/






























































































































































































































































Author: Вилази Г.
Tags: общая механика механика твердых и жидких тел физика математика биология компьютер
ISBN: 981-02-3308-6
Year: 2006




Text
Г. Вилази
ГАМИЛЬТОНОВА
ДИНАМИКА
R&C
OtfKAHtiCb
СЕРИЯ «КОМПЬЮТИНГ В МАТЕМАТИКЕ, ФИЗИКЕ, БИОЛОГИИ»
Редакционный совет:
Главный редактор В. А. Садовничий
Ответственный редактор А. В. Борисов
И. Антониу
В. В.Белокуров
A. В.Болсинов
К. А. Валиев
B. А. Журавлев
В. В. Козлов
В. Д. Лахно
И. С. Мамаев
Г. Ю. Ризниченко
К. Симо
И. А. Тайманов
Д. В. Трещев
О. А. Хрустал ев
СЕРИЯ «КОМПЬЮТИНГ В МАТЕМАТИКЕ, ФИЗИКЕ, БИОЛОГИИ»
Вышли в свет:
К. Симо, С. Смейл, А. Шенсине и др.
Современные проблемы хаоса и нелинейности
Под ред. А. В. Борисова и И. С. Мамаева
Неголономные динамические системы
Под ред. В. Д. Лахно и М. Н. Устинина
Компьютеры и суперкомпьютеры в биологии
А. Д. Морозов, Т. Н. Драгунов
Визуализация и анализ инвариантных множеств динамических систем
П. Г. Фрик
Турбулентность: подходы и модели
Под ред. А. В. Борисова, И. С. Мамаева, М. А. Соколовского
Фундаментальные и прикладные проблемы теории вихрей
А. С. Холево
Вероятностные и статистические аспекты квантовой теории
В. С. Анищенко, В. В. Астахов, Т. Е. Вадивасова, А. Б. Нейман, Г. И. Стрелкова,
Л. Шиманский-Гайер
Нелинейные эффекты в хаотических и стохастических системах
Под ред. А. Л. Фрадкова и О. А. Якубовского
Управление молекулярными и квантовыми системами
В. Эбелинг
()of)d юваиие структур при необратимых процессах. Введение в теорию
диссипативных структур
Г. М. Заславский
Физика хаоса в гамильтоновых системах
И. (’. Лишцспко, Т. Е. Вадивасова, Л. Шиманский-Гайер
Дшшиичсскос и статистическое описание колебательных систем
Г. Вилази
I амилыпонова динамика
УДК 531
• физика
• математика
• биология
• нефтегазовые
технологии
Вилази Г.
Гамильтонова динамика / Пер. с англ. — Москва-Ижевск: Институт компью¬
терных исследований; НИЦ «Регулярная и хаотическая динамика», 2006. —
432 с.
Книга основана на лекциях Гаэтано Вилази для студентов физико-математи¬
ческих специальностей (университет Салерно), посвященных аналитической меха¬
нике, дифференциальной геометрии, симплектическим многообразиям, интегриру¬
емым системам и электродинамике. Особенностью этой книги является то, что она
сочетает в себе достоинства научной монографии и учебника, т. е. теоретические
основы классической механики рассматриваются на достаточно высоком научном
уровне, при этом ясность и последовательность изложения позволяет использовать
ее в работе со студентами и аспирантами.
В книге дается систематическое представление гамильтоновой динамики, а так¬
же описание эффективных математических методов теоретической физики. Обсу¬
ждаются сложные вопросы вполне интегрируемой динамики с конечным и беско¬
нечным числом степеней свободы, включая геометрические структуры уравнений
сол ИТОНОВ.
Для широкого круга специалистов, студентов старших курсов, преподавателей
физико-математических факультетов.
ISBN 981-02-3308-6 (англ.)
ISBN 5-93972-444-2
(с) Институт компьютерных исследовании, ζυυο
Copyright (с) 2001 by World Scientific Publishing Co. Pte. Ltd.
http://rcd.ru
http://ics.org.ru
Интернет-магазин
http://shop.rcd.ru
Оглавление
Предисловие 13
Введение 14
ЧАСТЬ I. АНАЛИТИЧЕСКАЯ МЕХАНИКА 17
Глава 1. Лагранжевы координаты 20
1.1. Различные формулировки динамики 20
1.1.1. Ньютонова формулировка динамики 20
1.1.2. Обсуждение пространства и времени 21
1.1.3. Инерциальные системы координат 26
1.1.4. Лагранжева формулировка динамики 27
1.1.5. Гамильтонова формулировка динамики 29
1.2. Связи 31
1.3. Степени свободы и лагранжевы координаты 34
1.4. Вариационное исчисление и уравнение Лагранжа 37
1.4.1. Исторические заметки 39
1.4.2. Переход к вариационным методам в задаче с фиксированными
границами 43
1.5. Замечания об уравнениях Лагранжа 49
1.5.1. Эквивалентные лагранжианы 49
1.5.2. Динамическое подобие 49
1.5.3. Анализ электрических цепей 51
Глава 2. Гамильтоновы системы 52
2.1. Преобразование Лежандра 53
2.2. Уравнения Гамильтона 54
2.2.1. От уравнений Лагранжа к уравнениям Гамильтона 54
2.2.2. От уравнений Гамильтона к уравнениям Лагранжа 56
2.2.3. Замечания об уравнениях Гамильтона 58
2.3. Скобка Пуассона и теорема Якоби - Пуассона 60
2.3.1. Пространство состояний 60
2.3.2. Фазовое пространство 60
2.3.3. Первые интегралы 60
2.3.4. Скобка Пуассона 62
8
Оглавление
2.3.5. Теорема Якоби-Пуассона 65
2.4. Более компактная форма гамильтоновой динамики 69
2.4.1. Общая гамильтонова динамика 69
2.4.2. Динамика Якоби-Пуассона 71
2.4.3. Дополнительно о скобке Пуассона 71
2.4.4. Дальнейшие обобщения динамики Якоби - Пуассона 73
2.5. Вариационный принцип для уравнений Гамильтона 74
Глава 3. Теория преобразований 76
3.1. Канонические, вполне канонические и симплектические преобразо¬
вания 76
3.1.1. Канонические преобразования 76
3.1.2. Общий класс канонических преобразований 79
3.1.3. Вполне канонические преобразования 82
3.1.4. Симплектические преобразования 83
3.1.5. Преобразования, сохраняющие площадь 83
3.1.6. Преобразование, сохраняющее объем 85
3.2. Новое описание вполне канонических преобразований 85
3.3. Новое описание симплектических преобразований 89
Глава 4. Методы интегрирования 90
4.1. Интегральные инварианты системы дифференциальных уравнений . . 90
4.2. Производная Ли 94
4.3. Динамика Кеплера 97
4.3.1. Вектор Лапласа-Рунге-Ленца 99
4.3.2. Атом водорода 101
4.4. Метод интегрирования Гамильтона-Якоби 104
4.4.1. Замечания об уравнении Гамильтона-Якоби 108
4.5. Уравнение Гамильтона-Якоби для кеплеровского потенциала 109
4.6. Теорема Лиувилля о полной интегрируемости 113
4.6.1. Редукция 113
4.6.2. Теорема Лиувилля 115
4.6.3. Замечания о теореме Лиувилля 122
4.6.4. Переменные действие-угол 123
4.6.5. Переменные действие-угол гармонического осциллятора .... 124
4.6.6. Динамика Кеплера в переменных действие-угол 125
4.6.7. Возмущения интегрируемых систем и теорема КАМ 127
4.6.8. Представление Пуанкаре 129
ЧАСТЬ II. ОСНОВНЫЕ ПОНЯТИЯ ДИФФЕРЕНЦИ¬
АЛЬНОЙ ГЕОМЕТРИИ 131
Глава 5. Многообразия и касательные пространства 134
5.1. Дифференцируемые многообразия 134
Оглавление 9
5.2. Кривые на дифференцируемом многообразии 136
5.3. Касательное пространство в точке 137
5.3.1. Касательные векторы к кривой на многообразии 137
5.3.2. Касательные векторы к многообразию 139
5.4. Отступление о векторах и ковекторах 140
5.4.1. Векторное пространство 140
5.4.2. Двойственное векторное пространство 141
5.5. Кокасательное пространство в точке 143
5.6. Отображения между многообразиями 144
5.7. Векторные поля 145
5.7.1. Голономный и неголономный базис векторных полей 145
5.8. Касательное расслоение 148
5.9. Общее определение расслоенного пространства 149
5.9.1. Дополнительно о расслоенном пространстве 150
5.9.2. Анализ двух расслоений с базой S1 151
5.10. Интегральные кривые векторного поля 153
5.11. Производная Ли 156
5.12. Подмногообразия 159
5.12.1. Теорема Фробениуса 160
Глава 6. Дифференциальные формы 163
6.1. Тензоры 163
6.1.1. р-ковекторы 167
6.1.2. Внешнее произведение 168
6.1.3. Метрический тензор в векторном пространстве 170
6.2. Тензорные поля 171
6.2.1. Производная Ли тензорного поля 171
6.2.2. Дифференциальные р-формы 174
6.2.3. Внешняя производная 176
6.2.4. Замкнутые и точные дифференциальные формы 176
6.2.5. Оператор сжатия ίχ 177
6.2.6. Другая процедура 182
6.2.7. Двойственное описание голономного и неголономного базиса . 183
6.3. Метрическое тензорное поле на многообразии 185
6.3.1. Векторные поля Киллинга 185
6.3.2. Максимально симметричное многообразие 186
6.3.3. Ковариантная производная Леви-Чивиты 188
6.3.4. Тензорное поле Римана 191
6.3.5. Тензор Риччи и скалярная кривизна 192
6.4. Эндоморфизм, связанный со смешанным тензорным полем 193
6.4.1. Скобка Нийенхейса двух смешанных тензорных полей 194
Глава 7. Теория интегрирования 197
7.1. Ориентируемые многообразия 197
7.2. Интегрирование на ориентируемых многообразиях 197
10
Оглавление
7.3. р-векторы и двойственные тензоры 199
7.4. Метрика о объем = двойственность Ходжа 201
7.5. Теорема Стокса 203
7.6. Градиент, ротор и дивергенция 206
7.7. Когомология 208
7.8. Скалярное произведение дифференциальных р-форм 210
7.8.1. Внешний кодифференциал 210
7.8.2. Теорема Ходжа 211
Глава 8. Группы Ли и алгебры Ли 212
8.1. Группы Ли 212
8.1.1. Локальные группы Ли 213
8.2. Построение алгебры Ли из группы Ли 214
8.2.1. Алгебра Ли 214
8.2.2. Левоинвариаитные векторные поля 215
8.2.3. Сопряженное представление группы Ли 219
8.2.4. Косопряжепное представление группы Ли 225
ЧАСТЬ III. ГЕОМЕТРИЯ И ФИЗИКА 227
Глава 9. Симплектические многообразия и гамильтоновы системы230
9.1. Симплектические структуры на многообразии 230
9.2. Локально и глобально гамильтоновы векторные поля 231
9.2.1. Интегральные кривые гамильтонова векторного поля 232
9.3. Гамильтоновы потоки 233
9.3.1. Алгебры Ли гамильтоновых векторных полей и гамильтоно¬
вых функций 235
9.4. Кокасательное расслоение и его симплектическая структура 238
9.5. Геометрическая формулировка аналитической механики 240
9.6. Теорема Лиувилля 247
9.6.1. Построение переменных действие-угол 250
9.7. Новое описание полной интегрируемости 251
1. Смысл нулевого кручения Нийенхейса смешанного тензорного по¬
ля (251). 2. Свойства собственных векторов (252). 3. Инвариант¬
ность собственных значений инвариантного смешанного тензорного по¬
ля (254). 4. Особенности автоморфизмов смешанного тензорного поля
без кручения (255).
9.7.1. От лиувиллевской интегрируемости к инвариантным смешан¬
ным тензорным полям 258
9.8. Приложения 260
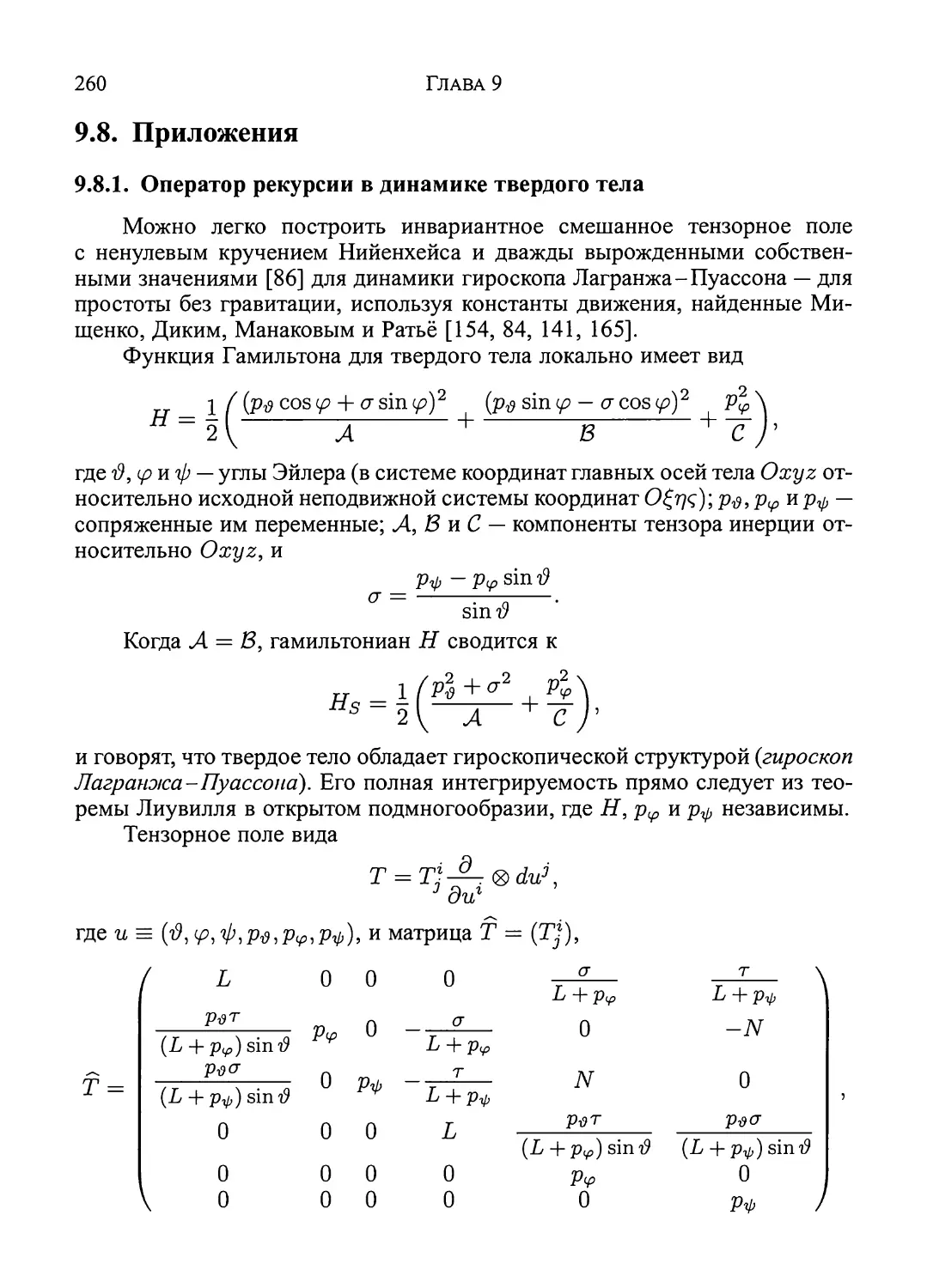
9.8.1. Оператор рекурсии в динамике твердого тела 260
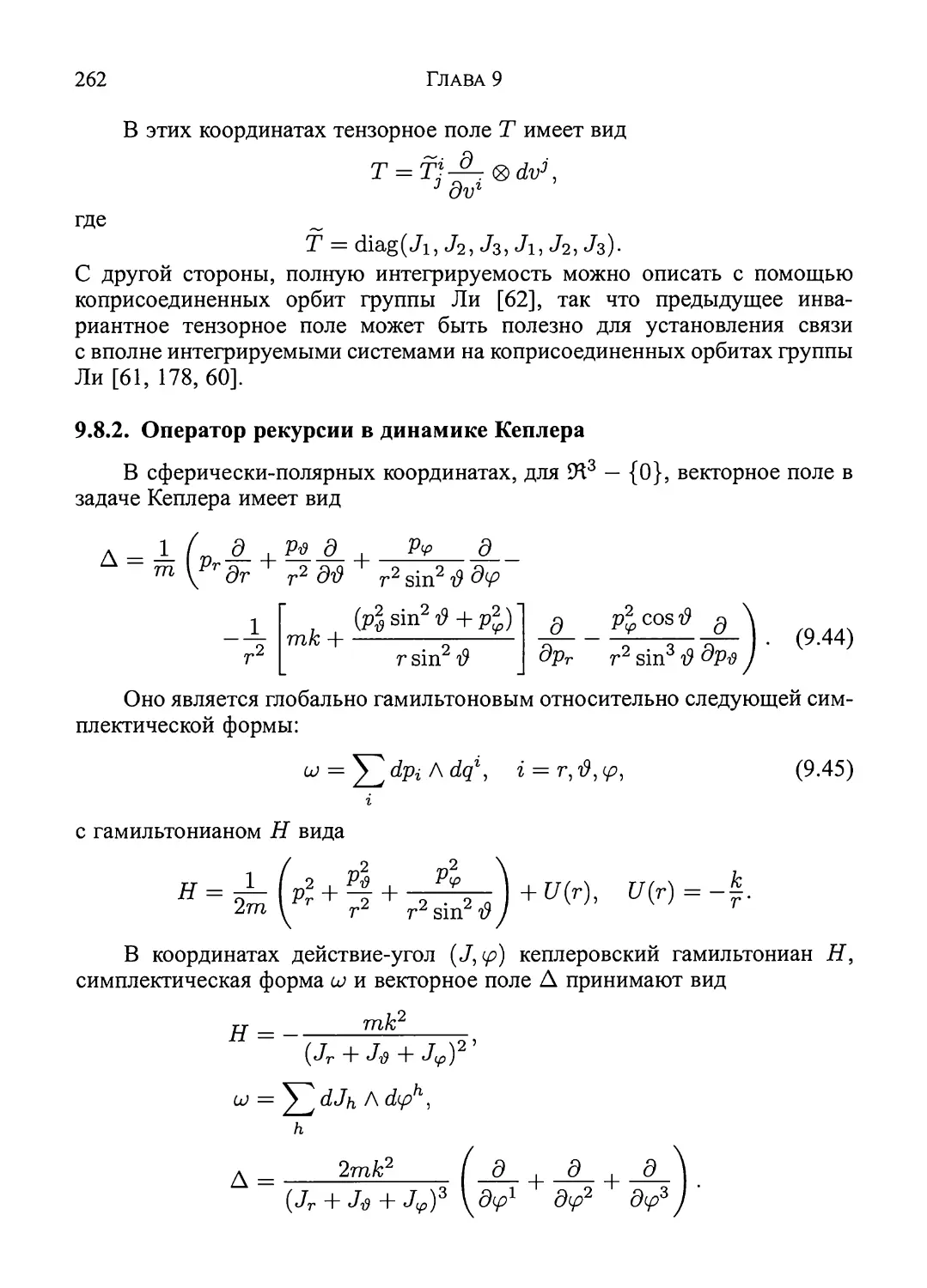
9.8.2. Оператор рекурсии в динамике Кеплера 262
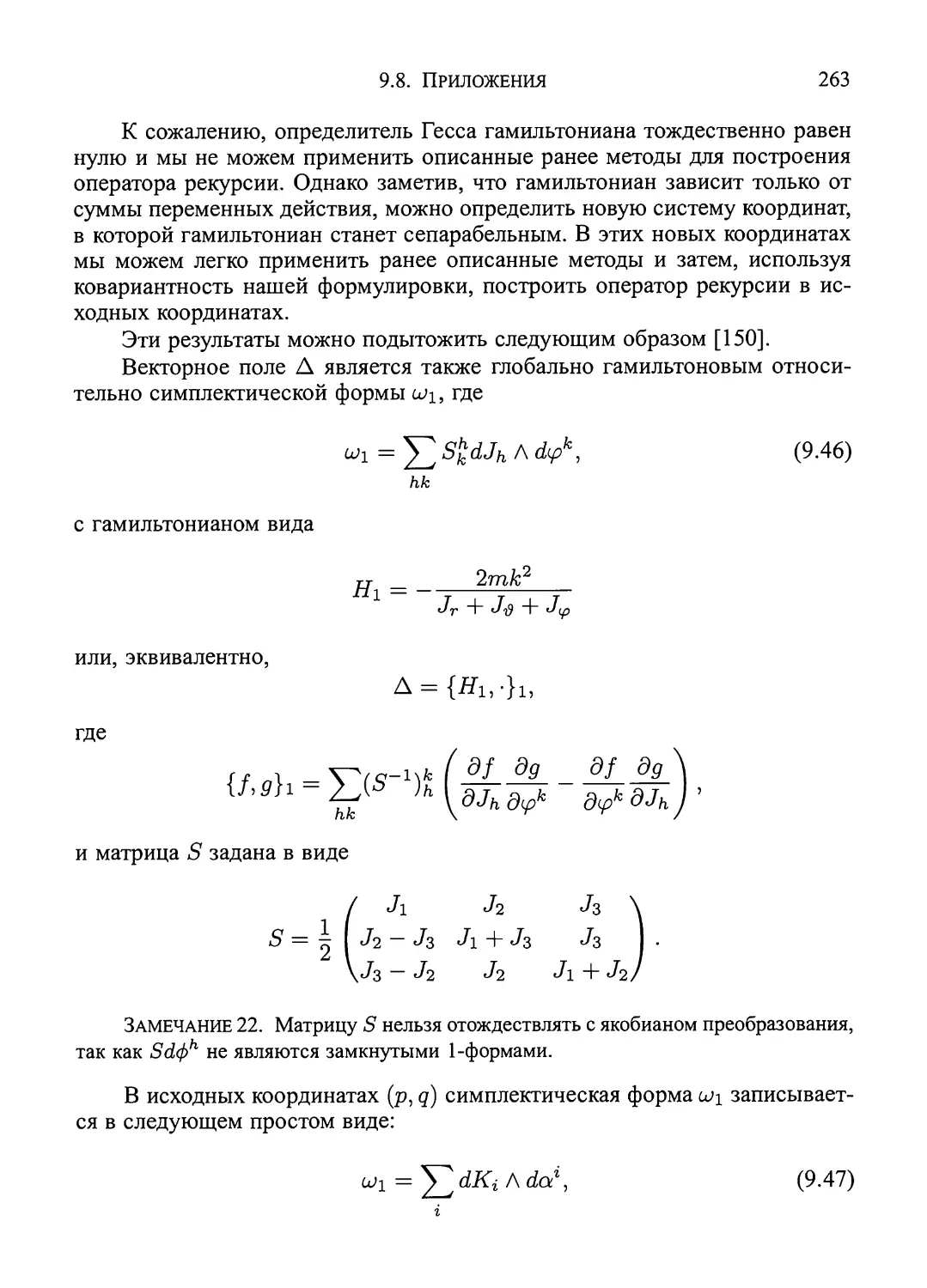
9.9. Структуры Пуассона-Нийенхейса 265
9.9.1. Совместимые пуассоновы пары 265
Оглавление
11
Глава 10. Метод орбит 268
10.1. Редуцированное фазовое пространство 268
10.2. Орбиты группы Ли в коприсоединенном представлении 276
10.3. Твердое тело 283
10.3.1. Угловые скорости в пространстве и в теле 285
10.3.2. Угловые моменты пространства и тела 286
10.4. Уравнения твердого тела 287
Глава 11. Классическая электродинамика 290
11.1. Уравнения Максвелла 290
11.2. Геометрическая интерпретация полей на £Н3 292
11.3. Геометрическая интерпретация электромагнитного поля в простран¬
стве-времени 294
11.3.1. Векторный потенциал и калибровочное преобразование . . . .295
11.3.2. Материальные уравнения 296
11.3.3. Волновое уравнение 298
11.3.4. Плоские волны 298
ЧАСТЬ IV. ТЕОРИИ ИНТЕГРИРУЕМЫХ ПОЛЕЙ 303
Глава 12. Уравнение КдФ 307
12.1. Теорема существования и единственности . . . 307
12.2. Симметрии 309
12.2.1. Пространственно-временные симметрии 309
12.2.2. Преобразование Беклунда 310
12.3. Законы сохранения 313
12.3.1. Представление Лакса 316
12.3.2. Метод обратной задачи рассеяния 317
12.4. КдФ как гамильтонова динамика 323
12.5. КдФ как вполне интегрируемая гамильтонова динамика 326
Глава 13. Общие структуры 331
13.1. Система обозначений и общие замечания 331
13.1.1. Возвращение к КдФ 334
13.2. Сильно- и слабосимплектические формы 336
13.3. Инвариантный эндоморфизм 337
13.3.1. Динамическая инвариантность 340
13.3.2. Кручение Нийенхейса 341
13.3.3. Двумерность собственных пространств Т (КдФ и сГ) 341
13.4. Инвариантные эндоморфизмы и лиувиллевская интегрируемость . . .341
13.5. Операторы рекурсии в диссипативной динамике 346
13.5.1. Иерархия Бюргерса 347
12
Оглавление
Глава 14. Значение и существование операторов рекурсии .... 352
14.1. Интегрируемые системы 352
14.1.1. Альтернативные гамильтоновы описания интегрируемых систем354
14.1.2. Операторы рекурсии для интегрируемых систем 356
14.1.3. Системы, интегрируемые по Лиувиллю - Арнольду 357
Глава 15. Разное 361
15.1. Тензорный вид представления Лакса 361
15.1.1. ПЛ гармонического осциллятора как условие параллельного
переноса 363
15.1.2. Δ-инвариантное тензорное поле гармонического осциллятора . 364
15.1.3. Δ-инвариантное тензорное поле для КдФ 365
15.1.4. Δ-ковариантное тензорное поле для КдФ 366
15.2. Лиувиллевская интегрируемость уравнения Шрёдингера 367
15.2.1. Сравнение с нелинейным уравнением Шрёдингера 372
15.3. Интегрируемые системы на коприсоединенных орбитах групп Ли . . 375
15.4. Деформация алгебры Ли 377
15.4.1. Деформация 377
15.4.2. Производная Ли-Нийенхейса и внешняя производная Нийен¬
хейса 378
Глава 16. Интегрируемость фермионной динамики 380
16.1. Операторы рекурсии в бозонном случае 380
16.2. Градуированное дифференциальное исчисление 381
16.3. Супермногообразие Пуассона 384
16.3.1. Суперкручение Нийенхейса 389
Приложение А. Лагранж: краткая биография 392
Приложение В. О производной Ли 394
Приложение С. О кеплеровских переменных действия 396
Приложение D. О редуцированном фазовом пространстве .... 399
Приложение Е. О канонической дифференциальной 1-форме . . 400
Приложение F. Об уравнениях твердого тела 403
Приложение G. Уравнение Гельфанда-Левитана-Марченко . . 404
Литература 417
Предметный указатель 429
Предисловие
Существует множество книг по классической механике. Грубо их мож¬
но разделить на два класса. Первый содержит книги, которые, при большей
доступности, иногда менее прозрачны в изложении теоретических основ
предмета. В другой класс входят книги, дающие общие аналитические и гео¬
метрические понятия и методы, используемые в классической механике.
Среди последних, в связи с использованием более сложных математиче¬
ских методов, трудно найти подходящую для обучения аспирантов книгу,
обычно из-за того, что они не предназначены для обучения, а скорее были
написаны авторами для своих коллег. Данная книга скорее принадлежит ко
второму классу, но без отмеченного недостатка.
Часть I, часть II и, частично, часть III предназначены для обучения
аспирантов. Таким образом, они написаны с точки зрения студентов, но
с намерением дать общее описание теории.
Напротив, часть IV касается текущих исследований в области теорий
вполне интегрируемых полей и может даже использоваться независимо от
остального материала. Эта часть написана без того педагогического духа,
который воодушевляет предыдущие части и, возможно, потребуются до¬
полнительные главы, касающиеся лагранжева и гамильтонова формализма
теории поля. Однако педагогическое изложение последнего может потребо¬
вать слишком много пространства-времени.
Я благодарен моим друзьям:
Джузеппе Мармо, за неоценимую помощь в прочтении рукописи, кри¬
тику и важные предложения и за многолетние общие усилия в достижении
понимания проблемы полной интегрируемости в теории поля.
Джиованни Спарано и Александру Виноградову за критику и некото¬
рые замечания в специальных вопросах.
Владимиру Гурджикову, Марио Розетти и Джеффри JI. Севеллу, кото¬
рые побуждали меня к написанию этой книги.
Я также выражаю благодарность моим друзьям Серджио де Филиппо
и Джанни Ланди за многолетнее сотрудничество.
В заключение я выражаю благодарность Роберто де Лука, профессио¬
нализм которого как в вопросах физики, так и английского языка, позволил
мне представить приемлемую окончательную версию книги. Естественно,
я один отвечаю за допущенные ошибки.
Салерно, апрель 1998 г.
Г. Вилази
Введение
К асимптотическому и геометрическому анализу динамических систем
были привлечены значительные научные усилия. Этот интерес был рожден
в конце XIX века после опубликования в 1892 году работы Анри Пуан¬
каре «Новые методы небесной механики» (Les Methodes Nouvelles de la
Mecanique Celeste). Предложенные новые методы состоят в интерпрета¬
ции решений дифференциальных уравнений как интегральных кривых век¬
торных полей на многообразиях, а также в анализе проблем, касающихся
долговременной устойчивости динамических систем, например, Солнечной
системы, с помощью изучения их топологических свойств.
Анри Пуанкаре был первым, кто распознал необычайную сложность
поведения (сегодня известного как хаос) траекторий в окрестности сепара¬
трис, анализ которых потребовал введения совершенно новой математики.
Предложенный Пуанкаре подход лежит в основе современной тополо¬
гии с ее мощными инструментами, состоящими из касательных и кокаса-
тельных расслоений, дифференциальных форм, внешней алгебры и исчис¬
лений, гомологии и когомологии. Развитие всех этих научных направлений
обычно ассоциируется с общей теорией относительности, теориями струн
или калибровочными теориями, однако главный их источник — классиче¬
ская механика.
С другой стороны, в последние десятилетия заново пробудился интерес
к вполне интегрируемым гамильтоновым системам — понятию, восходяще¬
му к прошлому столетию, — которые, вообще говоря, являются динами¬
ческими системами, допускающими гамильтоново описание и имеющими
достаточно много констант движения для того, чтобы их можно было ин¬
тегрировать в квадратурах.
Этот интерес, еще недавно слабо выраженный, для действительно
незначительного числа известных физических примеров вполне интегриру¬
емой динамики с конечным числом степеней свободы, возрожден с откры¬
тием представления Лакса и метода обратной задачи рассеяния. Представ¬
ление Лакса сделало возможным решение многих проблем, имеющих зна¬
чительный физический интерес, например, уравнение Кортевега- де Фриза,
уравнение синус-Гордона, нелинейные уравнения Шрёдингера, цепочка Тоды.
Все это примеры гамильтоновой динамики на бесконечномерных простран¬
ственных слабосимплектических многообразиях, для которых классический
Введение
15
критерий интегрируемости Лиувилля получает развитие с использованием
понятия смешанных тензорных полей с нулевым кручением Нийенхейса.
Особенностью в подходе к интегрируемости в терминах инвариантных
смешанных тензорных полей является прямое построение абелевой макси¬
мальной алгебры симметрий без использования соответствующей группы,
так что применяется только алгебраический аспект традиционной методо¬
логии. Элементарный пример дается динамикой Кеплера, в которой как
интегрируемость, так и вырождение, классическое и квантовое, являются
следствием существования соответствующих групп инвариантности SO(3)
и SO(4).
С другой стороны, именно благодаря современной теории гамильтоно¬
вых систем, основанной на анализе симметрий, метод алгебраических групп
вырастает из анализа динамики Лакса. Этот подход возникает из того на¬
блюдения, что гамильтонова динамика на траекториях коприсоединенного
представления группы Ли, снабженная их естественной симплектической
структурой, представляется в лаксовой форме, благодаря существованию
в алгебре Ли скалярного произведения, инвариантного относительно при¬
соединенного действия. Тем не менее, групповой подход при всей своей
полезности не позволяет a priori сделать заключение об интегрируемости
конкретной динамической системы.
В наших лекциях мы рассмотрим этот геометрический подход в изуче¬
нии гамильтоновых динамических систем — в частности, в связи с задачами,
возникающими в теориях вполне интегрируемых двумерных полей.
Было бы интересным включить главу, касающуюся неинтегрируемой
динамики, существенной для теории динамики частиц в ускорителях.
Однако эта тема слишком обширна и выходит за пределы данной книги.
Тем не менее, мы уделим немного места для пояснения идеи инвариантных
торов в фазовом пространстве, а также для определения и иллюстрации
структур, организующих динамику, и происхождения хаотических траекто¬
рий в неинтегрируемых системах.
В заключение остается выразить надежду на то, что мне удалось раз¬
веять впечатление, возникающее иногда из-за формального подхода, что
классическая механика является законченным разделом, в котором не оста¬
лось больше нераскрытых тайн.
Часть I
Аналитическая механика
Цель данной части — самодостаточное изложение классической ме¬
ханики в современной формулировке. Многие вопросы, необходимые для
приложений, не затронуты; ознакомиться с ними можно в превосходных
учебниках [57, 38, 47, 24, 9, 23, 32, 21, 39]. Наш подход вдохновили два
прекрасных классических учебника: Lezioni di Meccanica Razionale [Лекции
по теоретической механике] Т. Леви-Чивиты и У. Амальди и The Analytical
Foundations of Celestial Mechanics [Аналитические основания небесной ме¬
ханики] А. Винтнера [36, 58]. Определения даны для частицы, т. е. для те¬
ла, чьими пространственными размерами можно пренебречь по сравнению
с размерами того пространства, в котором оно движется, что естественно
обобщается на случай системы частиц и на непрерывные системы (поля).
Вследствие простоты формального перехода от систем частиц к полям и
трудности строгого перехода, мы ограничим рассмотрение системами ча¬
стиц.
Глава 1
Лагранжевы координаты
1.1. Различные формулировки динамики
1.1.1. Ньютонова формулировка динамики
Ньютонова формулировка классической динамики основана на трех
принципах:
Первый принцип, или принцип относительности Галилеях
• Существуют выделенные наблюдатели по отношению к которым части¬
ца, на которую не действуют никакие силы, движется прямолинейно.
• Такой наблюдатель называется инерциальным наблюдателем, или инер-
циальной системой отсчета. Он может определить время таким обра¬
зом, что движение будет являться также и равномерным.
• Любой наблюдатель, движущийся прямолинейно и равномерно по от¬
ношению к инерциалыюму наблюдателю, также является инерциаль¬
ным наблюдателем.
Второй принцип, или второй закон Ньютона2
• В инерциальной системе отсчета, в которой время выбрано описан¬
ным выше образом, движение частицы описывается дифференциаль-
1 Галилео Галилей родился в Пизе 15 февраля 1564 года и умер в Арцетри (Флоренция)
8 января 1642 г. Автор Dialogo dei Massimi Sistemi (Landini ed. Florence, 1632) [Диалог о двух
сильнейших системах мира] и Discorsi е dimostrazioni matematiche intorno a due nuove scienze
attenenti alia meccanica e i movimenti locali (Leida, 1638) [Беседы и математические доказатель¬
ства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению],
Галилей считается основателем динамики.
2Исаак Ньютон родился в Вулсторпе, в маленькой деревушке к югу от Грантама в Лин¬
кольншире, Англия, на рождество 1642 г. — одиннадцать месяцев спустя после смерти Галилея.
Умер Ныотон в пригороде Лондона в 1727 г. Автор выдающегося труда Philosophiae Naturalis
Principia Mathematica {London, 1687) [Математические начала натуральной философии], в ко¬
тором заложены основы механики и теоретической физики, Ньютон самостоятельно создал
главный инструмент исследования — дифференциальное исчисление. На его могиле в Вест¬
минстерском аббатстве начертано: Sibi gratulentur Mortales tale tantumque extitisse Humani
Generis Decus [Да возрадуются смертные, что среди них жило такое украшение рода челове¬
ческого].
1.1. Различные формулировки динамики
21
ным уравнением:
та = F,
где т — масса частицы, а — ее ускорение и F — сила, действующая на
частицу.
• Из эксперимента известно, что силы, действующие на частицу, могут
изменяться в зависимости от времени t, либо от координат г и ско¬
рости v частицы. Таким образом сила является векторной функцией
переменных (i,r, гГ), и второй закон более точно записывается в такой
форме:
Третий принцип
• Полный момент импульса Р и полный угловой момент импульса L
изолированной системы частиц не изменяются со временем:
Во многих элементарных учебниках можно найти такое утверждение:
первый принцип является частным случаем второго принципа, когда сила
стремится к нулю. Выраженное таким образом, это утверждение являет¬
ся неверным. Фактически тем самым утверждается, что различие между
кинематикой и динамикой является искусственным и инерциальные систе¬
мы отсчета могут быть определены только динамически, что будет ясно из
нижеследующего обсуждения.
1.1.2. Обсуиедение пространства и времени
В принципах Ньютона по крайней мере три концепции даны как есте¬
ственные и абсолютные, а именно:
• мы способны установить отсутствие сил, действующих на тело;
• мы имеем понятие абсолютно прямой линии;
• мы имеем понятие абсолютного времени как «текущего однородно»,
цитируя Ньютона.
Что касается отсутствия сил, очевидно, что ньютоновское определение
свободного тела как «тела, удаленного от всех других тел во Вселенной»
предполагает уменьшение с расстоянием всех сил. Таким образом, Ньютон
имел в виду только гравитационные силы.
(1.1)
22
Глава 1
Ясно, что Ньютон пытался абстрактно обобщить определение инер-
циального наблюдателя, данное Галилеем, который определил инерциаль-
ную систему координат как стационарную по отношению к «неподвижным
звездам». Однако после Маха мы знаем, что инерция относится ко всей
окружающей Вселенной, так что более прагматичное определение, данное
Галилеем, является гораздо более приемлемым.
В результате экспериментов с часами Галилей узнал, что приближенно
свободные тела движутся в приближенно инерциальной системе координат
вдоль приближенно прямых линий с приближенно постоянными скоростя¬
ми. Его инструментами были наклонная плоскость для замедления падения,
водяные часы для измерения времени падения и маятник для устранения
влияния трения вращения.
«Inoltre, е lecito aspettarsi che, qualunque grado di velocitd si trovi in
un mobile, gli sia per sua natura indelebilmente impresso, purche siano
tolte le cause esterne di accelerazione e di ritardamento; il che accade
soltanto nel piano orizzontale\ infatti nei piani declivie di gid presente
una causa di accelerazione, mentre in quelli acclivi di ritardamento;
infatti, se e equabile, non scema о diminuisce, ne tanto meno cessa.»
(G. Galilei, Discorsi e dimostrazioni matematiche intorno a due nuove
scienze, Terzo giomo).1
Ньютон понимал, что выводы Галилея могут рассматриваться как ис¬
тинные только приближенно, в то же время он был очень удивлен суще¬
ствованием множества преобразований координат, приводящих к системам,
в которых описание Галилея невозможно. Поэтому он придал эмпириче¬
ски открытым аппроксимациям Галилея статус строгого принципа — закона
инерции — и постулировал, что абсолютно свободные тела движутся в иде¬
альной инерциальной системе с абсолютно постоянными скоростями вдоль
идеально прямых линий.
«Абсолютное пространство, по своей природе и по отношению к че¬
му-либо внешнему, всегда остается однородным и неподвижным. От¬
носительное пространство является некоторым подвижным измерением
или характеристикой абсолютного пространства, которое наши органы
чувств воспринимают по расположению тел относительно друг друга и ко¬
торое часто выбирается в качестве абсолютного пространства.»
1 Кроме того, можно ожидать, что любой уровень скорости обнаруживается в подвижном
теле, которое в силу своей природы подверглось неизгладимому воздействию, лишь бы (при
этом воздействии) были переданы внешние причины ускорения и замедления; это случается
только на горизонтальной плоскости; действительно, на плоскости, наклоненной вниз, уже
присутствует причина для ускорения, тогда как на плоскости, наклоненной вверх — причина
для замедления; действительно, если она (плоскость) ровная, то (движение) не убывает, то
есть не уменьшается, ни, тем более, прекращается. (Г. Галилей. Беседы и математические
доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному
движению. День третий.) (Перевод с итальянского. — Прим. пер.)
1.1. Различные формулировки динамики
23
Исходя из этого, Ньютон определил также и однородность абсолютного
времени.
Для рассмотрения понятия прямой линии нам необходимо определить
структуру векторного пространства, а мы знаем, что на одном пространстве
можно задать различные структуры векторных пространств, потому понятие
прямой линии зависит от наблюдателя.
То же самое можно сказать о ньютоновском определении времени1.
Другими словами, нам необходима сравнительная динамика.
Даже если, с теоретической точки зрения, закон инерции позволит
нам получить корректное определение равных интервалов времени, невоз¬
можность наблюдать свободно движущиеся тела (из-за наличия сил трения
и гравитации) наводит на мысль задать определение следующим образом:
система является галилеевой, если абсолютно твердая сфера, вращающаяся
без трения вокруг оси, закрепленной в системе координат, имеет равномер¬
ную и постоянную скорость вращения. Постоянная скорость здесь пони¬
мается как измеренная с использованием стандарта равномерного времени,
определенного с помощью свободно движущегося тела в идеальных усло¬
виях, требуемых законом инерции. Предыдущее определение далеко от со¬
вершенного, но, по крайней мере, является согласованным с определением
равномерности времени, основанном на принципе причинности, который,
следуя Вейлю, может быть сформулирован так:
«Если абсолютно замкнутая физическая система каждый раз возвра¬
щается в точно такое же состояние, то та же самая последовательность
состояний повторится и в будущем, а вся последовательность в целом со¬
ставит цикл. В общем, такая система называется часами. Каждый период
цикла имеет равную продолжительность.»
Сейчас мы перейдем к эйнштейновскому определению галилеевой си¬
стемы координат, которое неявно дано в специальной теории относитель¬
ности: Скорость светового луча в инерциальной системе координат не
зависит от относительного движения источника света и системы коор¬
динат, а также от направления распространения луча.
Замечание 1. По существу, это свойство света определяет конформную груп¬
пу, которая содержит группу Лоренца в качестве подгруппы.
Оптическое определение представляет качественное превосходство над
определениями дорелятивисткой физики. И хотя в случае с земным враще¬
нием нам следует принимать справедливость закона Ньютона для определе¬
ния поправок, требуемых земным дыханием и трением океанических при¬
ливов, новое определение основывается на самых точных экспериментах,
известных физикам.
1 Для того чтобы скорость потока рассматривалась как равномерная, необходимо измерять
ее относительно некоторой другой скорости потока, выбираемой в качестве стандарта.
24
Глава 1
Важность эйнштейновского определения лежит в следствиях, которые
возникают из попытки увязать измерения пространства и времени в двух
системах отсчета при относительном движении. Концепции однородности
пространства и времени теряют классические атрибуты универсальности,
которыми их наделила ньютоновская физика. Позже было обнаружено, что
однородность может быть определена универсальным образом (независимо
от наблюдателя), только когда рассматривается расширение до 4-мерного
пространства-времени.
«И сейчас, в наше время, произошел катаклизм, который смел про¬
странство, время и материю, рассматриваемые ранее как незыблемые
основы естественной науки, освободив место для более широкого взгляда
на вещи и вызвавший более глубокое понимание.» (Г. Вейль. Пространство,
время и материя.)
Хотя они и могут показаться удивительными, эйнштейновские предви¬
дения подтверждены до малейших деталей.
После нашего краткого обсуждения таких тем, как
• галилеевский и ньютоновский принципы относительности,
• эйнштейновские принципы специальной теории относительности,
представляется полезным, спустя 115 лет после выхода в свет книги Ма¬
ха [40] и 83 года после статьи Эйнштейна [90], обсудить также
• эйнштейновские принципы общей теории относительности.
Принцип, предложенный после галилеевских опытов со свободно па¬
дающими телами, позднее подтвержден измерениями Этвеша (1889) и Ди¬
ка (1967), которые позволяют предположить, что в любой точке простран-
ства-времени можно выбрать такую систему координат, называемую локаль¬
но инерциальной системой координат, что в достаточно малой окрестности
этой точки движение свободно падающей частицы будет описываться урав¬
нением
где ξ — координаты в локально инерциальной системе координат, г — неко¬
торая параметризация кривых (принцип эквивалентности).
Таким образом, предполагая, что существует дифференцируемое отоб¬
ражение между координатами ха в лабораторной системе координат и ко¬
1.1. Различные формулировки динамики
25
ординатами £ в локально инерциальной, с помощью предыдущего уравне¬
ния получаем
о = А (= lf =
dr \ dr ) dr \8χμ dr J
_ f d 9ξα\ (Ιχμ , 9ξα ά2χμ _
I dr 8χμ ) dr ^ 8χμ dr2
μ=0 4 7 μ=0
_ 32ξα dxv άχμ , у-' 9ξα d2 χμ
8χβ8χυ άτ άτ ^ δχμ dr2 ’
μ=0 μ=0
откуда, умножая на θχλ/θξα и суммируя по Λ, приходим к
где функции
называются коэффициентами аффинной связи. Так как (1.3) описывает
уравнение движения частицы в гравитационном поле, мы будем интерпре¬
тировать коэффициенты аффинной связи как гравитационные силы в лабо¬
раторной системе координат. Отметим, что мы не сделали никаких допуще¬
ний относительно природы таких математических объектов, как векторное
пространство или метрическая структура.
Альтернативным описанием для принципа эквивалентности является
так называемый принцип общей ковариантности, состоящий в том, что
уравнение, описывающее физическое явление, является верным, если вы¬
полняется в отсутствие гравитации и, более того, является инвариантной
формой относительно любого преобразования координат.
Таким образом, данный принцип утверждает, что математическое вы¬
ражение законов природы должно сохранять ту же форму, независимо от
нашего выбора системы координат. Более того, расширив инвариантность
законов природы на все виды движений системы координат, этот принцип
является отправной точкой для рассмотрения возможной относительности
ускорения.
(1.3)
26
Глава 1
1.1.3. Инерциальные системы координат
Сейчас нам необходимо вернуться к элементарной механике, избегая
множества допущений касательно пространства событий, или несущего
пространства.
Мы начнем с 4-мерного гладкого многообразия, например, 914, как
с пространства событий для описания поведения частиц. Используя в нашей
лабораторной системе отсчета систему координат, скажем, (ж0,ж1,ж2,ж3),
опытным путем можно убедиться, что эволюция состояний системы описы¬
вается дифференциальным уравнением второго порядка следующего типа:
Теперь мы можем сформулировать утверждение о том, что такое свободная
частица и, следовательно, сравнительная динамика в этом пространстве.
Движение частицы называется свободным движением, если существует
координатная система, обозначаемая (ξ°,ξ1,ξ2,ξ3), такая, что уравнения
движения могут быть записаны в следующей форме:
Решения этого уравнения определяют структуру векторного пространства
на несущем пространстве и описывают мировую линию физической си¬
стемы (т. е. реально существующей системы) тогда и только тогда, ко-
Таким образом, инерциальные системы координат не зависят от выбо¬
ра систем сравнения, исключая системы, возникающие в гравитационной
теории.
В этом отношении общая теория относительности Эйнштейна не явля¬
ется теорией инвариантности или ковариантности, как специальная теория
относительности, которая дает указания относительно выбора системы ко¬
ординат, требуя отсутствия параметра, характеризующего систему коорди¬
нат (скорость), в преобразованных динамических уравнениях.
Теория Эйнштейна является динамической теорией гравитационного
поля, поскольку она не требует отсутствия параметра, характеризующего
систему координат (аффинную связь) в преобразованных уравнениях дви¬
жения; она лишь предписывает, как этот параметр должен появиться в этих
уравнениях.
Завершим наш обзор элементарной механики замечанием: система
должна быть физической по отношению ко всем локально инерциальным
гда άξ°/άτ ф 0.
1.1. Различные формулировки динамики
27
наблюдателям, так что мы назовем эквивалентными две инерциальные си¬
стемы координат (ξ°, ξ1, ξ2, ξ3) и (ξ/(), ξ1, ξ 2, ξ 3), если для любой мировой
линии, для которой άξ°/άτ ф 0, также выполняется и άξ °/dr ф 0.
В заключение рассмотрим
• принцип относительности Маха-Эйнштейна.
Этот принцип пытается осуществить релятивистское описание всех
видов движения: вращательное, ускоренное, а также равномерное. Это до¬
стигается тем, что все динамические явления, относящиеся к ускорению
и вращению частиц и электромагнитных систем, сводятся к движению по
отношению ко всей вселенной. Согласно этому принципу, не существует на¬
блюдаемой разницы между вращением тела относительно вселенной звезд
и вращением звезд вокруг тела. Таким образом, принцип Маха ознаменовал
попытку оправдать кинематический подход, несмотря на трудности, имею¬
щие динамическую природу, которые и послужили причиной его оттор¬
жения. Частично именно из-за стремления удовлетворить принципу Маха,
Эйнштейн разрабатывал модель цилиндрической вселенной. Этот вопрос
до сих пор остается открытым.
1.1.4. Лагранжева формулировка динамики
Предположим, что несущее пространство 913 снабжено евклидовой
метрикой, так что компоненты произвольного вектора совпадают с ком¬
понентами единственного вектора, естественным образом связанного с ним
через метрический тензор.
Выраженное через компоненты (ς?ι, <?2, <?з) вектора координат г и ком¬
поненты (г>1 = qi, V2 = q2, = 4з) вектора скорости ΰ
Г = (5ъ<?2,<?з)> v=(vi,v2,v3), (1.4)
уравнение (1.1) примет вид
4m% = Fh(t,qi,q2,q3,vi,V2,v3),
< h = 1,2,3, (1.5)
Jtqh = Vh’
где Fh — /г-компонента силы. Кинетическая энергия Т = ^mv2 задается
формулой
Т = ^m(g2 + q% + ql). (1.6)
28
Глава 1
Следовательно, замечая, что
d
d дТ
mah=dtmVh=dtmqh=dtdqh
(1.7)
Fh,
и что dT/dqh, уравнения движения (1.5) могут быть записаны в следующей
форме
d дТ _ дТ
dt dvh dqh
d
Vdtqh = Vh-
В случае консервативной системы существует функция U(qi,q2,qs),
потенциальная энергия, такая, что
Fh = -
dU
dqh'
(1.9)
В этом случае, заметив, что dU/dvh = 0, уравнения (1.8) и (1.5) можно
записать также и в лагранжевой форме:
' d _ дС _ q
dt dvh dqn
(1.10)
, dt
Qh — ^/i)
где функция Лагранэ/са\ или просто лагранэ/сиан, C(q,v,t) определяется
как разность между кинетической и потенциальной энергией:
С = Г -U.
(1.11)
Замечание 2. В случае обобщенного потенциала, т. е. в случае, когда сила F
может быть выражена через функцию U(qi, <?2, <?з, г>1, г>2, г>з), которая, через коор¬
динаты q, также зависит от скорости гГ:
р = d dU -
h dt dvh dqh ’
можно написать уравнения движения в том же виде, как и в (1.10).
(1.12)
1 Жозеф Луи Лагранж родился в Турине в 1736 г. и умер в Париже в 1813 г. В возрасте 19 лет
он уже был профессором математики в Школе Артиллерии в Турине, а вскоре после этого стал
одним из основоположников Туринской Академии наук. Автор Mecanique Analytique (Париж,
1788) [Аналитическая механика], Лагранж считается одним из величайших математиков нового
времени. Более подробная биография содержится в приложении А.
1.1. Различные формулировки динамики
29
Таков, например, случай заряженной массивной частицы, находящейся в элек¬
тромагнитном поле (J5, В). Силой в данном случае является сила Лоренца:
F(r, ΰ) = е(Ё + νΑ В), (1-13)
где е — заряд частицы, а символ Λ обозначает векторное произведение.
Сила Лоренца может быть получена из следующего обобщенного потенциала:
U(г, ΰ) = e(ip — ΰ - А), (1-14)
где ψ и А обозначают, соответственно, скалярный и векторный потенциалы. Таким
образом, функция Лагранжа, описывающая движение такой частицы, выглядит так:
£(r, v) = i^rnv2 — β(φ — ν · А). (1-15)
1.1.5. Гамильтонова формулировка динамики
Выраженное через вектор импульса р = (р1,р2,рз)> уравнение (1.1)
примет вид
d ^ т-ι (+ п п п Pi Р2 Рз λ
faPh *h <?Ъ 0.2ч т , т , т J ,
(1.16)
d_n _Vh
dtqh т'
С другой стороны, кинетическая энергия может быть записана в виде
(1.17)
т* = ^(р1+р1+р1),
где символ * указывает, что скорость выражена через импульс посред¬
ством ν = р/т.
В консервативном случае энергия Е = -mv2 + U(q\, #2, дз), выражен¬
ная через импульс, обычно обозначается Ή и называется функцией Гамиль¬
тона1 , или просто гамильтонианом:
^ - 2^(Pl + ^(<?ъ92,4з)·
(1.18)
Уильям Роуэн Гамильтон родился в Дублине, Ирландия, в 1805 г. и умер в Дансике
в 1865 г. Он был профессором астрономии в Дублинском университете и президентом Ир¬
ландской Академии наук. Он создал теорию кватернионов и внес выдающийся вклад в анали¬
тическую механику, в частности, в развитие теории распространения света [111].
30
Глава 1
Следовательно, если dU/dph = 0, уравнения движения можно записать
в гамильтоновой форме:
d дП
dt h dqn ’
d п
JtQh
дП
dph
(1.19)
Замечание 3. Читателю может показаться, что к уравнениям Лагранжа или
Гамильтона приводят простые формальные манипуляции с уравнениями Ньютона.
На самом же деле была использована дополнительная математическая структура —
скалярное произведение.
В самом деле, если векторное пространство V (в нашем случае *К3) обладает
скалярным произведением, определенным с помощью метрики g (в нашем случае
это евклидова метрика)
д: (гГ, v) Е V х V —» д(й, ν) = й · v G 9Я,
тогда с произвольной функцией /
/: (Й) - да) 6 эт
мы можем связать векторное поле, обозначаемое V/ или df/du и называемое
градиент /:
V/ · ν
= δ~ι
δη
de
f((u + ev))
Итак, метрическая структура позволяет нам определить силу F как консервативную,
если существует такая функция С/, что
F = —VC7.
При изменении координат силы в правой части уравнения Ньютона преоб¬
разуются как ускорения, так что они являются векторными полями и не требуют
использования какой-либо метрической структуры. Эти силы измеряются динамо¬
метром.
В противоположность этому силы, фигурирующие в уравнениях Лагранжа,
являются математически определенными и физически измеряются с помощью ска¬
лярной функции, называемой работой. Следовательно, эти силы являются коэффи¬
циентами дифференциальной формы и не могут быть сопоставлены с векторным
полем, если только в нашем распоряжении нет метрической структуры. Конечно,
эта метрика не может быть выбрана произвольно, а должна быть выведена из экс¬
периментов.
Замечание 4. Может показаться, что лагранжев и гамильтонов формализмы
ничего не добавили к развитию динамики. Это совершенно верно по отношению
1.2. Связи
31
к проблемам, касающимся частиц, не взаимодействующих с другими частицами,
например, в твердых телах или жидкостях. В более сложных случаях ньютоновское
приближение применимо только при соблюдении определенных предосторожностей
при анализе исследуемых сил. Этот анализ иногда становится затруднительным и
не приводит к однозначному ответу. Аналитический подход (лагранжев или гамиль¬
тонов) к проблеме движения является гораздо более действенным. В соответствии
с ним для системы N частиц, на которые наложено к ограничений, могут быть
найдены η = N — к параметров ςτι, ..., qn, для которых уравнения динамики при¬
нимают вид (1.10) или (1.19). Кроме того, как будет показано далее, существует
обобщающий принцип — принцип наименьшего действия, — который позволяет
получить полный набор аналитических уравнений динамики (уравнения Лагранжа
или Гамильтона). Формулировка этого принципа не зависит от выбора координатной
системы, и это определяет инвариантность аналитических уравнений относительно
преобразований координат. В отличие от подхода Коши, локального по определению,
обобщенный принцип позволяет исследовать глобальную проблему существования
и единственности решений динамических уравнений.
1.2. Связи
Частица называется связанной, если она не способна занять все возмож¬
ные положения в пространстве. В следующих примерах предполагается, что
пространство обладает евклидовой метрикой.
Пример 1. Рассмотрим частицу Р с координатами (х, у, z), связанную
с фиксированной точкой Ро с координатами (жо> 2/о> zo) с помощью жесткого
стержня длинной I.
Так как стержень твердый, точка Р может свободно двигаться только
на расстоянии I от фиксированной точки Ро. Другими словами, движение
точки Р ограничено движением на поверхности сферы с центром в точке Ро
и радиусом I; таким образом, ей доступна только та область пространства,
чьи координаты удовлетворяют уравнению
Пример 2. Рассмотрим частицу Р с координатами (х, у, z), связанную
с фиксированной точкой Ро с координатами (жо>2/о>^о) с помощью гибкой
и нерастяжимой нити длинной I.
Очевидно, частица Р способна свободно двигаться в пространстве вну¬
три сферы с центром в точке Ро и радиусом I; таким образом, ей доступна
только та область пространства, чьи координаты удовлетворяют уравнению
(X - х0)2 + {у- Уо)2 + {z- Zo)2 = I2.
(1.20)
(х - Zo)2 + (у - Уо)2 + (ζ- Ζο)2 ϊξ I2·
(1.21)
Глава 1
Ограничения, которые налагают запрет на возможность свободного
движения jР, называются связями. Уравнения (1.20) и (1.21) являются мате¬
матическим выражением связей.
Связь называется двусторонней, если она выражается с помощью ра¬
венства, и односторонней, если с помощью неравенства. Таким образом,
связь (1.20) является двусторонней, в то время как связь (1.21) — односто¬
ронней.
Вообще, связанная частица, ограниченная движением по поверхности,
заданной уравнением
называется подчиненной двусторонней связи.
А сейчас рассмотрим случай, в котором частица Р не может пересе¬
кать поверхность σ, заданную уравнением (1.22). Если поверхность σ делит
пространство на две области, то одна — та, в которой частица может свобод¬
но двигаться, — называется внешняя область, а оставшаяся — внутренняя
область.
Конечно, левая часть уравнения (1.22), обращающаяся в нуль на σ,
будет положительна в одной из областей и отрицательна в другой. Одна¬
ко можно умножить левую часть (1.22) на ненулевой множитель, приведя
таким образом уравнение к такому виду, что оно будет положительным во
внешней области, т. е. в области свободного движения частицы Р. Следо¬
вательно, для Р доступна вся область пространства (и только она), которая
удовлетворяет неравенству
Таким образом, связь, наложенная на Р, является односторонней.
При наличии таких связей возможные положения Р разделяются на
• обычные положения — удовлетворяющие условиям
f{x,y,z) = О,
(1.22)
или по кривой, заданной уравнением
(1.23)
(1.24)
f{x,y,z) > 0;
(1.25)
• граничные полоэ/сения — удовлетворяющие условиям
f(x,y,z) = 0.
(1.26)
В последнем случае также говорят, что точка покрывает поверх¬
ность σ.
1.2. СВЯЗИ
33
А сейчас распространим концепцию связей на случай произвольной
системы частиц.
Стоит напомнить, что при рассмотрении движения Μ системы ча¬
стиц S обычно говорят о способности для обозначения ансамбля координат
и о распределении скоростей νρ точек Р системы S в один и тот же момент
времени t. Способность обычно обозначается {Р, νρ}.
Таким образом, для системы частиц S любое ограничение занимаемых
положений в пространстве или ограничение способности системы S назы¬
вается связью. Связь будем называть внутренней, если такое ограничение
связано с внутренними свойствами тела, представляющего собой S, и внеш¬
ней, если ее происхождение связано с наличием препятствий (т. е. других
тел), внешних по отношению к S. Например, жесткость обусловлена вну¬
тренним свойством твердого тела (недеформируемость), так что она явля¬
ется внутренней связью.
Частица называется свободной, если на нее не наложены какие-либо
связи, в то время как система частиц называется свободной, если на нее не
наложены внешние связи.
Для дальнейшего рассмотрения полезно ввести для системы частиц S
следующие определения, впервые использованные Герцем1: голономные2
связи и неголономные связи.
• Связь, непосредственно накладывающая ограничение на координаты S,
называется голономной.
• Связь, непосредственно накладывающая ограничение на способ¬
ность S, называется неголономной.
Таким образом, если связь является голономной, равенство или нера¬
венство, выражающие данную связь, будут содержать только параметры,
связанные с координатами <S; если же связь является неголономной, будут
содержаться также производные по времени от этих параметров и произ¬
водные по времени, определяющие способность системы S. Классический
пример неголономной связи приведен ниже.
Рассмотрим жесткую сферу на плоскости π, катящуюся по ней без про¬
скальзывания. Согласно замечанию в конце параграфа (см. замечание 5), это
означает, что в любой момент времени t скорость сферы S относительно
плоскости π во всех точках контакта равна нулю. Так как характеристиче¬
ская скорость при перемещениях сферы как твердого тела есть
vq = νρ + ω Λ (Р - <2), (1.27)
1 Г. Герц родился в Гамбурге в 1857 г. и умер в Бонне в 1894 г. Физик и математик, он
первым обнаружил электромагнитные волны.
2 От греческого όλοσ (целый) и νόμοσ (закон).
34
Глава 1
где Q — произвольная точка сферы <S, ω — угловая скорость, то скорость
любой точки Q сферы S в момент времени, когда νρ = 0, равна
т. е. движение является чисто вращательным. Можно сделать вывод, что при
таких условиях способность сферы есть вращение вокруг мгновенной оси,
проходящей через точку Р — точку соприкосновения сферы S и плоско¬
сти π. Следовательно, требование того, чтобы жесткая сфера катилась по
плоскости π без проскальзывания определяет неголономную связь, посколь¬
ку способность сферы ограничена лишь вращением вокруг оси, проходящей
через точку соприкосновения.
Замечание 5. Если движение системы частиц наблюдается из различных си¬
стем координат, движущихся относительно друг друга, принято одну из них считать
неподвижной ХЬ, а вторую — подвижной То (Ω и О обозначают исходные ко¬
ординатные системы). Евклидово пространство, связанное с ТЬ, называется непо¬
движным пространством, в то время как связанное с То — подвижным. Теперь
рассмотрим поверхность σ, границу природного тела в подвижном пространстве, и
поверхность σ', границу другого тела в неподвижном пространстве. Если с течени¬
ем времени σ и σ' имеют общие точки и касательные поверхности в этих точках, то
говорят, что в процессе движения σ катится по σ'.
Предположим, что в процессе движения σ катится по σ', и Н — одна из точек
соприкосновения. Скорость точки Р поверхности σ, которая в момент t совпадает
с Н, называется скоростью скольжения поверхности σ относительно σ' в точке Н
в момент t. И, наконец, то обстоятельство, что для всех моментов времени t ско¬
рость сползания поверхности σ относительно σ' в каждой точке соприкосновения
равна нулю, позволяет утверждать, что в процессе движения σ катится по σ' без
проскальзывания.
1.3. Степени свободы и лагранжевы координаты
Пусть S — произвольная система частиц со связями1. Пусть Еп —
η-мерное евклидово пространство, и предположим, во-первых, что S со¬
стоит только из одной частицы Р. Пусть Р может двигаться только на
регулярной кривой 7, неподвижной в декартовой системе координат То.
Регулярная кривая представляется в координатной системе То параметри¬
ческими уравнениями:
1 Положения частиц рассматриваются в момент времени £, наложенные на S связи будем
называть «возможными положениями S в момент времени £» или «допустимыми положения¬
ми «5 в момент времени £».
vq = ω А (Р — <5);
(1.28)
(1.29)
1.3. Степени свободы и лагранжевы координаты
35
где φ, Ψ, х — три функции, определенные на замкнутом интервале [а, 6],
принадлежащем 9Я1, и А е [а, 6] — вещественный параметр.
Регулярность кривой 7 означает, что функции φ, ψ, χ предполагают¬
ся непрерывными вместе с их первыми производными на интервале [а, Ь]
и удовлетворяют следующим условиям:
• функция Я(А) = л/φ'2 + ψ'2 + χ'2 положительна VA е [а, 6];
• не существует пары (А', А") различных значений А таких, что одновре-
менно φ(λ') = φ{\"), ψ(\ ) = ^(А") и χ(λ') = χ(λ").
Если кривая 7 регулярна, возможные координаты частицы Р находятся,
в любой момент времени t, в однозначном соответствии с вещественными
числами интервала [а, Ь] С 9Я1.
Если частица Р может двигаться только по неподвижной регулярной
кривой 7, представленной в координатной системе То параметрическими
уравнениями (семейство регулярных кривых):
(χ = φ(λ,ί),
y = -ip(\,t), (1.30)
* = χ(λ,ί),
в каждый момент времени t, то, так как связь зависит от времени, коорди¬
наты Р, определяемые действием связи, находятся во взаимно однозначном
соответствии с вещественными числами из [а, Ь] С 9Я1, вообще говоря, из¬
меняясь со временем.
То, что можно установить взаимно однозначное отображение между
координатами Р, допустимыми для связей в данный момент времени £,
и множеством значений, которые параметр принимает на интервале из 9Я1,
обычно выражается такими словами:
Для того, чтобы определить координаты частицы на кривой, необхо¬
дим только один параметр, или, иначе, число степеней свободы частицы,
ограниченной движением по регулярной кривой, равно 1.
Допустим теперь, что частица Р ограничена движением по регулярной
поверхности σ, неподвижной в декартовой системе координат То. Регуляр¬
ная поверхность представляется в координатной системе То параметриче¬
скими уравнениями:
( χ = φ(\ι,λ2),
1у = ф{ λι,λ2), (1.31)
[ζ = χ(λι,Λ2),
где Αι и А2 — вещественные параметры, а φ,ψ, χ — три функции, опреде¬
ленные на односвязной ограниченной области, принадлежащей 9Я2:
(1.32)
36
Глава 1
Регулярность поверхности σ означает, что функции φ, ψ, χ предпола¬
гаются непрерывными вместе с их первыми частными производными
на [αχ, Ъ\ач, 62], и удовлетворяют следующим условиям:
детерминанты
А — det
( дф дф \
д\\ дХ2
δχ 3χ
дХ дХ
В = de‘ 1 fv I, с - det
\<9λι д\2/ \<9Αι 8X2,
(8φ
д<р \
θλι
д\2
дф
дф
\d\i
ж)
нигде не обращаются в нуль, так что функция W(X 1 ,\2)=VА2+В2+С2
всегда положительна VAi, А2 Е [а, 6];
не существует пары ((A'l5 А^), (А", А'^)) различных множеств значе¬
ний Αι, А2, таких, что одновременно Ai>) = </?(А", А^'), λ'2) =
= ^(А'',А'')их(А',А')=х(А'/,А'').
Если поверхность σ регулярна, возможные координаты частицы Р на¬
ходятся во взаимно однозначном соответствии с парами вещественных чи¬
сел из прямоугольника [а, Ь] С 9Я2.
Мы приходим к тому же самому заключению, когда частица Р ограни¬
чена движением по подвижной регулярной поверхности σ'. В этом случае,
естественно, прямоугольник, в качестве связи, будет зависеть от времени.
Можно сказать, что только два независимых параметра необходимы для
определения координат частицы на поверхности, или, иначе, число степеней
свободы частицы, ограниченной движением по регулярной поверхности,
равно 2.
Вообще говоря, система S частиц, даже со связями, имеет п степе¬
ней свободы, если возможно установить взаимно однозначное соответствие
между возможными положениями системы S в момент времени t и зна¬
чениями, которые принимают п вещественных параметров (gi, ... ,gn) из
открытого подмножества 9ЯП. Параметры (gi, ... ,gn) называются лагран-
э/севыми координатами системы. Конечно, выбор лагранжевых координат
не является однозначным.
Примеры
• Частица Р на кривой имеет 1 степень свободы. В качестве лагранжевой
координаты Р можно выбрать криволинейную координату.
• Частица Р на плоскости имеет 2 степени свободы. В качестве лагран¬
жевых координат Р можно выбрать декартовы либо полярные коорди¬
наты.
1.4. Вариационное исчисление и уравнение Лагранжа
37
• Свободная частица Р имеет 3 степени свободы. В качестве лагранже-
вых координат Р можно выбрать декартовы, цилиндрические, сфери¬
ческие координаты.
• Свободное твердое тело имеет 6 степеней свободы. В самом деле, для
того, чтобы определить координаты системы отсчета ХЬ(£,т7, С), свя¬
занной с телом, необходимо задать три координаты для Ω и три из
компонент единичных векторов, задающих направления осей (£,??, С)·
В качестве лагранжевых координат твердого тела можно выбрать три
координаты для Ω и триплет параметров во взаимно однозначном со¬
ответствии с тремя компонентами единичных векторов, задающих на¬
правления осей (ξ,τ?, С).
• Твердое тело с неподвижной осью г имеет 1 степень свободы. В ка¬
честве лагранжевых координат можно выбрать угол ϋ между двумя
плоскостями с г на пересечении, одна из которых неподвижна, а дру¬
гая связана с телом.
• Твердое тело с неподвижной точкой имеет 3 степени свободы, посколь¬
ку всего трех параметров достаточно для задания положения системы
координат, связанной с телом и имеющей в качестве начала координат
неподвижную точку.
• Система, состоящая из двух твердых тел, которые взаимодействуют на
общей оси (например, компас), имеет 7 степеней свободы. Действи¬
тельно, нужно шесть параметров для задания положения первого тела
и только один параметр для задания положения второго тела относи¬
тельно первого.
Следующее определение завершит параграф:
Система частиц называется голономной, если она имеет конечное
число степеней свободы и подчиняется только голономным связям.
1.4. Вариационное исчисление и уравнение Лагранжа
Рассматривая эволюцию голономной системы с п степенями свободы
как последовательность равновесных состояний (Д’Аламбер) под действи¬
ем всех сил (действующих, инерциальных и порождаемых наложенными
связями) и применяя принцип виртуальных работ к основным уравнениям
динамики, уравнения движения могут быть приведены к элегантной и дей¬
ственной лагранжевой форме:
38 Глава 1
где через q обозначены лагранжевы координаты, q — лагранжевы скоро¬
сти и Q — лагранжевы компоненты «силы». В случае консервативных сил,
существует функция U(q/q/t) (потенциальная энергия), такая, что
0 = d 3U дЫ
h dt dqh д qh ’
поэтому уравнения Лагранжа можно переписать в виде:
dt dqh dqh
где £ = T—U называется функцией Лагранжа. Мы не приводим вывода, так
как его можно найти почти во всех учебниках по классической механике.
Приведем лишь краткое аксиоматическое изложение вопроса:
• Состояние системы полностью определяется заданием ее координат
и скоростей (g, q).
• Эволюция — последовательность состояний, полностью определяется
функцией
Ця/я/t),
заданной на множестве состояний, и двумя различными конфигурация¬
ми qA и qe системы в два различных момента времени tA и ίβ, такими,
что
qA = qfa), qe = q(te)·
• Среди всех близких кривых qh = qh(t), связывающих Л и Б, та из них,
на которой интеграл действия
%] = I C{q/q/t)dt (1.33)
tA
принимает наименьшее значение, соответствует эволюции системы.
Замечание 6. Необходимо отметить, что это утверждение верно только для
небольших отрезков траектории. На всей траектории интеграл может иметь только
экстремум, который не обязательно будет минимумом. Тем не менее, уравнения
движения могут быть получены при использовании лишь условия экстремума.
Данный аксиоматический подход называется принципом наименьшего
действия, или принципом Гамильтона.
1.4. Вариационное исчисление и уравнение Лагранжа
39
Интегралы типа приведенного в (1.33) определены на пространстве
функций
и могут называться функциями, но, по историческим причинам, называются
функционалами. Несколько слов об их использовании будут сказаны после
краткого исторического комментария.
1.4.1. Исторические заметки
в
Задача Ньютона
Вариационное исчисление возникло одновременно с дифференциаль¬
ным исчислением (1686). Ньютон был первым, кто предложил в своем труде
Математические начала натуральной философии задачу тела с минималь¬
ным сопротивлением. Эта задача включает в себя различные конкретные
случаи, как в примере с нахождением наилучшей формы для тела (подвод¬
ной лодки, ракеты и т. д.) для сведения к минимуму сопротивления среды
при движении. Сформулированная таким образом, задача является слишком
сложной. Для упрощения вопрос был переформулирован для тела с формой,
инвариантной относительно вращения вокруг оси, параллельной направле¬
нию движения (равные моменты инерции в плоскости, ортогональной ско¬
рости), и только для головной части, в целях избежать трудностей с учетом
завихрений вокруг хвостовой части. Фиксируя длину и высоту головной
части, проблема формулируется так:
Даны две точки Р и Q\ найти плоскую кривую, соединяющую их и по¬
рождающую вращением вокруг вектора нормали плоскости ~п в точке Р
поверхность вращения, которая при движении, параллельном п, испыты¬
вает наименьшее сопротивление среды.
Ясно, что решение зависит от закона сопротивления. Ньютон предпо¬
ложил, что сопротивление, оказываемое элементу поверхности, пропорци¬
онально квадрату проекции скорости вдоль п.
Выбрав ортогональную декартову систему координат с осью х, совпа¬
дающей с осью вращения, и обозначив через у = у(х) неизвестную кривую,
найдем, что сопротивление R выглядит так:
RIV] = k [ 7
J 1 + у
V
где р, q — я-координаты точек Р, Q, а к — константа, которая зависит
от скорости поверхности. Задача заключается в том, чтобы найти среди
всех кривых у = у(х), связывающих Р и Q, одну, на которой предыдущий
интеграл принимает минимальное значение.
40
Глава 1
Задача о брахистохроне
Десятью годами позже Иоганном Бернулли была предложена и решена
следующая задача:
Даны две точки Р и Q на вертикальной плоскости. Среди всех плоских
кривых, соединяющих эти точки, определить такую, по которой частица
спустится без трения из Р в Q за наименьшее возможное время.
Выбрав подходящую ортогональную систему координат с вертикаль¬
ной осью у, определим время спуска частицы из Р в Q вдоль кривой у =
где p,q — это я-координаты точек Р, Q, a g ~ 9,8 м/с2 — ускорение свобод¬
ного падения. Искомая кривая — та, для которой этот интеграл принимает
наименьшее значение.
Иоганн Бернулли в качестве решения нашел кривую, параметрическое
уравнение которой выглядит так:
где к представляет отношение расстояний точек Р и Q от начала коорди¬
нат. Его метод решения подвергся резкой критике с математической точки
зрения со стороны Ньютона, Лейбница, Лопиталя и Якоба Бернулли1, ко¬
торый смог найти то же решение, используя дифференциальные методы.
В частности, Якоб Бернулли решил проблему с помощью геометрического
метода, более подходящего для приложений, основанного на принципе, со¬
гласно которому если кривая имеет максимум или минимум, любая часть ее
(не имеет значения, насколько малая) имеет то же свойство. Согласно этому
принципу, например, если кривая является брахистохроном, любая ее часть
также является брахистохроном. Следовательно, можно заменить кривую
ломаной линией таким образом, что проблема сведется к нахождению ее
вершин, используя обычные методы дифференциального исчисления.
*Якоб Бернулли родился в Базеле 27 декабря 1654 г. В течение многих лет он был про¬
фессором математики в университете Базеля. Сторонник научных идей Лейбница, он умер
в Базеле в 1705 г.
Иоганн Бернулли, брат Якоба, родился в Базеле 7 августа 1667 г. и умер там же 1 января
1748 г. В течение многих лет он был профессором математики в Гронингене (с 1695 по 1705 гг.)
и затем в университете Базеля, где он сменил своего брата (с 1705 по 1748 гг.). Как иллюстра¬
цию его характера можно отметить, что он выгнал своего сына Даниила из дома за получение
от Французской Академии приза, который он ожидал получить сам.
= у(х):
V
х = к(д — sin #),
у = k(ti — COS'#),
1.4. Вариационное исчисление и уравнение Лагранжа
41
Метод, использованный Якобом Бернулли, которого следует признать
основоположником вариационного исчисления, Эйлер1 обобщил и искусно
применил к широкому кругу задач. Он начал с систематизации, разделив
задачи на два класса:
• найти среди всех кривых, удовлетворяющих соответствующим гранич¬
ным условиям, одну, для которой данный интеграл достигает экстре¬
мального (минимального или максимального) значения;
• найти среди всех кривых, удовлетворяющих соответствующим гранич¬
ным условиям, для которых данные интегралы принимают заданные
значения (связи), ту, для которой другой интеграл принимает экстре¬
мальное значение (изопериметрические задачи).
Эйлер изобрел изопериметрический метод, который позволяет свести,
по крайней мере в принципе, задачу, принадлежащую ко второму классу,
к задаче из первого класса.
Более строгое решение было дано Лагранжем, который ввел концеп¬
цию вариации, позволившую решать этот вид задач обычными методами
дифференциального исчисления.
Пусть и = щ(х) — кривая, на которой интеграл 1[и\ достигает экстре¬
мума среди всех кривых на плоскости, связывающих две данные точки Р
и Q. Для того чтобы проанализировать свойства 1[и], необходимо сравнить
величину 1[ио], вычисленную для интеграла на кривой и = ио(х), со зна¬
чениями 1[и\ на других кривых. Разность и(х) — u$(x) есть вариация для
фиксированного х между кривой и = и(х) и и = ио(х). Если две кривые
«очень близки», эта вариация будет «очень маленькой» (по аналогии с диф¬
ференциалом du функции и при небольшом изменении dx переменной х),
но очень отличающейся по существу. Для того чтобы показать это разли¬
чие и в то же время подчеркнуть сходство, Лагранж ввел символ δη для
вариации и создал метод исчисления в полной аналогии с обычным.
При варьировании кривой и = щ(х) на δη интеграл 1[ио] подвергается
вариации на
1[и] -1[и0],
которую можно разложить на различные части подобно разложению функ¬
ции f(x) при изменении х. Эти различные части задаются, исключая число¬
вые множители, последовательностью дифференциалов df, d2f, ... Анало¬
гично различные части разложения 1[и] — 1[щ\, опуская числовые множи¬
тели, называются первой вариацией, второй вариацией, ... интеграла /
и обозначаются <9/, <92/, ...
Леонард Эйлер родился в Базеле в 1707 г. и умер в С.-Петербурге в 1783 г., был директором
Академии наук в Берлине и, вскоре после этого, Академии наук в С.-Петербурге. Он был одним
из наиболее значительных и плодовитых математиков всех времен как в области вычислений,
так и в области их физических приложений.
42
Глава 1
Лагранж смог показать, что, как и в случае с функциями, экстремумы /
удовлетворяют условию δΐ = 0. Для того чтобы разделить экстремумы на
максимумы и минимумы, Лежандр анализировал вторую вариацию и ввел
элегантное преобразование δ2Ι, приводящее к необходимым условиям вы¬
деления максимумов и минимумов. Условие Лежандра выдержало всесто¬
роннюю критику Лагранжа, который заметил, среди других вопросов, что
уравнение Риккати1, приводящее к преобразованию Лежандра второй вари¬
ации δ2Ι, не всегда допускает ограниченное непрерывное решение на всем
рассматриваемом интервале и что преобразование не всегда существует.
Наконец, трудный вопрос был в общем случае решен Якоби, давшем новое
необходимое условие.
В 1870 г. Вейерштрасс заметил, что в противоположность случаю
с функциями знак второй вариации не гарантирует существования максиму¬
ма или минимума. Согласно Вейерштрассу и Шефферу, причина этого раз¬
личия обусловлена сложностью кривой по сравнению с точкой. Две кривые,
хотя и «очень близкие», могут сильно отличаться при рассмотрении их ка¬
сательных, в близких точках, и интеграл / также содержит производную и',
которая характеризует эти касательные. Вейерштрасс смог дать достаточ¬
ные условия существования минимума или максимума в терминах знака
особой функции, которая сегодня называется функцией Вейергитрасса.
Вейерштрасс критиковал также представление у = и{х) для кривой,
так как при этом представлении пересечение прямых, параллельных верти¬
кальной оси, и точек кривой возможно не более чем в одной точке и, сле¬
довательно, сильно ограничивает область возможных решений. Он развил
свою теорию, использовав параметрическое представление
В то же самое время Дарбу нашел достаточное условие для минимума
в геодезической задаче, введя криволинейные координаты, которые позво¬
ляют записать рассматриваемые интегралы в особенно простой форме, при
которой свойства минимума становятся очевидными.
х = x(t), у = y(t), t е (ίο,ίι)
и переписав интеграл / в виде
to
1 Джакопо Риккати родился в Венеции в 1676 г. и умер в Тревизо в 1754 г. Он был аристо¬
кратом, который изучал математику самостоятельно. Его знаменитое уравнение содержится
в Acta Eruditorum (Липсия, 1722).
1.4. Вариационное исчисление и уравнение Лагранжа
43
Очень важный вклад в дальнейшем был сделан Кнезером, Линде-
бергом, Гауссом, Остроградским, Делоне, Клебшем, Шварцем, Вольтерра
и Гильбертом. Подробности см. в [53].
1.4.2. Переход к вариационным методам в задаче с фиксированными
границами
Непрерывные функционалы
Функционал F[u] называется непрерывным, если «малому измене¬
нию» и(х) соответствует «малое изменение» F(u).
Согласно этому определению, лишь немногие функционалы будут
непрерывными, так как, вообще говоря, функция в интегралах зависит от
производных и. Например, в интеграле действия также присутствуют пер¬
вые производные.
Таким образом, естественно дать следующие определения близких кри¬
вых.
Две кривые и(х) и v(x) являются близкими нулевого порядка близости,
если абсолютное значение их разности \и{х) — υ(χ) \ мало.
Две кривые и(х) и ν(χ) являются близкими первого порядка близости,
если абсолютное значение разностей \и(х) — ν(χ)\ и \и'(х) — ν'(χ)\ мало.
Две кривые и(х) и υ(χ) являются близкими k-го порядка близости, ес¬
ли абсолютное значение разностей \и'(х) — ν'(χ)\, ..., |v№(x) —
мало.
Дадим определение понятия расстояния σ между двумя кривыми. До¬
пуская, что и и ν имеют непрерывные производные вплоть до £;-го порядка,
расстояние k-го порядка определяется так:
к
о'кЫ.у) = max u^(x)—v^(x)
/ι=1
следовательно, близко лежащие кривые — это кривые с малым расстоянием
между ними.
Производные в векторном пространстве
1. Сильная производная, или производная Фреиле. Пусть U и V — два
нормированных векторных пространства, и F — отображение из открытого
подмножества А из U в V:
F: ACU—>V.
Отображение F называется дифференцируемым в точке и £ U, если
существует линейно-ограниченный оператор F', такой, что
F(u + К) — F(u) = F'h + σ(ΐί, /ι),
44
Глава 1
где σ является бесконечно малой по отношению к расстоянию в V, задава¬
емому нормой
|Мц,Д)||
14-0 ||* !|
Читатель узнает, сравнив U с 9ЯП и V с ΣΗ, обычное определение дифферен¬
цируемости для числовой функции п вещественных переменных.
Линейная часть приращения F'h называется сильным дифференциалом
(или дифференциалом Фреше) отображения F в точке и, а оператор F' —
сильной производной (или производной Фреше) отображения F в точке и.
Легко видеть, что если отображение F дифференцируемо, соответствующая
производная однозначно определена. Кроме того, легко можно доказать те¬
орему о производной композиции отображений [28].
2. Слабая производная, или производная Гато. Если через G обозначено
отображение из открытого подмножества U в V, предел
DG(u,h) = 4-G(u + th)
at
G(u + th) — G(u)
= lim ,
t=о о t
где сходимость рассматривается только по отношению к норме векторного
пространства V, называется слабым дифференциалом (или дифференциа¬
лом Гато) отображения G в точке и.
Дифференциал Гато может быть нелинейным по h. Если же он линей¬
ный, например, когда существует ограниченный линейный оператор Gu,
такой, что
DG(u, h) = Guh,
оператор Gu называется слабой производной (или производной Гато) отоб¬
ражения G в точке и.
Давайте убедимся, что в общем случае для слабой производной теорема
о производной композиции отображений неверна.
Легко видеть, что если сильная производная отображения F существу¬
ет, то слабая производная тоже существует, и обе производные совпадают.
Очевидно, если F является сильно дифференцируемой, то
F(u + th) — F(u) = Ff(u)(th) + a(u, th) = tF'(u)(h) + a(u, t),
F{u + th)-F(u) a(u,th)
-t
так что
F(u + th) — F(u) ,
lim = F (u)h = Fuh.
о t к у a
Обратное неверно, и в общем случае никогда не верно в конечномерных
пространствах, что хорошо видно из следующего примера.
