/












































































































































































Author: Богорад А.А. Загузин A.T.
Tags: техника технические науки подъемно-транспортные машины грузоподъемные машины
Year: 1984



Text
ПРОФЕССИОНАЛЬНО-ТЕХНИЧЕСКОЕ
ОБРАЗОВАНИЕ
А.А.богорад А.Т.Загузин
МОСТОВЫЕ
КРАНЫ
И их
ЭКСПЛУАТАЦИЯ
А. А. Богорад, A. T. Загузин
МОСТОВЫЕ КРАНЫ
И ИХ ЭКСПЛУАТАЦИЯ
Одобрено Ученым советом
Государственного комитета СССР
по профессионально-техническому образованию
в качестве учебного пособия
для технических училищ
МОСКВА «ВЫСШАЯ ШКОЛА* 1984
Р с и с и 'I с* и i 1.1
Г. 3. Обуховский (зам. дпргкюрл I 111 У .Nb
И. С. Цветков (главный механик Уирпилсппн
ремонтных служб Министерства черной метал-
лургии СССР)
Богорад А. А., Загузин А. Т.
Б74 Мостовые краны и их эксплуатация: Учеб, посо-
бие для техн, училищ. — М..’ Высш, шк., 1984.—
184 с., ил. — (Профтехобразование).
30 к.
Приведены сведения о кранах общего и споципл1.пого илчилчения’
и области их применения. Рассмотрены консгрук i iiiuimh is омы мохо-
вых, козловых и консольных крапов, их мсханпчг! нои и -»лгк। необо-
рудованно. Описаны ус।ройечна подкрЩ,о,,,,,х hvipH нннма-
НИС уделено нопросим ор| |||||1.1||ЦПИ п<’> |>V 10’1110 |||| и PV "Г1111,IX работ,
эксплуатации кринок и охране труда нрИ работ па ним
Для УЧНЩНХСН I exilll'H’CHIIx училищ, n • »Юи» MIKIH I бы II, 11СНОЛ1»*
SOIIIIIIO при II (»Л I О I«III К •' II11 И III > a IЦ11 III Hi ПЛ НроН lll'H) • I Нм
3001030000 ION hl’K J.o
’w,’» ................. «II»«
(V) ц4ЛЙ|1М1йнт iHi»imiiи ium
ВВЕДЕНИЕ
Современная технология промышленного производства требует
постоянного насыщения средствами комплексной механизации тру-
доемких процессов и исключения тяжелых (потенциально опасных)
ручных работ. Вот почему в настоящее время подъемно-транспорт-
ное машиностроение перестает играть вспомогательную роль в про-
изводственном процессе и превращается п один из решающих фак-
торов, определяющих уровень современного производства.
В «Основных направлениях экономического и социального раз-
вития СССР на 1981—1985 годы и на период до 1990 года», при-
нятых XXVI съездом КПСС, в качестве основной задачи на бли-
жайшие годы записано: «...повысить производительность труда в
промышленности на 23—25%, получить за счет этого более 90%
прироста продукции». За этой короткой строкой стоит реализация
грандиозных планов партии и народа. Эта задача должна быть
решена не за счет увеличения численности работающих, а путем
увеличения объемов производства машин и механизмов, внедрения
комплексной механизации погрузочно-разгрузочных, подъемно-
транспортных и складских работ и повышения эффективности ис-
пользования машин.
Наибольшее распространение в промышленности получили пе-
редвижные грузоподъемные краны: мостовые, козловые и консоль-
ные, без которых не может обойтись ни одно промышленное пред-
приятие или цех. Поэтому выполнение поставленных задач невоз-
можно без организации ритмичной, бесперебойнсщ и надежной эк-
сплуатации грузоподъемных машин.
Задача механизации подъемно-транспортных, погрузочно-раз-
грузочных и складских работ издавна считается первостепенной, и
вопросы ее развития уходят глубоко в историю.
Уже в далекие времена человечество знало и широко применя-
ло различные простейшие приспособления для подъема и переме-
щения грузов: рычаги и катки, козлы и сани, канаты из раститель-
ных волокон. В VII в; до н. э. появились простейшие полиспасты,
а во II в. до н. э. получили распространение вороты (кабестаны)
с зубчатыми и червячными передачами и ручным приводом.
По существу простейшие приспособления: рычажные подъем-
ники, кабестаны и полиспасты — явились прототипами современ-
ных стреловых кранов, лебедок и грузовых подъемных полиспастов.
В то же время был построен паровой двигатель и в 1860 г. появил-
ся первый грузоподъемный кран с приводом от парового двигате-
ля. Конец XIX в. отмечен широким распространением электропри-
вода в технике и в 80-х годах того же века появились первые подъ-
емные краны с электроприводом.
Необходимо отметить, что в дореволюционной России подъем-
но-транспортное машиностроение было одной из отсталых отрас-
3
лей хочяftci ил. К 101.1 г, lo/iuiinll Hhinyi h h|»minii нп отечественных
заводах состлплял 70 in г. TiMii.hn ши in II» iiiiiiih Октябрьской co-
тиипн’тпчгской pein mi юн,и ii трупом in iiiioioiuii инок» от гнета капи-
тала народа начался бурный |iiiiiiiini шни нпродного хозяйства.
Подъемно Tpniiriiopiiior miiiiiiiihm ipoi uno oi.i,но иi.i/ieJiено в самое-
тоятольпую 01 рпсло, и ГОГН1НГ ionпрпй Moiiiiii.ir гонременные специ-
ализированные MiiiHiiiioi । pi hi । гл hiii.it' hiiiii’ihi н квалифицированные
научные, koiici рукторекнг н рабочие киары, iiioinoiii.ie успешно ре-
шать любые задачи. В илстомщгг нремм о1рпгд|. освоила выпуск
практически всех существующих в мире iiii/ioh цодьемио-транспорт-
ных машин.
За последние годы отечественное краиостроеииг достигло зна-
чительных успехов в создании новых, более совершенных моделей
кранов. В частности, осуществлена широкая унификация деталей
и. сборочных единиц, усовершенствованы методы расчета, разрабо-
таны менее металлоемкие, производительные и надежные маши-
ны, снижены трудозатраты на изготовление кранов и их эксплуа-
тацию. Существенный вклад в совершенствование конструкций
кранов внесли ученые и конструкторы ВНИИПТМАШа, завода
пто им. С. М. Кирова, завода «Сибтяжмаш», МВТУ им. Н. Э. Бау-
мана и др.
Так, в настоящее время отечественная промышленность освои-
ла серийный выпуск мостовых кранов грузоподъемностью 5—320 т,
а грузоподъемность отдельных моделей достигла 630 т. Сегодня на
предприятиях страны работает несколько сотен тысяч передвиж-
ных грузоподъемных кранов. Наибольшее распространение полу-
чили краны грузоподъемностью 3—16 т.
Однако несмотря на современный уровень развития отечествен-
ного краностроения, высокую квалификацию проектирующих кра-
ны специалистов и повышенные требования, предъявляемые орга-
нами Госгортехнадзора СССР к конструкциям кранов в отношении
обеспечения высокой надежности и безопасной эксплуатации, кра-
" ны, как и другие подъемно-транспортные машины, перемещающие
грузы на весу, являются потенциальными источниками повышенной
опасности. Поэтому для обеспечения высоких эксплуатационных
характеристик кранов и их безаварийной работы машинист и обслу-
живающий персонал должны хорошо знать общее устройство ма-
шины, ее конструктивные особенности, основные технические па-
раметры и правила безопасности, иметь твердые навыки по управ-
лению механизмами крана, знать современную технологию и основ-
ные приемы выполнения работ по перемещению Г₽УЭО0| ежедневно-
му и периодическим техническим ООСЛуЖИМКИЯМ| • также ремон-
там кранов.
• • •
Введение в гл. II, III, VIII. IX, XI, 6^81, 82, 88
написаны канд. техн, наук А. А. Во1Ч>р*М№а§Жжг, V.wl, VII, X,
XIII, XIV написаны хайд. техн, наук А»Т»JylfMNtelill | 8, 3, 5, 26,
03,37,61, 83,85 написаны авторами
'. х ' ’ ’ tf 3;* 'г '*»-• 1 "^W^TW^’PSf'T'->•'’*
f ГЛАВА I. ОБЩИЕ СВЕДЕНИЯ О КРАНАХ
$ 1. НАЗНАЧЕНИЕ И ОБЛАСТЬ ПРИМЕНЕНИЯ КРАНОВ.
КЛАССИФИКАЦИЯ КРАНОВ
Подъемными кранами называются грузоподъемные машины,
предназначенные для подъема и перемещения грузов из одной точ-
ки площадки, обслуживаемой машиной, в другую.
Как правило, кран работает в пределах ограниченной площади
цеха, склада, разгрузочной (перегрузочной) площадки. Грузоподъ-
емные краны относятся к классу машин, без которых немыслимо
современное производство с перемещением грузов различной мас-
сы. Поэтому область применения грузоподъемных кранов весьма
обширна. Краны различных конструкций широко применяют в
строительстве, при загрузке и выгрузке судов в портах, на желез-
нодорожных станциях и складах, на горных и металлургических
предприятиях, во всех отраслях машиностроительной промышлен-
ности.
В машиностроении кроме погрузочно-разгрузочных операций
краны могут выполнять роль внутрицехового или межцехового
транспорта.
В соответствии с рекомендациями Международной конференции
технических.надзоров, проходившей в сентябре 1968 г. в г. Лейпци-
ге, грузоподъемные краны мостового типа делятся: •
по назначению на собственно мостовые, козловые и кон-
сольные;
по возможности перемещения на стационарные
и передвижные. Стационарными бывают только консольные пово-
ротные краны. Все остальные краны имеют механизмы передвиже-
ния;
по роду привода механизмов на ручные и электри-
ческие. К ручным относятся подвесные мостовые краны и кран-бал-
ки, механизмом подъема груза в которых служит ручная таль. Пе-
ремещение тали вдоль моста и передвижение самого моста вдоль
пролета цеха также производится вручную. Такие краны применя-
ются при ремонтных и монтажных работах. Выпускаются также
ручные консольные стационарные поворотные краны. Мостовые,
козловые и консольные передвижные краны выпускаются с электри-
ческим приводом;
по конструкции грузозахватного органа на крю-
ковые, грейферные, магнитные, траверсные и др.;
5
по типу управления на управляемые из кабины, с пола
(посредством подвесной кнопочной станции) или дистанционно.
Кройе того, мостовые и козловые краны делят на краны обще-
го назначения и специальные. К специальным мосто-
вым кранам относят различные металлургические краны, краны
для производства строительно-монтажных работ, обслуживания
Рис. 1. Структурные схемы кранов
гидротехнических сооружений, а также краны, работающие в усло-
виях повышенного агрессивного воздействия, во взрыво- и пожаро-
опасных средах.
| 2. КОНСТРУКТИВНЫ! СХ1МЫ КРАНОВ
Независимо от конструкции ВМ рвоамотмннцв Краны состоят
из одинаковых узлов и деталей, Основной на МИХ является метал*
локонструкция, служащая опорой, ДЛЯ ВМХ ЙЙМКИВМОВ крапа. На
металлоконструкции располагаются ГЛ1ВНОГО и вспо-
могательного подъема, механизмы п«рвдш^|^ив И тележки.
6
Любой механизм состоит из привода, как правило, электричес-
кого и исполнительного органа (канат, ходовые колеса).
Кроме того, на каждом кране имеются приборы, обеспечиваю-
щие безопасность работы механизмов, и вспомогательное оборудо-
вание, включающее отопительное, осветительное и монтажную ос-
настку. Структурные схемы кранов приведены на рис. 1.
Рис. 2. Мостовой двухбалочный опорный кран:
1—кабина крановщика, • 2—крановые рельсы, 3—ходовые колеса, 4—концевая балка, 5-»
гибкий кабель для токоподвода к тележке крана, 6—вспомогательный механизм подъ-
ема груза, 7—главный механизм подъема груза, 8— крановая тележка, 9—проволока
для подвески гибкого кабеля, 10—площадка для обслуживания цеховых троллеев, //—
главная балка, 12—механизм передвижения тележки, 13—механизм передвижения моста
крана
Грузоподъемные краны отличаются большим разнообразием
конструкций.
Мостовой кран — подъемный кран, предназначенный для
подъема, опускания и горизонтального перемещения различных
грузов. Он состоит из мостовой фермы, передвигающейся по рель-
сам, уложенным на подкрановые балки, и грузовой тележки, пе-
ремещающейся вдоль фермы.
По конструкции моста краны подразделяют на однобалоч-
ные и двухбалочные. Мостовой кран, опирающийся ходо-
выми колесами на рельсовый путь, называют опорным (рис. 2)
в отличие от подвесного крана, перемещающегося по подвесно-
му крановому пути (рис. 3). Однопролетный мостовой кран переме-
7
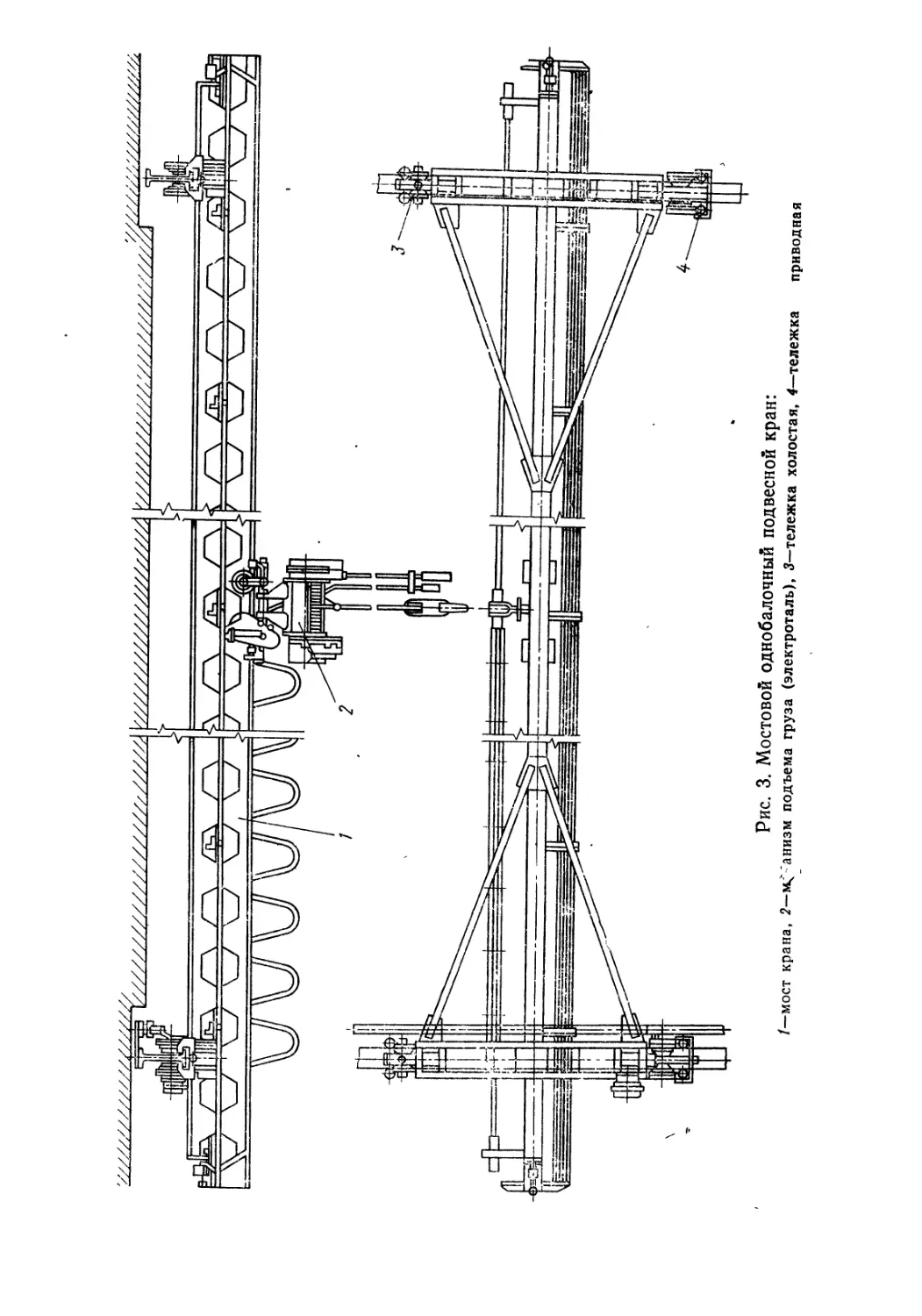
Рис. 3. Мостовой однобалочный подвесной кран:
/—мост крана, 2—м< 'анизм подъема груза (электроталь), 3—тележка холостая, 4—тележка приводная
щпстся по двум рельсам, тогда как двух- и многопролетные краны
дннгаются по трем и более рельсам.
Опорный кран передвигается по рельсам, уложенным на ме-
таллических или железобетонных подкрановых балках, опираю-
щихся на колонны здания или открытую эстакаду. Подвесной кран
Передвигается по нижним полкам двутавровых балок, закреплен-
ных под нижними поясами строительных ферм здания. Мостовые
крапы выполняют с гибкой (на канатах) и жесткой подвеской гру-
за. С жесткой подвеской груза выполняют специальные металлур-
гические краны и краны-штабелеры. В .зависимости от типа гру-
зозахватного органа мостовые краны подразделяются на крюко-
вые, магнитные и грейферные. Как правило, на однобалочных кра-
нах устанавливают передвижные электротали, а на двухбалоч-
ных — грузовые тележки (рис. 4).
• Рис. 4. Общий вид грузовых крановых тележек:
а—крюковой, б—грейферной, в—магнитной
Талью называется подвесное грузоподъемное устройство с
ручным, электрическим или пневматическим приводом; состоит из
лебедки и тележки. Электротали с однорельсовыми тележками
называются тельферами.
Краны мостовые опорные однобалочные с электрической талью
имеют грузоподъемность 1—5 т и длину пролетов 4,5—28 м
(ГОСТ 22045—76). Краны мостовые электрические общего назна-
чения должны соответствовать требованиям ГОСТ 24378—80Е, гру-
зоподъемность их 5—50 т. Краны мостовые электрические магнит-
ные выпускают грузоподъемностью 5—32 т при длине пролетов
10-34,5 м по ГОСТ 19482—74.
Козловый кран — катучий подъемный кран, передвигаю-
щийся по наземному рельсовому пути (рис. 5). Козловый кран сос-
тоит из фермы, перекрывающей при движении крана всю площадь,
на которой производят погрузочно-разгрузочные работы, и двух
ног опорных стоек.
9
Краны, у которых ферма (мост) одной стороной опирается на
опорную стойку, а другой — непосредственно на ходовые тележки,
называются полукозловыми. Опорная стойка передвигается
по наземным рельсовым путям, а ходовые тележки — по путям, уо-
тановленным на специальной эстакаде или колоннах здания.
Козловые краны изготовляют с одной или двумя консолями или
без них. Козловые крюковые электрические двухконсольные кра-
ны общего назначения изготовляют грузоподъемностью 3,2—32 т
с длиной пролетов 10—32 м (ГОСТ 23940—79 и ГОСТ 7352—81).
Краны изготовляют следующих типов: ККТ — с электрической пе-
Рис. 5. Козловой двухконсольный кран:
/—консоли крана, 2—грузовая тележка крана, 3—мост, 4—-опорные стойки, 5<—
ходовые тележки, 6 — крановый путь
редвижной талью, управлением из кабины (К) или с пола (П);
КК — с грузовой тележкой, управлением из кабины.
Козловые электрические контейнерные краны с грузоподъем-
ностью на захвате 20 и 32 т выпускают в соответствии с требова-
ниями ГОСТ 24390—80.
Консольный кран — подъемный кран с неповоротной йли
поворотной консольной фермой, предназначенный для перемещения
грузов в вертикальном и горизонтальном направлениях. У кон-
сольного крана с неповоротной фермой грузовая тележка пере-
двигается по консоли, подкрановый путь не занимает площади це-
ха, поэтому такие краны нашли применение в цехах различных
промышленных предприятий. По конструкции консольные краны
делят на стационарные и передвижные.
По специальным техническим условиям и заводским нормалям
выпускают настенные передвижные консольные краны (рис. 6). По
существу передвижной консольный кран представляет собой часть
мостового крана, мост которого выполнен в виде консоли. Пере-
движной консольный кран двигается аналогично мостовому по кра-
новому пути (одному рельсу). Устойчивость крана обеспечивают
верхние и нижние горизонтальные опорные ролики, катящиеся по
специальным продольным направляющим.
По назначению передвижные консольные краны являются вспо-
могательными грузоподъемными машинами, работающими в од-
10
ним пролете с основными мостовыми кранами. Именно этим объяс-
няйся конструктивное исполнение консольных кранов (вылет кон-
соли 4,5—6 м). Поэтому, выполняя поставленные задачи, консоль-
ные передвижные краны занимают малую часть пролета цеха.
Грузоподъемность кранов 2—5 т. Управление — с пола и из каби-
ны. Высота подъема груза 12—16 м.
Разновидностью передвижного консольного крана является ве-
лосипедный кран, консоль которого имеет возможность по-
Рис. 6. Консольный кран с тележкой:
/—главные балки полумоста, ^--грузовая тележка. кочцевая балка, 4—каби”а
управления, 5—стойки, 6—растяжки
ворачиваться на угол л рад в горизонтальной плоскости и в нера-
бочем положении повернутая вдоль .пролета цеха не мешает рабо-
те мостового крана.
§ 3. ОСНОВНЫЕ ПАРАМЕТРЫ КРАНОВ
Представление об эксплуатационных и экономических показа-
телях грузоподъемной машины дают основные параметры крана
(табл. 1, 2), к которым относят:
грузоподъемность — наибольшую допустимую массу ра-
бочего груза, на подъем которой рассчитан кран в заданных усло-
виях эксплуатации. Масса грейфера, электромагнита, а также съе-
мных грузозахватных устройств включена в грузоподъемность
крана;
скорость рабочего движения крана (подъема,
опускания груза; передвижения крана или тележки) — перемеще-
ние в единицу времени. Скорость рабочего движения крана указы-
вают с номинальным грузом;
нагрузку на ходовое колесо — наибольшую верти-
11
1. Геометрические параметры кранов
Параметр Определение Эскиз
Высота подъема Н Расстояние по вертикали от уровня стоянки (уровня пола) до грузозахват- ного органа, находящегося в верхнем рабочем положении. Для кранов с крюком или другим гру- зозахватным органом высота подъема определяется до опорной поверхности грузозахватного органа, а для кранов с грейфером до его нижней точки в замк- нутом положении JL 4!
Г Н\
Глубина
опускания Н
Пролет L
База В
Вылет консо-
ли Li
Расстояние по вертикали от уровня
стоянки до грузозахватного органа, на-
ходящегося в нижнем рабочем положе-
нии
Расстояние по горизонтали между ося-
ми рельсов кранового пути
Расстояние между вертикальными ося-
ми передних и задних колес или осями
балансирных тележек грузоподъемного
крана
Наибольшее расстояние по горизонта-
ли от оси рельса ближайшего к консоли
опоры крана до оси грузозахватного ор-
гана, расположенного на консоли
кальную нагрузку на ходовое колесо от собственной массы крана
и номинального груза;
установленн у ю мощность — суммарную мощность
электродвигателей всех механизмов крана;
массу крана — собственную массу крана без груза;
производительность — количество продукции (масса
груза), перемещаемое в единицу времени (час, смена, год).
12
2. Технически* характер нетто* кранов
/Мостовые Ксзловые j Ксвсоххгзге
- - —- —•——' — грузоподъемностью j механизма основного- подъема, т
Параметры 5 8 12,5 20 5 б 10 20 2 3 5
Пролет морта, м Вылег консолей, 28,5 25,5 25,5 22,5 16 4,24-4,2 16 4,5+4,5 32 9+8 32 6+6 4,5 6 5^5
м База, м • Наибольшая вы- 4,5 16 5,5 16 4,5 16 5 12,5 6 7,4 7,8 9 14 10 Л,4 11,2 2,8 12 4,2 12 4,5 16
сота подъема крю- ка, м
Скорость рабо-
чих движений, м/мин: основного 10 10 ю 8 8 20 15 9,35 8 12 10,7
подъема груза вспомогатель- ного подъема — — 20 20 — — — — — — —
груза передвижения 80 80 80 80 50 100 36 50 24/40 31,8 72
моста передвижения тележки (тель- 40 40 40 40 30 49,5 40 39 20 20 35,5
фера) Мощность двига- 7,1 8,4 43,2 41,5 23,2 53 42,2 92 5,5 6,0 19,9
теля, кВт Наибольшая на- 94 95 150 185 90 108,5 200 260 30 42,6 127
грузка на ходовое колесо, кН Масса крана, т 22 14 25 25 18,5 32,5 41,4 91 2,6 — —*
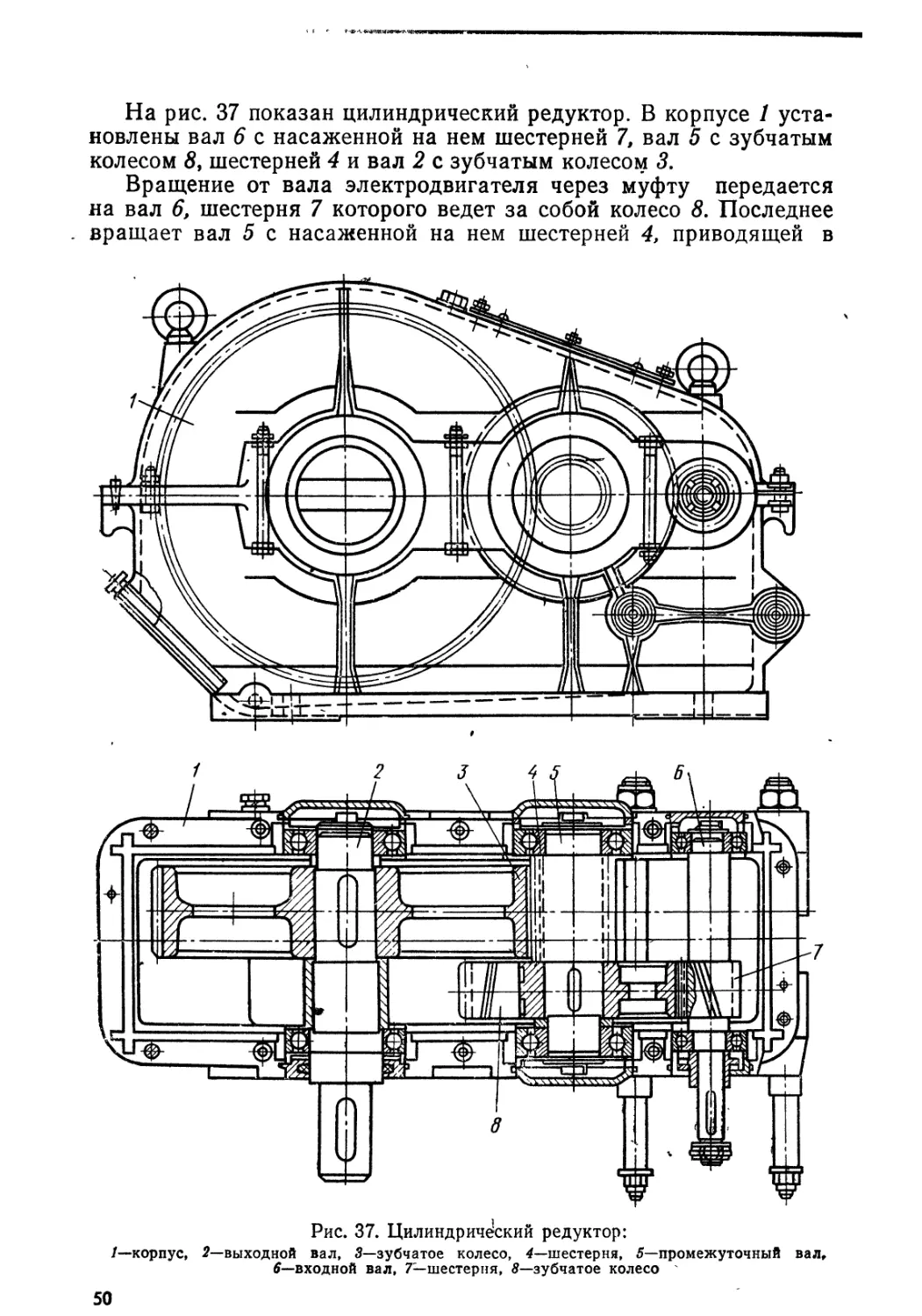
§ 4. ОБЩЕЕ УСТРОЙСТВО КРАНОВ
В зависимости от типа и назначения грузоподъемные краны
имеют различную конструкцию. В общем виде современный мосто-
вой кран состоит из моста с механизмом передвижения крана*
грузовой тележки (тельфера) с механизмами подъема груза и пе-
редвижения тележки, электрооборудования, унифицированной ка-
бины управления, люльки для обслуживания цеховых троллеев»
захватных приспособлений и тары для транспортирования грузов.
В комплект крана входит также эксплуатационная документация.
В соответствии с требованиями ГОСТ 2.101—68 «Виды изде-
лий», входящего в ЕСКД (Единая система конструкторской доку-
ментации), любое изделие отечественной промышленности, в том
числе кран, состоит из деталей и сборочных единиц.
Под деталью понимают изделие, изготовленное из однород-
ного материала без применения сборочных операций, например
вал, зубчатое колесо, литой корпус редуктора, болт и др. Сбороч-
ная единица — изделие, составные части которого подлежат
соединению между собой с помощью сборочных операций; свинчи-
вание, сочленение, сварка, пайка, клепка, опрессовка, склеивание
и др. Например, редуктор (в сборе), сварной корпус редуктора*,
мост крана, кран.
В то же время в инженерной практике и технической литера-
туре сохранены не включенные в ГОСТ термины — «узел» и «агре-
гат», например, узловая сборка, агрегатный метод ремонта. Поэто-
му для ясности изложения и облегчения усвоения материала в
пособии принята следующая терминология: узел — сборочная едиг
ница, собираемая отдельно от других и способная выполнять оп-
ределенную функцию в изделии только совместно с другими сбо-
рочными единицами. Например, вал в сборе с зубчатыми колесами,
и подшипниками; агрегат — сборочная единица, собираемая также
отдельно, обладающая свойствами полной взаимозаменяемости и
способная самостоятельно выполнять определенную функцию в
изделии. Например, электродвигатель, редуктор, тормоз, муфта (в
сборе) и др.; кран (машина) —сборочная единица (изделие), спо-
собная самостоятельно выполнять определенную работу.
Основной несущей конструкцией, на которой размещены все
механизмы крана, является мост (см. рис. 2). Мост крана черев
ходовые колеса опирается на крановый путь, а посредством меха-
низма передвижения передвигается вдоль пролета цеха. Механизм
передвижения крана установлен на его мосту.
Вдоль моста крана по подтележечным рельсам передвигается
грузовая крановая тележка с механизмами передвижения тележки и
подъема груза. Механизм передвижения тележки по конструкции
аналогичен механизму передвижения крана, а механизм подъема
груза, кроме двигателя, редуктора, тормоза и соединительных
муфт, имеет барабан лебедки с закрепленными на нем концами
каната. Канат запасован в полиспаст, подвижный блок которого
имеет крюковую обойму. При вращении барабана лебедки и на-
14
«iiiiuiiniH на него каната происходит подъем груза. Передвижение
mochi крана вдоль пролета и тележки по мосту крана (поперек
пролета) позволяет обслуживать практически всю площадь
цеха. •
Рассматриваемые конструкции передвижных грузоподъемных
крапов являются достаточно сложными машинами, вопросы изго-
I пиления, монтажа, эксплуатации и ремонта которых регламенти-
рованы различными нормативными документами.
В соответствии с требованиями Правил (<?м. § 61) все грузоподъ-
емные машины с электрическим приводом должны быть оборудо-
ваны следующими приборами и устройствами безопасности: ограни-
читель высоты подъема крюковой подвески, ограничитель грузо-
подъемности, ограничители передвижения моста и тележки крана,
контакты блокировки дверей кабины и люка настила моста, ава-
рийный выключатель, крановая защитная панель, звуковой сигналь-
ный прибор и анемометры, устанавливаемые на кранах, эксплуа-
тируемых на открытом воздухе.
§ 5. РЕЖИМЫ РАБОТЫ И ПРОИЗВОДИТЕЛЬНОСТЬ КРАНОВ
Изучаемые грузоподъемные машины относят к машинам пе-
рво дического (циклического) действия, работающим в пре-
рывистом режиме, т. е. время работы машины состоит из повторя-
ющихся законченных циклов, состоящих, в свою очередь, из ряда
последовательных операций: строповка груза (наполнение тары),
подъем груза, перемещение его в установленное место, опускание
груза, установка его на опору и расстроповка или опорожнение та-
ры. Другими словами, работа механизма подъема груза состоит
из процесса подъема (опускания) груза или порожнего грузозах-
ватного устройства. Работа механизмов передвижения состоит из
движений в обоих направлениях с грузом или без него’.
Кроме Периодов работы механизмов цикл работы машины
включает паузы, в течение которых электродвигатель выключен и
механизм не работает. Указанное время используют для строповки
(расстроповки) груза и подготовки к выполнению следующих опе-
раций. Помимо этого каждый процесс рабочего движения крана
включает периоды неустановившегося движения, в течение кото-
рого происходят разгон (период пуска) или замедление (период
торможения) поступательно движущихся и вращающихся масс гру-
за и деталей механизмов, а также период движения с постоянной
скоростью (период установившегося движения).
Полное время цикла работы механизма грузоподъемного крана
складывается из суммы времени пуска установившегося дви-
жения торможения и пауз 2/о, т. е. 7’ц—2/п+2/у + 2/.+
4-2/0- Очевидно, что время работы электродвигателя будет мень-
ше и равно 7’B=2fn+2/y.
Отношение времени включения электродвигателя Тв к полному
времени цикла Тц характеризует интенсивность использования ме-
ханизма. Данное отношение называют относительной продолжи-
15
тельностью включения и обозначают, %: ПВ= (Т'в/Т'ц) X
Х100.
Режим работы механизма грузоподъемной машины с машинным
приводом устанавливают в зависимости от коэффициента использо-
вания'механизма по грузоподъемности 7<гр=Сср/ОНом, где Gcp —
средняя величина единичного груза из числа перемещаемых за сме-
ну, Сном — номинальная (паспортная) грузоподъемность механиз-
ма. /(гр определяют с учетом собственных масс грузозахватного уст-
ройства и тележки, коэффициента годового использования механиз-
ма по времени Кг (число дней работы механизмов в году/365), ко-
эффициента суточного использования механизма по времени Кс
(число часов работы механизма в сутки/24). Аналогичным образом
может быть определен коэффициент использования механизма в те-
чение часа Кч- Режим работы механизма также зависит от отно-
сительной продолжительности включения электродвигателя меха-
низма ПВ, %, числа включений электродвигателя в час, темпера-
туры окружающей среды (воздуха), °C.
Различные механизмы крана могут работать в разных режимах.
Режим работы самого крана устанавливают по режиму работы
механизма главного подъема груза (табл. 3).
Производительность крана. Эксплуатационную (фактическую)
производительность грузоподъемного крана /7ЭКС (т/ч) определяют,
как правило, за единицу времени— 1 ч по общей формуле для ма-
шин циклического действия с учетом коэффициентов: Пэкс —
= (ЗбООбном/Сгр/ЛО-Кв, где GH0M — номинальная (паспортная) грузо-
подъемность крана, т; Кг?— коэффициент использования крана по
грузоподъемности; Кв — коэффициент использования крана по вре-
мени (отношение времени фактической работы крана (в с) к кален-
дарному времени; в данном случае к 1 ч, Кв = ^ф/<кал; Тц — полнее
время цикла работы механизма крана, ч.
Режимы работы электродвигателей кранов. Допустимые внеш-
ние нагрузки на электродвигатель крана определяются степенью
его нагрева, а следовательно, зависят от режима его работы. Раз-
личают три основных номинальных режима работы крановых элек-
тродвигателей : продолжительный (SO, при котором двига-
тель работает в течение длительного времени без выключения и его
нагрев при постоянной внешней нагрузке, соответствующей номи-
нальной мощности, не превышает допустимой температуры на-
грева обмоток; кратковременный (S2) с длительностью работы
двигателя при постоянной внешней нагрузке в течение 10, 30, 60 и
90 мин с последующим перерывом в работе до полного остывания;
повторио-кратковременный (S3), представляющий собой
длительно-повторяющиеся циклы работы двигателя при продолжи-
тельности цикла 10 мин.
По характеру нагрузки электродвигателей кранов различают
две основные группы приводов механизмов: подъема груза, рабо-
та которого характеризуется относительно небольшим временем
разгона (около 1 с) при соответствии номинальной внешней нагруз-
ки и крутящегр момента двигатедя^-иередвижения, работа которо-
14 - .
3. Режим работы кранов
Режим ||МЛ<>ГЫ и оЛпчна- чение Коэффициент исполь- зования механизма ПВ, % Число включений в час (среднее за смену) Характеристика режима работы
по грузо- подъем- ности, /<Гр но времени в течение
года суток
Лн кий — Л 1,о 0,75 0,5 0,25 0,1 Нёре ная, ] ра< 0,25 0,5 1,0 гуляр- эедкая эота 0,33 0,67 1,0 15 15 25 60 * Работа с большими переры- вами, редкая работа с номи- нальным грузом, с малым чис- лом включений электродвигате- ля и с малыми скоростями
Средний- С 1,0 0,75 0,5 0,25 ,0,1 1,0 0,5 0,5 1,0 1,0 0,67 0,33 0,67 1,0 1,0 15 25 25 40 60 120 < Работа с грузами различной величины, со средними скорос- тями и средним числом включе- ний электродвигателя
Тяже- лый — Т 1,0—0,25 0,75— 1,0 0,33- 1,0 25—60 240 Постоянная работа с груза- ми, близкими по величине к но- минальным, с высокими скорос- тями и большим числом вклю- чений
Весьма тяже- лый—ВТ 1,0—0,1 1,0 1,о 40, 60 300 Постоянная работа с номи- нальными грузами, с высокими скоростями и большим числом включений
го отличается высокими значениями инерционных масс и относи-
тельно большим временем разгона (8—10 с) при больших значени-
ях пусковых моментов и тока.
Работа электродвигателя механизма подъема груза отличается
от других механизмов еще и тем, что при подъеме груза часть зат-
раченной энергии превращается в потенциальную, которая при опу-
скании груза помогает вращению ротора (создает дополнительный
крутящий момент, направленный в сторону вращения ротора).
Различают два режима работы механизмов. При двигательном
режиме работы, когда двигатель преодолевает момент сил сопро-
тивления Мс в механизме, крутящий момент на валу ротора 2ИДВ
направлен в сторону его вращения п, например, при подъеме гру-
за или передвижении крана. В этом случае крутящий момент дви-
гателя положителен, а момент сил сопротивления—отрицателен
(рис. 7, а, б).
В случае ограничения скорости опускания тяжелого груза (рис.
7. в) или наличия попутного ветра, помогающего передвижению
17
крана (рис. 7, г), когда двигатель противодействует движению, мо«
мент двигателя Л4ДВ становится отрицательным, а момент сил соп-
ротивления Л4С — положительным. Режим работы двигателя, при
котором крутящий момент на валу ротора противоположен направ-
лению его вращения, называют тормозным. При опускании не-
большого по массе груза, сила тяжести которого не может прео-
долеть момент сил сопротивления Мс, двигатель развивает поло-
жительный момент Л4дв, направленный в сторону движения груза
{рис. 7, д). Такое опускание груза называют силовым.
Рис. 7. Режим работы электродвигателя механизма подъема груза и
передвижения:
а, б, д—двигательный, в, г—тормозной
Контрольные вопросы
1. Какие функции выполняют передвижные грузоподъемные краны в совре-,
менном производстве?
2. По каким признакам классифицируют краны мостового типа?
3. Расскажите о назначении и основных параметрах крана.
4. Расскажите об основных механизмах кранов и их назначении.
5. Что такое относительная продолжительность включения механизма крана?
6. Как определить производительность грузоподъемного крана?
ГЛАВА II. КРАНОВЫЕ ПУТИ
§ 6. ОБЩИЕ ТРЕБОВАНИЯ К КРАНОВЫМ ПУТЯМ
Рельсовые крановые пути предназначены для восприятия всех
рабочих нагрузок от крана или крановой тележки и передачи их на
строительные конструкции либо на грунт, а также направления
движения крана (тележки). Соответственно крановый путь пред-
ставляет собой пару рельсов одного типа, уложенных горизонталь-
но на специальном основании в одном высотном уровне. В кранах
любой конструкции с рельсами взаимодействуют рабочие поверх-
ности ходовых колес механизма передвижения.
а) 6) 6)
Рис. 8. Профили рельсов опор-
ных крановых путей:
а—железнодорожные типа Р, б—
крановые типа КР, в—сталь квад-
ратного профиля
В зависимости от типа подъемной машины рельсовые крано-
вые пути делятся 'на надземные, применяемые для установки
мостовых и передвижных консольных кранов, и наземные, при-
меняемые для установки козловых и полукозловых кранов, а так-
же* мостовых перегружателей. В свою очередь, надземные крано-
вые пути могут быть выполнены опорными, установленными на
подкрановые балки и передающими на-
грузки на колонны здания, или подвес-
ными, прикрепляемыми к элементам
перекрытий строительных конструк-
ций. Опорные крановые пути применя-
ют для однопролетных мостовых кра-
пов. Подвесные крановые пути исполь-
зуют для двух- и многопролетных мо-
стовых кранов, кран-балок, передвиж-
ных электрических талей (тельферов)
и электрических тележек различной
грузоподъемности. Сооружение крано-
вых путей производят по типовым или
выполняемым соответствующей проектной организацией.
индивидуальным проектам
§ 7. УСТРОЙСТВО ПУТЕЙ ДЛЯ МОСТОВЫХ КРАНОВ
Рельсовый путь мостового крана состоит из основных и вспомо-
гательных элементов. Основными элементами пути являются рель-
сы и подкрановые балки. К вспомогательным элементам относят-
ся подрельсовая постель, детали крепления рельсов к подкрановым
балкам и балок к колоннам (перекрытиям) строительной конструк-
ции, а также концевые упоры и отклоняющие линейки.
Для крановых путей мостовых однобалочных кранов с малой
рабочей нагрузкой применяют железнодорожные рельсы типа
Р18, ТР24. Двухбалочные мостовые краны грузоподъемностью 10—
30 т легкого и среднего режимов работы эксплуатируют на путях,
выполненных из рельсов типа Р38 при грузоподъёмности Юти
типа Р43 при грузоподъемности 20—30 т. Следует отметить, что
рельсы типа Р43 выпускают специально для промышленного
транспорта. Для кранов большей грузоподъемности заводы выпус-
кают железнодорожные рельсы типа Р50 и Р65 (рис. 8, а).
В настоящее время отечественная промышленность выпускает
стальные крановые рельсы специального профиля типа КР, соот-
ветствующие условиям эксплуатации мостовых, козловых и кон-
сольных кранов (рис. 8, б).
Специальные крановые рельсы типа КР имеют более широкую
подошву, благодаря чему нагрузка от ходовых колес крана рас-
пространяется по верхнему поясу подкрановой балки более равно-
мерно. В отдельных случаях в качестве рельсов с плоскими голов-
ками применяют сталь горячекатаную квадратную (рис. 8, в).
В зависимости от грузоподъемности крана выбирают тип опор-
ного рельса (табл. 4).
Рельсы крановых путей и грузовых тележек крепят таким об*
разом, чтобы исключить боковое и продольное их смещение при
передвижении и работе грузоподъемной машины. Крановые рельсы
опорного пути крепят к подкрановым балкам строительной конст-
4. Типоразмеры рельсов для крановых путей
фукции (цеха, эстакады), которые в зависимости от нагрузок, ре-
жима работы крана и типа строительной конструкции изготовля-
ют из профильного сортового стального проката, сварными из лис-
тового металла или из сборного железобетона. Рельсы грузовых
крановых тележек крепят непосредственно к металлоконструкции
Рис. 9. Крепления рельсов к подкрановым балкам:
а—приваренными скобами, б—прижимными накладками, в—пружинными план*
ками, г—крюками с регулируемыми гайками, б—пружинными скобами; /—рельс,
2—скоба, 3—накладка, 4—болт с гайкой, 5—пружинная планка, 6—крюк, 7—гай-
ка, 8—пружинная скоба, 9— шпилька с гайкой, 10—резиновая прокладка
моста крана. Существуют различные способы крепления рельсов
к подкрановым балкам (рис. 9). Предпочтение получили сборно-
разборные крепления, обеспечивающие возможность выполнения
горизонтальной рихтовки пути и простого ремонта с заменой выб-
ракованных участков рельса. Чтобы регулировать крепления при
рихтовке пути, в прижимных планках выполняют овальные отверс-
тия либо сверлят последние по месту. Для мостовых кранов с руч-
ным приводом механизмов и кранов i рузоподъемпостью до 30 т при
20
легком режиме работы Правила допускают крепить рельсы к под-
крановым балкам сваркой.
В качестве подвесных крановых путей мостовых кранов приме-
няют специальные рельсы, прикрепляемые снизу к элементам пере-
крытий строительных конструкций (фермы, стропильные балки) а
помощью подвесок или монтажных столиков. В качестве монорель-
сов для передвижных талей и
тельферов применяют специаль-
ные двухголовые, тавровые или
рельсы типа Р5. Для подвесных
кран-балок грузоподъемностью
до 1—2 т при величине пролета
менее 6 м в качестве опорных
рельсов применяют двутавровые
балки № 12—30 (ГОСТ 8239—72)
из горячекатаной стали марки
ВСтЗпс. Для машин большей гру-
зоподъемности (до 5 т) применя-
ют двутавровые балки специаль-
ного сечения № 24 М—45 М
(ГОСТ 19425—74).
Крепление подвесных крано-
вых путей выполняют с помощью
подвесок, привариваемых к узлам
металлоконструкции стальных
ферм перекрытия (рис. 10).
Рис. 10. Крепление подвесного кра-
нового пути к металлическим строи-
тельным конструкциям:
1 — двутавровая балка, 2 — подвеска, I
установочный зазор
i
§ 8. УСТРОЙСТВО ПУТЕЙ ДЛЯ КОЗЛОВЫХ КРАНОВ
Наземный крановый путь козлового крана на опорных элемен-
тах (шпалах, полушпалах, бетонных балках) состоит из верхне-
го и нижнего строений. В состав верхнего строения входят рельсы,
накладки, соединяющие рельсы между собой, шпалы и другие опор-
ные элементы, детали крепления рельсов к шпалам, выключающие
линейки, элементы заземления и балластный слой (призма). Ниж-
нее строение подкранового пути состоит из земляного полотна (пос-
тели) и устройства для отвода воды (водоотвода) (рис. 11, а).
Земляное полотно наземных крановых путей делают односкат-
ным в сторону водоотводящих дренажных труб, кюветов и стоков
для отвода ливневых вод. В дренирующих и скальных грунтах пло-
щадку земляного полотна разрешается выполнять горизонтальной.
Земляное полотно в зоне укладки, пути должно быть очищено от
строительных материалов, мусора, растительного слоя почвы, а в
зимнее время от снега и льда. Насыпной грунт должен быть пе-
счаным и однородным.
Конструкцию и размеры элементов рельсовых крановых путей
определяют в зависимости от нагрузки на ходовые колеса кранов,
режима их работы и интенсивности передвижения. Как. правило,
з наземных крановых путях применяют железнодорожные рельсы
21
типа Р38—Р65, которые укладывают на соответствующие опорные
элементы (рис. И, б). Для укладки рельсовых путей применяют
полушпалы (половина стандартной длины шпалы 2750 мм) обрез-
Рис. 11. Наземный рельсовый путь:
я—поперечное сечение рельса, б—стык рельсов; /—верхнее строение, 2—нижнее строение»,
3—соедини тельная электройроводящая перемычка, 4— подкладка, 5—полушпала, 6~двухголо-
вая рельсовая накладка, 7—рельс, S—стыковой болт
ные* и необрезные длиной 1375 мм, изготовляемые из древесины
хвойных пород (сосны, ели, пихты, лиственницы, кедра) с после-
дующей обязательной пропиткой антисептическими веществами.
