/








Author: Тимофеева Г.А. Умнов Н.В.
Tags: теория машин и механизмов общие вопросы технической механики общее машиностроение машиноведение машиностроение механизмы
ISBN: 978-5-7038-3569-2
Year: 2012




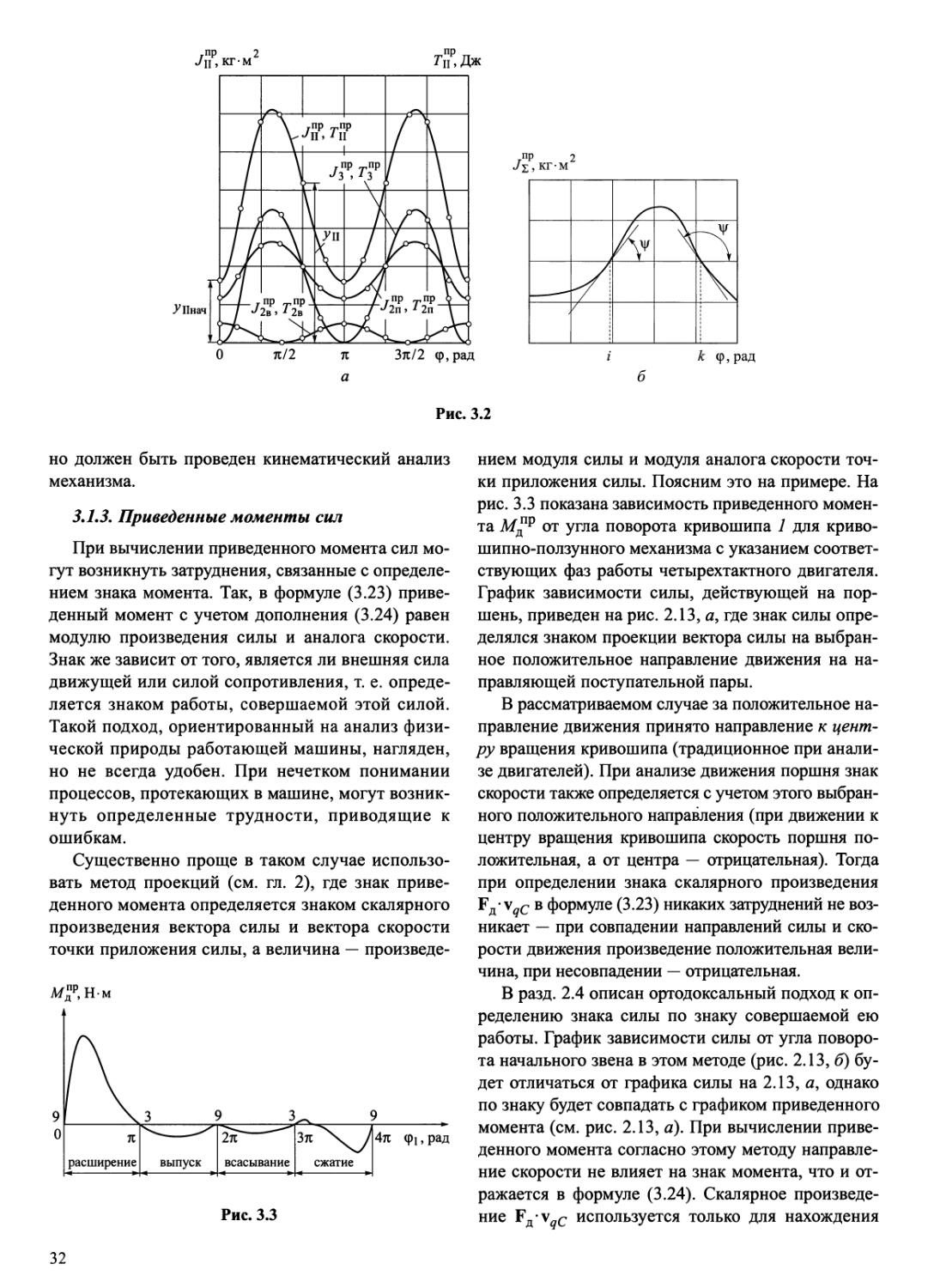
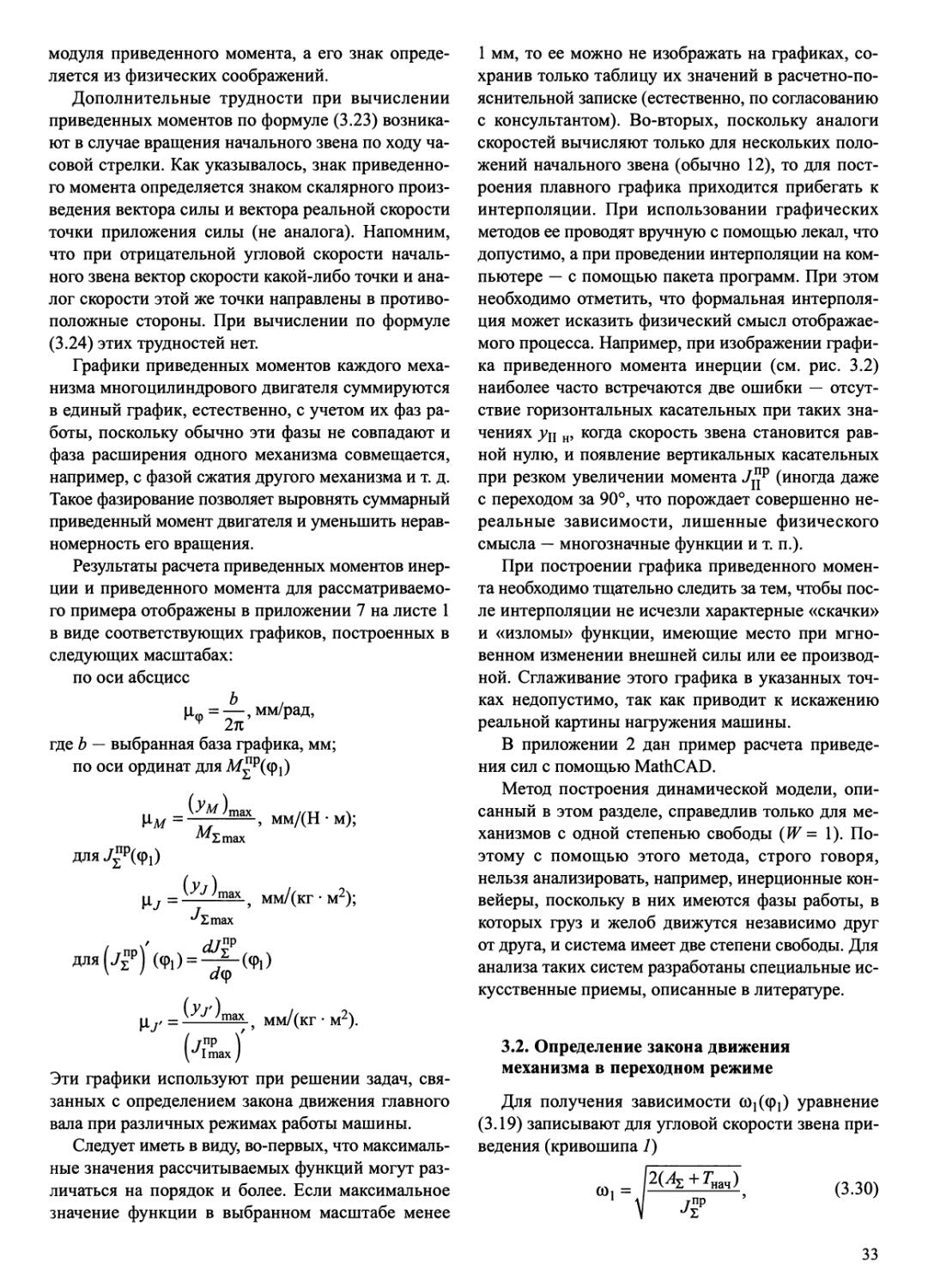
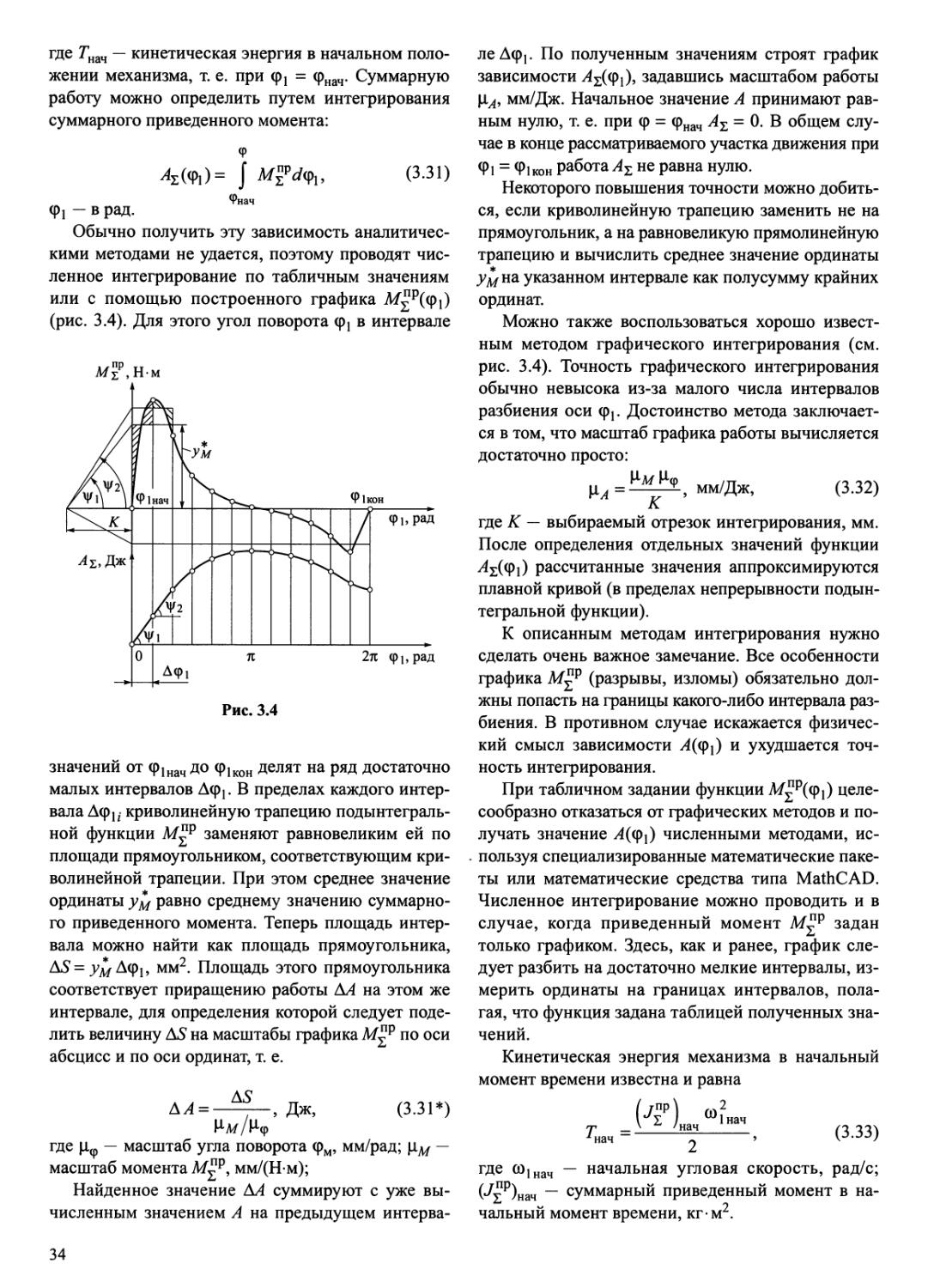
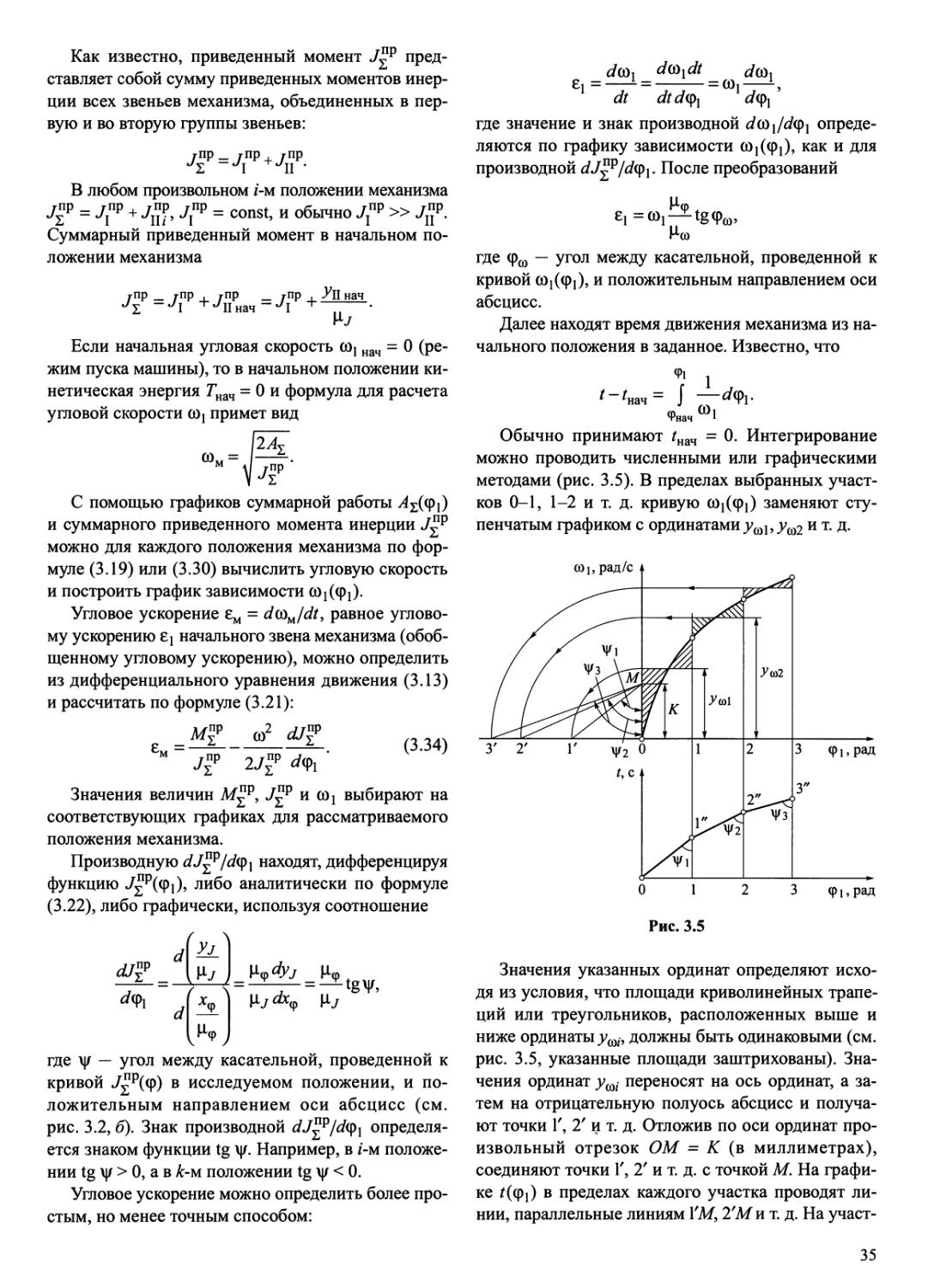
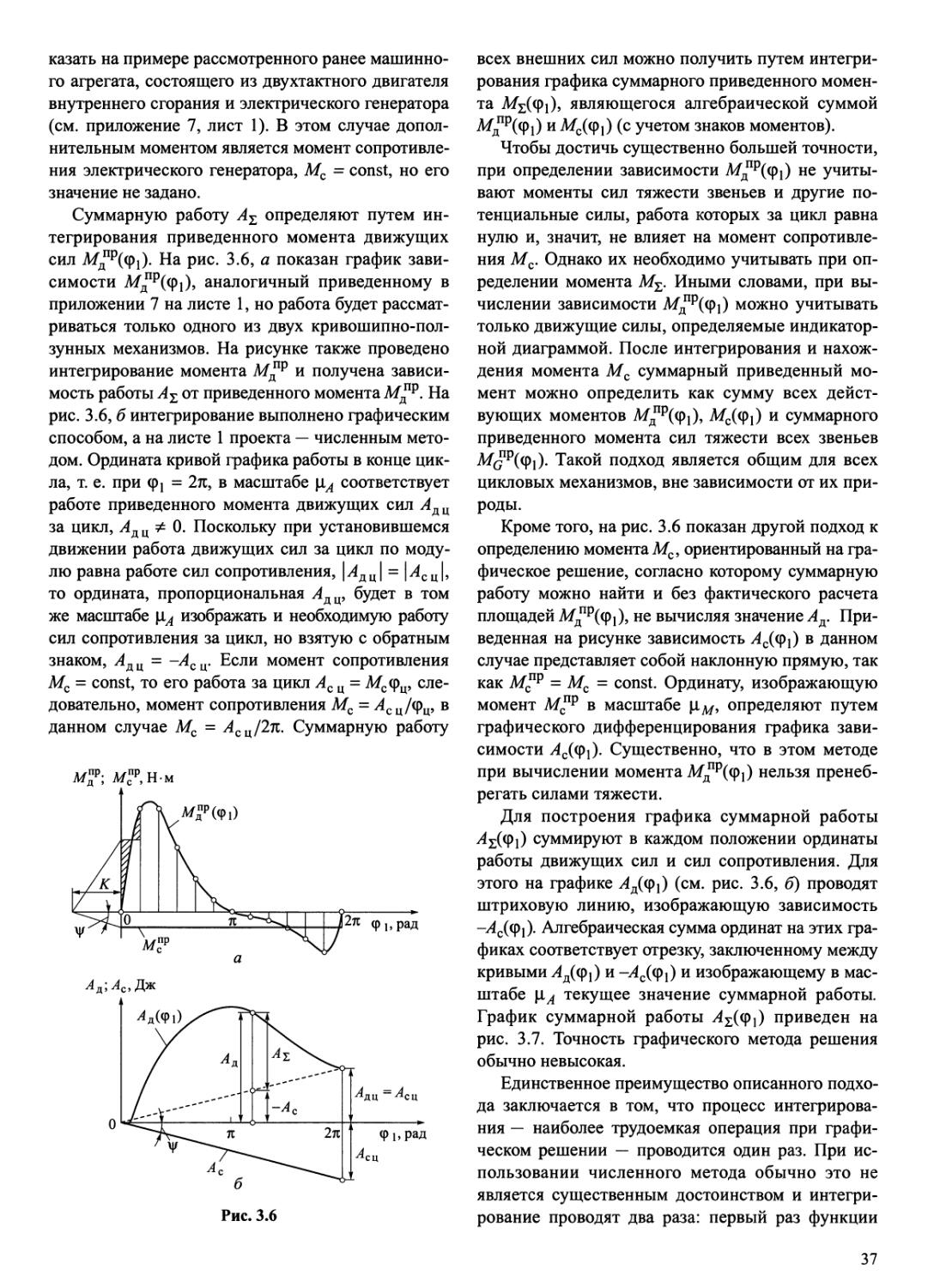
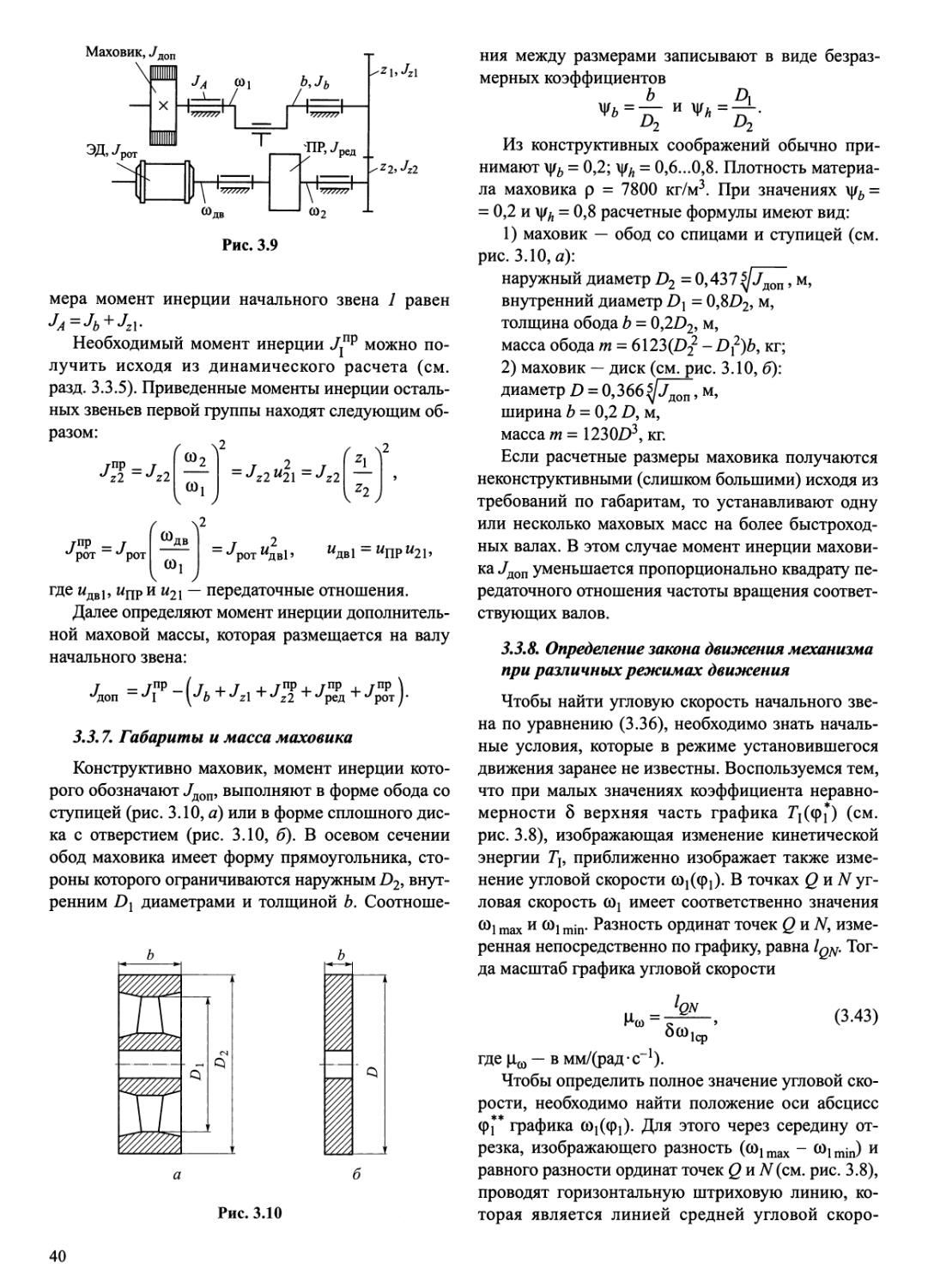
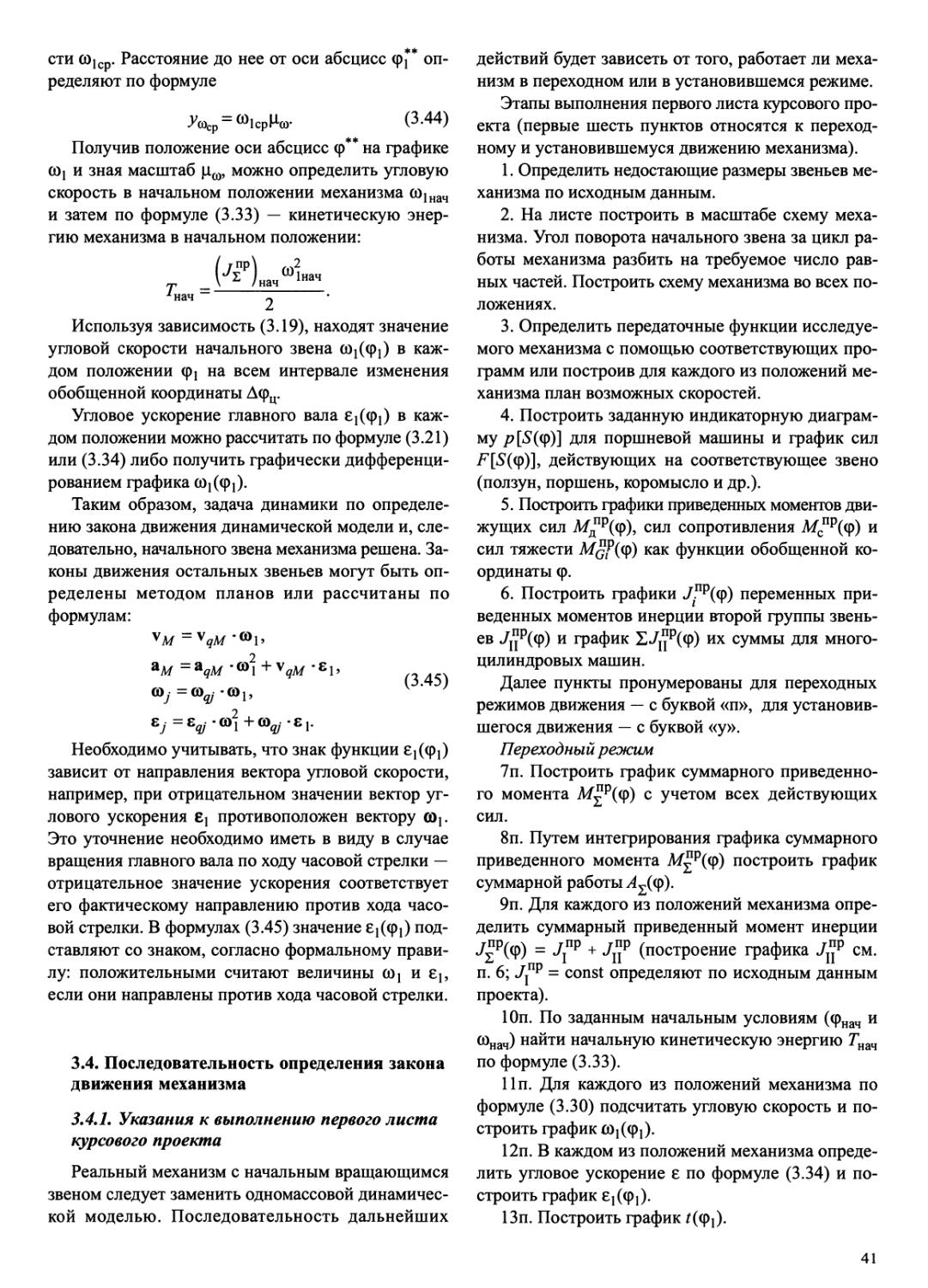
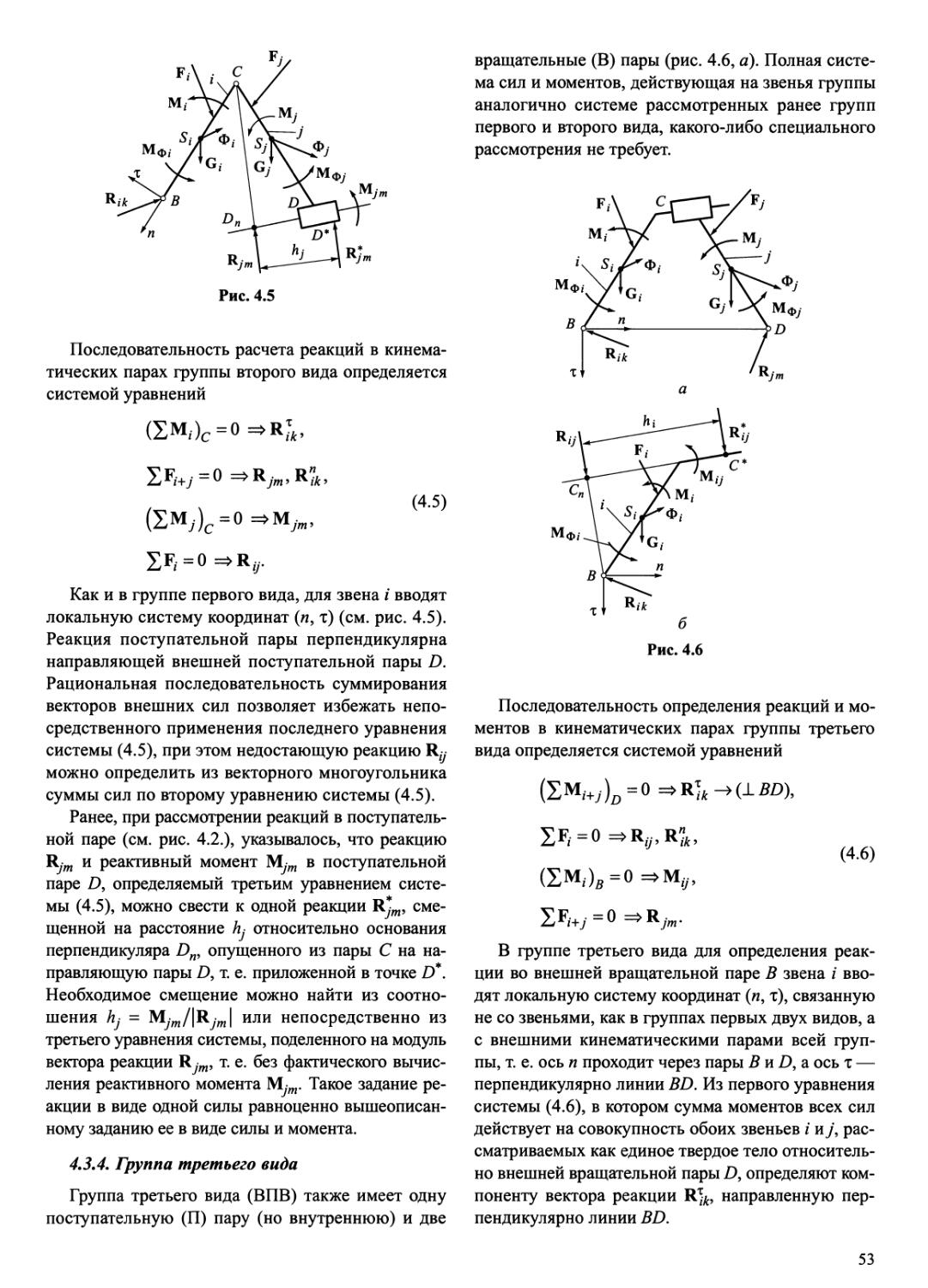
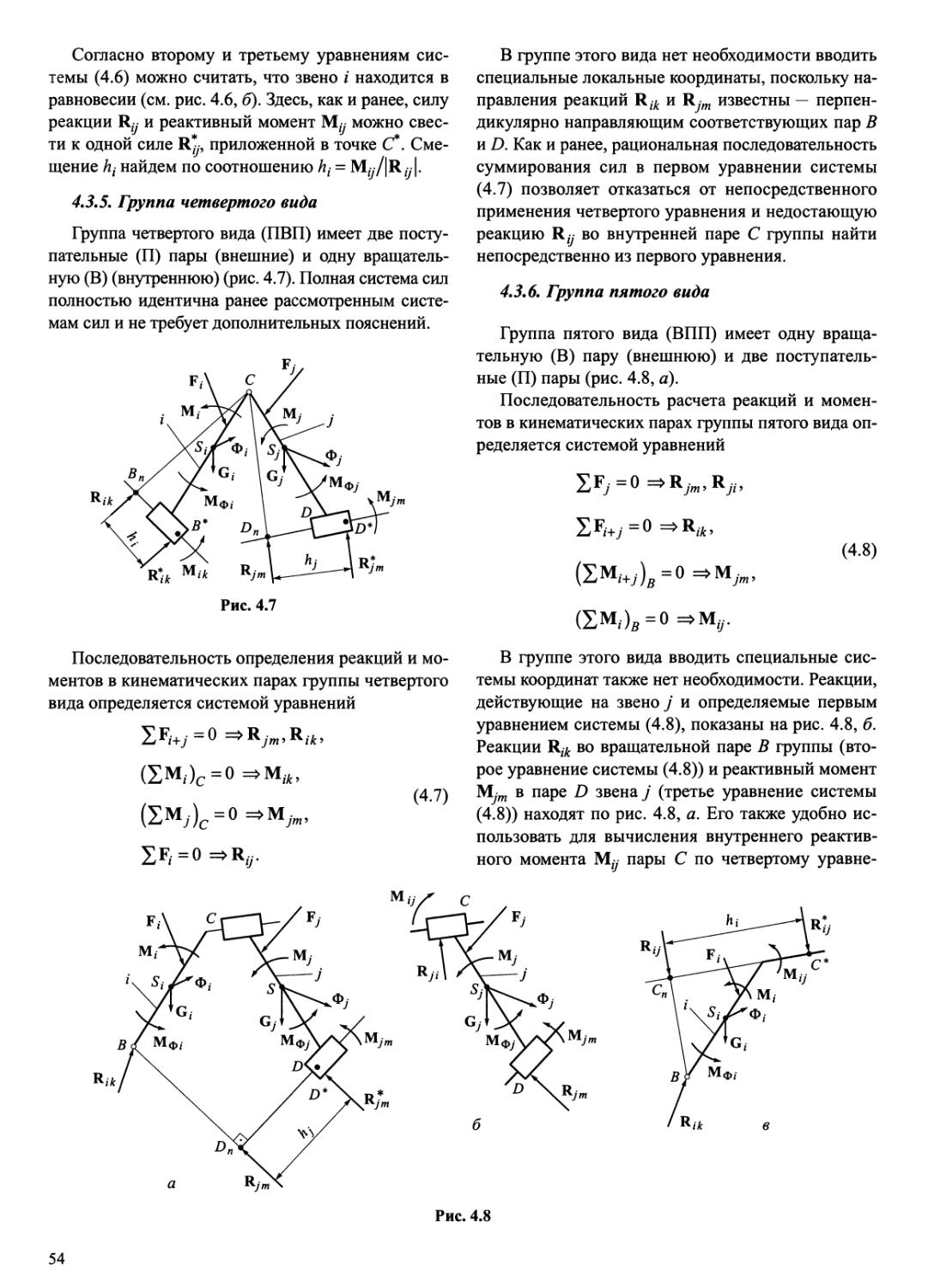
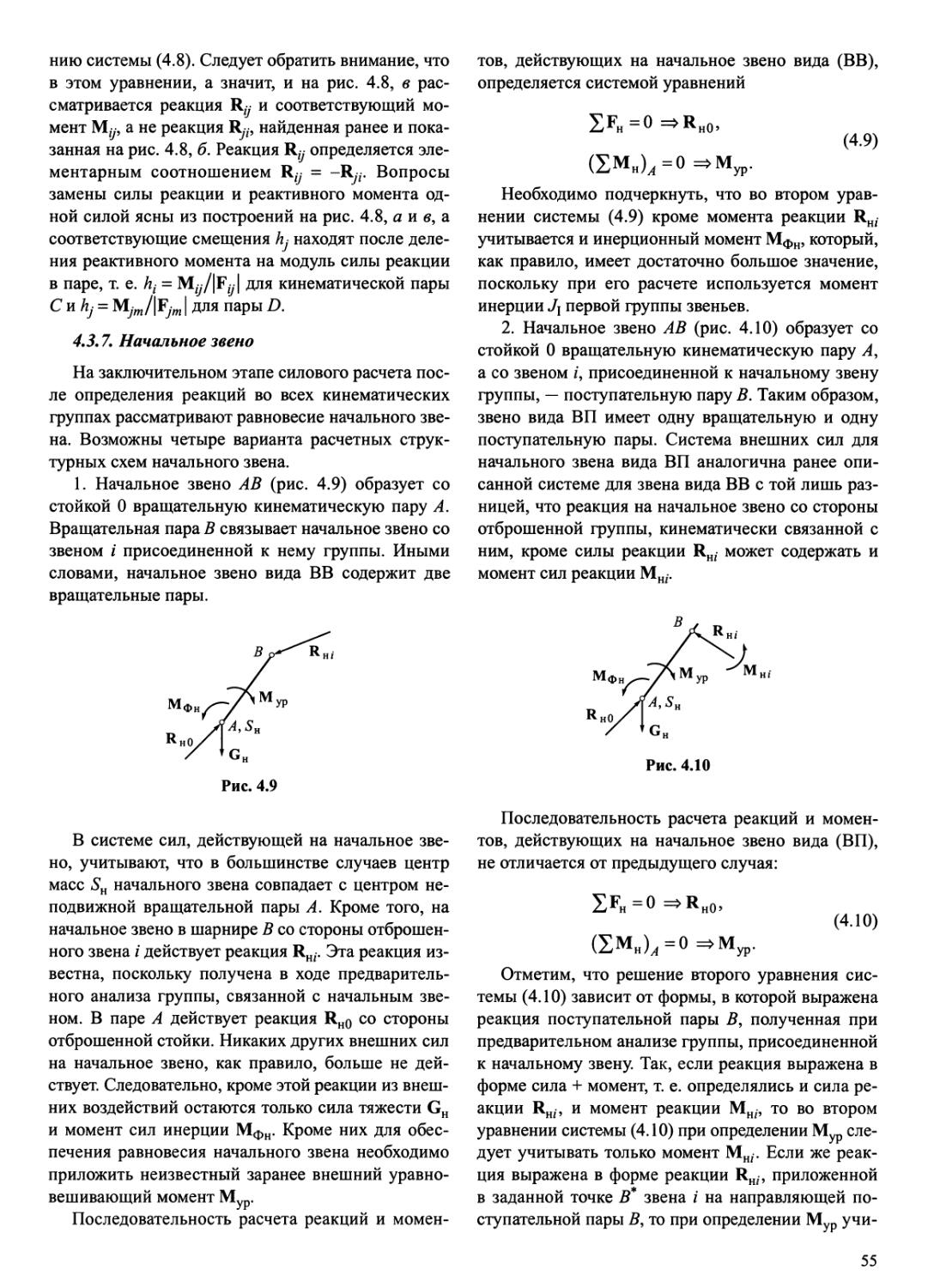
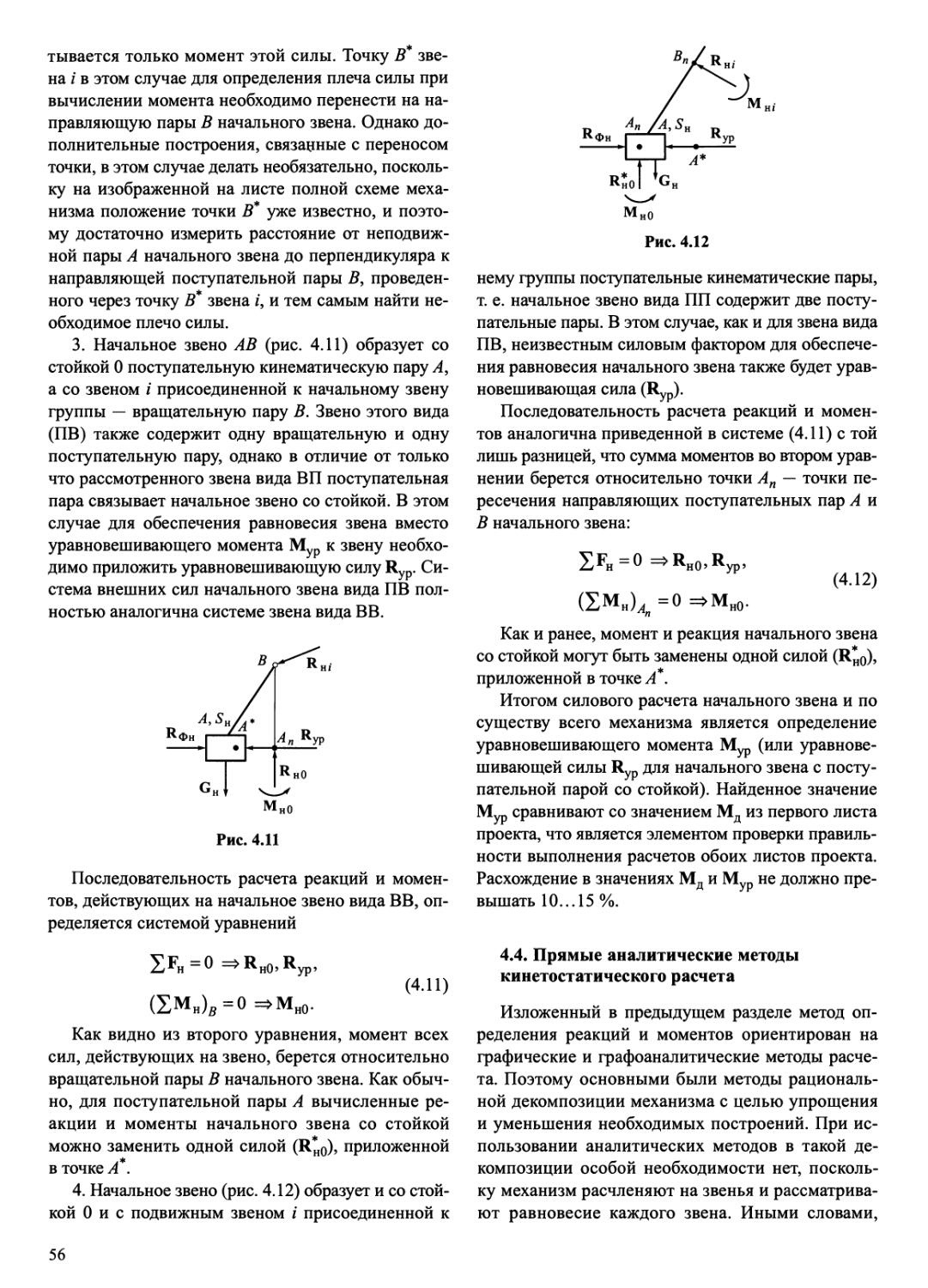
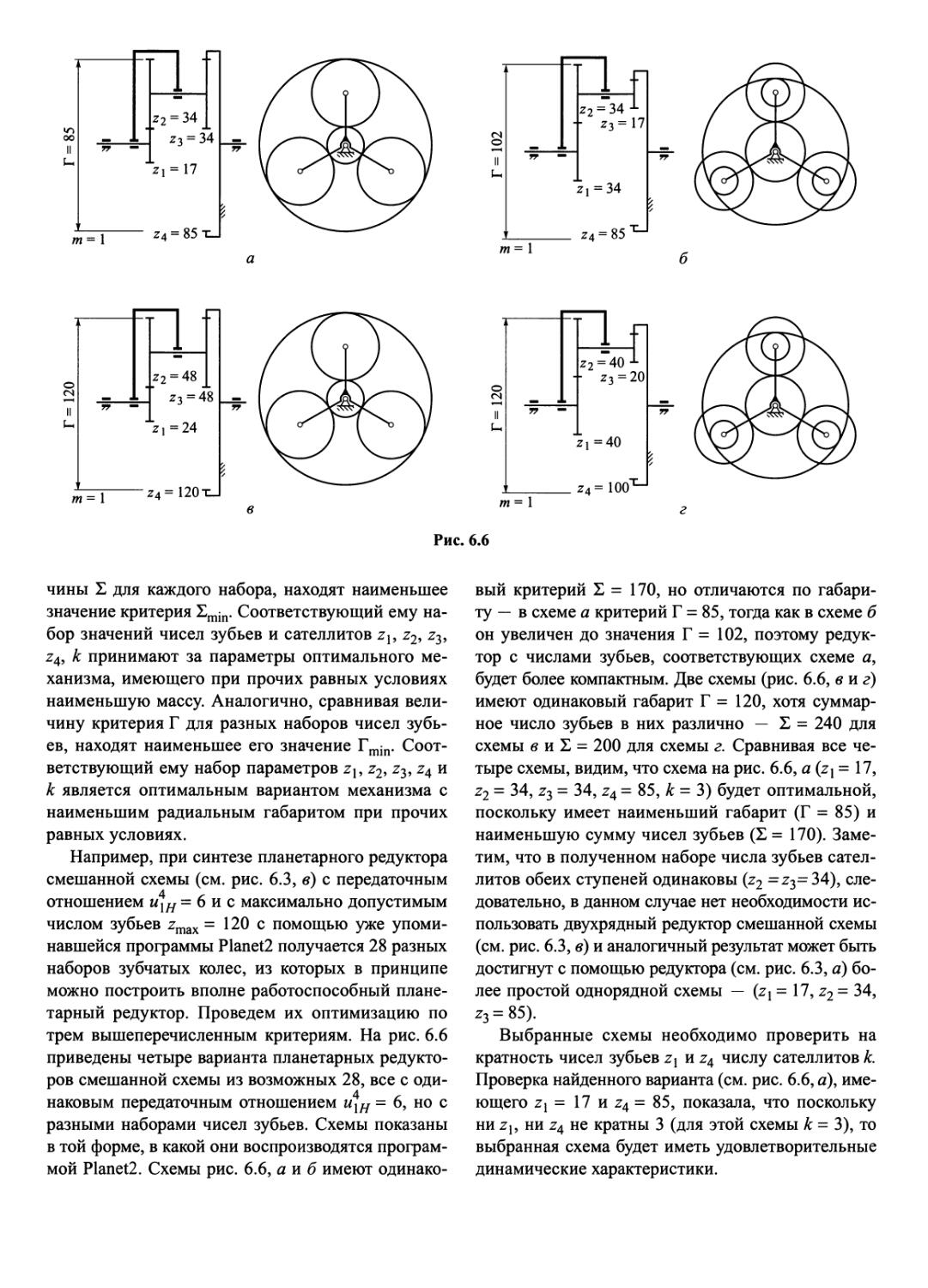
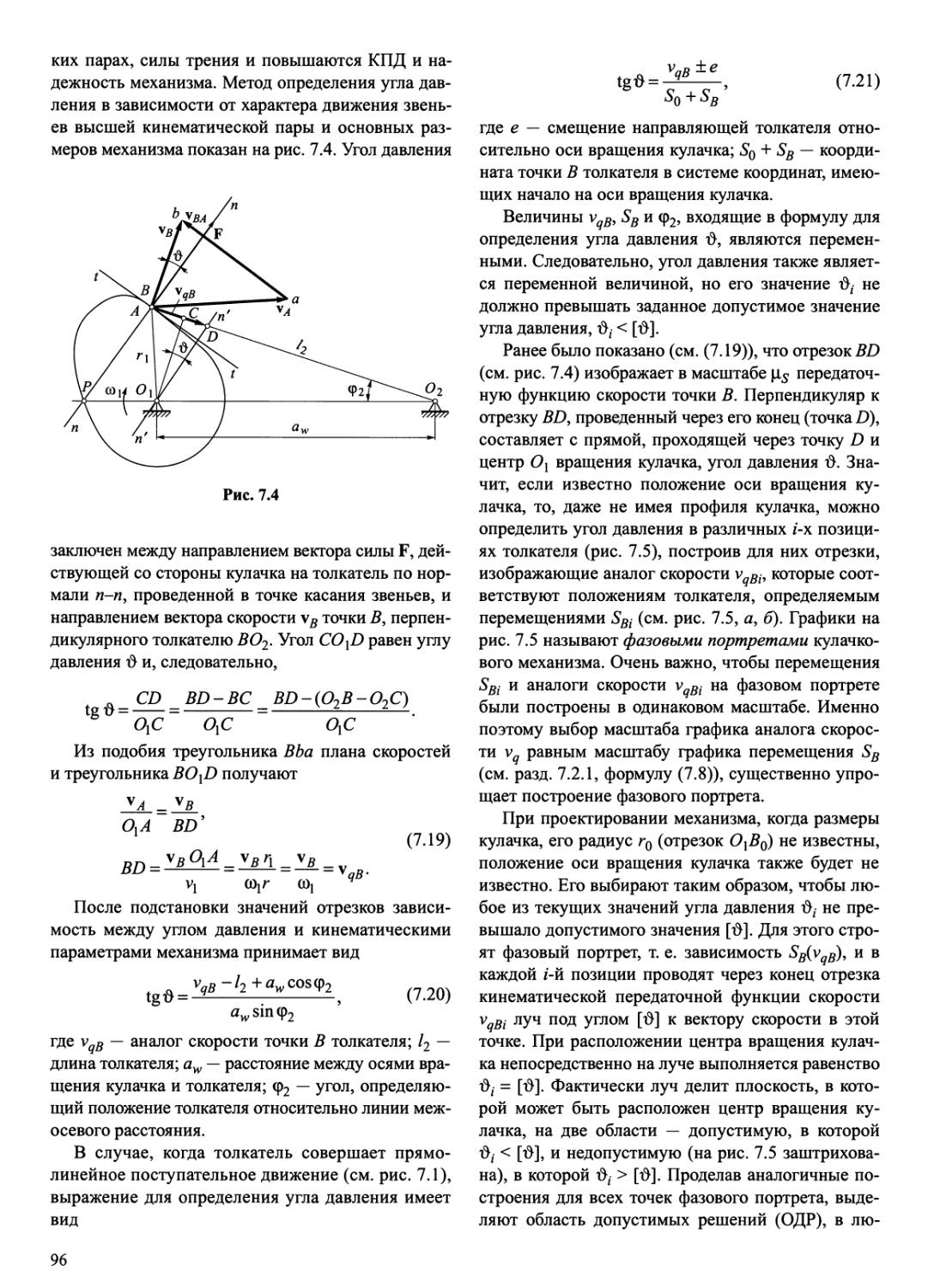
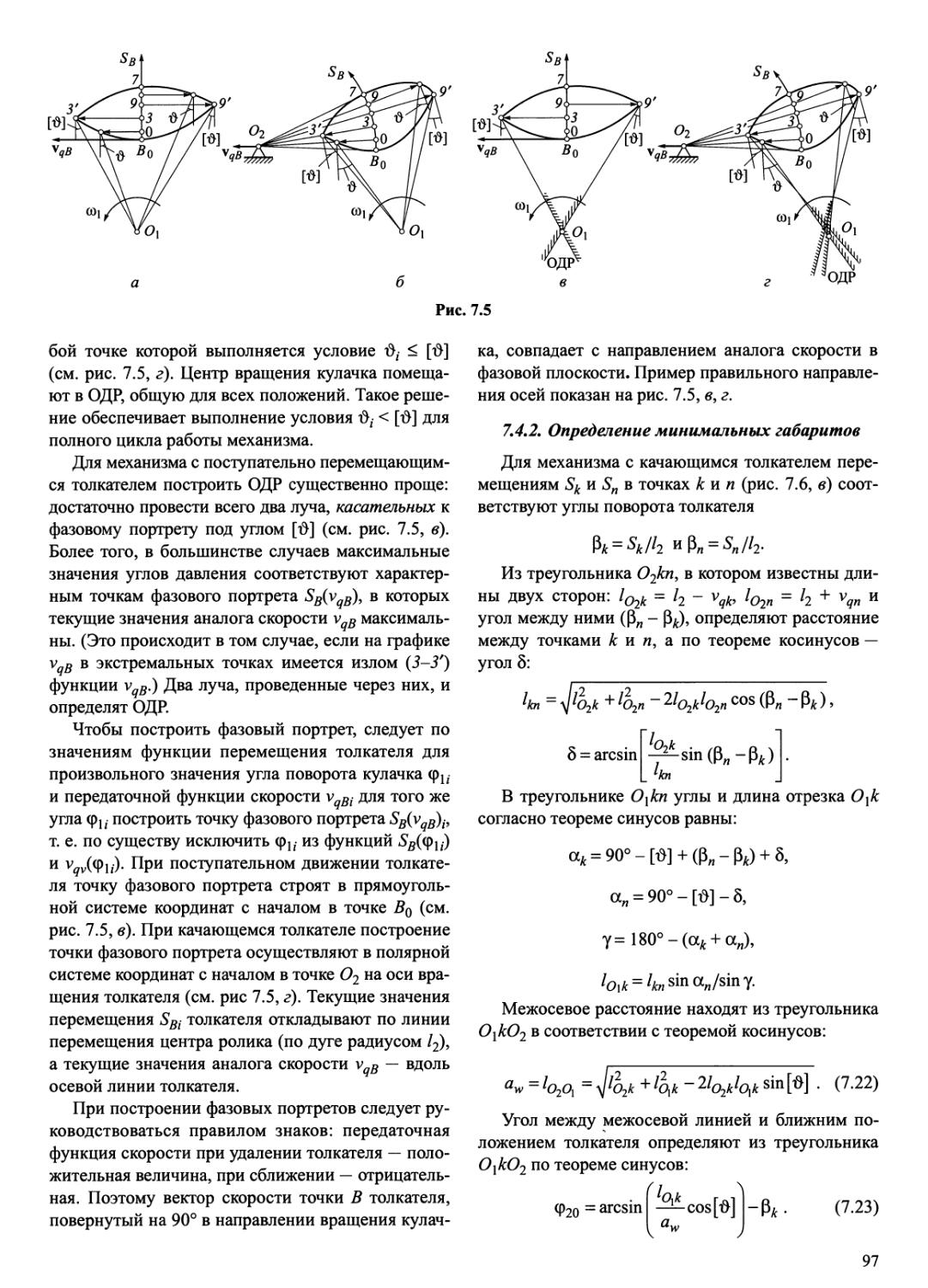
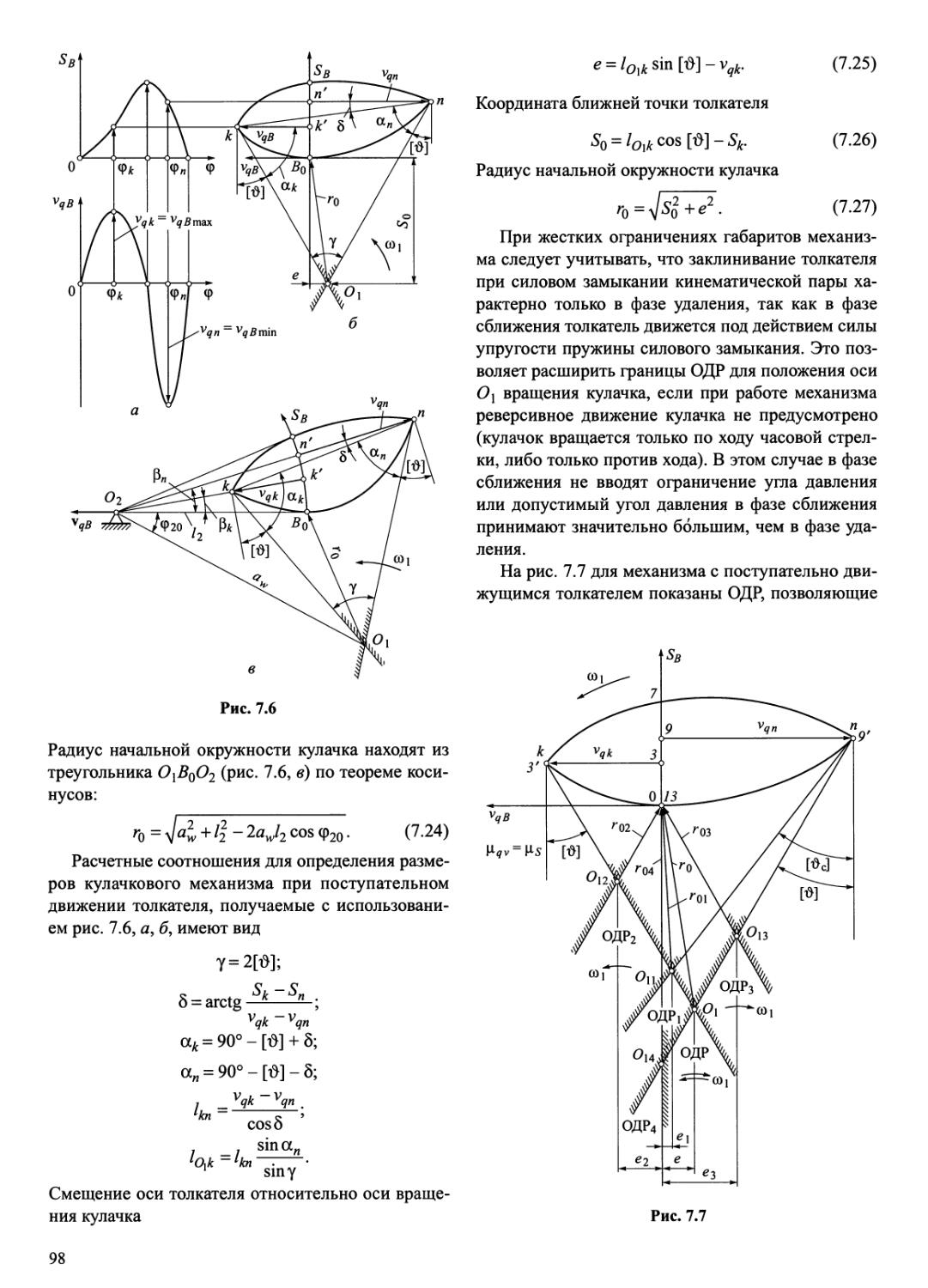
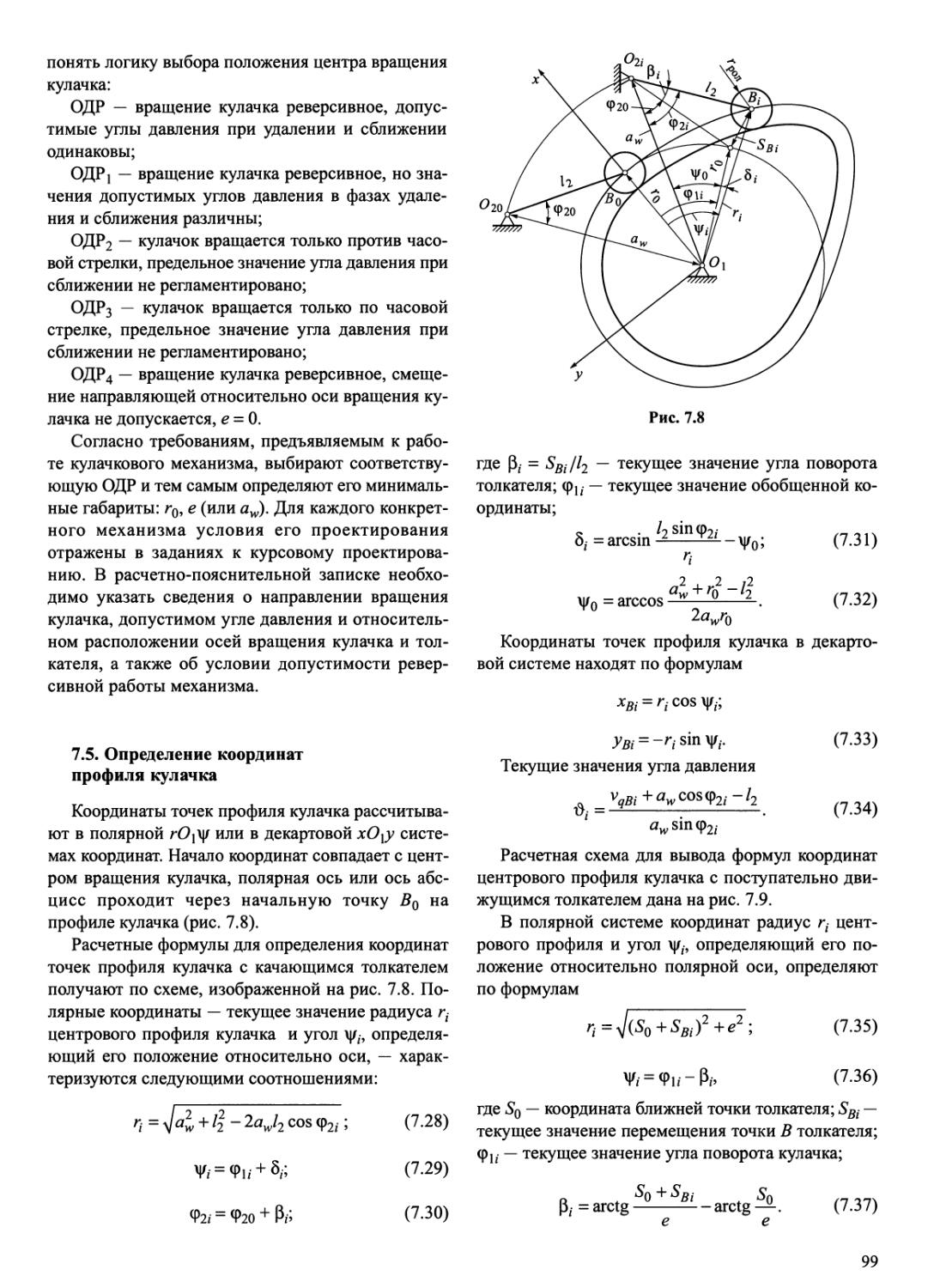
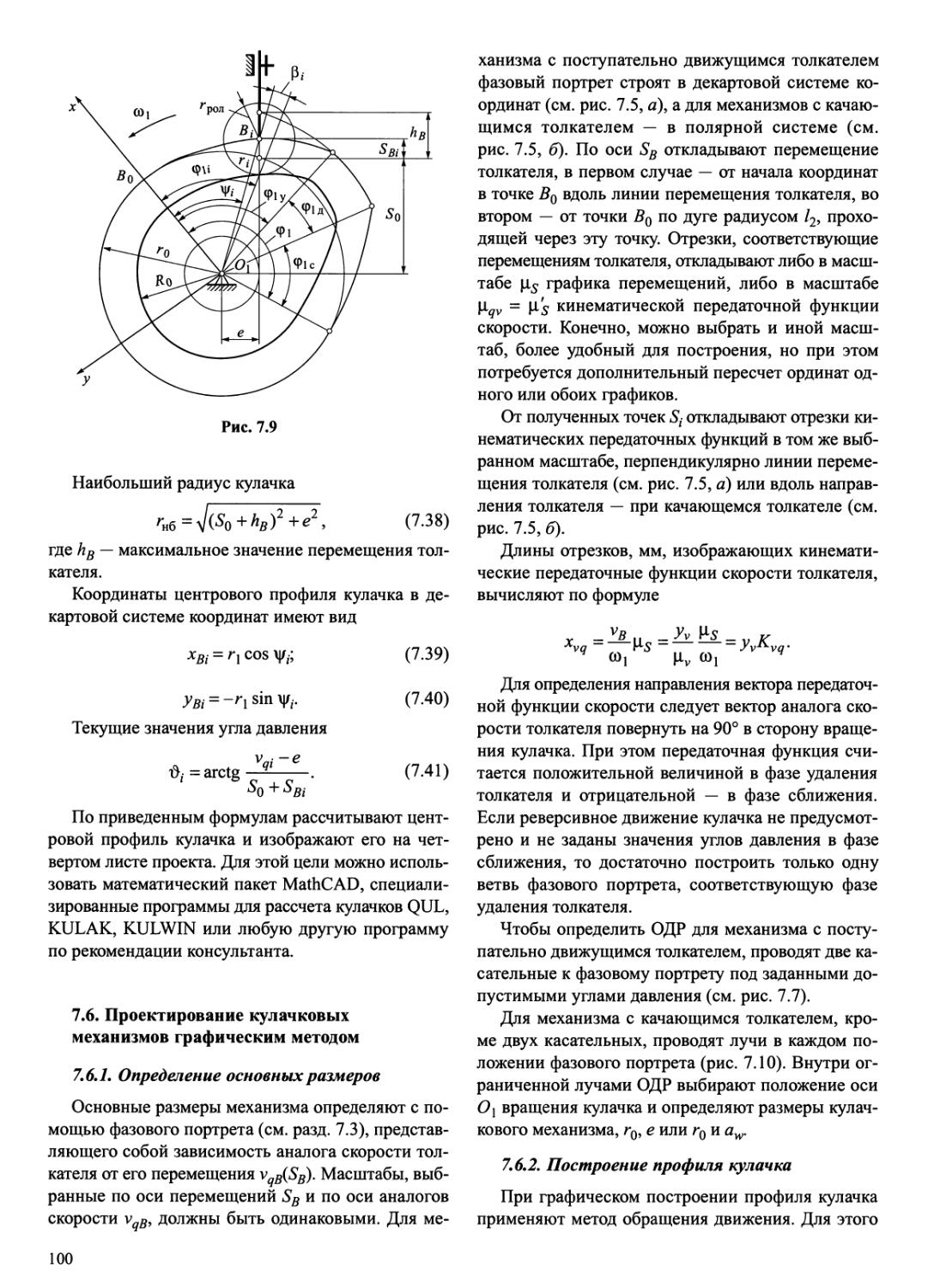
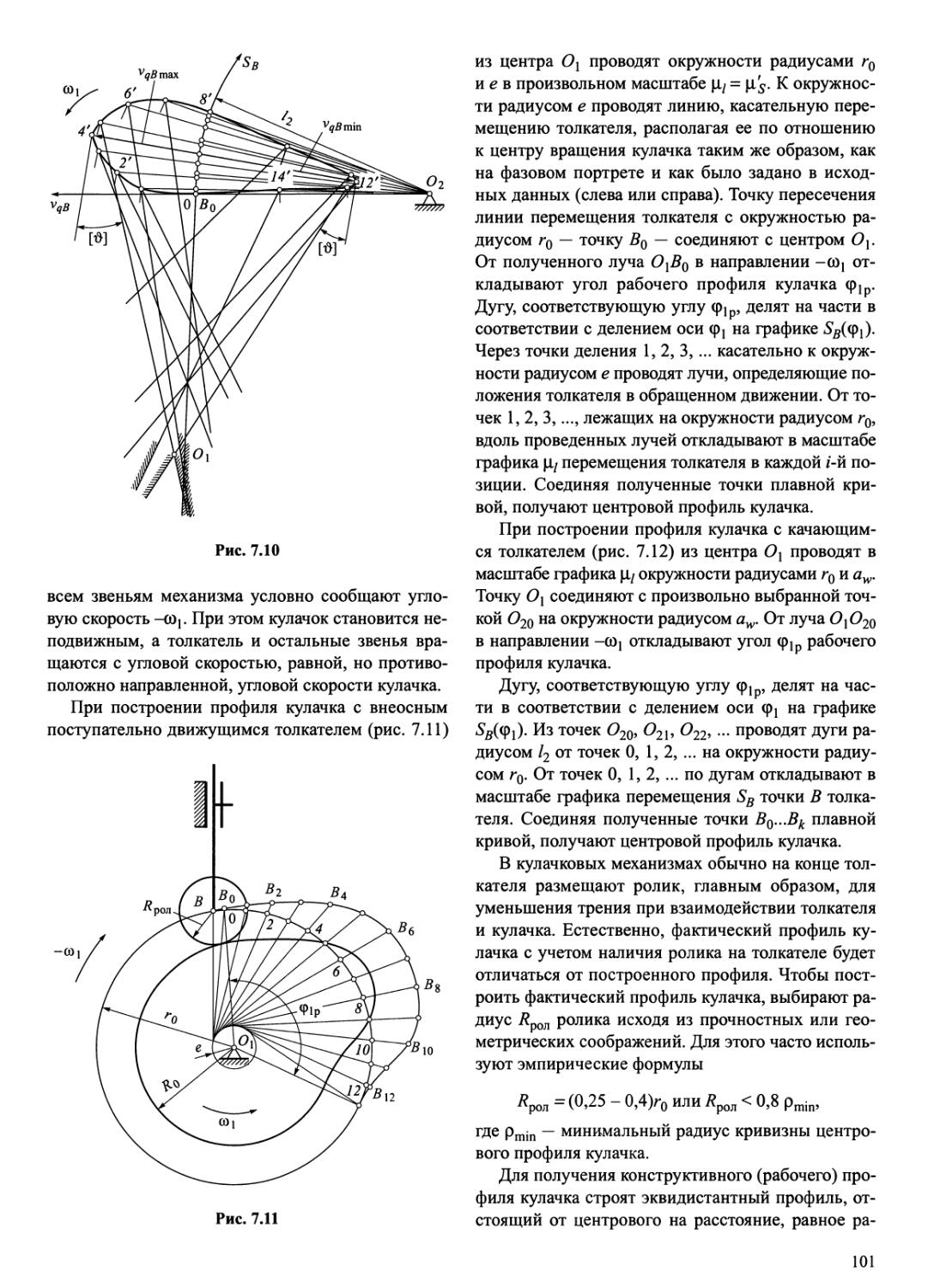
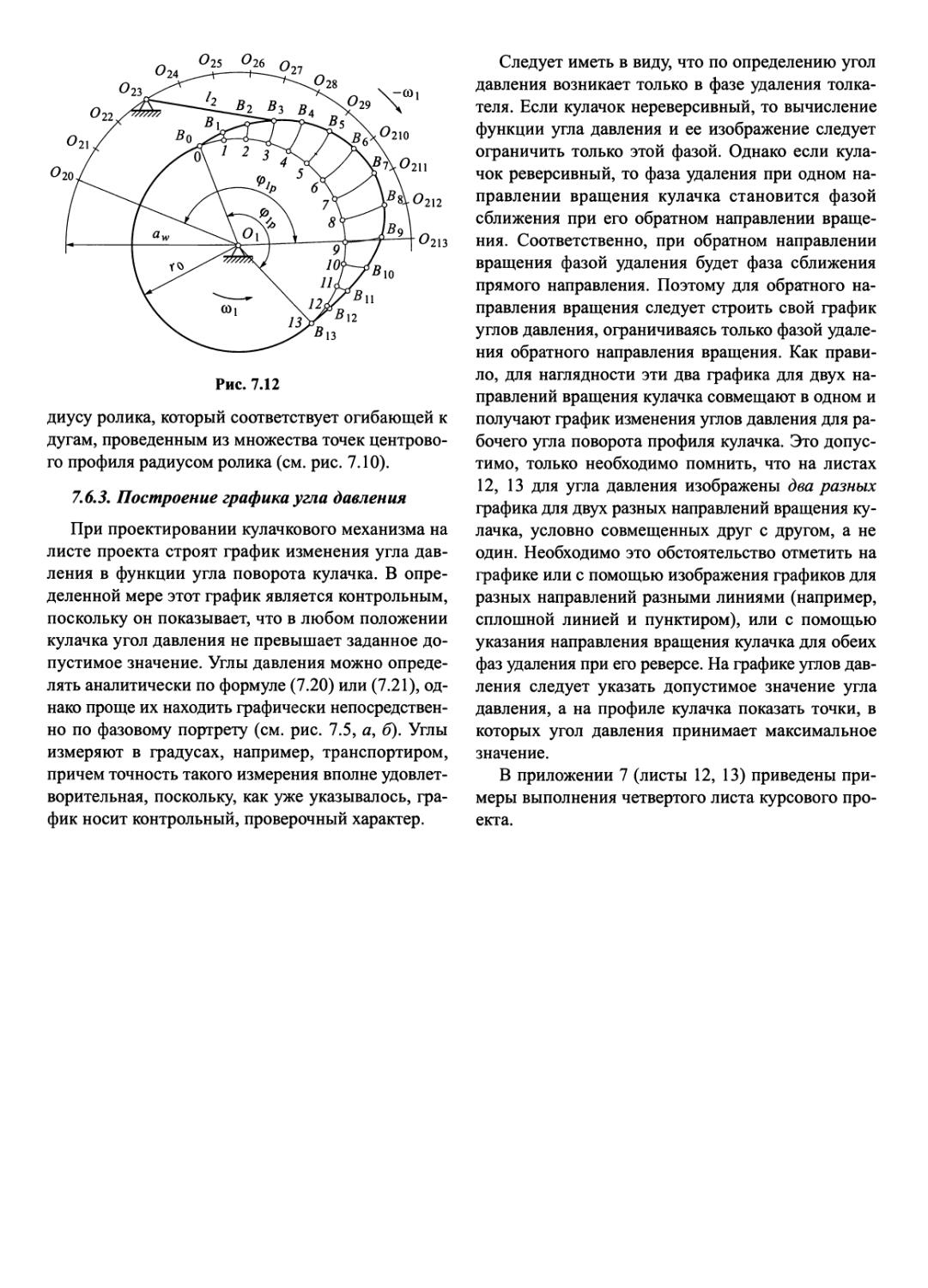
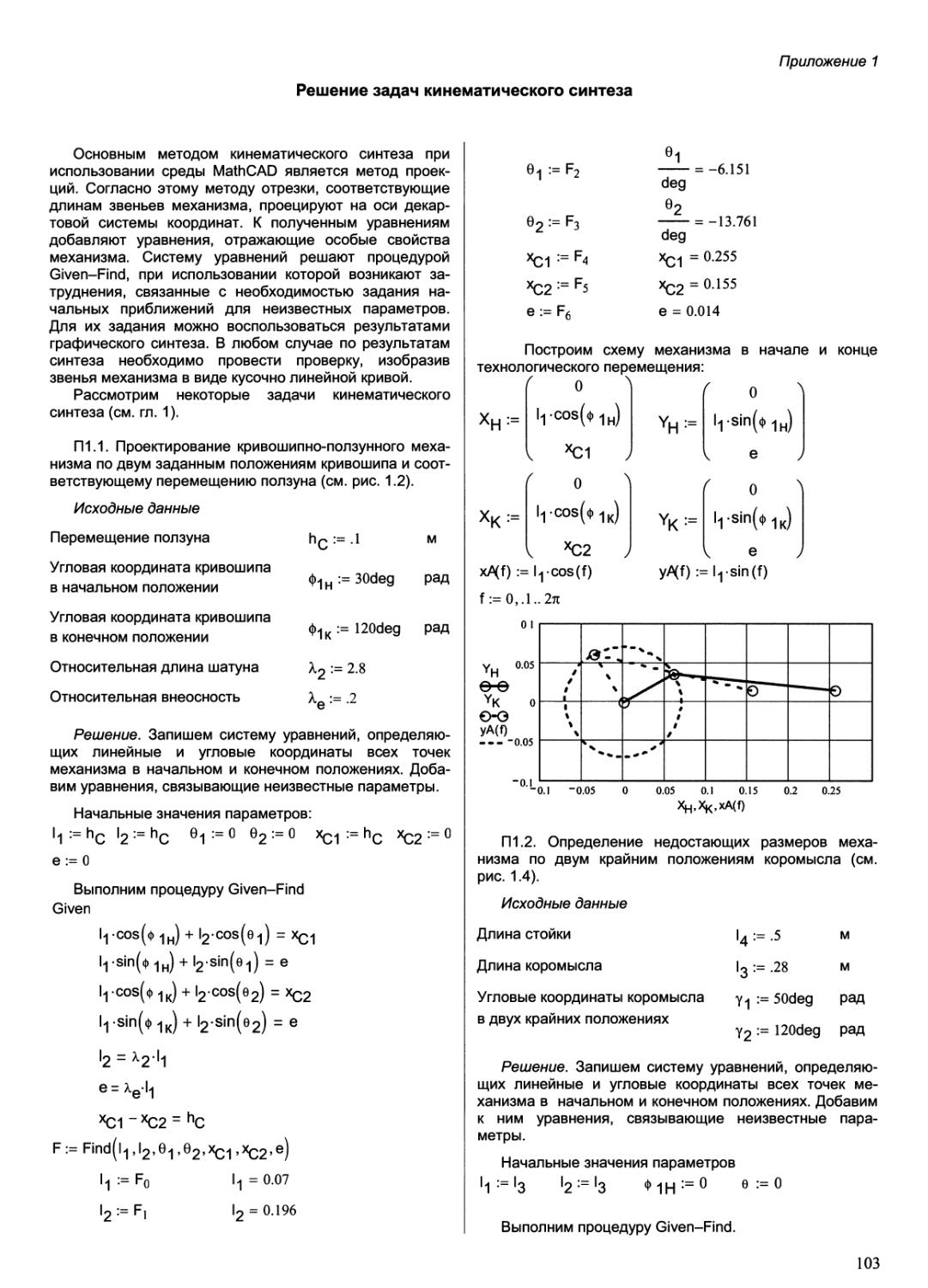
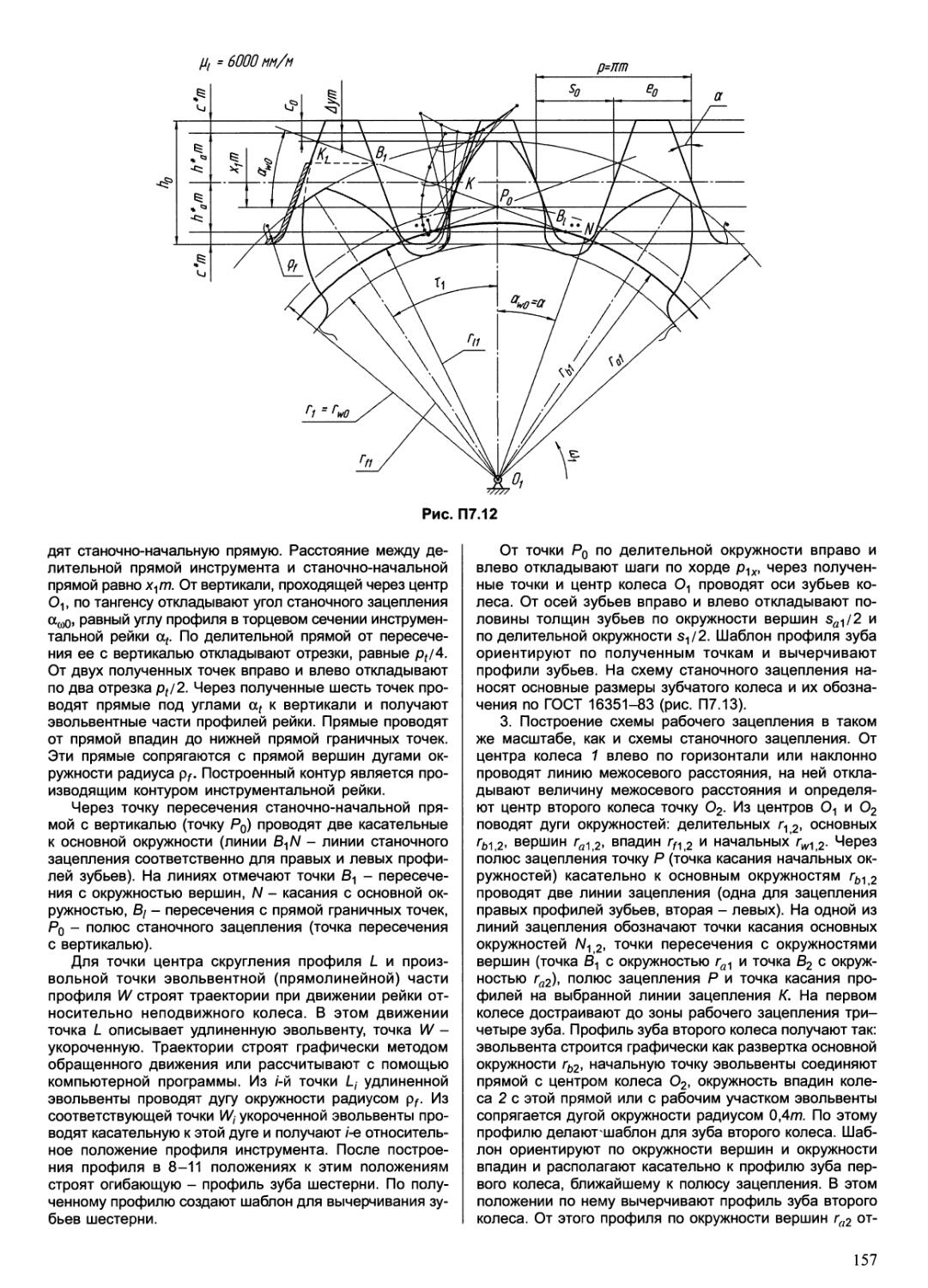
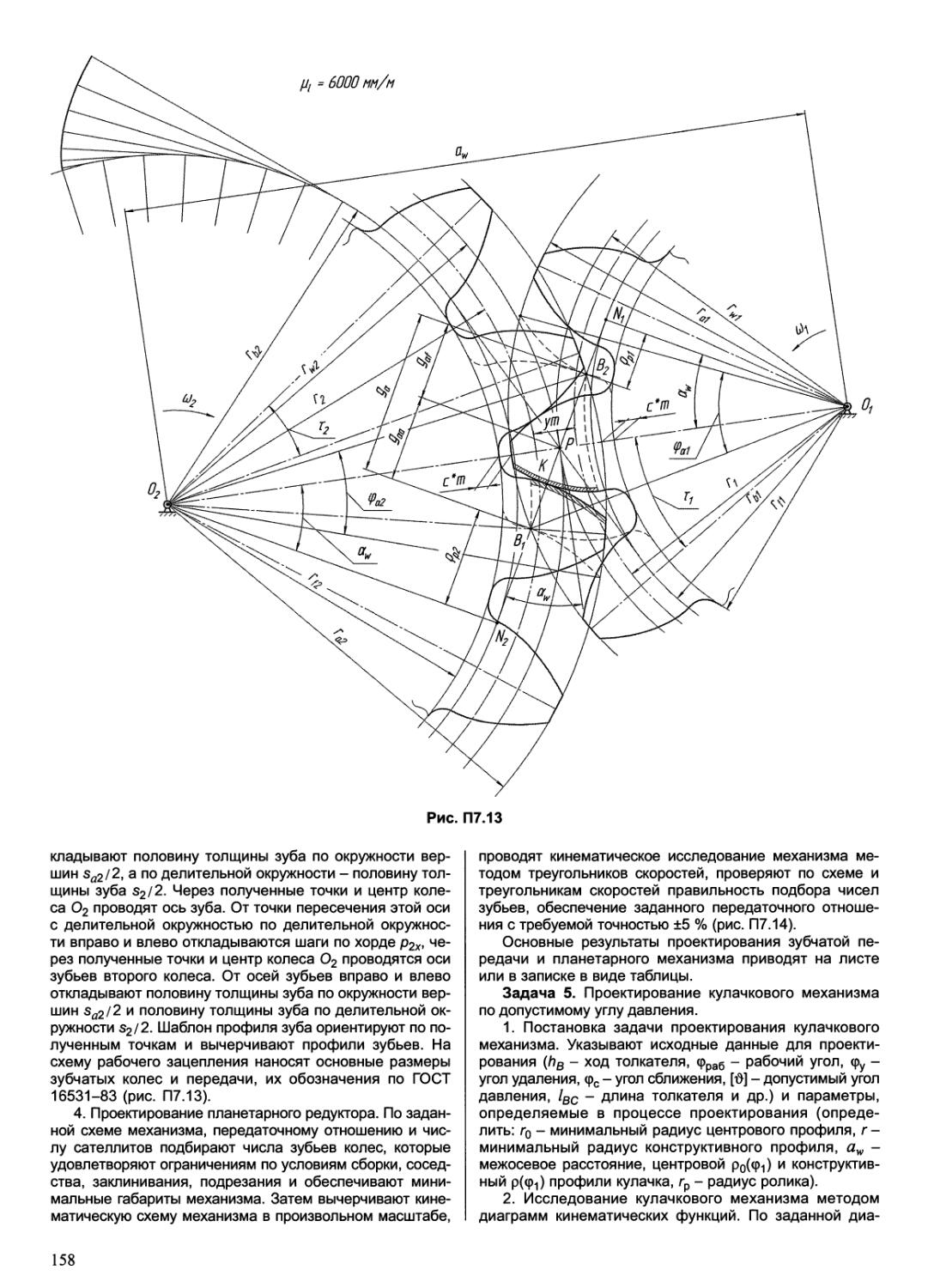
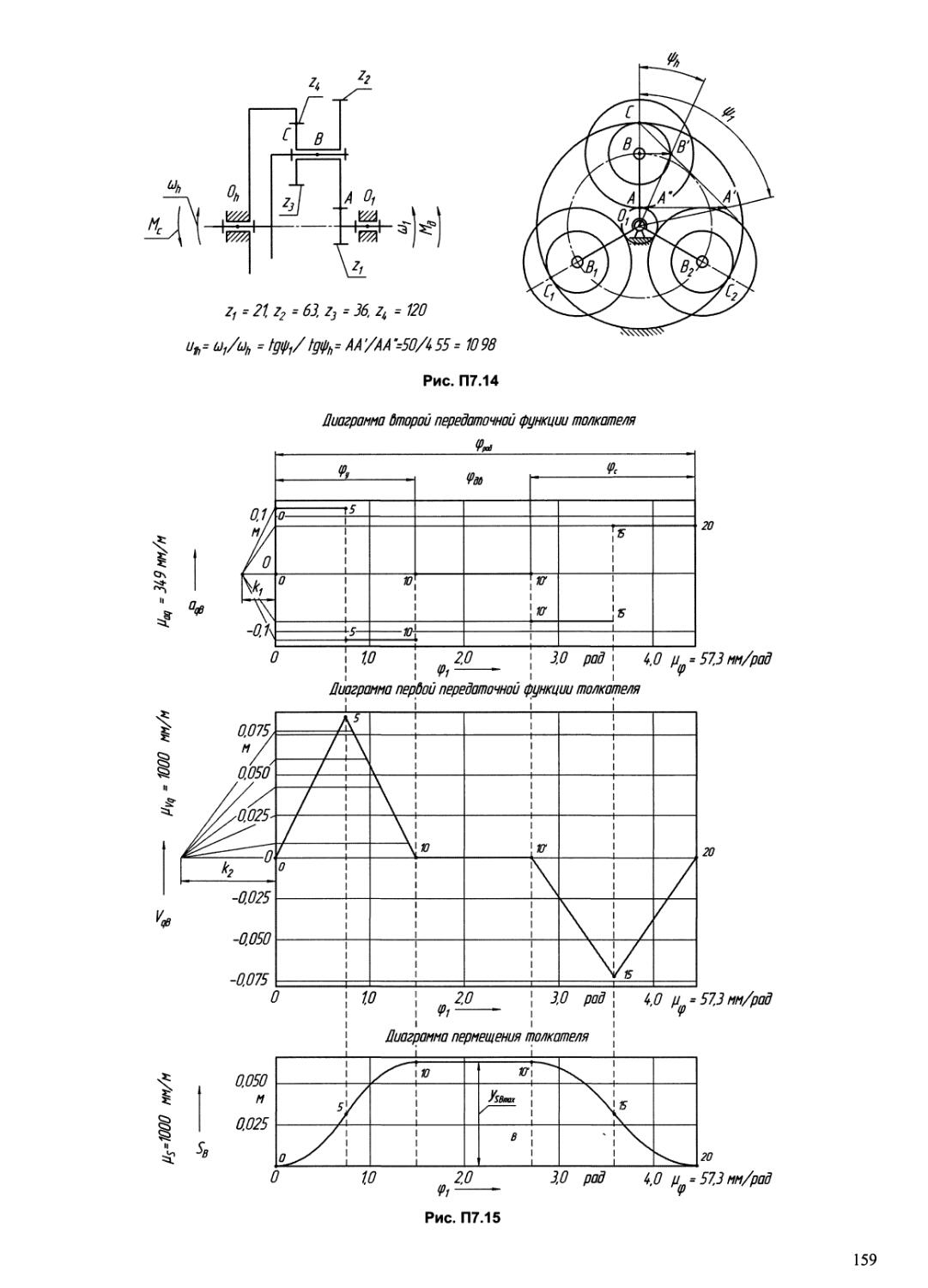
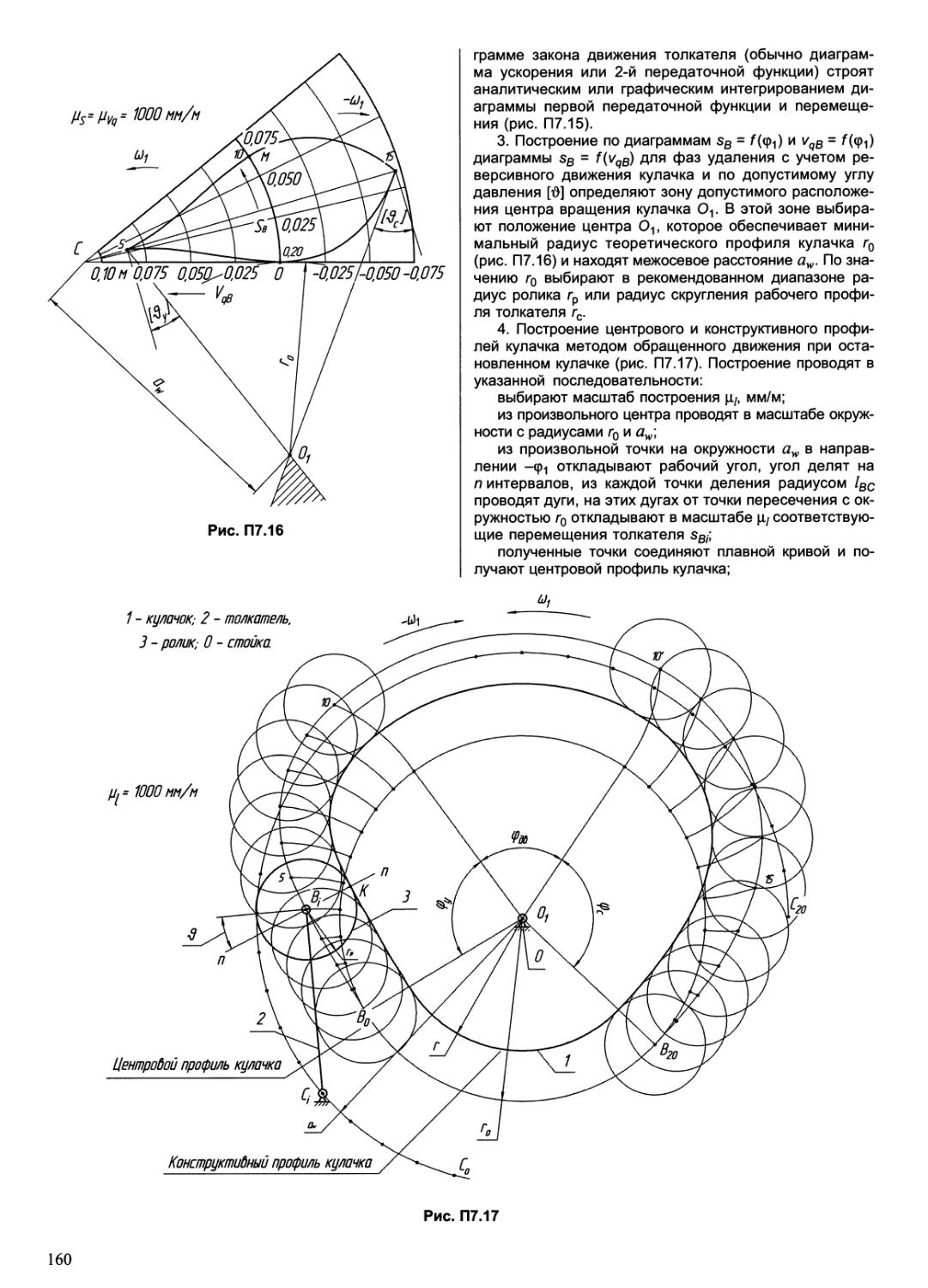
Text
Теория
механизмов
и машин
Курсовое
проектирование
Под редакцией Г.А. Тимофеева, Н.В. Умнова
2-е издание, переработанное и дополненное
Рекомендовано Научно-методическим советом
Министерства образования и науки Российской Федерации
в качестве учебного пособия по дисциплине
«Теория механизмов и машин» для студентов высших учебных заведений,
обучающихся по машиностроительным направлениям подготовки и специальностям
Москва 2012
УДК 531.8(075.8)
ББК 34.44
Т34
Авторы:
В.В. Кузенков, М.В. Самойлова, В.Б. Тарабарим, Г.А. Тимофеев, Н.В. Умное
Рецензенты:
заведующий кафедрой «Теория механизмов и машин» МГОУ
д-р техн. наук, проф. В.Д. Плахтин;
доцент кафедры «Основы конструирования машин» МГТУ им. Н.Э. Баумана
канд. техн. наук В.В. Лычагин
Теория механизмов и машин. Курсовое проектирование : учеб. пособие /
Т34 под ред. Г.А. Тимофеева. - 2-е изд., перераб. и доп. - М. : Изд-во МГТУ
им. Н. Э. Баумана, 2012. - 169, [3] с. : ил.
ISBN 978-5-7038-3569-2
Во втором издании учебного пособия (1-е в 2010 г.) в краткой форме
изложены основные разделы дисциплины «Теория механизмов и машин», охватывающие
структурный анализ и кинематический синтез механизмов, их кинематическое и
динамическое исследования, а также синтез зубчатых зацеплений и проектирование
планетарных и кулачковых механизмов. Приведены методики и примеры
выполнения листов курсового проекта с использованием графических пакетов AutoCAD,
КОМПАС, математического пакета MathCAD, а также характеристики асинхронных
двигателей.
Содержание учебного пособия соответствует курсу лекций, читаемому в МГТУ
им. Н.Э. Баумана.
Для студентов 3-го курса машиностроительных специальностей, выполняющих
курсовой проект (или работу) по дисциплине «Теория механизмов и машин».
УДК 531.8(075.8)
ББК 34.44
При оформлении обложки использована фотография модели паровой машины
Пафнутия Львовича Чебышева, изготовленной в мастерских Императорского Московского
технического училища в 1870 г.
ISBN 978-5-7038-3569-2
О Оформление. Издательство МГТУ
им. Н.Э. Баумана, 2012
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Учебное пособие предназначено студентам
высших учебных заведений, изучающим дисциплину
«Теория механизмов и машин» и обучающимся по
машиностроительным направлениям подготовки и
специальностям. При выполнении курсового
проекта (работы) студент использует знания и навыки,
полученные им при изучении теоретической части
дисциплины, выполнении лабораторных работ и
домашних заданий, а также предшествующих
дисциплин: физики, математики, информатики и
теоретической механики.
Пособие ориентировано на широкое
применение аналитических методов и использование
современной вычислительной техники и
программного обеспечения. В течение многих лет
коллективом кафедры создавались методология и
необходимое программное обеспечение,
объединенное в систему автоматизированных расчетов
курсового проектирования (САРКП). С большей ее
частью студенты могут ознакомиться на сайте
кафедры: http://tmm-umk.bmstu.ru/
Применение САРКП позволяет не только
высвободить у студентов большой резерв времени, но
и решать более сложные задачи. Любая выбранная
студентом программа доступна для использования
в вычислительном центре кафедры «Теория
механизмов и машин».
Во втором издании учтены замечания и
предложения преподавателей и студентов, которые
должны помочь студентам успешно выполнить и
защитить курсовой проект. Включены новые
приложения, в которых рассмотрены основные этапы
выполнения четырех листов курсового проекта,
приведены справочные материалы по асинхронным
электрическим двигателям и вопросы для
подготовки к защите курсового проекта.
В разработку существующей методологии
курсового проектирования неоценимый вклад внесли
несколько поколений преподавателей. Среди них
академик К.В. Фролов, профессора В.А. Гаврилен-
ко, С.А. Попов, И.В. Леонов, доценты Д.М. Луки-
чев, И.Н. Ермакова, В.В. Каганова, А.К. Мусатов,
В.В. Синицин и многие другие преподаватели
кафедры.
Большая работа была проделана соредактором
учебного пособия известным ученым, педагогом
заслуженным деятелем науки РФ, доктором
технических наук, профессором Н.В. Умновым,
скончавшемся в ноябре 2010 года.
Авторы признательны академику К.В. Фролову
и профессору В.Д. Плахтину за рекомендации и
критические замечания, которые были учтены при
окончательной доработке рукописи и выражают
благодарность старшему преподавателю кафедры
Д.В. Сащенко за помощь в техническом
оформлении работы.
Второе издание учебного пособия выходит под
редакцией доктора технических наук, профессора
Г.А. Тимофеева, заведующего кафедрой «Теория
механизмов и машин» МГТУ им. Н.Э. Баумана.
Предложения и замечания по улучшению книги
можно направлять по адресу: 105005, Москва, 2-я
Бауманская ул., д. 5, кафедра ТММ МГТУ им. Н.Э.
Баумана или по электронному адресу: timga@bmstu.ru.
ВВЕДЕНИЕ
Курсовой проект по дисциплине «Теория
механизмов и машин» - первый инженерный проект,
выполняемый студентами, - в значительной мере
отражает реальную практику проектирования
современных машин. При создании новой техники
выделяют пять последовательных этапов
проектирования: техническое задание, технические
предложения, эскизный проект, технический проект и
рабочий проект. Исследования и разработки,
проводимые студентами при выполнении курсового
проекта, относятся к первым двум этапам
проектирования и в малой степени - к третьему этапу. На
этой стадии проектирования создаются
структурные схемы, отражающие принцип работы машины,
задаются входные параметры и ряд выходных.
Оценка инерционно-массовых параметров
элементов машины проводится эмпирически на основе
опыта проектирования аналогичного типа машин
или на основании инженерной интуиции. Однако
методы теории механизмов позволяют даже при
такой скудной информации проанализировать
динамику проектируемой машины, оценить силовые
факторы, возникающие в ее звеньях и
кинематических парах, и даже подобрать электрический
двигатель, что позволяет обоснованно проводить
прочностные расчеты и проектировать подшипниковые
узлы. Некоторые элементы конструкции машины
(планетарные зубчатые механизмы, кулачковые
механизмы) даже на начальном этапе проектируются
с максимально возможной точностью.
И еще с одной особенностью проектирования
знакомит курсовой проект - с многовариантностью.
Одну и ту же кинематическую задачу, связанную с
получением необходимого закона движения
заданных звеньев, можно выполнить с помощью
механизмов разного типа или механизмов одного типа
и с одинаковой структурной схемой, но с разными
кинематическими характеристиками. Однако мас-
согабаритные параметры или динамические
характеристики разных вариантов механизмов машины
могут оказаться неодинаковыми. Этап сравнения и
выбора вариантов по тем или иным критериям
является определяющим на начальной стадии
проектирования. По результатам анализа с использованием
методов, аналогичных тем, которые будут применять
студенты в курсовом проектировании, и происходит
отбор оптимального варианта или группы
оптимальных вариантов для последующей конструкторской
проработки. Некоторые навыки сравнения вариантов
и отбора лучшего из них студенты также получают
при выполнении курсового проекта.
Курсовой проект состоит из четырех листов
формата А1 и расчетно-пояснительной записки с
необходимыми расчетами. Первый лист проекта,
наиболее трудоемкий, посвящен анализу кинематики
и динамики предложенной структурной схемы
