вы-
ходе t—dt. Тогда потеря тепла на участке dx вследствие охла-
ждения равна
— QyCdt,
где С — удельная теплоемкость жидкости.
2) Если температура внешней среды t0, то количество тепла,
отданного на участке dx во внешнюю среду через стенки трубы,
равно
{t — t0) dx,
где К — полный коэффициент теплопередачи от жидкости во
внешнюю среду через стенки трубы.
3) Обозначив коэффициенты трения трубы через X, получим,
что потеря напора на участке трубы длиной dx равна
dh = \ • —dx = idx,
2g D
где i — пьезометрический уклон.
Соответствующая потере напора работа сил трения опреде-
ляется из равенства
dA = Qydh = Qyidx
или в тепловых единицах
j j
где / — механический эквивалент тепла.
21* 323
(t — Q------—1 dx
QyC v 0 CJ _
knD
Полученное тепло идет на подогрев жидкости на участке dx.
Таким образом, уравнение баланса тепла на выделенном элемен-
те жидкости имеет вид
— QyCdt + dx = KnD{t —10)dx. (104)
Приняв коэффициент теплопередачи К. постоянным по длине
трубопровода, получим
— dt =
или
dt — t in' ил .
QyC L KnDJ
Обозначив
KnD
----- = а
QyC
И
-W- = ь,
KnDJ
будем иметь
~dt = a (t — t0 — b) dx.
Интегрируя это выражение, имеем
t —10 — b = Cr — e~ax.
Постоянную C[ находим из начального условия: при х = 0
t = tA, поэтому С\ — tA — t0 — b.
Окончательно закон распределения температуры по длине
трубы имеет вид
t = t0 + b + (tA — t0-— b) e~ax. (105)
Если пренебречь теплотой, развиваемой вследствие трения, то
мы получим, полагая b = 0
t' =t0 + (tA — t0)e~ax-, (106)
это уравнение называют формулой В. Г. Шухова [35].
Вычитая из формулы (105) равенство (106), получим тот при-
рост температуры At на длине х трубы, который обусловливается
трением:
At = 6(1 — е~ах).
На рис. 174 показан график t = f(x). Заштрихованная часть
графика означает нагрев, обусловленный внутренним трением
жидкости. Если нам задана труба длиной /, то, подставляя в ра-
венство (105) х = /, получим температуру в конце трубы:
te = t0 + b + (tA —10 — a) e~al
324
или, без учета трения,
tB ~ to + (Ci — t0) e~al.
На основании последней формулы можно произвести прибли-
женный гидравлический расчет трубы, который заключается
в том, что по заданной температуре tA и полученной вычислени-
ем t'B находим среднюю температуру
t=4- tA+4 tB,
о о
а затем по графику вязкость — температура находим вязкость ц,
соответствующую температуре t. По этой вязкости, пользуясь
Формулой Пуазейля, определяем потери давления в
трубе:
Необходимый для расчетов | xs.
коэффициент теплопередачи мож-
но положить для латунных и I | НIГпт
стальных труб К. = 50 ккал!м2X -4 .
X ч град. |
Рассмотрим частный случай х
движения ЖИДКОСТИ с переменной Рис. 174. Изменение температуры
температурой. ПО длине трубопровода
Предположим, что труба на-
ходится в условиях идеальной изоляции, так что теплоотвод через
стенки отсутствует. Тогда все развивающееся от трения тепло
идет на нагрев жидкости.
Определим закон увеличения температуры по длине трубы.
Положим для этого в уравнении (104) теплового баланса
К = о.
Тогда получим
dt =-----dx.
CJ
Интегрируя это выражение, будем иметь
константу интегрирования Со найдем из условия t=tA при х = 0.
Следовательно, Со = tA, а потому
325
§ 4. НЕКОТОРЫЕ ЗАДАЧИ ТУРБУЛЕНТНОГО ДВИЖЕНИЯ
В ТРУБОПРОВОДАХ И ДРОССЕЛИРУЮЩИХ ЭЛЕМЕНТАХ ГИДРОСИСТЕМ
Потери давления в трубопроводах
Как известно, величина потерь давления между двумя сече-
ниями трубопровода гидросистемы определяется из уравнения
Бернулли, написанного для этих двух сечений,
/ и? \ \
SApt- = ( 4- т 4- 1 _ f Р 4- т —_ 4- Tz2 L (107)
\ 2g / \ 2g /
где SAp, — сумма потерь давления между двумя сечениями,
включающая потери по длине трубопровода и мест-
ные потери.
Рассмотрим наиболее типичные для гидросистем примеры
расчета.
Потери давления в трубопроводе вычисляются по формуле
(108>
или, если измерять I в м; D в мм; v — в м/сек; у в кГ/дм3 и Ар — в
кГ/см3, то
. ли2 yl
П gD*
где X — коэффициент трения, равный:
для изотермического ламинарного течения
Re
для неизотермического ламинарного течения с учетом началь-
ного участка
для турбулентного движения и для режима гидравлически
гладких труб (2300 < Re < 100 000)
. _ 0,316
Reo,25:
для стальных, бывших в употреблении труб в области 2-104<
< Re < 2-Ю6
0,160
Re0.182 ’
На рис. 175 показана кривая зависимости X = f(Re).
326
При критическом числе Re = 2300 получается значение кри-
тической скорости
vK„ = 2,3 v-,
кр D
Рис. 175. Изменение коэффициента трения в трубках
в зависимости от Re
Принимая во внимание формулы для определения X, получа-
ем следующие расчетные формулы для потерь давления в трубо-
проводах:
ламинарное изотермическое течение
д ________________________ 3200щ>/
Pl “ d2 ’
ламинарное неизотермическое течение:
1 d2
турбулентное течение, гладкие трубы, 2300 < Re < 100 000
для новых стальных труб и Re < 106 для латунных и дюралюми-
ниевых труб:
. 0,61w2/
Л/?г " £>Re0,182’
турбулентное течение, стальные трубы, бывшие в употребле-
нии, Re > 20 000
. 0,815-уи2/
= D Re0.182-
Потери давления в закруглениях труб
Участки закругления трубопровода представляют собой мест-
ные сопротивления, потери давления в которых вычисляются по
формуле
V2
(109)
327
или с учетом размерности, проведенной на стр. 326,
И V 20g
Коэффициент сопротивления £ зависит от отношения радиуса
закругления R к диаметру трубы D.
2-90° 2 90° 2-90°
ZR=2tR90° ^3^90° ^^90°
Рис. 176. Коэффициент сопротивления фасонных участ-
ков труб
На рис. 176 показано изменение коэффициента сопротивления
для трех комбинированных поворотов труб, а на рис. 177 пока-
— \ для различных углов закруг-
ления.
Потери давления в дроссельных отверстиях
с постоянной площадью поперечного сечения
Потери давления в дроссельных отверстиях, которые пред-
ставляют собой местные сопротивления, вычисляются по форму-
ле (109), причем £ = —, где ц— коэффициент расхода отвер-
р2
стия.
эффициента сопротивле-
ния поворота трубы от
Г
отношения —:
а
1 _ Р = 90°; 2, 3, 4 — ₽ =
= 45, 90 и 120°
Рис. 178. Зависимость поправочного коэф-
фициента е при течении через диафрагму
d
от отношения при
различных {X
328
Таким образом, мы получили формулу
л 1 v2
кр =---------у------.
Ц2 2g
Однако для случая, когда > 0,3, следует учитывать попра-
вочный коэффициент 8, отражающий несовершенное сжатие
струи. В этом случае
Изменение поправочного коэффициента 8 показано на рис. 178.
Ар = —— у .
и2 2g
Таблица 28
Коэффициенты расхода диафрагм с различной формой кромки
Форма кромки отверстия Коэффициент сжатия а Коэффициеи для лами- нарного движения Re = 2000 т расхода ц. для турбу- лентного дви- жения при Re= 10 000 ч- -ч- 20 000
i Острая — fc, -- d:£)=0,25 . . . . . . 0,40; 0,7; 0,8; 0,9 а = 0,64; 0,68; 0,73; 0,82 d:D = 0,3; 0,5; 0,7 ц = 0,64; 0,67; 0,71 d:D = 0,3 0,5; 0,7; р. = 0,62 0,64; 0,66.
С закруглением 1=2,5тЗ<1 1,0 0,80—0,82
Типа «сопло» leu 1,0 0,98—0,99
329
Расчетные формулы потерь давления Др в дроссельных от-
верстиях можно выразить и через расход. Тогда будем иметь
л / Q V
Др = у (--------) при — < 0,3;
г \ 0,66^ / D
л / <? V d л о
Др = еу (----------) при — > 0,3.
r \ 0,66рД2 ) r D
Коэффициент расхода ц зависит от режима течения (числа
Ре), длины дроссельного отверстия, чистоты его обработки и
формы входной кромки.
В табл. 28 приведены значения коэффициента расхода и коэф-
фициента сжатия для трех различных конструкций дроссельного
отверстия.
На рис. 179 приведены расчетные характеристики диафрагм
второго типа (табл. 28).
Дросселирующие органы с переменной площадью
проходного сечения
К такого рода дросселирующим органам относятся различные
клапаны.
Рассмотрим работу плоского клапана, нагруженного пружи-
ной постоянной жесткости (рис. 180).
диафрагм
Рис. 180. Плоский клапан
Пусть при перепаде давления Др расход через клапан будет
равен Q. Тогда
Q = 2g;
в это уравнение входит как переменная площадь проходного се-
чения f = ndQy, где у — подъем клапана, так и переменный ко-
эффициент расхода ц (рис. 180). Однако, рассматривая турбу-
ззо
лентное течение жидкости (как наиболее распространенный слу-
чай), мы можем положить с достаточной точностью р. = const.
Выведем уравнение характеристики клапана, т. е. зависимость
Q — f (p)- Полагая, что начальный натяг пружины при закрытом
клапане равен нулю и жесткость пружины равна Ко, получим
усилие со стороны пружины на клапан при его открытии:
^пр = КоУ-
На клапан, кроме того, действует, как это следует из уравне-
ния количества движения, сила со стороны жидкости, равная
Ржидк = Apfo + QP (уо — v cos Ф)>
где f0 — площадь поперечного сече-
ния подводящего патрубка;
Q — расход через клапан;
р — плотность жидкости;
v — средняя скорость жидкости в
подводящем патрубке;
v0 — скорость струи;
Ф — угол отклонения струи.
Второе слагаемое в этом уравнении
представляет собой реакцию потока
на клапан.
Если для упрощения расчетов ре-
активной силой пренебречь, считая ее
на малых подъемах, соответствующих
малым расходам, незначительной, то
мы получим следующее уравнение
равновесия клапана:
К0У = &pf0.
Следовательно,
Рис. 181. Конический кла-
пан
y = -±pfs-
Подставляя последнее выражение в уравнение расхода, по
лучим
Q = Pndo &pVap
ИЛИ
2
Ap = AQ3, (НО)
где
2 1/
ла20 *
331
Уравнение (НО) есть уравнение характеристики плоского кла-
пана.
Для конического клапана (рис. 181) имеем следующие соот-
ношения:
:Х0Д П f / о Ар
усилие на клапан со стороны пружины Рп? = КоУ',
площадь, на которую действует давление жидкости
f = 2L (do _ 2у sin а • cos а)* = Л ~-^in 2 а)2 .
площадь проходного сечения клапанной щели
г / , sin 2а \
/о=л(«о— У—~—] У cos а.
Пренебрегая, как и в предыдущем примере, реактивной си-
лой, имеем
Др = Коу,
4
Подставляя выражения площадей в уравнение расхода, полу-
чим систему уравнений
гу - / 2g / , sin 2а \ ,/~
Q = рл 1 / —— ( а0 — у--------- у cos а|/ р
V у \ 2 )
и Др = . -------У---- ;
л (rf0 — у sin 2а)2
исключая отсюда у, получим уравнение характеристики клапана.
Для упрощения преобразований заметим, что в знаменателе
второго уравнения выражение у sin 2а значительно меньше, чем
d0, поэтому
Др _ . _______£_____. ________________J______
л (d0 — у sin 2а)2 л rf-j — 2р</0 sin а
откуда
ле? а
у = --------------- . р_
4/(0 -р 2npd0 sin 2а
Подставив это значение у в первое уравнение, получим
„ л /2g Г. лДр4 sin 2а 1
ц = ц.-----ап------------------------------- —---- X
V? L 4/(0-f-2лАр</0 sin 2а 2
лАрУу
4Ло ->• 2лАрй0 sin 2а
cosaj'Ap. (Hl)
J32
Для шарикового клапана вид зависимости p = f(Q) будет
аналогичен полученному выражению (111).
Характеристики шарикового клапана, полученные в резуль-
тате экспериментов, показаны на рис. 182. Там же показаны
размеры клапана и приведены значения вязкости, при которых
производились испытания.
На рис. 183 показан график зависимости коэффициента рас-
хода ц = f(Re) золотникового окна, образованного сочетанием
круглого и прямоугольного отверстий в гильзах [73]. Откладыва-
Рис. 183. Коэффициент расхода золо-
тникового окна в зависимости от х:
* — при х = 0,125 мм; □ — при
х = 0,25 мм; о — при х — 0,62 мм
Рис. 182. Характеристики шариково-
го клапана (масло АМГ-10):
х — t = —50° С; Д — t-----60° С; 0 —
t = +20° С
емые по оси абсцисс числа Рейнольдса можно определить из вы-
ражения
Re =
VCF
где о — смоченный периметр.
Из рассмотрения рис. 183 следует, что площадь f сегментно-
го отверстия и его смоченный периметр о равны:
f=-^-(0-sin 0);
о = г(д + 2 sin— Y
\ 2 /
cos 0 = (г — х) —,
где х — величина открытия золотниковой щели.
333
Зная коэффициент расхода из рис. 183 и пользуясь уравнени-
ем расхода через золотниковое окно Q = yf |//<2g —, можно
построить расходо-напорные характеристики золотника при
разных его открытиях и с учетом изменения коэффициента р от
числа Рейнольдса.
В некоторых случаях требуется иметь дроссельный клапан с
линейной характеристикой. Такое требование возникает, напри-
мер, при проектировании гидравлического демпфера, поглощаю-
щего энергию колебаний, типа флаттера и т. п.
Для получения линейной характеристики необходимо спро-
филировать проходное сечение клапана.
Рис. 184. Золотниковый клапан с линейной характеристи-
кой
Уравнение расхода через клапан имеет вид
Q = pf 2g-^.
Если теперь создать проходное сечение клапана таким, что
его площадь f будет связана с подъемом у зависимостью
1 = куУ~у
и если перепад давления в клапане линейно зависит от его подъе-
ма (реактивными силами пренебрегаем)
Ар = К.2у,
то, предполагая коэффициент расхода постоянным, получим
Q = р^Уу^/• Ур = \f ~ • УАр = САр.
Таким образом, для получения линейной характеристики про-
ходное сечение клапана должно быть спроектировано по урав-
нению f = К\ У У-
334
Олппм из конструктивных решений может быть золотниковый
клапан конструкции Е. И. Абрамова, показанный на рис. 184.
Клапан состоит из внутренней и внешней гильз. Во внешней
гильзе имеется окно параболической формы (уравнение у = ах2),
а во внутренней гильзе профрезеровано окно в виде прямоуголь-
ной щели шириной Ь. При перемещении одной гильзы относи-
тельно другой (клапан может работать, как это видно из рис. 184,
в обоих направлениях) образуется окно, площадь сечения кото-
рого равна: ___
f = b • 2х = 2b = КУ~у,
что удовлетворяет требуемому условию.
Характеристики одного из таких клапанов полученные экспе-
риментально на жидкости АМГ-10 при вязкости 1200 сст и 20 ст
имеют вид прямых везде, кроме области малых расходов. Иска-
жения характеристик на малых расходах объясняются перемен-
ным в этом диапазоне значением коэффициента расхода.
Гидравлический потенциометр
Если представить себе, что в распределительном устройстве,
показанном на рис. 185, расход Qo=O и, следовательно, Qi = Qz
(т. е. случай весьма большого импеданса нагрузки на поршень),
Рис. 185. Гидравлический потенциометр:
а — схема; б — характеристика
то мы будем иметь в этом случае гидравлический потенциометр.
Перемещая золотник при помощи тяги управления и давая тем
самым различную степень открытия проходных окон, мы полу-
чим различное значение давления рх. Выведем зависимость рх =
= f(x); расход через левое окно:
Qi = Сх (s — X) УР1 — Рх,
335
а через правое окно
Q2 — С2х 1/Л Рх Pi •
Считая золотник симметричным и полагая Qi = Q2, получим
= Pi (.s — х)2 + Р2Х2
Х (S — х)2 + X2
Так как чаще всего р2 = 0, то
Рх _ 1
Рассмотренный в гл. IX усилитель типа сопло — заслонка
также представляет собой гидравлический потенциометр, но с по-
Рис. 186. Сопло-заслонка
стоянным проходным сечением пер-
вого проходного окна (рис. 186). В
этом случае, полагая также коэф-
фициенты расходов обоих отверстий
одинаковыми, а также полагая р2 —
= 0, получаем
Сила давления жидкости на заслонку равна
Р = Рх —
+ Qpf,
где v — скорость в выходном сопле;
Q — расход жидкости.
§ 5. НЕКОТОРЫЕ ЗАДАЧИ ^УСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ
Одномерное неустановившееся движение
неупругой жидкости
Во многих элементах гидросистем мы встречаемся с задача-
ми, когда скорость и давление в какой-либо точке потока изме-
няются в зависимости от времени, т. е. с задачами так называе-
мого неустановившегося движения.
Рассмотрим метод решения подобных задач для одномерного
движения жидкости и выведем дифференциальное уравнение.
Для этого выделим, как показано на рис. Г87, элемент трубки то-
ка dfXds и применим к нему второй закон Ньютона. Проектируя
336
силы давления и силу веса на касательную к линии тока и прене-
брегая силой сопротивления, получим
pdF — ( р 4* б/s') dF + pgdFds cos а = dFdsp • ,
\ ds / dt
где v — скорость элемента; р — массовая плотность жидкости.
Так как
дг
cos а ---------
ds
и
dv dv , da
— =------h и---,
dt dt ds
то предыдущее уравнение после упрощений принимает вид
dz
ds
др
ds
Умножая на ds и инте-
грируя вдоль линии тока
для некоторого определен-
ного момента времени, по-
лучим
Рис. 187. К выводу уравнения неус-
тановившегося движения
Рг
или „ 2 s»
1 у9 — of а,,
— (p2 — pi) + g(z2 — z1)+^-~-\-^-ds = 0. (112)
р 2 J dt
Si
Полученное уравнение одномерного неустановившегося дви-
жения есть уравнение движения идеальной жидкости в канале
переменного сечения. Последнее слагаемое в этом уравнении
представляет собой инерционный напор, т. е. изменение в едини-
цу времени кинетической энергии массы жидкости, заключенной
между сечениями 1 и 2, отнесенное к весовому расходу.
Для неустановившегося движения в трубе (F=const) уско-
рение потока = j1 в любой рассматриваемый момент времени
будет одинаково для всех сечений потока и инерционный напор
будет равен
Л„м — — • f ds = — (s2 — sx) = -d- I,
“H g dt J g v 2 17 g
Si
где I — длина трубы.
22 Заказ 1076
337
При неустановившемся движении в трубе реальной жидкости
следует в уравнение движения ввести член, характеризующий по-
тери напора Zii-2 между сечениями 1 и 2, при этом скорость =
= v2 = v считать средней скоростью течения и ввести коэффи-
циент кинетической энергии р. Тогда
+ 21 + Р + 22 + ₽ ~-----И hUH + ^1-2
у 2g у 2g
или после сокращений
--------F 21 = ~-F z2 + hUH + ^1—2 • (ИЗ)
у---------------------------------------у
Потери напора h{-2 будем считать приближенно по формуле
у 2
установившегося движения h = £ — , где v — средняя скорость
в трубе в рассматриваемый момент времени, а £— коэффициент
сопротивления трубы £ = к — , величина X берется такой же ве-
d
личины, как и для установившегося движения.
Рассмотрим пример вычисления давления у поршня, переме-
щающего жидкость в трубе, заканчивающейся коническим на-
Рис. 188. К примеру вычисления давления у поршня
садком, который подключен к резервуару, где уровень жидкости
постоянный (рис. 188). Вычислим давление у поршня в тот мо-
мент, когда он находится в крайнем правом положении (т. е. при
а = 180°).
Для решения применим уравнение движения для сечений
1—1 (у поршня) и 2—2 (уровень в баке), рассматривая момент
времени, соответствующий крайнему правому положению
поршня.
Полагая р = 1, имеем
L
2 /»
— + ~ = — + #2 + ^ + — \-^dx + h^2,
у 2g у g g .! dt
о
где hi-2 — потери напора между сечениями 1 и 2;
338
jo — ускорение поршня, а следовательно, и жидкости в
трубе;
ди
~ — переменное по длине конуса ускорение;
; F<>
dt ‘° р ’
Pi — абсолютное давление в сечении 1;
Ро — атмосферное давление.
Выражая площадь F через координату х, получим
Г Я /Г> I А.Л2 nF>0 , nDg , , nk2X2 г. ,
F = ~(D0 + kx)2 = kx H------—^Fo + ex,
где последний член отброшен из-за малой величины;
£ = 2tg0Hc = k.
После преобразований имеем
Pi
V
—----------F + 10---------------1-----f о
V g g J
о
dx
или так как /0 = —со2г, то
поршня
искомое избыточное давление у
£
g
= Н2 — со2г
V 2
<*>2rF0 ! Fa~-cL
gc Fo
Распространенным случаем неустановившегося движения
жидкости является колебательное движение.
Рассмотрим следующую задачу. Пусть дана система, состоя-
щая из пружины, поршня и столба жидкости, длина которого L.
Жидкость выведена из состояния покоя и затем совершает сво-
бодные колебания (рис. 189).
Определим закон движения жидкости и вычислим период ее
колебания, если масса поршня tn, а площадь поперечного сече-
ния трубки /. Режим течения будем считать ламинарным; плот-
ность и вязкость жидкости р и V.
Пусть в некоторый момент времени t, выведенный из положе-
ния равновесия поршень, масса которого ш, двигаясь вправо,
находится на расстоянии х от положения равновесия; избыточ-
ное давление жидкости на поршень в этот момент равно р. Тог-
да дифференциальное уравнение движения поршня будет иметь
вид
d2 х
m ------= — Сх — pF
dt2 к
22;
339
ИЛИ
т + pF + Сх = °’
Где С — жесткость пружины.
Давление р на поршень найдем, применяя уравнение (ИЗ)
для сечения у поршня и для свободной поверхности в трубке:
= Но х hUH + Л1—2, (Н4)
где Л1-2 — потери напора в трубке (для ламинарного движения
_ g nvL dx \
gF dt /’
Л1-2
hUH — инерционный напор;
, __ L d2x
g dt2
в момент
времени t
Рис. 189. К вычислению частоты
колебания жидкого столба
Подставляя значения потерь и
инерционного напора в уравнение
(114), получим
+ х + х
у ° gF
х + A . . (115)
dt g dt2
Внося теперь уравнение (115) в
дифференциальное уравнение дви-
жения системы, получим
(m + pLF)^- + 8-^ JjL+(c+yF)x + vFHo=O.
at2- F dt
Разделив все члены уравнения на tn + pLF, будем иметь
d2x g рлД . dx / С + yF \ yFtfp _ q
dt2 (tn -f- pLF) dt \ m + pLF / m + pLF
Удобно ввести новую переменную величину
, У^о
S = X Н--— ,
т 4- pLF
тогда последнее уравнение превращается в однородное линейное
дифференциальное уравнение
+ 2А — + B2s = О,
dt2 dt
где
2 A == 8-----
(т 4- pLF) F
340
и
В2 =
т 4- pLF
Если В2 > А, то период колебаний (как известно из теории
дифференциальных уравнений) равен
Т = 2 л---- 1
Z c-\-yF ____Г 4лр.£ ]2
|/ tn+pLF [ (т + PLF)
При отсутствии сопротивления период колебаний был бы равен
V с-гур
Эту задачу можно решить короче, используя аналогию с за-
дачей механики о колебаниях груза массой цй, подвешенного на
пружине жесткостью Со. Период собственных колебаний груза
при отсутствии сопротивления
В данном случае масса груза состоит из массы поршня (мас-
сой пружины пренебрегаем) и массы водяного столба pLF.
Жесткость Со равна сумме жесткости нашей пружины С и от-
несенного к единице перемещения водяного столба изменения
усилия на поршень вследствие изменения напора Но при колеба-
ниях:
С0 = С + = C + Fy.
X
Следовательно,
То = 2л 1/-^+pZ-f .
° V C + yF
Если жидкость в трубе подключена к воздушному колпаку
(рис. 190), то частоту собственных колебаний столба жидкости
определим, представив находящийся в колпаке воздух как пру-
жину. Вычислим жесткость Со такой пневматической пружины.
Пусть в положении равновесия объем воздуха в колпаке ра-
вен ТГ0 и абсолютное давление равно Ро-
Пусть при отклонении уровня воды вверх на увеличину у от
положения равновесия объем воздуха станет W и давление бу-
дет р.
Тогда, считая процесс сжатия газа изотермическим, можем
записать
= /Л
341
откуда
^0 №0 /, , F \
р = ра -— = ра----2~ Ра I 1 Н----У I •
И ™ Wa-Fy W,J
Следовательно, увеличение давления равно
Fpo
p~p^~wy-
Жесткость пневматической пружины, пересчитанная на пере-
Рис. 190. К вычислению ча-
стоты колебаний жидкого
столба, присоединенного к
воздушному колпаку
мещение s воды в трубке, равна
q = (Р — Ро) Fy = ?Я0 ™
0 s2 We 1
где
Масса колеблющегося на этой пру-
жине груза
Л4°=Ly ir ’
поэтому частота собственных колеба-
ний жидкости равна
Некоторые задачи неустановившегося движения
упругой жидкости
При резком изменении скорости движения жидкости в трубо-
проводе (например, при быстром закрытии задвижки) возника-
ет волна резкого повышения давления. Это явление называется
гидравлическим ударом.
Величину ударного повышения давления руэ найдем из того
условия, что освобождающаяся при остановке жидкого столба
его кинетическая энергия К затрачивается на работу деформа-
ции Ai растяжения стенок трубы и деформации сжатия Л2 жид-
кости:
/< = А1 + А2. (116)
Для трубопровода постоянного диаметра d и длиной I имеем
342
2
Лх = -^- • — nd/б;
4б2 ЧЕ
2
А =- Ррд I
2 ' 2В ' 4 ’ ’
где руд — ударное повышение давления в трубе;
v — скорость течения жидкости в трубе перед закрытием
задвижки;
б — толщина стенок;
р — плотность жидкости;
В — объемный модуль упругости жидкости;
Е — линейный модуль упругости металла стенок трубы при
растяжении.
После подстановки значений энергии и работ деформации
в исходное равенство получим формулу Н Е. Жуковского
Руд = vPa>
(117)
где
а =
В
р
(118)
Bd
£о
а — скорость распространения звука в трубе.
Формула (117) справедлива для весьма быстрого закрытия
задвижки, т. е. когда время закрытия
t >
сзакр а •
Некоторые значения модуля упругости металлов приведены
ниже:
Сталь . . .
Чугун . . .
Дюралюминий
Медь . . .
Е в кГ/см2
2,1-10е
0,9-Ю6
0,75-10®
1,2-10®
Для трубопровода, состоящего из последовательно соединен-
ных отдельных труб длиной l\, 12, ---, In, вычисление гидравличес-
кого удара производится по формуле (117), в которой скорость
звука а определяется из выражения
а =
2
п___
Jn_
ап
0%
343
а скорость течения жидкости
~Ь 1^1 + + ^пУп
Л..+ ^2 + • • • + In
Собственная частота поперечных колебаний трубопровода,
заделанного по концам и заполненного жидкостью [65]
«о =
где J — момент инерции сечения трубы;
«/ " г Г"1 С Jrl ,
64
Е — модуль упругости материала трубы в кГ!см2\
I — длина трубы в м;
т — общая масса трубы и жидкости в кГ • сек2!м.
Глава XI. АКСИАЛЬНО-ПОРШНЕВЫЕ НАСОСЫ
§ 1. ОСНОВНЫЕ СХЕМЫ АКСИАЛЬНО-ПОРШНЕВЫХ НАСОСОВ
Аксиально-поршневые насосы находят в настоящее время
широкое распространение в гидроприводе. Они отличаются ком-
пактностью, высоким к. п. д. при высоких давлениях, большими
числами оборотов, сравнительно малой инерционностью, боль-
шой энергоемкостью на единицу веса (в некоторых высокооборот-
ных конструкциях до 12 квт/кг) и простотой конструкции.
В табл. 29 приведены основные схемы распространенных в
настоящее время аксиально-поршневых насосов.
§ 2. АКСИАЛЬНО-ПОРШНЕВОЙ РОТОРНЫЙ НАСОС
С ДВОЙНЫМ КАРДАНОМ
Аксиально-поршневой роторный насос с двойным карданом
и торцовым распределением, конструкция которого показана на
рис. 191, является в настоящее время наиболее распространен-
ным в гидроприводе. Насосы такого типа компактны, имеют вы-
сокий к. п. д. при высоких давлениях, малую инерционность и
высокую энергоемкость на единицу веса (в некоторых высокообо-
ротных конструкциях до 12 квт/кг). Они могут быть регулиру-
емыми и нерегулируемыми и работать при скорости вращения до
4000 об)мин, а в отдельных случаях и до 18 000 об]мин.
Вращение от двигателя через приводной вал 1 и двойной кар-
дан 2 передается цилиндровому блоку 3, который вращается на
внутреннем подшипнике 4 и торцом опирается на распредели-
тельный золотник 5. Благодаря двойному кардану при определен-
ном его положении вращение блока цилиндров и приводного вала
происходит синхронно. Вместе с приводным валом, а следова-
тельно и с блоком цилиндров, вращается упорное кольцо, в кото-
ром заделаны головки шатунов поршней. Поскольку ось блока
цилиндров имеет наклон по отношению к оси приводного вала,
то при одновременном вращении блока цилиндров и упорного
кольца происходит относительное движение поршней в цилинд-
рах: за одну половину оборота поршень совершает полный ход
в цилиндре, за вторую половину оборота этот же ход совершает-
ся в обратном направлении. При ходе поршня вглубь полость
цилиндра сообщается с линией нагнетания, при обратном ходе —
345
w
£
Основные схемы аксиально-поршневых насосов
Таблица 29
Роторные
(блок цилиндров вращается; распределение золотниковое)
С непосредственным приводом цилиндрового блока
С двойным карданом
Через внутренний вал
С наружным приводом
Продолжение табл. 29
Нероторные (блок цилиндров неподвижен; распределение клапанное нли золотниковое)
Бескарданиый с шатунным приводом С приводом через внутренний вал С наружным приводом
с линией всасывания. Таким образом, за один оборот в каждом
цилиндре совершается процесс всасывания и нагнетания
жидкости.