Для кранов с удельным давлением на ходовое колесо до 150 кН
допускается применение укороченных полушпал длиной 900 мм.
В качестве балластного
Рис. 12. Крепление рельсов к полушпа-
лам:
а—шурупами, б—костылями; /—рельс, 2—пу-
тевой шуруп, 5—прижимная планка, 4—под-
кладка, 5—костыль, 6—нолушпала
материала для подкрановых
путей применяют щебень или
гравий естественный (карь-*
ерный) или сортированный
(обогащенный), песок, гра-
нулированный металлурги-
ческий или доменный шлаке
размерами фракций частиц
до 60—70 мм. Балластная
призма имеет отношение
откосов боковых сторон
1 : 1,5.
Между рельсом и опор-
ным элементом устанавлива-
ют специальные плоские
стальные подкладки. Рельсы
к полушпалам крепят путе-
выми шурупами с прижим-
ными планками или косты-
22
лями для железных дорог (рис. 12). Предварительно в полушпалах
сверлят отверстия диаметром 16 мм на глубину 155 мм для путевых
шурупов и диаметром 12 мм на глубину 130 мм для костылей. Для
соединения концов рельсов применяют двухголовые рельсовые на-
кладки по ГОСТ 4133—73, одновитковые пружинные шайбы, стыко-
вые болты и соответствующие гайки (рис. 11, б). Стыки рельсов
располагают на двух, уложенных рядом полушпалах.
После укладки крановые пути обкатывают передвижением кра-
на без груза вдоль всего пути 10—15 раз, а затем краном с макси-
мальным контрольным грузом 5—10 раз с последующей подбивкой
балластного слоя на просевших участках цути. Осадка пути под
ходовыми колесами козлового крана не должна превышать 1 мм
на каждые 10 кН удельной нагрузки на колесо крана.
§ 9. УСТРОЙСТВО ПУТЕЙ
ДЛЯ КОНСОЛЬНЫХ КРАНОВ
Настенные передвижные консольные краны, как правило, име-
ют небольшую грузоподъемность и работают в производственных
цехах в одних пролетах с основными мостовыми кранами. Таким
кранам необходима только одна ветвь рельсового пути и располо-
жена она ниже подкранового пути основного мостового крана. По
конструкции крановые пути для консольных кранов надземные
опорные, т. е. аналогичны путям для мостовых кранов.
Конструктивной особенностью передвижных консольных кранов
является наличие дополнительной системы горизонтальных роли-
ков, взаимодействующих со специальными продольными направля-
ющими и обеспечивающих устойчивость грузоподъемной машины.
Обычно нижние ролики упираются и перекатываются по вертикаль-
ной стенке (шейке) основного рельса типа Р18, Р24, Р38, а верх-
ние ролики по дополнительной стальной квадратной направляющей
соответствующего размера. Рельсы кранового пути крепят к под-
крановым балкам, опирающимся на колонны строительной конст-
рукции, а дополнительную направляющую приваривают к консоль-
ным кронштейнам, установленным на колоннах вдоль рельсового
пути выше уровня его продольной оси.
Сдачу крановых путей в эксплуатацию производят по акту, к
которому обязательно прилагают результаты нивелировки пути,
схему геодезической съемки поперечного профиля пути и данные
по определению величины сопротивления растеканию тока в сис-
теме заземления рельсового пути.
Для остановки крана (тележки) у края кранового пути и предот-
вращения его схода применяют тупиковые упоры. Эти упоры, уста-
навливаемые на концах рельсового пути, должны воспринимать
ударные нагрузки от крана (тележки) с максимальным грузом,
поднятым в крайнее верхнее положение.
Тупиковые упоры должны быть закреплены на подкрановом
пути на расстоянии не менее 0,5 м от концов рельсов (рис. 13). При,
23
подходе крана (тележки) к концу рельсового пути его буферная
часть должна касаться деревянных подушек обоих тупиковых упо-
ров одновременно.
Контрольные вопросы
1. Расскажите о назначении рельсовых крановых путей.
2. Назовите основные детали и сборочные единицы крановых путей.
3. Какие типы рельсов применяют для устройства крановых путей?
4. Какие основные технические требования предъявляют к крановым путям?
5. Каким способом соединяют концы рельсов?
Рис. 13. Установка тупикового упора в конце кранового пути:
/—отклоняющая линейка, 2—деревянная подушка, 3—стойка, 4—подкос, 5—дополнитель-
ная опорная балка, 6— полушпала
6. Как выполняют крепление рельсов к опорным элементам пути?
7. Что такое верхнее и нижнее строение подкранового пути, из чего они со-
стоят и для какого типа кранов применяются?
8. Каково назначение тупиковых упоров?
ГЛАВА III. КРАНОВЫЕ КАНАТЫ
И ГРУЗОЗАХВАТНЫЕ ПРИСПОСОБЛЕНИЯ
§ 10. КОНСТРУКЦИИ СТАЛЬНЫХ ПРОВОЛОЧНЫХ КАНАТОВ
И ИХ РАСЧЕТ
Основным гибким тяговым (несущим) элементом практически
любой грузоподъемной машины является стальной проволочный
канат, назначение которого преобразовывать вращательное движе-
ние барабана подъемной машины в поступательное движение пе-
ремещаемого груза. Для соединения перемещаемого груза с захва-
тным устройством подъемной машины, как правило, также приме-
няют стальные проволочные канаты.
Стальные проволочные канаты имеют высокую удельную несу-
щую способность (прочность) и гибкость, более удобны в работе, а
24
их долговечность выше, чем у канатов из органических раститель-
ных волокон или грузовых круглозвенных стальных цепей. Сталь-
ной канат работает практически бесшумно, сглаживает динамичес-
кие нагрузки в механизме и обладает высокой надежностью, так
как разрушение происходит не внезапно, как у стальной цепи, а
количество обрывов проволок нарастает постепенно, что позволя-
ет следить за состоянием каната и выбраковывать его задолго до
обрыва.
Канат состоит из определенного числа проволок, как правилОе
круглою поперечного сечения диаметром 0,1—2,0 мм, получаемых
Рис. 14. Стальные проволочные канаты:
а—круглый, б—спиральный, в—двухслойный, г—односторонней свивки, б—кресто-
вой свивки, е—комбинированной свивки; /—прядь, 2—сердечник
волочением из специальной высокоуглеродистой катаной стала,
перевитых между собой и образующих элемент каната — прядь.
Несколько прядей, так же перевитых между собой и расположен-
ных на центральном сердечнике, образуют собственно канат. Спе-
циальная обработка канатной проволоки обеспечивает ее высокие
механические свойства — временное сопротивление проволок раз-
рыву составляет 1372—2358 МПа. В зависимости от количества
проволок в прядях, прядей в канате, формы, сочетания направле-
ний свивки элементов каната, наличия и типа сердечника и дру-
гих факторов возможны различные конструктивные формы кана-
тов. Основные технические требования к канатам отражены в
ГОСТ 3241—80, который предусматривает выпуск различных типов
стальных канатов:
по форме поперечного сечения: круглые (рис. 14, а)
и плоские;
по конструкции: одинарной, спиральной (рис. 14, б),
двойной и тройной свивки. Канат двойной свивки представляет со-
бой несколько канатов одинарной свивки (прядей), перевитых от-
носительно сердечника. В свою очередь, канаты двойной свивки
бывают одно-, двух- (рис. 14, в) и трехслойными. Две последние
конструкции называют многослойными (многопрядными);
по форме поперечного сечения прядей: кругло-
прядные и фасоннопрядные (трехгранной, овальной и другой фор-
мы) ;
по типу свивки прядей (канатов одинарной свивки)}
25
канаты типа ЛК с линейным касанием проволок между слоями^
типа ТК с точечным касанием, типа ТЛК (ЛТК) с комбинирован*!
ным касанием и типа ПК с полосовым касанием. В свою очередь^
канаты типа ЛК изготовляют из одинаковых по диаметру прово*;
лок в слоях прядей ЛК-0, разных по диаметру проволок ЛК-Р и?'
с промежуточными проволоками заполнения ЛК-3; ]
по материалу сердечника: с крученым сердечником
из растительных волокон (пенька, джут, кенаф, манила, сизаль
др.) — органический сердечник (о. с.), с витым сердечником из ка-q
натных проволок — металлический сердечник (м. с.) и с сердечни-^
ком из искусственных волокон (и. с.); органический сердечник
обязательно должен быть пропитан противогнилостным составом;
по способу свивки: раскручивающиеся и нераскручи-\
вающиеся (Н); -
по направлению свивки элементов: канаты пра*:
вого и левого направления свивки (Л).
В канатах правой свивки элементы располагаются справа вниз
налево, а в канатах левой свивки, наоборот, — слева вниз напра*;
во. Отечественная промышленность выпускает канаты преимуществ
венно правой свивки;
по сочетанию направлений свивки элемен*
тов каната: односторонней свивки с одинаковыми направление
ями свивки проволок в наружном слое прядей и прядей в канате
(рис. 14, г), крестовой свивки с противоположным направлением
(рис. 14, д) и комбинированной с сочетанием указанных направ-
лений свивки (рис. 14, е);
по степени крутимости: крутящиеся, в которых все эле-
менты каната имеют одинаковое направление свивки, и малокру-
тящиеся с противоположным направлением свивки прядей в слоях
каната;
по механическим свойствам проволоки: высокого
качества — марки В, нормального качества — марки I, II (ГОСТ
7372—79);
по назначению: грузолюдские — ГЛ, грузовые — Г и бен-'
зельные — Б. Канаты типа Б применяют для наложения бензель-
ных обвязок вместо мягкой отожженной проволоки при обработке
концов каната перед закреплением или запасовкой в полиспасты;
по виду покрытия поверхностей проволоки и
каната: из светлой проволоки (без покрытия) для легких условий
эксплуатации (Л), из проволоки с тонким слоем цинкового покры-
тия (оцинкованные) для средних условий эксплуатации в агрес-
сивных средах (С), из проволок со средней толщиной покрытия
для жестких условий эксплуатации (Ж), из проволоки с толстым
слоем покрытия для очень жестких условий эксплуатации (ОЖ).
Конкретные конструкции канатов, их параметры и назначение
регламентированы требованиями соответствующих ГОСТов. Ус-
ловное обозначение каната должно соответствовать требованиям.
ГОСТа и указывать: диаметр каната, назначение, марку, вид,
покрытия, направление свивки элементов, тип свивки, степень кру*
26
'тимости под нагрузкой, маркировочную группу проволок и номер
соответствующего стандарта на сортамент.
В механизмах подъема груза современных передвижных кра-
нов получили распространение канаты двойной свивки с органиче-
ским сердечником следующих конструкций: КЛ-РО 6X36+ 1 о.с. по
ГОСТ 7668—80, ЛК-3 6x25+1 о. с. по ГОСТ 7665—80, ТЛК-0
*6x37+1 о. с. по ГОСТ 3079—80, ЛК-Р 6X19+1 о. с. ГОСТ 2688—
S0.
5. Коэффициент запаса прочности канатов^и цепей
Назначение несущего органа, режим работы и привод машины Статический коэф- фициент запаса прочности (не мевее)
Канаты Грузовые (общего назначения) с приводом: 4,0
ручным машинным при режиме работы:
легком 5.0
среднем 5,5
тяжелом и весьма тяжелом 60
Грузовые для подъема расплавленного металла и пр. Грейферные с канатным приводом: 6,0
двухбарабанная лебедка 6,0
* однобарабанная лебедка 5,0
с моторным приводом 5,0
Тяговые Для стропов: 4,0
стальных 6,0
пеньковых 8,0
В случаях, когда прочности каната с органическим сердечником
оказывается недостаточно, а увеличение диаметра каната неже-
лательно, применяют стальные канаты с металлическим сердечни-
ком следующих конструкций: ЛК-РО 6x36 + 7x7 по ГОСТ 7669—
ВО. ЛК-3 6X25 + 7X7 по ГОСТ 7667—80 и ЛК-Р 6X19 + 7X7 по
ГОСТ 14954—80. Указанные конструкции канатов обязательны к
применению в грузоподъемных кранах, транспортирующих рас-
плавленный или раскаленный металл или жидкий шлак, когда
тепловое воздействие на канат велико и органический сердечник
быстро выгорает.
Основным документом, подтверждающим свойства каната, яв-
ляется сертификат, выдаваемый заводом-изготовителем. В этом
документе содержатся результаты испытаний образцов канатов
на заводе, по которым ведут расчет и подбирают канат, поэтому
сертификат должен храниться вместе с паспортом крана в служ-
бе главного механика.
Расчет канатов подъемных машин и стропов ведут методом
допускаемых нагрузок по формуле P/F^R, где Р — разрывное уси-
27
лие каната в целом (агрегатная прочность), принимаемое по сер-
тификату на канат или по данным ГОСТа, кН; F — наибольшее на-
тяжение ветви каната с учетом кпд полиспаста и без учета дина-
мических нагрузок, кН; /? —статический коэффициент запаса проч-
ности (табл. 5), принимаемый в соответствии с требованиями Пра-
вил в зависимости от назначения канатов.
Другими словами, на практике расчет сводится к подбору ка-
ната, агрегатная прочность которого удовлетворяет неравенству
Рис. 15. Строповка груза четырех*
ветвевым стропом:
О ~ вес груза, F — натяжение одной
•етви стропа, а—угол наклона ветви
стропа к вертикальной оси
вертикальной оси, град, т
Расчет стальных канатов прямо-
линейных одноветвевых стропов так-
же ведут по приведенной выше фор-
муле. В случае, когда указанные
стропы применяют для строповки
груза в две и более ветви каната или
используют специальные многовет-
вевые стропы, ветви которых рабо-
тают под углом к вертикальной оси
(рис. 15), наибольшее допускаемое
натяжение одной ветви стропа опре-
деляют по формуле Gl (cos а-и) =*
= m(G/n), где G — рабочая нагруз-
ка от массы поднимаемого груза, кН,
п — число ветвей каната в стропе,
а — угол наклона ветви каната к
— коэффициент, зависящий от уг-
ла а.*
При углах а наклона ветвей каната в стропе к вертикальной оси
аО, л/6, л/4 и л/3 рад, что соответствует углам между ветвями О,
л/3, л/2 и 2/3л рад, значения коэффициента т соответственно равны
1; 1,15; 1,42; 2 (рис. 16). На практике угол а ограничивают значе-
нием л/2.
Надежная эксплуатация гибких несущих элементов и срок их
службы в значительной мере зависят от диаметров блоков (бара-
банов), которые они огибают под нагрузкой. Соответственно, чем
Рис. 16. Распределение усилий между ветвями стропа в за-
висимости от угла между ними:
* G — вес груза, 1 — груз, 2 — ветви стропа; а — угол 2а=0 рад, б —
угол 2а = Л/3 рад, в—угол 2а = л/2 рад, г—угол 2а = 2/3л рад
2S
меньше диаметр блоков, тем ниже срок службы каната. Поэтому
при проектировании обязательно регламентируют наименьший'
допускаемый диаметр блока (барабана), определяемый по форму-
ле D>-dK-d, где D — диаметр блока, измеряемый по средней линии
оси навитого на него каната, мм, dK — диаметр каната, мм, е —
коэффициент, зависящий от типа подъемной машины и режима ее
эксплуатации.
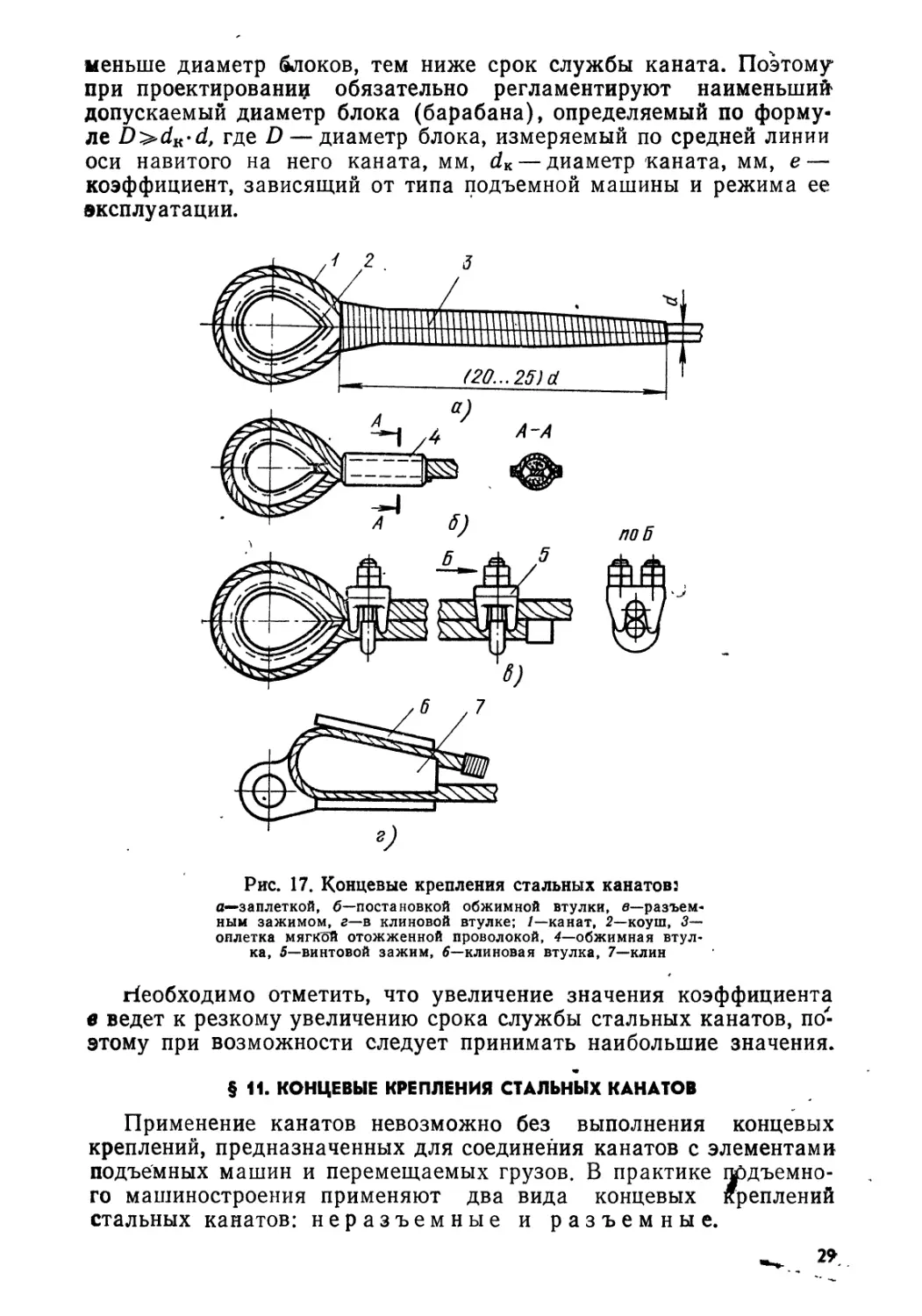
Рис. 17. Концевые крепления стальных канатов:
а—заплеткой, б—постановкой обжимной втулки, в—разъем-
ным зажимом, г—в клиновой втулке; /—канат, 2—коуш, 3—
оплетка мягкой отожженной проволокой, 4—обжимная втул-
ка, 5—винтовой зажим, б—клиновая втулка, 7—клин
Необходимо отметить, что увеличение значения коэффициента
в ведет к резкому увеличению срока службы стальных канатов, по-
этому при возможности следует принимать наибольшие значения.
§ 11. КОНЦЕВЫЕ КРЕПЛЕНИЯ СТАЛЬНЫХ КАНАТОВ
Применение канатов невозможно без выполнения концевых
креплений, предназначенных для соединения канатов с элементами
подъемных машин и перемещаемых грузов. В практике подъемно-
го машиностроения применяют два вида концевых креплений
стальных канатов: неразъемные и разъемные.
2Р
Неразъемные концевые крепления канатов применяют при из-
готовлении грузозахватных устройств (стропов), не являющихся
собственной принадлежностью крана, а также для натяжения ка-
ната, несущего кабельный токоподвод. В этих случаях на концах
стального каната выполняют петли заплеткой — счаливанием (рис.
17, а), постановкой обжимной стальной или алюминиевой втулки
(рис. 17, б) или заливкой легкоплавкими сплавами в конусной
втулке. Последний способ более трудоемкий и дорогой,
а потому широкого применения в подъемных машинах не полу-
пил.
Разъемные концевые крепления стальных канатов применяют
для соединения с барабанами лебедок, крюковыми подвесками и в
отдельных случаях для строповки нестандартных тяжеловесных
грузов. Как правило, для этого используют винтовые зажимы
(рис. 17, в), клиновые втулки (рис. 17, г), специальные прижимные
планки различного конструктивного исполнения или другие спосо-
бы по утвержденным отраслевым нормалям.
Заплетка (счаливание) концов канатов получила широкое
распространение и сохранилась из-за технологической простоты.
К недостаткам данного способа следует отнести высокую трудоем-
кость, необходимость применения тяжелого ручного труда, повы-
шенный расход канатов (концы после заплетки отрубают), нару-
шение структурной целостности каната в зоне заплетки и сниже-
ние его агрегатной прочности на 5—15% (в зависимости от диамет-
ра каната и квалификации рабочего). Необходимо отметить, что
применение в подъемных машинах счаленных (срощенных встык)
канатов запрещено.
Для обеспечения правильного формирования петли концевого
крепления каната, уменьшения внутренних контактных напряже-
ний от поперечных сил и предохранения каната от истирания о
захватные устройства в процессе работы применяют специальные
устройства — коуши, представляющие собой стальные изогнутые
пластинки в форме несимметричного овала с желобчатым попереч-
ным сечением (рис. 17, а).
Закрепление концов каната в обжимной втул-
ке является более технологичным и прогрессивным. Диаметр за-
крепляемых канатов до 36,5 мм. Основной деталью соединения яв-
ляется овальная втулка из стали 20 или алюминиевых сплавов*
АДО, АД1, АД31, АМЦ. Конец каната пропускают через овальную
втулку, изгибают для образования петли и вновь вставляют во
втулку с противоположной стороны, после чего соединение обжи-
мают в штампе.
Для выполнения разъемных концевых креплений стальных ка-
натов наиболее широко применяют винтовые зажимы, состоя-
щие из U-образной скобы и колодки. Количество зажимов в сое-
динении не меньше трех. Шаг установки зажимов — не менее шес-
ти диаметров закрепляемого каната. Диаметр закрепляемых кана-
тов — 6—£3 мм.
Клиновые соединения выполняют в кованых, штампо-
30
ванных или литых втулках из стали с клином соответствующей
конфигурации.
Крепление концов канатов на барабанах лебедок выполняют
следующим образом: клиновым зажимом, вставляемым в гнезда
в барабане, или прижимными планками, закрепляемыми внутри
Рис. 18. Концевые крепления каната на барабане лебедки:
а—клином, поджимаемым болтом, б, в—прижимными планками; /—болт, 2—прижимная
планка, 3—канат, 4—барабан
барабана (рис. 18, а), на торцовой (рис. 18, 6) и цилиндрической
(рис. 18, в) поверхностях барабана. Длина свободного конца ка-
ната за последней планкой должна быть не менее двух его диамет-
ров.
Крепление .сварных круглозвенных цепей к гладким барабанам
лебедок выполняют с помощью кованых крючкообразных зажи-
мов, прикрепляемых к барабану болтами (рис. 19).
§ 12. ОСНОВНЫЕ ФАКТОРЫ, ОПРЕДЕЛЯЮЩИЕ СРОК СЛУЖБЫ
СТАЛЬНЫХ КАНАТОВ, И УСЛОВИЯ ИХ ЭКСПЛУАТАЦИИ
Канат представляет собой сложный агрегат пространственно»
перевитых между собой проволок, в которых под нагрузкой воз-
никают различные дополнительные внутренние напряжения: рас-
тяжения, изгиба, кручения и контактные. Суммируясь, отдельные
напряжения в сечениях некоторых проволок могут достигнуть (а
в некоторых случаях и превысить) предела прочности материала.
Изгиб стального каната под нагрузкой обусловливает возник-
новение дополнительных напряжений и за счет упругой деформа-
ции проволок поворот (смещение) соседних поперечных сечений
каната. Кроме того, в местах контакта наружных проволок каната
с поверхностью блока (барабана лебедки) возникают значитель-
31
«ые по величине дополнительные контактные напряжения, кото-
рые приводят к взаимному износу этих деталей.
Канат — один из ответственных и в то же время быстр^изна-
шивающихся элементов грузоподъемной машины. Так, средний
)в подъема груза мостовых кра-
нов составляет 4—8 месяцев
при сроке службы кранов 20—25
лет.
В основе преждевременного
разрушения стальных канатов, их
ускоренного износа и возникнове-
ния структурных дефектов лежат:
неправильный выбор конструкции
каната, его типа и параметров
свивки, несоответствующих усло-
виям эксплуатации, неправиль-
ный выбор величины соотношения
DldK, геометрии профиля и разме-
ров желоба блока (канавок на
поверхности нарезного барабана
лебедки), неправильная запасовка
срок службы канатов
Рис. 19. Крепление сварных круг-
лозвенных цепей на барабане ле-
бедки:
/—цепь, 2—крючкообразный зажим, 3—
болты, 4—барабан лебедки
каната в полиспаст или навивка
его на барабан лебедки, статические перегрузки или чрезмерное
динамическое нагружение каната, наличие абразивного износа и
неблагоприятных условий в отношении коррозии.
Хранить стальные канаты следует в закрытых проветриваемых
помещениях (желательно в сухих, отапливаемых) с асфальтобе-
Рис. 20. Технология разматывания каната:
а—с барабана, б—из бухты методом перекатывания, в—из бухты с помощью
вьюшки; стрелками показаны направления каната (бухты)
тонным полом или деревянным настилом. Барабаны с канатами
необходимо устанавливать только на диски в один ряд; хранение
барабанов лежа на дисках (плашмя) запрещено.
Разматывать канаты следует посредством вращения барабана
при горизонтальном положении его оси (рис. 20, а). Допускается
разматывать канат перекатыванием бухты (барабана) в сторону,
32
противоположную от конца разматываемого каната (рис. 20, б).
Разматывать канат из бухты следует, применяя специальную вью-
шку (рис. 20, в). Разматывать канат сбрасыванием витков через
борт барабана, лежащего на диске, или вытягиванием из лежа-
щей бухты к ате го р и чески з а п р е щ е н о.
Резку канатов выполняют дисковыми пилами, отрезными кру-
гами, газовой горелкой или оплавлением током сварочного аппа-
рата. Перед резкой канатов всех типов любым методом для пре-
дохранения концов канатов от раскручивания и возникновения в
них структурных дефектов по обе стороны от места реза необходи-
Рис. 21. Бензельная обвязка на конце Рис. 22. Приспособление для
каната наложения бензельной об-
вязки:
а—устройство приспособления,
б—работа приспособления; /—
крючок, 2— паз, 3—рукоятка
мо наложить бензельные обвязки, т. е. намотать мягкую
отожженную проволоку (рис. 21). Для наложения бензельных об-
вязок следует применять простейшие ручные приспособления, обес-
печивающие ровную и плотную укладку обвязки (рис. 22).
При работе со стальными канатами следует применять различ-
ный специальный ручной инструмент (прошивки для каната, ку-
сачки, веревки-, палки, молотки для обстукивания и перерубания
прядей каната) и обязательно пользоваться рукавицами и защит-
ными очками, чтобы избежать возможного травматизма.
В процессе эксплуатации крана необходимо постоянно следить
за состоянием стальных канатов и предупреждать их возможные
повреждения, причиной которых, как правило, являются задева-
ние каната за элементы металлоконструкции крана, соприкоснове-
ние его с троллеями или токоведущими деталями и сход каната с
барабана лебедки (выход из ручья блока).
§ 13. ВЫБРАКОВКА КАНАТОВ
Надежная и безопасная эксплуатация грузоподъемных машин
в значительной мере зависит от состояния канатов.
Осмотр состояния каната обычно совмещают с проведением
технического обслуживания и проводят визуально без применения
увеличительных приборов. Сечение каната должно быть круглым,
а его диаметр должен соответствовать размеру, указанному в со-
2—1975 33
ответствующем сортаменте на канаты. Диаметр каната измеряют
в ненагруженном состоянии на расстоянии не менее 5 м от его
конца, как показано на рис. 23.
Очищенный канат осматривают по всей длине, разматывая его
с барабана лебедки. При этом устанавливают участки каната, име-
ющие наибольшее количество оборванных проволок. Для упроще-
ния работ по определению числа
0 12 3 4 5 6
6)
Рис. 23. Измерение параметров
стального каната:
а—диаметра с помощью штангенцирку-
ля, б—определение длины шага свивки
прядей в шестипрядном канате; 0—6—
номера прядей
обрывов проволок рекомендуется
сзади каната устанавливать зер-
кало и пользоваться мощным ис-
точником света.
Критерием для оценки состоя-
ния каната является число обры-
вов проволок в наружных слоях
свивки прядей каната на длине
одного шага свивки с учетом из-
носа (коррозии) проволок.
Браковочная норма составля-
ет примерно 10% общего количе-
ства проволок в канате крестовой
свивки. Для канатов односторон-
ней свивки эта норма вдвое ни-
же, так как потеря ими несущей
способности наступает вдвое бы-
стрее.
Помимо указанных критериев
браковки канат подлежит выбра-
ковке при наличии следующих
неустранимых дефектов: обрыв
одной пряди, утонение — местное
уменьшение диаметра каната в
результате разрущения органиче-
ского сердечника, сплющивание — нарушение круглого поперечно-
го сечения каната, отставание прядей от сердечника — «фонаре-
ние», выход сердечника на поверхность каната, заломы, петли и
«жучки» на канате, следы поджога каната (окалина, цвета побе-
жалости) в результате короткого замыкания кабеля электросвар-
ки и пр.
Аналогичным образом освидетельствуют и выбраковывают
стальные канаты грузозахватных приспособлений. Результаты ос-
видетельствования заносят в крановый журнал, в котором Ьтме-
чают места наибольшего скопления дефектов, максимальное обна-
руженное число обрывов проволок на длине одного пцга свивки,
процентный износ (коррозию) проволок, общее состояние каната
и др.
$ 14. ГРУЗОЗАХВАТНЫЕ ПРИСПОСОБЛЕНИЯ
Основное назначение грузозахватных приспособлений — соеди-
нение перемещаемых грузов с крюковой подвеской грузоподъем-
34
ной машины. Эта технологическая операция называется стропов-
кой груза, обратная операция — р а с ст р о п ов к о й. Соответст-
венно грузозахватные приспособления называют стропами, а
рабочих, выполняющих указанную операцию, — стропальщика-
м и. Классификация применяемых грузозахватных приспособлений
приведена на рис. 24.
Рис. 24. Классификация грузозахватных приспособлений
Современные грузозахватные приспособления удовлетворяют
следующим основным требованиям: простота конструкции и высо-
кая технологичность изготовления и практического применения,
высокая несущая способность при малых габаритах и собственной
массе, надежность в работе, исключающая самопроизвольную рас-
строповку груза, обеспечивающая его сохранность и безопасное
ведение работ, строгое соответствие перемещаемому грузу и низкая
стоимость.
2Ф
35
При ручной строповке грузов наибольшее распространение по-
учили гибкие стропы и специальные захваты. В соответствии с
хническими требованиями к грузовым стропам в качестве гибкого
есущего.органа следует применять стальные проволочные канаты
ГОСТ 7668—80, 7665—80 и 3079—80) и стальные круглозвенные-
парные цепи (ГОСТ 2319—70, 7070—75). В последнее время полу-
или. распространение многопрядные канаты (ГОСТ 3088—80),
бладающие'высокой прочностью и гибкостью, практически не
рутящиеся под действием растягивающей нагрузки. При отсутст-
ии канатов указанных конструкций разрешено применять канаты
о ГОСТ 2688—80, 3077—80, 3070—74 или канаты с металлическим
* рдечйиком (ГОСТ 7669—80 и 7667—80).
Рис. 25. Цепные стропы и приспособления к ним:
а—одноветвевые типа 1СЦ, б—двухветЕсвые типа 2СЦ, в—применение
стропа, г—подкладка под строп; /—цепь, 2—навесное звено, 3—грузоза-
хватное звено, 4— подкладка под строп
Преимуществом стальных круглозвенных сварных цепей по
равнению с канатами является высокая гибкость, недостатками —
ольшая масса и возможность внезапного разрушения вследствие
ыстрого раскрытия образовавшихся трещин, что~требует тщатель-
ого систематического контроля состояния (износа) звеньев цепи,
поэтому цепные стропы получили широкое распространение в тех
траслях народного хозяйства, где применение канатных стропов
еэффективно, т. е. в условиях высоких температур, абразивного
зноса или перемещения грузов с острыми кромками.
Промышленность выпускает одно- и многоветвевые канатные
цепные стропы, снабженные навесными и грузозахватными звень-
ми (рис. 25). С помощью навесных звеньев стропы навешивают на
рюк подъемной машины. Грузоподъемность одноветвевых канатных
тропов типа 1СК 0,32—20 т. Соответственно многоветвевые стро-
ы — «пауки»' типа 2СК, ЗСК и 4СК имеют общую грузоподъем-
ость 0,4—32 т. В аналогичном исполнении на ту же грузоподъем-
ость предусмотрен выпуск цепных стропов типа 1СЦ, 2СЦ, ЗСЦ и
СЦ. Канатные стропы выпускают обязательно с применением
тальных коушей.
Универсальные стропы не имеют захватных устройств и их, как
равило, применяют для строповки грузов, не снабженных спе-
иальными захватными устройствами в обхват или «на удав»
6
(рис. 26, в). Канатные универсальные стропы рзличают: прямые
типа УСК1 (рис. 26, а, б) и замкнутые (кольцевые) типа УСК2
(рис. 26, в). Эти стропы являются облегченными, поэтому коуши
'2
г)
Рис. 26. Канатные стропы:
а — одноветвевой типа УСК1 с заплеткой, б — типа УСК1 с обжимными втулками, в —
типа УСК2, г — полотенчатый, д, е — применение стропов типа УСК2; 1 — заплетка, 2 —
канат, 3—петля, 4—обжимная втулка, 5—захват
в них не применяют. Цепные стропы выпускают только замкнуты-
ми типа УСЦ. Для предохранения рабочих ветвей канатных стро-
пов от перетирания, а звеньев цепей от перелома на острых гранях
перемещаемого груза применяют стальные (реже деревянные) под-
кладки.
Рис. 27. Захватные и навесные звенья:
крюки типа: а—К1, б—К2, в—КЗ, а—треугольное звено неразъемное, б—треугольное
звено разъемное, е—овальное звено неразъемное, ж—карабин; /—крюк, 2—предохра-
нительное устройство
Для перемещения тяжелых грузов, не имеющих специальных
захватов, и в случаях, когда грузоподъемности стандартных стро-
пов не достаточно, применяют специальные полотенчатые стропы,
представляющие собой ряд параллельных ветвей каната, выполнен-
ных из одного целого куска и размещенных на специальных захват-
ных петлях для крепления к а крюковой подвеске грузоподъемной
машины (рис. 26, г).
37
Для упрощения производства работ по строповке грузов инвен-
арные гибкие стропы оснащают специальными звеньями — захва-
ами, принцип действия, конструкции и размеры которых различны
I зависят от типов перемещаемых грузов. '
Для строповки грузов (деталей машин), снабженных захват-
1ыми устройствами, например рым-болтами, скобами, проушинами
г др., применяют специальные палочные крюки. В отдельных слу-
]аях применяют подвески, соединительные кольца, карабины,
)азъемные такелажные скобы и др. (рис. 27).
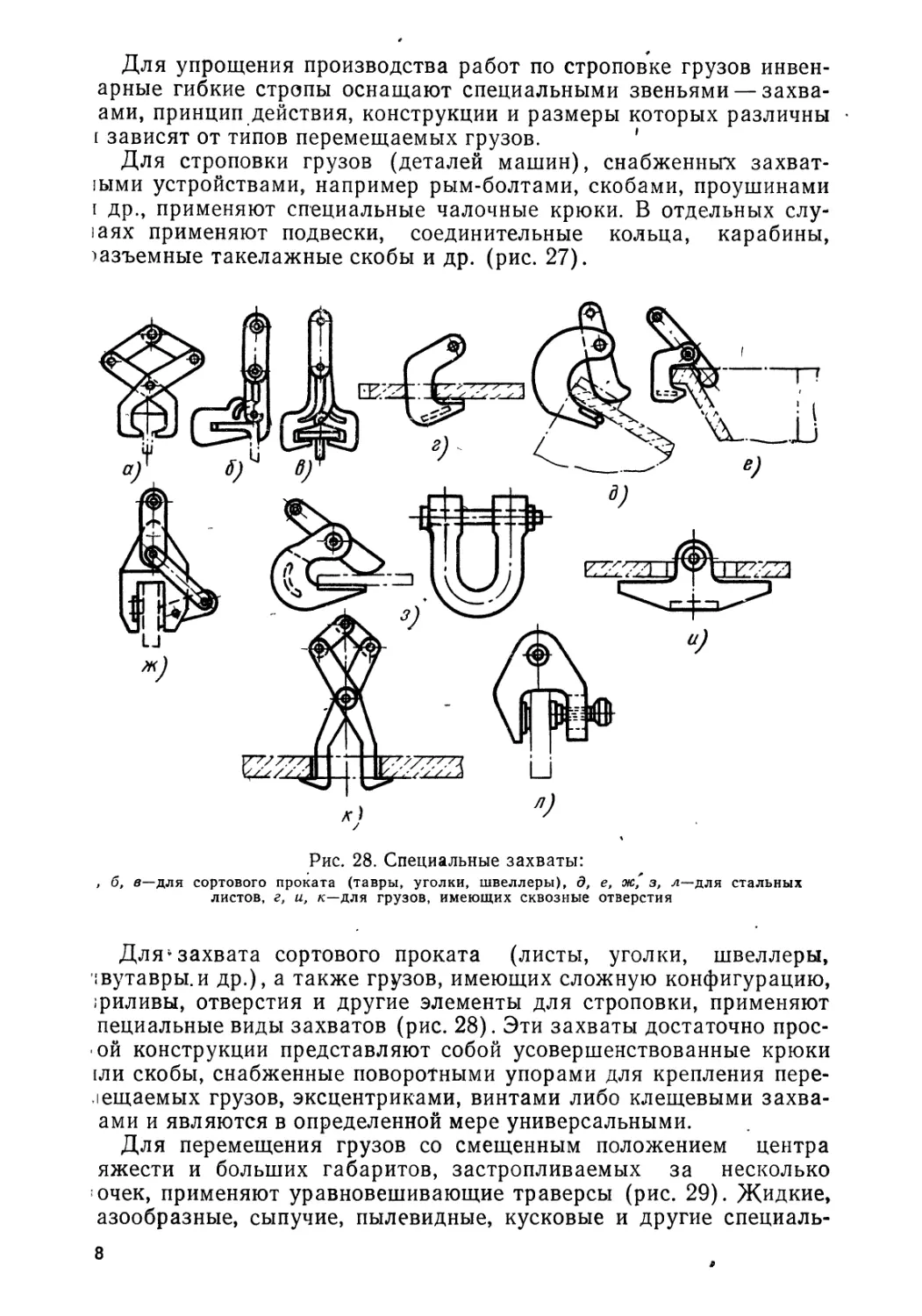
Рис. 28. Специальные захваты:
, б, в—для сортового проката (тавры, уголки, швеллеры), д, е, ж, з, л—для стальных
листов, г, и, к—для грузов, имеющих сквозные отверстия
Для*захвата сортового проката (листы, уголки, швеллеры,
двутавры.и др.), а также грузов, имеющих сложную конфигурацию,
филивы, отверстия и другие элементы для строповки, применяют
пециальные виды захватов (рис. 28). Эти захваты достаточно прос-
ой конструкции представляют собой усовершенствованные крюки
[ли скобы, снабженные поворотными упорами для крепления пере-
мещаемых грузов, эксцентриками, винтами либо клещевыми захва-
ами и являются в определенной мере универсальными.
Для перемещения грузов со смещенным положением центра
яжести и больших габаритов, застропливаемых за несколько
очек, применяют уравновешивающие траверсы (рис. 29). Жидкие,
азообразные, сыпучие, пылевидные, кусковые и другие специаль-
8
ные грузы транспортируют в спе-
циальных емкостях — таре. На
рис. 30 показаны примеры приме-
нения гибких грузозахватных уст-
ройств для строповки грузов раз-
личного народнохозяйственного
назначения, а на рис. 31 —жест-
ких клещевых захватов.
Pile. 29. Уравновешивающая траверса:
/—траверса, 2—навесное звено, 3— крюк
Рис. 3.0. Применение гибких грузозахватных приспособлений
для строповки различных грузов:
а—труб, б—валов, в, г—пакетов длинномерных материалов, д—
стальных листов, е—бочкотары; /—вспомогательная веревка, 2—за-
хватное звено, 3—канатный строп, 4—груз, 5—цепной строп
Рис. 31. Применение жест-
ких клещевых захватов для
строповки различных гру-
зов
39
§ 15. ГРУЗОПОДЪЕМНЫЕ ЭЛЕКТРОМАГНИТЫ И ГРЕЙФЕРЫ
рузоподъемных магнитов: круглые
11 10 9
Рис - 32. Грузоподъемный электромагнит
круглый:
/—наружный полюс магнита, 2—катушка, 3—
стальной корпус, 4—стальная шайба, 5—пробка,
6—коробка контактных зажимов, 7—зажимы, 8—
цепи, 9—внутренний полюс магнита, 10—секции
катушки, //—латунный лист
Сортовой прокат черных металлов, чугунные чушки, стальной
крап,, стружку и металлолом в промышленности и на транспорте
ффективно транспортировать с помощью грузоподъемных электро-
магнитов. Отечественная промышленность выпускает два вида
ипа М-22Б, М-42Б, М62-Б и
прямоугольные типа ПМ-15,
ПМ-25А в нормальном и
тропическом исполнении. По-
следние обозначают бук-
вой Т.
Круглые электромагниты
предназначены для переме-
щения плит, болванок, чу-
шек, рулонов, скрапа, струж-
ки. С помощью прямоуголь-
ных магнитов транспортиру-
ют длинномерные грузы:
сортовой прокат, балки, тру-
бы и др. В зависимости от
размеров груза и его массы
применяют несколько элек-
тромагнитов, одновременно
работающих на общей тра-
версе. Питание электромаг-
нитов осуществляют от элек-
тросети. Но грузоподъемные
электромагниты в качестве
захватных устройств недо-
статочно надежны из-за воз-
можного отключения элек-
троэнергии, и, используя их>
-риходится применять дополнительные меры безопасности.
Грузоподъемный круглый электромагнит (рис. 32) состоит из
ары полюсов — наружного и внутреннего, секционной катушки и
тального корпуса. Корпус отлит из низкоуглеродистой стали марки
5Л-1, обладающей высокой магнитной проницаемостью, и закрыт
верху стальной шайбой, а снизу латунным листом, обладающим
езначительной магнитной проницаемостью.’ Токоподводящий
абель от сети подведен к коробке контактных зажимов. Круглые
:агниты подвешивают на трех цепях. Аналогичным образом уст-
оен прямоугольный электромагнит. Основные параметры грузо-
одъемных магнитов приведены в табл. 6.
Для работы с сыпучими и кусковыми материалами, а также
ля перегрузки круглого леса и длинномерных лесоматериалов
рименяют специальные грузозахватные устройства — грейферы,
ахватными элементами грейферов являются челюсти (две или
О
несколько), шарнирно закрепленные на раме и зачерпывающие пе-
ремещаемый материал.
По типу привода механизма замыкания челюстей грейферные
механизмы делятся на две группы: канатные, у которых челюсти
замыкаются с помощью канатных систем, и приводные, снаб-
женные для замыкания челюстей специальным механизмом с неза-
висимым приводом. Конструктивно грейферы подразделяются на
двухчелюстные, перерабатывающие преимущественно сыпучие
грузы, многочелюстные, перерабатывающие крупнокуско-
вые грузы, и трех-, четырехлапые для длинномерных
грузов.
6. Основные характеристики электромагнитов
Тип электромагнита Мощность, кВт Масса, кг Грузоподъемность, кг, для грузов
болванки, нли!ы, слябы, рельсы чугун- ные чушки сталь- ной скрап стружка 3
М-22Б, М-22БТ 2,3 550 6 000 200 80
М-42Б, М-42БТ 7,15 1500 16 000 600 200
М-62Б, М-62БТ 12,4 3500 20 000 2000 650
JIM-15, ПМ-15Т 2,3 1550 7 000 — — - tS 1
ПМ-25А, ПМ-25АТ 4,4 2500 14 000 — — —
Наибольшее распространение получили двухчелюстные двухка-
натные грейферы, у которых один канат (группа канатов), назьг- *
ваемый подъемным (поддерживающим), осуществляет подъем са-
мого грейфера, а замыкание (размыкание) челюстей происходит с
помощью другого каната (нескольких канатов). Для обеспечения
нормальной работы такого грейфера необходима установка спе-
циальной двухбарабанной грейферной лебедки на грузоподъемной
машине.
Принцип работы простого двухканатного грейфера показан на
рис. 33. Замыкающий канат Fi проходит через отверстие в верхней
траверсе и закреплен на раме грейфера. Обычно на траверсе и раме
установлены блоки, образующие совместно с канатами полиспасты
соответствующего назначения. Для опускания открытого грейфера
оба барабана лебедки (ai—замыкающий и а2—подъемный) вра-
щаются синхронно по часовой стрелке (F{ и F2 направлены вниз)
до момента, когда челюсти грейфера внедрятся в подлежащий за-
черпыванию материал (рис. 33, а). Вращением замыкающего бара-
бана а\ против часовой стрелки (в сторону подъема) при затормо-
женном подъемном барабане а2 производят замыкание челюстей
грейфера (рис. 33, б). При этом замыкающий канат нагружен
(Fi направлена вверх), рама .грейфера приближается к верхней
траверсе, челюсти захватывают материал и сходятся до полного
соприкосновения режущих кромок (замыкаются). После чего вклю-
чают подъемный барабан а2 (против часовой стрелки) и совмест-
41
ым вращением обоих барабанов поднимают полный грейфер
рис. 33, в). При этом движение обоих канатов Fi и F2 направлено
верх. Затем грейфер переносят к месту разгрузки. Опорожняют
рейфер вращением замыкающего барабана а\ по часовой стрелке
в сторону опускания рамы грейфера) при заторможенном барабане
2 (рис. 33, г). В это время (F{ направлена вниз) челюсти грейфе-
а раскрываются под действием сил собственного веса и тяжести
материала, в результате чего материал разгружается.
Рис. 33. Схема работы двухканатного грейфераз
а — опускание, б — зачерпывание материала, в —подъем, г — опорожнение ковша
грейфера; Л—замыкающий канат, /^—подъемный канат, ах—барабан замыкаю-
щей' лебедки, а?— барабан подъемной лебедки; стрелками показаны направления
движения канатов
Приводные (моторные) грейферы являются быстросменными
рузозахватными приспособлениями, навешиваемыми на крюк
юдъемной машины, с которой грейфер связан для подачи электро-
нергии токоподводящим кабелем^ либо шлангами для подачи
'абочей жидкости или сжатого воздуха к механизму замыкания
щлюстей, смонтированному на раме грейфера. Моторные грейферы
ю типу привода подразделяют на электромоторные, электрогидрав-
1ические, гидравлические и пневматические. Два последних типа
1риводов более просты по конструкции и компактны, так как на
таме грейфера размещены только исполнительные устройства
(гидро- и пневмоцилиндры). -
$ 16. ЭКСПЛУАТАЦИЯ ГРУЗОЗАХВАТНЫХ ПРИСПОСОБЛЕНИЙ '
Изготовление съемных грузозахватных приспособлений на пред-
фиятиях организуется централизованно по нормалям, технологиче-
ким картам или индивидуальным чертежам. В соответствии с тре-
бованиями Правил все вновь изготовленные или подвергнутые
>емонту инвентарные грузозахватные приспособления (стропы,
раверсы, захваты и др.) должны быть обязательно испытаны и
12
промаркированы. Испытание проводят приложением пробной рас-
тягивающей нагрузки, в 1,25 раза превышающей номинальную ра-
бочую нагрузку.
При испытании стропов общего назначения их ветви должны
быть расположены под углом л/2 рад друг к другу.
Тара в обязательном порядке должна быть подвергнута осмотру.
Испытание тары пробным грузом-не обязательно.
