/































































































































































































































































































Text
M.r.MUAUIliH
А,С.€андлер
ОБЩИМ курс
ЭЛЕКТРОПРИВОДА
Дал (л^чрнП1«»С 6y^i •
М. Г. ЧИЛИКИН, А. С. САЙДЛЕР
ОБЩИЙ КУРС
ЭЛЕКТРОПРИВОДА
ИЗДАНИЕ ШЕСТОЕ, ДОПОЛНЕННОЕ И ПЕРЕРАБОТАННОЙ
Допущено Министерством высшего и среднего специаль-
ного образования СССР в качестве учебника для студен-
тов электромеханических и электроэнергетических вузов
МОСКВА
ЭН ЕРГОИЗДАТ
1981
ББК 31.291
4-61
УДК 62-83(075.8)
Рецензент: Кафедра электропривода и автоматизации
промышленных установок Ленинградского
политехнического института
Чиликин М. Г., Сандлер А. С.
.4-61 Общий курс электропривода: Учебник для ву-
зов.— 6-е изд., доп. и перераб. — М.: Энергоиздат,
1981,— 576 с., ил.
В пер.: 1 р. 40 к.
Книга представляет собой учебник, составленный применительно
к программе курса «Электропривод» для электромеханических спе-
' циальностей энергетических и электротехнических вузов. В ней изла-
гаются основы электропривода, а также вопросы управления автома-
тизированными электроприводами.
Пятое издание учебника вышло в 1971 г. Настоящее издание
обновлено в соответствии с последними достижениями науки и тех-
* ники, а также новой учебной программой курса.
Книга рассчитана на студентов, специализирующихся в области
электрических машин, электрических аппаратов, электротермических
установок и других специальностей шестой группы.
30307-431
4 051(01)-81
100-81(Э). 2302030000
ББК 31.291
6П2.1.081
ЧИЛИКИН МИХАИЛ ГРИГОРЬЕВИЧ,
САНДЛЕР АБРАМ СОЛОМОНОВИЧ
ОБЩИЙ КУРС ЭЛЕКТРОПРИВОДА
Редакторы П. Е. Сандлер, Р. С. Сарбатов
Редактор издательства Л. А. Реш мин а
Технический редактор А. С. Давыдова
Корректор И. А. Володяева
ИБ № 1699 («Энергия»)
Сдано в набор 14.01.81. Подписано в печать 17.07.81. Т-22057. Формат
84X 108732- Бумага типографская № 2. Гари, шрифта литературная.
Печать высокая. Усл. печ. л. 30,24. Уч.-изд. л. 33,38. Тираж 100 000 экз.
Заказ 1716. Цена 1 р. 40 к.
Энергоиздат, 113114, Москва, М-114, Шлюзовая наб., 10
Ордена Октябрьской Революции, ордена Трудового Красного Знамени
Ленинградское производственно-техническое объединение «Печатный
Двор» имени А. М. Горького Союзполиграфпрома при Государствен-
ном комитете СССР по делам издательств, полиграфии и книжной
торговли. 197136, Ленинград, П-13£>, Чкаловский пр., 15.
© Энергоиздат, 1981.
Невинном ноского филиала
ПРЕДИСЛОВИЕ
Шестое издание учебника «Общий курс элек-
тропривода» выходит в свет, когда его авторов — профессо-
ров Михаила Григорьевича Чиликина и Абрама Соломоно-
вича Сандлера уже нет в живых.
В основу настоящего издания положен учебник, соз-
данный М. Г. Чиликиным, выдержавший пять изданий
в СССР, неоднократно издававшийся за рубежом и полу-
чивший заслуженное признание технической обществен-
ности благодаря широте охвата проблем, ясному изложе-
нию сложных и разнообразных вопросов электрического
привода, удачному сочетанию теоретического и практиче-
ского материала.
В процессе подготовки шестого издания авторы под-
вергли содержание учебника существенной переработке.
Они стремились полно и глубоко отразить в книге совре-
менное состояние электропривода, подчеркнуть основные
тенденции его развития, показать новые технические идеи
и их реализацию. С этой целью была несколько изменена
структура учебника. Выделены главы «Механика электро-
привода», «Автоматическое регулирование скорости и мо-
мента», «Формирование переходных процессов», добавлен
ряд новых разделов. При изложении материала учтена
новая терминология по электроприводу в соответствии
с ГОСТ 6593-79.
Во вторую часть учебника «Системы автоматического
управления электроприводами» введен раздел, посвященный
тиристорному управлению асинхронными и синхронными
двигателями. Рассмотрены дополнительно электрические
схемы управления некоторыми производственными меха-
низмами в разомкнутых системах. Дана новая глава, в ко-
торой уделено внимание типовым схемам замкнутого управ-
ления приводами постоянного и переменного тока, в том
числе с системами подчиненного регулирования. Новыми
схемами взамен устаревших дополнена глава «Следящий
привод и программное управление», в которую введен
1*
3
параграф с краткими соображениями по адаптивному
управлению. Последняя глава дополнена материалами
по комплексной автоматизации электроприводов.
В книге изъяты разделы по автоматическому управле-
нию приводами с применением электромашинных усилите-
лей, а также исключены материалы, относящиеся к осно-
вам автоматического управления (вопросы о различных
критериях устойчивости, построение кривых переходных
процессов частотным методом и др.), освещаемые в соот-
ветствующем курсе. Исключены также некоторые мате-
риалы, отраженные в курсе «Вычислительная техника».
Новые разделы книги были написаны проф. А. С. Саид-
лером, им также выполнено редактирование остальной
части книги, написанной проф. М. Г. Чиликиным.
Приводя содержаниевсоответствиестребованиями быстро
прогрессирующей науки и практики, авторы стремились
оставить неизменным стиль учебника — ясное, как и в пре-
дыдущих изданиях, изложение материала, большое число
иллюстраций, практических приложений теории. Они стре-
мились помочь читателю разобраться в весьма непростых
вопросах, побудить его к творческому освоению материала.
Эту же цель ставил перед собой редактор книги канд.
техн, наук Р. С. Сарбатов, вложивший много труда в про-
цесс подготовки книги к изданию. Большой объем работы
выполнила по подготовке материалов рукописи книги
к изданию второй ее редактор инж. П. Е. Сандлер.
С именами авторов учебника профессоров Московского
энергетического института М. Г. Чиликина и А. С. Санд-
лера связан значительный период развития отечественной
науки об электроприводе, ими внесен существенный личный
вклад в создание ряда современных систем электропривода.
Огромный опыт, блестящая эрудиция и педагогический
талант авторов нашли отражение в книге, которая, несом-
ненно, принесет пользу всем, кто изучает современный
электрический привод.
Зав. кафедрой автоматизированного электропри-
вода МЭИ проф. Н. Ф. Ильинский
ЧАСТЬ ОСНОВЫ
первая электропривода
ВВЕДЕНИЕ
Автоматизация и электрификация всех отрас-
лей народного хозяйства приводит к облегчению труда
рабочих, к уничтожению существенного различия между
трудом умственным и трудом физическим, к дальнейшему
повышению материального благосостояния советских лю-
дей.
Производственные механизмы, без которых нельзя в на-
стоящее время представить себе ни одной фабрики, ни одного
завода, равно как механизированного транспорта и пере-
дового сельского хозяйства, прошли длительный путь своего
развития, прежде чем приняли вид современных машин,
где гений и труд человека нашли свое материальное вопло-
щение.
Современное машинное устройство или, как'его назы-
вают иначе, производственный агрегат состоит из большого
числа разнообразных деталей, отдельных машин и аппара-
тов, выполняющих различные функции. Все они в совокуп-
ности совершают работу, направленную на обеспечение
определенного производственного процесса. Необходимо
хорошо знать назначение отдельных элементов, составляю-
щих машинное устройство, так как без этого невозможно
проектировать и создавать машину, а также невозможно
правильно обслуживать ее в эксплуатации.
«Всякое развитое машинное устройство состоит из трех
существенно различных частей: машины-двигателя, пере-
даточного механизма, наконец, машины-орудия или рабочей
машины» х.
Назначение первых двух элементов: двигателя с его
системой управления и передаточного механизма, куда
могут входить валы, шкивы, ремни, шестерни и т. п.,
заключается в том, чтобы сообщить движение исполнитель-
ному механизму.
1 К. Маркс. Капитал, т. 1, —М.: Политиздат, 1973, с. 384.
5
' Следовательно, первая и вторая части машинного
устройства служат для приведения в движение рабочей
машины. Поэтому их объединяют общим названием «при-
вод».
Примером простейшего привода является ручной при-
вод, который сохранился в некоторых случаях и до настоя-
щего времени. Его можно встретить, например, в быту,
в сельском хозяйстве и т. д. Однако в современных усло-
виях он не играет сколько-нибудь заметной роли.
Конный привод, являющийся развитием ручного при-
вода, где усилия человека заменены тяговой силой живот-
ных, в настоящее время также утратил свое значение.
На смену им пришел механический привод от ветря-
ного двигателя, от водяного колеса и турбины, паровой
машины, двигателя внутреннего сгорания и от электриче-
ского двигателя, который постепенно занял главенствую-
щее место. Первые механические приводы известны были
в глубокой древности со времени устройства водяных и
ветряных мельниц.
В настоящее время водяные и паровые турбины широко
применяются на электрических станциях, вырабатывающих
энергию для промышленности, сельского хозяйства, транс-
порта и бытовых нужд. Однако для приведения в движение
рабочих машин основным двигателем является электриче-
ский двигатель и, следовательно, основным типом привода
является электрический привод или сокращенно, элек-
тропривод, а на современном уровне техники авто-
матизированный электропривод.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ СВЕДЕНИЯ.
ИСТОРИЯ РАЗВИТИЯ ЭЛЕКТРОПРИВОДА
1.1. Типы электроприводов и движения ,
осуществляемые ими
Автоматизированным элек-
троприводом называется электромеханическая си-
стема, состоящая из электродвигательного, преобразова-
тельного, передаточного и управляющего устройств, пред-
назначенных для приведения в движение исполнительных
органов рабочей машины и управления этим движением.
6
Нельзя представить себе ни одного современного про-
изводственного механизма, в любой области техники, кото-
рый не приводился бы в действие автоматизированным
электроприводом. В электроприводе основным элементом,
непосредственно преобразующим электрическую энергию
в механическую, является электрический двигатель, кото-
рый чаще всего управляется при помощи соответствующих
преобразовательных и управляющих устройств с целью
формирования статических и динамических характеристик
электропривода, отвечающих требованиям производствен-
ного механизма. Речь идет не только о сообщении машине
Электрическая сеть,Ude
Рис. 1.1. Структурная схема автоматизированного электропривода.
вращательного или поступательного движения, но, глав-
ным образом, об обеспечении с помощью автоматизирован-
ного электропривода оптимального режима работы ма-
шин, при котором достигается наибольшая производитель-
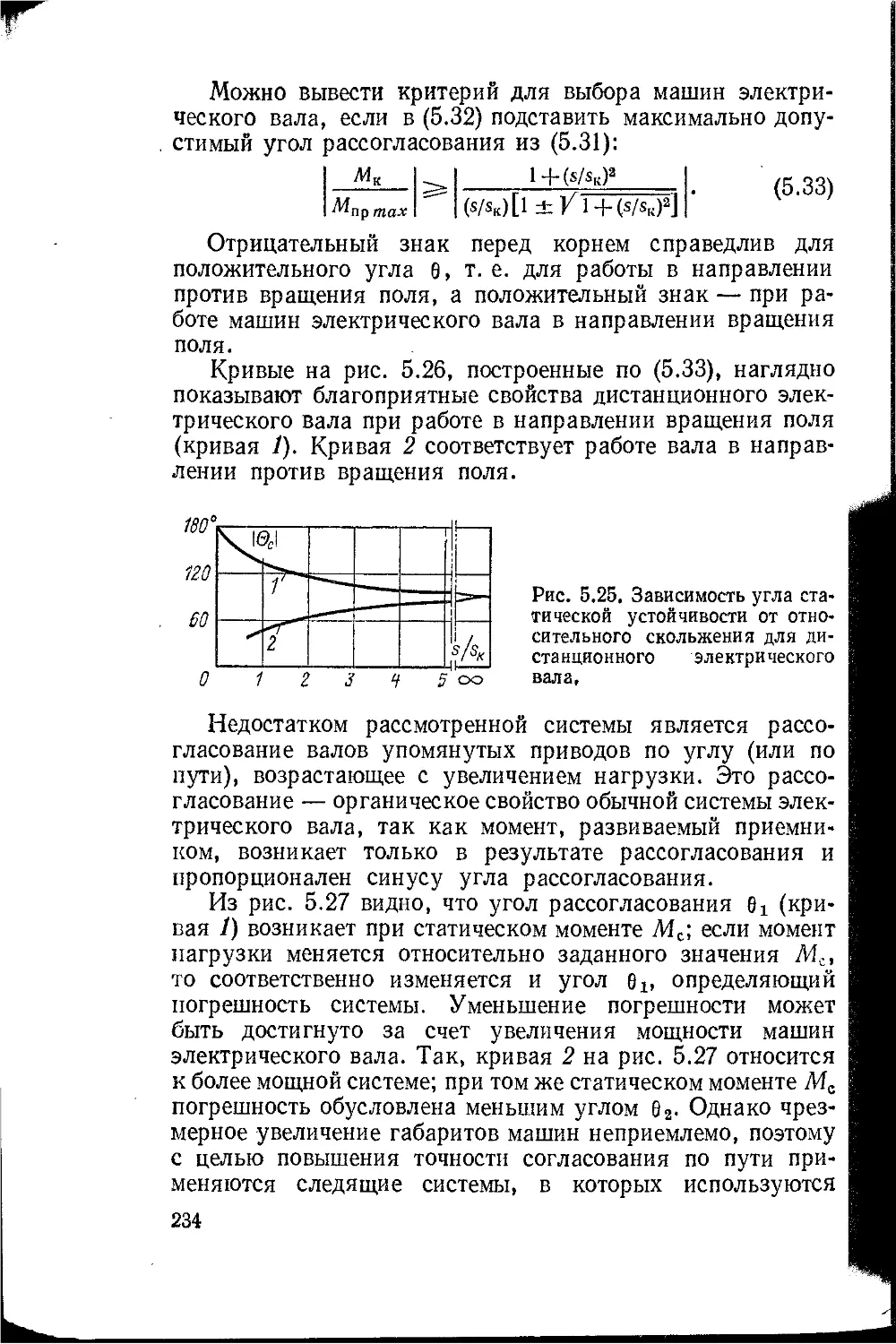
ность при высокой точности.
Структурная схема автоматизированного электропривода
приведена на рис. 1.1. В ней можно выделить три основ-
ных элемента:
1) механическая часть привода МЧ, включающая рабо-
чий механизм РМ, передаточное устройство ПУ, пред-
назначенное для передачи механической энергии от элек-
тродвигательного устройства электропривода к исполни-
тельному органу рабочей машины и для изменения вида
и скорости движения и усилия (момента вращения);
2) электродвигательное устройство ЭД, предназначен-
ное для преобразования электрической энергии в механи-
ческую или механической энергии в электрическую. На
схеме электродвигательное устройство (или двигатель) пред-
ставлено двумя элементами: электромеханическим преобра-
I
зователем энергии ЭМП (на вход которого подаются элек-
трические сигналы в виде напряжения и тока), преобра-
зующим электрическую мощность в механическую мощ-
ность, и массой ротора двигателя РД, на которую воздей-
ствует момент М двигателя при угловой скорости ш;
3) система управления СУ, состоящая из силовой пре-
образовательной части П (преобразователя), управляющего
устройства У, задающего устройства ЗУ и датчиков обрат-
ных связей — электрических ДОСЭ и механических ДОС Ml
и Д0СМ2. Преобразователь П предназначен для питания
двигателя и создания управляющего воздействия на него.
Он преобразует род тока или напряжение, или частоту
либо изменяет иные показатели качества электрической
энергии, подводимой к двигателю. Устройство У, управ-
ляющее преобразователем П, получает командные сигналы
от задающего устройства ЗУ, а информацию о текущем
состоянии электропривода и технологического процесса —
от датчиков обратных связей. С помощью этих датчиков
ток, напряжение, мощность двигателя или другие его элек-
трические параметры, скорость, момент или усилие и поло-
жение (перемещение) исполнительного органа, преобразу-
ются в пропорциональные этим параметрам электрические
сигналы, которые и подаются в управляющее устрой-
ство У. В нем текущее состояние электропривода и техно-
логического процесса сравнивается с заданным и при нали-
чии рассогласования вырабатывается управляющий сиг-
нал, воздействующий через преобразователь П на электро-
привод в направлении устранения возникшего рассогласо-
вания с требуемой точностью и быстродействием.
Разнообразные электроприводы с учетом их историче-
ского развития и с точки зрения способов распределения
механической энергии можно разделить на три основных
типа: групповой электропривод; индивидуальный и взаи-
мосвязанный.
Групповой электропривод обеспечивает движе-
ние исполнительных органов нескольких рабочих машин
или нескольких исполнительных органов одной рабочей
машины. Передача механической энергии от одного двига-
теля к нескольким рабочим машинам и ее распределение
между ними производится с помощью одной или нескольких
трансмиссий. Такой групповой привод называют также
трансмиссионным (рис. 1.2).
Дальнейшее развитие электропривода было связано
с отказом от распределения механической энергии между
3
рабочими машинами, т.’е. от трансмиссий, за счет уста-
новки на каждую рабочую машину своего электродвига-
теля ЭД (рис. 1.3). Однако при таком электроприводе
сохраняются системы распределения механической энер-
гии внутри машины, имевшие место и в трансмиссионном
приводе. Между отдельными рабочими органами одной
и той же машины остаются часто громоздкие механические
связи, усложняющие конструкцию самой машины. Этот
электропривод по сравнению с рассмотренным выше транс-
миссионным является более совершенным, но по существу
также может считаться групповым, если на рабочей машине
имеется несколько рабочих органов, приводимых в движе-
ние от одного двигателя.
Электрическая сеть
ЭД
Рабочие машины
Рис. 1.2. Структурная схема
группового трансмиссионного
электропривода.
Электрическая сеть
Рис. 1.3. Структурная схема
группового электропривода.
Вследствие своего технического несовершенства транс-
миссионный электропривод в настоящее время почти не при-
меняется, он уступил место индивидуальному и взаимо-
связанному, хотя в ряде случаев еще находит применение
и групповой привод по схеме на рис. 1.3.
Индивидуальный привод по сравнению с транс-
миссионным и групповым обладает рядом преимуществ:
производственные помещения не загромождаются тяжелыми
трансмиссиями и передаточными устройствами; улучша-
ются условия работы и повышается производительность
труда вследствие облегчения управления отдельными меха-
низмами, уменьшения запыленности помещений, лучшего
освещения рабочих мест; снижается травматизм обслужи-
вающего персонала. Кроме того, индивидуальный электро-
привод отличается более высокими энергетическими пока-
зателями. . . ...
В трансмиссионном приводе при выходе из строя или
при ремонте электродвигателя выбывает из работы группа
машин, тогда как в случае индивидуального привода или
группового по схеме на рис. 1.3 остановка одного электро-
двигателя вызывает остановку лишь одной рабочей ма-
шины.
При индивидуальном электроприводе за счет того, что
каждый рабочий орган машины приводится в движение
самостоятельным электродвигателем, рабочие органы ма-
шины оказываются уже не связанными друг с другом и
поэтому значительно упрощаются механические передачи.
В некоторых случаях в результате полного исключения
механических передач удается существенно повысить точ-
ность работы машины. Индивидуальный электропривод
Рис. 1.4. Индивидуальные электроприводы рабочих органов (шпинде-
лей) продольно-фрезерного станка.
позволяет обеспечить оптимальный режим работы машины,
при котором достигается максимальная производитель-
ность. Наконец, при использовании индивидуального элек-
тропривода создаются наиболее благоприятные условия
для автоматизации работы машин и технологических
процессов.
Индивидуальный электропривод широко применяется
в различных современных машинах, например в сложных
металлорежущих станках, в прокатных станах металлур-
гического производства, в подъемно-транспортных маши-
нах, экскаваторах, в роботах-манипуляторах и т. п.
Примером использования индивидуального привода мо-
жет служить продольно-фрезерный станок (рис. 1.4),
имеющий отдельные электроприводы главных движений
(приводы трех шпиндельных бабок). На том же станке
(на рисунке не показаны) обычно еще установлены отдель-
ные приводы для перемещения стола с обрабатываемым
изделием, быстрого перемещения траверсы, закрепления
10
траверсы и приводы других механизмов, обслуживающих
необходимые режимы работы станка как для автоматиче-
ского цикла, так и для наладочных операций. Коорди-
нация работы отдельных рабочих органов и выполнение
ими соответствующих рабочих операций достигается не за
счет сложных механических передач, а с помощью элек-
трической системы управления.
Взаимосвязанный электропривод содержит
два или несколько электрически или механически связан-
ных между собой электродвигательных устройства (или
электроприводов), при работе которых поддерживается
заданное соотношение или равенство скоростей или нагру-
зок или положение исполнительных органов рабочих ма-
шин. Необходимость в таком
приводе часто возникает по кон-
структивным или технологиче-
ским соображениям.
Примером взаимосвязанного
электропривода может служить
привод цепного конвейера. На
рис. 1.5 показана схема такого
привода, рабочим органом кото-
рого является цепь, приводимая
в движение двумя или несколь-
кими двигателями (Ml, М2),
расположенными вдоль цепи. Эти
Рис. 1.5. Схема взаимосвя*
занного привода конвейера,
двигатели имеют вынуж-
денно одинаковую скорость.
Взаимосвязанный электропривод широко применяется
в различных современных машинах и агрегатах, например
в копировальных металлорежущих станках и станках с про-
граммным управлением, в бумагоделательных машинах,
ротационных машинах полиграфического производства,
в текстильных агрегатах, в прокатных станах металлурги-
ческого производства, в поточных технологических линиях
по производству шинного корда, синтетических пленок
и т. д.
Одной из разновидностей взаимосвязанного электропри-
вода является многодвигательный электропри-
вод — это электропривод, двигательные устройства которого
совместно работают на общий вал. Примером многодвига-
тельного привода может служить привод платформы меха-
низма поворота мощного экскаватора. Здесь благодаря
применению многодвигательного электропривода и специ-
альному электрическому соединению двигателей удается
И
осуществить равномерное распределение статических и
динамических нагрузок, возникающих при работе меха-
низма поворота.
Представляет интерес современный многодвигательный
электропривод переменного тока, состоящий из четырех
Рис. 1.6. Мнстдвигате.|’ь:ис5 электропривод переменного тока моад»
кого внн1;'вого пресса.
или шести двигателей, приводящих в движение общую
шестерню мощного винтового пресса (рис. 1.6). Этот при-
вод работает с большим числом включений в час, что обес-
печивает высокую производительность пресса.
12
В том случае, когда во взаимосвязанном электропри-
воде возникает необходимость в поддержании постоянного
соотношения скоростей рабочих органов, не. имеющих
механических связей, или когда осуществление механиче-
ских связей затруднено, используется специальная схема
электрической связи двух или нескольких электродвига-
телей, называемая схемой электрическогова-
л а.
Многообразие производственных процессов обусловли-
вает различные виды и характеры движения рабочих орга-
нов машины, а следовательно, и электроприводов.
По виду движения электроприводы могут обеспе-
чить: вращательное однонаправленное движение, враща-
тельное реверсивное и поступательное реверсивное дви-
жения.
Вращательное однонаправленное, а также реверсивное
движение осуществляется электродвигателями обычного
исполнения. Поступательное движение может быть полу-
чено путем использования электродвигателя вращатель-
ного движения обычного исполнения совместно с преобра-
зовательным механизмом (кулисным, винтовым, реечным
и т. п.) либо применения электродвигателя специального
исполнения для поступательного движения (так называе-
мые линейные электродвигатели, магнитогидродинамиче-
ские двигатели и др.).
По степени управляемости электропривод может быть:
/) нерегулируемый — для приведения в дей-
ствие исполнительного органа рабочей машины с одной
рабочей скоростью, параметры привода изменяются только
в результате возмущающих воздействий;
2) регулируемый — для сообщения изменяемой
или неизменяемой скорости исполнительному органу ма-
шины, параметры привода могут изменяться под воздей-
ствием управляющего устройства;
3) программн о-у правляемый — управляе-
мый в соответствии с заданной программой;
4) следящий — автоматически отрабатывающий пе-
ремещение исполнительного органа рабочей машины с опре-
деленной точностью в соответствии с произвольно меняю-
щимся задающим сигналом;
5) адаптивный — автоматически избирающий
структуру или параметры системы управления при изме-
нении условий работы машины с целью выработки опти-
мального режима.
13
Можно классифицировать электроприводы и по роду
передаточного устройства. В этом смысле электропривод
бывает:
/) редукторный, в котором электродвигатель
передает вращательное движение передаточному устройству,
содержащему редуктор;
2) безредукторный, в котором осуществляется
передача движения от электродвигателя либо непосредст-
венно рабочему органу, либо через передаточное устройство,
не содержащее редуктор.
По уровню автоматизации можно различать:
/) неавтоматизированный электропривод,
в котором управление ручное; в настоящее время такой
привод встречается редко, преимущественно в установках
малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, уп-
равляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором
управляющее воздействие вырабатывается автоматическим
устройством без участия оператора.
Два последних типа электропривода находят примене-
ние в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы
постоянного и переменного тока.
1.2. Краткий исторический обзор развития
электропривода
Развитие промышленных предприятий стало возмож-
ным лишь при переходе от ручного привода исполнительных механиз-
мов к механическим приводам. Еще в глубокой древности применялись
простейшие способы механизации работ с помощью водяных колес,
приводимых в движение силой падающей или текущей воды. Известны
водяные колеса, применявшиеся в Китае еще за 3000 лет до нашей эры.
С развитием капитализма в XVIII в. появились многочисленные
фабрики, где широко применялись водяные двигатели, а затем и паро-
вые машины. Вплоть до конца прошлого столетия единственным типом
привода был чисто трансмиссионный, так как водяной двигатель или
паровая машина соединялись с помощью канатов и ремней с главной
трансмиссией, а все рабочие машины отдельного цеха или даже целой
фабрики приводились в движение от этой трансмиссии.
Переход к более совершенным типам привода — индивидуальному
и взаимосвязанному, которые полнее учитывают основные условия
работы различных производственных механизмов, стал возможен
лишь на базе широкой электрификации промышленности. Строи-
тельство электрических станций, передача электрической энергии
на большие расстояния и применение электропривода создали новую
эпоху в развитии промышленности,
14
Возможность создания электрического двигателя была обуслов-
лена успехами в области электромагнетизма. Вторая четверть XIX в.
характеризуется разработкой разнообразных физических приборов,
наглядно демонстрирующих превращение электрической энергии в ме-
ханическую. Первый электродвигатель, с помощью которого осуще-
ствлен электропривод, был построен в 1834—1838 гг. петербургским
академиком Б. С. Якоби, в 1838 г. на Неве были проведены испыта-
ния этого двигателя, установленного на небольшом катере, вмещав-
шем 12—14 чел.; это было первое судно, приводившееся в движение
электродвигателем. Однако отсутствие экономичных источников элек-
трической энергии не позволило внедрить электропривод в промыш-
ленность. Развитие электропривода совершалось в длительной борьбе
со старыми, отживающими способами распределения механической
энергии, и прошло более полувека, прежде чем окончательно победило
передовое прогрессивное направление. До создания промышленного
типа электрического генератора (3. Грамм, 1870 г.) встречались лишь
отдельные случаи применения электропривода. Известно, например,
что в 50—60-х годах XIX в. некоторое распространение получил
электродвигатель французского электротехника Фромана, приво-
дивший в движение типографские и ткацкие станки. Прогрессив-
ную роль в развитии электропривода сыграло изобретение в 1860 г.
итальянским ученым А. Пачинотти электродвигателя с кольцевым
якорем.
И все же до конца прошлого столетия пар и вода оставались основ-
ной силой, приводившей в движение станки и механизмы в промыш-
ленности. Несмотря на успехи, достигнутые к 70-м годам XIX в. в об-
ласти конструирования электродвигателей постоянного тока, элек-
трическая энергия использовалась в основном лишь для освещения.
Существовавшая тогда система постоянного тока не давала удовлетво-
рительного решения задач передачи и распределения электроэнергии
и тормозила развитие электропривода.
Появление переменного однофазного тока сыграло существенную
роль в развитии электротехники вообще, однако попытки решения
проблемы централизованного производства и распределения электро-
энергии на переменном однофазном токе не привели к заметным сдви-
гам в области электропривода вследствие того, что электродвигатели
однофазного тока не имели пускового вращающего момента.
Открытие явления вращающегося магнитного поля в 80-х годах
прошлого века (Г. Феррарис и Н. Тесла) положило начало конструи-
рованию многофазных электродвигателей. Наиболее экономичной
среди многофазных систем оказалась система трехфазного тока, основы
которой были разработаны в 1889—1891 г. русским инженером М. О.
Доливо-Добровольским. Система трехфазного тока явилась тем но-
вым техническим средством, с помощью которого разрешался весь
комплекс проблемы производства, передачи, распределения и потреб-
ления электроэнергии. Разработкой трехфазной системы были созданы
предпосылки для развития электрификации.
Создание М. О. Доливо-Добровольским в 1889 г. трехфазного
асинхронного двигателя ознаменовало новый этап в развитии электро-
привода и открыло широкую дорогу промышленному применению
электри чества.
Несомненные экономические преимущества централизованного
производства электроэнергии и простота ее распределения привели
к тому, что электродвигатель, постепенно вытесняя другие виды дви-
гателей, занял первое место во всех отраслях промышленности, Мощ-
15
ность электродвигателей по отношению к общей мощности установ-
ленных двигателей составляла в 1890 г. 5 %, в 1927 г. 75 %, в настоя-
щее время около 100 %.
Рис. 1.7. Общий вид современного цеха.
Применение электродвигателей оказало революционизирующее
влияние на устройство приводов и даже на конструкцию самих про-
изводственных механизмов. Прежде всего это сказалось в отказе от
трансмиссионного привода и пере-
ходе к индивидуальному и взаимо-
связанному электроприводам. Каж-
дый, кто бывал на современных
заводах, понимает, насколько раз-
личны условия работы в цехе, за-
громожденном большим числом
приводных ремней, и в свободном
светлом и чистом цехе, где нет
шумящих и затемняющих свет
трансмиссий (рис. 1.7).
Развитие электропривода всег-
да шло в направлении сближения
двигателя с производственным ме-
ханизмом и вытеснения промежу-
точных передач. Примером может
Рис. 1.8. Схема коробки скоростей
токарного станка при различных
типах приводных двигателей.
служить уменьшение числа пар переключаемых зубчатых колес в ко-
робке скоростей токарного станка (рис. 1.8). Для получения 12 ско-
ростей на шпинделе при нерегулируемом индивидуальном приводе
требуется 9 пар зубчатых колес (рис. 1.8, а). Применение двухско-
16
ростного асинхронного двигателя дает возможность уменьшить число
зубчатых колес до семи пар (рис. 1.8, 6), а при регулируемом Двигателе
постоянного тока их число снижается до четырех пар (рис, 1,8, в).
ОЫ 0
Рис. 1,10. Электропривод шлифовального круга (электрошпиндель).
На рис. 1.9 показана схема развития электропривода радиально-
сверлильного станка, где постепенное сближение приводного двига-
теля с производственным механизмом привело к значительному упро-
щению отдельных кинематических цепей рабочей машины, приводима»*'*
различными двигателями (a, b, с, d).
БИБЛИОТРТМ
Н®ВИНИОМЬТ''Г""""’'"' ;jл
17
Индивидуальные и взаимосвязанные электроприводы снабжаются
иногда обычными серийными двигателями, но часто в них применяются
специальные пристраиваемые фланцевые или встроенные двигатели,
чем достигается органическое слияние элементов всего электрифици-
рованного агрегата.
В индивидуальном электроприводе иногда достигается настолько
тесное слияние двигателя с исполнительным механизмом, что кои-
Рис. 1.11. Двигатель-ролик с наружным ротором.
структивно они представляют собой единое целое. На рис. 1.10 пока-
зан электропривод шлифовального круга от асинхронного коротко-
замкнутого двигателя, так называемый электрошпиндель.
Другим примером может служить двигатель-ролик (рис. 1.11),
применяемый в металлургической промышленности для перемещения
слитков металла. Неподвижная статорная обмотка двигателя здесь
располагается внутри, а сам ролик является ротором.
1.3. Развитие электропривода в СССР
В Советском Союзе развитие электропривода получило
широкий размах в годы пятилеток в связи с общей индустриализацией
страны.
Основоположники марксизма-ленинизма всегда придавали боль-
шое значение роли электрической энергии во всех отраслях народного
хозяйства. Всем известно гениальное определение В. И. Ленина
«Коммунизм — это есть Советская власть плюс электрификация всей
страны» г.
Под руководством Коммунистической партии ученые и инженеры
уже в первые годы советской власти создали государственный план
электрификации России — ГОЭЛРО, который был осуществлен с боль-
шим перевыполнением н в более короткие сроки, чем это было преду-
смотрено планом. По плану ГОЭЛРО было намечено соорудить и ввести
в эксплуатацию в течение 10—15 лет 30 новых районных электро-
станций общей мощностью 1 млн. 500 тыс. кВт. За 15 лет — к 1935 г.
на районных электростанциях было фактически введено около
4,5 млн. кВт.
Созданный по указанию В. И. Ленина еще в 1921 г. Государст-
венный экспериментальный электротехнический институт, реорга-
низованный в 1929 г. во Всесоюзный электротехнический институт
(ВЭИ), оказал большое влияние на развитие отечественной электро-
техники, в том числе и на развитие электропривода.
1 В. И. Ленин. Поли. собр. соч., т, 42, изд. 5. — М.: Госполитиздат,
1963, с. 159,
Большую роль в развитии электропривода сыграла также начав-
шаяся подготовка инженерных кадров в этой области.
Еще в 1922 г. в Ленинградском электротехническом институте
имени Ульянова (Ленина) под руководством проф. С. А. Ринкевича
создается специальность «электрификация промышленности», которая
положила начало регулярному выпуску специалистов в области элек-
тропривода и электрификации промышленности.
В 1925 г. выходит в свет книга проф. С. А. Ринкевича «Электри-
ческое распределение механической энергии», явившаяся первым
систематизированным трудом, в котором с большой полнотой рас-
сматривались основные вопросы теории и практики электропривода.
Дальнейшее развитие теории и практики электропривода нашло свое
отражение в труде проф. В. К. Попова «Применение электродвига-
телей в промышленности» (1932—1939 гг.), а также в трудах Р. Л. Аро-
нова, А. Т. Голована, Д. П. Морозова и др. Вопросы автоматиче-
ского управления электроприводами нашли освещение в трудах ака-
демиков М. П. Костенко, В. С. Кулебакина, а также А. Г. Иосифь-
яна, В. К. Попова, Д. В. Васильева и др.
Уже в первые годы советской власти были созданы предпосылки
к широкому развитию научно-исследовательских работ, способствовав-
ших внедрению электропривода в различные отрасли отечественной
промышленности.
Размах электрификации страны иллюстрируется данными о про-
изводстве электрической энергии в СССР, приведенными в таблице.
Таблица
Показатель 1940 1950 1955 1960 1965 1970 1975 1980
Выработка электро- энергии, млрд. кВт - ч 48,6 91,2 170,2 292,3 506,7 740,9 1038,6 1295,0
Огромное увеличение производства электроэнергии вызвано широ-
ким размахом электрификации всех отраслей промышленности. В уголь-
ной, металлургической, химической, машиностроительной и других
отраслях промышленности коэффициент электрификации (т. е. отно-
шение установленной мощности электродвигателей к общей уста-
новленной мощности двигателей всех видов, выраженное в процентах)
приближается к 100 %.
Уже в 1960 г. коэффициент электрификации в важнейших отрас-
лях промышленности СССР составлял: в химической промышлен-
ности 97,7, в металлургической 86,9, в промышленности общего маши-
ностроения 98,5, в угольной 99,1 %. Электровооруженность промыш-
ленности СССР достигла весьма значительных размеров.
В такой отрасли промышленности, как, например, металлургия,
в царской России преобладал паровой двигатель. В настоящее время
паровой привод в металлургии почти всюду вытеснен электроприво-
дом.
19
Претворение в жизнь плана индустриализации привело к созда-
нию в Советском Союзе мощной машиностроительной промышленности
и к выпуску огромного количества электрических машин, аппаратов
и других изделий электропромышленности.
Так, в черной металлургии уже в первой пятилетке было вве-
дено в строй 19 мощных прокатных станов, а во второй 60, из иих
9 блюмингов, электропривод которых является одним из наиболее
сложных автоматизированных устройств. Завод «Электросила» в 1931 г.
выпустил первый советский электропривод блюминга с двигателем
7000 л. с. и с трехмашинным маховичным агрегатом, состоящим из
асинхронного двигателя мощностью 3680 кВт и двух генераторов
по 3000 кВт. В 1931 —1932 гг. разрабатывается отечественная система
комплексной автоматизации электроприводов загрузки доменных пе-
чей. Создается электрооборудование для врубовых машин угольной
промышленности, взаимосвязанный электропривод бумагоделательных
машин и т. п.
В 1936—1937 гг. были разработаны на принципе следящего при-
вода схемы автоматического управления нажимными винтами прокат-
ных станов.
Последующие годы (1940—1945 гг.) ознаменованы разработкой
новых принципов построения систем автоматического управления
электроприводами, основанных на применении замкнутых цепей с об-
ратными связями и использовании электромашииных, электронных
и в дальнейшем магнитных усилителей.
Широкое применение усилителей позволило осуществить непре-
рывное управление и обеспечить необходимое формирование переход-
ных процессов в электроприводах большого числа механизмов с плав-
ным и большим диапазоном электрического регулирования скорости.
Еще в довоенное время проводились работы, связанные с заме-
ной электромашинного преобразовательного агрегата системы генера-
тор — двигатель статическим. Первая установка такого рода, в которой
двигатель постоянного тока для привода шахтного подъемника питался
от управляемого ртутного выпрямителя, была пущена в эксплуатацию
в 1940 г. Замена электромашинного агрегата ртутным выпрямителем
заметно удешевила установку и привела к повышению КПД электро-
привода.
В послевоенные годы такие электроприводы нашли применение
на металлургических заводах для привода прокатных станов.
Сложные автоматизированные электроприводы, способствующие
повышению производительности и улучшению качества продукции,
были использованы в станах холодной прокатки, шахтных подъемных
машинах, текстильных поточных агрегатах, скоростных лифтах высот-
ных зданий, бумагоделательных машинах, экскаваторах, сложных
металлорежущих станках и др.
В годы пятилеток такие заводы, как ХЭМЗ, «Электросила», «Ди-
намо» и др. обеспечили быстрое развитие новых типов электроприводов.
При проектировании и реализации указанных электроприводов
большую работу провели коллективы таких организаций и заводов,
как ЦНИИТмаш, трест «Электропривод», ГПИ «Тяжпромэлектро-
проект», ЭНИМС, заводы им. Я. М. Свердлова, фрезерных станков
в г. Горьком, им. Серго Орджоникидзе и др.
Широкое развитие сельскохозяйственного машиностроения (трак-
торостроения, производства комбайнов), автомобилестроения, самоле-
тостроения и других видов массового производства потребовало зна-
чительного развития механизации и автоматизации трудоемких про-
20
цессов на базе повсеместного использования автоматизированного элек-
тропривода и современных систем управления им.
Заводом «Станкоконструкция» и ЭНИМС еще в первой пятилетке
была разработана и пущена в эксплуатацию автоматическая линия
станков для обработки блока цилиндров тракторного двигателя. Вве-
дение автоматической линии способствовало заметному росту произ-
водительности труда за счет использования агрегатных станков, веду-
щих обработку изделий одновременно многими инструментами и с раз-
ных сторон, существенного сокращения вспомогательного времени
и автоматизации цикла обработки, совершаемого без участия опера-
тора.
Революционизирующее влияние на развитие автоматизированного
электропривода оказали разработка и производство полупроводнико-
вых приборов — транзисторов, тиристоров, которые благодаря своим
преимуществам стали вытеснять ранее применявшиеся в электропри-
воде устройства с электронными лампами и ионными приборами. На-
ряду с системой генератор—двигатель (Г—Д), все шире используется
более быстродействующая система тиристорный преобразователь —
двигатель (ТП—Д).
В результате освоения нашей промышленностью мощных и на-
дежных силовых тиристоров удается создавать преобразовательные
устройства большой мощности. Тиристорные преобразователи отли-
чаются высоким КПД, практически безынерционны, требуют незна-
чительной мощности для управления и с их помощью создаются си-
стемы электроприводов, обладающие плавным и широким диапазо-
ном регулирования скорости. Соответствующие схемные решения
обеспечивают формирование необходимых статических и динамических
характеристик.
Быстрое развитие в СССР и за рубежом полупроводниковой тех-
ники, существенное увеличение выпускаемых тиристоров обусловли-
вают резкое уменьшение их стоимости, поэтому наряду с широким
использованием тиристорных преобразователей для приводов постоян-
ного тока уже сейчас осваиваются автоматизированные электропри-
воды переменного тока, управляемые различного рода тиристорными
преобразователями.
Известно, что асинхронный двигатель с короткозамкнутым рото-
ром в несколько раз дешевле коллекторного двигателя постоянного
тока, имеет меньшие габариты, может быть выполнен на существенно
большие скорости при той же мощности, надежней и проще в эксплуа-
тации, так как является бесконтактным. Уже сейчас разработанные
принципы автоматического управления электроприводами переменного
тока с тиристорными преобразователями обеспечивают экономичное
плавное регулирование скорости в большом диапазоне, позволяя
получить значительно лучшие динамические характеристики этого
электропривода по сравнению с электроприводом постоянного тока.
Привод переменного тока, в котором используется асинхронный
двигатель с короткозамкнутым ротором с частотным управлением,
является весьма перспективным и в ближайшем будущем во многих
случаях сможет заменить систему ТП—Д постоянного тока.
Широким фронтом ведутся научно-исследовательские работы в об-
ласти электропривода во ВНИИэлектропривод и в других научно-
исследовательских, н проектных институтах, в высших учебных заве-
дениях страны — Московском энергетическом, Ленинградском и Харь-
ковском электротехнических институтах, Ленинградском политехни-
ческом и др, . . . - -.
21
Благодаря этому возникла возможность нового мощного разви-
тия теории и практики электропривода.
Природа социалистического хозяйства и его плановый характер
создают все условия для последовательного и целеустремленного
технического развития любой области техники. В этих условиях,
особенно в такой многогранной и всюду проникающей области тех-
ники, как электропривод, совершенно естественно возникает необ-
ходимость в общей теории, которая могла бы определенным образом
направлять и обобщать практическую деятельность. Поэтому не слу-
чайно, что именно в СССР вопросы общей теории и практики электро-
привода получили наибольшее развитие и работы советских ученых
в этой области являются наиболее значительными.
1.4. Значение электропривода в народном
хозяйстве и основные направления
его дальнейшего развития
Решения партии и правительства предусма-
тривают всемерное повышение эффективности обществен-
ного труда и улучшения качества продукции на базе уси-
ления его электровооруженности и автоматизации произ-
водства. Между электровооруженностью труда и его про-
изводительностью существует прямая зависимость: за пос-
ледние десятилетия производительность общественного тру-
да в промышленности СССР повышается приблизительно
на столько процентов, на сколько повышается его электро-
вооруженность. В связи с этим большое значение для
промышленности СССР приобретают вопросы, связанные
с развитием электропривода. Современный электропривод
определяет собой уровень силовой электровооруженности
труда и является благодаря своим преимуществам по
сравнению со всеми другими видами приводов основным
и главным средством автоматизации рабочих машин и
производственных процессов.
Если сравнить мускульную работу человека и работу
электрической машины, то получится разительный эффект.
В течение рабочего дня один человек может при помощи
мускульной энергии выработать около 1 кВт-ч. Отметим
кстати, что стоимость 1 кВт-ч энергии, полученной от
мощной гидроэлектростанции, составляет не более 1 коп.
В высокоэлектрифицированных отраслях промышленности
установленная мощность электродвигателей в среднем на
одного рабочего составляет 4—5 кВт, что при семичасо-
вом рабочем дне дает потребление в 28—35 кВт-ч. Это
означает, что рабочий управляет механизмами, работа
которых за смену эквивалентна работе 28—35 чел. Для
22
отдельных рабочих-новаторов производства, а также для
рабочих, управляющих сложными агрегатами, эти соотноше-
ния значительно выше.
Рост электрификации и автоматизации и создание на этой
базе более совершенных машин ведут к огромному повыше-
нию производительности труда. Поэтому при решении
вопроса о рациональном электроприводе было бы непра-
вильно исходить только из чисто энергетических сообра-
жений, т. е. оценивать привод только с точки зрения по-
требления энергии на единицу продукции. Конечно, борьба
за экономию электроэнергии требует уменьшения расхода
энергии и является дополнительным источником энергети-
ческих ресурсов в промышленности. Однако решающим
фактором в оценке электропривода является его влияние
на производительность рабочей машины и себестоимость
продукции. Себестоимость единицы продукции определя-
ется по формуле
А = (а4-б-|-1з4-г)/5,
где а — затраты на сырье; б — затраты на рабочую силу;
в — затраты на электроэнергию; г — накладные расходы;
Б — общее количество продукции, выработанное за время,
к которому отнесены составляющие числителя.
С увеличением продукции Б растут пропорционально
и затраты на сырье а, но затраты на рабочую силу б и
накладные расходы г возрастают значительно меньше,
а стоимость электроэнергии в играет относительно малую
роль, составляя всего лишь 3—8 % общей суммы числи-
теля.
Решающим является то, что правильно спроектирован-
ный электропривод увеличивает количество продукции Б,
т. е. приводит к увеличению знаменателя приведенного
выше выражения и определяет, таким образом, снижение
себестоимости продукции. Широкое внедрение рациональ-
ного электропривода коренным образом изменяет условия
производственной работы, повышая производительность,
улучшая качество продукции и облегчая труд рабочего.
В этом состоит существенное значение электропривода
для народного хозяйства Советского Союза.
Отечественная техника в короткие сроки создает образцы
электропривода более совершенные, а развитие советской
теории электропривода обеспечивает правильный путь
в решении основных проблем и вопросов.
23
Современный автоматизированный электропривод пред-
ставляет собой сложную электромеханическую систему,
которая управляет, например, мощными, в несколько
десятков тысяч киловатт, аэродинамическими трубами, где
осуществляется моделирование условий, аналогичных тем,
какие возникают в полете летательных аппаратов, или
реверсивными прокатными станами, в которых двигатели
постоянного тока мощностью каждый в 10 000 кВт более
1000 раз в течение 1 ч, т. е. примерно за каждые 3 с, ме-
няют свое направление вращения, обеспечивая автомати-
чески прокатку заготовки. Основные блоки системы управ-
ления прокатным станом реализуют: ввод данных, слеже-
ние за материалом, регистрацию измеряемых данных про-
цесса прокатки, автоматическую адаптацию и оптимальное
по времени регулирование процесса и другие функции.
В режиме адаптации используются УВМ.
Автоматизация управления станами горячей прокатки
с помощью УВМ позволяет выпускать продукцию высокого
качества. Кроме увеличения производительности труда
и улучшения качества продукции в результате применения
УВМ высвобождается большое число обслуживающего
персонала.
Автоматизированный электропривод развивает колос-
сальные мощности для сообщения значительной скорости,
высокой маневренности и большой надежности огромным
морским и океанским судам различного назначения. На-
конец, автоматизированный электропривод — это силовая
энергетическая основа мощных экскаваторов, магистраль-
ного электрического транспорта, уникальных металлоре-
жущих станков, огромных радиотелескопов и т. д., управ-
ляемых с помощью систем автоматики, обеспечивающих
оптимальные режимы работы.
Пределы использования по мощности современного элек-
тропривода весьма велики — от десятков тысяч киловатт
в единичном двигателе до долей ватта.
Для привода доменных воздуходувок применяются
двигатели переменного тока мощностью до 50 МВт. Такие
двигатели могут иметь частоту вращения до 3000 об/мин.
В измерительной, информационной технике, специаль-
ном приборостроении используются двигатели мощностью
в сотые доли ватта.
Диапазон изменения номинальных частот вращения
также имеет весьма широкие пределы. Так, известны без-
редукторные электроприводы, частота вращения которых
24
составляет единицы и десятки оборотов в минуту. С дру-
гой стороны, в специальных испытательных стендах, пре-
цизионных металлорежущих станках и в других объектах
в настоящее время применяются высоко- и сверхскоростные
(до 200 000 об/мин) бесконтактные электродвигатели пере-
менного тока, управляемые тиристорными преобразовате-
лями частоты.
Системы автоматического управления электроприводами
постоянного и переменного тока, в которых используются
все достижения полупроводниковой техники, а также
возможности электронной вычислительной техники, поз-
воляют существенно упростить конструкции производствен-
ных механизмов, повысить их точность и поднять произ-
водительность, т. е. способствовать техническому прогрессу.
Использование средств дискретной техники в системах
управления приводами постоянного тока расширяет диа-
пазон регулирования скорости до (10 000—15 000):! и
выше.
Широкая автоматизация механизмов на базе следящих
систем электроприводов, систем с цифровым программным
управлением и средств комплексной автоматизации —
обширная и весьма важная развивающаяся область авто-
матизированного электропривода. Иллюстрацией резуль-
тата такой автоматизации может служить быстрая и точ-
ная отработка команд по заранее предусмотренной про-
грамме на небольшом фрезерно-расточно-сверлильно-резь-
бонарезном станке с цифровым программным управлением.
Станок, представляющий собой по существу небольшой
обрабатывающий центр, предназначен для выполнения
с помощью шести шпинделей на револьверной головке
автоматического фрезерования, расточки, зенкования и
нарезания резьбы. Выбор операций и управление всеми
функциями осуществляется без вмешательства оператора
системой программного управления по трем координатам
с заданием программы на перфорированной ленте.
В машинах-автоматах будущего, в которых будут
широко использованы возможности автоматизированного
электропривода, должен развиваться принцип адаптации,
т. е. автоматического приспособления к изменению усло-
вий работы и выработки оптимального режима.
В условиях массового и крупносерийного производ-
ства, где применяются поточные линии, роль автоматизи-
рованного электропривода приобретает особое значение.
Такие автоматические линии включают большое число
25
электроприводов, объединенных сложной системой управ-
ления, обеспечивающей интенсифицированный режим ра-
боты, логическую бесперебойную последовательность управ-
ления многочисленными механическими, гидравлическими
и электрическими устройствами.
Комплексная автоматизация других объектов, напри-
мер поточно-транспортных систем, доменного и прокат-
ного производства, бумагоделательных агрегатов и т. д.
на базе широкого применения автоматизированного элек-
тропривода с использованием УВМ, способствует повыше-
нию производительности труда, улучшению качества про-
дукции.
Развитие автоматического управления электроприво-
дами ведет к совершенствованию конструкций машин,
коренным изменениям технологического процесса, к даль-
нейшему техническому прогрессу в промышленности, сель-
ском хозяйстве, транспорте и т. п.
ГЛАВА ВТОРАЯ
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Приведение моментов и сил
сопротивления, инерционных масс
и моментов инерции
Обычно двигатель приводит в действие
производственный механизм через систему передач, отдель-
ные элементы которой движутся с различными скоростями.
Примерная кинематическая схема электропривода с вра-
щательным движением исполнительного механизма пред-
ставлена на рис. 2.1.
Часто в рабочих механизмах один из элементов совер-
шает вращательное движение, другие — поступательное,
например в таких машинах, как подъемник (рис. 2.2),
кран, строгальный станок и т. п.
Механическая часть электропривода может представ-
лять собой сложную кинематическую цепь с большим
числом движущихся элементов. Каждый из элементов
реальной кинематической цепи обладает упругостью, т. е.
деформируется под нагрузкой, а в соединениях элементов
имеются воздушные зазоры. Если учитывать эти факторы,
то расчетная схема механической части привода будет
26
представлена многомассовой механической системой с упру-
гими связями и зазорами, расчет динамики которой состав-
ляет большие трудности и возможен только посредством
ЭВМ. Однако основные закономерности движения таких
систем определяются наибольшими массами и зазорами
и наименьшими жесткостями связей системы, что позво-
ляет свести расчетную схему механической часта привода
либо к трехмассовой, либо к двухмассовой механической
системе с эквивалентными упругими связями и с суммар-
ным зазором (или без него), приведенным к угловой ско-
рости вала двигателя. Но и эти расчетные схемы исполь-
зуются в тех ответственных случаях, где пренебрежение
Механизм
МС)
Рис. 2.1. Кинематическая схема
связи двигателя с исполнитель-
ным механизмом.
Рис. 2.2. Кинематическая схема
привода подъемника.
упругостью и зазором приведет к большим ошибкам рас-
чета (точные следящие системы радиотелескопов и метал-
лорежущих станков; механизмы с гибкими связями, длин-
ными валами, канатами; резкие изменения состояния
системы и т. п.). Методика расчета электроприводов, меха-
ническая часть которых содержит упругие связи и зазоры,
рассмотрена в [42].
В большинстве практических случаев в инженерных
расчетах при решении задач, не требующих большой точ-
ности, и для механических звеньев, обладающих неболь-
шими зазорами и незначительной упругостью (большой
жесткостью), можно пренебречь зазорами и упругостью,
приняв механические связи абсолютно жесткими. При
этом допущении движение одного элемента дает полную
информацию о движении всех остальных элементов, по-
этому движение электропривода можно рассматривать
на каком-либо одном механическом элементе. Обычно
в качестве такого элемента принимают вал двигателя.
27
Расчетную схему механической части привода, следова-
тельно, можно свести к одному обобщенному жесткому
механическому звену, имеющему эквивалентную массу
с моментом инерции J, на которую воздействует электро-
магнитный момент двигателя М и суммарный приведенный
к валу двигателя момент сопротивления (статический мо-
мент) 7ИС, включающий все механические потери в си-
стеме, в том числе механические потери в двигателе.
Момент сопротивления механизма Л4С,М (рис. 2.1),
возникающий на валу рабочей машины, состоит из двух
слагаемых, соответствующих полезной работе и работе
трения.
Полезная работа, совершаемая производст-
венным механизмом, связана с выполнением соответствую-
щей технологической операции.
График полезной работы может
быть построен на основании ана-
литических расчетов или по экс-
периментальным данным. Такой
график, например, для станка,
j t Рис. 2.3. Циклический график работы
О станка.
работающего по циклическому закону, представлен на
рис. 2.3. Заштрихованная область графика соответствует
полезной работе; незаштрихованная часть графика соот-
ветствует работе трения. При совершении полезной ра-
боты происходит деформация материала или изменяется
запас потенциальной энергии тел, например в подъем-
ных устройствах. В некоторых машинах совершение по-
лезной работы связано с незначительным превышением
момента по сравнению с моментом трения (например,
печатная машина, размольная шаровая мельница, кран,
передвигающийся по горизонтальным направляющим,
и т. п.).
Работа трения, совершаемая в производствен-
ном механизме, учитывается обычно КПД механических
связей привода. Работу трения можно иногда учесть,
пользуясь данными, полученными на основании опыта.
Например, при подъеме груза Gx на высоту h можно счи-
тать, чю силы трения как бы увеличивают вес груза на
некоторое дополнительное значение Go. Тогда работа подъ-
28
ема, Дж, записывается следующим образом:
A=h(Gi + G0). (2.1)
В насосах потери могут учитываться некоторой фиктив-
ной дополнительной высотой подачи Ло. Момент трения
всегда направлен против движущего момента привода.
Моменты сопротивления можно разделить на две кате-
гории, а именно: 1) реактивные моменты и
2) активные или потенциальные мо-
мент ы.
В первую категорию включаются моменты сопротивления
от сжатия, резания, моменты трения и т. п., препятствую-
щие движению привода и изменяющие свой знак при изме-
нении направления вращения.
Во вторую категорию входят моменты от силы тяжести,
а также от растяжения, сжатия и скручивания упругих
тел. Эти моменты могут быть названы потенциальными,
поскольку они связаны с изменением потенциальной энер-
гии отдельных элементов привода. Потенциальные моменты
могут тормозить движение привода или, наоборот, способ-
ствовать его движению. Следует отметить, что в отличие
от реактивного статического момента активный момент
сохраняет свой знак при изменении направления вращения
привода. Например, момент, создаваемый грузом подъем-
ного механизма, сохраняет свой знак как при подъеме
его, так и при опускании. Следовательно, в данном случае
активный статический момент при подъеме препятствует
движению, а при опускании способствует ему.
Приведение моментов сопротивления от одной оси вра-
щения к другой может быть произведено на основании
энергетического баланса системы. При этом потери мощ-
ности в промежуточных передачах учитываются введением
в расчеты соответствующего КПД — т]п. Обозначим через сод
угловую скорость вала двигателя, а йм — угловую ско-
рость вала производственного механизма. На основании
равенства мощностей получим:
м®м = Л4С(ВД,
откуда
где Л4С>М — момент сопротивления производственного ме-
ханизма, Н-м; Mz — тот же момент сопротивления, при-
29
веденный к скорости вала двигателя, Н-м; i = (од/(ом—
передаточное число.
При наличии нескольких передач между двигателем
и механизмом (см. рис. 2.1) с передаточными числами
к, 6>, •••, in и соответствующими КПД т]п1, т]п2, ..., т)„п мо-
мент сопротивления, приведенный к скорости вала двига-
теля, определяется формулой
Приведение сил сопротивления производится анало-
гично приведению моментов. Если скорость поступатель-
ного движения v, м/с, а угловая скорость вала двига-
теля йд, рад/с, то
= (2.4)
ЧП
где ЕС1М — сила сопротивления производственного меха-
низма,’ Н.
Отсюда приведенный к скорости вала двигателя момент
сопротивления равен:
Л4с = ^с.мУ/®дГ|п- (2-5)
В случае приведения вращательного движения к посту-
пательному приведенное усилие
Гс,м = Л1с(одт]п/п. (2.6)
Приведение моментов инерции к одной оси вращения
основано на том, что суммарный запас кинетической энер-
гии движущихся частей привода, отнесенный к одной оси,
остается неизменным. При наличии вращающихся частей,
обладающих моментами инерции Jд, Jlt J2, ..., Jn и угло-
выми скоростями (0д, (»i, (о2, ..., wn (см. рис. 2.1), можно
заменить их динамическое действие действием одного
момента инерции, приведенного например, к скорости вала
двигателя. В таком случае можно написать:
7^ = Л^ + Л^- + Л^- + ... + Л^, (2.7)
откуда результирующий или суммарный момент инерции,
приведенный к валу двигателя:
30
где Jд — момент инерции ротора двигателя и других
элементов (муфты, шестерни и т. п.), установленных на
валу двигателя.
Иногда в каталогах для двигателей указывается зна-
чение махового момента GD2, кгс-м2. В этом
случае моменты инерции ротора двигателя, кг-м2, в си-
стеме СИ вычисляются по формуле
Jp = G£)2/4, (2.9)
где D — диаметр инерции, м; G — сила тяжести (вес), кгс.
Это соотношение следует из формулы, определяющей
момент инерции тела массой т, кг,
J = mp2, (2.10)
где р — радиус инерции, м.
Если сила тяжести выражена в ньютонах, то масса
тела определяется из равенства
С = т£, (2-П)
где g = 9,81 м/с2 — ускорение свободного падения.
Момент инерции сплошного цилиндра относительно
продольной оси вычисляется по формуле
J = m/?2/2, (2.12)
где R — радиус цилиндра, м.
Приведение масс, движущихся поступательно, осуще-
ствляется также на основании равенства запаса кинети-
ческой энергии
Отсюда момент инерции, приведенный к валу двигателя,
/ = т(ц/шд)2. (2.13)
Если механизм имеет вращающиеся и поступательно
движущиеся элементы, то суммарный приведенный к валу
двигателя момент инерции определяется на основании
(2.8) и (2.13)
= Л+Ау? +Л-^ + -• • +••• (^.Н)
Ч 4*2 ЧЧ-.-'п \Ид/
Для приведения момента инерции к поступательному
движению нужно момент инерции заменить приведенной
массой, т. е.
т = J (<0д/у)2. (2.15)
31
2.2. Механические характеристики
производственных механизмов
и электрических двигателей.
Установившиеся режимы
При рассмотрении работы электродвига-
теля, приводящего в действие производственный меха-
низм, необходимо прежде всего выявить соответствие
механических характеристик двигателя характеристике
производственного механизма. Поэтому для правильного
проектирования и экономичной эксплуатации электро-
привода необходимо изучить эти характеристики.
Зависимость между приведенными к валу двигателя
скоростью и моментом сопротивления механизма и =
= f (Мс) называют механической характери-
стикой производственного механизма.
Различные производственные механизмы обладают раз-
личными механическими характеристиками. Однако можно
получить некоторые обобщающие выводы, если воспользо-
ваться следующей эмпирической формулой для механиче-
ской характеристики производственного механизма:
< = М0 + «НО>1-М0)(й)/®НО,Л (2.16)
где Мс — момент сопротивления производственного меха-
низма при скорости со; Мо — момент сопротивления тре-
ния в движущихся частях механизма; Л4С,НОМ — момент
сопротивления при номинальной скорости соном; х — пока-
затель степени, характеризующий изменение момента сопро-
тивления при изменении скорости.
Приведенная формула позволяет классифицировать ме-
ханические характеристики производственных механизмов
ориентировочно на следующие основные категории:
1. Не зависящая от скорости меха-
ническая характеристика (прямая 1 на рис.
2.4). При этом х = 0 и момент сопротивления Л-1С не зави-
сит от скорости. Такой характеристикой обладают, напри-
мер, подъемные краны, лебедки, механизмы подач метал-
лорежущих станков, поршневые насосы при неизменной
высоте подачи, конвейеры с постоянной массой передвигае-
мого материала. Сюда же могут быть отнесены с известным
приближением все механизмы, у которых основным момен-
том сопротивления является момент трения, так как обычно
в пределах рабочих скоростей момент трения изменяется
мало.
32
2. Л и не йн о-в о з р астающ а я механиче-
ская характеристика (прямая 2 на рис. 2.4).
