




































































































Author: Ильинский Н.Ф. Москаленко В.В.
Tags: характеристика машин по способу привода электроэнергетика электротехника энергетика электропривод издательство академия ресурсосбережение
ISBN: 978-5-7695-2849-1
Year: 2008




ВЫСШЕЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
Н.Ф. ИЛЬИНСКИЙ, В. В. МОСКАЛЕНКО
ЭЛЕКТРОПРИВО
J
ЭНЕРГО- И РЕСУРСОСБЕРЕЖЕНИЕ
Допущено
Учебно-методическим объединением по образованию
в области энергетики и электротехники
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по направлению подготовки дипломированных специалистов
140600 «Электротехника, электромеханика и электротехнологии»
ACADEMA
Москва
Издательский центр «Академия»
2008
УДК 62-83(075.8)
ББК. 31.291я73
И465
Рецензенты:
ученый секретарь ОАО «Электропривод», д-р техн, наук,
проф. М. Е Юньков;
зав. кафедрой электротехники и электромеханики Санкт-Петербургского
горного института (Технического университета), д-р техн, наук,
проф. А. £. Козярук
Ильинский Н. Ф.
И465 Электропривод: энерго- и ресурсосбережение : учеб, по-
собие для студ. высш. учеб, заведений / Н.Ф. Ильинский,
В. В. Москаленко. — М. : Издательский центр «Академия»,
2008. - 208 с.
ISBN 978-5-7695-2849-1
Рассмотрены общие принципы, методы и средства энерго- и ресурсо-
сбережения в электроприводе и средствами электропривода в обслужива-
емых им технологических процессах. Приведен отечественный и зарубеж-
ный опыт энерго- и ресурсосбережения в промышленности и жилищно-
коммунальном хозяйстве. Даны примеры практических расчетов техни-
ческой и экономической эффективности энерго- и ресурсосберегающих
мероприятий.
Для студентов высших учебных заведений, может быть полезно для
инженерно-технических работников.
УДК 62-83(075.8)
ББК 31.291я73
Оригинал-макет данного издания является собственностью
Издательского центра «Академия», и его воспроизведение любым способом
без согласия правообладателя запрещается
© Ильинский Н.Ф., Москаленко В.В., 2008
© Образовательно-издательский центр «Академия», 2008
ISBN 978-5-7695-2849-1 © Оформление. Издательский центр «Академия», 2008
ПРЕДИСЛОВИЕ
Электропривод осуществляет электромеханическое преоб-
разование энергии, используется практически во всех областях
человеческой деятельности, где нужны движение и механиче-
ская работа, потребляет более 60 % всей вырабатываемой электро-
энергии.
При освещении общих проблем энергосбережения основные
акценты сделаны на массовом простом электроприводе, исполь-
зуемом повсеместно в промышленности, сельском хозяйстве,
жилищно-коммунальном хозяйстве (ЖКХ).
Главная цель данного учебного пособия — показать пути и спо-
собы экономии электроэнергии и других ресурсов средствами элек-
тропривода.
Авторы старались не только предельно понятно изложить со-
временные представления о проблеме энергосбережения в элект-
роприводе и средствами электропривода, но и на многих приме-
рах показать практические решения, подчеркнуть опыт удачных
разработок, использованных на практике. Можно экономить элек-
троэнергию и другие ресурсы не только в больших и энергоемких
системах и агрегатах, но и в обыденных не очень заметных уст-
ройствах, связанных с электроприводом.
Введение, гл. 1 (кроме подразд. 1.4, 1.6), гл. 3 (кроме подразд.
3.5, 3.6, 3.7), гл. 4 и 5 написаны Н.Ф. Ильинским; подразд. 1.4,
1.6, гл. 2, подразд. 3.5, 3.6, 3.7 и Приложения написаны В. В. Мос-
каленко.
Авторы выражают благодарность Е. В. Бычковой за большую
помощь при подготовке рукописи.
ВВЕДЕНИЕ
Энергосбережение, точнее рационализация производства, рас-
пределения и использования всех видов энергии, стало в послед-
ние 15...20 лет наряду с информатизацией и компьютеризацией
одним из основных направлений технической политики во всех
развитых странах мира. Это связано, во-первых, с ограниченностью
и невозобновляемостью всех основных энергоресурсов, во-вто-
рых, с непрерывно возрастающими сложностью их добычи и соот-
ветственно стоимостью, в-третьих, с глобальными экологическими
проблемами, обозначившимися в последнее время.
Острый интерес ко всем аспектам энерго- и ресурсосбереже-
ния возник в мире на волне нефтяного кризиса 1970-х годов. Об-
наружилось, что за последние несколько десятков лет потреблено
2/3 энергии, израсходованной за всю историю цивилизации, что
разведанных основных энергоресурсов хватит меньше чем на 100
лет и сэкономить тонну условного топлива уже сейчас в несколь-
ко раз дешевле, чем добыть.
В развитых странах резко — в десятки раз — возросли инвести-
ции в сферу энергосбережения, стали создаваться специальные
программы и организации. Специалисты, а с ними и думающие о
будущем руководители, поняли, что энергетические ресурсы пла-
неты совсем не неисчерпаемы и ее грядущее напрямую связано с
тем, как сегодня распоряжаются этими ресурсами. Энерго- и ре-
сурсосбережение стало одной из первоочередных и важнейших эко-
логических проблем, решаемых сегодня во всех развитых странах
мира.
Существенной составляющей этой проблемы стало энергосбе-
режение в сферах, обслуживаемых электрической энергией, по-
скольку эта энергия универсальна и повсеместно применяема.
Энергосбережение сводится к снижению бесполезных потерь энер-
гии. Анализ структуры потерь в сфере производства, распределе-
ния и потребления электроэнергии показывает, что определяющая
доля потерь — до 90 % — приходится на сферу энергопотребле-
ния, тогда как потери при передаче электроэнергии составляют
лишь 9... 10 % (в США — 8 %, в ФРГ и Японии — 4...5 %). Оче-
видно, что основные усилия по энергосбережению должны быть
сконцентрированы именно в сфере потребления электроэнергии.
Экономия энергии за счет повышения эффективности ее исполь-
4
зования рассматривается в мировой практике как основное на-
правление развития современной энергетики. Рост эффективно-
сти ведет к росту всех показателей экономики страны, снижает
техногенную нагрузку на экологию регионов, связанных с произ-
водством энергии.
Проблема энергосбережения актуальна и в нашей стране. Вы-
сокая энергоемкость внутреннего валового продукта (ВВП) —
проблема национальной экономики. Она в России в 2,2 раза выше,
чем в США, в 3,2 раза выше, чем в Европейском Союзе (ЕС) и
в 3,6 раза выше, чем в Японии. Доля энергозатрат в стоимости
промышленной продукции Российской Федерации составляет
18 % (в СССР было 3 %), а в некоторых отраслях достигает 70 %,
что приводит к неконкурентоспособное™ наших товаров и нерен-
табельности инвестиций. Считается, что в среднем по миру за
счет экономии можно сберечь до 30 % энергии, в России потен-
циал энергосбережения — 40%.
В развитых странах электроэнергия составляет около 20 % от
всего расхода энергии. Основным потребителем электроэнергии
является электропривод (более 60 %), и именно на него обращено
главное внимание мировой технической общественности, рабо-
тающей в сфере энергосбережения.
Немецкие специалисты считают, что экономический потенциал
энергосбережения в электроприводе практически исчерпан, если
рассматривать индивидуальные компоненты электропривода, то
они уже достаточно совершенны. Вместе с тем остается громадный
потенциал, основанный на совершенствовании проектирования
систем в целом и оптимизации их параметров.
В 1997 г. доля электроэнергии составляла в ФРГ 462 ТВт-ч*
(более 18 % от общего потребления энергии). На долю промыш-
ленности приходилось 42,5 % от всей электроэнергии, из них 2/3
(133 ТВт-ч) потреблял электропривод, остальная электроэнер-
гия в промышленности расходовалась на отопление и различные
технологические процессы (26 %) и освещение (5 %).
Лишь около 5 % установленных в промышленности ФРГ двига-
телей было оборудовано энергосберегающими электронными уст-
ройствами регулирования скорости. По мнению специалистов с
энергетической точки зрения эта доля не должна быть менее 35 %,
тогда при экономии электроэнергии около 40 % на электропри-
вод общая экономия составит 16 ТВт-ч в год, что эквивалентно
энергии, произведенной семью электростанциями. Если учесть,
что эмиссия СО2 составляет 0,59 кг СО2 на кВт-ч, то экономия
по этому показателю составит 11 млн т в год.
Ежегодное потребление электроэнергии электроприводом в За-
падной Европе должно вырасти с 630 ТВт • ч в 1992 г. до 870 ТВт * ч
* 1 ТВт-ч = 1012 Вт-ч = 109 кВт-ч
в 2010 г., однако предполагается, что более 60% от ожидаемого
прироста будет покрыто за счет энергосбережения, в основном
при переходе к регулируемому электроприводу. Экспертные оцен-
ки показывают, что регулируемый электропривод экономически
эффективен в 25... 50 % всех технологических установок, хотя ис-
пользуется сейчас лишь в 10%.
Рассмотрим подробнее объект энергосбережения — электро-
привод.
Все электроприводы за исключением многочисленных мало-
мощных (доли киловатт) электроприводов бытовой техники можно
условно разделить на две большие группы.
Первая используется в агрегатах, обслуживающих технологи-
ческие процессы, неосуществимые без тонкого управления тех-
нологическими координатами, например прокатные станы, бу-
магоделательные машины, металлообрабатывающие станки, ро-
боты и т.д. К этой группе относятся не более 10 % всех электро-
приводов, она всегда пользовалась вниманием специалистов, и в
ней, как правило, уже осуществлены современные эффективные
технические решения.
Вторая группа (около 90 % всех электроприводов) использует-
ся в простых агрегатах — насосах, вентиляторах, транспортерах,
конвейерах и т.д. Этой группе до недавнего времени уделялось
мало внимания, так как в подобных агрегатах обычно использу-
ются самые простые электроприводы с не всегда правильно выб-
ранными двигателями, но именно в этой группе содержится гро-
мадный резерв энерго- и ресурсосбережения.
Это связано главным образом с объективно существующим
противоречием: подавляющее большинство таких электроприво-
дов (более 95 %) нерегулируемые, а обслуживаемые ими техно-
логические процессы, как правило, нуждаются в управлении ка-
кими-либо технологическими координатами: скоростью, давле-
нием, расходом, температурой и т.д. Это управление осуществля-
ется энергетически неэффективно и приводит к большим поте-
рям энергии, порождает несовершенство самого технологическо-
го процесса — снижает производительность, надежность и каче-
ство продукта.
Характерным примером может служить повсеместно исполь-
зуемый нерегулируемый асинхронный электропривод насосных
станций водоснабжения зданий. В большинстве случаев он создает
избыточный, не требуемый в данный момент напор, т.е. подво-
дит к гидравлической системе лишнюю, бесполезную мощность.
За впустую истраченную энергию платит потребитель, кроме того,
избыточный напор приводит за счет возрастания утечек к боль-
шим потерям воды (7...9 % на каждую лишнюю атмосферу),
гидравлическим ударам при пуске системы, разрывам труб, лиш-
нему шуму и т.д. Аналогичные последствия применения прос-
тейшего электропривода можно обнаружить во многих техноло-
гических процессах.
Цена электроэнергии, потребляемой ежегодно средним дви-
гателем в промышленности, в 5 раз превосходит цену двигателя.
Очевидно, что за время службы двигателя (10...20 лет) энергети-
ческая составляющая в десятки раз превысит составляющую, свя-
занную с капитальными затратами, в связи с чем забота об опти-
мизации именно энергетической составляющей является особен-
но важной.
Возникает вопрос: почему до сих пор в развитых странах мира,
включая, конечно, Россию, тераваттчасы дорогой энергии расхо-
дуются бесполезно?
Причины этого можно разделить на технические, экономичес-
кие и организационно-психологические.
Технические: до недавнего времени не было доступных и эф-
фективных средств энергосбережения в электроприводе. В 1980 —
1990-е годы такие средства благодаря успехам силовой и инфор-
мационной электроники появились, но и после этого в ЕС и США
ими оборудовано 5... 10 % всех электроприводов, в России — еще
меньше.
Экономические: энергосберегающее оборудование немало стоит,
оно иногда в разы дороже двигателя, а экономия проявится поз-
же, во время эксплуатации. Немецкие специалисты отмечают,
что часто лица, отвечающие за приобретение оборудования и
его эксплуатацию, работают в разных отделах компании и име-
ют различные интересы: первые экономят бюджет фирмы на ста-
дии приобретения оборудования, а вторые вынуждены мирить-
ся с его энергетической неэффективностью. Кроме того, между
поставщиками оборудования и конечными пользователями обыч-
но есть несколько посредников со своими интересами.
В жилищно-коммунальном хозяйстве городов, где особенно
велик потенциал энергосбережения, значительная доля затрат
покрывается из бюджета города, поэтому фактическая экономия
ресурсов приводит к снижению дотаций, не образуя реальных
средств экономии на счету эксплуатационных служб района. От-
сутствие экономической заинтересованности как у поставщиков,
так и потребителей энергоресурсов — причина медленного вне-
дрения энергосберегающей технологии.
Организационно-психологические: немецкие коллеги пишут, что
пользователь не хочет иметь какие-либо риски, связанные с на-
дежностью новых технологий, если нормально функционирует
старое оборудование. Ни один бизнесмен не станет вмешиваться
в хорошо работающее производство, если единственным аргу-
ментом служит экономия энергии. Он сделает это только по тех-
нической необходимости: либо для увеличения производитель-
ности, либо для повышения качества продукта.
7
Созвучна с этим мнением и позиция ряда наших хозяйствен-
ников. Так, в варианте проекта «Энергетической программы раз-
вития Московского региона до 2010 года», подготовленном Мос-
энергопроектом, энергосбережению уделено три строчки на 28
страницах. По-видимому, для успеха дела необходимо изменение
подходов хозяйственных руководителей к этой проблеме, созда-
ние комплекса условий, способствующих эффективному внедре-
нию уже существующих технических средств. Этот процесс дол-
жен сопровождаться рядом сопутствующих мероприятий: органи-
зацией квалифицированного энергоаудита, чтобы избежать не-
оправданной и бесполезной траты средств; созданием ремонтной
службы (здесь существенно, какие устройства будут формировать
эксплуатируемый парк, сколько будет разных производителей);
необходимым мониторингом, подготовкой персонала и т.д.
ГЛАВА 1
ПРИНЦИПЫ ЭНЕРГО- И РЕСУРСОСБЕРЕЖЕНИЯ
1.1. Электропривод и технологические процессы
Электроприводом называют систему, состоящую из обязатель-
ного элемента — электродвигателя (ЭД), из электрического (ЭП),
механического (МП) и информационного (ИП) преобразовате-
лей. Электропривод связан электрической сетью с системой элек-
троснабжения, рабочий орган соединяет его с технологической
установкой, через информационные каналы связи электропривод
взаимодействует с автоматизированной системой управления
(АСУ) верхнего уровня или человеком-оператором.
На рис. 1.1 показана общая структура электропривода. В много-
численных простых электроприводах часть элементов — электри-
ческий, а иногда и механический преобразователи — могут отсут-
ствовать, а информационный преобразователь трансформируется
в простой пускатель, осуществляющий команды «включить-вык-
лючить».
Электропривод осуществляет преобразование электрической
энергии в механическую (и обратное) с управлением — прими-
АСУ верхнего уровня
Каналы
связи
Система
электро-
снабжения
Сеть
ИП
Информационный
канал
МП
Рабочий
орган
Техноло-
гическая
установка
Электрическая часть
Механическая часть
Силовой канал
Рис. 1.1. Структура электропривода
a
б
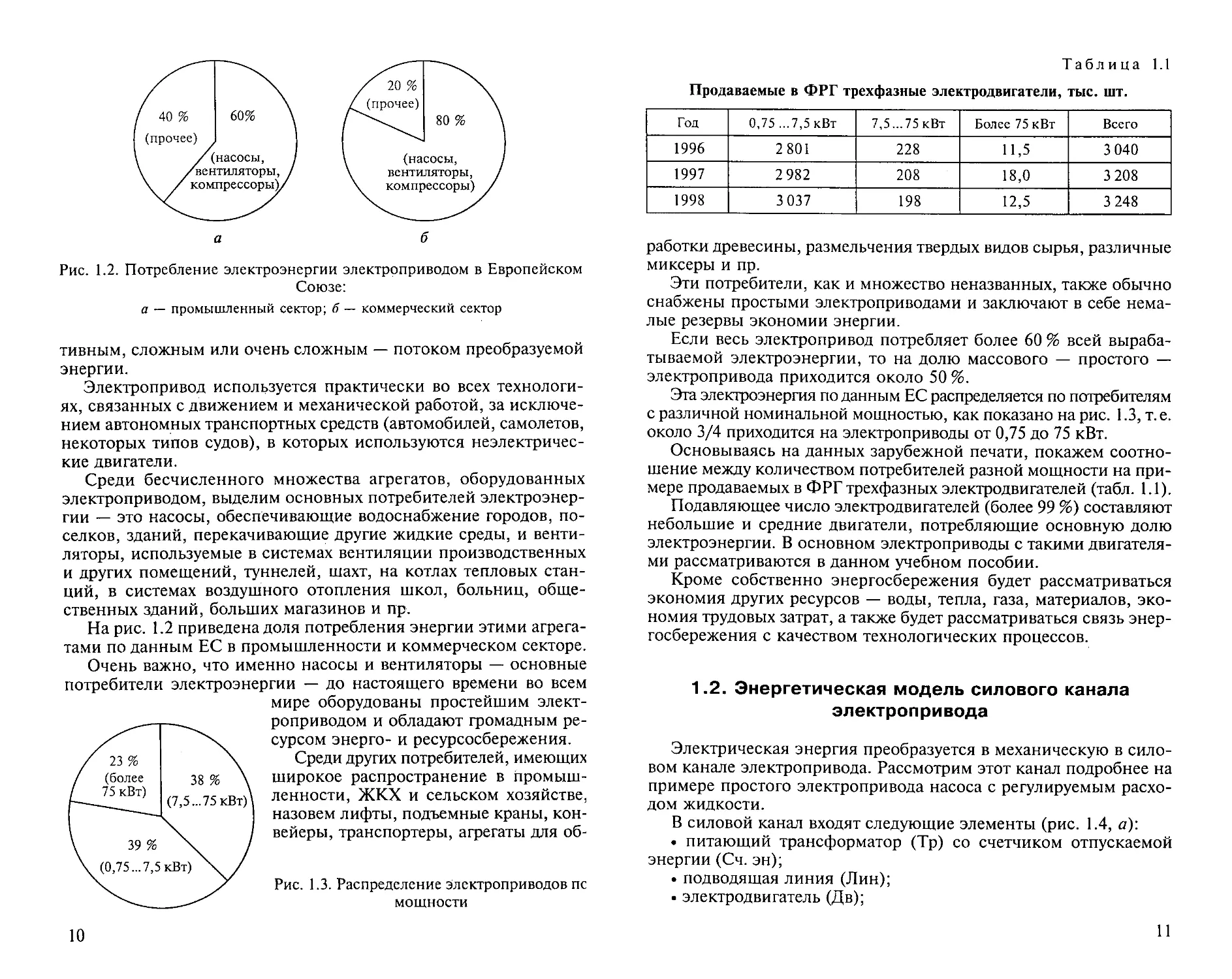
Рис. 1.2. Потребление электроэнергии электроприводом в Европейском
Союзе:
а — промышленный сектор; б — коммерческий сектор
тивным, сложным или очень сложным — потоком преобразуемой
энергии.
Электропривод используется практически во всех технологи-
ях, связанных с движением и механической работой, за исключе-
нием автономных транспортных средств (автомобилей, самолетов,
некоторых типов судов), в которых используются неэлектричес-
кие двигатели.
Среди бесчисленного множества агрегатов, оборудованных
электроприводом, выделим основных потребителей электроэнер-
гии — это насосы, обеспечивающие водоснабжение городов, по-
селков, зданий, перекачивающие другие жидкие среды, и венти-
ляторы, используемые в системах вентиляции производственных
и других помещений, туннелей, шахт, на котлах тепловых стан-
ций, в системах воздушного отопления школ, больниц, обще-
ственных зданий, больших магазинов и пр.
На рис. 1.2 приведена доля потребления энергии этими агрега-
тами по данным ЕС в промышленности и коммерческом секторе.
Очень важно, что именно насосы и вентиляторы — основные
потребители электроэнергии — до настоящего времени во всем
мире оборудованы простейшим элект-
роприводом и обладают громадным ре-
сурсом энерго- и ресурсосбережения.
Среди других потребителей, имеющих
широкое распространение в промыш-
ленности, ЖКХ и сельском хозяйстве,
назовем лифты, подъемные краны, кон-
вейеры, транспортеры, агрегаты для об-
Рис. 1.3. Распределение электроприводов пс
мощности
10
Таблица 1.1
Продаваемые в ФРГ трехфазные электродвигатели, тыс. шт.
Год 0,75 ...7,5 кВт 7,5...75 кВт Более 75 кВт Всего
1996 2 801 228 И,5 3 040
1997 2 982 208 18,0 3 208
1998 3 037 198 12,5 3 248
работки древесины, размельчения твердых видов сырья, различные
миксеры и пр.
Эти потребители, как и множество неназванных, также обычно
снабжены простыми электроприводами и заключают в себе нема-
лые резервы экономии энергии.
Если весь электропривод потребляет более 60 % всей выраба-
тываемой электроэнергии, то на долю массового — простого —
электропривода приходится около 50%.
Эта электроэнергия по данным ЕС распределяется по потребителям
с различной номинальной мощностью, как показано на рис. 1.3, т.е.
около 3/4 приходится на электроприводы от 0,75 до 75 кВт.
Основываясь на данных зарубежной печати, покажем соотно-
шение между количеством потребителей разной мощности на при-
мере продаваемых в ФРГ трехфазных электродвигателей (табл. 1.1).
Подавляющее число электродвигателей (более 99 %) составляют
небольшие и средние двигатели, потребляющие основную долю
электроэнергии. В основном электроприводы с такими двигателя-
ми рассматриваются в данном учебном пособии.
Кроме собственно энергосбережения будет рассматриваться
экономия других ресурсов — воды, тепла, газа, материалов, эко-
номия трудовых затрат, а также будет рассматриваться связь энер-
госбережения с качеством технологических процессов.
1.2. Энергетическая модель силового канала
электропривода
Электрическая энергия преобразуется в механическую в сило-
вом канале электропривода. Рассмотрим этот канал подробнее на
примере простого электропривода насоса с регулируемым расхо-
дом жидкости.
В силовой канал входят следующие элементы (рис. 1.4, а):
• питающий трансформатор (Тр) со счетчиком отпускаемой
энергии (Сч. эн);
• подводящая линия (Лин);
• электродвигатель (Дв);
Рис. 1.4. Силовой канал электропривода (а) и диаграмма передачи мощно-
сти от источника к потребителю (б)
• рабочая машина — насос (Нас);
• задвижка, регулирующая расход жидкости (Задв);
• технологическая часть — гидравлическая магистраль (Маг) —
с измерителями потребляемой энергии — расходомером (Расх) и
манометром (Ман).
На рис. 1.4, б в сильно упрощенном виде, отражающем лишь
главные черты энергетического процесса, представлена диаграм-
ма передачи мощности от источника (трансформаторной подстан-
ции) к потребителю (системе водоснабжения).
Потребляемая мощность Рвх, Вт, при трехфазной сети пере-
менного тока пропорциональна произведению двух основных ве-
личин, определяющих процесс: фазного напряжения U$, В, и
фазного тока /ф, А, с учетом угла сдвига ф между ними:
Лх = 3 С/ф/фСОйф. (1.1)
Механическая мощность Рмех, Вт, определяется угловой ско-
ростью ш, рад/с, и моментом М, Н • м:
= (1.2)
Угловая скорость со, рад/с, связана с частотой вращения п,
об/мин, соотношением со = —. Далее мы будем использовать обе
эти величины.
Гидравлическая мощность определяется давлением р, Па,
и расходом Q, м3/с:
12
гидр
J
(1.3)
2
или в практических единицах гидравли-
ческая мощность Ргидр, кВт, определяет-
ся напором Я, м вод. ст., и расходом Q,
Рис. 1.5. Цикл работы
электропривода
СВЯЗИ источник—по-
Р =HQ
гидр 367 *
Источник электроэнергии обеспечива-
ет одну из определяющих мощность ве-
личин (обычно напряжение). Вторая — ток
(и, следовательно, мощность) — цели-
ком определяется потребителем и каналом
требитель. У потребителя также одна из величин задается систе-
мой (в рассматриваемом случае — давление), вторая определяется
технологическим процессом (расход).
Энергия W, Дж, — потребляемая, преобразуемая и расхо-
дуемая — определяется как интеграл от изменяющейся во вре-
мени мощности Р(0 за некоторое время Т:
т
W = f P(r)dt (1.4)
О
В частном случае, когда на отдельных интервалах мощность
постоянна и равна Pt (рис. 1.5), формула (1.4) приобретает вид
m
i=l
где m — число интервалов.
Каждая ступень преобразования и передачи энергии, незави-
симо от способа реализации, сопровождается потерями ДР, вели-
чина которых существенно зависит от конкретного оборудования
и режимов его работы.
Потери энергии в соответствии с формулой (1.4) определя-
ются следующим образом:
AlF = jAP(Odf. (1.5)
о
Потери в питающей линии ДРЛИН будут зависеть от сопротивле-
ния провода Ялин и полного тока /лин:
АРЛИн = 3/Лин(0Лпин. (1-6)
Полный ток /лин, в свою очередь, определяется активной 1а и
реактивной I? составляющими (рис. 1.6): первая создает момент
двигателя и, следовательно, активную мощность, вторая — магнит-
13
Рис. 1.6. Векторная диаграмма токов в асин-
хронном электродвигателе
ное поле двигателя. Потери в линии и
питающем трансформаторе будут суще-
ственно зависеть от cos<p:
A^COS (р _ 1
^^cos(p=l COS (р
(1.7)
в связи с чем обычно стремятся избежать низких coscp.
Потери в двигателе определяются его коэффициент по-
лезного действия (КПД):
Лдв
вых. дв
вх. дв
дв
(1.8)
вых. дв
дв
вх. дв
вх. дв
и обычно невелики, поскольку КПД в широком диапазоне нагру-
зок высок — 0,8...0,9. Неверно выбранный или работающий зна-
чительную долю времени с малой нагрузкой или вхолостую дви-
гатель имеет низкий КПД и создает лишние потери.
Потери в насосе АРнас также определяются его КПД:
Пнас ”
вых. нас
(1.9)
вых. нас
нас
причем его максимум (70...75 %) располагается вблизи номиналь-
ного режима и резко снижается при отходе от номинальной на-
грузки. Здесь резервы экономии энергии очень существенны.
И, наконец, потери в задвижке АР^, используемой в про-
стейшем электроприводе для регулирования расхода, могут быть
очень большими.
Похожие рассуждения, приводящие к энергетической модели
электропривода, могут быть сделаны для любого потребителя —
вентилятора, конвейера, машины для пилки бревен и т.д.
Обобщая результаты рассмотрения энергетического процесса,
осуществляемого электроприводом, можно обнаружить, что эф-
фективность данного процесса определяется двумя факторами.
Первый — насколько соответствует подводимая к потребителю
мощность требованиям оптимального технологического процесса.
Например, насколько удачно выбрано давление на входе гидрав-
. лической системы, обслуживающей здание: его должно хватать
для комфортного водопотребления в любой квартире, и оно не
должно быть избыточным (лишняя потребляемая мощность, раз-
рывы труб, лишние утечки воды и т.д.).
14
Второй — насколько велики потери, сопровождающие про-
цесс (потери в насосе, бесполезно перемешивающем воду, и в
задвижке могут быть очень большими).
Очевидны, пока в самом общем виде, и приемы энергосбере-
жения: оборудование должно быть правильно выбрано, и должны
использоваться рациональные средства управления мощностью,
подводимой к потребителю.
В рассмотренной энергетической модели простого электропри-
вода могут использоваться любые электродвигатели, и она при-
менима к множеству установок, работающих с переменной на-
грузкой. Ее частный случай — постоянная нагрузка, например
постоянно работающий вентилятор. Здесь решение одно — пра-
вильно выбрать оборудование.
Разновидность рассмотренной модели относится к случаю пи-
кового приложения нагрузки с последующим холостым ходом,
например в штамповочной машине или прессе, или к часто вклю-
чаемым и выключаемым установкам, например в технологиче-
ских линиях и т.д. Здесь существенны динамические процессы из-
менения скорости и момента во времени, сопровождающиеся
значительными потерями, поэтому приемы энергосбережения
связаны с уменьшением именно этих потерь.
Полную и достоверную оценку фактической энергетической
эффективности любой системы можно сделать только на основе
КПД цикла т|ц, т.е. при сопоставлении необходимой полезной
энергии за некоторый цикл JVn0Jlщ с энергией, потребленной от
источника за это же время, И^отр.ц:
п _ и/пол.ц
“ и/П01р.ц
И/
пол.ц
пол.ц
+ ДИ/Ц
(1-10)
5
где ДРИц — потери энергии за цикл.
В ряде случаев непросто оценить необходимую полезную энергию
и приходится пользоваться лишь фактической оценкой, которую
удается получить по измерительным приборам и которая может от-
личаться от необходимой (например, неверно выбранное давление).
Однако такая оценка лучше, чем часто практикуемая оценка по КПД
в точке, вычисленному по отношению полезной и потребленной
мощностей в каком-либо режиме (часто — в номинальном).
Следует подчеркнуть некорректность оценок по мощностям в
точке (в одном режиме) для процессов, изменяющихся во време-
ни (например, полезный расход воды может меняться в разное
время суток в 10 и более раз).
Оценки энергетической эффективности усложняются при не-
однонаправленных потоках энергии (подъем—спуск, разгон—тор-
можение и т.д.), однако необходимость пользоваться понятиями
энергии, а не мощности в точке, сохраняется и там.
15
1.3. Свойства и характеристики
массовых асинхронных электродвигателей
Приведем краткие сведения об асинхронных двигателях, необ-
ходимые для понимания их основных свойств и характеристик.
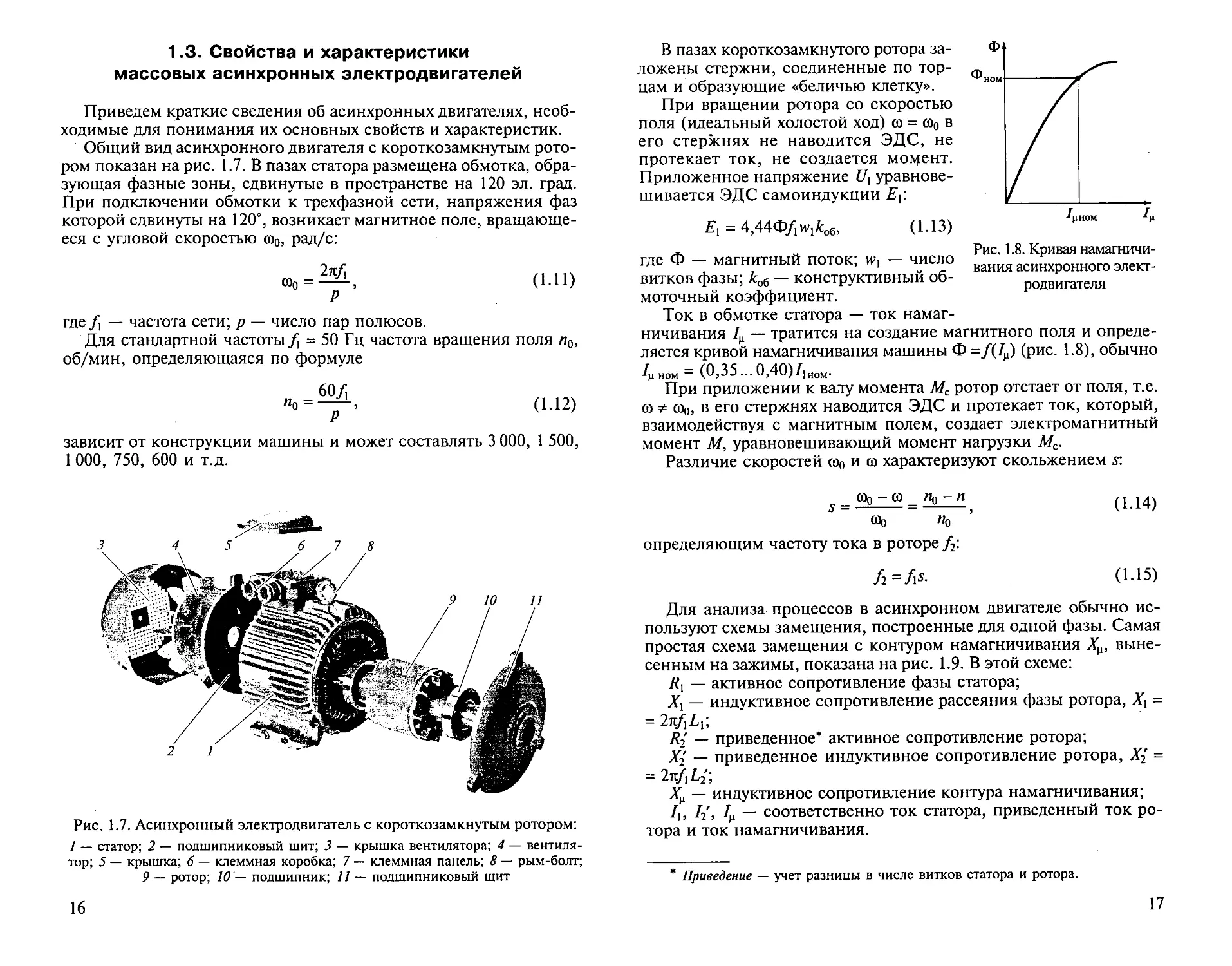
Общий вид асинхронного двигателя с короткозамкнутым рото-
ром показан на рис. 1.7. В пазах статора размещена обмотка, обра-
зующая фазные зоны, сдвинутые в пространстве на 120 эл. град.
При подключении обмотки к трехфазной сети, напряжения фаз
которой сдвинуты на 120°, возникает магнитное поле, вращающе-
еся с угловой скоростью со0, рад/с:
«0=^-, (1-11)
р
где /, — частота сети; р — число пар полюсов.
Для стандартной частоты/ = 50 Гц частота вращения поля п0,
об/мин, определяющаяся по формуле
60/,
= (1.12)
зависит от конструкции машины и может составлять 3 000, 1 500,
1 000, 750, 600 и т.д.
Рис. 1.7. Асинхронный электродвигатель с короткозамкнутым ротором:
1 — статор; 2 — подшипниковый щит; 5 — крышка вентилятора; 4 — вентиля-
тор; 5 — крышка; 6 — клеммная коробка; 7 — клеммная панель; 8 — рым-болт;
Р — ротор; 10 — подшипник: Н — подшипниковый шит
16
В пазах короткозамкнутого ротора за-
ложены стержни, соединенные по тор-
цам и образующие «беличью клетку».
При вращении ротора со скоростью
поля (идеальный холостой ход) со = со0 в
его стержнях не наводится ЭДС, не
протекает ток, не создается момент.
Приложенное напряжение Ux уравнове-
шивается ЭДС самоиндукции Ех.
Ех = 4,44Ф/>Лоб, (М3)
Рис. 1.8. Кривая намагничи-
вания асинхронного элект-
родвигателя
где Ф — магнитный поток; — число
витков фазы; £об — конструктивный об-
моточный коэффициент.
ШИ.
Ток в обмотке статора — ток намаг-
ничивания — тратится на создание магнитного поля и опреде-
ляется кривой намагничивания машины Ф = /(/ц) (рис. 1.8), обычно
41 ном = (0,35... 0,40)/1НОМ.
При приложении к валу момента Мс ротор отстает от поля, т.е.
со ф соо, в его стержнях наводится ЭДС и протекает ток, который,
взаимодействуя с магнитным полем, создает электромагнитный
момент М, уравновешивающий момент нагрузки Мс.
Различие скоростей со0 и со характеризуют скольжением s:
s = (114)
ОХ)
определяющим частоту тока в роторе f2:
(1.15)
Для анализа- процессов в асинхронном двигателе обычно ис-
пользуют схемы замещения, построенные для одной фазы. Самая
простая схема замещения с контуром намагничивания Х^, выне-
сенным на зажимы, показана на рис. 1.9. В этой схеме:
/?! — активное сопротивление фазы статора;
Xi — индуктивное сопротивление рассеяния фазы ротора, Х\ =
= 2n/iLi;
R2 — приведенное* активное сопротивление ротора;
Х2 — приведенное индуктивное сопротивление ротора, Х2 =
= 2TCZL/;
— индуктивное сопротивление контура намагничивания;
/ь h', 1ц ~ соответственно ток статора, приведенный ток ро-
тора и ток намагничивания.
* Приведение — учет разницы в числе витков статора и ротора.
17
Рис. 1.9. Схема замещения асинхронного электродвигателя
Схема замещения позволяет на качественном уровне оценить
вид основных характеристик двигателя, т. е. зависимостей Ф,
созуз и М от скольжения 5 (рис. 1.10).
Магнитный поток Ф в принятом приближении не зависит от
скольжения, приведенный ток ротора
(1.16)
стремится с ростом скольжения к асимптоте
(1.17)
где Хк = Х\ + Х{.
Величина cos\j/2, характеризующая сдвиг тока 1{ по отноше-
нию к вызвавшей его ЭДС Е{, близка к ± 1 при малых s и стремит-
ся к 0 при s —» ±
Электромагнитный момент М, развиваемый двигателем, опре-
деляется по формуле
Ф, 1г,
cosV?, М
Рис. 1.10. Основные характеристики асинхронного электродвигателя
18
М = &Ф/2'СО5\|/2
(1.18)
и имеет максимальные значения, называемые критическими ±МК
при критических скольжениях ±5К (см. рис. 1.10).
Для количественных оценок можно воспользоваться следую-
щими упрощенными соотношениями, полученными в предполо-
жении, что Ri = 0, и обычно не приводящими к большим погреш-
ностям при Рном > 5кВт:
(1-19)
5
Гч
3£/,2
ЛГ
Гч
2(DoJfK
(1.20)
(1-21)
Механическую со(Л/) и электромеханическую со(/1) характе-
ристики асинхронного двигателя с короткозамкнутым ротором
можно также построить по паспортным и каталожным данным
двигателя.
В каталогах обычно приводятся:
^ihomy/^ihoma — номинальные напряжения при соединении об-
моток в схему «звезда» и схему «треугольник»;
Лному/Лномд “ соответствующие номинальные токи;
/1ном — номинальная частота сети;
Рном— номинальная мощность на валу;
лном — номинальная частота вращения;
"Ином — номинальный КПД;
COS(Phom ” номинальный коэффициент мощности;
к/ — кратность пускового тока, kj-
км — кратность пускового момента, км = Л/пуск/Мном;
X — кратность критического момента, X =
— момент инерции двигателя;
к'м — кратность минимального момента, к'м=
Некоторые фирмы приводят типовые естественные характери-
стики п{М) и п(1), а также г|(Р2) и coscp(P2).
На рис. 1.11 в качестве примера приведены типовые механи-
ческая (а) и электромеханическая (б) характеристики (в относи-
тельных единицах) электродвигателей серий 4А и АН и базовое
обозначение этих двигателей (в).
Каталожные данные асинхронных двигателей, выпускаемых не-
которыми отечественными заводами, приведены в Приложении 1.
19
л*+
б
АИ Р 100 М А 4
Серия Увязка Высота Длина Длина Число
корпуса сердечника полюсов
50
Р 56
С 63
71
80
90
100
112
132
160
180
200
225
250
2
4
6
8
Рис. 1.11. Характеристики (а, б) и ба-
зовое обозначение (в) электродви-
? гателей серий 4А и АИ
Характеристики (в относительных единицах)
электродвигателей серий 4А и АИ
4А АИ
A/* m......................... 1,6... 1,0 1,6
М*............................ 2,0... 1,4 2,0... 1,6
Л/*......................... 2,2 2,2...2,8
I*.......................... 6,0...7,5 7,0...7,5
Приведенные ранее сведения относились к установившимся ре-
жимам двигателя. Переходные процессы — пуск, торможение, из-
менение скорости, наброс и сброс нагрузки — подчиняются урав-
нению движения
(1.22)
где М — момент, развиваемый двигателем; Мс — момент сопротив-
ления (нагрузки); — суммарный момент инерции.
Суммарный момент инерции определяется по формуле
20
Рис. 1.12. Графики пуска асинхронного электродвигателя в координатах
со — М(а) и со — t(6)
т _ т л_ т /;2
•'Е ~ •'дв “ •'мех/ * ?
где /дв — момент инерции двигателя; /мех — момент инерции меха-
низма; i — передаточное число редуктора (если он используется),
/ = со/сомех.
Для оценок поведения двигателя в динамических режимах ча-
сто можно заменить его механическую характеристику, имеющую
весьма сложную форму, средним моментом Л/ср на участке дина-
мического режима. При пуске можно принять
мп + мк
2
Тогда уравнение (1.22) имеет при Мс = const элементарное об-
щее решение:
СО — С0нач
Afcp - Мс
или для пуска при 0 < со < соуст
Мт - Мс
Ю=_£Р_---
А
Графики пуска показаны на рис. 1.12. Реальным характеристи-
кам соответствуют штриховые линии, аппроксимированным —
сплошные.
1.4. Энергетические модели электродвигателей
Электродвигатели служат обязательным элементом любого элек-
тропривода, и поэтому их энергетические модели особенно важ-
ны. Будут рассматриваться главным образом модели повсеместно
21
применяемых асинхронных двигателей, однако будут упоминать-
ся и другие типы двигателей.
Построение энергетических моделей асинхронных двигателей
основано на простейшей схеме замещения (см. рис. 1.9), каталож-
ных (паспортных) данных двигателей и некоторых обобщенных
характеристиках.
Рассмотрим случай питания двигателя номинальным напряже-
нием стандартной частоты (другие режимы рассмотрены далее).
Мощность, потребляемая трехфазным асинхронным двигате-
лем при соединении его обмоток в схему «треугольник», опреде-
ляется по формуле
р\ = -7=cos<p = >/3(71л/1л COS(p.
(1.23)
При соединении обмоток в схему «звезда»
Р\ = 3 /1л cos ср = >/3(7]л/1л cos ср. (1-24)
if **
Номинальная потребляемая мощность Р1Н0М будет соответство-
вать подстановке в формулу (1.23) или (1.24) номинальных на-
пряжения, тока и cos<p.
Мощность на валу Р определяется по формуле
Р = Моз,
(1-25)
номинальная мощность Рном соответствует номинальному момен-
ту Л/ном и номинальной угловой скорости <вном = .
Потери мощности ДР в электродвигателе в установившемся
режиме при питании от сети представляют обычно суммой двух
составляющих: постоянных К и переменных V потерь:
ДР = К + V.
(1-26)
Под постоянными потерями К подразумеваются потери мощ-
ности, не зависящие от нагрузки двигателя. К ним относят потери
в магнитопроводе (стали), механические и добавочные потери, а
также потери мощности на возбуждение двигателей.
К переменным относят потери, выделяемые в обмотках двига-
телей при протекании по ним токов, определяемых нагрузкой
электропривода. Переменные потери мощности в двигателе могут
быть в общем случае определены через электрические или меха-
нические переменные и параметры.
Для трехфазных асинхронных двигателей в соответствии со схе-
мой замещения (см. рис. 1.9)
К= И + Г2 = ЗУ? + 3/227?2. (1-27)
22
При использовании этой схемы замещения, в которой по ре-
зистору 7?! протекает ток /2', потери в статоре составляют
Vx = 3/2'2^ = = ВДь (L28)
а полные, переменные потери
V= 3I?(RX + А2) = И2(1 + Л,/А,'). (1.29)
Для двигателя постоянного тока переменные потери мощнос-
ти V определяются по формуле
PR, (1.30)
где 1, А — соответственно ток и сопротивление цепи якоря дви-
гателя.
Для трехфазных синхронных двигателей
7=3/^,. (1.31)
Переменные потери мощности, выделяющиеся в роторе асин-
хронного двигателя или в якоре двигателя постоянного тока, мо-
гут быть также определены как разность электромагнитной мощ-
ности (ЭМ) РЭм = Afcoo и мощности на валу (1.2):
И2 = Мcoq - Мео = Мсоо
<С00 - со
= MoigS,
(1-32)
где s — скольжение асинхронного двигателя или относительная
скорость двигателя постоянного тока, s = (о>о - со)/со0.
Переменные потери в статоре асинхронного двигателя в соот-
ветствии с формулой (1.28) составят
К1 = И^/А^Мсоо^/Лг,
(1-33)
а полные переменные потери в асинхронном двигателе будут равны
V= И, + И2 = Мшо$(1 + А,/А2). (1.34)
Потери мощности при работе двигателя в номинальном режи-
ме определяются по паспортным данным двигателя с помощью
номинального КПД Г|ном и номинальной мощности двигателя Рном:
ном — ^номО Пном)/Пном>
(1.35)
или как разность между потребляемой электрической мощностью
Лном и номинальной мощностью двигателя Рном:
ДР =
ном
1ном
ном
(1.36)
Постоянные потери мощности находятся по формуле
к = ДРном - ином, (1.37)
где Ином — переменные потери в двигателе в номинальном режиме.
23
АР,%"
15-----------------
_____.
0 50 100 P*,%
Рис. 1.13. Распределение потерь в асинхронном электродвигателе с номи-
нальным КПД 85 %
n
УД^Д (1-38)
На рис. 1.13 представлено ориентировочное распределение потерь
в асинхронном электродвигателе с КПД 85 % в зависимости от на-
грузки. Потери в меди составляют обычно большую часть общих по-
терь, и в дальнейшем на них будет обращено основное внимание.
За время /ц работы двигателя с переменной нагрузкой AP(f)
полные потери энергии, обусловленные потерями мощности К и
V, определяются соотношением (1.5); при работе двигателя с цик-
лически изменяющейся нагрузкой полные потери энергии за весь
цикл в соответствии с формулой (1.5) составят
ABz = |A/’(r)dr =
ft
где — время цикла, ta -^ьп~ число участков цикла; АД, г, —
i=i
соответственно потери мощности и время работы на z-м участке
цикла.
Потери энергии в переходных режимах при пуске, реверсе,
торможении, изменениях скорости и нагрузки существенно пре-
вышают номинальный уровень и могут заметно влиять на энерге-
тические показатели электропривода, а также вызывают допол-
нительный нагрев и тем самым влияют на срок службы двигателя.
Особенно большое значение определение потерь электроэнер-
гии в переходных процессах имеет для электроприводов, у кото-
рых динамический режим является основным. К ним относятся,
например, электроприводы подъемных кранов, строгальных стан-
ков, лифтов и т.д.
В общем случае потери энергии за время переходного процесса
(ПП) гпп могут быть определены с помощью следующего выражения:
'пп 'пп 'пп
Д1Г= J APdr= J Kdt + J Vdt = AWK + AWy, (1.39)
0 0 0
24
где Д^ — потери энергии, обусловленные соответственно
постоянными и переменными потерями мощности.
Потери энергии ДИ^ находятся как \WK- Ktm и невелики по
сравнению с AHV
Потери энергии ДРИ^ для асинхронного двигателя могут быть
найдены через ток и сопротивление, однако в большинстве слу-
чаев это оказывается затруднительным из-за того, что необходи-
мо иметь зависимость тока двигателя в переходном процессе от
времени z(r), а также располагать данными об активном сопро-
тивлении цепей двигателя А.
Более удобные расчетные соотношения для определения по-
терь в переходных режимах получаются в том случае, когда пе-
ременные потери мощности выражаются механические вели-
чины.
Потери энергии при работе электропривода без нагрузки (Мс = 0).
Потери мощности в якоре двигателя постоянного тока и роторе
асинхронного двигателя определяются одной формулой (1.32), и
поэтому потери энергии в этих частях двигателей в переходных
режимах вхолостую (Л/с = 0) с учетом формулы (1.22) определя-
ются следующим выражением:
Д Ж20 = ^©о^нач “ ^кон)/2, (1.40)
где со0 — соответственно момент инерции привода и скорость
идеального холостого хода двигателя; 5нач, sK0H — соответственно
начальное и конечное скольжение двигателя.
Потери энергии в якоре двигателя постоянного тока и роторе
асинхронного двигателя при их пуске, реверсе и торможении вхо-
лостую показаны в табл. 1.2.
Полные потери энергии в асинхронном двигателе при пере-
ходных процессах вхолостую в соответствии с выражением (1.12)
составят
4^0 = 4^20 (1 + ад'). (1.41)
Таблица 1.2
Потери энергии в динамических режимах
Режим •^пач ^кон А ^20
Пуск 1 0 Л)о/2
Динамическое торможение 1 0 Л)о72
Торможение противовключением 2 1 ЗЛоо2/2
Реверс 2 0 4Ja>o72
25
Потери энергии при работе электропривода с нагрузкой (Мс # 0).
Для приближенного учета нагрузки двигателей принимают, что
момент двигателя в переходных процессах не изменяется и равен
некоторому среднему моменту Мср, в результате чего имеем:
АИ/= Д W0Mcp/(Mcp ± Мс),
(1-42)
где ДРИ, ДИ^ — соответственно потери энергии под нагрузкой и
без нагрузки двигателя; Мср — средний, неизменный за время
переходного процесса момент двигателя (знак «-» соответствует
пуску, а знак «+» — торможению двигателя).
Приведенные формулы для определения потерь могут быть ис-
пользованы для расчета КПД двигателя по формулам (1.8) и (1.10).