1.4. Вариационное исчисление и уравнение Лагранжа 45
Пример 3. Функция
/: (х,у) еЖ2 —> f(x, у) = <
3
ХУ , если (х, у) ф (0,0),
х2 + у2
0, если (ж, у) = (0,0)
является непрерывной на £Н2. В точке (0,0) существует ее слабый диффе¬
ренциал:
s и ν "*■ thi, 0 + thz) — /(0,0)
/(*.»)Λ = th_^ 1 = °·
Тем не менее, слабый дифференциал не является линейной частью прира¬
щения функции в точке (0,0), так как
f{hi, h2) — /(0,0) _ 1
1|4м> ||/г|| 2·
Результат предыдущего примера не является удивительным, так как
в конечномерном случае существование частных производных функции не
гарантирует ее дифференцируемость, необходима так же и непрерывность
частных производных.
В этой связи важную роль играет следующая теорема, доказательство
которой можно найти, например, в [28].
Теорема 1.1. Если в окрестности точки и$ слабая производная Fu
отобраэюения F существует и является непрерывным оператором в uq, то
сильная производная отображения F также существует в ио и совпадает
со слабой.
3. Градиент функционала. Пусть U — векторное пространство число¬
вых функций вещественной переменной и(х), снабженное скалярным про¬
изведением (·,·), и пусть F — функционал, определенный в U:
F:ueU—>F[u\em.
Градиент функционала F, или функциональная производная функциона¬
ла F, относительно скалярного произведения есть функция U, обознача¬
емая G = 5F/5u и определяемая следующим образом:
(1.34)
46 Глава 1
Вторая функциональная производная функционала F определяется через
слабую производную Gu функционала G, в данном случае ее можно опре¬
делить следующим образом:
-^^_F[u + εφ + ттр\|ε=τ=ο =: (Gu-φ,φ).
Как обычно,
Gu4> = -f G(u + тф)
ат т=о
Конечно, оператор Gu симметричен относительно скалярного произве¬
дения (·, ·), т.е.
Gu = G +,
поскольку
{Gui>, Ф) = ~fefa.F\u + εΦ + ΤΨ\ |ε=τ=0
d F[u + εφ + τφ]\ε=τ-ο =: (ΰηφ, φ).
drde
ПРИМЕР 4. Пусть U — пространство всех С°° функций и(х), опреде¬
ленных на интервале I =]а, Ь[ вещественной оси х и обращающихся в нуль
в точках а и b вместе со всеми их производными по ж, и пусть F[u] —
функционал
ь
Ρ[ϋ] = J' f (ϋ, ux, uxx, ..., unx, ..., )cfcc,
о
где / — заданная функция от и и ее производных по х, которые мы обозна¬
чили Ί1Χ, ΊΙΧΧ^ · · · 5 'Unx·) · · ·
Согласно определению (1.34), имеем
SF = ±F[u + eh] |ε=0 =
/
6 -&fu df u df u , df
o h + -д—hx + — hxx + · · · + -д hnx + · ·«
C/li UriLX i/Ujj; i/Wju
dx
и, интегрируя по частям все слагаемые, за исключением первого,
ь
6F
I
udf U d, df , L d2 df , , w cP d/ ,
dx aux + dx2 5uxx + · · · + ή ^
мпх
dx.
1.4. Вариационное исчисление и уравнение Лагранжа 47
Следовательно,
ь
SF = ί (”+ £ °L + ...,h)dx,
J \ди dx дих dx дихх dx дипх )
так что
5F_df ddf d2df \ ( i\”· dn df \
' 7 9. ' 'У ) Лгг.П Ло, '
*пх
5и ди dx дих dx2 дихх dxn дип
Таким образом, в простом случае функционала, зависящего только от и,
о
F[u] = J f(u)da
функциональная производная имеет вид
5F_ _ df_
6и ди'
Функциональная производная функционала, зависящего только от и и их,
о
F[u\ = J f(u, ux)dx
имеет вид
6F _df d df
5u ди dx dux'
К примеру, для квадратично интегрируемых функций имеем
ь
u2dx = и.
~λ ί
Su2j
а
Ь
±I [
Su2j
ъ
2
vfxdx = —ихх,
±1 [ (λ
5u2j ^3
b
и3 — ut \ dx = и2, + uxx,
48 Глава 1
и производными Гато для
2
ΊΙ, U + ϋχχ
служат следующие операторы:
1, -д.
XX 5 Н- ^ХХ) 5
которые симметричны относительно скалярного произведения в L2.
Пример 5. Функция их не может быть градиентом любого функциона¬
ла относительно скалярного произведения в L2, поскольку ее производная
Гато является кососимметричным оператором дх.
Пример 6. С помощью той же процедуры легко увидеть, что для функ¬
ционала
ь
F[Ul,...,un}= J
dx
мы имеем
так что
6F
5и
SF
Jui’
5F
5F
Sun
[у\
J дщ dx дщ
г=1
dl_AK
ди\ dx du\ ’ * * * ’ dun dx dun J ’
df d df
Принцип Гамильтона
Из предыдущего примера следует, что, при отождествлении координа¬
ты х со временем t, функции и с лагранжевыми координатами q, а произ¬
водных их с лагранжевыми скоростями q, уравнения Лагранжа
d дС дС n l с ί
тт: = 0, h £ {1, ..., п},
dt dqh dqh
эквивалентны обращению в нуль функциональных производных функцио-
нала
bQ
■S'M = j £{q/<i/t)dt
для функций q(t), обращающихся в нуль в моменты времени tp и ig.
1.5. Замечания об уравнениях Лагранжа
49
Таким образом, уравнения Лагранжа — это уравнения для нахожде¬
ния экстремумов (или критических точек) функционала 5[д]. Если на q{t)
наложены некоторые дополнительные условия, уравнения Лагранжа дают
кривую, на которой интеграл действия принимает минимальное значение.
По этой причине принцип Гамильтона также называют принципом наимень¬
шего действия.
1.5. Замечания об уравнениях Лагранжа
1.5.1. Эквивалентные лагранжианы
Глядя на интеграл действия, кажется очевидным, что уравнения Ла¬
гранжа, соответствующие функциям Лагранжа C(q/q/t) и С (q/q/t), кото¬
рые отличаются на слагаемое, представляющее собой производную функ¬
ции, зависящую только от координат q и времени t,
£'(q/<i/t) = Ця/q/t) + Jtf{q/t),
совпадают. В самом деле, два интеграла действия
tQ tQ
%] = J £{<l/q/t)dt, S'[g] = J C'(q/q/t)dt
tP tP
отличаются на константу
S'[q]-S[q} = f(Q/tQ)-f(P/tP),
которая не вносит никакого вклада в вариацию
55'И = 5S[g].
Два такие лагранжиана называются эквивалентными.
Конечно, это не самый общий случай, и существуют примеры лагран-
жевой динамики, допускающей более одного неэквивалентного лагранжиа¬
на. Исчерпывающее изложение вопроса можно найти в [157].
1.5.2. Динамическое подобие
Начнем с того, что две функции Лагранжа, отличающиеся на констан¬
ту, дают одинаковые уравнения Лагранжа. Благодаря этому обстоятельству,
50 Глава 1
можно сделать заключение о некоторых свойствах движения без интегриро¬
вания соответствующих уравнений. Это возможно, к примеру, для простых
систем с кинетической энергией Т = imv2 = hm^Qh, и потенциальной
2 1 h
энергией U(q), которая является однородной функцией координат, т. е. функ¬
цией, удовлетворяющей условию
U(\q)=\«U(q),
где А — произвольная константа, и а — степень однородности U.
При преобразовании
Qh^Qh = Mh\ t -> t' = μί
• скорости qh умножаются на А/μ:
Qh * Qh ~ μόΐύι
• кинетическая энергия Т умножается на (X/μ)2:
• потенциальная энергия Ы умножается на Аа:
Ы -> х*и-
• функция Лагранжа С изменяется следующим образом:
Как следствие, функция Лагранжа умножается на константу Аа, только
если
Изменение координат на постоянный множитель А означает переход
с одной траектории на другую, геометрически подобную первой, с един¬
ственной разницей, заключающейся в линейных размерах (гомотетия).
Мы пришли к следующему заключению:
1.5. Замечания об уравнениях Лагранжа
51
Если потенциальная энергия простой системы является однородной
функцией координат, то уравнения движения допускают геометрически
подобные траектории, для которых временные интервалы tut' между
соответствующими точками на траекториях имеют отношение
Пример 7. Для малых колебаний потенциальная энергия является квад¬
ратичной функцией координат (а = 2). Уравнение (1.35) показывает, что пе¬
риод Р не зависит от их амплитуд (наблюдение Галилея за светильниками
в кафедральном соборе в Пизе).
Пример 8. В однородном поле потенциальная энергия является ли¬
нейной функцией координат (а = 1). Уравнение (1.35) показывает, что для
свободно падающего в гравитационном поле тела отношение квадратов вре¬
мен падения равно отношению начальных высот, с которых падали тела.
Пример 9. В случае ньютоновского притяжения двух масс или ку-
лоновского притяжения двух зарядов, потенциальная энергия находится
в обратно-пропорциональной зависимости от расстояний между ними (а =
= —1). Уравнение (1.35) показывает, что отношение квадратов периодов
обращения планет по их орбитам пропорционально третьей степени их ли¬
нейных размеров (третий закон Кеплера).
Предыдущий анализ можно провести, разумеется, используя уравнения
Ньютона. Советую читателю сделать это самостоятельно.
1.5.3. Анализ электрических цепей
Соотношения для схемы связных реактивных сопротивлений, по кото¬
рым протекают электрические токи г^, генерируемые электродвижущими
силами Vh, таковы:
где Lhk — Lkh — взаимные индукции (h ^ к) и самоиндукции (h = к), Сн —
емкости, Rh — сопротивления, a Fh = dVh/dt. Они являются уравнениями
Лагранжа с функцией Лагранжа
(1.35)
hk h h
Глава 2
Гамильтоновы системы
Уравнения Лагранжа представляют собой систему п дифференциаль¬
ных уравнений второго порядка для неизвестных кривых qь = qh (t):
d дС = у- д2С ■■ . у' д2С · д2С
dt dqh ~[dqhdqk к £^dqhdqk к dqhdt
Перепишем их в следующем виде:
д2С
где сила F определяется как
к= 1
τ~ι / /. / .ч дС _ V" · _ <92£
/г _ f-'dqhdqk к dqhdt
дс а2/: ^ д2£
к=1
Таким образом, если функция Лагранжа является регулярной, т. е. гессиан Т
матрицы
(дфм)
не равен нулю, уравнения Лагранжа могут быть записаны в следующей
нормальной форме:
п
Чк = ^(b_1)/c/A·
h=l
Кроме того, если соотношения dqh = Vh не рассматривать далее как уравне¬
ния связи, то уравнения Лагранжа могут быть записаны в более естествен¬
ном виде как система 2п дифференциальных уравнений первого порядка
2.1. Преобразование Лежандра
53
и, для регулярного лагранжиана, в следующей нормальной форме:
d~tVh = '^2{L~1)hkFkl
k=i Vft Е {1, 2, ..., τι}.
~,Qh = Vfc,
dt
d
2.1. Преобразование Лежандра
Форма уравнений (2.1) не является инвариантной. Она может быть
преобразована к новой системе 2п дифференциальных уравнений первого
порядка бесконечным числом способов, среди которых существует одно
замечательное преобразование, называемое преобразованием Лежандра1,
приводящее к особой системе 2п дифференциальных уравнений первого
порядка, называемой гамильтоновой системой и обладающей весьма инте¬
ресными свойствами симметрии. Преобразование Лежандра естественным
образом вытекает из вида уравнений Лагранжа и состоит во введении п но¬
вых вспомогательных переменных р, определенных следующим образом:
ph = j^-(q/v/t), Me {1,2,..., η}. (2.2)
Переменные р называются сопряженными к переменным q. В динамике
в нескольких типичных случаях они имеют смысл импульсов, сопряженных
координатам q.
Система (2.2), как система алгебраических уравнений, может быть раз¬
решена в случае регулярного лагранжиана относительно неизвестных ν
в следующем виде:
vh=ah{q/p/t). (2.3)
При помощи (2.2) и (2.3) уравнения Лагранжа (2.1) приводятся к виду:
(2.4)
~ d дС
' дС
dt dvh
*
dqh
dtQh = ah^q/p/^'
1 Адриен Мари Лежандр родился в Тулузе 18 сентября 1752 г. и умер в Париже 10 января
1833 г. Он был назначен на должность профессора в военной школе в Париже в 1777 г.
и в Высшей школе (Ecole Normale) в 1795 г. Лаплас прилагал постоянные усилия против
того, чтобы он получил публичное признание, и Лежандр, его крайне застенчивый ученик,
был вынужден сносить нападки недоброжелательно настроенных к нему коллег. Достижения
Лежандра в области математического анализа являются в высшей степени превосходными
и уступают только аналогичным трудам Лагранжа и Лапласа, хотя и не являются столь же
фундаментальными.
54
Глава 2
где символ * означает, что скорости ν выражены с помощью (2.3) через
лагранжевы координаты q, сопряженные им импульсы р и время t.
Итак, мы получаем нормальную систему 2п дифференциальных урав¬
нений первого порядка с 2п неизвестными функциями р и q:
Естественно, эта система эквивалентна исходной лагранжевой системе (2.1),
так как, с одной стороны, она выводится из (2.1) с помощью вышеописан¬
ной процедуры (при Т ^ 0), а с другой стороны, ее можно преобразовать
обратно к виду (2.1) простой заменой импульсов р в (2.5) на их выражения
из (2.2).
2.2. Уравнения Гамильтона
2.2.1. От уравнений Лагранжа к уравнениям Гамильтона
Стоит отметить, что правая часть (2.5) может быть выражена с помо¬
щью одной функции переменныхq,pnt, называемой функцией Гамильтона,
либо характеристической функцией, либо просто гамильтонианом.
Таким образом, система уравнений первого порядка выглядит столь же
простой, как и исходная система Лагранжа (2.1), зависящая от единственной
функции L. Вышеупомянутая функция Гамильтона по существу совпадает
с функцией
которая представляет собой в динамическом случае полную энергию си¬
стемы. Единственное отличие заключается в том, что она должна быть
выражена через переменные q, р и t из (2.2) и (2.3). Другими словами,
гамильтониан — это функция
Щр/q/t) = E(q/v/t)* = ^2phOth{q/p/t) - С {q/a(q/p/t)/t). (2.6)
Для того чтобы убедиться, что правая часть (2.5) очень просто может быть
выражена в виде (2.6), достаточно применить следующую классическую
процедуру, впервые предложенную Гамильтоном. Рассматривая ν, задава¬
емую уравнением (2.3), как функцию независимых переменных q, р и t
<
(2.5)
h
2.2. Уравнения Гамильтона
55
из (2.3), добавим, для фиксированного t, произвольные приращения δρ, 6q
к р и q. При этом функция Н увеличится на дифференциал 7i(p/q/t):
С другой стороны1, из (2.6) имеем:
SH(p/q/t)=5[E(q/v/t)\lvh=ah{q/p/t) = [SE(q/v/t)\\Vh=Qh{q/p/t) =
= Σ
vhS ( ψΛ + §±δνΗ
ovh J dvh
δ С
I vh=ath(q/p/t)
Σ
h
VhS
dC
dvh
= Σ
I dC sKLzn, dC
+ —ου/ι - -—- -—oqh
dvh ovh oqh
I vh=ath(q/p/t)
\vh=<xh(q/p/t)
dC
dqh
OihSph ~
\vh=och(q/p/t)
Следовательно, путем сравнения получаем следующие равенства:
Sqh
аМф) = Jg,
дС
dqh
дП
dqh
Vh € {1,2, ..., η}.
С учетом (2.2) и (2.2.1), уравнения Лагранжа дают:
d д£
dt dvh
d
Jtqh==Vh
дС
dqh’
' d дС
' дС
dt dvh_
*
dqh
дП
dqh
(2.7)
]Как и для (2.3), скорости ν не являются независимыми переменными. Однако, как хо¬
рошо известно из дифференциального исчисления, первый дифференциал [С]у=0с совпадает
с дифференциалом £, преобразованным с помощью соотношения Vh = &h(p> 0· Это следу¬
ет из того наблюдения, что дифференциал первого порядка функции / является инвариантной
формой, т. е. преобразование его дифференциала совпадает с дифференциалом преобразован¬
ной функции: где символ * обозначает соответствующее преобразование. Это
свойство, которое не выполняется для дифференциалов второго порядка, станет более ясным
после геометрического рассмотрения в части И.
56
Глава 2
или, окончательно,
d дП
dt h dqh ’
dt
Qh
дП
дрн
(2.8)
Данные уравнения называются уравнениями Гамильтона. Любая система,
записанная в форме (2.8), независимо от выбора функции H(q/p/t), называ¬
ется канонической системой, или гамильтоновой системой. Переменные р
и q называются каноническими координатами. Различие между ними несу¬
щественно, так как система (2.8) инвариантна относительно замены р <-> q
иЯн -Н.
2.2.2. От уравнений Гамильтона к уравнениям Лагранжа
В предыдущем параграфе было показано, что данная лагранжева си¬
стема сводится к нормальной форме, т. е. при условии J ф О может быть
преобразована к новой системе 2п дифференциальных уравнений первого
порядка для неизвестных р и q. Кроме того, уравнение (2.2)
Ph = frt{q/v/t) Wh £ {1,2> · · · > п}> (2-9)
разрешенное относительно v, имеет вид
Vh = Wh yhe^2>--->n^ (2Л°)
где через 7ί обозначена функция Гамильтона, определенная уравнени¬
ем (2.6). Естественно, возможно обратное преобразование. Предположим,
мы начинаем с уравнения (2.8) и гессиан
гамильтониана Ή не обращается в нуль, так что уравнения
s I®· =
могут быть разрешены относительно р\
Ph = Ph(q/v/t), V/ι е {1,2,..., η).
2.2. Уравнения Гамильтона
57
Теперь определим функцию Лагранжа, соответствующую гамильтони¬
ану Н\
£ = ^2vhfih(q/v/t) - H{q/P{q/v/t)/t)
h
или, короче,
£ =
Г, ЭН η.
Ph=Ph(q/v/t)
и рассмотрим ее дифференциал
Вновь используя свойство (df )* = <Э(/)*, получим
δ с
Σ
« st дн\ J. дНХп дП г дП г
51 dfJ + Wb6”1' ~ WKiPh “ Wb*"1
=Σ
|p/i=^/i(g/p/*)
|p/i=/3fc(g/p/t)
|p/i=^/i(g/p/*)
= Σ (««■ -(тг)
h\ ' S<'" '
Sqh
Кроме того, мы имеем
Ыя/v/t) =
дС_
, dqh
дН
dqh
V/ι € {1,2, , n}.
(2.11)
При использовании этих соотношений уравнения Гамильтона дают уравне¬
ния
Г - дП
dt h dqh ’
d_ дП
dt dph
d dC _ d_o _ _
dtdvh dt
m
dqh
dC
dqh’
Qh = Vh,
которые являются уравнениями Лагранжа (2.1).
58
Глава 2
В заключение отметим, что матрицы Гесса
dvhdvk
д2С
dphdpk
д2П
лагранжиана и гамильтониана, соответственно, являются обратными по от¬
ношению друг к другу, поскольку
так что Г = J 1.
2.2.3. Замечания об уравнениях Гамильтона
Теорема вириала
Усреднение по времени / функции f(t) определяется как предел:
Из определения видно, что усреднение по времени функции, являю¬
щейся производной по времени / = dF/dt ограниченной функции F(t),
равно нулю. В самом деле,
Если движение простой системы, чья потенциальная энергия U(q) яв¬
ляется однородной функцией координат, происходит в ограниченной обла¬
сти пространства, существует очень простое соотношение между усредне¬
ниями по времени для потенциала и кинетической энергии. Это соотноше¬
ние известно под названием теорема вириала.
Начнем с уравнения (2.6), записанного в следующей форме:
ск _ &Ph _ dPh даг _ д2С д2Н
h дрк Qyr дрк " dvrdvh дркдрг ’
т
О
т
т
О О
2.2. Уравнения Гамильтона
59
Это соотношение можно переписать в следующем виде:
В случае движения с ограниченными «скоростями» в ограниченной области
конфигурационного пространства, усредняя по времени обе части, получим
Для простой системы величина Н + С* равна удвоенной кинетической
энергии Т*, поэтому можно написать
Можно заключить, что для простой системы, чья потенциальная энер¬
гия H(q) является однородной степени а функцией координат, и для движе¬
ния с ограниченными «скоростями» в ограниченной области пространства,
искомое соотношение таково:
2Т* = ай.
Учитывая что для простой системы Н = J* + U, это соотношение
можно также переписать в следующей эквивалентной форме:
• для ньютоновского взаимодействия: 2Т* = — Ы или Е = — Т*, откуда
следует, учитывая Т* > 0, что ньютоновское движение будет проис¬
ходить в ограниченном пространстве, только если полная энергия Е
отрицательна.
Проведенный анализ может быть сделан, разумеется, с помощью урав¬
нений Лагранжа. Читателю предлагается проделать это самостоятельно.
где Е — полная энергия.
В частности,
• для малых колебаний: Т* = U = ^Е;
60
Глава 2
2.3. Скобка Пуассона и теорема Якоби-Пуассона
2.3.1. Пространство состояний
Решение уравнений Лагранжа, описывающее движение заданной про¬
извольной голономной системы Sen степенями свободы и лагранжевыми
координатам (71,(72, · · ·, Qn, дается п функциями времени
описывающими в каждый момент времени t координаты S. Их производные
дают в каждый момент времени соответствующие скорости. С точки зре¬
ния теоремы Коши, состояние S определяется 2п параметрами (q/q). Таким
образом, в анализе движения удобно использовать представление гиперпро¬
странства с 2п параметрами q и q в качестве декартовых координат 2п-мер-
ного пространства Е. Так как каждая точка этого пространства представля¬
ет состояние {Р, vp} системы <S, Е называется пространством состояний.
Движение в Е или, более точно, последовательность состояний в Е, опре¬
деляется параметрическими уравнениями (2.12) и (2.13).
2.3.2. Фазовое пространство
По аналогии геометрическое представление для канонических коор¬
динат р, q, вводимое путем рассмотрения их как декартовых координат
2п-мерного евклидового пространства Ф, называется, следуя Гиббсу, фазо¬
вым пространством. В этом пространстве любое решение
канонической системы (2.8) изображается в виде (интегральной) кривой, ча¬
сто называемой, при рассмотрении временной переменной t, траекторией.
Таким образом, мы имеем оо2п траекторий, соответствующих числу воз¬
можных выборов из 2п произвольных констант, от которых зависит общий
интеграл канонической системы.
2.3.3. Первые интегралы
Вернемся к рассмотрению канонической системы
4h = qh{t), ν/ι 6 {1,2, ..., η},
(2.12)
Vh — (ί), V/ι € {1,2, ..., n}
(2.13)
2.3. Скобка Пуассона и теорема Якоби-Пуассона
61
Как для любой системы дифференциальных уравнений первого порядка,
любая функция /, такая, что соотношение
тождественно удовлетворяется для всех решений системы, называется пер¬
вым интегралом, или, более кратко, интегралом канонической системы.
Другими словами, если
обозначает произвольное решение данной канонической системы, описы¬
вающее параметрические уравнения интегральной кривой в фазовом про¬
странстве, функция / в левой части такова, что
По этой причине функция / называется также инвариантом.
Конечно, функция / может принимать различные постоянные значе¬
ния констант для разных траекторий в фазовом пространстве. Более точно,
обозначив через ро, qo, to соответствующие начальные значения р, q, t,
константу следует выбирать совпадающей с /(р0, qo, to).
Вспомним, что если лагранжиан не зависит явно от времени t, то пол¬
ная энергия является первым интегралом:
Ввиду эквивалентности лагранжевой и соответствующей канонической
системы можно ожидать, что если функция Гамильтона явно не зависит от
времени t, то она является первым интегралом канонической системы.
Было бы интересно непосредственно доказать это утверждение, хотя
результат следует из общего тождества, которое будет использовано позже.
Скорость изменения любой функции /, зависящей от 2п коорди¬
нат (q/p) и времени t, при эволюции, описываемой уравнением (2.8), вы¬
глядит следующим образом:
f{p/q/t) = const
(2.14)
V/ι 6 {1,2, ..., η},
A) = const.
d t _df , { df d „ , df d „ \ _
dt dt “ \ dqh dt h дрь dt h)
df . / df QH df дн\ niS'»
dt 2-^\dqhdph dphdqh)'
62 Глава 2
Следовательно, для f = Н имеем
dU = дП
dt dt '
Поэтому, если гамильтониан не зависит от времени t, функция Гамиль¬
тона Н определяет для канонической системы первый интеграл, который
можно назвать также обобщенным интегралом энергии.
Простые первые интегралы существуют, когда характеристическая
функция Н не зависит от некоторых координат q. Например, если dH/dq =
= 0, из (2.8) следует
рг = const.
Эти типы интегралов называются также обобщенными импульсами, так
как они совпадают с аналогичными из лагранжевых систем в циклических
координатах. В этом случае, фактически, если функция Лагранжа не зави¬
сит, к примеру, от qr, это верно для
Ph = Wh v/l€-t1·2’···’n>>
и для обратных к ним
Qh= ah(q/p/t), V/ι € {1,2, .η}.
Также отсюда следует, что характеристическая функция TL не будет зависеть
от qr.
И наоборот, если qr отсутствует в характеристической функ¬
ции H(p/q/t) канонической системы, она не появится также в
9ft = J^S V/i 6 {1,2, ..., η},
и в обратных к ним
Ph= Ph(q/q/t), V/i€ {1,2, ..., η).
2.3.4. Скобка Пуассона
Уравнение (2.15) можно записать в следующем виде:
2.3. Скобка Пуассона и теорема Якоби-Пуассона
63
где скобка двух функций, / и д, определяется соотношением
’ Σ \dqh dph dph dqh)
и называется скобкой Пуассона1 функций / и д.
Скобка Пуассона удовлетворяет следующим тождествам:
• антисимметричность
{/,*} =-{*>/}> (2.17)
• тождество Якоби
{Л {#> ^}} + {д> {К /}} + {^, {fig}} = о, (2.18)
• дифференцирование
( {/»0 + Л} = {/,<?} + {/, Л},
I {f,gh} = {f,g}h + g{f, h}, (2.19)
[{Л,с} = 0, VceDt.
Свойства (2.17) и (2.19) легко следуют из определения, и их доказатель¬
ство предоставляется читателю. Свойство (2.17) просто выражает антисим¬
метричность скобки, в то время как свойство (2.19) просто утверждает,
что скобка Пуассона обладает естественной совместимостью с обычным
ассоциативным произведением функций, на которое она действует как диф¬
ференцирование.
Тождество Якоби2 также непосредственно следует из определения,
и читатель может проверить это, решая «в лоб».
Изящное доказательство приведено ниже.
Заметим, что левая часть (2.18) представляет собой сумму слагаемых,
каждое из которых является произведением первых частных производных
Симеон Дени Пуассон, автор трактата по механике (Париж, 1831), родился в Питивье
(департамент Луара) в 1781 г. и умер в Париже в 1840 г. Он был профессором механики
в университете Сорбонна.
2Карл Густав Якоби родился в Потсдаме в 1804 г. и умер в Берлине в 1851 г. Он в основном
известен благодаря своим исследованиям эллиптических функций, работам о детерминантах
и, в частности, о детерминанте Якоби, тождеством Якоби, которое является фундамен¬
тальным почти всюду в физике и математике, а также теорией Гамильтона-Якоби, ставшей
отправной точкой для квантовой механики. Большинство результатов исследований включено
в Лекции по динамике.
Глава 2
двух из трех функций /, д, h со второй частной производной оставшейся
функции, например:
Следовательно, тождество Якоби будет доказано, если мы сможем показать,
что левая часть (2.18) не содержит вторых частных производных. Для это¬
го введем для некоторой функции / дифференциальный оператор первого
порядка Xf, определенный следующим образом:
который будем называть гамильтоново векторное поле, связанное с /. Точ¬
ное выражение для X/ выглядит так:
С использованием введенных операторов левая часть (2.18) может быть
записана следующим образом:
{/, (5, h}} + {д, {h, /}} + {h, {/, 5}} =
= {/, {9, Μ} - {9, {/, Μ) - ({/> 9}, h} =
= Xf{9, h) - {g, X/h} - {Xfg, h} =
= XfXgh-XgXfh-X[fig}.
Таким образом, имеет место следующее замечательное соотношение:
{/, {9, h}} + {,д, {h, /}} + {h, {/, 5}} = [Xf, Xg]h - X{f<g}h, (2.20)
где скобка [-Х\У] обозначает коммутатор дифференциальных операто¬
ров X и Y.
Наконец, заметим, что:
(a) последний член Xy^h не содержит вторых производных функции h\
(b) коммутатор [.X, Y] двух дифференциальных операторов первого поряд¬
ка — тоже дифференциальный оператор первого порядка.
Действительно, если через
df dh d2g
dq dp dqdp'
Xf9 = U,9},
*/ = Σ(
h v
df__d_ _ df Q
dqh dph dph dqh
2.3. Скобка Пуассона и теорема Якоби-Пуассона
65
обозначены два дифференциальных оператора первого порядка, имеем
дх
дхг
Ψ =
= Σ (χίω
ij \
-s(W)
ij \
SYl^L+X>(x)Yi[x) »V
дх1 u u
dXi 9ψ
дх) дх
, + Υ:>(χ)Χι(χ)
дхгдх)
δ2φ '
= Σ(χ*μ
дхг дх3
дУ3 д
дхг дх3
-Y3(x)
дхгдх3
dXi 9ψ
дх3 дхг
dXi д
дх3 дх1
ψ :
дхг ) дх3
Как следствие свойств (а) и (Ь), левая часть (2.20) не содержит част¬
ных производных второго порядка функции h. Очевидно, что то же самое
справедливо и для функций fug. Следовательно, левая часть (2.20) не
содержит частных производных второго порядка. Это означает, что сумма
всех членов в левой части (2.20) равна нулю.
2.3.5. Теорема Якоби-Пуассона
Предположим, что для канонической системы
dt
Ph
дН
dqh:
d дН
dt h дрн ’
Vh e {1,2, n},
известны два первых интеграла, скажем, fug. Эти первые интегралы
удовлетворяют следующим соотношениям:
66
Глава 2
Легко доказать, что скобка Пуассона /, д функций / и д — также первый
интеграл. Во-первых, отметим, что, очевидно,
dt
Далее, используя предыдущее соотношение и тождество Якоби
{{/, 9},Щ = {{/, Ю , 9} + {/, {9, К}} ,
можно написать
d{f,g}
dt
Следовательно,
Г df
{Ж'ф·
dt +{f,n} 0, ^ d{f,g} +{{f'ghn} = 0'
do dt
LI + {^} = 0
Конечно, теорема Якоби-Пуассона не всегда дает новые первые инте¬
гралы, так как их число не может превышать 2п — 1, где п — число степеней
свободы. В некоторых случаях, фактически, скобка Пуассона первых инте¬
гралов просто сводится к их функции или к числовой константе. Про две
функции, / и д9 с нулевой скобкой Пуассона {/,<?} = 0 говорят, что они
находятся в инволюции.
Задачи
1. Показать, что если одна из функций, / или д, совпадает с импульсом
или координатой, скобка Пуассона просто сводится к частной производной:
/ П - df f
{PkJ} dqk' {qkJ} dpk
В частности,
{Qh,4k} = 0, {Ph:Pk} = o, {qh,Pk} = Shk,
где Shk — символ Кронекера.
2. Вычислить скобку Пуассона декартовых компонент импульса ~р
и момента импульса I = г Ар частицы.
2.3. Скобка Пуассона и теорема Якоби-Пуассона
67
Решение
{Рх, Ιχ} — = ~ ZPy^ =
{ру, U = = --§^(ур* - zPy) = -Р*>
{р*Л} = = -§^(VPz - zPy) =Ру>
так что
ОхэРсс} — 0> {1хтРу} = Ρζ, {ΙχιΡζ} — — Ру
Остальные скобки получаются циклическими перестановками индексов х,
у, ζ. Наконец, обозначив через (рь£>2,рз) и (7i,b,fa) компоненты р и I,
соответственно, можно записать
з
{h,Pj} = ^2£ijhph, Vi,j 6 {1,2,3},
h=1
где Eijk — тензор плотности Леви-Чивиты1, определяемый следующим
образом:
{1, если г, j, /ι — четная перестановка индексов 1, 2, 3,
— 1, если г, j, /ι — нечетная перестановка индексов 1, 2, 3,
О в остальных случаях, т. е. если два индекса совпадают.
3. Показать, что
з
{hiQj} — ^ ^EijhQhi yiij £ {1,2,3}.
h=1
4. Вычислить скобку Пуассона компонент момента импульса частицы,
используя только алгебраические свойства (2.19).
^уллио Леви-Чивита родился в Падуе в 1873 г. и умер в Риме в 1941 г. Он получил степень
в университете Падуи в 1894 г. Он стал профессором математической физики этого универ¬
ситета в возрасте 24 лет и преподавал до 1919 г., после чего переехал в Римский университет.
В 1938 г., с введением расовых фашистских законов, он был отстранен от должности, а на
его классические труды, включая Лекции по рациональной механике (1929) и Лекции по абсо¬
лютному дифференциальному исчислению (1923), был наложен запрет. К счастью, благодаря
Уиттекеру, они были переведены на английский язык и опубликованы в 1926 г. в издательстве
Blakie & Son. Смерть избавила его от необходимости скрываться от угрозы подвергнуться
насилию и расовому преследованию.
68 Глава 2
Решение
з
{^ ^ Ejjhlh·) ^ {1,2,3}.
h=l
Поскольку импульсы и координаты различных частиц являются независи¬
мыми величинами, легко проверить, что итоговые формулы предыдущих
задач подходят для полного импульса Р и для полного момента импульса L
произвольной системы частиц.
5. Доказать, что для любой скалярной1 функции φ координат и импуль¬
сов частицы имеет место соотношение
{Lz,ip} = 0.
Решение
Скалярная функция зависит от векторов г и р только через комбина¬
ции г2 = г · г, р2 = р · р и г ?р. Поэтому можно написать
дУ - д<Р 2т I 9φ ν
дг дг2 д(г · р)
= 3ψ_2ώ+ 9φ f
dp dp2 d(r · p)
Применяя теперь определение скобки Пуассона (2.6), получаем соот¬
ношение {Ώζ,φ} = 0. Такое же соотношение выполняется для остальных
компонент /, так что для любой скалярной функции φ координат и импуль¬
сов частицы имеет место соотношение
{^£’5 ψ} — {^5 ψ} — {J'Z') ψ} = 0.
6. Доказать, что для любой векторной функции / координат и импуль¬
сов частицы имеет место соотношение
0z,/} =nAf,
где п — единичный вектор вдоль оси z. Аналогичные формулы возникают
для остальных компонент I.
Решение
Любая векторная функция / векторов г и р может быть записана в ви¬
де / = φ\τ + ψ2р + ψζ{τ /\ р), где φι, φ2, (рз — скалярные функции. Таким
образом, используя алгебраические свойства скобки Пуассона, мы получим
решение задачи.
1 Здесь скалярные и векторные функции понимаются по отношению к группе враще¬
ний 50(3).
2.4. Более компактная форма гамильтоновой динамики 69
2.4. Более компактная форма гамильтоновой динамики
Начнем с рассмотрения гамильтоновой системы с п = 2 степеней сво¬
боды.
Введя вектор-столбец
• А( \ Υ7ΖΤ · А (дП дП дП дП
» = т,1(й,й,«.,«),
и кососимметричную матрицу
*-(; о1)· <2·2»
уравнения Гамильтона можно записать в виде
й = EVH,
или покомпоненто:
du_ Ehk&H (2.22)
dt Quk
где подразумевается суммирование по индексу к. Теперь скобка Пуассона
может быть записана так:
(/'9)=Ι^Ε“0=<ν/'ΕνΛ
где скобка (·, ·) обозначает евклидово скалярное произведение.
Конечно, предыдущие обозначения также могут использоваться для
гамильтоновых систем с п степенями свободы. В этом случае матрица Е
принимает вид
£=(? -/), (2.23)
где через 0 и / обозначены нулевая и единичная матрицы размером п х п.
2.4.1. Общая гамильтонова динамика
Рассмотрим теперь динамику, определяемую уравнением, аналогич¬
ным уравнению (2.22):
duh KhkdH
70 Глава 2
где матрица Λ может зависеть от точки и. Эволюция функции /, заданной
на фазовом пространстве, будет описываться так:
Ц. = = Щ-КНкЩ- = (V/,AVW).
dt du dt du du
Для того чтобы применить теорему Якоби-Пуассона для этого типа
динамики, необходимо потребовать
• кососимметричность
(V/,Λν^) = — (Уд,ЛУд),
• тождество Якоби
(V(V/, ЛУд), ЛУЛ) + (У(У<7, ЛУЛ), ЛУ/) + (У (УЛ, ЛУ/), ЛУд) = 0.
В этом случае скобка (У/, ЛУд) будет называться скобкой Пуассо¬
на функций / иди обозначаться {/, д}д, или просто, если не возникнет
неоднозначности, {/, д}. В терминах матрицы Л предыдущие требования
выражаются так:
• кососимметричность
Л = -Лт,
• тождество Якоби
д»7 dAhk + Ahj dAki , Akj dA'h = Q
du3 du3 du3
Конечно, эти свойства тривиально удовлетворяются для матрицы Е.
Определение 10. Будем называть гамильтоновой динамическую си¬
стему с п степенями свободы и с 2п-мерным фазовым пространством, если
она описывается уравнением
ί = ^'н^а'
где скобка, кроме обычных свойств дифференцирования, удовлетворяет еще
и следующим свойствам:
{/,5}л = ~{gJ}A,
{{/, 9}а, Мл + {{с?, Мл, /}л + {{^ /}л> </}л = 0·
2.4. Более компактная форма гамильтоновой динамики 71
2.4.2. Динамика Якоби-Пуассона
Заметим, что в предыдущем определении никакой роли не играла раз¬
мерность фазового пространства. Естественно определить более общую ди¬
намику с помощью следующего определения:
Определение 11. Динамика, описываемая уравнением
со скобкой, удовлетворяющей свойствам
{/> с}р = 0, Vc е R,
{/, д + h}P = {/, д}Р + {/, h}P,
{/, 9, h) = {/, g}Ph + g{f, h}P,
{f,g}p = ~{gJ}p,
{{f,g}p,h}p + {{g,h}p,f}p + {{h,f}p,g}p = 0,
называется динамикой Якоби-Пуассона.
Разумеется, гамильтонова динамика также является динамикой Якоби-
Пуассона.
2.4.3. Дополнительно о скобке Пуассона
Мы обратили внимание, что свойства, выраженные уравнениями (2.17)
и (2.18), наделяют множество Т дифференцируемых функций, определен¬
ных на Ф, структурой алгебры Ли.
Замечание 7. Алгебра Ли Λ является векторным пространством, снабженным
внутренним правилом композиции, обозначаемым [·, ·] и называемым скобкой Ли,
которая удовлетворяет свойствам:
[Х,У] = -[У,Х]| νχ,ΥΕΛ
[X, [У, Ζ]\ + [У, [Ζ, X]] + [Ζ, [X, Υ]] = О, УХ, Y,Z G А.
Примеры алгебры Ли:
• множество векторов в £Н3, снабженное скобкой Ли [·,·], задаваемой векторным
произведением
[й, υ\ = и А V]
• векторное пространство η х п матриц, снабженное скобкой Ли [·,·], заданной
коммутатором
[Μ, Ν] = ΜΝ - ΝΜ.
Геометрическое определение алгебры Ли будет дано в части II.
72 Глава 2
Поскольку тождество Якоби может быть записано в эквивалентных
альтернативных формах
X{f,g}h = [Xf,Xg}h, (2.25)
Xf{g, h} = {Xfg, h} + {g, Xfh}, (2.26)
оно эквивалентно следующим альтернативным утверждениям, возникаю¬
щим из (2.25) и (2.26), соответственно:
• отображение
/->*/ = {/,·},
{/>#} X{f,g}
является морфизмом алгебры Ли
tMv}) ~ (*М·,·])
между (^, {·,·}) и множеством гамильтоновых векторных полей
снабженным скобкой Ли, заданной коммутатором [·,·];
• оператор Xf = {/, ·} является производной скобки Пуассона.
Последнее утверждение, как будет показано в следующем параграфе,
позволяет ввести более общие структуры, называемые п-скобками Пуассо¬
на. Например, 3-скобка Пуассона на Т — это скобка {·, ·, ·}, удовлетворяю¬
щая следующим свойствам:
{f,g,h} = ~{f,h,g} = -{д, f,h},
{f,g,{u>v>w}} + {v’w> {/>5>u}} - {u,w, {f,g,v}} + {u,v,{f,g,w}} = 0,
{f,g,hih2} = {f,g, /ii}/i2 + M/,5>M,
{f,g,c} = o, VceJ?.
Алгебраическая формулировка
Замечая, что свойства, выраженные (2.17), (2.18) и (2.19), по своей при¬
роде чисто алгебраические, можно ввести следующую абстрактную форму¬
лировку.
Пусть М — пуассоново многообразие, и Т — кольцо функций, опреде¬
ленное на нем. Это значит, что на М скобка {·, ·} определена так, что
1) она порождает структуру алгебры Ли на Т, т. е.
{f,9} = ~{9,f}, {f,{9,h}} + {g,{hJ}} + {h,{f,9}} = 0,
2.4. Более компактная форма гамильтоновой динамики 73
2) она имеет естественное сходство с обычным ассоциативным произве¬
дением функций
{К fg) = {h,f}g + f{h,g}.
Следовательно, можно определить абстрактную алгебру Пуассона как
ассоциативную коммутативную алгебру, снабженную скобкой Ли, удовле¬
творяющей свойствам (2.17), (2.18) и (2.19).
Естественно обобщить понятие пуассонова многообразия, ослабив
условие (2) и потребовав только, чтобы {/, д} была именно локальной опе¬
рацией
support!/,д} С (support /) П (supportд).
Скобка {/,<?} тогда называется скобкой Якоби, а соответствующее много-
образие — многообразием Якоби.
2.4.4. Дальнейшие обобщения динамики Якоби-Пуассона
Возможность дальнейшего обобщения динамики Якоби-Пуассона свя¬
зана с надеждой на обобщение скобки Пуассона.
Рассмотрим динамическую систему, описываемую уравнением
|/ = {/,Wl,W2},
где трехкомпонентная скобка в правой части предполагается кососиммет¬
ричной. Такая динамика называется трехкомпонентной динамикой Якоби-
Пуассона, если трехкомпонентная скобка учитывает теорему Якоби-Пуас¬
сона о первых интегралах. В таком случае трехкомпонентная скобка будет
называться трехкомпонентной скобкой Якоби-Пуассона. Таким образом,
необходимо найти такое свойство трехкомпонентной скобки, что
{Л,ЯьЯ2}=0, h= 1,2,3 =Ф- {{/ь /2, /з}, Н\, Я2} = 0. (2.27)
С этой целью полезно вспомнить вид тождества Якоби для бинарной
скобки из (2.26):
Xf{g,h} = {Xfg,h} + {g,Xfh}.
Этот вид непосредственно обобщается на кососимметричную скобку с про¬
извольным числом позиций.
В самом деле, задавая трехкомпонентную скобку {/, g, h}9 мы потре¬
бовали, чтобы оператор Xfg (векторного поля), определенный как
Xfgh := {f,g, К),
74 Глава 2
был производной скобки, т. е.
Xfg{h Ь ^2, ^з} — {Xfgh 1з ^2, ^з} + {^1, ^з} + {^Ъ ^2, -^/р^з}·
(2.28)
Эта формула может быть подробно расписана в виде
{/зРз {^ъ ^2, ^з}} =
— {{/зРз hi}, h2, Λ-з} + {^1, {/, <7, ^2}, ^з} + {hu ^2, {/,#, Λ3}} ,
к которой было бы трудно прийти без глубокого понимания смысла обыч¬
ного тождества Якоби.
Нетрудно доказать, что (2.27) эквивалентно (2.28). Мы не будем дальше
углубляться в эту область. Более подробное описание можно найти в [152]
и в приведенных в ней ссылках. Там даны подробные примеры п-арной
динамики Якоби-Пуассона и доказано важное свойство, приведенное здесь
только для случая п = 3:
Если {/, д, h} — трехкомпонентная скобка Якоби-Пуассона, бинарная
скобка {f,g}h = {fiQih}, полученная фиксированием одной из функций,
является бинарной скобкой Якоби-Пуассона. Кроме того, линейная комби¬
нация двух из них, ci{/, д}}ц + С2{У, g}h2 ~ тоже бинарная скобка Якоби-
Пуассона.
2.5. Вариационный принцип для уравнений Гамильтона
Выше было показано, что уравнения Лагранжа (2.1) являются диффе¬
ренциальными уравнениями для неизвестных функций qh(t), на которых
достигается экстремум действия
tb
S[g] = J C(q/q/t)dt.
ta
С другой стороны, из (2.6) мы имеем
(£)*cft = dqh ~
h
где £* — лагранжиан £, в котором скорости qh выражены через импульсы
и координаты посредством (2.3).
2.5. Вариационный принцип для уравнений Гамильтона 75
Естественно утверждать, что уравнения Гамильтона могут быть полу¬
чены как уравнения для экстремума
tb
S*[q/p/t}= J £*(q/p/t)dt,
ta
преобразованного функционала S[q]
tb
s*[q/p/t] = [ ^2/Phdqh -Hdt.
J u
ta
h
oa
Это легко проверить, так как
tb
SS* = f ^2 (бри dqh + phSdqh) - STLdt —
t{ h
tb
= \Phhh]\BA + / Y^(5ph dqh - dph5qh) - 5Udt =
t h
ca
tb
= \Ph^qh]\BA + J Σ (Sph dqh ~ dPh5qh - g^^Phdt - 5qhdt
ta k
tb
= \pMlBA + /Σ [(^ - §^dt) ^ - (dP* + §^dt) 5®*
t h
Ъа
Таким образом, гамильтоновы уравнения движения следуют из обращения
в нуль 55* при любом выборе 5ph и 5qh.
Глава 3
Теория преобразований
3.1. Канонические, вполне канонические
и симплектические преобразования
3.1.1. Канонические преобразования
Дифференциальные уравнения движения были сведены к практически
удобной канонической форме:
Г А■
dt
А
dt
Vh
qh
дП
dqh’
дН
dVh
Wh e {1, 2, ..., η}.
Однако неизвестен метод непосредственного интегрирования канонических
систем. Существуют непрямые методы, позволяющие значительно упро¬
стить проблему интегрирования. Один из них — это метод преобразования
координат, суть которого заключена в нахождении новых координат, ска¬
жем, (π, χ), в которых характеристическая функция Ή канонической систе¬
мы является «более простой». Относительно произвольного преобразова¬
ния координат каноническая система не является инвариантной формой,
т. е. ее форма не сохраняется. Поэтому необходимой предварительной за¬
дачей является определение множества С обратимых дифференцируемых
преобразований, сохраняющих каноническую форму уравнений движения.
Любое преобразование, удовлетворяющее этому требованию, будет назы¬
ваться каноническим преобразованием1.
Из лагранжевой формы динамики было уже видно, что подходящий
выбор координат может существенно облегчить поиск решений диффе¬
ренциальных уравнений движения. Например, поскольку первый интеграл
Теория канонических преобразований существует благодаря Якоби, чьи усилия были во
многом направлены на проблему интегрирования, которой Гамильтон интересовался лишь
попутно. Возникшая в результате теория интегрирования сыграла важную роль в современном
развитии атомной физики.
3.1. Канонические, вполне канонические преобразования 77
уравнения Лагранжа известен, если одна из лагранжевых координат цикли¬
ческая, весьма полезно получить циклические координаты преобразованием
исходных координат.
Пусть
ТТЛ =Kh(q/p/t),
.Xh = Xh{q/p/t)
есть обратимое дифференцируемое преобразование от координат (q/p)
к (χ, π), которое может зависеть от времени t. Софусом Ли1 было дока¬
зано, что
Достаточное условие того, чтобы (3.1) определило каноническое пре¬
образование, состоит в том, что существуют две функции Но и Т
от {q/ρ/χ/π/ί), такие, что соотношение
Ph dqh = Σ π/,, dxh + U0dt + dT (3.2)
h h
выполняется тождественно2. Новая характеристическая функция есть tC -
= (Ή. — Но)*, где символ * означает, что все координаты (р, q) выражены
через (π/χ).
Легко убедиться, что преобразование
π/t = &Ph,
Xh = Pqh
является каноническим; новая каноническая система имеет вид:
d дК
dt dxh
d ЭК
dt h dirh
с /С = αβΤί*, но это преобразование не удовлетворяет условию (3.2).
1 Мариус Софус Ли родился в Нордфьердейде (Норвегия) в 1842 г. и умер в Осло в 1899 г.
Он был профессором в университете Осло с 1872 по 1885 гг., в университете Липсия с 1866 г.
по 1887 г. и опять в университете Осло с 1898 г. по 1899 г. Трудно описать в коротком
примечании его огромный вклад в математику. Он создал, в частности, теорию контактных
преобразований, теорию (конечных и бесконечных) групп Ли, теорию минимальных поверх¬
ностей, теорию поверхностей переноса, теорию поверхностей с геодезическими группами,
теорию поверхностей с постоянной кривизной. Многие результаты С. Ли были переоткры-
ты независимо замечательными современными математиками спустя почти 100 лет. Отметим
только симплектическую структуру Константа - Кириллова - Сурьо.
23десь тождественно означает, что если преобразование (3.1) было выполнено, соотно¬
шение (3.2) обращается в тождество.
78
Глава 3
Можно утверждать, что множество С канонических преобразований
больше, чем множество канонических преобразований, удовлетворяющих
условию Ли (3.2).
Позднее Ли Хва-Чунг [24] показал, как можно обобщить условие (3.2),
чтобы выразить необходимое и достаточное условие для того, чтобы (3.1)
было каноническим преобразованием.
Опишем эвристический путь для нахождения необходимого и доста¬
точного условия того, чтобы дифференцируемое обратимое преобразование
было каноническим.
Используя вариационный принцип, уравнения Гамильтона можно за¬
писать в виде:
55 = 0,
где
tb
S[q/p/t] = /? Ph dqjг Tidt.
t h
τα
Таким образом, с преобразованием
{
тг/i = Kh(q/p/t),
Xh = Xh(q/p/t)
можно связать рисунок:
tb
з* [х/1г/£] = У Σ π/ι dxh ~
+ h
i 5S = 0
I SS* = 0
d
дП
&l
чз
3*
II
dqh
d
дП
ζ'
&ι
►о
3*
II
дрн
Следовательно, необходимое и достаточное условие того, чтобы дифферен¬
цируемое обратимое преобразование было каноническим, таково:
SS* = 0 <£> 6S = о,
где 5[χ/π/ί] есть преобразование S[q/p/t\.
3.1. Канонические, вполне канонические преобразования
79
Указанная эквивалентность, разумеется, будет истинной, если диффе¬
ренциальные формы, с точностью до мультипликативной константы с, от¬
личаются на точную дифференциальную форму Т\
Ли Хва-Чунг показал, что это условие является также необходимым.
Можно заключить, что
Необходимое и достаточное условие того, чтобы дифференцируемое
обратимое преобразование (3.1) являлось каноническим — это существова¬
ние константы с и двух функций, Ho{q/p/x/^/t) и T^qjpjxj'K jt), таких,
что соотношение
выполняется тождественно. Новая характеристическая функция есть JC =
= 1/с(Н — Но)*, где символ * означает, что все координаты (p,q) выра¬
жены через (π/χ).
Простой пример канонического преобразования с Но = 0 и Т = pq
приведен ниже:
^2,Vhdqh = wh dXh + Hodt + dT
(3.3)
h
h
(3.4)
В самом деле,
Xp dq — A q dp
= pdq- 7>(pdq-qdp) = d(pq).
3.1.2. Общий класс канонических преобразований
Отдельный класс канонических преобразований порождается произ¬
вольной функцией V, зависящей от «половины» исходных координат и «по¬
ловины» новых координат, например, от q и π.
so Глава 3
От функции требуется выполнение единственного условия — чтобы
смешанный функциональный детерминант
Ή&)
не равнялся нулю тождественно: J ф 0.
Легко видеть, что соотношения
„ _ dV_ _ дУ
Ph о ) Х/г о (3.5)
dqh νπ h
неявно определяют дифференцируемое обратимое преобразование коорди¬
нат между р, q и π, χ. Фактически, так как J ф 0, с помощью теоремы
о неявных функциях второе из соотношений (3.5) можно разрешить в виде
9л = qhbr/χ/ί)
и, используя первое соотношение, получить взаимно однозначное преобра¬
зование между координатами (р, q) и (π, χ).
Для того чтобы убедиться, что преобразование является каноническим,
достаточно проверить выполнение условия Ли:
Y^Ph dqh + J2 xh d-Kh = Σ (d^Ldqh + d^d7rh) =dV~ %dt'
откуда, используя £ \h dnh =ά[Σ ^hXh - Σ dXh, получим
h \ h / h
dqh = Y тг/г dXh - ^dt + d ( V - Y πΗχΗ J .
h h V h /
Значит, преобразование, определенное соотношением (3.5) при J ф 0, яв¬
ляется каноническим при
По = ~%’
h
и приводит к новой характеристической функции
выраженной, естественно, через координаты (р, q).
3.1. Канонические, вполне канонические преобразования 81
Функция V называется порождающей функцией канонического преоб¬
разования.
Так же можно выбрать функцию Vзависящую от q и χ и удовлетво¬
ряющую условию: смешанный функциональный детерминант
j,=d*(£Q
не равняется нулю тождественно.
Соотношения
„ _ дУ ^ _дУ_ п ~
Ph dqh ’ nh dXh (3·}
неявно определяют дифференцируемое обратимое преобразование коорди¬
нат между р, q и π, χ. Фактически, так как 3* ф 0, с помощью теоремы
о неявных функциях, второе из соотношений (3.6) можно разрешить в виде
qh = днЫх/t)
и, используя первое соотношение, получить однозначное преобразование
между координатами (р, q) и (π, χ).
Для того чтобы убедиться, что преобразование является каноническим,
достаточно проверить выполнение условия Ли:
- Σ,^άχπ = Σ ¥-dqh + = dV' - д^-dt,
откуда получим
Σρ» d<*h = Σ ** dXh ~ wdt+dv'-
Значит, преобразование, определенное соотношением (3.6) при J* ф О,
является каноническим при
«»=-¥■
и приводит к новой характеристической функции
к-н+ж,
выраженной, естественно, через координаты (р, д).
Функция V' также называется порождающей функцией канонического
преобразования.
82 Глава 3
3.1.3. Вполне канонические преобразования
Было показано, что каноническое преобразование данной канониче¬
ской системы с характеристической функцией Н приводит к канонической
системе с /С = 1 /с(Н — Но)* в качестве характеристической функции. Ко¬
гда функция /С = 1 /с(Н — Но)* сводится к /С = 1 /с(Н)*, преобразование
называется вполне каноническим преобразованием. Значит, Но = 0 — это
необходимое и достаточное условие того, чтобы каноническое преобразо¬
вание было вполне каноническим.
Легко видеть, что каноническое преобразование
Г ТТЛ = 4>h{q/p), ,
Uh = Mq/p), ( }
которое не зависит от времени t явно, является вполне каноническим.
Условие Ли (3.3) для преобразования (3.7) дает
^2pkdqk = -Kh dxh + H0dt + dT =
k h
k
или, эквивалентно,
Σ
к
где функции Ф/с и Ф/с определяются так:
+ ( Но + ) dt — О,
$k(p/q) = ^k(p/q) =°Σφί^~ ~Рк'
ъ %
Отсюда следует, что Т должна удовлетворять следующим соотношениям:
Λ дТ .γ, дТ п, , дТ п
ф‘ Щ' *“ Ио + Ж = 0'
Более того, так как и не зависят от времени t явно, мы также
имеем
д ί дт\ д (дт\ г.
3.1. Канонические, вполне канонические преобразования
83
или, эквивалентно,
откуда следует, что дТ/dt не зависит от р и q, а только от t.
Из
f
следует, что
Г=№+Ъ(р/9)
И
Но + dJ~ = dJ~1.
Следовательно, условие Ли (3.3) принимает вид
У^Ph dqh = с^тг/г + dFi,
h
h
так что новая характеристическая функция — просто /С = (l/c)(W)*.
3.1.4. Симплектические преобразования
Каноническое преобразование, приводящее к новой характеристиче¬
ской функции /С вида /С = (W)*, называется симплектическим преобра¬
зованием. Следовательно, симплектическое преобразование — это вполне
каноническое преобразование с с = 1. Ниже приведены все описанные
случаи:
Преобразование (3.4) предыдущего примера является симплектиче¬
ским преобразованием с порождающей функцией вида
/С = \{Ή — Ήο)* 0каноническое),
/С = ^(Ή)* {вполне каноническое),
/С = (7~С)* (<симплектическое).
(3.8)
3.1.5. Преобразования, сохраняющие площадь
Обратимое дифференцируемое отображение из 9Я2 в себя
Глава 3
преобразует заданную измеримую по Лебегу область S С £Н2 в измеримую
область Σ С 9Я2:
Отображение будет называться сохраняющее площадь преобразование
или, проще, эквивалентное преобразование, если меры S и Σ совпадают:
777,2(5) = 777,2(Σ).
Теорема 12. Необходимое и достаточное условие того, чтобы обра¬
тимое преобразование на дК2
было симплектическим, состоит в том, чтобы оно было сохраняющим
площадь преобразованием.
Доказательство.
Пусть преобразование (3.9) будет симплектическим. Значит, существу¬
ет такая функция G, что, тождественно,
Поскольку правая часть данного уравнения является полным дифференци¬
алом, равенство перекрестных производных
(р, q) G £К2
(π,χ)εκ2
pdq = π άχ-h dG,
т. е.
дает
dp dq dp dq
θχ θπ Θπ θχ 5
что можно эквивалентно выразить так:
(др
д(р, q) _ I дж
д{*,х)~ \Ё1
\θπ
Отсюда следует, что
s
dndx = JJdwdx = m2(Σ)
Σ
3.2. Новое описание вполне канонических преобразований
85
Обратно, если преобразование (3.9) является сохраняющим площадь, то
д(р, q)
д(тг,х)
— 1 \ άπ άχ.
О = m2(Sf) — 77ΐ2(Σ) = JJ dpdq-JJ άπ άχ = JJ
s Σ Σ
Из произвольности Σ и непрерывности определителя Якоби следует
д(р, q)
9(π,χ)
= ±1.
Если якобиан равен 1, преобразование (3.9) является1 симплектическим.
То же верно и в случае, когда якобиан равен —1, достаточно переставить
названия переменных π и χ, чтобы вернуться к предыдущему случаю. ■
3.1.6. Преобразование, сохраняющее объем
Обратимое дифференцируемое отображение из Лп в себя
(p,q)£Kn <—>(тг,х)€!К" (ЗЛО)
преобразует заданную измеримую по Лебегу область S С У\п в измеримую
область Σ С *НП:
S<—>Σ.
Отображение будет называться сохраняющее объем преобразование
или, проще, эквивалентное преобразование, если меры S и Σ совпадают:
mn(5) = тп( Σ).
В следующем параграфе будет показано, что симплектическое преобра¬
зование на *Яп — также эквивалентное. Следует отметить, что обратное
верно только в случае п — 2.
3.2. Новое описание вполне канонических преобразований
Условие Ли нелегко использовать для проверки на каноничность обра¬
тимых дифференцируемых отображений. Итак, мы ищем условия, непо¬
средственно налагаемые на функции φπ,Ψΐι в обратимом дифференцируе¬
мом преобразовании
Г тTh = Vh(q/p), mn
I Хн=ЫФ\
определяющие вполне канонические преобразования.
1 Как обычно, предполагается, что Σ и S линейно односвязны.
86 Глава 3
Начнем с обычного условия, скажем,
Σ,Ρΐι dqh = cYwhdxh + dG,
h h
в котором должно быть выполнено преобразование (3.11). Таким образом,
мы имеем
-dG[plq) = Y^>hdqh + ^hdph), (3.12)
h
где
лч З'Фг
^ = cT,^Wh-PH,
г
(3.13)
Если правая часть (3.12) должна быть полным дифференциалом, то должны
выполняться следующие условия:
дФк дФь
dqh dqk ’
9Фк = d^h
дрп дрк ’
дФк = d^h
„ dph dqk '
Подставляя (3.13) в эти условия, найдем
Σ
к
Σ
к
Σ
дфк
д^Рк
дфк
дц>к
dq%
dpj
dpj
dq%
дфк
д<рк
дфк
дψк
dqi
dqj
dqj
dqi
дфк
д<Рк
дфк
- 1л
— q Oij ?
= о,
dpi dpj dpj dpi
0.
Данные соотношения могут быть записаны в очень компактной фор¬
ме при использовании скобки Лагранжа, которая для данных 2п функ-
3.2. Новое описание вполне канонических преобразований 87
ций φ^, ψΐτ, переменных и, ν определяется так1:
При использовании этой скобки необходимое и достаточное условие
того, чтобы преобразование было вполне каноническим, может быть выра¬
жено следующим образом:
Как было показано, симплектическое преобразование на плоскости £Н2
совпадает с преобразованием, сохраняющим площадь. Таким образом, ин¬
тересно проанализировать более детально, с этой точки зрения, свойства
вполне канонического преобразования.
Пусть, далее,
будет его определителем Якоби, который, более явно, может быть записан
в блочной форме:
следующие перестановки:
• строка под номером j со строкой под номером п + j, Vj Е {1, ..., η},
• столбец под номером j со столбцом под номером n+j, Wj Е {1, ..., η},
1 Многие авторы при определении скобки Лагранжа используют обратное к нашему пре¬
образование.
[Qi, Qj] = о, \pi,pj] = о, [qi,Pj] = 3%, v(i, j) € {1, 2, , η}. (3.15)
ί Kh = ^(g/p),
I Xh =^h{q/p)
будет вполне каноническим преобразованием, и пусть
Выполнив в матрице Якоби
ί дюк дюь \
\ dpi dqi )
88
Глава 3
• изменение знака в первых п строках,
• изменение знака в первых п столбцах,
получим матрицу
Естественно, так как было выполнено четное число 4п перестановок, каж¬
дая из которых добавляла множитель —1, получаем
J = det М = det М'.
Отсюда следует, что произведение Мт, транспонированной к М, с М’
имеет следующий детерминант
Матрица М' может быть получена непосредственно из М при исполь¬
зовании матрицы
где Е' — матрица, транспонированная к Е. Очевидно, Ет = —Е = Е~г.
Элементы сц произведения Мт · М' могут быть разделены на четыре
группы: (г ^ п, j ^ ή), (г ^ п, j > η), (г > п, j ^ п), (г > п, j > п).
Другими словами, подобно М и М', произведение Мт · М' также можно
разбить на четыре сектора; соответствующие вычисления дают
det(MT · М') = (det M)(det Mf) = J2.
введенной в (2.23) предыдущей главы. Соответственно,
Μ' = Ε·Μ· Ет,
• для (г ^ п, j ^ n), dj = Σ
h
δφπ д'фн _ д'фн diph
dpi dqj dpi dqj
• если (г ^ n, j > η), с^· = Σ
h
) = \Pj,Pi],
• для (г > n, j < n), Cij = Σ
h
д'фн _ д'фн дч>к
dqi dqj dqi dqj
) = I®.?#].
• если (г > n, j > η), cij = Σ
h
d^ph д'фн _ д'фн д^рн
dpj dqi dpj dqi
3.3. Новое описание симплектических преобразований 89
Следовательно, имеем
Мт-М'= Cfuqi\ ° ) = \h
Vte^j] \Pj,QilJ \ о \Sij) c
последнее равенство следует из (3.15). Таким образом, определитель Яко¬
би J вполне канонического преобразования на £Н2 удовлетворяет соотно¬
шению
J2 = с~2п. (3.16)
Из выражения
имеем
мт -м' = \l
мт = кмт1,
так что
м · (.М')т = \ ((М')-1)Т · (М')т = \ (М' ■ {М')-1)Т = \ΐ·
Вычисляя произведение М · (М')т, окончательно получим
(\&ij 0 \ _ (М'\Т — {'Фь.'Фк}
1 , - М. (М') =. ..
О \5ij) \{<Ph,<Pki {4>hi4>k}J
Следовательно,
Необходимое и достаточное условие того, чтобы преобразование бы¬
ло вполне каноническим, может быть выражено так:
{qi,qj} = 0, {pi,pj} = 0, {qhPj} = ^ij, V(i,j) G {1,2, ..., η}. (3.17)
3.3. Новое описание симплектических преобразований
Из соотношения (3.15) вытекает
Необходимое и достаточное условие того, чтобы преобразование бы¬
ло симплектическим, может быть выражено так:
fa, Qj] = 0, \pi,pj] = 0, fa,Pj} = Sijt V(i,j) G {1,2, ..., η},
или
Qj } = 0? {jPit Pj } 0? {(7г? Pj } fiij ? j) ^ {1? 2, . . . , 77,}.
Кроме того, из (3.16) следует, что
симплектическое преобразование сохраняет объем любой области фа¬
зового пространства.
Глава 4
Методы интегрирования
4.1. Интегральные инварианты системы
дифференциальных уравнений
Рассмотрим систему дифференциальных уравнений первого порядка
и обозначим через
Хг = xl(t, Xq)
решение, принимающее в момент времени to значение хо: хг0 = xl(to, хо)·
Это соотношение может быть выражено эквивалентным образом:
где Q и Qo обозначают точки с координатами (ж1, ..., хп) и (яд, · · ·, ) со¬
ответственно. Задано некоторое подмногообразие Uo Q £НП, точки которого
будут обозначаться через Qo, пусть U будет зависящее от t подмногообра¬
зие точек Q, заданных в (4.2). Другими словами, U представляет эволюцию
во времени t подмногообразия Uo, согласно (4.1).
Уравнение (4.2), следовательно, определяет отображение между U и [70.
Отображение является взаимно однозначным благодаря теореме существо¬
вания и единственности, которая выполняется для системы (4.1).
Рассмотрим произвольную функцию р οτ х и t и интеграл
4£=X\x/t\ Vie (1,2,..., η),
(4.1)
Q = Q(t, Qo),
(4.2)
(4.3)
и
который, конечно, в общем случае будет зависеть от времени t. В случае,
когда I не зависит от времени, при любом выборе U, будем говорить, что I
является интегральным инвариантом для системы (4.1).
4.1. Интегральные инварианты системы дифференциальных уравнений 91
Для того чтобы I был интегральным инвариантом, р должно удовле¬
творять определенным условиям. Начнем с естественной характеристики
интегрального инварианта, которая задается следующим образом:
| J p(x,t)dU = 0.
В приведенном выражении перенос производной по времени под знак инте¬
грала не допускается, так как область интегрирования зависит от времени.
Затруднение легко преодолевается с помощью замены переменных, задава¬
емой (4.2). Таким образом, получаем
J p(x,t)dU = J p(x0,t)J dU0,
U Uo
где р = р о Q — функция композиции между р и (4.2), т.е. p(xo,t) =
= р (х(хо, £), t), и J — определитель Якоби
= д(х\х2, ...,хп)
д{х\,х1, х%)
преобразования (4.2).
Замечание 8. В теореме о замене переменных в интегралах, на самом деле,
используется абсолютная величина определителя. В нашем случае, однако, матрица
Якоби в начальный момент времени to совпадает с единичной матрицей X. Значит,
благодаря непрерывности, существует окрестность to (интервал времени), в котором
якобиан всегда положительный.
Отсюда следует, что
1/^=11?JdU°=/1 =/ jft ^dU'
и Uo Uo и
где было использовано свойство, что якобиан обратного преобразования
совпадает с обратным якобианом.
Следовательно,
92
Глава 4
Для того чтобы явно вычислить производную dJ/dt, заметим, что J
Воспользовавшись разложением Лапласа1, запишем определитель Яко¬
би в виде
Важно отметить, что в этом выражении алгебраическое дополнение Gij
элемента дц не содержит элементы дц, ..., gin. Таким образом,
!Пьер Симон Лаплас родился в 1749 году в маленькой деревушке в Кальвадосе (область
Франции) и умер в Париже в 1827 году. Он занимал государственные должности и был членом
Академии наук Института Франции и профессором Высшей школы. От Наполеона он полу¬
чил титулы графа, маркиза и пэра Франции. Его достижения в небесной механике, акустике
и электромагнетизме весьма значительны. Трактаты по небесной механике (пять томов) и по
теории вероятностей, равно как и опубликованные работы Изложение системы мира (два то¬
ма) и Опыт философии теории вероятностей, сегодня считаются классическими. Полное же
собрание его трудов составляет 14 томов.
зависит от t через элементы дц = дхг/дх30 матрицы Якоби. Значит,
dJ_ _ dJ dg%j
dt ^ dgij dt
ij
n
J — gnGn + · · · + ginGin — QijGij, Vi E {1,2, ..., n}.
3 = 1
dJ _ sr' dJ dgij
dt ^ дац dt
ij
dgij
dt
гк j гк
г
4.1. Интегральные инварианты системы дифференциальных уравнений 93
и
j-li^ =divX.
at
Итак,
f=/(f+<4-5»
и
Так как функция в интеграле является непрерывной и область U произволь¬
на, можно заключить, что
Необходимое и достаточное условие того, чтобы I = f р(х, t)dU
и
являлся интегральным инвариантом, таково:
^+pdivX = 0. (4.6)
at
Функция р, удовлетворяющая данному уравнению, называется множитель
Якоби.
В заключение отметим, что при использовании тождества
dp = dp. _ др_ , dp {
dt dt dt dt dxi
г г
(4.6) можно переписать в более обычном виде
^ + di v(pX) = О,
который читатель уже встречал, например, в электродинамике, где р отож¬
дествляется с плотностью электрического заряда, а рХ — с плотностью
тока.
Стоит обратить внимание, что в случае отсутствия дивергенции век¬
торного поля X любая константа является множителем Якоби. Для этих ти¬
пов динамики получен важный результат, состоящий в том, что мера μ(υ)
любой области U не изменяется со временем. Это как раз выполняется для
гамильтоновых систем
r d._ dH
94
Глава 4
для которых имеем
д2П | д2П
dqhdph dphdqh
= 0.
Было уже замечено, что определитель Якоби вполне канонического
преобразования равен 1 и что этот тип преобразования является сохраняю¬
щим объем.
Также было отмечено, что гамильтонова эволюция сама является
вполне каноническим преобразованием между подмногообразием Uo фа¬
зового пространства Ф и подмногообразием U того же пространства, чьи
точки представляют эволюцию во времени t точек подмногообразия Щ,
имеющим гамильтонову функцию в качестве генератора.
Таким образом, для канонических систем выполняется двойное сохра¬
нение меры (.замечание Лиувиляя).
4.2. Производная Ли
Рассмотрим систему дифференциальных уравнений
где X не зависит явно от времени, и вычислим скорость изменения ка¬
кой-либо функции координат х вдоль решений системы, более кратко, «вре¬
менную» производную. Имеем
Следовательно, с системой дифференциальных уравнений можно есте¬
ственно связать дифференциальный оператор
действие которого на произвольную функцию / дает ее «временную» про¬
изводную. Так как с каждой точкой х пространства можно связать вектор,
имеющий вещественные числа Хг{х) в качестве компонент, оператор X
называется также векторным полем.
^ = Х\х), Vie (1,2, ...,п)
(4.7)
df_ _ у- df dx1 _ V df
dt дхг dt “ dx1
г=1 г=1
n
4.2. Производная Ли
95
И наоборот, с любым векторным полем можно связать систему диф¬
ференциальных уравнений
определяющих кривые хг = xl(t), такие, что касательный вектор ΰ =
= (dx1 /dt, ..., dxn/dt) в точке х как раз определяется компонентами Хг
в точке х. Такие кривые называются интегральными кривыми векторного
поля X.
Обозначая, как и раньше, точки с координатами ( 00 , 00 , . . . , 00 )
и (Xq, Xq, ..., Xq )> соответственно, Q и Qo, уравнения
представляют решения системы дифференциальных уравнений, которые
в момент времени to принимают значение Qo· Они локально определяют
взаимно однозначное глобальное отображение, которое зависит от парамет¬
ра t\
называемое поток, порождаемый векторным полем (Хг,Х2, ..., Хп),
удовлетворяющее групповым свойствам
Если система дифференциальных уравнений является канонической с ха¬
рактеристической функцией 7ϊ, отображение сpt называется также гамиль¬
тоновым потоком, порождаемым Л.
Производная функции / вдоль решений дифференциальной систе¬
мы (4.7) обозначается следующим образом:
^ = X\x\ Vie (1,2
Q = Q(t, Qo)
(4.8)
ψί· Qo -» Q = <pt{Qo)
' ψο = тождественное отображение,
< (<PtГ1 = φ-и
^ ψίχ ° ψί2 = ^ίι+ί2·
и известна как производная Ли функции / по X.
Из уравнений хг = xl(t,xo) следует
96
Глава 4
Теперь легко вычислить «временную» производную дифференциалов dx\
Получаем
d(dx
dt
dt \dxb) ~idx30 dt
n n / η Λ , Λ
= Σ<Γ7*' = Σ<4(Σβχ 8
J = 1
i=l
Хг =
= ΣΣ|4
k=1 W=1
β*4]|ί = Σ®^· <«>
/с=1
Упомянутая временная производная известна как производная Ли диффе¬
ренциалов dx1 по X и обозначается Lxdx\ так что вышеприведенное урав¬
нение можно переписать в следующем виде
Lx dx1 =dX\
без каких-либо ссылок на параметр t.
Используя формулу
д _ у^ дхо д
дх1 “ дх{ дх{ ’
которая также следует из хг = хг(£,жо), можно вычислить «временную»
производную частной производной д/дхг. Таким образом, получаем
L d _ d д _ d у^ дхо д _
Х дхг dt дхг dt дхг dxJ0
у^/ d δχ0\ д _ у^ дХк д
fri dtdxi}dxi 9x/C
(4.10)
Последний шаг в этой формуле явным образом проделан в приложении В.
Замечая, что
дХк д
Σ
к=1
дхг дхк
х,-@-
дхг
(4.11)
4.3. Динамика Кеплера
(4.10) также может быть записана в виде
Lx
_д_
дхг
д_
дх1
97
(4.12)
Производная Ли по векторному полю X может быть определена на
функциях /, на дифференциалах dx1 и на векторных полях д/дхг с ясным
физическим смыслом — «временная» производная, т. е. производная вдоль
решений эволюционирующей системы дифференциальных уравнений пер¬
вого порядка. Так как, по определению, Lx удовлетворяет правилу Лейбни¬
ца, производная Ли по векторному полю X определена для произвольных
дифференциальных форм а = ai(x)dxl и векторных полей Y = Yl(x)
г=1
Lxa = ±(Lxai dx‘ + aidX‘) = £(^ + a,
д .
дхг
(4.13)
i=l
3 =1
i=1
η / η
дХг
dxj, (4.14)
idY3
= Σ
г,^=1
χΐ д γ3 д
дхг ’ θχΐ
j=1 \г=1
[Χ,η
дхг
idXi д
δχΐ дхг
(4.15)
Замечание 9. Если производная Ли определена на функциях, правило Лейб¬
ница позволяет определить
Lxi)f=Lx (В)-
дх
7 (Lxf)·
Заинтересованный читатель докажет, что оба определения эквивалентны.
4.3. Динамика Кеплера
Гравитационная потенциальная энергия двух тел с массами т\ и т2,
расположенных в выбранной системе координат в г\ и Г2, имеет вид:
U{ri,r2) = -G
ГП\ГП2
|ri -г2у
где G = 6.6 · 10 11Н · м2/кг2 — универсальная гравитационная постоянная.
98 Глава 4
Функция Лагранжа £, получающаяся вычитанием Ы из кинетической
энергии Т, есть
£{n,r2/vi,v2) = \m\v\ + \m2v\ + к _ ■
J ^ Fi-r2|
Координаты г\ и г*2 могут быть выражены через координату центра масс R
и относительную координату г, определенные формулами
- т iri + m2f2 ^ ^ ^
R = т1+т2 ’ ί — г 2·
Имеем
- _ т^Т ,6 - _ mir , 6
Τΐ 777,1+777,2 ’ Г2 777,1+777,2
Скорости и ^2 также можно выразить через скорость центра масс R
и относительную скорость ν:
т7 , rn2v _ - 7711 υ
1>1 — V ~\ : , Ί>2 — j ·
777,1 + 777,2 7721 + 7722
Лагранжиан £, выраженный через г, R, ν и V —
£ — \{гп1 + rri2)V2 + + 7?
где
777,1777,2
V ~ 777,1+777,2
есть приведенная масса.
Таким образом, лагранжиан £ есть сумма свободного лагранжиа¬
на Cr = + 777,2 )F2 и лагранжиана £г = ^μν2 — к/г системы с 1 степе¬
нью свободы. Первый лагранжиан описывает движение центра масс, кото¬
рое, естественно, оказывается равномерным. Второй описывает движение
частицы в поле гравитационных сил с приведенной массой μ, расположен¬
ной в центре масс. Заметим, что если 777,2 τττ,ι, то μ ~ m2 и r\ ~ R.
Соответствующая функция Гамильтона с m2 = m и 777,1 = М задается
следующим образом:
1 - - к „
4.3. Динамика Кеплера 99
Стоит отметить, используя результаты задач из параграфа, посвященного
скобке Пуассона, что момент импульса L является константой движения,
так что
{ЦП} = 0. (4.17)
Естественно, это свойство всех центральных потенциалов, т. е. всех потен¬
циалов U{г), зависящих только от модуля г вектора координаты г. Поэтому
траектория лежит в плоскости, заданной начальными значениями коорди¬
наты го и скорости vo и перпендикулярной моменту импульса L.
4.3.1. Вектор Лапласа-Рунге-Ленца
Для кеплеровского потенциала, кроме момента импульса L, существу¬
ют особые константы, выраженные с помощью так называемого вектора
Лапласа - Рунге - Ленца:
B=±pAL-k?, (4.18)
компоненты которого не являются независимыми, так как
В · L = 0,
что говорит о том, что вектор Лапласа-Рунге-Ленца лежит в плоскости
движения.
Интересно вычислить скобку Пуассона, включающую В. Читателю
предлагается доказать, что
{В,Н} = 0.
Кроме того, скобка Пуассона
{L, В} = η Λ В,
для которой уже была проверена истинность для любого В, может быть
переписана через компоненты:
з
^ ^ SjjkBk·
к=1
Более важная, хотя и более трудоемкая, задача — проверить, что
{ВгМ = -Щ^2етЬк.
к=1
100 Глава 4
Хорошо известно, что для отрицательной полной энергии, Е < 0, движение
происходит в ограниченном пространстве, по орбитам в форме эллипсов с
солнцем, расположенным в одном из двух фокусов. Для этого случая введем
вектор
так что предыдущая скобка Пуассона запишется в виде
з з
{Li, Aj} = ^ ^ SjjkAk, {Ai,Aj} = ^ ^ SjjkLk.
к=1 к=1
Как следствие, векторы, определенные посредством
I = \{L + A),
J = \{L-A),
будут иметь следующие скобки Пуассона:
з з
{huh} = {Jh,Jk} — {h,Jk} = 0,
1=1 1=1
похожие на скобки момента импульса.
Читатель, хорошо знакомый с алгебрами Ли, увидит, что алгебра Ли
симметрий для кеплеровской динамики является дваэюды so(3), или, лучше
сказать, 5^(2) ® 5^(2), которое локально изоморфно с so(4).
Более точно, мы обнаружили, что гамильтониан TL может быть записан
в виде
п, _ тк2 _ тк2
2(L2 + A2)~ 4(/2 + J2) *
В терминах генераторов группы 50(4), Lap = —Lpa (α,β = 1,2,3,4),
определенных как
з
Lhk = ^ ^ £Нкг^г, h, к = 1, 2, 3,
i=l
LhA = ~L^h = Ah, h = 1,2,3,
4.3. Динамика Кеплера
101
гамильтониан Ή принимает вид
где С\ = J2 LapLap — первая функция Казимира группы 50(4).
α,β
4.3.2. Атом водорода
Инвариантность относительно 50(4) объясняет, почему вырождение
квантовых энергетических уровней атома водорода больше того, что есте¬
ственно было бы ожидать от центральной симметрии (инвариантность от¬
носительно 50(3)).
Правила квантования состоят, грубо говоря, в замене классических ди¬
намических переменных на самосопряженные операторы в гильбертовом
пространстве комплексных квадратично интегрируемых функций согласно
следующему:
где h = 1.052 · ΙΟ"27 — постоянная Планка1 (деленная на 2π), а г — мнимая
единица. Таким образом, квантовый момент импульса и оператор Гамильто¬
на, соответствующие классической функции Гамильтона Ή = (1/2т\р-р —
— е2/г]), будут выглядеть так:
где V2 — оператор Лапласа, и е — электрический заряд протона. Вектор
Лапласа-Рунге-Ленца должен быть записан в виде
*Макс Планк родился в Киле в 1858 г. и умер в Гёттингене в 1884 г. Он был назначен
профессором кафедры теоретической физики в 1880 году в университете Киля и в 1884 году
в Берлинском университете. Вызвавший коренные изменения против своей воли, первона¬
чально сам Планк был убежден, что концепция нарушения непрерывности, характеризуемая
так называемым квантом действия h, была «чисто математическим неожиданным насили¬
ем над законами классической физики». В действительности, это был лишь первый пример
применения процедуры перенормировки, введенной в теорию поля с целью избавиться от
расходимостей. Он получил Нобелевскую премию в 1918 году.
н = -
102 Глава 4
для того, чтобы соответствующий вектор-оператор, который называется век¬
тор Паули
3 г
Вг = 2^ Σ eihk(PhLk - LhPk) - е2^г,
/г,/с=1
был самосопряженным оператором.
Классические формулы заменяются соответствующими квантовыми:
j2BhLh = 0, [Bh,H]= 0, /г =1,2,3,
h=l
3 3
[-L^, -Lj] = ihy'^eijkLki [Li, Bj] = ihEjjkBk,
k=1 fc=l
где скобка [·, ·] обозначает коммутатор-оператор. Кроме того, имеем
з
— ih ^ ^ ^ SjjkLk-
k=ί
Теперь ограничимся рассмотрением гильбертова подпространства, со¬
ответствующего связным состояниям, т. е. состояниям оператора Н с от¬
рицательно определенными собственными значениями Е < 0. В этом под¬
пространстве можно определить другой самосопряженный вектор-опера¬
тор (А1Д2Д3):
а=(-1)"Ч
так что предыдущие коммутационные соотношения перепишутся в виде
3 _ ^ ^ 3 _
^ ^ Sjjк Ак7 = ^ ^ SjjkLk'
к=1 к=1
Как следствие, определенные таким образом операторы
Д = \(Lk + Ак),
Jk = Ак)
4.3. Динамика Кеплера
103
будут удовлетворять следующим коммутационным соотношениям:
з з
[Ih,h\ = klh, [Jh, Jk\ = ih^2£hklJl, [h, Λ] = 0.
/=1 /=1
Оператор Гамильтона, следовательно, будет
jj- _ _ те4 _ те4
2(L2 + А2 + /г2) 2 (2(Р + J2) + /г2) ’
и, замечая, что
окончательно можно записать
jj- _ те4
2(4/^ + /г2) *
Предыдущая формула позволяет найти (квантовый) энергетический
спектр Еп и соответствующее вырождение атома водорода, используя толь¬
ко знание неприводимого представления 5/7(2) (8) 5/7(2), без какого-либо
использования уравнения Шрёдингера1.
Фактически, так как операторы Д удовлетворяют коммутационным
соотношениям момента импульса, Т2, может быть проквантовано в соответ¬
ствии с Т2 = h2l(l + 1), с целым или полуцелым Z, так что уровни энергии
атома водорода будут определяться формулой
4 4
тр те* те
= — - ~
2h2(2l + I)2 2h2n2 ’
которая является, конечно, формулой Бора2 с п = 21 + 1.
1 Эрвин Шрёдингер родился в Вене в 1887 году и умер там же в 1961 году. После полу¬
чения степени в университете Вены в 1906 году он отправился в Стоккард, Цюрих и Берлин.
После прихода Гитлера к власти Шрёдингер уехал в Оксфорд и Дублин. Окончательно он вер¬
нулся в Вену в 1956 году. Согласно Нильсу Бору, он был «универсальным человеком»; в самом
деле, он был ученым с большими культурными интересами в области физики, философии,
политики, биологии и классической греческой культуры. Он установил основное уравнение
нерелятивисткой квантовой механики и был награжден, вместе с Дираком, Нобелевской пре¬
мией в 1933 году.
2Нильс Хенрик Бор родился в Копенгагене в 1885 году и умер там же в 1962 году. Веко-
104
Глава 4
Вырождение энергетических уровней будет задаваться так:
71—1
degE'n = 5^(2Z + 1) = η2 = D
1=1
η — 1 η — 1
где D(i,j) обозначает размерность (г, ^-неприводимого представле¬
ния 577(2) О 5£7(2) - 50(4),
Л(г,Л = (2z + l)(2j + l).
4.4. Метод интегрирования Гамильтона-Якоби
В предыдущем параграфе были рассмотрены такие важные концепции,
как первый интеграл и интегральный инвариант, касающиеся канониче¬
ских систем. Наступило время кратко рассмотреть проблемы эффективного
интегрирования канонических систем. Начнем с классического метода ин¬
тегрирования Гамильтона-Якоби.
Этот метод сводит интегрирование канонических систем ранга 2п
к определению так называемого полного интеграла дифференциального
уравнения в частных производных с η + 1 независимыми переменными.