В этом случае х = 1 и момент сопротивления линейно за-
висит от скорости со, увеличиваясь с ее возрастанием (для
упрощения принято 2И0 = 0).
Такая характеристика получится, например, в приводе
генератора постоянного тока с независимым возбуждением,
если последний будет работать на постоянный внешний
резистор.
3. Нелинейно-возрастающая (парабо-
лическая) механическая характеристи-
к а (кривая 3 на рис. 2.4). Этой характеристике соответст-
вует х ~ 2; момент сопротивления Л4С здесь зависит от
квадрата скорости. Механизмы, обла-
дающие такой характеристикой, назы-
вают иногда механизмами с вентиля-
торным моментом, поскольку у вен-
тиляторов момент сопротивления за-
висит от квадрата скорости. К меха-
Рис. 2.4. Механические характеристики про-
изводственных механизмов.
низмам, обладающим параболической механической харак-
теристикой, относятся также центробежные насосы, греб-
ные винты и т. п.
4. Нелинейно-спадающая механиче-
ская характеристика (кривая 4 на рис. 2.4).
При этом х = —1 и момент сопротивления Мс изменяется
обратно пропорционально скорости, а мощность, потреб-
ляемая механизмом, остается постоянной. Такой харак-
теристикой обладают, например, некоторые токарные, рас-
точные, фрезерные и другие металлорежущие станки, мо-
талки в металлургической промышленности и т. п. Эти
характеристики не исчерпывают всех практически воз-
можных случаев, но дают представление о характеристиках
некоторых типичных производственных механизмов.
Механической характеристикой
электродвигателя называется зависи-
мость его угловой скорости от вра-
щающего момента, т. е. со = f (М). Почти все
электродвигатели обладают тем свойством, что скорость
их является убывающей функцией момента двигателя.
2 Чиликин М. Г.. Сандлер А. С.
33
Это относится почти ко всем обычным электродвигателям,
применяемым в промышленности, т. е. к двигателям
постоянного тока независимого, последовательного и сме-
шанного возбуждения, а также к асинхронным бесколлек-
торным и коллекторным двигателям переменного тока.
Однако степень изменения скорости с изменением момента
у разных двигателей различна и характеризуется так
называемой жесткостью их механических характеристик.
Жесткость механической характе-
ристики электропривода — это отношение
разности электромагнитных моментов, развиваемых элек-
тродвигательным устройством, к соответствующей разности
угловых скоростей электропривода, т. е.
Р = (М2-Л41)/(©2-©1) = АМ/Асо. (2.17)
Обычно на рабочих участках механические характери-
стики двигателей имеют отрицательную жесткость |3 < 0.
Линейные механические характеристики обладают постоян-
ной жесткостью. В случае нелинейных характеристик
их жесткость не постоянна и определяется в каждой точке
как производная момента по угловой скорости
Р=оМ/дсо. (2.18)
Понятие жесткости может быть применено и к механи-
ческим характеристикам производственных механизмов,
Эти характеристики можно оценивать жесткостью
₽С = <ШС/Зсо. (2.19)
Механические характеристики электродвигателей можно
разделить на четыре основные категории:
I.Абсолютно жесткая механическая
характеристика (0 = оо) — это характеристика,
при которой скорость с изменением момента остается
неизменной. Такой характеристикой обладают синхронные
двигатели (прямая 1 на рис. 2.5).
2. Жесткая механическая характер и
стика — это характеристика, при которой скорость
с изменением момента хотя и уменьшается, но в малой
степени. Жесткой механической характеристикой обладают
двигатели постоянного тока независимого возбуждения,
а также асинхронные двигатели в пределах рабочей части
механической характеристики (кривая 2 на рис. 2.5).
Для асинхронного двигателя жесткость в различных
точках механической характеристики различна (рис. 2.6).
34
Между максимальными (критическими) значениями момен-
тов в двигательном Л4КлД и генераторном Л4К1Г режимах
характеристика асинхронного двигателя имеет сравнительно
большую жесткость.
3. Мягкая механическая характери-
стика — это характеристика, при которой с изменением
момента скорость значительно изменяется. Такой харак-
теристикой обладают двигатели постоянного тока после-
довательного возбуждения, особенно в зоне малых моментов
(кривая 3 на рис. 2.5). Для этих двигателей жесткость
не остается постоянной для всех точек характеристик.
Двигатели постоянного тока смешанного возбуждения
могут быть отнесены ко второй или третьей группе в зави-
Рис. 2.5. Механические харак-
теристики двигателей.
Рис. 2.6. Механическая харак-
теристика асинхронного двига-
теля.
симости от значения жесткости механической характери-
стики.
4. Абсолютно мягкая механическая
характеристика 0 = 0) — это характеристика,
при которой момент двигателя с изменением угловой ско-
рости остается неизменным. Такой характеристикой обла-
дают, например, двигатели постоянного тока независимого
возбуждения при питании их от источника тока или при
работе в замкнутых системах электропривода в режиме
стабилизации тока якоря (прямая 4 на рис. 2.5).
Работе электрического двигателя и производственного
механизма в установившемся режиме соответствует равно-
весие момента сопротивления механизма и вращающего
момента двигателя при определенной скорости, т. е. Л4=Л4С.
Изменение момента сопротивления на валу двигателя
приводит к тому, что скорость двигателя и момент, который
он развивает, могут автоматически изменяться и
2* 35
привод будет продолжать устойчиво работать при другой
скорости с новым значением момента.
Для восстановления равновесия между изменившимся
моментом сопротивления и моментом двигателя во всех
неэлектрических двигателях требуется участие специаль-
ных регуляторов, которые воздействуют .на источник
энергии, увеличивая или соответственно уменьшая подачу
воды, топлива или пара. В электрических двигателях роль
автоматического регулятора может выполнять ЭДС двига-
теля. Эта особенность электродвигателей автоматически
поддерживать равновесие системы при изменяющемся мо-
менте сопротивления является весьма ценным свойством,
так как во многих случаях момент может изменяться в той
или иной степени.
Изложенное иллюстрируется рис. 2.7, где приведены
механическая характеристика 3 двигателя постоянного
тока независимого возбуждения и две характеристики 1
и 2 производственного механизма, например конвейера,
приводимого в движение этим двигателем X
Характеристика 1 соответствует моменту сопротивле-
ния Mt при холостом ходе конвейера. Характеристика 2
получается при большом моменте сопротивления М2 после
того, как на конвейер .положены транспортируемые им
детали. Вначале при холостом ходе конвейера М —
двигатель работает со скоростью од. С увеличением на-
грузки двигатель тормозится, скорость его снижается,
благодаря чему уменьшается ЭДС. При уменьшении ЭДС
возрастают ток в якорной цепи двигателя и момент, раз-
виваемый двигателем! Рост момента двигателя продол-
жается до тех пор, пока не наступит равновесие моментов
М = Л'12 (точка со2). Эта новая точка также является
общей для механической характеристики конвейера (2)
и механической характеристики электродвигателя (3).
Рассмотренные условия работы электропривода в уста-
новившемся режиме характеризуют статическую
устойчивость привода, когда изменение во вре-
мени скорости и момента происходит относительно медленно
в отличие от динамической устойчивости, имеющей место
при переходных режимах.
Под статической устойчивостью по-
нимается такое состояние установившегося режима ра-
1 Механические характеристики производственного механизма для
удобства изображаются в первом квадранте, хотя момент сопротивле-
ния имеет отрицательный знак.
36
боты привода, когда при случайно возникшем отклонении
скорости от установившегося значения привод возвратится
в точку установившегося режима. При неустойчи-
вом движении любое, даже самое малое, отклонение ско-
рости от установившегося значения приводит к изменению
состояния привода — он не возвращается в точку устано-
вившегося режима.
Привод статически устойчив, если в точке установив-
шегося режима выполняется условие
или
дМ/да — дМс/да < О
₽-₽с<0.
(2.20)
(2.21)
Условие (2.20) означает, что привод статически устой-
чив, если при положительном приращении угловой ско-
Рис. 2.7. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения и приводимого им меха-
низма.
Рис. 2.8. К определению стати-
ческой устойчивости привода
при постоянном моменте сопро-
тивления и вентиляторной на-
грузке.
роста момент двигателя окажется меньше статического
момента (момента сопротивления) и привод вследствие
этого затормозится до прежнего значения скорости. При
отрицательном приращении угловой скорости момент дви-
гателя окажется больше момента сопротивления и привод
вследствие этого разгонится до прежнего значения ско-
рости.
При постоянном моменте нагрузки (прямая 1 на рис. 2.4)
статическая устойчивость будет определяться только жест-
костью механической характеристики двигателя, так как
дМс/да — 0. Если она отрицательна, то работа в уста-
37
новившемся режиме устойчива д/И/дсо — dMJda =*
= дМ/да> < 0, как это имело место в рассмотренном слу-
чае (рис. 2.7).
Если же использовать асинхронный двигатель с ко-
роткозамкнутым ротором и нагрузить его постоянным
моментом (рис. 2.8), то в точке а дМ/да> — dMJd® =
= —А /В — 0 < 0, т. е. устойчивый режим, а в точке б
дМ1да> — dMJdti) = А /С — 0 > 0, т. е. режим неустой-
чивый. При работе того же двигателя на механизм с вен-
тиляторной характеристикой (рис. 2.8) легко доказать,
что во всех точках работа будет устойчивой.
Обычно при проектировании электропривода механиче-
ская характеристика производственного механизма явля-
ется уже заданной. Поэтому для получения устойчивой
работы в установившемся режиме для определенных ско-
ростей и моментов сопротивления производственных меха-
низмов необходимо подбирать механическую характери-
стику электродвигателя соответствующей формы. Это мо-
жет быть достигнуто подбором электродвигателя соответ-
ствующего типа и изменением электрических параметров
его цепей. Иногда для получения требуемых механических
характеристик приходится применять специальные схемы
включения электрических машин и аппаратов.
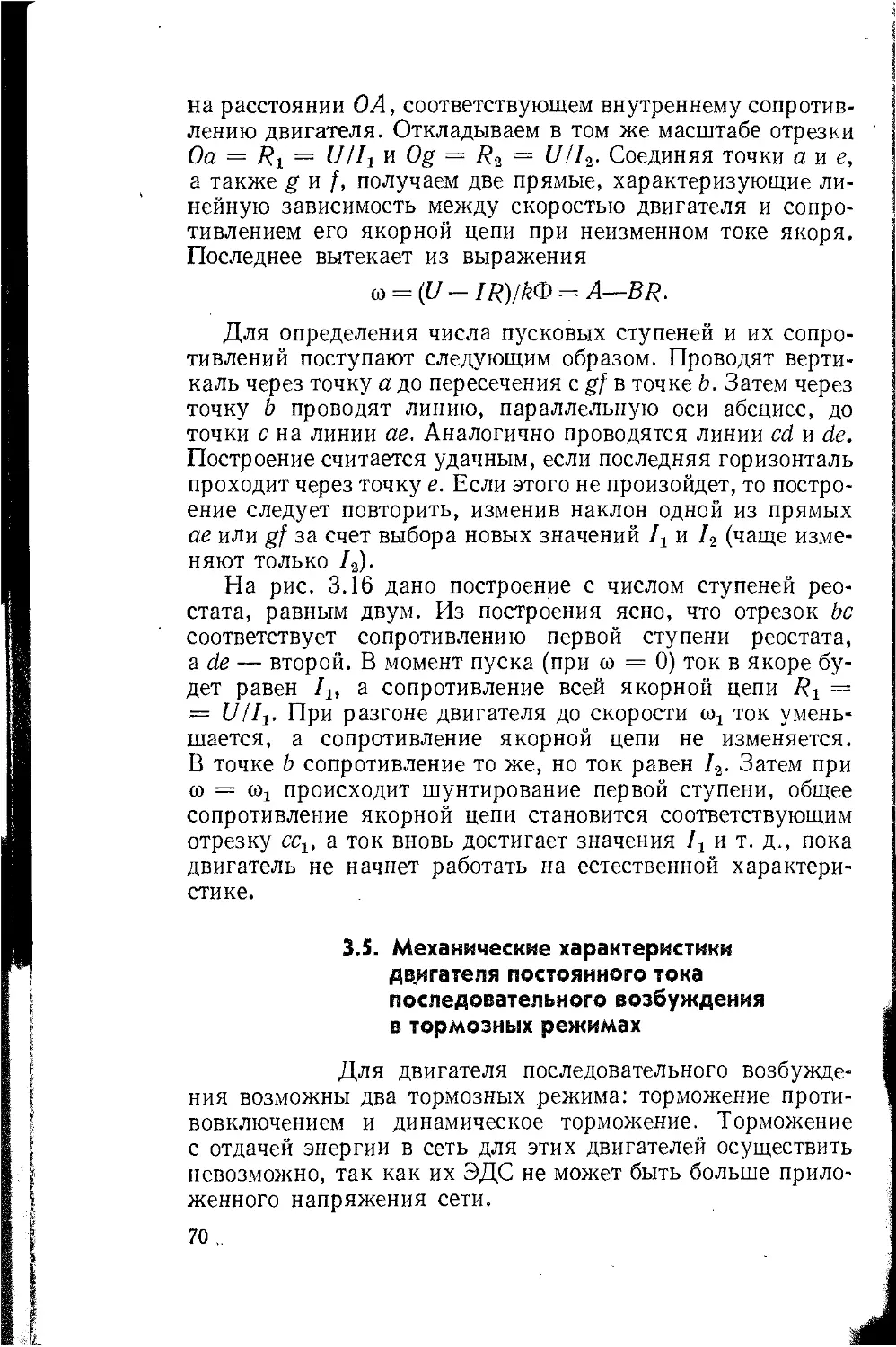
2.3. Уравнение движения электропривода
Выше были рассмотрены условия работы
электропривода в установившемся режиме, когда момент,
развиваемый двигателем, равен моменту сопротивления
механизма и скорость привода является постоянной. Од-
нако во многих случаях привод ускоряется или замедля-
ется, и тогда возникает инерционная сила или инерцион-
ный момент, которые двигатель должен преодолевать,
находясь в переходном режиме. Таким образом, пере-
ходным режимом электропривода называют ре-
жим работы при переходе от одного установившегося со-
стояния к другому, когда изменяются скорость, момент
и ток.
Причинами возникновения переходных режимов в элек-
троприводах является либо изменение нагрузки, связан-
ное с производственным процессом, либо воздействие на
электропривод при управлении им, т. е. пуск, торможе-
ние, изменение направления вращения и т. п. Переходные
режимы в электроприводах могут возникнуть также в ре-
38
зультате аварий или нарушения нормальных условий
электроснабжения (например, изменения напряжения или
частоты сети, несимметрия напряжения и т. п.).
Уравнение движения электропривода должно учитывать
все силы и моменты, действующие в переходных режимах.
При поступательном движении движущая сила F всегда
уравновешивается силой сопротивления машины Fz и
инерционной силой возникающей при изменениях
скорости. Если масса тела т выражена в килограммах,
а скорость v — в метрах в секунду, то сила инерции, как
и другие .силы, действующие в рабочей машине, измеря-
ются в ньютонах (кг-м-с-2).
В соответствии с изложенным уравнение равновесия
сил при поступательном движении записывается так:
F-Fz = m^. (2.22)
Аналогично уравнение равновесия моментов, Н-м, для
вращательного движения (уравнение движения привода)
имеет следующий вид:
M-Mz = J~.
с dt
(2.23)
Уравнение (2.23) показывает, что развиваемый двига-
телем вращающий момент М уравновешивается моментом
сопротивления Л1С на его валу и инерционным или дина-
мическим моментом J В (2.22) и (2.23) принято, что
масса тела т и соответственно момент инерции привода J
являются постоянными, что справедливо для значительного
числа производственных механизмов.
Из анализа (2.23) видно:
1) при М > Л1С d&ldt> 0, т. е. имеет место ускорение
привода;
2) при М < ЛЕ da>!dt < 0, т. е. имеет место замедле-
ние привода (очевидно, что замедление привода может быть
и при отрицательном значении момента двигателя);
3) при М = Mz d&ldt = 0; в данном случае привод
работает в установившемся режиме.
Вращающий момент, развиваемый двигателем при ра-
боте, принимается положительным, если он направлен
в сторону движения привода. Если он направлен в сторо-
ну обратную движению, то он считается отрицательным.
39
Отметим, что знак минус перед Mt. указывает на тормозя-
щее действие момента сопротивления, что отвечает усилию
резания, потерям трения, подъему груза, сжатию пру-
жины и т. п. при положительном знаке скорости.
При спуске груза, раскручивании или разжатии пру-
жины и т. п. перед Л-1,. ставится знак плюс, поскольку
в этих случаях момент сопротивления помогает вращению
привода.
Инерционный (динамический) момент (правая
часть уравнения моментов) проявляется только во время
переходных режимов, когда изменяется скорость привода.
При ускорении привода этот момент направлен против
движения, а при торможении он поддерживает движение.
Инерционный момент как по значению, так и по знаку
определяется алгебраической суммой моментов двигателя
и момента сопротивления.
При учете сказанного о знаках моментов формула (2.23)
соответствует работе двигателя в двигательном режиме
при реактивном моменте сопротивления (или при потен-
циальном тормозящем моменте сопротивления). В общем
виде уравнение движения привода может быть записано
следующим образом:
±Л4 + < =
(2.23а)
Выбор знаков перед значениями моментов в (2.23а)
зависит от режима работы двигателя и характера моментов
сопротивления.
2.4. Уравнение движения электропривода
при переменном моменте инерции,
зависящем от угла поворота вала
В некоторых устройствах, преобразующих вращатель-
ное движение в возвратно-поступательное при помощи кривошипно-
шатунного механизма, скорость и ускорение поступательно движу-
щихся масс изменяются по значению и знаку за один оборот криво-
шипа. Соответственно запас кинетической энергии этих масс изменя-
ется от нуля до максимального значения. Момент инерции, приведен-
ный к валу кривошипа,
/к = лш7<о^,
где mv2 — масса поступательно движущегося элемента системы, имею-
щая скорость v; сок — угловая скорость вала кривошипа.
Используя геометрические соотношение в кривошипном механизме
(рис. 2.9), можно после некоторых преобразований получить выра-
40
жение
v = ru> sin (a + |3)/cos |3. (2.42)
Подставив в формулу момента инерции значение о из (2.24), най-
дем:
JK = mr2 sin2 (« + 13)/cos2 [3. (2.25)
Так как угол |3 можно выразить в функции угла а как
[3 = arcsin sin а 1, (2.26)
то приведенный момент инерции от поступательно движущейся массы
будет зависеть только от величины а, т. е. положения кривошипа.
Для определения суммарного момента инерции нужно к моменту инер-
ции, полученному по (2.25), прибавить момент инерции всех других
элементов электропривода, приведенный к валу кривошипа. Если
Рис. 2.9. Схема кривошипно-шатунного механизма.
между валом кривошипа и двигателем имеются промежуточные пере-
дачи, то приведение момента инерции от вала кривошипа к валу дви-
гателя производится по (2.8).
Пользуясь (2.5) и подставляя выражение для скорости из (2.24),
находим статический момент, приведенный к угловой скорости вала
двигателя:
Mc = Fcrsin(a + |3)/r]icos₽, (2.27)
где Д. — сила сопротивления поступательно-движущегося элемента;
I — передаточное число от вала двигателя к валу кривошипа.
При переменном моменте инерции, как это имеет место в криво-
шипных механизмах, уравнение движения электропривода получает
более сложный вид, так как Тк = / (a).
Кинетическая энергия, запасенная на валу кривошипа и выра-
женная в величинах, приведенных к валу двигателя, равна:
А = Тш2/2,
где J — приведенный к валу двигателя суммарный момент инерции^
зависящий от угла ф поворота вала двигателя; <в — угловая скорость
двигателя.
Динамическая мощность при этом равна:
dt - Л dt + 2 dtp dt' { ’
Так как со = dtp/dl, то
+ (2.29)
41
Бели учесть, что динамический момент Л4ДИН = P№n!'J>, то урав-
нение движения для рассматриваемого случая примет вид:
, dco , и2 dJ /п ...
М — Mz — J ~г- + —- 7-. (2.30)
с dt 1 2 dtp v ’
Сравнивая уравнения (2.23) С (2.30), видим, что последнее носит
более общий характер (имеет дополнительное слагаемое в правой
части),
2.5. Время ускорения и замедления
привода. Определение
наивыгоднейшего передаточного
отношения
Время переходных режимов привода: пуска,
торможения, перехода от одной скорости к другой влияет
на производительность механизма. Определение времени
переходных процессов основано на интегрировании уравне-
ния движения привода (2.23). Разделяя переменные, полу-
чаем:
dt = Jdu>/(M-MJ. (2.31)
Время, необходимое для изменения скорости привода
от юх до ®2,
/1,2 = У Jda/(M-MJ. (2.32)
Для решения этого интеграла необходимо знать зави-
симости моментов двигателя и механизма от скорости.
В простейшем случае, приняв М — const, — const
и J = const, получим:
(12 = ДЙ2-И1)/(М-Ли (2.33)
Этим уравнением можно воспользоваться, например,
для расчета времени пуска привода. Если значение момента
двигателя во время пуска обозначить через Л4П, как это
показано на рис. 2.10, то получим следующее выражение
для времени пуска от состояния покоя до конечной ско-
рости соном, соответствующей заданному моменту сопро-
тивления:
/п = /0)ном/«-<). (2.34)
Если требуется точно учесть время переходного про-
цесса и момент двигателя не может быть принят постоян-
ным, например при пуске двигателя с короткозамкнутым
42
ротором, необходимо пользоваться (2.32). При этом
следует иметь в виду, что момент инерции для большинства
приводов имеет постоянное значение, а момент двигателя
и момент сопротивления в переходных режимах обычно
не остаются постоянными.
Из (2.32) видно, что теоретически полное время пере-
ходного процесса равно бесконечности. Действительно,
поскольку переходный процесс заканчивается при наступле-
нии равенства моментов (Л4 = Л4С), то величина, стоящая
под знаком интеграла, стремится к бесконечности. В прак-
считают, что процесс разбега
тических расчетах обычно
Рис. 2.10. Пусковой график при-
вода,
Рис. 2.11, График торможения
привода.
заканчивается при скорости, равной не со2, а приблизи-
тельно со = 0,95со2, тогда время разбега получит конечное
значение.
В тех случаях, когда динамический момент имеет отри-
цательное значение, привод замедляется. Как указывалось
выше, для такого случая уравнение моментов будет иметь
вид:
Очевидно, привод замедляется и в том случае, когда
двигатель развивает положительный момент по абсолют-
ному значению, меньший момента сопротивления.
Из последнего уравнения следует, что в.ремя торможения
©2 ©X
j’ J da f J da
-(Л4+ЛК) “ J A4 + Mc-
©I CO 2
(2.35)
43
Полагая в частном случае J — const, М — const и
Mz — const, получаем:
= (2.36)
Пользуясь уравнением (2.36), можно рассчитать время
торможения (®2 = 0) для графика момента, показанного
на рис. 2.11.
Если момент двигателя и момент статический находятся
в сложной зависимости от скорости, уравнение движения
аналитически не решается. В этом случае приходится
пользоваться приближенными графическими или графо-
аналитическими методами решения.
В ряде практических случаев (например, в следящих
системах, приводах вспомогательных механизмов прокат-
ных станов, продольно-строгальных станках и т. п.) воз-
никает необходимость в получении минимального времени
разгона и торможения производственного механизма с целью
повышения его производительности. При заданных зна-
чениях моментов инерции ротора двигателя 7Д, произ-
водственного механизма Jc и момента сопротивления Mz
уравнение движения привода относительно рабочего вала
механизма (пренебрегая потерями в передачах) может быть
записано так:
ш-Я = (Л + ад^, (2.37)
где k — коэффициент, учитывающий момент инерции пере-
дач.
Очевидно, минимум времени разгона имеет место при
наибольшем ускорении. Из (2.37)
dajdt — (iM — + kJ
Пользуясь правилом определения максимума dajdt
и полагая Л4С = const, а также М = const (средним за
период переходного режима), находим оптимальное (или
наивыгоднейшее) передаточное отношение г:
гопт = М (2-38)
В том случае, когда момент сопротивления оказывается
значительно меньшим момента двигателя при пуске и
торможении,
Ё>ПТ J jkJ Д-
(2.39)
44
2.6= Графическое и графо-аналитическое
решение уравнения движения привода
Если невозможно аналитически решить урав-
нение движения электропривода (2.23), то его решают,
например, так называемым методом пропорций или мето-
дом конечных приращений. Сущность этого метода заклю-
чается в замене бесконечно малых приращений скорости do
и времени dt малыми конечными приращениями А® и АЛ
При этом предполагается, что в уравнение движения элек-
тропривода подставляются средние значения момента дви-
гателя и момента сопротивления для каждого интервала
изменения скорости. Эти средние значения моментов обычно
находятся графическим путем на основании механических
характеристик двигателя и производственного механизма.
Рассмотрим применение метода пропорций
на примере привода вентилятора от асинхронного двига-
теля с короткозамкнутым ротором. Метод пропорций осно-
ван, как указывалось выше, на следующей записи урав-
нения движения электропривода:
М — Л4С = J
Считая, что в некотором интервале времени At раз-
ность моментов М — Мс остается величиной постоянной,
получаем пропорцию
(M-Mc)/J = Aco/At. (2.40)
На рис. 2.12 показан ход графического построения
кривой скорости со = f (t), выполненного на основании
пропорции (2.40), й нахождения времени пуска двигателя,
Построение ведется следующим образом. В левом ква-
дранте строятся характеристики М — f (®) и Л4С = /у (®).
Графически . находится их разность М — Л4С = ф (со) —
кривая динамического момента, изображаемая в том же
квадранте. Последнюю кривую заменяют ступенчатой
с участками М — Л4С = const. От числа участков зависят
точность построений и конечные результаты. Точность
тем выше, чем на большее число участков разбита кривая
Л1 — Л4С = ф (со).
Полученные на отдельных участках значения динами-
ческих моментов откладывают вверх на оси ординат. Так,
для первого участка получаем отрезок ОВ, для второго ОВг
и т. д. Отмеченные на оси ординат точки В, Вг, В2 и т. д.
соединяют прямыми с точкой А, находящейся от начала
45
координат на расстоянии, пропорциональном величине J.
Затем из начала координат проводят прямую ОС, парал-
лельную АВ. Последняя прямая характеризует искомую
функцию ® = f (0 для первого участка моментов. Это
следует из подобия треугольников АОВ и ODC.
Действительно, ОВ/ОА = CDIOD, но ОВ = Мг — Мс;
ОА = J; CD = Ао)1, следовательно, отрезок OD согласно
уравнению (2.40) соответствует времени пуска на первом
участке, т. е. OD = А^.
Проведя аналогичное построение для всех последующих
участков М — ЛГС, строим кривую скорости двигателя и
находим искомое время пуска привода.
Рис, 2.12. Применение метода пропорции для случая пуска привода
вентилятора от асинхронного двигателя с короткозамкнутым ротором,
При построении следует учитывать масштабы величин,
связанные между собой соотношением
mMlmj = malmt,
где тм — масштаб момента; m.j — масштаб момента инер-
ции J; та — масштаб скорости двигателя; — масштаб
времени.
Если задаться масштабами трех величин: момента,
скорости, времени, то из приведенного соотношения нахо-
дится масштаб четвертой величины — момента инерции J.
Подобный метод построения кривой скорости для опре-
деления времени пуска применим также для двигателей
постоянного тока, если механические характеристики не мо-
гут быть выражены аналитически. Этот метод расчета
46
может быть применен не только для пусковых, но и для
тормозных режимов.
Кроме метода пропорций, для построения кривой угло-
вой скорости со = f (t) и определения времени пуска дви-
гателя используется метод площадей, сводящийся
к графо-аналитическому интегрированию уравнения дви-
жения. Задаются механическими характеристиками дви-
гателя и производственного механизма. Затем эти две
характеристики совмещаются и, как в предыдущем слу-
чае, определяется кривая динамического момента Л4дан =*
М — < (рис. 2.13).
Рис. 2.13. К определению времени пуска привода вентилятора,
Кривая динамического момента делится на ряд участ-
ков, на каждом из которых момент предполагается постоян-
ным и равным среднему значению. Для каждого участка
будет справедливо следующее выражение:
At = J A®/(M-MC). (2.41)
При равенстве значений А со на всех участках общее
время пуска определится по формуле
t=2(At) = /А© 2 —7ИС), (2.42)
1 1
где т — число участков; А® = const — перепад угловой
скорости на каждом участке; М — Л4С — соответствующее
значение динамического момента (ЛД, АД ...) на каждом
из участков.
47
При расчете переходных режимов электроприводов
необходимо учитывать хараюеристики не только произ-
водственных механизмов, но и различных типов электро-
двигателей. Особенности характеристик различных двига-
телей оказывают существенное влияние на протекание
переходных режимов.
Изучение переходных режимов в электроприводах свя-
зано с необходимостью установления зависимостей ско-
рости, тока, момента, а иногда и пути от времени при
пуске, торможении и реверсировании электродвигателей.
ГЛАВА ТРЕТЬЯ
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОПРИВОДОВ
3.1. Механические характеристики
двигателя постоянного тока
независимого возбуждения
Обычная схема включения двигателя по-
стоянного тока независимого возбуждения представлена
на рис. 3.1. Якорь двигателя М и его обмотка возбуждения
ОВ обычно получают питание от разных, независимых
друг от друга источников (преобразователей) напряжения U
Рис. 3.1. Схема включения двига-
теля постоянного тока независи-
мого возбуждения.
и UB, что позволяет отдельно регулировать напряжение
на якоре двигателя и на обмотке возбуждения и выполнять
их на разное номинальное напряжение. Лишь при нали-
чии сети постоянного тока или при нерегулируемом пре-
образователе в якорной цепи обмотка возбуждения пита-
ется от- того же источника напряжения, что и якорь дви-
гателя. Но и в этом случае ток возбуждения /в не зависит
от тока / якоря двигателя.
48
Направления тока I и ЭДС вращения двигателя Е,
показанные на рис. 3.1, соответствуют двигательному
режиму работы, когда электрическая энергия потребляется
двигателем из сети (от источника напряжения U) и пре-
образуется в механическую энергию, мощность которой
равна Р — Л4©. Зависимость же между М и со двигателя
определяется его механической характеристикой.
Аналитическое выражение механической характери-
стики двигателя может быть получено из уравнения равно-
весия напряжений, составленного для якорной цепи схемы
(рис. 3.1). При установившемся режиме работы двигателя
приложенное напряжение U, В, уравновешивается паде-
нием напряжения в якорной цепи IR и наведенной в якоре
ЭДС вращения Е, В, т. е.
U^IR + E-, (3.1)
здесь / — ток в якорной цепи двигателя, A; R — суммар-
ное сопротивление якорной цепи, Ом, включающее внеш-
нее сопротивление резистора Rp и внутреннее сопротивле-
ние якоря двигателя Ra (при наличии дополнительных
полюсов учитывается и их сопротивление);
Е = &Ф©,
(3-2)
где k — коэффициент, зависящий от конструктивных дан-
ных двигателя, k = pN/2па (р — число пар полюсов
двигателя; N — число активных проводников обмотки
якоря; а — число пар параллельных ветвей обмотки якоря);
Фи© — соответственно магнитный поток, Вб, и угловая
скорость двигателя, рад/с.
Если в (3.1) вместо Е подставим ее значение Е из (3.2),
то получим уравнение для скорости двигателя
© = (U - IR)!k®.
(3.3)
Уравнение (3.3) представляет собой зависимость ско-
рости двигателя от тока якоря. Такую зависимость © =
== f (/) называют электромеханической ха-
рактеристикойдвигателя.
Для получения уравнения механической характеристики
необходимо найти зависимость скорости от момента дви-
гателя. Это легко сделать, если учесть, что момент, Н-м,
развиваемый двигателем, связан с током якоря и магнит-
49
ным потоком простой зависимостью, а именно г:
М = &ФЛ (3.4)
Подставив в (3.3) значение тока I, найденное из (3.4),
получим выражение для механической харак-
теристики:
или
где
со = U/кФ - MR/ktfW,
со = U/c — MR/c1,
с = кФ.
(3-5)
(3.6)
(3-7)
Коэффициент с принимается постоянным, не зависящим
от нагрузки, если у двигателя с независимым возбужде-
нием имеется компенсационная обмотка. Он может счи-
таться неизменным, если для обычных двигателей прене-
бречь реакцией якоря.
Механическая характеристика двигателя при неизмен-
ных параметрах U, Ф и R представляется прямой линией.
Ниже показано, что, изменяя тот или иной параметр меха-
нической характеристики, можно при определенном моменте
сопротивления на валу двигателя получать различные
скорости двигателя, т. е. регулировать скорость электро-
привода.
Здесь же рассмотрим влияние лишь одного параметра,
а именно сопротивления якорной цепи, поскольку это
необходимо для выяснения основных определений, связан-
ных с понятием о механической характеристике для раз-
личных режимов работы двигателя.
На рис. 3.2 представлены механические характери-
стики двигателя независимого возбуждения для различных
сопротивлений якорной цепи. Как видно из (3.5), при
М = 0 все характеристики проходят через одну точку,
лежащую на оси ординат. Угловая скорость в этой точке
имеет вполне определенное значение, не зависящее от со-
противления якорной цепи. Эта скорость носит название
1 Приведенным уравнением определяется электромагнитный мо-
мент двигателя. Момент на валу двигателя будет меньше электромагнит-
ного момента на значение, соответствующее потерям в стали и механи-
ческим потерям. Однако для практических расчетов можно пользо-
ваться, уравнениями механических характеристик, где приводится
электромагнитный момент,
50
скорости идеального холостого хода «о
и определяется выражением
«о = U/кФ. (3.8)
При скорости идеального холостого хода, когда ток
в якорной цепи равен нулю, ЭДС якоря, направленная
навстречу приложенному напряжению, равна ему по абсо-
лютному значению. Если двигатель до приложения на-
грузки работал с угловой скоростью со0, то при появлении
на его валу момента сопротивления угловая скорость
будет снижаться. Следствием этого будет уменьшение ЭДО
вращения Е согласно (3.2) и увеличение тока якоря в соот-
ветствии с (3.1) и момента двигателя по (3.4). Угловая
Рис. 3.2. Естественная характери-
стика и семейство реостатных ме-
ханических характеристик двига-
теля постоянного тока независи-
мого возбуждения.
скорость будет снижаться до тех пор, пока момент двига-
теля не сравняется с моментом сопротивления. Разность
значений установившихся скоростей электропривода до
и после приложения заданной статической нагрузки назы-
вается статическим падением (перепадом)
скорости электропривода.
Второй член (3.6) характеризует собой статическое
падение угловой скорости (перепад) относительно угловой
скорости идеального холостого хода:
Ао) = Л'1/?//г2ф2. (3.9)
Таким образом, уравнение для скорости двигателя
может быть записано так:
со = Wo — Ао). (3.10)
Верхняя характеристика из семейства, приведенного
На рис. 3.2, носит название естественной. Естестве н-
51
ной характеристикой называется та-
кая характеристика двигателя, кото-
рая получается при отсутствии внеш-
них резисторов в якорной цепи и но-
минальных значениях напряжения и
магнитного потока двигателя. Жесткость
естественной характеристики зависит от внутреннего со-
противления якорной цепи двигателя 7?я. Внутреннее
сопротивление якорной цепи включает собственное сопро-
тивление якорной обмотки, сопротивление обмотки допол-
нительных полюсов, компенсационной обмотки и щеток.
Соответственно перепад скорости для естественной харак-
теристики
Л(0=ЖяЛ2ФвОМ-
По (3.9) определяется статическое падение скорости
для любой из характеристик двигателя независимого воз-
буждения, представленных на рис. 3.2. Например, при
дополнительно включенном реостате, имеющем сопротив-
ление /?Р, статическое падение скорости определится из
соотношения
Д(о = Л1(/?я + Яр)/^Ф2. (З.И)
Разделив (3.10) на соо, получим статическое падение
скорости в относительных единицах:
Д<о* = Дю/СОо = («о — <о)/соо-
Статическое падение скорости в относительных едини-
цах Дсо* аналогично скольжению асинхронного двигателя,
хотя скольжение для двигателей постоянного тока не имеет
того физического смысла, как у асинхронных двигате-
лей.
Если в якорную цепь двигателя включен дополнитель-
ный резистор (реостат), то механические характеристики,
получаемые при этом, называются искусственными
или реостатными. Эти характеристики пересекаются
все в одной точке <о0. Реостатные характеристики так же ли-
нейны, как и естественная характеристика, но имеют зна-
чительно больший наклон к оси моментов, т. е. обладают
меньшей жесткостью. Чем больше введенное в цепь якоря
сопротивление резистора, тем круче идет характеристика,
тем меньше ее жесткость.
52
3.2. Построение механических
характеристик двигателя независимого
возбуждения
Для построения механической характеристики
двигателя независимого возбуждения, естественной или
реостатной, достаточно знать лишь две ее точки, поскольку
все механические характеристики теоретически представ-
ляют собой прямые линии (рис. 3.2). Эти две точки для
каждой характеристики могут быть любыми, однако постро-
ение естественной механической характеристики удобно
производить по точкам, одна из которых соответствует но-
минальному электромагнитному моменту двигателя и номи-
нальной скорости (М = 7ИНОМ и со = (оном), а другая — ско-
рости идеального холостого хода (М = 0 и со = а>0)- Но-
минальная скорость двигателя определяется по паспортным
данным. Номинальный электромагнитный момент вычисля-
ется по формуле
^14 ном ^Мом^ном*
Скорость идеального холостого хода для естественной
характеристики может быть получена из (3.8), если числи-
тель и знаменатель ее умножить на «>ном и учесть, что
^НОМ ^®НОМ®НОМ И[10м - ' /цомДя»
тогда
^иом®ном/(^ном /цом^я)* (3.12)
Так как в каталогах внутреннее сопротивление якоря Дя
обычно не указывается, то его ориентировочно определяют,
принимая, что половина всех потерь в двигателе при номи-
нальной нагрузке связана с потерями в меди якоря. Поэ-
тому /*ом#я 0,5 (1 — т]Ном)Люм^ном- Отсюда
. Rs^0,5(\-nHmt)UaoJIKO№. (3.13)
Пользуясь естественной механической характеристикой,
легко построить и реостатную характеристику при любом со-
противлении реостата RP. Она также строится по двум
точкам: угловой скорости идеального холостого хода
ю = (о0 (при М = 0) и угловой скорости, соответствующей
номинальному моменту при заданном сопротивлении ре-
зистора Rp, т. е. со = ®иом,р (при Л4 = Л4НОМ). Угловая ско-
рость соНОМ1Р определяется по формуле
®ном,р Wo [1 Iном (4?я 4“ ^?р)/^ном]' (3- 14)
53
Механическая характеристика может быть построена
также по точке идеального холостого хода и точке, соответ-
ствующей режиму короткого замыкания х, где М = Л4К,3,
аскоростьсо = 0. Угловую скорость w0 определяем по (3.12),
а момент МКя3, пренебрегая реакцией якоря, — по формуле
<,з = Л1ном/к,з//Ном, (3-15)
гДе /к,з = U/R — ток короткого замыкания.
Сопротивление якорной цепи R = R., + Rp может быть
различным в зависимости от сопротивления внешнего ре-
зистора. В соответствии с этим будут различными для раз-
ных реостатных характеристик и токи короткого замыкания
/к,3 и моменты короткого замыкания Л4К,3.
Для естественной механической характеристики значе-
ние момента короткого замыкания Л-1К,3 является наиболь-
шим, так как при этом ток короткого замыкания ограничи-
вается лишь внутренним сопротивлением обмоток якоря дви-
гателя.
С учетом сказанного уравнение механической характе-
ристики представляется в следующем виде:
и = й9 (1 — М/Л4К,3). (3.16)
Согласно (3.16) при М = 0 скорость о> = ®0. Если
в (3.16) положить М = Л4К13, то скорость со = 0. Это будут
(при различных реостатных характеристиках) точки, лежа-
щие на оси абсцисс (рис. 3.2) и определяемые в конечном
счете сопротивлениями, ограничивающими ток и момент
короткого замыкания.
Так, если у нескольких двигателей механические харак-
теристики обладают одинаковой жесткостью, то указанные
характеристики, выраженные в относительных единицах,
будут для всех этих двигателей представлены одной и той
же прямой.
Уравнение характеристики двигателя независимого воз-
буждения в относительных единицах легко может быть по-
лучено из (3.3), если выразить его следующим образом:
со = со0(1 — 77?/Д). (3.17)
Разделив затем левую и правую части (3.17) на соо,
получим:
— i — IR/U', (3.18)
1 Режимом короткого замыкания двигателя называется такой ре-
жим его работы, при котором угловая скорость двигателя, подклю-
ченного к источнику напряжения, равна нулю,
54
после преобразований
<о* = 1-7*7?* (3.19)
или соответственно (при Ф = Фном = const)
со* = 1 -М*7?*, (3.20)
где со* = <л>/соо; 7* = М* = 7ИШ1К)М — соответ-
ственно угловая скорость, ток и момент двигателя в отно-
сительных единицах; R* = R/Ril0K — сопротивление в от-
носительных единицах; 7?ном = 77НОМ/7НОМ —- номинальное
сопротивление двигателя.
Номинальным сопротивлением двига-
теля постоянного тока называется такое сопротивление,
которое при неподвижном якоре и номинальном напряже-
нии ограничивает ток в якоре до номинального значения.
Рис. 3.3. Схема включения двига-
теля постоянного тока независи-
мого возбуждения при пуске.
В (3.19) и (3.20) второй член правой части представляет
собой перепад (статическое падение) угловой скорости, вы-
раженный в относительных единицах и равный:
Лео* = 7*7?* =М*/?*. (3.21)
Последнее равенство позволяет при известных условиях
значительно упростить расчет механических характеристик.
Действительно, если рассматривать точки механических
характеристик, отвечающие номинальному моменту, то для
них
7* = 1 и /И* = 1
и, следовательно, равенство (3.21) принимает вид:
Л(о*=7?*. (3.22)
Это означает, что при номинальном моменте относи-
тельный перепад угловой скорости двигателя численно ра-
вен относительному сопротивлению якорной цепи двига-
теля.
55
Произведем теперь в качестве примера построение меха-
нических характеристик двигателя независимого возбужде-
ния, схема включения которого представлена на рис. 3.3.
Процесс пуска двигателя состоит в том, что вначале замыка-
ется выключатель /С, затем через некоторые промежутки
времени по мере увеличения угловой скорости замыкаются
последовательно выключатели /С/, К2 и КЗ. Когда же все
контакты замкнутся и пусковой резистор окажется пол-
ностью зашунтированным, двигатель начнет работать с оп-
ределенной угловой скоростью на естественной механиче-
е-кой характеристике.
Рис. 3.4. Механические характери-
стики двигателя постоянного тока
независимого возбуждения в отно-
сительных единицах.
Естественная характеристика в относительных единицах
легко может быть построена, если принять согласно (3.20)
и (3.22)
со* = (Оо* = 1 и при Л4# = 1.
Координаты одной точки характеристики:
©* = 1, М* =0;
Другой
1 А®НОМ*, М % ™ 1 .
Проведенная через эти две точки прямая и будет естест-
венной механической характеристикой. Указанное построе-
ние произведено на рис. 3.4. Там же даны построение ре- |
остатных характеристик и графическое определение сопро- i
тивлений. я
Построение реостатных характеристик и расчет сопрстив-1
лений резисторов имеют значение при проектировании схем I
автоматизированного пуска двигателя. Для построения ре-1
56
остатних характеристик принято, что момент и ток двига-
теля при пуске изменяются в пределах от до и
от Iljjt до /2.s. Значение (Ц*) при номинальном потоке
двигателя обычно принимается по условиям коммутации
равным 2—2,5. Что касается значения Л12* (/2*), то его нуж-
но принять по крайней мере на 10—20 % больше момента
сопротивления механизма.
В соответствии с характеристикой 1—2 двигатель увели-
чивает угловую скорость до значения, определяемого поло-
жением точки 2, затем должна быть зашунтирована первая
ступень резистора (замыкается выключатель К1 схемы на
рис. 3.3.). Угловая скорость двигателя из-за инерционно-
сти электропривода не может измениться сразу, а момент,
если пренебречь индуктивностью якоря, возрастает мгно-
венно до значения Л41$, поэтому переход на новую характе-
ристику осуществляется по линии 2—3, параллельной оси
абсцисс.
Далее двигатель будет увеличивать угловую скорость
соответственно прямой 3—4 до точки 4, и когда замкнется
выключатель R2, произойдет переход на следующую ха-
рактеристику. После замыкания выключателя КЗ наступает
переход на естественную характеристику (6—7). Если при
пуске нагрузка на валу двигателя соответствует номиналь-
ному моменту, то двигатель по окончании пуска работает
на естественной характеристике со скоростью, соответствую-
щей ®иом#.
Согласно (3.22) вертикальные отрезки на линии, прове-
денной через точку М* — 1, соответствуют отдельным сту-
пеням сопротивления якорной цепи в относительных еди-
ницах (рис. 3.4). Ордината af в относительных единицах
равна номинальному сопротивлению, т. е. Дном* = 1. Орди-
наты ае, ad, ас, ab равны соответственно относительным со-
противлениям отдельных ступеней якорной цепи двигателя.
Если из указанных относительных величин вычесть отно-
сительное внутреннее сопротивление двигателя, отмеченное
отрезком ab, то получатся относительные сопротивления
отдельных ступеней реостата (соответствующие ординатам
be, bd и be). Отдельные секции реостата Rl, R2 и R3 (рис. 3.3)
имеют относительные сопротивления /?1#, /?2# и /?3#, соот-
ветствующие отрезкам de, cd и be (рис. 3.4).
Для перехода от сопротивлений, выраженных в относи-
тельных единицах, к значениям сопротивлений в омах,
производится соответствующий пересчет по равенству Rt =
Д<#Кном-
57
3.3. Механические характеристики
двигателя постоянного тока
независимого возбуждения
в тормозных режимах
Выше была рассмотрена работа двигателя не-
зависимого возбуждения в двигательном режиме, чему со-
ответствовали механические характеристики, представлен-
ные на рис. 3.2 и расположенные в первом квадранте коор-
динатных осей. Однако этим не исчерпываются возможные
режимы работы электродви-
гателя и его механические
характеристики.
Весьма часто в современ-
ных электроприводах необхо-.
димо быстро и точно остано-
вить механизм или изменить
направление его движения.
Быстрота и точность, с ка-
кой будут проделаны эти опе-
рации, во многих случаях
определяют производитель-
ность механизма, а иногда
и качество вырабатываемого
Рис. 3.5. Механические характери-
стики двигателя постоянного тока
независимого возбуждения при раз-
личных режимах, работы.
продукта, Вэ время торможения или перемены направле-
ния движения (реверса) электродвигатель работает в тор-
мозном режиме на одной из механических характеристик,
соответствующих осуществляемому способу торможения.
Графическое изображение механических характеристик
двигателя независимого возбуждения для разных режимов
работы представлено на рис. 3.5. Здесь, кроме участка
характеристик, соответствующих двигательному режиму
(квадрант /), показаны участки характеристик в квад-
рантах II и IV, характеризующие три возможных способа
генераторного электрического торможения, а именно:
1) торможение с отдачей энергии в сеть (рекуперативное);
2) динамическое торможение;
3) торможение противовключением.
58
Каждый тормозной режим является генераторным, так
как энергия поступает в машину с вала, преобразуется
в электрическую и либо отдается в сеть, либо затрачивается
на нагрев элементов якорной цепи, обладающих активным
сопротивлением, и рассеивается в окружающую среду.
Рассмотрим подробнее особенности механических ха-
рактеристик при указанных способах торможения.
1. Торможение с отдачей энергии в сеть (генератор-
ный режим работы параллельно с сетью) осуществляется
в том случае, когда скорость двигателя оказывается выше
скорости идеального холостого хода и его ЭДС Е больше
приложенного напряжения U. Двигатель здесь работает
в режиме генератора параллельно с сетью, которой он от-
дает электрическую энергию; ток при этом изменяет свое
направление. Последнее очевидно из равенства
/ = (U-E)/R = -(E— U)/R, (3.23)
следовательно, изменяет знак и момент двигателя, т. е. он
становится тормозным М = —кФ1. Если обозначить тор-
мозной момент через М, = —М, то уравнение (3.5) при
со > о)о примет следующий вид:
со = U/ЬФ + адМ2Ф2. (3.24)
Первый член в правой части уравнения показывает, что
механическая характеристика двигателя независимого воз-
буждения в этом генераторном режиме при М = 0 проходит
через точку, соответствующую угловой скорости идеального
холостого хода, как и в случае двигательного режима. На-
клон (жесткость) механической характеристики определя-
ется сомножителем второго члена уравнения 7?Д2Ф2, ко-
торый по абсолютному значению (при заданном сопротив-
лении 7?) остается неизменным. Следовательно, наклон ме-
ханической характеристики в рассматриваемом генератор-
ном режиме будет таким же, как и в двигательном. Поэ-
тому графически механические характеристики двигателя
в режиме торможения с отдачей энергии в сеть являются
продолжением характеристик двигательного режима в об-
ласть квадранта 11 (рис. 3.5). Этот способ торможения
возможен, например, в приводах транспортных и подъемных
механизмов при спуске груза и при некоторых способах ре-
гулирования скорости, когда двигатель, переходя к низ-
шим скоростям, проходит значения о> > ш0. Такое тормо-
жение является весьма экономичным, поскольку оно сопро-
вождается отдачей в сеть электрической энергии (за выче-
59
том потерь в двигателе), которую двигатель преобразует
из механической, поступающей к нему с вала. Но торможе-
ние этим способом может быть осуществлено в ограничен-
ных пределах, так как не во всех приводах возможно соб-
людение условия
со > ©о-
Необходимо отметить, что чем больше сопротивление
в якорной цепи двигателя, тем выше его угловая скорость
в генераторном режиме работы параллельно с сетью при том
же тормозном моменте (рис. 3.5).
2. Динамическое торможение происходит при отключе-
нии якоря двигателя от сети и замыкании его на резистор
(рис. 3.6), поэтому иногда его называют реостатным
торможением. Обмотка возбуж-
дения при этом должна оста-
ваться присоединенной к сети.
Режим динамического торможе-
ния также соответствует работе
машины в качестве генератора.
Однако этот режим отличается
Рис. 3.6. Схема включения двигателя
постоянного тока независимого возбуж-
дения при динамическом торможении,
от описанного выше торможения с отдачей энергии в сеть.
При динамическом торможении, так же как и в предыду-
щем случае, механическая энергия, поступающая с вала,
например, в виде кинетической энергии, запасенной в дви-
гателе и в движущихся элементах приводимого им меха-
низма, преобразуется в электрическую. Однако эта энер-
гия не отдается в сеть, а выделяется в виде теплоты
в сопротивлениях цепи якоря.
Вследствие того что ЭДС двигателя сохраняет при тор-,
можении такой же знак, как и в двигательном режиме, а на-
пряжение извне к якорю не прикладывается, ток якоря
определяется по формуле
/ = — E/R, (3.52)
где R— сопротивление якорной цепи.
Тормозной момент при динамическом торможении, если
пренебречь реакцией якоря, может быть выражен равенством
— Л1т = АФ/ = —А2Ф2(о//?, (3.26)
60
При Ф = const получим:
ю = /И,Ж2. (3.27)
При динамическом торможении механическая характери-
стика двигателя, как это видно из (3.27), представляет собой
прямую, проходящую через начало координат. Семейство
характеристик динамического торможения при различных
сопротивлениях 7? якорной цепи показано в квадранте 11
на рис. 3.5. Как видно из этого рисунка, жесткость характе-
ристик уменьшается с увеличением сопротивления якорной
цепи.
Динамическое торможение широко используется для
останова привода при отключениях его от сети (особенно
при реактивном характере момента), при спуске грузов
в подъемных механизмах. Оно достаточно экономично, хотя
и уступает в этом отношении торможению с отдачей энергии
в сеть.
3. Торможение противовключением (генераторный ре-
жим работы последовательно с сетью) осуществляется в том
случае, когда обмотки двигателя включены для одного на-
правления вращения, а якорь двигателя под воздействием
внешнего момента или сил инерции вращается в противо-
положную сторону. Это может происходить, например,
в приводе подъемника, когда двигатель включен на подъем,
а момент, развиваемый грузом, заставляет привод вра-
щаться в сторону спуска груза. Такой же режим получается
и при переключении обмотки якоря (или обмотки возбужде-
ния) двигателя для быстрой остановки или для изменения
направления вращения на противоположное.
Графическое изображение механической характери-
стики для торможения противовключением, когда имеет ме-
сто, например, так называемый тормозной спуск груза, при-
ведено на рис. 3.7. Как видно из этого рисунка, а также из
рис. 3.5, механическая характеристика при торможении
противовключением является продолжением характери-
стики двигательного режима в область квадранта IV. Пос-
леднее выгекает из уравнения механической характери-
стики двигателя, если полагать момент большим момента
короткого замыкания и положительным по знаку.
При включении обмоток двигателя для подъема двига-
тель может быть пущен в ход лишь тогда, когда момент
сопротивления груза Л1с1 будет меньше момента 7ИК?3
(рис. 3.7). В этом случае после включения двигателя в сеть
61
угловая скорость его увеличивается и достигает установив-
шегося значения (точка А).
При этом ток в якоре, как обычно в двигательном ре-
жиме, определяется по формуле
I = (U- E)/R.
С увеличением момента груза угловая скорость двига-
теля уменьшается соответственно характеристике АВ, и
если момент груза будет равен 7ИК,3, двигатель остановится.
В этом состоянии при со = О ЭДС двигателя равна нулю,
поэтому ток определяется равенством
/ = /к.3 = Д/Д.
Когда момент сопротивления при дальнейшем увеличе-
нии груза превысит момент двигателя в неподвижном
Рис. 3.7. Механическая харак-
теристика двигателя постоян-
ного тока независимого возбуж-
дения при торможении противо-
включением в случае тормозного
спуска.
состоянии, последний начнет вращаться в противоположном
направлении и груз станет опускаться. При моменте, рав-
ном ТИс2, будет достигнута установившаяся скорость спуска,
соответствующая точке С на приведенной характеристике.
Поскольку якорь теперь вращается в обратную сторону,
а направление магнитного потока не изменилось, ЭДС дви-
гателя изменит направление на обратное. Ток, определяемый
уравнением
I = (U+E)/R, .
будет больше, чем в двигательном режиме, и соответственно
момент, развиваемый двигателем при торможении проти-
вовключением, тоже возрастет.
В таблице на рис. 3.8 стрелками показаны направления
напряжения, ЭДС и падения напряжения, а также даны соот-
ношения для токов якоря в случае двигательного режима,
короткого замыкания и торможения противовключением
62
при одном и том же значении сопротивления якорвой цепи.
Для ограничения тока и момента при торможении проти-
вовключением приходится включать дополнительный рези-
стор.
Рассмотренное торможение противовключением при уста-
новившейся скорости используется, например, в подъемных
устройствах при спуске груза G (рис. 3.8). Как видно из
таблицы на рис. 3.8, при торможении противовключением
ЭДС двигателя направлена последовательно-согласно с на-
пряжением сети, т. е. двигатель работает в генераторном
режиме последовательно с сетью, получая механическую
Рис. 3.8. Иллюстрация возможных режимов работы двигателя при
подъеме и спуске груза.
энергию с вала и преобразуя ее в электрическую энергию.
Потребляется электрическая энергия и из сети. Вырабаты-
ваемая двигателем и потребляемая из сети энергия выделя-
ется в виде теплоты в сопротивлениях цепи якоря, поэтому
торможение противовключением не экономично, требует
больших затрат энергии.
Значительно чаще, чем за счет груза, торможение проти-
вовключением получают, изменяя полярность напряжения,
подводимого к якорю двигателя при его вращении. В этом
случае, так же как и в предыдущем (при спуске груза),
ЭДС направлена согласно с напряжением сети, а момент
двигателя направлен против вращения якоря. Как было
сказано выше, в режиме противовключения необходимо
включать дополнительный резистор в якорную цепь для
ограничения тока и момента. При этом механические харак-
теристики будут иметь большой наклон к оси абсцисс.
63
На рис. 3.9 представлены механические характеристики
при торможении противовключением. Здесь при изменении
полярности напряжения, подводимого к якорю, двигатель,
работавший до этого со скоростью, соответствующей точке
А квадранта 7, переходит на работу по характеристике ВС
(индуктивностью якорной цепи пренебрегаем) в точку В
квадранта II. Сохранение неизменной скорости в первый
момент переключения двигателя обусловливается механиче-
ской инерцией электропривода. Под влиянием тормозного
момента скорость двигателя уменьшается соответственно
характеристике ВС до нулевого значения. При скорости,
равной нулю (точка С, рис. 3.9), двигатель в случае тормо-
жения для останова, а не реверса, должен быть отключен от
Рис. 3.9. Механические характери-
стики двигателя постоянного тока
независимого возбуждения при тор-
можении противовключением.
сети. Если такого отключения не произойдет, скорость дви-
гателя начнет увеличиваться в обратном направлении
(характеристика CD квадранта 777). Вместе с изменением
направления вращения изменяет направление ЭДС якоря,
которая снова в двигательном режиме направлена встречно
напряжению сети. Теперь привод вновь работает в двига-
тельном режиме с постоянной угловой скоростью, будучи
переведенным на естественную характеристику при проти-
воположном направлении вращения (точка F характери-
стики FE).
Если еще раз изменить полярность напряжения на
выводах якоря, то двигатель вновь перейдет в режим про-
тивовключения. Торможение и последующее увеличение
угловой скорости двигателя в обратном направлении про-
исходят по характеристике GKL.
Изменение направления вращения двигателя может
быть осуществлено двояко. Чтобы получить режим проти-
вовключения, можно переключить либо обмотку якоря, либо
обмотку возбуждения. Однако переключение обмотки воз-
буждения практикуется реже, так как вследствие значи-
64
тельной ее индуктивности время торможения возрастает
по сравнению с временем торможения при переключении
обмотки якоря.
Электрическое торможение получило в настоящее время
широкое применение, особенно в часто пускаемых приводах.
Для обеспечения необходимого времени торможения и тре-
буемой точности остановки в практике чаще всего приме-
няется динамическое торможение или торможение проти-
вовключением. Для нереверсивных приводов чаще приме-
няют динамическое торможение, так как оно осуществля-
ется по более простой схеме. Для реверсивных приводов,
где торможение и пуск двигателя в обратном направлении
представляют собой единый процесс, целесообразно при-
менять торможение противовключением, которое дает вы-
игрыш во времени.
3.4. Механические характеристики
двигателя постоянного тока
последовательного возбуждения
Для электродвигателя последовательного
возбуждения, принципиальная схема включения которого
представлена на рис. 3.10, уравнение электромеханической
характеристики, так же как и для двигателя независимого
возбуждения, имеет вид:
со = (U - 1Я)/кФ,
где R — суммарное сопротивление якорной цепи, состоящее
из сопротивления обмотки якоря, обмотки возбуждения и
сопротивления внешнего резистора г.
В отличие от двигателя независимого возбуждения
здесь магнитный поток Ф является функцией тока якоря /.
Эта зависимость, приведенная на рис. 3.11, носит название
кривой намагничивания. Так как нет точного аналитиче-
ского выражения для кривой намагничивания, то трудно
дать и точное аналитическое выражение для механической
характеристики двигателя последовательного возбужде-
ния.
Если для упрощения анализа предположить, пренебре-
гая насыщением магнитной системы, линейную зависимость
между потоком и током якоря, как это показано пунктиром
1 При наличии дополнительных полюсов учитывается и их сопро-
тивление.
3 Чиликин М. Г„ Сандлер А. С.
65
на рис. 3.11, т. е. считать Ф = al, то момент двигателя
М — кФ1 — ак12. (3.28)
Подставив в равенство для угловой скорости двигателя
значение тока из (3.28), получим выражение для механиче-
ской характеристики:
со = —У-----------В. (3.29)
aky M/ak ak уМ
Отсюда следует, что при ненасыщенной магнитной
цепи двигателя механическая характеристика изображается
кривой (рис. 3.12), для которой ось ординат является
асимптотой. Особенностью механической характеристики
Рис. 3.10, Схема включения
двигателя постоянного тока
последовательного возбужде-
ния.
Рис. 3.11, Кривая намагничи-
вания двигателя постоянного
тока последовательного возбуж^
дения.
двигателя последовательного возбуждения является ее
большая крутизна в области малых значений момента.
Значительное увеличение угловой скорости при малых
нагрузках обусловливается соответствующим уменьшением
магнитного потока.
Уравнение (3.29) дает лишь общее представление о меха-
нической характеристике двигателя последовательного воз-
буждения. При расчетах этим уравнением пользоваться
нельзя, так как машин с ненасыщенной магнитной системой
обычно в современной практике не строят. Вследствие того,
что действительные механические характеристики сильно
отличаются от кривой, выраженной уравнением (3.29),
построение характеристик приходится вести графо-аналити-
ческими способами. Обычно построение искусственных
характеристик производится на основании данных катало-
гов, где приводятся естественные характеристики: п =з
= f (/) и М = ф (/).
66
Для серии двигателей определенного типа эти характе-
ристики могут быть даны в относительных единицах: со* =*
= f (/*) и М* = ip (/*). Такие характеристики, называе-
мые универсальными, представлены на рис. 3.13.
Отметим, что в каталогах дается зависимость момента
на валу двигателя от тока. При построении механических
характеристик принимается зависимость угловой скорости
от электромагнитного момента. Это практически допустимо
Рис. 3.12. Естественная механи-
ческая характеристика двига-
теля постоянного тока после-
довательного возбуждения.
Рис. 3.13, Зависимость момента и
угловой скорости от тока якоря
двигателя постоянного тока после»
довательного возбуждения (в отно-
сительных единицах).
ввиду небольшой разницы между электромагнитным момен-
том и моментом на валу.
Для построения искусственных (реостатных) характери-
стик можно воспользоваться следующим методом.
Уравнение естественной характеристики
сое = ((/-70Ж
где Яя = RB + RB,
или
_ и / IR,\
йФ V и г
(3.30)
В случае включения в якорную цепь дополнительногр
резистора 7?р двигатель будет работать на реостатной ха-
рактеристике, для которой
U Г /(Яд+Яр)1
U J
(3.81)
3*
67
При делении (3.31) на (3.30) получим:
отсюда
<о/<ое = [(/ — / (/?д + /?р)]/((/ - 7/?д),
6/-/(Рд + Рр)
ю —<ое u-lRx
(3.32)
или в относительных единицах
1 — 1 ^R*
1 / * А?л*
(3.33)
здесь R* = (7?д + /?р)//?НОм — суммарное сопротивление
якорной цепи в относительных единицах;
Т~ ^д/^ном- ®/®ном> ^е/^ном I* ^/^ном*
Порядок построения реостатной характеристики сво-
дится к тому, что, задаваясь некоторыми произвольными
Рис. 3.14. Естественная и рео-
статная электромеханические
характеристики двигателя по-
стоянного тока последователь-
ного возбуждения (в относи-
тельных единицах).