Очевидно, что подача насоса зависит от угла, составляемого
осью блока цилиндров и осью приводного вала. В связи с этим,
изменяя этот угол, можно регулировать подачу.
На рис. 191 показан насос с управляемой подачей. В этой
конструкции вся система блок — золотник монтируется на спе-
циальном поворотном устройстве — люльке 6, которая может
Рис. 191. Аксиальный поршневой насос с двойным карданом:
1 — приводной вал; 2 — кардан; 3 — блок цилиндров; 4 — подшипник блока;
5 — распределительный золотник; 6 — люлька; 7 — упорный диск; 8 — тяга
регулятора
вращаться вокруг оси, перпендикулярной к плоскости чертежа,
при помощи отдельного механизма — регулятора 8, приводимого
в действие давлением жидкости.
Основные кинематические соотношения
Выведем закон движения поршня по углу вращения <р привод-
ного вала (а следовательно, и блока цилиндров). Разместим на-
чало системы неподвижных координат, как показано на рис. 192.
Ось Ох направлена вдоль оси блока цилиндров; ось Oz направ-
лена перпендикулярно плоскости чертежа (вокруг этой оси и про-
исходит поворот всего блока при управлении подачей). Ось Оу
находится в плоскости чертежа.
Для общности задачи начало координат О размещено на не-
котором расстоянии а от плоскости заделки штоков в упорном
кольце. Углы <р поворота блока и кольца будем отсчитывать в
направлении против часовой стрелки. При изменении угла <р от
348
О до л в цилиндре происходит всасывание, при изменении от л до
2л — нагнетание.
Рассмотрим текущий угол ф отклонения цилиндра от верти-
кальной плоскости.
Рис. 192. К выводу закона движения:
а —. расчетная схема; б — углы кардана
Обозначив координаты центра шаровой заделки поршня
в упорном кольце через xh у\ и zb имеем следующие соотно-
шения, полученные С. В. Ломовым:
хх = R cos ф sin р — a cos Р;
z/x = — R cos ф cos p — a sin P;
Zx = /?БШф.
Обозначив координаты центра шаровой заделки штока в
поршне через х2, У2 и z2, можем записать
У2. = — г cos ф;
z2 = г sin ф.
Считая длину штока L заданной, можем составить следующее
уравнение:
L2 = (х2 — хх)2 + (t/2 — рх)2 + (z2 — zx)2.
Подставив сюда полученные выше значения координат и ре-
шая относительно интересующей нас координаты х2, будем иметь
х, = R cos ф sin р — a cos р +
+ V (R cos ф sin р — a cos Р)2 + Л2 — /?2 — г2 + 2r R х
X (sin2 ф + cos р cos2 ф) + 2аг Р cos ф. (119)
349
Мы получили закон движения поршня, который является
сложной функцией угла <р. Подставляя в уравнение (119) <р = О
и ф = л, можно получить ход поршня s, который будет равен
s = Х2 (л) — х2 (0).
Дифференцируя уравнение (119) по t, получим скорость
поршня
dx, dx,
V = --2_ _ 2 ,
dt d<f
dtp
где со = — угловая скорость вращения поршня.
Рассмотрим теперь частный случай схемы, а именно: поло-
жим а = 0 и г = — cos ^ й>.
2
Тогда будем иметь
хх = R cos <р sin Р;
ух = — 7? cos ср cos 3;
zx = jR sin ф;
после этого выражение (119) преобразуется в следующее:
х2 = R cos ф sin 3 + у ]/4Z,2 — jR2(l — cos З)2. (120)
Очевидно, что формулу (120) можно переписать в виде
х2 = R sin 3 cos ф + А,
где А = const,
поэтому скорость поршня
v = co =—colR sin 3 sin ф, (121)
dy
т. e. мы получили синусоидальный закон изменения скорости.
Ход поршня в такой конструкции
s = х2 (л) — х2 (0) = 2R sin р
и литраж насоса
q =----st — 2R sin 3 —— г,
' 4 4
где i — число цилиндров.
Условие а = 0 и г = R -—— имеет еще одно следствие:
угол 8 между осью штока и осью цилиндра не зависит от угла ф,
т. е. величина постоянная и наименьшая из всех возможных
углов 8. Вычислим этот угол. Уравнение оси штока как урав-
350
некие прямой, проходящей через две точки, определяется соот-
ношением
x~xt _ у—У! _ z—zx
Х2 ~Хг у2~ У! Z2 — Zj
которое при полученных выше значениях хь у}, Z\ и Ха, а также
при
z/2 = — -5- (1 + cos р) cos ф
и
р
z2 = — (1 + cos Р) sin <р
дает
х —R cos <р sin Р _ У + R cos ср cos Р _ z — R sin <р
|/"4Л2—7?2(1 cos Р)2 7? cos ф (cos р — 1) 7?sin<p(cosp— 1)
Уравнение оси цилиндра имеет вид
х у г cos <р z — г sin <р
~ — 6 “ О
Вычисляя угол между этими прямыми, получим
COS 8 - -cosp)2
2L
Величина этого угла нужна для вычисления радиальных сил,
приложенных к блоку.
Полученная выше формула для скорости поршня позволяет
вычислить степень неравномерности подачи насоса.
Мгновенная подача одного цилиндра
q = vf = — fa>R sin (3 sin ф,
следовательно, подача всего насоса
Q = "V (q) = — fuR sin р sin ф =
1 1
= faR sin(3 sin ф -f- sin ^ф H-------r-J + • • • + sin (ф +
n — 1 \ ЛП
<p +----;— л I sin —;—
---------* l-----------— f<pR sin p,
Л
sin —
i
n — 1
где n — число цилиндров, находящихся в зоне нагнетания;
i — общее число цилиндров.
Т-Г - .1. 2п
Периодом полученной функции является угол —.
351
При четном числе цилиндров п =
i ,
т*
л
sin —
cos
л
sin —
так как угол
, 2л
Л ф Л —р ....... )
i
то
(Л \ Л "]
л-Ь—I — —
Чтах = S1I1 р------------------------— = f(o7? sitl £----- ;
Л л
sin — sin —
i i
л
i
cos
Qmin = Sin ₽--------
Л Л
sin — sin —
i i
Средний расход
Q = fa>R sin P — ,
Л
поэтому степень неравномерности при четном числе
поршней
_ __ Qmax' ’ Qmin
При нечетном числе.цилиндров
i 4-1 л
п — —-—, когда иг
__ , 2л
мы
имеем следующие случаи:
i — 1 , л __ __
——.когда 77 + у
Проделав преобразования, аналогичные приведенным выше,
получим
® нечетн
л f, 2л \
---(1 — COS ).
i \ i /
В заключение рассмотрим вопрос об условиях, при которых
угловая скорость вращения блока цилиндра будет постоянной.
Так как блок цилиндров соединен с ведущим (приводным)
валом насоса через двойной кардан, то обозначив угол поворота
и
352
вала через ф0, а блоки — через <р, имеем, как известно, следую-
щую зависимость:
cos 62
tg ф = tg ф0 - - 2 ,
cos Oj
где 6i и 62 — углы, составляемые осью кардана и осью вала и
блока (рис. 192, б).
Дифференцируя последнее уравнение по t, получим
со = соо------------------------------,
/ cos о, \ ( cos б, \
----Г- s'n ?о > ----cos2 <р0
\ COS б, / \ COS 62 /
где со0 — угловая скорость вращения приводного вала.
Из полученной формулы следует, что равенство угловых ско-
ростей со = соо и углов поворота ф = фо будет иметь место при
61 — 62. Очевидно, что при проектировании насоса желательно
соблюдать это равенство, так как иначе возникают дополнитель-
ные силы, действующие на блок.
Расчет фаз распределения
Распределение потока жидкости в рассматриваемом насосе
является золотниковым. Золотник, показанный на рис. 193, име-
ет два окна: всасывающее и нагнетательное. В течение одной
половины оборота цилиндр
блока соединяется со всасы-
вающим окном, в течение вто-
рой — с нагнетательным ок-
ном. Определение правильно-
го положения этих окон по уг-
лу имеет большое значение
для рабочего процесса насоса
и в частности для его акусти-
ческих качеств. В момент пе-
рехода через межоконные пе-
рекрытия (перемычку) на дис-
ке замкнутые объемы жидко-
сти перемещаются из зоны
высокого давления в зону по-
ниженного, и наоборот. Это
вызывает высокочастотные
Рис. 193. К расчету фаз распределе-
ния насоса
ударные волны и высокоско-
ростные перетечки жидкости с
последующей эрозией на меж-
оконных перемычках.
Исследования этого явления показали, что уменьшение эро-
зии и вибрации, а следовательно, и шума, производимого насо-
сом, достигается в том случае, когда жидкость в полости вра-
23 Заказ 1076
353
вдающегося цилиндра предварительно сжимается на участке пе-
рехода от всасывания к нагнетанию и подвергается растяжению
при переходе от нагнетания к всасыванию. В нереверсивных ма-
шинах это может быть достигнуто смещением напорного (всасы-
вающего) отверстия по углу до положения, при котором переме-
щение поршня вызовет требуемое повышение (понижение) дав-
ления. Определим тот необходимый угол смещения окна, при
котором достигается требуемая величина сжатия жидкости.
Выделим один из цилиндров ротора. Положение его будем оп-
ределять углом ср = со/ поворота ротора от начального положе-
ния (рис. 193), где со — угловая скорость вращения вала насоса,
a t — время. За начальное примем такое положение ротора, при
котором для выделенного цилиндра начинается такт нагнетания.
Тогда при выполнении определенных условий в конструкции ка-
чающего узла насоса (см. стр. 350) скорость поршня выразится
соотношением
v = Rm sin Р sin mt,
где R — радиус окружности, на которой расположены центры го-
ловок штока в упорном кольце вала;
р — угол наклона оси барабана к оси ведущего вала.
Если при mt > 0 цилиндр не сообщается ни с зоной всасыва-
ния, ни с зоной нагнетания, то уравнение неразрывности для зам-
кнутого объема жидкости в цилиндре запишется в виде
FRm sin р sin mt = — . + Q (р), (122)
В dt
где F — площадь сечения поршня;
В — модуль упругости жидкости;
V — объем жидкости в цилиндре при mt = 0.
Левая часть уравнения (122) определяет расход, обусловлен-
ный движением поршня; первый член в правой части — расход
за счет сжимаемости жидкости, второй — утечки из полости ци-
линдра.
Ввиду скоротечности процесса и незначительности утечек по-
следним членом в уравнении (122) можно пренебречь. Тогда
будем иметь
FmR sin Р sin coz' = . (123)
Интегрируя равенство (123) и используя начальное условие,
заключающееся в том, что при mt = 0 р = рве, где рве — давление
во всасывающей магистрали насоса, получаем
— FR sin р cos mt = р — FRsmri----рвс (124)
или
р = Рвс 4- . (125)
354
Соотношение (125) представляет собой зависимость давле-
ния в замкнутой полости цилиндра от угла поворота ротора.
Переписав уравнение (124) в виде
со/ = arccos 1 —
RFD-.- (Р — Pec)
BFR sin p
(126)
и подставив сюда вместо р значение давления рн в нагнетатель-
ной магистрали, получим выражение величины того угла щ, на
который должен переместиться замкнутый объем от положения
мертвой точки до точки начала открытия нагнетательного окна
(в предположении нулевого начального промежутка):
а, = arccos Г1-------------(рн — рес)
1 L BFR sin р4,1
(127)
При обратном переходе условия более благоприятны, так как
в этом случае из области нагнетания переносится только мерт-
вый объем.
Интегрируя уравнение неразрывности
FmR sin В sin со/ = ,
г В dt
где V' — объем жидкости в цилиндре при со/ = л, с начальным
условием, что при со/ = л р = рн, будем иметь
р = рн - cosco/) (128)
или
со/ = arccos Г-------(рн — р) — 11- (129)
[BFRsinji \
Принимая во внимание, что со/ > 0, т. е. со/ = а + л, и под-
ставляя вместо р в равенство (129) значение давления во вса-
сывающей магистрали, получаем величину угла, на который дол-
жен переместиться замкнутый объем V' от положения мертвой
точки до точки начала открытия всасывающего окна (при усло-
вии прекращения сообщения цилиндра с зоной нагнетания в точ-
ке со/ = л):
Г. У ! ч
а, = arccos 1----------------(р„ — рвд
2 [ BFR sin р 1вс’
(130)
Формулы (127) и (128) дают требуемые значения фаз рас-
пределения. Спроектированные таким образом золотники были
проверены экспериментом, который показал хорошие результа-
ты: амплитуда колебаний давления и шум уменьшились почти в
3 раза.
23* 355
Давление в цилиндре как функция угла
поворота блока
С момента начала сообщения полости цилиндра с полостью
нагнетания (at cci) будет справедливым следующее уравне-
ние неразрывности:
Ro7?sinpsin^ = р,1)1(а1, at) 1 / — (р — рн) + -К- • , (131)
|/ р В at
где pii — коэффициент расхода;
р — плотность жидкости;
fi(ai,at) —площадь раскрытия дугообразного паза нагне-
тания окном цилиндра.
В общем случае зависимость Л(«ь
ображений определяется соотношениями
= 0 при 0 < ав,
(а1( at) = г2 2 arccosf 1 —
из геометрических со-
(рис. 193) fi (аь at) =
Ф1
2г0
— 2 fl — Ф1— 'jlZcpi — fl — Ф1-7—)
\ г0 / у г„ \ 4г0 /
при
2^*
(fi = — а2 ------— ;
fi («!, at) =лго + -7 Фг № — fi)
при
Н-----— Ф2 = at — -|---— ] ai Н---------Ь Фо'>
Г \ Г I г
и, наконец,
fr (c^at) = fr fax + + Фо) = const
при
«I + Фо at < Л — (ar Н---------- + ф0).
Ввиду того, что дифференциальное уравнение (131), являю-
щееся нелинейным [члены FaR sin р sin at, ft (ai, at) и — (p —
— pH) нелинейный], обычными способами решить невозможно,
ниже рассматривается способ решения этого уравнения при по-
мощи электронно-моделирующей установки.
Сущность моделирования заключается в перенесении изуче-
ния явления в оригинале на модель другой физической природы,
в данном случае на электрическую модель.
Идентичность дифференциальных уравнений, описывающих
физический и электрический процессы, позволяет при соответст-
356
вующем подборе постоянных изучать физические явления на
электрической модели.
Для удобства расчета перепишем уравнение (131) в виде
dp BFR sin В . ,
—— =----------— sin (Pt
dt V
и добавим равенство
—^fl(a,af)yp_pH (132)
d (<о/)
——— = со.
dt
(133)
Теперь можно составить структурную схему электрической
модели (рис. 194), работа которой описывалась бы системой
уравнений, идентичных уравнениям (132) и (133):
SCZy — ^Ti^e
= f6 (U7);
St/j —
_ 1
IsL Л £-Zo£-Zx«
100 3 0
U5 — fi (u7);
U3 — fs (иг),'
U2 — ^21^1 ^22^0,
d
где s — производная —;
dT
т — независимая переменная установки (время);
kij — j-и коэффициент усиления z-м блоком;
fs и/б — соответствующие нелинейные функции.
После несложных преобразований системы уравнений
получаем
5И1 = ^llfe (И?) 0,01^12/5 (w7) f3 (A21W1 ^22Ио)>
(134)
(134)
(135)
stty —
Величины напряжений tit на модели могут представлять в не-
котором масштабе переменные в физическом процессе; аналогич-
но и независимое переменное — время может отличаться от вре-
мени исходной задачи потому, что процессы на установке воспро-
изводятся в замедленном или ускоренном темпе. Таким образом,
~ d
s = smf; s - ------;
* dt
<0
ц0 = —
u m
co
357
,,' _ Рн и , ______ Р .
U о — ---- И U J — ----,
тр тр
из ~ У~й^ • 10 = 10 ]/ki i«i — k22u'o;
„ _ fi(a, «О .
«5 ~~~ у
тр
sin at at
ue =--------- и щ = —— ,
«sin mat
где m — соответствующие масштабы.
график учета знака функции sign(p— рк):
а — схема; б — график
Подставляя полученные значения напряжений в уравнения
системы (135), получаем
d о , sin at „ ,, . .
— mt ' dt тр X /1 (а, со/) Т/ d mf dt * fen 0,1A!i2 > ^sin Гъ _p k К21 к22 , mp rnp at , <0 = *71 — «cot «co
358
или
= Mp Sjn
dt P
mtm^a
mftnt
л / ь _р ъ Рн .
I / «21 «22 ,
V тР тр
d , Ьптеа
at =
dt----------mamt
co.
(136)
соответствующие коэффициенты уравнений
Приравнивая
(132), (133) и (136), получаем выражения для коэффициентов
усиления:
, BFR sin В
*11 =--------“
mtfnsin .
fnp
V
ВРЯ/ —
k - Р
«12-----------
mftnt
тр
К
^21 = ^22 ~ P^p'i
mamt
........ .
ma>t
Для нелинейных блоков в соответствующих масштабах наби-
раются кривые у = Ух; у = fi (at, со/) и у = sin со/.
Для обеспечения работы на наибольшем возможном уровне
напряжения в установке целесообразно выбирать масштабы т
исходя из того, чтобы максимально возможное значение перемен-
ной в физическом процессе соответствовало напряжению ~ 100 в.
Измеряя напряжения щ и ы7 на выходе первого и седьмого
блока соответственно, получаем искомую зависимость (в опреде-
ленном масштабе) р = р (со/), так как
Uj f U>j \
тр \ mat /’
эта зависимость изображена на рис. 195 (участок от 0 до л).
При 0 < со/ < at цилиндр не сообщается ни с зоной всасыва-
ния, ни с зоной нагнетания, жидкость в- цилиндре на этом участ-
ке сжимается от давления рв до давления pi. В точке со/ = at от-
крывается окно нагнетания и жидкость при перепаде (рн—р)
поступает в цилиндр, затем после выравнивания давлений р и
рн она начинает поступать из цилиндра в полость нагнетания.
Ввиду недостаточного раскрытия окна нагнетания окном ци-
линдра в начале их сообщения и сравнительно большой подачи
жидкости поршнем давление в цилиндре возрастает до величи-
ны /?тах > Рн (рис. 195). В случае большого скачка давления
(ртах — Рн) предварительное сжатие жидкости в замкнутом
объеме следует уменьшить на некоторую величину р0.
359
Заменив в уравнении неразрывности (132) рн на (рн — Ро),
получим новую величину угла си предварительного сжатия. Те-
перь давление в цилиндре в момент открытия нагнетательного
окна будет равно (рн — Ро), соответственно изменится и зависи-
мость fl (dl, at).
Тогда уравнение неразрывности (131) примет вид
|/ —
= Basing s.n -------И_р_
dt V V
где
Xfi(af,(ot)yip — pHl sign (р — рн),
sign (р—рн)
1 при р > рн;
— 1 при р < рп.
Для учета знака функции sign(p — рн) достаточно в нелиней-
ном блоке 3 (рис. 194, а) набрать кривую вида, показанного на
рис. 194, б, а для учета изменения функции f(ai, at) достаточно
на вход блока 7 подать напряжение \ щ-----Меняя ве-
\ mmt /
личину ро и решая последнее уравнение, можно так подобрать
значение угла аг, что величина скачка давления (/?тах— рн) бу-
дет меньше заданного значения.
Аналогично определяется зависимость р = p(at) для углов
at > л. Уточнение величины угла аг (рис. 193) предварительного
разрежения жидкости от давления рн до давления р0 произво-
дится с таким расчетом, чтобы давление в цилиндре не падало до
давления ру упругих паров рабочей жидкости.
360
В общем случае уравнение расходов при at п запишется
в виде
= */тх
dt V V
X fi (аг, /I р — рв I sign (р — рв).
Решение этого уравнения на электрической модели проводит-
ся аналогичным образом и также не представляет трудностей
(см. стр. 357).
В результате решения получаем зависимость р = p(at), т. е.
Р ~ Р(ф) для всего диапазона <р (рис. 195).
Силы, действующие на блок цилиндров
Рассмотрим нерегулируемый насос и предположим, что блок
цилиндров статически и динамически сбалансирован. Тогда на
блок цилиндров (рис. 197) действуют следующие силы:
1. Равнодействующая Ро осевых
сил давления в цилиндрах. В каждом
цилиндре давление действует на пло-
щадь
где f0K — площадь окна цилиндра;
d0 — диаметр цилиндра (рис. 196).
Следовательно,
Р<> ~ Р^нагн’
Рис. 196. Окно цилиндра
где 1нагн — ЧИСЛО цилиндров, находя- насоса
щихся в зоне нагнетания;
р — давление, создаваемое насосом.
Так как число цилиндров в блоке обычно выполняется нечет-
i —1 i+1
ным, то 1нагн изменяется от t = —— до = —— и, еле-
пиан Q пиан су
довательно, Рр будет силой, меняющейся от р" = pfif,aeH ДО
Рр= Р^нагн ЦентР давления, т. е. точка приложения равно-
действующей, также будет периодически меняющейся точ-
кой.
2. Боковые, т. е. перпендикулярные оси блока, составляющие
сил давления, обусловленные наклоном штоков поршней под уг-
лом е.
361
Рассматривая схему на рис. 197, можем записать для одного
цилиндра, отстоящего на угол <р от оси Оу, от которой ведем от-
счет углов,
, nd?
Рг = р-----sin е,
4
а так как
. я
где к = —,
г
то
. itd20 k—1 D
Рг = р--------------------- • ----
4 k 2L
Проектируя эту силу на ось х, получим
п' nd*
РгХ = ~Р
4
k— 1 D .
------ sin <р
k----2L
Суммируя, получим для всех находящихся под нагнетанием
поршней результирующую проекцию боковой силы на ось х:
Ргх = — Р
fe —1
k
4
Ф=180
i?Ssin<₽
<р=0
или, заменяя ее средней величиной, получим
- nd20
Ргх=-Р —
2kL л
где i — среднее число поршней, находящихся под нагнетанием,
— i
I = —.
2
362
Так как сумма проекций всех сил P't на ось у равна нулю, то
Л = Ргх- Эта сила воспринимается радиальным подшипником 4
(см. рис. 191), который рассчитывается на основании полученной
величины силы Ргх.
3. Центробежные силы и момент центробежных сил поршней.
Рассмотрим схему, показанную на рис. 198. Можем записать,
что центробежная сила, развиваемая одной поршневой группой,
равна (Gi — вес поршня; G2— вес штока)
• — со2 + ----со
g 2 К g 2
Момент этой силы относительно оси Ох
где
/1 = tg Р cos Ф,
>2 —
L
и суммарный момент
Ф=360
мах = ГОх + g2 4-1 ii У cos <р
2g L J
cp=O
или после осреднения
мах = 4^ +g2 4-] и pa
8g L1
^x'2
D
Рис. 198. К определению центробеж-
ных сил
4. Силы линейных перегрузок Pm. Если весь насос движется
с ускорением, так что перегрузка вдоль оси блока равна т, то
Рт = Gm, где G — вес блока
5. Силы действия пружи-
ны блока и пружины карда-
на (см. рис. 191) обозначим
Р пруж-
6. Силы трения в голов-
ках шатунов о стенки ци-
линдров и на торце блока
обозначим Т.
7. Силы давления на то-
рец блока цилиндров, воз-
никающие в зазоре торцово-
го распределителя.
Силы давления, действующие на торец блока цилиндров, воз-
никают благодаря тому, что в зазоре между торцовыми поверх-
ностями распределителя и торцовой поверхностью блока цилинд-
ров имеет место давление жидкости. Определение этих сил яв-
ляется трудной задачей, усложняющейся тем, что торцовые по-
верхности из-за внецентренного действия результирующей силы
363
давления на блок в сторону его прижима к распределительному
диску устанавливаются под некоторым наклоном друг к другу,
Поле давлений в перемычке между окнами показано на рис. 199.
Точная зависимость давления р в зазоре между наклоненны-
ми друг к другу под углом а торцовыми поверхностями от угла <р-
и радиус г (рис. 204, б) при ламинарном движении имеет вид
Г 1—ar 4а (г — R2)2a3rR2(r — R2) — За2 (г2—R^,)
р = р 1П^~1П"а72+ 2 (1 — аг)2 (1 — а/?2)2 .
j 4а (R, - R2)-f-2a3R1R2 (R, - R2) - 3a\R\-R^ ’
^1ПТ?2~1П1-afl2+ 2(1 -aROG - aR2)2
где
a cos <p.
ff ’
a — угол наклона поверхностей.
Вид эпюры, построенной
по полученному уравнению,
показан на рис. 204, б.
Кроме того, задача ус-
ложняется тем, что блок со-
вершает колебательное дви-
жение, обусловленное пере-
менной силой Рр (под на-
гнетанием находится перио-
i — 1 i + 1
дически —-— и —-— ци-
линдров) .
Однако, как показывают
OS)
001 002 ОЮ 020Очо/ООО
Рис. 199. Распределение давления
в перемычке
измерения зазора, проведенные С. Н. Поповым и автором, нак-
лон блока цилиндров уменьшается с увеличением давления, до-
стигая при давлении р = 200 ат (например, для насоса ГМ-37)
значения 15", что дает основание создать приближенную схему
расчета сил давления в зазоре и затем величины этого зазора,
считая торцовые поверхности блока параллельными друг другу.
Поэтому предположим, что давление в зазоре изменяется в ра-
диальном направлении по линейному закону. Кроме того, будем
считать задачу статической (колебания отсутствуют) и стенки
нетеплопроводными.
Тогда будем иметь следующие силы, действующие на торец
блока цилиндров в направлении его отжима от распределителя:
1. Силу давления, обусловленную линейной эпюрой давления
в зазоре:
Рр = PFo= Р
8
где р — давление нагнетания;
364
Fo — площадь полукольцевой поверхности, границы которой
проходят по средним окружностям уплотнительных по-
ясков и средним линиям перемычек (рис. 200).
2. Силу давления, вызванную термическим клином на наруж-
ном уплотнительном пояске и равную (в предположении ц =
= const):
1 h'lyc ’
где ц — вязкость жидкости;
щ — окружная скорость на среднем диаметре пояска Dp,
А—термический эквивалент ра-
боты;
a—коэффициент объемного рас-
ширения жидкости;
6; —ширина пояска;
с — удельная теплоемкость;
у — удельный вес жидкости;
h — зазор.
3. Аналогичную силу термического
клина на внутреннем уплотнитель-
ном пояске:
H2v2AanD2b2
4. Силу термического клина на поверхности опорных бурти-
ков (эскалопов);
ц2у^Лал,О36з<р
Р ч j
h3yc
где 63 — ширина эскалопа;
L — суммарная длина эскалопов (по дуге средней окруж-
ности) .
Определение зазора в торцовом распределении насоса
Величину зазора приближенно найдем исходя из уравнения
равновесия блока, которое в предположении того, что вся систе-
ма сил приводится к равнодействующей, имеет вид
Ро + Л» + Рт + Рпруж + Т = Рр 4- Р, + Р2 + Р3.
Обратим внимание здесь на то, что поскольку при определе-
нии силы Рр мы включили всю площадь нагнетательного окна, то
365
силу Ро следует вычислять не через площадь f окна цилиндра, а
через всю площадь поперечного сечения цилиндра, т. е.
Подставив значения сил Рр, Pi, Р2 и Р3, получим
р л. р цп + Т - о 4-
Р 8 + + Рт + Рпрум + 1 - Р 8 + h*yc
X (viDibl 4- v2D2bl 4- ЦзО3&з1|5),
откуда зазор
h =
Ц2ЛаЛ 4- у2^2^2 + ^зФ)
ndgi
Ус р-^~
Л (£>2 —
'пР-Т-р
о
Для .приближенного расчета зазора можно положить Т = О,
Pm = 0, тогда
2 ц2а>Ма ^1^1 + ^2^2 +
УСР ’ [id2 4-8 (Pffl+P„p)-(O2 - О2)] ’
Эту задачу можно решить и в обратном порядке, т. е. зада-
ваясь h, определить требуемый конструктивный размер пары, на-
пример, ширину эскалопа bs.
Сравнение формулы с экспериментом подтверждает получен-
ную закономерность изменения зазора с давлением; однако вы-
численные значения зазора получаются меньше экспериметаль-
ных. Лучшее совпадение результатов имеет место для пят с ши-
рокими опорными поверхностями.
Эпюры распределения давления
вдоль уплотнительного пояска распределителя
Поле давлений наружного уплотнительного пояска плоского
торцового распределителя экспериментально исследовалось
Р. М. Пасынковым на насосе НПА-64 с подачей 96 л/мин, а так-
же автором на насосе НП-25 (Q = 120 л/мин). На рис. 201 пока-
заны места установки тензодатчиков (из манганиновой проволо-
ки), а на рис. 202 и 203 показаны эпюры давления при различных
скоростях вращения блока, а также эпюры распределения тем-
пературы по дуге пояска [43].
366
Рис. 201. Установка датчиков
давления и термопар в распре-
делителе насоса НПА-64:
1 — термопара; 2 — датчик дав-
ления
Рис. 202. Эпюры давления в торцовом зазоре вдоль наруж-
ной уплотняющей кромки распределителя насоса НПА-64 при
различных давлениях нагнетания и скоростях вращения блока:
а — г — давление нагнетания соответственно 8, 40, 70 и 90 кГ/см2
367
На рис. 204 показана полученная автором эпюра давлений на
наружном пояске насоса НП-46 аналогичной конструкции, но
имеющего большие числа оборотов.
Проведенные исследования подтверждают, что масляная
пленка в зазоре имеет вид клина, причем зона наименьшего за-
зора смещена от вертикальной оси на ~40—50° в сторону враще-
ния блока.