Задав каноническую систему
d дп
dt h dqh 5
dn = дП
dt h дрн ’
V/ι E {1, ..., n},
попытаемся наити, если таковые существуют, новые канонические коорди¬
наты (π, χ), такие, что новая функция Гамильтона /С будет наипростейшей,
т. е. /С = 0. После чего интегрирование преобразованной канонической си¬
стемы
{”=»;v,,e{i η>·
становится тривиальным
{π/ζ = const,
Х/г = COnst,
V/г G {1, , п}.
ре после получения степени он переехал в Кембридж, а затем в лабораторию Резерфорда
в Манчестере. Он разрешил противоречие между моделью атома Резерфорда и классическими
законами электродинамики. На самом деле он привел в согласие четыре физические теории:
классическую электродинамику, квантовое излучение абсолютно черного тела Макса Планка,
модель атома Резерфорда и атомные спектры, наблюдавшиеся Бальмером. Он был награжден
Нобелевской премией в 1922 году и был одним из основателей CERN в Женеве.
4.4. Метод интегрирования Гамильтона-Якоби
105
Воспользуемся развитым ранее общим методом, состоящим в поро¬
ждении канонических преобразований
Ph =
дУ
dqh
Xh =
дУ
дкн
с помощью произвольной функции У, зависящей от q и π и удовлетворяю¬
щей условию
д2У
J = det
dqhdTTk/
Новая характеристическая функция, следовательно, будет
К =
w(f4 + f
где * указывает, что в преобразовании все q должны быть выражены че¬
рез (π, χ) с помощью соотношений
ш=
Цель будет достигнута, если У таково, что /С = 0. Поэтому У долж¬
на быть решением знаменитого дифференциального уравнения в частных
производных
(4.19)
известного как уравнение Гамильтона-Якоби.
Метод интегрирования Гамильтона-Якоби формулируется следующим
образом.
• Задана каноническая система
jtVh
дН
dqh’
d , _ дП
dt h дрн ’
Vfte {l,n},
заменим импульсы p в H(p/q/t) на
Ph =
дУ
dqh
где У — неизвестная функция.
Глава 4
Запишем уравнение Гамильтона-Якоби:
*(М+£-л
Находим полный интеграл V(q/n/t) уравнения Гамильтона-Якоби,
т. е. какое-нибудь решение V уравнения
*(М+f-°·
зависящее, кроме q и t, также от п произвольных констант интегриро¬
вания, а именно (πχ, π2, ..., 7Гз), и удовлетворяющее условию 3
Запишем каноническое преобразование
ду
Ph=d^i'
4 V/ι £ {1, ..., η}, (4.20)
γ,
приводящее к тривиальным решениям π/г = const, х/г = const новой
канонической системы.
Это преобразование записывается явно в виде
/ Ph = Ph(ir/x/t),
λ ( ! /л V/г G {1, ..., тг}, (4.21)
I qh = qh{n/x/t),
представляя общий интеграл канонической системы.
Зафиксируем значения констант 7Г/г и %/г в соответствии с начальными
данными:
о
Ph=Ph(n/x/to),
Qh=Ph{n/x/t0),
Составим композицию отображений (4.21) и (4.22), чтобы получить
(Ph=Ph{po/qo/t), , ,
УЛ€{1' ' ''"J· (4'23>
представляющее, наконец, интеграл канонической системы, учитыва¬
ющий начальные условия.
4.4. Метод интегрирования Гамильтона-Якоби 107
Пример 13. Рассмотрим гармонический осциллятор с 1 степенью сво¬
боды и гамильтонианом
я = +πι2ω2ς2)’
так что соответствующее уравнение Гамильтона-Якоби записывается сле¬
дующим образом:
x((eS‘+mw\+m
2 my\dqj +ти q )+ dt
Попытаемся найти решение вида
V = -Et + W9
где Е — произвольная константа.
Тогда уравнение Гамильтона-Якоби упрощается до
2
ή (f)
решение которого легко находится в виде
W = ^ у/2тЕ — m2uj2q2 + ^ arcsin -
muq
2v_ , ω
так что
V = -Et + ^ \j2mE - m2uj2q2 + β- arcsin muJ<L· # (4.24)
1 \J2mE
Функция V порождает каноническое отображение
р = Щ- — \j2mE — τη2ω2ίί2,
dq
dV , , 1 ·
χ = —— = —t + — arcsin ■
dE ω у/7тЁ'
J =
где
d2V _ m
dq dE ^/ (2mE — m2u2q2)
108
Глава 4
Искомое каноническое преобразование в явном виде задается формулами
представляет собой общий интеграл канонической системы.
4.4.1. Замечания об уравнении Гамильтона-Якоби
Уравнение Гамильтона-Якоби представляет собой наиболее элегант¬
ную форму динамики и дает замечательный физический пример глубокой
взаимосвязи дифференциальных уравнений в частных производных первого
порядка и систем обычных дифференциальных уравнений первого порядка.
Впервые оно было введено в 1834 г. Гамильтоном [112] в его иссле¬
довании аналитической динамики и послужило отправной точкой для шре-
дингеровской формулировки квантовомеханического волнового уравнения,
аппроксимацией которого оно является в случае, когда постоянной Планка
можно пренебречь.
Доказательство же того, что если полный интеграл найден, то задача
динамики может быть полностью решена с использованием (4.20), принад¬
лежит Якоби [115], поэтому уравнение и соответствующий метод решения
названы именами обоих ученых — Гамильтона и Якоби.
Каждый полный интеграл уравнения Гамильтона-Якоби порождает
семейство решений уравнений Гамильтона и, согласно Дираку1 [85], «хотя
семейство решений не имеет никакого смысла с точки зрения ньютоновской
!Поль Адриен Морис Дирак родился в Бристоле в 1902 году и умер в 1984 году. После
получения степени в Бристольском университете в 1921 году он переехал в Кембриджский
университет. В этом университете с 1932 года он был профессором Лукасовской кафедры,
которую в свое время возглавлял Ньютон. Дирак был одним из многих великих физиков
нашего времени и может рассматриваться в качестве основателя современной физики. Мы
обязаны отметить уравнение Дирака, предсказавшее существование позитрона и вообще анти¬
частиц, статистику Ферми -Дирака и метод связей, являющийся важным инструментом для
гамильтоновой формулировки уравнения Эйнштейна, ставшего ступенью к квантовой теории
гравитации. Метод связей также стал фундаментальным шагом по направлению к квантованию
калибровочных теорий. Его книги сейчас рассматриваются как классические работы. Вместе
со Шрёдингером Дирак был награжден Нобелевской премией в 1933 году.
и обратное к нему
р = v2m7rcos(ω(χ + t)),
4.5. Уравнение Гамильтона-Якоби для кеплеровского потенциала 109
механики, ... оно ... соответствует определенному состоянию движения
в квантовой теории, поэтому, возможно, семейство решений имеет глубокий
смысл в природе, все еще не понятый до конца».
После того как задача динамики полностью решена, явное решение
уравнения Гамильтона-Якоби имеет вид
г
/
Y^Ph{r)q'h — Ή(ρ/q/т)
. h
dr ■
г
I mq/q'M]
dr,
где t и t — два момента времени, qf = dqj dr, Tin С — функции Гамильтона
и Лагранжа, а интеграл необходимо взять вдоль действительной траекто¬
рии динамической системы. Правая часть данного уравнения удовлетворяет
уравнению Гамильтона-Якоби, а также дополнительному уравнению [32]
dS
dt
Н = 0.
Замечание 10. Для консервативных систем S реально зависит только от раз¬
ности t — t, так что
Щ-и = о^-Щ + н = о.
dt dt
4.5. Уравнение Гамильтона-Якоби для кеплеровского
потенциала
В сферических полярных координатах {τ,ϋ,φ) декартовы координаты
точки (x,y,z) выражаются так:
(х = г sin^cos^,
у = г sin $ sin
z = Г COS0.
Длина линии ds = (dx2 + dy2 + dz2)1/2, представляющая собой бес¬
конечно малое расстояние между двумя точками с координатами (x,y,z)
и (х + dx, у + dy, z + dz), имеет вид
ds2 = dr2 + г2 dfi2 + г2 sin2 ϋάφ2.
Кинетическая энергия Т массивной частицы задается формулой
Т = hmv2 = \m (= \m(r2 + r2rd2 + г2 sin2 ϋφ2),
I I \dt J I
110 Глава 4
так что лагранжиан частицы для потенциала U (г) может быть записан в сле¬
дующем виде:
С = ^т(г2 + г2Ь2 + г2 sin2 ΰφ2) — U(f).
С введением сопряженных импульсов {ΡηΡΰ,Ρφ) Для (г,т9, <р):
рг = гаг, р$ = πιτΰ, ρφ = mr2 sin2 τ9<ρ,
соответствующий гамильтониан примет вид
Поскольку гамильтониан не зависит явно от времени, уравнение Гамильто¬
на-Якоби
может быть преобразовано, при V = W — Et, к виду
1 (f dwV , 1 f dwY , 1 idwY\ , 7/,.^ _ с
2m (д dr J r2 \ dtf J r2 sin2 $ J J
Для центрального потенциала U (г) можно найти полный интеграл пре¬
дыдущего уравнения, используя метод разделения переменных, состоящий
в том, что решение W (г, #, <р) ищется в виде
W(r,i9,^) = Wr(r) + ИЪ(0) +
т. е. решение представляется в виде суммы трех различных функций Wr,
W#, каждая из которых зависит только от одной из переменных г, #, <р.
Таким образом, уравнение Гамильтона-Якоби для W" становится та-
4.5. Уравнение Гамильтона-Якоби для кеплеровского потенциала 111
а после несложных преобразований оно принимает вид
Левая часть этого уравнения зависит только от φ9 в то время как правая
часть — только от г и ϋ. Так как переменные г, ϋ и φ независимы, каждая
часть уравнения должна равняться константе, а именно π2. Таким образом,
получаем
Снова замечаем, что левая часть зависит только от в то время как правая
часть — только от г. Так как переменные гид независимы, каждая часть
уравнения должна равняться константе, а именно .
Замечание 11. Константа πφ имеет ясный физический смысл: она просто
соответствует компоненте ρφ момента импульса вдоль оси ζ. Таким образом, она
отражает факт равенства площадей в плоскости (ж, у), заметаемых проекцией ради¬
ус-вектора R = г — zk.
Константа соответствует модулю момента импульса
так что, если а обозначает угол между плоскостью орбиты и плоскостью (ж, у),
имеем
Кроме того, уравнение Гамильтона-Якоби для W является для этого
решения эквивалентным системе
' <№φ
<
ρψ = \L\ cosa.
а также
ΊΤφ — ”7Γ·$ COS CX·
(4.25)
dWv
112
Глава 4
В случае кеплеровской динамики мы выбираем U(r) = —к/г, так что эти
уравнения перепишутся в виде:
ά\νφ
άφ
(dWj У
V dt J
dWr
dr
A
2m
π,,
E+%
'
Таким образом, имеем
V — —Et 4* Ήφψ 4* I d$
/<
Λ
7T2q -
I
2mk
J2 ·
Задачи
1. Найти полный интеграл уравнения Гамильтона-Якоби гармониче¬
ского осциллятора с 3 степенями свободы
г=1
методом разделения переменных в сферических полярных координатах.
2. Найти полный интеграл уравнения Гамильтона-Якоби кеплеровской
динамики
Ή= Р2 к
2т г>
используя параболические координаты (ξ,η,φ), определенные как
х — λ/ζν cos Ψί
У = λ/ζν sin Ψι
ζ = 1(ξ-η)
с ζ G [0,+οο[, η G [0,+οο[. Поверхность, заданная следующим образом:
ξ = const, η = const, определяет два семейства параболоидов вращения,
имеющих ось ζ в качестве оси симметрии.
4.6. Теорема Лиувилля о полной интегрируемости
ИЗ
3. Найти полный интеграл уравнения Гамильтона-Якоби гамильтони¬
ана с 3 степенями свободы
2т ri
описывающий динамику частицы в поле (ньютоновском или кулоновском1)
двух частиц с координатами г\ и Г2, расположенных на расстоянии а друг
от друга. Использовать эллиптические координаты (£,77, φ), определенные
как
" х = (£2 — 1)(гу2 — 1) cos φ,
У = oV(£2 - 1)0?2 - !) sinΨ>
ζ = σξη,
где σ — произвольный параметр и ξ G [l,+oo[, η G
выбрать σ = a.)
(Подсказка:
4.6. Теорема Лиувилля о полной интегрируемости
4.6.1. Редукция
Знание первого интеграла / данной динамической системы, описыва¬
емой уравнениями
хг = Xl(x/t), Vz G {1, 2, ..., m},
упрощает проблему интегрирования, так как соотношение
/ (x(t)/t) = const = /о
должно быть удовлетворено каким-либо решением χ(ί) уравнения движе-
ния, конечно, при подходящем выборе константы, зависящем от начальных
условий. Все т — 1 гиперповерхностей, полученных при вариации констан¬
ты /о, расслоят пространство, и каждая траектория будет принадлежать
одной и только одной из них. Расслоение называется регулярным, если
гиперповерхности имеют одинаковую размерность, в этом случае каждая
гиперповерхность называется лист.
1 Шарль Огюстен Кулон родился в Ангулеме в 1736 г. и умер в Париже в 1806 г. Он работал
инженером и был членом института Франции. В последние годы своей жизни он был генераль¬
ным инспектором парижского университета. Его вклад в теории трения и электромагнетизма
имеет фундаментальное значение.
Глава 4
Кроме того, если известен добавочный функционально независимый
первый интеграл д, данная траектория также принадлежит гиперповерхно¬
сти
определенной с помощью д. Следовательно, каждая траектория лежит, в об¬
щем случае, на (га — 2)-мерном пересечении листов двух расслоений. От¬
сюда следует, что знание га — 1 функционально независимых первых ин¬
тегралов, определяющих регулярные расслоения, полностью решает задачу
интегрирования, так как 1 -мерное пересечение листов как раз соответствует
кривым, представляющим траектории.
Замечание 12. Эта схема описывает лишь виртуальный случай и предваряет
переход к изложению теоремы Ли. Описанный случай почти никогда не реали¬
зуется, даже в простых системах — как, например, в гармоническом осцилляторе
с 2 степенями свободы, описываемом гамильтонианом
с иррациональным числом ω\/ω2. Прекрасный глобальный координатный анализ
можно найти в книге Винтнера [58], в которой введено понятие изолирующего инте¬
грала (менее корректно называемого также однородным). Интеграл f (x) называется
изолирующим, если «он способен сделать предсказания, касающиеся возможного
будущего (или прошлого) координат точек х = x(t) траектории, проходящей через
хо в момент t = 0 (случай x(t) = хо равновесного решения не исключается)».
Таким образом, естественно ожидать, что для канонической системы
знание 2η — 1 функционально независимых первых интегралов, определя¬
ющих регулярные расслоения, полностью решает задачу интегрирования.
Можно показать, что реально для канонической системы с п степенями
свободы (и с 2п-мерным фазовым пространством Ф) полностью решает за¬
дачу интегрирования знание только п функционально независимый первых
интегралов /*, находящихся в инволюции, т. е.
Более точно об этом говорит замечательная теорема, доказанная Софу-
сом Ли [134, 25].
Теорема 14 (Ли). Если для канонической системы ранга 2п известны
т функционально независимых первых интегралов, находящихся в инволю¬
ции, которые могут быть разрешены относительно т импульсов р, задача
интегрирования сводится к интегрированию новой канонической системы
ранга п — га.
9 (x{t)/t) = go,
2
г=1
{fi,fj}= 0, ViJ € {1,2, ..., η}.
4.6. Теорема Лиувилля о полной интегрируемости
115
Другими словами, если для произвольной системы дифференциальных
уравнений первого порядка знание т первых интегралов понижает ранг
на га, то для гамильтоновой системы — на 2га.
Представляет интерес (для конкретных приложений) случай т = п,
т. е. когда число таких первых интегралов точно равно числу п степеней
свободы.
4.6.2. Теорема Лиувилля
Теорема 15 (Лиувилля). Если для гамильтоновой системы известны
п функционально независимых первых интегралов, находящихся в инволю¬
ции, которые могут быть разрешены относительно импульсов р, задача
интегрирования сводится к интегрированию в квадратурах, т. е. уравнения
движения могут быть получены просто вычислением интегралов.
Доказательство будет получено с помощью метода интегрирования Га¬
мильтона-Якоби. Согласно этому методу, для того чтобы получить общий
интеграл канонической системы
• дН
Ph dqh
дН
ЧН dph’
v/ie (ί,..., η},
достаточно найти полный интеграл V дифференциального уравнения
в частных производных
f+4f^‘)=°· (4·26»
Тогда утверждение Лиувилля будет доказано, если мы покажем, что
знание п первых интегралов fr(p/q/t) = с г £ {1, ..., п} канонической
системы, для которых выполняются следующие свойства:
п
(i) являются функционально независимыми, т. е. Σ dfh = 0 => = О,
h=l
(и) находятся в инволюции, т. е. {/r, fs} = 0, г, s е {1, ..., п},
(ill) определяют алгебраическую систему frip/q/t) = тгн, разрешимую от¬
носительно т импульсов р, т. е.
д(/ь ·· · ? /п) / Q
д(ри ■■•,Ρη)
позволяет найти в квадратурах полный интеграл (4.26).
116 Глава 4
Рассмотрим случай, когда гамильтониан Н и функции fr не зависят
явно от времени t.
Уравнения
frip/q) = тгг, г G {1, ..., π}, (4.27)
для фиксированных π определяют подмногообразие Μ^(π), известное как
многообразие уровня фазового пространства Ф. Используя свойство (iii),
разрешим (4.27) относительно р, в виде
Pa=Va{q/ir), а € {1, ... , τι}.
Конечно, на многообразии уровня Μπ разность ра — φ&^/π) и, следова¬
тельно, скобки Пуассона {ра — φα(ς/π),Ρβ — ψβ^/π)} тождественно рав¬
ны нулю.
Кроме того, в конце параграфа будет показано, что из инволютивно-
сти / на всем фазовом пространстве Ф следует обращение в нуль скобки
Пуассона {ра — <£α(#/π), Ρβ ~ Ψβ^/^)} на всем фазовом пространстве Ф,
а именно:
{fr,fs}= о, Vr,s € {1, ... ,π} =Φ· {ρα-φα,ρβ-φβ}=0, να,β G {1, .. .,π}.
С другой стороны,
, , Οψβ 3φα
так что
{/r,/s} = 0, Vr,s G {1, ..., n} => Vo;, β G {1, ..., n};
откуда следует, что дифференциальная форма
п
Yvh(q/ir)dqh
h=l
является замкнутой или, что то же самое, локально точной. Другими сло¬
вами, в любой односвязной части Μπ существует такая функция W(q/π),
что
<Ph(q/n/t) = (4.28)
4.6. Теорема Лиувилля о полной интегрируемости
117
Таким образом, было показано, что из инволютивности / следует, что ре¬
шения (4.27) могут быть локально выражены относительно импульсов р
следующим образом:
dW( , \
м=
Теперь определим п новых координат χι, %2, · ·
* -
Далее легко проверить, что соотношения
Хп посредством
dW ( I \
Ph = Wh{qM'
8W, , ч
хъ = ьГкШ
неявно определяют обратимое преобразование между переменными (p/q)
и (π/χ), которое оказывается каноническим для результатов, полученных
в параграфе 3.1.2. Обратимость преобразования легко следует из
д 2W = _d_dW = &Ph.
dqhdnk дпк dqh дпк 5
т. е., замечая, что d2W/dqhdnk — это элемент матрицы Якоби из φ относи¬
тельно π, так что определитель Якоби det(d2W/dqhdnk) является обратным
якобиану det(dfi/dpj), который предполагается (свойство (iii)) отличным
от нуля.
Итак, приходим к новой канонической системе
d _ dJC
dt*h дхн
d _ dJC
dt h дпь
с новой характеристической функцией /С в виде
Цъ/х) = п*,
где * обозначает, как обычно, выполненное преобразование.
(4.29)
118 Глава 4
Каноническая система (4.29) показывает, что /С реально не зависит от χ,
поскольку π = 0. Как следствие, производные дК/д'кь не будут зависеть от
времени t, так что система (4.29) тривиально интегрируется в следующем
виде
7Th = COnst,
Xh = Vht 4" δ}ι,
где = dJC/dnh и δ — произвольные константы.
Для рассмотрения общего случая необходимо введение двух вспомога¬
тельных параметров ро, qo и двойных скобок
ίί„. λ,ίί _ ( ди dv ди dv \ _ ди dv ди dv , г л
’ h^\dqhdph dpk dqk' dqo dp° dp° dq°
Разумеется, если и и ν не зависят от ро, то
{{и, и}} = {u,v},
и тогда
{{fr,f,}} = {fr,fe} = 0.
Кроме того, выбрав qo = t, имеем
{{ро + Я, /г}} = 1 · - 0 + {ро + Я, fr} = + {Я, /г}.
В терминах двойных скобок, лиувиллевские гипотезы о знании п инволю-
тивных первых интегралов /Г(р/#Д)> г ^ {!> · · · можно сформулиро¬
вать так:
{{/μ> fv}} = 0, μ, υ G {0,1, ..., η},
с /о = Ро + Η.
С другой стороны, из тех же гипотез следует, что алгебраическая си¬
стема
Г fr(p/q/t) = 7ГГ,
\ ро + Н = 0
может быть решена в виде
Ра - <Pa(q/n/t) = 0, a G {0,1, ..., п}, (4.30)
где
Ыд/тгД) = —Ή{φ/q/t)·
4.6. Теорема Лиувилля о полной интегрируемости 119
Как и раньше, оказывается, что обращение в нуль {{/μ,/υ}} Для
всех μ, υ е {0, ..., п} влечет
{{ра ~ ψα,Ρβ ~ Ψβ}} = 0, Va, /3 € {0, , π},
или, более явно,
гг Ί Ί
{{Р.э^~э^·
Поскольку
{{ίμ,ίν}} = о, 4μ,ν G {0,1, ...,π} => ^ Va,β G {0,1, ...,η},
дифференциальная форма
η
/ι=0
является замкнутой или, что то же самое, локально точной. Другими слова¬
ми, в достаточно малой области существует такая функция V(q/n/t), что
Vaiq/n/t) = Va G {0,1, ..., η}.
Таким образом, было показано, что из инволютивности / следует, что ре¬
шения уравнений /Г(р/#Д) = тгг могут быть локально выражены относи¬
тельно импульсов р следующим образом:
Рг = Ι^^/ττ/ί), т е {1, ···, гг},
где V такова, что
^ = ψο(ς/π/ί) = —Ή{φ/q/t) = -Η (^/q/t^j .
Это эквивалентно тому, что V — полный интеграл уравнения Гамильтона-
Якоби
120 Глава 4
Следовательно, определяя п новых координат χι, · ·, Хп посредством
*. = !£№/«>,
соотношения
неявно определяют обратимое преобразование между переменными (p/q)
и (π/χ), которое оказывается каноническим для результатов, полученных
в параграфе 3.1.2, и приводит к тривиально интегрируемой новой канони¬
ческой системе
7Г/1 = 0,
.Xh = 0.
Лемма 1 (инволютивные соотношения). Заданы п функций gr в фа¬
зовом пространстве Ф, такие, что алгебраическая система уравнений
9r(p/q) = 0, г е {1, п}, (4.31)
моэ/сет быть разрешена относительно р в виде
Pi = <Pi(<l), *е{1, ...,η}. (4.32)
Тогда во всем фазовом пространстве Ф имеем
{5r,5s}=0, Vr, s е {1, ..., η} =>· {ρα-φα,ρβ-φβ}=0, Va,/3 € {1, .. ,,η}.
Доказательство.
Уравнение (4.32) при подстановке его в (4.31) дает тождественно
9г(я) = 9г {ч>{ч)/ч) = 0, Г е {1, ..., п},
и затем на Ф
9r {<p{q)/q) = о.
Последнее соотношение в явном виде выглядит так:
4.6. Теорема Лиувилля о полной интегрируемости 121
Кроме того, частная производная дд3/ддн выражается в виде
dgs _ dgs d(pj — ψι)
dqh ϊ-ί dpi dqh
г=1
С другой стороны, так как d(pj — <pj)/dph = Sjh, имеем
dgr _ dgr d(pj — φj)
dph “ dpj dph
так что
dgLdg±= γ-% dgr dgs d(pj - ψι) d(pj - ψό)
dph dqh dpt dpj dph dqh ’
г,J = l
fyfrfyh _ y' dgr dgs d(pt - <pj) djpj - ipj)
dph dqh .4-'. dpi dpj dqh dph
г,3 = 1
Отсюда следует, что
r Ί _ ( dgT dgs dgr dgs \
{9r, 9s} 2^ [ Ят>и F)nu Ят>и Япи J
dgr dg.
h=i \dph dqh dphdqh
ЕиУг uys Г Ί
,j=i WiWj i,Pj ~Ψά
Это выражение можно переписать в виде
®9г -у (s)
г=1
где
η
XiS) = Σ life - Pi - ^·>· (4·34)
j=i Pj
Поскольку детерминант Якоби d(gi, ..., gn)/d(pi, ..., ρη) ненулевой,
из (4.33) следует
{.9r, 9s} = 0 =}► Xja) = 0.
Аналогично, используя в (4.34) тот же аргумент, окончательно получаем
XiS) = 0 ^ {Рг ~ Ψύ Pj ~ ψ]} = °·
122
Глава 4
4.6.3. Замечания о теореме Лиувилля
Рассмотрим каноническую систему с функцией Гамильтона Н, которая
не зависит от времени явным образом. Было показано, что знание п первых
интегралов fr(p/q), г Е {1, · · · которые функционально независимы,
п
т. е. Σ λhdfh = 0 => Xh = 0, находятся в инволюции, т. е. {/r,/s} = О,
h=l
г, 5 Е {1, ..., п}, и алгебраическая система fr{p/q/t) = тгь может быть
разрешена относительно п переменных рг, позволяет тривиально интегри¬
ровать уравнения движения.
Арнольд дал глобальную формулировку теоремы, наложив требование
компактности и связности многообразия уровня Μπ. Она будет подробно
рассмотрена в части III. Здесь мы ограничимся следующим.
Во-первых, заметим, что W в (4.28) определена лишь локально. Как
следствие, координаты χ определяются на Mf (π) не единственным образом.
Они будут непрерывными многозначными функциями точки р Е
χ: р G Μ/(π) -> р' = χ(ρ) G 9ίη.
Кроме того, с каждой точкой р Е Mf (π) можно связать точку р' е 9^п,
чьи координаты χ1, χ2, ..., χη. Действительно, так как χ определены
не однозначно, можно связать с р бесконечно много точек, по одной для
каждого выбранного определения χ:
p€MfM ^ р'пр'ър'з, ■ ■ ■
Ясно, что так как χ изменяются непрерывно, все точки р\ связанные
со всеми точками р многообразия Μ^(π), будут покрывать все простран¬
ство W1.
Исследуем более тщательно многозначную структуру χ.
Вектор а будет называться периодом, если \/χ, χ и χ + а представляют
одну и ту же точку в Конечно, он будет независим от χ, так как χ
и χ+α оба являются решениями (4.29). Вместе с тем, модуль \а\ вектора а не
может быть сколь угодно малым, поскольку в достаточно малой области χ
является однозначным.
Если а\ — период с минимальным модулем, то τηχ αχ с mi е Ν —
тоже период. Кроме того, любой период, параллельный αχ, должен быть
кратным а\ относительно целых чисел. Действительно, если а' = Ха\
с Λ е (9\ — Ν),το, обозначив через [Λ] максимальное целое, меньшее, чем Λ,
получим а' — [λ]αι = (Λ — [λ])αι — период с модулем, меньшим, чем |αι|.
Как следствие, любой новый период а будет иметь компоненту, ортогональ¬
ную а\. Выбирая среди них период а2 с компонентой, ортогональной а\
4.6. Теорема Лиувилля о полной интегрируемости
123
и имеющей наименьший модуль, получаем, что векторы πίχαι + πΐ2(ΐ2 — пе¬
риоды. Более того, в плоскости, натянутой на векторы αχ, нет периодов
другого вида. Следовательно, по индукции, все периоды имеют вид
где г = О соответствует отсутствию периодов, и г ^ п, так как все векто¬
ры а\ являются, по построению, линейно независимыми. Таким образом,
каждая точка р G Mf(π) будет иметь только один образ в каждом паралле¬
лепипеде со сторонами а* (если г < г ^ п, то а* = оо).
Область движения ограничена, если г = п, и неограничена, если г ф п.
Если п = 2, возможны три случая:
• г = О =Φ· Μ/(π) — топологически эквивалентно плоскости,
• г = 1 =Φ· Μ/(π) — топологически эквивалентно цилиндру,
• г = 2 =>· Μ/(π) — топологически эквивалентно тору
Только в последнем случае область движения является компактной.
В общем, если dim Μ^π) = η, компактная гиперповерхность, соот¬
ветствующая г = п, называется η-тором Тп. В любом случае движение
происходит на Mf(π) С Ф, которое является инвариантным.
4.6.4. Переменные действие-угол
Рассмотрим подробнее случай тора. Обозначив через 71 близкие кри¬
вые, которые на Μ/(π) являются образами отрезков Χαι с 0 ^ Λ ^ 1,
определим
J будут первыми интегралами, так как они являются функциями /, и
где AiW представляет вариацию W вдоль кривой 7*. Кроме того, они будут
независимы и инволютивны, так как
Следовательно, используя с самого начала J вместо /, можно ввести со¬
пряженные к ним переменные φh таким же образом, как χ были введены
m\di + rri2a2 Η l· mrar, r G {0, ..., n}, ra* G N,
124
Глава 4
в качестве сопряженных переменных к /. Вдоль замкнутой кривой 7^ будем
иметь
Awh = Ak®£ = -£-AkW = 2w5hk. (4.35)
Согласно этому уравнению, φ — угловые переменные, так как их вари¬
ация равна 2π вдоль любого замкнутого пути, проходящего по тору один
оборот. Их сопряженные импульсы J дают, не считая постоянного множите¬
ля, вариацию действия W вдоль замкнутой кривой, на которой все φ, кроме
одной, являются константами. По этой причине они называются переменны¬
ми действия. Функция Гамильтона /С = Н* будет функцией исключительно
переменных действия J, а угловые переменные удовлетворяют уравнениям
интегрирование которых дает
<Ph = Vh(J)t + Sh·
Описываемое ими движение называется мулътипериодическим движением
с частотами Vh-
В заключение заметим, что переменные действие-угол определены не
однозначно, поскольку любое линейное преобразование φ с целыми коэф¬
фициентами и детерминантом соответствующей матрицы, равным 1, опять
даст угловые переменные, сопряженные к которым будут переменными дей¬
ствия.
4.6.5. Переменные действие-угол гармонического осциллятора
Гамильтониан гармонического осциллятора с η = 1 степенью свободы
выглядит так:
ТТ 1 / 2 , 2 2 2\
= 2т +т“Ч)·
Система имеет ровно один первый интеграл, который, конечно, находится
в инволюции с самим собой. Таким образом, система вполне интегрируема
по Лиувиллю. Многообразие уровня
МЕ = |(р/д) € Ф: 2~(Р2 + m2uj2q2) = е|
является, в фазовом пространстве Ф, эллипсом с полуосями а = у/2тЕ
1 /о/т1
и b = — у —. Переменная действия
4.6. Теорема Лиувилля о полной интегрируемости
125
должна быть вычислена вдоль кривой 7, заданной значениями q* в точках
поворота, т. е. значениями
где соответствующие импульсы равны нулю.
Соответствующий интеграл легко вычисляется. Его можно легче вы¬
числить, если заметить, что, не учитывая множитель 1 /2π, переменная дей¬
ствия — это площадь nab упомянутого эллипса. Итак, получаем
Гамильтониан гармонического осциллятора, выраженный в переменных
действия, выглядит так:
Угловая координата вычисляется с помощью (4.24).
Такая же процедура, проделанная с осциллятором с п степенями сво¬
боды,
4.6.6. Динамика Кеплера в переменных действие-угол
В предыдущем параграфе было показано, что функция Гамильтона для
динамики Кеплера в сферических координатах записывается как
и что соответствующее приведенное уравнение Гамильтона-Якоби имеет
вид
K, = ujJ.
п
приводит к
п
К = YoJhJh■
Глава 4
Было также показано, что, используя метод разделения переменных,
полный интеграл уравнения приводится к виду
В компактном случае, когда Е ф О, можно ввести переменные действия Jr,
Остающиеся две замкнутые кривые интегрирования фиксируются требо¬
ванием обращения в нуль соответствующих скоростей или, лучше, соот¬
ветствующих импульсов рг9 и рг, выраженных, естественно, через пере¬
менные и πφ. Таким образом, пределы интегрирования фиксируются
с помощью
W(r,0,<p) = Wr(r) + Ψΰ(ΰ) + πψ{φ),
где функции Wr(r), W# ($), \νφ(φ) удовлетворяют уравнениям
' №ψ
Так как πφ — константа и 0 ίί ψ ·ζ~ 2тг, имеем
(4.36)
4.6. Теорема Лиувилля о полной интегрируемости
127
Следовательно, интегрирование по ϋ должно быть выполнено между пре¬
делами ϋι и $2, заданными решениями
sin2 ϋ = —у = cos2 α,
А
где было использовано (4.25). Так как сама ϋ всегда лежит между 0 и π,
где sin ϋ > 0, имеем sin ϋι = sin $2 = cos а. Таким образом, интегрирование
проводится от ϋι = 7г/2 — а до π/2 и обратно от $2 = тг/2 + а до ϋι, так
что sin ϋ колеблется от cos а до 1, а затем до cos а. Таким образом получаем
(см. приложение С)
Ji9 = 7Г$ — Ήφ. (4.37)
Интегрирование по г, также представленное в приложении С, с использо¬
ванием метода вычетов дает
Jr = -π* + ,тк ■ (4.38)
V-2 тЕ
Из (4.36), (4.37) и (4.38) получаем
тк
Jr + Jfi + Jm
у/—2 тЕ
Это уравнение позволяет непосредственно написать новую функцию Га¬
мильтона К, = Н* в виде
£/j\ гпк2
2(Jr + «7# + J^)2 *
4.6.7. Возмущения интегрируемых систем и теорема КАМ
Существует совсем не много динамических систем, удовлетворяющих
гипотезам теоремы Лиувилля. В общем случае, для функции Гамильтона,
не зависящей от времени t, существует только первый интеграл, заданный
гамильтонианом. Некоторые классические интегрируемые системы: систе¬
мы с центральной симметрией, частица в ньютоновском гравитационном
поле, порождаемом двумя фиксированными точками, сферический волчок
в ньютоновском гравитационном поле. Существует еще несколько дина¬
мических систем с конечным числом степеней свободы, открытых недавно
в связи с проблемой интегрирования в теории поля, где встречается намного
больше примеров [161, 44].
Для приложений представляет интерес разработка методов, которые
позволили бы изучать данную гамильтонову динамику путем разделения ее
Глава 4
функции Гамильтона Н на сумму двух частей. Первая часть, Но, должна
быть вполне интегрируемой, так что
Н = Но + ХН1,
где Λ — малый параметр и Hi — аналитическая функция 2п переменных.
С помощью переменных действие-угол (J, φ) данное уравнение перепишет¬
ся в виде
H(J^)=H0(J)^XH1(J^).
Для Λ = 0 фазовое пространство расслаивается, согласно теореме Лиувил¬
ля, на η-мерные инвариантные торы Μ/(π), определяемые с помощью Jh =
= π^, на которых происходит накручивание кривых
ΨΗ = Vh{J)t + 4>h(Q)·
До 1954 года существовало общее мнение, что Λ ф 0 полностью раз¬
рушает расслоение на инвариантные торы и замечательную геометриче¬
скую структуру, лежащую в основе интегрируемой системы, что приводит
к эргодическому поведению, т. е. орбитам, плотно заполняющим подмно¬
гообразие Н = const. Следовательно, вопрос в том, чтобы узнать, что
остается от этой геометрической структуры, когда Λ ф 0. Это мнение
основывалось на том факте, что в возмущенных рядах появляются члены
типа V · к, где к = (fci, /с2, . · ·, кп) — целые числа. Поэтому если отноше¬
ния vi/vj — рациональные числа, то ряды расходятся. Утверждение, что
отношения vijvj — рациональные числа, эквивалентно утверждению, что
существует период Т, кратный всем периодам т = 1 jvj, так что орбита на
торе Тп является замкнутой. В этом случае тор называется резонансным.
Помимо этого случая, возникнут другие, близкие к резонансу, однако чле¬
ны ряда будут слишком велики (малые знаменатели), поскольку множество
рациональных чисел Q плотно в Это происходит, например, в случае
с Юпитером и Сатурном, которые движутся по орбитам по 299" 1' и 120//5/
в день, соответственно, так что 2ι/ι — 5z/2 — 0. Существование сильного
возмущения с большим периодом в движении планет, связанного с малым
знаменателем 2ζ/ι — 5ζ/2, было известно уже Лапласу. Присутствие ΰ · к
в знаменателе можно легко понять, обратив внимание на то, что члены
в разложении Н\ в ряд Фурье,
Hi(J,<p) = y~^i(J)expifc · φ,
к
в возмущенном случае будут дифференцироваться или интегрироваться по t.
4.6. Теорема Лиувилля о полной интегрируемости
129
Окончательно, в 1954 году, положительный ответ о применимости ме¬
тодов возмущения и роли параметра Λ в сходимости соответствующих рядов
был получен Колмогоровым. Его теорема, обобщенная и формализованная
Арнольдом (1963) и Мозером (1967), сегодня известна как теорема КАМ.
Теорема [2] доказывает, что для малых значений |А| и при ненуле¬
вом гессиане гамильтониана разрушаются только несколько инвариантных
торов. Большую часть из них возмущение только деформирует. На таких
деформированных торах орбиты везде остаются плотными и почти перио¬
дичными с п частотами. Такие инвариантно деформированные торы соот¬
ветствуют невозмущенным начальным условиям, для которых
V · к ^ а\к\~ь
с положительными константами а и 6. Показано, что для достаточно боль¬
ших b константа а порядка О(А) и дает меру потерянных торов.
Мы не будем углубляться в детали, а отсылаем интересующегося чи¬
тателя к литературе (кроме книги Арнольда [2], см., например, [45, 3]).
4.6.8. Представление Пуанкаре
Существует возможность конкретно увидеть, что происходит при ис¬
пользовании так называемого отображения ПуанкареК
Рассмотрим гамильтонову систему с п = 2 степенями свободы, чья
функция Гамильтона Ή явно не зависит от времени t. Предположим так¬
же, что 3-мерное многообразие Με = {р £ Ф: 1~i{p/q) = Щ, определенное
с помощью первого интеграла энергии, компактно. Известно, что существо¬
вание второго первого интеграла, назовем его /, обеспечивает полную инте¬
грируемость и что многообразие Me расслоится на 2-мерные инвариантные
торы Т2. Для заданного начального условия движение будет представлено
спиралью, принадлежащей только одному тору и плотно намотанной на
него, никогда не возвращаясь (при условии, что тор нерезонансный) в ту же
самую точку.
Рассмотрим теперь 2-мерное многообразие Σ, определенное с помо¬
щью уравнения
W(P1,P2,<?1,0) = Е,
представляющее собой пересечение Me с гиперплоскостью, заданной q2 =
= 0 и точкой σο Е Σ, которая может быть фиксирована заданием точки
в плоскости S = (pi,qi)-
*Αηρη Пуанкаре родился в Нанси в 1854 году и умер в Париже в 1912 году. Он был
профессором Парижского университета и Политехнической школы. Выполненный Адамаром,
Ланжевеном, Бете и Вольтерра обзор его фундаментального вклада в математику и теорети¬
ческую физику можно найти в книге Анри Пуанкаре Научные работы, философские работы,
вышедшей в серии Сборники научных эссе (Париж: Алкан, 1914).
130
Глава 4
Выберем σο в качестве начального условия в момент времени to, по¬
тока Н, тогда наступит момент времени когда траектория опять пере¬
сечет Σ в точке σι G Σ. Таким образом, рекурсивно, возникнет последова¬
тельность моментов времени £&, в которых траектория будет пересекать Σ
в точках σ/с G Σ. Так как последовательность точек G Σ — это образ
последовательности sk = точек в плоскости S, можно описать
эволюцию, задавая последовательность sk G S. Отображение
Σ —► S,
описывающее эволюцию, называется отобраэюение Пуанкаре.
Кроме того, так как траектория наматывается на тор Т2, она пе¬
ресекает Σ по 1-мерному подмногообразию, определенному уравнени¬
ем /(ρι,ί>2,<7ъ42) — тг> т. е. по гладкой замкнутой кривой, которая также
является образом подобной кривой в S. Поэтому для нерезонансного тора
точки Sk будут располагаться вдоль регулярной кривой, в то время как для
резонансного тора последовательность прервется, т. е. будет существовать
такое целое число г, что Sk+r = sk, и т. д.
Это описание может быть применено к частично интегрируемой ди¬
намике. В этом случае траектория пересечет Σ не по регулярной кривой,
но в точках σ/с, покрывающих 2-мерную область, которая является образом
2-мерной области S (хаотическое поведение).
Теорема КАМ предсказывает, что при увеличении параметра А можно
наблюдать в S переход от картины, составленной из регулярных кривых,
к картине, составленной из большой части предыдущих кривых вместе
с дополнительными точками, а затем к картине, составленной из несколь¬
ких кривых и большого количества отдельных точек, покрывающих всю
рассматриваемую область.
Компьютерный анализ дал, естественно, именно то, что ожидалось,
и позволил открыть новые замечательные вполне интегрируемые системы.
Рекомендации для дальнейшего чтения
• G. dell’ Antonio, Elementi di Meccanica (Liguori, Naples, 1996).
• A. Lichnerowicz, «Les varietes de Poisson et leurs algebres de Lie
associees», J. Diff. Geom. 12, 253 (1977).
• A. Romano, Lezioni di Meccanica Razionale (Liguori, Naples, 1990).
• E. C. G. Sudarshan, N. Mukunda, Classical Dynamic: A Modern Perspective
(John Wiley, 1974).
• W. Yourgrau, S. Mandelstam, Variational Principles in Dynamics and
Quantum theory (Dover, 1968).
Часть II
Основные понятия
дифференциальной геометрии
Дифференциальная геометрия представляет собой дифференциальное
исчисление, которое не зависит от системы координат и поэтому является
наиболее подходящим для науки (физики) языком для описания явлений,
которые не зависят от наблюдателя.
Часть II посвящена краткому обзору полезных геометрических поня¬
тий, таких как дифференциальное многообразие, касательное простран¬
ство, расслоенные пространства, производная Ли, дифференциальные
формы, внешняя производная.
Дифференциальные формы описывают все основные физические поня¬
тия: работа, теплота, внутренняя энергия, электромагнитное поле и т. д.
Расслоенные пространства используются в физике элементарных ча¬
стиц для описания частиц с внутренними структурами (изотопический спин
и т. п.), а также для построения мгновенных решений в теории поля.
В дальнейшем суммирование по повторяющимся верхним и ниж¬
ним индексам будем обозначать согласно эйнштейновскому соглаше¬
нию: Σ сцЬг = сцЪг.
Глава 5
Многообразия и касательные
пространства
5.1. Дифференцируемые многообразия
Многообразие М является сепарабельным топологическим простран¬
ством, таким, что каждая его точка представлена по крайней мере на
одной карте; картой (ΙΑ,φ) многообразия М. является открытое множе¬
ство U С М., называемое областью карты, с гомеоморфизмом
φ:ΙΑ СМ-+ АсЖп
из U в открытое множество А в 9ЯП.
Отображение f:U-*V между двумя топологическими пространства¬
ми U и V называется гомеоморфизмом, если оно взаимно-однозначно и оба
отображения / и /_1 являются непрерывными.
Пусть р будет элементом в М, представленном на карте (ΖΥ, φ). Коор¬
динаты φι(ρ) образа точки р называются координатами р на карте (W, <р),
или локальными координатами точки р. Таким образом, карта является, по
существу, локальной системой координат.
Атлас класса Ск на многообразии М — это совокупность
карт {(Κα,ψα)}, такая, что области Ыа образуют покрытие М и гомео¬
морфизмы
ψβ ψβψίαΟΪΑβ)
являются отображениями класса Ск между открытыми множествами 9ЯП.
Два атласа Ск являются эквивалентными, если их объединение является
атласом Ск.
Многообразие М с классом эквивалентности атласа Ск называется
дифференцируемым многообразием класса Ск; его размерность равна п.
Многообразие будет называться ориентируемым, если атлас может
быть выбран таким образом, что для любых а, β детерминанты Яко¬
би det ( ] имеют одинаковый знак. Точное определение будет дано
\д(Рр/
в параграфе 2.5.
5.1. Дифференцируемые многообразия 135
Сфера как дифференцируемое многообразие
п-мерная сфера Sn определяется следующим образом:
S"= j(*i,...,*„+1)e!Kn+1: =
Она является сепарабельным топологическим пространством, и ассоцииро¬
ванные с U С Sn и V С Sn карты (<U, φ) и (V, ψ) могут быть определены
следующим образом:
U = Sn-N, V = Sn - S,
где N и S суть северный и южный полюсы:
N = (0, ...0,1), S = (0, ...,0, —1).
При использовании обозначения х = (жх, ..., жп) точка р еЫ будет иметь
координаты (ж, £η+ι)·
Отображение
φ-.peU -> φ(ρ) = t= γ—^ 6 9*tn
1 Хп+1
называется стереографической проекцией сферы Sn относительно север¬
ного полюса N. Это взаимно-однозначное отображение, непрерывное вме¬
сте с обратным к нему, которое имеет вид:
Аналогично, стереографическая проекция сферы Sn относительно южно¬
го полюса S определяется так:
ф-.peV^ ψ(ρ) = и = —|— е Dtn,
1 "г J~>n+1
и это взаимно-однозначное отображение, непрерывное вместе с обратным
к нему, которое имеет вид:
136 Глава 5
Поскольку образы пересечения
WnV = 5n-{W,S},
для <ри ψ совпадают с (9ЯП — {0}), то есть
φ(Κ η V) = Π V) = 5КП - {0},
отображение
φ о : й е (9ЯП — {0}) —> t = (φ о '0_1)(й) = —G (9ЯП — {0})
м
является отображением класса С°°.
Таким образом, две совместимые карты (U, φ) и (V, ψ) являются атла¬
сом класса С°° для Sn, и (ίχ, ..., ίη), (tii, ..., tin) представляют локальные
координаты точки р е Sn относительно этих карт.
Упражнение 5.1.1. Показать, что сфера S2 является ориентируемой.
5.2. Кривые на дифференцируемом многообразии
Дифференцируемые функции на многообразии
Если
есть функция, определенная на дифференцируемом многообразии Л4,ир —
элемент в Л4, представленном на карте (U, φ), отображение
/ о φ~ι: φψ) С 9Г -+ 9*
преобразует открытое множество 9ЯП в открытое множество Так как ко¬
ординаты φι(ρ) для <р(р) представляют точку р в локальной карте (И,ф),
следовательно, отображение f = f οφ~λ представляет функцию / в локаль¬
ной карте.
Функция / называется дифференцируемой в точке р £ Л4, если в дан¬
ной карте (U, φ) / = / о φ~λ дифференцируема в <р(р), или, эквивалентно,
если она, выраженная в локальных координатах, приводит к дифференци¬
руемой функции.
Данное определение не зависит от выбора карты. В самом деле, если
точка р представлена на двух картах (Ы, φ) и (V, ψ), имеем
f оф-1 = [f οφ-1)ο(φο'φ~1).
Если (/о<£-1) дифференцируема в φ(ρ), то /οψ-1 дифференцируема в ψ(ρ),
так как φ о ψ-1 дифференцируема в φ(ρ), и (φ о /0_1)(/0Ср)) — ψ(ρ)·
5.3. Касательное пространство в точке 137
Пусть М и ЛГ — два дифференцируемых многообразия с размерностя¬
ми т и п соответственно, и пусть / — отображение
f:peM-*f(p)eAf (5.1)
из М в ΛΛ
Если р и f(p) представлены на картах (<U, φ) и (V, ψ), соответственно,
функция
ψο/οφ-1: φ{μ) С 9tn ψ (f(U)) С 9tn
представляет отображение / в локальных картах (W, <р) и (V,ψ). Говорят,
что / дифференцируема в точке р G Л4, если f = фо f о φ~λ дифференци¬
руема в φ(ρ).
Отображение (5.1) называется дифференцируемым в М., если оно диф¬
ференцируемо в каждой точке р е М\ если / является взаимно-однознач-
ным и / и /_1 дифференцируемы, то / называется диффеоморфизмом.
Кривые на многообразии
Кривая 7 на дифференцируемом многообразии М является гомеомор¬
физмом
7: т £ I С 9Я —> 7(7·) £ .М
из открытого множества I С (открытый интервал) в открытое множество
в Л4.
Кривая 7 называется дифференцируемой в т = 0, если отображение
φοη: т £ I С 9Я —> ^(7(г)) £
является дифференцируемым в т = 0, где φ есть гомеоморфизм карты, на
которой представлена р = 7(0).
Две кривые 7 и 7' на Л4 называются эквивалентными, если
^ г Ч>ЫТ)) - <ρ(ί'(τ)) п ^
7(0 = 7 (0) = р, lim = = 0 (5.2)
т—>0 '
в карте (U, φ). Конечно, соотношение (5.2) является истинным на любой
другой карте [1, 2, 7].
5.3. Касательное пространство в точке
5.3.1. Касательные векторы к кривой на многообразии
Определение 16. Касательным вектором Хр к дифференцируемой
кривой 7 = 7(г) на многообразии М. в точке р = 7(то) называется опера¬
138
Глава 5
тор производной по направлению вдоль кривой η = η(τ) в точке р:
\r (L
Х*~Тт
7(то)
Если р е Ыа с М, т е I
функцией на М, имеем
G 9Я, и / является дифференцируемой
df Ыт))
dr
d(f о-у) (т)
ί(το)
dr
l(To)
d{f οψ-1 ο ψα °7)(r)
dr
7(To)
где есть гомеоморфизм карты (Κα,φα), на которой представлена р.
Так как
/ξ/о^1: (ж1, ..., хп) & АС. 9ЯП —> /(х\ ..., *") е «К,
η = ψαο 7: т € 9Я —> 7(г) = (ж^т), ..., хп(т)) £ А С 31",
имеем
(ЗД(р) :
где X* = (if/dr |ν
Из приведенной выше формулы следует, что любой касательный вектор
к данной кривой в данной точке представляет собой линейную комбинацию
d(f о j)(t)
- к
dr?
dr
а%>
dr
ν
п частных производных
М·
\dx'Pj
которые являются линеино независимыми.
Конечно, каждый касательный вектор является касательным к беско¬
нечному числу различных кривых, проходящих через точку р, по двум
различным причинам. Первая состоит в том, что существует множество
кривых, касательных друг к другу и имеющих тот же касательный вектор
в точке р, а вторая — та же траектория может быть перепараметризована
таким образом, чтобы получить ту же касательную в точке р.
Таким образом, мы естественно приходим к следующему альтернатив¬
ному определению.
5.3. Касательное пространство в точке
139
5.3.2. Касательные векторы к многообразию
Класс эквивалентности кривых η(τ) на М., проходящих через точку р
называется, касательным вектором к многообразию Л4 в точке р. Множе¬
ство всех касательных векторов к многообразию ЛЛ в точке р с операциями
сложения и произведения на скаляр, определенными следующим образом:
есть векторное пространство, называемое касательном пространством
к М. в точке р, оно будет обозначаться ТРЛ4. Это пространство имеет
ту же размерность, что и многообразие, компоненты каждого касательного
вектора Хр £ ТРМ, в локальной карте {U, φ), на которой представлена р,
заданы соотношением
Замечание 13. Касательный вектор к многообразию Μ в точке р может быть
определен эквивалентным образом как линейная функция из пространства F(U)
дифференцируемых функций, определенных в окрестности U точки р, в ίΗ,
где а, 6 Е ίΗ, fug — дифференцируемые в окрестности Ы точки р функции.
Величина Хр на / есть
где хг = φ%(ρ) и Хгр — компоненты Хр на данной карте (W, φ). Предыдущая
формула часто записывается в виде
{аХр + bYp){f) = aXp(f) + bYp(f),
т—0
?{μ) -»«к,
удовлетворяющая правилу Лейбница, то есть
ХрЫ + Ьд) = aXp{f) + ЬХр(д),
Xv(fg) = f(p)XP{9)+9(p)Xv(f),
(5.3)
(5.4)
Касательные векторы
140
Глава 5
образуют базис для касательного пространства ТРМ., называемый есте¬
ственным базисом.
Поскольку карта (ΖΥ, φ) в точке р порождает изоморфизм, то есть обра¬
тимое линейное отображение между пространствами ТрМ. и 9ЯП, размер¬
ность ТрМ. совпадает с размерностью многообразия М..
Законы преобразования
Если р принадлежит пересечению Ui OUj, то могут быть введены два
набора локальных координат, а именно (ж1, ж2, ..., хп) и (хп,х 2, ..., х'п),
и вектор Vp может быть локально записан в двух различных формах в за¬
висимости от выбора координатного базиса:
Это соотношение, примененное к функции x,k: W1 —> дает знакомый
закон преобразования для компонент вектора
5.4. Отступление о векторах и ковекторах
5.4.1. Векторное пространство
Давайте вспомним, что множество Е, чьи элементы мы обозначаем
заглавными латинскими буквами X, У, Z, ..., называется векторным про¬
странством (над вещественными числами 9Я), если
• может быть определен внутренний закон композиции
или
Таким образом, имеем
+ : (Χ,Υ) еЕхЕ^Е,
по отношению к которому Е является абелевой группой;
5.4. Отступление о векторах и ковекторах
141
• умножение на вещественные числа с £ 9Я определено так, чтобы удо¬
влетворить следующим свойствам
с · (X + Υ) = с · X + с · У,
(С1С2) · X = Cl · (С2 · -X"),
1 · X = X
Обычно принято опускать точку операции умножения и скобки, ис¬
пользованные при описании предыдущих свойств.
Элементы множества Е называются векторами, а вектор, соответству¬
ющий единичному элементу в Е, обозначается как 0.
Набор векторов Χχ, Х2, Хк в Е называется линейно независимым,
если
к
Σ °гХг = 0 Ci = 0, Vi S {1, 2, ... , к},
i=l
и линейно зависимым в ином случае. Набор векторов называется макси¬
мально линейно независимым, если набор, полученный добавлением к нему
любого другого вектора из Е, является линейно зависимым. Это означает,
что любой другой другой вектор в Е может быть выражен как линейная
комбинация векторов из максимального набора, который по этой причине
называется базисом для Е. Число векторов базиса называется размерно¬
стью Е. Если {е*} обозначает базис для векторного пространства Е, то
любой вектор V может быть записан в виде
V = ν%
и коэффициенты Vх £ называются компонентами V в данном бази¬
се {ej.
5.4.2. Двойственное векторное пространство
Пространство всех линейных отображений из Е в обозначается
Е* = Lin(J5,9l)
и называется сопряженным пространством Е. Элементы Е* будут обозна¬
чаться маленькими греческими буквами а, /3,7, ...
Для произвольного элемента а е Е* имеем
а: X е Е^ а(Х) е<Я,
а(Х + Y) = а{Х) + а(У), VX, Y е 91,
а{сХ) = са(Х),Усе5Я.
142
Глава 5
Легко видеть, что
• Е* также является векторным пространством, внутренний закон компо¬
зиции и умножение на вещественные числа тривиально определяются
следующим образом:
(α + β)(Χ) = α(Χ)+β(Χ),
('са)(Х) = са(Х).
Векторы пространства Е* называются ковекторами для того, чтобы
отличить их от векторов пространства Е\
• Е* имеет ту же размерность, что и Е.
Если ei, в2, ..., еп — базис пространства Е, заданный вектор X £ Е
может быть выражен в виде
Х = Х%, г £ {1,2, , п}.
В соответствии с заданным базисом {е*} пространства Е введем эле¬
менты пространства Е*, а именно ϋ1, ϋ2, ..., ϋη, определенные сле¬
дующим образом:
ϋ\Χ)=Χ\ г € {1,2, ..., π},
или, эквивалентно,
= hj е {1,2,..., η}.
Так как для любых элементов а £ Е* и X £ Е мы имеем
а(Х) = а(Х%) = Х1а(ег) = сц&(Х),
где oti = а(вг) £ 9Я, элемент а может быть выражен в виде
а = Οίΐϋ1.
Набор ϋι ,ϋ2, ..., ϋη является, следовательно, базисом для Е*.
Можно рассмотреть двойственное Е** = (Е*)* к двойственному дан¬
ному векторному пространству Е. Читатель может легко доказать, что если
размерность Е конечна, то Е** изоморфно Е и они могут быть отожде¬
ствлены.
5.5. КОКАСАТЕЛЬНОЕ ПРОСТРАНСТВО В ТОЧКЕ
143
Таким образом, Е и Е* двойственны друг другу; для того чтобы под¬
черкнуть взаимную двойственность, значение, которое ковектор а прини¬
мает на векторе X, также обозначается скобками (·, ·), так что
а(Х) = (а,Х).
Если {е[} и {вг} — два различных базиса, а {?9/г}и {ί?2} — их двойствен¬
ные базисы, данный вектор V может быть представлен в двух различных
формах. Значит, имеем
V = = V^i.
Таким образом, значение исходного элемента д/к из {ί9/2} на V будет
<dfk(V) = Ун&к(е$ = V4,k{ei),
и значит,
v,k = MkV\
М обозначает матрицу с элементами д/к(ег).
5.5. Кокасательное пространство в точке
Как для любого векторного пространства Е, можно ввести двойствен¬
ное пространство Т*ЛЛ векторного пространства ТРМ. Векторное про¬
странство Т*Л4 называется кокасатепъным пространством к многообра¬
зию М. в точке р. Специальные ковекторы пространства Т*М могут быть
связаны с любой дифференцируемой функцией /, определенной на М., сле¬
дующим образом:
Если f:M-+ 9Я — дифференцируемая функция в точке р е М, ее
дифференциал (или градиент, или внешняя производная) dfp в точке р
является линейным отображением
dfp: ТрМ —> 9Я
касательного пространства ТРМ в определенным следующим образом:
(d/p, Хр) = Хр/, VXp G ГРМ.
Более детально, пусть Хр — кокасательный вектор к М в точке р,
и 7(г) — кривая, принадлежащая к классу эквивалентности кривых, прохо¬
дящих через р (7(0) = р), которая представляет Хр, значит,
144 Глава 5
Если р представлена на карте (Ίλ,φ\ имеем
(dfp,Xp)= J^(/°7)(T)
т=О
= (/ ° (<Р ° 7)) (т)
г=0
df\( άγ{τ)
дх
df
\ dr ) =1а?) χί· <5·7>
р \ / т=О \ / р
Выбрав для / координатные функции xJp: р Е U —> получим
(dxlXp)=Xi.
Значит, уравнение (5.7) можно также записать в виде
(d/p,Xp)= (<Ц,хР>
или, эквивалентно, в виде
Следовательно, набор ковекторов {dxJp} является двойственным базисом
естественного базиса < > векторного пространства ТРМ.
I дхп I
5.6. Отображения между многообразиями
Если ф: Μ —> Λί — отображение из многообразия М в другое многооб¬
разие Λί, образ кривой 7 на М будет кривой η' = фо^ на Λί, и касательный
вектор Хр к 7 в точке р будет иметь в качестве образа касательный вектор
к 7; в преобразованной точке ф(р). Таким образом, ф индуцирует линейное
отображение
Ф*Р · ΤΡΛ4 —> Τφ(ρ)Λί
между касательными пространствами ТРЛЛ и Τφ(ρ)Λί, определенное фор¬
мально как в уравнении (5.6):
Ф*рхр = о 7)(т) , УХр е ТрМ.
ат т=О
5.7. Векторные поля 145
Однако здесь ф*рХр — вектор, принадлежащий Τφ^λί. В самом деле,
если точка р представлена в карте (W, <р) и q = ф(р) — в карте (V,V0, то>
следовательно, имеем
где φ = ψ о φ о φ~ι. И наоборот, мы можем связать с заданным ковекто-
ром aq £ Т*Я ковектор βρ еТ*М, определенный следующим образом:
(βρ,Χρ) = (Oiq, ф*рХр)
с q = ф{р).
Таким образом, отображение ф*рХр называется прямым для векто¬
ра Хр, в то время как βρ = φρθίφ(ρ) называется обратным для &ф(р).
5.7. Векторные поля
Векторное поле X на многообразии М есть правило, которое каждую
точку р £ М сопоставляет с касательным вектором Хр £ ТРМ, то есть
отображение
X: р £ М —» Х(р) = Хр £ ГрМ
определено на М. В локальной системе координат векторное поле X может
быть записано в виде
х^=х>мШР·
Векторное поле Х(р) будет называться Ch-дифференцируемым на много¬
образии М класса Ск с h < к — 1, если функции Хг(р) являются Сн-диф¬
ференцируемыми на многообразии М.
5.7.1. Голономный и неголономный базис векторных полей
—}
дхг J
Естественный базис < -^-т > не является, конечно, единственным бази¬
сом для векторных полей. Составив из его элементов п поточечно линейно
независимых комбинаций е*, то есть
146 Глава 5
с det(a^(x)) φ 0 везде, мы получим новый базис {еДх)}. Фактически,
предыдущие соотношения могут быть разрешены относительно -^-т в виде
дх3
о i ~ ’ ί = 1, · . . , 7Ί,
дхг
где (Ъ1(х))— матрица, обратная к
Таким образом, произвольное векторное поле X, которое в исходном
базисе выглядело как X = Хг-^т, принимает вид
дхг
х = х'%,
где X i = Ъ\ (х)Хг — новые компоненты.
Другими словами, базис задается с помощью п произвольных поточеч¬
но линейно независимых векторных полей.
Если матрица является матрицей Якоби, существуют такие
координаты уг, что
€>i = ., i 1, ... , τι.
дуг
Конечно, эти координаты являются решениями системы дифференциальных
уравнений
(5-9)
которая определяет, следовательно, преобразование координат между х и у.
Естественный базис (так же, как и базисы, полученные из него преоб¬
разованиями координат) имеет следующее очевидное свойство:
JL JL
дхг ’ дх3
= 0, м = 1,
Для произвольной линейной комбинации векторов, такой, как в уравне¬
нии (5.8), в общем случае имеет место формула
[βΐ, 6j] ф 0,
по крайней мере для некоторых значений индексов г, j.
5.7. Векторные поля
147
Если же эта линейная комбинация создана с помощью матрицы Якоби,
предыдущее свойство будет выполняться, поскольку
е»> ез\ ~~
А. Л_
дуг ’ dyj
О, i,j = 1, п.
Верно также и обратное, а именно: если для элементов базиса {е*}
векторных полей выполняется свойство
\бг, 6j\ 0, г, j 1
mo существуют такие координаты уг, что
βί ., 2 1, . . . , П.
дуг
Это можно понять, заметив, что элементы е* базиса, как бы он ни был
выбран, являются линейной комбинацией (с функциями в качестве коэффи¬
циентов) частных производных
д .
дх1
е% — а1(х)——, г = 1, ..., п.
Таким образом,
[вг, е,] —
а
дх3
= («?(*)
j \x)
dxh
dxh I dxk
Следовательно,
Если — матрица, обратная к ^aj(x)J, имеем
bjaf = г* =* (ЭДа* = -ЬК^о?) =* {дна)) = -a$(dhbj)af =*
=>· a?(dha)) - a)(dhaf) = а$а\(дн1%)а* - α£α*·(0Λ6|>£ =
= alj0£(diirh)<4 - аЦ{днЩ)акр = a$a?a* ((^b£) - (3fcbf))
где для удобства введено сокращение dh =
_ _j9
дх
h'
148
Глава 5
[ei>ej] = aX ( ]ep (5.10)
[e,, ej] = 0 <£4- -^-j- =
Таким образом,
^dxl
и, поскольку det(a^) 7^ 0,
дК^Щ
dx1 dxh
что как раз и является тем условием, выполнение которого необходимо для
того, чтобы система дифференциальных уравнений, подобная (5.9), допус¬
кала решения. Другими словами, условия
дъ1=дЩ_
дх1 дхн
означают, что дифференциальные формы
ΰρ = Ъvh dxk, р = 1, ..., η,
являются замкнутыми, то есть существуют, по крайней мере локально, такие
функции ур, что ϋρ — dyp.
Уравнение (5.10) показывает, что коммутационные соотношения между
элементами произвольного базиса имеют вид
[ег, ej]
Базис, для которого с? = 0, Уг^^р, будет называться голономным (ин¬
тегрируемым), и неголономным (неинтегрируемым) в противном случае.
5.8. Касательное расслоение
Объединение |J ТРМ всех касательных пространств ТРМ к многооб-
реЛ4
разию М естественным образом наделяется структурой дифференцируемо¬
го многообразия. Ее элементом является пара (р, Хр) с р £ М и Хр £ ТРМ.
Таким образом, используя локальные координаты (ж1, ж2, ..., хп) точ¬
ки р и координаты (Х1Х2, ..., Хп) касательного вектора Хр, мож¬
но ввести систему локальных координат (ж1, ж2, ..., жп, X1, X2, ..., Xй)
для IJ ТРМ. Рассматриваемое как дифференцируемое многообразие, мно-
ρ(ΞΛ4
жество IJ ТРЛ4 обозначается ТЛ4 и называется касательным расслое-
рЕЛ4
нием многообразия Λ4, в то время как отдельное касательное простран¬
ство ТРЛ4 называется слоем касательного расслоения ТМ. Естественно,
размерность ТМ равна удвоенной размерности М.
5.9. Общее определение расслоенного пространства
149
Кривая на ТМ. задает вектор в каждой точке Л4, и, следовательно,
определяет векторное поле на М. Такая кривая, то есть кривая трансвер-
сальная слоям, называется поперечным сечением ТМ..
Термины расслоение, слой, поперечное сечение относятся, впрочем,
к общим понятиям, которые наше «частное» дифференцируемое многообра¬
зие ТМ делит с общим классом дифференцируемых многообразий, назы¬
ваемых расслоенными пространствами. Общее расслоенное пространство
состоит из многообразия (называемого базой расслоения), которым в на¬
шем случае является М, и из слоя, прикрепленного к каждой точке базы
расслоения. Если размерность базы расслоения п, а размерность каждого
слоя — га, то размерность расслоенного пространства равна га + п. Точки
каждого слоя связаны друг с другом, а точки различных слоев — нет.
Слои не обязательно связаны с дифференциальными структурами ба¬
зы расслоения М.. В физике элементарных частиц рассматриваются рас¬
слоенные пространства со слоями, представляющими собой пространства
изотопического спина, прикрепленные к точкам пространства-времени, ко¬
торое является базой расслоения. Такое расслоенное пространство описыва¬
ет, помимо координат (£, ж, у,ζ), также и изотопический спин элементарной
частицы.
5.9. Общее определение расслоенного пространства
Пусть Е, Λ4, F — дифференцируемые многообразия, и π — дифферен¬
цируемое отображение
π: Е —> Л4
из Е в М.
Пусть {Uj}j=i, ...,п — покрытие М, состоящее из открытых подмно¬
жеств М, представляющих собой совместимые области карт
п
M = \JUj.
3 = 1
Предположим, что для каждого открытого множества Uj существует
гомеоморфизм φj из n~1(Uj) в декартово произведение Uj х F вида
4>з : у G 7r_1(Wj) -> <Pj{y) = (тг(у), € Uj х F,
где ψΑ: 7г-1(Ц·) —> F, а ограничение отображения до π-1(р),
π_1 (р)
Δ
4>э
u=$j,p:n
w-Чр)
150
Глава 5
есть гомеоморфизм отображения π 1 (р) на F, такой, что диаграмма
π У \<pj
Uj Uj х F
коммутирует, то есть
π = р oipj,
р обозначает каноническую проекцию из Uj х F на Uj.
А Δ-1
Естественно, множество отображений (рк^р о φ^ρ: F —► F для
всех р eUj C\Uk и для всех j,k G {1, ..., η} является группой G. Если
эта группа является группой Ли и отображения
gjk :p&Ujf\Uk^ 9jk(p) = <Рк,р ° <Pj,P е <3
являются дифференцируемыми, будем говорить, что (Е, А4, π, F, G) есть
дифференцируемое расслоенное пространство, называется базисом рас¬
слоенного пространства, F называется типичным слоем, и 7г_1(р) назы¬
вается слоем в точке р. Группа называется структурной группой. Обычно
расслоение (Ε,λΊ,π, F, G) обозначается просто Е.
Локально, расслоенное пространство всегда является декартовым про¬
изведением, то есть π“1(ΖΥ7·) ^ Wj х F. Расслоенное пространство ϋ?, ко¬
торое является декартовым произведением глобально, то есть Е = Λ4 х F,
называется тривиальным.
5.9.1. Дополнительно о расслоенном пространстве
Давайте снова рассмотрим η-мерное дифференцируемое многообра¬
зие М и множество пар (р, Хр), где р G Λ4 и Хр G 7^Л4. Такое множество,
обозначенное символом ТМ, может быть оснащено структурой диффе¬
ренцируемого расслоения следующим образом: в качестве базы возьмем
дифференцируемое многообразие Λί, отображение π есть проекция
π: (р,Хр) еТМ —> 7г(р,Хр) = р G Λί.
Типичный слой F является евклидовым пространством 9ЯП, и для
каждого р е М слой 7г-1(р) есть 7^Л4, касательное пространство к Л4
в точке р. Покрытие многообразия М. состоит из областей Uj совместимых
карт (Uji'ipj), таких, что
п
м = \JUj.
j = 1
5.9. ОБЩЕЕ ОПРЕДЕЛЕНИЕ РАССЛОЕННОГО ПРОСТРАНСТВА 151
Гомеоморфизм определен следующим образом:
Ψΐ ■ (ρ,Χρ) е π_1(Wj) ->■ Ψί{ρ,χρ) =
= (тг(р. ^р)> (^)*р (тг2(р, ЗД) е Щ х 9Г\
где тг2(Р) Хр) = Хр·
Координаты точки (р, Хр) на ΤΛ4, таким образом,
(х\ ...,хп,Х$,
где хг — координаты р и
х; = ш*Р(*Р)Г
— координаты Хр в карте (Uj^j).
Линейное отображение
('ФЛ+р-.ТрМ^Ж71
является изоморфизмом между пространствами и 9ЯП.
Если р представлена на двух картах (Uj^j) и (Мк,Фк), отображение
№)*Р о ш^г1: жп - Я”
является изоморфизмом пространства 9ЯП самого на себя. Таким образом,
структурная группа G есть GL(n, 9Я).
Как было уже замечено, пространство ТЛ4 обычно называется каса¬
тельным расслоением.
Кокасательное расслоение
Кокасательное расслоение строится точно так же, как и касательное
расслоение ТМ, с простой заменой касательных пространств ТРМ на ко-
касательные пространства Т*М.
5.9.2. Анализ двух расслоений с базой S1
Касательное расслоение TS1 окружности S1 можно визуализиро¬
вать как цилиндр, который глобально является декартовым произведени¬
ем S1 х 9Я, и, следовательно, это расслоение является тривиальным.
Цилиндр, однократно рассеченный вдоль директрисы, «становится»
бесконечным прямоугольником, принадлежащем 9Я2, его часть является ко¬
нечным прямоугольником.
152
Глава 5
Пусть а и а' — верхние углы прямоугольника, а Ъ и Ъ' — нижние.
До рассечения а — а' отождествлялось с одной и той же точкой цилиндра,
а а' — Ь' — с различными точками одной и той же директрисы.
Таким образом, склеивая а с а' и Ъ с Ъ' мы получим часть цилиндра,
ограниченную сверху и снизу, склеив же а с Ъ' и Ъ с а' получим так назы¬
ваемую ленту Мёбиуса.
Следовательно, с одной и той же базой 51 и одними и теми же слоя¬
ми можно построить два глобально различных расслоения. Первое, ТS1,
является тривиальным расслоением, второе — нетривиальным, оба демон¬
стрируют одни и те же локальные свойства. Их различие, проявляющееся
глобально, описывается структурной группой.
Расслоение ТS1
п
Пусть {ЦЬ=1,...,п — открытое покрытие S1, S1 = |J Uj. Каждое Uj
3 = 1
имеет, в качестве координатной системы, параметр Tj вдоль S1 и, для р EUj,
базис пространства TpSl ~ F = будет задаваться вектором d/drj. Таким
образом, данный вектор V G TPS1 будет представлен как d/drj, где —
вещественное число и, поскольку ^ фиксировано, суммирования по j нет.
Если р принадлежит пересечению двух окрестностей Uj и Ui, вектор V
будет иметь два представления, d/drj и v%d/dri, где, так как rj и rj
независимы, vJ и ν1 — два ненулевых вещественных числа.
Δ Δ-^
Поскольку типичный слой — 9Я, гомеоморфизм φί<ρ о φ^ρ: ЕЯ —> ЕЯ
отображает vJ в v% и сводится просто к умножению на вещественное чис¬
ло rij = уг/уЭ.
Таким образом, структурная группа пространства TS1, посколь-
ку Гу — ненулевые произвольные вещественных числа, есть GL(l,iK) =
Ξ(ίΗ-{0}, х), то есть — {0} с умножением в качестве закона компози¬
ции.
Мы замечаем, что для любого j параметры Tj можно выбрать согласо¬
ванными, то есть таким образом, что любые два из них, а именно Tj и Tj,
увеличиваются в одном направлении окружности S1 (dri/drj > 0), на пе¬
ресечении Uj{Ί Ui. При этом выборе тц > 0, и структурная группа сводится
к 9Я+, положительным вещественным числам с умножением в качестве за¬
кона композиции.
Кроме того, якобианы dri/drj можно выбрать таким образом,
что dri/drj = 1 на пересечении Uj П Ui. Таким образом, структурная груп¬
па окончательно сводится к (1, х) — настолько же тривиальной группе,
насколько тривиально расслоение TS1.
5.10. Интегральные кривые векторного поля
153
Пространство расслоений Мёбиуса
Легко видеть, что лента Мёбиуса не является ориентированным много¬
образием, поэтому по крайней мере одно из вещественных чисел гц — уг/V
будет —1. Таким образом, структурная группа сводится к({1,—1},х).
Расслоение реперов и пространство главных расслоений
Реперное расслоение FrA4 η-мерного дифференцируемого многообра¬
зия М — это расслоение, имеющее М в качестве базы, GL(n, УК) в качестве
структурной группы (как и для касательного расслоения ТМ) и множество
всех базисов пространства УК71 в качестве слоя. Поскольку множество всех
базисов пространства УК71 гомеоморфно группе GL(n, УК), типичный слой F
есть в точности GL(n, УК).
Следовательно, ТМ имеет G = GL(n, УК) и F = УКп, в то время
как FrM - G = GL(n, ЭТ) и F = GL(n, ЭТ).
Реперное расслоение является точным примером расслоения, для
которого структурная группа (не обязательно GL(n,iK)) является гомео-
морфной слою. Такое расслоение, то есть расслоение, для которого струк¬
турная группа является гомеоморфной слою, называется пространством
главных расслоений.
5.10. Интегральные кривые векторного поля
Как уже было отмечено, для данного вектора Хр G ТРМ существует
бесконечно много дифференцируемых кривых на М, которые в точке р име¬
ют Хр в качестве касательного вектора. Для данных двух векторов, Хр и Xq,
также легко найти кривые на М, имеющие Хр и Xq в качестве касатель¬
ных векторов в точках р и q, соответственно. Ясно также, что поиск таких
кривых становится все более и более трудным по мере увеличения числа
заданных векторов. Кажется удивительным, что для заданного векторного
поля X на М, и затем выбора бесконечного количества касательных векто¬
ров (по одному в каждом касательном пространстве ТРМ, Ур G М), всегда
существует кривая р = р(т) на Л4, т G ]а, Ь[ С DK, чей касательный вектор
в точке ро = р{то) совпадает со значением ХРо поля в точке Vro G ]α, b[.
Фактически, если хг = хг(т) — локальное параметрическое представ¬
ление неизвестной кривой, производные dxl/dr \т=т будут представлять
компоненты касательного вектора в то, а если X = Хг(д/дхг) — локаль¬
ное представление векторного поля, Хг(ро) будут компонентами вектора,
соответствующего значению векторного поля X в ро. Таким образом, неиз¬
вестная кривая будет решением системы дифференциальных уравнений
ψ-=χ\χ), Vie (1,2,..., η).
154
Глава 5
Мы знаем, что для гладких Хг данная система всегда имеет, локально, един¬
ственное решение хг = хг(т), имеющее в т = то начальное значение хг0.
Такое решение называется интегральной кривой векторного поля X.
Такие кривые хорошо известны в физике как силовые линии, назван¬
ные так М. Фарадеем, который ввел их для электрических и магнитных
векторных полей Е и Н.
Пример 17. Пусть
будет векторным полем гармонического осциллятора. Его интегральные
кривые будут задаваться решениями системы дифференциальных уравне¬
ний
<
которые являются окружностями
2,2 2
X + у = Г
произвольного радиуса г.
Пример 18. Интегральные кривые векторного поля
где г = (х2 +У2)1/2, будут задаваться решениями системы дифференциаль¬
ных уравнений
Умножая первое уравнение на х, а второе на у, получим
5.10. Интегральные кривые векторного поля 155
Таким образом,
\£(*2 + Уг)-г
или
откуда следует
г = т + с,
представляющее бесконечно много спиралей, по одной для каждого значе¬
ния константы с.
Подвести итог вышесказанному можно следующим образом: для каж¬
дой точки р на Л4 существует интегральная кривая векторного поля X, то
есть кривая на М
7: т G I С 9Я —> 7(г) G Λ4,
удовлетворяющая дифференциальным уравнениям
™ = Х Ь(т)) , Ут G I.
Более строго, для каждой точки р G М существует интервал 1Р С 9Я
и интегральная кривая т G 1Р —> 7(т,р) класса на /р, такие,
что 7(0, р) = р. Более того, эта интегральная кривая определяется един¬
ственным образом.
Следовательно, если σ и г — элементы интервала /р, такие, что σ +
+ т G /р, имеем
7(τ,7(σ,ρ)) = 7(т+ σ,ρ), Vp G Λ1 (5.11)
Если ро £ М, существует открытое множество Ы{ро) С Λ4, содержа¬
щее ро и интервал 1Р0 С 9Я, такие, что 7 определена на /ро х W(po):
7: (т,р) G /ро х W(p0) -> 7(r) P) Ξ Ai.
Для каждого r G /Ро отображение
7Т : р G W(p0) -> 7т(р) = 7(т,р) G X (5.12)
является диффеоморфизмом между открытыми подмножествами многооб¬
разия Μ, точка ршЫ (р0) переходит в точку 7т(р) е М вдоль интегральной
кривой векторного поля X в точке р. Положение кривой 7т (р) определяется
параметром т.
156
Глава 5
Пусть {U(po)} — покрытие многообразия М. Пересечение I интер¬
валов 1Р0, соответствующее открытым множествам Ы(ро), может быть пу¬
стым, но если многообразие М. компактно, покрытие {U(po)} содержит
конечное подпокрытие и пересечение I соответствующих интервалов опре¬
деленно не пусто. В этом случае диффеоморфизмы (5.12) могут быть рас¬
пространены на все многообразие М с т € /, и векторное поле X называ¬
ется полным [29]. Из уравнения (5.11) следует
7 (τ + σ,ρ) =7τ+σ(ρ), 7(т,7 (σ,ρ)) = Υ (ΐ(σ,ρ)) =ΊΤ οΊσ(ρ),
и, значит,
Ίτ+σ =ΊΤ ο Ίσ.
Кроме того, каждое отображение ητ имеет обратное, то есть диффео¬
морфизм 7“т, поэтому можно определить ητ для каждого т £ DI
Вышесказанное можно подытожить с помощью следующей теоре¬
мы [29].
Теорема 19. С каждым Сн-дифференцируемым векторным по¬
лем X (р) на компактном дифференцируемом многообразии Л4 класса Ск
(h ^ к — 1) связана однопараметрическая группа
7 Т:М-*М. (5.13)
Эта группа диффеоморфизмов многообразия Л4 в себя удовлетворяет сле¬
дующему условию:
= Х(р), Vp е М.
т—О
Группа 7Т называется также потоком векторного поля Х{р) и обозна¬
чается ητχ.
Группа (5.13) хорошо определена, если многообразие М компактно.
В общем случае, ητ определяются точно также, как и в (5.12), только
в окрестностях точки ро £ М и для малых т.
5.11. Производная Ли
Пусть X (р) и Υ (р) — два векторных поля на η-мерном дифференциру¬
емом многообразии Λ4, и φχ — поток векторного поля X.
Производная Ли LxY векторного поля Y — это векторное поле, опре¬
деленное соотношением
(Ф-т)*ФчР)(г(Фтт-у(р)
(LxY)(p) = lim - , (5.14)
т—► О 1
5.11. Производная Ли
157
где
(Φ )*0т(р) · Тфт> ТрМ.
Вычислим производную Ли базисных векторов
Ш-
Для упрощения формы записи обозначим через х е W1 координаты
точек многообразия М и положим фт(х) = у. Если фг(т,х)^ — координа¬
ты фт{х), и ф*(т,х) — координаты ф~т(у), то фг(0,р) = хг и фг(0,у) = уг.
Из уравнения (5.14) следует
Компоненты -^-г в естественной системе координат (5.5) будут рав-
дхг
ны δ\, поскольку
ΆΛ =3>(-*Л
дх1
в то время как компоненты
дх1
)*у ( ^Г7 ) имеют ВИД
дф> (т, у) . дф>(т, у)
~ О А
ду
h г
дуг
Следовательно, имеем
_д_
дхг
Lx— ) (р) = Um?
дф*(т, у) _sj
дуi 4
д_
дхг
ТГТ (5-15)
при
~ф<(0,у) = у’,
(5.16)
Используя (5.16), уравнение (5.15) можно переписать в следующем
виде:
Lx
дхг
dr \ду* ) V дх3) р
т=и
158 Глава 5
Так как
А =А*=()
dr удун дх* J _о dr 1
мы имеем
' d дф>(т,у)\ дфк(0,ж) | дф>(О,у) ( d дфк(т,х)\
Kdr dyh )т=о дх1 дун у dr дх* )т=0~
поэтому
dr dyh I г h \ dr dxi .
\ * / T—о \ / r=0
^ dr дуг ) T_Q \dr dx*
r=0
\ / r=0
ЭР ( d \
дхг \ dxj J p
(5.17)
Производная Ли является аддитивным оператором, то есть
Lx{U + V) = LxU + LxV,
где X, U и V — векторные поля на многообразии М. Кроме того, произ¬
водная Ли удовлетворяет правилу Лейбница
Lx(U 0 V) = (LxU) 0 V + U 0 LxV,
где символ 0 обозначает тензорное произведение, определенное в следую¬
щей главе.
Используя уравнение (5.17) и соотношения (dx1,—т ) = <5j, мож-
\ да;·7 / J
но вычислить производную Ли Lx dx2 базиса дифференциальной 1-фор¬
мы {dx1}. Действительно,
5.12. Подмногообразия
159
поэтому
(
_ axiy _ вх± _ dxisк _
дхк ’ δχΐ
Следовательно, получаем
Lxdxl =dX\
Производная Ли дифференцируемой функции / на многообразии М
выражается следующим образом:
где / = / о ψ 1 — функция, представляющая / на карте (ρΐ,ψ), на которой
представлена р.
5.12. Подмногообразия
Примеры подмногообразий представляют сфера S2 или кривая 7 в про¬
странстве 9Я3. В некоторой окрестности Ы С 9Я3 любой точки р £ s2
можно задать такую систему координат (ж, у, ζ) для 9Я3, что точки пересе¬
чения S2 П Ы будут описываться уравнением ζ = 0.
Подобным образом, в некоторой окрестности Ы С 9Я3 любой точ¬
ки р £ 7, можно задать такую систему координат (ж, у, ζ) £ 9Я3, что точки
пересечения 7 П W будут описываться уравнением у = ζ = 0.
Сфера S2 (или кривая 7) называется 2-мерным (1-мерным) подмного¬
образием S многообразия М = 9Я3.
Таким образом, естественно определить га-мерное подмногообразие S
η-мерного многообразия М как множество точек многообразия М., таких,
что в некоторой окрестности Ы С М. любой точки р £ S можно задать
такую систему координат (х1, ..., хп) для М, что точки пересечения SПЫ
будут описываться уравнением xm+1 = xm+2 = · · · = хп = 0.
160
Глава 5
Более формально, взаимно однозначное отображение f: Q М. назы¬
вается влоэ/сением га-мерного многообразия Q в η-мерное многообразие М
(га ^ п), если для каждой q £ Q существует окрестность V С Q точки q
и карта (U, φ) многообразия М в р = f(q), такие, что (V, φ о /|у) является
картой многообразия Q, то есть φ о /|у : ζ) —> 9Ят есть координаты на V
для Q. Многообразие Q называется вложенным в многообразие Л4. Об¬
раз S = f(Q) называется подмногообразием многообразия М., имеющим
структуру многообразия, для которой f:Q-+SCM есть диффеомор¬
физм.
Если отображение / не является взаимно однозначным, говорят о по¬
гружении. Другими словами, отображение /: Q —> М называется погру¬
жением многообразия Q в многообразие М, если для каждой точки р £ Q
существует окрестность V С Q точки р и карта (W, φ) многообразия М для
отображения f(p), такие, что (V, <р о /) является картой многообразия Q,
то есть φ о f: Q —> *КП есть координаты на V для ζ). Многообразие Q
называется погруэ/сенным в многообразие Λ1.
Касаясь отображений между многообразиями, о которых шла речь в па¬
раграфе 5.6, заметим, что векторное поле, определенное на подмногообра¬
зии 5, является также векторным полем на М. и ковекторное поле на М
является также ковекторным полем на S. Рекомендуемая для чтения по
этому вопросу и приложениям литература содержится в книге [41].