Рис. 3.15. Естественная и рео-
статные механические характе-
ристики двигателя постоянного
тока последовательного возбуж-
дения (в относительных едини-
цах).
значениями тока 7а^, по имеющейся естественной характе-
ристике находят <ое1*. Затем по (3.33) при определенном
— -^1* (для которого строится реостатная характери-
стика) и том же определяют искомое значение <ои.
Таким же образом для других значений I* определяют
искомые значения скорости <о2*> “з* и т. д. На рис. 3.14
показаны естественная характеристика двигателя последо-
вательного возбуждения R^ и реостатная Rljt., построен-
ные по указанному методу.
68
Пользуясь кривой со* = f (/*) (см. рис. 3.13) и электро-
механическими характеристиками, легко построить кри-
вые (о* = / (Л4*), т. е. механические характеристики дви-
гателя.
На рис. 3.15 приведены естественная и реостатные
механические характеристики двигателя после-
довательного возбуждения, построенные в относительных
единицах. С увеличением сопротивления скорость двига-
теля при том же моменте уменьшается и характеристика
смещается вниз. Жесткость характеристики уменьшается
с ростом дополнительного сопротивления в якорной цепи. -
Рис. 3.16. Графическое построение ступеней пускового резистора дви-
гателей постоянного тока последовательного возбуждения.
Особенностью механических характеристик рассматривае-
мого двигателя является невозможность получения режима
идеального холостого хода.
При нагрузке ниже 15—20 % номинальной работа дви-
гателя практически недопустима из-за чрезмерного увели-
чения скорости якоря.
Расчет сопротивлений резисторов для пуска двигателей
последовательного возбуждения может быть произведен
следующим графо-аналитическим методом, не требующим
построения самих реостатных характеристик двигателя.
Воспользуемся естественной характеристикой двигателя
to = f (/) и, отметив на ней точки допустимых токов при пе-
реключении с одной ступени резистора на другую и /а
(рис. 3.16), проведем через эти точки пунктиром две парал-
лельные линии до пересечения с вертикалью Af в точках
/ и е. Вертикаль Af расположена влево от начала координат
69
на расстоянии ОА, соответствующем внутреннему сопротив-
лению двигателя. Откладываем в том же масштабе отрезки
Оа = Ri = и/Ц и Og = Т?2 = U/Ц. Соединяя точки а и е,
а также g и f, получаем две прямые, характеризующие ли-
нейную зависимость между скоростью двигателя и сопро-
тивлением его якорной цепи при неизменном токе якоря.
Последнее вытекает из выражения
(о = (U - IR)/k<b = A—BR.
Для определения числа пусковых ступеней и их сопро-
тивлений поступают следующим образом. Проводят верти-
каль через точку а до пересечения с gf в точке Ь. Затем через
точку b проводят линию, параллельную оси абсцисс, до
точки с на линии ае. Аналогично проводятся линии cd и de.
Построение считается удачным, если последняя горизонталь
проходит через точку е. Если этого не произойдет, то постро-
ение следует повторить, изменив наклон одной из прямых
ае или gf за счет выбора новых значений Д и /2 (чаще изме-
няют только /2).
На рис. 3.16 дано построение с числом ступеней рео-
стата, равным двум. Из построения ясно, что отрезок Ьс
соответствует сопротивлению первой ступени реостата,
a de — второй. В момент пуска (при <о = 0) ток в якоре бу-
дет равен а сопротивление всей якорной цепи =
= U/R. При разгоне двигателя до скорости ток умень-
шается, а сопротивление якорной цепи не изменяется.
В точке b сопротивление то же, но ток равен /2. Затем при
и = о»! происходит шунтирование первой ступени, общее
сопротивление якорной цепи становится соответствующим
отрезку cclt а ток вновь достигает значения R и т. д., пока
двигатель не начнет работать на естественной характери-
стике.
3.5. Механические характеристики
двигателя постоянного тока
последовательного возбуждения
в тормозных режимах
Для двигателя последовательного возбужде-
ния возможны два тормозных режима: торможение проти-
вовключением и динамическое торможение. Торможение
с отдачей энергии в сеть для этих двигателей осуществить
невозможно, так как их ЭДС не может быть больше прило-
женного напряжения сети.
70 .
При торможении противовключением в цепь
якоря двигателя вводится дополнительный резистор для
ограничения тока.
Механические характеристики для этого торможения
являются продолжением характеристик двигательного ре-
жима в область отрицательной угловой скорости. Это иллю-
стрируется характеристиками, которые проходят в квад-
рантах I м IV (рис. 3.17).
Торможение противовключением возможно, если дви-
жущий момент нагрузки становится больше момента корот-
кого замыкания МК:3 двигателя. Нагрузка двигателя при
Рис. 3.17. Механические харак-
теристики двигателя постоянно-
го тока последовательного воз-
буждения при различных режи-
мах работы.
Рис. 3.18. Механические харак-
теристики двигателя постоянно-
го тока последовательного воз-
буждения при торможении про-
тивовключением.
противовключении должна быть ограничена допустимым
током в якорной цепи.
Так же как и для двигателя параллельного возбужде-
ния, здесь возможно торможение противовключением при
изменении полярности напряжения, подводимого к якорю.
В этом случае следует, изменив направление тока якоря,
оставить без изменения направление тока в обмотке воз-
буждения.
Механические характеристики при перемене полярности
напряжения на якоре представлены на рис. 3.18 построен-
ными по тому же принципу, что и на рис. 3.9.
Динамическое торможение двигателя по-
следовательного возбуждения может быть осуществлено
двумя способами: с самовозбуждением и с независимым
возбуждением.
71
При торможении с самовозбуждением'(рис. 3.19) якорь
и обмотка возбуждения двигателя отключаются от сети и
замыкаются на резистор.
Следует отметить, что при переводе машины из двигатель-
ного режима в режим динамического торможения с самовоз-
буждением необходимо во избежание размагничивания ма-
шины переключить обмотку возбуждения или якоря таким
образом, чтобы направление тока в обмотке возбуждения не
изменялось. В этом случае машина самовозбуждается при
данном сопротивлении цепи якоря лишь при определенных
значениях скорости; возбудившись, она создает тормозной
момент. Практически тормозной момент возникает и при ско-
ростях, близких к нулю, вследствие наличия остаточного
Рис. 3.20. Схема включения дви-
Рис. 3.19. Схема включения дви-
гателя постоянного тока после-
довательного возбуждения при
динамическом торможении с са-
мовозбуждением.
гателя постоянного тока после-
довательного возбуждения при
динамическом торможении с не-
зависимым возбуждением.
магнетизма, но при низких скоростях тормозной момент
весьма мал. Механические характеристики машины для
этого случая приведены в квадранте II на рис. 3.17.
При этом способе торможения может вначале происхо-
дить интенсивное самовозбуждение, которое приводит к зна-
чительному скачку тормозного момента. Последний при
сравнительно больших маховых массах механизма может
вызвать нежелательные удары в механизме. Поэтому чаще
применяется динамическое торможение с независимым воз-
буждением двигателя последовательного возбуждения по
схеме, представленной на рис. 3.20. Обмотка возбуждения
в этом случае подключается к сети через резистор, ограни-
чивающий ток до номинального значения. Поскольку дви-
гатель работает как генератор с независимым возбуждением,
его характеристики подобны характеристикам машины не-
зависимого возбуждения при динамическом торможении,
которые были приведены на рис. 3.15. Эти характеристики
72
линейны и все пересекаются в начале координат, обладая
большей жесткостью при меньших сопротивлениях.
Иногда для двигателей малой мощности' отказываются
от включения последовательной обмотки по схеме рис. 3.20
и осуществляют поддержание потока при динамическом тор-
можении короткозамкнутыми медными кольцами на полю-
сах. Такие схемы с целью экономии аппаратов были выпол-
нены, например, для двигателей мощностью 0,52 кВт в си-
стеме управления загрузкой доменной печи.
3.6. Механические характеристики
двигателя постоянного тока
смешанного возбуждения
Двигатель смешанного возбуждения (рис. 3.21) имеет
две обмотки возбуждения: независимую ОВ2 и последовательную ОВ1,
поэтому его механические характеристики занимгют промежуточное
положение между соответствующими характеристиками двигателей
независимого и последовательного возбуждения. Механическая ха-
рактеристика рассматриваемого двигателя вследствие изменения маг-
нитного потока при изменении нагрузки не имеет аналитического
Рис. 3.21. Принципиальная схе-
ма включения двигателя посто-
янного тока смешанного воз-
буждения.
Рис. 3.22. Зависимость момен-
та М* и угловой скорости со*
от тока якоря /* для двига-
теля постоянного тока смешан-
ного возбуждения (в относитель-
ных единицах).
выражения, поэтому при расчетах обычно пользуются естественными
универсальными характеристиками момента и скорости от тока якоря,
которые даются в каталогах. Такие характеристики в относительных
единицах представлены на рис. 3.22.
В отличие от двигателя последовательного возбуждения двига-
тель смешанного возбуждения имеет конечное значение скорости иде-
ально холостого хода. Эта скорость определяется только магнитным
потоком, созданным МДС независимой обмотки, и равна:
Wq — и/кФц,
73
где Фо — магнитный поток, созданный током возбуждения независи-
мой обмотки.
Соотношения МДС независимой и последовательной обмоток раз-
личны для двигателей разных серий. Наиболее употребительным явля-
ется соотношение, которое при номинальном токе дает равенство МДС
обеих обмоток возбуждения. Скорость двигателя смешанного возбуж-
дения при малых нагрузках изменяется значительно, а затем при уве-
личении нагрузки медленно уменьшается почти по прямой, как у дви-
гателя независимого возбуждения. Происходит это вследствие того,
что при больших нагрузках насту-
пает насыщение машины, и хотя
МДС последовательной обмотки
возрастает, магнитный поток уже
почти не изменяется.
Для расчета реостатных ха-
рактеристик может быть применен
Рис. 3.23. Механические характе-
ристики двигателя постоянного
тока смешанного возбуждения для
различных режимов работы,
рассмотренный-выше метод построения характеристик двигателя по-
следовательного возбуждения.
Двигатель смешанного возбуждения допускает три способа элек-
трического торможения: 1) с отдачей энергии в сеть, 2) динамическое
и 3) противовключением.
При торможении с отдачей энергии в сеть ток в якоре и в после-
довательной обмотке изменяет направление и может размагнитить
машину. Чтобы избежать размагничивающего действия, обычно при
переходе через угловую скорость соо последовательную обмотку шун-
тируют, и поэтому механические характеристики в квадранте //
(рйс. 3.23) имеют вид прямых. Такой же вид имеют и характеристики
динамического торможения вследствие того, что оно осуществляется
обычно при включении только независимой обмотки, когда магнитный
поток практически постоянен. Характеристики при торможении про-
тивовключением нелинейны вследствие влияния изменяющейся МДС
последовательной обмотки возбуждения при изменяющейся на-
грузке.
3.7. Механические характеристики
асинхронного двигателя
Асинхронные двигатели получили в промыш-
ленности весьма широкое применение благодаря ряду су-
щественных преимуществ по сравнению с другими типами
двигателей. Асинхронный двигатель прост и надежен
в эксплуатации, так как не имеет коллектора; асинхрон-
ные двигатели дешевле и значительно легче двигателей по-
стоянного тока.
74
Для вывода уравнения механической характеристики
асинхронного двигателя можно воспользоваться упрощен*
ной схемой замещения, приведенной на рис. 3.24, где при*
няты следующие обозначения:
— первичное фазное напряжение; /х — фазный ток
статора; Д — приведенный ток ротора; Xj и Х'> — первич-
ное и вторичное приведенные реактивные сопротивления
рассеяния; 7?0 и Хо — активное и реактивное сопротивле*
ния контура намагничивания; s = (<о0 — <о)/®о — скольже*
ние двигателя; ю0 — 2лпо/6О — синхронная угловая ско*
рость двигателя; ю0 = 2nfiJp‘, и 7?г — первичное и вто-
ричное приведенные активные сопротивления; — частота
сети; р — число пар полюсов.
Рис. 3.24. Упрощенная схема заме-
щения асинхронного двигателя.
В соответствии с приведенной схемой замещения можно
получить выражение для вторичного тока
г' —___________________ (3 34)
2 /(Ri+R27s)2+(^+^D2’
Момент асинхронного двигателя может быть определен
из выражения потерь Л4<о0з = 3 (Д)2/?^ откуда
М = 3(Д)27?2/(о0з. (3.35)
Подставляя значение тока Д в (3.35), получаем:
М ~ M(Ri + ^/s)2 + (*i+*2)21s' (3,36)
Кривая момента Л4 = f (s) имеет два максимума: один —•
в генераторном режиме, другой — в двигательном х.
Приравнивая dMlds — 0, определяем значение критиче-
ского скольжения sK, при котором двигатель развивает
максимальный (критический) момент
s--±>raw (3-37>
1 При значительных сопротивлениях роторной цепи максимум
момента может оказаться в режиме торможения противовключением.
75
Подставляя значение sK в (3.36), находим выражение
для максимального момента
Мк =-----f---- =.Ф. (3.38)
2coo[R1±/R( + (X1 + X)2]
Знак «+» в равенствах (3.37) и (3.38) относится к дви-
гательному режиму (или торможению противовключением),
знак «—» — к генераторному режиму работы параллельно
с сетью (при со > <оо).
Если выражение (3.36) разделить на (3.38) и про-
извести соответствующие преобразования, то можно по-
лучить:
М Режим
Дёига- торможения
тельный, протибо-
режим включением
Рис. 3.25. Механические характе-
ристики асинхронного двигателя.
М = . 2^(]±£skL (3.39)
s/sK+sK/s + 2asK’ ' '
где Л4К — максимальный
момент двигателя; sK —
критическое скольжение,
соответствующее макси-
мальному моменту; а =
= RRRz-
Здесь следует подчерк-
нуть весьма важное для
практики обстоятельство —
влияние изменения напря-
жения сети на механичес-
кие характеристики асин-
хронного двигателя. Как видно из (3.36),- при данном
скольжении момент двигателя пропорционален квадрату
напряжения, поэтому двигатель этого типа чувствителен
к колебаниям напряжения сети.
Критическое скольжение и угловая скорость идеального
холостого хода не зависят от напряжения.
На рис. 3.25 приведена механическая характеристика
асинхронного двигателя. Ее характерные точки:
1) s = 0; М = 0, при этом скорость двигателя равна
синхронной;
2) s = sH0M; М — Л4Н0М, что соответствует номинальной
скорости и номинальному моменту;
3) s = sK; /И = Л4К>Д — максимальный момент в двига-
тельном режиме;
.. , „ ,, ,. 2Л1К (1 +asK) s„
4) s = 1,0; М=Ма=- rv ' —начальный пуско-
1 TSK V +za)
вой момент;
76
5) s = —sK; M — —Л4К.Г — максимальный момент в' ге-
нераторном режиме работы параллельно с сетью.
При s> 1,0 двигатель работает в режиме торможения
противовключением, при s <; 0 имеет место генераторный
режим работы параллельно с сетью.
Необходимо подчеркнуть, что абсолютные значения sK
в двигательном и генераторном параллельно с сетью режи-
мах одинаковы.
Однако из (3.39) следует, что максимальные моменты
в двигательном и генераторном режимах различны. В гене-
раторном режиме работы параллельно с сетью максималь-
ный момент по абсолютному значению больше, что следует
из соотношения
/VJK, г /ПК, Д ,-j--I
Ri-V Ri + xi
где
Если в уравнении (3.39) пренебречь активным сопротив-
лением статора, то получится формула, более удобная для
расчетов:
М = --2Л/К т;
(3.40)
здесь sK = ±Ri/XK-, Л4К = 3f7|/2<D0XK.
Подставив в выражение (3.40) вместо текущих значе-
ний Л4 и s их номинальные значения и обозначив кратность
максимального момента Л4К/Л4НОМ через к, получим:
Sk = sH0^±]A2-1).
В последнем выражении перед корнем следует брать
знак «+»•
Анализ формулы (3.40) показывает, что при s > sK
(нерабочая часть характеристики) получится уравнение
гиперболы, если в этом случае пренебречь вторым членом
знаменателя в уравнении (3.40), т. е.
Л4 = 2Л4К “,
S
или
где
Л4 = A/s,
A = 2Mrsk.
77
Эта часть характеристики практически соответствует
Лишь пусковым и тормозным режимам.
При малых значениях скольжения (s < sK) для М =<
t= f (s) получится уравнение прямой, если пренебречь пер-
вым членом в знаменателе (3.40):
или .
здесь
М = 2/Ик|,
М = Bs;
В = 2A4K/sK.
Эта линейная часть характеристики является ее рабочей
частью, на которой двигатель обычно работает в установив-
шемся режиме. На этой же части характеристики находятся
точки, соответствующие номинальным данным двигателя:
•^ном» ^ном) ^ном, ^ном*
Статическое падение (перепад) скорости в относитель-
ных единицах на естественной механической характеристике
асинхронного двигателя при номинальном моменте опреде-
ляется его номинальным скольжением.
Номинальное скольжение зависит от сопротивления
ротора. Наименьшим номинальным скольжением при оди-
наковой мощности и числе полюсов обладают обычно дви-
гатели с короткозамкнутым ротором нормального исполне-
ния. У этих двигателей в силу конструктивных особенно-
стей сопротивление ротора имеет относительно небольшое
значение, что ведет к уменьшению значений критического
скольжения sK (3.37) и номинального скольжения sH0M.
По тем же причинам при увеличении мощности двигателя
уменьшается его номинальное скольжение и растет жест-
кость естественной характеристики. Последнее иллюстри-
руется кривой рис. 3.26, построенной по средним данным
для двигателей разной мощности.
Максимальный момент, как это видно из (3.38), не зави-
сит от активного сопротивления ротора /?2; критическое же
скольжение согласно (3.37) увеличивается по мере увели-
чения сопротивления ротора. Вследствие этого у двигателей
с фазным ротором при введении резисторов в цепь ротора
максимум кривой момента смещается в сторону больших
скольжений.
Значение сопротивления /?2, необходимое для построе-
ния естественной и реостатных характеристик двигателя
78
с фазным ротором, определяется из выражения
Ri — shom^2k/]/<3 /
НОМ’
где £2к> ^зном — линейное напряжение при неподвижном
роторе и номинальный ток ротора.
На рис. 3.27 приведено семейство реостатных характе-
ристик в двигательном режиме в координатных осях М
и ® для различных значений сопротивлений роторной цепи.
С известным приближением реостатные характеристики в ра-
бочей их части могут быть приняты линейными. Это дает
возможность при расчете сопротивлений резисторов, вклю-
чаемых в роторную цепь асинхронного двигателя, поль-
зоваться методами, аналогичными методам, применяемым
Рис. 3.26. Кривая номиналь-
ного скольжения для асин-
хронных двигателей разной
мощности.
Рис. 3.27. Естественная и рео-
статные механические характе-
ристики асинхронного двига-
теля с фазным ротором.
для расчета сопротивления цепи якоря двигателя постоян-
ного тока независимого возбуждения. Некоторая неточность
в определение сопротивления резистора вносится при этом
за счет того, что характеристика асинхронного двигателя на
участке графика от Л! = 0 до максимального момента при
пуске считается линейной.
Более точным является метод, когда спрямление харак-
теристик производится на меньшем участке. Кратность
максимального момента X = Мк,д/Л1ном должна быть у дви-
гателей нормального исполнения с фазным ротором не
ниже 1,8, а у двигателей с короткозамкнутым ротором не
ниже 1,7. Крановые двигатели отличаются более высокой
кратностью максимального момента. Например, для дви-
_ гателей с короткозамкнутым ротором серии МТК
79
2,3 4- 3,4. Двигатели с фазным ротором упомянутых
серий имеют приблизительно те же величины Л.
Для двигателей с короткозамкнутым ротором сущест-
венное значение с точки зрения электропривода имеют крат-
ности начального пускового момента и начального пуско-
вого тока.
На рис. 3.28 представлены примерные естественные ха-
рактеристики двигателя с нормальным короткозамкнутым
ротором, имеющим круглые пазы. Эти характеристики по-
казывают, что двигатель с короткозамкнутым ротором,
потребляя из сети весьма большой ток, имеет сравнительно
Рис. 3.28.
— f (М) и
хронного
замкнутым
пазами.
Характеристики со =
со = К (/) для асин-
двигателя с коротко-
ротором с круглыми
низкий начальный пусковой момент,
ного пускового момента двигателей
Кратность началь-
но = Мп/Мном = 1 ч- 1,8,
а для крановых двигателей
Кратность пускового тока
И/ ^пДном “ 5 . 7.
Отсутствие пропорциональности между моментом дви-
гателя и током статора во время пуска (рис. 3.28) объяс-
няется значительным снижением магнитного потока двига-
теля, а также уменьшением коэффициента мощности вторич-
ной цепи при пуске.
Момент асинхронного двигателя, как и любой электри-
ческой машины, пропорционален магнитному потоку Ф и
активной составляющей вторичного тока
Л4 = Н'ФД cos ф2, (3-41)
где k' — конструктивная постоянная асинхронного двига-
теля; ф — угол сдвига между ЭДС и током ротора;
cos ф2 = R'2 . (3.42)
80
При увеличении скольжения растет ЭДС ротора Е2 —
е= ESKs, возрастает ток ротора Г> в соответствии с (3.34),
асимптотически стремясь к некоторому предельному зна-
чению, a cos ip2 с ростом s уменьшается (на рабочем участке
характеристики очень мало), асимптотически стремясь к ну-
лю при s -> оо. Поток двигателя также не остается неизмен-
ным, уменьшаясь при возрастании тока из-за падения на-
пряжения на сопротивлениях обмотки статора. Все это и
обусловливает отсутствие пропорциональности между то-
ком и моментом двигателя.
Для повышения начального пускового момента и сниже-
ния пускового тока применяются двигатели с короткозам-
кнутым ротором специальных конструкций. Роторы элек-
тродвигателей имеют две клетки, расположенные концен-
трически, или глубокие пазы с высокими и узкими стерж-
нями. Сопротивление ротора этих двигателей в пусковой
Рис. 3.29. Механические характерис-
тики асинхронного двигателя с корот-
козамкнутым ротором с провалом при
малых угловых скоростях.
период значительно больше, чем при номинальной скорости,
вследствие поверхностного эффекта, обусловленного повы-
шенной частотой тока в роторе при больших скольжениях.
Поэтому при переходе к двигателям с глубоким пазом или
двойной обмоткой ротора существенно увеличивается крат-
ность пускового момента (увеличивается cos ф2 и поток)
и снижается кратность пускового тока. Правда, в этом слу-
чае несколько уменьшаются коэффициент мощности и КПД,
соответствующие номинальной нагрузке.
Необходимо отметить, что у двигателей с короткозамкну-
тым ротором пусковой момент практически не всегда явля-
ется наименьшим значением момента в области двигатель-
ного режима. Как видно из рис. 3.29, механическая харак-
теристика двигателя с короткозамкнутым ротором иногда
при малых угловых скоростях имеет провал, вызванный
влиянием высших гармоник зубцовых полей. Это обстоя-
81
тельство следует учитывать при пуске двигателя под на-
грузкой.
У двигателей с фазным ротором начальный пусковой мо-
мент увеличивается по мере возрастания до известных пре-
делов сопротивления резистора (рис. 3.27), а пусковой ток
при увеличении сопротивления уменьшается. Начальный
пусковой момент может быть доведен до максимального мо-
мента. С дальнейшим ростом сопротивления роторной цепи
увеличение cos ф2 Уже не компенсирует уменьшения тока
ротора и пусковой момент уменьшается.
3.8. Механические характеристики
асинхронного двигателя в тормозных
режимах
В § 3.7 были рассмотрены механические харак-
теристики асинхронной машины, работающей в двигатель-
ном режиме. Однако асинхронный двигатель может работать
и в тормозных режимах: при торможении с отдачей энергии
в сеть, при торможении противовключением и при динами-
ческом торможении.
1. Торможение с отдачей энергии в сеть (генераторный
режим работы параллельно
с сетью) возможно при скоро-
сти выше синхронной. Меха-
нические характеристики
асинхронного двигателя в
координатах Мию представ-
лены на рис. 3.30. В квад-
ранте I расположены участки
характеристик двигательного
Рис. 3.30, Механические характе-
ристики асинхронного двигателя
для различных режимов работы.
режима для трех различных сопротивлений роторной цепи.
По мере приближения скорости двигателя к скорости
идеального холостого хода, или синхронной скорости,
момент двигателя приближается к нулю.
При дальнейшем увеличении угловой скорости под вли-
янием внешнего момента, когда ю > ю0, двигатель рабо-
тает в режиме генератора параллельно с сетью, которой он
может отдавать электрическую энергию, потребляя при этом
реактивную мощность для возбуждения. Торможению с от-
82
дачей энергии в сеть отвечают участки характеристик, рас-
положенные в верхней части квадранта II. В этом режиме,
как видно из (3.38), максимальный момент имеет большее
значение, чем в двигательном. Режим торможения с отда-
чей энергии в сеть применяется практически для двигате-
лей с переключением полюсов, а также для приводов грузо-
подъемных машин (подъемники, экскаваторы и т. п.) и
в некоторых других случаях.
2. Торможение противовключением имеет значительно
большее применение на практике. Режим торможения про-
тивовключением может быть получен, так же как и для дви-
гателя постоянного тока, при движущем моменте нагрузки
Mz > МП (рис. 3.30). Для ограничения тока и получения
соответствующего момента необходимо при использовании
двигателя с фазным ротором в его роторную цепь включить
дополнительный резистор. Установившемуся режиму при
торможении противовключением соответствует, например,
точка — <вуст, АТ на характеристике Т?р2 (рис. 3.30).
Механическая характеристика для 7?р1 в режиме тормо-
жения противовключением и Мс = const не обеспечивает
устойчивой работы. Торможение противовключением может
быть получено также путем переключения на ходу двух
фаз обмотки статора, что ведет к перемене направления вра-
щения магнитного поля (переход из точки А в точку В на
рис. 3.31). Ротор при этом вращается против направления
движения поля и постепенно замедляется. Когда угловая
скорость спадет до нуля (точка С на рис. 3.31), двигатель
нужно отключить от сети, иначе он может вновь перейти
в двигательный режим, причем ротор его будет вращаться
в направлении, обратном предыдущему (точка D).
3. Динамическое торможение асинхронного двигателя
осуществляется обычно включением обмотки статора на
сеть постоянного тока; обмотка ротора при этом замыка-
ется на внешние резисторы. Для перехода из двигательного
режима в режим динамического торможения контактор КД
(рис. 3.32) отключает статор от сети переменного тока,
а контактор К 2 присоединяет обмотку статора к сети посто-
янного тока. Для ограничения тока и получения различных
тормозных характеристик в цепи ротора предусмотрены
внешние резисторы.
Проходя по обмотке статора, постоянный ток образует
неподвижное поле, основная волна которого дает синусо-
идальное распределение индукции. Во вращающемся роторе
возникает переменный ток, создающий свое поле, которое
83
также неподвижно относительно статора. В результате
взаимодействия суммарного магнитного потока с током
ротора возникает тормозной момент, который зависит от
МДС статора, сопротивления ротора и угловой скорости
двигателя. Механические характеристики для этого режима
приведены в нижней части квадранта II (см. рис. 3.30).
Они проходят через начало координат, так как при угло-
вой скорости, равной нулю, тормозной момент в этом режиме
также равен нулю. Максимальный момент пропорционален
квадрату приложенного к статору напряжения1 и возрастает
с ростом напряжения. Критическое скольжение зависит от
Рис. 3.31. Механические харак-
теристики асинхронного двига-
теля при переключении двух
фаз статора.
Рис. 3.32. Схема включения
асинхронного двигателя для
перехода на режим динамиче-
ского торможения.
сопротивления роторной цепи. Оно увеличивается пропор-
ционально росту сопротивления. Максимальный момент при
этом не изменяется. На рис. 3.30 характеристики динамиче-
ского торможения даны для трех различных сопротивлений
цепи ротора и одном и том же токе статора.
На рис. 3.33, а—е представлены различные схемы
включения обмоток статора при питании их от источника
постоянного тока. В схемах на рис. 3.33, д, е нагрузка всех
фаз обмотки статора равномерна, однако схема переключе-
ния статора сложна. Более простыми, часто применяемыми
на практике являются схемы на рис. 3.33, а, б.
Питание обмоток статора асинхронных двигателей для
осуществления динамического торможения может произво-
1 Последнее справедливо при условии пренебрежения насыщением,
84
диться от сети переменного тока через полупроводниковый
выпрямитель В, как это показано на рис. 3.34.
Анализ работы асинхронного двигателя в режиме дина-
мического торможения целесообразно произвести, считая,
что статор питается не постоянным, а эквивалентным трех-
фазным переменным током /экв. Эта замена предполагает
равенство МДС, созданных постоянным током и эквива-
Рис. 3.33. Схемы включения обмоток статора асинхронного двигателя
при динамическом торможении.
лентным переменным током. Амплитуда МДС, создаваемой
переменным током,
с 3^2 ,
F 2
где u/j — число последовательно соединенных витков фазы
статора.
Магнитодвижущая сила, создаваемая постоянным током,
пропорциональна постоянному току, числу витков фазы
статора и зависит от схемы соединения. Например, при сое-
динении статора в звезду и прохождении постоянного тока
только по двум фазам (рис. 3.33) МДС постоянного тока,
определяемая геометрической суммой МДС двух фаз,
равна:
АП = УЗ/Л.
Исходя из равенства Fn = F, определяют значение
эквивалентного переменного тока для рассматриваемого
85
случая:
экв
~Кз п’
Определив эквивалентный ток, можно построить упро-
щенную векторную диаграмму токов для асинхронного дви-
гателя при динамическом торможении (рис. 3.35). На ди-
аграмме /ц, — ток намагничивания; /ц0 — наибольшее зна-
чение намагничивающего тока; 1'2 — вторичный ток, приве-
денный к статору; /экв — первичный эквивалентный ток;
Elt Ё2 — соответственно первичная и вторичная приведен-
ная ЭДС.
Намагничивающий ток определяется геометрической
суммой эквивалентного тока /экв и вторичного приведенного
Рис. 3.34. Схема включения асин-
хронного двигателя при динами-
ческом торможении с питанием
статора через полупроводнико-
вый выпрямитель,
Рис. 3.35. Векторная диаграмма
для асинхронного двигателя в
режиме динамического тормо-
жения.
к статору тока ротора; с изменением скорости. ротора
изменяется вторичный ток. Конец вектора тока /экв при
уменьшении скорости ротора будет перемещаться по окруж-
ности вправо и при неподвижном роторе вектор /экв совпа-
дет с /у., так как вторичная ЭДС и соответственно вторичный
ток окажутся равными нулю. Поэтому при малых скоро-
стях ротора и сравнительно большом эквивалентном токе
двигатель в режиме динамического торможения оказывается
с сильно насыщенной магнитной системой. Наоборот, при
больших угловых скоростях и том же эквивалентном токе
магнитная система будет ненасыщенной. Примерная зави-
симость /у = f [s (ю)1 приведена на рис. 3.36.
86
В связи с явлением насыщения магнитной системы не
остается постоянной и реактивность намагничивания
(рис. 3.36).
Из диаграммы (см. рис. 3.35)
/экв — 1ч 27ц72 sin i]>2
j,_
2 /'СЧРФГ2 V^ + tX^’
(3.43)
(3.44)
где Его — приведенная вторичная ЭДС при синхронной
угловой скорости <в0 двигателя и намагничивающем токе /ц
(вторичная ЭДС может быть найдена по кривой намагничи-
вания двигателя); Хй = Е’-^П^ — реактивность намагннчи-
Рис. 3.36. Зависимость /|t и ’от
скольжения s или угловой скоро-
сти со.
вания; s = ю/ю0 — скольжение при динамическом тормо-
жении.
Решая совместно (3.43) и (3.44), находим:
,, (3.45)
V{RU^+{x^+x'^
Электромагнитный момент, развиваемый двигателем,
ог,a Ra у2 Ra
— о7эКВЛц,~
М = = COo[(R^)2 + (*n4-*a)2] * ‘46)
Если предположить в первом приближении машину не-
насыщенной, то в (3.46) = const и М будет функцией s,
так как другие параметры принимаются постоянными,
поэтому,дифференцируя М nos и приравнивая производную
нулю, находим:
sK1T = Wn + ^), (3.47)
87
при котором момент имеет максимум:
(3-48)
(ЛЦ“Г^2)
После несложных преобразований (3.46) принимает вид:
М
2МК, т
S/SK,т 4” ®к.т/8
(3.49)
Уравнение (3.49) по своей структуре аналогично уравне-
нию механической характеристики асинхронного двигателя
в двигательном режиме.
Отметим, что критическое скольжение в двигательном
режиме существенно больше критического скольжения в ре-
Рис. 3.37. Схема включения асинхрон-
ного двигателя при торможении с само-
возбуждением.
жиме динамического торможения при том же сопротивле-
нии цепи ротора, т. е.
вследствие того что Хр Хг.
Кроме того, в реальных условиях в связи с уменьше-
нием Лф и ростом /экв критическое скольжение sK;T не ос-
тается постоянным для различных /экв; следует учесть
также, что кривая М = f (s) при динамическом торможе-
нии может быть построена графо-аналитическим методом
с учетом насыщения, для чего должны быть заданы ток
/экв и зависимость Е1 — f
Иногда применяют торможение с самовозбуждением,
подключая к статору конденсаторную батарею, например,
по схеме, приведенной на рис. 3.37. В этом случае машина
работает асинхронным генератором, получая намагничива-
ющий ток от конденсаторов Cl, С2, СЗ. Возбуждаясь со
стороны статора, машина при определенной угловой скоро-
сти генерирует энергию, выделяемую в виде теплоты в ро-
торной цепи. Подобные схемы торможения не нашли еще
88
широкого применения вследствие высокой стоимости кон-
денсаторов.
На практике применяют чаще всего торможение проти-
вовключением, особенно когда требуется осуществить пере-
мену направления вращения (реверс), или динамическое
торможение по схемам, изображенным на рис. 3.32 и 3.34,
когда реверс не требуется.
3.9. Механическая и угловая
характеристики синхронного двигателя
Синхронные двигатели, если они работают при
постоянной частоте с неизменной угловой скоростью, при-
меняются для приводов, не требующих регулирования ско-
рости. К таким приводам относятся: компрессоры,
Рис. 3.38. Схема включения (а) и
механическая характеристика (б)
синхронного двигателя.
Рис. 3.39. Пусковые характери-
стики синхронного двигателя.
холодильные машины', камнедробилки и т. п. Основное до-
стоинство синхронного двигателя, заключающееся в воз-
можности работать с высоким коэффициентом мощности,
приводит к все более широкому применению этого двига-
теля.
Угловая скорость синхронного двигателя (рис. 3.38, б)
при работе в установившемся режиме с возрастанием на-
грузки на валу до определенного значения, не превышаю-
щего максимального момента Мтал, остается строго посто-
янной и равна синхронной угловой скорости:
ю0 = 2nfxtp.
Поэтому механическая характеристика его имеет вид
прямой линии, параллельной оси абсцисс. Если момент
89
нагрузки превышает Мтах, то двигатель может выпасть из
синхронизма и показанная на рис. 3.38, б зависимость со
от М нарушится.
Современные синхронные двигатели имеют в роторе,
кроме нормальной рабочей обмотки, питаемой постоянным
током, еще и специальную пусковую короткозамкнутую
обмотку. С помощью этой обмотки двигатель пускается
в ход как асинхронный, и поэтому в пусковых режимах
он обладает асинхронной характеристикой. На рис. 3.39
представлены две пусковые характеристики синхронного
двигателя, одна из них 1 соответствует пуску с понижен-
ным начальным пусковым моментом MnX и значительным
«входным» моментом Л4В1, под которым понимается момент,
развиваемый при скорости, равной 0,95 соо. При этой ско-
рости возможно вхождение двигателя в синхронизм после
включения постоянного тока в обмотку возбуждения.
Если пусковая клетка имеет увеличенное активное со-
противление, то начальный пусковой момент Мп2 будет
больше, чем в предыдущем случае, а входной момент Л4в2
уменьшится (кривая 2 на рис. 3.39). Выбор одной из двух
указанных пусковых характеристик зависит от моментов
сопротивления, которым обладают производственные меха-
низмы.
При пульсации нагрузки на валу двигателя в установив-
шемся режиме значение мгновенной скорости колеблется
около среднего значения. Эти колебания происходят за счет
изменения угла между напряжением и ЭДС синхронной
машины. Колебания скорости имеют практическое значение
при работе синхронного двигателя на пульсирующую на-
грузку, например на поршневой компрессор. Для решения
вопроса об устойчивой работе двигателя в таких случаях
необходимо знать зависимость момента М от угла 6 между
напряжением и ЭДС х. Этсму углу 0 соответствует простран-
ственный угол сдвига между осью результирующего поля
машины и ссью полюсов (пространственный угол в р раз
меньше угла 6).
Зависимость момента синхронной машины от угла 6
носит название угловой характеристики.
Для нахождения уравнения угловой характе-
ристики обратимся к упрощенной векторной диаграмме
неявнополюсной машины, представленной на рис. 3.40.
1 Здесь и в дальнейшем электрический угол 6 выражается в гра-
дусах,
90
Если пренебречь потерями в активном сопротивлении ста-
тора, считая = 0 (рис. 3.41), то подводимая к синхрон-
ному двигателю мощность, Вт, может быть принята равной
электромагнитной мощности:
Р = ЗЛ/со5ф, (3.50)
где 1 и U — фазные ток и напряжение статора.
Рис. 3.40. Упрощенная вектор-
ная диаграмма синхронного
двигателя.
Рис. 3.41. Векторная диаграмм
ма синхронного двигателя при
7?1 = 0.
Из векторной диаграммы (рис. 3.41) следует, что
U cos ф = Е cos (ф — 6).
Из рассмотрения вспомогательного треугольника АВС
видно, что
cos (ф — 6) = АВ/АС = U sin 6//Хх,
следовательно,
и cos ф = Еи
1Л1
Теперь, подставив полученное выражение в (3.50), полу-
чим уравнение электромагнитной мощности, Вт,
Р = ЗЕ7К,3 sin 6, (3.51)
где ^к.з — ток короткого замыкания,
Д, з = ^/Х1.
Отсюда электромагнитный момент
M = - = -E7K3sin6. (3.52)
«o ' v '
В случае явнополюсной -машины появляется еще допол-
нительный реактивный момент. Однако для практических
91
расчетов им можно пренебречь и пользоваться формулой
(3.52).
При 6 = 90° момент имеет максимальное значение:
Q
Mmax = ±EISi3. (3.53)
Поэтому искомое уравнение угловой характеристики
принимает следующий вид:
М = Мтах sin 0. (3.54)
С увеличением нагрузки угол 6 возрастает. Из (3.54)
видно, что вначале с увеличением угла 6 растет и развивае-
мый двигателем момент (рис. 3.42), что удовлетворяет требо-
ванию устойчивой работы двигателя. В правой части гра-
фика при 6 > 90° условие устойчивой работы двигателя
Рис. 3.42. Угловая характе-
ристика синхронного двига-
теля.
Рис. 3.43. Принципиальная схе-
ма включения синхронного дви-
гателя при динамическом тормо-
жении.
нарушается, так как при увеличении нагрузки угол Q
продолжает возрастать, а момент, развиваемый двигателем,
уменьшается, вследствие чего двигатель выпадает из синхро-
низма. Левая часть характеристики является рабочей
частью, а правая, где угол 6 изменяется от 90 до 180°, пред-
ставляет собой неустойчивую часть характеристики.
Номинальному моменту двигателя АД,ОЧ практически
соответствует угол бном — 30 ч- 25°. При этом кратность
максимального момента к номинальному составляет:
= Мтах/Мнои = 2 -: 2,5.
Однако в специальных случаях применяют синхронные
машины и с большей кратностью максимального момента,
достигающей 3,5—4.
92
Синхронный двигатель может работать и в режиме гене-
ратора параллельно с сетью при синхронной угловой ско-
рости, когда нагрузочный момент на его валу будет иметь
отрицательное значение, чему отвечает левая ветвь характе-
ристики на рис. 3.38. Для торможения такой режим практи-
ческого значения не имеет, так как при этом нельзя полу-
чить снижения скорости.
Обычно применяется динамическое торможение синхрон-
ных двигателей, при котором обмотки статора отключаются
от сети и замыкаются на резисторы (рис. 3.43). Механиче-
ские характеристики в этом случае подобны характеристи-
кам асинхронного двигателя при динамическом торможении.
Интенсивность торможения зависит от сопротивления ста-
торной цепи и от потока, создаваемого током роторной об-
мотки. Время торможения при питании цепей возбуждения
от собственного возбудителя, находящегося на валу син-
хронного двигателя, больше, чем при питании от независи-
мого источника постоянного тока. Объясняется это тем,
что при снижении угловой скорости возбудителя уменьша-
ется его ЭДС, а следовательно, уменьшаются ток возбужде-
ния двигателя и тормозной момент.
Торможение синхронных двигателей противовключе-
нием практически не применяется, так как оно сопровож-
дается большими толчками тока и ведет к усложнению управ-
ления ввиду необходимости отключения двигателя при под-
ходе к нулевой скорости.
ГЛАВА ЧЕТВЕРТАЯ
РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ
ЭЛЕКТРОПРИВОДОВ
4.1. Основные показатели регулирования
угловой скорости электроприводов
В современной промышленности используется
большое количество производственных механизмов, рабо-
тающих с различной, изменяющейся скоростью. К этой мно-
гочисленной группе относятся металлообрабатывающие
станки, прокатные металлургические станы, подъемные
краны и транспортные устройства, а также различные ме-
ханизмы бумажной, угольной, текстильной и других отрас-
лей промышленности. Так, в металлорежущих станках
93
скорость электропривода должна регулироваться в зависи-
мости от рода обрабатываемого металла, качества резца,
размеров обрабатываемых изделий и других факторов,
В прокатных станах для каждого профиля прокатываемого
металла также имеются свои наиболее благоприятные ско-
рости, определяющие производительность стана и качество
продукции. Снижение скорости при прокатке ведет к умень-
шению производительности и увеличению расхода энергии
вследствие охлаждения металла, а чрезмерное увеличение
скорости ухудшает качество продукции и даже приводит
к появлению брака, так как при чрезмерных скоростях
металл не успевает заполнить углы калибров прокатных
валков.
В лифтах, подъемных и транспортных механизмах ско-
рость необходимо снижать по мере подхода к пункту оста-
новки, чтобы обеспечить плавное замедление и точную оста-
новку в нужном месте. Скорость, при которой должен рабо-
тать дымосос в котельной, определяется качеством топлива,
его влажностью, зольностью, условиями процесса горения
и требуемой производительностью котла. Во всех этих меха-
низмах, как и во многих других, для достижения высокой
производительности и требуемого качества работы необхо-
димо осуществлять регулирование скорости.
Регулированием скорости называется принудительное
изменение скорости электропривода в зависимости от тре-
бований технологического процесса. Понятие регулирования
скорости не следует смешивать с естественным изменением
скорости, возникающим в электроприводах в силу изме-
нения нагрузки на валу работающей машины. Регулиро-
вание скорости осуществляется дополнительным воздей-
ствием на приводной двигатель; оно может быть произ-
ведено человеком или специальным автоматическим устрой-
ством.
В настоящее время все большее применение находит
электрическое регулирование скорости, которое имеет ряд
преимуществ в отношении технических и экономических
показателей.
Основными показателями, характеризующими различ-
ные способы регулирования скорости электроприводов,
являются: 1) диапазон регулирования; 2) плавность;
3) экономичность; 4) стабильность скорости; 5) направле-
ние регулирования скорости (уменьшение или увеличение
ее относительно основной скорости); 6) допустимая нагрузка
при различных скоростях,
94
1. Диапазон регулирования угловой скорости определя-
ется отношением возможных установившихся скоростей!
максимальной озтах к минимальной amin
D = (х>тах ! <£>min
при заданной точности регулирования (с заданным статиче-
ским падением скорости электропривода) для установленных
пределов изменения момента нагрузки и других возмуще-
ний.
Обычно диапазон регулирования выражается в числах
в виде отношения, например: 2 :1, 4 :1, 10:1,20:1 и т. д.
Современные системы автоматического регулирования элек-
троприводов с обратными связями позволяют существенно
расширить диапазон регулирования скорости.
Различные производственные машины требуют разных
диапазонов регулирования. Например, главные механизмы
металлорежущих станков в зависимости от их назначения
работают с диапазонами регулирования О = (4:1)4-
4- (100 : 1) и выше; для механизмов подач универсальных
станков требуется диапазон до 10 000 : 1 и выше. При изго-
товлении бумаги для газет бумагоделательная машина ра-
ботает с диапазоном регулирования D = 3 : 1, а при изго-
товлении высших сортов бумаги D — 20 : 1. Некоторые
прокатные металлургические станы имеют диапазон регули-
рования D = (20 : 1) -е (25 : 1).
2. Плавность регулирования характеризует скачок ско-
рости при переходе от данной скорости к ближайшей воз-
можной. Плавность тем выше, чем меньше этот скачок. Число
скоростей, получаемых в данном диапазоне, определяется
плавностью регулирования. Ее можно оценить коэффициен-
том плавности регулирования, который находится как
отношение двух соседних значений угловых скоростей при
регулировании
фпл =
где со, и о>г1 — угловые скорости соответственно на /-й и
(i — 1)-й ступенях регулирования.
При плавном регулировании српл -> 1, а число скоростей
г -4- ос. В случае ступенчатого регулирования коэффи-
циент плавности регулирования может существенно отли-
чаться от единицы. Число скоростей, диапазон регулиро-
вания D и коэффициент плавности регулирования при та-
ком регулировании связаны между собой равенством
D = т2 —1
'ПЛ •
95
Плавность регулирования во многих случаях определяет
качество продукции. В практике электропривода наимень-
шей плавностью регулирования обладают двухскоростные
асинхронные двигатели с короткозамкнутым ротором (фпл =
— 2). Высокая плавность регулирования угловой скорости
достигается, например, в двигателе постоянного тока неза-
висимого возбуждения при регулировании изменением по-
тока или подводимого к якорю двигателя напряжения.
3. Экономичность регулирования характеризуется затра-
тами на сооружение и эксплуатацию электропривода.
Необходимо отметить, что экономически выгодным ока-
зывается такой регулируемый электропривод, который обес-
печивает большую производительность приводимого им
в действие механизма при высоком качестве технологиче-
ского процесса и сравнительно быстро окупается..
При оценке экономичности регулируемого электропри-
вода следует принимать во внимание надежность его в экс-
плуатации, а также учитывать дефицитность материалов и
оборудования, затрачиваемых на сооружение того или иного
привода. Существенное значение имеют потери энергии
в процессе регулирования. Потери мощности ДР, возникаю-
щие при регулировании скорости, определяют КПД при-
вода:
т] = Р2/(Р2 + ДР),
где Р2 — мощность на валу двигателя.
При работе двигателя на разных угловых скоростях
следует подсчитывать так называемый средневзвешенный,
КПД за регулировочный цикл, состоящий из т ступеней,!
по выражению
т
где P2q и ДР9 — полезная мощность и потери на q-й ступени;
t4 — время, в течение которого двигатель работает н<
q-й ступени.
Из этого соотношения следует, что при известных уело
виях работы электропривода КПД за цикл может оказатьс?
значительно выше КПД на какой-либо одной ступени ско
росТи. Если цикл не задан, то можно принять, что на все;
ступенях двигатель работает одинаковое время с одинако
вой нагрузкой.
Потери энергии при регулировании скорости различив
для разных способов регулирования. Они сравнительж
96
велики в системах, .где регулирование ведется в главных
цепях машин, и значительно ниже при регулировании в це-
пях возбуждения. Последнее становится понятным, если
вспомнить, что мощность цепи возбуждения, например,
машин постоянного тока составляет лишь 1—5 % мощности
главных цепей.
Важным экономическим показателем электропривода
является коэффициент мощности и потребление реактивной
энергии за рабочий цикл. В случае двигателя переменного
тока сдвиг фаз между током и напряжением сети обусловли-
вается потреблением реактивной мощности, затрачивае-
мой на создание магнитного потока.
Зная потребляемые двигателем активную Ра и реактив-
ную Рр мощности, можно определить коэффициент мощно-
сти, с которым в данный момент работает двигатель:
cos ср = PJVPi + P'i,
и средневзвешенный cos фр при работе на разных угловых
скоростях с разным временем и с различными нагрузками
в течение цикла регулирования:
tn I tn
COS фр = 2 Pagtg / 2 + tg-
Номинальный коэффициент мощности для большинства
двигателей составляет cos фном = 0,8 -т- 0,9 и зависит от
мощности двигателя. С ростом мощности и номинальной уг-
ловой скорости двигателя повышается номинальный коэф-
фициент мощности. Коэффициент мощности асинхронного
двигателя в сильной степени зависит от нагрузки; при хо-
лостом ходе коэффициент мощности мал вследствие значи-
тельной реактивной мощности, затрачиваемой на создание
потока, и малой активной мощности, связанной лишь с по-
стоянными потерями. По мере роста нагрузки примерно до
номинальной активная мощность растет быстрее реактивной
и cos ф возрастает до номинального значения.
Коэффициент мощности синхронного двигателя также за-
висит от нагрузки, однако он может быть изменен при регу-
лировании тока возбуждения. При меньшем токе возбужде-
ния синхронный двигатель является потребителем реактив-
ной мощности. С увеличением тока возбуждения возрастает
cos ф. При дальнейшем увеличении тока возбуждения син-
хронный двигатель может работать в качестве генератора
реактивной мощности.
4 Чиликин М. Г., Сандлер А. С.
97
Широкое использование управляемых полупроводнико-
вых преобразователей для регулирования угловой скоро-
сти двигателей постоянного и переменного тока приводит
к искажению формы первичного напряжения и тока и
к значительному возрастанию потребляемой из сети реактив-
ной мощности. Коэффициент мощности примерно равен:
cos <р cos а = соао/соо,
где соа0 — минимальная угловая скорость идеального холо-
стого хода, соответствующая наибольшему углу регулиро-
вания а; 0)() — то же при а = 0.
4. Стабильность угловой скорости характеризуется изме-
нением угловой скорости при заданном отклонении момента
нагрузки и зависит от жестко-
сти механической характеристи-
ки; она тем выше, чем больше
жесткость характеристики.
Если при регулировании
угловой скорости жесткость ха-
рактеристики изменяется, то и
Рис.- 4.1. Иллюстрация изменения уг-
ловой скорости для механических ха-
рактеристик различной жесткости.
отклонение скорости от заданной тоже будет изменяться.
На рис. 4.1 приведены две характеристики двигателя посто-
янного тока параллельного возбуждения при регулирова-
нии угловой скорости введением резисторов в цепь якоря.
Если при этом момент сопротивления Л4С остается неиз-
менным, то двигатель, работавший ранее с угловой ско-
ростью се»!, будет после введения дополнительного резистора
в цепь якоря работать с угловой скоростью со2- Однако при
наличии изменений нагрузочного момента в некоторых
пределах (± ДЛ4) угловая скорость двигателя не остается
постоянной, она изменяется относительно средних значе-
ний сох или со2. Отклонения угловой скорости Дсо, вызван-
ные изменениями нагрузки, будут тем больше, чем меньше
жесткость характеристики. Это обстоятельство во многих
случаях ограничивает диапазон регулирования скорости.
9. Направление регулирования скорости, т. е. уменьше-
ние или увеличение ее по отношению к основной скорости,
зависит от способов регулирования.
98
Основная угловая скорость, например, двигателя по-
стоянного тока независимого возбуждения соответствует
номинальным значениям напряжения и магнитного потока.
Эта скорость получается в том случае, когда в цепях двига-
теля нет никаких внешних резисторов, т. е. точкй ®осн
находится на естественной механической характеристике.
Различают однозонное регулирование вниз от основной
скорости, однозонное регулирование вверх от основной ско-
рости и двухзонное регулирование, когда имеется возмож-
ность получать характеристики выше и ниже естественной.
При регулировании с помощью резисторов в цепи якоря
двигателя постоянного тока или в цепи ротора асинхрон-
ного двигателя угловая скорость в двигательном режиме
при данной нагрузке по мере увеличения сопротивления
резисторов уменьшается. Это означает, что регулирование
изменением сопротивления резисторов может быть осуще-
ствлено только вниз по отношению к основной скорости.
Напротив, регулирование уменьшением магнитного по-
тока ведет в пределах нормальных нагрузок к увеличению
угловой скорости, т. е. в этом случае осуществляется
однозонное регулирование вверх от основной скорости.
6. Допустимая нагрузка двигателя, т. е. наибольшее
значение момента, который двигатель способен развивать
длительно при работе на регулировочных характеристиках,
определяется нагревом двигателя и для разных способов
регулирования будет различной.
Изменение нагрузочного момента в зависимости от ско-
рости у различных производственных механизмов различно.
Например, многие механизмы требуют регулирования при
постоянном моменте. К ним относятся: подъемные краны,
лебедки, некоторые прокатные станы и т. п. С другой сто-
роны, существуют механизмы, у которых регулирование
скорости производится с постоянной мощностью. В ка-
честве примеров подобного механизма можно привести
токарный станок, у которого в процессе обработки данной
детали желательно поддержание постоянства линейной
скорости (или скорости резания) и усилия резания. При
этих условиях произведение скорости резания на усилие
даст постоянство мощности. Поддержание постоянства
скорости резания достигается плавным регулированием
угловой скорости электропривода.
Принципиально путем выбора соответствующей мощ-
ности двигателя можно удовлетворить любому изменению
нагрузочного момента или мощности при регулировании
4*
99
скорости. Однако в таком случае регулирование угловой
скорости двигателя может оказаться неэкономичным, так
как двигатель на разных угловых скоростях будет исполь-
зован неодинаково и при работе на некоторых из них
будет недогружен.
Недогрузка двигателя ведет к ухудшению эксплуата-
ционных показателей привода, так как при этом умень-
шается КПД двигателя, а при переменном токе, кроме
того, уменьшается и коэффициент мощности. Желательно
поэтому применять такой способ регулирования, при кото-
ром двигатель был бы по возможности полностью загру-
жен при всех угловых скоростях.
Допустимая нагрузка двигателя ограничивается сте-
пенью его нагрева. Степень нагрева в свою очередь зави-
сит от потерь энергии в двигателе, а последние, опре-
деляются главным образом током, потребляемым двига-
телем.
Таким образом, мы приходим к выводу, что условием
полного использования двигателя при работе на разных
регулировочных характеристиках является постоянство на-
грузочного тока. Если при работе на всех характеристиках
ток будет равен номинальному току двигателя, то это
и будет означать, что двигатель загружен полностью при
всех угловых скоростях. При этом предполагается, что
условия охлаждения двигателя остаются неизменными
как при больших, так и при малых угловых скоростях.
С учетом этого важного предположения допустимой нагруз-
кой двигателя можно считать такую, при которой ток дви-
гателя в его силовых цепях равен номинальному. Тогда
допустимый момент, например, двигателя постоянного
тока
^ДОП ~ кФ1цО1Л-
Момент зависит от способа регулирования.
Рассмотрим в качестве примера двигатель постоянного
тока независимого возбуждения. Он может иметь две зоны
регулирования, как это показано на рис. 4.2. Зона / отве-
чает регулированию с постоянным моментом. Действитель-
но, если регулирование осуществляется изменением сопро-
тивления или напряжения главной цепи при неизменном
номинальном магнитном потоке двигателя, то при номи-
нальном токе якоря допустимый момент будет постоянным
Мдоп ^Фном^ном = const = Л4НОМ.
100
Мощность на валу двигателя в этой зоне изменяется
по линейному закону, так как она пропорциональна угло-
вой скорости
Р2 = М<а.
Зона // отвечает регулированию с постоянной мощ-
ностью, когда оно производится изменением магнитного
потока двигателя.
В этом случае при неизменном токе якоря, равном
номинальному, магнитный поток с увеличением угловой
скорости необходимо регулировать по закону гиперболы,
Рис. 4.2. Характеристики двух зон
регулирования двигателя постоян-
ного тока независимого возбужде-
ния.
что следует из (3.3). Если решить это уравнение относи-
тельно магнитного потока, то получим:
Ф = (^ном - /ном^я)/^® = Л/СО.
Таким образом, становится ясной зависимость допусти-
мого момента от угловой скорости в зоне регулирования II,
а именно:
Л4ДОП = ^Ф/ном = Мном(0ном/(0.
Отсюда следует, что мощность в этой зоне регулирова-
ния остается постоянной, так как
^2доп AfcO Const ^ном^ном ном*
Допустимая нагрузка при регулировании угловой ско-
рости двигателей других типов определяется аналогич-
ными методами.
Следует, однако, иметь в виду, что для самовентилируе-
мых двигателей, снабженных собственным вентилятором
для охлаждения, снижению угловой скорости должно
соответствовать уменьшение допустимых потерь в двига-
теле. На малых угловых скоростях эти двигатели должны
работать при токах, меньших номинального, а следова-
101
тельно, и допустимый момент уменьшается по мере умень-
шения угловой скорости.
В приводах с вентиляторным моментом нагрузки дви-
гатель не может быть полностью загружен при низких
угловых скоростях. Особенностью регулирования таких
приводов является увеличение момента с возрастанием
угловой скорости. Поэтому здесь приходится выбирать
мощность двигателя по нагрузке при наибольшей угловой
скорости. При всех других меньших угловых скоростях
двигатель будет недогружен. Особенно больших габаритов
при вентиляторной нагрузке необходим двигатель в случае
регулирования током возбуждения. Это следует из того,
что такой двигатель должен будет развивать наибольший
момент при наименьшем магнитном потоке.
4.2. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения
изменением магнитного потока
Из уравнения
a = (U-IX)/k<&
вытекает, что возможны три принципиально различных
способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока)
двигателя;
2) изменением сопротивления цепи якоря посредством
резисторов (реостатное);
3) изменением подводимого к якорю двигателя напря-
жения.
Регулирование угловой скорости двигателя изменением
тока возбуждения является одним из наиболее простых
и экономичных способов. Мощность, потребляемая обмот-
кой возбуждения двигателя, составляет примерно 2—2,5 %
мощности двигателя, поэтому этот способ находит широ-
кое применение в современной практике электропривода.
Принципиальные схемы электропривода при регулиро-
вании тока возбуждения показаны на рис. 4.3, а, б. Ток
возбуждения регулируется или с помощью резистора
(рис 4.3, а) в случае двигателей малой мощности, или
посредством регулятора напряжения PH (рис. 4.3, б).
Регулирование скорости в этом случае осуществляется
вверх от основной, причем допустимый момент двигателя
102
изменяется по закону гиперболы, а допустимая мощность
остается неизменной. Так как допустимая нагрузка опре-
деляется током, равным номинальному, то мощность,
развиваемая двигателем, постоянна (Р = Рном — const)
независимо от магнитного потока (тока возбуждения).
Электромеханическим характеристикам со = f (7) при изме-
нении тока возбуждения соответствуют различные значе-
ния угловой скорости идеального холостого хода, опре-
деляемые по (3.8):
* (00 = ^7//гФ.
На рис. 4.4 по оси ординат отложено значение угловой
скорости идеального холостого хода соо для естественной
характеристики, когда по-
ток Ф = Фном. Значения
угловых скоростей идеаль-
ного холостого хода при
ослабленном потоке соб и
йо лежат, очевидно, выше
соо. Все электромеханиче-
Рис. 4.3. Принципиальные схе-
мы электропривода при регули-
ровании угловой скорости изме-
нением магнитного потока с по-
мощью резистора (а) и регуля-
тора напряжения PH (б).
ские характеристики пересекаются с осью абсцисс в одной
точке. Последнее следует из того, что при со = 0 урав-
нение для любой электромеханической характеристики
имеет вид:
О = (Z7 — 7/?я)//гФ,
откуда определяется ток в якоре двигателя
Следовательно, при различных токах возбуждения и
при угловой скорости двигателя, равной нулю, ток в якор-
ной цепи равен току короткого замыкания двигателя.
Этим значением тока и определяется общая точка пере-
сечения электромеханических характеристик.
Механические характеристики, показанные на рис. 4.5,
имеют те же значения угловых скоростей идеального холо-
103
стого хода, что и для электромеханических характеристик.
Это следует из (3.5). Однако эти характеристики не пере-
секаются в одной точке на оси абсцисс, так как по мере
уменьшения потока уменьшается и момент короткого
замыкания, определяемый по формуле
Л4|(,3 = /?/|(,3Ф.
Регулирование является экономичным при• постоянной
мощности; полному использованию двигателя соответствуют
точки, находящиеся на линии номинального тока /с = 7НОМ
(см. рис. 4.4); этому соответствуют точки, лежащие на
гиперболической кривой момента сопротивления Л4С, как
Рис. 4.4. Электромеханические
характеристики двигателя по-
стоянного тока независимого
возбуждения при регулирова-
нии угловой скорости током
возбуждения.
Рис. 4.5. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения при регулировании угло-
вой скорости током возбужде-
ния.
это показано пунктиром на рис. 4.5. При этом потери мощ-
ности в цепи якоря при работе на регулировочных харак-
теристиках будут такими же, как и на естественной харак-
теристике, а потери на возбуждение — меньше.
При работе на угловых скоростях, соответствующих
точкам, лежащим левее указанной кривой момента Л4С,
двигатель будет недогружен: напротив, работа на скоро-
стях правее этой кривой приведет к перегрузке двига-
теля.
Любопытно отметить, что при малых моментах нагрузки
угловая скорость с ослаблением поля растет, а при боль-
ших уменьшается.
При постоянном моменте сопротивления (Л4С — const)
и длительной нагрузке двигатель нужно выбирать так,
чтобы при наибольшей угловой скорости ток в цепи якоря
не превосходил номинального. При сниженных угловых
104
скоростях в этом случае приходится мириться с недогруз-
кой двигателя, так как ток в якоре становится меньше
номинального вследствие возрастания магнитного по-
тока.
Обычно регулируемые двигатели имеют диапазон регу-
лирования от 2:1 до 5:1, в ряде случаев до (8-НО) : 1.
Диапазон регулирования ограничивается различными
факторами. Главным из них является ухудшение условий
коммутации с возрастанием угловой скорости, поскольку
реактивная ЭДС, вызывающая искрение на коллекторе,
пропорциональна току и угловой скорости, т. е. Ер = cla.
Кроме того, при больших угловых скоростях требуется
повышать механическую прочность якоря. Нижний предел
угловой скорости ограничивается степенью насыщения
машины и нагревом обмотки возбуждения, т. е. номиналь-
ной угловой скоростью.