При исследовании процессов, протекающих в зазоре распре-
делителя, следует иметь в виду, что при некоторых условиях
Рис. 203. Изменение температуры у поверхности опор-
ных поясков распределителя насоса НПА-64 при раз-
личных давлениях нагнетания и вероятное поле темпе-
ратур на 20-й минуте работы:
а, б, в — давление нагнетания 20, 40 и 90 ат
в зазоре может иметь место граничная смазка, когда несущая
способность масляной пленки определяется давлением жидкости,
находящейся во впадинах неровностей поверхности. Смазка
в граничном слое приобретает свойства пластического тела и
отлична от гидродинамической смазки. Расчет этих процессов
базируется на реологических зависимостях. На основании экспе-
368
риментов, проведенных И. А. Куниным, можно сделать вывод, что
при п < 500 об!мин жидкостное трение переходит в граничное.
в)
Эпюра
1450 об}мин (Q
при п
100 ат, t = 65° С; 3 — при р =
65° С; б — по радиусу; в — по
дуге при п = 2930 об!мин и наддуве 1,6 ат
Рис. 204. Эпюры давления в насосе
НП-46 (опыты МВТУ им. Н. Э. Баумана):
а — по дуге
— 35 л!мин)\ 1 — при р = 50 ат, t — 70° С;
2 — при р
- 150 ат, t
Направление
вращения
блока
§ 3. ДИАГОНАЛЬНО-ПОРШНЕВОЙ РОТОРНЫЙ НАСОС
Насос такой конструкции с управляемой подачей, спроекти-
рованный для авиационных гидросистем, показан на рис. 205, а.
Насос рассчитан на давление до 210 ат и число оборотов п —
= 2000 в минуту. Особенностью конструкции является наклонное
расположение поршней, кинеторной поверхностью для которых
является внутренняя коническая поверхность упорного кольца.
Этот насос может работать при больших числах оборотов, чем
аксиально-поршневой насос, так как благодаря наклонному по-
ложению поршней диаметр окружности распределительных окон
здесь меньше, следовательно, при одинаковых окружных скорос-
тях число оборотов этого насоса будет больше, что делает его бо-
лее легким на единицу передаваемой мощности. Кроме того,
влияние центробежных сил улучшает условия всасывания.
Управление подачей осуществляется поворотом упорного
кольца относительно оси, перпендикулярной к плоскости черте-
жа. Если ось качения упорного кольца проходит через вершину
конуса, а оси поршней перпендикулярны поверхности конуса
упорного кольца в его нейтральном положении (наиболее рас-
пространенный случай), то можно несложным способом получить
закон движения поршня, т. е. « = /:(ф)> гДе s — перемещение
поршня относительно цилиндра, а ср —угол поворота блока.
В предположении заостренности поршня в точке контакта с ко-
24 Заказ 1076 36?
нической поверхностью получим закон движения, выражающий-
ся следующей зависимостью:
I sin atgp (1 — tgatg ₽ sin q>)sin q>, (137)
где l и a—см. рис. 205, 6, a p— угол поворота упорного кольца.
Отсюда ход поршня
h = s л — « л = 2/ sin a tg В
и, следовательно, литраж насоса
ndn nd? .
а = ih----- - 2г —— I sin a tg В,
4 4
где i — число поршней.
Рис. 205. Диагонально-поршневой насос:
а — конструктивная схема; б — к выводу закона движения
Дифференцируя уравнение s = получим скорость
поршня
o = /sinatgp(l — 2tgatgpsinф cos ф)и,
что позволяет вычислить мгновенный расход и степень неравно-
мерности методом, изложенным выше.
370
Распределение насоса золотниковое, поэтому приведенный
выше расчет торцового распределителя применим полностью и
здесь.
§ 4. АКСИАЛЬНО-ПОРШНЕВОЙ НАСОС С КЛАПАННЫМ РАСПРЕДЕЛЕНИЕМ
Рассмотренные выше роторные насосы с золотниковым рас-
пределением обладают следующими недостатками:
возможно разрушение поверхности распределительного золот-
ника вследствие поджима к нему блока цилиндров и большой
скорости скольжения блока по золотнику;
небольшая долговечность подшипников качения, особенно
подшипника блока цилиндров.
Эти недостатки устраняются 'применением насосов с непод-
вижными цилиндрами, свободно открывающимися окнами на
всасывании и клапанным распределением на нагнетании.
В насосе (рис. 206) нет быстроизнашивающегося золотника и
выходящего из строя подшипника блока цилиндров.
Насос работает следующим образом. Масло из бака через
всасывающий штуцер поступает во внутреннюю полость насоса,
откуда по каналам в блоке цилиндров поступает к всасывающим
окнам.
Заполнение маслом внутренних полостей цилиндров проис-
ходит в период хода всасывания; на обратном ходе плунжера,
происходящем под воздействием косого среза кинетора 2, после
перекрытия перепускного окна происходит нагнетание жидкости
через клапан 9 в полость нагнетания и далее в гидросистему. По-
лость нагнетания через канал соединена с полостью золотника
регулятора. При достижении в полости нагнетания заранее уста-
новленного давления этот золотник начнет смещаться вправо,
сжимая при этом пружину и увлекая коромысло 13 вместе с ре-
гулирующими втулками 11. Если до смещения золотника втул-
ки 11 перекрывали отверстия в плунжерах на всей длине рабоче-
го хода, то при смещении золотника на части хода эти отверстия
будут сообщать камеру цилиндра с внутренней полостью насоса,
т. е. подача насоса будет уменьшаться. Изменяя затяжку пружи-
ны, мы можем обеспечить ту или иную величину давления нагне-
тания, при которой насос начнет изменять производительность.
Крутизна падения производительности от полной до нулевой бу-
дет зависеть от жесткости пружины.
Расчет подачи насоса
В отличие от других поршеньковых насосов в рассматривае-
мой конструкции расход определяется не полным ходом плунже-
ра, а лишь той частью его, которую он проходит после отсекания
кромки всасывающего окна. Таким образом, полный ход
24* 371
372
Рис. 206. Аксиально-поршневой насос с клапанным распределением на нагнетании:
/—упорный подшипник; 2 — кннетор; 3 — корпус; 4 — поршень; 6 — блок; 6 — регулятор; 7 — пружина регулятора; 8 -
упорная гайка регулятора; 9 — нагнетательный клапан; 10 — насосная полость; 11 — регулировочная втулка; 12 — упор коро-
мысла; 13— коромысло; 14 — уплотнение
плунжера h, определяемый геометрией насоса, складывается из
двух частей: части, которая обеспечивает всасывание жидкости,
и части, обеспечивающей подачу рабочей жидкости в систему, т. е.
Л — + h2.
Полный ход плунжера можно также определить по формуле
h = d ctg 3,
где d — диаметр расположения цилиндров в блоке цилиндров;
Р — угол наклона шайбы к оси вала.
В связи с тем, что подача насоса определяется только ходом
нагнетания h2, обозначая диаметр плунжера dQ, а число поршней
г, получим действительный расход насоса
2
q = _L По) (138)
где п — число оборотов вала в минуту;
т]о — объемный к. п. д. насоса.
Чтобы обеспечить надежное заполнение цилиндров насоса,
соотношение — следует брать равным ~0,8. Учитывая это,
из формулы (138) для do получаем
d0= 1,17 10217—, (139)
Г ««Цо
где Q — расход в л/мин-,
п — число оборотов в минуту;
т]о = 0,95 0,97.
Используя уравнение (139) по заданным Q и п, а также вы-
бранным i и т]о, найдем диаметр плунжера и величину рабочего
хода h2 = 0,8 d0. Ход нагнетания
/i2 = -f-ctgp(l-cosa0), (140)
где ао — угол поворота вала, при котором происходит отсечка
кромки всасывающего окна поршеньком.
Используя равенство (140), найдем выражение для определе-
ния диаметра расположения поршней в блоке цилиндров:
d =-------. (141)
ctg р (1 — cos а0)
По конструктивным соображениям угол наклона шайбы к оси
вала следует брать равным 75—78°. Меньший угол позволяет
создать более компактную конструкцию, но вызывает появление
больших боковых усилий на опорный подшипник. Угол ао выби-
рается таким, чтобы можно было обеспечить заполнение маслом
полости цилиндра за время двойного хода от а = ао до а = 180°.
373
Приняв p = 77° и ао = 132°, вместо уравнения (141) получим
d = 5,2/г2. (142)
Таким образом, используя уравнения (139) и (141) или (142),
мы определяем всю геометрию качающегося узла, обеспечиваю-
щую заданные параметры насоса.
Из рассмотрения процесса всасывания можно получить вы-
ражение для оценки давления на входе в насос, необходимого
для обеспечения бескавитационной работы насоса.
Проходное сечения окна на всасывании меняется, являясь
функцией угла поворота вала. Мгновенный расход жидкости че-
рез окна:
~-= pvndoho, (143)
at
где р — коэффициент расхода;
v — теоретическая скорость всасывания;
h0 — текущее открытие окна.
Текущее перемещение поршня h, соответствующее углу пово-
рота вала а, как мы видели выше, равно:
/z = -|-ctgP(l—cos ос). (144)
Вычитая равенство (140) из уравнения (144), находим
/г0 = ~^-ctgp(cosa0 — cos а), (145)
где а > ао.
Считая давление в полости цилиндра в процессе всасывания
постоянным, скорость всасываемого потока можем определить из
равенства
где Ар — перепад давления между внутренними полостями на-
соса и цилиндра;
у — удельный вес жидкости.
Подставляя v и h в уравнение (143) и выражая dt через угло-
,, da
вую скорость вала, т. е. dt = —, получаем следующее выра-
со
жение: _____
р 1 / 2g jid0 — ctg р (cos сс0 — cos ос) = dQ.
У у 2 со
Полный объем цилиндра будет заполняться за время двойного
хода Й1, т. е. равенство расходов можно записать в виде
-^2 / Л
—— ^2 = Р1 / 2g nd«-- ctg р С (cos а0 — cos a) da,
4 у у ы J
а»
374
откуда получаем
(л—а0) cos а0 + sin а0 corfo
1 — cos а0 Г L\p
8ц|/ 2^
Обозначая левую часть уравнения через f(a0) (см. рис. 207),
найдем для перепада давления Ар выражение
2 2
Ар >7,2 • 10~13 —кГ/см2, (146)
Н2/2 («о)
где d0 — в мм; п — в об/мин.
Принимаем п0 = 132°, f(a0) = 0,109. Тогда вместо неравенст-
ва (146) получаем
Дп>2л£1.ю-1ОП2^ кГ/см2. (147)
Определенная величина Ар дол-
жна быть прибавлена к минимально
допустимому давлению в полости
цилиндров насоса. Согласно опы-
там минимальная величина давле-
ния до появления кавитации может
быть принята равной 0,25—
0,3 кГ/см2 для насосов без гидравли-
ческой разгрузки плунжеров и
0,7 кГ/см2 для насосов с гидравличе-
Рис. 207. К расчету насоса
ской разгрузкой плунжеров.
Разница давлений объясняется тем, что при гидравлической
разгрузке плунжеры имеют сквозные отверстия, питающие смаз-
кой подпятники, которые не позволяют создавать в цилиндрах
вакуум.
Как видно из рис. 207, функция f(a) быстро измеряется с из-
менением угла а, а так как она входит в знаменатель выраже-
ния (146) в квадрате, то ясно, что она влияет на величину необ-
ходимого перепада давления на входе в цилиндры насоса. Чтобы
избежать кавитации и не прибегать к ’большим давлениям под-
качки или наддува в баке, угол и0 следует выбирать меньше, но
малые углы увеличат необходимый диаметр плунжеров, что вы-
зовет увеличение габаритов насоса. Практически угол cto берется
в пределах 130—135°, что обеспечивает достаточно компактную
конструкцию и насосы при умеренных оборотах вала (до
4000 об/мин) работают без кавитации при отсутствии наддува
в баке. Чтобы пользоваться уравнениями (146) и (147) для рас-
чета величины Ар, надо знать, как изменяется коэффициент рас-
хода на всасывании в функции от числа оборотов вала насоса.
Мы его принимаем постоянным для всего процесса всасывания,
в действительности он является переменным, зависящим от от-
375
крытия окна, через которое происходит всасывание жидкости.
Опыты показали, что коэффициент расхода имеет функциональ-
ную зависимость от числа оборотов:
ц = ц0 + £цп, (148)
где цо — постоянная составляющая коэффициента расхода для
п = 0;
k,L — коэффициент пропорциональности.
Для насоса без гидравлической разгрузки поршней &nj=
= 4,16-10-5 и Цо = 0,35 -г- 0,350, а для поршней с гидравлической
разгрузкой k». = 1,4-10-4. Эти коэффициенты действительны до
п = 3500 4- 4000 об!мин. При более высоких скоростях вращения
вала насоса процесс работы усложняется как вследствие измене-
ния условий заполнения полостей цилиндров, так и вследствие
возникновения запаздывания посадки клапанов на седла, умень-
шение подачи насоса начинается при давлениях на входе более
высоких, чем это определяется по уравнениям (146) и (147).
Граничные кривые кавитационных режимов работы насосов,
построенные по уравнению (147), хорошо подтверждаются опыт-
ными данными.
Расчет клапанов насоса
На объемный к. п. д. насоса большое влияние оказывают кла-
паны, установленные на нагнетательной линии. Так как в насосе
имеется только один клапан, то изолированное рассмотрение его
работы имеет основание, чего нельзя сказать про насосы, имею-
щие клапаны на всасывающей и нагнетательной линиях. Запи-
шем уравнения Вестфаля:
^Цк У 2g-y- = Fv — fKuK, (149)
где I — периметр клапана, по которому происходит истечение
жидкости из-под него;
s — высота подъема клапана;
цк — коэффициент расхода клапана;
Ар — перепад давления на клапане;
v, F — площадь и скорость плунжера;
fK, vK — площадь и скорость клапана.
Так как vn — — = со —, то вместо уравнения (149)
dt da
имеем
со fK + /8ц 2g = Fv = F ctg (Зсо sin а
376
или
ds
da
(150)
Введем обозначения:
Fd ctg 6 . n
------sin a = 0.
2fK
ti>dK
Fd ctg p ’ <t>f,
тогда вместо равенства (150) получим линейное дифференциаль-
ное уравнение первого порядка
+ ау — since = 0. (151)
Решение этого уравнения при а = const имеет вид
—аа , a sin а — cos а .
у=се +—гг?—’ (52>
Поскольку клапан является свободным телом, не имеющим
жесткой связи с плунжером, записать какие-то начальные или
граничные условия, которые безусловно выполнялись бы, невоз-
можно.
Определение постоянной интегрирования с произведем для
периода посадки клапана при условии, вытекающем из требова-
ния работы клапана без отставания и стука, а именно: положим»
что в конце хода плунжера вместе с приходом его в крайнее по-
ложение клапан садится на седло, т. е. положим у = 0 при а =
= 2л. Тогда из уравнения (152) получаем выражение
е2т
с —------,
1 -Ра2
подставляя которое в уравнение (152), имеем
у = ~i'lp 2 [еа(2п~а) + a sin ст— cos а]. (153)
Дифференцируя равенство (153) для безразмерной скорости
посадки клапана, найдем
у' — 1 ® 2 [a cos а + sin а — аеа (2зх-а)]. (154)
Отсюда видно, что при а = 2л скорость клапана у' = 0, т. е.
посадка клапана при этом условии будет происходить без стука.
Дифференцируя равенство (154), получим для безразмерного ус-
корения
у" = —-— [а (аеа (2п~а) — sin а) + cos а]. (155)
1 + а2
377
В конце хода нагнетания поршня при а = 2л t/"=2TC = со2. Пе-
реходя к размерному ускорению клапана, получаем
d2s Fd ctg р
dt2 ' 2fK
Дифференциальное уравнение движения можно написать так-
же в виде (рис. 208)
//2 с
Al^ = 7<(So-S)-/KAp + G + T, (156)
где М — масса клапана;
К — коэффициент жесткости пружины;
G — вес клапана;
У —сила трения при движении клапана.
Рис. 208. К расчету клапана
Для а = 2л s = 0 и расход
жидкости, обусловливаемый
движением плунжера, обращает-
ся в нуль, а следовательно, и Др
должно обращаться в нуль. Тог-
да, пренебрегая влиянием веса
клапана и силой трения, для ус-
корения можно записать
= °-, (157)
Л2 ММ ' 7
где Ро-—сила начального натяжения пружины клапана.
Приравнивая правые части уравнений (155) и (156), получаем
выражение, определяющее начальную силу пружины клапана
для работы при заданных числах оборотов вала насоса:
Ро = 5,5 • ДГ3 —Wctg₽/z2 кГ, (158)
где п — число оборотов в минуту.
Из уравнения (158) можно определить максимальное значе-
ние числа оборотов, до которого данная пружина обеспечивает
своевременную посадку клапана и его работу без стука:
гстах<13,5 --об/мин. (159)
у FMd ctg р
Коэффициент жесткости пружины можно определить, зная
максимальную высоту подъема клапана s'Q , которую найдем, по-
ложив в уравнении Вестфаля второй член правой части равным
нулю для момента, когда подача поршнем достигает макси-
мума, т. е.
/Son 1/ 2g— = coF-J-ctg₽,
V У 2
378
откуда
S; = —M.Frfc^L= . (160)
2Zp, j/ 2g -y-
Жесткость пружины К найдем по отношению s0 к s0 + s'.
Коэффициент р расхода через клапан необходимо брать из
опытов. Для предварительных расчетов можно принять цк =
SQ ~so
= 0,60,7. Отношение ----------= пг, для быстроходных насосов
so
можно принять равным 1,2-4-1,4. Тогда, зная Ро, можно найти К,
S0 rz Р0
так как s0= ----- и д = —Ч
т — 1 s0
Испытания насосов показали, что подбором соответствующе-
го значения Ро можно обеспечить нормальную работу клапанов
насоса при числах оборотов до 6000—8000 в минуту. Это под-
тверждает справедливость полученных уравнений (158) и (159).
В случае появления стука при работе клапанов их отставание
от движения плунжера можно уменьшить введением отрицатель-
ного перепада давления на клапан до прихода плунжера в его
крайнее положение. Практически это можно осуществить сообще-
нием полости цилиндра с линией слива, как это показано на
рис. 206. Тогда согласно уравнению (156) сила пружины и вели-
чина перепада на клапане будут суммироваться и клапан, полу-
чив большее ускорение, быстрее сядет на седло. Регулируя вели-
чину открываемой площади канала и момент открытия, можно
обеспечить достаточно плавную и своевременную посадку кла-
пана без значительного снижения объемного к. п. д. насоса и сни-
зить инерционные нагрузки перемещения плунжера. Этот способ,
устраняющий отставание посадки клапана, вызывает дополни-
тельные технологические трудности, связанные с обеспечением
одновременности открытия каналов.
Действительная работа клапана более сложна, чем это описы-
вается уравнениями (152) —(154), полученными при предполо-
жении а = const, так как а — величина переменная и является
функцией а.
Конструкция плунжерного узла
Вал, вращаясь, скользит опорной поверхностью по бронзово-
му башмаку, шарнирно соединенному с плунжером. Опыты пока-
зали, что вал, изготовленный из стали Х12Ф1, а башмаки — из
бронзы Бр.АЖ9-4 обеспечивают удовлетворительную работоспо-
собность узла. Для предотвращения быстрого износа башмаки
следует делать гидравлически разгруженными за счет подвода
масла под башмак под давлением, как это показано на рис. 209.
379
В этом случае опора плунжера насоса работает как гидроста-
тическая пята и расчет ее размеров должен обеспечить режим
жидкостного трения.
В основу расчета размеров пяты положим следующие уравне-
ния, составленные для ламинарного течения в зазоре и канале
пяты при постоянном коэффициенте вязкости.
Рис. 209. К расчету опорных пят поршней:
а — конструктивная схема; б — расчетная номограмма
Уравнение равновесия башмака пяты
npr (d? — d( j cos 0 ndgpQ
4
d2
8 In —-
dr
(161>
Уравнение расходов
Q = -
Pr^h3 = (Pq —Рг)яг4
d2 8pL
6u. in---
(162>
где pr — давление во внутренней расточке опорного башмака пя-
ты (рис. 209, б).
Исключая из последнего уравнения рг и решая его относи-
тельно h, получим
/3 г Г2Й(1 — D2) / 1 У
—--------L —21g 4-) , (163)
8 L [ sec 0 \ D /_
где
D = и D2 = .
^2 ^0
380
Соотношение размеров опорной поверхности башмака пяты
определим исходя из требований получения ее максимального
к. п. д.
Потери мощности, обусловленные утечками,
q рцлЛ3 sec 0
•^1 — Ро = — >
2 6ц£>^(1—D2)
и потери мощности на преодоление вязкого трения (предполагая,
что пята совершает движение по окружности радиусом R)
n3n2R2 (1 — D2)
Е, =-------------------
2 3600Л
Тогда полная мощность одного цилиндра насоса
__ РОЛ d20Rn tg 0
0 120 ’
(165)
(166)
Суммируя уравнения (164) и (165) и деля полученную сумму
на равенство (166), получим
1—П = £1 + £з =h ----, (167)
1 N„ L sin 0 30 tg 0Л2₽ J
где т] — к. п. д. пяты;
Й = — ; R = — ;
р = p?Di(i-P)]. (168)
цп
Дифференцируя уравнение (167) по р при h = const, получим
т 0,129 zicn\
"“ТГ' (169)
Выражение (169) позволяет определить размеры опорной по-
верхности пяты. _
Задаваясь h, а следовательно и h (поскольку Do известно),
находим по формуле (168) величину р. Затем, зная р, Ро,ц , п,
R=—и задаваясь по условиям габаритов диаметром^, нахо-
4° —
дим из последней зависимости D и, следовательно, диаметр d\.
При проверочном расчете пяты ее к. п. д. определяется из урав-
нения (167). Для облегчения расчетов на рис. 209 показаны кри-
вые функций h. = f(p) для различных т] [72].
В рассмотренном расчете термический клин не учитывался.
Если уточнить расчет, т. е. учесть термический клин, имеющий
381
место в зазоре пяты, то вместо равенства (161) получим следую-
щее уравнение равновесия сил:
л<12
(Р/г + Л)со5 0-р0--^, (170)
где Pt — усилие, развиваемое термическим клином;
р 10аА<№ВЧ. .
* yCh* ’ '
Ph — усилие, обусловленное эпюрой давления течения жид-
кости в радиальном направлении.
Совместно с уравнением расхода получаем следующее урав-
нение для определения зазора /г:
чр/i7 + (Ф — Q) /14 — yh3 = х,
где
ip = 8Lpondo sec 0; Ф = 6nr4doPo sec 9
Q = Зр0л (d* — dj)p4; x = 32£L;
х=24^1пШ; k = .
\ D ) yC
Если опорная пята плунжера выполнена не как гидростатиче-
ская опора, а как теплогидравлическая, то уравнение (171) яв-
ляется расчетным для определения зазора h.
Подшипниковый узел насоса
В рассматриваемом насосе установлены подшипники сколь-
зящего типа — упорный с тремя поверхностями скольжения, ра-
диальный— укороченный (отношение— =0,35). Такая конст-
d
рукция подшипника очень компактна, но вместе с тем надежна
в эксплуатации.
Подшипник сделан из свинцово-оловянистой бронзы Бр.ОС
5-25. На подшипники действует давление: на торцовый р =
= 50 кГ/см2, на радиальный р = 55 кГ/см2. Скорость скольжения
на упорном подшипнике — до 12,5 .м/сек, на радиальном — до
8,0 м]сек.
Регулятор подачи насоса
Насос обеспечивает почти постоянную подачу до заданного
давления р в системе. При повышении давления подача начинает
уменьшаться, и при максимальном значении ртах подача насоса
обращается в нуль, так как при этом золотник, сжимая пружину
7 втулки 11 (см. рис. 206), устанавливает такое положение, при
котором цилиндровая полость насоса оказывается сообщенной с
его внутренней полостью. Обозначая площадь кольцевого уступа
382
на золотнике 6 через fo, получим выражение для определения пер-
воначального усилия пружины регулятора;
P'o^Pk-
Разность давлений ртах и р0 должна обеспечить деформацию
пружины, равную величине полного хода нагнетания, т. е.
/о (Ртах Р) =
откуда находим коэффициент жесткости пружины регулятора
К = /о — ах~р кГ/мм. (172)
Как видно из формулы (172), пружина регулятора получается
довольно мягкая, т. е. большой длины, поэтому для сохранения
устойчивости ее делают составной, с введением промежуточной
направляющей втулки, как это показано на рис. 206.
§ 5. БЕСКАРДАННЫЙ АКСИАЛЬНО-ПОРШНЕВОЙ РОТОРНЫЙ НАСОС
На рис. 210 показана конструкция насоса фирмы Гидроматик,
у которого блок цилиндров приводится во вращение штоками,
Рис. 211. Характеристики бескарданного
нерегулируемого насоса:
а — Г) = f(p); б — универсальная характе-
ристика
контактирующими на определенных углах с внутренними ра-
сточками поршней. Крепится блок цилиндров на шаровом шар-
нире центральной оси при помощи пружины и силы давления
жидкости, развивающейся в золотниковом зазоре.
383
На рис. 210 показан также торцовый золотниковый распреде-
литель насоса. Его поверхность представляет сферу, что приво-
дит к гидравлической самоцентрируемости блока и тем самым
создает лучшие условия работы распределителей. Насосы тако-
го типа проектируются на давление до 350 ат и подачи до
1200 л!мин.
Рис. 212. Бескарданный регулируемый насос «Лукас»
На рис. 211, а приведен график зависимости к. п. д. насоса от
давления при п = 1450 об/мин, вязкости 35 сст и при наиболь-
шем угле регулирования (т. е. при максимальной подаче Q =
= 150 л/мин), а на рис. 211, б приведены его топографические
характеристики. По данным В. Дитера [61] наибольшая допусти-
мая температура составляет 80° С, рекомендуемая вязкость жид-
кости 35 сст при 50° С.
Максимальный угол регулирования в существующих конст-
рукциях насосов равен 25°; минимальный угол не доводится до
нуля с целью обеспечения определенного расхода жидкости для
смазки и охлаждения. Величину минимального угла рекомен-
дуется выбирать исходя из обеспечения расхода, равного 4%
максимального.
На рис. 212 показана конструкция бескарданного насоса, от-
личающаяся наклонным положением направляющей шайбы, по
которой движутся опорные пяты поршней. Блок цилиндров кре-
пится в двух подшипниках и приводится во вращение приводным
валом. Распределительный золотник — плоский. Насос такого
типа имеет то преимущество, что в нем масса механизма регули-
рования (шайбы) меньше, чем масса всего блока у насоса пре-
дыдущей конструкции, поэтому применение этого насоса в следя-
щих быстродействующих системах предпочтительно.
Глава XII. ГИДРОЦИЛИНДРЫ И ГИДРОМОТОРЫ
§ 1. КОНСТРУКТИВНЫЕ СХЕМЫ ГИДРОЦИЛИНДРОВ
Гидравлические цилиндры (гидроцилиндры) представляют
собой гидравлические двигатели с возвратно-поступательным
движением выходного звена, т. е. штока или плунжера. Скорость
штока гидроцилиндра, так же как и его ход и передаваемое уси-
лие, могут достигать значительных величин. Однако ход гидро-
цилиндров более 3500 мм следует считать предельным. На
рис. 213 показаны основные конструктивные схемы гидроцилинд-
ров. На рис. 213, а показан гидроцилиндр простого действия
с плунжером, который под действием давления подводимой в ци-
линдр жидкости перемещается на весь ход s, т. е. до тех пор, по-
ка борт плунжера не дойдет до дна цилиндра (до упора). Обрат-
ный ход осуществляется либо под действием собственного веса
плунжера, либо под действием внешней силы. Так как в этой кон-
струкции имеется только одно уплотнение, то ее к. п. д. оказыва-
ется достаточно высоким. К внутренней поверхности цилиндра
требований высокой точности не предъявляется, поэтому рас-
сматриваемый гидроцилиндр имеет сравнительно невысокую
стоимость.
На рис. 213, б показан гидроцилиндр двойного действия,
в котором под давлением жидкости находится или вся
площадь поршня, или кольцевая. Очевидно, что при одинаковом
расходе жидкости в обе полости гидроцилиндра скорость штока
будет различной: при поступлении жидкости в штоковую полость,
т. е. при обратном ходе, скорость поршня больше, чем при пря-
р
мом ходе в отношении-----, где f— площадь штока. Следова-
F — f
тельно, при обратном ходе расход в линии слива будет больше
расхода, поступающего в штоковую полость, и поэтому сечения
трубопроводов, подключенных к нештоковой полости гидроци-
линдра, должны быть больше сечений трубопроводов, подклю-
ченных к штоковой области. Если же сечения трубопроводов вы-
браны одинаковыми, то при обратном ходе будет иметь место
повышение давления в точке А, следовательно, и во всей
гидросистеме, которое может быть значительным. Покажем это
на следующем примере.
25 Заказ 107G
385
Примем отношение— = 2 (где Fo — активная площадь порш-
Р о
ня в штоковой области) и будем считать длину и диаметр маги-
стралей CD и АВ (см. рис. 213, б) одинаковыми. Рассмотрим
Рис. 213. Конструктивные схемы гидроцилиндров:
а — простого действия с плунжером; б — к определению давления в полостях гидро-
цилиндра двойного действия; в — простого действия с поршнем (рабочий ход «на втя-
гивание»); г — двойного действия с проходным штоком; д — двойного действия с за-
крепленным поршнем; е — с различными скоростями прямого и обратного хода: 1 —
штуцер насосной линии; 2 — штуцер бака; 3 — штуцер сливной линии; ж — телеско-
пического гидроцилиндра с последовательным выходом ступеней; з — телескопического
гидроцилиндра с одновременным выходом ступеней
прямой ход гидроцилиндра. Пусть расход, поступающий в левую
полость, равен Q; тогда расход в линии АВ будет равен —. Если
386
потери давления в линиях АВ и CD при расходе Q равны plt то
давление в точке С при прямом ходе будет
Pc = Pi + ~ + Рн = PCD + РАВ + Рн = ~ Р1 + Рн,
4 4
где рн — давление, соответствующее нагрузке.
При обратном ходе (направление течения жидкости от А к В
и от DkC показано пунктиром) давление рл в точке А будет уже
равно (при условии равенства скорости прямого и обратного
хода)
Ра = "у + 2Pi + Рн = ~^-Р1 + Рн,
где р'н — давление, соответствующее нагрузке обратного хода.
Подключение гидроцилиндра по дифференциальной схеме
показано на рис. 139, в.