машины. Второй лист проекта - силовому расчету
схемы рычажного механизма машины по данным,
полученным после выполнения первого листа.
Третий лист - синтезу планетарной зубчатой передачи
с минимальными размерами и синтезу одной пары
зубчатого зацепления. Четвертый лист - синтезу
кулачкового механизма с минимальными размерами.
Исходные данные к курсовому проекту
содержатся в специальных сборниках заданий к курсовому
проектированию. Все задания базируются на
реально существующих машинах, в которых иногда с
целью упрощения выделен только один из ее
механизмов и частично изменены исходные данные, и носят
комплексный характер. Кроме структурной схемы и
режимов работы создаваемой машины в них также
представлены параметры зубчатого привода,
кулачкового механизма, хотя некоторые машины могут и
не иметь, например, кулачкового механизма или
планетарного редуктора. Эти параметры добавлены в
задания к курсовому проектированию искусственно
для выравнивания объема выполняемой по проекту
работы.
В заданиях к курсовому проектированию объект
проектирования (машинный агрегат или прибор)
4
разбит на основные узлы, и для каждого из них
рекомендована структурная схема механизма, в
наибольшей степени удовлетворяющая исходным
условиям. В их число входят рычажный и
кулачковый механизмы, зубчатая передача и планетарный
зубчатый механизм.
Анализ рычажного механизма - наибольшая по
объему часть курсового проекта. В этом разделе в
большинстве проектов исследуется четырех- или
шестизвенный плоский механизм с одной степенью
свободы и с вращающимся входным звеном
(кривошипом или коромыслом). Выходным звеном
механизма, к которому приложена полезная
технологическая нагрузка, является ползун либо коромысло.
В некоторых заданиях, связанных с
проектированием двигателя, входное звено движется
поступательно, а нагрузка приложена к вращающемуся звену.
Исследование рычажного механизма составляет
содержание первых двух листов курсового проекта
(см. далее гл. 1, 2) и включает в себя четыре
последовательных этапа:
1) проектирование кинематической схемы;
2) кинематический анализ;
3) определение реального закона движения
механизма под действием заданных внешних сил;
4) кинетостатический анализ.
Отметим, что в гл. 3 (третий этап) рычажный
механизм исследуется в составе машины,
содержащей также электрический двигатель, связывающий
редуктор или мультипликатор.
Проведенное исследование рычажного
механизма оформляют в виде двух листов чертежей
формата А1 и соответствующего раздела расчетно-по-
яснительной записки, содержащей описание всех
расчетов и графических построений. На двух
других листах курсового проекта исследуются
планетарный, зубчатый и кулачковый механизмы.
При выполнении курсового проекта применяют
как графоаналитические, так и аналитические
методы расчета, ориентированные на использование
специализированных программ или математических
пакетов общего назначения.
Ниже приведены этапы проектирования
структурной схемы рычажного механизма и требования
к содержанию и форме их представления. Указаны
основные допущения, принятые на том или ином
этапе исследования, причем каждое такое допущение
распространяется и на все последующие этапы.
Проектирование кинематической схемы. На
этом этапе исходными данными являются заданные
структурная схема рычажного механизма и
некоторые кинематические параметры. Основная задача -
определение недостающих размеров механизма.
Кинематический анализ. На этом этапе
исходными данными являются структурная схема
рычажного механизма и размеры звеньев, полученные на
первом этапе. Основные задачи:
1) анализ функций положения звеньев,
траекторий точек и центров масс звеньев;
2) определение кинематических функций:
функций положения, кинематических
передаточных функций скорости и ускорения (аналогов
скорости и ускорения) центров масс каждого звена;
функций углового положения (аналогов угловой
скорости и углового ускорения звеньев);
3) определение крайних положений механизма
и хода выходного звена (для цикловых
механизмов).
Решение задач этого этапа выполняют как в рас-
четно-пояснительной записке, так и на первом
листе курсового проекта. В расчетно-пояснительной
записке проводят вывод необходимых формул и
приводят результаты расчетов. На этом же листе строят
план положений механизма и график перемещения
выходного звена. Также в виде графиков
отображают найденные кинематические функции.
Исследование положений выходных звеньев и аналогов
скоростей и ускорений следует выполнять не менее чем
в двенадцати положениях начального звена
механизма.
Кинематическому анализу предшествует
структурный анализ рычажного механизма, цель
которого - выявить особенности строения механизма,
определяющие последовательность проведения его
кинематического и динамического исследований.
Определение реального закона движения
механизма под действием заданных сил. На этом этапе
исходные данные включают данные по
кинематике, полученные на предыдущем этапе,
кинетические параметры механизма (значения масс и
моментов инерции звеньев), силу (или момент)
полезного сопротивления и движущую силу, заданные
графически или в ином виде, а также требуемое
значение средней угловой скорости главного вала и
коэффициент неравномерности хода для цикловых
машин. Основные задачи:
1) построение динамической модели машины;
2) численный анализ параметров динамической
модели;
3) расчет работы сил сопротивлений и
движущих сил;
4) численный анализ угловой скорости и
углового ускорения главного вала машины;
5) оценка неравномерности хода машины,
определение момента инерции маховика и изменения
угловой скорости главного вала за цикл;
5
6) в случае анализа установившегося движения
определяют, кроме того, момент и мощность
электрического двигателя и выбирают его для рабочих
цикловых машин, а также оценивают влияние
статической характеристики двигателя на
кинематические параметры машины (только первая итерация).
В расчетно-пояснительной записке дают вывод
формул приведенных моментов инерции машины,
сил сопротивлений и движущих сил (задача 1),
расчетную часть задач 4 и 5. На листе решают
задачу 3 и частично - задачу 4, результаты решения
задач 2 и 4 отображают в виде графиков.
Кинетостатический анализ. Исходными
данными на этом этапе служат кинематическая схема
механизма и реальный закон движения начального
звена, которое в большинстве случаев является
ведущим (см. далее гл. 4). Задача - определение реакций
в кинематических парах и уравновешивающего
момента на начальном звене.
Результаты вычислений отображают на втором
листе проекта и в расчетно-пояснительной записке.
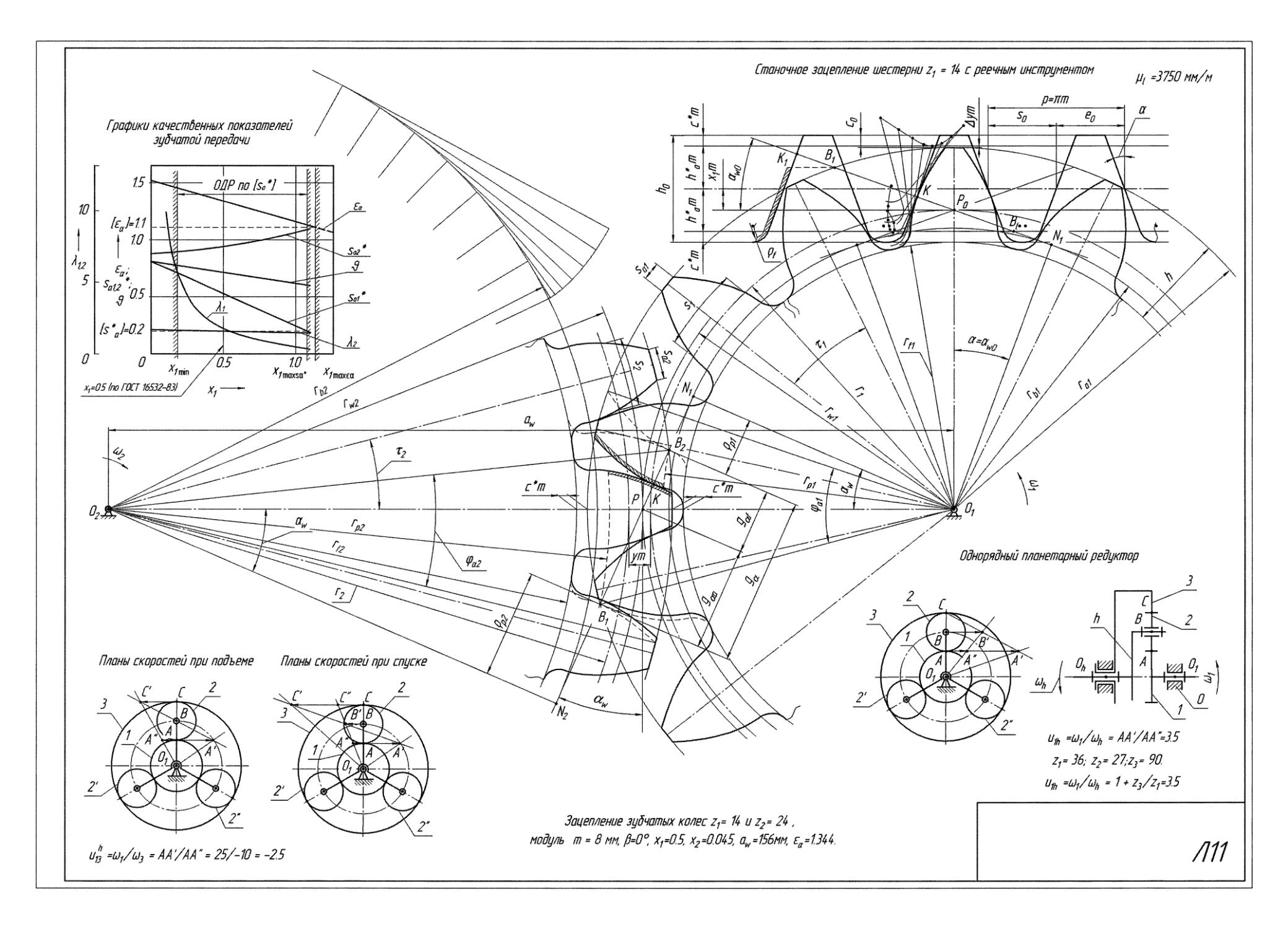
Третий лист проекта посвящен синтезу
планетарного зубчатого механизма с заданной структурной
схемой и выбору параметров зубчатого зацепления
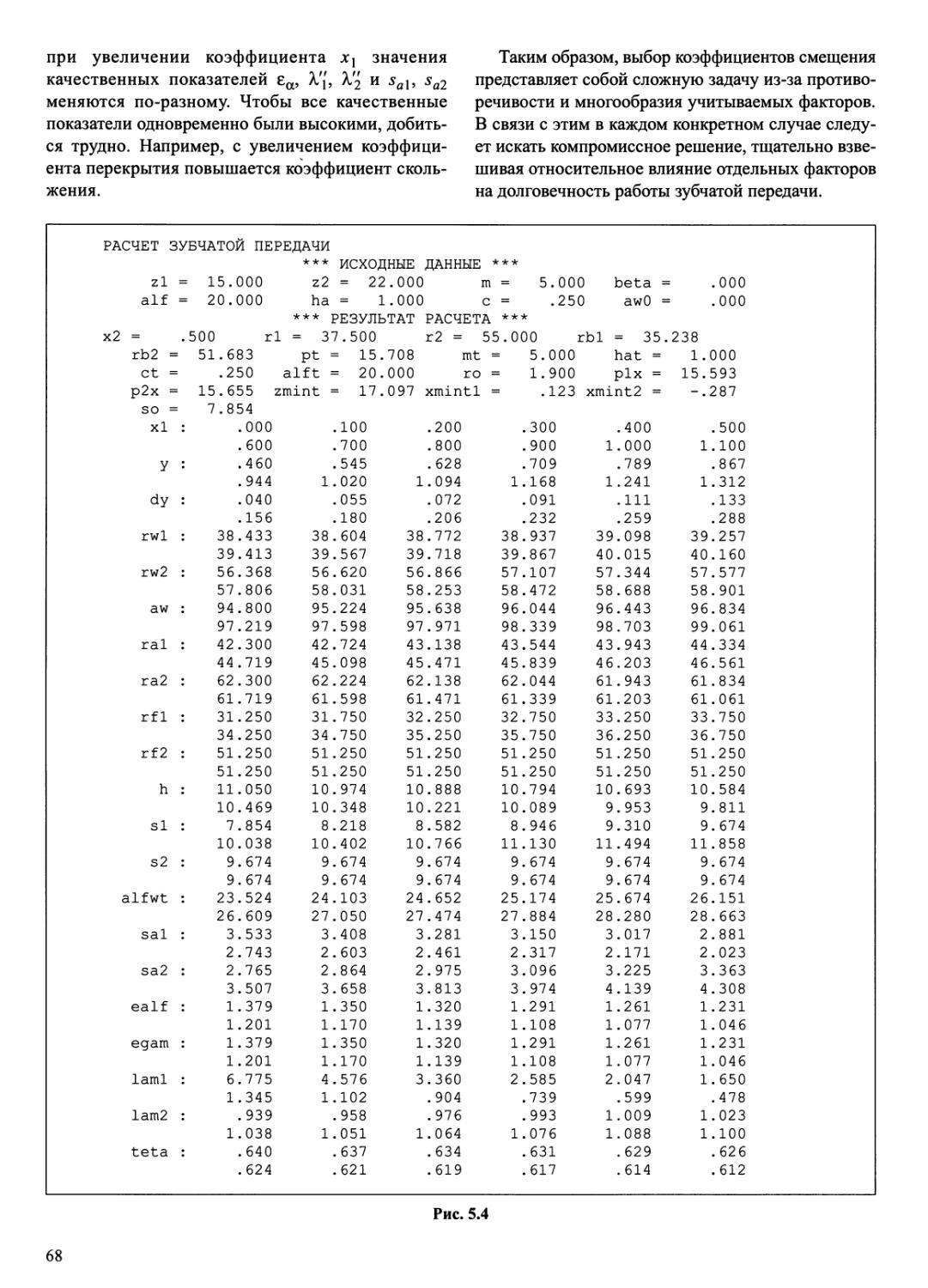
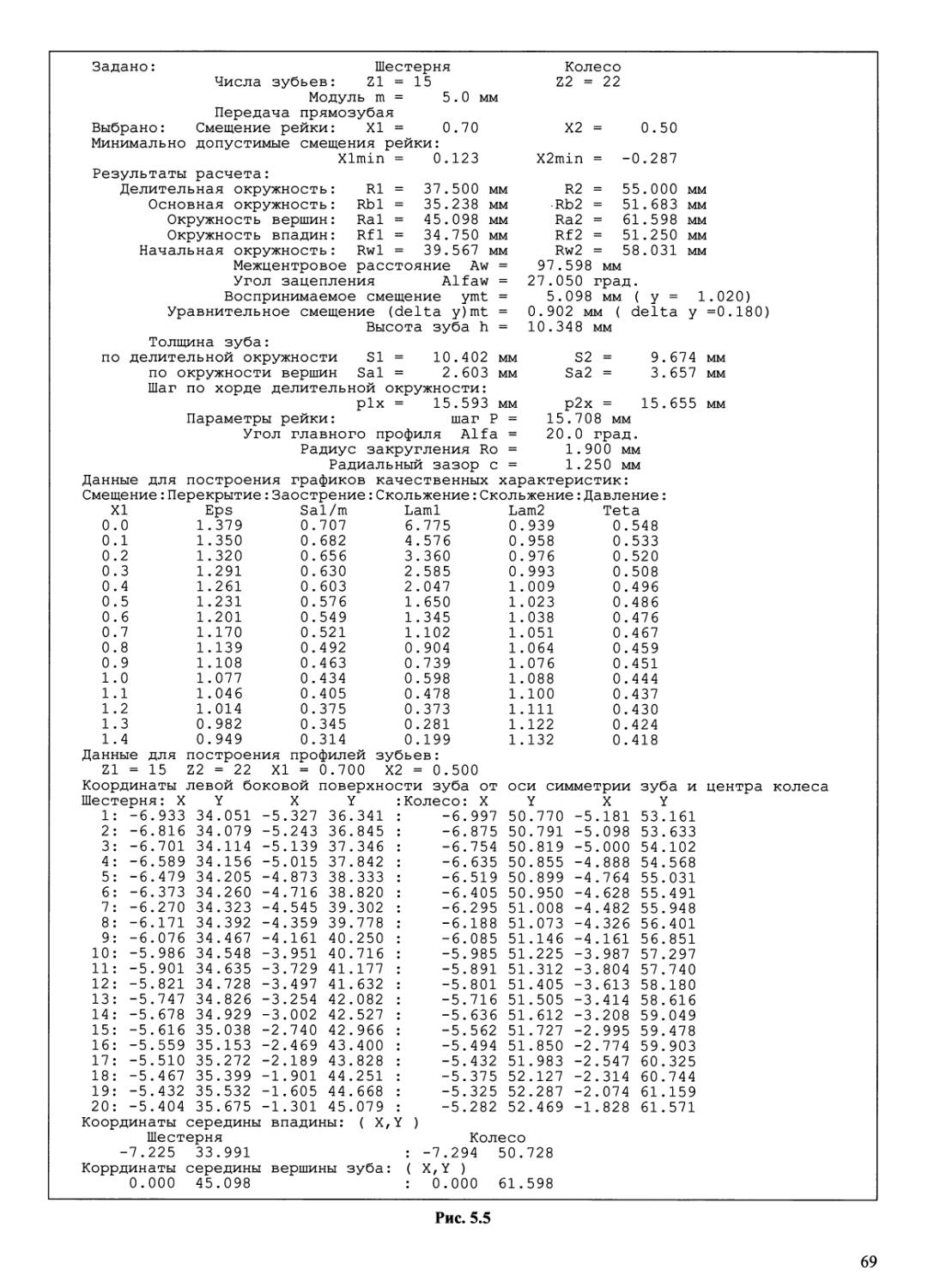
открытой зубчатой передачи (см. далее гл. 5, 6). При
проектировании зубчатого зацепления и зубчатой
передачи на третьем листе в
расчетно-пояснительной записке приводят результаты расчета по
выбору оптимального смещения при нарезании
зубчатых колес. Непосредственно на листе изображают
станочное зацепление шестерни и зубчатое
зацепление шестерни с колесом. Масштаб изображения
колес следует выбирать достаточно крупным,
чтобы высота изображаемых зубьев колес составляла
60...80 мм. Процесс построения укороченной и
удлиненной эвольвент в станочном зацеплении в
записке не описывают. На этом же листе приводят
графики качественных показателей, на основе
которых осуществлялся выбор оптимального
смещения. Также на третьем листе в произвольном
масштабе изображают синтезированную планетарную
зубчатую передачу. На схеме передачи строят
кинематические диаграммы, позволяющие
графически оценить передаточное отношение
спроектированной передачи. Процесс подбора зубьев отражается
в пояснительной записке.
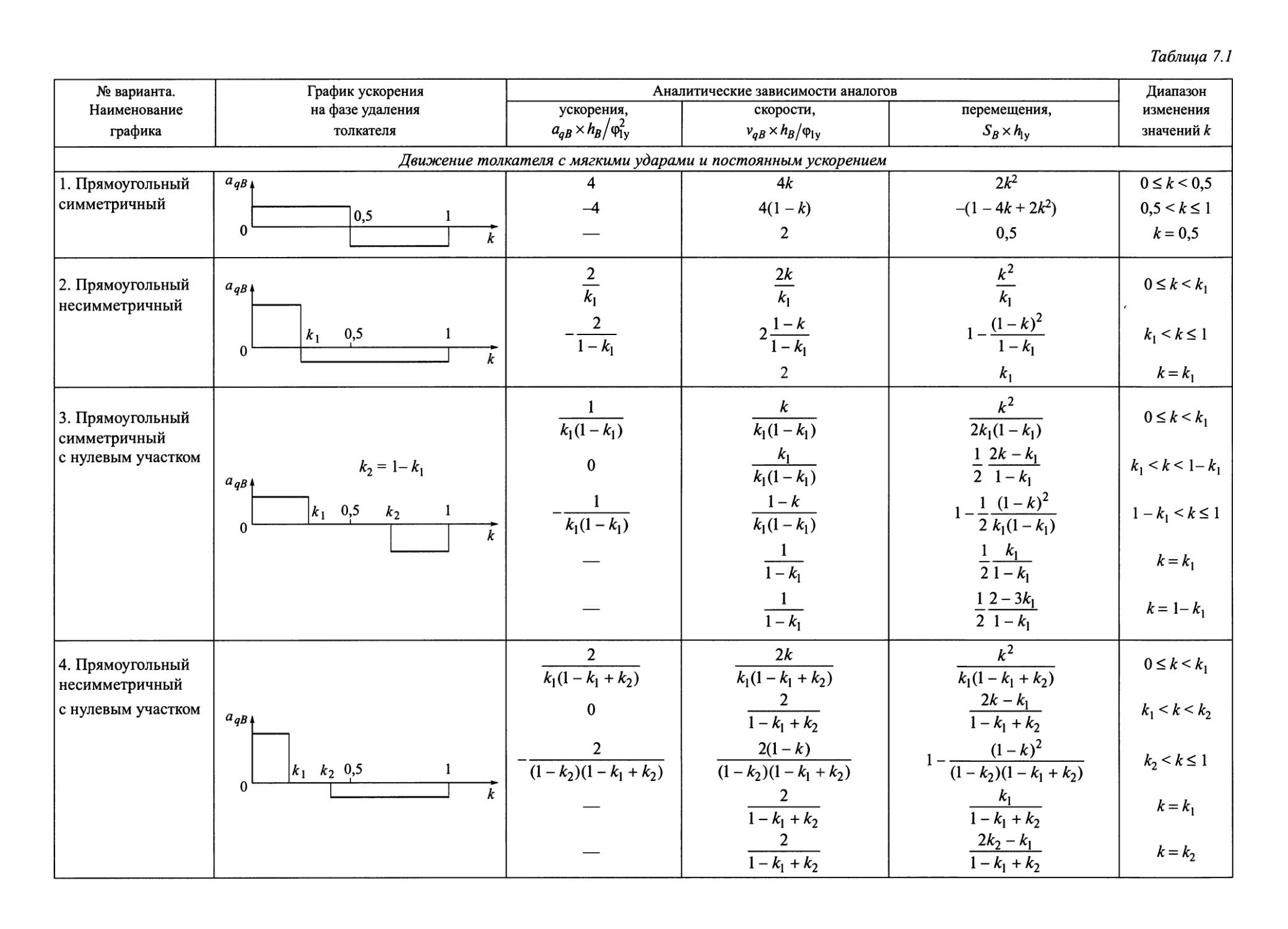
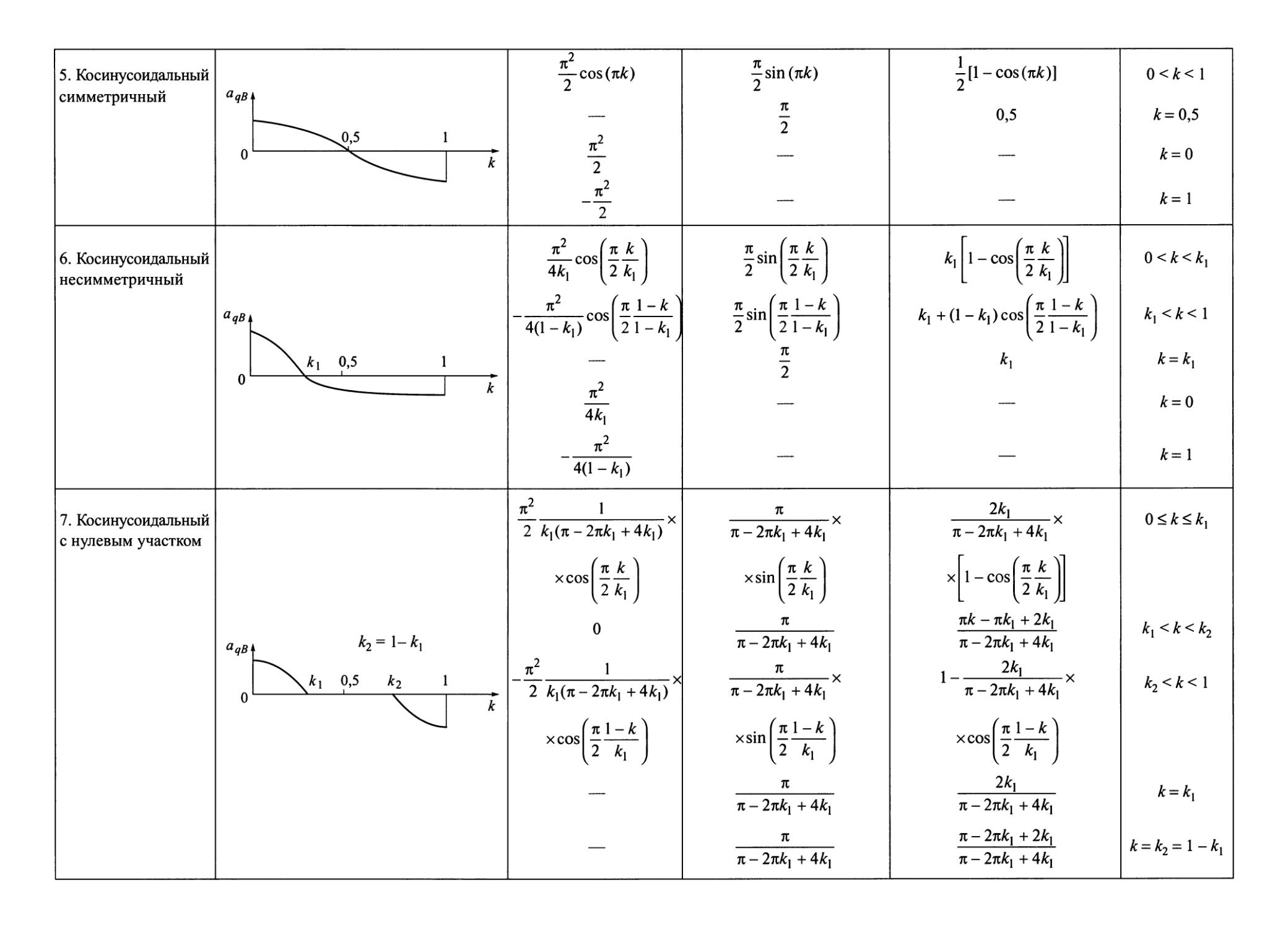
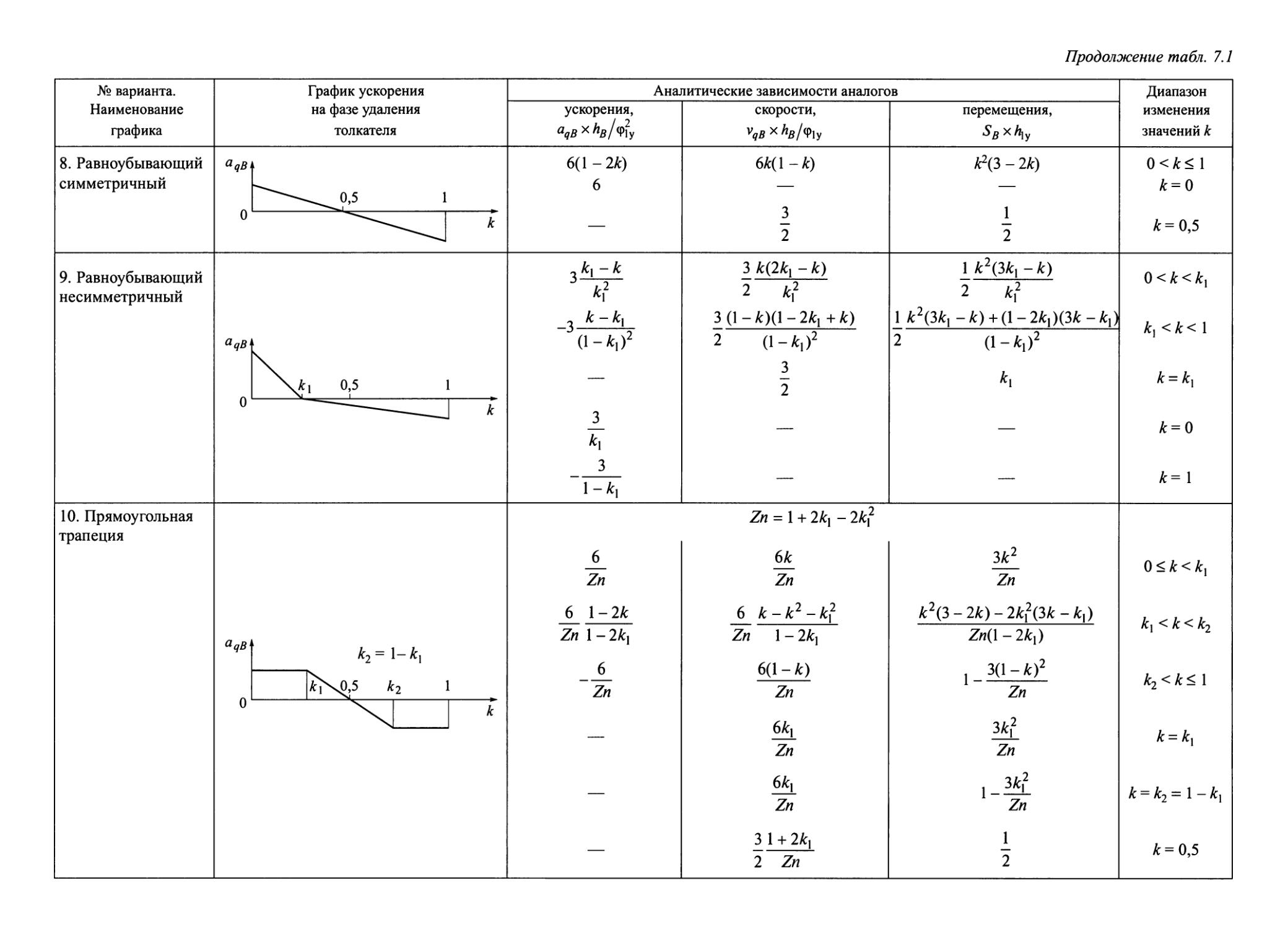
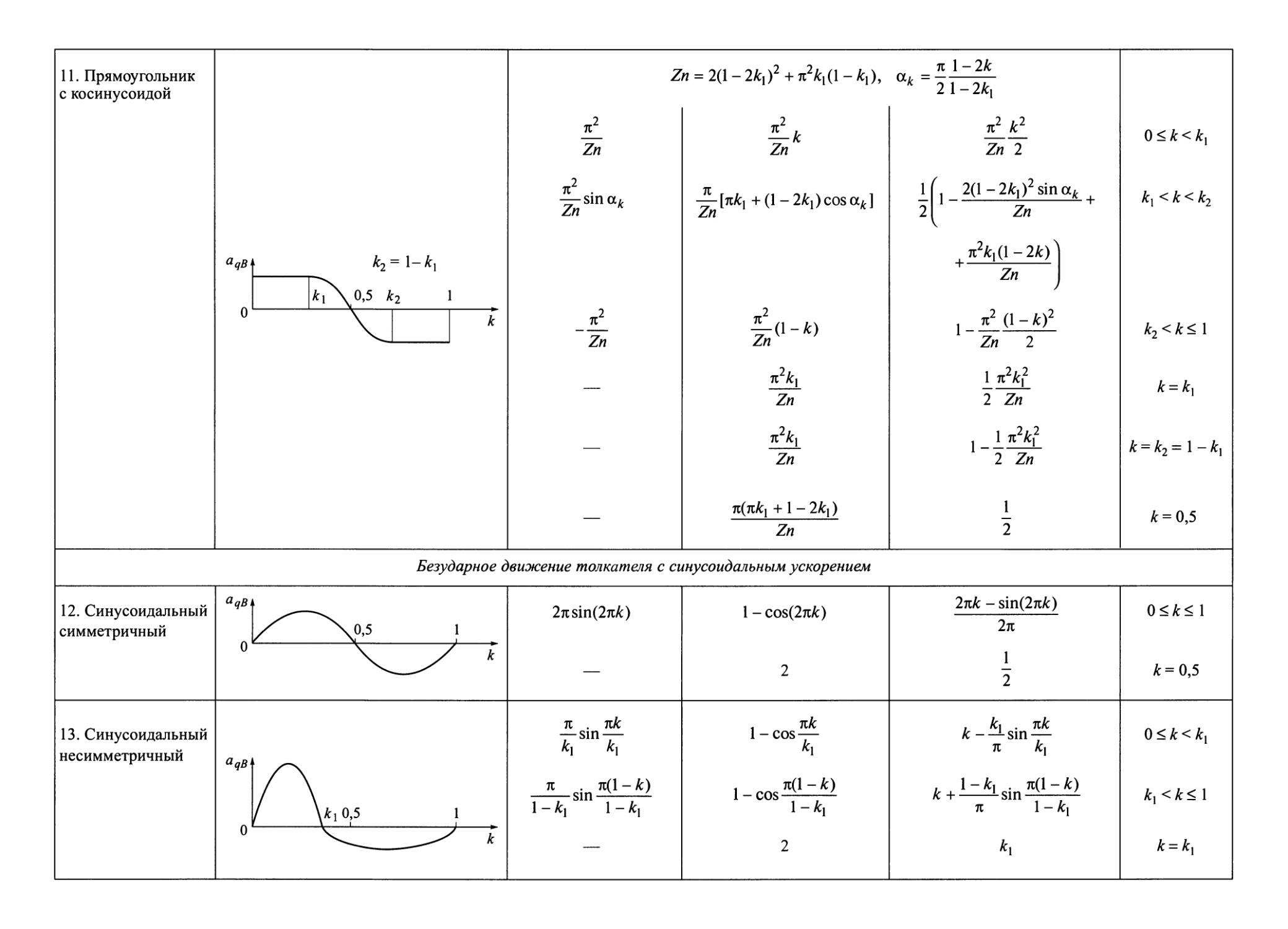
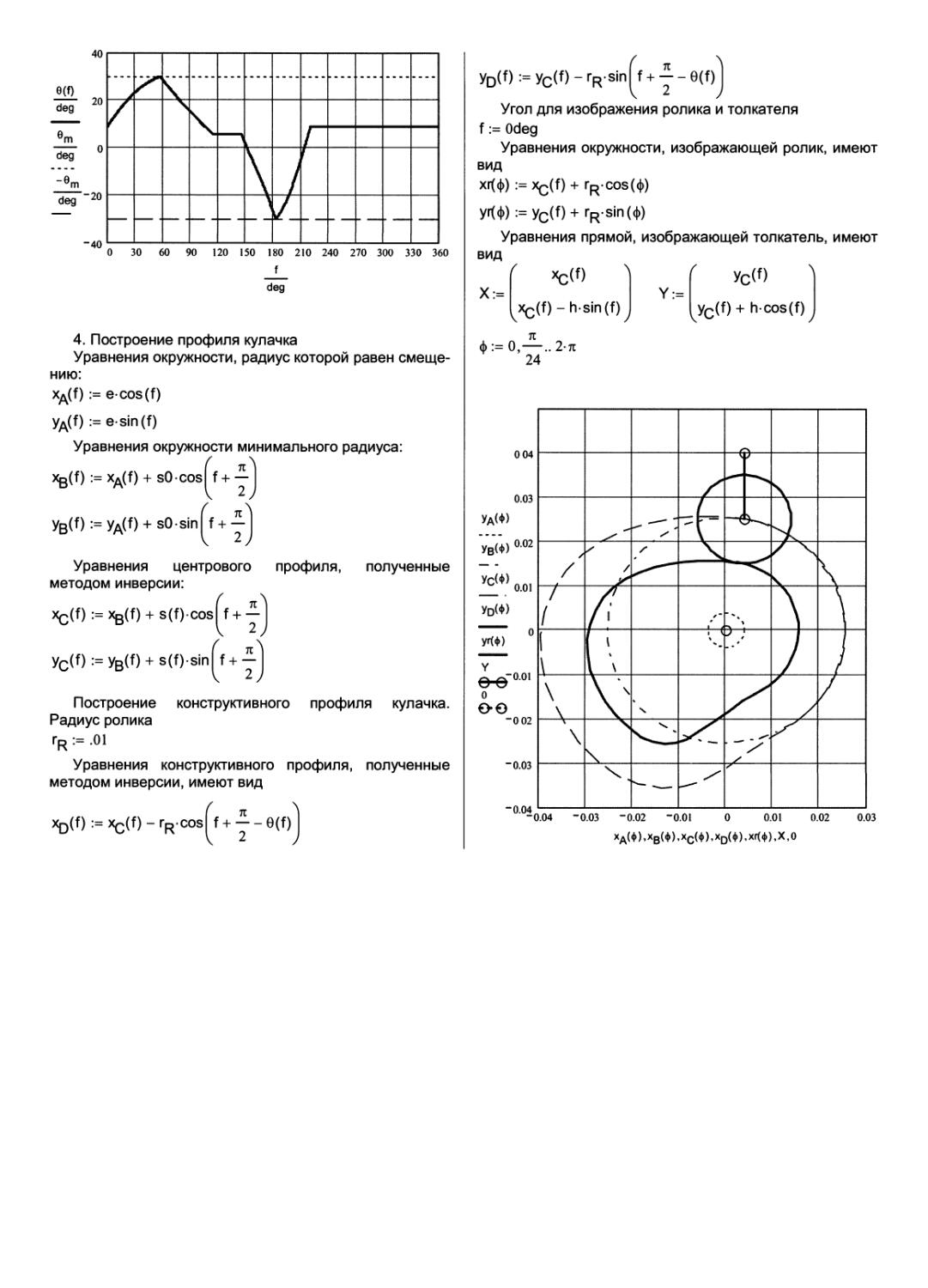
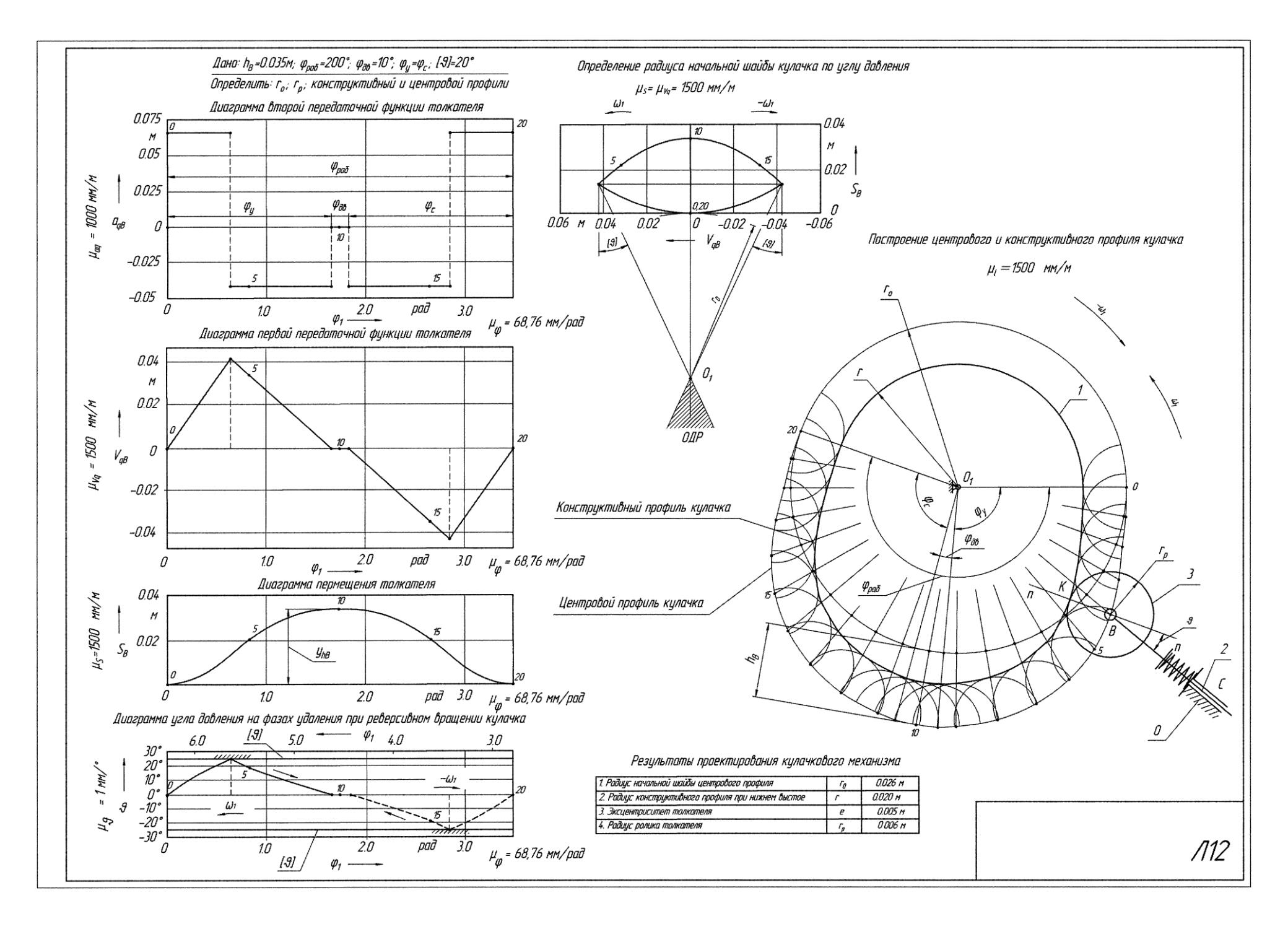
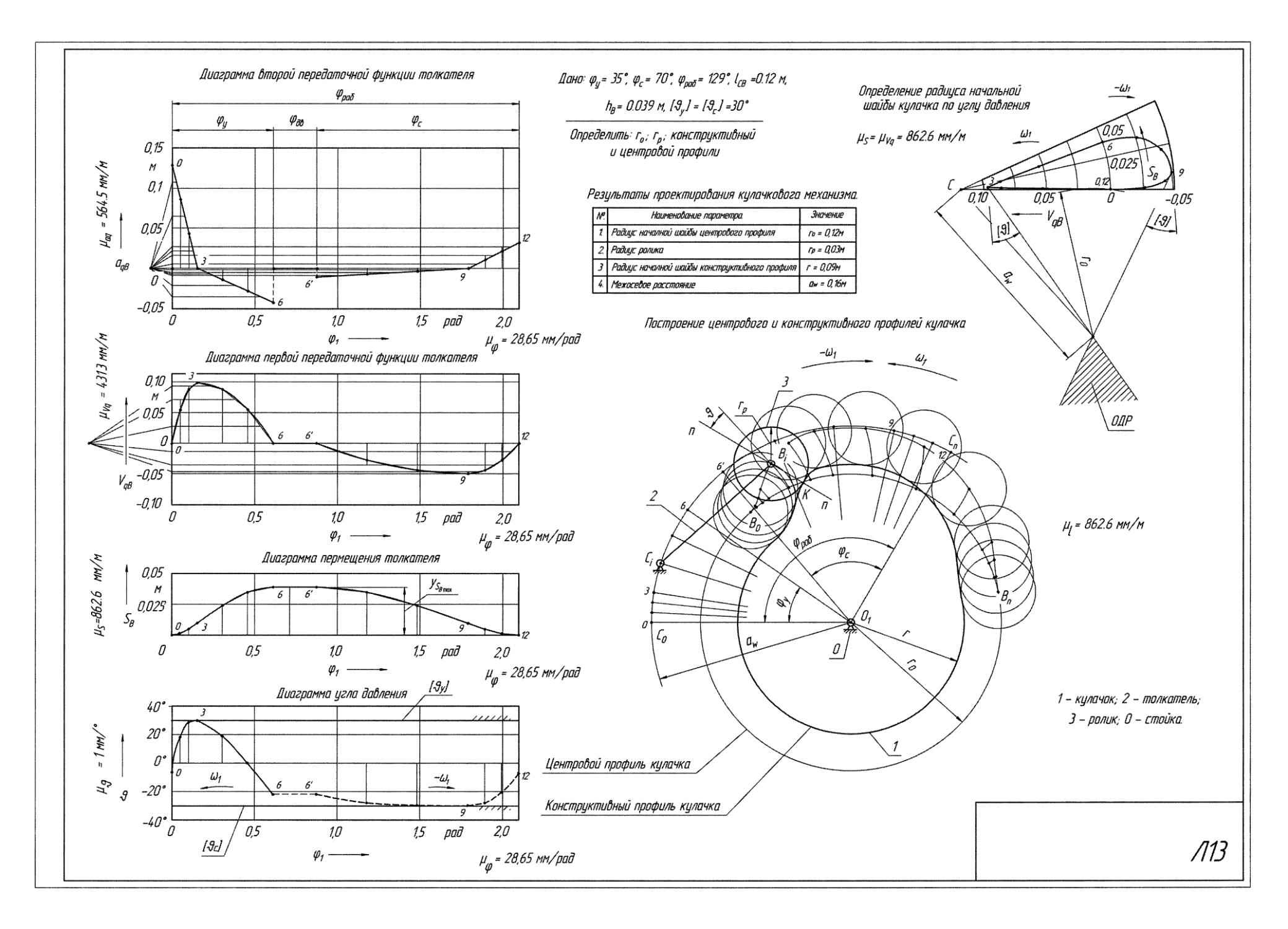
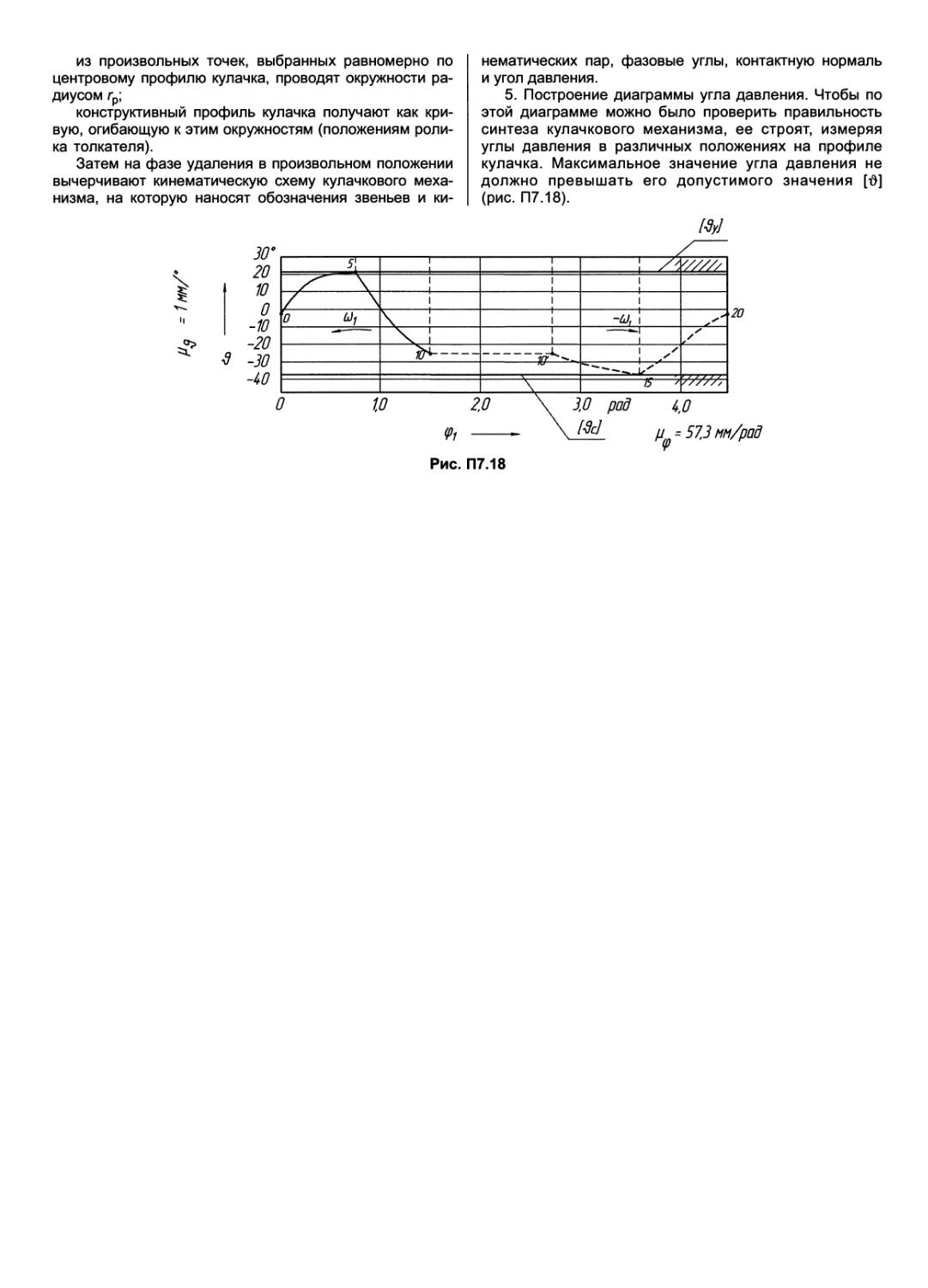
На четвертом листе проектируют кулачковый
механизм (см. далее гл. 7): строят кинематические
диаграммы движения толкателя (графики аналогов
его ускорения, скорости и перемещения). На листе
графически определяют минимальный радиус
центрового профиля кулачка. По полученным данным
строят центровой (теоретический) и рабочий
(практический) профили кулачка, график
зависимости углов давления от угла поворота кулачка.