Плавность регулирования в пределах заданного диапа-
зона может быть получена весьма значительной и опреде-
ляется количеством ступеней регулировочного реостата
или же числом ступеней специальных устройств, регули-
рующих напряжение, подводимое к обмотке возбуждения.
Посредством этих же устройств или посредством ползун-
кового реостата (при малой мощности двигателя) можно
получить плавное регулирование.
Широко используется также импульсное параметриче-
ское регулирование тока возбуждения, при котором в цепь
обмотки возбуждения с определенной частотой и изменяё-
мой продолжительностью обычно посредством полупровод-
никового ключа (транзистора, тиристора) или реле (кон-
тактора) вводится добавочный резистор с постоянным
сопротивлением. Изменяя продолжительность включенного
состояния резистора (или ключа, шунтирующего резистор)
при заданной частоте включения, можно получить плавное
регулирование угловой скорости в диапазоне (2ч-3) : 1
и более.
Стабильность угловой скорости при регулировании
определяется относительным перепадом угловой скорости
при изменении нагрузки и в данном случае при номиналь-
ном токе якоря как Айном/й0 = поэтому неза-
висимо от тока возбуждения относительный перепад сохра-
няется одним и тем же для естественной и искусственной
характеристик, т. е. угловая скорость сравнительно ста-
бильна.
105
4.3. Реостатное и импульсное
параметрическое регулирование
угловой скорости двигателя
постоянного тока независимого
возбуждения
Регулирование угловой скорости изменением
сопротивления цепи якоря не требует особых пояснений.
В гл. 3 дано построение реостатных механических харак-
теристик применительно к пуску двигателя. Подобный
вид имеют характеристики и при регулировании угловой
скорости посредством реостатов в цепи якоря. В отличие
от пускового реостата регулировочный реостат должен
быть рассчитан в соответствии с режимом работы привода,
он оказывается включенным не только кратковременно
во время пуска, но и во время работы двигателя с заданной
угловой скоростью.
При этом способе регулирования изменяется жесткость
характеристики, а с ней и стабильность угловой скорости,
угловая скорость регулируется вниз от основной, причем
полное использование двигателя по току достигается при
регулировании с постоянным номинальным моментом, если
двигатель имеет независимую вентиляцию.
Действительно, если считать, что для любой угловой
скорости допустимым является номинальный ток, т. е.
/доп = /я,ном, а поток двигателя остается номинальным,
то допустимый момент двигателя равен номинальному
7ИдОП = йФн0мЛ,Н0м = Л4„ом; по мере снижения угловой
скорости допустимая мощность двигателя уменьшается,
так как Рдоп = Мномсо. Если допустить. перепад угловой
скорости в 25 % при изменении момента нагрузки на ± 25 %
номинального, то диапазон регулирования составит при-
мерно 2:1. Если допустить еще больший перепад угловой
скорости, можно несколько расширить диапазон регули-
рования. Однако следует иметь в виду, что при значитель-
ном перепаде угловой скорости с изменением нагрузки
наблюдается резкое снижение производительности меха-
низма, поэтому практически допустимый диапазон регу-
лирования не превышает (1,5 4- 2) : 1.
В большинстве случаев реостатное регулирование угло-
вой скорости производится с помощью контакторов, замы-
кающих отдельные ступени резисторов, т. е. скорость
привода изменяется дискретно, поэтому данный способ
при контакторном управлении не обеспечивает плавного
106
регулирования. Применение жидкостного (при малой мощ-
ности двигателя) или ползункового реостата позволяет
достигнуть плавного регулирования. Другим способом
достижения плавного регулирования при введении рези-
сторов в цепь якоря является использование (при неболь-
шой мощности двигателя) импульсного параметрического
Рис. 4.6. Схема включения двигателя постоянного тока независимого
возбуждения при импульсном регулировании добавочного сопротивле-
ния (а), график регулирования угловой скорости при изменении скваж-
ности 8 замыкания контакта /< (б), механические характеристики при
импульсном регулировании сопротивления (в), схема тиристорного
ключа (г).
регулирования угловой скорости, применяемого также
в автоматизированном электроприводе для стабилизации
(поддержания) заданного значения угловой скорости при
изменении момента нагрузки или для предварительного
снижения скорости перед остановкой привода.
Схема включения двигателя постоянного тока незави-
симого возбуждения при импульсном регулировании доба-
вочного сопротивления в цепи якоря приведена на рис. 4.6,а.
Добавочный резистор 7?доб, включаемый в цепь якоря,
либо полностью вводится в схему, либо замыкается нако-
107
ротко ключом К- Коммутация ключа К осуществляется
периодически. При замкнутом накоротко 7?доб ток в цепи
якоря и угловая скорость двигателя возрастают, а при
введении Кло5 в цепь, когда ключ К разомкнут, ток и угло-
вая скорость снижаются. Колебания тока и угловой ско-
рости происходят около некоторого среднего значения
(рис. 4.6, б). Среднее значение тока определяется моментом
нагрузки на валу двигателя, а среднее значение угловой
скорости зависит от соотношения длительностей замкнутого
и разомкнутого состояния ключа К и от момента нагрузки.
Амплитуды колебаний тока и угловой скорости зависят
при данных параметрах привода от частоты коммутации
ключа К, которая должна быть достаточно высокой. Соот-
ношение длительностей 4 замкнутого и 4 разомкнутого
состояний ключа К принято выражать в виде относительной
величины
е = + ^2),
называемой скважностью управляющих импульсов. Оче-
видно, что с увеличением е при неизменной нагрузке
на валу двигателя угловая скорость его будет возрастать,
а при е = 1 двигатель будет работать на естественной
характеристике (ключ К постоянно замкнут). При 8 = 0
двигатель будет работать на реостатной характеристике,
соответствующей постоянно включенному резистору /?доб
(ключ К разомкнут). При других значениях 8 эквивалент-
ное (усредненное) добавочное сопротивление в цепи якоря
определяется соотношением
^доб.э ^ДОбО ®)>
и механические характеристики двигателя, показанные
на рис. 4.6, в, определяются формулой (для средних зна-
чений угловой скорости и момента)
U Л4СП
Ис₽= кФ &Ф2 -Кдоб (I e)J>
т. е. характеристики имеют тот же вид и те же свойства,
что и при чисто реостатном регулировании угловой ско-
рости.
Для реализации импульсного способа регулирования
сопротивления (следовательно, и угловой скорости) при-
меняются бесконтактные ключи, выполненные на базе
транзисторов (при токах до 15—20 А) или тиристоров
(при токах до 100—150 А).
108
На рис. 4.6, г показана схема тиристорного ключа. Роль
ключа выполняет тиристор VI, шунтирующий резистор Рдоб
при подаче на него управляющего импульса. Выключается
тиристор VI с помощью вспомогательного тиристора V2,
подключающего к тиристору VI коммутирующий конден-
сатор Ск, предварительно заряженный через тиристор V4
и резистор 7?п от маломощного источника Un. Выключение
тиристора V2 происходит по окончании перезаряда кон-
денсатора Ск от напряжения цепи якоря (падение напря-
жения на 7?доб при включенном тиристоре VI). При оче-
редном включении тиристора VI обратный колебательный
перезаряд конденсатора Ск осуществляется через VI,
диод V3 и реактор £к. Более подробные сведения об этом
способе регулирования можно найти в [19].
При регулировании угловой скорости введением рези-
сторов в цепь якоря двигателя постоянного тока потери
мощности в этой цепи изменяются пропорционально пере-
паду угловой скорости. Это видно из следующих энергети-
ческих соотношений:
для двигателя постоянного тока потребляемая мощ-
ность в цепи якоря определяется равенством
Последнее уравнение может быть переписано так:
1гФв)01 = 1гФ<£>1 + ДР,
откуда
ДР =/гФ®0/
(Oq
ИЛИ
ДР = РД (4.1)
где
6 = (ю0 — <й)/®0-
Таким образом, потери мощности в этой цепи пропор-
циональны потребляемой мощности и перепаду угловой
скорости, выраженному в относительных единицах. Так,
если момент нагрузки постоянен (следовательно, постоянна
потребляемая мощность) и угловая скорость двигателя
уменьшается вдвое, то примерно половина мощности,
потребляемой из сети, будет рассеиваться в виде теплоты,
выделяемой в реостате, т. е. данные способы регулирования
(реостатный и импульсный параметрический) являются
неэкономичными. При импульсном регулировании сопро-
109
тивления энергетические показатели несколько хуже, чем
при ступенчатом его изменении. Это обусловлено наличием
в кривой тока якоря переменной составляющей, вызванной
коммутациями ключа, что приводит к увеличению потерь
энергии.
Средний КПД при Л4С = const в предположении ра-
боты привода с одинаковой длительностью на каждой
ступени угловой скорости определяется по формуле
£> + 1
Лер 2D ^е’
(4.2)
где D = (oe/<£>min' <ое, — угловая скорость на есте-
ственной и регулировочной характеристиках; — КПД
привода на естественной характеристике.
Некоторые особенности в отношении энергетических
показателей имеет регулирование угловой скорости при-
водов с вентиляторным моментом. Момент, развиваемый
двигателем при вентиляторной нагрузке, пропорционален
квадрату скорости, т. е. М = Сю2 (потери в вентиляторе
не учитываются). Потребляемая двигателем мощность
Р1 = Л1ю0,
или
со \2 _ р ю0 / со \2
м ) *2ном ,А (,А ) >
,шном/ ("ном \шном/
(4.3)
где PiHOM — мощность, потребляемая при номинальной
нагрузке; Р2ном — номинальная мощность двигателя (мощ-
ность на валу); ®0 — угловая скорость идеального холо-
стого хода; юном — номинальная угловая скорость.
Мощность на валу двигателя
или
Р2 = М«),
Р% ^2ном (®/®Н0м)3*
Потери мощности в цепи якоря двигателя1
др2 = />1_р2 = ^но»(^_у («,„_«,). (4.4)
WHOM \шном/
Взяв первую производную d (ДР2) и приравняв ее
2
нулю, найдем угловую скорость ю = уоа, при которой
1 Здесь не учитываются потери в стали и механические потери,
ПО
потери в цепи якоря достигают максимума!
ДР2^ = 2>211ОМ(-^У. (4.5)
Z/ \WHOM/
Анализ формулы (4.4) показывает, что в случае венти-
ляторной нагрузки при в = 0 и в = о, потери мощности
равны нулю, тогда как при неизменном моменте на валу
и и = 0 вся потребляемая мощность (Pt = UI) теряется
в цепи якоря.
Коэффициент полезного действия привода при реостат-
ном регулировании и вентиляторном моменте ориентиро-
вочно может быть определен по той же формуле, что и
КПД при Мс = const, т. е.
ц^ю/юо. (4.6)
Соответственно и среднее значение КПД за цикл опре-
деляется по (4.2). Однако, несмотря на то что КПД при-
вода при Л4С = const и Л4С = Сю2 одинаковы, регулиро-
вание угловой скорости введением резисторов в цепь
якоря для механизмов с вентиляторным моментом нагрузки
связано со значительно меньшими потерями мощности,
чем для механизмов с неизменным нагрузочным моментом.
Таблица 4.1
Угловая скорость, % Мощность вентилятора, % Потребляемая мощность двига- теля, % Потери в цепи якоря, % кпд
100 100 105,2 5,2 0,95
90 72,9 85,3 12,4 0,855
80 51,2 67,4 16,2 0,76
70 34,3 51,6 17,3 0,665
60 21,6 37,9 16,3 0,57
50 12,5 26,3 13,8 0,475
40 6,4 16,8 10,4 0,38
30 2,7 9,5 6,8 0,285
20 0,8 4,2 3,4 0,19
10 0,1 1,05 0,95 0,095
0 0 0 0 0
Если, например, относительный перепад угловой ско-
рости при номинальной нагрузке До^ном = 0,05, то по-
тери мощности, отнесенные к номинальной мощности,
и КПД привода характеризуются цифрами, приведенными
в табл. 4.1.
111
По данным табл. 4.1 на рис. 4.7 построены зависи-
мости Р^, Р^, кР2* от ю*.
Несмотря на значительно меньшие потери мощности,
которые дает регулирование угловой скорости измене-
нием сопротивления при
вентиляторном моменте,
нельзя, однако, признать
этот способ достаточно
экономичным, особенно
в тех случаях, когда вен-
тиляторы могут работать
длительно при угловых
Рис. 4.7. Кривые зависимости
Р2* и А-Р2* от угловой
скорости (в относительных еди-
ницах).
скоростях, меньших номинальной, поэтому приходится
искать более экономичные способы регулирования угло-
вой скорости.
4.4. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения изменением
подводимого к якорю напряжения
Регулирование угловой скорости осуществля-
ется вниз от основной, так как напряжение, прикладывае-
мое к якорю, в большинстве случаев может изменяться
только вниз от номинального (иногда, например, при регу-
лировании угловой скорости двигателя с постоянными
магнитами возможно регулирование как вниз, так и вверх
от основной скорости —- двухзонное).
Допустимый момент без учета ухудшений условий
вентиляции со снижением угловой скорости остается по-
стоянным, так как допустимый ток якоря равен номиналь-
ному, а поток при независимом возбуждении остается
неизменным (номинальным).
Для различных значений напряжений угловая скорость
двигателя равна:
<й1 = (^1-/^я)Дф;
= (U2 - 1Ря)/кФ.
112
Их отношение
. (4-7)
Отсюда следует: при изменении напряжения регули-
ровочные характеристики располагаются параллельно друг
другу, т. е. имеют одинаковую жесткость (как показано
на рис. 4.8), что определяет относительно высокую ста-
бильность угловой скорости. Диапазон регулирования
D = (4-8)
где Uaoa и Umin — номинальное и минимальное напряже-
ния.
Из (4.8) следует, что относительный перепад угловой
скорости растет со снижением напряжения; это ограни-
чивает диапазон регулирования значением D = (8 ч-10) : 1
в системах привода без обратных связей (в замкнутых си-
стемах диапазон регулирования существенно больше и
может достигать значений 1000:1 и более).
Плавность регулирования определяется плавностью из-
менения напряжения питания и обычно характеризуется
значением коэффициента плавности (рпл 1.
Коэффициент полезного действия двигателя в данном
случае (без учета потерь на возбуждение) равен отноше-
нию фактической угловой скорости двигателя к угловой
скорости идеального холостого хода на заданной характе-
ристике. Потерн мощности в якорной цепи при постоянном
моменте нагрузки остаются неизменными при регулирова-
нии угловой скорости и равными потерям при работе
на естественной характеристике. Но поскольку полезная
мощность по мере снижения угловой скорости умень-
шается, то и КПД двигателя падает. Вследствие малых
потерь мощности в цепи якоря этот способ регулирования
скорости является экономичным. Однако для полной оценки
экономичности необходимо учитывать потери мощности
еще в устройстве, посредством которого регулируется
напряжение на якоре двигателя, и затраты на это устрой-
ство.
Так как напряжение питающей сети поддерживается
постоянным, то указанный способ регулирования возмо-
жен при использовании соответствующего преобразова-
теля с регулируемым напряжением постоянного тока
на его выходе, например, в системе генератор—двига-
тель (Г—Д) или управляемый выпрямитель — двигатель
(УВ - Д).
113
а) Система генератор — двигатель
Принципиальная схема включения двигателя
постоянного тока с независимым возбуждением по системе
Г—Д приведена на рис. 4.9. Здесь генератор G с постоян-
ной угловой скоростью приводится во вращение асинхрон-
ным или синхронным двигателем MI; питание цепей воз-
буждения генератора би исполнительного двигателя М осу-
ществляется от независимого источника постоянного тока.
Рис. 4.8. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения при различных напряже-
ниях,
Рис. 4.9. Принципиальная схе-
ма включения двигателя посто-
янного тока независимого воз->
буждения по системе Г — Д.
Якорь двигателя М присоединяется к якорю генера-
тора G непосредственно. Электродвижущая сила генератора
определяется по формуле
Ег — &гФг(ог,
где kr — коэффициент, зависящий от конструктивных дан-
ных генератора и определяемый по формуле
&г = ргЛ1г/2лаг,
где рт — число пар полюсов; Afr — число активных про-
водников обмотки якоря; ат — число параллельных вет-
вей обмотки якоря. Следовательно, при постоянной угло-
вой скорости генератора ®г ЭДС его будет определяться
магнитным потоком, который легко регулируется током
возбуждения.
Пользуясь схемой замещения для рассматриваемого
случая (рис. 4.10,а), можно составить уравнение равно-
весия ЭДС
£Г-£ = 7(ЯГ4-ЯД), (4.9)
114
или
£r — ^Фа> = Z (7?г7?д), (4.10)
где Е и I — ЭДС двигателя и ток якорной цепи машин;
/?,, /?д — соответственно сопротивление якоря генератора
и двигателя.
Отсюда угловая скорость двигателя
со = ДДФ— 1 (1?г -}• Дд)/А:Ф« (4.11)
Так как Л4 = &Ф/, то
® = £r/^-M(7?r + O(W. (4-12)
При неизменном потоке двигателя
со = ©о — ВМ, (4.13)
где В = (Rr + /?д) /кФ.
Механические характеристики двигателя при неизмен-
ном потоке двигателя и изменении потока генератора (без
учета реакции якоря) представляют собой семейство ли-
нейных характеристик, на-
клон которых остается посто-
янным и определяется общим
сопротивлением якорной це-
пи. Скорость идеального хо-
лостого хода определяется
по формуле
сое = Е^/кФ
и может приобретать любое
значение — от соо = Ег/кФ
Рис. 4.10. Схема замещения (а) и
характеристики (б) при двухзон-
ном регулировании угловой ско-
рости двигателя постоянного тока
независимого возбуждения, вклю-
ченного по системе Г — Д.
до —ю0 = —£г/йФ; отрицательное значение ЭДС генера-
тора легко может быть получено при реверсировании тока
возбуждения изменением полярности напряжения на обмот-
ках возбуждения генератора.
Механические характеристики двигателя располагаются
lb четырех квадрантах; основным достоинством этой системы
115
является плавность регулирования, которая осуществля-
ется воздействием на цепь возбуждения.
Система Г—Д может обеспечить двухзонное регулирова-
/ ние угловой скорости — до основной скорости изменением
I ЭДС генератора при постоянном потоке двигателя, а выше
, основной регулированием тока возбуждения двигателя
> при постоянной, равной номинальному значению ЭДС
/ генератора. Характеристики, соответствующие первой зоне
регулирования, показаны на рис. 4.10, б сплошными
линиями, а второй зоне — штриховыми.
Верхний предел угловой скорости при регулировании
с постоянным потоком двигателя ограничивается номи-
нальным значением ЭДС генератора и тем перепадом ско-
рости, который обусловлен нагрузкой и сопротивлением
якорной цепи. Нижний предел регулирования определя-
ется заданным относительным перепадом угловой скорости
при заданном изменении нагрузки; этот относительный
перепад, называемый статизмом, определяется при мини-
мальной угловой скорости для случая изменения момента
нагрузки от нуля до Л4НОМ как
6 = А(оном/(о0т;и, (4.14)
или
S 1 ном (7?г + 7?л) ^Kimax'Eг» ном ^0 tnin* (4.15)
Отсюда допустимый диапазон регулирования
^доп = max/&П min ~ Е,, ном6//
НОМ (7?г ^д) — б/А® *ном» (4.16)
где Асо*НОм — относительный перепад угловой скорости
при Ev,mii.
Если, например, для машин средней мощности отно-
сительный перепад принять равным А(о^.ном = 0,1, то при
допустимом статизме 6 = 0,2 допустимый диапазон регу-
лирования составит всего D — 2:1, если же задаться
еще меньшим статизмом 6sg0,l, то осуществлять регу-
лирование нельзя, так как D 1.
б) Регулирование угловой скорости двигателя
постоянного тока независимого возбуждения
изменением напряжения на якоре с помощью
управляемых тиристорных выпрямителей
К недостаткам системы Г—Д относятся:
1) необходимость в двукратном преобразовании энер-
гии (из электрической энергии переменного тока в меха-
ническую и из механической вновь в электрическую по-
116
стоянного тока регулируемого напряжения), что приводит
к значительному снижению КПД;
2) наличие двух машин в преобразовательном агрегате,
установленная мощность каждой, если пренебречь поте-
рями в машинах, равна установленной мощности регули-
руемого двигателя;
3) значительные габариты и масса установки, необхо-
димость в фундаменте для преобразовательного агрегата;
4) высокие капитальные и эксплуатационные рас-
ходы.
Развитие в последние годы силовой полупроводниковой
техники позволило создать статические преобразователи
(выпрямители), преобразующие переменное напряжение
в регулируемое постоянное напряжение.
Регулирование постоянного напряжения осуществляется
регулированием угла включения вентилей в проводящей
части периода переменного напряжения и имеет свои осо-
бенности.
Рассмотрим принцип регулирования напряжения на
примере включения тиристоров по однофазной нулевой
двухполупериодной схеме выпрямления, приведенной на
-'рис. 4.11, а. Допустим, что на управляющий электрод
тиристора VI подается от системы управления СУ отрица-
тельный импульс в момент времени (рис. 4.11 б). Угол а,
отсчитываемый от момента естественного включения вен-
тиля VI, вызовет на нагрузке скачок напряжения, которое
будет изменяться по кривой и2а. В момент /2 напряжение ига
становится равным нулю и тиристор VI закрывается. На
интервале /2 — t3 оба тиристора закрыты и ток равен
нулю, а в момент t3 вступает в действие тиристор V2 и
остается открытым до момента и т. д.
При активной нагрузке кривая выпрямленного тока
(рис. 4.11, в) повторяет кривую выпрямленного напряже-
ния.
Если изменяется угол а относительно начала синусоиды
напряжения на анодах тиристоров, то соответственно
меняется среднее значение выпрямленного напряжения.
Процессы в схеме с управляемым выпрямителем при
учете индуктивности рассеяния обмоток трансформатора
индуктивности обмотки якоря двигателя и противо-ЭДС
двигателя имеют свою особенность. В этом случае гра-
фики изменения во времени напряжения и тока преобра-
зователя имеют довольно сложный характер. Кривая вы-
прямленного напряжения состоит из положительных и отри-
117
цательных участков синусоид. Ток может быть как непре-
рывным, так и прерывистым.
Выпрямленное напряжение (и выпрямленный ток)
содержит постоянную Ud и переменную составляющие
(последняя содержит ряд гармоник). Наличие пульсаций
и
ига игъ
Рис. 4.11. Регулирование напряжения при включении тиристоров по
однофазной нулевой (двухполупериодиой) схеме выпрямления.
а — схема выпрямления; б — диаграмма напряжений; в — диаграмма токов.
(переменной составляющей) выпрямленных напряжения
и тока ухудшает условия коммутации двигателей постоян-
ного тока и увеличивает потери в них, поэтому на выходе
выпрямителя часто устанавливается индуктивный фильтр,
представляющий собой реактор, включаемый последова-
тельно с якорем двигателя и обладающий большим реак-
тивным сопротивлением для переменной составляющей
выпрямленного тока, которая значительно уменьшается,
118
а падение напряжения от этой составляющей на активном
сопротивлении реактора незначительно. Другим средством
уменьшения пульсаций выпрямленного напряжения явля-
ется использование многофазных схем выпрямления.
Рис. 4.12. Регулирование напряжения при трехфазиой нулевой схеме
включения тиристоров.
а — схема выпрямления; б — диаграмма напряжений; в — диаграмма токов.
Рассмотрим форму напряжения и тока для трехфазной
нулевой схемы включения тиристоров, показанной на рис.
4.12, а, с учетом индуктивности рассеяния, приведенной
к вторичной обмотке трансформатора, и значительной ин-
дуктивности сглаживающего реактора La, при которой ток
можно считать идеально сглаженным.
119
Из-за индуктивности рассеяния вторичной обмотки
трансформатора переход тока от одного тиристора к дру-
гому происходит не мгновенно, а в течение времени, кото-
рое соответствует так называемому углу коммутации.
В интервале t1 — t2 работает тиристор VI’, в момент t2
начинается процесс коммутации тока с тиристора VI на V2,
в течение которого работают оба тиристора. За счет ЭДС
самоиндукции, наводимой в фазе м2а, ток ial спадает не сразу,
а из и2Ь вычитается часть напряжения, соответствующая
ЭДС самоиндукции, которая препятствует росту тока ia2 так,
что сумма токов ial и ia2 в момент коммутации остается
равной выпрямленному току 1а. К концу коммутации
(момент /3), обозначенной углом у, ток в тиристоре VI ста-
новится равным нулю, а в тиристоре V2 возрастает до зна-
чения 1а. В период коммутации выпрямленное напряже-
ние становится меньшим и равным иа = 1/2 (м2в 4~ и2Ь)',
оно изменяется так, как показано на рис. 4.12, б. К концу
коммутации напряжение скачком возрастает до фазного
напряжения и2Ь. Следовательно, выпрямленное напряже-
ние снижается из-за индуктивного падения напряжения,
которое показано заштрихованной площадкой на рис. 4.12,6.
Среднее значение выпрямленного напряжения определя-
ется соотношением (без учета падения напряжения на ти-
ристоре):
t/d = t7rfoCosa-7d(^- + 7?T + ^j, (4.17)
где Uao = ~ ]/2 U sin — среднее значение выпрямлен-
ного напряжения при холостом ходе выпрямителя и пол-
ностью открытых тиристорах; U — действующее значе-
ние переменного фазного напряжения; т — число фаз
выпрямителя; хт, 7?т — соответственно приведенные к вто-
ричной обмотке индуктивное сопротивление рассеяния
сбмоток фазы трансформатора и их активное сопротивление;
Rl — активное сопротивление сглаживающего реактора.
Форма кривой тока приведена на рис. 4.12, в.
Уравнение электромеханической характеристики двига-
теля независимого возбуждения.
® cos а — 77?э)//гФ, (4.18)
а уравнение механической характеристики
® cos а/£Ф — Л47?э/(/гФ)2, (4.19)
где R3 = хгт/2п 4- 7?т 4* Rl 4“ Rs-
120
Механические характеристики двигателя постоянного
тока независимого возбуждения, управляемого тиристор-
ным выпрямителем, напоминают характеристики в систе-
ме Г — Д (рис. 4.13), однако они отличаются рядом осо-
бенностей.
Характеристики имеют меньшую жесткость за счет
большего падения напряжения в якорной цепи; при раз-
личных углах включения наклон их остается постоянным.
При конечных значениях индуктивности сглаживающего
реактора и малых нагрузках наступает режим прерывистых
токов, при котором имеет место резкий подъем характери-
стик. Чем больше угол включения тиристоров, тем больше
зона прерывистых токов.
Явление прерывистых токов обусловленотем, что с умень-
шением нагрузки снижается количество энергии, запасен-
Рис. 4.13. Механические характе-
ристики двигателя постоянного
тока независимого возбуждения,
питающегося от тиристорного
управляемого выпрямителя.
ной в индуктивности Ld, и наступает момент, когда созда-
ваемая ею ЭДС самоиндукции оказывается недостаточной
для поддержания тока при отрицательных напряжениях
на анодах тиристоров, что приводит к увеличению выпрям-
ленного напряжения Ud, а следовательно, к возрастанию
угловой скорости двигателя при холостом ходе.
В схемах, приведенных на рис. 4.12, а и 4.14, двига-
тель может работать в двигательном режиме и режиме
торможения противовключением (за счет активного мо-
мента, например, груза) при неизменном направлении
тока в якорной цепи. Когда возникает необходимость'
реверсирования двигателя, можно изменять полярность
на выводах якоря при неизменном направлении тока воз-
буждения. На рис. 4.15 дана схема реверсирования с по-
мощью реверсора в якорной цепи, на рис. 4.16 — трех-
фазная мостовая реверсивная схема выпрямителя и на
рис. 4.17 — реверсивная трехфазная нулевая схема выпря-
мителя. Схема с реверсором (рис. 4.15) наиболее проста,
121
Рис. 4.14. Схема нереверсивного
электропривода постоянного то-
ка по системе УВ — Д при пита-
нии двигателя от трехфазного
мостового тиристорного выпря-
мителя.
Рис. 4.15. Схема реверсирова-
ния двигателя в системе
УВ — Д с помощью реверсора
в якорной цепи.
Рис. 4.16. Трехфазная мостовая
схема выпрямителя,
Рис. 4.17. Трехфазная нулевая
схема выпрямителя.
122
в ней отсутствуют уравнительные реакторы и вдвое меньше
тиристоров, чем в схеме рис. 4.16. Но хотя переключение
реверсора может производиться при отсутствии тока в якор-
ной цепи, когда тиристоры закрыты, для мощных электро-
приводов аппаратура в силовой цепи оказывается гро-
моздкой.
В схемах электропривода на рис. 4.15 — 4.17 двигатель
может работать в двигательном режиме и режимах тор-
можения противовключением и с отдачей энергии в сеть
(рекуперативное торможение). В последнем режиме один
из комплектов тиристоров выпрямителя работает в режиме
инвертора (при больших углах включения), передавая
энергию от двигателя через трансформатор в сеть, а дру-
гой комплект тиристоров, находящийся в это время в вы-
прямительном режиме, оказывается закрытым, так как
ЭДС двигателя больше выпрямленного напряжения. Воз-
можность работы двигателя в режиме рекуперативного
торможения и высокое быстродействие являются большим
достоинством выпрямителей, включенных по реверсивной
схеме.
Возможно изменение направления вращения двигателя
в реверсивном приводе также за счет изменения направ-
ления тока в цепи возбуждения двигателя постоянного
тока независимого возбуждения, когда в цепи якоря исполь-
зуется нереверсивный управляемый выпрямитель. Эта
схема проще остальных и дешевле (и даже позволяет при
определенном управлении осуществлять рекуперативное
торможение), но уступает им по динамическим показателям
из-за сравнительно большой постоянной времени обмоток
возбуждения.
Коэффициент полезного действия тиристорного выпря-
мителя определяется произведением КПД трансформатора
и вентилей. Коэффициент полезного действия трансфор-
матора средней и большой мощности при номинальной
нагрузке примерно равен 0,95—0,98. Коэффициент полез-
ного действия тиристорного выпрямителя определяется
прямым падением напряжения на нем, которое для одного
тиристора составляет всего 1—1,2 В, поэтому общий КПД
выпрямителя при номинальной нагрузке для мощности
50—100 кВт составляет 0,9—0,92. С увеличением мощ-
ности КПД выпрямителя оказывается еще выше. Коэф-
фициент мощности тиристорного выпрямителя определи-,
ется по формуле
cos фа = cos (а ф- у/2),
123
откуда видно, что с увеличением угла включения тиристо-
ров резко падает коэффициент мощности, что является
существенным недостатком схем с тиристорным выпрями-
телем.
В системе УВ—Д так же, как и в системе Г—Д, воз-
можно регулирование угловой скорости двигателя вверх
от основной (при полностью открытых тиристорах) воз-
действием на поток двигателя и регулирование вниз —
изменением угла включения тиристоров при неизменном
магнитном потоке двигателя. В разомкнутой системе УВ—Д
диапазон регулирования невелик, примерно такой же, как
в системе Г—Д.
в] Регулирование угловой скорости двигателя
постоянного тока независимого возбуждения
изменением напряжения на якоре посредством
импульсных регуляторов напряжения
(широтно-импульсных преобразователей)
Регулирование напряжения на якоре дви-
гателя можно осуществить импульсным методом, когда
двигатель периодически подключается к источнику пита-
ния и отключается от него. В период отключения электро-
привод продолжает работать за счет запасенной кинетиче-
ской и электромагнитной энергии.
Схема включения двигателя постоянного тока незави-
симого возбуждения при импульсном регулировании на-
пряжения показана на рис. 4.18, а. Диод V, шунтирую-
щий якорь двигателя, создает цепь для протекания тока
якоря под действием ЭДС самоиндукции, возникающей
в индуктивности обмотки якоря в период разомкнутого
состояния ключа К- Это создает условия для непрерывного
протекания тока якоря, что существенно уменьшает его
пульсации и устраняет коммутационные перенапряжения
на ключе К и обмотке якоря.
Из всех известных видов импульсного регулирования
для регулирования угловой скорости преимущественное
применение нашло широтно-импульсное регулирование на-
пряжения (ШИР), при котором период коммутации Т&
(частота) остается постоянным, а изменяется время 4
замкнутого состояния ключа К — скважность е = tJT&
(рис. 4.18, б).
Среднее значение напряжения на якоре при ШИР равно:
^я, ср =
где U — неизменное напряжение сети.
124
Диаграммы токов показаны на рис. 4.18, в — д. Урав-
нение механической характеристики двигателя для сред-
них значений угловой скорости и момента имеет вид:
®ср = еД/ЙФ-МсрДЛФа, (4.20)
откуда следует, что угловую скорость можно регулировать
в широких пределах, изменяя е, а жесткость механических
характеристик при регулировании угловой скорости по-
стоянна и равна жесткости естественной характеристики.
Это является достоинством данного способа регулирования
угловой скорости. Однако высокая жесткость свойственна
характеристикам лишь в области непрерывного тока якоря.
Если же в период выключенного состояния ключа К ток
якоря успевает снизиться до нуля и в кривой тока содер-
жится пауза, то имеет место режим прерывистых токов,
где жесткость механических характеристик (рис. 4.18, е)
резко падает. Основным средством сужения зоны преры-
вистых токов, уменьшения пульсаций тока якоря (момента)'
и угловой скорости относительно среднего значения и, сле-
довательно, дополнительных потерь в обмотках якоря
является увеличение частоты коммутации ключа /(. Обычно
частота коммутации составляет 800—1200 Гц. Увеличению
ее препятствует рост потерь в ключе (транзисторе, тири-
сторе) и его предельные динамические параметры.
Для реализации рассмотренного способа регулирования
напряжения могут быть использованы либо транзисторы,
работающие в режиме ключа, либо тиристоры.
Схема электропривода с тиристорным ключом приве-
дена на рис. 4.18, ж. Этот ключ работает так же, как и
в схеме на рис. 4.6, г, но в данном случае нет необходи-
мости в дополнительном источнике питания для предвари-
тельного заряда коммутирующего конденсатора Ck, кото-
рый предварительно заряжается от сети через коммути-
рующий тиристор V2 и якорь двигателя. При включении
тиристора VI происходит подача напряжения на якорь
двигателя, выключение тиристора V2 и колебательный пере-
заряд конденсатора Ск через реактор LK, тиристор VI
и диод V3.
При включении двигателя по схемам рис. 4.18, а, ж
он может работать только в двигательном режиме и режиме
динамического торможения (при активном характере мо-
мента), а реверс двигателя возможен только посредством
реверса тока возбуждения. Но существует много схем ШИР
напряжения (угловой скорости двигателя), позволяющих
125
двигателю работать во всех режимах (при питании от сети
постоянного тока или от аккумуляторов) и осуществлять
бесконтактное его реверсирование по цепи якоря. Неко-
fe- о
овм
Рис. 4.18. Схема включения двигателя постоянного тока независимого
возбуждения при импульсном регулировании напряжения на якоре
двигателя (а), диаграммы напряжения (б), токов (в, г, д) и механиче-
ские характеристики (е) при ШИР и схема тиристорного ключа (ж).
торые из этих схем и более подробный анализ процессов
в них изложены в [19].
Электроприводы с ШИР напряжения на якоре двига-
теля вследствие их относительной простоты и высокого
126
быстродействия широко используются в различных отраслях
промышленности и техники, в транспортных установках
и т. д. Они особенно удобны при наличии сети постоянного
тока или в автономных установках при питании привода
от аккумуляторов. В случае сети переменного тока пита-
ние привода с таким управлением производится через
неуправляемый выпрямитель. При этом возникают боль-
шие трудности с организацией тормозных режимов и ре-
верса двигателя по цепи якоря, вследствие чего область
применения такого привода ограничивается установками
малой мощности.
4.5. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения
при шунтировании якоря
Для получения сравнительно жестких меха-
нических характеристик при малых скоростях применяют
иногда шунтирование якоря резистором 7?ш при обязатель-
ном включении последовательного резистора Дп, как это
показано на рис. 4.19. Резисторы и представляют
Рис. 4.19. Схема шунтирования
обмотки якоря двигателя постоян-
ного тока независимого возбужде-
ния.
собой делитель напряжения. Правда, на работу этого
делителя в значительной степени влияет нагрузка двига-
теля, так как потребляемый из сети ток /п, а значит, и па-
дение напряжения на последовательном резисторе Яп
зависят от тока якоря /я двигателя. При таком включении
двигателя используются как бы одновременно два способа
регулирования угловой скорости двигателя — изменением
подводимого к якорю напряжения и реостатное, поэтому
и получаемые регулировочные характеристики двигателя
занимают промежуточное положение между характери-
стиками, свойственными указанным способам.
127
Уравнение механической характеристики двигателя
в схеме, представленной на рис. 4.19, может быть полу-
чено на основании следующих соотношений:
U = E + IA + lnRn-, (4.21)
U = ImRm + InRn; (4.22)
/П = Л + /Ш. (4.23)
Обозначения величин, входящих в соотношения (4.21) —
(4.23), приведены на рис. 4.19.
После соответствующих преобразований получим:
E = U~R^-------(4.24)
Обозначим через А отношение сопротивлений (коэффи-
циент деления напряжения сети делителем Rus + Rn при
идеальном холостом ходе двигателя)
+ RA —А.
Разделив левую и правую части равенства (4.24) на
коэффициент с и подставив, кроме того, величину А, полу-
чим уравнение электромеханической характеристики дви-
гателя при шунтировании якоря:
® = Л®0-ЛЖ + Ж)/с. (4.25)
Уравнение для механической характеристики двигателя
имеет вид:
и = Л®0-М(Ря + ЛОЛ (4-26)
Из рассмотрения последнего уравнения видно, что меха-
нические характеристики двигателя в этом случае линейны.-
Кроме того, угловая скорость идеального холостого хода
двигателя здесь будет меньше, чем при реостатном регули-
ровании угловой скорости. Действительно, для М = О
угловая скорость будет равна А®0, причем всегда
А = Яш/(/?ш+ /?„)< 1.
Снижение угловой скорости идеального холостого хода
объясняется тем, что при отсутствии тока в цепи якоря
приложенное к якорю напряжение не будет равно напря-
жению сети U, как это имеет место при реостатном регули-
ровании. В этом случае оно меньше напряжения сети на зна-
чение падения напряжения в последовательном сопротив-
128
лении, так как в нем будет проходить ток и при отсутствии
тока в якоре.
На рис. 4.20 представлена механическая характеристика
двигателя при шунтировании якоря, проходящая через и',.
Там же приведены естественная и реостатная характери-
стики для обычной схемы включения. Из сопоставления
этих характеристик видны преимущества рассматриваемой
схемы. Действительно, получение пониженной угловой
скорости оу возможно и в обычной схеме путем перехода
от естественной характеристики к соответствующей реостат-
ной. Однако из сравнения реостатной характеристики
Рис. 4.20. Механическая харак-
теристика двигателя постоян-
ного тока независимого возбуж-
дения при шунтировании об-
мотки якоря.
Рис. 4.21. Семейство механиче-
ских характеристик при неиз-
менном сопротивлении шунти-
рующего резистора и различных
сопротивлениях последователь-
ного резистора.
с характеристикой при шунтировании якоря видно, что
последняя является значительно более жесткой и потому
обеспечивающей при возможных отклонениях момента на-
грузки более стабильное регулирование угловой скорости.
Жесткость механической характеристики и угловая
скорость идеального холостого хода зависят от соотноше-
ния сопротивлений последовательного и шунтирующего
резисторов. Если изменить сопротивления этих резисторов,
то можно получить другой наклон характеристики.
При неизменном шунтирующем сопротивлении рези-
стора %Ш1 или и различных значениях сопротивления
последовательного резистора R,, получаются семейства
характеристик, имеющие соответственно общие точки А
и А' (рис. 4.21).
5 Чиликин М. Г„ Сандлер А. С. 129
Точка А пересечения характеристик соответствует ре-
жиму, при котором сопротивление последовательного ре-
зистора не будет влиять на ток якоря, т. е. когда через
последовательный резистор не будет проходить ток. Это
возможно лишь при вращении якоря с угловой скоростью,
большей угловой скорости идеального холостого хода,
а именно тогда, когда ЭДС якоря полностью уравновеши-
вает приложенное напряжение сети и внутреннее падение
напряжения в якоре, т. е. когда
Д = ^ + /яЯя. (4.27)
В таком случае двигатель работает в режиме динамиче-
ского торможения на внешний резистор Поскольку
напряжение на якоре равно £7, ток в якоре
/я = ОДш. (4.28)
Подставив (4.28) в (4.27) и заменив Е и U пропорцио-
нальными им величинами (оЛ и соо, получим значение угло-
вой скорости в точке А:
®A = ®o(Rm + Rn)/Rm- (4.29)
В предельных случаях при неизменном и перемен-
ных сопротивлениях резистора получаются две харак-
теристики, показанные на рис. 4.21 утолщенными линиями.
Если Еп == 0, то напряжение, подводимое к якорю, не за-
висит от сопротивления шунтирующего резистора и оста-
ется неизменным при изменении тока якоря, поэтому зна-
чению R„ = 0 соответствует естественная характеристика
двигателя.
Если Еп — оо, то это означает, что двигатель не полу-
чает питания от сети и работает в режиме динамического
торможения на внешний резистор Дш. Характеристика
при этом проходит через начало координат. Крутизна
ее зависит только от сопротивлений шунтирующего рези-
стора. Из сказанного ясно, что все остальные характери-
стики для любых конечных значений Еп при неизменном
сопротивлении резистора образуют семейство харак-
теристик, лежащих в промежутке между двумя указанными.
При другом значении Еш — const и различных /?„ полу-
чается второе подобное семейство характеристик, показан-
ное на рис. 4.21 штриховыми линиями. При этом все ха-
рактеристики будут также пересекаться в одной точке А',
лежащей на естественной характеристике и соответствую-
щей меньшему значению 7?ш = Дш2.
130
Можно построить и другое семейство характеристик
(рис. 4.22), соответствующих неизменному сопротивлению
последовательного резистора при различных сопротивле-
ниях шунтирующего резистора.
Это семейство характеристик будет иметь общую точку
Вх, где сопротивление шунтирующего резистора не будет
оказывать влияния на ток
якоря. Такое условие мо-
жет быть осуществлено
лишь при определенной
отрицательной угловой
скорости, когда
Е (4-30)
В этом случае ток не
проходит через шунтиру-
ющий резистор при любом
Рис. 4.22. Семейство механиче-
ских характеристик при неиз-
менном сопротивлении последо-
вательного резистора и различ-
ных сопротивлениях шунтирую-
щего резистора.
значении сопротивления последнего, так как разность
потенциалов между щетками якоря равна нулю. Двигатель
будет потреблять ток
/я = П/Я„. (4.31)
Угловую скорость в точке Вг можно определить, под-
ставив значение тока 1Я в (4.30) и заменив Е и U значе-
ниями соВ1 и соо, т. е.
(ГШ1 — — <Я(|/?я//?п2. (4.32)
В предельных случаях при неизменном ЯП2 и перемен-
ных сопротивлениях резистора получаются две харак-
теристики, показанные на рис. 4.22 утолщенными линиями.
Если = 0, характеристика параллельна естественной
и двигатель работает в режиме динамического торможе-
ния. Характеристика при этом проходит через начало
координат. Если = 0, то это равносильно отключению
шунтирующего резистора и, следовательно, работе дви-
о*
131
гателя на реостатной характеристике с резистором Rn2.
Остальные характеристики для промежуточных значений
Rm пересекаются в этой же точке и лежат между
ными двумя характеристиками.
При некотором другом значении ЯП1 = const и для
различных Rm получается новое семейство характеристик,
показанное на рис. 4.22 штриховыми линиями. Эти харак-
теристики пересекаются также в одной общей точке В2,
соответствующей увеличенному сопротивлению последо-
вательного резистора Rn = Rnl.
Рассмотренный способ регулирования угловой скорости
двигателя постоянного тока независимого возбуждения
посредством подключения его якоря к сети через рези-
сторный делитель напряжения (шунтирование якоря) обла-
дает такими же основными показателями, что и реостатное
регулирование. Здесь повышенная жесткость механических
характеристик несколько исправляет некоторые недостатки
реостатного регулирования. Стабильность угловой ско-
рости при шунтировании якоря выше, и вследствие этого
больше диапазон регулирования’— примерно (2-^-3) : 1 до
(5 4- 6) : 1 при малом отклонении момента нагрузки.
При малой мощности двигателя использование пол-
зункового потенциометра позволяет получить плавное регу-
лирование. Однако потери энергии при шунтировании
якоря и одинаковых с реостатным способом диапазоне
регулирования и нагрузке больше. Поэтому схема с шун-
тированием якоря используется в приводах сравнительно
небольшой мощности. Обычно она применяется при пред-
варительном снижении скорости для более точной остановки
привода. Длительная работа при шунтированном якоре
неэкономична вследствие относительно больших потерь
энергии в резисторах.
4.6. Регулирование угловой скорости
двигателя постоянного тока
последовательного возбуждения
Для двигателя последовательного возбужде-
ния, как и для двигателя независимого возбуждения, воз-
можны три способа регулирования угловой скорости,
а именно: 1) регулирование посредством резисторов, вклю-
ченных в цепь якоря; 2) регулирование изменением тока
возбуждения; 3) регулирование изменением подводимого'
напряжения.
132
Это вытекает из уравнения электромеханической харак-
теристики двигателя
® = (U - IR)/k®.
Регулирование угловой скорости изменением сопротивле-
ния резисторов в цепи якоря. Введением резисторов после-
довательно с обмоткой якоря двигателя можно ступенчато
регулировать его угловую скорость вниз от основной.
Жесткость характеристик при этом уменьшается по мере
увеличения сопротивления резистора, т. е. стабильность
угловой скорости невысокая, уменьшается по мере уве-
личения диапазона регулирования и зависит от момента
сопротивления (см. рис. 3.75). Диапазон регулирования
угловой скорости не превышает (2 -е 2,5) : 1 и зависит
от нагрузки. Регулирование угловой скорости изменением
сопротивления последовательно включенного резистора по
условиям полного использования двигателя на всех угло-
вых скоростях должно производиться при постоянном
нагрузочном моменте, что соответствует работе двига-
теля с неизменным током якоря, равным номинальному.
Как и в предыдущем случае, не учитывается ухудшение
условий вентиляции при снижении угловой скорости.
Несмотря на большие потери в резисторах, этот способ
находит применение в крановых и тяговых установках,
поскольку он является одним из простейших для двига-
телей последовательного возбуждения, применяемых в ука-
занных приводах, а также потому, что работа этих уста-
новок происходит с перерывами.
Регулирование угловой скорости изменением тока воз-
буждения. Этот способ применяется в тех случаях,
когда требуется расширить пределы регулирования за
счет увеличения угловой скорости выше основной при
загрузке двигателя номинальным током. В этом случае
приходится осуществлять изменение тока возбуждения
при помощи шунтирования обмотки возбуждения двига-
теля .
Регулирование угловой скорости изменением подводимого
напряжения. Регулирование может быть осуществлено
с помощью отдельного генератора, тиристорного преобра-
зователя либо последовательно-параллельным включением
двигателей. При последовательно-параллельном включении
двух двигателей можно получить две ступени угловой
скорости благодаря изменению напряжения, подводимого
133
к каждому из двигателей К Подобный способ регулирова-
ния осуществляется в том случае, если один производствен-
ный механизм приводится одновременно двумя двигателями
половинной мощности. Применение двух двигателей вместо
одного возможно по разным причинам, например: из-за
необходимости сократить время пуска и торможения путем
уменьшения суммарного момента инерции или по условиям
большей надежности работы, если ее можно вести при
пониженной мощности, т. е. с одним двигателем, или, на-
конец, по условиям удобства размещения двух двигателей
Рис. 4,23, Последовательность переключений при регулировании уг-
ловой скорости двух одинаковых двигателей постоянного тока после-
довательного возбуждения,
меньших габаритов вместо одного большого. Такой при-
вод находит применение, например, для мощных разли-
вочных кранов, в транспортных устройствах, трамваях,
в доменных подъемниках, мощных ножницах для разреза-
ния металла и для других механизмов. В подобных меха-
низмах два двигателя одинаковой мощности работают
на один общий вал (многодвигательный электропривод).
Применение последовательно-параллельного включения
дает экономические выгоды. При последовательном вклю-
чении на каждый из двигателей приходится половина
напряжения сети. Когда двигатели переключаются на
1 Такая схема применима и для нескольких двигателей, а также
для двигателей независимого или смешанного возбуждения,
134
параллельную работу, каждый из них оказывается включен-
ным на полное напряжение. Таким образом, получаются
две ступени регулирования без добавочной бесполезной
траты энергии. При снижении угловой скорости вдвое
роль резистора, в котором должно теряться напряжение,
играет второй двигатель, полезно использующий энергию.
Для получения промежуточных ступеней регулирования
в цепь якоря может быть введен добавочный резистор.
На рис. 4.23 приведены принципиальные схемы переклю-
чений, согласно которым получается пять ступеней регу-
лирования, из них две без потерь в резисторах. В целях
полного использования двигателей это регулирование может
производиться при постоянном нагрузочном моменте (без
учета ухудшения условий вентиляции).
Кроме указанных способов, находит применение и ком-
бинированный способ регулирования угловой скорости —
сочетание регулирования изменением подводимого к якорю
напряжения и тока возбуждения с реостатным. Этот спо-
соб реализуется в схеме шунтирования обмотки якоря.
4.7. Регулирование угловой скорости
двигателя постоянного тока
последовательного возбуждения
шунтированием обмотки якоря
или обмотки возбуждения
Регулирование угловой скорости двигателя
вниз от основной может быть достигнуто шунтированием
его обмоток при обязательном наличии в цепи последова-
тельно включенного сопротивления в виде резистора или
обмотки возбуждения (рис. 4.24, а, б).
Снижение угловой скорости двигателя по схеме, при-
веденной на рис. 4.24, а, вызывается падением напряжения
на резисторе /?п, в котором проходит ток 7П, являющийся
суммой тока якоря 1Я и тока в шунте /ш. Допустимой на-
грузкой двигателя в этой схеме является номинальный
момент. Однако при малых нагрузках характеристики
по-прежнему асимптотически приближаются к оси орди-
нат и, следовательно, имеют малую жесткость. Более
благоприятные характеристики получаются при включе-
нии двигателя по схеме на рис. 4.24, б. Снижение угловой
скорости обусловлено здесь вследствие малого сопротивле-
ния обмотки возбуждения в основном возрастанием потока
за счет увеличенного тока, проходящего по обмотке воз--
135-
буждения. Ток возбуждения протекает по обмотке даже
при нулевом токе якоря. В этом случае характеристики
имеют конечные угловые скорости идеального холостого
хода и пересекают ось ординат. Угловая скорость идеаль-
ного холостого хода тем меньше, чем меньше сопротивле-
Рис. 4.24. Схемы шунтирования обмоток двигателя постоянного тока
последовательного возбуждения,
а — шунтирование двигателя; б — шунтирование обмотки якоря.
ние шунтирующего резистора Вследствие этого угло-
вые скорости при малых значениях нагрузки лежат зна-
чительно ниже, чем для обычных реостатных характери-
стик, и жесткость характеристик увеличивается.
Наибольшее кратковременное снижение угловой ско-
рости здесь практически ограничивается насыщением дви-
гателя при увеличении тока возбуждения, что является
недостатком схемы. При длительной работе диапазон регу-
Рис. 4.25. Схема регулирования
угловой скорости двигателя посто-
янного тока последовательного
возбуждения шунтированием об-
мотки якоря.
лирования ограничивается нагревом обмотки возбуждения,
поэтому длительная работа на регулировочных характе-
ристиках возможна только при малых статических момен-
тах, а при номинальном моменте нагрузки и продолжитель-
ном режиме работы использование этой схемы включения
двигателя недопустимо.
В схеме, приведенной на рис. 4.25, сочетаются особен-
ности двух предыдущих схем. Такая схема позволяет
осуществить регулирование угловой скорости одновре-
менно за счет снижения напряжения, подводимого к якорю
двигателя, изменения потока и реостатное. При заданном-
136 ' |
токе якоря /я можно получать различные токи возбужде-
ния /п = /я + /ш, если изменять сопротивление рези-
стора 7?ш. Угловая скорость двигателя регулируется обычно
ступенчато вниз от основной в достаточно широких пре-
делах, которые зависят от соотношения сопротивлений 7?,и
и 7?п, от насыщения машины и нагрева ее обмотки воз-
буждения. В данном случае обеспечивается значительнее
снижение угловой скорости и механические характери-
стики при этом обладают относительно большой жесткостью.
На рис. 4.26, а, б показаны механические характери-
стики, полученные при этой схеме включения двигателя.
Подобно тому, как это было для двигателя постоян-
ного тока независимого возбуждения, при R„ = const и
= var получается се-
мейство характеристик,
пересекающихся в одной
точке, ограниченное двумя
крайними линиями, как это
показано на рис. 4.26, а.
В предельном случае, когда
= со, характеристика
Рис. 4.26. Семейство механиче-
ских характеристик двигателя
постоянного тока последователь-
ного возбуждения при шунтиро-
вании обмотки якоря по схеме
на рис. 4.25.
становится такой, как и для обычного включения в цепь
якоря последовательного резистора с сопротивлением Ra,
и жесткость ее уменьшается.
Если /?„, = 0, то напряжение на якоре равно нулю
и характеристика представляет собой прямую, проходя-
щую через начало координат. Это условие соответствует
работе двигателя независимого возбуждения в режиме
динамического торможения без внешнего резистора.
Семейство характеристик для = const и = var
приведено на рис. 4.26, б. При 7?п = оо двигатель оказы-
вается отключенным от сети и не развивает момента. Если
0, то характеристика отвечает схеме, приведенной
на рис. 4.24, б.
При переходе угловой скорости в область отрицатель-
ных моментов двигатель не отдает энергии в сеть, но рабо-
137
тает генератором на шунтирующий резистор, так как
и в этой схеме ЭДС двигателя последовательного возбужде-
ния не может быть больше приложенного напряжения
сети. В этом режиме механическая характеристика машины
имеет максимум момента. Объясняется это тем, что воз-
растание ЭДС вызывает уменьшение тока в обмотке воз-
буждения. Вначале, когда машина насыщена, поток ее
мало изменяется, и момент с возрастанием угловой ско-
рости и тока якоря продолжает расти, но, начиная с неко-
торой угловой скорости, поток машины резко уменьша-
ется вследствие перехода из насыщенного состояния ма-
шины в ненасыщенное; это ведет к уменьшению момента,
который при дальнейшем росте угловой скорости стре-
мится к нулю. При номинальном моменте нагрузки и
продолжительном режиме работы использование этой схемы
включения двигателя также недопустимо.
ОВМ R Рис- 4.27. Схема шунтирования
+ q—~i о якоря двигателя постоянного тока
—— j последовательного возбуждения
с включением обмотки возбуждения
в цепь шунтирующего резистора
(параллельное соединение якоря и
обмотки возбуждения).
Регулирование шунтированием обмотки якоря двигателя
постоянного тока последовательного возбуждения, так же
как и в случае независимого возбуждения, является неэко-
номичным, поскольку потери в резисторах значительны.
И по остальным показателям оно близко к регулированию
шунтированием обмотки якоря двигателя, постоянного
тока независимого возбуждения. Существенное различие
состоит в значении допустимого момента нагрузки.
По условиям полной загрузки двигателя по току при
длительной работе уменьшение угловой скорости в схе-
мах на рис. 4.24, а, б и 4.25 должно сопровождаться сни-
жением допустимого момента нагрузки таким образом,
чтобы ток возбуждения не превосходил номинального.
Поэтому эти схемы обычно используются для кратковре-
менного снижения угловой скорости. Схема на рис. 4.25
обеспечивает пределы регулирования до (2,5 ч- 3) : 1.
В крановых подъемных механизмах находит применение
еще одна схема шунтирования якоря двигателя постоян-
ного тока последовательного возбуждения, в которой
обмотка возбуждения включена в цепь шунтирующего
резистора (рис. 4.27). Не останавливаясь подробно на свой-
138
ствах характеристик двигателя, приведенных на рис.
4.28, а, б и проанализированных в [191, отметим только,
что получаемые в этой схеме характеристики целесообразно
использовать, например, для спуска грузов при малых
моментах в двигательном режиме и при больших и средних
моментах в генераторном режиме динамического тормо-
жения (в частности, при Ra = оо с самовозбуждением
без каких-либо переключений обмоток двигателя) и в гене-
раторном режиме параллельно с сетью при Rn = 0. В пос-
леднем случае двигатель последовательного возбуждения
включен как двигатель с независимым возбуждением.
Механические характеристики имеют максимум момента,
но в режиме торможения противовключением, где с ростом
Рис. 4.28. Семейство механических характеристик двигателя при шун-
тировании якоря по схеме на рис, 4.27,
а — при изменении Дш; б — при изменении Дп.
тока якоря из-за усиливающегося падения напряжения
на резисторе Ra уменьшается ток возбуждения. По этой
же причине в двигательном режиме при низких угловых
скоростях жесткость механических характеристик отно-
сительно мала, что ограничивает диапазон регулирования.
В режиме динамического торможения с ростом тока якоря
падение напряжения на резисторе Rn уменьшается (7П =
= 1Ш — /я) и ток возбуждения увеличивается; при низ-
ких угловых скоростях жесткость механических харак-
теристик больше, чем при высоких, что значительно рас-
ширяет диапазон регулирования угловой скорости в этом
режиме, например при спуске груза (для реализации этого
режима для спуска груза нужно переключить одну из об-
моток двигателя так, чтобы угловые скорости идеального
холостого хода были отрицательными). В рассматриваемой
.схеме не всегда удается полностью использовать двига-
тель, так как токи в якоре и обмотке возбуждения не сов-
139
падают друг с другом, в связи с чем при номинальном токе
в одной обмотке ток в другой может быть меньше, а зна-
чит, будет меньше допустимый момент двигателя.
Регулирование угловой скорости шунтированием обмотки
возбуждения осуществляется по схеме на рис. 4.29. Здесь
Рис. 4.29. Схема регулирования
угловой скорости двигателя посто-
янного тока последовательного
возбуждения шунтированием об-
мотки возбуждения.
регулирование угловой скорости производится изменением
магнитного потока двигателя, поскольку при заданном
токе якоря /я можно с помощью резистора изменять
ток возбуждения /„ — 1Я — 1Ш. Регулирование осущест-
вляется вверх от основной угловой скорости вследствие
уменьшения магнитного потока. Оно является экономич-
1 Шунтирование
( обмотки возбуждения
Естественная характеристика
Шунтирование якоря
Реостатныв ссарактеристини
Рис. 4.30. Механические характеристики двигателя последователь-
ного возбуждения при различных способах регулирования его угловой
скорости.
ным, так как потери в резисторе будут примерно такими
же, что и при регулировании ослаблением потока двига-
теля независимого возбуждения. Объясняется это тем,
что сопротивление обмотки возбуждения относительно мало,
следовательно, и сопротивление шунтирующего резистора
должно быть также малым.
Пределы регулирования угловой скорости двигателя
здесь обычно не превышают 2:1 при условии постоянству,
мощности нагрузки. Стабильность угловой скорости доста-
140
точно высокая (не хуже чем на естественной характери-
стике). Плавное регулирование здесь получить трудно
из-за большого тока обмотки возбуждения. Поэтому обычно
используется ступенчатое регулирование. Этот способ регу-
лирования угловой скорости находит применение в элек-
троприводах механизмов, требующих увеличения ско-
рости при малых нагрузках, например в безмаховиковых
ножницах блюминга, запускаемых для каждого пореза
металла.
На рис. 4.30 в верхней его части приведены механиче-
ские характеристики при шунтировании обмотки воз-
буждения. В нижней части даны характеристики, соот-
ветствующие шунтированию обмотки якоря. На этом же
рисунке утолщенной линией показаны естественная харак-
теристика двигателя и штриховой линией — характери-
стики при регулировании изменением сопротивления после-
довательного резистора, включенного в цепь якоря.
4.8. Регулирование угловой скорости
электроприводов переменного тока
Для плавного и глубокого регулирования
угловой скорости различных производственных механиз-
мов в настоящее время широко применяются разнообраз-
ные электроприводы с двигателями постоянного тока.
Однако наряду с использованием электроприводов посто-
янного тока в последние годы с развитием полупроводнико-
вой техники все большее внимание уделяется применению
различных систем регулируемых электроприводов пере-
менного тока с асинхронными двигателями с короткозамк-
нутым ротором или двигателями. с фазным ротором. Для
установок сравнительно большой мощности в безредуктор-
ных тихоходных электроприводах экономически оправдан-
ным оказывается также регулируемый синхронный дви-
гатель.
Применение двигателей переменного тока обусловлено
их простотой, дешевизной, повышенной надежностью, суще-
ственно (в 2—3 раза) меньшими габаритами и массой по
сравнению с двигателями постоянного тока. Кроме того,
некоторые способы регулирования угловой скорости не тре-
буют специальных преобразовательных устройств.
Отмечая достоинства двигателей переменного тока,
нельзя не обратить внимания на то, что относительно про-
стые способы регулирования угловой скорости электро-
141
приводов переменного тока обладают и рядом недостатков,
к которым можно отнести в одном случае небольшую
плавность, в другом — невысокие энергетические показа-
тели и т. д. Более эффективные способы регулирования осу-
ществляются при помощи сравнительно сложных пре-
образовательных устройств и средств управления.
В последующих параграфах рассматриваются различ-
ные, получившие практическое применение способы регу-
лирования угловой скорости электроприводов перемен-
ного тока, анализируются их технико-экономические
показатели и определяется возможная область примене-
ния.
Наибольшее распространение получили следующие спо-
собы регулирования угловой скорости асинхронного дви-
гателя: 1) реостатное регулирование; 2) переключением
числа полюсов; 3) изменением частоты питающего напря-
жения; 4) каскадным включением асинхронного двигателя
с другими машинами или преобразователями. Для регули-
рования угловой скорости, кроме упомянутых, могут быть
использованы некоторые другие способы включения элек-
трических двигателей: импульсное регулирование, регу-
лирование изменением подводимого к статору напряжения,
регулирование с помощью электромагнитной муфты сколь-
жения и др.
4.9. Реостатное и импульсное
параметрическое регулирование
угловой скорости асинхронного
электропривода
Введение резисторов в цепь ротора (реостат-
ное регулирование) позволяет, как и для двигателей по-
стоянного тока, регулировать угловую скорость двигателя.
Плавность регулирования зависит от числа ступеней вклю-
чаемых резисторов. Регулирование осуществляется вниз
от основной угловой скорости.
Реостатные характеристики асинхронного двигателя,
как и в приводе постоянного тока, отличаются невысокой
жесткостью, уменьшающейся с ростом сопротивления рези-
сторов в роторной цепи. Если считать, что рабочая часть
механической характеристики двигателя линейна, то мо-
дуль жесткости реостатной характеристики
Рр ~ ^иом/^оЗцом,pi (4.33)
142
где sH0M>p — скольжение на реостатной характеристике,
соответствующее номинальному моменту.