Если в обоих направлениях требуются одинаковые усилия на
штоке и одинаковые скорости движения, то его диаметр выби-
, D „ ,
рается равным а =—— , где D — диаметр поршня (если же уси-
Г2
лие на штоке при обратном ходе значительно меньше усилия при
прямом ходе и при этом обратный ход должен совершаться
с большой скоростью, то диаметр штока нужно брать возможно
большим, а следовательно, кольцевую площадь возможно мень-
шей).
Нередко (например, в приводе станков) требуется, чтобы ско-
рость штока в обоих направлениях была одинакова при одинако-
вом расходе жидкости. Тогда выполняют гидроцилиндр с про-
ходным штоком. Если при этом делают неподвижным цилиндр,
то общий габарит гидроцилиндра будет более трех ходов поршня
(рис. 213, г), если же закрепляют шток (рис. 213, д), то общий
габарит будет меньше, чем в предыдущем случае, на величину
одного хода.
На рис. 213, е показан гидроцилиндр со ступенчатым поршнем,
что применяется в тех машинах, например в некоторых прессах,
где требуется высокая скорость в обоих направлениях. Штуцер 1
присоединяется к насосной линии, штуцер 3 — к линии слива,
штуцер 2— к баку.
Благодаря небольшой рабочей площади поршень двигается
вправо с большой скоростью. Одновременно большая цилиндро-
вая полость через штуцер 2 заполняется жидкостью из бака. При
ходе прессования (тоже вправо) штуцера 1 и 2 подключаются
к линии высокого давления, благодаря чему на поршне разви-
вается большое усилие.
В тех случаях, когда мало места для размещения гидро-
цилиндра по сравнению с его ходом, применяют телескопический
25* ♦ 387
гидроцилиндр (рис. 213, ж). Соответственно с нагрузкой движе-
ние поршней происходит последовательно, начиная с большего
поршня. Скорость движения изменяется скачкообразно при пере-
ходе от одного поршня к другому.
§ 2. ДЕМПФИРОВАНИЕ ГИДРОЦИЛИНДРОВ
Для того чтобы избежать жесткой остановки поршня в конце
хода, необходимо ввести в конструкцию гидроцилиндра демпфи-
рующие устройства, которые могли бы обеспечить плавное за-
медление движения поршня.
Наиболее распространенные конструктивные схемы таких
концевых демпферов показаны на рис. 214.
Рис. 214. Демпфирование штока гидроцилиндра в конце хода:
а — демпфер с щелью постоянного сечения; б — демпфер с профильной
щелью; в — демпфер с последовательным включением щелей; г — кла-
панный демпфер
В конструкции (рис. 214, а) демпфирование достигается за
счет выдавливания жидкости утолщением штока через кольцевой
зазор, образующийся между этим утолщением и цилиндрической
расточкой, выполненной в крышке гидроцилиндра. На рис. 214, б
показана конструкция, в которой демпфирование достигается по-
следовательным выключением выпускных отверстий, соединяю-
щих полость гидроцилиндра с линией слива. Активной тормозной
поверхностью является в этом случае вся площадь поршня (или
площадь поршня за вычетом площади штока).
В конструкции, показанной на рис. 214, в, демпфирование
осуществляется включением в конце хода профильной дроссели-
рующей щели, а в конструкции на рис. 214, г — включением дрос-
сельного клапана.
§ 3. ДЕТАЛИ ГИДРОЦИЛИНДРОВ
Силовой цилиндр. Материал для изготовления цилиндра вы-
бирается в зависимости от давления. Так, цилиндры, рассчитан-
ные на давление до 70 ат, выполняются из чугуна; для более вы-
388 *
соких давлений цилиндры делаются из стального литья или из
катаных труб. Если движение пары шток — поршень осуществ-
ляется штоковой втулкой и цилиндром, то при стальном цилинд-
ре поршень следует выполнять чугунным, и наоборот при чугун-
ном цилиндре поршень должен быть из стали. Зазор между
поршнем и цилиндром должен быть больше зазора между што-
ком и направляющей втулкой. Длина направляющей втулки
должна быть ~1,5 d, где d — диаметр штока. Если же в конст-
рукции предусматривается одно направление — в штоковой втул-
ке, то длина этой втулки выбирается равной 2,5—3 d. Поверх-
ность штока выполняется шлифованной и хромированной.
Уплотнения. Неподвижное (статическое) уплотнение, т. е.
уплотнение между крышкой и корпусом цилиндра, осуществляет-
ся преимущественно при помощи резиновых колец круглого сече-
ния. Для низких давлений применяется резина с твердостью по
Шору 60—70, а для высоких давлений — с твердостью до. 90.
Уплотнение осуществляется таким образом, что резиновое
кольцо вводится в канавку с предварительным натягом и затем
деформируется давлением жидкости, принимая форму сечения
канавки.
Таблица 30
Размеры уплотнительных элементов
Размеры в мм Наибольшее допускаемое давление ^шах Наибольший допусти- мый зазор s при твердости резины по Шору
d Ь t г г' 70 90
1,5 1,9 1,2 0,3 До 100 0,1 0,15
2,0 2,5 1,7 0,3 100—150 0,05 0,12
2,5 3,2 2,2 0,3 150—200 — 0,10
3,0 3,8 2,7 0,5 200—300 — 0,07
4,0 5,0 3,6 0,5 — — —
5,0 6,3 4,5 0,5 — — —
В табл. 30 показана конструкция и приведены размеры такого
узла уплотнения в зависимости от давления и диаметра d сече-
ния кольца. Конструкция, показанная в табл. 30 (слева), имеет
недостаток, состоящий в том, что при неполной предварительной
затяжке гаек крышка может отойти под действием давления от
389
фланца, кольцо будет выдавливаться в зазор и при этом разру-
шаться. В связи с этим конструкция, показанная в табл. 30 (в се-
редине), будет более предпочтительной. Следует, однако, при
монтаже обратить внимание на то, чтобы уплотнительное кольцо
не протягивалось через острую кромку, что может вызвать его
Рис. 215. Уплотнение штока:
а — круглым кольцом; б — профильной манжетой с пружиной; в — обычной U-образ-
ной манжетой; г — манжетой специального профиля; о — V-образиой манжетой
Рис. 216. Уплотнения поршня:
а ~ сплошная манжета-поршень; б — кольцевая манжета; в — манжета с кольцом
круглого сечения
разрушение. Так как резина может легко менять форму, но не
сжиматься, то сечение канавки необходимо выбирать равным
Ко = 1,1К, где Fo — сечение канавки, F — сечение кольца.
Рассмотрим подвижное уплотнение. Для уплотнения штоков
цилиндров применяются как круглые кольца (до давлений
150 ат), так и манжетные уплотнения. Преимуществом колец
является простота конструкции и малые габариты. Конструкции
узлов уплотнения показаны на рис. 215, из которых приведенные
на рис. 215, г, д применяются для тяжелых условий работы, со-
провождаемых колебаниями, и для большей продолжительности
работы (более 500 000 двойных ходов). Манжеты в последнем
390
случае были изготовлены из хлопчатобумажной ткани, пропитан-
ной синтетической резиной или пербунаном. Сила трения, воз-
никающая на штоке, в этих конструкциях будет значительно
больше, чем в схемах, показанных на рис. 215, а — в.
Конструкция узла уплотнения поршня показана на рис. 216.
Для низких давлений и высокого класса чистоты обработки по-
верхности (шлифовка) можно применять также кольца круглого
сечения. Для более высоких давлений следует применять в узле
уплотнения, помимо уплотняемых круглых колец, и упорные
кольца, которые предотвратили бы выдавливание уплотнитель-
ных колец в зазор.
Уплотнение, конструкция которого приведена на рис. 216, б,
рекомендуется применять до давлений 50 ат и в том случае, если
шток направляется только штоковой втулкой. В этой конструк-
ции допускаются колебания размера диаметра до 0,4 мм (при
диаметре 50 мм).
Для предохранения узла уплотнения от попадания грязи и
твердых частиц предусматривается установка специальных очи-
стительных колец, как это показано на рис. 215.
§ 4. ТРЕНИЕ В ГИДРОЦИЛИНДРАХ
Сила трения Т в уплотне-
нии зависит от типа, мате-
риала уплотнения, предвари-
тельного напряжения уплотни-
тельного материала, рабочего
давления, чистоты поверхности
трущихся деталей, а также от
смазки поверхности рабочей
жидкости. Некоторое пред-
ставление о силе трения дает
рис. 217, где показан график
зависимости силы трения в уп-
лотнениях штока (d = 50 мм)
от рабочего давления для раз-
личных типов уплотнений. Чис-
тота поверхности штока V10,
и его скорость составляет
0,15 м!сек. Рабочей жидкостью
являлась водо-масляная эмуль-
сия (17% масла).
Эксперименты показывают,
Рис. 217. Зависимость силы трения
в узлах уплотнения штока от дав»
ления:
1 — V-образные манжеты; 2 — манже-
ты профиля, показанного на рис. 215, г;
3 — U-образная манжета; 4 — уплот-
нительное кольцо круглого сечения
(твердость 80 по Шору) без упорного
кольца
что сила трения при трогании
с места больше в 1,3 раза у манжетных уплотнений и в 3 ра-
за— у колец круглого сечения, чем сила трения при равномер-
ном движении.
391
К. п. д. гидроцилиндра можно определить из уравнения
-н
j (Р1Л — P2F2 — Т) ds
J (Pj/i ~ Р2Л>)
—s
где Pi и p2 — давления в полостях гидроцилиндра;
Т — сила трения.
При постоянной нагрузке и постоянной силе трения
pF — Т
п = -—-— •
рр
§ 5. НЕКОТОРЫЕ ЭЛЕМЕНТЫ КОНСТРУКЦИЙ
На рис. 218, а показан гидроцилиндр простого действия, рас-
считанный на рабочее давление до 150 ат, его ход составляет
400 мм.
Рис. 218. Гидроцилиндры:
а — простого действия, рассчитанные на давление 150 ат и ход 400 мм;
б — дифференциальный гндроцилиндр на 300 ат
max 1170
Рис. 219. Гидроцилиндр конструкции «Главстроймеханизация»
Дифференциальный гидроцилиндр, рассчитанный на давление
до 300 ат, показан на рис. 218, б. В конструкции предусмотрено
демпфирующее устройство.
392
Плавающий поршень
На pad: 219 приведена конструкция гидроцилиндра для до-
рожных машин, рассчитанного на давление р = 65 ат.
В тех случаях, когда необходимо фиксировать шток силового
цилиндра в определенном положении, в его конструкцию вводят
специальное устройство, называемое фиксатором или замком.
На рис. 220, а показана конструкция фиксатора шарикового
типа. Этот фиксатор закрепляет поршень в любом положении.
Шарики заклинивают-
ся на конических по-
верхностях под дей-
ствием пружин. Раз-
блокировка произво-
дится плавающим пор-
шнем под действием
давления подводимой
в цилиндр жидкости.
а)
vzzm
айв«Мяв>з1
5)
£=®И
и 1
Рис. 220. Фиксаторы поршня:
а — шариковый; б — поршневой
Для фиксирования гидроцилиндра при аварийном падении
давления в линии нагнетания применяется гидравлический за-
мок. Конструкция замка двустороннего действия и схема его
включения показаны на рис. 221. Давление, при котором отпи-
рается замок, определяется диаметром D поршня замка.
§ 6. ЧАСТОТА СОБСТВЕННЫХ КОЛЕБАНИЙ ГИДРОЦИЛИНДРА
Рассчитаем частоту собственных колебаний гидроцилиндра
с подводящим и отводящим трубопроводами (рис. 222). Так как
жидкость, заполняющая гидросистему, сжимаема, то рассматри-
ваемую систему можно представить как массу, закрепленную на
пружине. Пусть масса подвижных частей, приводимых в движе-
ние гидроцилиндром, равна М, и пусть штоку, находящемуся
в состоянии равновесия, дано некоторое перемещение х. Предпо-
ложим, что приложенная к поршню восстанавливающая сила Р
пропорциональна перемещению х, т. е. Р = kx. Составим диффе-
ренциальное уравнение движения
Р = — М —
393
или
М + kx = О,
Л2
откуда найдем частоту собственных колебаний
Подсчитаем коэффициент k. При перемещении поршня на ве-
личину х объемная деформация составляет V = Рх, где F—ак-
тивная площадь поршня.
Рис. 221. Двусторонний гидрав-
лический замок
Рис. 222. К расчету частоты собствен-
ных колебаний
Эта деформация вызывает повышение давления:
р-5 — ,
где Vq — суммарный сжимаемый объем жидкости.
Вследствие этого на одной стороне поршня возникает сила
Pi = pF;
на двух сторонах поршня (суммарное усилие, приложенное
к поршню)
F2 у
Р = 2Р, = 2В — .
Vo
Следовательно, коэффициент
Я = — = 25 —
X V)
и собственная частота колебаний
®о
V0M
394
§ 7. РАСЧЕТ НА ПРОЧНОСТЬ
Рассмотрим определение толщины стенок гидроцилиндров
для случаев статической нагрузки.
Для тонкостенных гидроцилиндров, т. е. цилиндров, у кото-
рых отношение диаметров и = у- =£г 1,2(max), выполненных из
бесшовных стальных труб, и для случая, когда температура t <
< 120° С, толщина стенки определяется по формуле
g _£iDiP
200 -у- — 2р
или
g _ CiD^p
к ’
200 —
S
и Do — внешний и внутренний диаметры цилиндра в мм;
р — наибольшее давление в цилиндре в кГ/см2;
К — допустимое напряжение в материале в кГ/мм2-,
S — запас прочности (k = 1,84-3);
Ci — коэффициент, учитывающий допуск на изготовле-
ние труб.
рис. 223 приведена номограмма для решения последнего
где Di
На
уравнения.
Для толстостенных гидроцилиндров | —^ 1,2) расчет необ-
ходимо вести отдельно для закрытых и открытых конструкций.
У закрытых гидроцилиндров стенка нагружена еще и усилием
в осевом направлении, что приводит к трехосному напряженному
состоянию.
Эквивалентное напряжение (по энергетической теории проч-
ности) определяем из уравнения
= 0,71 /(о, — о,,)2 + (сте — а,)2 + (сгг — <tz)2,
где о,
и2 — 1
_ 1
— U2— 1
И2 — 1
р — тангенциальное напряжение;
р — осевое напряжение;
р —радиальное напряжение;
и ик= — {D — текущий радиус сечения).
на внутренней стенке опреде-
оЛ = —
d2
и = —
Di
Наибольшее напряжение оэ'К8
ляется условием
Оэкв '-С Д ’ Р
и2 — 1
395
Подставляя в это равенство и = 1,24-1,5, получим
6
_______Di
/ 230ст
\ Р
Для открытых гидроцилиндров имеем двухосное напряженное
состояние, для которого ________________
= Ко/ + О/ — cstcsr ,
а условие прочности
„ /Зи4+ 1
°ЭКв ‘Чг & доп Pi м2 |
§ 8. ГИДРОМОТОРЫ
Рассмотренные выше роторные насосы (шестеренчатые, пла-
стинчатые, радиально-поршневые роторные, аксиально-поршне-
вые роторные) являются машинами обратимыми, следовательно,
396
они могут работать в качестве гидромоторов. Насосы с клапан-
ным распределением являются машинами необратимыми.
При В1#£оре конструкции гидромотора необходимо учитывать
рабочее давление; рабочий и пусковой моменты; диапазон числа
оборотов; характер нагрузки и частоту реверса; постоянство или
регулируемость объемной постоянной (литраж); габариты, вес,
стоимость; коэффициент полезного действия; акустические свой-
ства.
Ниже мы рассмотрим некоторые распространенные конструк-
ции гидромоторов.
Шестеренчатые и пластинчатые гидромоторы
Шестеренчатые гидромоторы имеют постоянный литраж и ра-
ботают в диапазоне чисел оборотов 500—2500 в минуту и при низ-
ком пусковом моменте. Однако благодаря одностороннему при-
жиму шестерен пусковое давление
ненагруженного мотора ока-
зывается достаточно высоким.
К. п. д. гидромотора этой конст-
Рис. 225. Зависимость к. п. д. гид-
ромотрра от давления:
1 _ п = 50 об/Мин; 2 — п — 150
об!мин; 3 — п = 250 об! мин
рукции колеблется в зависимости от давления, числа оборотов
и вязкости жидкости в пределах 65-ъ80%.
Шестеренчатые гидромоторы могут применяться как для по-
стоянного направления вращения, так и для переменного.
На рис. 224 показана конструкция пластинчатого гидромотора
«Тевес», совершающего три цикла за один оборот. Увеличение
числа циклов объемной машины, как мы видели (см. стр. 271),
приводит к пропорциональному увеличению крутящего момента.
Рассматриваемый гидромотор рассчитан на число оборотов до
250 в минуту и крутящий момент 240 кГм при давлении до 160 ат.
На рис. 225 показаны кривые зависимости ц = f(P)-
397
Радиально-поршневые и аксиально-поршневые гидромоторы
Радиально-поршневые гидромоторы могут быть рассчитаны
на большую величину крутящего момента (до 1000 кГм при
р — 150 ат) и могут выполняться как быстроходными, так и тихо-
ходными. Они обладают высоким к. п. д. в широком диапазоне
давлений, чисел оборотов и вязкости. На рис. 226 показана кон-
струкция гидромотора «Хил-Шоу» с двумя циклами за один обо-
рот. Распределительное устройство выполнено в цапфе (золотни-
ковое распределение), в которой имеется четыре соединенных по-
парно в два канала отверстия.
Рис. 226. Радиально-поршневой гид-
ромотор «Хил-Шоу»
Давление может быть подведено
Рис. 227. Радиально-поршневой гид-
ромотор четырехкратного действия
к тому или другому каналу. Пусть давление р подводится к ка-
налу 1—3. Тогда сила, действующая на поршень, равна Р =
ndfl ,
= р----- , где «о — диаметр поршня.
4
Реакция кинетора N (нормальная к его поверхности) и тан-
генциальная сила Т образуют параллелограмм сил, из которого
имеем
Т = Р tg а,
т. е. силу, определяющую передаваемый гидромотором крутящий
момент.
С учетом силы трения будем иметь
Т' =Ptg(a —<р),
где ф — угол трения.
Следовательно, механический к. п. д. гидромотора равен
„ _ Т' _ tg(a — Ф) _ .___Ф
Чмех m 1
Т tg a a
398
Чем больше угол а, т. е. чем больше выбрано число циклов на
один оборот, тем выше будет к. п. д. гидромотора.
Рис. 228. Радиально-поршневой гидромотор
с торцовым распределением
Рис. 229. Радиально-поршневой гидромотор «Дюстерло»
с жидкостным поршнем
На рис. 227 показан гидромотор такого же типа, но совершаю-
щий четыре цикла за один оборот. Механический к. п. д. такого
гидромотора достигает 0,95 (61]. Подводимое давление — до
150 аг, число оборотов — до 750 в минуту и вес на единицу мощ-
ности достигает 1 кГ1квт.
399
На рис. 228 показан радиально-поршневой гидромотор, отли-
чающийся торцовым золотниковым распределением. По данным
Торикашвили К. Ш. применение торцового распределителя в ра-
Рис. 230. Зависимость крутящего
момента от числа оборотов гид-
ромотора «Дюстерло»
сто их гидравлическая разгрузка,
сцентрику имеет незначительную
диально-поршневых моторах
имеет ряд преимуществ, в ча-
стности при работе на малых
числах оборотов, когда утечки
становятся очень малыми.
На рис. 229 приведен тихо-
ходный реверсивный гидромо-
тор несколько необычной кон-
струкции (мотор «Дюстерло»).
На эксцентриковый вал опира-
ются поршневые втулки, соз-
дающие жидкостный поршень.
Поршневые втулки рассчиты-
ваются так, чтобы имела ме-
, благодаря чему прижим к эк-
величину. Распределение жид-
Рис. 231. Аксиально-поршневой гидромотор с большим углом
наклона блока
кости по цилиндрам производится золотниковым распределите-
лем, отдельно сидящим на эксцентриковом валу. По данным ра-
400
26 Заказ 1076
Рис. 232. Гидромотор со звездообразным расположением цилиндров
боты [61] такие гидромоторы рассчитываются на крутящий мо-
мент до 1000 кГм при наибольшем допустимом давлении, рав-
ном 250 ат, и при п = 300 об/мин. К. п. д. насоса до 90%. Мини-
мальный пусковой расход составляет незначительную величину:
Рис. 233. Высокомоментный гидромотор с прямоугольными порш-
нями:
а _ однорядный (М = 1000 кГм; п = 15 об/мин-, р = 200 ат); б — двух-
рядный
например, для гидромотора с литражом 0,33 л он равен не бо-
лее 0,35 л/мин при р = 250 ат. Экспериментально полученные
кривые зависимости крутящего момента от числа оборотов по-
казаны на рис. 230.
402
Среди высокомоментных гидромоторов распространение полу-
чил радиально-поршневой гидромотор «Стаффа» со звездообраз-
ным расположением поршней, эксцентриковым приводом и с зо-
лотниковым распределением, выполненным отдельным узлом на
Рис. 234. Гидромотор с качающимся блоком цилиндров:
а — гидромотор; б — лебедка; 1 — управление тяговым усилием; 2 — реверсивный
механизм; 3 — торцовый распределитель; 4 — ручной тормоз
приводном валу. Такая конструкция рассчитывается на работу
в диапазоне чисел оборотов 50—2000 в минуту. К преимуществам
описанной конструкции можно отнести возможность выполнения
эксцентрика полым, что позволяет, например, пропустить через
него буровую штангу. Таким образом, этот гидромотор будет
наиболее подходящим для буровых установок. Пример двухряд-
ной радиально-поршневой машины, спроектированной автором,
26* 403
А. В. Никитиным и А. И. Турлаевым (МВТУ им. Н. Э. Баумана)
для рулевой машины тяжелого самолета, показан на рис. 232.
На рис. 231 показан аксиально-поршневой гидромотор (кон-
струкции Хеллер, ФРГ), отличающийся большим (45°) углом
наклона блока; распределением, выполненным в цапфе сравни-
тельно большого диаметра, и зубчатой конической передачей,
обеспечивающей синхронность вращения блока цилиндров и
приводного вала; шарикоподшипниковыми опорами штоков во
фланце ведущего вала вместо шаровых шарниров. Выполненная
конструкция рассчитана на давление 40 ат.
На рис. 233 показан радиально-поршневой гидромотор
с поршнями прямоугольного сечения. Такая конструкция огра-
ничивает габаритные размеры в радиальном направлении и поз-
воляет развить конструкцию в осевом направлении, что, напри-
мер, встречается при проектировании объемных гидропередач
для тепловозов и некоторых кранов. На рис. 233, а показан тихо-
ходный регулируемый гидромотор, имеющий п = 15 об!мин, М =
= 1000 кГм при р = 200 кГ/см2. Объемный к. п. д. его 95—96%.
На рис. 233, б показан гидромотор такого же типа, но с двумя
рядами поршней, а на рис. 234 показан трехпоршневой гидромо-
тор, спроектированный для судовых лебедок и отличающийся
тем, что его рабочий цилиндр выполнен заодно с поворотным зо-
лотником. В конструкции предусмотрены золотник реверса, дрос-
сель регулирования скорости и тормоз.
Глава XIII. РАСПРЕДЕЛИТЕЛЬНЫЕ И ЗАЩИТНЫЕ ОРГАНЫ
ГИДРОСИСТЕМ
§ 1. АВТОМАТЫ РАЗГРУЗКИ НАСОСОВ
Для питания гидравлических систем с эпизодическим дейст-
вием потребителей часто (в особенности в авиационных систе-
мах) используют насос постоянной подачи с включением в систе-
му гидропневматического аккумулятора и автомата разгрузки
насоса. Пример такой системы мы рассмотрели раньше.
В этом случае основную часть времени насос работает на хо-
лостом ходу и включается на нагрузку только по мере опорожне-
ния аккумулятора. Такой режим эксплуатации позволяет резко
увеличить долговечность насоса и уменьшить тепловыделение
в гидросистеме.
Автомат разгрузки — самодействующий агрегат, который по
достижении определенного давления в системе переключает на-
сос на бак или на линию нагнетания. Принципиальная схема
включения автомата в гидросистему приведена на рис. 235.
Простейший автомат разгрузки прямого действия показан на
рис. 235. Когда давление в аккумуляторе достигает заданной ве-
личины р0, поршень 1, перемещаясь влево, сжимает пружину и
толкает стержень клапана 2, благодаря чему нагнетательная ли-
ния насоса соединяется со сливом, а линия, ведущая к гидродви-
гателю, оказывается подключенной к аккумулятору, где имеет
место давление р0.
При включении гидродвигателей давление в аккумуляторе на-
чинает падать. Когда оно становится равным некоторому значе-
нию р', поршень 1 перемещается вправо настолько, что освобож-
дает толкатель клапана 2, после чего клапан под действием гид-
родинамического давления закрывается; насос отключается от
линии слива и начинает работать для зарядки аккумулятора.
Рассматривая равновесие поршня для моментов открытия и
закрытия клапана, после несложных преобразований получим
£1 = 2g- = 2_ . (173)
Р Р F ' '
Недостаток автомата прямого действия состоит в том, что
переключение клапана происходит резко и приводит к гидравли-
ческим ударам, а также поломке пружины.
405
На рис. 236 изображена схема автомата разгрузки непрямого
действия, менее склонного к зависанию его подвижных элементов.
Жидкость от насоса подается к штуцеру 1, откуда через обрат-
Рис. 236. Автомат разгрузки с серводействием:
а — автомат работает на систему; б — автомат работает на слив; 1 — штуцер;
2 — штуцер к аккумулятору; 3 — линия слнва; 4 — штуцер от аккумулятора;
5 и 6 — поршни; 1 — пружина; 8 — клапан; 9 — упорный стержень; 10 — пру-
жина золотника; И — золотник
ный клапан и штуцер 2 поступает в гидросистему и к аккумуля-
тору. При достижении в аккумуляторе определенного давления,
которое передается через штуцер 4 от аккумулятора к поршню 6,
406
оно сожмет пружину 7 и сместит поршень 6 вместе с клапаном 8.
В момент, когда клапан 8 дойдет до стержня 9 и станет на него
как на упор, откроется проход под клапаном 8, через который
аккумулятор сообщается с полостью поршня 6, смещая его вле-
во. При этом открывается золотник 11 и насос через штуцер 3 со-
общается с баком, т. е. переключается на холостой ход.
При падении давления в полости аккумулятора до заданного
нижнего уровня пружины 7 сместит поршень 6 вправо, и как
только клапан 8 будет снят со стержня 9, в полости поршня 6
упадет давление, и золотник 11 под действием пружины 10 пере-
кроет канал, соединяющий насос с баком, и насос снова пере-
ключится на питание гидросистемы.
Техническими требованиями к агрегату обычно задается пере-
пад Ар между давлением переключения автомата на разгрузку
насоса и давлением, при котором насос вновь переключается на
рабочий режим. По величине этот перепад составляет 15—
25 кГ1см2. В рассматриваемой конструкции перепад Ар обеспечи-
вается за счет разности верхней площади F поршня 6 и площади f
кольца, образуемой частью поршня 6 и седлом под клапаном 8,
когда он открывается. Считая, что срабатывание автомата на
нагрузку и разгрузку происходит при одном и том же положении
поршня 6, можно показать, что
_L = 1+^-. (174)
F р'
§ 2. ДРОССЕЛЬНЫЕ ДЕЛИТЕЛИ ПОТОКОВ
Как мы видели выше (см. стр. 285), делители потоков включа-
ются в гидросистемы для обеспечения синхронизации движения
отдельных исполнительных механизмов независимо от разницы
нагрузки на них.
Поддержание равенства расходов в ветвях осуществляется за
счет дросселирования потока в той ветви, где исполнительный ме-
ханизм нагружен меньше. Схема и конструкция делителя на два
равных потока представлены на рис. 237. Здесь входной поток,
проходя через дросселирующие окна пакета шайб 1, делится на
два и проходит по разные стороны от дросселирующего поршня 2
и далее через окна 3 к силовым цилиндрам. Если в одной из ма-
гистралей давление повысится, перепад на входном дроссель-
ном окне упадет, снизится и расход в этой ветви; это приведет
к появлению перепада давлений на дросселирующем поршень-
ке 2, который сместится в сторону ненагруженной ветви, чем
увеличит сопротивление в ней и приведет к равенству потоков
в обеих ветвях.
Характеристики Ар = f (Q) ветвей делителя имеют вид, пока-
занный на рис. 238.
407
Общий расход, подводимый к делителю, обозначим через Qo-
Q
При точном разделении через каждую ветвь пойдет расход -у-.
Пусть для выполнения операций исполнительным механизмом
требуется давление р. Прибавляя эту величину к перепаду при
<?о
расходе — , получим величину давления на входе в делитель рн.
Если рн является предельным
давлением в гидросистеме, то из-
Рис. 237. Делитель потока:
1 — пакет дроссельных шайб; 2 — пе-
редвижной дросселирующий поршень;
3 — дроссельные окна гильзы; 4 — к
гидроцилиидрам
менение величины нагрузки, а
также и р в одной из ветвей
делителя приведет к соответ-
ствующему изменению скоро-
сти движения исполнительных
механизмов. При снижении на-
грузок максимальная скорость
исполнительных механизмов
определяется максимальным
Рис. 238. Характеристика делителя
потока;
1 — характеристика левого канала; 2 —
характеристика правого канала
расходом жидкости, подводимым к делителю. При увеличении
нагрузки скорость механизмов определится величиной рн- Допу-
стим, что давление в правой ветви увеличилось и стало рь Так
как при этом дросселирующий поршенек будет перекрывать
левую ветвь, характеристика правой ветви останется прежней,
как и при давлении в ней, равном р, поэтому расход в ней опре-
делится пересечением характеристики Ар = f (Q) с линией pi =
= const. Характеристика левой ветви при этом изменится.
Поскольку подводимое давление для обеих ветвей одинаково и
равно рк, то, откладывая от этой величины вниз величину сопро-
403
тивления механизма р, получим линию располагаемого перепада
в верхней ветви.
Для того чтобы расходы в обеих ветвях были одинаковыми,
характеристика верхней ветви должна пройти через точку а, яв-
<?о
ляющуюся пересечением линии нового расхода — с линиеи р,
что обеспечивается дросселирующим поршеньком. Проводя ана-
логичные рассуждения при предельном расходе Qo, можно найти
величины подводимых к делителю давлений в зависимости от со-
противлений со стороны исполнительных механизмов.