5.12.1. Теорема Фробениуса
Было показано, что для данного гладкого векторного поля X на п-мер-
ном многообразии М. можно найти такую кривую (интегральную кривую),
что в каждой точке р £ М. вектор Хр векторного поля X совпадает с каса¬
тельным вектором к кривой в этой точке.
Другими словами, так как векторное поле X есть задание в каждой
точке р £ М вектора Хр в касательном пространстве ТРМ, можно пере¬
формулировать предыдущее утверждение следующим образом:
В каждой точке р £ Л4 задано 1-мерное подпространство Dp каса¬
тельного пространства ТрМ.\ молено найти такое 1-мерное подмногооб¬
разие λί, что Dp = ТРМ, Ур £ Л4.
Интересно было бы получить ответ для аналогичной задачи:
В каэюдой точке р £ М задано 2-мерное подпространство Dp каса¬
тельного пространства ТрМ. (то есть плоскости); существует ли 2-мер¬
ное подмногообразие λί такое, что Dp = Τρλί Vp £ Μ.Ί
Ответ: в общем случае нет.
Для того чтобы рассмотреть общий случай, рекомендуется ввести сле¬
дующие полезные определения:
5.12. Подмногообразия 161
• Задание D в каждой точке р G М h-мерного подпространства Dp
касательного пространства ТРМ, то есть гиперплоскости, называется
h-мерным распределением на Л4, или же дифференциальной системой
h плоскостей на М..
• Говорят, что h-мерное распределение D является С°°, если в каждой
точке р G М существует окрестность Ы точки р и h С00-векторных
полей, а именно, , Xh, определенных в U, задают в каждой точ¬
ке q G U базис X\(q), ..., Хн{ч) для Dq. Векторные поля Хг, ..., Xh
называются локальным базисом для D.
• Говорят, что векторное поле X принадлежит D, если Хр G Dp в каж¬
дой точке р £ М.
• С°°-распределение D называется инволютивным, если
Данное соотношение эквивалентно утверждению, что локальный ба¬
зис {Χι, ..., инволютивного распределения обладает следующим
свойством:
[ХиХ5] = c^Xk,
поскольку скобка Ли любых двух векторных полей X и Y, представля¬
ющих собой /-линейные (то есть коэффициенты являются функциями)
комбинации элементов базиса
X = f(p)Xi, ¥=д*(р)Хи
будет линейной комбинацией Xf.
[Χ,Υ\ = [fXusPXA = /У + ГУг{9к)Хк - 9%{fk)Xk =
= (/У 4 + fXi(9k) - 9*Хг(1к)) Хк = d%xk.
• Связное подмногообразие ΛΓ многообразия М называется интеграль¬
ным многообразием распределения D, если f*(TpJ\f) = Dq для
всех р G λί, где / — вложение λί в М. Подмногообразие λί называется
максимальным интегральным многообразием распределения D, если
не существует другого интегрального многообразия распределения D,
содержащего λί.
Можно доказать (смотри, например, [11], [29], [50]), следующую тео¬
рему:
Глава 5
Теорема 20 (Фробениуса). Если D является инволютивным распре¬
делением на дифференцируемом многообразии Λ4, через каждую точ¬
ку р G Λ4, проходит единственное максимальное интегральное многообра¬
зие λί(ρ) распределения D. Любое интегральное многообразие, проходящее
через точку р, является открытым подмногообразием λί(ρ).
Другими словами, если Х\, ..., Xh являются h (< п) векторными по¬
лями, заданными на области U η-мерного многообразия М, так что
[Хг,Х0]=С%Хк,
интегральные кривые векторных полей сцепляются, образуя семейство под¬
многообразий.
Каждое подмногообразие имеет размерность, равную размерности век¬
торного пространства, которое определяют векторные поля в каждой точке,
максимальное значение размерности равно h. Каждая точка окрестности Ы
принадлежит одному и только одному подмногообразию, благодаря чему
размерность векторного пространства, определяемого векторными полями,
одинакова во всей окрестности U. Это семейство подмногообразий называ¬
ется слоением окрестности Ы, а каждое многообразие — листом окрестно¬
сти U.
Главная идея теоремы Фробениуса заключается в том, что, если инте¬
гральные кривые векторных полей Хг, ..., Xh, задающих распределение,
определяют подмногообразие, к которому векторные поля должны быть
касательными, они должны опутывать друг друга, как нити в паутине. Дру¬
гими словами, потоки φιχ векторных полей Χχ должны преобразовать ин¬
тегральную кривую векторного поля Xj в интегральную кривую (образа)
векторного поля, построенного как линейная комбинация (с коэффициента¬
ми-функциями) векторных полей Х\, ..., Это будет выполнено, если
все их скобки Ли [Xi,Xj] являются касательными к себе, то есть при¬
надлежат распределению [X^Xj] = с\^Хк. Это как раз и означает, что
распределение должно быть инволютивным.
Глава 6
Дифференциальные формы
6.1. Тензоры
В предыдущей главе было показано, как построить двойственное про¬
странство Е* для данного векторного пространства Е. Элементы такого
пространства представляют простейшие примеры тензоров.
Более интересный пример дается площадью A{U,V) заданного парал¬
лелограмма, построенного на двух векторах С/, V. Его главное свойство
выражается следующим образом:
А(Х + У, Z) = А(Х, Ζ) + A(Y, Z).
Таким образом, площадь параллелограмма есть правило
A: (U, V) G Е х Е —> A(U, V) е И,
которое связывает вещественное число с двумя векторами, линейно относи¬
тельно U,V.
Любое билинейное отобраясение Т из декартова произведения Е х Е
в называется тензором типа (0, 2).
Пространство всех таких тензоров обозначается
Т2°(£) ξ Lin(£ х Ε,ίЯ)
и может быть естественным образом наделено структурой векторного про¬
странства, определяемого следующим образом:
(Τι + Т2)(Х, У) = Тг(Х, У) + Т2(Х, У),
(kT)(X,Y) = k(T(X,Y)), VfceiH.
Базис такого векторного пространства можно легко построить, используя
базис {е*} векторного пространства Е и его двойственный базис {■$'}.
В заданном базисе {е*} векторы X и У могут быть записаны в виде
Х = Х%, Y = Yjej,
IΜ
Глава 6
и имеем
Т(Х, Υ) = Т(Х1еи Yjej) = Х^Т(еи ej) = ΤίάΧΎ^
при Tij = T(ei,ej) G 9t
Поскольку, по определению, ΰι(Χ) = Xх для любого X G Е, преды¬
дущее соотношение может быть также записано в виде
Т(Х,У)=Тч#*(Х)&(У). (6.1)
Таким образом, вводя тензорное произведение 0 двух ковекто-
ров a G Е*, β G Е*:
(α®β)(Χ,Υ) :=α(Χ)β(Υ),
соотношение (6.1) приводится к виду
Τ(Χ,Υ) = (Т^0^)(Х,У)
или, для произвольных X, У,
Т = Туф
Поскольку тензор Т является произвольным элементом векторного
пространства ^(Е), последнее соотношение показывает, что базис для это¬
го пространства задается п2 элементами {ΰι 0 №}. Таким образом, базис
в пространстве Е определяет базис в его двойственном пространстве Е*,
а также базис в векторном пространстве тензоров типа (0, 2). По этой при¬
чине п2 элементов пространства 9Я называются компонентами тензора Т
в данном базисе.
Аналогично, любое билинейное отображение R из декартова произве¬
дения Е* χ Е* в 9Я,
R: (α,/З) G Е* х Е* —> Д(а,/3) G Я,
называется тензором типа (2,0). Пространство всех таких тензоров обо¬
значается
Tq(E) = Lin(J5* х JS7*,K)
и может быть естественным образом наделено структурой векторного про¬
странства, определяемого следующим образом:
(R1+R2)(X,Y)=R1(X,Y) + R2(X,Y),
(kR)(X,Y) = k(R(X,Y)), Vkem.
6.1. Тензоры 165
Определяя, что тензорное произведение X 0 Υ двух векторов X, Υ
пространства Е является тензором типа (2,0), задаваемым формулой
(Х0У)(а,/3) =а(Х)/3(У), \/а G Е\ β G Е\
мы фиксируем базис {е* 0 ej} пространства Т£{Е) в терминах выбранного
базиса {вг} пространства Е.
Еще раз: любое билинейное отображение S из декартова произведе¬
ния Е* х Е в Я,
S: (α, X) е Е* х Е —> S(a,X) G Я,
называется тензором типа (1,1). Пространство всех таких тензоров обо¬
значается
Т^{Е) = Lin(S* х Ε,ΐϋ)
и может быть естественным образом наделено структурой векторного про¬
странства, определяемого следующим образом:
(5i + S2)(a, X) = 5, (α, X) + 52(а, X),
(Л5)(а, X) = к (5(а, X)), Vfc G Я.
Упражнение 6.1.1. Показать, что базис пространства T±(E) можно
задать как {ϋ1 0 ej} с очевидным определением его тензорного произведе¬
ния.
Предыдущие примеры дали исчерпывающее представление о тензорах
ранга 2.
Вообще, любое мультилинейное отображение
Т: ΕχΕχ···χΕχΕ*χΕ*χ···χΕ* —> Я,
4 ν ' 4 V '
q раз р раз
называется тензором типа (p,q). Говорят также, что тензор Т будет ран¬
га р + q.
Пространство всех таких тензоров обозначается
Т£{Е) =Ш(Е х Е х ... х ЕхЕ* х Е* х · · · х £7*, Я)
g раз р раз
и может быть естественным образом наделено структурой векторного про¬
странства, определяемого следующим образом:
(Т!+Т2)(Х,У, ..., Ζ,α,β,..., 7) =
= Ά(Χ,Υ, ...,Ζ,α,β, ...,^ + Τ^Χ,Υ,..., Ζ,α,β, ...,Ί),
(kT)(X,Y,..., Ζ,α,β,..., 7) =
= k(T(X,Y,..., Ζ,α,β,..., 7)), V/cGiH.
166
Глава 6
Базис пространства Т£(Е) легко найти с помощью процедуры, которая
была использована для Ί^(Ε), Tq(E) или Τχ{Ε). В самом деле, пусть Т —
тензор ранга (р, q)9 {е*} — базис пространства Е и {ΰ1} — их двойственный
базис. Имеем
Τ(Χ,Υ,...,Ζ,α,β,...,Ί) =
= X*Yj · · · zkappq · · · lrT(eh ek, oP, β\ ..., Y) =
= Tij'-'k xiYj ■ · · Zkapfiq · · · 7r =
= Τ%:;ζϋ\Χ)ϋ\Υ).. · tffe(Z)ep(a)e9(/3) ■ · · er(7) =
= <g> & ® · ■ · <g> ® ep <g> eq ® · · · <g> er) x
x (X,Y, Ζ,α,β, 7).
Поскольку X, У, ..., Ζ, α, /3, ..., 7 — произвольные векторы и ковек-
торы, можно написать
т = ®W ®---®дк ®ер®ед®---®ег, (6.2)
откуда видно, что базис векторного пространства Т?(Е) имеет вид
$г ® ΐ?·7' ® ® <g> ep <g> eq <g> · · · <8> er .
9 p раз
Замечание 14. Из предыдущего определения следует:
• Ковектор является тензором типа (0,1). Соответствующее векторное простран¬
ство Е*, помимо обозначения Τχ(Ε), обозначается также А(Е), или просто А.
Так что А(Е) = Тг°(Е) = Е*.
• Вектор является тензором типа (1,0). Соответствующее векторное простран¬
ство Е можно обозначить также Tq(E).
• Элементы пространства 9Я называются тензорами типа (0,0).
Говорят, что тензор Т типа (0, 2) будет:
• симметричным, если Т(Х, У) = Т(У, X);
• антисимметричным, если T(X,Y) = —Τ(Υ,Χ).
Такое же определение может быть дано для тензоров типа (2,0) и, во¬
обще, для тензоров типа (0,р) или (q, 0). Что касается тензора типа (1,1),
нельзя придать никакого смысла замене вектора на ковектор.
6.1. Тензоры 167
Множество всех антисимметричных тензоров типа (0,2) являет¬
ся, конечно, векторным подпространством Л2(Е) векторного простран¬
ства Т^Е). Базис можно легко найти, рассмотрев произвольный элемент А
пространства Л2(Е). В данном базисе {е*} пространства Е антисимметрич¬
ный тензор А типа (0,2) можно записать в виде
А = А„0*®&,
где ^п(п — 1) различных чисел Aij = A(ei,ej) антисимметричны для пе¬
рестановки г j. Таким образом,
А = ® & - \Ац& ® (04 О & - & ®
Следовательно, с введением внешнего (или Л-) произведения ΰι Л №
элементов базиса ΰι и W
βι д := βι (g) βΐ — $ (g) βι
антисимметричный тензор А типа (0,2) может быть записан в виде
А = ±Αϋ0* Λ ΰ>.
Таким образом, базис для А2(Е) задается ^п{п — 1) элемента¬
ми {ϋι Л W}.
Вообще, тензор Т типа (0, q) будет
• симметричным, если Т(Ха,Хъ, ..., Хс) = Т(Хь-Хг, ···, Xq) для
всех перестановок (а, 6, ..., с) из (1,2, ..., q);
• антисимметричным, если Т(Ха,Х^, ..., Хс) = —Τ(Χι,Χ2, · · ·, Xg)
для всех нечетных перестановок (а, 6, ..., с) из (1,2, ..., <?).
Аналогичное определение можно дать для тензора типа (<?, 0).
6.1.1. р-ковекторы
Антисимметричные векторы типа (0,р) называются р-ковекторы (или
р-формы) и обычно обозначаются маленькими греческими буквами. Значит,
р-форма ω есть функция
ω: (Хь ...,*„) еЕх ··· хЕ^ш{Хи ...,Х„) ей,
которая
168 Глава 6
• р-кратно линейна, то есть для всех г = 1,2, ..., р
• полностью антисимметрична:
где |σ| =0 или 1 в зависимости от четности (четная или нечетная,
соответственно) перестановки σ = (ζι, ..., гр) из (1,2, ..., р).
Множество р-ковекторов является подпространством АР(Е) векторно¬
го пространства Т®(Е). Базис пространства АР(Е) можно найти, применяя
обычную процедуру, требующую, однако, понятия внешнего или А-произ¬
ведения р-векгоров.
6.1.2. Внешнее произведение
Пусть c*i, OL2, · · ·, 0ίρ — р-ковекторы на векторном пространстве Е. Их
внешнее произведение αι Λα2 А ... Ααρ является р-формой на Е, заданной
следующим образом:
то есть через детерминант матрицы (ai(Xj)).
Из свойства детерминанта следует, что внешнее произведение, задан¬
ное в (6.5), является р-формой.
Используя процедуру, уже использованную для 2-форм, легко прове¬
рить, что каждая р-форма ω может быть записана в данном базисе {е*}
пространства Е в следующем виде:
где ... ip = w{eil, ..., eip), и {$*} — двойственный базис для {ej.
(αι Λ аг Λ · · · Λ αρ)(Χι, ..., Χρ) = det
6.1. Тензоры
169
Таким образом, (™) = ^ п-—— различных элементов
ΰ11 А ... ΑΰгР, р ^ гг,
(6.6)
образуют бдзис в векторном пространстве ЛР{Е) для р-форм на Е, то есть
любую р-форму о; можно через него выразить, и, следовательно,
Внешнее произведение р-формы a G АР(Е) и g-формы β G Aq(E)
есть (р + <?)-форма а А β е Ар+д(Е), определенная следующим образом:
где суммирование происходит по всем перестановкам σ— (ζι,..., , ji,. · ·, ji)
из(1, ..., fc + Ζ), и |σ| = О или 1 в зависимости от четности (четная или
нечетная, соответственно) перестановки.
Легко проверить, что
• а А β действительно является (р + q)-формой;
• произведение обладает свойствами:
- антикоммутативности: а А β = (—1)ρςβ А а,
- дистрибутивности по отношению к суммированию: (аа+Ьа) Αβ —
= аа А β + ba А β,
- ассоциативности: (а А β) А 7 = а А (β А 7),
- совпадает с произведением, определенном в (6.5), если а и β яв¬
ляются одночленами, то есть если а представляет собой внешнее
произведение р ковекторов а±, ..., ар и β представляет собой
внешнее произведение q ковекторов βι, ..., βς, соответственно:
всех р-ковекторов с произвольным р, снабженная внешним произведени¬
ем А, называется алгеброй Грассмана.
(а А β)(Χι, Xk+i) = £(—1)1*4^, ..., ХгЖХп, ■■■, Xji),
σ
a = ai A ... Λ αρ, β = β\ Λ ... Α βς.
Пара
170
Глава 6
6.1.3. Метрический тензор в векторном пространстве
Метрический тензор в η-мерном векторном пространстве Е есть тен¬
зор д типа (0, 2), удовлетворяющий следующим требованиям:
• симметричность: g(X,Y) = g(Y,X)9 X,Y G E;
• невырожденность: g(X, Y) = 0, VX G E Y — 0.
Упражнение 6.1.2. Показать, что предыдущие требования эквива¬
лентны, в заданном базисе {е*}, нижеследующим:
• симметричность:
• невыроэ/сденность: det(g^) ф 0,
где = p(ei, Cj) — компоненты тензора g в базисе {е*}.
Поскольку матрица р = (р^·) является симметричной, существует ба¬
зис {ει = U(ej} с ортогональный матрицей С/ = (Е/f), такой, что
где собственные значения А*, г = 1, ..., п, не равны нулю по предположе¬
нию о невырожденности д.
Таким образом, если д — метрический тензор, существует такой базис
Метрический тензор обеспечивает изоморфизм между векторами и ко-
векторами. Фактически, с любым вектором X G Е можно связать ковек-
тор χ = ixg, определенный следующим образом:
чьи компоненты в заданном базисе есть
Xj = = Xl9ij■
Поскольку det (pi j) φ 0, предыдущее отображение является обратимым, так
что
д (βί ,
что
9ij = = ±5ц.
X = (ixg)(Y)=g(X,Y),
Хг = 9 Xj
где (glj) — матрица, обратная к (gij)’
g ghj — Sij.
6.2. Тензорные поля
171
6.2. Тензорные поля
Тензорное поле S типа (га, п) на многообразии Μ есть правило, ставя¬
щее в соответствие каждой точкер Е Л4 тензор Sp Е Т™(ТРЛ4) типа (га, п),
то есть отображение
S: peU СМ-> 5(р) = Sp Е Т™(ТРМ).
Применяя алгебраическую процедуру, использованную для получения (6.2),
легко увидеть, что в локальной системе координат тензорное поле 5 может
быть записано в виде
S(p) = S$Zcg(p)dxe ® dxf ® · · · ® dx» ® ^ ® ^ ® · · · ® (6.7)
где хг = <^г(р) — координаты точки р на карте (W, у?). Говорят, что тензорное
поле S(p) будет Ch-дифференцируемым на многообразии М. класса Ск
с h ^ к — 1, если функции Sff\\'cg(p) являются -дифференцируемыми на
многообразии ./И.
6.2.1. Производная Ли тензорного поля
Поскольку производная Ли была определена на функциях, дифферен¬
циальных 1-формах и векторных полях, не составляет труда определить
ее, используя правило Лейбница, на общем тензорном поле, как в уравне¬
нии (6.7).
Одно из наиболее важных применений производной Ли в физике —
это проверка тензорного поля на инвариантность относительно некоторых
преобразований. Если преобразование порождено некоторым векторным
полем Δ, то инвариантность тензорного поля 5 выражается следующим
образом:
LaS = 0.
Условие инвариантности сохраняет свой вид и в локальном случае.
Например, пусть смешанное тензорное поле
5: (Х,а) -+S(X,a)
локально представлено в виде
1 72 Глава 6
Его производная Ли по векторному полю Δ имеет вид
LaS = La (Si dx* ® Ж) =
\ дх3 J
= (LbSfrdx* ® А- + SiiLbdx1) ®A- + S{ dx‘ ® (LaAS] =
дх3 дх3 \ дх3)
= ® JL + Si^dxk ®А~- S^dx* ® -А. =
дх <9х·? дх^ dx·? <9xJ dxfc
+ (68)
\дхк k дхг г дхк) дх3 у ’
Таким образом, инвариантность поля S выражается формулой
ЩАк = 3кЩ _ dA^gj
дхк дхк дхг
С помощью матриц
S = (S?), δ'=(δ^' = 0)
это выражение можно переписать в виде
5, Δ'
4- S
ат~
Для интересующегося читателя можно дать полное определение, как
в случае векторного поля.
Производная Ли по X тензорного поля S определяется следующим
образом:
(rTUr{p)(s(r(p)))-S(p)
(.LxS){p) = lim , (6.9)
где
• фт — поток векторного поля X:
фт: р € М -» фт(р) еМ,
6.2. Тензорные поля
173
• (Фт)* ~ его производная:
(фт)*р' ТрЛ4 ι—> Тфг(р)М,
• (0Т)* — расширение [29] производной (фт)*:
(фТ)*Р: Пр) - Т(фт(р))
на всю тензорную алгебру
Г(р) = £ Τ™(ΤρΛί).
m,n=0
Таким образом, в нашем случае
(ф-тиг{ру.Т(фЦр))^Т(р).
Это определение формально выглядит довольно сложным. В действи¬
тельности, оно очень простое с геометрической точки зрения. Фактиче¬
ски, отображение ф между двумя многообразиями М и ЛГ преобразует
кривую, проходящую через точку р G М, в кривую, проходящую через
точку ф(р) G ЛГ, тогда оно преобразует касательный вектор к многообра¬
зию Л4 в точке р в касательный вектор к многообразию ЛГ в точке ф(р).
Значит, ф индуцирует отображение ф* между соответствующими касатель¬
ными пространствами ТРМ и Тф^ЛГ в соответствующих точках. Конеч¬
но, оно также индуцирует отображение между тензорными пространства¬
ми Т™(ТРЛ4) и Т™ (^фг{р)М) в соответствующих точках, и, наконец, меж-
оо оо
ДУ Пр)= Σ Ί?(ΤρΜ)«η<ρ·(ρ))= £ т™(тФЧр)м).
771,71=0 771,71=0
Если 5 — тензорное поле типа (1, г), соотношение
(a,S(Y\Y2, ...,Yr)) =S(a,Y\Y2, ...,Yr)
определяет векторное поле S(Y1, У2, ..., Yr).
Можно легко доказать, что для любого векторного поля X имеет место
(LXS)(Y\Y2, ...,Yr)= [x,S(Y\Y2,...,Yr) -
Г
-J2s(y\ - ·, [χ,γ*ι (61°)
i=1
г/Ί Глава 6
Из правила Лейбница следуют следующие общие свойства производ¬
ной Ли:
Lx(R®S) = (LxR)®S + R®(LxS), (6.11)
Lx (Т(а 1, ..., ар, Хх, ..., Xq)) = (LxT)(ai, ..., αρ, Χι, ..., Xq)+
V
+ γτ(αι, ..., Lxoti, ..., αρ,Χι, ..., Χ,)+
ί=1
Ρ
+ Ύ^Τ(αι, ..., αρ,Χι, ..., LxXi, ..., Xg). (6.12)
ί=1
Уравнение (6.10) как раз является частным случаем уравнения (6.12).
Упражнение 6.2.1. Показать, что для любых векторных полей X и Υ
£[х,у] = [Lx, Ly].
6.2.2. Дифференциальные р-формы
Дифференциальная 1-форма а на многообразии Л4 есть регулярное
отображение
а: ТМ —> Я (6.13)
касательного расслоения многообразия Л4 в Я, линейное в каждом каса¬
тельном пространстве ТРМ:
ар(аХ + ЬУ) = аар(Х) + bap{Y), Va, 6 Е Я, УХ, Y Е ТРМ.
Таким образом, дифференциальная 1-форма на М — это ковек-
тор на ТРМ, дифференцируемый в точке р. Предположим, что функ¬
ции х1, ..., хп являются системой локальных координат в данной обла¬
сти U многообразия М.:
хг: ро Е U -> ^(р0) = 4 Е Я, Vi = 1, ..., п.
Эти функции являются дифференцируемыми, и их дифференциа¬
лы dxpo в точке ро,
<Ц0 : X € ТРоМ -> ^40(Х) € ЭТ, V* = 1, ..., п,
являются ковекторами на ТРоМ.
6.2. Тензорные поля 175
Значения дифференциалов dxpo, ..., dxpo вектора X есть компонен¬
ты X1, ..., Хп вектора.
Если аРо — какой-либо ковектор на ТРоМ, то, ввиду линейности аРо,
имеем
(аРо,Х) = Lpa,Xl (j-)\=Xl(aP0, ^
^ dx;a (X) = aMdxl (X) =
= {<Xi(po)dxlPo,X),
где
«.Μ = (а„, (Д ^
Ковектор аРо, таким образом, может быть локально выражен в виде
аР0 = ai(p0)dxlo + ... + an(p0)dx™0.
Следовательно, всякая дифференциальная 1-форма а (6.13) в области U
может быть локально выражена в виде
а = ai(p)dx1 + ... + an(p)dxn.
к-ковектор ωρ в точке р е М есть к раз линейная (6.3) и антисиммет¬
ричная (6.4) функция
(Хи ...,Хк)е ТрМ х ... х ТрМ -> ωρ{Χ ь ..., Хк) G Я. (6.14)
Дифференциальная к-форма ω определена на многообразии М, если
форма (6.14) задана в каждой точке р в М и, кроме того, если она диффе¬
ренцируема.
Каждый дифференциал /с-формы ω может быть единственным образом
выражен в области в локальных координатах ж1, ..., хп\
ω = ^ωίι.. .ikfa1) · · ·, xn)dx4 Λ ... Λ dxlk, (6.15)
где dx4 Λ ... Λdx%k — внешние произведения базисных 1-форм dx1, ..., dxn.
Поточечно всегда возможны такие операции, как суммирование
/с-форм, умножение на вещественное число, внешнее произведение форм,
то есть в каждой точке р е М для соответствующих внешних форм на
касательных пространствах ТРМ возможны суммирование, умножение на
число либо внешнее произведение.
I iu Глава 6
Производная JIu дифференциальной к-формы
Из уравнения (6.9), определяющего производную Ли тензорного поля,
получаем для дифференциальной /с-формы ω полезную формулу:
(Lxu>)(Y\Y2, ...,Yk)= [Χ,ω(Υ\Υ2, .. ■, Ffc)] -
Г
-Σω(Υ\...,[Χ,Υ%...,Υη, (6.16)
г=1
которая аналогична полученной для тензорного поля типа (1 ,/с) в уравне¬
нии (6.10).
6.2.3. Внешняя производная
На пространстве дифференциальных к-форм можно определить опера¬
тор d, называемый внешней производной, обладающий следующими свой¬
ствами:
Если a G Ак(М), β G Ак(М), 7 G Ah (М), то
(1) d(a + β) = da + d/?;
(2) d(a A 7) = da A 7 + (—l)ka Λ άη\
(3) d2a = 0;
(4) на дифференциальных 0-формах, то есть на функциях, оператор d сов¬
падает с дифференциалом, определенным в параграфе 5.5.
Оператор d, как это легко следует из его свойств, преобразует диффе¬
ренциальные /с-формы в дифференциальные (к + 1)-формы.
Используя свойства (1), (2), (3) и (4), можно легко вычислить внешнюю
производную /с-формы в координатном базисе. Для ω, заданного уравнени¬
ем (6.15), получаем
άω = ———- άωi ik A dx11 A ... A dx%k,
(/с + 1)!
так как ddx1 = 0.
6.2.4. Замкнутые и точные дифференциальные формы
Дифференциальная к-форма называется замкнутой, если
άω = 0,
и точной, если существует такая a G Ak~l(M), что
ω = da.
6.2. Тензорные поля 177
Поскольку d? = 0, точная р-форма является также и замкнутой. Обрат¬
ное неверно, примером чему в 9Я2 является следующее.
Пример 21. Рассмотрим дифференциальную 1-форму
_ xdy — у dx
которая, как легко видеть, является замкнутой:
άω = 0.
В полярных координатах
( х = г COST?,
\ у = г sin ΰ
она принимает вид
ω = άΰ.
Таким образом, напрашивается вывод, что ω является также и точной диф¬
ференциальной формой. Но в действительности углов-то нет!
Недоразумение разрешится, если заметить, что ω не определена в точ¬
ке (0,0), так же, как и преобразование из декартовых в полярные коорди¬
наты.
6.2.5. Оператор сжатия ίχ
Пусть Е — η-мерное векторное пространство и ΛТ(Е) — векторное
пространство r-ковекторов, заданных на нем.
Если ω е АГ(Е) — антисимметричное мультилинейное отображение
из Е х Е х · · · х £ в 9Я, и Χι,Х2, · · ·, Хг — векторы пространства Е, то
ЦХЬХ2, ...,ХГ) (6.17)
есть вещественное число, антисимметричное при перестановке любых двух
векторов. Следовательно, r-ковектор задан, если число (6.17) задано УХи
г = 1, ..., г.
Представляется естественным для какого-либо r-ковектора ω е АГ(Е)
и вектора X е Е определить (г — 1)-ковектор, а именно ίχω G Λr~1(E)
с помощью следующего уравнения:
(ixcj)(XuX2, ..., Xr-i) := ш(Х,ХиХ2, ..., Xr-i).
I7S
Глава 6
Таким образом, (ίχω) есть (г — 1)-ковектор, построенный для ω е АТ(Е)
и X е Е, который, вычисленный на (г — 1) векторах Χι, Х2, ..., Xr-i, Дает
то же вещественное число, что и ω на г векторах X, Χχ,Χ2, ..., Хг-ъ
Оператор ίχ называется оператором сжатия относительно X} Мы
уже встречались с ним в случае, когда ω — простой ковектор. Фактически,
при обозначении через а элемента пространства А1(Е) = А(Е) = Е*
предыдущее определение сводится просто к
ίχα = а(Х) = (а,Х).
Для того чтобы проиллюстрировать данное определение, представим г-ко-
вектор ω в базисе {т9г}:
ω
1
Г!
(6.18)
Таким образом,
(ίΧ\^) (Х2 > · · · > Χτ) — I ^122 · · . гг det
^2№), (хг)
, (6.19)
и значит, с помощью разложения Лапласа (по первой колонке) детерминан¬
та ίχω представляется в виде
(ίΧιω) = -Ц11а... ίτϋ^ Λ^Λ···Λ^-
r!
Λ Λ · · · Λ ΰ*Γ +
+ . ..ί„0*3(Χι)0*1 Λ i9i2 Λ i9i4 ■ ■ ■ Λ i9ir + ...+
+ ±-A-l)T-lojili2...irdi'-(X1)tiii Λ <9* Λ···Λ^-> =
Γί
1
(г - 1)!
Каковы же свойства оператора гх?
А0<3 Λ---Λ04 (6.20)
1 Такая терминология не является общеупотребительной.
6.2. Тензорные поля 179
• Легко видеть, что
ixiy = —iyix- (6.21)
Это легко получить, заметив, что, \/ω G АГ(Е),
ω(Χ, Υ, Хи Х2, · · ·, Хг-2) = (ίχω)(Υ, Хи Х2, · · ·, Хг-2) =
= (ίγίχω)(Χι,Χ2, ..., Хг-г),
ЦУ, X, Хъ Х2, ..., Хг-2) = (ίγω)(Χ, ХиХ2,..., Хг-2) =
= (ixiy<j)(XuX2, · · ·, Хг-2)·
Как частный случай, получаем
= 0. (6.22)
• Если a G АТ(Е) и β G AS(E), где г + 5 ^ п, то
ζχ(α А β) = (гха) А β + (-1)га Λ ίχβ. (6.23)
Это непосредственно следует из следующей формулы:
(а А β)(Χ\, ..., Xr+s) =
= (^ji · · ·« ^v)№h-i. · · · ·
где суммирование ведется по всем перестановкам (ji, j2» · · ·» jr+s)
из (1, 2, ..., г + s), и σ = 0 или 1, в соответствии с ее четностью
(четная или нечетная, соответственно).
Свойства (6.22), (6.23) естественным образом распространяются,
с единственным дополнительным требованием, что %xf = 0 на 0-фор¬
мах / G Т{М), на r-формы на дифференциальном многообразии М.
Пусть X — векторное поле на М и a G Ак(М).
Оператор %χ, который, действуя на дифференциальные к-формы а,
преобразует их в дифференциальные (/с — 1)-формы ζχα (называемый так¬
же внутренним произведением X и а), определяется в точке следующим
образом:
(гха)р(Хи . ..Хк-г) = αν {Х{р\Хъ ..., Xfc-i), Vp G Λ4, (6.24)
где Χι, ..., Xk-i — касательные векторы к М в р.
1 SO Глава 6
Оператор %χ удовлетворяет следующим свойствам:
(1) гх(а 1 + ад) = ix&i + ixOLi\
(2) ix{a А β) = ίχα Λ β + (-l)fca Λ ζχ/3;
(3) если a e Λ^Λί), (ixa)(p) = (Χ(ρ),αρ) = αρ (Χ(ρ));
(4) если / — 0-форма, το ixf = 0.
Таким образом, свойства внутреннего произведения %χ на дифференци¬
альном многообразии М. алгебраически эквивалентны свойствам внешней
производной d, а именно:
d2 = 0, d(a Αβ) = (da) Αβ + (—1)Γα Λ άβ.
Конечно,
гх: Лг(Μ.) —> ΛΤ~1(Λ4),
d: АГ(М) —> ΚΤ+1(Μ)
ixd: АТ{М) -> ΛΓ(Λί),
dix: Лг(Λ4) —> Лг(Μ).
Операторы ixd и dzx не совпадают, что легко проверить на простом
примере а = dx\ В самом деле, обозначив через Хг компоненты в бази¬
се | f-1 векторного поля X, получим:
(:ixd)dxl = 0,
F)Yi (6.25)
(dix)dx1 = d(ix dx1) = dA4 = ψγάχ3·
Кроме того, операторы ixd и dzx не являются производными, посколь¬
ку
zxd(a Λ β) = %χ [(da) Λ β + (-l)ra Λ d/?] =
= ϊχ [(da) Α β] + (~1)τίχ[α Λάβ\ =
= (ixda) Λ β + (-1 )r+1(da) Λ ίχβ+
+ (~1)τ(ίχα) Λ άβ + (—1)Γ+Γα Λ ίχάβ
6.2. Тензорные поля
181
и
άίχ(α А β) = d[(ixda) А β + (-1 )rα A ίχβ] =
= d [(ίχα) Α β\ + (-l)rd[a Λ ίχβ] =
= (dixa) Λ /? + (—1)Γ+1(ζχα) Λ d/?+
+ (-l)r(da) Λ ίχβ + (—1)Γ+Γα Λ άίχβ.
Тем не менее, добавив ίχά(αΑβ) и άίχ(αΑβ) из предыдущих соотно¬
шений, получим в результате, что оператор ϊχά+άίχ является производной,
так как
(ixd + dix)(a А β) = [(ixd + dix)a\ A β Λ-a A (ixd + άίχ)β. (6.26)
В заключение заметим, что три оператора Lx, %χ и d не независимы
на ΛГ(М). Легко видеть, что на r-формах ω е АГ(М) они удовлетворяют
весьма полезному соотношению, так называемому гомотопическому тож¬
деству, или тождеству Картана:
Lxu = ίχάω + άίχω (6.27)
или, в операторном виде,
Lx = %х о d + d о ίχ. (6.28)
Доказательство.
• Если / G F(M) = ΛГ(М), то, поскольку ixf = 0, имеем
ixdf + dixf = ixdf = (df)(X) =Xf = Lxf.
• Для исходной 1-формы a = f dg e А(Л^):
ixda = ix(df A dg) = (Xf)dg - (df)Xg,
dixa = d(fXg) = (df)Xg + fd(Xg), (6.29)
Таким образом,
ixda+dixa = (Xf)dg+fd(Xg) = (Lxf)dg+fLxdg = Lxa, (6.30)
где было использовано тождество Картана на функциях:
fd(Xg) = fd(ixdg) = f(dix)dg = f(dix + ixd)dg = fLxdg.
Далее доказательство проводится по индукции.
Более элегантное доказательство можно найти в книге Кобаяши и Но-
мизу, оно состоит из следующих шагов:
Глава 6
1) ίχά + άίχ является производной степени 0;
2) всякая производная степени 0, коммутирующая с d, является произ¬
водной Ли по некоторому векторному полю;
3) производные Lx и ίχά + άίχ имеют одинаковое значение
на f е Р(М).
Из уравнения (6.28) прямо следуют полезные соотношения
[Lx, d] = 0, [Lx, ίχ] = 0.
6.2.6. Другая процедура
Тот факт, что три оператора d, Lx и ζχ не независимы на диффе¬
ренциальных формах, подсказывает другой способ определения внешней
производной через внутреннее произведение и производную Ли.
Заметим, что, используя тождество Картана, имеем
• для функции /:
ixdf = (df,X) = Lxf·,
• для дифференциальной 1-формы а € А(М):
(da)(X,Y) = iYixda =
= iy(Lxa — άίχα) =
= (Lxa,Y) - iY(dixa) =
= (Lxa,Y) - iYd(ixa) =
= (Lxa,Y) - LY(a,X) =
= (Lxa, Y) - (LYa, X) + (α, [X, Y}) =
= (Lxa, Y) - (LYa, X) - (a, [X, Y]),
где было использовано правило Лейбница и свойство / ξ ίχα — (α,Χ)
как функции, к которой можно применить предыдущую формулу;
• для дифференциальной 2-формы ω € А2(М):
άω(Χ, Υ, Z) = iYixizdu) =
= iYix(Lz — diz)oJ =
= iYixLzu> — iYixd(izu>) =
= (Lzu>)(X, Y) - (ά(ίζω)) (X, Y) =
= (Lzw)(X,Y) - Lx(izu,Y) +LY ((ίζω),Χ) - ((ΐζω), [Χ,Υ]) =
= (Lzu>)(X, Υ) - LX (ω(Ζ, Υ)) + LY (ω(Ζ, X)) - ω (Ζ, [X, Υ}) =
= (Lzu>)(X, Υ) - (.Ιχω)(Ζ, Υ) + (LYω)(Ζ, Χ) + ω (Ζ, [X, Υ}) +
+ ω ([X, Ζ), Υ) - ω (Ζ, [Υ, X}) - ω ([Υ, Ζ], Χ)-ω (Ζ, [X, Υ}) =
= Lxuj{Y, Ζ) - LYu(X, Ζ) + (Lz<n)(X, У)+
+ ω (X, [У, Ζ}) - ω (Υ, [X, Ζ}) + ω (Ζ, [X, Υ}),
6.2. Тензорные поля
183
где мы применили предыдущее соотношение к а = которая является
дифференциальной 1-формой и к / ξ У), которая является функцией.
Кроме того, было использовано уравнение (6.16).
Таким образом, внешнюю производную можно определить аксиомати¬
чески следующим образом:
• для функции / в виде
(df)(X) = Lxf;
• для дифференциальной 1-формы а Е А(М) в виде
(da)(X, Y) = (Lxa, Y) - (LYa, X) + (α, [X, У]);
• для дифференциальной 2-формы ω Е А2(М) в виде
άω{Χ, У, Ζ) = ЬхЦУ, Z) -Ly^(X, Ζ) + (£ζω)(Χ, Υ)+ω ([X, У], Ζ);
• для дифференциальной р-формы ω Е А? (М) в виде
мх1гХр+1) = Y^{-l)^LXiu{Xh, ..., Xip)-
σ
-53(-ι)|0Γ|ω(№,α·4ι], ...,xip), (6.31)
σ
где сумма берется по всем перестановкам σ = (г, гх, ..., гр)
из (1, ..., р + 1), и |σ| = 0 или 1, в соответствии с четностью (четная
или нечетная, соответственно) перестановки.
Упражнение 6.2.2. Доказать, исходя из определения, заданного соот¬
ношением (6.31), все свойства внешней производной.
6.2.7. Двойственное описание голономного и неголономного базиса
Вернемся к теме, обсуждавшейся в параграфе 5.7.1 и рассмотрим про¬
извольный базис {е*} векторных полей на η-мерном многообразии М:
lei, ej] = C^eh.
Двойственный базис {?9г} обладает поточечным свойством
{d\ej) = 5kj.
184 Глава 6
Взяв производную Ли предыдущего выражения по векторному полю е*,
получим
(Leitik, е,) = - [еи е,}) = -с^($к, eh) = -с£·.
Затем, используя тождество Картана, получим
(ώ9k)(ei,ej) = -с£.
Внешние производные ddk являются дифференциальными 2-формами,
и предыдущее соотношение позволяет нам вычислить их коэффициенты dkj
в данном базисе, в котором d$k = dks,dr Λ Os.
Мы получаем
dkrs(rA^)(ei,ej) = -ckj
или
2 dkj = -с%.
Следовательно, элементы двойственного базиса {$г} обладают следу¬
ющим свойством:
d-dk =-Ic'ljW Atij. (6.32)
Можно суммировать полученные результаты следующим образом:
Если {вг} — базис векторных полей и {$г} — его двойственный базис
на η-мерном многообразии М, то
[а, е0] = с%еъ, ^ d$k = А &.
Поэтому для голономного базиса, в котором с^· = 0, двойственный базис
состоит из замкнутых дифференциальных 1-форм дк, ddk = 0, и, значит,
локально существуют такие координатные функции {хг}, что
$к = dxk.
Как следствие,
дхг
Таким образом, помимо описанного в параграфе 5.7.1, новое описание го¬
лономного базиса {е*} дается с помощью свойства замкнутости дифферен¬
циальных 1-форм, которые определяют его двойственный базис.
6.3. Метрическое тензорное поле на многообразии
185
6.3. Метрическое тензорное поле на многообразии
Метрическое тензорное поле д на многообразии М есть правило, ко¬
торое связывает с каждой точкой р Е М симметричный и невырожденный
тензор типа (0, 2) д(р).
Таким образом, в каждой точке р Е Л4, д(р) есть метрический тензор
для касательного пространства ТРМ, аналогичный рассмотренному ранее
метрическому тензору на векторном пространстве. В частности, в каждом
касательном пространстве TVM базис можно выбрать таким, что g%j(p) =
= ±5ij.
Поскольку метрическое тензорное поле должно быть по крайней мере
непрерывным, а целые числа не изменяются непрерывно, канонический вид
поля g должен везде представлять собой константу, и говорят о сигнатуре
поля д. Набор базисов, в которых поле д принимает канонический вид,
определяет глобально ортонормальный базис на многообразии Л4, но этот
глобальный базис не является в общем случае координатным базисом.
По этой причине пространство 9ЯП, рассмотренное как многообразие,
снабженное евклидовым метрическим тензорным полем (Sij в каждой точ¬
ке), представляет как раз исключительный случай. И даже в этом случае
только декартовы координаты порождают ортонормальный базис.
6.3.1. Векторные поля Киллинга
Векторные поля Киллинга играют значимую роль в изучении изомет¬
рий метрического тензорного поля, по этой причине они обычно исполь¬
зуются в общей теории относительности. Они определены как векторные
поля Δ, сохраняющие метрическое тензорное поле д, то есть из условия
инвариантности имеем
La9 = 0.
Данное уравнение, при заданном д, допускает очень небольшое количество
решений для Δ.
Пусть метрическое тензорное поле
д: (X,Y)^ g(X,Y)
будет локально задано в виде д = g^dx1 ® dx3.
Его производная Ли по векторному полю Δ имеет вид
Lap = L&(gijdxl <g> dxj) =
= (L^gij)dx1 (g) dx3 + gij{L&dxl) ® dx3 + gijdx1 ® (L^dx3) =
= Щ-Ак<1хi ® dxj + gij^-dxk ® dxj + g^^-dx1 ® dxk =
dx dx dx
= (^Ak+gkj^+gik^Jdxi®dxj. (6.33)
186 Глава 6
Таким образом, инвариантность поля д выражается так:
л к , дАк , л дАк п
Выраженное в матричном виде
,-(*). А'=(Д^ = 0),
уравнение (6.34) может быть записано в следующем виде:
d
trl = -{A'l + iA'T
где символ т обозначает транспонирование матрицы.
6.3.2. Максимально симметричное многообразие
Теперь можно задать следующий вопрос: сколько векторных полей,
сохраняющих метрическое тензорное поле g инвариантным, существует на
η-мерном многообразии МР.
Введя дифференциальную 1-форму ξ,
(ξ,Χ)=9(Α,Χ),
уравнение (6.34) можно переписать в следующем виде:
I ^0 Г\£ р/г (Г ΛΛΧ
м + а? " ί4 «’ <6 35)
где
■р/г 1 „hk \ &9ki , &9kj Λ
“ ~ 2* ^ + W ~ a?) <6'36)
называются символами Кристоффеля.
Число независимых дифференциальных уравнений в системе диффе¬
ренциальных уравнений в частных производных (6.35) равно |n(n + 1),
в то время как число неизвестных функций ξ — η, а следовательно, си¬
стема (6.35) переопределена при η > 1, и число векторов Киллинга будет
ограничено сверху.
6.3. Метрическое тензорное поле на многообразии
187
Взяв производную от уравнения (6.35), получим
д2£,з _ о д (<- rh \ (г
dxjdxk дх1дхк дхк ij
Добавляя к данному уравнению его же, но с перестановкой индексов (г —> j,
j —> г, к —> j), и вычитая его же с перестановкой (г —> j, j —> /с, /с —> г),
окончательно получим
_ ats d£r or л
где — функция от gij и его первых производных, и В\-к — функция
от gij и его первых и вторых производных.
Таким образом, когда метрическое тензорное поле g задано, и функ¬
ции ξ с их первыми производными известны в точке р Е Л4, данное уравне¬
ние позволяет нам узнать, в точке р, также и значение вторых производных
функций ξ. Следовательно, таким же образом, дифференцируя уравнение,
можно определить все высшие производные функций ξ в точке р. Это поз¬
воляет, если многообразие М является аналитическим, везде определить
дифференциальную 1-форму ξ.
Поскольку задание функции ξι в точке р определяет, через уравне¬
ние (6.37), симметричную часть первых производных -^г, заключаем, что
дх3
любой вектор Киллинга на М определяется заданием значений
_ с ( \ и &ζί
аг — ζί[Ρ)> Oij —
дЪ
дхг
в произвольной точке р Е М.
Следовательно, поскольку число N параметров а* и bij
N = п + bn(n - 1) = \п(п + 1),
на η-мерном многообразии М существует самое большее |n(n +1) векто¬
ров Киллинга, б для п = 3.
Стоит отметить, что уравнение (6.35) может не иметь решений.
η-многообразие М, снабженное метрическим тензорным полем, назы¬
вается максимально симметричным, если на нем существует |n(n + 1) век¬
торов Киллинга.
188
Глава 6
6.3.3. Ковариантная производная Леви-Чивиты
На дифференциальном многообразии М существует только три есте¬
ственных производных: производная Ли, внутреннее произведение и внеш¬
няя производная. При этом они не являются независимыми на дифферен¬
циальных формах ввиду тождества Картана
Lx = ίχά + άίχ.
Однако, раз метрическое тензорное поле g задано на многообразии М, мож¬
но определить новую производную, ковариантную производную Леви-Чи¬
виты Vх по векторному полю X:
Vxf = Lxf,
(Vxa)(Y) = \ {(da)(X, Υ) + {LXag)(X, У)], (6’38)
где /, а и У — дифференцируемая функция, дифференциальная 1-форма
и векторное поле, соответственно, и где Ха — векторное поле, связанное
с а через метрическое тензорное поле g, то есть
g(Xa,Y) = a(Y)
или, символически
Ха=д~1(а).
Отметим, что (\7χα:)(Υ) представляет собой сумму двух слагаемых, сим¬
метричного и антисимметричного, соответственно, при замене X Υ.
Ковариантная производная Леви-Чивиты может быть естественным об¬
разом распространена на векторные поля с помощью правила Лейбница:
(a,VxYt)=Lx(a,Y)-(Vxa,Y).
Из уравнения (6.38) легко следует, что ковариантная производная Леви-Чи-
виты является ^-линейной, то есть обладает следующим свойством:
V/χ = /Vx, VfeT(M).
Стоит напомнить, что аналогичное свойство не выполняется для производ¬
ной Ли, то есть
Lfx ф fLx,
за исключением случая, когда она применяется к функциям.
6.3. Метрическое тензорное поле на многообразии 189
Вычислим ковариантную производную Леви-Чивиты в бази¬
се {е;}> {^г}· Имеем
X = Υ = а = ац9\ д = д^ ® 0*,
так что
Ха = 9 ^ OijCi.
Повторив в произвольном базисе, в котором [е^е^·] = c^eh, вычисления,
аналогичные проводившимся при выводе уравнения (6.33), получим
Lxag = \Ха (Ckidij) + 9ljcik + 9licjk) 9kjei{Xa)^~
+ дкгеЛХк)]д1®&,
и, значит,
(Lxag)(ei, ej) = Хк (ek{9ij) + 9ijcik + 9ucljk) + gkj6i(Xk) + 9ki^j{X^)'
С другой стороны,
X-a = gkhOLhek,
поэтому
Xk=gkhah.
Следовательно, получаем
{Lxag){ei,ej) =
= ahghk (ek{gij) + 9ijClik + 5i»Cj-fc) + gkjei{ghkah) + дые^дНкак) =
= ahghk (ek(ffij) + 9ij<Hk + 9ucljk - ei{gkj) ~ Cj(gki)) + e*(ay) + еДа*).
Таким образом, можно написать
(Vxa)(y)=X^(Veia)(ej) =
= [(da)(ebej) + (ЬХад)(ег,е^} =
= [eiiaj) - ejioa) - ahchi0 + (ЬХад)(еие^)} =
= Х*У*<ц(ч) + \х^андкк (ek(9ij) - ei{gkj) - е^ды)) +
+ |xiyjahghk(gijclik + дцс)к - дысιυ)
190
Глава 6
или, короче,
(Vxa)(Y) = ΧΎi [ei{aj) - Т%ан] , (6.39)
где
= 2^ Λ (ез(дкг) + ei(dkj) ~ ^k(dij) ~ 9licjk ~ 9ljcik 9klcij) ·
Данные величины, которые также называются коэффициентами связности
Леви-Чивиты, в голономном базисе сводятся к символам Кристоффеля из
уравнения (6.36). Они не являются компонентами какого-либо тензора и об¬
ладают свойством
г£.-Г£-4-=0. (6.40)
Упражнение 6.3.1. Показать, что в данном базисе
4χΥ = X1 [α(Υή - Г%Yi] eh,
поэтому
V ei6j = ГjiCh-
Ковариантная производная может быть распространена на любое тен¬
зорное поле с помощью правила Лейбница, так что
Vx(S (g) Т) = (Vx5) <8> Т + S <8> VxT.
Упражнение 6.3.2. Показать, что ковариантная производная Ле¬
ви-Чивиты метрического тензорного поля обращается в нуль, то есть
4x9 = 0.
Уравнение (6.39), для а = ΰΗ и X = ei9 дает
νβ.0Λ =
и может служить отправной точкой для определения более общей ковари-
антной производной, без использования каких-либо метрик, но мы не бу¬
дем углубляться далее в этот предмет. Чисто алгебраическую формулировку
можно найти в [125].
Уравнение (6.40) выражает, в данном базисе, обращение в нуль тензор¬
ного поля типа (1,2), определенного следующим образом:
Т(а, X, Y) = (а, V*У - VyX - [X, У]),
которое называется кручением связи V.
6.3. Метрическое тензорное поле на многообразии
191
Упражнение 6.3.3. Показать, что на самом деле Т есть тензорное
поле и что в заданном базисе
7^=Т(<еье,-) = Г£-Г£-4.
Таким образом, ковариантная производная Леви-Чивиты имеет нулевое
кручение и удовлетворяет свойству Vxg = 0. Можно показать, что для
заданной метрики на многообразии единственная связность без кручения,
для которой Vхд = 0 — это связность Леви-Чивиты [43].
6.3.4. Тензорное поле Римана
Тензорного поле ΊΖ типа (1,3) Римана1 определяется следующим об¬
разом:
Ща, Ζ, X, Y) = (a, R(X, Υ)Ζ), (6.41)
где R(X, У) — оператор кривизны V,
— VxVy - Vy Vx - V[x5y].
Упражнение 6.3.4. Показать, что фактически 7Z, определенное урав¬
нением (6.41), является тензорным полем, то есть Т-мультилинейным.
Упражнение 6.3.5. Показать, что в заданном базисе
nkhij = η{ϋ\ еи ej, ен) = *(1%) - е,-(Г&) + TrhjTkri - TrhiTkrj - с^Ткг.
Упражнение 6.3.6. Показать, что ковариантная производная V удо¬
влетворяет тождеству Якоби
[Vx, [Vy, Vz]] + [Vy, [Vz, Vx]] + [Vz, [Vx, Vy]] = 0.
Показать также, что в координатном базисе данное уравнение сводится
к так называемому тождеству Бианки2
Ve|^«+VeAi + Vei^K= 0.
1 Георг Фридрих Бернхард Риман родился в Брезеленце 17 сентября 1826 года и умер
в Селаске 20 июля 1866 года. Он учился в Геттингене у Гаусса, а впоследствии в Берлине
у Якоби, Дирихле, Штейнера и Эйнштейна — все они были профессорами в этом университете
в одно время. Несмотря на бедность и болезнь, он боролся, чтобы продолжить исследования.
Риман был одним из наиболее блестящих математиков своего времени. В 1857 году он стал
профессором в Геттингене.
2Луиджи Бианки родился в Парме в 1856 году и умер в Пизе в 1928 году. Он был студен¬
том Э. Бетти и У. Дини в Пизе и Ф. Клейна в Геттингене. Он был профессором в Университете
и в Высшей нормальной школе в Пизе. Он был одним из наиболее значительных итальянских
математиков прошлого столетия. Его труды составляют более 10 томов и касаются, главным
образом, дифференциальной геометрии и теории чисел. Как оригинальные статьи, так и книги,
сегодня являющиеся классическими (по дифференциальной геометрии, группам преобразова¬
ний, эллиптическим функциям), написаны в очень прозрачной и изящной манере. Бианки был
очень любим своими студентами, и не только за замечательный vis comica (веселый нрав),
который был одной из его характерных особенностей.
192
Глава 6
6.3.5. Тензор Риччи и скалярная кривизна
Тензор Риччи1 — это тензорное поле типа (0,2), определенное в коор¬
динатном базисе как
7Zij = 7Zkkj
и являющееся симметричным:
7= IZji.
Скалярная кривизна определяется следующим образом:
П = ·
Упражнение 6.3.7. Показать, что тензор Риччи является симметрич¬
ным тензорным полем. Показать таю/се, что из ограниченных тождеств
Бианки
VeA+Ve^ + Ve^y = О
следует
ve. (nij - \щ^ == 0.
Предыдущие тензорные поля играют основную роль в общей теории
относительности Эйнштейна2 , в которой пространство-время представлено
Грегорио Риччи-Курбастро родился в Луго (Равенна) в 1853 году и умер в Болонье
в 1925 году Он учился в университетах Рима, Болоньи и Пизы, где получил степень в 1875 году
Он был студентом Ф. Клейна в Геттингене и обучающим ассистентом У. Дини в Пизе. Он был
профессором математической физики в университете Падуи с 1880 года. Главным научным
вкладом Риччи было открытие (вместе с его студентом Леви-Чивитой) абсолютного дифферен¬
циального исчисления, впоследствии необходимого инструмента для формулирования общей
теории относительности.
2Альберт Эйнштейн родился в Ульме, Германия, в 1879 году, и умер в Принстоне, США,
в 1955 году. Он провел молодость в Мюнхене и после периода, проведенного в Милане, он
переехал в 1896 году в Швейцарию. Он получил степень доктора философии в Цюрихе, в По¬
литехническом в 1905 году. После работы в швейцарском патентном бюро, он был назначен
профессором в Цюрихском университете в 1909 году и затем в Берлинском университете
в 1913 году. В 1905 он написал шесть статей. Первая из них, с введением фотона, заложи¬
ла основы квантовой теории, вторая и третья — специальной теории относительности и, тем
самым, новой концепции пространства-времени, остальные были посвящены объяснению бро¬
уновского движения и тем самым ввели новые методы измерения размеров атомов. Его статья
по общей теории относительности датирована 1915 годом. Он был награжден Нобелевской
премией за объяснение фотоэлектрического эффекта в 1921 году. В 1933 году, с введением
нацистских расовых законов, он переехал в Принстон, где был назначен на должность про¬
фессора физики в Институт современных проблем, где он преподавал до 1955 года.
6.4. Эндоморфизм, связанный со смешанным тензорным полем 193
как 4-мерное многообразие с метрическим тензорным полем д, представля¬
ющим гравитационное поле. Гравитационное поле д пустого пространства
находится из решений эйнштейновских уравнений поля:
6.4. Эндоморфизм, связанный со смешанным тензорным
Пусть Т — смешанное тензорное поле, то есть тензорное поле ти¬
па (1,1), на η-мерном многообразии М. В координатном базисе это можно
выразить так:
Пусть ТРМ — касательное пространство к многообразию в точке р,
и Т*М - двойственное к нему.
Тензорное произведение Т*М <8> ТРМ изоморфно Lm(TpM,TpM),
векторному пространству линейных операторов на ТРМ, через канониче¬
ский изоморфизм, имеющий вид
X: а® X <Е Т*М<8> ТРМ -> 1{а®Х) = La®x е Пп(ТрМ,ТрМ),
где La<s,x — линейное отображение
Следовательно, с тензором (6.42) можно связать эндоморфизм Т
Кроме того, существует другой изоморфизм между тензорным произ¬
ведением Т*М <8> ТРМ и пространством 1Ап.(ТрМ, ТРМ), который сопо¬
ставляет каждому а® X еТ*М® ТРМ линейное отображение
nij - ±ngij = 0.
полем
η
(6.42)
La0X: Y G ТРМ -> La®x{Y) = a{Y)X € TVM.
на ТРМ
Т: X 6 ТрМ —> ТХ € ТрМ,
определенный следующим образом:
П
П
(6.43)
194 Глава 6
Таким образом, с тензором (6.42) можно связать также и эндомор¬
физм Т шТ*М
Т:аеТ;М^ТаеТ;М,
определенный так:
п п
Τα=Σ ajTf dx\ а = ^ otkdxk. (6.44)
i,j=1 к=1
Используя уравнения (6.43) и (6.44), получим, что (Τα,Χ) = (α,ΤΧ).
Фактически,
{α,ΤΧ) = а(ТХ) = а ( £ ПХ*-^- ) = £
\i,j=l / i.J=l
(Τα,Χ) = (Та)(Х) = £ atf dx\X) = £ оцТ°Х\
i,j=1 ij=1
В дальнейшем, если это не будет вызывать недоразумений, мы не будем
делать различий между тензором Т и связанными с ним эндоморфизмами Т
и Т.
6.4.1. Скобка Нийенхейса двух смешанных тензорных полей
Если S и Т — эндоморфизмы, связанные с двумя тензорными полями
типа (1,1), и если X, Y — два произвольных векторных поля, соотношение
2П^(Х, Y) = [SX, TY} + [ТХ, SY] + ST[X, Y] + TS[X, Y]~
- S[X, TY) - S[TX, Y] - T[X, 5У] - T[SX, Y]
называется скобкой Нийенхейса для S и Т. Оно определяет векторное по¬
ле 7i^(X, У), антисимметричное при замене X Υ.
Тензорное поле типа (1,2), определенное следующим образом:
ΛΓ$(α,Χ,Υ) = (α,ΗΪ(Χ,Υ)),
называется кручением Нийенхейса для S и Т.
6.4. Эндоморфизм, связанный со смешанным тензорным полем 195
Заметим, что Ηγ(Χ, Υ) можно записать также в виде
τ4(Χ, Υ) = |(LsxT + LTXS - SLxT - TLXS)Y.
Кручение Нийенхейса Ντ смешанного тензорного поля Т с самим собой
называется кручением Нийенхейса поля Т, вообще говоря, оно не равно
нулю.
В этом случае предыдущее соотношение принимает вид
λίτ(α,Χ,Υ) = (α,Ητ(Χ,Υ)),
где
Нт(Х, Υ) = (LtxT - TLXT)Y.
Упражнение 6.4.1. Показать, что
• Afs+τ — Ns + 2Λίγ + N’t,
• Ντ — 0 ==> Νχ2 = 0.
Упражнение 6.4.2. Предположим, что тензорное поле (6.42) имеет
нулевое кручение Нийенхейса. Таким образом, поле удовлетворяет условию
(.LfxT)AY = T(LXT)AY. (6.45)
Из этого соотношения следует, что если Т есть инвариант векторного по¬
ля Δ, то он является инвариантом всех векторных полей ТпА, порожден¬
ных повторяющимся действием Т на Δ. Показать, что [ТпД,ТтД] = 0,
Vn, т.
Производная Ли по Δ тензора (6.42) имеет вид (смотри уравнение (6.8))
^=(0Δ*+Γ*^-Γ*0)ώ'®έ7·
В локальных координатах на λΛ имеем
196
Глава 6
t(lxt)ay = (т?Щ-хку1 + ήτΐ^γ* -т^Щ-уЛ
у х J \г дхк к 1 дхг 1 дхк ) дх!
Следовательно, соотношение (6.45) принимает вид
flrpj flrpj flrpi Qfjii
—Т,кХ1У* г-Т,кУ1Х1 = Т?—l-XkYl - Т?—l-YkXl. (6.46)
дхк дхк дхк дхк
Если 7: т £9$ —>■ А4 — кривая на Л4, такая, что 7(0) = р, и
( άη{τ)\
\ dT )т=о
■X,
мы имеем
Τ'{ρ){Χ,Υ)=^Τ{Ί{τ))Υ
= Щ-ХкУ1-*К.
т=о δχ0
Таким образом, соотношение (6.46) можно также записать в виде
Τ'(ρ)(ΤΧ,Υ) - T'(p)(TY,X) = Т \f'(p)(X,Y) - T'(p)(Y,X)] . (6.47)
Глава 7
Теория интегрирования
7.1. Ориентируемые многообразия
Дифференцируемое многообразие М называется ориентируемым, ес¬
ли на нем существует нигде не обращающаяся в нуль непрерывная диф¬
ференциальная η-форма Ω. Такая дифференциальная η-форма называется
п-формой объема.
В каждой точке р G Л4 п-форма Ω будет определять п-ковек-
тор Ωρ G Ап(ТрМ), величина которого Ωρ(β\,β2, ..., еп) в бази¬
се {ei,e2? · · ·, еп} вТрМ будет отлична от нуля. Поэтому все базисы в ТрМ
будут разбиты на два класса в зависимости от знака Ωρ(βι,62, .еп).
Оба класса являются независимыми от Ω, так как каждая всюду ненулевая
η-форма Ω' будет пропорциональна Ω с множителем f ф 0, и, значит, будут
иметь тот же знак (зависящий от знака /) на элементах каждого класса.
Эти классы будут называться левосторонним и правосторонним1. Таким
образом, можно выбрать, непрерывно Vp G Л4, базис {ei,e2, еп}р,
принадлежащий тому же классу. Если базис является координатным бази¬
сом, определитель Якоби перехода от одного базиса к другому будет иметь
в окрестности каждой точки р G Л4 один и тот же знак. Лента Мёбиуса не
является ориентируемым многообразием.
7.2. Интегрирование на ориентируемых многообразиях
Пусть М — η-мерное ориентируемое многообразие и ω — дифферен¬
циальная η-форма на нем. На данной карте ('ΊΑ,φ), ω будет локально пред¬
ставлена как η \ χ
ω = f(x , .. ·, x )dx Λ · · · Λ dx .
Интеграл от ω по Ы С М. определяется таким образом:
Jω= J f(x1,...,xn)dx1‘"dxn, (7.1)
и φ(μ)
1 Какой класс как будет называться является делом соглашения, так как знак Ω' будет
зависеть от множителя /, который находится в нашем распоряжении.
198
Глава 7
где φ(ΙΑ) С Яп — образ Ы, и символ dx1 · · · dxn обозначает меру для обыч¬
ного интеграла дифференциального исчисления.
Для того чтобы показать, что определенный таким образом интеграл
не зависит от координат, выберем другой координатный базис | |, в ко¬
тором
u = f{y1, yn)dy1 ■ ■ ■ dyn.
Равенство _
f(y)dy1 Λ ... Λ dyn = f(x)dxl Λ ... Λ dxn,
вычисленное в базисе < >,
\дугУ
f(y)(dyl А ... A dy1
д д
ду1’ ‘''’ дуп
дает
f(y) det
ду1
ay1
V ^г/1
dy1 \
&/n
5yn/
= / (s(y)) det
( дх1
дх'\
ду1
дуп
дхп
дхп
Уду1
дуп)
или
f(y) = Jf Иу)),
где J — определитель Якоби.
Таким образом, имеем
если
[ь>= [ Jf(y\-..,yn)dy1---dyn. (7.2)
и ф{и)
Тогда наше определение интеграла от ω не будет зависеть от координат,
J /(ж1, , xn)dx1 ■■■dxn = J Jf(y\ , yn)dyl · · · dyn.
ψ{ΙΑ)
ф(Ц)
7.3. р-ВЕКТОРЫ и двойственные тензоры
199
Как известно из дифференциального исчисления, данное равенство вы¬
полняется только в случае J > 0.
Следовательно, в определении (7.1) должна быть выбрана ориентация
для U, то есть необходимо добавить требование ориентации базиса. Это
объясняет, для чего в самом начале М предполагалось ориентированным
многообразием, то есть таким, для которого можно выбрать, непрерывно
Тем не менее, теория интегрирования дифференциальных форм была
распространена де Рамом на неориентированные многообразия [4] введе¬
нием классов нечетности, и это может иметь интересные физические при¬
ложения [173]. В качестве исторической справки отметим, что они были
введены Германом Вейлем [56] и развиты Схоутеном [48] и называются
тензорами Вейля. Синг и Шильд ссылаются на них как на ориентирован¬
ные тензоры, в то время как де Рам называет их тензорами со свойством
нечетности [7]. При замене координат (х <-> х') скрученная дифференци¬
альная форма преобразуется следующим образом:
где J — определитель Якоби, и | J\ — его абсолютная величина.
7.3. р-векторы и двойственные тензоры
Полностью антисимметричные тензоры типа (р, 0) на η-мерном век¬
торном пространстве Е называются р-векторами. Алгебра Грассмана, ко¬
нечно, может быть построена на них в полной аналогии с построением
р-ковекторов. Векторное пространство р-векторов обозначается УР(Е). Его
размерность —
^ab'-'C
J дхр dxq дхТ
^pq-'-тч
И дх,а дх,ъ дх,с
а базис имеет вид
еа Λ еь Λ · · · Λ ес .
р раз
Таким образом,
dim VP(E) = dim Vn~p(E) = dim ΛP{E) = dimAp(£).
200 Глава 7
Если {г?г} — базис, двойственный к {ег}, п-ковектор
Ω = tf1 Λ ϋ2 А · · · Λ ϋη = Ле»1*2-»„041 Αϋί2 Α··· Αϋίη
η!
есть базис для векторного пространства Λη и будет называться ковектором
объема.
Используя ковектор объема, можно сопоставить каждому р-вектору
χ = 1 хаЬ-сеа Λ еь Λ ... Λ е
р\
(п — р)-ковектор, определенный таким образом:
Ω(Χ) =гхП= Λ-dip+2 A - ■■ Αϋίη.
Данный (η — р)-ковектор называется Ω-двойственным к X, или же Пуанка-
ре-двойственным к X.
Определение, не зависящее от базиса, имеет вид
ίχΩ(Υρ+1, ...,Υη) = ЩХ a Yv+1 А ... А У”), УУр+\ ..., Υη € Е.
Возможно также проделать обратное, то есть сопоставить каждому
р-ковектору а (п — р)-вектор
Ω (α) = — ε 1 2 nO'i1i2'.. грегр+1 А · · · Λ e^n,
где
ε^2···^ιί2...ίη =nl (7.3)
Вычислим теперь «двойственный к двойственному к» данному р-век-
тору X.
Имеем
Ω“2 (ΩΡ0) = Ω-1 (liXili2-i’’eili2...intfi’’+1 А г^+2 А - ■ ■ А ϋίη ) =
= ±Xili2-i<’sili2...in-1 (tfip+1 Λ i9ip+2 Λ · · · Λ ϋίη)
ρ!
ϋ: yiii2-"ipΡ. . . c^p+1 · · · inji32 · · · 3ν ρ . Λ . . . Λ ρ . —
ρ\(η-ρ)\ еЛА AeJp-
— ^ ί χΙΐΐ2···ΙρΓ. . . Fjl32· · -jptp+l . . .Ιηρ ш Α.,.Αρ.
~ ρ\(η-ρ)\ £^··ζ^ ел/\ 3ν ·
7.4. Метрика о объем = двойственность Ходжа
201
Значит,
[Ω-1 (Ω(Χ))]
10 „ (-Л )р(п-р) ... ч
Р V ) γ·ίΐΪ2 "'ip с. ■ ■ (А"'РгР +1 · ■ · 1Т1
-*»■ t’ii io · ·-г*, с·
р\(п — р)\
(_Л \р(п~р)
^ J yi1···ρ(ρ+1)···η _
. -Л- C-Zi •••гр(р+1)---пс
— 12”·^
Еще раз вычислим «двойственный к двойственному к» данному р-ко-
вектору а.
Имеем
Ω (Ω_1(α))
(η — р)\р\
1 εΐιΐ2...*„α
ρ!(π — ρ)ί
iii2 . . · ip^ip+i . . . inji . . . jp^31 Λ · · · Λ $ p —
гР+1 · · -гпл · · ·3ΡαήΪ2 · · . ip^1 Λ · · · Λ Ό ρ.
(_;ΠΡ(η-ρ) . ...
_ V- ' ε^ρ+1 ■ ' '1711112 · ■ · гР£,
ρ!(η —р)!
Подведя итоги, мы получим
П~\гхп) = {-ΐγ^-νϊχ, VX G Vp(E),
Ω (Ω-1(α)) = (-1)ρ(η“ρ>α, Va G ΑΡ(Ε).
Таким образом, ковектор объема Ω и обратный к нему Ω-1 дают следующие
отображения:
Ар
у р
Ар
у р
Ω
Ω-
>
1
43
у п-р
>
1
43
у п-р
7.4. Метрика о объем = двойственность Ходжа
В параграфе 6.3 было показано, что метрический тензор д на п-мерном
векторном пространстве дает изоморфизм между векторами и ковекторами.
202
Глава 7
Легко видеть, что он также дает изоморфизм между р-векторами и р-ковек-
торами, поскольку
&ij--к — 9il9jm * * * 9кпХ
является полностью антисимметричным по индексам г, j, ..., к.
Значит, метрический тензор д позволяет завершить предыдущую диа¬
грамму следующим образом:
Ар
у р
Ар
/
Ω-1
/ \
у р
>
1
■о
<-9<-
у п-р
>
1
■в
у п-р
Отображение композиции * = д о Ω 1
*: Ар —>Ап~р,
дающее изоморфизм между р-ковекторами и (п — р)-ковекторами, называ¬
ется двойственностью Ходжа.
Транспонированное ему Ω-1 о g дает изоморфизм между р-векторами
и (π — р)-векторам и обозначается таким же символом.
Пример такого изоморфизма дает так называемое векторное произве¬
дение двух векторов в 3-мерном евклидовом пространстве (Я3, дц = δ^):
• рассматриваются два вектора С/, V в D^3;
• берутся ковекторы и = g(JJ, ·), v = g(V, ·), связанные через евклидову
метрику;
• рассматривается 2-ковектор, заданный с помощью их внешнего произ¬
ведения и Λ ν\
• двойственный объем и Αν есть вектор, который называется векторным
произведением векторов U, V.
Суммируя,
UAV = n-1(g(U,-)Ag(V,·))·
Замечание 15. Если многообразие имеет метрику g, пусть {$г} будет орто-
нормальным базисом для дифференциальной 1 -формы и Ω будет формой объема
Ω = ΰ1 А ϋ2 А ■ ■ ■ А ΰη.
7.5. Теорема Стокса 203
Если {хк} — произвольная координата и Л — матрица преобразования от {dxk}
к {$г}, то есть
ϋι = A{dxk,
имеем
Ω = А] · Λ2 · · · Akdx1 A dxJ Λ · · · Λ dxk =
= Λ] · Aj · · · Ak£tj" kdxl A dx2 Λ · · · Λ do;71 =
= (det A)da;1 Λ dx2 A · · · Λ dccn.
С другой стороны, также имеем
9ij = Ai Ajp(e^,efc),
где pi-,· — компоненты метрического тензора д в координатном базисе
и g(e/i, е/с) = поскольку исходный базис был ортонормальным.
Поэтому
g = det(pij) = (det Λ)2
ί-Ч
I дхг j
Ω = ^f\g\dxl A dx2 Λ · · · Λ dxn.
Из уравнения (7.3) следует, что компоненты Ω1·7' ^ для Ω-1 имеют вид
1 1
Ω
Ωΐ2···η νΤβΓ
Однако в нашем метрическом многообразии обратная форма для Ω может быть
определена также следующим образом:
— Qipqjq . . . gkrQOa...r
у 12 ... η λ/ίβΙ
g'gJ---g wP9...r,
так что
Ω'
g '
Если g отрицательна, Ω12 ' η и Ω/12 " п отличаются знаком. В специальной или
общей теории относительности есть соглашение использовать Ω/12 ‘’п в двойствен¬
ных соотношениях.
7.5. Теорема Стокса
Пусть λΛ — ориентируемое η-мерное дифференцируемое многообразие
и U — область многообразия λΛ. Границей области U называется ориенти¬
руемое (η — 1)-мерное подмногообразие многообразия λΛ, а именно 8U,
204 Глава 7
которое делит Л4 — dU на две несвязанные части U и CU таким образом,
что любая непрерывная кривая, соединяющая точку области U с точкой
в области CU, содержит точку области dU. Рассмотрим интеграл от произ¬
вольной η-формы ω по U
h
U
Пусть X — векторное поле и U(r) — образы области U под действием
потока φ, порождаемого полем X:
υ(τ)=φτ(ΙΙ).
Из уже проведенного в параграфе 4.1 анализа следует, что
£χ ω= Lxu,
U (т) С7(т)
ИЛИ
Lx u= άΐχω, (7.4)
U(r) U(t)
поскольку форма ω очевидно является замкнутой.
С другой стороны, непосредственно применяя определение производ¬
ной Ли, получаем
Lx J ω = lim ψ j ω- Jw = lhn I J ω
U (t) U(r) U{ 0) -1 SU(r)
c U(0) = U И SU(t) = U(r) - U(0).
Рассмотрим часть 9У(0) С dU(0), к которой векторное поле X не яв¬
ляется касательным, и SV(r), часть δύ(τ), представляющую собой область
между dU(0) и dU(r), локально имеющую вид
SV(t) =9У(0)х]0,т[.
Далее, если (х2,хз, ..., хп) обозначают координаты для dV(0), можно вве¬
сти при х\ = т координаты (χι,χ2, · · ·, Хп) Для SV(т). В этих координатах
дифференциальная η-форма ω может быть выражена в следующем виде:
ω = f(x 1, хз, · · ·, xn)dx 1 Λ dx2 A ... A dxn
7.5. Теорема Стокса
205
ω =
δν{τ)
lim ~ ω = lim \ /
r—>0 T J t—>0 T J
av(o)x]o ,r[
lim ^ / / ώι A с&г2 A ... A chn
r-^0 T J
av(o)x]o ,r[
T
^ / jfdXl
dV{0)
dx 2 A
= lim ^ / [г/ (0, ж2, · · ·, a:n)] ώ2 Λ
г—>0 ' J
dV(0)
— J f \dU{0) dx2 A ... A dxn =
/\ dxri —
av(o)
dU( 0)’
av(o)
(7.5)
где символ |a[/ обозначает ограничение на 9/7.
Окончательное уравнение
/ ω= / (ίχω)Ι^(0)
5ν(τ) av(o)
не зависит от построенных координат, но оно требует, чтобы X не было
касательным к dU в V. Для всей границы dU возможны два случая:
• X касательно к изолированным точкам, образующим подмногообразие
меньшей размерности.
В этом случае данные точки не вносят вклад в интеграл.
• X касательно к dU в ее открытой области.
В этом случае обе части уравнения (7.5) обращаются в нуль и уравнение
выполнено.
Итак, суммируя по всем частям dV края dU, получаем
J ω= J (ixUJ}\dU(0)'
SU (τ)
dU{0)
206
Глава 7
откуда
Lx Jω = J(ίχω)\9υ. (7.6)
и ди
Сравнив два выражения, производной Ли (7.4) и интеграла J ω (7.6),
и
окончательно получим
J άίχω = j{ίχω)\9υ,
и ди
и, поскольку ίχω и ω произвольны, можно заключить, что
Теорема 22 (Стокса). Для любой (п — 1)-формы а на п-мерном мно¬
гообразии U выполняется следующее соотношение:
J da = j а\ди. (7.7)
и ди
Если U = [а, Ь\ — интервал вещественной прямой и /: U —> 91 —
дифференцируемая функция, то теорема Стокса1 сводится к
ь
J f'dx = f(b) - f(a),
а
поскольку dU = {а, Ь}.
7.6. Градиент, ротор и дивергенция
На η-мерном ориентируемом многообразии М, снабженном метриче¬
ским тензорным полем g, все свойства объемной двойственности и двой¬
ственности Ходжа в точке могут быть получены непосредственно. Это поз¬
воляет нам лучше понять смысл некоторых хорошо известных понятий
пространства 9Я3 — таких, как градиент, дивергенция и ротор.
1 Джордж Габриэль Стокс родился в Скрине (Ирландия) в 1819 году и умер в Кембридже
в 1903 году Физик и математик, он был профессором математики в университете Кембриджа
и широко известен исследованиями по преобразованию интегралов в теории волн в жидкости
и в теории оптики, основанной на гипотезе эфира.
7.6. Градиент, ротор и дивергенция
207
• Градиент
Рассмотрим функцию / и возьмем ее внешнюю производную df. Век¬
торное поле, связанное с дифференциальной формой df через обратный
евклидов метрический тензор η, называется градиентом функции /:
V/ = 7r\df, ■) <ί=>· ιν}η = df.
• Ротор
Рассмотрим векторное поле U, возьмем соответствующую дифферен¬
циальную форму а = η ([/,·) и ее внешнюю производную da. Объемная
двойственность da есть вектор, который называется ротором поля U:
V х и = Ω_1(<ία),
где Cl = dx Ady A dz.
• Дивергенция
Рассмотрим векторное поле У, возьмем соответствующую дифферен¬
циальную 2-форму через форму объема Ω = dx Л dy Л dz. Ее внешняя
производная пропорциональна Ω с коэффициентом пропорционально¬
сти в виде мультипликативной функции, называемой дивергенцией по¬
ля V:
(V · ν)Ω = divSl.
Кроме того, если V = V х U = Ω_1(^α), то
V · V х U = gKvxc/Ω = din-ΐ(όα)Ω =
= d (Ω (Ω_1(^α))) = d(-lf~lda = d2a = 0.
Упражнение 7.6.1. Используйте теорему Стокса для доказательства
того, что для каждой точной дифференциальной 2-формы ω на сфере S2
/„ = 0.
s2
Доказательство.
Для того чтобы ω была точной, должна существовать такая дифферен¬
циальная 1-форма а, что ω = da. В этом случае теорема Стокса дает
ω = da = I a = 0,
S2 S2 dS2
поскольку S2 не имеет границы.
208
Глава 7
Упражнение 7.6.2. Используйте теорему Стокса, чтобы показать,
что для дифференциальной 2-формы ω = xldx2 A dx3 на ίΗ3
f I _ 4
J Из2 — β71*?
s2
где S2 — единичная сфера, рассматриваемая в качестве подмногообразия
пространства 9Я3.
Решение.
Дифференциальная 3-форма
do; = dx1 A dx2 Λ dx3
является обычной формой объема, поэтому, проинтегрированная по объ¬
ему V сферы, дает
/"=1г-
V
Далее решение следует из теоремы Стокса.
Данное упражнение дает пример замкнутой дифференциальной 2-фор¬
мы на S2, которая не является точной, поскольку она не удовлетворяет
критерию первого упражнения.
7.7. Когомология
Пусть ZP(M) и ВР(М) — множество всех замкнутых дифференци¬
альных р-форм и множество всех точных дифференциальных р-форм со¬
ответственно. Оба множества имеют естественную структуру векторного
пространства и, кроме того, ВР{М) является подпространством множе¬
ства ΖΡ(Λ4). Тогда можно ввести в ΖΡ(Λ4) отношение эквивалентности,
а именно объявив
απβ^(α-β)β Вр(М),
то есть
а ^ β а — β = dry.
Множество всех классов эквивалентности обозначается НР(Л4) и на¬
зывается когомологией де Рама размерности р векторного пространства
многообразия Л4.
7.7. Когомология
209
Легко показать, что если М — произвольное связное многообразие, то
Н°(М) = Ζ°(Μ) = «я.
В самом деле, нулевая дифференциальная форма является функцией, по¬
этому Ζ°(Λ4) — пространство функций /, для которых df = 0, то
есть Z°(M) = УК. Кроме того, В®(М) = {0}, то есть нулевая функция,
поэтому константы / и д эквивалентны, если они совпадают.
Если М — несвязное многообразие, то элемент в Ζ°(Λ4) будет кон¬
стантой на каждом связном компоненте многообразия М, но значение кон¬
станты может быть различным на различных компонентах, поэтому
Н°(М) = Ζ°(Μ) = тт,
где т — число компонент многообразия М.
Упражнение 7.7.1. Показать, что для п-мерного открытого шара
или любой области Ы, диффеоморфной ему,
НР(Ы) = 0, р^1.
(Подсказка: все замкнутые дифференциальные р-формы эквивалентны друг
другу и, следовательно, нулевой дифференциальной р-форме).
Упражнение 7.7.2. Показать, что
Hn(Sn) ф 0, Hn~1(Sn) = 0.
Можно доказать [51], что
Hn(Sn) = <н,
Hp(Sn) = 0, 0 < р < п,
H°(Sn) = «К.
Замечание 16. Размерность НР(М) называется числом Бетти'.
Замечание 17. Данное определение НР(М) основывается на дифференци¬
альной структуре многообразия Λί. Однако можно доказать (см., например, [55]),
что группы когомологий зависят только от топологии многообразия Λί, а не от его
дифференцируемости.
Энрико Бетти родился в Пистойе в 1823 году и умер в Пизе в 1892 году, был профессором
математической физики в университете Пизы и директором Высшей нормальной школы в Пи¬
зе. Он внес огромный вклад в алгебру, топологию, теорию упругости, теорию потенциалов.
Превосходный преподаватель; среди его студентов были Луиджи Бианки и Вито Вольтерра.
210 Глава 7
7.8. Скалярное произведение дифференциальных р-форм
Пусть М — ориентируемое η-мерное компактное дифференцируемое
многообразие, и пусть а, β — дифференциальные р-формы ΛР(М). Двой¬
ственность Ходжа *β формы β есть дифференциальная (п — р)-форма,
*β Е Ап~р(М), поэтому а Λ *β является дифференциальной п-формой.
Это позволяет нам определить скалярное произведение (α,β) форм а и β:
(α,β)= J а Λ *β.
м
Упражнение 7.8.1. Показать, что предыдущее соотношение опреде¬
ляет скалярное произведение на АР(Л4).
7.8.1. Внешний кодифференциал
Используя введенное выше скалярное произведение, можно определить
новый оператор δ, сопряженный d, таким образом:
(Ί,δβ)·.= (άΊ,β), Ί € Λρ_1(Λΐ), /?еЛ%М).
Очевидно,
АР(М) —»Ар_1(Л1), 1<р<п,
δ f = 0 для каэ/сдой функции /.
Оператор δ называется кодифференциалом. Стоить отметить, что его можно
ввести, только используя метрическое тензорное поле, определенное на Λ4.
Упражнение 7.8.2. Показать, что для каэ/сдой дифференциальной
р-формы а
δ = (_ΐ)"Ρ+"+ι * rf* (7.8)
и что δ не является производной.
В заключение отметим, что из уравнения (7.8) следует δ2 = 0.
Оператор Лапласа-Белтрами
Оператор Лапласа-Белтрами1 Δ определяется посредством соотноше¬
ния
Α = άοδ + δοά = (d -|-
^вгенио Белтрами, родившийся в Кремоне в 1835 году и умерший в Риме в 1900 го¬
ду, был профессором алгебры и аналитической геометрии в университете Болоньи и, позже,
в университетах Пизы, Павии и Рима. Его исследования в области ньютоновского потенци¬
ала и дифференциальных параметров имеют фундаментальное значение, а его Saggio sulla
interpretazione della Geometria non Euclidea рассматривается как классическая работа.
7.8. Скалярное произведение дифференциальных р-форм 211
он является самосопряженным оператором, поскольку
(Δα,β) = (α,Αβ).
Упражнение 7.8.3. Выразить Δ в ίΗ3, используя декартовы и сферы-
ческие координаты.
Дифференциальная форма ω, удовлетворяющая дифференциальному
уравнению
Αω = О,
называется гармонической.
Очевидно,
Αω = 0 <==> άω = 0, δω = 0.
В самом деле,
(Δω, ω) = (άδω, ω) + (δάω, ω) = (δω, δω) + (άω, άω)
с ^ 0, (do;, do;) ^ 0.
7.8.2. Теорема Ходжа
Теорема Ходжа является важной теоремой разложения, которую мы
дадим без доказательства.
Теорема 23 (Ходжа). Каждая дифференциальная р-форма ω может
быть записана в виде
ω = άα + δβ + 7,
где а — дифференциальная (р — \)-форма, β — дифференциальная (р +
+ 1 )-форма, и 7 — гармоническая форма. Кроме того, дифференциальные
формы άα, δβ и 'у определяются единственным образом.