Все необходимые расчеты обязательно приводят в
расчетно-пояснительной записке.
Все графики на листах проекта должны быть
выполнены в достаточно крупном масштабе, чтобы
при необходимости можно было без большой
погрешности определить любое промежуточное
значение функции.
При графическом изображении физических
величин масштаб обычно обозначают буквой «JUL» с
индексом, указывающим, к какой величине он
относится. Например, масштаб длин Ц/, мм/м,
масштаб сил \iF, мм/Н, и т. д.
Графики строят по дискретно заданным значе-
ням величин (по точкам), тогда как на самом деле
они представляют собой гладкие функции (кроме
специально оговоренных случаев). Интерполяцию
значений проводят приближенно или с помощью
математических средств (например,
сплайн-методами MathCAD). Очень важно, чтобы при
интерполяции не искажалась физическая природа
отображаемых процессов. Об этом будет более подробно
указано в соответствующих разделах пособия (см.
далее гл. 3).
Примеры выполнения отдельных разделов
курсового проектирования с помощью программы
MathCAD приведены в приложениях 1-6. В
приложении 7 содержатся образцы листов курсовых
проектов, выполненных студентами МГТУ им.
Н.Э. Баумана с использованием графических
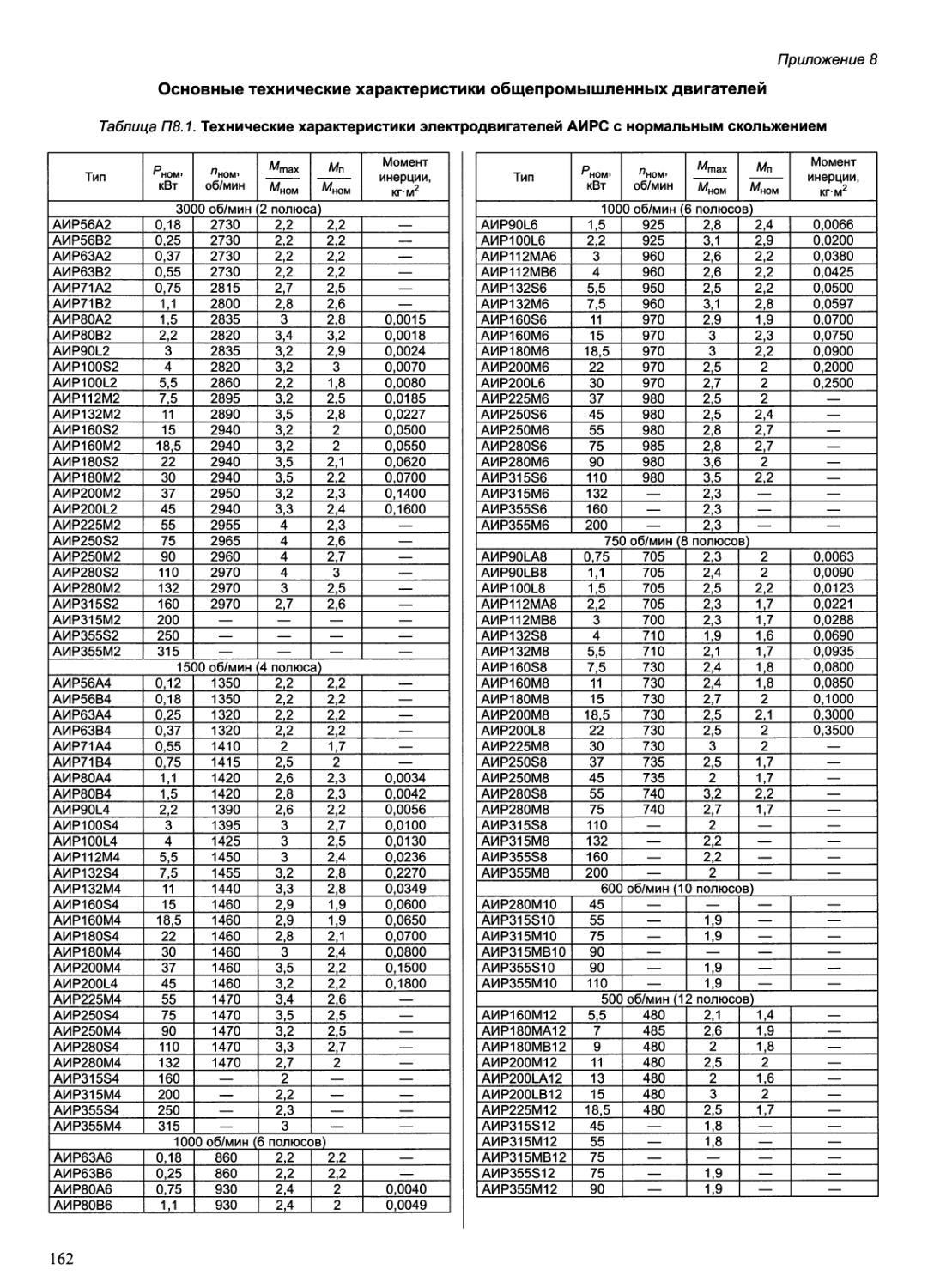
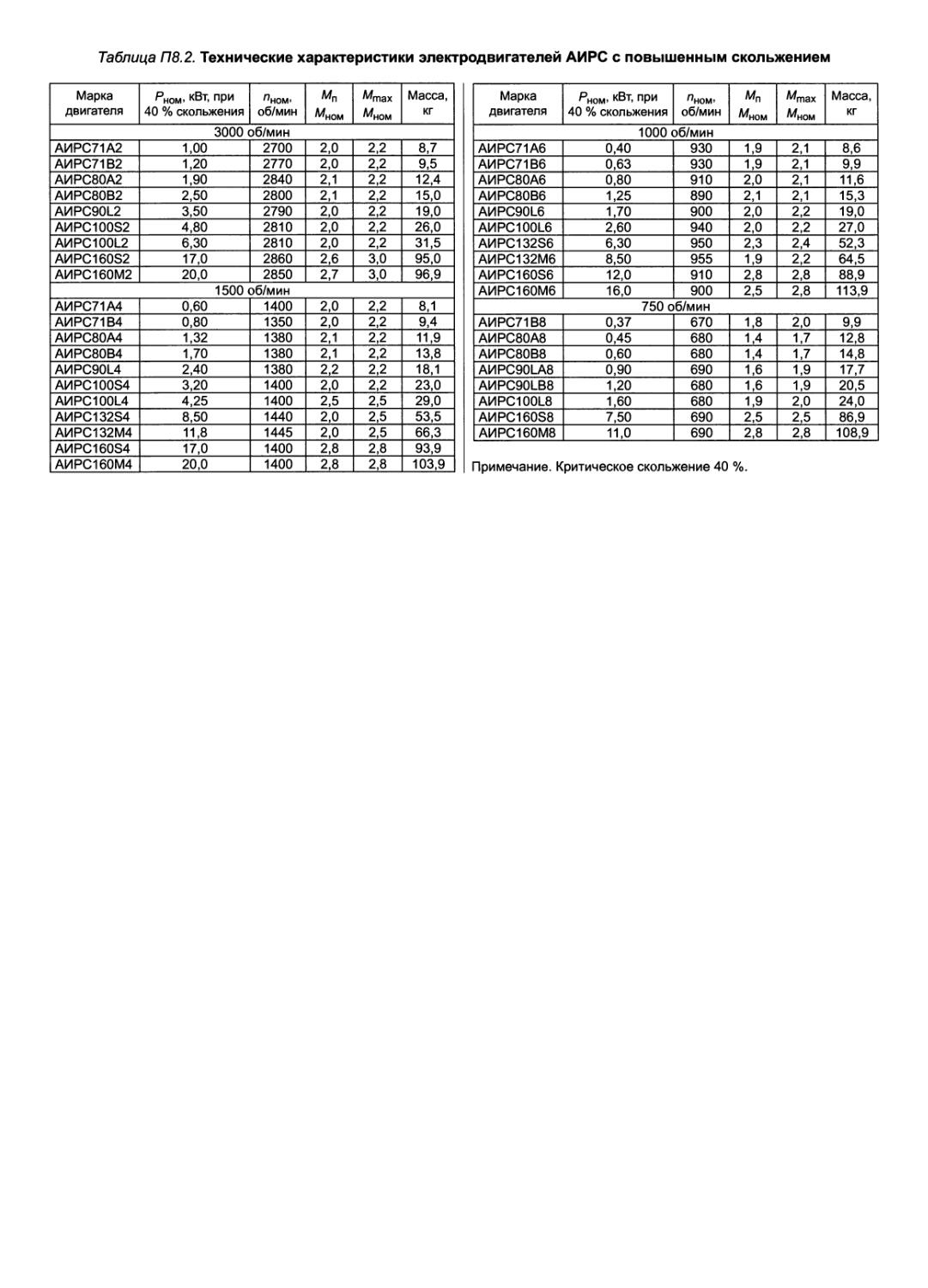
пакетов AutoCAD и КОМПАС. В приложении 8
представлены основные технические характеристики
электродвигателей, в приложении 9 - вопросы для
подготовки к защите.
В течение последних семи лет на кафедре
«Теория механизмов и машин» МГТУ им. Н.Э.
Баумана широко используется математический пакет
MathCAD, который студенты успешно применяют
при курсовом проектировании. Так как MathCAD
не позволяет использовать традиционные
обозначения величин, студент должен самостоятельно
ввести их в соответствии с принятыми в учебном
пособии.
Исходные данные к курсовому проектированию
приведены в сборниках заданий, а также на сайте
кафедры «Теория механизмов и машин» МГТУ
им. Н.Э. Баумана: http://tmm-umk.bmstu.ru.
Программы по отдельным разделам курсового
проектирования, разработанные на кафедре,
можно также найти на сайте http://tmm.bmstu.ru.
1. ОПРЕДЕЛЕНИЕ НЕДОСТАЮЩИХ РАЗМЕРОВ МЕХАНИЗМА
С УЧЕТОМ ДОПОЛНИТЕЛЬНЫХ УСЛОВИЙ
Цель кинематического синтеза - определение
геометрических параметров кинематической схемы
механизма по его заданным кинематическим
свойствам. При проектировании механизма принят ряд
традиционных допущений.
Допущение 7. Звенья механизма представляют
собой абсолютно твердые тела.
Допущение 2. Все кинематические пары
плоского рычажного механизма (вращательные или
поступательные), независимо от особенностей их
конструктивного исполнения, - одноподвижные пары
V класса.
Допущение 3. Зазоры в кинематических парах
отсутствуют.
Необходимость предварительного выполнения
кинематического синтеза рычажного механизма
обусловлена тем, что в заданиях к курсовому
проектированию приведены не все геометрические
размеры механизма, поэтому для их определения
приходится использовать дополнительные
кинематические характеристики. Эту часть курсового проекта
выполняют в расчетно-пояснительной записке.
Как правило, в курсовом проекте решают одну
типовую задачу синтеза плоского рычажного
механизма с одной степенью свободы, например,
размеры звеньев механизма либо иные
геометрические параметры определяют по крайним
положениям ведомого звена или по трем заданным
положениям ведомого и ведущего звеньев.
Недостающие размеры механизма - по средней скорости
одного из звеньев или по заданному коэффициенту
изменения средней скорости хода. Кроме того,
проводят расчеты, связанные с ограничением или
оптимизацией углов давления. Для получения
работоспособного механизма при кинематическом
синтезе требуется выполнить некоторые обязательные
условия такие, как условие существования
механизма на заданном интервале движения входного
звена, условие постоянства сборки (отсутствие
дефектов ветвления и порядка) и т. п. В рычажных
механизмах с непрерывным вращением кривошипа,
кроме того, необходимо выполнить условие
проворачиваемое™ кривошипа.
Помимо обязательных возможен ряд
дополнительных условий, связанных с ограничением
размеров механизма заданными пределами или с
требованием благоприятных условий передачи сил от
ведущего звена к ведомым звеньям, оцениваемых
углами давления. Углом давления называется угол
между вектором силы, с которой ведущее звено
действует на ведомое, и вектором скорости точки
ведомого звена, к которой приложена сила. Силы
трения при этом не учитываются.
Рассмотрим наиболее распространенные задачи
кинематического синтеза для разных видов
рычажных механизмов, приведенных в заданиях к
курсовому проектированию.
1.1. Кривошипно-ползунные механизмы
1.1.1. Синтез механизма по заданным
геометрическим параметрам
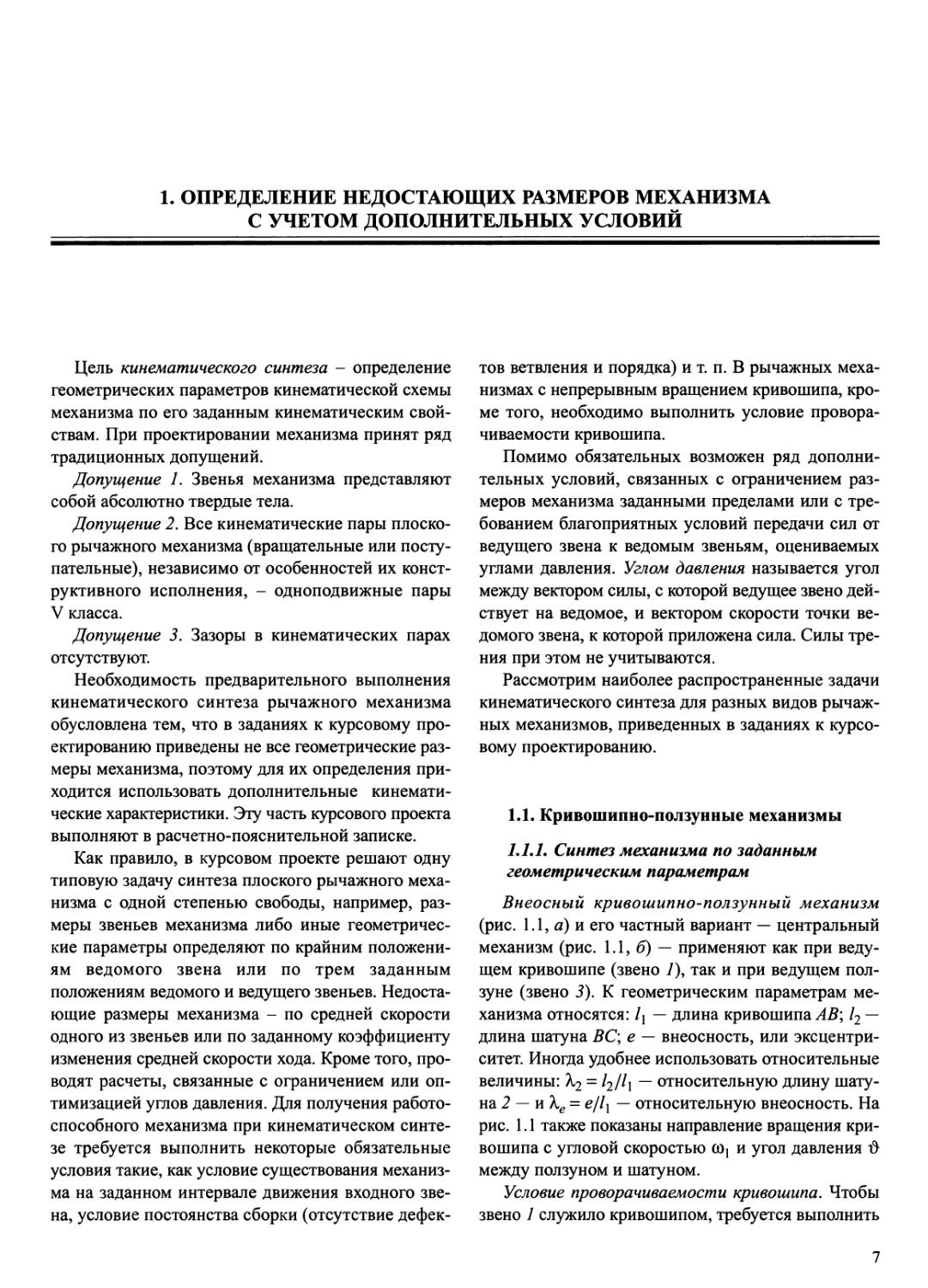
Внеосный кривошипно-ползунный механизм
(рис. 1.1, а) и его частный вариант — центральный
механизм (рис. 1.1, б) — применяют как при
ведущем кривошипе (звено 7), так и при ведущем
ползуне (звено 3). К геометрическим параметрам
механизма относятся: 1Х — длина кривошипа АВ; 12 —
длина шатуна ВС; е — внеосность, или
эксцентриситет. Иногда удобнее использовать относительные
величины: Х2 = 12/1\ — относительную длину шату-
на 2 — и Хе = е/1х — относительную внеосность. На
рис. 1.1 также показаны направление вращения
кривошипа с угловой скоростью 0)! и угол давления Ф
между ползуном и шатуном.
Условие проворачиваемости кривошипа. Чтобы
звено 7 служило кривошипом, требуется выполнить
7
дополнительное условие, связанное с
ограничением размеров звеньев, которое называют условием
проворачиваемости кривошипа, /j < /2 + е. При
несоблюдении этого условия механизм становится ко-
ромыслово-ползунным.
Определение размера кривошипа по заданному
ходу ползуна. Прежде чем использовать понятие
хода ползуна, напомним, что считают размером
звена для разных видов звеньев. Например, для звена
с двумя вращательными парами — расстояние
между центрами этих пар, для звена с одной
вращательной и одной поступательной парой - длина
перпендикуляра, опущенного из центра вращательной
пары на направляющую поступательной пары, и для
звена с двумя поступательными парами - угол
между направляющими поступательных пар. Если
вращательная пара лежит на направляющей
поступательной пары (например, пара С на рис. 1.1), то
длину звена принимают равной нулю, т. е. длина звена 3
/3 = 0. Важно отметить, что на кинематических
схемах поступательные пары не имеют размеров
(изображены условно). Поэтому положение звена,
содержащего поступательную пару, определяется
положением вращательной кинематической пары,
в случае двух поступательных пар на звене -
точкой пересечения направляющих поступательных
пар.
Ход hc ползуна соответствует расстоянию
между крайними положениями звена 3, т. е.
расстоянию между крайними положениями вращательной
пары, например, между крайними положениями Сх
и С2 кинематической пары С на рис. 1.1. Иногда на
схемах для упрощения написания индекс,
соответствующий вращательной кинематической паре,
опускают, т. е. обозначают ход ползуна А, или
специальным индексом указывают только номер
звена, для которого определяется ход, например А3. Все
эти обозначения равнозначны, однако следует
помнить, что при любом способе написания ход - это
расстояние между крайними положениями
вращательной пары.
Для центрального механизма ход ползуна
(поршня) равен двум длинам кривошипа, hc = 2/l5
следовательно, при заданном ходе ползуна можно найти
длину кривошипа, а затем по заданной
относительной длине Х2 шатуна определить его фактическую
длину /2.
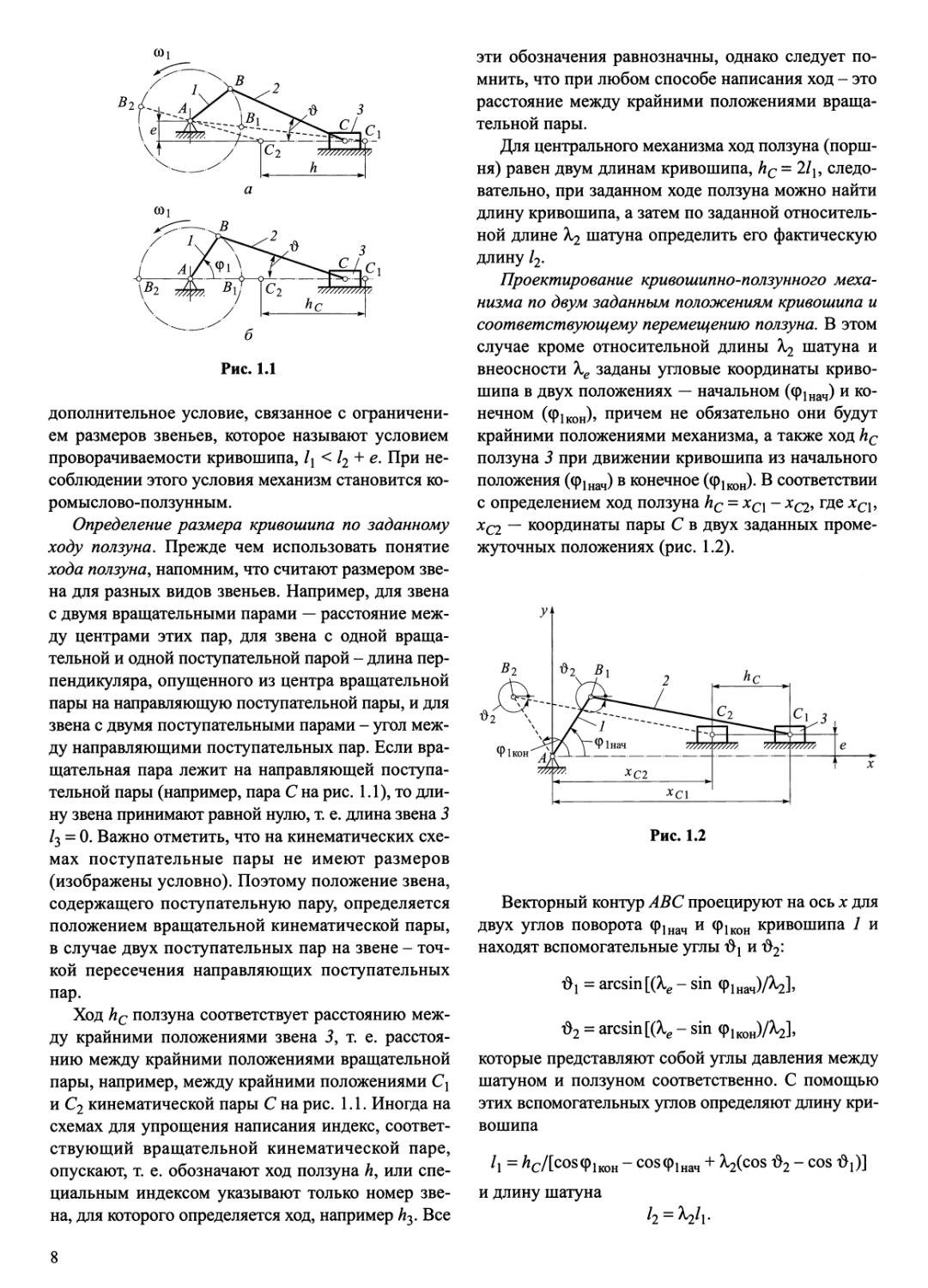
Проектирование кривошипно-ползунного
механизма по двум заданным положениям кривошипа и
соответствующему перемещению ползуна. В этом
случае кроме относительной длины А^ шатуна и
внеосности Хе заданы угловые координаты
кривошипа в двух положениях — начальном ((piHa4) и
конечном (Ф1К0Н)> причем не обязательно они будут
крайними положениями механизма, а также ход hc
ползуна 3 при движении кривошипа из начального
положения (ф1нач) в конечное ((piK0H)- В соответствии
с определением ход ползуна hc = jcc1 - х^, где хС\,
хС2 — координаты пары С в двух заданных
промежуточных положениях (рис. 1.2).
У-
в2
в-
\
ч^~
ф1кон^\
,
#2
~ Z
В\
*—<_._
^7
~ф1нач
2 hC ^
^Г\
W//M
^ ХС2
-<
£2
П ^^R
г 1 ™
с^з,
~~^A
V///// V/WAW////.
*С1 '
е
1
X
Рис. 1.2
Векторный контур ABC проецируют на ось х для
двух углов поворота (piHa4 и 9iK0H кривошипа 1 и
находят вспомогательные углы Ь\ и Ф2:
Ьх = arcsin[(A,e - sin Ф^ачУЫ
Ъ2 = arcsin[(A,e - sin ф^Аг],
которые представляют собой углы давления между
шатуном и ползуном соответственно. С помощью
этих вспомогательных углов определяют длину
кривошипа
1\ = ЛС/[С08ф1к0Н - С08ф1нач + A,2(C0S #2 - COS fy)]
и длину шатуна
/2 - A^/i
8
1.1.2. Синтез механизма по средней скорости
движения ползуна и углам давления
Синтез кривошипно-ползунного механизма по
средней скорости. Чаще всего этот вариант
синтеза применяют при проектировании центрального
кривошипно-ползунного механизма (см. рис. 1.1,6).
Здесь дополнительно заданы: средняя скорость
движения ползуна (поршня) vcp, м/с, и частота
вращения кривошипа пх, с"1.
Кривошип совершает один оборот в течение
времени, равного времени полного цикла работы
механизма, tn = 1/wj. Учитывая, что ползун механизма
движется с одинаковой средней скоростью в прямом
и обратном направлениях, вычисляют ход ползуна,
hc = vcp/u/2. Как уже указывалось, для
центрального кривошипно-ползунного механизма ход ползуна
hc= 2 lh тогда длина кривошипа lx = vcp/(4n{), м, а
длина шатуна /2 =A,2/i, м.
Синтез кривошипно-ползунного механизма по
заданному углу давления. Для работы механизма в
соответствии с условиями передачи сил в
кинематических парах необходимо, чтобы максимальное
значение угла давления во вращательной
кинематической паре на ползуне не превышало допустимого
значения [&]: Фтах = [Ф]. Ориентировочно принимают
[$] < 30° при прямом (рабочем) ходе и [&] < 45° при
обратном (холостом) ходе. В центральных кривошип-
но-ползунных механизмах наиболее
распространенных поршневых машин угол давления обычно
находится в диапазоне значений Ф = 10°.. .20°.
Для центрального кривошипно-ползунного
механизма (см. рис. 1.1,6) угол давления принимает
максимальное значение при углах поворота кривошипа
(р! = 90° или 9j = 270°, т. е. Фтах = arcsin (l\/l2) или
Фтах = arcsin (1Д2). Для нецентрального
кривошипно-ползунного механизма (см. рис. 1.1, а) угол
давления также будет иметь максимальное значение при
(р! = 90° или (р! = 270°, т. е. #max = arcsin [(lx+e)/l2]
или Фтах = arcsin[l/(A^+ Xe)]. Эти формулы можно
использовать как при проверочном расчете, так и
при кинематическом синтезе для определения
недостающих размеров кривошипно-ползунного
механизма в случаях, когда он входит в состав более
сложной кинематической цепи.
1.2. Четырехшарнирные механизмы
1.2.1. Синтез механизма по заданным
положениям его звеньев
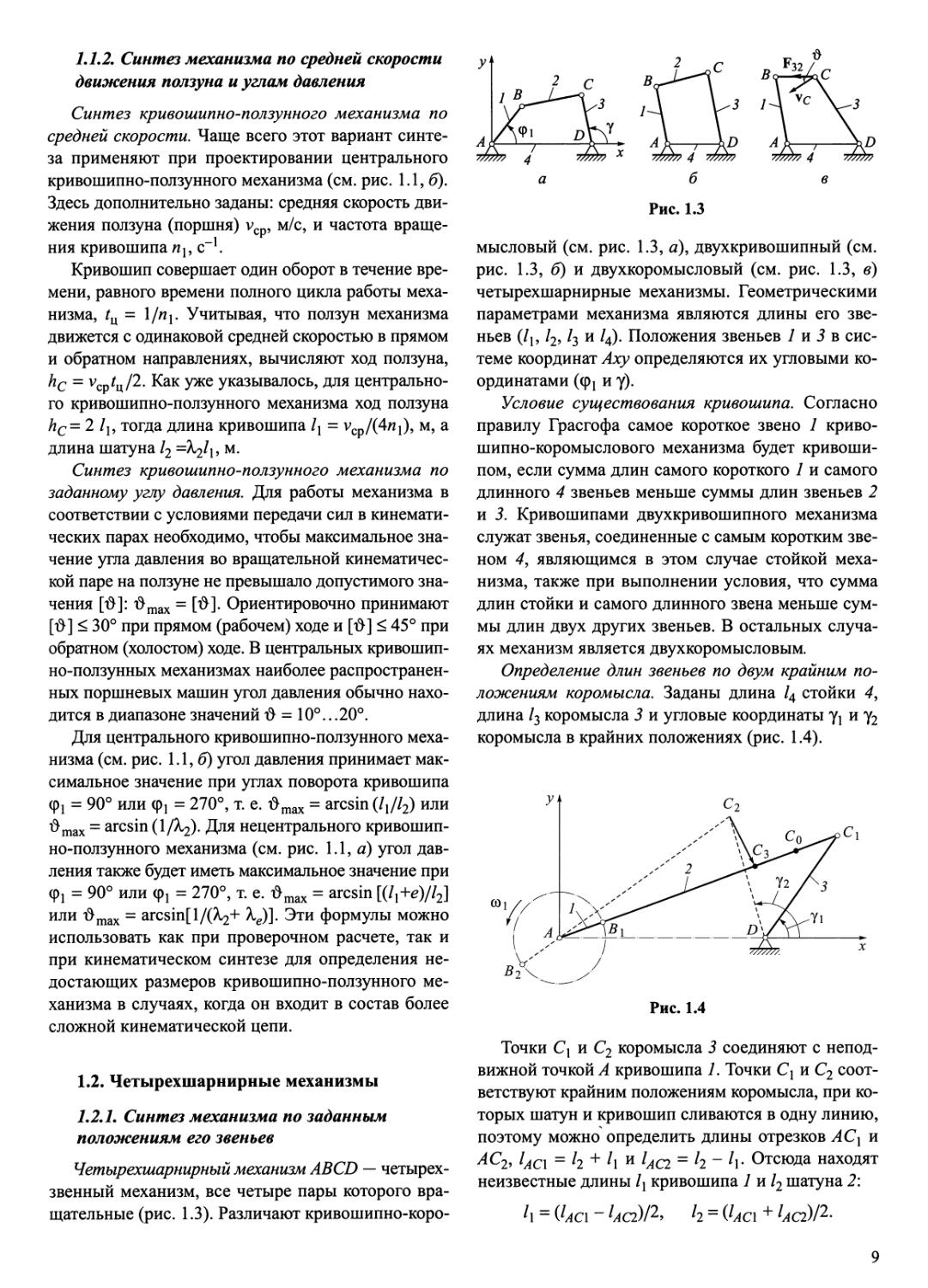
Четырехшарнирный механизм ABCD — четырех-
звенный механизм, все четыре пары которого
вращательные (рис. 1.3). Различают кривошипно-коро-
а б в
Рис. 1.3
мысловый (см. рис. 1.3, а), двухкривошипный (см.
рис. 1.3, б) и двухкоромысловый (см. рис. 1.3, в)
четырехшарнирные механизмы. Геометрическими
параметрами механизма являются длины его
звеньев (/], /2, /3 и /4). Положения звеньев 1 и 3 в
системе координат Аху определяются их угловыми
координатами (ф! и у).
Условие существования кривошипа. Согласно
правилу Грасгофа самое короткое звено 1 криво-
шипно-коромыслового механизма будет
кривошипом, если сумма длин самого короткого 1 и самого
длинного 4 звеньев меньше суммы длин звеньев 2
и 3. Кривошипами двухкривошипного механизма
служат звенья, соединенные с самым коротким
звеном 4, являющимся в этом случае стойкой
механизма, также при выполнении условия, что сумма
длин стойки и самого длинного звена меньше
суммы длин двух других звеньев. В остальных
случаях механизм является двухкоромысловым.
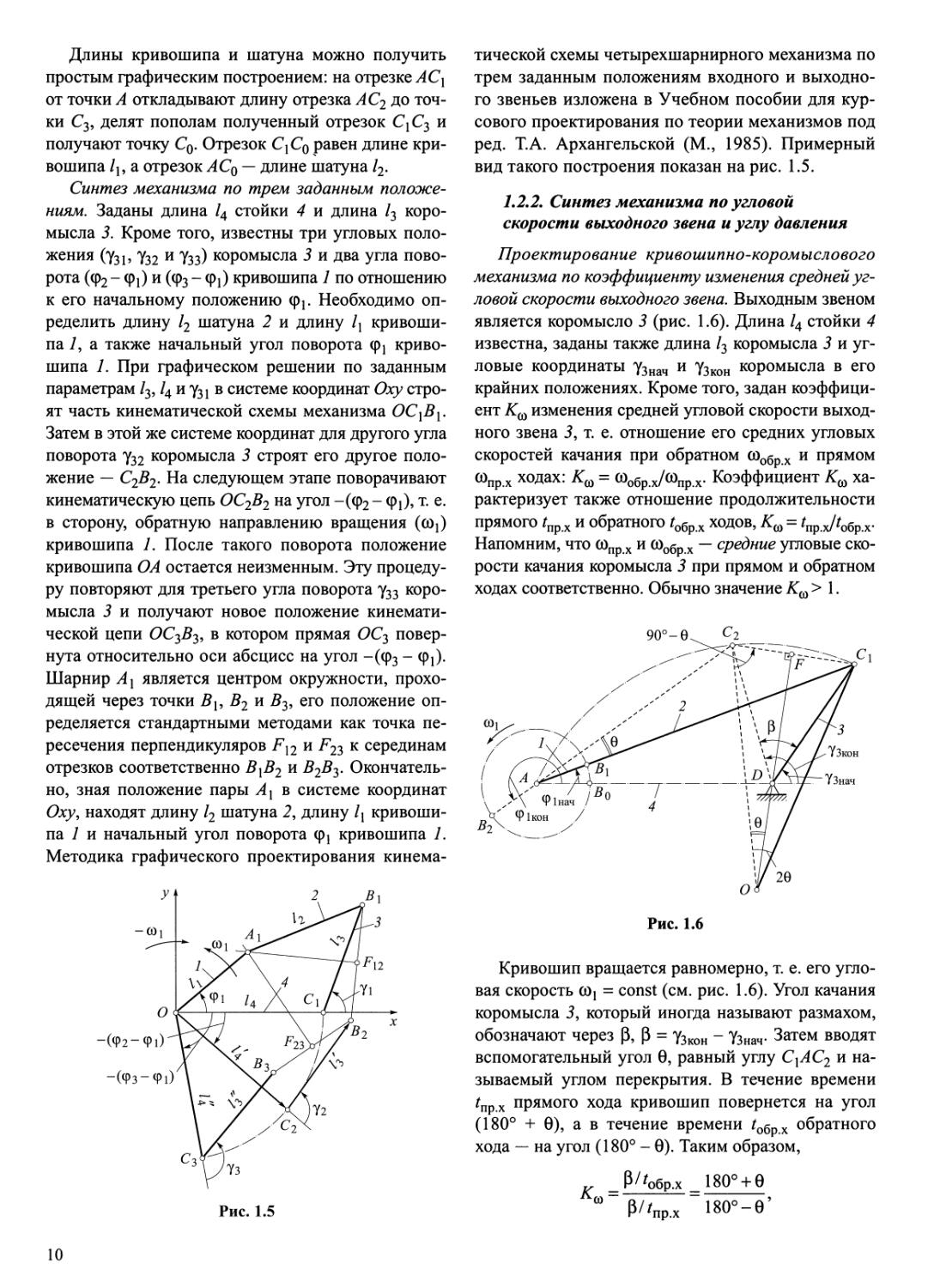
Определение длин звеньев по двум крайним
положениям коромысла. Заданы длина /4 стойки 4,
длина /3 коромысла 3 и угловые координаты ух и у2
коромысла в крайних положениях (рис. 1.4).
Рис. 1.4
Точки С] и С2 коромысла 3 соединяют с
неподвижной точкой А кривошипа 7. Точки Q и С2
соответствуют крайним положениям коромысла, при
которых шатун и кривошип сливаются в одну линию,
поэтому можно определить длины отрезков АСХ и
АС2, 1дс\ = h + h и Uc2 ~ h~ h- Отсюда находят
неизвестные длины 1Х кривошипа 1 и 12 шатуна 2:
h = (Uc\ - Iaci)/2, h = (hex + hd)P-
9
Длины кривошипа и шатуна можно получить
простым графическим построением: на отрезке АСХ
от точки А откладывают длину отрезка АС2 до
точки С3, делят пополам полученный отрезок СХС^ и
получают точку С0. Отрезок СХС0 равен длине
кривошипа /1? а отрезок АС0 — длине шатуна /2.
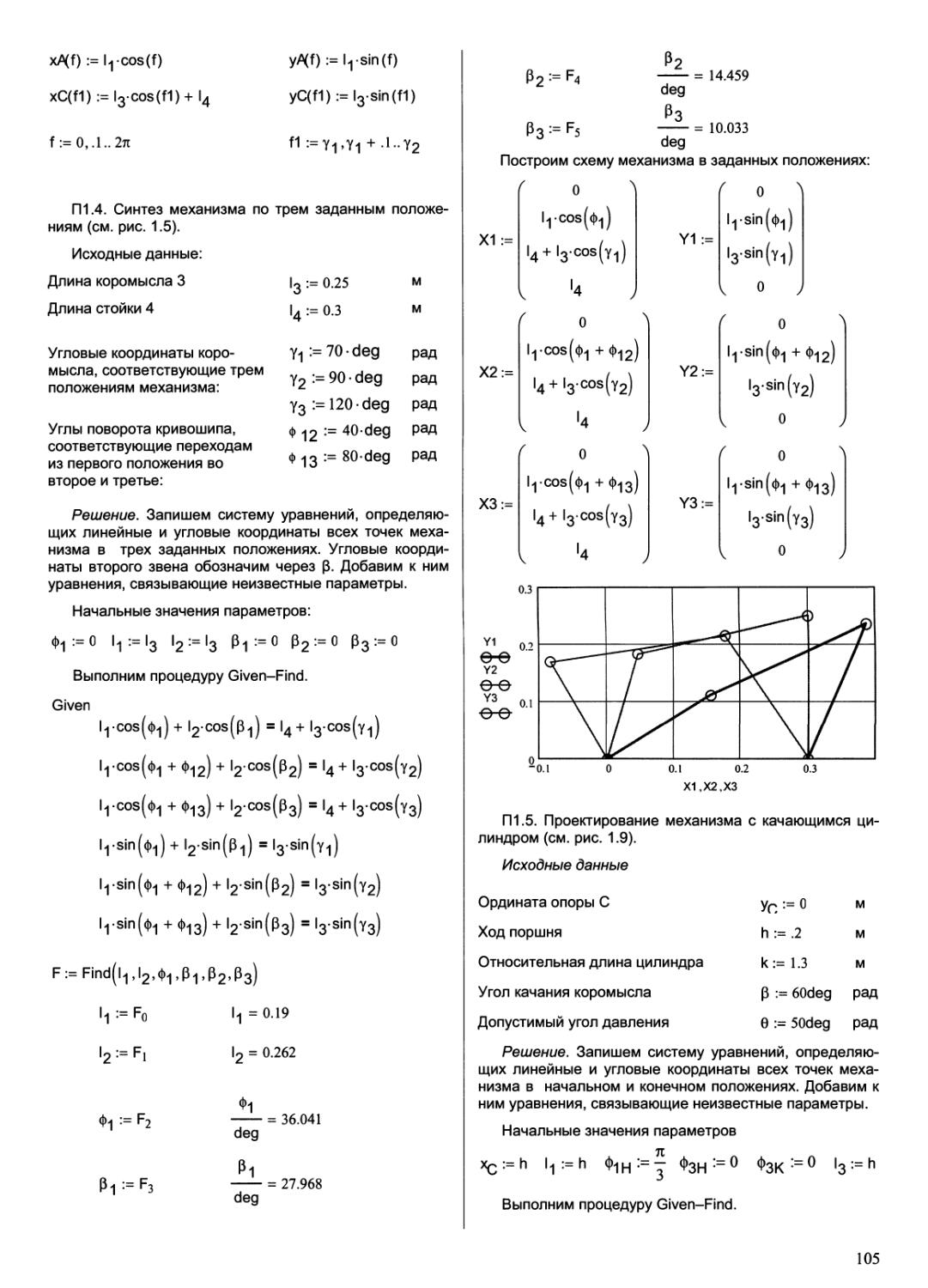
Синтез механизма по трем заданным
положениям. Заданы длина /4 стойки 4 и длина /3
коромысла 3. Кроме того, известны три угловых
положения (Узь Уз2 и Узз) коромысла 3 и два угла
поворота (ф2 - (pi) и (ф3 - (р\) кривошипа 1 по отношению
к его начальному положению ф1# Необходимо
определить длину /2 шатуна 2 и длину 1Х
кривошипа 7, а также начальный угол поворота cpj
кривошипа 1. При графическом решении по заданным
параметрам /3, /4 и y3i в системе координат Оху
строят часть кинематической схемы механизма ОСхВх.
Затем в этой же системе координат для другого угла
поворота Уз2 коромысла 3 строят его другое
положение — С2В2. На следующем этапе поворачивают
кинематическую цепь ОС2В2 на угол -(ф2 - cpj), т. е.
в сторону, обратную направлению вращения (щ)
кривошипа 7. После такого поворота положение
кривошипа ОА остается неизменным. Эту
процедуру повторяют для третьего угла поворота у3з
коромысла 3 и получают новое положение
кинематической цепи ОС353, в котором прямая <9С3
повернута относительно оси абсцисс на угол -(ф3 - ф^.
Шарнир Ах является центром окружности,
проходящей через точки Вх, В2 и 7?3, его положение
определяется стандартными методами как точка
пересечения перпендикуляров FX2 и F23 к серединам
отрезков соответственно ВХВ2 и В2В3.
Окончательно, зная положение пары Ах в системе координат
Оху, находят длину /2 шатуна 2, длину 1Х
кривошипа 7 и начальный угол поворота (рх кривошипа 7.
Методика графического проектирования кинема-
Рис. 1.5
тической схемы четырехшарнирного механизма по
трем заданным положениям входного и
выходного звеньев изложена в Учебном пособии для
курсового проектирования по теории механизмов под
ред. Т.А. Архангельской (М., 1985). Примерный
вид такого построения показан на рис. 1.5.
1.2.2. Синтез механизма по угловой
скорости выходного звена и углу давления
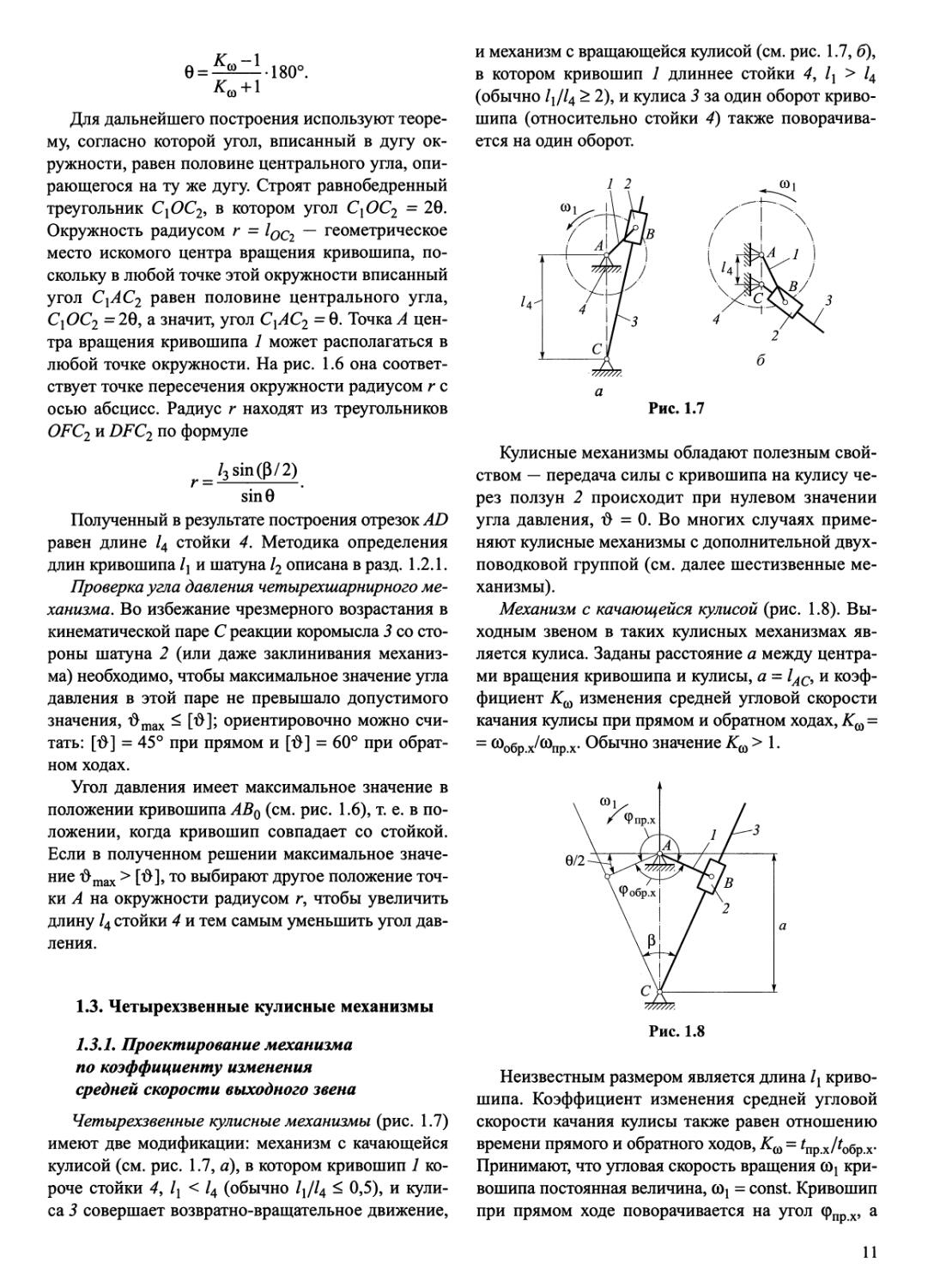
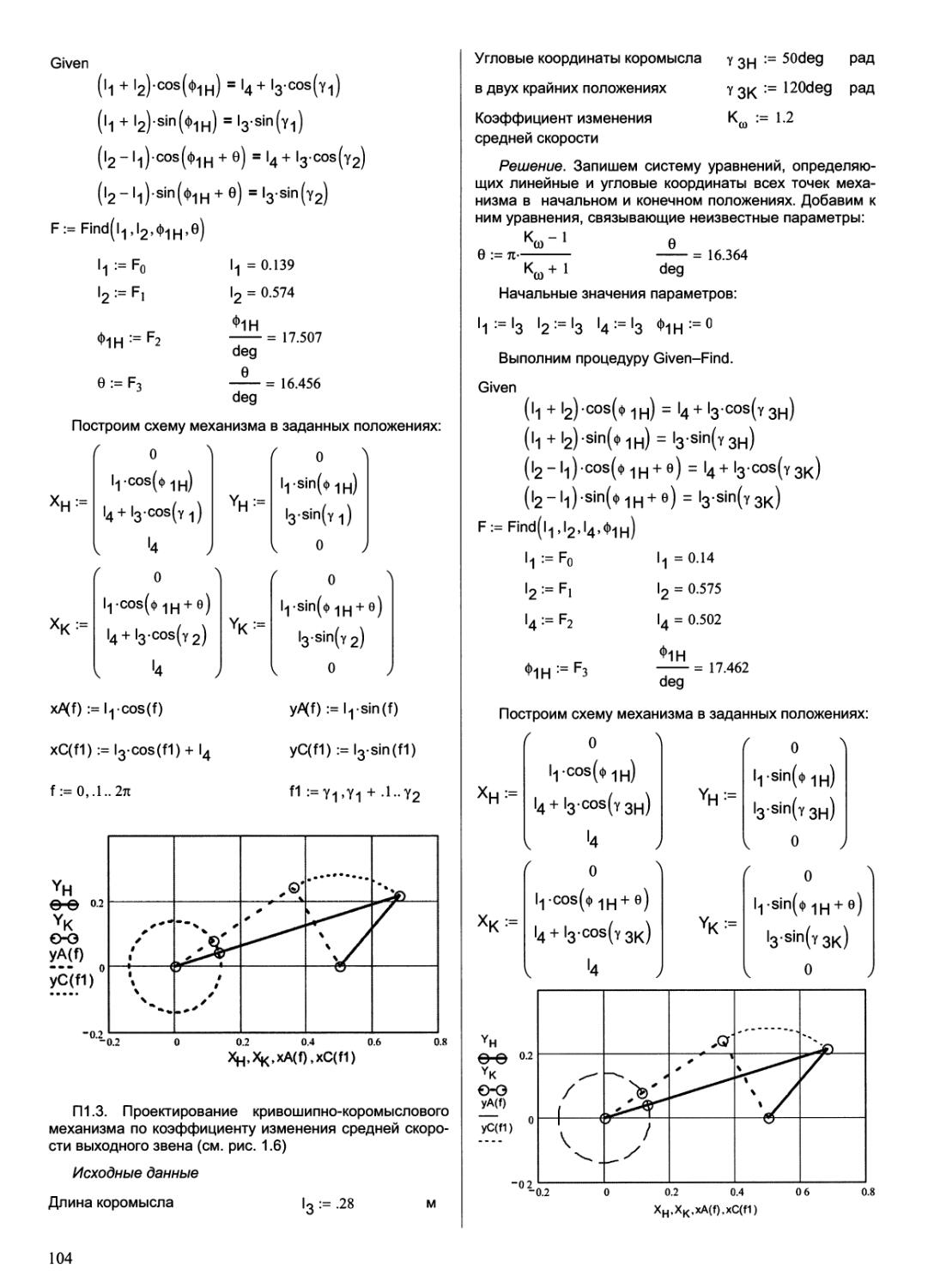
Проектирование кривошипно-коромыслового
механизма по коэффициенту изменения средней
угловой скорости выходного звена. Выходным звеном
является коромысло 3 (рис. 1.6). Длина /4 стойки 4
известна, заданы также длина /3 коромысла 3 и
угловые координаты Узнач и Узкой коромысла в его
крайних положениях. Кроме того, задан
коэффициент К^ изменения средней угловой скорости
выходного звена 3, т. е. отношение его средних угловых
скоростей качания при обратном сообр х и прямом
Юпр.х ходах: ^со = ^обр.х/^пр.х- Коэффициент Кт
характеризует также отношение продолжительности
прямого tupx и обратного /обр х ходов, Кт = tnpJto6px.
Напомним, что сопр х и сообр х — средние угловые
скорости качания коромысла 3 при прямом и обратном
ходах соответственно. Обычно значение К„ > 1.
Рис. 1.6
Кривошип вращается равномерно, т. е. его
угловая скорость C0j = const (см. рис. 1.6). Угол качания
коромысла 5, который иногда называют размахом,
обозначают через Р, (3 = Узкой ~ Узнач- Затем вводят
вспомогательный угол 9, равный углу СХАС2 и
называемый углом перекрытия. В течение времени
*пр.х прямого хода кривошип повернется на угол
(180° + 0), а в течение времени £обрх обратного
хода — на угол (180° - 0). Таким образом,
к =Р/'обр.х^18О° + 0
ю р//_х 18О°-0'
10
е=^
*ш + 1
•180°.
Для дальнейшего построения используют
теорему, согласно которой угол, вписанный в дугу
окружности, равен половине центрального угла,
опирающегося на ту же дугу. Строят равнобедренный
треугольник СхОСъ в котором угол СхОС2 = 29.
Окружность радиусом г = l0Cl — геометрическое
место искомого центра вращения кривошипа,
поскольку в любой точке этой окружности вписанный
угол С\АС2 равен половине центрального угла,
СхОС2 = 29, а значит, угол СХАС2 = 9. Точка А
центра вращения кривошипа 1 может располагаться в
любой точке окружности. На рис. 1.6 она
соответствует точке пересечения окружности радиусом г с
осью абсцисс. Радиус г находят из треугольников
OFC2 и DFC2 по формуле
r = /3sin(p/2)
sin 9
Полученный в результате построения отрезок AD
равен длине /4 стойки 4. Методика определения
длин кривошипа 1Х и шатуна /2 описана в разд. 1.2.1.
Проверка угла давления четырехшарнирного
механизма. Во избежание чрезмерного возрастания в
кинематической паре С реакции коромысла 3 со
стороны шатуна 2 (или даже заклинивания
механизма) необходимо, чтобы максимальное значение угла
давления в этой паре не превышало допустимого
значения, Фтах ^ [&]; ориентировочно можно
считать: [&] = 45° при прямом и [Ф] = 60° при
обратном ходах.
Угол давления имеет максимальное значение в
положении кривошипа АВ0 (см. рис. 1.6), т. е. в
положении, когда кривошип совпадает со стойкой.
Если в полученном решении максимальное
значение Фтах > [д], то выбирают другое положение
точки А на окружности радиусом г, чтобы увеличить
длину /4 стойки 4 и тем самым уменьшить угол
давления.
1.3. Четырехзвенные кулисные механизмы
1.3.1. Проектирование механизма
по коэффициенту изменения
средней скорости выходного звена
Четырехзвенные кулисные механизмы (рис. 1.7)
имеют две модификации: механизм с качающейся
кулисой (см. рис. 1.7, а), в котором кривошип 1
короче стойки 4, /j < /4 (обычно /j//4 < 0,5), и
кулиса 3 совершает возвратно-вращательное движение,
и механизм с вращающейся кулисой (см. рис. 1.7, б),
в котором кривошип 1 длиннее стойки 4, 1Х > /4
(обычно /j//4 > 2), и кулиса 3 за один оборот
кривошипа (относительно стойки 4) также
поворачивается на один оборот.
1 2
Рис. 1.7
Кулисные механизмы обладают полезным
свойством — передача силы с кривошипа на кулису
через ползун 2 происходит при нулевом значении
угла давления, Ь = 0. Во многих случаях
применяют кулисные механизмы с дополнительной двух-
поводковой группой (см. далее шестизвенные
механизмы).
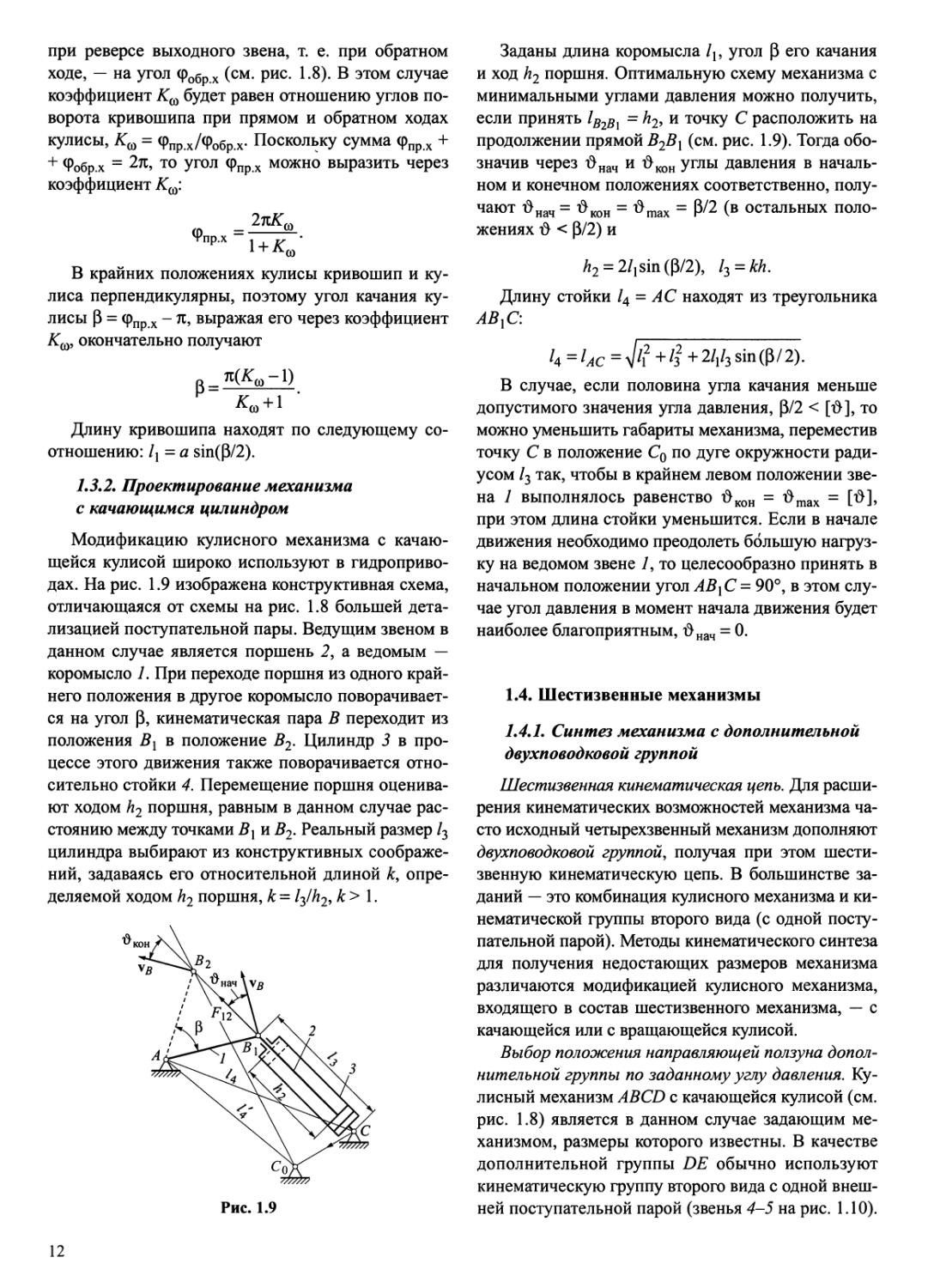
Механизм с качающейся кулисой (рис. 1.8).
Выходным звеном в таких кулисных механизмах
является кулиса. Заданы расстояние а между
центрами вращения кривошипа и кулисы, а = 1АС, и
коэффициент К^ изменения средней угловой скорости
качания кулисы при прямом и обратном ходах, К^ =
= ^обр.х^пр.х- Обычно значение К^ > 1.
0/2
,
/ Фпр.х
1
^
\фобр.х
\р
Л
с\
/
1 А
О/в
/ 2
-3
А
у
Рис. 1.8
Неизвестным размером является длина 1Х
кривошипа. Коэффициент изменения средней угловой
скорости качания кулисы также равен отношению
времени прямого и обратного ходов, К^ = tnpx/to6px.
Принимают, что угловая скорость вращения сох
кривошипа постоянная величина, щ = const. Кривошип
при прямом ходе поворачивается на угол фпр х, а
11
при реверсе выходного звена, т. е. при обратном
ходе, — на угол ф0бр.х (см- Рис- 1-8)- В этом случае
коэффициент АГф будет равен отношению углов
поворота кривошипа при прямом и обратном ходах
кулисы, Кп = Фпр.х/Фобр.х- Поскольку сумма фпр х +
+ Фобр.х = 27Г, то угол фпр х можно выразить через
коэффициент К^:
В крайних положениях кулисы кривошип и
кулиса перпендикулярны, поэтому угол качания
кулисы Р = фпр х - я, выражая его через коэффициент
АГЮ, окончательно получают
В_*(*»-1)
Длину кривошипа находят по следующему
соотношению: /j = a sin(p/2).
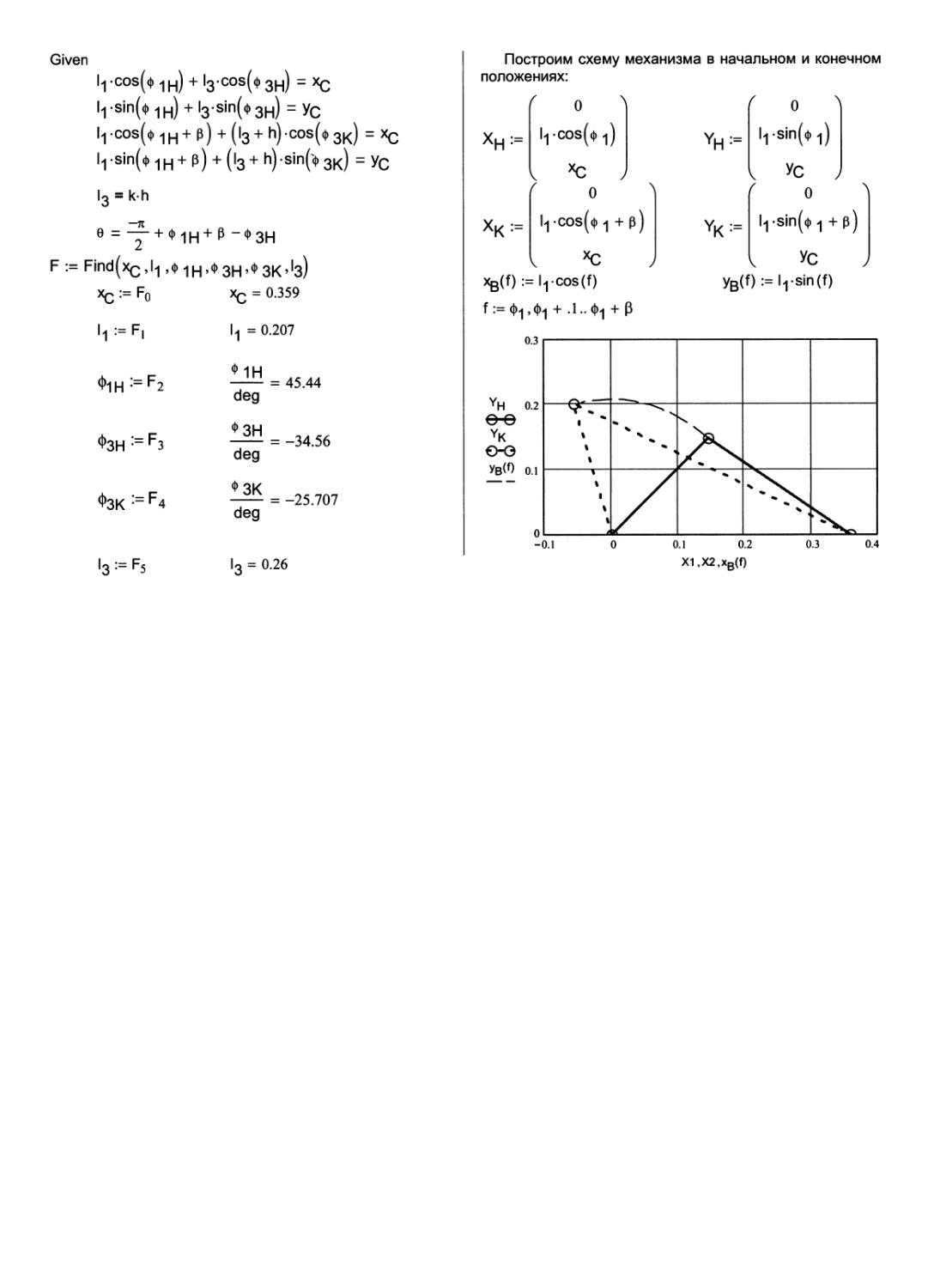
1.3.2. Проектирование механизма
с качающимся цилиндром
Модификацию кулисного механизма с
качающейся кулисой широко используют в
гидроприводах. На рис. 1.9 изображена конструктивная схема,
отличающаяся от схемы на рис. 1.8 большей
детализацией поступательной пары. Ведущим звеном в
данном случае является поршень 2, а ведомым —
коромысло 1. При переходе поршня из одного
крайнего положения в другое коромысло
поворачивается на угол Р, кинематическая пара В переходит из
положения Вх в положение В2. Цилиндр 3 в
процессе этого движения также поворачивается
относительно стойки 4. Перемещение поршня
оценивают ходом h2 поршня, равным в данном случае
расстоянию между точками Вх и В2. Реальный размер /3
цилиндра выбирают из конструктивных
соображений, задаваясь его относительной длиной к,
определяемой ходом h2 поршня, к - /3/Л2, к> \.
Рис. 1.9
Заданы длина коромысла /l9 угол Р его качания
и ход h2 поршня. Оптимальную схему механизма с
минимальными углами давления можно получить,
если принять lBlBx = къ и точку С расположить на
продолжении прямой В2ВХ (см. рис. 1.9). Тогда
обозначив через Фнач и #кон углы давления в
начальном и конечном положениях соответственно,
получают Фнач = Фкон = dmax = р/2 (в остальных
положениях Ь < р/2) и
A2 = 2/1sin(p/2), l3 = kh.
Длину стойки /4 = АС находят из треугольника
АВХС\
l4=lAC=yjli +/2 +2/1/3sin(p/2).
В случае, если половина угла качания меньше
допустимого значения угла давления, р/2 < [Ф], то
можно уменьшить габариты механизма, переместив
точку С в положение С0 по дуге окружности
радиусом /3 так, чтобы в крайнем левом положении
звена 1 выполнялось равенство Фкон = Фтах = [Ф],
при этом длина стойки уменьшится. Если в начале
движения необходимо преодолеть большую
нагрузку на ведомом звене 7, то целесообразно принять в
начальном положении угол АВХС = 90°, в этом
случае угол давления в момент начала движения будет
наиболее благоприятным, Фнач = 0.