Равенство (или заданное соотношение) расходов в ветвях за-
висит от степени взаимного соответствия характеристик \р = f(Q)
входных дросселей и величины трения дросселирующего порш-
ня. Согласование характеристик \p = f(Q) входных дросселей
можно производить методом экспериментального подбора, а их
влияние исключить. Поэтому рассмотрим влияние неустранимой
причины неточности — трения поршня, которое определяет нечув-
ствительность делителя потока и величину их рассогласования.
Обозначим силу трения поршенька 2 (рис. 237) в гильзе че-
рез Т. Очевидно, что поршенек начнет двигаться лишь тогда, ког-
да перепад давлений на его торцах создает силу, равную или
больше Т, т. е. можно записать
Т = bpF,
где F— площадь поршенька;
Др — перепад давлений на поршеньке.
Так как подводимый поток имеет общее давление, то перепад
давления на поршеньке определится разностью перепадов на
входных
дросселях, т. е.
Др = Драр — Драр,
но
, <2fp „ Qfp
А^р = ——; Ардр = —-
2p.fl
где р — плотность жидкости;
р.— коэффициент расхода;
fi и fz— площади проходного сечения входных диафрагм.
Если требуемое соотношение расходов Q] и Qz будет равно п,
то для обеспечения равенства перепадов на входных дросселях
при одинаковых коэффициентах расхода р соотношение площа-
дей диафрагм также должно быть равно п, следовательно, доста-
точно рассмотреть работу делителя при п=1. Используя выраже-
ния Др^р и Др^'р для перепада давлений на поршеньке, получим
“ iff? - Qi) = w‘ - й)
<4* / /
409
Так как Qi + Q2 = Qo, a Qi — Q2 = AQ— рассогласование
расходов, то получаем
T = _pfQ«,AQ
2ц2/2
Определим величину относительной погрешности делителя
расхода:
AQ — 2^2Т — 2ц2/2АРг (175)
Фо рФо
. Т где Арт = перепад F давления, соответствующий силе
трения.
Если р, и f постоянны, то вместо предыдущего можно записать
следующее уравнение:
AQ К
Qo Q2 ’
2|.i2/2Ap,
где к =------------------
Р
Статическая погрешность делителя расхода пропорциональна
квадрату отношения площади дросселя на входе к расходу дели-
мого потока, а также величине перепада давления, соответствую-
щего трению поршня. Поэтому при постоянном проходном сече-
нии входных дросселей погрешность делителя зависит от расхода
Qo делимого потока, увеличиваясь с уменьшением его величины.
Чтобы погрешность деления мало зависела от расхода потока,
необходимо площадь входных дросселей делать регули-
руемой.
Пример конструкции такого делителя приведен на рис. 239.
Здесь входные дросселирующие окна изменяются в зависимости
от величины подводимого к делителю потока. Данный делитель
не только делит поток на два равных, но и соединяет их при об-
ратном ходе механизмов.
В этой конструкции делителя для снижения величины Лрт ре-
гулирующий поршень, на который воздействует перепад давле-
ний, сделан большей площади, чем дросселирующая часть меха-
низма.
Из уравнения (175) видно, что для того, чтобы погреш-
ность деления потоков не зависела от расхода разделяемого
потока, необходимо, чтобы площадь дросселирующих окон при
входе в делитель изменялась пропорционально расходу.
Как видно из рис. 239, изменение величины открытия окна на
входе зависит от перепада давления на нем, который пропорцио-
нален квадрату расхода. Перепад на дросселирующем поршне
уравновешивается пружиной.
410
Равновесие поршня определяется равенством
Рвх^п Р/гр 4~ (Рвх Ардр) ?п,
откуда
АРар =
* п
где — давление потока на входе в делитель;
Fn— площадь дросселирующего поршенька;
Р„р — усилие пружины;
Арар — перепад давления на входном дросселе.
Рис. 239. Делитель потока с
переменным входным дрос-
селем:
а — прямой ход: б — левый
цилиндр дошел до упора; пра-
вый дожимается; в — обратный
ход
Когда расход и перепад давления малы, поршень находится
в верхнем положении, упираясь в упор. Жидкость в это время
идет через верхнее маленькое отверстие, предназначенное для пи-
тания механизма дожима, работающего в момент, когда один
исполнительный механизм дошел до упора, а второй еще не за-
кончил своего хода. При таком расходе жидкости, когда \pepFn >
> Рпр, т. е. когда перепад на дросселе преодолевает начальное
натяжение пружины (когда поршень находится на упоре), пор-
411
шень начинает смещаться вниз и открывает основные проходные
сечения входных дросселей. При Дрдр?п > Рпр max поршень вста-
нет на упор и делитель начнет работать с f = const.
Перепад давления на дросселе пропорционален квадрату от-
ношения расхода к проходному сечению, поэтому чтобы погреш-
ность деления потока при изменении расхода изменялась мало,
необходимо, чтобы жесткость пружины была незначительной.
Тогда Лрэр по ходу поршня будет изменяться мало, а следова-
Q AQ т-,
тельно, и отношение — и — изменятся незначительно. Поскольку
и в этой конструкции делителя его точность определяется трени-
ем дросселирующего поршня, оценку погрешности его можно
производить по формуле (175).
Принимая Qo = pf у/ 2 и подставляя в формулу (175),
получим
д<? _ АРГ
<?о &Рдр
Так как ДрэР зависит от хода поршня и определяется форму-
лой (175), то, подставляя его в последнюю формулу, можно най-
ти, как изменяется точность деления потоков: по ходу или по
расходу Qq. Если верхние дроссельные отверстия круглые, то
расход через верхний дроссель можно определить из урав-
нения
-у- = И /о + ( r2 arccos — — *-(г — х) х
X V2гх — х2 ) 11/ 2 -Л-,р +-*-
V -п
для хода х = г. Для хода х > г надо вычитать из тег2 величину
площади, полученную из второго слагаемого, подставляя вместо
х выражение 2г— х, где г— радиус нижнего перекрываемого
поршнем отверстия; х — ход поршня от упора и начала открытия
нижнего отверстия.
Иногда требуется синхронизировать движение трех и более
механизмов. Для этого можно последовательно включать дели-
тели в ветвь или использовать специальную конструкцию делите-
ля, могущую делить потоки на любое число потоков. В случае
последовательного включения делителей гидравлическое сопро-
тивление и погрешности деления будут накладываться и могут
достигать больших величин.
На рис. 240 приведена конструктивная схема реверсивного де-
лителя на несколько потоков. При прямом ходе входной поток,
отжимая поршень 1, проходит через окна в гильзе 2 в соответст-
412
413
Рис. 240. Реверсивный делитель потока:
а — прямой ход; б — дожим II, III, IV цилиндров; в — обратный ход; г — механизм сохранения постоянно замкнутого объема; / —
поршень; 2 _ гильза; 3 и 4 — поршни; 5 — соединительный канал
вующие ветви делителя. Когда возникает разница в сопротивле-
ниях ветвей, давления pi и р3 будут разные, вследствие чего
поршни 3 и 4, сообщающиеся между собой каналом 5, начнут
перемещаться в сторону полости, где давление меньше, что при-
ведет к дополнительному дросселированию той ветви, где давле-
ние меньше, что в итоге приведет к выравниванию давлений
в полостях, а вместе с этим и к выравниванию расходов в ветвях
делителя. Объем нижней полости под поршнями 3 и 4 должен
быть таким, чтобы при полном ходе одного из поршней все дру-
гие поршни перекрыли проходные сечения ветвей, т. е. должно
соблюдаться соотношение
Ь^(п — 1) h,
где L — полный ход поршней 3 и 4\
п — число ветвей делителя;
h — рабочий ход поршня, обеспечивающий перекрытие
ветви.
Чтобы не произошло опорожнения или переполнения полости,
в поршнях 3 и 4, предусмотрены клапаны, через которые происхо-
дит подпитка или выброс лишнего масла из полости.
Оценка точности работы многопроточного делителя может
быть проведена методом, изложенным выше. Вследствие более
сложной конструкции и большего числа пар трения точность
многопоточного делителя ниже точности двухпоточного.
§ 3. УПРАВЛЯЮЩИЕ ЗОЛОТНИКОВЫЕ УСТРОЙСТВА
Для управления работой исполнительных механизмов гидро-
привода применяют различные распределители потоков в виде
золотниковых или клапанных устройств. Наиболее широкое рас-
пространение получили золотниковые распределители. Основным
преимуществом распределителей золотникового типа является их
разгруженность от осевых нагрузок, что облегчает управление
ими. Золотниковые распределители изготовляются с цилиндри-
ческими или плоскими золотниками, с ручным или электромаг-
нитным управлением.
По характеру протекания потоков золотники делятся на че-
тырехходовые или трехходовые (рис. 241).
Запирающие пояски золотника по длине могут быть равны
ширине окон в гильзе и быть больше или меньше их. В первом
случае мы имеем идеальный золотник, во втором — золотник с по-
ложительным перекрытием и в третьем — с отрицательным пере-
крытием или проточный золотник.
Размеры золотников и проходных сечений в гильзе зависят от
величины перепадов давления и расходов жидкости, перетекаю-
щей через окна, образуемые золотником.
414
Расход через окна золотника можно определить из уравнения
где р — коэффициент расхода;
f — площадь проходного сечения окна;
Др — перепад давления на кромке золотника, который при
расчете проходного сечения принимают равным 2% от
рабочего давления;
р — плотность жидкости.
Коэффициент расхода ц является функцией числа Рей-
нольдса.
Для турбулентного потока
при Re = 260; p=const,
V
где х— открытие окна.
Рис. 241. Схемы золотников:
а — с тремя поясками; б — с четырьмя поясками
Для жидкостей типа АМГ-10 это значение может быть при-
нято равным 0,57—0,6 для золотников с острыми кромками и
0,8 для закругленных или срезанных кромок.
Для золотников следящих систем большое значение имеет
коэффициент усиления золотника, т. е. наклон характеристики
Q = f(x) к оси 0 — х.
Для обеспечения постоянства коэффициента усиления, т. е.
линейности характеристики Q = /(х), окна в золотниках обычно
делают прямоугольного сечения, т. е. f = bx, где b — ширина
окна.
При малых величинах смещения золотника от нейтрального
положения, т. е. при малых числах Re, коэффициент расхода р
415
уменьшается. Одновременно происходит изменение и коэффици-
ента усиления золотника, что может вызвать изменение его ди-
намических характеристик.
Для определения-проходного сечения окон важно знать до-
пустимую величину перемещения золотника и ширину окон.
Отношение диаметра шейки золотника к диаметру разделитель-
ных поясков не должно быть меньше 0,5, иначе золотник может
оказаться не жестким, а отношение ширины окон к максималь-
ному ходу золотника не должно превышать 67 при условии вве-
Рис. 242. Золотник с большим ходом
дения кольцевых проточек и обеспечения площади каналов, в
4 раза превышающих площадь проходного сечения окна, т. е.
*™x<-^-<0,047d3, (176)
О/
где d3 — диаметр распределительного пояска золотника.
При выборе величины перемещения золотника необходимо
учитывать, что при больших величинах хода меньше сказывает-
ся изменение коэффициента усиления золотника по ходу, умень-
шаются утечки через него, т. е. в этом случае диаметр золотни-
ка при тех же проходных сечениях окон можно сделать меньше,
а следовательно, меньше будут и длины каналов утечек. Однако
416
при этом понижается быстродействие золотника и повышается
мощность, потребная для его перемещения.
Нередко соотношение (176) нарушается из-за сжатия потока
в подводящих каналах золотника, поэтому используют большие
величины хода золотников, достигающие 3—5 мм. Это обычно
имеет место в золотниках с ручным управлением, а также там,
где необходимо обеспечить небольшие коэффициенты усиления
расхода по ходу золотника (например, при управлении самолета
автопилотом). Конструктивная схема такого золотника показана
на рис. 242. На левом конце золотника установлено демпфирую-
щее устройство, предотвращающее установление автоколеба-
тельного режима при управлении сервоцилиндром гидроусили-
теля.
Силы, действующие на золотник
На золотник действуют следующие силы: сила инерции
золотника, силы трения золотника о гильзу и силы реакции
потока. Зная вес золотника и сообщаемые ему ускорения, можно
определить силы инерции. Силы трения золотников определя-
ются труднее, так как они зависят от технологических и кон-
структивных причин.
При отклонениях в геометрических размерах золотника ра-
бочее давление, действующее на золотник, может вызвать появ-
ление больших усилий, которые необходимо преодолеть при его
смещении. Для снижения этих усилий при изготовлении геомет-
рические размеры золотника соблюдаются с большой точностью.
Конусность и эллипсность не должны превышать 1—3 мк при
зазорах 2—10 мк и чистоте поверхности 10—11-го класса. Кроме
того, для центровки золотника в гильзе часто применяют коль-
цевые канавки (на поверхности уплотняющих буртиков) шири-
ной до 1 мм и глубиной 0,2—0,3 мм, обрабатывают поверхност-
ный слой методом сульфидирования или применяют антифрик-
ционные смазки типа молибденита и т. п.
Для предотвращения сращивания молекул рабочей жидко-
сти под действием поверхностного электростатического поля
(облитерации) в момент нахождения золотника в покое и под
давлением рабочей жидкости, приводящего к значительному по-
вышению усилия сдвига золотника, часто, особенно в автомати-
ческих или следящих системах, где золотники управляются от
датчиков или электромеханических преобразователей, создают
принудительную вибрацию золотников вдоль оси с малой ампли-
тудой и частотой до 50 гц или вращают золотник вокруг оси.
Это позволяет повысить чувствительность системы к управляю-
щему сигналу. Для определения направления и величины гидро-
27 Заказ 1076
динамической силы реакции рассмотрим поток в золотниковом
устройстве, как это изображено на рис. 243.
Поток жидкости, проходящий через золотник, изменяет ско-
рость от V] (сечение /) до v2 (сечение II).
Учитывая симметрию элементов золотника, радиальные силы
можно считать уравновешенными.
Применяя теорему импульсов, найдем реакцию потока в осе-
вом направлении. Прибавив к ней силу инерции, получим выра-
жение для полной осевой составляющей R, действующей со
стороны потока на золотник:
Rx = Qp(ylx-v,x) + pL^, (177)
at
L — расстояние между окнами золотника.
Составляющая скорости = 0, так как в сечении I — I ско-
рость перпендикулярна оси золотника. Составляющая v2x ~
~ v2 cos 0. Расход Q можно выразить через коэффициент расхо-
Рис. 243. К определению реактив-
ных сил
да, площадь окон золотника и
перепад на окнах:
Q -- un,d3knx р/ 2 ,
где d3 — диаметр золотника;
kn— коэффициент полно-
ты использования пе-
риметра золотника
окнами (&ncj 1);
Ар — перепад давления на
окнах золотника;
х — величина смещения
золотника вдоль оси.
Пренебрегая изменением Ар по х, можем полагать, что про-
dQ „ dx
изводная — равна производной — , умноженной на посто-
dt dt
янный коэффициент. С учетом сказанного уравнение (177) при-
мет вид
Rx = pnd3knx]/Г2Арр[ CpL —-------cos0
\ dt у р
(178)
Первый член, стоящий в скобках, отражает демпфирующее
действие потока. Демпфирование может быть как положитель-
ным, т. е. усиливающим динамическую устойчивость золотника,
так и отрицательным, т. е. способствующим возникновению не-
устойчивости. Знак демпфирования зависит от знака L, который
определяется направлением потока по отношению к золотнику.
При направлении, показанном на рис. 243, знак L положителен,
при обратном направлении — отрицателен.
418
В четырехходовых золотниках имеются две рабочие щели,
включенные последовательно, и чаще всего направление пото-
ков в них противоположное. Демпфирование золотника опреде-
ляется алгебраической суммой длин демпфирования каждой
щели, поэтому всегда имеется возможность подбором длин дем-
пфирования получить в сумме положительное демпфирование и
обеспечить устойчивость золотникового распределителя.
Второй член выражения (178) пропорционален открытию
золотника х и по своему действию подобен пружине, стремящей-
ся вернуть золотник в исходное закрытое положение.
Для установившегося потока
Rx — — 2[i2Mi3kn&.px cos 0.
Расчеты осевой составляющей, действующей на золотник, по
формуле (178) затрудняются из-за отсутствия величин коэффи-
циентов расхода и углов
вытекания струи при из-
менении геометрических
размеров золотников и
величин перепадов дав-
ления на окнах.
Для идеального золот-
ника 0 = 69°.
При наличии радиаль-
ного зазора S в формулу
(178) вместо х___следует
подставлять У"х2 + д2, т. е.
мы получим следующую
формулу:
Rx = — 2p2ndsknAp cos 0 х
Рис. 244. Влияние угла контура кромки зо-
лотника
х/х2 + 62. (179)
Из уравнения (179), видно, что при радиальном зазоре осе-
вая сила увеличивается, если 0 остается неизменным, а так как
при этом 0 будет уменьшаться, то осевая сила возрастет. Как
показано в исследованиях Ю. Е. Захарова, угол 0 зависит также
от угла обтекаемого контура, образуемого буртиками золотника,
и угол 0 всегда меньше угла профиля ср.
На рис. 244 показана зависимость 0 от величины х = д/х при
различных углах контура кромки золотника ср.
Наличие скруглений на кромках золотника и втулки также
снижает величину угла 0.
Коэффициент расхода является функцией от х и числа Re.
Как показывают опыты, коэффициенты расхода при больших
числах Рейнольдса стабилизируются.
27* 419
§ 4. ПОЗИЦИОННЫЕ ЗОЛОТНИКОВЫЕ РАСПРЕДЕЛИТЕЛИ ПОТОКОВ
Золотниковые и клапанные распределители (краны) приме-
няются как устройства, направляющие поток рабочей жидкости
к требуемому исполнительному механизму, а также осущест-
вляющие реверс таких механизмов.
Золотниковые распределители могут быть как с круглым, так
и плоским золотником, управление которым осуществляется
электромагнитом или вручную.
Золотниковый распределитель с электромагнитным управле-
нием часто называют электромагнитным краном.
Перепад давления на позиционном золотнике должен быть
возможно меньше, так как он является местным сопротивлением
на пути от насоса к исполнительному органу, а привод работает
Рис. 245. Плоский двухпозиционный золотник с электромагнитным
управлением:
а — электромагнит выключен; б — электромагнит включен
как система с Q = const, где соотношение 2/3 (см. стр. 278) не-
применимо. Приемлемые величины гидравлических потерь полу-
чаются при выборе скоростей потоков на входе и выходе из агре-
гата —5 м/сек и при не очень сильных местных ускорениях по-
токов. Техническими требованиями оговаривается величина по-
терь ~3—5 кГ1см^.
Другими параметрами, определяющими характеристики
электромагнитных кранов, являются быстродействие или ско-
рость срабатывания и минимальные значения напряжения и
давления в системе, при которых кран работает нормально.
Скорость срабатывания обычно определяется долями секунды и
зависит от соотношения проходных сечений управляющего эле-
мёнта и объемов жидкости, потребной на переключение
золотника.
420
Рис. 246. Плоский трехпозиционный золотник:
а — левый электромагнит включен; б — оба элект-
ромагнита выключены; в — правый электромагнит
включен
421
Минимальное напряжение срабатывания регламентируется
общими требованиями к изделиям и в большинстве случаев со-
ставляет 18—20 в.
Минимальное давление срабатывания определяется каждый
раз отдельно в зависимости от системы и назначения крана.
В кранах с плоским золотником возникает большая сила трения,
поэтому их срабатывание происходит при более высоком давле-
нии, чем в кранах с круглым золотником.
На рис. 245 изображена конструктивная схема плоского
двухпозиционного золотника с электромагнитным управлением.
При выключенном электромагните давление от насоса поступа-
ет по обе стороны золотника, и
так как площадь поршня с пра-
вой стороны больше, чем с левой,
золотник смещается влево. При
включении магнита доступ жид-
кости под давлением в правую
полость прекращается, полость
сообщается с линией слива, иду-
щей в бак и золотник давлением
золотникаФорма окон плоского на левый торец перемещается
вправо. В случае отказа электро-
магнита (или по желанию опера-
тора) переключить золотник можно вручную при помощи кноп-
ки, которая через толкатель прижмет шариковый клапан к лево-
му седлу.
На рис. 246 показан электромагнитный трехпозиционный
клапан с плоским золотником. Здесь управление золотника осу-
ществляется поочередным включением электромагнитов. При
выключенных электромагнитах золотник под действием давле-
ния промежуточными втулками устанавливается в нейтральное
положение. Данное золотниковое устройство также имеет кноп-
ки ручного управления. Золотниковые распределители с плоски-
ми золотниками имеют круто возрастающую характеристику
Q = f (х), зависящую от формы окон, обычный вид которых по-
казан на рис. 247.
Поскольку герметизация плоского золотника происходит за
счет гидравлического поджима втулки 1 к золотнику 2 и золот-
ника к плоской поверхности (рис. 248), то требования точности
изготовления этих золотников ниже, чем круглых. Так, если
диаметр круглого золотника должен выполняться с точностью
до 3 мк при зазорах между гильзой и золотником 2—10 мк, то
плоский золотник выполняется с точностью: по непараллель-
ности 0,02 мм, по неперпендикулярности 0,03 мм и неплоскост-
ности 2 мк. Точность изготовления плоского золотника техноло-
гически обеспечивать проще, чем круглого, при этом обеспечи-
вается более высокая герметичность.
422
Недостатком кранов с плоским золотником является более
высокий вес и трудное уравновешивание, что затрудняет приме-
нение их для систем с управлением при помощи маломощных
механизмов.
Рис. 248. Плоский золотник с сервоуправлением:
1 — втулка поджима золотника; 2 — золотник
tel
Рис. 249. К расчету поджима
золотника
Величина прижима золотника к плоской пяте определяется
результирующей силой давления жидкости. Так, из чертежа
втулки (рис. 249) видно, что рабочее
давление, прижимающее втулку к зо-
лотнику, действует на площадь круга
диаметром 25 мм, тогда как отжим
происходит по площади диаметром
23 мм, а на кольце шириной 1 мм дей-
ствует давление, убывающее примерно
по прямой, т. е. эпюра давлений пред-
ставляет треугольник. Начальный при-
жим втулки к золотнику обеспечива-
ется пружиной.
Золотники и пяты изготовляются
из стали 12ХНЗА с последующей це-
ментацией и закалкой до HRC 58—62,
стали ШХ15 и калится до HRC 54—58. Сопрягаемые поверхно-
сти золотника, втулки и пяты доводятся, обеспечивая чистоту
поверхностей V 10.
При распределении небольших потоков рабочей жидкости
часто используются электромагнитные распределители прямого
втулка изготовляется из
423
действия клапанного типа. Эти распределители компактны и
обеспечивают хорошую герметичность. Основной вес в этих
агрегатах составляют электромагниты, так как клапаны, будучи
гидравлически неуравновешенными, требуют для управления
ими больших усилий.
На рис. 250 изображена схема двухпозиционного клапанного
распределителя. Рабочая жидкость от насоса поступает к клапа-
ну и при включенном электромагните проходит к агрегату. При
выключении электромагнита клапанный золотник под действием
В агрегат
Рис. 250. Двухпозиционный клапанный распределитель
пружины слева перемещается вправо, перекрывает поступление
жидкости из насоса к агрегату, а агрегат сообщается с баком.
Герметизация клапана происходит за счет прижима конической
поверхности клапана к острой кромке втулок силой электромаг-
нита или пружины. Втулка со стороны электромагнита имеет
больший диаметр, чем со стороны пружины, это облегчает от-
крытие клапана пружиной, когда электромагнит выключен, так
как разность диаметров при рабочем давлении вызывает гид-
равлическую неуравновешенность золотника ~3—3,5 кг, кото-
рая помогает пружине переместить золотник в сторону
магнита.
Но это вызывает одновременно необходимость соответствую-
щего увеличения тяговой силы электромагнита. Обычно измене-
ние тяговой силы магнита идет более круто, чем характеристики
пружины. Такое соотношение характеристик пружины и элек-
тромагнита обеспечивает четкое срабатывание клапанного рас-
пределителя.
424
§ 5. РЕГУЛЯТОРЫ СКОРОСТИ ГИДРОДВИГАТЕЛЯ
Когда требуется обеспечить постоянство скорости исполни-
тельного механизма независимо от нагрузки, действующей на
него, чаще всего устанавливают в гидросистему дроссельные
регуляторы скорости.
В большинстве конструкций таких регуляторов постоянство
расхода жидкости в системе (а следовательно, и постоянство
скорости исполнительного механизма) обеспечивается за счет
поддержания постоянства перепада давлений на чувствительном
элементе регулятора — дроссельной шайбе независимо от ко-
К агрегату
Рис. 251. Регулятор расхода:
1 — входной дроссель; 2 — золотник; 3 — пружина регу-
лятора; 4 — поршень
лебания давлений на входе и выходе из него. На рис. 251 пока-
зана одна из конструктивных схем регулятора расхода.
Регулятор состоит из дросселя 1 с постоянным или регули-
руемым открытием и золотникового дроссельного устройства.
Жидкость от насоса подводится через канал и, пройдя через
дроссель 1 и регулируемую золотником 2 щель, поступает в си-
стему.
На золотники 2 действует усилие пружины 3 и сила давле-
ния жидкости на поршень 4. Под таким же давлением происхо-
дит истечение через дроссель 1. Таким образом, перепад давле-
ний до дросселя и после дросселя определяется натяжением
пружины 3 и почти постоянно независимо от давлений у входа
и выхода из регулятора.
Для обеспечения высокой чувствительности и точности регу-
лятора золотник 2 изготовляется из цементируемой стали с по-
верхностной твердостью HRC 56—62 и чистотой поверхности
V 10. Золотник с гильзой изготовляют с зазором 5—12 мк и с
425
отклонением по овальности и конусности не более 2 мк. Для
устойчивости работы регулятора большое значение имеет про-
филь дросселирующего паза и точность расположения его по
отношению к оси золотника.
На золотнике (рис. 252) дросселирующая щель выполнена
в виде треугольного паза, переходящего в плоский паз с выхо-
дом под углом 45° к оси золотника. Такой профиль при расходах
до 30—40 л/мин обеспечивает устойчивую работу регулятора.
Работа регулятора характеризуется его статической характе-
ристикой, т. е. зависимостью Q = f(kp) в установившемся ре-
жиме работы.
Рис. 252. Регулятор с профильной щелью
Рассматривая установившийся режим работы регулятора,
можно записать следующие уравнения:
&pF0 = P±T — R;
2g^ = p2f2j/2£-^; (180)
Aft + Др2 = Др,
где Др] — перепад давления на диафрагме:
Fq—площадь сервопоршня;
Р — усилие пружины;
Т — усилие трения в сервомеханизме и золотнике;
R — реакция потока на дросселирующий золотник;
pi и р2 — коэффициенты расхода дросселирующей шайбы и
щели, образуемой золотником;
fi, /г —площади проходного сечения дроссельной шайбы и
окна, образуемого золотником;
Дрг — перепад давлений на дросселирующем золотнике.
Первое уравнение отражает условие равновесия сервопор-
шня, управляющего Дросселирующим золотником, второе —
426
уравнение расходов через дроссельную шайбу и окна, образуе-
мые золотником; третье •— уравнение перепадов давлений в
регуляторе.
Используя эти уравнения, можно построить статическую ха-
рактеристику регулятора Q = f(Ap).
Зная характеристику пружины регулятора по первому урав-
нению системы уравнений (180), можно построить график
Api = f(x), где х — перемещение золотника от полностью за-
крытого положения, когда х = хтах. Величину ц2 как функцию
х следует брать из опыта, но при предварительных расчетах бу-
1 — расходная ГП7-14; 2 — расходная ЭГ13-921; 3 — реактивной силы
ГП7-141; 4 — реактивной силы 1Г13-921
Площадь fz = f(x} определяется замерами или из чертежа.
Из первого уравнения системы (180) получаем для Дрь
ДЛ = Po + Cx±T-R , (181)
Fo
где С — коэффициент жесткости пружины;
Ро — сила начального натяжения.
Реакцию потока жидкости на золотник приближенно можно
выразить формулой
Р = 2|T2/2AP2COSa,
где а — угол выхода струи, зависящий от формы золотника-
при прямых его кромках, как мы видели, а = 69°.
Реакцию потока на золотник можно также определять экспе-
риментально и подбирать профиль золотника таким, чтобы
усилие по ходу изменялось незначительно. Этому условию
427
хорошо удовлетворяет золотниковая пара, показанная на
рис. 252, имеющая характеристику Q = f(x) и R = f(x) (см.
рис. 253).
Подсчитав по формуле (181) Др1 = /(.г), можно построить
график этой функции (рис. 254). На этом же рис. 254 можно
построить расчетные значения f2 = f(x) и опытные или теоре-
тически предполагаемые кривые ц,2 = f (х).
Во второй четверти графика (рис. 254) по второму уравнению
системы (180) при jxi = 0,61 -^0,65 строим характеристику дрос-
селя Q = f (Д/Ji).
В четвертой четверти того
же графика строим кривую
Др2 = f(x), для этого задаем-
ся различными значениями х,
находим по кривой Др] =
Рис. 254. К расчету характеристики
регулятора
a
Др
Рис. 255. Расходо-напор-
ная характеристика ре-
гулятора
—f(x) для этих х соответствующие значения Др] и вычисляем
на основании второго уравнения системы (180) перепад давле-
ния в золотнике:
^2
Теперь можно построить статическую характеристику регу-
лятора.
Задаемся некоторым значением х = х1( по которому при по-
мощи построенных графиков, как показано на рис. 254 стрелка-
ми, находим Дрь Q, /\р2 и, следовательно, Др = + Др2.
Таким образом, получаем статическую характеристику регу-
лятора Q = f (Др), примерный вид которой показан на рис. 255.
§ 6. ПРЕДОХРАНИТЕЛЬНЫЕ КЛАПАНЫ
Схема установки предохранительного клапана на напорной
линии показана на рис. 256. Этот клапан применяется для
защиты гидросистемы от повышения давления сверх допустимо-
428
го значения. Предохранительный клапан должен быть надежным
в работе; иметь требуемую (чаще всего пологую) расходо-на-
порную характеристику; быть динамически устойчивым (на
расчетном режиме); иметь наименьший гистерезис и малые га-
бариты.
Требование надежности работы клапана — это требование
безотказности его открытия независимо от продолжительности
пауз между открытиями. Надежность работы клапана обеспечи-
вается правильным выбором его конструкции.