Глава 8
Группы Ли и алгебры Ли
8.1. Группы Ли
Конечномерная группа Ли есть многообразие G класса С°° размерно¬
сти п, снабженное групповой структурой, такой, что произведение
(g,h) е G х G |—> gh е G (8.1)
и инверсия
geG^g-leG (8.2)
являются отображениями класса С°°. Диффеоморфизмы
Lg \ h G G —> gh G G, Rg: h G G —> hg G G
называются левым сдвигом на g и правым сдвигом на h, соответственно.
Пусть (W, φ) — такая карта в G, что е G U и φι(β) = 0, где е — единица
группы. Для каждого открытого множества U, содержащего е, существует
такое открытое множество V С Ы, которому принадлежит е, что V · V С Ы,
где V · V = {gh: g, h G V}.
Значит, произведение φ(ν) χ φ(ν) является открытым множест¬
вом ίΗη χ ίΗη, содержащим точку (0,0). Поскольку G — группа Ли, отоб¬
ражение (8.1) является дифференцируемым. Поэтому, если g и h — два
элемента в V, координаты φι^Ιι) = (gh)1 их произведения являются диффе¬
ренцируемыми функциями их координат хг = φг(д) элемента дну1 = у>г(Ь)
элемента /г, и можно положить
(gh)i = fi(x1,...,xn,y\...,yn)
или, краткая запись,
(дьу = Р{х,у)·
Групповая структура требует, чтобы функции /г удовлетворяли следу¬
ющим свойствам:
г (f(x, y),z) = f (х, f(y, ζ)), f(x, 0) = ή 0, χ).
8.1. Группы Ли 213
Первое свойство следует из ассоциативности группового произведения, то
есть
((gh)u)% = (g(hu))1, Vg,h,ueG => f (f(x, y),z)= f (x, f(y, z))
при любом выборе x, у, z в с ζ1 = φι{η). Второе следует из
(gey = (egY = х{ => Г(х,0) = f ( 0, ж) - ж4.
Кроме того, функции /г могут быть представлены в виде разложения:
fi(x,y)=xi + yi+ £ Χ*βχανβ· (8·3)
Для получения д~1 — элемента, обратного д, — достаточно решить
следующую систему уравнений относительно уг:
Г(х\...,хп,у\...,уп)= 0. (8.4)
Из уравнения (8.3) получаем
к9*)
з5
(0,0)
«9(f1 ... fn)
так как определитель Якоби т1 - в точке (0,0) в У\п χ 9ЯП ра-
д(у , ···» Уп)
вен 1. Поэтому, вследствие непрерывности, якобиан не обращается в нуль
в окрестности начала координат, и, по теореме о неявных функциях, су¬
ществует открытое множество V' С V в е, такое, что для каждого д G V'
система (8.4) имеет единственное решение (у1, ..., уп).
8.1.1. Локальные группы Ли
Локальная группа Ли является локальной версией группы Ли. Следова¬
тельно, это есть пара (А, /), где А — открытое множество 9ЯП, содержащее
точку начала координат, и / — дифференцируемое отображение
f:AxA-+<Rn,
удовлетворяющее Vx, у, z G Л следующим условиям:
(а) / (ж, /(г/, 2)) = / (/(ж, у), ζ);
214
Глава 8
(b) f(0,x) = f(x, 0) = x;
(c) существует дифференцируемое отображение ε: А —> 9ЯП, такое, что
/(ж,ф)) = f{e(x),x) =0.
Таким образом, задав группу Ли G, всегда можно построить локальную
группу Ли с отождествлением А = φ(ν') С 9ЯП.
Две локальные группы Ли (Αχ,/χ) и (^,/2) являются изоморфны¬
ми, если существуют такие две окрестности Αχ С Αχ и А'2 с А2 начала
координат пространства 9ЯП и диффеоморфизм ψ: А[ Af2, что диаграмма
Α'ι
xAi -
—<Яп D
Α'ι
V’xV’J
4
^2
χΆ2 -
> 9in D
a 2
коммутативна, то есть
Ф{к{х,у)) = h {{Φ X Ф){х,у)) = /2 (ф{х),ф{у)), V(z,2/) € х Ai-
Конечно, все локальные группы Ли, полученные из одной группы Ли
G описанным способом, являются изоморфными между собой.
8.2. Построение алгебры Ли из группы Ли
8.2.1. Алгебра Ли
Алгебраическое определение алгебры Ли было уже дано в части I.
Здесь мы считаем уместным только упомянуть о трех особенно важных
алгебрах, таких как абелева алгебра Ли, простая алгебра Ли и полупростая
алгебра Ли.
Векторное пространство, снабженное тождественно нулевым комму¬
татором, составляет так называемую коммутативную, или абелеву, алгебру
Ли. Определение простой и полупростой алгебры Ли требует введения до¬
полнительного понятия — такого как идеал алгебры Ли.
Говорят, что подпространство Т алгебры Ли Λ будет идеалом, если
[Α,τ] а,
то есть xGl, если [у,х] Е Т для любого у Ε Λ.
8.2. Построение алгебры Ли из группы Ли
215
Конечно, поскольку [у, х] = — [х, у] и X — векторное пространство, то
из [х,у\ Е Т для любого у Е Л следует χ Е Т. Заметим, что это определяет X
как подалгебру.
Тривиальными идеалами в Л являются {0} и Л. Алгебра Ли, содержа¬
щая только тривиальные идеалы, называется простой. Алгебра Ли, содер¬
жащая нетривиальные идеалы, ни один из которых не является абелевым,
называется полупростой алгеброй Ли.
Существуют различные методы построения алгебры Ли из группы Ли.
Здесь мы намерены дать описание двух наиболее интересных методов.
Первый из них основывается на использовании дифференциальных
операторов на группах.
8.2.2. Левоинвариантные векторные поля
Пусть G — конечномерная группа Ли. Для любого g Е G левый сдвиг
Lg:heG^Lg(h)=gheG
есть диффеоморфизм из G в себя. Любая окрестность е отображается по¬
средством левого сдвига на элементе g в окрестность g, поэтому происходит
отображение кривых, проходящих через е, в кривые, проходящие через g,
и кривых, проходящих через h, в кривые, проходящие через gh. Значит,
производная отображения в точке h, а именно (Lg)*h, является линейным
отображением из касательного пространства T^G в касательное простран¬
ство TghG:
(Lg)*h: ThG —> TghG.
Если V — векторное поле, его значение V(h) в точке h принадле¬
жит ThG. Его образ при действии (Lg)*h, который принадлежит TgfbG, будет
обозначаться как (gV)(gh), то есть
(gV)(gh) = (LgUV(h);
следовательно, имеем
(gV)(h) = (L^g-^Vig^h). (8.5)
Говорят, что векторное поле V на группе Ли G будет левоинвариант¬
ным, если
(gV)(h) = V(h), Wg,h е G,
или, эквивалентно, если
V(gh) = (LgUV(h).
216 Глава 8
Сложение векторных полей на G и умножение их на вещественные
числа можно естественно определить следующим образом:
(V + W)(g) = V(g) + W(9),
(aV)(g) = aV(g), 9 Ь
таким образом, из линейности оператора (Lg)*g следует, что
• множество левоинвариантных векторных полей на G является век¬
торным пространством на DK.
Кроме того,
• левоинвариантное векторное поле на G однозначно определено его
значением на единичном элементе е группы G.
В самом деле, если V(h) и W(К) — левоинвариантные векторные поля
на G
{gV){h) = V{h),
(gW)(h) = W(h),
такие, что V(e) = W’(e), имеем (с h = g)
V(g) = (gV)(g) = (Lg).e-lg (V^g)) = (Lg)*e (V(e)) =
= (Lg).e (W(e)) = (Lg).g-ig (W(g~1g)) = (gW)(g) = W(g).
• Векторное пространство левоинвариантных векторных полей изо¬
морфно TeG, касательному пространству Gee.
В самом деле, с каждым вектором Ve Е %G можно связать векторное
поле V(h) на G с помощью оператора (Lh)*e-
V(h) = (Lh)*e(Ve), V/г G G; (8.6)
левоинвариантность V (g) следует из
(gV)(h) = (Lg).g->h (Vig-'h)) = (Lg).g->h {{Lg-ih)^Ve) =
= (LgoLg-lh)^eVe = (Lh)*eVe = V(h), Wg,heG.
Рассмотрим теперь множество дифференциальных 1-форм а на G, которые
составляют векторное пространство на 9Я, если сложение и умножение на
вещественные числа г определены как
(ίΓ^ΚίΟ = a(g) + a'(g),
(ra)(g) = ra(g), 9 '
8.2. Построение алгебры Ли из группы Ли 217
Для оператора (Lg)* существует удобное обозначение в виде симво¬
ла dLg. Тогда соотношения (8.5) и (8.6) можно переписать в виде
(gV)(h)=dLa(V(g-1h)), (8.7)
V(h) = dLh(Ve). (8.8)
Введем транспонированный оператор dL* для dLg, который действует
на дифференциальные 1-формы а таким образом:
(V,dL*g(a)) = (dLg(V),a), (8.9)
где V и а — векторное поле и дифференциальная 1-форма на G, соответ¬
ственно, а скобки (·, ·) обозначают, как обычно, внутреннее произведение.
Таким образом, dLs и dL* — следующие операторы:
dLg: ThG —> TghG, dL*: Tg*hG —> Th*G. (8.10)
Дифференциальная 1-форма а на G преобразуется при действии dL*
в дифференциальную 1-форму да на G, в соответствии с соотношением
(ga)(h)=dL*s (a{gh)).
Дифференциальная 1-форма а будет называться левоинвариантной, ес¬
ли
(ga){h) = a{h), Vg,heG.
Поскольку линейность dLs влечет линейность dL*, имеем
• мноэюество левоинвариантных дифференциальных 1-форм на G яв¬
ляется векторным пространством на 91
Кроме того,
• левоинвариантная дифференциальная 1-форма однозначно определе¬
на ее значением в е.
В самом деле, если аиа' — две левоинвариантные дифференциальные
1-формы, такие, что а(е) = а' (е), имеем
<х{д) = (5_1<*)(з) = dL*-> (я(5-1з)) = dL*-1 (а(е)) =
= (а'(е)) = dLHrt)) = а\д).
Так как векторное пространство левоинвариантных векторных полей
изоморфно TeG, то векторное пространство левоинвариантных дифферен¬
циальных 1-форм изоморфно T*G.
218 Глава 8
Если ае обозначает ковектор на TeG, то дифференциальная 1-фор-
ма α(^), определенная как
а{д) =dL*-1(ae), Уд е G,
является левоинвариантной дифференциальной 1-формой.
Действительно, поскольку
dL*gh = dL*odL*h,
мы имеем
(ga)(h) = dL* (a(gh)) = (dL*g о dL*{gh)^ (ae) =
= (dLlodLl-^) (ae) = dLU{ae) = a(h), Vgh e G.
Таким образом, с каждым вектором на TeG мы можем связать, един¬
ственным образом, левоинвариантную дифференциальную форму на G.
Интересным и полезным является следующий результат:
• свертка (а, V) левоинвариантной дифференциальной 1-формы а
с левоинвариантным векторным полем V является константой на G.
Действительно,
(a, V)(g) = Ш, V(g)) = (dL(а(е)), dLg (V(e))) =
= [dLg-x о dLg) ((a(e), V(e))) = (a(e), V(e)), VgeG.
Верно и обратное, а именно:
• векторное поле V на G, для которого (а, V) есть константа на G
для каэ/сдой левоинвариантной дифференциальной 1-формы, является ле¬
воинвариантным векторным полем.
В самом деле,
(a(h),gV(h)) = (a(h),dLg (V^h))) = (dL; (a(h)), V^h)) =
= = (<*(Λ),ν(Λ))·
Поскольку левоинвариантная форма а является произвольной, то
(gV)(h) = V(h), Vg,h£G.
Два этих свойства, вместе с полезным соотношением1
da(X>Y) = Lx((a,Y)) - LY «α,X)) + (α, [X,У]), (8.11)
]В этой главе производная Ли по векторному полю X обозначалась символом £χ вме¬
сто Lx, чтобы избежать недоразумений с обозначением левого сдвига Lx.
8.2. Построение алгебры Ли из группы Ли
219
позволяют нам доказать следующее утверждение:
• если X и Υ — два левоинвариантных векторных поля на группе Ли G,
их скобка Ли [.X, Υ] является левоинвариантным векторным полем.
Для этой цели нам необходимо доказать, что (се, [X, У]) является кон¬
стантой на G для любой левоинвариантной дифференциальной 1-фор-
мы а(д). Действительно, если а — левоинвариантна, то (а,Х) и (се, У) —
константы на G, так как Х(д) и У (д) являются, по предположению, лево¬
инвариантными векторными полями, так что производные Ли Lx ((се, У))
и Ly ((се, X)) тождественно равны нулю.
Следовательно, имеем
da(X,Y) = (a,[X,Y]). (8.12)
Поскольку da — точная 2-форма, для которой dda = 0, и правая часть
уравнения (8.12) является 0-формой, то есть функцией на G, то
(се, [.X, У]) = const.
Таким образом, используя изоморфизм между %G и векторным про¬
странством левоинвариантных векторных полей, можно ввести в касатель¬
ном пространстве %G коммутационное соотношение, которое, будучи би¬
линейным, антисимметричным и удовлетворяющим тождеству Якоби, снаб¬
жает его структурой алгебры Ли.
Для определенности, если Хе и Уе обозначают два вектора, принадле¬
жащих %G, то скобки Ли двух левоинвариантных векторных полей на G,
соответствующих им, остаются левоинвариантным векторным полем, кото¬
рое также является однозначно определенным своим значением в единич¬
ном элементе группы.
Итак, задавая векторы Хе и Уе, принадлежащие %G, мы определяем
коммутатор Ли X и У, при единичном элементе е группы G, как значение
скобки Ли соответствующих левоинвариантных векторных полей
[Xe,Ye} = [dLg(Xe),dLg(Ye)}g=e.
Эта алгебра Ли называется алгеброй Ли группы Ли G.
8.2.3. Сопряженное представление группы Ли
Также существует и второй метод, позволяющий ввести алгебру Ли
в касательном пространстве TeG.
Заметим, что отображение
Ад: h G G —> Ag(h) — ghg ^ G G,
220
Глава 8
составленное из левого сдвига посредством д и правого сдвига посред¬
ством д~х
Ад = Rg-ιLgh G G —> (Rg-ι Lg) (h) = ghg ^ G G,
является взаимно однозначным дифференцируемым отображением. Факти¬
чески, поскольку А~1 = Ад-1, отображение является диффеоморфизмом G
в себя.
Так как
Ag{hih2) = ghih2g~l = ghg^gh^1 = Ag(h{)Ag{h2),
Ag есть гомеоморфизм G в себя. Фактически, Ад является изоморфизмом G
в себя, так называемым внутренним автоморфизмом G, поскольку Ад-\ =
= V·
Отметим, что всякое отображение Ад отображает единичный элемент е
в себя, поэтому всякая кривая, проходящая через е, отображается в (воз¬
можно, другую) кривую, проходящую через е. Поэтому производная (Ад)*е
в единице е, обычно обозначаемая через Adg,
Adg : TeG —> TeG,
является обратимым линейным отображением какого-либо касательного
вектора TeG в другой в TeG.
Для автоморфизма Ад имеем
и для производных
поэтому
А/7 ° Ад — Afg, V/, g G G,
(Af О Ад)*е (Af)*e о (Ад)*&)
Adfg = Adf о Adg.
Множество всех обратимых линейных отображений TeG в себя есть
группа, чей внутренний закон композиции — обычная композиция отобра¬
жений. Эта группа обозначена через Aut7^G.
Таким образом, отображение
Ad: geG^ Ad(g) = Adg G Aut TeG (8.13)
является гомеоморфизмом G в группу Aut TeG обратимых линейных отоб¬
ражений векторного пространства TeG.
8.2. Построение алгебры Ли из группы Ли 221
Когда базис в %G выбран, отображение Ad становится гомеоморфиз¬
мом G в группу GL(n, *К), где п — размерность пространства %G. Груп¬
па GL(n, *К) есть группа несингулярных вещественных матриц η χ п и мо¬
жет быть снабжена структурой дифференцируемого многообразия.
Совместимость группы и структур дифференцируемого многообразия
делает группу GL(n, *К) группой Ли. Очевидно, размерность GL(n, *К) рав¬
на п2.
Итак, отображение Ad есть представление многообразия G на %G
и называется сопряженным представлением группы Ли G.
Касательное пространство к GL(n, *К) в единичной матрице I есть про¬
странство (обозначаемое посредством Matn(9V)) не обязательно обратимых
вещественных матриц η х п.
Отображение Ad является дифференцируемым, а его производ¬
ная (Ad)*e в единице е является линейным отображением касательного про¬
странства TeGB End %G, векторное пространство (не обязательно обрати¬
мых) линейных отображений пространства TeG в себя, являющихся эндо¬
морфизмами пространства TeG. В других терминах,
End TeG εξ T(AutTeG).
Производная (Ad)*e обозначается символом ad:
ad'. V G TqG —> ad(V) = ady G EndT^G.
Однопараметрическая подгруппа группы Ли G есть представление
пространства в G, можно сказать, гомеоморфизм пространства в G, то
есть дифференцируемое отображение
р: t G -> p(t) G G,
такое, что
р(0) = е, p(t + tf) = p(t)p(tf), Vi, i! G 9Я.
Пусть Ve — элемент в TeG, и пусть
pVe: t e 9Я - pVe(i) = eiV* e G (8.14)
будет интегральной кривой левоинвариантного векторного поля (Lg)*e(Ve)
на G.
Также зафиксируем s G и определим отображение
XI: t £ 9Я χ(ί) = pve{s)pve{t) = LfiVe{cr)pVc(t) е G,
где Lpv^s) — левый сдвиг на pve(s).
222
Глава 8
Поскольку векторное поле (Lg)*e(y) на G левоинвариантно, имеем
так что xi(t) — интегральная кривая поля V = (Lg)*e(Ve), проходящая
через руе (s) при t = 0.
С другой стороны, отображение
также является интегральной кривой поля V = (Lg)*e(Ve), проходящей
через руе (5) при t — 0.
Таким образом, χι(ί) = χ2(t), поскольку интегральная кривая по¬
ля V = (Lg)*e(Ve), проходящая через pve(s) при t = 0, является един¬
ственной. Как следствие, имеем
Из уравнения (8.15) следует, что отображение (8.14) является гомеомор¬
физмом пространства 9Я в G и, значит, однопараметрической подгруппой
многообразия G. Эта подгруппа является единственной.
Действительно, если
— другая однопараметрическая подгруппа многообразия G, такая, что
dXijt)
dt
t=о
t=О
(Ve(«))«e (^e)>
X2: t G —> X2(i) = Pve (s + t) £ G
Pve (s + t) = pVe (s)pvc (i)
(8.15)
и
e(s + t)Vc _ gSVegtVe
g \ t G 9Я —> c{t) G G
σ(0) = e,
TO
σ(ί + s) = cr(t)a(s) = La(t)a(s).
Таким образом,
8.2. Построение алгебры Ли из группы Ли
223
то есть σ(ί) — интегральная кривая поля V = (Lg)*e(Ve), проходящая че¬
рез е при t = 0. Так как уравнение (8.14) показывает, что руе — интегральная
кривая поля V = (Lg)*e(Ve), проходящая через е, то ру = σ.
Мы можем заключить, что со всяким вектором Ve e%G связана един¬
ственная однопараметрическая подгруппа руе (t) многообразия G.
Используя обозначение pye(t) = etVe, можно записать
d JVe
Ve = -^e
e dt
t=о
Явное выражение оператора ady можно легко найти. В самом деле,
adVe = (AdU(Ve) = ftAd(etV■)
ί=0
t=о
поэтому значение оператора adye на векторе We £%G будет
adVe(We) = <LAdetve(We
t=о
= ft(Re-tVeLetve)^e (We)
t=0
= ft(Re-*v.)metvALe*v.)me{We)
= |(i2e-‘Ve).e,v.(W(etV*))
t=0
tVe
t=0
как раз значение в е потока векторного по-
С другой стороны, е
ляУ(д) = (Lg)*e(Ve), как это непосредственно следует из
°у(д) = де e=Retveg
поэтому
Итак, имеем
etVe = сгу(е).
= (LVW) (e)
(8.16)
i=0
С помощью уравнения (8.16) и хорошо известных свойств производной
Ли можно определить следующую скобку в TeG:
[·,·] = 04, We) е TeG X TeG -> [Ve, We] = adye (We) G TeG, (8.17)
которая, как легко видеть, является
224
Глава 8
• билинейной, так как
o>dClx1+C2x2(Y) = ciadx^Y) + c2adx2(Y),
adx(ciYi + C2Y2) = c\adx(Yi) + c2adx(Y2)
безотносительно к выбору Χι, Х2, V, Υχ, Y2, Y G TeG и ci, c2 G 9Я;
• антисимметричной, так как
а^х(У) = -adY(X), VI,7G TeG;
• и удовлетворяющей тождеству Якоби:
adx (αάγ(Ζ)) + ady (adz(X)) + cidz (ο,άχ(Y)) = 0.
Закон композиции, заданный уравнением (8.17), наделяет векторное
пространство TeG структурой алгебры Ли.
Итак, задав группу Ли G, всегда можно построить на ее основе алгебру
Ли. Теперь мы можем спросить: существует ли для данной алгебры Ли А
такая группа Ли, для которой, vice versa, Л являлась бы алгеброй? Ответ на
этот вопрос дает следующая теорема.
Теорема 24 (Картана). Всякая алгебра Ли является алгеброй Ли неко¬
торой группы Ли.
В предыдущем параграфе мы говорили о локальных группах Ли. Они
аналогично связаны с алгебрами Ли, так как всякая алгебра Ли является ал¬
геброй Ли некоторой локальной группы Ли. Кроме того, локальные группы
Ли изоморфны тогда и только тогда, когда соответствующие алгебры также
изоморфны.
Пусть Λι и А2 — две алгебры Ли, а Gi и G2 — соответствующие груп¬
пы Ли. С помощью последних мы можем построить две локальных группы
Ли G[ и G2, которые будут изоморфны, если А\ и А2 являются изоморф¬
ными. Однако то обстоятельство, что G[ и G2 изоморфны, не гарантирует,
что Gi и G2 тоже изоморфны. В этом случае мы говорим о локальном
изоморфизме между Gi и G2.
Для одно связной группы Ли G выполняется следующая теорема:
Теорема 25 (монодромии). Если G — односвязная группа Ли и F — ка¬
кая-либо группа Ли, всякий локальный гомеоморфизм1 группы G в F продол-
э/сается единственным образом до глобального гомеоморфизма группы G
в F.
вокальный гомеоморфизм — это гомеоморфизм соответствующих локальных групп.
8.2. Построение алгебры Ли из группы Ли 225
Обозначим через GL(n, дК) группу Ли η χ п обратимых вещественных
матриц и через QL(n, ϋΚ) соответствующую алгебру Ли, которая задается
с помощью векторного пространства пхп вещественных матриц с комму¬
татором в виде скобки Ли. Весьма важным результатом является следующая
теорема:
Теорема 26 (Адо). Всякая алгебра Ли группы Ли является подалгеброй
алгебры Ли QL(n, ϋΚ) при некотором значении п.
Для групп Ли аналогичное утверждение выполняется только локально,
то есть
Всякая группа Ли локально изоморфна подгруппе группы GL(n, ϋΚ) при
некотором значении п.
С помощью этой теоремы локальный изоморфизм между G\ и
продолжается до глобального гомеоморфизма.
Итак, можно заключить, что ровно одна одно связная группа Ли G
соответствует алгебре Ли А.
8.2.4. Косопряженное представление группы Ли
Можно ввести операторы сдвига также и в двойственном простран¬
стве T*G пространства TeG. Для левого сдвига можно использовать соот¬
ношения (8.9) и (8.10), правые сдвиги определяются совершенно аналогич¬
ным образом:
(y,dR*(a)) = {dRg(V),a),
dRg: %G - ThgG, dR*: T^G - T^G.
Можно также определить оператор Ad*g, сопряженный оператору Adg,
следующим образом:
(V,Ad*g(a)) = (Adg(V),a). (8.18)
С помощью уравнения (8.18) и используя свойства Adg, получаем, что
Ad*g: Te*G^Te*G
— обратимое линейное отображение пространства T*G в себя.
Отображение
Ad*: geG^ Ad* (g) = Ad*g e AutT*G, (8.19)
как и отображение в (8.13), является представлением группы Ли G. Оно
называется косопряженным представлением группы Ли G.
226
Глава 8
Отображение (8.19) является дифференцируемым. Его производ¬
ная (Ad*)*e в единице, обозначаемая через ad*, есть отображение
ad*: V е TeG -> ad*(V) = ad*v G EndT*G.
Оператор ady является косопряженным оператору ady, и
(W, ady (а)) = {adv(W), а), Va G Te*G, \fW G TeG.
Векторные пространства TeG и T*G, снабженные скобкой, данной им
структурой алгебры Ли, обычно обозначаются символами Q и Q*.
Ко сопряженное представление группы Ли играет важную роль в клас¬
сической механике. Как мы увидим, орбитами группы при косопряженном
представлении являются симплектические многообразия.
Это будет показано в части III, в главе Метод орбит, после введения
некоторых предварительных понятий. Исчерпывающее обсуждение этой те¬
мы содержится в [41]. Вторая часть указанной книги фактически полностью
посвящена редукции, действиям групп и алгебр.
Рекомендации для дальнейшего чтения
• R. Abraham, J. Е. Marsden, Т. Ratiu, Manifolds, Tensor Analysis, and
Applications (Addison-Wesley, 1983).
• Б. H. Дубровин, С. П. Новиков, А. Т. Фоменко, Современная геометрия
(М.: Наука, 1979).
• С. J. Isham, Modern Differential Geometry for Physicists (World Scientific,
1989).
• J. L. Koszul, Lectures on Fibre Bundles and Differential Geometry (Tata
Institute of Fundamental Research, Bombay, 1960).
• A. Trautman, Differential Geometry for Physicists (Bibliopolis, Naples,
1984).
Часть III
Геометрия и физика
Часть III посвящена описанию аналитической механики на основе гео¬
метрического подхода. Глава 9 посвящена переформулировке максвеллов¬
ских дифференциальных уравнений в терминах дифференциальных форм,
что можно считать введением в калибровочные теории.
Глава 9
Симплектические многообразия
и гамильтоновы системы
9.1. Симплектические структуры на многообразии
Если М — 2п-мерное дифференцируемое многообразие, то симплек-
тическая структура на М есть дифференциальная 2-форма ω, являющаяся
• замкнутой
άω = О
• и невырожденной
(ωρ(Χ,Υ) =0, УУ G TVM) =>(X = 0), Vp G M. (9.1)
Пара (ΛΊ,ω), с 2п-мерным дифференцируемым многообразием ΛΊ
и снмплектической структурой ω, называется симплектическим многооб¬
разием.
В заданном базисе {е*} для векторных полей на ΛΊ можно записать
Х = Х*еи Υ = Υ%;
следовательно, с учетом ω^(ρ) = uJp(ei,ej), соотношение (9.1) принимает
вид
(ΧΎωφ) = 0, VIй) =» (X* = 0), VpGM,
или, эквивалентно,
(х*шу = 0) =s> (X* = 0).
Таким образом, дифференциальная 2-форма не является вырожденной тогда
и только тогда, когда
det (oJij(p)) φ 0, Vp € М.
9.2. Локально и глобально гамильтоновы векторные поля 231
Произвольная дифференциальная 2-форма ω на многообразии опреде¬
ляет гомеоморфизм
ω: ТРМ^Т*М
векторного пространства ТРЛ4 касательных векторов в точке р £ М
в Т*М, векторное пространство дифференциальных 1-форм к многооб¬
разию М в точке р е М, поскольку ω сопоставляет вектору Хр G ТРЛ4
дифференциальную 1-форму ар, заданную в виде
Οίρ =
Как следствие, с векторным полем X ω связывает дифференциальную
1-форму а, заданную поточечно в виде
а = ίχω.
В случае невырожденности дифференциальной 2-формы данное соот¬
ношение может быть разрешено в точке относительно векторного поля X.
Следовательно, невырожденная дифференциальная 2-форма ω задает
изоморфизм между векторными пространствами ТРМ и Т*М, имеющий
вид
X = Λ(α, ·),
где 2-векторное поле Λ
К:Т;М^ТРМ (9.2)
является обратным к ω:
Λοω = ωο А = 1.
Это соотношение в заданном координатном базисе, в котором
ω = lutijdx* Λ dxi, Λ = |λ« (9.3)
записывается в простом виде
Aihu)hj = δ).
9.2. Локально и глобально гамильтоновы векторные поля
Векторное поле X на симплектическом многообразии (ΛΊ, ω) называ¬
ется (локально) гамильтоновым векторным полем, если
Lxlо = О,
232
Глава 9
то есть если симплектическая структура инвариантна относительно потока,
порожденного полем X.
Поскольку симплектическая форма является замкнутой, данное соот¬
ношение можно также переписать, используя тождество Картана, в следу¬
ющем виде:
άίχω = 0.
Таким образом, локально гамильтоновым векторным полем на Л4 является
векторное поле, удовлетворяющее требованию, чтобы дифференциальная
1 -форма а, заданная в виде
α = ίχω,
была замкнутой.
Если дифференциальная 1-форма а = ίχω является также и точной, то
есть существует такая функция Н на Л4, что
ίχω = -dH, (9.4)
то векторное поле называется глобально гамильтоновым векторным полем
или просто гамильтоновым векторным полем, а функция Н называется га¬
мильтоновой функцией, соответствующей X. Знак минус в уравнении (9.4)
поставлен лишь по историческим причинам.
И наоборот, любая дифференцируемая функция на симплектическом
многообразии Μ,
задает гамильтоново векторное поле X/ с помощью соотношения
ίΧ/ω = df.
9.2.1. Интегральные кривые гамильтонова векторного поля
В координатном базисе можно записать
X = ω = Λ dxj, dH = Щ<1х\
дх1 2 гз ’ дхг
поэтому
ίχω = ijXг dx^ — ^ijdxlXj = ω^Χ1 dx\
и уравнение (9.4) принимает вид
9.3. Гамильтоновы потоки
233
или
дН
ωόίΧτ =
дх3
Поскольку det (иHj{x)) Φ О, из последнего соотношения следует
χί = Αί3
дх3
Таким образом, дифференциальные уравнения первого порядка для ин¬
тегральных кривых гамильтоновых векторных полей X имеют следующий
вид:
f=A"U’ (95)
и они весьма похожи на уравнения (2.24) параграфа 2.4.1.
Уравнения (2.24) и (9.5) совпадают в случае, когда элементы антисим¬
метричной матрицы Агз удовлетворяют тождеству Якоби:
л« ^ + Akj ^ = 0. (9.6)
дх3 дх3 дх3
Фактически, тождество Якоби удовлетворено благодаря замкнутости
симплектической формы ω. Действительно, в координатном базисе можно
записать
άω=ί дщ jk άχί Λ dxj Λ dxk
\дхк дх1 дх3 J
так что
άω = 0^^- + ^ + ^ = ο.
дхк дхг дх3
Читатель легко может проверить, что если AlhuJhj = Sj, то уравне¬
ния (9.6) эквивалентны
dujjk dcuki _ q
дхк дх1 дх3
9.3. Гамильтоновы потоки
Всему сказанному в предыдущем параграфе можно дать геометриче¬
скую интерпретацию, что и будет сделано ниже.
234 Глава 9
Рассмотрим функцию /, заданную на дифференцируемом симплекти-
ческом многообразии (Λί, ω). Ее дифференциал dfp в точке р е М принад¬
лежит 71* Λί:
dfp:TpM^m, УреМ.
Бивекторное поле А ставит в соответствие дифференциалу dfp касательный
вектор к Λί в точке р е Л4 следующим образом:
Xf(p) = A(df(p),·).
С векторным полем X/ (р) связана однопараметрическая группа диф¬
феоморфизмов (5.13)
σ1: М —> М,
такая, что
' =ед.
t=О
Группа аь, называемая гамильтоновым потоком с гамильтоновой функци¬
ей Η, сохраняет симплектическую структуру, то есть
σι*ω = ω, (9.7)
где σь* — производная σ1.
Более подробно соотношение (9.7) может быть записано в следующем
виде:
(σ*'ω)ρ(Χ, Υ) = ωσί(ρ) «,(*), σ\ρ{Υ)) = ωρ(Χ, У), (9.8)
где Χ,Υ е ΤΡΜ, и
σϊΡ: 7рМ —> Τσ*(ρ)Λί
есть производная σ1 в точке р.
Производная Ли 2-формы ω вдоль X/ имеет вид
(Ьх,ш)р (Χ,Υ) = |ωσ4ρ) = О,
где было использовано соотношение (9.8).
Поскольку ω является замкнутой, можно записать
Lxfuj = 0 4Ф d%xfuj = 0. (9.9)
Разумеется, ixfuj есть точная дифференциальная 1-форма, так как
iXfu> = u>(Xf,-)=u>(A(df,-),)=df.
9.3. Гамильтоновы потоки
235
9.3.1. Алгебры Ли гамильтоновых векторных полей и гамильтоновых
Напомним, что алгебра Ли — это векторное пространство Л, снабжен¬
ное скобкой
удовлетворяющая условиям (9.10), (9.11) и (9.12), задает на бесконечно¬
мерном векторном пространстве дифференцируемых векторных полей на
многообразии Л4 структуру алгебры Ли.
Пусть X и Υ — два векторных поля, σιχ и Ογ — соответствующие
этим векторным полям потоки. Как уже было сказано, такие потоки явля¬
ются диффеоморфизмами, определенными на всем М., если многообразие
является компактным. В противном случае, σιχ и Ογ определены только
на открытых множествах в М. и при малых значениях параметров t и s.
Однако этого достаточно для наших целей.
Важное свойство скобки Ли двух векторных полей состоит в том, что
обращение ее в нуль является необходимым и достаточным условием ком¬
мутирования соответствующих потоков [2]:
функций
[·.·]: (х> у) е Л х Л -> [х, у] е Л,
которая является
• билинейной
[ах + Ру, ζ} = а[х, ζ] + /%, ζ],
[х, ay + βζ\ = а[х, у] + β[χ, ζ],
Vx, у, ζ 6 Л, Va, β e*R (или С);
(9.10)
• антисимметричной
[х,у] = ~[у,х\, V х,уеЛ;
(9.11)
Скобка Ли
[X,Y]=LxY,
(9.13)
[X, У] = 0 <*=> σ*χσρ = σ^σιχ.
(9.14)
Пусть (Λ4,ω) — симплектическое многообразие, /ид — две диффе¬
ренцируемые функции на М..
236 Глава 9
Скобка {/,<?}, определенная следующим образом:
(9.15)
t=О
где обозначает гамильтонов поток, соответствующий гамильтонову век¬
торному полю Xf, заданному посредством ixfu = df, называется скобкой
Пуассона функций fug.
Из определения (9.15) следует, что обращение в нуль скобки Пуассо¬
на {/, #} является необходимым и достаточным условием для того, чтобы
функция д являлась первым интегралом потока с гамильтоновой функ¬
цией /.
Вследствие изоморфизма (9.2) между векторными полями и дифферен¬
циальными формами, скобка Пуассона (9.15) может быть записана в следу¬
ющем виде:
{/,$}(?) = AP(df,dg) = Up(XftXg). (9.16)
В самом деле, Vp € М
{g,f}(p) = 4:д(^/(р))
aL t=О
= dgp(Xf) = (Х/д)р = ixfdgp = ixfixgujp =
= шр(Хд) Xf)·
Упражнение 9.3.1. Доказать, используя (9.16), что скобка Пуассона
является билинейной, антисимметричной и удовлетворяющей тождеству
Якоби
{{/. g}, h} + {{3, h},f} + {{h, f},g} = 0. (9.17)
Таким образом, скобка Пуассона задает на множестве F(M) диффе¬
ренцируемых функций на М. структуру алгебры Ли. Эта алгебра Ли, как
уже было показано в части I, по модулю констант изоморфна алгебре Ли
дифференцируемых векторных полей на многообразии М.
Упражнение 9.3.2. Пусть ω — замкнутая дифференциальная 2-форма,
а X и У — два произвольных векторных поля на многообразии М., локально
представленных таким образом:
ω = ωπάχί Adxj, X = XjY = YkAL.
3 дх3 dxk
9.3. Гамильтоновы потоки 237
Имеем
L/χίγ ω — ίγΐ/χω = άϊχϊγίϋ + ΐχάΐγω — ϊγάίχω =
= d (ω(Υ, X)) + ΐχάΐγϋϋ — ΐγάίχω =
= di-UijXlYj) + ixd(uijYi dxj - ωίόΥ* dxι)~
- iYd(uijXi dxj - uji;}Xj dx1) =
= u>ij [.X, Y? dxj - uij [X, У]·7 dx* =
= г[х>У]йЛ
Доказать соотношение
ί[χ,γ]ω — LxIyu — ϊγί,χω, (9.18)
не используя координат.
Пусть 1/и15- гамильтоновы векторные поля, связанные с функци¬
ями /ид, соответственно, то есть
гх/Ш = df, ίχ9ω = dg.
Используя соотношение (9.18) для гамильтоновых векторных полей X/
и У/, получим
iixf,xg]v = Lxfixgu = dixfixguj + ixfdixguj = diXfiXgbj = d{/, #}, ^
откуда
£[x/?x9]^ = 0· (9.20)
Следовательно, [Xf,Xg] является глобально гамильтоновым вектор¬
ным полем с гамильтоновой функцией вида
H(p)=Up(Xf,Xg) = {f,g}(p).
Таким образом, множество глобально гамильтоновых векторных полей
на симплектическом многообразии — замкнутое на подалгебре всех вектор¬
ных полей.
Упражнение 9.3.3. Доказать, что множество первых интегралов га¬
мильтонова потока образует подалгебру алгебры Ли всех дифференцируе¬
мых функций.
Упражнение 9.3.4. Доказать, используя (9.18), что скобка Пуассона
двух локально гамильтоновых векторных полей X и Y является глобально
238
Глава 9
гамильтоновым векторным полем с гамильтоновой функцией вида Н(р) =
= ωρ(Υ,Χ).
Отсюда следует, что множество локально гамильтоновых векторных
полей также образует подалгебру алгебры Ли всех векторных полей.
Материал, приведенный в параграфе 2.4.4 (Дальнейшие обобщения ди¬
намики Якоби-Пуассона), может быть, естественно, пересмотрен в свете
развитых здесь новых идей. Полезное изложение теории обычных много¬
образий Якоби-Пуассона дано в книге Вайсмана [54].
9.4. Кокасательное расслоение и его симплектическая
структура
Примером симплектического многообразия служит кокасательное рас¬
слоение T*Q η-мерного многообразия Q. Элементом ϋ расслоения T*Q
является дифференциальная 1-форма на TPQ — касательном простран¬
стве к многообразию Q в точке р. В координатном базисе (q1, ...,qn)
дифференциальная 1-форма ϋ имеет компоненты р\, ... ,рп, и 2п чи¬
сел (ρι, ..., рп, q1, .. ., qn) можно выбрать в качестве локальных координат
точки в T*Q.
Таким образом, кокасательное расслоение М. = T*Q имеет естествен¬
ную структуру 2п-мерного дифференцируемого многообразия [2, 1].
Более того, можно доказать (см. приложение Е), что T*Q имеет есте¬
ственную симплектическую структуру шс, которую в локальных координа¬
тах можно записать в следующем виде:
шс = dpi A dq1 + . .. + dpn A dqn, (9.21)
или
ujc — dO c,
где
ϋ0 = pidq\
Дифференциальные 1-формы ϋ0 и шс называются канонической диф¬
ференциальной 1-формой и канонической симплектической структурой, со¬
ответственно.
Более того, любое симплектическое многообразие может быть локаль¬
но рассмотрено как кокасательное расслоение. Это гарантирует теорема
Дарбу1 [2, 1, 7].
1 Гастон Дарбу родился в Ниме в 1842 году и умер в Париже в 1917 году, был профессором
в Университете Сорбонна около 40 лет. Его четырехтомный труд по теории поверхностей
9.4. Кокасательное расслоение и его симплектическая структура 239
Теорема 27 (Дарбу). В каждой точке ро 2п-мерного симплектическо-
го многообразия ЛА существует карта (ΙΑ,φο), в которой симплектиче¬
ская структура ω принимает вид
ω = dxг А бЬг+п, г = 1, ..., п.
Такая карта (νί,φο) называется картой Дарбу. В карте Дарбу, положив
(ρι ΞΞΧ1, ...,Ρη Ξϊ"^1 = xn+1, ...,qn = х2п),
симплектическая структура ω и бивекторное поле Λ, заданные в (9.3), при¬
нимают канонический вид
ис = dpi Λ dq1
dpi dqг
соответственно. При этом уравнения (9.3)
dxг _ j^ij дН
dt дх^
становятся знакомыми уравнениями Гамильтона:
- -Ш.
dq1'
4 V* = l ,.,.,η. (9.22)
,= дН
dpi'
Атлас для Λ4, составленный из карт Дарбу, называется атласом Дарбу,
или симплектическим атласом.
Теперь ясно, что гамильтонова формулировка динамики, описанная
в части I (Аналитическая механика), является, по крайней мере для си¬
стем, не зависящих явно от времени, локальной разновидностью (то есть в
карте Дарбу) теории гамильтоновых векторных полей на симплектическом
многообразии М.
признается классическим. Кроме того, сделав замечательный вклад в дифференциальную гео¬
метрию, он оказал значительное влияние на развитие теории дифференциальных уравнений
и, благодаря глубокому геометрическому пониманию и искусному использованию алгоритмов,
дал решения существенных проблем математического анализа и механики.
240
Глава 9
9.5. Геометрическая формулировка аналитической
механики
Читатель может самостоятельно получить глобальные версии многих
результатов, полученных в части I.
Действительно,
• Система частиц обладает п степенями свободы, если ее конфигурации
определяют η-мерное дифференцируемое многообразие Q. Простран¬
ство состояний системы — это касательное расслоение TQ, в то время
как фазовое пространство — кокасательное расслоение T*Q.
• Функция Лагранжа С — это дифференцируемое отображение
С:
из TQ в 91
• Уравнения Лагранжа
dv^ jhkp*
dt ~ к
могут быть записаны во «внутреннем» виде:
La$c = dC,
или
i^ddc = ~dEc,
где
(9.23)
(9.24)
- Δ — векторное поле, заданное следующим образом: Δ = vh-^~r +
dq
+ LhkFk(q/v
dv
- Lhk — элементы матрицы L-1, где L = ( ^ S', ] ;
\dv v J
- дс — дифференциальная 1-форма на TQ, определяемая как дс =
=
dvh
9.5. Геометрическая формулировка аналитической механики 241
- Ес — энергия:
Ес = — £·
Заметим, что если определитель Гесса лагранжиана не обращается
в нуль, то шс = ddc является симплектической структурой на TQ.
Внутренний вид уравнения Лагранжа позволяет ввести теорему Нетер
следующим образом.
Рассмотрим полное векторное поле X на TQ, то есть генератор од¬
нопараметрической группы φτ диффеоморфизмов на TQ. Вычислим
инфинитезималъное преобразование 6С = LxC, которое X порождает
на функции Лагранжа С. Из уравнения (9.23) имеем
5С = LXC = ixdC = ixLaO/: = (La^/:, X) =
= La ($£, X) - (^c.LaX) = i[xtA]tic + Ьа^х^с*
Следовательно,
LxC = 0 и [X, Δ] = 0 => La^xOc — 0,
то есть
Теорема 28 (Нетер). Симметрия X как лагранжиана С, так
и динамики Δ приводит к первому интегралу, задаваемому посред¬
ством LA(ixtic)‘
Перевод приведенной геометрической формулировки на язык коорди¬
нат возвращает к формулировке, данной Эмми Нетер.
Замечание 18. Для того чтобы ix$c было первым интегралом, достаточно
обращения в нуль i[x^\&c — LxC, что является менее строгим условием, чем
требование обращения в нуль каждого слагаемого.
• Преобразование Лежандра задает изоморфизм векторного расслоения
между TQ hT*Q.
В самом деле, отображение
f:(q,v)eTQ^(q,p)eT*Q,
где рь = ν), порождает производное отображение
dv
U:Xe rM(TQ) >->Х* = их е T(q>p)(T*Q).
242
Глава 9
Преобразование Лежандра задается посредством
(Q,v/Q,V)-^(q,p/Q,P),
где ζ), V обозначают наборы щ» и «ν» компонент векторного поля X,
соответственно, и Q, Р — наборы щ» и «р» компонент векторного
поля Х< %.
х = + vh-$-r,
dq dv
X, = Qh^-r + Ph^i-.
dq dp
В матричном виде, задав
где I — единичная матрица η χ η, и
7 d2C
Μ:
dvhqk
имеем
r а
(g/p/t)\
f)j'
где тильда ~ указывает, что скорости ν должны быть выражены через q
и р путем обращения соотношений рь = ^r(q, у)·
dv
Если лагранжиан вырожденный, то есть определитель Гесса равен ну¬
лю, то преобразование Лежандра задает лишь гомеоморфизм вектор¬
ного расслоения из TQ в T*Q.
Из этого наблюдения берет начало теория связей Дирака и Бергма¬
на [85, 17, 18, 26]. Геометрический анализ можно найти в [41, 108, 177,
146, 136].
Алгебраическую формулировку лагранжевой динамики, подходящую
для использования в общем контексте, включая случаи с отсутстви¬
ем глобальных лагранжевых и/или фермионных переменных, можно
найти в [76].
9.5. Геометрическая формулировка аналитической механики 243
• Симплектическое преобразование, как оно определено в части I,
является, по существу, отображением между двумя картами Дарбу
(U, φ = (p/q)) и (V, ψ ξ (π/χ)), то есть это отображение вида
dpi A dqг = άπι Λ άχι.
• Данное соотношение является внешней производной от
Pidq1 = πιάχ1 + dT,
представляющего собой условие Ли того, что преобразование является
симплектическим.
• Вполне каноническое преобразование — это отображение между двумя
почти картами Дарбу в том смысле, что
dpi Λ dqг = cdni Λ άχι.
• Скобка Лагранжа
\Ώ. aj] = _ dlTh 9χΗ
dpi dq3 dq3 dpi ’
в которой перестановка ковариантных и контравариантных индексов
вызвана использованием старых обозначений, может быть получена го¬
раздо проще с помощью приведения предыдущего соотношения к виду
dpi Λ dq1 = cdiTh Λ άχΗ = c\pi, qj]dpi Λ dq3,
что дает знакомые условия того, что преобразование является вполне
каноническим:
φι,ς3} = δ).
• Скобка Пуассона {тгь,Хк}, как она определена в части I, получается,
наоборот, преобразованием обратного соотношения
д д д _ с д д _д_
дп,г дхн дрг dq1
в обратном направлении:
д Λ _д_ = с( дщьд^ _ дт^д^Л _д_ д _д_
дхн у дрг dq{ dq* dpi J dnh Qxk ’
244
Глава 9
что дает прежние условия того, что преобразование является вполне
каноническим,
c{irh,xh} = δ£,
на этот раз с правильной ковариантностью индексов!
• Оператор
Г г t } д/ д df д
f дрг dq1 dq{ дрг'
который мы называли гамильтоновым векторным полем в части I,
является частным случаем гамильтонова векторного поля
iXfu) = df,
введенного здесь.
• Существует полная аналогия между инвариантными уравнениями Ла¬
гранжа и уравнениями Гамильтона:
= —dEc, ΐχω = — dH.
Основное различие между ними состоит в том, что в уравнениях Га¬
мильтона «взаимодействие» присутствует только в функции Гамиль¬
тона, в то время как в уравнениях Лагранжа «взаимодействие», по¬
средством функции Лагранжа, присутствует также в симплектической
структуре cj£. Другими словами, симплектическая структура ω в урав¬
нениях Гамильтона является универсальной в том смысле, что она не за¬
висит от рассматриваемой динамической системы. Это не так для урав¬
нений Лагранжа, что является следствием того факта, что кокасатель-
ное расслоение T*Q многообразия Q содержит естественную сим-
плектическую структуру, в то время как касательное расслоение TQ
не обладает такой структурой.
• Теорема, подобная теореме Нетер, связывающая наличие симметрии
с существованием первого интеграла, может быть доказана в гамиль¬
тоновом формализме, так же, как и в лагранжевом, и даже проще.
В самом деле, пусть Δ и Xf — глобально гамильтоновы векторные
поля, с функциями Гамильтона Ни/, соответственно, то есть
г до; = —dH, %xf ω = —df.
Тогда имеем
LxfH = О ixfdH=0 <=$ ixfi&u)=0 u)(Xf, Δ)=0 {ii, /}=0,
9.5. Геометрическая формулировка аналитической механики
245
так что
LXfH = 0^LAf = 0,
то есть каждой симметрии гамильтониана соответствует константа дви¬
жения, и, наоборот, каждая константа движения является инфините-
зимальным генератором преобразования симметрии.
Другими словами,
Первый интеграл гамильтоновой динамики порождает однопарамет¬
рическую группу симплектоморфизмов, которая оставляет функцию
Гамильтона Н инвариантной, и наоборот, с каждой однопараметри¬
ческой группой симплектоморфизмов, оставляющей Н инвариантной,
можно связать первый интеграл.
• Параграф 4.1 (Интегральные инварианты) может быть пересмотрен
следующим образом. Обратим внимание, что производная Ли по век¬
торному полю X дифференциальной п-формы
так что соотношение (4.5) для функции р не зависит явно от времени,
проще говоря,
Отсюда следует, что необходимое и достаточное условие того, что¬
бы f а был инвариантом, есть Γχα = 0.
и
Сказанное можно обобщить следующим образом.
Дифференциальная к-форма а Е ΛΑ:(Λ/ί) на η-мерном многообра¬
зии М будет называться абсолютным интегральным инвариантом
полного векторного поля X, если
а = ρ(χ)άχλ Λ dx2 Λ · · · Λ dxn
на η-мерном многообразии М имеет вид
ΓχΟί = ά%χθί = div(pX)dx1 Λ dx2 Λ · · · Λ dx71,
и
и
Lxol = 0.
Последнее эквивалентно
φ*τ Ы<Мр))) = а{р),
где ψΤ обозначает поток векторного поля X.
(9.25)
246
Глава 9
Если U — к-мерное подмногообразие многообразия Миг — отобра¬
жение погружения
i:U^M,
то (φτ о i)(U) — новое /с-мерное подмногообразие многообразия М и
выполняется при любом U, г и т, то (г* о φτ*)α = i*a, или, эквива¬
лентно, φ*α = а.
Можно заключить, что необходимое и достаточное условие того, чтобы
дифференциальная /с-форма была абсолютным интегральным инвари¬
антом, есть
(φτο i)(U) i(U)
для любого выбора U, г и т.
Дифференциальная (к — 1)-форма β Е Л/с_1(Л/1) на η-мерном мно¬
гообразии М будет называться относительным интегральным инва¬
риантом полного векторного поля X, если άβ является абсолютным
интегральным инвариантом, то есть если
• Пересмотр теории Гамильтона-Якоби можно найти в [149].
Следующей трудной задачей является глоболизация теоремы Лиувил¬
ля. Выполнение этой задачи может также оказаться бесполезным, поскольку,
как мы увидим в следующем параграфе, это уже было сделано.
{ψτο i)(U) U
U
Из соотношения (9.25) следует, что если а — инвариант, то
(φτο i)(U) U i(U)
И наоборот, если соотношение
(ψτο i)(U) i(U)
dL/χβ = L/χάβ = 0.
9.6. Теорема Лиувилля 247
9.6. Теорема Лиувилля
Пусть (Μ,ω) — 2п-мерное симплектическое многообразие, на котором
заданы п дифференцируемых функций
/<: М ->9t, Vi = 1, ... ,п.
Предположим, что функции fi, ..., fn находятся в инволюции, то есть
{fi,fj} = 0, = 1, .. .,п, (9.26)
и что η дифференциальных 1-форм dfi, ..., dfn линейно независимы в каж¬
дой точке р множества уровня определяемого как
= {р£М: Ш =т,г = 1 ,.,.,η}.
Согласно теореме о неявных функциях, множество уровня М яв¬
ляется η-мерным подмногообразием многообразия Л4, которое называется
многообразием уровня.
Ввиду изоморфизма (9.2), каждой дифференциальной 1-форме dfi мож¬
но сопоставить векторное поле Xft на М:
ixf.u> = dfi.
Эти векторные поля Xfi линейно независимы в каждой точке многообразия
уровня Mf(iг), поскольку линейно независимыми являются дифференциа¬
лы dfi, ..., dfn, и симплектическая форма ω невырождена.
К тому же, согласно (9.26), векторные поля Xft коммутируют друг
с другом:
[χ/ο^Λ·]=0, Vi,j = l, ...,η.
Кроме того, поскольку
(Lxfj(p)fi) (Р) = (ixfjdfi) (Р) = dfi\p (xfj(p)) = {fi,fj}(p) = О,
поля Хд, ... ,Х/П являются касательными к
Таким образом, существует п коммутирующих касательных векторных
полей на М./(π), которые являются линейно независимыми в каждой точке.
Эти векторные поля образуют локальный базис инволютивного рас¬
пределения, которое, согласно теореме Фробениуса, является вполне инте¬
грируемым.
Более того, Mf (π) является инвариантным относительно каждого
из п коммутирующих потоков σ|, связанных с функциями fi.
248
Глава 9
Можно доказать, что если дифференцируемое многообразие Mf(π)
является компактным и связным, оно диффеоморфно η-мерному тору Тп
с углами у?1, ..., φη в качестве локальных координат, где Тп представляет
собой прямое произведение п окружностей. Действительно, заметим, что,
по предположению, на Μ/(π) существуют п функций fi, которые опреде¬
ляют η-мерную абелеву алгебру Ли со скобкой Пуассона в качестве скобки
Ли. В каждой точке они порождают п независимых потоков, относительно
которых Л4инвариантно. Следовательно, a priori, Μ/(π) ^ iRn~k х Тк,
но если М/(тг) компактно, возможно только к = п.
Под действием гамильтонова потока, порождаемого Н = Д, угловые
координаты φг изменяются согласно
άρ% i w 1
-—=ω\ \/г = 1, ..., η,
где ωί = сУ(/ь · · ·, Λι), так что движение на Μ/(π),
φτ(ί) = φι(0) + ωΗ, Vi = 1, . .. , η, (9.27)
является почти периодическим.
Рассмотрим окрестность^ С М многообразия уровня Mf^)· Исполь¬
зуя функции fi, ..., fn в качестве координат в Ы, можно найти окрест¬
ность U' С Ы С М многообразия уровня г), которая диффеоморф-
на Тп х Sn, где Sn — сфера η-мерного евклидова пространства, то есть
окрестность π в D\n.
Гамильтонов поток, порождаемый Н = f±, выраженный в координа-
тах (ψ1, · · ·, ψη, fi, , fn), принимает вид
ί=°’ Λ"=ω<(/ι’ Vi = 1> ···>"· <9·28)
Система уравнений (9.28) непосредственно интегрируется:
fi(t) = fi( о), Ψι(ί) = φζ(0) +ωζ (/i(o), .. . ,/η(0))ί, Vi = 1, ...,η.
Следовательно, интегрирование исходной канонической системы урав¬
нений эквивалентно нахождению угловых переменных φ1, ..., φη. Это мо¬
жет быть сделано с использованием только квадратур.
Все сказанное о компактном случае можно объединить с помощью
следующей теоремы.
9.6. Теорема Лиувилля 249
Теорема 29 (Лиувилля). Если на 2п-мерном симплектическом много¬
образии М заданы п функций fi, . .., fn в инволюции
{fijj} = 0, Vi, i = 1, , гг,
и п дифференциальных 1-форм d/i, ..., dfn линейно независимы в каждой
точке многообразия уровня
М/М = {р £ М: fi(p) = 7Гг, г = 1, ..., η} ,
то
a) М /(тг) является п-мерным подмногообразием многообразия М., инва¬
риантным относительно гамильтонова потока, порождаемого Н =
= Λ;
b) если многообразие уровня Λ4 является компактным и связным,
то оно диффеоморфно п-мерному тору Тп с угловыми координата-
ми (ψ\
c) движение на М f определяемое гамильтоновым потоком, порожда¬
емым Н, является почти периодическим:
d) канонические уравнения с функцией Гамильтона Н могут быть про¬
интегрированы с использованием только квадратур.
Теперь заметим, что, вообще говоря, координаты (/χ,..., fn, φ\ ..., φη)
не образуют симплектическую систему координат. Однако существуют
функции
Λ = Λ(/ι, ν* = 1 ,.,.,η, (9.29)
такие, что координаты (Ji, ..., Jn, φ1, ..., φη) будут симплектическими,
то есть такие, что исходная симплектическая форма ω может быть выражена
в виде
ω = dJh Λ άφΗ.
Переменные (9.29), сопряженные углам, называются переменными дей¬
ствия, они являются первыми интегралами гамильтонова потока, порожда¬
емого Н.
В этих координатах система уравнений (9.28) принимает вид
250
Глава 9
9.6.1. Построение переменных действие-угол
Анализ построения глобальных переменных действия можно найти
в [19, 13], а общий анализ возможности введения переменных вида «дей¬
ствие-угол» можно найти в [158, 41].
Рассмотрим случай, когда многообразие М является касательным рас¬
слоением, так что ω = άΰ0 = d(ph dqh).
Рассмотрим далее погружение
многообразия уровня Mf^) в М и обратное погружение %*ω в
симплектической структуры. Поскольку di* = г*d, имеем
Таким образом, ι*ω является замкнутой дифференциальной 2-формой на
торе. Оно не является точной дифференциальной формой, поскольку тор
не является односвязным, то есть на торе существуют кривые, которые не
могут быть стянуты в точку. Имеем
С другой стороны, векторные поля = Xft являются базисом для вектор¬
ного поля, касательного к Mf^, поэтому для любых двух таких полей X
и У можно написать
Поскольку две гомотопные кривые 71 и 72 на торе будут границей
двумерной области Σ, с помощью теоремы Стокса получаем
di*D = ι*άω = 0.
г*со = i*ddc = di*dc.
J ί*ω = 0.
Σ
Σ
7iU{_72}
9.7. Новое описание полной интегрируемости
251
Как следствие, имеем
Ji*$c = J ί*ΰ0.
71 72
Кривые на торе Тп могут быть разбиты на п эквивалентных клас¬
сов [7/г], каждый из которых содержит нестягивающиеся гомотопные кри¬
вые. Переменные действия определяются теперь следующим образом:
Jh = h J едс = I
[7/г] [7/г]
где h = 1,2, ..., п.
Построение может быть окончательно завершено, как в парагра¬
фе 4.6.4.
9.7. Новое описание полной интегрируемости
В общем случае особенности заданной динамики Δ могут быть охарак¬
теризованы инвариантностью некоторой геометрической структуры. Напри¬
мер, симплектические свойства динамики описываются инвариантностью
симплектической структуры. Это случай лагранжевой и гамильтоновой ди¬
намики.
Было бы интересно ответить на вопрос о возможности описания с этой
точки зрения свойства интегрируемости. Как мы увидим, это возможно.
Начнем со следующих соображений.
1. Смысл нулевого кручения Нийенхейса смешанного тензорного по¬
ля. Следствием нулевого кручения Нийенхейса Λίτ смешанного тензор¬
ного поля Т является то, что для заданного векторного поля Δ: векторные
поля последовательности
Δη_|_ι = ΤΔη, η ^ 1,
замкнуты на абелевой алгебре Ли
[Δ„, Ато] = 0, η,τη^Ι,
и что транспонированный эндоморфизм Т порождает последовательность
точных дифференциальных 1-форм [78], то есть
(da = 0, dfa = 0, Λίτ = 0) => d (Тпа) = 0, η ^ 1, аеТ*ЛЛ.
252 Глава 9
Кроме того, инвариантность Т относительно потока, порождаемого вектор¬
ным полем Δ, влечет инвариантность векторных полей ТАп и дифферен¬
циальных 1-формТпа.
2. Свойства собственных векторов. Интересно также проанализи¬
ровать свойства векторных полей, являющихся собственными векторами
диагонализируемого смешанного тензорного поля без кручения.
Пусть М — дифференцируемое многообразие и Т — диагонализируе-
мое смешанное тензорное поле, то есть
Tek = Хкек, TSk = Afc0fc,
где {е/с} — произвольный базис ТрЛ4,
[ег5 &j]
и {дк} — двойственный к нему базис Т*М,
d$k = —^cks'dr Λ $s.
Напомним, что кручение Нийенхейса поля Т определяется следующим
образом:
Λίτ(<*,Χ,Υ) = (α,Ήτ(Χ,Υ)),
где
ПТ(Х, Υ) = (LfxT)h Y - f(LxT)*Y =
= [ТХ, ΤΥ) + Τ2[Χ,Υ)- Τ[ΤΧ, Υ) - Τ[Χ, ΊΎ).
Вычислим Ητ в базисе {efc}:
Urieuej) = [fei,Tej)-\-f2[ei,ej) - Т[Теие0) - Т[е*,Тел·]. (9.31)
Поскольку для двух произвольных дифференцируемых функций / и д
и двух произвольных векторных полей X и У на М можно записать
[fX, gY) = fg[X, Υ) + g(LYf)X - f(Lxg)Y,
и далее:
5 j [A-je-j, ^7 ^7] ^1^7'5 ^j\ ^j ^7')
T[Tei) ej] = T — A{T[ei, ej] + A^ e^,
(^.7[^15 ^j\ ^j ’
9.7. Новое описание полной интегрируемости 253
Таким образом, соотношение (9.31) принимает вид
7£j) — {Т — Xi)(T — Лj)[ei, ej] + (А^ — A*) [(£eiXj) ej + (£ejXг) ei\ ,
и из равенства нулю кручения Нийенхейса ej) =0 следует
(Г-Лг)(Т-Л^)[ег,е,-]=0, (9.32)
(Xi-Xj)£eiXj = 0. (9.33)
Следовательно, если, по предположению, собственные значения А& поля Т
имеют везде ненулевые дифференциалы
(dX^)p ф 0, VpeM,
и являются двукратно вырожденными, то два векторных поля е* и еj, при¬
надлежащие одному собственному значению А* = A j, удовлетворяют соот¬
ношению
[ef, ej] = авг + bej. (9.34)
Следовательно, векторные поля е*, ej являются локальным базисом 2-мер-
ного инволютивного распределения и, по теореме Фробениуса, определяют
2-мерное подмногообразие многообразия М.
Двойственный подход состоит в том, чтобы, сокращая соотноше¬
ние (9.32) на элементы двойственного базиса, найти
0 = (Afc — Xi)(Xk - Xj) ([ег,е^к) =
= ~(Хк — Хг)(Хк — Xj) (ej,Leidk) =
= (Afe Aj)(Aк Xj) (ej,ieid$ ^ =
= 2^fc ~ — Xj) (zj>ieiCrs® = ^ 25^
= <*s\{Xk - AiXAfe - Xj) - δ°ΰη =
= сЦ(хк - Хг)(Хк - Xj) m - Wi) =
= ^ij[^k Xi)(Xk A j),
где было использовано соотношение [e^ej] = c^efc.
Таким образом, соотношение (9.35) просто утверждает, что
с\. — 0, Vfc ф г и h±j% (9.36)
254 Глава 9
то есть мы опять получили соотношение (9.34). Кроме того, мы также по¬
лучили
ddk = Cksds А дк (без суммирования по к).
Из последнего соотношения следует
■дк Λ dtik = О,
что снова, по теореме Фробениуса (в двойственной форме), гарантирует
голономность базиса.
В заключение повторим, что соотношения (9.32) или (9.35), которые
прямо следуют из условия Нийенхейса, гарантируют голономность бази¬
са {е/с}, в котором тензорное поле Т диагонально:
T = J2 (9.37)
г
3. Инвариантность собственных значений инвариантного сме¬
шанного тензорного поля. Легко проверить, что инвариантность поля Т
относительно потока, порожденного векторным полем Δ, влечет инвари¬
антность его собственных значений Λ. ^
Действительно, пусть V Е ТРМ и а еТ*М — собственные векторы Т
и ί1, соответственно, т. е.
TV = XV, Та = λα,
принадлежат одному и тому же собственному значению А, так что iya^O.
Если Т, по предположению, Δ-инвариант, имеем
La{TV) = (LaT)aV + T(LaV) = T{LAV), У E TPM, (9.38)
поэтому
TV = XV => T{LaV) = LA(TV) = (LaX)V + X{LaV)
и
(LAV,Ta) = (TLAV, a) = (LAX)(V, a) + (XLAV,a).
Далее из
(LAV,Ta) = (LAV,Xa) = (XLAV,a)
окончательно получаем
(LAX)(V,a) = 0 ^ LAX = О,
то есть инвариантность А относительно потока, порожденного Δ.
Если тензорное поле Т инвариантно относительно потока, порожден¬
ного векторным полем Δ, то векторное поле Δ называется автоморфизмом
тензорного поля Т.
9.7. Новое описание полной интегрируемости 255
4. Особенности автоморфизмов смешанного тензорного поля без
кручения. Из Δ-инвариантности следует соотношение (9.38), так что
(Лг - Лj)Lei(A,W) = XМА,&) - XjLei(A,&) =
= \i(LeiA,&)-Xj(LeiA,&) =
= -Χί^&βί,ϋ3) + (LAeuXj$3) =
= —Лг(Ьдбг, Ί?·7) + (Ьдбг, TW) =
= -Xi(LAeuW) + (TLAeuW) =
= ~Xi(LAeuW) + (LAfeuW) =
= -A i(LAei,tij) + A i(LAei,tij) = 0.
Здесь уместно напомнить, что динамическое векторное поле Δ назы¬
вается сепарабельным (в динамике с меньшими размерностями) в открытом
множестве О С Λί, если существует такая система координат {е*}, что
ίβΛΔ,ϋ3) ф 0 => г = j,
где {&} — базис, двойственный к базису {е*}. Если О совпадает с Л4,
говорят, что поле Δ сепарабельно.
Поскольку, как было показано,
LaT = 0 => (А< - Aj)Lei (Δ, ΰή = 0,
то из Δ-инвариантности Т следует сепарабельность динамики.
Замечание 19. Это понятие сепарабельности отличается от соответствующего
понятия (см. [65]) в теории Гамильтона-Якоби.
Уравнение (9.33) можно также записать в виде
XiLei Xj — XjLeiXj,
так что
TdXj = TPLe-Xj = Xi^LeiXj = XjdlLeiXj = XjdXj. (9.39)
Поскольку собственные значения T являются дважды вырожденными,
разложение (9.37) можно записать также в виде
п
T = J2 Aj(е,- ® & + еп+з ® ^+п)·
3 = 1
256
Глава 9
С помощью уравнения (9.39), из которого следует функциональная неза¬
висимость собственных значений A j и, как следствие, линейная независи¬
мость d\j, теперь можно выбрать такой базис, в котором выражение для Т
имеет вид
то есть d\j = d\3 являются частью этого базиса.
Выражение (9.40) явно показывает интегрируемость проецируемой ди¬
намики.
Уравнение х = Д(ж) можно разложить на следующие несвязанные
системы уравнений:
Выражение (9.40) можно переписать в координатах (φ3, X3) в виде
где собственные значения А глобально определены на Λί, в то время как φ,
такие, что άφ = ΰ3, могут быть определены на Л4 только локально; таким
образом, все поля, удовлетворяющие уравнению ЬдТ = 0, могут быть
выражены в следующем виде:
Δ = Δ^ν')^-,
οφ3
и системы уравнений (9.41) принимают вид
Легко проверить, что сепарабельное и интегрируемое векторное поле Δ
является также и гамильтоновым векторным полем.
Фактически, задав Δ, можно построить большое количество инвари¬
антных симплектических структур ω,
п
(9.40)
(9.41)
(9.42)
(9.43)
к
9.7. Новое описание полной интегрируемости 257
где fk — произвольные функции, требуемые для обеспечения инвариант¬
ности дифференциальной 2-формы (9.43). Если предположить, что поле Δ
не имеет сингулярных точек, произвольная симплектическая структура ω
примет вид
W = V sb2p.d(pkAdXb.
В базисе, связанном с переменными действие-угол (Jfc, tpk), тензорное
поле Т становится таким:
г “EW) (&*"*+£***)■
и ω принимает вид
w = J2dJk Λ Vs-
к
Все сказанное в этом параграфе можно подытожить в следующей тео¬
реме [78, 80].
Теорема 30 (DMSV). Пусть Δ — динамическое векторное поле на
многообразии М, имеющее диагонализируемое смешанное тензорное по¬
ле Т, которое
• инвариантно:
LaT = 0;
• имеет нулевое кручение Нийенхейса:
АГт — 0;
• имеет дважды вырожденные собственные значения А·7 с ненулевыми
дифференциалами:
deg А·7 =2, [ά\ό)ρφ 0, Vp G М.
Тогда векторное поле Δ является сепарабельным, вполне интегрируе¬
мым и гамильтоновым.
Замечание 20. Условия LaT = 0, λίτ = 0 и двумерности собственных
пространств Т возникли из существования динамики с бесконечным числом сте¬
пеней свободы, допускающей представление Лакса (см. часть IV). Тот факт, что
258
Глава 9
теории нелинейных полей, интегрируемых методом обратного рассеивания, демон¬
стрируют эндоморфизм, инвариантный относительно динамики с нулевым круче¬
нием Нийенхейса и двумерными собственными пространствами, подсказывает, что
легче провести анализ интегрируемости динамических систем в терминах смешан¬
ного тензорного поля Т, чем симплектической структуры ω.
Условия интегрируемости в понятиях симплектической структуры ω сильно
зависят от конечности размерности пространства и не могут быть легко распростра¬
нены на бесконечномерный случай. В противоположность этому, интегрируемость
на основе Т выражается с помощью условий, которые не зависят от конечного числа
степеней свободы динамической системы Δ.
Замечание 21. Полезно напомнить, что векторное поле Δ не полагается
a priori гамильтоновым. Как мы увидим в части IV, интегрируемость диссипативной
динамики может быть основана на тех же самых условиях в предположении других
спектральных гипотез для тензорного поля Т.
ЭЛЛ. От лиувиллевской интегрируемости к инвариантным
смешанным тензорным полям
Рассмотрим задачу построения инвариантных смешанных тензорных
полей с подходящими свойствами (называемых также операторами рекур¬
сии) для заданной лиувиллевской интегрируемой гамильтоновой динами¬
ки Δ. Если Н — функция Гамильтона и {·, ·} — скобка Пуассона, имеем
Δ / = {Я,/}.
Введем в некоторой окрестности лиувиллевского тора Тп переменные
действие-угол (Jb ..., Jn, φ1, ..., φη).
Имеем
dJi Λ dJ2 Λ .. · Λ dJn ф О, {#, Jh} = 0,
или, эквивалентно,
dH Λ dJi Λ dJ2 Λ . ·. Λ dJn = 0,
ω = ^ dJh Λ άφΗ,
h
Λ' _ дН д
dJh δφΗ
Рассмотрим по отдельности два случая:
• Гамильтониан Н является сепарабельным:
я = 53як(л).
к
9.7. Новое описание полной интегрируемости
259
В этом случае легко определить класс рекуррентных тензорных полей
с произвольными функциями А, необходимыми для того, чтобы диф¬
ференциалы нигде не обращались в нуль. Действительно, тензорное
поле Т является инвариантным, имеет нулевое кручение Нийенхейса
и дважды вырожденные собственные значения.
• Гамильтониан имеет ненулевой гессиан
В этой окрестности можно определить новую симплектическую струк-
относительно которой гамильтониан становится сепарабельным:
С помощью этого построения можно найти вторую симплектическую
структуру для вполне интегрируемой гамильтоновой системы.
В этом случае могут быть введены новые координаты
удовлетворяющие условиям
dv1 Λ dv2 Λ ... Λ dvh φ 0.
туру
h
hk
Η=\Σ{νΗγ.
h
Класс рекуррентных тензорных полей теперь задается в виде
260
Глава 9
9.8. Приложения
9.8.1. Оператор рекурсии в динамике твердого тела
Можно легко построить инвариантное смешанное тензорное поле
с ненулевым кручением Нийенхейса и дважды вырожденными собствен¬
ными значениями [86] для динамики гироскопа Лагранжа-Пуассона — для
простоты без гравитации, используя константы движения, найденные Ми¬
щенко, Диким, Манаковым и Ратьё [154, 84, 141, 165].
Функция Гамильтона для твердого тела локально имеет вид
1 ((Ρϋ cos φ + σ sin φ)2 (ρ$ sin φ — σ cos φ)2 Ρφ
Η 2\ Λ + В + С
где ΰ,φπψ — углы Эйлера (в системе координат главных осей тела Oxyz от¬
носительно исходной неподвижной системы координат Οξης);ρϋ, ρψπρψ —
сопряженные им переменные; Л, В и С — компоненты тензора инерции от¬
носительно Oxyz, и
_Ρψ - Ρφ sin
sin ΰ
Когда Λ = В, гамильтониан Н сводится к
Hs = 2{-^— + T
и говорят, что твердое тело обладает гироскопической структурой (гироскоп
Лагранэ/са-Пуассона). Его полная интегрируемость прямо следует из тео¬
ремы Лиувилля в открытом подмногообразии, где Η, ρφ и ρψ независимы.
Тензорное поле вида
T = Ti-^-®duj,
3 диг
где и = (Ό,φ,'φ,ρϋ,ρφ,ρψ), и матрица Т = (Tj),
( L 0 0
Т =
ΡϋΤ
(L + ρφ) sin?
ρ-οσ
Ρφ 0
(L + ρψ) sintf ^ ^
0 0 0
0 0 0
0 0 0
0
и
L+Ρφ
/
L + ρ-ψ
σ
0
-Ν
L+Ρφ
Τ
Ν
0
L + ρψ
г
ΡϋΤ
ρ$σ
JU
(.L+Ρφ) sin$
(.L + рф) sin
0
Ρφ
0
0
0
Ρ'Φ
9.8. Приложения
261
имеет следующие свойства:
• lat = О,
• Ήτ —
• deg(co6cTBeHHbie значения Τ) = 2,
где
А = _Р±д_ +
Λ δΰ
σοοίΰ-^-
д
д
+
στ
д
А С ) δφ Л sin ϋ дф Л sin ϋ дщ
обозначает гамильтоново векторное поле, соответствующее Hs,
iAu>c = -dHs,
посредством канонической симплектической структуры ω0.
Эти свойства легко проверить, используя координаты действие-угол
ν = (φι,φ2,φ*, J3), связанные с координатами гг ξ (ϋ,φ,φ,Ρϋ,Ρφ,Ρ'ψ)
посредством следующего симплектического отображения:
ϋ
arccos
η + cos φ1
9 ( τ ζ — 77 + 1 Ψ1\ / ,
* = * - arctg I Λ ξ{^ _ Jz) tg τ 1 + arctg I Ji
ξ + ν-1 t Ψ1
C(J3 + J2) 2
ф = φ3 — arctg J\
ξ-η + ι
ψ
Ρΰ =
Ρφ — ^2?
, Ρψ = J3,
где
J\ sin φ1
(η + cos^1)'
ξ =
л
[(J32 - ЯШ - Λ2)]
J2J3
[(J| - J?)(J2 - л2)]
1/2'
262
Глава 9
В этих координатах тензорное поле Т имеет вид
д_
dvi
Т = Тг_о_ ® dvj,
где
Т = diag(Ji, J2, J3, Ji, J2, ^з)·
С другой стороны, полную интегрируемость можно описать с помощью
коприсоединенных орбит группы Ли [62], так что предыдущее инва¬
риантное тензорное поле может быть полезно для установления связи
с вполне интегрируемыми системами на коприсоединенных орбитах группы
Ли [61, 178, 60].
9.8.2. Оператор рекурсии в динамике Кеплера
В сферически-полярных координатах, для D^3 — {0}, векторное поле в
задаче Кеплера имеет вид
Δ = — ί р JL + E* JL +
тпу^дг г2 дд
тк +
Ρψ д
г2 sin2 ϋ 9φ
(pi sin2 ϋ + p%)
r sin2 ϋ
д _ Pi cos'd q
дрг
-2 ■& др$
(9.44)
r sin
Оно является глобально гамильтоновым относительно следующей сим-
плектической формы:
ω = ^ dpi Λ dqг,
г =
(9.45)
с гамильтонианом Н вида
Н=тЬ Р2г + Ч +
VI
2т
2 г2 sin2 ϋ
+ U(r), U (г)
к
г *
В координатах действие-угол (J, φ) кеплеровский гамильтониан Н,
симплектическая форма ω и векторное поле Δ принимают вид
9.8. Приложения
263
К сожалению, определитель Гесса гамильтониана тождественно равен
нулю и мы не можем применить описанные ранее методы для построения
оператора рекурсии. Однако заметив, что гамильтониан зависит только от
суммы переменных действия, можно определить новую систему координат,
в которой гамильтониан станет сепарабельным. В этих новых координатах
мы можем легко применить ранее описанные методы и затем, используя
ковариантность нашей формулировки, построить оператор рекурсии в ис¬
ходных координатах.
Эти результаты можно подытожить следующим образом [150].
Векторное поле Δ является также глобально гамильтоновым относи¬
тельно симплектической формы ωχ, где
ωι (9.46)
hk
с гамильтонианом вида
гг _ 2тк2
1 — т т Т~
Jr + J'Q + ϋφ
или, эквивалентно,
Δ = {#!,·}!,
где
сг г sr^fq-i\k ( df dg _ df дд \
м d^k d^k dJh J ’
и матрица S задана в виде
/ Ji J2 J3 \
S = ^ I J2 — Js Ji + Js J3 J ·
\Js - J2 J2 J1+J2/
ЗАМЕЧАНИЕ 22. Матрицу S нельзя отождествлять с якобианом преобразования,
так как Sd(j)h не являются замкнутыми 1-формами.
В исходных координатах (р, q) симплектическая форма ωχ записывает¬
ся в следующем простом виде:
ωχ = dKi Λ da1,
г
(9.47)
264
Глава 9
где функции Ki(p, q) и аг(р, д), заданные формулами
' к, = + Jzf]{p,q),
< ^2 = ij2[Ji+J3](p,g),
^3 = |J3[Ji+J2](p,9),
, аг = <pl{p,q),
рассматриваются как функции координат р, q ввиду отображения Ji =
= ψί = ψΚρ,ο)·
Следовательно, может быть построено смешанное инвариантное тен¬
зорное поле Т, определяемое для невырожденной ω как
ω(ΤΧ,Υ) = ωλ (Χ,Υ).
В то же время проверить равенство нулю кручения Нийенхейса и двой¬
ное вырождение собственных значений тензорного поля Т легче в коорди¬
натах действие-угол, где Т записывается просто как
Кроме того, имеем
1
Таким образом, повторное применение Т не приводит к новым функ¬
ционально независимым константам движения. Как было показано, эта си¬
туация является обычной в периодических системах, когда период Р пред¬
ставляет собой гладкую функцию от начальных условий [150].
Теперь ясно, что все различные альтернативные гамильтоновы описа¬
ния, которые можно построить с помощью оператора рекурсии Т, будут
удовлетворять
dP А СT)kdH = 0,
TdH = к
то есть
dP ф о -*· СtfdH A (T)k+rdH = 0.
9.9. Структуры Пуассона-Нийенхейса
265
Однако в этой конечноразмерной подстановке {Тг(Т)/с,Tr(T)h} = О,
и ТгТ, Тг(Т)2, Тг(Т)3 являются функционально независимыми. С другой
стороны, в случае бесконечной размерности, трудно придать смысл следу
эндоморфизма.
Г-схема
Заметим, что симплектическая форма cji, заданная в (9.47), может быть
рассмотрена [181] в качестве производной Ли симплектической формы ω,
заданной в (9.45), по векторному полю
Γ=Κ>Ά·
так что
ω\ = Lpcj.
Векторное поле Г порождает последовательность бесконечного коли¬
чества (абелевых) симметрий по следующей схеме:
Δ^+ι = [А^, Г],
где Δ0 = Δ, а скобка [·,·] обозначает обычный коммутатор дифференци¬
альных операторов. Такие векторные поля оказываются гамильтоновыми по
отношению к обеим симплектическим структурам, поэтому
Ak = {Hkr} = {Hk+lr}u
и их коммутатор
[Α/ι, А/с] = 0.
9.9. Структуры Пуассона-Нийенхейса
Можно также упомянуть несколько отличный подход к той же самой
задаче, когда с самого начала предполагается, что многообразие снабжено
пуассоновой структурой Λ, так что (Л4, Λ) является пуассоновым многооб¬
разием.
9.9.1. Совместимые пуассоновы пары
Следуя [139], будем говорить, что на многообразии Л4 задана струк¬
тура Пуассона-Нийенхейса, если на М одновременно заданы пуассоново
266
Глава 9
тензорное поле Λ и тензорное поле Т с нулевым кручением Нийенхейса,
которые удовлетворяют следующему двойному условию:
при произвольном выборе векторного поля X и дифференциальной 1-фор¬
мы а.
Фактически, мы увидим, что на том же самом многообразии имеется
бесконечно много структур Пуассона-Нийенхейса, так как можно дока¬
зать, что все тензоры ТкА при к = 1,2,... также являются пуассоновыми
тензорами и удовлетворяют двойному условию.
Введенная структура выглядит весьма специфической, но интересно
отметить, что она является совершенно естественной в динамике солито-
нов. Фактически, почти в каждой теории вполне интегрируемых систем
можно заметить, какое решающее значение имеют так называемые согласо¬
ванные пуассоновы тензоры [88,22, 139,140], или, как они еще называются,
гамильтоновы пары [103].
Два пуассоновых тензора Р и Q называются согласованными, если
тензор Р + Q также является пуассоновым тензором.
Приведем теперь следующую теорему [139]:
Теорема 31 (Магри I). Пусть Р и Q — пуассоновы тензоры на М.
Предполоэюим, что Q~l существует и является гладким полем непрерыв¬
ных линейных отобралсений р Е Λ4 —> Q~λ. Тогда тензорные поля Т =
= Ροζ)-1 и Q наделяют многообразие структурой Пуассона-Нийенхейса.
И наоборот, если Т — тензорное поле с нулевым кручением Нийенхей¬
са, удовлетворяющее двойному условию с пуассоновым тензором Q, то Q
и Т о Q = TQ являются согласованными пуассоновыми тензорами на М..
Конструкцию, использованную в приведенной теореме, можно приме¬
нить в следующей ситуации. Предположим, мы имеем на многообразии М.
одновременно тензор Пуассона Λ и замкнутую 2-форму ω (не обязательно
невырожденную), или, как ее часто называют, пресимплектическую форму.
Тогда имеет место следующая теорема [139]:
Теорема 32 (Магри II). Если форма ω о К о ω замкнута, то тен¬
зорные поля Λ и Т = Λ о ω задают структуру Пуассона-Нийенхейса на
многообразии М..
Стоит отметить, что здесь мы рассматриваем 2-форму ω в качестве
поля отображений
(а) ТА = АТ
(iЬ) ALfxa - ALX (Та) + (LKaT)v (X) = 0,
(9.48)
(9.49)
9.9. Структуры Пуассона-Нийенхейса
267
Интересная ситуация возникает на симплектическом многообра¬
зии (Λ4,ω), когда вдобавок существует невырожденный тензор Нийенхей¬
са Т, удовлетворяющий следующему условию:
ω о Т = Т о си. (9.50)
Это условие очевидно является аналогом условия (а) для структуры Пуас¬
сона-Нийенхейса. В этом случае можно показать, что если собственные
значения тензорного поля Т — гладкие функции на Λί, то они порождают
систему интегрируемых векторных полей, без дополнительных требований,
которые обычно налагаются на ω и Г (например, см. [139]). Более точно
(см. [100, 139]):
Теорема 33 (Флорко-Магри-Яновски). Пусть (ΛΊ,ω) — 2п-мерное
симплектическое многообразие, на котором существует тензорное поле
с нулевым кручением Нийенхейса Т, так что Т* о ω = ω о Т. Пусть в каж¬
дой точке ре МТр будет полупростым оператором и размерность его
собственных пространств будет константой на М.. Тогда
• Собственные пространства Si, соответствующие собственным зна¬
чениям Хг, являются ортогональными кии имеют четную размер¬
ность.
• Если ни одна из функций Xi не является константой, то есть не суще¬
ствует открытого подмножества V С Λ4, такого, что | = const,
то формы dXi являются независимыми и находятся в инволюции. Со¬
ответствующие векторные поля ίχόω = —dXj поточечно принадле¬
жат подпространству Sj.
• Если для каждой точки р е М dim5p = 2, то есть если каждое
собственное значение дважды вырождено и если эти собственные
значения не константы, то
a) Множество {А*, г = 1, 2, ..., п} является полным набором функ¬
ций в инволюции, и каждое векторное поле Xj является вполне
интегрируемой гамильтоновой системой.
b) Дифференциальная 2-форма ω может быть представлена следу-
п
ющим образом: ω — Σωΐ, ωΐ = ω\ω* = dXi Λ ηгде 7г ~
г=1
некоторые дифференциальные 1-формы на М.. Если обозначить
через Yi векторные поля, соответствующие 7i (—7i = ΐγίω), то
Xi, Yi покрывают подпространства Si. Если Xi, Yi выбрать
таким образом, чтобы [.Xi, Yi]L =0, mo Εχ{Γ = 0.
c) Если собственные значения Xi не имеют нулей на М, то диф¬
ференциальные 2-формы ωη = ω о Тп при п = 0,1, 2... снова
являются симплектическими структурами на М..
Глава 10
Метод орбит
10.1. Редуцированное фазовое пространство
Действие группы Ли G на симплектическом многообразии (Μ,ω) есть
дифференцируемое отображение
Ф· (д,р) eG χ М -> Ф(д,р) е М, (10.1)
удовлетворяющее следующим требованиям:
Ф(е,р) =р, Ф(/,Ф(^,р)) = Ф(fg,p), V/,# е Gyp е М.