На рис. 1.14, а показаны зависимости номинального КПД асин-
хронных двигателей серий АИР и 5А от номинальной мощности
Рном. С ростом номинальной мощности номинальный КПД растет,
что объясняется уменьшением потерь мощности относительно
полезной мощности двигателя.
КПД работающего двигателя зависит от развиваемой им по-
лезной механической мощности на валу. На рис. 1.14, б показаны
типовые зависимости КПД двигателей от коэффициента нагрузки
/сн = Рс/Рном для двух значений номинального КПД, где Рс — ме-
ханическая мощность на валу. При малых нагрузках КПД двигате-
ля небольшой, по мере увеличения нагрузки он растет, достигая
максимального значения r|max при мощности, равной примерно
0,7...0,8 номинальной.
Другая энергетическая характеристика асинхронного двигате-
ля — коэффициент мощности coscp.
Рис. 1.14. Зависимости номинального КПД от номинальной мощности (а)
и КПД от коэффициента нагрузки двигателя (б)
26
если электропривод раоотает в некотором цикле при различных
нагрузках или скоростях, то он как потребитель реактивной энер-
гии характеризуется средневзвешенным или цикловым коэффи-
циентом мощности, который определяется отношением потреб-
ленной активной энергии за цикл к полной или кажущейся
энергии РГП в соответствии с формулой
c°s фц =
п
(1.43)
где 5, — полная, или кажущаяся, мощность, 5( = у]P3i + Q2.
При работе электропривода в установившемся режиме коэф-
фициент мощности определится по формуле
(1-44)
Входящие в формулы (1.43) и (1.44) активная Рй и реактивная
Q мощности применительно к трехфазному асинхронному двига-
телю могут быть рассчитаны по следующим формулам:
Ра = Р1а = Рмех + ДР = Л/(0 + ^ + + И2; (1.45)
Q = 3/Д, + ЗВД + 3/2'%', (1.46)
где 1[, 12, 1ц — соответственно токи статора, приведенный ток
ротора и ток намагничивания; A'j, Х2, Хц — соответственно индук-
тивное сопротивление статора, приведенные сопротивления ро-
тора и контура намагничивания.
Для П-образной схемы замещения двигателя при О1ц = и$/Хц
и формулу (1.46) можно записать в виде
Q = 3{7ф/и + 3/22Хкз, (1.47)
где £/ф — напряжение питания двигателя; — индуктивное со-
противление короткого замыкания, Х^3 = Х\ + Х2.
Так как 3722ЛКЗ = Ma>osXK3/R2, из формулы (1.47) имеем
Q = 3 иф1ц + 3 122ХКЗ = 3 иф1ц + М^ХК,3/Я2. (1.48)
На рис. 1.15, а приведены зависимости номинального коэффи-
циента мощности для асинхронных двигателей различных номи-
нальных мощностей Рном и различных частот вращения холостого
хода л0. Характерным для них является более высокое значение
cosq>HOM для двигателей больших номинальных мощностей и ско-
ростей вращения.
27
0,75- \ «о=1500 об/мин
«о=3 ООО об/мин
0,70 ----1---1--J---1---j---------►
0 10 20 30 40 50 Дюм, кВт
б
а
Рис. 1.15. Зависимости номинального коэффициента мощности от номи-
нальной мощности (о) и коэффициента мощности от коэффициента
нагрузки двигателя (б)
\Для большинства асинхронных двигателей cos<pHOM = 0,8...0,9.
Для этих значений Q = (0,5...0,75)Р), т.е. асинхронный двигатель
на каждый киловатт активной мощности потребляет из сети
0,5...0,75 кВАр реактивной мощности. Чем ниже coscp, тем боль-
шую реактивную мощность потребляет асинхронный двигатель из
системы электроснабжения, загружая ее элементы дополнитель-
ным током и вызывая в ней соответствующие потери.
Коэффициент мощности асинхронного двигателя существен-
но зависит от его нагрузки. При холостом ходе асинхронного дви-
гателя коэффициент мощности невелик, так как относительно
велика доля реактивной мощности по сравнению с активной. По
мере увеличения нагрузки двигателя возрастает и coscp, достигая
своего максимального значения примерно в области номиналь-
ной нагрузки двигателя. Зависимость coscp от коэффициента меха-
нической нагрузки кн ~ Рс/РНом Для асинхронных двигателей се-
рии 4А при различных уровнях номинальных cos<pHOM приведена на
рис. 1.15, б.
Для расчета входящих в приведенные формулы тока намагни-
чивания 7g и приведенного номинального тока ротора Т2' асинх-
ронного двигателя могут быть использованы следующие прибли-
женные формулы:
7ц ~ 71ном(^1Дфном ~ $номС08фном/$к) =
7|HOM(sin<pJIOH cos<pHOM/(Хм + — 1 ))» (1-49)
^2ном Аном C0S<pHOM-у 2АМ/(Ам +\А.М (1.50)
где Ам — кратность максимального момента асинхронного двига-
теля, А^ Л/К/А7НОМ.
28
При Хм > 1,7 формула (1.50) может быть упрошена и примет
следующий вид:
'2ном * 1номСО8фном.
(1-51)
При этом погрешность получаемого результата по сравнению
с выражением (1.50) будет менее 5%.
Определение параметров цепей двигателей и потерь мощности
в них по паспортным данным покажем на примере асинхронного
двигателя.
Основное допущение при расчетах состоит в том, что электро-
магнитный момент двигателя принимается равным моменту на
валу двигателя. Тем самым не учитываются механические потери в
двигателе, которые при необходимости могут быть в дальнейшем
отнесены к нагрузке двигателя. Отметим, что это допущение мо-
жет быть сделано для двигателей мощностью более 10 кВт, в то
время как для двигателей небольшой мощности оно приводит к
заметным ошибкам.
Пример 1.1. Рассчитать параметры схемы замещения и потери
мощности в номинальном режиме двигателя типа RA180L6, име-
ющего следующие номинальные паспортные данные: Рном- 15 кВт;
^ном ~ 970 об/мин, Дном — 31 A, cos<pHOM — 0,82, т]ном — 89 %, —
= = 3; р = 3; Дном = 50 Гц; (Длном = 380 В.
1. Определяем номинальные угловую скорость, момент, сколь-
жение и скорость идеального холостого хода:
“ном = 2тс/2ном/60 = 2 • 3,14 970: 60 = 101,6 рад/с;
Мим = ^ном/<0ном = 15 000:101,6 = 147,7 Н м;
*ном = (®о - ®ном)/«>о = (Ю4,7 - 101,6): 104,7 = 0,03;
«>о = 'L’K.fJp = 2 • 3,14 • 50: 3 = 104,7 рад/с.
2. По формуле (1.51) определяем номинальный приведенный
ток ротора:
2ном HhomCOS<Phom —
31-0,82 = 25,4 А.
3. По формуле (1.49) находим ток намагничивания:
Д Дном (sin(pHOM СОБфном/(А,м + \^-м 1)) —
= 31(0,57 - 0,82/(3 + V32 -1)) = 13,3 А.
4. Используя выражение для потерь мощности в роторе У2 =
= ЗД'27Д = MgjqS, находим приведенное активное сопротивление
ротора:
R1 = Мном®0*ном/ЗД'н2о„ = 147,7 104,7 • 0,03:3 • 25,42 = 0,24 Ом.
29
5. Рассчитываем реактивную мощность в номинальном режиме:
Оном = з £/ф/1ном51Пфном = 3 • 220 • 31 • 0,57 = 11 662 В • А.
6. Используя формулу (1.47), рассчитываем индуктивное со-
противление короткого замыкания:
Х*,3 = (Оном - 3= (11 662 - 3 • 220 • 13,3): 3 • 25,42 =
= 1,49 Ом.
7. Определяем активное сопротивление цепи статора, исполь-
зуя формулу для критического момента асинхронного двигателя:
Мк = 3 ^/2(00(7?! + Jr? + Х23).
Выражая из нее как искомую величину, находим
7?! = ((3(7ф/2о)оМк)2 - %2.3)/2(3(7Ф2/2(00Л/К) =
= ((3 • 2202:2 • 104,7 • 3 147,7)2 - 1,492): 2 (3 • 2202:
: 2 - 104,7-3-147,7) = 0,07 Ом.
8. Полные номинальные потери определяем по формуле (1.35):
ДРном = Рном (1 - ПномУПном = 15 000(1 - 0,89) :0,89 = 1 854 Вт.
9. Переменные номинальные потери находим по формуле (1.27):
нам Пном + -2ном ]номА] + 4/2ном^2 —
= 3 • 312- 0,07 + 3 25,42- 0,24 = 666 Вт.
10. Находим постоянные потери мощности:
К = ДРНом - Р'ном = I 854 - 666 = I 188 Вт.
1.5. Резервы экономии энергии и ресурсов
и принципы энергосбережения
Перечислим и рассмотрим более подробно основные принци-
пы экономии энергии в электроприводе и средствами электро-
привода, отмеченные в общем виде в подразд. 1.2.
Разделим возможные ситуации на две большие группы:
1) регулирование скорости не используется;
2) нерегулируемый электропривод заменяется регулируемым.
В первой группе основная возможность влиять на энергети-
ческие процессы — правильный выбор основного оборудова-
ния, в первую очередь, электродвигателя и редуктора, если он
используется, а также применение некоторых мероприятий,
снижающих потери.
30
Выбор электрооборудования. Важным и еще очень мало исполь-
зованным резервом энергосбережения служит правильный выбор
основного электрооборудования в простейшем, самом массовом
и энергоемком нерегулируемом электроприводе.
Европейские эксперты считают, что средний коэффициент
использования двигателей (отношение средней мощности за цикл
к номинальной) составляет 0,6.
Как показывает опыт, в отечественных условиях этот коэффи-
циент иногда существенно ниже. Ситуация дополнительно ослож-
нилась в связи с частичным свертыванием в 1990-е годы ряда про-
изводств.
Обнаружилось, что нередко доля энергетических затрат на ос-
тавшуюся продукцию непомерно возрастает, что делает произ-
водство нерентабельным.
Существенный эффект в подобных случаях может дать простая
замена оборудования (двигателей), однако корректное решение
подобной задачи предполагает достаточно высокую квалифика-
цию персонала.
Здесь весьма эффективны прикладные компьютерные програм-
мы, ориентированные на широкий круг специалистов, связанных
с электроприводом, и поддерживающие принятие рациональных
решений.
Опыт создания таких программ для европейской фирмы IMOFA
(см. подразд. 5.5) показал несмотря на большие затраты труда эф-
фективность такого подхода: в руках специалистов оказывается
мощный, удобный, очень легко осваиваемый инструмент, позво-
ляющий быстро решать весьма непростые задачи.
Был создан пакет программ, охватывающих массовый элект-
ропривод переменного тока и позволяющих решать задачи выбора
и проверки асинхронных двигателей АИР (АИС) с высотами осей
вращения до 160 мм, оценивать их характеристики при отклоне-
нии напряжения от нормы, определять срок службы подшипни-
ков в любых условиях их работы, оценивать потери в ременных
передачах в различных режимах и т.д.
К сожалению, в период создания программ (1990—1994 гг.)
отечественные предприятия не были в достаточной мере оснаще-
ны компьютерами, поэтому программы интенсивно эксплу-
атировались лишь в европейских фирмах. Сейчас положение изме-
нилось, и этот вид поддержки инженерных решений в сфере элек-
тропривода может быть с успехом перенесен в отечественную прак-
тику.
Уменьшение потерь в двигателях. В мировой практике с середи-
ны 1970-х годов активно пропагандируется использование энер-
госберегающих двигателей (Energy Efficient Motors — ЕЕМ).
Идея очень проста: в асинхронный двигатель закладывается на
25...30 % больше активных материалов (железа, меди, алюминия),
31
за счет чего на 30 % снижаются потери и возрастает КПД — на
5 % в небольших двигателях (единицы кВт) и на 1 % в двигателях
70... 100 кВт.
Цена двигателя обычно увеличивается на 20...30%, срок оку-
паемости по данным европейских экспертов составляет около двух
лет.
Существует множество восторженных публикаций, относящихся
к ЕЕМ.
В частности, считается, что если бы все двигатели в Европе
были заменены на ЕЕМ, то экономия электроэнергии была бы
эквивалентна закрытию шести электростанций по 500 МВт.
Особенно широкий размах кампания по продвижению ЕЕМ на
рынок приобрела в 1990-е годы в США. Десятки фирм — произво-
дителей ЕЕМ — используют развитую прикладную компьютер-
ную программу Motor Master+, облегчающую пользователям вы-
бор нужных энергосберегающих двигателей для замены установ-
ленных. Широко рекламируется достигаемый эффект — экономия
около 5 % электроэнергии, в этом процессе участвует Минис-
терство энергетики США, организован ряд специальных программ
и т.д.
Однако это направление энергосбережения, рассмотренное в
гл. 2, содержит ряд спорных и неочевидных обстоятельств.
Во-первых, речь идет о нерегулируемом электроприводе, т.е.
сэкономив несколько процентов на потерях в двигателе, в самых
массовых и энергоемких применениях (насосы, вентиляторы и т.д.)
можно продолжать терять в десятки раз больше в агрегатах, об-
служиваемых электроприводом.
Во-вторых, расчетная экономия будет достигаться лишь при
мало меняющейся и близкой к номинальной нагрузке. При резко
переменной нагрузке, например при значительной доле холосто-
го хода в цикле, экономия будет существенно меньше расчетной.
В-третьих, экономия может быть заметной (рекламируемые
4...5 %), если все элементы силового канала правильно выбраны
и настроены. Так, потери в ременной передаче, часто использу-
емой, например, в электроприводе вентиляторов, могут варь-
ироваться от 5 до 10... 12 % только за счет нерационального выбо-
ра параметров передачи и могут резко возрастать при неверно выб-
ранном натяжении ремней. Таким образом, существует ряд при-
чин, которые могут практически обесценить этот популярный в
США и Европе способ энергосбережения в электроприводе.
Уменьшение потерь в питающих сетях. Проблема потерь мощ-
ности возникает за счет низкого, особенно при малых нагрузках,
коэффициента мощности (cos<p), в силу чего ток /лин, протека-
ющий в питающих линиях, трансформаторах, выше тока 4, свя-
занного с активной мощностью, следовательно, выше и потери в
линиях 3/дИН/?л.
32
Проблема компенсации реактивной мощности традиционно
пользуется большим (иногда избыточно большим) вниманием в
отечественной практике. Найдены и применяются различные
технические решения (переключаемые конденсаторные батареи,
синхронные компенсаторы, фильтрокомпенсирующие устройства
и Т.Д.).
Однако большинство этих приемов ориентированы на нерегу-
лируемый, а иногда и сильно недогруженный электропривод с
асинхронными двигателями с короткозамкнутым ротором. Дости-
гаемый эффект может оказаться несопоставимо меньше убытков
от использования нерегулируемого электропривода.
К другим способам энергосбережения в нерегулируемом элек-
троприводе можно отнести:
• снижение времени холостого хода;
• переключение обмоток по схемам A—Y на время холостого
хода или малых нагрузок;
• изменение типа торможения в электроприводах с частыми
пусками и торможениями.
Переход от нерегулируемого электропривода к регулируемому.
Этот переход является генеральным направлением энергосбе-
режения, принятым во всем мире и дающим наибольший эффект
как в части экономии электроэнергии, так и в других показате-
лях технологического процесса.
Для этого в силовой канал (см. рис. 1.4) включается дополни-
тельный элемент — преобразователь электрической энергии, по-
дающий к асинхронному двигателю напряжение с регулируемы-
ми амплитудой и частотой. В результате обеспечивается подача ко-
нечному потребителю (на рис. 1.4, а — вход водопроводной систе-
мы) необходимой (или оптимальной) мощности Рвых и исключа-
ются большие потери в задвижке.
Одна из величин — расход воды — изменяется неуправляемо,
поскольку она определяется открытыми в данный момент крана-
ми, а вторая задается насосом и, следовательно, может управ-
ляться.
В других технологических процессах свободны для управления
обе образующие мощность величины. Так, при пилке бревен, об-
работке металлов резанием существуют оптимальные режимы,
определяемые наилучшим в частных случаях сочетанием скорости
и силы резания: Р2опт = М)пт®0Пт-
Следует подчеркнуть, что в рассматриваемом случае наряду с
главным эффектом — существенным снижением потерь в техно-
логической машине, обслуживаемой электроприводом, и в дру-
гих элементах силового канала достигается ряд дополнительных,
часто не менее важных эффектов: рационализируется весь техно-
логический процесс, экономятся другие ресурсы, увеличивается
срок службы основного оборудования, снижается шум и т.д.
2 Ильинский
33
Здесь особенно существенен выбор рационального с техниче-
ской и экономической точек зрения способа управления величи-
ной (величинами), образующей потребляемую технологическими
машинами мощность.
До середины 1980-х годов единственным доступным решением
был электропривод постоянного тока.
Его общеизвестные недостатки — дорогая машина и необхо-
димость в обслуживании — ограничивали использование случая-
ми, когда без регулируемого электропривода обойтись было
нельзя (станки, металлургические агрегаты, мощные экскавато-
ры и т.д.).
Электропривод постоянного тока практически не использовался
в массовых агрегатах (насосы, вентиляторы и т.д.), там абсолют-
но преобладал нерегулируемый электропривод с асинхронными
двигателями с короткозамкнутым ротором.
Сейчас ситуация радикально изменилась: на широком рынке
появились совершенные и доступные электронные преобразова-
тели частоты.
Они выпускаются десятками зарубежных и отечественных фирм,
имеют практически одинаковую структуру (неуправляемый вып-
рямитель—фильтр—автономный широтно-амплитудный модуля-
тор (ШИМ-инвертор)) и развитую систему микропроцессорного
управления, обеспечивающую широкие функциональные возмож-
ности, надежную защиту привода и другие важные пользователь-
ские функции. Именно эти устройства произвели переворот в со-
временном электроприводе: резко (до 15 %) снизили долю элект-
роприводов постоянного тока в общем парке регулируемых элек-
троприводов, стали основным (и пока практически единствен-
ным) средством, реализующим высококачественный регулиру-
емый асинхронный электропривод в массовых применениях.
Вместе с тем предпринимались попытки использовать для ре-
гулирования скорости асинхронного двигателя с короткозамкну-
тым ротором в продолжительном режиме (насосы и пр.) более
простые тиристорные регуляторы напряжения.
Эти устройства, широко и успешно применяемые для плав-
ного пуска и останова электропривода («мягкие» пускатели), за
редкими исключениями не могут сколько-нибудь эффективно ис-
пользоваться для непрерывного продолжительного регулирования
скорости.
Они требуют, даже при самой благоприятной вентиляторной
нагрузке, увеличения мощности двигателя в 2—3 раза, специаль-
ного исполнения ротора (повышенное скольжение), интенсивно-
го независимого охлаждения и при этом имеют низкую надеж-
ность и низкие энергетические показатели.
Столь же неэффективны и другие способы регулирования ско-
рости асинхронного двигателя с короткозамкнутым ротором,
34
основанные на изменении напряжения при неизменной часто-
те (специальные «хитрые» асинхронные двигатели, муфты сколь-
жения и пр.).
Становятся малоэффективными и многоскоростные асинхрон-
ные двигатели.
Они тяжелы, дороги, требуют много контактной аппаратуры,
стоимость привода соизмерима со стоимостью системы преобра-
зователь частоты — серийный двигатель.
Выход на широкий рынок электронных преобразователей частоты
ставит новую задачу — создание асинхронных двигателей с корот-
козамкнутым ротором.
Здесь, по-видимому, удастся существенно сэкономить актив-
ные материалы, снизить себестоимость и т.д.
Итак, система электронный преобразователь частоты—асинх-
ронный двигатель с короткозамкнутым ротором становится глав-
ным на ближайшие годы техническим решением массового регу-
лируемого электропривода.
Она особенно привлекательна на стадии модернизации, так
как сохраняется все существующее оборудование, но между се-
тью и двигателем включается новый элемент — преобразователь
частоты, радикально меняющий весь технический и экономиче-
ский облик системы.
Приведенный обзор способов энергосбережения в электропри-
воде иллюстрируется далее изложением конкретных технических
решений, примерами их использования, а также описанием опы-
та применения на практике и полученными результатами.
1.6. Экономическая оценка энерго-
и ресурсосбережения
Энерго- и ресурсосбережение в электроприводах и средствами
электропривода может обеспечиваться различными методами и
средствами.
При проектировании новых электроприводов рассматривают-
ся, как правило, несколько вариантов, из которых должен быть
выбран тот, который отличается наилучшими технико-экономи-
ческими показателями.
Модернизация действующих электроприводов с целью энерго-
и ресурсосбережения требует капитальных затрат, эффективность
которых должна быть экономически оправдана. Таким образом,
возникает необходимость экономической оценки энергосбере-
гающих мероприятий и их результатов.
Экономическая эффективность (ЭЭ) энергосберегающих ме-
роприятий (проектов) и их результатов, как и любых инвестици-
онных проектов, производится путем сопоставления стоимостных
35
оценок получаемых результатов (выгод) Р и проведенных затрат 3
на их реализацию по следующей формуле:
ЭЭ = Р-3. (1.52)
При ЭЭ > 0 энергосберегающее мероприятие экономически
эффективно, в противном случае — нет.
Экономическая эффективность может быть также оценена по
отношению Р/3. При Р/3 > 1 энергосберегающее мероприятие эко-
номически оправдано, и наоборот.
Для энерго- и ресурсосберегающих проектов результаты (выго-
ды) обусловливаются получаемой экономией энергии и матери-
альных ресурсов при общем повышении технического уровня об-
служиваемого технологического процесса. Эффект может быть
выражен как в натуральных единицах (кВт • ч электроэнергии, Гкал
тепловой энергии, кубические метры воды и газа), так и в соот-
ветствующих стоимостных оценках.
Методы расчета экономической эффективности подразделяются
на статические, не учитывающие фактор времени, и динамиче-
ские, учитывающие фактор времени*.
Особенностью большинства проектов энерго- и ресурсосбере-
гающих мероприятий в электроприводе являются небольшие сро-
ки реализации, поэтому для определения их экономической эф-
фективности в отечественной и зарубежной практике чаще всего
применяются статические методы, связанные с расчетом срока
окупаемости проекта.
Метод, основанный на расчете срока окупаемости TqK, исполь-
зуется для оценки эффективности производимых капитальных зат-
рат (инвестиций).
Срок окупаемости представляет собой период времени, в тече-
ние которого капитальные вложения окупаются за счет снижения
эксплуатационных (текущих) затрат.
Этот показатель может использоваться для оценки экономической
эффективности модернизации электроприводов и выбора наибо-
лее выгодного варианта реализации электропривода.
При модернизации расчет срока окупаемости производится по
формуле
Гок = K3/(33j - Э32) = КЗ/ДЭЗ, (1.53)
где КЗ — капитальные затраты при модернизации; ЭЗЬ Э32 —
соответственно эксплуатационные затраты до и после модерни-
зации; ДЭЗ — снижение эксплуатационных затрат, получаемое за
счет производимых капитальных затрат.
* Экономика предприятия : учебник / [И.Э.Берзинь, С.А.Пикунова,
Н. Н.Савченко, С.Г.Фалько]; под ред. С. Г.Фалько. — М.: Дрофа, 2003. — 368 с.
36
В ЭЗ в общем случае входят амортизационные отчисления, зат-
раты на обслуживание и ремонт оборудования, стоимость техно-
логической электроэнергии и заработная плата обслуживающего
персонала.
Капитальные затраты в общем случае включают в себя сто-
имость оборудования, затраты на его транспортирование, стро-
ительные и монтажно-наладочные работы, проведение научно-
исследовательских и опытно-конструкторских разработок (НИОКР)
по проекту.
При модернизации уточнение суммы капитальных затрат мо-
жет быть выполнено за счет учета ликвидной стоимости заменя-
емого оборудования.
По аналогичной формуле может быть оценен срок окупаемости
более дорогого варианта энерго- и ресурсосберегающего проекта:
Ток = (КЗ! - К32)/(Э32 - ЭЗ!), (1.54)
где КЗЬ Э31 — соответственно капитальные и эксплуатационные
затраты более капиталоемкого варианта проекта; К32, Э32 — со-
ответственно капитальные и эксплуатационные затраты менее ка-
питалоемкого варианта.
Рассчитанный по приведенным формулам срок окупаемости
сопоставляется с приемлемым (нормативным) для хозяйствующе-
го субъекта периодом времени, и делается вывод о принятии или
непринятии данного проекта для реализации.
В Приложениях приведены данные по некоторым сериям сило-
вого отечественного оборудования для электроприводов, опреде-
ляющие основную часть капитальных затрат.
Там же приведены сведения о тарифах на электрическую и теп-
ловую энергию, воду и газ для потребителей в Российской Феде-
рации, необходимые для расчета эксплуатационных затрат при
функционировании электропривода и обслуживаемого им техно-
логического оборудования.
Далее для ориентировочных оценок приведены некоторые ус-
редненные удельные показатели стоимости отечественного элек-
трооборудования для электроприводов:
• низковольтные асинхронные двигатели общепромышленного
исполнения мощностью до 315 кВт, с синхронной частотой вра-
щения л0 = 1 500 об/мин серий АИР, 4А, 5А, RA со степенью за-
щиты IP23 имеют удельные цены 1 000... 700 руб./кВт с учетом НДС;
• высоковольтные асинхронные двигатели типа ДАЗО4 на на-
пряжение 6 кВ, мощностью от 315 до 2 000 кВт, синхронной час-
тотой вращения = 1 500 об/мин и степенью защиты IP54 имеют
удельные цены 1 000...490 руб./кВт с учетом НДС;
• преобразователи частоты для низковольтных двигателей се-
рии «Универсал» мощностью до 75 кВт характеризуются удельной
ценой соответственно в пределах 10000... 2700 руб./кВт;
37
• «мягкие» пускатели («мягкие» стартеры) серии ДМС мощно-
стью от 7,5 до 400 кВт имеют удельные цены соответственно
2800...400 руб./кВт;
• двигатели постоянного тока серии 4П в пределах мощностей
от единиц до 132 кВт имеют соответственно удельные цены в пре-
делах 20 000... 1 600 руб./кВт;
• тиристорные нереверсивные преобразователи постоянного
тока на напряжение 220 В серий ТЕ4 и ТП4 характеризуются удель-
ными ценами 3 000...550 руб./кВт;
• редукторы цилиндрические одноступенчатые типа 1ЦУ (пере-
даточные числа 2,0...6,3) имеют удельную цену по отношению к
номинальному моменту на выходном (тихоходном) валу 32,0...
7,5 руб./Н • м; двухступенчатые 1Ц2У (передаточные числа 8...50) —
18,6... 3,0 руб./Н -м; трехступенчатые 1ЦЗУ (передаточные числа
16...200) - 10...5 руб./Н м;
• редукторы червячные одноступенчатые универсальные типа Ч
(передаточные числа 8...80) имеют удельную цену по отношению
к номинальному моменту на выходном валу 43... 17 руб./Н • м;
• насосы водяные консольные серии К характеризуются удель-
ной ценой 2200...915 руб./кВт;
• вентиляторы серии ВЦ № 2,0...8,0 имеют удельные цены в
пределах 4500... 1 200 руб./кВт.
Рассмотрим пример расчета срока окупаемости для экономи-
ческой оценки энерго- и ресурсосбережения.
Пример L2. Холодное водоснабжение здания осуществляется
от насоса типа К90/55 с номинальными напором 55 м, произво-
дительностью (подачей) 90 м3/ч (0,025 м3/с) и КПД т|ном = 0,63.
В насосной установке используется двигатель типа АИР18082УЗ с
номинальными мощностью 20 кВт и КПД т|Эд = 88 %. Произво-
дится модернизация электропривода насоса за счет использова-
ния преобразователя частоты (ПЧ) типа «Универсал» мощностью
22 кВт и стоимостью ЦПч = 65 160 руб. (по состоянию на 2005 г.).
Требуется оценить срок окупаемости производимой модерниза-
ции за счет экономии электроэнергии.
Режим работы насосной установки круглосуточный. Время рабо-
ты насоса составляет 8 000 ч в год, из них насос работает с номи-
нальными расходом (?ном = 0,025 м3/с и напором Нном ~ 55 м вод. ст.
в течение времени Гр1 = 2 600 ч, с расходом Qj = 0,015 м3/с в тече-
ние времени Тр2 = 3 000 ч и с расходом Q2 - 0,0025 м3/с стечение
времени Гр3 = 2 400 ч.
Напор для пониженных расходов в соответствии с Характери-
стикой насоса И- Q при номинальной скорости вращения состав-
ляет Я] = 59 м вод. ст. и Я2= 62 м вод. ст.
Условия расчета:
1) одноставочный тариф на потребляемую электроэнергию
составляет 1,3 руб./кВт - ч. (Приложение 15);
38
2) затраты на проведение НИОКР отсутствуют, поскольку
выпускается широкая номенклатура преобразователей частоты для
насосных установок и на многочисленных примерах реализации
показана целесообразность такой модернизации;
3) затраты на пусконаладочные работы составляют 8 % от сто-
имости преобразователя частоты;
4) затраты на монтаж преобразователя частоты принимаются
в размере 10 % от его стоимости;
5) годовые амортизационные отчисления по преобразователю
частоты составляют 6,4 %;
6) транспортные расходы принимаются в размере 1 % от сто-
имости преобразователя частоты;
7) КПД насоса и двигателя при расчете примем неизменными
и равными номинальным;
8) численность и заработная плата обслуживающего персонала
насосной станции после модернизации не изменились.
Экономию электроэнергии находим, сопоставляя потребление
электроэнергии нерегулируемого и регулируемого по скорости
электроприводов.
Нерегулируемый по скорости электропривод. Для каждого уров-
ня расхода Q и напора Я находим потребляемые мощность Рпотр =
= Р£Я(2/(г|номг|эп), где Р — плотность воды, р = 1 000 кг/м3; g —
ускорение свободного падения, g= 9,81 м/с2, и энергию JKnOTp =
“ ЛютрТр- Результаты расчета представлены в табл. 1.3.
Потребление электроэнергии за год работы насосной установ-
ки составит 123 405 кВт • ч.
Регулируемый электропривод. После модернизации электропри-
вода за счет снижения скорости двигателя уменьшаются при тех
же расходах напор и, следовательно, потребляемые мощность и
эле ктроэнергия.
Пересчет уровней напора и мощности для двух скоростей СО] и
со2 осуществляется с помощью формул подобия:
Q\/Qi = Усо2; Н\/Нг = (Ш1/со2)2; Р\/Рг = (я>1/°ъ)3-
Таблица Г.З
Данные расчета электропривода
Q, м3/с 0,025 0,015 0,005
Н, м 55 59 62
Тр, ч 2 600 3 000 2 400
Тпотрэ кВт 24,33 15,66 5,49
И^, кВт • ч 63 260 46 980 13 165
39
Таблица 1.4
Данные расчета электропривода при его модернизации
Q, м3/с 0,025 0,015 0,005
Я, м вод. ст. 55,0 21,2 2,5
Тр, ч 2 600 3 000 2 400
^потр» кВт 24,33 5,64 0,22
^потр> кВт ’ Ч 63 260 16913 527
Данные расчета при условии модернизации электропривода
представлены в табл. 1.4.
Потребление электроэнергии в этом случае составит 80 700 кВт • ч,
а искомая экономия 1ИЭК = 42 705 кВт ч.
Используя формулу (1.53), определяем срок окупаемости, при-
нимая в качестве капитальных затрат стоимость преобразователя
частоты и все сопровождающие затраты при модернизации:
Ток= КЗ/ДЭЗ = 65 160(1 + 0,08 + 0,1 + 0,01):
. (42 705- 65 160 0,064) = 1,51 г.
Динамические методы расчета применяются в тех случаях, когда
срок реализации энергосберегающего проекта составляет несколько
лет и рассматривается весь период его использования.
Учет фактора времени осуществляется выполнением операции
дисконтирования, которая позволяет привести (пересчитать) бу-
дущие стоимости (БС) к современной стоимости (СС) по следу-
ющей формуле:
СС, = с,БС, = БС,/( 1 + £,)',
где а, — коэффициент дисконтирования, о, = (1 + £,)'; Е, — норма
дисконта (в ее качестве могут быть взяты норма доходности на
капитал, уровень рентабельности или норма чистой прибыли); t —
участок дисконтирования (шаг по годам).
В качестве показателей экономической эффективности ис-
пользуются чистый дисконтированный доход (ЧДД), индекс до-
ходности (ИД), срок окупаемости Ток и внутренняя норма доход-
ности (ВИД).
Чистый дисконтированный доход, называемый также интег-
ральным экономическим эффектом, определяет разницу между
приведенными к одному и тому же моменту времени результата-
ми и затратами.
С учетом формулы (1.5) он рассчитывается по следующему
выражению:
40
ЧДД = £(Р,-3,)/(1 +£,)',
!=0
где Р, — результаты, достигаемые на шаге расчета /; 3,— затраты,
осуществляемые на том же шаге; Т — горизонт расчета (срок дей-
ствия энергосберегающего проекта).
Если ЧДД энергосберегающего проекта положителен, то про-
ект является экономически эффективным при данной норме ди-
сконта Е, и наоборот.
Индекс доходности (ИД) является относительным показате-
лем и представляет собой отношение суммы приведенных ре-
зультатов к сумме приведенных затрат по энергосберегающему
проекту:
ид = £ра/£за.
Г=0 Г=0
Если ИД > 1, то проект эффективен, и наоборот. ИД удобно
применять в тех случаях, когда сравниваемые проекты имеют при-
мерно одинаковый ЧДД.
Внутренняя норма доходности представляет собой ту норму
дисконта при которой ЧДД равен приведенным капиталь-
ным затратам КЗ,. ВИД определяется путем решения следующего
уравнения:
f (Р, - 3,)/( 1 + Е вн)' = £ КЗ,/( 1 + Е вн)'.
/=0 г=0
Срок окупаемости — это период (измеряемый обычно в го-
дах), начиная с которого затраты на энергосберегающий проект
покрываются суммарными результатами его осуществления. Он
определяется при заданном нормативном коэффициенте эконо-
мической эффективности капитальных затрат Евн путем решения
уравнения
Грк Ток
£Р,/(1 + £вн)' = ХКЗ,/(1 + Ему.
t=0 z=0
Модернизация электроприводов относится, как правило, к
краткосрочным инвестиционным проектам, и ее эффективность
обычно оценивается без учета фактора времени.
Контрольные вопросы
1. Почему насосы и вентиляторы признаны основными объектами
энергосбережения средствами электропривода?
41
2. Какие факторы обеспечивают эффективность энергетического про-
цесса, осуществляемого электроприводом?
3. Как оценивается энергетическая эффективность?
4. Из чего складываются полные потери мощности в двигателях?
5. Как можно рассчитать потери энергии в переходных процессах элек-
тропривода?
6. В чем разница между КПД в точке, например номинальным КПД
двигателя, и КПД цикла? Когда и как следует использовать эти показа-
тели?
7. Что характеризует коэффициент мощности асинхронного двигате-
ля?
8. Перечислите и прокомментируйте способы энергосбережения при
нерегулируемом электроприводе.
9. Что представляет собой срок окупаемости ресурсосберегающего
проекта?
10. В каких случаях используются динамические методы оценки эко-
номической эффективности ресурсосберегающего проекта?
ГЛАВА 2
ЭНЕРГОСБЕРЕЖЕНИЕ ПРИ НЕРЕГУЛИРУЕМОМ
ЭЛЕКТРОПРИВОДЕ
2.1. Выбор двигателя и редуктора
Проектирование электроприводов предусматривает одновремен-
ное определение параметров двигателя и механической передачи
(в большинстве случаев — редуктора). За счет рационального вы-
бора передаточного числа (радиуса приведения) механической
передачи могут быть достигнуты необходимые показатели элект-
ропривода. Ими могут быть минимальное время пуска, наимень-
шие стоимость, масса, габаритные размеры и потери энергии или
максимальный КПД электропривода.
Масса, габаритные размеры (и соответственно стоимость) дви-
гателя определяются при заданной мощности его номинальным
моментом. Для примера в табл. 2.1 приведены данные двигателей
серии 5А на номинальную мощность 45 кВт и различные номи-
нальные скорости вращения, иллюстрирующие это положение.
Как видно из приведенных данных, двигатели с высокой но-
минальной скоростью вращения имеют меньшую массу и повы-
шенные значения номинальных коэффициентов полезного дей-
ствия т|ном и мощности cos<pHOM. Поэтому при проектировании элек-
Таблица 2.1
Номинальные данные двигателей серии 5А мощностью 45 кВт
Тип двигателя ^НОМ) рад/с М.ом, Нм ПнОМ) COS(pnoM ДР НОМ) Вт Цена с учетом НДС, руб. (на 2004 г.) Масса, кг
5A200L2 308 146,1 93,4 0,90 3 180 34 478 255
5A200L4 153 294,1 92,5 0,85 3 649 35 378 270
5A250S6 103 436,9 92,5 0,83 3 649 49 050 430
5А250М8 77 584,4 92,5 0,76 3 649 62 096 460
5А280М10 62 725,8 92,5 0,81 3 649 83 427 760
5A315S12 51 882,4 93,0 0,76 3 387 113986 925
43
Л/pjo, Н’М1
500- ^ИО2
400- м I I
„„„ ™ИО1 I
300--------------- 1 '
200 ---------------------------------------J
100- I I
I I_____0
о 100 200 300 400 500 600 700 Л с
Рис. 2.1. Нагрузочная диаграмма исполнительного органа рабочей ма-
шины
тропривода рекомендуется ориентироваться в первую очередь на
высокоскоростные двигатели.
Однако при использовании высокоскоростных двигателей для
обеспечения заданных скоростей движения исполнительных орга-
нов рабочих машин и производственных механизмов потребуется
применение более тяжелых редукторов с большими значениями пе-
редаточного отношения, отличающихся более высоким потерями
мощности. Таким образом, задача совместного выбора двигателя и
редуктора имеет оптимизационный характер и должна решаться с
использованием определенных критериев оптимизации: срока оку-
паемости, минимума потерь мощности (энергии), минимума сто-
имости электропривода, максимального быстродействия. Выбор дол-
жен производиться с учетом параметров напряжения питающей сети,
способа монтажа на рабочей машине и условий окружающей среды.
Рассмотрим пример выбора сочетания двигатель—редуктор для
нерегулируемого электропривода, работающего в длительном
режиме.
Пример 2.1. Исполнительный орган (ИО) рабочей машины
вращается со скоростью сор = 12 рад/с и в течение времени tx = 5 мин
создает момент сопротивления Л/цсн = 300 Н • м, а в течение вре-
мени t2 = l мин — Л/цо2 = 460 Н • м, как это показано на рис. 2.1.
Требуется выбрать двигатель и редуктор для электропривода, ори-
ентируясь на электродвигатели серии АИР, цилиндрические ре-
дукторы серии Ц и червячные редукторы серии Ч. Возможно при-
менение мотор-редуктора серии 4МЦ2С. Критериями при выборе
принимают стоимость оборудования и его КПД, определяющий
потери энергии при эксплуатации электропривода.
1. Определяем эквивалентный полезный момент нагрузки элек-
тропривода:
Гй
М иоэ = V{----------
3002-300 + 4602*420
--------------------= 401
300 + 420
Нм.
44
Таблица 2.2
Данные двигателей
Двигатель <о„ом, рад/с Ином» % 7„ом, кг • м2 Цена с учетом НДС, руб. (на 2005 г.)
AHP100L2 298,3 88,0 0,0075 3 375
АИР112М4 151,0 85,5 0,0170 4 244
AHP132S6 100,5 85,0 0,0400 5 549
АИР132М8 74,6 83,0 0,0570 5 600 4
2. Находим расчетную механическую мощность двигателя:
Л>асч = ^зап^иоэСОр = 1,1 • 401 • 12 = 5 293 Вт,
где &зап — коэффициент запаса, учитывающий наличие динами-
ческих режимов работы двигателя и потерь мощности в механи-
ческой передаче, к^ =1,1.
3. По полученной мощности выбираем двигатели серии АИР
на номинальную мощность 5,5 кВт с различными скоростями вра-
щения, данные которых приведены в табл. 2.2.
4. Выбираем редуктор для каждого из двигателей, ориентируясь
на требуемое передаточное число и номинальный момент на вы-
ходном валу редуктора, который должен быть не менее 460 Н • м.
Полученные данные сведены в табл. 2.3, где также указаны номи-
нальные КПД и цены для различных вариантов.
Таблица 2.3
Данные по вариантам реализации электропривода
Двигатель AHP100L2 АИР112М4 AHP132S6 АИР132М8
Передаточное число редуктора 24,9 12,5 8,4 6,2
Тип редуктора 1 ШУ- 125 1ЦЗУ- 160 1 ШУ- 125 1 ШУ- 125 1 ШУ- 125
КПД редуктора, % 97 96 97 97 98
Цена редуктора, руб. 8 320 12 740 8 320 8 320 10660
Цена двигателя и редуктора, руб. 11 695 16 115 12564 13 869 16 260
КПД двигателя и редуктора, % 85,4 84,5 83 82,5 81,3
45
Анализ полученных данных позволяет сделать следующие вы-
воды:
• приемлемым вариантом оказалось сочетание двигателя
АИР100Ь2 с двухступенчатым редуктором Щ2У—125, при кото-
ром электропривод имеет наименьшую стоимость и наибольший
общий КПД;
• этот вариант характеризуется и наименьшим суммарным мо-
ментом инерции, что позволяет снизить потери энергии в пере-
ходных режимах электропривода;
• определяющими факторами при выборе варианта являются
КПД двигателя и стоимостные оценки оборудования, поскольку
КПД редукторов различаются несущественно.
Возможными вариантами исполнения механической части элек-
тропривода являются применение червячного редуктора или мо-
тора-редуктора на требуемые параметры.
В качестве червячного редуктора для двигателя АИР100Ь2 мо-
жет быть использован универсальный редуктор типа Ч — 100 с пе-
редаточным числом 25 и номинальным моментом на тихоходном
валу Л/тих = 480 Н • м. Однако цена этого редуктора выше, чем цена
цилиндрического редуктора 1Ц2У—125, а КПД ниже, что делает
применение редуктора типа Ч—100 экономически неоправданным.
В качестве мотора-редуктора, может быть выбран мотор-редук-
тор типа 4МЦ2С—100 со следующими номинальными парамет-
рами: мощность — 5,5 кВт; частота вращения выходного вала —
112 об/мин (11,73 рад/с); момент на выходном валу — 450 Н • м;
КПД 83%; цена с учетом НДС (на 2005 г.) — 20 256 руб. Как
следует из сопоставления с данными табл. 2.3, цена мотора-ре-
дуктора заметно выше при примерно тех же уровнях КПД, что
делает применение этого варианта реализации механической час-
ти электропривода экономически нецелесообразным. В то же вре-
мя применение мотора-редуктора упрощает и удешевляет монтаж
и обслуживание электропривода.
Рассмотренный пример относится к выбору двигателя и редук-
тора при длительном режиме их работы. В то же время существует
большое число электроприводов, работающих в повторно-кратко-
временном режиме при частых пусках, торможениях и реверсах.
Для таких электроприводов при проектировании с учетом фак-
тора энергосбережения определяющими могут стать потери энер-
гии в этих переходных процессах. Как следует из формулы (1.42),
эти потери пропорциональны запасу кинетической энергии, кото-
рая, в свою очередь, определяется механической инерцией движу-
щихся частей электропривода и исполнительного органа рабочей
машины.
На рис. 2.2 показаны кривые, характеризующие запас ки-
нетической энергии двигателей серий АИР и RA при скорости
идеального холостого хода, которая близка к номинальной ско-
46
Jcoq/2, Джл
2 000-
1800-
1600 -
1400-
1200-
1000-
800-
600-
400-
200-
Рном
Рном
Рном
100 200 300
" 5,5 кВт
- 3,0 кВт
= 1,1 кВт
©о, рад/с
а
ном ” 22 кВт
AiOM ”11 кВт
2 200-
2 000-
1800-
1600-
1400-
1200-
1000-
800-
600-
400-
200-
0
100
200
ном
ном
__-*Рном~3,0 кВт
---• РцгОМ = 1J 1 кВт
—I---------------
300 “о, PWC
0
б
Рис. 2.2. Зависимости запаса кинетической энергии ротора от скорости
холостого хода двигателей серии АИР (а) и RA (б)
рости. Этот показатель снижается по мере уменьшения скорости
холостого хода, а при некоторых номинальных мощностях двига-
теля даже принимает минимальное значение для скоростей 104,7
и 157,0 рад/с. Таким образом, двигатели с такими скоростями вра-
щения являются по соображениям энергосбережения более пред-
почтительными для электроприводов с повторно-кратковремен-
ным режимом работы.
47
Суммарный приведенный момент инерции электропривода
определяется как моментом инерции ротора (якоря) двигателя,
так и инерцией элементов механической передачи и исполни-
тельного органа рабочей машины. Таким образом, за счет выбора
передаточного числа (радиуса приведения) механической пере-
дачи, с помощью которого осуществляется приведение к валу
двигателя масс и моментов инерции элементов механической пе-
редачи и исполнительного органа, могут быть оптимизированы
определенные показатели работы электропривода.
Одна из типовых задач такого рода связана с обеспечением ми-
нимального времени пуска или торможения двигателя, т. е. с получе-
нием максимального быстродействия электропривода. Это достига-
ется за счет оптимизации передаточного числа редуктора, которому
будут соответствовать минимальный запас кинетической энергии и
минимальные потери энергии в переходных процессах. Покажем эту
связь и найдем оптимальное передаточное число редуктора.
Допустим, что моменты двигателя и нагрузки в переходных
процессах постоянны. Тогда, относя потери в механической пере-
даче к моменту нагрузки и используя основное уравнение движе-
ния, можно для времени переходного процесса /Пп записать
^ПП = Л<°с/(Л/д - Л/с) = (РЛ + ЛюЛ2)/(МД ± (2.1)
где /д, /ио ~ соответственно моменты инерции двигателя и ис-
полнительного органа; Мд, Л/ись Л/с — соответственно моменты
двигателя, исполнительного органа и нагрузки на валу двигателя;
р — коэффициент, учитывающий момент инерции элементов ре-
дуктора; i — передаточное число редуктора (знак «-» соответству-
ет пуску двигателя, знак «+» — его торможению).
Заменяя в формуле (2.1) передаточное число редуктора отноше-
нием скоростей двигателя и исполнительного органа (/=сос/шио),
после преобразований получаем
^ПП " (₽/д(0с2 + /иОс°Ио)/(Л/д(0с ± Л/Ио®ио) =
= 2(р1Гд+ ^ио)/(Л + Лю), (2.2)
где РИд, Иио — соответственно запасы кинетической энергии дви-
гателя и исполнительного органа при скорости сос,
И^ио = Лю<°ио/2; Л, Лю — соответственно мощности двигателя и
исполнительного органа.
Из формулы (2.2) следует, что минимальному времени пе-
реходного процесса соответствуют минимальный запас кинети-
ческой энергии в электроприводе и исполнительном органе ра-
бочей машины и минимальные потери энергии в динамических
режимах.
Найдем оптимальное передаточное число редуктора для случая
пуска двигателя (знак «-» в формулах), при котором время пуска
48
Таблица 2.4
Значения оптимального КПД редуктора
Лю/(Л) 0,1 0,5 1 5 10 50 100
• ^опт 1,09 1,37 1,62 2,79 3,7 7,59 10,5
и потери энергии будут минимальными. Для этого находим про-
изводную d/nn/dz и приравниваем ее к нулю. После преобразова-
ний получаем следующее выражение:
^ио
опт М,
(2.3)
В табл. 2.4 в качестве примера приведены рассчитанные по фор-
муле (2.3) значения /опт для случая Л/ио/тИд = 0,5 и различных от-
ношений /ио/(РЛ) ПРИ ₽ = 1-
Важно отметить, что найденное оптимальное передаточное
число, кроме обеспечения минимальных времени и потерь энер-
гии в переходных процессах, должно обеспечить также и необ-
ходимую рабочую скорость исполнительного органа рабочей ма-
шины.
2.2. Проверка соответствия двигателя и нагрузки
Важным условием энерго- и ресурсосбережения в электропри-
водах является соответствие мощности двигателя и нагрузки. При-
менение двигателей недостаточной мощности приводит к их пе-
регрузке и преждевременному выходу из строя. Использование
двигателей завышенной мощности влечет за собой неоправдан-
ное повышение капитальных затрат, недоиспользование вложен-
ных материальных ресурсов и снижение КПД, а для асинхронных
двигателей — и уменьшение коэффициента мощности.
Фактором, ограничивающим нагрузку электродвигателя, яв-
ляется нагрев изоляции его обмоток. Даже небольшое превыше-
ние температуры изоляции по сравнению с нормативным уров-
нем вызывает ее преждевременное старение и выход двигателя из
строя. Так, для изоляции класса А превышение допустимой тем-
пературы нагрева на 8... 10°C сокращает срок ее службы вдвое.
В двигателях применяются шесть классов изоляции, допустимая
(нормативная) температура нагрева которых составляет: А — до
105°С, Е-до 120°С, В-до 130 °C, F-до 155°С, Н - до 180°С,
С — свыше 180 °C. Основными классами изоляции, применяемыми
в настоящее время при изготовлении электрических двигателей,
являются классы В, F и Н.
49
Сущность проверки соответствия двигателя и нагрузки состоит
в сопоставлении допустимой для двигателя температуры с той,
которую он имеет при работе. Если рабочая температура двигателя
не превышает допустимую, то номинальная мощность двигателя
соответствует его нагрузке, и наоборот. Повышенный уровень
температуры может быть вызван не только недостаточной мощ-
ностью двигателя, но и возникновением нештатных ситуаций,
например исчезновением фазы питающего напряжения или обра-
зованием короткозамкнутого витка в обмотках двигателя.