Рис. 256. Схема установки и характеристика объемного насоса
с предохранительным клапаном:
а — схема; б — характеристика; 1 — насос; 2 — пружина; 3 — приспо-
собление для затягивания пружины; 4 — предохранительный клапан;
5 — напорная магистраль
Так, например, плоский клапан (или конический) будет бо-
лее надежным, чем золотниковый, для условий работы, когда
открытие клапана происходит эпизодически, с длительными
паузами между открытиями, так как длительность бездействия
может привести к заклиниванию золотника мелкими твердыми
(или смолистыми) частичками, находящимися в жидкости.
Требование пологости расходо-напорной характеристики кла-
пана состоит в следующем. Предположим, что клапан отрегули-
рован на давление ро, это значит, что при достижении в напор-
ной линии этой величины давления клапан откроется и жидкость
начнет поступать через клапан в область низкого дав-
ления.
Течение жидкости через клапан приводит к превышению дав-
ления Др в линии сверх давления ро, при котором клапан
открылся.
Следовательно, характеристика клапана, т. е. кривая
p = ^(Q), является возрастающей; это значит, что с увеличени-
429
ем расхода жидкости перепад давления в клапане возрастает
(кривая 1 на рис. 257).
Значительное увеличение перепада давления, а значит и уве-
личение давления под клапаном в процессе перепуска отрица-
тельно сказывается на работе клапана.
Можно представить себе и другой случай, когда перепад
давления уменьшается с увеличением расхода (падающая ха-
рактеристика— кривая 2) или же остается неизменным при лю-
бых расходах (горизонтальная характеристика).
Таким образом, процесс перепуска жидкости через предохра-
нительный клапан может быть осуществлен по возрастающей,
Рис. 257. возможные характери-
стики предохранительного клапа-
на:
1 — возрастающая; 2 — убывающая
падающей или горизонтально»
характеристике.
Наилучшим является клапан,
имеющий горизонтальную или
близкую к горизонтальной ха-
рактеристику.
Одноступенчатые предохрани-
тельные клапаны, т. е. клапаны с
одной дросселирующей щелью,
называемые клапанами прямого
действия, имеют возрастающую
характеристику.
Увеличение перепада давле-
ния с увеличением расхода через
клапан объясняется тем, что
при его подъеме на нем не возни-
кает добавочного усилия со стороны жидкости, которое компен-
сировало бы уменьшение силы давления жидкости на клапан,
вызванное падением давления из-за увеличения скорости тече-
ния под клапаном, и возрастающие с подъемом клапана усилия
в пружине. В связи с этим компенсация недостающего усилия
давления жидкости и возрастающего усилия пружины может
быть произведена только за счет увеличения давления под кла-
паном, что и приводит к возрастающей характеристике.
Таким образом, получение постоянного давления при пере-
менном расходе в клапанах прямого действия невозможно.
Выравнивания давления под клапаном при переменном расходе
можно достичь, если создать условия для увеличения усилия
жидкости на клапан по мере его подъема. Конструктивно это
может быть достигнуто созданием двухступенчатого клапана
или клапана с серводействием. Эти конструкции мы рассмотрим
ниже.
Т ребование динамической устойчивости означает, что в кла-
пане не должны возникать незатухающие колебательные про-
цессы на всем диапазоне расходов через него или на основном
рабочем диапазоне. Клапан представляет собой динамическую
430
систему, связанную с упругой средой — жидкостью. В этой си-
стеме при определенных условиях могут возникнуть автоколеба-
ния. Такие явления нежелательны в работе клапана как из-за
поломок пружин, так и из-за нарушения работы всей связанной
с клапаном гидросистемы (скачки давления, колебания других
элементов гидросистемы и т. п.).
Требование наименьшего гистерезиса означает, что клапан
должен быть таким, чтобы разница между давлением ро его
открытия и давлением р0 его полного закрытия была возможно
меньшей. Гистерезис объясняется трением, а также рассеянием
энергии на перекристаллизацию металла при деформации
пружины.
Рассмотрим некоторые конструкции клапанов и их характе-
ристики.
Конструкции предохранительных клапанов
и их характеристики
клапана
опорной поверхности b = 1,2 мм
Рис. 258. Характеристики плоского пре-
дохранительного клапана при различ-
ных вязкостях жидкости:
— О — О--------при 300° Е; — X — X------
при 30° Е
На рис. 258 показаны характеристики плоского
низкого давления с шириной
при диаметре подвода d =
— 22 мм. Характеристики
сняты для вязкости 30 и
300° Е. Характеристики кла-
пана, особенно для высокой
вязкости, имеют возрастаю-
щий характер. Также воз-
растающей является харак-
теристика клапана золотни-
кового типа конструкции
«Пауль Лайстриц», показан-
ная на рис. 259. Вязкость
жидкости при этом была
30° Е.
Особенностью конструк-
ции этого клапана является
наличие кольцевого прост-
ранства после золотниковой
щели, которое служит для
создания добавочного уси-
лия, преодолевающего уси-
лие пружины и открывающе-
го клапан на слив. Выби-
рая кольцевую площадь до-
статочного размера, можно добиться лишь незначительного воз-
растания характеристики.
431
На рис. 260 показана конструктивная схема двухступенчато-
го предохранительного клапана. Этот клапан имеет вторую сту-
Рис. 259. Предохранительный клапан насоса фирмы
Пауль Лайстриц и его характеристика:
а — конструктивная схема; б — характеристика клапана;
J — выпускная камера; 2 — промежуточная камера; 3 —
подводящая камера
пень сопротивления и форму, при которой реакция потока имеет
большее значение. В образующейся между первой и второй
Рис. 260. Двухступенчатый предохрани-
тельный клапан
ступенями промежуточ-
ной камере создается
при открытии клапана
избыточное давление,
которое создает доба-
вочную силу давления
на клапан, что приво-
дит к его дополнитель-
ному подъему и сниже-
нию давления под ним
(в подводе). Правиль-
ным выбором кольцево-
го зазора (второй сту-
пени сопротивления)
можно получить гори-
зонтальную характери-
стику. Одна из таких конструкций клапана низкого давления, вы-
полненная в ВИГМе Г. В. Складневым и С. Н. Рождественским,
показана на рис. 261. Угол при вершине 6 = 120°.
432
Клапан конструкции «Бош» и
на рис. 262. Давление жидкости
зазор демпфирующего .порш-
ня в пространство а, где,
действуя на торец направ-
ляющего поршня, создает
усилие, преодолевающее
усилие пружины и открыва-
ющее, таким образом, кла-
пан. Как видно из чертежа,
в клапане применено демп-
фирование колебательного
процесса при помощи гид-
равлического демпфера в ви-
де кольцевой щели.
Давление закрытия кла-
пана отличается от давления
открытия на 1—2 ат (гисте-
его характеристика показаны
передается через кольцевой
Рис. 261. Характеристики двухступенча-
того клапана:
— о — О — — v — 8,7 ст; — Д — Д — v —
- 12,5 ст; — X — X — v - 22 ст
резис). Этот клапан приме-
няется на давление до 160 ат
и расход до 60 л!мин.
На рис. 263 показана
конструкция предохранительного клапана золотникового типа
(«Ойл-Гир»), отличающегося незначительным возрастанием ха-
Рис. 262, Клапан «Бош» и его характеристика
рактеристики. Демпфирование колебаний осуществляется при
помощи дополнительного шарикового клапан, который при ходе
клапана вниз закрывается, благодаря чему жидкость перетекает
28 Заказ 1076 433
из-под клапана только через дроссель. По сравнению с предыду-
щей в этой конструкции могут иметь место утечки через коль-
цевой зазор, которые возрастают с увеличением давления (об-
щий недостаток золотниковых клапанов по сравнению с тарель-
чатыми) .
Рис. 263. Клапан
«Ойл-Г ир»
Рис. 265. Клапан
«Кросби» высоко-
го давления
На рис. 264 показан тарельчатый предохранительный клапан
«Кросби», особенностью которого является применение в нем
специального регулировочного кольца, при помощи которого
можно, создавая дополнительно реактивную силу, управлять
характеристикой клапана.
Клапан предназначен для средних величин давления (р <
< 70 кГ/см2) и температур до 250° С.
Величины расхода, на которые рассчитан клапан, размеры
его подвода и скорости приведены в табл. 31.
Таблица 31
Параметры предохранительных клапанов низкого давления
Давление открытия ро В кГ/СМ* Расход Q в л/сек Диаметр сопла в свету d в дюймах Скорость и в м/сек
50 10,5 1 21,5
70 15 1 32
434
Клапан, предназначенный для более высоких давлений
<210 ат и температур (более 250° С), показан на рис. 265,
а в табл. 32 приведены некоторые его параметры.
Таблица 32
Параметры предохранительных клапанов высокого давления
Давление открытия ро в ат Расход Q в л/сек Диаметр сопла в свету d в дюймах Скорость и в м/сек
70 4,2 % 15
105 5,1 м 18
140 5,9 34 21
175 6,5 34 23
210 12 34 42,5
в тех случаях,
Область
нагнетания
Рассмотрим некоторые конструкции предохранительных кла-
панов с серводействием, которые применяются
когда требуется обеспе-
чить незначительное по-
вышение давления при
перепуске больших рас-
ходов и когда нежела-
тельно устанавливать
большие и жесткие
пружины. Эти клапаны
отличаются от клапа-
нов прямого действия,
тем, что на давление
потока перед клапаном
реагирует чувствитель-
ный элемент, представ-
ляющий собой малень-
кий клапан прямого
действия. Конструкция
такого клапана, приме-
няемого в гидроприво-
де станков, и его харак-
теристика показаны на
рис. 266.
При открытии шари-
кового клапана 1 поя-
вившийся в камере 2
расход приводит к по-
явлению перепада давления на большом поршне, который слу-
жит сервопоршнем и сжимает пружину 4, открывает щель, че-
рез которую лоток из напорной полости идет на слив. Клапан
такого же типа, но несколько иного конструктивного исполнения,
Рис. 266. Клапан «Виккерс» с серводей-
ствием и его характеристика:
1 — клапан настройки; 2 — камера сервоци-
линдра; 3 — дроссель; 4 — пружина пере-
пускного клапана; 5 — перепускной клапан
28*
435
для авиационных гидросистем показан на рис. 267. Там же пока-
заны характеристика клапана, полученная для жидкости
Рис. 267. Клапан для авиационных гидросистем и его детали:
а — конструктивная схема; б — детали; в — характеристика
АМГ-10, и размеры его основных элементов. Клапан высокого
давления (210 ат) аналогичной конструкции для авиа-
Рис. 268. Клапан с серводействием кон-
струкции А. В. Полозова:
/ — клапан настройки; 2 — пружина;
3 — внутренний канал; 4 — сливная ли-
ния; 5 — напорная лниия
ционных гидросистем по-
казан на рис. 268. При
открытии шарикового кла-
пана настройки 1 жид-
кость течет через дрос-
сель и далее по централь-
ному каналу <3 и каналу 4
на слив. Давление в каме-
ре понижается, в резуль-
тате этого перемещается
основной клапан влево и
жидкость сливается. Пре-
вышение давления при пе-
репуске полного расхода
жидкости составляет не
более 8% давления от-
крытия клапана.
Характеристику клапа-
на непрямого действия
можно построить графически по характеристикам его отдельных
элементов (см. рис. 269).
436
В первом квадранте строим характеристику дросселя Qgp =
= f(kp) (кривая /), где Др — перепад давления на дросселе.
Рис. 269. Графо-аналитический способ построения характеристи-
ки клапана:
а построение; б — результат; 1 — характеристика дросселя; 2 — ха-
рактеристика клапана; 3 — характеристика настроечного клапана;
4 — характеристика проходного сечения клапана
Там же наносим статическую характеристику датчика, как кла-
пана прямого действия (кривая 2).
Рис. 270. Клапан «Виккерс» высо-
кого давления
цилиндра
Рис. 271. Предохранительный клапан
двустороннего действия
В четвертом квадранте строим характеристику перемещения
х основного золотника в функции Др и сумму Др + ркл, где
Ркл — перепад в шариковом клапане.
437
В третьем квадранте строим зависимость проходного сечения
от перемещения золотника, а во втором квадранте строим кри-
вую расхода через окно золотника в функции проходной щели
(кривая 3). Используя эти кривые, можно, как показано стрел-
ками, построить и характеристику клапана р = f(Q).
На рис. 270 показан клапан «Виккерс» высокого давления
(до 350 кГ/см1), а на рис. 271 — предохранительный клапан дву-
стороннего действия и схема его присоединения.
Выбор скорости и определение диаметра
проходного сечения предохранительного клапана
прямого действия
При расчете предохранительного клапана важным является
вопрос определения диаметра подводящего патрубка, который
мы будем называть подводом.
Диаметр подвода определяется на основании выбора скоро-
сти жидкости и в подводе и расхода Q через клапан:
Следовательно, задача сводится к выбору скорости и.
Выбор скорости и в клапанном подводе, а следовательно,
и определение диаметра d подвода в свету связаны с величи-
ной давления р в линии во время пропуска расчетного расхода
через клапан.
Подсчитаем величину давления р под клапаном при пропу-
ске через него расчетного расхода Q и определим силу, дей-
ствующую на клапан со стороны жидкости. Для этого составим
уравнение изменения количества движения потока, взяв сечения
1—1 и 2—2 (рис. 272):
Qp (и — v cos а) = Р — pYf, (182)
где Q — расход жидкости через клапан;
и — скорость в подводе (сечение У);
v — скорость в щели (в струе);
а — угол отклонения струи, вытекающей из-под клапана;
f — площадь поперечного сечения подвода в свету;
Р — сила, действующая со стороны жидкости на клапан;
Pi — избыточное давление в сечении 1—1 (давление за кла-
паном считается атмосферным);
р — плотность жидкости.
Из этого уравнения находим
Р Qp (и — v cos а)
Л-Т ]
438
но
Р = Ро + Сх,
где Ро — сила начального натяжения пружины;
С — жесткость пружины;
х — подъем клапана.
Однако
Q = uf.
а поэтому
__ Ро + Сх up (и — v cos а)
или
Pi + Сх и2 । uv cos а
Y yf g g '
Выразим теперь давление в линии (или емкости) р через
давление р\. По уравнению Бернулли имеем
Р = Pi ! । г и?
У У 2g 2g ’
где £— коэффициент сопротивления насадка (т. е. подвода).
Рис. 272. К расчету проходного сечения клапана:
а — картина течения; бив — проточные части клапана
Скорость жидкости в линии меньше, чем скорость и, поэтому
ею пренебрегаем.
Следовательно,
Р ___ Рр Р Сх
У yf
и2 . uv cos а . и2
2g g +Q^g'
Так как Ро = Pof, где р0 — давление открытия клапана, то
р р0 . Сх и2 . uv cos а . и2
-- —-------------------------1-------------L- (,--- .
У У fy 2g g 2g
(183)
439
Мы получили выражение для определения давления р в ли-
нии при полностью открытом клапане.
Проанализировав это выражение, мы видим, что давление р
равно давлению открытия ро плюс некоторое дополнительное
давление Др:
Р = Ро । Др
Y У У ’
причем
Др __ Сх । uv cosа и2
У yf g 2g 2g
где первый член правой части — приращение напора благодаря
сжатию пружины при подъеме клапана; третий член — сопротив-
ление подводящей части клапана; второй и четвертый члены
обусловлены изменением количества движения потока.
Угол отклонения потока а является величиной переменной и
зависит от подъема клапана, причем а убывает с подъемом.
Точную зависимость угла а от подъема определить очень
сложно, поэтому ограничимся здесь только приближенной
оценкой.
Примем, что на расчетном подъеме х ~ — , а ~ 70°, и =— V,
6 3
cos а ~ 0,3. Следовательно,
jw'cos а f 2и За • 0,3 , о и2
= = 1,о ,
g---------------------------2g-2g
поэтому
Др Сх , о и2 у и2 и2
--- =------р 1 о----F- С------- -
У yf 2g 2g 2g
ИЛИ
= 0,8 — + ?— •
У yf 2g 2g
Коэффициент сопротивления £ зависит от формы подвода и
является функцией числа Рейнольдса потока:
£ = f(Re),
где Re = —;
У
d — диаметр подвода;
v — кинематическая вязкость жидкости.
Однако, как показывают эксперименты, при Re 10 000 на-
ступает зона турбулентной автомодельности потока, где £=
= const, т. е. не зависит от числа Рейнольдса.
Для конструкции подвода клапана, показанного на рис. 272
(конический сходящийся насадок с углом 20°, переходящий в
440
цилиндрический насадок), можно принять для чисел Re >
>10000 £ = 0,2, следовательно,
Ар. = АА. _|_ (0,8 + 0,20) —
У yf 2g
или
-^- = —+ 1,00 — ,
У yf 2g
Ьр Ьрпруж । ц2 (184)
У V 2g
Теперь можно выбрать скорость в подводе в зависимости от
начального давления открытия клапана.
Так как
Р _ Ро I Ар
У У У ’
то вопрос заключается в том, какой величины можно допустить
Др сверх ро- Это зависит от технических условий на проектиро-
вание.
Положим
Др = kp0
и
Арпруж = ^1Ро,
тогда, подставив эти выражения в формулу (184), получим
ц2
kp0 = kiPo + —y ,
откуда
« = ]/" (k-k1)2g-^-.
Приняв k = 0,08 и ki — 0,05, получим после вычислений
(у = 900 кГ/м?) _
и = 2,5]/р0,
где ро — давление открытия клапана в ат.
Таким образом, мы получили зависимость скорости и от дав-
ления открытия клапана при условии, что превышение давления
клапаном при перепуске полного расхода над давлением его
открытия Др = 0,08 ро-
Определим теперь подъем клапана и требуемую жесткость
пружины.
Так как мы положили (исходя из требований заданной
характеристики)
Сх ,
—7“ = kiPo,
yf
441
то отсюда жесткость пружины
Q = felPoTf
X
где х — подъем клапана, который по уравнению расхода равен
для плоского клапана
. f 2gPo(l+^)
find | / --------,
F Y
и для конического клапана
j • n’l / 9п-Ро(1+^)
|ind sin 0 1/ Xg----
F Y
где 0 —половина угла при вершине конуса (см. рис. 272);
ц— коэффициент расхода, который является функцией
числа Re.
Для плоского клапана с узкой опорной поверхностью можно
полагать ц величиной постоянной (имея в виду преимуществен-
но турбулентный режим течения) и равной 0,62.
Для шарикового и конического клапана рекомендуют (2] по-
чти на всем диапазоне чисел Re (для Re > 3)
0,73
Выбор ширины опорной поверхности в клапане производится
исходя из допустимого давления на нее. Рекомендуемое допу-
стимое давление для стали о = 1500 кГ/см2 и для бронзы
о = 300 кГ/см2.
Динамическая устойчивость предохранительного клапана
Рассмотрим колебания клапана и определим условия его ус-
тойчивости.
Представим себе, что клапан находится в равновесии в (по-
токе, находясь от седла на некотором расстоянии х. Силы, дей-
ствующие на клапан со стороны жидкости, уравновешиваются
силой, действующей со стороны пружины. Таким образом,
Ржидк = Рпруж или, обозначая разницу Ржидк — Рпруж = К, мо-
жем записать условие равновесия клапана в виде К = 0.
Сила К, появляющаяся при отклонении клапана от положе-
ния равновесия, может быть представлена как функция четырех
переменных: давления р, расхода через клапан Q, подъема кла-
пана х и угла отклонения потока на бесконечности а.
Таким образом, можно записать
К = К(р, Q, х, а). (185)
442
Кроме того, для клапана, находящегося в потоке жидкости,
имеют место еще два уравнения
F (р, Q, х) = 0 (186)
и
Ф(х, а) = 0. (187)
Уравнение (186) характеризует течение через клапанную
щель, т. е. потери напора в клапане. Уравнение (185) показыва-
ет связь между углом отклонения потока на бесконечности d и
подъемом клапана х. При помощи этого уравнения можно
учесть динамическую реакцию потока на клапан. Рассматривая
течение через клапан выбранной нами формы (рис. 272), можно
предположить, что динамическая реакция будет существенной,
особенно при больших расходах.
Для конических клапанов, у которых отклонение потока не-
значительно, реакция потока также будет незначительной, по-
этому ее можно не учитывать. Наши исследования в дальнейшем
проведем для двух случаев — без учета динамической реакции и
с учетом ее.
Уравнение (187), решенное относительно а, может быть
представлено в виде
а = (х).
Подставляя последнее выражение в уравнение (185), по-
лучаем
Я = Я(р, Q, х).
Следует заметить, что уравнение (187) является неполным,
так как в нем не учтено влияние степени перекрытия клапана на
угол отклонения потока а. Однако мы будем рассматривать кон-
струкцию с определенной и неизменной степенью перекрытия.
Таким образом, уравнение (187) нужно рассматривать как
зависимость а от х при заданной степени перекрытия.
Если из-за каких-либо причин параметры р, Q, х получают
отклонения, то условие равновесия нарушается и появляется
избыточная сила &К, создающая ускорение движения клапана.
Обозначим отклонение от положения равновесия через g.
Тогда уравнение движения выведенного из положения равнове-
сия клапана будет иметь вид
+ (188)
dti
где Т — сила сопротивления движению клапана, которую мы на-
зываем силой демпфирования.
Предположим, что сила демпфирования пропорциональна
•скорости в первой степени, т. е.
Т = .
dt
443
Предположение о линейном законе для сопротивления явля-
ется некоторым допущением, однако принятие квадратичного за-
кона ведет к большим математическим затруднениям.
Таким образом,
= Mt.
dt2 dt
Раскроем правую часть уравнения, для этого прежде
запишем
др dQ дх
В этом
Следовательно,
dt2 dt др dQ дх
дифференциальном уравнении производные
всего
(189)
дК
др
дК дК
--- И ---
dQ дх
являются известными, так как для клапана,
нахо-
дящегося в равновесии, мы можем составить выражение для
силы К-
Но нам неизвестны выражения для Др и Д Q, и мы обязаны
искать дополнительные уравнения, которые позволили бы ис-
ключить из уравнения (189) величины Др и Д<2.
Дополнительными уравнениями будут следующие:
_^Др + _^д(2+_^5=О (190)
др dQ дх
И
-^-(ДР) =--------
dt р V р
(191)
где Vp — объем системы, заполненной жидкостью, которая ис-
пытывает изменение давления на Др;
fo — площадь проекции клапана на плоскость, перпендику-
лярную к его оси.
Уравнение (190) следует из уравнения (186), а уравнение
(191) вытекает из определения коэффициента относительного
сжатия жидкости р.
Далее мы проделаем алгебраические операции, в результате
которых из уравнения (189) будут исключены Др и AQ.
Порядок преобразования при этом следующий. Из уравне-
ния (190) находим AQ и подставляем в уравнение (189), затем
решаем его относительно Др и подставляем в равенство (191).
Таким образом, мы получим одно дифференциальное уравнение
с неизвестной функцией %.
444
Проделав преобразования, получим
dF
др
dF
dQ
dF
dx
~dF_
dQ
Это уравнение можно переписать:
+Л2— + А1-^- + А£ = 0,
dt3 dt2 1 dt и
где обозначено
4 = ± + -^-;
2 т PVM
(192)
1
тМ
dp
dQ
dx
(193)
А
4 =
и
dx
dF dF
dQ jj __ dK dK dQ
dF ’ dQ dp dF ’
dp
dQ
dp dp
dx dK , dK . dQ 1
dQ dx dQ dx J
dx Г dK + dK . dp 1
dp L dx dp dx J
445
Для сходимости процесса, описываемого уравнением (192),
необходимо соблюдение следующих условий (условий Гурвица):
коэффициенты А2, Ai и Ае должны 'быть положительны;
должно соблюдаться неравенство
Д1Д2 — Ао > 0.
т-r dp dx
Производные и дают тангенсы углов наклона ха-
рактеристик клапана, поэтому введение этих производных в урав-
нения представляет некоторое удобство. Для краткости будем
обозначать в дальнейшем-^- = 0Р и =QX.
dQ dQ
Исследование условия устойчивости произведем для двух ос-
новных случаев: И=ооиЙУ=0, ИУ=°о.
Первый случай (V = сю) означает, что подклапанное прост-
ранство, заполненное жидкостью, предполагается большим, так
что во время колебаний клапана давление в этом пространстве
остается неизменным.
Второй случай (Г#=0и V =# сю) означает, что объем систе-
мы предполагается конечным. Этот случай является наиболее
общим.
В первом случае V = сю и р = const, тогда
Ао = 0; = L_; Л2 = —
0х тМ т
Условия устойчивости, как известно, требуют, чтобы Ai > 0 и
А2 > 0. В данном случае А2 является величиной существенно по-
ложительной, а коэффициент Ai будет положительным, если при
g
IJ > 0 —— > 0. Последнее выражение означает, что кривые р =
О*
= f(Q) и х = fi(Q) должны быть одновременно возрастающими
или убывающими. Таким образом, в рассматриваемом случае
внешний признак динамической устойчивости клапана заключа-
ется в возрастании кривой давления в зависимости от расхода.
Покажем теперь, что всегда U > 0.
Мы имели
dF
U = дк — дк dQ
dQ dp dF
др
л К
Производная--- всегда положительна; так как известно, что
dQ i
с увеличением величины расхода через клапанную щель будет
dK п
увеличиваться усилие на клапан, следовательно,U.
446
Далее заметим, что производные --и --- имеют обяза-
dQ др
тельно обратные знаки, так как это производные от уравнения
потерь давления в клапанной щели, которое имеет вид
р —CQ2 =0.
Описанное свойство производных 'приводит к тому, что знак
минус у второго члена правой части выражения для U переходит
в плюс, и, следовательно, мы получаем, что для клапанов вообще
U > 0.
Для случая конечного объема системы все коэффициенты вы-
числяются по формулам (193). Подставив значения этих коэф-
фициентов в условие Гурвица, получим неравенство, обусловли-
вающее границу устойчивости:
----тМ------_М_ . J
р $VM$ + m 1/pV v '
Таким образом, имея перед собой характеристику клапана и
зная значение фактора демпфирования, можно установить, будет
ли клапан работать устойчиво или неустойчиво.
Рассмотрим частный случай, когда характеристика клапана
горизонтальная, т. е. 0Р = 0.
Коэффициенты До и Д2 остаются без изменений, а коэффи-
Ф
циент Д] = ---- при подстановке 0Р = 0.
тмр V
Для устойчивости прежде всего необходимо, как мы видим,
чтобы До > 0, Д1 > 0 и А2 > 0.
Коэффициент Д] > 0 при ф =Д= 0, т. е. устойчивость клапана,
имеющего горизонтальную характеристику, обеспечивается демп-
фированием.
Из условия Гурвица Д1Д2— До > 0 следует, что
1 / &и\ 0
рУтИ \ т рУМ 0* /
или (так как М > 0)
(195)
Напомним, что
и
др
447
Кроме этого, 9х = __%9^, * р Р р *
где dF dF
f — Ж dJC dx dK dK dx и о =
dx dp dF dx dQ dF dp dp
можно переписать в виде
+ Т>0. (196)
следовательно, неравенство (195)
№ &
~ + $VM
ГТ дК
Производная ----- отрицательна; второе слагаемое правой
dx
части выражения для S остается также всегда со знаком минус
dF
/ dx ~ л 5 К л \
(так как отношение-------> 0, а-----> 0), следовательно, величи-
df dp
др
на Т всегда отрицательна. Поэтому неравенство (196) можно пе-
реписать:
Из последнего неравенства можно найти предельно мини-
мальную величину фактора демпфирования, обеспечивающего
устойчивость клапана:
е =----------\--\f —--------hm)T|- (197)
2£Л4У у 4PWV2 111 v
В качестве примера применения полученных формул рассмот-
рим двухступенчатый предохранительный клапан, показанный
на рис. 260.
Составим выражения функций К и F.
Как мы видели, особенностью этого клапана является проме-
жуточная камера с некоторым давлением р', определяемым при
заданном расходе размерами дросселирующей щели второй сту-
пени.
, г, ji(Z)2—d2)
с)то давление/?, действуя на кольцевую площадь гк = —---
4
Л(Р)2_d2)
приводит к появлению добавочной силы Pv = p' —-------
4
В связи с этим выражение для силы К имеет вид
K = p-^- + Pv + R — Cx — Ро, (198)
448
где /? — динамическая реакция на клапан;
Ро — сила предварительного натяжения пружины;
С — жесткость пружины.
Экспериментальное изучение щели, образованной цилиндри-
ческой поверхностью и острой кромкой, показало, что потери дав-
ления р' для турбулентного режима (который является преиму-
щественным) можно определить по формуле
0,128 и2
р = у------------,
г /Л]2’1 2g
где 6 — зазор второй ступени;
и — скорость в клапанном подводе.
Однако
6 = 6'+ — и и = -^,
2 f ’
где 8' — зазор второй ступени при закрытом клапане;
f — площадь подвода в свету.
Следовательно,
(199)
Сила Р, представляющая собой динамическую реакцию пото-
ка на клапан, определяется изменением количества движения по-
тока, поэтому
Р = (v + v' sin а),
g
где v' — скорость истечения из щели первой ступени;
а — угол отклонения потока на бесконечности.
Точно определить величину скорости v' мы не можем, так как
неизвестно значение коэффициента сжатия е, поэтому запишем
приближенную формулу:
п' = —f—v =------2--- (е = 0,6).
endx 0,6ndx
Установление связи между углом а и подъемом х представля-
ет сложную гидродинамическую задачу, поэтому упростим зави-
симость а = f(x), полагая
_ х
sin а = sin аое х°,
где ао — угол обратного конуса клапана (в данном случае cto =
= 30°);
xQ — максимальный подъем клапана.
29 Заказ 1076 4 49
Таким образом, выражение для гидродинамической реакции
перепишем в виде
= Q2T (j f sin ар ~
gf \ nde )
Подставляя полученные выражения в
чаем
К = -----------------------ь.----
4 (К’ , х V'1
I ф -L —
\ 2 J
fsina0 х„
nde
формулу (198), полу-
FK + — 1 +
к gf
(200)
Функцию F(p, Q, х) = 0 можно раскрыть, зная из экспери-
ментальных исследований закон изменения коэффициента сопро-
тивления первой и второй ступени в зависимости от подъема
клапана х. Для первой ступени (при угле конуса ао = 30°) для
турбулентного режима течения
и2 0,0375 ________ Q2y а
~2g ' ~ ' х2'75 ’
\ d /
(201)
где а = 0,0375г/275.