Действие (10.1) называется симплектическим, если диффеоморфизмы
Фд: р е М Фд(р) = Ф(д,р) е М
являются симплектическими, то есть
Φ*ω = CJ, Уд е G.
Для любого ξ е Q отображение
Ф^: (t,p) G 9Я χ М —> Ф^(t,p) = Φ(βίξ,ρ) в М (10.2)
есть действие аддитивной группы (91,+) на многообразии М. Таким об¬
разом, каждому элементу ξ в Q можно сопоставить векторное поле на М.,
заданное в виде
Ы(р) = 4$(е**,р) · (10.3)
аъ t=o
Тогда каждая однопараметрическая подгруппа группы G действу¬
ет как локально гамильтонов поток на М. Фактически, поскольку дей¬
ствие (10.1) является симплектическим1,
£ξΜω = 0
и
άΐξΜίϋ + ίξΜάΐϋ di^M cj,
*B этой главе производная Ли по векторному полю X обозначается символом Сх вме¬
сто Lx во избежание путаницы с левым сдвигом Lg.
10.1. Редуцированное фазовое пространство
269
имеем
то есть дифференциальная 1-форма ΐξΜω является замкнутой.
Поэтому для любого ξ Е Q можно локально найти такую функцию Jξ
на Л4, что
Чмш = dJi- (10·4)
Кроме того, поскольку
ίξΜω + ιηΜω =
имеем
— dJξ —f- dJj-j f
или
Jt+n = Jξ ~\r Jr) + Q)
где Q — константа. Можно выбрать эту константу равной нулю, тогда
Jf+77 = Λξ + «Л?· (10.5)
Если для любого ξ G Q £м является глобально гамильтоновым вектор¬
ным полем, то </ξ глобально определено на М, и (10.5) позволяет задать
отображение
J:peM-*J(p)eg*, (10.6)
где J(p) — элемент Q*, такой, что
&Ар)) = Мр), v^es.
Следуя Сурио [52], отображение (10.6) называется отображением мо¬
мента.
Для любых ξ G Q и р G М через обозначим отображение
7ξ)Ρ: д € G -> 7?,РЫ = ($s(p)) “ JAdg.^(p),
производная которого в единице (7£,р)*е, вычисленная на векторе η G G,
дает
Ы,р)*е(л) = 4ΐΊξΑβίη)
dt
t=о
t=0
= R, 4,}(p) - 4 <Ade-.4£,J(p)>
ac i=0
= {Λη}(ρ) — ([£> J{p)) — ^[ξ,η]) (p)·
270 Глава 10
Если — константа на G, то (7ξ,ρ)*β(^) — 0, поэтому
(р) = 0, VijGS.
Кроме того, поскольку ηξιΡ(β) = 0, имеем
J(@a(p)) = JAdt-4(p), VgeG,
или, эквивалентно,
(ξ, J (Фд(р))) = (ξ, Adl-г (J(p))) , VgeG.
Суммируя, можно сказать, что если 7^р — константа на G для лю¬
бых ξ G Q и р G Λί, то есть если
J (ф*(р)) = Adl^Jip), Ур е М,Уде G, (10.7)
или, эквивалентно, если диаграмма
Λΐ —Λΐ
коммутативна, то
({Je, JJ - %,„]) (ρ) = 0, V£, η € G,Vp£ М.
Следовательно, условие (10.7) гарантирует, что линейное отображение
е—
является гомеоморфизмом алгебры Ли группы G в алгебру Ли гамильтоно¬
вых функций на Λί. В этом случае действие (10.1) называется пуассоновым
действием. Конечно, не все симплектические действия Ф на симплектиче¬
ских многообразиях Λί являются пуассоновыми.
Если симплектическая форма ω9 заданная на многообразии, также яв¬
ляется точной, то есть
uj = -άθ, (10.8)
и действие Ф оставляет Θ инвариантной, то есть
φ;θ = 0, Уде G, (10.9)
10.1. Редуцированное фазовое пространство
271
то есть
+ Нм^ — 0·
Кроме того, из (10.8) имеем
ά4Μθ~4Μω = °>
то есть
dJ*L = Чмш>
таким образом, J — отображение момента. Теперь, ввиду того, что (см.
приложение D)
поскольку Ф оставляет Θ инвариантной. Окончательно, данное соотношение
эквивалентно условию
(мд->$м ср) = (νθ.*β(Ρ) (ы (%т
также имеем
(» (Adg-ιξ) м θ) (р) = θρ {{Adg-ΐξ)Μ) =
= *p((VΟ.Φβ(ρ) &и(Ф9(р))))
= θφ9(ρ) (£м ($g(p))) .
(10.11)
^ (ф9(р)) = JAdg-M, G д, Vp G M, v<? e G,
то есть
J (Фа(р)) = Adl-г (J(p)), УреМ,ЧдеС.
Если μ — элемент Q*, множество
является подгруппой группы G, действующей на М..
272 Глава 10
Группа G обычно переставляет множества типа
= {реМ: J(p) = μ}.
Фактически, если ρ Е J_1(/z), то J(p) = μ, однако Фд(р) с д Е G может не
принадлежать </_1(μ).
Пусть ρ Ε </-1(μ) ид — элемент GM, тогда
что с помощью (10.7) можно переписать в виде
Ad*g-l{J{p)) = J{$g{p)),
так что
J{^g{p)) = ^ V# € ΰμ, Ур € J“V);
то есть GM оставляет J~ι(μ) неподвижным.
Следовательно, с помощью (10.1) можно определить действие Ф под¬
группы ΰμ на
Ф: (д,р) £Сдх J-^μ) -> Φ(<?,ρ) € (10.12)
Орбита точки р Е </_1(μ) под действием группы ΰμ задается в виде
Ομ·ρ={Φ9(ρ):9εΟμ}. (10.13)
Можно ввести отношение эквивалентности на </-1(μ), определив две
точки J~ι(μ) как эквивалентные, если они принадлежат одной и той же
орбите (10.13).
Множество классов эквивалентности, обозначаемое обычно че¬
рез J~1(μ)/Gμ — это множество орбит точек </_1(μ) под действием GM.
Точка μ Е G* называется регулярным значением отображения J, если
для любого ρ Е J~ι{μ) производная
J*p: ТРМ -> Τμΰ*
является сюръективным отображением. В этом случае можно доказать [1],
что множество </_1(μ) является дифференцируемым многообразием.
Действие (10.12)
Ф: (д,р) G ΰμ х J-1(M) -> Ф(5,Р) € ·7_1(μ)
называется собственным действием, если оно удовлетворяет следующему
условию:
£а/ш (pn)nGK и {Ф9г1(Рп))пек — последовательности точек J~l(μ), ко¬
торые сходятся в то (дп)пек допускает подпоследовательность,
которая сходится в GM.
10.1. Редуцированное фазовое пространство 273
Предположения о том, что μ Е G* — регулярное значение отображе¬
ния J и что действие (10.12) — собственное действие, являются достаточ¬
ными условиями того, что </-1(μ)/£μ является дифференцируемым много¬
образием и что отображение
πμ: J-1(/x) ->
которое сопоставляет каждой точке обратного отображения </-1(μ) орбиту,
которой она принадлежит, и его производная
Ы*р: W) - Τ0μ.ρ {Γ1(μ)/Ομ) (10.14)
являются сюръективными отображениями [1].
Многообразие J~1(μ)/Gμ называется редуцированным фазовым про¬
странством и может быть наделено естественной симплектической струк¬
турой.
Действительно, рассмотрим два вектора V и W, касательных к мно¬
гообразию </-1(μ)/£μ в точке у, которое является орбитой точки J_1(μ)
под действием <3μ. Выберем точку р на этой орбите: векторы V и W, каса¬
тельные к орбите в у, могут быть получены из некоторых векторов V и W,
касательных к </_1(μ) в точке р, при использовании отображения (10.14).
Таким образом, мы можем задать на J~1(μ)/Gμ билинейную фор¬
му Ωμ, выраженную через симплектическую форму ω на М.,
π*Ωμ = cj,
то есть
ΚΩμ)Ρ(ν, W) = wp(V, W), V,W 6 V_1(M).
Ωμ ((nM).p(V), (πμ).Ρ(\ν)) = »р<У, W),
Ωμ(Ϋ, W) = ωρ(ν, W). (10.15)
О Билинейная форма Ωμ не зависит от выбора точки р на орбите
и от векторов V и W пространства 7^</-1(μ).
Действительно, пусть
G -р = {Ф(д,р): д € G}
— орбита точки р под действием группы G. Касательные простран¬
ства TP(G ■ р) и Τρ(ΰμ ■ р):
ΤΡ(0·ρ) = {ξΜ(ρ):ξ€ΰ}
274
Глава 10
Τρ(@μ ·ρ) = {£м(р)'- ξ ^ Ομ} ,
где £м(р) определено в (10.3), и ζ}μ — алгебра Ли ΰμ.
Теперь можно доказать, что
Τρ{ΰμ·ρ) = Tp(G-p)nTpJ-1(M). (10.16)
Фактически, если {р) принадлежит Tp(G-p), то (10.16) эквивалентно
утверждению, что £м(р) £ ^р^_1(аО тогда и только тогда, когда ξ е 0μ.
Поэтому можно написать
t=о
t=о
= ftAdU, (.J(p))
t=0
t=0
поскольку J удовлетворяет (10.7). Так как J(p) = μ для любого р G J ι(μ),
то
TpJ (/Ό — ker J*p.
Значит, £м(р) ^ — ker тогда и только тогда, когда
= 0;
ί=0
то есть когда ξ Ε βμ.
Пусть V — вектор в ТРМ; для любого ξ £ Q из (10.4) имеем
ωΡ (Ы(р), V) = (ίξΜω)ρ (V) = dJt\р (V).
Если a(t) — интегральная кривая вектора V, то
ωΡ(ξΜ(ρ),ν) =
t=О
t=О
следовательно, V eTpJ (μ) = ker J*p тогда и только тогда, когда
= 0, veea,
t=0
или, эквивалентно, тогда и только тогда, когда
ωΡ(ξΜ(ρ),ν) = о, щ&д.
(10.17)
10.1. Редуцированное фазовое пространство 275
Поэтому два касательных пространства Тр (</-1(μ)) и TP(G · р) явля¬
ются ортогональными дополнениями (относительно ω) друг друга.
Далее, так как
(Фр(Р)) = 7Γμ(ρ). V5 € G μ,
имеем
ΤΓμ (Φ(βίξ,ρ)) = 7Γμ (Φε<ί (ρ)) = πμ(ρ), 4ξ £ 9μ,
И
Ы*р{ЫШ= 0, (10.18)
Таким образом, векторы У и W, соответствующие векторам V и W
в (10.15), определены как векторы касательного пространства Τρ(ΰμ · р),
но добавление вектора этого пространства к V и W не изменяет правую
часть уравнения (10.15), так как пространства TPJ~1(μ) и TPG · р являются
«ортогональными».
Что касается независимости (10.15) от выбора точки р на орбите, то
это связано с тем, что действие Ф является симплектическим и с инвари¬
антностью J-1(μ). Фактически,
№)ф9(р)= ω9β{ρ){ν',W'), V\W· e Ί^{ρ)1~\μ\
так что, используя соотношения
^ = (ф9ЫП w> = (%)*P(W), v,w £Τμ-\μ),
окончательно получаем
К%)фд(р)<У'’W') = ωΦ „(Р) ((^ЫП (Ф,).р(И^)) =
= up(V,W) = (π;ημ)ρ(ν,ψ).
О Билинейная форма Ωμ является невырожденной.
Действительно, если
Ωμ(ν, W) = 0
для любого W, представленный вектор V должен быть ортогональным ко
всем векторам TPJ_1(μ), поэтому он должен принадлежать к TP(G · р)
и, согласно (10.16), к Τρ(Ομ ·ρ). Поэтому, с помощью (10.18), имеем
V = (πμ)*Ρ(ν) = 0.
О Дифференциальная 2-форма Ωμ является замкнутой.
276
Глава 10
Фактически, так как άω = 0, имеем
<^π*Ωμ = 0.
Таким образом, из
άπ*μΩμ = π*μάΩμ
следует
άΩ,μ = 0,
поскольку (πμ)* является сюръективным приложением.
Дальнейшие подробности по процессам редукции можно найти в [106,
41, 153, 128, 107]; последняя ссылка содержит также пример некоммута¬
тивной редукции в контексте некоммутативной геометрии [12, 33].
10.2. Орбиты группы Ли в коприсоединенном
представлении
В предыдущем параграфе мы видели, как задав симплектическое мно¬
гообразие и симплектическое действие группы Ли на этом многообразии,
которое допускает отображение момента, при соответствующих условиях
можно определить симплектическую структуру на редуцированном фазо¬
вом пространстве. В этом параграфе мы увидим, как для кокасательного
расслоения T*G группы Ли G можно определить симплектическое дей¬
ствие и отображение момента, так что редуцированное фазовое простран¬
ство совпадает с орбитой группы в коприсоединенном представлении [27].
Пусть G — группа Ли. Рассмотрим действие группы G на себя посред¬
ством левых сдвигов Lg,
Ф: (д, h) G G х G —> Ф(д, h) = gh G G\ (10.19)
то есть полагая
Фg = Lg, Уд G G.
Используя (10.19), можно ввести действие ψ группы G на T*G:
<ф: (д, ah)eGx T*G - ф(д, ah) = L*-i (ah) G T*G, (10.20)
где ah — произвольная точка кокасательного расслоения T*G, то есть диф¬
ференциальная 1-форма на кокасательном расслоении к G в точке h и
(10.21)
10.2. Орбиты группы Ли в коприсоединенном представлении 277
— транспонированный оператор производной от Lg-i в точке gh:
Mtgh:TghG^ThG.
Следовательно, (10.20) дает
Ф{е, ah) = Kiah) = &h,
Ψ (f, Ψ(9, <*/>)) = Φ (/, L*-x (αΛ)) = о L*_i) (ah) =
= L*_lK) = qfg)-iah = φ(ί9, ah).
Из (10.21) видно, что ψ отображает дифференциальную 1-форму ан
на ThG в дифференциальную 1-форму на TghG. Диффеоморфизм (10.21)
сохраняет каноническую дифференциальную 1-форму Θ на кокасательном
расслоении.
Кроме того, так как
L'g-гШ = —Lg-ίάθ = -dVg-^θ = -άθ = и, Уд G G,
где ω — каноническая симплектическая форма, действие (10.20) на кокаса¬
тельном расслоении является симплектическим действием. Это позволяет
определить отображение J для Ψ, как в (10.10).
Пусть ξ — элемент алгебры Q. Рассмотрим действие (10.19) группы G
в себя.
Отображение
Ф«: (i,д) S Я х G -> Φξ(ί,д) = Ф(е* д) G G
задает действие на G.
Векторное поле
, Vg G G,
t=o
является правоинвариантным векторным полем, так как
Ф(еь*,д) = е^д = Rg(e^)
£g(#) — (^)*е(0*
Из (10.10) выводим, что импульс J есть отображение
J: ад G T*G -> J(ap) G 0*, (10.22)
278 Глава 10
заданное посредством (приложение Е)
(ξ, J(ag)) = ад (ξα(9)) = ад ((Дв).е(0) = (Щ<*д№> ^ е Q,
то есть
J(ag) — RgCXg-
(10.23)
Каждая точка μ в 5* является регулярным значением для импуль¬
са (10.23), то есть для любой точки ад Е J~1(μ) отображение
^αΒ'.ΤαΒ{Τ*ΰ)-+Τμ0*
является сюръективным. Действительно, если Υ Е Τμΰ*, а μ(ί) — инте¬
гральная кривая Υ при
μ(0) = μ,
то, применяя к μ(ί) оператор R*-i, получим кривую в T*G, проходящую
через точку ад при t = 0. Это так, поскольку
Щ<*д
μ, Уад S J 1(μ),
t=О
t=О
I-*»
Υ,
t=о
свидетельствующее о том, что для любого Υ Е Τμ5* существует век¬
тор X Е Tag(T*G), такой, что
J*ag(X)=Y.
Если к элементу μ в б* применить правый сдвиг R*-i для любо¬
го д Е G, то получим правоинвариантную дифференциальную 1-форму
на G:
*μ(9)=ΙΓδ-ιμ· (Ю.24)
Изменением д в G из (10.24) получим все точки (и только их) J~1(μ)
вследствие (10.23). Из (10.24) очевидно, что действие L* на кокасательном
расслоении отображает точки J~1(μ) в точки J~1(μ) для всех д, принадле¬
жащих подгруппе ϋμ, заданной согласно
— jg Е G: Ad*-!μ — μ| .
(10.25)
10.2. Орбиты группы Ли в коприсоединенном предстаблении 279
Из соотношения
(5/ι, αμ{9Κ)) (h, αμ{Η)), Уд е Ομ, (10.26)
следует, что Ομ можно также выразить в виде
Gti = [gdG:L*g-latl = atl}. (10.27)
Из (10.26) можно определить действие группы ΰμ на J-1(μ), совпа¬
дающее с действием (10.20), когда оно ограничено на ΰμ х J-1(μ). Это
действие является собственным действием: фактически, если αμ(Ηη) — по¬
следовательность точек в J~1(μ), сходящаяся к точке из J-1(μ), имеем
lim αμ(Ηη) = αμ(Κ).
η—>+οο
Ввиду непрерывности отображения (10.24), имеем
lim ajhn) = αμ ( lim hn ) ,
n—>+oo \ η—>+οο J
поэтому
lim hn = h
n—>+oo
с h G поскольку ΰμ является замкнутой.
Предположим, что последовательность L*_1aM(/in) сходится к точке
9 τι
из J-1 (μ) для η —> +оо. Тогда можем написать
lim L* !aJhn) = lim ajgnhn) = αμ lim gnhn ,
η—>+oo 9η ^ η—>+οο \ π—>+οο /
где, очевидно, gn G Vn G tt. Итак, последовательность (gn^n)neN са¬
дится к точке / из (?μ, так как ΰμ является замкнутой.
Следовательно,
lim hn = h, lim gnhn = /,
n—>+oo n—>+oo
и последовательность (gn)neN сходится к точке из ΰμ. Орбита точки αμ(Κ)
из J~1(μ) под действием группы ΰμ есть множество
σμ · αμ(/ι) = : д е £μ} . (10.28)
Таким образом, мы показали, что
(a) μ есть регулярное значение отображения J;
(b) ΰμ действует собственным образом на J~1(μ).
280
Глава 10
Из сказанного в предыдущем параграфе следует, что условия (а) и (Ь)
являются достаточными для утверждения: множество 7_1(μ)/(?μ, являю¬
щееся множеством орбит точек из 7_1(μ) под действием ΰμ, является сим-
плектическим многообразием. Это многообразие является редуцированным
фазовым пространством и, естественно, может быть отождествлено с орби¬
той μ под коприсоединенным действием группы G, то есть
G · μ — |Αά*-λμ: д Е (?| .
Действительно, в соответствии с (10.26), действие ΰμ на точки
из 7-1(μ) сводится к левому сдвигу основных точек. Следовательно, каж¬
дой орбите ΰμ · θίμ(Κ) точек в 7-1(μ) под действием группы ΰμ можно
сопоставить орбиту ΰμ · h точки h в G под действием ΰμ\
^ μ ' ^ Gμ ’
Таким образом, редуцированное фазовое пространство является диффео-
морфным К G/ΰμ, поэтому
« ■§-. (10.29)
Каждой орбите ΰμ · h из G/ΰμ можно сопоставить точку орбиты μ
в Q* в коприсоединенном представлении
· h —> Αά^-ιμ,
так что
G
и тогда
β-πΰ-μ, (10.30)
J-Ημ)
G · μ.
Таким образом, с помощью (10.29) и (10.30) редуцированное фазовое
пространство 7-1(μ)/(7μ можно отождествить с орбитой G · μ под коп¬
рисоединенным действием. Следовательно, орбита μ в коприсоединенном
представлении является симплектическим многообразием.
Найдем теперь выражение симплектической формы Ωμ на орбите G · μ.
Для этого введем отображение
ζ*Ωμ=ω.
(10.31)
10.2. Орбиты группы Ли в коприсоединенном представлении
Поскольку
&μ : д £ G —> Οίμ{9) = ^ J 1(/i)j
касательное пространство к в точке αμ(9) есть
Ταμ{3^-\μ) = (Ы*э ((Д9)*е(0) : ξ 6 G} .
Действительно,
(αμ)*9 (№s)*e(0) — dta^6 ^
t=0
где aμ(et^g) — кривая в J 1(μ), проходящая через αμ(#), поэтому
(αμ)*2 ((^)*е(0) ^ %3ίμ(ς)^ (αΟϊ ^
И наоборот, если У Е ^(s)^-1(/4 его интегральная кривая есть
. OW)
при σ(0) = д.
Кроме того,
a(t)=a(t)g 1д = r(t)g = Rgr(t),
где r(t) — кривая в G, проходящая через е при t = 0, так что
ν =;§<»„ М<»
t=0
= (ДРТ№)
281
(αμ)*2 (№#)*е(0) J
t=0
где
€9-
t=о
Вычислим cj и на паре векторов, касательных к J 1(μ)'·
ωθίμ(ς) {αμ)*9 ((^)*е(0) 5 (αμ)*9 ((^)*е(7?)) —
= (№s)*e(0> (^^)*е(7?)) = ~άθίμ ((^з)*е(0> (^^)*е(7?)) ·
О последнем шаге вычислений подробнее см. в приложении Е.
282 Глава 10
С другой стороны, используя (8.11), имеем
— СΙαμ ((^)*e(0> (^)*е(т?)) = ~£(Rg)*e(£) (αμ (№9) *e(v))) +
g)*e{v) ((^^)*е(0)) — °ίμ {{Rg)*e(О? {Ltg)*e{v)) ·
Теперь, поскольку
£№),β(0 Ομ ((^)*е(7?))) = £№)^(ξ)μ(77) = 0,
£(Rg)*e(v) (αμ (№s)*e(0)) — ^(^9)*β(η)^(ζ) —
αμ (№s)*e(0> (^)*e(^)) = ~μ ([ί, v\) ,
TO
ω&μ{9) ((αμ)*0 (№s)*e(0) 5 (αμ)*£ ((^)*e(^))) = ([^j7?]?/^) ·
Что касается ζ*Ωμ, то
(ίμΩμ)α^) ((αμ)*£ (№s)*e(£)) > (αμ)*0 ((^)*е(^))) =
Ω,
((R9)*e№) > {Adl-^)rg ((R9)*eW
Вычислим теперь (Ad*_ l μ) ((Rg) *e (ξ)):
(№)*e(e)) = JtAdUg)-^
1Αά;-^φ
t=0
ftAd*e-t<Ad*g-ιμ
t=o
ftAd* (ε*,Αά*(9,μ))
t=0
где Ad* — коприсоединенное действие, то есть Αά*(ρ,μ) = Αά*_λμ.
Таким образом,
(Αά*3-φ)^ ((^).«(0) = ftAd* (β*,Αά*(9,μ))
t=0
= ±Α<Τ(β«9,μ)
t=0
dt
Ad* ! Ad* (g 1είξς,μ)
t=0
j^Ad^AdlAdr^g^)
= Ad*g.1 (ftAd* (ειΛά^,μ)
t=0
t=0
= ^ ((Μ,-χ^, (μ)) = Ad*g^Ad*g (&.(μ)) = ξ0-(μ),
10.3. Твердое тело
283
где
&-М = 4жГ(е*М) .
ατ t=о
Окончательно, можно записать
(С Ώμ)αμ(0) ((αμ)*9 (№s)*e(0) 5 (αμ)*9 ((Rg)*e(r}))) = Ωμ (£д* (μ), ης* (μ)) .
Таким образом, мы получили формулу, которая определяет симплекти-
ческую форму на орбите
Ωμ (& (v),vg· (μ)) = (μ, [ί. η]) · (10.32)
Данное соотношение, разумеется, выполняется также и для любых дру¬
гих точек V = Αά*_λμ орбиты.
Теперь, поскольку
= -αάς(μ),
t=о
соотношение (10.32) можно записать в следующем окончательном виде
Ωμ (αά*ζ(μ), ad* (μ)) = (μ, [ξ,η]). (10.33)
10.3. Твердое тело
В этом параграфе анализируется движение твердого тела с неподвиж¬
ной точкой при отсутствии внешних сил. Твердое тело представляет про¬
стой пример гамильтоновой системы, чье конфигурационное простран¬
ство — группа Ли. Будет показано, что на каждой орбите коприсоединен-
ного представления уравнение Эйлера является гамильтоновым, функция
Гамильтона дается кинетической энергией.
Твердое тело — это система частиц с наложенными на нее голономными
связями, определяемыми условием, чтобы расстояние между любыми дву¬
мя точками системы было постоянным. Конфигурационным пространством
твердого тела является шестимерное многообразие £Н3 х 50(3), где 50(3) —
группа ортогональных матриц 3x3, если рассматриваемое твердое тело со¬
стоит по крайней мере из трех несовпадающих точек. Рассмотрим задачу
определения движения свободного твердого тела. Эта система инвариантна
относительно переносов, и, таким образом, существуют три первых ин¬
теграла, которые являются тремя компонентами полного импульса. Сле¬
довательно, движение центра масс будет свободным движением, и, таким
284
Глава 10
образом, можно выбрать инерционную систему, в которой центр масс нахо¬
дится в покое. В этой системе координат свободное твердое тело вращается
относительно своего центра инерции так, будто оно прикреплено к непо¬
движной точке. Таким образом, задача свободного движения твердого тела
эквивалентна задаче движения твердого тела с неподвижной точкой с тре¬
мя степенями свободы. Конфигурационным пространством является про¬
сто 50(3), а положение и скорость тела определяются точкой касательного
расслоения Т50(3). Система инвариантна относительно вращений вокруг
неподвижной точки и, согласно теореме Нетер, существуют три соответ¬
ствующих первых интеграла, которые являются тремя компонентами Jx,
Jy и Jz момента импульса. Кроме этих трех интегралов имеется полная
энергия системы Е, которая состоит только из кинетической части. Четыре
первых интеграла, Jx, Jy, Jz и Е являются функциями, определенными на
касательном расслоении Т50(3).
Можно определить действие 50(3) на себя левыми сдвигами,
где gh обозначает матричное произведение.
Касательное расслоение Т50(3) изоморфно 50(3) х TeS0(3);
TeS0(3) обозначает касательное пространство к 50(3) в единице е, то
есть пространство 3x3 антисимметричных матриц.
Существует два изоморфизма касательного расслоения Т50(3)
в 50(3) х Те50(3): первый задается через производную от Lg-i в виде
А: д € Т50(3) - А(д) = (д, (Lg-i)tgg) € 50(3) х TeSO(3), (10.34)
где д — касательный вектор к группе в точке д; второй — через производную
от Rg-i, правого сдвига, в виде
р: д € Т50(3) - р{д) = (д, (Rg-i)tgg) € 50(3) х TeSO(3). (10.35)
Касательное пространство 7^.50(3), в свою очередь, изоморфно евкли¬
дову пространству *Н3, изоморфизм задается следующим образом:
поведение jb j\ сыирани как ииычнис ьслчирнис нриизьсдснис, итииражс-
ние (10.36) является гомеоморфизмом алгебры Ли.
Lg:h€ 50(3) Lg{h) = gh е 50(3),
(10.36)
10.3. Твердое тело
285
10.3.1. Угловые скорости в пространстве и в теле
Скорость твердого тела д есть касательный вектор к группе в точке д;
тогда вектор
где π2: 50(3) х Те50(3) -> Те50(3) - отображение проецирования, явля¬
ется угловой скоростью в пространстве, в то время как вектор
является угловой скоростью в теле.
Фактически, элемент д в 50(3) представляет положение твердого те¬
ла при движении д, то есть положение, получаемое применением левого
сдвига Lg к произвольно выбранному начальному состоянию (например,
единице группы). Вектор угловой скорости ω8 твердого тела относительно
неподвижной системы имеет вид
и, для любого t е УI, еηί есть вращение с угловой скоростью ω8. Поскольку
при инфинитезимальном вращении βητ (т <£: 1)
откуда следует (10.37). Перемещению е^д в неподвижной системе коорди¬
нат соответствует инфинитезимальное вращение е^Т в системе координат,
связанной с телом, получаемое применением Lg-i к eVTд:
Естественно, 1(ξ) = ω0 — это угловая скорость в теле. Следовательно,
можно написать
o;s = (Хо7Г2 о р)(д)
(10.37)
ω0 = {1 о7г2 о А)(д)
(10.38)
ω3 = Χ(η), η G Te50(3),
g = j-e^g = (Rg)*e(v)
(10.39)
r=0
имеем
V = (Rg-0,9 (si),
(10.40)
де*т = e*Tg.
Из (10.39) имеем
f ge*T = (Lg)te( ξ),
2T r=0
286
Глава 10
поэтому
i=(V‘)4(9).
откуда следует (10.38).
Формула (10.36) позволяет упростить запись, так как можно использо¬
вать вместо выражений (10.37) и (10.38) для ω0 и ω3 более простые
u>c=(Lg-i)'ggzQ, (10.41)
И
^ = (Rg^),ggeG· (10.42)
10.3.2. Угловые моменты пространства и тела
Алгебра Ли Q = TeSO(3) группы 50(3) является трехмерным про¬
странством угловых скоростей всех возможных вращений, и скобка Ли та¬
кой алгебры задается обычным векторным произведением.
Если касательное расслоение TSO(3) — это пространство скоростей
твердого тела, то кокасательное расслоение Т*50(3) — это пространство
угловых импульсов J. Если вектор J лежит в кокасательном пространстве
к группе в точке д, по аналогии с (10.41) и (10.42) его можно переместить
в кокасательное пространство Q* к группе в единице либо левыми сдвигами,
либо правыми сдвигами. Таким образом, мы получаем два вектора
Jc = L*gJeG* (10.43)
и
js = R*jeg\ (10.44)
Вектор Jc — это угловой момент в теле, и Js — это угловой момент
в пространстве.
Фактически, алгебры Q и Q* могут быть отождествлены, так как легко
можно доказать, что
Ι(ξ)·1(η) = -1ττ(ξη), (10.45)
где ξ и η — элементы алгебры Q, точка · обозначает евклидово скалярное
произведение и Тг — оператор следа. Данное соотношение задает изомор¬
физм между пространствами Q и Q*. Таким образом, можно рассматривать
векторы угловой скорости и углового момента как лежащие в одном про¬
странстве. Однако далее мы не будем делать это отождествление и про¬
должим рассматривать векторы угловой скорости как принадлежащие Q
и векторы момента как принадлежащие Q*.
10.4. Уравнения твердого тела 287
10.4. Уравнения твердого тела
Как было показано в предыдущем параграфе, полный угловой им¬
пульс Js твердого тела есть константа движения, поэтому
w = °- (10-46)
В параграфе 8.2.4 был введен, для любого ξ £ Q, линейный оператор ad
действие которого на элемент а в Q* задается следующим образом:
(αάςα)(η) = (αά*ξα,η) = (α,αάξη) = (α, [ξ,τ?]}, (10.47)
для любого η £ Q. Данное соотношение можно написать в виде
(]£. <*[. ν) = (<*, [ξ, η}), νξ,ηε G, Va е £*,
где скобка ] ·, · [ определяется как
]ξ,α[=α<%α. (10.48)
В случае, если Q отождествлена с <?*, скобка ]·, - [сводится, с точностью
до знака, к скобке Ли алгебры Q.
Если g(t) — кривая в 50(3), соотношение a(t) = Ad*^-iа определяет,
для любого a £ G*, кривую в Q*. Соотношение
А
dt
доказано в приложении F.
Из (10.43) и (10.44) имеем
Jc(t) = Ad*gWJs(t), (10.50)
поэтому, с помощью (10.41), уравнение (10.49) дает
ψ=}ω0,Μ. (10.51)
Уравнение (10.51) называется уравнением Эйлера. Важным следствием
уравнения (10.50) является то, что поток, определяемый уравнением Эйле¬
ра, отображает точки заданной орбиты коприсоединенного представления
288 Глава 10
в точки, принадлежащие этой же орбите. Следовательно, орбиты коприсо-
единенного представления в двойственном пространстве алгебры являют¬
ся инвариантными многообразиями для потока, определяемого уравнением
Эйлера (10.51).
Хорошо известно, что векторы ω0 и Jc связаны следующим соотноше¬
нием:
Jc =
где
а:
— оператор инерции. Поскольку 3 — линейный и симметричный оператор,
можно задать риманову метрику на 50(3). Действительно, полагая
(ξ,ν) = {ν,№, νξ,η&9,
мы задаем на каждом касательном пространстве 7^50(3) метрический тен¬
зор
(X,Y)g = (X,ZgY), X,YeT9SO( 3),
где
3g=L*g-l3Lg-u, Уд G 50(3),
определяющий метрическое тензорное поле на 50(3).
Кинетическая энергия Т имеет следующий вид:
т — 2 (д,д)д — 2 (дтЗдд) — 2 ((^^д)*е^с^д{^д)*е^с) =
= 2 (^)*е^с?3 (Lg)*eLUc^ = 2 Κ)3ωο)·
Поскольку u;c = кинетическую энергию можно представить как
функцию углового момента:
Т = \(ω0,Ζωα) = ±(ч>с,шс) = ^(Г1 Jc, Jc)· (10.52)
Таким образом, кинетическая энергия может рассматриваться как
функция, заданная на двойственном пространстве Q* алгебры.
Любой касательный вектор к орбите V в точке J может быть записан
в виде
м
с ξ е Q. С другой стороны, поскольку
dT = шс,
10.4. Уравнения твердого тела 289
правая часть уравнения Эйлера может быть записана в виде
]dT, J[,
где дифференциальная 1-форма dT, будучи внешней производной функции,
заданной на Q*, принадлежит двойственному пространству Q*, то есть Q.
Симплектическая структура на V задается уравнением (10.33). Через
введенную здесь скобку ]·, ·[ она может быть записана в виде
Ωμ (adl(J),ad*dT(J)) = ([ξ,άΤ]^) = (}ξ, J[,dT) = dH (adJ(J)) ,
где H обозначает ограничение Т на орбиту коприсоединенного представ¬
ления.
Из этого соотношения следует
= 0,
то есть уравнение Эйлера является уравнением Гамильтона, а Н — функцией
Г амильтона.
Глава 11
Классическая электродинамика
Частицы и поля — основные понятия классической физики. Частицы
рассматриваются как точечные, а поля представляют собой тензорнознач¬
ные функции на пространстве-времени. Поля, при заданном распределении
зарядов и начальных условий, определяются уравнениями Максвелла1.
11.1. Уравнения Максвелла
Феноменологические уравнения электродинамики даются следующи¬
ми уравнениями Максвелла:
J В ■ nda = 0 магнитные заряды не существуют,
ди
^ — J В · nda = — J Ё - dl закон Фарадея,
s ds
J D ’ nda — Q закон Гаусса,
ди
^ J D · n da + Щ- J J -nda— J H · dl закон Ампера,
s s as
где
• с — скорость света в вакууме,
1 Джеймс Клерк Максвелл родился в Эдинбурге в 1831 году и умер в Кембридже в 1879 го¬
ду Он был профессором физики в Университете Кембриджа с 1871 года. Известный физик
и математик, он дал математическое выражение интуитивным представлениям и эксперимен¬
тальным данным Фарадея в классическом Трактате по электричеству и магнетизму (Лондон,
1873), в котором, как следствие его электромагнитной теории света, он предсказал электро¬
магнитные волны, позже обнаруженные Герцем и примененные Маркони.
11.1. Уравнения Максвелла
291
• S — регулярная поверхность в 9Ϊ3, которая может изменяться со вре¬
менем, с заданной ориентацией, определяющей внешнюю нормаль п,
• dS граница поверхности S с ориентацией, определяемой ориентацией
поверхности S,
• U — регулярное подмногообразие (объем) с заданной ориентацией,
dU — граница (поверхность) объема U с ориентацией, определяемой
ориентацией объема U.
Е и В — это электрическое векторное поле и векторное поле магнит¬
ной индукции, которые могут быть также определены силой Лоренца F,
действующей на частицу с электрическим зарядом е и скоростью ΰ:
Уравнения Максвелла представляют собой обобщение открытий Фара¬
дея, Гаусса и Ампера.1
Если ввести плотность заряда р с помощью соотношения
1 Майкл Фарадей родился в Невингтоне (Великобритания) в 1791 году. В 1813 году он
работал лаборантом у X. Дэйви. В противоположность идее о действии сил он ввел концеп¬
цию силовых линий, чтобы объяснить распространение электрических или магнитных эффек¬
тов. Сегодня они известны как интегральные кривые электрических или магнитных полей.
В 1831 году он открыл явление электромагнитной индукции и сконструировал первый элек¬
трический генератор. Он открыл также действие магнитного поля на плоскость поляризации
света и, в области химии, два фундаментальных закона по распространению электрического
тока в химических растворах. В первом он установил прямую пропорциональность между
количеством преобразованного вещества и количеством электрического заряда, пропущенного
через электролит; во втором — пропорциональность между количествами различных веществ
и их эквивалентными весами. Для того чтобы описать эксперименты и объяснить результаты,
Фарадей ввел термины ион, катод, анод, электролит. Он умер в Хэмптон-Корте в 1867 году
Карл Фридрих Гаусс родился в Брауншвейге в 1777 году и умер в Геттингене в 1855 году
С 1807 года он был профессором Геттингенского университета и директором Геттингенской
астрономической обсерватории. Основатель дифференциальной геометрии поверхностей, ма¬
тематик, физик и астроном, его называли princeps mathematicorum (король математики). Де¬
визом его работ было раиса sed matura (немного, но глубоко). Действительно, его работы
отмечены также и за превосходный стиль. Впрочем, хоть и раиса, однако, он таки написал
одиннадцать больших томов.
Андре Мари Ампер родился в Лионе в 1775 году и умер в Марселе 10 июня 1836 года.
Математик, химик, физик, человек, очарованный тайной, Ампер стремился найти в природе
отклик на свою потребность в универсальности. С 1809 года он был профессором математики
в Ecole Polytechnique (Политехническая школа) в Париже. Его статьи, касающиеся связи между
электричеством и магнетизмом, были написаны в 1820 году.
(11.1)
и
292 Глава 11
уравнения Максвелла принимают вид
J В · nda = О,
dU
\j-t J В · nda = — J Ё ■ dl,
S ds
, г (11.2)
/ D · nda = / pdu,
at/ с/
jD-ηάσ+ψ J J - nda = J H ■ dl,
S dS
где J = pv — плотность тока.
Если S является стационарной поверхностью, а поля достаточно ре¬
гулярны, можно использовать теорему Стокса, чтобы получить уравнения
Максвелла в следующем дифференциальном виде:
div В = 0,
rot£=-lf
5
div D = 4 πρ,
rot Я = ψ J +
4π dD
c dt '
(11.3)
11.2. Геометрическая интерпретация полей на *Н3
Феноменологические уравнения (11.2) играют важную роль в понима¬
нии геометрического смысла полей (Е, Б, Н, D). Действительно, уравне¬
ния (11.2) показывают, что В, D и J должны задавать дифференциальные
2-формы на 9Ϊ3, поскольку они интегрируются на 2-мерном многообра¬
зии 3U, в то время как Е и Н должны задавать дифференциальные 1-фор-
мы на £К3, поскольку они интегрируются на 1-мерном многообразии dS.
Наконец, р должна задавать дифференциальную 3-форму, поскольку она
интегрируется на объеме U.
Фактически, благодаря свойствам преобразования электромагнитных
полей, определенных из физических соображений, В и Н должны задавать
скорее скрученные [56, 48] дифференциальные формы, чем четные.
11.2. Геометрическая интерпретация полей на 9Я3 293
Действительно, законы преобразования полей Е и В при простран¬
ственных преобразованиях
t -> t' = t,
xi _> х« = f(x)
либо при обращении времени
могут быть получены из выражения для силы Лоренца (11.1).
Ясно, что вследствие наличия векторного произведения в выражении
для силы Лоренца, В должен изменять знак при обращении времени. Следо¬
вательно, В изменится при таком преобразовании, даже если он не зависит
от времени.
Ясно, что если рассмотреть только координатные преобразования с по¬
ложительным якобианом, будет возможно отождествление электромагнит¬
ных полей с четными дифференциальными формами.
Вышесказанное резюмируется следующим образом:
Поля, входящие в закон Ампера, должны отождествляться со скручен¬
ными дифференциальными формами, в то время как поля, входящие в закон
Фарадея, могут отождествляться с четными дифференциальными фор¬
мами.
Уравнения (11.2) позволяют сделать следующие соответствия аналогии
отожде ствл ения:
Е = Ех dx + Еу dy + Ez dz электрическое поле —
дифференциальная 1-форма,
В = Вх dy Λ dz 4- By dz A dx 4- Bz dx Λ dy магнитная индукция —
дифференциальная 2-форма,
Η = Ηχ dx + Ην dy 4- Hz dz магнитное поле —
дифференциальная 1-форма,
D = Dx dy Л dz + Dy dz Λ dx + Dz dx A dy электрическая индукция —
дифференциальная 2-форма,
J — Jx dy Λ dz 4- Jy dz Λ dx 4- Jz dx Λ dy электрический ток —
дифференциальная 2-форма,
R = ράχ Λ dy Λ dz электрический заряд —
дифференциальная 3-форма,
294
Глава 11
позволяющие переписать уравнения Максвелла в следующем виде:
Если S стационарна и поля регулярны, можно применить теорему Сток¬
са для получения уравнений Максвелла в следующем дифференциальном
виде:
обращении времени, представляется предпочтительным рассмотреть элек¬
тромагнитные поля непосредственно в пространстве-времени.
11.3. Геометрическая интерпретация электромагнитного
поля в пространстве-времени
Введя следующие дифференциальные формы:
ди
S
as
ди
и
s
s
as
dB = О,
dE = \В,
dD — 47xR = О,
dH-\{D + A-kJ) = 0.
Как следствие свойств преобразования, в частности поведения В при
F = dx° А Е — В 2-форма Фарадея,
G = dx° Л Н + D 2-форма Ампера,
I — dx° Λ J — R 3-форма заряда-тока,
где х° = ct, уравнения Максвелла можно записать просто в виде
dF = 0,
dG = L
(11.4)
11.3. Геометрическая интерпретация электромагнитного поля 295
Из последнего уравнения, поскольку d2 = 0, имеем уравнение непрерывно¬
сти:
dl = 0.
11.3.1. Векторный потенциал и калибровочное преобразование
Первое уравнение из (11.4) говорит, что F является замкнутой диффе¬
ренциальной 2-формой, и, значит, существует, локально, дифференциальная
1-форма А, такая, что
F = dA.
С дифференциальной 1-формой А можно связать, используя метрику, век¬
торное поле, называемое векторный потенциал.
Дифференциальная 1-форма А определена не однозначно, поскольку
к А можно прибавить любую точную дифференциальную 1-форму df:
F = dA = d(A + df).
Отображение
А -> А' = A+ df
называется калибровочным преобразованием.
При пространственной инверсии
Р: (ж0, ж1, ж2, х3) —> (ж0, —ж1, —ж2, —х3)
имеем
Р: (Ao,Ai,A2,As) —> (Ao,—Ai,—A2,—As).
При временной инверсии
Р: (ж0, ж1, ж2,ж3) —> (—ж0,ж1,ж2,ж3)
имеем
Р: (Ao,Ai,A2,As) —> (Ао, — Αι, — А2, —Аз).
Таким образом, потенциал А ведет себя как обыкновенная дифферен¬
циальная 1-форма при преобразовании четности и как скрученная диффе¬
ренциальная 1 -форма при обращении времени.
Эти свойства согласуются с СРТ-теоремой, согласно которой фотоны
являются частицами с нечетным зарядом, то есть потенциал А является
скрученной дифференциальной 1-формой при сопряжении заряда:
С: Aq dx° + А{ dxг —> A'0dx/0 + A^dx'1 = — (Aq dx° + A\ dx1).
296
Глава 11
11.3.2. Материальные уравнения
Поля (Е, В, H,D) не являются независимыми и связаны с помощью
феноменологических соотношений
D = D[E,B),
Н = Н[Ё, В],
зависящих от особенностей рассматриваемой среды1. Если рассматривается
проводящая среда, имеем обобщенный закон Ома:
J = J[E,B].
В случае, когда мы ограничиваемся средой с линейными свойствами,
материальные уравнения принимают вид:
D = е(Я),
- (11.5)
В = М(Я),
где ε и μ — обратимые линейные отображения, называемые диэлектриче¬
ским отображением и отобраэюением магнитной проницаемости, соот¬
ветственно.
В случае особой изотропной среды — такой, как вакуум — уравне¬
ния (11.5) принимают очень простой вид:
D — eqTE,
В = μο 1Й,
(11.6)
где 1 — тождественное отображение.
Для того чтобы придать уравнениям (11.6) предварительную геометри¬
ческую форму, необходимо линейное отображение между дифференциаль¬
ной 1-формой и дифференциальной 2-формой из Е в D и из Н в В.
Если рассматривать Е, В, Н, D как дифференциальные формы на
многообразии М = 9Я3, линейное отображение, о котором мы говорим,
может задаваться с помощью двойственности Ходжа *: А(9Я3) —> Λ2(ϋΗ3).
Таким образом, экспериментальные соотношения (11.6) определяют евкли¬
дову метрику в 9Я3 и могут быть записаны в следующем геометрическом
виде:
D = so * Е,
В = μο * Н,
квадратные скобки использованы для того, чтобы напомнить, что соотношения D =
= D[E, В] и Н = Н[Е, В] могут не быть локальными (гистерезис) и линейными.
11.3. Геометрическая интерпретация электромагнитного поля 297
где двойственность Ходжа * сконструирована из формы объема Ω =
= dx A dy A dz и евклидовой метрики дц — Sij.
Однако специальная теория относительности вынуждает рассматри¬
вать F и G как дифференциальные 2-формы на пространственно-времен¬
ном многообразии М = 9Я4. Таким образом, линейное отображение все
еще задается двойственностью Ходжа, но на этот раз построено из формы
объема Ω = с dt A dx A dy A dz и метрики Минковского gij = η^. Поэтому
мы получаем материальные уравнения в следующей форме:
задает метрику с точностью до скалярной функции, так чтобы основные
свойства вакуума соответствовали конформной лоренцевой структуре про¬
странства-времени.
Замечание 23. Стоит заметить, что уравнения Максвелла, написанные в виде
являются инвариантными для любого преобразования в пространстве-времени. Если
мы потребуем, чтобы такие преобразования сохраняли материальные уравнения
то тогда группа симметрий преобразований уменьшается до конформной группы.
Наконец, используя кодифференциальный оператор δ, который в М =
= 9Я4 может быть выражен следующим образом:
так что уравнения Максвелла в вакууме могут быть написаны в следующем
виде:
В четырех измерениях двойственность Ходжа
dF = О,
dG = I,
S = — * d*,
имеем
dF = О,
298
Глава 11
или
dF = О,
4.F-&I. (П'7)
V εο
11.3.3. Волновое уравнение
Подставляя F = dA во второе уравнение из (11.7), получим
d*dA = \[ϊβΐ,
V εο
или
Можно таюке написать
SdA = -\№-*I.
So
ПА = —\ уг· * I + άδΑ,
V εο
где □ — оператор Лапласа-Бельтрами, который в пространстве-времени
Минковского имеет вид
д2 д2 д2 д2
8xq дх2 дх2 дх\
Таким образом, мы видим, что нахождение решений уравнений Макс¬
велла связано с изучением волнового уравнения.
11.3.4. Плоские волны
Найдем решение F уравнений Максвелла в пустом пространстве
dF = О,
d * F = О,
типа бегущей волны; то есть такое, что Е и В — функции ξ = х — ct:
Ё = Ё{х — ct), В = В(х — ct).
Имеем
dF = dx° Λ dE — dB,
11.3. Геометрическая интерпретация электромагнитного поля
299
где
Е = Exdx + Eydy + Ez dz, В = Вх dy A dz + By dz A dx + Bz dx A dy.
Таким образом,
dE = Λ dx + ^άξ A dy + Щ-άξ Adz =
= —с^Щ^-dt A dx + -^-d(x — ct) A dy + ^r-d(x — ct) A dz
Οξ Οξ Οξ
η j-л Q ^Β F) R
dB = —*dt; A dy A dz + A dz A dx + —^τάξ A dx A dy =
οξ οξ οξ
= ^^-d(x — ct) A dy A dz — c-^-dt A dz A dx — c^^-dt A dx A dy.
9ξ Οξ θξ
Следовательно,
dEj Д π
dx° Λ dE = c-pr^-dt A dx A dy + c-^-dt A dx A dz
Οξ 9ξ
и
dF = dx° AdE — dB =
dEy fJEz
= c—^—dt A dx A dy + c—^—dt A dx A dz—
Οξ Οξ
— d(x — ct) A dy A dz — с dt A dz A dx — dt A dx A dy =
Οξ Οξ Οξ
= C ~~ dtAdxAdy + c + dt A dx A dz-
— ^Щ^-dx Ady Adz + с^Щ^-dt A dy A dz.
Οξ Οξ
Таким образом,
dF = 0 Вх = О, Bz = Еу, Ву = —Ez.
300
Глава 11
Аналогично,
d * F = 0 => Ех = 0, Βζ = Еу, By = —Ez.
Следовательно, плоская электромагнитная волна имеет поперечные
электрические и магнитные поля, которые задаются двумя независимыми
функциями, соответствующими двум независимым состояниям поляриза¬
ции.
Рекомендации для дальнейшего чтения
• R. Aldovrandi, J. G. Pereira, An Introduction to Geometrical Physics (World
Scientific, 1995).
• N. V. Balasubramanian, J. W. Linn, D. P. Sen Gupta, Differential forms on
electromagnetic networks (Butterworths, London, 1970).
• W. L. Burke, Applied differential geometry (Cambridge University Press,
1985).
• H. Flanders, Differential forms (Academic Press, New York, 1963).
• C. Godbillon, Geometrie Differentielle et Mecanique Analytique (Hermann,
Paris, 1969). (Имеется русский перевод.)
• V. Guillemin, S. Sternberg, Symplectic Techniques in Physics (Cambridge
University Press, 1984).
• B. Kostant, «Orbits, symplectic structures and representation theory»,
Proc. U.S.-Japan Seminar in Differential Geometry, Kyoto, 1965 (Nippon
Hyoronisha Tokyo, Japan, 1965), p. 71.
• R. S. Ingarden, A. Jamiolkowski, Classical Electrodynamics (Elsevier, Ams¬
terdam, 1985).
• P. Libermann, C.-M. Marie, Symplectic Geometiy and Analytical Mechanics
(Dordrecht, Reidel, 1987).
• A. Lichnerovich, «New Geometrical Dynamics», in Lecture Notes in
Mathematics (Springer, 1975), p. 570.
• G. M. Marie, Symplectic manifolds, dynamical groups and Hamiltonian
mechanics (Reidel, Boston, 1976).
11.3. Геометрическая интерпретация электромагнитного поля 301
J. Moser, «Various Aspects of Integrable Hamiltonian Systems», in Progr.
Math., vol. 8 (Birkhauser, Boston, 1980).
G. Pichon, Groupes de Lie: representation lineaires et applications
(Hermann Paris-Collection Methodes).
W. Thirring, A course in Mathematical Physics (Springer Verlag, 1978).
C. von Westenholtz, Differential forms in Mathematical Physics (North-Hol-
land, 1981).
Часть IV
Теории интегрируемых полей
Последние десятилетия показали захватывающие перспективы иссле¬
дования нелинейных полевых теорий (в двух измерениях) с использованием
их свойств полной интегрируемости [92, 93, 89, 116].
Напомним, что концепция вполне интегрируемых гамильтоновых си¬
стем с конечным числом степеней свободы восходит к прошлому столе¬
тию [135, 164]. Некоторые качественные особенности этих систем остаются
истинными в некоторых специальных классах бесконечномерных гамильто¬
новых систем, задаваемых нелинейными уравнениями эволюции, краткий
список которых представлен ниже:
ut + иих + иххх = 0
уравнение Кортевега-де Фриза,
ut —(- и их —(- Uxxx — 0
модифицированное уравнение
Кортевега - де Фриза,
iut + ^uxx + \u\2 и = 0
нелинейное уравнение Шрёдингера,
uxt + eu = 0
уравнение Лиувилля,
ut — и Λ (ϊίχχ + Ju) = 0
уравнение Ландау - Лившица,
Utt (12uux —(- CLxxx)x — 0
уравнение Буссинески,
Uxt + sin и = 0
уравнение синус-Гордона,
Ut 2uux Huxx — 0
уравнение Бенджамина - Ото,
{u>t -I- uux —(- Uxxx)x —(- 3ol uyy — 0
уравнение Кадомцева -Петвиашвили,
φ _ C±ebr ar ^ 0)
b
потенциал Тоды,
iut —(- Uxx —(- z(|a| u)x — 0
производно-нелинейное уравнение
Шрёдингера,
g
1
IT
1
\
Ю
H
H
H
II
о
уравнение Гарри -Дима.
Следующий замечательный пример интегрируемого уравнения эволю¬
ции дается уравнением Бюргерса:
Ut — 2иих + Ίΐχχ, (11.8)
которое описывает распространение тепла и интегрируется с помощью пре¬
образования Хопфа-Коула.
Стоить заметить, что уравнение эволюции (11.8) соответствует не
гамильтоновой динамике, а диссипативной. Однако его интегрируемость
можно объяснить в терминах инвариантного смешанного тензорного по¬
ля [78, 80].
Существенным прогрессом в изучении этих систем с бесконечномер¬
ным фазовым многообразием Л4 было введение представления Лакса [131],
которое сыграло важную роль в формулировании метода обратной задачи
рассеяния, получившего всеобщее признание в качестве одного из наибо¬
лее замечательных результатов теоретической физики прошлых десятиле¬
тий, и AKNS-схемы [59]. Этот метод позволяет выполнить интегрирование
нелинейной динамики, допускающей представление Лакса [101, 8], как для
конечного, так и для бесконечного числа степеней свободы, что важно как
с точки зрения физики, так и математики [156].
С другой стороны, естественным местом применения анализа интегри¬
руемости динамических систем является представление через фазовое про¬
странство, снабженное естественной симплектической структурой. В тер¬
минах этой структуры данные рассеяния интерпретируются как переменные
действие-угол.
Будет показано, что интегрируемость нелинейных полевых теорий мо¬
жет быть естественно объяснена в терминах смешанных тензорных полей,
а не симплектических структур, и как такие тензоры связаны с оператора¬
ми Лакса. Этот подход ведет к теореме интегрируемости, которая не пред¬
полагает конечного числа степеней свободы и для динамической системы
с конечным числом степеней свободы является эквивалентной классической
теореме Лиувилля.
В качестве примера будет использовано уравнение Кортевега-де Фриза
(КдФ), которое является наиболее известной вполне интегрируемой нели¬
нейной полевой теорией.
Глава 12
Уравнение КдФ
Уравнение
Ut Η- ΊΙΊΙχ Η- ΊΑχχχ — 0 5 0^.1)
где и: (x,t) Е 9Я2 —> DI — числовая функция, зависящая от перемен¬
ных я,£, и индексы обозначают частные производные, было получено
Д. Ж. Кортевегом и Дж. де Фризом [120] в 1985 году для описания мел¬
ких волн на воде, перемещающихся в канале без изменения формы [170]
и известное как уравнение КдФ, или просто КдФ.
12.1. Теорема существования и единственности
Решение типа бегущей волны уравнения КдФ вида
и(х, t) = s(x — ct)
может быть легко найдено в предположении, что s обращается в нуль на
бесконечности вместе с ее пространственными производными.
Действительно, подстановкой ξ = х — ct уравнение КдФ приводится
к виду
—cs Н- ss Н- s — 0,
где штрих обозначает производную по ξ. Таким образом, интегрируя и ис¬
пользуя граничные условия, получим
-cs+±s2 + s"= 0.
Первый интеграл данного уравнения может быть найден умножением на s',
так что
—css' Н- qS^s Η- s s — 0,
и интегрируя еще раз, получим уравнение
308
Глава 12
решение которого, имеющее вид
Зс
(;X — Ct)
ch2
^γ(χ~ Ct)
называется уединенной волной.
Кроме того, теорема единственности может быть легко доказана [131]
при тех же предположениях, что и обращается в нуль на бесконечности
вместе с ее пространственными производными.
Действительно, если и иу — два таких решения,
ZLt + ΊλΊΑχ ~\~ ΊΙχχχ — 0,
Vt + vvx + vxxx = 0,
их разность w = u — v удовлетворяет уравнению
wt + uwx + vxw + wxxx = 0.
Таким образом, умножая на w, получим
wwt + wuwx + w2vx + wwxxx = 0,
поэтому
+oo
J (wwt + wuwx + w2vx + wwxxx)dx = 0,
— oo
или
+oo +oo +oo +oo
J \^dT^XJr J J w2vxdx+ J wwxxxdx = 0. (12.2)
— OO —OO —OO —OO
Интегрируя по частям, легко видеть, что последний интеграл обращается
в нуль:
+оо
^ wwxxxdx — 0,
— оо
в то время как
12.2. Симметрии 309
Следовательно, уравнение (12.2) принимает вид
+оо +оо
А
dt
J w2dx + J (2vx — u)w2dx = 0. (12.3)
— oo
Таким образом, положив
+oo
E(t) = J w2dx, M = max \2vx — u\,
— oo
из уравнения (12.3) получим оценку
^ ME(t).
Следовательно,
E(t) ^ E(0)eMt,
где
+оо +оо
Е(0) = J w2(x,0)dx= J [и(х, 0) — v(x, О)]2 dx.
—оо —оо
Отсюда следует, что
и(х, 0) = υ(χ, 0) => Е{0) = 0 => E{t) = 0 => и(х, t) = υ(χ, t).
Резюмируя, можно сказать, что
Для заданного начального условия ио(х) в классе С°° функций, задан¬
ных на вещественной оси и обращающихся в нуль на бесконечности вместе
со всеми пространственными производными, существует одно и только
одно решение u(x,t) уравнения КдФ, удовлетворяющее начальному усло¬
вию и(х, 0) = Uo(x).
12.2. Симметрии
12.2.1. Пространственно-временные симметрии
Легко видеть, что уравнение КдФ инвариантно относительно преобра¬
зования Галилея
χ' = χ + λ£,
t! = t.
310 Глава 12
Действительно, имеем
ди _ du' dx' , ди' dt' _ ди'
дх дх' дх dt' дх дх' ’
ди _ ди' дх' , ди' dt' _ \duf_ , ди'
dt дх' dt dt' dt dx' dt' ’
где и' обозначает сложную функцию
u'(x',t') = и(х' — Xt',t').
Следовательно, КдФ принимает вид
л du! , du! x.tdu! , d3u' n
Аа?+э7 + “э? + а^ = 0'
или, записывая через функцию й = и' + Λ,
и^' + иих' + Ux> χ> χ> — 0.
Наконец, уравнение КдФ инвариантно относительно преобразования
(12.4)
12.2.2. Преобразование Беклунда
Внутренние симметрии, как обычно, играют важную роль при анализе
динамических систем, как это хорошо видно из следующего примера.
Пример 34. Рассмотрим уравнение Бюргерса, имеющее вид
Ut — 2иих + Uxx.
Легко проверить, что при отображении
и=^, (12.5)
уравнение Бюргерса становится уравнением теплопроводности
Vt — Ί^χχ. (12.6)
12.2. Симметрии
311
Отображение, заданное уравнением (12.5), называется преобразованием
Хопфа-Коула и может быть использовано следующим образом.
Во-первых, заметим, что из уравнения (12.5) можно получить
νχ = гш,
а затем
Vxx = Uxv + uvx — uxv + u2v = {ux + u2)v. (12.7)
Во-вторых, если ν — решение уравнения (12.6), то и υχ будет решением
этого же уравнения. Это же справедливо, конечно, и для всех производных
более высокого порядка.
Следовательно, начав с решения ν уравнения теплопроводности, мож¬
но построить по крайней мере два решения, а именно и и й, уравнения
Бюргерса:
^X — νχχ
и ~ ~V ’ и ~ Vx ’
поэтому
οΊοι —
V
Сравнивая уравнения (12.7) и (12.8), можно написать
_ их+и2
U = 71 ,
йи = Щ^. (12.8)
что позволяет получить новое решение из данного и составляет пример
так называемого преобразования Беклунда. Это отражает инвариантность
уравнения Бюргерса при переносах вдоль оси х.
Подобным образом, Миура заметил, что при выполнении преобразова¬
ния
1 2
и = υχ -гг
КдФ преобразуется в так называемое модифицированное уравнение КдФ
(мКдФ):
Vt vx + vxxx — О,
которое, очевидно, является инвариантным при замене
ν —> — г?,
так что, если ν — решение уравнения мКдФ, то —υ — также решение.
312 Глава 12
Следовательно, задавая решение ν уравнения мКдФ, мы получаем два
решения и ий уравнения КдФ:
1 2 — ί 1 2
и = ух — qV , U = Vx+qV.
Из этих соотношений получаем
й — и = \v2, й + и = 2υχ,
\j\^u ~ и(и + и).
3
поэтому
/- ч 2
(и - и)х = -vvx
Приведенное выше уравнение позволяет получить новое решение из дан¬
ного и составляет другой пример преобразования Беклунда.
Подставляя преобразование Хопфа-Коула
αΨχ
ν = —6—
Ф
в модифицированное уравнение КдФ, получим
Φί + Ψχχχ - ζ'^-ψ-'Φχ = 0. (12.9)
Φ
Затем, комбинируя преобразования Миуры и Хопфа-Коула, получаем
отображение
,Фх
ф ’
для которого уравнение КдФ принимает менее привлекательный вид (12.9).
Однако вид уравнения (12.9) может ввести в заблуждение. Действи¬
тельно, мы установили, что КдФ может быть записано в следующем виде:
Λ Фхх
и= -6 — ,
Ф
Φί “Ь Фххх ~ 3 ■ фХ — 0,
ф
6ΨΧΧ
-
что можно переписать как
12.3. Законы сохранения 313
где для сокращения записи был введен символ
dx = w-
ох
Кроме того, используя галилеевскую инвариантность КдФ, можно сде¬
лать замену, используя соотношения (12.4):
х —> х + 6 λ£,
t -> ί,
и —> и — 6Л.
Фактически, легко видеть, что эта замена позволяет записать данную
систему в следующем виде:
Фхх + = Хф,
Φί + ^4дххх + идх + т^их^ Ф — О?
поэтому, вводя операторы
L — 9χχ + 0^?
В Ίί3χ ~^ΪΙχ ^
уравнение КдФ принимает следующий замечательный вид:
(Ьф = X ф,
у ф = Вф.
12.3. Законы сохранения
Из уравнения КдФ имеем
+оо +оо +оо
J utdx = - J (иих + uxxx)dx = - J fa. + Ux^j dx = О,
(12.10)
— OO
поэтому
- ί
dt J
+oo
udx = 0.
314 Глава 12
Таким образом, функционал
+оо
Ki[u\ = J udx
— оо
является первым интегралом уравнения КдФ.
Другой первый интеграл легко получить, умножая КдФ на и и применяя
ту же самую процедуру. После интегрирования по частям получим
+оо +оо +00
J* uutdx — (и %ίχ + uuxxx)dx — (и их riLx'iLxx)dx —
— оо —оо —оо
~Тк{т-т)*-л
— ОО ' '
Таким образом, мы можем написать второй закон сохранения:
+ОС
КМ ш 1 J
+оо
u2dx.
Третий закон сохранения имеет вид
+оо
и
I3
3
Заметим, что градиенты Gi(u) = δΚ{/δη предыдущих функционалов
имеют вид
Gi(u) = l,
G2(u) = и,
и2
Gs{u) — ^ 2 “Ь Uxx j ;
кроме того, имеет место следующая рекурсивная формула Ленара [131]:
= ад», η = 1,2,3..., (12.11)
12.3. Законы сохранения 315
где оператор Ек, выраженный в виде
Ек = дххх + т^идх + }^иХ) (12.12)
является антисимметричным по отношению к скалярному произведе¬
нию 1,2.
Кроме того, система (12.10) подсказывает, что собственные значения
оператора Шрёдингера
L = da? + BU(X,t)’
соответствующие «потенциалу», заданному решением u(x,t) КдФ, не за¬
висят от времени, поэтому эти собственные значения, рассмотренные как
функционалы Л[гх] потенциала и, являются первыми интегралами КдФ.
Прямое доказательство было дано Гарднером и др. [101, 155] путем
алгебраического решения уравнений для собственных значений
ψχχ + ^η(χ,ί)ψ = λ(ί)ψ
относительно и:
и = 6Λ(ί) - 6%^,
ψ
и затем подстановкой данного выражения в КдФ.
Таким образом,
AtV>2 - (il>Qx - ipxQ)x = 0, (12.13)
где
Q — Ψί + 'φχχχ + 3 и + λ) 'Фх ·
Если ψ обращается в нуль, когда \х\ —> оо, уравнение (12.13), проинтегри¬
рованное по χ, дает
+оо
At J ψ2άχ = 0,
— оо
и, значит,
Л = const.
316
Глава 12
12.3.1. Представление Лакса
Взяв производную по времени от первого уравнения системы (12.10),
можем написать
Ьф + Ьф = Хф
и, используя второе уравнение, а именно ф = Вф, имеем
Ьф + ЬВф = ХВф = ВЬф,
откуда получим
Ьф = [В,Цф,
где скобка [ ·, ·] обозначает обычный коммутатор между операторами.
Читатель может легко проверить, что именно КдФ представлено ниже¬
следующим уравнением:
L = [B,L]. (12.14)
Данное уравнение называется представлением Лакса уравнения КдФ
и может быть введено для многих других систем с бесконечномерным фазо¬
вым многообразием М. Введение представления Лакса [131] стало значи¬
тельным прогрессом в изучении интегрируемых систем и сыграло важную
роль в создании метода обратного рассеяния, получившего всеобщее при¬
знание в качестве одного из стандартных методов интегрирования [101, 8].
Коротко, суть его состоит в следующем.
Пусть М — некоторое пространство функций, выбранное так, что для
любого t решение u(t) произвольного уравнения эволюции
u(t) = A(u) (12.15)
лежит в М.
Предположим, что с каждой функцией и в М можно связать само¬
сопряженный оператор L(u —> L) над некоторым гильбертовым простран¬
ством таким образом, что если и изменяется со временем t согласно урав¬
нению (12.15), операторы L(t), которые также изменяются с t, остаются
унитарно эквивалентными себе:
L(t) = U{t)L(0)U(t)~\ (12.16)
где через U(t) обозначено 1-параметрическое семейство унитарных опера-
торов.
Взяв «производную по времени» от этого уравнения, получим
L = [B,L],
(12.17)
12.3. Законы сохранения 317
где кососимметричный оператор
В = С/С/-1
является генератором семейства U(t). Данное уравнение называется пред-
оглавлением Лакса динамики, заданной уравнением (12.15), а пара (B,L)
называется парой Лакса.
Следствием выражения (12.16) является то, что собственные значения
операторов L(t) не зависят от t.
Действительно, рассмотрим уравнение для собственных значений для
оператора Лакса в момент времени t = 0:
L(0)V>(0) = А(0Ж0).
Используя уравнение (12.15) и U = BU, получим
L(t) (U№(0)) = λ(0) 0)), (12.18)
или, эквивалентно,
L{t)i){t) = л (i)V'(i),
где
Λ(ί) = Λ(0), φ{ί) = υ(ί)φ( 0).
Следовательно,
Λ = 0, ψ(ί) = Βψ(ί). (12.19)
По этой причине выражение (12.16) называется изотопическим потоком.
12.3.2. Метод обратной задачи рассеяния
Рассмотрим теперь, как, воспользовавшись преимуществами формулы
Гельфанда-Левитана-Марченко [102, 143, 118, 14], представление Лакса
позволяет нам решить заданное уравнение эволюции (12.15).
Пусть ио(х) — начальное условие, то есть щ = и(х, 0), и Lo — соот¬
ветствующий оператор Лакса. Предположим, что мы можем решить соот¬
ветствующую задачу на нахождение собственных значений
LoV>° = к2ф°,
то есть найти
• свободные состояния (непрерывный спектр), то есть состояния, соот¬
ветствующие к2 > 0, представленные волнами ф°(х,к), асимптотиче¬
ское поведение которых имеет вид
ф^{х,к) ~ С0(к) ехр[—гкх],
х—*■ — оо
ф°(х, к) ~ С®_{к) ехр[—гкх] + С+(к) ехр[гкх],
х—>+оо
318
Глава 12
где
называются коэффициентом прохождения и коэффициентом отраже¬
ния, соответственно;
• связные состояния (точечный спектр), то есть состояния, соответству¬
ющие к2 < 0, представленные собственными функциями ψ®(χ^η)
с к2 = — χ2 (или, лучше, кп = ιχη, χη > 0), асимптотическое поведе¬
ние которых имеет вид
где коэффициенты с^(хп) называются нормировочными константами.
Множество
называется множеством данных рассеяния.
Конечно, до решения уравнения эволюции известен только вид опе¬
ратора В, генерирующего изоспектральный поток, но не его явная зави¬
симость от (х,£). Однако, как это будет явно показано в случае уравнения
КдФ, простого знания асимптотического поведения оператора В достаточно
для определения данных рассеяния, а именно
оператора Лакса L, связанного с решением u{x,t) уравнения (12.15), соот¬
ветствующего заданному начальному значению ^о-
Знание асимптотического поведения оператора L позволяет с помощью
формулы Гельфанда-Левитана-Марченко (ГЛМ), написать в явном виде L
и, следовательно, u(x,t).
Мы можем проиллюстрировать описанную процедуру с помощью сле¬
дующей схемы:
Ψη(χ,ί·Χη) ~ ехр[хпж],
х—* — ОО
Ψη(χ,ίχη) ~ сп(Хп) ехр[—χηχ],
х—>-)-оо
S° = {xn,c°(x„), R°(k), VfceiH}
s = {Xn,cn(Xn,t), R(k, t), Vfc € ίΗ} ,
uQ(x) -> I/0
Lqф°=к2ф°^ Г^
u(x, t) <— L
глм
S
12.3. Законы сохранения
319
Случай КдФ
В случае КдФ пара Лакса имеет вид
L — 9χχ + ~^и{х,
В — 49χχχ t)dx "^ϋχ^χ^ t).
Рассмотрим задачу нахождения собственных значений уравнения
Lip = к2ф,
для которого решениями будут
• свободные состояния, соответствующие к2 > 0, представленные вол¬
нами ψ°(χ, к, t), асимптотическое поведение которых имеет вид
ip(x,k,t) ~ С(/с, ί) ехр[—г/сх],
х—> — оо
ф(х,к,Ь) ~ С- (к, ί) ехр[-г/сх] + С+ (/с, i) exp[гкх],
х—>+оо
где
ν,ι€Μ’
являются неизвестными коэффициентом прохождения и коэффициен¬
том отраэюения, соответственно;
• связные состояния, соответствующие /с2 < 0, представленные соб¬
ственными функциями ^п(х> /сп), с /с2 = —χ2 (или, лучше, кп = ζχη,
χη > 0), асимптотическое поведение которых имеет вид
Ψη(χ,ίχη,ή ~ ехр[х„х],
х —> — оо
ψ°(χ,ίχη,ί) ~ с„(х„, ί) ехр[—х„а:],
х—>+оо
где коэффициенты <^(χη,£) — неизвестные нормировочные констан¬
ты.
Множество
s = {хп, Сп(хп, i), О, V/c <E 91}
320
Глава 12
есть множество данных рассеяния, которое можно определить с помощью
асимптотического поведения
В ^ Воо = ^дххх
X—юо
оператора В.
Действительно, уравнение
ψ = Βψ,
взятое из (12.19), будет истинным также асимптотически,
Фоо — Воафоо,
поэтому можно написать
• для связных состояний,
όη(χ„,ΐ)βχρ[—х„г] = 4χ3οη(χη,ί) ехр[-х„а;],
что тривиально интегрируется:
Cn(Xn,i) = ο°(χ„)βχρ[4χ®ί];
• для свободных состояний,
C(k,t)e~ikx = -4 ik3C{k,t)e~ikx,
С-(к, t)e~ikx + C+(M)eifcx = -4ifc3[CL(M)e_ifex - C+(fc, t)e+ikx],
что дает
C(k,t) = -4 ik3C(k,t),
C-(k,t) = —4ik3C-(k, t),
C+(k,t) = 4ik3C+(k,t)
и, значит,
T(k,t)=T°(k),
R(k, t) = R°(k) exp[8ifc3i].
Теперь мы знаем временную эволюцию данных рассеяния, когда «по¬
тенциал» изменяется согласно уравнению КдФ. Мы также знаем, что число
связных состояний не изменяется со временем и определяется начальным
состоянием uq(x).
12.3. Законы сохранения 321
При наличии зависимости от времени, формула ГЛМ (см. приложе¬
ние G) должна быть записана в виде
оо
А(х, у, t) + F(x + y,t) + J A(x, z, t)F{z + y, t)dz = 0,
X
+ 00
F(x, t) = ± J R(k, t)eikxdk + £. c2(Xj, t)e~^x,
— OO
и решение уравнения КдФ будет иметь вид
u(x,t) = —2-j-Aix^x^t).
αχ
Односолитонное решение. Рассмотрим прозрачный потенциал, то
есть начальное условие щ(х) таково, что прямая задача рассеяния да¬
ет R°(k) = 0. Предположим, кроме того, что существует только одно связ¬
ное состояние с собственным значением — χ2 и нормировочной констан¬
той со- Ядро F ГЛМ задается как
F(x,t) = Cge4*3*-**,
поэтому из ГЛМ получим
оо
А{х, у, t) + с^е4*3*-*^-^ + j А{х, г, i)c§βίχΗ~χ{ζ+ν)άζ = 0,
X
ИЛИ
оо
А{х, у, t) + с1еАхЧ~^х+^ + с^е4*3*-*2' J А(х, z, t)e~xzdz = 0.
X
Так как это ядро сепарабельно, можно попробовать найти решение в следу¬
ющем виде:
А(х, у, t) = h{x, t) exp[—xj/],
так что уравнение упрощается,
h(x, t) + с1еАхЧ~*х + cle^hix, t)^-e~2xx = 0,
322 Глава 12
и, алгебраически, получаем
c2e4x3t~xx
h(x, t) = -
Таким образом, можно написать
1 _£0_<ο4χ3ί-2χχ
2χ
Γ264χ3ί-χ(χ+2/)
A(x,y,t) =
1 _l ^0.<ο4χ3ί-2χχ
2χ
и, поскольку Л(х, у, £) непрерывна и дифференцируема при у = х,
А(х, х, ί) =
с2е4х^-2х*
1 £ΐ<04χ3ί-2χχ
2χ
Наконец, после простых вычислений, можно написать
u(x,t) = -2-^A(x,x,t)
2χ2
ch2 [х(ж - 4χ2ί) - J]
Ν-солитонное решение. Опять рассмотрим прозрачный потенциал,
но на этот раз с N собственными значениями — χ2 и нормировочной кон¬
стантой Cj.
Тогда ядро уравнения ГЛМ дается
j
и можно попытаться найти решение в следующем виде:
A(x,y,t) = Y^hj(x,t)e~x^y.
3
Подставив данное выражение в уравнение ГЛМ, получим
^e~XiV
ОО
hj(x,t) + e~XjX + ^2hi(x,t)ci J<
-(Xi+X^dz
0.
12.4. КДФ КАК ГАМИЛЬТОНОВА ДИНАМИКА 323
Обращение в нуль суммы подразумевает обращение в нуль множителя
в квадратных скобках, так что вычисляя содержащийся в них интеграл,
получаем
hj{x,t) + e~XjX + Σ hi(x> *)ci 6 J* * } ■ = 0> Vj = 1, ..., N.
Λ.3 ' Л.г
г
Данное уравнение может быть переписано следующим образом:
или, введя матрицы
М = (rriij), K=(e~^x), Н=(ЫМ),
где
_ с 2
тпц=6ц+ъ χ,+χί ,
в следующем компактном виде:
МН = -К.
Поскольку det Μ ф 0, имеем
Я = М~1К.
Читатель может выполнить остающиеся вычисления, чтобы получить
следующее простое окончательное решение:
u(x,t) = —2дхх ln|detM|.
12.4. КдФ как гамильтонова динамика
Гарднером было замечено, что КдФ является гамильтоновой динамикой
с бесконечным числом степеней свободы. Действительно, уравнение (12.1)
можно записать в следующем виде:
324
Глава 12
где функционал Кз [и] имеет вид
+оо
ВД = \ J (у -«2) dx■
— оо
Таким образом, «производная по времени» любого функционала, диффе¬
ренцируемого по Фреше F[u], имеет вид
+оо +00
iFi") - / Έ'<“dx = - / f1
—oo —oo
где Gf = SF/Su и(?з ξ δΚ^/δη — градиенты функционалов F и Кз,
соответственно, и (·, ·) — -скалярное произведение.
Легко проверить, что для любых двух дифференцируемых функциона¬
лов F и F' скобка
{F,F'} = (GF,dxGF О
на выбранном классе функций является антисимметричной. Кроме того,
она удовлетворяет тождеству Якоби и является операцией взятия производ¬
ной на ассоциативном произведении функционалов. Таким образом, можно
заключить, что уравнение КдФ является пуассоновой динамикой, пуассо-
ново бивекторное поле А которой имеет компоненты в формальном бази¬
се Е(х) ξξ -у-, задаваемые оператором дх.
6и(х)
Оператор дх имеет ядро в виде констант с е £Н, так что он не обладает
обратимостью, и КдФ не определяет строго гамильтонову динамику.
Однако на фактор-многообразии, а именно Μ, КдФ является гамиль¬
тоновой динамикой. Действительно, многообразие М можно снабдить сим-
плектической структурой
+00 X
ωΜ= J dx J dy[5u(x) Λ 5u(y)],
—oo —oo
которая, имея постоянные коэффициенты, тривиально замкнута.
Кроме того, легко показать, что функционалы Кп, градиенты которых
построены с помощью последовательности Ленара (12.11),
12.4. КДФ КАК ГАМИЛЬТОНОВА ДИНАМИКА 325
попарно находятся в инволюции. Действительно,
{Кп,Кт} = (Gn,dxGm) = (Gn,EkGm-1) = -(EkGn,Gm-1) =
= (&xGn-\-i, Gjji—i) = (On_)_i, dxGrn—\) = {iiTn_)_i, Krn—\}.
Таким образом, если η < m, можно найти такой индекс к, что
{Kn,Km} = (Gk,AGk),
где А — один из двух антисимметричных операторов дх или Ек, так что
{Кп,Кш} = 0, Vn, т ^ 1.
Следующим существенным шагом в изучении КдФ являются резуль¬
таты, полученные Фаддеевым и Захаровым [92].
Симплектическая форма ω и гамильтониан Кз, выраженные в терминах
данных рассеяния S = {£Н(А;), χ2, сп(кп)} через преобразование ГЛМ
и —> S,
принимают вид
+оо
сos = J SJ(k) Λ 6Ф(к)с1к + ^ SJi Λ δφι
+ο° 5
ВД = 8 J k3J(k)dk-fJ2Ji -
-СЮ *
соответственно, где
J(fc) = -|ln (l - 1ВД12) Φ(Λ) = argC+(M),
Ji = Xi, Vi = 21n6i;
. da(fc)
Uj — 2 Cj
dk
J dk
k=iXj
k=ixj
Таким образом, (J(k), Ф(к), Ji, φι) являются координатами Дарбу для сим-
плектической формы ω. Выражение гамильтониана Кз подсказывает, что
они играют ту же роль, что и обычные координаты действие-угол для га¬
мильтоновых систем с конечным числом степеней свободы.
326
Глава 12
12.5. КдФ как вполне интегрируемая гамильтонова
динамика
Решающий шаг в изучении КдФ был сделан Ф. Магри [137, 138], за¬
метившим, что КдФ является пуассоновой динамикой также по отношению
к пуассонову бивекторному полю А^, компоненты которого в формальном
г
базисе имеют вид е(х) = г . . через оператор Ленара Е*. Действительно,
ои(х)
КдФ может быть записано в виде
удовлетворяет тождеству Якоби, так что эта скобка, при антисимметрично¬
сти оператора £*, является скобкой Пуассона.
Тождество Якоби может быть проверено непосредственно или косвен¬
но обращением оператора Ek на фазовом многообразии, факторизованном
его нуль-пространством.
Таким образом, на фактор-многообразии Λί можно задать невырожден¬
ную функциональную 2-форму посредством
где Х(и) и Y(u), обозначаемые для краткости X и Y, есть (^-число¬
вые функции, заданные на Λί и представляющие компоненты векторных
Внешняя производная δω' функциональной 2-формы ω' имеет вид
и скобка
(12.20)
г
полей Х[и\, Y[u] е TUN в базисе е(х) = , . -
ои(х)
, то есть
— оо
— оо
3
δω{η] (ВД, Х2[и], ХзМ) = £ eijk {Хи (Е^)и(Х^Хк))
12.5. КдФ КАК ВПОЛНЕ ИНТЕГРИРУЕМАЯ ГАМИЛЬТОНОВА ДИНАМИКА
327
где
(E;1)u(Xi,Xj)= ±(Е^(и + XX,)) Χ,
(12.21)
λ=0
d\
Поскольку ЕкЕ^Х = X, имеем
(Ек)и(ХьЕ?ХА + Ек{Е^)и{ХиХ0) = О,
так что
(E^UXuXj) = -E^iEkUXuE^Xj).
Используя выражение для Ек, данное в (12.12), получим
[Ek)u{XuE?Xj) = | Xi{dxE^Xj) + \{E^Xi)[dxXi),
и далее
з
<Ци] (ВД,Х2М,*зМ) = I Σ e#*[2 {Е^ХиХ^дхЕ~1Хк)) +
i,j,k= 1
+ {E-1Xi,(dxXj)(E^1Xk))},
поэтому
δω[η] = °·
Таким образом, ω'^ является симплектической структурой на Λί, и вну¬
треннее произведение гдо/ имеет вид
+оо
(iAu>')u= J dx^-δη = (6К3)и, VueM,
— ОО
то есть
ι^ω1 = ЗК2,
следовательно, КдФ является на Λί гамильтоновой динамикой также отно¬
сительно о/.
Можно задать оператор Т так, чтобы
Ек = дхТ,
что позволяет написать рекурсию Ленара градиентов сохраняющихся функ¬
ционалов Ki[u] в следующем виде:
TGn = Gn+1, G!=3, Vra^l. (12.22)
328 Глава 12
На фактор-многообразии оператор дх может быть инвертирован:
ί } \
Ό~1φ(χ) = i J / φ(χ)άχ — / ψ(χ)άχ 1 , Ϋφ € Μ;
имеем
Τφ(χ) = D~1Ek4>(x) = 9χχφ(χ) + |ηφ(χ) - |-D_1 (ηχφ(χ)), Μφ € Л4.
(12.23)
Оператор Τ’ и оператор Лакса L = дхх + связаны следующим заме¬
чательным соотношением:
Ьф = Хф=> Тф2 = 4А'02, (12.24)
то есть если ψ — собственное состояние шредингеровского оператора, соот¬
ветствующее собственному значению А, то ф2 — собственное состояние Т,
соответствующее собственному значению 4А.
Действительно, если Ьф = Аф, имеем
Фхх + = А ф
X
Тф2 = дххф2 + \иф2 - | J Uyip2dy =
— ОО
X
= дх{2ффх) + |иф2 - \иф2 + | J иффу dy =
—ОО
X
= 2^х + ϊψψχχ + \иф2 + 4 J фу dy =
— ОО
X X
= 2Φΐ + 2Λф2 - |иф2 + |иф2 + 4Λ J ффу dy - 4 J фyфyydy =
2ф2х+4\ф2-2ф2х = 4\ф2.
12.5. КдФ КАК ВПОЛНЕ ИНТЕГРИРУЕМАЯ ГАМИЛЬТОНОВА ДИНАМИКА 329
Заметим, что соотношение (12.24) не зависит от того факта, что и
удовлетворяет уравнению КдФ. Кроме того, если ψ нормированы, имеем
Λ = λ(φ, φ) = (φ, λ φ) = {ψ, Ьф),
поэтому
δλ = (φ, δΣφ) = (φ, ^διιφ) = ίIφ2, δη \ ,
и отсюда следует, что
^ = V·
δη 6Ψ
Можно заключить, что собственные значения L являются собственны¬
ми значениями Т и что соответствующие собственные состояния Т явля¬
ются градиентами собственных значений
τψ = 4Λγ^.
ди ди
Теперь рассмотрим скобку Пуассона двух функционалов К и К
{k,k'} = (G,dxG'), (12.25)
и предположим, что функционалы находятся в инволюции, то есть их скобка
Пуассона обращается в нуль:
(G,dxG')= 0.
Если G*n и G*n обозначают производные в точке и функционалов G и G',
производная по и данного соотношения дает
(G*u(Su), dxG') + (G, дха,и(6и)) = 0, Su G ТиМ.
Оператор G*: ТМ —* ТМ является симметричным относительно
1,2-скалярного произведения, поэтому
(Su, G,dxG') - (G'^AG, δη) = (δη, G*udxG' - G'+udxG) = 0,
или, эквивалентно,
G^udxG' = G*n<9xG. (12.26)
Если G' — градиент К3, то левая сторона уравнения (12.26) есть — G,
где точка означает производные G вдоль интегральных кривых, заданных
330 Глава 12
решениями уравнения КдФ, в то время как правая сторона имеет вид FG,
где F =
&ххх + идх.
Таким образом, можно записать
G=-A^G, (12.27)
где оператор А = —дххх — идх — их, сопряженный оператору F, является
производной динамики.
«Производная по времени» последовательности, выраженной в (12.22),
дает
Gn+i — TGn + TGn,
поэтому, используя (12.27), имеем
fGn = [f,A*]Gn,
где скобка [·, ·] обозначает обычный коммутатор. Читатель может легко про¬
верить, что
f= [~А\Т]. (12.28)
Аналогия между L и Т может быть резюмирована следующим образом:
ίψ-Λψ, f|= 4Λ"
L = [B,L\, f=[-A\f],
ψ = Βψ, G = -A'G.