После испытания все съемные грузозахватные приспособления
должны быть промаркированы, для чего непосредственно на кор-
пус приспособления или на прочно прикрепленную к нему бирку
наносят наименование или товарный знак предприятия-изготовите-
ля, грузоподъемность приспособления, дату испытания, порядковый
номер приспособления по системе нумерации предприятия-изгото-
вителя.
Маркировку наносят ударным способом на соответствующем
установленном месте приспособления. Каждое звено инвентарного
грузозахватного приспособления также должно иметь соответствую-
щую маркировку. При этом грузоподъемность стропов общего наз-
начения указывают при угле л/2 рад между ветвями. Грузоподъем-
ность специальных стропов целевого назначения, предназначенных
для перемещения конкретных грузов, указывают при угле между
ветвями, принятом при расчете. На таре, за исключением специаль-
ной технологической (бадьи для раствора и другие), должны быть
указаны ее назначение, порядковой номер, собственная масса и
масса груза, для транспортировки которого тара предназначена.
Емкость тары должна исключать возможность перегрузки грузо-
подъемной машины.
§ 17. ОСВИДЕТЕЛЬСТВОВАНИЕ И БРАКОВКА
ГРУЗОЗАХВАТНЫХ ПРИСПОСОБЛЕНИЙ
В соответствии с требованиями Правил владелец грузозахватных
приспособлений обязан периодически освидетельствовать их в уста-
новленные сроки, но не реже одного раза в шесть месяцев — тра-
версы, одного раза в месяц — специальные захваты (клещевые,
эксцентриковые и др.), одного раза в десять дней — тару и система-
тически используемыестропы.
Редко используемые съемные грузозахватные приспособления
необходимо осматривать непосредственно перед работой.
При этом следует осмотреть металлоконструкции приспособле-
ний: отсутствие погнутости, искривлений осей, местных деформа-
ций, трещин, следов коррозии и других видимых дефектов. Особое
внимание следует обращать на состояние соединений: сварных и
резьбовых. Нарушения целостности сварных швов и возникновение
трещин в местах приварки проушин, петель, серег и цапф не до-
пускается. То же касается установки рым-болтов. Затем необходимо
проконтролировать состояние гибких несущих элементов грузозах-
ватных приспособлений (канатов, цепей) и чалочных крюков, а
также клещевых, эксцентриковых, опорных и других захватов.
43
Допустимый износ звеньев навесных и грузовых цепей не должен
превышать 10% от номинального диаметра прутка (калибра зве-
на), из которого изготовлено звено.
Концевые крепления гибких несущих элементов должны соот-
ветствовать требованиям технической документации. Коуши не
должны быть деформированы, погнуты и разрушены. Стальные и
алюминиевые обжимные втулки не должны иметь трещин, видимых
невооруженным глазом, и вмятин глубиной более 35% от толщины
стенки втулки.
Винтовые канатные зажимы должны быть установлены и затя-
нуты в соответствии с требованиями ОСТ 24.090.51—80.
Чалочные крюки и другие захватные детали не должны иметь
износ *по высоте основного несущего (вертикального) сечения более
10% от первоначального размера. При этом нельзя допускать отги-
бание рога палочного крюка, проверяемое замером величины зева
крюка от конца рога до передней стенки крюка, которое должно
соответствовать паспортным данным. Все замеры проводить с по-
мощью штангенциркуля. Детали специальных захватов не должны
иметь видимых дефектов и следов механических повреждений.
Шарнирные соединения должны поворачиваться без заеданий, а
рабочие поверхности захватов не должны иметь следов износа. По-
мимо визуального осмотра и замера требуемых параметров грузо-
захватных приспособлений необходимо провести контрольное оп-
робование их работой под нагрузкой.
При освидетельствовании грейферов необходимо помимо ви-
зуального осмотра проверить правильность,, плавность и надеж-
ность замыкания (размыкания) челюстей, обращая внимание на
работу грейферной лебедки, механизма замыкания челюстей, конеч-
ных выключателей и защитных устройств, предохраняющих привод
от перегрузок. Грузоподъемные магниты следует подвергнуть ви-
зуальному осмотру, обращая особое внимание на крепление
катушек, состояние полюсов и нижнего защитного листа из ла-
туни.
Отдельно следует проверить состояние деталей подвески магнита
к грузоподъемной машине, токоподводящего кабеля, надежность
подключения его к контактной коробке, работу устройства натяже-
ния токоподводящего кабеля и всей коммутирующей электроаппа-
ратуры. Пробным включением магнита в сеть проверить его работо-
способность. Искрение в контактах свидетельствует о ненадежном
подключении, а повышенный нагрев катушек магнита указывает
на внутреннее межвитковое замыкание в обмотках.
При освидетельствовании грузозахватных приспособлений дис-
танционного (автоматического) действия следует проверить сос-
тояние и работу их механической части, а также систем управле-
ния: крепление вспомогательных канатов, шлангов, кабелей.
Выполняя техническое освидетельствование съемных грузозахват-
ных приспособлений, необходимо контролировать четкость и
своевременность срабатывания соответствующих фиксирующих
устройств (стопоров, защелок, фиксаторов и пр.). Все подвижные
44
соединения необходимо очистить от грязи и смазать рекомендуемой
смазЪой.
Результаты освидетельствования съемных грузозахватных прис-
пособлений должны фиксироваться в журнале их учета и осмотров.
Выявленные в процессе осмотра поврежденные грузозахватные
приспособления должны быть изъяты из употребления до проведе-
ния необходимого ремонта, объемы и сроки которого устанавливает
лицо, ответственное за исправное состояние грузоподъемных
^кранов.
Контрольные вопросы
1. Назовите основные типы и конструкции стальных проволочных канатов.
2. Каким требованиям должны удовлетворять стальные канаты?
3. Какие конструкции канатов применяют на кранах и для изготовления стро-
пов?
4. В каких случаях и каким образом выполняют расчет каната на проч-
ность?
5. Что такое соотношение DldK, на что оно влияет и исходя^из каких условий
выбирают его величину?
6. Какие существуют виды концевых креплений стальных канатов?
7. Как выполняют крепление концов стальных канатов в стропах и к эле-
ментам подъемных машин?
8. Каковы преимущества концевого крепления каната в обжимной втулке по
сравнению с заплеткой?
9. В чем особенности применения зажимов для стальных канатов?
10. Как крепят концы стальных канатов к барабанам лебедок?
И. Каковы основные факторы, определяющие работоспособность каната?
12. Как производят освидетельствование и браковку канатов?
13. Что такое бензельные обвязки и для чего они нужны? '
14. Какие меры следует принимать для предупреждения возможных повреж-
дений стальных канатов?
15. Каково назначение съемных грузозахватных приспособлений? Из каких
материалов их изготовляют?
ГЛАВА IV. МЕХАНИЧЕСКОЕ ОБОРУДОВАНИЕ МОСТОВЫХ,
КОЗЛОВЫХ И КОНСОЛЬНЫХ КРАНОВ
Рабочие движения кранов — подъем груза, передвижение тележ-
ки и моста крана — осуществляются с помощью механизмов. Меха-
низмы подъема и передвижения имеют индивидуальный электричес-
кий привод и состоят, как правило, из следующих основных
элементов: электродвигателей, редукторов, муфт, тормозов, откры-
тых зубчатых передач, исполнительных органов (барабанов — для
лебедок механизмов подъема, ходовых колес — для механизмов пе-
редвижеция).
Каждый механизм имеет техническую характеристику, по кото-
рой его подбирают для того или ицрго крана. В характеристику
механизма включают параметры двигателя (мощность и частоту
вращения ротора), редуктора (число ступеней, тип редуктора, пе-
редаточное отношение), габаритные и привязочные размеры. Для
лебедок дополнительно рассматривают тяговое усилие на барабане,
45
канатоемкость и диаметр каната, для механизмов передвижения —
диаметр катка (колеса), допустимую вертикальную нагрузку на
колесо.
$ 18. ДЕТАЛИ КРАНОВЫХ МЕХАНИЗМОВ И ИХ СОЕДИНЕНИЯ
Валы и оси. Вращающиеся детали машин устанавливают на ва-
лах или осях, обеспечивающих постоянное положение оси враще-
ния этих деталей. Валы — это детали, предназначенные для пере-
дачи крутящего момента вдоль своей оси и для поддержания
Рис. 34. Разъемный подшипник скольжения:
/—корпус, 2—крышка, 3—половинки вкладыша
вращающихся деталей машин. Валы вращаются в подшипниках.
В механизмах кранов на валах вращаются шестерни редукторов,
барабаны лебедок, приводные ходовые колеса и другие детали.
Трансмиссионные валы передают крутящие моменты от приводов
к рабочим органам. Поскольку,передача крутящего момента связа-
на с возникновением сил, например, в зубчатом зацеплении, то,
кроме крутящих моментов, на валы действуют поперечные силы и
изгибающие моменты.
Оси — детали, предназначенные для поддержания вращаю-
щихся деталей и не передающие крутящего момента. Обычно они
подвергаются воздействию изгибающих моментов и не учитываемых
при расчетах крутящих моментов от сил трения. Оси разделяют
на вращающиеся и неподвижные. На осях устанавливают блоки
полиспастов, неприводные ходовые колеса механизмов передвиже-
ния, барабаны механизмов подъема груза, если крутящий момент
к ним передают через зубчатый венец, закрепленный на бара-
бане.
Опорные части валов и осей называют цапфами. Промежу-
точные цапфы называют шейками, а концевые — шипами.
Длинные, например, трансмиссионные валы механизмов передви-
жения делают составными, что необходимо такя<е по условиям мон-
тажа и транспортировки. Валы соединяют с помощью муфт или
фланцев. Опорами для валов и вращающихся осей служат под-
шипники.
Подшипники. По принципу работы различают подшипники'
46
скольжения и подшипники качения. В подшипниках скольжения
вал вращается в специальном вкладыше (рис. 34), состоящем из
двух половинок, изготовленном из более мягкого металла, чем вал.
В процессе работы вкладыш подшипника изнашивается. По мере
износа вкладышей из плоскости разъема соединения извлекают
тонкие прокладки, что позволяет регулировать зазор между вкла-
дышем и валом и поддерживать его в пределах установленной
нормы. Разъем вкладышей выполняют по оси, перпендикулярной
направлению действия нагрузки.
скольжения изготовляют из антифрик-
ционных материалов. К
ним относятся сплавы на
оловянной и свинцовой
основах, носящие общее
название баббитов. В ка-
честве антифрикционных
сплавов на медной основе
для изготовления вклады-
шей подшипников колес
моста и тележки крана
чаще всего применяют
различные марки бронзы.
В современных кранах
подшипники скольжения
у
Рис. 35. Подшипники качения:
а—шариковый однорядный, б—роликовый; /—
внутреннее кольцо, 2— наружное кольцо, <?—шари-
ки, 4—ролики, 5—сепаратор, 6—вал
не применяются.
Подшипники качения обладают значительными преимущества-
ми по сравнению с подшипниками скольжения: меньше’ расход
цветных металлов, трение в опорах, расход энергии и смазки, более
высокий срок службы подшипников. Подшипники качения по кон-
струкции разделяют на шариковые (рис. 35, а) и роликовые (рис/
35, б), а в зависимости от вида нагрузок, на восприятие которых
рассчитаны подшипники, их разделяют на три типа: упорные под-
шипники предназначены для восприятия осевых усилий; радиаль-
ные подшипники предназначены для восприятия радиальных
усилий; радиально-упорные подшипники предназначены для восп-
риятия нагрузок, одновременно действующих перпендикулярно к
оси и вдоль нее.
Подшипники качения состоят из наружного кольца, внутреннего
кольца*, сепаратора и тел качения (шариков или роликов). На на-
ружной поверхности внутреннего кольца и на внутренней поверх-
ности наружного кольца выполнены точно обработанные дорожки
качения, по которым катятся тела качения. Для удержания послед-
них на равном расстоянии друг от друга служит сепаратор. Внут-
реннее кольцо подшипника надевают на вал, а наружное устанавли-
вают в корпусе.
На кранах подшипники качения применяют в узлах трения
ходовых колес моста или тележки, канатных барабанов, валов
редукторов, блоков полиспастов, грузовых крюков и других дета-
лей.
47
Муфты. При сборке механизма, т. е. при соединении редуктора
с валами электродвигателя и исполнительного органа, а также сек-
ций трансмиссионного вала между собой и с ходовыми колесами,
неизбежны перекосы между соединяемыми деталями. Поэтому для
обеспечения правильной работы валов вместо жесткого соединения
применяют компенсирующие муфты. В кранах применяют в ос-
новном два типа муфт — втулочно-пальцевые и зубчатые. Муфта
упругая втулочно-пальцевая (рис. 36, а) состощ^из двух полумуфт
1 и 4, одна из которых одновременно служит тормозным шкивом.
Как правило, тормоз устанавливают на быстроходном валу редук-
ВидА
Рис. 36. Муфты:
а—втулочно-пальцевая, б, в—зубчатые; /—ведущая полумуфта, 2—палец, 3—втулка (на*
бор-резиновых шайб), 4—ведомая полумуфта — тормозной шкив, 5, 7, 9—зубчатые полу-
муфты, 6, 8—зубчатые обоймы
тора и тормозным шкивом служит полумуфта, насаженная на этот
вал. Полумуфты соединены между собой четырьмя или шестью паль-
цами 2. Один конец пальца закреплен в коническом отверстии первой
полумуфты с помощью гаек, другой конец с надетыми на него упру-
гими втулками 3 из резины вставлен в цилиндрическое гнездо вто-
рой полумуфты. Упругость втулок 3 и возможность их осевого
перемещения относительно ведомой полумуфты компенсируют не-
точности в соединении двух валов. Предельное радиальное смеще-
ние валов при отсутствии перекоса, допускаемое этими муфтами,
равно 0,2—0,6 мм при диаметре вала 38—120 мм, а угол перекоса
без смещения валов не более 0,0174 рад. Установка тормозного
шкива на вал ротора электродвигателя запрещена, так как в слу-
чае разрушения пальцев тормоз не сможет воздействовать на ме-
ханизм.
Муфта зубчатая (рис. 36, б, в) более надежна в работе, чем
втулочно-пальцевая. Крутящий момент передают зубья полумуфт
5, 7, 9, входящие в зацепление с внутренними зубьями обойм 6, 8.
Наличие зазоров в зубчатых соединениях и бочкообразная наруж-
ная поверхность зубьев полумуфт компенсируют неточности соеди-
нения валов. Допустимое радиальное смещение валов без перекоса
1,1—3,1 мм для валов диаметром 38—120 мм, а перекосы без сме-
щения валов до 0,0262 рад.
Шпоночные и шлицевые соединения. Для фиксации деталей, на-
саженных на вал, и передачи крутящего момента применяют раз-
48
личные шпонки. Основные типы шпонок стандартизованы. Раз-
личают ненапряженные и напряженные шпоночные соединения.
Ненапряженные шпоночные соединения осуществляют с помощью
призматических и сегментных шпонок, а напряженные — посредст-
вом клиновых шпонок. В свою очередь, призматические шпонки
подразделяют на обыкновенные, высокие, направляющие и сколь-
зящие^ Примерно половина высоты шпонки размещена в пазу вала,
а другая половина — в пазу ступицы сопрягаемой детали. Рабочи-
ми гранями шпонок являются их боковые (более узкие) грани.
Для соединения ступицы с валом вместо шпонок часто приме-
няют зубчатые или шлицевые соединения, представляющие со-
бой выступы на валу, называемые зубьями (шлицами), входящие в
соответствующие пазы ступицы. В зависимости от формы зубьев
различают соединения с прямобочными, эвольвентными и треу-
гольными зубьями.
По сравнению со‘шпоночными соединениями шлицевые обла-
дают следующими преимуществами: способностью передавать боль-
шие крутящие моменты благодаря значительной поверхности соп-
рягаемых деталей и более равномерному распределению контакт-
ных давлений по этой поверхности, более точйым центрированием
ступицы на валу, возможностью перемещения д'етали по валу без
нарушения соосности и большой прочностью самого вала.
§ 19. СБОРОЧНЫЕ ЕДИНИЦЫ КРАНОВЫХ МЕХАНИЗМОВ
Редукторы. Редуктором называется зубчатая или червячная
передача, заключенная в корпус и предназначенная для передачи
движения от одного элемента машины или механизма к другому
посредством зацепления зубьев и получения при этом изменения
частоты или направления вращения. Редукторы служат для пони-
жения частоты вращения электродвигателя, что приводит к увели-
чению момента вращения (крутящего момента на валу).
На кранах применяют электродвигатели с относительно высокой
частотой вращения роторов, которую редукторы уменьшают в 10—
40 раз. Редукторы устанавливают jb механизмах подъема, передви-
жения крана и тележки. В краностроении применяют горизонталь-
ные и вертикальные цилиндрические редукторы. Цилиндрические
редукторы применяют для передачи крутящих моментов между
параллельными валами.
У всех типов зубчатых передач малое колесо сопряженной пары
называется ведущим (шестерней), большое — ведомым
(зубчатым) колесом. Отношение числа зубьев колеса к числу
зубьев шестерни называется передаточным отношением (чис-
лом).
Зубья цилиндрических зубчатых колес изготовляют прямыми,
косыми, шевронными и круговыми. Прямые зубья перпендикулярны
к боковой плоскости колеса, косые — наклонены к ней под некото-
рым углом, шевронные зубья имеют вид «елочки».
49
На рис. 37 показан цилиндрический редуктор. В корпусе 1 уста-
новлены вал 6 с насаженной на нем шестерней 7, вал 5 с зубчатым
колесом 8, шестерней 4 и вал 2 с зубчатым колесом 3.
Вращение от вала электродвигателя через муфту передается
на вал 6, шестерня 7 которого ведет за собой колесо 8. Последнее
вращает вал 5 с насаженной на нем шестерней 4, приводящей в
Рис. 37. Цилиндрический редуктор:
/—корпус, 2—выходной вал, 3—зубчатое колесо, 4—шестерня, 5—промежуточный вал,
6—входной вал, 7—шестерня, 8—зубчатое колесо
50
движение колесо 3, насаженное на вал 2, соединенный посредст-
вом муфты с валом канатного барабана. Для нахождения переда-
точного числа редуктора примем, что шестерня 7 имеет 12 зубьев,
колесо 8 — 42 зуба, шестерня 4—12 зубьев и колесо 3—60 зубьев.
Передаточное число I ступени редуктора (пары 7—8) А =
= 42/12 = 3,5.
Следовательно, вал 5 будет вращаться в 3,5 раза медленнее,
чем вал 6.
•Передаточное число II ступени- редуктора (пары 3—4) 12 =
= 60/12 = 5.
Общее передаточное число двухступенчатого редуктора f=
= • ^2“ 3,5 X 5= 17,5.
Если ротор двигателя, соединенный с валом 6, имеет частоту
вращения п\ = 15,2 с-1, то вал 2 редуктора будет иметь частоту вра-
щения п2 = П1Л= 15,2/17,5 = 0,87 с"1.
Кроме редукторов для изменения частоты и направления вра-
щения крановых механизмов применяют простые или открытые
зубчатые передачи. Они не имеют корпуса, как редукторы, а просто
закрыты стальными кожухами для предотвращения несчастных
случаев.
Тормоза. После отключения электродвигателя его ротор неко-
торое время продолжает вращаться под действием сил инерции
самого ротора в соединенных с ним других деталей механизма,
поэтому для своевременной остановки и надежного удержания ме-
ханизма в покое применяют тормоза. По способу установки
различают открытые (наружные) и встроенные тормоза. Наиболь-
шее распространение в краностроении получили колодочные тор-
моза.
Колодочные тормоза по конструкции бывают замкнутого или
разомкнутого типа. У тормоза замкнутого типа рычаги замыкаются
вокруг тормозного шкива элементом тормоза. Тормоз разомкнутого
типа не имеет замыкающего элемента, т. е. рычаги с колодками
остаются консольными. Тормоз замкнутого типа может быть длин-
ноходовым (рис. 38, а) или короткоходовым (рис. 38, б, в) в зави-
симости от конструкции привода тормоза. По типу привода эти тор-
моза бывают с электромагнитным приводом переменного (МО-Б)
или постоянного (МП) тока и электрогидравлическим толкателем
(ТКГ, ТКТГ).
По принципу действия тормоза делят на нормально открытые
и нормально закрытые. При отключении питания в нормально
открытом тормозе шкив растормаживается, а в нормально закры-
том тормозе шкив затормаживается. В кранах преимущественно
применяют нормально закрытые тормоза. Принцип действия нор-
мально закрытого замкнутого тормоза заключается в том, что
замыкающая пружица 6 с помощью системы рычагов 4 и тяг 3 при-
жимает колонки 1 с фрикционными накладками 8 к тормозному
шкиву 2. При этом возникает тормозной момент, величину которого
регулируют, чтобы обеспечить надежное стопорение механизма.
Величина тормозного момента зависит от усилия сжатия пружины,
51
соотношения плеч рычагов механизма и материала накладок коло*
док. Для надежной работы тормоза его тормозной момент должен
превышать крутящий момент, возникающий при работе механизма,
в К раз. Величина К (коэффициент запаса торможения) в зависи-
мости от привода и режима работы по Правилам изменяется от
1,5 до 2,5.
При включении привода механизма электромагнит или толка-
тель 5 развивает усилие, достаточное для сжатия пружины 6, что
приводит к освобождению шкива.
Рис. 38. Двухколодочные тормоза:
а—схема тормоза типа ТКДТ, б, в—схема и конструкция тормоза с Электромаг-
нитом типа МО; /—колодка, 2—тормозной шкив, 3—*#яга, 4—рычаги’, 5—привод
(растормаживающее устройство — электромагнит, двигатель электрогидротолка-
теля), 6—замыкающая пружина, 7—регулировочный болт, 8—тормозная накладка,
9, 10—регулировочные гайки, //—скоба, 12—якорь электромагнита, 13—гидроци-
линдр, 14—шток, /5—поршень, 16—крыльчатка; стрелками указаны направления
движения исполнительных органов
Механическую часть тормоза обозначают буквами ТК с цифрой,
равной диаметру тормозного шкива в миллиметрах. Причем, если
приводом служит электромагнит постоянного тока, то тормоз обоз-
начают ТКП, если переменного — ТКТ. При использовании электро-
гидравлического толкателя тормоз обозначают ТКТГ. Иногда по
конструктивным соображениям на тормозной шкив диаметром,
например, 200 мм ставят тормоз с более слабым приводным элек-
тромагнитом, предназначенным для 100-миллиметрового шкива.
В этом случае обозначение тормоза имеет вид ТКТ-200/100.
Тормоза могут обеспечивать расчетный тормозной момент лишь
при правильной их регулировке, для чего служат гайки 9 и 10,
устанавливающие ход тяги 3 и усилие сжатия дружины 6. Для рав-
номерного отхода колодок от шкива служат регулировочные бол-
ты 7.
§ 20. БЛОКИ И БАРАБАНЫ ЛЕБЕДОК
Блок — простейшая деталь грузоподъемной машины, выпол-
ненная в форме диска с желобом по окружностй для размещения
каната (рис. 39). В грузоподъемных машинах блоки направляют
гибкий тяговый орган между подъемным механизмом и грузом.
52
Блоки диаметром до 350 мм изготовляют штампованием из
стали СтЗкп (ГОСТ 380—71). Для кранов, работающих в легком
и среднем режиме работы, блоки изготовляют из чугуна марок
СЧ 12, СЧ 15 или СЧ 28 (ГОСТ 1412—79).
Конструкция блоков должна обеспечивать спокойное набегание
на них гибкого тягового органа. Кроме того, профиль ручья блока
должен иметь достаточную глубину (рис. 40), исключающую вы-
падение тягового органа из ручья. Во избежание заклинивания ка-
Рис. 39. Схемы взаимодействия кана-
та с блоком:
а—неподвижным, б—подвижным; G —
вес груза, F — усилие натяжения ка-
ната, V—скорость подъема ролика; /—
диск, 2—желоб, 3—канат
Рис. 40. Профиль ручья
блоков
ната в процессе работы радиус ручья блока принимают равным
fl = 0,54dK.
Барабаны лебедок механизмов подъема служат для преобразо-
вания крутящего момента подъемного механизма в тяговое усилие
гибкого органа. Вращательное движение привода посредством
барабана преобразуется в. поступательное движение каната с под-
вешенным к нему грузом.
Барабаны лебедок (рис. 41) имеют цилиндрическую форму, их
изготовляют литыми, сварно-литыми или сварно-вальцованными.
Сварно-литой барабан состоит из секционных литых обечаек, лито-
го фланца и литой ступицы. Сварно-вальцованный барабан содер-
жит вальцованные из листа обечайки, литую ступицу и листовой
фланец. Материалом для барабанов лебедок служат стали 35Л и
55Л и чугун марок СЧ 18, СЧ 28.
Как правило, навивку канатов на поверхности барабанов гру-
зоподъемных Машин осуществляют в один слой в специально
нарезанные по винтовой линии канавки.
. Радиус канавки принимают равным r=0,54dK, где dK — диаметр
навиваемого на барабан каната (см. рис. 41). Размеры канавок
нормализованы и даны в справочниках. Наличие канавок обеспе-
чивает не только правильную укладку каната, но и позволяет сни-
53
зить контактные напряжения между ним и барабаном за счет
увеличения площади контакта и, следовательно, повысить срок
службы каната. ,
Реборда — выступающая часть блока или барабана, направ-
Рис. 41. Барабан лебедки:
/—обечайка барабана, 2—реборда, 3—
ступица барабана, 4—вал барабана;
L—длина барабана, /—шаг нарезки ка-
навки под канат
ляющая движение каната или пре-
пятствующая сходу его с барабана.
Барабаны лебедок механизмов подъ-
ема груза мостовых кранов, имею-
щих сдвоенные полиспасты, выпол-
няют без реборд.
Для равномерности распределе-
ния нагрузки на подшипники бара-
бана и исключения горизонтального
перемещения груза в процессе подъ-
ема (или опускания) в кранах при-
меняют сдвоенные полиспасты.
Сдвоенные полиспасты требуют при-
менения вдвое большей длины ка-
ната. Длина барабана в этом случае
также увеличивается вдвое.
§ 21. КРЮКИ, ПОЛИСПАСТЫ
И КРЮКОВЫЕ ПОДВЕСКИ
Крюк грузовой — деталь
грузоподъемных машин для подве-
шивания грузов или грузозахватных
приспособлений к канатам или цепям механизмов подъема. Крюки
выполняют однорогими и двурогими. Однорогие кованые или
штампованные крюки изготовляет грузоподъемностью до 75 т.
Рис, 42. Типы крюков:
а-*одиорогий кованый, б—то же, с приливом для крепления предохранитель-
ного устройства, в—двурогий кованый
Однорогие крюки имеют два исполнения: без прилйва (рис. 42, а)
и с приливом под установку предохранительного замка (рис. 42, б).
Предохранительный замок (защелку) устанавливают на крюках для
предотвращения самопроизвольного выпадения каната из зева
крюка. Освобождение каната из зева крюка в этом случае может
54
производиться только стропальщиком при открывании предохрани-
тельного замка. Двурогие кованые крюки (рис. 42, в) изготовляют
грузоподъемностью до 75 т.
Применяют также пластинчатые однорогие крюки грузоподъем-
ностью 37,5—175 т и двурогие пластинчатые грузоподъемностью
100—350 т. Пластинчатые крюки проще кованых в изготовлении и
более надежны, так как разрушение всех пластин не может про-
изойти одновременно, но они
тяжелее. Материалом для
изготовления крюков служит
сталь 20. Для закрепления
в грузовой подвеске крана
стержень кованого крюка в
верхней части имеет резьбу:
треугольную при грузоподъ-
емности до 10 т и трапецеи-
дальную — от 15 т и выше.
На резьбу навинчивают гай-
ку, которую с помощью сто-
порной планки фиксируют
от возможного поворачива-
ния. Стопорение гайки
штифтами, шплинтами и
стопорными болтами не до-
пускается.
Крюки имеют зев, раз-
меры которого должны быть
Рис. 43. Схемы полиспастов:
а—одинарный, б—сдвоенный; т—кратность
полиспаста, F— натяжение ветвей каната, G—
вес груза, ик — скорость движения кана-
достаточными для помеще-
ния в нем канатов и цепей, с
та, огр — скорость подъема груза
помощью которых осуществляют строповку груза. Крюки изготов-
ляют вращающимися на шариковых закрытых опорах. Подвеску
крюка выполняют так, чтобы он мог свободно вращаться и уста-
навливаться при работе в соответствии с положением груза. Ниж-
ний торец гайки опирается на верхнюю обойму упорного шарико-
вого подшипника. На всех крюках должно быть клеймо завода-из-
готовителя с указанием грузоподъемности.
Полиспастом называется» грузоподъемное устройство из
нескольких подвижных и неподвижных блоков, огибаемых гибким
органом (канатом или тросом), служащее для выигрыша в силе при
подъеме тяжелых грузов. В кранах применяются 'силовые полис-
пасты, позволяющие уменьшить натяжение каната, крутящий мо-
мент на барабане лебедки от массы груза и передаточное число
механизма. Они являются основной частью механизма подъема
груза. Схемы полиспастов показаны на рис. 43.
Блоки, образующие полиспаст, подразделяют на подвижные,
ось которых перемещается в пространстве, и неподвижные, ось ко-
торых не перемещается в пространстве.
Неподвижные направляющие блоки (см. рис. 43, а), устанавли-
ваемые на неподвижных осях, служат только для изменения нап-
55
равления тягового органа, не давая выигрыша в силе и скорости.
Вследствие наличия сил трения в подшипниках блока и дополни-
тельных усилий на преодоление жесткости канатов при изгибе соот-
ношение между необходимым тяговым усилием F и массой подни-
маемого груза G выразится формулой /7=С/цбл, где т]бл—
коэффициент полезного действия (кпд) механизма, учитывающий
потери на преодоление сил трения в подшипниках и изгибной
жесткости каната.
В подвижных блоках (см. рис. 43, 6), если подвесить груз к
блоку и один конец каната закрепить неподвижно, сила тяги на
другом конце каната F будет приблизительно в два раза меньше
массы груза, а скорость движения блока и груза и в два раза мень-
ше скорости движения тянущего конца каната, т. е. в этом случае
получается выигрыш в силе и проигрыш в скорости подъема груза:
Г=О/2цбл.
В грузоподъемных машинах применяют полиспасты одинарные
и сдвоенные. В одинарном полиспасте на барабан лебедки нави-
вается одна ветвь тягового органа. В мостовых кранах применяют
полиспасты, в которых канат навивается на барабан с подвижного
блока (см. рис. 43, а).
В сдвоенном полиспасте с уравнительным блоком на барабан
лебедки одновременно навивают две ветви одного каната (см. рис.
43, б). Основным параметром, определяющим характеристику по-
лиспаста, является его кратность (передаточное число). Кратность
полиспаста показывает, какой выигрыш в силе дает данный меха-
низм.
Кратность одинарного полиспаста численно равна количеству
ветвей каната, на которых подвешен груз. Кратность сдвоенного
полиспаста равна половине количества ветвей каната, на которых
висит груз.
При грузоподъемности крана до 25 т обычно применяют двух-,
трех- и четырехкратные полиспасты. При больших грузоподъемно-
стях кратностыполиспаста достигает 12.
Компоновка блочной крюковой подвески зависит от
кратности и типа полиспаста и от положения уравнительного блока.
Atacca подвески для кранов обычно не превышает 2—5% от его
грузоподъемности. ,
На рис. 44, а показана конструкция блочной’крюковой подвески
нормальной длины с кратностью полиспаста, равной четырем.
Такие подвески используют в кранах грузоподъемностью 3 и 5 т.
Блоки в крюковых подвесках устанавливают на осях, неподвиж-
но закрепленных стопорными планками. В нормальной подвеске
применяют крюк с коротким хвостовиком типа А, который подвеши-
вают на отдельной траверсе в нижней части подвески с возмож-
ностью поворота относительно продольной оси (рис. 44, а). В слу-
чае, когда длина подвески должна быть минимальной, применяют
крюк с длинным хвостовиком типа Б,-который крепят непосредст-
венно на оси блоков полиспаста. Такая подвеска называется уко-
роченной (рис. 44, б\.
56
2
Рис. 44. Крюковая крановая подвеска: * ’
а—нормальная, б—укороченная; 7—щека, 2— блок, 3—крышка, 4— подшипник, 5—ось, 6— стяжные болты, 7—упорный подшипник, 8—
крюк, Р—траверса, /0—гайка хвостовика крюка, //—стопорное устройство, /2—кожух
§ 22. ХОДОВЫЕ KQJ1ECA И БАЛАНСИРЫ
Ходовые колеса в механизмах передвижения кранов изготов-
ляют главным образом из стали марок 75 и 65Г. Колеса бывают
двухребордные, одноребордные и безребордные. Под ребордой хо-
дового кранового колеса понимают приподнятый край обода, нап-
равляющий колесо при движении по рельсу. Диаметры колес в
зависимости от грузоподъемности, скорости движения и других
параметров крана находятся в пределах 160—1000 мм.
Рис. 45. Двухребордное ходовое колесо на угловой буксе:
/—ходовое колесо, 2—подшипник качения, 3—букса, 4—болты крепления буксы к
металлоконструкции моста
Как правило, ходовые колеса кранов изготовляют двухреборд-
ными. Одноребордные ходовые колеса применяют в опорных и под-
весных тележках кранов мостового типа и подвесных тележках,
передвигающихся по однорельсовому пути (монорельсу). Кроме
направления движения колес и предотвращения схода их с рельсов
реборды воспринимают горизонтальные поперечные силы, возни-
кающие при передвижении крана.
Наибольшее распространение получила установка колес на
угловых буксах (рис. 45). Буксы закрепляют болтами на раме
тележки, концевой балке или балансире. От смещения при работе
крана буксы удерживают платки, приваренные к металлоконст-
рукции или балансиру и взаимодействующие с пазами в буксах.
Такая фиксация установки обеспечивает взаимозаменяемость букс
и сокращает трудоемкость при замене колес за счет исключения
времени на выверку их положения. При использовании безреборд-
ных колес (главным образом в мостовых и передвижных консоль-
ных кранах) функции реборд выполняют дополнительные горизон-
тальные ролики (рис. 46).
58
Изйос крановых колес происходит от трения реборд о головки
рельсс)В ПРИ движении крана с перекосом, при нарушении правиль-
ности расположения колес в плане (перекос), взаимодействии с
изношенными деформированными рельсами и др. Существенно
влияет1' на интенсивность изна-
шивания колеса профиль его
обода. При наличии радиусных
переход08 от беговой дорожки
к реб°РДам износ уменьша-
ется.
Приводные ходовые колеса
закрег1ЛЯ1°т на валах с по-
мощыР шпонок, холостые хо-
довые колеса — на вращаю-
щихся осях без шпонок, а гори-
зонтаЛьные ролики — на не-
подвижных осях в подшипни-
ках. Для обеспечения правиль-
ности монтажа и удобства за-
Рис. 46. Установка горизонтальных ро-
ликов:
а—с двух сторон рельса, б—с одной стороны
рельса; /—рельс, 2—ролики, 3—ходовое коле-
со крана
мены /три эксплуатации колеса,
закрещенные на валах, монти-
руют сферических подшип-
никах в буксах.
С ростом грузоподъемности
крана увеличивается число ходо-
вых кс)лес> которое назначается на основании расчета. Краны гру-
зоподъемностью Д° 50 т имеют четыре ходовых колеса. Краны гру-
зоподъемностью 80—125 т при любых пролетах и грузоподъемностью
Рис. 47. Схема балансирного крепления колес:
а—восьмиколесного крана, б—шестнадцатикодесного крапа
150 т £ пролетом 18 м имеют восемь ходовых колес, а краны
грузоподъемностью 150 т с пролетом более 18 м и грузоподъем-
ность»5 200 и 250 т имеют по 16 колес.
Жесткое крепление ходовых колес к мосту крана всегда обус-
ловливает неравномерное распределение нагрузки между ними,
вызванное неровностью крановых путей или деформацией моста
крана; Очевидно, что с увеличением числа колес возрастает нерав-
59
номерность распределения нагрузки между ними. Поэтому в кранах
большой грузоподъемности (при установке восьми или шестнадцати
ходовых колес) для равномерного распределения нагрузки ходовых
колес на рельсы применяют уравновешивающие балан-
сиры.
Ходовые колеса в балансирах устанавливают попарно. Каждый
из четырех балансиров восьмиколесного крана шарнирно соединен
с мостом горизонтальной осью (рис. 47, а). У шестнадцатиколес-
ных кранов ходовые колеса крепят с помощью главных и малых
балансиров (рис. 47, б). Главные балансиры шарнирно крепят к
мосту красна горизонтальными неподвижными осями, а малые ба-
лансиры шарнирно соединяют с концами главных. На малых балан-
сирах попарно установлены ходовые колеса крана. Шарнирно уста-
новленные балансиры имеют возможность поворачиваться
(качаться) на" осях, обеспечивая при передвижении моста крана
его опирание на все ходовые колеса и их равномерное нагружение
вне зависимости от состояния кранового пути.
§ 23. МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ МОСТОВ
И ТЕЛЕЖЕК КРАНОВ
Механизмы передвижения кранов состоят из приводной части —
электродвигателя, тормоза, приводных ходовых колес, передаточ*
ного устройства и неприводной части — холостых ходовых колес.
Механизмы передвижения бывают с центральным приводом, когда
используют один двигатель и одно передаточное устройство (рис.
48, а, б), и с раздельным приводом, имеющим два и более двигателя
(рис. 48, в). Механизмы с центральным приводом применяют в
тележках и некоторых конструкциях мостов. Для передвижения
мостов кранов чаще используются механизмы с раздельным при-
водом.
В механизме передвижения с тихоходным валом (рис. 48, а)
трансмиссионный вал 2 состоит из отдельных секций, соединенных
между собой посредством зубчатых муфт б. Трансмиссионный вал
получает вращение через редуктор 3 от электродвигателя 5, уста-
новленного в середине пролета моста крана. На конце вала поса-
жены ходовые колеса /. Для торможения и остановки механизма
передвижения служит колодочный тормоз 4, установленный, как
правило, между электродвигателем и редуктором. У этого механиз-
ма частота вращения ходовых колес и трансмиссионного вала оди-
накова.
Трансмиссионный вал в этом случае передает большие крутя-
щие моменты, имеет большой диаметр, массивные соединительные
муфты и опоры. Этот тип привода обладает наибольшей металло-
емкостью и массой. Краны с тихоходными трансмиссионными вала-
ми меньше подвержены перекосу, так как отклонения в размерах
колес и разница в* сопротивлениях передвижению компенсируются
закручиванием вала.
60
У механизма передвижения с быстроходным валом (рис. 48, б)
трансмиссионный вал 2 состоит из двух половин, соединенных с
валом электродвигателя 5, расположенного в середине пролета
моста. Противоположные концы вала соединены- с двумя редукто-
рами 3, крутящий момент от которых передается непосредственна
на ходовые колеса 7. В этом случае трансмиссионные валы 2, вра-
Рис. 48. Схемы механизмов передвижения:
а—с центральным приводом и тихоходным валом, б—с центральным при-
водом и быстроходным валом, в—с раздельным приводом; /—ходовые ко-
леса, 2—вал, 3—редуктор, 4—тормоз, 5—электродвигатель, 6—соединитель-
ная муфта
щаясь с частотой вращения ротора электродвигателя, передают
минимальные крутящие моменты. Поэтому быстроходные транс-
миссионные валы обычно имеют меньшие диаметры и массу, чем
соответствующие тихоходные валы. Однако вследствие больших
угловых скоростей, быстроходные трансмиссионные валы требуют
более высокой точности изготовления и монтажа. Поэтому, несмот-
ря на возможность снижения габаритов и массы трансмиссии, данг
ный тип привода в современных кранах применяют редко.
Наибольшее распространение в кранах мостового типа получил
раздельный привод (рис. 48, в). В этом случае электродвигатель.
5 и редуктор 3 непосредственно связаны с приводными ходовыми
колесами 1 кранов. Ходовая часть каждой половины крана имеет
свой привод.
6t
Хотя раздельный привод имеет удвоенное количество электро-
двигателей, редукторов и тормозов, он легок и удобен в изготовле-
нии и монтаже. К его недостаткам следует отнести значительную
чувствительность к неравномерности нагрузок на противоположных
сторонах крана.
В механизмах передвижения кранов наибольшее распростране-
ние имеют горизонтальные редукторы с цилиндрическими зубчаты-
ми шестернями. Применяют также и вертикальные редукторы.
Передаточное устройство в механизмах передвижейия с раздельным
приводом устанавливают как можно ближе к ходовому колесу.
Рис. 49. Кинематические схемы механизмов передвижения козловых кранов:
а—с промежуточной открытой зубчатой передачей, б—с навешенным на конец вала ходо-
вого колеса редуктором, в, г—с промежуточной открытой зубчатой передачей и двумя при-
водными .колесами; /—редуктор, 2—соединительная компенсирующая муфта, 3—электро-
двигатель, 4—открытая зубчатая передача, .5—ходовое колесо, б—центральный вал
Механизм передвижения грузовой тележки мостового крана
аналогичен по конструкции механизму передвижения моста крана
с тихоходным трансмиссионным валом. Конструктивные разновид-
ности механизмов передвижения крановых тележек отличаются е
основном расположением редуктора: центрально относителык
колеи тележки либо консольно с вынесением за пределы ее габа-
ритов и способом соединения концов выходного вала редуктора
и трансмиссионного вала.
§ 24. ОПОРНО-ХОДОВЫЕ УСТРОЙСТВА
И МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ КОЗЛОВЫХ КРАНОВ
Механизмы передвижения козловых кранов общего назначения
выполняют с раздельным электроприводом. Приводными выпол-
няют не менее 50% ходовых колес. Редукторы обычно применяют
цилиндрические, реже конические.
Конструктивно крановые механизмы передвижения выполняют
в виде скрепляемых с основанием стоек опор одно- или двухко-
62
лесных тележек и реже ходовых балок, на которые попарно опи-
раются две стойки.
Существует несколько схем приводов механизмов передвижения
козловых кранов (рис. 49).
Рис. 50. Ходовая тележка козлового крана ККС-10:
/—рама тележки, 2—цилиндрический горизонтальный редуктор, 3—открытая зуб-
чатая передача, 4—ходовое колесо, 5—электродвигатель
63
Рис. 51. Передвижной консольный кран:
/—направляющий рельс, 2—продольная балка для направ-
ляющего рельса, 3 — стойка, 4 — раскосы, 5 — ограждение, 6 —
механизм подъема груза, 7—грузовая тележка, 8—подвесная
люлька для обслуживания главных троллеев, 9—кабина кра-
новщика; 10—поперечная балка, //—главные балки моста,
12—настил, 13— верхние горизонтальные ролики, 14—элек-
тродвигатель механизма передвижения моста, /5—ходовые
колеса, Тб—нижние горизонтальные ролики, ' 17—концевая
балка, 18—главные троллеи
С0
сл
12
Рис. 51. Продолжение
На рис. 49, а приведена схема привода с двухступенчатым ре-
дуктором, на выходной вал которого насажена шестерня, зацеплен-
ная с открытым зубчатым венцом ходового колеса. Редуктор обычно
цилиндрический горизонтальный установлен на площадке рамы
ходовой тележки.
В данной схеме на консольный вал редуктора при реверсирова-
нии механизма действует знакопеременная нагрузка, приводящая
при интенсивной работе механизма к разбалтыванию крепления
редуктора и даже к поломке его лап.
На рис. 50 представлена ходовая приводная тележка козлового
крана ККС-10. Рама тележки, на которой установлен механизм
передвижения, изготовлена из двух балок швеллерного сечения.
Вал шестерни открытой зубчатой передачи вращается на двух опо-
рах и соединен с выходным валом редуктора с помощью зубчатой
муфты. Такое соединение, хотя и несколько увеличивает габариты
механизма, технологично для сборки и ремонтов.
Для устранения указанного недостатка применяют кинематиче-
скую схему механизма передвижения, в которой редуктор навеши-
вают на конец вала колеса (см. рис. 49, б). В этом случае, кроме
исключения консольной нагрузки, отсутствуют быстроизнашиваю-
щиеся и требующие регулярного ухода открытые Зубчатые переда-
66
чи. В то же время такая схема привода вызывает необходимость
применения угловых или разъемных букс и листовой рамы сложной
конструкции.
В конструкциях кранов с двумя ведущими колесами (двухколес-
ные балансирные тележки) практически невозможно избежать
применения открытых зубчатых передач. Существуют две принци-
пиальные схемы механизмов передвижения (см. рис. 49, в, г). В от-
личие от схемы (см. рис. 49, г) при установке редуктора на цент-
ральный вал (см. рис. 49, в) несколько улучшается работа
открытой зубчатой передачи, так как крутящий момент распре-
деляется от центральной шестерни на два колеса.
$ 25. ОПОРНО-ХОДОВЫЕ УСТРОЙСТВА
И МЕХАНИЗМЫ ПЕРЕДВИЖЕНИЯ КОНСОЛЬНЫХ КРАНОВ
Настенный передвижной консольный кран можно рассматривать
как специальное исполнение мостового крана (рис. 51). Мост крана
двигается по крановому пути, выполненному из одного рельса 1.
Кран имеет два ходовых двухребордных колеса 15. Каждое колесо
получает вращение от своего электродвигателя 14. Две пары верх-
них 13 и нижних 16 горизонтальных роликов удерживают кран от
опрокидывания. Опорные ролики опираются на специальные нап-
равляющие рельсы, закрепленные на конструкциях здания. Реакции
на опорных роликах (направленные в противоположные стороны)
образуют пару сил, уравновешивающую момент от груза и собствен-
ного веса крана относительно подкранового пути. Тележка 7 с ме-
ханизмом подъема груза 6 передвигается по рельсовому пути,
расположенному на консоли крана. В качестве тележек консольных
кранов, как правило, используются типовые тележки мостовых кра-
пов соответствующей грузоподъемности. Консольные краны обору-
дуют кабиной.крановщика 9 и подвесной люлькой 8 для обслужи-
вания троллеев 18.
$ 26. УСТРОЙСТВА БЕЗОПАСНОСТИ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ
Предохранительными устройствами, обеспечивающими безопас-
ность передвижения крана (грузовой тележки) в рабочем и нерабо-
чем состояниях являются опорные детали, ограничители передвиже-
ния и перекоса, противоугонные устройства, буфера, анемо-
метры.
Перед ходовыми колесами кранов и их тележек должны быть
установлены щитки, предотвращающие возможное попадание посто-
ронних предметов под колеса. Наибольший зазор между предохра-
нительными щитками и рельсом не должен превышать 10 мм.
-Для обеспечения безопасности работы кранов, управляемых из
кабины и имеющих скорость передвижения моста (тележки)
0,5 м/с и более, устанавливают ограничители передвижения, при
необходимости автоматически отключающие механизм передвиже-
ния.
8*
67
Как правило, ограничитель передвижения механиче-
ского типа состоит из рычажного конечного выключателя с само*
возвратом в исходное положение и отключающей линейки. Конечный
выключатель механизма передвижения крана устанавливают на
самом кране, а отключающую линейку укрепляют на крановом пути
перед тупиковым упором. Для ограничения хода крановой тележки
Рис. 53. Установка ограничителей пере-
движения на двух работающих в одном
пролете кранах:
/—конечный выключатель, 2—удлинитель, 3-*
„ . скоба; 4— металлоконструкция крана
Рис. 52. Ограничители передвижения:
/—исходное положение, //—рабочее поло-
жение (выключено); 1 — конечный выклю-
чатель, 2—рычаг выключателя с роликом,
3—отключающая линейка, 4— металлокон-
струкция моста (тележки) крана
конечный выключатель также закрепляют на металлоконструкции
крана, а отключающую двухстороннюю линейку — на тележке.
Работа ограничителя передвижения тележки показана на рис. 52.
При наезде отключающей линейки на ролик рычаг конечного вык-
лючателя поворачивается по ходу ее движения (положение II),
что вызывает размыкание его контактов. После схода линейки с
ролика (при движении крана в обратном направлении) рычаг
пружиной возвращается в исходное положение I, и ограничитель
вновь готов к работе. Так же работают ограничители взаимного пе-
ремещения кранов, работающих на одних путях. В. этом случае на
поворотном рычаге конечного выключателя, установленного на
одном кране, закрепляют удлинитель, взаимодействующий при
48
приближении к другому крану с закрепленной на нем скобой. От-
ключение механизма передвижения последнего крана производится
устройством, показанным на рис. 53.
Отключающую линейку необходимо устанавливать таким обра-
зом, чтобы отключение механизма происходило на расстоянии от
тупикового упора, равном не менее половины тормозного пути
машины. Взаимное отключение механизмов передвижения мостовых
(консольных) кранов, приближающихся друг к другу по одному
подкрановому пути, должно
производиться на расстоянии
не менее 0,5 м.