Таким образом [с учетом формулы (199)], давление под кла-
где b = 0.128D2-1.
Следовательно, уравнение F (р, Q, х) имеет вид
F =. р —
<?2У
2gf2
(202)
Уравнения (200) и (202) являются основными для нахожде-
ния выражений (193) и (196), а следовательно, и для проверки
условий динамической устойчивости.
Определим теперь коэффициент демпфирования.
При составлении дифференциального уравнения мы приняли
демпфирующую силу (т. е. силу сопротивления) пропорциональ-
ной первой степени скорости:
Р = я.
дет* W d( ’
где О- — коэффициент демпфирования.
450
Для проведения дальнейших вычислений нам нужно дать ко-
личественную оценку этого коэффициента. Это трудно сделать
из-за сложности физической картины течения, возникающего
в вязкой жидкости вблизи колеблющегося тела, а также слож-
ности определения силы трения в элементах конструкции кла-
пана, поэтому оценка будет приближенной.
Ввиду отсутствия опытного материала по демпфированию пре-
дохранительных клапанов воспользуемся рекомендациями, кото-
рые даются при расчете форсунок двигателей внутреннего сго-
рания.
Игла форсунки находится в потоке жидкости в условиях,
близких к условиям, в которых находится предохранительный
клапан во время перепуска жидкости.
Проф. Г. Г. Калиш [26] рекомендует динамический расчет фор-
сунок проводить с запасом при следующих значениях коэффи-
циента демпфирования: О = 0,02 кГ-сек/см-, О’ = 0,2 кГ сек/см,
0 = 2 кГ -сек!см.
Выбирать коэффициент О следует, учитывая особенности кон-
струкции. Так, для конструкций клапанов типа «Бош» (рис. 262),
где имеются достаточной длины направляющие поршни и, кроме
того, введен демпфирующий поршень, можно Принять большее
значение 0—1,0 кГ-сек/см. Для двухступенчатых клапанов, учи-
тывая сложную форму дросселирующей щели, можем принять
О — 0,5 кГ сек!см.
„ дК дК дК dF dF
Вычислим производные —-, -----, -—, а также ——, —-
дх др dQ дх dQ
dF
и ---.
др
Дифференцируя формулы (200) и (202), имеем
Q2T sin аое
g:te,xgd
дК = <?у . b
dQ ~ gf2 ' (\ , * \2,i
\ 2 J
дК _____ nd2
др ~ 4 ’
dF __ Q2y
дх 2gf2
(х
। i f sin «0 ~ T,
:ie.d
29*
451
Составим теперь выражения для величин S и Т, при помощи
которых затем можно будет воспользоваться формулой (197):
5 1 >№>bFK Q2y sin аое х° .
2gf2 Л 2L\3J ng&xod
\ + 2 /
Q? . b р ] i 2 QT ({ л. /sinctp ~ ~Ta
gf2 , * A2,1 K gf I ned
\ + 2 / J \
Q27 / 2,75а
T3 ’’75’
a
x2 ’75
Q2y , l,O5bFK______________Q-y sin g0 . g Xo
2gf* (« , x \3,1 ng&d -
о +-------------- x0
\ 2 /
.nd2 Q2y г 2,75а . 1,056
~4 2gf~ „3.75 ' ~7 x \3,1
(6 +— )
L k 2 / J
Вычисления удобно проводить при помощи таблицы, зада-
ваясь различными значениями Q. Так как обычно подъем клапана
линейно (достаточно точно) связан с расходом q(x = х0 ——j,
то, зная Хо и Qmax, получим для каждого Q свое значение х.
Таким образом, вычислив для различных Q и х, S, Т и М, имея
коэффициент сжатия жидкости р и массу подвижных частей
клапана т, определяем, задаваясь коэффициентом •&, границу ус-
тойчивой работы по формуле (195) или по формуле (197) опре-
деляем требуемый для устойчивой работы коэффициент демпфи-
рования Фо и сравниваем его с тем значением ft, которым мы за-
давались. Можно рекомендовать первый приближенный расчет
устойчивости проводить без учета реактивной силы, тогда все
вычисления будут значительно проще.
Глава XIV. ГИДРОПРЕОБРАЗОВАТЕЛИ И ГИДРОПЕРЕДАЧИ
§ 1. ГИДРОПРЕОБРАЗОВАТЕЛИ
В практике применения гидропривода в различных областях
машиностроения часто появляется необходимость использовать
гидропреобразователи, т. е. устройства, преобразующие величины
давления и расхода жидкости. Иногда такие преобразователи
или, иначе говоря, трансформаторы преобразуют энергию сжато-
го газа в энергию жидкости.
Использование гидротрансформаторов позволяет создавать
компактные исполнительные механизмы, развивающие большие
усилия на определенном этапе технологического процесса, и обе-
спечивать большие скорости их при рабочем или холостом ходе
при наличии в системе гидропривода одного насоса, рассчитан-
ного на обеспечение всех циклов, кроме силового.
Примером использования повышающих трансформаторов мо-
гут служить гидравлические прессы.
Иногда, наоборот, все механизмы требуют большого давления
рабочей жидкости, а отдельные механизмы, как, например, меха-
низмы следящих систем, для обеспечения устойчивой работы
требуют пониженного давления питания. В этом случае, чтобы
избежать излишних потерь энергии и увеличенного тепловыделе-
ния, в гидросистеме привода вместо редуктора бывает выгодно
применить понижающий трансформатор.
Наконец, если для привода целесообразно использовать энер-
гию сжатого газа, то в этом случае также может быть использо-
ван трансформатор.
Основным преимуществом применения гидротрансформато-
ров по сравнению с использованием для этих целей автономных
насосных установок или редукционных клапанов является упро-
щение гидросистемы и повышение к. п. д. привода.
Трансформаторы бывают прерывистого действия, когда пере-
ключение их хода осуществляется специальным переключателем
или основным устройством, управляющим исполнительным меха-
низмом, и непрерывного действия — действующие автоматически.
Примерная схема включения гидротрансформатора в систему
гидропривода машины показана на рис. 273.
453
" Конструктивно гидротрансформаторы выполняются роторны-
ми в виде двух роторных гидромашин (рис. 274) или возвратно-
поступательного
Рис. 273. Схема включения гидро-
трансформатора:
/ — предохранительный клапан; 2 — гид-
ропреобразователь; 3 — регулятор расхо-
да; 4 — фильтр; 5 — насос
движения — в виде 'поршневого агрегата с зо-
лотниковым управлением
(рис. 275).
Таким образом, в гидро-
трансформаторах объемного
типа имеются две ступени:
моторная и насосная. К мо-
торной ступени подводится
рабочая жидкость основной
гидравлической системы ма-
шины, а насосная подает
жидкость с преобразован-
ным давлением к исполни-
тельным механизмам. Рабо-
чая жидкость поступает к
насосной ступени обычно из
бака основной гидросисте-
мы. Для гидротрансформа-
торов, состоящих из двух
поршеньковых гидромашин, возможно применение самостоятель-
ного бака для питания насосной ступени при условии разделения
Рис. 274. Роторный (вальный) гидротрансформатор:
1 — моторная ступень; 2 — насосная ступень
сливных и дренажных магистралей обеих ступеней. В этом случае
гидротрансформатор будет конструктивно сложнее, а его к. п. д.
будет несколько ниже из-за необходимости установки дополни-
тельных уплотнений на валу трансформатора.
454
Практически к. п. д. вальных гидротрансформаторов ц =
= 0,7 -т- 0,8; к. п. д. безвальных трансформаторов л = 0,9 + 0,8.
Рис. 275. Понижающий гидротрансформатор возвратно-посту-
пательного движения:
1 — корпус; 2 — поршень; 3 — клапан; 4 — вспомогательный золот-
ник; 5 — основной золотник; 6 — вспомогательный перестановочный
золотник
§ 2. ГИДРОПЕРЕДАЧИ
Гидропередача представляет собой объединенные в одном
корпусе насос и гидромотор, составляющие замкнутый гидравли-
ческий контур. Мощность подводится к валу насоса и снимается
с вала гидромотора.
Пусть Qi — расход; П\ — число оборотов, в минуту; 7, — лит-
раж и т]о1 — объемный к. п. д. насоса, Q2, «2, <h и Л°2 — расход,
число оборотов, литраж и объемный к. п. д. гидромотора. Тогда
имеем
Qi = «1<71Ло1 = «2-----
Л 02
откуда число оборотов в минуту вала гидромотора
о,
«2 = «1-^—11о>
<?2
где т]0 — объемный к. п. д. всей гидропередачи;
Ло = Ло1Ло2 •
Величина ц0 изменяется в зависимости от конструкции в пре-
делах 0,90—0,96 (меньшее значение имеет место для гидропере-
455
дач с шиберными насосом и гидромотором, большее — для гидро-
передач с поршеньковыми машинами).
Если Ni — мощность, подводимая к валу насоса, а — мощ-
ность, снимаемая с вала гидромотора, то
Рис. 276. Схема действия и регу-
лирование гидропередачи (е—
эксцентрицитет)
>V2 = Л\т],
где ,т] — общий к. п. д. гидропере-
дачи.
В гидропередачах могут иметь
место следующие случаи регули-
рования:
регулируемый насос (71 = var)
и нерегулируемый гидромотор
(q2 = const);
нерегулируемый насос (qi =
= const) и регулируемый гидро-
мотор (q2 = var);
регулируемый насос (qi = var)
и регулируемый гидромотор (q2 =
= var).
В первом, наиболее распрост-
раненном случае крутящий мо-
мент на валу гидромотора при по-
стоянном давлении есть величина
постоянная, не зависящая от чис-
ла оборотов вала гидромотора.
При tii = const мощность, снимае-
мая с гидромотора, пропорцио-
нальна
Во втором случае (71 = const)
при tii = const и постоянном дав-
лении подводимая и снимаемая
мощность постоянна. Число обо-
ротов гидромотора изменяется
обратно пропорционально q2 (од-
нако достичь малых значений q2
не удается из-за заклинивания
гидромотора).
В третьем случае (71 = var, q2 = var) можно достичь наибо-
лее широкой регулировки. Процесс регулирования протекает та-
ким образом, что сначала изменяется 71 от наименьшей до наи-
большей величины, а затем q2 от наибольшей величины до наи-
меньшей, возможной в данной конструкции. В процессе
изменения 7| крутящий момент М2 остается постоянным.
Таким образом, протекающий процесс регулирования пред-
ставлен на рис. 276, где взята в качестве примера схема с шибер-
ным насосом и гидромотором.
456
На рис. 277 представлена конструкция гидропередачи
«Форет», составленная из шиберного насоса и гидромотора, а на
рис. 278 дана ее характеристика, т. е. зависимость М2 и /V2 от п2.
Рис. 277. Гидропередача «Форет»
Регулирование производится одним общим ручным приводом
так, что сразу изменяются оба эксцентрицитета: насоса (спра-
ва) увеличивается, мотора (слева) уменьшается. На рис. 279 по-
казана гидропередача «Форет» с раздельным регулированием от
ручного привода, осуществляемым таким образом, что сначала
изменяется эксцентрицитет насоса до наибольшего значения, а
затем уже начинает изменяться эксцентрицитет мотора в сторо-
ну уменьшения до своего наименьшего (допустимого по услови-
457
ям заклинивания) значения. Особенность конструкции — раз-
движной соединительный трубопровод.
Рис. 279. Гидропередача с раздельным регулированием
Рассмотренная гидропередача рассчитана на крутящий мо-
мент до 125 кГм и мощность до 18 кет.
Глава XV. ТРУБОПРОВОДЫ, АРМАТУРА, АККУМУЛЯТОРЫ
§ 1. РАСЧЕТ ТРУБОПРОВОДА
Расчет трубопроводов состоит из гидравлического расчета и
расчета на прочность. Гидравлический расчет заключается в оп-
ределении диаметра трубопровода при заданном расходе через
него и заданной потере напора. Расчет ведется по формулам,
приведенным на стр. 327. Расчет на прочность, т. е. определение
толщины стенок, производится на основании величины рабочего
давления в системе. Предполагая трубопровод тонкостенной обо-
лочкой, в формулу, применяемую в сопротивлении материалов
для толщины стенки цилиндрической оболочки, введем коэффи-
циенты, учитывающие коррозию, а также отклонения диаметра
труб от номинального. Таким образом, имеем
б = С хб0,
где С] — коэффициент, учитывающий колебания размеров при
изготовлении, а также коррозию материала (С! = 1,15);
до— расчетная толщина стенки, для которой (при —
dj
1J)
имеем
б0 = А
200щ
(203)
где ch — внешний диаметр трубы в мм\
os — предел упругости материала стенок в кГ/мм2-,
k — запас прочности, принимаемый равным 1,7—2,0.
В табл. 33 приведены наибольшие допустимые значения дав-
ления р при k = 1,7 и os = 16 кГ)мм2.
Если трубопровод подвергается действию переменного давле-
ния или действию гидравлического удара, то толщину стенки не-
обходимо рассчитывать по максимальному давлению ртах, т. е.
пользоваться формулой
б dzPmax
0 200as
причем для ртах можно воспользоваться формулой прямого уда-
ра (стр. 343). Если же мы имеем случай немгновенного закрытия
459
Таблица 35
Допустимые давления в трубопроводах в кГ [см?
Толщина стенок 8 В мм
di в мм 1 1 ,5 2 2 ,5 3,0 3,5 4,0
6 268
8 200 300
10 170 254 338
12 141 212 282 353
14 121 182 242 302
16 106 159 212 265 317
18 94 141 188 235 282 329
20 85 127 170 212 254 296 339
22 77 115 154 192,5 231 270 308
25 68 102 135 170 203 240 272
30 56 85 113 141 170 198 226
35 48 73 97 121 145 170 194
40 42 64 85 106 127 148 170
клапана в трубопроводе, то для труб, длина которых I 500 d,
можно воспользоваться выражением [61]
Ртах ФР,
где
ф = I (1 + 0,2]/2),
mpg
т, — коэффициент, учитывающий скорость закрытия кла-
пана (р в кГ/см2; у в кг[дм?; g в ж/се№).
Для быстрозакрывающихся клапанов т = 25, для нормаль-
но закрывающихся т = 50 и для медленно закрывающихся
т = 75.
§ 2. ГИБКИЕ ШЛАНГИ И ГИБКИЕ МЕТАЛЛИЧЕСКИЕ ТРУБОПРОВОДЫ
Гибкие шланги применяются для соединения между собой
тех элементов гидросистем, которые в процессе ее функциониро-
вания перемещаются относительно друг друга, или тех элемен-
тов, для соединения которых требуется трубопровод сложной
пространственной конфигурации.
Существенно важным при проводке гибких шлангов является
придание им такого положения, при котором исключается дефор-
мация кручения.
На рис. 280 показаны случаи правильного монтажа гибких
шлангов.
460
Гибкие шланги можно разделить на две группы: низкого дав-
ления (для линий всасывания и слива) и высокого давления (для
напорных линий).
Шланги выполняются резино-тканевыми (рис. 281) или ме-
таллическими, которые представляют собой металлическую гоф-
Рис. 280. Примеры укладки гибких шлангов:
а — неправильно; б — правильно
рированную бесшовную трубку, заключенную в проволочную оп-
летку.
В табл. 34 приведены некоторые данные по гибким шлангам
«Аргус» низкого давления из синтетической резины, рассчитан-
ным на минеральное масло в диапазоне температур —30 -и
+ 100° С.
В табл. 35 приведены данные по резино-тканевым шлангам
высокого давления, выпускаемым в ГДР [61].
461
Таблица 34
Параметры гибких шлангов «Аргус» низкого давления
Параметры Диаметр проходного сечения в мм
4 6 8 10 13 16 40 20
Рабочее давление в ат-.
статическое 40 30 25 25 15 25 10 15
ударное . 25 15 13 13 13 8 6 8
Пробное давление в ат . . 60 45 38 38 38 23 15 23
Наименьший допустимый
радиус закругления в мм . . 60 70 80 90 115 155 260 155
Таблица 35
Параметры гибких шлангов повышенной прочности
высокого давления
Параметры Диаметр проходного сечения в мм
4 6 8 10 13 16 20 40
Рабочее давление в ат'. статическое 450 425 400 350 300 250 225 но
ударное 280 260 240 210 180 150 135 65
Пробное давление в ат . . 700 650 600 525 450 375 350 16
Минимальный радиус за- кругления в мм ...... 50 55 60 65 70 80 90 300
Гибкие шланги оказывают влияние на работу гидросистемы
из-за своей большой деформируемости и способности вследствие
Рис. 281. Устройство гибкого шланга:
1 — синтетическая резина; 2 — пряжа; 3 — стальная
проволока
этого к аккумулированию энергии. Это влияние сказывается на
расчетном модуле упругости, о котором мы говорили выше
(стр. 298). Сейчас нет еще методов расчета, позволяющих учесть
462
сжимаемость многослойной (резина — стальной каркас — рези
на — оплетка) оболочки при определении модуля уп-
ругости.
Можно привести только некоторый опытный материал [2], на-
пример, данные, показанные на рис. 282, где по оси ординат от-
&УСМ3/М
Рис. 282. Аккумулирующая
способность гибкого шлан-
га:
1 — р = 800 ат; 2 — р =
= 800 ат, dt = 13; 3 — р =
= 700 ат; d, =16; 4 — р -
= 350 аг, Й! — 10; 5 — р -
= 300 ат, dt = 16
ложена объемная деформация на 1 м длины для некоторых
шлангов, характеристики которых приведены там же.
Рис. 283. Арматура гибких шлангов:
а — ниппельное соединение; б — угловое соединение; в — в собран-
ном виде; г — с промежуточной поджимной втулкой
Примеры присоединения шлангов показаны на рис. 283.
Гибкие металлические трубопроводы предназначаются для
работы в широком диапазоне температур (—200-4- +500° С) и
давлений (до 400 ат). В табл. 36 приведены некоторые данные
по гибким металлическим трубопроводам отечественного произ-
водства (тип РГС).
463
Таблица 36
Некоторые параметры гибких металлических
трубопроводов высокого давления
Диаметр проходного сечения в мм Наружный диаметр в мм Наименьший радиус закруг- ления в мм Рабочее давление в ат
при t = 20°С при t = 200° С
8 14,2 96 400 320
12 18,7 144 250 200
16 25,5 192 250 200
20 31,3 240 250 200
25 37,4 300 220 175
40 55,9 480 220 175
§ 3. ПРИСОЕДИНИТЕЛЬНАЯ АРМАТУРА
Примеры присоединений трубопроводов к агрегатам показа-
ны на рис. 284.
Примеры шарового шарнирного соединения для труб, рассчи-
танных на давление до 400 ат, показаны на рис. 285. Шарнир до-
Рис, 284. Арматура трубопроводов:
а — ниппель с уплотнительным конусом; б — соединение с проклад-
кой и втулкой; в — ниппель со стальным кольцом; г — соединение с
развальцовкой; д — соединение с шайбой и прокладкой
пускает поворот на угол ±20° и небольшие скорости кручения.
На рис. 285, б показаны плоское шарнирное соединение для двух
труб и схема его подключения к гидроцилиндру, поворачиваю-
щемуся вокруг оси шарнира О — О.
На рис. 286 показана конструкция быстроразъемной муфты с
клапаном. При отсоединении трубопровода от другого, находя-
щегося под давлением, второй трубопровод автоматически при
помощи клапана закрывается, прекращая течение жидкости.
464
30 Заказ 1076
465
§ 4. АККУМУЛЯТОРЫ
Наибольшее распространение в гидравлических системах по-
лучили газо-гидравлические аккумуляторы, где аккумулирующей
энергию средой является газ, а средством для передачи энер-
гии — жидкость.
Аккумулятор в гидросистемах служит источником постоянно-
го давления, а также поглотителем колебаний.
Включение аккумулято-
ра в схему мы рассмотрели
в гл.IX.
Аккумуляторы можно
разделить на две группы:
без разделения жидкости от
газа и с разделением этих
сред, которые выполняются
или с гибким разделителем,
или с поршнем. Аккумулято-
ры с разделителем облада-
ют преимуществами, заклю-
чающимися в том, что в них
благодаря разделению жид-
кости от газа исключается
адсорбция газов в жидкость,
, • - падение давления в системе
а не приводит к выделению га-
Рис. 287. Аккумулятор с разделите- ЗОВЫХ пузырей ИЗ ЖИДКОСТИ;
ля^и: исключается попадание газа
тиль; 2 -бКгИиб;кая Гбо.ХТ'Т-^клап^’ В СИСТеМУ И3 ЭККуМуЛЯТОра;
° с поршнем ' аккумулятор может устанав-
ливаться и транспортиро-
ваться в любом положении; аккумулятор работоспособен после
длительного отключения.
На рис. 287, а показан аккумулятор с гибким (из пербунана)
разделителем, в который при помощи вулканизации введен на-
полнительный газовый клапан. На рис. 287, б показана конструк-
ция поршневого аккумулятора. Уплотнение поршня осуществля-
ется обычно кольцами круглого сечения. Для обеспечения доста-
точной продолжительности работы уплотнительных колец при
одновременно малом трении необходима обработка внутрен-
ней поверхности аккумулятора до высокой степени ее чистоты.
Возникающие силы трения поршня, а также его масса ограни-
чивают область применения поршневых аккумуляторов по срав-
нению с аккумуляторами с гибким разделителем: поршневые ак-
кумуляторы менее пригодны для низких давлений и для систем
с высокими частотами пульсаций расходов и давлений. Их при-
меняют преимущественно в области высоких давлений, и выпус-
466
каются они до 200 ат с полезной емкостью 0,5—25 л. Аккумуля-
торы наполняют азотом для обеспечения взрывобезопасности, а
также для уменьшения процесса коррозии стенок.
Расчет аккумулятора состоит в определении его объема, ча-
стоты колебаний и времени срабатывания на заданный гидро-
двигатель.
Расчет полезного объема аккумулятора
Обозначим общий объем аккумулятора Vj и абсолютное дав-
ление газа в нем перед поступлением в него жидкости pi. Пусть
затем происходит зарядка аккумуля-
тора жидкостью до тех пор, пока
объем газа не станет V3 (рис. 288) и
давление р3, которое является наи-
большим давлением газа в аккумуля-
торе. Предположим, далее, что ак-
кумулятор разряжается на гидроси-
стему так, что давление в нем пада-
ет до р2 и газ расширяется до V2.
При медленном наполнении и
Рис, 288, К расчету полезного объема аккумулятора:
а — схема; б — изотермический процесс; в — адиабатический процесс
опорожнении аккумулятора процесс будет изотермическим, сле-
довательно, можно записать
Р1У1 = PzV 2 ~ Рз^з-
При быстро протекающих процессах теплообмен со средой не
успевает осуществиться и связь давления с изменением объема
характеризуется уже адиабатическим законом
V3 = ’А (и У3 = V. ,
3 Ч Рз / 3 ‘ Из I
30*
467
где Т — абсолютная температура;
х — показатель адиабаты.
Полезный объем аккумулятора Vo = V2— V3 вычисляют в до-
лях от общего объема аккумулятора. На рис. 288 показаны
кривые изменения — =f(p) для адиабатического и изотерми-
V,
ческого процессов.
Пусть, например, имеем избыточное давление наполнения ак-
кумулятора pi = 50 ат. Кроме того, пусть р3 = 170 и р2 = 100 ат.
Тогда для изотермического процесса Vo = 70—50 = 20% общего
объема аккумулятора.
Расчет аккумулятора как демпфера колебаний
Для того чтобы аккумулятор демпфировал пульсации давле-
ния, возникающие в гидросистеме (например, вследствие нерав-
номерности подачи насоса), необходимо, чтобы его резонансная
частота была приблизительно равна частоте пульсации. Так, у
насоса, работающего при п = 2000 об/мин и имеющего девять ци-
20009
линдров, частота пульсаций f — = 300 гц. Если резонанс-
ная частота аккумулятора будет близка к частоте пульсаций, то
демпфирование этих пульсаций будет эффективным.
Определим резонансную частоту аккумулятора и построим
его амплитудно-частотную характеристику.
Дифференциальное уравнение движения поршня аккумулято-
ра в предположении линейной зависимости силы трения от скоро-
сти имеет вид
м + + Кх ^pF’ (204)
где М = Mi + М2 + М3— приведенная масса, равная сумме
масс: поршня Mi, жидкости в аккуму-
ляторе М2 и приведенной массы жид-
кости в присоединительной трубке
Г 2
= Ifp
Г
I — длина трубки;
f — площадь поперечного сечения трубки;
F — площадь поршня аккумулятора;
коэффициент демпфирования,
К — упругая константа газового объема
(жесткость газовой пружины);
Ар— изменение давления в жидкости под
поршнем аккумулятора.
Однако
Ар .-^-AQ0
5Q0
468
и
AQ — /\Qa 4~ 4Qo,
где AQa — расход, поступающий в аккумулятор;
AQo— расход, направляемый в гидросистему:
AQ — расход, даваемый насосом (рис. 288, а).
Так как
AQ0 = AQ — AQa
и _
Q-C/p,
то
Ар = -^(aQ — F — Y
dQ \ dt I
но -дР-—а потому Др =—(AQ—F
dQ0 Q Q \ dt I
Следовательно, дифференциальное уравнение имеет вид
М — + О — + Кх = (AQ — F —}
dP dt Q \ dt I
или
M +($ + — + Kx = \Q. (205)
dP\Q'dt Q v
Представим уравнения (204) и (205) в операторной форме:
Л1лф2 + + + К
L \ Q /
-=F^-\Q; (206)
Q
Mx [s2 + fl's + 7<] = ApF, (207)
где s — оператор Лапласа.
Составим, следуя Расселу [70], 'передаточную функцию, раз-
делив уравнение (206) на уравнение (207):
Др __ s2 + Os 4- К 2р
"^2 - 2 . Лч , 2РЯ , К ' '
S2 -г I О -у —— s + К
\ ч. /
Очевидно, что при s-> 0 (т. е. при co-> 0), а также и при
s —> сю
Др _ 2р
\Q ~ Q
Кроме того, отбрасывая член, представляющий собой квад-
рат частоты, а также член, отражающий силу трения поршня, по-
лучим передаточную функцию в виде
Др __ 1 2р
Д<2 ~ Ts + 1 Q ’
т 2pF2
где 1 — —— — постоянная времени.
K.Q
469
Следовательно, частоту среза можно найти по формуле
При адиабатическом процессе
К = р2
V
где V — объем газа в аккумуляторе, а потому
Рис. 289. К расчету частоты колебаний
Собственную частоту недемпфированных колебаний поршня
определим из уравнения (204):
Зная и7 и ио, построим асимптотическую амплитудно-частот-
ную характеристику аккумулятора (рис. 289). Имея частоту
пульсаций f, создаваемых насосом, определим, как далеко акку-
мулятор находится от резонанса, т. е. эффективность демпфи-
рования.
Определение времени срабатывания аккумулятора
Рассмотрим случай, когда аккумулятор приводит в действие
гидроцилиндр, нагруженный усилием, постоянным по длине хода
поршня. Пусть это усилие равно Ро кг. Размеры гидроцилиндра
заданы (рис. 290), так же как и размеры трубопровода d и I.
Предположим далее, что режим движения жидкости в трубопро-
воде ламинарный в течение всего процесса работы гидроцилинд-
ра. Для решения задачи составим дифференциальное уравнение
опорожнения аккумулятора.
470
Пусть в некоторый момент времени с начала истечения дав-
ление в аккумуляторе будет равно р и за время dt уровень в нем
понижается на dz.
Тогда имеем
Qdt = — Fdz,
где Q — расход, соответствующий моменту времени t.
Предположив, что си-
лы инерции отсутствуют,
можно записать
Q — (р _ р )
128ц/
где
Рис. 290. К расчету времени срабатыва-
ния
Интегрируя получен-
ное дифференциальное
уравнение с учетом рас-
ширения газа по изотерме, получим окончательно время сраба-
тывания [4]:
Рз 4~ Рат
t = --------- а3 Рз t. Р“т 1п Р» + Рат ,
К (Ро + Рат) Ро Ч~ Рат Рз Рат
Ро + Рат
где F =
яР2
4
^L + a3, К =
D2 128ц!
S — ход поршня.
Глава XVI. ПРИМЕРЫ ГИДРОПРИВОДА МАШИН
В настоящей главе мы рассмотрим некоторые примеры гид-
ропривода, применяемого в различных областях промышленно-
сти. Схемы даны в условных обозначениях, которые приводятся
в приложении.
§ 1. ГИДРОПРИВОД БЕТОНОМЕШАЛКИ
На рис. 291 показана схема гидропривода бетономешалки, ус-
тановленной на грузовом автомобиле [71].
Насос 1 с управляемой подачей и гидромотор 2 составляют
замкнутую цепь. Управление подачей насоса осуществляется гид-
Рис. 291. Гидропривод бетономешалки:
1 — основной насос; 2 — гндромотор; 3 — гидроцилнидр цепи регулирования;
4 — насос цепи регулирования; 5 — золотник; 6 — насос подпитки; 7 — клапан-
ный блок; 8 — фильтр •
роцилиндром 3, который приводится в действие специальным на-
сосом 4 через трехпозиционный четырехходовой золотник 5 (с
пружинами возврата в нейтральное положение), благодаря ко-
торому осуществляется установка поршня гидроцилиндра в лю-
бом промежуточном положении, что позволяет плавно регулиро-
вать число оборотов гидромотора, вращающего мешалку. К замк-
нутой цепи насос — мотор подключен насос подпитки 6, обрат-
ные и предохранительные клапаны 7, а также фильтр 8.
472
§ 2. ГИДРОПРИВОД ЛЕБЕДКИ
На рис. 292 показана схема гидропривода лебедки, в которой
предусматривается регулирование числа оборотов в широких
пределах в зависимости от нагрузки. Основу схемы представляет
замкнутая цепь, состоящая из регулируемого насоса 6, гидромо-
тора 9, приводящего в движение вал лебедки, и клапанного бло-
ка 10. Гидромотор может быть как нерегулируемым, так и регу-
лируемым. На рассматриваемой схеме включен регулируемый
'Электродвигатель
Рис. 292. Гидропривод лебедки с автоматическим регулированием скорости
подъема груза:
1 — рукоятка включения; 2 — контакты; 3 — распределитель линии торможения; 4 —
гидроцилнидр тормоза; 5 — гидроцилнидр управления гидромотором; 6 — основной на-
сос; 7 — насос цепи управления; 8 — насос подпитки; 9 — гидромотор лебедки; 10 —
клапанный блок; 11 — ограничитель мощности
мотор, благодаря чему регулирование числа оборотов между хо-
лостым и рабочим ходом осуществляется в отношении 1 : 25 [71].