Обычно оценка нагрева двигателя осуществляется с использо-
ванием понятия перегрева т, который представляет собой раз-
ность температур двигателя t° и окружающей среды (ОС) Гос:
т = /°- /°
L 1 *ос*
При выполнении тепловых расчетов принимается стандарт-
ная температура окружающей среды, равная 40 °C, которой со-
ответствует номинальная мощность двигателя, указанная на его
щитке. При более низкой температуре окружающей среды дви-
гатель можно нагружать несколько выше номинальной мощ-
ности, а при более высокой температуре его нагрузка должна
быть снижена или должны быть предприняты меры по допол-
нительному охлаждению двигателя или его замене на более
мощный двигатель.
При использовании понятия перегрева двигатель будет рабо-
тать в допустимом тепловом режиме при выполнении условия
Траб < ^доп»
где траб — перегрев при работе двигателя; тдоп — допустимый (нор-
мативный) перегрев двигателя, определяемый классом его изо-
ляции.
В качестве траб при проверке выбирается средний или макси-
мальный перегрев за время (цикл) работы двигателя. При ориен-
тировании на средний перегрев будет иметь место наиболее пол-
ное использование двигателя, хотя в некоторые периоды его ра-
боты перегрев будет превышать средний. Если же ориентировать-
ся на максимальный перегрев, то рабочий перегрев двигателя всегда
будет меньше нормативного, но при этом двигатель будет недоис-
пользован по своей мощности.
При проектировании электропривода степень нагрева двигате-
ля удобно анализировать с использованием нагрузочной диаграм-
мы двигателя, представляющей собой зависимость изменения
момента двигателя от времени Л/(г). Эта диаграмма строится с ис-
пользованием основного уравнения движения
50
где знак «+» соответствует увеличению скорости двигателя, знак
«-» — снижению скорости, а зависимость Mc(t) представляет со-
бой нагрузочную диаграмму рабочей машины.
С помощью полученной нагрузочной диаграммы двигателя рас-
считывается эквивалентный момент двигателя при его работе в
заданном технологическом цикле и сопоставляется с номиналь-
ным моментом предварительно выбранного двигателя:
экв
ном*
(2.4)
где Mj — момент двигателя на z-м участке цикла; Z, — длительность
/-го участка цикла; /ц — длительность цикла.
Если указанное в формуле (2.4) неравенство выполняется, то
средний нагрев двигателя не будет превосходить нормативного
уровня, и наоборот. С помощью формулы (2.4) производится оцен-
ка нагрева при длительном режиме работы двигателя, и она будет
точной в тех случаях, когда магнитный поток двигателя будет ра-
вен номинальному и не будут изменяться активные сопротивления
цепей двигателя. Приведем пример расчета нагрузочной диаграм-
мы двигателя, продолжая выполнение примера 2.1.
Пример 2.2. Предварительно выбранный рациональный вариант
исполнения механической части электропривода предусматрива-
ет использование двигателя AHP100L2 и редуктора 1Ц2У—125.
Дополнительно известно, что момент инерции исполнительного
органа составляет /ио = 4,5 кг-м2, требуемый график скорости
движения исполнительного органа имеет показанный на рис. 2.3, а
вид, время пуска /п и торможения гт равны друг другу и должны
составлять 0,3 с.
Примем следующие допущения при расчете:
• скорость вращения двигателя на участках установившегося
движения принимается номинальной соном = 298,3 рад/с;
Рис. 2.3. Тахограмма (а) и нагрузочная диаграмма (б) двигателя
51
• КПД редуктора принимается номинальным г|рном = 97 %;
• момент инерции элементов редуктора, приведенный к валу
двигателя, составляет 5 % момента инерции ротора двигателя.
1. Определяем номинальный момент двигателя:
Л/ном = Люм/сОном = 5 500: 298,3 = 18,44 Н • м.
2. Находим суммарный приведенный к валу двигателя момент
инерции:
4 = 1,05/Эд + ЛюЛ2 = 1,05- 0,0075 + 4,5: 252 = 0,015 кг • м2.
3. Для построения нагрузочной диаграммы двигателя M(f) оп-
ределяем динамические моменты на участках разбега Л/Дин р и тор-
можения Л/дин т:
Л/дин.р=/хйН0М/Гп= 0,015 298,3 :0,3 = 14,9 Н • м;
Л/пин.т= -Люном/^т = -0,015 298,3 :0,3 = -14,9 Н • м.
4. Определяем моменты двигателя на участках пуска Мп и тор-
можения Мт:
Mi = ^cl "I" ^дин.п = ^ИО1/0Лр.ном) "* Мцин.п =
= 300: (25 • 0,97) + 14,9 = 12,4 + 14,9 = 27,3 Н • м;
М — -М12 + Мдин.т ~ ^ИОг/О'Пр.ном) + -Мин.т _
= 460: (25 0,97) - 14,9 = 19 - 14,9 = 4,1 Н • м.
Построенная по полученным данным нагрузочная диаграмма
двигателя показана на рис. 2.3, б.
5. Выполняем проверку двигателя по нагреву, используя фор-
мулу (2.4):
27,32 • 0,3 +12,42 300 +192 • 420 + 4,12 0,3
720,6
= 16,56 Н м.
Так как эквивалентный момент (Л/экв = 16,56 Н • м) меньше
номинального (Л/Ном = 18,44 Н м), нагрев двигателя не будет пре-
восходить допустимого уровня. Степень использования двигателя
в рассматриваемом случае составляет порядка 90 %.
При оценке нагрева двигателя, работающего в повторно-крат-
ковременном режиме, проверка осуществляется с помощью сле-
дующей формулы:
--------------р----------<м
^“пот(^®ном — ^®р) + ПВном
(2.5)
52
где Л/р — эквивалентный момент двигателя при его работе (вклю-
чении); ПВр — продолжительность включения (работы) дви-
гателя в цикле, %, ПВр = (Гр//Ц) 100 %; &пот — коэффициент по-
терь, &пот = K/V\ ПВН0М — номинальная продолжительность вклю-
чения двигателя.
Рассмотрим пример использования этой формулы при провер-
ке двигателя по нагреву.
Пример 2.3. Электропривод передвижения моста подъемного
крана осуществляется от асинхронного двигателя краново-ме-
таллургической серии типа 4МТН225М8, который имеет но-
минальные мощность Рном = 30 кВт при ПВН0М = 40 % и частоту
вращения лном = 720 об/мин. Требуется оценить нагрев двигателя
при его работе в следующем цикле: движение крана с грузом в
течение /р1 = 3 мин с моментом нагрузки МС1 = 425 Н * м —- первая
пауза (отключение) /01 = 5 мин; движение крана без груза в тече-
ние /р2 = 2,5 мин с моментом нагрузки Л/с2 = 180 Н м — вторая
пауза г02 = 5 мин.
При расчете примем следующие допущения: магнитный поток
и сопротивления цепей двигателя не изменяются; постоянные
потери мощности не учитываются (&пот = 0); работа двигателя на
участках пуска и торможения не принимается во внимание. Дан-
ный цикл работы соответствует повторно-кратковременному ре-
жиму, поэтому в соответствии с принятыми допущениями ис-
пользуем соотношение (2.5) при £пот = 0.
1. Рассчитываем номинальную угловую скорость и номинальный
момент при номинальном ПВН0М двигателя:
(«ном = ™Н0м/ЗО = 3,14- 720:30 = 75,4 рад/с;
Мном = Рном/(Оном = 30 000: 75,4 = 398 Н • м.
2. Находим реальную продолжительность включения двигателя
в цикле ПВреал, %:
ПВ^ = [rpS/(Zp2 + /ох)] • ЮО = ((3 + 2,5): (5,5 + 5)) 100 = 55.
3. Определяем эквивалентный среднеквадратичный момент на-
грузки за время работы:
Д/ Д l^cl^pl + Мс2?р2 _
'"ЭКБ “л J —
4252-3 + 1802 • 2,5 „
--------—-----— = 337 Н • м.
pl 1р2
4. Пересчитываем этот момент к стандартному значению ПВН0М =
= 40%:
I ПВ HS
Мест = M3Kd——?- = 337. 44 = 315 Н м.
^ПВНОМ \40
53
Так как Мс ст = 395 Н • м < 398 Н • м = Мном, средний нагрев
двигателя при работе в таком цикле не будет превосходить допу-
стимого уровня и двигатель будет использоваться полностью.
Оценка нагрева двигателя также может быть выполнена с ис-
пользованием методов средних потерь и эквивалентных тока и
мощности.
При эксплуатации двигателя оценка его нагрева и соответствия
нагрузке может быть выполнена непосредственным измерением
его температуры или с помощью косвенных методов.
Информацию о нагреве двигателя при непосредственном из-
мерении его температуры можно получить с помощью встраива-i
емых в двигатель температурных датчиков — термопар или термо-
метров сопротивлений. Эти датчики обычно помещаются в пазы
магнитопровода двигателя и дают информацию о температуре
обмоток и магнитопровода, которая может быть также использо-
вана для реализации тепловой защиты двигателя.
Другой метод оценки нагрева двигателя связан с определением
сопротивления обмоток в исходном (холодном) и нагретом со-
стояниях. Определяя эти сопротивления методом амперметра-
вольтметра или с использованием измерительных мостов, нахо-
дят температуру обмоток t° в нагретом состоянии по следующей
формуле:
/°-(235 + ^)(Л-7?о)/^о + /о,
где R, Rq — сопротивления обмотки соответственно в рабочем
режиме и при начальной температуре
Температуру доступных открытых поверхностей двигателя мож-
но измерить с помощью термометров расширения (ртутных и спир-
товых), а также незаложенных термопар и термометров сопротив-
ления. Этими же приборами измеряют температуру охлаждающе-
го воздуха на входе и выходе охлаждающей системы в случае при-
нудительной вентиляции двигателя, оценивая тем самым нагрев
внутренних полостей двигателя.
Косвенные методы используют информацию переменных дви-
гателя, которые определяют его нагрев и могут быть измерены
при работе двигателя. Такими переменными могут быть ток двига-
теля и потребляемая им мощность, величины которых могут быть
получены с помощью измерительных приборов.
Метод эквивалентного тока используется в том случае, когда
имеется график изменения тока двигателя во времени, получен-
ный экспериментально по показаниям амперметра, для двигате-
лей переменного тока могут быть использованы и токоизмери-
тельные клещи.
Оценка нагрева двигателя производится в этом случае путем
сопоставления номинального /ном и эквивалентного среднеквад-
ратичного тока /экв, рассчитываемого по формуле
54
экв ~
(2.6)
где 7, — ток двигателя на /-м участке цикла; t; — продолжитель-
ность i-ro участка цикла.
Если /экв < /ном, то средняя температура перегрева двигателя не
будет превосходить нормативной, и наоборот.
Оценка нагрева двигателя по формуле (2.6) будет наиболее
точной в тех случаях, когда за рассматриваемый цикл работы не
изменяются постоянные потери мощности и сопротивление це-
пей двигателя.
Оценка нагрева по потребляемой двигателем мощности произ-
водится по следующей формуле:
(2.7)
где Рэкв — эквивалентная среднеквадратичная потребляемая дви-
гателем при работе мощность.
Если выполняется соотношение (2.7), то нагрев двигателя не
превышает допустимого уровня. Получаемая оценка будет точ-
ной при неизменных постоянных потерях мощности, активном
сопротивлении цепей двигателя, магнитного потока и скорости
двигателя. Рассмотрим пример использования этих соотношений.
Пример 2.4. Двигатель постоянного тока типа 4ПФ132М имеет
следующие паспортные данные: Рнон = 11 кВт; пноы= 1 090 об/мин;
Лом = 30 А. Требуется оценить тепловой режим двигателя при его
работе по следующему циклу: продолжительность первого участка
4 = 12 мин, ток якоря /С1 = 35 А; продолжительность второго участ-
ка /2 = 25 мин, ток якоря /с2 = 25 А; продолжительность третьего
участка t3= 18 мин, ток якоря /с3= 15 А. Сопротивление якорной
цепи при работе двигателя в этом цикле не изменяется.
Заданный цикл относится к длительному (продолжительному)
режиму с переменной нагрузкой. Так как сопротивление цепи якоря
не изменяется, для проверки двигателя по нагреву можно приме-
нить метод эквивалентного тока, используя формулу (2.6):
352 • 12 + 252 • 25+ 152 • 18
12+25+18
Сопоставим рассчитанный эквивалентный ток /экв с но-
минальным. Так как /экв= 25 < 30 = /ном, двигатель не будет нагре-
ваться выше допустимого уровня.
55
Проверка двигателя по нагреву при повторно-кратковре-
менном режиме работы производится с помощью следующей
формулы:
j _________ПВр_________
ном р «а(ПВном - ПВр) + ПВНОМ ’
где 7Р — среднеквадратичный ток двигателя в периоды его вклю-
чения (работы).
При выполнении поверочных расчетов возможны ситуации,
когда нагрев двигателя оказывается существенно ниже до-
пустимого уровня, т.е. двигатель работает с недогрузкой. Воз-
можные варианты действий в этом случае рассмотрены в под-
разд. 2.4.
2.3. Энергосберегающие двигатели
Один из путей повышения экономичности самого массового
нерегулируемого асинхронного электропривода мощностью
0,3...400 кВт связан с использованием энергосберегающих дви-
гателей. В таких двигателях за счет увеличения массы активных
материалов (меди и стали), применения высококачественной
изоляции, а также оптимизации конструкции снижаются поте-
ри энергии, и вследствие этого происходит повышение их КПД
на несколько процентов. Степень повышения иллюстрируют дан-
ные табл. 2.5, в которой приведены значения КПД ц при раз-
ных отношениях суммарных потерь мощности в двигателе ДР к
мощности нагрузки Р. Расчет проведен по формуле для КПД
двигателей:
ц = Р/(Р + ДР) - 1/(1 + ДР/Р).
В США в 1997 г. вступил в действие законодательный акт
(EPACT), устанавливающий минимальный уровень КПД двух-,
четырех- и шестиполюсных асинхронных двигателей с коротко-
замкнутым ротором мощностью 0,75... 150 кВт, предусматрива-
ющий значительные штрафы за выпуск двигателей с КПД ниже
установленного уровня.
В 1999 г. по инициативе Европейского союза производителей
электрических машин и силовой электроники в рамках проекта
Таблица 2.5
Зависимость КПД двигателя от соотношения ДР/Р
ДР/Р 0,40 0,35 0,30 0,25 0,20 0,15 0,10 0,05
п, % 71 74 77 8 83 87 91 95
56
Рис. 2.4. Уровни КПД двигателей в классах EFF1 —EFF3
ЕС «Энергосбережение в электроприводе» было заключено добро-
вольное соглашение с производителями электродвигателей о пере-
ходе с 2000 г. на трехуровневую классификацию двигателей по
КПД. В соответствии с соглашением самовентилируемые двух- и
четырехполюсные двигатели мощностью от 1 до 90 кВт напряже-
нием 400 В и частотой 50 Гц подразделяются по КПД на три клас-
са: стандартные EFF3, повышенной энергоэффективности EFF2
и высокой энергоэффективности EFF1. Представление об уровнях
КПД двигателей этих классов дает рис. 2.4, где цифрами 7, 2 и 3
обозначены соответственно области двигателей с высоким, по-
вышенным и обычным КПД.
В Российской Федерации с 2001 г. введен стандарт ГОСТ Р
51677 — 2000 «Машины асинхронные мощностью от 1 до 400 кВт
включительно. Двигатели. Показатели энергоэффективности». Стан-
дарт регламентирует показатели энергоэффективности — КПД и
costp — трехфазных низковольтных асинхронных двигателей с ко-
роткозамкнутым ротором общепромышленного назначения. Стан-
дарт предусматривает два уровня КПД:
1) нормальный — для двигателей мощностью от 1 до 400 кВт;
2) повышенный —для двигателей мощностью от 15 до 400 кВт.
Нормальный КПД устанавливается на уровне, достигнутом в
единой серии двигателей АИ. Суммарные потери мощности в дви-
гателях с повышенным КПД на 20 % ниже, чем в двигателях с
нормальным КПД.
ГОСТ Р 51677—2000 является основным документом при сер-
тификации асинхронных двигателей, предусмотренной Законом
РФ «Об энергосбережении» от 03.04.96 № 28-ФЗ. В соответствии с
ГОСТом двигатели с повышенным КПД после проведения соот-
ветствующей сертификации должны иметь дополнительную мар-
кировку — строчную букву е после цифры, обозначающей число
полюсов двигателя.
В Российской Федерации основными поставщиками энергосбе-
регающих двигателей в настоящее время являются Ярославский
57
Таблица 2.6
Значения т]эс и /суд при е = 0,2
Пет, % 75 80 85 90 95
Пэс, % 79,0 83,3 87,6 91,8 96,0
^уд 2,0 1,8 1,6 1,4 1,2
электромашиностроительный завод (ОАО «ELDIN») и Владимир-
ский электромоторный завод (ВЭМЗ).
Ярославский электромашиностроительный завод выпускает энер-
гоэффективные асинхронные трехфазные двух- и четырехполюс-
ные двигатели мощностью от 1 до 90 кВт со степенью защиты IP54
и IP55 для длительного режима работы. Эти двигатели выпускаются
в соответствии с соглашением с Европейским комитетом произво-
дителей электрических машин и силовой электроники. Владимирс-
кий электромоторный завод выпускает энергосберегающие двига-
тели типов 5А280, 5А315 и в перспективе 5А355. КПД т|эс этих энер-
госберегающих двигателей может быть определён по формуле
Пэс = Пст/[ 1 ~ “ Лет)]? (2*8)
t.
где е — относительное снижение суммарных потерь в двигателе;
Г|ст — КПД стандартного двигателя.
Относительное снижение суммарных потерь в двигателе опре-
деляют по формуле
е = (ДРСТ - ДРЭС) / ДРСТ,
где ДРСТ, ДРЭС потери мощности соответственно в стандартном
и энергосберегающем двигателях.
Дополнительные затраты на производство энергосберегающе-
го двигателя можно оценить с помощью коэффициента удорожа-
ния ку^
ЛуД = 1 + (1 -цст)е2-100. (2.9)
В табл. 2.6 приведены значения г|эс и к^ расчитанные по фор-
мулам (2.8) и (2.9) при предусмотренном ГОСТ Р 51677 — 2000
значении е = 0,2, для различных КПД стандартных двигателей.
Стоимость Сэк электроэнергии, которая может быть сэко-
номлена при использовании энергосберегающего двигателя, в
том числе и работающего с переменной нагрузкой, может быть
рассчитана по следующей формуле:
С
^ЭК
эк
(2.10)
где ДЭ — экономия потребленной электроэнергии, кВт ч; сэ —
стоимость электроэнергии, руб./кВт • ч; Р, — мощность двигателя
58
Таблица 2.7
Срок окупаемости при использовании энергосберегающего двигателя
тр, ч 1 500 3 000 4 500 6 000
ДЭ, кВт • ч‘ 1 809 3618 5 427 7236
Т г 1 ОК5 1 * 20 4,7 3,6 2,6
на z-м участке работы, кВт; г|/ст, т|/эс — КПД соответственно стан-
дартного и энергосберегающего двигателей, %; t( — время работы
двигателя с мощностью Ph ч; л — число участков работы элект-
ропривода с различными нагрузками.
Окупаемость более дорогого энергосберегающего двигателя
происходит за счет снижения стоимости потребляемой энергии.
Пример 2.5. Оценить экономическую целесообразность приме-
нения энергосберегающего двигателя типа 5AM315S6e с номи-
нальной мощностью Рном =110 кВт при показателе е - 0,2 для
электропривода, работающего в номинальном режиме в течение
Гр = 1 500, 3 000 и 4500 ч в год.
Двигатель стандартного исполнения 5AM315S6 имеет номиналь-
ный КПД пст = 0,95 и стоимость (с учетом НДС по состоянию на
2005 г.) 103 641руб.
Принять, что тариф на электроэнергию составляет сэ = 1,3 руб./
кВт’Ч (Москва, 2005 г.), а коэффициент амортизации составляет
6,4%, т.е. /?а = 0,064.
1. КПД энергосберегающего двигателя 5AM315S6e в соответ-
ствии с формулой (2.8) составит т|эс = 0,965.
2. Коэффициент удорожания в соответствии с формулой (2.9)
будет равен ЛуД = 1,2, цена энергосберегающего двигателя при этом
составит Цэс = 124 369 руб., а разность цен ДЦ = 20 728 руб.
3. Экономия энергии за год при использовании энергосбере-
гающего двигателя рассчитывается по формуле (2.10), принима-
ющей при работе с номинальной нагрузкой следующий вид:
ЛЭ = РнокЛО/Пст - 1/Пэс)>
а время окупаемости Гок при неучете изменения затрат на амор-
тизацию определяется по формуле
Гок = ДЦ/(сэДЭ - раДЦ).
В табл. 2.7 представлены результаты расчетов по этим фор-
мулам.
По данным ВЭМЗ, срок окупаемости энергосберегающих дви-
гателей составляет 2 — 3 года, при этом для более мощных двига-
телей он меньше, так как эти двигатели имеют большую годовую
наработку и более высокий коэффициент загрузки.
59
2.4. Экономия энергии при замене
малозагруженных двигателей
Анализ работы действующих электроприводов показывает, что
большинство приводных двигателей имеют завышенную номиналь-
ную мощность по сравнению с той, которая требуется от элект-
ропривода для реализации технологического процесса. В евро-
пейской практике принято считать, что коэффициент нагрузки
(коэффициент использования) двигателей кн, определяемый от-
ношением мощности нагрузки двигателя Рс к его номинальной
мощности Рном, составляет величину порядка 0,6. В нашей стране
этот коэффициент еще ниже и лежит в пределах (0,3 ...0,5)*.
Кроме того, электроприводы ряда рабочих машин и производ-
ственных механизмов часть своего цикла работают с малыми ме-
ханическими нагрузками или на холостом ходу. К ним относятся,
например, электроприводы обрабатывающих станков, кузнечно-
прессового оборудования, подъемно-транспортных механизмов.
В обоих рассмотренных случаях в соответствии с существующи-
ми зависимостями КПД и коэффициента мощности coscp от кн
(рис. 2.5) двигатели при недогрузке работают с невысокими КПД,
а асинхронные двигатели — и с пониженным коэффициентом
мощности со&р. Повышение этих показателей приводит к сниже-
нию потерь энергии в электроприводе и системе электроснабже-
ния и может быть достигнуто, например, заменой малозагружен-
ных двигателей двигателями меньшей мощности.
Замена малозагруженных двигателей целесообразна в тех слу-
чаях, когда произойдет снижение потерь энергии в заменяющем
двигателе и системе электроснабжения, что позволит окупить ка-
питальные затраты при такой модернизации за приемлемый срок.
Расчеты показывают, что при коэффициенте нагрузки кн < 0,4 в
большинстве случаев замена малозагруженных двигателей оказы-
вается экономически целесообразной, при кн > 0,7 — нецелесооб-
разной, а при 0,4 < кн < 0,7 требуется выполнение технико-эко-
номических расчетов.
Существует условие, при котором двигатель будет работать с
максимальным КПД при данном коэффициенте нагрузки двига-
теля кн. КПД двигателя ц можно рассчитать следующим образом:
Найдем условие работы двигателя с максимальным КПД при
данном коэффициенте нагрузки, взяв производную dr|/dA:H и при-
равняв ее нулю. После преобразований получим, что максималь-
* Браславский И. Я. Некоторые результаты энергетического обследования электро-
приводов промышленных предприятий / И.Я. Браславский, В. В.Куцин, Е. Г, Ка-
заков И Электротехника. — 2004. — № 9. — С. 43 — 45.
60
Рис. 2.5. Зависимости КПД 7 и коэффици-
ента мощности 2 от коэффициента нагруз-
ки двигателя
ное значение КПД будет иметь место
при оптимальной нагрузке, определя-
емой следующим соотношением по-
стоянных К и номинальных перемен-
ных Кном потерь мощности:
к2
Л'Н.ОПТ
= К/ ином.
Из формулы (2.12) следует, что при К > Ином максимальный
КПД может быть получен при нагрузке двигателя, превышающей
номинальную, что неприемлемо. Значения Лн опт ПРИ К < Ином при-
ведены в табл. 2.8. Анализируя работу электропривода с конкрет-
ным двигателем, можно с помощью формулы (2.12) определить
нагрузку двигателя, при которой он будет работать с наименьши-
ми потерями мощности, т. е. при данной нагрузке с максималь-
ным КПД.
Рассмотрим пример определения нагрузки недогруженного
двигателя, при которой целесообразна его замена на двигатель
меньшей мощности.
Пример 2.6. Определить оптимальную нагрузку двигателя типа
4A180S4 и нагрузку, при которой экономически целесообразна
его замена на двигатель меньшей мощности.
Двигатель 4A180S4 имеет следующие номинальные данные:
мощность Рном= 22 кВт; напряжение 380/220 В; скольжение sH0M =
= 0,02; ток статора /1ном = 41,2 А; КПД Ином = 90 %; cos<pHOM= 0,87;
активные сопротивления обмоток статора = 0,219 Ом и приве-
денное ротора Я'г = 0,112 Ом. Цена двигателя 4A180S4 по состоя-
нию на 2005 г. составляет Цуст = 19 311 руб.; нормативный срок
службы (срок амортизации) Тсл = 20 лет; срок службы до модер-
низации Тр= 15 лет; норма амортизации ра = 6,4 % в год.
Условия решения задачи:
• двигатели меньшей мощности выбираются из серии АИР;
• в качестве тарифа на электроэнергию принимается односта-
вочный тариф для Москвы на 2005 г., равный 129,65 коп./кВт - ч;
Таблица 2.8
Значения А,,.опт ПРИ различных отношениях А/ Ком
К/ Ком 0,1 0,3 0,5 0,7 0,9
1с ^н.опт 0,32 0,55 0,71 0,84 0,95
61
• заработная плата обслуживающего персонала после модерни-
зации не изменяется;
• затраты на демонтаж действующего двигателя не учитываются;
• затраты на транспортировку, монтаж и пусконаладочные ра-
боты нового двигателя принимаются в размере 35 % его стоимости;
• заменяемый двигатель становится резервным на предприя-
тии, и его ликвидационная стоимость равна нулю.
1. Определяем скорость холостого хода, номинальные скорость
и момент двигателя 4A180S4:
®0 - 2л/]/р = 2 • 3,14 • 50 : 2 = 157 рад/с;
^ном — ®о(1 “ ^ном) ~ 15/(1 — 0,02) = 154 рад/с,
Мном = Люм/®НОм= 22 000 : 154 = 143 Н м.
2. Найдем для номинального режима полные, переменные и
постоянные потери мощности, используя формулы (1.34), (1.35)
и (1.37):
Кгом “ ^ном®0^ном(1 + /^2) =
= 143-157-0,02(1 + 0,219:0,112) = 1 327 Вт;
АРН0М = Рном(1 -Пном)/ПноМ = 22 000(1 - 0,9) : 0,9 = 2 444 Вт;
К = АРНОМ - Кном = 2444 - 1 327 = 1 117 Вт.
3. Оптимальная нагрузка двигателя определяется по формуле (2.12):
Лн.опг = = V1 117:1327 = 0,92.
4. КПД двигателя при этой нагрузке в соответствии с формулой
(2.11) составит:
= 0,92 • 22 000/(0,92 - 22 000 + 1 117 + 0,922 • 1 327) = 0,903.
5. Определяем остаточную стоимость установленного двигателя:
Цост - Цуст(1 “ Рр/^сл) = 19311(1 - 15 :20) = 4825 руб.
6. Определяем сроки окупаемости при замене этого двигателя
для коэффициентов нагрузки кп = 0,25; 0,5; 0,75 и времени работы
двигателя в год Тр = 1 500, 3 000, 4 500 и 6 000 ч. Срок окупаемости
рассчитываем по формуле
Рок — (КЗН0В + КЗОСТ КЗликв)/(сэГрДРэкон
+ (Цуст - Цнов) ра), (2.13)
КЗН0В — капитальные затраты по новому двигателю, КЗН0В =
нов + Здем + 3-рр + Змонт + Знал, ЦНОв цена нового двигателя, Здем,
62
Зтр, Змонт, Знал — затраты соответственно на демонтаж заме-
няемого двигателя, транспортирование, монтаж и пуско-
наладочные работы по новому двигателю; (Цуст - Цнов)^а — раз-
ница в амортизационных отчислениях до и после модернизации.
В соответствии с условиями решения задачи Здем = 3W + Змонт +
+ Знал = 4,35Ц„ОВ. Тогда формула (2.13) принимает вид
Ток = (1,35ЦНОВ + 4825)/(1,ЗТрДРэкон +
+ 0,064 (19311 - Цнов*). (2.14)
Результаты расчета по формуле (2.14) приведены в табл. 2.9.
Таблица 2.9
Данные по расчету срока окупаемости при замене двигателя
Показатель Расчетная формула ки = 0,25 кп = 0,5 ка = 0,75
Мощность нагрузки при данном ktt, кВт Р - к Р 1 с “ ном 5,5 11 15,4
Потери мощности в заменяемом дви- гателе, кВт ДР = К+ McOqScx ха+я./яу 1,2 1,45 1,87
Двигатель для замены Серия АИР 112М4 132М4 160S4
Потери мощности в новом двигателе в номинальном режиме, кВт АДюм = ДюмО — Пном)/Пном 0,933 1,071 1,668
Цена нового дви- гателя (с учетом НДС, 2005 г.), руб. —— 4 584 6 985 12 860
Снижение потерь мощности при за- мене, кВт ДРЭКОН = ДР-ДРНОМ 0,267 0,378 0,2
Срок окупаемости при Гр = 1 500 ч в год Т0К=(1,35ЦН0В + 4 825): : (1,3 7'рДРЭ1;он + 0,064 х х(19 311 - Цнов)*) 7,5 9,3 27,3
Срок окупаемости при Тр = 3 000 ч в год 5,6 6,3 18,6
Срок окупаемости при Тр = 4 500 ч в год 4,4 4,8 14
Срок окупаемости при Тр = 6 000 ч в год 3,6 3,8 Н,2
63
Как видно из полученных данных, относительно приемлемый
срок окупаемости получается при кп = 0,25 и Гр = 6000 ч, что со-
ответствует имеющимся в технической литературе рекомендациям.
Уточнение расчета срока окупаемости может быть выполнено
за счет учета потерь мощности в системе электроснабжения и
ликвидационной стоимости заменяемого двигателя. Учет этих
факторов приведет к некоторому снижению срока окупаемости.
Например, если заменяемый двигатель будет после демонтажа ре-
ализован (продан) по своей остаточной стоимости, то срок оку-
паемости установки нового двигателя АИР112М4 при кн = 0,25 и
Тр = 6 000 ч составит примерно два года.
2.5. Экономия энергии при переключении обмоток
статора по схеме «треугольник—звезда»
Эффективным средством энергосбережения в асинхронных
электроприводах является снижение подводимого к двигателю
напряжения при его работе с малыми нагрузками или в режиме
холостого хода. При этом происходит снижение потребляемой ре-
активной мощности и тем самым потерь в элементах системы элек-
троснабжения электропривода, а при определенных коэффици-
ентах нагрузки — и потерь мощности в двигателе.
Потребляемая асинхронным двигателем реактивная мощность
Q при использовании П-образной схемы замещения определяет-
ся формулой
<2 = Огп + 0ПР = 3£7i/g + зцх. + зц2х; = зи?/ Хц + 31?ХКЗ =
= 3 Ul/Х» + AfaosX^ Яъ (2.15)
где (2ГП, QnP — реактивные мощности соответственно магнитного
главного поля (ГП) и магнитных полей рассеяния (ПР) обмоток
статора и ротора; U} — напряжение, подаваемое на двигатель; /ц,
— соответственно ток и реактивное сопротивление контура
намагничивания; — ток статора; — приведенный ток ротора;
Хъ Х{, %к з — индуктивные сопротивления соответственно обмот-
ки статора, приведенное обмотки ротора и короткого замы-
кания, Лк 3= X! + Х{\ М, <о0, s — соответственно момент, скорость
холостого хода и скольжение асинхронного двигателя.
Из выражения (2.15) следует, что за счет снижения подводимого
к двигателю напряжения можно влиять на уровень потребляемой
двигателем реактивной мощности и тем самым на значение coscp.
Это положение иллюстрируют зависимости тока намагничива-
ния и приведенного тока ротора /2' от напряжения питания дви-
гателя U? = U}/ 171НОМ при различных моментах нагрузки Мс, при-
веденные на рис. 2.6. Из рис. 2.6 видно, что снижение напряжения
приводит к уменьшению тока намагничивания и соответственно
64
Рис. 2.6. Зависимости тока намагничивания и приведенного тока ротора
от напряжения на статоре
той части потребляемой реактивной мощности, которая идет на
создание главного магнитного потока двигателя.
В то же время при неизменном моменте нагрузки возрастают
токи в цепях статора и ротора двигателя, что вызывает повыше-
ние потребления реактивной мощности, идущей на создание по-
лей рассеяния обмоток статора и ротора. Таким образом, сниже-
ние напряжения можно проводить только при малых нагрузках
двигателя или его холостом ходе, когда снижение напряжения,
приводящее к уменьшению магнитного потока двигателя, не вы-
зовет увеличения токов в цепях двигателя.
Для проведения практических расчетов выражение (2.15) удобно
записать в следующем виде, позволяющем учесть степень нагруз-
ки кп двигателя:
Q = Qo + Whom,
где Qo — реактивная мощность при холостом ходе двигателя;
ДОном — прирост реактивной мощности при переходе двигателя из
режима холостого хода в номинальный режим.
Прирост реактивной мощности определяется по формуле
Д0НОМ= (Qhom ~ Со),
где 0НОМ — реактивная мощность в номинальном режиме.
Реактивная мощность в номинальном режиме определяется по
формуле
Сном = 3 ^фЛном sin(pH0M = ^ном ^ёфном/Пном-
На практике применение нашли два способа снижения напря-
жения: за счет переключения обмотки статора со схемы «треу-
гольник» на схему «звезда» и с помощью тиристорных регулято-
ров напряжения. Рассмотрим первый из названных способов.
Этот способ снижения напряжения возможен при равенстве
номинального фазного напряжения обмотки статора двигателя и
Ильинский
65
линейного напряжения сети. При нагрузках двигателя, близких к
номинальному уровню, обмотки статора включены по схеме «тре-
угольник» (Д) и двигатель работает при номинальном напряже-
нии с полным магнитным потоком.
При снижении нагрузки обмотки двигателя переключаются на
схему «звезда» (Y), к обмоткам подводится пониженное в >/з = 1,73
раза напряжение, за счет чего снижаются ток намагничивания,
реактивная мощность и суммарные потери в двигателе и системе
электроснабжения. Важно отметить, что при этом потери мощно-
сти в двигателе в зависимости от коэффициента его нагрузки мо-
гут как уменьшаться, так и увеличиваться.
Зависимость реактивной мощности асинхронного двигателя от
подаваемого на статор напряжения может быть выражена фор-
мулой*
б“^0о+^Л0ном/^, (2.16)
где ки — коэффициент снижения напряжения, равный единице
при соединении обмоток статора в схему «треугольник» и 1/V3
при соединении обмоток статора в схему «звезда».
Зависимость потерь активной мощности асинхронного двига-
теля от подаваемого на статор напряжения может быть выражена
аналогичной формулой**:
ДР = Л^АРо + А:н2ДРНоМАа, (2-17)
где ДР0 — потери мощности в двигателе при холостом ходе, при-
нимаемые в дальнейшем равными постоянным потерям К.
Подставляя в формулы (2.16) и (2.17) значения ки для обеих
схем, можно определить снижение реактивной мощности Д04 _Y
при переключении обмоток:
ДОд-y = 0д - AQy = 2Qo/3 - 2£Н2Д0НОМ, (2.18)
а также снижение потерь мощности Д(АРЛ_У) при таком переклю-
чении:
ДРд _ Y = ДРд — ДРу = 2ДР0 /3 - 2к* ДРНОМ. (2.19)
Анализ соотношения (2.18) при наиболее вероятных значениях
0О = (О,6О...О,75)0ном показывает, что при коэффициенте нагруз-
ки кп < 0,7 реактивная мощность в схеме «звезда» всегдй меньше,
чем в схеме «треугольник». Анализ формулы (2.19) при наиболее
вероятном соотношении ДРо= (0,30... 0,35) ДРНОМ показывает, что
* Федоров О. В. Основы технико-экономического выбора электроприводов
промышленных установок : монография / О. В. Федоров, Э.Л. Карпова. — Н. Нов-
город: Изд-во ГГУ, 1991. — 164 с.
** Там же.
66
Таблица 2.10
Соотношение КПД для двух схем включения обмоток статора
^н 0,1 0,2 0,3 0,4 0,5
Пу/Пд 1,27 1,1 1,04 1,01 1,0
снижение потерь мощности в двигателе при переходе на схему
«звезда» будет иметь место начиная со значений коэффициента
нагрузки двигателя кн < 0,4.
Далее приведены данные, позволяющие оценить изменение
КПД (табл. 2.10) и costp (табл. 2.11) при переключении обмоток
для различных коэффициентов нагрузки двигателя кн.
Анализ данных табл. 2.10 и 2.11 показывает, что при кн < 0,5
КПД и cos<p в схеме «звезда» выше, чем в схеме «треугольник».
Таким образом, переключение при таких нагрузках обмотки ста-
тора со схемы «треугольник» на схему «звезда» обеспечивает эф-
фект энергосбережения.
Важным вопросом является оценка допустимой нагрузки дви-
гателя и его перегрузочной способности при таком переключении.
Ранее уже отмечалось, что снижение напряжения при неиз-
менной нагрузке на валу двигателя сопровождается увеличени-
ем токов ротора и статора, что увеличивает потери мощности и
нагрев двигателя. Одновременно с этим пропорционально квад-
рату напряжения снижается максимальный (критический) мо-
мент двигателя, который определяет перегрузочную способность
Таблица 2.11
Отношение cos<p¥/cos<pA для двух схем включения обмоток статора
при различных значениях ки и cos<p„OM
COSCPhom
0,1 0,2 0,3 0,4 0,5
0,78 1,94 1,80 1,64 1,49 1,35
0,80 1,86 1,73 1,58 1,43 1,30
0,82 1,78 1,67 1,52 1,37 1,26
0,84 1,72 1,61 1,46 1,32 1,22
0,86 1,66 1,55 1,41 1,27 1,18
0,88 1,60 1,49 1,35 1,22 1,14
0,90 1,57 1,43 1,29 1,17 1,10
0,92 1,50 1,36 1,23 1,11 1,06
67
Таблица 2.12
Зависимость относительного момента нагрузки М* от коэффициента
перегрузочной способности двигателя при kv= 1/>/3
1,6 2,0 2,4 2,8 3,2
м* 0,500 0,535 0,550 0,560 0,563
асинхронного двигателя. По этим причинам снижение напря-
жения может осуществляться только при пониженных нагруз-
ках двигателя.
Формула для расчета максимально возможного относительно-
го момента нагрузки Л/с* при кц = 1/х/З, характерного при пере-
ключении обмоток статора со схемы «треугольник» на схему «звез-
да», при котором ток ротора, потери мощности и нагрев не пре-
вышают номинального уровня:
(2Хл/(ХЛ/+М-1)-3)2
Л(Ч + М -1)
В табл. 2.12 приведены результаты расчета по этой формуле.
Из данных табл. 2.12 следует, что при включении обмоток ста-
тора в схему «звезда» двигатель по условиям нагрева не может
нести нагрузку более 60%.
Рассмотрим пример оценки экономической эффективности
рассматриваемого способа энергосбережения.
Пример 2.7. Определить целесообразность способа энергосбе-
режения в электроприводе переключением обмоток двигателя АОЗ-
315М-6УЗ, работающего с коэффициентом нагрузки кн = 0,3, со
схемы «треугольник» на схему «звезда». Номинальные данные дви-
гателя: Рном= 132 кВт; t/H0M= 380/660 В; 5Н0М= 0,017; /1Н0М= 138 А;
cos(pHOM = 0,9, sin<pH0M = 0,44, т|ном — 93,5 %, — Л/к/Л/Ном — 2,6, р — 3,
/1ном = 50 Гц.
Условия решения задачи:
• время работы двигателя с указанным коэффициентом нагрузки
в году составляет Тр = 1 500 ч;
• рассматриваемый способ энергосбережения реализуется со-
зданием релейно-контакторной схемы переключения обмоток с
использованием четырех контакторов. Для схемы выбираются
контакторы переменного тока типа КТ6022 на номинальный ток
160 А по цене 2 022 руб. за штуку (с учетом НДС по состоянию на
июнь 2005 г.);
• затраты на транспорт, монтажные и пусконаладочные работы
принимаются в размере 60 % от стоимости контакторов;
68
• коэффициент амортизационных отчислений кл принимается
в размере 10 %;
• численность и зарплата обслуживающего персонала после
модернизации не изменяются;
• тариф на электроэнергию сэ равен 1,3 руб./кВт-ч (Москва,
2005 г.).
1. Определяем скорость идеального холостого хода и номиналь-
ные угловую скорость и момент:
о>0 = 27с/|/р = 2 • 3,14- 50 : 3 = 104,7 рад/с;
®ном= ®о(1 - 5„ом) = Ю4,7(1 - 0,017) = 103 рад/с;
Мном = Люм/Шном = 132 000 : 103 = 1 282 Н • м.
2. Определяем номинальный приведенный ток ротора:
^2ном ~ ЛномСОБфном = 138 0,9 = 124 А.
3. Находим ток намагничивания двигателя:
•4* Лном (81Г1фном СО5<рном/(^Л/ V М 1))
= 138 (0,44 - 0,9/(2,6 + V2,62-l )) = 36 А.
4, Используя выражение для потерь мощности в роторе V2 =
= 3?227?2 = Afiov, записанное для номинального режима, находим
приведенное активное сопротивление ротора:
R'l = Л/ноМ«0 5ном/3/йом = 1 282 104,7 • 0,017: 3 • 1242 = 0,05 Ом.
5. Рассчитываем реактивную мощность в номинальном режиме:
(Зном = 3 «7Ф71НОМ sincpH0M = 3 • 380 • 138 • 0,44 = 69 221 В • А.
6. Рассчитываем реактивную мощность холостого хода:
Go = тР™ /Ином = 0,31 • 132 000 :0,935 = 43 764 В • А,
где т = 2,2 - 2,1 cos<pHOM = 2,2 - 2,1 0,9 = 0,31.
7. Из выражения для номинальной реактивной мощности
Ghom ~ 3 Vp + 4/ном£0()5ном ЛГК 3/Т?2 — Qo + А Оном
находим X,:
— Rl ( Qhom Qo)/(^ном^О^ном ) “
= 0,05 • (69 221 - 43 764): 1 282 • 104,7 • 0,017 = 0,55 Ом.
8. Определяем активное сопротивление цепи статора, исполь-
зуя формулу для критического момента асинхронного двигателя:
МК = 3 £/ф/2со0(/?1 +7л2 + %2,).
69
Выражая из нее 7?| как искомую величину, находим:
Л, = ((3^ф2/2®оЛ/к)2 - Х\,3)/(2(3 6/ф2/2®0 Ю) =
= ((3 • 3802:2 • 104,7 - 2,6-1 282)2 - 0,552):
: (2(3 • 3802: 2 • 104,7 • 2,6 • 1 282)) = 0,07 Ом.
9. Определяем полные номинальные потери:
ДРном = Лом(1 - ПномУПном = 132 000(1 - 0,935): 0,935 = 9 176 Вт.
10. Находим переменные номинальные потери:
ном ” Y 1ном
2ном “ 1ном
+ 3/22ном7?2 =
= 3 • 1382 • 0,07 + 3 1242- 0,05 = 6 306 Вт.
11. Находим постоянные потери мощности
К = ДРНОМ - Ином = 9 176 - 6 306 = 2 870 Вт.
12. Рассчитываем по формуле (2.18) снижение реактивной мощ-
ности ДОд.у при переключении обмоток статора со схемы «треу-
гольник» на схему «звезда»:
А^д-у — бд — А0у — 2Qo/3 - 2 ^hAQhom -
= 2-43 764: 3 - 2-0,32-25456 = 24594 В-А.
13. Рассчитываем по формуле (2.19) снижение активной мощ-
ности Д(ДРд_у) при переключении обмоток статора со схемы «тре-
угольник» на схему «звезда»:
Д(ДРд_у) = ДРд - APy = 2ДР0/3 - 2Л2ДРНОМ =
= 2 - 3 859 : 3 - 2 - 0,32-9 176 = 921 Вт.
14. Суммарное снижение потерь мощности составит
ДРЭК = MQa_y + Д(АРд-у) = 0,1 - 24 594 + 921 = 3 381 Вт,
где кп — коэффициент снижения потерь мощности, получаемого
от снижения реактивной мощности Q, кВт/квар.
15. Время окупаемости Ток определяем по формуле
Гок= Цконт/( 2рСэДРэк — РаЦконт) =
= 1,6-4-2022: (1 500-1,3-3,381 - 0,1-4-2022) = 2,2 г.
2.6. Экономия энергии за счет ограничения
времени холостого хода двигателей
При отсутствии полезной механической нагрузки асинхрон-
ный двигатель тем не менее потребляет из сети реактивную мощ-
ность и в двигателе и элементах системы электроснабжения име-
ют место потери энергии. В связи с этим в целях энергосбереже-
70
ния может быть выполнено отключение двигателя от сети на вре-
мя его холостого хода.
Основанием для принятия такого решения является сопостав-
ление потерь энергии за время работы двигателя на холостом ходу
с потерями энергии, которые будут иметь место при новом включе-
нии двигателя в работу. Если потери энергии при пуске двигателя
меньше потерь энергии за время его холостого хода, то отключе-
ние обеспечит энергосбережение в электроприводе, и наоборот.
Получим выражение для определения граничного времени холос-
того хода, при превышении которого отключение двигателя будет
целесообразным с точки зрения энергосбережения.
Равенство потерь энергии при работе на холостом ходу (XX) и
при пуске может быть записано в следующем виде:
Л'/хх == ^пуск + Лрив^оО + ^1/^2) ^н/2, (2.20)
где К — постоянные потери мощности в двигателе; /хх граничное
время работы двигателя на холостом ходу; — время пуска дви-
гателя при холостом ходе; /прив — приведенный к валу двигателя
суммарный момент инерции электропривода, /прив = Л; — ко-
эффициент, учитывающий нагрузку двигателя при расчете потерь
энергии при пуске, ки = Мср/(Мср ~ Мхх)-
Время пуска двигателя при холостом ходе определяется по формуле
Алуск *AipHB®o/(Мср ~ ^хх)э
где Afcp — средний момент двигателя при пуске; М%х — момент
нагрузки при холостом ходе двигателя.
Средний момент двигателя при пуске определяется по формуле
-ЭДср (МПуСК + М^/2,
где Мпуск, МК — соответственно пусковой и критический моменты
двигателя.
Из выражения (2.20) получаем формулу для определения гра-
ничного времени работы двигателя на холостом ходу:
(XX ~ Л1рив®о/(Л^ср “ МХХ) + •Атрив^оО
+ R}/RQMcp/2K(Mcp - Мхх). (2.21)
При пренебрежении моментом нагрузки Мхх ввиду его малости
по сравнению с Л/ср формула (2.28) упрощается и принимает вид
(кх = Л1рив®о/^Иср + ЛРив®о2( 1 + Л1/Л2')/2Х (2.22)
Рассмотрим пример применения полученных соотношений к
двигателю 4A180S4.
Пример 2.8. Дополнительно к данным двигателя 4A180S4,
приведенным в примере 2.6, известны: момент инерции ротора
/рот = 0,19 кг м2, кратности критического Хк = 2,3 и пускового ХпуСК =
= 1,4 моментов.
71
Условия решения задачи:
• приведенный момент инерции /прив = 1,2 • 0,19 = 0,23 кг - м2;
• моментом нагрузки двигателя на холостом ходу Л/хх пренеб-
регаем.
1. Рассчитываем средний момент двигателя при пуске:
Мср (-^пуск + -^к)/2 — (^пуск Ком + ^К^НОм)/2 “
= (1,4-143 + 2,3 • 143): 2 = 264,5 Н • м.
2. Определяем по формуле (2.22) граничное время холостого хода:
6<Х — Лтрив^о/^ср Лтрив^О (1 —
= 0,23 • 157: 264,5 + 0,23 • 1572( 1 + 0,219 : 0,112): 2 • 1 117 = 7,6 с.
Таким образом, если время работы электропривода на холостом
ходу превышает 7,6 с, то отключение двигателя приведет к эконо-
мии электроэнергии в электроприводе и системе электроснабжения.
Отключение всегда целесообразно при времени работы двига-
теля на холостом ходу более 10 с.
2.7. Энергосбережение в режиме частых пусков
Многие рабочие машины и производственные механизмы ра-
ботают в повторно-кратковременном режиме 53 или его разно-
видностях. Для ЭП таких машин и механизмов важным элементом
анализа их работы является определение допустимой частоты вклю-
чений, которая лимитируется главным образом нагревом двига-
телей. Снижая тем или иным способом потери энергии в двигате-
ле в установившемся или переходных режимах, можно решать как
задачу энергосбережения, так и задачу повышения допустимой
частоты включения двигателей.
Рассмотрим цикл работы двигателя с помощью графика ско-
рости (тахограммы) со(г), изображенного на рис. 2.7. Движение в
этом цикле состоит из участков пуска продолжительностью ZnycK,
установившейся работы со временем /уст, торможения со време-
нем ZT и паузы со временем /0 (отключения). Интервалы /пуск, ZycT и /т
составляют время включения
(работы) двигателя /р, которое
вместе со временем пауды t0 со-
ставляют время цикла tn.
Рис. 2.7. Тахограмма в режиме корот-
ких циклов
72
Таблица 2.13
Исходные данные для уравнения теплового баланса
Участок цикла, его продолжительность Тепловая энергия, выделившаяся в двигателе Тепловая энергия, отдан- ная в окружающую среду
ПуСК, /пуск * пуск (1 + р)ДРном^ПуСК/2
Установившийся режим, /уст ДР/уСТ А Р / ном*уст
Торможение, /т ди; (1 + ₽)ДРН0М/т/2
Пауза, /0 0
Для удаленного цикла работы ЭП наступает квазиустановив-
шийся тепловой режим двигателя, когда выделяющееся в двига-
теле количество теплоты равно количеству теплоты, отдаваемому
в окружающую среду. Это позволяет составить уравнение теплово-
го баланса для двигателя, исходные данные для которого приве-
дены в табл. 2.13.