Для смягчения последствий
возможного удара о тупиковые
упоры или кранов друг о друга
при подходе крана (тележки) к
краю пути предназначены бу-
фера. Упругие элементы —
буфера выполняют эластич-
ными, пружинными, пружинно-
фрикционными и гидравличе-
скими и устанавливают на ме- „ ~
таллоконструкции крана или Рнс> 54’ Эластичн^^УФеР (амортиза-
раме ТелеЖКИ. Два последних /—упругий элемейт, 2—корпус, 3—крепежные
типа буферов применяют на болты
кранах большой грузоподъем-
ности при высоких скоростях передвижения. Эластичный буфер с
монолитным резиновым элементом обладает высокой упругостью
(рис. 54). В последнее время в эластичных буферах в качестве ра-
Рис. 55. Пружинные буфера:
в—для крановых тележек, б—для кранов; /—корпус, 2—пружина, 3—упор, 4—дополни-
тельная концентрично установленная пружина
бочего элемента вместо резины применяют полимерный материал.
Допускается применение в качестве буферов мягких пород дерева.
Пружины для буферов тележек изготовляют навивкой из круглой
стальной проволоки (рис. 55, а). В крановых буферах применяют
составные (концентрические) пружинные упругие элементы, имею-
щие при тех же габаритах большую энергоемкость (рис. 55, б).
69
Рис. 56. Противоугонный захват:
/—крановый рельс, 2—серьга, 3—рычаги,
4—концевая балка, 5—гайки, 6— конечный
выключатель, 7—винт с правой и левой
резьбой, 8—цепь, 9—звездочка
Под противоугонными устройствами следует пони-
мать механизмы, предназначенные для удержания крана от угона
при воздействии ветрового давления, величина которого регламен-
тируется требованиями ГОСТ 1451—77. Указанными устройствами
оборудуют все краны, имеющие запас удерживающей силы меха-
низма передвижения менее 1,2 и работающие на открытом воздухе.
По принципу действия противоугонные устройства подразделяют
на стопорные (фиксаторы), со-
единяющие кран с неподвижной
опорой с помощью закладных
пальцев, крюков или выдвижных
упоров; остановы (нажимного ти-
па), действие которых основано
на создании сил трения между
рельсом и заторможенным коле-
сом крана; клещевые захваты,
основанные на непосредственном
зажатии рабочими поверхностями
головки кранового рельса. Наи-
большее распространение полу-
чили именно клещевые захваты.
По типу привода противоугон-
ные клещевые захваты делят на
ручные и машинные, а по харак-
теру нагружения — на захваты с
постоянным и переменным по ве-
личине усилием торможения и
соответственно с плоскими или
эксцентричными рабочими по-
верхностями. Замыкание захватов
с ручным приводом производят
только принудительным порядком,
тогда как машинный привод пред-
усматривает как принудительное, так и автоматическое замыкание.
Простой по конструкции и надежный в работе противоугонный кле-
щевой захват с плоскими рабочими поверхностями и постоянным уси-
лием торможения показан на рис. 56. Захват состоит из двух сим-
метричных рычагов (клещей), шарнирно закрепленных на осях.
Нижние концы рычагов снабжены сменными губками, взаимодей-
ствующими с боковыми гранями головки рельса, а верхние выпол-
нены в форме двусторонних балок, связанных с гайками. Послед-
ние имеют правую и левую внутреннюю резьбу и связаны с ходо-
вым винтом, при вращении которого гайки перемещаются поступа-
тельно вдоль оси винта в противоположные стороны, управляя по-
ложением рычагов.
Существуют и другие конструкции противоугонных захватов
(эксцентриковые, с гидротолкателем и пр.).
Для предупреждения возможного угона крана ветром, оповеще-
ния крановщика звуковым сигналом об опасных для работы ско-
ро
рости или давлении ветра и автоматического включения привода'
противоугонных устройств на козловых кранах грузоподъемностью
более 8 т рекомендуется устанавливать специальные устройства —*
анемометры. Наибольшее распространение получил прибор, из-
меряющий силу ветра,— сигнальный анемометр типа М-95 Рижского
опытного завода гидрометеорологических приборов. Прибор состоит
из датчика (трехлопастной вертушки, совмещенной с тахогенера-
тором), устанавливаемого на наиболее высокой части крана, не на-
ходящейся в аэродинамической тени (в закрытой зоне), и указа-
тельного пульта (регистрирующего прибора), размещаемого в
кабине в поле зрения машиниста.
При допустимой скорости ветра на шкале прибора регистри-
руются ее абсолютные значения. В случае достижения скорости,
близкой к предельной, на пульте управления включаются сигналь-'
ные лампы и срабатывает реле управления, контакты которого
включают звуковой предупредительный сигнал и отключают все
механизмы крана. При этом остается возможным только опускание
груза. В данной ситуации крановщик обязан прекратить работу,
обесточить кран и закрепить его всеми имеющимися противоугон-
ными устройствами за рельсовый путь.
- Контрольные вопросы
1. Расскажите о назначении основных деталей крановых механизмов.
2. Что такое детали и сборочные единицы крановых механизмов? Приведите
примеры.
3. Что такое узлы и агрегаты крановых механизмов?
4. Какую роль выполняют балансиры в грузоподъемных кранах?
5. Расскджите о назначении полиспастов в механизмах подъема груза кра-
пов и дайте их характеристики.
6. Какую роль выполняет крюковая подвеска в кранах?
7. В чем назначение тормозов крановых механизмов?
8. В чем особенности механизмов передвижения козловых кранов?
9. Какую роль*выполняют открытые зубчатые передачи в приводе механизма
передвижения крана?
10. Какие редукторы применяют в механизмах передвижения козловых кра-
нов?
11. В чем назначение опорных роликов в механизмах передвижения консоль-
ных кранов?
12. Как устроен и работает ограничитель передвижения крана (тележки)?
13. Для чего необходимы, в каких случаях и как включают противоугонные
устройства?
14. Расскажите о назначении крановых буферов.
15. Как устроен и работает анемометр?
ГЛАВА V. МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ КРАНОВ
§ 27. МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ МОСТОВЫХ КРАНОВ
Мост крана является опорной конструкцией, на которой раз-
мещены все механизмы крана. В плане металлоконструкция моста
представляет собой раму, образованную главными (или пролетны-
ми) и концевыми балками. По главным балкам, расположенным
71
поперек пролета цеха, передвигается крановая тележка. Вдоль про*
лета на концевых балках расположены колеса для передвижения
моста и привод.
Наибольшее распространение имеет коробчатая конструкция
мостового крана (рис. 57),обладающая высокой усталостной проч-
ностью, наименьшей общей высотой моста и возможностью приме-
нения на концевых балках выкатных колес; эта конструкция также
легка в изготовлении. Главные балки коробчатого сечения выпол-
няют из четырех (реже трех)
Рис. 57. Коробчатая металлическая
конструкция мостового крана:
/—главные ба^ки, 2—концевые балки
замкнутых пространственных
листовых плоскостей. Прост-
ранственную жесткость кон-
струкции обеспечивают диа-
фрагмы, установленные внутри
балки по длине пролета и реб-
ра жесткости.
Вне зависимости от конст-
рукции главных балок моста
крана концевые балки имеют,
как правило, коробчатое попе-
речное сечение. Соединение
главных балок моста с кон-
цевыми осуществляют свар-
кой. 1
Кроме того, применяют со-
единение главных и концевых балок моста на болтах. Этот способ
обеспечивает быстрый, точный монтаж моста на месте его эксплуа-
тации и исключает деформации, возможные при соединении свар-
кой.
Двухбалочные и некоторые однобалочные мосты кранов имеют
консольные рабочие и переходные площадки для обслуживания
оборудования. Площадки состоят из горизонтальных кронштейнов,
приваренных к главным балкам крана, покрытых стальным насти-
лом и огражденных перилами.
§ 28. МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ КОЗЛОВЫХ КРАНОВ
В зависимости от назначения козловые краны бывают консоль-
ными и бесконсольными. Краны изготовляют с одностоечными опо-
рами и с раздельными стойками, разнесенными на расстояние,
достаточное для передвижения тележки с грузом. В последнем
случае для соединения опор применяют стяжки. Конструктивное
исполнение всех перечисленных элементов металлоконструкций коз-
ловых кранов весьма разнообразно. •
Однобалочные мосты получили наибольшее распростра-
нение. Для кранов грузоподъемностью до 5 т преимущественно
применяют мосты трехгранного сечения с ездовым монорельсом.
Указанную схему применяют и для кранов грузоподъемностью до
20—30 т.
72
На рис. 58 представлены поперечные сечения различных одно-
балочных мостов. На рис. 58, а показано пролетное строение, обра-
зованное вертикальной фермой, состоящей из ездового двутавра,
S)
Рис; 58. Поперечные сечения трехгранных пролетных строений од-
нобалочных мостов:
а—с вертикальной фермой, б—треугольной формы
верхнего пояса и системы раскосов и стоек. Такое сечение обеспе-
чивает удобное крепление опорных стоек, но сложно в изготовлении
и относительно металлоемко. Видоизменением данной формы яв-
ляется сечение на рис. 58, б, в котором ездовой двутавр подвеши-
вают к поперечинам нижнего
пояса трубчатой трехгранной
фермы, что упрощает конструк-
цию стыков крепленйя двутав-
ра и самой фермы.
Широкое распространение в
последнее время получили кра-
ны с мостами, изготовленными
из труб большого диаметра
(424—1030 мм), к которым не-
посредственно (рис. 59, а) или
через промежуточный элемент
(рис. 59, б) приваривают ездо-
вую монорельсовую балку. Не-
смотря на то что трубчатые се-
чения недостаточно эффектив-
ны на изгиб, простота изготов-
ления, малое аэродинамическое
сопротивление и хороший то-
Рис. 59. Трубчатые пролетные строения
мостов (поперечные сечения):
а—с непосредственным креплением ездовой
балки, б—с креплением через промежуточный
элемент
варный вид обусловили их широкое применение в козловых кранах
грузоподъемностью до 10 т.
Пролетные балки двухбалочных мостов в большинстве слу-
чаев сходны с балками мостовых кранов.
Конструкция стоек опор в значительной мере зависит от их
типа. Стойки жестких опор выполняют пространственными или пло-
73
скими, развитыми в направлении моста. Гибкие опоры имеют
стойки из одного элемента каждая или из ферм, развитых в нап-
равлении, перпендикулярном мосту.
На рис. 60 приведены конструктивные схемы стоек опор, при-
меняющиеся в козловых кранах. Гибкие опоры (рис. 60, а), как
правило, выполняют из одиночного стержня трубчатого или короб-
чатого сечения. Жесткие опоры отличаются значительным разно-
образием конструкций (рис. 60, б, в, г, д). Сечение опор может быть
трех-, четырехгранным и коробчатым различного профиля.
Рис.’ 60. Конструктивные схемы стоек опор Козловых кранов
Узел сопряжения стоек опор с пролетным строением является
одним из наиболее ответственных элементов конструкции крана.
Узлы должны быть выполнены таким образом, чтобы обеспечить
надежное крепление стоек опор к мосту; вместе с тем конструкция
их должна способствовать удобству монтажа крана. При этом не-
обходимо обеспечить компенсацию возможных погрешностей при
сборке крана.
В настоящее время конструкции большинства кранов предус-
матривают их самомонтаж стягиванием стоек опор. Это предопре-
деляет необходимость сопряжения последних с мостом крана с
помощью шарниров, оси которых параллельны продольной оси
моста.
В металлоконструкцию кранов с раздельными стойками входят
также стяжки. Стяжки связывают опоры стоек по низу; их крепят
либо к нижним частям стоек, либо непосредственно к ходовым
тележкам.
Г4
$ 29. МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ
КОНСОЛЬНЫХ КРАНОВ
Металлические конструкции мостовых и консольных передвиж-
ных кранов имеют много общего. Основной несущей конструкцией
моста (полумоста) консольного крана является концевая балка 17
коробчатого сечения с диафрагмами, к которой крепят остальные
детали (см. рис. 51). Рама крана (полумост) служит опорой для
грузовой тележки с механизмом подъема груза и состоит из двух
главных (ездовых) балок 11, приваренных одной стороной к кон-
цевой балке 17, а другой — к поперечной * балке (двутавру) 10.
Ездовые балки коробчатого поперечного сечения усилены диафраг-
мами и служат опорой для рельсов грузовой тележки.
Жесткость конструкции полумоста обеспечивает ферма с ра-
скосами 4, собранная из уголкового проката и сваренная с главными
балками (по наружной стороне) и верхней частью стойки 3. В верх-
ней и нижней частях стойки закреплены горизонтальные опорные
ролики механизма передвижения крана. Рама крана покрыта
сверху рифленым стальным настилом.
Металлоконструкция тележки консольного крана аналогична
тележке мостового крана соответствующей грузоподъемности. Во
избежание падения с крана обслуживающего персонала мост
по периметру с трех сторон имеет предохранительное огражде-
ние 5.
f § 30. РАМЫ ТЕЛЕЖЕК
Исполнение крановых тележек зависит от числа главных балок
моста. В двухбалочных мостовых кранах применяю! опорные кра-
новые тележки, которые передвигаются по рельсам, расположенным
на верхних поясах балок. Однобалочные мостовые краны имеют
опорные или консольные крановые тележки, которые передвигаются
по двум рельсам, уложенным на верхнем поясе балки или по одному
рельсу, уложенному на верхнем поясе, и дополнительно опираются
на горизонтальные ролики, катящиеся по боковым поверхностям
балки.
Рама грузовой тележки крана состоит из взаимно пересекаю-
щихся под прямым углом балок П-образного сечения, гнутых и сва-
ренных из стального листа. Балки, параллельные главным балкам
моста и несущие на себе колеса тележки, называют продольны-
ми, а перпендикулярные им балки — поперечными. Для увели-
чения жесткости рамы зашивают стальным листом в плоскости
верхних, а иногда и нижних поясов балок. Одновременно верхний
лист обшивки выполняет роль настила при обслуживании механиз-
мов грузовой тележки. Для прохода грузовых канатов, идущих с
барабана лебедки вниз, в настиле выполнены продольные вырезы.
Узлы механизмов подъема груза и передвижения тележки уста-
навливают на платики, которые после сварки рамы подвергаются
механической обработке. В нижней части рамы тележки выполнены
75
места крепления уравнительного блока (балансирного рычага) гру-
зового полиспаста крана.
§ 31. МАТЕРИАЛЫ ДЛЯ ИЗГОТОВЛЕНИЯ
КРАНОВЫХ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ
Наиболее металлоемкой частью крана является его металло-
конструкция, масса которой составляет 60—80% общей массы кра-
на. Стоимость металла крана составляет примерно 65% стоимости
изготовления конструкции.
Надежная и долговечная работа крана в большой степени зави-
сит от качества металлической конструкции, состоящей из множе-
ства узлов и деталей. К деталям металлоконструкций предъявляют
определенные требования. Для изготовления металлических кон-
струкций кранов црименяют сортовой прокат из углеродистых и
низколегированных сталей.
Для изготовления крановых металлоконструкций применяют
сталь углеродистую обыкновенного качества по ГОСТ 380—71, ка-
чественную и конструкционную по ГОСТ 1050—74, низколегиро-
ванную по ГОСТ 19281—73 и мостовую по ГОСТ 6713—75. Для
несущих элементов кранов обычно применяют спокойную или полу-
спокойную сталь, как наиболее подходящую по условиям наклепа.
Кипящую сталь в крановых конструкциях применяют для вспомо-
гательных элементов, таких, как лестницы, перила, площадки,
обшивка кабин и т. д.
Низколегированные стали* повышенной прочности снижают
массу конструкций, поэтому на кранах большой грузоподъемности
рационально применение низколегированной стали марок 09Г2,
Q9F2C, 16ГС, 17ГС, 15ХСНД. Несущие элементы конструкций из
низколегированной стали могут работать при отрицательных тем-
пературах до —40°С, поэтому указанные стали применяют при из-
готовлении кранов для районов Крайнего Севера.
При изготовлении металлоконструкций кранов используют
листовой прокат, главным образом в виде толстолистовой стали
толщиной от 4 мм и выше, удельный вес которого в металлокон-
струкциях кранов постоянно увеличивается; уголковый профиль
для изготовления элементов, воспринимающих осевые усилия, и
соединительных элементов; швеллеры для элементов, воспринимаю-
щих осевые усилия, и для балок, работающих на изгиб.
Контрольные вопросы
1. Расскажите о назначении металлических конструкций передвижных кранов.
2. Перечислите основные узлы металлоконструкции мостового крана.
3. Как влияет грузоподъемность на выбор конструкции моста крана?
4. В чем отличительные особенности металлоконструкций козловых кранов?
5. В чем отличие металлоконструкций консольных кранов от мостовых?
6. Какие материалы применяют ддя- металлических конструкций кранов?
W
ГЛАВА VI. МЕХАНИЗМЫ ПОДЪЕМА ГРУЗА
$ 32. МЕХАНИЗМЫ ПОДЪЕМА ГРУЗА МОСТОВЫХ,
КОНСОЛЬНЫХ И КОЗЛОВЫХ КРАНОВ
Механизм подъема груза состоит из электродвигателя, зубча-
того цилиндрического редуктора, тормоза, соединительных муфт.
открытых зубчатых передач, промежуточных валов (при необходи
мости) и барабана лебедки.
На барабане подъемной ле-
бедки закреплен гибкий тяговый
орган (канат), запасованный в
грузоподъемный полиспаст (рис..
61).
В механизмах подъема груза,
имеющих постоянную кинемати-
ческую связь барабана с двигате-
лем, в качестве тормозного шки-
ва используют одну из полумуфт
муфты, соединяющей вал двига-
теля с редуктором. Если эта муф-
та является упругой (МУВП,
пружинная и т. п.), то в качестве
тормозного шкива Правила до-
пускают использовать только по-
лумуфты, связанные с валом ре-
дуктора.
Согласно Правилам механиз-
мы подъема груза выполняют так,
чтобы опускание груза производи-
лось только принудительно вклю-
чением двигателя.
. Механизмы, предназначенные
для подъема людей, расплавлен-
ного или раскаленного металла,
ядовитых и взрывчатых веществ
Рис. 61. Кинематическая схема
механизма подъема груза:
1 — электродвигатель, 2 — редуктор, 3—
барабан, 4 — уравнительный ролик. 5 —
канат, 5 —крюковая подвеска, 7—тор-
моз, 8 — открытая зубчатая передача
или Кислот, должны иметь два
тормоза. При отказе одного из них другой должен надежно удер-
живать номинальный груз на весу.
Козловые краны общего назначения имеют в качестве механиз-
ма подъема груза электрические тали или грузовые тележки.
В зависимости от конструкции краны имеют грузовые тележки:
монорельсовые, двухрельсовые опорные для двухбалочных кранов,
двухрельсовые подвесные для однобалочных кранов, однорельсо-
вые опорные для однобалочных кранов.
В монорельсовых подвесных тележках в качестве механизма по-
дъема в большинстве случаев используются передвижные электри-
ческие тали. В ряде случаев козловые краны оборудуются грейфер-
ными или магнитными тележками, выполненными с применением
П
механизмов передвижения электроталей. К недостаткам кранов с
монорельсовыми тележками относится низкая износостойкость мо-
норельсов и поперечное раскачивание тележки.
Двухрельсовые подвесные грузовые тележки перемещаются по-
двум укрепленным на мосту подтележечным рельсам или непосред-
ственно по элементам нижнего пояса моста.
В качестве двухрельсовых опорных грузовых тележек для двух-
балочных кранов обычно применяют Грузовые тележки мостовых
электрических кранов соответствующих грузоподъемностей и режи-
ма работы. Эти тележки должны оборудоваться легкосъемными ко-
жухами, защищающими их механизмы от атмосферных осадков..
$ 33. ТАЛИ И ТЕЛЬФЕРЫ
На. многих грузоподъемных кранах малой грузоподъемности в
качестве грузовых тележек применяют стандартные электрические
тали и тельферы.
Таль — простейший компактный грузоподъемный механизм, ус-
тановленный стационарно (подвешенный к конструкции). При не-
обходимости совмещения операции подъема груза с перемещением!
его в горизонтальном направлении таль подвешивают к тележке,,
передвигаемой по подвесному однорельсовому пути, выполненному
из проката'двутаврового сечения (монорельсу). Такую передвиж-
ную таль называют тельфером. При скорости движения тель-
фера менее 32 м/мин им управляют с пола, а при большей скоро-
сти к приводной тележке подвешивают кабину управления. В ка-
честве грузозахватного органа тельферы оснащают крюками, подъ-
емными электромагнитами или любыми другими специальными за-
хватами для штучных и массовых грузов.
Электрические тали отличаются небольшими размерами
и массой, высоким кпд, большой надежностью в работе, простотой
и легкостью обслуживания. По конструкции тали делят на три груп-
пы: с соосным расположением осей двигателя и барабана, получив-
шие наибольшее распространение; с параллельным расположением
осей двигателя и барабана; с двигателем, размещенным внутри ба-
рабана.
У электроталей с двигателем, встроенным в барабан лебедки,
плохое охлаждение двигателя и тормоза, ускоренный износ опор-
ных роликов, высокая трудоемкость монтажа и обслуживания.
Электротали типа ТЭ с соосным расположением осей двигателя
и барабана (рис. 62) имеют два механизма: подъема и передвиже-
ния. Ходовая тележка, передвигаясь по однорельсовому пути, пе-
ремещает подъемный механизм вместе с подвешенным к нему гру-
зом. Обеспечение плавного торможения электроталей грузоподъем-
ностью 1—5 т достигается установкой двух тормозов: электромаг-
нитного дискового и грузоупорного.
Электромагнитный тормоз автоматически включается или вы-
ключается одновременно с включением или выключением электро^
двигателя механизма подъема.
78
Грузоупорный тормоз выполняет функции спускного — служит
для ограничения скорости опускающегося груза. В случае ускорен-
ного движения груза вниз диски грузоупорного тормоза в резуль-
тате взаимного трения друг о друга, замедляют скорость враще-
ния барабана. При этом груз имеет установившуюся скорость опус-
кания в соответствии с частотой вращения.
Монорельсы, служащие опорой для горизонтального перемеще-
ния тельфера, могут иметь большую длину и разветвленность, что
позволяет обслуживать всю площадь цеха (склада). В этом случае
путь оборудуют специальными стрелками.
$ 34. МЕХАНИЗМЫ ПОДЪЕМА ГРУЗА
С МИКРОПРИВОДОМ
Во многих случаях в механизмах подъема кранов необходимо
производить изменение скорости подъема и спуска груза в зависи-
мости от характера выполняемой работы и от величины груза. Это
привело к созданию многоскоростных механизмов подъема
груза.
Существует много различных кинематических схем многоскоро-
стных механизмов подъема. Однако все они обычно имеют два эле-
ктродвигателя и планетарные редукторы или муфты. Эти системы
позволяют получать по две-три скорости подъема и столько же ско-
ростей опускания груза, а также обеспечивать получение малых
(посадочных) скоростей, в 10—12 раз меньше основной скорости.
Использование планетарных передач позволяет создать механиз-
мы, отличающиеся особой компактностью.
Получить микроскорости при опускании — подъеме груза поз-
воляет установка в механизме дополнительного электродвигателя
и планетарной муфты с тормозом (рис. 63). Механизм подъема
груза, состоящий из электродвигателя 5, тормоза 4, одноступен-
чатого 3 и двухступенчатого 2 редукторов, открытой зубчатой пере-
дачи 11 и барабана лебедки 12, дополняют планетарной муфтой 6,
тормозами 7, 8 и электродвигателем 9. Центробежные выключате-
ли 1 и 10 служат для отключения механизмов при неисправных тор-
мозах или при поломке планетарной муфты. При их отсутствии или
поломке указанных узлов может произойти разгон двигателя. Вы-
ключатели срабатывают при скорости, в два раза превышающей
частоту вращения ротора связанного с ними двигателя. Схема обес-
печивает получение отношения скоростей 24:1.
Для работы механизма с основной скоростью тормоз 8 замыка-
ют, а тормоза 4 и 7 размыкают. При этом вал двигателя 9 неподви-
жен. Это объясняется тем, что вал двигателя 5 кроме передачи кру-
тящего момента на барабан вращает соединенное с ним водило
планетарной муфты. При этом центральная шестерня муфты, сое-
диненная с валом двигателя 9, остается неподвижной, а сателли-
ты, вращающиеся с помощью водила, перекатываются по централь-
ной .шестерне и вращают зубчатый венец планетарной муфты.
Для работы механизма с микроскоростью тормоза 4 и 8 размы-
80
кают, а тормоз 7 замыкают. При этом зубчатый венец планетарной
муфты остается неподвижным. При включении двигателя 9 и отклю-
чении двигателя 5 первый приводит во вращение центральную ше-
стерню муфты, вследствие чего сателлиты, перекатываясь по не-
подвижному зубчатому венцу, приводят во вращение водило. Да-
лее крутящий момент через вал двигателя 5 и трансмиссию пере-
дают на барабан 12. В механизме предусмотрен ограничитель вы-
соты подъема крюковой подвески 13:
Рис. 63. Механизм подъема груза с микроприводом
§ 35. СХЕМЫ ЗАПАСОВКИ КАНАТОВ В ПОЛИСПАСТЫ
И НАВИВКИ НА БАРАБАНЫ ЛЕБЕДОК
Изгиб каната существенным образом влияет на его работоспо-
собность. Причем влияет не только кривизна изгиба (отношение
Dldn), но и направление его. Общеизвестно, что изгиб сопровожда-
ется поворотом (смещением) его поперечных сечений и ведет к воз-
никновению кручения каната относительно продольной оси.
При .подборе конструкции каната для полиспастов необходи-
мо отдавать предпочтение малокрутящимся стальным канатам и
применять рациональные схемы запасовки, обеспечивающие допол-
нительное подкручивание канатов в процессе эксплуатации. Так,
в случае запасовки в одиночный полиспаст канатов пр а вой свив-
ки необходимо обеспечить направление витков справа — налево
(рис. 64, а), а для канатов левой сливки — обратное направление
слева — направо (рис. 64, б).
При запасовке канатов в сдвоенные полиспасты, в которых канат
изменяет направление изгиба на уравнительном ролике, указанное
требование оказывается несущественным.
81
Рассматриваемое явление изгиба имеет место и при навивании
жаната на барабан лебедки, поэтому для обеспечения нормальных
условий его работы необходимо пользоваться «правилом руки» или
Рис, 64. Схема запасовки каната в одиночный полиспаст:
а — правой свивки, б — левой свивки; нв — неподвижная ветвь каната, хв — ходоваж
(подвижная) ветвь
соответствующими рекомендациями (табл. 7). Так, для определе-
ния требуемой схемы навивки каната правой свивки на барабан
лебедки необходимо ладонь соответствующей руки (в данном слу-
чае правой) обратить к барабану, а пальцы ладони ориентиро-
Рис. 65. Рекомендуемые направления навивки на барабан лебедки
каната:
а—правой свивки, б—левой свивки
вать в сторону укладывания навиваемого каната. Тогда отогнутый
на угол л/2 рад большой палец укажет требуемое направление вра-
щения барабана (рис. 65). В табл. 7 направления движения и ук-
ладки ходовой ветви каната на барабан указаны по ходу ветви, а
направление вращения барабана лебедки указано со стороны пра-
вого торца вала.
82
$ 36. УСТРОЙСТВА БЕЗОПАСНОСТИ МЕХАНИЗМОВ
ПОДЪЕМА ГРУЗА
К устройствам безопасности механизмов подъема груза относят
ограничители грузоподъемности и ограничители высоты подъема
крюковой подвески.
Крановые металлоконструкции и детали механизмов способны
воспринять возможную расчетную перегрузку. В отдельных случа-
ях при технологической необходимости или возможной перегрузке
крана устанавливают ограничители грузоподъемности.
Ограничитель грузоподъемности предназначен не допускать
превышение массы поднимаемого груза более чем на 10% относи-
7. Правила навивки каната на барабан
Позиции на рис. 65 Направления
свивки каната укладки витков на барабане движения витков вращения барабана
1 Правое Слева — направо На барабан По часовой стрелке
11 > Справа — налево Под барабан Против часовой стрелки
III Левое » > На барабан По часовой стрелке
IV » Слева — направо Под барабан Против часовой стрелки
тельно номинального, он должен иметь точность срабатывания ±2
—3% и не срабатывать при кратковременных (<0,8 с) перегрузках.
Ограничители грузоподъемности делят на механические (рычаж-
ные, эксцентриковые), электрические и гидравлические. Механиче-
ские ограничители имеют уравновешивающие детали в виде пружин
или торсионов, а их исполнительные элементы взаимодействуют с
конечными выключателями, включенными в электрическую цепь
управления механизмом.
При использовании электрических ограничителей в эту цепь
включают силоизмерительный элемент, выходной сигнал которого
изменяется в зависимости от приложенной нагрузки.
Механические ограничители грузоподъемности непосредствен-
ного действия просты в исполнении и надежны в эксплуатации. Ус-
тройство торсионного ограничителя показано на рис. 66. Уравни-
тельный блок грузового полиспаста соединен через кривошип с тор-
сионным валом, работающим на кручение. Другой конец торсион-
ного вала жестко защемлен в конструкции тележки. В случае недо-
пустимого превышения рабочей нагрузки на крюке крана торсион до-
полнительно закручивается и через угольник воздействует на конеч-
ный выключатель, размыкающий цепь управления электроприво-
дом механизма подъема груза. Благодаря небольшому передаточ-
83
.ному числу механизма ограничитель, имеет высокую чувствитель-
ность. ' ' ’ Д'
Иногда применяют взвешивающие эксцентриковые устройства с
циферблатным указателем и пружинные ограничители с вмонти-
рованными микровыключателями цепи управления.
Согласно требованиям Правил все краны мостового типа долж-
ны быть оборудованы ограничителями высоты подъема крюковой
подвески.
Рис. 66. Торсионный ограничитель грузо-
подъемности мостового крана:
/—торсионный вал, 2—труба, 3—подвеска, 4—*
кронштейн, 5—кривошип, связанный с концом
торсионного вала, 6—уголок, 7—уравнитель-
ный блок полиспаста, 5—конечный выключа-
тель, 9—подшипники торсионного вала
Контрольные вопросы
1. Что обшего и чем отличаются механизмы подъема груза мостовых, козло-
вых и консольных кранов?
2. Объясните устройство и принцип работы электрической тали.
3. В чем отличие электротельфера от электротали?
4. Что такое монорельс?
5. Для каких целей применяются механизмы подъема груза с микропри-
80Д0М?
6. На что влияют направления запасовки канатов в полиспасты и навивки
на барабан лебедки? Как на практике определить требуемые направления?
7. В каких случаях применяют ограничители грузоподъемности кранов и как
они устроены?
8. Для чего необходим ограничитель высоты подъема крюковой подвески?
84
ГЛАВА VII. ОБОРУДОВАНИЕ КРАНОВ
$ 37. КАБИНА КРАНОВЩИКА И ПРИБОРЫ УПРАВЛЕНИЯ
На кранах применяют открытые и закрытые, обычные или па-
норамные кабины управления. Открытыми кабинами оборудуют мо-
стовые и передвижные консольные краны, работающие в закрытых
•отапливаемых помещениях при температуре воздуха от 10 до 28° С,
а закрытыми — краны, работающие на открытом воздухе при тем-
Рис. 67. Размещение оборудования в кабине:
с/—огнетушитель, 2—пульт управления, 3—распределительный щит, 4—крановая защитная
панель, 5—электронагревательный прибор, 6— ножная педаль, 7—кресло крановщика
пературе от —40 до +60° С. При температуре окружающей среды
ниже 10° С эти кабины должны снабжаться отопительными прибо-
рами и при температуре выше 28° С — кондиционерами. Наиболее
широко распространены торцовые кабины, закрепленные с одной
стороны моста крана.
В некоторых случаях для улучшения обзора кабину подвеши-
вают либо к середине моста (панорамная кабина), либо к тележке
крана. Расположение кабины на кране должно исключать возмо-
жность удара по ней грузозахватного органа (груза) при работе
крана. Минимально допустимое расстояние между ними 0,4 м.
Кабина должна располагаться на кране так, чтобы крановщик,
сидя в кресле, мог наблюдать за положением крюковой подвески и
груза в течение всего цикла работы крана. Для нормального обзо-
ра углы зрения, считая от плоскостей, проведенных на уровне глаз
крановщика, должны быть от горизонтальной вверх —л/3 рад,
вниз — л/2 рад, от вертикальной — 0,75 л/рад в обе стороны. Кра-
новые кабины — рамной конструкции, причем кабины открытого
типа должны иметь сплошное ограждение со всех сторон высотой
&
Рис. 68. Размещение электроаппаратуры на
пульте управления:
/—рычаги командоконтроллеров, 2—сигнальные
лампы, 3—кнопки управления, 4—телефонный ап-
парат, 5—кресло крановщика, 6—подлокотники,
7—контрольно-измерительные приборы, 8 — пере-
ключатель
не менее 1000 мм. Размещение оборудования в кабине показано на
рис. 67.
В остекленных кабинах должна быть предусмотрена возмож-
ность протирки стекол с двух сторон вручную или механически. Для
этого устраивается необходимое количество фрамуг, снабженных
замками для удержания их как в закрытом, так и в открытом со-
стоянии при работе крана. Остекление- закрытых кабин следует
выполнять из безосколочно-
го стекла.
В остеклении кабин кра-
нов, работающих на откры-
том воздухе, предусматри-
вают солнцезащитные щит-
ки, а в кабинах, подвешен-
ных к тележкам, — зеркала,
с помощью которых кранов-
щик видит происходящее
сзади. Нижние стекла, на ко-
торые может встать кранов-
щик, должны быть защище-
ны решетками. В потолке
кабины предусматривается
люк размером 500x500 мм
для выхода на рабочую пло-
щадку. Кабины должны
иметь предупреждающую
окраску в виде чередующих-
ся полос желтого и черного
цветов, расположенных под углом л/4 рад.
Дверь для входа в кабину может быть распашной или раздвиж-
ной и должна иметь запор с внутренней стороны. Распашная дверь
•должна открываться внутрь кабины. На кранах, работающих на от-
крытом воздухе, должны быть устройства для запирания двери сна-
ружи.
Пол кабины должен быть покрыт материалом, мало проводящим
тепло. Поверхность пола не должна быть скользкой. В местах об-
служивания электрообрудования необходимо иметь диэлектриче-
ские коврики размером не менее 500x700 мм. Внутреннюю облицов-
ку стен следует делать из хорошо моющихся материалов светлых,
тонов.
Кабина должна освещаться лампой с матовым плафоном, ис-
ключающим световые блики на остеклении. Освещенность в кабине
на рабочих поверхностях пульта и рычагах управления должна быть
не менее 20 лк. Высота кресла от уровня пола должна быть 400—
500 мм, высота спинки 840—860 мм. Кресло должно выполняться
полужестким с подлокотниками и иметь возможность регулировки
от среднего положения вперед и назад на 75 мм, вверх и вниз на
50 мм. Опора для ног и подлокотники должны переставляться по*
высоте, а спинка иметь регулируемый угол наклона. Для повыше-
86
ния производительности работы машины и обеспечения удобства
работы крановщика на современных кранах устанавливают магнит-
ные контроллеры, управляемые командоконтроллерами, вмонтиро-
ванными в подлокотники кресла крановщика — пульты управления
типа DVP— 15 или UP35/1 (рис. 68).
Рукоятки управления силовыми контроллерами установлены вер-
тикально и передвигаются в направлении рабочих движений
крана.
В положении «Стоп» рукоятки фиксируются так, чтобы их мо-
жно было переключить легким нажатием руки (не более
30 Н).
При установке для управления механизмами педалей расстоя-
ние между ними должно быть 200—450 мм, расстояние от спинки
кресла до оси педали 935 мм, а угол движения (ход) педали 2/5л
рад. После срабатывания на величину полного хода педаль долж-
на возвращаться в нейтральное положение пружиной (с усилием
70—80 Н).
Пульты могут иметь также кнопочное управление. Органы уп-
равления следует располагать так, чтобы по возможности свести
движения крановщика к движению предплечий и кистей рук, допус-
кая движение плечевых суставов только в виде исключения.
Органы управления краном должны иметь надписи или графи-
ческие символы в соответствии с требованиями ГОСТ 12.4.040—78.
Аварийный выключатель должен быть окрашен в красный цвет.
Кроме оборудования управления кабина должна быть оснащена
огнетушителем и вешалкой для одежды. В кабине должны быть
предусмотрены места для хранения документации, инструмента, и
аптечки, термоизолированного бачка для питьевой воды емкостью
не менее 2 л.
. § 38. УСТРОЙСТВА ДЛЯ ДИСТАНЦИОННОГО
УПРАВЛЕНИЯ КРАНАМИ
В ряде случаев, когда управление краном из кабины неудобно
или нахождение крановщика в зоне работы крана нежелательно по
условиям производства, а также из-за нехватки кадров, применяют
дистанционное управление кранами, либо с помощью кнопочных по-
стов (станций)—управление с пола, либо по проводному или ра-
диоканалу с использованием портативных переносных пультов.
Кнопочные посты выполняют в пластмассовых корпусах и под-
вешивают на вспомогательном канате. Монтажный кабель зажима-
ют внутри кнопочного поста скобой, а противоположный конец ка-
беля соединяют с соответствующими электромагнитными пуска-
телями и контакторами механизмов крана.
Если корпус кнопочного поста выполнен из металла, при напря-
жении в цепи управления более 36 В его обязательно заземляют
не менее чем двумя проводниками. Обычно в качестве одного из
проводников используют вспомогательный канат, на котором под-
вешен пост. Маркировку, указывающую направление рабочего дви-
87
жения механизма крана, выполняют на корпусе кнопочного поста
в виде стрелок.
Для выполнения требуемого движения необходимо нажать кно-
пку с соответствующим обозначением. Работа кнопочного поста
возможна только при наличии пластмассового рлюча, вставляемо-
го в соответствующее отверстие на торцовой части поста. В слу-
чае утери пластмассового ключа заменять его случайными пред-
метами к а тего р и ч еск и запрещено. Также запрещена экс-
плуатация кнопочных постов с поврежденными корпусами, крыш-
ками, кнопками и электрокабелем.
При наличии двух пультов управления одним краном в схемег
должна быть предусмотрена установка блокирующих переключате-
лей; исключающих возможность одновременного управления краном
с обоих пультов.
§ 39. ГАЛЕРЕИ И ПОСАДОЧНЫЕ ПЛОЩАДКИ
Настил галерей выполняют из стальных- рифленых или дырча-
тых листов с отверстиями не более 20 мм. Правилами разрешено-
устройство деревянного настила, если он обеспечивает прочность
и отвечает противопожарным требованиям. Настилы должны быть
уложены по всей длине и ширине галереи, площадок и перехо-
дов.
Все галереи и ремонтные площадки, предназначенные для обс-
луживания кранов, а также концевые балки мостовых кранов ог-
раждают решетчатыми перилами высотой 1 м со сплошной зашив-
кой понизу защитной полосой высотой не менее 100 мм.
Галереи для прохода вдоль крановых путей должны отвечать
указанным выше требованиям и иметь для выхода на них удобные-
и безопасные лестницы. Проходная галерея должна быть снабже-.
на перилами со стороны пролета, ширина прохода по ней должна
быть не менее 500 мм. Для обеспечения элёктробезопасности гале-
реи должны располагаться со стороны пролета, противоположно-
го троллеям.
Для входа машиниста в кабину управления краном устанавли-
вают посадочные площадки с постоянными лестницами.
Посадочные площадки обязательно должны быть размещены с
противоположной стороны расположения главных троллеев. Рас-
стояние от пола до нижних частей перекрытия или выступающих ча-
стей конструкций должно быть не менее 1800 мм.
Для обеспечения нормального и безопасного перехода с пло-
щадки в кабину и наоборот пол площадки располагают на одном
уровне с полом кабины. Зазор между площадкой и кабиной должен
быть не менее 60 и не более 150 мм. В отдельных случаях разре-
шено устройство посадочной площадки ниже уровня пола кабины
(не более чем на 250 мм), если при расположении площадки на
одном уровне с полом кабины нельзя обеспечить габарит (1800 мм)
по высоте.
88
$ 40. ОГРАЖДЕНИЯ И ЛЕСТНИЦЫ
Безопасность обслуживающего персонала на кранах может
быть обеспечена с помощью надежного ограждения всех легкодо-
ступных вращающихся и движущихся частей. Для свободного до-
ступа к движущимся частям во время осмотра, обслуживания и
ремонта механизмов ограждения делают съемными.
Ограждают все открытые передачи, соединительные муфты с
выступающими болтами и шпонками, барабаны, расположенные
вблизи рабочего места машиниста или в проходах, трансмиссион-
ные валы механизма передвижения моста'по всей длине при часто-
те вращения 0,83 с""1 и более. При частоте вращения вала менее
0,83 с-1 его ограждают только в месте расположения люка для вы-
хода на галерею. Все оголенные токоведущие части электрообору-
дования, в том числе рубильники, контакторные панели, ящи-
ки сопротивлений и др., должны быть надежно ограждены. Рубиль-
ник, подающий напряжение на главные троллеи, кроме того, должен
иметь устройство для запирания его в отключенном положении с
указанием положения «Включен» и «Выключен». Особое внимание
должно быть уделено ограждению главных троллеев и их токо-
съемников в местах возможного прикосновения к ним лиц, об-
служивающих кран.
Обслуживание кранов вызывает необходимость в устройстве
лестниц для выхода на площадкй и галереи. Правила предусма-
тривают изготовлять лестницы шириной не менее 600.мм и с рассто-
янием между ступенями не более 300 мм. Для выхода из кабины
крана на галерею допускается устройство лестницы шириной не
менее 350 мм.
Наклонные лестницы (при наклоне к горизонту 2/5л рад и ме-
нее) должны иметь перила и плоские ступени шириной не менее
120 мм из стальных рифленых или гладких с направленным рель-
ефом листов. Лестницы с углом наклона более 2/5л рад или вер-
тикальные при высоте более 5 м, начиная с высоты 3 м, должны
иметь защитные дугообразные ограждения. Дуги следует рас-
полагать друг от друга на расстоянии не более 800 мм и соединять
между собой не менее чем тремя продольными полосами.
Расстояние между лестницей и дугой должно быть не менее
700 и не более 800 мм, при радиусе дуги 350—400 мм. Такой прос-
вет ограждения разрешает свободное продвижение человека по ле-
стнице и обеспечивает его безопасность в случае падения.
Контрольные вопросы
1. Какие кабины применяют на кранах, работающих в закрытых помещениях
и на открытом воздухе?
2. Чем должна быть оборудована кабина управления краном?
3. Для чего кабина крановщика должна иметь хороший обзор?
4. В каких случаях применяют дистанционное управление кранами и что
это дает?
8»
ГЛАВА VIII. ЭЛЕКТРООБОРУДОВАНИЕ КРАНОВ
$ 41. КЛАССИФИКАЦИЯ ЭЛЕКТРООБОРУДОВАНИЯ
И РАЗМЕЩЕНИЕ ЕГО НА КРАНЕ
Надежная и безаварийная эксплуатация кранов в значительной
мере зависит от надежности работы электропривода. Поэтому каж-
дый крановщик должен хорошо знать основы электротехники,
иметь четкое представление о процессах, протекающих в электри-
ческих машинах и аппаратах.
Электрические аппараты предназначены для включения (вык-
лючения), реверсирования, регулирования скорости электродвига-
телей и ограничения рабочих движений механизмов крана в задан-
ных пределах, защиты персонала от поражения электротоком, обес-
печения условий удобного управления, обслуживания. Каждый из
аппаратов имеет марку: буквенное обозначение указывает назва-
ние, а последующие цифры — основную техническую характеристи-
ку и модификацию.
Отечественная электропромышленность выпускает специальные
серии электрооборудования для кранов, включающие крановые эле-
ктродвигатели переменного и постоянного тока, силовые магнит-
ные контроллеры, командоаппараты, кнопочные посты (станции),
конечные выключатели, тормозные электромагниты и электрогид-
равлические толкатели, пускорегулирующие резисторы (сопротив-
ления) и другие аппараты, комплектующие различные крановые
электроприводы.
Крановое электрооборудование по назначению подразделяют на
основное — собственно электропривод и вспомогатель-
ное — оборудование рабочего и ремонтного освещения, звуковая
сигнализация, отопление (кондиционеры) и пр.
В современных крановых электроприводах применяют электро-
двигатели переменного (около 90%) и постоянного тока. Электро-
двигатели постоянного тока серии Д с последовательным или неза-
висимым возбуждением обеспечивают большое число включений
привода в час при возможности плавного и широкого диапазона
регулирования частоты вращения ротора. Для питания двигателей
необходимы сети постоянного тока (подстанции) или применение
специальных преобразователей. Они требуют высококвалифициро-
ванного обслуживания и ремонта.
Кроме того, масса такого двигателя в 2,2—3 раза больше массы
асинхронного двигателя переменного тока той же мощности. Дви-
гатели постоянного тока дороги в изготовлении и в эксплуатации,
поэтому они нашли применение только в приводах специальных кра-
нов, например металлургических.
По ряду экономических факторов применение электродвигате-
лей переменного тока для привода механизмов кранов общего на-
значения оказывается более экономичным.
В настоящее время почти все краны грузоподъемностью до 50 т
комплектуют унифицированными кабинами, в которых устанавли-
90
вают вводное устройство (защитную панель), силовые кулачковые
контроллеры или командоконтроллеры, ручной аварийный выклю-
чатель, вольтметр, конечный выключатель двери и люка выхода на
галерею моста, кнопку включения звукового сигнала (звонка гром-
кого боя), выключатели цепей рабочего и ремонтного освещения,
телефонный аппарат (при необходимости) и отопительные устрой-
ства.
“На мосту крана устанавливают двигатели механизма передви-
жения моста, силовые контракторы командоконтроллеров, ящики
пускорегулирующих резисторов, конечные, выключатели ограниче-
ния передвижения моста и тележки, токосъемник и токоподвод к
механизмам крановой тележки.
На раме крановой тележки устанавливают токосъемник к меха-
низмам крановой тележки, двигатели механизмов подъема груза
и передвижения тележки, конечный выключатель ограничения вы-
соты подъема крюковой обоймы.
§ 42. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К ЭЛЕКТРООБОРУДОВАНИЮ
Электропривод крановых механизмов характеризует повторно-
кратковременный режим работы при большой частоте включений,
широкий диапазон регулирования скоростей, переменные по вели-
чине и направлению рабочие нагрузки, значительные, перегрузки
при разгонах (торможениях) механизмов и частые реверсы.
Грузоподъемные краны устанавливают не только в производ-
ственных помещениях, но и на открытых площадках, где на крано-
вое электрооборудование воздействует влага, пыль и перепады
температуры, разрушающие электроизоляцию и снижающие ее ди-
электрические свойства. Краны, работающие в помещениях, часто
подвергаются воздействию повышенных температур (до +50° С в
металлургических цехах), высокой концентрации производствен-
ной пыли, а также паров кислот и щелочей (металлургические и
химические производства), вредно воздействующих на электрообо-
рудование. Крановое электрообрудование общего назначения выпу-
скают в климатическом исполнении категорий У1 и У2 (ГОСТ
15150—69).
С учетом специфических условий эксплуатации, крановое элект-
рооборудование имеет повышенную механическую прочность, устой-
чиво к различным перегрузкам и обеспечивает удобство обслужи-
вания и ремонта в затрудненных условиях эксплуатации крановых
механизмов.
Крановые электроприводы могут получать питание от трехфаз-
ных сетей переменного тока частотой 50 Гц и напряжением 380 В
либо от специальных единых общезаводских сетей постоянного то-
ка напряжением 220 В.
$ 43. ТОКОПОДВОД И КАБЕЛИ
Назначение кранового токоподвода — подавать на движущийся
кран и его механизмы электроэнергию от сети. Как правило, токо-
подвод к мостовым и консольным кранам осуществляют с помощью
троллеев жесткого типа и скользящих по ним при движении крана
токоприемников.
Различают главные (цеховые) троллеи, расположенные вне кра- <
на, и крановые троллеи, расположенные на мосту. Главных тролле- '
ев для передачи трехфазного переменного тока — три. Число кра-
новых троллеев зависит от числа.двигателей на крановой тележке ।
Рис. 69. Держатель троллеев из угол-
ковой стали:
/—несущая консоль, 2—фарфоровый изоля-
тор, 3—стяжная шпилька, 4—лапы для
крепления, 5—троллей
Рис. 70. Токоприемник для троллеев из
уголковой стали:
/—троллей, 2—башмак, 3—качающийся рычаг,
4—гибкий провод, 5—планка, 6—фарфоровый
изолятор, 7—кронштейн.