1.4. Шестизвенные механизмы
1.4.1. Синтез механизма с дополнительной
двухповодковой группой
Шестизвенная кинематическая цепь. Для
расширения кинематических возможностей механизма
часто исходный четырехзвенный механизм дополняют
двухповодковой группой, получая при этом шести-
звенную кинематическую цепь. В большинстве
заданий — это комбинация кулисного механизма и
кинематической группы второго вида (с одной
поступательной парой). Методы кинематического синтеза
для получения недостающих размеров механизма
различаются модификацией кулисного механизма,
входящего в состав шестизвенного механизма, — с
качающейся или с вращающейся кулисой.
Выбор положения направляющей ползуна
дополнительной группы по заданному углу давления.
Кулисный механизм ABCD с качающейся кулисой (см.
рис. 1.8) является в данном случае задающим
механизмом, размеры которого известны. В качестве
дополнительной группы DE обычно используют
кинематическую группу второго вида с одной
внешней поступательной парой (звенья 4-5 на рис. 1.10).
12
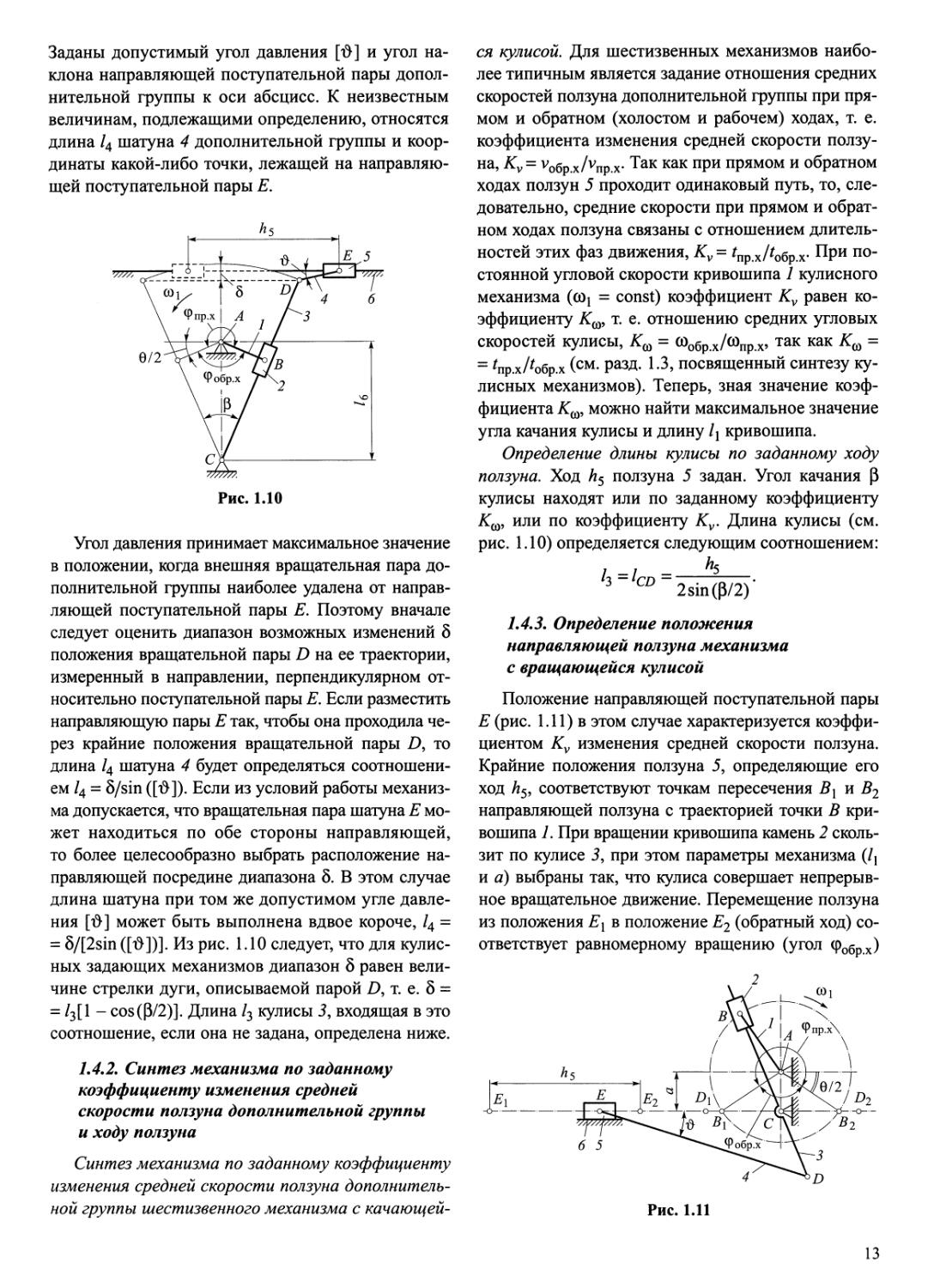
Заданы допустимый угол давления [&] и угол
наклона направляющей поступательной пары
дополнительной группы к оси абсцисс. К неизвестным
величинам, подлежащими определению, относятся
длина /4 шатуна 4 дополнительной группы и
координаты какой-либо точки, лежащей на
направляющей поступательной пары Е.
777777?.
Рис. 1.10
Угол давления принимает максимальное значение
в положении, когда внешняя вращательная пара
дополнительной группы наиболее удалена от
направляющей поступательной пары Е. Поэтому вначале
следует оценить диапазон возможных изменений 8
положения вращательной пары D на ее траектории,
измеренный в направлении, перпендикулярном
относительно поступательной пары Е. Если разместить
направляющую пары Е так, чтобы она проходила
через крайние положения вращательной пары Д то
длина /4 шатуна 4 будет определяться
соотношением /4 = 8/sin ([&]). Если из условий работы
механизма допускается, что вращательная пара шатуна Е
может находиться по обе стороны направляющей,
то более целесообразно выбрать расположение
направляющей посредине диапазона 8. В этом случае
длина шатуна при том же допустимом угле
давления [Ф] может быть выполнена вдвое короче, /4 =
= 8/[2sin ([#])]. Из рис. 1.10 следует, что для
кулисных задающих механизмов диапазон 8 равен
величине стрелки дуги, описываемой парой Д т. е. 8 =
= /3[1 - cos(P/2)]. Длина /3 кулисы 3, входящая в это
соотношение, если она не задана, определена ниже.
1.4.2. Синтез механизма по заданному
коэффициенту изменения средней
скорости ползуна дополнительной группы
и ходу ползуна
Синтез механизма по заданному коэффициенту
изменения средней скорости ползуна
дополнительной группы шестизвенного механизма с
качающейся кулисой. Для шестизвенных механизмов
наиболее типичным является задание отношения средних
скоростей ползуна дополнительной группы при
прямом и обратном (холостом и рабочем) ходах, т. е.
коэффициента изменения средней скорости
ползуна, Kv= vo6px/vnpx. Так как при прямом и обратном
ходах ползун 5 проходит одинаковый путь, то,
следовательно, средние скорости при прямом и
обратном ходах ползуна связаны с отношением
длительностей этих фаз движения, Kv = tnpx/t0$px. При
постоянной угловой скорости кривошипа 1 кулисного
механизма (coj = const) коэффициент Kv равен
коэффициенту К^, т. е. отношению средних угловых
скоростей кулисы, К^ = сообр х/сопр х, так как К^ =
= *пр.хЛобр.х (см- Р^Д- 1-3, посвященный синтезу
кулисных механизмов). Теперь, зная значение
коэффициента А^ю, можно найти максимальное значение
угла качания кулисы и длину /j кривошипа.
Определение длины кулисы по заданному ходу
ползуна. Ход h5 ползуна 5 задан. Угол качания (3
кулисы находят или по заданному коэффициенту
АГШ, или по коэффициенту Kv. Длина кулисы (см.
рис. 1.10) определяется следующим соотношением:
h — *т —
lCD
2sin(p/2)
1.4.3. Определение положения
направляющей ползуна механизма
с вращающейся кулисой
Положение направляющей поступательной пары
Е (рис. 1.11) в этом случае характеризуется
коэффициентом Kv изменения средней скорости ползуна.
Крайние положения ползуна 5, определяющие его
ход h5, соответствуют точкам пересечения Вх и В2
направляющей ползуна с траекторией точки В
кривошипа 1. При вращении кривошипа камень 2
скользит по кулисе 3, при этом параметры механизма (/j
и а) выбраны так, что кулиса совершает
непрерывное вращательное движение. Перемещение ползуна
из положения Е{ в положение Е2 (обратный ход)
соответствует равномерному вращению (угол ф0бр.х)
£
6 5
в)
/
Е2*.
/
^Jd B^
^"^^2
Рис.
1.11
ч /
обр.)
V
_L^1
11 х
/ 1 , Фпр.х\
Ж*ч&
/ср~ /вТ
V5
^^>Z)
13
кривошипа из положения АВХ в положение АВ2. Ре-
версное перемещение Е2ЕХ (прямой ход ползуна)
соответствует дальнейшему повороту кривошипа на
угол фпр х. Эти углы не равны и различаются на угол
перекрытия 0 = 180°(Л^ - l)/(Kv -l). Центр
вращения С кулисы 3 лежит на пересечении
направляющей поступательной пары и биссектрисы угла
ВХАВ2. Поэтому длина 1Х кривошипа и расстояние
а между осями вращения кривошипа и кулисы
связаны следующим соотношением: а = /jsin (0/2). Зная
одну из этих величин, всегда можно найти другую.
Длина кривошипа lCD дополнительной группы 4-5
равна половине хода ползуна: lCD = h5/2. Длина /4
шатуна 4 должна быть такой, чтобы выполнялось
условие 0тах = [0], т. е. /4 > A5/[2sin ([#])].
Все задачи кинематического синтеза, описанные
в этой главе, рассчитаны в первую очередь на
графическое решение. Численные результаты можно
получить с помощью написанной самостоятельно
программы или с использованием математических
пакетов общего назначения (MathCAD, Maple
и т. п.). Каких-либо особенностей при численных
расчетах описанные задачи синтеза не имеют.
В приложении 1 приведено решение некоторых
задач синтеза с помощью MathCAD. Тексты
программ и комментарии позволят использовать
аналогичный подход при решении любых других
задач, связанных с определением недостающих
параметров механизма, т. е. с решением задач
синтеза механизмов.
2. АНАЛИЗ КИНЕМАТИКИ МЕХАНИЗМА И ЗАДАННЫХ ВНЕШНИХ СИЛ
Анализ реального движения машины
представляет собой решение прямой задачи динамики —
определение закона движения машины,
находящейся под действием заданных внешних сил. Для
механизмов с одной степенью свободы
достаточно найти закон движения одного звена; законы
движения остальных звеньев можно определить по
кинематическим соотношениям (см.: Теория
механизмов и механика машин / Под ред. Г.А. Тимофеева.
М., 2009).
В курсовом проектировании рассматриваются
как машины-двигатели (поршневые двигатели
внутреннего сгорания, детандеры и т. п.), так и
рабочие машины (насосы, станки, компрессоры,
манипуляторы, конвейеры, испытательные машины
и т. д.).
В состав рабочей машины согласно
структурной схеме (рис. 2.1) входят: двигатель (Д),
передаточный механизм (ПМ) (редуктор) и
исполнительный (ИМ), как правило, рычажный механизм
технологической машины. Рычажный механизм
нагружен силами Fnc или моментом Мпс
производственного сопротивления и приводится в
движение электрическим двигателем, момент М*в
которого преобразуется редуктором передаточного
механизма в движущий момент Мдв на входном
звене рычажного механизма. Иногда входное
звено рычажного механизма называют главным валом
машины. Главный вал — это общий вал
выходного звена передаточного механизма и входного
звена рычажного механизма, которые при работе
машины образуют единое звено.
д
МДВ
ПМ
мю
ИМ
^п.с
Рис. 2.1
2.1. Кинематический анализ
2.7.7. Функции положения звеньев
Кинематический анализ механизма — первый
этап и необходимая предпосылка расчета
динамики машины. На этом этапе определяют функции
положения звеньев механизма и необходимые
кинематические передаточные функции, которые
зависят от положения начального звена (обобщенной
координаты). Для цикловых механизмов с
непрерывным вращением кривошипа анализ
ограничивают одним циклом работы машины (как правило,
это один оборот кривошипа).
Напомним, чем характеризуется положение
кинематических пар, звеньев и точек. В неподвижной
системе координат положение кинематических пар
стойки определяют: для вращательных —
координатами центров вращательных пар, для
поступательных — координатами какой-либо точки,
лежащей на направляющей поступательной пары, и
углом между вектором положительного направления
поступательной пары и осью абсцисс. Положение
подвижной вращательной кинематической пары
механизма и характерных точек (центров масс
звеньев, точек приложения сил и т. п.) также
определяют в неподвижной системе координат. Положение
поступательной кинематической пары механизма
характеризуется координатами точки на
направляющей пары и углом наклона этой направляющей
относительно оси абсцисс.
Положение звена определяется положением
прямой линии, жестко связанной со звеном: звена с
двумя вращательными кинематическими парами —
прямой линией, соединяющей обе вращательные пары;
звена с одной вращательной и одной
поступательной парами — длиной перпендикуляра,
опущенного из вращательной пары на направляющую
поступательной пары. Если вращательная пара лежит на
направляющей поступательной пары, то длина
звена равна нулю и его положение определяется поло-
15
жением вращательной пары. Положение звена с
двумя поступательными парами определяется
координатами точки пересечения направляющих пар и
углом наклона вектора положительного направления
одной из поступательных пар звена к оси абсцисс.
Кроме абсолютных координат, характеризующих
положение звеньев, для звеньев с одной
поступательной парой широко используют относительное
положение звена, под которым понимают
положение основания перпендикуляра, опущенного из
вращательной кинематической пары на направляющую
поступательной пары, измеренное вдоль
направляющей относительно какой-либо неподвижной
точки, лежащей на направляющей поступательной
пары. Относительное положение звена, длина
которого равна нулю, т. е. точки, определяется
положением вращательной пары звена относительно
неподвижной точки направляющей.
Функции положения звеньев проще определять
графическим построением кинематической схемы
механизма для нескольких заданных положений
кривошипа (обычно 12 или 24), что позволяет проверить
правильность определения параметров при
кинематическом синтезе механизма. Функцию положения
ведомого звена находят графическими или
аналитическими методами в тех случаях, когда характеристика
внешней технологической силы задана как функция
перемещения выходного звена и для динамических
расчетов обычно требуется определить ее
зависимость от положения начального звена. Чтобы
определить параметры динамической модели
(приведенные моменты и массы), требуется найти
передаточные функции (аналоги скоростей), расчет которых
проводят на этапе кинематического анализа.
2.1.2. Кинематические передаточные функции
Для плоского механизма с одной степенью
свободы, W = 1, кинематические передаточные
функции (аналоги) являются геометрическими
характеристиками преобразования движения входного
звена в движение других звеньев механизма. Они
зависят от структуры механизма, размеров его
звеньев и от обобщенной координаты — угла фн
поворота начального звена. Для определения
кинематических передаточных функций необходимо знать
положения звеньев и точек, которые, в свою
очередь, зависят от положения начального звена.
Для любого у-го звена и любой выбранной
точки М какого-либо звена в общем случае можно
записать:
ф/-=ф/(фн); (2.1)
Гл/=Гл/(Фн)> (2.2)
где фу — угол поворота у-го звена; гм — радиус-
вектор точки М в выбранной системе координат;
фн — угол поворота начального звена.
Первые производные величин фу- и хм по
обобщенной координате ф называют аналогами
скорости (кинематические передаточные функции);
вторые производные величин фу- и хм по обобщенной
координате ф — аналогами ускорения.
Аналог угловой скоростиу-го звена
(0qj=d<Pj/d(P = Ujn>
где uJK — отношение угловой скорости у-го звена к
угловой скорости начального.
Аналог скорости точки М
V/ = drM /dip.
Аналог углового ускорения у-го звена
Eqj = d2(pj/d(p2 = d(uqj/d<p.
Аналог ускорения точки М
^gM = d2rM/d(?2 = d\qM/dq>.
Здесь в отличие от обычных скоростей и ускорений
к обозначениям аналогов скоростей и ускорений
добавлен индекс «q» (от лат. quasi — как бы, почти).
Аналоги угловой скорости и углового
ускорения — безразмерные величины, аналоги скорости
и ускорения — имеют размерность длины. При
выборе в качестве обобщенной другой координаты,
не являющейся углом, размерности аналогов
изменяются — в этом случае их следует поделить на
размерность новой обобщенной координаты. В
любом случае аналоги являются относительными
величинами.
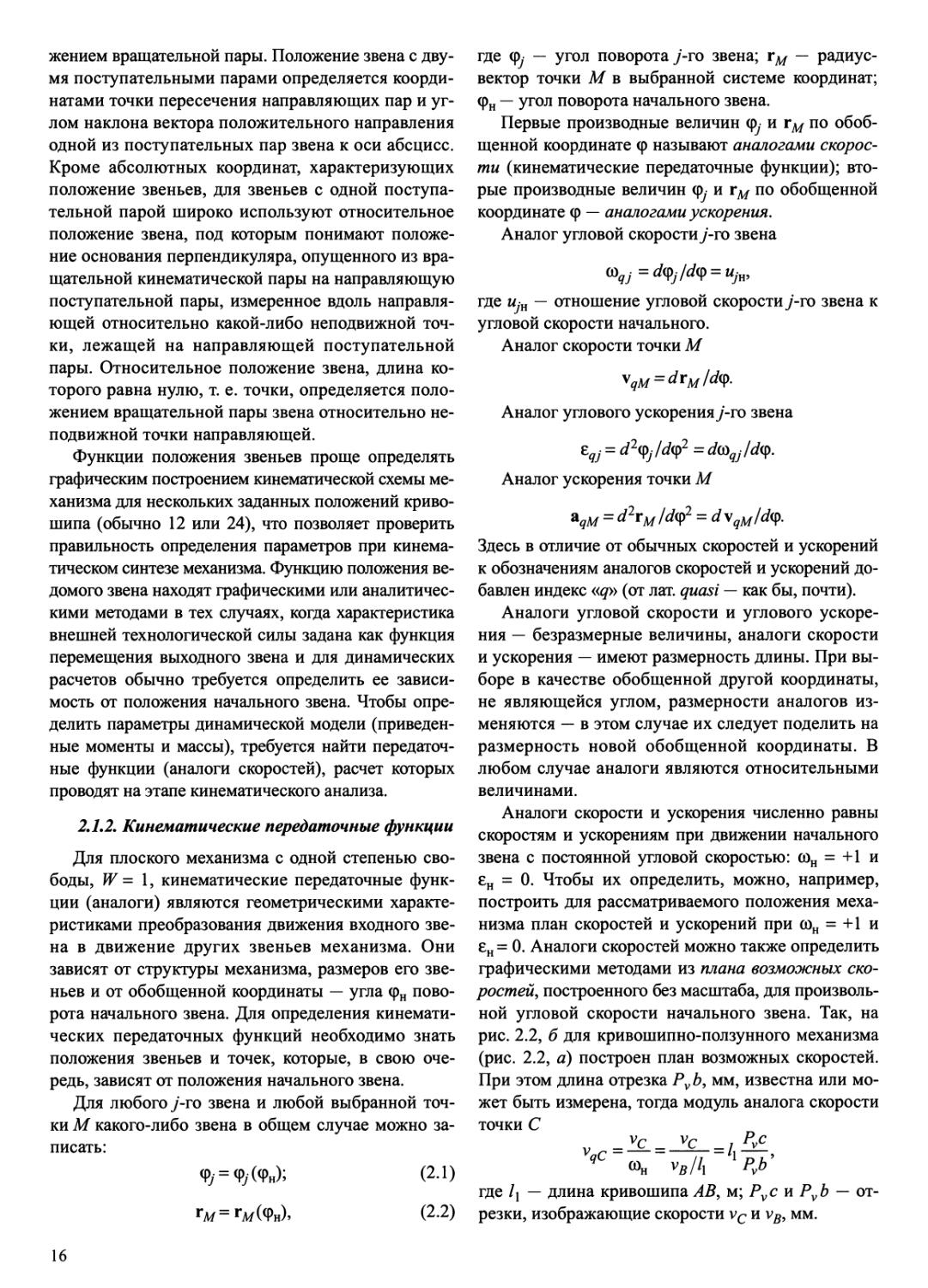
Аналоги скорости и ускорения численно равны
скоростям и ускорениям при движении начального
звена с постоянной угловой скоростью: (0Н = +1 и
£н = 0. Чтобы их определить, можно, например,
построить для рассматриваемого положения
механизма план скоростей и ускорений при сон = +1 и
8Н = 0. Аналоги скоростей можно также определить
графическими методами из плана возможных
скоростей, построенного без масштаба, для
произвольной угловой скорости начального звена. Так, на
рис. 2.2, б для кривошипно-ползунного механизма
(рис. 2.2, а) построен план возможных скоростей.
При этом длина отрезка Pvb, мм, известна или
может быть измерена, тогда модуль аналога скорости
точки С
v = vc = vc =/ pvc
qC coH vB/lx lPvb9
где /j — длина кривошипа АВ, м; Pvc и Pvb —
отрезки, изображающие скорости vc и vB, мм.
16
Рис. 2.2
Аналитические расчетные формулы для
аналогов можно получить методом замкнутых векторных
контуров Зиновьева. Согласно этому методу связи
в механизме, определяемые характером
кинематических пар и размерами звеньев, выражаются в
форме условий замкнутости векторных контуров,
построенных на базе кинематической схемы
механизма. В скалярной форме соответствующие
зависимости получают, проецируя векторные
контуры на оси координат.
Число независимых замкнутых контуров
определяют по формуле Гохмана, к = п -рнизш (п —
число подвижных звеньев; рнти1 — число низших пар).
При построении контуров механизмов можно
также руководствоваться следующим простым
правилом: четырехзвенный механизм имеет один
замкнутый векторный контур, шестизвенный — два. При
этом все звенья механизма должны входить хотя бы
в один замкнутый векторный контур. Если
механизм имеет несколько векторных контуров, анализ
начинают с контура, включающего начальное
звено, и результаты анализа этого контура используют
при анализе последующих контуров. Например,
исследование кривошипно-ползунного механизма (см.
рис. 2.2, а) сводится к анализу одного контура
АВСА, состоящего из входного звена 7, звеньев 2, 3
и стойки 4.
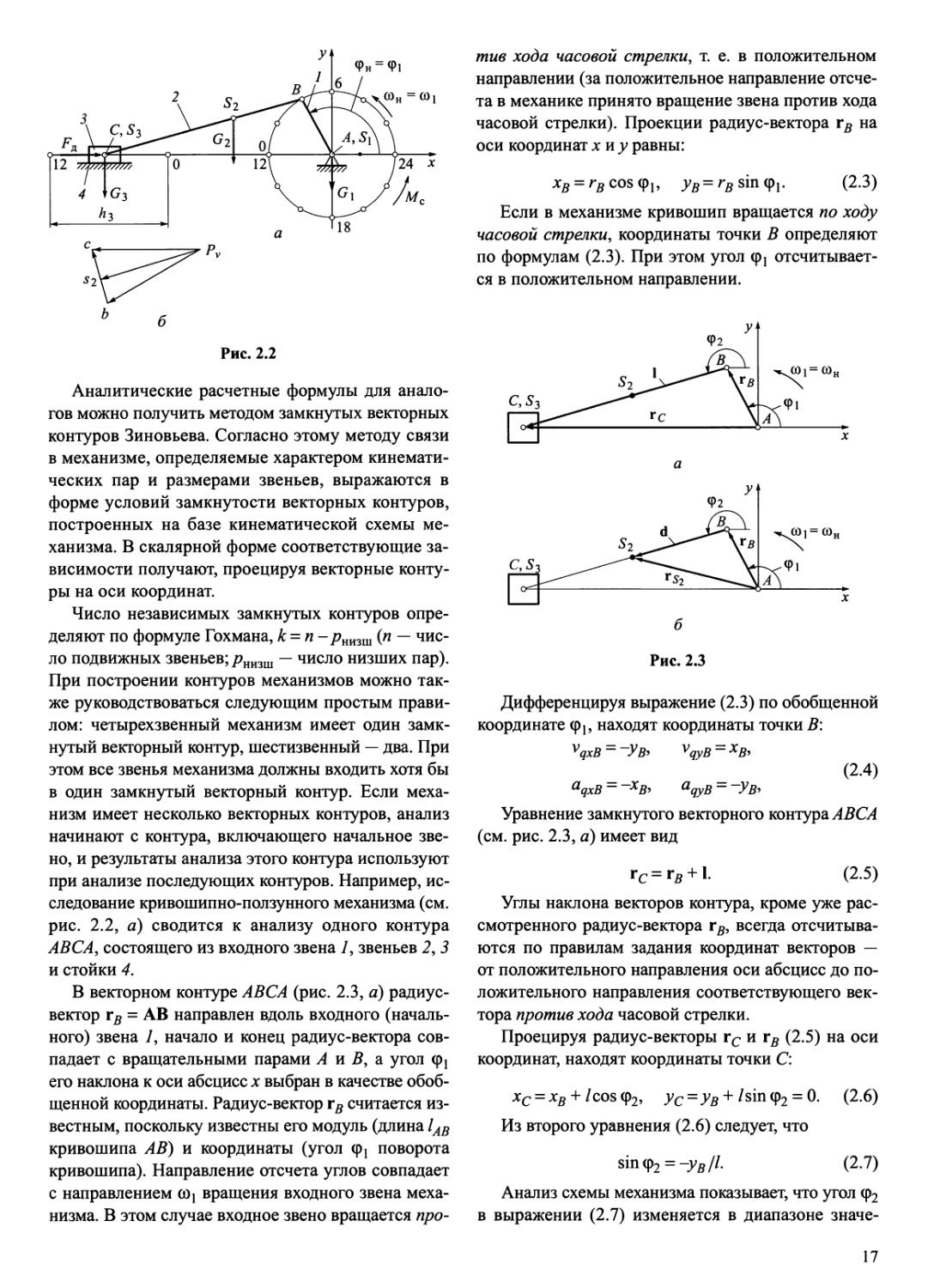
В векторном контуре АВСА (рис. 2.3, а) радиус-
вектор гв = АВ направлен вдоль входного
(начального) звена 7, начало и конец радиус-вектора
совпадает с вращательными парами А и В, а угол cpj
его наклона к оси абсцисс х выбран в качестве
обобщенной координаты. Радиус-вектор гв считается
известным, поскольку известны его модуль (длина 1АВ
кривошипа АВ) и координаты (угол cpj поворота
кривошипа). Направление отсчета углов совпадает
с направлением coj вращения входного звена
механизма. В этом случае входное звено вращается
против хода часовой стрелки, т. е. в положительном
направлении (за положительное направление
отсчета в механике принято вращение звена против хода
часовой стрелки). Проекции радиус-вектора гв на
оси координат х и у равны:
хв = rB cos ф1э ув = rB sin ф1в (2.3)
Если в механизме кривошип вращается по ходу
часовой стрелки, координаты точки В определяют
по формулам (2.3). При этом угол cpj отсчитывает-
ся в положительном направлении.
б
Рис. 2.3
Дифференцируя выражение (2.3) по обобщенной
координате ф15 находят координаты точки В:
VqxB = ~УВ> vqyB ~ ХВ>
(2.4)
aqxB ~ ~ХВ> aqyB ~ ~Ув>
Уравнение замкнутого векторного контура АВСА
(см. рис. 2.3, а) имеет вид
гс = гв + 1. (2.5)
Углы наклона векторов контура, кроме уже
рассмотренного радиус-вектора гв, всегда отсчитыва-
ются по правилам задания координат векторов —
от положительного направления оси абсцисс до
положительного направления соответствующего
вектора против хода часовой стрелки.
Проецируя радиус-векторы гс и гв (2.5) на оси
координат, находят координаты точки С:
хс = хв + ^cos Ф2> Ус = Ув + ^п Ф2 = 0. (2.6)
Из второго уравнения (2.6) следует, что
smy2 = -yB/L (2.7)
Анализ схемы механизма показывает, что угол (р2
в выражении (2.7) изменяется в диапазоне значе-
17
ний 0 < ф2 < 71, поэтому его можно вычислить по
формуле
coscp2 =^/l-sin2(p2.
Положение центра масс 53 звена 3 в системе
координат хАу определяется координатой хс и может
быть найдено из первого уравнения системы (2.6).
Чтобы вычислить аналоги угловой скорости со„2 =
= и2\и углового ускорения гд2 звена 2> дважды
дифференцируют второе уравнение системы (2.6) и
получают следующие соотношения:
0 = VqyB + lcOS(p2-(Oq2,
0 = aqyB ~ /(sin(p2 * С0^2 - COS ф2 ■ Zq2)9
из которых находят передаточные функции
СО(72-~1 > Zq2~ ; • \z-°)
/cos92 H /coscp2
Аналоги скорости \qC и ускорения а^с точки С
звена 3 соответствуют первой и второй
производным функции х^ф):
(2.9)
aqC=aqxB -/(C0S92 -C022 H-silKfc -8^).
Если на звеньях механизма есть еще и другие
точки, координаты, скорость и ускорение которых
представляют интерес, то их кинематические
параметры находят после определения всех
кинематических параметров векторов, входящих в
замкнутый контур. Так, радиус-вектор rs ,
определяющий положение центра масс S2 звена 2 (см.
рис. 2.3, б),
rS2 = r5 + d,
а его проекции на оси координат
xS2 = xB + dcos(f)2, j>s2=Jb + rfsin<p2, (2.10)
Дифференцируя уравнения (2.10) дважды,
находят проекции аналогов скорости и ускорения
точки S2:
VqxS2 = VqxB - ^Sin ф2 • CO^,
VqyS2 = vgyB + dcosq>2'(x)q2;
aqxS2 = aqxB ~ 4cOS<p2 • C0^2 + sinCfc • 8^2 ),
/ 2 \ (2Л2)
*©tf2 = *g* -</(sinq>2 -Ш^ -С08ф2 -8^2 ].
Соотношения (2.10)—(2.12) справедливы при
направлении отсчета угла ф2 от положительного
направления оси х до положительного направления
вектора ВС против хода часовой стрелки.
Кинематический анализ, как правило,
ограничивают определением функций положения звеньев и
аналогов скоростей (угловых и линейных).
Кинематические параметры обычно вычисляют не для
всех звеньев и точек механизма, а только для тех,
которые необходимы для расчета динамических
параметров, т. е. для тех, с которыми так или иначе
связаны приложенные к механизму внешние силы.
При этом руководствуются изложенными ниже
соображениями.
1. Функции положения вычисляют только для тех
звеньев и точек, к которым приложены силы,
зависящие от положения этого звена или точки.
2. Для звена, у которого задана масса,
вычисляют аналог скорости его центра масс (по
соображениям, которые станут понятными далее, можно
ограничиться вычислением только проекции аналога
на ось у).
3. Для звена, у которого задан или может быть
вычислен момент инерции, определяют аналог
угловой скорости этого звена.
4. Для звена, к которому приложен внешний
момент, также вычисляют аналог угловой скорости.
5. Для всех точек приложения внешних сил
вычисляют аналоги линейной скорости точек их
приложения. Если сила приложена к точке звена,
входящего в поступательную пару, и ориентирована
вдоль направляющей этой пары, то рекомендуется
вычислять проекцию аналога на эту направляющую,
например, в случае расположения направляющей
вдоль осей координат. Однако при наклонном
расположении направляющих (например, у V-образ-
ного двигателя или компрессора) можно для
каждой поступательной пары ввести дополнительно
локальную систему координат, начало координат
которой лежит на направляющей пары, а одна из
осей ориентирована вдоль нее, и определять
проекцию аналога на эту ось локальной системы, т. е.
на проекцию аналога вдоль направляющей
поступательной пары. Эта проекция будет иметь знак,
определяемый знаком проекции аналога скорости
на ось локальной системы координат. Очень
важно, что впоследствии и знак силы, действующей
на поступательную пару, также будет определяться
в выбранной локальной системе координат.
Поскольку локальные системы координат выбирают
произвольно, то можно ограничиться только
положительным направлением вдоль направляющей и
определять знак проекции аналогов скорости и
ускорения по совпадению или несовпадению
проекций векторов аналогов на ось положительного
направления поступательной пары с вектором
положительного направления. Математически это можно
18
оценить знаком скалярного произведения этих
векторов.
Еще раз подчеркнем, что знак силы также будет
определяться знаком скалярного произведения
векторов силы и вектора положительного направления
поступательной пары. При вычислении
приведенного момента от внешней силы необходимо
определить знак проекции действительной скорости
точки на направляющую поступательной пары, а не
знак проекции аналога. Напомним, что при
вращении начального звена против хода часовой стрелки
аналог скорости и действительная скорость
одинаково направлены, а при вращении по ходу часовой
стрелки — противоположно.
Как указывалось ранее, положительное
направление в поступательной паре может быть выбрано
произвольно.
2.1.3. Определение аналогов скоростей
и ускорений с помощью вычислительной
техники
Традиционные методы определения аналогов
скоростей и ускорений с помощью построения
планов скоростей и ускорений достаточно трудоемкие
и, кроме того, во многих случаях не обеспечивают
необходимой точности. Не менее трудоемкие и
методы расчета с помощью уравнений замкнутости.
Производительность вычислений существенно
повышается при использовании специализированных
программ. Так, для кривошипно-ползунных
механизмов можно рекомендовать программу AR2*.
Для более сложных шестизвенных механизмов
целесообразно применение программ Diada, САРЦМ
или некоторых других программ,
специализированных на конкретные виды механизмов (по
рекомендации консультанта). Характерно, что в
большинстве случаев эти программы не требуется
предварительно изучать.
Некоторые трудности методического характера
могут возникнуть только при отрицательном
направлении вращения начального звена. Дело в том,
что в основном в программах по умолчанию
задано положительное направление отсчета углов.
Поэтому при использовании программы Diada
следует отказаться от стандартной формы вывода
результатов расчета и выбрать свою, в которой задать
положительную угловую скорость начального
звена и отрицательное приращение угла его поворота.
Углы, для которых проводится расчет аналогов,
будут отсчитываться от оси абсцисс в
положительном направлении, однако их значения при этом
будут уменьшаться, что имитирует движение
начального звена механизма по ходу часовой стрелки. Для
расчета реальных (истинных) углов поворота фи
начального звена можно воспользоваться
соотношением фи = л: - фпр, где фпр — углы поворота,
получаемые с помощью программы. Напомним, что
величины и направления аналогов скорости и
ускорения не зависят от фактического направления
вращения начального звена.
Достаточно эффективно для получения аналогов
скоростей звеньев применять математические
пакеты общего назначения, однако и здесь есть
некоторые особенности. Прежде всего при использовании
пакета программ MathCAD замкнутые векторные
контуры специально не выделяют, а подразделяют
механизм на первичный механизм и структурные
группы и для них записывают уравнения проекций
координат звеньев. Обычно первичный механизм —
кривошип (или коромысло), связанный со стойкой.
Угол поворота кривошипа определяется
обобщенной координатой Ф1(фм) = Ф1Н + фм. Знак«+», как
правило, соответствует вращению кривошипа
против хода часовой стрелки. При этом динамическая
модель вращается в положительном направлении,
а все звенья механизма движутся в реальных
направлениях. Кроме того, направления всех
аналогов скоростей и ускорений совпадают с
направлениями реальных скоростей и ускорений.
Обобщенная координата ф! изменяется от нулевого значения
до требуемого. Начальное значение угла поворота
вала выбирают на этапе синтеза механизма и чаще
всего оно соответствует началу прямого (рабочего)
хода.
Функции положения звеньев механизма
определяются их проекциями на оси декартовой системы
координат. Расчетная схема механизма
представляет собой схему, на которой все линейные размеры
звеньев изображены векторами, причем для
облегчения понимания записанных уравнений индексы
угловых величин удобно принимать
совпадающими с номерами соответствующих звеньев. Векторы
на оси координат проецируют, начиная с входного
звена и далее последовательно по структурным
группам. Из систем получаемых уравнений
проекций полезно вывести формулы, явно выражающие
искомые величины. В случае затруднений с
решением систем уравнений можно воспользоваться
процедурой Given-Find, имеющейся в математическом
пакете MathCAD. После указанной процедуры
целесообразно провести сплайн-интерполяцию и по
полученным данным для проверки построить
кинематическую схему механизма и траектории
определяемых точек.
Расчет аналогов скоростей (как и аналогов
ускорений) проводят численным дифференцировани-
19
ем функций положения звеньев, процедура
которого имеется в пакете MathCAD. Для возможности
выполнения этого расчета функции положения
должны быть явно выражены в функции обобщенной
координаты.
Примерный текст программы для расчета
аналогов скоростей и ускорений механизмов (см.
рис. 2.2) приведен в приложении 2.
2.2. Режимы движения машины
В зависимости от того, какую работу
совершают внешние силы в исследуемом интервале
движения, различают три основных режима движения
машины: разгон, установившееся движение и
торможение (выбег). Функции положения звеньев
механизма, кинематических пар и точек являются
периодическими функциями положения начального
звена. Время, по истечении которого скорость
начального звена принимает первоначальное
значение и далее характер ее изменения повторяется,
называют временем цикла, или циклом. Цикл
является удобной мерой для оценки энергетических
характеристик режимов движения. Так, в режиме
разгона работа движущих сил за цикл превышает
работу сил сопротивления. Поскольку суммарная
работа внешних сил за цикл положительна, то
кинетическая энергия системы за цикл
увеличивается. Это приводит к тому, что угловая скорость
начального звена увеличивается. Машина движется в
режиме разгона при пуске или переходе с меньшей
скорости на большую.
В режиме установившегося движения
периодически изменяется угловая скорость начального
звена механизма. При этом работа движущих сил за
цикл установившегося движения равна работе сил
сопротивления. Если угловая скорость начального
звена уменьшается, то такой режим движения
называют торможением, или выбегом. Режим
торможения осуществляется при остановке механизма
или при переходе с большей скорости на меньшую.
В отличие от режима установившегося движения
режимы разгона и выбега называют
неустановившимися, или переходными.
Существует также большое количество машин,
выходное звено которых перемещается из
начального положения в конечное, после чего
останавливается, т. е. и в начале, и в конце интервала
движения выходное звено неподвижно. Такой режим
движения называют режимом пуска-останова.
Основной рабочий режим машины — режим
установившегося движения. Методы анализа
установившегося движения различаются для разных
видов машин. Так, для технологических машин силы
производственного сопротивления считаются
заданными, тогда как движущие силы подлежат
определению из условия поддержания установившегося
движения с заданной средней угловой скоростью
соср начального звена. Для упрощения задачи
обычно принимают движущий момент постоянной
величиной, не зависящей от реально существующих
периодических колебаний угловой скорости
начального звена. По сравнению с технологическими
машинами для машин-двигателей также из условия
поддержания режима установившегося движения
постоянной величиной считают момент
сопротивления нагрузки.
На основании анализа периодических колебаний
угловой скорости начального звена оценивают
неравномерность хода машины (вычисляют
коэффициент изменения угловой скорости — коэффициент
неравномерности 8). Если коэффициент
неравномерности 5 превышает заданное допустимое значение,
8 > [5], то для уменьшения колебаний скорости
систему дополняют маховиком, момент инерции JM
рассчитывают, например, методом Мерцалова.
При исследовании переходных режимов
заданными являются движущие силы и силы
производственных сопротивлений, а также начальные
условия (/ = 0) — начальная угловая скорость и
начальная кинетическая энергия системы. В результате
анализа определяют закон движения начального
звена механизма, т. е. зависимость его угловой
скорости от начального положения угла поворота, а
при необходимости и время осуществления
поворота из заданного начального положения в
конечное.
При исследовании режима пуска-останова
известными считают условия начала движения и
останова выходного звена в конечном положении и
действующие внешние силы, а также функции
положения начального звена. Определяют закон
изменения движущих сил, обеспечивающий
выполнение требуемого режима, и реальный закон
движения начального звена механизма.
2.3. Силы, действующие на звенья механизма
Закон движения механизма в первую очередь
определяется характером сил и моментов,
приложенных к его звеньям. Все силы и моменты,
действующие на звенья механизма, подразделяют на внешние
и внутренние.
Внешние силы совершают работу и изменяют
кинетическую или потенциальную энергию машины
и в свою очередь их подразделяют:
20
на движущие силы, работа которых положительна
(система получает энергию);
на силы сопротивления, работа которых
отрицательна (система отдает энергию):
а) силы полезного, или технологического
сопротивления, возникающие при выполнении машиной
ее основных функций (работа по изменению
координат, формы или свойств изделия и т. п.);
б) силы трения, или диссипативные силы,
возникающие в кинематических парах (их работа
всегда отрицательная величина);
на силы взаимодействия с потенциальными
полями, или потенциальные (позиционные) силы,
возникающие при перемещении объекта в
потенциальном поле различной природы.
Сила в каждый момент времени
характеризуется численным значением (модулем), точкой
приложения и линией действия. Характерная особенность
потенциальных сил заключается в том, что их
работа за цикл, т. е. при возврате системы в исходное
положение, равна нулю. В гравитационном поле
потенциальными будут силы тяжести звеньев. Силы
упругости пружин также являются
потенциальными силами. Курсовое проектирование включает в
себя механизмы, взаимодействующие и с
некоторыми другими потенциальными полями (например,
электромагнитными). Поле потенциальных сил
характеризуется скалярным потенциалом.
Внутренние силы действуют между звеньями
механической системы. Работа этих сил не
изменяет энергии системы. В механических системах
такими силами будут реакции в кинематических
парах. При определении движения механизма их не
учитывают.
Выделяют еще одну группу сил — расчетные
(фиктивные) силы, которые не существуют в
реальности, но их вводят с целью упрощения некоторых
расчетов. К ним, например, относятся силы
инерции. При анализе динамики механизма эти силы
также не учитывают.
Относится ли сила к движущим силам или к
силам сопротивления, можно определить по знаку
скалярного произведения векторов силы и скорости
точки приложения силы. При этом для движущих
сил произведение положительная величина, для сил
сопротивления — отрицательная. Если силовой
фактор задан в виде момента силы, то моменты
подразделяют на движущие и моменты сопротивления
также по знаку скалярного произведения векторов
момента и угловой скорости — при совпадении
направления действия момента силы и направления
вращения звена момент силы будет движущим
моментом.
Следует отметить, что деление сил на
движущие силы и силы сопротивления несколько
условно. Одна и та же сила на разных этапах цикла
работы машины может быть и движущей силой, и
силой сопротивления. Например, сила тяжести
кабины лифта при подъеме кабины является силой
полезного сопротивления, а при ее спуске —
движущей силой. Внешние силы, приложенные к
различным звеньям механизма, в процессе работы
механизма могут изменяться в соответствии с каким-
либо известным законом или оставаться
постоянными (например, силы тяжести).
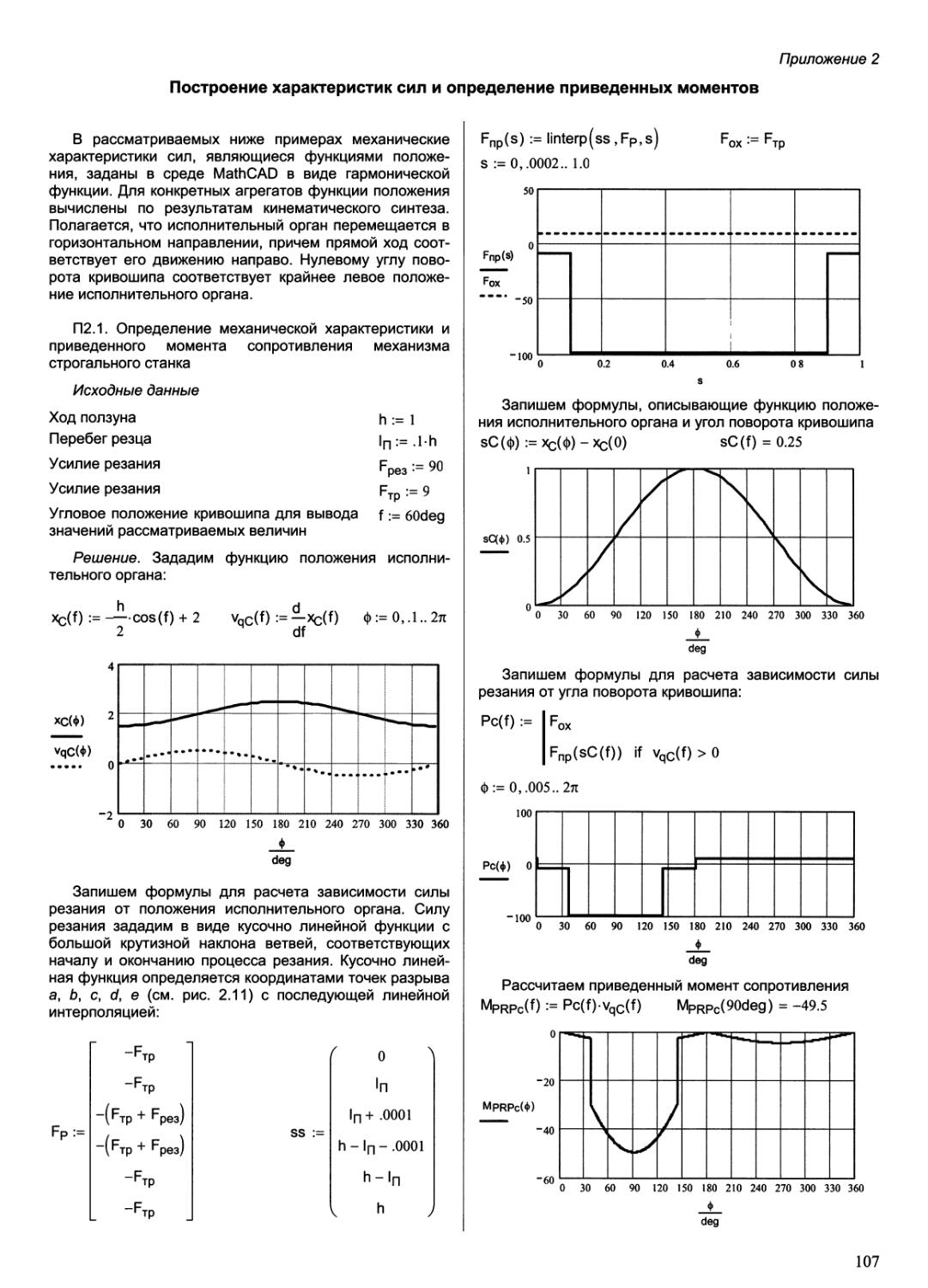
2.4. Характеристики сил
2.4.1. Механическая характеристика
На этапе подготовки исходных данных
необходимо определить все внешние силы, действующие
на входные и выходные звенья машины. Для
машин-двигателей, которые преобразуют энергию
разного вида в кинетическую энергию, закон
изменения движущей силы устанавливается физическими
законами. Для электрических двигателей —
законами электромагнитной индукции, для тепловых
двигателей — законами термодинамики и т. д.
Силы сопротивления на выходных звеньях для
рабочих машин определяются законами
взаимодействия рабочего органа с обрабатываемой деталью
или с окружающей средой. Так, для
металлообрабатывающих станков — силы резания, кузнечно-
прессовых машин — силы деформации заготовки,
в транспортерах и конвейерах — силы трения и т. д.
Законы изменения этих сил находят теоретически
или устанавливают экспериментально.
Теоретические соотношения или усредненные
экспериментальные зависимости используют в динамических
расчетах машин в виде механических характеристик —
статической и динамической.
Статической характеристикой называют
функциональную зависимость модуля силы от
кинематических параметров (координат, скорости) точки
ее приложения. Сила может также зависеть от
времени. Механические характеристики при решении
задач динамики считаются известными. Более того,
любую известную зависимость силы от
кинематических параметров можно трактовать как
заданную механическую характеристику, даже если она
не является постоянной, «паспортной»
характеристикой объекта и используется только при
расчете.
Ниже приведены примеры механических
характеристик различных машин.
21
1. Двигатели внутреннего сгорания (ДВС). В
заданиях к курсовому проектированию для
поршневых машин (ДВС, двигатели с внешним
подводом теплоты) механическая характеристика
задается индикаторной диаграммой, описывающей
изменение давления в цилиндре от перемещения
поршня. В зависимости от типа двигателя полный
цикл его работы может составлять как один, так и
два оборота кривошипа (соответственно два или
четыре хода поршня).
а. Четырехтактный ДВС. Кинематическая
схема одноцилиндрового четырехтактного ДВС
изображена на рис. 2.2, а, а на рис. 2.4 — его индикаторная
диаграмма, р = p(Sc), где р — давление рабочего
тела в цилиндре двигателя, Sc — перемещение
поршня. Цикл такого ДВС равен двум оборотам
кривошипа (фц = 4л, рад) или четырем ходам поршня.
Рабочий процесс в цилиндре двигателя происходит
следующим образом: при движении поршня 3 (см.
рис. 2.2, а) вправо (скорость поршня хс > 0) в
цилиндре происходит всасывание (участок cd); при
движении влево (хс < 0) — сжатие (участок da);
затем при повторном движении вправо хс > 0) —
расширение (рабочий ход — участок ab); и,
наконец, снова влево (хс < 0) — выпуск (участок be). На
этом цикл заканчивается.
Рис. 2.4
Для перехода к механической характеристике
ДВС, т. е. для определения зависимости силы
давления FR на поршень от перемещения Sc поршня,
необходимо давление, найденное из индикаторной
диаграммы, умножить на площадь поршня. Выбор
участка характеристики для определения давления
(ab, be, cd или da) зависит от того, какой процесс в
это время происходит в цилиндре. На участке
расширения направление вектора силы давления
совпадает с направлением вектора скорости
перемещения поршня, т. е. работа движущей силы
положительна; на остальных трех участках — всасывания,
сжатия и выпуска — векторы силы давления и
скорости перемещения поршня направлены
противоположно, т. е. работа силы трения отрицательна.
Иными словами, только на участке ab сила FR —
движущая сила, на остальных трех участках она
является силой сопротивления.
Функциональная зависимость силы FR от
координаты поршня имеет вид
^ = ^(*0signic:)> (2ЛЗ)
где хс — координата поршня (функция положения
точки С от обобщенной координаты — угла
поворота кривошипа). При хс > 0 давление выбирают
на участках ab и cd характеристики, при хс < 0 —
на участках be и da.
Важно отметить, что при выполнении
динамических расчетов необходимо знать зависимость
силы FR от положения начального звена, тогда как
статическая характеристика позволяет получить
зависимость этой силы от положения поршня.
Задаваясь значениями угла поворота кривошипа фн,
графическими или аналитическими методами находят
положение хс поршня, а затем по функциональной
зависимости Fa(xc) — модуль силы РД. При
аналитическом решении используют найденную на
этапе кинематического анализа функцию положения
точки С. Механическую характеристику ^д(фн)
изображают в виде графика; она отличается от
характеристики РД(хс), поскольку хс(Фн) —
нелинейная функция.
б. Двухтактный ДВС. Кинематические схемы
двухтактного и четырехтактного двигателей,
естественно, не различаются (см. рис. 2.2, а), однако
цикл двухтактного ДВС равен одному обороту
кривошипа (фц = 2л, рад) или двум ходам поршня.
Рабочий процесс в цилиндре определяется
индикаторной диаграммой (рис. 2.5) и происходит
следующим образом: при движении поршня 3 (см.
рис. 2.2, а) вправо (скорость поршня хс > 0) в
цилиндре происходит два последовательных
процесса: расширение (прямой ход) — участок ab и
продувка — участок be; при движении влево (хс < 0) —
сжатие (обратный ход) — участок са. На этом цикл
заканчивается.
Рис. 2.5
22
Для получения зависимости силы давления на
поршень от перемещения поршня необходимо, как
и в случае четырехтактного двигателя, давление,
найденное из индикаторной диаграммы, умножить
на площадь поршня. На участке аЪ сила Fa —
движущая сила, на участке са она является силой
сопротивления.
Для двухтактного двигателя, как и для
четырехтактного двигателя, необходимо зависимость Рд(хс)
пересчитать в ^д(фн) по известной характеристике
*с(Фн)-
2. Электрические двигатели. В первом
приближении можно считать, что движущий момент
электрического двигателя — постоянная величина. При
более подробном анализе следует учитывать
зависимость движущего момента от угловой скорости
вращения двигателя, которая различается для
разных типов двигателей.
а. Асинхронный электрический двигатель
переменного тока. На статической характеристике
(рис. 2.6) такого двигателя: Мпус — пусковой
момент; Мном — номинальный крутящий момент; Мтах
или Мкр — максимальный или критический момент,
иногда называемый моментом опрокидывания;
соном — номинальная круговая частота вращения
вала двигателя; сосин — частота вращения вала
двигателя без нагрузки, или синхронная частота; аЪ —
неустойчивый участок характеристики; bd —
устойчивый участок характеристики.
м„
кр
пус
1 1
[а _^^^
с
\d
сос
сол
Рис. 2.6
Часть статической характеристики
асинхронного электрического двигателя, т. е. зависимость
движущего момента Мдв на валу двигателя от его
угловой скорости содв на участке dc в области
номинального момента, можно линеаризовать:
МДВ = Ь-
k(On
Здесь к = Мном/(сосин - соном) и Ъ = ксос
подстановки к и b в (2.14) получим
(2.14)
После
Млв = Ком Кин - ЮУКин - Юном)-
(2.15)
Фактически линеаризованная характеристика на
рабочем участке является прямой линией,
проходящей через две точки с координатами сосин, 0 и соном,
^ном-
Статическая характеристика асинхронного
электрического двигателя на всем диапазоне изменения
угловой скорости определяется более сложной
формулой, в которой момент Мдв выражается через
скольжение s:
Мпп = 2 Mvn (s/syn + s}
ХДВ
*кр<
'кр
кр
'S),
(2.16)
где 5=1- содв/сосин, а критическое скольжение sKp =
= 1-сокр/сосин.
б. Двигатель постоянного тока с независимым
возбуждением. Для двигателя постоянного тока с
независимым возбуждением на участке be (рис. 2.7)
Л/дв
^пус<
Мтт.
1ГЛ ном
Регулировочные
^SL характеристики
"^ N\/V\
4
, Внешняя
Ч. характеристика
v .. \\^с
0 юном сосин содв
Рис. 2.7
функциональная зависимость аналогична
зависимости для линейной части характеристики
асинхронного двигателя:
^ДВ ^*HOM V^CHH "
содв)/(сосин-соном). (2.17)
Однако в данном случае характеристику можно
продолжить до точки а — точки пуска двигателя
(содв = 0) и определить пусковой момент
Кус = Ком «син /(Шсин - С0ном). (2.18)
На рисунке также изображено семейство
регулировочных характеристик — семейство
статических характеристик при разных значениях
управляющего напряжения на статоре двигателя.
3. Пружинный двигатель. Если в качестве
двигателя используется пружина (например,
спиральная), то в большинстве случаев рабочую часть
(участок аЪ) ее механической характеристики (рис. 2.8)
Рис. 2.8
23
можно представить в виде линейной убывающей
функции перемещения (угла поворота вала
двигателя), т. е. Мдв = М0 - Лфда, где М0 < Мпус; к -
коэффициент пропорциональности.
4. Рабочие машины: поршневые машины
(компрессоры, насосы), металлорежущие станки, прессы,
транспортные машины, испытательные стенды и др.
а. Поршневой компрессор. Механическая
характеристика компрессора, т. е. зависимость силы,
действующей на поршень, от его перемещения, также
задается индикаторной диаграммой (рис. 2.9).
1
\а +- b
У
\.
1 'd
1*
Линия
Ч атмосферного
\^ давления
** с
he
»«
' Sc
Рис. 2.9
Рабочий процесс в цилиндре двигателя
осуществляется следующим образом: всасывание
(участок dc); сжатие (участок cb)\ нагнетание (участок
Ьа); расширение остаточного воздуха (участок ad).
Участки сЪ и ad характеристики определяются
параметрами газа (объемом, давлением и
температурой) и в общем виде описываются уравнением
политропы, pVn = const, гдер — давление; V — объем
газа; п — показатель политропы. Силу, как и ранее,
находят умножением давления, полученного из
диаграммы, на площадь поршня. Как и в случае
двигателей внутреннего сгорания, для дальнейшей
работы следует зависимость Fc(xc) пересчитать в
зависимость Fc((pH) графическими или аналитическими
методами с помощью известной функции
положения поршня.
б. Поршневой насос. Для получения
механической характеристики поршневого насоса
используют индикаторную диаграмму (рис. 2.10), где учас-
[а
b
Линия
атмосферного
давления
1 /
К
Ь
he
с
—*-
' SC
Рис. 2.10
ток cd — всасывание, а участок аЪ — нагнетание.
Как и ранее, сила равна произведению давления,
найденного из диаграммы, и площади поршня.
Несмотря на то что вектор силы меняет направление
из-за изменения знака давления, одновременно
меняется и направление движения поршня, поэтому
работа силы всегда остается отрицательной.
в. Металлообрабатывающие станки. К станкам
металлообрабатывающей группы кроме
металлорежущих относится и большинство прессов. Внешняя
сила, связанная с усилием на резце или ползуне,
как правило, не остается постоянной и меняется в
зависимости от перемещения точки ее приложения.
Для металлорежущих станков изменение силы
связано главным образом с тем, что процесс резания
происходит только при движении резца в одном
направлении (прямой ход). При обратном движении
резца (обратный ход) процесс резания не
осуществляется и сила сопротивления движению
существенно уменьшается (вплоть до практически
полного ее исчезновения). Аналогичное соотношение
сил имеет место и в станках обработки
давлением — усилие прессования возникает только при
прямом ходе.
Покажем теперь, как будет выглядеть
механическая характеристика для полного цикла работы станка.
Для металлорежущего станка механическая
характеристика определяется зависимостью силы
сопротивления резанию, действующей со стороны
обрабатываемой детали на резец, от его перемещения.
Форма характеристики в общем случае, как и у
поршневого насоса, имеет два участка с двумя разными
значениями силы, соответствующие прямому и
обратному ходу резца. Следует иметь в виду, что для
некоторых видов станков моменты начала и конца
процесса резания не совпадают с моментами
начала и конца движения рабочего хода. Обычно
процесс резания начинается немного позднее начала
прямого движения резца и заканчивается раньше,
чем он останавливается. Например, механическая
характеристика строгального станка (рис. 2.11)
состоит из четырех участков: cd — резание, fa' —
обратный ход и два участка прямого хода аЪ и ef,
А
[а'
i i
| (
>Ъ
he
^
—■*
е<
> i
и
Г
7" s'c
24
на которых сила сопротивления резанию
отсутствует (так называемые участки перебега). Хотя сила
сопротивления перемещению резца из-за трения на
участках перебега и может существовать, она
значительно меньше силы резания. Очень важно, что
на границах участков перебега и резания
характеристика имеет разрывы и сила меняется «скачком».
Для станков обработки давлением сила
полезного сопротивления также имеет два характерных
участка — прямого и обратного хода, на которых
силы существенно различаются. На участке
прямого хода зависимость силы от перемещения
определяется видом станка и обычно известна (задана
таблицей или графиком). При этом для прессов сила
сопротивления перемещению поршня чаще всего
задана в относительном виде, т. е. в долях полного
хода поршня. Для получения зависимости силы от
перемещения поршня следует для каждой
табличной точки ее относительное положение умножить
на полный ход поршня, заданный или найденный
по кинематической схеме механизма. Чтобы
повысить точность, значения силы интерполируют для
получения плавной кривой. Однако здесь
необходима осторожность, поскольку в характеристике
могут явно присутствовать разрывы значений силы
(скачки), связанные с внезапным приложением или
сбросом нагрузки. При интерполяции эти разрывы
не должны исчезнуть. Такое искажение чаще всего
возникает при неудачном использовании сплайн-
интерполяции с помощью математических пакетов
MathCAD.
Для прессов и всевозможных высадочных и
штамповочных станков-автоматов сила
сопротивления движению ползуна при прямом ходе действует
на ограниченном участке be (обычно ближе к
концу участка). Как правило, она меняется нелинейно
от начального значения FHa4 до максимального Fmax.
На остальном участке прямого хода аЪ сила
сопротивления отсутствует (или очень мала по
сравнению с силой полезного сопротивления). Здесь
также полезно использование интерполяции
(графической или численной), причем при численной
необходимо следить за сохранением имеющихся
скачков и изломов (рис. 2.12).
г. Конвейеры и транспортеры (не
вибрационные). Статическая характеристика конвейеров
(например, пальцевых), как и станков, различна на
участках прямого и обратного ходов. Увеличение
силы при прямом ходе связано с дополнительной
нагрузкой при волочении заготовок. В некоторых
конструкциях рабочая нагрузка прикладывается не
с самого начала прямого хода, аналогично тому, как
это имело место в строгальных станках, т. е. сила
F Ч
П(
,
а
U(r
нач
max
Ь
L
hC
с
Sr
Рис. 2.12
на участке прямого хода меняется скачком.
Внезапное приложение силы в этих машинах также
связано с мгновенным присоединением
дополнительной массы перемещаемых заготовок. Ударными
процессами при мгновенном присоединении массы
обычно пренебрегают.
д. Вибрационные конвейеры. Природа сил в
вибрационных конвейерах связана с трением
желоба с грузом о направляющие и трением груза о
желоб при движении груза относительно желоба.
Взаимодействие сил в вибрационном транспортере имеет
сложный характер. Более того, в периоды движения
груза система имеет две степени свободы,
вследствие чего традиционные методы динамики,
используемые в теории механизмов, не выполняются и
требуются дополнительные приемы для решения этой
задачи. В настоящем пособии эти устройства не
рассматриваются. Методы расчета этих машин см.,
например, в кн.: Зенков З.Л., Ивашков И.И., Колобов
Л.Н. Машины непрерывного транспорта (М., 1987).
е. Транспортные машины. Энергия двигателя в
транспортных машинах затрачивается на
перемещение самой машины; при этом возникают различные
силы трения качению колес, в подшипниках,
сопротивления воздуху и т. п.). Общий момент
сопротивления на валу транспортной машины в первом
приближении принимают постоянным.
Существуют и другие устройства, внешняя сила
сопротивления в которых не зависит ни от
перемещения, ни от скорости и остается постоянной в
течение всего цикла работы машины. К ним
относятся, например, грузоподъемные устройства, лифты
и т. п. Генераторы электрического тока также
имеют постоянный момент сопротивления вращению.
Подчеркнем, что если заданная статическая
характеристика связывает значение силы не с
положением начального звена, а с положением какого-
либо другого звена, то необходимо пересчитать ее
относительно положения начального звена, что
может быть сделано графически или с помощью
функции положения звена, к которому приложена сила.
25
Результат пересчета обязательно должен
сопровождаться графиком.
2.4.2. Определение знака силы
На первый взгляд, заголовок этого раздела
лишен смысла. Сила как вектор характеризуется
величиной (или модулем) и направлением, тогда о
каком знаке силы идет речь? Еще в середине XX в.
большинство задач теории механизмов решали
графическим методами. Так, при решении задач
динамики механизма использовали
графоаналитические методы Виттенбауэра и Мерцалова. В основе
этих методов лежит уравнение энергетического
равновесия или теорема об изменении кинетической
энергии. При этом многозвенный механизм с
одной подвижностью и одной обобщенной
координатой заменяли динамической моделью, состоящей из
одного звена с переменной инерционной
характеристикой, движущегося под действием
приведенного момента (или силы). Этот момент
определяли с помощью критерия равенства виртуальных
работ (или мощностей), который формулируется
так: работа приведенной силы (или момента) на
возможном изменении обобщенной координаты
равна сумме работ всех приложенных к
механизму внешних сил и моментов на их
соответствующих возможных перемещениях. Работа вектора
силы на возможном перемещении точки ее
приложения равна скалярному произведению модуля
этой силы, модуля возможного перемещения и
косинуса угла между этими векторами. Из трех
сомножителей только косинус угла имеет знак. Если
угол острый, знак положительный, в противном
случае — отрицательный. При остром угле проекция
силы на направление перемещения точки ее
приложения и перемещение направлены в одну сторону и
работа силы положительна, при тупом — в
противоположные стороны и работа силы отрицательна.
Согласно классификации сил, если работа силы
отрицательна, силу относят к силам сопротивления
и присваивают знак минус; если положительна, силу
считают движущей и присваивают ей знак плюс.
Выходное или входное звено многих машин
совершает поступательное движение. Направление
приложенной к нему силы совпадает с осью
поступательной пары и параллельно ей. При этом угол
между приложенной к звену силой и его
возможным перемещением 0 или 180°. При нулевом зна-
сении угла силу считают положительной, т. е.
движущей; при угле, равном 180°, — отрицательной,
^д>Н
т. е. силой сопротивления. Передаточные функции
механизма, согласно графоаналитическому методу,
определяют с помощью планов возможных
скоростей. Поскольку отрезки плана и длины звеньев
механизма — положительные величины, рассчитанные
передаточные функции также положительные.
Таким образом, знак работы определяется знаком
силы.
В настоящее время задачи динамики
механизмов часто решают с использованием
специализированных компьютерных программ, в которых
векторы сил и перемещений представлены как
проекции на оси координат. В этом случае знаки
проекций сил зависят от выбора системы
координат. В качестве примера на рис. 2.13 изображены
две диаграммы силы, действующей на поршень
четырехтактного ДВС. На рис. 2.13, а сила
представлена проекцией на оси системы координат, ось х
которой направлена к центру вращения
кривошипа, на рис. 2.13, б знак силы определяется знаком
виртуальной работы.
2.4.3. Математические пакеты для расчета
характеристик
Характеристики машин в некоторых случаях
задают не аналитически, а таблично. Если
ограничиться анализом динамики движения машины
только в этих точках, точность вычислений будет явно
недостаточной. Для повышения точности в таком
случае полезно использовать методы интерполяции,
позволяющие получить промежуточные значения
характеристик. Примеры расчета характеристик с
помощью MathCAD для трех различных типов
машин даны в приложении 2.
3. ОПРЕДЕЛЕНИЕ ЗАКОНА ДВИЖЕНИЯ МЕХАНИЗМА
ПОД ДЕЙСТВИЕМ ЗАДАННЫХ ВНЕШНИХ СИЛ
Определение закона движения механизма
связано с первой и достаточно трудоемкой задачей
динамики, для решения которой требуется разделить
механизм на звенья и отдельно к каждому звену
применить дифференциальные уравнения
динамики. При этом неизвестными величинами будут
скорости или ускорения центров масс каждого звена.
Однако механизм представляет собой
кинематическую цепь, т. е. группу звеньев, связанных
кинематическими парами. Как следует из гл. 2,
кинематические характеристики любого звена однозначно
определяются законом движения только одного
начального звена. Следовательно, можно не решать
системы уравнений для всех звеньев, а проводить
анализ динамики всего механизма, изучая
движение одного начального звена. Такой подход,
принятый в теории механизмов и машин, связан с
построением динамической модели, для которой
уравнения движения механизма записывают в форме
энергий и в форме моментов. Построению
динамической модели и определению закона движения
механизма под действием внешних сил и посвящена
настоящая глава.
Обобщенная сила определяется как сила,
совершающая на возможном перемещении системы (при
любом допустимом изменении координаты q)
работу, равную работе всех действующих в системе
сил. Обобщенная сила имеет размерность силы,
если q — линейная величина, и размерность
момента, если q — угол.
Обычно в качестве обобщенной координаты
принимают угол фн поворота начального звена
динамической модели (кривошипа) исследуемого
рычажного механизма, а значит, и главного вала машины (фн =
= фм). Обобщенную угловую скорость обозначают
сон, при этом сон = сом. Тогда обобщенная сила
представляет собой момент А/, и уравнение (3.1)
примет вид
d дТ дТ
= М.
(3.2)
Л Эсом Эфм
Кинетическая энергия Т есть сумма
кинетических энергий звеньев механизма, поэтому для
плоского механизма можно записать
г = ^со;
м+£
Г 2
mjvsj
Jsj<*) Л
(3.3)
3.1. Уравнения движения
и динамическая модель
3.1.1. Общие уравнения движения машины
Уравнение движения механической системы с
одной степенью свободы можно записать в форме
уравнения Лагранжа второго рода:
dt dq dq
(3.1)
где Т — кинетическая энергия всей системы, т. е.
суммарная кинетическая энергия всех звеньев; Q —
обобщенная сила; q — обобщенная скорость; q —
обобщенная координата.
где Ут — момент инерции первой группы звеньев
относительно оси главного вала машины,
учитывающий инерционность кривошипа, ротора двигателя и
звеньев редуктора; trip JSj — масса и момент
инерции относительно центра массу-го эвена; v^-, соу —
скорость центра масс и угловая скоростьу-го звена.
Выделим в уравнении (3.3) член, не зависящий
от угловой скорости главного вала:
Т =
j
m,
+ JSj
/COy л
К, (3.4)
Здесь отношения скоростей — передаточные
функции или аналоги соответствующих скоростей,
27
которые зависят лишь от обобщенной
координаты фм. Поэтому выражение (3.4) можно переписать
в виде
Г^"У", (3.5)
где */^р(фм) — суммарный приведенный момент
инерции всех звеньев механизма:
^%м)=4пр+^р(<Рм); (з.б)
Jjnp = const — приведенный момент инерции
первой группы звеньев; */j"p((pM) = var — приведенный
момент инерции второй группы звеньев:
4Р (Фм) = l(>"j v2qSj + JsK) ■ (3-7)
J
Здесь vqSj и Qdqj — передаточные функции (аналоги
скоростей). Иногда аналог угловой скорости звена
j обозначают как передаточное отношение ujt, где
i — номер звена, с которым связана обобщенная
координата.
Инерционную характеристику машины «/цР(фм),
определяемую соотношениями (3.6) и (3.7),
называют приведенным к динамической модели моментом
инерции машины, или приведенным моментом
инерции. Динамическая модель, обладающая таким
моментом инерции, будет иметь кинетическую энергию Гпр,
равную кинетической энергии всей машины:
Гпр = Г. (3.8)
При этом динамическую модель называют
звеном приведения, а равенство (3.8) кинетических
энергий — условием приведения масс и моментов
инерции.