В табл. 2.13 приняты следующие обозначения: Д1Кпуск, ДИ^ —
соответственно потери энергии при пуске и торможении; ДРН0М,
ДР — соответственно мощности потерь в номинальном режиме и
при установившемся движении; р — коэффициент ухудшения теп-
лоотдачи.
В табл. 2.14 приведены значения коэффициента р для двигате-
лей с различными способами охлаждения.
Уравнение теплового баланса получаем приравниванием коли-
честв выделенной и отданной теплоты:
пуск
+ ДР/уст +
Д Жт = (1 + р) дрном(
^пуск
+ + Д^ном(^уст + РО-
Введя обозначения для числа включений в час h = 3600/7ц и
относительной продолжительности включения е = /Р//Ц5 получаем
после упрощений следующее выражение для допустимой частоты
включения двигателя при рассматриваемом цикле:
Таблица 2.14
Значения коэффициента ухудшения теплоотдачи
Исполнение двигателя р
Закрытый с независимой вентиляцией 1
Закрытый без принудительного охлаждения 0,95...0,98
Закрытый самовентилируемый 0,45 ...0,55
Защищенный самовентилируемый 0,25 ...0,35
73
h — з goo AP)e + АРномр(1 е)
а И'пуск + А и;
(2.23)
Из выражения (2.23) следует, что повышение частоты вклю-
чения двигателей может осуществляться за счет снижения потерь
мощности АР в установившемся режиме и потерь энергии при
пуске и торможении ДИ^уск и АИ^, а также применения более
интенсивного охлаждения (вентиляции) двигателей.
Рассмотрим конкретный пример расчета допустимой частоты
включения.
Пример 2.9. Асинхронный двигатель с короткозамкнутым
ротором типа AHP132S4 имеет номинальные мощность Рном -
= 7,5 кВт; скольжение sH0M = 0,04; КПД Лном = 87,5 %; = 2;
Мпах/Л^ном = 2,5; /Эд = 0,028 кг • м2. Рассчитать допустимую частоту
включения.
Условия решения задачи:
• двигатель работает с е - 0,42 при номинальной нагрузке;
• отношение RJRi = 1,5;
• коэффициент ухудшения теплоотдачи 0 = 0,3;
• суммарный приведенный к валу двигателя момент инерции
электропривода составляет 1,2/Эд;
• торможение двигателя осуществляется выбегом (отключением).
1. Определяем скорость двигателя при холостом ходе и в номи-
нальном режиме:
«о = 2л/]/р = 2 • 3,14 • 50: 2 = 157 рад/с;
«ном = «о(1 - sHOM) = 157(1 - 0,04) = 150,7 рад/с.
2. Определяем номинальный момент двигателя:
Л/ном = Люм/«ном= 18 500:150,7 = 50 Н • м.
3. Находим полные потери мощности в двигателе в номиналь-
ном режиме:
АРном= Рном(1 -Пном)/Пном- 7 500(1 - 0,875): 0,875 = 1 071 Вт.
4. Определяем переменные потери мощности в обмотках стато-
ра и ротора в номинальном режиме:
^НОМ ^ном«0^ном( 1 R] /R-l)
= 50- 157-0,04(1 + 1,5) = 785 Вт.
5. Находим постоянные потери мощности:
К= АРН0М - Ином = 1 071 - 785 = 286 Вт.
6. Рассчитываем средний момент двигателя при пуске, прини-
мая его равным полусумме пускового и максимального (крити-
ческого) моментов:
74
Л/"ср — (^/пуск+ ^тах)/2 — (2Л/Н0М + 2,5Л/Н0М)/2 —
7. Находим время пуска двигателя:
/пуск ~ /sC0hom/(Mp - мс) = 1,2 • 0,028 150,7: (113 - 50) = 0,08 с.
8. Находим потери энергии при пуске А1УИ, обусловленные пе-
ременными потерями мощности К:
AHV= (1 + Я1/Я2) ($2Нач - 52кон)Л/ср/2(М:р “ Мс) =
= 1,2 0,028 • 1572(1 + 1,5)(12- 0,042) (113 : 2)(113 - 50)= 2547 Дж.
9. Определяем потери энергии, обусловленные постоянными
потерями мощности К, и суммарные потери энергии за время
пуска:
АИ^ = KtnycK = 286 • 0,08 = 23 Дж;
АРИпуск = АИ^+ АИ^ = 2 547 + 23 = 2 570 Дж.
10. Рассчитываем допустимую частоту включения двигателя по
формуле (2.23), учитывая, что двигатель работает при номиналь-
ной нагрузке и без потерь энергии при торможении:
, , АРном р (1 - е) 3 600 • 107 Ь 0,3 (1 - 0,42) _, .
h-3 600----Д-1---- =-------—2—1’—- = 261 вкл/ч.
Дркпуск 2570
Повышение допустимой частоты включения двигателей одно-
значно связано со снижением потерь мощности и энергии в дви-
гателе. Кратко рассмотрим эти возможности, следующие из фор-
мулы (2.23).
Во-первых, снижение потерь энергии при пуске ЛИ/пуск воз-
можно за счет частотно-управляемого пуска с использованием
преобразователя частоты. Потери энергии при таком пуске по
сравнению с рассмотренным в примере прямым пуском меньше
в 2ТМ/Гчп раз, где гчп — время частотно-управляемого пуска (ЧП);
Гм = ^^о/^пуск- При выполнении условия /чп > 2ГМ будет иметь
место снижение потерь энергии при пуске и повышение допусти-
мой частоты включения двигателя.
Для рассматриваемого примера Тм = 1,2 • 0,028 • 157 : (2 • 50) =
= 0,05 с, поэтому снижение потерь энергии в двигателе будет про-
исходить при времени нарастания частоты при пуске более 0,1 с.
Наличие преобразователя частоты позволяет также реализовы-
вать частотно-управляемое торможение двигателя, в том числе с
возможностью рекуперации энергии в сеть.
Во-вторых, снижение потерь при пуске может быть обеспечено
за счет оптимального выбора передаточного числа (радиуса приве-
дения) механической передачи и номинальной скорости двигате-
ля. Эти возможности были рассмотрены ранее.
75
2.8. Компенсация реактивной мощности
Работа большинства электроприемников переменного тока со-
провождается потреблением реактивной энергии (мощности) и
характеризуется коэффициентом мощности coscp. Усредненные зна-
чения coscp для систем электроснабжения различных предприятий
приведены далее. На практике коэффициент мощности предприя-
тия определяется договором на его электроснабжение и должен
находиться в пределах 0,93...0,99.
Значение coscp предприятий
Предприятие Примерный cosip
Хлебопекарное производство................... 0,6... 0,7
Мясоперерабатывающее производство............ 0,6...0,7
Мебельное производство....................... 0,6...0,7
Лесопильное производство..................... 0,55...0,65
Молочные заводы.............................. 0,6...0,8
Механообрабатывающие заводы.................. 0,5...0,6
Авторемонтные предприятия.................... 0,7...0,8
Циркуляция реактивной мощности между системой электро-
снабжения и электроприводом сопровождается потерями мощно-
сти. В связи с этим снижение уровня этой мощности, называемое
обычно компенсацией реактивной мощности, определяет одну из
возможностей энергосбережения.
Кроме того, прохождение реактивной мощности снижает про-
пускную способность всех элементов системы электроснабжения и
приводит к дополнительному падению напряжения в линиях элект-
ропередачи и трансформаторах. Таким образом, компенсация ре-
активной мощности представляет собой важную технико-экономи-
ческую задачу.
Таблица 2.15
Данные по результатам компенсации реактивной мощности
costp до компенсации costp после компенсации Снижение тока и полной мощности, % Снижение вели- чины потерь, %
0,5 0,9 44 69
0,5 1,0 50 75
0,6 0,9 33 55
0,6 1,0 40 64
0,7 0,9 22 39
0,7 1,0 30 51
0,8 1,0 20 36
76
Прежде чем приступить к компенсации реактивной мощности
и выбору средств для ее реализации, следует провести мероприя-
тия по снижению потребления реактивной мощности, которые
были рассмотрены ранее.
Компенсация реактивной мощности не всегда экономически
выгодна для предприятия, ее осуществляющего. Это связано с
необходимостью капитальных затрат на установку средств ком-
пенсации и возрастанием потребления активной энергии, вызыва-
емой потерями мощности в компенсирующих устройствах. По-
этому определение уровня компенсации, средств ее реализации
и места их установки требует выполнения технико-экономиче-
ских расчетов.
В табл. 2.15 приведены ориентировочные данные, характеризу-
ющие эффект от компенсации реактивной мощности в системе
электроснабжения*.
Средства компенсации реактивной мощности. К таким сред-
ствам относятся конденсаторные батареи, синхронные двигате-
ли, синхронные компенсаторы и фильтрокомпенсирующие уст-
ройства.
Конденсаторные батареи являются основным сред-
ством компенсации реактивной мощности при рабочих напря-
жениях до 10 кВ и практически не имеют ограничения по мощ-
ности. Они характеризуются простотой при монтаже и эксплуа-
тации, бесшумностью в работе, относительно невысокой сто-
имостью, возможностью установки практически в любом поме-
щении, малыми удельными собственными потерями мощности
порядка 0,0025... 0,005 кВт/квар. Их недостатком являются невоз-
можность плавного регулирования отдаваемой мощности, нали-
чие остаточного заряда, требующее применение разрядных ре-
зисторов, чувствительность к несинусоидальности напряжения
сети и пожароопасность.
Реактивная мощность батареи конденсаторов QK, В А, опре-
деляется по соотношению
£ = <oi/2HOMC-10-6, (2.24)
где со — угловая частота напряжения сети переменного тока с
частотой/, Гц, со = 2л/; UUOM — номинальное напряжение конден-
саторов, В; С — емкость конденсаторной батареи, мкФ.
Как видно из выражения (2.24), конденсаторные батареи од-
ной и той же емкости более высокого напряжения способны ге-
нерировать и большую реактивную мощность QK.
Синхронные двигатели, приводя в движение испол-
нительные органы рабочих машин и производственных механиз-
* Компенсация реактивной мощности как средство сокращения затрат //
Энергосбережение. — 2003. - № 1.
77
COS(p, If
0
в. HOM
Рис. 2.8. U-образные характеристики синхронного двигателя
мов, способны одновременно генерировать реактивную мощность.
За счет этого электропривод с синхронным двигателем может ра-
ботать с требуемым коэффициентом мощности coscp и минималь-
ными потерями мощности (максимальным КПД) или обеспечи-
вать наилучшие значения этих показателей в системе электроснаб-
жения или в узле нагрузки, к которому он подключен. Воздей-
ствие на эти энергетические показатели осуществляется с помо-
щью регулирования тока возбуждения двигателя, которое может
осуществляться в автоматическом режиме по заданному крите-
рию качества с помощью систем автоматического регулирования
возбуждения (АРВ).
Возможность работы синхронного двигателя в качестве источ-
ника (компенсатора) реактивной мощности иллюстрируют U-об-
разные характеристики (рис. 2.8): зависимости тока статора двига-
теля Ц и его coscp от тока /в возбуждения при 6/ф= const,/] = const
и Р] = const. Они имеют минимум, которому соответствует макси-
мум коэффициента мощности coscp ~ 1.
На рис. 2.8 показаны зависимости /(/в) (кривые 7 и 2) и coscp(/B)
(кривые 3 и 4) при двух уровнях механической нагрузки син-
хронного двигателя: номинальной Рном (кривые 1 и 3) и его холо-
стом ходе (кривые 2 и 4). Область характеристик справа от пунк-
тирной линии 5 соответствует работе двигателя с опережающим
coscp, слева от нее — с отстающим, на самой линии 5 coscp = 1.
При небольших токах возбуждения ток статора Ц отстает от
напряжения сети на угол ср, что соответствует работе синхронно-
го двигателя с отстающим coscp и потреблению им реактивной
энергии из питающей сети.
При некотором токе возбуждения реактивная составляющая тока
станет равной нулю, т. е. ток статора станет чисто активным / == /1а.
Этому режиму соответствует минимальное значение тока статора
78
и максимально возможное значение cos<p= 1. При дальнейшем уве-
личении тока возбуждения вновь появится реактивная составля-
ющая тока, но уже опережающая напряжение сети на 90°. За счет
этого ток статора Ц будет также опережать напряжение сети и
двигатель начнет работать с опережающим coscp, отдавая реактив-
ную энергию в питающую сеть.
Как видно из рис. 2.8, с ростом мощности нагрузки область
генерации реактивной мощности (опережающего coscp) смещает-
ся в сторону больших токов возбуждения. Таким образом, если
синхронный двигатель работает с переменной нагрузкой на валу,
то для полного использования его компенсирующих свойств тре-
буется соответствующее изменение его тока возбуждения.
Серийные синхронные двигатели выпускаются с опережающим
номинальным coscp в пределах 0,8...0,9, что определяет возмож-
ность их использования в качестве источников реактивной мощ-
ности.
Регулирование тока возбуждения позволяет использовать син-
хронный двигатель не только в качестве компенсатора реактив-
ной мощности, но и обеспечивать с его помощью другие полез-
ные опции электропривода и системы электроснабжения, среди
которых повышение устойчивости работы синхронного двигателя
при колебаниях механической нагрузки и поддержание номиналь-
ного напряжения в узле системы энергоснабжения, к которому
присоединен двигатель. В общем случае регулирование тока воз-
буждения синхронного двигателя осуществляется в автоматиче-
ских схемах, в которых используются тиристорные возбудители и
различные виды обратных связей — АРВ.
Генерация реактивной мощности этими двигателями сопро-
вождается выделением в них дополнительных потерь мощности
ДР0, которые определяются по формуле*:
&PQ = + Д2(0/Сном)25 (2.25)
где Дь Д2 — постоянные для данного двигателя величины, зави-
сящие от типа двигателя, его мощности и скорости вращения;
(2Н0М, Q “ соответственно номинальная и генерируемая реактив-
ные мощности двигателя.
В табл. 2.16 приведены значения Дь Д2, номинальных мощнос-
ти Рном, КПД т|ном и реактивной мощности QH0M для синхронных
двигателей серии СДН напряжением 6 кВ с номинальной скорос-
тью 1 000 об/мин.
Синхронные компенсаторы представляют собой син-
хронные двигатели облегченной конструкции, работающие без
* Федоров О. В. Основы технико-экономического выбора электроприводов
промышленных установок : монография / О. В. Федоров, Э.Л. Карпова. — Н. Нов-
город: Изд-во ГГУ, 1991. — 164 с.
79
Таблица 2.16
Данные двигателей серии СДН
^ном» кВт QH0M, квар Ином» % Дь кВт Дз, кВт
1 000 511 95,37 5,09 3,99
1250 633 95,95 4,74 4,42
1600 812 95,75 6,65 6,80
2 000 1010 96,06 8,06 7,53
2 500 1260 96,50 8,13 7,74
3 200 1610 96,75 10,30 8,91
4 000 2 000 96,43 14,10 11,80
5 000 2 500 96,90 13,80 11,50
6 300 3 150 97,22 14,60 13,10
механической нагрузки. Их достоинство — возможность быстро-
го плавного регулирования тока возбуждения в большом диапазоне,
а недостатки — значительная стоимость и относительно высокие
удельные потери мощности, составляющие 0,15...0,32 кВт/квар.
По этим причинам применение синхронных компенсаторов ока-
зывается целесообразным при необходимости генерации изме-
няющейся во времени значительной реактивной мощности (50
Мвар и выше).
Фильтрокомпенсирующие устройства (ФКУ) целе-
сообразно использовать на предприятиях, работа которых харак-
теризуется переменной электрической нагрузкой, вызывающей
большие колебания напряжения и искажения формы кривых тока
и напряжения. Эти устройства выполняют одновременно две функ-
ции: компенсацию реактивной мощности и фильтрацию высших
гармоник напряжения и тока. Для этого в их состав входят фильтр
состоящий из индуктивных и емкостных элементов и настроенный
на подавляемые частоты высших гармоник, и специальный тири-
сторный преобразователь, работающий в режиме генерации ре-
активной мощности.
Те же функции, что и ФКУ, но без фильтрации высщих гар-
монических составляющих, выполняют статические тиристорные
компенсирующие устройства.
Способы компенсации реактивной мощности. По способам ком-
пенсации различают единичную, групповую и централизованную
схемы компенсации.
Единичная компенсация предусматривает компенса-
цию реактивной мощности одной отдельной электроустановки.
80
Групповая компенсация предусматривает компенса-
цию Q нескольких электроустановок, расположенных рядом и
подключенных к одному распределительному устройству.
Централизованная компенсация применяется для
компенсации реактивной мощности нескольких групп электро-
приемников цеха или предприятия в целом. Как правило, такая
компенсация характеризуется наличием регулятора реактивной
мощности, позволяющего изменять уровень генерируемой реак-
тивной мощности при изменении режима работы системы элект-
роснабжения.
Включение компенсирующих устройств может осуществляться
параллельно электроустановке или последовательно с ней. Пер-
вый вариант, получивший название поперечной компенсации,
применяется для повышения собственно коэффициента мощности
электроустановок. Второй вариант включения, называемый про-
дольной компенсацией, применяется для электроприемников,
работающих с резкопеременной нагрузкой. Его применение по-
зволяет снизить колебания напряжения за счет компенсации ин-
дуктивных сопротивлений элементов систем электроснабжения.
Реактивная мощность компенсирующей установки (КУ) (2КУ
определяется по формуле
0КУ = ^(tg<Pi - tg(p2)» (2.26)
где Р — активная мощность электроприемника (электроприво-
да); tg<pb tg(p2 — тангенсы угла ф соответственно после и до компен-
сации.
Экономия электроэнергии за счет снижения потерь мощности
в системе электроснабжения при компенсации реактивной мощ-
ности может быть определена двумя способами.
Первый способ предусматривает использование коэффициента
£пп, учитывающего снижение потерь активной мощности в сис-
теме электроснабжения за счет снижения передаваемой реактивной
мощности, кВт/квар. Значения этого коэффициента лежат в пре-
делах 0,02...0,15, и он определяется схемой электроснабжения. При
его использовании формула для определения экономии потерь
активной мощности в системе электроснабжения при компенса-
ции реактивной мощности имеет вид
АРЭк ~ ДйЛиь (2.27)
где Д0К — величина скомпенсированной реактивной мощности.
Формула (2.27) привлекает своей простотой, однако из-за от-
сутствия точного значения коэффициента Лпп результаты расчета
могут иметь значительную погрешность.
Второй способ расчета предполагает наличие конкретной схе-
мы электроснабжения электропривода с известными параметра-
ми ее элементов. В этом случае снижение потерь мощности в звене
81
системы электроснабжения, обусловленное снижением проходя-
щей по нему реактивной мощности, может быть рассчитано по
следующей формуле:
АЛн = 0ку (20 - 0Ку) W - АРКу, (2.28)
где 0ку “ реактивная мощность компенсирующего устройства;
0 — реактивная мощность до компенсации; /? — активное со-
противление звена; U — напряжение; ДРКУ “ потери мощности в
компенсирующем устройстве.
Для трансформаторов компенсация реактивной мощности сни-
жает их нагрузку и тем самым потери мощности, которые опреде-
ляются формулой
ДРТ = APvv + kl ДА 3,
где ДРТ — потери мощности в трансформаторе; АРхх, АРКЗ — по-
тери мощности соответственно холостого хода и короткого за-
мыкания; к3 — коэффициент загрузки трансформатора.
В практике электропривода применение находит индивидуаль-
ная компенсация реактивной мощности электродвигателей, в том
числе и низковольтных. Такая компенсация производится как в
целях снижения потерь мощности в системе электроснабжения,
так и для повышения напряжения на двигателе при его питании
по длинным линиям. Формула для расчета мощности компенси-
рующего устройства 0КУ, повышающего напряжение на величину
Д(7, имеет вид
еку = д^ном/(Л£),
где t/HOM — номинальное напряжение питания; удельное ре-
активное сопротивление двигателя; L — длина питающей линии.
Рассмотрим примеры расчета энергосбережения при исполь-
зовании компенсирующих устройств.
Пример 2.10. Синхронный двигатель типа СДН—- 1000 — 600УЗ
имеет следующие паспортные данные: Рном = 1 000 кВт; лном =
“600 об/мин; t/H0M = 10 кВ; coscpHOM= 0,9 (опережающий); КПД
Пном= 95 %; /1ном= 67,5 A; R} = 1,26 Ом; Л/тах/Л/ном = 2; номиналь-
ный ток возбуждения /в ном = 236 А; сопротивление обмотки воз-
буждения (ОВ) в нагретом состоянии Яов = 0,225 Ом; номиналь-
ная потребляемая мощность цепью возбуждения Рвном = 12,5 кВт.
Требуется рассчитать зависимости /j(/B) и cosq)(/B) при работе
двигателя с номинальной нагрузкой на валу, а также зависимость
реактивной мощности 0(/в) от тока возбуждения при работе дви-
гателя с опережающим coscp.
При расчете примем следующие допущения:
• магнитная цепь двигателя не насыщена;
• активное сопротивление статора не учитывается;
• двигатель имеет неявнополюсную конструкцию.
82
При этих допущениях ЭДС статора на основании векторной
диаграммы двигателя может быть представлена в виде
Е2 = /?Ном^ + ^ном ± Х\ 7л2ном " Ла- (2.29)
1. Рассчитываем активную PiH0M, полную 51Н0М и реактивную
Qihom мощности и активную составляющую тока 71а двигателя в
номинальном режиме:
Лном = Лном/Пном = 1 000:0,95 = 1 052,63 кВт;
S1HOM = ЛноМ/(ПномС05фном) = 1000: (0,95-0,9) = 1 170 кВ-А;
(А ном = *^1ном^шфном 1 170 0,435 509 квар,
Аа = АномСОЗфиом 67,5 0,9 — 60,75 А.
2. Рассчитываем номинальный момент двигателя:
Л/ном = Рном/Чом = 1 000; (0,1047 600) = 15,92 кН • м;
скорость вращения холостого хода и максимальный момент:
соо= 62,82 рад/с;
Чих = 2Ком = 2 • 15,92 = 31,84 кН -м.
3. Используя формулу для максимального момента синхронно-
го двигателя и формулу (2.29), представим номинальную ЭДС ста-
тора Еном в виде
£ноМ = Mmax<Do^/(3tZHOM) = 31 840-62,82^/(3-5780) = 115,61^;
где Xi — индуктивное сопротивление цепи статора.
4. Совместное решение системы двух этих уравнений позволяет
найти индуктивное сопротивление цепи статора Х} = 83,86 Ом и
номинальную ЭДС статора £ном = 115,61 • 83,86 = 9 695 В.
5. По номинальным ЭДС £ном и току возбуждения двигателя
/вном находим сопротивление взаимной индукции (ВИ) %ви:
*ви = Ети/1вмои = 9 695:236 = 41,08 Ом.
6. Порядок расчета искомых зависимостей состоит в сле-
дующем. Задаваясь значениями тока А, определяем по формуле
(2.29) ЭДС двигателя Е, затем находим через сопротивление
взаимной индукции Хви ток возбуждения /в, определяем созф =
= Аа/А, 51Пф и рассчитываем генерируемую реактивную мощность
Q = 3f/H0MAsinT.
В табл. 2.17 приведены результаты расчета, при этом в послед-
ней строке таблицы приведены значения генерируемой двигате-
лем реактивной мощности Q при его работе с опережающим coscp.
83
Таблица 2.17
Результаты расчета U-образных характеристик двигателя
Л, А 67,5 65 63 60,75 63 65 67,5
£, В 6 077 6 380 6 720 7 705 8 802 9 248 9 695
/в, А 148 155 164 188 214 225 236
COS(p 0,9 0,935 0,964 1 0,964 0,935 0,9
sirup 0,436 0,355 0,266 0 0,266 0,355 0,436
Q, квар *1 1 —— —— 0 305 440 509
Характеристики Q, /ь coscp, соответствующие данным табл. 2.17,
приведены на рис. 2.9.
Пример 2.11. Для двигателя СДН — 1000—600УЗ определить сни-
жение потерь в двигателе при работе с coscp = 1 по сравнению с
его работой с номинальным опережающим coscp = 0,9.
Снижение потерь в двигателе будет вызвано уменьшением про-
текающих в цепях якоря и возбуждения токов.
1. При работе в номинальном режиме с coscpHOM = 0,9 потребля-
емая активная мощность Р1Н0М, полные потери мощности ДРНОМ,
потери мощности в цепях статора ДР] и возбуждения АРВ соответ-
ственно составят:
= 3£71HOMcoscpHOM = 3*5 780 • 67,5 • 0,9 = 1 053 кВт;
ДЛюм = Лном - Л1ОМ = 1 053 - 1 000 = 53 кВт;
Л?! = 3/?ном/?! = 3• 67,52-1,26 = 17,2 кВт;
ДРВ = 12,5 кВт.
84
2. Используя данные табл. 2.17, находим потери мощности в
цепях якоря и возбуждения при работе с coscp = 1 (т.е. при сниже-
нии тока возбуждения до значения 188 А):
APj = Д/>1ном(/]а//1ном)2 = 17(60,75 : 67,5)2 = 13,8 кВт;
АЛ = A^.hom(V4.hoM)2 = 12,5(188 : 236)2 = 7,9 кВт.
В результате суммарные потери в двигателе снизятся на 8 кВт.
Дополнительно к этому уменьшатся потери мощности в эле-
ментах системы электроснабжения и возбудителе синхронного
двигателя.
Пример 2.12. Определить мощность и емкость конденсаторной
батареи, которую необходимо использовать для повышения ко-
эффициента мощности трехфазного асинхронного электропривода
от coscp! = 0,8(tgcpj = 0,75) до coscp2 = 0,96(tgcp2 = 0,29). Потребляемая
активная мощность электропривода составляет 2 200 кВт, а номи-
нальное напряжение — 6 кВ.
1. Требуемая мощность конденсаторной батареи находится по
формуле (2.26):
6ку = ^(tgcpi - tgcp2) = 2 200 (0,75 - 0,29) = 1 008 квар.
2. Емкость конденсаторной батареи на одну фазу определяется
с помощью формулы (2.24):
С = QKy/(3®tPHOM-10-6) =
= 1008-1 000: (3 - 2 - 3,14 - 50 - 6 0002- 10’6) = 29,72 мкФ.
Пример 2.13. Синхронный двигатель СДН — 2500 —1000 имеет но-
минальные мощность Рном = 2 500 кВт, скорость ином = 1 000 об/мин и
напряжение UH0M = 6 кВ и работает с номинальной нагрузкой на
валу. Требуется определить, на сколько изменятся потери мощно-
сти в двигателе по сравнению с номинальными потерями при
генерации реактивной мощности величиной 1 500 квар.
1. Потери мощности на генерацию мощности QHOM = 1 260 квар
в соответствии с формулой (2.25) составят:
\PQ = Д( + Д2= 8,13 + 7,74 = 15,87 кВт.
2. Потери мощности на генерацию мощности 1 500 квар со-
ставят:
дро = Д1С Сном + Д2(С/Сном)2 = 8,13 • 1 500:1 260 +
+ 7,74 • (1 500: 1 260)2 = 20,65 кВт,
т.е. потери мощности увеличатся на 4,78 кВт. Если эти потери мощ-
ности не будут превышать экономию потерь мощности в системе
85
электроснабжения, то синхронный двигатель может рассматри-
ваться как приемлемое средство компенсации.
Пример 2.14. Цеховой трансформатор типа ТМ—1000/10 с
каталожными данными ДРХ = 2,45 кВт; ДРК = 12,2 кВт; UK = 5,5%;
/х = 1,4 % работает с активной нагрузкой Р = 540 кВт, реактив-
ной нагрузкой Qi = 718 квар и полной (кажущейся) нагрузкой
S[ = 900 кВ • А (индексом 1 обозначены переменные до компенсации
реактивной мощности; индексом 2 — после компенсации). Коэф-
фициент загрузки трансформатора составляет £31 = 0,9. Средневзве-
шенный коэффициент мощности нагрузки coscp] = 0,65 (tgcpi = 1,17).
Трансформатор питается от главной понизительной подстан-
ции при напряжении 10 кВ по кабельной линии, имеющей актив-
ное сопротивление жил R = 0,31 Ом.
Требуется за счет компенсации реактивной мощности на сто-
роне низкого напряжения трансформатора 0,4 кВ повысить коэф-
фициент мощности цеховой системы электроснабжения до уров-
ня cos<p2 = 0,9 (tg<p2 = 0,44).
Условия решения задачи:
• для компенсации реактивной мощности используются авто-
матизированные компенсирующие устройства (АКУ);
• потери активной мощности в компенсирующем устройстве
не учитываются;
• число часов работы трансформатора в году Тг = 8 760 ч; число
часов работы с полной загрузкой при двухсменной работе цеха
составляет Тр = 5 400 ч;
• число часов наибольших потерь мощности в кабельной линии
т принимается равным 3 500 ч в год;
• одноставочный тариф на электроэнергию сэ= 1,3 руб./кВт-ч
(Москва, 2005 г.);
• норма амортизационных отчислений ра = 0,05;
• затраты на транспорт и монтаж компенсирующего устрой-
ства принимаются в размере 15 % от его стоимости.
Компенсация реактивной мощности осуществляется на сторо-
не низкого напряжения трансформатора 0,4 кВ и обеспечивает
снижение потерь мощности в трансформаторе и питающей его
кабельной линии.
1. Рассчитываем мощность компенсирующего устройства по
формуле (2.26):
Ску = ^(tg<Pi - tg<p2) - 540(1,17 - 0,44) = 394 ква'р.
2. Находим нагрузку трансформатора после компенсации и его
коэффициент загрузки при этом:
S2 = #2+«21-0ку)2 = V5402-(718-394)2 = 630 кВ • А;
кл = 52/52ном = 630:1 000 = 0,63.
86
3. Потери энергии в трансформаторе за год определяются фор-
мулой
ДИ^ = ДРхГг + к2 ЛРкТъ,
тогда потери энергии до и после компенсации составят:
Д = 2,45 8 760 + 0,92 -12,2-5 400 = 74 825 кВт-ч;
Д1Гт2 = 2,45 - 8 760 + 0,632- 12,2 - 5 400 = 47 610 кВт-ч.
4. Годовая экономия электроэнергии в трансформаторе со-
ставит:
ДИ<г = Д1Ут1 - Д1Гт2 = 74 825 -47 610 = 27 215 кВт-ч.
5. Снижение потерь мощности в кабельной линии определяем
по формуле (2.28) при ДРКУ = 0 и номинальной мощности ком-
пенсирующей установки £)Ку = 400 квар:
АЛн= Ску(20!- Q^y)R/u2 =
= 400(2 • 718 - 400) • 0,31:102 = 1,29 кВт.
6. Экономия потерь энергии в кабельной линии (КЛ) за год
составит:
Д= ДРэнт = 1,29-3 500 = 4515 кВт-ч.
7. Общая экономия электроэнергии в трансформаторе и кабель-
ной линии будет равна:
Д1ГЭК= Д1ГТ + ДИ^ = 27 215 + 4 515 = 31 730 кВт-ч.
8. Для установки выбираем автоматизированную конденса-
торную установку типа АКУ 0,4—400 —20УЗ стоимостью (по со-
стоянию на 2005 г.) 125 400 руб. с учетом НДС. Находим срок оку-
паемости Ток при ее использовании:
Ток = К3/(Д Жэксэ - АЦку) =
= 1,15 * 125400: (31 730 • 1,3 - 0,05 • 125400) = 4,1 года,
где КЗ — капитальные затраты на покупку, транспортирование и
монтаж установки, КЗ = 1,15ЦКУ; Цку — цена компенсирующей
установки.
Контрольные вопросы
1. В чем важность задачи правильного выбора двигателя по мощности?
2. Какие данные являются исходными при расчете мощности и выбо-
ре двигателя?
3. Что позволяет получить оптимизация передаточного числа редукто-
ра?
87
4. Какими расчетными методами может быть выполнена проверка дви-
гателя по нагреву?
5. Какими методами можно проверить нагрев двигателя при его эксп-
луатации?
6. В чем состоят особенности исполнения энергосберегающих асинх-
ронных двигателей?
7. Как зависят КПД и coscp асинхронного двигателя от нагрузки на
валу?
8. За счет чего переключение обмоток статора асинхронного двигате-
ля со схемы «треугольник» на схему «звезда» при малых нагрузках может
привести к повышению энергетических показателей его работы?
9. При каких условиях целесообразно отключать асинхронный двига-
тель при холостом ходе?
10. За счет чего может быть повышено допустимое число включений
асинхронного двигателя?
11. Каким образом компенсация реактивной мощности позволяет сни-
жать потери энергии в системе электроснабжения?
12, Какие схемы и технические средства применяются при компенса-
ции реактивной мощности?
ГЛАВА 3
РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД - ОСНОВНОЕ
СРЕДСТВО ЭНЕРГО- И РЕСУРСОСБЕРЕЖЕНИЯ
3.1. Виды и общая характеристика регулируемых
электроприводов
Примеры энергосбережения, рассмотренные в предыдущей
главе, относились к снижению потерь в двигателе и питающей
линии и не затрагивали технологическое оборудование, не были
связаны с изменением его режима. Основная же доля потерь, как
отмечалось в подразд. 1.2, связана именно с технологическим про-
цессом, со способами управления технологическими координата-
ми. Так, в насосе и задвижке, регулирующей расход (см. рис. 1.4),
теряется основная часть мощности. Это же относится к вентилято-
ру с перекрываемым в целях регулирования воздуховодом и т.д.
Радикальный способ энергосбережения в электроприводе —
переход от нерегулируемого электропривода к регулируемому, т.е.
подача к рабочему органу технологической установки требующейся
в каждый момент мощности при минимальных потерях во всех
элементах силового канала.
Тр Лин Дв Нас
Рис. 3.1. Силовой канал электропривода с преобразователем электри-
ческой энергии
89
Технически это реализуется включением между сетью и двига-
телем управляемого электрического преобразователя П (рис. 3.1),
воздействующего на скорость вращения двигателя, т.е. в соответ-
ствии с формулой (1.2) — на мощность, подводимую к нагрузке,
благодаря чему исключается необходимость использования дру-
гих энергоемких регулирующих средств.
Энергетический эффект можно проследить по диаграммам,
представленным на рис. 3.1. Первая (штриховые линии) относит-
ся к нерегулируемому электроприводу, вторая — к регулируемо-
му электроприводу (сплошные линии). При одинаковой выход-
ной мощности и открытой задвижке во втором случае существен-
но уменьшаются потери в гидравлической части и потребляемая
системой мощность Рвх.
Эффект, разумеется, будет существенно зависеть от конкрет-
ной реализации подсистемы преобразователь—двигатель, т.е. от
того, как организован регулируемый электропривод.
До середины 1980-х годов единственным доступным решением
регулируемого электропривода был электропривод постоянного
тока. Его общеизвестные недостатки — дорогая машина и необ-
ходимость в обслуживании — ограничивали использование случа-
ями, когда без регулируемого электропривода обойтись было нельзя
(станки, металлургические агрегаты, мощные экскаваторы и т.д.).
Электропривод постоянного тока практически не использовался
в массовых агрегатах (насосы, вентиляторы и т.д.).
В некоторых агрегатах (краны, лифты и др.) использовались и
используются многоскоростные асинхронные двигатели с обмот-
ками статора на разное число полюсов и короткозамкнутым рото-
ром, асинхронные двигатели с фазным ротором при реостатном
регулировании, в мощных агрегатах с небольшим диапазоном ре-
гулирования применялись каскадные схемы электропривода, од-
нако подавляющее большинство (до 95 %) электроприводов были
нерегулируемыми, построенными на основе асинхронного двига-
теля с короткозамкнутым ротором.
Сейчас ситуация радикально изменилась: на широком рын-
ке появились совершенные и доступные электронные преоб-
разователи частоты. Именно эти устройства произвели перево-
рот в современном электроприводе — резко (до 15 %) снизили
долю электроприводов постоянного тока в общем парке регули-
руемых электроприводов, стали основным и пока практически
единственным средством, реализующим высококачественный
регулируемый асинхронный электропривод в массовых приме-
нениях.
Становятся малоэффективными многоскоростные асинхронные
двигатели — они тяжелы, дороги, требуют много контактной ап-
паратуры, стоимость привода соизмерима, а иногда и больше сто-
имости системы преобразователь частоты —серийный двигатель.
90
Стало непривлекательным неэкономичное реостатное регули-
рование.
Оказались неудачными попытки энтузиастов приспособить для
регулирования скорости асинхронного двигателя в продолжитель-
Таблица 3.1
Сопоставление свойств электроприводов различных типов
Виды ЭП
ЭП посто-
янного тока
Асинхронный
ЭП
Вентильно-
индукторный
ЭП
Достоин-
ства
Хорошие ре-
гулирово-
чные воз-
можности
Возможность
работы непо-
средственно
от сети пере-
менного тока.
Развитые схе-
мотехника и
программное
обеспечение
Недо-
статки
Трудоемкая
и материа-
лоемкая до-
рогая маши-
на. Необхо-
димость об-
служивания
Относительно
высокая
стоимость ре-
гулируемого
ЭП
Простота, тех-
нологичность,
низкая стои-
мость маши-
ны. Высокая
надежность.
Большие мо-
менты при
низких ско-
ростях
Необходимость
в специальном
силовом пре-
образователе;
Сложные ал-
горитмы уп-
равления.
Недостаточно
разработанное
программное
обеспечение
ЭП с маши-
нами на по-
стоянных
магнитах
Хорошие
энергетиче-
ские и массо-
габаритные
показатели
Дорогие пос-
тоянные маг-
ниты. Высо-
кая стоимость
машины
Предпо-
чтитель-
ные при-
менения
Многодвига-
тельные ЭП
технологиче-
скихлиний
по системе
источник то-
ка—двигате-
ли. Система
генератор —
двигатель в
ответствен-
ных установ-
ках
Общепро-
мышленный
ЭП широко-
го примене-
ния
Бытовая тех-
ника. Низко-
скоростные и
высокоско-
ростные ЭП.
Легкие транс-
портные сред-
ства. Автомо-
бильные стар-
тер-генера-
торы
Станки, ро-
боты, быто-
вая техника,
маломощные
объекты
91
ном режиме тиристорные регуляторы напряжения — плавные
пускатели.
Система электронный преобразователь частоты—асинхронный
двигатель с короткозамкнутым ротором становится главным на
ближайшие годы техническим решением массового регулируемо-
го электропривода. Она особенно привлекательна на стадии мо-
дернизации, так как сохраняется все существующее оборудова-
ние, но между сетью и двигателем включается новый элемент —
преобразователь частоты, радикально меняющий технический и
экономический облик системы.
Развивается новый тип регулируемого электропривода — вен-
тильно-индукторный электропривод, имеющий очень простую,
технологичную, дешевую и надежную машину, простой и надеж-
ный (в сравнении с преобразователем частоты) электронный ком-
мутатор, что позволяет этому приводу превосходить по основным
свойствам электроприводы других типов. Правда, до настоящего
времени не удается полностью преодолеть проблемы, связанные
с управлением двигателем в таком электроприводе.
В табл. 3.1 в краткой форме представлены достоинства и недо-
статки различных регулируемых электроприводов.
Основное техническое решение регулируемого электро-
привода в массовых применениях сегодня — система элект-
ронный преобразователь частоты —асинхронный двигатель с ко-
роткозамкнутым ротором. Эта система рассмотрена далее более
подробно.
3.2. Частотно-регулируемый асинхронный
электропривод
Трехфазный асинхронный электродвигатель (АД) с коротко-
замкнутым ротором — самый массовый тип электрической маши-
ны, прекрасно отработанный технологически за более чем сто-
летний период развития. Частота вращения поля и0 в двигателе
согласно формуле (1.12) определяется частотой напряжения пи-
тающей сети /:
60/!
р
где р — число пар полюсов.
Отличие частоты вращения ротора п от и0 определяется сколь-
жением 5:
”о - п
«о
которое в нормальных двигателях не превышает 0,02...0,04, т.е.
92
Рис. 3.2. Структура частотно-регулируемого электро- о
привода
/1с
—- пч
п = и0 - nQs = (О,96...О,98)яо. (3.1) L (7i=var
Ъ' /i = var
Из выражения (1.12) следует, что единствен-
ным рациональным способом плавно регулиро- пАДн ))
вать скорость такого двигателя является измене-
ние частоты приложенного к его обмоткам на- М со
пряжения (рис. 3.2). Другие способы — измене-
ние числа пар полюсов или амплитуды напряжения — предпола-
гают либо использование специального более тяжелого и дорого-
го двигателя, либо связаны с существенным ухудшением энерге-
тических характеристик.
При изменении частоты вниз от номинальной необходимо из-
менять и амплитуду напряжения. Поскольку ЭДС, наводимая в
обмотках статора, согласно формуле (1.13) примерно равна (если
пренебречь падением напряжения на обмотках) приложенному
напряжению:
Е\ = 4,44 O/iWj*06 = Ub
то для сохранения при изменении частоты номинального магнит-
ного потока и, следовательно, максимального (критического)
момента необходимо выполнить условие:
Ф = Ф
^ном
^Чном
/1НОМ
Ui
— = const.
(3.2)
Несоблюдение этого условия, т.е. изменение частоты вниз при
номинальном напряжении, недопустимо, так как вызовет рост
Рис. 3.3. Механические характеристики частотно-регулируемого электро-
привода
93
Рис. 3.4. Зависимость напряжения от часто-
ты при частотном регулировании
магнитного потока и в соответствии с
кривой намагничивания (см. рис. 1.8) рез-
кий рост намагничивающего тока Zg.
Изменение частоты вверх от но-
минальной при номинальном напряже-
нии возможно, это будет приводить к снижению критического
момента.
Механические характеристики асинхронного двигателя при
частотном регулировании имеют вид, показанный на рис. 3.3.
Для того чтобы компенсировать падение напряжения в обмот-
ках статора и сохранить неизменный Мк при низких частотах, не-
сколько увеличивают напряжение, как показано на рис. 3.4.
Длительно допустимый момент двигателя при частотном ре-
гулировании показан на рис. 3.3 штриховой линией. Допустимый
момент несколько снижается при низких скоростях в связи с
ухудшением вентиляции и уменьшается обратно пропорциональ-
но скорости при высоких скоростях из-за уменьшения магнит-
ного потока.
Важное свойство частотного регулирования — практическое
постоянство потерь при изменении скорости и одинаковой на-
грузке. Покажем это, оценив потери при критическом скольже-
нии. В соответствии с формулой (1.34)
АР = V = Л/соо5к
Рис. 3.5. Графики частотного пуска асинхронного электродвигателя в
координатах со — М (а) и со — t (б)
б
94
Заменив соо и 5К их выражениями по формулам (1.11) и (1.21),
соответственно будем иметь
a n u 2т/ R-} (. У?) , /?2 + /?1 /V \
ДР = Л/-^-------=---- 1 + —7 =М— -------““*/(©).
Р 27/(1, + L'2)[ R2 ) p(L^L'2)
Еще одно очень полезное свойство частотного регулирования —
управление динамическими режимами с нужной мерой сокраще-
ния потерь энергии при пусках и торможениях.
При частотном регулировании можно задавать любой темп из-
менения скорости поля со0(0- На рис. 3.5 в качестве примера пока-
заны два варианта пуска: ускоренный (7) и замедленный (2). Ско-
рость ротора co(z) отстает от скорости поля co0(z) на величину элек-
тромеханической постоянной времени Тм:
г Лд® (з.з)
м дм
определяемой по рабочему участку механической характеристики
двигателя.
Момент, развиваемый двигателем на основном участке пере-
ходного процесса, пропорционален ускорению:
Л/дин=Ае = Л^1. (3.4)
а/
Как было показано в подразд. 1.4, потери энергии при прямом
пуске и прямом торможении вхолостую определяются в соответ-
ствии с выражением (1.40):
Здесь учитываются только переменные потери, значительно пре-
вышающие в динамических режимах постоянную составляющую.
Потери энергии при пуске — площадь фигуры, заключенной
между кривыми электромагнитной мощности Рэм = Afto0 и мощ-
а
Рис. 3.6. Потери энергии при прямом (а) и частотном (б) пуске
74
б
95
ности на валу Р2 = Л/со (рис. 3.6). При прямом пуске (торможении)
электромагнитная мощность возникает практически мгновенно,
а мощность на валу, пропорциональная скорости, нарастает в
неуправляемом темпе переходного процесса (см. рис. 1.12). Потери
энергии определяются площадью треугольника на рис. 3.6 а.
Потери энергии при частотном пуске (торможении) — зашт-
рихованная область на рис. 3.6, б — будут зависеть от управля-
емого времени переходного процесса /Пп:
д и;аст = А И/пр 2 (3.5)
гпп
и могут быть сделаны сколь угодно малыми при увеличении Сп-
итак, частотно-регулируемый асинхронный электропривод
в его простейшей реализации (см. рис. 3.2) позволяет регулиро-
вать скорость вниз и вверх от основной, соответствующей час-
тоте 50 Гц, при минимальных возможных потерях, управлять
временем переходных процессов и снижать до желаемого уров-
ня потери энергии, сопровождающие переходный процесс.
3.3. Принципы построения преобразователей
частоты
Современные массовые электронные преобразователи частоты
появились в 1980-е годы благодаря развитию средств силовой и
информационной электроники. Их основа — полностью управля-
емый (отпираемый и запираемый внешним сигналом) электрон-
ный ключ — транзистор. Создание таких ключей на токи до 600 А и
обратные напряжения до 1 200 В при частоте коммутации до 30 кГц
позволило построить простые массовые ПЧ в диапазоне мощно-
стей до 250 кВт с выходной частотой 0... 100 Гц, работающие от
стандартной трехфазной сети 380 В.
Типовая структура массового ПЧ показана на рис. 3.7. Он со-
стоит из неуправляемого выпрямителя В, питающегося от сети,
на выход которого через конденсатор С подключен трехфазный
управляемый автономный инвертор напряжения АИН, питающий
асинхронный двигатель АД напряжением регулируемой частоты.
Управление ключами АИН — их включение и выключение — осу-
ществляется блоком управления БУ, построенным на микропро-
цессорных средствах.
Принцип действия автономного инвертора поясним на про-
стом примере, когда инвертор подключен к источнику с напря-
жением, равным единице, и нагружен тремя одинаковыми резис-
торами с сопротивлениями, равными единице, соединенными в
схему «звезда» (рис. 3.8).
БУ
Рис. 3.7. Схема системы преобразователь частоты —асинхронный элек-
тродвигатель
Обозначим ключи цифрами как показано на рис. 3.8 а,
период выходного напряжения разобьем на шесть интервалов и
обозначим их римскими цифрами I...VI (рис. 3.8, б).
Выберем положительное направление тока в резисторах от А,
В, С к 0 и поручим блоку управления включать ключи на каждом
интервале в порядке следования их номеров и оставлять включен-
ными на три интервала, т.е. на 1/2 периода (180° коммутация) —
жирные линии на рис. 3.8, б.
На интервале I включены ключи 1, 5 и 6, т.е. точки А и С
подключены к «+» источника, а точка В — к «-». Сопротивление
цепи между «+» и «-» составит 1/2 + 1 = 3/2, а ток 1:3/2 = 2/3,
причем в фазах Л и Сон будет положительным и равным 1/3, а в
фазе В — отрицательным -2/3 (рис. 3.9, а).
На интервале II ситуация изменится: будут включены ключи 1, 2
и 6, точка А соединена с «+» источника, точки Bu С —с «-», общее
а
£ I II III IV V VI I
2
3
4
5
6
1,5.6 1,2.6 1,2.3 2.3.4 3,4.5 4.5.6
б
Рис. 3.8. К принципу работы преобразователя частоты:
а — структура; б — диаграмма коммутации — замыкание ключей
4 Ильинский
97
б
в
Рис. 3.9. Схемы соединения нагрузки при коммутации фаз — I (а), II (0
и III (в) интервалы
сопротивление будет 1/2 + 1 = 3/2, ток в фазе будет 1:3/2 = 2/3, а
токи в фазах Ви С будут -1/3 (рис. 3.9, б).
Рассматривая следующие интервалы (рис. 3.9, в) легко обнару-
жить, что на зажимах нагрузки будут формироваться напряже-
ния, показанные на рис. 3.10.
Изложенное иллюстрирует лишь принцип работы автономного
инвертора. В действительности процессы имеют более сложный
характер.
Во-первых, асинхронный двигатель является сложной актив-
но-индуктивной нагрузкой, и токи не повторяют напряжения,
как в рассмотренном примере, а оказываются отстающими от на-
пряжения, в связи с чем на каждом интервале есть участок, когда
ток протекает по ключу в обратном направлении. Это обеспечива-
ется диодами в составе ключа, шунтирующими транзистор, и кон-
денсатором С, принимающим энергию обратных токов.
Во-вторых, в рассмотренном случае не регулируется амплиту-
да напряжения, что необходимо при регулировании частоты вниз
фазах
от основной. Для этого используется
либо управляемый выпрямитель В, либо
(чаще) широтно-импульсная модуляция.
При этом каждый интервал проводи-
мости ключа делится на большое коли-
чество подинтервалов с продолжитель-
ностью т. Ключ оказывается включенным
лишь в течение времени (вкл, составля-
ющем долю т. Тогда среднее значение
напряжения на подинтервале составит
Ucp = = Ut. (3.6)
Варьируя /вкл, т. е. е, можно управлять
средним напряжением, формируя в ре-
98
зультате напряжение на нагрузке любой формы, в частности нор-
мальное синусоидальное напряжение.
В-третьих, 180-градусная коммутация, рассмотренная ранее, —
лишь один частный случай. Используются и 120-градусная комму-
тация, когда ключ включен в течение 1/3 периода, и другие спе-
циальные виды коммутации.