и принятой схемы управления. Троллеи с помощью троллеедержа-
телей на фарфоровых изоляторах крепят к подкрановым балкам
или конструкциям здания (рис. 69).
Съем тока с 1роллеев осуществляют скользящие токоприемни-
ки, укрепленные на мосту крана. Токоприемник имеет качающийся
рычаг с башмаком, скользящим по троллею (рис. 70). Он изолиро-
ван от металлоконструкции моста крана и связан электрически
(через вводной силовой ящик) с защитной панелью крана. Баш-
мак токоприемника выполнен из чугуна и обеспечивает необхо-
димое усилие нажатия на троллеи — 20—160 Н.
Главные троллеи жесткого типа окрашивают в красный цвет,
контактную поверхность оставляют незакрашенной. Наличие си-
лового напряжения на троллеях указывают сигнальные лампы (по
одной на каждый троллей),которые загораются при наличии напря-
жения в сети. В случае секционирования троллеев или наличия в-
пролете зоны для ремонта кранов каждая секция троллеев должна
иметь автономное подключение к сети и соответствующую, сигна-
лизацию.
42
В настоящее время крановые троллеи применяют редко (в ос-
новном на металлургических и старых кранах); для подачи элект-
роэнергии к механизмам грузовой тележки мостового крана приме-
няют токоподвод с помощью гибкого кабеля. Кабельный токопод-
вод на краны применяют также в случаях, когда невозможно за-
щитить троллейный токосъем от воздействия атмосферных осадков,
агрессивных сред и во взрывоопасных помещениях. Для козловых
кранов это единственный способ токоподвода.
Рис. 71. Кабельный токоподвод с каретками:
1 — неподвижное крепление кабеля, 2 — каретка, 3 — ролик каретки, 4 — поводок, 5 — за*
жим, 6 — гибкий кабель, 7 — вспомогательный канат, 8 — опора, 9 — стальной уголок
Для устройства кабельного токоподвода вдоль подкранового пу- ’
ти крепят жесткую направляющую (стальной уголок) или натяги-
вают вспомогательный тонкий канат, по которым катятся ролики,
кареток (рис. 71) или скользят кольца подвесок (рис. 72). Один;
конец кабеля жестко прикреплен к выводной коробке на неподвиж-
ной конструкции и подключен к силовому распределительному
ящику, а другой конец закреплен на мосту крана (возле кабины)
или на раме грузовой тележки и подключен к соответствующим*
электроаппаратам.
Чтобы предохранить токоведущий кабель, питающий кран или*
приводные грузозахватные устройства, от возможного запутывания
и повреждения, применяют специальные кабельные барабаны, уста-
новленные на мосту, крана (рядом с механизмом передвижения),,
или на раме грузовой тележки. Встроенная в кабельный барабан’
пружина или привод от механизма передвижения и подъема гру-
за обеспечивает постоянное натяжение кабеля.
93
Токосъемное устройство барабана состоит из медных контакт-
ных колец, закрепленных на вращающемся валу барабана, с кото-
рыми соединены жилы кабеля, и неподвижного щеткодержателя о
прилегающими угольными щетками, с которых снимается подводи-
мое напряжение.
В рассмотренных системах токоподвода применяют преимуще-
ственно гибкие шланговые кабели общего назначения с резиновой
изоляцией марки КРПТ или лифтовые гибкие кабели марки
КЛШН. Радиус кривой перегиба кабеля не должен быть менее че-
тырех его диаметров.
§ 44. УСТРОЙСТВА БЕЗОПАСНОСТИ ЭЛЕКТРООБОРУДОВАНИЯ
Основной задачей системы
Рис. 72. Кабельная подвеска:
/—гибкий кабель, 2—защитная трубка,
3—зажим, 4, 5—кольца, 6—несущий
тонкий канат
защиты крановых электроприводов
всех типов является предотвраще-
ние недопустимых перегрузок элек-
тродвигателя, механизмов крана из-
за неисправности цепей управления/
заклинивания механизмов, неот-
ключения тормоза, превышения гру-
зоподъемности и др. Кроме того,
краны являются передвижными ус-
тановками, которые в процессе экс-
плуатации могут подвергаться воз-
действию вибраций и ударов, в ре-
зультате чего возможность повреж-
дения кабелей и проводов на кранах'
гораздо выше, чем в электроприво-
дах стационарных установок. По-^
этому первоочередной задачей защи-
ты кранового электрооборудования,
является защита от токов коротко-
го замыкания (к.з.).
Современные крановые электро-
приводы имеют следующие основ-
ные типы защитных устройств: мак-
симальную защиту для отключения от сети при возникновении в за-
щищаемой цепи недопустимого по величине тока, нулевую защиту
для отключения от сети при прекращении подачи питания (нулевая
блокировка, исключающая самозапуск электродвигателя при возоб-
новлении подачи питания в случае, если рукоятка органа управле-
ния находится в рабочем положении), конечную защиту для огра-
ничения перемещений движущихся конструкций.
На современных кранах для подачи питания и его отключения
применяют специальные включающие устройства, отпираемые при
помощи ключа-марки (рис. 73). При этом рубильник нельзя вклю-
чить, не отперев предварительно механизм включающего устрой-
ства и, наоборот, ключ-марку нельзя вынуть без отключения эле-
ктропитания.
$4
8
Рис. 73. Электромеханический замок крановой защитной па-
нели:
/—механическая часть, 2—корпус, 3— поводок, 4—контакты, 5—контакт-
ная шайба, 6—ограничитель поворота, 7—задняя крышка, 8—основание*
для крепления контактов, 9—соединительная муфта, 10—изолирующая*
перегородка, 11—ключ:марка
Рис. 74. Размещение электроаппаратуры в защитной пане-
ли (двери шкафа открыты):
/—доска зажимов, 2—блок плавких предохранителей, 3—ввод ка-
беля, 4—рубильник трехполюсный, 5—линейный контактор, 6—рей-
ки для установки реле максимального тока, 7—вывод крановой
электропроводки
1
Защитная панель (вводное устройство) обеспечивает основные 5
защитные функции электроприводов крановых механизмов, управ-1
ляемых с помощью силовых или магнитных контроллеров, не име-
ющих собственных защитных устройств (рис. 74).
&
Рис. 75. Реле максимального тока:
/—шкала указателя, 2, 8, 9—втулки, 3—неподвижный контакт, -/—кон-
тактный мостик, 5—магнитопровод, 6—катушка, 7—толкатель, 10—ре-
гулировочный винт
Рукоятка включения общего рубильника и пусковая кнопка вы-
ведены наружу на боковую поверхность шкафа. На передвижных
«ранах применяют защитные панели марок ПЗКБ160, ПЗКБ250 и
ПЗКБ400 продолжительного режима по номинальному току 160,
250 и 400 А соответственно.
Для защиты крановых электродвигателей при резком возраста-
нии величины тока, например при перегрузке крана, резком вклю-
чении привода или коротком замыкании, применяют электромагнит-
ные токовые реле мгновенного действия блочного типа марки РЭО
•401УЗ по ГОСТ 8250—78 (рис. 75). Реле состоит из двух основ-
ных частей — электромагнита и размыкающего контактного мости-
ка, включенного в цепь управления контактора. Катушку магнита
-включают последовательно в защищаемую силовую цепь. При про-
текании по катушке электрического тока в ней возбуждается маг-
нитное поле, пропорциональное величине тока. Под действием маг-
нитного поля толкатель поднимается вверх и в случае превышения
заданной величины тока воздействует на контактный мостик и раз-
мыкает контакты.
96
Рис. 76. Биметаллическое
тепловое реле:
1 — подвижный контакт, 2—
неподвижный контакт, 3 —
колодка, 4 — пружина, фик-
сирующая положение колод-
ки, 5, 8 — упоры, 6 — на-
гревательный элемент,' 7 —
биметаллическая пластинка,
9 — возвратное устройство
Для защиты электродвигателей и токоподводящих проводов от
небольших, но длительных перегрузок (ток в цепи двигателя на
30% и более превышает номинальный) применяют температурно-
токовые (тепловые) реле.
Основу такого реле составляет биметаллическая пластинка, сва-
ренная из двух полос металла с различными коэффициентами линей-
ного расширения, например инвар—сталь.
При нагревании рабочим током, проходя-
щим по расположенному рядом нагрева-
тельному элементу (реле типа ТРП, рис.*
76) или,по самой пластинке и элементу*
(реле типа ТРТ), пластинка изгибается в
сторону металла с меньшим коэффициен-
том линейного расширения (направление
А на рис. 76). При этом биметаллическая
пластинка через пружину повернет ко-
лодку против часовой стрелки (показано
пунктиром) и разомкнет контакты за-
щищаемой цепи. По мере остывания би-
металлической пластинки (через 1-*-
Змин) она возвращается в исходное по-
ложение (реле с самовозвратом). Суще-
ствуют реле с принудительным возвратом
пластинки.
Тепловое реле срабатывает с выдерж-
кой времени, обратно пропорциональной
величине силы тока. Чем больше ток в
цепи, тем за меньший период времени би-
металлическая пластинка нагревается до
срабатывания реле.
Для защиты электрических сетей (проводов и кабелей), цепей
управления и вспомогательных це'пей от перегрузок и токов корот-
кого замыкания применяют плавкие предохранители. Пла-
вкий предохранитель типа ПРС-25 УЗ-П или ПРС-63 УЗ-П пред-
ставляет собой фибровую трубку с латунными контактными втул-
ками по концам, между которыми закреплена цинковая или медная
тонкая пластинка с одним или несколькими местными сужениями
(перешейками). Материал пластинки имеет низкую температуру
плавления, поэтому при прохождении по ней тока, превышающего
номинальное значение, пластинка нагревается, расплавляется и раз-
рывает защищаемую цепь. Такую пластинку называют «плавкой
вставкой».
Для автоматического ограничения рабочих движений кранов
служат конечные или путевые выключатели (ограничи-
тели перемещения), защищающие механизмы крана в случае их
приближения к крайним допустимым положениям, если крановщик
не успел (недосмотрел) выключить контроллер или последний ока-
зался неисправным.
4—1975
97
Рис. 77. Конструктивные схемы рычажных
выключателей (справа, приведены .возмож-
ные схемы замыкания контактов)
По принципу действия
конечные выключатели
разделяют на рычажные
серии КУ и приходные
(шпиндельные) серии ВУ.
Конечные выключатели
предназначены для рабо-
ты только в цепях управ-
ления, поэтому их размы-
кающие контакты вклю-
чают либо в цепь катуш-
ки линейного контактора
защитной панели, либо в
цепь нулевой защиты маг-
нитных контроллеров. За-
мыкающие контакты вы-
ключателей применяют
только в цепях сигнализа-
ций.
Рычажный выключа-
тель состоит из кулачко-
- вого барабана, соединен-
ного с рычагом, установ-
ленным в корпусе и воз-
действующим на контакт-
ные элементы. Рычаг по
отношению к валу бара-
бана может быть установ-
Рис. 78. Шпиндельный конечный выключатель:
/—замыкающая кулачковая шайба, 2—вал червячного коле-
са, 3—неподвижные контакты, 4—контактный мостик, 5—ры-
чаг, б—приводной вал, 7—ось поворота рычага, 8, /0—упоры
на рычаге, 9—пружина, //—размыкающая кулачковая шай-
' ба, /2—червяк, 13—червячное колесо •
98
угла поворота кулачковых шайб.
Выключатели марки ВУ-150А имеют
одну цепь управления и предназна-
чены для ограничения перемещения
крюковой подвески вверх, а выклю-
чатели ВУ-250А имеют две пары
чатели ВУ-250А
ниях. Отечественная х промышленность выпускает четыре исполне-
ния выключателей серии КУ, имеющих приводной механизм, рычаг
с самовозвратом или фиксацией (рис. 77).
Шпиндельные конечные выключатели (рис. 78) имеют регули-
руемую диаграмму замыкания контактов в интервале 0,25—1,5 рад
Рис. 80. Ограничение высоты подъема
крюковой подвески крана с помощью ко-
нечного выключателя ВУ-150А:
/—вал барабана лебёдки, 2— барабан лебедки,
3—закрытая зубчатая передача, 4—конечный
выключатель ВУ-150А
Рис. 79. Ограничение высо-
ты подъема крюковой под-
вески крана с помощью ко-
нечного выключателя КУ-
703:
а—общий вид, б — установка
конечного выключателя на кра-
не; 1 — тележка крана, 2 —
вспомогательный канат, 3 — по-
перечная планка (грузик), 4
крюковая подвеска, 5 — конеч-
ный выключатель КУ-703-
контактов и обеспечивают ограничение перемещений крюковой под-
вески в обоих направлениях. Последнее важно при опускании крю-
ковой подвески ниже уровня пола (в колодцы, приямки и т. д.).
Выключатели типа КУ-701 применяют для ограничения перед-
вижений механизмов крана при небольших выбегах, а типа КУ-704
и КУ-706 — при любых выбегах. Органом воздействия на выключа-
тели типа КУ-701 и КУ-706 является ограничительная линейка, а
для КУ-704 — вилка с роликом. Фиксацию выключателя типа КУ-
703 в рабочем положении осуществляет вспомогательный груз, под-
вешенный на тонком канате к концу рычага, на другом плече ко-
торого находится противовес, создающий момент, меньший по вели-
99
чине, чем момент от груза. Этот выключатель применяют для ог-
раничения перемещений крюковой подвески крана. При подходе
подвески к крайнему верхнему положению полка, закрепленная на
корпусе крюковой подвески, поднимает груз и рычаг выключателя
Рис. 81. Блок-контакт:
а—общий вид, б—установка блок-контакта под крышкой
люка; /—шток, 2—направляющая шток втулка, 3—кор-
пус, 4—возвратная пружина, 5—подвижный контакт, 6—
неподвижный контакт, 7—крышка корпуса, 8— крышка
люка, 9—лестница
поворачивается под
действием противо-
веса (рис. 79, а).
Приводной вал ки-
нематически связан
с механизмом кра-
на, например с впа-
лом барабана лебед-
ки механизма подъ-
ема груза, и при до-
стижении крюковой
подвеской крайнего
положения (чему со-
ответствует опреде-
ленное число оборо-
тов барабана лебед-
ки) кулачковые шай-
бы разомкнут цепь
управления электро-
привода (рис. 80).-
Необходимо от-
метить, что после
срабатывания любо-
го конечного вы-
ключателя и оста-
новки механизма
крана включение ме-
ханизма возможно
только в направле-
нии противополож-
ного движения.
Блокировку всех
дверей (люков) ка-
бины, площадок и
галерей осуществля-
ют с помощью блок-
контактов. Блок-кон-
такт представляет собой конечный выключатель типа ВК, имеющий
необходимые контактные группы (рис. 81, а).
Выключатели выполнены в металлическом корпусе пылевлаго-
защищенного исполнения, рассчитаны на рабочий ток до 6 А, допу-
скают до 300 включений в час, имеют высокий срок службы и хо-
рошо зарекомендовали себя. При закрывании.крышки (люка) по-
следняя нажимает на шток выключателя, контакты которого за-
мыкаются (рис. 81, б). После срабатывания всех защитных выклю-
100
чателей цепь управления защитной панели крана оказывается зам-
кнутой, после чего становится возможным включить главный ли-
нейный контактор панели и начать работу на кране.
§ 45. КРАНОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Электродвигатель — это электрическая машина, преобразующая
электрическую энергию сети в механическую энергию вращения ро-
тора.
Принцип действия электродвигателя. Электродвигатель состоит
из четырех сборочных единиц: неподвижной — статора, подвиж-
ной— ротора и двух подшипниковых щитов, на подшипники кото-
рых опираются концы вала ротора. Подшипниковые щиты бцлтами
крепят к торцам статора.
В простейшем случае обмотка статора представляет собой три
катушки, смещенные по окружности на углы 2/Зл рад и подключа-
емые к сети переменного трехфазногб тока, создающего в обмотке
статора вращающееся магнитное поле.
Частота вращения магнитного поля статора ni(c-1) зависит от
частоты колебаний переменного тока f(c-1) и числа пар плюсов р:
ni=f/p.
Три секции обмотки статора, смещенные по окружности на рав-
ные углы, образуют одну пару полюсов, при этом частота вращения
магнитного поля = 50/1 =50 с-1. Шесть катушек обмотки образу-
ют две папы полюсов и обеспечивают частоту вращения поля
П1 = 50/2 = 25 с-1.
Отечественные крановые электродвигатели имеют 3,4 и 5 пар по-
люсов, что обеспечивает частоту вращения магнитного поля 16,6,
12,5 и 10 с^1. Такая частота вращения магнитного поля статора со-
ответствует частоте питающего электрического тока и называется
синхронной. Вращающееся магнитное поле статора пересекает об-
мотку неподвижного ротора с максимальной скоростью и наводит
(индуктирует в ней) ЭДС, величина которой пропорциональна чи-
слу проводников в обмотке, соединенных последовательно, и ча-
стоте вращения магнитного поля относительно проводников. Оче-
видно, что при неподвижном роторе величина ЭДС будет максималь-
ной. При замыкании обмотки ротора.через сопротивление или на-
коротко по ней течет ток, прямо пропорциональный величине ин-
дуктированной ЭДС и обратно пропорциональный сопротивлению
цепи.
Ток в обмотке ротора создает собственное магнитное поле рото-
ра, которое взаимодействует с вращающимся магнитным полем
статора, в результате чего ротор начинает вращаться в сторону
вращения магнйтного поля статора, преодолевая приложенный к
валу ротора момент сопротивления нагрузки.
По мере увеличения частоты вращения ротора Пъ, который «до-
гоняет» магнитное поле статора, уменьшается скорость пересече-
ния проводников ротора вращающимся магнитным полем и соот-
ветственно уменьшаются индуктируемая в роторе ЭДС, ток в цепи
101
ротора и крутящий момент на его валу. Когда крутящий момент
электродвигателя станет равным моменту сопротивления на его ва-
лу, наступит состояние равновесия, при котором частота вращения
ротора будет постоянной.
Даже при холостом (без нагрузки) вращении ротора часть ра-
боты расходуется на преодоление сопротивления сил трения в под-
шипниках и ротора о воздух, поэтому ротор никогда не достигает
частоты вращения магнитного поля статора. Отставание частоты
вращения ротора и2 от вращающегося поля статора п\ называется
скольжением S: S = (n}—п2)1пх. Поэтому электродвигатели такой
конструкции называются асинхронными (несинхронными). У
крановых электродвигателей обычно величина скольжения равна
3—12%, причем двигателям большей мощности соответствуют мень-
шие Значения.
Трехфазные асинхронные двигатели. Статор электродвигателя
(рис. 82) состоит из чугунного (алюминиевого) корпуса, в полости
которого размещен цилиндрической формы магнитопровод, на-
бранный из штампованных листов активной электротехнической
стали. Для снижения магнитных потерь и температуры магнито-
провода листы изолируют друг от друга лаком. На внутренней по-
верхности магнитопровода по его длине выполнены продольные па-
Рис. 82. Крановые электродвигатели:
а—асинхронный -с короткозамкнутым ротором, б—то же, с фазным ротором;
/—корпус, 2—обмотка статора, 3—ротор, 4— подшипниковый щит, 5—вентилятор,
6—вал ротора, 7—обмотка ротора, 8—контактное кольцо, 9—щеткодержатель „со
щеткой
102
Рис. 82. Продолжение
зы, в которых размещены секции обмотки статора, навитые из кру'
глого медного провода с температуростойкой изоляцией.
Обмотка статора двигателя выполнена в виде трех секций (ка
тушек) или групп катушек, шесть выводных концов которых сна-
бжены кабельными наконечниками, имеют маркировку начал трех-
фазной обмотки Cl, С2, СЗ и ее концов С4, С5 С6 и выведены в ко-
робку за-жимов, расположенную на корпусе статора двигателя.
Как правило, крановые электродвигатели выпускают на напря-
жение 380/220 В, поэтому в зависимости от фактического напряже-
ния тока в сети и требуемой схемы включения обмотки концы про-
К сети
---------
02 003
0---0---0
L 06 04 05,
К сети
000
001
0
06
002 003
0 &
04 05
Рис. 83. Схемы соединения обмоток
статора электродвигателя:
а—в звезду, б—в треугольник
водов соединяют в различных со-
четаниях. При напряжении сети
380 В секции обмотки статора со-
единяют .в звезду, т.е. концы про-
водов С4, С5 и С6 соединяют вме-
сте, а к началам Cl, С2, СЗ при-
соединяют питающие провода
трехфазной сети (рис. 83, а).
При напряжении сети 220 В
секции обмотки статора соединя-
ют в треугольник, при этом концы
проводов С1 и С6, С2 и С4, СЗ и
С5 соединяют попарно и к образо-
вавшимся трем точкам присоединяют питающие провода (рис.
83,6). Чтобы избежать возможных ошибок схемы подключения пи-
тающих проводов к секциям, обмотки двигателя указаны на внут-
ренней стороне крышки коробки зажимов.
Ротор электродвигателя представляет собой цилиндр, собран-
ный из листов электротехнической стали (магнитопровода) и ук-
репленный на валу. На образующей поверхности ротора выполне-
ны продольные пазы, в которых размещена обмотка. Именно тип
обмотки ротора определяет конструкцию асинхронного электродви-
гателя переменного тока.
Обмотка короткозамкнутого ротора состоит из медных или алю-
миниевых стержней круглого либо прямоугольного поперечного се-
чения, припаянных или* отлитых заодно целое с бронзовыми либо
алюминиевыми кольцами большого сечения, насаженными на вал.
Такая обмотка носит название «беличье колесо» (см. рис. 82, а).
У фазного ротора в пазы заложена обмотка из медного прово-
да, состоящая, как и обмотка статора, из трех секций (катушек)
или трех групп катушек. Указанная обмотка не имеет электриче-
ского соединения с питающей электросетью. Секции обмотки рото-
ра соединены в звезду, концы которой выведены на медные контак-
тные кольца, закрепленные на валу ротора (см. рис. 82, б). Кон-
тактные кольца изолированы от вала ротора и изолирующие пере-
городки выступают над рабочими поверхностями колец. С контак-
тными кольцами взаимодействуют медно-графитовые щетки мар-
ки М-1 (ГОСТ 2332—75), установленные в неподвижных щетко-
держателях на корпусе двигателя.
104
Щетки постоянно пружинами поджаты к поверхностям колец,
тем самым осуществляется подвижный электрический контакт ме-
жду вращающейся обмоткой ротора и выводами обмотки ротора,
расположенными на корпусе двигателя.
Провода цепи управления током ротора вводят с боковой сто-
роны соответствующего подшипникового щита и присоединяют не-
посредственно к зажимам щеткодержателей.
Асинхронные двигатели трехфазного переменного тока имеют
обозначение серий, состоящие из букв и цифр. Первые‘буквы пока-
зывают исполнение двигателя: МТ— с фазным ротором, МТК — с
короткозамкнутым ротором. Последняя буква обозначает класс на-
гревостойкости изоляции. ГОСТ 185—70' предусматривает выпуск
крановых двигателей с нагревостойкой изоляцией класса F с допу-
скаемой температурой 155° С и металлургических двигателей с изо-
ляцией класса Н с температурой до 180° С. Первая цифра трехзна-
чного числа характеризует размер наружного диаметра статорных
листов, вторая цифра указывает модернизацию двигателя и тре-
тья—длину сердечника статора двигателя данного габарита. По-
следняя цифра, стоящая после тире, обозначает число полюсов
двигателя.
Например, маркировка MTF312-6 обозначает крановый электро-
двигатель с фазным ротором с классом нагревостойкости изоля-
ции F (температура до 155°С), 3-й величины, модернизированный,
2-й длины, шестиполюсный.
Крановые двигатели имеют мощность 1,2—30 кВт при частоте
вращения ротора 11 —16,1 с-1 и массу 51—345 кг.
Двигатели металлургических кранов имеют мощность 2,5—
200 кВт при частоте вращения ротора 9,4—16,1 с-1 и массу 76—
1900 кг.
§ 4$. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОДВИГАТЕЛЕЙ
Регулирование скоростей рабочих движений крановых механиз-
мов непосредственно связано с регулированием характеристик эле-
ктродвигателя. Для правильного управления краном необходимо
уяснить происходящие в электродвигателе физические процессы.
Поэтому перед рассмотрением конкретных схем управления крано-
выми механизмами необходимо более подробно изучить основные'
процессы регулирования двигателя.
Очевидно, что частота вращения ротора электродвигателя за-
висит* от его конструкции и числа пар полюсов. Чем больше сила
тока, тем более сильное магнитное поле ротора он создает. Взаи-
модействие двух сильных магнитных полей ротора и статора опре-
деляет крутящий момент на валу ротора. Частота вращения рото-
ра асинхронного двигателя переменного тока йри постоянном со-
протйвлении его цепи практически не изменяется в зависимости от
момента внешней нагрузки во всем диапазоне. Механическая ха-
рактеристика такого двигателя является жесткой в отличие от
мягких характеристик двигателей постоянного тока.
105
1
Указанные механические характеристики органически присущи
каждому типу электродвигателя, являются единственными и пото-
му называются естественными в отличие от семейства дру-
гих характеристик, получаемых искусственным путем за счет из-
менения режима работы двигателя благодаря введению в .электро-
привод дополнительных элементов, называемых искусствен-
ными.
Статор электродвигателя к короткозамкнутым ротором под-
ключают непосредственно к сети, а так как сопротивление обмотки
его ротора минимально, то в ней и в обмотке статора в период пу-
ска (неустановившегося движения разгона ротора) течет ток боль-
шей величины. Величина пускового тока в 5—7 раз превышает ве-
личину нормального (рабочего) тока при установившейся частоте
•вращения ротора.
Основные недостатки' электродвигателей с короткозамкнутым
ротором следующие: высокие значения пускового момента вызыва-
ют большие ускорения механизма при каждом пуске, что затрудня-
ет управление механизмом, обусловливает высокие динамические
нагрузки (удары) на детали и раскачивание перемещаемого кра-
ном груза; все пусковые потери, пропорциональные кинетической
энергии привода, преобразуются в тепловую энергию и идут на на-
грев обмотки двигателя; невозможность регулирования частоты
вращения ротора вызывает необходимость повышения частоты
включений привода, что также повышает нагрев электродвигателя.
Эти недостатки можно устранить, уменьшая величины пусково-
го момента и соответственно ток в обмотке статора, для чего в цепь
ротора вводят дополнительные резисторы, соответствующие уста-
новленным значениям пускового момента и тока. Двигатели с фаз-
ным ротором позволяют ступенчато регулировать величины пуско-
вого момента и частоты вращения ротора, переходя с одНЪй искус-
ственной характеристики на другую.
Очевидно, что чем больше число ступеней пускорегулирующих
резисторов в цепи ротора, тем более плавным- будет нарастание
частоты его вращения. При выходе на естественную характеристи-
ку обмотка ротора оказывается замкнутой накоротко, т. е. двига-
тель становится как бы с короткозамкнутым ротором и может ра-
ботать в данном режиме продолжительно. Удается избежать боль-
ших пусковых моментов*, перегрузки по току и динамическому на-
гружению, перегрева двигателя и других нежелательных явлений,
присущих двигателям с короткозамкнутым ротором.
Описанный способ регулирования частоты вращения ротора ’
электродвигателя достаточно прост и широко распространен в кра-
яюстроении.
§ 47. КОНТРОЛЛЕРЫ И КОМАНДОКОНТРОЛЛЕРЫ
Наиболее распространенной в крановых электроприводах яв-
ляется система .управления с помощью контроллеров, осуществляю-
щих коммутацию цепей электродвигателя, необходимую для пус-
106
ка, регулирования частоты вращения ротора, торможения и ревер-
сирования его. По принципу работы контроллеры делят на два ви-
да: силовые непосредственного ручного управления, замыкаю-
щие (размыкающие) силовые цепи с помощью контактных уст-
ройств; дистанционного управления или магнитные, управляемые
посредством командоконтроллеров, переключающих цепи
управления.
На
новными сборочными единица-
ми которых являются контакт-
ные элементы и вал с кулачко-
выми шайбами. Подвижный и
неподвижный контакты конт-
роллера собраны в единый
блок, управляемый кулачковой
шайбой (рис. 84). Каждый
блок состоит из основания (не-
подвижного контакта), под-
вижного рычага с контактом и
роликом и замыкающей пру-
жины, обеспечивающей соеди-
нение контактов. Набор кон-
тактных блоков монтируют в
кранах применяют силовые
кулачковые контроллеры, ос«
Рис. 84. Контактный блок кулачкового
контроллера:-
алюминиевом корпусе на пласт-
массовых рейках' по установ-
ленной для данного типа конт-
роллера схеме коммутации.
/—гибкий проводник, 2— замыкающая пружи-
на, 3—ось поворота подвижного рычага, 4—
ролик, 5—приводной вал, 6—кулачковая шай-
ба, 7—подвижный рычаг, 8—вспомогательная
пружина, 9—неподвижный контакт, 10—рейка
При размыкании силовых электрических цепей, находящихся
под нагрузкой, между контактами возникает электрическая дуга,
вызывающая их ускоренный износ и разрушение. Поэтому для га-
шения дуги и предотвращения возможного перебрасывания ее на
соседние контакты или «массу» силовые контакты помещают в ду-
гогасительные камеры из огнестойких материалов: асбоцемента
или керамики. Приводной вал с кулачковыми шайба'ми рукояткой
(маховиком) поворачивают в подшипниках. В то время, когда ро-
лик на конце рычага подвижного контакта находится во впадине
кулачковой щайбы, контакты контроллера замкнуты под действием
пружины (рис. 85). При повороте вала и выходе ролика на гребень
кулачка подвижный контакт повернется и разомкнет цепь.
Вспомогательная пружина, обеспечивает требуемое усилие на-
жатия контактов. Напряжение на подвижный контакт подают по
гибкому проводнику. В момент замыкания цепи дугообразная часть
подвижного контакта соприкасается < неподвижным, перекатывает-
ся по его контактной поверхности и прижимается к ней с требуе-
мым усилием (нажатием).
Применяя кулачковые шайбы различного профиля, получают'
необходимую последовательность замыкания (размыкания) кон-
тактов. Вал с кулачковым^ шайбами снабжен фиксирующим меха-
низмом храпового типа, обеспечивающим его остановку в положе-
107
ниях, строго соответствующих полному замыванию (размыканию)
контактов (на рис. 85 не показан). На кранах применяют контрол-
леры типа ККТ горизонтального двухрядного исполнения, при ко-
Рис. 85. Кулачковый контроллер:
1—рукоятха, 2—кулачковая шайба, 3—рейка, 4—гибкий проводчик, 5—подвижный ры-
чаг, 6—главные контакты
тором каждая кулачковая шайба одновременно управляет двумя
элементами.
Силовые контроллеры выполняют только коммутацию главных
(статора) и роторных цепей электродвигателя.
Рис. 86. Командоконтроллер серии КШ000:
/—крышка, 2—корпус, 3— храповой фиксирующий механизм, 4—кулачковая шайба, 5—
контакты мостикового типа, 6—рейка
108
Более совершенной и надежной конструкцией является магнит-
ный контроллер, состоящий из командоконтроллера (рис. 86), мон-
тируемого на пульте управления, и контакторов,"собираемых сов-
местно с защитной аппаратурой на общей панели (раме) открыто-
го или закрытого исполнения и устанавливаемых, как правило, вне
кабины (на мосту крана).
§ 48. КОНТАКТОРЫ И МАГНИТНЫЕ ПУСКАТЕЛИ
Основным комплектующим аппаратом магнитных контроллеров,
крановых (защитных) и реверсивных панелей является контак-
тор — аппарат, замыкающий и размыкающий силовые цепи при
Рис. 87. Контактор типа КТ6000:
п—внешний вид, б—установка короткозамкнутого витка; /—основание, 2—опора, 3—
вспомогательные койтакты, 4—контактный рычаг, 5—неподвижный контакт, 6—глав-
ный вал, 7—электромагнит, 8— «ярмо» магнита, 9—короткозамкнутый виток
дистанционном управлении. В крановом электроприводе применя-
ют контракторы только с электромагнитным приводом.
Подвижные дугообразные контакты собраны на валу и при за-
мыкании перекатываются по поверхностям неподвижных контак-
тов. Привод вала осуществляет электромагнит, установленный сбо-
ку от контактной группы (рис. 87, а). Все контакторы серии КТ
(КТ 6000 и КТ 64) разработаны на основе одних и тех же конст-
руктивных принципов и работают на переменном токе.
Главные контакты имеют мощную дугогасительную систему с
электромагнитным гашением. По числу одновременно переключаё-
мых цепей контакторы делят на одно- и многополюсные. Контак-
торы переменного тока .выпускают двух-, трех- и четырехполюсны-'
ми. Кроме главных контактов контактор имеет группу вспомога-
тельных контактов (замыкающих и размыкающих), количество
109
которых в процессе эксплуатации может быть изменено в соответ-
ствии со схемой включения электроаппаратуры.
Для обеспечения надежной работы электромагнита при питании
его переменным, током на торцах ярма электромагнита уложен
короткозамкнутый виток в виде латунной рамки, охватывающий
часть магнитопровода
(рис. 87, 6). В коротко-
замкнутом витке ин-
дуктируется ток (как
во вторичной обмотке
трансформатора),- со-
здающий дополнитель-
ный магнитный поток,,
который исключает
вибрацию якоря элек-
тромагнита. Нормаль-
ная работа электромаг-
нита характеризуется
легким гудением аппа-
рата.
В крановых элек-
троприводах широка
распространены пуска-
тели типа ПМЕ-200 и
ПАЕ-300 на рабочий
ток 25 и 40 А соответ-
ственно. Основное от-
Рис. 88. Магнитный пускатель ПМЕ-211:
/—плоская пружина, 2—неподвижный главный контакт,
3, 4— блокирующие контакты, 5—пружина блокирующих
контактов, 6—катушка электромагнита, 7—подвижный
главный контакт мостикового типа
Рис. 89. Реверсор ДР-160УЗ:
/—доска зажимов, 2—механическая блоки-
ровка, 3—корпус, 4—контактор
личие пускателя типа
ПМЕ от контактора
обычного исполнения
состоит в том, что era
якорь не поворачивает-
ся при срабатывании
магнита, а движется
поступательно вместе с
подвижными контак-
тами в специальных
направляющих (рис.
88). х
Для изменения на-
правления рабочего
движения крановых ме-
ханизмов, приводимых
в дейстие от асинхрон-
ных двигателей с ко-
роткозамкнутым ротором, в комплексе с кулачковыми контролле-
рами или пусковыми кнопками применяют-специальные контак-
торы-реверсоры типа ТР-160УЗ или ДР-166УЗ (рис. 89). Ре-
версор состоит из двух двухполюсных контакторов, цепи управле-
110
ния которых замыкают кулачковым командоконтроллером, а глав-
ные контакты переключают фазы статорных цепей электродвига-
теля. Оба контактора размещены в одном корпусе и имеют вза-
имную электрическую и механическую блокировки, не позволяю-
щие включать их одновременно.
На кранах реверсоры, как правило, применяют для управления
силовыми контроллерами двумя одновременно работающими и
механически связанными двигателями, например механизма пере-'
движения крана.
§ 49. АППАРАТЫ УПРАВЛЕНИЯ
Кроме аппаратов для частой коммутации цепей электроприво-
дов на кранах применяют различные конструкции рубильников и.
выключателей периодиче-
ской коммутации цепей
управления и силовых це-
пей.
Рубильник с блоком
предохранителей, встро-
енным * в металлический
шкаф, называется сило-
вым распредели-
тельным ящиком
(рис. 90, а). Рукоятка ру-
бильника имеет блокиро-
вочное устройство, не поз-
воляющее открывать
шкаф при включенном ру-
бильнике и,* наоборот,
включать рубильник при
открытой крышке шкафа.
Рис. 90. Аппараты для нечастой коммута-
ции электрических цепей:
а—силовой распределительный, ящик/ б—блок пре-
дохранитель-выключатель; /—шкаф, 2—рубильник,.
3—рукоятка, 4—предохранители, 5—контактные
губки, 6—рычажная система, 7—подвижный нож-
предохранитель
Силовые ящики уста-
навливают на пунктах подключения кранов к общей электросети и
на самом кране для отключения на' время проведения ремонтно-про-
филактических работ. В отдельных случаях в силовые ящики встра-
ивают блок предохранитель — выключатель, у которого подвиж-
ные ножи рубильника выполнены заодно с предохранителями
(рис. 90,6).
Все силовые распределительные ящики, устанайливаемые вне
крана, должны иметь устройство для запирания и обязательно в
выключенном положении. Кнопки управления серии КУ или
КЕ относятся к командоаппаратам и предназначены для замыка-
ния (размыкания) цепей управления (катушек контакторов, маг-
нитных пускателей, реле) и звукового сигнала. В зависимости от
назначения кнопок головки толкателей снабжены соответствующи-
ми надписями, например «Пуск», «Стоп» и др., и окрашены в со-
ответствующие цвета. Комплект кнопок управления, встроенных в
общий корпус (пульт), называют кнопочной станцией
(постом).
Кнопки рассчитаны нН рабочий ток 5—6 А и выдерживают до
5 млн. переключений, что позволяет применять их для частой ком-
мутации в цепях управления (рис. 91, а).
Выключатели управления бывают с ручным и пе-
чальным (ножным) приводом. Ручные'типа ВУ-22-2Б4УЗ приме-
няют для экстренного отключения линейного контактора защитной
панели, мгновенного разрыва основных цепей управления и быст-
рой остановки крана, в связи с чем их называют аварийными
выключателями. Педальные выключатели применяют для комму-
тации цепей управления электроприводами кранов, когда руки кра-
Рис. 91. Аппараты коммутации цепей управления и вспомогательных:
а—кнопка управления, б—педальный выключатель, в—пакетный выключатель, г—
универсальный переключатель; 1, 4—корпус, 2—головка, 3, 10—зажимы, 5—крышка,
6—педаль, 7, //—контактная секция, 8, 13—рукоятка, 9—заводное устройство, 12—
перегородка
новщика заняты на основных аппаратах управления. Например,
для выключения двух двигателей механизма передвижения козло-
вого крана после окончания его разгона, блокировки (отключения)
первых положений контроллера механизма подъема, груза при
опускании груза противовключением, подачи звукового сигнала и
в других случаях (рис. 91, 6).
Пакетные выключатели серии ПВМ состоят из секций,
включающих подвижные (скользящие) и неподвижные контакты.
Секции (до семи) собирают в пакет (рис. 91, в). Выключатель
управляется рукояткой, которая через специальное встроенное за-
водное устройство с пружиной обеспечивает мгновенное переклю-
чение контактов вне зависимости от скорости поворота рукоятки.
Заводное устройство не позволяет возникать дуге при размыкании
контактов.
Для нечастой коммутации цепей управления, в частности для
управления магнитными контроллерами приводов механизмов
крана с короткозамкнутыми роторными двигателями, применяют
многоцепные универсальные переключатели типа УП-
5311 (рис. 91, г). Контактные секции переключателя управляются
кулачковыми шайбами, закрепленными на общем валу, который
поворачивается рукояткой, имеющей фиксирующее устройство.
112
§ 50. РЕЛЕ
Реле представляет собой автоматически действующий аппарат,
замыкающий (размыкающий) свои контакты под действием меха-
нических, электрических, магнитных или тепловых импульсов. По
принципу действия различают электромагнитные, индукционные и
тепловые реле. Для контроля и управления работой крановых
электроприводов применяют электромагнит-
ное и тепловые реле, выполненные по еди-
ной конструктивной схеме.
Реле напряжения и тока пред-
назначены для контроля соответствующих
параметров в электрических цепях кранов и
применяются при необходимости. Проме-
жуточные реле используют для фор-
мирования команд управления, т. е. в каче-
стве вспомогательных аппаратов, когда ос-
новной аппарат, например силовой контрол-
лер, не имеет необходимого числа контакт-
ных блоков, требуемых для включения элек-
тросхемы или для усиления сигналов команд
и передачи их от низковольтных органов
управления к основным электроаппаратам
цепи управления, т. е. в случаях, когда мощ-
ность контактов аппаратов управления недо-
статочна для размыкания (замыкания) це-
пи управления.
Промежуточные реле выпускают с ка-
тушками постоянного и переменного тока
(рис. 92). Реле имеет два — четыре нор-
мально замкнутых (разомкнутых) контак-
та. При включении катушки в сеть якорь
Рис. 92. Промежуточ-
ное реле:
1 — ярмо, 2 — катушка,
3 — короткозамкнутый,
виток, 4 — якорь, 5 —
рейка с изоляторами, 6—
контактная пружина, 7—
контактный мостик, 8—
неподвижные контакты,
9—стержень
притягивается к ярму и связанные с ним контакты мостикового ти-
па производят необходимые переключения, в схеме.
Реле времени выполняют, как правило, с электромагнит-
ной системой постоянного тока и применяют в цепях управления
электроприводов для реализации заданных интервалов времени
между подачей команды управления (электрического импульса) на
размыкание катушки и переключением контактов реле. На кранах
реле времени применяют в схемах магнитных контроллеров для ав-
томатического замыкания (размыкания) цепей управления с за-
данной выдержкой времени.
, $ 51. ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ
И ЭЛЕКТРОГИДРАВЛИЧЕСКИЕ ТОЛКАТЕЛИ
Для сжатия силовых (замыкающих) пружин двухколодочных
тормозов и их размыкания в крановых механизмах применяют спе-(
циальные тормозные электромагниты и электрогидравлические тол-
катели.
5—1975
113
Тормозной электромагнит типа МО состоит из сле-
дующих основных частей: магнитопровода, обмотки возбуждений
(катушки) и якоря. Короткохрдовой электромагнит однофазный
поворотный типа МО работает на переменном токе промышленной
частоты. Ярмо магнитопровода собрано из пакета листов электро-
технической стали и замыкается поворачивающимся на оси якорем.
Пакет ярма склепан с корпусом магнита и двумя кронштейнами.
Катушка возбуждения закреплена на ярме с помощью 1фышки.
Рис. 93. Однофазный электромагнит МО:
/—рабочее положение электромагнита, //—нерабочее положение; А, Б—
соседние заклепки на корпусах магнита и якоря, а—угол поворота якоря;
/ — крышка катушки, 2 — катушка, 3 — якорь, 4 — щека якоря, 5 — ось яко-
ря, 6 — корпус магнита, 7 — поперечная планка, 8 — тяга тормоза, 9 —
кронштейны, 10 — провода
На ярме Закреплен короткозамкнутый виток, постоянно замыкаю-
щий магнитный поток и устраняющий вибрацию и гудение магнита
при работе на переменном токе (рис. 93).
- Поворотный/ якорь шарнирно соединен с корпусом магнита. ,
Между щеками якоря установлена поперечная планка, воздейст-
вующая на тягу тормоза. При прохождении электрического тока
через обмотку возбуждения возникающее в магнитопроводе маг-
нитное поле притягивает (поворачивает) якорь к ярму. При этом
поперечная планка упирается в тягу тормоза и перемещает ее,
обеспечивая через систему рычагов отход колодок тормоза от шки-
вами растормаживание механизма. В отдельных случаях применя-
ют электромагниты постоянного тока и длинноходовые.
Электрогидравлический толкатель — это устрой-
ство, преобразующее электрическую энергию в механическую и
имеющее прямолинейно перемещающийся шток (типа гидроци-
114
Рис. 94. Электрогидравлический толкатель:
/—коробка зажимов, 2—центробежный насос, 3—поршень
гидротолкателя, 4—цилиндр, 5—заливное (контрольное)
отверстие, 6—шток, 7—корпус, 8—электродвигатель, 9—
* кронштейн крепления толкателя
рычагов
Для под-
электро-
служит
зажимов,
соединения
линдра). Электрогидротолкатель состоит из корпуса, электродви-
гателя с короткозамкнутым ротором, центробежного насоса, ци-
линдра и штока с поршнем. На валу электродвигателя закреплен
центробежный насос. .
Поршень, в свою оче-
редь, двигается в ци-
линдре, а шток гид-
ротолкателя связан с
системой
тормоза,
ключения
двигателя
коробка
Места
корпусных деталей
гидротолкателя и вы-
ходные отверстия ва-
ла электродвигателя
и штока толкателя
уплотнены соответ-
ственно маслостой-
кими резиновыми
кольцами и манжет-
ными уплотнениями,
препятствующими
выходу рабочей жид-
кости. Для залива-
ния и контроля уров-
ня рабочей жидкости
в верхней части кор-
пуса гидротолкателя
имеется закрытое
резьбовой пробкой
отверстие (рис. 94).
При включении
электродвигателя на-
чинает работать
центробежный насос,
создающий избыточ-
ное давление рабо-
чей жидкости в под-
поршневой полости
цилиндра. ’Под давлением поршень поднимается в верхнее рабочее
положение и воздействует на систему рычагов тормоза. При этом
вытесняемая поршнем рабочая Жидкость через специальные ка-
налы вытекает из верхней полости цилиндра и поступает в центро-
бежный насос.
5‘
§ 52. КРАНОВЫЕ РЕЗИСТОРЫ
Применяемые на кранах резисторы делят на пускорегулирую-
щие, включаемые в силовые (роторные) цепи электродвигателей,
и резисторы управления, используемые в цепях управления и сиг-
нализации.
Крановые пускбрегулирующие резисторы включа-
ют в цепь ротора асинхронного двигателя и контроллером управ-
ляют ими для плавного разгона, регулирования частоты вращения
и электрического торможения ротора, при этом значительная часть
электрической энергии превращается в тепловую. В зависимости
от мощности электродвигателя, степени плавности разгона и тор-
можения ротора резисторы имеют различную мощность, величину
и число ступеней.
Резисторы изготовляют из сплавов: фехраль, нихром и реже
константан в виде проволоки или ленты.
Проволоч н ы е, резисторы навивают на трубчатые фарфо-
ровые цилиндры (изоляторы), установленные на стальные держа-
тели. После навивки цилиндры покрывают нагревостойкой стекло-
видной эмалью. Несколько таких резисторов, собранных в пакет,
стянутый болтами, и закрепленных с помощью изоляторов на плос-
ких металлических держателях, составляют ящик резисто-
ров. Отдельные резисторы перемычками (медными оголенными
проводами) собирают по определенной схеме в реостат. В'зависи-
мости от назначения реостат может состоять из одного и более
ящиков.
Для экономии изоляторов и улучшения условий охлаждения
проволочные резисторы навивают непосредственно на плоские дер-
жатели, на ребрах которых установлены дугообразные фарфоровые
изоляторы (рис. 95, а).
Ленточные резисторы навивают из фехралевой ленты, по-
ставленной на‘ребро и закрепленной аналогичным образом на фар-
форовых трубчатых изоляторах (рис. 95, б). Выводы (концевые и
промежуточные) от активного материала резисторов выполняют в
виде петель самого материала либо пайкой тугоплавким актив-
ным припоем.
Так как резисторы при работе выделяют значительное количе-
ство тепла, ящики с воздушным зазором между ними 70—100 мм
устанавливают друг на друга на мосту крана в горизонтальном
положении. При этом защитные кожухи должны иметь жалюзи
или окна, которые обеспечивают свободную циркуляцию воздуха
между элементами резисторов.
Рассмотренные пускорегулирующие резисторы просты по кон-
струкции, технологичны в изготовлении и ремонте, так как позво-
ляют легко найти и быстро заменить негодный элемент.
Резисторы управления применяют для ограничения
напряжения или силы токр в цепях управления. Эти резисторы на-
матывают из константановой или нихромовой проволоки на кера-
мическую трубку и покрывают стекловидной эмалью. В отличие от
1И
крановых пускорегулирующих резисторов они рассчитаны на дли-
тельный режим работы, устанавливают их на панелях магнитных
контроллеров или в ящиках выпрямителей.
Контрольные вопросы
1. Расскажите о требованиях, предъявляемых к крановому электрообору-
дованию.
2. Как выполнен токоподвод к передвижному крану и его механизмам?
3. Где размещают крановое электрооборудование?
Рис. 95. Ящики резисторов:
а—с проволочными резисторами, б—с ленточными резисторами; /—боко-
вина, 2—константановая проволока, 3, 7—фарфоровый изолятор, 4—пере-
мычка, 5—держатель, 6—фехралевая лента
4. Расскажите о конструктивных особенностях крановых электродвигателей
переменного тока, в чем их преимущества и недостатки.
5. Как работают различные защитные устройства?
6. Как устроен и работает силовой контроллер?
7. Как устроены магнитные контроллеры?
8. Для чего нужны магнитные пускатели и контакторы?