Составляющая Jjnp суммарного приведенного
момента инерции определяет инерционно-массовые
характеристики тех вращающихся звеньев, которые
по отношению к динамической модели имеют
постоянные передаточные отношения, например ротор
двигателя, либо образуют с ним единое целое,
например кривошип. Другие звенья рычажного
механизма характеризует составляющая У^р, изменение
которой связано с расположением звеньев в
процессе движения, что учитывается входящими в
соотношение (3.7) передаточными функциями
(аналогами) скоростей. В связи с этим для машин
циклового действия приведенные моменты инерции УцР
и J^P являются периодическими функциями угла
фм с тем же периодом, что и у аналогов скоростей.
Аналогично приведенному моменту инерции
обобщенный силовой параметр Мв уравнении (3.2)
называют приведенным к динамической модели
моментом сил, или приведенным моментом,
обозначаемым далее М^. Расчет приведенного момента
можно проводить исходя из сравнения
элементарных работ на возможных перемещениях, однако
более удобно сравнивать соответствующие им
мощности. Мощность приведенного момента на звене
приведения
Рпр = М™рым (3.9)
должна быть равна суммарной мощности всех сил,
действующих на звенья механизма:
^ = l|M>y+I|F,||v,|cos(f^), (3.10)
j k
где My, со,- — момент, приложенный к звену у, и его
угловая скорость; F^, v^ — векторы силы,
приложенной в точке с индексом к, и скорости этой
точки (мощность МуСОу считают положительной, если
направления My и С0у совпадают). Согласно условию
приведения, т. е. условию равенства мощностей:
Р™ = Р, (3.11)
после подстановки выражений (3.9) и (3.10) в (3.11)
получают
I |С0; V,
У1 'Юм к «м
или
MInp=l|My|co,y + XFrv„. (3.12)
j к
Из активных сил в уравнении (3.12) учитывают
движущие силы, силы полезного сопротивления и
силы тяжести подвижных звеньев. Работа сил
сопротивления всегда отрицательна, поскольку эти
силы направлены противоположно движению.
Работа сил тяжести в процессе движения может быть
как положительной, так и отрицательной, но при
этом суммарная работа их за цикл равна нулю. Так
как силами трения пренебрегают, то реакции в
кинематических парах не совершают работу и,
следовательно, не учитываются в расчетах (см. (3.10) и
(3.12)). Для цикловых машин приведенный момент
сил MJP есть периодическая функция обобщенной
координаты фм, период которой определяется
периодом входящих в уравнение (3.12) функций.
Анализ формул (3.10) и (3.12) показывает, что
выражение для приведенного момента можно
получить из выражения для мощности всех
действующих сил, если в нем скорости всех звеньев
заменить передаточными функциями скоростей.
Аналогично, на основании формул (3.3), (3.6) и (3.7)
заключаем, что выражение для приведенного
момента инерции можно получить из выражения
удвоенной кинетической энергии машины, если за-
28
менить скорости звеньев их передаточными
функциями.
Чтобы представить уравнение движения (3.2) в
виде, обычно используемом в динамике машин,
вычисляют необходимые производные кинетической
энергии, записанной в форме (3.5):
дТ
Эса
= ^р(ФмК;
d дТ
dt Эса,
dA z VVm; mJ diu dt M
+ упр^м_
dt
rdJ^
dq>
Эф
<*&
Подставив эти выражения в уравнение (3.2),
можно получить
Ф*ы+^
dJl_
= м?.
(3.13)
По форме уравнение (3.13) представляет собой
уравнение динамики вращающегося тела с переменным
моментом инерции. В него входят только
параметры движения динамической модели — фм, сом, ем.
Основываясь на уравнении (3.13), можно
сформулировать понятие динамической модели машины.
Динамической моделью машины называют
простейший механизм, состоящий из одного звена,
образующего вращательную пару со стойкой, движение
которого тождественно движению начального звена
(рис. 3.1). Динамическая модель имеет переменный
момент инерции У^р и вращается под действием
момента М^р (см. рис. 3.1, а). Параметры
динамической модели — приведенные момент инерции J~р
и момент М^р — определяются условиями
приведения (3.11), (3.13). Иногда динамическую модель
строят не в виде вращающегося звена с
переменным моментом инерции, а в виде материальной
точки переменной массы, зафиксированной на
невесомом вращающемся звене на плече / (см. рис. 3.1, б).
В этом случае параметрами модели являются
приведенная масса тпр и приведенная сила Fnp,
которые также определяются условиями приведения
(3.8), (3.11). В уравнение (3.13) подставляют
величины j£p и М£р, J^ = mnvi2HM^ = F nP/.
Таким образом, задачу о движении
многозвенного механизма машины можно свести к
рассмотрению движения условного звена — динамической
модели машины. Определив по уравнению (3.13)
закон движения динамической модели, а значит, и
входного звена рычажного механизма, можно
найти законы движения остальных звеньев с помощью
функций положения, аналогов скоростей и
ускорений, полученных при предварительном
кинематическом анализе механизма.
Уравнение (3.13) — нелинейное
дифференциальное уравнение второго порядка относительно
переменной фм = фн, так как сом = фм, ем = фм. Чтобы
упростить расчеты, полагают, что звено
приведения совпадает с начальным звеном. Поскольку
далее кинематический анализ проводят только для
динамической модели, индекс «м» опускают либо
заменяют номером звена приведения. Левую часть
(3.13) можно представить в виде полной
производной кинетической энергии по обобщенной
координате ф, для чего в уравнение следует подставить
угловое ускорение
_ Jco_
z'~dt~
d(u dip Jco
- = co—,
d(p dt dip
тогда уравнение (3.13) примет вид
.2 . Г
dip dip 2 dip
2 \
2 2
dip
(3.14)
В случае, когда все действующие силы, а
значит, согласно (3.12) и приведенный момент М^р,
зависят только от положения механизма (от
обобщенной координаты ф), в уравнении (3.14) можно
разделить переменные:
j?
со
2^
= М"р(ф)</ф.
(3.15)
Интегрируя выражение (3.15) в интервале
значений угла поворота динамической модели от
начального положения фнач до текущего ф и
обозначая суммарную работу
ф
4е= J Mid^ (3.16)
Рис. 3.1
получают уравнение, определяющее зависимость
угловой скорости со модели от угла поворота ф:
^ПР(ф)у-^Р(фнач)43- = ^(ф), (3-17)
29
где «/^(Фнач) и ^нач ~~ приведенный момент
инерции и угловая скорость динамической модели в
начальном положении; А% — суммарная работа всех
действующих в машине внешних сил в интервале
значений от фнач до ср.
Обозначив кинетическую энергию через Г, Гнач
соответственно в текущем и начальном
положениях и ее приращение AT в интервале значений от
Фнач Д° Ф> записывают выражение (3.17) в виде
Т-Тт = АТ=А* (3.18)
Уравнение движения машины в виде (3.17) или
(3.18), называемое уравнением движения машины
в форме энергий, описывает известную теорему
механики об изменении кинетической энергии
механической системы.
Из уравнения (3.17) функцию со = со(ф)
выражают в явном виде:
w"4' ^р(ф)
_ [2[^1(ф) + Унач(фнач)(^ач]
^Р(ф)
(3.19)
Подставляя в выражение (3.19) угловую скорость
со = dq>/dt, получают
со
dip
f
г. (3.20)
|2[^(Ф) + Унач(фнач)(02]/У^(ф)
Интегрируя (3.20), находят зависимость между
параметрами t и ф и, следовательно, вычисляют
время движения машины в интервале значений от фнач
до ф. После определения угловой скорости по
формуле (3.19) угловое ускорение главного вала в том
же положении машины можно найти из уравнения
(3.13):
6 =
£ </ф 2
(3-21)
Далее расчитывают производную приведенного
момента инерции dj£p/dip, дифференцируя по
параметру ф момент инерции второй группы звеньев
(3.7):
Ml* _dJ$ _
dip dip
= 2l[mjvqsf • Vy + JSj(°gj' %\ (3-22)
где \qSp (Oqj — аналоги линейной и угловой
скорости; 2iqSp eqj — аналоги линейного и углового
ускорения.
Уравнения движения динамической модели
(3.13) и (3.17) при принятых допущениях
справедливы для любого режима движения машины.
Однако допущение о зависимости внешних сил
только от положения механизма, позволяющее
вычислить работу А^ по формуле (3.16) и угловую
скорость со по формуле (3.19), для случая, когда
силы зависят от угловой скорости (например, в
электрическом двигателе), справедливо лишь при
сравнительно небольшом ее изменении.
3.1.2. Пример построения
динамической модели
Задача о приведении сил и масс в механизме
двухтактного двигателя внутреннего сгорания
приведена в приложении 7 на листе 1. В сдвоенном
кривошипно-ползунном механизме на звенья 3 и 5
действуют силы давления FR на поршень,
определяемые индикаторной диаграммой, аналогичной
приведенной на рис. 2.5, а на звено 7 со стороны
рабочей машины, которую двигатель приводит в
движение, — момент Мс сопротивления (Мс = const).
Кроме того, заданы массы всех звеньев и моменты
инерции шатунов J^ и J^ и кривошипа Jx.
В качестве звена приведения выбирают
начальное звено механизма (звено 7) — коленчатый вал
двигателя — и строят динамическую модель с
параметрами J^{ip\) И M^P(ip{).
Для определения приведенного момента
М^(<р{)9 заменяющего все действующие в
механизме силы, используют формулу (3.12):
^p=lGrv.s;+F^v?c-M,
•со
1=1
'*!'
(3.23)
где Gz — сила тяжести /-го звена; \qSi, \qC —
аналоги скоростей центров масс звеньев 7, 2, 4 и
ползунов 3 и 5; (Oqi = Ш//©1 = ип — аналог угловой
скорости /-го звена.
В формуле (3.23) учтено, что моментМс
направлен противоположно угловой скорости C0j.
Учитывая, что проекции вектора G, на оси координат х9
у равны соответственно Gix = 0 и Giy = -G,
получают
G/ * yqSi = GixvqSix + GiyvqSiy = ~GivqSiy'
Поскольку \qCy = 0, \qS{ = \qA = 0, \qCx = \qC,
M? =~G2vqS2y ±|Fflv,c|-Mc. (3.24)
30
Знак «+» перед модулем |F^v^c| в выражении (3.24)
соответствует участку аЪ на индикаторной
диаграмме (см. рис. 2.5); знак «-» — участку da.
Представляя передаточные функции как
отношение скоростей, приведенный момент силы тяжести
G2 звена 2 (см. рис. 2.2, 2.3) можно записать в виде
= и2
ч 2 со
^=G2^cos(G2,v5J.
Здесь наглядно видно, что работу совершает не вся
сила, а лишь ее часть — проекция вектора силы на
направление скорости, т. е. проекция вектора
скорости на вертикальную ось ординат —
вертикальная компонента вектора скорости. Именно поэтому
в гл. 2 при определении аналога скорости центра
масс звена вычисляли также (или только) его
вертикальную компоненту.
Несмотря на то что аналоги скоростей \qSi и
\qC — периодические функции с периодом 2л;,
приведенный момент М^р в рассматриваемом
примере будет периодической функцией с периодом
Афц = 4л, поскольку сила давления, задаваемая
индикаторной диаграммой, есть периодическая
функция с периодом 4л.
Далее определяют суммарный приведенный
момент инерции механизма. Схема механизма
двигателя внутреннего сгорания аналогична схеме кри-
вошипно-ползунного механизма, показанного на
рис. 2.2. Для приведения масс следует
воспользоваться условием (3.11) равенства кинетических
энергий всех звеньев механизма и звена
приведения. Запишем это условие для г-го звена механизма
в зависимости от характера его движения.
1. При поступательном движении /-го звена
(звенья 3 и 5)
т. е.
У,пр =
Ш:
\2
V м J
= m:Vt
■ivqSr
(3.25)
2. При вращательном движении /-го звена вокруг
неподвижной оси к (звено 7)
Jt»<ul_Jik<s>l
т. е.
J : — J :>
ik
со,
\2
v<0m,
= Jik%f
(3.26)
Если для вращающегося /-го звена задан момент
инерции JSi относительно оси, проходящей через
центр масс Si9 который не совпадает с осью
вращения к, то Jik = JSi + тДцг
3. При плоскопараллельном движении /-го
звена (шатуны 2 и 4)
Jfp(oj_miv2Si ^co*
2 2 2 '
т. е.
ф=щ
( \2
+ ./,
iS
3.
со,.
\2
= w,^+/s<d5„(3.27)
где vqSh wqi — аналоги скоростей.
Суммарный приведенный момент инерции кри-
вошипно-ползунного механизма (см. рис. 2.2)
равен сумме приведенных моментов инерции всех его
звеньев и является периодической функцией
обобщенной координаты 9j с периодом 2л.
Используя формулы (3.25)-(3.27) и учитывая, что
co^j = 1, записывают
Jf =JSi +m2v2qSi + JSi<u2qi +m3v2qC. (3.28)
На рис. 3.2 показаны зависимости
приведенного момента инерции от угла поворота звена
приведения для одного кривошипно-ползунного
механизма, полученные по результатам расчетов по
формуле (3.28). Приведенный в приложении 7 на
листе 1 суммарный момент инерции для всех
механизмов двигателя получен путем сложения
графиков (рис. 3.2, а) для каждого из механизмов с
учетом фазы их работы, т. е. с учетом
относительных углов поворота каждого из механизмов. Так,
если угол между кривошипами двух механизмов
составляет, например, 60° (V-образный двигатель),
то при сложении один из графиков на рис. 3.2, а
необходимо сдвинуть по оси абсцисс на значение
л/3. На рис. 3.2, б построены все три переменные
составляющие зависимости (3.28). Поступательная
и вращательная составляющие приведенного
момента инерции обозначены J2n и J2£
соответственно.
Производную приведенного момента инерции
можно получить, дифференцируя (3.28) по
параметру Фм-
= 2(W2V2 * V2 +JS2(°42^2 +тЪУяС m*qc)> (3'29)
где a^2, aq0 zq2 — аналоги ускорений.
Подчеркнем, что для расчета приведенных
моментов инерции должны быть известны
кинематические передаточные функции, т. е. предваритель-
31
J\l, КГМ
Гц,Дж
.УИнач
Зя/2 ф,рад
ПР 2
Jх, кг • м
/V
\
?
к
к ф,рад
Рис. 3.2
но должен быть проведен кинематический анализ
механизма.
3.1.3. Приведенные моменты сил
При вычислении приведенного момента сил
могут возникнуть затруднения, связанные с
определением знака момента. Так, в формуле (3.23)
приведенный момент с учетом дополнения (3.24) равен
модулю произведения силы и аналога скорости.
Знак же зависит от того, является ли внешняя сила
движущей или силой сопротивления, т. е.
определяется знаком работы, совершаемой этой силой.
Такой подход, ориентированный на анализ
физической природы работающей машины, нагляден,
но не всегда удобен. При нечетком понимании
процессов, протекающих в машине, могут
возникнуть определенные трудности, приводящие к
ошибкам.
Существенно проще в таком случае
использовать метод проекций (см. гл. 2), где знак
приведенного момента определяется знаком скалярного
произведения вектора силы и вектора скорости
точки приложения силы, а величина — произведе-
М"р,Н-м
Рис. 3.3
нием модуля силы и модуля аналога скорости
точки приложения силы. Поясним это на примере. На
рис. 3.3 показана зависимость приведенного
момента Мдпр от угла поворота кривошипа 1 для криво-
шипно-ползунного механизма с указанием
соответствующих фаз работы четырехтактного двигателя.
График зависимости силы, действующей на
поршень, приведен на рис. 2.13, а, где знак силы
определялся знаком проекции вектора силы на
выбранное положительное направление движения на
направляющей поступательной пары.
В рассматриваемом случае за положительное
направление движения принято направление к
центру вращения кривошипа (традиционное при
анализе двигателей). При анализе движения поршня знак
скорости также определяется с учетом этого
выбранного положительного направления (при движении к
центру вращения кривошипа скорость поршня
положительная, а от центра — отрицательная). Тогда
при определении знака скалярного произведения
*Vyqc B формуле (3.23) никаких затруднений не
возникает — при совпадении направлений силы и
скорости движения произведение положительная
величина, при несовпадении — отрицательная.
В разд. 2.4 описан ортодоксальный подход к
определению знака силы по знаку совершаемой ею
работы. График зависимости силы от угла
поворота начального звена в этом методе (рис. 2.13, б)
будет отличаться от графика силы на 2.13, а, однако
по знаку будет совпадать с графиком приведенного
момента (см. рис. 2.13, а). При вычислении
приведенного момента согласно этому методу
направление скорости не влияет на знак момента, что и
отражается в формуле (3.24). Скалярное
произведение ¥Д-\дС используется только для нахождения
32
модуля приведенного момента, а его знак
определяется из физических соображений.
Дополнительные трудности при вычислении
приведенных моментов по формуле (3.23)
возникают в случае вращения начального звена по ходу
часовой стрелки. Как указывалось, знак
приведенного момента определяется знаком скалярного
произведения вектора силы и вектора реальной скорости
точки приложения силы (не аналога). Напомним,
что при отрицательной угловой скорости
начального звена вектор скорости какой-либо точки и
аналог скорости этой же точки направлены в
противоположные стороны. При вычислении по формуле
(3.24) этих трудностей нет.
Графики приведенных моментов каждого
механизма многоцилиндрового двигателя суммируются
в единый график, естественно, с учетом их фаз
работы, поскольку обычно эти фазы не совпадают и
фаза расширения одного механизма совмещается,
например, с фазой сжатия другого механизма и т. д.
Такое фазирование позволяет выровнять суммарный
приведенный момент двигателя и уменьшить
неравномерность его вращения.
Результаты расчета приведенных моментов
инерции и приведенного момента для
рассматриваемого примера отображены в приложении 7 на листе 1
в виде соответствующих графиков, построенных в
следующих масштабах:
по оси абсцисс
Цф=—, мм/рад,
где Ъ — выбранная база графика, мм;
по оси ординат для M£p((pj)
Дм=-
{Ум\
М*
мм/(Н • м);
дляУЛфО
Zmax
Ш/
= U/Jmax ^ ммДкг-мг).
'Zmax
для(/1пр)(ф1) = ^-(ф1)
^ = У^>>тах? мм/(кг . м2)
(/imax )
Эти графики используют при решении задач,
связанных с определением закона движения главного
вала при различных режимах работы машины.
Следует иметь в виду, во-первых, что
максимальные значения рассчитываемых функций могут
различаться на порядок и более. Если максимальное
значение функции в выбранном масштабе менее
1 мм, то ее можно не изображать на графиках,
сохранив только таблицу их значений в расчетно-по-
яснительной записке (естественно, по согласованию
с консультантом). Во-вторых, поскольку аналоги
скоростей вычисляют только для нескольких
положений начального звена (обычно 12), то для
построения плавного графика приходится прибегать к
интерполяции. При использовании графических
методов ее проводят вручную с помощью лекал, что
допустимо, а при проведении интерполяции на
компьютере — с помощью пакета программ. При этом
необходимо отметить, что формальная
интерполяция может исказить физический смысл
отображаемого процесса. Например, при изображении
графика приведенного момента инерции (см. рис. 3.2)
наиболее часто встречаются две ошибки —
отсутствие горизонтальных касательных при таких
значениях уц н, когда скорость звена становится
равной нулю, и появление вертикальных касательных
при резком увеличении момента J^ (иногда даже
с переходом за 90°, что порождает совершенно
нереальные зависимости, лишенные физического
смысла — многозначные функции и т. п.).
При построении графика приведенного
момента необходимо тщательно следить за тем, чтобы
после интерполяции не исчезли характерные «скачки»
и «изломы» функции, имеющие место при
мгновенном изменении внешней силы или ее
производной. Сглаживание этого графика в указанных
точках недопустимо, так как приводит к искажению
реальной картины нагружения машины.
В приложении 2 дан пример расчета
приведения сил с помощью MathCAD.
Метод построения динамической модели,
описанный в этом разделе, справедлив только для
механизмов с одной степенью свободы (W= 1).
Поэтому с помощью этого метода, строго говоря,
нельзя анализировать, например, инерционные
конвейеры, поскольку в них имеются фазы работы, в
которых груз и желоб движутся независимо друг
от друга, и система имеет две степени свободы. Для
анализа таких систем разработаны специальные
искусственные приемы, описанные в литературе.
3.2. Определение закона движения
механизма в переходном режиме
Для получения зависимости a>i((Pi) уравнение
(3.19) записывают для угловой скорости звена
приведения (кривошипа 7)
COi =
2(^ + Гнач)
J?
(3.30)
33
где Гнач — кинетическая энергия в начальном
положении механизма, т. е. при ф! = фнач. Суммарную
работу можно определить путем интегрирования
суммарного приведенного момента:
ф
ЫЪ)= j M?d<b9 (3.31)
Фнач
q>! - в рад.
Обычно получить эту зависимость
аналитическими методами не удается, поэтому проводят
численное интегрирование по табличным значениям
или с помощью построенного графика М£р(у{)
(рис. 3.4). Для этого угол поворота ф! в интервале
М?,Н-м
2л фьрад
Рис. 3.4
значений от Ф1нач до Ф1К0Н делят на ряд достаточно
малых интервалов Аф^ В пределах каждого
интервала А(ри криволинейную трапецию
подынтегральной функции Myp заменяют равновеликим ей по
площади прямоугольником, соответствующим
криволинейной трапеции. При этом среднее значение
ординаты ум равно среднему значению
суммарного приведенного момента. Теперь площадь
интервала можно найти как площадь прямоугольника,
А5 = .у^Дф1, мм2. Площадь этого прямоугольника
соответствует приращению работы АА на этом же
интервале, для определения которой следует
поделить величину AS на масштабы графика М^ по оси
абсцисс и по оси ординат, т. е.
АА = -
AS
; Дж>
, , ^-, (3.31*)
где Цф — масштаб угла поворота фм, мм/рад; [1М —
масштаб момента М^р, мм/(Нм);
Найденное значение АА суммируют с уже
вычисленным значением А на предыдущем
интервале Аф!» По полученным значениям строят график
зависимости Ajj[ip{)9 задавшись масштабом работы
\1А, мм/Дж. Начальное значение А принимают
равным нулю, т. е. при ф = фнач Аъ = 0. В общем
случае в конце рассматриваемого участка движения при
9i = Ф1кон работа А^ не равна нулю.
Некоторого повышения точности можно
добиться, если криволинейную трапецию заменить не на
прямоугольник, а на равновеликую прямолинейную
трапецию и вычислить среднее значение ординаты
Ум на указанном интервале как полусумму крайних
ординат.
Можно также воспользоваться хорошо
известным методом графического интегрирования (см.
рис. 3.4). Точность графического интегрирования
обычно невысока из-за малого числа интервалов
разбиения оси ф1# Достоинство метода
заключается в том, что масштаб графика работы вычисляется
достаточно просто:
ЦА=^^-, мм/Дж, (3.32)
К
где К — выбираемый отрезок интегрирования, мм.
После определения отдельных значений функции
^x(9i) рассчитанные значения аппроксимируются
плавной кривой (в пределах непрерывности
подынтегральной функции).
К описанным методам интегрирования нужно
сделать очень важное замечание. Все особенности
графика Myр (разрывы, изломы) обязательно
должны попасть на границы какого-либо интервала
разбиения. В противном случае искажается
физический смысл зависимости А(<р{) и ухудшается
точность интегрирования.
При табличном задании функции М^ф^
целесообразно отказаться от графических методов и
получать значение А((р{) численными методами, ис-
. пользуя специализированные математические
пакеты или математические средства типа MathCAD.
Численное интегрирование можно проводить и в
случае, когда приведенный момент М^р задан
только графиком. Здесь, как и ранее, график
следует разбить на достаточно мелкие интервалы,
измерить ординаты на границах интервалов,
полагая, что функция задана таблицей полученных
значений.
Кинетическая энергия механизма в начальный
момент времени известна и равна
Т =
И")
СО
1нач
(3.33)
где со1нач — начальная угловая скорость, рад/с;
(^тР)нач ~~ суммарный приведенный момент в
начальный момент времени, кгм2.
34
Как известно, приведенный момент J^P
представляет собой сумму приведенных моментов
инерции всех звеньев механизма, объединенных в
первую и во вторую группы звеньев:
^р = ^1пр + -/11р-
В любом произвольном /-м положении механизма
J£P = У,1* + У*Р, JW = const, и обычно J{* » Jg>.
Суммарный приведенный момент в начальном
положении механизма
/Пр _ тПр гПр _ гПр
ЛЛ
Mj
Если начальная угловая скорость щ нач = 0
(режим пуска машины), то в начальном положении
кинетическая энергия Гнач = 0 и формула для расчета
угловой скорости coj примет вид
юм =
С помощью графиков суммарной работы A^((f>{)
и суммарного приведенного момента инерции J^
можно для каждого положения механизма по
формуле (3.19) или (3.30) вычислить угловую скорость
и построить график зависимости CQ^cpj).
Угловое ускорение 8М = d(uM/dt, равное
угловому ускорению 8j начального звена механизма
(обобщенному угловому ускорению), можно определить
из дифференциального уравнения движения (3.13)
и рассчитать по формуле (3.21):
М"р
со2 dJ«*
(3.34)
J? 2Jlv Ли
Значения величин М^р, J^P и coj выбирают на
соответствующих графиках для рассматриваемого
положения механизма.
Производную dJ^P/dtyi находят, дифференцируя
функцию J^((P\), либо аналитически по формуле
(3.22), либо графически, используя соотношение
Уз
tgV>
где \|/ — угол между касательной, проведенной к
кривой /^р(ф) в исследуемом положении, и
положительным направлением оси абсцисс (см.
рис. 3.2, б). Знак производной dJ^P/dty\
определяется знаком функции tg \|/. Например, в j-м
положении tg \|/ > 0, а в к-м положении tg \|/ < 0.
Угловое ускорение можно определить более
простым, но менее точным способом:
ei =
Jcoi d(oxdt ^/coi
UIU|
= COi
dt dtd(px d<px
где значение и знак производной ^/со1/^ф1
определяются по графику зависимости co^cpj), как и для
производной dJ^P/d<p\. После преобразований
£i=coi;
^а
-tgcPco,
где фю — угол между касательной, проведенной к
кривой co^cpj), и положительным направлением оси
абсцисс.
Далее находят время движения механизма из
начального положения в заданное. Известно, что
t-L
1
Фнач
Обычно принимают tHm = 0. Интегрирование
можно проводить численными или графическими
методами (рис. 3.5). В пределах выбранных
участков 0-1, 1-2 и т. д. кривую ce>i((Pi) заменяют
ступенчатым графиком с ординатами ^ю1, у^2 и т- Д-
со ь рад /с
Значения указанных ординат определяют
исходя из условия, что площади криволинейных
трапеций или треугольников, расположенных выше и
ниже ординаты^, должны быть одинаковыми (см.
рис. 3.5, указанные площади заштрихованы).
Значения ординат y^i переносят на ось ординат, а
затем на отрицательную полуось абсцисс и
получают точки Г, 2' и т. д. Отложив по оси ординат
произвольный отрезок ОМ = К (в миллиметрах),
соединяют точки Г, 2' и т. д. с точкой М. На
графике t(q>{) в пределах каждого участка проводят
линии, параллельные линиям I'M, 2'Ми т. д. На участ-
35
ке 0-1 проводят линии 01", параллельные \'М\ на
участке 1-2 — линии 1"2", линии 2'М. Точки 0, 1",
2", ... соединяют кривой t(<P\). Масштаб этой
кривой |i/ = (ИфХ/М-ад, мм/с. Чем длиннее отрезок
интегрирования К, тем большие значения имеют
ординаты графика зависимости f((Pi). Конечная
ордината графика зависимости f((Pi) пропорциональна
времени одного цикла работы механизма.
Примеры выполнения первого листа курсового
проекта в переходном режиме приведены в
приложениях 3 и 7 (лист 2).
3.3. Определение закона движения
механизма в установившемся режиме
3.3.1. Общие положения
В установившемся режиме движения
механизма начальное звено, которое обычно является
главным валом машины (например, коленчатым валом
основного механизма), вращается с угловой
скоростью C0j = d(f>i/dt, изменяющейся в соответствии с
периодическим законом. В течение цикла
изменение угловой скорости coj относительно среднего
значения C0j cp определяет неравномерность
вращения вала, которую оценивают коэффициентом
неравномерности
учетом разделения звеньев на группы можно
записать
5 =
со
lmax
-со
lmin
СО
(3.35)
1ср
где C0j max и cot min — соответственно наибольшее и
наименьшее значения угловой скорости за цикл.
Из уравнения (3.30) следует, что при заданных
силах, определяющих работу А^ диапазон
изменения угловой скорости зависит от суммарного
приведенного момента инерции J^P механизма.
Практически его изменение обусловлено только
приведенным моментом инерции первой группы звеньев
УхПр, поэтому можно подобрать необходимую
маховую массу и, тем самым ограничивая диапазон
изменения угловой скорости, добиться, чтобы
коэффициент неравномерности имел заданное значение.
При этом момент инерции связан с
коэффициентом неравномерности 8 следующим соотношением:
ю1ср5
(3.36)
где (АТ^)н6 — наибольшее изменение кинетической
энергии первой группы звеньев за цикл, Дж;
C0j ср — средняя угловая скорость начального звена,
рад/с.
Кинетическая энергия механизма равна сумме
кинетических энергий всех его звеньев. Тогда с
Т=Тг + Т119
т. е.
т=тг-т119
(3.37)
где Т = А^+ Гнач — полная кинетическая энергия
механизма; Ти — кинетическая энергия второй
группы звеньев.
По уравнению (3.37) можно построить график и
определить
(ЛГОнб=Г1тах-Г1т1п. (3.38)
Здесь Г1тах и rImin — соответственно наибольшее
и наименьшее значения кинетической энергии
первой группы звеньев за цикл.
3.3.2. Работа суммарного приведенного
момента
В случае, когда все действующие силы, а
значит, и приведенный момент М^р зависят только от
положения механизма (от обобщенной координаты
(pj), суммарная работа
ф
^x(<Pi)= \ м^ср^Ф!.
Фнач
Если внешняя сила задается из индикаторной
диаграммы, то для определения М^р необходимо
найти зависимость этой силы от угла поворота
начального звена для полного цикла его работы. Для
четырехтактного двигателя, например, (рх = 4тс.
В установившемся режиме движения суммарная
работа внешних сил за цикл А^п = 0. Однако в
общем случае для обеспечения равенства нулю
суммарной работы требуется внешний силовой фактор —
дополнительный внешний момент, который имеет
естественный физический смысл: для технологических
машин — движущий момент двигателя, а для машин-
двигателей — внешний момент нагрузки. Эти
моменты приложены непосредственно к звену приведения,
т. е. к главному валу. Значения этих величин не
заданы, и в процессе проектирования их подбирают
так, чтобы выполнялось равенство А^ц = 0. Отсюда
следует, что работа движущих сил за цикл должна
быть равна работе сил сопротивления: АДЦ = АС ц.
Полагают, что дополнительные моменты — движущий
или момент сопротивления — постоянные
величины, не зависящие от положения механизма. Тогда
их работа будет пропорциональна углу поворота и
за цикл составит Мщ ц.
Определение дополнительного момента,
обеспечивающего установившееся движение, можно по-
36
казать на примере рассмотренного ранее
машинного агрегата, состоящего из двухтактного двигателя
внутреннего сгорания и электрического генератора
(см. приложение 7, лист 1). В этом случае
дополнительным моментом является момент
сопротивления электрического генератора, Мс = const, но его
значение не задано.
Суммарную работу Аъ определяют путем
интегрирования приведенного момента движущих
сил Мд^ф^. На рис. 3.6, а показан график
зависимости M^cpj), аналогичный приведенному в
приложении 7 на листе 1, но работа будет
рассматриваться только одного из двух кривошипно-пол-
зунных механизмов. На рисунке также проведено
интегрирование момента Мдпр и получена
зависимость работы А<£ от приведенного момента Мдпр. На
рис. 3.6, б интегрирование выполнено графическим
способом, а на листе 1 проекта — численным
методом. Ордината кривой графика работы в конце
цикла, т. е. при cpj = 2я, в масштабе \1А соответствует
работе приведенного момента движущих сил Адп
за цикл, Ад ц Ф 0. Поскольку при установившемся
движении работа движущих сил за цикл по
модулю равна работе сил сопротивления, |^дц| = МСц1>
то ордината, пропорциональная Адц, будет в том
же масштабе \х,л изображать и необходимую работу
сил сопротивления за цикл, но взятую с обратным
знаком, Адц = -Асц. Если момент сопротивления
Мс = const, то его работа за цикл Асц = Мсфц,
следовательно, момент сопротивления Мс = ^сц/фц, в
данном случае Мс = Асп/2п. Суммарную работу
<р; *
, /к
V )\
i>H
с
я
,н
■м
^ <P(<Pl)
0 тГ^-^1 1
ч
М
пр
/2тс fp,
, рад
Лд(ф1)
^ДЦ ^СЦ
всех внешних сил можно получить путем
интегрирования графика суммарного приведенного
момента М^((р{)9 являющегося алгебраической суммой
M^(<p{) и Мс((р{) (с учетом знаков моментов).
Чтобы достичь существенно большей точности,
при определении зависимости Мдпр(ф!) не
учитывают моменты сил тяжести звеньев и другие
потенциальные силы, работа которых за цикл равна
нулю и, значит, не влияет на момент
сопротивления Мс. Однако их необходимо учитывать при
определении момента Mz. Иными словами, при
вычислении зависимости Мдпр(ф1) можно учитывать
только движущие силы, определяемые
индикаторной диаграммой. После интегрирования и
нахождения момента Мс суммарный приведенный
момент можно определить как сумму всех
действующих моментов Мд^ф!), Мс(<р{) и суммарного
приведенного момента сил тяжести всех звеньев
Мс?р(ф1). Такой подход является общим для всех
цикловых механизмов, вне зависимости от их
природы.
Кроме того, на рис. 3.6 показан другой подход к
определению момента Мс, ориентированный на
графическое решение, согласно которому суммарную
работу можно найти и без фактического расчета
площадей М^^), не вычисляя значение Ад.
Приведенная на рисунке зависимость Az{§{) в данном
случае представляет собой наклонную прямую, так
как Мспр = Мс = const. Ординату, изображающую
момент Мспр в масштабе \1М, определяют путем
графического дифференцирования графика
зависимости ^4с(ф1). Существенно, что в этом методе
при вычислении момента Мдпр(ф1) нельзя
пренебрегать силами тяжести.
Для построения графика суммарной работы
^i((Pi) суммируют в каждом положении ординаты
работы движущих сил и сил сопротивления. Для
этого на графике Ад(<р{) (см. рис. 3.6, б) проводят
штриховую линию, изображающую зависимость
-^с(ф!). Алгебраическая сумма ординат на этих
графиках соответствует отрезку, заключенному между
кривыми Ад(($х) и -^4с(ф!) и изображающему в
масштабе [iA текущее значение суммарной работы.
График суммарной работы ^(ф^ приведен на
рис. 3.7. Точность графического метода решения
обычно невысокая.
Единственное преимущество описанного
подхода заключается в том, что процесс
интегрирования — наиболее трудоемкая операция при
графическом решении — проводится один раз. При
использовании численного метода обычно это не
является существенным достоинством и
интегрирование проводят два раза: первый раз функции
37
az;T,Rk
к
1
>^^L(q>i)
тс
^нач
r
2л фьрад
ф 1, рад
Рис. 3.7
M^((pi) для получения момента Мс, и второй —
функции М% для вычисления суммарной работы А^.
Для повышения точности при графическом
решении также используют подход, основанный на
двухкратном интегрировании (особенно в случае
сложных функций приведенных сил — с разрывами и
изломами).
Примеры выполнения первого листа проекта
приведены в приложениях 4 и 7 (лист 3).
3.3.3. Кинетическая энергия
звеньев механизма
а. Построение графика полной кинетической
энергии всех звеньев механизма Т((р{). Поскольку
Т = А^+ Гнач, где Гнач — кинетическая энергия в
начальном положении, то для получения графика
зависимости Т(ух) следует ось абсцисс (см. рис. 3.7)
перенести вниз на ординату, соответствующую
начальной кинетической энергии Гнач. Значение Гнач
не известно, поэтому новое положение оси абсцисс
ф* на рис. 3.7 показано условно.
б. Построение графика приведенного момента
инерции J^(<$\) и приближенного графика 7111(ф1).
Для решения уравнения (3.37) строят график
кинетической энергии Г11(ф1) второй группы звеньев, для
определения кинетической энергии Ти через
приведенные моменты инерции этой же группы
звеньев — график J^(<P\). В кривошипно-ползунном
механизме вторая группа звеньев включает в себя
шатун 2 и поршень 3 (см. рис. 2.2), следовательно,
4Р = J?+'£+•%=m^c+щ*Ьг+Js2<-
Вычисленные значения приведенных моментов
инерции заносят в таблицу. Графики зависимостей
^(фд* ^if^i) и ^(^l) СТР0ЯТ в выбранном
масштабе, |Ху, мм/(кг-м2), затем их суммируют и
получают график J^((p\) (см. рис. 3.2, а).
Кинетическая энергия Ти звеньев 2 иЗ
Ц№ =
^iniP(9i)^
Поскольку закон изменения угловой скорости щ =
= со^ф^ не известен, для определения кинетической
энергии Тп используют приближенное равенство
щ = со1ср, впервые предложенное Н.И. Мерцаловым.
Коэффициент неравномерности 8 обычно мал,
поэтому
(3.39)
Учитывая, что со1ср = const, считают
кинетическую энергию пропорциональной приведенному
моменту J^P, а построенную кривую J^((f>\)
принимают за приближенную кривую 7,11(ф1). Масштаб
графика 7,и(ф1)
|Иг=-т^,мм/Дж.
(3.40)
со'
1ср
В случае многоцилиндровых поршневых машин,
как уже указывалось, необходимо построить сум-
п
марный график, ХГп(ф) = £ГШ, где п — число рас-
/=1
сматриваемых механизмов, равное числу
цилиндров машины. Описанным выше способом
рекомендуется сначала построить график JfjP(<P\) для
механизма, передающего движение от поршня одного
цилиндра на главный (коленчатый) вал, а затем в
каждом положении механизма графически или
аналитически просуммировать п ординат этого
графика, учитывая углы между осями цилиндров и
кривошипами коленчатого вала. Далее полученный
график 2,J^((p{) после расчета масштаба \1Т
преобразуют в график ЕГ11(ф1).
В приложении 7 (лист 1) показана схема
двухцилиндрового двухтактного двигателя внутреннего
сгорания с рядным расположением цилиндров.
Рабочий процесс в каждом цилиндре происходит за
один оборот коленчатого вала — начального звена 1.
Угол между кривошипами коленчатого вала равен я,
угол между осями цилиндров — нулю.
При таком расположении цилиндров и таком угле
между кривошипами кинематические процессы
механизмов рассматриваемого двигателя сдвинуты
относительно друг друга на угол тс. Фазы рабочего
процесса в цилиндре 5 механизма 2 сдвинуты по
отношению к одноименным фазам рабочего процесса в
цилиндре 3 механизма 1 также на угол я, т. е. на угол
поворота коленчатого вала в течение времени
осуществления половины цикла. Следовательно, график
приведенного момента (А/дПр)2ц также сдвинут по
отношению к (Мдпр)1ц на угол п. На такой же угол
сдвинут и график 711(ф1)2ц по отношению к
графику ?11(ф1)1ц. После сложения ординат этих
графиков можно получить график ЕГ11(ф1).
38
3.3.4. Построение приближенного
графика зависимости 7\(9i)
Согласно уравнению (3.37), кинетическая
энергия первой группы звеньев
TY = T-TU.
Следовательно, при построении кривой ^(ф*) из
ординат кривой Г(ф*) (см. рис. 3.7) в каждом
положении механизма вычитают отрезки,
изображающие кинетическую энергию Ти (см. рис. 3.2, а).
Длины этих отрезков определяются соотношением
^;Г;Г,ьДж
coj, рад/с
ЧгУт»>
п/
где ут* ут — ординаты в масштабе [iA и \1Т
соответственно (см. рис. 3.7).
Кривая зависимости Г^ф*) — приближенная, так
как получена вычитанием из точной кривой Г(ф*)
приближенных значений Ти (рис. 3.8).
3.3.5. Определение необходимого момента
инерции маховых масс
На кривой зависимости ^(ф*) находят точки Q
и N9 соответствующие максимальному 7imax и
минимальному и Ti min значениям кинетической
энергии первой группы звеньев (см. рис. 3.8) и
получают, согласно уравнению (3.38), наибольшее
изменение кинетической энергии первой группы звеньев
за цикл:
(А?1)нб=Г1г - ^
— Т =-
1 max LI min
/нб
V-a
где (Д>>Г1)нб — отрезок, изображающий (АГ1)нб в
масштабе \1А, мм/Дж.
Необходимый момент инерции J^
рассчитывают по формуле (3.36):
•/{* =
(A?i)
нб
«icp5
Допущение, что со1ср ~ со1ср при построении
графика Tu((f>i), не вносит заметной ошибки, если
заданный коэффициент неравномерности 8 < 1/20.
При больших значениях заданного коэффициента
неравномерности в расчет момента Jjnp
целесообразно внести поправку, чтобы избежать завышения
маховых масс. Для этого можно использовать
формулу
J? =
(A7l)H6-5(7iie-rIW)
wLp5
(3.41)
где Тцд и rIIAf — кинетическая энергия второй
группы звеньев (см. рис. 3.2, б) соответственно в поло-
ф 1, рад
Рис. 3.8
жениях механизма Q и N, при которых
кинетическая энергия первой группы звеньев имеет значения
Г1тахИГ1тш(см.риС.3.8).
3.3.6. Определение момента инерции
дополнительной маховой массы (маховика)
По формуле (3.36) рассчитывают необходимый
момент инерции J^9 который обеспечит
изменение угловой скорости C0j главного вала в
интервале значений, заданных допустимым
коэффициентом неравномерности [8]. В первую группу
звеньев кроме начального звена механизма часто входят
еще и другие звенья — машины: роторы
электрических двигателей, зубчатые колеса, подвижные
звенья редукторов и т. д. Все эти вращающиеся
звенья, связанные с начальным звеном постоянным
передаточным отношением, обладают маховыми
массами, которые влияют на закон движения
начального звена. Если сумма приведенных
моментов инерции вращающихся звеньев Упр
оказывается меньше необходимого момента инерции J^9 то
в состав первой группы звеньев следует ввести
дополнительную маховую массу (маховик), момент
инерции которой
•/Доп=-/.ПР-1ЛПрР- (3-42)
В качестве примера на рис 3.9 показана та часть
механизмов машинного агрегата, которая
представляет собой первую группу звеньев. Начальное
звено (coj) — коленчатый вал Ъ основного механизма —
тихоходное. Поэтому между ним и электрическим
двигателем (ЭД) находится понижающая передача,
состоящая из планетарного редуктора (ПР) и пары
зубчатых колес z2 и zx Для рассматриваемого при-
39
Маховик, Уд
ЭДУ,
JА 0)! b,Jb
* и»!»*
*>>>>}>> *
рот
п
*;>>>>>»^7*
0)л
ilr, »/ред I
у?7777771
С02
^ьЛ1
'z2*Jz2
Рис. 3.9
мера момент инерции начального звена 1 равен
Необходимый момент инерции J^ можно
получить исходя из динамического расчета (см.
разд. 3.3.5). Приведенные моменты инерции
остальных звеньев первой группы находят следующим
образом:
(<«А2 г„ л2
j:i=j
z2
со,
COi
-Jz2u2\ -Jz2
V z J
Jnp =J
u рот и рот
CO
дв
V
CO
«'рот ^дв1'
Идв1 -и11?и2Ъ
где мдв1, wnP и w2i — передаточные отношения.
Далее определяют момент инерции
дополнительной маховой массы, которая размещается на валу
начального звена:
^оп = J\ ~ \Jb + Jz\ + JJz2 + *^ред + ^рот ]•
3.3.7. Габариты и масса маховика
Конструктивно маховик, момент инерции
которого обозначают /доп, выполняют в форме обода со
ступицей (рис. 3.10, а) или в форме сплошного
диска с отверстием (рис. 3.10, б). В осевом сечении
обод маховика имеет форму прямоугольника,
стороны которого ограничиваются наружным D2,
внутренним Dx диаметрами и толщиной Ъ. Соотноше-
\* **
шш
Ш^^'
ЩЖ
и
шт
А
ния между размерами записывают в виде
безразмерных коэффициентов
Ъ Z),
Из конструктивных соображений обычно
принимают \\fb = 0,2; \\fh = 0,6...0,8. Плотность
материала маховика р = 7800 кг/м3. При значениях \\fb =
= 0,2 и \\fh = 0,8 расчетные формулы имеют вид:
1) маховик — обод со спицами и ступицей (см.
рис. 3.10, а):
наружный диаметр D2 = 0,437^УДОП, м,
внутренний диаметр Dx = 0,8£>2, м>
толщина обода Ъ = 0,2£>2? м,
масса обода т = 6123(Z)22 -Dftb, кг;
2) маховик — диск (см. рис. 3.10, б):
диаметр D = 0,366^УДОП, м,
ширина Ъ = 0,2 Д м,
масса т = 1230£>3, кг.
Если расчетные размеры маховика получаются
неконструктивными (слишком большими) исходя из
требований по габаритам, то устанавливают одну
или несколько маховых масс на более
быстроходных валах. В этом случае момент инерции
маховика Удоп уменьшается пропорционально квадрату
передаточного отношения частоты вращения
соответствующих валов.
3.3.8. Определение закона движения механизма
при различных режимах движения
Чтобы найти угловую скорость начального
звена по уравнению (3.36), необходимо знать
начальные условия, которые в режиме установившегося
движения заранее не известны. Воспользуемся тем,
что при малых значениях коэффициента
неравномерности 8 верхняя часть графика Г^ф*) (см.
рис. 3.8), изображающая изменение кинетической
энергии Ть приближенно изображает также
изменение угловой скорости co^cpj). В точках QnNyr-
ловая скорость щ имеет соответственно значения
^l max и ю1 mm- Разность ординат точек Q и N,
измеренная непосредственно по графику, равна IqN.
Тогда масштаб графика угловой скорости
Иш =
lQN
8со
(3.43)
1ср
Рис. 3.10
где ц,ш - в мм/(рад-с-1).
Чтобы определить полное значение угловой
скорости, необходимо найти положение оси абсцисс
ф** графика со1(ф1). Для этого через середину
отрезка, изображающего разность (o)imax - colmin) и
равного разности ординат точек Q и N(cm. рис. 3.8),
проводят горизонтальную штриховую линию,
которая является линией средней угловой скоро-
40
сти со1ср. Расстояние до нее от оси абсцисс cpj
определяют по формуле
Лиф = Ю1срМю- (3.44)
Получив положение оси абсцисс ф** на графике
О)! и зная масштаб ц,ю, можно определить угловую
скорость в начальном положении механизма со1нач
и затем по формуле (3.33) — кинетическую
энергию механизма в начальном положении:
2
Используя зависимость (3.19), находят значение
угловой скорости начального звена со1(ф|) в
каждом положении ф! на всем интервале изменения
обобщенной координаты Афц.
Угловое ускорение главного вала е^ф}) в
каждом положении можно рассчитать по формуле (3.21)
или (3.34) либо получить графически
дифференцированием графика a>i(9i).
Таким образом, задача динамики по
определению закона движения динамической модели и,
следовательно, начального звена механизма решена.
Законы движения остальных звеньев могут быть
определены методом планов или рассчитаны по
формулам:
Необходимо учитывать, что знак функции Е^ф])
зависит от направления вектора угловой скорости,
например, при отрицательном значении вектор
углового ускорения Е\ противоположен вектору ©j.
Это уточнение необходимо иметь в виду в случае
вращения главного вала по ходу часовой стрелки —
отрицательное значение ускорения соответствует
его фактическому направлению против хода
часовой стрелки. В формулах (3.45) значение £\(<p{)
подставляют со знаком, согласно формальному
правилу: положительными считают величины coj и £1?
если они направлены против хода часовой стрелки.
3.4. Последовательность определения закона
движения механизма
3.4.1. Указания к выполнению первого листа
курсового проекта
Реальный механизм с начальным вращающимся
звеном следует заменить одномассовой
динамической моделью. Последовательность дальнейших
действий будет зависеть от того, работает ли
механизм в переходном или в установившемся режиме.
Этапы выполнения первого листа курсового
проекта (первые шесть пунктов относятся к
переходному и установившемуся движению механизма).
1. Определить недостающие размеры звеньев
механизма по исходным данным.
2. На листе построить в масштабе схему
механизма. Угол поворота начального звена за цикл
работы механизма разбить на требуемое число
равных частей. Построить схему механизма во всех
положениях.
3. Определить передаточные функции
исследуемого механизма с помощью соответствующих
программ или построив для каждого из положений
механизма план возможных скоростей.
4. Построить заданную индикаторную
диаграмму р [5(ф)] для поршневой машины и график сил
F[S(<p)]9 действующих на соответствующее звено
(ползун, поршень, коромысло и др.).
5. Построить графики приведенных моментов
движущих сил Мдпр(ф), сил сопротивления Мспр(ф) и
сил тяжести М^Р(ф) как функции обобщенной
координаты ф.
6. Построить графики ./пр(ф) переменных
приведенных моментов инерции второй группы
звеньев ^р(ф) и график Е^"р(ф) их суммы для
многоцилиндровых машин.
Далее пункты пронумерованы для переходных
режимов движения — с буквой «п», для
установившегося движения — с буквой «у».
Переходный режим
7п. Построить график суммарного
приведенного момента М^р(ф) с учетом всех действующих
сил.
8п. Путем интегрирования графика суммарного
приведенного момента М^р(ф) построить график
суммарной работы ^(ф).
9п. Для каждого из положений механизма
определить суммарный приведенный момент инерции
У£р(ф) = Jjnp + J^ (построение графика ^р см.
п. 6; /jnp = const определяют по исходным данным
проекта).
10п. По заданным начальным условиям (фнач и
сонач) найти начальную кинетическую энергию Гнач
по формуле (3.33).
11 п. Для каждого из положений механизма по
формуле (3.30) подсчитать угловую скорость и
построить график Щ{<$\).
12п. В каждом из положений механизма
определить угловое ускорение б по формуле (3.34) и
построить график £j^i).
13п. Построить график /(Ф1).
41
Установившийся режим
7у. Построить график суммарного
приведенного момента M^p((pj) (без учета потенциальных сил).
8у. После интегрирования графика суммарного
приведенного момента М^(ух) найти Мд (или Мс)
для обеспечения установившегося движения.
9у. Найти суммарный приведенный момент
M^p(9j) с учетом потенциальных сил и
найденного Мд (или Мс), путем интегрирования графика
суммарного приведенного момента М~Р((рх)
построить график суммарной работы ^(cpi).
10у. Выполнить переход от графика А^((рх) к
графику кинетической энергии всего механизма T(q>*).
Ну. Выполнить переход от графика J\\(<P\) к
приближенному графику Ги(ф1) кинетической энергии
второй группы звеньев.
12у. Построить график ^(ф*) кинетической
энергии первой группы звеньев.
13у. Определить по формулам (3.36)
необходимый момент инерции маховых масс .Лпр, по
формулам (3.42) — момент инерции дополнительной
маховой массы (маховика) JRon и найти размеры
маховика.
14у. Выполнить переход от графика Тх (ф*) к
приближенному графику со(ф]) угловой скорости
начального звена.
Результаты расчета параметров необходимо
свести в таблицу (и включить в расчетно-пояснительную
записку). На каждом графике выполняемого листа
должна быть построена шкала. Графики должны
быть оформлены в соответствии с ГОСТ 3.319-81,
ГОСТ 3.317-80. Примеры выполнения листов
курсового проекта для различных машин приведены в
приложении 7. На них изображены результаты
динамических исследований как установившегося, так
и переходного режимов работы для транспортной
машины с двигателем внутреннего сгорания,
упаковочного автомата, брикетировочного пресса с
электрическим приводом и др.
3.4.2. Пример проектирования и выполнения
первого листа курсового проекта
Для машинного агрегата (рис. 3.11, г),
состоящего из одноцилиндрового вертикального
поршневого компрессора, кривошипно-ползунного
механизма и электрического двигателя, определяют при
установившемся режиме работы необходимый
момент инерции <Лпр маховых масс и закон движения
механизма (см. рис. 3.1, ж). Исходные данные
приведены в табл. 3.1.
Ниже приведена последовательность
выполнения первого листа с использованием графических
методов.
1. Синтез механизма. Согласно формулам (1.1),
(1.2) длина кривошипа 1Х - vcp/(4tfj) = 3,20/(4-10) =
= 0,080 м, по заданному соотношению ljl2 = 4,0
находят длину шатуна /2 = 4/\ = 0,080 -4 = 0,320 м.
2. Построение схемы механизма (см. рис. 3.11, а),
масштаб [is, мм/м. Отрезок АВ = lx\is = 64 мм,
тогда \is = 64/0,080 = 800 мм/м; отрезок ВС = l2\xs =
= 0,320-800 = 256 мм. Угол поворота начального
звена разбивают на 24 равных интервала по 15° (на
схеме номера позиций проставлены через 30°).
Отсчет угла поворота cpj проводят от вертикальной
оси, когда поршень (звено 3) находится в верхней
мертвой точке (ВМТ).
3. Вычисление передаточных функций с
использованием программы AR2u для определения
кинематических характеристик
кривошипно-ползунного центрального механизма. В расчетно-пояснитель-
ной записке необходимо привести таблицы входных
и выходных данных. Графики vqC(<Pi) и и2\(ц>\)
строят в соответствующих масштабах (рис. 3.11, в).
4. Построение индикаторной диаграммы
(рис. 3.11, б) по заданной таблице значений
давления в цилиндре компрессора (табл. 3.2).
Максимальный ход поршня h3\is на листе делят на 10
интервалов. В каждой точке деления строят ординату
диаграммы, задавшись максимальной ординатой,
которая для рассматриваемого примера равна
100 мм. Тогда в относительном положении поршня
Sc/h3 = 0,6 (где Sc — текущее положение поршня 3),
Таблица 3. J
Исходные данные
Средняя скорость vcp поршня
Отношение длины /2 шатуна 2 к длине 1х
кривошипа /, Х2 = 12Н\
Относительное положение центра масс XSl
шатуна 2 (XS2 = lBS2/l2)
Диаметр d цилиндра
Частота вращения пх коленчатого вала
Максимальное давление ртах в цилиндре
Масса т2 шатуна 2
Масса т3 поршня 3
Момент инерции J2S шатуна 2
относительно оси, проходящей через центр масс
Момент инерции J]A коленчатого вала (без
маховика)
Момент инерции Урот ротора
электрического двигателя
Момент инерции J^ муфты редуктора
зубчатой передачи, приведенный к звену 7
Коэффициент 5 неравномерности вращения
Значение
20 м/с
4,0
0,33
0,20 м
12 с"1
0,5 МПа
8 кг
10 кг
0,22 кгм2
0,25 кгм2
0,023 гм2
0,55 кгм2
1/40
42
\l$ = 800 мм/м
,
h
'
2410
QS31
Л
й!
18/<
16/ «
/l4
2 J
s2f
/ J^<
в/С/\
18f
16чД
14^*
Д
>6
•8
Iе!
12
0
A, Si
■^yp
2 ^
\4
v8
10
Цр = 0,2 мм/кПа
0 200 400 P, кПа
12
Цу= 1,5-10 мм/кгм |Li7'=0,76 мм/Дж
«Ль
0,12f
ГПР 2
Уц» КГ-М
^ьДж
Н200
Н юо
я/2 я Зя/2 фьрад
I!© = 38 мм/рад
з
д
Л^ДВ
го L
ШДВ
КМ
зп
пм
зп
птттп м
Iх
fi\.
шла —■1
ИМ
VqO
0,08
0,04
0
-0,04
-0,08
-o,ioi
м
УдС
-
\1м= ЮОмм
^спр, кН-
м
uv =0,8 мм/м
и
1 1 1 I i
, /, \я А , 2я
^-°^\-
\1и= 19,1 мм/рад
21
0,2
-0,2
в
/(кНм) Цф = 38,2 мм/рад
£3 0,25
0
-0,25
-0,50
-0,75
-1,00
/i
дер
я/3 2я/3 я
/
МспРр
\lM= ЮОмм/кНм
Mznp, кНм
цф = 38,2 мм/рад
4я/3 5я/3
я/3 2я/3
Цл = 0,095 мм/Дж jLio = 37,5 мм/рад |
А;Т,Дж ГКф?)
/®1(ФГ)
1X05 = 38,2 мм/рад
Цд/ = 100мм/(кНм)
Рис. 3.11
текущее значение ординаты Ю0р/ртах = 100-0,18 =
= 18 мм. Значениер/ртах выбирают из табл. 3.2 для
Sc/h3 = 0,6 при ходе поршня вверх (при этом в
цилиндре компрессора происходит сжатие воздуха).
Затем вычисляют масштаб индикаторной
диаграммы: /?тах = 0,5 МПа = 5000 кПа. Тогда \ip =
= 100/500 = 0,2 мм/кПа, где 100 мм — выбранная
ордината на чертеже, соответствующая ртах (табл. 3.2).
Для определения силы давления Fc на поршень
необходимо давление умножить на площадь
поршня. При построении графика силы, действующей
на поршень, ординаты этого графика принимают
43
равными ординатам индикаторной диаграммы.
Тогда масштаб силы можно определить по формуле
[iF = \ip/Sn = 0,2/0,0314 = 6,37 мм/кН,
где площадь поршня 5П = nd2/4 = я-0,22/4 =
= 0,0314 м2.
Положительные значения силы FR соответствуют
положительному знаку работы этой силы, а
отрицательные — отрицательному знаку. Таблицу значений
FR приводят в расчетно-пояснительной записке.
5. Построение графиков приведенных моментов.
Для определения закона движения механизма
заменяют реальный механизм его одномассовой
динамической моделью и находят приложенный к ее
звену суммарный приведенный момент
М£Р = Мспр + МдпР.
Приведенный момент М "р, заменяющий силу
сопротивления Fc, определяют в каждом положении
механизма по формуле (3.23):
^cnp = ^cV^Ccos(Fc,vcC).
Силу Fc выбирают по таблице или находят по
индикаторной диаграмме (после ее интерполяции):
где yFi = ypi — ордината с индикаторной
диаграммы, мм; \\,F — масштаб сил, мм/кН.
Для построения графика Mj^cpj) (рис. 3.11, ё)
определяют ординаты ум с шагом Aq>j = 30°
(табл. 3.3).
Масштаб по оси ординат графика Mcnp((pj)
находят, назначая (ум)тах = Ю4,15 мм. Тогда \1М =
= ШтЛМспр)тах = 104,15/1,0415 = 100 мм/(кН-м).
Масштаб по оси абсцисс цф = 240/(2я) =
= 38,2 мм/рад. Здесь 240 мм — выбранная база
графика, а угол поворота cpj звена 1 за цикл равен 2л рад.
Результирующий график приведен на рис. 3.11, д.
Приведенный момент движущих сил М^{(^х) =
= const определяют из условия, что при
установившемся движении \АД\ = \АС\ за цикл; работа \АСЦ\
пропорциональна площади fc =/j - f2 (в квадратных
миллиметрах) под кривой М^((рх). Тогда
M^ = \fc\[iM^2n = 3190/(100-38,2-6,28) =
= 0,133 кНм.
Приведенным моментом М^ сил тяжести G2
звена 2 пренебрегают, так как он мал по сравнению с
моментом М"р (табл. 3.3).
6. Построение графика суммарного
приведенного момента М^((р{). С учетом знака
суммируют ординаты графиков M^cpj) и Mcnp(9j) (см.
рис. 3.11, д).
7. Определение суммарной работы ^((Pi):
ф
АТ = j M?d<b.
Фнач
График ^x((Pi) (см. рис. 3.11, ж) строят методом
графического интегрирования графика M^cpj),
выбирая отрезок интегрирования К = 40 мм. В конце
цикла установившегося движения суммарная ра-
Таблица 3.2
Наименование величины
Относительное перемещение
поршня (в долях хода К)
Давление воздуха А,,- (в долях
Лпах) ПРИ движении поршня:
вверх
вниз*
Расчетная формула
Sc/h3
\=Р/Ртю.
Значение
0
1
1
0,1
1
0,30
0,2
1
0
0,3
0,58
0
0,4
0,38
0
0,5
0,26
0
0,6
0,18
0
0,7
0,12
0
0,8
0,08
0
0,9
0,04
0
1,0
0,0
о
Направление отсчета относительного положения поршня — от ВМТ вниз.
Таблица 3.3
Параметр
V
Ур, ММ
Fc,kH
Мс"р, кНм
ум,ът
Значение угла поворота ф1? град
0
0
0
0
20
50
80
40
70
0
20
30
15
5
Позиция
0
0
0
5,69
0
—
2
0,487
5
0,49
0,267
26,7
4
0,782
-
-
—
—
6
0,800
—
—
—
—
8
0,604
-
-
—
-
10
0,313
-
—
—
-
12
—
-
—
-
—
14
0,313
—
0,47
0,015
1,5
16
0,604
—
0,25
0,076
7,6
18
0,800
1
0,39
0,263
26,3
20
0,782
0
0,41
0,736
73,6
22
0,487
00
5,69
0,764
76,4
23
0,667
00
5,69
1,047
104,7
24
0,257
7
10,52
0,270
7,0
44
бота всех сил равна нулю, А% = 0. Масштаб
графика ^(cpi) по оси ординат \iA = \iM[i^/K =
= 95,5 мм/кДж = 0,0955 мм/Дж.
8. Построение графика переменных (рис. 3.11, з)
приведенных моментов инерции JJJP второй
группы звеньев выполняют с помощью формул (3.25)-
(3.27), используя полученные значения
передаточных функций.
В механизме компрессора во вторую группу
звеньев входят звено 3 — поршень и звено 2 — шатун.
Приведенные моменты инерции этих звеньев
определяют по следующим формулам:
Рекомендуется зависимость */"р(ф0 строить с
более мелким шагом Acpj = 15°. Результаты
расчетов сводят в таблицу. Отдельно строят зависимо-
ста У3ПР(Ф,), ^(ФО, ЛПвР(Ф1) и их сумму j£P(<Pi)-
Масштаб по оси ординат \ij (мм/(кг-м2)) выбирают
из удобства построения. В рассматриваемом
примере при ф! = 90° (положение 6) У3пр = 0,064 кг-м2.
В положении 6 механизма ордината графика
73пр = 96 мм. Тогда \ij = y"p/J3np = 96/0,064 =
= 1,5-103мм/(кг-м2).
9. Построение графика полной кинетической
энергии всего механизма Г(ф*) проводят по
зависимости Т=А<£ + Гнач.
10. Построение графика кинетической энергии
Гп(ф!) (приближенного) второй группы звеньев (см.
рис. 3.11, з). По формуле (3.40) пересчитывают
масштаб построенного графика ^"р(ф1):
|ir= 2\ij/(02lcp = 2 • 1,5 • 103/62,8 = 0,76 мм/Дж;
со1ср = 2кпх = 6,28 • 10 = 62,8 рад/с.
11. Построение графика кинетической энергии
Г^ф*) первой группы звеньев (приближенного)
(см. рис. 3.11, ж) осуществляют по уравнению
(3.37), Тх-Т- Ти. В каждом положении
механизма из ординат кривой Дф*) вычитают ординаты
J>ii0WMt)> равные значениям Tu\iA в
соответствующих положениях механизма. Ординаты j>n берут
с графика 7'11(ф1):
^/|иг= 0,0955/0,76 = 0ДЗ.
Далее составляют таблицу вычитаемых отрезков
(табл. 3.4) и строят график (см. рис. 3.11, ж).
12. Определение необходимого момента инерции
маховых масс </jnp по формуле (3.36).
Максимальное изменение (Д^)^ за период цикла находят из
графика Тх (см. рис. 3.11, ж), т. е.
^Imax " ^Imin = (АУп)нб/^ = 59/0,0955 = 617,8 ДЖ.
Таблица ЗА
Позиция
0; 12; 24
2; 22
4; 20
6; 18
8; 16
10; 14
Длина отрезка, мм
Уи
56
93
155
162,5
116
73,5
У\№л1\*-т
10,7
17,7
29,4
30,8
22
14
Тогда
Jf* = (АГ^нб /(со?ср8) = 617,8 • 40/(62,82 • 1) =
= 6,28 кг-м2.
Момент инерции дополнительной маховой
массы с/доп определяют по формуле (3.42):
«^доп = J\ ~~ ^Лр = J\ ~ \J\S + ^рот + ^ред ) =
= 6,26 - (0,25 + 0,53 + 0,55) = 4,93 кг-м2,
где i/pPT — приведенный момент инерции ротора
электрического двигателя:
ЛПоРт = </рот"ред =0>023.4,82 = 0,53 кг-м2.
13. Построение графика (приближенного)
угловой скорости ©i(<p**) выполняют по графику Г^ф*)
(см. рис. 3.11, ж), для чего определяют масштаб
угловой скорости по формуле (3.43):
Ш) = )1л ^inPc°icp = 0,0955 ■ 6,26 • 62,8 =
= 37,54 мм/(рад-с-1).
Расстояние от линии со1ср до оси абсцисс
находят по формуле (3.44):
JVp = ^lcp Мхо = 62>8 * 37>54 = 2357,5 мм.
В приложении 7 (лист 7) приведен пример
анализа динамики инерционного конвейера, не
описанного подробно в настоящем пособии, но с
методикой выполнения которого можно ознакомиться в
учебной литературе, посвященной инерционным
транспортерам (см.: Решение задач динамики для
инерционных транспортеров / Под ред. А.К.
Мусатова. М., 2003).
3.5. Выбор электрического двигателя
и анализ влияния его механической
характеристики на движение механизма
При определении закона движения начального
звена механизма и расчете маховых масс по методу
Мерцалова исходят из предположения, что силы
сопротивления и движущие силы зависят только от
приведенного момента движущих сил, который
считают постоянным и равным его среднему за цикл
45
значению. Однако механические характеристики
электрических асинхронных и ряда других
двигателей не обеспечивают выполнение этого условия,
так как движущий момент Мдв на валу ротора
электрического двигателя изменяется с изменением
частоты п его вращения (рис. 3.12, а). Поэтому
решение, найденное по методу Мерцалова, следует
считать только первым приближением. Для всех
машинных агрегатов, в которых источником
движения является электрический двигатель,
необходимо подобрать тип двигателя по каталогу
(справочнику) или с помощью приложения 8.
Расчеты начинают с определения работы Ас ц
заданных сил сопротивления на выходном звене
механизма за цикл установившегося движения:
при поступательном движении звена
Acn = \FcdS,
о
при вращательном движении
Асц= $ Mcdq>.
При вычислении интеграла работу Ас ц
представляют, как правило, в виде суммы работ при рабочем
Арх и вспомогательном Авх ходах:
Лц=^р.х+Л.х«
Во многих частных случаях работу Ас ц
вычисляют по следующим соотношениям:
а) сила сопротивления Fc, приложенная к
ползуну, постоянна при прямом и обратных ходах:
Лц = Апр.х + ^*обр.х = Fc * 2Йо
где hc — ход ползуна;
б) сила сопротивления Fc постоянна при прямом
ходе и равна нулю при обратном:
в) сила сопротивления Fc постоянна на части
прямого хода длиной / и равна нулю на остальном
перемещении:
А —А — L? /.
лс ц ^пр.х L с*'
г) сила сопротивления Fc постоянна на части
прямого хода длиной /, сила трения FT постоянна
при рабочем и холостом ходах:
Acn = Anp.x+Ao6p.x=Fcl + FT'2hC>
д) силы сопротивления Fpx и Fxx постоянны
соответственно при рабочем и холостом ходах:
А — А + А г —
^с ц ^пр.х ^обр.х
= Fnp.xhC +^0бр.хЛО
е) сила сопротивления на части хода длиной /
изменяется линейно в пределах от F* до F**:
^q = 0,5(Fc*+F**)/;
ж) момент Мс сил сопротивления постоянен при
повороте звена 1 (см. рис. 3.11, а):
Асц = Мс(р],
где ф* — угол поворота, рад;
з) сила сопротивления задана в виде графика
(F5c, S5) силы, приложенной, например, к звену 5:
Лц=/с/^М>
где /с — площадь под кривой F5c(55), mm2; \iF —
масштаб силы F5c, мм/Н; \is — масштаб
перемещений S5, мм/м.
Для рассматриваемого одноцилиндрового
поршневого компрессора (см. рис. 3.11) механическая
характеристика задана в виде индикаторной
диаграммы P(SC) (см. рис. 3.11, б). Площадь диаграммы
пропорциональна затраченной работе.
Средняя мощность рабочей машины
^ср "~ ^с ц / * ц ~~ ^с ц ^ 1'
где пх — заданная частота вращения кривошипа 7,
с"1. После выбора электрического двигателя по
мощности частоту пх необходимо уточнить.
Для определения необходимой мощности
электрического двигателя нужно рассчитать
коэффициент полезного действия привода (включающего
зубчатые, ременные, цепные передачи, планетарный
редуктор, муфты, подшипники). Ниже приведены
ориентировочные значения КПД различных
элементов привода:
Элемент привода КПД
Одноступенчатая цилиндрическая
зубчатая передача 0,96-0,98
Однорядный планетарный редуктор ... 0,9-0,95
Двухрядный планетарный редуктор
со смешанным зацеплением 0,85-0,9
Ременная передача 0,94-0,95
Цепная передача 0,93-0,95
Пара подшипников качения 0,99
Упругая соединительная муфта 0,98
При последовательном соединении элементов
привода общий КПД определяют как произведение
КПД отдельных элементов.
В рассматриваемом машинном агрегате (см.
рис. 3.11, г) привод вала компрессора (кривошипа 7)
включает однорядный планетарный редуктор (ПР)
и открытую зубчатую передачу (ЗП) (общее
передаточное отношение которых мд1 = nmjnx -
- wnpw3n = 4,8), а также две пары подшипников и
упругую муфту. Поэтому суммарный КПД привода
здесь рассчитывают по формуле
Ле ^ПРЛзпЛподЛмуф*
Лх = 0,93 • 0,96 • 0,992 • 0,98 = 0,86.
При определении закона движения вала
компрессора в рассматриваемом примере не учитывались
силы трения в кинематических парах рычажного
46
механизма, поэтому КПД кривошипно-ползунного
механизма принимают равным единице. Кроме того,
не учитывалась передача мощности кулачковому
механизму (КМ) и зубчатой передаче.
Далее определяют мощность электрического
двигателя Рдв>Рср/лД1.
Электрический двигатель выбирают по каталогу
или по таблицам приложения 8. Рекомендуется
применять асинхронные двигатели с короткозамкнутым
ротором как наиболее надежные и экономичные.