В-четвертых, нагрузка инвертора—фазы двигателя не обяза-
тельно соединены в схему «звезда»; они могут быть соединены и в
схему «треугольник», что повлияет на форму выходного напря-
жения.
Изложенные простые алгоритмы управления частотой и амп-
литудой напряжения — лишь важные частные случаи. Широкие
возможности, предоставляемые современными микропроцессор-
ными средствами для управления ключами инвертора, позволили
создать новые эффективные структуры частотно-регулируемого
асинхронного электропривода, не уступающие по функциональ-
ным возможностям электроприводу постоянного тока. Сюда от-
носятся векторное управление в различных модификациях и пря-
мое управление моментом.
Кроме описанного ПЧ на основе автономного инвертора на-
пряжения, получившего наиболее широкое применение, вы-
пускаются и используются другие типы преобразователей ча-
стоты.
Преобразователь частоты на основе автономного инвертора
тока (АИТ) может быть построен на основе ключей — тиристо-
ров. В нем будут использоваться тяжелый и громоздкий реактор в
звене постоянного тока и управляемый выпрямитель на входе,
но появится возможность рекуперации энергии, которой не об-
ладает в базовой комплектации преобразователь с инвертором
напряжения.
Непосредственный преобразователь частоты (НПЧ) не име-
ет явно выраженного звена постоянного тока, может быть по-
строен на обычных тиристорах, может осуществлять рекупера-
цию энергии, однако имеет ограниченный диапазон измене-
ния частоты и вносит существенные искажения в напряжение
питающей сети.
3.4. Современные преобразователи частоты
общего применения
На мировом рынке работают сотни производителей преобра-
зователей частоты. Среди них есть не только всемирно известные
гиганты — Mitsubishi, Hitachi (Япония), ABB (Финляндия), Siemens
(ФРГ), но и малые, и очень малые фирмы. С 1990-х годов произ-
водство ПЧ успешно освоено в России.
99
0,7 1 2 3 4 5 10 20 30 40 50 100 200 300 400 500 1000 2 000 3 000 10 000
MEGASTAR
1000 ...8 000 кВт
STAR 18,5... 1500 кВт
т
MINISTAR 0,75 ... 3,0... 55 кВт
II» I 1 1 III I гн-——
MIKROSTAR
CSI
150... 1000 кВт
FLOWSTAR
75... 250 кВт
и—II 1 । ->
Рис. 3.11. Семейство преобразователей частоты АВВ
Крупные фирмы уже давно производят широкий спектр преоб-
разователей. На рис. 3.11 на примере ПЧ фирмы АВВ (семейство SAMI)
показана типичная шкала типоразмеров в завйсимости от мощ-
ности — 0,75...3,0 кВт, 3,0...55 кВт, 75...250 кВт, 150... 1000 кВт,
1 000... 8 000 кВт. Аналогичные семейства выпускают Allen Bradley,
Mitsubishi и другие крупные фирмы. Малые фирмы, заявившие о
своей продукции в последние годы, специализируются, в основ-
ном, на выпуске одного—трех ходовых типоразмеров в диапазоне
мощностей от 5 до 75 кВт.
Быстрый рост рынка электронных ПЧ связан прежде всего с
появлением новой элементной базы — силовых транзисторных
модулей IGBT, IPM и др.
Преобразователи частоты поставляются фирмами в разном
исполнении (от IP00 до IP54) и выпускаются в нескольких кон-
структивных исполнениях — от навесного компактного до
крупногабаритного в виде шкафа. На рис. 3.12 представлены
зависимости массогабаритных показателей от мощности
преобразователя.
Преобразователи частоты, производимые крупными фирма-
ми, в большинстве случаев предназначены для общего примене-
ния с питанием от трехфазной сети 50/60 Гц с напряжениями
380...460 В и могут эксплуатироваться в условиях, обеспечиваю-
щих помехе- и влагозащищенность, защиту от вибраций и маг-
100
a
дм , кг
160
120
80
40
i J
в. р
♦ *
* * *
0 50 100 150 250 кВт
в
Рис. 3.12. Массогабаритные показатели преобразователей частоты:
а — ПЧ мощностью 2,2...75 кВт (навесные), исполнение IP54; б — ПЧ исполне-
ния IP54 в виде шкафов для мощностей 37...315 кВт; в — встраиваемых ПЧ мощ-
ностью 37...315 кВт, исполнение IP00; — вес; * — объем
нитных помех, при температуре окружающей среды от -10 до
+40°C и влажности воздуха не более 95 %.
Современные ПЧ удовлетворяют высоким техническим тре-
бованиям и обеспечивают мягкий программируемый пуск дви-
гателя, плавное и экономичное регулирование скорости в ши-
роких пределах, высокий и стабильный коэффициент мощ-
ности, хорошее использование двигателя, высокие эксплуата-
ционные качества — надежность системы и существенное сни-
жение шума.
Большинство ПЧ общего назначения имеют следующие функ-
циональные возможности:
• управление по аналоговому входу;
• управление по цифровому входу;
• ручное управление;
• автоматическое управление;
• диапазон частот до 400 Гц;
• несущая частота до 15 кГц;
• время ускорения/торможения до 6000 с;
• возможность формирования ряда типовых зависимостей U/f
(от 1 до 16 вариантов);
• возможность векторного управления (по заказу потребителя);
• диагностика неисправностей как преобразователя, так и дви-
гателя.
101
Преобразователи частоты обеспечены широким набором защит:
• от мгновенного повышения тока — до 3,75 /ном;
• от перегрузки по току (1,2... 1,5) /ном в течение. 1 мин каждые
10 мин;
• от повышенного напряжения 1,3t/H0M;
• от пониженного напряжения 0,65 47НОМ;
• от потери фазы — электронная;
• от перегрева двигателя — электронная, программируемая;
• от перегрева радиатора транзисторов свыше 70...85°C;
• от внезапной остановки АД — электронная, программи-
руемая.
3.5. Высоковольтные преобразователи частоты
Появление управляемых силовых полупроводниковых при-
боров на высокие рабочие параметры сделало возможным со-
здание на их базе высоковольтных преобразователей частоты для
управления двигателями переменного тока большой мощности.
В настоящее время модули IGBT выпускаются на номинальные
напряжения до 6,5 кВ и токи до 2,5 кА, обычные тиристоры — на
напряжения до 4 кВ и токи до 4 кА, запираемые тиристоры GTO —
на напряжения до 6 кВ и токи до 1,2 кА, интегрированные запи-
раемые тиристоры со встроенными драйверами асимметричные
IGCT и симметричные SGCT — на напряжения до 6,5 кВ и токи
до 2 кА. Использование мощных полупроводниковых приборов
делает возможным создание высоковольтных электроприводов на
напряжения 3, 6, 10 и 16 кВ мощностью до 20 МВт и более.
Высоковольтные преобразователи частоты выполняются по двум
основным схемам: с использованием трансформаторов и в без-
трансформаторном исполнении.
На рис. 3.13 показана схема преобразователя частоты с двумя
трансформаторами. Ее характерной особенностью является нали-
чие входного понижающего трансформатора Тр1 и выходного
повышающего трансформатора Тр2. В качестве преобразователя
частоты ПЧ может использоваться стандартный низковольтный
преобразователь частоты.
Разновидностью трансформаторных преобразователей часто-
ты являются высоковольтные преобразователи с одним входным
трансформатором, имеющим две или более вторичных обмоток.
6,10 кВ Тр1 0,4 кВ
—Н/------Го)----
7W
Рис. 3.13. Схема преобразователя частоты с двумя трансформаторами
102
Bl ин
Рис. 3.14. Схема преобразователя частоты с одним трансформатором, име-
ющим две вторичные обмотки
Такой трансформатор позволяет выполнить преобразователь, в
котором снижается уровень пульсаций напряжения и тока и тем
самым упрощается решение проблемы электромагнитной совме-
стимости электропривода и системы электроснабжения. Кроме
того, в таком преобразователе могут быть использованы силовые
полупроводниковые приборы на меньшие номинальные пара-
метры в виде одинаковых стандартных блоков.
На рис. 3.14 приведена схема преобразователя частоты с од-
ним трансформатором Тр, имеющим две вторичные обмотки. Эти
обмотки питают два последовательно соединенных выпрямителя
В1 и В2, напряжение с которых через фильтр звена постоянного
тока (конденсаторы С1 и С2) подается на инвертор напряжения
ИН. Инвертор включает в себя ряд последовательно соединен-
ных силовых транзисторов с элементами, обеспечивающими рав-
номерное распределение напряжения между ними. Такая схема
преобразователя иногда называется многоуровневой*.
Выпускаются также преобразователи частоты с трансформа-
тором, имеющим три и более (до 18) вторичных обмоток, на-
пряжения которых электрически сдвинуты друг относительно друг
друга. Это позволяет создавать многопульсные схемы, в которых
снижен уровень пульсаций напряжения и тем самым упрощают-
ся условия электромагнитной совместимости. На рис. 3.15 в каче-
стве примера приведена схема преобразователя частоты с одним
трансформатором Тр, имеющим девять вторичных обмоток. На-
пряжение с обмоток подается на низковольтные инверторные
ячейки Я1...Я9, включенные последовательно по три в каждую
фазу. Ячейка представляет собой соединение в одном блоке вып-
рямителя В, конденсаторного фильтра Ф и инвертора И, выпол-
ненного в данной схеме на IGB-транзисторах.
* Высоковольтный преобразователь частоты для питания асинхронных дви-
гателей / [В. И. Кузькин, В. Н. Мелешкин, С. В. Мясищев и др.] // Электротехни-
ка. - 2004. - № 10. - С. 19-24.
103
Tp J
Рис. 3.15. Схема преобразователя частоты с одним трансформатором,
имеющим девять вторичных обмоток
Бестрансформаторные преобразователи частоты обеспечивают
прямое (без промежуточной трансформации) преобразование
напряжения питающей сети 6 или 10 кВ в напряжение регулиру-
емой частоты и амплитуды и могут выполняться по различным
схемам силовой части.
На рис. 3.16 в качестве примера приведена схема высоковольт-
ного преобразователя частоты серии ВПЧА для управления асин-
хронными и синхронными двигателями мощностью до 6 300 кВт
и напряжениями 6 или 10 кВ. Схема содержит входной токоогра-
ничивающий реактор РТ, управляемый выпрямитель УВ, фильтр
выпрямленного напряжения Ф1, инвертор напряжения ИН, вы-
ходной фильтр Ф2 и мотор М.
Выпрямитель выполнен на тиристорах с импульсно-фазовым
управлением, а инвертор — на последовательно соединенных
IGBT-модулях с управлением по принципу широтно-импульсной
модуляции. Такое исполнение преобразователя частоты позволяет
получить синусоидальные формы выходного напряжения и тока с
коэффициентом искажения синусоидальности кривой напряже-
ния, определяемым отношением среднеквадратичных значений
амплитуд высших гармонических составляющих напряжения к
амплитуде напряжения первой гармоники напряжения, не пре-
вышающим 5... 10 %.
Рис. 3.16. Схема преобразователя частоты типа ВПЧА
104
3.6. Электропривод с тиристорным регулятором
напряжения
Наряду с преобразователями частоты в регулируемом асинх-
ронном электроприводе иногда используется тиристорный регу-
лятор напряжения (ТРН) (рис. 3.17). Он изменяет амплитуду на-
пряжения, подводимого к статору без изменения частоты, и ис-
пользуется главным образом для управления пуском (мягкие пус-
катели) и осуществления ряда других полезных функций.
Принцип действия тиристорного регулятора напряжения рас-
смотрим на примере регулирования напряжения на однофазной
нагрузке переменного тока гн с помощью однофазного ТРН. Сило-
вая часть ТРН (рис. 3.17, а) образована двумя тиристорами VS1 и
VS2, включенными в цепь нагрузки по встречно-параллельной
схеме, которая обеспечивает протекание тока в нагрузке в оба
полупериода напряжения сети Ux. Управление тиристорами осу-
ществляется с помощью системы импульсно-фазового управления
(СИФУ), которая подает на тиристоры импульсы управления Ua и
обеспечивает их сдвиг на угол управления а в соответствии с вели-
чиной внешнего сигнала управления Ur
Если на тиристоры VS1 и VS2 не подаются импульсы управ-
ления от СИФУ, то они закрыты и напряжение на нагрузке С/рег
равно нулю. При подаче на тиристоры импульсов управления в
момент их естественного открывания (угол управления а = 0) они
полностью откроются (рис. 3.17, б) и к нагрузке будет приложено
все напряжение сети U\ - £/регза вычетом небольшого (1...3 В)
падения напряжения на тиристорах.
Если осуществлять подачу импульсов управления на тиристо-
ры с некоторой задержкой относительно момента их естественно-
го открытия (угол управления а ф 0), то к нагрузке будет
прикладываться часть напряжения сети (рис. 3.17, 5). Изменяя угол
Рис. 3.17. Схема (а) и кривые напряжения (б) однофазного тиристорно-
го регулятора напряжения
105
управления а от нуля до тс, можно регулировать напряжение на
нагрузке от полного напряжения сети до нуля при неизменной
частоте этого напряжения.
При активной нагрузке ТРИ кривая тока / в нагрузке будет
повторять кривую напряжения на ней, а при активно-индуктив-
ном характере нагрузки будет от нее отличаться. Форма напряже-
ния на нагрузке является несинусоидальной. Несинусоидальное
напряжение можно представить как совокупность нескольких
синусоидальных напряжений (гармоник). Частота изменения пер-
вой из них (основной гармоники) равна частоте питающего на-
пряжения, а частоты других гармоник больше, чем первой. Обы-
чно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся
все основные расчеты.
Закрытие тиристоров в непроводящий полупериод происходит
за счет напряжения сети (так называемая естественная коммутация
тиристоров), что позволяет использовать в схемах ТРИ наиболее
простые, надежные и дешевые однооперационные тиристоры.
На основе однофазной схемы (см. рис. 3.17, а) построены ТРН
для регулирования напряжения на трехфазной нагрузке (рис. 3.18, а).
Пример силовой части схемы для регулирования напряжения на ста-
торе трехфазного асинхронного двигателя АД, состоящей из шести
тиристоров KS7... VS6, приведена на рис. 3.18, б. За счет добавления в
эту схему двух пар тиристоров создаются реверсивные схемы элект-
ропривода, а с помощью соответствующего управления ТРН могут
обеспечивать и динамическое торможение двигателей.
В схемах ТРН вместо одной пары встречно-параллельно вклю-
ченных тиристоров может применяться полупроводниковый при-
бор — симистор, обеспечивающий протекание тока в нагрузке в
оба полупериода питающего напряжения и имеющий такой же
принцип действия, что и тиристор. Его применение сокращает
число электронных приборов вдвое и упрощает схему СИФУ, хотя
он и менее надежен в работе.
а
б
Рис. 3.18. Схемы включения тиристорного регулятора напряжения на трех-
фазной нагрузке:
а — общая; б — силовая части
106
Рис. 3.19. U-образные характеристики
асинхронного двигателя
1
Тиристорные регуляторы напряжения
находят широкое применение в элект-
роприводах переменного тока, где за
счет регулирования напряжения на ста-
торе асинхронных двигателей обеспечи-
Л/cl ^с2< ^сЗ < ^с4
ваются регулирование токов и моментов двигателей в переходных
режимах, симметрирование токов в фазах, ряд защит двигателя и
некоторые другие опции. Одна из них связана с повышением энер-
гетических показателей работы асинхронных электроприводов при
малых нагрузках. Тиристорные регуляторы напряжения, выпол-
няющие эту функцию, получили название регуляторов экономич-
ности, или экономайзеров.
Возможность энергосбережения этим способом иллюстриру-
ют зависимости тока статора Ц от прикладываемого к двигате-
лю напряжения Ux (рис. 3.19) при разных моментах нагрузки
МсХ < Мс2 < Мс3 < Л/с4. Эти зависимости иногда называют
U-образными характеристиками двигателя. Как видно из графи-
ков, при каждой нагрузке двигателя имеется такое напряжение,
при котором потребляемый ток минимален. Снижение тока про-
исходит за счет уменьшения его реактивной составляющей. За счет
этого обеспечиваются снижение потерь энергии в двигателе, по-
вышение его КПД и коэффициента мощности coscp.
На рис. 3.20 показаны построенные для двигателя 4А180М4
мощностью 30 кВт зависимости КПД т|, coscp, относительных тока
Рис. 3.20. Зависимости тока статора, потерь мощности, КПД и коэффи-
циента мощности от напряжения
107
Рис. 3.21. Структурная схема электропривода с экстремальным регуля-
тором
статора I* и потерь мощности в двигателе АР* от относительного
напряжения U* при моменте нагрузки Мс, равном 20 % от номи-
нального. Из кривых видно, что наилучших значений эти показа-
тели достигают при напряжениях, равных 0,6...0,8 номинального
значения.
Достижение экстремальных значений указанных переменных
может быть обеспечено с помощью двух возможных схем включе-
ния асинхронного двигателя.
На рис. 3.21 приведена одна из них — схема с так называемым
экстремальным регулятором*, позволяющая минимизировать по-
требляемый двигателем ток при различных нагрузках Мс. Схема
содержит асинхронный двигатель АД, ТРН со схемой управления
СУ, датчики тока ДТ и напряжения ДН, функциональный пре-
образователь ФП и инерционное звено ИЗ. За счет выбора харак-
теристики ФП обеспечивается минимизация потребления тока при
различных нагрузках двигателя, а инерционное звено ИЗ совмест-
но с отрицательной обратной связью по напряжению устраняет
возможные автоколебания в системе.
Показано**, что экстремальные значения переменных двигате-
ля обеспечиваются при определенных (оптимальных) его сколь-
жениях, которые должны поддерживаться постоянными при лю-
бых нагрузках. Эти скольжения 50ПТ определяются по формулам:
• при минимизации тока статора —
^ОПТ ~
* Безаев В. Г. Методика расчета обратных связей в асинхронном электро-
приводе с экстремальным управлением / В. Г. Безаев// Тр. МЭИ. — 1982. — Вып.
570.
** Энергосберегающие технические решения в электроприводе / под ред.
А.О.Горнова. — М.: Изд-во МЭИ, 1991. — 56 с.
108
• при минимизации потерь мощности —
\>пт = (^М7^ + Л1)/(Л2 + Л1)) / ^к,3;
• при минимизации активной потребляемой мощности —
sonT = R'2/ + X2 /ад) / ;
• при максимализации коэффициента мощности —
5опт = ^2(^1 + + ^М^к.з)/(^^к,з)>
где 7?ь R'2, 7?g — соответственно активные сопротивления ста-
тора, приведенное ротора и контура намагничивания; ХЦ7 Хкз —
соответственно индуктивные сопротивления контура намагничи-
вания и короткого замыкания.
Значение тока статора при оптимальном скольжении может
быть вычислено по следующей формуле:
Amin ~ 3 (Dq/ ЗХц ,
где ЛГС — момент нагрузки двигателя; ®0 — скорость холостого
хода.
Требуемый уровень оптимального скольжения может быть ре-
ализован в замкнутой по скорости системе ТРН —АД, схема ко-
торой приведена на рис. 3.22. На схеме обозначено: ТГ — тахогене-
ратор, ЗП — потенциометр задания требуемой скорости (сколь-
жения) двигателя. Схема обеспечивает поддержание скорости со и
тем самым скольжения с определенной точностью при изменени-
ях момента нагрузки Л/с.
В качестве примера проведены расчеты по этим формулам приме-
нительно к двигателю 4A200L6Y3, имеющему следующие номи-
нальные данные: Рном= 30 кВт; скольжение 5НОМ = 0,021; ток стато-
9 9 9 ТРН
Рис. 3.22. Схема замкнутой системы ТРН — АД с обратной связью по ско-
рости
109
Таблица 3.2
Данные по оптимизации энергетических параметров
Способ оптимизации ^опг ДР, кВт /ь А Рь кВт coscp
Минимум потерь мощности ДР 0,012 0,219 13,1 3,22 0,835
Минимум тока статора Д 0,006 0,271 11,8 3,29 0,678
Минимум активной мощности Рх 0,014 0,223 13,9 3,21 0,858
Максимум coscp 0,024 0,278 17,2 3,24 0,881
Без оптимизации при U~ UnoKi=const 0,002 0,649 15,1 3,68 0,319
pa /1Н0М = 55,8 А; КПД Пном = 90,5 %; coscpHOM = 0,9. Результаты рас-
четов при моменте нагрузки 29 Н • м, равном 10 % номинального
момента, приведены в табл. 3.2.
Результаты расчетов показывают, что за счет регулирования
напряжения возможно примерно в 2,5 —3 раза уменьшить потери
мощности и повысить coscp.
До появления доступных преобразователей частоты в нашей
стране предпринимались попытки использовать ТРН для регули-
рования скорости асинхронных двигателей насосов, работающих
в продолжительном режиме.
Теоретически такое регулирование, называемое параметриче-
ским, возможно, поскольку механические характеристики в ра-
зомкнутой системе имеют вид, показанный на рис. 3.23 сплошны-
ми линиями, а при использовании отрицательной обратной свя-
зи по скорости (см. рис. 3.22) — штриховыми. Однако такое реше-
ние связано с техническим ограничением, делающим его практи-
чески нецелесообразным.
Потери в роторной цепи в номинальном режиме, которые мож-
но считать допустимыми, составляют
А^Зном = ^Люм^О^номз (3*7)
потери при регулировании скорости со-
ставляют
СОА
Д/^2рег ^/цоп®0*^регв (3.8)
Рис. 3.23. Механические характеристики асин-
хронного двигателя при регулировании на-
пряжения на статоре
ПО
Приравняв ДР2рег = ДЛном> получим:
^доп “ ^ном^ном/^рег* (3»9)
Из формулы (3.9) следует, что допустимая нагрузка резко падает
с уменьшением скорости. При 5НОМ = 0,03 снижение скорости всего
на 15% (5рег ~ 0,15) требует снижения момента в 5 раз (рис. 3.23,
линия с засечками).
В связи с изложенным ограничением использование ТРН в про-
должительном режиме даже при благоприятной «вентиляторной»
характеристике нагрузки (Л/с- со2) делает необходимым завышение
мощности двигателя в 2,5 — 3 раза (увеличение Л/ном), использова-
ние ротора с повышенным сопротивлением (s'H0M > sHOM), примене-
ние специальных средств (вентилятор—«наездник») для выдувания
тепловых потерь из двигателя. Это делает внешне привлекательный
способ регулирования скорости неконкурентоспособным.
Вместе с тем тиристорный регулятор напряжения, используе-
мый по основному назначению — плавный пускатель, энергосбе-
регающее устройство при малых нагрузках — очень полезное сред-
ство, широко используемое за рубежом, но мало применяемое в
России.
3.7. Электропривод постоянного тока.
Система преобразователь—двигатель
Электроприводы с двигателями постоянного тока до 1980-х го-
дов были практически единственными регулируемыми электро-
приводами и использовались в агрегатах, в которых регулирова-
ние скорости было необходимо: прокатные станы, экскаваторы,
металлорежущие станки, бумагоделательные машины и др. Ос-
новное достоинство этих электроприводов — отличная управля-
емость, главные недостатки — высокая стоимость машины, необ-
ходимость ее обслуживания.
К 2000 г. в связи с развитием частотно-регулируемого асинхрон-
ного электропривода доля электропривода постоянного тока в се-
мействе регулируемых электроприводов снизилась до 15 % и остает-
ся примерно на этом уровне. В мощных агрегатах, когда необходимо
обеспечить благоприятное взаимодействие с сетью, используется
система генератор—двигатель (Г—Д), при меньших мощностях при-
меняются различные схемы тиристорных преобразователей.
Далее рассмотрены кратко лишь некоторые вопросы, относя-
щиеся к энергетическим режимам электропривода постоянного тока.
Электроприводы с двигателями постоянного тока выполняют-
ся, как правило, с использованием преобразователей, которые
осуществляют питание обмоток якоря. При питании электропри-
водов от сети переменного тока такими преобразователями явля-
111
ются мотор-генераторные установки в системах Г-Д или управ-
ляемые выпрямители всех видов — однофазные и трехфазные,
реверсивные и нереверсивные, мостовые и с нулевой точкой. Ста-
тические преобразователи используются также для питания об-
моток возбуждения двигателей.
Преобразователи обеспечивают регулирование координат элек-
тропривода и создают возможности энергосбережения в устано-
вившемся и переходном режимах.
Минимизация выделяемых в двигателе потерь мощности мо-
жет обеспечиваться за счет регулирования тока возбуждения. Рас-
смотрим условия минимизации потерь мощности при следующих
двух допущениях: учитываются только потери в цепях обмоток
якоря и возбуждения и не учитывается насыщение магнитной цепи
двигателя. При этих условиях установившийся режим работы дви-
гателя описывается следующей системой уравнений:
ДР2 = ДРЯ + ДРВ =/2РЯ +/2ВЯВ; (3.10)
М=Мс = кФ1я; (3.11)
Ф = М», (3-12)
где ЛРХ, ДРЯ, ДРВ — потери мощности соответственно суммар-
ные, в цепях якоря и возбуждения; /я, 1В — соответственно токи в
цепях якоря и возбуждения; RB, RB — соответственно сопротивле-
ния цепей якоря и возбуждения; М, Мс — моменты двигателя и
нагрузки (сопротивления), равные в установившемся режиме друг
Другу; Ф — магнитный поток двигателя; к — конструктивный ко-
эффициент двигателя; кв — коэффициент пропорциональности
между магнитным потоком и током возбуждения.
Подстановка формул (3.11) и (3.12) в формулу (3.10) приво-
дит к следующему выражению для потерь мощности ДРУ:
ДР2 = М2М(ккв1в)2 + I2RB. (3.13)
Беря производную от ДРу по току возбуждения /в и приравни-
вая ее нулю, находим оптимальное значение тока возбуждения,
при котором суммарные потери мощности ДР^ минимальны:
/вопт = ^M2R„ /(RBk2k2). (3.14)
Минимальное значение суммарных потерь мощности ДР£ПТ,
соответствующее этому току возбуждения, будет равно: .
ДРГ = ДР°ПТ + ДРГ = (McjRJ^ )/(ккв) + (Mcy[R^ )/(^) =
= 2(Л/С )/ТО- (3-15)
Из формулы (3.15) следует, что суммарные потери мощности
будут минимальными в том случае, когда потери мощности в це-
112
Рис. 3.24. Схема электропривода с двигателем постоянного тока при ми-
нимизации потерь мощности
пях якоря и возбуждения будут равны друг другу. Это положение
справедливо и для других типов двигателей.
Из формулы (3.14) видно, что оптимальный ток возбуждения
зависит от нагрузки двигателя Л/с, т.е. должен регулироваться при
ее изменении. На рис. 3.24 показана схема электропривода, в ко-
тором осуществляется автоматическое поддержание тока возбуж-
дения на оптимальном уровне при изменении нагрузки двигателя.
При этом определение уровня нагрузки производится косвенно
по измерению тока в якоре двигателя.
На схеме приняты следующие обозначения: ПЯ, ПВ — соот-
ветственно преобразователи цепей якоря и возбуждения; ДТЯ и
ДТВ — соответственно датчики токов якоря и возбуждения; П —
блок перемножения; ФП — функциональный преобразователь,
осуществляющий расчет оптимального тока возбуждения I* в со-
ответствии с формулой (3.14); РТВ — регулятор тока возбужде-
ния; кв — коэффициент передачи цепи возбуждения; Я — якорь;
U±, Uy — сигналы соответственно ошибки (рассогласования) и
управления преобразователем возбуждения ПВ.
Пример 3.1. Двигатель постоянного тока имеет следующие номи-
нальные данные: Рном - 19 кВт; лном = 1 500 об/мин; t/H0M = 220 В;
4ном= 103 А; /Е.ном = 2,04 А; Ля = 0,12 Ом; RB = 77 Ом, Фном =
= 10,1 • 10-3 Вб.
Требуется найти оптимальный ток возбуждения и соответству-
ющие ему потери мощности при номинальном моменте нагрузки
Мс — Л/ном.
из
1. Определяем номинальные скорость и момент двигателя:
®ном = 2тспном/60 = 2-3,14-1 500:60 = 157 рад/с;
Л/ном = ^ном/Юном = 19 000: 157 = 121 Н м.
2. Используя формулу электромеханической характеристики,
записанную для номинального режима, находим произведение
^Фцом:
ЛФном = (Цюм - /ном *я)/<0ном = (220 - 103 • 0,12): 157 =
= 1,32 В-с.
3. Определяем конструктивный коэффициент к и коэффици-
ент кв.
Л = ЛФНОм/Фном = 1,32: (10,1-10-3) = 130,7;
К = ФномДвном = 10,1-10-3:2,07 = 5 10’3 Вб/А.
4. По формуле (3.14) находим оптимальный ток возбуждения:
/°пт = /(RBk2k2) = ^/(1212 - 0,12): (77(130,7 5-10 3)2) = 2,7А.
5. Находим по формуле (3.15) суммарные потери мощности
при этом токе возбуждения:
Д^пт= 2(МсЛ/ДЛ )/(ккъ) =
= 2(121 70,12-77): (130,7 • 5 • КГ3) = 1 126 Вт.
6. Для сопоставления определим эти же потери при номиналь-
ном токе:
ДР2 = /я2ном/?я + /кЛ = ЮЗ2 - 0,12 + 2,042- 77 = 1 593 Вт.
Таким образом, снижение потерь составляет примерно 30 %.
Минимизация потерь при использовании такого подхода воз-
можна при ненасыщенной магнитной цепи двигателя. Только в
этом случае повышение тока до оптимального значения приведет
к пропорциональному увеличению магнитного потока и сниже-
нию потерь в двигателе до минимального уровня.
Для электроприводов, работающих в повторно-кратковремен-
ном режиме с частыми пусками, торможениями и реверсами,
эффективное энергосбережение может быть осуществлено за счет
снижения потерь в этих переходных процессах. Применительно к
системе преобразователь—двигатель постоянного тока это обес-
печивается за счет управляемых пуска и торможения двигателя,
когда подаваемое на якорь двигателя напряжение при пуске по-
степенно повышается от нуля до полного (номинального), а при
торможении постепенно снижается до нулевого уровня. При этом
114
^зса
г
Рис. 3.25. Электропривод с двигателем постоянного тока с задатчиком
скорости:
а — схема электропривода; б — сигнал на входе задатчика скорости; в — сигнал
на выходе задатчика скорости; г — графики скорости холостого хода и скорости
якоря
режим торможения двигателя может быть реализован с рекупера-
цией (отдачей) энергии в сеть.
На рис. 3.25, а приведена схема электропривода, в которой
осуществляется регулирование напряжения при пуске и торможе-
нии. Необходимым элементом схемы является задатчик скорости
(ЗС), называемый также иногда задатчиком интенсивности. Его
работу иллюстрируют диаграммы на рис. 3.25, б и в. При подаче на
вход ЗС ступенчатого сигнала задания скорости t/3C в момент вре-
мени tx (пуск двигателя) напряжение t/3C на выходе ЗС начинает
постепенно нарастать, например по линейной функции времени,
а при снятии этого сигнала в момент времени Z2 (торможение дви-
гателя) — постепенно снижаться.
В соответствии с этим пропорционально будут изменяться по-
даваемое на двигатель напряжение U и определяемая им скорость
холостого хода двигателя соо = U/кФ (см. рис. 3.25, г). Скорость
якоря двигателя со(г) из-за инерционности элементов механиче-
ской части электропривода и исполнительного органа рабочей ма-
шины при пуске будет несколько меньше скорости соо, а при тор-
можении — несколько больше. За счет этого, как и в рассмотрен-
ном ранее асинхронном электроприводе, будут снижены потери
энергии в якоре двигателя.
При линейном нарастании напряжения при пуске двигателя
потери энергии в его якоре ДИ^р определяются следующим вы-
ражением:
115
\W^ = \W-2TJtn, (3.16)
где AJV — потери энергии при прямом пуске (ступенчатой подаче
полного напряжения на якорь); — электромеханическая по-
стоянная времени, Тм = /7?Я/(ЛФНОМ)2; tn — время пуска.
Потери энергии Д W в якоре двигателя при прямом пуске опре-
деляются выражением
ДИ/= Ло02(^ач - 52кон)Л/ср/(2(Мср - Мс)), (3.17)
где J -— момент инерции электропривода; соо — скорость холостого
хода двигателя; 5нач, sK0H — соответственно начальный и конечный от-
носительный перепад скорости двигателя, sHa4 (кон) = (со0 - сонач(кон))/соо;
Л/Ср ~ средний момент двигателя при пуске; Мс — момент нагруз-
ки двигателя.
Из формулы (3.16) следует, что при /п >2ГМ потери энергии
при управляемом пуске будут меньше по сравнению с прямым
пуском.
В системе генератор—двигатель, схема которой представлена
на рис. 3.26, плавное изменение напряжения при пуске, торможе-
нии и реверсе двигателя происходит естественным образом вслед-
ствие наличия электромагнитной инерционности обмотки возбуж-
дения генератора (ОВГ). При пуске двигателя замыкаются контак-
ты аппарата КМ1 (или КМ2 для пуска двигателя в другом направ-
лении), после чего происходит плавное нарастание тока возбуж-
дения генератора (ВГ) /вг, его ЭДС Ev и напряжения на якоре
двигателя U, темп которого определяется постоянной времени цепи
возбуждения генератора. За счет этого происходит снижение по-
терь мощности в двигателе по сравнению с пуском двигателя по-
дачей полного (номинального) напряжения на якорь.
Рис. 3.26. Схема системы генератор—двигатель
116
Количественно снижение потерь энергии в двигателе может
быть оценено с помощью выражения
ДИг=/<о02/2(/и+1), (3.18)
где т — отношение постоянных времени, т = Тв/Ты (Тв — посто-
янная времени цепи возбуждения генератора).
Из выражения (3.18) видно, что потери энергии в двигателе
уменьшаются в (т + 1) раз по сравнению с соответствующими
потерями в нем при скачкообразном изменении напряжения на
якоре. Другими словами, чем больше инерция цепи возбуждения
генератора и чем медленнее изменяется напряжение на якоре дви-
гателя постоянного тока, тем меньше будут в нем потери энергии
в переходных процессах.
Рекуперация энергии в сеть переменного тока при торможе-
нии двигателя (или на первом этапе его реверса) обеспечивается
за счет свойства обратимости энергетических режимов электри-
ческих машин.
Торможение двигателя осуществляется отключением обмотки
возбуждения от источника питания UB размыканием контактов
КМ1 (или КМ2). При этом происходит постепенное уменьшение
тока возбуждения генератора /вг, его ЭДС ЕТ и напряжения на
якоре двигателя U. Вследствие наличия механической инерции
якоря двигателя, элементов механической передачи и исполни-
тельного органа рабочей машины ЭДС двигателя Ед, определя-
емая скоростью двигателя, превышает ЭДС генератора. При этом
двигатель Д переходит в режим генератора, генератор Г — в ре-
жим двигателя, а приводной двигатель генератора АД — в режим
генератора с отдачей (рекуперацией) энергии в сеть переменного
тока напряжением U\.
Указанные свойства системы генератор—двигатель делают эту
систему привлекательной с позиций энергосбережения, в первую
очередь, для рабочих машин и производственных механизмов, ра-
ботающих в повторно-кратковременном режиме. В то же время
наличие электромашинного преобразователя (агрегат АД — Г) оп-
ределяет более сложные условия эксплуатации электропривода,
шум при работе, необходимость фундамента для установки этого
агрегата, более высокие потери мощности по сравнению с полу-
проводниковыми преобразователями.
Пример 3.2. Двигатель постоянного тока с независимым
возбуждением типа 2ПН —132 имеет следующие номинальные
данные: Рном = 4 кВт; £/ном = 220 В; ином = 1 500 об/мин; т|ном = 79 %;
/?я = 0,9 Ом; J= 0,05 кг м2. Требуется определить потери энергии в
якоре при прямом и управляемом пуске с номинальным момен-
том нагрузки со временем нарастания напряжения /п = 1 с. Сум-
марный приведенный к валу двигателя момент инерции составля-
ет 0,1 кг - м2. Принять, что при пуске средний момент двигателя
117
равен двукратному номинальному моменту, а магнитный поток
имеет номинальный уровень.
1. Определяем номинальную скорость двигателя:
“ном = ялном/30 = 3,14-1 500: 30 = 157 рад/с.
2. Находим произведение /сФН0М, используя формулу электро-
механической характеристики двигателя постоянного тока для
номинального режима:
*Фном = (uttou - /ном/?я)/<0ном = (220 - 23 • 0,9): 157 = 1,27 В • с.
3. Рассчитываем скорость холостого хода:
®0 = ^номАФном = 220:1,27 = 173 рад/с.
4. Рассчитываем электромеханическую постоянную времени:
Тм= /Яя/(£ФНОМ)2 = 0,1 0,9: (1,27)2 = 0,056 с.
5. Находим номинальный момент двигателя:
Л/ном = Люм/Юном = 4 000:157 = 25,5 Н м.
6. Рассчитываем конечный относительный перепад скорости:
^кон (®0 ®кон))/ (®0 ®ном)/
= (173 - 157): 173 = 0,092.
7.Определяем потери энергии в якоре при прямом пуске дви-
гателя (ступенчатая подача напряжения) по формуле (3.17):
ДЖ= J(0o (^нач - Jkoh)Kp/(2(Mcp - Мс)) =
= 0,1 • 1732-(I2 - 0,0922) 51: (2(51 - 25,5)) = 2 968 Дж.
8. По формуле (3.16) вычисляем потери энергии в якоре при
линейном нарастании напряжения в течение 1 с:
ДЖ™, = ДЖ- 2ТМ//П = 2968 • 2 • 0,056:1 = 332 Дж.
J *
Как видно, при плавном нарастании напряжения потери сни-
зились в tn/2T„ = 1:2- 0,056 = 2986:332 = 9 раз.
Электрическое торможение двигателей осуществляется пере-
водом их в генераторный режим, в котором они создают на своем
валу тормозной момент. По характеру взаимодействия с источни-
ком питания (сетью) различают три разновидности генераторно-
го режима и соответственно три вида торможения:
• генераторный режим работы параллельно с сетью (режим ре-
куперативного торможения);
• генераторный режим работы последовательно с сетью (ре-
жим торможения противовключением);
• генераторный режим работы независимо от сети (режим ди-
намического торможения).
118
Работа электрической машины в режиме генератора харак-
теризуется одинаковым направлением ЭДС и тока якоря, в то
время как в двигательном режиме ЭДС и ток якоря направлены
встречно и двигатель потребляет электроэнергию.
Таким образом, для перевода двигателя в режим генерато-
ра необходимо обеспечить одинаковое направление ЭДС и тока
якоря.
С позиций энергосбережения очевидным является использова-
ние рекуперативного торможения, поскольку в этом случае запа-
сенная энергия в электроприводе и исполнительном органе рабо-
чей машины может быть отдана (рекуперирована) источнику пи-
тания (в сеть), где может быть использована другими потребите-
лями энергии. Два других вида торможения характеризуются пре-
образованием этой энергии в тепловую энергию, т.е. она попросту
теряется. Рассмотрим режим рекуперативного торможения под-
робнее.
Режим рекуперативного торможения может быть реализован в
системе управляемый выпрямитель—двигатель при использовании
как нереверсивного, так и реверсивного выпрямителя.
Рекуперативное торможение в системе нереверсивный выпрями-
тель-двигатель. В этой схеме для обеспечения условий рекупера-
ции энергии должны быть использованы устройства, обычно на-
зываемые реверсорами. Схема такой системы с реверсорами в цепи
якоря двигателя приведена на рис. 3.27, а. На схеме УВ — управ-
ляемый тиристорный выпрямитель; В, Н — управляемые ключи
реверсора; ОВ — обмотка возбуждения двигателя.
Реверсорами в такой схеме могут быть контактные или бескон-
тактные устройства.
Контактные реверсоры выполняются на базе электромагнит-
ных контакторов общепромышленных серий или на основе спе-
Рис. 3.27. Схемы электропривода с реверсорами в цепи якоря (а), при
двигательном режиме (5), при рекуперации энергии (я)
119
циальных моноблочных конструкций электромагнитного типа. Для
повышения надежности и срока службы электропривода обычно
предусматривают бестоковую коммутацию цепей двигателя, что
позволяет также использовать реверсоры без устройств дугога-
шения.
Бесконтактные реверсоры выполняются с использованием ти-
ристоров. При их использовании также реализуется бестоковая
коммутация тиристоров реверсора, обеспечиваемая путем закры-
тия тиристоров управляемого выпрямителя.
Двигательный (основной) режим работы электропривода ил-
люстрирует схема на рис. 3.27, б, получаемая, например, при за-
мыкании ключей В. В этом режиме угол управления а тиристорами
УВ лежит в пределах а = 0...90’ и он работает в выпрямительном
режиме. ЭДС двигателя Е и ток якоря 1Я направлены встречно, и
двигатель потребляет электроэнергию.
Для осуществления рекуперативного торможения (реверса)
двигателя вначале закрываются тиристоры УВ установкой угла
а > 90°. После прекращения протекания тока размыкаются ключи
В и замыкаются ключи Н, УВ переводится в инверторный режим
за счет увеличения угла управления тиристорами до значений,
превышающих 90°.
Схема, иллюстрирующая этот режим, приведена на рис. 3.27, в.
ЭДС и ток якоря оказываются направленными согласно, дви-
гатель переходит в режим генератора, и электроэнергия Э отда-
ется в сеть. При торможении угол а должен регулироваться таким
образом, чтобы ток в якоре не превышал допустимых значений.
К концу торможения угол а достигает 90°, ток в якоре становит-
ся равным нулю и реверсоры отключаются.
Режим рекуперативного торможения может быть реализован
при использовании реверсоров в цепи обмотки возбуждения ОВ
по схеме, показанной на рис. 3.28. В двигательном режиме работы
электропривода включен, например, ключ В и тиристоры УВ ра-
ботают с углами управления а в пределах 0...90°.
Для осуществления рекуперативного торможения (реверса)
двигателя размыкаются ключи В и замыкаются ключи Н, а У В пе-
реводится в инверторный режим за счет увеличения угла управле-
ния тиристорами до значений, превышающих 90°. За счет измене-
ния направления тока возбуждения и соответственно магнитного
потока ЭДС также изменяет свое направление на противополож-
ное и ток якоря оказываются направленным с ней согласно. Дви-
гатель переходит в режим генератора, и электроэнергия Э отдает-
ся в сеть.
Рекуперативное торможение в системе реверсивный выпрями-
тель-двигатель. В состав реверсивного выпрямителя (рис. 3.29)
входят два нереверсивных управляемых выпрямителя УВ1 и УВ2.
При двигательном режиме работы электропривода один из вып-
120
Рис. 3.28. Схема электропривода
с реверсорами в цепи обмотки
возбуждения
ям
ОВ
Рис. 3.29. Схема электро-
привода с реверсивным уп-
равляемым выпрямителем
рямителей, например УВ1, работает в выпрямительном режиме с
углом управления Ct] < 90е, а другой, УВ2, работает в инвертор-
ном режиме с углом а2 > 90° (при совместном управлении) или
его тиристоры закрыты (при раздельном управлении). Этому ре-
жиму соответствуют направления ЭДС, тока якоря и электроэнер-
гии, показанные на рис. 3.29 сплошными линиями.
Для реализации рекуперативного торможения (реверса) угол
а] должен быть увеличен, а угол а2 уменьшен, за счет чего и
будет происходить рекуперация энергии в сеть с использовани-
ем УВ2. Этому режиму соответствуют направления ЭДС £, тока
якоря и электроэнергии, показанные на рис. 3.29 штриховыми
линиями.
3.8. Электроприводы постоянного тока.
Система источник тока—двигатели
Во множестве случаев, когда требуется регулировать скорость,
на смену электроприводам постоянного тока приходят асинхрон-
ные электроприводы с преобразователями частоты, бесконтакт-
ные двигатели с постоянными магнитами и разные другие типы
привода.
Иногда это диктуется действительными преимуществами но-
вых технических решений, иногда — это дань моде, но процесс
сокращения традиционных электроприводов постоянного тока
идет, и процесс этот, конечно, необратим.
121
Рис. 3.30. Традиционная система транспортировки нити
Однако есть обширная область технологий, где электроприво-
дам постоянного тока, правда специальным, нет и, возможно, в
обозримом будущем не будет конкурентов. Это — транспортировка
(перемотка или намотка) длинномерных гибких изделий (нитей,
лент, полос и т.д.) с заданной или произвольно изменяющейся
скоростью и требуемым натяжением. Специально созданные для
этой цели электроприводы постоянного тока, отличающиеся от
традиционных, известны с начала 1970-х годов. Они были пред-
ложены, разработаны и реализованы в России, прекрасно себя
зарекомендовали, но прижились, да и то частично, только в ка-
бельной промышленности.
Когда нужно перемотать нить (жилу кабеля, ленту, полосу) с
одного барабана на другой (рис. 3.30), не запутав и не оборвав, т.е.
задавая и контролируя скорость v и натяжение F, на каждом ба-
рабане устанавливают свой регулируемый электропривод. Раньше
для этого всегда использовались электроприводы постоянного тока,
теперь — другие, новые.
Привод одного из барабанов, например левого БЛ на рис. 3.30,
обычными средствами задает скорость перемотки. Привод же пра-
вого барабана БП управляется от датчика натяжения (ДН) таким
образом, чтобы поддерживать натяжение заданным и по возмож-
ности неизменным. Это является слабым местом системы.
Во-первых, хороший датчик натяжения — это уже проблема.
Часто используют так называемый компенсатор — систему ро-
ликов, охватываемых нитью, с грузом на нижнем ролике, по-
казанную на рис. 3.30. Груз задает натяжение, а отклонение гру-
за от некоторого равновесного положения служит сигналом
приводу поднять или снизить скорость, чтобы положение вос-
становилось.
Во-вторых, система регулирования должна быть очень высоко-
го качества, так как любое случайное возмущение вызывает коле-
бания, с которыми трудно справиться. Используют быстрые кон-
троллеры (и не один, а несколько), но качество движения нити
все равно оставляет желать лучшего.
В-третьих, при компенсаторе изменить натяжение можно только
уменьшив груз, что нетехнологично. Или надо искать хороший
122
датчик натяжения, который будет стоить почти столько же, сколько
вся установка.
Есть у этой системы и другие недостатки. Каждый из электро-
приводов выполнен на полную мощность, включая силовой пре-
образователь, причем один из них, тот, что тормозит, должен
или уметь отдавать энергию в сеть, что иногда непросто, или те-
рять ее, т.е. снижать энергетические качества системы.
Так или примерно так организованы во всем мире системы транс-
портировки нитей, лент, полос. Появление новых технических
средств усложняет и удорожает их, не устраняя главных недостат-
ков, заложенных в самом принципе построения систем.
Кардинально изменить ситуацию и избавиться от всех недо-
статков сразу можно, изменив принцип создания заданного натя-
жения: чтобы сохранять натяжение нужно просто тянуть нить с
заданной силой.
Эта идея легко реализуется только на обычных двигателях
постоянного тока с обмоткой возбуждения. Для этого нужно
питать якорь от источника тока, т.е. поддерживать ток в якоре
неизменным, не зависящим от скорости вращения двигателя.
Момент двигателя, пропорциональный этому неизменному те-
перь току якоря /я и легко управляемому по цепи возбуждения
потоку Ф:
М ЕЕ /яф,
не зависит от скорости, т.е. двигатель приобретает новое и очень
важное для рассматриваемых систем свойство управляемого по
цепи возбуждения источника момента или, при определенных
условиях, источника силы (рис. 3.31, а).
Избавленный источником тока от влияния ЭДС вращения дви-
гатель (ЭДС лишь определяет напряжение на якоре и не вмешива-
ется в работу привода) — отличный объект для формирования
посредством обратных связей практически любых механических
характеристик.
Так, отрицательная обратная связь по скорости со дает семейство
слегка наклонных характеристик со—М в широком диапазоне из-
менения скорости (рис. 3.31, б), отрицательная связь по ЭДС (на-
пряжению на якоре) — семейство гипербол (рис. 3.31, в) и т.д.
Изложенные особенности системы источник тока—двигатель
постоянного тока, иногда очень полезные сами по себе, позволя-
ют совсем по-новому и очень эффективно организовать систему
транспортировки (перемотки) нити. Покажем это на самом про-
стом устройстве (рис. 3.32), которое в свое время было реализова-
но и отлично работало на одном из подмосковных предприятий
на перемоточно-контрольных станках.
Якоря двух машин постоянного тока соединены последовательно
и подключены к общему источнику тока (ИТ). Левая машина, ра-
123
Ф=уаг
а
Рис. 3.31. Схема и механические характеристики системы источник тока—
двигатель в разомкнутой структуре (а), в структуре, замкнутой по ско-
рости (б), в структуре, замкнутой по напряжению (в)
ботая как показано на рис. 3.31, а, задает момент, т.е. натяжение
F, и служит одновременно мощным тахогенератором (не нужны
усилители) для простейшей обратной связи по скорости для пра-
вой машины, которая соответственно задает скорости со и v. Обе
величины (Fh v) можно изменять в довольно широких пределах.
Датчик натяжения здесь не нужен принципиально, поскольку при
любой скорости оно уже задано новым качеством левой маши-
ны — ее свойством источника момента.
Рис. 3.32. Система транспортировки нити или полосы с использованием
источника тока
124
С ликвидацией датчика натяжения и исключением вместе с
ним принципа подстраивания скорости устранены все пробле-
мы, типичные для традиционной структуры. Перемотка осуще-
ствляется без колебаний, поскольку устранена причина их воз-
никновения. В динамических режимах изменения Еили v инерци-
онность цепей возбуждения в управляющих каналах демпфирует
рывки и эти процессы протекают плавно, не травмируя перема-
тываемую нить или полосу.