9. Расскажите о назначении и устройстве крановых резисторов.
117
ГЛАВА IX. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ КРАНОВ
$ 53. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ЭЛЕКТРИЧЕСКИХ СХЕМ
Электрическая схема — это чертеж, на котором с помощью ус-
ловных обозначений изображены электрические машины, аппара-
ты, приборы и связывающие их цепи. В зависимости от назначения
и способов изображения электрических устройств существуют раз-,
личные типы электрических схем. При эксплуатации кранов кра-.
новШику необходимо знать символику обозначений, уметь читать
и разбирать принципиальные.и монтажные схемы кранов.
Принципиальная электрическая схема — основ-
ной документ по электрооборудованию крана. Она определяет пол-
ный состав оборудования, указывает электрические связи между
'Ним и дает полное представление о принципах работы. Электро-
оборудование и связывающие цепи показывают на схеме в виде
условных графических обозначений (символов). Каждый элемент
оборудования имеет на схеме буквенно-цифровое обозначение, по-
ясняющее его назначение и порядковый номер. Коммутирующие
устройства (выключатели, контакты, кнопки, реле и т. п.) изобра-
жают в отключенном, положении, т. е. при отсутствии тока во всех
цепях схемы;"При этом разомкнутые в отключенном положении
контакты называют замыкающими (нормально разомкнуты-
ми) , в отличие от замкнутых, которые называют размыкаю-
щими (нормально замкнутыми)'.
На принципиальной электросхеме каждый аппарат, например
койтакТор, изображают разделенным на составные элементы: ка-
тушку, Главные контакты, бло’к-контакты и др., а каждый элемент
включают в соответствующую цепь.
Монтажная электрическая схема (Соединения)
предназначена для выполнения электромонтажных работ в процес-
се монтажа (демонтажа) крана и проведения капитальных-ремон-
тов. На схеме указывают соединения отдельных элементов элект-
рооборудования, типы, сечения, число жил и длины проводов, а
также способ их прокладывания. В -отличие от принципиальной
схемы на монтажной электрическую проводку крана изображают
в соответствии с расположением оборудования. Многожильные
провода и группы проводов, размещенные в защитных рукавах,
показывают одной линией, разветвляющейся по концам на отдель-
ные маркированные жилы.
§ 54. ОСНОВНЫЕ ТРЕБОВАНИЯ К КРАНОВЫМ ЭЛЕКТРОСХЕМАМ
Правила предъявляют к электрическим схемам ряд требований,
обеспечивающих безопасность работы кранов. Так, электросхема
управления краном должна исключать: самозапуск электродвига-
телей после восстановления подачи напряжения в питающей кран
сети; пуск и разгон электродвигателей не по заданной схеме уско-
118
рения; пуск электродвигателей с помощью предохранительных
устройств (конечных выключателей, блокировочных приборов
и др.).
Цепь рабочего освещения на кране (кабина управления, места
установки аппаратуры и механизмов) должна быть подключена к
электросети до вводного ус-
тройства и иметь собствен-
ные рубильник и защитные
предохранители. Это требо-
вание регламентирует нор-
мальное освещение рабочих
мест при отключении крано-
вого электрооборудования в
период осмотров и обслужи-
вания.
Способ подключения све-
тильников, освещающих ра-
бочую зону крана, не регла-
ментирован. Следует отме-
тить только, что наружное
освещение должно обеспечи-
вать безопасность кранов-,
щика при подъеме на кран
(сходе с него) в темное вре-
мя суток. В отличие от цепей
освещения электрические
отопительные приборы долж-
ны быть подключены к сети
после вводного устройства
(но до контактора защитной
панели) через собственный
рубильник и отключающий
автомат. При таком под-
Рис. 96. Принципиальная электрическая
схема управлением тельфером козлового
крана КД-05
ключении отопительные приборы-ве могут быть оставлены включен-
ными после окончания работы крана. Если отопительные приборы
будут подключены к сети после крановой защитной панели, при
каждом отключении главного линейного контактора будут отклю-
чаться и отопительные приборы, что'не рационально.
$ SS. СХЕМА УПРАВЛЕНИЯ ЭЛЕКТРОТЕЛЬФЕРОМ КРАНА
Рассмотрим наиболее простую электрическую схему управления
тельфером (рис. 96). Напряжение питающей сети через токосъем-
ник, плавкие предохранители ПрЗ защитной панели и контакты
реверсивных пускателей KI, К2, КЗ и К4 подается к обмоткам ста-
торов двигателей Ml, М2 и М3 с короткозамкнутыми роторами и
на катушку тормозного магнита ТМ. Ml—двигатель механизма
подъема груза, М2 и М3 — механизмы передвижения тельфера.
119
Развертка цепи управления состоит из четырех самостоятель-
ных электрических цепей, в которые последовательно включены
(от провода А15 к проводу В15) катушки магнитных пускателей i
К1 (подъема груза), К2 (опускания), КЗ (передвижения тельфера <
вправо) и К4 (передвижения влево); нормально замкнутые блок-
контакты соответствующих пускателей БК1, БК2, БКЗ и БК4; нор-, |
мально замкнутые контакты конечных выключателей механизма |
подъема груза ВК1, ВК2 и зажимы универсального переключателя |
(кнопочной станции) Кн1, Кн2, КнЗ и Кн4. Механизм передвиже- *
ния тельфера конечными выключателями не оборудован. Каждая
цепь управления предназначена для включения конкретного меха-
низма на выполнение определенного движения. Цифры на рисунке
обозначают маркировку проводов. ,
Для подъема груза крановщик нажимает на кнопку переключа- J
теля (замыкает зажимы Кн1) и замыкает соответствующую цепь J
управления. Катушка К1 втягивает сердечник, связанный с кон- у
тактором. Контактор замыкает силовую цепь электродвигателя
(контакты К1) и подает питание на катушку электромагнита тор-
моза ТМ, в результате чего механизм начинает работать на подъ-
ем груза. При отпускании кнопки переключателя последняя под -;
действием возвратной пружины возвращается в исходное положе-
ние и размыкает цепи управления и силовую и, следовательно,,^
прекращает подъем груза. При случайном нажатии обеих кнопок,£
например Кн1 и Кн2, электродвигатель не сможет включиться, такЖ
как при замыкании основных контактов контактора, например, КнШ
на подъем груза* размыкается блок-контакт БК2 в цепи управле-Ц
ния, включающей двигатель на опускание груза, и наоборот. Этим!
достигается надежная блокировка привода. Аналогичным образом!
управляют механизмом передвижения тельфера. j
х - I
§ 56. СХЕМА КУЛАЧКОВОГО КОНТРОЛЛЕРА 1
'Я
Схемы управления приводами различных крановых механизмов J
с асинхронными двигателями, имеющими фазный ротор, примернс \
одинаковы и отличаются режимами их включения. Для управлени* ;
приводами на ряде кранов применяют силовые кулачковые конт 1
роллеры. ' 1
Принципиальная электрическая схема (развертка) силового ку
лачкового контроллера ККТ-61, управляющего механизмом подъе
ма груза, приведена на рис. 97, а. Контроллер имеет симметрично'
исполнение, т. е. замыкает одинаковое число контактных блоке
(пяуь) при переводе рукоятки управления влево (на подъем груза
и вправо (на опускание) от нулевого положения. Четыре верхни
контактных блока (К1, КЗ, К5, К7) замыкают цепь статора. Пр
переводе рукоятки влево на позицию 1 замыкаются контакты К
и К7, подающие напряжение на обмотку статора двигателя. Кор
такты остаются в замкнутом положении на всех пяти позициях
соответствующих подъему груза. При переводе рукоятки в проти '
воположное положение,, соответствующее опусканию груза (впра
120 <
во), контакты КЗ и Л7 размыкаются и замыкаются контакты К1 и
Кб, изменяющие порядок подключения двух фаз сети к обмотке
статора, в результате чего осуществляется реверсирование двига-
теля. Данные контакты также остаются в замкнутом положении
на всех пяти позициях. Замкнутые контакты на схеме показаны
жирными точками, жирная линия обозначает, что контакты замк-
нуты в соответствующих позициях рукоятки контроллера.
Рис. 97. Принципиальная схема кулачкового контроллера КТ-61:
а—развертки, б—включение пускорегулирующих сопротивлений в цепь ротора, в—•
механические характеристики электродвигателя
fr Пять средних контактных блоков (К2, К4, Кб, К8 и КЮ) ком-
мутируют цепи ротора. В первой позиции рукоятки контроллера
указанные контакты разомкнуты, все пускорегулирующие сопро-
’ЙвЛения включены в цепь ротора (рис. 97, б, /), ток в цепи ротора
ййимальный и последний начинает разгоняться по кривой 1С
fee. 97, в). При переводе рукоятки контроллера в позицию 2 за-
ЙЙКается контакт К2 и отключает часть первого сопротивления на
«Ветке Р5 — Р6 (рис. 97, б, 2), в результате чего сила тока в цепи
«Ибра увеличивается и ротор продолжает разгоняться по кри-
t 2С (рис. 97, в). Последовательным включением остальных кон-
тактных блоков ступенчато отключают все цускорегулирующие со-
Противления (рис. 97, б, 5), закорачивают все обмотки ротора и
гвреводят двигатель на работу по естественной характеристике 5С
ФД975
121
(рис. 97, в). Три нижних коцтактных блока (К9, КН и К12) яв-
ляются блокировочными и предназначены для замыкания цепей
управления, например цепи катушки линейного контактора защит-
ной панели крана.
§ 57. СХЕМА МАГНИТНОГО КОНТРОЛЛЕРА
. На рис. 98 приведена типовая схема магнитного контроллера.
Схемы всех магнитных контроллеров обеспечивают автоматический
Рис. 98. Типовая схема магнитного контроллера типа ТСА
ступенчатый разгон ротора электропривода, его торможение и ре-
версирование. Управление приводом осуществляют с помощью
командоконтроллера, имеющего по четыре фиксированных рабочих
позиции рукоятки. В отличие от кулачкового контроллера ККТ-61
рассматриваемый магнитный контроллер имеет несимметричное ис-
полнение, т. ё; на подъем и опускание груза замыкается разное
число контактов.
При установке рукоятки командоконтроллера (см. рис. 97, б)
на подъем в позиции 1 производят выбирание слабины каната и
подъем легких грузов с пониженной скоростью. При установке ру-
коятки на позицию'2 поднимают тяжелые грузы с пониженной ско-
ростью. Позиции 3 и 4 обеспечивают разгон ротора электродвига-
теля под контролем реле времени РУ1 и РБ. На позициях 1 и 2
122
рукоятки управления при опускании груза включается режим тор-
можения противовключением, обеспечивающий малые скорости
опускания номинальных грузов. Опускание средних по массе гру-
зов в режиме торможения с однофазным питанием обмотки стато-
ра происходит на позиции 3 рукс^тки, а опускание грузов с наи-
большей скоростью на позиции 4 рукоятки, соответствующей ми-
нимальному сопротивлению цепи ротора. Ступени пускорегулирую-
щих сопротивлений в цепи ротора отключают с помощью контак-
торов ускорения КУ1 — КУ4 и контактора противовключения
КП.
Рис. 99. Схемы динамического торможения электродвига-
теля:
а—с питанием от сети переменного тока, б—с самовозбуждением
Рис. 100.
Схема тормо-
жения элек-
тродвигателя
с однофаз-
ным питани-
ем обмотки
статора
J
Торможение механизма с однофазным питанием обмотки стато-
ра двигателя осуществляется при включении контакторов КО и КН
в цепи статора, а также контактора ускорения КУ1 в цепи ротора.
Чтобы исключить возможность одновременного включения схем
торможения — противовключением и с однофазным питанием об-
мотки статора, контакторы КО и КП, КН и КВ, КВ2 и КН2 имеют
попарно механическую и электрическую блокировки. Чтобы при
опускании тяжелых грузов не развивалась слишком большая ско-
рость, на позиции 3 рукоятки команде контроллер а применяют на-
жатием на педаль опускания тяжелых грузов НП блокировку при-»
вода.
123
$ 58. СХЕМЫ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МЕХАНИЗМОВ
Для осуществления динамического торможения асинхронного
двигателя обмотки статора отключают от питающей сети и пода-
ют на них питание постоянным током. При этом ротор двигателя
вращается-1 за счет запаса кинетической энергии механизма. В ре-
зультате пересечения неподвижного магнитного поля статора вра-
щающимся роторбм в последнем возникает электрический ток, соз-
дающий собственное магнитное поле. Взаимодействие'обоих элект-
ромагнитных полей обеспечивает торможение ротора электродвига-
теля и механизма в целом.
Существуют две схемы динамического торможения: с питанием
от сети через выпрямитель (рис. 99, а) и с самовозбуждением
(рис. 99, б). Последняя выгодно отличается отсутствием понижаю-
щего трансформатора и автоматической зависимостью величины
тока возбуждения, а следовательно, тормозного момента от нагруз-
ки на валу электродвигателя. Для крановых электроприводов, ха-
рактеризуемых широким диапазоном изменения нагрузок, это свой-
ство имеет большое значение. Очевидно, что динамическое тормо-
жение с самовозбуждением применимо только для двигателей с
фазным ротором. Несмотря на некоторую сложность, динамическое
торможение электроприводов весьма эффективно.
Разновидностью способа динамического торможения" является
торможение с однофазным питанием обмотки статора (рис. 100).
Питание может быть осуществлено от основной сети или за счет
самовозбуждения. К недостаткам данного способа следует отнести
повышенный ток и нагрев обмотки статора.
$ 59. СХЕМА ЦЕПЕЙ УПРАВЛЕНИЯ ЗАЩИТНЫХ ПАНЕЛЕЙ
Примерная схема включения цепей управления защитных пане-
лей приведена на рис. 101. Цепь питания катушки линейного кон-
тактора Л будет замкнута только после, замыкания выключающе-
го устройства (ключ-марки) КМ, всех нулевых контактов контрол-
леров К12 или командоконтроллеров, блок-контактов дверей (лю-
ков) КЛ, аварийного выключатели АВ, контактов максимальных
реле МР1, МР2 и конечных выключателей (всех механизмов) КВВ
и КВН. При этом после включения главного рубильника и нажа-
тия блокировочной кнопки КВ через катушку пойдет электриче-
ский ток и линейный контактор подаст напряжение в силовые цепи
электроприводов механизмов крана (кран готов к работе).
В случае перегрузки любого привода механизма или короткого
замыкания в цепи контакты группового максимального реле МР1,
МР2 разомкнут цепь катушки линейного контактора Л, который
отключит от сети все двигатели, силовые или цепи управления ко-
торых включены через панель. При срабатывании одного из аппа-
ратов конечной защиты КВВ, КВН, блокировки двери (люка) КЛ
или нажатии на кнопку аварийного выключателя АВ также про-
изойдет отключение линейного контактора. Включение его возмож-
124
но только после установки рукояток всех органов управления в
нулевое положение, возвращения всех аппаратов в первоначальное
положение и нажатия блокировочной кнопки КВ (нулевая блоки-
ровка). Кнопку КВ можно отпустить, так как цепь катушки линей-
ного контактора Л останется под напряжением благодаря шунти-
рующему блок-контакту Л (на схеме под кнопкой КВ) до тех пор,
пока вновь не произойдут указанные выше явления.
В схему
главных
цепей.
Рис. 101. Схема цепей*управления защитных панелей:
а—при управлении кулачковыми контроллерами, б—при управлении командо-
контроллераМи; Г—П, Г—С, В—П и В—С—контакты, замыкающие цепи приводов
механизмов главного и вспомогательного подъема на подъем и опускание груза
соответственно, Т—В, Т—Н, М~В и М—Н—контакты, включающие приводы ме-
ханизмов передвижения тележки и моста крана вперед и назад, KJ2—нулевые
контакты контроллеров, КВВ, КВН — контакты конечных выключателей соответ*
ствующих механизмов крана, КБ — блокировочная кнопка, КЛ — блок-контакты
дверей (люков), АВ — аварийный выключатель, МР1 и МР2 — контакты макси-
мальных реле, Л -у катушка линейного контактора и шунтирующий блок-контакт
контактора, 1П—ЗП — предохранители, ПП. — переключатель
§ 60. СХЕМЫ ЗАЗЕМЛЕНИЯ КРАНОВ
Все передвижные грузоподъемные краны с электроприводом
механизмов должны быть заземлены. Заземление выполняют для
предупреждения возможного поражения людей электрическим то-
ком в случае прикосновения к металлическим частям крана, не яв-
ляющимися деталями электрооборудования, но случайно оказав-
шимися под напряжением в результате повреждения изоляции
электроцепей.- Заземление — специальная система электриче-
ского соединения деталей крана с землей через различные зазем-
ляющие устройства. Обязательному заземлению подлежат крано-
вые металлоконструкции, корпуса электроаппаратов, металличе.
125
ские оболочки и защитные трубы электропроводки и кабелей.
В зависимости от напряжения и системы энергоснабжения питаю-
щей сети применяют различные схемы заземления.
Заземление корпусов крановой электроппаратуры и двигателей
осуществляют надежным электрическим соединением (контакт) с
металлоконструкцией крана; для этого на контактирующих поверх-
ностях оставляют зачищенные и неокрашенные места. В свою оче-
редь, металлоконструкции кранов заземляют через крановый путь,
стыки рельсов которого надежно соединяют между собой сваркой,
приваркой соединительных перемычек или приваркой к стальным
/юдкрановым балкам для обеспечения надежной непрерывной
электрической цепи. Заземление крановых путей, расположенных
в промышленных зданиях, выполняют соединением их с основным
контуром заземления деталей строительной конструкции. Крановые
пути, расположенные на открытом воздухе, заземляют соединением
их со специальными заземлителями. Величина сопротивления цепи
заземления растеканию тока, измеряемая любым прибором, не дол-
жна превышать 10 Ом.
Краны, имеющие четырехжильный кабель, заземляют через ну-
левой провод линии, что значительно проще и надежнее. С 1976 г.
выпускают грузовые электромагниты, получающие питание с по-
мощью трехжильного кабеля, одну жилу которого используют для
заземления устройства.
Контроль состояния цепи заземления производят одновременно
с выполнением работ по ремонту кранового электрооборудования,
но не реже одного раза в год.
Контрольные вопросы
ч1. Каким условиям должны удовлетворять крановые электросхемы?
2. Как работает схема управления электротельфером?
3. Объясните принципы реверсирования и регулирования частоты вращения
ротора электродвигателя с помощью кулачкового контроллера.
4. В чем основные различия схем магнитного и силового контроллера?
5. Как включается электродвигатель в режиме торможения?
6. Как работает схема управления защитной панели крана?
7. Для чего необходимо заземлять электрооборудование и как выполняют
схемы заземления кранов?
ГЛАВА X. ПРАВИЛА ЭКСПЛУАТАЦИИ КРАНОВ
§ 61. ОСНОВНЫЕ ПОЛОЖЕНИЯ ПРАВИЛ УСТРОЙСТВА
И БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ ГРУЗОПОДЪЕМНЫХ КРАНОВ
За качеством изготовления и безопасной эксплуатацией грузо-
подъемных машин, основную категорию которых составляют кра-
ны, установлен технический надзор, осуществляемый органами Го-
сударственного комитета по надзору за безопасным ведением ра-
бот в промышленности и горному надзору при Совете Министров
СССР (Госгортехнадзор СССР).
126
Госгортехнадзор СССР является союзно-республиканским коми-
тетом и имеет в своем составе комитеты союзных республик, управ-
ления округов и районные инспекции.
Надзор установлен на предприятиях и в организациях всех ми-
нистерств и ведомств. Порядок надзора определен Правилами Гос-
гортехнадзора СССР.
При проектировании, изготовлении, установке и эксплуатации
кранов следует руководствоваться Правилами устройства и без-
опасной эксплуатации грузоподъемных кранов, утвержденными
Госгортехнадзором СССР 30 декабря 1969 г. Действие этих Правил
распространяется на краны всех типов; ла все съемные грузбза-
хватные приспособления (например, стропы, траверсы, клещи), с
помощью которых груз подвешивают к крюку грузоподъемной ма-
шины; сменные грузозахватные органы (крюк, грейфер, электро-
магнит и др.). Правила распространяются также и на тару для
подъема и перемещения мелкоштучных, сыпучих и других грузов,
за исключением специальной тары, применяемой в металлургиче-
ской промышленности.
Требования к электрооборудованию грузоподъемных кранов, пи-
тающихся от сети напряжением до 10 кВ и установленных на фун-
даменте или рельсовом пути, изложены в Правилах устройства
электроустановок (сокращенно ПУЭ), утвержденных 21 января
1975 г. • '
При эксплуатации электрического оборудования кранов следует
руководствоваться Правилами технической эксплуатации электро-
установок потребителей и Правилами техники безопасности. при
эксплуатации электроустановок потребителей (сокращенно ПТЭ и
ПТБ), утвержденными 12 апреля 1969 г. Госэнергонадзором Ми-
нистерства энергетики и электрификации СССР.
Сооружение и эксплуатацию крановых путей следует осуществ-
лять в соответствии с требованиями СН 78-79 (Инструкция по
устройству, эксплуатаций и перебазированию рельсовых путей
строительных башенных кранов. М., Стройиздат, 1980.), а заземле-
ние передвижных грузоподъемных кранов необходимо выполнять в
соответствии с требованиями СН 102-76 (Инструкция по.устройству
сетей заземления и зануления в электроустановках. М., Стройиз-
дат, 1978.). ,
Требования указанных Правил и инструкций обязательны для
выполнения всеми организациями, независимо от их принадлежно-
сти к министерствам и ведомствам.
Администрация предприятия, на балансе которого находятся
грузоподъемные машины, обязана обеспечить содержание этих ма-
шин, съемных грузозахватных приспособлений и тары в исправном
состоянии, обслуживание их обученным персоналом (крановщика-
ми, стропальщиками, слесарями, электромонтерами) и соблюдение
рабочими должностных инструкций.
На всех предприятиях, где применяют грузоподъемные маши-
ны, руководство (директор, главный инженер) должно назначить
инженерно-технического работника по надзору, в обязанности ко-
127
торого входит проведение технических освидетельствований, а так-
же контроль за выполнением администрацией цехов и участков тре-
бований Правил по содержанию и эксплуатации всех имеющихся
на предприятии грузоподъемных машин. Лицо, ответственное по
надзору, должно быть подчинено главному инженеру предприятия
или его заместителю по технике безопасности.
Администрация предприятия назначает также инженерно-техни-
ческих работников, ответственных за содержание грузоподъемных
машин в исправном состоянии и за безопасное производство ра-
бот по перемещению грузов кранами.
$ 62. РЕГИСТРАЦИЯ И ТЕХНИЧЕСКОЕ ОСВИДЕТЕЛЬСТВОВАНИЕ
КРАНОВ
Все грузоподъемные машины; эксплуатируемые на предприяти-
ях, подлежат регистрации в органах Госгортехнадзора СССР. Ре-
гистрацию кранов производят на основании письменного заявления
руководства предприятия и паспорта крана, а также актов прове-
дения статических и динамических испытаний.
К этим документам прилагают выписку из приказов по пред-
приятию о назначении лиц, осуществляющих надзор за содержа-
нием крана в исправном состоянии, безопасной эксплуатацией и
безопасным производством работ по перемещению грузов кранами,
а также машиниста (крановщика) и стропальщика, которые будут
работать на данном кране.
При регистрации кранов к паспорту прилагают акт, подтверж-
дающий качество выполнения монтажных работ в соответствии с
инструкцией завода-изготовителя по монтажу крана, подписанный
ответственным представителем организации, монтировавшей кран.
Кроме того, к паспорту прилагают чертеж установки крана с ука-
занием расположения главных троллеев и посадочной площадки,
безопасных расстояний и проходов, справку о том, что крановый
путь рассчитан на работу данной грузоподъемной машины. Все
грузоподъемные машины подвергают полному первичному техниче-
скому освидетельствованию, чтобы установить, что монтаж кон-
струкций крана и его установка выполнены правильно, техническое
состояние крана и его обслуживание соответствуют требованиям
Правил и обеспечивают безопасную работу.
/ Периодичность технического освидетельствования следующая:
частичное — через 12 месяцев эксплуатации и полное — не реже
одного раза в 3 года./Полное техническое освидетельствование Кра-
снов должно производиться после капитального ремонта крана, за-
(мены механизма подъема груза и ремонта металлоконструкций с
'заменой расчетных элементов или узлов. ’
При полном техническом освидетельствовании производят
осмотр крана, статическое и динамическое испытания. При частич-
ном освидетельствовании испытание крана грузом не производит-
ся. При осмотре крана проверяют в рабочем состоянии все меха-
низмы и оборудование, приборы безопасности, тормоза и аппара-
128 -
туру управления. Особенно тщательно осматривают металлокон*
струкции крана и состояние сварных соединений на отсутствие тре-
щин и деформаций, крепление кабины, лестниц, площадок и ограж-
дений. Проверяют состояние крюка и деталей его подвески; креп-
ления канатов, состояние блоков, осей и деталей их крепления,
надежность заземления и состояние крановых путей.
После устранения выявленных неисправностей жран подвергают
испытанию грузом. Статическое испытание крана производят на-
грузкой, на 25% превышающей номинальную грузоподъемность,
при этом проверяют прочность всех элементов. Статическое испы-
тание мостового и козлового кранов осуществляют при положении
тележки на середине пролета, а консольного — на кране (на мак-1
симальном вылете). Контрольный груз поднимают на высоту 200—о
300 мм с последующей выдержкой в таком положении в течение
10 мин. После опускания груза проверяют отсутствие остаточной
деформации ^моста крана. У_ козлового крана с консолями отсутст-
вие остаточной деформации моста проверяют как при установке те-
лежки между опорами крана, так и при установке ее на консоли.
При обнаружении остаточной деформации работать на кране не
разрешают до выяснения причин деформации.
Динамическое испытание крана производят нагрузкой, на 10%
превышающей грузоподъемность. Это испытание можно выполнять
рабочим грузом поднятием и опусканием его на небольшую высо-
ту. Одновременно проверяют действие всех механизмов и работу
ограничителя высоты подъема. У кранов, имеющих два и более ме-
ханизма подъема груза, испытанию подлежит каждый из
них.
Результаты испытаний заносят' в паспорт за подписью лица,
проводившего освидетельствование. Сюда же записывают право на
дальнейшую эксплуатацию крана (при удовлетворительных резуль-
татах испытаний) и срок следующего освидетельствования.
$ 63. ТЕХНИЧЕСКАЯ ДОКУМЕНТАЦИЯ ПО ЭКСПЛУАТАЦИИ КРАНОВ
Каждый кран, поступивший на предприятие с завода-изготови-
теля, должен иметь паспорт (ПС). В’нем приведены основные па-
раметры и характеристики крана, гарантированные заводом-изго-
товителем.
Техническое описание (ТО) предназначено для изучения крана
.и,содержит описание его устройства и принципа действия, техниче-
ские характеристики и другие сведения, необходимые для обеспе-
чения полного использования технических возможностей ма-
шины.
Типовая инструкция по эксплуатации (ИЭ) содержит сведения,
необходимые для правильной эксплуатации (транспортирования,
хранения, работы и технического, обслуживания) крана и поддер-
жания его в постоянной готовности к действию. На основании «ин-
струкции завода-изготовителя эксплуатирующее предприятие раз-
рабатывает свою инструкцию по эксплуатации, которая отражает
129
специфику работы на нем. Обычно в нее входят права, обязанности
обслуживающего персонала; порядок' приемки и сдачи смен; по-
следовательность пуска и остановки машины; технологическая по-
следовательность выполняемых операций; порядок технического
обслуживания и устранения неисправностей; правила техники без-
опасности.
В инструкции по техническому обслуживанию (ИО) изложен
порядок и правила выполнения технического обслуживания крана’
в различных условиях эксплуатации.-Эта инструкция может вхо-
дить в инструкцию по эксплуатации.
Ведомость запасных частей, инструмента и принадлежностей
(ЗИП) устанавливает номенклатуру, назначение, количество и
места укладки ЗИП и материалов, необходимых для эксплуатации
и ремонта на начальной стадии использования крана.
На предприятий, эксплуатирующем краны, должен вестись жур-
нал периодических осмотров крана и крановых путей — крановый
журнал. Записи в этом журнале производят слесари и электромон-
теры, которым поручается осмотр кранов в сроки, установленные
графиком планово-предупредительного ремонта. В журнале дол-
жны быть указаны лица, ответственные за исправное техническое
состояние крана и его эксплуатацию, а также места их нахожде-
ний. При отсутствии специального журнала в данный записывают
сведения о состоянии съемных грузозахватных приспособлений и
тары’. Журнал является юридическим документом при решении во-
просов, связанных с эксплуатацией, техническим состоянием и ре-
монтом крана, а также грузозахватных приспособлений. Форму
журнала и характер записей в нем устанавливает администрация
предприятия. Запись об устранении неисправностей производят ли-
ца, их устранившие.
Каждый кран должен иметь пронумерованный журнал приемки
и сдачи смен машинистами (вахтенный журнал), в который зано-
сят замечания по техническому состоянию крана. Ведение журна-
ла должно ежедневно проверяться* механиком и электриком
цеха.
Кроме этих журналов администрация выдает машинисту про-
изводственную инструкцию, содержащую основные положения без-
опасного производства работ при эксплуатации и обслуживании
крана. Крановый и вахтенный журналы вместе с инструкциями
хранят в кабине управления краном, а при проведении капиталь-
ного ремонта журналы и инструкцию по эксплуатации передают на
ремонтное предприятие. Экземпляр производственной инструкции
вывешивают в кабине управления вместе с краткой инструкцией по
безопасности труда и противопожарной инструкцией, перечнем наи-
более часто перемещаемых грузов с указанием их массы, располо-
жения центра тяжести и рекомендуемых схем строповки.
На мосту каждого крана должен быть вывешен плакат (трафа-
рет), отчетливо видимый обслуживающему персоналу, с указани-
ем грузоподъемности крана, регистрационного номера и даты сле-
дующего технического освидетельствования.
130
§ 64. ПОРЯДОК ПОДГОТОВКИ КРАНА К РАБОТЕ
Прежде чем приступить к работе крановщик должен ознако-
миться с записями в вахтенном журнале и принять кран, убедив-
шись в исправности машины и кранового пути.
Осматривать кран можно только при выключенном вводном ру-
бильнике. При этом проверяют исправность всех механизмов ма-
шины, ходовой части, тяговых и буферных устройств, тормозов, на-
личие и исправность защитных ограждений, смазку всех механиз-
мов, состояние узлов машины, исправность звуковой и световой
сигнализации. Кроме того, производят внешний осмотр крана, про-
веряют исправность съемных грузозахватных приспособлений и на-
личие на них клейм и бирок с указанием грузоподъемности, даты
испытания и номера (совместно со стропальщиком). Обязательно
осматривают состояние троллеев (как главных, так и крановых)«
Троллееи должны иметь гладкую чистую поверхность, скользящие
контакты (башмаки или ролики) токоприемников должны быть
правильно установлены и прочно закреплены в кронштейнах. Про-
вода, проложенные по мосту крана в стальных трубах, не должны
иметь поврежденной изоляции при выходе из труб, втулки на тру-
бах должны быть уплотнены асбестовой набивкой для защиты от
попадания внутрь трубы масла и влаги. Сигнальные лампы глав-
ных (цеховых) троллеев должны быть включены: три — при‘трех-
фазном токе, две — при постоянном.
Необходимо проверить наличие и исправность приборов и
устройств безопасности (конечных выключателей, аварийного вы-
ключателя, звукового сигнала). Конечные выключатели проверяют,
нажимая рукой на их рычаги. После освобождения рычаг должен
возвращаться в исходное положение.
Перед пуском крана в работу крановщик должен убедиться,
что на кране никого нет, а рукоятки всех аппаратов управления
находятся в нулевом положении. Только после этого можно дать
звуковой сигнал, вставить в замок и повернуть ключ-марку, вклю-
чить рубильник защитной панели, нажать кнопку «Пуск», прове-
рить исправность всех электродвигателей крана, опробовать вхо-
лостую его механизмы. Проверить работу ограничителя высоты
подъема крюка и конечных выключателей хода тележки и моста.
Обнаружив неисправность во время осмотра, крановщик обя-
зан, не приступая к работе, отключить рубильник, сделать соответ-
ствующую запись в вахтенном журнале и сообщить об этом лицу,
ответственному за исправное состояние крана.
Подготовку крана к работе заканчивают проверкой освещен-
ности рабочей площадки в зоне действия крана. При недостаточ-
ном освещении площадок кранов, работающих на открытом воз-
духе, сильном снегопаде или тумане, крановщик должен, не при-
ступая к работе, сообщить об этом лицу, ответственному за без-
опасное производство работ по перемещению грузов кранами.
Крановщик не должен приступать к работе на кране, если об-
наружится, что имеются трещины или деформации в металлокон^
131
струкции крана; отсутствуют ранее имевшиеся зажимы для креп-
ления концов канатов, оборвана полная прядь каната или его из-
нос превышает браковочную норму; повреждены детали тормоза
механизма подъема груза или износ грузового крюка в зеве пре-
вышает 10% первоначальной высоты сечения; отсутствует ограж-
дение подвижных деталей механизмов или оголенных токоведу-
’ щих частей электрооборудования.
Перед началом работы крановщик должен проверить у стро-
пальщика наличие удостоверения на право производства работ.
- В противном случае крановщик не должен приступать к работе.
После приемки крана крановщик делает соответствующую запись
в вахтенном журнале о результатах осмотра и после получения-за-
дания' от лица, ответственного за безопасное производство работ
по перемещению грузов краном, приступает к работе.
Прием работающего крана и его осмотр производится совмест-
но с крановщиком, сдающим смену, для чего администрация выде-
ляет в конце смены 15—20 мин.
' § 65. ОБЯЗАННОСТИ МАШИНИСТА КРАНА
; В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ
Крановщик обязан работать четко и аккуратно, не допуская
аварийных ситуаций, простоев крана и своевременно устраняя воз-
никающие неполадки. Он должен постоянно следить за техниче-
ским состоянием крана включая крановые пути, работой механиз-
мов и систем управления, современно ’ ставить в известность лицо
по надзору за'грузоподъемными машинами обо всех обнаружен-
ных неисправностях крана, устранение которых не входит в круг
его обязанностей, и регистрировать их в крановом журнале.
Крановщики должны пройти обучение, аттестацию и иметь удо-
стоверение, в котором должен быть указан тип крана, к управле-
нию которым они допущены.
Крановщик несет полную ответственность в административном
иорядке в соответствии с действующим законодательством за вы-
. иолнение всех указаний, изложенных в инструкции по эксплуата-
ции крана и дополнительных, утвержденных администрацией. За
допущенные нарушения, разбираемые в дисциплинарном порядке,
крановщик может быть лишен удостоверения крановщика, восста-
новление которого и допуск к самостоятельной работе на кране
производят после повторного обучения и аттестации в установлен-
ном порядке.
Наиболее совершенной системой эксплуатации мостовых и кон-
сольных кранов, управляемых из кабин, является марочная систе-
ма, при которой управление (обслуживание включая ремонт) кра-
ном разрешено только лицу, получившему в установленном на
предприятии порядке специальный ключ-марку. Отсюда произо-
шло и название системы — марочная.
В зависимости от конструкции установленной на кране защит-
ной панели ключ-марка представляет собой ключ или фишку, при-
132
крепленную к стальной пластинке размером 100X50 мм, на кото-
рой выбито название предприятия или цеха, марка крана, его гру-
зоподъемность и инвентарный номер. На обратной стороне пластин-
ки обычно выбит текст: «Разрешено: крановщику — управлять
краном, а ремонтному персоналу—'производить обслуживание и
ремонт». Каждый кран должен иметь индивидуальный ключ-мар-
ку с соответствующим инвентарным номером, не' подходящий к
другим кранам. При данной системе право включения крана для
работы или производства на нем каких-либо работ дает только
наличие на руках ключа-марки.
Рабочие движения крана машинист должен выполнять только
по команде стропальщика. Машинист должен хорошо видеть по-
дающего команду (стропальщика, сигнальщика). Команду «Стоп,
прекратить движение» машинист обязан выполнить независимо от
того, кем она подана.
При передвижениях моста (тележки крана), выполняемых по
команде производителя работ (стропилыцика, сигнальщика), за-
прещено выполнять команду по передвижению в сторону подаю-
щего команду, если последний находится на пути возможного дви-
жения груза, т. е. в опасной зоне.
Машинист крана должен подавать звуковые сигналы перед на-
чалом любого'движения механизма крана, при подъезде к людям,
перемещении грузов над проездами и (местами) массового прохо-
да людей. Машинист обязан следить, чтобы под висящим или под
перемещаемым грузом не было людей. На кранах, управляемых
с пола, звуковой сигнал не устанавливают.
Машинист крана должен следить за тем, чтобы на барабане'
лебедки при крайнем нижнем положении крюковой подвески оста-
валось не'менее полутора витков каната. При навивании каната
витки должны ложиться ровно и не набегать на реборды бара-
бана. ,
Если во время работы обнаружатся какие-либо неисправности
в механизмах крана, внезапно появятся признаки износа деталей
или обрыва прядей каната, машинист обязан опустить груз на зем-
лю. Если же опустить груз на землю нельзя, машинист должен
принять меры предосторожности, потребовать через стропальщика
или другого лица ограждения места возможного падения груза,
немедленно прекратить работу крана и поставить в- известность
соответствующее должностное лицо, сделать запись в крановом
журнале.
§ 66. ПОРЯДОК ОСМОТРА КРАНА
ПОСЛЕ ОКОНЧАНИЯ РАБОТЫ
После окончания работы крановщик обязан остановить кран у
посадочной площадки или места стоянки крана, поставить все ру-
коятки аппаратов управления в нулевое положение, выключить
главный рубильник, запереть замок защитной панели и вынуть
ключ-марку.
133
Предварительно груз должен быть установлен в требуемом ме-
сте, а крюковая подвеска поднята в верхнее положение. Ковш грей-
фера следует установить на деревянные подкладки и закрепить от
возможного смещения. Грузовые канаты должны быть ослаблены.
Таким же образом следует установить грузоподъемный электро-
магнит, крюковую подвеску поднять вверх. Краны, работающие на
открытых площадках, необходимо закрепить от возможного угона
ветром.
По окончании смены крановщик обязан проверить состояние
крана и о всех замеченных недостатках в работе й дефектах сооб-
щить сменщику. Кроме того, он должен сделать соответствующую
запись в вахтенном журнале и обязательно отметить состояние тор-
мозов, конечных выключателей, грузовых канатов, аппаратов управ-
ления'и выполненные мероприятия по обслуживанию.
Если канат имеет износ, близкий к предельному, необходимо
указать степень износа и количество оборванных проволок соглас-
но'нормам браковки стальных канатов, а также место наибольше-
го износа.
Для профилактического осмотра, чистки и смазки трущихся де-
талей механизмов крана необходимо не менее 30 мин ежесменно.
Остановку крана.на профилактический осмотр производят на по-
стоянной площадке, при этом с крана должны быть спущены пре-
дупреждающие плакаты с надписью «Проход запрещен» и уста-
новлены знаки 1.3 и 2.9 по ГОСТ 12.4.026—76.
Во время профилактического осмотра крановщик обязан произ-
вести смазку механизмов и узлов крана, проверить и отрегулиро-
вать тормозные устройства, проверить крепление болтовых соеди-
нений, состояние канатов и их крепления, состояние подшипников,
крюков, валов, осей, траверс, соединительных муфт, зубчатых пе-
редач, конечных выключателей, блокировочных устройств и ограж-
дений, произвести поверхностный осмотр металлоконструкций,
очистку механизмов и уборку крана.
Производить осмотр, чистку, смазку и ремонт крана во время
его работы категорически запрещено.
При сдаче смены крановщик обязан передать ключ-марку смен-
щику. Когда .кран работает в одну смену, крановщик должен от-
ключить главные троллеи, запереть на за^иок установленный йнизу
распределительный щит или ящик, где находится рубильник пита-
ния, и сдать ключ-марку в установленном на предприятии порядке.
§ 67. ЭВАКУАЦИЯ ЛЮДЕЙ С КРАНА
В случае непредвиденной остановки мостового (консольного)
передвижного крана среди пролета цеха крановщик должен выклю-
чить все аппараты управления, отключить крановую панель и ввод-
ное устройство, поставить в известность лицо, ответственное за ис-
правное состояние крана, и покинуть кран. При этом необходимо
помнить, что кабина управления расположена на высоте и эвакуа-
ция людей сопряжена с определенной опасностью.
134
Существующие краны не оснащены устройством для эвакуации
людей, поэтому вопрос эвакуации администрация предприятия (це-
ха) решает в каждом конкретном случае отдельно. Крановщик
должен быть проинструктирован и знать наиболее простые и без-
опасные способы эвакуации и применяемые средства. Как прави-
ло, для эвакуации применяют соседний кран, передвижные вышки,
подмости, веревочные лестницы, ручные лебедки и другие средства.
При возможности разрешено использовать строительные конструк-
ции здания, подкрановые пути, оборудованные огражденной гале-
реей, крыши внутренних помещений или навесы. Во всех случаях
необходимо применять предохранительные пояса и страховку эва-
куируемого другим рабочим.
Контрольные вопросы
1. Какая организация осуществляет надзор за правильной эксплуатацией гру-
зоподъемных машин?
2. Как часто проводят техническое освидетельствование кранов?
3. Как проводят статические и динамические испытания кранов?
4. На основании каких документов проводят освидетельствование и реги-
страцию кранов?
5. Какими документами должен быть снабжен кран в процессе эксплуа-
тации?
6. Какие требования предъявляют лицам, работающим в качестве кранов-
щиков?
7. В каких случаях крановщик должен проводить повторное освидетельст-
вование?
8. Расскажите об обязанностях персонала, обслуживающего кран.
9. Расскажите об обязанностях крановщика в процессе эксплуатации крана
и по окончании смены.
10. Что такое марочная система эксплуатации кранов?
11. Каков порядок эвакуации людей с крана?
ГЛАВА XI. УПРАВЛЕНИЕ И ТЕХНИЧЕСКОЕ
ОБСЛУЖИВАНИЕ КРАНОВ
§ 68. ПОСЛЕДОВАТЕЛЬНОСТЬ ВКЛЮЧЕНИЯ АППАРАТУРЫ .
УПРАВЛЕНИЯ
При управлении механизмами крана с грузом с- помощью сило-
вых контроллеров рукоятку необходимо переводить постепенно из
нулевого положения в рабочие позиции по направлению стрелок с
задержкой рукоятки в течение 1,5—2 с. Исключением является опу-
скание легкого (пустой крюковой подвески) груза краном с приво-
дом от переменного тока, когда рукоятку контроллера можно сра-
зу установить в любую позицию, минуя промежуточные.
Механизм передвижения крана (тележки) с грузом надо вклю-
чать еще более плавно, чтобы время разгона машины было не ме-
нее 8 с. Для этого наибольшую выдержку надо делать в первой
позиции рычага контроллера, когда кран (тележка) начинает дви-
жение. В противном случае возникают рывки (ударные нагрузки)
в механизме крана, перегрузка электродвигателя, пробуксовывание
135
ведущих колес крана и сильное раскачивание груза. Это не отно-
сится к электроприводам механизмов крана, управляемым с по-
мощью магнитных контроллеров и других командоаппаратов,
в схемах которых предусмотрен ступёнчатый разгон ротора двига-
теля под контролем реле времени. В этих случаях крановщик мо-
жет сразу установить рукоятку командоаппарата в требуемую по-
зицию, а включение силовых контроллеров будет произведено по
заложенной программе.
Выключать механизмы крана (остановку) следует быстрым пе-
реключением рукоятки контроллера в / позицию и затем, после
снижения скорости до минимальной, в нулевое положение.. Когда
резкое торможение механизмов крана не опасно (отсутствие груза
на крюке и нахождение крюка вверху), рычаг контроллера можно
переводить из любой рабочей позиции сразу в нулевую.
При подходе к концевым упорам механизмы крана следует вы-
ключать заблаговременно, не ожидая срабатывания конечного вы-
ключателя. Пользоваться конечными выключателями для отключе-
ния механизмов крана в нормальном режиме эксплуатации запре-
щено, так как это вызывает значительные динамические нагрузки
на кран, перегрузку его механизмов, ведет к раскачиванию груза
и создает аварийные ситуации. Допускается выключать механизмы
крана с помощью конечных выключателей только в случае провер-
ки правильности их работы перед началом смены или после ре-
монта (регулировки).
Реверсирование электродвигателей привода крановых механиз-
мов (перемену направления вращения вала двигателя) можно осу-
ществлять только после полной остановки крана. Резкая перемена
направления вращения вала двигателя (без его остановки) обус-
ловливает возникновение ударных нагрузок в механизме крана и
резкий бросок тока в цепи в результате перегрузки электродвига-
теля, что ведет к перегрузке механизмов крана, разрушению де-
талей и срабатыванию электрической защиты (отключению двига-
телей). В порядке исключения подобное реверсирование без оста-
новки вала двигателя разрешено только для экстренного торможе-
ния механизма, чтобы предотвратить аварию или несчастный слу-
чай. Для этого рукоятку контроллера резко переводят в позицию 11
обратного хода, а затем возвращают ее в нулевое положение до
полной остановки ротора двигателя во избежание возможности его
реверсирования.
Работа крановых механизмов при установке рукоятки контрол-
лера в промежуточных (нефиксированных) положениях категори-
чески запрещена, так как может привести к возникновению устой-
чивой дуги между контактами, их расплавлению, заеданию и ава-
рийной ситуации.-
Для предотвращения аварии или несчастного случая, которые
могут произойти в результате неправильных действий машиниста
(стропальщика), заедания рукоятки контроллера в рабочем поло-
жении, невыключения электропривода или возникновения непред-
виденных обстоятельств, следует быстро отключить аварийный вы-
136
ключатель. При этом отключится главный линейный контактор -за-
щитной панели крана и все электроприводы крана будут отсоеди-
нены от силовой цепи.
§ 69. ОСНОВНЫЕ ПРАВИЛА ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗОВ
Крановщик должен стремиться использовать все технические*
возможности “крана, в частности наибольшие скорости рабочих дви-
жений. Так, передвижение крана без груза и опускание пустой крю-
ковой подвески следует выполнять с максимальной скоростью. Ес-
ли на кране есть многоскоростные механизмы, крановщик должен
выбирать скорости рабочих движений в зависимости от массы гру-
за/его габаритов и условий работы: чем меньше масса груза, тем
выше могут быть скорости его перемещения.
Для выбирания слабины каната, исключения «подхвата» и
подъема легких грузов с малой скоростью рукоятку контроллера
ставят в позицию /. Подъем грузов средней массы с пониженной
скоростью выполняют на позиции // рукоятки контроллера, а гру-
зов большой (номинальной) массы на позициях III, IV.
Предназначенный для транспортировки груз должен быть на-
дежно застроплен имеющимися грузозахватными приспособления-
ми в соответствии с утвержденными схемами строповки.
Запрещено перемещать груз, застропленный в положении не-
устойчивого равновесия или подвешенный за один рог двурогого
крюка крана. Нельзя выравнивать положение застропленного гру-
за на весу перемещением стропов, затягиванием узла «на удав»г
поворотом груза с помощью рычагов и силы тяжести стропальщи-
ка. Для перестроповки груз обязательно должен быть опущен на
пол цеха.
При подъеме грузов машинист должен следить за тем, чтобы
крюк подъемного механизма был установлен вертикально над гру-
зом, подлежащим подъему. При подъеме груза, близкого по массе
к номинальной грузоподъемности крана, машинист должен произ-
водить подъем груза в два приема: вначале оторвать груз от пола
на 100 мм, убедиться в надежности строповки и проверить дейст-
вие тормоза механизма подъема, а затем уже поднимать груз окон-
чательно.
Наибольшую сложность представляет опускание груза различ-
ной массы. При опускании груза небольшой массы (крюковой под-
вески без груза) электродвигатель привода необходимо включать
на'опускание для преодоления сил сопротивления трения в меха-
низме и регулировать скорость контроллером ступенчато.
При опускании груза номинальной массы следует помнить, что
момент на валу ротора, создаваемый подвешенным грузом, будет
способствовать увеличению частоты его вращения.
Опускание груза номинальной массы надо производить на по-
следних позициях рукоятки контроллера (при закороченной цепи
ротора). Данный способ называют торможением со сверхсинхрон-
ной частотой вращения ротора двигателя и применяют для кранов
137
малой грузоподъемности с небольшой частотой вращения рабоче-
го органа механизма подъема груза.
В отличие от рассмотренного выше способ нижесинхронного
торможения обеспечивает значительное снижение скорости опускае-
мого груза номинальной массы и разгружает механический тормоз
при остановке груза. Этот способ называют торможением проти-
вовключением. Не следует путать его с реверсированием электро-
привода без остановки ротора.