Если учесть, что диапазон регулирования
D — (£>inaxl<S)min— (1 SHOM)/(1 ®ном,р)>
ТО
Рр = DMuoJ(D — 1 +sH0M) <йо. (4.34)
Формула (4.34) подтверждает сказанное — чем больше
диапазон регулирования, тем меньше жесткость характе-
ристик.
Любой способ регулирования скорости привода, в том
числе и реостатное регулирование, теоретически при неиз-
менном моменте нагрузки может обеспечить D = оо. Од-
нако практически в силу различных причин возникают
отклонения нагрузочного момента от расчетного; это откло-
нение момента АЛ1С вызывает изменение угловой ско-
рости Асо. Если отнести его к расчетной угловой скорости
на регулировочной характеристике <ор, то относительное
отклонение угловой скорости, или точность регулирования,
можно записать:
А(о/<йр = Айр* = AA4CJ1:/(Pp;f: — 1), (4.35)
где АЛ1СН. — относительное отклонение момента нагрузки от
Мною ₽р* = АЛЕ,./Аа>.г. — модуль жесткости реостатной
характеристики в относительных единицах (при базовых
единицах Л1нон и <й0).
Подставляя значение Рр4. из (4.34) в (4.35), получаем:
A®p*=AMcJD/(l-sH0M)-l]. (4.36)
Отсюда можно найти допустимый диапазон при рео-
статном регулировании по заданному отклонению нагру-
зочного момента и допустимой точности регулирования:
Я = (1 -Shom) (А(орн./АЛ4сн. + 1). (4.37)
Так как sH0M 1, то приближенно
£>№ AtOp^/ATHc* 1. (4.38)
Из (4.38) видно, что, например, при равных относи-
тельных отклонениях угловой скорости и момента нагрузки
диапазон регулирования D = 2 : 1. При еще меньшем
допустимом относительном отклонении угловой скорости
по отношению к возможному относительному отклонению
момента нагрузки диапазон регулирования окажется еще
143
меньшим. Следовательно, практически допустимый диа-
пазон при реостатном регулировании угловой скорости
не превышает (1,5 -ь 2) : 1. В условиях эксплуатации
напряжение питающей сети также может изменяться отно-
сительно номинального значения. Его снижение приведет
к уменьшению модуля жесткости характеристики и к еще
большему уменьшению диапазона регулирования.
При вентиляторной нагрузке может быть допущен
больший диапазон регулирования, примерно (3 -ь 5) : 1.
Реостатное регулирование скорости двигателей средней
и большой мощности может осуществляться плавно с по-
мощью, например, жидкостного реостата, включаемого
в роторную цепь. Этот способ из-за нестабильности сопро-
тивления электролита, громоздкости реостата и повышен-
ной инерционности регулирования не нашел широкого
применения.
Чаще всего используются дополнительные металлические
резисторы, ступени которых регулируются дискретно при
помощи контакторов, поэтому регулирование получается
ступенчатое. Плавность регулирования тем выше, чем
больше число ступеней регулировочного резистора.
Допустимая нагрузка длительно работающего двига-
теля при реостатном регулировании определяется неизмен-
ным моментом, равным номинальному, так как номиналь-
ному моменту соответствует номинальный ток двигателя.
В этом случае предполагается, что двигатель имеет неза-
висимую вентиляцию и охлаждается одинаково интенсивно
при любой угловой скорости.
Допустимый ток и соответственно допустимый момент
самовентилируемого двигателя должен быть снижен по
сравнению с номинальным тем в большей мере, чем ниже
его угловая скорость.
Допустимый момент асинхронных самовентилируемых
двигателей с фазным ротором уменьшается по мере сниже-
ния угловой скорости примерно до 0,4 а>ном в соответ-
ствии с равенством
^доп^^иомКю/СОном- (4.39)
Если момент нагрузки при регулировании угловой
скорости остается неизменным и равным номинальному,
то нужно завысить установленную мощность двигателя
(использовать двигатель с большей номинальной мощностью)
так, чтобы момент нагрузки не превысил допустимый
момент двигателя при минимальной угловой скорости,
144
При этом условии и для допустимого момента, определяе-
мого равенством (4.39), коэффициент завышения мощности
равен:
:2s = • (4.40)
Принимая ориентировочно Л4Д0П линейно-зависящим
от угловой скорости, получаем:
^доп/^ном № (ВМо* + 1 — Mo^)/D, (4.41)
где Alo* = А1д0по/Л1ном — относительный допустимый мо-
мент двигателя при неподвижном состоянии ротора дви-
гателя (для асинхронных само вентилируемых двигателей
с фазным ротором Al0;i. 0,25).
Тогда
^^/(DA^ + l-Mo*). (4.42)
Потери мощности при реостатном регулировании скла-
дываются из переменных потерь, включающих потери в меди
статора и ротора и во внешних резисторах роторной цепи,
и постоянных — не зависящих от нагрузки. К последним
относятся потери в стали статора и ротора, а также меха-
нические и добавочные, обусловленные полями рассеяния
и высшими гармониками МДС статора и ротора.
Потери в стали статора в данном случае остаются по-
стоянными независимо от скольжения, так как напря-
жение, подводимое к статору, не изменяется.
Механические потери приблизительно пропорциональны
угловой скорости, с увеличением скольжения уменьша-
ются, при этом потери в стали ротора возрастают вслед-
ствие увеличения частоты тока ротора, поэтому можно
приближенно считать, что сумма постоянных потерь оста-
ется неизменной независимо от нагрузки и скорости при-
вода.
Сумма же переменных потерь мощности может быть
найдена по формуле
АР24” &Р 1= A4tt>os[l 4“Pi/(Ps 4~Рдоб)]. (4.43)
Из (3.37) следует:
sk, h/sk, е = (Рг4- Рдоб)/Рг> (4.44)
где sk,h, sK,e — соответственно критическое скольжение,
отвечающее искусственной (реостатной) и естественной ха-
к.рактеристикам двигателя; Рдоб,Р2 — внешнее дополнитель-
ное и собственное сопротивленйя фазы ротора.
145
При одном и тбм же моменте на естественной и искусст-
венной характеристиках справедливо соотношение:
SK.H/SK,e = SH/Se> (4.45)
здесь sH, $е — соответственно текущее значение скольжения
на искусственной и естественной характеристиках.
Тогда
^доб/^2 = 5и/5е-1. (4.46)
С учетом (4.46)
АР2 + ЛР1 = Л1<Во5 4-Л1<во-§г5е. (4-47)
*^2
Таким образом, при неизменном моменте нагрузки и ре-
остатном управлении потери мощности в роторной цепи
изменяются пропорционально скольжению, а потери в ста-
торе не зависят от скольжения и остаются неизменными
при данном моменте нагрузки.
Напомним, что основная мощность теряется в регулиро-
вочном резисторе. Если, например, скорость двигателя
снижена вдвое по сравнению с номинальной, то примерно
половина всей потребляемой из сети мощности теряется
в регулировочных резисторах.
Иначе оцениваются потери мощности в меди статора и
ротора при вентиляторной нагрузке. Для упрощения будем
считать, что вентиляторная характеристика выражается
квадратичной зависимостью момента нагрузки от угловой
скорости, а момент холостого хода вентилятора не учиты-
вается. Тогда
М = М ( ю V = М —(1-—. (4 48)
2Г*Н0М I J 2Х1Н0М/1 « \2
\WHOM / Vх йном/
Кроме того,
+ = <4'49>
Подставляя эти значения в (4.43), получаем:
ЛР>+ ЛР‘= + <4 50’
Первый член (4.50) определяет потери мощности в ро-
торной цепи от скольжения
ДР2 = Мномсо0 = Рном (1-W* S> (4,51)
где Рном — номинальная мощность двигателя.
146
Из (4.51) следует, что при s = 0 и s = 1 потери мощности
в роторной цепи АР2 = 0.
Анализ (4.51) показывает, что максимум потерь мощно-
сти в роторной цепи при вентиляторной нагрузке так же,
как и в случае привода постоянного тока, имеет место при
s = 1/3 и составляет:
4р“-та- и-52)
Например, при sH0M = 0,02 kPimax = 0,16РНОМ.
Потери мощности в меди статора при вентиляторной
нагрузке (без учета потерь от тока холостого хода) равны:
ДР1 = MlloMoa ,/ls s)7oz - (4.53)
U —SH0m) Kz
ИЛИ
ДР1 = ДР2но (4.54)
К1 йном/ ^2
Из (4.54) следует,.что при s, изменяющемся от 1 до s1I0l,
ДР, изменяется от 0 до АР2ном4|.
^2
На рис. 4.31 приведены кривые относительных потерь
- мощности АРи = АР1/РН0М и АРа* = АР2/РНОМ при рео-
статном регулировании и вентиляторной нагрузке.
Суммарные потери мощности при регулировании угло-
вой скорости равны:
AP = AP1 + APa + APSnoCT, (4.55)
где APs пост — постоянные потери.
Обычно привод работает на различных регулировочных
характеристиках неодинаковое время. В этом случае по-
тери энергии за регулировочный цикл следует определять
с учетом продолжительности работы на каждой характери-
стике, поэтому
ААц = APXG + АР2/2 + ... + \Pntn = 2 АРЛ, (4.56)
где AP1T ДР2, ...АРл и 4, 4, •••, — соответственно суммар-
ные потери мощности и продолжительность работы при-
вода на первой, второй, .... п-й регулировочных характери-
стиках.
Зная полезную мощность, развиваемую приводом на
каждой регулировочной характеристике, можно найти
147
КПД привода за регулировочный цикл
У
Лр. ц — — п • (4.57)
У Pi + 2 ^Рiti
1 1
Коэффициент мощности при реостатном регулировании
с постоянным моментом нагрузки и неизменным магнит-
ным потоком остается постоянным.
Если на валу двигателя имеет место вентиляторная на-
грузка, то со снижением угловой скорости коэффициент
Рис. 4.31. Кривые относитель-
ных потерь мощности Д_Р2* и
APbt при реостатном регули-
ровании и вентиляторной на-
грузке.
Рис. 4.32. Зависимость коэффициен-
та мощности от скольжения асин-
хронного двигателя с реостатным
регулированием при различных на-
грузках (в относительных едини-
цах).
1 — при Мс = const; 2 — при венти-
ляторной нагрузке.
мощности падает. При уменьшении угловой скорости вслед-
ствие снижения момента нагрузки и соответственно тока
ротора уменьшается потребляемая двигателем активная
мощность. Однако с уменьшением роторного тока неизмен-
ными остаются значения намагничивающего тока и соот-
ветственно потребляемой двигателем реактивной мощности,
и поэтому коэффициент мощности первичной цепи падает
с уменьшением угловой скорости.
На рис. 4.32 приведены в относительных единицах
(отнесенные к номинальному значению коэффициента мощ-
ности) примерные значения коэффициента мощности асин-
хронного привода с реостатным регулированием при раз-
личных нагрузках.
148
Следует отметить, что энергетические показатели регу-
лируемого электропривода за цикл зависят от режима ра-
боты. При продолжительном режиме они существенно
ниже, чем при повторно-кратковременном. В обоих случаях
они тем выше, чем меньше диапазон регулирования и чем
большую часть времени привод работает на повышенных ско-
ростях.
Недостатками реостатного регулирования скорости яв-
ляются: 1) необходимость дискретного изменения сопротив-
ления в роторной цепи с помощью силовых аппаратов, уп-
равляемых дистанционно или вручную, что дает ступенча-
тое регулирование скорости и исключает возможность ис-
пользования замкнутых систем автоматического управле-
ния; 2) невысокое быстродействие; 3) большие потери энер-
гии.
Реостатное регулирование благодаря своей простоте
находит практическое применение, например, в приводе
подъемно-транспортных устройств, вентиляторов и насосов
малой и средней мощности (до 100 кВт).
Плавное бесступенчатое регулирование угловой скорости
асинхронных двигателей при введении резисторов в цепь
статора или ротора можно получить (при небольшой мощно-
сти двигателя), использовав импульсное параметрическое
регулирование, применяемое в автоматизированном элект-
роприводе для стабилизации заданного значения угловой
скорости при изменении момента нагрузки или для пред-
варительного снижения скорости перед остановкой при-
вода.
Схема включения асинхронного двигателя с короткозам-
кнутым ротором при импульсном регулировании добавоч-
ного сопротивления (во всех трех фазах) в цепи статора при-
ведена на рис. 4.33, а. Механические характеристики дви-
гателя, включенного по этой схеме, для различных значе-
ний скважности е показаны на рис. 4.33, б.
При е = 1 двигатель будет работать на естественной ха-
рактеристике (ключи К двусторонней проводимости — по-
лупроводниковые или контактные — постоянно замкнуты).
При е — 0 двигатель будет работать на реостатной характе-
ристике, соответствующей постоянно включенному рези-
стору (ключи К разомкнуты). Как следует из (3.37) и
(3.38), при увеличении активного сопротивления цепи ста-
тора уменьшаются максимальный момент и критическое
скольжение, модуль жесткости механической характери-
стики и стабильность угловой скорости уменьшаются.
149
Допустимый момент асинхронного двигателя с коротко-
замкнутым ротором при импульсном параметрическом ре-
гулировании со снижением угловой скорости резко падает
(как это показано штриховой линией на рис. 4.33, б), так
как значительно возрастают потери в нем (потери в цепи
ротора равны ДР = Mcoos), а выделяются они все внутри
машины. Для двигателя с независимой (принудительной)
вентиляцией по мере увеличения скольжения нужно так
уменьшать момент нагрузки, чтобы потери в двигателе не
превышали номинальных. Поэтому схема, показанная на
рис. 4 33, а, может быть использована в приводах малой
Рис, 4.33. Принципиальная схема импульсного параметрического уп-
равления асинхронным двигателем с короткозамкнутым ротором (а) и
механические характеристики (б).
мощности и в кратковременном режиме работы. По этой же
причине диапазон регулирования обычно не превышает
(1,15—1,2) : 1 при продолжительном режиме работы. В крат-
ковременном режиме работы регулирование угловой ско-
рости в более широких пределах может производиться лишь
при осуществлении замкнутых систем управления, в кото-
рых используются обратные связи для автоматического
поддержания угловой скорости двигателя на заданном
уровне.
Лучшее использование двигателя при импульсном пара-
метрическом регулировании угловой скорости асинхронного
двигателя достигается, когда применяется двигатель с фаз-
ным ротором. В этом случае дополнительные потери мощно-
сти, обусловленные регулированием угловой скорости,
в основном выделяются в добавочных резисторах вне ма-
150
шины, поэтому допустимый момент для двигателя с незави-
симой вентиляцией оказывается примерно равным номи-
нальному. Схема включения асинхронного двигателя с фаз-
ным ротором при импульсном параметрическом регулиро-
вании угловой скорости приведена на рис. 4.34, а. Дополни-
тельный резистор R включен через выпрямитель В в ротор-
ную цепь последовательно со сглаживающим реактором.
Резистор R периодически включается и выключается с по-
мощью ключа К (контактного или тиристорного, выпол-
ненного, например, по схеме рис. 4.6, г).
Рис. 4.34. Схема включения асинхронного двигателя с фазным рото-
ром с импульсным параметрическим регулированием угловой скоро-
сти (а), механические характеристики (б).
Когда ключ К замкнут (е = 1), двигатель работает на
характеристике, соответствующей R3 = 0 (рис. 4.34, б);
если ключ разомкнут (е = 0) и R3 = R, то двигатель рабо-
тает на реостатной характеристике. Рабочая зона при
импульсном параметрическом регулировании располага-'
ется между двумя крайними характеристиками.
Энергетические показатели при импульсном регулиро-
вании сопротивления несколько хуже, чем при ступенча-
том его изменении. Это обусловлено пульсациями выпрям-
ленного тока (или действующего значения тока), увеличи-
вающими потери, наличием в цепи обмоток тиристоров, ко-
торые искажают форму тока двигателя, что приводит к по-
явлению моментов высших гармоник и дополнительным
потерям.
151
Импульсное управление асинхронным двигателем с фаз-
ным ротором в цепи выпрямленного тока простыми сред-
ствами обеспечивает плавное и в широких пределах (в зам-
кнутых системах) регулирование угловой скорости с высо-
ким быстродействием.
4.10. Регулирование угловой скорости
асинхронного электропривода
изменением напряжения
Если регулировать напряжение, подводимое
к трем фазам статора асинхронного двигателя, то можно,
отвлекаясь от влияния параметров регулирующего устрой-
ства на характеристики двигателя, изменять максимальный
момент, не изменяя критического скольжения. Устрой-
ством для регулирования напряжения может быть, напри-
мер, тиристорный регулятор; при этом в каждой фазе ста-
тора двигателя находятся два встречно-параллельно вклю-
ченных тиристора. Управляя углом включения тиристоров
(фазовое управление), можно плавно менять действующее
значение напряжения.
Максимальный момент при пониженном напряжении сни-
жается пропорционально квадрату напряжения:
<,и = Л4к(Пи/ПЙОМ)2, (4.58)
где Л4К1И,Л4К — соответственно максимальные моменты, раз-
виваемые двигателем при сниженном и номинальном напря-
жениях; £/и, (7ИОМ — соответственно пониженное и номи-
нальное напряжения.
Критическое скольжение, не зависящее от напряжения,
остается неизменным. Не изменяется также и синхронная
угловая скорость, которая зависит только от частоты питаю-
щего напряжения и числа пар полюсов двигателя.
Регулирование угловой скорости двигателя . при этом
способе происходит за счет уменьшения модуля жесткости
механических характеристик и осуществляется вниз от
номинальной угловой скорости. Плавность регулирования
определяется плавностью изменения напряжения; при
применении тиристорного регулятора напряжения угло-
вая скорость регулируется бесступенчато.
Механические характеристики двигателя с короткозам-
кнутым ротором при регулировании напряжения на статоре
приведены на рис. 4.35. Из этих характеристик следует,
что пределы регулирования весьма ограничены даже при
152
использовании вентиляторной нагрузки, но они могут быть
существенно расширены в замкнутых системах электропри-
вода. В действительности вследствие уменьшения критиче-
ского скольжения из-за влияния параметров регулирую-
щего устройства пределы регулирования в разомкнутых си-
стемах еще уменьшаются.
Так как большие потери мощности скольжения в двига-
теле с короткозамкнутым ротором выделяются в самом ро-
торе, то допустимый момент резко уменьшается по мере
роста скольжения, поэтому такой неэкономичный способ
регулирования угловой скорости асинхронного двигателя
с короткозамкнутым ротором можно использовать только
при малой мощности двигателя и в кратковременном ре-
жиме работы.
Рис. 4.35. Механические характе-
ристики двигателя с короткозамк-
нутым ротором при регулировании
напряжения на статоре.
Лучшее использование двигателя и более благоприят-
ные характеристики могут быть получены, если применить
двигатель с фазным ротором, в роторную цепь его включить
дополнительный нерегулируемый резистор и регулировать
напряжение на статоре (рис. 4.36, а). Механические харак-
теристики для рассматриваемого способа приведены на
рис. 4.36, б. Преимущество этого способа по сравнению с ре-
остатным заключается в том, что управление двигателем
осуществляется плавно и исключается контактная аппара-
тура в роторной цепи.
Потери энергии в приводе получаются примерно такими
же или несколько больше, как и при реостатном регулиро-
вании; потери мощности скольжения в основном выносятся
из двигателя и выделяются в дополнительном резисторе,
что увеличивает допустимый момент. Этот способ может
быть использован при вентиляторной нагрузке для продол-
жительного режима, а при Мс = const для кратковремен-
ного режима работы. Очевидно, что регулирование измене-
153
нием напряжения может быть осуществлено только вниз от
основной угловой скорости.
Механические характеристики (рис. 4.36, б) по мере сни-
жения напряжения становятся мягкими и не обеспечивают
стабильности угловой скорости при возможном отклоне-
нии нагрузки. Кроме того, наличие постоянно включен-
ного резистора приводит к недоиспользованию двигателя
по скорости (угловая скорость всегда меньше номиналь-
ной) и по мощности. Повышение стабильности угловой ско-
рости и расширение диапазона регулирования до (5 ч- 10) : 1
достигается в замкнутых системах.
Рис. 4.36. Схема включения двигателя с фазным ротором с нерегули-
руемым резистором в роторной цепи и регулированием напряжения
на статоре (а) и механические характеристики (б).
Для регулирования напряжения используются как ти-
ристорные регуляторы напряжения с фазовым управле-
нием, так и реакторы насыщения, автотрансформаторы и
импульсные, например тиристорные или контактные регу-
лирующие устройства.
Простейшая принципиальная схема включения асин-
хронного двигателя с короткозамкнутым ротором при им-
пульсном регулировании напряжения приведена на
рис. 4.37, а; механические характеристики двигателя, вклю-
ченного по этой схеме, для различных значений скважности
е включенного состояния ключей К — на рис. 4.38, а.
При е = 1 двигатель работает на естественной характери-
стике (ключи К постоянно замкнуты); при е = 0 двигатель
отключен от сети. Характеристики двигателя и его свойства
154
при этом способе регулирования такие же, как и при не-
прерывном регулировании напряжения.
Энергетические показатели при импульсном регулиро-
вании напряжения хуже из-за больших пульсаций напряже-
Рис. 4.37. Схемы включения дви-
гателя с короткозамкнутым рото-
ром с импульсным регулированием
напряжения.
ния и угловой скорости, а также из-за переходных электро-
магнитных процессов, вызванных включением и отключе-
нием обмоток статора двигателя. Частота коммутаций
здесь может быть небольшая, ограниченная целым числом
полупериодов для включенного состояния тиристорных
или симисторных ключей К-
Рис. 4.Зе. Механические характеристики двигателей, управляемых по
схемам, изображенным на рис. 4.37,
Еще худшими энергетическими показателями обладает
электропривод с импульсным регулированием напряже-
ния и импульсным чередованием фаз, включенный по схеме
рис. 4.37,-б; механические характеристики двигателя при
этой схеме включения приведены на рис. 4.38, б для различ-
ных значений скважности е включенного состояния ключей
КВ. На интервалах выключенного состояния ключей КВ
включены ключи КН, изменяющие чередование фаз подве-
155
денного к двигателю напряжения. Поэтому при е = 0, когда
постоянно включены ключи КН, двигатель оказывается
в режиме торможения противовключением. Наложение
двигательного и тормозного режимов вызывает почти не-
прерывные электромагнитные переходные процессы, обу-
словливающие увеличение потерь мощности. Основное до-
стоинство этого способа импульсного регулирования —
повышенная жесткость механических характеристик в об-
ласти генераторного режима, что может быть полезным при
некоторых применениях этого способа.
Импульсное регулирование переменного напряжения
применяется редко, оно уступило место фазовому и другим
видам непрерывного регулирования.
4.11. Регулирование угловой скорости
асинхронного электропривода
переключением числа полюсов
Из выражения для угловой скорости асин-
хронного двигателя:
со — со0 (1 -s) = 2nA(l -s)/p (4.59)
следует, что угловую скорость можно регулировать, изме-
няя число пар полюсов р, если задана частота питающей
сети /1 и мало изменяется скольжение s. Так как число пар
полюсов может быть только целым числом, то регулирова-
ние угловой скорости оказывается ступенчатым. Такой
способ регулирования реализуется практически в двига-
телях с короткозамкнутым ротором,-где переключение по-
люсов производится в обмотке статора, обмотка ротора при
этом автоматически приспосабливается к избранному числу
полюсов. Если использовать двигатель с фазным ротором,
то переключение числа полюсов на статоре потребует одно-
временного переключения числа полюсов и на роторе, что
усложнит конструкцию, поэтому для этого способа регули-
рования практически используются асинхронные двига-
тели с короткозамкнутым ротором, в которых чаще всего
переключение полюсов осуществляется изменением направ-
ления тока в отдельных половинах каждой фазной обмотки.
Принципиальные схемы присоединения полуобмоток для
изменения числа полюсов в обмотках с соотношением
2 : 1 приведены на рис. 4.39, а—в.
На рис. 4.40, а—д даны наиболее употребительные
схемы переключения обмоток статора. При переключений
153
с одного числа полюсов на
другое сохраняется то же
направление вращения дви-
гателя. В табл. 4.2 приве-
дены отношения магнитных
индукций для различных
соединений обмоток стато-
ра. Согласно рис. 4.40, а—д
одинарное число полюсов
обозначено I, а двойное
число полюсов — II.
Электромагнитный мо-
мент асинхронного двига<-
теля:
М = т^ко6рФ1'г cos тр2 •
(4.60)
Рис. 4.39. Принципиальные схе-
мы присоединения полуобмоток
для изменения числа полюсов в
обмотках с соотношением 2:1,
Рис. 4.40. Схемы переключения
обмоток статора,
и
п
а)
г)
157
Таблица 4.2
№ рис. Двойное число полюсов (обозначение //, рис. 4.40) Одинарное число полюсов (обозначение 1, рис. 4.40) Отно- шение ВЦ В1
Соединение полуобмоток Соедине- ние фаз Соединение полуобмоток Соедине- ние фаз
4. 40, а Последователь- ное Y Параллельное д 0,58
4. 40, б Y или Д YY или Д 1,0
4. 40, в Последователь- ное или па- раллельное Y Последователь- ное или па- раллельное Д 1,16
4. 40, г Последователь- ное Д Параллельное YY 1,73
4. 40, д Последователь- ное или па- раллельное Y или Д Последователь- ное или па- раллельное Y или Д 2,0
Если принять для упрощения обмоточный коэффициент
^Об! = ^обП и Cos Ф21 =cos ф2ц, то получим:
Mn/Mi = (4-61)
Так как рцФц = АВп; Р1Ф1 = ABj, где А — конструк-
тивный коэффициент машины, то, полагая, что дац/211
wt/2i, получаем:
Мп/ЛЬ = Вп/В\.
(4.62)
Следовательно, моменты, развиваемые двигателем с раз-
личными схемами соединения обмоток статора, отвечаю-
щими разным числам полюсов, относятся как соответствую-
щие магнитные индукции.
Отношение магнитных индукций можно оценить через
отношение ЭДС. Известно, что ЭДС можно рассчитать по
формуле
Е = лУ2 fwko6(£> = л ]/~2 fwko6AB/p, (4.63)
где Ф = В Alp.
Т огда отношение ЭДС
Еп a’lIfeo6HSIl/Pll
' <4-64>
или
Ёп/Ei = wiiBup1/wiBipn. ' (4.65)
158
Под w следует понимать число витков одной параллель-
ной ветви фазы. Если для неизменного напряжения сети Ur
пренебречь падением напряжения в статоре, то при соеди-
нении обмоток статора в звезду Е — а в треуголь-
ник Е = Ux.
На основании (4.65) в графе Вц/Bi табл. 4.2 даны отно-
шения-магнитных индукций при различных соединениях
обмоток статора.
В соответствии с этими данными на рис. 4.41 для схемы
на рис. 4.40, а приведены примерные механические харак-
теристики, которые могут быть использованы в приводах
с вентиляторным моментом
нагрузки.
Если применяется схема
переключения, отвечающая
рис. 4.40, б или в, то в этом
случае номинальные момен-
ты, развиваемые двигателем
Рис. 4.41. Примерные механичес-
кие характеристики для схемы на
рис. 4.40, а в приводах с вентиля-
торным моментом нагрузки.
при двойном и одинарном числах полюсов, примерно оди-
наковы, а его механические характеристики имеют вид,
показанный на рис. 4.42.
Переключение обмоток статора по схемам, изображен-
ным на рис. 4.40, г и д, дает возможность получить момент,
вдвое больший при двойном числе полюсов по сравнению
с одинарным. Это означает, что с.уменьшением номинальной
угловой скорости в 2 раза соответственно возрастает номи-
нальный момент (рис. 4.43).
Схемы переключения, показанные на рис. 4.40, а—д,
отвечают использованию одной обмотки на статоре, дающей
только две скорости, отношение которых равно 2. Такие
двигатели называются двухскоростными. Выпускаются также
серийные двигатели трех- и четырехскоростные сравни-
тельно небольшой мощности. Эти двигатели могут иметь
две независимые обмотки на статоре, каждая из которых
(или одна из них) выполняется полюсопереключаемой.
Использование двух полюсопереключаемых обмоток расши-
ряет диапазон регулирования скорости.
159
Минимальная синхронная частота вращения, с которой
выпускаются полюсопереключаемые двигатели широкого
назначения, равна 500 об/мин. Двигатели специального
назначения имеют меньшую частоту вращения. Максималь-
ная частота вращения составляет 3000 об/мин. Очевидно,
что при заданной мощности снижение нижнего предела ча-
стоты вращения приводит к увеличению габаритов двига-
теля и ухудшению его энергетических показателей.
Точность регулирования определяется статизмом на
данной характеристике и оценивается скольжением, которое
в среднем составляет: для многоскоростных двигателей
Рис. 4.43. Механические харак-
теристики для схем рис. 4.40, г
и д.
Рис. 4.42. Механические харак-
теристики для схем рис. 4.40, б
и в.
малой мощности — 0,05, средней мощности — 0,03, т. е.
точность оказывается сравнительно высокой.
Практически диапазон регулирования не превышает
6 : 1 (3000 : 500 об/мин).
Направление регулирования при этом способе является
условным и зависит от того, при каком числе полюсов угло-
вая скорость для механизма принята номинальной (основ-
ной). Так, для вентиляторной нагрузки и характеристик на
рис. 4.41 регулирование осуществляется вниз от основной,
а при постоянстве мощности нагрузки и характеристиках
по рис. 4.43 — вверх от основной.
В соответствии с данными табл. 4.2 и приведенными
выше характеристиками на рис. 4.41—4.43 можно заклю-
чить, что полюсопереключаемые двигатели в зависимости
от схемы соединения обмоток статора можно выбрать прак-
тически для любой нагрузки (вентиляторной, с постоянным
160
моментом и мощностью), обеспечивая при этом достаточ-
ную перегрузочную способность (Л. = 1,8 -ь 2,5).
Регулирование угловой скорости переключением полю-
сов является не плавным, а ступенчатым. Вместе с тем рас-
сматриваемый способ регулирования является весьма эко-
номичным и отличается механическими характеристиками,
обладающими большой жесткостью. Благодаря своим пре-
имуществам двигатели с переключением полюсов находят
применение там, где не требуется плавного регулирования
скорости, например в некоторых металлорежущих станках
в целях уменьшения количества механических передач.
Они применяются также для вентиляторов, насосов, эле-
ваторов, в цементной, нефтяной и других отраслях промыш-
ленности.
4.12. Частотное регулирование асинхронных
электроприводов
Принципиальная возможность регулирования
угловой скорости асинхронного двигателя изменением ча-
стоты питающего напряжения вытекает из формулы со —
2nft (1 — s)/p. При регулировании частоты также воз-
никает необходимость регулирования амплитуды напря-
жения источника, что следует из выражения «а =
= йФ/у. Если при неизменном напряжении изменять ча-
стоту, то поток будет изменяться обратно пропорционально
частоте. Так, при уменьшении частоты поток возрастет и
это приведет к насыщению стали машины и как следствие
к резкому увеличению тока и превышению температуры
двигателя; при увеличении частоты поток будет умень-
шаться и как следствие будет уменьшаться допустимый
момент.
Для наилучшего использования асинхронного двига-
теля при регулировании угловой скорости изменением ча-
стоты необходимо регулировать напряжение одновременно
в функции частоты и нагрузки, что реализуемо только
в замкнутых системах электропривода. В разомкнутых
системах напряжение регулируется лишь в функции ча-
стоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электропри-
водов переменного тока с двигателями с короткозамкнутым
ротором находит все большее применение в различных от-
раслях техники. Например, в установках текстильной
промышленности, где с помощью одного преобразователя
6 Чиликин М. Г., Сандлер А. С. 161
частоты, питающего группу асинхронных двигателей, на-
ходящихся в одинаковых условиях, плавно и одновременно
регулируются их угловые скорости. Примером другой уста-
новки с частотно-регулируемыми асинхронными двигате-
лями с короткозамкнутым ротором могут служить транс-
портные рольганги в металлургической промышленности,
некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхрон-
ных двигателей широко применяется в индивидуальных
установках, когда требуется получение весьма высоких
угловых скоростей (для привода электрошпинделей в ме-
таллорежущих станках с частотой вращения до
20 000 об/мин).
Экономические выгоды частотного регулирования осо-
бенно существенны для приводов, работающих в повторно-
кратковременном режиме, где имеет место частое измене-
ние направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой
скорости находят применение преобразователи, на выходе
которых по требуемому соотношению или независимо ме-
няется как частота, так и амплитуда напряжения. Преобра-
зователи частоты можно разделить на электромашинные и
вентильные. В свою очередь электромашинные преобразо-
ватели могут быть выполнены с промежуточным звеном
постоянного тока и непосредственной связью. В последних
используют коллекторную машину переменного тока, на
вход которой подают- переменное напряжение с постоянной
частотой и амплитудой, а на выходе ее получают напряжение
с регулируемой частотой и амплитудой. Электромашинные
преобразователи с непосредственной связью практического
применения не получили.
Принципиальная схема электромашинного преобразо-
вателя с промежуточным звеном постоянного тока, в кото-
ром используется синхронный генератор, показана на
рис. 4.44. Преобразователь состоит из агрегата постоян-
ной скорости (Ml, G1), предназначенного для преобразова-
ния переменного тока сетевого напряжения и неизменной
частоты в регулируемое постоянное напряжение, которое
зависит от тока возбуждения генератора постоянного тока
G1. Двигатель постоянного тока М2 агрегата переменной
скорости получает питание от генератора G1. При измене-
нии напряжения на выводах генератора G1 плавно регули-
руется угловая скорость двигателя М2 и одновременно уг-
ловая скорость синхронного генератора G2. Изменение угло-
162
вой скорости генератора G2 при неизменном токе его воз-
буждения приводит к пропорциональному изменению
скорости, частоты и амплитуды напряжения генерато-
ра G2.
От синхронного генератора G2, являющегося источни-
ком напряжения с переменной частотой и амплитудой, пи-
тается один или группа асинхронных двигателей с корот-
козамкнутым ротором М3 — М5. Меняя направление тока
возбуждения генератора постоянного тока G1, можно изме-
нять направление вращения асинхронных двигателей. При
неизменном токе возбуждения синхронного генератора G2
Рис. 4.44. Принципиальная схема электромашинного преобразователя
частоты с промежуточным звеном постоянного тока с использованием
синхронного генератора,
и двигателя постоянного тока М2, меняя его угловую ско-
рость, можно автоматически регулировать выходное напря-
жение по закону С72//2 = const. В данном случае, как будет
показано далее, со снижением частоты снижается перегру-
зочная способность асинхронных двигателей и поэтому
диапазон регулирования при постоянном моменте нагрузки
заметно уменьшается. Больший диапазон регулирования
с обеспечением необходимой перегрузочной способности (по
отношению к статическому моменту нагрузки) может быть
получен при вентиляторной нагрузке.
Угловая скорость двигателя постоянного тока М2 при
номинальной ЭДС генератора G1 может быть увеличена за
счет уменьшения тока возбуждения двигателя М2 с по-
мощью резистора R2, при этом частота и амплитуда напря-
6*
163
жения синхронного генератора G2 также возрастают, но
допустимый момент двигателя М2 уменьшается.
Независимо от частоты (угловой скорости) синхронного
генератора G2 амплитуда напряжения на его выходе
может регулироваться только вниз от номинального зна-
чения.
Если мощность, потребляемая асинхронными двигате-
лями от источника регулируемой частоты, равна Рном, то
при пренебрежении потерями в машинах общая установлен-
ная мощность преобразователя частоты составит:
Рп.ч — Рли + Pai 4~ Рлк + РQ2 = 4Рном.
С учетом потерь энергии в машинах преобразователя
частоты его установленная мощность будет превышать че-
тырехкратное значение установленной мощности нагрузки,
что является недостатком электромашинного преобразова-
теля частоты. Другим его недостатком является низкий
КПД, определяемый произведением КПД отдельных ма-
шин. Если, например, КПД каждой машины при полной
нагрузке принять равным 0,9, то номинальный КПД преоб-
разователя составит 0,94 = 0,66. С уменьшением нагрузки
и при регулировании угловой скорости двигателей М3 —
М5 вниз от основной КПД становится еще меньше.
Регулирование частоты связано с преодолением значи-
тельной механической и электромагнитной инерционности,
которой обладает электромашинный преобразователь.
В схемах электромашинного преобразователя частоты
могут быть использованы в качестве основного преобразо-
вателя обычные асинхронные машины с фазным ротором
в режиме асинхронного преобразователя частоты. Одна
из таких схем с асинхронным преобразователем частоты
АПЧ приведена на рис. 4.45. Здесь статор АПЧ присоединен
к сети переменного тока через автотрансформатор АТ,
позволяющий независимо регулировать на входе (и выходе)
АПЧ амплитуду напряжения. Ротор АПЧ механически свя-
зан с якорем двигателя М2, угловая скорость которого
регулируется по системе Г—Д так же, как и в предыду-
щей схеме с синхронным генератором. Вторичная (ротор-
ная) цепь АПЧ служит источником напряжений регулируе-
мой частоты и амплитуды.
Частота на выходе АПЧ равна:
/2=Л±/в,₽. (4-66)
164
где fB.p = гор/2 л; го — скорость двигателя М2', f\ —
частота напряжения питания статора, принятая равной
частоте питающей сети.
В (4.66) знак плюс относится к случаю, когда ротор
вращается против поля статора, а знак минус — согласно
с полем статора. Следовательно, при вращении ротора
против поля частота f2 > flt согласно с полем f2 <; При
неподвижном состоянии ротора АПЧ частота f2 — fv
Энергия, передаваемая АПЧ нагрузке, при вращении
против поля складывается из механической энергии, посту-
Ui
Рис. 4.45. Схема с асинхронным преобразователем частоты.
пающей с вала двигателя М2, и электрической энергии,
потребляемой АПЧ со стороны автотрансформатора АТ.
При вращении по полю электрическая энергия, поступаю-
щая в статор АПЧ, частично передается нагрузке, а часть —
двигателю М2, в этом случае работающему в генераторном
режиме. Эта часть энергии после преобразований возвра-
щается в сеть с помощью машины Ml.
Распределение активных мощностей, поступающих с вала
двигателя постоянного тока Рм и со стороны питающей
сети Р2, происходит (без учета потерь в АПЧ) пропорцио-
нально частотам статора и ротора, т. е.
P2 = PSA/A; (4.67)
Рм = Р^^~Ш2, (4.68)
165
или
Pt/Рм-Mh-fl), (4.69)
где P% — суммарная мощность, потребляемая на выходе
АПЧ.
Если, например, принять частоту на выходе АПЧ
f2 = 100 Гц, а частоту питания = 50 Гц, то активная мощ-
ность Р2 составит только 50 % установленной мощности
нагрузки, а через двигатель М2 будет подводиться также
50 % Р-%. Таким образом, при указанном соотношении ча-
стот установленная мощность машин системы Г—Д окажется
вдвое меньше, чем в случае электромашинного преобразо-
вателя с синхронным генератором. Раздельное регулирова-
ние напряжения с помощью автотрансформатора АТ дает
возможность (ограничиваемую насыщением стали АПЧ)
устанавливать требуемое соотношение между U2 и f2.
Если установленную мощность асинхронных двигателей
(нагрузки АПЧ) принять равной Р,гам, то, пренебрегая по-
терями в машинах преобразовательного агрегата, можно
найти установленную мощность преобразователя частоты
(при f2 = 100 Гц и Д = 50 Гц):
Рщ ч = Pmi + Pq + Рмч + Р апч + Рат =
= 0,5РИОМ + 0,5РНОМ + 0,5РНОМ + Рном + 0,5РНОМ = ЗРНОМ.
С возрастанием выходной частоты АПЧ установленная
мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ при-
меняются обычно для получения частот, превышающих
частоту питающей сети, когда необходимо регулировать
угловую скорость большого числа согласованно работаю-
щих асинхронных двигателей с короткозамкнутым ротором.
Схема вентильно-электромашинного преобразователя ча-
стоты с синхронным генератором (вместо него может быть
использован и АПЧ) приведена на рис. 4.46. Здесь вращаю-
щийся преобразовательный агрегат постоянной скорости
заменен статическим управляемым преобразователем (вы-
прямителем) УП, собранным, например, на тиристорах.
От управляемого выпрямителя питается двигатель Ml
агрегата переменной скорости. В данном случае несколько
повышается КПД преобразователя частоты ПЧ, сокраща-
ются его габариты. Однако остаются такие недостатки,
как невысокая надежность, необходимость в использова-
нии, кроме УП двух машин (двигателя Ml и генератора G),
значительная инерционность привода, связанная с изме-
166
нением угловой скорости агрегата переменной скорости при
изменении выходной частоты.
Указанные недостатки ограничивают применение элек-
тромашинных преобразователей и приводят к необходи-
мости создания статических преобразователей на основе
использования тиристоров или транзисторов.
По структуре схемы статических преобразователей ча-
стоты сходны с аналогичными схемами электромашинных
преобразователей и могут быть представлены двумя основ-
ными классами: 1) с непосредственной связью и 2) с проме-
жуточным звеном постоянного тока.
Рис. 4.46. Схема вентильно-электромашинного преобразователя ча-
стоты с синхронным генератором.
Преобразователь с непосредственной связью предназна-
чен для преобразования высокой частоты в низкую и состоит
из 18 тиристоров, объединенных во встречно-параллельные
группы с раздельным управлением (рис. 4.47). В основе
преобразователя лежит трехфазная нулевая схема выпрям-
ления; каждая фаза преобразователя состоит из двух та-
ких встречно включенных выпрямителей. Группу из трех
вентилей, имеющих общий катод, называют положительной
или выпрямительной, а группу с общим анодом — отрица-
тельной или инверторной. Вентильные группы могут управ-
ляться раздельно либо совместно.
Во избежание короткого замыкания управляющие им-
пульсы при раздельном управлении должны подаваться на
тиристоры одной из вентильных групп в соответствии с на-
правлением тока в нагрузке. Для обеспечения раздельной
работы применяется специальное логическое устройство,
исключающее возможность прохождения тока в одной
группе в то время, когда ток проходит в другой группе.
167
В преобразователях с совместной работой вентильных
групп необходимо включение дополнительных реакторов,
ограничивающих уравнительный ток между вентилями
каждой группы, а углы управления положительной и отри-
цательной групп изменяются по определенному закону,
исключающему появление постоянной составляющей урав-
нительного тока. Преобразователи с совместным управле-
нием работой вентильных групп обладают большой установ-
ленной мощностью силовых элементов.
В течение одного полупериода выходного напряжения
преобразователя пропускают ток выпрямительные группы,
Рис. 4.47. Преобразователь частоты с непосредственной связью.
а в течение другого — инверторные. Выходное напряжение
состоит из отрезков волн напряжения питающей сети. На
рис. 4.48 показана кривая выходного напряжения при не-
изменном угле включения вентилей а = О’. Фазовая комму-
тация вентилей в одной группе, т. е. включение одного вен-
тиля и выключение другого, происходит подобно переклю-
чению в. трехфазной нулевой схеме выпрямления без комму-
тирующих конденсаторов. Для получения выходного на-
пряжения, близкого по форме к синусоидальному, необ-
ходимо изменять угол включения вентилей таким образом,
чтобы среднее за полупериод питающей сети значение на-
пряжения изменялось в течение полупериода выходного
напряжения по синусоидальному закону. Регулирование
168
напряжения на выходе преобразователя достигается изме-
нением угла включения вентилей.
К достоинствам этого типа преобразователей можно
отнести: 1) однократное преобразование энергии и, следо-
вательно, высокий КПД (около 0,97—0,98); 2) возможность
независимого регулирования амплитуды напряжения на вы-
ходе от частоты; 3) свободный обмен реактивной и активной
энергией из сети к двигателю и обратно; 4) отсутствие ком-
мутирующих конденсаторов, так как коммутация тиристо-
ров производится естественным путем (напряжением сети.)
К недостаткам рассмотренного преобразователя частоты
относятся: 1) ограниченное регулирование выходной ча-
стоты (от 0 до 40 % частоты сети); 2) сравнительно большое
число силовых вентилей и сложная схема управления ими;
Рис. 4.48. Форма выходного- напряжения трехфазиого преобразова-
теля частоты с непосредственной связью.
3) невысокий коэффициент мощности — максимальное зна-
чение на входе преобразователя около 0,8).
Преобразователь частоты с непосредственной связью
можно использовать в случаях, когда частота питающей
сети много выше частоты нагрузки (например, если питаю-
щая сеть имеет частоту 400 Гц, а двигатель серийного
использования рассчитан на 50 Гц). Этот же преобразова-’
тель может быть применен в случае использования тихоход-
ного безредукторного привода, когда возникает необходи-
мость в плавном регулировании угловой скорости (напри-
мер, в приводе шаровых мельниц, где номинальная угловая
скорость двигателя соответствует 12—15 Гц и регулируется
вниз; при этом частота питающей сети составляет 50 Гц).
Кроме того, данный тип преобразователя целесообразно
применить для регулирования угловой скорости асинхрон-
ного двигателя с фазным ротором, работающего в режиме
двойного питания, когда статор его присоединен к сети,
а ротор питается от той же сети через преобразователь
частоты.
169
Наибольшее применение для промышленных приводов
может иметь статический преобразователь частоты с проме-
жуточным звеном постоянного тока, структурная схема ко-
торого приведена на рис. 4.49. Преобразователь состоит из
двух силовых элементов — управляемого выпрямителя УВ
и инвертора И. На вход УВ подается нерегулируемое на-
пряжение переменного тока промышленной частоты; с вы-
хода УВ постоянное регулируемое напряжение подается
на инвертор И, который преобразует постоянное напряжение
в переменное регулируемой амплитуды и частоты. Кроме
Рис. 4.49. Структурная схема статического преобразователя частоты
с промежуточным звеном постоянного тока.
У В — управляемый выпрямитель; И — инвертор; БУ В, БУИ — соответ-
ственно блок управления выпрямителем и инвертором; БЗС — блок задания
скорости.
двух силовых элементов, преобразователь содержит еще
систему управления, состоящую из блока управления вы-
прямителем БУ В и блока управления инвертором БУИ.
Выходная частота регулируется в широких пределах и опре-
деляется частотой коммутации тиристоров инвертора, кото-
рая задается блоком управления инвертором БУИ. В такой
схеме производится раздельное регулирование амплитуды
и частоты выходного напряжения, что позволяет осущест-
вить при помощи блока задания скорости БЗС требуемое
соотношение между действующим значением напряжения и
частотой на зажимах асинхронного двигателя.
Преобразователь с промежуточным звеном постоянного
тока позволяет регулировать частоту как вверх, так и вниз
от частоты питающей сети; он отличается высоким КПД
(около 0,96), значительным быстродействием, малыми габа-
170
ритами, сравнительно высокой надежностью и бесшумен
в работе.
Примером принципиальной силовой схемы статического
преобразователя частоты с промежуточным звеном постоян-
ного тока, выполненного на тиристорах для привода неболь-
шой мощности (до 5 кВт), может служить схема, приведен-
ная на рис. 4.50 *.
Рис.'4.50. Схема статического преобразователя частоты с промежуточ-
ным звеном постоянного тока.
В качестве управляемого выпрямителя используются
два тиристора (V7 и V8) и два диода (V15 и V16), включен-
ные в так называемую полууправляемую мостовую схему
для получения двухполупериодного выпрямленного напря-
жения, среднее значение которого можно регулировать
обычным способом, воздействуя на угол включения тиристо-
ров 1/7 и V8.
Автономный инвертор напряжения (АИН) (рис. 4.50)
состоит из шести тиристоров (VI — V6), шести последова-
тельно включенных с ними диодов (V9 — V14) и шести дио-
дов, включенных по трехфазной мостовой схеме (V18 — V23)
и, наконец, шести колебательных контуров LC.
* Схема разработана в проблемной лаборатории электромеханики
МЭИ,
171
Преобразование постоянного напряжения в трехфазное
переменное осуществляется коммутацией тиристоров VI —
V6, работающих в определенной последовательности. Время
открытого состояния каждого тиристора составляет 2/3
полупериода выходного напряжения (длительность откры-
того состояния тиристоров равна 120°); последователь-
ность включения тиристоров отвечает их нумерации по
схеме, т. е. сначала включается VI, через 60° включается
V2 и т. д. до V6. После V6 вновь VI и т. д. через каждую Чд
периода выходного напряжения. В каждый момент времени
вне коммутации открыты одновременно два тиристора.
Включение . тиристоров осуществляется подачей положи-
тельного импульса на управляющий электрод от БУИ.
Для выключения тиристоров необходимо ток, протекающий
через него, довести до нуля. Это достигается с помощью
коммутирующих контуров LC; например, при включении
V3 через ранее открытый VI происходит разряд конденса-
тора С и VI закрывается.
Выходное напряжение при чисто активной нагрузке
имеет ступенчатую форму (рис. 4.51), и длительность каж-
дой ступени соответствует 1/(! периода выходного напряже-
ния.
При питании от преобразователя асинхронного двига-
теля форма выходного напряжения искажается и зависит
ст коэффициента мощности, который в свою очередь опреде-
ляется нагрузкой на валу двигателя.
Диоды V8 — V14 служат для отделения коммутирующих
конденсаторов от нагрузки, что дает возможность сущест-
венно снизить их емкость по сравнению с обычным парал-
лельным инвертором. Через мост V18— V23 реактивная
энергия двигателя возвращается конденсатору С7. Напряже-
ние на выходе инвертор а регулируется изменением напря-
жения на его входе — управляемым выпрямителем, а часто-
та — изменением частоты подачи импульсов на тиристоры.
Достоинствами однофазной схемы выпрямления явля-
ется меньшее количество тиристоров по сравнению с трех-
фазной схемой выпрямления, а также более простое управ-
ление, что снижает стоимость преобразователя. Поэтому
при небольшой мощности привода и малом диапазоне регу-
лирования напряжения целесообразно использовать одно-
фазный выпрямитель, хотя пульсации выпрямленного на-
пряжения получаются довольно большими, что требует
применения сглаживающего реактора значительной индук-
тивности.
172
Для преобразователей большей мощности (от 20 кВт
и выше) с относительно большим диапазоном регулирования
выпрямленного напряжения (до 20 : 1) используются трех-
фазный полностью управляемый выпрямитель, обычно вы-
полняемый по мостовой схеме.
При больших диапазонах регулирования напряжения
целесообразно для средней мощности преобразователя (до
20 кВт) применять мостовую схему с трехфазным полу-
управляемым выпрямителем, который содержит три тири-
стора и три диода. В данном случае схема оказывается
более простой по сравнению с полностью управляемым вы-
прямителем.
В тех случаях, когда инвертор питается от сети постоян-
ного тока или от неуправляемого выпрямителя, прнме-
О]
Рис. 4.51. Форма выходного на-
пряжения при чисто активной
Рис. 4.52. Схема ШИР напря-
жения.
нагрузке.
няется широтно-импульсный регулятор (ШИР) напряже-
ния. Одна из возможных схем такого регулятора дана на
рис. 4,52. На схеме приняты обозначения: V2 — вспомога-
тельный тиристор; L1 — ограничивающий реактор; L2,
С — реактор и конденсатор коммутирующего контура. При
подаче импульса на VI напряжение источника питания
прикладывается к нагрузке. Для отключения нагрузки от
источника питания подается импульс на включение V2.
Среднее значение напряжения на выходе регулятора пропор-
ционально относительному времени (скважности) включе-
ния силового тиристора VI, частота коммутации которого
должна быть высокой (около 800 Гц) для уменьшения габа-
ритов фильтрующих устройств, которые необходимо уста-
навливать на выходе регулятора. Среднее напряжение на
нагрузке:
U„,zp = EtBKJ = ES> (4.70)
где ^вкл — время включенного состояния V 1\ f — частота
173
переключения тиристоров; е — скважность выходного на-
пряжения.
Системы с ШИР могут обеспечить большой диапазон ре-
гулирования выходного напряжения и позволяют умень-
шить габариты фильтрующих устройств. Питание инвер-
тора от неуправляемого выпрямителя через ШИР позволяет
получить высокий коэффициент мощности на входе преобра-
зователя частоты во всем диапазоне регулирования. Недо-
статками преобразователя частоты с ШИР на входе ин-
вертора являются необходимость установки силового тири-
стора, рассчитанного на всю мощность, потребляемую ин-
вертором, снижение КПД преобразователя из-за дополни-
тельного преобразования энергии (потери мощности в ШИР),
усложнение схемы преобразователя и снижение его надеж-
ности, поэтому ШИР на входе инвертора используется в ос-
новном только при наличии сети постоянного тока.
В случае применения в преобразователях частоты авто-
номных инверторов напряжения с фазной или индивидуаль-
ной коммутацией тиристоров или транзисторных инверто-
ров можно совместить в самом инверторе функции инверти-
рования и регулирования напряжения методом широтно-им-
пульсной модуляции (ШИМ). Такие тиристорные инверторы
и их системы управления существенно сложнее рассмотрен-
ных инверторов с межфазной коммутацией, а КПД их
ниже из-за повышенных потерь, связанных с высокой часто-
той коммутации тиристоров.
Несмотря на этот недостаток инверторы с индивиду-
альной и фазовой коммутацией тиристоров (и транзистор-
ные) используются в весьма перспективных преобразовате-
лях частоты с инверторами с ШИМ, применяемых в приво-
дах с глубоким регулированием скорости. Отличитель-
ной особенностью этих инверторов является не только
возможность регулирования в них как напряжения, так
и частоты от нуля до номинального значения, но и полу-
чение формы выходного тока, близкой к синусоидальной.
Это позволяет в таких системах обеспечить весьма широкий
диапазон регулирования угловой скорости асинхронного
двигателя и уменьшить потери в нем от высших гармоник
напряжения. При использовании инверторов с ШИМ отпа-
дает необходимость в источнике регулируемого выпрям-
ленного напряжения, что упрощает силовую схему и позво-
ляет получить коэффициент мощности преобразователя,
близкий к единице. Рассмотрим принцип действия такого
инвертора (рис. 4.53, а). Нагрузка гн присоединяется к ис-
174
точнику питания с напряжением Е'2 с помощью ключа К,
переключаемого с высокой частотой из положения 1 в поло-
жение 2 и наоборот. Если время Д^ нахождения ключа в по-
ложении 1 равно времени Д/2 нахождения ключа в положе-
нии 2, то среднее значение напряжения на нагрузке за пе-
риод несущей частоты равно нулю. Когда Дй Ф At2, т0
(рис. 4.53, б) среднее значение напряжения на нагрузке
за период несущей частоты равно:
(/н.ср = Е(Д^-Д^)/2т, (4.71)
где т = Д/х + Д/2 — период несущей частоты; Д/х, Д4 —-
соответственно время нахождения ключа /С в положениях
1 и 2.
Рис, 4.53. К пояснению принципа действия инвертора с ШИМ.
а — эквивалентная схема однофазного инвертора с синусоидальной ШИМ;
б — график напряжения и тока регулируемой частоты в нагрузке при по-
стоянной несущей частоте и неизменном выпрямленном напряжении на входе
инвертора.
Если при постоянной несущей частоте изменить соотно-
шения между Дй и Д/2 по синусоидальному закону (Д^ —
—-Д £2)/т — ц sin Ш, то среднее значение напряжения на на-
грузке за период несущей частоты также будет меняться по
синусоидальному закону (пну на рис. 4.53, б) с частотой мо-
дуляции:
ПН|Ср = (цЕ sin Ш)/2; (4.72)
здесь Q — круговая частота модуляции (выходная частота);
ц — коэффициент глубины модуляции, показывающий, в ка-
ких пределах изменяется длительность интервалов Д^
и Д/2 в течение периода частоты модуляции.
При ц = 1 Д^ и Д72 изменяются от 0 до т и амплитуда
среднего значения напряжения на нагрузке равна £72.
Таким образом, изменяя ц и £!, можно осуществлять неза-
висимое регулирование амплитуды и частоты напряжения
175
на нагрузке при постоянной несущей частоте и неизмен-
ном выпрямленном напряжении (рис. 4.53, б).
Принципиальная схема однофазного инвертора, работа-
ющего в режиме синусоидальной ШИМ, приведена на
рис. 4.54. Здесь тиристоры VI и V2 коммутируются с по-
мощью конденсаторов С1 и С2 и реактора L так, что при’
открывании тиристора V2 закрывается тиристор VI и на-
оборот. Так как тиристоры обладают односторонней прово-
димостью, то для пропускания обратного тока служат ди-
оды V3 и V4. При формировании положительной полуволны
тока проводит тиристор VI и ток нагрузки потребляется от
верхней половины источника питания. Когда открывается
тиристор V2 (закрывается тиристор VI) и ток нагрузки про-
текает в непроводящем направлении по отношению к тири-
стору V2, открывается тиристор V4 и ток возвращается
Рис. 4.54. Принципиальная схе-
ма однофазного инвертора, ра-
ботающего в режиме синусои-
дальной ШИМ.
в нижнюю половину источника питания. После изменения
полярности тока в нагрузке проводит тиристор V2, а во
время его закрытого состояния — диод V3. Когда открыт
тиристор V2, ток нагрузки потребляется из нижней поло-
вины источника питания, при открытом диоде V3 ток воз-
вращается в верхнюю половину. _
Простейшая схема трехфазного преобразователя частоты
с инвертором, работающим по принципу ШИМ, приведена
на рис. 4.55. Преобразователь состоит из мостового неуправ-
ляемого выпрямителя (V7 — V12) и автономного инвертора
из шести тиристоров (VI — V6) и шести обратных диодов
(VI' — V6'), предназначенных для передачи реактивной
мощности от двигателя М к конденсатору С. Конденсаторы
С1 — С6 и реакторы L1 — L3 осуществляют коммутацию
тиристоров. Частота на выходе преобразователя может
регулироваться от 0 до 50 Гц и выше при практически сину-
соидальной форме тока в нагрузке. Выходное напряжение
также регулируется от нуля до максимального значения,
определяемого постоянным напряжением на входе инвер-
тора.
176
По сравнению с простейшей схемой на рис. 4.55, в кото-
рой из-за высокой частоты переключения тиристоров между
тиристорным мостом и мостом обратного тока устанавли-
вается постоянно циркулирующий уравнительный ток,
Рис. 4.55. Простейшая схема трехфазного преобразователя частоты
с инвертором, работающим по принципу ШИМ.
приводящий к снижению КПД и бесполезной загрузке вен-
тилей, лучшими показателями обладает инвертор с двухсту-
пенчатой коммутацией, схема которого приведена на
рис. 4.56.
Рис. 4.56. Схема инвертора с двухступенчатой коммутацией.
При регулировании напряжения на выходе инвертора
с поочередной коммутацией тиристоров (см. рис. 4.50)
коммутирующая способность инвертора снижается пропор-
ционально уменьшению напряжения на входе инвертора
(коммутирующая способность характеризуется максималь-
ным током нагрузки, который он способен коммутировать).
177
Коммутирующая особенность инверторов с ШИМ остается
постоянной, так как напряжение на его входе, а следова-
тельно, и напряжение на коммутирующих конденсаторах
остается неизменным.
Однако потери в инверторах с ШИМ вследствие высокой
частоты коммутации (несущая частота обычно в 8—10 раз
превышает максимальную выходную частоту) выше, чем
в инверторах с поочередной коммутацией. С другой стороны,
при питании двигателей напряжением ступенчатой формы,
которое имеет место в инверторах с поочередной коммута-
цией, КПД двигателя снижается из-за несинусоидальной
формы напряжения примерно на 1,5—2 %. В случае инвер-
тора с ШИМ потери в двигателе от высших гармоник меньше.
Суммарные потери в частотно-управляемом приводе с ин-
вертором с ШИМ оказываются несколько выше, чем в пре-
образователе с поочередной коммутацией.
Система управления инвертором с ШИМ сравнительно
сложнее системы управления АИН с поочередной коммута-
цией.
Инверторы с ШИМ могут найти широкое применение в си-
стемах электроснабжения, имеющих питающую сеть посто-
янного тока, где к тому же может быть использовано реку-
перативное торможение (например, троллейбус, трамвай
и др.).
Следует отметить, что при использовании преобразова-
телей частоты по схемам на рис. 4.46, 4.50, 4.55, 4.57 допу-
стимы только двигательный режим работы привода и дина-
мическое торможение. Торможение противовключением
в схемах с преобразователями частоты обычно не использу-
ется из-за больших токов. Для реализации рекуперативного
торможения необходимо усложнять схему выпрямителя,
выполняя его реверсивным.
В результате рассмотрения тиристорных преобразовате-
лей частоты можно наметить рекомендации по их примене-
нию. Выбор типа преобразователя зависит от типа привода
и режима его работы, а также от частоты и напряжения на
входе и выходе преобразователя. При частоте питающей
сети 50 Гц и выходной частоте до 25—12,5 Гц целесообразно
применять преобразователи с непосредственной связью
с устройствами на его входе, повышающими коэффициент
мощности.
При выходной частоте 50 Гц и ниже или выше могут
быть использованы преобразователи с автономным инвер-
тором, причем: 1) для индивидуальных и взаимосвязанных
178
нереверсивных приводов средней и малой мощности (от
200 кВт до долей киловатт) при диапазоне регулирования
частоты до 20 : 1 (для высокоскоростных приводов с номи-
нальной частотой от 100 до 2500 Гц) — преобразователь
с АИН; 2) для индивидуальных реверсивных и нереверсив-
ных приводов и особенно приводов, работающих в повтор-
но-кратковременном режиме, с диапазоном изменения ча-
стоты до 20 : 1 независимо от мощности преобразователя —
преобразователь с автономным инвертором тока (АИТ) *;
Рис. 4.57. Принципиальная силовая схема преобразователя частоты
на транзисторах с промежуточным звеном постоянного тока.
3) для индивидуальных и взаимосвязанных приводов,
реверсивных и нереверсивных, с диапазоном регулирования
частоты свыше 20 : 1 независимо от мощности — преобра-
зователь с АИН с ШИМ (АИН—ШИМ), отличающийся,
как упоминалось, от преобразователей с АИН и АИТ высо-
ким коэффициентом мощности.
В последнее время в связи с разработкой более мощных
транзисторов, рассчитанных на напряжение до 1000 В и
на ток в несколько десятков и даже сотен ампер, стало воз-
можным производство транзисторных преобразователей ча-
стоты. На рис. 4.57 показана принципиальная силовая схема
преобразователя частоты на транзисторах с промежуточным
звеном постоянного тока и с ШИР. Напряжение от неуправ-
ляемого мостового выпрямителя регулируется ШИР, вы-
* Более подробно преобразователь с АИТ рассматривается в гл. 6.