Есть и другое — энергетическое — преимущество. Поскольку
якоря соединены последовательно (см. рис. 3.32), а ЭДС в них дей-
ствуют встречно (одна машина тянет, а другая тормозит), мощ-
ность источника тока, определяемая по формуле
Лтг = Лгг(ЛггХ^я + " Еп),
в установившемся режиме тратится лишь на покрытие потерь в
сопротивлениях якорей. Но и в динамических режимах, когда
Ел * Еп, она существенно меньше суммы мощностей двигателей.
Разумеется, система, показанная на рис. 3.32, это предельный,
хотя вполне работоспособный вариант, отражающий главные от-
личия и преимущества данного технического решения. В более
развитых системах обмотки возбуждения питаются от усилителей
(мощность цепи возбуждения на 1—2 порядка меньше мощности
двигателя), используются датчики линейной скорости нити (см.
рис. 3.30), если необходимо — датчики радиуса бунта и т.д. Кон-
троллеры играют свою роль — задают уставки скорости и натяже-
ния в соответствии с технологией, осуществляют диагностику,
контроль за ходом процесса и т.д. С них снята задача обеспечения
качества основного процесса.
Система получается проще, если удается прямое соединение
валов двигателей и барабанов. Если это не удается, то использу-
ются приемы компенсации потерь в передачах.
Главное (и часто решающее) преимущество — это бескомпен-
саторный, бездатчиковый, т.е. параметрический, способ задания
натяжения и сопутствующие ему энергетические выгоды.
В технических реализациях изложенного принципа важную роль
играет устройство для питания двигателей — источник тока.
В современных условиях не составляет особого труда постро-
ить его на обычном управляемом выпрямителе с сильной отри-
цательной обратной связью по току. Это решение выглядит при-
влекательным, если почему-либо нужно управлять уровнем тока
якоря. Если же это не требуется, то значительно лучшие резуль-
таты можно получить от так называемых параметрических ис-
точников тока.
Одна из многочисленных версий таких источников тока, наи-
более удобная в практических целях при трехфазной сети 380 В,
показана на рис. 3.33, а. Это трехфазный вариант индуктивно-ем-
125
Id = const
б
Рис. 3.33. Схемы индуктивно-емкостного преобразователя (а), включе-
ния двигателей (б) и основные характеристики (<?)
костного преобразователя, обеспечивающий при XL - Хс = X ток
во вторичной цепи:
т Ui
= const
и, следовательно, при подключении к а, Ь, с выпрямителя (рис.
3.33, б)
Id ~ ^2/0J6 = const.
Изменения других переменных: тока /ь напряжений и токов
реактивных элементов (РЭ) UP3i /РЭ в функции U2 - I2R2 показа-
ны в относительных величинах на графиках на рис. 3.33, в; за
базу приняты {/1ф и 12. Потребляемый из сети ток Д растет пропор-
ционально U2, при закороченной нагрузке /?2 = 0 (или Ud « 0 —
двигатель стоит) ток из сети не потребляется. Этот источник тока
позволяет получать при бестрансформаторном подключении к
трехфазной сети любые, ограниченные лишь прочностью эле-
ментов, напряжения на выходе. Он очень прост, надежен (за-
щита нужна только от холостого хода — обрыв цепи — на выходе),
имеет КПД около 98%, коэффициент мощности по первой гар-
монике, равный единице, минимально влияет на сеть. Недоста-
ток такого ИТ — реакторы с требуемым реактивным сопрртивле-
нием.
При нежестких требованиях к неизменности силы тока иногда
удается использовать совсем простой источник тока (рис. 3.34). Внеш-
няя характеристика построена в относительных единицах Ud, I*,
за базовые величины приняты Ud = Тб {/1ф и IdK 3 = 6V2 U^fC, где
f — частота сети.
126
Рис. 3.34. Схема вентильно-емкостного источника тока (а), внешняя ха-
рактеристика (б)
Этот источник тока очень прост, и это его главное преимущество.
Он имеет КПД, близкий к 100%, и по отношению к питающей
сети играет роль компенсатора реактивной мощности с опережа-
ющим costp = Ud* в диапазоне напряжений 0 < U* < 0,8.
Рассмотренное перематывающее устройство — далеко не един-
ственная возможность рационально использовать систему источ-
ник тока—двигатель. Можно привести много примеров опро-
бованных и хорошо зарекомендовавших себя технических реше-
ний, в которых удачно использованы эти системы. Вот некоторые
из них:
• многодвигательная система перемотки нити, ленты или по-
лосы, в секциях которой производятся различные технологиче-
ские операции: наложение изоляции, ее обработка, снятие ока-
лины, сушка, окраска и т.д. Такие технологические линии удобно
строить по описанному ранее принципу: один из двигателей зада-
ет скорость, другие, соединенные последовательно с первым, обес-
печивают необходимое натяжение в каждой секции без каких-
либо дополнительных устройств;
• барабаны или шпули, принимающие проволоку или ленту
после обработки, например после волочильных станов. Качествен-
ная укладка без нарушения шпуль, без заклинивания проволоки
или перекоса ленты и с нужной плотностью возможна только при
качественном управлении натяжением. Рассмотренное ранее (см.
рис. 3.31) решение позволяет безукоризненно и очень просто ре-
шить эти задачи;
• устройства для намотки с заданным натяжением различных
катушек, обмоток электрических машин и т.д.;
• лебедки для буксировки судов на волнах или для поддержа-
ния в натянутом состоянии ведущего троса при передаче груза с
корабля на корабль в условиях волнения моря;
127
• лебедки для создания управляемого пригруза в вибрационных
сваепогружателях;
• нагружающие устройства в установках для испытания различ-
ных двигателей, позволяющие изменять по программе момент на
валу двигателя;
• устройства для испытания передач, муфт и других механиз-
мов, в которых один двигатель задает скорость, второй — прило-
женный к передаче момент.
Этот перечень можно продолжать. Важно подчеркнуть, что есть
малоизвестное, нетрадиционное, но иногда очень полезное тех-
ническое решение, основанное на традиционных двигателях по-
стоянного тока и позволяющее просто и энергетически эффек-
тивно решить некоторые практически важные задачи.
3.9. Вентильно-индукторный электропривод
Развитие силовой и информационной электроники в после-
дней четверти XX в. привело к появлению на рынке ряда новых
электроприводов с различными типами электромеханических пре-
образователей (синхронными реактивными, синхронными с по-
стоянными магнитами, индукторными и др.) и электронными
П1
-И— в
коммутаторами — аналогами традици-
онных коллекторов.
Среди этих новых электроприводов
особенно выделяется вентильно-индук-
торный электропривод (ВИП), или
Switched Reluctance Drive (SRD).
Вентильно-индукторный электро-
привод (рис. 3.35) состоит из собствен-
но двигателя — вентильно-индукторной
машины (ВИМ), электронного комму-
татора К, подключенного к выпрями-
телю В параллельно с конденсатором С,
и управляемого обычно датчиком по-
ложения ротора Д через схему управ-
ления СУ. ВИМ имеет явнополюсный
статор, например с п = 6 полюсами, не-
сущий сосредоточенные обмотки (ка-
тушки), и явнополюсный пассивный
ротор, число полюсов которого отли-
чается от числа полюсов статора, на-
Рис. 3.35. Вентильно-индукторный элект-
ропривод
128
пример т = 4. Катушки связаны с электронным коммутатором,
на каждую из п/2 фаз которого приходятся в рассматриваемом
примере два ключа — транзистора — и два диода (на рис. 3.35
показана только одна фаза АХ),
Принцип действия ВИП состоит в притяжении металли-
ческого тела зубца ротора к возбужденному полюсу статора. Так,
в изображенном на рис. 3.35 состоянии возбуждена фаза АХ и к
полюсам а статора притянуты зубцы а ротора. При отключении
фазы АХ (конденсатор С позволяет это сделать без осложнений)
и включении BY (на рис. не показана) к возбужденным теперь
зубцам b статора притянутся ближайшие зубцы ротора р. Поле
повернется по часовой стрелке на угол 2п/п, а ротор — против
часовой стрелки на угол
2л 2л _ 2я(п - т)
т п тп
Если повторять указанный процесс коммутаций, то ротор бу-
дет перемещаться. Управление движением (выбор моментов вклю-
чения и отключения фаз, формирование нужных импульсов тока
и т.д.) осуществляется датчиком Д и схемой управления СУ.
На каждом такте коммутации по мере перехода ротора от
рассогласованного состояния 1 к согласованному состоянию 2
потокосцепление Т и ток i изменяются по сложной траектории
(рис. 3.36, а).
Общее выражение для механических характеристик можно по-
лучить из основного уравнения, описывающего этот процесс на
каждом такте коммутации:
U_=iR
d?
ф
При ряде сильных допущений (линейное изменение Т, прямо-
угольная форма импульсов тока (рис. 3.36, б), приняв 4х = Ы и
пренебрегая iR^, будем иметь на каждом угловом шаге 0:
Рис. 3.36. Характеристики вентильно-индукторного электропривода:
а — зависимость Ч* = /(/)); б — зависимости Ч'(б) и /'(0); е — механические
характеристики
5 Ильинский
129
= dT = d(Zz) = Ldi_ ,dL = £dZ .dL de
dz dz dz dz dz 1 de dz
ГУ - т dz d£ + de
Пренебрегая L— и полагая —- = const и — = со, имеем:
dz de dt
IL = i(&.
Принимая M = /Фср, получим:
Z1 и Л/со
или
СО =
м
Механические характеристики двигателя при разных напряже-
ниях показаны на рис. 3.36, в.
Изложенный принцип действия ВИП был использован в индук-
торных шаговых двигателях в дискретном электроприводе, появив-
шемся в 1960-е годы на волне развития первых полупроводниковых
приборов и применяющемся для преобразования цифры или кода
в дозированные механические перемещения. В 1960—1970-е годы
этот электропривод получил серьезное развитие в России бла-
годаря работам М. Г. Чиликина, Б. А. Ивоботенко, их коллег и уче-
ников.
Однако в то время не был завершен (из-за ограниченности
элементной базы) переход к силовой версии электропривода,
построенного на шаговом принципе. Понадобились еще годы, что-
бы этот последний шаг был сделан. Роль создателя силового вен-
тильно-индукторного электропривода принадлежит проф. П. Лоу-
ренсону (Лидс, Великобритания), работы которого, демонстри-
рующие преимущества ВИП, открыли целую волну разработок и
публикаций на эту тему. Часть их собрана и обобщена в моногра-
фии Т. Миллера, дающей достаточно полное представление об этой
проблеме в мире.
Интерес к вентильно-индукторному электроприводу связан с
рядом его особенностей.
Во-первых, это предельно простая, технологичная, дешевая и
надежная конструкция собственно двигателя ВИМ. В нем не ис-
пользуются существенно усложняющие технологию производства
постоянные магниты, цена которых иногда составляет около по-
ловины цены всего привода. Отсутствует технологическая опера-
ция заливки ротора, неизбежная при производстве асинхронных
двигателей с короткозамкнутым ротором. Обмотки (катушки) ста-
тора хорошо приспособлены к машинному производству, просты
сборка и, что важно при массовых применениях, разборка для
130
ремонта или утилизации. Осуществляется пропитка собственно
катушек, а не статора в целом, как у других типов машин, что
также снижает долю технологических затрат. Лишь один элемент —
датчик положения ротора — выпадает из этого перечня благопри-
ятных особенностей. Итак, машина в ВИП позволяет преодолеть
устойчивую тенденцию роста на 10... 12 % в год цены основных
типов электрических машин: ее цена может быть в 1,5 — 2 раза
ниже цены самого дешевого асинхронного двигателя.
Во-вторых, электронный коммутатор должен обеспечивать пода-
чу на фазы ВИМ однополярных импульсов, что позволяет выпол-
нить его более надежным в сравнении с аналогичным преобразова-
телем частоты для асинхронного электропривода, так как ликвиди-
руется опасность сквозных коротких замыканий и упрощается защита.
В-третьих, по основным массогабаритным и энергетическим
показателям ВИП не уступает и даже превосходит частотно-регу-
лируемый асинхронный электропривод.
Это связано с важной особенностью ВИМ — полезным ис-
пользованием насыщения магнитной цепи.
В-четвертых, благоприятные функциональные особенности
ВИП: большие моменты при низких скоростях и небольших то-
ках, гибкое управление скоростью, широкий диапазон плавного
регулирования скорости — делают этот привод очень привлека-
тельным для широких применений.
В-пятых, большое разнообразие структур ВИМ (различные
отношения п/т = 6/4, 8/6,... различные способы коммутации фаз)
делают этот привод хорошо применимым как в низкооборотных
(сотни оборотов в минуту), так и высокооборотных (десятки ты-
сяч оборотов в минуту) версиях.
Итак, ВИП — серьезный конкурент современных регулируемых
электроприводов без ограничения по мощности, скорости и т.д.
Однако массовым этот электропривод не стал.
При простой структуре и конструкции (см. рис. 3.35) ВИП со-
держит один весьма сложный блок — схему управления СУ, от
которой в сильной степени зависит вся работа привода. Это его
мозг, и его несовершенное функционирование приводит к не-
удовлетворительной работе всего объекта.
В качестве основы для схемы управления использованы совре-
менные микропроцессорные средства, организующие посредством
ШИМ задание нужного напряжения, а также токоограничение,
формирование импульсов тока требуемой формы.
В процессе совершенствования схемы управления ВИП удалось
в первом приближении устранить его конструктивный недостаток —
избавиться от датчика положения ротора, заменив его простыми
датчиками тока и напряжения. Это повлияло на конструктивный
облик ВИМ — машина стала много проще короткозамкнутого
асинхронного двигателя.
131
Новый вентильно-индукторный электропривод близок к пер-
спективному практическому применению во многих сферах, где
необходим простой и надежный энергосберегающий регулируемый
электропривод.
Он был опробован и успешно работал на насосной станции в
центральном тепловом пункте (ЦТП)*, разрабатывается для лег-
ких электрических транспортных средств** и т.д.
Контрольные вопросы
1. Частотно-регулируемый асинхронный электропривод стал основ-
ным средством энергосбережения при переходе от нерегулируемого элек-
тропривода к регулируемому. Почему?
2. Почему нельзя регулировать скорость асинхронного двигателя вниз
от номинальной, уменьшая частоту при неизменной амплитуде пита-
ющего напряжения?
3. Какова допустимая нагрузка при частотном регулировании скоро-
сти асинхронного двигателя вниз и вверх от основной?
4. Какие возможности предоставляет частотное регулирование асинх-
ронных двигателей с точки зрения управления динамикой установки?
5. Возможна ли рекуперация энергии в тормозных режимах, если ис-
пользуется простейший автономный инвертор напряжения? Что должно
быть добавлено в таком преобразователе частоты для «слива» энергии
торможения?
6. Как должен быть построен преобразователь частоты в случае, когда
электропривод должен обеспечивать интенсивные пусковые и тормоз-
ные режимы или работать с активной нагрузкой (например, при спуске
тяжелого груза)?
7. Какие схемы высоковольтных преобразователей частоты находят
применение на практике?
8. Что называется тиристорным регулятором напряжения и какими
свойствами он характеризуется?
9. Какие зависимости иллюстрируют возможность энергосбережения
в асинхронном электроприводе при использовании тиристорного регу-
лятора напряжения?
. 10. По каким причинам и в каких случаях регулирование скорости
асинхронных двигателей с использованием тиристорного регулятора на-
пряжения является нецелесообразным?
11. За счет чего может быть осуществлена минимизация потерь мощ-
ности в двигателе постоянного тока независимого возбуждения в стати-
ческом режиме?
* Натурные испытания вентильно-индукторного электропривода насоса в
центральном тепловом пункте / [Б.М.Сарач, А.С. Паньшин, А. В. Кисельникова
и др.] // Вестник МЭИ. — 2003. — № 3. — С. 56—58.
** Ильинский Н. Ф. Вентильно-индукторный электропривод для легких тран-
спортных средств / Н. Ф. Ильинский, М. Г. Бычков // Электротехника. — 2000. —
№2.-С. 28-31.
132
12. Какими способами могут быть снижены потери энергии в пере-
ходных процессах электропривода с двигателем постоянного тока неза-
висимого возбуждения?
13. Соотношением каких параметров определяются потери энергии в
переходных процессах в системе генератор—двигатель?
14. При каких условиях может быть реализовано рекуперативное тор-
можение в двигателе постоянного тока при его питании от управляемого
выпрямителя?
15. Система источник тока—двигатели постоянного тока эффективна
в установках, транспортирующих длинномерные изделия. Назовите при-
чины, сопоставьте с другими техническими решениями.
16. В мировой практике вентильно-индукторный электропривод часто
рассматривают как конкурент традиционному частотно-регулируемому
асинхронному. Почему?
ГЛАВА 4
ЭНЕРГО- И РЕСУРСОСБЕРЕЖЕНИЕ В СИСТЕМАХ
ВОДОСНАБЖЕНИЯ И ВЕНТИЛЯЦИИ
4.1. Энергетические модели центробежных машин
Центробежные машины — насосы и вентиляторы, использу-
емые в разных отраслях экономики, потребляют не менее 40 %
вырабатываемой электроэнергии и заключают в себе громадные
резервы энергосбережения.
Многолетними усилиями разработчиков этих машин их конст-
рукция доведена до совершенства, учтены все, даже мелкие дета-
ли, влияющие на процесс преобразования механической энергии
вращения в энергию движущейся среды — жидкости или газа.
Промышленность производит сегодня широкую гамму насосов и
вентиляторов высокого качества. Однако главный резерв энерго-
сбережения — управление режимом центробежной машины (дав-
лением и расходом) посредством регулирования скорости — до
настоящего времени практически не используется: более 95 % аг-
регатов общего применения во всем мире оборудованы простей-
шим нерегулируемым электроприводом с асинхронными двига-
телями, имеющими короткозамкнутый ротор.
К центробежным механизмам массового применения относят-
ся агрегаты мощностью 2...50 кВт. В эту категорию входят насосы
холодного и горячего водоснабжения с подачей 12,5—100 м3/ч и
напором 20...80 м вод. ст., вентиляторы общего применения с
расходом до 50 000 м3/ч и давлением до 1 500... 2 000 кПа (диамет-
ры рабочего колеса от 200 до 1 000 мм). В промышленности и ком-
мунальном хозяйстве работают сотни тысяч таких агрегатов, их
доля в общем количестве центробежных механизмов не менее
80-85%.
Для упрощенного анализа и построения энергетических моде-
лей центробежных машин примем ряд допущений.
1. Будем считать, что давление р или связанный с ним напор
Я = p/pg (р — плотность жидкости или газа; g — ускорение сво-
бодного падения), определяемый как разность напоров на выходе
и входе насоса (вентилятора) при неизменной номинальной ско-
рости, не будет зависеть от расхода Q в пределах изменения пос-
леднего от нуля до номинала, т. е. будем считать
134
Рис. 4.1. Зависимости Я*= /(0*) при со = const
для центробежных машин
Н = яном = const,
или в относительных величинах
Я. = 1; Q* = 0... 1 при со. = 1. (4.1)
За базовые величины приняты номинальные напор, расход и
скорость. Соответствующая характеристика 1 показана на рис. 4.1.
Обоснованность такого допущения вытекает из приведенных
на рис. 4.1 обобщенных характеристик 2 насосов типа КМ, венти-
ляторов с лопастями, загнутыми назад — 3 и вперед — 4, полез-
ной мощностью 10... 15 кВт.
2. Механическую мощность Рмех при неизменной номинальной
скорости будем считать линейно зависящей от расхода:
Дкех — С7 +
или (в относительных единицах)
^мех* С + (1 С)(?*,
(4.2)
где д, Ь, с, — постоянные, зависящие от типа центробежной ма-
шины.
Здесь за базу мощности принята механическая мощность
Рмех ном (мощность на валу), кВт, в номинальном режиме насоса
(вентилятора), т.е. при Я= Яном, м вод. ст., и Q = QH0M, м3/ч:
мех. ном
~ Яном0ном/367т|
ном*
Номинальный КПД т|Ном современных центробежных машин
рассматриваемого класса и мощности можно принять равным 70 %
(для упоминавшихся насосов — 70 %, для вентиляторов с лопа-
стями, загнутыми назад — 80 %, вперед — 70 %).
Как следует из рис. 4.2 (обозначения соответствуют рис. 4.1),
указанное допущение хорошо выполня-
ется для насосов (с = 0,4), хуже — для
вентиляторов (с = 0,2...0,6 ). Для общего
случая примем с = 0,4.
3. Будем рассматривать лишь статиче-
ские (установившиеся) режимы агрега-
тов при их продолжительной работе.
Рис. 4.2. Зависимости Рмех,=/(0*) при со. = const
для центробежных машин
135
Рис. 4.3. Зависимости H* = f(Q*) при регули-
ровании скорости
Несмотря на различную физическую
природу транспортируемой среды (жид-
кость, газ) и существенные различия в
конструкции для всех центробежных ма-
шин справедливы соотношения подобия.
Для конкретной машины, работающей со
скоростями и соА, они имеют вид:
(4.3)
(4.4)
(4.5)
= (4.6)
со?
где М — момент на валу машины, Л/ = Рмех/<о.
Из соотношений подобия (4.3), (4.4) с учетом принятого до-
пущения (4.1) получены характеристики насоса (вентилятора)
напор —расход при регулировании скорости (горизонтальные ли-
нии на рис. 4.3).
4. Для построения характеристики магистрали, т.е. зависимости
H(Q), воспользуемся зависимостями (4.3) и (4.4), применив их к
структурам магистрали на рис. 4.4. Далее будем пользоваться обоб-
щенной зависимостью Н = aQ2.
На рис. 4.3 штриховыми линиями показаны две характеристи-
ки магистрали при ее постоянном сопротивлении, соответству-
ющем номинальному 1 и половинному 2 расходу.
Поскольку режим работы определяется точкой пересечения
характеристик насоса и магистрали, регулирование скорости от-
крывает широкие возможности управления режимами по любому
целесообразному закону или алгоритму — любая точка в области
Н— Q становится легко доступной при регулировании скорости.
Если в случае нерегулируемого привода единственной возможно-
стью перехода от номинального расхода к половинному было уве-
личение сопротивления магистрали, т.е. переход от характеристи-
ки 7 к характеристике 2 (дросселирование); при этом избыток
напора составлял ДЯ. = 0,75 (см. рис. 4.3), то при регулируемом
136
. в
Рис. 4.4. Характеристики магистрали
а — перекачка жидкости (газа) без подъема; б — перекачка жидкости с подъ-
емом на высоту Л; в — перекачка жидкости с подъемом на два этажа
приводе режим Q. = 0,5 в соответствии с формулой (4.3) достига-
ется заданием скорости со. = 0,5 без какого-либо избытка напора.
Указанная гибкость управления технологическими координата-
ми (напором и расходом) достигается при радикальном снижении
энергетических затрат. Зависимость механической мощности от рас-
хода при скоростях со» от 0,5 до 1,1 показана на рис. 4.5. В соответ-
ствии с формулой (4.5) зависимость механической мощности от
расхода при регулировании скорости представляет собой кубиче-
скую параболу (штрихпунктирная кривая на рис. 4.5). Заштрихован-
ная область на рис. 4.5 отражает реализуемую экономию мощности
в сравнении с нерегулируемым приводом (со. = 1). В условиях пре-
дыдущего примера (см. рис. 4.3) переходу от 0. = 1 к Q. = 0,5 со-
Рис. 4.5. Зависимости Рмсх. = f(Q-) при регулировании скорости
137
a
6
Рис. 4.6. Энергетические диаграммы центробежных машин для двух спо-
собов регулирования расхода:
а — дросселирование; б — изменение скорости
ответствовало бы уменьшение мощности от 1,0 до 0,7 при дроссе-
лировании согласно формуле (4.2) и от 1 до 0,125 при регулиро-
вании угловой скорости.
Приведенные идеализированные энергетические модели цент-
робежных машин позволяют оценивать в любых конкретных усло-
виях эффективность их регулирования. Если требуются более де-
тальные оценки, то следует пользоваться характеристиками кон-
кретных агрегатов. На рис. 4.6 показаны составляющие потерь в
насосе ДРнас, задвижке ДРзадв и магистрали ДРмаг при двух способах
регулирования расхода.
Иногда при анализе работы центробежных машин удобно
пользоваться электрическими аналогами гидравлической систе-
мы, представленными в табл. 4.1.
Таблица 4.1
Гидравлические и электрические аналоги
Гидравлические величины Электрические величины
Напор Н Напряжение U, ЭДС Е
Расход Q Ток I
Гидравлическое сопротивление Rr Электрическое сопротивление R
138
г. маг
а
Рис. 4.7. Гидравлическая система (с) и эквивалентная электрическая схе-
ма (5)
б
Тогда гидравлической системе на рис. 4.7, а (в RTBa входит со-
противление насоса и запорного устройства) будет соответство-
вать электрическая схема на рис. 4.7, б, для которой:
нагр
нагр
По аналогии для гидравлической системы будут справедливы
соотношения:
и
п
Лг.маг
ХЛмаг “нас п „
*'г.вн 4" ЛГ-Маг
Таким образом, как показано ранее, переход от нерегулиру-
емого электропривода насосов и вентиляторов к регулируемому
радикально решает вопрос управления технологическими режи-
мами установок при резком снижении энергетических затрат.
4.2. Опыт энерго- и ресурсосбережения
в системах водоснабжения зданий
С июня 1994 г. в Московском энергетическом институте (МЭИ)
проводились широкие натурные испытания энергосберегающих насос-
ных станций*, оборудованных частотно-регулируемым электропри-
водом и установленных на центральных тепловых пунктах (ЦТП)
* Сарач Б.М. Энергосберегающие насосные станции / Б. М.Сарач, И. Е. Хро-
мых // Промышленная энергетика. — 1997. — № 8. — С. 13—16.
139
МО «Лефортово». Энергосберегающие комплектные устройства,
изготовленные по разработкам МЭИ на Опытном заводе МЭИ,
работали на трех насосных станциях, установленных в учебно-
лабораторных корпусах, и на трех ЦТП в жилом секторе. Характе-
ристика объектов, обслуживаемых насосными станциями, и сро-
ки установки нового оборудования приведены в табл. 4.2.
Таблица 4.2
Энергосберегающие насосные станции
Адрес и характеристика объекта Срок ввода в действие Напор, м вод. ст. Экономия
Ифакт Нрасч Нустав воды электро- энергии
м3/мес кВт-ч/ мес %
Красноказарменная, 17, учебно-лабора- торные корпуса, 5 этажей, 3 600 м2 в плане м" 10.01.95 70 32 40 1 925 25 2 090 51
Красноказарменная, 14, административ- но-учебные корпуса, 6 этажей, 2 500 м2 в плане 10.07.95 75 36 40 2512 26 2 696 65
Красноказарменная, 13, корп. М, учебно- лабораторный кор- пус, 10 этажей, 2 700 м2 в плане 26.09.95 85 43 45 1 170 27 2 243 54
Крас ноказарме иная, 19, жилой дом, 9 эта- жей, 453 жильца, дет- ский сад, прачечная 26.11.95 70 45 50 1 179 16 1964 37
Энергетическая, 22, жилой дом, 8 этажей, 399 жильцов, стома- тологическая поли- клиника 03.04.96 75 42 50 972 14 1 192 33
Авиамоторная, 49/1, 5 жилых 5... 6-этажных домов, 1 420 жильцов, кафе, магазин 20.05.96 70 39 45 2 284 9 2 446 31
140
~ 380 В
QF1
QF3
КМ2
М2
Ввод
от
бителям
хвс
городской Пожарная
водосети магистраль
Рис. 4.8. Система водоснабжения здания
QF2
КМ1
Ml
К бойлерам
гвс
Все шесть устройств были установлены на однотипных насосах
холодного водоснабжения (ХВС) типа КМ 80—50—200 с номи-
нальным напором 50 м вод. ст. и номинальной производитель-
ностью 50 м3/ч, оснащенных асинхронными короткозамкнутыми
электродвигателями типа 4АМ16052ЖУ2, 15 кВт, 380 В, 29 А,
2 900 об/мин.
Схема включения агрегатов — параллельная (рис, 4.8), один из
насосов находится в работе, второй — в резерве. Каждый из насо-
сов включается в работу через 15 дней, чем достигается равномер-
ный износ и сохраняется работоспособность уплотнений и обрат-
ных клапанов. Пожарная магистраль обычно закрыта и открывает-
ся только в случае пожара.
В жилых зданиях включение контакторов КМ1 и КМ2 произво-
дится автоматически через блоки автоматики типа «БАТ», «МАС-
ТЕР», управление которыми производится от контактного мано-
метра, устанавливаемого в этом случае в выходной магистрали.
В административных зданиях включение и отключение контак-
торов КМ1 и КМ2 производится дежурным персоналом.
Энергосберегающие устройства с преобразователями частоты
ПЧ дополняли существующую схему на рис. 4.8 и подключались
между выходом линейного автомата насоса QF2 и входами линей-
ных контакторов насосов КМ1 и КМ2 (рис. 4.9).
Управление насосами для обслуживающего персонала остава-
лось без изменений. В случае срабатывания какой-либо защиты
преобразователя частоты (перегрузка по току, повышение или
понижение напряжения, перегрев и др.) он автоматически от-
141
I
Рис. 4.9. Фрагмент системы водоснабжения с энергосберегающим уст-
ройством
ключался от сети контакторами КМ22 и КМЗЗ, а питание двигате-
ля насоса осуществлялось напрямую от сети через шунтирующий
контактор КМ11.
Такая конфигурация схемы была использована для обеспече-
ния непрерывного водоснабжения и отражала неуверенность пер-
сонала в надежности нового элемента — электронного преобразо-
вателя частоты. Интересно отметить, что опыт эксплуатации энер-
госберегающих устройств изменил позицию эксплуатационников:
они потребовали убрать цепь, шунтирующую ПЧ, поскольку он
не выходил из строя, а прямые пуски грозили разрывами труб и
другими неприятностями.
Насосы, установленные в учебно-лабораторных корпусах, ра-
ботали с 6.00 до 23.00 ч при относительно стабильном, незначи-
тельно меняющемся расходе воды. Поскольку давление городской
воды в Лефортово также относительно стабильно (2 м вод. ст.),
замыкание систем по давлению не использовалось. Насосы в жи-
лом секторе работали круглосуточно при существенном различии
дневного и ночного расхода. На рис. 4.10 показаны регистрограм-
мы тока двигателя одного из насосов. Здесь также использовались
разомкнутые структуры, хотя их замыкание по давлению с изме-
142
«ч ч h 30 oil
о о
к СП
о
♦ 14
( 34 © о
□ч 15
1 ( 30 S
g Г 91
о о “1 8
О.
О ©
оо
о ©
19
О О
20
© ©
21
© ©
гч гч
?ч S
с 23
5 8
Я а •
о g 4 40 © о
§ 40 ОЧ сч
5! 5 S
еч
8
© о
о ©
V4
о ©
40
© ©
© ©
оо
8
О ©
10
© ©
© ©
сч
Рис. 4.10. Регистрограммы токов двигателя насоса при питании от сети и от преобразователя частоты
143
нением уставки напора в зависимости от времени суток могло бы
дать дополнительный эффект.
На всех шести объектах с энергосберегающими насосными стан-
циями в процессе ввода их в эксплуатацию и при дальнейшей
эксплуатации проводились детальные исследования режимов ра-
боты и определялся напор, необходимый для комфортного водо-
снабжения.
Было установлено, что грубые, но достаточные для практики
оценки необходимого напора Ярасч, м вод. ст., могут быть сделаны
на основании соотношения
Ярасч = (3...3,5)Я+(10...15), (4.7)
где N — число этажей, включая подвал, если там установлена
насосная (для группы зданий — число этажей самого высокого
здания).
Было обнаружено, что на всех шести объектах фактический
напор //фак,., заложенный при проектировании, существенно пре-
вышал необходимый расчетный напор Ярасч (см. табл. 4.2), в связи
с чем значительная экономия электроэнергии и воды при модер-
низации достигалась простым устранением этого ненужного и
вредного избытка за счет снижения частоты питающего двигатель
напряжения и, следовательно, скорости вращения насоса. Вели-
чины установленного напора Яустан показаны в табл. 4.2.
В качестве примера на рис. 4.11 показаны экспериментальные
зависимости напора Н, расхода Q и потребляемой мощности Р
Экономия
мощности ДР
Рис. 4.11. К определению требуемого напора в системе водоснабжения
здания
144
IX X XI XII I II III V IV VI VIIVIII
6
Месяцы
Рис. 4.12. Диаграммы расхода воды (а) и электроэнергии (б) на ЦТП
до и после внедрения энергосберегающего оборудования
от частоты приложенного к двигателю напряжения для насос-
ной станции административно-учебного здания (Красноказар-
менная, 14).
При снятии этих характеристик измерялся напор в диктующей
точке На т, расположенной в наиболее удаленной и высокой части
здания. По условиям комфортного водоснабжения в этой точке
(^д.т ~ 15,4 м вод. ст.) выбрана уставка напора на выходе насоса
40 м вод. ст. и получена, как следует из рис. 4.11, экономия мощ-
ности 9 кВт (75 %) и воды 14 м3/ч (40 %).
Данные по экономии воды и электроэнергии, полученные на
шести объектах в Лефортово, приведены в табл. 4.2.
На рис. 4.12 показаны в качестве примера диаграммы месячно-
го расхода воды и электроэнергии для административно-учебного
корпуса.
6 Ильинский 145
Результаты обследования подтвердили данные по экономии
воды, полученные ранее Н. Н. Чистяковым: каждая лишняя ат-
мосфера (10 м вод. ст.) при существующем у нас состоянии гид-
равлических систем приводит к росту утечек воды на 7...9 %.
Поскольку утечки горячей воды уносят часть тепла, можно
ожидать, что их сокращение сэкономит около 5 % тепла.
В тех случаях, когда избыток напора невысок, экономия воды
и электроэнергии может быть получена за счет суточного про-
граммного управления напором.
Опыт эксплуатации шести энергосберегающих устройств по-
зволяет отметить их высокую надежность:
• за два года непрерывного мониторинга состояния системы
ХВС не было случаев поломок штатного оборудования насосных
(двигатели, насосы, контакторы, автоматы и пр.);
• ни на одном объекте ни разу не зарегистрировано случая по-
тери водоснабжения;
• профилактический ремонт оборудования (подтяжка клеммных
соединений, зачистка контактов, продувка печатных плат и т.д.)
требуется примерно через 1,5 года эксплуатации.
Применение энергосберегающих устройств не создает каких-
либо дополнительных обязанностей для обслуживающего пер-
сонала и снижает эксплуатационные расходы по обслуживанию
системы водоснабжения и сантехнического оборудования. На
объектах МЭИ, где установлены устройства, в 2 раза уменьши-
лось число вызовов сантехников по причинам выхода из строя
смесителей, различных кранов, разрыва труб и т.д. Это связано
с уменьшением давления в системе и устранением гидравли-
ческих ударов при пуске насосов. Существенно снижен шум от
насосов, что весьма существенно при установке насосов в под-
валах в непосредственной близости от жилых и служебных по-
мещений.
Кроме указанного ранее прямого эффекта в сфере ресурсо- и
энергосбережения опыт эксплуатации нового оборудования по-
зволил установить обеспечиваемые им следующие важные пре-
имущества, известные ранее лишь теоретически:
• повышение надежности систем водоснабжения за счет умень-
шения износа основного оборудования и исключения гидравли-
ческих ударов;
• возможность использования на ЦТП насосов, выбранных с
запасом на развитие (подключение новых потребителей), без ка-
кого-либо увеличения эксплуатационных расходов;
• автоматическая адаптация системы внутреннего водоснабже-
ния к изменению режима магистральных сетей, в частности к
снижению давления в них;
• техническая осуществимость совместного управления насоса-
ми холодного водоснабжения и циркуляционными насосами го-
146
Таблица 4.3
Экономия электроэнергии и воды на ЦТП «Срогино»
Год Количество * модернизм- рованных ЦТП Среднемесячный расход
Лето Отопительный сезон
Электроэнер- гии, тыс. кВт * ч Воды, м3 Электроэнер- гии, тыс. кВт ’ ч Воды, м3
1997 0 693 1049 1
1998 2 683 37200 953 45 837
1999 16 578 35 745 942 43695
2000 21 508 32 373 830 41858
2001 41 345 33 818 738 38 352
2002 41 354 1 679 мм»
рячего водоснабжения зданий в целях существенной дополнитель-
ной экономии электроэнергии, воды и тепла;
• упрощение обслуживания, возможность удобной и эффек-
тивной диспетчеризации;
• снижение шума, беспокоящего жильцов нижних этажей при
установке насосов в подвалах жилых зданий.
Последовавшая за первыми опытами эксплуатация десятков, а
затем сотен насосных станций с ПЧ подтвердила их изложенные
ранее достоинства.
Приведем в качестве примера данные об экономии элект-
роэнергии и воды на ЦТП района теплосетей «Строгино» (табл.
4.3).
По мере ввода модернизированных ЦТП с частотно-регулиру-
емым электроприводом уменьшался расход электроэнергии и воды.
Общий вывод о результатах энерго- и ресурсосбережения в си-
стемах водоснабжения, сделанный на представительной выборке
модернизированных ЦТП: экономия электроэнергии составила от
30 до 50 %, воды — от 5 до 15 %.
Опыт создания и обоснования эффективности частотно-регу-
лируемого электропривода насосных станций широко опублико-
ван в научно-технической периодике, обсуждался на представи-
тельных научно-технических семинарах, российских и междуна-
родных конференциях.
Этот опыт инициировал активный интерес к проблеме ресурсо-
и энергосбережения в сфере водоснабжения зданий на основе но-
вого прогрессивного электрооборудования в ряде серьезных орга-
низаций.
147
К сожалению, значительно меньшие успехи можно отметить в
другой энергоемкой сфере — вентиляции, хотя резервы энерго-
сбережения здесь также весьма существенны.
4.3. Пример энергосбережения в системе
воздушного отопления
Системы воздушного отопления используются во многих про-
мышленных, административных и общественных зданиях — цехах
предприятий, школах, кинотеатрах, гостиницах. В таких системах
наружный воздух прогоняется вентилятором через калориферы,
нагревается до нужной температуры и поступает в обслуживаемые
помещения.
Вентилятор обычно приводится во вращение нерегулируемым
короткозамкнутым асинхронным электродвигателем и обеспечи-
вает поступление в здание одинакового количества воздуха. Нуж-
ная температура в помещениях поддерживается за счет использо-
вания основного канала управления — автоматического регули-
рования подачи теплоносителя в калориферы — и может допол-
нительно регулироваться изменением положения фрамуг, через
которые нагретый воздух поступает в помещения.
Выбор вентилятора производится из условия обеспечения ком-
фортных условий в помещениях при любых, в том числе экстре-
мальных, погодных условиях.
Поскольку низкая температура (-25 °C) держится не более 3 %
от продолжительности отопительного сезона, имеется потенци-
альная возможность экономии тепловой и электрической энергии
за счет использования дополнительного канала — регулирования
производительности вентилятора посредством изменения часто-
ты вращения.
При этом должны соблюдаться оптимальные климатические
условия в помещениях, в частности по количеству подаваемого в
помещения чистого воздуха.
Были проведены исследования указанной возможности энер-
госбережения на примере одной из типовых школ города — ли-
цея № 1502 при МЭИ*.
Работы проводились при поддержке администрации лицея и
при содействии и непосредственном участии сотрудников орга-
низации «Спецэнергоремонт», обслуживающей подобные систе-
мы отопления.
Теплоснабжение лицея производится по типовой схеме, в со-
став которой входят системы горячего водоснабжения, водяного
и воздушного отопления.
* Ващук В. С. Исследование систем отопления и вентиляции лицея МЭИ /
В.С. Ващук // Тр. Моск, энерг. ин-та. — Вып. 675. — 1997. — С. 84—90.
148
От городской
теплосети (прямая вода)
К городской
теплосети (обратная вода)
Рис. 4.13. Схема подключения лицея к городской теплосети:
1 — расходомер; 2 — датчик давления; 3 —• теплосчетчик; 4 — элеватор; 5 —
система горячего водоснабжения; 6 — система водяного отопления; 7 — система
воздушного отопления; 8 — задвижка
Схема подключения лицея к городской теплосети приведена
на рис. 4.13.
Все теплопотребляющие узлы подключаются к городской теп-
лосети параллельно через общий элеватор, поддерживающий тем-
пературу обратного теплоносителя за счет подмешивания отра-
ботавшего теплоносителя в поступающий теплоноситель город-
ской сети.
На вычислительное устройство теплосчетчика подаются сиг-
налы температуры прямой и обратной воды городской теплосети
и ее расхода.
Теплосчетчик фиксирует интегральный расход теплоносителя
0тепл, м3, интегральное количество тепловой энергии 0, ГДж, те-
кущие значения температур теплоносителя ть т2, разность темпе-
ратур приходящего и уходящего теплоносителя Ат, °C, и мгно-
венную тепловую мощность РтеПл> кВт.
Упрощенная схема системы воздушного отопления лицея № 1502
приведена на рис. 4.14.
Воздух забирается из подвального помещения лицея венти-
лятором типа Ц4-76-№8 (1430 об/мин, 25 000 м3/ч) с асинхрон-
ным короткозамкнутым приводным двигателем 4A160S4 (15 кВт,
220/380 В, 1465 об/мин), площадь сечения воздуховода 1,66 м2.
Перед поступлением в классы воздух нагревается калориферами и
увлажняется (на рис. 4.14 не показано). Количество теплоносите-
ля, подаваемого на каждую ступень калорифера, регулируется ин-
дивидуальными задвижками, управление которыми производит-
ся автоматически в зависимости от температуры в помещениях
соответствующей зоны.
Датчики температуры зоны I установлены в коробе воздухо-
вода в подвальном помещении, датчики температуры зон II и III
установлены в соответствующих классах.
Желаемая температура в помещениях устанавливается с пульта
управления системой отопления. При отключении системы авто-
149
Актовый зал
спортзал,
столовая
Воздух/
Вентилятор
1500 об/мин
I зона
Угловые
классы
Рядовые
^классы/
Калориферы
II зона III зона
D
Теплоноситель
о о
<11 <ш
Задание
Рис. 4.14. Упрощенная схема воздушного отопления школы
матики возможно ручное управление задвижками подачи тепло-
носителя в калориферы. Электропривод вентилятора в базовой
схеме нерегулируемый, с питанием двигателя непосредственно
от сети.
Таким образом, теплоснабжение лицея осуществляется по ти-
повой схеме, а регулирование системы воздушного отопления
производится в ручном и автоматическом режимах только за счет
регулирования подачи теплоносителя в калориферы.
На рис. 4.15 приведен проектный график теплозатрат здания
лицея при различных температурах наружного воздуха. Там же
показаны экспериментально снятые по теплосчетчику графики теп-
лопоступлений в здание лицея при работе базовой системы водя-
ного и воздушного отопления.
Из графиков следует, что теплопоступления существенно пре-
вышают расчетные теплозатраты и это приводит иногда к пере-
греву классов.
Нарушение климатического комфорта вынуждает открывать
окна и двери, что вызывает дополнительный расход тепла. Кроме
того, в указанной ситуации система тепловой автоматики будет
дополнительно увеличивать подачу тепла.
Регулирование частоты вращения приводного двигателя вен-
тилятора позволяет изменять подачу нагретого воздуха в помеще-
150
Рис. 4.15. Зависимости тепловой мощности от температуры наружного
воздуха
ния лицея, при этом возникает возможность экономии тепла,
поскольку при уменьшении количества нагнетаемого в здание
воздуха в помещениях создается меньшее избыточное давление и,
следовательно, уменьшается расход тепла, уносимого из здания
вместе с нагретым воздухом.
Проведенные экспериментальные исследования позволили за-
фиксировать качественно и оценить количественно экономию,
получаемую при использовании указанного дополнительного ка-
нала управления.
В схеме включения вентилятора между контактором К и при-
водным двигателем вентилятора были установлены преобразова-
тель частоты и измерительные приборы (рис. 4.16, а). Буквой А
обозначены автоматы.
На рис. 4.16, б показаны характеристики напора — расхода вен-
тилятора при различных частотах вращения; там же показана экс-
периментально снятая усредненная кривая сопротивления магис-
трали с нагретым воздухом 7?маг.
В ручном режиме устанавливались частоты 25, 30, 35, 40, 45
Гц, частота 50 Гц соответствовала базовой схеме включения
вентилятора. Настройки тепловой автоматики при этом не ме-
нялись.
Оценка допустимых пределов регулирования частоты враще-
ния вентилятора проводилась путем измерения количества возду-
ха, подаваемого в классы лицея, и сравнения его со строительны-
ми нормами и правилами (СНиП).
Измеренная анемометром скорость воздуха умножалась на пло-
щадь отверстия, через которое подается нагретый воздух в каж-
дый класс.
151
-380 В
Н, Па
маг
1600
1500
1200
800
Измерительный
комплекс К-506
10 000
л, об/мин
1000
20 000 30 000
0
Рис. 4.16. Схема включения (а) и характеристики вентилятора (б)
На рис. 4.17 приведены графики количества поступающего воз-
духа в зависимости от частоты вращения двигателя вентилятора
(кривая 1 — рядовой класс на 25 человек, кривая 2 угловой
класс на 15 человек), там же нанесены линии санитарной нормы
для указанных классов.
Графики количества подаваемого воздуха в другие классы рас-
полагаются между указанными на рис. 4.17, из чего следует, что
возможные пределы регулирования частоты вращения от 1 000 до
1 500 об/мин. При частоте 50 Гц, используемой в базовой систе-
Рис. 4.17. Поступление воздуха в классы при различной частоте вращения
вентилятора
152
Рис. 4,18. Температура в классе 415 (а) и классе 406 (б) при различных
частотах вращения вентилятора
ме, количество подаваемого в классы воздуха примерно в 2,5 раза
выше санитарной нормы, а при 30 Гц — соответствует ей.
Таким образом, частота вращения приводного двигателя мо-
жет быть снижена до 0,6 от номинальной без ущерба для ком-
фортности.
Оценка экономии тепловой энергии осуществлялась следующим
образом.
Включение системы воздушного отопления производилось ут-
ром после остывания классов, на приводном двигателе вентиля-
тора устанавливалась частота из ряда 50, 45, 40, 35, 30 Гц, и
работа на выбранной частоте происходила в течение 3...5 ч.
Фиксировались тепловая энергия 0, расход теплоносителя 0тепл,
температура приходящего теплоносителя т,, разность температур
приходящего и уходящего теплоносителя Дт и тепловая мощность
W. В классах фиксировалась средняя температура воздуха в поме-
щении тср, которая измерялась по трем точкам: у стола препода-
вателя, в центре класса и в ряду у окна.
На рис. 4.18 приведены графики нагрева воздуха в двух ха-
рактерных классах при трех различных частотах вращения вен-
тилятора.
На графиках видно, что с уменьшением частоты вращения вен-
тилятора температура в классах снижается до комфортного уров-
ня, т. е. климатические условия улучшаются.
Изменения теплопоступлений в здание при регулировании ча-
стоты вращения вентилятора были показаны на рис. 4.15.
При снижении частоты вращения вентилятора с 1 500 до
1 000 об/мин экономия тепловой мощности составляет 180 кВт,
или 0,16 Гкал/ч. Длительность отопительного сезона для по-
добных систем в Москве составляет 2 500 ч, т.е. за сезон эко-
номится около 400 Гкал.
153
Мощность, потребляемая двигателем вентилятора при 50 Гц,
составляет 8,6 кВт, при снижении частоты до 30 Гц она снижа-
ется на 60 %.
Экономия электроэнергии составит около 13 000 кВт • ч/сезон.
При современных ценах на энергоресурсы и преобразователи ча-
стоты внедрение энергосберегающего устройства окупится менее
чем за один отопительный сезон.
Таким образом, применение второго дополнительного ка-
нала регулирования подачи тепла в системе воздушного отоп-
ления школы за счет изменения частоты вращения вентилятора
позволяет экономить до 25 % тепла и до 60 % электроэнергии
при одновременном улучшении климатических условий в по-
мещениях.
4.4. Энергоаудит систем водоснабжения зданий
Эффект энерго- и ресурсосбережения, достигаемый при ис-
пользовании частотно-регулируемого электропривода центробеж-
ных машин, существенно зависит от требуемого и фактического
напора, а также от расхода транспортируемой среды — воды или
воздуха.
В одних ситуациях (при неоправданно завышенном напоре или
расходе, регулируемом дросселированием) эффект может быть
значительным, в других (при правильно спроектированных сис-
темах) — совсем небольшим.
Для обоснованного решения вопроса об использовании частот-
но-регулируемого электропривода в конкретных условиях необ-
ходим энергоаудит, т.е. энергетическое обследование объекта с
оценкой ожидаемого эффекта в натуральном и денежном выра-
жении.
Далее энергоаудит рассматривается на примере водоснабже-
ния зданий.
Опыт, накопленный в МЭИ в 1990-е годы, позволяет выде-
лить три стадии энергоаудита:
• экспресс-анализ, или оценочный энергоаудит, предшеству-
ющий модернизации оборудования и позволяющий решить, сле-
дует ли использовать частотно-регулируемый электропривод;
• оперативный анализ — обследование модернизированной
системы в течение одной-двух недель и сравнение результатов с
полученными до модернизации;
• сопоставительный анализ энергетических характеристик
системы за длительный период (год и более) до и после модер-
низации.
Оценочный энергоаудит систем холодного водоснабжения зда-
ний осуществляется посредством прямого сопоставления факти-
154
ческого среднего напора в системе ХВС с напором, необходи-
мым для комфортного водоснабжения всех потребителей.
Фактический напор м вод. ст., определяется как сумма
напора городского водопровода Нвк и напора Ннас, создаваемого
повышающим насосом ХВС:
*
(4.8)
Так как в большинстве современных зданий используются на-
сосы типа КМ с жесткими характеристиками, в первом прибли-
жении при номинальной частоте 50 Гц можно принять
нас
ном
Напор, необходимый для комфортного водоснабжения потреби-
телей Янеобх, м вод. ст., может быть рассчитан следующим образом:
Hueo6x = 3N+ Кпт, (4.9)
где N — число этажей самого высокого здания, включая подвал,
если насос установлен в подвале здания; ЗУ — напор, необходи-
мый для поднятия воды на верхние этажи; А"пот — доля напора,
расходуемая при подаче воды потребителям на покрытие потерь в
трубах, Кпт = 5... 15 м вод. ст. (минимальное число относится к
насосу, обслуживающему только одно здание, максимальное — к
группе зданий).