Для опускания висящего неподвижно груза номинальной массы
механизм включают на подъем на первых положениях рукоятки
контроллера. К недостаткам способа следует отнести влияние мас-
сы г-руза на скорость опускания и возможность его подъема вме-
сто опускания.
Торможение противовключением наиболее эффективно для ме-
ханизмов подъема грейферных и магнитных кранов. Быстроход-
ные механизмы требуют интенсивного торможения, а масса рабо-
чего оборудования достаточно велика, чтобы быть поднятой вме-
сто необходимого опускания.
В обоих рассмотренных способах скорость опускания зависит
ют массы груза, конструкции и мощности механизма и требует раз-
вития определенных практических навыков у крановщика.
Скорости движения остальных механизмов крана следует
уменьшать заблаговременно, переводя рукоятку контроллера в со-
ответствующие позиции плавно без задержки. Затормаживать ме-
ханизмы крана с грузом необходимо плавно (ступенчато), не до-
пуская экстренного торможения, вызывающего значительные ди-
намические нагрузки и раскачивание груза, на успокоение и навод-
ку которого, на место разгрузки потребуется дополнительное время
и трудозатраты.
Подъем, перемещение и опускание грузов запрещено произво-
дить при нахождении людей в зоне возможного падения груза. Ука-
занные зоны и способы ограждения определяет руководство пред-
приятия, эксплуатирующего грузоподъемные краны. Категорически
запрещено перемещать людей кранами с помощью съемных грузо-
захватных приспособлений.
При использовании специальных грузозахватных приспособле-
ний — клещевого, эксцентрикового и др. фрикционного типа, осно-
ванных на создании полезных сил трения между рабочими поверх-
ностями захвата и перемещаемого груза, следует помнить, что си-
лы трения не являются постоянными и зависят от внешних усло-
вий: температуры, влажности, состояния'поверхностей и др. Поэто-
му Правила запрещают применение захватов для перемещения
ядовитых и взрывоопасных грузов, а также сосудов, находящихся
под давлением.
Электромагнитные и грейферные захваты являются автомати-
ческими системами и одновременно дистанционного действия, так
как их применение не требует ручного труда для крепления гру-
зов, а управление ими ведется из кабины машиниста крана. Одна-
138
ко им присущи серьезные недостатки, определяющие особые усло-
вия эксплуатации. Пребывание людей в зоне их работы катего-
рически запрещено.
$ 7Б. РАЦИОНАЛЬНЫЕ И БЕЗОПАСНЫЕ ПРИЕМЫ
РАБОТЫ НА КРАНАХ
Безопасная эксплуатация крана и его высокая производитель-
ность, увеличение межремонтных циклов эксплуатации машин и
сокращение простоев в результате неисправностей в значительно»
мере зависят от условий организации работ, квалификации маши-
ниста и его практических навыков. Правильное управление краном
обеспечивает плавное перемещение груза без рывков, ударов и
раскачивания, а также его точную остановку над заданным местом.
В зависимости от типа, назначения, конструкции и схем электро-
привода механизмов кран имеет свои эксплуатационные особен-
ности. Подробные сведения по управлению кранами приведены в
соответствующих инструкциях по эксплуатации, разработанных за-
водами-изготовителями. Однако крановщику необходимо знать и
строго соблюдать ряд общих положений.
Повышение эффективности применения действующих кранов
возможно за счет рациональной организации работ (повышения
степени использования кранов по грузоподъемности и рабочему вре-
мени), увеличения скоростей рабочих движений крана и совмеще-
ния указанных рабочих движений во времени.
Наименьшие значения скоростей рабочих движений кранов со-
ответствуют механизму подъема груза, что при больших высотах
перемещения составляет большую долю от времени полного цикла
работы машины. Поэтому для обеспечения наивысших технико-
экономическйх показателей работы крана допускается совмещение
(одновременное выполнение), не 6ojfee двух рабочих движений, на-
пример одновременные подъем груза и передвижение моста крана
либо передвижение моста крана и грузовой тележки (тельфера).
При этом нельзя допускать одновременного включения всех
механизмов крана (передвижения моста, тележки и подъема гру-
за). Совмещение работы всех трех крановых механизмов разре-
шено только при необходимости предупреждения несчастного слу-
чая или аварии.
При перемещении расплавленного металла, жидкого шлака или
особо громоздких грузов производить одновременно подъем груза
и перемещение тележки или моста запрещено. В случае на-
вески на крюки механизмов главного и вспомогательного подъе-
мов различных грузоподъемных приспособлений (например, маг-
нит, клещи и т. п.) одновременная работа обоих механизмов также
запрещена.
Расстояние между крайними точками двух мостовых кранов,
работающих на одном пути, должно быть не менее 2 м.
139
$ 71. СМАЗЫВАНИЕ МЕХАНИЗМОВ КРАНОВ
Работоспособность и эффективность применения грузоподъем-
ных машин в значительной мере зависят от режима смазки дета-
лей (сборочных единиц), своевременности и качества ее выполне-
ния. Инструкции завода-изготовителя содержат карты смазки, в
соответствии с которыми необходимо смазывать все краны. Карты
смазки представляют собой таблицы, в которых указаны места
смазки, их количество, марки смазочных материалов и способы
смазки. Иногда для наглядности прилагают схему крана с указа-
Рис. 102. Схемы смазывания механизмов мостового крана:
а—механизма передвижения моста, б—механизма передвижения тележки, в—
f механизма подъема груза (главного и вспомогательного), г—грейфера
нием точек смазки (рис. 102, 103 табл. 8, 9). Для смазки зубчатых
зацеплений и подшипников, работающих в редукторах, применяют
смазочные масла (индустриальные, трансмиссионные, автотрактор-
ные) , а отдельно работающих деталей — пластичные консистент-
ные смазки (солидол, графитная, канатная и др.). К маслам отно-
сят смазочные материалы, которые при температуре 10—15° С со-
храняют текучесть, а к смазкам — материалы, переходящие при
такой температуре в мазеподобное состояние.
В крановых редукторах детали смазывают разбрызгиванием,
т. е. шестерни, погруженные в масло, при вращении захватывают
и разбрызгивают его, создавая масляный туман (рис. 104).
140
Рис. 103. Схемы смазывания механизмов козлового крана:
а—грузовой тележки, б—опорной тележки, в—тельфера
Так же применяют принудительную подачу масла насосом к
точкам смазывания.
Контроль уровня масла в-картерах редукторов проводят ежед-
невно по масломерной игле, для этого перед началом работы кра-
на, пока механизмы еще не включали и масло в картерах редукто-
141
8. Смазочные материалы, применяемые для смазки механизмов кранов
Условное обозна- чение смазочно- го материала (ра- бочей жидкости) Марка ГОСТ, ТУ
Смазочный материал
1 Солидол С 4366—76
2 Пресс-солидол С »
3 Солидол жировой 1033—79
4 ЦИАТИМ 201 6267—74
5 ЦИАТИМ 203 8773—73
6 УНИОЛ-2 23510—79
7 Канатная № 39У 5570—69
8 Торсиол 55 20458—75
9 Торсиол 35 ТУ 38 УССР-2-01-214—75
10 Графитная УС 3333—80
И Смазка ЖР ТУ 32-ЦТ-553—73
12 Веретенное АУ 1642—75
13 Для холодильных машин • ХФ-12-16 5546—66 .
14 Индустриальное И-40А, И-50А 20799—75
15 Моторное М-8А, М^8В 10541—78
16 М-6Б, М-20Б 17479—72
17 Трансмиссионное ТАп-15В ТУ 38-101-176—74
18 Трансмиссионное северное ТУ 38-101-148—71
ТС-Ю-ОТП
19 Цилиндровое 38 или 52 6411—76
20 Трансформаторное 982—80
Рабочая жидкость:
21 ПГ-271А ВТУ НП-166—64
22 ПМС-20 МРТУ 6-230—61
23 АМГ-10 6794—75
ров не вспенено, необходимо вынуть масломерную иглу, протереть
ее чистыми концами, снова вставить в гнездо и вынуть. След масла
на стержне иглы покажет его уровень в картере. Уровень масла
должен находиться между верхней и нижней метками.
Для нанесения смазок используют специальные устройства:
шприцы, пресс-масленки (лубрикаторы), лопаточки и другие обще-
го назначения. В зависимости от типа масленки применяют раз-
личны? конструкции шприцов.
142
9. Схема смазки механизмов крана
Места смазки по схеме смазывания (см. рис. 102, 103) Детали и сборочные единицы Смазочный материал (услов- ное обозначение по табл. 8) в зависимости от температу- ры, °C Система смазывания Периодич- ность смазки» ч
38 1 1 —20 +10 —25 4-30 4-20 4-50
С м Подшипники: а з о ч I I ы е м [ а т е р и а л I
1 электродвига- телей z 5 2 2 ' 1 Индивиду- альная 5000
2 роликов, блоков 3,4 2 2 2 То же 2500
3 барабана лебедки 3,4 2 2 2 » 2500
4 ходовых колес 3*,4 2 2 I » 2500
5 (на рис. не пока- зано) опор кабельно-’ го барабана 5 5 2 2 » 5000
6 Подшипники скольжения 2 2 I 1 » 2500
7 Шарниры рыча- гов Зубчатые пере- дачи: 14 2,4 1 I » 360
в открытые 16 16 10 10 » 2500
9 закрытые 13 15, 12 16 14 Разбрызги- ванием 2500 (замена)
10 Зубчатые муфты 18 15 17 19 Индивиду- альная 720
11 (на рис. не показано) Цепь привода кабельного бара- бана 17 14 1 1 То же 720
12 Передача «винт— гайка» противо- угонного захвата 17 14 1 1 » 720
13 Сборочные еди- ницы 6 6 6 6 / Централи- зованная В соответст- вии с инет* рукцией
14 Стальные канаты 8 7,9 7,9 ,9,14 Индиви- дуальная 360
(5 Детали электро- оборудования 12 12 1 1 То же 2500
16 Детали пульта управления 17 14 1 5 » 720
17 Рельсы 10 10 11 И Автомати- ческая По мере не- обходимости
143
Места
смазки
по схеме
смазывания
(см. рис.
102, 103)
Детали и сборочные
единицы
Смазочный материал (услов-
ное обозначение по табл. 8>
в зависимости от температу-
ры, °C
—40 -20
-20 +10
—25 +20
+30 +50
Продолжение табл. 9
Система
смазывания
Периодич-
ность смазки,
Рабочие жидкости
18
19
20
Электрогидро-
толкатели:
одноштоковые
двухштоковые
Гидравлические
системы
21
21
23
22
23
12
22
12
12
22 Заполнение В соответст-
вии с инст-
рукцией
20 Заполнение То же
20 То же- >
При больших объемах смазочных работ (при проведении сезон-
ных обслуживаний кранов) используют солидолонагнетатель мод*
390 или установки для смазки автомобилей С-101. Лопаточками
наносят пластичные смазки
на открытые поверхности де-
талей машин и канаты.
Смазка канатов выпол-
няет свои функции по защи-
те проволок ’ от коррозии»
снижению сил трения между
элементами каната и соот-
ветственно износа, а также
по увеличению гибкости ка-
ната только в том случае»
когда ровный защитный слой
покрывает поверхности всех
проволок. Поэтому для по-
вышения срока службы ка-
натов их необходимо перио-
дически очищать .и смазы-
вать. Для очистки канатов
рекомендуют применять: специальные проволочные щетки (рис.
105), перегретый пар, сжатый воздух, горячую воду, бензин»
бензол.
Лучший способ смазывания каната — окунанием в ванне (рис.
106, а) или пропусканием через воронку (рис. 106, б, в).
144
/ 2 3 4
Рис. 105. Проволочная щетка:
/—стяжные винты, 2—корпус, <7—щетка, 4—канат
Рис. 106. Устройства для смазывания проволочных канатов:
о—ванна с подогревом смазки, б—воронка подвесная, в—воронка ручная; /—сред*
яий ролик, 2—ванна, канат, ^направляющие ролики, 5—горелка, б—воронка,
Ж—кольцевой сальник, S— подвеска воронки, 9—ручная воронка, /б—масленка; на*
правление движения каната показано стрелками
145
. § 72. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ ЭЛЕКТРООБОРУДОВАНИЯ
двигатели, нагрев которых следует
Рис. 107. Схема притирания щеток к кон-
тактным кольцам:
а—правильное положение деталей, б—непра-
вильное; /—щетка, 2—стеклянная шкурка,.3—
контактное кольцо, Р—сила нажатия
При ежесменных осмотрах и обслуживациях крана наружные
поверхности электрооборудования очищают от пыли и грязи, про-
веряют отсутствие наружных повреждений, обрывов кабельных
вводов и ослаблений зажимных приспособлений.
Во время работы грузоподъемной машины крановщик должен
внимательно наблюдать за работой всех механизмов, в том числе
и элементов электропривода. Особого внимания требуют электро-
проверять на ощупь во время
технологических перерывов
2—3 раза в смену. Сильное
гудение,' стуки, повышен-
ный нагрев корпуса двигате-
ля или подшипниковых щи-
тов свидетельствуют о его
неисправности. При перио-
дических обслуживаниях
крана необходимо проверять
состояние зажимных коро-
бок электродвигателей, сос-
тояние контактных колец и
крепление подшипниковых
щитов. Во избежание корот-
кого замыкания в двигателе скапливающуюся при износе щеток и
контактных колец пыль необходимо удалять сухой чистой тряпкой.
Длительная безотказная работа электродвигателя с фазным рото-
ром в значительной мере зависит от состояния пары деталей: щет-
ка — контактное кольцо. Их рабочие поверхности должны быть чис-
тыми и гладкими, (до зеркального блеска). Правильно отрегули-
рованный электродвигатель должен работать без шума и иск-
рения.
Основные причины искрения: заедание щетки в щеткодержате-
ле, недостаточное усилие прижатия и износ (замасливание) рабо-
чих поверхностей. Зазор между щеткой и щеткодержателем должен
быть около 0,4 мм (достигается опиловкой напильником или при-
тиранием стеклянной шлифовальной шкуркой).ч Сильно изношен-
ные щетки заменяют. Вновь устанавливаемые щетки предваритель-
но обрабатывают по радиусу контактного кольца/ а затем прити-
рают стеклянной шкуркой. Шкурку пропускают между щеткой и
контактным кольцом (абразивной стороной вверх) и протягивают
в одну сторону, нажимая пальцем на щетку (рис. 107). В обрат-
ном направлении шкурку перемещают, подняв щетку. Для пред-
отвращения возможного закругления краев щетки и уменьшения
площади контакта угол обхвата шкуркой контактного кольца
должей быть не меньше л/3 рад. Образовавшуюся после притирки
графитную пыль удаляют сухой или смоченной в бензине тряпкой.
Один раз в несколько смен необходимо осматривать состояние
контроллеров и командоконтроллеров. При этом снимают кожух
146
«и, передвигая рукоятку управления, проверяют работу фиксирую-
щего механизма, состояние контактов и креплений. Обнаруженные
«ейсправности своевременно устраняют. Во время осмотра смазы-
вают трущиеся поверхности деталей.
Рис. 108. Определение величины нажатия контактов:
а—помещение полоски бумаги между контактами, б—вытягивание полоски бумаги; /—
полоска бумаги, 2—подвижный контакт, 3—поворотный рычаг, 4—регулировочная пру*
жина, 5—динамометр, 6— неподвижный контакт
Контакты кулачковых контроллеров регулируют по величине
усилия нажатия, раствора и провала. Для контроллера ККТ-61
усилие нажатия составляет 12—14 Н. Первоначально устанавли-
вают большую величину, чтобы при износе контактов и ослабле-
нии пружины сила нажатия не уменьшилась ниже допускаемого
значения. Усилие нажатия
регулируют винтом, сжимаю-
щим пружину, и проверяют
динамометром и с помощью
полоски бумаги, которую вы-
тягивают из зажатых кон-
тактных губок, оттягивая
подвижный контакт динамо-
метром (рис. 108). Раствор—
расстояние между контакта-
ми контроллера в раскры-
том положении. Провал —
перемещение подвижного
Рис. 109. Схема регулирования контак-
тов кулачкового контроллера ККТ-61 А:
а—контакты разомкнуты, б—контакты замк-
нуты; /—неподвижный контакт, 2—подвижный
контакт, а—величина раствора, Ь—величина
провала
контакта при удаленном не-
подвижном. Другими словами, это «запас перемещения», обеспечи-
вающий нормальную работу аппарата при износе губок. Раствор
(раскрытие контактов) измеряют линейкой или по шаблону (рис.
109, а). Величину провала измерить без разборки контроллера
нельзя, поэтому ее оценивают по расстоянию между подвижным
контактом и его упором (рис. 109, б).
Площадь контакта губок проверяют с помощью копировальной
бумаги, помещенной между губками. Если площадь контакта ока-
жется меньше 80% рабочей площади, губки следует обработать
напильником по шаблону. При образовании нагара на рабочих по-
147
верхностях губок или их незначительном оплавлении контактные
поверхности следует зачистить личным напильником.
Контрольные вопросы
1. В чем различие между двигательным и тормозным режимами работы кра*
новых электроприводов?
2. Расскажите о последовательности и порядке включения аппаратуры управ-
ления.
3. Для чего предназначен аварийный выключатель?
4. Перечислите основные правила подъема и перемещения грузов.
5. Объясните существо способа нижесинхронного торможения механизма
подъема груза и в каких случаях его следует применять?
6. Почему нельзя 'эксплуатировать кран с незамыкающимися тормозами не*
ханизма передвижения крана?
7. Совмещение каких рабочих движений крана и в каких случаях разре-
шено?
8. Как управлять краном, чтобы не допустить раскачивания груза и какие
меры следует принять ддя «успокоение» раскачивающегося груза?
9. Расскажите о назначении, порядке и периодичности смазки крановых ме-
ханизмов.
10. Расскажите об основных неисправностях кранового электрооборудования,
причинах, признаках и способах устранения. .
♦
ГЛАВА XII. РЕМОНТ МЕХАНИЧЕСКОГО
ОБОРУДОВАНИЯ КРАНОВ
$ 73. ТРЕНИЕ И ИЗНОС ДЕТАЛЕЙ КРАНОВЫХ МЕХАНИЗМОВ
При работе крдна между взаимодействующими деталями возни-
кают силы трения, приводящие к постепенному изменению структу-
ры материала, формы и размеров деталей, в которых возникают
внешние и внутренние (видимые и скрытые) дефекты, в результате-
чего снижается мощность двигателей, производительность машины
и надежность ее эксплуатации, возрастают усилия на рабочих ор-
ганах, иными словами, машина изнашивается.
В основе изнашивания лежит механическое взаимодействие
между твердыми телами, называемое внешним трением, которое
возникает в местах их соприкосновения’ и которое по наличию и
характеру движения сопряженных поверхностей делят на трение
покоя и кинематическое. Трение покоя соответствует нача-
лу относительного движения поверхности и его величина превыша-
ет величину силы кинематического трения.
В зависимости от вида движения одного тела по поверхности
другого различают кинематическое трение скольжения и качения.
При трении скольжения скорости движения сопряженных по-
верхностей в точках касания различны по величине и направлению
либо только по величине или направлению; при трении качения
указанные скорости одинаковы по величине и направлению
(рис. ПО).
Трение между телами, поверхности которых не смазаны, назы-
вают сухим, а прц обильной смазке жидкостным (рис. 111).
148
При сухом трении имеет место интенсивное механическое
изнашивание, которое в свою очередь подразделяется на абразив-
но-царапающее действие твердых частиц (рис. 112) и усталостное
в результате действия внутренних напряжений.
Основными видами, разрушения деталей грузоподъемных машин
являются абразивное, усталостное и коррозионно-механическое.
Изнашивание, возникающее под воздействием различных факторов
при условии нормальной эксплуатации,.называется естествен-
ным. Изнашивание, протекающее быстро и являющееся следстви-
ем неправильной эксплуатации- машины или дефектов производст-
ва, называется аварийным.
Нормальный процесс изнашивания большинства деталей кранов
при эксплуатации показан на рис. 113. Участок АВ характеризует
а)
Рис. 110. Трение деталей машин: ч
•-по виду движения, б—по наличию смаз-
ки
интенсивное изнашивание дета-
лей в процессе их приработки (об-
катка машины). Участок ВС соот-
ветствует естественному изнаши-
ванию в процессе эксплуатации
Рис. 112. Схема абразивного изнаши-
вания детали:
Р—сила нормального давления; /, 2—струк-
тура материала движущейся и неподвиж-
ной деталей, 3—включения абразивных ча-
стиц (зерен); направление движения ука-
зано стрелкой•
Рис. 111. Толщина слоя смазки в зави-
симости от частоты вращения вала:
а — частота вращения л=0, б — л>0, в — номи-
нальная; Л—толщина слоя смазки, точки О и
01—центры поперечных сечений вала и отвер-
стия соответственно; стрелками показано \ на-
правление вращения вала
Рис. 113.' Кривая изнашивания
подвижного сопряжения деталей:-
S—износ,,?—время работы машины
14?
машины, т. е. рабочий период Т сопровождается минимальным из-
носом деталей. Для увеличения рабочего периода необходимо стро-
го соблюдать правила технической эксплуатации крана и не допус-
кать перегрузку его механизмов. Участок CD соответствует интен-
сивному изнашиванию, ведущему к повреждению деталей и ава-
рийной ситуации.
Износ деталей, соответствующий точке С, является максималь-
но допустимым или предельным, при достижении которого дальней-
шая эксплуатация механизма запрещена.
§ 74. СИСТЕМА ПЛАНОВО-ПРЕДУПРЕДИТЕЛЬНЫХ
РЕМОНТОВ МАШИН
Организация (предприятие), на балансе которой находятся кра-
ны, постоянно должна обеспечивать высокий уровень технической
готовности машин, предупреждение их отказов в процессе экс-
плуатации, осуществляя систему планово-предупредительного тех-
нического обслуживания и ремонта (ППР). Система ППР пред-
ставляет собой комплекс взаимосвязанных положений, норм и
организационно-технических мероприятий по техническому обслу-
живанию и ремонту машин, проводимых в плановом порядке. Цель
их обеспечить работоспособность и исправность машин в течение
всего срока их службы при соблюдении заданных условий и режи-
мов эксплуатации. Система основана на обязательном планирова-
нии, подготовке и проведении соответствующих видов технического
обслуживания и ремонта каждой машины с заданной последова-
тельностью и периодичностью.
Сущность системы ППР состоит в том, что после отработки
машиной определенного количества часов (выполнения определен-
ного объема работ) проводят профилактические осмотры и раз-
личные виды плановых ремонтов, чередование и периодичность ко-
торых определяют исходя из назначения машины, ее конструктив-
ных особенностей и условий эксплуатации. Система ППР преду-
преждает прогрессирующий износ машин, уменьшает вероятность
случайных отказов, позволяет осуществлять предварительную под-
готовку ремонтных работ и выполнять их качественно в кратчайшие
сроки, увеличивает сроки службы машин и повышает эффектив-
ность их применения.
Система называется плановой потому, что все мероприятия осу-
ществляются по заранее разработанному плану (графику), а пре-
дупредительной — потому, что входящие в нее мероприятия носят
/профилактический характер.
При этом под техническим обслуживанием крана понимают
комплекс работ для поддержания его работоспособности в условиях
эксплуатации. Под ремонтом крана следует понимать комплекс
работ по восстановлению исправности и работоспособности крана,
т. е. устранение повреждений и причин отказов. Периодичность,
порядок выполнения и содержание работ при ремонтах устанавли-
*150
ваются техническими условиями и инструкцией завода-изготовите-
ля, а также графиком проведения ремонтов.
В процессе эксплуатации крана выполняют ежесменное техни-
ческое обслуживание (ЕО), выполняемое перед началом, в течение*
или после окончания работы; периодическое техническое обслужи-
вание (ТО-1 и ТО-2), выполняемое в плановом порядке через опре-
•деленные, установленные заводами-изготовителями сроки работы*
крана; сезонное техническое обслуживание (СО) для кранов, ра-
ботающих на открытом воздухе, выполняемое 2 раза в год с целью»
подготовки машины к эксплуатации в наступающих весенне-летнем1'
и осенне-зимнем периодах.
Проведение СО рекомендуется совмещать с ТО-1 или ТО-2.
Средняя продолжительность СО составляет один день.
Различают два вида плановых технических обслуживаний кра-
нов ТО-1 и ТО-2, отличающихся периодичностью и объемом выпол-
няемых регламентных работ. Система ППР основана на том, что*
каждый вид последующего обслуживания включает в себя полный-
объем работ предыдущего. Так, при ТО-1 выполняют ЕО с добав-
лением ряда операций смазочного и регулировочного характера.
Выполнение работ по ТО-2 включает проведение ЕО и ТО-1 с до-
бавлением ряда операций, характерных только для ТО-2 (проверка-
состояния механизмов и электрооборудования с заменой, легкодо-
ступных деталей).
Согласно Единой системе ППР текущий ремонт — виД планово-
го ремонта, при котором заменой или восстановлением изношенных,
деталей и регулированием механизмов обеспечивают нормальную-
эксплуатацию машины до очередного планового ремонта. Капи-
тальный ремонт призван обеспечить исправность и полный (близ-
кий к полному) ресурс крана восстановлением (заменой) изношен-
ных деталей (сборочных единиц) включая базовые.
Наряду с плановыми видами ремонтов существует аварийный
ремонт, не предусмотренный годовым планом и выполняемый для
обеспечения работоспособности .крана при возникновении аварий-
ной ситуации (после аварии).
Для передвижных грузоподъемных кранов установлена опреде-
ленная примерная периодичность проведения технических обслу-
живаний ТО-1 и ТО-2. Так для мостовых кранов периодичность
составляет 100 и 300 ч соответственно *для новых кранов и 80 и?
240 ч — для кранов после капитального ремонта. Средняя продол-
жительность ТО-1—3 ч, а ТО-2 — 6—7 ч. Технические обслужива-
ния кранов, как правило, выполняют во время технологических пе-
рерывов в работе (внесменное время, дни отдыха) без нарушения?
ритмичности процесса основного производства.
§ 75. ОСНОВНЫЕ НЕИСПРАВНОСТИ В РАБОТЕ
КРАНОВЫХ МЕХАНИЗМОВ И СПОСОБЫ ИХ УСТРАНЕНИЯ
При эксплуатации кранов детали (сборочные единицы) изнаши-
ваются, в результате чего нарушаются режимы их работы и как:
15V
10. Характерные неисправности крановых механизмов,
причины их возникновения и рекомендуемые методы устранения
Неисправности, внешнее их проявление и дополнитель- ные признаки .Возможная причина Метод устранения
Электродвигатель ме- Велико' давление тор- Отрегулировать тормоз
ханизма подъема груза мозной пружины, недо- согласно инструкции
три положении груза на статочен ход тормозных
весу не приводит в дви- колодок Промыть редуктор, залить
жения механизм подъема Загрязнение редукто-
ра, густая смазка Загрязнение поверхно- новое масло
Тормоз не удерживает Тщательно очистить шкив,
груз на весу или тормоз- стен трения тормозного при необходимости сменить
той путь груза превыша- шкива, попадание на не- фрикционные накладки
ет установленный (обыч- ный) го смазки, большой из- нос фрикционных на- кладок Уменьшена сила сжа- тия замыкающей тормоз- ной пружины (поломка пружины)' Заедание в шарнирах рычажной системы Полное сжатие вспо- могательной пружины в Заменить пружину, отре- гулировать силу сжатия пру- жины Устранить заедание, сма- зать шарниры Заменить тормозные на- кладки
Редуктор греется выше результате чрезмерного износа накладок Отсутствие, недоста- Пополнить или слить из-
температуры 60® С ток или избыток масла в лишек масла по масломер-
редукторе ной игле
Залито масло повы- шенной вязкости или Слить масло, промыть ре- дуктор маловязким маслом
масло загрязнено Не растормаживается и залить масло в соответст- вии с картой смазки (см. стр. 140—145) Отрегулировать тормоз
тормоз механизма крана Превышение режима эксплуатации Износились подшипни- ки или зубья шестерен согласно заводской инст- рукции Прекратить работу и дать редуктору остыть Проверить состояние под- шипников и зубчатых пере-
Перекос редуктора дач, устранить неисправно- сти Ликвидировать перекос,
Вибрации - редуктора вследствие ослабления креплений Износ зубьев или под- подтянуть крепления Восстановить зубья, за-
механизма, рывки, толч- шипников (постоянный менить подшипники.
ки и удары при включе- шум). Поломка одного Заменить зубчатые ко-
нии механизма (нескольких) зубьев в за- леса
цеплении (удары при включении) Поломка соединитель- ных муфт Смята шпоночная ка- навка, срезана шпонка Заменить муфты Восстановить шпоночную канавку, заменить шпонку
152
Продолжение табл. 70
Неисправности, внешнее их роявление и дополнитель- ные признаки Возможная причина Метод устранения
Течь смазки из редук- Слабо затянуты болты, Подтянуть болты, подкра«
гора неудовлетворительно за- крашена поверхность прилегания фланцев Неисправность уплот- нений или трещина в корпусе Засорено вентиляцион- ное отверстие (сапун) сить поверхность прилега- ния Заменить уплотнения, лик- видировать трещину Прочистить вентиляцион- ное отверстие
Шум и нагревание под- Отсутствие (недоста- Промыть узел керосином,
шинника качения выше температуры 60° С ток) смазки или ее несо- ответствие Избыток смазки Осевой перекос под- шипников при сборке или повреждение сепара- тора Износ подшипников заменить смазку Удалить избыток смазки Ослабить посадку наруж- ного кольца подшипника в гнезде, заменить подшипник Заменить подшипники
Течь масла из корпуса подшипника Смазка заложена в из- быточном количестве Засорены канавки (от- верстия) для стока смаз- ки Разрушены уплотнения Удалить избыток смазки Прочистить канавки, про- мыть подшипники кероси- ном, заменить смазку Заменить уплотнения
Неравномерность пе- Износ ходовых колес Восстановить ходовые ко-
редвижения крана, рыв- крана и их подшипников леса, заменить подшипники Заменить рельсы, отрих- товать крановый путь
ки и толчки Износ (коробление) кранового пути или от- клонение его от допусти- мых значений
• ' Ослаблено крепление ходовых колес Не работает один из приводов механизма пе- HQ ТТ ТЭ тт УтлQTT ттгт Подтянуть крепежные бол- ты Отремонтировать привод
Перекос крана при пе- рсДВИЖсг! ИЯ Оси ходовых колес пе- Устранить перекос уста-
едвижении рекошены Различная частота вра- щения или разные диа- метры ходовых колес новкой прокладок под бук- сы Проверить состояние пус- ковых резисторов электро- привода с таким расчетом, чтобы оба двигателя имели одинаковую частоту враще- ния, проверить диаметры ко- лес, проточить их на токар- ном станке
Буксование колес при Загрязнение ездовой Очистить рельсы (ездовую
пуске и при движении балки, попадание на ра- бочую поверхность колес смазки, влаги, обледене- ние рельсов балку) и рабочую поверх- ность колес
Повышенный износ ка- Несоответствие ручья Заменить (проточить)
ната желоба блоков (бараба- на) диаметру каната ручьи блоков. Заменить ка- нат
7—1975
153
Продолжение табл. 10
Неисправности, внешнее их роявление и дополнитель- ные признаки Возможная причина Метод устранения<
Закручивание каната Отсутствие смазки па канате Не вращаются (греют- ся) блоки: изношены подшип- ники засорены подшипники отсутствует смазка в подшипниках замяты края блоков или сужен их ручей в результате удара грузом при стропов- ке Поставлен канат од- Очистить и смазать канат Подшипники заменить Подшипники промыть и смазать Подшипники смазать Выправить (заменить) блоки Поставить канат кресто-
Выход каната из ручья носторонней свивки Неправильно запасован канат Канат закручен в ре- зультате неправильной размотки его из бухты (с барабана) Перекошены оси бло- вой свивки Произвести перезапасовку каната Раскрутить канат и вновь- запасовать его в полиспаст,1 не допуская закручивания Проверить и восстановит
(барабана) ков Большой зазор между блоками и ограждением (кожухом) блока Повреждено концевое крепление каната на ба- рабане правильность установи осей Выправить ограждение установить требуемый зазо Заменить концевое креп ление
следствие ухудшаются основные показатели работы крана. В от-
дельных случаях оказывается невозможным или небезопасным вы-
полнение отдельных рабочих движений крана или машины в целом.
Как правило, причиной таких отказов является превышение
установленных режимов эксплуатации крана, ослабление крепле-^
ний деталей, изменение ранее установленных регулировкой пара-'
метров, замасливание (загрязнение) или, наоборот, отсутствие
смазки на рабочих поверхностях деталей и другие причины, устра-‘
нение которых не требует проведения специальных ремонтных ра-,
бот (табл. 10).
$ 76. РЕМОНТ КРАНОВЫХ МЕХАНИЗМОВ :
Ремонт крана назначает лицо, ответственное за исправное сС'-\
стояние грузоподъемных кранов, в соответствии с утвержденный
графиком их ремонта по приказу начальника цеха (руководител
154 *1
предприятия). На производство ремонта обязательно оформляют
наряд-допуск в порядке, установленном на данном предприятии.
В наряде-допуске должны быть указаны основные меры по обеспе-
чению безопасных условий организации ремонтных работ, по пре-
дупреждению возможного поражения ремонтного персонала током,
падения с высоты, выхода персонала на крановые пути и наезда
работающих в пролете кранов на ремонтируемый. Дата и время
ремонта и фамилия лица, ответственного за его проведение, должны
быть указаны в наряде-допуске и в крановом журнале. Без наря-
да-допуска разрешено проводить только профилактические осмот-
ры кранов и устранять отдельные неисправности по вызову кранов-
щика.
Эксплуатация крана во время его ремонта категорически
запрещена до получения разрешения на работу крана, выдавае-
мого ответственным лицом с записью в крановом журнале или
паспорте.
При действии на предприятии марочной системы эксплуатации
кранов лицо, ответственное за выполнение работ по обслуживанию
(ремонту) крана, обязано в установленном порядке получить
ключ-марку от данного крана.
В соответствии с заявками крановщика кран перед ремонтом
тщательно осматривают, обращая особое внимание на детали и
сборочные единицы, работающие в наиболее тяжелых условиях и
от исправного действия которых зависит нормальная и безопасная
эксплуатация крана в целом.
Для сокращения сроков проведения, снижения стоимости ре-
нтных работ и уменьшения времени простоя крана в ремонте
шменяют агрегатно-узловой способ ремонта, при котором ремонт
одится к снятию дефектных сборочных единиц и агрегатов с
Ьана и замене их новыми (заранее отремонтированными) . Этот
^пособ ремонта машин называется обезличенным, так как детали
и сборочные единицы (агрегаты), снятые с одного крана, не явля-
ются его принадлежностью и в процессе ремонта могут быть уста-
новлены на любом другом аналогичном кране.
В отдельных обоснованных случаях оказывается целесообраз-
ным снятые с крана детали (сборочные единицы) после ремонта
устанавливать на тот же кран. Данный способ ремонта машин
называется индивидуальным (необезличенным). Он более трудое-
мок й длителен и находит применение при небольшом числе одно-
ипных кранов на предприятии и малых объемах ремонтных
^абот.
Сборочные единицы и целые агрегаты собирают предварительно
до ремонта крана), подгоняют сопряжения деталей, регулируют
еобходимые зазоры и опробовают, что позволяет устанавливать
к без последующей доработки на ремонтируемый кран.
Для обслуживания и ремонта козловые краны снабжают специ-
чьной ремонтной площадкой, люлькой или мостиком.
$ 77. СБОРКА, РЕГУЛИРОВКА И КОНТРОЛЬ КАЧЕСТВА РЕМОНТА
После ремонта отдельные детали (сборочные единицы) укруп-
няют и монтируют на кране, соединяя их муфтами, зубчатыми пе-
редачами, трансмиссионными валами и выполняя крепежные ра-
боты. Обеспечение правильного взаимного расположения сбороч-
ных едниц на кране во многом определяет надежную и долговеч-
ную работу крана. При большой частоте вращения деталей, на-
Рис. 114. Балансировка деталей:
а — статичевкая, б — динамическая, в —приспособление для статической балаы-
сировки; О — центр вращения детали (продольная геометрическая ось), 3—
Центр тяжести детали, е — эксцентриситет, G — вес детали, Р — пара сил, / —
плечо; 1 — деталь, 2 — оправка, 3 — призма
пример, быстроходных валов трансмиссий маховиков, шкивов.,
большое значение имеет их уравновешенность.
Несбалансированность (неуравновешенность) бывает
статическая, когда центр тяжести детали смещен относительно
оси ее вращения на величину е (рис. 114, а), и динамическая, ког-
да центр тяжести, кроме того, расположен не по середине оси вра-
щения. В этом случае при вращении детали (большой длины)
возникает пара сил Р, действующая на плече I (рис. 114, б). При
уменьшении длины плеча I до нуля (короткие детали — маховики,
колеса) величина момента пары сил и соответственно динамическая
неуравновешенность стремятся ~к нулю, поэтому такие детали ди-
намически не балансируют.
Статически неуравновешенная деталь 1 на оправке 2, установ-
ленная на призме 3, стремится повернуться так, чтобы ее центр
тяжести находился внизу (положение устойчивого равновесия,
156
рис. 114, в). Добавляя массу материала к верхней части детали
установкой дополнительных грузиков или уменьшая массу нижней
части, например высверливанием, добиваются такого состояния,
при котором деталь, повернутая на любой угол, остается неподвиж-
ной, т. е. становится статически сбалансированной. Обычно стати-
ческую балансировку выполняют на специальных стендах.
При монтаже валов воз-
можны отклонения осей от
заданного: несоосность
(торцовое биение), смеще-
ние осей (радиальное
биение) и их н е п а р а л-
лельность или непер-
пендикулярность (пе-
рекосы) , создающие недо-
пустимые вибрации и пере-
грузки (рис. 115). Допусти-
мые отклонения назначают в
зависимости от частоты вра-
щения деталей. Основные
способы контроля взаимного
расположения валов приве-
дены на рис. 116. Наиболь-
шую точность обеспечивают
Рис. 115. Расположение валов в прост-
ранстве:
а, д—правильное, б, е—с перекосом, в—с ра-
диальным смешением, г—с перекосом и ра-
диальным смещением; (р—угол, е—эксцентри-
микрометрические методы и ситет
применение скоб (рис. 116,
в, г, д). Оставшиеся после регулировки неустраненные отклонения
при работе компенсируют соединительные упругие муфты.
Положение подшипников (разбивку опор) определяют по стру-
нам и отвесам. Окончательную установку и крепление подшипни-
ков совмещают с центровкой валов.
Рис. 116. Основные способы контроля взаимного расположения
валов:
а—по линейке, б—с помощью клиньев, в, г, д—с помощью скоб; /—
линейка, 2—клин, 3—скоба, 4—регулировочные винты, 5—индикатор ча-
сового типа; а и Ь—смещения
157
При сборке цилиндрических зубчатых передач проверяют нали-
чие радиального и торцового биения, бокового зазора между зубья-
ми, величину межосевого расстояния, положение и размеры пятен
контакта. Величину бокового зазора можно определять прокручи-
ванием передачи с помещенной между зубьями тонкой свинцовой
проволокой, толщина сплющенной части которой покажет искомую
величину.
Размеры (табл. 11) и расположение пятен касания сопряженных
зубьев передач, полученные с помощью краски, наносимой на
зубья при правильном и неправильном зацеплении, показаны на
рис. 117.
11. Размеры пятен касания при зубчатом зацеплении
Степень точности Пятно касания, % Степень точности Пятно касания, %
по высоте зуба in его длине по высоте зуба по его длине
6 50 70 8 40 50
7 45 60 9 30 40
Проверка качества сборки конических зубчатых передач сво-
дится к контролю угла пересечения геометрических осей, бокового
зазора и пятен контакта.
Биение, овальность и конусность шкива механизма тормоза не
должно превышать 0,0005 его диаметра. Тормозные шкивы боль-
шого диаметра обязательно подвергают статической балансировке.
Рис. 117. Расположение отпечатков на зубьях цилиндрического колеса при:
а—нормальном зацеплении, б—уменьшении межцентрового расстояния, в—увеличении
межцентрового расстояния, г—перекосе валов
Радиальное смещение центров окружности колодок и шкива не
должно превышать 0,3 мм, а перекос колодок по ширине шкива—'
не более 0,1—0,2 мм на 100 мм ширины. Радиальные зазоры между
колодками и поверхностью шкива должны быть в следующих пре-
делах: 1—1,25 мм при диаметре шкива 300 мм, 1,5—1,75 мм при
диаметрах 400—500 мм и 2—2,5 мм при диаметрах 600—800 мм.
Площадь прилегания колодок к поверхности шкива 80—85% номи-
нальной и разность радиальных зазоров по длине дуги прилегания
158
не более 0,1 мм свидетельствуют о хорошем качестве сборки меха-
низма. Для обеспечения плавной (без рывков) и надежной работы
тормоза типа ТКТ необходимо отрегулировать нормальный ход
якоря электромагнита, равномерные зазоры между колодками и
шкивом, а также усилие сжатия рабочей (замыкающей) пружины.
Величину хода якоря электромагнита регулируют следующим
образом. Ослабляют гайки 2, 6 и 7 на тяге 1 и вращают гайку 7
Рис. 118. Регулировка тормозов:
а—типа ТКТ, б—типа ТКТГ, в—схема регулировки магнита МО, г, б—схема регулировки
электрогидравлического толкателя ТГМ
до смещения тяги 1 влево и упора якоря в сердечник корпуса
электромагнита S. В этом положении измеряют линейкой расстоя-
ние от внешней поверхности якоря (в нижней его точке) до наруж-
ного торца катушки электромагнита (рис. 118, а). Расстояния рав-
ны для магнита МО-ЮОБ — 25 мм; МО-200Б — 48,5 мм. После
измерения гайку 7 заворачивают, смещая тягу 1 вправо до упора
в якорь 9 и подъема его (поворота на допустимый угол).
При этом тягу 1 удерживают от вращения ключом за квадрат на
конце.
159
Величина Н в данном случае будет равна сумме двух размеров:
ранее полученного при замкнутом магните (якорь опущен) и ве*
личины установочного хода якоря, т. е. 25+11=36 мм для магнита
МО-ЮОБ и 48,5+14 = 62,5 мм для магнита МО-200Б (рис. 118, а).
Допускается при регулировке величины хода якоря замерять рас-
стояние между двумя смежными заклепками на корпусах якоря
и магнита (точки А и Б).
При регулировке тормозов типа ТКТГ ход штока электрогидро-
толкателя регулируют гайками 2, а усилие сжатия пружины 5 гай-
кой 6 (рис. 118, б).
Требуемую величину зазора между поверхностями тормозных
колодок и шкива по обеим сторонам последнего устанавливают
вращением регулировочного болта 12 после ослабления контргайки
11. При этом электромагнит должен быть замкнут. Величину ра-
диальных зазоров проверяют щупом, после чего болт фиксируют
контргайкой 11, Затем регулируют величину сжатия замыкающей
пружины и соответственно тормозного момента. Регулировку вы-
полняют изменением длины пружины в соответствии с тарировоч*
ным графиком, приведенным в сертификате на пружину, при не-
замкнутом якоре электромагнита.
Механизмы кранов работают в режиме знакопеременных на-
грузок, ослабляющих первоначальную затяжку резьбовых соеди-
нений. Поэтому первоначальные моменты затяжки резьбовых со-
единений необходимо периодически контролировать и восстанавли-
вать при каждом ТО и ремонте машины. Одиночные болты затяги-
вают сразу в один прием до отказа, а групповые — постепенно
(в 2—3 приема), переходя от одной гайки к другой.
§ 78. ОРГАНИЗАЦИЯ РАБОЧЕГО МЕСТА ПРИ РЕМОНТЕ
МЕХАНИЧЕСКОГО ОБОРУДОВАНИЯ КРАНОВ
Техническое обслуживание и ремонт кранов осуществляют, как
правило, на месте их установки, т. е. их выполняют на высоте при
наличии других кранов, работающих в данном или соседних про-
летах, что сопряжено с определенными сложностями. Поэтому для
качественного, своевременного и безопасного выполнения требуе-
мого объема работ необходимо уделять внимание организации
ремонтной зоны. Прежде всего зону необходимо огородить, исклю-
чив возможный выход ремонтного персонала за пределы рабочей
площадки. Все имеющиеся проемы должны быть огорожены (за-
крыты) и персонал предупрежден об их наличии. Необходимые
для ремонта леса и подмости должны быть выполнены в соответст-
вии с установленными правилами.
Перед началом работ всех рабочих инструктируют под расписку
о мерах безопасности и*приемах выполнения работ по ремонту кра-
на в условиях действующего цеха.
Выход ремонтного персонала на подкрановые пути и проходные
галереи действующих мостовых и передвижных консольных кранов
для производства работ разрешается в исключительных случаях
160
ответственным за проведение ремонта лицом, после принятия всех
необходимых мер по обеспечению безопасных условий работы и
оформляется нарядом-допуском, подписанным руководством цеха.
Рабочее место ремонтника должно быть удобным для выполне-
ния поставленной задачи и иметь размеры, достаточные для разме-
щения ящика с набором инструментов, применяемых приспособле-
ний и оснастки, демонтируемых агрегатов и запасных деталей. Все
работы, связанные с выходом на подкрановые пути передвижных
мостовых и консольных кранов, не имеющих стационарных ограж-
дений, обслуживание крановых металлоконструкций и установлен-
ных на них механизмов обязательно выполнять с применением
страховочных предохранительных поясов, карабины которых сле-
дует крепить за надежные части конструкций.
Переходить С одного мостового крана на другой, находиться на
мосту (тележке) крана во время движения, проводить на ходу
осмотр, смазку, регулировку и ремонт механизмов категориче-
ски запрещено.
В порядке исключения крановщик может производить пробное
включение механизмов и электроаппаратуры при снятом огражде-
нии и нахождении возле них рабочих только по указанию и под
контролем ответственного за проведение работ по обслуживанию
и ремонту крана.
Ремонт деталей (сборочных единиц) крана, размещенных са
стороны главных троллеев, должен производиться только при от-
ключенном и запертом на замок главном рубильнике, подающем
напряжение .на троллеи, снятых вставках плавких предохраните*
лей и вывешенном плакате «Не включать — работают люди!». t
Под колеса крана с обеих сторон необходимо подложить клино-
вые упоры', на подкрановых путях установить отключающие линей-
ки и временные тупиковые упоры, ограничивающие пути переме-
щения работающих кранов. Ремонтную зону следует ограничить
красными сигнальными флажками, а в темное время суток —
красными фонарями. Часть пролета цеха под ремонтируемым кра-
ном также должна быть ограждена и закрыта для прохода людей
с установкой соответствующей предупреждающей сигнализации
флажками, запрещающего знака «Проход воспрещен» по ГОСТ
12.4.026—76 «Цвета сигнальные и знаки безопасности» (рис. 119, а)
и соответствующих плакатов. Кроме того, администрация цеха
должна предупредить весь персонал о проводимых работах, уста-
новлении запретной зоны и необходимых мерах безопасности.
При работе в одном пролете, когда невозможно обесточить
главные троллеи, необходимо принять дополнительные меры без-
опасности. Прежде всего надежно оградить рабочую зону вблизи
главных троллеев, снять ползуны токосъемников ремонтируемого
крана и вывесить предупреждающий знак 2.5 «Осторожно! Элект-
рическое напряжение» по ГОСТ 12.4.026—76 (рис. 119, б).
Крановщики всех смен пролета (при необходимости смежных
пролетов) цеха, где выполняются ремонтные работы, должны
быть заранее уведомлены записью в вахтенных журналах кранов.
161
При подъеме ремонтников на кран (спуск) по лестнице их руки,
должны быть свободны, чтобы держаться за перила (ограждения)
лестницы. Инструмент и мелкие детали необходимо переносить в
специальной сумке с наплечным ремнем или в ранце. Тяжелый
инструмент, приспособления или запасные детали следует подни-
мать в ящике (люльке) на веревке или с помощью вспомогательной
лебедки. Использовать для этой цели ремонтируемый кран з а п р е-
щено. Также запрещено сбрасывать с крана ненужный инструмент
или детали. Все работающие на кране обязаны заботиться о том,
чтобы инструмент и другие предме-
Jk ты не падали вниз.
При выполнении технического
Н И Jобслуживания и ремонта кранов ре-
Wk j Т монтная зона должна иметь посто-
t«ннамшаЖ явное и равномерное освещение с
g\ удельной мощностью не менее
* * 200 Вт/м2. Кроме того, каждое рабо-
Рис. 119. Знаки безопасности чее место должно иметь дополни*
тельное освещение.