В большинстве заданий на курсовой проект
указаны параметры электрических двигателей:
частота вращения ротора, момент инерции (или маховой
момент) ротора. Однако эти данные
ориентировочные и их следует уточнить и привести в
соответствие с параметрами выбираемого двигателя. Для
его подбора задаются синхронной частотой
вращения ротора (750, 1000, 1500, 3000 об/мин) и
используют найденную выше его минимально
необходимую мощность.
Единая серия асинхронных электрических
двигателей 4А предусматривает пределы мощности от
0,06 до 400 кВт. Двигатели выполняют со
стандартным скольжением (4А), с повышенным пусковым
моментом (4АР) или с повышенным скольжением
(4АС). Они обладают разными свойствами. Так,
движущий момент на валу двигателя с
повышенным скольжением (при одном и том же
коэффициенте неравномерности вращения) изменяется
меньше, чем у двигателей серии 4А.
В каталоге указаны синхронная псии и
номинальная пном частоты вращения, номинальная
мощность Рдв, относительные значения пускового,
критического и номинального крутящих моментов,
^п = Кус/Ком> ^кР = М™х/Мюм> * также маховой
момент ротора mZ) , с помощью которых можно
найти соответственно пусковой и максимальный
(опрокидывающий) моменты.
Синхронную частоту вращения исин ротора
подбираемого двигателя находят из соотношения
«син>«1"д1-
Здесь пх — заданная приближенная частота
вращения кривошипа 1.
По каталогу выбирают асинхронный трехфазный
электрический двигатель единой серии 4А с
повышенным скольжением. Для рассматриваемого
примера это двигатель 4АС132М2УЗ, его номинальная
мощность Рдв =11 кВт, синхронная частота
вращения псин= 3000 об/мин, номинальная частота
вращения пном = 2840 об/мин; А^ = 2; А,кр = 2,4;
маховой момент ротора mD2 = 0,09 кг • м2.
Перечисленные параметры двигателя позволяют
рассчитать угловую скорость при номинальной
мощности
Юдвном = яяном/30 = л-2840/30 = 297,25 рад/с;
номинальный движущий момент
Кш = Рдв/С0дв ном = 11 000/297,25 = 37,01 Н • м;
пусковой момент
Мпус = ?1ПМН0М = 2-37,01= 74,02 Н-м;
критический (максимальный) момент
КР = КрМНш = 2,4-37,01 = 88,82 Нм;
момент инерции ротора
Урот = 0,25 mD2 = 0,25 • 0,9 = 0,0225 кг • м2
и построить механическую характеристику ядв(Мдв)
двигателя 4АС80А6УЗ (рис. 3.12, а).
При построении механической характеристики
участок кривой, примыкающий к точке с
номинальными параметрами ином AfH0M, приближенно
можно заменить отрезком прямой линии (второй
участок кривой от Мпус до Мкр также допускается
заменить отрезком прямой).
Параметры динамической модели механизма
уточняют, используя построенную механическую
характеристику двигателя (см. рис. 3.12, а).
Сначала, учитывая передаточное отношение привода
Иц1 = Лдв/hj = 4,8 и его КПД (г| = 0,86), строят при-
ядв, об/мин
со да, рад /с
О
мном мпус л/кр мдв,н-м о мд% мдпнР0М
а б
Рис. 3.12
MJPH-m
47
веденную механическую характеристику
двигателя, т. е. зависимость щ(М^р) (см. рис. 3.11, ж). С
этой целью рассчитывают синхронную угловую
скорость звена приведения (и кривошипа 1)
со
1син
= Юдвсин/Идв! = Я"син/(3(Чв1) =
идвсин/мдв1 IXtncim'\Dy3UwbV
= 71-3000/(30-4,8) = 65,42 рад/с
и номинальную угловую скорость звена приведения
^lHOM = Юдвном/Идв! = 297,25/4,8 = 61,93 рад/с;
находят приведенный номинальный движущий
момент
7К/ДНОМ iK/HOM ДВ1 Л1
= 31,01-4,8-0,86= 152,78 Н-м;
приведенный пусковой момент
Кпус = KMZm = 2-152,78 = 305,56 Н-м;
приведенный критический (максимальный) момент
ОДах = \РМДПНР0М = 2,4-152,78 = 366,7 Н-м.
Среднее значение приведенного движущего
момента
ЛСРР = ЛЛ? (3-46)
сравнивают для проверки со значением Мдпр,
найденным в разд. 3.3.
Далее по рассчитанным выше значениям
параметров сосин, соном, Мдпром, Мдпрус и Мдпрах строят
приведенную механическую характеристику двигателя
(рис. 3.12, б), находят среднюю угловую скорость
w-Пр
т д ном _ СОсин - 0)ном
мпр
^дср
(3.47)
Юсин-Юср
152,78 = 65,42-61,93
133,6 " 65,42-ш(
, соср = 62,37 рад/с
ср
и частоту пх вращения кривошипа
^=00^/(271).
Согласно формуле (3.47)
«1=62,37/(2тс) = 9,93с"1
(в исходных данных было задано п± = 10,1 с-1).
На графике содв(Мдпр) отмечают наибольшее
изменение угловой скорости (Асо)нб, которое
определяют по формуле (Асо)нб = 8соср; (Дсо)нб =
= 1/(40-62,37) = 1,56 рад/с, и соответствующее
наибольшее изменение приведенного движущего
момента (Мдпр)нб при работе машины с заданным
коэффициентом неравномерности 6 вращения
кривошипа 1. При этом необходимо провести проверку
условия
Ю1тах<Юсин> (3.48)
где со1тах — максимальная угловая скорость
кривошипа, определяемая из соотношения
Wimax = ttlcpO+5/2).
Если условие (3.48) не выполняется, то следует
либо уменьшить заданный коэффициент 8, либо
выбрать электродвигатель с другой механической
характеристикой (с большим скольжением).
Найденные по формуле (3.48) числовые
значения со1тах можно использовать для уточненных
расчетов движущего момента.
Используя ось C0j графика 0)2(9!**), повторяют
построение приведенной механической
характеристики двигателя (см. рис. 3.11, ж) (01(А/Дпр) в
масштабах ili^ и \х,м от C0iCHH до соном. При этом график
(Oi(M^) располагают так относительно графика
oe>i((Pi ), чтобы оси coj совпадали.
Ординату точки оо1син на оси coj (см. рис. 3.11, ж)
находят, пользуясь масштабом |Д,С0, или
рассчитывают длину отрезка оси от со х ср до со х син:
М©1 син " Щ сР) = 37,82(65,42 - 62,37) =
= 115,35 мм.
Ординату Цд/Мд^р графика M$p(<pi)9
построенного на рис. 3.12, б штриховыми линиями,
откладывают по горизонтали на уровне щ ср (см.
рис. 3.11, ж:) и таким образом получают точку
^дПр(Фь ю1)> которую соединяют прямой линией с
точкой C0j СИН. Фактически на рис. 3.11, ж построен
линеаризованный участок приведенной рабочей
характеристики двигателя.
Текущие значения приведенного движущего
момента М^ср^ со^ определяют графически,
используя построенный на рис. 3.11, ж график щ(М^р).
Для этого проводят горизонтальные прямые через
точки графика со^ф**) до пересечения с графиком
механической характеристики и определяют
отрезки Цл/МцПр для каждой позиции механизма.
По этим отрезкам графически можно построить
зависимость M^cpj), которая будет отличаться от
значения Мдпр = const, принятого ранее в
динамических расчетах. Девиация значения движущего
момента обычно невелика и в ее интегрировании для
получения «уточненного» закона движения нет
необходимости.
В приложении 7 (листы 5, 6) приведены
примеры проектирования станков в установившемся
режиме движения с разными законами изменения сил
производственного сопротивления.
4. СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
При проектировании механизма необходимо
знать внешние силы и моменты, действующие на
его звенья, а также внутренние силовые факторы —
реакции связей — в кинематических парах. Чтобы
определить внутренние силы, проводят силовой
расчет механизма, по результатам которого
выполняют расчеты деталей и узлов машины на прочность,
жесткость и износ, подшипников качения и
скольжения и выбирают вид смазки и места ее подвода,
а также выполняют другие проектные и
проверочные расчеты.
В кинематических парах реакции связи
вычисляют с помощью уравнений статики для
механической системы, основываясь на принципе Д'Алам-
бера. При этом рассматривают только идеальные
кинематические пары, т. е. считают, что трение в
парах отсутствует. Методика проведения силового
расчета в курсе теории механизмов и машин
отличается от методики, принятой в курсе
теоретической механики, главным образом системой
упрощений, связанных с учетом конкретных особенностей
структурной схемы механизма.
4.1. Силы, действующие в кинематических
парах плоского механизма
Вращательная кинематическая пара. Связь,
наложенная на относительное движение звеньев / и у
(рис. 4.1, а), допускает их вращение (со,у)
относительно направляющей пары В и запрещает
относительное поступательное движение звеньев. Рассмат-
Рис. 4.1
ривая звено i в условиях равновесия (рис. 4.1, б),
удаляют связь и заменяют ее реакцией R^-.
При силовом расчете механизма с вращательной
кинематической парой определяют модуль вектора
реакции | R,y1 и его направление в выбранной
системе координат. Точка приложения силы известна —
геометрический центр кинематической
вращательной пары. При необходимости можно найти и
проекции вектора реакции R^ на оси координат.
Число связей псв во вращательной
кинематической паре и, следовательно, число неизвестных
скалярных величин при ее силовом расчете равно двум,
"ев = 2.
Поступательная кинематическая пара. Связи,
наложенные на относительное движение звеньев i
и у (рис. 4.2, а), допускают только их
относительное поступательное движение (v^) вдоль
направляющей поступательной пары А и запрещают их
относительное поступательное движение
перпендикулярно оси направляющей пары и их
относительное вращение. Рассматривая звено / в условиях
равновесия (рис. 4.2, б), удаляют связь и заменяют ее
реакцией Щ и реактивным моментом Мц.
Рис. 4.2
При силовом расчете механизма с
поступательной парой определяют модуль вектора реакции | Ry \
и реактивный момент 1VL-. Направление вектора
реакции Щ известно — по нормали к
контактирующим поверхностям звеньев, т. е. по нормали к на-
49
правляющей поступательной пары А. Иногда
вместо реактивного момента определяют плечо hi
приложения реакции, которое отсчитывают вдоль
направляющей поступательной пары от точки Ап
основания перпендикуляра, опущенного из центра
вращательной пары В этого же звена i на
направляющую поступательной пары А, или от точки
пересечения направляющих двух поступательных пар.
Иными словами, реакцию R^ и реактивный момент
Му можно заменить одной силой — реакцией R*,
приложенной в точке А*, которая смещена на
расстояние ht от точки Ап.
Число связей псъ в поступательной
кинематической паре и, следовательно, число неизвестных
скалярных величин при ее силовом расчете равно двум,
псв = 2.
Высшая кинематическая пара. Связи,
наложенные на относительное движение звеньев / и j
(рис. 4.3), запрещают движение звеньев в
направлении нормали п к контактирующим поверхностям,
допуская относительное движение звеньев (vfy)
вдоль касательной t и относительное вращение (cozy).
Рассматривая равновесие звена / (рис. 4.3, б),
удаляют связь и заменяют ее реакцией Кл.
а б
Рис. 4.3
При силовом анализе механизмов с высшей
кинематической парой определяют только модуль
вектора реакции |R,y |. Точка приложения силы
известна — точка Сп контакта рабочих профилей
кинематической пары С, кроме того, известно направление
вектора силы — нормаль пп контакта к профилям.
Число связей псв в высшей кинематической паре
и, следовательно, число неизвестных скалярных
величин при ее силовом расчете равно единице, псв = 1.
4.2. Виды и этапы силового расчета
Задачей силового расчета исследуемого
механизма при известных внешних силах, моментах,
кинематических характеристиках, а также
известном законе движения является определение
реакций в кинематических парах механизма и
уравновешивающей силы или момента (управляющее
силовое воздействие).
Виды силового расчета:
статический — для механизмов, находящихся в
покое или движущихся с малыми скоростями, когда
инерционные силы пренебрежимо малы, а также в
случаях, когда массы и моменты инерции звеньев
механизма не известны (что возможно на начальных
этапах проектирования). Уравнения статического
равновесия составляют для каждого звена:
i(F/+R/) = 0;
Ып (4Л)
t[M/+M(R|.)] = 0,
/=i
где F; — внешние силы, приложенные к звеньям
механизма; М/ — внешние моменты сил, приложенные
к звеньям; R, — реакции в кинематических парах
звена; M(R,) — момент реакции и связей в
кинематических парах; п — число подвижных звеньев;
кинетостатический — для движущихся
механизмов при известных массах и моментах инерции
звеньев, когда пренебрежение инерционными
силами приводит к существенным погрешностям.
Уравнения кинетостатического равновесия:
i(F/+R/+O/) = 0;
^ (4.2)
2[М1.+М(К1.) + М(^) + Мф/] = 0,
1=1
где Ф; — главный вектор сил инерции звеньев;
М(Ф/) — момент от главного вектора сил инерции;
Мф/ — главный момент сил инерции звена;
кинетостатический с учетом трения для
механизмов, у которых определены параметры трения в
парах и размеры элементов пар. При его
выполнении кроме коэффициентов трения необходимо
знать направления относительного движения в
кинематических парах и фактические размеры
вращательных пар (для нахождения кругов трения).
В настоящем учебном пособии этот вид расчета
не рассматривается.
Для определения числа неизвестных величин
при силовом расчете плоских механизмов и,
следовательно, числа необходимых уравнений,
предварительно проводят структурный анализ механизма,
чтобы установить число и класс кинематических
пар, число основных подвижностей механизма и
число избыточных связей. Для проведения
силового расчета с использованием только уравнений
кинетостатики необходимо устранить избыточные
связи. В противном случае система будет иметь
статическую неопределимость и для ее раскрытия
придется использовать дополнительные условия,
например, учитывать деформацию звеньев и т. п. Так
50
как каждая связь в кинематической паре механизма
соответствует одной компоненте вектора реакции,
то число неизвестных компонент реакций равно
суммарному числу связей исв, накладываемых
парами механизма. При числе степеней свободы
механизма W = 1 (системы с несколькими степенями
свободы в этом пособии не рассматриваются) к
системе уравнений с неизвестными параметрами
необходимо добавить уравновешивающую силу или
уравновешивающий момент. Поэтому суммарное
число неизвестных величин в силовом расчете
определяется суммой связей в кинематических парах
механизма и степенью его подвижности:
р
^н.вел = X «ев + W = 2Рнтш + /?высш +1, (4.3)
У=1
где AfH вел — число неизвестных величин при
силовом расчете; псв — число связей в кинематических
парах; рнизш и^высш — число низших и высших
кинематических пар в механизме соответственно.
Перед силовым расчетом проводят структурный
анализ механизма, выделяя при этом два этапа:
а) определение числа звеньев механизма,
количества и класса кинематических пар, определение
и устранение избыточных связей;
б) декомпозиция механизма на структурные
группы и первичный механизм (при W~ 1).
Далее силовой расчет выполняют в указанной
последовательности:
определяют все внешние силы и моменты,
включая силы тяжести, главные векторы и главные
моменты сил инерции, действующие на звенья;
составляют уравнения кинетостатики для
каждой выделенной группы и первичного механизма
(Ny = 3n);
решают уравнения и определяют неизвестные
реакции в кинематических парах.
По окончании силового расчета определяют
уравновешивающий момент на начальном звене или
уравновешивающую силу.
4.3. Силовой расчет кинематических групп
4.3.1. Группы Ассура
Важно отметить, что в качестве подсистемы для
силового расчета нельзя выбирать отдельное звено,
которое в любом замкнутом механизме входит по
крайней мере в две кинематические пары. Дело в
том, что при рассмотрении звена в условиях
равновесия необходимо определить четыре неизвестных
величины — по две в каждой низшей
кинематической паре, при этом для звена можно составить
только три независимых уравнения равновесия. В
связи с этим потребуется рассмотреть условия
равновесия других звеньев и решить более сложную
систему уравнений, однако тогда теряется смысл
декомпозиции как элемента упрощения решения.
В качестве подсистем при силовом расчете
удобно выбирать структурные кинематические
группы Ассура, так как они являются статически
определимыми механическими системами, т. е.
число неизвестных величин при определении
реакций в кинематических парах группы в точности
совпадает с числом уравнений равновесия для
элементов группы. Поэтому общая система
уравнений силового расчета распадается на подсистемы
меньшего порядка по числу групп Ассура. Так,
например, в двухповодковой кинематической
группе Ассура, имеющей три кинематические пары,
будет шесть неизвестных величин. Для каждого из
двух звеньев, входящих в группу, можно составить
три уравнения статического равновесия. Отсюда
и следует статическая определимость группы. В
заданиях к курсовому проектированию
представлены только простые рычажные механизмы, в
большинстве случаев состоящие только из двухповод-
ковых групп. Различают пять разновидностей
двухповодковых групп. Рассмотрим алгоритм
проведения силового расчета для каждого вида
двухповодковой группы.
4.3.2. Группа первого вида
Группа первого вида (ВВВ) имеет три
вращательные (В) пары (рис. 4.4). На рисунке показана
система внешних сил, действующих на каждое звено
группы: сумма всех внешних сил F, и Fy (главный
вектор), приложенных к звеньям / и у
соответственно; сумма внешних моментов М,- и My (главный
момент); главные векторы сил инерции Ф( и Фу,
приложенные в центрах масс S,- и Sj звеньев i и у;
главные моменты сил инерции Мф/ и Мфу. На рис. 4.4
отдельно выделены силы тяжести Gz и G, звеньев /
Рис. 4.4
51
и у, приложенные в соответствующих центрах масс
S; и Sj. Естественно, что при анализе реальных
механизмов некоторые силы могут отсутствовать или
быть пренебрежимо малы и поэтому их не
учитывают. Кроме того, показаны полцые реакции во
внешних кинематических парах группы 5 и Д
возникающие после выделения группы (после
отбрасывания звеньев кит, связанных с ней): реакция
R^ действующая на звено i со стороны
отброшенного звена к, и реакция R^, действующая на звено
у со стороны отброшенного звена т. Ясно, что
среди звеньев кит может быть стойка.
Последовательность расчета реакций в
кинематических парах группы первого вида определяется
системой уравнений
(ZM/)c=0=*Rjk,
(£M,)c=0=>R}OT,
(4.4)
S Fj+y = 0 => R"m, R"ik,
2f;.=o=>r&,
Здесь (ZMj)c и (ZMj)c — векторные суммы всех
внешних моментов, действующих на звенья i или у
соответственно, взятых относительно точки С;
£F/5 2F,-+y — векторные суммы всех сил.
Нижние индексы «/», «у» показывают, к какому
звену приложены силы; нижний индекс «/+/»
означает, что при суммировании сил рассматривается
совокупность обоих звеньев группы как единое
твердое тело, т. е. с использованием принципа
«отвердевания», принятого в теоретической механике.
Верхние индексы «т» и «и» обозначают проекции
полного вектора реакции на соответствующие оси
координат пит. Отсутствие верхнего индекса у
реакции Щ в последнем уравнении (4.4) показывает,
что в этом случае непосредственно определяется
полный вектор реакции, действующей на звено i со
стороны звенау.
Из четырех уравнений системы (4.4) последние
два — векторные, каждое из которых сводится к
двум уравнениям в проекциях, т. е. общее число
уравнений системы для расчетов равно шести. При
последовательном решении уравнений системы
(4.4) каждое из них определяет какую-либо
компоненту вектора реакции, показанную в уравнениях
после знака « =>». Это частный случай системы из
шести уравнений, решение которой
графоаналитически позволяет определить искомые реакции в
кинематических парах 5, С и D.
Следует сделать два важных замечания.
Во-первых, проекции реакций Rjm и Rik внешних пар В и
D группы являются проекциями не в абсолютной
системе координат (х, у), в которой определялись
функции положения пар и звеньев механизма, а
проекциями в локальной системе координат (и, т)
специального вида — ось п направлена вдоль
соответствующего звена, а ось т — перпендикулярно ему.
При таком расположении осей локальных систем
координат в каждом из первых двух уравнений
системы (4.4) остается только по одной неизвестной
величине — компоненте вектора реакции /?т,
поскольку компоненты Rn не дают момента и в уравнениях
не участвуют. Это и позволяет найти составляющие
реакций RT из уравнений моментов. Составляющие
реакций Rn, направленные вдоль звена, находятся из
третьего уравнения системы (4.4) — векторной
суммы всех сил, действующих на группу. Реакция Щ,
действующая между звеньями группы, в это
векторное уравнение не входит. При векторном
суммировании удобно располагать компоненты векторов Rx
и Rn рядом, что позволяет избежать лишних
дополнительных построений при определении полной
реакции R.
Во-вторых, рациональная последовательность
векторного суммирования в третьем уравнении
системы (4.4) позволяет избежать дополнительного
построения векторного многоугольника сил по
четвертому уравнению системы (4.4). Рациональная
последовательность заключается в том, что
вначале векторно суммируют все силы, действующие на
одно звено, и лишь затем суммируют силы,
действующие на другое. Если в многоугольнике сил
равновесия группы провести замыкающий вектор
сил, действующих только на одно звено, то он и
будет вектором реакции во внутренней
кинематической паре. Рассматривая только группу векторов,
относящихся к одному звену, по существу
имитируют четвертое уравнение системы (4.4), но без
фактического построения дополнительного
векторного многоугольника. Еще раз подчеркнем, что
дополнительное построение векторного
многоугольника можно избежать только в случае
рациональной последовательности суммирования векторов
сил. Например, для группы на рис. 4.4 такая
последовательность может иметь вид R^ + K]k + F( +
+ Ф + G + G +Ф +F - + R* + R" =0
4.3.3. Группа второго вида
Группа второго вида (ВВП) имеет одну
внешнюю поступательную (П) пару и две вращательные
(В) (рис. 4.5). Полная система внешних сил,
действующих на звенья / и у группы второго вида,
аналогична системе сил для группы первого вида (см.
рис. 4.4) и поэтому подробно не рассматривается.
52
Рис. 4.5
Последовательность расчета реакций в
кинематических парах группы второго вида определяется
системой уравнений
(2Ml)c=0=>Rjl,
£ F/+y = 0 => RyOT, Rik,
(Ему)с=о=*муи,
2^=0 =>R&-.
Как и в группе первого вида, для звена / вводят
локальную систему координат (и, т) (см. рис. 4.5).
Реакция поступательной пары перпендикулярна
направляющей внешней поступательной пары D.
Рациональная последовательность суммирования
векторов внешних сил позволяет избежать
непосредственного применения последнего уравнения
системы (4.5), при этом недостающую реакцию R,y
можно определить из векторного многоугольника
суммы сил по второму уравнению системы (4.5).
Ранее, при рассмотрении реакций в
поступательной паре (см. рис. 4.2.), указывалось, что реакцию
Rjm и реактивный момент Mjm в поступательной
паре Д определяемый третьим уравнением
системы (4.5), можно свести к одной реакции R*m,
смещенной на расстояние hj относительно основания
перпендикуляра Dn, опущенного из пары С на
направляющую пары Д т. е. приложенной в точке D*.
Необходимое смещение можно найти из
соотношения hj = Mjm/\Rjm\ или непосредственно из
третьего уравнения системы, поделенного на модуль
вектора реакции Rym, т. е. без фактического
вычисления реактивного момента Mjm. Такое задание
реакции в виде одной силы равноценно
вышеописанному заданию ее в виде силы и момента.
4.3.4. Группа третьего вида
Группа третьего вида (ВПВ) также имеет одну
поступательную (П) пару (но внутреннюю) и две
вращательные (В) пары (рис. 4.6, а). Полная
система сил и моментов, действующая на звенья группы
аналогично системе рассмотренных ранее групп
первого и второго вида, какого-либо специального
рассмотрения не требует.
Рис. 4.6
Последовательность определения реакций и
моментов в кинематических парах группы третьего
вида определяется системой уравнений
(lMi+J)D=0^R)k^(±BD),
(4.6)
(Ем,.)5=о=>м(/.,
2F/+y=0=»Ryai.
В группе третьего вида для определения
реакции во внешней вращательной паре В звена /
вводят локальную систему координат (я, х), связанную
не со звеньями, как в группах первых двух видов, а
с внешними кинематическими парами всей
группы, т. е. ось п проходит через пары 5иДа ось т —
перпендикулярно линии BD. Из первого уравнения
системы (4.6), в котором сумма моментов всех сил
действует на совокупность обоих звеньев / и у,
рассматриваемых как единое твердое тело
относительно внешней вращательной пары Д определяют
компоненту вектора реакции R^, направленную
перпендикулярно линии BD.
53
Согласно второму и третьему уравнениям
системы (4.6) можно считать, что звено / находится в
равновесии (см. рис. 4.6, б). Здесь, как и ранее, силу
реакции Щ и реактивный момент My можно
свести к одной силе R*-, приложенной в точке С*.
Смещение ht найдем по соотношению ht = My/\Ry\.
4.3.5. Группа четвертого вида
Группа четвертого вида (ПВП) имеет две
поступательные (П) пары (внешние) и одну
вращательную (В) (внутреннюю) (рис. 4.7). Полная система сил
полностью идентична ранее рассмотренным
системам сил и не требует дополнительных пояснений.
Последовательность определения реакций и
моментов в кинематических парах группы четвертого
вида определяется системой уравнений
(4.7)
£F,.+7.=0=>R,m
>R/A:>
(Ем.-)с=о=>мЛ,
(2му)с=о=>м>|,
23=0 =>R&,
FA £JT~\-/*J
М' \Л Уг~М*
\SA Ф' ^
У?0' о)
J
D\?
В группе этого вида нет необходимости вводить
специальные локальные координаты, поскольку
направления реакций Rik и Rjm известны —
перпендикулярно направляющим соответствующих пар В
и D. Как и ранее, рациональная последовательность
суммирования сил в первом уравнении системы
(4.7) позволяет отказаться от непосредственного
применения четвертого уравнения и недостающую
реакцию R^- во внутренней паре С группы найти
непосредственно из первого уравнения.
4.3.6. Группа пятого вида
Группа пятого вида (ВПП) имеет одну
вращательную (В) пару (внешнюю) и две
поступательные (П) пары (рис. 4.8, а).
Последовательность расчета реакций и
моментов в кинематических парах группы пятого вида
определяется системой уравнений
(4.8)
£Fy=0
EF/+y=0=>Rtt,
(lMi+j)B=o^Mjm,
(Sm/)»=o=>m„.
В группе этого вида вводить специальные
системы координат также нет необходимости. Реакции,
действующие на звено у и определяемые первым
уравнением системы (4.8), показаны на рис. 4.8, б.
Реакции Rik во вращательной паре В группы
(второе уравнение системы (4.8)) и реактивный момент
М;т в паре D звена у (третье уравнение системы
(4.8)) находят по рис. 4.8, а. Его также удобно
использовать для вычисления внутреннего
реактивного момента М,у пары С по четвертому уравне-
Ф/
vM
jm
Dn
D*
>V
R
7™
Рис. 4.8
54
нию системы (4.8). Следует обратить внимание, что
в этом уравнении, а значит, и на рис. 4.8, в
рассматривается реакция Щ и соответствующий
момент My, а не реакция R^, найденная ранее и
показанная на рис. 4.8, б. Реакция Щ определяется
элементарным соотношением Rtj = -Ry/. Вопросы
замены силы реакции и реактивного момента
одной силой ясны из построений на рис. 4.8, а и в, а
соответствующие смещения hj находят после
деления реактивного момента на модуль силы реакции
в паре, т. е. ht = Му/\¥у\ для кинематической пары
Cnhj = MJm/\¥jm | для пары D.
4.3.7. Начальное звено
На заключительном этапе силового расчета
после определения реакций во всех кинематических
группах рассматривают равновесие начального
звена. Возможны четыре варианта расчетных
структурных схем начального звена.
1. Начальное звено АВ (рис. 4.9) образует со
стойкой 0 вращательную кинематическую пару А.
Вращательная пара В связывает начальное звено со
звеном i присоединенной к нему группы. Иными
словами, начальное звено вида ВВ содержит две
вращательные пары.
тов, действующих на начальное звено вида (ВВ),
определяется системой уравнений
В системе сил, действующей на начальное
звено, учитывают, что в большинстве случаев центр
масс SH начального звена совпадает с центром
неподвижной вращательной пары А. Кроме того, на
начальное звено в шарнире В со стороны
отброшенного звена / действует реакция RH/. Эта реакция
известна, поскольку получена в ходе
предварительного анализа группы, связанной с начальным
звеном. В паре А действует реакция Rh0 со стороны
отброшенной стойки. Никаких других внешних сил
на начальное звено, как правило, больше не
действует. Следовательно, кроме этой реакции из
внешних воздействий остаются только сила тяжести GH
и момент сил инерции Мфн. Кроме них для
обеспечения равновесия начального звена необходимо
приложить неизвестный заранее внешний
уравновешивающий момент Мур.
Последовательность расчета реакций и момен-
£fh=o^rh0,
(4.9)
(2.МВ)А=0 =>М„.
Необходимо подчеркнуть, что во втором
уравнении системы (4.9) кроме момента реакции RH/
учитывается и инерционный момент Мфн, который,
как правило, имеет достаточно большое значение,
поскольку при его расчете используется момент
инерции JT первой группы звеньев.
2. Начальное звено АВ (рис. 4.10) образует со
стойкой 0 вращательную кинематическую пару А,
а со звеном /, присоединенной к начальному звену
группы, — поступательную пару В. Таким образом,
звено вида ВП имеет одну вращательную и одну
поступательную пары. Система внешних сил для
начального звена вида ВП аналогична ранее
описанной системе для звена вида ВВ с той лишь
разницей, что реакция на начальное звено со стороны
отброшенной группы, кинематически связанной с
ним, кроме силы реакции RH/ может содержать и
момент сил реакции Мн/.
Мур ^Мн/
Последовательность расчета реакций и
моментов, действующих на начальное звено вида (ВП),
не отличается от предыдущего случая:
IF„=0^RH0,
(4.10)
(SMH)i<=0=>Myp.
Отметим, что решение второго уравнения
системы (4.10) зависит от формы, в которой выражена
реакция поступательной пары В, полученная при
предварительном анализе группы, присоединенной
к начальному звену. Так, если реакция выражена в
форме сила + момент, т. е. определялись и сила
реакции RH/, и момент реакции Мн/, то во втором
уравнении системы (4.10) при определении Мур
следует учитывать только момент Мн/. Если же
реакция выражена в форме реакции RH/, приложенной
в заданной точке В* звена / на направляющей
поступательной пары 5, то при определении Мур учи-
55
тывается только момент этой силы. Точку В
звена / в этом случае для определения плеча силы при
вычислении момента необходимо перенести на
направляющую пары В начального звена. Однако
дополнительные построения, связанные с переносом
точки, в этом случае делать необязательно,
поскольку на изображенной на листе полной схеме
механизма положение точки В* уже известно, и
поэтому достаточно измерить расстояние от
неподвижной пары А начального звена до перпендикуляра к
направляющей поступательной пары В,
проведенного через точку В* звена /, и тем самым найти
необходимое плечо силы.
3. Начальное звено АВ (рис. 4.11) образует со
стойкой 0 поступательную кинематическую пару А,
а со звеном i присоединенной к начальному звену
группы — вращательную пару В. Звено этого вида
(ПВ) также содержит одну вращательную и одну
поступательную пару, однако в отличие от только
что рассмотренного звена вида ВП поступательная
пара связывает начальное звено со стойкой. В этом
случае для обеспечения равновесия звена вместо
уравновешивающего момента Мур к звену
необходимо приложить уравновешивающую силу Ryp.
Система внешних сил начального звена вида ПВ
полностью аналогична системе звена вида ВВ.
Последовательность расчета реакций и
моментов, действующих на начальное звено вида ВВ,
определяется системой уравнений
(4.11)
(Емн)5=о^мн0.
Как видно из второго уравнения, момент всех
сил, действующих на звено, берется относительно
вращательной пары В начального звена. Как
обычно, для поступательной пары А вычисленные
реакции и моменты начального звена со стойкой
можно заменить одной силой (RhoX приложенной
в точке А*.
4. Начальное звено (рис. 4.12) образует и со
стойкой 0 и с подвижным звеном / присоединенной к
мн/
нему группы поступательные кинематические пары,
т. е. начальное звено вида ПП содержит две
поступательные пары. В этом случае, как и для звена вида
ПВ, неизвестным силовым фактором для
обеспечения равновесия начального звена также будет
уравновешивающая сила (Ryp).
Последовательность расчета реакций и
моментов аналогична приведенной в системе (4.11) с той
лишь разницей, что сумма моментов во втором
уравнении берется относительно точки Ап — точки
пересечения направляющих поступательных пар А и
В начального звена:
(Емн), =о
УР'
Мн0-
(4.12)
Как и ранее, момент и реакция начального звена
со стойкой могут быть заменены одной силой (R*hq\
приложенной в точке А*.
Итогом силового расчета начального звена и по
существу всего механизма является определение
уравновешивающего момента М^ (или
уравновешивающей силы Ryp для начального звена с
поступательной парой со стойкой). Найденное значение
Мур сравнивают со значением Мд из первого листа
проекта, что является элементом проверки
правильности выполнения расчетов обоих листов проекта.
Расхождение в значениях Мд и Мур не должно
превышать 10... 15 %.
4.4. Прямые аналитические методы
кинетостатического расчета
Изложенный в предыдущем разделе метод
определения реакций и моментов ориентирован на
графические и графоаналитические методы
расчета. Поэтому основными были методы
рациональной декомпозиции механизма с целью упрощения
и уменьшения необходимых построений. При
использовании аналитических методов в такой
декомпозиции особой необходимости нет,
поскольку механизм расчленяют на звенья и
рассматривают равновесие каждого звена. Иными словами,
56
отброшенные связи в кинематических парах
заменяют реакциями и записывают уравнения силового
равновесия для каждого звена в проекциях на оси
координат. При этом вводить какие-либо локальные
или специальные системы координат не нужно, все
реакции определяют в проекциях абсолютной
системы координат.
При п подвижных звеньях таких уравнений
может быть составлено Ъп. Число неизвестных
величин будет равно 2/?низш + W, где рптт ~~ число
низших пар механизма; W = 1 — число его степеней
свободы, т. е. система Ъп уравнений позволяет
найти все реакции и внешний силовой фактор —
уравновешивающий момент. Составление системы
уравнений равновесия сил базируется на третьем
законе Ньютона. Поэтому при рассмотрении равновесия
звена у не вводят новую неизвестную реакцию R^,
а используют уже введенную реакцию R,y, но с
обратным знаком. Если этого не сделать, то
количество уравнений системы увеличится до Ъп + 2рнизш,
т. е. к Ъп уравнениям равновесия добавятся 2рнтш
дополнительных условия, Fy = —F^, естественно, в
проекциях.
В результате, например, для четырехзвенного
механизма система включает 9 уравнений с 9-ю
неизвестными, для шестизвенного — 15 уравнений,
причем важно, что эти уравнения линейные. Их всегда
можно решить численными методами. Напомним,
что для составления уравнений равновесия сил
предварительно необходимо решить как задачу
кинематики, т. е. определить положения пар и углы
наклона звеньев, так и задачу динамики, т. е. найти
фактическое ускорение начального звена,
ускорения центров масс и угловые ускорения всех
звеньев, с помощью которых можно вычислить
необходимые силы инерции и моменты сил инерции.
4.5. Использование вычислительной
техники для решения задач
силового расчета механизма
4.5.1. Специализированные программы
Программа PRlu (и ее более ранняя версия PR1)
предназначена для определения реакций в
кинематических парах кривошипно-ползунного
механизма. При вычислениях в программу вводят таблицы
значений сил, определенных по индикаторной
диаграмме, и закон движения кривошипа, который
может задаваться неравномерным. При работе с
программой следует обратить внимание на принятое в
программе положительное направление движения
поршня — от центра вращения кривошипа. Отсюда
следует, например, что проекция силы давления на
поршень в фазе расширения будет отрицательна,
скорость движения поршня в этой фазе также
будет отрицательна, что даст положительную работу
сил давления газов. Результатом расчета по
программе, кроме таблиц значений реакций и
соответствующих графиков, является вычисление годографов
реакций в кинематических парах.
Программа PR3050 предназначена для кинето-
статического силового расчета четырехзвенного
кулисного механизма гидроподъемника. Программа
написана для DOS, поэтому при ее использовании
в среде Windows XP имеются трудности с
русификацией и выводом, а работа в Windows Vista,
вообще говоря, невозможна. Результатом силового
расчета кроме массивов значений реакций в
кинематических парах является также массив значений
силы F2 в гидроцилиндре, приводящей в движение
механизм.
Программа PR3207 предназначена для кинето-
статического силового расчета шестизвенного
кулисного механизма строгального станка.
Программа также написана для DOS, поэтому при
использовании в среде Windows XP возникают трудности
с русификацией и выводом результатов.
В исходных данных не учитывается изменение
угловой скорости начального звена, т. е. принято,
что кривошип вращается равномерно.
Особенностью задания углов, при которых вычисляются
значения реакций, является то, что они выводятся
равномерно через одинаковые приращения углов, но
задаются не значениями углов, а числом позиций
вывода, причем углы начальной и конечной
позиций совпадают. Например, при выводе через 30°
угла поворота кривошипа необходимо задать 13
позиций вывода (N= 360°/30° + 1).
Программа САРЦМ предназначена для расчета
цикловых механизмов и позволяет проводить
силовой анализ любых плоских рычажных механизмов,
образованных из двухповодковых групп Ассура.
Программа недостаточно интерактивна и ее
необходимо предварительно изучить. Для выполнения
силового расчета в этой системе требуется использовать
специальный алгоритм подготовки исходных данных,
затем по определенным правилам составить
матрицу строения механизма, матрицы координат и
соединений и далее сформировать специальную
«весовую» матрицу.
В результате расчета на печать выводятся
проекции на оси локальных систем координат реакций
во внешних и внутренних парах групп Ассура,
моменты в поступательных парах, а также
уравновешивающий момент первичного механизма.
57
Программа DIADA предназначена как для
кинематического анализа, так и для силового
расчета любых плоских рычажных механизмов,
образованных из двухповодковых групп Ассура.
Особенности программы позволяют ей успешно
работать также и в среде Windows XP. Работа с
программой организована в диалоговом режиме и
поэтому ее не требуется предварительно изучать.
Для силового расчета в программу кроме
информации о структуре механизма и размерах его
звеньев необходимо ввести информацию о массах
звеньев и их моментах инерции, а также о модулях и
направлениях векторов внешних сил, действующих
на звенья механизма, и внешних моментах.
Угловое ускорение и угловая скорость начального
звена также должны быть заданы. Иными словами,
решить задачу динамики с помощью этой
программы невозможно.
Особенность программы DIADA заключается в
том, что силовой расчет при данном наборе сил
проводится для одного положения механизма, т. е. при
получении информации о реакциях в нескольких
положениях механизма принято, что силовые факторы
при этом не меняются. Если сила — переменная
величина (зависит от положения начального звена), то
для каждого положения начального звена силу
необходимо корректировать (внутренними средствами
коррекции данных, без выхода из программы) и
делать расчет для каждого положения отдельно.
В результате расчета выводится информация о
реакциях в кинематических парах механизма с
указанием модуля вектора силы, его угловой
координаты и проекций этого вектора на оси координат.
Для поступательных пар дополнительно
выводится значение реактивного момента. Также подсчи-
тываются уравновешивающий момент на начальном
звене, приведенные к нему моменты инерции от
каждого звена и суммарный приведенный момент
инерции.
Программа DIADA не позволяет проводить
расчет механизмов, в которых к начальному звену
приложен не уравновешивающий момент, а
уравновешивающая сила. Для таких механизмов программу
можно использовать как проверочную.
Необходимую помощь в выборе программных
средств можно получить у консультанта проекта.
4.5.2. Особенности применения
математических пакетов общего назначения
Использование MathCAD позволяет повысить
производительность труда при выполнении
силового расчета и существенно повысить точность
расчетов.
Силовой расчет в MathCAD проводится
матричным методом. При этом выполняются следующие
соглашения:
на каждое звено механизма действуют активные
силы и моменты, силы тяжести, главные вектора и
главные моменты сил инерции и реакции в
кинематических парах (некоторые составляющие при
этом могут отсутствовать);
все силы, включая реакции в поступательных
кинематических парах, представлены в виде
проекций на оси абсцисс и ординат;
все силы и моменты ориентированы в
положительном направлении отсчета (моменты — против
часовой стрелки, проекции на ось абсцисс — по
горизонтали вправо, проекции на ось ординат — по
вертикали вверх). Истинное направление показывает
знак при числовом значении силы или момента;
для каждого звена записываются три уравнения
равновесия: суммы проекций на оси координат и
суммы моментов относительно начала системы
координат. Для поступательных кинематических пар
дополнительно вводится условие равенства нулю
суммы проекций составляющих реакции на
направляющую кинематической пары.
Таким образом, общее число уравнений
равновесия будет равно утроенному числу подвижных
звеньев (Зи) плюс число поступательных
кинематических пар, либо единица плюс удвоенное число
вращательных кинематических пар плюс утроенное
число поступательных кинематических пар.
Пример решения задачи силового анализа для
кривошипно-ползунного механизма (см. рис. 2.2)
приведен в приложении 5.
4.6. Указания к выполнению второго листа
курсового проекта
Этапы выполнения второго листа курсового
проекта.
1. Определение исходных данных, необходимых
для силового расчета механизма, по заданиям к
курсовому проектированию и по результатам
выполнения первого листа проекта:
вариант а. Силовой расчет проводят для одного
положения начального звена механизма. Следует
задать:
угловую координату начального звена механизма
(по заданию или по согласованию с консультантом);
внешние силовые факторы, действующие на
звенья механизма в этом положении (по результатам
выполнения первого листа проекта);
фактические скорость и ускорение начального
звена механизма в этом же положении;
58
вариант б. Силовой расчет выполняют для
всего цикла движения механизма. Следует определить:
законы изменения внешних силовых факторов,
действующих на звенья механизма (с
соответствующих диаграмм на первом листе проекта);
фактические законы изменения скорости и
ускорения начального звена механизма.
2. Проведение подготовительных операций:
определение ускорений центров масс и угловых
ускорений звеньев, расчет сил тяжести звеньев, главных
векторов и главных моментов сил инерции. Для
варианта а на листе следует построить планы
скоростей и ускорений при заданном положении
начального звена механизма.
3. Составление расчетной схемы механизма с
изображением на ней всех внешних сил (включая
главные векторы и главные моменты сил инерции
звеньев), ее структурный анализ, определение
числа неизвестных величин в силовом расчете и
выбор алгоритма выполнения силового расчета.
4. Построение на листе всех кинематических
групп механизма с нанесенными на них внешними
силовыми факторами и реакциями в
кинематических парах и составление системы уравнений кине-
тостатического равновесия для каждой группы —
уравнения равенства сил (векторное или в
проекциях на оси координат), уравнения равенства
моментов, а также условия равновесия начального звена.
5. Графоаналитическое или аналитическое
решение полученных систем уравнений. Для
варианта а следует построить планы сил (по
векторным уравнениям сил), с помощью которых
определить неизвестные величины и направления
векторов реакций, а для варианта б по
результатам расчета — годографы для векторов сил и
диаграммы для моментов.
6. Оценка адекватности результатов силового
расчета путем сравнения полученного значения
уравновешивающего момента или
уравновешивающей силы с результатами расчетов, выполненных
на первом листе проекта (для одного значения в
варианте а или за весь цикл в варианте б).
7. Составление итоговой таблицы полученных
реакций во всех кинематических парах для
варианта а.
По согласованию с консультантом можно
выбрать один из трех вариантов:
1) кинетостатический расчет
графоаналитическим методом планов сил при одном заданном
положении начального звена;
2) кинетостатический расчет аналитическим
методом при одном заданном положении начального
звена;
3) кинетостатический расчет рычажного
механизма за весь цикл движения.
Для всех вариантов на втором листе проекта в
масштабе изображают кинематическую схему
механизма в заданном положении с нанесенными на
ней внешними силами, включая главные векторы и
главные моменты сил инерции. Рядом со схемой
вычерчивают в масштабах планы скоростей и
ускорений для заданного положения механизма.
При расчете по варианту а изображают все
рассматриваемые группы звеньев в
последовательности решения задачи силового расчета. Масштаб
изображения групп такой же, как и для всей схемы
механизма. Рядом с группой записывают уравнения
кинетостатики — векторные уравнения сил и
уравнения моментов и изображают в масштабе сил план
сил, действующих на группу. Отдельно составляют
план сил начального звена.
На листе приводят таблицу результатов
силового расчета: модули и направления сил реакций во
вращательных парах; модули сил, координаты
точки их приложения или модуль реактивного
момента в поступательных парах. Отдельно записывают
модуль уравновешивающего момента (или
уравновешивающей силы). Обязательно около таблицы
результатов указывают расхождение (в процентах)
модулей уравновешивающего момента (или силы)
между первым и вторым листами проекта. Эта
величина определяется как отношение модуля
разности между уравновешивающим моментом,
определенным на втором листе, и соответствующим
значением движущего момента на первом к среднему
значению движущего момента за цикл движения.
При расчете по варианту б изображают в
масштабе кинематическую схему механизма в заданном
положении с нанесенными на нее внешними
силами, включая главные векторы и главные моменты
сил инерции. Затем (в последовательности решения
задачи силового расчета) строят в принятом для
схемы механизма масштабе рассматриваемые
кинематические группы звеньев. Рядом с группой
записывают уравнения кинетостатики (уравнения сил и
моментов, как правило, в проекциях на оси системы
координат). Если какие-либо из этих уравнений
записываются в локальной системе координат,
связанной с одним из рассматриваемых звеньев группы, то
эту систему координат также показывают на
звеньях группы. На основе этой системы уравнений
составляют матрицу коэффициентов для определения
реакций, которую записывают на листе.
На листе приводят результирующую таблицу
вычисленных по этим уравнениям реакций (модули и
направления сил во вращательных парах, модули
59
сил, точки их приложения или модуль реактивного
момента в поступательных парах). Найденный
уравновешивающий момент (или силу) на входном
звене также необходимо показать на листе.
Рядом с таблицей результатов указывают (в
процентах) расхождение модулей уравновешивающего
момента между первым и вторым листом проекта.
При расчете по варианту а на листе кроме
кинематической схемы механизма в произвольном
положении тонкими линиями показывают
начальное и конечное положения механизма (для
механизма с циклом движения 2тс или 471 вычерчивают
«мертвые» положения). Затем (в
последовательности решения задачи силового расчета)
изображают рассматриваемые группы звеньев в принятом
для схемы механизма масштабе. Рядом с группой
записывают уравнения кинетостатики —
уравнения сил и моментов в проекциях на оси системы
координат. Если используется локальная система
координат, связанная с одним из рассматриваемых
звеньев группы, то изображают и эту систему
координат.
Полученные в результате расчетов реакции во
вращательных кинематических парах представляют
в виде годографов — полярных диаграмм, Щ =
=/(ф^), где ф,у — угол, образуемый вектором силы
с положительным направлением оси абсцисс. Для
поступательных пар реакции изображают двумя
диаграммами в прямоугольных координатах: R^- =
=Дфн), Му =/(Фн) или hRiJ =Д<р&-), где hRij - плечо
момента силы Ry.
На листе также вычерчивают диаграмму
уравновешивающего движущего момента (силы) на
входном звене или момента (силы) сопротивления
на выходном звене. На этой диаграмме показывают
две зависимости: одна для величин, определенных
при выполнении первого листа, вторая — при
выполнении второго. Относительно кривой для
момента с первого листа строят область 5%-ного
доверительного интервала. Если кривая момента,
определенного на втором листе, располагается в области
доверительного интервала, то результаты силового
расчета считаются адекватными результатам
энергетического расчета, проводимого при выполнении
первого листа.
Примеры второго листа с выполненным
силовым расчетом в соответствии с выбранным
вариантом даны в приложениях 5 и 7 (листы 8, 9).
5. АНАЛИЗ ЗУБЧАТЫХ ЗАЦЕПЛЕНИЙ МЕХАНИЗМОВ
В настоящее время практически нет машин и
механизмов, в которых не использовались бы
зубчатые механизмы, называемые также зубчатыми
передачами. Широкое распространение зубчатых
передач объясняется, с одной стороны, высокой
несущей способностью силовых приводов, а с
другой — надежностью в работе.
Правильно рассчитанные зубчатые передачи и
планетарные механизмы могут работать
теоретически неограниченное, а практически — очень
длительное время.
В заданиях к курсовому проектированию по
теории механизмов и машин зубчатая передача и
планетарный механизм рассматриваются как часть
общей кинематической схемы проектируемой
машины. Их используют либо в качестве основного
механизма привода исполнительных звеньев, либо
как вспомогательный передаточный механизм для
преобразования движения между двигателем и
исполнительным органом.
5.1. Виды зубчатых передач и их свойства
При проектировании зубчатой передачи
существенную роль играет выбор ее геометрических
параметров. Расчет параметров зубчатой передачи
выполняют при условии, что модуль зацепления
т зубчатых колес получен из расчета зубьев на
прочность.
Цилиндрическую зубчатую передачу можно
сформировать из колес с прямыми и косыми
зубьями. Передачи с косозубыми колесами отличаются
достоинствами, из которых можно выделить два:
коэффициент перекрытия, определяемый рабочей
шириной зубчатых колес, практически может быть
более 10; небольшое число зубьев колес, например,
малое колесо может иметь три зуба, а
теоретически — даже один. Это приводит к тому, что
передача может быть выполнена очень компактной.
Недостаток передачи с косозубыми колесами —
наличие осевых сил, что приводит к усложнению
конструкции подшипниковых узлов передачи.
Зубчатые передачи с прямыми и косыми
зубьями в соответствии с ГОСТ 16531-81 могут быть
трех видов: без смещения, положительные и
отрицательные. Зубчатая передача без смещения
формируется или из зубчатых колес 7, 2 при условии,
что коэффициент смещения инструмента при их
нарезании jcj = х2 = 0, или из одного положительного
и другого отрицательного колес при условии, что
хх = -х2 (так называемая равносмещенная передача).
Делительные окружности колес зубчатой передачи
без смещения соприкасаются в полюсе Р
зацепления и в процессе зацепления перекатываются друг
по другу без скольжения, т. е. одновременно
являются начальными окружностями колес (рис. 5.1, б),
при этом коэффициент воспринимаемого смешения
у равен нулю, у = 0. Радиусы начальных
окружностей колес 7, 2 равны радиусам делительных
окружностей:
rw\,2 =ri2= mzh2/2.
Межосевое расстояние aw равно сумме
радиусов делительных окружностей:
aw=r{ + r2=m(zx +z2)/2=a, (5.1)
где а — делительное межосевое расстояние. При
этом угол зацепления aw передачи без смещения
равен углу а.
Положительная зубчатая передача может быть
составлена из двух положительных зубчатых колес
{хх > 0 и х2 > 0), из положительного и нулевого
колес и из положительного и отрицательного
колес. Важно, чтобы суммарный коэффициент
смещения колес был положительным. Делительные
окружности колес положительной зубчатой
передачи не соприкасаются, радиусы начальных
окружностей больше радиусов делительных, и поэтому
коэффициент воспринимаемого смещения у > 0
(рис. 5.1, а), т. е. межосевое расстояние равно
сумме радиусов начальных окружностей колес 7, 2:
61
m(z} +z2) cos a /c оч
*w = *Wi + ^2 = \ 2 • (5.2)
2 cosaw
При этом aw > a, а угол зацепления положительной
зубчатой передачи aw > a.
Рис. 5.1
Суммарный коэффициент смещения
отрицательной зубчатой передачи у<0. Она может быть
составлена из двух отрицательных зубчатых колес,
из отрицательного и нулевого колеса и из
отрицательного и положительного колес. В последнем
случае коэффициент смещения отрицательного
зубчатого колеса должен быть по модулю больше,
чем у положительного. Делительные окружности
отрицательной зубчатой передачи пересекаются
(рис. 5.1, в). Радиус делительной окружности
отрицательного колеса превышает радиус начальной
окружности, r> rw. Коэффициент воспринимаемого
смещения^ для этой передачи отрицательный;
межосевое расстояние определяется формулой (5.2);
При проектировании следует учитывать
особенности каждого вида зубчатых передач.
Наилучшими эксплуатационными характеристиками
обладают положительные зубчатые передачи: у них по
сравнению с другими передачами больше радиусы
кривизны боковых поверхностей зубьев и при
одинаковых передаточном числе и модуле они могут
иметь меньшие габариты и массу.
Несмотря на то что эксплуатационные
характеристики зубчатых передач без смещения хуже,
чем у положительных, в настоящее время их
достаточно часто применяют в машинах, так как они
удовлетворяют принципу сменности колес.
Отрицательную зубчатую передачу, имеющую
наихудшие эксплуатационные характеристики,
используют, как правило, когда задано межосевое
расстояние.
5.2. Исходный производящий контур
инструмента и станочное зацепление
Геометрия зубчатой передачи определяется
параметрами исходного контура инструмента и его
смещением при нарезании колес. Поэтому при
проектировании прежде всего следует задать исходный
производящий контур инструмента, а затем выбрать
расчетное смещение. Если цилиндрическое
зубчатое колесо нарезается реечным инструментом, то
станочное зацепление представляет собой
зацепление реечного исходного производящего контура с
нарезаемым колесом. Такое зацепление
рассматривают в торцевой плоскости, перпендикулярной оси
зубчатого колеса. Реечный исходный производящий
контур в соответствии с ГОСТ 13755-81 — это
контур зубьев производящей рейки в нормальном или
торцевом сечении плоскостью, перпендикулярной
ее делительной плоскости.
Параметры исходного производящего контура
стандартизованы. Согласно ГОСТ 13755-81
исходный производящий контур для нарезания
цилиндрических эвольвентных зубчатых колес с модулем
больше 1 мм (рис. 5.2) — это прямобочный
реечный контур с равномерно чередующимися
симметричными зубьями и впадинами. На рисунке
переход от профиля зуба к линии впадин очерчен дугой
окружности. Стандартом установлены следующие
параметры и коэффициенты исходного контура:
угол главного профиля a = 20°; коэффициент
высоты головки зуба h* = 1,0; коэффициент высоты
ножки Ау*=1,25; коэффициент граничной высоты
(высота прямолинейного участка профиля) h*=2h*;
коэффициент радиуса кривизны переходной кривой
Pf= 0,38; коэффициент радиального зазора с* = 0,25.
62
,
s
*Q
'
s
*
Aym
'
p =
Km
eo > _ so
/ 1
_T":ii
"Til
fb4U,
/s
^тJг\
f |Л1ГЛ
^lfc /r .
nrrrs
W5-
ч-ЛУ L
vm:
9*s
f G.
т' ^ 1 \ \ T<^vfliy
^v/N^A й*2
\t \\ш
ЩК
fev^
^5
^y
/W \! 2'\Х^^М^Г '
/ l
^^/ ///
\^i \^ \ \ \
^4. \ <-*. \ \ \
\ V/ \ \ \
W
t\
0 w
v\-vi—
\\^]vr
Р^Ж
^бТТ
5/flfc
в гЧ
^wo-a/ /
Jjv /
VII—VIII
^^w/
V /.^
-&' Л/Г
^j^8'
л^5^
<y
^a
fix
><rviii \
и^
i /
\9/i
i<!>/
^
V
Vх
\ 5
1 V4
r>/
W /'
/ */
S 1
*
о 1
/и T
i *
/ ^
/ T
r—O \J
' ^ ^
T
Oi
Рис. 5.2
Размеры зуба исходного контура получают
умножением перечисленных коэффициентов на модуль т.
Исходный производящий контур для нарезания
мелкомодульных зубчатых колес (0,1 < т < 1,0)
также регламентирован ГОСТ 9587-81: ha* = 1,0... 1,1;
с =0,25...0,40. Переходная кривая может быть
выполнена или одной дугой радиусом ру= 0,44т, или
двумя дугами радиусом 0,38т и сопрягающей
прямой.
Для нарезания косозубых колес применяют тот
же стандартный инструмент, что и для прямозубых,
но его устанавливают наклонно к плоскости
заготовки. Реечный исходный производящий контур в
этом случае имеет параметры, зависящие от угла
наклона линий зубьев. Эти параметры определяют
следующим образом:
угол профиля
а, = arctg (tg а/cos р);
шаг
модуль зацепления зубьев
mt = m/cos p;
коэффициент высоты головки зуба
h*at = h*a C0SP;
(5.3)
(5.4)
(5.5)
(5.6)
коэффициент радиального зазора
с* = с* cos p. (5.7)
Следовательно, зная параметры контура: а, т, /**,
с* и угол наклона р линии зубьев для нарезания
прямозубого колеса, можно подсчитать все параметры
реечного исходного производящего контура для
нарезания косозубых колес, т. е. at, mt, h*at, с*.
Принципиальная схема станочного зацепления
при нарезании косозубого колеса имеет такой же
вид, как и при нарезании прямозубого.
Делительная прямая реечного исходного производящего
контура в станочном зацеплении может располагаться
по отношению к делительной окружности
нарезаемого колеса различным образом. При нарезании
колеса без смещения делительная прямая контура
касается делительной окружности колеса, при
нарезании колеса с положительным смещением она
сдвинута по отношению к делительной
окружности на величину, равную положительному
смещению, а при нарезании колеса с отрицательным —
придвинута к центру колеса на величину, равную
этому смещению. На рис. 5.2 изображена схема
станочного зацепления при нарезании
положительного прямозубого колеса.
В процессе зацепления колеса с рейкой по его
делительной окружности без скольжения перекаты-
63
вается та прямая производящего контура
инструмента, которая параллельна делительной прямой и
касается делительной окружности. Эту прямую
называют станочно-начальной. Шириной впадины
инструмента на станочно-начальной прямой
определяется толщина зуба колеса по делительной
окружности. У колеса без смещения толщина s зуба
по делительной окружности равна половине шага,
s = тип/2, у положительного колеса она больше
половины шага, s > кт/2, у отрицательного колеса —
меньше, s < кт/2.
5.3. Геометрический расчет эвольвентной
зубчатой передачи внешнего зацепления
5.3.1. Расчет передачи при свободном выборе
межосевого расстояния
Методика расчета основана на системе расчета
диаметров окружностей вершин колес, при которой
в зацеплении пары колес сохраняется стандартный
зазор с*т. Это частный, но наиболее
распространенный на практике случай регламентируется ГОСТ
16532-83.
В соответствии с ГОСТ 13755-81 при нарезании
колес прямозубой передачи исходный производящий
контур имеет следующие параметры: а = 20°, ha = 1,
с* = 0,25. Параметры исходного производящего
контура инструмента в торцевом сечении
рассчитывают по формулам (5.3)-(5.7). Затем определяют
радиусы делительных окружностей колес
r\,2 = mtz\,2/2
и радиусы основных окружностей
(5.8)
rbia = mtziacosat/z (5-9)
Расчетные коэффициенты смещений хх и х2 для
эвольвентной зубчатой передачи внешнего
зацепления должны быть такими, чтобы обеспечивалось
отсутствие подрезания (xt min) и заострения (xt max)
зубьев, а также гарантировался минимально
допустимый коэффициент перекрытия еа.
Следовательно, должно выполняться условие xt min <xt< xt max,
где xt — коэффициент торцевого смещения.
Наименьшее число зубьев без смещения,
свободных от подрезания,
^min = 2C/sin2a,. (5.10)
Коэффициенты минимального смещения
исходного производящего контура колес 7,2
*f min 1,2 —"at
ztmin zl,2
*7min
(5.11)
Отсутствие заострения может быть определено
после расчета толщины зубьев по окружностям
вершин шестерни 1 и колеса 2; оно отсутствует, если
толщина зуба по окружности вершин равна или
превышает допустимое значение, sa Х2 > [sa].
Коэффициент смещения х2 выбирают в
соответствии с ГОСТ 16532-83 (табл. 5.1): если z2 > 30, то
расчетное значение х2 = 0; если передаточное число
передачи щ2> 3,5 и 14 < zx < 20, то х2 =-0,3. Если
10 < zx < 30, то х2 = 0,5. При расчете на
компьютере значения коэффициента торцевого смещения xXt
перебирают с шагом 0,1 от хх = хнач= 0 до xXt = 1,1.
Таблица 5.1
Коэффициент
смещения
х\
0
0,3
0
0,3
0
0,5
х2
0
-о,з
0
-0,3
0
0,5
Область применения зубчатой передачи
Вид
передачи
Кинематическая
Силовая
Межцентровое
расстояние aw
Не задано
aw=0,5(zx+z2)m
aw=0,5(zx+z2)m
Не задано
Число зубьев
Zl,2
zx>\l
\2<zx<\6
и z2 > 22
zx>2\
14<Zl<20
при ип > 3,5
zx > 30 или zx > 20
и проведена
модификация
головки зуба по
ГОСТ 13755-81
10<zj<30
Угол зацепления передачи определяют по
формуле
uiva^ =inva, +
2*stga,
z2
(5.12)
где x^ = xx + jc2, a z^ = zx + z2; угол зацепления a^
можно рассчитать с помощью эвольвентных
функций inv a^.
Коэффициент воспринимаемого смещения
zl+z2
cos a
vcosa^
^--1
(5.13)
Коэффициент уравнительного смещения
Ay=xz-y. (5.14)
Радиусы начальных окружностей шестерни 1 и
mz12cosar
колеса 2
rwL2 -'
2cosa
•tw
Межосевое расстояние
<*w=rwl +Ъ
rw2-
(5.15)
(5.16)
64
Для расчета исполнительных размеров зубчатых
колес используют следующие формулы:
радиусы окружностей вершин
faL2=mt
V
радиусы окружностей впадин
rf\a=mt
zl,2
+ хХ2 ~ hta - ct
Л
(5.17)
(5.18)
высота зубьев колес
h=hl=h2 = mt(2h*a + c*-Ay); (5.19)
толщины зубьев по дугам делительных
окружностей
п
\2=щ\-+2х\,2Ш^ |;
(5.20)
углы профиля на окружностях вершин зубьев
колес
aai,2 =arccos
га\,2
(5.21)
толщины зубьев по дугам окружностей вершин
sal,2=mt
cos a
cosocal>2
■х
X
71
- + 2*1>2tga, -z1>2(invael>2 -inva,)
(5.22)
Для построения станочного зацепления
дополнительно определяют толщину зуба s0 исходного
производящего контура по делительной прямой,
равную ширине впадины:
S0t = e0t = Kmt/2>
(5.23)
шаг
pt = nmt; (5.24)
радиус скругления основания головки зуба ИПК
* г. т.
(5.25)
9ft = 9fimt= —
SKI ОС;
шаг по хорде делительной окружности шестерни
fl80o>\
Pl = WjZi sin
(5.26)
5.3.2. Расчет передачи при заданном
межосевом расстоянии
Расчет эвольвентной зубчатой передачи
внешнего зацепления при заданном межосевом расстоянии
представляет собой задачу, обратную задаче,
рассмотренной в разд. 5.3.1. Кроме межосевого
расстояния проектируемой зубчатой передачи должно
быть задано передаточное число иХ2 или числа
зубьев zj и z2. Если задано значение aw, то расчет
начинают с определения чисел зубьев. Число зубьев
шестерни находят по формуле
2а„
z=—i^SL— (5.27)
(l + w12)m,
и округляют до ближайшего целого числа. Число
зубьев второго колеса вычисляют по формуле
z2=zxuX2 (5.28)
и также округляют до целого числа, но так, чтобы
отклонение от заданного передаточного числа было
наименьшим.
Затем определяют угол зацепления
проектируемой зубчатой передачи
а^ = arccos
cos ос,
2а„,
(5.29)
(5.30)
и суммарный коэффициент смещения
х =(*1+*2)(туа^-туос,)
Z 2tgcc,
Коэффициенты смещения выбирают так, чтобы
выполнялись условия: хх > xtmXn; x2 > xtmin; x% =
=хх + х2. По известному углу зацепления
передачи находят значения коэффициентов
воспринимаемого и уравнительного смещений по формулам
(5.13) и (5.14). Далее последовательность расчета
аналогична последовательности расчета зубчатой
передачи при свободном выборе межосевого
расстояния.
5.4. Качественные показатели
При проектировании зубчатых передач
качественные показатели дают возможность оценить
плавность и бесшумность зацепления, прочность и
возможный износ зубьев колес по сравнению с
другими передачами. Такая оценка важна для
рационального выбора коэффициентов смещения
исходного производящего контура инструмента при
изготовлении зубчатых колес.
Коэффициент скольжения X зуба учитывает
влияние геометрических и кинематических факторов
на проскальзывание профиля зуба в процессе
зацепления. Наличие скольжения профилей зубьев и
давления одного профиля на другой при передаче
сил приводит к их износу. Для оценки процессов
скольжения и, следовательно, изнашивания эволь-
вентных профилей зубьев используют отношение
скорости скольжения vCK к компоненте вектора
скорости точки контакта К по касательной к профилю
соответствующего зубчатого колеса, X = vCK/v '.
Необходимо учитывать, что зубья большего зубчатого
колеса входят в зацепление в иХ2 раз реже, чем
зубья шестерни.
65
Коэффициент скольжения шестерни
м-
хк _
h
(
lpi+h
1 +
_1_
"12
колеса
Х2 =
VAT2"12
_ lk
lp2~k
(5.31)
(5.32)
Качество зубчатой передачи принято оценивать
максимальными значениями коэффициентов
скольжения в начале (точка В{) и в конце зацепления
(точка В2) (см. приложение 7, листы 10, 11).
В точке В
^(tga^-tga^)
(
v
Х"=-
(г1+22)18а^-г21§аа2
в точке 52
1 + iL
z2
А
(5.33)
(5.34)
(z1+z2)tgahv-z1tgaall
Коэффициент удельного давления ~&р
учитывает влияние радиусов кривизны профилей зубьев
на контактные напряжения и равен отношению
модуля зацепления к приведенной кривизне
профилей в точке К контакта. Если эвольвентные
поверхности зубьев приближенно принять за
поверхности круглых цилиндров, радиусы которых равны
радиусам кривизны соответствующих эвольвент-
ных поверхностей в точке их контакта, то для
определения возникающего при этом контактного
напряжения можно использовать известную
формулу Герца:
ся =0,418^
F„tEnp
bwpnv
(5.35)
где FHt — равнодействующая распределенной
нагрузки по линии контакта, направленной по линии
зацепления; £"р = 2ЕХЕ2/(ЕХ + Е2) — приведенный
модуль упругости {Еь Е2 — модули упругости
материалов колес); рпр — приведенный радиус
кривизны 1/рпр = 1/Pi + 1/р2 (Рь р2 ~~ радиусы
кривизны эвольвентных профилей колес в точке
контакта); bw — рабочая ширина зубчатых колес.
Геометрическая форма зуба влияет на удельное
давление и не зависит от модуля, $р = т/рпр,
поэтому контактное напряжение можно выразить как
ан =0,4^FHtE/(bwm)-^.
Отметим, что коэффициент удельного давления
характеризует не отдельное колесо, а
взаимодействие двух зубчатых колес.
Коэффициент удельного давления переменен в
разных точках контакта. Расчетное значение
коэффициента удельного давления принимают равным
его значению в полюсе зацепления:
р а„$та^ип zxz2ig a^cos a,
(5.36)
Коэффициент удельного давления наиболее
важно учитывать для передач, работающих в режиме
жидкостного трения.
Коэффициент перекрытия га позволяет
оценивать непрерывность и плавность зацепления. Эти
качественные показатели передачи
обеспечиваются перекрытием зацепления пары зубьев: каждая
последующая пара зубьев должна войти в
зацепление до того, как предшествующая пара выйдет из
него. Коэффициент перекрытия в прямозубой
передаче зависит от коэффициента торцевого
перекрытия, равного отношению угла торцевого
перекрытия зубчатого колеса к его угловому шагу.
Коэффициент перекрытия прямозубой передачи больше
единицы.
По схеме рабочего зацепления (см.
приложение 7, листы 10, 11) определяют длину активной
линии зацепления
ВХВ2 = (N2BX -PN2) + (N{B2 - PN{),
или
B\B2 = rb2 (tgaa2 - tga^) + rM(tgafll - tgaj,
где ааХ и аа2 — углы профилей на окружностях
вершин зубьев колес.
Учитывая, что шаг зацепления по основной
окружности (см. рис. 5.1, a) pb = 2nrbl/z{ = 2nrb2/z2,
получают формулу для коэффициента торцевого
перекрытия в окончательном виде:
8a=S(tg0Cfll"tga^) +
+ S(tga*2"tg0C'w)'
(5.37)
Коэффициент перекрытия косозубой передачи
при прочих равных условиях превышает
коэффициент перекрытия прямозубой передачи вследствие
того, что пара зубьев входит в зацепление не
одновременно по всей длине зуба, а постепенно.
Благодаря этому увеличивается продолжительность
работы одной пары зубьев сверх той, что
определяется соотношением (5.37). Коэффициент перекрытия
косозубой передачи
Vising
£у — ^ое "*" ^Р — ^^ ~*~
ТЕ
(5.38)
где 8р — коэффициент осевого перекрытия
отражает влияние неодновременности фаз зацепления
66
sjm
0,6
0,5
0,4
0,3
[sa/m]
0,1
- 26°
- 24°
- 22°
i i
- 1
1
и g
о я
- en ф
7,
J
ОДЗпо
1
[еЦ
i
v-
[
°v
// -*■
f>
i
4 ^al/m
^2 ^
/ /
L 4-
1 Г^ ^ i
1
2
!
J
#
Г
U Зона технологического
заострения
1 i
A*
5,0
2,5 -
2,0
1,5
1,0
0,5
1,25
[ea]
1,00
0,75
0,50
0,25
0 0,1 0,2х! 0,4
■*l ~~*lmin
0,6 0,9
X! = 0,5
1,0
1,2
1,4
1,5
*i
xl -^max
"x lmax
Рис. 5.3
вдоль линии контакта на продолжительность
зацепления одной пары зубьев. Как правило,
коэффициент 8р осевого перекрытия намного больше
коэффициента га торцевого перекрытия. Коэффициент
8р зависит от ширины зуба и его выражают через
коэффициент ширины зубчатого венца, \\fb = В/т
(В — ширина колеса), выбираемый из условий
прочности и износостойкости зуба.
Наряду с описанными выше качественными
показателями в теории эвольвентной зубчатой
передачи анализируется и ряд других. Эти показатели в
курсовом проектировании не рассматриваются.