Вторая составляющая может существенно изменяться в зависи-
мости от расхода воды, диаметра и качества труб, однако принятые
значения ХпОТ вполне могут использоваться на первом этапе энерго-
аудита и уточняться, если необходимо, на последующих этапах.
Устраняемый за счет снижения скорости насоса избыток напора
А/7 = Т/факт ~ ^необх
при известном среднем расходе воды Qcp, м3/ч, и КПД двигателя
т|дв и насоса т]нас позволяет оценить экономию электроэнергии АЭ,
кВт • ч в год, за известный промежуток времени, например за год:
ДЭГ
_АЯ^р_
367т|насг],в
IflaU (До
где 1Г — число рабочих часов в году; Ищ, = П
(значение а можно оценить, используя ха-
рактеристику на рис. 4.19).
Рис. 4.19. График зависимости а от Q/QUCM
(4.Ю)
155
Рассчитанная величина ДЯ может также использоваться для
оценки бесполезно расходуемой воды, если принять, что каждая
лишняя атмосфера (10 м вод. ст.) увеличивает утечки в условиях
Москвы на 7... 9 %. Тогда за год расчетная экономия воды ДВГ, м3/г.,
составит
ДВГ = Qcp^y (0,07 -0,09)Гг. (4.11)
Для оценки эффективности оценочного энергоаудита в табл. 4.4
сопоставлены величины экономии электроэнергии и воды для ше-
сти ЦТП в округе «Лефортово», полученные по результатам ауди-
та и измеренные фактически при эксплуатации ЦТП с энергосбе-
регающим оборудованием.
Из табл. 4.4 следует, что оценочный энергоаудит, организо-
ванный по изложенному алгоритму, как правило, дает песси-
мистические оценки за счет неточного учета КПД и неучета
ряда дополнительных факторов. Тем не менее оценки, получен-
ные в результате энергоаудита, могут использоваться при при-
нятии решения о целесообразности модернизации насосных
станций.
Таблица 4.4
Оценка эффективности оценочного энергоаудита
Адрес объекта (ЦТП) ^фат м ВОД. ст. Густап > м ВОД. ст. (2ер, М3/ч Предполагаемая экономия Фактическая экономия
воды, м3 в год электро- энергии, кВт • ч в год воды, м3 в год электро- энергии, кВт - ч в год
Красноказар- менная, 17 70 40 10,6 22 300 22 400 23 100 25100
Красноказар- менная, 14 75 40 13,4 28 800 27 700 30100 32 400
Красноказар- менная, 13 85 45 6,0 14 700 21000 14000 27 000
Красноказар- менная, 19 70 50 10,2 12 500 22 500 14 150 23 600
Энергетиче- ская, 22 75 50 9,6 16 800 17 800 11700 14300
Авиамотор- ная, 49/1 70 45 35,2 27 000 33 250 27 400 29 400
156
Оценочный энергоаудит несмотря на его невысокую точность
очень прост в исполнении, общедоступен, выполняется по мало-
му числу легко доступных данных и очень полезен, поскольку дает
надежную пессимистическую оценку резерва энерго- и ресурсо-
сбережения.
Рассмотренная простая процедура оценочного энергоаудита
была использована для получения информации о 70 ЦТП жилого
района «Лефортово» — характерного для Москвы района с основ-
ной застройкой 1950— 1980-х годов зданиями высотой 5... 16 эта-
жей*. В процессе энергоаудита была получена краткая характерис-
тика всех ЦТП, включающая в себя адрес, число и характеристи-
ку домов, тип и параметры установленных насосов, среднюю ве-
личину напора в городском водопроводе, минимальный и макси-
мальный напоры, обеспечиваемые насосными станциями в зави-
симости от режима водопотребления.
Для удобства обращения с исходной базой данных все ЦТП,
оборудованные повышающими насосами, были разделены на че-
тыре группы по этажности обслуживаемых ими зданий:
• до 5 этажей (ЦТП № 1... 15);
. 6...9 этажей (ЦТП № 16...33);
. 10... 16 этажей (ЦТП № 34...50);
• свыше 16 этажей (ЦТП № 51...70).
В каждой из этих групп по формуле (4.9) были определены
минимальный и максимальный необходимый (комфортный) на-
поры и сопоставлены с фактическим напором, обеспечиваемым
городским водопроводом (среднее значение) и повысительными
насосами.
Результаты приведены на рис. 4.20. Затемненные участки на гра-
фиках представляют собой избытки напора в самой неблагопри-
ятной ситуации, когда напор городской сети минимален и со-
ставляет 5 м вод. ст.
Заштрихованные участки соответствуют среднему существу-
ющему напору городского водопровода.
Полученные данные по 70 ЦТП района «Лефортово» позволя-
ют оценить потребность в модернизации насосных станций ЦТП
посредством использования частотно-регулируемого электропри-
вода (ЧРП).
Можно использовать следующие критерии целесообразности
установки ЧРП:
• ЧРП необходим, если избыток напора превосходит 15 м вод. ст.;
• ЧРП желателен, если избыток напора колеблется в пределах
от 5 до 15 м вод. ст.;
* Хромых И.Е. Оценочный энергоаудит систем холодного водоснабжения
зданий / И. Е. Хромых, Б. М.Сарач // Тр. Моск, энерг. ин-та. — Вып. 676. — 2000. —
С. 104-111.
157
Максимально необходимый напор
м в.ст
№ ЦТП
Напор, развиваемый насосом
м в.ст
80
70-
60-
50-
40-
30-
20-
10-
0
\ 4 Максимально необходимый напор
Минимально необходимый напор
м в.ст
90
80-
70^
60-
50-
40-
30-
20-
10-
0
34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50
в № ЦТП
---—--------/Напор, развиваемый-насосом
Максимально необходимый напор
Минимально необходимый напор
51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70
г № ЦТП
Рис. 4.20. Результаты энергоаудита 70 ЦТП:
а — дома высотой до 5 этажей; б — дома высотой 6...9 этажей; в — дома высотой
9... 16 этажей; г — дома высотой свыше 16 этажей
158
Дома высотой до 5 этажей (я=15)
Дома высотой выше 16 этажей (л =20)
10%___________65% 25%
| 85% 110%|5%
ЦТП «Лефортово» (л =70)
9% 37% 54%
55% 30% 15%
I I — ЧРП не требуется
I I —ЧРП желателен
। > — ЧРП необходим
п — число ЦТП
---при существующем напоре
городской сети
---при напоре городской
сети 5 м в. ст.
Рис. 4.21. Потребность в средствах энерго- и ресурсосбережения на ЦТП
района «Лефортово»
• ЧРП не требуется, если избыток напора не превышает 5 м
вод. ст.
Результаты анализа представлены на рис. 4.21. Из приведенных
диаграмм следует, что ЧРП насосов может быть с успехом приме-
нен на 50 % всех обследованных ЦТП.
Этот результат сохраняется даже в критических ситуациях,
когда напор в городской сети снижается до минимального зна-
чения 5 м вод. ст.
Наиболее целесообразен переход к частотно-регулируемому
приводу на ЦТП, обслуживающих пятиэтажные дома (87 %) и
дома от 6 до 16 этажей (до 57 %). В домах свыше 16 этажей ЧРП
необходим лишь в 25 % домов.
Разработанные и проверенные на практике процедуры энерго-
аудита систем водоснабжения зданий вошли в «Инструкцию по
расчету экономической эффективности применения частотно-ре-
гулируемого электропривода» (1997).
Аналогичные процедуры были разработаны для вентиляторов
и представлены в виде прикладных компьютерных программ, рас-
смотренных далее.
159
Контрольные вопросы
1. Сравните два способа регулирования расхода в центробежной ма-
шине: дросселирование и изменение скорости.
2. Часто насосы в системах водоснабжения зданий выбраны с завы-
шенным напором. Как это сказывается на потреблении электроэнергии?
На расходе воды?
3. Первый опыт использования частотно-регулируемого электропри-
вода насосов водоснабжения зданий взамен нерегулируемого дал ряд
положительных результатов. Назовите и прокомментируйте эти резуль-
таты.
4. Что дает использование дополнительного канала — регулирования
скорости вращения вентилятора — в системах воздушного отопления
зданий?
5. На чем основана система простейшего энергоаудита систем водо-
снабжения зданий?
6. Если есть возможность, выполните оценочный энергоаудит систе-
мы водоснабжения дома, где вы живете или работаете.
ГЛАВА 5
ОБЗОР ЭНЕРГОСБЕРЕГАЮЩИХ ТЕХНИЧЕСКИХ
РЕШЕНИЙ
5.1. Особенности применения современных
регулируемых электроприводов. Зарубежный опыт
В гл. 4 был рассмотрен отечественный опыт энерго- и ресурсос-
бережения средствами электропривода в самых перспективных
сферах — водоснабжении и воздушном отоплении. Далее на осно-
ве данных зарубежных специалистов приведены краткие сведения
о зарубежном опыте и возникающих проблемах.
В странах Европейского Союза регулируемый электропривод
рассматривается как технология, имеющая наиболее значительный
потенциал энергосбережения. Экономия электроэнергии с исполь-
зованием этой технологии до 2015 г. может составить 39 ТВт-ч в
год в промышленном и 8 ТВт • ч в год в коммерческом обслужива-
ющем секторах экономики.
Наибольший эффект энергосбережения достигается в обору-
довании, работающем с потоками жидкости и газа, — насосах,
компрессорах и вентиляторах. Преимущества регулируемого элек-
тропривода проявляются в конвейерах, станках, лифтах, центри-
фугах и другом оборудовании. Кроме энергосбережения регулиру-
емый электропривод позволяет существенно улучшить управле-
ние технологическим процессом, снижает износ механического
оборудования, уровень шума, дает ряд других технических, эко-
номических и экологических преимуществ.
Вместе с тем отмечаются недостатки и не до конца решенные
проблемы, связанные с доминирующим использованием в регу-
лируемом электроприводе электронных преобразователей энер-
гии. К таким проблемам относятся генерирование электромагнит-
ных помех, искажение напряжения питающей сети, возможное
снижение КПД и срока службы двигателей, снижение надежнос-
ти при нарушениях в питающей сети.
Повышение внутренней температуры двигателя связано с ро-
стом гармоник, вызывающим увеличение потерь в стали и меди.
Например, в закрытом двигателе 35 кВт с номинальным КПД
90 % увеличение потерь на 7,5 % вызывает повышение температу-
ры на 2,3 °C. Это должно учитываться при выборе двигателя для
конкретного применения.
161
Гармоники тока во входном каскаде преобразователя, попадая
в питающую сеть, могут отрицательно влиять на работу других
устройств, подключенных к той же сети.
Более существенна проблема, связанная с частичными разря-
дами и разрушением изоляции обмоток двигателя. Использование
в преобразователях на IGBT широтно-импульсной модуляции с
частотой 2...20 кГц связано с высокими производными du/dt (до
2,5...9,0 кВ/мкс) при наносекундных фронтах импульсов, что по-
рождает при определенных сочетаниях параметров эффект отра-
женных волн. При длине кабеля, соединяющего преобразователь
с двигателем, 15 и более метров этот эффект может приводить к
значительным (2—5-кратным) перенапряжениям на клеммах дви-
гателя при времени нарастания импульса около 0,2 мкс. Это вы-
зывает частичные разряды в воздушных полостях изоляции,
которые постепенно увеличиваются, снижая диэлектрическую
прочность изоляции.
. Паразитные емкости между отдельными элементами асинхрон-
ных двигателей, в частности внутри подшипников, вызывают
протекание высокочастотных токов по замкнутому контуру, об-
разованному обоими подшипниками, валом и станиной. Это при-
водит к ускоренному износу смазки, шариков и дорожек каче-
ния, т.е. к снижению надежности подшипников.
Разработаны способы преодоления указанных негативных яв-
лений. Это высокочастотные фильтры, специальные экранирован-
ные кабели, играющие роль распределенных фильтров между пре-
образователем и двигателем, специальные электронные устрой-
ства, в том числе трехуровневые преобразователи с мягкой ком-
мутацией, и т.д. На рынке появились конструкции, где двигатель
интегрирован с преобразователем, что позволяет исключить боль-
шинство упомянутых ранее проблем.
Одна из серьезных проблем, связанных с применением ре-
гулируемого электропривода с электронными преобразователя-
ми, связана с его способностью выдерживать кратковременные
перерывы питания. Если в результате какого-либо перебоя в пита-
нии прерывается технологический процесс, обслуживаемый элек-
троприводом, то ущерб может составлять десятки и сотни тысяч
долларов.
В 1993— 1999 гг. американский научно-исследовательский ин-
ститут электроэнергетики (EPRI) провел в США исследование
качества электроэнергии в низковольтных электрических сетях.
Исследование показало, что 92 % нарушений качества электро-
энергии составили провалы напряжения до 50 % с длительностью
до 0,5 с. Типичное распределение провалов напряжения с дли-
тельностью до 0,5 с показано на рис. 5.1.
В Западной Европе наблюдается аналогичная ситуация — про-
должительность более 90 % нарушений не превышала 1 с.
162
Число провалов &
в узле за год
Рис. 5.1. Диаграмма провалов напряжения
Таким образом, электропривод должен выдерживать провалы
напряжения длительностью до 1 с.
Возможны различные способы достижения такого результата:
использование момента инерции нагрузки, схемные решения,
технологии, основанные на запасании энергии.
Если используется момент инерции нагрузки, то при сниже-
нии напряжения программа, управляющая электроприводом, за-
дает частоту немного ниже частоты двигателя, который оказыва-
ется в генераторном режиме и поддерживает напряжение в звене
постоянного тока на нужном уровне.
Современные схемные решения могут содержать блок повы-
шения напряжения, включаемый между выпрямителем и конден-
сатором в звене постоянного тока и позволяющий выдерживать
кратковременные понижения напряжения до 50 %.
Другим схемным решением служит активный выпрямитель на
входе преобразователя. Он позволяет сохранять работоспособность
электропривода при снижении напряжения на 40 %. Кроме того,
этот способ обеспечивает коэффициент мощности по входу, рав-
ный единице, отсутствие искажений напряжения питания, воз-
можность рекуперативного торможения. Плата за эти преимуще-
ства — второй комплект инвертора с соответствующим увеличе-
нием габаритных размеров и стоимости.
163
2
3
4
Рис. 5.2. Преобразователь частоты с устройством резервирования питания:
1 — сеть; 2 — выпрямитель; 3 — инвертор; 4 — двигатель; 5 — зарядное устрой-
ство и накопитель энергии
Полностью сохранить работоспособность электропривода с
электронным преобразователем при перерывах питания позво-
ляют накопители энергии: аккумуляторные батареи, конденса-
торы, мотор-гецераторные установки, маховики, топливные
элементы.
Пример такого решения показан на рис. 5.2. Количество энер-
гии, запасаемой в дополнительном модуле, зависит от ожидаемой
длительности перерывов питания.
Для наиболее ответственных процессов, когда необходимо пол-
ностью сохранить работоспособность электропривода при пере-
рыве питания до 5 с, экономически целесообразно применение
конденсаторов большой и сверхбольшой емкости, которые стали
доступны в последние годы.
5.2. Примеры энергосбережения средствами
электропривода в различных установках
Основываясь на данных зарубежной литературы (Велико-
британия, ФРГ), рассмотрим различные случаи, когда при-
менение энергосберегающих мероприятий давало эффект. Речь
идет о немасштабных мероприятиях, доступных малым ..фир-
мам, заинтересованным в рациональном расходовании энер-
гии и ресурсов.
Использование ТРН. Смеситель в химическом производстве
имеет вариацию нагрузки от 41 до 65 % полной (измерено по току
двигателя). Использование тиристорных регуляторов напряжения
позволило снизить среднюю мощность каждого смесителя с 99 до
81 кВт, что позволило сэкономить 872 фунта стерлингов в год.
164
При цене регулятора 720 фунтов стерлингов (включая установку)
срок окупаемости составил 10 мес.
Вязальная машина имеет циклическую нагрузку, средняя ве-
личина которой зависит от скорости и типа пряжи. Применение
ТРН номинальной мощностью 4 кВт позволило снизить потреб-
ляемую мощность на 19%, что сэкономило 151 фунт стерлингов
на одну машину в год. При цене ТРН с установкой 185 фунтов
стерлингов срок окупаемости составил 15 мес. Было также уста-
новлено, что использование ТРН большей мощности, обслужи-
вающего несколько машин, более экономично.
На ткацких станках, двигатели которых по технологическим
причинам работают с существенной недогрузкой, использовались
два варианта ТРН: один с мощностью 15 кВт и второй 75 кВт,
обслуживающий шесть станков. Первый вариант снижал потреб-
ляемую мощность на 8,6 % и окупался за 17 мес. Второй вариант
окупался за 14 мес.
Мощность, потребляемая упаковочным прессом, была умень-
шена при использовании ТРН на 18%, что за год дало экономию
466 фунтов стерлингов. Цена ТРН для тяжелых условий работы
составила 644 фунта стерлингов, период окупаемости — 16 мес.
Этот результат был особенно важен, поскольку электроэнергия
вырабатывалась на месте.
Тиристорные регуляторы напряжения были установлены на двух
сушильно-ширильных машинах, каждая из которых имела по не-
сколько вентиляторов. На одной из сушильно-ширильных машин
с пятью вентиляторами мощность снизилась на 15%, экономия
за год составила 480 фунтов стерлингов. ТРН мощностью 15 кВт,
работающий на несколько двигателей стоил 275 фунтов стерлин-
гов, срок окупаемости составил около 7 мес. На другой сушиль-
но-ширильной машине с восемью вентиляторами было исполь-
зовано регулирование, срок окупаемости составил один год.
Использование регулируемого электропривода. В четырехэтажном
здании госпиталя вентиляторы, подающие воздух и осуществля-
ющие вытяжку, работали с полной скоростью. Было решено оце-
нить возможности энергосбережения при регулировании скоро-
сти в соответствии с гигиеническими требованиями.
Предварительные замеры показали, что двигатель мощностью
22 кВт вентилятора, подающего воздух, потреблял 20,69 кВт, а
двигатель мощностью 11 кВт вытяжного вентилятора потреб-
лял 7,99 кВт. Было решено регулировать скорость преобразова-
телями частоты в функции времени: 80 % в дневное время и
50 % — в ночное. Цена сэкономленной электроэнергии состави-
ла 5 416 фунтов стерлингов, срок окупаемости при цене допол-
нительного оборудования 13 470 фунтов стерлингов составил
2,5 года. Одновременно были снижены затраты на отопление,
что позволило уменьшить срок окупаемости до 1,3 года.
165
Проведенный мониторинг содержания СО2 в воздухе позволил
определить минимальную смену воздуха, что привело к дополни-
тельному снижению скорости до 40...50 % от номинальной в те-
чение суток. Это дополнительно снизило срок окупаемости ме-
роприятий, который стал меньше года.
Опыт был распространен на другие объекты, общая экономия
за год составила 42 783 фунтов стерлингов при затратах 39 200 фун-
тов стерлингов, что соответствовало сроку окупаемости 11 мес.
Кроме того, плавный пуск вентиляторов позволил сэкономить
на ремнях, которые стали меньше изнашиваться.
После модернизации нагревательного оборудования в сушиль-
ной камере текстильного производства три двигателя вентилято-
ров 111 кВт, 1 500 об/мин были заменены на двигатели 45 кВт,
1 000 об/мин, но и после этой замены заслонки оказывались ча-
стично закрытыми. Двигатели были снабжены преобразователями
частоты 75 кВ • А, после чего потребляемая мощность снизилась с
30 до 10 кВт. При стоимости дополнительного оборудования с
установкой 5 250 фунтов стерлингов на один преобразователь срок
окупаемости составил 14 мес.
После пуска агрегата по производству бумаги первая продук-
ция оказывается бракованной и идет в переработку, для чего раз-
мельчается и смешивается с водой, полученная пульпа перекачи-
вается на заготовительные участки. Все перекачивающие насосы
выбраны на максимальный расход, соответствующий указанному
периоду, хотя в другое время они работают при минимальном
расходе.
Два двигателя насосов мощностью 75 и 37,5 кВт были снаб-
жены преобразователями частоты 100 и 50 кВ • А соответственно,
благодаря чему удалось сэкономить примерно 74 кВт. При стоимо-
сти оборудования 12 500 фунтов стерлингов срок окупаемости со-
ставил И мес.
На текстильных машинах требовалось регулирование скорости
в широких пределах и поддержание заданной с высокой точностью.
Первоначально использовались асинхронные двигатели с фазным
ротором, снабженные управляемыми муфтами. В процессе модер-
низации они были заменены двигателями с короткозамкнутым
ротором 7,5 кВт, питающимися от преобразователей частоты, после
чего в течение 18 мес проводился мониторинг работы 12 таких
установок. Было установлено, что экономия энергии составила
50...66% при работе электроприводов в диапазоне частоты вра-
щения 800... 1 800 об/мин. На низких скоростях ток снизился с 8,6
до 2,7 А, на высоких — с 12,1 до 6,2 А. Как следствие установки
инверторов на 50 кВ А снизилась мощность, потребляемая в часы
максимума. Срок окупаемости составил 14,4 мес.
Различные установки. В линии по разливке напитков использо-
вался электропривод со стандартным электродвигателем мощнос-
166
Таблица 5.1
Энергетические характеристики базовой и новой систем
Баланс мощности, кВт Базовая система Новая система
Средняя потребляемая мощность 1,67 0,94
Полезная мощность 0,64 0,69
Потери в передаче 0,53 0,04
Потери в двигателе 0,42 0,16
Потери в преобразователе 0,08 0,05
тью 2,2 кВт, питающимся от преобразователя частоты, червяч-
ным редуктором и цепной передачей.
В процессе модернизации линии был использован другой
электропривод с энергосберегающим электродвигателем мощно-
стью 1,5 кВт, связанным с линией звеном винт—гайка и ремен-
ной передачей. Энергетические характеристики двух решений при-
ведены в табл. 5.1.
Экономия энергии составила 44 %, срок окупаемости — около
двух лет.
Лифт на 1 000 кг с высотой подъема на 17 м и пятью останов-
ками был оборудован асинхронным двухскоростным электродви-
гателем мощностью 8,8 кВт (базовый вариант).
Приведем потребление электроэнергии при различных ва-
риантах электропривода лифтов с нормальным двигателем мощ-
ностью 6,3 кВт по сравнению с базовым двигателем при 1 400
циклах в день.
Потребление энергии при различных вариантах электропривода
Варианты электропривода Потребление энергии, %
Базовый...............................
ТРН, нормальная механическая
передача..............................
ПЧ, нормальная механическая
передача..............................
ПЧ, специальная механическая
передача..............................
ПЧ, специальная механическая
передача, рекуперация энергии.........
100
62
47
28
19
Вентилятор с двигателем мощностью 7,5 кВт был установлен в
системе очистки воздуха деревообрабатывающего цеха. В целях
энергосбережения регулирование вытяжки заслонкой было заме-
нено регулированием скорости двигателя с использованием пре-
образователя частоты.
167
Показатели энергопотребления вытяжного вентилятора
Показатель
Результат
Число рабочих часов в год, ч..................... 4 000
Средний расход воздуха, %.......................... 70
Потребляемая мощность
при дросселировании, кВт.......................... 5,7
Потребляемая мощность
при регулировании скорости, кВт................... 3,6
Сэкономленная энергия, кВт * ч в год............. 8 400
Срок окупаемости, мес.............................. 12
В системе вентиляции издательства в Гамбурге взамен ис-
пользования заслонки было применено регулирование скорос-
ти вентилятора электромагнитной муфтой. Экономия энергии
составила 30%. Для полного использования потенциала энер-
госбережения было решено воспользоваться преобразователем
частоты. Это дало еще 35 % экономии энергии. При исполь-
зовании системы в течение 250 дней в году срок окупаемости
составил около двух лет. Ежедневный расход энергии при ис-
пользовании каждой из энергосберегающих систем и ее эконо-
мия при частотно-регулируемом электроприводе приведены в
табл. 5,2.
Насос на станции водоочистки должен перекачивать макси-
мальный объем 750 м3/ч при среднем объеме 400 м3/ч. При макси-
мальном расходе напор составляет 18 м, при среднем —12м. На-
сос работает 8 000 ч в году. Он перекачивает 900 м3/ч при номи-
нальной скорости и должен иметь мощность на валу 70 кВт при
входной мощности 73 кВт.
Сравнивались три варианта адаптации режима насоса к объему
очищаемой воды: использование задвижки, включение —выклю-
чение насоса и частотное регулирование скорости.
Таблица 5.2
Сравнение энергопотребления вентилятором издательства
Нагрузка, % Время работы, ч Расход энергии (муфта), кВт-ч Расход энергии (ПЧ), кВт-ч Экономия энер/ии, %
100 3 47,1 36,0 23,6
80 4 60,8 43,2 28,9
60 4 50,8 32,0 37,0
40 5 47,5 22,5 52,6
Всего 16 206,2 133,7 142,1
168
Сравнение вариантов электропривода насоса
Техническое решение Потребляемая мощность,
кВт
Задвижка............................. 44,4
Включение — выключение............... 32,4
Регулирование скорости............... 23,0
Ежегодная экономия энергии при замене задвижки преобра-
зователем частоты составила 172 000 кВт • ч. Срок окупаемости со-
ставил 0,5 г.
Приведенные примеры из зарубежной практики, разумеется,
далеко не исчерпывают богатый опыт энергосбережения в стра-
нах, остро и уже давно ощущающих дефицит энергоресурсов. Эти
примеры позволяют сделать ряд полезных выводов и для наших
условий.
Во-первых, экономить энергию можно практически везде и не
только с использованием современных технических средств.
Во-вторых, срок окупаемости технических мероприятий по
энергосбережению редко превышает год. Этот показатель был ха-
рактерен раньше только для стран с дорогой энергией, однако
теперь, как показывает наш собственный опыт, он типичен и для
наших условий.
В-третьих, наибольший эффект дают технические решения,
основанные на использовании регулируемого электропривода с
электронными преобразователями, особенно в технологиях, свя-
занных с транспортированием жидкости и воздуха — в насосах и
вентиляторах.
5.3. Управление режимами оборудования
на тепловых станциях средствами электропривода
ч
Интересное техническое решение регулирования тепловой мощ-
ности котлоагрегатов типа ПТВМ предложено на московских теп-
ловых станциях*.
Эти широко распространенные в системах теплоснабжения
водогрейные котлы представляют собой многогорелочные агрега-
ты (12 и 16 горелок для котлов типа ПТВМ-50 и ПТВМ-100 соот-
ветственно), производительность которых регулируется числом
включенных в работу горелок.
Величина нижней границы тепловой мощности котлов, кото-
рая определяется необходимостью постоянной работы четырех
* Вайнер И. Г. Регулирование тепловой мощности котлоагрегатов типа ПТВМ /
И. Г. Вайнер, Ю. А. Крылов, А. С. Паньшин // Промышленная теплоэнергетика. —
2001.— № 4. — С. 18-21.
169
растопочных горелок, составляет 25... 30 % и 35...40 % от номи-
нального значения соответственно для котлов типа ПТВМ-100 и
ПТВМ-50.
В летний период на теплостанциях, как правило, в работе на-
ходится один котел и часто нагрузка теплосети (расход тепла на
горячее водоснабжение) значительно ниже указанных величин.
Особенно это относится к ночным режимам, например на РТС
«Матвеевское» в Москве потребление тепла снижается до 7 Гкал/ч,
в то время как по режимным картам минимальная производи-
тельность котла превышает 19 Гкал/ч.
Для решения задачи снижения минимальной производи-
тельности котла было предложено установить в схеме питания элек-
тродвигателей дутьевых вентиляторов растопочных горелок ПЧ.
Этот способ регулирования тепловой мощности котла — из-
менение одновременно с расходом газа и расхода воздуха за счет
переменной частоты вращения дутьевого вентилятора — приме-
няется для других типов котлов, главным образом, в целях энер-
госбережения (исключаются потери энергии в направляющем ап-
парате). Однако для многогорелочных котлов типа ПТВМ такой
способ до недавнего времени не применялся, хотя кроме сниже-
ния минимальной производительности котла, исключительно
важного в летний период, он позволяет от дискретного управле-
ния тепловой мощностью перейти к непрерывному и на базе
этого создать систему автоматического регулирования нагрузки
теплостанции.
Такое решение было использовано летом 2000 г. на одном из
котлов типа ПТВМ-50 РТС «Матвеевское».
Структурная схема системы регулирования режима горения
показана на рис. 5.3. Программируемый контроллер 1 получает
Рис. 5.3. Структурная схема системы регулирования режима горения котла
170
сигналы о текущем значении давления газа Рт, температуре дутье-
вого воздуха Т, °C, числе включенных горелок, содержании
кислорода О2 в отходящих газах и воздействует на регулирую-
щий клапан 2 давления газа. В структурную схему добавлен
преобразователь частоты 3, который через блок коммутирующей
аппаратуры 4 регулирует частоту вращения всех четырех дутье-
вых вентиляторов 5 растопочных горелок; сигнал о частоте вра-
щения поступает также на контроллер 1. Дополнительным эле-
ментом управления является многопозиционный ключ 6 выбора
режима и задания тепловой мощности.
Все дополнительные функции управления выполняет внутрен-
ний контроллер преобразователя частоты по специально создан-
ной программе.
Для сохранения котла в работе при любом виде неисправности
системы регулирования предусмотрен автоматический возврат на
ручное управление с соответствующей сигнализацией.
Оперативное управление котлом практически не изменилось.
Розжиг осуществляется при питании дутьевых вентиляторов от
сети с последующим включением подсистемы 7. Далее последова-
тельной установкой ключа 6 выбора режима в положения «Готов-
ность» и выбранной тепловой мощности (например 70 % от мощ-
ности при четырех горелках) вводится в работу подсистема регу-
лирования тепловой мощности.
Эксплуатация системы в сентябре — октябре 2000 г. дала следу-
ющие результаты.
Наиболее часто и продолжительно использовался режим 75%-й
тепловой мощности в штатном режиме при четырех горелках. Рас-
ход газа при этом составлял 1 640 м3/ч, что соответствует при-
мерно трем включенным горелкам. Был отработан также режим
65%-й тепловой мощности при расходе газа 1450 м3/ч.
Из условия устойчивости горения факела и качества сгорания
топлива имеется возможность дальнейшего снижения тепловой
мощности котла, однако для этого необходимо обосновать вели-
чины уставки защиты котла по минимальному значению давле-
ния газа и допустимости ее снижения.
Возможно расширение диапазона регулирования за счет уве-
личения верхней границы при выходной частоте преобразователя
свыше 50 Гц. При частоте питающего напряжения 60 Гц и отсут-
ствии перегрузок электродвигателей и преобразователя использо-
вание повышенной частоты увеличит производительность котла
по сравнению со штатным режимом.
Регулирование тепловой мощности даже для сравнительно хо-
лодных летних суток можно проследить по суточной диаграмме рас-
хода газа котлом за 13 сентября 2000 г. (рис. 5.4). Среднесуточная
температура наружного воздуха в этот день составляла 9,9 °C. Такой
режим был характерен для сентября—октября вплоть до включе-
171
13
12
Рис. 5.4. Пример энергетической диаграммы котла при регулировании
режима горения
ния отопления. Более глубокого регулирования тепловой мощнос-
ти не требовалось, хотя для летних месяцев оно необходимо.
Эффективность системы регулирования проявляется и в за-
тратах энергоресурсов. За счет более низкого расхода газа в но-
чные часы среднесуточный расход 13 сентября 2000 г. оказался на
2,5 % ниже, чем 12 сентября 2000 г. — 2 380 м3/ч вместо 2 440 м3/ч.
Экономия газа от работы системы регулирования составила
1 000 м3 в сутки.
Полученные результаты позволяют создать замкнутую систему
автоматического регулирования температуры сетевой воды в лет-
ний период. Кроме исключения повышенного износа котлов за
счет отказа от отключения растопочных горелок это позволит за
счет непрерывного (или с малой дискретностью) изменения про-
изводительности увеличить экономию газа.
При установке преобразователей частоты на все вентиляторы
котла можно использовать систему регулирования температуры
сетевой воды (РТС) с котлами типа ПТВМ во все сезоны. В режи-
ме с определенным числом горелок непрерывным регулировани-
ем расхода газа и воздуха можно обеспечить достаточно большой
диапазон изменения производительности. Наличие на теплостан-
172
ции такого котла-регулятора (одного или нескольких) и системы
автоматического управления им позволит свести к минимуму уча-
стие человека в регулировании параметров теплосети и повысить
надежность и экономичность работы теплостанций.
Регулирование расхода воды в теплосети особенно необходимо
в переходный период, т.е. в начале и в конце отопительного сезо-
на, когда из-за резкой смены температуры наружного воздуха в
течение суток меняются расход и, естественно, давление на пода-
ющем трубопроводе. Иногда это приводит к остановке теплостан-
ции, когда из-за резкого изменения расхода и давления может
сработать автоматика безопасности на котлах.
Регулирование, ведущееся, как правило, с помощью дроссе-
лирующих устройств (например, задвижек на насосе), малоэф-
фективно, и потери электроэнергии достигают 50...55 %.
Проблема эффективно решается за счет применения регулиру-
емого электропривода.
Разработанная система регулирования (рис. 5.5) обеспечивает
стабилизацию давления в напорном трубопроводе, а также раз-
ность давлений в напорном и обратном трубопроводах. Выбор регу-
лируемого параметра и его величины осуществляется с клавиатуры
контроллера, на который возложены функции вычисления разни-
цы давлений от датчиков, устанавливаемых на трубопроводах, уп-
равление коммутационной аппаратурой и резервирование насосов.
нап
Ввод 1
0,4кВ
нал
Робр
Ввод 2
0,4 кВ
Рис. 5.5. Схема регулирования расхода воды в теплосети:
1 — программируемый контроллер; 2 — преобразователь частоты; 3 — сетевой
насос; 4 — запорная арматура; 5 — устройство мягкого пуска
173
Возможности преобразователя частоты по автоматическому
перезапуску при исчезновении напряжения оказываются беспо-
лезными из-за несоответствия времени перезапуска и уставок за-
щиты на котлах. Поэтому возникает необходимость автоматиче-
ского включения резервного нерегулируемого насоса, имеющего
питание от другого ввода, на открытую задвижку. В целях избежа-
ния гидроударов в этом случае применяется устройство мягкого
пуска насоса. Так решен вопрос устойчивости работы теплостан-
ции и тепловых сетей при пропадании напряжения на одном из
вводов электрического питания.
Другим возможным решением могло быть дооснащение преоб-
разователя частоты накопителем энергии, например показанным
на рис. 5.2. Как показал опыт, кроме повышения качества тепло-
снабжения, безопасности работы теплостанции и улучшения ус-
ловий труда обслуживающего персонала обеспечивается эконо-
мии электроэнергии до 35...45 %.
5.4. Потенциал энергосбережения средствами
электропривода и европейский рынок
энергосберегающих устройств
Энергосбережение средствами электропривода —- основного
потребителя электроэнергии — постоянно находится в поле зре-
ния европейских специалистов, этой теме посвящены десятки
конференций, европейские и международные проекты, серии
публикаций, обзорные статьи и т.д.
Млн.
Диапазон
мощности, кВт
Рис. 5.6. Количество и стоимость преобразователей частоты, проданных
в странах Европейского Союза в 2002 г.
174
Информация собирается из разных источников (анкеты, дан-
ные торговых ассоциаций, крупных производителей и т.д.) в Да-
нии, Великобритании, Ирландии, Франции, ФРГ, Австрии, Гол-
ландии, Португалии и Испании, представляющих около 70%
рынка преобразователей частоты, и распространена на Европей-
ский Союз с использованием европейской статистики. За базовый
для характеристики потенциала энергосбережения и рынка обо-
рудования выбран 2002 г.
На рис. 5.6 показано число единиц энергосберегающей техники
(преобразователей частоты), проданной в Европейском Союзе в
разных мощностных диапазонах. Общее число единиц, проданных
в 2002 г., составило 1,8 млн, из них 76% относятся к диапазону
мощности 0,75...4,00 кВт. Объем продаж составил 1 млрд евро.
На рис. 5.7 приведены средняя цена за единицу оборудования,
средняя цена за кВт собственно устройства и устройства с уста-
новкой в различных диапазонах мощности — от 0,75 до 500 кВт.
Удельная стоимость устройств снижается по мере роста мощности
и стабилизируется при мощностях 30 кВт и более.
В обзоре приведены данные о потенциале энергосбережения в
Европейском Союзе. Потребление энергии электроприводом в стра-
нах Евросоюза к 2015 г. оценивается как 721 ТВт ч в промышлен-
ном секторе и 224 ТВт • ч в обслуживающем. Рассматриваются три
сценария энергосбережения: технический, экономический при
неизменных ценах на энергосберегающие устройства и экономи-
ческий при ценах на устройства, снижающиеся на 5 % в год. Эко-
Рис. 5.7. Ценовые показатели преобразователей частоты в странах Евро-
пейского Союза
175
Таблица 5.3
Потенциал энергосбережения в Европейском Союзе
Энергосбережение Технический потенциал Экономический потенциал
Неизменные цены Снижающиеся цены
Всего в промышленности, ТВт ’ ч в год 62 39 43
Всего в коммерческом и бы- товом секторах, ТВт-ч в год 22 8 11
Всего, ТВт • ч в год 84 47 54
Снижение выбросов СО2, Мт в год* 33 19 22
Экономия средств, млн евро в год** 5 600 2 050 3 500
* Средняя эмиссия СО2 составляет 0,4 кг/кВт • ч.
** Оценка средней цены энергии: 0,05 и 0,1 евро/кВт-ч в промышленности
и обслуживающем секторах соответственно.
комические сценарии предполагают ограничения, связанные с
экономической неэффективностью маломощных энергосберега-
ющих устройств. Общие оценки потенциала энергосбережения
приведены в табл. 5.3.
Приведенные данные свидетельствуют о внушительных размерах
ожидаемой экономии средств при реализации энергосберегающих
мероприятий в электроприводе. Однако лишь 25 % выпускаемых
электродвигателей снабжаются средствами регулирования скоро-
сти и момента, что связано главным образом с технологией, но
не с энергосбережением.
Таким образом, предстоит еще много сделать для того, чтобы
энергосбережение стало реальностью.
5.5. Компьютерная поддержка
технических решений
Компьютеры давно и прочно вошли в нашу жизнь, ^однако
далеко не все сферы человеческой деятельности в достаточной
степени компьютеризированы. Все еще редко можно увидеть ин-
женера, пользующегося компьютером для того, чтобы оценить,
надо ли устанавливать на агрегате дорогостоящее энергосберега-
ющее средство или срок его окупаемости будет слишком велик,
определить, хорош ли вентилятор или насосный агрегат и пра-
вильно ли подобран к нему двигатель или их лучше заменить,
176
сколько прослужат подшипники на вибрирующей установке и
не откажет ли она в самый неподходящий момент, и т.д. Тысячи
подобных вопросов возникают у специалистов, они совсем не
просты даже для профессионалов, и цена ошибки в их решении
иногда очень высока.
Есть несколько причин малого использования компьютеров при
решении инженерных задач. Первая причина — нехватка доступ-
ного программного обеспечения. Задачи, подобные перечисленным
ранее, нетривиальны, и для их решения требуются прикладные
компьютерные программы высокого уровня типа экспертных си-
стем. Создание таких емких и одновременно простых в примене-
нии программ требует немалых объединенных усилий специалис-
тов в области соответствующего технического объекта и систем-
ных программистов.
Вторая причина — малая осведомленность потенциальных
пользователей. Это сдерживает спрос на такой программный про-
дукт и, следовательно, не стимулирует его создание.
Третья причина — определенный психологический барьер у
потенциальных пользователей, связанный с непривычностью при-
менения компьютера в таких целях. Но такие программы есть, в
частности в области электропривода.
Самая заметная из них американская программа Motor Master,
инициированная в начале 1990-х годов производителями энерго-
эффективных двигателей (см. подразд. 2.3) и выпущенная в 1992 г.
(Motor Master, версия 1.0 DOS) при поддержке Министерства
энергетики США. Программа содержала каталог новых двигате-
лей, выпускаемых ее инициаторами, и позволяла оценить целесо-
образность их использования (срок окупаемости) вместо стандар-
тных двигателей. Она рассылалась за символическую плату (100
долл. США) заинтересованным организациям и получила широ-
кую известность в США.
В апреле 1996 г. была выпущена новая версия программы (Mo-
tor Master+, версия 1.0 Windows), разработанная за счет средств
Министерства энергетики США. Эта версия, существенно рас-
ширенная (двигатели мощностью 1...300 кВт), более удобная в
практическом применении, была предназначена для пользова-
телей электродвигателей, фирм, торгующих двигателями, раз-
работчиков двигателей и оборудования с их использованием, а
также государственных организаций, связанных с энергосбе-
режением.
Действенная, в том числе финансовая, поддержка государствен-
ных организаций США вместе с широкой рекламой позволили
вооружить инженеров и энергоменеджеров этой страны компью-
терным инструментом, позволяющим, правда, в очень простых,
но часто встречающихся случаях рационально выбирать техниче-
ские решения.
7 Ильинский
177
Эта популярная в США программа не свободна от недостат-
ков, заметных даже при беглом знакомстве с ней. В частности, в
ней вовсе не рассматриваются и не учитываются условия работы
двигателя — изменение нагрузки за цикл и т.д. Так, заменив стан-
дартный двигатель вентилятора, работающего с переменным рас-
ходом, на энергоэффективный и узнав, что потери снизятся на
3 %, а срок окупаемости составит два года, можно и не заметить,
что другое решение — использование преобразователя частоты —
позволит сберечь 50 % энергии и его окупаемость будет меньше
6 мес.
Известны и другие попытки создания аналогичных пакетов
программ. В ФРГ разработан пакет фирмы VEM Antriebstechnik
(Дрезден) для выбора двигателя и других компонентов электро-
привода- Стали появляться и программы более широкого профиля.
Сравнительно дорогой пакет прикладных программ AUDIT, пред-
назначенный для анализа затрат материалов и энергии на пред-
приятии с целью их снижения, рекламируется в Австрии. В Швей-
царии в середине 1990-х годов был создан пакет OPAL для выбора
двигателей и расчета режимов привода, однако по мнению самих
авторов его использование предполагает сложные процедуры мо-
делирования и идентификации, что препятствует практическому
применению пакета.
Пакеты прикладных компьютерных программ, относящихся к
электроприводу и энергосбережению, были разработаны и в Рос-
сии*.
Первый пакет, рационализирующий проектирование новых и
проверку уже установленных электроприводов с асинхронными
короткозамкнутыми двигателями 0,37... 18,50 кВт, выполненны-
ми по европейскому стандарту DIN (серия АИС), был разработан
в 1990—1994 гг. в МЭИ по заказу европейской фирмы IMOFA и
включал в себя три программы:
• Imofa Мотог Selection (выбор двигателей IMOFA), несколько
версий, последняя — IMS 3.1, DOS;
• Bearings in AC Motors (подшипники в асинхронных двигате-
лях), версия 1.0, Windows;
• V-belt Transmissions (передачи с V-образными ремнями), вер-
сия 1.0, Windows.
Созданию программ предшествовали детальные, проведенные
на специально созданном испытательном оборудований, много-
плановые исследования десятков образцов двигателей (по три эк-
земпляра каждого типоразмера), подшипников в них и ременных
передач, поставляемых фирмой-заказчиком, благодаря чему уда-
лось получить исчерпывающие сведения о фактических свойствах
* Ильинский И. Ф. Прикладные компьютерные программы для массового элек-
тропривода // Электротехника. — 1994. — № 7. — С. 15— 17.
178
и характеристиках двигателей и устанавливаемых в них подшип-
ников, а также о ременных передачах, используемых в электро-
приводах с этими двигателями.
Фирму-заказчика интересовал широкий круг вопросов, свя-
занных с поведением исследуемых объектов в нормальных и, глав-
ным образом, в отличающихся от нормальных условиях, что и
нашло отражение в созданном в результате программном продук-
те, имевшем характер экспертной системы («что будет, если...»).
Программа IMS состояла из трех разделов. Первый содержал
детальный каталог всех двигателей рассматриваемого отрезка се-
рии. Во втором разделе приводились статические и динамиче-
ские механические, энергетические и тепловые характеристики
двигателей в нормальных и различных аномальных условиях,
например при отклонении напряжения от номинала, обрыве
фазы, работе со снятым вентилятором и т.д. Третий раздел позво-
лял обосновано выбрать двигатель при любой заданной нагру-
зочной диаграмме.
Программа Bearings 1.0 позволяла выбрать или проверить уста-
новленные подшипники при любом режиме работы двигателя, оце-
нить срок службы в различных эксплуатационных условиях и т. д.
Программа V-belt Transmissions 1.0 давала возможность обосно-
ванно выбрать ременную передачу, оценить ее энергетическую
эффективность, в частности цену, которую нужно заплатить за
установку лишнего ручья в передаче, и т.д.
Программы, особенно IMS 3.1, широко использовались фир-
мой в повседневной практике при разработке по заказам и по-
ставке в различные страны систем отопления, вентиляции и конди-
ционирования воздуха (HVAC-systems). Фирма экспонировала про-
граммы на десятках выставок и ярмарок (Лондон, Париж, Ганно-
вер, Утрехт, Сингапур и др.), что позволило ей поднять рейтинг
и заметно способствовало повышению деловой активности.
Уникальный экспериментальный материал и умение создавать
сложный прикладной программный продукт с предельно простым,
дружественным, доступным каждому пользовательским интерфей-
сом оказались не востребованы в России в 1990-е годы, и эти
работы были свернуты.
Следующий пакет программ относился к энергосбережению и
состоял из трех программ:
• «Центробежные вентиляторы; режимы работы и экономия
энергии»;
• «Оценка экономической эффективности частотно-регули-
руемого электропривода насосов и вентиляторов»;
• «Оценка экономической эффективности частотно-регули-
руемого электропривода насосов центральных тепловых пунктов».
Этот пакет позволял пользователю при минимальных исходных
данных за минуты оценить с высокой степенью достоверности
179
целесообразность (срок окупаемости) использования современ-
ных средств энергосбережения (преобразователей частоты) в лю-
бых конкретных условиях работы вентиляторов и насосов.
Первое, что должен сделать пользователь, работая с такими
программами, это понять, соответствует ли программа задачам,
которые он должен решать. Если оказывается, что задачи пользо-
вателя и возможности программы сочетаются, например, если
пользователь, ответственный за работу десятков или сотен не-
больших вентиляторов, обслуживающих технологическое обору-
дование, хочет оптимизировать их режимы и заметно сэкономить
энергию, то ему понадобится программа «Центробежные венти-
ляторы. Режимы работы и экономия энергии». Рассмотрим на этом
примере, как работают с такими программами.
Пользователь должен выбрать и ввести в компьютер тип венти-
лятора (его конструктивное исполнение), требуемое номинальное
давление и расход воздуха, условия работы. Здесь, как и на всех
других этапах работы, можно воспользоваться помощью и узнать,
с какими вентиляторами работает программа (имеющаяся версия
работает с вентиляторами с диаметром колеса до 1 000 мм, обес-
печивающими давление до 2 000 Па и расход до 50 000 м3/ч).
На основании введенных данных программа предложит опти-
мальный типоразмер вентилятора и соответствующие двигатели.
Может оказаться, что предлагаемое оборудование отличается
(иногда существенно) от уже установленного. Это повод пользо-
вателю задуматься, следует ли воспользоваться советом програм-
мы или продолжать работу, ориентируясь на установленное обо-
рудование.
Следующий этап — ввод данных о режиме работы вентилятора
и условиях работы, что соответствует разным применениям вен-
тиляторов в технологических процессах, т.е. данных о требуемых
технологией изменениях расхода во времени за цикл.
Введя свои данные, а также цену энергии, пользователь по-
лучит стоимость энергии за год для базового варианта (расход
регулируется дросселированием — задвижкой) и для варианта
регулирования расхода изменением частоты вращения с исполь-
зованием преобразователя частоты, а также срок окупаемости пре-
образователя частоты при средних ценах, уже заложенных в про-
грамму.
Пользователь может «играть» с программой, изменяя по свое-
му усмотрению условия и режимы и наблюдая результаты. Итог
«игры» — принимаемое осмысленное решение о целесообразно-
сти или нецелесообразности использования недешевого энерго-
сберегающего оборудования с конкретной экономической оцен-
кой каждого из возможных решений. Так, изменяя диаграмму рас-
ход-время работы, легко прийти к результату, когда использо-
вание преобразователя частоты совсем нецелесообразно, и оце-
180
нить количественно, во что обойдется модное, но ненужное в
конкретной ситуации техническое решение.
Описанные программы были разработаны по заказу зарубежных
фирм и широко использовались и используются за рубежом. Раз-
работчики до настоящего времени ждут заказов от отечественных
промышленников на аналогичные программы, учитывающие нашу
специфику и ориентированные на наше оборудование.
Иногда такие заказы появляются. Одна из сравнительно новых
программ «Оценка экономической эффективности частотно-ре-
гулируемого электропривода насосов тепловых пунктов». Основ-
ной экран программы показан на рис. 5.8. Пользователь вводит
основные технические сведения:
• характеристики насосной станции;
• номинальные данные насоса и двигателя;
• результаты простейших измерений и режимы работы;
• цену электроэнергии, воды и тепла.