179
полненным с помощью транзистора VI, затем через фильтр
LC подается на инвертор. Транзисторный преобразователь
частоты более экономичен и надежен, чем тиристорный,
из-за меньшего числа переключающих элементов. Эти пре-
образователи могут выполняться и с инверторами с ШИМ.
В этом случае количество элементов сокращается ещё более
резко по сравнению с тиристорным АИН—ШИМ. При той
же схеме инвертора, что и на рис. 4.57, можно реализовать
ШИМ и убрать из схемы преобразователя ШИР и реактор L.
Транзисторные преобразователи частоты для регулируе-
мых электроприводов малой и средней мощности являются
более перспективными, чем тиристорные.
Для выявления свойств асинхронного двигателя при ча-
стотном управлении предполагаем, что преобразователь
Рис. 4.58. Схема замещения асинхронного двигателя при частотном
регулировании.
обладает неограниченной мощностью, выходное напряже-
ние которого симметрично и синусоидально. Такое представ-
ление преобразователя позволяет выявить предельные воз-
можности асинхронного двигателя и получить достаточно
простые закономерности.
Анализ характеристик асинхронного двигателя при ча-
стотном управлении можно произвести, использовав схему
замещения, приведенную на рис. 4.58. На схеме приняты
следующие обозначения:
1) относительная частота напряжения (тока) статора —
отношение частоты тока статора к ее номинальному зна-
чению:
°- — А/Аном>
2) параметр абсолютного скольжения или относитель-
ная частота ротора:
Р Ас0/С01ном f 2//1ном>
180
где o)1HOM — синхронная угловая скорость при номинальной
частоте /Хною;
параметр [3 используется вместо скольжения s и связан
с ним отношением
s = Дю/coi = ₽/а;
здесь coj — синхронная угловая скорость при частоте /х;
3) относительное напряжение на статоре
у = 77Д7Н0Н.
Момент, развиваемый двигателем,
Л4а = 37 2аТ?2/Лсо = 372а7?2/а>хпомР. (4.73)
При подстановке в (4.73) выражения для тока 7га, най-
денного из расчета токов в схеме замещения двигателя
(рис. 4.58):
Ла = ^номТ -г , (4.74)
fla \?2£ т" ?0а/ “Г ?2fS?0a
где гоа = /хоа; г1а = /?х 4~ /хха; z2fj = /?2<х/Р + /х2а =
= а (7?г/Р + /Хг), после преобразований получим формулу
для момента двигателя:
_ ЗЕ/ному2____________________________________
’ “ “ «1НОМ К3+Л2) Р3 + 27?Х/?^Р 4- К3 4- е3«3) ~
= (4.75)
W1H0M А (ахР) ' ’
здесь о = 7?х (1 4- т3); с = хот; d — Rr/x0; е = 1 + тх,
где тх и т2 — коэффициенты рассеяния соответственно для
статора и ротора, тх = Xi/x0 и т2 = Х2/х0; т — общий коэф-
фициент рассеяния,
т = tx 4- т2 + ххт2.
Когда регулирование производится при напряжении,
зависящем только от частоты и не зависящем от нагрузки
Р, то абсолютное критическое скольжение равно:
PK(a) = ±7?:]/'g±|g, (4.76)
а максимальный момент
/4 (а) = ЗС7»ому2.-------------------=. (4.77)
М 1 2<о1НОм + +
181
Анализ выражения (4.77) показывает, что при сравни-
тельно больших частотах, когда значением по сравнению
с хк = %! + x'i можно пренебречь, максимальный момент
двигателя при изменении частоты постоянен Мка =
= const, если напряжение изменяется пропорционально
частоте, т. е. у = а или UIf = const.
При дальнейшем снижении частоты активное сопротив-
ление статора становится соизмеримым со значением хк
и максимум момента двигателя снижается (рис. 4.59). Это
происходит как вследствие
уменьшения потока двига-
теля из-за увеличивающей-
ся доли падения напряже-
ния на /?, от общего при-
ложенного напряжения,
так и уменьшения абсолют-
ного критического сколь-
жения, определяемого фор-
мулой (4.76), что приводит
Рис. 4.59. Механические харак-
теристики асинхронного двига-
теля при частотном управлении
по закону Ulf = const.
даже при неизменном потоке к уменьшению момента вслед-
ствие уменьшения тока ротора'в соответствии с выраже-
нием М = /гФД cos ф3.
Для поддержания достаточной перегрузочной способно-
сти во всем диапазоне регулирования необходимо при ма-
лых частотах уменьшать напряжение в меньшей степени,
чем снижается частота.
Приравняв единице отношение максимального момента
при номинальной частоте к максимальному моменту для лю-
бой частоты, получим закон регулирования напряжения,
когда максимальный момент двигателя сохраняется:
„ - 1 / - : (^+^«а) (d2 + eaaa) ,,
7 V Rs ±/(&24-са)(^4-е2)
Однако управление по этому закону связано с увеличе-
нием потока двигателя в точке максимума момента при-
мерно обратно пропорционально У(iKa, что приводит к на-
сыщению стали двигателя в случае большого диапазона ре-
гулирования. Поэтому применение закона (4.78) ограничи-
182
вается диапазоном регулирования частоты вниз от номи-
нальной до (3 4- 7) : 1.
Диапазон регулирования угловой скорости определя-
ется статизмом, который может быть допущен при малой
угловой скорости.
Если момент нагрузки принять равным Л4НОМ = const;
Рс = Рвом и управлять двигателем по закону (4.78), то ста-
тизм при малой угловой скорости по аналогии с приводом
постоянного тока можно определить:
S = Асо/(Oja = Рнои^а>
где рном — номинальное скольжение; Da = fiK0№/fi — диа-
пазон регулирования частоты.
Например, задаваясь допустимым статизмом 6 = 0,1
и полагая для . двигателей средней мощности рном =
= 0,03 = 0,05, получаем максимальный диапазон регулиро-
вания двигателя (с принудительной ^вентиляцией) равным
Ватах (3 4- 2) : 1.
Регулирование ниже основной скорости может произво-
диться с постоянным моментом нагрузки, если двигатель
имеет независимую вентиляцию. В тех случаях, когда
используется самовентилируемые двигатели, у которых
со снижением скорости уменьшается теплоотдача, допусти-
мая нагрузка должна быть снижена при длительной работе
на низких скоростях. При частотном регулировании ско-
рости и номинальном моменте потери уменьшаются за счет
снижения потерь в стали, что позволяет в меньшей мере сни-
жать его нагрузку, чем при других способах регулирова-
ния. О коэффициенте завышения мощности в связи с ухуд-
шением теплоотдачи при снижении скорости см. § 4.9.
При вентиляторной нагрузке в разомкнутой системе,
управляемой по закону Ulf = const, диапазон регулирова-
ния может быть значительно расширен до D^max (=& (20 4-
10) : 1 при 6 = 0,1. В этом случае может быть использо-
ван самовентилируемый двигатель без завышения его уста-
новленной мощности.
Обычно для вентиляторной нагрузки рекомендуется за-
кон управления у = а2 или = const, получаемый из
квадратичной зависимости момента нагрузки от угловой
скорости и квадратичной зависимости максимального мо-
мента идеализированного двигателя = 0) от напряже-
ния и частоты. Применимость этого более экономичного,
но более сложного для реализации закона ограничивается
183
из-за принятых идеализаций двигателя и нагрузки (в ко-
торой не учтена постоянная составляющая момента) диапа-
зоном регулирования до 2:1. При больших диапазонах
целесообразно использовать закон у = а.
Частотное регулирование при изменении частоты и соот-
ветственно подводимого к статору напряжения может про-
изводиться не только ниже основной угловой скорости, но
и частично (в соответствии с допустимым превышением угло-
вой скорости над синхронной по условиям механической
прочности) выше основной.
Регулирование угловой скорости выше основной обычно
производится при постоянной мощности нагрузки. При ре-
гулировании угловой скорости вниз от основной потребу-
ется завышение установленной мощности двигателя с неза-
висимой вентиляцией пропорционально диапазону регули-
рования, что экономически нецелесообразно. Для нагрузки
с постоянной мощностью рекомендуется закон экономич-
ного регулирования у = Уа, или t/j/]/?! = const, полу-
ченный аналогично случаю вентиляторной нагрузки. При-
менение этого закона при регулировании угловой скорости
вверх от основной требует завышения установленной мощ-
ности преобразователя частоты пропорционально У Da, где
Da — fimax/fmo»- Поэтому обычно при диапазоне регулиро-
вания до 2 : 1 вверх от основной угловой скорости регули-
рование производят при неизменном номинальном напря-
жении, т. е. = Д1НОМ = const. В этом случае в первом
приближении поток двигателя и допустимый момент убы-
вают обратно пропорционально увеличению частоты, что
соответствует нагрузке, но перегрузочная способность дви-
гателя уменьшается обратно пропорционально УОа.
В замкнутых системах частотного управления могут быть
получены характеристики требуемого качества в диапазоне
регулирования 10 000 : 1 и более.
Частотное регулирование угловой скорости является эко-
номичным, так как управление двигателем производится
при малых скольжениях. Кроме того, в замкнутых системах
можно управлять двигателем, достигая минимума потерь
в нем или минимума потребляемого двигателем тока или
экстремума других энергетических показателей, так как
имеется возможность регулировать напряжение в функции
нагрузки. Частотное регулирование угловой скорости
обычно плавное, бесступенчатое. Но оно требует примене-
ния относительно сложного преобразователя.
184
Большим достоинством частотного регулирования яв-
ляется возможность реализации высоких регулировочных
свойств, не уступающих приводу постоянного тока, в элек-
троприводе с бесконтактным асинхронным двигателем с ко-
роткозамкнутым ротором — наиболее простым, надежным
и дешевым электрическим двигателем.
4.13. Асинхронный регулируемый
электропривод в каскадных системах
Каскадные электроприводы с асинхронными двига-
телями с фазным ротором в отличие от асинхронных электроприводов
с параметрическими и импульсными способами управления целесо-
образно применять в установках средней и большой мощности, рабо-
тающих в продолжительном режиме при относительно небольших
диапазонах регулирования. К таким установкам относятся, например,
воздуходувки, центробежные насосы, шахтные вентиляторы, приводы
бумажных машин, шаровые мельницы и др.
Каскадные электроприводы позволяют полезно использовать энер-
гию скольжения, повышая при этом эффективность электропривода.
Они легко поддаются автоматизации и позволяют обеспечить оптималь-
ный режим работы производственного механизма.
Каскадные электроприводы в зависимости от того, как реализу-
ется энергия скольжения, разделяются на электрические и электро-
механические. В электрических каскадах энергия скольжения за вы-
четом потерь возвращается в питающую сеть. В электромеханических
энергия скольжения, преобразованная в механическую энергию, воз-
вращается на вал основного асинхронного двигателя.
По типу устройства, преобразующего энергию скольжения, раз-
личают электромашинные, вентильно-машинные и вентильные каскады.
Электромашинные каскады с асинхронными двигателями не полу-
чили широкого применения, так как предусматривали включение
в роторную цепь одноякорного преобразователя, отличающегося
повышенной инерционностью, неудовлетворительными условиями ком-
мутации и неустойчивой работой при малых скольжениях.
Бурное развитие силовой полупроводниковой техники и особенно
тиристоров, а также интегральных систем управления значительно
расширило область использования вентильных каскадных приводов,
повысив их надежность и КПД.
Наиболее простыми схемами вентильных и вентильно-машинных
каскадов являются схемы с промежуточным звеном постоянного тока.
Принципиальная схема вентильно-машинного электрического каскада
с промежуточным звеном постоянного тока приведена на рис. 4.60.
Здесь обмотка статора основного асинхронного двигателя Ml при-
соединена к сети переменного тока промышленной частоты, а роторная
обмотка соединена с выпрямительным мостом В. Энергия скольже-
ния, преобразуемая выпрямительным мостом, реализуется двигателем
постоянного тока М2. С помощью синхронного генератора G, нахо-
дящегося на одном валу с двигателем постоянного тока, энергия сколь-
жения за вычетом потерь возвращается в питающую сеть.
Регулирование угловой скорости двигателя Ml осуществляется
Изменением добавочной ЭДС, создаваемой машиной М2 в цепи выпрям-
185
ленного тока посредством воздействия на ток возбуждения этой ма-
шины при помощи R1.
При работе каскада в двигательном режиме выпрямленное напря-
жение ротора должно уравновешивать противо-ЭДС машины постоян-
ного тока, падение напряжения в активных сопротивлениях роторной
цепи, а также падение напряжения, обусловленное процессом комму-
тации вентилей.
Ток, протекающий в цепи выпрямленного напряжения, опреде-
ляется по формуле
1а = (Еаоз-Едо5-2Ьи)№3, (4.79)
где Efio — среднее значение ЭДС на выходе выпрямительного моста
при скольжении s = 1,
£rf0 = /2£aK^-sin^; (4.80)
R9 — эквивалентное сопротивление роторной цепи; £2К — линейное
напряжение на кольцах ротора Ml при s=l; Ддоб—добавочная
ЭДС, определяемая противо-ЭДС машины постоянного тока М2; 2ДС7 —
падение напряжения на вентилях.
Рис. 4.60. Принципиальная
схема вентильно-машинного
электрического каскада с
промежуточным звеном по-
стоянного тока.
Если принять 1а = 0, то можно, отвлекаясь от области прерыви-
стых токов, найти скольжение, отвечающее угловой скорости идеаль-
ного холостого хода:
80 = (£Доб + 2Д[/)/£йо, (4-81)
или, для упрощения полагая Д(/=0, получить:
<oai = <0o(l—Ддоб/^ак)» (4.82)
где со0 — синхронная угловая скорость асинхронного двигателя Ml.
Таким образом, угловая скорость идеального холостого хода
каскада снижается по мере увеличения Ддоб-
Мощность скольжения, проходящая через роторную цепь, вос-
принимается, за исключением потерь, двигателем постоянного тока М2
и равна:
Ato()s = £d()s/d—тхкз1^/2п; (4.83)
здесь т — число фаз выпрямителя (для мостовой схемы т — 6); хл—
приведенное к цепи ротора индуктивное сопротивление фазы асин-
хронного двигателя,
.186
Из (4.83) момент двигателя
д! (Edo mXpIд/2п) trf
q?o
После соответствующих преобразований получим:
Ei s — sn
Wo
R*
mxn
(4.84)
(4.85)
где /?э = mXjS/2n + 2/?д +/?я; /?д — приведенное к цепи ротора
активное сопротивление фаз асинхронного двигателя; /?я — сопро-
тивление якорной цепи двигателя постоянного тока М2.
Пренебрегая в (4.85) слагаемым тхл (s— s0) /2л по сравнению с /?9
(при значениях s, близких к s0), получаем:
M = Edo(s~so)/v>oRs- (4'86>
На рис. 4.61 приведены механические характеристики электриче-
ского каскада.
Полное использование асинхронного двигателя в электрическом
каскаде достигается в случае постоянства момента нагрузки (при
независимой вентиляции) на его
валу, поэтому вентильнр-машин-
ный электрический каскад иног-
да называют каскадом постоян-
ного момента.
В рассматриваемо:,: случае
установленная мощность выпря-
мительного моста и машины
Рис. 4.61. Механические харак-
теристики электрического кас-
када.
(О ' Естественная
постоянного тока определяется наибольшим напряжением на кольцах
ротора, пропорциональным скольжению, и наибольшим током, зави-
сящим от момента нагрузки.
При постоянном моменте нагрузки наибольшему напряжению
в роторной цепи, обусловленному диапазоном регулирования, соот-
ветствует наименьшая угловая скорость асинхронного двигателя и
наибольший, равный номинальному, ток нагрузки (при независимой
вентиляции).
В случае вентиляторной нагрузки наибольшему току нагрузки
соответствует минимальное напряжение. Однако как при регулирова-
нии с постоянным моментом, так и при регулировании с вентилятор-
ным моментом установленные мощности преобразовательных агрега-
тов будут одинаковы.
Активная мощность синхронного генератора определяется мак-
симальной мощностью скольжения. Отсюда следует, что чем больше
диапазон регулирования угловой скорости, тем больше установлен-
ная мощность устройств в роторной цепи асинхронного двигателя,
преобразующих мощность скольжения. Поэтому практический диа-
пазон регулирования угловой скорости не превышает D = 2 : 1; при
этом суммарная установленная мощность вентильно-машинного элек-
187
нагрузки и угловой скорости).
каскада при указанных условиях
трического каскада составляет 250 % и разделяется так: 100 % —
основной асинхронный двигатель, 50 % — выпрямительный мост,
50 % — машина постоянного тока и 50 % — синхронный генератор.
С увеличением диапазона регулирования угловой скорости возрастает
установленная мощность каскада, достигая 400 %.
Регулирование угловой скорости может осуществляться только
вниз, от основной, поэтому этот тип каскада относится к приводам,
обладающим однозонным регулированием. Плавность регулирования
угловой скорости неограниченна, так как она определяется плав-
ностью изменения тока возбуждения машины постоянного тока. Регу-
лирование экономичное. Коэффициент полезного действия электро-
привода при номинальной нагрузке и максимальной угловой скорости
каскада составляет примерно 0,82—0,85 (уменьшаясь с уменьшением
Коэффициент мощности собственно
составляет 0,7—0,75, однако может
быть увеличен за счет перевозбуж-
дения синхронной машины агрегата
постоянной скорости.
Стабильность угловой скоро-
сти определяется жесткостью ме-
ханических характеристик н су-
щественно выше, чем при реостат-
ном и других видах параметриче-
Рис. 4.62. Принципиальная схема
веитильно-машинного электромеха-
нического каскада.
ского и импульсного регулирования, но хуже, чем при частотном
управлении.
Принципиальная схема вентильно-машинного электромеханиче-
ского каскада приведена па рис. 4.62. Как и в предыдущем случае,
к сети переменного тока присоединяется статор асинхронного двига-
теля Ml, ротор которого механически связан с двигателем постоян-
ного тока М2. Электрически якорь двигателя соединен через выпря-
мительный мост с обмоткой ротора; реализуемая двигателем постоян-
ного тока энергия скольжения за вычетом потерь возвращается на вал
привода. .
Регулирование угловой скорости привода осуществляется, как
и в случае вентильно-машинного электрического каскада, изменением
добавочной ЭДС, создаваемой двигателем постоянного тока, в цепи
выпрямленного напряжения.
Управляющим воздействием при регулировании угловой ско-
рости является изменение тока возбуждения двигателя постоянного
тока. С увеличением тока возбуждения снижается угловая скорость
двигателей. Очевидно, что в электромеханическом каскаде ЭДС ма-
шины постоянного тока зависит не только от тока возбуждения, но
и от угловой скорости асинхронного двигателя, поскольку обе машины
находятся на одном валу.
Электромагнитный момент, развиваемый каскадом, равен сумме
моментов асинхронного двигателя и машины постоянного тока:
Мкаск = Mmi + Мм-2 = + кФм.,1а. (4.87)
188
Уравнение равновесия ЭДС роторной цепи
(4.88)
Подставляя в (4.88) вместо ЕМ2 — кФМ2и>0 (1 — s), находим сколь-
жение асинхронного двигателя, соответствующее угловой скорости
идеального холостого хода каскада (полагая = 0):
s0 — (йФ^Юо + 2 MJ}/(Ed0 j (4.89)
С учетом (4.89) можно из (4.88) найти выражение для тока
(4.90)
Подставляя
ний получаем:
ld = (s - SO) Ч- ЙФЛ13соо)/Яэ.
из (4.90У значение тока в (4.87), после преобразова-
^каск
(grf0+^aao0)2s-s,
®0
ть
ar(s-So) •
(4.91)
___4)
*1
Яэ
По аналогии с (4.86) можно записать:
М,.3,к = (gtfP-+fe(I)Mn®o)2 . (4.91а)
С00 Лэ
Приведенное выражение для момента каскада справедливо при
токах, соответствующих так называемому первому режиму работы
схемы выпрямления.
Рис. 4.63. Примерные механиче-
ские характеристики вентильно-
машинного электромеханичес-
кого каскада.
Из (4.89) и (4.91) следует, что с увеличением магнитного потока
машины постоянного тока момент каскада возрастает, при этом угло-
вая скорость его снижается. Примерные характеристики вентильно-
машинного электромеханического каскада приведены на рис. 4.63.
Без учета потерь в машинах мощность, отдаваемая асинхронным
двигателем на вал, равна:
/>мех =/>1(1-3)- (4.92)
где Рг — мощность, потребляемая из сети; s — скольжение асинхрон-
ного двигателя.
Мощность скольжения, реализуемая двигателем постоянного тока
и возвращаемая на вал каскада, равна:
Ps = PlS. (4.93)
Таким образом, суммарная мощность, развиваемая каскадом
независимо от скольжения (и от угловой скорости), будет поддержи-
ваться постоянной. Поэтому иногда вентильно-машинный электро-
механический каскад называют каскадом постоянной мощности. При
189
этом следует иметь в виду, что поддержание постоянства мощности,
а следовательно, возрастание момента каскада со снижением его угло-
вой скорости может быть обеспечено соответствующим выбором ма-
шин каскада и независимой их вентиляцией.
Установленная мощность машины постоянного тока может быть
найдена из равенства
P1S = MM2coo(l-s), (4.94)
откуда
рж;=Л1жюо=/’15/(1-в)с«/’ж5А1-«)- (4'95)
Уже при s = 0,5 РМ2 = РМ1; с ростом скольжения, т. е. с уве-
личением диапазона регулирования, мощность машины постоянного
тока существенно возрастает по сравнению с мощностью РМ1, что
вытекает из (4.95), поэтому диапазон регулирования ограничен прак-
тически значением 2:1. Вентнльно-машинный каскад позволяет полу-
чить плавное однозонное (вниз от основной) экономичное регулирова-
ние.
Коэффициент полезного действия каскада при регулировании
угловой скорости и полной нагрузке составляет примерно 0,82—0,85,
а коэффициент мощности асинхронного двигателя при номинальной
угловой скорости и полной нагрузке составляет примерно 0,75—0,8.
Стабильность угловой скорости примерно такая же, как и в случае
электрического каскада.
В настоящее время электромеханический агрегат посто-
янной скорости в электрическом каскаде заменяется инвер-
тором. Принципиальная схема такого каскада, называе-
мого асинхронно-вентильным (АВК), приведена на рис. 4.64.
Здесь асинхронный двигатель М подключен со стороны
статора к сети переменного тока, роторная цепь его через
выпрямитель В, инвертор И и согласующий трансформа-
тор Т присоединяется к той же питающей сети. Для сгла-
живания выпрямленного тока и нормальной работы инвер-
тора включен реактор L. Принцип действия этого каскада
аналогичен действию вентильно-машинного каскада и со-
стоит в том, что в цепь выпрямленного тока ротора вво-
дится добавочная ЭДС, получаемая регулированием угла р
опережения включения тиристоров инвертора.
Ток в роторной цепи
h = (Eaos - ЕМа cos р - 2 Д£)/£э, (4.96)
где Edn = 1,35 £2К; Edoa — ЭДС холостого хода инвертора
при р — 0, £rfOil — 2,34 £2ф>т; £2ф1Т — ЭДС фазы трансфор-
матора; 2Д(7 — суммарное падение напряжения в венти-
лях роторной и инверторной групп преобразователя; /?э —
эквивалентное сопротивление, приведенное к роторной
цепи;
/?э = Зхдз/л + Зхт/л + 2£д + + 2£т;
190
xT, RT — соответственно индуктивное и активное сопротив-
ления фазы трансформатора, приведенные к цепи ротора;
Rl — активное сопротивление реактора.
Уравнение для момента асинхронного двигателя оказы-
вается аналогичным полученному для электрического вен-
тильно-машинного каскада (4.83). Ток ротора равен:
h = Ем (s - 8 cos р + Л)//?э; (4.97)
здесь 8 = Ed9nIEd9‘, К = S Д£/ЛЕ^0.
Из (4.97) при Id = 0, пренебрегая AL7, находим:
s0 = EdoHcosp/Edo- (4.98)
Используя (4.83), после преобразований получаем при-
ближенное выражение для момента
M^-£^°-(s-s0), (4.99)
й>о/?э
где 7?э0 = ЗХд$0/л + Зхт/л + 27?д + Rl + 27?т.
Формула не учитывает высших гармоник тока, искаже-
ний механических характеристик в области прерывистых
Рис. 4.64. Принципиальная схе-
ма асинхронно-вентильного кас-
када.
Рис. 4.65. Примерные механи-
ческие характеристики асин-
хронно-вентильного каскада.
токов, а также различных режимов работы выпрямителя,
в которых внешняя характеристика выпрямителя резко
падает.
Примерные механические характеристики АВК пока-
заны на рис. 4.65 (момент выражен в долях максимального
момента двигателя в естественной схеме включения). Из
191
них видно, что при некотором угле р перегрузочная способ-
ность АВ К падает. Регулировочные свойства АВ К при
уменьшении угловой скорости ограничены некоторым допу-
стимым по условиям устойчивой работы инвертора мини-
мальным углом р и током инвертирования.
Максимальная угловая скорость АВК при номинальном
моменте составляет примерно 0,9соо; минимальная угловая
скорость практически принимается равной О,5со0. Даль-
нейшее снижение угловой скорости приводит к увеличе-
нию установленной мощности всех силовых элементов,
включенных в роторную
цепь, точно так же, как и
в электрическом вентиль-
но-машинном каскаде.
Регулирование угловой
скорости в АВК однозон-
ное (вниз от основной),
плавное бесступенчатое,
экономичное. КПД асин-
хронно-вентильного кас-
Рис. 4.66. Примерная зависи-
мость коэффициента мощности
от скольжения для асинхронно-
вентильного каскада небольшой
мощности.
када достигает 0,82—0,9 при максимальной угловой скоро-
сти и тем выше, чем больше его мощность. При снижении
угловой скорости КПД падает. Если КПД сравнительно
высок, то коэффициент мощности АВК оказывается низ-
ким, что обусловливается значительным суммарным потреб-
лением реактивной мощности двигателем и инвертором и
искажением тока инвертором. Коэффициент мощности
зависит не только от нагрузки, но и от угловой скорости
асинхронного двигателя. Примерная зависимость cos <рк от
скольжения и момента Л4* = М/Ма011 для АВК небольшой
мощности дана на рис. 4.66.
Стабильность угловой скорости АВК хуже, чем у вен-
тильно-машинного электрического каскада. Регулирование
осуществляется при независимой вентиляции с постоянным
(номинальным) моментом нагрузки.
Следует отметить, что в рассмотренных схемах каскадов
двигатель может работать в двигательном режиме при ско-
192
роста ниже синхронной, в режимах противовключения,
динамического торможения и генераторном параллельно
с сетью при скорости выше синхронной. При этом энергия
скольжения рекуперируется в сеть. Двигатель не может
работать в генераторном режиме при скорости ниже син-
хронной и двигательном режиме при сверхсинхронной ско-
рости, когда энергия должна поступать из сети в ротор,
что невозможно при нереверсивном неуправляемом выпря-
мителе в роторной цепи. Эти режимы могут быть реализо-
ваны в машине двойного питания.
4.14. Регулируемый асинхронный
электропривод в системе двойного
питания
Подсоединяя статор асинхронного двигателя
с фазным ротором к питающей сети переменного тока с не-
изменным напряжением и частотой, а в ротор его подавая
напряжение с изменяемой частотой и амплитудой, можно
Рис. 4.67. Схема включения (а) и замещения (б) МДП.
Л7 Rr Rz/s jx’z
О
плавно регулировать угловую скорость двигателя. Такой
двигатель принято называть машиной двойного питания
{МДП). Схемы включения и замещения МДП показаны на
рис. 4.67, а, б.
На основании схемы замещения система уравнений для
первичного и вторичного напряжений имеет вид:
01 = li {Ri + /Хю) + jl'iXo',
O'^r^/s — /j (R'i/s -J- jx'io) -J- jliXo,
(4.100)
7 Чиликия M. Г., Сандлер А. С.
193
где х10 = хг + х0; х2о — х2 + х0’, 9 — угол сдвига между
напряжением иг и приведенным к цепи статора напряже-
нием U2.
Если пренебречь потерями в стали, то для электромаг-
нитного момента можно записать формулу
М = 3(717/1-7^1)/соо. (4.101)
Подставляя в (4.101) выражение для тока, полученное
из (4.100), и не учитывая составляющей намагничивающего
тока в первичном токе, после преобразований находим:
М = 1 _[/'2 А 1 +
<о0 ( 1 s г2 2 s2 г2
+ U1U* 4[Хк sin 9 - (Ri/s - Rt) cos 9]j,
(4.102)
где г2 = (7?! + R2/s)2 + 4; хк = хг + х2.
Момент, развиваемый МДП, состоит из трех составляю-
щих: первая — синхронный момент при питании со стороны
статора напряжением Ut и замкнутой накоротко вторичной
обмотке; вторая — при питании со стороны ротора напря-
жением U2 и замкнутой накоротко первичной цепи; третья—
синхронизирующий момент, обусловленный возбуждением
со стороны ротора и зависящий от напряжения и его фазы.
Выведенное соотношение для момента в установив-
шемся режиме дано в общем виде независимо от способа
управления машиной. Установившийся режим любой элек-
трической машины переменного тока определяется соотно-
шением
А = А + А>,Р.
где Л, /2 и Д.,р —соответственно частоты напряжений, под-1
водимых к обмоткам статора и ротора; fBiP = ар/2л. -
Указанное условие может быть выполнено, например,
при неизменной частоте питающей сети, либо когда Д яв-
ляется независимой переменной, а /В1Р — ее функция, либо
когда fB>p — независимая переменная, а /2 — ее функция.
Первый случай — /2 — независимая переменная, а/В1Р —
ее функция:
А>,Р = Л-/г, или /в,р = <г(/2), (4.103)
т. е. угловая скорость ротора будет изменяться в том слу-
чае, если управление производится изменением частоты на-
пряжения, притоженного к обмоткам ротора, но эта частота
194
не изменяется при изменении нагрузки. Такой режим ра-
боты МДП называется синхронным. В частном случае,
когда f2 = 0, что означает питание роторной обмотки по-
стоянным током, машина работает в установившемся ре-
жиме с синхронной угловой скоростью как обычная синхрон-
ная машина.
Схема включения МДП, работающей в синхронном ре-
жиме, соответствует рис. 4.67, а. На рис. 4.67, а приняты
следующие обозначения: ПЧ — преобразователь частоты
с непосредственной связью; СУ — система управления
преобразователем. На вход преобразователя подают трех-
фазное напряжение l/t с частотой fr, а на выходе получают
трехфазное напряжение U2, амплитуду и частоту /2 которого
можно изменять в широких пределах. Для снижения угло-
вой скорости МДП необходимо увеличить частоту f2 и пово-
ротом вектора й2 в соответствующем направлении обеспе-
чить отрицательный электромагнитный момент, что приве-
дет к замедлению электропривода. Снижение угловой ско-
рости будет происходить до тех пор, пока не наступит уста-
новившийся режим, при котором возникнет равновесие
между моментом МДП и моментом нагрузки при заданном
значении частоты f2. Для увеличения угловой скорости при-
вода надо уменьшить частоту /2 и установить соответствую-
щие значения модуля и направление вектора Д2; при этом
увеличится ток в роторной цепи МДП, возрастет электро-
магнитный момент, привод начнет ускоряться до угловой
скорости, при которой наступит установившийся режим.
За счет легко осуществляемого посредством преобразо-
вателя частоты изменения чередования фаз напряжения,
вводимого в цепь ротора, можно заставить машину работать
с угловой скоростью выше синхронной. Так как МДП в рас-
сматриваемом режиме работает как синхронная машина,
то угловая скорость ее не зависит от нагрузки, а развивае-
мый ею момент определится при заданных Ur и Д2 углом
сдвига между ними. Если МДП работает при подсинхрон-
ной угловой скорости > 0) в двигательном режиме,
когда мощность, развиваемая машиной, отдается на вал
(рис 4.68, а), то она потребляет из сети мощность, равную
сумме:
Л = р2 + ^, (4.104)
где Ps — мощность скольжения.
В роторе генерируется мощность скольжения Ps и через
преобразователь за вычетом потерь возвращается в сеть.
7* 195
Рис. 4.68. Направление потоков мощности в МДП в двигательном (а)
и генераторном (<5) режимах и механические характеристики- (в) при
подсинхронной угловой скорости и синхронном режиме.
Рис, 4.69. Направление потоков мощности в МДП в двигательном (а)
и генераторном (6) режимах и механические характеристики (в) при
сверхсинхронной угловой скорости и синхронном режиме,
196
Изменяя фазу вводимого в ротор напряжения, но не меняя
частоты, можно при соответствующей нагрузке заставить
работать МДП в генераторном режиме (рис. 4.68, б). В этом
случае при f± > Д без учета потерь мощность, отдаваемая
в сеть, складывается из мощности, поступающей с вала и
со стороны ротора, т. е.
Pi = -P2-Ps. (4.105)
Механические характеристики МДП показаны для рас-
сматриваемой области угловых скоростей и режимов на
рис. 4.68, в.
Обмотки МДП могут быть так включены, что поля ста-
тора и ротора будут вращаться встречно (^ < 0); тогда угло-
вая скорость двигателя
+ (4.106)
При сверхсинхронной угловой скорости МДП и работе
в двигательном режиме машина потребляет мощность и со
стороны статора и со стороны ротора, отдавая ее на вал
(рис. 4.69, а). Эта мощность равна:
P^Pi + Ps. (4.Ю7)
В генераторном режиме мощность с вала передается
в сеть и статорной и роторной цепями (рис. 4.69, б), а соот-
ношение этих мощностей определяется равенством (4.107).
Механические характеристики МДП показаны для рас-
сматриваемой области угловых скоростей и режимов на
рис. 4.69, в.
Как видно из рис. 4.68, а, б и 4.69, а, б, для обеспече-
ния всех режимов работы МДП при угловых скоростях выше
и ниже синхронной преобразователь частоты должен обла-
дать двусторонней проводимостью и обеспечивать бескон-
тактное изменение чередования фаз. Для этого наиболее при-
годен преобразователь частоты с непосредственной связью.
В установившемся процессе и синхронном режиме ра-
боты МДП скольжение сохраняется неизменным, поэтому
ее устойчивость определяется характером изменения угла 9.
Второй случай — fBtP — независимая переменная, a f2 —
ее функция:
/а = А —/в.р» или А: = Ф(/в,р)- (4.108)
Здесь при изменении частоты ротора, например, вслед-
ствие изменения нагрузки должна соответственно изме-
няться частота напряжения, приложенного к обмоткам ро-
тора. Этому отвечает асинхронный режим работы МДП.
197
На рис. 4.70 дана структурная схема МДП для этого режима.
На одном валу с асинхронным двигателем М. установлен
датчик частоты вращения ДЧВ, представляющий собой син-
хронный тахогенератор с возбуждением от постоянных маг-
нитов с числом полюсов, равным числу полюсов двига-
теля М. Датчик ДЧВ одновременно служит датчиком угло-
вого положения ротора. На входы блока формирования
напряжения частоты скольжения ФНЧС подаются сигналы
с частотой питающей сети и частотой вращения. На выходе
Рис. 4.70. Структурная схема
МДП для асинхронного режима
работы.
этого блока вырабатываются
синусоидальные сигналы, ча-
стота которых соответствует
(4.108). Напряжение с часто-
Рис. 4.71. Механические характе-
ристики МДП для асинхронного
режима работы.
той сети подается на блок ФНЧС через фазовращающее
устройство ФВ и регулятор напряжения PH, благодаря
чему на выходе ФНЧС получают регулируемое по амплитуде
и фазе напряжение. Регулирование угловой скорости МДП
в этом режиме осуществляется воздействием на амплитуду
(посредством PH) и фазу (посредством ФВ) вводимого в ро-
торную цепь напряжения. Для получения механических
характеристик требуемого вида необходимо производить
одновременное изменение амплитуды и фазы роторного на-
пряжения по некоторому закону или посредством замкну-
тых систем регулирования; желательно также регулирова-
ние фазы роторного напряжения в функции нагрузки.
В асинхронном режиме работы МДП благодаря введе-
нию обратной связи по положению ротора, осуществляемой
ДЧВ, устойчивость работы МДП определяется характером
198
изменения скольжения; при этом, как показывают более
подробные исследования, МДП может устойчиво работать
с любым углом между ЭДС статора и напряжением сети
(кроме Ойл) как в двигательном, так и в генераторном ре-
жимах. Это одно из преимуществ асинхронного режима по
сравнению с синхронным.
Механические характеристики МДП для асинхронного
режима приведены на рис. 4.71, где со* = со/со0пом, 7И* =
- М/Мном.
Диапазон регулирования угловой скорости МДП опре-
деляется предельной частотой на выходе преобразователя.
В обычном преобразователе частоты с непосредственной
связью и естественной коммутацией вентилей наибольшее
значение частоты на его выходе не превышает половины
частоты питающего напряжения, поэтому минимальная уг-
ловая скорость при регулировании МДП вниз от синхрон-
ной составит О,5со0. Так как МДП допускает двухзонное ре-
гулирование, то верхний предел скорости может достигать
1,5<оо, т. е. общий диапазон регулирования не превосходит
3:1. Регулирование во всем диапазоне плавное экономич-
ное, поскольку энергия скольжения за вычетом потерь
в цепи ротора и в преобразователе либо возвращается в сеть,
либо передается на вал (при сверхсинхронной скорости в ре-
жиме двигателя). При таком .регулировании стабильность
скорости высокая.
Допустимая нагрузка МДП в установившемся продол-
жительном режиме определяется номинальными токами
в роторной и статорной цепях (постоянство момента 7ИДОП =
= Л4НОМ), если пренебречь ухудшением условий охлажде-
ния при регулировании угловой скорости вниз от синхрон-
ной. Регулирование вверх от синхронной обеспечивает не-
которое улучшение условий охлаждения, поэтому допу-
стимые токи в обмотках машины могут несколько превосхо-
дить номинальные значения.
Допустимую нагрузку нельзя оценивать только по
статорному току, проверка должна быть произведена и по
роторному току, так как область допустимых первичных то-
ков не совпадает с областью допустимых вторичных токов.
Следует заметить, что при значениях скольжения, превы-
шающих номинальные, для двигательного и генераторного
режимов имеют место ограничения по амплитуде и фазе вто-
ричного напряжения.
В МДП может осуществляться независимое регулирова-
ние вторичного напряжения и его фазы, поэтому возможно
199
поддерживать высокий коэффициент мощности. Этим вы-
годно отличается привод с МДП от вентильных каскадов.
Реактивная мощность первичной цепи
Q1==mt/1Im[/1]. (4.109)
Если раскрыть уравнение (4.109), то можно увидеть,
что оно состоит из двух членов. Первый член со знаком
минус пропорционален квадрату первичного напряжения,
он представляет собой выражение отстающей реактивной
мощности обычной асинхронной машины, не возбуждае-
мой со стороны ротора; второй член со знаком плюс —
опережающая реактивная мощность, поставляемая со сто-
роны ротора и зависящая от вторичного напряжения и его
фазы, регулируя которую можно влиять на реактивную
мощность, потребляемую со стороны статора, а следова-
тельно, и на коэффициент мощности МДП. В частности,
возможна полная компенсация реактивной мощности пер-
вичной цепи (cos <рх = 1), когда машина возбуждается
только со стороны ротора. Очевидно, что этому условию
соответствует равенство первого и второго членов выраже-
ния (4.109). Однако не при любом значении вторичного
напряжения cos <рх = 1. Расчеты показывают, что в прак-
тически используемом диапазоне регулирования угловой
скорости при изменении момента нагрузки от номинального
в двигательном режиме до номинального в генераторном
МДП может работать с cos <рх = 1. Если cos <рх =1 при
номинальном моменте, то при меньших нагрузках cos <рх
окажется опережающим.
Для определения результирующего коэффициента мощ-
ности (cos <р2) электропривода необходимо учесть коэффи-
циент мощности вторичной цепи.
При ограниченном диапазоне регулирования частоты
скольжения для создания одного и того же магнитного
потока со стороны ротора потребуется значительно мень-
шая реактивная мощность, чем при питании со стороны
статора, поэтому результирующий коэффициент мощности
МДП может быть получен более высокий, чем у обычного
асинхронного двигателя. С увеличением диапазона регу-
лирования угловой скорости cos <р2 понижается. Так как
роторная цепь МДП питается от преобразователя частоты,
то для оценки cos <р2 необходимо определить активную
и реактивную мощности на его входе.
В заключение необходимо отметить, что благодаря своим
преимуществам каскады с использованием МДП могут
200
найти более широкое применение в установках, мощностью
от нескольких десятков киловатт до нескольких мегаватт,
требующих плавного и экономичного регулирования угло-
вой скорости, а также для получения высокого быстро-
действия. При этом исполнение МДП в зависимости от усло-
вий окружающей среды возможно в контактном варианте
на базе обычного асинхронного двигателя с фазным рото-
ром и в бесконтактном варианте, например в виде двух
сидящих на одном валу обычных машин с фазным ротором,
роторные обмотки которых электрически соединены (без
контактных колец и щеток) так, чтобы их магнитные поля
вращались в противоположные стороны. В последнем слу-
чае статор первой машины присоединяется к питающей
сети с неизменным напряжением и частотой, а статор дру-
гой — к преобразователю частоты с непосредственной
связью.
Перспективной оказывается и специальная бесконтакт-
ная МДП, выполненная с двумя совмещенными обмотками
на общем статоре и со специальным короткозамкнутым
ротором. Регулируемый привод с МДП может быть исполь-
зован в установках с автономным питанием, где в качестве
генератора применяется синхронная машина. Применение
практически безынерционного преобразователя частоты
в роторной цепи МДП дает возможность реализовать все ее
положительные свойства в системе автоматического управ-
ления, обеспечивающей благоприятные статические ха-
рактеристики и высокие динамические качества электро-
привода.
4.15. Частотное регулирование угловой
скорости синхронного электропривода
Регулируемый синхронный электропривод с частот-
ным управлением в настоящее время находит применение в произ-
водстве искусственного волокна, в прядильном производстве, на мор-
ских судах и для некоторых специальных производств.
Использование полупроводниковых преобразователей частоты от-
крывает большие возможности в отношении формирования требуемых
статических и переходных процессов частотно-управляемых синхрон-
ных электроприводов. Этот привод обладает рядом свойств, не при-
сущих асинхронному электроприводу с частотным управлением в разомк-
нутых системах, а именно:
1) стабильность угловой скорости независимо от момента на-
грузки во всем диапазоне регулирования угловой скорости;
2) высокая точность синхронного движения управляемых машин
с контролем по углу вращающихся осей; •
201
3) большие значения моментов на ползучих скоростях при регу-
лировании напряжения и тока возбуждения.
В регулируемом синхронном электроприводе должны быть уста-
новлены закономерности, связанные с регулированием частоты пере-
менного тока и внутреннего угла сдвига. Важное значение имеет уста-
новление законов регулирования электрических параметров синхрон-
ного двигателя при выявлении запаса статической устойчивости.
Электромагнитный момент синхронного двигателя с явновыражен-
ными полюсами
М=- 5UE.....sinB+~(~----------sin 20, (4.110)
ВД| 2со0 \Xq xdj
Это выражение удобно представить, пренебрегая насыщением,
в виде
М = А~^ sin0 + B sin 20, (4.111)
где Iв — ток возбуждения синхронного двигателя; А и В — постоян-
ные величины.
Основные режимы управления синхронным двигателем:
1. Регулирование синхронного двигателя при f = const; U = var;
/в = var, является наиболее характерным для нерегулируемого син-
хронного электропривода. Формула электромагнитного момента для
этого случая:
Л4 = с11//В sin S + c2t/2 sin 20; (4.112)
здесь с± — A/f; с2 = В/р.
Для характеристики электромеханических свойств здесь удобно
рассматривать регулирование синхронного двигателя отдельно при
ZB = var; U = constaH /в = const; U = var. Моментно-угловые харак-
теристики при этом соответственио представлены на рис. 4.72 и 4.73.
2. Режим частотного регулирования синхронного электропри-
вода при £///= const; ZB = var, Для этого случая характеристики
даны на рис. 4.74, а их аналитическая зависимость имеет вид:
Л4 = Ci/B sin0+c2 sin 20, (4.113)
где сх = AU/f-, с2= В (U/ff.
3. Режим частотного регулирования синхронного электропри-
вода при U — const; ZB = const; / = var. Формула электромагнитного
момента:
M=Cj sin0 +sin 20; (4.114)
здесь Cj = AUJB; c2 = BL’2.
Из (4.114) видно, что при сниженных угловых скоростях (часто-
тах напряжения статора) синхронный двигатель обладает значитель-
ным максимальным моментом. Момеитно-угловые характеристики для
случая изменения только частоты приведены на рис. 4.75. Увеличе-
ние максимального момента при снижении угловой скорости (частоты
статорного напряжения) синхронного двигателя, но при неизменном
напряжении связано с большим увеличением тока статора, которое
определяется уменьшением противо-ЭДС и реактивных сопротивлений
машины.
Закон регулирования напряжения и тока возбуждения неявно-
полюсного синхронного двигателя или приближенный закон регули-
202
Рис. 4.72. Моментно-угловые ха-
рактеристики синхронного дви-
гателя при /в= var; U = const,
1 — нормальное возбуждение; 2 —
повышенное возбуждение; 3 — по-
ниженное возбуждение; Afj — мо-
мент от поля возбуждения; М2 —
момент от явнополюсности; М —
суммарный момент.
Рис. 4.73. Моментно-угловые ха-
рактеристики синхронного дви-
гателя при /в— const; U = var.
/ — I/ — t/ном5 > ^ном*
3 — U < С7Н0М; М* ~~ момент от
поля возбуждения; М2 — момент
от явнополюеноети; М — суммар-
ный момент.
Af
Рис. 4.74. Моментно-угловые ха-
рактеристики частотно-регули-
руемого синхронного электро-
привода при U/f = const; /в =
= var,
I — нормальное возбуждение; 2 —
повышенное возбуждение; 3 — по-
ниженное возбуждение; Mi — мо-
мент от поля возбуждения; М2 —
момент от явяополюеноети; М —
суммарный момент.
Рис. 4.75. Моментно-угловые
характеристики синхронного
двигателя при U = const; /в =
= const; f = var,
Mi — момент от поля возбужде-
ния; М2 — момент от явнополюс-
ности; М — суммарный момент.
203
рования для крупных явнополюсных синхронных двигателей при изме-
нении угловой скорости (частоты) и момента нагрузки и заданном
запасе статической устойчивости найдем, воспользовавшись первой
составляющей (4.111) для электромагнитного момента.
При постоянстве угла нагрузки синхронного двигателя закон
регулирования напряжения и тока возбуждения находим следующим
образом:
1/sin Оном" Л^ном/в, ном/f ном^ном1=5
откуда
^^в/^ном^в> ном = fM/fWO№M
ном* (4.115)
При UIf — t/HoM//HoM = const получим зависимость регулирова-
ния тока возбуждения синхронного двигателя от момента на валу:
^вДв, ном = М/Мном. (4.116)
Из (4.116) следует, что при постоянном отношении U/f возбужде-
ние синхронного двигателя должно изменяться прямо пропорциональ-
но изменению момента на валу.
Для /в = /в.ном = const из (4.115) следует, что U/f = UBON/faoia =
= const и регулирование производится при постоянном моменте.
В случае постоянной мощности регулирование осуществляется
изменением только частоты при неизменных возбуждении и напря-
жении.
По аналогии с двухзонным регулированием двигателей постоян-
ного тока независимого возбуждения можно осуществить двухзонное
регулирование угловой скорости синхронных двигателей: при постоян-
ном моменте используется регулирование в зоне до номинальной угло-
вой скорости, а при постоянной мощности — в зоне регулирования
выше номинальной угловой скорости.
Таким же образом, как и для неявнополюсной машины, определя-
ется закон регулирования напряжения для синхронных двигателей
с явновыражениыми полюсами при существенном влиянии реактивной
составляющей момента. Из (4.110) при условии постоянства угла 0
и тока возбуждения (/в = const), приняв в ограниченном диапазоне
регулирования угловой скорости Е U, получим:
U
^ном
т. е. закон регулирования имеет тот же вид, что и для асинхронного
двигателя при частотном управлении. Следовательно, и частотные
законы регулирования для различного вида нагрузок будут одина-
ковы для обоих типов машин: U/f = const при М = Л4НОМ = const;
U/Vf = const при Р — Рном = const; U/f2, = const при вентилятор-
ной нагрузке.
Из (4.117), в частности, следует, что при некоторой фиксирован-
ной частоте f и при изменении момента нагрузки напряжение нужно
регулировать по закону
WJ/hom = /M/Mhom; (4.118)
угол нагрузки при этом останется неизменным в диапазоне изменения
момента от холостого хода до номинального.
Для явнополюсного синхронного двигателя регулирование тока
возбуждения, как это следует из (4.111), приводит к изменению только
одной составляющей момента, поэтому закон регулирования тока
204
“ЛУ лГ"’ (4л17)
возбуждения существенно усложняется, в частности при Ulf — const
и 0 = const
НОМ--(Al ty /(AIhom ^)>
где b — постоянная величина.
Предел статической устойчивости синхронного двигателя с неяв-
новыраженными полюсами наступает, когда угол 6 становится рав-
ным 90° при максимальном моменте
Mirnax — AUldf. (4.119)
Для реактивного синхронного двигателя этот предел наступает,
когда угол 6 становится равным 45° при максимальном моменте
Alamax— В {UIf)2.
(4.120)
Как видно из (4.119) и (4.120), при уменьшении частоты пере-
менного тока максимальные значения электромагнитных моментов
увеличиваются и, наоборот, с увеличением частоты уменьшаются.
Для синхронных двигателей с явновыраженными полюсами при
изменении частоты переменного тока неучет реактивного электромаг-
нитного момента (от явнополюсности) приводит к значительным по-
грешностям в оценке механических свойств.
При низких частотах пренебрежение активным сопротивлением
статорной обмотки вносит значительные искажения в расчетное зна-
чение электромагнитного момента. Отрицательное влияние активного
сопротивления статора на характеристики синхронного двигателя
проявляется в меньшей степени и при относительно более низких
частотах, чем в случае асинхронного двигателя, и может быть в опре-
деленной мере скомпенсировано регулированием возбуждения.
Частотное регулирование, являясь практически единственным
способом регулирования угловой скорости синхронных двигателей,
характеризуется в основном такими же показателями, что и частот-
ное регулирование асинхронных двигателей с короткозамкнутым ро-
тором. Это регулирование плавное экономичное двухзонное; стабиль-
ность скорости высокая (идеально жесткие характеристики); допу-
стимая нагрузка при постоянном возбуждении — номинальный момент
(в случае независимой вентиляции); диапазон регулирования вверх
от основной угловой скорости ограничивается механической проч-
ностью ротора и подшипников; диапазон регулирования вниз с уче-
том идеальной жесткости характеристик может быть большим [до
(50 4- 100) : 1 и белее] при обеспечении синусоидальности напряже-
ния, достаточного запаса устойчивости и сохранении значения мак-
симального момента.
Синхронный двигатель обладает очень важным для некоторых
применений свойством — при подаче в статорные обмотки постоян-
ного тока он создает тормозной момент при неподвижном роторе, обес-
печивая тем самым электрическую фиксацию ротора в заданном поло-
жении, что позволяет отказаться от применения механического тор-
моза.
Посредством явнополюсных или специальных тяговых синхрон-
ных двигателей может быть организовано дискретное движение ротора,
его поворот на заданный угол и удержание ротора в этом положе-
нии. Угловая скорость (средняя) при дискретном движении также регу-
лируется изменением частоты переключения обмоток статора двига-
205
теля (изменением частоты напряжения прямоугольной или ступенча-
той формы).
Некоторые трудности при использовании регулируемых синхрон-
ных двигателей вызывает их известный недостаток — склонность
к качаниям ротора.
4.16. Регулируемый привод переменного
тока с вентильным двигателем
Вентильным двигателем (ВД) называется устройство,
состоящее из электродвигателя переменного тока (по конструкции
аналогичного синхронному) и вентильного коммутатора (преобразова-
теля частоты), управляемого в функции положения ротора или маг-
нитного потока двигателя. На статоре его располагается обычно трех-
фазная обмотка (обмотка переменного тока), а ротор является воз-
будителем; возбуждение может быть выполнено либо от обмотки воз-
буждения, размещаемой на роторе и питаемой через кольца и щетки
от источника постоянного тока, либо с помощью постоянных магнитов,
расположенных в пазах ротора.
Существенным отличительным признаком ВД является наличие
вентильного коммутатора, который функционально заменяет щетки
и механически вращающийся коллектор машины постоянного тока.
Вентильный коммутатор присоединяется к выводам статора и выпол-
няет функции распределителя постоянного тока с преобразованием
его в переменный. Последовательность переключения тока статора
и связанная с этим очередность включения тиристоров вентильного
коммутатора определяется датчиком положения ротора.
Вентильные двигатели различаются по типу преобразователя
частоты, конструктивному исполнению машины и устройству системы
управления. Несмотри на многообразие сочетаний конструкций элек-
трических машин и принципов управления ВД имеют следующие
общие признаки, а именно: возможность регулирования угловой ско-
рости изменением подводимого к статору напряжения (вниз от номи-
нальной), тока возбуждения (при наличии обмотки возбуждения)
и угла опережения включения вентилей относительно фазных ЭДС
двигателя (вверх от номинальной).
Характеристики ВД аналогичны характеристикам двигателя по-
стоянного тока.
В ВД используются чаще всего два вида преобразователей частоты:
1) с промежуточным звеном постоянного тока и-2) с непосредственной
связью (НПЧ).
Если, например, синхронная угловая скорость двигателя со0 =
= Vstf/p для многополюсной машины при р = 6 составляет со0 —
— 314 рад/с при частоте питающего напряжения 300 Гц, то следует
выбирать схему преобразователя с промежуточным звеном постоянного
тока.
Коммутация тока_в вентилях инвертора может быть естественной
или искусственной.
Инверторы с естественной коммутацией — это преобразователь
постоянного тока в переменный, отдающий энергию нагрузке, кото-
рая уже содержит источник ЭДС той же частоты, что и выходное на-
пряжение преобразователя; при этом благодаря действию этой ЭДС
осуществляется коммутация вентилей; такая коммутация и называется
естественной,
206
Инвертор с искусственной коммутацией — это преобразователь
постоянного напряжения или тока в переменные с принудительной
(обычно конденсаторной) коммутацией тока в вентилях, отдающий
энергию нагрузке, характер которой жестко не лимитирован.
Рис. 4.76. Принципиальная
ной коммутацией инвертора
схема вентильного двигателя с естествен*
тока.
Принципиальная схема ВД с естественной коммутацией инвер*
тора тока приведена на рис. 4.76. Схема содержит управляемый вы*
прямитель УВ, сглаживающий реактор L, инвертор тока И, тиристор*
ный возбудитель ТВ двигателя М и системы управления выпрями*
телем СУВ и инвертором СУИ. Угловое положение ротора ВД кон*
тролируется косвенно — управление вентилями инвертора осущест*
вляется в функции фазы напряжения на выводах обмотки статора дви*
гателя [U (ф)],
207
При естественной коммутации отпирающие импульсы на венти-
ли инвертора подаются с опережением на угол Р относительно ЭДС
двигателя. Минимальный угол опережения р равен:
₽^я==7+6. (4.121)
где у — угол коммутации тока, зависящий от параметров преобразо-
вателя и двигателя и от выпрямленного тока Id\ б — угол выключе-
ния, определяемый временем восстановления запирающих свойств
тиристора.
В рассматриваемой схеме инвертор обычно работает с некоторым
постоянным углом р, выбранным из условия надежной коммутации
наибольшего нагрузочного или пускового тока.
Регулирование угловой скорости ВД в этом случае производится
изменением выпрямленного напряжения посредством УВ или тока
возбуждения посредством ТВ.
Естественная коммутация вентилей, позволяющая использовать
простой надежный инвертор, может быть осуществлена при сравни-
тельно большой ЭДС синхронного двигателя, т. е. при угловой ско-
рости его не ниже 10 % номинальной. Поэтому для пуска двигателя
в схеме с естественной коммутацией применяют следующие способы:
1) импульсный метод, использующий специальную систему управле-
ния выпрямителем; 2) переключение инвертора в режим искусствен-
ной коммутации; 3) асинхронный пуск синхронного двигателя, имею-
щего пусковую обмотку, от сети (включен К1, рис. 4.76) с последующим
переключением его на инвертор (К.1 отключается, К2 включается).
В первом случае запирание вентилей инвертора достигается сни-
жением до нуля его входного тока путем кратковременного запира-
ния выпрямителя или перевода его в инверторный режим. Прерыва-
ние выпрямленного тока приводит к уменьшению пускового момента
примерно на 15—20 % по сравнению с пусковым моментом при пита-
нии двигателя синусоидальным током. Во втором случае значительно
усложняется система управления ВД. При асинхронном пуске услож-
няется конструкция ВД, возрастают потери от высших гармоник из-за
наличия короткозамкнутой пусковой обмотки иа роторе.
Таким образом, сравнительно простой способ естественной ком-
мутации не может быть реализован при пуске ВД, когда ЭДС его от-
сутствует или очень мала. В этом отношении схема ВД с искусственной
коммутацией предпочтительнее; фаза тока относительно ЭДС двига-
теля может быть установлена любой и ВД может работать не только
с опережающим током, но и с отстающим.
На рис. 4.77 представлен один из вариантов схем преобразова-
теля с промежуточным звеном постоянного тока с инвертором напря-i
жения и искусственной коммутацией. Схема содержит: инверторный
мост на тиристорах VI — V6, коммутирующие тиристоры V7, 1Л9,
обратный мост на диодах VI' — V6', разрядные резисторы R1,
и диоды V7', V8', силовой фильтр LI, С1 и устройства коммутации
(L2 - L5, С2, СЗ).
Искусственная коммутация осуществляется за счет энергии;
запасенной в конденсаторах С2 и СЗ от дополнительного источника
подзаряда Un. Инвертор имеет групповую коммутацию тиристоров;
Выключение тиристоров анодной группы осуществляется элементами
С2, L2, L4, V7, а тиристоров катодной группы — СЗ, L3, L5, V8. При
подаче отпирающего сигнала, например, на тиристор V7 конденса-
тор С2 разряжается по цепи С2 — Cl — R2 — V2' (V4', V6') —
— VI (V3, V5) — L4 — V7 — С2. После спадания тока в этом кон-
208
гуре до нуля тиристоры VI (V3, V5) закрываются, но продолжается
колебательный подзаряд конденсатора С2 через реактор L2, обеспе-
чивая обратное напряжение на тиристоре VI (V3, V5) в течение вре-
мени, необходимого для восстановления запирающих свойств тири-
сторов. После перезаряда конденсатора С2 и закрывания тиристора 1/7
(и в течение этого процесса) энергия, накопленная в реакторе L2,
частично гасится в резисторе R1. Во внекоммутационный интервал
конденсатор С2 вновь перезаряжается от источника подзаряда. Спа-
дающий во время коммутации ток нагрузки, протекающий через ком-
мутируемый тиристор VI, переводится на диод V2 обратного моста.
Рис. 4.77. Принципиальная схема вентильного двигателя, содержа-
щая преобразователь с промежуточным звеном постоянного тока с ин-
вертором напряжения с искусственной коммутацией.
Управление инвертором производится в функции положения ро-
тора двигателя М, контролируемого посредством датчика положения
ротора ДПР, который воздействует на систему управления инверто-
ром СУИ. Регулирование угловой скорости двигателя в этой схеме
возможно всеми тремя способами: изменением выпрямленного напря-
жения, тока возбуждения и угла р.
Рассмотренная схема преобразователя частоты не свободна от
недостатков и приведена только как пример инвертора с искусствен-
ной коммутацией. Возможно также и применение других схем инвер-
торов с искусственной коммутацией, например инвертора с отсекаю-
щими диодами без источника подзаряда.
209
Применение искусственной коммутации связано с более сложной
схемой преобразовательной части по сравнению с естественной ком-
мутацией в инверторе, как это видно из приведенных примеров инвер-
торов. Но в случае инвертора с естественной коммутацией, как отме-
чалось выше, возникает проблема пуска двигателя.
Наиболее просто пусковой режим обеспечивается при питании
двигателя от преобразователя частоты с непосредственной связью
(НПЧ). В НПЧ функции выпрямления и инвертирования выполняют
одни и те же вентили, что позволяет для коммутации тока в фазах ВД
использовать переход питающего напряжения через нуль.
Из краткого рассмотрения различных схем ВД следует, что во-
прос о применении целесообразной схемы преобразователя частоты
может быть решен только на основании технико-экономического сопо-
ставления.
Так как ВД обладает характеристиками машины постоянного
тока независимого возбуждения (можно получить у ВД и характери-
стики двигателя последовательного возбуждения, если обмотку воз-
буждения синхронного двигателя включить последовательно в цепь
выпрямленного тока на входе инвертора), то все способы регулиро-
вания его угловой скорости характеризуются такими же показате-
лями, что и соответствующие способы (изменением напряжения на якоре
и тока возбуждения) регулирования угловой скорости двигателя по-
стоянного тока независимого возбуждения. Но в случае преобразова-
теля частоты инверторного типа энергетические показатели регулиро-
вания у ВД будут хуже из-за двукратного преобразования энергии.
Несколько хуже оказывается стабильность скорости и как следствие
меньше диапазон регулирования вниз от основной угловой скорости,
так как механические характеристики ВД мягче, чем у двигателя по-
стоянного тока такой же мощности.
В случае питания инвертора от сети постоянного тока или от акку-
муляторов ВД называют бесколлекторной машиной постоянного тока.
То же название иногда распространяют и на ту часть ВД, которая вклю-
чает в себя инвертор с системой управления, синхронную машину
и датчик положения. Коэффициент полезного действия инвертора
обычно ниже, чем у коллекторно-щеточного узла машины постоянного
тока, но надежность инвертора и в целом ВД и его механическая про-
чность выше, чем обычной машины постоянного тока.
ГЛАВА ПЯТАЯ
ВЗАИМОСВЯЗАННЫЙ ЭЛЕКТРОПРИВОД
Иногда по конструктивным соображениям
или с целью уменьшения момента инерции электропривода,
а также из-за невозможности выполнения привода большой
мощности с одним двигателем прибегают к электроприво-
дам, состоящим из двух или нескольких машин, соединен-
ных между собой механическим или электрическим спо-
собом. Подобного рода взаимосвязанные электроприводы
встречаются в механизмах металлургической промышлен-
ности, кузнечно-прессовых машинах, подъемно-транспорт-
210
них устройствах, в специальных установках большой
мощности и т. п.
В качестве примера можно привести электропривод
аэродинамической трубы, осуществляемый от двух мощ-
ных двигателей постоянного тока, связанных общим валом
(многодвигательный электропривод). Другим примером спе-
циального исполнения электропривода может служить
привод крупного портального крана или шлюзового затвора,
где один механизм обслуживается двумя двигателями,
расположенными на значительном расстоянии. Эти дви-
гатели имеют электрическую связь для согласованной
работы (электрический вал).