Соотношение (12.28) может также быть записано в следующем виде:
Т=[ДТ], (12.29)
где оператор Т является сопряженным относительно скалярного произве¬
дения 1,2 оператору Т = D~lEk'-
Τ· = дхх · * +\^ихВ 1 · . (12.30)
Глава 13
Общие структуры
Несмотря на успех в качестве алгоритма интегрирования, компактный
a priori критерий интегрируемости в терминах пар Лакса в настоящее время
отсутствует.
С другой стороны, только метод обратной задачи рассеяния, являю¬
щийся преобразованием из произвольных координат (потенциалов) к пе¬
ременным действие-угол [92], позволяет естественным образом устано¬
вить критерий интегрируемости для солитонных уравнений, рассматривая
их как динамическую систему на бесконечномерном фазовом многообра¬
зии [137, 138, 103, 179, 168, 81, 82, 144, 78, 80, 147, 73, 100, 166]. Эта точка
зрения возникла также благодаря наличию в этих важных системах особого
оператора [174, 175, 137, 132, 138, 103, 179, 104, 81, 82, 144, 78, 80, 147, 73,
100, 20, 162, 98, 99, 117, 67], обеспечивающего эффективность методов, ко¬
торый естественным образом возникает в этой геометрической постановке
как смешанное тензорное поле на фазовом многообразии М.
13.1. Система обозначений и общие замечания
Многие геометрические идеи, представленные в части II, при соблю¬
дении необходимых предосторожностей, связанных с переходом от конеч¬
номерного случая к бесконечномерному, могут быть распространены на
бесконечномерные многообразия, локальная модель которых — бесконечно¬
мерное топологическое векторное пространство.
Многие свойства конечномерного случая продолжают выполняться
в бесконечномерном, только если рассматриваемое многообразие — банахо¬
во многообразие, то есть многообразие, локально гомеоморфное банахову
пространству. Причина заключается в том, что теорема о неявных функциях
не выполняется в произвольном топологическом векторном пространстве.
Для заданного нелинейного оператора Δ исходное уравнение эволюции
Έ = ΔΜ
(13.1)
332 Глава 13
будет рассматриваться как динамическое уравнение на функциональном
пространстве полевых функций u(x,t), которые предполагаются завися¬
щими только от пространственных координат, заданными на всей веще¬
ственной оси и удовлетворяющими подходящим граничным условиям.
Скорость изменения вдоль решений уравнения (13.1) любого функци¬
онала F[u\ будет задаваться посредством
+оо +оо
4-F[u} = ί Ψ-- ^dx = [ dxA(u) · -Ц— (13.2)
dt 1 J J Su dt J v J 5u(x)
— OO —OO
и, значит, действием оператора
+oo
A[u\ = J dxA(u)
который будет называться динамическим векторным полем.
В функциональном пространстве М дифференциальные операторы
первого порядка ^ образуют базис для векторных полей. Двойствен-
ои(х)
ный базис задается вариациями 6и(х), и, как обычно,
6и(у)
6и{х)
6(у-х),
где δ — дельта-функция Дирака.
Тогда любое векторное поле Х[и\ можно записать в следующем виде:
+оо
Х[и}= [ dxX(u)~
J С
6и(х) ’
—оо
а двойственные векторы или ковекторы а[и\ в виде
оо
а[и\ = j dya(u)Su(y).
— оо
Свертка (а, X) между векторами и ковекторами будет иметь вид
оо
(а,Х)= J X(u)a(u)dx.
13.1. Система обозначений и общие замечания 333
Скорость изменения вдоль решений уравнения (13.1) векторного по¬
ля X [и] имеет вид
+оо
jtX[u}= J [Хи-Ь{и)-Аи-Х{и)}-^, (13.3)
— ОО
где операторы Хи и Аи, заданные посредством
Χν,ψ := £ψ)\ε=0ι Δηψ := εψ)\ε=0ι
есть слабые производные, или производные Гато, от Х(и) и Δ(?χ), соответ¬
ственно.
Заметим, что (13.2) и (13.3) соответствуют обычным производным Ли
по Δ[?χ] от F[u] и X[и], соответственно.
Такие временные производные будут обозначаться1 через C&F и С&Х,
где £д есть оператор производной Ли по векторному полю Δ.
Заметим, что уравнение (13.3) может быть написано в виде
:= ftX[u} = [A,X],
где скобка [·, ·] обозначает обычный коммутатор между дифференциальны¬
ми операторами.
Касательное пространство и кокасательное пространство кМви будет
обозначаться ТиМ и Т*М, соответственно.
В непрерывном (формальном) базисе 6/6и(х) и кобазисе 6и(х) уравне¬
ние эволюции может рассматриваться как обыкновенное дифференциальное
уравнение
1=дм·
Для упрощения формы записи в дальнейшем векторное поле Х[и] бу¬
дем отождествлять с его компонентами Х(и), а смешанное тензорное по¬
ле Т — с соответствующими ему эндоморфизмами Т или Т, заданными
следующим образом:
Т(а,Х) = (α,ΤΧ) = (Τα,Χ).
*В дальнейшем, во избежание путаницы с оператором Лакса L, производная Ли по век¬
торному полю X будет обозначаться как Сх.
334
Глава 13
Эти эндоморфизмы будут, в общем случае, представлены как операто¬
ры, действующие на векторных (или двойственных им) полях.
Таким образом, выражаясь не совсем точно, производную Ли С&Х
векторного поля X по Δ будем отождествлять с Хи · Δ (и) — Аи · Х(и),
и симметрии X данной динамики1 Δ будут задаваться решениями следую¬
щего линейного дифференциального уравнения:
Хи-А(и)-Аи-Х(и) = 0.
Производная Ли по Δ оператора Т, то есть эндоморфизма на вектор¬
ных полях, соответствующих смешанному тензорному полю, будет даваться
оператором или эндоморфизмом £дТ в виде
£ΑΤφ = Τη(Α,φ) - [Аи,Т]<р,
где
Γ„(Δ, φ) := j-T{u + εΔΜβ=0. (13-4)
Следовательно, инвариантность относительно динамики такого тен¬
зорного поля будет выражаться следующим образом2:
Τη(Α,φ) = [Αη,Τ}φ.
13.1.1. Возвращение к КдФ
В случае с уравнением КдФ, М является многообразием С°° полевых
функций и, рассматриваемых как функции только переменных х и обраща¬
ющихся в нуль на бесконечности вместе с их пространственными произ¬
водными.
Динамика задается векторным полем
оо
А[и\ = / {иих + иххх)— - ~dx,
J ди{х)
— оо
поэтому решения уравнения КдФ соответствуют интегральным кривым
оператора Δ.
1 Весьма общий и фундаментальный подход к анализу симметрий нелинейных дифферен¬
циальных уравнений в частичных производных описан в [182, 30].
Соотношение (13.4), несмотря на его вид, не соответствует, вообще говоря, представ¬
лению Лакса. Возможное тензорное объяснение этого дано рядом авторов либо в контексте
альтернативных лагранжианов ([147], [73]), либо ввиду наличия обращающейся в нуль вдоль
динамики ковариантной производной сечения расслоения, основанного на М. [81].
13.1. Система обозначений и общие замечания 335
Заметим, что уравнение (12.29) является просто выражением, в ло¬
кальных координатах, инвариантности относительно действия КдФ-потока
смешанного тензорного поля, заданного в виде
Т(а,Х) = (ΤΧ,α) = (Х,Та), a G Т*М, X G ГМ. (13.5)
Действительно, уравнение (12.29) можно записать, в геометрических тер¬
минах, следующим образом:
САТ = 0, (13.6)
где С а — производная Ли относительно Δ.
Тензор Т, который в локальных координатах может быть записан в виде
+оо
Т[и]= J dxT(u)-^®5u, (13.7)
удовлетворяет условию
ТЦТX, Y) - Ти(ТХ, Y) =Т [гм(Х, Y) - ГМ(Х, Y)] , (13.8)
которое является аналогом, в бесконечномерном случае, соотношения (6.47).
Данное условие может также быть записано следующим образом:
(CfxT)AY = T(CxT)AY, Χ,Υ £ TUM. (13.9)
Напомним, что соотношение (13.9) или (13.8) называется условием
Нийенхейса, или скобкой Нийенхейса, и что тензорное поле
MT[u](a,X,Y) = (a,{CfxT)AY-f(CxT)AY) (13.10)
с a G Т*М, X, Y G ТиМ называется кручением Нийенхейса смешанного
тензорного поля Т. Таким образом, условие Нийенхейса (13.9) выражается
в виде
ЛГТ = 0. (13.11)
Следствием условия (13.11) является то, что векторные поля последо¬
вательности
Δη+ι = ТАп (Δι = их), Уть ^ 1,
336 Глава 13
замкнуты на абелевой алгебре Ли симметрий для уравнения КдФ, и КдФ
является гамильтоновой динамикой; последовательность
= № = зу V»>1,
ди ди \ ди )
является последовательностью градиентов сохраняющихся функционалов.
Другими словами, уравнение (13.11) гарантирует, что эндоморфизм Т по¬
рождает последовательность замкнутых 1-форм, в том смысле что
(£α = 0, δΤα = 0) =>■ δ (Тпа) = 0, аеТ*М, Vn ^ 1.
В нашем случае функциональные 1-формы являются точными, то есть они
являются внешними производными функционалов, которые, поскольку Т —
Δ-инвариантно, являются первыми интегралами уравнения КдФ.
13.2. Сильно- и слабосимплектические формы
Теперь стоит сказать несколько слов относительно определения сим-
плектической формы на бесконечномерном многообразии, поскольку в дан¬
ном случае необходимо ввести различие между сильносимплектическими
формами и слабосимплектическими формами.
Говорят, что дифференциальная 2-форма ω на бесконечномерном мно¬
гообразии М является сильносимплекшической структурой, если
i. ω является замкнутой, то есть άω = 0,
ii. Vp G Μ, ωρ: ΤρΜ χ ΤρΜ —> 9Я является невырожденной билинейной
формой, то есть отображение
I: ТрМ->Тр*М, (13.12)
которое каждому вектору X Е ТРЛ4 сопоставляет дифференциальную
1-форму Т(Х) на ТрМ, заданную следующим образом
(Ι(Χ))(Υ)=ωρ(Χ,Υ), VY G ТРМ,
является инъективным и сюръективным. Другими словами, X является
изоморфизмом между пространствами ТРМ иТ*Л4.
Если отображение (13.12) является только инъективным, то дифферен¬
циальная 2-форма ω называется слабосимплектической структурой.
13.3. Инвариантный эндоморфизм
337
Такое различие не было сделано в конечномерном случае, поскольку
инъективное отображение между двумя конечномерными векторными про¬
странствами с одинаковой размерностью, является также и сюръективным.
В бесконечномерных случаях это различие является важным. Действи¬
тельно, рассмотрим локально гамильтоново векторное поле X и сильно-
симплектическую форму ω; тогда
Если ίχω является также и точной дифференциальной формой, то есть
то векторное поле X является глобально гамильтоновым векторным полем,
и Н является гамильтоновой функцией.
И наоборот, если Н является дифференцируемой функцией на Μ,
существует векторное поле X на Μ, такое, что (13.13) выполняется, по¬
скольку отображение (13.12) является изоморфизмом, но если ω является
только слабосимплектической, то векторное поле X не может существовать.
13.3. Инвариантный эндоморфизм
Все эволюционные уравнения, представленные выше (с. 265), в отли¬
чие от уравнения Бюргерса, являются гамильтоновыми системами относи¬
тельно симплектической структуры. Фактически, многие из них — гамиль¬
тоновы динамики относительно двух симплектических структур [137, 138,
103], а именно ω\ и CJ2·
Например,
• в случае уравнения КдФ имеем
CxUJ = δίχϋύ = 0.
ΐχίύ = —δΗ,
(13.13)
Ш1(Х, Υ) = (X(u), D~lY(u)), Ш2(Х, γ) = №), E^Y(U)),
где
338 Глава 13
где скобка (·, ·) обозначает L2-скалярное произведение. Последователь¬
ность Ленара градиентов сохраняющихся функционалов, выраженная
через операторы D = д/дх, Ek, имеет следующий вид:
DGn+\ = EkGn;
• в случае уравнения синус-Гордона1
vxt + sin ν = О
имеем
Ш1(Х, У) = (Χ(υ), DY{v)), ω2(Χ, Υ) = (ВД, Д,"1^)),
где
Es = D + D + vxD 1vx.
Действительно,
Es sin?; = D~l sin?;,
так что уравнение синус-Гордона можно записать в следующем ви¬
де [138]:
vt + Es sin г? = 0.
Таким образом, рекурсию ленаровского типа градиентов сохраняющих¬
ся функционалов можно записать в виде
Gn+1 = (D2 + v2 + vxxD lvx)Gn, G\ —
Многие из предыдущих систем, включая уравнение Бюргерса, допус¬
кают оператор, то есть эндоморфизм по модулю векторных полей, а имен¬
но Т, который является инвариантом относительно динамики и отвечает за
построение (бесконечно большого числа) абелевых симметрий (векторных
полей) или, в гамильтоновом случае, бесконечно большого числа законов
сохранения.
Таким образом, эндоморфизм Т или связанное с ним тензорное поле
Т(а,Х) = (а,ТХ)
оказывается наиболее интересным объектом в анализе интегрируемости по¬
левых теорий. Фактически, как было показано в части III, можно описать
полную интегрируемость систем с конечным числом степеней свободы (ли-
увиллевскую интегрируемость) в понятиях смешанного тензорного поля Т,
удовлетворяющего подходящим условиям.
1 Здесь х, t обозначают координаты светового конуса.
13.3. Инвариантный эндоморфизм 339
Пример 35. Уравнение синус-Гордона
vxt + sin ν = О
обладает инвариантным эндоморфизмом
Ts = D2+vl + vxxD~lvx,
связанным с эндоморфизмом Т*. уравнения КдФ через преобразование по¬
добия
Ta = VTkV~\
где
V = ZiV^lD2 - vxx - 3vxD),
и где тильда означает, что было выполнено преобразование
u=^{v2x + V^vxx). (13.14)
Значит, Ts и Т/е являются одним и тем же тензорным полем в двух раз¬
личных системах координат, и уравнение КдФ соответствует, в то же время,
гамильтоновой динамике, порождаемой вторым сохраняющимся функцио¬
налом уравнения синус-Гордона [179]. Из этого следует, что сохраняющиеся
функционалы уравнения синус-Гордона могут быть получены из сохраня¬
ющихся функционалов уравнения КдФ просто использованием преобразо¬
вания (13.14). Например,
J udx —5► | J v\dx,
i J u2dx -» I J(vx - 4V2xx)dx
и так далее.
ПРИМЕР 36. Уравнение Лиувилля
axt + exp σ = О
допускает инвариантный эндоморфизм
Tl = D2 — DaxD—lax + а2, а = lim σχ,
χ—>+οο
связанный с эндоморфизмом уравнения КдФ через преобразование по¬
добия
TL = JTkJ~\
340
Глава 13
где
J = 3 (—Ζ)2 + σχχ + σχΌ),
и где тильда означает, что было выполнено преобразование
и = —|(σ2 + 2σχχ - а2).
Значит, Tl и Tk являются одним и тем же тензорным полем в двух раз¬
личных системах координат, и уравнение КдФ соответствует, в то же время,
гамильтоновой динамике, порождаемой вторым сохраняющимся функцио¬
налом уравнения Лиувилля [180].
Пример 37. Уравнение Бюргерса
ut — 2иих “Ь ихх
допускает инвариантный эндоморфизм
Тв = D + DuD 1,
порождающий абелеву последовательность симметрий динамики.
Следующие параграфы будут посвящены анализу свойств феномено¬
логических тензорных полей.
13.3.1. Динамическая инвариантность
Благодаря последовательности Ленара и бигамильтоновой структуре
(некоторых) эволюционных уравнений, первое существенное свойство тен¬
зорного поля Т будет иметь вид
САТ = 0.
Такое описание динамики напрашивается из-за соответствия:
Динамика
Инвариантная структура
Симплектическая
ω
невыроэ/сденное, ко со симметричное, замкнутое
(2) тензорное поле
Геодезическая
Г
связная 2-форма
Киллинга
g
симметричное, невыроэ/сденное (2) тензорное
поле
Гамильтонова
Λ
ко со симметричное (2) тензорное поле,
удовлетворяющее тождеству Якоби
Лиувилля
Ω
форма объема
Лакса
Т
(j) тензорное поле с нулевым кручением
13.4. Инвариантные эндоморфизмы и интегрируемость 341
13.3.2. Кручение Нийенхейса
Второе существенное свойство, связанное с последовательностью Ле¬
нара, это δ(Τηα) = 0, если а является ί-замкнутой и ίτ-замкнутой, то есть
если δα = 0 и δ (Та) = 0.
Мы знаем, что это свойство обеспечено в том случае, если
λίτ(α,Χ,Υ) = 0,
где [159, 110, 96, 97, 160]
λίτ(α,Χ,Υ) = (α,Ητ(Χ,Υ))
и
Нт(Х, Υ) = (.CfxT)A - т(схту
Y.
13.3.3. Двумерность собственных пространств Т (КдФ и сГ)
Поскольку Т— (1,1)-тензорное поле, можно поставить задачу нахожде¬
ния собственных значений соответствующего эндоморфизма Т на А(Л4):
TGX = AGa.
Легко видеть, что для любого А существует два (обобщенных) собственных
вектора, а именно G\, G\, для которых
TG\ = XG\, TGl = XGl + Gl
что соответствует жордановой нормальной форме для конечной матрицы.
В явном виде, имеем
G\ = e2ij ih(ikj, ζ)]'2 , G\ = e2ij [/2(ikj ,χ)\2 ,
где /(к, χ) — решения Иоста для оператора Лакса L,
L2f = -k2f, к2 = —А.
13.4. Инвариантные эндоморфизмы и лиувиллевская
интегрируемость
Как было показано, свойства
• СаТ = 0,
• Ят= 0, где λίτ(α, Χ,Υ,) = (a, [(CfxT)A - T{CxT)f
• d = dim (собственные пространства T) = 2,
342
Глава 13
кажется, имеют место для всех эволюционных уравнений, интегрируемых
методом обратной задачи рассеяния.
Напомним, что в части III, используя первые два свойства, но предпо¬
лагая диагонализуемость вместо третьего свойства [78, 80], была построе¬
на геометрическая схема интегрируемости, в соответствии с которой было
установлено, что:
Динамическое векторное поле Δ, которое допускает инвариантное
(£дТ = 0) смешанное диагонализуемое тензорное поле Т с тензорным
полем с нулевым тензорным полем Нийенхеса (Λ/т = 0) и дважды выро¬
жденными собственными значениями Л без стационарных точек (ίλ ф 0),
является сепарабельным, интегрируемым и гамильтоновым, то есть сепа¬
рабельной вполне интегрируемой гамильтоновой системой [80].
Представленное доказательство основывалось на том, что
• Л/т = 0 означает интегрируемость по Фробениусу собственных про¬
странств Т;
• £дТ = 0 означает сепарабельность оператора Δ вдоль собственных
многообразий в динамиках с одной степенью свободы, каждая из кото¬
рых обладает первым интегралом.
Построение симплектической формы (фактически бесконечно многих),
относительно которой Δ является гамильтоновым векторным полем, было
тогда легко достигнуто.
Несмотря на важность случая диагонализуемости, третье свойство яв¬
ляется характеристической чертой теорий солитонов. Сейчас мы хотим
установить a priori критерий сепарабельности, который основан на этой но¬
вой спектральной гипотезе и который стоит использовать для солитонных
уравнений. Что касается динамики солитонов, то интегрируемость доказы¬
вается без дополнительных гипотез, в то время как для динамики фонового
излучения компактный a priori критерий интегрируемости до настоящего
времени отсутствует.
Представленные результаты должны естественно привести к соответ¬
ствующим результатам в терминах пар Лакса (рассматриваемых в контексте
расслоений, основанных на фазовом многообразии) [81], поскольку отноше¬
ния между ними и данным оператором, только теперь ставшие аналитиче¬
ски понятными, будут сформулированы в ясных геометрических терминах.
Можно доказать следующий критерий интегрируемости [83]:
Динамическое векторное поле Δ, допускающее инвариантное смешан¬
ное тензорное поле Т с нулевым тензором Нийенхейса Λ/т и двумерные
собственные пространства, полностью разложимо в динамики с одной
степенью свободы. Те из них, что связаны со степенями свободы, соот¬
ветствующими нестационарным собственным значениям X, являются ин¬
тегрируемыми и гамильтоновыми.
13.4. Инвариантные эндоморфизмы и интегрируемость 343
Действительно, обозначим через Лг произвольное дискретное собствен¬
ное значение Т и допустим, что непрерывный спектр тензорного поля Т
состоит из вещественной полуоси £Я+. Тогда равенство нулю кручения
Нийенхейса Л/т, соответствующее Т, означает, что для всех а е Л^^(Л4)
и Χ,Υ еТМ
λίτ(α, Υ, X) = (а, \{СтхТ) - Т(СХТ)\ Υ) = 0. (13.15)
Согласно нашим допущениям, существует базис пространства ТМ.
feii f 1,(к) ί f2,(k)') ί ^ 11 2, · ■ · , Tl, ,
такой, что
Tei = Хгвг,
Tei = Xl£i + ei, ί = I, 2, . . . , П,
ГД(*)=*Д(*), 1 = 1,2, к еж+.
Теперь введем соответствующий двойственный базис
г = 1,2,..., η; к G 0ΐ+}
пространства Λ1 (Λ4 ), то есть базис, для которого
(■д\е0) = {т\е0)=5),
(ti'tZj) = (T\ej) = (д\А(к)) = 0,
(т\/цк)) = Ь1’(к),ег) = ('Yl’{k),ei) = 0,
(13.16)
где i,j = l, ..., η, δ1^ = 61р5(к - h).
Соотношения, соответствующие уравнениям (13.16), выраженные че¬
рез дифференциальные 1-формы, имеют вид
m = х% + т\
Тп = Хгп, г = 1,2, ..., п,
fV’(fc) = к^'{к), I = 1,2, к ζ 9ΐ+,
где Т обозначает транспонированный Т. Как будет показано, более ничего
не требуется для доказательства разложимости на динамике с одной сте¬
пенью свободы и (исключая случай нигде не являющихся стационарными
344 Глава 13
собственных значений Аг) интегрируемости ее дискретной части. Анализ
начнем с того, что перепишем условие (13.15) в следующем виде:
LeiXj = 0, Ьклк)\1 = 0, (А* - \i)LSi\i = О,
(Т-А*)(Т-А*)[е*,е,]=0,
(Т — Л*)(Т — AJ)2[ei, = О,
0, (13.17)
(T-k)(T-h)[flt{k),fPtW] = О,
Т - Х1)(Т - k)[eiJl<{k)} = О,
(Т — Xi)(T — k)[si, /ii(fe)] = 0.
На самом деле, легко видеть, что система (13.17) эквивалентна1
т* А δτi = т*Л&Л δϋ* = 71,(fc) Л 72,(fe) Α δЧЦк) = 0. (13.18)
Отсюда следует, по теореме Фробениуса, что, без потери общности, τ, ϋ
и 7 могут рассматриваться как замкнутые дифференциальные формы или,
эквивалентно, что базис
{et,e»,/ii(fc),/2)(fc), г = 1,2, ..., п, к е £Я+}
может быть выбран голономной системой координат.
С другой стороны, первый ряд уравнений (13.17) эквивалентен δλι =
= (L£iXг)т\ откуда следует, что
Τδ\ι = \15\\ (13.19)
Это означает, в частности, что т могут быть выбраны равными δλ1, если, по
предположению, Аг нигде не являются стационарными. Кроме того, из голо-
номности следует, что набор функций А1, А2, ..., Ап может быть дополнен
до системы координат следующего вида2:
(А1, А2, . .. , Λ", φ\ ψ\ . .. , ψη, ψ1*, к е 91+)
таким образом, что
Р - А- е - A. t - δ
1 δΨν 1 δ\ν Цк) δψλ’Μ'
1 Здесь и в последующем <5 обозначает внешнюю производную, а Λ — обычное V-произ-
ведение.
2Некоторые из них могут не быть глобальными, а только периодическими.
13.4. Инвариантные эндоморфизмы и интегрируемость
345
Для определенности, выберем тензорный оператор Т в следующей ка¬
нонической форме:
2 00
т = Σ^ίττϊ®ίλ< ++Α®ίλή+Σ ί
zr/ \<5Аг V V / δφΐ
Теперь легко доказать, что для такого Т Δ-инвариантность, то
есть ЬдТ = 0, дает
(a) А*, Δ> = О,
(b) ^-(δφ\Α) = 0,
w φί{δφ,·Α)=0'
(d) (Α*-λί)^-(ν,Δ)=0, (1320)
(e) /-(δ^,Α) = 0,
δφι
(/) -f-Wi’W,A)=0I
δ\ι
ω <,;-'·>^!ί'ί’’,№,'Δ>=0'
откуда следует сепарабельность и интегрируемость. В частности, уравне¬
ние (13.20а) означает обращение в нуль «Л-компонентов» векторного по¬
ля Δ, уравнение (13.20Ь) — независимость (^-компонентов на φ, уравне¬
ние (13.20с) — независимость непрерывных координат, уравнение (13.20d)
означает, что каждая компонента φ может зависеть только от соответству¬
ющей Л. С другой стороны, уравнение (13.20е) показывает, что непрерыв¬
ные компоненты не могут зависеть от дискретных переменных, и урав¬
нение (13.20f) — что каждая непрерывная компонента может быть только
функцией непрерывных переменных с тем же самым непрерывным индек¬
сом. Тогда наиболее общая форма Δ есть
346 Глава 13
Динамическое уравнение разбивается на следующие системы уравнений
второго порядка для непрерывных степеней свободы (динамика фонового
излучения):
■ф1(к) = А1,к(‘ф1^к\ф2’^),
ф2,(к) = A2,k^Uk)^2,(k))
и следующие тривиально интегрируемые системы:
ф1 = му),
А* = 0
для дискретной части (динамика солитонов). Кстати, дискретная часть ди¬
намики является гамильтоновой относительно всех симплектических форм
ωο =^/<(λ<)5λ<Λ δφ*
г
для дискретной части спектра, fi будут произвольными ненулевыми функ¬
циями.
Замечание 24. Векторное поле Δ не обязано определять гамильтонову ди¬
намику. Ее гамильтонова структура возникает из предположения о двумерности
собственных пространств Т и требования dX ф 0.
13.5. Операторы рекурсии в диссипативной динамике
Мы видели, что нелинейное уравнение эволюции щ = Δ [и], то есть
уравнение, задающее интегральные кривые векторного поля Δ, является
интегрируемым, если существует смешанное тензорное поле Т на М, удо¬
влетворяющее следующим условиям:
• Т является Δ-инвариантным, то есть СаТ = 0,
• Т удовлетворяет условию Нийенхейса, то есть [СтхТ — Τ£χΤ]Υ = 0,
для любых двух векторных полей X и Υ,
• Т является диагонализуемым с дважды вырожденными собственными
значениями А без стационарных точек.
Эти предположения относительно Т гарантируют не только общую
интегрируемость, но также и существование симплектических форм, от¬
носительно которых динамика является гамильтоновой и интегрируемой
в переменных действие-угол. С другой стороны, существует много важных
13.5. Операторы рекурсии в диссипативной динамике
347
с точки зрения физики случаев, в которых динамика не является гамиль¬
тоновой, но тем не менее подходящее обобщение данной геометрической
схемы может оказаться полезным. Цель представленного примера состо¬
ит в исследовании возможности использования инвариантных смешанных
тензорных полей для анализа диссипативной динамики. Чтобы это сде¬
лать, было бы естественным начать с удаления только последнего условия
на Т, поскольку именно оно ведет к существованию констант движения.
Пример динамики, которая допускает инвариантное смешанное тензорное
поле Т, удовлетворяющее условию Нийенхейса, но недиагонализуемое без
комплексификации, и собственные значения которого тривиально являются
константами, дается уравнением Бюргерса.
Это уравнение — самое простое из сочетающих в себе одновременно
нелинейное распространение и эффекты диффузии, и это можно использо¬
вать как рабочий пример для нашего анализа.
13.5.1. Иерархия Бюргерса
Хорошо известно [114, 72], что уравнение Бюргерса может быть лине¬
аризовано с помощью преобразования
Легко показать [70], что уравнение Бюргерса является одним из целой
иерархии нелинейных эволюционных уравнений, линеаризуемых с помо¬
щью того же преобразования (13.21) к уравнению типа
с D, обозначающим производную по х. Четные элементы уравнения (13.22)
очевидно задают диссипативную динамику, в то время как нечетные явля¬
ются интегрируемыми гамильтоновыми эволюционными уравнениями от¬
носительно следующей симплектической формы:
V:
(13.21)
где ν удовлетворяет тепловому уравнению
Vt = V.
Vt = Dnv, η = 1,2,...,
(13.22)
(13.23)
— οο
где
+οο
(D~1f)(x) = J f(y)dy
— oo
348
Глава 13
с гамильтоновыми функционалами вида
+оо
Яр = | J (Dpv)2dx. (13.24)
— ОО
Для того, чтобы уравнения (13.23) и (13.24) имели смысл, необходимо сде¬
лать некоторые предположения относительно функционального простран¬
ства М: например, предположить, что М состоит из быстро затухающих
бесконечно дифференцируемых функций. Тогда ясно, что
T[v] = D
является Δ-инвариантным тензорным оператором Нийенхейса для иерар¬
хии уравнений теплопроводности. В представленном геометрическом под¬
ходе уравнение (13.21) играет роль преобразования координат и, следо¬
вательно, Δ-инвариантный тензорный оператор Нийенхейса для иерархии
Бюргерса легко получается из Τ[ν] [94]:
откуда легко следует
Т[и] = D + DuD-1. (13.25)
Далее иерархия Бюргерса получается с помощью повторяющегося приме¬
нения на генераторе группы переносов Δο = их тензорного оператора,
выраженного посредством уравнения (13.25) в виде
Ак = ТкА о. (13.26)
Первые поля иерархии таковы:
Δο — их,
Δι — c2ililx Η- ilxx,
Δ2 — (3и + 3иих ~Ь ихх)х.
Эта иерархия — только запись в новых координатах линейного случая. Не
вдаваясь в некоторые технические вопросы о фазовом многообразии , мож¬
но применить все сказанное об уравнении (13.22) к иерархии Бюргерса.
Более точно, уравнение (13.26) расщепляется на следующие две подиерар-
хии:
13.5. Операторы рекурсии в диссипативной динамике 349
• диссипативная иерархия
ТА0,Т3А0, ...,Т2п+1А0,
гамильтонова иерархия
Δ0,Τ Δ0, ... ,Τ Δ0, ...,
представляющие собой последовательности, соответственно, диссипатив¬
ных и гамильтоновых векторных полей. Предшествующее утверждение
можно понять, исследуя спектральные свойства оператора Т, блочно-диаго-
нальная форма [79] которого имеет вид
где векторные поля
оо
е^[и] = J dx{—и cos кх — ksinkx) exp — J
— оо
оо
udy
— оо
X
е^[и]= j dx{—usinkx + kcoskx) exp — J
udy
Su(x) ’
δ
6u(x)
составляют базис произвольного инвариантного подпространства
Те(к) — ~к,е(к)’>
Те(к) = ке(к)->
(0'ik\e[k)) = (^k\e{k)) = 5(h- к),
^k\e(h)) = (^k\e'(h)) = 0.
Из условий
[e{k)->e(h)\ — \e(k)ie(h)] = [e(k)ie(h)\ ~ О
следует голономность системы координат, то есть существование координат
(,Μ,ρΜ),
таких, что
— <5 ο' δ
е(к) — J е(к)
δρΜ'
350
Глава 13
В двумерном интегральном многообразии {e(k)ie[k)} оператор Т может
быть спроецирован в
г г
δφ^ (g) —7ТТ — δ —— (без суммирования по к),
5JW δφ
где
J{k) = \ (q(h)2 +Р{к)2) , φ{к) = arctg^y
— переменные типа действие-угол. Значит, Т преобразует диссипативное
интегрируемое поле типа
в гамильтоново поле
Х(к) =
о ’ д№
X= A{J(k)) ——
δφ^
и наоборот.
Такое чередующееся поведение Т и отвечает за расщепление иерар¬
хии (13.26) на две подиерархии. Кроме того, мы видим, что
• Т задан на двумерных инвариантных пространствах, но не является
диагонализуемым без комплексификации.
• Т2, определяющий гамильтонову иерархию, является диагонализуе¬
мым с дважды вырожденными постоянными собственными значени¬
ями.
Таким образом, ни для какой из подиерархий невозможно использовать
критерий интегрируемости для определения их интегрируемости.
Однако мы видим, что проекции диссипативной динамики на двумер¬
ные инвариантные пространства являются просто динамиками с одной сте¬
пенью свободы, в то время как для гамильтоновых динамик существование
функционала J^[u], который не является тривиально сохраняющимся на
каждом двумерном пространстве, гарантирует их интегрируемость. Заслу¬
живает внимания то, что этот же самый функционал J^[u], очевидно,
играет роль функционала Ляпунова1 для проецирования диссипативной ди¬
намики на двумерное инвариантное подмногообразие, таким образом обес¬
печивая асимптотическую устойчивость решения jW [ία] = 0.
'Александр Михайлович Ляпунов родился в Ярославле (центральная Россия) в 1857 году
и умер в Санкт-Петербурге в 1918 году Он был профессором математики в Харьковском
университете и позже членом Петербургской Академии Наук.
13.5. Операторы рекурсии в диссипативной динамике
351
Гамильтонова подиерархия
Обсудим более детально гамильтонов характер подиерархии (13.22).
Чтобы это сделать, необходима некоторая осторожность при выборе соот¬
ветствующего функционального пространства Л4, на котором задана ди¬
намика. Наиболее естественным был бы выбор М как функционального
пространства, элементы и которого стремятся к константе при х —> =Ьоо, по¬
скольку в этом пространстве находится типичная уединенная волна иерар¬
хии Бюргерса. Однако при таком выборе не было бы возможности ввести
гамильтонову структуру на М.
Это можно легко понять, если обратиться к линейной иерархии, для
которой М. становится, благодаря преобразованию (13.21), пространством
функций, которые при х —> ±оо ведут себя подобно ехр[кх], и гамильтониан
теряет смысл. Необходимо ограничить М таким образом, чтобы как сим-
плектическая структура, так и гамильтонова были бы вполне определены.
Это можно сделать, рассматривая только такую функцию ν(χ), которая стре¬
мится к некоторым ненулевым фиксированным константам при х —> =Ьоо,
или, эквивалентно, функцию и(х), стремящуюся к нулю при х —> =Ьоо,
интеграл от которой имеет фиксированное значение. Более точно, что ка¬
сается касательных пространств, производная отображения Хопфа-Коула
является биекцией δν —> δν, между <S(9^), то есть пространством всех бы¬
стро затухающих пробных функций, и пространством функций, которые
являются производными элементов <S(9^). Это гарантирует существование
симплектической структуры, относительно которой подиерархия является
гамильтоновой.
Предыдущий анализ показывает роль спектральной гипотезы об ин¬
вариантном смешанном тензорном поле Т в описании динамических си¬
стем. Нарушение предположения о диагонализуемости позволяет включить
диссипативную динамику в геометрическую схему. Кроме того, пример по¬
казал, что даже если собственные значения Т2 тривиально являются кон¬
стантами, с их помощью можно построить последовательности констант
движения.
Глава 14
Значение и существование операторов
рекурсии
Относительно операторов рекурсии в литературе существует некото¬
рый беспорядок. Эта глава направлена на разъяснение значения и суще¬
ствования операторов рекурсии для вполне интегрируемой гамильтоновой
системы.
В предыдущих главах было показано, что вполне интегрируемые га¬
мильтоновы динамические системы могут допускать больше чем одно га¬
мильтоново описание. Также было показано, что обычно с этими альтер¬
нативными описаниями можно связать (1,1)-тензорное поле, которое мо¬
жет быть использовано при подходящих условиях как оператор рекурсии,
а именно как оператор, который порождает достаточно констант движе¬
ния в инволюции. Остается открытым вопрос, можно ли найти оператор
рекурсии для любой вполне интегрируемой системы.
В предположении отсутствия резонанса было показано, что оператор
рекурсии можно всегда построить, даже для некоторых бесконечномерных
систем [80]. Некоторые авторы утверждали, однако, что это не всегда вы¬
полняется.
Поэтому нам кажется, что имеет смысл далее прокомментировать воз¬
можное значение операторов рекурсии и показать, что при условии отсут¬
ствия резонанса любая интегрируемая система может быть сведена к линей¬
ной нормальной форме с помощью нелинейного неканонического преобра¬
зования. Для этих нормальных форм не вызывает затруднений построить
операторы рекурсии [130].
14.1. Интегрируемые системы
Пусть М — гладкое 2п-мерное многообразие. Предположим, что
можно найти п векторных полей Xi,...,Xn Е Х(М) и п функ¬
ций Fi, ..., Fn G Т(М) со следующими свойствами:
[Xi,Xj]=0,
CXiFJ = 0, i,j € {1, ... ,η}.
(14.1)
(14.2)
14.1. Интегрируемые системы 353
Предположим также, что на открытом плотном подмногообразии многооб¬
разия М имеем
Xl Л · · · Л Хп ф 0, (14.3)
dF1 Л · · · Л dFn ф 0. (14.4)
Покажем, что любая динамическая система Δ на М. вида
п
А = ^2^Хг, vi = vi{F1, ...Fn), (14.5)
г=1
является явно интегрируемой на подмногообразии, на котором выполняются
уравнения (14.3) и (14.4).
Предположим, наконец, что множества уровня погружения
F:М^Мп, F = (F\ (14.6)
являются компактными. Значит, векторные поля Xi являются полными на
каждом листе F-1(a), а Е *ЯП, и они определяют локально свободное дей¬
ствие абелевой группы *ЯП. Кроме того, каждый лист является параллелизу-
емым и можно найти замкнутые дифференциальные 1-формы а1, ... ,ап,
da1 = 0, такие, что
а\Х5)=^ UG{l,...n}. (14.7)
Со всей описанной конструкцией векторное поле Δ в уравнении (14.5)
может быть явно проинтегрировано в окрестности каждого листа F-1(a),
где в качестве координат выбраны функции {F1, φ^} с άφΐ = о?. Уравнения
движения динамической системы Δ имеют вид
ф* = vi(F1, ...,Fn),
V (14.8)
Fl = 0.
Поэтому соответствующие решения определяются формулами
ipi(t) = ti/l(F(po)) + φι(ρο), n4 Qs
Fi(t) = Fi{p0), K ;
с начальной точкой po G Л4. Мы видим, что функции v% играют роль частот.
Отметим тот факт, что до сих пор мы не использовали никакой гамиль¬
тоновой структуры. Алгебраическое описание полной интегрируемости см.
в [77, 126].
354
Глава 14
14.1.1. Альтернативные гамильтоновы описания интегрируемых
систем
Рассмотрим теперь, при каких условиях динамическая система, инте¬
грируемая в сформулированном ранее смысле, допускает бесконечно много
альтернативных гамильтоновых описаний.
С η-функциями F1, ..., Fn, подчиняющимися условию, выраженному
уравнением (14.4), можно задать замкнутую дифференциальную 2-форму
посредством
uJf = Yjdfi{F^)hai, (14.10)
г
которая является невырожденной, пока dfi А · · · Λ dfn φ 0. Любая из этих
симплектических форм связана с гамильтонианом на пространстве W1. Дей¬
ствительно, по построению ω/,
iXjuf = —dfj, j € {1, ...,η}. (14.11)
Как и для векторного поля Δ в уравнении (14.5), будет выполняться
iAOJf = - (14.12)
г
Необходимым условием того, чтобы была точной, является условие
замкнутости, а именно
YjdviAdfi = 0. (14.13)
г
Все семейства решений этого уравнения для f1, ...,/п, удовлетворяю¬
щих df χ Λ · · · Λ dfn φ 0, дадут альтернативные гамильтоновы описания для
динамических систем Δ в уравнении (14.4). Кроме того, любая такая ди¬
намическая система Δ будет вполне интегрируемой в смысле Лиувилля-
Арнольда, функции Д, ..., /п будут константами движения (по предполо¬
жению уравнения (14.2)) в инволюции,
{/г, /, Ь = Uf(Xi, Xj) = £xifj = 0. (14.14)
Имеется два предельных случая, когда легко найти решения уравне¬
ния (14.13).
Случай константы
Все частоты иг являются постоянными, так что dvг — 0 и уравне¬
ние (14.13) автоматически выполняется.
14.1. Интегрируемые системы
355
Любая дифференциальная 2-форма в уравнении (14.10) является допу¬
стимой симплектической структурой, и соответствующая функция Гамиль¬
тона имеет вид
Пример такой системы дает η-мерный гармонический осциллятор:
Здесь mi и ki — масса и коэффициент упругости г-го осциллятора. Функ¬
ции Fг задаются частными гамильтонианами
Нерезонансный случай
Ни одна из частот ζ/ не является константой, и du1 Λ ... Λ dvn φ 0.
В этом случае можно считать уг «координатами» и fi — функциями от ζΛ
В этом втором случае простое решение уравнения (14.13) дается линей¬
ными функциями fi = Σ Aiji/i, г G {1, .. .η}, Ац G 91 Соответствующее
з
гамильтоново описание для Δ можно дать квадратичными гамильтоновыми
функциями посредством
в которой любая fi зависит только от соответствующей частоты г/2, будет
допустима, пока Uf невырождена, то есть пока dfi А · · · Λ dfn φ 0. Соот¬
ветствующие гамильтоновы функции зависят от явной формы функций fi.
(14.15)
г
г
(14.16)
(14.17)
(14.18)
(14.19)
у
Кроме того, любая другая симплектическая структура вида
(14.20)
г
356
Глава 14
dG- ~·
Например, если fi = —^(z/), то соответствующий гамильтониан примет
dv%
вид
(14.21)
г ' '
Простой пример для этого случая снова дает η-мерный гармонический
осциллятор:
Α = ΣρίΔί, (14-22)
г
где Fг и Ai даются уравнениями (14.17) и (14.16) соответственно. Теперь
частные гамильтонианы Fг играют роль частот.
Промежуточные случаи более запутаны. За дальнейшими комментари¬
ями относительно них мы отсылаем к [80].
Стоит подчеркнуть, что могут иметься допустимые гамильтоновы
структуры для Δ, которые не могут быть получены предыдущим построе¬
нием.
14.1.2. Операторы рекурсии для интегрируемых систем
Теперь покажем, как строить операторы рекурсии для интегрируемых
систем, которые мы рассмотрели в предыдущих параграфах. Как мы виде¬
ли, задавая динамическую систему, выраженную уравнением (14.5), можно
построить бесконечно много гамильтоновых структур, заданных, например,
уравнениями (14.10) или (14.20).
Случай константы: dvx = 0, Vz £ {1, ..., п}
Две возможные альтернативные симплектические структуры получены
из уравнения (14.10):
w1=Y/5ijdFi = J2^k, (14.23)
ij k
“j = л о* = J2fh(FkΗ. (14·24)
ij k
при условии df i Λ · · · Λ dfn φ 0. Задав эти структуры, можно построить
(1,1)-тензорное поле Т на ЛЛ в виде
Τ = ω/οω1-1 =J2fk(Fk)U, (14.25)
k
где Ifc — тождественный оператор на к-й двумерной «плоскости» простран¬
ства Т*М с «координатами» (dFk,ak).
14.1. Интегрируемые системы
357
Нерезонансный случай: dv1 Л ... dv71 ф О
В этом случае два возможных альтернативных симплектических опи¬
сания получены из уравнения (14.20):
ωχ = ^2 Sijdvг АоР = (14.26)
ij к
= Σ ^/v)^Λ ^ = Σ (14·27)
fc
при условии dfi A · · · Λ dfn φ 0. Задав эти структуры, можно построить
(1,1)-тензорное поле Т на М в виде
Γ = ω/οω1-1 =^/V)Ifc, (14.28)
к
где Ifc — тождественный оператор на fc-й двумерной «плоскости» простран¬
ства Τ*Λί с «координатами» (diyk,ak).
Из построения видно, что Т в уравнениях (14.25) и (14.28) являют¬
ся инвариантными относительно действия Δ, имеют дважды вырожденный
спектр с собственными функциями без критических точек и нулевое круче¬
ние Нийенхейса Λ/т· Следовательно, они являются операторами рекурсии
для динамической системы Δ.
14.1.3. Системы, интегрируемые по Лиувиллю-Арнольду
Допустим, что динамическое векторное поле Δ на симплектическом
многообразии (Λί,ωο) имеет п констант движения Н1, ... ,#п, которые
находятся в инволюции (относительно пуассоновой структуры, связанной
с cj0), функционально независимы, dHlA· · · AdHn φ 0, и порождают полное
векторное поле Х1у ... ,Хп. То есть имеется действие пространства SK1
на Λί, которое является локально свободным и расслоенным.
В этой ситуации можно найти угловые дифференциальные 1-фор¬
мы а1, ..., ап, такие, что
al{Xj) = δί·, da1 = 0.
Для любой функции F от Н·? (или dF A dH1 Λ · · · Λ dHn = 0), удовле¬
творяющей условию
det (-ЛЕ-) о,
\вН'ЭН> )
358 Глава 14
дифференциальная 2-форма
ωΡ = ά( -^τα'
\дНг
будет допустимой симплектической структурой для действия W1. В част¬
ности, если
F=\Y,m,
г
снова получим {Нг} как функцию Гамильтона.
Для набора переменных действие-угол (Jk^k) имеем
Δ = vh-^T,
8ipk
= dJk Λ d<pk,
г
где ик = ЭН/dJk, к G {1, ...,п} — частоты. В нерезонансном случае,
когда du1 А · · · dz/1 / 0 или, эквивалентно, det ^ О,1 можно исполь¬
зовать в качестве переменных vk и записать допустимую симплектическую
структуру
ων = S^/dvk A
ίΔω = vkdJk = = -<Ш,
dJk
к
с гамильтоновой квадратичной функцией
к
Используя анализ предыдущего параграфа, получаем, что нерезонансная
вполне интегрируемая система имеет бесконечно много допустимых сим-
плектических структур, некоторые из них имеют вид
ωf = y^dfj(vl) Л dip1,
г
при условии df1 А · · · dfn ф 0. Однако, вообще говоря, таким образом невоз¬
можно получить cjo· Кроме того, такие системы допускают операторы ре¬
курсии, заданные уравнением (14.28).
*Это также эквивалентно невырожденности функции Гамильтона.
14.1. Интегрируемые системы
359
Пример 38. Рассмотрим вполне интегрируемую систему с двумя сте¬
пенями свободы. Возьмем М = 9Я2 х Т2 = {(ж, у, η)} с симплектической
структурой ωο = dx Λ άΰ + dy Λ άη. Динамическая система описывается га¬
мильтонианом Н = х3+у3+ху. Соответствующее динамическое векторное
поле имеет вид
Из сказанного выше следует, что эта система допускает бесконечно много
альтернативных гамильтоновых описаний в плотном открытом подмного¬
образии, описываемом άν$ Λ άνη φ 0, а именно 36ху — 1/0, что совпадает
с подмногообразием, на котором Н невырожден. Две такие структуры име¬
ют вид
где / и д — любые две функции, такие, что df Λ dg φ 0. Соответствующие
Подчеркнем тот факт, что ωο не находится среди симплектических структур,
построенных в (14.31) и что наши операторы рекурсии (14.32) не могут быть
«факторизованы» через ω0.
Поясним подробнее значение операторов рекурсии и их использование
в анализе полной интегрируемости [78, 80, 185, 145].
Предположим, что имеется динамическое векторное поле Δ Е Х(М)
и совместимое (1,1)-тензорное поле Т, а именно С/±Т = 0, так что функ¬
ции tr Тк, к ^ 1, являются константами движения. Возводя Т в степень,
получим векторные поля Ак = Тк( А), являющиеся симметриями Δ. Алге¬
бра Ли {Δ/с, к ^ 0} является абелевой, если λίτ = 0.
Если F Е F{M) — константа движения для Δ, говорят, что Т есть
F-слабый оператор рекурсии, если Λ/т = 0 и d(T(dF)) = 0. Если Т —
F-слабый оператор рекурсии, то можно доказать, что d(Tk(dF)) = 0,
Уk > 1. Локально найдутся функции Fk Е F(M) из dFk = Tk(dF), ко¬
торые являются константами движения для Δ.
щ = Зх2 + у,
ι/η = 3 у2 + X.
(14.29)
ωχ = di/tf Λ dd + άνη Λ άη,
и>2 = f[y{))dv{) Λ άΰ + g(vv)dvv Λ άη,
(14.30)
(14.31)
операторы рекурсии Τ = ω2 ° ωλ 1 имеют вид
360
Глава 14
Стоит подчеркнуть, что данный оператор Т может быть оператором ре¬
курсии для константы движения F и не быть рекурсией для другой констан¬
ты движения G. Кроме того, может также случиться, что тензор Т является
F-рекурсионным оператором, но Tk(dF) A dF = 0, У к ^ 1, так что невоз¬
можно использовать Т и F для получения новых констант движения. Такой
случай имеет место, например, в задаче Кеплера, если начать со стандартной
функции Гамильтона [150]. Однако всегда выполняется =
Если ω — допустимая симплектическая структура для Δ, а имен¬
но Lacj = 0, говорят, что Т есть ω-слабый оператор рекурсии, если1 λίτ =
= 0 и d(T(ω)) = 0. Если Т — ω-слабый оператор рекурсии, можно доказать,
что d(Tk(u>)) = 0, Уk > 1. Все дифференциальные 2-формы u>k = Тк(и>)
являются допустимыми симплектическими структурами для Δ.
Стоит подчеркнуть, что любые две данные допустимые симплектиче¬
ские структуры ωι и ω2 для Δ не обязательно будут связаны оператором
рекурсии. Кроме того, может случиться, что Тк(и)А от ω до 0, Ук ^ 1, так
что получение новых симплектических структур невозможно.
Если Δ является гамильтоновой по отношению к паре (ω,Η)9 а имен¬
но г да; = —dH, говорят, что Т есть сильный оператор рекурсии, если он
является одновременно оператором if-рекурсии и оператором ω-рекурсии.
В этом случае любое векторное поле Δ& является гамильтоновым по отно¬
шению к о; с функцией Гамильтона Hk так же, как и по отношению к Uk
с функцией Гамильтона Н. Кроме того, константы движения Hk попарно
находятся в инволюции относительно пуассоновой структуры, построенной
инвертированием любых симплектических структур с^, к ^ 0.
*Мы снова используем тот же самый символ для продолжения Т на дифференциальные
формы.
Глава 15
Разное
15.1. Тензорный вид представления Лакса
В этом параграфе показано, что представление Лакса (ПЛ) может трак¬
товаться как обращение в нуль вдоль динамики ковариантной производной
сечения расслоения, основанного на М [81].
Хотя гамильтонова структура нелинейных полевых теорий приводит
к чрезвычайно простому методу построения последовательностей сохра¬
няющихся функционалов и к геометрической интерпретации данных рас¬
сеяния, это не играет основной роли в построении ПЛ. С другой сторо¬
ны, хотя глубокая и эффективная интерпретация должна рассматривать ПЛ
как линейную задачу, условие интегрируемости которой совпадает с исход¬
ным нелинейным уравнением эволюции, не ясно, как существование ПЛ,
в этом смысле, квалифицирует векторное поле и многообразие. Несмотря
на связь с мощным методом обратного спектрального преобразования [8],
формулировке Лакса недостает ясной геометрической интерпретации, то
есть динамика Лакса не определена в терминах геометрической структу¬
ры. Предварительные интересные ответы на поставленные вопросы даются
в подходе групп петель (см., например, [163]).
Существующий геометрический подход мотивируется, прежде всего,
интересом per sex к возможным геометрическим структурам, лежащим
в основе представления Лакса для динамического векторного поля на много¬
образии, а с другой стороны, нашей верой в то, что геометрическое понима¬
ние может помочь в переходе к большим пространственным размерностям.
Если задано векторное поле Δ на многообразии М:
А:М^ТМ тм ° Δ = 1м,
где тм — естественная проекция касательного расслоения ТЛ4, наша цель
состоит в том, чтобы сформулировать в геометрических терминах задачу
поиска пары Лакса L, Б, то есть пары операторных полей на М, таких, что
L = [B,L].
xPer se (лат.) — сам по себе, как таковой, по существу. — Прим. перев.
362
Глава 15
Структура уравнения Лакса естественно предполагает два простых
и привлекательных геометрических толкования. Прежде всего, ее можно
представить как явный вид уравнения
если L было интерпретировано как сечение линейного расслоения реперов.
Фактически, если зафиксировать репер, L и Δ примут вид
(Для конкретности обозначений здесь и в последующем, за исключением
бесконечномерного случая, М предполагается конечномерным дифферен¬
циальным многообразием с 91п в качестве локальной модели.) С другой
стороны, уравнение Лакса может читаться как явный вид уравнения типа
где ковариантная производная берется по заданной связи на расслоенном
пространстве на М, не обязательно на линейном расслоении реперов. Что¬
бы проиллюстрировать эту возможность, рассмотрим случай, когда упомя¬
нутое расслоенное пространство совпадает с главным расслоенным про¬
странством структурной группы GL(n, *И), то есть линейным расслоением
реперов. В таком случае форма связности ω может быть записана в виде
£aL = О,
(15.1)
Σ = Ιμχεμ®ϋχ, А = Αμεμ,
и уравнение вида L = [B,L] получается при использовании уравне¬
ния (15.1) и
DaL = О
(15.2)
ω = (ωλ)> р,А = 1, ...,п,
где ωΧ — вещественнозначные 1-формы, и
DL = (dLμχ + ωμρχ - ω^ρ)εμ ®
Сокращая на Δ и используя уравнение (15.2), получим
L^ + i^Lpx-L^iAwpx = 0,
где точка обозначает оператор г Ad. В более компактной записи
L = [B,L]
15.1. Тензорный вид представления Лакса
363
где
В = г дал
(15.3)
то есть В]· = —ΔαΓ^^·, Г — коэффициенты связности.
Как было показано в предыдущей главе, уравнениям первого ти¬
па СаТ = 0 удовлетворяют (1,1)-тензорные поля, связанные с вполне инте¬
грируемыми нелинейными полевыми теориями и играющие, в связи с сим¬
плектической структурой и при некоторых специальных предположениях,
существенную роль в свойствах интегрируемости.
«Феноменология» интегрируемой нелинейной полевой теории показы¬
вает, что два различных полевых оператора играют в ней две различных
роли. Один (назовем его Т), который порождает последовательность со¬
храняющихся функционалов, по своему построению является безусловным
эндоморфизмом по модулю Х(М) векторных полей на М (или ввиду двой¬
ственности Х(М)*) и удовлетворяет уравнению £дТ = 0. Другой (назовем
его L) — линейный оператор, который используется в методе обратной зада¬
чи рассеяния, не является a priori эндоморфизмом по модулю X (М) и, когда
мы предполагаем, что он является объектом такого типа, не удовлетворяет
уравнению £д£ = 0. Следовательно, естественно предположить, что урав¬
нение Лакса необходимо рассматривать как уравнение типа DaL = 0. Это
предположение находит подтверждение, так как конкретные примеры пока¬
зывают, что, в то время как уравнение СаТ = 0 является обычным в случае
динамических векторных полей, уравнение DaL = 0, при надлежащем
выборе связности, напротив, способно непротиворечиво фиксировать поле
направлений, связанное с Δ.
Следующий пример, несмотря на простоту, демонстрирует все суще¬
ственные особенности высказанной идеи.
15.1.1. ПЛ гармонического осциллятора как условие параллельного
переноса
В естественной карте динамическое векторное поле есть
Если выбрать форму связности1
(15.4)
'Вектор-столбец представляет собой векторное поле
364
Глава 15
где гамильтониан Н = |(р2 + д2), из (15.3) будет следовать
Легко видеть, что уравнение (15.2) удовлетворено, то есть в выбранном
базисе
Уравнение (15.2) можно рассматривать, при заданных L πω, как урав¬
нение на Δ, и в этом смысле оно является не только свойством Δ, но также
определяет (как было замечено, без неоднозначности) поле направления,
связанное с А, в отличие от действия, производимого уравнением £дТ = 0.
Для того, чтобы прояснить этот вопрос, рассмотрим следующие примеры.
15.1.2. А-инвариантное тензорное поле гармонического осциллятора
Общее решение в Δ уравнения £дТ = 0, имеющее вид
где / и д — произвольные функции.
В координатном представлении уравнение £дТ = 0 имеет вид
L = [B,L\,
где L — тензорное поле
L = p <8>dp . (15.5)
можно переписать следующим образом:
Т = [А,Т]
(15.6)
где
/дАч дАч\
dq др
<9ΔΡ <9ΔΡ I V-1 0
\ dq др J
15.1. Тензорный вид представления Лакса
365
С другой стороны, и это является общей чертой уравнений типа Лакса,
выведенных благодаря инвариантности тензорных полей, существует та¬
кая связность, что уравнение (15.6) становится переводом в координатное
представление уравнения £>дТ = 0. Фактически, форма связности
,. 1 (gdq + pdp q dpp dq\
3 H \pdq-q dp 0 J
удовлетворяет соотношению A = —гдо;. Общее решение уравнения 1)дТ =
= 0, написанное как уравнение на Δ, есть
Δ'(ρ,9)=/(ρ,9)(ρ^-9^)
(/ — произвольная функция), то есть гармонический осциллятор с точ¬
ностью до параметризации. Во избежание недоразумений отметим, что
производная Ли вдоль Δ для тензорных полей, удовлетворяющих урав¬
нению (15.2), является обычно отличной от нуля. Таков, например, случай
с тензорным полем из уравнения (15.5).
15.1.3. А-инвариантное тензорное поле для КдФ
Напомним, что уравнение эволюции есть
й + иих + иххх = 0,
и что тензорное поле, удовлетворяющее уравнению
САТ = 0, (15.7)
дается операторным полем
X
т- = дхх · +3и · J -dy,
—ОО
сопряженное к которому используется для построения последовательно¬
сти сохраняющихся функционалов и связано посредством Миура-подоб-
ного преобразования тензорной природы с аналогичным оператором для
уравнения синус-Гордона. Уравнение (15.7), выписанное явно, принимает
вид Т = [А, Т], где А
— &ххх
- идх - их.
ЗАМЕЧАНИЕ 25. О существовании Δ-инвариантности Т: в лагранжевой ди¬
намике ^-эквивалентность лагранжианов [148] всегда приводит к Δ-инвариантно¬
сти Т.
366
Глава 15
15.1.4. А-ковариантное тензорное поле для КдФ
Для того чтобы рассмотреть обычное L для КдФ, снова воспользуемся
координатным представлением через «локальные координаты» и(х): диф¬
ференциалы 6и(х) и функциональные производные ^ как формальные
ои(х)
элементы «непрерывного естественного базиса» кокасательного и касатель¬
ного пространств, соответственно. Векторное поле запишется в виде
оо
Δ = J dxA(u) ^ » Δ(ίί) = -дх + их
Легко проверить, что производная Ли тензорного поля Лакса
ОО
JJ dx dy δ" {χ - у) + ^η(χ)δ(χ - у)
Su(x)
®5u(y),
соответствующая оператору Лакса L = дхх + не равна нулю.
Если, с другой стороны, рассмотреть форму связности
ОО
и>[х,у\ = J Г(а:,y)5u(z)dz,
где
ш[х,у]= δ{χ-ζ) 4S"\x-y)+u{x)5'{x-y)-~uxS(x-y) (uuz + uzzz)~l,
получим
ker (В) = -ίΑω\χ, у] = Αδ"'(χ - у) + и(х)6'(х - у) - ^их6(х - у)
и, следовательно,
В — идх их.
Поэтому представление Лакса для уравнения КдФ можно записать в ви¬
де DaL = 0.
Чтобы проиллюстрировать полезность геометрического рассмотрения
ПЛ как условия параллельного переноса, рассмотрим преобразования пар
15.2. ЛИУВИЛЛЕВСКАЯ ИНТЕГРИРУЕМОСТЬ УРАВНЕНИЯ ШРЁДИНГЕРА
367
Лакса, вызванные преобразованиями полевых переменных. Это уместный
вопрос в связи с общим представлением [138, 179, 180, 105, 119] о том,
что несколько интегрируемых нелинейных полевых теорий эквивалентны
между собой с точностью до задач обращения преобразований. Эта точка
зрения, например, приводит к наличию связи операторов Т для уравнений
синус-Гордона и КдФ и операторов Т для уравнения Лиувилля и КдФ.
В качестве простого примера действия метода преобразования рассмотрим
еще раз гармонический осциллятор. Для преобразования, например, пары
Лакса
L=(l ?)' В = 5(-1 »)
к переменным действие-угол (J, φ), L должно быть преобразовано как
(1,1)-тензорное поле и В — как свертка формы связности (15.4) с динами¬
ческим векторным полем. Закон преобразования ω из естественного базиса
в координатах х в естественный базис в координатах х' есть
‘'-(£М&М“М&)·
Значит, в новой системе координат
Т = ( -V2Jcosy> —2 sin ψ \ R ( 0
\-х/(2/рsiny \/2Jcos</?/ ’ y_j о /
что, конечно, является парой Лакса для динамики J = 0, φ = 1.
15.2. Лиувиллевская интегрируемость уравнения
Шрёдингера
Несколько лет назад было предложено [176] использовать канони¬
ческие комплексные координаты в формулировке обобщенной динамики,
включающей классическую и квантовую механику как отдельные случаи.
В том же духе может быть предложена двойственная точка зрения [151]:
вместо комплексификации классической механики может оказаться полез¬
ной формулировка квантовой механики в терминах вещественных вектор¬
ных пространств.
Согласно теореме Стоуна-фон Неймана квантовомеханическая систе¬
ма связана с векторным полем на некотором гильбертовом пространстве
(подход Шрёдингера) или с векторным полем, то есть дифференцировани¬
ем, на алгебре наблюдаемых (подход Гейзенберга).
368
Глава 15
В классической механике аналогом инфинитезимального генератора
канонических преобразований служит векторное поле на симплектическом
многообразии (фазовое пространство).
Следовательно, для того чтобы использовать подобные процедуры,
необходимо сделать вещественным L2(Q,C) — гильбертово пространство
квадратично интегрируемых комплексных функций, заданных на конфигу¬
рационном пространстве Q как симплектическое многообразие или, более
определенно, как кокасательное расслоение. Будет показано, что его мож¬
но рассматривать как T*(L2(<2,5Н)), где L2(Q,1K) обозначает гильбертово
пространство квадратично интегрируемых вещественных функций, задан¬
ных на Q.
Этот подход отличается от предыдущих [124], [66], [71], [69], также
касающихся интегрируемости квантовомеханических систем в трактовке
Гейзенберга и Шрёдингера.
Чтобы сделать более прозрачным геометрическое и физическое содер¬
жание предмета, трудные технические аспекты (которые являются, однако,
важными в контексте бесконечномерного многообразия [10] — как, напри¬
мер, различие между слабо и сильно невырожденными билинейными фор¬
мами, обращение шредингеровского оператора, и так далее) будут опущены.
Изложение будет снова ограниченно работой с не вызывающим серьезных
трудностей бесконечномерным многообразием, локальная модель которо¬
го — банахово пространство, так как в этом случае все еще выполняется
теорема о неявных функциях.
Хотя в бесконечномерном симплектическом многообразии карта Дарбу
a priori не существует, для уравнения Шрёдингера
могут быть введены естественные канонические координаты р и q.
Введем вещественную и мнимую части волновой функции ψ:
при этом L2(Q, С) рассматривается как кокасательное расслоение простран¬
ства L2(Q,9l).
В этих новых координатах уравнение Шрёдингера принимает вид
p(v,t) = Ιταφ(τ,ί),
q(r,t) = Ββφ(τ ,ί),
15.2. Лиувиллевская интегрируемость уравнения Шрёдингера 369
где Hi задан в виде
Hi[q,p] -.= \jdv{%\{Vpf + (Vg)2] + U(v)(p2 + q2)},
и δΗ/δρ, δΗ/δς обозначают компоненты градиента от H[q,p] относительно
вещественного скалярного произведения части L2.
Данная система является гамильтоновой динамической системой отно¬
сительно скобки Пуассона, заданной для любых двух функционалов F[q,p]
и G[q,p] посредством
Л.даи) := {F.Gb := ΐ/ώ· · f - fp -f ) . (15.8)
Менее известен тот факт, что эта структура — не единственная возмож¬
ная гамильтонова структура. Действительно, уравнение Шрёдингера может
также быть записано в виде
А(Р\= I ( 0 ~П
dt\q hYH О
где Но задана в виде
Ho[q,p] ·■= \ Jdr(p2 + q2),
и Ή — оператор Шрёдингера,
Н:=-Йд+С,м·
Тогда это снова гамильтоновы динамические системы относительно
новой скобки Пуассона, которая для любых двух функционалов F[q,p]
и G[q,p] определена следующим образом:
An{SF,6G) := {F,G}„
Таким образом, для одного векторного поля существует выбор из двух ва¬
риантов:
370
Глава 15
• фазовое многообразие с универсальной симплектической структурой
и гамильтоновым функционалом, зависящим от классического потен¬
циала;
• фазовое многообразие с симплектической структурой, задаваемой клас¬
сическим потенциалом
и универсальным гамильтоновым функционалом, представляющим
квантовую вероятность.
Эти две скобки удовлетворяют тождеству Якоби, так как соответству¬
ющие дифференциальные 2-формы замкнуты, поскольку они не зависят от
точки ψ = (р, q) фазового пространства.
Имеет место соотношение
Поскольку тензорное поле Т не зависит от точки т/> ξ (p,q) фазового
пространства, его кручение тождественно равно нулю, так что соотно¬
шение (15.9) можно повторением привести к виду
δη δη
(15.9)
где
и
/Ж\
Ш= 0q
δη
\SpJ
δΗη _ δΗο
δη δη
Можно вывести, что уравнение Шрёдингера допускает бесконечно много
сохраняющих функционалов, определенных следующим образом:
15.2. ЛИУВИЛЛЕВСКАЯ ИНТЕГРИРУЕМОСТЬ УРАВНЕНИЯ ШРЁДИНГЕРА 371
Все они находятся в инволюции относительно предыдущих скобок Пуассо¬
на:
{Яп, Нт} о = {Яп, Нш} ί = 0.
Стоит подчеркнуть, что для гладких потенциалов U(х) в одномерном
пространстве собственные значения оператора Шрёдингера Ή невырожде¬
ны, так что собственные значения Т дважды вырождены.
Преобразование эйконала
Отображение
Г / Ч А Г \ * S(r,t)
р(г, t) = А(г, i) sin ——,
. S(r,t)
^ 9(r, i) = A(r, t) cos —-—
является каноническим преобразованием между координатами (р, q) и (π =
= 5(2Я)-1Е', χ = А2), поскольку
δρ Л Sq = δ (^j Λ <5A2.
Гамильтониан Hi принимает вид
Κ1\χ,π]= Jdv |£ ^ί^!+4χ(νπ)2^ +^χ|,
так что гамильтоновы уравнения
’ δπ _
ΐδΚι
dt
ft
д\ _
- dt
ft <5π
дают
дп _ ft ^(л/х) ft /π_\2 ТТЪ-1
< dt~ 2^^^~m(V7r) -
% 2ft , Г, V
, ~dt = — 2m ^ π)’
V 9
где Р — χ и J = hx^- представляют плотность вероятности и плот¬
ность тока, соответственно.
372
Глава 15
Это преобразование, являющееся нелинейным, приводит предыдущие
бигамильтоновы описания во взаимно согласованную пару нелинейного ти¬
па.
Наконец, стоит подчеркнуть, что уравнение Шрёдингера, несмотря на
линейность, показывает, что класс вполне интегрируемых полевых теорий
в пространствах высокой размерности не пуст. Кроме того, предыдущий
анализ кажется интересным также при формулировке вариационных прин¬
ципов [109] для стохастической механики.
15.2.1. Сравнение с нелинейным уравнением Шрёдингера
Двумерное нелинейное уравнение Шрёдингера
=~Ьфхх+ь
было исследовано рядом авторов [186, 122, 188, 95].
В канонических координатах
' р(х, t) = ΙΐΩψ(χ, £),
q(x,t) = R βψ(χ,ί)
(15.10)
оно принимает вид
А
dt
р\ = 1
q h
/δΚι\
δρ
δΚι
Sq I
где Κι определяется следующим образом:
Ki[q,p] := \ Jdx + b(9xq)2} + (р2 + я2)2
Следовательно, это гамильтонова динамическая система относительно
канонической скобки Пуассона Λί, определенной уравнением (15.8):
Λi(5F,SG) := {F,G}i:=i J
dx
6F 5G
6q δρ
δ£_ e SG
δρ 6q
Это не единственно возможная гамильтонова структура. Фактиче¬
ски, нелинейное уравнение Шрёдингера может также быть записано
как [122, 138]:
/δΚ0\
Ή,г
δq
15.2. Лиувиллевская интегрируемость уравнения Шрёдингера 373
где Ί~ίдг — оператор Пуассона,
Ήν = ° +ipD~l[ip(o) + ψ(ο)}),
или, эквивалентно,
1 (~^п^х+ ^ap^~lp —2apD_1q
^ у —2aqD~lp --J^dx + 2aqD~x q ^
где a = b\/2m/h, и
(X oo \
J dx — J dxj , ifo[<?,p] := -^= J dx(qpx).
-oo X /
Следовательно, это опять же гамильтоновы динамические системы от¬
носительно новой скобки Пуассона1, заданной для любых двух функциона¬
лов F[q,p] и G[q,p] посредством
WF.SO) := {F,0>а := /ώ (f ■ f
Для того же векторного поля снова имеется следующий выбор из двух
вариантов:
• фазовое многообразие с канонической симплектической структурой
ωι = А'1 := h J άχ(δρ Λ Sq)
и гамильтоновым функционалом, учитывающим взаимодействия;
• фазовое многообразие с симплектической структурой, определяемой
взаимодействиями
= Λ2 1 := h J άχ(Ί~ίΝ1δρ Λ 5q)
и свободным гамильтоновым функционалом, задаваемым средним зна¬
чением импульса р = —ihdx.
1 Для простоты доказательство тождества Якоби для Λ2 опущено.
374 Глава 15
Имеет место соотношение
δΚΐ ПП δΚ-0 /1 г ί ί \
ί^-Τνί^’ (15Л1)
где
Т := AJ"1 о Л2
2aqD гр 2т^х + 2aqD lq
2т^х ‘^аР^)~1Р —2apD~1q
Можно показать, что сумма Л2 + Αχ снова является скобкой Пуассона.
Это является эквивалентом нулевого кручения тензорного поля Тдг, так что
соотношение (15.11) можно повторением привести к виду
δΚη /г^ ,ηδΚο
(ΤΝ)η—^. (15.12)
δη δη
Следовательно, нелинейное уравнение Шрёдингера допускает бесконечно
много сохраняющихся функционалов. Первые три из них:
K-i[q,p] = | J dx{p2 + q2) = J άχ(φφ),
Ko[q,p]= J dx(qpx)=2i J άχ(φφχ),
Kx[q,p\ = dx {^PxP)2 + (8xq)2] + (p2 + g2)2} .
Все они находятся в инволюции относительно предыдущих скобок Пуассо¬
на, то есть
{Кп, Кш}о = {Кп, Кт}χ = 0.
Заметив, что
δη δη
рекуррентное соотношение (15.12) можно привести к завершенному виду:
s~t = ^η+1ψ·
15.3. Интегрируемые системы на коприсоединенных орбитах групп Ли 375
С помощью операторов Т, Tq, Тк, Тдг, заданных следующим образом:
То := —Δ о +Uо ξξ Wo,
ТЬ° := 9ХХ О +'0a:JD_1'0a:o5
Тк° ■= дхх о +^ψ о
ΤΝο г(дх о +-φΌ~1[φ(о) + ф(о)}),
получаем диаграмму, изображенную на следующей странице.
Замечание 26. Интересно заметить, что К-\ является сохраняющимся функ¬
ционалом как для линейного, так и для нелинейного уравнений Шрёдингера. Это не
верно для Ко, что является следствием того факта, что уравнение Шрёдингера неин¬
вариантно относительно пространственных переносов, и Ко соответствует среднему
значению (р) линейного импульса р = —ihdx. Другими словами, векторное поле,
соответствующее Ко через каноническую скобку Пуассона Αχ, является инвариант¬
ным относительно переносов.
Наконец, стоит сравнить операторы рекурсии в случае иерархии
Шрёдингера с нулевым потенциалом U(х) и в случае нелинейной иерархии
Шрёдингера с а = 0. Легко видеть, что в этом случае Т = Tjy.
15.3. Интегрируемые системы на коприсоединенных
орбитах групп Ли
Интегрируемость также исследовалась рядом авторов с использовани¬
ем эйлерова подхода коприсоединенных орбит групп Ли.
Пусть {вг} — базис алгебры Ли Q, где [е*, ej] = и {ΰ1} — двой¬
ственный базис в Q*, двойственной к Q.
Кроме того, пусть х — координаты в Q* относительно (т9г) и Т —
множество
J7 = {f е С°°,
Определим скобку
{f,g}(x) = c%x^-^-k = (х, [V/, Vg]),
где V/ G Т и Ух,у Е Q*, и градиент V/ функции / — элемент из Q,
определенный формулой
(y,Vf) = ftf(x + ty)\t=o.
376
Глава 15
Иерархия Шрёдингера
ф = гН2ф
т
г
ф = —гНф
Иерархия синус-Гордона
т
г
φ = —%ф
ΤΝ
i
TG-
ф = фх
■Тк
TN
i
Иерархия КдФ
Ф = -гфххх + \рвг\2ф
TN
i
φ фххх “l· 3\ф\ φχ
TN
i
■φ = -ίφχχχχ + 4\·ψ\2ψχχ + Зф(фх)2 + 2φ\φχ\2 + φ2φχχ + ^\φ\4φ
Нелинейная иерархия Шрёдингера
15.4. Деформация алгебры Ли
377
Существование на Q невырожденного скалярного произведения (·,·),
которое инвариантно относительно присоединенного представления, позво¬
ляет отождествить Q с Q* согласно
(у,х) = (у,х).
С другой стороны, из свойства ([с, 6], а) + (6, [с, а]) = 0 вытекает, что
предыдущая скобка может быть записана также в виде
{/,$}(*) = (V$,[*,V/]).
Итак, для динамики, порождаемой в Q функцией Н е Т,
|=:{tf,/} = (V/,[:r,Vtf]),
имеем
§ = [x,VH].
Это соответствует подходу Эйлера для динамики твердого тела, а также
представлению Лакса для КдФ при рассмотрении фазового многообразия
для КдФ как коприсоединенной орбиты оо-мерной группы Ли интеграль¬
ного оператора Фурье, интегрируемого на окружности S1 [61, 60, 49].
15.4. Деформация алгебры Ли
15.4.1. Деформация
Пусть Q — алгебра Ли и X, Y — два любых элемента в Q.
Семейство скобок
[Χ,Υ]χ = [Χ,Υ] + λω(Χ,Υ),
удовлетворяющих тождеству Якоби VA G 91, называется деформацией [87]
алгебры Ли Q.
Следовательно, ω должна удовлетворять следующим условиям:
Г [X, о;(У, Ζ)\ + ω (X, [У, Ζ]) + циклические перестановки из Χ,Υ,Ζ = 0,
\ ω(Χ, ω(Υ, Ζ)) + циклические перестановки из Χ,Υ,Ζ = 0.
Такая деформация является 2-коциклом ω на Q с коэффициента¬
ми в присоединенном представлении. Эта деформация определяет новую
структуру алгебры Ли.
.г/ιк Глава 15
Деформация называется тривиальной, если существует эндомор¬
физм Т: Q —> Q, такой, что оператор 1 + АТ является морфизмом из новой
скобки Ли [ ·, ·]λ в старую [·,·].
Таким образом, для тривиальной деформации имеем
(1 + ΛТ)[Х, У]л = [(1 + АТ)Х, (1 + АТ)У].
Данное равенство подразумевает, что для произвольного А должно быть
удовлетворено следующее условие:
(1 + λΓ)([Χ,Υ] + λω(Χ,Κ)) = [Χ,Υ]+ΧΤ[Χ,Υ]+λ[Χ,ΤΥ] + Χ2[ΤΧ,ΤΥ],
то есть
ω(Χ, Υ) = [ΤΧ, Υ) + [X, ΤΥ} - Τ[Χ, Υ],
Τω(Χ,Υ) = [ΤΧ,ΤΥ}.
Следовательно, ω есть кограница коцепи Τ со свойством
Нт(Х, Υ) = 0, где НТ(Х, Υ) = [(£fxT)A - Τ(£χΤ)Λ] Υ.
Кроме того,
Г[Х,У]Т = [ГХ,ГУ],
где
хХ, Υ]τ=ω(Χ, У).
15.4.2. Производная Ли-Нийенхейса и внешняя производная
Нийенхейса
Производная Ли-Нийенхейса определена на векторных полях
CTXY = [X, Υ]τ = ω(χ, Υ) = [ΤΧ, Υ] + [X, ΤΥ] - Τ[Χ, Υ]
и на дифференциальных формах через определение следующей внешней
производной Нийенхейса:
(dTf)(X) = df(TX), f е А(М),
(dTa)(X, Υ) = da(TX, Υ) + da{X,TY) - (dTa)(X, Y), a € A^M).
Действительно, внешняя производная Нийенхейса обладает свойством
[dT(dT,f)}(X,Y) = df(HT(X,Y)),
15.4. Деформация алгебры Ли
379
поэтому
d^r = О Ηχ = 0.
Кроме того, если Т обратима, выполняется лемма Пуанкаре, то есть ес¬
ли άτΟί = 0, то локально существует такая дифференциальная форма β,
что а = άχβ-
Отметим также, что
d^d = —ddx.
Утомительные вычисления показывают, что
(dTa)(X,Y) = {,CTxa,Y) - (.Стха,Х) + {a,CTxY).
Обращение в нуль скобки Нийенхейса
[ТХ, ТУ] - Т[Х, ТУ] - Т[ТХ, У] + Т2[Х, у] = о
для тензорного поля R, удовлетворяющего условию R2 = 1, дает модифи¬
цированное классическое уравнение Янга-Бакстера [171, 123]:
[RX, RY] - R[RX, У] - R[X, RY] + [X, У] = 0.
В этом случае условия на ω могут быть переписаны в следующем виде:
ω(Χ, У) = [RX, У] + [X, ДУ] - R[X, У],
lj(X,Y)=R[RX,RY].
Наконец, отметим [63], что и скобка, определенная следующим обра¬
зом:
[X, У]д = ω(Χ, У) + R[X, У] = [RX, У] + [X, RY],
удовлетворяет тождеству Якоби.
Из этого следует, что если R является решением модифицированного
классического уравнения Янга-Бакстера, все скобки
ω(Χ, У) = [RX, У] + [X, RY] - R[X, У],
[X,Y]r = [RX,Y] + [X,RY],
[Χ,Υ}χ = [Χ,Υ}Ε + \ω(Χ,Υ)
удовлетворяют тождеству Якоби.
Замечание 27. Существуют различные подходы в рассмотрении полной инте¬
грируемости систем с бесконечным числом степеней свободы, но ясное понимание
связи между ними на сегодняшний день отсутствует. Возможно, более глубокое
понимание может дать новые инструменты для решения назревших проблем нели¬
нейной квантовой теории [ИЗ, 91].
Глава 16
Интегрируемость фермионной динамики
Предпринималось несколько попыток проанализировать интегрируе¬
мость фермионных динамических систем (см., например, [31, 142, 74])
и распространить на такие системы [75], по крайней мере в алгоритми¬
ческом смысле, результаты и методы, используемые для бозонной динами¬
ки и основанные на роли операторов рекурсии. В частности, хотелось бы
определить градуированное кручение Нийенхейса.
В этой главе мы рассмотрим эти попытки. Мы покажем, что смешанное
градуированное (1,1)-тензорное поле Т может действовать как оператор
рекурсии тогда и только тогда, когда Т — четное отображение [129].
Имеются динамические системы, подобные суперсимметричной дина¬
мике Виттена [184], которые допускают бигамильтоново описание с четной
и нечетной гамильтоновыми функциями и в терминах четной и нечетной
структуры Пуассона, соответственно, т. е. так, чтобы динамическое вектор¬
ное поле было всегда четным [183, 172]. Это позволяет строить нечетное
тензорное поле, которое может быть хорошим кандидатом на роль операто¬
ра рекурсии. Мы ясно показываем, что это невозможно.
16.1. Операторы рекурсии в бозонном случае
Здесь мы кратко напомним альтернативное описание в терминах инва¬
риантного (при динамической эволюции) (1,1)-тензорного поля Т.
Мы будем иметь дело только с гладкими, то есть С°°-, объектами, си¬
стема обозначений будет близка, насколько возможно, к используемой в [1]
и [41]. В частности, если М — обычное многообразие (конечной размер¬
ности), мы обозначим через F{M) кольцо вещественнозначных функций
на М, через Х(М) — алгебру Ли векторных полей, через Х{М)* — двой¬
ственную алгебру форм для нее и через Ίι(Μ) — смешанные (1, ^-тен¬
зорные поля.
Было показано, что главное свойство поля Т при анализе полной инте¬
грируемости его инфинитезимальных автоморфизмов — это равенство нулю
его тензора Нийенхейса Мг = 0. Вполне вероятно, что соответствующее
16.2. Градуированное дифференциальное исчисление
381
обобщение такого условия могло бы сыграть важную роль в анализе ин¬
тегрируемости динамических систем с фермионными степенями свободы.
Кроме того, кажется естественным, что такое обобщение могло бы появить¬
ся из градуированного обобщения некоторых из следующих соотношений,
которые являются доступными в бозонном случае:
(a) ЛГт = 0 ==> Im Т — алгебра Ли;
(b) ЛГТ = 0, d(TdH) = 0 ==> d(TkdH) = 0;
(c) ЛГт = 0 άτ о άτ = 0, где άτ — внешняя производная Нийенхейса;
(d) Т =: Лг 1 о Λ2, Ντ = 0 Αχ + А2 удовлетворяет тождеству Якоби
(здесь Αχ и Λ2 — две пуассоновы структуры);
(e) ω(Χ, У) =: [ТХ, Υ] + [X, ТУ] - Т[Х, У], Τω(Χ, У) = [ТХ, ТУ].
Можно было бы ожидать, что некоторые, если не все, из предыдущих
соотношений не выполняются в градуированной ситуации.
Прежде чем мы продолжим анализ градуированного условия Нийенхей¬
са, мы дадим краткий обзор градуированного дифференциального исчисле¬
ния на супермногообразиях, который будет сопровождаться рассмотрением
некоторых простых примеров.
16.2. Градуированное дифференциальное исчисление
Рассмотрим некоторые основные принципы теории супермногообра¬
зия [15, 167], обращаясь к литературным источникам для математически
согласованного определения [169, 64]. В последующем под градуированно-
стъю мы всегда будем понимать Ъ2 -градуированность.
Основным алгебраическим объектом является вещественная внешняя
алгебра Bl = (Bl)о Θ (Bl) 1 с генераторами L. (га, п)-мерное супермного¬
образие — это топологическое многообразие 5, построенное над векторным
суперпространством
В?'п = (ВД х (BL)? (16.1)
с помощью атласа, функции перехода которого удовлетворяют подходяще¬
му условию супергладкости. Супергладкая функция f:U С В™'п —> Bl
обладает обычным суперполевым разложением
fix1 ...х™,#1...#") =
п
= ίο(χ) + Σί«(χ)ΰα+ ..· +/ι...η(*)01.·.0", (16-2)
α=1
382
Глава 16
где х — четные (грассмановы) координаты, ϋ — нечетные координаты, и за¬
висимость функций коэффициентов /... (х) от четных переменных фикси¬
рована их значениями для вещественных аргументов.
Обозначим через G(S) и Q(U) градуированное кольцо супергладких
Б^-значных функций на S и U С 5, соответственно.
Класс супермногообразий, который в настоящее время находит важные
применения в физике, дается супермногообразиями де Витта. Они опре¬
делены в терминах грубой топологии на В™'п, называемой топологией
де Витта, открытые множества которой являются прообразами открытых
множеств в !Ят через отображение тела ат,п: В™'п —> *Нт. Девиттовским
(га, п)-супермногообразие будет, если оно имеет такой атлас, что образы
отображений координат открыты в топологии де Витта, (га, п)-супермного-
образие де Витта является локально тривиальным расслоенным простран¬
ством над обычным m-многообразием So (называемым телом S) с вектор¬
ным слоем [167]. Неудивительно, что, с некоторыми оговорками, супермно¬
гообразие де Витта можно отождествить с супермногообразием Березина-
Константа [121, 5].