Организованные для ввода данных диалоговые окна имеют со-
ответствующие заголовки {Характеристики ЦТП, Номиналы обо-
рудования, Измерения, Цены ресурсов), причем сразу после запол-
Q оценка эффект^ностЙ ^
Задача Данные Изменения Справка
ПРОТОКОЛ оценки эффективности использования преобразователей частоты на насосной станции водоснабжения ЦТП Организация : МЭИ Дата: 07/06/2004 Оценку проводил : ИВЭНОВ
Характеристики ЦТП i Номиналы оборудования Измерения ’ Цены ресурсов
3л.энергия, руб/кВтч 1.00 Вода, руб/мЗ 10.00 Тепло, руб/Гкал 325.00
Расположение: отдельное строение Обслуживает: группу зданий Наибольшее число этажей: 12 Комфортность: стандартная НАСОС Т ип: Напор, м в ст: 50 Расход, мЗ/ч: 70 КПД. X: 50 | ДВИГАТЕЛЬ Т ип: Напряжение,В: 400 i Мощность, кВт: 30.0 Частота враж_, 1/мин: 1000 Ток. A: СО, С КПД. X: 90 Вх. напор, м в ст: 25 Вых. напор, м в ст: 60 Расход средн. мЗ/ч: 50 Токдв, средн.. А: 50 0 Режимы
Мин. вх. напор,м в ст: 5 j Вероятность появления: высокая Число раб. часов в году, ч: w 11
Система: Б азовая Н оаая
Эл.энергия, кВтч/год: 133212 111413 Вода, мЗ/год: 400000 374799 Тепло, Гкал/год: 3200 2938
г -я . ? 1 ьгЦена, руб 1 Гг . ; • 1 , J ► 1 Е •“Г Г ; 1 i -' F <
Эл.энергия, кВтч 21739 21300 Вода, м3 25201 252000 Т епло, Г кал 202 G5G00 Ориентировочный срок окупаемости, год 0.5 Модность ПЧ, кВт 22.00 Цена ПЧ, руб. G5IB4 Установка ПЧ О(1П1П (затраты], руб:
^Сохранение и печать-мышью через ЗАДАЧА ;Новый протокол-ДАННЫЕ, для изменения данных-ИЗМЕНЕНИЯ
Рис. 5.8. Основной экран компьютерной программы для оценки эффек-
тивности преобразователей частоты на насосной станции водоснабже-
ния ЦТП
181
нения каждого из них введенные данные автоматически заносят-
ся в протокол.
Для удобства ввода данных программа предусматривает опера-
тивную помощь в виде системы подсказок, появляющихся в ниж-
ней строке активного (диалогового) окна по мере того, как за-
полняется та или иная позиция.
Результаты вычислений программы по мере ввода данных пред-
лагаются пользователю для просмотра. Такими промежуточными
данными являются:
• потребляемые ресурсы (электроэнергия, вода и тепло) в ба-
зовой и новой (с использованием частотно-регулируемого элект-
ропривода) системах;
• параметры преобразователя частоты, предлагаемого для дан-
ной системы;
• годовая экономия ресурсов и расчетный срок окупаемости.
Программа предоставляет пользователю возможность избежать
случайных ошибок при вводе данных, которые могут привести к
получению неверных результатов.
Полностью заполненный пользователем Протокол оценки эф-
фективности использования преобразователей частоты на насосной
станции водоснабжения ЦТПс результатом выполненных програм-
мой расчетов может быть сохранен и распечатан.
Как показал опыт, использование данной программы ощу-
тимо сокращает время на принятие решения о модернизации
ЦТП и практически исключает риск принятия неверного реше-
ния, приводящего к бесполезной трате средств. Очевидно, что
подобные программы нужны, если объектов много, если их два-
три, то лучше проконсультироваться у тех, кто имеет програм-
му, или проделать все выкладки и получить оценки самостоя-
тельно.
Так, или примерно так, организована работа со всеми про-
граммами, упоминавшимися ранее. Работа с программой умень-
шает риск сделать ошибку, цена которой может многократно пре-
вышать стоимость программы.
Еще одна польза от программ — экономия времени. Даже опыт-
ный специалист должен потратить дни на оценки, которые с по-
мощью программы получаются за минуты.
Упоминавшиеся ранее специальные программы содержат уни-
кальную информацию (они построены на детальном исследова-
нии натурных объектов), которую нельзя получить иным путем.
Например, как угадать (или рассчитать) совокупность условий,
при которых качественный подшипник фирмы FAG прослужит
не десятки тысяч, а всего лишь несколько сотен часов. Или до
какой температуры нагреется стандартный двигатель при поло-
винной нагрузке, если с него вынужденно снят вентилятор. Или
сколько придется заплатить в год за лишний (запасной) ручей в
182
ременной передаче и на сколько удастся сократить потери в ней,
используя рациональные шкивы.
Экспертные системы отвечают на множество подобных вопро-
сов, и в этом их несомненная польза для специалистов.
Из изложенного ясно, кто в первую очередь может стать пользо-
вателем компьютерных программ, о которых шла речь, и им по-
добных. Это менеджеры, т.е. специалисты, призванные рациональ-
но управлять электрохозяйством любого предприятия. Это руко-
водители и технические работники эксплуатационных служб ком-
мунального хозяйства, в распоряжении которых громадное
число агрегатов (насосы, вентиляторы), целенаправленная модер-
низация которых может дать очень ощутимый эффект. Это специ-
алисты торговых фирм, реализующих современную технику, в
частности, преобразователи частоты. Это консультанты, сотруд-
ники консультационных центров, специализирующиеся в облас-
ти электротехники.
Есть интересные программы, разработанные в Екатеринбурге,
помогающие исследовать системы автоматического регулирования.
Программы есть, их число будет расти, и компьютер будет ста-
новиться действительным помощником менеджера и инженера в
самой тонкой — творческой сфере их деятельности.
Контрольные вопросы
1. Перечислите проблемы, с которыми встретились специалисты при
использовании электронных преобразователей в массовом электропри-
воде. Как решались эти проблемы?
2. Какие примеры из зарубежной практики в области энергосбереже-
ния средствами электропривода показались вам наиболее интересными?
Почему?
3. Какие примеры следовало бы использовать в отечественной прак-
тике?
4. Перечислите преимущества, обеспечиваемые регулируемым элект-
роприводом на оборудовании тепловых станций.
5. Компьютерная поддержка энергосберегающих технических реше-
ний активно используется в зарубежной практике. Будут ли аналогичные
программные продукты востребованы в нашей стране? Если да, то како-
го типа и назначения?
ПРИЛОЖЕНИЯ
Приложение 1
Трехфазные асинхронные двигатели
Серия Номинальная мощность, кВт Синхронная частота враще- ния, об/мин Номинальное напряжение, В Исполнение, область применения
Двигатели с короткозамкнутым ротором общего применения *
RA 0,37 ...100 750; 1 000; 1 500; 3 000 220; 380 Защищенные и за- крытые, обдува- емые, широкого применения
6А 90 ...200 •ч 750; 1 000; 1 500; 3 000 220; 380; 660 Закрытые, обду- ваемые, широкого применения
5А (5АН) 0,37...400 750; 1 000; 1 500; 3000 220; 380; 660 Защищенные и за- крытые, обдувае- мые, широкого применения
АИР 0,19 ...315 750; 1 000; 1 500; 3 000 220; 380; 660 Открытые, защи- щенные, закрытые, обдуваемые, проду- ваемые, широкого применения
4А 0,06 ...400 500; 600; 750; 1 000; 1 500; 3 000 220; 380; 660 Защищенные и за- крытые, обдува- емые, широкого применения
4АР 15...45 750; 1 000; 1 500 220; 380; 660 Закрытые, обду- ваемые, с повы- шенным пусковым моментом
4АС 0,3 ...63 при ПВ = 40% 750; 1000; 1500; 3 000 220; 380; 660 Закрытые, обдува- емые, с повышен- ным скольжением
ДАЗО 315...2 000 500; 600; 750; 1 000; 1 500 6 000; 10000 Закрытые, обдуваемые
184
Продолжение прил. 1
Серия Номинальная мощность, кВт Синхронная частота враще- ния, об/мин Номинальное напряжение, В Исполнение, область применения
АН-2 500... 2 000 500; 600; 750; 1 000 6 000 Защищенные, для нерегулируемых по скорости электро- приводов
АТД2, АТД4 500 ...8 000 3 000 ч 6 000 Для привода быстро- ходных механизмов
Двигатели для привода крановых механизмов и механизмов м ет аллурги ческ ого производст в а
MTKF 1,4,..22 при ПВ = 40% 750; 1 000 380; 220; 500 Имеют повышенную перегрузочную спо- собность и пусковой момент, для привода крановых меха- низмов
МТКН 3...37 при ПВ = 40% 750; 1 000 380; 220; 500 Имеют повышенную перегрузочную спо- собность и пусковой момент, для при- водов металлурги- ческого производства
Двигатели с фазным ротором
4АНК, 4АК 15 ...400 750; 1 000; 1 500 220; 380; 660 Защищенные (4АН) или закрытые (4А), общего назначе- ния
5 АН К 45 ...400 600; 750; 1 000; 1 500 220; 380, 660 Защищенные или закрытые, общего назначения
АКП 55 ...125 1 000; 1 500 220; 380; 660 Защищенные, для привода прессов, ра- ботающих в закры- тых помеще- ниях
185
Окончание прил. 1
Серия Номинальная мощность, кВт Синхронная частота враще- ния, об/мин Номинальное напряжение, В Исполнение, область применения
АКН2 315...2000 250; 300; 375; 500; 600; 750; 1 000 6 000 Для привода меха- низмов с частыми или тяжелыми условиями пуска
MTF, МТН 1,4...30,0 3...118 600; 750; 1000 220; 380; 240; 415; 400; 500 Защищенные, с не- зависимой вентиля- цией, для привода крановых механиз- мов (MTF) и меха- низмов металлурги- ческого произ- водства (МТН)
186
и
§
£
iiiiiiiiiH«a*tsiMtaaaaai
iiHiimniiiiiiMiaeaBai
iiiiiiiiiiimiataaiaa/aai
МН •••!>«
ин
Miuiiii'лаг*»
iBBatfliaasaaiiatMaiaaar чва^авг iiir»F eardii' ataa. Шввав8вван1тн1вип11т11вввв111111п1и11ш1в1в|авв|вяаая111т|ввмваааааавв
‘--------- -------- ---------------------------------HiHll»fNttii>Hti«na*ait>iiHii«ia«>»>i>«B>aBBaHHHBai«iia«*ig**««fi»aaeBa
iiiiiciiiiaaaa«aBiaaj«*Bi
iiHunimimiiiifliBaai
iHti»M6tiaaatieiiv«a«Bflii
HlllHillillllBBIIMBBBIH
aiiiiumuiaiMiit bbbbiii
tiiiiutittaaaaMiaiflvaaai
iitiiiiHiaiiiaaaiiaaaaeti1
;HNitit«i«»aaaaiBaaaae»ti
imriiiiMMSiiiiiaBMiai
§
2
miBaBataaBniiiiiiiiiiiiiiiitiHBmiiiiriiiniamimaiiiiflBaBaaifiiiHaiiiiaBaaaavi
............................В1ааавваававн111Н11ипм1Ш1аввваи111ПН118ма1ша1а8аввввввм118»на11ававвавва
«ii*iiai8Ba8BO«BBOoiiiiieiteataa8BaBaaaBiiitLiiiiiiiaiiia«BaavBeaiiiiiiiiiii«8iBiiBeBBflaBBaaaaaii'*atiaaBaBBaBaaaB8
aii«i«ai8aaBaBaaaaa»iiiaitaaBBBBB8BBeaanHiiiiitiai»aaaiaiaa»a«iiiiniiii>aii8ia8a8BfBBaaBBBe<aiaBafB«BiBa«8ooaBB
|||наа1авввввввввв1н1а1аааваааявав»в111'11ш'11ав11ма1вввав11111111111анм1в1аваааа««аяваа1«а«аааваа1вв*веввв
niiiiai8BBBBBB8BBB»«iiaie8BBBa8Baa8saBfiimii(t>iaiiiaiiaBBBaBiiiiiniiiifliiBii>i»iBBeeaaB«MiHi<M8iaBBaBBBaa
• •••а
1н1вв1«вв1вв«вваа«1т111вввааваааавав1н111|||1|вва||в1мввввв1111и1(1111и1в1а<аввааа«ввавв111а11ввавввввввввв
|в11111авв1вв8вваввм11в1ввваввавв8вва8111111|1|||вм1в«аввваввв1ши111|11мт«вввввва«ваввв111в11вва8вввввв8ва
Н«1|в|вв«1в«авввяввн1>1аввавьввввввав1111111н|1а11а111а1ааавв»11н*1»ш1в«11*<1«вввв8«вввв1111в11вввввввввввв18
.............................................Н1п111ввв1авававвп1г»»тнв»11а«а1ввв*ва8вввв1твмававввввввв1в8
|1в1вв1авв1вввв8аа81111811ввв8аввввввавш111111111в«вв1»в1о«аавшв1аа1ав1ва«1«11*«ввввваввввв111вв1вввввввввввав
|«>ввв11вв1авввааяя11|1в11аааавваввввввш11111111в1«в11ав1авав8шмт111вв111«11ввввваввввв1111в11авввввв88вв«в
1шн11м1аав*ввав1111а111в1вавввввава1н11|ш||||||||н1в11ва1111ш1111шп1ма1аамввавв1111аиав«а|аааааавв
в1ввваа1вяавввввввв1|и811вваавввввввввш11111111аав«|1ав1аввав1111*ш1а1аа1ашвввавваввввва111вввавв9вввввавва
i a lumeaaa н a*««»a в • •« ш ata a a at а а в* ••• a • а в a a a at « a a !«
_____________ __________ _ .. ____________________мtttaita ••••» »t»i«aataai•• uiu«i»«egae*aaa«»«
аввеввеааааа11авааиав|ваамаъ ев* jB8M«jBr«iai aaaaBaiiBm»»iiiiiiiiHBiiBBBBiiHii*iiiiaiiiimiB«BBiBat«atiiii*imiBaaeBaaBfl
iiamaaBBaBiaiiiiiiiHaimiBk '?4вв’ж8>ввлн'<в8'аммгвваввинии11твммвввввва1вши1111в1ввввв1ввввая»вевваана118вв»ввввв&ав
ввавввввввв«|»11<1Н1»вв1аваав1а 'at jBB-jb» авв^аав^авв /ввгл 88нвв1т1вшвв*111в«*8вв8ав1вш111111в1шм18в1ваеааова111«*1ваввввввавввав
иввввваавва JiiiitiimaiiiiiaiBB ^вв^ваавв iiimiuibsw «11т1ививава88авеааава1тгн1н«а11вв181ввваввмв8ввва11»|1в11ввав8вв8вва
вввмиаввав1в1п«11111впвввв1ввв 'B>BB4Br4t4Me«^B*48B4Bv'a8viiii«ivnwfiiBBiBBBBBBBiiiii!MiiiBriBiiBiBBiflBBBB8BBtiHBiflaflaBBe8aaBBe8
мн
ИН
III
НИ
1Ш
H1I
1Ш____________________________________ ________________________________......._____________________________________________________________
HiiiiimiaiaiiBiiBaaBeBiiiiHiiiitaiaiiiaiBBBB «вг 4врввгг»авв>ав'4ва4вва.1,а1н<1ии<1111а111мввавв11ш111ш11и11а1ав1яавааоввв1иа11вввввввввввяв
||И1Ш?1Ш11П11Н11П1Н11Н!1П111ИП!1!ПЯН111П1пнн1игн111гттттнпп1П1И1Ш1ттжп4гштщшши?н1^^^^
•«gifiiimtiiiitftiiiMtiiBBaaBaifHgiiflaMaaaaaaflaBiittHttiiittitMitttagggitinittitt '«аа «* <а»глай лиг а«г»аи ji |«аааи»»*м*
|Ин11а<на»а*вава1Ваввй1а1на»и*аа>1аа1д<аа»еавааавВ1<иааааддааааааваав«1тн11««1»ааавеаааиииш1нм111к'« .аа д ива лва-лаа ^а< ,»*»••••••••••
»д*В1«а»*««еваавввввав*8В1«в*ввв1а**вввеевввв«евввоввмвав»1евеааввяваооввммв1вв*ваев*«еввм*вввнвано1«в4ввв*«вввь '••• <11а«а1'.аа «ва4|1аглаааь/ааааваава
»«*ама***»авии«аививвввв1ва**а-*1и**виааипвамви вв••••гавваавпаа*внвнвмн"»*»«»вв*«*ввввааааава«вв1в»*»»а>*ааавч ча «•*•' аа' авч1|| анваааааавнниви
»а*д|вааса4авааагааавМнв1«аа»й|а*4ав*аа*авва**внмн *«»• на«маааа»дааа1ааваавввваввавн1а1«*taiааавва> *ем Jit' -р.ма» а•ааааоави
laiatBBBtaaaR аававв«вваа0|ааыан«а**аиааиввнаввинннммнв*«апва»вваанн*й»нам1а«внн««авва*аааааавваавв1й)г»*ан*аа«11 w »'• лаг aaf^itaiitaaieBBHBBHaa
Ни«1авв11мва8ав88в8а8а1ввива1аввв<ва1ав1вввявааввввв*нвввв8ввявввмввв1шнввт11внв1вваоввоо1«1в1в1нв1вв1вв ввя'.вав jbbjbf 411ввввввв1ввввва»ав
1м111ввв11«вваввввавяввя1вш11«*>*а1вавв*в8ввввввввввввнвввввввввв8вввавв 1шт1нвввваав8«аа*оотттв1вввв*а. «глявр4яв^в^а1в1вввввввввввваваав
1т4нв«1в*в||аввваавввв1в11111«а1*в1ввава|ввввввввввв1таввввваввааававв1в««и«ч11м1ввввввяаваавн1«1ви»1г1вв1в>ав- явравв^ав ло»в1ваввввв«вававааав
1нтввв1в»в1вваввв8ва8в1а111|1и1ва1ва«ав1вввввввавваввввввввввввавваявввинн1ннвв*ввввваававан1«1в||«в1а1ввма<^ г.авв 4а*4ов1а1аа*вваввваавааааа
1ив111в*1мв1|ааваавв8вв1111в111«мв1вавав1аввввввпввав«вввввввааааяввв»омин«««мв1»оааяяаввввв111а«анаваяавв«ваав а*4вв«вввва«вавааеааав8ваааав
В1'11н|швва1ваввааавв81**111111на11вввв18ваввввмававвв1вва«аав*ававяввв«шн1а1н11аа11ва1ввпанп*1111вт1ивв1яв «ввввввва818ааввавваввавванв
Н1мн»нишва1мввввв14111г11а11в1111ав1ав8вваввввв1мм181авааавввама1111ш1ш11н11вмав«вв11шш11шшававвивяв«ааа1а11811вявааа8ввввва
...................................................................................................
I Т I I I 1 I I 1 Г 1 I I I Г I 111(1 III I
187
Приложение 3
Автоматические регуляторы приводов переменного тока
«Универсал»
Номинальная мощность двигателя, кВт кпд, coscp на входе Частота напряжения на выходе, Гц Степень защиты Система управле- ния ная цена, тыс. руб. (2005 г.)
0,55; 0,75 95 0,8 0,5...2000,0 IP54 А 15,84
М; 1,5 96 0,8 0,5...2000,0 IP43 А 17,64
1,5; 2,2 97 0,9 0,5...2000,0 IP54 Б 19,62
3,0; 3,7 97 0,9 0,5-2000,0 IP54 Б 22,32
5,5; 7,5 97 0,9 0,5.„2000,0 IP54 Б 28,44
11; 15 97 0,9 0,5-2000,0 IP54 Б 43,92
18,5; 22 97 0,9 0,5-2000,0 IP54 Б 65,16
11; 15 97 0,9 0,5-500,0 IP54 В 54,72
18,5; 22 .97 0,9 0,5-500,0 IP54 В 74,16
30 97 0,9 0,5-500,0 IP54 В 90,00
37 97 0,9 0,5-500,0 IP54 в 108,00
45; 55 97 0,9 0,5-500,0 IP43 в 162,00
75 97 0,9 0,5-500,0 IP43 в 202,50
Примечания.
1. Преобразователи мощностью от ПО до 400 кВт изготовляются на заказ.
2. Частота напряжения на входе (50/60) Гц.
3. Входное напряжение 1 х 220, 3 х 380 В (Рном = 0,55 ... 1,5) кВт; 3 х 380 В
(РНом= 1,5 ...75) кВт.
4. Выходное напряжение 3 х (0...220) В, 3 х (0...380)В (РНОм = 0,55 ... 1,5) кВт;
3 х (0...380) В (Рном = 1,5 ...75) кВт.
188
Приложение 4
Преобразователи частоты серии АП—140
общепромышленного исполнения типа А
Тип ПЧ Мощность двигателя, кВт Выходной ток, А Мощность, кВА
АП—140—А—5К5 5,5 13 8,5
АП-140-А-7К5 7,5 16 10,5
АП—140—А—11К5 11,0 25 16,4
АП—140—А—15К 15,0 32 21,0
АП-140-А-18К5 18,5 38 25,0
АП-140-А-22К 22,0 45 29,6
АП-140-А-30К 30,0 60 39,4
АП-140-А-37К 37,0 75 49,3
АП-140-А-45К 45,0 90 59,2
АП-140-А-55К 55,0 НО 72,3
АП—140—А—75 К 75,0 150 98,6
АП—140—А—90К 93,0 170 111,8
АП-140-А—110К 110,0 210 138,1
АП-140-А-132К 132,0 250 164,4
АП—140—А—160К 160,0 300 197,2
АП—140—А—200К 200,0 380 249,8
АП-140-А-220К 220,0 415 272,8
АП-140-А-250К 250,0 470 309,0
АП-140-А-280К 280,0 520 341,8
АП-140-А-315К 315,0 600 394,4
АП-140-А-400К 400,0 750 493,1
АП-140-А-500К 500,0 920 604,8
Примечание. Входное напряжение 3 х 380 В, 50/60 Гц. Выходное напря-
жение фазы 3 (0... (7Н0Ч) частотой 2...200 Гц.
189
Приложение 5
Удельная стоимость (УС) низковольтных отечественных
преобразователей частоты
Приложение 6
Удельная стоимость (УС) высоковольтных отечественных
преобразователей частоты
Тип ПЧ Напряже- ние, кВ Мощность, кВт Производитель Примечания
ВПЧА 6; 10 500... 1 250 ОАО «Электро- выпрямитель»
ПЧТТЕ 6; 10; 15,75 ОАО «Электро- выпрямитель» Для СД
кпчт 6; 10 200... 1 250 ОАО «Электро- привод» Для АД
ПЧ 50 ...800 6; 10; 15,75 500 ...8 650 ОАО «Электро- привод» Для СД
АТО 7 3; 6 400... 5000 Корпорация «Триол» ——
АТО9 3; 6; 10 400... 2 500 Корпорация «Триол» ——
СТ-10 3; 6; 10 320... 1 600 Корпорация «Триол» Для СД
СТ-17 3; 6; 10 630... 8 000 Корпорация «Триол» ——
190
Окончание пр ил. 6
Тип ПЧ Напряже- ние, кВ Мощность, кВА Производитель Примечания
ТПЧ-СД * 1... 16 1 000... 25 000 АО «Ансальдо— ВЭЙ» Для СД
ТПЧ-АД 1 ...4 800... 6 000 АО «Ансальдо— ВЭИ» Для АД
EI-7009M 6; 10 220... 1 250 Компания «ВЕСПЕР» Для АД
EI-SN-2001 3; 6; 10 До 900 Компания «ВЕСПЕР» Для СД
Примечание. АД — асинхронный двигатель, СД — синхронный двигатель.
Приложение 7
Удельная стоимость (УС) низковольтных отечественных
регуляторов напряжения
Тип ^НОМ» В I А JHOM» л Производитель
ПН-ТТЕ (ТТВ) 380 6...630 ОАО завод «Инвертор»
РНТО, РНТТ 380; 660 50 ...630 АО «Российская Электро- техническая компания
ТСУ-4 380 25 ...400 НПО «Электропривод»
ПБ 220; 380; 440 10... 630 ГУП «ПО УМЗ»
Примечание. Удельная цена устройств (2 800... 400) руб./кВт при мощности
от единиц до 500 кВт.
Приложение 8
Низковольтные мягкие пускатели
Тип Мюм» В Рцо.м, кВт I А 1 лом» л Производитель
ПБН, ПБР 220; 380; 660 «^«1 4...630 ОАО «Электропривод»
БУ. АЭК 1М 380 75...315 ОАО «ЗВИ»
УПР1, УПР2 380 7,5 ...200 25 ...400 ОАО ЧЭАЗ
ИРБИ-61 380 110...315 —— АО ИРБИС
ДМС-ОЮН ...550Н 380 7,5...400 1 Компания «ВЕСПЕР»
ПТ 380 —— 16; 40 ОАО завод «Инвертор»
191
Окончание прил. 8
Тип ^НОМ! В Phom* кВт / А 2ном* Производитель
АПН 380; 660 45...315 100...600 Корпорация «Триол»
БПУ 380 45... 250 100...630 ОАО «ВНИИР»
Примечание. Удельная цена устройств 2800...400 руб./кВт при мощности
от единиц до 500 кВт.
Приложение 9
Высоковольтные мягкие пускатели
Тип II R Рцом> кВт Производитель Примечание
УБПВД 6; 10 До 12 500 ОАО «ВНИИР» Для АД и СД
АС15 3;6; 10 160...8000 Корпорация «Триол» II
ПН-ТТП 6; 10 600... 6 000 Корпорация «Союз» Для АД и СД
ТПУ-СД 6; 10 До 6 000 ОАО «Ансальдо— ВЭИ» Для СД. Схема выпрямитель— инвертор
Приложение 10
Высоковольтные компенсаторы реактивной мощности
серии КРМ-6 и КРМ-10
Номинальное напряжение, кВ 6; 10
Наибольшее рабочее напряжение, кВ 7,2; 12
Номинальная мощность, квар 450; 900; 1 350; 1 800; 2 250; 2 700; 3 150
Номинальное напряжение вспомогатель- ных цепей, В 220
Степень защиты по ГОСТ 14254 — 96 IP21; IP54
192
Приложение 11
Низковольтные автоматизированные конденсаторные установки
серии АКУ
Тип Мощ- ность, квар Номиналь- ный ток, А Сечение мед- ного кабеля, м2 Цена с учетом . США
АКУ 0,4—50—10УЗ 50 72,2 3x50 900
АКУ 0,4-75-12,5УЗ 75 108,7 3x50 1 140
АКУ 0,4-100-25УЗ 100 144,5 3x70 1 380
АКУ 0,4-100-1ОУЗ 100 144,5 3x70 1430
АКУ 0,4—150—10УЗ 150 216,7 2 х (3 х 50) 1995
АКУ 0,4—200—20УЗ 200 289 2 х (3x70) 2 660
АКУ 0,4—220—20УЗ 220 319 2 х (3 х 70) 2926
АКУ 0,4—240—20УЗ 240 348 2х(3х95) 2 976
АКУ 0,4—260—20УЗ 260 377 2х(3х95) 3 094
АКУ 0,4—280—20УЗ 280 406 2 х (3x95) 3 220
АКУ 0,4—300—20УЗ 300 433,5 2х(3х 120) 3 450
АКУ 0,4-330-15УЗ 330 478,5 2х(3х 120) 3 795
АКУ 0,4—350—25УЗ 350 507,5 2х(3х 150) 3 850
АКУ 0,4—380—20УЗ 380 551 2х(3х 150) 4180
АКУ 0,4—400—20УЗ 400 580 2х(3х 150) 4400
АКУ 0,4—420—20УЗ 420 609 2 х (3 х 185) 4620
Примечание. В маркировке первое число — номинальное напряжение,
кВ; второе число — номинальная мощность, квар; третье число — мощность
ступени регулирования, квар; УЗ — для умеренного климата и установки внутри
помещения.
193
Приложение 12
Технические характеристики одноступенчатых редукторов 1ЦУ
Наименование технических характеристик Типоразмер редуктора
1ЦУ-100 1ЦУ-160 1ЦУ-200 ЩУ-250
Передаточные числа 2; 2,5; 3; 3,5; 4; 5; 6,3
Допустимая радиальная консольная нагрузка, Н: на быстроходном валу на тихоходном валу 630 1250 2 800 4 000
2 240 4 500 6 300 9 000
Номинальный крутящий мо- мент на тихоходном валу, Н • м 315 1250 2 500 5 000
кпд, % 98
' Масса, кг 27 78 135 250
Цена с учетом НДС (2004 г.), руб. 10177 10660 30193 37657
Технические характеристики двухступенчатых редукторов 1Ц2У
Наименование технических характеристик Типоразмер редуктора
1Ц2У- 100 1Ц2У- 125 Щ2У— 160 1Ц2У- 200 1Ц2У- 250
Передаточные числа 8; 10; 12,5; 16; 20; 25; 31,5; 40
Допустимая радиальная консольная нагрузка, Н: на быстроходном валу на тихоходном валу 500 750 г. 1000 2 240 3 150
4 500 6 300 9 000 12 500 18000
Номинальный крутящий момент на тихоходном валу, Н • м 315 630 1 250 2 500 5 000
кпд, % 97
Масса, кг 20 32 95 170 320
Цена с учетом НДС (2004 г.), руб. 5 850 8 320 11570 18 174 27690
194
Технические характеристики трехступенчатых редукторов 1ЦЗУ
Наименование технических характеристик Типоразмер редуктора
ЩЗУ-160 1ЦЗУ-200 1ЦЗУ-250
Передаточные числа 16; 20; 25; 31,5; 40; 45; 50; 56; 63; 80; 100; 125; 160; 200
Допустимая радиальная консольная нагрузка, Н: на быстроходном валу на тихоходном валу 630 1 250 2 240
9 000 12 500 18000
Номинальный крутящий момент на тихоходном валу, Н • м 1 250 2 500 5 000
кпд, % 96
Масса, кг 27 190 335
Цена с учетом НДС (2004 г.), руб. 12 740 19 НО 33 150
Основные технические характеристики редукторов 24, Ч
Люм 24-63 24-80
Р, кВт Л7КП, Н м Р, кВт
8 120 0,89 230 0,90
10 ПО 0,88 210 0,89
12,5 100 0,88 200 0,88
16 140 0,84 260 0,85
20 120 0,83 240 0,83
25 110 0,81 220 0,82
31,5 150 0,74 280 0,77
40 130 0,73 260 0,72
50 120 0,68 240 0,71
63 100 0,62 210 0,64
80 90 0,60 180 0,61
195
Окончание
№ ^ном 4-100 4-125 4-160
^кр» Н * м Л кВт Кр, Н * М Р, кВт Мкр, Н • м Р, кВт
8 488 0,92 850 0,93 1 600 0,94
10 462 0,91 825 0,92 1500 0,93
12,5 437 0,90 825 0,91 1500 0,92
16 500 0,88 900 0,88 1800 0,90
20 487 0,86 825 0,87 1 500 0,87
25 475 0,85 775 0,85 1400 0,86
31,5 515 0,79 1 000 0,80 2 000 0,83
40 488 0,75 850 0,78 1600 0,79
50 475 0,74 800 0,75 1450 0,75
63 375 0,66 750 0,72 1 320 0,74
80 355 0,65 650 0,66 1 320 0,71
Примечание. / 11ОМ — номинальное передаточное число; — номиналь-
ный крутящий момент; Р — передаваемая мощность.
Удельная стоимость редукторов — 43... 17 руб./Н м (2004 г.).
Приложение 13
Консольные насосы
Марка насоса Подача, м3/ч Напор, м Частота вращения, об/мин Цена с учетом НДС (2004 г.), руб.
К50—32—125а 12,5 20 3 000 6 637
К50—32—125 12,5 20 3 000 4 773
К65-50-160 25,0 32 3000 6 254
К20/30 20,0 30 3 000 5 390
К90/20 90,0 20 3000 7 072
К80-65-160 50,0 32 3 000 7 376
К80—50—200 50,0 50 3000 19-384
К100—80—160 100,0 32 3000 19 708
К100-65-200 100,0 50 3 000 27 662
К100-65-250 100,0 80 3 000 39675
К150-125-250 200,0 20 1 500 37 237
К150-125-315 200,0 32 1500 41060
196
Окончание прил. 13
Марка насоса Подача, м3/ч Напор, м Частота вращения, об/мин Цена с учетом НДС (2004 г.), руб.
К200-150-250 315,0 20 1500 48 816
К200-150-315 315,0 32 1 500 63023
К200-150-400 400,0 50 1 500 92 233
К290/30 290,0 30 1 500 53 038
К160/30 160,0 30 1500 37 988
Приложение 14
Вентиляторы радиальные низкого и среднего давления ВЦ 14—46
Типоразмер вентилятора Двигатель, кВт/ (об/мин) Параметры в рабочей зоне Цена с учетом НДС (2005 г.), руб.
Производитель- ность, м3/ч Полное давление, Па
ВЦ 14-46-5 4/1 000 6 000 ...8 400 950... 1070 13 358
5,5/1000 6000... 11500 950... 1 120 13 979
7,5/1 000 6000... 14 500 950... 1 180 14 320
11/1500 9 000... 11000 2 200 ...2 350 15 541
15/1 500 9000... 14 500 2 200... 2 500 17980
18,5/1500 9 000... 17 000 2 200 ...2 550 17980
22/1 500 9 000... 20 000 2 200... 2 500 23912
30/1 500 9 000... 23 000 2 200... 2 400 24 970
ВЦ 14-46-6.3 5,5/750 9 200... 13 000 890... 980 20 150
7,5/750 9 200... 17 000 890... 1 040 22 950
11/750 9 200 ...23 000 890... 1020 24970
11/1 000 12 300... 15 000 1 580... 1 700 24970
15/1 000 12 300... 19 500 1 580... 1 800 24 970
18,5/1000 12 300 ...24 000 1 580... 1 820 28 958
22/1 000 12 300 ...28 000 1 580... 1 800 31960
ВЦ 14-46-8 15/750 19 000 ...22 500 1 430... 1530 34 628
18,5/750 19 000 ...27 500 1430... 1 620 40 860
22/750 19 000 ...32 000 1 430... 1 640 41230
197
Окончание прил. 14
Типоразмер вентилятора Двигатель, кВт/(об/мин) Параметры в рабочей зоне Цена с учетом НДС (2005 г.), руб.
Производитель- ность, м3/ч Полное давление, Па
ВЦ 14-46-8 30/750 19 000 ...41 000 1 430... 1 630 50 490
37/1 000 24 500 ...31 000 2 600...2 750 50 490
45/1 000 24 500... 37 000 2 600 ...2 850 57 340
Приложение 15
Тарифы на электрическую энергию, отпускаемую ОАО «Мосэнерго»
потребителям Москвы, введенные с 1 января 2005 г.
Группы
бюджетных
потребителей
Единица
измерения
Высокое
напря-
жение
Диапазон напряжений
Среднее
напряже-
ние ~ I
Среднее
напряже-
ние — II
Низкое
напряжение
Одноставоч-
ный тариф
коп./кВт - ч
105,93 129,65
Двухставоч-
ный тариф:
плата за
мощность
руб./МВт • мес
279346,4 361 144,4
плата за
энергию
коп./кВт - ч
47,69
55,53
Приложение 16
Тарифы на водоснабжение и водоотведение
для МГП «Мосводоканал», введенные с 1 января 2005 г.
Группы потребителей Тарифы, руб./м3
Водоснабжение Водоотведение
1-я группа (с учетом НДС) 6,12 5,27
2-я бюджетная группа 5,28 4,68
2-я хозрасчетная группа и 3-я группа 10,0 9,5
Оптовые потребители— перепродавцы 5,19 4,47
Техническая вода 1,66
198
Приложение 17
Тарифы на горячую воду для потребителей Москвы,
введенные с 1 мая 2005 г.
Потребители Тарифы на горячую воду, руб./м3
ОАО «Мосэнерго» ГУП «Мосте плоэнерго» ГУП « М ос горте пл о», ГУП «Теплоремонтналадка»
Бюджетные 32,64 46,60 45,98
Прочие 38,11 52,07 51,45
СПИСОК ЛИТЕРАТУРЫ
1. Богословский В.Н. Отопление и вентиляция : учебник / В. Н. Бого-
словский, В. П. Щеглов, Н. Н. Разумов. — 2-е изд., перераб. и доп. — М.:
Стройиздат, 1980. — 295 с.
2. Браславский И. Я. Энергосберегающий асинхронный электропривод:
учеб, пособие / И. Я. Браславский, 3. Ш. Ишматов, В. Н. Поляков ; под ред.
И.Я. Браславского. — М.: Изд. центр «Академия», 2004. — 256 с.
3. Ильинский Н. Ф. Основы электропривода : учеб, пособие / Н. Ф. Иль-
инский. — М.: Изд-во МЭИ, 2003. — 224 с.
4, Ильинский Н. Ф. Энергосбережение в центробежных машинах сред-
ствами электропривода / Н.Ф. Ильинский // Вестник МЭИ. — 1995. - № 1. -
С. 53-62.
5. Копытпов Ю. В. Экономия энергии в промышленности : справочник /
Ю.В. Копытов, Б.А.Чуланов. — 2-е изд., перераб. и доп. — М. : Энерго-
атомиздат, 1982. — 112 с.
6. Кудрин Б, И. Электроснабжение промышленных предприятий .* учеб-
ник / Б. И. Кудрин. — М.: Энергоатомиздат, 1995. — 416 с.
7. Москаленко В. В. Электрический привод: учеб, пособие / В. В. Мос-
каленко. — М.: Изд. центр «Академия», 2004. — 368 с.
8. Опыт разработки и применения асинхронных электроприводов с тирис-
торными преобразователями напряжения / [Л. Б. Масандилов, В.А.Ани-
симов, А. О. Горнов и др.] // Электротехника. — 2000. — № 2. — С. 12—14.
9. Сыромятников ИА. Режимы работы асинхронных и синхронных дви-
гателей / И. А. Сыромятников. — М.: Энергоатомиздат, 1984. — 240 с.
10. Черкасский В.М. Насосы, вентиляторы, компрессоры : учебник /
В.М.Черкасский. — 2-е изд., перераб, идол. — М.: Энергоатомиздат, 1984. —
416 с.
11. Электротехнический справочник: В 4 т. Т. 4. Использование электри-
ческой энергии / под ред. проф. МЭИ В. Г. Герасимова и др. (гл. ред. А. И. По-
пов). — 8-е изд., испр. и доп. — М.: Изд-во МЭИ, 2002. — 696 с.
12. Энергосберегающая технология электроснабжения народного хо-
зяйства : В 5 кн.: практ. пособие / под ред. В. А. Веникова. Кн. 2. Энерго-
сбережение в электроприводе / Н.Ф.Ильинский, Ю.В.Рожанковский,
А. О. Горнов. — М.: Высш, шк., 1989. ~ 127 с.
ОГЛАВЛЕНИЕ
Предисловие ................................................. 3
Введение........................................................4
Глава 1. Принцыпы энерго-н ресурсосбережения................... 9
1.1. Электропривод и технологические процессы..............9
1.2. Энергетическая модель силового канала электропривода.11
1.3. Свойства и характеристики массовых асинхронных
электродвигателей..........................................16
1.4. Энергетические модели электродвигателей..............21
1.5. Резервы экономии энергии и ресурсов и принципы
энергосбережения ..........................................30
1.6. Экономическая оценка энерго- и ресурсосбережения.....35
Глава 2. Энергосбережение при нерегулируемом электроприводе....43
2.1. Выбор двигателя и редуктора..........................43
2.2. Проверка соответствия двигателя и нагрузки...........49
2.3. Энергосберегающие двигатели..........................56
2.4. Экономия энергии при замене малозагруженных
двигателей.................................................60
2.5. Экономия энергии при переключёнии обмоток
статору по схеме «треугольник—звезда»......................64
2.6. Экономия энергии счет ограничения времени
холостого хода дв^глтелей..................................70
2.7. Энергосбережение ь режиме частых пусков..............72
2.8. Компенсация реакги^йой мощности......................76
Глава 3. Регулируемый электропривод — основное средство
энерго- п ресурсосбережения......................................89
3.1. Виды и общая характеристика регулируемых
электроприводов .......................................... 89
3.2. Частотно-регулируемый асинхронный электропривод......92
3.3. Принципы построения преобразователей частоты.........96
3.4. Современные преобразователи частоты общего
применения................................................ 99
3.5. Высоковольтные преобразователи частоты..............102
3.6. Электропривод с тиристбрным регулятором
напряжения..........к................................... 105
3.7. Электропривод постоянного тока. Система
преобразователь- Двигатель.................................111
201
3.8. Электроприводы постоянного тока. Система
источник тока—двигатели............1...................121
3.9. Вентильно-индукторный электроприьод...............128
Глава 4. Энерго- и ресурсосбережение в системах водоснабжения
и вентиляции....................... #.J.................. 134
4.1. Энергетические модели центробежных машин,.
4.2. Опыт энерго- и ресурсосбережения ы
водоснабжения зданий';..............
4.3. Пример энергосбережения в бистеме]
отопления.....................t.....
4.4. Энергоаудит систем водоснабжения
Глава 5. Обзор энергосберегающих тежйтескк
и 1
5.1. Особенности применения Срйрбменн
электроприводов. Зарубежны Л опыт,.
5.2. Примеры энергосбережения средства
электропривода в различных у станов)
5.3. Управление режимами оборудования
на тепловых станциях средствами эле
5.4. Потенциал энергосбережения средст
электропривода и европейский рына
энергосберегающих устройств.........
5.5. Компьютерная поддержка техничеси
Приложения......................... 1
Список литературы.................... 1
системах
.............
оздушного
ан и и
решений.......
х регулируемых
и
гропривода
ами
х решении
134
139
148
154
161
161
164
169
174
176
184
200
Учебное издание
Ильинский Николай Федотович
Москаленко Владимир Валентинович
Электропривод: энерго- и ресурсосбережение
Учебное пособие
Редактор Н.Л. Котелина
Технический редактор Е. Ф. Коржуева
Компьютерная верстка: О. В. Кокорева
Корректоры: Т. В. Кузьмина. И, В. Могилевец
Качество печати соответствует качеству
диапозитивов, предоставленных издательством.
Изд. № 101112436. Подписано в печать 29.06.2007. Формат 60 х 90/16.
Гарнитура «Таймс». Печать офсетная. Бумага тип. № 2.
Усл. псч. л. 13,0. Тираж 2 500 экз. Заказ №25025.
Издательский центр «Академия», w5vw.acadcmia-moscow.ru
Санитарно-эпидемиологическое заключение № 77.99.02.953.Д.004796.07.04 от 20.07.2004.
117342, Москва, ул. Бутлерова, 17-Б, к. 360. Тел./факс: (495)330-1092, 334-8337.
Отпечатано в ОАО «Саратовский поли граф комбинат», www.sarpk.ru
410004, г. Саратов, ул. Чернышевского, 59.
T&i Издательский центр
ACADEMA
«Академия»
Учебная литература
для профессионального
образования
НАШИ КНИГИ МОЖНО ПРИОБРЕСТИ (ОПТОМ И В РОЗНИЦУ)
МОСКВА
129085, Москва,
пр-т Мира, д. 101 в, стр. 1
(м. Алексеевская)
Тел./факс: (495) 648-0507,
330-1092,334-1563
E-mail: sale@academia-moscow.ru
м. Алексеевская
ФИЛИАЛЫ:
СЕВЕРО-ЗАПАДНЫЙ
198020, Санкт-Петербург,
наб. Обводного канала,
д. 211 -213, литер «В»
Тел.: (812) 251-9253,252-5789,575-3229
Факс: (812) 251-9253, 252-5789
E-mail: fspbacad@ peterstar.ru
ПРИВОЛЖСКИЙ
603005, Нижний Новгород,
ул. Алексеевская, д. 24г и 24д
Тел.: (8312)34-1158,18-0404
Факс: (8312)18-1678
E-mail: pf-academia@bk.ru
ул. Отто Шмидта
, , уд- Щорса
УРАЛЬСКИЙ
620144, Екатеринбург,
ул. Щорса, д. 92а, корп. 4
Тел.: (343)257-1006
Факс: (343) 257-3473
E-mail: academia-ural@mail.ru
СИБИРСКИЙ
630108, Новосибирск,
ул. Станционная, д. 30
Тел. / факс: (383) 300-1005
E-mail: academia_sibir@mail.ru
ул. 20-я линия
ДАЛЬНЕВОСТОЧНЫЙ
680014, Хабаровск, Восточное шоссе, д. 2а
Тел./факс: (4212)27-6022
E-mail: filialdv-academia@yandex.ru
ЮЖНЫЙ
344037, Ростов-на-Дону,
ул. 22-я линия, д. 5/7
Тел.: (863) 253-8566;
Факс: (863) 251-6690
E-mail: academia-rostov@skytc.ru
ПРЕДСТАВИТЕЛЬСТВО
В РЕСПУБЛИКЕ ТАТАРСТАН
420094, Казань,
Ново-Савиновский район,
ул. Голубятникова, д. 18
Тел. / факс: (843) 520-7258,556-7258
E-mail: academia_kazan@mail.ru
www. academia-moscow. ru
ACADEMA
Издательский центр
«Академия»
Учебная литература
для профессионального
образования
Предлагаем
вашему вниманию
следующие книги:
С. А. БАШАРИН, В. В. ФЕДОРОВ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЭЛЕКТРОТЕХНИКИ:
ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
И ЭЛЕКТРОМАГНИТНОГО ПОЛЯ
Объем 304 с.
В учебном пособии изложены основы теории электрических цепей и
электромагнитного поля. Наряду с традиционными материалами вошли
новые положения теории матричного анализа электрических цепей, рас-
пространения электромагнитных волн вдоль направляющих систем и в
многослойных средах. Приведены примеры решения практических задач
в области электротехники.
Для студентов учреждений высшего технического профессионального
образования.
М. П. БЕЛОВ, В. А. НОВИКОВ, Л. Н. РАССУДОВ
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД
ТИПОВЫХ ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ
И ТЕХНОЛОГИЧЕСКИХ КОМПЛЕКСОВ
Объем 576 с.
В учебнике изложены блочно-модульные принципы построения унифи-
цированных систем автоматизированных электроприводов с программи-
руемыми микроконтроллерами. Рассмотрены принципы построения ком-
пьютерных систем управления механизмами, агрегатами и комплексами
на базе автоматизированных электроприводов и компьютерных средств
автоматизации. Приведены примеры построения компьютерных систем
управления многодвигательными электроприводами машин и агрегатов
типовых групп технологического и транспортного оборудования, а также
автоматизированных технологических комплексов базовых отраслей про-
мышленности.
Для студентов учреждений высшего профессионального образования.
Может быть полезен широкому кругу инженерно-технических работников,
занятых разработкой, проектированием и эксплуатацией систем автома-
тизации.
В. Я. БЕСПАЛОВ, Н.Ф. КОТЕЛЕНЕЦ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Объем 320 с.
В учебном пособии рассматриваются трансформаторы и электричес-
кие машины, используемые в современной технике. Показана их решаю-
щая роль в генерации, распределении, преобразовании и утилизации элек-
трической энергии. Даны основы теории, характеристики, режимы работы
и примеры конструкций и применения электрических генераторов, транс-
форматоров и двигателей.
Для студентов учреждений высшего профессионального образования.
Может быть использовано в системе повышения квалификации и перепод-
готовки инженеров-электромехаников и инженеров смежных специально-
стей.
И. Я. БРАСЛАВСКИЙ, 3. Ш. ИШМАТОВ, В. Н. ПОЛЯКОВ
ЭНЕРГОСБЕРЕГАЮЩИЙ АСИНХРОННЫЙ
ЭЛЕКТРОПРИВОД
Объем 256 с.
В учебном пособии изложены основные сведения о наиболее распро-
страненных классах современных систем регулируемых асинхронных элек-
троприводов и их энергетических показателях. Рассмотрены в общем виде
возможности снижения энергопотребления в асинхронных электроприво-
дах при работе в установившихся и переходных режимах. Обоснована
целесообразность автоматизации энергоемких технологических процес-
сов с использованием регулируемых асинхронных электроприводов, что
позволяет удовлетворять возрастающие технологические требования и
одновременно решать задачи энергосбережения. Приведены рациональ-
ные структуры энергосберегающих автоматизированных частотно-регу-
www. academia-moscow. ru
лируемых асинхронных электроприводов для типовых производственных
механизмов. Даны количественные оценки снижения энергопотребления.
Для студентов учреждений высшего профессионального образова-
ния.
О. Б. БУЛЬ
МЕТОДЫ РАСЧЕТА МАГНИТНЫХ СИСТЕМ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ: МАГНИТНЫЕ ЦЕПИ,
ПОЛЯ И ПРОГРАММА FEMM
Объем 336 с.
В учебном пособии в части I рассмотрены расчеты магнитных систем
методами теории цепей: с помощью коэффициентов рассеяния, по участ-
кам; без учета сопротивления магнитопровода и с его учетом, на постоян-
ном токе и на переменном. Описаны методы расчета магнитных проводи-
мостей двухмерных и трехмерных полей с помощью простых фигур; по
картинам поля, построенным вручную и снятым на проводящей бумаге.
В части II рассмотрены расчеты магнитных систем с использованием те-
ории поля, дана классификация методов их расчета. Подробно описана
возможности конечно-элементной компьютерной программы FEMM.
Для студентов учреждений высшего профессионального образова-
ния.
О. Б. БУЛЬ
МЕТОДЫ РАСЧЕТА МАГНИТНЫХ СИСТЕМ
ЭЛЕКТРИЧЕСКИХ АППАРАТОВ: ПРОГРАММА ANSYS
Объем 288 с.
В учебном пособии описана конечно-элементная компьютерная про-
грамма ANSYS, позволяющая проводить моделирование таких инженер-
ных устройств, расчет которых сводится к анализу полей любой природы.
Рассмотрены возможности программы ANSYS по расчету магнитных сис-
тем постоянного и переменного токов в стационарном и нестационарном
режимах, без учета нелинейной характеристики магнитного материала и с
ее учетом. Даны примеры интерактивных и командных анализов в ANSYS
осесимметричной разомкнутой магнитной системы и магнитной системы с
одним зазором при трехмерном поле.
Для студентов учреждений высшего профессионального образова-
ния.
www. academia-moscow. ru