Кроме основного насоса, в гидропривод входят насос подпитки 8
и насос цепи управления 7.
Управление лебедкой осуществляется рукояткой 1, при помо-
щи которой включается концевой выключатель 2, замыкающий
цепь электромагнитного крана 3, включающего гидроцилиндр
тормоза 4, растормаживающий тормозной диск лебедки. Угол
регулирования подачи насоса изменяется от —[3 до +р (что дает
реверс), а угол гидромотора изменяется только в одну сторону.
Холостой ход осуществляется при максимальной подаче насоса
(т. е. при наибольшем угле отклонения) и при наименьшем угле
отклонения регулирующего органа гидромотора.
473
При возрастании нагрузки на лебедку, т. е. при возрастании
давления, в основной цепи при помощи гидроцилиндра 5 произ-
водится увеличение угла регулирования гидромотора, что при-
водит к уменьшению числа оборотов гидромотора при неизмен-
ной подаче насоса. Когда весь диапазон угла регулирования
гидромотора выбран, а давление в системе продолжает увеличи-
ваться, включается ограничитель мощности 11, при помощи
которого угол регулирования насоса начинает уменьшаться и,
следовательно, уменьшается его подача. При достижении пре-
дельной нагрузки насос дает минимальную подачу, компенсирую-
щую только расход утечек.
§ 3. ГИДРОСИСТЕМА ГРУЗОПОДЪЕМНОГО КРАНА
Рассмотрим гидравлическую систему гидрофицированного
портового крана. Гидросистема, показанная на рис. 293, состоит
из трех цепей: подъема груза, наклона стрелы и поворота крана.
Регулируемые насосы 1 и 2 являются источниками гидравличес-
кой энергии в цепях поворота крана и подъема груза, которые
выполнены по замкнутой схеме аналогично тому, как это имело
место в предыдущих примерах. Цепь, осуществляющая наклон
стрелы крана, выполнена по разомкнутой схеме и состоит из не-
регулируемого насоса 3 и гидроцилиндров наклона. В цепи, осу-
ществляющей подъем груза, исполнительным механизмом явля-
ется регулируемый гидромотор 5, перестановка угла регулирова-
ния которого, а следовательно, и изменение числа оборотов
осуществляется гидроцилиндром 4. Для надежной фиксации стре-
лы в любом ее положении и предотвращения ее просадки из-за не-
избежных утечек в золотниковом распределителе 8 между ним и
гидроцилиндрами включен гидравлический замок 6 в виде двой-
ного обратного клапана. При перегрузке цилиндров наклона
стрелы включается реле давления 11, управляющее через двух-
позиционный золотник 10 добавочными гидроцилиндрами 12, что
вызывает воздействие на рычаг 13, благодаря чему уменьшается
подача насоса и, следовательно, скорость подъема груза. Движе-
ние стрелы также прекращается, так как рычаг 7 устанавлива-
ется в нейтральное положение, выключая золотниковый
распределитель 8. Одновременно замыкается контакт в цепи элек-
тромагнитного крана 9, который при этом переключает двухпози-
ционный золотник тормозной цепи так, что жесткость из тормоз-
ного цилиндра сливается, благодаря чему затормаживается вал
гидромотора лебедки подъема груза.
§ 4. ГИДРОСИСТЕМА ЭКСТРУДЕРА ПЛАСТМАСС
Экструдеры, служащие для изготовления изделий из пласт-
масс методом нагнетания расплавленной массы в форму, могут
быть выполнены по двум схемам. По первой, более простой схе-
474
л
Рис. 293. Гидросистема крана:
1 — основной насос гидросистемы поворота крана; 2 — основ-
ной насос гидросистемы подъема груза; 3 — насос системы
управления наклоном стрелы; 4 — гидроцнлнндр управления
лнтражем гндромотора; 5 — гндромотор подъема груза; 6 —
гидравлический замок гндроцнлнндров стрелы крана; 7 — ры-
чаг выключения распределителя; 8 — распределитель; 9 —
кран включения тормоза; 10 — распределитель линии защиты
от перегрузки; 11 — реле давления; 12 — вспомогательные
гидроцилиндры; 13 — рычаг линии защиты
лнндр; 3 и 4 — камеры прессования; 5 — сопло
475
ме исходный материал (гранулы) поступает из загрузочного ко-
нуса 1 (рис. 294, а) в камеру 2, откуда далее выдавливается под
высоким давлением (1000—1500 ат) через сопло в требуемую
форму. Расплавление материала (гранулата) происходит в са-
мом рабочем цилиндре 2 при помощи электронагревателей 3.
В другой схеме (рис. 294, б) экструдера предусматривается два
цилиндра: один — для приготовления расплава, второй — для
выдавливания в форму. Следовательно, гидравлическая система
экструдера предназначается для выполнения закрытия и откры-
Рис. 295. Гидросистема экструдера:
/ — гидроцилиндр раскрытия формы;
2 — гидроцилнидр прессования
Рис. 296. Гидросистема шнекового
экструдера:
/ — гидроцилнидр, управляющий откры-
тием и закрытием формы; 2 и 3 — гид-
роцилиндры
тия формовочной камеры, а также для выдавливания массы че-
рез сопло в форму.
В показанной на рис. 295 схеме гидросистемы экструзионной
машины первого типа гидроцилиндр 1 служит для открытия и
закрытия формы, гидроцилиндр 2 — для экструзии пластмассы
через сопло. Соотношение диаметров экструзионного поршня и
поршня гидроцилиндра определяется соотношением давлений
экструзии и давления подводимой в гидроцилиндр жидкости.
В машинах второго типа требуется несколько более сложная
схема, состоящая из трех и более гидроцилиндров, работающих
в заданной последовательности.
В настоящее время распространены также шнековые экстру-
деры. Гидросхема такого экструдера показана на рис. 296. Гид-
роцилиндр 1 выполняет функцию закрытия и раскрытия формы;
экструзия в форму осуществляется шнеком, приводимым от гид-
ромотора. Рабочий процесс, осуществляемый гидросхемой, проте-
кает в следующей последовательности: •
запирание формы гидроцилиндром /;
экструзия пластмассы в форму невращающимся шнеком при
помощи гидроцилиндра 3;
476
пластификация массы вращением шнека с одновременным
перемещением его в обратном направлении;
раскрытие формы гидроцилиндром 1 для извлечения изделия.
В системе установлен насос с постоянной подачей.
§ 5. ГИДРОПРИВОД ПРОКАТНОГО СТАНА
На рис. 297 показана схема гидропривода валков прокатного
стана. Короткозамкнутый электродвигатель (обычно большой
мощности) с большими вращающимися массами приводит во
вращение аксиально-поршне-
вой насос 1 переменной произ-
водительности, который пита-
ет радиально-поршневой нере-
гулируемый гидромотор. Ре-
верс этого гидромотора осуще-
ствляется четырехходовым
трехпозицпонным золотником.
От перегрузок в процессе регу-
лирования гидропривод защи-
щен 'предохранительным клапа-
ном, включенным между двумя
обратными клапанами, как по-
казано на схеме. В качестве
примера [71] можно указать
конструкцию, в которой давле-
™e, развиваемое насосом, р Рис 297. гидропривод прокатного
= 200 ат, расход изменяется в стана:
пределах 2—200 л/мин, ЧТО да- / — иасос; 2 — гидромотор
ет изменение числа оборотов
гидромотора 10—1000 в минуту. Зубчатый редуктор имеет пере-
даточное число 1:10, так что скорость вращения валков изменя-
ется от 1 до 100 об/мин. Реверс гидромотора с подключенными
валками осуществляется за 1 сек. Применение гидропривода вал-
ков таким образом позволило значительно сократить время цик-
ла, т. е. ускорить рабочий процесс.
§ 6. ГИДРОСИСТЕМА БУРИЛЬНОЙ УСТАНОВКИ
Показанная на рис. 298 гидросистема состоит из двух авто-
номных гидроприводов: гидропривода вращения бура и гидро-
привода подачи. В гидроприводе вращения бура гидромо-
тор 10 включен в замкнутую цепь вместе с насосом переменной
подачи 1, регулирование которой осуществляется сервоприводом
с питанием от отдельного нерегулируемого насоса 2. Рассматри-
ваемая схема относится к бурильной установке, предназначенной
для проходки в твердых породах стволов диаметром до 810 мм
477
и глубиной до 220 м. Скорость вращения бура колеблется от 0 до
50 об/мин. Гидромотор, как это видно на схеме, связан с буром
через четырехступенчатый зубчатый редуктор. Максимальный
крутящий момент составляет 1500 кГм при давлении в системе
80 ат.
Подача борштанги осуществляется двумя параллельными
гидроцилиндрами, питаемыми от автономной насосной станции
с аксиально-поршневым регулируемым насосом, развивающим
давление 120 ат при максимальном усилии подачи 30 т. Скорость
подачи в рассматриваемой схеме может плавно изменяться от 0
Рис. 298. Гидропривод бурильной установки:
а — гидропривод вращательного движения; б — гидропривод подачи ин-
струмента; / — основной иасос; 2 — насос подпитки; 3 — предохранительный
клапаи линии подпитки; 4 — обратные клапаны; 5 — регулятор подачи;
6 — фильтры; 7, 8 — клапанный блок; 9 — места присоединения гибких
шлангов; 10 — гндромотор
до 1 м/мин. После рабочего хода шток гидроцилиндра отводится
в первоначальное положение и штанга удлиняется вставкой, по-
сле чего процесс подачи повторяется. Насосные станции обоих
гидроприводов выполнены в виде автономных узлов с органами
защиты и подключаются к гидромоторам гибкими штангами, до-
пускающими разъем.
§ 7. ГИДРОПРИВОД, ОБЕСПЕЧИВАЮЩИЙ малые и стабильные
СКОРОСТИ ДВИЖЕНИЯ ПОРШНЯ ГИДРОЦИЛИНДРА
В некоторых машинах, в частности станках, требуется осуще-
ствлять также и очень малые, так называемые ползучие скорости
перемещения рабочих узлов.
Так, например, в расточных станках в связи с повышением
требований к чистоте и точности обработки минимальные ско-
рости подач составляют 0,5—4 мм/мин-, такие же подачи необхо-
димы при доводке алмазного инструмента. В высокоточных шли-
фовальных станках подачи отделочных операций составляют
0,05—1 мм/мин. Во всех этих случаях привод подач должен обе-
спечивать постоянство выходной скорости.
478
Методы стабилизации скорости гидродвигателя при больших
расходах жидкости, как мы видели выше в § 5 гл. XIII, неслож-
ны. Серийные дроссельные регуляторы и регулируемые насосы
с компенсацией или стабилизацией утечек позволяют обеспечить
стабильную работу гидропривода при расходах до 80—
150 см^/мин, которые, однако, недостаточны для получения ско-
ростей движения менее 6—8 мм!мин при обычно применяемых
силовых цилиндрах диаметром 80—
120 мм.
При расходах менее 80 м^мин в
системе с обычным дросселем имеет
место уменьшение скорости с тече-
нием времени вплоть до полной ос-
тановки поршня, а в системе с дрос-
сельным регулятором наблюдается
уменьшение скорости вследствие об-
литерации (заращивания) дроссель-
ных щелей, сопровождающейся за-
сорением проходного сечения смо-
листыми включениями, содержащи-
мися в маслах минерального проис-
хождения.
Эффективным способом устране-
ния облитерации является сообще-
ние дросселю вращательного движе-
ния. Вращающийся дроссель позво-
ляет получить минимальные расхо-
ды до 4—6 см^/мин. без возникнове- о^ей.Гияропривод малых
НИЯ облитерации. д s _ нереГуЛНруемые насосы;
В СВЯЗИ С ЭТИМ ВОЗМОЖНОСТИ дрос- 2 — регулируемый насос; 4 — гид-
о __ роцплиндр; 5 — регулятор
сельных дозирующих устройств, свя-
занных с течением жидкости через
щель, при расходах 5—10 см3/мин ограничены.
Другим способом регулирования малой скорости является
объемный, в котором задача точного регулирования малого рас-
хода решается при помощи группы насосов (один из которых ре-
гулируемый), работающих по дифференциальному принципу и
осуществляющих точное дозирование. Для уменьшения влияния
колебаний давления на выходную скорость гидродвигателя при-
меняют схемы со стабилизацией утечек при постоянном рабочем
давлении, либо с компенсацией утечек в зависимости от рабо-
чего давления. Рассмотрим схему (рис. 299), исследованную в
КНИГА Бочаровым В. П., в которой в дифференциальное дозиру-
ющее устройство, обладающее способностью реверсировать рас-
ход, поступает жидкость из сливной полости гидродвигателя при
малом давлении, постоянство которого обепечивается специаль-
ным стабилизатором.
479
Нерегулируемый насос 1, забирая жидкость из общего слива
системы, подает расход Qi, соответствующий углу наклона регу-
лировочной шайбы уо, в систему- Если насос 2, установленный на
общем валу с насосом 1, имеет угол наклона шайбы у2 > уь то
потребляемый им расход Q2 > Qi- В этом случае расход жидко-
сти из подпорной ^правой) полости силового цилиндра будет
равен
Q = 0.2, — Qi + Qy ~ AQ + Яу
Давление р в подпорной полости упадет до величины, соот-
ветствующей затяжке пружины регулятора 5, дросселирующего
расход рабочего насоса 3 (Q3) параллельно рабочей полости
гидроцилиндра 4. При этом дроссельная щель клапана прикро-
ется, а давление pR в рабочей полости цилиндра возрастет до
величины, достаточной для преодоления нагрузки R на штоке и
сил трения в уплотнениях Т. Поршень цилиндра начнет двигать-
ся вправо.
Уравнение равновесия сил, действующих на поршень силово-
го цилиндра, имеет вид
РКР = PUF + R + T.
При изменении нагрузки R на штоке меняется давление pR
в рабочей полости; при этом в подпорной полости поддержива-
ется давление ри с незначительным (в случае установки пружины
с малой жесткостью) отклонением от первоначально установлен-
ного значения рио. Утечки в корпусе qy, являющиеся функцией
подпорного давления, будут меняться незначительно, что обеспе-
чивает стабильность расхода Qv из правой полости цилиндра;
этот расход и определяет скорость штока v.
Схема обеспечивает стабилизацию скорости при расходах
жидкости до 3—5 см3[мин.
§ 8. ГИДРОПРИВОД СТАБИЛИЗАЦИИ ЧИСЛА ОБОРОТОВ ГЕНЕРАТОРА
В качестве примера расмотрим авиационный гидропривод ге-
нератора переменного тока.
Принципиальная схема гидропривода генератора переменно-
го тока постоянной частоты показана на рис. 300. Гидропривод
представляет систему автоматической стабилизации скорости
вращения выходного вала 2 при изменяющейся в широком диа-
пазоне скорости входного вала 1, приводимого во вращение авиа-
ционным двигателем, и изменяющейся нагрузке на выходном ва-
лу, обусловленной отбором мощности потребителями из борто-
вой сети. Принцип регулирования скорости выходного вала 2
гидроприводом состоит в следующем.
480
Допустим, что скорость вращения входного вала уменьши-
лась на некоторую величину. В этом случае уменьшится скорость
и на выходном валу. Сила пружины регулятора, преодолевая
уменьшившуюся центробежную силу грузиков, смещает золот-
ник 7 влево, при этом открывается большой доступ жидкости
под давлением в полость силового цилиндра 9; полость цилинд-
ра изодрома 8 сообщается в это время со сливом через большее
проходное сечение. Поршень изодрома, двигаясь вправо, обеспе-
Рис. 300. Гидропривод автоматической стабилизации числа оборотов:
1 — вал авиадвигателя; 2 — вал генератора (выходной вал); 3 — редуктор:
4 — генератор; 5 — регулируемая гидромашина; 6 — нерегулируемая гидромашина;
7 — распределительный золотник с центробежным регулятором; 8 — изодром;
9 — тепловой цилиндр; 10 — жесткая обратная связь
чивает перетечку жидкости под давлением р% из левой камеры
силового цилиндра в левую камеру цилиндра изодрома, а при
больших перемещениях золотника изодрома вправо обеспечива-
ется перетечка жидкости под давлением р2 на слив. В последнем
случае поршень силового цилиндра будет более эффективно дви-
гаться вниз. Двигаясь вниз, шток поршня обеспечивает увеличе-
ние угла наклона люльки (управляемого органа) регулируемой
гидромашины. Увеличившаяся вследствие этого производитель-
ность регулируемой гидромашины вызывает увеличение скорости
вращения вала нерегулируемой гидромашины, на котором жест-
ко насажена солнечная шестерня редуктора.
Нерегулируемая гидромашина, вращая солнечную шестерню
планетарного редуктора 3 в соответствующую сторону, обеспе-
чит на выходном валу 2 заданную скорость вращения. Одновре-
менно с движением штока изодрома при помощи жесткой обрат-
ной связи 10 перемещается золотниковая втулка в ту же сторону,
31 Заказ 1076 481
куда движется золотник 7, уменьшая величину открытия х про-
ходных окон.
К моменту, когда золотниковая втулка, следящая за порш-
нем изодрома, догонит золотник 7 и кромки буртиков золотника
займут относительно окон во втулке начальное положение, меха-
низм регулятора приходит в состояние равновесия. Аналогично
происходит процесс регулирования при увеличении числа оборо-
тов выходного вала.
Влияние изменения нагрузки на работу гидропривода зави-
сит от следующих причин. Включение в бортовую сеть объекта
новых потребителей или изменение режима ранее работавших
вызывает изменение электромагнитного момента генератора.
В результате на выходном валу 2, а через планетарную переда-
чу и на валу гидромотора изменяется момент и, следовательно,
давление в магистрали гидромашин. С увеличением нагрузки
давление рн и утечки на этом участке увеличиваются. Вследст-
вие увеличения утечек уменьшается скорость вращения вала не-
регулируемой гидромашины, поэтому скорость выходного вала
уменьшается.
§ 9. УРАВНЕНИЯ КИНЕМАТИКИ ГИДРОПРИВОДА
К уравнениям геометрических и кинематических связей гид-
ропривода относятся следующие:
х = х± — х2, (208)
где Х[ИХ2 — поступательное движение распределительного зо-
лотника и золотниковой втулки в системе коорди-
нат, жестко связанной с корпусом гидропривода;
х —движение распределительного золотника в системе
координат, связанной с золотниковой втулкой;
х2 = ру, (209)
где Х2 — жесткая связь между перемещением золотниковой втул-
ки и перемещением изодрома у; р — отношение плеч соедини-
тельного рычага;
г = Куу, (210)
где z — связь между углом поворота люльки регулируемой гид-
ромашины у и перемещением штока силового цилинд-
ра z;
Ку— коэффициент графической линеаризации;
со = (211)
где со — скорость выходного вала; соа — скорость вала авиацион-
ного двигателя; сог — скорость вала нерегулируемой гидрома-
шины;
482
й и i2 — соответственно передаточные числа от вала авиационно-
го двигателя до выходного вала при остановленной
солнечной шестерне и от вала нерегулируемой гидрома-
шины до выходного вала при остановленном водиле;
®ч = 1>, (212)
где (Оц — скорость вращения вала центробежного регулятора;
1ц — передаточное число;
= г3®«, (213)
где <п„ — скорость вращения блока цилиндров регулируемой
гидромашины;
i3 — передаточное число.
Уравнение равновесия центробежного регулятора
На рис. 301 показан чувствительный элемент центробежного
регулятора. Вся масса сосредоточена в центре, плечи элемента
невесомы. Центробежная сила одного грузика
(214)
Рис. 301. К выводу уравнения движения регулятора:
а — регулятор в нейтральном положении; б — регулятор
в отклоненном положении
Сила, передаваемая на золотник от одного грузика,
= (215)
Уравнение равновесия золотника имеет вид
— 2m — соцГ = Go + Kxxlt (216)
b
где 2m — масса двух грузиков;
Кх — жесткость пружины центробежного регулятора (рис.
300);
Go — начальное натяжение, выбираемое из условия xi0 = 0
при юо, равной регулируемому значению.
31
483
Подставляя г = Го + Дг и используя геометрическую связь
Дг =----^-Х] при Хю = 0 и кинематическую связь (212), получим
равенство (216) в виде
х = «1Ы2 + GB
1 a2w2 — Кх
(217)
о а .2 а
где 04 = 2m — г4г0; а2 = cq-------------------- .
b г0Ь
В рассматриваемом примере можно уравнение (217) записать
в виде
х1 = —КЦДЮ, (218)
v 2a,0)0
где Кч =--------LJLy
Кх— ®2Ы0
Используя уравнения (208), (209) и (218), уравнение регуля-
тора получим в виде
х = -КчДЮ-^. (219)
Уравнение объекте регулирования
На вал нерегулируемой гидромашины действуют следующие
моменты:
момент от активной нагрузки W на валу генератора
М = С — кГсм,
(£>
где С — постоянная, зависящая от единиц измерения мощ-
ности;
момент от сил инерции нерегулируемой гидромашины
/г — момент инерции, состоящий из момента инерции вра-
щающихся частей нерегулируемой гидромашины, момента инер-
ции жидкости в трубопроводе, приведенного к оси вращения гид-
ромашины, и момента инерции солнечной шестерни;
момент от сил инерции генератора
М2 = J — ;
2 dt
J — сумма момента инерции вращающихся частей генерато-
ра и момента инерции шестерен редуктора (кроме солнечной),
приведенных к оси вращения генератора;
гидравлический момент нерегулируемой гидромашины
= —Рн,
2л
484
где t/г —литраж нерегулируемой гидромашины в см3/об;
ри —давление в системе насос — гидромотор в кГ/см3.
За положительное вращение нерегулируемой гидромашины
Иг > 0 принято вращение, способствующее увеличению скорости
выходного вала. В этом случае нерегулируемая гидромашина ра-
ботает как гидромотор. При сог < 0 нерегулируемая гидромаши-
на работает в режиме насоса, функции гидромотора выполняет
регулируемая гидромашина. Учитывая обратимость работы не-
регулируемой гидромашины, механические потери в ней и в ре-
дукторе, Иле вводим в соотношение моментов следующим об-
разом:
при юг > 0;
е = 1
-------- при от, < 0,
Л*
где е — кусочно-постоянная функция, имеющая конечный ска-
чок при СОг = 0.
В этом случае уравнение моментов на валу нерегулируемой
гидромашины имеет вид
Qs * г • г d(£S I т d(3bp
8 ~Т~ Рн = ch---F ~7 F J2 (220)
2л о dt dt
Связь между расходами в системе насос — гидромотор сле-
дующая:
Qi = Q2 — Qy см3/сек, (221)
где Qi = — со£—производительность нерегулируемой гидро-
2л
машины;
Qa = sin у<нк — производительность регулируемой гидрома-
шины;
Qy = RyPH — суммарные утечки в системе насос — гидро-
мотор (предполагаются линейно-зависящи-
ми от давления рн);
wH — постоянная гидромащины, зависящая от
геометрических параметров;
Ry — коэффициент пропорциональности в
см3/кГсек.
Используя равенство (213), уравнение расходов запишем
в виде
иа sin V - RypH. (222)
2л 2л "
485
Исключая из этого уравнения рн при помощи равенств (220)
и (211), а затем линеаризуя, получим уравнение объекта в виде
(Tns + 1) Am - Ка (Tas + 1) Атй - /CVAW +
Ка — il + Мз
wH sin у,j .
<7г
т =
1 а
(2л)2 Ryije . _ (2лг2)гс7?г/.
е?1“о
г2г3соа1|Шн cos у0 _
s -------символ дифференцирования по времени;
dt
m0, ®ао> То — значения координат системы, в окрестности ко-
торых проводится линеаризация.
При линеаризации мы отбросили малый член 2яг?^^« Ат.
Пренебрегая малой величиной Та, окончательно получим
уравнение объекта в виде
(Tns + 1) Am = /СаАтй — KNhN + /СгАг.
(223)
Уравнения сервомеханизма и изодрома
На поршень силового цилиндра действуют следующие силы:
сила давления, обусловленная разностью давлений рз и р2;
сила инерции приведенных к штоку масс;
приведенная к штоку сила от центробежного момента, дейст-
вующая на люльку регулируемой гидромашины; силы, возникаю-
щие от прочих моментов, малы и в расчете не учтены.
На рис. 302 показана схема сил, действующих на люльку гид-
ромашины. Полагаем, что в центре заделки головки шатуна
в поршне сосредоточена масса тш — половина массы шатуна, вся
масса поршня и масла, находящегося в цилиндре. Сила инерции
будет приложена к этой точке и направлена от центра в ради-
альном направлении. Проекция этой силы от одного шатуна р>
на плоскость yOz:
Pi = тшы2нКбл. (224)
486
Момент, который дает проекция данной силы относительно
оси поворота управляющего органа,
Mj = Pj cos аД (225)
где Л = L — KROt cos cq sin у;
L — расстояние между центрами головок шатуна;
Кбл — радиус заделки головок шатунов на ведущем валу;
R4 — радиус расположения цилиндров блока.
Рис. 302. К анализу сил в насосе
Осредняя уравнение (225) по периоду, получим среднее зна-
чение момента от одного шатуна с поршнем за оборот:
2л
М,ср =----- [ Mjd^. (226)
о
Для вычисления Mjсу подставим равенства (224) и (225) и
значение Л в уравнение (226). Умножая Mjcp на п — число ша-
тунов с поршнями в блоке, получим искомый момент:
Л1(( = — ctlo>a sin у, (227)
где с,( = -i- nilR^K
Момент от центробежных сил инерции действует на управ-
ляющий орган, увеличивая угол наклона у. Учитывая это, в даль-
нейшем знак минус в уравнении (227) опустим.
48?
Уравнение равновесия поршня силового цилиндра получим
в виде
F3P3 - F2P2 + sin у = 0, (228)
‘1
где /[ — расстояние от оси штока силового цилиндра до оси
цапф люльки;
F2 и F3 — площади поршня силового цилиндра.
Рис. 303. Схема направления потоков жидкости
в системе регулирования
Разлагая последний член равенства (228) в ряд Тейлора в ок-
рестности (й)а0, уо) и ограничиваясь первыми членами разложе-
ния, получим
F3P3 — F2P2 + 7.аДиа + хгДг + са = 0; (229)
2сцsin уо®ао . _ сЧааО cos Vo .
ГД Уа~ h ’ г ’
сЧшаО sin Vo
С„ = ---------- ’
h
Здесь использовали равенство (210), выразив Ду через Дг.
На схеме рис. 303 показаны направления потоков рабочей
жидкости в системе регулирования.
Связь между расходами через кромки золотника и расхода-
ми в цилиндре изодрома:
Л/(а0 - х) УРр- Р, = Af (b0 + х) У У + А^ж1 УРГ -F^ .
(230)
458
Связь между расходами через кромки золотника и расходами
в силовом цилиндре:
Af (а0 + х) УРр-Р3 = Af (b0 - х) /Р3 +
A-Af^VPz + F,-^- . (231)
at
Связь расходов между цилиндром изодрома и силовым ци-
линдром:
= + <232)
dt dt Е dt
'где Е' — объемный модуль упругости рабочей жидкости;
VCM — суммарный объем, включающий половину объема ци-
линдра изодрома, половину объема силового цилиндра
и объем трубопровода, их соединяющего.
Рис. 304. Проходные сечения золотника
Последний член этой формулы учитывает сжимаемость жид-
кости.
Переменные площади f(a0, х) и f(b0, х) показаны на рис. 304,
где а0 и Ьо — начальные открытия окон в гильзе; Ft и F% — пло-
щади поршня изодрома.
Расход Q(Pz, у) можно определить следующим образом.
Расход через отверстие / (см. рис. 303) при его открытии
кромками золотника изодрома равен
Q = X/1(z/)/Pp-P4 . (233)
Расход через жиклер II равен
<1Ж = А^УР^Ъ- (234)
32 Заказ 1076 4 89
Используя равенства расходов (233) и (234), возведем эти
уравнения в квадрат и исключим тогда
Q(^,t/)
урР-р2 _
[ Afj (У) ] [ 1
(235)
Уравнение расхода при открытии сливного отверстия III кром-
ками золотника изодрома составляется аналогично и при нуле-
вом сливном давлении имеет вид
Q(p2, у) =
(236)
Уравнение (235) имеет смысл при у < 0, а уравнение (236) —
при у > 0, где fi(y) и fin (у) — переменные площади открытий,
зависящие от перемещений штока, причем fi(y) — tiii(y) = О,
когда |f/| v. Физически это означает, что отверстия перекры-
ты золотником изодрома. В этом случае Q(P2,y) =0, ^4 = р
Л = рж у —, где /ясп — площадь проходного сечения жиклера;
Рж—коэффициент расхода жиклера; v — величина положитель-
ных перекрытий золотником изодрома перепускных отверстий
I и II.
Представим уравнения (235) и (236) в виде
Q (Р2, у) = q> (Р2) Ф («/),
1
(237)
где Ф (у) =
Г 1 1 2 + Г 1 2
. Af(y) J - AlfofC II -
\УРр — Р2 при у<0.
Проводимость Ф(у) показана на рис. 305. Принимая Р2 =
= Р20 = const, можно построить кривые зависимости Q(P2q, у),
вид которых для различных значений Р2о показан на рис. 306.
Уравнение движения поршня изодрома имеет вид
F2P2 - F\P2 = G1 — G2 — (Кг + К2) У,
где G] и G2 — силы предварительного натяжения пружин изо-
дрома;
К\ и К2 — жесткости пружин изодрома.
490
Рис. 305. Кривые суммарной проводимости:
1 — для жиклера с d — 0,8 мм-, 2 — для жиклера с d — 0,6 мм
Рис. 306. Гидравлические характеристики золотника
32
При выводе уравнений предполагалось, что авиационный
двигатель является бесконечным источником мощности. Массы
распределительного золотника, поршней и штоков изодрома и
сервоцилиндра в расчете не учтены. Внешними воздействиями
на рассматриваемую систему являются <аа — угловая скорость
Рис. 307. Характеристики переходного процесса
вращения вала двигателя и N — нагрузка на выходном валу гид-
ропривода.
Полученные нелинейные уравнения решаются на электронной
моделирующей установке. Кривая переходного процесса, полу-
ченная на установке ЭММ-8, показана на рис. 307.