5.5. Выбор коэффициентов смещения
с учетом качественных показателей
Для выбора оптимальных коэффициентов
смещения на третьем листе курсового проекта строят
графики основных качественных показателей в
зависимости от коэффициента смещения jq
шестерни. К ним относятся: коэффициент торцевого
перекрытия 8а, относительные толщины зубьев при
вершине saX/m и sa2/m, коэффициенты относительного
скольжения зубьев X" и Х2 и коэффициент
удельного давления Ьр (рис. 5.3). Эти параметры можно
рассчитать по формулам (5.22), (5.31)—(5.34), (5.36),
(5.37). Однако можно использовать программы ZUB
для получения таблиц значений качественных
характеристик и построить соответствующие
графики. Пример такой распечатки приведен на рис. 5.4,
на которой нижние семь функций являются
качественными характеристиками. Распечатка
получена с помощью программы ZUB. Иную форму
вывода имеют программы ZZZ3 и WinZub. Пример
распечатки, полученной с помощью WinZub,
показан на рис. 5.5. Возможно использование других
программ. Выбор программы может быть сделан
по рекомендации консультанта.
На основании анализа построенных графиков
выбирают оптимальный коэффициент смещения
для шестерни. От выбора коэффициентов
смещения во многом зависят геометрия и качественные
показатели зубчатой передачи. В каждом
конкретном случае коэффициенты смещения следует
назначать с учетом условий работы зубчатой
передачи.
Зубчатую передачу с минимальными
габаритами, массой и требуемым ресурсом работы можно
спроектировать только в том случае, если будут
правильно учтены качественные показатели:
коэффициенты удельного давления, определяющие
контактную прочность зубьев передачи, коэффициенты
скольжения, характеризующие степень абразивного
износа, и коэффициент перекрытия, показывающий
плавность работы передачи, а также
продолжительность и характер нагружения зубьев.
Вне зависимости от последовательности
расчета зубчатой передачи необходимо иметь
представление о том, как влияют коэффициенты смещения
Xj и х2 на качественные показатели. Коэффициент
смещения х2 влияет на качественные показатели
незначительно, поэтому принимают фиксированные
значения х2, рекомендованные ГОСТ 16532-83, как
близкие к оптимальным. На рис. 5.3 представлены
графики изменения качественных показателей для
передачи с прямозубыми колесами (Р = 0, zx = 15 и
z2 = 22) в зависимости от изменения коэффициента
хх при х2 = const (x2 = 0,5). Из рисунка следует, что
67
Xj значения
Чтобы все качественные
при увеличении коэффициента
качественных показателей £„, А,"
меняются по-разному,
показатели одновременно были высокими,
добиться трудно. Например, с увеличением
коэффициента перекрытия повышается коэффициент
скольжения.
Таким образом, выбор коэффициентов смещения
представляет собой сложную задачу из-за
противоречивости и многообразия учитываемых факторов.
В связи с этим в каждом конкретном случае
следует искать компромиссное решение, тщательно
взвешивая относительное влияние отдельных факторов
на долговечность работы зубчатой передачи.
РАСЧЕТ ЗУБЧАТОЙ ПЕРЕДАЧИ
zl =
alf =
х2 =
rb2 =
ct =
р2х =
so =
xl
У
dy
rwl
rw2
aw :
ral :
ra2 :
rfl
rf2
h
si
s2
alfwt
sal
sa2
ealf
egam
laml
lam2
teta
= 15.000
= 20.000
500 rl
51.683
.250
*** ИСХОДНЫЕ ДАННЫЕ
z2 = 22
ha = 1
.000 m
.000 с
*** РЕЗУЛЬТАТ РАСЧЕТА
= 37.500
pt = 15.
alft = 20.
15.655 zmint = 17.
7.854
.000
.600
.460
.944
.040
.156
38.433
39.413
56.368
57.806
94.800
97.219
42.300
44.719
62.300
61.719
31.250
34.250
51.250
51.250
11.050
10.469
7.854
10.038
9.674
9.674
23.524
26.609
3.533
2.743
2.765
3.507
1.379
1.201
1.379
1.201
6.775
1.345
.939
1.038
.640
.624
.100
.700
.545
1.020
.055
.180
38.604
39.567
56.620
58.031
95.224
97.598
42.724
45.098
62.224
61.598
31.750
34.750
51.250
51.250
10.974
10.348
8.218
10.402
9.674
9.674
24.103
27.050
3.408
2.603
2.864
3.658
1.350
1.170
1.350
1.170
4.576
1.102
.958
1.051
.637
.621
* • •
5.000
.250
• * •
beta =
awO =
r2 = 55.000 rbl = 35.
708 mt
000 ro
097 xmintl
.200
.800
.628
1.094
.072
.206
38.772
39.718
56.866
58.253
95.638
97.971
43.138
45.471
62.138
61.471
32.250
35.250
51.250
51.250
10.888
10.221
8.582
10.766
9.674
9.674
24.652
27.474
3.281
2.461
2.975
3.813
1.320
1.139
1.320
1.139
3.360
.904
.976
1.064
.634
.619
5.000
1.900
.123
.300
.900
.709
1.168
.091
.232
38.937
39.867
57.107
58.472
96.044
98.339
43.544
45.839
62.044
61.339
32.750
35.750
51.250
51.250
10.794
10.089
8.946
11.130
9.674
9.674
25.174
27.884
3.150
2.317
3.096
3.974
1.291
1.108
1.291
1.108
2.585
.739
.993
1.076
.631
.617
hat =
plx =
xmint2 =
.400
1.000
.789
1.241
.111
.259
39.098
40.015
57.344
58.688
96.443
98.703
43.943
46.203
61.943
61.203
33.250
36.250
51.250
51.250
10.693
9.953
9.310
11.494
9.674
9.674
25.674
28.280
3.017
2.171
3.225
4.139
1.261
1.077
1.261
1.077
2.047
.599
1.009
1.088
.629
.614
.000
.000
238
1.000
15.593
-.287
.500
1.100
.867
1.312
.133
.288
39.257
40.160
57.577
58.901
96.834
99.061
44.334
46.561
61.834
61.061
33.750
36.750
51.250
51.250
10.584
9.811
9.674
11.858
9.674
9.674
26.151
28.663
2.881
2.023
3.363
4.308
1.231
1.046
1.231
1.046
1.650
.478
1.023
1.100
.626
.612
68
Рис. 5.4
Задано:
Выбрано:
Минимально
Результаты
Числа
Шестерня
зубьев: Z1 =
Модуль m =
Передача прямозубая
Смещение рейки: XI =
= 15
5.0 мм
0.70
допустимые смещения рейки:
расчета
Xlmin =
Делительная окружность: R1 =
Основная окружность: Rbl =
Окружность
Окружность
вершин: Ral =
впадин: Rfl =
Начальная окружность: Rwl =
0.123
= 37.500 мм
= 35.238 мм
= 45.098 мм
= 34.750 мм
39.567 мм
Межцентровое расстояние Aw =
Угол зацепления
Alfaw =
Воспринимаемое смещение ymt =
Уравнительное смещение (delta y)mt =
Толщина зуба
Высота зуба h =
по делительной окружности S1 =
по окружности вершин Sal =
Шаг по хорде
10.402 мм
2.603 мм
делительной окружности:
plx =
Параметры рейки:
Данные для i
15.593 мм
шаг Р
Угол главного профиля Alfa
Радиус закругления Ro
Радиальный зазор с
=
=
=
=
Колесо
Z2
Х2
= 22
> = 0.50
X2min = -0.287
R2
-Rb2
Ra2
Rf2
Rw2
1 = 55.000 mm
> = 51.683 мм
1 = 61.598 mm
> = 51.250 мм
> = 58.031 мм
97.598 мм
27.05C
) град.
5.098 мм ( у = 1.020)
0.902
10.34E
мм ( delta у =0.180)
) MM
S2 = 9.674 мм
Sa2 = 3.657 мм
p;
Ix = 15.655 мм
15.708 мм
20.0 град.
1.
1.
900 мм
250 мм
"юстроения графиков качественных характеристик:
Смещение:Перекрытие
XI
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
Данные для i
Zl = 15 ,
Eps
1.379
1.350
1.320
1.291
1.261
1.231
1.201
1.170
1.139
1.108
1.077
1.046
1.014
0.982
0.949
:Заострение:Скольжение:Скольжение:
Sal/m
0.707
0.682
0.656
0.630
0.603
0.576
0.549
0.521
0.492
0.463
0.434
0.405
0.375
0.345
0.314
Laml
6.775
4.576
3.360
2.585
2.047
1.650
1.345
1.102
0.904
0.739
0.598
0.478
0.373
0.281
0.199
юстроения профилей зубьев:
Z2 = 22
XI = 0.700 Х2 = 0.500
Координаты левой боковой поверхности зуба от
Шестерня: X
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
-6.933
-6.816
-6.701
-6.589
-6.479
-6.373
-6.270
-6.171
-6.076
-5.986
-5.901
-5.821
-5.747
-5.678
-5.616
-5.559
-5.510
-5.467
-5.432
-5.404
Координаты <
Y
34.051 -
34.079 -
34.114 ■
34.156 ■
34.205 -
34.260 -
34.323 -
34.392 ■
34.467 ■
34.548 -
34.635 -
34.728 -
34.826 -
34.929 -
35.038 -
35.153 ■
35.272 -
35.399 -
35.532 -
35.675 ■
середины
Шестерня
-7.225
Коррдинаты (
0.000
33.991
середины
45.098
X Y
-5.327 36.341
-5.243 36.845
-5.139 37.346
-5.015 37.842
-4.873 38.333
-4.716 38.820
-4.545 39.302
-4.359 39.778
-4.161 40.250
-3.951 40.716
-3.729 41.177
-3.497 41.632
-3.254 42.082
-3.002 42.527
-2.740 42.966
-2.469 43.400
-2.189 43.828
-1.901 44.251
-1.605 44.668
-1.301 45.079
впадины: ( X,}
вершины зуба:
Колесо: X
-6.997
-6.875
-6.754
-6.635
-6.519
-6.405
-6.295
-6.188
-6.085
-5.985
-5.891
-5.801
-5.716
-5.636
-5.562
-5.494
-5.432
-5.375
-5.325
-5.282
f )
Lam2
0.
0.
0.
0.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
939
958
976
993
009
023
038
051
064
076
088
100
111
122
132
Давление:
Teta
0.548
0.533
0.520
0.508
0.496
0.486
0.476
0.467
0.459
0.451
0.444
0.437
0.430
0.424
0.418
оси симметрии зуба и центра
50
50
50
50
50
50
51
51
51
51
51
51
51
51
51
51
51
52
52
52
Колесо
: -7.294 50.
( X,Y )
: 0.000 i
51.
Y
.770 -
.791 -
.819 -
.855 -
.899 -
.950 -
.008 -
.073 -
.146 -
.225 -
.312 -
.405 -
.505 -
.612 -
.727 -
.850 -
.983 -
.127 -
.287 -
.469 -
728
598
X Y
-5.181 53.161
-5.098 53.633
-5.000 54.102
-4.888 54.568
-4.764 55.031
-4.628 55.491
-4.482 55.948
-4.326 56.401
-4.161 56.851
-3.987 57.297
-3.804 57.740
-3.613 58.180
-3.414 58.616
-3.208 59.049
-2.995 59.478
-2.774 59.903
-2.547 60.325
-2.314 60.744
-2.074 61.159
-1.828 61.571
колеса
Рис. 5.5
69
Несмотря на указанные трудности выбора
оптимального сочетания качественных показателей,
можно сформулировать некоторые обязательные
условия, при выполнении которых обеспечивается
выбор оптимальных коэффициентов смещения:
1) проектируемая передача не должна заклинивать;
2) коэффициент перекрытия проектируемой
передачи должен превышать допустимое значение, еа >
> [еа]; 3) зубья у проектируемой передачи не
должны быть подрезаны и их толщина на окружности
вершин должна превышать допустимое значение,
Расчетные коэффициенты смещения
необходимо выбрать так, чтобы избежать подрезания и
заострения зубьев. Отсутствие подрезания
обеспечивается минимальным значением коэффициента
смещения, а отсутствие заострения — максимальным;
следовательно, должно выполняться условие xlmax >
х\ -^lmin-
Коэффициент xlmin определяют по формуле (5.11)
и наносят на график (см. рис. 5.3). Для получения
максимального коэффициента смещения на графике
проводят вертикальную линию допустимого
заострения [sa/m] до пересечения с кривой sa]/m. В
точке их пересечения коэффициент смещения имеет
максимальное значение, хх = х1тах. Таким образом,
выделяют зоны безусловного подрезания и
заострения. При выборе оптимальной комбинации
коэффициентов смещения внутри выделенной зоны
следует обеспечить наилучшие условия,
предотвращающие различные виды повреждений колес передачи.
Основными видами повреждений зубьев колес,
учитываемых в расчетах, являются следующие:
а) выкрашивание и отслаивание материала на
боковых поверхностях зубьев, преимущественно в
окрестностях полюса зацепления Р9 вызываемые
высокими контактными напряжениями в
поверхностном слое зубьев;
б) излом зубьев у вершины в случае их
чрезмерного заострения или у основания, где имеют место
наибольшие напряжения изгиба;
в) истирание боковых поверхностей зубьев
(абразивный износ), в большей степени
наблюдающееся в плохо герметизированных передачах;
г) заедание зубьев, возникающее от разрыва
масляной пленки; возникновение заедания
связано с высокими контактными напряжениями и
большими относительными скоростями и
ускорениями зубьев.
Высокие контактные напряжения вызывают три
вида повреждений зубьев: выкрашивание,
отслаивание и заедание. Чтобы уменьшить эти напряжения
геометрическими средствами (выбор размеров и
формы профилей колеса), необходимо увеличить
приведенный радиус кривизны эвольвентных профилей
зубьев или по возможности уменьшить коэффициент
удельного давления. Это автоматически приведет и
к уменьшению коэффициента скольжения А,", что
также необходимо для предотвращения заедания
зубьев. Таким образом, выбирают значение
коэффициента хх в зоне Xj < xlmax. Однако выбор
коэффициентов смещения без учета других параметров
может привести, например, к нежелательному
уменьшению коэффициента перекрытия.
При проектировании зубчатых передач с
колесами 8-й или 9-й степеней точности согласно
ГОСТ 1643-81 уменьшение коэффициента еа не
приводит к снижению их работоспособности (если,
конечно, 8а > 1) вследствие того, что ошибки
зацепления и деформации зубьев под нагрузкой
препятствуют одновременному контакту двух пар
зубьев. Поэтому уменьшение контактных
напряжений за счет увеличения коэффициента еа для колес
8-й и 9-й степеней точности практически не
осуществимо, и нет смысла в этом случае добиваться
высоких значений £а. Можно ограничиться
диапазоном значений га = 1,05... 1,20. Иным должен
быть подход для тяжело нагруженных зубчатых
передач с колесами 6-й или 7-й степени точности.
Совместная работа двух пар зубьев в них
возможна, поэтому для уменьшения контактных
напряжений следует увеличить значение еа, чтобы
нагрузка распределялась на две пары зубьев на
возможно большем участке активной линии
зацепления (5j52).
Рекомендуемые значения коэффициентов
перекрытия, соответствующих степени точности колес
передачи, согласно ГОСТ 1643-81 приведены ниже:
Степень точности ... 6 7 8 9
[ej > 1,3 1,2...1,3 1,1...1,2 1,05.-1,1
Ограничение коэффициента перекрытия может
привести к тому, что значения хх придется
выбирать из более узкой области значений — области
допустимых значений (ОДЗ). При этом
коэффициент удельного давления в полюсе зацепления
должен быть меньше единицы, Ьр < 1.
Излом зубьев во многом зависит от толщины зуба
на окружности вершины. Для тяжело нагруженных
передач следует выбрать вид химико-термической
обработки. Значения относительной толщины зубьев
на окружности вершин в зависимости от вида
химико-термической обработки приведены ниже:
Нормализация, улучшение 0,20...0,30
Цементация, азотирование 0,30...0,40
Закалка 0,40...0,45
70
Для зубчатых передач с колесами 6-й и 7-й
степеней точности, наоборот, предельная толщина зуба
может быть уменьшена до (0,15...0,20)т, а для
передач среднего и малого нагружения — до
(0,1...0,15)т.
Истирание зубьев имеет место только в
открытых или плохо герметизированных передачах, у
которых между зубьями попадает абразивный
материал (например, передачи тракторов и других
сельскохозяйственных машин). Абразивный износ, как
показывают исследования, зависит главным
образом от удельного давления на зубья, а также от
линейной скорости скольжения профилей зубьев в
полюсе зацепления: чем больше удельное давление и
выше скорость, тем интенсивнее изнашиваются
зубья. В меньшей степени на изнашивание зубьев
оказывает влияние скорость скольжения боковых
поверхностей зубьев, от которой зависят значения
коэффициентов скольжения Х'[ и Х'^ Согласно
рис. 5.3 уменьшение коэффициента X" в основном
осуществляется за счет увеличения коэффициента
смещения xj.
Для средненагруженных передач можно
попытаться уменьшить интенсивность изнашивания
подбором коэффициентов смещения. Для этого
необходимо выбрать значение хх таким, чтобы
значения X" и Х{ были либо равными, либо такими, что
наибольшие значения коэффициентов скольжения
были пропорциональны твердости материалов
зубьев колес:
хцх{=шех1шс2.
Аналогично осуществляется выбор
коэффициентов смещения для косозубых передач.
Функциональные зависимости показателей качества
зацепления от изменения коэффициентов смещения xXt и
x2t сохраняют тот же общий характер. Понятие
торцевого коэффициента смещения имеет формальный
характер, оно систематизирует технику
геометрических расчетов.
После выбора коэффициента смещения хх
шестерни по графикам на рис. 5.3 можно вычислить
все геометрические параметры колес зубчатой
передачи (см. разд. 5.3 или рис. 5.4, 5.5).
Кроме описанной методики расчета,
существует несколько других методик выбора
коэффициентов смещения (например, рекомендации ISO,
ГОСТ 16532-83 и др.).
Область возможных значений расчетных
коэффициентов смещения может быть также
представлена в виде соответствующего блокирующего
контура, построенного для заданной зубчатой
передачи с числами зубьев zx и z2. Примеры блокирующих
контуров и рекомендации по их использованию
приведены в ГОСТ 16532-83.
5.6. Построение профиля зуба колеса,
изготовляемого реечным инструментом
Для образования профиля зуба колеса проводят
огибающую ряда положений исходного
производящего контура реечного инструмента в станочном
зацеплении, что отражает реальный процесс
изготовления колеса на станке. При этом эвольвентная
часть профиля зуба образуется прямолинейной
частью реечного производящего исходного контура,
а переходная кривая профиля зуба — закругленным
участком контура.
Схему станочного зацепления (см. рис. 5.2)
строят в указанной последовательности:
1) проводят делительную (гх = г^) и основную
(гьх) окружности, а также окружности вершин гаХ
и впадин ry-j колес. (Размеры выбирают по рис. 5.4,
5.5 или рассчитывают по формулам разд. 5.3.);
2) откладывают от делительной окружности
выбранное смещение ххт (с учетом знака) и проводят
делительную прямую исходного производящего
контура реечного инструмента. На рис. 5.2 эта
прямая проходит выше делительной окружности
колеса, что соответствует положительному смещению
ххт инструмента. На расстоянии h*am вверх и вниз
от делительной прямой проводят линии граничных
точек, а на расстоянии (h*am + с*т) — линии
вершин и впадин, станочно-начальную линию Q-Q,
касательную к делительной окружности в точке Р0
(полюсе станочного зацепления);
3) проводят линию станочного зацепления NXP0
через полюс станочного зацепления Р0,
касательную к основной окружности в точке Nx. Эта линия
образует с прямыми исходного производящего
контура инструмента углы, равные ос,;
4) строят исходный производящий контур
реечного инструмента так, чтобы ось симметрии
впадины совпадала с вертикальной осью Ох-0. Для
этого от точки пересечения оси Ох-0 с
делительной прямой (точка G) откладывают влево по
горизонтали отрезок в 1/4 шага и через его конец
перпендикулярно линии зацепления Л^Р0 проводят
наклонную линию, которая образует угол ос, с
вертикалью. Эта линия соответствует
прямолинейной части профиля зуба исходного производящего
контура инструмента. Закругленный участок
профиля строят как сопряжение прямолинейной части
контура с линией вершин или с линией впадин
окружностью радиусом ру. Симметрично
относительно вертикальной линии P0G (линия симметрии впа-
71
дин) строят профиль второго зуба исходного
производящего контура, прямолинейный участок
которого перпендикулярен другой возможной линии
зацепления: PqK'. Расстояние между одноименными
профилями зубьев исходного контура равно шагу,
р =кт;
5) строят профиль зуба проектируемого колеса,
касающийся в точке К профиля исходного
производящего контура.
Для построения ряда последовательных
положений профиля зуба исходного производящего
контура проводят вспомогательную линию ММ,
касательную окружности вершин. Фиксируют точку W
пересечения линии ММ и прямолинейной части
профиля инструмента и центр окружности
закругленного участка профиля — точку L. Откладывают
на линии ММ несколько отрезков равной длины
(15...20 мм) и отмечают точки I, II, III, IV, V и т. д.
Такие же отрезки откладывают на станочно-началь-
ной прямой Q-Q (точки 7, 2, 3,...) и на дуге
делительной окружности (точки 7', 2', 3\ ...). Из центра
Ох колеса через точки 7', 2', 3', ... на делительной
окружности проводят лучи 01', 02', 03', ... до
пересечения с окружностью вершин в точках Г, 2", 3", ...
При перекатывании без скольжения станочно-на-
чальной прямой по делительной окружности точки
7, 2, 3, ... и точки Г, 2', 3', ... последовательно
совпадают; то же для точек I, II, III, ... и точек 7", 2",
3",... При этом точка W описывает укороченную
эвольвенту, а точка L — удлиненную.
Любое промежуточное положение точки W или
L находят построением соответствующих
треугольников. Например, в точке 2 строят треугольник 112W,
размеры которого при обкатке сохраняются. Когда
точка 2 совпадает с точкой 2', сторона
треугольника 112 пойдет по лучу 02' и займет положение
стороны 2"2. Тогда точка й^п будет соответствовать
вершине треугольника, построенного методом засечек
по известным сторонам (2"2' = 112 Wu2" = II W\
2'Wn = 2JV), т. е. треугольник 112W займет
положение треугольника 2"2'WIV Аналогично находят
положение точки L2. Из точки L2 радиусом ру
проводят окружность, а через точку W^ касательно к этой
окружности линию, которая показывает новое
положение исходного производящего контура. Все
последующие положения профиля зуба исходного
контура {Wm, WlY, Wy и т. д.) строят аналогично,
затем проводят к ним огибающую, которая
определяет левый профиль зуба изготовляемого колеса.
Затем на окружности вершин откладывают
толщину зуба saX. Через концы отложенных отрезков по
шаблону строят вторую половину профиля этого же
зуба.
На изготовляемом колесе строят три зуба. Для
этого откладывают от вертикали в обе стороны шаг
рх по хорде делительной окружности. Через концы
этих отрезков и центр колеса 0\ проводят линии
симметрии правого и левого зубьев, по отношению
к которым по шаблону строят зубья колеса. При
правильном построении зацепления эвольвенты,
очерчивающие профили зубьев нарезаемых колес,
должны касаться прямолинейной части профиля
инструмента на линии зацепления (см.
приложение 7, лист 10). Расположение станочного
зацепления на третьем листе курсового проекта показано в
приложении 7 (листы 10, 11).
5.7. К построению зубчатой передачи
на третьем листе проекта
Кроме станочного зацепления шестерни на
третьем листе проекта изображают и зацепление
колеса с шестерней. Его построение выполняют
следующим образом.
1. Откладывают межосевое расстояние aw и
проводят окружности: начальные (dwl, dw2),
делительные (dh d2), основные (dbl, db2), вершин (dab da2) и
впадин (dfb dp). Начальные окружности должны
соприкасаться в полюсе Р зацепления. Расстояние
между делительными окружностями по осевой
линии равно воспринимаемому смещению ут.
Расстояние между окружностями вершин одного колеса
и впадин другого, измеренное по осевой линии,
должно быть равно радиальному зазору ст.
2. Через полюс зацепления проводят линию
зацепления, касательную к основным окружностям
колес. Точки касания N^ и N2 называют
предельными точками линии зацепления. Линия зацепления
образует с перпендикуляром, восстановленным к
осевой линии в полюсе, угол зацепления aw на
активной линии зацепления ВХВ2. Точка Вх является
точкой пересечения окружности вершин колеса с
линией зацепления, ее называют точкой начала
зацепления, точка В2 — точкой пересечения
окружности вершин шестерни с линией зацепления, ее
называют точкой конца зацепления.
3. Строят профили трех зубьев, причем так,
чтобы точка контакта К располагалась на активной
линии зацепления. Профили зубьев шестерни могут
быть перенесены на чертеж проектируемой
передачи со схемы станочного зацепления с помощью
шаблона; эвольвентную часть профиля зуба колеса
в соответствии с определением эвольвенты строят
как траекторию точки прямой при перекатывании ее
по основной окружности колеса без скольжения
(см. построение на листах 10, 11 приложения 7),
72
и переносят также с помощью шаблона в точку
контакта К зубьев на линию зацепления. Переходную
часть профиля зуба для колеса строят приближен-
'но. Если Гг > гъ или /у < гь, но (rb - rj) < 0,4m, то
эвольвентную часть сопрягают с окружностью
впадин радиусом Pfffi; если r^ < rb, но (rb - rf) > 0,4m,
то от основания эвольвенты на основной
окружности проводят линию, параллельную оси зуба, до
окружности впадин, а затем у основания зуба делают
закругление радиусом р^т. От построенного
профиля зуба откладывают толщину зуба по
делительной окружности и проводят аналогичный профиль
другой стороны зуба. Профили двух других зубьев
располагаются на расстоянии хордового шага р2.
На зубьях, соприкасающихся в точке К, отмечают
активные профили, которые взаимодействуют в
процессе зацепления. Нижние точки активных
профилей лежат на пересечении окружностей dpX и dp2
соответствующих профилей. Активные профили
перекатываются друг по другу со скольжением,
поэтому их длины различаются.
4. На чертеже проектируемой зубчатой
передачи обязательно указывают диаметры начальных,
делительных, основных окружностей, окружностей
вершин и впадин, шаг и толщину зубьев по
делительным окружностям, высоту зубьев, межосевое
расстояние, воспринимаемое смещение, угол
зацепления, радиальный зазор, положение профилей
в точках начала и конца зацепления, углы
торцевого перекрытия (фа1 и фа2). Варианты
компоновки третьего листа проекта представлены в
приложении 7 (листы 10, 11).
5.8. Расчет профилей
цилиндрических зубчатых колес
и геометрии переходной кривой,
нарезанных инструментом реечного типа
5.8.1. Построение эвольвентной части
профиля зуба
При расчете и построении зубчатых зацеплений
с использованием компьютерной графики
используют аналитические выражения для определения
координат профиля зуба как для эвольвентного
участка, так и для его нерабочей переходной части.
Профили зубьев при нарезании методом
огибания содержат три характерных участка (рис. 5.6):
1) а-а, являющийся огибающим по отношению к
профилю зубьев инструмента; 2) b-b, очерченный
по дуге окружности (rj) и представляющий собой
дно впадины; 3) Ъ-а, очерченный по так
называемой переходной кривой.
Рис. 5.6
Переходной поверхностью называют часть
боковой поверхности зуба, которая соединяет его
главную (эвольвентную) поверхность с поверхностью
впадин. Часть профиля зуба, расположенную в
пределах его переходной поверхности, называют
переходной кривой.
Форма переходной поверхности, определяющая
размеры зуба у основания, характеризует изгиб-
ную прочность зуба, а также правильность
зацепления (без интерференции) с сопряженным
колесом и выполнения некоторых видов отделочных
операций.
Аналитическое уравнение профиля зуба
позволяет точно построить профиль в любом требуемом
масштабе, не прибегая к графическим способам,
описанным ранее. Наличие точных изображений
профилей значительно облегчает вычисление
коэффициентов концентрации напряжений для зубьев,
нарезанных со смещением.
Для построения эвольвентного профиля
используют методику, предложенную В.А. Гавриленко. В
прямоугольной системе координат хОу (см. рис. 5.6) ось
ординат проходит через середину зуба, а начало
координат лежит на окружности впадин. В качестве
текущего параметра принимают угол \|/ обкатки
инструмента или поворота колеса при нарезании. В
такой системе координат достаточно просто определить
толщину зуба и описать переходную кривую
профиля зуба колеса, нарезаемого реечным инструментом.
Вывод основных уравнений профиля
базируется на методе преобразования координат,
отражающем кинематику образования профиля с помощью
инструмента, работающего по методу обкатки. Этот
метод нарезания основан на том, что по станочно-
начальной окружности, являющейся в процессе
нарезания центроидой, зуборезный инструмент обка-
73
тывается без скольжения с помощью своей
центроиды. Центроидой рейки является прямая.
На рис. 5.7 изображены расчетная схема
станочного зацепления, а также неподвижная x0Oiy0 и
подвижная х'Ау' системы координат. Ось 0\у§
неподвижной системы координат проходит через точку Р
пересечения профиля с делительной окружностью,
а начало координат Ох находится в центре
вращения нарезаемого колеса. Ось Ах подвижной
системы координат совпадает с делительной прямой
рейки, а начало координат лежит в точке А на
режущей кромке ВС инструмента.
Рис. 5.7
Формулы преобразования для перехода от
системы координат jcqOj^q к системе координат х'Ау'
имеют вид
х =х0 coscp -у0 sincp + гф;
у' =х0 sincp + y0 coscp - г,
или
jc0 = (х' - rep) coscp + (у' + г)sincp ;
(5.40)
у0 =-( х' - rep) sincp + (у' + r)coscp.
Координаты точки Э, лежащей на нарезаемой
эвольвенте профиля, в системе координат х'Ау'
определяют по формулам
x'3 = rcpsin2oc,
(5.41)
у'э =rcpsinoc cos a.
Подставляя их в выражение (5.40), получают
уравнения эвольвентного профиля в системе
координат х0Оху0 :
74
хО\Э =r [sincp - ф cos а соз(ф + а)],
(5.42)
у0хЭ=г[со$<$ + фсо80С8т(ф + а)].
В системе координат хОу (см. рис. 5.6),
ориентированной относительно середины зуба, формулы
преобразования имеют вид
х =jc0 cos\|/ -y0 sin\|/,
(5.43)
у =у0 sin\|/ + у0 cos\|/ - /у,
где \|/ = sjlr — угол, соответствующий половине
угловой толщины зуба на делительной
окружности; ту— радиус окружности впадин нарезаемого
колеса.
С учетом уравнений (5.40) и (5.43) формулы для
перехода в систему хОу принимают вид
х = (х' - гф) соз(ф - \|/) + (у' + г) 8т(ф - \|/);
у = ~{х' - гф) sin (ф - \|/) + (5.44)
+ 0/ + г)сО8(ф-\|/)-Г/?
а в системе координат х'Ау' уравнения эвольвенты
имеют вид
хэ = г [sin( ф - \|/) - ф cosoc со8(ф - \|/ + а)],
y3 = r[cos(qH\\f) + (5.45)
+ Ф cosa зт(ф - \|/ + а)] - ту.
Уравнение эвольвентной части профиля можно
получить существенно проще, используя
непосредственно параметрическое уравнение эвольвенты в
полярной системе координат
p = r^/cosa, 6 = inva, (5.46)
где a — угол профиля зуба. Однако используемый
выше подход с преобразованием координат
хорошо подходит для получения уравнений переходной
части профиля и поэтому приведен здесь для
единообразия методов расчета.
5.8.2. Вывод уравнения переходной кривой
профиля зуба
В случае, когда рейка имеет закругления в
вершинах, выполненные по дуге окружности
радиусом ру, на рейке отмечают произвольную точку 3,
лежащую на закруглении (рис. 5.8). Через точку 3
проводят нормаль и находят точку К — точку
пересечения нормали к кривой закругления с начальной
прямой Ах' рейки. Нормаль ЗК всегда проходит
через точку L — центр дуги закругления. Напомним,
что в процессе нарезания прямая АК обкатывается
без скольжения по делительной окружности наре-
заемого колеса. Точка 3 рейки коснется нарезаемой
поверхности зуба в тот момент, когда нормаль KL
пройдет через полюс зацепления. Это произойдет
при таком положении обкатываемого инструмента,
когда точка К нормали KL к закруглению окажется
на делительной окружности нарезаемого колеса, т. е.
когда точка К станет полюсом зацепления. Для этого
рейка должна повернуться на угол ф (см. рис. 5.7),
который следует определить.
Высота закругления рейки с = с*т (см. рис. 5.2,
5.8), поэтому радиус закругления
Р/=-^. (5-47)
1-since
Из рис. 5.8 следует, что
h'=ha0-c*m,
h" = ha0-pf.
Тогда координаты точки L (центра закругления)
определяются как
x'L = -(К tgoc + pf cosoc),
(5.48)
y'L = -h" = -(ha0-pf).
Вводят вспомогательный параметр — угол |И (см.
рис. 5.8) и определяют координаты произвольной
точки 3 закругления в системе координат х'Ау'
через параметр |И и координаты центра L:
x'3=x'L + PyCOS|Ll,
(5.49)
/з=.й-Р/*11Ц1.
Связь между углом поворота рейки ф и углом |1
выражается зависимостью
гф + h'tga - pf cosoc
ctgH = -^ •
(5.50)
Для перехода в неподвижную систему
координат подставляют соотношения (5.48) и (5.49) в
уравнение (5.44) и получают координаты переходной
кривой профиля зуба:
х3 = -(h'tg а + ру cos а - ру cos ц + гф) cos (ф - \|/) +
+ (-h" - р f sin (in- r) sin (ф - \|/);
(5.51)
уз = (A'tgoc + ру cos а - ру cos |i + гф) sin (ф - \|/) +
+ (-А"- ру sin|ин- г)cos(ф-\|/) - /у.
Здесь, как и ранее, угол \|/ = s /2r.
Диапазон изменения угла ф определяют исходя
из следующих соображений. В точке I (см. рис. 5.6) —
точке касания переходной части профиля с
окружностью впадин — угол jlx = 90°, отсюда следует, что
<Pi =
A'tgot + py cos a
(5.52)
В точке II (см. рис. 5.6) — точке касания
переходной и эвольвентой частей профиля — угол \i = a,
отсюда следует, что
Фп=—— . (5.53)
г sin a cos a
5.8.3. Вывод уравнения переходной кривой
профиля косозубого колеса
Как известно, при нарезании косозубых колес
используют реечный инструмент, но повернутый на
угол (5. Это приводит к тому, что в торцевой
плоскости параметры рейки несколько изменяются. Угол
а зацепления увеличивается и становится равным
углу ос, торцевого зацепления, при этом дуга
окружности скругления на конце рейки превращается в
дугу эллипса. Меньшая (вертикальная) ось этого
эллипса равна ру, т. е. равна радиусу скругления
рейки, поскольку по высоте параметры рейки не
меняются, а большая ось (горизонтальная)
увеличивается до значения py/cos p (рис. 5.9). На этом
рисунке АК — начальная прямая рейки, которая
катится без скольжения по делительной окружности
нарезаемого колеса. На дуге эллипса отмечают про-
^•/cosP
о.
К
X
\
L
В
'
\
\
\
\
"
Р
S
2
М0
ис.
1
5.9
f^'/
^
/
А
/ *'
,е
^
75
извольную точку М и проводят через нее нормаль
MN к эллипсу до ее пересечения с начальной
прямой рейки. Как и в разд. 5.8.1, необходимо найти
координаты точки М в подвижной системе
координат х'Ау' и определить угол ф поворота
инструмента, при котором точка М рейки совпадет с
делительной окружностью колеса (см. рис. 5.7). При
этом линия А К равна длине дуги гср, поскольку
поворот инструмента происходит до совпадения
нормали МК с полюсом зацепления. Некоторое
затруднение возникает лишь при проведении нормали к
эллипсу и определении координат точек, лежащих
на нем.
Используя свойство эллипса, на рис. 5.9
выполняют некоторые дополнительные построения.
Проводят из центра эллипса L вспомогательную
окружность радиусом, равным большей оси эллипса.
Проецируют точку М эллипса на вспомогательную
окружность и получают точку М0. Соединяют
точку М0 с центром эллипса L и проводят линию QM,
перпендикулярную прямой MqL, до пересечения с
большой полуосью эллипса в точке Q. Прямая QM0
является касательной к вспомогательной
окружности, так как прямая MqL — нормаль к ней.
Соединяют точку Q с точкой М9 прямая QM будет
касательной к эллипсу в точке М. Проводят линию МК,
перпендикулярную QM в точке М, и получают
искомую нормаль к эллипсу.
Далее записывают необходимые геометрические
соотношения, понятные из рис. 5.9:
SM0 =py sin co/cos (3;
LS=PfCos со/cos (3;
SQ = SM0 tg со = pf sin со tg со/cos p;
SM= SM0 cos p = py-sin со;
tg у =SM/SQ = cos p/tg со;
tg |i =SQ/SM= tg со/cos p.
Координаты центра L эллипса находят по
формулам (5.48), в которых угол а заменяют углом ос,.
Координаты точки М можно выразить через
координаты центра L и отрезки LS и SM:
y'M=yL-SM-
Отрезок АК, равный гф, определяют из
соотношения
AK = x'M + y'Mtgy.
В соответствии с формулами (5.51) находят
положение точки М на переходной кривой профиля
зуба, сопряженной с точкой М на переходной
кривой профиля рейки.
В расчетах удобно в качестве параметра
выбирать угол \i. Угол [I находится в диапазоне
значений а,.. ж/2. Угол у связан с углом |И элементарным
соотношением: у +11 = к/2.
Пример вывода координат боковой поверхности
зубьев шестерни и колеса с помощью программы
WinZub приведен на рис. 5.5. Как следует из
рисунка, выводятся координаты только левых
боковых поверхностей зубьев от середины впадины до
вершины зуба. Координаты точек рассчитаны в
системе координат с началом в центре
соответствующего зубчатого колеса. Ось ординат проведена
через ось симметрии зуба. Поэтому для получения
координат профиля правых поверхностей зуба
можно поменять знаки абсцисс соответствующих точек.
При неудачном выборе коэффициентов
смещения может появиться подрез зуба. Переходная
кривая подрезанного зуба в этом случае также
выводится на экран. Ее координаты рассчитывают по
более сложным формулам, чем формулы, приведенные
в разд. 5.8.1. и 5.8.2.
Кроме специализированных программ студенты
для расчета по приведенным выше формулам
всегда могут воспользоваться математическими
пакетами общего назначения типа MathCAD и
использовать развитые графические средства систем
AutoCAD или КОМПАС для построения зубчатого
зацепления.
В приложении 7 (листы 10, 11) приведены
примеры выполнения третьего листа курсового
проекта.
6. ПРОЕКТИРОВАНИЕ ПЛАНЕТАРНЫХ ЗУБЧАТЫХ МЕХАНИЗМОВ
С ЦИЛИНДРИЧЕСКИМИ КОЛЕСАМИ
Из всех видов механических передач
планетарные зубчатые механизмы в большей степени, чем
другие, снижают материалоемкость машины. По
сравнению с зубчатыми передачами, имеющими
неподвижные оси вращения, их габариты и массы
меньше при равных передаточных отношениях. Это
связано главным образом с тем, что в планетарных
зубчатых механизмах благодаря наличию
нескольких сателлитов осуществляется многопоточность
передачи мощности с ведущего звена на ведомое.
Однако проектирование планетарных передач —
более трудоемкая задача, чем проектирование
обычных передач, поскольку подбор числа зубьев колес
отдельных ступеней связан с необходимостью
соблюдения ряда условий и ограничений. При этом,
как правило, число условий бывает меньше числа
неизвестных, поэтому нельзя получить
однозначного решения. Задача определения числа зубьев
колес сводится к поиску множества вариантов,
соответствующих исходным данным, и выбору
оптимального.
6.1. Основные характеристики
Проектирование планетарного зубчатого
механизма, если не задана структурная схема
механизма редуктора, начинают с ее выбора. На рис. 6.1
приведены все 22 схемы планетарных редукторов,
имеющих не более трех пар зацеплений. Однако на
практике схемы с составным сателлитом, т. е. с
сателлитом, состоящим из четырех зубчатых колес,
применяют достаточно редко и обычно
используют передачи с двумя парами зацепления, которых
существенно меньше (рис. 6.2). Более того, в
практике машиностроения широко распространены
только четыре схемы планетарных зубчатых
передач (рис. 6.3). В табл. 6.1 представлены их
основные характеристики.
Следует обратить внимание, что значения
оптимальных передаточных отношений для каждой
схемы на рис. 6.3 находятся в некотором диапазоне,
который определен эмпирически из практики ре-
дукторостроения. При нахождении заданного
передаточного отношения в этом диапазоне
проектируемая передача будет иметь определенные
характеристики. Если заданное передаточное отношение
выходит за пределы этого диапазона, то следует
выполнить привод многоступенчатым с
последовательным соединением планетарного механизма и
рядовой передачи или в виде комбинации нескольких
планетарных механизмов, которые образуют тем
самым двух- или трехступенчатые механизмы. В
противном случае передача будет иметь низкий КПД.
Наиболее часто в силовых приводах применяют
однорядный планетарный механизм с одновенцо-
выми сателлитами (см. рис. 6.3, а). Это
объясняется простотой его изготовления и подбора чисел
зубьев колес, малыми осевыми габаритами,
достаточно высоким КПД. Для реализации больших
передаточных отношений можно, как уже
указывалось, последовательно соединить несколько
однорядных планетарных механизмов.
Более широкий диапазон значений передаточных
отношений и достаточно высокий КПД имеет
планетарный механизм, выполненный по схеме,
представленной на рис. 6.3, б (см. табл. 6.1). Его также
применяют в силовых приводах. Однако наличие
двухвенцового сателлита несколько усложняет
подбор чисел зубьев, поэтому такую схему механизма
используют реже.
Широкие кинематические возможности имеют
механизмы, схемы которых изображены на рис. 6.3, в, г
(см. табл. 6.1). Передаточные отношения этих
механизмов изменяются в очень широком диапазоне
значений и могут быть как положительными, так и
отрицательными. Однако следует иметь в виду, что
с увеличением передаточного отношения КПД этих
77
л
Jh JH
J4L «Щ>
и d
Ji
z M
TW
lit—■—■
г
T
lib
"FT
fll
ifl
fl
Ш
И
s-sifl
fl
TJ TJ
[Ш
1 *4l
ЧГ
л
и ■-,
и
^^UT^
и
Л
M
л
N
PiL
fU*A
tJ TJ
Рис. 6.1
Z4r
Z2|
.1
*1
z\
iJ
г2-Г
п
*3
z4
LI
Ж
' z3
zl z4
LT U
Рис. 6.2
coi Mi
Z2 l
«4 »
zA
-4 4^
z4
\\Mh \\®h\
V7V
Ufid,
мн'
z3i
Г?
-Я
.Zj
Mi z4x
M
к
я
Mo
78
Рис. 6.3
Таблица 6.1
Структурная схема.
Передаточное отношение
Однорядный планетарный
механизм (см. рис. 6.3, а)
Двухрядный планетарный
механизм со смешанным
зацеплением (см. рис. 6.3, б)
и\н = 1 + z2z4/(z}z3)
Двухрядный планетарный
механизм с двумя внешними
зацеплениями (см. рис. 6.3, в)
k//=i-w(ziz3)
Двухрядный планетарный
механизм с двумя внутренними
зацеплениями (см. рис. 6.3, г)
Звено
входное
1
3
1
1
Я
1
я
выходное
Я
Я
Я
Я
1
Я
1
неподвижное
3
1
4
4
4
4
4
Диапазон
значений и (по модулю)
2,8-8
1,13-1,5
7-16
До 1/25
До 1/1600
До 1600
До 1/16
До 1/1600
8-13
35-300
До 1600
Ориентировочное
значение КПД
0,99-0,97
0,98-0,97
0,99-0,97
0,96
Самоторможение
С увеличением и резко падает
0,96
Самоторможение
0,90-0,75
0,8-0,4
Низкий
механических передач снижается. При больших
значениях передаточного отношения (м1Я > 25) в
таких механизмах за входное звено принимают
водило (Я), а не колесо zx (см. рис. 3.2), как в других
передачах, иначе существенно возрастают потери
на трение, вплоть до возможности возникновения
процесса самоторможения. Эти схемы применяют,
как правило, в несиловых установках
кратковременного действия или приводах приборов, когда
необходимо получить очень большое или очень малое
передаточное отношение, а КПД механизма не
имеет решающего значения. Схема на рис. 6.3, в (см.
табл. 6.1) с двумя внутренними зацеплениями
обладает некоторыми преимуществами, поскольку она
более компактна и имеет более высокий КПД.
6.2. Общие условия
кинематического синтеза
При кинематическом синтезе планетарной
зубчатой передачи необходимо выполнить главное
условие — обеспечить заданное передаточное
отношении. Кроме того, для получения работоспособной
передачи следует выполнить ряд дополнительных
обязательных условий таких, как условия
соосности входного и выходного валов, соседства, сборки
и правильности зацепления зубьев колес.
Некоторые из этих условий являются общими
при синтезе любой планетарной зубчатой
передачи, другие зависят от особенностей
кинематической схемы выбранного планетарного механизма.
При синтезе проектируемого механизма
необходимо также учитывать показатели качества: 1) КПД;
2) минимальные габариты; 3) массу; 4)
динамические нагрузки в зацеплениях колес. Последнее
условие обеспечивается выбором зубьев центральных
колес и зубьев сателлитов взаимно простыми, а
также тем, что числа зубьев сопряженных колес не
имеют общих множителей.
При проектировании планетарного механизма
силового привода до подбора чисел зубьев
необходимо оценить его КПД по табл. 6.1 или рассчитать
самостоятельно, используя аналитические
зависимости (см. кн.: Планетарные передачи / Под ред.
В.Н. Кудрявцева, Ю.Н. Кирдяшева. Л., 1997).
Масса механизма зависит от многих факторов и
ее трудно оценить каким-либо одним критерием.
Наиболее достоверным критерием может служить
сумма чисел зубьев всех колес механизма в
предположении, что все колеса имеют одинаковый
модуль зацепления.
При синтезе планетарных зубчатых механизмов
выполняют ряд условий.
1. Первое и главное условие — передаточное
отношение проектируемого планетарного
механизма должно совпадать с заданным. Следует
подчеркнуть, что это совпадение не обязательно
должно быть абсолютным, а может выполняться с
некоторой допустимой точностью. Зачастую при
обеспечении абсолютного совпадения
увеличиваются габариты механизма. Допустимое
отклонение передаточного отношения от заданного значе-
79
ния (обычно несколько процентов) согласуется с
консультантом.
Передаточное отношение механизма любой
схемы можно выразить через передаточное отношение
механизма с неподвижным водилом, т. е. через
передаточное отношение зубчатого механизма с
неподвижными осями зубчатых колес. Согласно
известному соотношению
"/я= 1-4 (6-1)
где и{н — передаточное отношение угловой
скорости /-го колеса к угловой скорости водила Н при
неподвижном у-м колесе; и? — то же к угловой
скорости у-го колеса при неподвижном водиле.
Напомним, что знак передаточного отношения
пары колес зависит от вида зацепления: внешнее
зацепление — знак минус, внутреннее — знак
плюс.
Для схем механизмов, в которых задано
передаточное отношение от водила к колесу, а не
наоборот, можно использовать формулу
*4 =!/"/*• (6-2)
2. Второе условие, накладывающее ограничения
на выбор числа зубьев, связано с использованием в
планетарном механизме зубчатых колес, нарезанных
без смещения. Для исключения подрезания и
заклинивания любого из колес с внешними зубьями
zBHeiII, нарезанных стандартным инструментом без
смещения, принимают
z>zmin = 17, (6.3)
а для колес с внутренними зубьями zBHyTp в
зависимости от параметров долбяка принимают
*^тт = 85при й*=1,
(6.4)
z>zmin = 58npH/*a = 0,8.
Во избежание интерференции зубьев при
внутреннем зацеплении необходимо, чтобы разность
чисел зубьев в зацеплении не была слишком
маленькой. Обычно принимают
ZBHyrp — ZBHem — "• \Р-5)
3. Третье обязательное условие определяется со-
осным расположением центральных колес
планетарного механизма с водилом. Условие соосности
основных звеньев сводится к равенству
межосевых расстояний входящих в зацепление колес
сателлита с центральным колесом и с эпициклом.
Условие соосности, определяемое соотношением
радиусов водила и начальных окружностей, для
схем механизмов, изображенных на рис. 6.3, а-г,
имеет вид:
гн ~ rw\ + rwi - гю ~ гт>
rH = rW\ + rW2 =rWA ~гт')
(6.6)
rH = rw\ - rwi =rw4 - rm>
При одинаковых значениях модуля зацепления
зубчатых колес условие (6.6) сводится к
соотношениям между числами зубьев:
zl + z2=z3 _z2'
Zj т- Z2 = Z4 — Z^\
zl _z2=z4~z3»
Z\ у Z2 = Za ' Z-5.
Приведенные три условия не зависят от
выбранного числа к сателлитов.
4. Четвертое условие — условие соседства,
учитывающее возможность свободного размещения
сателлитов без их взаимного соприкосновения, будет
выполнено, если расстояние между осями
сателлитов превышает диаметр da окружности вершин
наибольшего сателлита (рис. 6.4, ВХВ2 > da2).
Для механизмов, представленных на рис. 6.3, это
условие выражается неравенством
sin->-^f S (6.7)
к Zi±z2
где z2(z3) — число зубьев большего сателлита: z2,
если z2 > z3, и, наоборот, z3, если z2 < z3; zx±z2 —
относительное межосевое расстояние между цент-
Рис. 6.4
80
ральными колесами и сателлитами: zx + z2 — для
внешнего зацепления; zx-z2 — для внутреннего.
Чтобы определить наибольшее число сателлитов,
которое может иметь планетарный механизм с
известными числами зубьев, условие соседства (6.7)
приводят к виду
arcsin[(z2 + 2h*a)/(zx ±z2)J
5. Пятое условие связано с возможностью
свободного размещения сателлитов — условие сборки.
При симметрии зон зацепления это условие
выражается соотношением
»Ч1 + Ш)=Ц, (6.9)
к
где П = 0, 1, 2,... — произвольное дополнительное
число оборотов водила при сборке; Ц — любое
целое число.
Выполнение этого равенства фактически
означает следующее: если один из сателлитов свободно
устанавливается на вертикальной оси (см. рис. 6.4),
то все последующие сателлиты будут свободно
входить в зацепление с соответствующими колесами в
той же позиции. Для этого необходимо повернуть
водило на расчетный угол
2те
фя= —+ 2яП. (6.10)
к
Здесь принято, что у двухвенцовых сателлитов, т. е.
у сателлитов, состоящих из блока двух жестко
скрепленных между собой зубчатых колес, в
каждом блоке зубья одного венца одинаково
ориентированы относительно зубьев второго венца.
Необходимо также отметить, что даже в случае,
если задано выходное передаточное отношение ихн,
а не какое-либо иное, например м1Я, для проверки
условия сборки по соотношению (6.9) его следует
вычислить по уравнению
"ш=1-"Г4- (611)
При выполнении всех этих условий будет
спроектирован работоспособный планетарный зубчатый
механизм.
6.3. Методика проведения
кинематического синтеза
В исходных данных числа зубьев колес не
заданы, поэтому для их определения при
проектировании схемы планетарного механизма составляют
уравнения (6.1)—(6.10) и решают их совместно.
Особенность решения заключается в том, что
искомые величины — числа зубьев колес — целые
числа. Для уравнений в целых числах не существует
строгих методов их решения, поэтому чаще всего
прибегают к тем или иным методам подбора.
Наиболее простой путь определения чисел
зубьев связан с прямым перебором всех комбинаций
чисел зубьев в некотором диапазоне до тех пор, пока
не найдется механизм, удовлетворяющий всем
требованиям и ограничениям. При максимальном
числе зубьев zmax = 150...200 общее число вариантов
не превысит (2.. .6) • 106, что не является
принципиальным затруднением для современных
вычислительных машин — среднее время такого перебора
составляет обычно несколько минут.
Программу перебора вариантов чисел зубьев
студент может написать самостоятельно на любом
языке, ориентируясь на алгоритм, приведенный на
рис. 6.5. По существу программа содержит три
вложенных цикла перебора чисел зубьев колес zx— z3,
при этом число зубьев z4 четвертого колеса
определяется из условия соосности. Затем вычисляют
передаточное отношение по формуле (6.1). После
вычисления передаточного отношения, если
отклонение его от заданного не превышает допустимой
точности, проводят проверку механизма на
выполнение условий сборки и соседства. Далее наборы
чисел зубьев выводят на печать как результат
синтеза. Если отклонение и больше заданной
точности, необходимо продолжить перебор чисел зубьев z.
Конечно, при таком алгоритме выполняется
значительное число лишних вычислений, однако это
компенсируется простотой алгоритма. Программы
получаются компактными, а время счета обычно
не превышает нескольких минут. Распечатку
текста самостоятельно написанной программы и
результаты ее счета приводят в расчетно-пояснитель-
ной записке.
Для подбора чисел зубьев можно также
воспользоваться такими программами, как Planet2, Plan5, SP
или другими по согласованию с консультантом. Для
учебных целей очень часто применяют метод
сомножителей. В основе реализации метода
используются два основных условия:
- выполнение заданного передаточного
отношения (либо точно, либо с заданной погрешностью);
- выполнение условия соосности (оси входного
и выходного валов должны лежать на одной
прямой линии).
Остальные условия, описанные ранее,
проверяются.
Покажем использование этого метода на
примере планетарного механизма (редуктора) со
смешанным зацеплением (см. рис. 6.3, б), для которого
заданы ихн и число сателлитов к. Передаточное
отношение такого редуктора определяется по формуле
81
Нет
Нет
Нет
Начало
I
Цикл для колеса z \
от zx=zmin до z\ = zmax
Цикл для колеса z2
ОТ^2 = ^ттД0^2=^тах
I
Цикл для колеса z3
от z3=zmin до z3=zmax
Вычисление числа зубьев колеса Z4
по условиям соосности
I
Проверка на допустимость чисел зубьев
по ограничениям (6.3)-(6.5)
I
>
Вычисление передаточного отношения
редуктора по соотношениям (6.1) или (6.2)
I
Проверка на точность совпадения
вычисленного передаточного отношения
чисел зубьев редуктора с заданным
<
I
Проверка на условие сборки
по соотношению (6.8)
I
Проверка на условие соседства
по соотношению (6.10)
I
Вывод найденного набора чисел зубьев колес
zb Z2, Z3 HZ4Ha печать, в файл или на экран
I
Продолжение цикла для колеса z3
<
1
Конец цикла для колеса z3
1
>
Продолжение цикла для колеса z2
<
1
Конец цикла для колеса z2
I
>
Продолжение цикла для колеса z 1
<
т
Конец цикла для колеса z 1
Конец
>
Рис. 6.5
Не выполнено
Не выполнено
Не выполнено
Не выполнено
Щн
= 1 + £2f4
межосевое расстояние
2w\ - aw2 -aw~ rw\ + rw2 ~ rw4 ~ rw3-
(6.12)
(6.13)
Если принять модули первой (zx и z2) и второй (z4
и z3) ступеней равными т^ = гпц = т, то условие
соосности упростится и примет вид
Z] +z2=z4-Z3. (6.14)
Затем проверяют условие сборки (6.9) и условие
соседства (6.7), которое при z2 > z3 принимает вид
а при z3 > z2
>Zo -
. 71 z2 + 2ha
к z^+ z2
. n z<>+ 2hn
к z±+ z2
Из уравнения (6.12) определяют значение
отношения z2z4/(z!Z3) и полученное число разлагают на
сомножители А, 5, С и Д которым числа зубьев z1?
z2, z3, z4 должны быть соответственно
пропорциональны. Чтобы обеспечить соосность механизма,
82
aw\ ~ aw2> вводят дополнительные множители,
поставленные в скобки:
ZjZ3 АС
BD B(D-C) D(A + B)
A(D-C) C(A + B)'
(6.15)
С учетом условия соосности для этой схемы
механизма
(6.16)
zx=A(P-Qq9
z2=B(D-Qq,
z3=C(A+B)q,
z4=D(A + B)q.
Общий множитель q необходимо подобрать так,
чтобы все числа зубьев были целыми и, кроме того,
z] > 17;z2> 17;z3>20;z4>85, a z4-z3>8.
Далее следует проверить, как выполняются
условия соседства (6.7) и сборки (6.9), а также
требования к минимизации габаритов.
В расчетно-пояснительной записке указывают
метод, которым были найдены числа зубьев
редуктора.
После определения чисел зубьев планетарного
механизма и расчета радиусов делительных
окружностей колес на листе проекта изображают
кинематическую схему механизма в двух проекциях и
на одной из них строят диаграмму скоростей (см.
рис. 6.3, а и приложение 7, листы 10, И). На
диаграмме угловые скорости колеса zx и водила Н
пропорциональны тангенсам углов \\f^ и \|/я,
передаточное отношение и^
На схеме углы \\fx и \\fH лежат в одной четверти,
следовательно, и угловые скорости будут
одинаково направлены.
6.4. Критерии оптимальности
При синтезе планетарного зубчатого
механизма необходимо учитывать не только условия,
определяющие его кинематику, но и дополнительные
требования, позволяющие улучшить качество
механизма. Условия проектирования
работоспособного механизма рассмотрены в разд. 6.2, 6.3.
Соответствующие им решения многовариантны,
поэтому из них выбирают оптимальное. Таких
решений может быть несколько, в зависимости от
выбора оценочных параметров. В качестве
критериев оптимальности планетарного механизма
могут быть выбраны разные условия. Наиболее
распространены три критерия оптимальности.
1. Критерий Г — наибольший радиальный
габарит. Для получения этого критерия сравнивают
габариты ступеней Tj — зацепления колеса 1 с
сателлитом 2 и Ги — колеса 4 с сателлитом 3 (см.
рис. 6.3). При этом для внешнего зацепления в
качестве габарита принимают величину dUK + 2д?сат,
а для внутреннего зацепления ступени — rfBHyT, где
^ц.к> ^сат> ^внут ~~ диаметры делительных
окружностей центрального колеса, сателлита, колеса
внутреннего зацепления соответственно. Наибольший из
критериев Tj или Ги принимают за критерий Г,
оценивающий габарит редуктора. Отметим, что
критерий Г не является фактическим габаритом
передачи, поскольку для внешнего зацепления габарит
определяется через диаметры окружностей вершин
соответствующих колес, а для внутреннего
зацепления необходимо учитывать размеры зубчатого
венца. Поэтому критерий используется только для
сравнения вариантов, поскольку понятно, что
механизм с большим значением критерия Г будет
иметь и большие размеры.
Это наиболее важный критерий, поскольку при
прочих равных условиях более компактная
передача всегда предпочтительнее.
2. Критерий Z — сумма чисел зубьев (X =zx +
+ z2+ z3 + z4), косвенно определяющий массу
редуктора и трудоемкость его изготовления. Заметим,
что иногда в качестве критерия Z выбирают более
сложное выражение, учитывающее число
сателлитов к и, на наш взгляд, более точно отражающее
величину массы редуктора, X = zx + k(z2 + z3) + z4.
Заметим также, что критерий Е никак не
учитывает случай, когда разные ступени редуктора имеют
разные модули.
3. Критерий некратности — условие отсутствия
кратности числа зубьев центральных колес числу
сателлитов к. При наличии такой кратности в
механизме могут возникать периодические силовые
возмущения и, кроме того, износ зубьев в этом
случае получается неравномерным. Если таковая
кратность отсутствует, то механизм с некратным
числом зубьев числу сателлитов будет более
динамически работоспособным. Это слабый критерий и
один из наиболее трудно достижимых,
поскольку в случае передаточных отношений, не
кратных числу сателлитов, он конфликтует с
условием сборки.
Как уже указывалось, при синтезе планетарных
редукторов число неизвестных зубьев колес
больше числа кинематических условий.
Следовательно, задача имеет множество решений. Для поиска
оптимальных решений из всех вариантов наборов
чисел зубьев z1? z2, z3, z4, удовлетворяющих
кинематическим условиям, рассчитывают оценочные
показатели по критериям 1иГ. Затем,
последовательно сравнивая между собой, например, вели-
83
z2 = 34
z3 = 34
"zi = 17
Tl z4 = 85"
102
и
u
■
i
w —
'
»
z2 = 34 -1-
■ z3 = 17
Z! = 34
z4 =
= 85n
c_
m = l
z2 = 48
z3 = 48
"zj =24
—j z4= 120-
z2 = 40±
t ^3 = 20
m=l
Z!=40
z4=1001
Рис. 6.6
чины Е для каждого набора, находят наименьшее
значение критерия Emin. Соответствующий ему
набор значений чисел зубьев и сателлитов z1? z2, z3,
z4, А: принимают за параметры оптимального
механизма, имеющего при прочих равных условиях
наименьшую массу. Аналогично, сравнивая
величину критерия Г для разных наборов чисел
зубьев, находят наименьшее его значение Tmin.
Соответствующий ему набор параметров zb z2, z3, z4 и
к является оптимальным вариантом механизма с
наименьшим радиальным габаритом при прочих
равных условиях.
Например, при синтезе планетарного редуктора
смешанной схемы (см. рис. 6.3, в) с передаточным
4 г
отношением м]Я=6ис максимально допустимым
числом зубьев zmax = 120 с помощью уже
упоминавшейся программы Planet2 получается 28 разных
наборов зубчатых колес, из которых в принципе
можно построить вполне работоспособный
планетарный редуктор. Проведем их оптимизацию по
трем вышеперечисленным критериям. На рис. 6.6
приведены четыре варианта планетарных
редукторов смешанной схемы из возможных 28, все с оди-
4 г
наковым передаточным отношением иш = 6, но с
разными наборами чисел зубьев. Схемы показаны
в той форме, в какой они воспроизводятся
программой Planet2. Схемы рис. 6.6, а и б имеют
одинаковый критерий Z = 170, но отличаются по
габариту—в схеме а критерий Г = 85, тогда как в схеме б
он увеличен до значения Г = 102, поэтому
редуктор с числами зубьев, соответствующих схеме я,
будет более компактным. Две схемы (рис. 6.6, виг)
имеют одинаковый габарит Г = 120, хотя
суммарное число зубьев в них различно — £ = 240 для
схемы би! = 200 для схемы г. Сравнивая все
четыре схемы, видим, что схема на рис. 6.6, a (zj =17,
z2 = 34, z3 = 34, z4 = 85, к = 3) будет оптимальной,
поскольку имеет наименьший габарит (Г = 85) и
наименьшую сумму чисел зубьев (Z = 170).
Заметим, что в полученном наборе числа зубьев
сателлитов обеих ступеней одинаковы (z2 =z3=34),
следовательно, в данном случае нет необходимости
использовать двухрядный редуктор смешанной схемы
(см. рис. 6.3, в) и аналогичный результат может быть
достигнут с помощью редуктора (см. рис. 6.3, а)
более простой однорядной схемы — (zx =17, z2 = 34,
z3 = 85).
Выбранные схемы необходимо проверить на
кратность чисел зубьев zx и z4 числу сателлитов к.
Проверка найденного варианта (см. рис. 6.6, я),
имеющего zj = 17 и z4 = 85, показала, что поскольку
ни z1? ни z4 не кратны 3 (для этой схемы к - 3), то
выбранная схема будет иметь удовлетворительные
динамические характеристики.
7. ПРОЕКТИРОВАНИЕ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Кулачковые механизмы — плоские или
пространственные механизмы с одной высшей
кинематической парой — широко распространены в
механизмах перемещения рабочих органов различных
машин-автоматов, в устройствах подачи станков,
механизмах газораспределения двигателей
внутреннего сгорания и во многих других случаях, когда
требуется получить возвратно-вращательное или
возвратно-поступательное движение ведомого
звена в соответствии с заданным законом. Важное
свойство кулачковых механизмов заключается в
возможности создания такого режима движения, при
котором выходное звено остается неподвижным в
течение времени поворота кулачка на некоторый
угол. Движение ведомого звена (толкателя) в
кулачковых механизмах воспроизводится теоретически
точно. Ведущее звено кулачкового механизма
называют кулачком, а ведомое (выходное) —
толкателем.
Четвертый лист проекта посвящен расчету и
проектированию кулачкового механизма, который
является составной частью проектируемой машины.
Его можно использовать как основной механизм,
но чаще — как вспомогательный для выполнения
технологической операции, последовательность и
продолжительность которой согласуется с
движением звеньев основного механизма. В связи с этим
проектирование кулачковых механизмов
выполняют после того, как предварительно намечена общая
компоновка машины, спроектированы ее рабочие
органы, установлены продолжительность и
последовательность выполнения элементов движения
ведомого звена кулачкового механизма и выбран
закон его движения.
Проектирование кулачкового механизма
заключается в определении взаимного расположения
ведущего звена, ведомого звена и координат профиля
кулачка, обеспечивающих заданный закон
движения толкателя. При этом необходимо соблюдать
требования, обусловленные технологическим
процессом и эксплуатационными показателями
механизма. Эти требования отражены в заданиях к
курсовому проектированию.
Проектное решение оценивается комплексом
показателей таких, как взаимозаменяемость деталей,
их прочность, долговечность, стоимость и т. д.
Получить решение, в котором все эти показатели
оптимальные, обычно не удается. Поэтому
оптимизируют один или несколько показателей с
обеспечением выполнения ограничений по остальным
показателям.
В этой главе рассмотрена методика
проектирования кулачковых механизмов с оптимизацией по
габаритам. Дополнительным условием синтеза
является обеспечение отсутствия заклинивания
кулачкового механизма, что достигается учетом допустимых
углов давления на выходном звене. Кроме
аналитических методов проектирования кулачковых
механизмов в практике широко используют и графические
методы, которые также описаны в настоящей главе.
7.1. Исходные данные
и этапы проектирования четвертого листа
В заданиях к курсовому проектированию
кулачковых механизмов содержатся следующие исходные
данные:
1) структурная схема, показывающая тип
кулачка, вид толкателя, их относительное расположение
и характер движения толкателя. Ведущим звеном в
механизме (рис. 7.1, 7.2) является дисковый
кулачок 7, ведомым — толкатель 2, снабженный
роликом 3. Толкатель может совершать поступательное
(см. рис. 7.1) или вращательное (см. рис. 7.2)
движение;
2) максимальное перемещение толкателя — ход
hB толкателя (см. рис. 7.1) или угол (3 поворота
толкателя (см. рис. 7.2), рассчитываемый по ходу hB
толкателя, осуществляемому по дуге (см. рис. 7.2);
3) длина /2 в случае вращательного движения
85
Рис. 7.2
толкателя или внеосность е — в случае его
поступательного движения;
4) фазовые углы: угол ф1р рабочего профиля
кулачка и его составляющие в фазах удаления ф1у,
дальнего стояния ф1д и сближения ф1с, которые
назначаются в соответствии с циклограммой,
отражающей согласованность перемещений
исполнительных звеньев механизма;
5) закон движения толкателя в виде графика
изменения относительного ускорения толкателя в
зависимости от угла поворота кулачка. Закон
движения определяется конкретной технологической
операцией, для выполнения которой предназначен
проектируемый механизм;
6) допустимое значение угла давления [&];
7) направление вращения кулачка и частота его
вращения.
Спроектированный кулачковый механизм
должен реализовывать заданный закон движения и при
этом иметь наименьшие габариты и достаточную
надежность работы.
Проектирование кулачкового механизма
подразделяют на три этапа:
определение недостающих кинематических
передаточных функций, характеризующих, как в
большинстве заданий, скорости и перемещения
толкателя, в функции угла поворота кулачка или времени;
расчет основных размеров кулачкового
механизма — минимального радиуса г0 кулачка, внеоснос-
ти е (если она не задана) или межосевого
расстояния aw, при которых углы давления ft не
превышают допустимых значений;
определение координат профиля кулачка.
Проектирование кулачкового механизма
выполняют с использованием аналитических
зависимостей либо графических методов. Часто сочетают оба
метода, т. е. некоторые из этапов выполняют
аналитически, а другие — графически.
7.2. Выбор закона движения толкателя
При проектировании кулачкового механизма
выбор закона движения толкателя определяется
главным образом требованиями, предъявляемыми
технологическим процессом. В качестве закона движения
можно принимать не только закон перемещения
толкателя, но также законы изменения его скорости или
ускорения. Однако на практике для
проектирования в качестве исходного чаще всего задают закон
изменения ускорения толкателя. Это связано с тем,
что динамика кулачковых механизмов в основном
определяется законами изменения ускорения и
силами инерции, которые учитывают, например, при
силовом расчете пружин, напряжений в деталях
механизма, при анализе износа и долговечности
кулачка и т. д. Если заданным является закон
перемещения толкателя, то для определения его ускорения
дважды дифференцируют функцию перемещения
толкателя и затем оценивают максимальные
значения ускорения, плавность хода толкателя,
возможные разрывы функции (удары второго рода) и
сравнивают их с допустимыми. Следует иметь в виду,
что в большинстве случаев не обязательно строго
придерживаться какого-либо конкретного закона
перемещения толкателя, но важно, чтобы толкатель
переместился на расстояние, равное ходу hB за
заданный угол ф1у поворота кулачка в фазе удаления.
Определяющим с позиций работоспособности
кулачкового механизма является закон ускорения
толкателя. Именно поэтому чаще задаются законом
ускорения толкателя, а его скорость и закон перемещения
получают путем интегрирования этого ускорения.
При проектировании кулачковых механизмов
используют типовые законы изменения ускорения
86
толкателя. Механизмы, работающие по этим законам,
различаются долговечностью, плавностью хода и
другими параметрами. И хотя в большинстве
случаев для неответственных конструкций достаточно
ограничиться самыми простыми законами, иногда из
технологических соображений приходится
обращаться к более сложным законам движения толкателя.
В табл. 7.1 приведены некоторые наиболее
распространенные на практике законы изменения
аналогов ускорения aqB, скорости vqB и перемещения SB
толкателя. Все зависимости представлены в виде
функций относительного угла к поворота кулачка,
который меняется от 0 до 1, т. е. к = (Pi/(piy, где (pj —
текущий угол поворота кулачка. Исходными
данными для использования таблиц служат ход hB
толкателя и углы ф1у и ф1с фаз удаления и сближения
соответственно. Характерные (особые) точки на
графике аналога ускорения отмечены в относительных
долях угла поворота кулачка некоторыми
постоянными величинами кх, к2. В «симметричных»
графиках величину к2 отдельно не задают, а выражают
через кх9к2 = 1 - к{. Связь между кинематическими
параметрами толкателя в фазе удаления
определяется следующими соотношениями:
SB = HBf(k);
Нв dfjk
Ф1У dk
v _HBdf(k).