При работе следует дополнительно пользоваться безопасными
переносными лампами с питанием от понижающего трансформа-
тора напряжением не более 36 В или аккумуляторной батареи.
Перед сдачей в эксплуатацию ремонтный персонал обязан очи-
стить кран и подкрановые пути от мусора и посторонних предме-
тов, убрать инструмент, ненужные детали и пр.
$ 79. ПУСК КРАНОВ В ЭКСПЛУАТАЦИЮ ПОСЛЕ РЕМОНТОВ
Приемку и пуск крана в эксплуатацию после текущего ремонта
осуществляет персонал производственного цеха, в ведении которо-
го находится кран. При этом проводят внеочередное частичное
техническое освидетельствование, включающее наружный осмотр
крана и его механизмов, а также опробование их в действии с про-
веркой качества и объема выполнения ремонтных работ в соответст-
вии с ведомостью дефектов и неисправностей. Приемку осуществля-
ет лицо, ответственное по надзору за подъемными сооружениями,
вместе с руководством цеха и лицом, ответственным за вы-
полнение ремонта. Результаты приемки оформляют в крановом жур-
нале.
После замены изношенных грузовых канатов или их перезапа-
совки при установке грейфера вместо крюка техническое освиде-
тельствование крана не производят, а выполняют проверку пра-
вильности схем запасовки канатов, надежности крепления их кон-
цов, а -по возможности — обтяжку канатов рабочим грузом. Про-
ведение этих работ возлагают на лицо, ответственное за исправное
состояние грузоподъемных кранов. Лицо, ответственное за исправ-
ное состояние крана, фиксирует в паспорте данные о ремонте ме-
таллоконструкции крана или замене его механизмов, канатов и
грузового крюка.
162
Контрольные вопросы
1. Расскажите о видах трения и его влиянии на процесс изнашивания.
2. Расскажите о назначении системы ППР и мероприятиях, в нее входящих.
3. Назовите виды ремонтов, их назначение и объем.
4. Расскажите о видах технических обслуживаний кранов, их периодичности
и объеме.
5. Как организован текущий ремонт кранов?
6. Назовите основные неисправности крановых механизмов, расскажите о их
диагностике и способах устранения
7. Каковы основные требования к регулировке сборочных единиц и меха-
низмов кранов?
ГЛАВА XIII. ОРГАНИЗАЦИЯ
ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ
§ 80. ВИДЫ ПЕРЕМЕЩАЕМЫХ ГРУЗОВ И ИХ КЛАССИФИКАЦИЯ
Все многообразие перемещаемых кранами грузов может быть
разделено на несколько больших групп, связанных между собой
общими характеристиками. К ним относятся тарно-штучные грузы,
сыпучие материалы, тяжеловесные грузы, металлы и металлоизде-
лия, лесоматериалы. Особую группу составляют грузы, перемещае-
мые в контейнерах.
Тарно-штучные грузы отличаются большим разнообразием та-
ры, массы, размеров и конфигурации отдельных мест. Тара, в кото-
рую упаковывают эти грузы, может быть жесткой, полужесткой и
мягкой. Для сыпучих и других грузов, не подвергающихся дефор-
мации, применяют мягкую тару (мешки, кули, сетки, тюки). Сетки,
сплетенные из проволоки или металлических лент, используют для
упаковки грузов большого объема, например, тюков хлопка.
Кроме того, грузы упаковывают в полужесткую и жесткую тару.
Полужесткой тарой считают коробки, решетки и корзины. Жесткая
тара предохраняет груз от давления извне. К ней относятся ящики,
бочки, бидоны и др.
Большинство тарно-штучных грузов транспортируют пакетами.
Под транспортным пакетом понимают укрупненную грузо-
вую единицу, сформированную из более мелких и обеспечивающую
в процессе перемещения и хранения возможность механизации
подъемно-транспортных операций. В пакет укладывают, как пра-
вило, однородные грузы в одинаковой упаковке.
Навалочными называют массовые сыпучие грузы, хранимые и
перемещаемые без упаковки: руда, уголь, строительные материа-
лы и др.
К тяжеловесным относятся грузы с единичной массой свыше
500 кг: станки, автомобили, тракторы, различные изделия машино-
строительной промышленности, элементы строительных конструк-
ций и др. К тяжеловесным грузам также относят прокат черных и
цветных металлов и изделия из них, транспортируемые в паке-
тах.
163
Лесоматериалы подразделяют на круглый лес и пиломатериалы
(доски, брусья, шпалы и др.)- Круглый лес включает стволы всех
видов деревьев с правильно опиленными торцами (бревна, столбы,
кряжи, сваи). В зависимости от длины бревна делят на три груп-
пы: длинные — свыше 6,5 м, средние — 4—6,5 м и короткие—
1,5-2,5 м.
Большинство из перечисленных грузов транспортируют'в кон-
тейнерах. Применяемые в СССР и странах—членах СЭВ контейнеры
делятся на универсальные и специальные. К универсальным отно-
сятся малотоннажные контейнеры массой брутто 1,25 т, среднетон-
нажные массой брутто 3 и 5 т и крупнотоннажные массой брутто
Iff и 20 т. Специальные контейнеры в основном принадлежат про-
мышленным предприятиям и используются для доставки сырья,
полуфабрикатов и готовой продукции.
$ 81. СПОСОБЫ СТРОПОВКИ ГРУЗОВ
Предназначенный для перемещения груз должен быть надежно
застроплен в соответствии с утвержденными схемами. Если нет
рекомендуемых" схем строповки или специальных захватных уст-
ройств на грузе (рымов, петель, проушин, цапф), должны быть
разработаны соответствующие схемы строповки (обвязки) грузов
с указанием конкретных типов применяемых грузозахватных уст-
ройств, обеспечивающих надежное и безопасное перемещение
грузов.
Схемы строповки грузов должны обеспечивать их надежное
крепление, простоту, технологичность и безопасность выполнения
строповки и исключать самопроизвольное смещение груза (выпа-
дение) или расстроповку в процессе перемещения краном. Для
грузов неправильной формы необходимо указывать положение
центра тяжести.
Схемы строповки могут быть разработаны по группам сходных
изделий, деталей и узлов. Графические изображения схем стропов-
ки типовых грузов следует вывешивать в местах производства ра-
бот или выдавать на руки крановщикам и стропальщикам.
Крановщику запрещается применять грузозахватные при-
способления, не имеющие клейма или бирки установленного образ-
ца, тару без указания ее незначения и грузоподъемности, а также
приспособления, не зарегистрированные в соответствующем жур-
нале.
Перед началом каждой смены машинист крана или прикреп-
ленный стропальщик обязан осмотреть применяемые грузозахват-
ные приспособления. Если на них обнаружатся изломы, трещины
и расслоения металла, нарушения целостности сварных швов, об-
рывы резьбы, отгибание рога крюка или износ его зева более 10%,
износ или другие дефекты канатов, износ звеньев цепей, а также
другие отклонения от требований технических условий, приспособ-
ление должно быть изъято из применения.
1«4
На место установки груза, обвязанного стропами, необходимо
предварительно уложить прочные прокладки для того, что*
бы стропы можно было легко и без повреждений извлечь из-под
груза.
Подъем и перемещение грузов, для которых специальные схемы
строповки не- разработаны, необходимо производить в присутствии
и под руководством лица, ответственного за безопасное произвол*
ство работ по перемещению грузов кранами.
$ 82. СХЕМЫ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗОВ
3»
Правильные способы подъема и перемещения грузов должны
обеспечить выполнение двух основных задач: высокопроизводи*
тельную и безопасную работу крана.
Лицо, ответственное за безопасное перемещение грузов, обязано
организовать работы, указать крановщику и стропальщику место,
порядок и габариты складирования, объяснить специфику выпол*
няемых работ и правила личной безопасности стропальщика.
Перемещать груз в горизонтальном направлении можно лишь
при подъеме его на 0,5 м выше встречающихся на пути оборудова-
ния, штабелей груза и других предметов.
Опускать перемещаемый груз разрешено лишь на предназна-
ченное для этого место, где исключается возможность падения,
опрокидывания или сползания установленного груза. На месте
опускания груза людей быть не должно. Удерживать от разворота
или, наоборот, направлять длинномерные и габаритные грузы при
укладке в штабель или погрузке в транспортное средство следует
с помощью специальных крючьев, оттяжек и других приспособ-
лений.
Безопасным следует считать такое расстояние от груза (в мет-
рах), при котором находящийся рядом рабочий не может быть
травмирован отцепившимся или сорвавшимся грузом. Когда это
расстояние не может быть выдержано, стропальщик обязан выхо-
дить из транспортного средства после каждой выполненной опера-
ции. Руководство предприятия должно подготовить лестницы, пе-
реходные мостики, погрузочные эстакады (рис. 120). Укладку
(снятие) грузов в транспортные средства необходимо производить
без нарушения равновесия последних.
Работа кранов мостового типа, оснащенных электромагнитом
или грейфером, существенно отличается от работы кранов с крю-
ком. Особую опасность представляет внезапное обесточивание
электромагнита и самопроизвольное раскрытие грейфера, когда
возможно падение груза или его части. Опасной зоной в этом слу-
чае является весь пролет цеха, где работают указанные краны.
Проход через опасную зону должен быть закрыт с установкой зна-
ков 1.3 по ГОСТ 12.4.026—76, а пребывание в ней людей запреще-
но. Категорически запрещено пребывание людей в транс-
портных средствах во время работы магнитных или грейферных
145
кранов из-за возможного падения груза или прижатия рабочего
к борту вагона при качании грейфера (магнита). Подсобные рабо-
чие, обслуживающие грейфер (электромагнит), могут быть допу-
щены к выполнению своих обязанностей только в перерывах рабо-
ты крана, после опускания грейфера или магнита вниз и установки
их на деревянные подкладки. Для надежности захвата груза и
снижения динамических нагрузок на кран включение электромаг-
Рис. 120. Погрузочная эстакада:
I—всПкада, 1-»аолу*агФв
нита производить только при на-
хождении магнита на грузе. Вы-
ключать питание электромагнита
и сбрасывать груз разрешено с
высоты не более 1 м. Исключение
составляют электромагнитные
краны, работающие со специаль-
ным шаром для разбивания ме-
таллолома в копровых цехах.
Учитывая переменную подъем-
ную силу электромагнита в зави-
симости от вида груза, его формы,
свойств и температуры, админист-
рация предприятия должна при-
нять меры предупреждения пере-
грузки крана (четко указать кра-
новщику размеры, массу и способ
захвата допустимого количества
перемещаемых болванок, чушек
или плит).
§ 83. РАБОТА СТРОПАЛЬЩИКА
Стропальщики выполняют работу по обвязке грузов грузозах-
ватными устройствами и подвешиванию их к крюку крана. К ра-
ботам по строповке, зацепке, перемещению и укладке грузов с по-
мощью грузоподъемных машин допускаются лица не моложе
18 лет, прошедшие специальное обучение и аттестацию по соот-
ветствующей программе.
Руководство предприятия должно обеспечить стропальщиков
испытанными и промаркированными грузохватными устройствами
и тарой соответствующей грузоподъемности, а также выделить для
укладки грузов место, оборудованное необходимыми приспособле-
ниями (прокладками, подставками и т. п.), и проинструктировать
крановщика и стропальщика о порядке и габаритах складиро-
вания.
Стропальщик должен иметь понятие об устройстве обслуживае-
мого крана, уметь подбйрать необходимые для работы строповоч-
ные канаты и цепи, знать установленный порядок обмена сигнала-
ми с крановщиком и указания по безопасному перемещению груза
(табл. 12). Стропальщик должен знать нормы заполнения тары
сыпучими, штучными и другими грузами, правила и нормы склади-
186
Операции
Эск«*
Подаваемый сигнал
12. Сигналы безопасности при работе крана
Поднять груз или
крюковую подвеску
Опустить груз или
крюковую подвеску
Прерывистое движение
вверх перед грудью ру-
кой, согнутой в локте ла-
донью вверх
Прерывистое движе-
ние вниз перед грудью
рукой, согнутой в локте
ладонью вниз
Движение вытянутой
рукой, ладонью в направ-
лении движения моста
крана
167
Операции
Эскиз
Подаваемый сигнал
Продолжение табл. 12
Передвинуть крано-
вую тележку
Стоп (прекратить
подъем груза или пе-
редвижение моста —
тележки)
Осторожно (приме-
няют перед подачей
любого из перечислен-
ных сигналов при не-
обходимости незна-
чительного перемеще-
ния)
Движение согнутой в
локте рукой, ладонью в
направлении движения
крановой тележки
Резкое движение рукой
вправо и влево на уров-
не пояса, ладонь обраще-
на вниз
Кисти поднятых вверх
рук обращены ладонями
одна к другой на неболь-
шом расстоянии друг от
друга
168
рования грузов, нормы браковки канатных и цепных стропов, а
^гакже других грузозахватных устройств.
Перед началом работы стропальщик обязан проверить состояние
грузозахватных устройств и изъять из употребления те их них,
которые не отвечают условиям безопасности. Необходимо также
проверить, хорошо ли освещены места производства работ и отсут-
ствие на них людей. Кроме того, проверяют места складирования
грузов.
Канатные стропы должны быть наложены на поднимаемый
груз без узлов и перекрутки. При обвязке грузов с острыми краями
необходимо применять подкладки для предохранения канатов от
повреждения.
Прежде чем подать сигнал крановщику о подъеме или переме-
щении груза, стропальщик обязан убедиться в том, что никому не
угрожает опасность, поднимаемый груз свободен, на нем нет не-
закрепленных деталей и инструмента, а сам груз во время подъ-
ема не может зацепиться. Убедившись в возможности беспрепят-
ственного перемещения груза, стропальщик обязан сам отойти от
груза в безопасное место и дать сигнал крановщику.
При подъеме или опускании груза вблизи стены или оборудова-
ния запрещается стропальщику находиться между грузом и частя-
ми здания или оборудованием, так как он может быть прижат
грузом. Сопровождая перемещаемый груз, стропальщик должен
идти впереди крана и удалять людей, могущих оказаться на пути
транспортировки груза.
Перемещение грузов над производственными служебными по-
мещениями при нахождении в них людей может быть допущена
руководством предприятия в исключительных случаях после раз-
работки мероприятий, обеспечивающих безопасное выполнение
работ.
Во всех случаях, когда зона, обслуживаемая краном, обозрева-
ется из кабины не полностью, т. е. крановщик не может лично наб-
людать весь процесс перемещения груза, включая его строповку (рас-
строповку), и отсутствует телефонная'(радио) связь между кранов-
щиком и стропальщиком, в соответствии с требованиями Правил
лицо, ответственное за безопасное перемещение грузов, должно на-
значать сигнальщика из числа аттестованных стропальщиков. Сиг-
нальщик внимательно следит за работой стопалыцика и точно
передает его сигналы крановщику. Фамилию сигнальщика следует
записать в вахтенный журнал крана.
Контрольные вопросы
1. Как подразделяют перемещаемые грузы?
2. Какие типы контейнеров применяют для транспортировки грузов?
3, Какие требования предъявляют к строповке грузов?
4. Что такое опасная зона при перемещении грузов кранами и как опреде-
ляют ее размеры?
5. Как поднимают и транспортируют длинномерные и габаритные грузы?
6. Каковы основные права и обязанности стропальщика?
7. Кто и как организует производство погрузочно-разгрузочных работ?
169
ГЛАВА XIV. ОХРАНА ТРУДА
И ПРОТИВОПОЖАРНЫЕ МЕРОПРИЯТИЯ
ПРИ ЭКСПЛУАТАЦИИ КРАНОВ
$ 84. ОХРАНА ТРУДА НА ПРЕДПРИЯТИИ
Организация охраны труда на предприятии является одной из
важнейших задач и обязанностей администрации, которая должна
обеспечивать надлежащее техническое оборудование всех рабочих
мест и создавать условия работы, соответствующие требованиям
охраны труда. Трудовое законодательство устанавливает полную
ответственность руководства предприятия (директора и главного
инженера) за организацию труда в целом по предприятию. Ответ*
ственность по подразделениям возложена на соответствующих ру-
ководителей (начальников цехов, участков, мастеров и др.). Непо-
средственное руководство по организации охраны труда осущест-
вляет главный инженер предприятия.
Конкретная работа в области охраны труда предусматривается
коллективным договором, ежегодно заключаемым между админи-
страцией предприятия и местным комитетом профсоюза по поруче-
нию коллектива. КЗоТ РСФСР возлагает на администрацию пред-
приятия или ее соответствующие службы проведение инструктажа
рабочих и служащих по вопросам безопасности труда, производст-
венной санитарии и противопожарной охраны, а также осуществле-
ние постоянного контроля за соблюдением работниками всех нор-
мативных документов по охране труда. Инструктаж и обучение
рабочих безопасным приемам и способам работы обязательно
должны проводиться на всех предприятиях, независимо от харак-
тера и степени опасности выполняемых работ, а также квалифи-
кации и стажа работы рабочего.
В свою очередь, на рабочих и служащих возложены следующие
обязанности: неукоснительное выполнение всех действующих нор-
мативных документов и обязательное применение индивидуальных
средств защиты.
Основные факторы, определяющие безопасную эксплуатацию
крана, учтены при разработке его конструкции и изложены в соот-
ветствующих разделах учебника. Вопросы безопасной эксплуатации
кранов также рассмотрены выше. Погрузочно-разгрузочные работы
следует выполнять в соответствии с требованиями ГОСТ
12.3.002—75, ГОСТ 12.3.009—76, Правил Госгортехнадзора СССР
и др. Места производства работ должны быть ограждены и осна-
щены знаками безопасности по ГОСТ 12.4.026—76. При этом необ-
ходимо следить, чтобы масса груза не превышала паспортную
грузоподъемность крана. Кран должен работать в паспортном ре-
жиме; применять кран для работы в более тяжелом режиме кате-
горически запрещено.
Необходимо помнить, что рабочее место крановщика находится
на высотной отметке, работы на которой отнесены к категории особо
опасных. Применительно к крану опасной является не работа на
170
нем (кабина современного крана имеет надежное ограждение и
необходимые предохранительные устройства), а подъем и сход с
крана, выполнение регламентных и ремонтных работ, а также эва-
куация крановщика в случае непредвиденной остановки крана по-
середине пролета цеха.
§ 85. ОСНОВНЫЕ ПРАВИЛА ЭЛЕКТРОБЕЗОПАСНОСТИ
Поражение человека электрическим током возникает при замы-
кании электрической цепи через тело, т. е. в случае прикосновения
человека к двум точкам электрической цепи, между которыми име-
ется некоторое напряжение (электрический потенциал). Как пра-
вило, это один электрический провод и земля («масса»). В трехфаз-
ных сетях переменного электрического тока возможно включение
тела человека в цепь между двумя проводами. При прохождении
электрического тока через организм человека возникает электро-
травматизм (величина тока 0,0005—0,05 А), при котором имеют
место болевые ощущения, паралич рук, разложение крови, ожоги
участков тела, металлизация кожи, нарушение биотоков организма
и другие явления. При большей величине тока возникает электри-
ческий удар, вызывающий паралич органов дыхания и фибриляцию
(трепетание) сердца. Величина тока 0,1 А считается смертельной,
так как вызывает паралич сердечной мышцы.
Чтобы исключить возможное поражение обслуживающего пер-
сонала током, все грузоподъемные краны должны быть оборудова-
ны специальным устройством, отключающим энергоснабжение
крана при выходе человека на его галерею.
При работе с электрической аппаратурой, находящийся под на-
пряжением, следует строго соблюдать правила электробезопасно-
сти. Работать разрешено только в диэлектрических перчатках и
галошах, либо стоя на изолирующем резиновом коврике (подстав-
ке). Необходимо применять специальный инструмент и приборы с
изолированными (безопасными) ручками. Во избежание возмож-
ного поражения электрическим током прикасаться к контактным
зажимам, выводам и оголенным проводам категорически
запрещено.
Пострадавшего от поражения электротоком прежде всего сле-
дует освободить от действия электрического тока и оказать довра-
чебную помощь. При освобождении следует иметь в виду, что
прикасаться к пострадавшему голыми руками (без защитных
средств) нельзя, так как освобождающий неминуемо окажется под
действием электрического напряжения. Поэтому лучше всего от-
ключить питающую сеть либо перерубить провода. Если невозмож-
но обесточить электрическую цепь, необходимо оттянуть постра-
давшего от токоведущих частей сухими (изолирующими) предме-
- тами: досками, палками, веревками или одеждой. Спасающий
должен стоять на сухом месте или на изоляторе. До прибытия
врача на пострадавшем следует расстегнуть одежду, растереть ему
тело, дать понюхать нашатырный спирт и при необходимости де-
лать искусственное дыхание.
171
$ 86. ПРИЧИНЫ ВОЗНИКНОВЕНИЯ ПОЖАРОВ
И СПОСОБЫ ИХ ПРЕДОТВРАЩЕНИЯ
Горением называют сложный физико-химический процесс взаи-
модействия горючего вещества с кислородом воздуха, в результате
которого выделяется тепловая и световая энергия. В особых усло-
виях окислителем в процессе горения может служить не только
кислород, но и азотная кислота, хлор и другие химические элемен-
ты. Кроме того, многие взрывоопасные вещества могут разлагать-
ся без поглощения кислорода — взрываться (быстрое горение) с
образованием теплоты и света.
Процесс горения может возникнуть при наличии импульса, вы-
зывающего воспламенение. Таким импульсом может быть: откры-
тое пламя, накаленная поверхность металла, лучистая энергия,
искра, а также скрытые (несветящиеся) источники — силы трения,
удар, адиабатическое сжатие и др. Процесс горения может возник-
нуть и протекать при наличии трех факторов: горючего вещества,
окислителя и источника воспламенения. Горючее вещество и окис-
литель создают горючую систему, которая под действием источника
воспламенения может загореться и послужить причиной пожара.
Смеси газов или паров с воздухом могут гореть лишь при опреде-
ленных объемных соотношениях. В замкнутых объемах возникает
большая вероятность образования пожароопасных смесей. В этих
случаях скорость горения велика и может привести к взрыву, что
является наиболее опасным случаем горения.
При работе грузоподъемных кранов основными источниками
возникновения пожара могут быть неисправности собственно кра-
нового оборудования (преимущественноэлектрооборудования) ина-
рушения правил подъема и перемещения грузов (особенно взрыво-
и пожароопасных). Чаще всего перегреваются и способны загореть-
ся обмотки тормозных электромагнитов переменного тока типа
МО крановых механизмов. Причины их перегревания: неплотное
прилегание якоря к магнитопроводу в результате неправильной
регулировки, заедания или перекоса якоря в шарнире и загрязне-
ния поверхности магнитопровода. Реже перегреваются обмотки
электродвигателей в результате неправильной регулировки тормо-
зов, разрушения подшипников и задевания ротора за статор. Оче-
видно, что причиной загорания может быть короткое замыкание в
цепи кранового электропривода. Все современные грузоподъемные
краны имеют в схемах специальные защитные устройства, предот-
вращающие негативные последствия короткого замыкания (назна-
чение, конструкции и работа данных устройств изложены в соот-
ветствующих разделах учебника). При обнаружении на кране оча-
га загорания необходимо прежде всего отключить вводное устрой-
ство (рубильник), если до того времени не сработала крановая за-
щита (защитная панель).
При эксплуатации крановых механизмов применяют различные
нефтепродукты: масла и смазки, керосин для промывки и др., ко-
торые при определенных условиях могут самовозгораться. Напрж-
171
мер, обтирочные концы и ветошь, пропитанные маслом, могут
самовоспламениться при хранении свыше 8 ч. Поэтому категориче-
ски запрещено иметь на кране запасы смазочных материалов, ке-
росина, обтирочных концов и др. Также запрещено применять для
чистки механизмов бензин, ацетон и другие легковоспламеняющие-
ся жидкости. Чистку крановых механизмов следует проводить
только при отключенном вводном устройстве не только во избежа-
ние возможного поражения работающих электротоком, но и с целью
исключения загорания применяемых материалов от электрической
искры. Освещение ремонтной зоны должно* быть только от электро-
сети напряжением 12 В. Применение открытого огня, спичек, фа-
келов или фитилей категорически запрещено.
Согласно СНиП II-M.2—72 все существующие производства
подразделяют по взрывной, взрывопожарной и пожарной опасности
на шесть категорий: А и Б—взрывопожароопасные производства,
В, Г, Д — пожароопасные и Е — взрывоопасные. Краны мостового
типа отнесены к категории Е, Д — несгораемые вещества и мате-
риалы в холодном состоянии. Однако фактическая пожароопас-
ность конкретного крана будет соответствовать категории того
производства, в котором кран эксплуатируется.
$ 87. ОСНОВНЫЕ ПРОТИВОПОЖАРНЫЕ МЕРОПРИЯТИЯ
Возникновение пожара на промышленном предприятии может
привести к разрушению строительных конструкций и зданий, по-
вреждению технологического оборудования, другими словами на-
носит большой материальный ущерб. Опасность пожара обычно
усугубляется возможными человеческими жертвами, последствия
которых в моральном и физическом плане оценить практически
невозможно. Поэтому на каждом предприятии действует комплекс-
ный план мероприятий, направленных на предупреждение возник-
новения пожаров и на быстрейшую ликвидацию возникших оча-
гов.
Очевидно, что чем раньше обнаружен очаг загорания, тем быст-
рее и с меньшими затратами сил и средств он может быть ликви-
дирован. В связи с этим большое значение имеют совершенные
средства извещения о пожаре (связи). Пожарную связь подразде-
ляют на связь: извещения, обеспечивающую информацию о пожаре
и вызов специальных подразделений на пожар; диспетчерскую,
обеспечивающую управление силами и средствами пожаротуше-
ния; и связь на пожаре — для руководства работами по тушению
пожара. Такие виды связи обеспечивают телефонами, радиопере-
датчиками и средствами пожарной сигнализации.
К электрической пожарной сигнализации относят извещатели,
подающие сигнал о пожаре автоматически или ручным включением,
приемные станции, получающие сигналы о пожаре от извещателей,
и сети, соединяющие указанные аппараты. Сети пожарной сигна-
лизации могут быть: кольцевыми, когда извещатели соединены с
178
приемной станцией по кольцевой схеме, или лучевыми — при ра-
диальной схеме включения извещателей. В зависимости от импуль-
са срабатывания извещатели подразделяют на дымовые, световые
и тепловые, регистрирующие соответствующие физические про-
цессы.
Для быстрого прекращения горения при пожаре необходимо вы-
полнить два основных условия: прекратить доступ воздуха (кисло-
рода) в зону горения, так как горение возможно при содержании
кислорода в воздухе не менее 14% (естественное содержание кис-
лорода в воздухе 21%), охладить зону горения ниже температуры
самовоспламенения (в этом случае процесс горения прекращается
даже при наличии достаточного количества воздуха).
Вещества, введенные в зону горения и нарушающие условия
процесса горения, называются огнегасительными веществами: вода,
водяной пар, песок, химические средства тушения пожара и др.
Воздействие этих средств на процесс горения зависит от физико-
химических свойств горящих материалов и способов их приме-
нения.
Тушение пожара на кране осложнено изоляцией крановщика
от других участников производственного процесса при нахождении
крана посередине пролета и трудностью оказания ему практиче-
ской помощи. Поэтому при обнаружении очага возгорания на кра-
не крановщик обязан прекратить работу, отключить вводное уст-
ройство, поставить в известность администрацию цеха и, не дожи-
даясь помощи, приступить к ликвидации очага загорания. Для
тушения пожара на кране применяют имеющиеся углекислотные
огнетушители одной из трех марок: ОУ-2, ОУ-5 или ОУ-8 (цифры
указывают водную емкость баллона в литрах). Время действия
огнетушителя при температуре +20° С 25—40 с; длина струи 1,5—
3,5 м. Для приведения огнетушителя в действие необходимо напра-
вить раструб в сторону очага горения и повернуть запорный вен-
тиль против часовой стрелки. Для тушения находящегося под на-
пряжением электрооборудования можно применять углекислотно-
бромэтиловые огнетушители типа ОУБ-3 и ОУБ-7, которые со вре-
менем не теряют огнегасительных свойств.
Огнетушитель должен постоянно находиться на кране в уста-
новленном месте в опломбированном состоянии. Нельзя допускать
попадания на вентиль огнетушителя бензина, масла или влаги;
ударять по баллону, вентилю, предохранителю или раструбу снего-
образователя какими-либо предметами категорически запрещено.
При тушении пожара на кране запрещено применять пенные ог-
нетушители марок ОП-3, ОП-4 и ОП-5, так как выпускаемая струя
электропроводна и может вызвать поражение работающего с огне-
тушителем человека электрическим током.
На каждом предприятии существуют добровольные пожарные
дружины, а на крупных — специальные пожарные подразделения,
назначение'которых — тушение пожаров. Добровольные пожарные
дружины комплектуют из числа передовых, квалифицированных
рабочих и служащих, прошедших специальное обучение, инструк-
174
таж и имеющих навыки по тушению пожаров. На специальных
стендах рядом с первичными средствами пожаротушения должны
быть вывешены соответствующие инструкции и схемы взаимодей-
ствия пожарных постов добровольной дружины. Когда очаг загора-
ния велик и его ликвидация не по силам пожарной дружине, адми-
нистрация предприятия вызывает специализированные подразделе-
ния, которым добровольная пожарная дружина оказывает помощь
всеми имеющимися силами и средствами.
§ 88. ОХРАНА ОКРУЖАЮЩЕЙ СРЕДЫ
Необходимость охраны окружающей среды от воздействия бур-
но развивающейся промышленности продиктована прежде всего
заботой о самом человеке, поэтому закреплена основным законом
нашей страны — Конституцией СССР и другими правоохранитель-
ными актами, принятыми партией и правительством в последнее
время. На первый взгляд может показаться, что изучаемые грузо-
подъемные машины не оказывают существенного влияния на со-
стояние окружающёй среды и здоровье людей. На самом деле это
не так! Выполняя функцию основного (неустранимого) элемента
в цепи современного производства, грузоподъемный кран является
достаточно активным источником загрязнений:
материальных — твердых (продукты износа, пыль) и жид-
ких (утечки смазочных материалов);*
энергетических — тепловые выбросы (нагрев деталей и
сборочных единиц при работе), шум и вибрации, а также электро-
магнитные поля, наводимые при работе электрооборудования.
Необходимо знать, что материальные загрязнения и тепловые
выбросы не только загрязняют атмосферу и нарушают ее тепловой
баланс, но и оказывают негативное влияние на здоровье людей.
Шумы, вибрации и электромагнитные поля разрушают сооружения
и неблагоприятно влияют на все живое на земле, при воздействии
на живой (человеческий) организм поражают прежде всего цент-
ральную нервную и сердечно-сосудистую системы. При этом сле-
дует помнить, что источники загрязнения действуют на фоне дру-
гих источников, присущих любому современному промышленному
предприятию (городу).
Основные способы ликвидации источников загрязнения и сниже-
ния уровней их воздействия можно подразделить на активные:
правильное и своевременное регулирование крановых механизмов,
применение рациональных и безопасных приемов управления кра-
ном, правильное выполнение регламентных работ по обслуживанию
и ремонту кранов;
пассивные (защитные): изолирование и герметизация источ-
ников жидких материальных загрязнений (своевременный контроль
состояния и замена поврежденных сальниковых уплотнений), экра-
нирование (поглощение и глушение) энергетических источников:
тепловых, электромагнитных полей, шумов и вибраций.
175
Контрольные вопросы
1. Расскажите об основных задачах безопасности труда в условиях социа-
листического производства.
2. На кого возложен надзор за соблюдением безопасных условий труда на
производстве и кто конкретно на предприятии отвечает за вопросы охраны труда?
3. Назовите основные факторы, определяющие безопасные условия работы на
кране, и расскажите о мероприятиях по их осуществлению.
4. * Каковы основные правила электробезопасности при работе и обслужива-
нии крана?
5. Что такое процесс горения?
6. Каковы условия возникновения пожара и что является источником вос-
пламенения горючих систем?
7. Каковы основные причины возникновения пожара на кране?'
- 8. Что должен делать крановщик при возникновении пожара на кране?
9. Какие марки огнетушителей применяют для тушения пожаров на кране?
10. Расскажите о порядке извещения о пожаре.
ПРИЛОЖЕНИЯ
Приложение *
Основные параметры крановых путей,
обеспечивающие правильные условия длительной и надежной
эксплуатации передвижных грузоподъемных кранов
на рельсовом ходу
Наименование допуска Величина допуска, мм
мостовые краны козловые краны
при укладке в процессе эксплуа- тации при укладке в процессе эксплуа- тации
Разность отметок головок крановых рельсов в одном поперечном сечении: на опорах 15 20 10/20 15/30
в пролете 20 25 — —
Разность отметок головок крановых рельсов на соседних колоннах при рас- стоянии между колоннами: <10 м 10 15
>10 м 15 20 — —
Разность отметок головок рельсов на длине 10 м пути (общая) 20/20 30/30
Отклонение в расстоянии между осями рельсов 10 15 8/30 12/40
Отклонение рельса от прямой оси на длине: 40 м для мостовых кранов 15 20
30 м для козловых кранов — — 15/15 20/20
Зазоры между рельсами в стыках при температуре 0°С и длине рельса 12,5 м 4 4 6/6 6/6
Взаимное смещение торцов стыкуемых рельсов в плане и по высоте 2 3 1/1 2/2
Примечание. В числителе приведены значения для козгозыд кранов с длиной «ре-
нета до 30 м, а в знаменателе — свыше 30 м.
176
Приложение II
Типоразмеры крановых рельсов в зависимости
от грузоподъемности передвижного крана
Тип опорного рельса Типоразмер рельса в зависимости от грузоподъемности крана, т
5 10 16 20 25 35 50 80
Рельс с выпуклой головкой Плоский рельс ши- риной, мм PI8, Р24 40 РЗ 50 8 61 КР70, Р43 70 80 КР80, Р50 90 КР12О, Р65 100
Приложение III
Основные параметры кранового пути
Удельное давление на ходовое колесо, кН Тип рельса Марка полу ши алы Шаг установки полушпал, мм Высота балластно й призмы, мм
<100 Р38 ША, ШБ 700 200
100—150 > » >
150—200 Р43 ПА, ПБ 600 250
200—250 Р50 1А, 1Б 550 300
250—300 Р65 500 350
Приложение IV
Оптимальное число зажимов для соединения
стальных проволочных канатов,
размеры резьбы иа скобе зажима
и рекомендуемый момент затяжки
резьбовых соединений _
Диаметр каната, мм 6 8 10 13 16 19 22 25 28 32 40 36 45 50 56 6B
Количество за- жимов в соедине- нии, шт 3 4 5 6
Размер резьбы на скобе, мм Момент затяж- ки соединения, Н-м Мб 3 М8 10 М10 30 М12 55 М16 80 М20 125 М24 200 мзо 330 М36 450
177
Приложение V
Браковочные нормы для стальных проволочных канатов
в соответствии с требованиями Правил
Таблица 1
Конструкция каната с органическим сердечником
6x19=114 | 6X37=222 | 6X61 = =366 | ' 18X19=342
Статический коэффициент запаса прочности каната при установленном соотношении D/dK Направление свивки каната
крес- товое одно- сторон- нее крес- товое одно- сторон- нее крес- товое одно- сторон- нее крес- товое одно- сторон- нее
<6 6—7 7< 12 И 16 6 7 8 22 26 30 11 13 15 36 38 40 18 19 90 36 38 40 18 19 20
При необходимости выбраковки стальных канатов, браковоч-
ные нормы для конструкций которых не приведены в таблице, сле-
дует ориентироваться на соответствующие браковочные нормы для
канатов аналогичных конструкций с корректировкой предельной
величины числа оборванных проволок в зависимости от количества
проволок в наружных слоях прядей данного каната.
Канаты грузоподъемных машин, предназначенных для подъема
людей и перемещения расплавленного (раскаленного) металла,
взрывчатых, огнеопасных или ядовитых веществ, следует браковать
при вдвое меньшем числе оборванных проволок, чем указано в
таблице.
Как правило, обрывы проволок в работающих канатах сочета-
ются с уменьшением их диаметров в результате абразивного изна-
шивания и коррозии. При этом браковочная норма должна быть
снижена с учетом уменьшения диаметров проволок.
Таблица 2
Уменьшение диаметра проволок, % Число обрывов проволок на длине одного шага свивки, отнесенное к брако- вочной норме, % Уменьшение диаметра проволок, % Число обрывов проволок на длине одного шага свивки, отнесенное к брако- вочной норме, %
10 ‘ 85 25 60
15 75 30 и более 50
20 70
Приложение VI
Для унификации различных физических единиц и удобства при-
менения их в различных отраслях науки и техники, а также для
расширения контактов между странами была разработана Между-
178
народная система единиц СИ (система интернациональная), одоб-
ренная и принятая в 1960 г. международной Генеральной конфе-
ренцией по мерам и весам. Для внедрения данной системы единиц
в нашей стране Госстандартом СССР был разработан и утвержден
ГОСТ 9867—61, рекомендованный к преимущественному примене-
нию. По мере накопления опыта применения системы единиц СИ
в рамках СЭВ был утвержден новый стандарт СТ СЭВ 1052—78
«Метрология. Единицы физических величин», который с декабря
1978 г. заменил ГОСТ 9867—61. В настоящее время переходный
период завершен и с 1 января 1980 г. СТ СЭВ 1052—78 является
единственным и обязательным к применению нормативным доку-
ментом на территории всех стран — членов СЭВ.
В настоящем издании все физические величины приведены в
Международной системе единиц СИ. Так как в предыдущцх изда-
ниях учащиеся могут встретить физические единицы в старой тех-
нической системе — МКГСС (м, кгс, с), в табл. 1 приведены основ-
ные необходимые единицы в соотношении с системой единиц
МКГСС.
Из анализа табл. 1 видно, что основная физическая величина в
механике — сила (сила тяжести, вес, сила давления) в системе СИ
измеряется в ньютонах (Н). Ньютон почти в десять раз меньше ки-
лограмм-силы (кгс). Если учесть, что 1Н=0,1 кгс=100 гс, то дан-
ная сила, равномерно распределенная на один квадратный метр
поверхности, создает удельное давление очень малой величины.
В практических расчетах действующие силы измеряют в тоннах
(тс), изгибающие и крутящие моменты — в тс-м, а прочностные
характеристики материала (допускаемые напряжения) и давления
в гидро- (пневмо-) системах достигают десятков и сотен кгс/см2
(атмосфер). Очевидно, что практическое применение столь малых
величин, как ньютон или паскаль, потребует написания большого
количества нулей после значащего числа и существенно осложнит
расчеты.
Таблица 1
' Наименование величины Единица измерения в системе СИ Сокращенное русское обозначение и физи- ческий смысл Соотношение с системой МКГСС
Основные единицы
Длина метр м 1 м=102 см
Масса килограмм кг 1 кг=103 г
Время секунда с 1 с=0,3-Ю-2 ч
Сила электри- ампер А 1 А=1 а
ческого тока
Дополнительные единицы
Плоский угол I радиан 1 Рад 1 1 рад=57,4 град
179
Продолжение
Наименование
величины
Единица измерения в Сокращенное русское
системе СИ обозначение и физи-
ческий смысл
Соотношение с системой
МКГСС
Произвольные единицы
Площадь квадратный метр м2 1 м2==Ю* см2
Объем кубический метр м3 1 м3= 10е см3
Плотность, килограмм на КГ‘М“3 1 КГ-М“3—10“3 г/см3
объемная масса .кубический метр
Скорость метр в секунду мс-1 1 MC-1=1 м/с
Угловая ско- радиан в секунду раде""1 1 рад е-1 —0,105 об/мин
рость
Частота вра- секунда в минус с-1 1 С“1=1 об/с=
щения первой степени =»jl об/мин / 60
Частота кот лебания герц Гц(с~0 1 Гц=1 с-1
Сила, вес ньютон Н(м кг-с~2) 1 Н=0,102 кге
Момент инер- ции Момент силы килограмм, ум- ноженный на квад- ратный метр кгм2 1 кг-м2=1 кгм2
ньютон, умно- женный на метр Нм 1 Нм=0,102 кге м
Работа, энер- джоуль Дж(м2-кгс~2) 1 Дж=1 Н-м
гия
Мощность ватт Вт(м2‘КГС“3) 1 Вт—1 Дж с”1 1 кВт=1 кДж-е-1 — = 1,36 л. с.
Давление, на- паскаль Па (м-^кг с-2) 1 Па = 1 Н/м2 =
пряжение = 1,02 10“5 кгс/см2
Для упрощения практических расчетов стандартом СЭВ пре-
дусмотрено применение приставок для образования кратных и доль-
ных единиц. Названия, величины и сокращенные обозначения ука-
занных приставок сведены в табл. 2.
Таблица 2
Название риставки Величина Сокращен- ное обозначе- ние Название приставки Величина Сокращен- нре обозначен ине
экса 1018 Э деци 0,l = 10~4 А
пета 1015 п санти 0,01 = 10-2 С
тера 1012 т милли 0,001 = 10-3 м
гига 109 г микро ю-6 мк
мега 106 м нано 10-9 н
кило 1000= 103 к пико 16"12 п
гекто 100=10» г фемто 10~13 ф
дека 10= 101 да атто 10-18 а
180
ОГЛАВЛЕНИЕ
Стр..
Введение . *...................................................... Э
Глава I. Общие сведения о кранах . . . ' . ............. 5
§ 1. Назначение и область применения кранов.'Классификация кранов . 5
§ 2. Конструктивные схемы кранов......................................6
§ 3. Основные параметры кранов........................................11 .
§4. Общее устройство кранов.........................................14
§ 5. Режимы работы и производительность кранов.......................15
Глава II. Крановые пути................................................18
§ 6. Общие требования к крановым путям...............................18
§ 7. Устройство путей для мостовых кранов............................19
- §8. Устройство путей для козловых кранов............................21
§ 9. Устройство путей для консольных кранов..........................23
Глава III. Крановые канаты и грузозахватные приспособления ... 24
§ 10. Конструкции стальных проволочных канатов и их расчет ... 24
§11. Концевые крепления стальных канатов............................29
§ 12. Основные факторы, определяющие срок службы стальных канатов,
и условия их эксплуатации............................................31
§13. Выбраковка канатов.............................................33
§ 14. Грузозахватные приспособления..................................34
§ 15. Грузоподъемные электромагниты и грейферы.......................40
- § 16. Эксплуатация грузозахватных приспособлений.....................42
§ 17. Освидетельствование и браковка грузозахватных приспособлений . 43
Глава IV. Механическое оборудование мостовых, козловых и консольных
кранов................................................................45
§ 18. Детали крановых механизмов и их соединения.....................46
§ 19. Сборочные единицы крановых механизмов..........................49
§ 20. Блоки и барабаны лебедок . •...................................52
§21. Крюки, полиспасты и крюковые подвески..........................54
§22. Ходовые колеса и балансиры.....................................58
§ 23. Механизмы передвижения мостов и тележек кранов .... 60
§ 24. Опорно-ходовые устройства и механизмы передвижения козловых
кранов......................................................62
§ 25. Опорно-ходовые устройства и механизмы передвижения консоль-
ных кранов..................................................67
§26. Устройства безопасности механизмов передвижения .... 67
Глава V. Металлические конструкции кранов.....................72
§ 27. Металлические конструкции мостовых кранов......................72
§ 28. Металлические конструкции козловых кранов......................72
§ 29. Металлические конструкции консольных кранов....................75
§ 30. Рамы тележек................................................. 75
§ 31. Материалы для изготовления крановых металлических конструкций 76
181
Глава VI. Механизмы подъема груза...............................77
§ 32. Механизмы подъема груза мостовых, консольных и козловых кранов 77
§ 33 Тали и тельферы . . ................................78
§ 34. Механизмы подъема груза с микроприводом..................80
§ 35. Схемы запасовки канатов в полиспасты и навивки на барабаны ле-
бедок ..............................................................81
§ 36. Устройства безопасности механизмов подъема груза .... 83
Глава VII. Оборудование кранов.......................................85
§ 37. Кабина крановщика и приборы управления . ....................85
§ 38. Устройства для дистанционного управления кранами .... 87
§ 39. Галереи и посадочные площадки................................88
§ 40. Ограждения и лестницы . ..............................89
Г лаза VIII. Электрооборудование кранов
§41. Классификация электрооборудования и размещение его на кране
§ 42. Технические требования к электрооборудованию ....
§ 43. Токоподвод и кабели .....................................
§ 44. Устройства безопасности электрооборудования..............
§ 45. Крановые электродвигатели...............................
§ 46. Механические характеристики электродвигателей ....
§ 47. Контроллеры и командоконтроллеры.........................
§ 48. Контакторы и магнитные пускатели.........................
§ 49 Аппараты управления .....................................
§ 50. Реле.....................................................
§51. Тормозные электромагниты и электрогидравлические толкатели
§ 52. Крановые резисторы . . ..........................
90
90
91
92
94
101
105
106
109
113
116
Глава IX. Электрические схемы кранов . ..........................118
§53. Назначение и классификация электрических схем..................118
§54. Основные требования к крановым электросхемам...................118
§ 55. Схема управления электротельфером крана.......................119
§ 56. Схема кулачкового контроллера..................................120
§ 57. Схема магнитного контроллера ..........................122
*§58. Схемы электрического торможения механизмов.......................124
§ 59. Схема цепей управления защитных панелей......................124
§ 60. Схемы заземления кранов........................................125
Глава X. Правила эксплуатации кранов..................................126
§ 61. Основные положения Правил устройства и безопасной эксплуата-
ции грузоподъемных кранов..........................................126
§62. Регистрация и техническое освидетельствование кранов . . . 128
§ 63. Техническая документация по эксплуатации кранов...............129
§ 64. Порядок подготовки крана к работе...........................131
§ 65. Обязанности машиниста крана в процессе эксплуатации . . . 132
§ 66. Порядок осмотра крана после окончания работы.................133
§ 67. Эвакуация людей с крана.......................................134
Глава XI. Управление и техническое обслуживание кранов .... 135
§ 68. Последовательность включения аппаратуры управления . . . 135
§ 69. Основные правила подъема и перемещения грузов................137
§ 70. Рациональные и безопасные приемы работы на кранах .... 139
§ 71. Смазывание механизмов кранов.................................140
• § 72. Техническое обслуживание электрооборудования..................146
Глава XII. Ремонт механического оборудования кранов...................148
§ 73. Трение и износ деталей крановых механизмов...................148
§74. Система планово-предупредительных ремонтов машин .... 150
182
§ 75. Основные неисправности в работе крановых механизмов и способы
их устранения . . . ..............................151
§ 76. Ремонт крановых механизмов...................................154
§77. Сборка, регулировка и контроль качества ремонта..............156
§ 78. Организация рабочего места при ремонте механического оборудо-
вания кранов........................................................160
§ 79. Пуск кранов в эксплуатацию после ремонта.....................162
Глава XIII. Организация погрузочно-разгрузочных работ................163
§ 80. Виды перемещаемых грузов и их классификация..................163
§81. Способы строповки грузов................................... 164
§ 82. Схемы подъема и перемещения грузов ........................- 165
§83. Работа стропальщика . . . ....................166
Глава XIV. Охрана труда и противопожарные мероприятия при эксплуа-
тации кранов.........................................................170
§ 84. Охрана труда на предприятии..................................170
§ 85. Основные правила электробезопасности.......................171
§ 86. Причины возникновения пожаров и способы их предотвращения . 172
§ 87. Основные противопожарные мероприятия.........................173
§88. Охрана окружающей среды . 175
Приложения ......................................................... 176
Александр Аркадьевич Богорад
Андрей Тимофеевич Загузин
МОСТОВЫЕ КРАНЫ И ИХ ЭКСПЛУАТАЦИЯ
Заведующий редакцией Г. П. Стадниченко
Научный редактор Б. М. Розеншейн
Редактор Е. Б. Коноплева
Художественный редактор В. П. Спирова
Технический редактор Л, А. Муравьева
Корректор Т. И. Виталева
ИБ № 3548
Изд. Ns М—210 Сдано в набор 25.10.83. Подп. в печать 28.12.83. Т-23651.
Формат 60X90 Vie. Бум. тип. № 3. Гарнитура литературная
Печать высокая. Объем 11,5 усл. печ. л. 11,75 усл. кр.-отт. 12,56 уч.-изд. л.
Тираж 72 000 экз. Зак. № 1975. Цена 30 коп.
Издательство <Высшая школа», 101430, Москва, ГСП-4, Неглинная ул., д. 29/14
Московская типография № 8 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
101898, Москва, Центр, Хохловский пер., 7,