Градуированное касательное пространство TS строится следующим
образом. Для каждого х Е S пусть Q(x) — ростки функций в х, обо¬
значим через TXS пространство градуированных Вь-линейных отображе¬
ний X: Q(x) —> Bl, удовлетворяющих правилу Лейбница. Тогда TXS —
свободный градуированный .В^-модуль размерности (га, п), и несвязное
объединение |J TXS может быть задано структурой ранга (га,п) вектор-
xes
ного суперпространства расслоения над S, обозначаемого через TS. Сече¬
ния X(S) пространства TS представляют собой градуированный Q(S)-мо¬
дуль и отождествляются с градуированной алгеброй Ли DerQ(S) производ¬
ных G(S). Производные (или векторные поля) называются четными (или
нечетными), если они являются четными (или нечетными) отображения¬
ми G(S) —> G(S) (удовлетворяющими к тому же градуированному правилу
Лейбница). Локальный базис имеет вид
д д д д л/'
дх15 θϋη' К }
Замечание 28. Если не оговорено явно, то при использовании частной произ¬
водной мы всегда будем подразумевать левую производную, то есть производную,
действующую слева. Вообще, если 2г = (х\дк), то при действии на любую одно¬
родную функцию f Е G{S) левые и правые производные связаны соотношением
Д/ = (-l)p(2i>tp(/>+11//-, ie {1, ...,m + n}. (16.4)
σζ σζ
Аналогичным образом можно определить кокасательное пространство
и расслоение. T*S — это пространство градуированных Вь-линейных отоб-
16.2. Градуированное дифференциальное исчисление 383
ражений TX{S) —> Вь, и TS = IJ Т*5. Т*5 — это свободный градуиро-
x£S
ванный Вь-модуль размерности (га, гг), в то время как Т*5 — это векторное
суперпространство расслоения над S ранга (га,п).
Сечения X(S)* пространства T*S являются градуированным Q(S)-mo-
дулем и отождествляются с градуированными G(S)-линейными отобра¬
жениями DerQ(S) —> G(S). Они являются дифференциальными 1-фор¬
мами на S' и называются четными (или, соответственно, нечетными),
если являются четными (или, соответственно, нечетными) отображения¬
ми Х{М) -> G(S).
Вообще, p-ко вариантным и q-контравариантным градуированным
тензором является любое градуированное Q(S)-мультилинейное отобра¬
жение1 a: X(S) х · · · х X(S) χ X{S)* χ · · · χ X{S)* —> G(S). Набор всех
тензоров ранга (р, q) является градуированным G(S)-модулем.
Градуированная р-форма — это кососимметричные ковариантные гра¬
дуированные тензоры ранга р.
Обозначим через Ωρ(5) набор всех дифференциальных р-форм.
Внешний дифференциал на S определяется посредством X _L df =
= X(f), V/ G G(S), X G X(S), и распространяется на отображе¬
ния QP(S) —> Ωρ+1(5), ρ > 0, обычным образом, так что d2 = 0.
Если Xi G A? (S') — однородные элементы, то
Р+1 *
Χι Λ ... ΛΧρ+ι -L dtp = AXP+1 J. p)+
i=l
+ Σ (-l)6(i’j)[Xi,XJ]AXiA../.....^..AXp+1 JLp, (16.5)
гда i_i
a(i) = 1 + i +p(Xi) ^p(X,t),
/i=l
г-l j~1
b(i,J) = i + j +p№) +p№) ΣΛ)·
h=l h=i
h^i
По определению имеем p(d) = 0.
Производная Ли L(.) форм определяется следующим образом:
L{.y.X(S) х np(S) -> Ωρ(5),
= X _L od + dol _L, VXeX(S).
Очевидно, p(Lx) = p(X).
'С множителями p — X(S) и q — X(S)*.
(16.6)
(16.7)
384
Глава 16
Производную Ли любого тензорного произведения можно очевидным
образом задать с помощью правила Лейбница и, с учетом линейности, рас¬
пространить на любой тензор.
Предположим теперь, что имеется однородный степени р(Т) тен¬
зор Т Е Ti(S). Снова можно задать два градуированных эндоморфизма
сечений X(S) и X(S)* с помощью формул (в следующих двух форму¬
лах X, Y — однородные элементы в X(S), в то время как а — любой
элемент в X(S)*):
Т: X(S) —► X(S), Т: X(Sy —> X(S)*,
T(X, a) =:TX ± a =: (-1 )р(*)рСПх ± fa. (16.8)
Можно было бы попытаться задать градуированное кручение Нийен¬
хейса Т с помощью соотношения, аналогичного обычному соотношению
в бозонном случае:
°λίτ(Χ,Υ;α) =: GHT(X,Y) ± а,
СПТ(Х, Υ) =: Т2[Х, Y] + (-1)р(т)р(х)[?Х, TY] - Т[ТХ, Y}- (16.9)
- (-1)р(Т)р(х)?[Х,?У].
Вычислением легко проверить, что отображение °Ήτ· X{S) х A”(5) —>
—» X(S), заданное в (16.9), является Q{8)-линейным и градуированно ан¬
тисимметричным тогда и только тогда, когда р(Т) = 0.
Замечание 29. Если р(Т) = 1, то отображение, заданное в (16.9), не является
ни антисимметричным, ни линейным как над четной функцией, так и в случае, когда
оно ограничено четными векторными полями. Следовательно, (16.8) и (16.9) задают
градуированный тензор (который к тому же градуируется антисимметрично) тогда
и только тогда, когда р(Т) = 0.
16.3. Супермногообразие Пуассона
Опишем кратко, как ввести суперструктуру Пуассона на (т,п)-мер-
ном супермногообразии S [5, 133]. Дополнительные результаты содержатся
в [68]. Как и прежде, мы обозначим через гг = (х·7 , Ok), г G {1, ..., m +
+ п}, локальные координаты на S. Непосредственным вычислением можно
доказать [5], что
Если (ω2·7 ) — матрица (га + п) х (га + п), зависящая от точки z G S,
со следующими свойствами:
• элементы ωи являются однородными с четностью ρ{ωιΐ) = ρ(ζι) +
+ ρ(ζ^) +ρ(ω) и ρ{ω), независимо от индексов г и j,
16.3. Супермногообразие Пуассона
ωϋ — _(_ΐ)[ρ(ζτ)+ρ(ω)][ρ(ζ3)+ρ(ω)]ων ^
385
(16.10)
• (_l)[p(zi)+p(^)][p(zi)+p(cv)]cuis_d_cujz_|_
dzs
_|_ ( l\\v(zl)+v(u)]\p{zJ)+p{uj)]uls 3 uij I
dzs
_|_ (_ΐ)[ρ(ζ3)+ρ(ω)][ρ(ζζ)+ρ(ω)]^8_^ω1τ _ (16.11)
то скобка ^^
{F,G}=:F^-^^-G (16.12)
делает Q(S) супералгеброй JIu (суперструктурой Пуассона).
Имеется два различных вида структур, соответствующих двум случаям:
ρ(ω) = 0 (четная пуассонова структура) и ρ(ω) = 1 (нечетная пуассонова
структура). Действительно, можно проверить, что скобка (16.12) обладает
свойствами:
. {F,G} = (16.13)
+ (_l)[p(G)+p(w)][p(F)+p(oj)]||(o^^^?j_)_
+ (_1)[р(я)+рИ][р(С)+рИ]цЯ)^)С,^ = 0 (16Л4)
Из (16.13) и (16.14) выводится, что рассматриваемые как элементы
пуассоновой супералгебры однородные элементы G(S) сохраняют свою чет¬
ность, если ρ(ω) = 0, в то же время они изменяют ее, если ρ(ω) = 1.
Если матрица (ωlj) является регулярной, то обратная к ней (ω^·),
= δ·?, дает компоненты симплектической структуры ω = ^dz1 Λ
Adz^Uji, то есть ω является замкнутой и невырожденной со свойствами
p(wij) = р(гг) + ρ(ζ3) + ρ(ω),
Wji = -(-l)p(2i)p(2'W (16.15)
и ω является однородной с четностью, в точности равной ρ(ω).
Имеет место теорема Дарбу [133].
386
Глава 16
Теорема 39. Пусть (5, ω) — (га, п)-мерное симплектическое многооб¬
разие с однородной ω. Тогда
Предложение 40.
• Если ρ(ω) = 0, то dim S = (2г, п), и существуют локальные коорди¬
наты, такие, что
• Если р(ω) = 1, то dim S = (га, га), и существуют локальные коорди¬
наты, такие, что
Располагая пуассоновой структурой, можно приступать к уравнениям
Гамильтона. Из (16.12), если Н — гамильтониан, получаем соответствующие
уравнения:
Теперь хотелось бы сохранить возможность явно построить поток
для (16.17). Для этого требуется, чтобы динамическая эволюция была чет¬
ным векторным полем. В свою очередь, это подразумевает, что пуассонова
структура и функция Гамильтона должны иметь одинаковую четность, так
что, в частности, при нечетной пуассоновой структуре необходима нечетная
функция Гамильтона.
Прежде чем приступить к анализу градуированного условия Нийен¬
хейса, рассмотрим несколько примеров.
Пример 41 (бозонно-фермионный осциллятор). Смешанный бозон-
но-фермионный гармонический осциллятор размерности (2,2) описывается
координатами (#,р, 77, ξ) и следующими уравнениями движения:
dzi
(16.17)
Q = P,
P= -Q,
(16.18)
< V = £,
,£ = -ν·
16.3. Супермногообразие Пуассона
387
Уравнениям (16.18) могут быть даны два гамильтоновых описания. Обыч¬
ному четному гамильтониану
Н = |(р2 +q2) +ιξη
и нечетному
К = ρξ + ςη
соответствуют две пуассоновы структуры:
Ля
Ак =
/О 1 о 0\
-10 0 0
0 0 г 0
0 0 0 г/
/ 0 0 0 1Ν
0 0-10
0 10 0
\-1 0 0 Оу
и>н
ωχ =
ί°
-1
0
0\
1
0
0
0
0
0
—ί
0
^0
0
0
-ί)
ί°
0
0
-1\
0
0
1
ο
0-100
\1 о о о
(16.19)
(16.20)
(16.21)
(16.22)
Можно построить смешанное инвариантное тензорное поле Т в виде
Т =: сон ° Лк
/0 0 1 (Л
0 0 0 1
0 -г 0 0
\г 0 0 0у
(16.23)
Однако это нечетное тензорное поле (р(Т) = 1) не является оператором
рекурсии. Действительно, легко проверить, что
TdH = —ί(άς)ξ + ί(άρ)η — ί(άη)ρ + ί(άξ)ς,
поэтому
TdK = dH, d{TdH) φ 0. (16.24)
Если вычислить скобки Пуассона в координатных переменных, используя
две симплектические структуры, заданные соотношениями (16.21) и (16.22),
получим, что
{q,p}h = 1, {р,д}н = ~ 1, {гп>гп}н = г> = ^ (16.25)
а также
{g.£bc = 1. {^.9}λ· = -1, {Ρ,η}κ = ~ 1, {η,ρ}κ = 1', (16.26)
Глава 16
остальные тождественно равны нулю. Понятно, что сумма {·,·}+ двух
структур сама является пуассоновой структурой со свойством
но она не имеет определенной четности. Кроме того, скобка {·,·}+ является
вырожденной.
Пример 42 (динамика Виттена). Интересные примеры можно взять
из суперсимметричной динамики. Было показано [183, 172], что динамика
гамильтоновых систем Виттена [184] может задаваться бигамильтоновым
описанием с четной скобкой Пуассона и грассмановским четным гамильто¬
нианом или с нечетной скобкой и грассмановским нечетным гамильтониа¬
ном. Вместо рассмотрения общего случая рассмотрим суперсимметричную
цепочку Тоды в координатах (д,р,77,£).
Четный гамильтониан имеет вид
{F,G}+ = 4-l)p(F)p(G){G,i4+,
(16.27)
Я = |(р2 + е«) + ^е*/2.
(16.28)
С четной пуассоновой структурой
О 1
(16.29)
V О О
уравнения движения выглядят следующим образом:
Q = P,
р= -|е9- |^г/е9/2,
ξ = ~\Tieq!‘2·
(16.30)
Тогда следующие функции являются константами движения:
К = ρξ + eq/\
L = ρη - βϊ/2£,
F = ίξη.
(16.31)
16.3. Супермногообразие Пуассона 389
Можно использовать К (или L) в (16.31) как альтернативную функцию
Гамильтона. Соответствующая симплектическая структура имеет вид
ωκ = dq А άξ + dp A dq(e~q/2η) + dp A d^-2e~q/2) + df A dH, (16.32)
где / (q, ρ, η, ξ) — функция, заданная явно в виде
ί = Αξ + Βη,
где
лЫ = -^г-(^=
Р +eq \ _|_ eq \р _|_ ^/р2 _|_ eq ) ^р2 _|_ ед
B(q, р) = ( 2е9/2 In ( т==) - 2р - 2Ре~Ч/2
Р + eq \у/р2 + еЧ \р + у/р2 + еЧ ) yjp2 + е?
(16.33)
Симплектическую структуру со к можно таюке записать в следующем виде:
ωκ = d{dq(-£) + dp( 2β~4/2η) + fdH}.
Если Г — динамическое векторное поле системы уравнений Тоды ви¬
да (16.30), то функция / будет удовлетворять соотношению irdf = β~4^2η,
а это, в свою очередь, гарантирует, что ίΓωκ = dK. Потребуются некоторые
алгебры, чтобы проверить, что (1,1)-тензорное поле
Τ = ωκ о Ля (16.34)
таково, что
TdH = dK,
d(T2dH)^0. (16.35)
И снова тензорное поле Т в (16.34) не является оператором рекурсии.
16.3.1. Суперкручение Нийенхейса
Вспомним, что одним из наиболее важных следствий, вытекающих из
(неградуированного) (1,1)-тензорного поля Т с нулевым кручением Ний¬
енхейса, является возможность генерировать последовательности точных
дифференциальных 1 -форм согласно следующему:
ЛГт = 0, d(TdF) = 0 => d(TkdF) = 0. (16.36)
Глава 16
Данное соотношение является следствием тождества
1ДУ1 d(T2a) = {X ΛΤΥ + ТХ ΛΥ} ± d{Ta)~
- {ТХ ΛΤΥ} ± da-Ητ(Χ,Υ) -La, ( '
в котором а — любая дифференциальная 1-форма.
Действительно, предполагая, что а и Та являются замкнутыми, из
соотношения (16.37) получаем, как следствие, что Т2а является замкнутой
тогда и только тогда, когда Нт = 0, то есть если кручение Нийенхейса
поля Т равно нулю.
Теперь рассмотрим градуированный случай. Предположим, что Т яв¬
ляется градуированным (1,1)-тензорным полем, то есть однородным чет¬
ности р(Т). Тогда, если а — любая дифференциальная 1-форма, используя
определение (16.5) и некоторую (градуированную) алгебру, получим урав¬
нение, аналогичное (16.37):
X AY ± d(T2a) =
= {(-1 )Ρ(τΜγ)χ ΑΤΥ + (-1)Р(Т)Ь(Х)+Р(у)1тх ЛУ} 1 d(Ta)~
_ (_1)Ρ(Τ)[ρ(Χ)+ρ(Τ)]τχ д τγ _|_ da _ (_1 )P(T)GHt(X^ у) ± α+
+ (-1)ρ(τ)ρ(χ)[ΐ - (-1)P^]LTX(TY ± a), (16.38)
где °Ήτ определено в (16.9).
Теперь понятно, что для нечетного (1,1)-тензорного поля (1,2)-тензор-
ное поле, соответствующее его суперкручению Нийенхейса, можно опреде¬
лить только в случае р(Т) = 0. Тот же результат получен при использовании
общего подхода άχ о άχ = 0.
Таким образом, было показано, что существуют примеры динамиче¬
ских систем, динамическое векторное поле Г которых допускает два га¬
мильтоновых описания, нечетное и четное соответственно, и что тензорное
поле Т, построенное на основе соответствующих пуассоновых структур,
не является оператором рекурсии, так как оно не может порождать новые
интегралы движения кроме первых двух.
Было также показано, что этот факт является общим и что для произ¬
вольного градуированного (1,1)-тензорного поля Т градуированное круче¬
ние Нийенхейса не может быть определено за исключением случая, когда Т
четно.
Судя по характеру доказательства кажется вероятным, что подобная
теорема должна быть справедливой также и в бесконечномерном случае.
Запрещающая теорема, доказанная в нашей работе, не исчерпывает,
конечно, анализ полной интегрируемости для градуированных гамильтоно¬
вых систем. Намного больше внимания должно быть привлечено, однако,
16.3. Супермногообразие Пуассона
391
к обобщению на градуированный случай геометрических структур, которые
играют важную и естественную роль в неградуированном случае.
Рекомендации для дальнейшего чтения
• М. Batchelor, «Graded Manifols and Supermanifolds», in Mathematical
Aspects of Superspace, Clarke, C. J. S., Rosenblum, A., Seifert, H.-J. eds.
(Dordrecht, Reidel, 1984).
• M. Dubois-Violette, «Derivation et calcul differentiel non commutatif»,
C. R. Acad. Sci. Paris 307 Serie 1403 (Paris, 1988).
• B. A. Dubrovin, Geometry of Hamiltonian Evolutionary Systems (Bibliopo-
lis, Naples, 1991).
• Faddeev, V. E. Korepin, «Quantum Theory of Solitons», Physics Reports
42C, 1 (1978).
• В. E. Захаров, С. В. Манаков, С. П. Новиков, JI. П. Питаевский, Теория
солитонов: метод обратной задачи (Наука, М., 1980).
Приложение А
Лагранж: краткая биография
Лагранж считается одним из величайших математиков современности
и просто невозможно на нескольких страницах описать его огромный вклад
в математику и физику, поэтому мы ограничимся кратким биографическим
очерком.
Джузеппе Луиджи Лагранджиа (Жозеф Луи Лагранж) родился в Ту¬
рине 25 января 1736 года и умер в Париже 10 апреля 1813 года. В возрасте
19 лет он уже был профессором математики в Артиллерийской школе в Ту¬
рине и вскоре после этого член-корреспондентом Академии Наук Турина.
Первым плодом работы Лагранжа, когда ему было всего девятнадцать, бы¬
ло его письмо к Эйлеру, в котором он решил изопериметрическую задачу,
больше половины столетия бывшую предметом обсуждения. «Чтобы по¬
лучить решение, он сформулировал принципы вариационного исчисления.
Эйлер оценил общность примененного метода и его превосходство над тем,
который использовал он сам, и с редкой любезностью отказался от статьи,
которую он предварительно написал, касающуюся того же самого пред¬
мета, чтобы молодой итальянец мог иметь время закончить свою работу
и объявить бесспорное открытие нового исчисления» [46].
Большинство ранних работ Лагранжа содержатся в пяти томах Трудов
Туринской Академии, известных как Miscellanea Turinensia.
Первый том содержит мемуар по теории распространения звука. В нем
Лагранж указывает на ошибку, сделанную Ньютоном, получает общее диф¬
ференциальное уравнение движения и интегрирует его для случая движе¬
ния по прямой. В этом томе можно найти полные решения задачи попе¬
речных колебаний струны. В частности, статья указывает на недостаток
общности в решениях, ранее данных Тэйлором, Д’Аламбером и Эйлером;
приходит к выводу, что форма кривой в любое время t дается выражени¬
ем у = a sin тх sin nt, и заканчивается блестящим обсуждением эха, биений
и сложных звуков. Другие статьи этого тома касаются рекурсивных рядов,
вероятностей и вариационного исчисления.
Второй том включает в себя замечания о теории и системе обозначе¬
ний вариационного исчисления, уже обсуждавшегося в первом томе, вывод
принципа наименьшего действия как иллюстрации метода, а также решения
различных динамических задач.
Третий том, помимо решений дополнительных динамических задач
с помощью вариационного исчисления и некоторых статей по интегрально¬
Лагранж: краткая биография
393
му исчислению, включает общие дифференциальные уравнения движения
для трех тел, движущихся под действием взаимного притяжения.
Одним словом, в 1761 году Лагранж был величайшим из живших то¬
гда математиков. В своей статье 1764 года о колебании Луны он объясняет,
при помощи принципа виртуальной работы, почему Луна всегда обраще¬
на к Земле одной стороной. Здесь уже содержались в зародыше будущие
обобщенные уравнения движения.
«В 1766 году Эйлер покинул Берлин, и Фридрих Великий немедленно
написал письмо, выражая желание, чтобы у «величайшего Короля в Евро¬
пе» состоял при дворе «величайший математик Европы». Лагранж принял
предложение и провел последующие двадцать лет в Пруссии, где он выпу¬
стил не только длинный ряд мемуаров, изданных в Берлинском и Туринском
издательствах, но и фундаментальный труд Mecanique Analytique» (Анали¬
тическая механика) [46].
Действительно, в течение этих двадцати лет Лагранж публиковал
в среднем по одному мемуару в месяц в Академиях Берлина, Турина и Па¬
рижа. Все его мемуары имеют высокий научный уровень. Более того, неко¬
торые из них фактически являются трактатами. Среди посланных в Париж
заслуживают упоминания мемуар о системе Юпитера (1766), эссе о задаче
трех тел (1772), статья о вековом уравнении Луны (1773) и трактат о возму¬
щении комет (1778). За все эти статьи Лагранж был награжден Академией
Франции, которая объявляла конкурс по этим темам.
В 1787 году, после смерти Фридриха, Лагранж, «который нашел климат
Берлина тяжелым, с удовольствием принял предложение Луи XVI переехать
в Париж. Он получил подобные приглашения из Испании и Неаполя» [46].
Декрет от октября 1793 года, который обязывал всех иностранцев поки¬
нуть Францию, содержал исключение, сделанное специально для него. Ему
предложили стать президентом Комиссии по реформе мер и весов, и различ¬
ные революционные правительства осыпали его почестями и отличиями.
В 1795 году Лагранж был назначен на математическую кафедру в недавно
организованной Ecole Normale (Высшая нормальная школа), которая насла¬
ждалась кратким существованием в течение четырех месяцев, а в 1797 году
он был избран профессором в Ecole Polytechnique (Политехническая шко¬
ла).
Внешне Лагранж был среднего роста и мягких форм, со светло-синими
глазами и бледным цветом лица. По характеру он был нервным и робким,
не переваривал конфликты и для того, чтобы избегать их, охотно позво¬
лял другим пользоваться славой за то, что он сделал сам. Действительно,
значительная часть открытий его великого современника Лапласа состоит
из применения лагранжевых формул к явлениям природы. Даже введение
импульсов и скобки Пуассона произошло в письмах Лагранжа, так же, как
и теории сведения задачи п тел.
Приложение В
О производной Ли
Заметим, что из
следует
или, эквивалентно,
дхр дхк =
дхί дх%
d_ у^ &хо дхк _ q
dt “ дхг дхд
у^ ( d дгр\ дхк , у' &χο ί d дхк\ _ Q
h= ί \dt 9χί ) 9χο έί 9χί \dt dxo J
Значит, можно записать:
f d д^оЛ дхк _ _ sr' δχο ( d дхк ^ _
h=1 \dt 9χί ) дх0 έί δχί \dt dx0 J
_ _ \ ' дхо d f dxk A _ _ y^ 0Xq дХк _ _ y^ &хо dXk
h=1 дхг дх% V dt ) ^ dxi dx% ^ dx1 dxft
dx^
Таким образом, умножая на —£ и суммируя по к, получим
дх
/ d_^o\ дх^_ _ у дхо дХк
к дхк h^i\dt 9χί / дх0 к дхк дх1 ’
у^ / d дхо \ ίу^ дхк \ _ _ у^ dxp дХк
h=1 \dt 9χ1 j \k dxk dx0 j dxk dx1 ’
dXk
dx1
О ПРОИЗВОДНОЙ Ли
и далее
d дхо
dtdxi
Следовательно,
dxj ЗХк
дхк дхг
к= 1
Приложение С
О кеплеровских переменных действия
Две замкнутые кривые интегрирования в интегралах
зафиксированы требованием равенства нулю соответствующих скоростей
или, лучше, соответствующих импульсов р$ ирг, выраженных, естествен¬
но, через переменные и πφ. Таким образом, пределы интегрирования
фиксируются с помощью соотношений
2 2
Ρΰ =
pi = 2 тЕ +
7С
sin ΰ
= 0,
2 тк
--f = °·
Следовательно, интегрирование по ΰ должно происходить в пределах
между ΰι и $2, являющихся решениями уравнения
sin2 ΰ = —\ = cos2 α,
где было использовано уравнение (4.25). Поскольку сама ΰ всегда лежит
между 0 и π, где sin > 0, имеем sin^i = sin ΰ2 = cosa. Следовательно,
интегрирование происходит от ϋ\ = π/2 — а до π/2 и до ΰ2 = π/2 + а
и обратно до ϋ\\ sin изменяется от cos а до 1 и затем до cos а. Таким
О КЕПЛЕРОВСКИХ ПЕРЕМЕННЫХ ДЕЙСТВИЯ
397
образом, получаем
7г/2
7г/2—а
Jo = ί о Vsin2 а — cos2 ΰάΰ =
ΔΈ J Sin V
π/2
2πΰ . 2 f cos2 τ 7
— sm a dr,
J 1 — sm a sm r
где τ определяется из выражения
cos ΰ = sin a sin r.
Следовательно, при ж ξ tg т имеем
Jβ
2πΰ
+οο
/
-d*--cos2a-
I + χ
dx
1 + аг cos a
/ 7Г 7Г
π . 2 _ 2 cosa ) = “ cosa)
и, снова используя уравнение (4.25),
Jβ — 7Ttf 7Τφ.
Интегрирование по г требует применения метода вычетов.
Корни η и Г2 уравнения
2т£ +
являются положительными, если Е < 0, и соответствуют радиусам точек
возврата.
В комплексной плоскости ζ функция
/ (ζ) — \ 2тЕ +
2тк _
Ζ ζ2
имеет две точки ветвления при
ζ± = -
2 Е
1±А/1 + -
2π|Е
тк2
.ш Приложение С
и простой полюс при ζ = 0, поэтому
Jr — % (7— 0) Η- = -|-οο)).
Поскольку ΊΖ(ζ = 0) = \[—π$ и = +°°) — rnk/y/2mE,
получаем
τ , тк
окончательно
Приложение D
О редуцированном фазовом
пространстве
Для того чтобы доказать соотношение
(Adg£)M(p) = (Фд)*Фд-1(р) (£м (Φ9-ι(ρ)))
для начала заметим, что
(AdgOM(p)=±*{etAd*,p)
t=О
= ^{9^-9 \р)
t=О
= |φ(^ίξ.φ9-(ρ))
Следовательно, поскольку Ф является действием
£=О
(Αά9ξ)Μ(ρ)= ±Ф(де«,Фа-1{р))
t=о
ί=0
имеем
= (Фз)*Ф9_!(р) (ξΜ (Φ9-ι(ρ))) ,
(Adg-ιζ)м (р) = Фд(р) (€м(Фд(р))) ■
Приложение Ε
О канонической дифференциальной
1-форме
Пусть М. — дифференцируемое многообразие и Т*ЛЛ — его кокаса-
тельное расслоение. Отображение
т: Т*М^М,
которое связывает с каждой дифференциальной 1-формой на TqM точку q Е
Л4, является сюръективным дифференцируемым отображением.
Пусть Vaq Е Taq(T*M) — касательный вектор на кокасательном рас¬
слоении в точке aq еТ*М. Производная
т*: Т(Т*М)^ТМ
естественной проекции т отображает вектор Vaq в вектор r*aq(Vaq), каса¬
тельный к М в точке q.
Отображение
6:aqe Т*М в(ад) = θα<ι € T*q{T*M),
заданное посредством
0aq(Vaq) = aq (τ*α,(νς,)) , (E.l)
называется канонической 1-формой на кокасательном расслоении Т*Л4.
Если многообразие М по предположению является группой Ли G, то
диаграмма
T*G T*G
Ί 1' (Ε·2)
G ► G
О КАНОНИЧЕСКОЙ ДИФФЕРЕНЦИАЛЬНОЙ 1-ФОРМЕ 401
является коммутативной (здесь Фд = Lg и, для любого д е G, Φ*_ι является
симплектическим диффеоморфизмом индуцированного действия группы G
на кокасательном расслоении T*G).
Действительно,
т ы) = Т (agh) = gh, Wah £ T*G,
Фд (r(ah)) = Фд(Н) = gh, Vah e T*G.
Диаграмма
T*G -
-!—> G
*4
ϊξα
T(T*G) -
► TG
где ξο и ξτ*ϋ задаются посредством
ξβ: 9£θ^ξα(9) = ±Фвч(д)
eTgG,
t=О
£r*G : € T*G -*■ ^t*g(o:s) = (as)
€Ta9(T*G),
i=0
также является коммутативной диаграммой.
Используя коммутативную диаграмму (Е.2), получим
t=0
= ±ФеЧ (τ(αΛ))
t=о
= f Φβ«(Λ)
t=o
= £gW = £g (τ(αΛ))
Из соотношения (10.24) имеем
^ξ(αρ) = (4τ*αθ) (аа) = ^9 (6r*G(as)) =
= ag (r*Qs (Ct*g(Q!s))) = ag (ξβ{9)) ■
•102
Приложение Е
Вернемся к общему случаю.
Нетрудно доказать, что
β*θ = θ
для всякой дифференциальной 1-формы на Т*М,
0:q€M^0(q)=fiqeT*M.
Для начала заметим, что производная от (Е.З) задает отображение
/?* : ТМ —> Т(Т*М),
поэтому, если
t=о
то есть Vq Е TqM с интегральной кривой q(t), где q(0) = q, то
(P*o)q(vq) = e0q cs„(vg)) = β, (τ,β, (/ЗД))).
С другой стороны,
Т./9, (P*q(Vq))= ftr(0(qm
t=о
i,(i)
= Κι.
ί=0
поэтому
(Е.З)
(/?*0),(У,)=/?,(1д, VVqeTqM.
Если ω = —άθ — каноническая симплектическая форма на Т*М, имеем
β*ω = -β*άθ = -άβ*θ = -άβ
для любой дифференциальной 1-формы β на Τ*М.
Приложение F
Об уравнениях твердого тела
Заметим, что для заданного отображения
Αάζα: д G G -> (Αάζα) (д) = Ad*a G (?*, а в S*,
его производная в единице задает отображение
(Αά:α),ε(ξ)= ftAd*eHa
t=О
= ad\a, \/ξ G д.
Точно так же производная отображения
AdlAd*a :heG-> AdrhAdTga G G*
имеет вид
{Αά:Αά;α)^(ξ)= ftAd*eHAd*ga
9 ) *e
С другой стороны, также имеем
t=о
= αάξ(Αά*α).
{Ad:Ad*ga)^)= j-tAd*e4Ad*ga
t=0
t=0
t=0
поэтому
(Ad:a),g((LgUti))=adl(Ad*ga).
Если g — g(t) — кривая в G и a(t) = Ad— кривая в Q*, данное
соотношение эквивалентно соотношению (10.49).
Приложение G
Уравнение Гельфанда-Левитана-
Марченко
Рассмотрим стационарное уравнение Шрёдингера (h = 1,т = ^ на
вещественной оси iR,
+ (к2 - U(x)) φ = 0, (G.l)
где потенциал U(ж) по предположению является быстро убывающей функ¬
цией при ±оо:
lim U(x)= 0.
х->±оо V }
Если ф{х,к) — решение уравнения (G.1) со следующим асимптотическим
поведением:
ф(х,к) ~ expHkx], (G.2)
Ж—>00
то, ввиду четности, ф(х, —к) является решением уравнения (G.1), асимпто¬
тическое поведение которого имеет вид
ф(х,—к) ~ ехр \-ikx].
ж—юо
Кроме того, нетрудно доказать [14, 16], что решение ф(х, к) может быть
выражено в следующем виде:
оо
ф(х, к) = ехр[гкх] + J А(х,у) exp[iky\dy. (G.3)
X
В завершение отметим, что
• имеет место следующая теорема:
Уравнение Гельфанда-Левитана-Марченко 405
Теорема 43 (Титчмарш). Необходимое и достаточное условие того,
чтобы вещественная функция F(q) G L2{—оо, +оо) была веществен¬
ным пределом
F(q) = lim F(q + ih), Vg G ίΗ,
6—>o
функции F(z), голоморфной в области в верхней комплексной полуплос¬
кости (Ь > 0) и удовлетворяющей условию
+оо
J \F(q + ib)\dq = 0(ехр[—2аЬ}),
— ОО
задается формулой
+оо
φ(ί) = ± J F(q) exp[~iqt\dq = 0, Vt < α;
• для b > 0, к ф 0 и М(х) = f \U(y) \ dy < oo существует такая констан-
х
та С, что
\g(x,k) -1\2 < С, (G.4)
где
g(ж, /с) = к) ехр[—гкх\.
Действительно, умножая уравнение (G.1), записанное для φ = ф(у, /с),
на sin к (у — х), получим
и(у)ф(у, к) sin к(у -х) =
= А
dy
-^ф{у, к) sin kly — х) — кф(у, к) cos к(у — χ)
dy
которое, проинтегрированное от х до оо с граничным условием, выра¬
женным уравнением (G.1), дает
оо
J и(у)ф(у, к) sin к(у - x)dy = к [ф(х, к) - егкх] ,
Приложение G
или
оо
ф(х, к) = eikx - J
sin к(х — у) , ч ,
£ и(у)Ф(у, k)dy.
Данное уравнение, выраженное через д(х, к) = ф(х, к) exp[-ikx], име-
ет вид
Решение этого уравнения дается выражением
д(х,к) = ~29п(х,к),
где
9п-\-1 (^5 &) —
ии
/
ехр [—2гк(х — у)] — 1
2гк
U(y)gn{y, k)dy, д0(х, к) = 1,
равномерную сходимость которого легко проверить. Действительно,
поскольку y>xnk = q + ibcb>0, имеем
< 1*1’
exp [—2гк(х — у)] — 1
1
1
ехр [2Ь(х - у)]
2 гк
2 гк
“Г
2 гк
поэтому, с М(х) = f \U(y)\dy,
\gi(x,k)\ <
М(х)
Τ'
Кроме того,
ОО
|gn+i(x, fe)| < щ J\U(y)\\gn(y,k)\dy,
Уравнение Гельфанда-Левитана- Марченко
так что, из индуктивного предположения
Мп(х)
\3η{χΛ)\ <
имеем
оо
I , ,м 1 „M'Wj M“+1w
<WJ №)l < -р^ри-
X
Таким образом,
Iff(s, ft) - 1| < exp
Следовательно, для b > 0 функция
h(x, /с) = ф(х, k) — ехр[г/сж] = ехр[г/сж] [у(ж, к) — 1], к = q + ib,
является квадратично интегрируемой относительно q Ε ίΗ, поскольку
\h(x,k)\ = |exp[iftx] [g(x,k) - 1]| = exp[-6z] |ff(z,ft) - 1|,
так что
\h(x, k)\2 = exp[—2bx] \g(x,k) — 1|2 < Cexp[—2bx] ос О (exp[— 2foe])
Следовательно,
+oo
J Ih(x, k)|2 dq — О (exp[—2foe]),
— oo
и можно применить теорему Титчмарша, получив выражение
+оо
А(х, У) = ^ j h(x, ft) exp[~iqy]dq = 0, Vy < x,
— OO
обратное которому при у > х дает
+оо
h(x, к) = / А(х, у) exp[iky]dy, у > х.
X
Из вида h(x, ft) и данного уравнения получаем (G.3).
М(х)
1*Г
407
•и ж Приложение G
Таким образом, было показано, что решение
оо
ф(х, к) = ехр[гкх] + J А(х,у) exp[iky\dy (G.5)
X
является аналитическим в комплексной открытой верхней полуплоскости,
определенной условием Im/c > 0. Кроме того, всякое решение уравне¬
ния (G.1) можно выразить как линейную комбинацию ф(х,к) и ф(х,—к),
которые линейно независимы.
Следовательно, два решения ψ(χ, к) и ψ(χ, —к) уравнения (G.1), име¬
ющие асимптотическое поведение
ф(х,к) ~ ехр[—гкх],
х —► — оо
ф{х,-к) n*j ехр [гкх],
х—► — оо
могут быть выражены в следующем виде:
ψ(χ, к) = р(к)ф(х, к) + а(к)ф(х, —к),
ψ(χ, —к) = р(—к)ф(х, —к) + а(—к)ф(х, к).
Обратные соотношения имеют вид
ф(х, к) = 0(к)ф(х, к) + а(к)ф(х, —к),
ф(х, —к) = p(—k)rf>(x, —к) + α(—φψ(χ, к),
где
р(к)р(к) +а(к)а(—к) = 1, р(к)а(к) +а(к)р(—к) = 0,
а(к)р(к) + р(-к)а(к) = 0, ЖкЩк) + а(-к)а(к) = 1.
Коэффициенты а(к), Р(к), а(к) и р(к) можно легко выразить через функ¬
ции ф(х, к) и ψ(χ, к).
Действительно, используя выражения (G.6), вронскиан W функ¬
ций ф{х, к) и ψ(χ, к)
W [ф(х, к),ф(х, к)} = ф(х, k)-j-ip(x, к) — ψ(χ, к)-^ф{х, к)
ах ах
связан с вронскианом W функций ф(х, к) и ф(х,—к) посредством
W [ф(х, k),i/j(x, /с)] = a(k)W [ф(х, к), ф(х, —/с)].
Поскольку вронскиан двух решений уравнения Шрёдингера не зависит от х,
имеем
W [ф(х, к), ф(х, -/с)] = lim W [ф(х, к), ф(х, -/с)] = W [eikx, e~ikx] = -2гк,
(G.6)
(G.7)
Уравнение Гельфанда - Левитана- Марченко
409
поэтому
W [ф(х,к),ф(х,к)\
а(к) = 1 V ’ . (G.8)
ΔΊΚ
Альтернативно, используя соотношения (G.7) вместо (G.6), получим
W [ф(х, /с), г1>(х, к)] = aW [ф(х, /с), ф(х, -к)},
поэтому
5(ц = о(ц = -Щ£фЫ.
Подобным образом из
W [ф(х, -к), ф(х, fc)] = 0(k)W [ф(х,-к), ф(х, к)} =
= P(-k)W [ф(х, -к), ф(х, А)]
мы также получаем
ж-h) = -0(к) =
так что
|a(A;)|2 = l + |/3(fc)|2. (G.9)
С помощью первого соотношения из (G.6) можно ввести функцию рас¬
сеяния, определяемую посредством
^Ш1 = ф(х’-к) + Ш;ф{х,к)· <G10)
которая хорошо описывает следующие физические процессы:
Волна ф(х, —к) ~ ехр[—гкх], падающая из +оо на препятствие,
представленное потенциалом U(x), частично отражается при +оо
Р(к) р(к)
как ——ф(х,к) ~ __ехр[—гкх], и частично проходит при —оо
CiyK) СХуК)
ф(х,к) 1 г ·; 1
как —— — ехр-г/сгс.
а(к) а(к)
Отношения
R(k) = Т(к) ~ 1
а(к) ’ а(к)
называются коэффициентом отраэюепия и коэффициентом прохождения,
соответственно. Вследствие (G.9), они удовлетворяют соотношению
|ад|2 + |Т(А:)|2 = 1.
410 Приложение G
Кроме того, R(k), а(к) и р(к) являются аналитическими в комплексной
открытой верхней полуплоскости Im к > 0.
Умножая обе части уравнения (G.10) на ехр[iky] и интегрируя по к
от — оо до +оо, получим
+оо +оо +оо
/ ^а{к) eikVdk = / Ф(х’-кУкУ(1к+ J R(k)<P{x,k)eikydk. (G.11)
— оо —оо —оо
Вычислим по отдельности обе части, далее обозначаемые как D и В.
Используя соотношение (G.5), то есть
оо
ф(х,±к) = ехр[±гкх] + J А(х, у) exp[±iky]dy,
имеем1
+оо +оо оо +оо
J ф(а:,-k)eikydk = j eik(y~x)dk + J dz(A(x,z) J eik(y~z)dkj =
— OO —OO X —OO
OO +00
= J dz^A(x,z) J eik(<y~z'j dk'j = 2nA(x,y).
Следовательно,
+oo
B = 2nA(x,y) + J R(k)eih{x+y)dk+
—00
00 +00
+ Jάζ^χ,ζ) J R(k)eik{z+y)dk
OO
= 2n^A(x,y) + Fc(x+y) + J A(x,z)Fc(z + y)dzj,
где +oo
Fc(x) = ^ J R(k)eikxdk
— OO
есть преобразование Фурье коэффициента отражения.
1 Учтем, что А(х,у) определена только при у > х и что в этом случае δ(χ ± у) =
-у +оо
ξξ —— f dk ехр [гк{х =Ь у)] = 0.
Уравнение Гельфанда-Левитана-Марченко 411
Для того чтобы вычислить интеграл в левой части уравнения (G.l 1),
+оо
D= г
J а(к)
заметим, что а(к) — аналитическая функция в комплексной открытой верх¬
ней полуплоскости Im к > 0, где она имеет простые нули, соответствующие
связным состояниям. Действительно, если а(к) равно нулю в точке ко, то
W [ф(х,ко),г1>(х,ко)] = О,
поэтому ф(х, ко) и ψ(χ, ко) являются линейно зависимыми. Следовательно,
получаем
ф(х,к0) = Р(к0)ф(х, ко). (G.12)
С другой стороны, решение ф(х, к) экспоненциально убывает при я—>оо
так же, как и яр(х,к) при х —> —оо, поскольку Im/c > 0. Следовательно,
можно заключить, что ф(х, ко) и ψ(χ, ко) являются волновыми функциями
связных состояний, если Im ко > 0.
Так как к% является вещественным, fco = ΐχο будет чисто мнимым.
Для того чтобы показать, что ко — простой нуль, введем для простоты
обозначения
ф = ф(х,к), ф = гр(х,к), а(к) = Ф = Ф =
и рассмотрим уравнение Шрёдингера для фиф:
ф" + к2ф = иф, Ψ" + к2ф = Uip.
Дифференцируя по к второе уравнение, получим
■ф" + к2ф = иф- 2к-ф.
Вычитая из первого уравнения Шрёдингера, умноженного на ψ, данное
уравнение, умноженное на ф, получим
или, эквивалентно,
поэтому
ф,,гф — ψ"φ = 2 кфф,
~±ντ[φ,φ} = 2кфф,
\У[ф,ф] ^ = 2к J φφάх, (G.13)
-I
где ί — произвольный параметр.
412
Приложение G
С помощью такой же процедуры получим
- νν[φ,·ψ} 1 = 2к ί φφάχ.
(G.14)
X
С другой стороны, используя (G.8), можно написать
-jr(2ika) = 2га(к) + 2гкй(к) = -У/[ф,ф\ - \У[ф,ф 1.
ак
(G.15)
Теперь обратим внимание, что
• данное уравнение не зависит от х\
• при к = ко как ф, так и ψ равны нулю;
• как W[<j), ψ\, так и \№[ф, ф] равны нулю при х = ±/ —> ±оо.
Следовательно, при таких условиях, прибавляя (G.13) и (G.14) к (G.15),
получим
где было использовано (G.12).
Данное уравнение показывает, что ко является простым нулем а(к).
Продолжим вычисление интеграла D, применяя метод вычетов, со¬
гласно которому
для любой области дТ>, полностью принадлежащей полю аналитичности
функции ф и содержащей конечное число сингулярных изолированных то¬
чек Zk.
Для этого выберем полуокружность бесконечного радиуса, содержащу¬
юся в верхней полуплоскости Im к > 0.
При бесконечном радиусе полуокружности множители ви¬
да ехр[гк(у ± ж)] при у > х дадут нулевой вклад от интеграла по границе.
+оо
2гкоа(ко) = 2ко / ф(х, ко)ф(х, ko)dx =
— оо
— оо
п
Уравнение Гельфанда-Левитана-Марченко 413
Следовательно, вклад в интеграл дает только интеграл по вещественной
оси к, то есть от D. Таким образом,
п
D = 27™Σ^(*χ:ί).
3 = 1
где χ соответствуют связным состояниям, то есть a(ixj) = 0.
С другой стороны,
П(гх,) = йп (* - ад^е·*» = e-»V(x,%) Ш» =
= e~Xjyip(x,iXj) lim ^ ^ —
e XjV^p(x,ixj) lim
k^Xj a(k) - a(ixj)
(k-ixj)
k^Xj a(k) - a(ixj)
\ dk
— ΐβ~χΐυψ(χ, IXj)
-1
к-iXj,
1
+oo
β^Χί) I <P2(x,iXj)dx
— OO
где было использовано (G.16) и где с — константы нормировки φ, опреде¬
ляемые ниже.
Волновые функции связных состояний ζ(χ,ίχ^ имеют вид
/- ( · ^ · \ Ф&^Хз)
CiWXj) = Οόφ(χ,1Χό) = Cj —— - ,
р{гХз)
где было использовано (G.12). Здесь с — константы нормировки φ, задавае¬
мые следующим образом:
1
J \C(x,iXj)\2 dx = с2 J\<fi{x,iXj)\2 dx,
и входящие в асимптотическое поведение функций ζ,
((x,kj) ~ Cjexp[—kjx].
χ—>oo
414 Приложение G
Таким образом, было показано, что
Щ^Хз) = i<?je~Xiy ф(х, ixj).
Следовательно, используя для ф выражение (G.5), окончательно получим
D = -2ttJ2 ή
Полагая
-эо(*+1/)+ J A{x,z)e~x>(z+y)dz
X
Fb(x) = J2j с)е
ο-Xj*
+ 00
F(x) = Fb(x) + Fb(x) = Fc(x) = ± J R(k)eikxdk + J2
ήβ~χ*χ,
можно записать (G.11), то есть В = D, в следующем виде:
оо
А(х, у) + F(x + у) + J А(х, z)F(z + y)dz = 0.
X
Данное уравнение, которое является интегро-дифференциальным уравнени¬
ем типа уравнения Вольтерра, известно как уравнение Марченко при х £
и как уравнение Гельфанда-Левитана при х £ U {0}.
Уравнение Гельфанда-Левитана-Марченко позволяет восстанавли¬
вать потенциал взаимодействия U, если известны данные рассеива¬
ния S = {xj, Cj, R(k)}, поскольку может быть доказано следующее соот¬
ношение1 :
Щх) =-2±А(х,х).
'Стоит напомнить, что А(х, у) определено только при у > х. Таким образом,
ти л ,· ί дА(х>У) , дА(х,У)
Конечно, А(х,у) может быть определена по непрерывности при у = х, и если она дифферен¬
цируема в точке, потенциал будет иметь вид
U(x) = -2
dA(x, х)
dx
Уравнение Гельфанда-Левитана-Марченко 415
Для того чтобы доказать справедливость данного соотношения, вычислим
из (G.5) производную ф(х, к) по х.
Имеем
оо
£ф(х,к) = ikeikx + J Ax(x,y)eikydy- А{х,у)\у=.
гкх
х е »
поэтому
оо
£рф(х,к) = —k2eikx + JAxx(x,y)eikvdy - Ах(х,у)\y=xeikx-
X
~ [Мх,У)\у=х + Ау(х’У)\у=х} eikx-ik А(х,у)\у=х
Лкх
С другой стороны, представляя интеграл в (G.5) в виде двух частей,
в предположении
lim А(х,у) = О,
получаем
ф(х,к) = eikx + ^ А(х,у)е^ -±J Ay(x,y)eikydy
X
ОО
= - ±А(х,х)е** -±J Ay(x,y)eikydy =
X
ОО
+ 77^ / Avv{x,y)e*»dy =
(г/с) J
X
= eikx _ ±A(x,x)eikx + i Ay(x,y)\y=xeikx-
OO
-±J Ayy(x,y)eikydy.
416 Приложение G
Подставляя предыдущие выражения ф и ф" в левую часть уравнения
Шрёдингера, получим
оо
-2Ax(x,x)eikx + J [Ахх(х,у) - Ауу(х,у)]е*кУс1у = 11ф(х,к)
X
и, еще раз используя (G.5) в правой части, также
оо
с(х> х)егкх + j [Ахх(X, у) - Ауу(X, у)] e%kydy =
ОО
J A(x,y)eikydy
-2 А~
= U
eikx +
что окончательно дает
U (х) = -2^А(х,х),
Ахх(х,у) - Ауу(х,у) - U(x)A(x,y) = 0.
Литература
[1] R. Abraham, J. E. Marsden, Foundations of Mechanics (Benjamin/Cum¬
mings, Reading, Mass., 1978).
[2] В. И. Арнольд, Математические методы классической механики (На¬
ука, М., 1979).
[3] V. I. Arnold, V. V. Kozlov, A. I. Neishtadt, Mathematical Aspects
of Classical and Celestial Mechanics, Dynamical Systems III
(Springer-Verlag, Berlin, 1988). Имеется русск. изд.: В. И. Арнольд,
В. В. Козлов, А. И. Нейштадт, Математические аспекты классиче¬
ской и небесной механики (ВИНИТИ, М., 1985).
[4] D. V. Alekseevskij, А. М. Vinogradov, V. V. Lychagin, «Basic ideas and
concepts of differential geometry», Encyclopaedia of Mathematical
Sciences, Vol. 28, ed. R. V. Gamkrelidze (Springer-Verlag, Berlin,
1992). Имеется русск. изд.: Д. В. Алексеевский, А. М. Виноградов,
В. В. Лычагин, Основные идеи и понятия дифференциальной геомет¬
рии, в т. 28 сборника «Современные проблемы математики. Фунда¬
ментальные направления» (ВИНИТИ, М., 1988).
[5] F. A. Berezin, Introduction to Superanalysis, ed. Kirillov (D. Reidel,
Dordrecht, 1987).
[6] L. Brillouin, Wave Propagation in Periodic Structures (Dover, 1953).
[7] I. Choquet-Bruhat, C. Dewitt-Morette and Dillard-Bleik, Analysis,
Manifold and Physics (North-Holland R C., 1977).
[8] F. Calogero and A. De Gasperis, «Spectral Transform and Solitons 1»,
Studies in Mathematics and its Applications, Vol. 13 (Amsterdam, 1982).
[9] C. Cercignani, Spazio, tempo e movimento (Zanichelli, Bologna).
[10] R. Chemoff and J. Marsden, Lect. Notes in Math (Springer-Verlag, Berlin,
1974), p. 425.
[11] C. Chevalley, Theory of Lie Groups (Princeton University Press, Princeton,
1946). Имеется русск. изд.: К. Шевалле, Теория групп Ли (Изд. ин. лит.,
М., 1948).
418
Литература
[121 A. Connes, Non-Commutative Differential Geometry, Pub. I.H.E.S. 62,257
(Paris, 1986).
[13] R. Cushman and L. Bates, Classical Integrable Systems (1993).
[14] V. de Alfaro, T. Regge, Potential Scattering (North-Holland, Amsterdam,
1965).
[15] B. De Witt, Supermanifolds (Cambridge University Press, London, 1984).
[16] A. di Giacomo, Lezioni di Fisica Teorica (Edizioni ETS, Pisa, 1992).
[17] P.A.M.Dirac, Lectures in Quantum Mechanics, Belfer Graduate School
of Sciences (Yeshiva University, New York, 1964). Имеется русск. изд.:
П. А. М. Дирак, Лекции по квантовой механике (Ижевская республи¬
канская типография, Ижевск, 1998).
[18] Р. А. М. Dirac, Lectures on Quantum Field Theory, Belfer Graduate School
of Science (Yeshiva University, New York, 1966). Имеется русск. изд.:
П. А. М. Дирак, Лекции по квантовой теории поля (Мир, М., 1971).
[19] J. J. Duistermaat, «Global action-angle coordinate», Comm. Pure Appl.
Math., Vol. XXXIII (1980), p. 687.
[20] G. Eilemberger, Solitons (Springer-Verlag, Berlin, 1981).
[21] A. Fasano, S.Marmi, Meccanica Analitica (Boringhieri, Torino, 1994).
[22] L. D. Faddeev, L. A. Takhtadjan, Hamiltonian Method in the Theory
of Solitons (Springer-Verlag, Berlin, 1986). Имеется русск. изд.:
Л. Д. Фаддеев, Л. А. Тахтаджян, Гамильтонов подход в теории соли-
тонов (Наука, Гл. ред. физ.-мат. лит., М., 1986).
[23] G. Gallavotti, Meccanica Elementare (Boringhieri, Torino, 1986).
[24] Ф. P. Гантмахер, Лекции no аналитической механике (Мир, М., 1975).
[25] Е. Goursat, Lecons sur I ’ integration des equations aux derivees partielles
du premier ordre (Hermann, Paris, 1921).
[26] A. Hanson, T. Regge, C. Teitelboim, Constrained Hamiltonian Systems
(Accademia Nazionale dei Lincei, Roma, 1976).
[27] А. А. Кириллов, Элементы теории представлений (Мир, М., 1974).
[28] А. Н. Колмогоров, С. В. Фомин, Элементы теории функций и функци¬
онального анализа (Наука, М., 1977).
[29] S.Kobaiashi, К. Nomizu, Foundations of differential geometry, I, II
(Interscience Publishers, New York, 1963). Имеется русск. изд.:
Ш. Кобаяси, К. М. Номидзу, Основы дифференциальной геометрии
(Наука, М., 1981).
Литература
419
[30] I. S. Krasil’shchik, V. V. Lichagin, A. M. Vinogradov, Geometiy of jet
spaces and nonlinear partial differential equations (Gordon and Breach,
1986).
[31] B. Kupershmidt, Elements of Superintegrable Systems (D. Riedel,
Dordrecht, 1987).
[32] C. Lanczos, The Variational Principles of Mechanics (Dover, 1986). Име¬
ется русск. изд.: К. Ланцош, Вариационные принципы механики (Мир,
М., 1965).
[33] G. Landi, «Ап introduction to noncommutative spaces and their
geometries», Lectures Notes in Physics, New Series m: Monographs
(Springer-Verlag, Berlin, 1997).
[34] S. Lang, Linear Algebra (Addison-Wesley, Reading, Mass., 1966).
[35] J. W. Leech, Classical Mechanics, Science Paperbacks (Chapman and Hall,
London, 1965). Имеется русск. изд.: Дж. У. Лич, Классическая механи¬
ка (JAR, М., 1961).
[36] Т. Levi-Civita, U. Amaldi, Lezioni di Meccanica Razionale (Zanichelli,
Bologna 1929). Имеется русск. изд.: Т. Леви-Чивита, У. Амальди, Курс
теоретической механики (Изд-во ин. лит., М., 1951).
[37] S.Lie, Theorie der transformationsgruppen, Zweiter Abschnitt, unter
mitwirkung von. Prof. Dr. Frederich Engel (Teubner, Leipzig, 1890).
[38] Л.Д. Ландау, E. М. Лифшиц, Механика (Наука, М., 1988).
[39] S. D. Lindenbaum, Analytical Dynamics (World Scientific, 1994).
[40] E. Mach, «Die Mechanik», in ihrer Entwickelung historisch-kritisch
dargestellt (1883). Имеется русск. изд.: Э. Max, Механика, истори¬
ко-критический очерк ее развития (СПб., 1909).
[41] G. Marmo, Е. J. Saletan, A. Simoni, В. Vitale, Dynamical Systems (John
Wiley, 1985).
[42] J. Moser, «Various aspects of integrable hamiltonian systems», in Progr.
Math., Vol. 8 (Birkhauser, Boston, 1980).
[43] E. Nelson, Tensor Analysis (Princeton University Press, Princeton, 1967).
[44] A. M. Perelomov, Integrable Systems of Classical Mechanics and Lie
Algebras (Birkhauser Verlag, Basel, 1990). Имеется русск. изд.:
А. М. Переломов, Интегрируемые системы классической механики
и алгебры Ли (Наука, М., 1990).
[45] М. Rasetti, Modern methods in equilibrium statistical mechanics (World
Scientific, 1986).
420
Литература
[46] W. W. Rouse Ball, A Short Account of the History of Mathematics (Dover,
New York, 1960).
[47] E. J. Saletan and A. H. Cromer, Theoretical Mechanics (John Wiley, New
York, 1971).
[48] J. A. Schouten, Ricci Calculus, 2nd ed. (Springer, Berlin, 1954).
[49] R. Schmid, Infinite Dimensional Hamiltonian Systems (Bibliopolis,
Naples, 1987).
[50] B. Schutz, Geometrical Methods of Mathematical Physics (Cambridge
University Press, 1980).
[51] M. Spivak, A Comprensive Introduction to Differential Geometry (Publish
or Perish, Boston, 1970).
[52] J. M. Souriau, Structure des systemes dynamiques (Dunod, Paris, 1970).
[53] L. Tonelli, Fondamenti di Calcolo delle Variazioni (Zanichelli, Bologna,
1921).
[54] I. Vaisman, Lectures on the Geometry of Poisson Manifolds (Birkhauser
Verlag, Basel, 1990).
[55] F. W. Warner, Foundations of Differentiable Manifolds and Lie Groups
(Springer-Verlag, Berlin, 1983). Имеется русск. изд.: Ф. Уорнер, Основы
теории гладких многообразий и групп Ли (Мир, М., 1987).
[56] Н. Weyl, Space, Time and Matter, 4th ed. (Dover, New York, 1952). Име¬
ется русск. изд.: Г. Вейль, Пространство, время, материя (Янус, М.,
1996).
[57] Ε. Т. Whittaker, A Treatise on the Analytical Dynamics of Particles and
Rigid Bodies (Cambridge University Press, London, 1904, 4th edition,
1959). Имеется русск. изд.: Э. Уиттекер, Аналитическая динамика
(Изд-во РХД, Ижевск, 1999).
[58] A. Wintner, The Analytical Foundations of Celestial Mechanics (Princeton
University Press, Princeton, 1941). Имеется русск. изд.: А. Уинтнер,
Аналитические основы небесной механики (Физматгиз, 1967).
Статьи
[59] М. J. Ablowitz, D. J. Каир, А. С. Newell and Н. Segur, Phys. Rev. Lett. 30
1262 (1973), Stud Appl. Math. 53 249 (1974).
Литература 421
[60] М. Adams, Т. Ratiu and R. Schmid, Math. Ann. 273, 529 (1986), 275
(1986).
[61] M. Adler, «On the trace functional for formal pseudodifferential operators
and the symplectic structure for Korteweg-de Vries type equations», Inv.
Math. 50,219 (1979).
[62] V. I. Arnold, Ann. Inst. Fourier Grenoble 16(1), 319 (1966).
[63] O. Babelon, С. M. Viallet, SISSA 54, EP (1989).
[64] C. Bartocci, U. Bruzzo, «Some differential-geometric approach to super-
manifolds», J. Geom. and Phys. 4, 391 (1987).
[65] S.Benenti, Lect. Notes in Math. №836, 512 (1980).
[66] A.M.Bloch, Phys. Lett. A116, 353 (1986).
[67] A. Bogoyavlenskij, Comm. Math. Phys. 180, 529 (1996).
[68] F. Cantrijn and A. Ibort, Introduction to Poisson supermanifolds, preprint,
1989.
[69] G. Cassinelli, E. De Vito, A. Levrero, The Dynamical Evolution of
Quantum Systems in the Adiabatic Approximation, preprint (Universita
di Genova, 1996).
[70] D. V. Choodnovsky and G. V. Choodnovsky, II Nuovo Cimento 40, 339F
(1977).
[71] R. Cirelli, L. Pizzocchero, «On the integrability of quantum mechanics as
an infinite dimensional Hamiltonian system», Nonlinearity 3 (1990).
[72] J. D. Cole, Q. Appl. Math. 9, 225 (1951).
[73] M. Crampin, G. Marmo and C. Rubano, Phys. Lett. 37A, 88 (1983).
[74] A. Das and S. Roy, J. Math. Phys. 31, 2145 (1990).
[75] A. Das, When-Jui Huang, S. Roy, J. Math. Phys. 32, 2733 (1991).
[76] S. De Filippo, G. Landi, G. Marmo, G.Vilasi, «Tensor field defining
a tangent bundle structure», Ann. Inst. H. Poinc. 53, 205 (1989);
«An algebraic description of the electron-monopole dynamics», Phys.
Lett. 220B, 576 (1989); G. Landi, G. Marmo, «Algebraic Lagrangian
formalism», SISSA, Trieste (SISSA 90/90/FM 1990).
[77] S. De Filippo, G.Landi, G.Marmo, G.Vilasi, «An algebraic
characterization of complete integrability for hamiltonian systems», in
Differential Geometric Methods in Theoretical Physics, Rapallo (June,
1990), Lect. Notes in Physics 375 (Springer-Verlag, 1991).
I
Литература
[78] S. De Filippo, G. Marmo, M. Salerno, G. Vilasi, On the Phase Manifold
Geometry of Integrable Nonlinear Field Theory, preprint IFUSA (Salerno,
1982), unpublished.
[79] S. De Filippo, G. Marmo, M. Salerno and G. Vilasi, «Phase manifold
geometry of Burgers hierarchy», Lett. Nuovo Cimento 37(3), 105 (1983).
[80] S. De Filippo, G. Marmo, M. Salerno, G. Vilasi, «А new characterization
of complete integrable systems», IlN. Cimento 83B, 97 (1984).
[81] S. De Filippo, G. Marmo, G. Vilasi, «А geometrical setting for the Lax
representation», Phys. Lett. 117B(6), 418 (1982).
[82] S. De Filippo, G. Vilasi, «Geometrical Methods for Infinite Dimensional
Dynamical Systems», Proceedings Second World Conference on
Mathematics (Las Palmas, Spain, 1982), p. 236.
[83] S. De Filippo, M. Salerno, G. Vilasi, Lett. Math. Phys. 9, 85 (1985).
[84] L. A. Dikii, Funkt. Anal. Pril. 6(4), 83 (1972).
[85] P. A. M. Dirac, «Generalized Hamiltonian dynamics», Canad. J. Math. 2,
129 (1950).
[86] P. Di Stasio and G. Vilasi, Lett. Math. Phys. 11, 299 (1986).
[87] I. Ya Dorfman, Deformation of Hamiltonian Structures and Integrable
Systems (1983).
[88] V. G. Drinfeld, V. V. Sokolov, Lie Algebras and Korteweg-de Vries Type
Equations, VINITI, Contemporary Problems of Mathematics. Recent
Developments (Moscow, 1984) (in Russian) p. 81-180.
[89] Б. А. Дубровин, В. Б. Матвеев, С. П. Новиков, Успехи мат. наук, 31(1)
(1976) 59.
[90] A. Einstein, «Die Grundlage der allgemeinen Relativitatstheorie», Annalen
derPhysik 49, 769 (1916).
[91] L. Faddeev, «Symplectic structures and quantization of the Einstein
gravitation theory», Actes du Congris Internal Math. 3, 35 (1970).
[92] L. D. Faddeev and V. E. Zakharov, Funct. Anal. Appl. 5, 18 (1971).
[93] L. D. Faddeev and L. A.Takhtajan, Theor. Math. Phys. 21, 160 (1974).
[94] A. S. Fokas and B. Fuchsteiner, «On the structure of symplectic operators
and hereditary symmetries», Lett. Nuovo Cimento 28(8), 299 (1980);
A. S. Fokas and B. Fuchsteiner, Nonlinear Anal. TMA 5, 423 (1981);
A. S. Fokas, R. L. Andersen, «On the use of isospectral eigenvalue problem
for obtaining hereditary symmetries for Hamiltonian systems», J. Math.
Phys. 23(6), 1066 (1982).
Литература
423
[95] А. Р. Fordy, P. Р. Kulish, «Nonlinear Schrodinger equation and simple Lie
algebras», Comm. Math. Phys. 89(4), 423 (1983).
[96] A. Frolicher and A. Nijenhuis, Indag. Math. 23, 338 (1956).
[97] A. Frolicher, A. Nijenhuis, «Theory of vector valued differential forms
I—II», Nederl. Acad. Westinch. Proc. A59, 338 (1965).
[98] B. Fuchsteiner, «The Lie algebra structure of the NEE admitting infinite
dimensional abelian symmetry group», Prog. Theor. Phys. 65(3), 861
(1981).
[99] B. Fuchsteiner, «The Lie algebra structure of the degenerate Hamiltonian
and bi-Hamiltonian system», Prog. Theor. Phys., 68(4), 1082 (1982).
[100] B.Florko, A. Yanovski, On Magns theorem for complete integrability,
Communication JINR (Joint Institute for Nuclear Research), Dubna,
E5-83-831 (1983).
[101] C. S. Gardner, S. M. Greene, M.D. Kruskal and R. M. Miura, Phys. Rev.
Lett. 19, 1095 (1967).
[102] I. M. GeFfand and В. M. Levitan, «On the determination of a differential
equation from its spectral function», Isv Akad. Nauk SSSR, Ser. Mat. 15
(1951), Amer. Math. Soc. Transl. 1, 253 (1955).
[103] I. M. Gelfand, I. Ya. Dorfman, «The Schouten bracket and Hamiltonian
operators», Funct. Anal Appl. 14, 71 (1980).
[104] V. S. Gerdjikov, P. P. Kulish, «The generating operator for η x n linear
system», Physica D D3(3), 549 (1981).
[105] V. S. Gerdjikov, A. B. Yanovski, «Gauge-covariant formulation of the
generating operator» (1. The Zakharov-Shabat system; 2. Systems on
homogeneous spaces), Phys. Lett. A103(5), 232 (1984); A110(2), 53
(1985); Comm. Math. Phys. 103, 549 (1986).
[106] R. Giachetti, «Hamiltonian systems with symmetry: an introduction», La
rivista del Nuovo Cimento 4(12) (1981).
[107] J. Grabowski, G. Landi, G. Marmo, «Generalized reduction procedure:
symplectic and Poisson formalism», Forthscritte der Physik 42(5) (1994).
[108] J. Gotay, J. Nester and G. Hinds, «Presymplectic manifolds and the Dirac-
Bergman theory of constraints», J. Math. Phys. 19, 2388 (1978).
[109] F. Guerra and L. Morato, Phys. Rev. D27, 1774 (1983); F. Guerra and
R. Marra, Phys. Rev. D28, 1916 (1983); D29, 1647 (1984).
[110] J. Haantjes, «On Xm-forming sets of eigenvectors», Nederl. Acad.
Westinch. Proc. A58(2), 158 (1955).
•LM
Литература
[111] W.R.Hamilton, Trans. R. Irish Acad. 15, 69 (1828).
[112] W. R. Hamilton, Phil. Trans. Roy. Soc. Part I, 247 (1834); Phil. Trans. Roy.
Soc. Part II, 95 (1835). In The Mathematical Papers of Sir W. R. Hamilton
(Cambridge University Press, 1940).
[113] J. Hietarinta, Quantum Integrability and Classical Integrability (Turku
University, 1984).
[114] E.Hopf, Comm. Pure Appl. Math. 3, 201 (1950).
[115] C. G. J. Jacobi, Crelles J. 17, 97 (1837); Liouvilles J. 3, 60, 161 (1837).
[116] R. Jackiw and V. E. Zakharov, Phys. Rev. I, 133 (1979).
[117] D. J. Каир, J. Math. Anal. Appl. 54, 849 (1976).
[118] B. Kay, Η. E. Moses, II Nuovo Cimento 3, 276 (1956).
[119] B. G. Konopelchenko, V. G. Dubrovski, «General TV-th order differential
spectral problem: general structure of the integrable equations,
nonuniqueness of the recursion operator and gauge invariance», Ann. Phys.
156(2), 256 (1984).
[120] D. J. Korteweg, G. de Vries, Philos. Mag. Ser. 5 39, 422 (1895).
[121] B. Kostant, «Graded manifolds, graded Lie theory and prequantization»,
Differential Geometric Methods in Mathematical Physics, LNM 570
(Springer-Verlag, Berlin, 1977), pp. 177-306.
[122] P. P. Kulish, A. G. Reymann, «Hierarchy of symplectic forms for the
Schrodinger equation and for the Dirac equation on the line», Zap. LOMI
(Notes of the Leningrad Branch of the Mathematical Institute) 77 (1978)
{in Russian), pp. 134-147.
[123] P. P. Kulish, E. K. Sklyanin, «About the Yang-Baxter equation solutions»,
Zap. LOMI (Notes of the Leningrad Branch of the Mathematical Institute)
95 (1980) (in Russian), pp. 129-160.
[124] B. A. Kupershmidt, Phys. Lett. A109, 136 (1985).
[125] G. Landi, «An algebraic setting for gauge theories», Doctor Philosophiae
Thesis, SISSA (Trieste, 1988); G. Landi, G. Marmo, «Lie Algebra
extensions and Abelian monopoles», Phys. Lett. B195, 429 (1987);
«Extensions of Lie superalgebras and supersymmetric Abelian gauge
fields», Phys. Lett. B193, 61 (1987); «Graded Chem-Simons terms»,
Phys. Lett. B192, 61 (1987); «Algebraic reduction of the ’t Hooft-
Polyakov monopole to the Dirac monopole», Phys. Lett. B201,101 (1988);
«Einstein algebras and the algebraic Kaluza-Klein monopole», Phys. Lett.
B210, 68 (1988); «Algebraic instantons», Phys. Lett. B215, 338 (1988);
Литература
425
«Algebraic differential calculus for gauge theories», Nuclear Physics В
(Proc. Suppl.) A18, 171 (1990).
[126] G. Landi, G. Marmo, G. Vilasi, «An algebraic approach to inlegrabilily»,
Journal of Group Theory in Physics 2, 1 (1994).
[127] G. Landi, G. Marmo, «Algebraic Lagrangian Formalism», SISSA, Trieste
(SISSA 90/90/FM, 1990).
[128] G. Landi, G. Marmo, G. Sparano, G. Vilasi, «А general reduction
procedure for dynamical systems», Modern Physics Letters A6(37), 3445
(1991).
[129] G. Landi, G. Marmo, G. Vilasi, «Remarks on the complete integrability of
dynamical systems with fermionic variables», J. Phys. A25, 4413 (1992).
[130] G. Landi, G. Marmo, G. Vilasi, «Recursion operators: Meaning and
existence for completely integrable systems», J. Math. Phys. 35(2), 808
(1994).
[131] P. D. Lax, Comm. Pure Math. 21, 467 (1968); 28, 141 (1975); SIAM Rev.
18,351 (1975).
[132] D. L. Lebedev, J. I. Manin, «Gel’fand-Dikii Hamiltonian operator and the
adjoint representation of the Volterra group», Funct. An. Appl. 13(4), 40
(1979).
[133] D. A. Leites, «New Lie superalgebras and mechanics», Soviet Math. Dokl.
18, 1277 (1977).
[134] S. Lie, «Theorie der partiallen gleichungen erster Ordnung», Ann. Math.
Bd. IX, 1875.
[135] J. Liouville, Acta Math. 20,239 (1897).
[136] L. Lusanna, Phys. Rep. 185, 1 (1990);Riv. Nuovo Cimento 14(3), 1 (1991);
Int. J. Mod. Phys. A8, 4193 (1993).
[137] F. Magri, «А simple model of the integrable Hamiltonian equations»,./.
Math. Phys. 19, 1156 (1978).
[138] F. Magri, «А geometrical approach to the nonlinear solvable equations»,
in Lecture Notes in Physics (Springer-Verlag, New York, 1980), p. 120.
[139] F. Magri, C. Morosi, «А geometrical characterization of integrable Ha¬
miltonian systems through the theory of Poisson-Nijenhuis manifolds»,
Quademi del Dipartimento di Matematica (Universita di Milano, 1984).
[140] F. Magri, C. Morosi, O.Ragnisco, «Reduction techniques for infinite-di-
mensional Hamiltonian systems. Some ideas and applications», Comm.
Math. Phys. 99, 115 (1985).
426
Литература
[141] S. V. Manakov, Funkt. Anal. Pril. 10, 93 (1976).
[142] Y. Manin and A. O. Radul, Comm. Math. Phys. 98, 65 (1985).
[143] V. A. Marchenko, «On the reconstruction of the potential energy from
phases of the scattered waves», Dokl. Akad. Nauk. SSSR 104, 695 (1955).
[144] G. Marmo, «А geometrical characterization of completely integrable
systems», Proceedings Geometry and Physics (Florence, 1982), p. 257.
[145] G. Marmo, «Nijenhuis operators in classical dynamics», Proceedings of
Seminar on Group Theoretical Methods in Physics (USSR Academy of
Sciences, Yurmala, Latvian SSR, 1985).
[146] G. Marmo, N. Mukunda, and J. Samuel, «Dynamics and symmetry for
constrained systems: a geometrical analysis», La rivista de II Nuovo
Cimento 6, 2 (1983).
[147] G. Marmo and C. Rubano, II N. Cimento B78, 70 (1983).
[148] G. Marmo and E. J. Saletan, II Nuovo Cimento B40, 67 (1977).
[149] G. Marmo, G. Morandi, G. Mukunda, «А geometrical approach to the
Hamilton-Jacobi form of dynamics and its generalizations», La rivista
del Nuovo Cimento, № 8 (1990).
[150] G. Marmo, G. Vilasi, «When do recursion operators generate new
conservation laws?», Phys. Lett. B277, 137 (1992).
[151] G. Marmo, G. Vilasi, «Symplectic structures and quantum mechanics»,
Modem Phys. Lett. B10(12), 545 (1996).
[152] G. Marmo, A. M. Vinogradov, G. Vilasi, «The local structure of n-Jacobi
and n-Poisson manifold», J. of Geom. Phys. 25(1/2) (1997).
[153] J. E. Marsden, T. Ratiu, «Reduction of Poisson manifolds», Lett. Math.
Phys. 11, 161 (1986).
[154] A. S. Mischenko, Funkt. Anal Pril. 4(3), 73 (1970).
[155] R. M. Miura, C. S. Gardner, M. D. Kruskal, J. Math. Phys. 9. 1204 (1968).
[156] R. M. Miura, SIAM Rev. 3, 412 (1976); C. Cercignani, Riv. Nuovo
Cimento 7, 429 (1977); M. J. Ablowitz, Lect. Appl. Math. 58, 17 (1978);
L. D. Faddeev and V. E. Korepin, Phys. Rep. C42, 1 (1978); V. E. Zakharov
and S. V. Manakov, Phys. Rev. 1, 133 (1979).
[157] G. Morandi, C. Ferrario, G. Lo Vecchio, G. Marmo, C. Rubano, «The
inverse problem in the calculus of variations and the geometry of the
tangent bundle», Phys. Rep. 188, 147 (1990).
Литература 427
[158] Ν. N. Nehorosev, «Action-angle variables and their generalizations»,
Trans. Moscow Math. Soc. 26, 180.
[159] A. Nijenhuis, Indag. Math. 13, 200 (1951); 15, 233 (1953); 16, 17 (1954).
[160] A. Nijenhuis, Indag. Math. 49, 2 (1987).
[161] M. A. Olshanetsky and A. M. Perelomov, Phys. Rep. 71, 313 (1981).
[162] J. P. Olver, J. Math. Phys. 18, 1212 (1977).
[163] R. S. Palais, «The · symmetries of solitons», Bullettin of the American
Mathematical Society 34(4), 339 (1997).
[164] H. Poincare, Acta Math. 13, 1 (1899).
[165] T. Ratiu, Indiana Univ. Math. J. 29(4), 609 (1980).
[166] H. J. Reshetihin, L. D.Faddeev, «Hamiltonian structures of the inlcgrable
field theory models», Theoretical and Mathematical Physics 56(3), 323
(1983).
[167] A. Rogers, «Α global theory of supermanifolds», J. Math. Phys. 21,
1352 (1980); «Graded manifolds, supermanifolds and infinite-dimensional
Grassmann algebras», Comm. Math. Phys. 105, 375 (1986).
[168] A. G. Reiman and M. A. Semenov-Tian-Shanskii, Invent. Math. 54,
81 (1979). A. G. Reymann, M. A. Semenov-Tian-Shanski, «Families of
Hamiltonian structures, hierarchies of Hamiltonian functions and
reductions for first order matrix-valued differential operators», Fund.
Anal. Appl. 14(2), 77 (1980).
[169] M. Rothstcin, «The axioms of supermanifolds and a new structure arising
from them», Trans. AMS 297, 159 (1986).
[170] A. Scott, F. Chu and D. Me Laughlin, Proc. IEEE 61, 1443 (1973).
[171] M. A. Semenov-Tian-Shanski, «What is the classical r-matrix», Func.
Anal. Appl. 17(4), 17 (1973).
[172] V. A. Soroka, Lett. Math. Phys. 17,201 (1989).
[173] R. Sorkin, J. Phys. A10, 717 (1977).
[174] A. P. Stone, «Higher order conservation laws», J. Diff Geometry 3, 447
(1969).
[175] A. P. Stone, «Some remarks on the Nijenhuis tensor», Canad. J. Math.
25(5), 903 (1973).
[176] F. Strocchi, Rev. Mod. Phys., Vol. 4 (1966).
428
Литература
[177] К. Sundermeyer, «Constrained dynamics», Lecture Notes in Physics,
vol. 169 (1982).
[178] W. W. Symes, Physica DI, 339 (1980).
[179] G. Vilasi, «On the Hamiltonian structure of KdV and sine-Gordon
theories», Phys. Lett. B94(2), 195 (1980).
[180] G. Vilasi, «Invariant endomorphism and conserved functionals of the
Liouville equation», Phys. Lett. B174, 203 (1986).
[181] G. Vilasi, «Recursion operator and Г-scheme for Kepler dynamics»,
Conference Proceedings, Vol. 48, National Workshop on Nonlinear
Dynamics, Societa Italiana di Fisica (Bologna, 1995).
[182] A. M. Vinogradov, «Local symmetries and conservation laws», Acta
Aplicandae Mathematicae, №2 (1984), pp. 21-78.
[183] D. V. Volkov, A. I. Pashnev, V. A. Soroka and V. I. Tkach, JETP Lett. 44, 70
(1986).
[184] E. Witten, Nucl. Phys. B188, 513 (1981).
[185] V. E. Zakharov, B. G. Konopelchenko, «On the theory of recursion
operator», Commun. Math. Phys. 94, 483 (1984).
[186] V. E. Zakharov, S.V. Manakov, «About the complete integrability of
nonlinear Schrodinger equation», Theoretical and Mathematical Physics
19(3), 332 (1974); Sov. Scient. Rev. 1, 133 (1979).
[187] V.E. Zakharov and A.B.Shabat, Sov. Phys. JEPT 34, 62 (1972);
F. Lund and T. Regge, Phys. Rev. 114, 1524 (1976); A. S.Bugadov and
L. A.Takhtajan, Sov. Phys. Dokl. 22, 428 (1977); M. Chaichain and
P. Kulish, Phys. Lett. B78,413 (1978); V. E. Zakharov and A. V. Minkailov,
Sov. Phys. JETP 47, 1017 (1978); V. E. Zakharov and A. B. Shabat, Funct.
Anal. Appl. 13, 166 (1979); R. D’Auria, T. Regge and S. Sciuto, Phys. Lett.
B89, 363 (1980).
[188] V. E. Zakharov, L. A. Takhtadjan, «Equivalence between nonlinear
Schrodinger equation and Heisenberg ferromagnet equation», Theoretical
and Mathematical Physics 38(1), 26 (1979).
Предметный указатель
1-форма, дифференциальная канони¬
ческая 237
2-форма Ампера 294
— Фарадея 294
Алгебра Грассмана 169
-Ли 72,219, 234
Атлас 134
— симплектический 238
Базис расслоения 150
Биография Ампера 290
— Бельтрами 210
— Бернулли 41
— Бетти 209
— Бианки 191
— Бора 104
— Галилея 21
— Гамильтона 30
— Гаусса 290
— Герца 33
— Дарбу 238
— Дирака 109
— Кулона 113
— Лагранжа 392
— Лапласа 92
— Леви-Чивиты 68
— Лежандра 53
-Ли 77
— Ляпунова 350
— Максвелла 290
— Ньютона 21
— Планка 101
— Пуанкаре 129
— Пуассона 63
— Риккати 42
— Римана 191
— Риччи 191
— Стокса 205
— Фарадея 290
— Шрёдингера 103
— Эйлера 41
— Эйнштейна 192
— Якоби 64
Вектор Лапласа -Рунге- Ленца 99
— Паули 102
— касательный 137, 139
Гессиан 58
Группа Ли 212
локальная 213
— косопряженное представление
225
— сопряженное представление 220
Действие пуассоново 270
Деформация алгебры Ли 377
Динамика Якоби-Пуассона 72
трехкомпонентная 73
— гамильтонова 70
Идеал алгебры Ли 214
Инвариант интегральный 91
абсолютный 245
относительный 246
Инволюция 67, 115
Интеграл первый 235
— полный 104
Интегрирование, метод Гамильто-
на-Якоби 104
Исчисление вариационное 39
Ковектор 141
430
Предметный указатель
Координаты действие-угол 123, 249
— лагранжевы 37
Кривая брахистохрона 40
— интегральная 95, 153
Лагранжиан 29
— функция 29
Метод обратного рассеяния 317
Многообразие максимально симмет¬
ричное 187
— ориентируемое 134, 197
— подмногообразие 159
— симплектическое 230
— уровень 247
Множитель Якоби 93
Оператор Лапласа-Бельтрами 210
— кодифференциальный 209
— рекурсионный 257, 352
— сжатия 177
— слабо рекурсионный 359
— строго рекурсионный 360
— эндоморфизм 192
Операторы 352
Отображение Пуанкаре 130
— вложение 159
— гомеоморфизм 134
— диффеоморфизм 136
— импульсное 269
— погружение 159, 250
Пара Лакса 318
Поведение хаотическое 130
Поле векторное 93, 145, 244
Киллинга 185
гамильтоново 64
глобально гамильтоново 231
левоинвариантное 214
локально гамильтоново 231
полное 156
— тензорное 170
метрическое 184
Поток векторного поля 156
— гамильтонов 95
— изо спектральный 317
Представление Лакса 315
Преобразование Баклунда 310, 311
— Лежандра 53, 241
— Хопфа-Кола 310
— вполне каноническое 82, 243
— генерирующая функция 81
— каноническое 77
— обратное 145
— прямое 145
— симплектическое 84
— сохраняющее объем 86
площадь 84
Принцип Гамильтона 39, 49
— общей ковариантности 25
— относительности Галилея 21
Маха-Эйнштейна 28
эйнштейновский 24
— эквивалентности эйнштейновский
24
Проекция стереографическая 134
Произведение внешнее 169
— внутреннее 179
— тензорное 164
Производная Гато 45, 333
— Ли 95, 156, 171
— Ли-Нийенхейса 378
— Фреге 44
— внешняя 143, 175
Нийенхейса 378
— ковариантная 188
— функциональная или градиент 46
Пространство векторное 139
— касательное 139
— кокасательное 143
— расслоений главное 152
— расслоенное 150
— редуцированное фазовое 273
— сопряженное векторное 141
— состояний 60, 239
— фазовое 61, 239
Распределение 160
— инволютивное 161
— интегральное многообразие 161
Предметный указатель
431
— локальный базис 160
— максимальное интегральное мно¬
гообразие 161
Рассеяние, коэффициент отражения
317
прохождения 317
Расслоение 114, 162
— Мёбиуса 152
— касательное 148, 151
— кокасательное 151, 237
— лист 114, 162
— реперное 152
— слой 150
— структурная группа 150
— типичный слой 150
Связи голономные 33
— неголономные 33
Сила Лоренца 30
Система каноническая 56
— координат инерциальная 21,23,27
локально инерциальная 24
Скобка Лагранжа 87, 243
— Пуассона 63
— Якоби - Пуассона трехкомпонент¬
ная 73
Скобки Лагранжа 87, 243
— Ли 161,219
— Нийенхейса 194
— Пуассона 63, 235, 243
— коммутатор 65
Сопряжение Ходжа 201
Степени свободы 37
Структура 230
— симплектическая каноническая
237
— слабо симплектическая 336, 337
— строго симплектическая 336
Тензор 164
— Римана191
— Риччи 191
— кручение 190
Нийенхейса 194
— метрический 169
— скалярная кривизна 191
— супер кручение Нийенхейса 389
Теорема Адо 224
— Дарбу 238
— КАМ 129
— Картана 224
— Ли Хуа-Чанга 79
— Лиувилля 116, 248
— Лиувилля-Арнольда 354
— Нетер 241, 244
— Стокса 205
— Фробениуса 161
— Ходжа 211
— Якоби - Пуассона 67
— вириала 59
— монодромии 224
Тождество Бианки 191
ограниченное 191
— Картана 180
— Якоби 64
Тор 123, 124
Уравнение Лагранжа 239
Уравнения Гамильтона-Якоби 105
— Гельфанда-Левитана - Марченко
320
— Кортевега-де Фриза 307
модифицированное 312
— Лиувилля 339
— Максвелла геометрические 2()4
дифференциальные 291
феноменологические 290
— Шрёдингера 368
нелинейное 371
— Эйлера 287
— Эйнштейна 192
— Янга-Бакстера 379
— синус-Гордона 337
Форма гармоническая 210
— дифференциальная А;-форм,ч I7S
— замкнутая 176
— каноническая 1-форма 400
— скрученная 198
— точная 176
Формула Бора 104
Функция гамильтонова 231
Интересующие Вас книги нашего издательства можно заказать почтой или
электронной почтой:
subscribe@rcd.ru
Внимание: дешевле и быстрее всего книги можно приобрести через наш
Интернет-магазин:
http://shop.rcd.ru
Книги также можно приобрести:
1. Москва, ФТИАН, Нахимовский проспект, д. 36/1, к. 307,
тел.: 332-48-92 (почтовый адрес: Нахимовский проспект, д. 34).
2. Москва, ИМАШ, ул. Бардина, д. 4, корп. 3, к. 414, тел. 135-54-37.
3. МГУ им. Ломоносова (ГЗ, 1 этаж).
4. Магазины:
Москва: «Дом научно-технической книги» (Ленинский пр., 40)
«Московский дом книги» (ул. Новый Арбат, 8)
«Библиоглобус» (м. Лубянка, ул. Мясницкая, 6)
С.-Пб.: «С.-Пб. дом книги» (Невский пр., 28)
Гаэтано Вилази
Гамильтонова динамика
Дизайнер М. В. Ботя
Технический редактор А. В. Широбоков
Компьютерная верстка Д. 77. Вакуленко
Корректор М. Г. Пушель
Подписано в печать 17.01.06. Формат 60 х 84У16.
Печать офсетная. Уел. печ. л. 25,11. Уч. изд. л. 25,43.
Гарнитура Таймс. Тираж 600 экз. Бумага офсетная №1. Заказ №007.
АНО «Институт компьютерных исследований»
426034, г. Ижевск, ул. Университетская, 1.
http://rcd.ru E-mail: borisov@rcd.ru
Отпечатано ГУП УР «Ижевский полиграфический комбинат»
426039, г. Ижевск, Боткинское шоссе, 180.