Взаимосвязанный электропривод в установках большой
мощности позволяет уменьшить нагрузку каждого при-
вода и тем самым облегчить передачу к рабочему органу,
уменьшить суммарный момент инерции роторов двигате-
лей.
Важной задачей в подобных системах является необхо-
димость равномерного распределения нагрузок между от-
дельными электроприводами в статическом и динамиче-
ском режимах. Рассмотрим вопрос о распределении на-
грузок в наиболее простом случае, на примере двухдвига-
тельного электропривода.
5.1. Электропривод с механическим
соединением валов
При механическом соединении валов двух
двигателей в статическом режиме угловая скорость их
будет одинакова, а результирующий момент, развиваемый
электроприводом, равен:
М = Мг + М2 = ^(соО1-со)+^ («02-со), (5.1)
а>01 ш02
или
М = | Pl I (COoi — со) + I Рг [ (йог — со), (5.2)
где | Pi I, I Рг I, соО1, соО2 — модули жесткости механиче-
ских характеристик и соответственно угловые скорости
холостого хода каждого двигателя.
Из (5.2) находим уравнение механической характери-
стики двухдвигательного электропривода:
___COoi I fit I ~4~ соО2 | Pa I_______М
lfit| + |₽2l Ifiil + lfial*
(5-3)
211
На рис. 5.1 тонкой линией показана механическая ха-
рактеристика двигателя постоянного тока независимого
возбуждения. Каждый из двух взаимосвязанных двига-
телей имеет такую характеристику [со = f (Л11,2)]. Резуль-
тирующая характеристика привода со = f (М) показана
утолщенной линией 1.
Так как соО1 = со02, а ( | = | 02 |, то (5.3) примет
вид:
со = соо — Л4/21 Р1|, (5.4)
где соо = соО1 = со02; рх = р2.
Как следует из (5.4), результирующая характеристика
привода проходит через точку соо, жесткость результирую-
щей характеристики равна сумме жесткостей отдельных
двигателей.
Рис. 5.1. Механические харак-
теристики двухдвигательного
привода постоянного тока.
Рис. 5.2. Механические1 харак-
теристики двухдвигательного
привода при вентиляторной на-
грузке.
На рис. 5.1 показано, что момент нагрузки М = Ма
равномерно распределяется между обоими двигателями
и они оказываются одинаково загруженными.
Взаимосвязанный привод может быть как нерегулируе-
мым, так и регулируемым. Например, если два двигателя
постоянного тока с независимым возбуждением включены
параллельно и требуется регулировать скорость привода,
то это можно осуществить изменением подводимого напря-
жения или другим известным способом. При пониженном
напряжении результирующая механическая характери-
стика привода 2 параллельна характеристике 1 (рис. 5.1).
При пониженной угловой скорости и одинаковых параме-
трах привода распределение нагрузки будет также равно-
мерным.
212
В случае регулирования угловой скорости при венти-
ляторном законе изменения нагрузки (рис. 5.2) и сниже-
нии угловой скорости до определенного значения рабо-
тают оба двигателя. Затем один из двигателей отключается
и нагрузка преодолевается только другим двигателем.
Жесткость характеристики одного двигателя меньше жест-
кости результирующей характеристики.
Механические характеристики упомянутых двигателей
могут иметь различную жесткость из-за различных сопро-
тивлений цепей якорей или вследствие неодинаковых токов
возбуждения; тогда при совместной работе двигателей
Рис. 5.3. Механические харак-
теристики двухдвигательного
привода при различных сопро-
тивлениях якорных цепей дви-
гателей постоянного тока неза-
висимого возбуждения.
Рис. 5.4. Механические харак-
теристики двухдвигательного
привода при различных токах
возбуждения двигателей посто-
янного тока независимого воз-
буждения.
распределение нагрузки между ними неодинаково. Харак-
теристики отдельных двигателей при различных сопро-
тивлениях цепей якорей и результирующая характеристика
даны на рис. 5.3.
В соответствии с (5.2) можно найти распределение
нагрузки М = Мс между двигателями:
Д-li = | Р1| (<в0 — со + Mj\ 0 |); |
М2 = I Рг I («о — со + Д4с/| 0 |), J
где I 0 I = I 01 I + I 02 I-
Механические характеристики двух двигателей постоян-
ного тока независимого возбуждения при различных токах
возбуждения показаны на рис. 5.4. Распределение нагрузки
между двигателями в данном случае
Mi = | 0i| (cooi — со + Л4с/| 0 |); | /5 6)
Л12 = |02|(соо2-со + Л4с/|0|). J ( J
213
Из (5.6) следует, что двигатель, имеющий меньшую
скорость идеального холостого хода, может развивать
момент в генераторном режиме параллельно с сетью, хотя
привод работает в двигательном режиме, при этом оказы-
вается, что другой двигатель преодолевает не только мо-
мент сопротивления, но и тормозной момент двигателя,
работающего в генераторном режиме (рис. 5.4).
Совместная работа двигателей постоянного тока после-
довательного возбуждения обеспечивает более равномер-
ное распределение нагрузок, чем в случае двигателей
независимого возбуждения, даже при той же разнице
Рис. 5.5. Схема параллельного со-
единения двух двигателей постоян-
ного тока независимого возбужде-
ния при различных сопротивлениях
цепей якорей и разных угловых
скоростях идеального холостого
хода при совместной работе на
общий вал.
Рис. 5.6. Схема последователь-
ного включения двигателей при
совместной работе на общий
вал.
в сопротивлениях, так как характеристики этих двигателей
обладают меньшей жесткостью.
При одинаковых угловых скоростях идеального холо-
стого хода и параллельном соединении цепей якорей дви-
гателей постоянного тока независимого возбуждения, имею-
щих разные сопротивления, необходимо в цепь якоря
двигателя, имеющую меньшее сопротивление, включить
постоянный добавочный, резистор (рис. 5.5). Аналогичным
способом, т. е. включением постоянных дополнительных
резисторов в цепь ротора, можно, например, добиться
достаточно равномерного распределения нагрузок между
асинхронными двигателями, имеющими неодинаковую жест-
кость механических характеристик в их рабочей части.
При различных угловых скоростях идеального холостого
хода двух двигателей независимого возбуждения можно
путем введения дополнительных резисторов в обмотки
214
возбуждения уменьшить неравномерное распределение на-
грузок (рис. 5.5).
Равномерное распределение нагрузок при неодинако-
вых сопротивлениях цепей якорей может быть также
осуществлено путем последовательного соединения двига-
телей (рис. 5.6), если напряжение сети окажется достаточ-
ным для получения необходимой угловой скорости.
Так как токи в цепи якорей обоих двигателей одина-
ковы, то при одинаковой угловой скорости напряжение
на выводах якоря одного двигателя
U-l = с® +1 Ri,
а на выводах якоря другого двигателя
Uг = с® -J-1 R.4-
Следовательно, напряжение на якоре двигателя с боль-
шим сопротивлением будет выше, а с меньшим — ниже.
Рис. 5.7. Механические характе-
ристики двухдвигательного при-
вода при последовательном соеди-
нении якорных цепей двух дви-
гателей постоянного тока неза-
висимого возбуждения.
При этом можно себе представить, что характеристика сооа
переместится параллельно самой себе вверх, а ®об —
соответственно вниз (рис. 5.7). В точке в обе характери-
стики пересекутся при одном и том же моменте на каждом
двигателе.
В переходных процессах распределение нагрузок может
ухудшаться по той причине, что связь между двигателями
не является абсолютно жесткой, что создает благоприят-
ные условия для развития механических колебаний, обус-
ловленных действием возмущений со стороны электриче-
ской части привода и внутренними и внешними возмуще-
ниями. Колебания упругосвязанных масс всегда вызывают
дополнительные динамические нагрузки передач, которые
при неблагоприятных условиях могут достигать опасных
значений.
215
Исследования динамики многодвигательных электро-
механических систем показали, что рассмотренные особен-
ности двухдвигательного электропривода характерны и
для большего числа двигателей, причем с возрастанием
числа двигателей динамические процессы усложняются.
Поэтому для многодвигательных электроприводов при-
ходится отказываться от последовательного соединения
двигателей, переходя к другим схемам соединения сило-
вых цепей, обеспечивающим демпфирование любых воз-
никающих в системе колебаний.
Число возможных схем соединения двигателей увели-
чивается при возрастании числа двигателей многодвигатель-
ного электропривода.
Заслуживает внимания многодвигательный электропри-
вод с индивидуальным питанием двигателей от отдельных
управляемых преобразователей, в котором осуществляется
индивидуальное управление током каждого двигателя и его
угловой скоростью во всех режимах. Однако при этом
увеличиваются габариты установки из-за дробления мощ-
ности преобразователя. Поэтому в тех случаях, когда
влиянием зазоров и погрешностей передач на динамиче-
ские нагрузки электромеханической системы можно пре-
небречь, рациональным является использование последо-
вательного соединения двигателей.
5.2. Асинхронный двухдвигательный
электропривод со сложением
механических характеристик
В некоторых производственных установках,
снабженных электроприводами переменного тока, возни-
кает необходимость стабильной работы при пониженных
скоростях. Например, в подъемных устройствах необ-
ходимо осуществлять достаточно точную остановку; с этой
целью важно перед полной остановкой производить тор-
можение с малой скорости.
Получение пониженной скорости возможно при совмест-
ной работе двух механически связанных асинхронных,
двигателей, один из которых работает в двигательном
режиме, другой — в генераторном режиме торможения
противовключением (рис. 5.8, а).
Механические характеристики 1 и 2 этих машин и ре-
зультирующая 3 приведены на рис. 5.8, б. Наклон харак-
теристик I и 2 растет с увеличением сопротивления’ цепи
216
ротора. Уравнение результирующей механической ха-
рактеристики
М _ 2Л1К1____________2Л1ка_____ /г 74
s/ski + ski/s (2 — s)/sK2 -f-sk2/(2 — s) ’
где 7ИК1, Мк2 — максимальные моменты, развиваемые соот-
ветственно двигателями Ml и М2; при одинаковых дви-
гателях /Ик1 = Мк2; sk1, sk2 — критическое скольжение
Ml и М2.
Графическое суммирование двух указанных характе-
ристик дает результирующую характеристику привода 3,
обладающую в двигательном режиме достаточной жест-
костью при малых угловых скоростях.
Рис. 5.8. Принципиальная схема и механические характеристики двух-
двигательного асинхронного привода при работе одного из двигателей
в режиме торможения противовключением.
Однако с ростом жесткости результирующей характе-
ристики заметно снижается перегрузочная способность
агрегата в двигательном режиме, поэтому ограничивается
диапазон регулирования угловой скорости. Коэффициент
полезного действия такого привода низок; потери в элек-
троприводе равны сумме потерь в обоих двигателях, при-
чем один из них работает в режиме противовключения,
а другой — в двигательном режиме с повышенным сколь-
жением. Подбором сопротивлений в роторных цепях можно
перераспределить потери между двигателями и внешними
резисторами так, чтобы двигатели не перегружались. Если
используются самовентилируемые двигатели, то со сни-
жением угловой скорости на результирующей характери-
стике привода допустимый момент резко снижается по срав-
нению с номинальным. Коэффициент мощности, так же
как и при реостатном управлении, сравнительно высок.
Более жесткой в двигательном режиме при пониженной
угловой скорости является результирующая механическая
217
характеристика привода, показанного на рис. 5.9, а.
В приводе первая машина работает двигателем (кривая 1
на рис. 5.9, б), а вторая — в режиме динамического тор-
можения (кривая 2 на рис. 5.9, б). Режим динамического
торможения второй машины получается путем подключе-
ния.обмотки статора к источнику постоянного тока.
Рис. 5.9. Принципиальная схема и механические характеристики двух-
двигательного асинхронного привода при работе одного из двигателей
в режиме динамического торможения.
Уравнение механической характеристики привода (кри-
вая 3 на рис. 5.9, б) в данном случае имеет вид:
дд______2Л1К1 2Л1кат
S/SK1+SK1/S (1 --S)/(l SK2t)+(1 SK2t)/(1 s)
(5-8)
где Л!к2т и sk2t — максимальный момент и критическое
скольжение двигателя М2, работающего в режиме дина-
мического торможения.
Рис. 5.10. Механические характе-
ристики двухдвигательного привода
при работе асинхронного двигателя
в двигательном режиме, а двига-
теля постоянного тока независимого
возбуждения в режиме динамиче-
ского торможения.
Таким образом, изменением сопротивления роторной
цепи двигателя М2, а также тока в цепи его статора можно
регулировать угловую скорость идеального холостого хода
результирующей характеристики при неизменной пере-
грузочной способности привода. Коэффициент полезного
действия привода при пониженной угловой скорости неве-
218
лик, поэтому работа привода на пониженной угловой ско-
рости должна быть ограничена во времени.
Приблизительно аналогичный результат может быть
получен, если асинхронный двигатель соединяется на од-
ном валу с вспомогательной машиной постоянного тока,
также работающей в режиме динамического торможения.
Уменьшая сопротивление цепи якоря машины постоянного
тока, можно получить более жесткие результирующие
характеристики (рис. 5.10).
5.3. Электропривод с электрическим валом
В ряде случаев между отдельными механиз-
мами одного и того же агрегата, требующими согласован-
ного движения и расположенными на значительном рас-
стоянии, трудно осуществить механическую связь из-за
необходимости увеличения диаметра и длины соединитель-
ных валов, возрастания числа опорных подшипников
и т. д. При передаче значительных вращающих моментов
и большой длине вала может возникнуть недопустимое
скручивание вала. Иногда конструктивно производствен-
ный механизм такой, что механическая передача движения
его рабочим органам становится практически невозможной.
Взамен громоздкой механической передачи может быть
использована электрическая передача для согласованного
вращения отдельных механизмов, которую называют для
простоты электрическим валом. Помимо упрощения кине-
матической схемы механизма электрический вал обычно
дает возможность увеличить его угловую скорость, так
как при этом снимаются ограничения, обусловленные
механическим резонансом, и, кроме того, упрощается
управление механизмом.
Электрический вал находит применение для привода
таких механизмов, как разводные мосты, затворы шлю-
зов, мостовые краны, крупные токарные станки и т. п.
Система электрического вала наиболее проста, когда
синхронный двигатель через питающую сеть присоединя-
ется к синхронному генератору. Согласованное вращение
между синхронным генератором и синхронным двигателем
выполняется независимо от расстояния между ними. Два
или несколько синхронных двигателей, предназначенных
для привода одного механизма и получающих питание
от общей сети переменного тока, вращаются с равными
или жестко согласованными скоростями, не будучи меха-
219
нически связанными. В обоих случаях имеет место осуще-
ствление электрического вала. Однако такая, хотя и про-
стая система электрического вала, не нашла практического
применения вследствие того, что в переходных режимах,
в частности при асинхронном пуске, возникают существен-
ные рассогласования в угловых скоростях и положении
валов отдельных двигателей, поэтому в системах электри-
ческого вала наибольшее распространение нашли асин-
хронные машины. Можно выделить три основные схемы:
1) с уравнительными машинами, или уравнительный элек-
трический вал; 2) с основными рабочими машинами и об-
щими резисторами — рабочий электрический вал; 3) с асин-
хронным преобразователем частоты —дистанционный элек-
трический вал.
Рис. 5.11. Принципиальная схема электрического вала с уравнитель-
ными асинхронными машинами.
Система электрического вала с уравнительными асин-
хронными машинами. Принципиальная схема электриче-
ского вала с уравнительными асинхронными машинами
приведена на рис. 5.11. Каждый элемент привода состоит
из основного (рабочего) двигателя Nil (М2) (двигатель
может быть любым в том числе и не электрическим), меха-
нически связанного с производственным механизмом ПМ1
(ПМ2), а также со вспомогательной уравнительной маши-
ной ВМ1 (ВМ2).
Уравнительные машины — это обычные асинхронные
двигатели с фазным ротором с одинаковыми числом фаз,
напряжением, обмотками и числом полюсов; статорные
обмотки их параллельно присоединяются к сети перемен-
ного тока, роторные соединяются между собой. В обеих
уравнительных машинах от сети наводятся одинаковые
магнитные поля с равными частотами, временным и про-
странственным расположением. При одинаковом относи-
тельном положении обмоток статора и ротора (и одинако-
вом скольжении) в обмотках ротора будут наводиться
220
равные по амплитуде ЭДС, совпадающие по фазе (В — 0):
£2к EiKs — E2ks, где Ё2к — ЭДС ротора при его непод-
вижном состоянии (s — скольжение). Если встречно вклю-
чить роторные обмотки, то при 6=0 ток в них проте-
кать не будет; каждая из машин будет потреблять из сети
только ток намагничивания (рис. 5.12, а). Поворот ротора
одной из машин на определенный угол В вызовет под
влиянием разности ЭДС Д£2 уравнительный ток /2 (рис.
5.12, б), который, взаимодействуя с магнитными полями
Рис. 5.12. Векторные диаграммы электрического вала с уравнитель-
ными машинами.
статора одной и другой машин, создаст вращающие мо-
менты, стремящиеся повернуть ротор в исходное поло-
жение.
Уравнительный ток, а следовательно, и момент при
данном угле сдвига роторов зависит от угловой скорости
машин, уменьшаясь с ее возрастанием или уменьшением
скольжения; при скольжении s = 0 ДЕ2 = 0 и момент
равен 0. Для определения уравнительного тока и вращаю-
щих моментов, развиваемых машинами, воспользуемся
схемой замещения для роторных цепей, приведенной на
рис. 5.13.
Согласно схеме замещения
1-2 = - b'iKse^)/2z2, (5.9)
или'
/2 = £2ks(1 — cos9— / sin 9)/2 (/?2/x2s). (5.10)
Активная составляющая тока /2 равна:
I5'11’
221.
или
$
1 — cos 6-----sin 6
J _____ T __________________SK
'2a ' 2a, H, c g
(5.12)
где /за.н.с = E^sRJ [У?! + (x2s)2] — активная составляю-
щая тока ротора асинхронного двигателя в нормальной
(обычной) схеме включения; sK /?2/х2 — критическое
скольжение асинхронного двигателя при = 0 и JQ = 0.
/?2 /?г jxzS
Рис. 5.13. Схема замещения роторных цепей электрического вала с
уравнительными машинами.
Так как момент асинхронной машины пропорционален
активной составляющей тока ротора, то момент первой
вспомогательной (уравнительной) машины равен:
Л4в>М1 = ^-(1-cose-Asine). (5.13)
* \ SK /
Аналогично можно показать, что момент, развиваемый
второй уравнительной машиной:
, . /Vi л
Л1В, М2 =—(1 —
cos 9 4-— sin 9),
SK /
(5-14)
где М — 2МК/ (Sjc/s + s/sK) — момент асинхронной ма-
шины в нормальной схеме включения.
Уравнения (5.13) и (5.14) показывают, что моменты
уравнительных машин содержат две составляющие:
пропорциональную sin 9 —это синхронизирующий мо-
мент:
A4cBHi(2)=±4rsin9’ <5Л5)
z sk
знак «—» относится к синхронизирующему моменту пер-
вой машины, «+» — ко второй;
асинхронная составляющая
Л4всИН1(2) = м (1 - cos 9)/2.
(5.16)
222
Синхронизирующий момент поддерживает согласован-
ное вращение, действуя на обе уравнительные машины
одинаково, но с противоположными знаками, поэтому
разность этих моментов определяет уравнивающее действие
системы. Таким образом, уравнительный или синхрони-
зирующий момент системы равен:
Ms“" = ^sme = w5TO5S7s'"e' (5|7)
Наибольшее значение
стемы имеет место при 0
синхронизирующего момента си-
= 90° и равно:
М _2MKs2
1'1S сии max —
(5.18)
Из (5.18) следует, что максимум синхронизирующего
момента зависит от скольжения уравнительных машин,
стремясь к предельному значению, равному 2Л4К (рис. 5.14).
Рис. 5.15. Характеристика момен-
тов электрического вала с уравни-
тельными машинами в относитель-
ных единицах. >
Рис. 5.14. Зависимость синхро-
низирующего момента от сколь-
жения.
Очевидно, что при малых скольжениях, когда малы абсо-
лютные значения ЭДС роторов, малы и уравнительные
моменты. Поэтому практически с целью увеличения урав-
нительного момента машин необходимо вращать машины
против направления вращения поля статора; в этом слу-
чае скольжение будет выше 1.
Асинхронный момент действует в направлении враще-
ния вала, вызывая ускорение обоих его элементов.
Характеристика уравнительного момента электриче-
ского вала в относительных единицах Л4у$ = Л4у/Л4к = / (9)
показана на рис. 5.15; там же приведены составляющие
и Л4Э!-ин*. Одна из уравнительных машин, как это
видно из (5.14), развивает положительный момент, т. е.
223
работает в двигательном режиме, тогда как другая раз-
вивает отрицательный момент, работая в генераторном
режиме (5.13). Очевидно, что
I м21 > | Л4в>м1 !•
Синхронизирующий момент поддерживает согласованное
вращение за счет передачи вращающего момента от одной
машины к другой. При идеальных уравнительных машинах,
у которых сопротивление роторов равно 0, развивались бы
только синхронизирующие моменты. Практически же ма-
шины обладают активными сопротивлениями, в роторной
цепи возникают потери и создаются асинхронные моменты.
На рис. 5.16, а, б приведены энергетические диаграммы
электрического вала при s = 0,5 без учета потерь и с уче-
том потерь.
Рис. 5.16. Энергетические диаграммы электрического вала с уравни-
тельными машинами при s = 0,5 без потерь (а) и с потерями (б).
В электрическом вале без учета потерь (рис. 5.16, а)
электромагнитная мощность передается через соединитель-
ные провода статоров; поступающая в ротор одной машины
электромагнитная мощность Р12 частично передается на
вал, другая часть в виде мощности скольжения Ps пере-
дается через контактные кольца от одной машины к дру-
гой. Мощность, потребляемая из сети, равна 0. Аналогич-
ное распределение мощности наблюдается в реальном
электрическом вале, отличающемся наличием потерь в ма-
шинах, которые покрываются потреблением энергии из
сети.
На диаграммах Ри и Р12 — мощности, потребляемые
статорами первой и второй машины; Л1в,мь 7ИВ, мг— мо-
менты, развиваемые первой и второй уравнительными
машинами; ДРП, ДР12 — потери мощности в статорах;
Рмех1, ^мех2 — механическая мощность каждой из машин.
224
Большая часть мощности циркулирует в цепи статоров
машин. Расхождение в значениях электромагнитных мо-
ментов машин (рис. 5.16, б) вызвано потерями в роторе.
Чем больше эти потери, тем больше разность моментов
машин.
При вращении роторов против поля (s> 1) подведен-
ная с вала к первой машине мощность Рмех j складывается
с мощностью, потребляемой со стороны статора, и пере-
дается через роторную цепь другой машине (рис. 5.17),
т. е. при s > 1 первая машина работает в тормозном ре-
жиме (режим торможения противовключением), потребляя
мощность из сети и с вала; вторая машина частично гене-
рирует энергию в сеть и, кроме того, развивает двигатель-
ный момент.
Рис. 5.17. Энергетиче-
ские диаграммы элек-
трического вала с урав-
нительными машинами
при вращении роторов
против поля.
При вращении машин против поля изменяются знаки
электромагнитной мощности и мощности скольжения; урав-
нительный поток мощности в роторной цепи значительно
больше, чем в случае вращения машин по полю, что объяс-
няется большими вторичными ЭДС, пропорциональными
скольжению; этим обусловлено большое значение уравни-
тельного момента, что является достоинством этого режима.
Направление механической мощности не изменяется с пе-
реходом от s<; 1 к s> 1.
Другим достоинством по сравнению с вращением по
полю является уменьшение угла рассогласования валов
при одном и том же расхождении в нагрузках отдельных
элементов системы.
Недостатком вращения машин против поля являются
повышенные потери в стали ротора из-за увеличенной
частоты тока ротора.
8 Чиликин M. Г., Сандлер А. С. 225
Нормальная работа электрического вала требует соблю-
дения следующих условий:
1) сумма всех действующих в каждом элементе системы
моментов должна быть равна нулю, т. е.
Л1Д1(2)~Л1с1(2)4-Л1в>м1(2) = 0, (5.19)
где 2ИД1 (2) — момент, развиваемый рабочим двигателем;
Мс1(2) —статический момент на валу рабочего двигателя;
МВ,М1(2) —уравнительный момент;
2) система должна быть статически устойчива, т. е. при
небольшом нарушении равновесия вращающие моменты
после устранения возмущающего воздействия должны вы-
звать замедление или ускорение привода, направленное
к установлению равновесия;
3) система должна б ять динамически устойчива, т. е.
отвечать известным критериям устойчивости, удовлетворять
необходимым требованиям качества переходного процесса:
обладать допустимыми максимумом амплитуды угла рас-
уравнительного момента и
временем переходного про-
цесса.
В рассмотренной систе-
ме электрического вала
уравнительные машины
могут развивать асинхрон-
ный момент только при
согласования и соответственно
Рис. 5.18. Принципиальная схе-
ма рабочего электрического вала
с регулируемыми резисторами.
6 #= 0 и различных нагрузках на валах отдельных эле-
ментов системы; основной ее особенностью является обра-
зование синхронизирующего момента, обеспечивающего
согласованное вращение.
Схема с основными рабочими машинами и общими
резисторами— рабочий электрический вал. Вместо двух
уравнительных машин возникла идея создания такой си-
стемы, в которой одна и та же машина выполняла бы за-
дачу приводного двигателя и синхронизирующего уст-
ройства. Такой является система электрического вала,
состоящая из двух (или нескольких) одинаковых асинхрон-
ных машин с фазными роторами, статорные цепи которых
226
подключены параллельно к питающей сети, а роторные
обмотки соединены встречно и параллельно этим соеди-
нениям включены во все три фазы регулируемые рези-
сторы (рис. 5.18). Иногда эту систему называют рабо-
чим электрическим валом потому, что в ней одна и та же
машина выполняет рабочую и синхронизирующую функ-
ции.
Влияние регулируемых добавочных резисторов весьма
существенно; при /?доб = 0 электрический вал превраща-
ется в обычные, независимо работающие асинхронные
двигатели с короткозамкнутым ротором. Если /?доб = со,
электрические машины работают в режиме сельсинной
передачи угла.
Рис. 5.19, Упрощенная схема замещения рабочего электрического
вала.
Рассмотрим свойства этой системы, когда А?доб > О,
воспользовавшись упрощенной схемой замещения, приве-
денной на рис. 5.19. На основании схемы замещения состав-
ляем систему уравнений:
F2ks = /2i (jx2s-\- А?2 + #доб) + Лг^доб' | (5 20)
/j2ltse;0 — /22 (jx2s -р Т?2 4“ Рдоб) +121^доб‘ /
После несложных преобразований получим уравнения
для токов в роторе первой и второй машин:
/ „Й2к«(1-е/0) , Ё2к«(1+е/0) . 9]
21 2(/x2s + 7?2) *" 2(№8+К2+2Ядоб) ’ 1 ’
j E2ks (1 -f-г/в)_____Ё2кз (1 а/0) /г qo,
22 2 (jx%s R2 + 2/?дОд) 2 (/x2s —/?3)
Пользуясь (5.21) и (5.22), определяем моменты машин
электрического вала аналогично тому, как это было сде-
8* 227
лано для системы с уравнительными машинами: . м^м K\S/Sk + Sk/S ®/®к+®к/®Г S/SK S/SK V (5.23)
K \s/s' +s'/s M M 1 1—cos® J- S/SK + VS/’ 1 -|- COS 0 \
\.S/SK + ®K/S — A4K sin 6 ( ,^K , \ S/Sk+</S S/SK + s,</S / S/SK \ . (5.24)
s/sK+sK/s/’..
где & = sK (/?2 + 2Rm6)/R2.
Из (5.23) и (5.24) следует, что моменты, развиваемые
первой и второй машинами, представляются суммой двух
составляющих, где первая — асинхронная:
пл пл / 1 —‘COS 0 । 14-COS 6 \ /в* пг\
Масин! (2) - Мк (s/Ss + SK/S + S/S^+S'/S ) ’ (5,25)
а вторая — синхронизирующая составляющая:
Л4СИН1 (2) = ± Ма (-т—тт - sin 0- (5-26)
СВИК К \s/»' -J-s'/s s/sH4-sK/s/ ' '
По сравнению с электрическим валом с уравнительными
машинами здесь прибавляется составляющая асинхрон-
ного момента, равная:
= (5-27)
Анализ выражений (5.25) и (5.26) показывает, что при
6 = 0 обе машины развивают одинаковые моменты, рав-
ные:
«№«-•> - <5-28>
т. е. каждый из двигателей работает в асинхронном режиме
с добавочным сопротивлением в роторной цепи, равным 2Rдоб.
При этом синхронизирующий момент равен 0.
Если нагрузки на валах машин окажутся разными,
то уравнительный момент будет разгружать машину с боль-
шей нагрузкой и подгружать менее нагруженную машину.
При этом нагрузки на обеих машинах окажутся равными,
а угловые скорости одинаковыми, но появится угол рас-
согласования в положении роторов двигателей.
228
Условием установившегося режима работы является
равновесие приводных и нагрузочных моментов, при этом
ни одна из машин не испытывает ускорения или замед-
ления.
Максимальный угол рассогласования для рабочего вала
составляет 90°. Это означает, что рабочий электрический
вал, так же как и электрический вал с уравнительными
Рис. 5.20. Кривые зависимо-
стей моментов от скольже-
ния рабочего электрического
вала при изменении сопро-
тивления резисторов /?Доб«
машинами, можно нагружать выше критического момента
машины электрического вала, работающей в генераторном
режиме, со статически устойчивой передачей уравнитель-
ных моментов. В этом случае нагрузочный момент не дол-
жен быть ниже определенного минимального значения.
Возможность использования рабочего электрического
вала видна из рис. 5.20, а, б, где для ряда значений х =
== (/?2 + 2А?доб) показаны кривые зависимости момен-
тов: от скольжения. Все вращающиеся моменты отнесены
к максимальному моменту машин электрического вала.
229
•Характеристики асинхронных моментов при симметрич-
ной нагрузке показаны на рис. 5.20, а. Электрический
вал с уравнительными машинами в этом случае никакого
момента не развивает (х = 0). При х = 1 роторы непо-
средственно замкнуты накоротко (7?доб — 0) и машины
рабочего электрического вала работают как обычные ма-
шины с короткозамкнутым ротором с малой нагрузкой.
Соответствующим выбором сопротивления резисторов мож-
но устанавливать любые промежуточные значения момен-
тов, причем следует учитывать также и требуемые урав-
нительные моменты.
Характеристики передаваемых уравнительных моментов
показаны на рис. 5.20, б. Наибольшие уравнительные
моменты имеет уравнительный вал (при х = 0), а при
х = 1 никакие уравнительные моменты в рабочем элек-
трическом вале передаваться не могут. На рис. 5.20, б
^М-тах — разность моментов нагрузок, передаваемых при
этом режиме работы:
kMrr.ax — I — Ml [е-ЭО».
В практически важном диапазоне скольжений (от
s= 0,1 приблизительно до s = 0,3) при уменьшении со-
противления резисторов /?доб уравнительный момент сна-
чала снижается лишь незначительно, хотя уже и созда-
ются значительные моменты. Эта особенность весьма бла-
гоприятствует обеспечению необходимых моментов на
рабочих механизмах.
Минимальный нагрузочный момент каждого двигателя
электрического вала приведен на рис. 5.20, в; для под-
держания статически устойчивой работы его значения
не должны быть ниже указанных.
Когда на обоих валах моменты инерции равны, условия
работы аналогичны электрическому валу с уравнительными
машинами. Статическая устойчивость в случае сильно
различающихся моментов инерции для уравнительных
моментов определяется исключительно нагрузкой машин
с малым моментом инерции. Этот привод может нагружаться
максимально вплоть до его критического момента. За этим
пределом статически устойчивая работа невозможна. |
На рис. 5.21 даны предельные кривые 9 для различ!
ных значений х в зависимости от относительного сколь!
жения. Из них видно, что при малых скольжениях отри!
цательные углы рассогласования могут быть большими!
а положительные — только малыми. I
230 I
Рабочий электрический вал может применяться лишь
при небольшой разнице статических моментов, прило-
женных к разным валам. Кроме того, из-за наличия по-
стоянно включенных резисторов КПД этого вала оказы-
вается низким и ухудшается использование машин.
Дистанционный электрический вал. Для обеспечения
согласованной работы вспомогательного привода с глав-
ным приводом приобрел особо важное значение дистанцион-
ный электрический вал. Например, для точного нарезания
резьбы в токарных станках часто требуется, чтобы скорость
Рис. 5.21. Предельные кривые О
для различных значений и в
зависимости от относительного
скольжения для рабочего элект-
рического вала.
Рис. 5.22. Принципиальная схе-
ма дистанционного электричес-
кого вала.
подачи резца (суппорта) находилась в постоянном соот-
ветствии с угловой скоростью главного привода, вращаю-
щего обрабатываемую деталь. Так как мощности главного
привода и привода суппорта сильно различаются, то вся
необходимая для перемещения суппорта мощность переда-
ется через дистанционный электрический вал.
На рис. 5.22 представлена, схема дистанционного элек-
трического вала. Одна из машин Ml вала — датчик Д —
соединена с главным приводным двигателем ДГ, а дру-
гая М2 — приемник П1 — соединена с производственным
механизмом (Мс2). К одному датчику могут быть при-
соединены два приемника и больше с различными нагруз-
ками. Здесь в противоположность уравнительному валу
направление потока энергии неизменно. Датчик получает
231
необходимую мощность в основном от главного привода
Приемник как двигатель вращает нагрузку Л1с2. Датчик
работает в режиме асинхронного преобразователя частоты
а приемник как машина двойного питания — в синхрон
ном режиме.
По сравнению с уравнительным валом менее благопрн
ятной для дистанционного вала является работа в направ
лении против вращающегося поля. Приемник под нагруз
кой стремится снизить свою скорость. Вследствие этого
возникает угловой сдвиг в направлении вращения поля
так как направление
вала противоположно
вращения
Рис. 5.23, Зависимость синхронизирующего (вращающего) момента ма
шииы-приемника от угла рассогласования для различных относится
ных скольжений в системе дистанционного электрического вала.
направлению вращения поля. Угол рассогласования прием
ника при этом положительный, а максимальный, синхро
визирующий момент — относительно низкий (рис. 5.23)
На рис. 5.24, а, б показаны соотношение знаков и обра
зование момента машины — приемника из синхронно!
и асинхронной составляющих для обоих режимов работы
Из рис. 5.23 и 5.24 следует, что работа в направлении вра
щения поля является благоприятной (рис. 5.24, а), та?
как вращающий момент приемника при отрицательны?
углах S больше (см. рис. 5.23). Для машин большой мощ
ности может быть рекомендована также и работа в направ
лении против вращающегося поля (рис. 5.24, б).
Вращающий момент приемника дистанционного элек
трического вала:
Мвр = 4[(1 -cos 6) - ^sine], (5.29
где М = 2МК/ (sK/s 4- $7$к); причем угол е должен в соот
ветствии с направлением вращения относительно пол?
232
выбираться либо положительным, либо отрицательным
(для 0 < s< 1 угол 0 < 0 и для s> 1 угол 0 > 0).
Устойчивая работа дистаициоииого электрического вала
обеспечивается в диапазоне моментов вплоть до максималь-
ного момента. Максимально допустимый угол рассогласо-
вания в статике определяется из условия
и равен:
м г s 1
=-к- sin6c--------cos0c — 0 (5.30)
L sk J
0C = arctg | s/sx |.
(5.31)
На рис. 5.25 показана зависимость 0C от относитель-
ного скольжения s/sK. Кривые 1 и 2 соответствуют работе
в направлении вращающегося поля и против.
Рис. 6.24. Соотношение знаков и образование момента приемника
из синхронной и асинхронной составляющих при работе в направле-
нии (а) и против (6) вращающегося поля.
Приемник ие может отдавать вращающий момент боль-
ший, чем возникающий при 0С. Следовательно, максималь-
ная нагрузка на приемнике равна:
Л4 Г s . ”|
^np max 2 ^0 СО8 ®с) 81П ®cj‘
(5.32)
233
Можно вывести критерий для выбора машин электри-
ческого вала, если в (5.32) подставить максимально допу-
. стимый угол рассогласования из (5.31):
---- 1+ук)8 t (5.33)
Мпр max I l(s/sK)[l±F l + (s/sK)2]|
Отрицательный знак перед корнем справедлив для
положительного угла 9, т. е. для работы в направлении
против вращения поля, а положительный знак — при ра-
боте машин электрического вала в направлении вращения
поля.
Кривые на рис. 5.26, построенные по (5.33), наглядно
показывают благоприятные свойства дистанционного элек-
трического вала при работе в направлении вращения поля
(кривая 1). Кривая 2 соответствует работе вала в направ-
Рис. 5.25. Зависимость угла ста-
тической устойчивости от отно-
сительного скольжения для ди-
станционного электрического
вала.
Недостатком рассмотренной системы является рассо-
гласование валов упомянутых приводов по углу (или по
пути), возрастающее с увеличением нагрузки. Это рассо-
гласование — органическое свойство обычной системы элек-
трического вала, так как момент, развиваемый приемни-
ком, возникает только в результате рассогласования и
пропорционален синусу угла рассогласования.
Из рис. 5.27 видно, что угол рассогласования 91 (кри-
вая 1) возникает при статическом моменте Л4С; если момент
нагрузки меняется относительно заданного значения Л'!,,
то соответственно изменяется и угол 0Х, определяющий
погрешность системы. Уменьшение погрешности может
быть достигнуто за счет увеличения мощности машин
электрического вала. Так, кривая 2 на рис. 5.27 относится
к более мощной системе; при том же статическом моменте Ме
погрешность обусловлена меньшим углом б2- Однако чрез-
мерное увеличение габаритов машин неприемлемо, поэтому
с целью повышения точности согласования по пути при-
меняются следящие системы, в которых используются
234
машины постоянного тока и сельсинные датчики угла
рассогласования валов. Эти системы отличаются некоторой
сложностью.
Следящая система на переменном токе, в основу кото-
рой положена рассмотренная выше схема дистанционного
электрического вала, приведена на рис. 5.28. Здесь валы
датчика М.1 и приемника М2 соединены соответственно
с сельсинами С1 и С2, статорные цепи которых присоеди-
нены к источнику переменного тока, а роторные обмотки
Рис. 5.27, Зависимость мо-
мента от угла рассогласова-
ния для различных мощно-
стей электрического вала,
Рис. 5.26. Необходимое ми-
нимальное значение макси-
мального момента двигате-
лей дистанционного элект-
рического вала при работе
в направлении вращения по-
ля (7) и против вращения
поля (2).
включены встречно. Отличительной особенностью этой
системы электрического вала, в которой, как видно из
схемы, электрически соединены машины Ml и М2, явля-
ется применение машины-датчика Ml с поворотным ста-
тором. Поворот статора осуществляется при помощи испол-
нительного двигателя М3 малой мощности через редуктор Р
с большим передаточным отношением. Двигатель М3 пита-
ется от преобразовательного устройства ПУ, управляемого
промежуточным усилителем У.
Если после предварительной синхронизации до пуска
системы имеет место рассогласование в положении роторов
датчика Ml и приемника М2, например обусловленное
моментом трения, то при включенных статорных обмотках
235
сельсинов Cl и С2 вследствие рассогласования их роторов
(соответственно упомянутому рассогласованию роторов дат-
чика и приемника) на выходе сельсинов возникает ЭДС,
равная геометрической разности сдвинутых ЭДС С1 и С2.
На вход усилителя У будет подан сигнал, в результате
действия которого сработает исполнительный двигатель М3
и статор датчика М2 повернется на такой угол, при кото-
ром практически устраняется рассогласование в положе-
нии роторов машин Ml и М2 вследствие поворота вала
приемника Ml под действием возникшего синхронизирую-
щего момента. Статор датчика повернется на угол, соот-
ветствующий тому рассогласованию, которое имело место
до начала действия следящей системы.
Рис. 5.28. Следящая система на переменном токе на основе дистанцион-
ного электрического вала.
Затем, как обычно, производится пуск главного дви-
гателя и за ним согласованно следует синхронно-следящая
система электрического вала. В динамическом режиме,
так же как и в статике, действие системы направлено
к автоматическому устранению рассогласования в положе-
нии валов электрического привода за счет перенесения этого
рассогласования в положение статоров. Очевидно, что
такая система может обеспечить более высокую точность
отработки, чем обычная система электрического вала.
Установка роторов машин электрического вала в оди-
наковое угловое положение и осуществление предусмо-
тренных для согласованного вращения соединений между
обмотками машин и сетью производится с помощью син-
хронизации. Необходимо следить за тем, чтобы вращаю-
236
щиеся поля соединенных между собой машин имели оди-
наковое направление вращения.
Схема, которая надежно исключает погрешности при
синхронизации, изображена на рис. 5.29. Здесь весь про-
цесс синхронизации происходит в три ступени (KJ, К2, КЗ)-
На рис. 5.30 показано пространственное положение глав-
ного потока в машинах электрического вала на различных
ступенях включения схемы синхронизации.
< Синхронизация в три ступени не всегда является обя-
зательной. В установках., к которым не предъявляются
высокие требования и синхронизация требуется редко,
иногда считается допустимой случайная погрешность син-
хронизации, и синхронизацию можно производить в две
ступени (первая и третья или
вторая и третья по рис. 5.29
и 5.30).
Моменты трения и нагру-
зочные моменты действуют
навстречу соответствующим
направлениям вращательного
Рис. 6.29. Схема предварительной
трехступенчатой синхронизации ма-
шин электрического вала.
движения и оказывают поэтому демпфирующее воздействие
на возникающие уравнительные колебания. В отдельных
случаях, когда механическое демпфирование недостаточно,
для сокращения времени, протекающего между отдель-
ными ступенями синхронизации, в соединение роторов
включают резисторы с относительно большим демпфирую-
щим сопротивлением, которые при последнем переключении
на трехфазное присоединение машин вала к сети шунти-
руются и таким образом не могут влиять на работу вала.
Обычная выдержка времени между ступенями переклю-
чения при синхронизации составляет несколько секунд.
Иногда возникает необходимость пуска и синхрониза-
ции машины приемника дистанционного электрического
вала при уже вращающемся датчике. Наиболее надежная
возможность пуска машины-приемника дистанционного
электрического вала до угловой скорости, одинаковой
с угловой скоростью машины-датчика, и последующей
синхронизации приемника обеспечивается при возбужде-
237
нии машин вала постоянным током по схеме рис. 5.31.
При вращающемся главном двигателе ДГ и датчике Ml
Рис. 5.30. Пространственное положение главного потока в машинах
электрического вала на различных ступенях включения схемы синх-
ронизации на рис. 5.29.
замыкаются контакты /и и К1 . Машина М2 получает
питание со стороны ротора от машины-датчика Ml, рабо-
тающей как синхронный
генератор с возбуждением
постоянным током со сто-
роны статора. Две фазы
обмотки статора М2 замк-
нуты накоротко. Машина-
приемник М2 разгоняется
почти до угловой скорости
Рис. 5.31, Схема синхронизации
машины-приемника дистанцион-
ного электрического вала при
возбуждении постоянным током
в случае вращающегося дат-
чика.
датчика как обычный асинхронный двигатель. После
переключения контактора К2 машина М2 получает воз-
буждение постоянным током и как синхронная машина
238
входит в синхронизм с машиной-датчиком Ml. После
этого воздействием на контактор КЗ на обе машины вала
подается трехфазное питание и они переходят в режим
работы дистанционного электрического вала.
ГЛАВА ШЕСТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
УГЛОВОЙ СКОРОСТИ И МОМЕНТА
ЭЛЕКТРОПРИВОДОВ
6.1. Общие положения
Ранее было показано, что в разомкнутых
системах регулирования вследствие значительного пере-
пада угловой скорости при изменении нагрузки на валу
двигателя не удается получить большого диапазона регу-
лирования угловой скорости и обеспечить высокую
точность регулирования. В разомкнутой системе при задан-
ном сигнале на входе (например, токе возбуждения дви-
гателя постоянного тока, питаемого от сети, или токе воз-
буждения генератора в системе Г—Д) выходная величина —
угловая скорость определяется параметрами двигателя
и нагрузкой на его валу, и ее изменение не компенсируется
при различных возмущениях, которые практически всегда
существуют. Параметры двигателя, а также и нагрузка,
обусловленная работой механизма, могут изменяться вслед-
ствие изменения сопротивления обмоток двигателя, ре-
жима работы механизма и т. д. Поэтому в таких системах
диапазон и точность регулирования угловой скорости
не высоки. В разомкнутой системе также нельзя получить
высокой точности поддержания момента, развиваемого при-
водом.
Для расширения диапазона регулирования и повышения
точности используются замкнутые системы регулирования.
Идея замкнутых систем регулирования сводится к тому,
что в системе автоматически компенсируется воздействие
возмущающих факторов и угловая скорость или момент
двигателя могут с большей точностью поддерживаться
на требуемом уровне. Последнее поясняется рис. 6.1.
Здесь тонкими линиями показаны механические характе-
ристики двигателя в разомкнутой системе преобразова-
239
тель — двигатель, например в системе Г—Д. При задан-
ной угловой скорости идеального холостого хода соо
поддержание угловой скорости на требуемом уровне при
изменении нагрузки может быть достигнуто соответст-
венно моменту Mlt если увеличить ЭДС генератора от
значения £г3 до Дг2 так, чтобы компенсировать падение
угловой скорости на значение Лац и получить значение
угловой скорости, равное о>х. Дальнейшее увеличение
нагрузки до М2 потребует увеличения ЭДС генератора
до значения £Г1 > Ег2. При этом наблюдается большая
Рис. 6.1. Механические характеристики в разомкнутой системе Г —Д.
компенсация падения угловой скорости, равного До)2, для
получения угловой скорости <о2; в случае большего мо-
мента нагрузки М3 ЭДС генератора еще увеличивается
и становится равной Et,,A0M > E,.lt угловая скорость при-
вода при этом <о3.
Таким образом, для получения характеристики с вы-
сокой жесткостью (утолщенная линия на рис. 6.1) и
расширения диапазона регулирования необходимо ав-
томатически с ростом нагрузки повышать ЭДС генера-
тора.
Рассмотрим системы автоматического управления двига-
телями постоянного тока независимого возбуждения. Си-
стема автоматического регулирования, в которой цепь
воздействий замыкается, характеризуется наличием обрат-
840
ных связей; она имеет, по крайней мере, одну обратную
связь, соединяющую выход системы с ее входом. Кроме
того, могут быть, так называемые внутренние обратные
связи, соединяющие выход и вход отдельных элементов
системы автоматического регулирования.
Обратные связи делятся на жесткие и гибкие. Жесткие
связи действуют как в переходном, так и в установившемся
режимах работы, гибкие — только в переходном режиме.
Различают положительные и отрицательные обратные связи.
При увеличении регулируемой величины положительная
связь еще больше ее увеличивает, а отрицательная, наобо-
рот, уменьшает. Обратные связи могут передавать сигналы,
пропорциональные значению или производной (иногда
интегралу) от значения напряжения, тока (или момента),
скорости, угла поворота и т. п. В этих случаях они назы-
ваются (жесткими или гибкими, положительными или
отрицательными) обратными связями соответственно по
напряжению, току, скорости, углу.
Для осуществления автоматического регулирования не-
обходимо измерить сигнал обратной связи, затем этот
результат в виде напряжения сравнить (произвести алге-
браическое суммирование) с заданным в виде напряжения
значением регулируемой величины и направить результат
сравнения регулируемому объекту. Обычно энергии изме-
рительного органа оказывается недостаточно для воздей-
ствия на регулирующий орган, поэтому возникает необ-
ходимость в применении усилительного устройства. Пере-
численные элементы (измерительный орган, усилитель и
регулирующий орган) входят в устройство регулятора,
осуществляющего процесс регулирования.
Таким образом, система автоматического регулирования
состоит из регулируемого объекта и регулятора, реаги-
рующего на изменение регулируемой величины.
Ограничение момента, развиваемого приводом, до тре-
буемого значения с определенной точностью может про-
изойти, например, при снижении ЭДС преобразователя,
питающего якорь двигателя постоянного тока независимого
возбуждения. Автоматически это выполняется при исполь-
зовании соответствующей обратной связи. В данном слу-
чае целесообразно применить отрицательную обратную
связь по току, которая вступает в действие при достиже-
нии током (или моментом при Ф = const) заданного зна-
чения.
241
6.2. Система автоматического
регулирования угловой скорости
с жесткой отрицательной обратной
связью по напряжению
Структурная схема системы автоматического
регулирования угловой скорости с жесткой отрицательной
обратной связью по напряжению на якоре двигателя по-
стоянного тока независимого возбуждения приведена на
рис„ 6.2, а.
Рис. 6.2. Структурная схема системы автоматического регулирования
угловой скорости с жесткой отрицательной обратной связью по напря-
жению (о) и характеристики двигателя (б).
Система уравнений в установившемся режиме всех
элементов системы имеет вид:
^ВХ---^3 «С7Д, -- kykaUBK,
Ua — En—IRa', U^E.+ IR.-,
Ea = C(i>', M — cI,
(6.1)
где ky— kn=En/Uy — соответственно коэффи-
циенты усиления усилителя У и преобразователя П;
Еп, Ея — соответственно ЭДС преобразователя П и двига-
242
теля М; 7?п, 7?д — сопротивления преобразователя и дви-
гателя; а = иОл/ил — коэффициент усиления обратной
связи по напряжению.
После преобразований получим уравнение механиче-
ской характеристики в замкнутой системе:
или
® —с(1+а£уйп)
___ КУз
®“с(1+аМ
/?п+/?д(1+ай5,йп)
М С2(1+а^п)
д- Яп + Яд (1 +«М
М С2(1+айс)
(6-2)
(6.3)
где
Если считать, что коэффициенты /гу и kn постоянные,
то (6.3) есть уравнение прямой. Первый член уравнения (6.3)
определяет угловую скорость идеального холостого хода,
пропорциональную задающему напряжению U3 (характе-
ристики 3 и 3' на рис. 6.2, б).
Анализ (6.3) показывает, что при коэффициенте усиле-
ния /гс = kyka -> оо жесткость механической характери-
стики в рассматриваемой системе не превосходит жесткости
естественной характеристики двигателя (характеристика 1
на рис. 6.2, б), подключенного к сети с постоянным напря-
жением С7Д = с®0. Следовательно, в такой системе наи-
больший диапазон регулирования будет обусловливаться
падением напряжения в якорной цепи собственно двига-
теля; статизм в замкнутой системе регулирования при
нагрузке, равной Л1ном, может быть определен как отно-
шение перепада угловой скорости по уравнению (6.3)
к текущему значению угловой скорости идеального холо-
стого хода:
6 = ». г, - 4--Г,---» (6.4)
ckJJ3 1 cU3 ’ ' '
где 7?я Rn 4~ ^д-
Анализируя (6.4), можно установить следующее: 1) при
конечном значении коэффициента усиления 0 <; kz <. со
статизм системы будет возрастать по мере снижения зада-
ющего напряжения; 2) минимальный перепад скорости
(при /гс -> оо) обусловливается внутренним сопротивле-
нием цепи якоря собственно двигателя, т. е. предельная
жесткость характеристики, как отмечалось, определяется
жесткостью естественной характеристики, а относительная
жесткость падает по мере снижения задающего напряже-
ния. Поэтому такая система автоматического регулирова-
243
ния не может обеспечить большой диапазон регулирования
и не обладает высокой точностью поддержания скорости.
На рис. 6.2, б показаны: естественная характери-
стика 1 двигателя, к которой стремится характеристика
в замкнутой системе регулирования при &с-> со; характе-
ристика 2 в разомкнутой системе регулирования с учетом
общего сопротивления якорной цепи двигателя и преобра-
зователя и характеристики 3 и 3' в замкнутой системе
регулирования при конечном значении коэффициента уси-
ления системы.
В данной системе посредством обратной связи компенси-
руются падение напряжения на внутреннем сопротивле-
нии преобразователя н колебания напряжения сети, т. е.
стабилизируется выходное напряжение преобразователя.
Поэтому предельной жесткостью характеристики является
жесткость естественной характеристики двигателя.
6.3. Система автоматического
регулирования угловой скорости
с жесткой положительной обратной
связью по току якоря двигателя
В случае жесткой положительной обратной
связи по току якоря двигателя компенсация падения угло-
вой скорости, возникающего в результате увеличения
нагрузки, достигается автоматическим увеличением ЭДС
преобразователя. Структурная схема такой системы при-
ведена на рис. 6.3, а. Здесь сигнал на входе усилителя
определяется суммой напряжений:
UM==U3 + $I(Rn + RR), (6.5)
где р == RJ (R„ + Яд).
В качестве шунтового резистора Яш, с которого сни-
мается сигнал обратной связи, могут быть использованы
обмотки дополнительных полюсов, стабилизирующая и
компенсирующая обмотки.
Приняв систему уравнений, аналогичную (6.1), можно
после соответствующих преобразований получить уравне-
ние механической характеристики в замкнутой системе
регулирования:
® = ---М--------ё------
(6.6)
244
Если считать, что коэффициенты усиления усилителя
и преобразователя постоянны, то характеристика двига-
теля (6.6) оказывается прямой линией. Первый член (6.6)
определяет угловую скорость идеального холостого хода,
пропорциональную задающему напряжению U3 (точки
идеального холостого хода на характеристиках 2 и 2'
на рис. 6.3, б).
Рис. 6.3. Структурная схема системы автоматического регулирования
угловой скорости с жесткой положительной обратной связью по току
якоря двигателя (а) и характеристики двигателя (б).
Для определения статизма разделим второй член пра-
вой части (6.6) на его первый член при МЯ0№; тогда полу-
чим:
§ = Мцом^я О М) (6 7)
Анализ (6.7) показывает, что статизм- в замкнутой си-
стеме может быть равен 0 при условии, что $kz = 1 (харак-
теристика 3 на рис. 6.3, б); для значений > 1 харак-
терйстика может быть восходящей (характеристика /),
245
при значениях $kz < 1 характеристика имеет отрицатель-
ную жесткость (кривая 2).
Если коэффициенты усиления с ростом нагрузки падают,
то характеристики становятся нелинейными (кривые Г и 3'
на рнс. 6.3, б).
6.4. Система автоматического
регулирования угловой скорости
с жесткой отрицательной обратной
связью по угловой скорости
двигателя
Принцип действия жесткой обратной связи
по угловой скорости (рнс. 6.4, а) заключается в следующем.
С ростом нагрузки на валу двигателя уменьшается его
угловая скорость н понижается сигнал с тахогенератора GT,
находящегося на одном валу с двигателем М; напряжение,
снимаемое с якоря тахогенератора, пропорционально угло-
вой скорости двигателя. Так как задающий сигнал оста-
ется при этом постоянным, то сигнал на входе усилителя У
при понижении угловой скорости возрастает, следователь-
но, возрастает ЭДС преобразователя П, что автоматически
приводит к компенсации падения угловой скорости при-
вода.
Составим для схемы на рнс. 6.4, а систему уравнений:
^ВХ - Уз, С Y® ’ Еа - ^с^вх’
Пд = £п-77?п; 17д = £д + 7/?д;
= М=сГ,
(6-8)
здесь изл — задающее напряжение в системе с обрат-
ной связью по скорости; у = £70)С/<о — коэффициент пере-
дачи обратной связи по скорости. Все остальные обозна-
чения такие же, как и для рассмотренных выше схем.
После соответствующих преобразований получим урав-
нение для механической характеристики в замкнутой
системе регулирования:
_^з, с _дд Ъ
® 1+уй с2(1 + уй)’
(6.9)
где k = kjc — коэффициент передачи (усиления) всей
системы; 7?я = 7?п +
При постоянном коэффициенте передачи k механиче-
ские характеристики двигателя линейны. Очевидно, что,
как и в предыдущих случаях, первый член правой части
246
уравнения (6.9) определяет угловую скорость идеального
холостого хода двигателя, а второй член — падение угло-
вой скорости, обусловленное изменением момента нагрузки.
В данной системе аналогично первому рассмотренному
случаю задающее напряжение в замкнутой системе выше,
Рис. 6.4. Структурная схема системы автоматического регулирования
угловой скорости с жесткой отрицательной обратной связью по угловой
скорости (а) и характеристики двигателя (б),
чем в разомкнутой. Статизм в этой системе регулирования
определится по формуле (при М = Л4НОМ):
6 = MH0A/cW3. (6.Ю)
Из (6.10) следует, что статизм может быть сколь угодно
малым с возрастанием коэффициента передачи всей си-
стемы. Поэтому в системе с отрицательной обратной связью
по скорости можно при большом коэффициенте передачи
получить значительный диапазон регулирования. На рис.
6.4, б приведены: предельная характеристика 1 при k -> оо,
характеристики 2, 2' при конечном значении коэффициента
передачи (усиления) системы и характеристика двигателя
в разомкнутой системе 3.
247
• Применение комбинированных обратных связей рас-
ширяет возможности электрического привода в отношении
диапазона регулирования, например возможно сочетание
жестких отрицательной обратной связи по напряжению
с положительной по току или отрицательной обратной
связи по угловой скорости с положительной по току.
Подобного же вида обратные связи могут быть применены
в системах привода переменного тока.
В качестве преобразователя П в рассмотренных систе-
мах могут быть использованы различные устройства: асин-
хронный двигатель— генератор, управляемый выпрями-
тель, магнитный усилитель, широтно-импульсный пре-
образователь и т. п.
Следует отметить, что увеличение коэффициента усиле-
ния в рассмотренных системах ограничено их динамической
устойчивостью и чувствительностью к помехам. При боль-
ших коэффициентах усиления приходится вводить допол-
нительные корректирующие устройства или стабилизи-
рующие обратные связи (обычно гибкие отрицательные),
которые делают систему устойчивой и обеспечивают желае-
мое качество (время процесса, перерегулирование, колеба-
тельность процесса) переходных процессов в системе (изме-
нение задания по скорости, сброс — наброс нагрузки
и т. п.). Ограничение на коэффициент усиления системы
предопределяет и ограничение на диапазон регулирования.
Так, для системы с обратной связью по скорости, обладаю-
щей наилучшей стабильностью при всех возможных воз-
мущениях (изменение потока двигателя, нагрузки, тем-
пературы обмоток, напряжения сети и т. п.) среди рассмо-
тренных систем, наибольший диапазон регулирования
составляет около 2000:1.
6.5. Автоматическое регулирование
момента электропривода в системе
преобразователь — двигатель
Для автоматического регулирования момента
привода постоянного тока независимого возбуждения может
быть использована так называемая нелинейная жесткая
отрицательная обратная связь по току, или связь с отсеч-
кой. Упрощенная принципиальная схема, в которой наряду
с жесткой отрицательной обратной связью по угловой
скорости имеется еще жесткая отрицательная обратная
связь по току с отсечкой, показана на рис. 6.5. Отрицатель-
248
ная обратная связь по скорости действует на первом участке
характеристики двигателя (рис. 6.6), когда ток нагрузки
не достигает тока отсечки (7 /отс), и на втором — при
7 > 70«- Принцип действия обратной связи по скорости
был описан в § 6.4.
Отрицательная обратная связь по току с отсечкой на-
чинает действовать тогда, когда ток якоря двигателя пре-
вышает ток отсечки. Вступая в действие, эта обратная
связь позволяет системе обеспечивать с определенной
Рис. 6.5. Принципиальная схема
системы автоматического регулиро-
вания угловой скорости с жесткой
отрицательной обратной связью по
скорости и жесткой отрицательной
обратной связью по току с отсечкой.
Рис. 6.6. Механические харак-
теристики двигателя, работаю-
щего в системе с отрицатель-
ными обратными связями по
угловой скорости и по току
с отсечкой.
точностью поддержание постоянства тока или момента
(при Ф — const).
На схеме рис. 6.5 преобразователь 77 (например, маг-
нитный или электромашиниый усилитель или тиристор-
ный выпрямитель с промежуточным магнитным усилите-
лем) имеет две обмотки управления: одна ОУ1, сигнал
управления которой пропорционален разности задающего
сигнала U3, снимаемого с потенциометра П1, и сигнала
отрицательной обратной связи по скорости (70С, снимае-
мого с тахогенератора GT, и другая обмотка ОУ2, вклю-
ченная через диод V на разность опорного напряжения Uoni
снимаемого с потенциометра 772, и падения напряжения
249
на шунте /?ш, пропорционального току якоря двигателя М.
Разность этих напряжений при протекании тока / > /отс
создает МДС Д, направленную встречно МДС Еу. При
токах, меньших тока отсечки, в обмотке ОУ2 ток не про-
текает (из-за диода V и соответствующим образом подо-
бранного значения опорного напряжения) и система рабо-
тает только с обратной связью по скорости соответственно
характеристикам на участках со0/, а>'0Г или (рис. 6.6),
отвечающим различным задающим напряжениям, снимае-
мым с потенциометра П1. По мере увеличения тока на-
грузки угловая скорость двигателя падает, уменьшается
напряжение обратной связи £70жС, возрастает напряжение
на обмотке ОУ1, равное t/0,yl = U3 — U0,c, и возрастает
ЭДС преобразователя, частично компенсируя падение угло-
вой скорости. При токах, больших тока отсечки, появля-
ется напряжение на обмотке ОУ2. Это напряжение вызы-
вает размагничивающий сигнал, и результирующая МДС
падает (Fs = FY — FJ, приводя к резкому падению ЭДС
преобразователя и угловой скорости двигателя. При не-
подвижном состоянии двигателя в его якорной цепи про-
текает ток стопорения /ст, а результирующая ЭДС пре-
образователя равна произведению стопорного тока на
сопротивление якорной цепи преобразователь — двига-
тель.
На втором участке характеристики (при I > /отс)
вместе с отрицательной обратной связью по скорости
действует отрицательная обратная связь по току. В этом
случае результирующий сигнал, выраженный через пара-
метры схемы управления, можно записать так:
р_, _С3, с &тг(1) б'оп ____
г X —---Б------®о, у1-----о----- =
Ao, у1 3 Ат
= Е3 —/?0,сю —/?т(/ —/01С), (6.11)
где /?о,У1— полное сопротивление цепи обмотки управле-
ния 0У1\ Rt — полное сопротивление цепи обмотки токовой
отсечки ОУ2; k, = R^/Rf, /отс = Uon/Rw‘, kox =
— klTwOiY\IRoty i, F3 = t/3,c®0,yi//?0,yi, ^o.yi, соот-
ветственно число витков обмоток управления ОУ1 и ОУ2\
kyc — коэффициент передачи обратной связи по скорости
(тахогенератора).
Если в (6.8) вместо первого уравнения подставить (6.11),
а вместо второго выражения En = kn (Fs) Fs, то полу-
чим уравнение электромеханической характеристики дви-
250
гателя на втором участке:
Г k (FM1
(WJWVWHnr1 /с 1ОЧ
“ ’+Wn(W, ’ (6’ 2)
где ka (F2) — коэффициент передачи (усиления) преобра-
зователя; kx — Me.
Если заданы значения /отс и /ст, а также известны
параметры цепи управления обмоток, то можно найти /?т.
Для режима стопорения (со = О, I — !„)•.
СТ = ^3 (£т ^отс) >1 /с t ох
F -I R I (6- 3)
2-‘П, ст 1 )
Зная характеристику преобразователя Еп — f (Fs) и
£П1СТ, находим:
йт = (£3-£2сТ)/(/ст-/оТС). (6.14)
Изменяя Uon, можно менять ток, при котором вступает
в действие отрицательная обратная связь по току, следова-
тельно, изменять предельный момент.
6.6. Автоматическое регулирование
скорости и момента в системе источник
тока — двигатель
Рассмотренные ранее способы автоматическо-
го регулирования скорости и момента двигателя постоян-
ного тока независимого возбуждения предполагают пита-
ние его от источника ЭДС, не зависящей от тока нагрузки.
Рассмотрим схемы автоматического регулирования момента
с питанием якорной цепи от источника тока, в котором
задан ток, не зависящий от ЭДС и сопротивления нагрузки
(допустим / = /ном). Обмотка возбуждения двигателя полу-
чает питание от источника регулируемого напряжения,
полярность которого можно изменять. Механические ха-
рактеристики такого привода представляют собой верти-
кальные прямые линии (рис. 6.7), т. е. являются абсолютно
мягкими (момент не зависит от угловой скорости), а их
положение (значение момента) определяется магнитным
потоком, так как М — кФ1 = &/номФ = &ХФ.
Применение обратных связей в схеме источник тока —
двигатель позволяет сформировать из вертикальных харак-
теристик любые характеристики. Таким примером явля-
251
ется схема, приведенная на рис. 6.8. Здесь якорь двига-
теля М подключен к источнику тока ИТ, а обмотка воз-
буждения ОВМ присоединена к усилителю У с линейной
характеристикой, на входе которого две обмотки управле-
ния. Одна из них 0У1 получает питание от потенциометра
П1 и предназначена для создания сигнала, пропорциональ-
ного потоку FM = IuwK (задание момента), другая ОУ2 —
обмотка отрицательной обратной связи по скорости с сиг-
налом Е0,с = /о,са»о.с> направленным встречно сигналу Ем.
Обмотка обратной связи ОУ2
присоединена к тахогенера-
тору GT через потенциометр
П2 и выпрямитель V так, что
сигнал, пропорциональный
скорости, появляется на ней
тогда, когда | Е„ | > U3.
Меняя с помощью потенцио-
Рис. 6.7. Механические характери-
стики привода пр системе источник
тока — двигатель.
метра П2 задающее напряжение U3, можно регулировать
уставку отсечки обратной связи по скорости, так как вен-
тили V пропускают ток /0,с только в том случае, когда
напряжение GT превосходит П3.
Результирующий сигнал на входе усилителя У:
Fs = FM-F0,c = FM — /?о,ссо. (6.15)
Полагая, что магнитный поток линейно зависит от тока
возбуждения (Ф = kBIB), получаем (при / = /ном):
М = kIB0№kBIB = kIB0№kBkyF^ = , (6.16)
где ky — коэффициент усиления усилителя У.
Пока не действует обратная связь по скорости (система
разомкнута), двигатель развивает постоянный момент,
пропорциональный сигналу, зависящему только от Ft,
(рис. 6.7). С помощью потенциометра П1 (рис. 6.8) можно
изменять направление тока в обмотке управления ОУ1,
следовательно, изменять знак момента.
Если вступает в действие обратная связь по скорости
Г0,с > 0, результирующий сигнал F% становится меньше,
а вместе с ним уменьшается и момент. Уравнение меха-
252
нической характеристики приобретает вид:
и = ГДс-Жс^. (617)
где ю0 = FM/£O1C; Дю = M/kotA.
На рис. 6.9 даны характеристики, соответствующие
различным уставкам задающего напряжения UB (юх и ю2)
и F„ (Мг и М2).
Механические характеристики могут быть расположены
в четырех квадрантах, если источник тока ИТ позволяет
рекуперировать энергию в сеть.
Рис. 6.8. Принципиальная схема системы источник тока—двигатель
с обратными связями.
Наиболее простое устройство, работающее в режиме
источника тока, — индуктивно-емкостный преобразователь
(ИЕП). Схема привода с таким преобразователем пока-
зана на рис. 6.10. Индуктивно-емкостный преобразователь
состоит из трех одинаковых реакторов с индуктивностью Хд
и трех конденсаторов с емкостным сопротивлением хс-
Точки А, В и С присоединены к питающей сети переменного
тока, а а, b и с к входу неуправляемого выпрямителя,
нагрузкой которого является двигатель постоянного тока
независимого возбуждения.
253
Принцип действия ИЕП основан на резонансе напряже-
ний в цепи LC, в которой ток нагрузки не зависит от со-
противления нагрузки, а зависит от линейного напряжения
питающей сети и реактивного сопротивления xL — хс =
— Хр,9 (где хР19 — реактивное эквивалентное сопротивле-
ние)^. е. обладает свойством источника тока.
Рассмотренный неуправляемый преобразователь (ИЕП)
в силовой цепи относительно прост и надежен, так как
теристики двигателя в системе
источник тока — двигатель с об-
ратной отрицательной связью
по угловой скорости с отсеч-
кой,
Рис. 6.10. Принципиальная схе-
ма электропривода, с ИЕП.
не имеет вращающихся частей; он обладает хорошими
технико-экономическими показателями (высокие КПД и
cos ср). Диапазон регулирования (50—100):1 и зависит
от коэффициента усиления усилителя. Система обеспечивает
высокую стабильность и плавность регулирования угло-
вой скорости.
К недостаткам схемы следует отнести невозможность
получения рекуперативного торможения; торможение осу-
ществляется противовключением, для чего служит ограни-
чивающий резистор /?т. Регулирование момента ограничено
254
значением (1 + 1,2) AfH0M в результате насыщения маг-
нитной системы. Система обладает невысоким быстродей-
ствием вследствие незначительной перегрузочной способ-
ности двигателя и в связи с тем, что управление переход-
ными процессами переносится в цепь возбуждения.
6.7. Автоматическое регулирование
угловой скорости асинхронных
электроприводов при помощи
тиристорных регуляторов напряжения
Несмотря на то что в разомкнутой системе асинхрон-
ный двигатель не может работать на неустойчивой части механиче-
ской характеристики, в замкнутой системе автоматического регули-
рования асинхронный привод может быть устойчивым, обеспечивая
плавное регулирование угловой скорости в сравнительно широком
диапазоне.
Структурная схема асинхронного электропривода с регулиро-
ванием угловой скорости при помощи тиристорного регулятора на-
пряжения приведена на рис. 6.11, а. Здесь регулирование напряжения
на статоре асинхронного двигателя производится тиристорным регуля-
тором напряжения ТРИ, угол а включения тиристоров которого изме-
няется системой управления СУ. На вход СУ подается сигнал от уси-
лителя У; этот сигнал зависит от разности задающего напряжения С3
и напряжения отрицательной обратной связи по скорости, снимаемой
'с выводов тахогенератора, t/OlC = ую, где у — коэффициент передачи
тахогенератора.
Механические характеристики в замкнутой системе регулирова-
ния располагаются в зоне между двумя характеристиками в разомкну-
той системе (рис. 6.11, б). Одна из этих характеристик соответствует
минимальному углу включения тиристоров а,Д1-„ = <р (s), равному
фазовому углу нагрузки <р, который определяется по схеме замещения
двигателя как:
, „ г'^ + х0х'2
<p = arctg + ° + (6.18)
где z2 — ]^P'/s)2-!~x22; х0 — индуктивное сопротивление цепи на-
магничивания.
Другая характеристика соответствует наибольшему углу включе-
ния атах, примерно равному 135°. При таком угле момент, развивае-
мый двигателем, обычно меньше статического момента холостого хода
двигателя Л1х,х. Следовательно, при работе двигателя в замкнутой
системе по мере увеличения его нагрузки угол включения а должен
уменьшаться от некоторого максимального до минимального. Поэтому
система управления тиристорами должна вырабатывать при отсутствии
сигнала управления импульсы с углом включения а0 ~>атах, а с воз-
растанием сигнала управления по мере увеличения нагрузки двига-
теля и уменьшения его угловой скорости угол а должен уменьшаться.
Такое действие системы управления отражает на рис, 6,11, а узел
255
сравнения на выходе СУ. В соответствии со структурной схемой можно
записать:
а = а0 — k^ky (Ua—у<в). (6.19)
Используя это уравнение, можно рассчитать требуемые значения
коэффициента усиления усилителя У и задающего напряжения U3,
обеспечивающие необходимые значения угловой скорости и жесткости
Рис. 6.11. Структурная схема асинхронного электропривода с регу-
лированием скорости при помощи тиристорного регулятора напряже-
ния (а) и механические характеристики (б).
механической характеристики двигателя прн работе его в замкнутой
системе регулирования. Задавшись крайними точками coj и ш2 меха-
нической характеристики (рис. 6.11, б), можно составить систему
a/nax==ao hky(U3 усог)» (6.20)
ат1п = Ф (si) = «о — Му (Уз —У®1), (6.21)
где St — скольжение, соответствующее угловой скорсоти <оэ, а <р (s,)
определяется по (6.18).
ь ____ атах ф (sl) , /й
*УТРеб—(6’22)
Из (6.20) и (6.21) следует:
256
,, «О («2 — ГйО + Итад-И! — С02фр1)
U3' тре5 “7 аи77-<Р&)---------• (6'23)
Механические характеристики двигателя в этой системе регули-
рования строятся обычно графо-аналитическим способом с исполь-
зованием универсальных кривых иг — f (а, <р), графической зависи-
мости <₽ = Л (s), определяемой (6.18), уравнения (6.19) и формулы
момента двигателя Л1 = /2 ((Д, s).
Диапазон регулирования составляет для рассматриваемой си-
стемы (15 -4- 20) : 1.
Напомним, что данный способ регулирования угловой скорости
является неэкономичным и может быть использован в основном при
кратковременном режиме работы.
6.8. Автоматическое регулирование
электроприводов переменного тока
с частотным управлением
Диапазон и точность регулирования в замкну-'
тых системах частотного управления, в которых напряже-
ние, приложенное к двигателю, регулируется в функции
нагрузки, значительно выше, чем в разомкнутых системах,
где диапазон регулирования достигает не более 3:1 (см.
гл. 4).
Распространенной системой частотно-регулируемого
асинхронного привода является система со статическим
преобразователем частоты с автономным инвертором.
Многообразие автономных инверторов можно разделить '
на два класса: инверторы напряжения и инверторы тока.
В случае автономных инверторов напряжения (АИН)
в качестве управляющих воздействий приняты частота
и напряжение па статоре двигателя, а в случае автоном-
ных инверторов тока (АИТ) может быть использован прин-
цип частотно-токового'' управления, при котором основ-
ными управляющими воздействиями являются потребляе-
мый статором ток и частота этого тока.
Существенным достоинством АИН является независи-
мость выходного напряжения от частоты и от момента
нагрузки. Выходное напряжение определяется лишь на-
пряжением питания инвертора. Это упрощает формирова-
ние необходимого закона частотного регулирования, осо-
бенно когда напряжение регулируется только в функции
частоты.
Однако если рассматривать систему в целом, т. е.
АИН — Д, то при глубоком диапазоне регулирования
9 Чиликин М, Г., Сандлер А. С. 257
угловой скорости привода и произвольно меняющемся
моменте нагрузки напряжение на двигателе должно регу-
лироваться в функции двух параметров — частоты и мо-
мента. Такое регулирование может быть осуществлено
в замкнутой системе управления. Практически реализация
системы регулирования напряжения в функции момента
нагрузки усложняется неоднозначностью закона регулиро-
вания при изменении частоты и трудностью получения
информации о моменте на валу двигателя.
Рис. 6.12. Структурная схема замкнутой системы автоматического ча-
стотного регулирования с АИН с жесткой отрицательной обратной
связью по угловой скорости в контуре стабилизации скорости.
Проанализируем основные особенности замкнутых си-
стем частотного регулирования асинхронных двигателей
с короткозамкнутым ротором, управляемых АИН.
В системах с жесткой отрицательной обратной связью
по угловой скорости (рис. 6.12) одновременно создается
воздействие на напряжение и частоту. Связь между регу-
ляторами частоты РЧ и напряжения УВ происходит с по-
мощью функционального преобразователя ФП, обеспечи-
вающего требуемое соотношение между напряжением и
частотой на статоре двигателя. На структурной схеме
пунктиром показан внутренний контур стабилизации на-
пряжения. Такая система обладает ограниченным диапа-
зоном регулирования до 7:1 при Мс = const из-за умень-
шения перегрузочной способности двигателя при низких
частотах.
258
Стабилизация магнитного потока посредством жесткой
отрицательной обратной связи по потоку двигателя Ф
(рис. 6.13) путем регулирования напряжения на двигателе
в функции частоты (с помощью ФП) и нагрузки обеспечи-
вает механические характеристики двигателя с высокой
перегрузочной способностью и жесткостью, соответствую-
щей естественной характеристике.
Рис. 6.13. Структурная схема замкнутой системы автоматического ча-
стотного регулирования с АИН с жесткой отрицательной обратной
связью по потоку в контуре стабилизации потока.
В соответствии с рис. 6.13 магнитный поток опре-
деляется по формуле
Ф =
knUkH JJ
3V’
(6.24)
где knu — Ua0My/Uy‘, ka Ф/ПномТ . 1/-/П---in ’ ^ДФ
С1/1Н0М * \а> Р/
= 1/C]/1HOM> = ^О.с/Ф-
Преобразуя (6.24) с учетом принятых ранее [см. (4.75)]
обозначений, находим:
Wy (Р)
Ci/том V А (а, В) Н-А У В (Р) *
(6.25)
где k~knu В = T?Z2 4- х'гР3.
Подставляя (6.25) в формулу момента Ма —
3c2f- „ /?'В
__ фз _t получаем выражение механической ха-
рактеристики двигателя в замкнутой системе с обратной
связью по потоку:
— SknUUsy _________________________
“ Ф1ном ’ + k VВ>Г ’
.(6.26)
9*
259
Из выражения магнитного потока Ф = —^ном у
_________ £1/1пом
X у j/"получаемого из схемы замещения, и
из (6.25) найдем, что напряжение на двигателе в этой
системе регулируется согласно выражению
= kllVU3y у==р5(+’/^-в^- • (6-27)
Напряжение, подводимое к двигателю, нужно менять
так, чтобы поток для всех частот и нагрузок оставался
неизменньпм и равным потоку при номинальном напряже-
нии и частоте и идеальном холостом ходе (Ф = Фо).
Начиная с некоторого большого коэффициента усиле-
ния (k 2s 100) максимальный момент двигателя в рассма-
триваемой системе при любой частоте остается практически
постоянным и стремится к значению
Л Л _ M-jUном 1 ЗбнОМ zc Г)О\
™2<01номх' d* + ~ 2(01НО,Х' ’
а критическое абсолютное скольжение
(6.29)
Из (6.28) и (6.29) видно, что предельные значения Л4ка
и рк(Х не зависят от частоты и возрастают примерно в 2 раза
по сравнению с максимальным моментом и критическим
абсолютным скольжением на естественной характеристике.
Анализ замкнутой системы с обратной связью по потоку
показывает незначительное уменьшение токов по сравне-
нию с разомкнутой системой (при одинаковых моментах
нагрузки), но при этом уменьшается коэффициент мощ-
ности (примерно на 3—5 % по сравнению с номинальным
при а = 1 и р = 1).
Максимальный диапазон регулирования при М —
— Мши = const можно определить (при регулировании
вниз от номинальной угловой скорости) по формуле
Damax^2-^—, (6.30)
Рк. ном
где Рк, ном — критическое абсолютное скольжение в есте-
ственной схеме включения двигателя.
Принимая в среднем рк, ном — 0,10 -ь 0,2, получаем
Damax = (20 -г- 10) : 1, поэтому если есть необходимость
в дальнейшем расширении диапазона регулирования, то
260
необходимо рассмотренную систему дополнить отрицатель-
ной обратной связью по скорости с воздействием на ча-
стоту и задающее напряжение контура стабилизации
потока, как это показано пунктиром на рис. 6.13. Возможно
также использование обратной связи по скорости и в кон-
туре стабилизации потока.
В приводах, работающих с частыми переходными про-
цессами, и в случаях, когда требуется генераторное тор-
можение асинхронного двигателя с рекуперацией энергии
в сеть, целесообразно использование преобразователя ча-
стоты с АИТ. В этих случаях сказываются преимущества
АИТ, заключающиеся в возможности рекуперации энер-
гии в сеть при более простой силовой схеме. При исполь-
зовании АИН рекуперативное торможение асинхронного
двигателя возможно при дополнительном параллельном
подключении к управляемому выпрямителю инвертора,
ведомого сетью, так как при переводе двигателя в генера-
торный режим в звене постоянного тока меняется направ-
ление тока при неизменной полярности напряжения.
В системе с АИТ и работе двигателя в генераторном
режиме направление постоянного тока не меняется, а из-
меняется полярность напряжения в звене постоянного
тока. Следовательно, для рекуперации энергии в сеть
управляемый выпрямитель переводится в инверторный
режим.
По сравнению с АИН схема с АИТ отличается отсут-
ствием моста обратного (реактивного) тока, инвертора,
ведомого сетью, и конденсатора фильтра в звене постоян-
ного тока.
Используя схему замещения, приведенную на рис. 4.58,
находим связь между током /2 и If.
j' _ j h
(6.31)
При этом электромагнитный момент двигателя:
М _ 3/^ В? _3/fxg%
И111ОМ Р И1П0М 1(Хв+ -':2)2’Т(^2/Р)2] Р
(6.32)
а его магнитный поток:
' ф = -А_/1х01/
С1/ 1ИОМ г .
^ЧО)2
1?22 + (^o+^s)2 Р2
(6.33)
Анализ (6.32) и (6.33) показывает, что при неизменном
токе статора механические характеристики двигателя об-
261
ладают постоянной перегрузочной способностью при всех
частотах как в двигательном, так и в генераторном режи-
мах, а момент его и магнитный поток однозначно связаны
с абсолютным скольжением и не зависят от частоты.
Однако при управлении с неизменным током статора
машина приобретает неблагоприятные свойства, заклю-
чающиеся в том, что с увеличением нагрузки (скольжения)
резко падает магнитный поток. Поэтому система должна
быть замкнута таким образом, чтобы с увеличением на-
грузки по определенному закону увеличивался и ток ста-
тора так, чтобы поток машины поддерживался постоянным.
Упрощенная схема системы частотно-токового управ-
ления асинхронным двигателем с АИТ представлена на
рис. 6.14. В ней задающий сигнал U3tZ определяет частоту
переключения тиристоров АИТ, а следовательно, частоту
тока статора, если не вошло в зону ограничения устройство
ограничения УО. После вычитания из напряжения Пзл
напряжения, пропорционального угловой скорости дви-
гателя (7Ш, образуется сигнал абсолютного скольжения (7g,
который является управляющим (после прохождения че-
рез ФП) для контура регулирования тока. В этот контур
входят управляемый выпрямитель УВ с системой управ-
ления СУВ, усилитель разностного сигнала У, сильная
обратная отрицательная связь по току (7,, стабилизирую-
щая ток на уровне, определяемом сигналом задания, и
сигнал задания тока (7/3, получаемый на выходе функ-
ционального преобразователя ФП. В данной схеме (7/з =
= k | Р |. Следовательно, при всех частотах ток двига-
теля пропорционален скольжению.
Подставляя в (6.32) и (6.33) зависимость тока статора
от скольжения (принимая ее линейной) /х = йр|3, получаем
выражения для момента:
М = -----------^.34gj_2. (6.34)
ИНОМ (^о + ^О2 +
и магнитного потока:
Ф = —— Appxol/' , (6.35)
сЛпом Г Г £'2 + (*o + *W V
где ftp — коэффициент пропорциональности между током
и абсолютным скольжением.
При малых Р поток почти пропорционален абсолют-
ному скольжению. В области рабочих скольжений момент
пропорционален Р, а нарастание потока уменьшается.
262
При резких изменениях заданного сигнала в системе
по рис. 6.14 или при перегрузках двигателя срабатывает
ОУ (ограничивая на заданном уровне и задание тока).
Система переходит в режим ограничения момента. Сигнал
задания частоты в этом режиме определяется текущим
Рис, 6.14. Упрощенная схема системы частотно-токового управления
асинхронным двигателем с АИТ.
значением угловой скорости и заданным ограничителем ОУ
абсолютным скольжением. Двигатель работает при любой
угловой скорости в этом режиме с постоянными значениями
тока и абсолютного скольжения, что и определяет, как
это следует из (6.32), постоянство момента, т. е. характе-
ристика двигателя становится абсолютно мягкой.
263
Г
На рис. 6.15 приведены примерные механические ха-
рактеристики асинхронного двигателя с короткозамкнутым
ротором мощностью 45 кВт, управляемого АНТ в сис-
теме по рис. 6.14. Характеристики в двигательном и гене-
об/мин п
1500 1 1 Г=501ц К,5Гц 31,3Гц, 20,8Гц Г0,8Гц М
1000- 1 1
i
500- I— । )
। ... 1 1 1_J !
-100 0 -100 200 300 Мм„ W0 Нм
Рис. 6.15. Механи-
ческие характери-
стики асинхронного
двигателя с корот-
козамкнутым ро-
тором мощностью
45 кВт, управляе-
мого от АИТ по
рис. 6.14.
раторном (рекуперативное торможение) режимах обла-
дают жесткостью не ниже, чем естественная характерис-
тика двигателя.
Система с АИТ позволяет регулировать угловую ско-
рость в диапазоне примерно до (20—30) : 1.
6.9. Автоматическое регулирование
каскадных электроприводов
Производственные механизмы, в которых возникает
необходимость в более высокой точности регулирования угловой ско-
рости в статических и динамических режимах, должны иметь электро-
привод с системой автоматического регулирования. Для этого необ-
ходимо разомкнутую систему каскада дополнить соответствующими
обратными связями.
Например, АВК, если в нем возникают затруднения с установ-
кой тахогенератора, может быть выполнен с положительными обрат-
ными связями ио току и напряжению выпрямленной цепи. Когда на
асинхронном двигателе возможна установка тахогенератора, в качестве
обратных связей можно использовать положительную обратную связь
по току выпрямленной цепи и отрицательную обратную связь по ско-
рости.
Управление АВК при неизменном напряжении питающей цепи
осуществляется воздействием через усилитель на угол регулирова-
ния инвертора, т. е. на изменение его противо-ЭДС, что приводит
к изменению скорости привода. Для компенсации падения угловой
скорости, возникающего при увеличении нагрузки, нужно уменьшить
ЭДС инвертора (см. § 4.13). Это — особенность системы электропри-
вода с АВК, отличающая ее от всех ранее рассмотренных систем авто-
матического регулирования скорости, где для компенсации падения
угловой скорости нужно увеличивать ЭДС преобразователя. Другая
особенность обусловлена видом регулировочной характеристики инвер-
тора. Система управления инвертором выполнена таким образом, что
264
при отсутствии сигнала управления на ее входе ЭДС инвертора имеет
максимально допустимое по условиям его устойчивой работы значе-
ние. Это достигается, например, посредством подачи на вход системы
управления сигналом смещения (7СМ. При увеличении сигнала управ-
ления он вычитается из сигнала смещения, результирующий сигнал
уменьшается, вследствие чего уменьшается ЭДС инвертора.
С учетом этих пояснений система уравнений для случая жестких
обратных связей (отрицательной по скорости и положительной по вы-
прямленному току) в системе АВК запишется так
где U2 — суммарный сигнал управления; U — напряжение смеще-
ния; U3,z — задающий сигнал по скорости; А0.с, Л0>т — коэффициенты
обратной связи соответственно по скорости и току; ю0 (1 — s) — угло-
Рис. 6.16. Экспериментальные
статические электромеханичес-
кие характеристики АВК не-
большой мощности при работе
в системе автоматического регу-
лирования с жесткими обрат-
ными связями, отрицательной
по скорости и положительной
по выпрямленному току.
вая скорость привода; 1ги — коэффициент усиления тиристорного пре-
образователя (инвертора); £rf[1 —ЭДС инвертора; £rf0— ЭДС ротор-
ного выпрямителя при s= 1; Дэ — эквивалентное сопротивление
роторной цепи, приведенное к цепи выпрямленного тока.
Совместное решение системы уравнений (6.36) дает:
[б'см (7y-f-fe0, с<0р (1 $)]
Дэ АИАО, т
(6.37)
Если отвлечься от влияния прерывистых токов в зоне малых на-
грузок, можно найти скольжение холостого хода (при /я- = 0)
^и(^си — с(о0)
•Edo 4-^И^О, сио
После преобразований (6.37) с учетом (6.38) получим:
I - + ^И^о. сюо) (5 5о)
d Rs — kKk0,t
(6.38)
(6.39)
Подставляя в формулу (4.84) значение /«• из (6.39), находим:
(Еа’0 + /ги^о.сио)2 [ 1 л ь ь ,°/р 77 хл Is so) | (s so)
М =. (6-40)
(Ra т)
Экспериментальные статические электромеханические характе-
ристики АВК небольшой мощности при работе в рассмотренной замкну-
той системе регулирования показаны на рис, 6,16,
265
ГЛАВА СЕДЬМАЯ
ПЕРЕХОДНЫЕ РЕЖИМЫ
В ЭЛЕКТРОПРИВОДАХ
7.1. Общие положения
Переходным или динамическим режимом элек-
тропривода называется режим работы при переходе из
одного установившегося состояния привода к другому,
происходящему во время пуска, торможения, реверсиро-
вания и резкого приложения нагрузки на валу. Эти
режимы характеризуются изменениями ЭДС, угловой ско-
рости, момента и тока.
Изучение переходных режимов электропривода имеет
большое практическое значение. Результаты их расчетов
позволяют правильно определить мощность электродви-
гателей и аппаратуры, рассчитать систему управления и
оценить влияние работы электропривода на производи-
тельность и качество работы производственных механиз-
мов.
В переходном режиме электропривода одновременно и
взаимосвязанно между собой действуют переходные меха-
нические, электромагнитные и тепловые процессы. При
быстро протекающих процессах изменение теплового со-
стояния электропривода в большинстве случаев не оказы-
вает существенного влияния на другие процессы, поэтому
в дальнейшем при изучении переходных режимов в электро- I
приводах изменение теплового состояния двигателя не
учитывается. В этом случае имеют в виду протекание только
механических и электромагнитных переходных процессов,
в совокупности называемых электромеханическим пере- ^^В
ходным процессом. ^^В
Электромагнитные переходные процессы вызываются ^^В
электромагнитной инерцией обмоток электрических машин ^^В
и аппаратов. В некоторых случаях с влиянием электромаг- ^^В
нитных процессов можно не считаться, тогда переходные ^^В
процессы будут определяться только механическими про- ^^В
цессами, в которых учитывается только механическая
инерция движущихся масс электропривода. ^^В
При расчете переходных процессов необходимо построить ЦВВ
зависимости i — (/); М = f2 (t\, а = f3 (f), а в ряде
случаев зависимость пути от времени <р = (0. В
266
7.2. Пуск двигателя постоянного тока
независимого возбуждения до
основной угловой скорости и ударное
приложение нагрузки
Переходный процесс пуска двигателя посто-
янного тока независимого возбуждения до основной ско-
рости происходит в случае питания двигателя от сети
постоянного тока при замыкании в цепи якоря выключа-
теля /< (рис. 7.1). В приведенной схеме постоянно включен
резистор, следовательно, общее сопротивление цепи якоря
Я = Яя+Яр.
При исследовании процесса пуска полагаются неизмен-
ными: магнитный поток двигателя Ф, напряжение сети U
Рис. 7.1. Принципиальная схе-
ма пуска двигателя постоянного
тока независимого возбуждения
в одну ступень.
Рис. 7.2. Пусковая механичес*
кая характеристика двигателя
постоянного тока независимого
возбуждения.
и момент нагрузки Мс. Кроме того, индуктивность обмотки
якоря принимается Ля = 0.
Уравнения электрического и механического равновесия
системы при пуске:
U^ca + iR; (7.1)
= + (7.2)
Если из (7.2) определить значение тока якоря i и под-
ставить его в (7.1), а затем разделить его левую и правую
части на с, то после несложных преобразований получим:
U . JRda , MZR
или
соо = со + та 4- Асос, (7.3)
267
где <в0 = U 1с—угловая скорость двигателя при идеаль-
ном холостом ходе; Д®с = M.Jtjc2' — перепад угловой
скорости при нагрузке моментом/Йс (рис. 7.2); Тм~ =
= Ja>0/MKt3— электромеханическая постоянная времени.
Электромеханической постоянной времени называется
время, в течение которого привод, обладающий моментом
инерции J, разгоняется без нагрузки из неподвижного
состояния до угловой скорости идеального холостого
хода <в0 при неизменном моменте, равном моменту короткого
замыкания Л1К13. Необходимо отметить, что постоянная
времени зависит от /Ик,3. С увеличением сопротивления
цепи якоря момент /Ик,3 уменьшается и соответственно
увеличивается постоянная времени. Электромеханическая
постоянная времени не зависит от нагрузки.
Уравнение (7.2) может быть записано иначе:
doy/dt + <в/Тм = (ю0 — Л®с)/Тм.
Решение этого уравнения^ает:
® = Д<вс + Се-;/7’м, (7.4)
где С — постоянная интегрирования, определяемая по
начальным условиям переходного режима.
Для t — 0 начальное значение угловой скорости со =
= сонач, поэтому
С = ®нач ~~ (®0 - А®с) = ®нзч ~ ®с-
Теперь легко получить уравнение для угловой скорости
двигателя при пуске в общем виде:
® = ®с + (<омч —®с)е~;/\ (7.5)
где сос — установившаяся угловая скорость двигателя
при моменте нагрузки Л4С (рис. 7.2).
В частном случае, когда пуск двигателя совершается
под нагрузкой из неподвижного состояния (сонач = 0),
со = сос(1-е-;/гм). (7.6)
При пуске без нагрузки до установившейся угловой
скорости <в0
со = соо(1 (7.7)
Аналогичные формулы получаются, если вместо угло-
вой скорости использовать частоту вращения двигателя п,
об/мин, приводимую в каталогах.
268
На рис. 7.3 представлены кривые со = f (t) -при пуске
двигателя постоянного тока независимого возбуждения
под нагрузкой (кривая 1) и без нагрузки (кривая 2). Со-
гласно (7.6) и (7.7) процесс пуска теоретически заканчи-
вается за бесконечно большое время. Однако практически
можно считать процесс пуска закончившимся при /п =
= (3-4-4) Тя, так как угловая скорость в этом случае
отличается от установившегося значения не более чем на
5—2 %. Из (7.6) вытекает, что
— ЦТ
при t = co;e м = 0;
> ^ = ЗГИ; г?3 0.05;
> г = 4Гм; е-4^0,02;
ы — ы,.;
со 0,95й)с;
со 0,98<1)с.
Таким образом, для t = 3 Тя угловая скорость привода
отличается от установившегося значения не более чем на
5 %, и можно считать, что
неустановившийся процесс
к этому времени практически
закончится.
Если бы пуск двигателя
совершался с неизменным мо-
ментом, равным Л4К1Э, то уг-
Ри с. 7.3. Кривые со = / (0 при
пуске двигателя постоянного тока
независимого возбуждения в одну
ступень.
ловая скорость двигателя во времени изменялась бы по
прямой Оа при пуске двигателя без нагрузки и по Об —
при пуске под нагрузкой (рис. 7.3). Следовательно, если
провести через начало координат касательную к кривой 2
до пересечения с горизонталью, проходящей через точку <в0,
то полученный отрезок <воп даст в определенном масштабе
значение t — Т„. Если же аналогичным путем провести
касательную к прямой 1, то отрезок юсб также будет
равен Т„.
Зависимость тока в цепи якоря от времени при пуске
двигателя определяется из (7.2):
,__ J da . .
1 “ ~с 17 + /с’
где /с — MJc — ток нагрузки.
269
Определив из (7.4)
и подставив значение производной в уравнение для тока,
получим!
,=_2^е-^м + /с. (7.8)
J м
Для начальных условий при I — 0; i = /нач постоянная
интегрирования
С = _Д«(/нач_/с).
Подставив постоянную интегрирования С в (7.8), най-
дем:
« = Л + (/Нач-/с)е-'/Г“. (7.9)
Начальное значение тока в общем виде определяется
по формуле
/нач = (1/-£)/Д.
В частном случае, когда пуск совершается из неподвиж-
ного состояния двигателя, ЭДС его равна 0 и /нач — /кз —
= U/R.
Ток в якоре при этом выражается зависимостью
f = (4,3-/c)e-'/rM + /c. (7.10)
При пуске без нагрузки, когда /с = 0,
г = /К13е~'/Гм- (7.11)
По (7.10) и (7.11) построены кривые i= f (/), приве-
денные на рис. 7.4.
Из рассмотрения (7.5), (7.6), а также (7.10) и (7.11)
можно заключить, что-если механическая характеристика
двигателя линейна и момент нагрузки постоянен, то и =
= f (0 и i = (0 выражаются простыми экспоненциаль-
ными зависимостями.
При многоступенчатом резисторном пуске двигателя
постоянного тока независимого возбуждения и постоянном
напряжении сети задаются обычно определенными грани-
цами колебаний пускового тока или пускового момента.
В этом случае для нахождения времени пуска удобнее
пользоваться в качестве исходного не уравнением угловой
скорости, а уравнением тока (7.9).
270
Процесс пуска двигателя в несколько ступеней, изобра-
женный на рис. 7.5, характерен тем, что ток двигателя
во время пуска колеблется в пределах от /2 до /2. В начале
пуска /нач = /ь далее по мере ускорения двигателя рас-
тет его ЭДС, вследствие чего начинает уменьшаться ток
в цепи якоря двигателя, а следовательно, и момент двига-
теля. Когда ток достигнет некоторого значения /2, выклю-
чается часть пускового резистора с таким расчетом, чтобы
ток двигателя снова достиг значения Д и т. д. Найдем
Рис. 7.5. Графики при реостат-
ном пуске двигателя постоян-
ного тока независимого воз-
буждения в несколько ступе-
ней.
Рис. 7.4, Кривые i—f (/) при
пуске двигателя постоянного
тока независимого возбуждения
в одну ступень.
/ — пуск под нагрузкой; 2 — пуск
вхолостую.
время tx, в течение которого ток двигателя изменяется от /х
до /2. Для этого воспользуемся уравнением (7.9), написав
его в следующем виде:
/2=/c+(/i-/c)e“^/r«, (7.12)
где Д и /2 — границы изменения пускового тока (рис. 7.5);
tx — время разбега двигателя на рассматриваемой ступени
пускового резистора; Т№Х — электромеханическая пос-
тоянная времени для той же ступени.
Постоянная времени для каждой ступени резистора
соответствует суммарному сопротивлению цепи якоря.
Решая (7.12) относительно времени разбега, находим:
t —т п71
— 1 MX 111 I J
(7.13)
271
Если значение тока нагрузки /с не изменяется, то под
знаком логарифма стоит постоянная величина и, следова-
тельно, можно написать:
tx^kT№X. (7.14)
По мере выведения резистора сопротивление цепи якоря
уменьшается, а следовательно, уменьшается и электроме-
ханическая постоянная времени, что приводит в свою
очередь к уменьшению времени разбега на каждой после-
дующей ступени, т. е. txi > txi > tx3 и т. д.
Приведенная на рис. 7.5 зависимость i = f (t) построе-
на на основании (7.9) с учетом сказанного выше, а кривая
угловой скорости двигателя ® = f (f) построена по (7.5).
Время переходного процесса на последней ступени (при
1 = /с или со = юс) получается равным бесконечности.
Рис. 7.6. Графики а= / (/) и । =
= f (t) при пуске в одну ступень
под нагрузкой двигателя постоян-
ного тока независимого возбужде-
ния, построенные с учетом элект-
ромагнитной инерции якоря.
Практически для этой ступени надо принимать подобно
предыдущему
G = (34-4)TmX.
В тех случаях, когда время протекания электромагнит-
ных процессов соизмеримо со временем протекания механи-
ческих процессов, приходится учитывать и влияние элект-
ромагнитной инерции цепи якоря, которым мы до сих пор
пренебрегали. На рис. 7.6 показаны кривые пуска дви-
гателя при постоянном напряжении сети и учете индуктив-
ности якоря. Как видно из рис. 7.6, пуск двигателя состоит
из двух этапов.
Первый этап: якорь двигателя неподвижен, пока ток
в якоре не достигнет значения, необходимого для создания
момента трогания. На этом этапе увеличение тока двига-
теля зависит от скорости протекания электромагнитного
272
процесса, определяемого уравнением напряжений для цепи
якоря двигателя:
U = iR + L^. ' (7.15)
Решение (7.15) при индуктивности якоря Ls — const
дает закон изменения тока в якоре при неподвижном якоре
i=^-(l -е-^э) = /к>3(1-е-^э), (7.16)
где /к,з— —ток короткого замыкания двигателя;
Ts = LJR — электромагнитная постоянная времени цепи
якоря; она имеет размерность времени и определяет ско-
рость протекания электромагнитных процессов.
Кривая тока, построенная по (7.16), изображена на
рис. 7.6 в пределах промежутка времени ta сплошной кри-
вой, а за его пределами — штриховой. Время t3, которое
называют временем запаздывания, определяется из (7.16)
при подстановке тока i = /с. В этом случае'
/3 = тэ1П7Ь-з (717)
1 К, з 1 с
Следует отметить, что в действительности время запаз-
дывания будет несколько больше времени, подсчитанного
по (7.17). Это дополнительное запаздывание пуска двига-
теля объясняется тормозящим влиянием вихревых токов,
возникающих в стали двигателя.
По истечении времени t3 якорь начнет вращаться. Угло-
вая скорость двигателя возрастает, и ЭДС, возникающая
в якоре, влияет на ток двигателя. Теперь уже оба процес-
са — электромагнитный и электромеханический проте-
кают совместно, составляя единый процесс пуска двига-
теля. Расчет тока якоря и угловой скорости двигателя при
Ф = const необходимо вести, исходя из следующих урав-
нений:
U = iR-md^ + e = iR + L, J + c® (7.18)
и
с 1 dt
Разделив обе части последнего равенства на с, получим:
(7.19)
273
Совместное решение уравнений (7.18) и (7.19) приводит
к линейному дифференциальному уравнению второго по-
рядка относительно ®
^2f0 _i L 4- —с — О П 201
dt2 >ТЭ dt * Т-аТа ’ У
где о)с — установившееся значение угловой скорости при
моменте нагрузки Мс.
Решение этого дифференциального уравнения имеет вид!
®= Ае01^-f-Be^st-f-(dc, (7.21)
где alt a2 — корни характеристического уравнения а2 +
+ 1/7> + 1/ТэТм = 0,
В — постоянные интегрирования, определяющиеся на-
чальными условиями.
Соответственно для тока:
i — (Аа^ё*1* 4- Boc-je0^) у + /с. (7.22)
При условии, что Тм > 4 Т3, корни уравнения и а2
имеют действительные отрицательные значения, а выра-
жения для угловой скорости и тока с учетом постоянных
интегрирования имеют вид:
ю = (7.23)
у OCj Ovg OCj OCg J
i = (еац _ _|_ j (7.24)
/1-474/74,V V '
Кривые угловой скорости и тока, полученные по (7.23)
и (7.24), показаны на рис. 7.6. Угловая скорость асимпто-
тически стремится к <ос, а ток, достигнув максимума
«1
А-Ь, (7.25)
<*2/ $ \а2/
уменьшается, асимптотически приближаясь к значению /с.
В процессе прямого пуска двигателя индуктивность якоря
ограничивает пик тока и увеличивает время пуска. Из (7.25)
следует, что максимум тока зависит от соотношения пос-
тоянных времени Т3 и Тя. Реальное соотношение этих
постоянных времени таково, что ограничение тока при
прямом пуске оказывается незначительным и пик тока
превосходит допустимое по условиям коммутации значение.
Поэтому прямой пуск (без добавочных резисторов) практиче-
274
ски недопустим для двигателей мощностью более 0,5—1 кВт.
Для ограничения тока при пуске вводится в цепь якоря
пусковой резистор. При этом Тэ уменьшается, а Т№ увели-
чивается настолько, что оказывается Тэ Тм.
Если Тв Т„, то можно приближенно принять:
и а2^-1/7\. (7.26)
Тогда при /с = 0 получим более простые выражения
для определения угловой скорости и тока, а именно:
® = ---- №®0(1-е ); (7.27)
\ 1 м 1 э '
I = - е-,/Г0 /К,зе~1/Гм; (7.28)
Imax = /к,з (Тэ/Ты)т^т,- /к, з. (7.29)
Как видно из (7.27) — (7.29), при 7\ «С Тп (при боль-
шом сопротивлении добавочного резистора) индуктивность
якоря практически не сказывается на переходных процес-
сах.
Пик тока при прямом пуске можно попытаться умень-
шить введением в якорь реактора (индукционной катуш-
ки). Однако при этом процесс разбега приобретает неже-
лательный колебательный характер, если 4Та > Ты.
При Т№ < 4Т3 корни аг и а2 есть комплексные числа:
ai.2 = — ]&>
гдеа=1/27э; Q = ]/4 1.
Уравнение для определения угловой скорости в данном
случае:
® 1 - s in (Q/+,Ф)1;
г * • э
(7.30)
для тока:
здесь if = arctg V4Та/Тм — 1;
. 2(/к,3-/с)
У4Тэ/Т№-1
erat sin (Q/) -j- /с.
(7-31)
Из (7.30) и (7.31) следует, что изменения угловой ско-
рости и тока имеют характер затухающих колебаний
(рис. 7.7). Из-за колебательного характера процесса су-
щественно увеличивается время пуска, возникает значи-
тельное перерегулирование угловой скорости (превышение
275
над установившимся значением) и снижается эффектив-
ность ограничения пика тока. Так, для граничного значе-
ния 7\ = Тм/4 при пуске вхолостую 1тах ж 0,73 7К13, а
при Та — 1,25 Тм пик тока 1тах 0,52 7К;3, что обычно
превышает допустимый по условиям коммутации ток. Поэ-
тому пуск с индукционной катушкой на практике не при-
меняют, а используют пусковые резисторы, при наличии
которых влияние индуктивности якоря на процесс, как было
показано выше, несущественно.
При торможении или реверсировании влияние электро-
магнитных процессов оказывается также незначительным,
если в цепь якоря включается дополнительный резистор,
сопротивление которого должно быть больше, чем при
пуске.
Рис. 7.7. Кривые тока (й) и угло-
вой скорости (б) в функции вре-
мени при колебательном процессе
пуска двигателя постоянного тока
независимого возбуждения с доба-
вочной индуктивностью в якорной
цепи.
Влияние индуктивности якоря на переходный процесс
может существенно сказаться при работе двигателя на
естественной характеристике в случае резкого приложения
или снятия нагрузки как при питании двигателя от сети,
так и по системе преобразователь — двигатель. Наличие
индуктивности в якорной цепи в переходных режимах
нарушает связь между угловой скоростью и моментом,
определяемую статической механической характеристи-
кой.
В переходных режимах при ударном приложении на-
грузки возникает резкое динамическое падение угловой
скорости, что отрицательно сказывается на работе многих
электроприводов (в металлургии, машиностроении и т. п.).
Это динамическое падение угловой скорости должно быть
ограничено определенным небольшим значением (около
5—10 % значения установившейся угловой скорости) до
приложения нагрузки.
276
Переходный процесс при ударном приложении нагруз-
ки в случае, когда 47\ > Т„, протекает так, как показано
на рис. 7.8, а—в. До приложения нагрузки двигатель посто-
янного тока независимого возбуждения работал на стати-
ческой характеристике 1 с угловой скоростью со = со11ач
при моменте нагрузки МС1 (рис. 7.8, в). При скачкообразном
Рис. 7.8. Графики изменения угловой скорости (а), момента (о) и пере-
ходного процесса (в) при ударном приложении нагрузки к валу дви-
гателя постоянного тока независимого возбуждения.
/ — статическая характеристика; 2 — фазовая траектория.
изменении момента сопротивления до значения Мс2 возни-
кает резкое замедление привода, в первый момент равное
(da>/dt)^o = (Mci — Mc2)/d =
и угловая скорость быстро падает (рис. 7.8, й), вызывая
вследствие уменьшения ЭДС двигателя рост его тока и мо-
мента. Но индуктивность цепи якоря задерживает нараста-
ние тока и момента двигателя (рис. 7.8, б), поэтому, когда
угловая скорость достигнет значения ыс, момент двигателя
не достигнет значения Мс2, равновесия моментов не будет
' и угловая скорость будет продолжать снижаться
(рис. 7.8, а, б). Лишь после того, как момент двигателя
277
сравняется со статическим моментом Л1с2, уменьшение
угловой скорости прекратится. В этой точке угловая ско-
рость будет минимальной, а перепад Atamax — максималь-
ным. Это значение перепада угловой скорости и называется
динамическим падением угловой скорости, которое обычно
больше статического Дшс.
В точке равенства моментов двигателя и нагрузки угло-
вая скорость оказывается меньше, чем это соответствует
статической характеристике 1, что влечет за собой (из-за
малого значения ЭДС двигателя) дальнейший рост момента
до значения Мтах. Угловая скорость возрастает. Когда
она достигнет значения <ос, момент двигателя окажется
больше Л1с2 и угловая скорость, продолжая расти, превы-
шает значение шс. Это превышение повлечет за собой умень-
шение момента и т. д. Протекающие таким образом коле-
бания затухают за счет электрических и механических
потерь в системе. После двух-трех колебаний момент и
угловая скорость достигнут установившихся значений Л1с2
и сос.
Отклонение момента и угловой скорости в переходном
процессе от значений, соответствующих статической харак-
теристике 1, наглядно показывает фазовая траектория про-
цесса (кривая 2). Точки этой траектории получают из гра-
фиков рис. 7.8, а и б, перенося значения моментов и угло-
вой скорости для каждого момента времени в виде одной
точки на плоскость со, М (на рис. 7.8 построение одной
точки показано стрелками).
Подобно рассмотренному будет протекать переходный
процесс и при резком снятии (сбросе) нагрузки. Колеба-
ниями сопровождаются и другие переходные процессы
(пуск, торможение, реверс) при отсутствии добавочных
резисторов в цепи якоря, когда 477, > Т№, что часто имеет
место, например, в системе управляемый (тиристорный)
выпрямитель—двигатель.
7.3. Пуск двигателя постоянного тока
независимого возбуждения до угловой
скорости выше основной
Ранее был рассмотрен пуск двигателя до
основной угловой скорости; при этом предполагалось, что
в процессе пуска магнитный поток и напряжение сети ос-
тавались неизменными и равными номинальным. Если воз-
никает необходимость пустить двигатель до угловой ско-
278
роста выше основной, то обычно этот процесс совершается
в два этапа — первый заключается в разгоне двигателя до
основной угловой скорости с выведением его на естествен-
ную характеристику и второй — в разгоне от основной уг-
Рис. 7.9. Принципиальная схема
разгона двигателя постоянного тока
независимого возбуждения до угло-
вой скорости выше основной.
ловой скорости до требуемой, которая достигается ослаб-
лением магнитного потока двигателя. Разгон двигателя до
угловой скорости выше основной может быть произведен
по схеме, приведенной на рис. 7.9, размыканием контактов
выключателя К, до этого находившихся в замкнутом со-
стоянии.
Рис. 7.10. Статические характеристики при ослаблении магнитного
потока двигателя постоянного тока независимого возбуждения.
а — механические; б — электромеханические.
Статические характеристики,соответствующие номиналь-
ному и ослабленному магнитному потоку двигателя, по-
казаны сплошными линиями на рис. 7.10. Если бы поток
двигателя изменялся мгновенно, то переходе одной харак-
теристики на другую происходил так, как показано штри-
ховыми стрелками.
В действительности за счет индуктивности обмотки
возбуждения магнитный поток изменяется во- времени
(скорость этого изменения определяется электромагнитной
постоянной времени контура обмотки возбуждения), и
279
поэтому ток якоря и момент двигателя не достигают зна-
чений, соответствующих и М1г как показано на рис. 7.10,
а изменяются по траекториям, изображенным сплошными
линиями, отвечающим так называемым динамическим ме-
ханическим характеристикам. В данном случае вследствие
нелинейной зависимости угловой скорости двигателя от его
магнитного потока, а также магнитного потока от тока
возбуждения решение уравнений переходного режима це-
лесообразно производить графо-аналитическим методом.
В общем случае исходные уравнения для расчета угло-
вой скорости и тока двигателя при ослаблении его магнит-
ного потока можно представить в виде
U = k<Da + iR; (7.32)
k®l = Mc + J~. (7.33)
Здесь не учитывается индуктивность якоря ввиду ее
незначительности по сравнению с индуктивностью обмотки
возбуждения.
Заменив k в (7.32) через k — ШФвомю0> а в (7.33) —
через k = Л4НОИ/ФНОМ7НОМ, получим:
и = -^и—Фа + 1Р;
ФНОМ®0
ФномЛюм
(7-34)
(7.35)
Определив i из (7.35) и подставив его в (7.34), а также
разделив обе части полученного уравнения на £7ФНОм/Ф,
получим:
ФНОМ Ком/ ®0 " dt ’
где Т„—электромеханическая постоянная времени, отве-
чающая естественной характеристике, или
Ф* = Ф^+Д®с* + Гм^, (7.37)
где Ф* = Ф/Фцом — относительное значение магнитного
потока; ы.(. = а/а0 — относительная угловая скорость дви-
гателя; Дмс* — относительный перепад угловой скорости
двигателя при нагрузке, равной /Ис, и номинальном маг-
нитном потоке; соо — угловая скорость идеального холосто-
го хода, соответствующая номинальному магнитному пото-
ку.
280
Для решения (7.37) следует найти зависимость Ф.(. =
= f (t). На небольшом интервале изменения потока
(рис. 7.11, й) можно принять зависимость между током
возбуждения и потоком линейной; тогда изменение потока
во времени определится по формуле
Ф* = Фкон*(1 -е"г/г0 + ФНаЧ*е-//г% (7.38)
где Фнач*, ФКон* — начальное и конечное относительные
значения магнитного потока двигателя; —электромаг-
нитная постоянная времени контура обмотки возбуждения
двигателя.
Кривую Ф* = / (/), приведенную на рис. 7.11, б, разби-
ваем на ряд отрезков с постоянными значениями потока на
Рис. 7,11. Кривые изменения магнитного потока.
а — в функции тока возбуждения; б — в функции времени.
каждом участке и с интервалом времени, соответствующим
выбранному интервалу времени А/. Имея зависимость
Ф;(: = / (/), легко найти и Ф“ = Д (/), после чего (7.37)
может быть разрешено в конечных приращениях. Расчет
кривой угловой скорости ведется с первого участка, для
которого известны начальная угловая скорость ®иач* и
среднее значение потока Фи.
Приращение угловой скорости на первом участке можно
определить по формуле
д^ ___Ф1» '
Тм/Д/ + Ф!%/2
Начальная угловая скорость на втором участке равна:
®вач2* ®вач1*
281
Аналогично определяется приращение угловой скорости
на втором участке и т. д.
По рассчитанным приращениям строится кривая угло-
вой скорости двигателя при ослаблении магнитного потока
(рис. 7.12, а). Для определения
тока в цепи якоря двигателя
при разгоне его путем ослабле-
ния потока можно воспользо-
ваться формулой (7.32) и после
несложных преобразований при-
вести ее к виду
*7/в.3=1-Ф*о)#, (7-40)
где 1К,3 — U/R — ток корот-
кого замыкания.
Рис. 7.12. Кривые изменения <о„ =
= f (f) (а) и i = Д (t) (6) при разгоне
двигателя постоянного тока независи-
мого возбуждения ослаблением его
магнитного потока,
Примерный вид кривой i = ф (/) при неизменном стати-
ческом моменте дан на рис. 7.12, б. Конечное значение тока
при этом
Л.кон “ -А,начФнач*/Фкоа* • (7*41)
7.4. Динамическое торможение двигателя
постоянного тока независимого
возбуждения
Если обмотку якоря работающего двигателя
посредством переключателя К отключить от сети и замкнуть
па дополнительный резистор Rt (рис. 7.13), то двигатель
переходит в генераторный режим динамического торможе-
ния и снижает свою угловую скорость (рис. 7.14).
Обмотка возбуждения в процессе торможения остается
присоединенной к сети постоянного тока.
Основные уравнения, характеризующие процесс динами-
ческого торможения:
с«4-гД = 0; (7.42)
сг == J + Л1С,
где R = Дх + Да.
282
Совместное решение этих уравнений относительно со
дает:
со = — Дмс + Се-//Г«. (7.43)
Постоянная интегрирования С определяется из началь-
ных условий. При t = О
G) Ч)пач
С О)нач " [_
где (внач = <вс — угловая скорость двигателя в момент пе-
реключения с двигательного режима на динамическое тор-
Рис. 7.13. Принципиаль-
ная схема динамического
торможения двигателя по-
стоянного тока независи-
мого возбуждения.
Рис, 7,14, Механические характерис-
тики двигателя постоянного тока неза-
висимого возбуждения при переходе
из двигательного режима в режим
динамического торможения.
можение; Д<ос = MJJJc2 — абсолютное значение перепада
угловой скорости, определяемое по характеристике дина-
мического торможения при моменте нагрузки Мс (рис. 7.14).
После подстановки значения С в (7.43) получим:
м = —Дмс + (миач + Дй)с)е~//7'». (7.44)
При динамическом торможении без нагрузки (Mz = 0)
Дог. = 0 и юнач = <о0, тогда
ti} = aoe-t/T«. (7.45)
На рис. 7.15, а показаны характеристики ы = f (t)
при динамическом торможении в случае, когда торможение
производится под нагрузкой (кривая 1) и когда Mz = Q
(кривая 2).
283
При торможении под нагрузкой кривая со = f (f) асим-
птотически стремится к угловой скорости—Дсо., если
момент нагрузки активный, например, в случае опускаю-
щегося груза в приводе крановой установки. Если момент
нагрузки реактивный, то торможение электропривода за-
кончится при угловой скорости со = 0 (точка Ь).
При торможении без нагрузки кривая со = f (t) асимп-
тотически приближается к 0, начальная угловая скорость
в этом случае юнач — а0.
Рис. 7.15. Кривые <о — f (0 (а) и « = Д (0 (б) при динамическом тор-
можении двигателя постоянного тока независимого возбуждения.
Для определения i = (f) можно воспользоваться фор-
мулой (7.8), если подставить в нее постоянную интегриро-
вания С, соответствующую данным начальным условиям
С = сТа (7иач + 7C)/J.
Тогда
^-(7НаЧ + 7с)е-//г« + Л. (7.46)
На рис. 7.15, б кривая 1 иллюстрирует изменение тока
в цепи якоря при динамическом торможении и наличии
активной нагрузки на валу .двигателя, которой соответст-
вует ток 1С. При реактивном моменте процесс закончится
в точке b при со = 0.
Кривая 2 иллюстрирует процесс динамического тормо-
жения при Мс = 0. Ток в цепи якоря для этого случая
определяется по формуле
i = (7.47)
284
(7-49)
Абсолютное значение тока в момент переключения из
двигательного режима в режим динамического торможения
/Нач = сынач//?. (7.48)
Время торможения от начальной угловой скорости ыиач
до текущей со1 может быть получено из (7.44), если решить
его относительно т. е.
= Ти 1П +
1 “ <01 -t- Л«с
При торможении до полной остановки (®х = 6)
/т = Тм 1п^+А^. (7.50)
т м Д<ос ' '
Когда /с = 0; Дыс — 0 и теоретически время = со,
практически процесс торможения можно считать закон-
ченным за время = ЗГМ. Постоянная времени определя-
ется аналогично тому, как это производилось в § 7.2. В дан-
ном случае учитывается суммарное сопротивление цепи
якоря двигателя при динамическом торможении.
Время торможения может быть также определено на
основании (7.46). Например, при торможении до полной
остановки, когда i — 0, время торможения
гт = Ти1п^
(7.51)
7.5. Торможение противовключением
и реверсирование двигателя
постоянного тока независимого
возбуждения
Торможение противовключением осуществля-
ется при изменении полярности напряжения на выводах
обмотки якоря, работающего двигателя и неизменном нап-
равлении тока в обмотке возбуждения. По схеме, приведен-
ной на рис. 7.16, указанное переключение выполняется
с помощью переключателя К, причем для ограничения тока,
потребляемого из сети при торможении, в цепь якоря
вводится дополнительный резистор R1.
Рисунок 7.17 иллюстрирует переход из двигательного
режима в режим противовключения. В этом случае проис-
ходит торможение соответственно характеристике —
Если якорь двигателя при угловой скорости, равной или
близкой к 0, не отключить, то двигатель, развивая момент,
по абсолютному значению больший реактивного момента
285
сопротивления, разгонится в противоположном направле-
нии до установившейся угловой скорости —соуст [характе-
ристика Ох (—wyCT)], или под действием суммы моментов
двигателя и нагрузки он разгоняется до скорости —соуст
при активном моменте сопротивления. Процесс электричес-
кого торможения противовключением с последующим раз-
гоном в обратном направлении и называется реверсирова-
нием.
Рис. 7.16. Принципиальная схе-
ма торможения противовключе-
нием и реверсирования двига-
теля постоянного тока незави-
симого возбуждения.
Рис. 7.17. Механическая харак-
теристика двигателя постоян-
ного тока независимого возбуж-
дения при переходе из двига-
тельного режима в режим про-
тивовключения.
Уравнение электрического равновесия для цепи якоря
двигателя в период торможения противовключением
-U = c& + iR. (7.52)
Это уравнение отличается от аналогичного при пуске
(7.1) тем, что перед U стоит знак минус. Поэтому можно
воспользоваться общим уравнением для угловой скорости
(7.4), заменив в нем ~т~а>0 на —со0, тогда при реверсировании
ю = —Юо-Дис + Се~//7м. (7.53)
Для t = 0 угловая скорость двигателя в момент переклю-
чения якоря со = соиач = сос (рис. 7.17) и постоянная ин-
тегрирования С — сос + со0 + Дсос.
Зависимость со = f (f) при реверсировании определяется
выражением
со = — (сооДсос)(coq-р Дсос “Ь сос) е м. (7.54)
286
формула (7.54) получена в предположении постоянства
знака Дсос с изменением направления вращения двигателя,
т. е. момент нагрузки принят активным. В этом случае
после реверсирования установившаяся угловая скорость
двигателя превысит соо на значение Дсос. Зависимость
и = f (/) при активном моменте нагрузки представлена
кривой 1 (рис. 7.18).
Для реверсирования без нагрузки (сос = юй и Дсос = 0)
со = — (Оо4-2со0е-//Гм. (7.55)
Данному случаю соответствует кривая 2 на рис. 7.18.
Если же реверсирование происходит с реактивным момен-
Рнс. 7.18. Зависимость со = / (/)
при реверсировании двигателя
постоянного тока независимого
возбуждения.
Рис. 7.19. Зависимость г = f (/)
при реверсировании двигателя
постоянного тока независимого
возбуждения.
том нагрузки, то кривая со = / (/) в точке пересечения
с осью абсцисс имеет излом и к установившейся угловой
скорости —соуст приближается асимптотически, как по-
казано на рис. 7.18 (кривая 3). Расчет этой кривой произ-
водится на основании тех же исходных формул, но с учетом
того обстоятельства, что при изменении знака угловой
скорости момент нагрузки также изменит свой знак. Реак-
тивный момент всегда ' препятствует движению, поэтому
на участке торможения угловая скорость снижается под
действием суммы моментов двигателя и нагрузки, а на
участке разгона увеличение угловой скорости происходит
под действием разности этих моментов.
287
Ток в цепи якоря двигателя при реверсировании опре-
деляется, как и в § 7.4. В окончательном виде ток равен:
+ (7.56)
где 7ИЗЧ = (17 + ca>c)/R — абсолютное значение тока в на-
чальный момент переключения из двигательного режима
в режим торможения противовключением; R = Rs + R1—
общее сопротивление якорной цепи.
Формула (7.56), так же как и (7.54), справедлива для слу-
чая активного момента нагрузки (кривая 1 на рис. 7.19).
Эта формула также применима и для реактивного момента
с начала торможения до остановки двигателя. В точке Ох
кривая i = f (0 при реактивном моменте нагрузки будет
иметь излом. К установившемуся значению тока —7С кри-
вая i = f (f) приближается асимптотически, как показано
на рис. 7.19 (кривая 3).
При реверсировании без нагрузки
i = (7.57)
Так как в этом случае сос — со0, то
7нач = 2£7/7? = 27к,3
и
» = —27к,3е“^. (7.58)
Зависимость i = f (t) при Мс = 0 иллюстрируется кри-
вой 2 на рис. 7.19.
7.6. Торможение двигателя постоянного
тока независимого возбуждения
от угловой скорости выше основной
до основной
Снижение угловой скорости двигателя по-
стоянного тока независимого возбуждения от выше основной
до основной путем усиления его магнитного потока проис-
ходит за счет возникающего торможения с отдачей энергии
в сеть (рекуперативного торможения). В этом случае, как
показано на рис. 7.20, а, б, угловая скорость будет изме-
няться ОТ COj до ®2.
В силу механической инерции привода угловая скорость
его не может мгновенно измениться, и поэтому с ростом
магнитного потока возрастает ЭДС двигателя. Когда ЭДС
двигателя станет по абсолютному значению больше прило-
288
женного напряжения, ток якоря приобретет отрицательнее
значение и энергия будет рекуперироваться в сеть. В на-
чальный момент торможения момент и соответственно ток
Рис. 7.20. Статические характеристики при усилении магнитного по-
тока двигателя постоянного тока независимого возбуждения.
1 - ф < фном; 2 - ф = фном-
двигателя не достигают значений —и —/х. Объясняется
это тем, что благодаря электромагнитной инерции цепи
возбуждения магнитный поток двигателя сразу не дости-
гает своего установившегося значения.
Рис. 7.21, Кривая изменения
магнитного потока в функции
времени.
Рис. 7.22. Кривые со* = f (t) (а)
и i = f (/) (б) при торможении
усилением магнитного потока
двигателя постоянного тока не-
зависимого возбуждения.
Максимумы тока и момента при торможении оказываются
меньше (по модулю) значений соответственно Mj и
На рис. 7.20, а, б, представлены характеристики для
случая торможения с постоянным статическим моментом Мс.
10 Чиликин 1Л, Г., Сандлер А. С. 289