V„R —
a„n =
HB d2f(k)
<Piy dk2
В фазе сближения также можно использовать
соотношения табл. 7.1, только отсчет относительного
угла поворота кулачка следует проводить в
обратную сторону, т. е. от конца фазы сближения к ее
началу. При расчете и построении соответствующих
графиков углы ф1у, ф1с и угол ф1р рабочего
профиля кулачка удобно выражать в градусах.
7.3. Определение кинематических
передаточных функций
7.3.1. Построение графиков
по аналитическим зависимостям
Связь между кинематическими параметрами
толкателя определяется известными соотношениями
кинематики:
т т
vB=jaBdt; SB=jvBdt,
о о
где Т — промежуток времени, в течение которого
осуществляется один оборот кулачка.
Закон изменения скорости кулачка не известен,
поэтому нельзя использовать приведенные
зависимости, но их можно выразить через
кинематические передаточные функции, не зависящие от
времени:
т <Pip
о о wi
«Pip <PiP
= со? J Ц-d(f>{ = О)! f a Bd<h, (7.1)
о wi о
«Pip
<PiP
SB = \vBdt = J vB ^ = j vqBd<b. (7.2)
о о ^ о
Если известна зависимость aqB = fa((p{), можно
по формуле (7.1) получить аналог скорости как
функцию vqB =fv(<$\), а по формуле (7.2) —
перемещение как функцию угла поворота, SB = fs(<P\)
(табл. 7.1). Подчеркнем, что в табл. 7.1 приведены
не законы изменения ускорения и скорости
толкателя, а кинематические передаточные функции —
аналоги ускорения и скорости. Истинные скорость
и ускорение толкателя при необходимости всегда
можно получить через угловую скорость кулачка:
v = v^coj и а = ag(ui (при щ = const).
Отметим, что функция fa(q>\) в некоторых
законах имеет особые точки — точки разрыва или
излома. При этом функцию fa((P\) при ф! g [0, ф1р]
разбивают на участки фь е [ф/нач, Ф/КОн]> внутри
которых нет особых точек.
Чтобы избежать неопределенности в задании
функции aqB =/а(щ) =/i +f2 + ... +fm считают, что
отрезки каждого участка [ф/нач, Ф/КОн) открыты
справа.
В случае, когда исходная функция задана в виде
графика или таблицы значений, что бывает редко,
решение получают при помощи численных или
графических методов. Для определения передаточной
функции скорости толкателя интегрируют заданную
функцию ускорения толкателя, а затем, интегрируя
полученную функцию скорости, находят функцию
перемещения толкателя. Обычно применяют
стандартный метод численного интегрирования —
метод трапеций, согласно которому
aqB(i-\) + адЫ
V.d; = V.
Ч - vqB{i-\)
■Афь
$Bi - $В(1-\)
VqB(i-\) + VqBi A
+ ' — A(Pl>
где Аф! = Дф1р/(#- 1) — приращение угла
поворота кулачка на шаге интегрирования; N — число
равноотстоящих точек, в которых заданы значения
переменной.
87
Таблица 7.1
№ варианта.
Наименование
графика
График ускорения
на фазе удаления
толкателя
Аналитические зависимости аналогов
ускорения,
скорости,
V
хЛд/ф,
iy
перемещения,
SBxhXy
Диапазон
изменения
значений к
Двиэюение толкателя с мягкими ударами и постоянным ускорением
1. Прямоугольный
симметричный
<*qB
о
{
0,5 1
1 к
4
-4
4к
4(1 -*)
2
2k2
-(\-4к + 2к2)
0,5
0<к<0,5
0,5<к<\
к = 0,5
2. Прямоугольный
несимметричный
й?я+
к
*1
0,5
1
1
1 к
^2_
*1
1-Л,
2£
*1
,1-*
'l-Jfc,
2
1-
(1-А:)2
l-Jfc,
Л,
0 < к < Jfc,
А:! < А: < 1
* = *,
3. Прямоугольный
симметричный
с нулевым участком
1
aqB
0
i
Ку 1 К]
кх 0,5 к2 1
[
it
о
1
\-к
1
1
l-Jfc
2*,(1-*,)
1 2к-кх
2 1-ife,
2*,(1-*,)
1 fr
21-Jt,
1 2 - 3fct
2 l-Jfc,
0<jfc<jfc,
А, <£< 1-*,
1 — A:, < Л: < 1
Jfc = *.
*=!-*,
4. Прямоугольный
несимметричный
с нулевым участком
»9я
2Jfc
*! к2 0,5
&i(1-A;j + &2)
0
2
'(1-*2)(1-*,+*2)
^(1 -Л] + £2)
2
1-^+^2
2(1 - Л:)
(1-*2)(1-*,+*2)
2
1 - £[ + £2
2
1 - А:, + £2
&l(l-A:, + &2)
2к-кх
\-кх+к2
ч2
1--
(1-*Г
(1-*2)(1-*,+*2)
1-^+^2
2А2 - к{
\-к\+к2
0<к<к,
кх<к<к2
к2<к<\
к = кх
к = к,
5. Косинусовдальный
симметричный
qB
0
""^■^0,5 1
к
-со$(пк)
к
У
2
1 sin (nk)
-[\-со$(пк)\
0,5
0<£<1
* = 0,5
к = 0
к=\
6. Косинусовдальный
несимметричный
к (к к
cos
4fc 2 Л,
м
'и 1-Й
-cosl —
л . f я А:
— sin
2 2 Л,
1-COS
2*1 ,
4(1-А:,) I 2 1 — Л:
—sin
2
re 1-А:")
I 2 1 - *i
%
к\ +(1 - &i)cos
я 1-А:
2 1 — А:,
я2
4(1 - Л,)
0 < к < к.
*,<£<!
* = *,
к = 0
к=1
7. Косинусовдальный
с нулевым участком
1
2кг
2 АГ|(я: — 2л;А:| +4к{)
XCOS
aqB
0
к2=\-кх
0,5 к2 1
к
2 кг
V ' J
1
к - 2пкх + 4/^
к к
xsin|
2 Л,
к - 2пкх + 4^
1 -cos
к к
Ткг
2 kx(K-2nkt +4А:,)
'тг 1 - Л:
-х
XCOS
2 Л,
7С
71 - 271&! + 4&!
71
71 - 271^ + Акх
xsin
2 к.
К
к - 2пкх + 4кх
71
X
1-
пк - пкх + 2кх
и - 2пкх + 4кх
2кх
71 - 27^ + 4кх
к - 2пкх + 4кх
п\-к
XCOS
[2 кх
2кх
п - 2пкх + 4^j
я - 271^ + 2кх
к - 2пкх + 4кх
0<к<кх
кх<к<к2
к2<к<\
к = кг
к = к2=1-кх
Продолжение табл. 7.1
№ варианта.
Наименование
графика
График ускорения
на фазе удаления
толкателя
Аналитические зависимости аналогов
ускорения,
скорости,
V
х Ад/ф]
1у
перемещения,
SB х Л1у
Диапазон
изменения
значений к
8. Равноубывающий
симметричный
6(1-2*)
6
6*(1-*)
3
2
Р(3-2к)
2
0<*<1
£ = 0
£=0,5
9. Равноубывающий
несимметричный
^ кх - к
(1-А:,)2
3 А:(2А:, - A:)
2
Ч
3 (1 - к)(1 - 2кх + к)
2 (1-А:,)2
3
2
1 А:2(ЗА:, - к)
1 А:2(ЗА:,-А:) + (1-2А:,)(ЗА--А:,)|
(1-А:, Г
Л,
1-А:,
0 < А- < А:,
Ат,<А:<1
* = *,
А- = 0
А:=1
10. Прямоугольная
трапеция
qB
0
i
^
А-2=1-А-,
\0,5 к2 1
^\
к
6
Z/I
6 1-2к
Zn \-2кх
6
Zn
—
—
—
Zn = 1 + 2Jfc, - 2£,2
6А:
Z«
6 к-к2-кх2
Zn 1 - 2A:,
6(1 - A)
Z«
6A;,
z«
6A:,
Zn
3 1 + 2*,
2 Z«
3^
Z«
A:2(3-2A:)-2A;2(3A:-A:,)
Z«(1-2A:|)
x 3(1-A:)2
Z/j
ЗА:,2
Zn
1_Ж
Zn
I
2
0<k<k{
kt<k<k2
k2<k<l
k = k.
k = k2= 1 — A:]
A: =0,5
11. Прямоугольник
с косинусоидой
IqB
{
*1
к2=\-кх
\0,5 к2
1
к
2 ^Л.
~Zn
л .
— sin ou
Zn "
Zn = 2(\-2kxY+%zkxi\-kl),
Zn
%
1£п
Zn
\nkx + (\-2k^o,<ys,a.k\
Zn
(l-k)
n2kx
Zn
K2k\
Zn
7c(rtA:i +1 -
■2*,)
Zn
ak =
я 1-2Л
2 1-2*!
n2 k2
Zn 2
1
2
'j 2(1-2A:,)2 since* +
Z«
jAfc,(l-2*)'
Zn
)
, n2(l-k)2
Zn 2
1 я2*,2
2 Z/i
j 1 Л,2
2 Z/i
1
2
0 < * < kx
kx<k<k2
k2<k<\
k = kx
k = k2=l-kx
к = 0,5
Безударное движение толкателя с синусоидальным ускорением
12. Синусоидальный
симметричный
2nsm(2nk)
1 - cos(2rcA:)
Ink - sin(27tA;)
2л
2
0<k< 1
A: =0,5
13. Синусоидальный
несимметричный
я . nk
— sin —
A:, A:,
4
nk
1-cos-—
к . tc(1 - A:)
-sin-
1-fc 1-fc
1-cos
7i(l-A:)
1-fc
, kx . nk
k —Lsin—
л kx
, \-kx . n(l-k)
k+ Lsin — -
я 1 -&
0<*<*,
kx<k<\
k = L
Окончание табл. 7.1
№ варианта.
Наименование
графика
График ускорения
на фазе удаления
толкателя
Аналитические зависимости аналогов
ускорения,
скорости,
перемещения,
SB х hXy
Диапазон
изменения
значений к
14. Синусоидальный
симметричный
с нулевым участком
адв
*,= !-*,
1 п . пк
sin —
2кх(\-кх) кх
1 л 7г(1 — Л:)
-sin
1 (f пк}
1 - cos —
2(1 - *,) [ *,
1
1
к\ 0,5 &2
2*1(1-*1) кх
2{\-кх)
1-*,
1 -cos
1 1 ( . . . пк
2тс 1 - кх у 1 кх
\2к-кх
2 \-кх
п(\-к)
1 1
2тс 1 - кх I
- кх sin
7с(1 + к + 2кх)-
. тс(1-*Г
1
1 *,
\-кх
1
\-кх
1
1-*,
2 1-*!
12-3*!
2 1-*,
2
0<*<*,
*! < * < *2
*2 < * < 1
/С — /Ci
*=!-*,
к = 0,5
15. Синусоидальный
несимметричный
с нулевым участком
. пк
-sin-
кх(\ - кх + к2) кх
\-кх+ к2
Л ък\
1 -cos —
1
l-k,+h
л(1 - Л| + £2)
2А: -А:)
пк - кх sin —
кх
1 ™2
1 - *i + к
1 ™2
(1-*2)(1-*1+*2)
тс(1 - к)
1-кх+ к2
1 -cos
71(1-*)
1-*2 J
1
711(1-*! +*2)
7C(*-*i + *2) +
0<*<*!
*! < * < *2
*2<*<1
xsin-
. 71(1-*)
1-*9
1 - кх + *2
2
1 - *! + *2
/v2;on
*i
l-*i
2А:2-
1
1-
+ к2
-*i
■к2
\-кх+к2
к = к.
К — /to
16. Треугольный
симметричный
17. Треугольный
несимметричный
aqB
0
aqB
0
^^\о,5
Л
/ \*1 °.,5
1
У к
1
-^ 1
Ъ2к
16(1 -2к)
-32(1 - А:)
8
0
-8
~ к\ - к
8 *"*■
(1-Л,)2
-8-Ь*
О-А:,)2
4
0
4
16А:|
2[1 - 2(1 - 2А:)2]
16(1-А:)
1
2
1
к2
А:2
2
2
*.2 .
\ 2{к-к{)2'
(1-А",)2
(l-*i)2
1
2
1
3
|(l_2A:)3-(l-2A-) + i
i-fa-t)3
1
12
1
2
11
12
4 А:3
ЗА:,2
1 3 А:,2
2А- А- 4<*-*1>3
3(1-А:,)2
j 4 (1-А:)3
3(1-А:,)2
6
А,
1-А-,
6
0<А<0,25
0,25 <А<0,75
0,75 <А<1
А = 0,25
А = 0,5
А = 0,75
0 < А < 0,5А,
0,5А, < к < А,
А,<А< —у1
1 + Jfc,
^-L<A<1
А = 0,5А,
А = А,
к 2
Кулачковые механизмы относятся к цикловым
механизмам. В течение полного цикла движения
толкатель кулачкового механизма должен
переместиться из начального положения на расстояние,
соответствующее ходу hB, а затем возвратиться в
исходное положение, т. е. перемещение толкателя в
фазе удаления равно его перемещению в фазе
сближения. Следовательно, кинематическая
передаточная функция скорости должна удовлетворять
условию
Фр Фу
j VqBd<P\ = J V^rfCft, (7.3)
Фснач О
где фс нач — угловая координата начальной точки в
фазе сближения.
Скорость и кинематическая передаточная
функция скорости толкателя в фазах ближнего и
дальнего выстоя равны нулю, т. е. скорость толкателя в
момент начала фаз удаления и сближения и в
момент их окончания равна нулю. При этом
необходимо, чтобы выполнялись соотношения
Тур Yy
J" Vrf(Pl= J aqBd(f>b
сур
(7.4)
Фснач+Ф1ср Фр
J aqBd(Q\ = j aqBdqx,
Фснач Фснач+Ф1ср
где Фу р — угловое положение толкателя при
разгоне в фазе удаления; ф1ср — угловое перемещение
кулачка при разгоне в фазе сближения; фс р = фр -
~ (Фснач + 9i ср) ~~ угловое положение кулачка при
торможении в фазе сближения. Эти условия
учитывают при построении безразмерных графиков
передаточных функций скорости и ускорения,
фактически эти условия сводятся к выравниванию
площадей графиков над осью абсцисс и под ней,
соответствующих указанным интегралам.
После определения законов перемещения и
скорости толкателя путем непосредственного
интегрирования заданного закона ускорения или по табл. 7.1
результаты расчета заносят в расчетно-пояснитель-
ную записку и строят на четвертом листе проекта
соответствующие графики. Все три графика
располагают один под другим на одинаковой базе Ъ по оси
абсцисс, которую следует выбирать в интервале
150...240 мм, и с примерно одинаковыми
максимальными ординатами у каждого графика. Верхним
будет график аналога ускорения, под ним — график
аналога скорости и ниже — график перемещения.
На листе обязательно указывают масштабы
построения графиков.
Масштаб угла поворота кулачка, мм/рад,
Ь
И«
<Pip
Масштаб перемещений толкателя, мм/м,
Vs
УТ
(7.5)
(7.6)
гдеу™вх — максимальная ордината с графика
перемещений точки В центра ролика толкателя, мм
Масштаб аналога скорости, мм/м,
_ ,,max/,.max
*qv Jvq
К
(7.7)
где Vq — максимальное значение аналога
скорости; у™** — соответствующее ему выбранное
значение ординаты на графике аналога скорости.
Масштаб аналога скорости, рассчитанный по
формуле (7.7), является предварительным и служит
для оценки возможности размещения графика на
листе. Его всегда можно скорректировать. Для
дальнейших построений удобно выбирать масштаб
графика аналога скорости равным масштабу графика
перемещений, т. е.
однако это не всегда возможно.
Масштаб аналога ускорений, мм/м,
(7.8)
„max
rneaq
Viaq=y^X/^\ (7.9)
максимальное значение аналога ускоре-
„ л, max -.
нии; saq — соответствующее ему выбранное
значение ординаты на графике аналога ускорения.
Масштаб аналога ускорений, рассчитанный
по формуле (7.9), также является
предварительным и служит для оценки возможности
размещения графика на листе. Его всегда можно
скорректировать.
Если из заданий к курсовому проектированию
известна угловая скорость или частота вращения
кулачка, то можно одновременно найти истинные
скорость и ускорение толкателя. Как следует из
законов кинематики, скорость толкателя определяется
соотношением
VB = VqB®h (7Л°)
где 0)! — угловая скорость кулачка, рад/с.
График изменения аналога скорости vqB
одновременно является и графиком скорости v5,
построенным в своем масштабе |iv, мм/(м-с-1). Масштаб
графика абсолютной скорости можно найти по
известному масштабу графика аналога скорости
Ш = М™М-
(7.11)
94
Аналогично график изменения аналога
ускорения aqB одновременно является и графиком
ускорения ав, построенным в своем масштабе \1а,
мм/(м*с~2). Масштаб графика абсолютного
ускорения можно найти по известному масштабу графика
аналога ускорений
поскольку ускорение через аналог ускорения
можно определить по соотношению
aB = aqB(*l (7.13)
В заключение находят длительность различных
фаз. Принято, что кулачок вращается равномерно,
поэтому длительность рабочей фазы
'р = ФРМ- (7.14)
С помощью зависимости (7.14) определяют
масштаб графика времени |И„ мм/с, по оси абсцисс
М* = йф<01- (7.15)
В большинстве заданий к курсовому
проектированию углы рабочего профиля кулачка, углы
удаления, сближения и дальнего выстоя заданы в
градусах. Поэтому допустимо для удобства
построения масштаб графика углов |1°, мм/град, по оси
абсцисс также выражать в градусах, т. е.
М$=*/ф
iP-
(7.16)
7.3.2. Построение графиков методом
графического интегрирования
Для получения зависимостей изменения
скорости и перемещения толкателя, если заданная в
проекте функция ускорения толкателя отсутствует в
табл. 7.1, проводят ее интегрирование. В
аналитической форме для этого можно воспользоваться
средствами пакета символьных вычислений Mapple, а при
численном анализе — программой MathCAD. Кроме
того, применяют методы графического
интегрирования, хотя точность графических вычислений
обычно невысокая. Пример такого интегрирования
приведен на рис. 7.3, а—в. Согласно этому методу
вначале в произвольном масштабе изображают график
аналога ускорений толкателя. Размер (базу) Ъ
графика по оси абсцисс выбирают в диапазоне
150...240 мм и по зависимости (7.5) находят
масштаб графика цф по горизонтальной оси.
Далее, произвольно задавшись отрезками
интегрирования Кх и К2, дважды проводят графическое
интегрирование для определения аналога скорости
и перемещения толкателя. По полученной в
результате интегрирования максимальной ординате на гра-
Рис. 7.3
фике перемещений находят масштаб графика \is (см.
(7.6)). По этому масштабу и выбранным отрезкам
интегрирования Кх и К2, мм, находят масштабы, в
которых фактически построены графики аналогов
скорости и ускорения толкателя:
М^МУМчр;
(7.17)
Следует отметить, во-первых, углы поворота
кулачка при вычислении jlu задаются в радианах, во-
вторых, при выборе отрезка интегрирования К2,
численно равного масштабу |Иф, масштаб графика
аналога скорости \iqv будет равен масштабу
графика перемещений \is, \iqv = [is.
7.4. Определение основных размеров
кулачкового механизма по условию
ограничения угла давления
7.4.1. Построение фазового портрета
При выборе основных размеров кулачкового
механизма (см. рис. 7.1) — минимального радиуса
кулачка г0, смещения (внеосности) оси толкателя
относительно оси вращения кулачка или межосевого
расстояния (см. рис. 7.2) — стремятся получить
минимально возможные значения углов давления, так
как при этом уменьшаются реакции в кинематичес-
95
ких парах, силы трения и повышаются КПД и
надежность механизма. Метод определения угла
давления в зависимости от характера движения
звеньев высшей кинематической пары и основных
размеров механизма показан на рис. 7.4. Угол давления
£ВА^
VBJ
V
уа
/
V ®\i °\
\ ' г
\ V
Jiv
'-+
\ t
^-4^
^w
Ф2^
\6>
я£
►
Рис. 7.4
заключен между направлением вектора силы F,
действующей со стороны кулачка на толкатель по
нормали п-п, проведенной в точке касания звеньев, и
направлением вектора скорости \в точки 5,
перпендикулярного толкателю В02. Угол COxD равен углу
давления Ь и, следовательно,
0 CD BD-BC BD-(02B-02C)
охс охс охс
Из подобия треугольника ВЪа плана скоростей
и треугольника BOxD получают
BD9
ОхА
ВО = Хв01А=ХвЦ = Хв_ = у
(7.19)
яв-
После подстановки значений отрезков
зависимость между углом давления и кинематическими
параметрами механизма принимает вид
tg^=V/2+fl-C°S(p2? (7.20)
*wsinq>2
где vqB — аналог скорости точки В толкателя; /2 —
длина толкателя; aw — расстояние между осями
вращения кулачка и толкателя; ф2 — угол,
определяющий положение толкателя относительно линии
межосевого расстояния.
В случае, когда толкатель совершает
прямолинейное поступательное движение (см. рис. 7.1),
выражение для определения угла давления имеет
вид
tgfl
_ V
±е
Sn+S
(7.21)
>о
в
где е — смещение направляющей толкателя
относительно оси вращения кулачка; S0 + SB —
координата точки В толкателя в системе координат,
имеющих начало на оси вращения кулачка.
Величины vqB, SB и ф2, входящие в формулу для
определения угла давления Ф, являются
переменными. Следовательно, угол давления также
является переменной величиной, но его значение bt не
должно превышать заданное допустимое значение
угла давления, fy < [Щ.
Ранее было показано (см. (7.19)), что отрезок BD
(см. рис. 7.4) изображает в масштабе [is
передаточную функцию скорости точки В. Перпендикуляр к
отрезку BD, проведенный через его конец (точка £>),
составляет с прямой, проходящей через точку D и
центр 0\ вращения кулачка, угол давления Ь.
Значит, если известно положение оси вращения
кулачка, то, даже не имея профиля кулачка, можно
определить угол давления в различных i'-х
позициях толкателя (рис. 7.5), построив для них отрезки,
изображающие аналог скорости vqBb которые
соответствуют положениям толкателя, определяемым
перемещениями SBi (см. рис. 7.5, а, б). Графики на
рис. 7.5 называют фазовыми портретами
кулачкового механизма. Очень важно, чтобы перемещения
SBi и аналоги скорости vqBi на фазовом портрете
были построены в одинаковом масштабе. Именно
поэтому выбор масштаба графика аналога
скорости vq равным масштабу графика перемещения SB
(см. разд. 7.2.1, формулу (7.8)), существенно
упрощает построение фазового портрета.
При проектировании механизма, когда размеры
кулачка, его радиус г0 (отрезок ОхВ^) не известны,
положение оси вращения кулачка также будет не
известно. Его выбирают таким образом, чтобы
любое из текущих значений угла давления bt не
превышало допустимого значения [Щ. Для этого
строят фазовый портрет, т. е. зависимость SB(vqB), и в
каждой /-й позиции проводят через конец отрезка
кинематической передаточной функции скорости
vqBi луч под углом [Щ к вектору скорости в этой
точке. При расположении центра вращения
кулачка непосредственно на луче выполняется равенство
А = [&]. Фактически луч делит плоскость, в
которой может быть расположен центр вращения
кулачка, на две области — допустимую, в которой
fy < [д], и недопустимую (на рис. 7.5
заштрихована), в которой $( > [Щ. Проделав аналогичные
построения для всех точек фазового портрета,
выделяют область допустимых решений (ОДР), в лю-
96
Рис. 7.5
бой точке которой выполняется условие fy < [Щ
(см. рис. 7.5, г). Центр вращения кулачка
помещают в ОДР, общую для всех положений. Такое
решение обеспечивает выполнение условия д,- < [&] для
полного цикла работы механизма.
Для механизма с поступательно
перемещающимся толкателем построить ОДР существенно проще:
достаточно провести всего два луча, касательных к
фазовому портрету под углом [Щ (см. рис. 7.5, в).
Более того, в большинстве случаев максимальные
значения углов давления соответствуют
характерным точкам фазового портрета SB(vqB), в которых
текущие значения аналога скорости vqB
максимальны. (Это происходит в том случае, если на графике
vqB в экстремальных точках имеется излом {3-3')
функции vqB.) Два луча, проведенные через них, и
определят ОДР.
Чтобы построить фазовый портрет, следует по
значениям функции перемещения толкателя для
произвольного значения угла поворота кулачка фи
и передаточной функции скорости vqBi для того же
угла фи построить точку фазового портрета SB(vqB)i9
т. е. по существу исключить фи из функций 5^(ф12-)
и v^v((pu). При поступательном движении
толкателя точку фазового портрета строят в
прямоугольной системе координат с началом в точке В0 (см.
рис. 7.5, в). При качающемся толкателе построение
точки фазового портрета осуществляют в полярной
системе координат с началом в точке 02 на оси
вращения толкателя (см. рис 7.5, г). Текущие значения
перемещения SBi толкателя откладывают по линии
перемещения центра ролика (по дуге радиусом /2),
а текущие значения аналога скорости vqB — вдоль
осевой линии толкателя.
При построении фазовых портретов следует
руководствоваться правилом знаков: передаточная
функция скорости при удалении толкателя —
положительная величина, при сближении —
отрицательная. Поэтому вектор скорости точки В толкателя,
повернутый на 90° в направлении вращения
кулачка, совпадает с направлением аналога скорости в
фазовой плоскости. Пример правильного
направления осей показан на рис. 7.5, в, г.
7.4.2. Определение минимальных габаритов
Для механизма с качающимся толкателем
перемещениям Sk и Sn в точках кип (рис. 7.6, в)
соответствуют углы поворота толкателя
fLk = Sk/l2*fln = Sn/l2.
Из треугольника 02кп, в котором известны
длины двух сторон: l0lk = /2 - vqh l0in = /2 + vqn и
угол между ними (pw - (Зд), определяют расстояние
между точками к и и, а по теореме косинусов —
угол 8:
1кп = >\102к + 102п ~ 2l02kl02n cos Фп - $к ) >
8 = arcsin
h2k
sm($n-$k)
кп
В треугольнике 0\кп углы и длина отрезка Охк
согласно теореме синусов равны:
а, = 90о-[^] + (р,-(3,) + 8,
ocw = 90°-[#]-8,
у= 180°-(«* + «*),
W = /bSma„/siny.
Межосевое расстояние находят из треугольника
0\к02 в соответствии с теоремой косинусов:
aw = Ь2о, = ^+^"2/o2^sinM • (7-22)
Угол между межосевой линией и ближним
положением толкателя определяют из треугольника
ОхЮ2 по теореме синусов:
ф2о = arcsin
^cos[#]W
(7.23)
97
Рис. 7.6
Радиус начальной окружности кулачка находят из
треугольника ОхВ^02 (рис. 7.6, в) по теореме
косинусов:
r0 = ylal+ll-2aJ2<ns<ho- (7-24)
Расчетные соотношения для определения
размеров кулачкового механизма при поступательном
движении толкателя, получаемые с
использованием рис. 7.6, а, б, имеют вид
У=2[Щ;
8 = arctg^^
*qk Vqn
oc£ = 90°-[fl] + 8;
an = 90° - [d] - 8:
j __ чк *qn
li™ ^—
COS О
sinoc„
loxk - L
kn'
sin у
e = l0]ksin[$]-vqk. (7.25)
Координата ближней точки толкателя
S0 = lO{k cos m-Sh (7.26)
Радиус начальной окружности кулачка
^2_L„2
>0 +е
гп=л/ад+е-. (7.27)
При жестких ограничениях габаритов
механизма следует учитывать, что заклинивание толкателя
при силовом замыкании кинематической пары
характерно только в фазе удаления, так как в фазе
сближения толкатель движется под действием силы
упругости пружины силового замыкания. Это
позволяет расширить границы ОДР для положения оси
0\ вращения кулачка, если при работе механизма
реверсивное движение кулачка не предусмотрено
(кулачок вращается только по ходу часовой
стрелки, либо только против хода). В этом случае в фазе
сближения не вводят ограничение угла давления
или допустимый угол давления в фазе сближения
принимают значительно большим, чем в фазе
удаления.
На рис. 7.7 для механизма с поступательно
движущимся толкателем показаны ОДР, позволяющие
Смещение оси толкателя относительно оси
вращения кулачка
Рис. 7.7
98
понять логику выбора положения центра вращения
кулачка:
ОДР — вращение кулачка реверсивное,
допустимые углы давления при удалении и сближении
одинаковы;
ОДР! — вращение кулачка реверсивное, но
значения допустимых углов давления в фазах
удаления и сближения различны;
ОДР2 — кулачок вращается только против
часовой стрелки, предельное значение угла давления при
сближении не регламентировано;
ОДР3 — кулачок вращается только по часовой
стрелке, предельное значение угла давления при
сближении не регламентировано;
ОДР4 — вращение кулачка реверсивное,
смещение направляющей относительно оси вращения
кулачка не допускается, е - 0.
Согласно требованиям, предъявляемым к
работе кулачкового механизма, выбирают
соответствующую ОДР и тем самым определяют его
минимальные габариты: r0, e (или aw). Для каждого
конкретного механизма условия его проектирования
отражены в заданиях к курсовому
проектированию. В расчетно-пояснительной записке
необходимо указать сведения о направлении вращения
кулачка, допустимом угле давления и
относительном расположении осей вращения кулачка и
толкателя, а также об условии допустимости
реверсивной работы механизма.
7.5. Определение координат
профиля кулачка
Координаты точек профиля кулачка
рассчитывают в полярной Ю\УЦ или в декартовой хО\у
системах координат. Начало координат совпадает с
центром вращения кулачка, полярная ось или ось
абсцисс проходит через начальную точку В0 на
профиле кулачка (рис. 7.8).
Расчетные формулы для определения координат
точек профиля кулачка с качающимся толкателем
получают по схеме, изображенной на рис. 7.8.
Полярные координаты — текущее значение радиуса rt
центрового профиля кулачка и угол \|/z,
определяющий его положение относительно оси, —
характеризуются следующими соотношениями:
[fi£ + /f-2aw/2cos(p2,-;
\|/, = ф1( + 6,.;
Ф2/ = Ф20 + Р/;
(7.28)
(7.29)
(7.30)
Рис. 7.8
где р; = SBi/l2 — текущее значение угла поворота
толкателя; <plf- — текущее значение обобщенной
координаты;
2 . /2sin(p2/
Oj = arcsin — ■LAL - \|/0;
\|/0 = arccos
2awr0
(7.31)
(7.32)
Координаты точек профиля кулачка в
декартовой системе находят по формулам
хш = rt cos \|/,;
Текущие значения угла давления
ф = Vi+flwcos92|-/2
(7.33)
(7.34)
tfwsm<P2/
Расчетная схема для вывода формул координат
центрового профиля кулачка с поступательно
движущимся толкателем дана на рис. 7.9.
В полярной системе координат радиус rt
центрового профиля и угол \|//? определяющий его
положение относительно полярной оси, определяют
по формулам
n=J(S0+SBi)2+e2; (7.35)
V/ = <Pi/-P/, (7.36)
где S0 — координата ближней точки толкателя; SBi —
текущее значение перемещения точки В толкателя;
фи — текущее значение угла поворота кулачка;
S0+SBi s0
Pi = arctg arctg —-
е е
(7.37)
99
Рис. 7.9
Наибольший радиус кулачка
rH6=J(S0+hB)2+e2, (7.38)
где hB — максимальное значение перемещения
толкателя.
Координаты центрового профиля кулачка в
декартовой системе координат имеют вид
^^cosy,; (7.39)
yBi = -rlsin\\fi. (7.40)
Текущие значения угла давления
fl,=arctg^-^. (7.41)
^0 + ^Bi
По приведенным формулам рассчитывают
центровой профиль кулачка и изображают его на
четвертом листе проекта. Для этой цели можно
использовать математический пакет MathCAD,
специализированные программы для рассчета кулачков QUL,
KULAK, KULWIN или любую другую программу
по рекомендации консультанта.
7.6. Проектирование кулачковых
механизмов графическим методом
7.6.1. Определение основных размеров
Основные размеры механизма определяют с
помощью фазового портрета (см. разд. 7.3),
представляющего собой зависимость аналога скорости
толкателя от его перемещения vqB(SB). Масштабы,
выбранные по оси перемещений SB и по оси аналогов
скорости vqB, должны быть одинаковыми. Для ме-
100
ханизма с поступательно движущимся толкателем
фазовый портрет строят в декартовой системе
координат (см. рис. 7.5, я), а для механизмов с
качающимся толкателем — в полярной системе (см.
рис. 7.5, б). По оси SB откладывают перемещение
толкателя, в первом случае — от начала координат
в точке В0 вдоль линии перемещения толкателя, во
втором — от точки В0 по дуге радиусом /2,
проходящей через эту точку. Отрезки, соответствующие
перемещениям толкателя, откладывают либо в
масштабе |1£ графика перемещений, либо в масштабе
\iqv = [i's кинематической передаточной функции
скорости. Конечно, можно выбрать и иной
масштаб, более удобный для построения, но при этом
потребуется дополнительный пересчет ординат
одного или обоих графиков.
От полученных точек St откладывают отрезки
кинематических передаточных функций в том же
выбранном масштабе, перпендикулярно линии
перемещения толкателя (см. рис. 7.5, а) или вдоль
направления толкателя — при качающемся толкателе (см.
рис. 7.5, б).
Длины отрезков, мм, изображающих
кинематические передаточные функции скорости толкателя,
вычисляют по формуле
Для определения направления вектора
передаточной функции скорости следует вектор аналога
скорости толкателя повернуть на 90° в сторону
вращения кулачка. При этом передаточная функция
считается положительной величиной в фазе удаления
толкателя и отрицательной — в фазе сближения.
Если реверсивное движение кулачка не
предусмотрено и не заданы значения углов давления в фазе
сближения, то достаточно построить только одну
ветвь фазового портрета, соответствующую фазе
удаления толкателя.
Чтобы определить ОДР для механизма с
поступательно движущимся толкателем, проводят две
касательные к фазовому портрету под заданными
допустимыми углами давления (см. рис. 7.7).
Для механизма с качающимся толкателем,
кроме двух касательных, проводят лучи в каждом
положении фазового портрета (рис. 7.10). Внутри
ограниченной лучами ОДР выбирают положение оси
Ох вращения кулачка и определяют размеры
кулачкового механизма, r0, e или г0 и aw.
7.6.2. Построение профиля кулачка
При графическом построении профиля кулачка
применяют метод обращения движения. Для этого
Рис. 7.10
всем звеньям механизма условно сообщают
угловую скорость -cOj. При этом кулачок становится
неподвижным, а толкатель и остальные звенья
вращаются с угловой скоростью, равной, но
противоположно направленной, угловой скорости кулачка.
При построении профиля кулачка с внеосным
поступательно движущимся толкателем (рис. 7.11)
Рис. 7.11
из центра О^ проводят окружности радиусами г0
иев произвольном масштабе |i/ = \i's. К
окружности радиусом е проводят линию, касательную
перемещению толкателя, располагая ее по отношению
к центру вращения кулачка таким же образом, как
на фазовом портрете и как было задано в
исходных данных (слева или справа). Точку пересечения
линии перемещения толкателя с окружностью
радиусом г0 — точку В0 — соединяют с центром 0\.
От полученного луча О^В0 в направлении -щ
откладывают угол рабочего профиля кулачка ф1р.
Дугу, соответствующую углу ф1р, делят на части в
соответствии с делением оси ($х на графике SB((p{).
Через точки деления 1, 2, 3,... касательно к
окружности радиусом е проводят лучи, определяющие
положения толкателя в обращенном движении. От
точек 1, 2, 3,..., лежащих на окружности радиусом г0,
вдоль проведенных лучей откладывают в масштабе
графика JUL/ перемещения толкателя в каждой /-й
позиции. Соединяя полученные точки плавной
кривой, получают центровой профиль кулачка.
При построении профиля кулачка с
качающимся толкателем (рис. 7.12) из центра Oj проводят в
масштабе графика |И/ окружности радиусами г0 и aw.
Точку Ох соединяют с произвольно выбранной
точкой 02о на окружности радиусом aw. От луча О102о
в направлении -щ откладывают угол ф1р рабочего
профиля кулачка.
Дугу, соответствующую углу ф1р, делят на
части в соответствии с делением оси <рх на графике
SB((p{). Из точек 02о> ^21» 022» ••• проводят дуги
радиусом /2 от точек 0, 1, 2, ... на окружности
радиусом г0. От точек 0, 1, 2,... по дугам откладывают в
масштабе графика перемещения SB точки В
толкателя. Соединяя полученные точки В0...Вк плавной
кривой, получают центровой профиль кулачка.
В кулачковых механизмах обычно на конце
толкателя размещают ролик, главным образом, для
уменьшения трения при взаимодействии толкателя
и кулачка. Естественно, фактический профиль
кулачка с учетом наличия ролика на толкателе будет
отличаться от построенного профиля. Чтобы
построить фактический профиль кулачка, выбирают
радиус /?рол ролика исходя из прочностных или
геометрических соображений. Для этого часто
используют эмпирические формулы
7?рол = (0,25 - 0,4)г0 или Ярол < 0,8 pmin,
где pmin — минимальный радиус кривизны
центрового профиля кулачка.
Для получения конструктивного (рабочего)
профиля кулачка строят эквидистантный профиль,
отстоящий от центрового на расстояние, равное ра-
101
Рис. 7.12
диусу ролика, который соответствует огибающей к
дугам, проведенным из множества точек
центрового профиля радиусом ролика (см. рис. 7.10).
7.6.3. Построение графика угла давления
При проектировании кулачкового механизма на
листе проекта строят график изменения угла
давления в функции угла поворота кулачка. В
определенной мере этот график является контрольным,
поскольку он показывает, что в любом положении
кулачка угол давления не превышает заданное
допустимое значение. Углы давления можно
определять аналитически по формуле (7.20) или (7.21),
однако проще их находить графически
непосредственно по фазовому портрету (см. рис. 7.5, а, б). Углы
измеряют в градусах, например, транспортиром,
причем точность такого измерения вполне
удовлетворительная, поскольку, как уже указывалось,
график носит контрольный, проверочный характер.
Следует иметь в виду, что по определению угол
давления возникает только в фазе удаления
толкателя. Если кулачок нереверсивный, то вычисление
функции угла давления и ее изображение следует
ограничить только этой фазой. Однако если
кулачок реверсивный, то фаза удаления при одном
направлении вращения кулачка становится фазой
сближения при его обратном направлении
вращения. Соответственно, при обратном направлении
вращения фазой удаления будет фаза сближения
прямого направления. Поэтому для обратного
направления вращения следует строить свой график
углов давления, ограничиваясь только фазой
удаления обратного направления вращения. Как
правило, для наглядности эти два графика для двух
направлений вращения кулачка совмещают в одном и
получают график изменения углов давления для
рабочего угла поворота профиля кулачка. Это
допустимо, только необходимо помнить, что на листах
12, 13 для угла давления изображены два разных
графика для двух разных направлений вращения
кулачка, условно совмещенных друг с другом, а не
один. Необходимо это обстоятельство отметить на
графике или с помощью изображения графиков для
разных направлений разными линиями (например,
сплошной линией и пунктиром), или с помощью
указания направления вращения кулачка для обеих
фаз удаления при его реверсе. На графике углов
давления следует указать допустимое значение угла
давления, а на профиле кулачка показать точки, в
которых угол давления принимает максимальное
значение.
В приложении 7 (листы 12, 13) приведены
примеры выполнения четвертого листа курсового
проекта.
Решение задач кинематического синтеза
Приложение 1
Основным методом кинематического синтеза при
использовании среды MathCAD является метод
проекций. Согласно этому методу отрезки, соответствующие
длинам звеньев механизма, проецируют на оси
декартовой системы координат. К полученным уравнениям
добавляют уравнения, отражающие особые свойства
механизма. Систему уравнений решают процедурой
Given-Find, при использовании которой возникают
затруднения, связанные с необходимостью задания
начальных приближений для неизвестных параметров.
Для их задания можно воспользоваться результатами
графического синтеза. В любом случае по результатам
синтеза необходимо провести проверку, изобразив
звенья механизма в виде кусочно линейной кривой.
Рассмотрим некоторые задачи кинематического
синтеза (см. гл. 1).
П1.1. Проектирование кривошипно-ползунного
механизма по двум заданным положениям кривошипа и
соответствующему перемещению ползуна (см. рис. 1.2).
Исходные данные
Перемещение ползуна Iiq:=.1 m
Угловая координата кривошипа
(hu:=30deg рад
в начальном положении Yl н »
Угловая координата кривошипа
в конечном положении
Относительная длина шатуна
Относительная внеосность
ф1к:= 120deg рад
Х2 '= 2.8
Хе:=2
Решение. Запишем систему уравнений,
определяющих линейные и угловые координаты всех точек
механизма в начальном и конечном положениях.
Добавим уравнения, связывающие неизвестные параметры.
Начальные значения параметров:
•l:=hC '2:=hC е1:=0 е2:=0 tl^C ^г^0
е:=0
Выполним процедуру Given-Find
Given
l<|-cos((|> iH) + l2-cos(e-j) = xq^
ll-sin(<i> 1h) + l2-sin(e1) = e
l-|-cos(<|) iK) + l2-cos(e2) = xq2
If -sin((|> <jK) + ^-sin^) = e
l2 = x2e|1
e=xe-l1
xq>, - xq2 = hc
F:= Find(l1,l2»ei'e2'xC1'xC2'e)
\o := F,
Ц = 0.07
l2 = 0.196
91 := F2
92 := F3
*C1 := F4
*C2 := F5
e:=F6
= -6.151
deg
02
= -13.761
deg
xc1 = 0.255
Xq2 = 0.155
e = 0.014
Построим схему механизма в начале и конце
технологического перемещения:
ХН:=
ХК:=
V
< о ^
*С1
0
l-j-COS^ <|Kj
*С2
x^(f) := lrcos(f)
f :=0,.1..2ti
01
/
yH:=
Y*:=
0
Л
rK
1гз1п(ф1н)
e
0 ^
1Г81п(ф1к)
/
yA(f):=lrsin(f)
rH
0.05
YK 0
€K3
yA(f)
--- -0.05
-o.i
/
/
1
1
1
%
%
\
&'.\
\
\
\
4
4
* *» a.
4
4
**
m + *
4
\
%
#
9
i
i
О
"-0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25
Хн,Хк,хА(0
П1.2. Определение недостающих размеров
механизма по двум крайним положениям коромысла (см.
рис. 1.4).
Исходные данные
Длина стойки
Длина коромысла
14:=-5
"з := -28
м
м
Угловые координаты коромысла
в двух крайних положениях
Y1 := 50deg рад
Y2 := 120deg рад
Решение. Запишем систему уравнений,
определяющих линейные и угловые координаты всех точек
механизма в начальном и конечном положениях. Добавим
к ним уравнения, связывающие неизвестные
параметры.
Начальные значения параметров
'V=,3
l2:=l3
1Н
:=0
6 :=0
Выполним процедуру Given-Find.
103
Given
(|1 + 12)-соз(ф1Н) = 14+13-соз(у1)
(l1 + l2).sin^1H) = l3-sin(Yl)
(l2 - l.|)-cos((|>1H + e) = l4 + I3-cos(y2)
(l2-l1)-sin(01H + e)=l3-sin(Y2)
F:=Find(l1,l2^1H,e)
'1:=
l2:=
♦iH
6:=
Fo
Fi
:=F2
F3
^ =0.139
l2 = 0.574
Ф1Н
deg
6
deg
= 17.507
= 16.456
Построим схему механизма в заданных положениях:
/ л Л / п \
ХН:=
0
l-j-cos^ 1H)
l4+l3-cos(Yl)
YH==
0
lrsin(o1H)
l3-sin(Y1)
ХК:=
11-соз(ф 1н + е)
l4 + l3cos(Y2)
U
yk==
x^f):=lrcos(f)
xC(f1):=l3cos(f1) + l4
f :=0,.1..2я
e-e °2
€НЭ
yC~(f1)°
0
lrsin(<j>1H + e)
l3sin(Y2)
0
y/4f) :=lrsin(f)
yC(f1):=l3sin(f1)
f1 :=y-|,Yi + .1«Y2
-0.2
i
1
%
4
4^
7 '
*
*
.*
ф
+
4 J
4 /
lfr>
0.2
0.2
0.4
0.8
XH^xAffbxCtfl)
П1.3. Проектирование кривошипно-коромыслового
механизма по коэффициенту изменения средней
скорости выходного звена (см. рис. 1.6)
Исходные данные
Длина коромысла
l3 := .28
Угловые координаты коромысла у 3|_| := 50deg рад
в двух крайних положениях у 3^ := 120deg рад
Коэффициент изменения Кш := 1.2
средней скорости
Решение. Запишем систему уравнений,
определяющих линейные и угловые координаты всех точек
механизма в начальном и конечном положениях. Добавим к
ним уравнения, связывающие неизвестные параметры:
0 := я-
Kg)"1
е
deg
= 16.364
Начальные значения параметров:
Н :=|3 !2:=,3 !4:=,3 Фщ:=0
Выполним процедуру Given-Find.
Given
(I1 + I2)cos(*1h) = I4 + I3cos(v3h)
(|1 + 12)8т(ф1Н) = 1з8т(у3н)
(|2-11)со8(ф1Н + е) = 14+1зсо5(г3к)
(|2-11)-з1п(ф1Н + в) = l3sin(Y3K)
F:=Find(l1;l2,l4,<|)1H)
'1==
l2:=
Ц:=
*1Н
Ffl
F,
F2
:=F3
'1 =
\2 =
u =
Ф1Н
0.14
0.575
0.502
1
- - 17
deg
Построим схему механизма в заданных положениях:
Г л Л
ХН:=
0
l4 + l3cos(Y3H)
/
YH~
Х„:=
0
|.j-cos(<t> •щ + 9)
I4 + I3cos(y3k)
U
0
\
1гЦф1Н)
l3sin(Y зн)
0
YK:=
l3.sin(Y3K)
0
тн
е-е °-2
О-О
yA(f)
yC(f1) °
-02
I г
/
J3'
*
"*% у
Ч уХ
% уГ
*•»
-0.2
0.2 0.4
XH,XK,xA(f),xC(f1)
06
104
x^f):=lrcos(f)
xC(f1):=l3cos(f1)+l4
f :=0,.1..2я
y/4f) :=lrsin(f)
yC(f1):=l3sin(f1)
f1 :=Y-|,Yi + .I..Y2
П1.4. Синтез механизма по трем заданным
положениям (см. рис. 1.5).
Исходные данные:
Длина коромысла 3
Длина стойки 4
13 := 0.25
14 := 0.3
м
м
Угловые координаты коро- Yi := 70 • deg рад
мысла, соответствующие трем -=90-с1еа рад
положениям механизма: *2 ■ у м
Y3:=120-deg рад
Углы поворота кривошипа, ф ^ := 40-deg рад
соответствующие переходам
из первого положения во ф 13 :" 80с,е9 Р Д
второе и третье:
Решение. Запишем систему уравнений,
определяющих линейные и угловые координаты всех точек
механизма в трех заданных положениях. Угловые
координаты второго звена обозначим через р. Добавим к ним
уравнения, связывающие неизвестные параметры.
Начальные значения параметров:
ф1:=0 Ц:=13 l2:=,3 Pl:=0 ^2 := ° Р3 := °
Выполним процедуру Given-Find.
Given
l^cos^) + l^cos^) = I4+ I3-cos(y-|)
I-j-cosU^ + ф12) + l2-cos(p2) = '4+ '3,cos(y2)
I-j-cosU-j + ф13) + l2-cos(p3) =14+ 1з*С08(уз)
11-в1п(ф1) + l2-sin(p1) = l3-sin(Y1)
l^ -sin (ф-| + ф12) + l2sin(p2) = '3*s'n(Y2)
l^-sinU^ + ф^3) + l^sin (Э3) = 'з*8'п(уз)
F := Findf^ , l2,ф1, p 1, P2, P3)
«1 := F0
l2 := Fi
^ =0.19
l2 = 0.262
ф1
фн := F2 = 36.041
deg
P1-F3
deg
= 27.968
P2 •= F4
P3:=F5
il
deg
il
deg
= 14.459
= 10.033
Построим схему механизма в заданных положениях:
Х1:=
0
11-соз(ф1)
l4+ l3cos(Yl)
Y1:=
Х2:=
1гсоз(ф1 + Ф12)
I4+I3-cos(y2)
Y2:=
f 0 ^
l-l-sin^)
l3-sin(Yl)
f 0 >t
11-зт(ф1 + ф12)
l3.sin(Y2)
0
lrcos(01 + ф13)
11-вт(ф1 + ф13)
l3-sin(Y3)
0
0.1 0.2
X1,X2,X3
П1.5. Проектирование механизма с качающимся
цилиндром (см. рис. 1.9).
Исходные данные
Ордината опоры С уг := о м
Ход поршня h := .2 м
Относительная длина цилиндра к := 1.3 м
Угол качания коромысла р := 60deg рад
Допустимый угол давления 9 := 50deg рад
Решение. Запишем систему уравнений,
определяющих линейные и угловые координаты всех точек
механизма в начальном и конечном положениях. Добавим к
ним уравнения, связывающие неизвестные параметры.
Начальные значения параметров
XQ:=h li:=h Ф1Н :=f ФЗН:=0 ФЗК:=0 "3:=h
Выполним процедуру Given-Find.
105
Given
1-008(ф1Н) + 1з-СО8(фЗН) = )^
1-81п(ф1Н) + 13-81п(фзН) = ус
гсо8(ф1Н + р) + (1з+И)-со8(фзк) = хс
1 -Цф 1 н + р) + (l3 + h) -sin(> зк) = Ус
= kh
F:=Find(xc,l1^1H^3H^3K'l3)
Xq = 0.359
*С~
Ц:=
Ф1Н
Фзн
Фзк
'з:=
Fo
Fi
:=F2
:=F3
:=F4
F5
Ц = 0.207
deg
3H
= 45.44
deg
ФЗК _
deg
l3 = 0.26
-34.56
-25.707
Построим схему механизма в начальном и конечном
положениях:
ХН:=
ХК:=
1^-соз(ф ^)
*С
ч-
cos
(ф-l + p)
*С
xB(f):=lrcos(f)
f :=ф1,ф1 + .1..Ф-, + Р
0.3
YH 0.2
е-©
yk
YH:=
f 0 ^
УС
YK^=
Ц-81п(ф ^ + р)
УС
yB(f):=lrsin(f)
О-О
УВ<*> 0.1
?я. >——г
I "* JOL. I I
* *4x\J
* Тх«. >v I
1— 7Г *~^—Г>^ —
i S \ щ „ ^v
J/ F*
-0.1
0.1 0.2
X1,X2,xB(f)
0.3
0.4
Приложение 2
Построение характеристик сил и определение приведенных моментов
В рассматриваемых ниже примерах механические
характеристики сил, являющиеся функциями
положения, заданы в среде MathCAD в виде гармонической
функции. Для конкретных агрегатов функции положения
вычислены по результатам кинематического синтеза.
Полагается, что исполнительный орган перемещается в
горизонтальном направлении, причем прямой ход
соответствует его движению направо. Нулевому углу
поворота кривошипа соответствует крайнее левое
положение исполнительного органа.
П2.1. Определение механической характеристики и
приведенного момента сопротивления механизма
строгального станка
Исходные данные
Ход ползуна
Перебег резца
Усилие резания
Усилие резания
Угловое положение кривошипа для вывода
значений рассматриваемых величин
Решение. Зададим функцию положения
исполнительного органа:
п:= 1
ln:=.bh
Fpe3 := 90
FTp := 9
f := 60deg
xc(f):= cos(f) + 2
2
хс(Ф)
VqC(<H
VqC(f):=-Xfc(f)
df
>:=0,.1..2тг
-2
* w :." i»
0 30 60 90 120 150
180 210 240 270 300 330 360
Ф
deg
Запишем формулы для расчета зависимости силы
резания от положения исполнительного органа. Силу
резания зададим в виде кусочно линейной функции с
большой крутизной наклона ветвей, соответствующих
началу и окончанию процесса резания. Кусочно
линейная функция определяется координатами точек разрыва
а, Ь, с, d, e (см. рис. 2.11) с последующей линейной
интерполяцией:
FP:=
-F-
-FT
тр
тр
~\FTp + Fpe3J
~\ Ftp + Fpe3J
-Ftp
-Ftp .
ss :=
0
In
ln+ .0001
h-ln-.0001
h-ln
h
Fnp(s):=linterp(ss,FP,s)
s :=0,.0002.. 1.0
Fox :_ FTp
Fnp(s)
Fox
5U
0
"50
^^^^^^^^
0.2
0.4 0.6
S
08
Запишем формулы, описывающие функцию
положения исполнительного органа и угол поворота кривошипа
8С(ф):=Хс(ф)-Хс(0) sC(f) = 0.25
БС(ф) 0.5
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Запишем формулы для расчета зависимости силы
резания от угла поворота кривошипа:
Pc(f) :=
Fnp(sC(f)) if vqC(f)>0
ф:=0,.005.. 2я
100
Рс(ф) 0
1
100 0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Рассчитаем приведенный момент сопротивления
MpRPc(f) := Pc(f)vqC(f) MPRPc(90deg) = -49.5
-20
MpRPcW)
-40
-60
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
107
П2.2. Определение механической характеристики и
приведенного момента сопротивления механизма
горизонтально-ковочной машины
Исходные данные
Полный ход ползуна Н := 1
Рабочий ход ползуна h := .6Н
Максимальная сила сопротивления р5 := 90
Угловое положение кривошипа для вывода f := 30deg
значений рассчитываемых величин
Зададим формулу, связывающую относительное
положение исполнительного органа и угол поворота
кривошипа:
*c(f) :=
-Н
•cos(f) + 2
VqC(f):=-Xc(f)
df
>:=0,.1..2тг
хс(Ф)
VqCto)
^————— t*-j————±^*
1 0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Запишем формулы для расчета зависимости силы
сопротивления от относительного положения
исполнительного органа в пределах рабочего хода; сила
резания задается кусочно линейной функцией; кусочно
линейная функция характеризуется координатами точек
излома с последующей линейной интерполяцией:
РР:=
(°]
.9
1
.9
.8
UJ
sH :=
(°)
.2
А
.6
.8
llJ
pP(s) :=linterp(sH,PP,s)
s :=0,.05.. 1
pP(3) 0.5
Зададим формулу, связывающую относительное
положение исполнительного органа в пределах рабочего
хода и угол поворота кривошипа (рис. П2.1):
8(ф) :=
Xc(<D)-(H-h + Xc(0))
s(f) = -0.555
рс
МО)
*с/<РГ
J&L
Н
Рис. П2.1
я(Ф)
30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Зададим формулы для расчета зависимости силы
сопротивления от относительного положения
исполнительного органа в пределах полного хода:
Рс(Ф):=
0 if vqC((|>) < 0
0 if в(ф ) < 0
-p5-pP(sfo )) otherwise
ф:=0,.02..2я
РС(Ф) -50
Изобразим зависимость силы сопротивления от угла
поворота кривошипа.
Рс(Ф) -50
0 30 60 90 120 150 180 210 240 270 300 330 360
108
Рассчитаем приведенный момент от силы
сопротивления:
МррРс(Ф):=Рс(ФИдс(Ф)
MpRPc(f) = О
п
ф:=0, ..2-я
360
MpRPC(<!>)-20
30 60 90 120 150 180 210 240 270 300 330 360
180
П2.3. Определение механической характеристики и
приведенного момента сопротивления механизма хо-
лодновысадочного автомата
Исходные данные
Полный ход ползуна
Рабочий ход ползуна
Максимальная сила сопротивления
Угловое положение кривошипа для
вывода значений рассчитываемых величин
Н:= 1
h:=.6H
Fmax := 90
f := 30deg
Зададим формулы, связывающие относительное
положение исполнительного органа и угол поворота
кривошипа:
xc(f):= cos(f) + 2
2
VqC(f):=-Xc(f)
df
ф:=0,.1..2я
xfc(f) = 1-567
vqC(f) = 0.25
хс(Ф)
VqC(<l>)
30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Зададим формулы для расчета зависимости силы
сопротивления от относительного положения
исполнительного органа в пределах рабочего хода; сила
сопротивления задается массивом координат; непрерывная
функция получена с помощью сплайн интерполяции:
рр:=
0.11
.127
.175
.238
.318
.420
.539
.682
.830
V 1 У
pc(s) := linterp(ss,pp,s)
s:=0,.001.. 1.0
ss :=
.2
.3
.4
.5
.6
.7
.8
.9
viy
Pc(s) 0.5
Зададим формулу, связывающую относительное
положение исполнительного органа в пределах рабочего
хода и угол поворота кривошипа:
8С(ф) :=
Хс(ф)-Н + И-Хс(0)
sC(f) = -0.555
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Запишем формулу для расчета зависимости силы
сопротивления от относительного положения
исполнительного органа в пределах полного хода:
Fc(f) :=
0
-Pc(sC(f)).Fmax if (vqC(f)>0).(sC(f)>0)
ф:=0,.001..2я
109
О 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Рассчитаем приведенный момент силы
сопротивления:
MPRPc(f) := Fc(f).vqC(f) MPRPc(90deg) = -5.46
MpRPc(<H-10
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
П2.4. Определение механических характеристик и
приведенного момента сопротивления механизма
четырехтактного двигателя внутреннего сгорания
Исходные данные
Ход поршня hc := 1
Диаметр поршня d := .1
Максимальное давление в цилиндре ртах := 30-105
Угловое положение кривошипа для выво- f := 30deg
да значений рассчитываемых величин
Зададим формулы, связывающие относительное
положение поршня и угол поворота кривошипа:
xc(f) := — cos(f) + 2 vqC(f) := -Xfc(f)
2 df
ф:=0,.1..2я
з
ХС(Ф)
VqC(Ф)
-••T Г"-
I I I I г» I I ~
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
Зададим формулы для расчета зависимости силы,
действующей на поршень от относительного положения
поршня; сила задается массивом значений давления в
цилиндре, соответствующих четырем тактам работы
двигателя; непрерывные функции получены с помощью
сплайн интерполяции (см. рис. 2.4):
sC :=
( ° 1
.05
.0665
.1
.2
.3
.4
.5
.6
.7
.8
.9
1 1 )
pcd :=
С о >
-.01
-.01
-.01
-.01
-.01
-.01
-.01
-.01
-.01
-.01
-.01
t-.oij
pda :=
(А6)
.3
.28
.245
.17
.104
.066
.038
.02
.01
.01
0
UoiJ
pab :=
(м)
.95
1
.87
.56
.4
.31
.245
.2
.16
.12
.097
V-047J
pbc :=
f ° 1
.01
.01
.01
.01
.01
.01
.01
.01
.01
.01
.01
1-047 J
Vcd:= lspline(sC,pcd)
Vda := Ispline (sC,pda)
pcd(s) := Jnterp(Vcd,sC,pcd,s)
pda(s) := interp(Vda,sC,pda,s)
Vab := Ispline (sC, pab)
Vbc := Ispline (sC, pbc)
pab(s) := interp(Vab,sC,pab,s)
pbc(s) := interp(Vbc,sC,pbc,s)
s :=0,.01.. 1
110
I
pcd(s)
—- 0.5
pda(s)
pab(s)
pbc(s) °
i
1
*
*
••
4
-4
чч^
** ^ * «■ »
:J
0.2
0.4
0.6
0.8
Зададим формулы, связывающие относительное
положение поршня и угол поворота кривошипа; так как
цикл работы двигателя равен двум оборотам,
распространим функцию положения поршня на два оборота:
x1C(f):= |хс(0
xc(f-360deg) if f > 360deg
x1c(f) = 1.567
хс(ф)-х1с(0)
Б(ф) := s(f) = 0.067
H
ф:=0,.01.. 4л
l
0.75
з(ф) 0.5
0.25
0 60 120 180 240 300 360 420 480 540 600 660 720
Ф
deg
Четыре функции, определяющие давление в
цилиндре, объединяем в одну путем указания диапазонов
изменения углов поворота кривошипа; давление
представим зависимостью положения поршня от угла поворота
кривошипа:
Рс(Ф) :=
раЬ(з(ф)) if 0<ф< 180deg
рЬс(з(ф)) if 180deg < ф < 360deg
pcd(sW) if 360deg < ф < 540deg
pda(s(ф)) if 540deg < ф < 720deg
ф:=0,.01..4я
РС(Ф)
-0.5
lit
0.5
0
(\
0 0.2 0.4 0.6 0.8 1
ft
1Hi \\\\\\\W
о r™ " " *
РС(Ф)
05 0 60 120 180 240 300 360 420 480 540 600 660 720
Ф
deg
Рассчитаем приведенный момент давления в
цилиндре:
.2
Рс(Ф) := Ртах-Рс(Ф)'— Рс(0 = 2-3563 х 10*
4
Мрррс(Ф) := Рс(ФКс(Ф) MpRpc(f) = 5.8907 х 103
ф:=0,.1.. 4-я
8000 г
6000
4000
MpRpCW)
2000
-2000
4 1
Л
N
' N
111111111 Ш
0 60 120 180 240 300 360 420 480 540 600 660 720
, 180
Определение закона движения механизма компрессорной установки
Приложение 3
Кинематический синтез проводят по средней
скорости поршня. Угловую координату первого звена
связывают с обобщенной координатой, вводя начальное
значение и инвертируя знак. В этом случае нулевому
значению обобщенной координаты соответствует
крайнее верхнее положение поршня, и направления всех
скоростей совпадают с направлениями самих скоростей.
Функции положения рассчитывают, проецируя
звенья на оси координат. Аналоги скоростей и ускорений
получают численным дифференцированием функций
положения.
При приведении сил используют заданную таблично
индикаторную диаграмму с последующей сплайн
аппроксимацией.
В целях обеспечения установившегося режима
движения рассчитывают необходимое значение
приведенного движущего момента.
Для ускорения процесса интегрирования
приведенного суммарного момента проводят его сплайн
интерполяцию.
Выбор электродвигателя проводят по его мощности
с учетом коэффициента полезного действия. По
паспортным данным рассчитывают механическую
характеристику электрического двигателя, учитываемую при
расчете передаточного отношения редуктора. Затем
рассчитывают приведенную механическую
характеристику и оценивают ее влияние на приведенный движущий
момент.
Рис. П3.1
Исходные данные (рис. П3.1)
Средняя скорость поршня
Отношение длины шатуна 2
к длине кривошипа 1
Относительное положение
центра масс шатуна 2
Диаметр цилиндра
Частота вращения коленчатого
вала
Максимальное давление в
цилиндре
vsr:=3.2
А,2:=4
XS2 := .33
d:=.2
n1 := 10
м/с
м
1/с
'max
:= .5-10"
Па
Масса шатуна 2
Масса поршня 3
Момент инерции шатуна 2
относительно оси, проходящей
через центр масс
Момент инерции коленчатого
вала
Момент инерции ротора
электродвигателя
Момент инерции муфты,
редуктора, зубчатой передачи,
приведенный
к звену 1
Коэффициент неравномерности
вращения
Ускорение свободного падения
то := :
т3 := Ю
J2S := 22
J1A:=.25
Jp := .023
Jred:=.55
8:= —
20
g:= Ю
кг
кг
кг-м2
кг-м2
кг-м2
кг-м2
м/с'
1. Проектирование механизма
ii:=
¥sr
4-n*
l2:=X2l1
co1sr:=2-7in1
Ц = 0.08
l2 = 0.32
1д52 = 0.1056
(О
1sr
= 62.8319
2. Вычисление передаточных функций механизма
2.1. Функции положения. Для контроля найдем
значения передаточных функций при угле поворота
кривошипа от начального положения 120°.
За начальное положение механизма принимаем
положение, в котором поршень находится в крайней
верхней точке:
f := 120-deg
Ф1<Ф) := Ф = "30
2 deg
Спроецируем звенья механизма компрессора на оси
координат и получим значения функций положения
(рис. П3.2)
хв(ф) := 11-008(ф1(ф)) Xg(f) = 0.0693
УВ(Ф) := 11^п(ф1(ф)) yB(f) = -0.04
Рис. П3.2
112
сэ2(ф) :=■
-Хв(Ф)
cs2(f) = -0.2165
180
ф2(0 = 102.5039
я
ф2(ф) := acos(cs2(0))
Ус(Ф):= Ув(Ф) + >2-8'п(Ф2<*)) Ус(Г) = а2724
Хз2(ф) := хв(ф) + 1д82С08(ф2(ф)) X52(f) = 0.0464
yS2(*>:= Ув(Ф) + 'ASZsln(*2^)) yS2(f) = 00631
Построим кинематическую схему механизма в
заданном положении и определим траектории точек:
/
0
\
XS2(f)
v о у
(
Y:=
0
yB(f)
yS2(f)
yc(f)
ф:=0,.05..2-я
о.з
е-е oz
ув(Ф)
Ус(Ф) o.i
-0.1
1
1
1
f
v'~"
\\
^'
.-•'
1
f
'''
0.1 -0.05 0 0.05 0.1
Х,ХВ(ф),Х82(ф),0
Построим графики функций положения:
0.35
Ус(Ф) о.з
0.25
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
2.2. Кинематические передаточные функции
скорости (аналоги скоростей):
vqByfo>:=— Ув(Ф)
аф
аф
^Су(ф):=Тус(ф>
dф
vqS2yW:=T УЭ2(Ф)
dф
^32х(ф):=^х82(Ф)
vqBy(f) = -°0693
vqBx<f) = -°04
vqCy(f) = -°0604
vqS2y(f) = -°0664
vqS2x(f) = -°0268
vqS2(*>:= JvqS2x(W2+vqS2y(*)2 vqS2<f) = 00716
шд2(Ф) := —Ф2(Ф) «a2(f) = -°л28
с1ф ч
ф:=0,.1..2-л
0.1
vqS2x<*> 0.05
vqS2y<*> ok
VqCy<*>
-0.05
V
4%V
W
,-<
4^
ч •
4
r
#*
•
f
.J-.?
.4
%»4
**
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
113
2.3. Кинематические передаточные функции
ускорения (аналоги ускорений):
dф
d2
aqBxW:=—*bW
dф
d2
aqCyW:=—УС<Ф)
dф
d2
aqS2y^:=—^S2W
dф
d2
aqS2x(W:=—2^2(W
dф
d2
£д2(Ф):=—^(Ф)
dф
ф:=0,.01..2-я
aqBy(f) = 004
aqBx(f) = -°0693
aqCy(f) = °05
aqS2y(f) = 00433
aqS2x(f) = -°0464
£q2(f) = -0.2181
0.05
aqS2yM)
ад82х(Ф)
aqCy(*>
-0.05
-0.1
-0.15
I I I I «У*ч 1^^ L
)/ *Г XL К
•/ y\ W\ v%
I —Jr\ щ A" \ x
E2J L^
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
3. Приведение масс
3.1. Определим приведенные моменты инерции:
JPRJ2^) := J2S,0)q2^) JPRJ2<f) = 36066х 10~
JPRm2W := m2'(vqS2x^)2+ vqS2y^)2J
JPRm2(f) = 0041
JPRm3^):=m3'(vqCy^)2)
JPRm3(f) = 0048
JpR||(4>) := JpRj2W + JPRm2W + JPRm3^
JpR„(f) = 0.0926
ф:=0,.01..2-71
0.15
JPRJ2^)
JPRm2^)
JPRm3^)
JPRII<*>
0.1
0 05
/ .r"Ki \ /—}vr4 \
I/ Lei к \L/ л fa \J
\ A * мч J--' * к
Г Lr * I L* \ \ i
L£ 1*> ^J—- П **<-» 1» ■-!.» * fcj
0 30 60 90 120 150 180 210 240 270 300 330 360
. 180
3.2. Определим производные приведенных моментов
инерции:
dJPRJ2^) := 2J2S'(0q2^)'Eq2^)
dJpRJ2(f) = 0.0123
dJPRm2^):= 2m2'(vqS2><№'aqS2><W + vqS2yWaqS2^))
dJpRm2(f) =-0.0261
dJPRm3^ ) := 2m3'vqCyfo ),aqCy^ )
dJPRm3(f) =-0.0554
сиРр„(Ф) := dJpRJ2((|>) + dJpRm2W + dJPRm3^)
dJpR||(f) = -0.0692
ф:=0,.1.. 2-я+0.1
dJPRJ2<*) 005
dJPRm2(<i))
0
dJPRm3№)
dJPR||U0 -0.05
-0 1
«*
Г* -
S~ v
• • %
V-
\\
V\
».''
.
- _
m'l
/ ,'
У- N
v\
A
L,'
* —
^*—
">J
i
l\
/l\
/
0 30 60 90 120 150 180 210 240 270 300 330 360
. 180
4. Приведение сил
4.1. Рассчитаем силу давления сжимаемого газа на
поршень компрессора (см. рис. 2.9).
4.1.1. Построим индикаторную диаграмму:
sad :=
.1
V-2y
pad :=
(Л
.3
V0y
114
sbc :=
(2)
.3
.4
.5
.6
.7
.8
.9
U J
pbc :=
f * 1
.58
.38
.26
.18
.12
.07
.03
l о J
Vpbc := lspllne(sbc,pbc)
Pbc(su) := interp(Vpbc,sbc,pbc,su)
PBC(s) := I 1 if s< .2
I Pbc(s) otherwise
Vpad := lspline(sad,pad)
Pad(sd) := interp(Vpad,sad,pad,sd)
PAD(s)
0 if s > .2
Pad(s) otherwise
4.1.2. Построим зависимость относительного
перемещения поршня от угла поворота кривошипа:
Ус(°)-Ус(*>
s((|)) := s(f) = 0.7974
2|1
ф:=0,.01..2я
1
0 75
*ф) 0.5
0.25
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
4.1.3. Построим зависимость давления в цилиндре
двигателя от перемещения поршня:
Р(Ф) :=
PBC(s(<j>)).pmax if vqCy(o)>0
PAD(s(0))pmax otherwise
6 10
р(Ф)
-2-Ю-
»5
i5
)
0
0.2
0.4 0.6
ЖФ)
0.8
4.1.4. Построим зависимость давления в цилиндре от
угла поворота кривошипа:
р(Ф)
\| I | I I ! |гН
If
Hill Ш
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
4.1.5. Построим зависимость силы, действующей на
поршень от угла поворота кривошипа:
Fcy(f) := -P(f)
7i -d
Fcy(f) = 0
0
Fcy(<>) -1x104
4
/
У
т
i
\
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
4.2. Рассчитаем приведенные моменты
сопротивления:
МррРс(Ф ) := Fcyfa )-vqCyfo ) MpRFc(f) = 0
115
MPRG2(<I>) := -m2-g-vqS2y№) MPRG2<f) = 53084
MPRG3^ ) := -m39vqCy(* ) MpRG3(f) = 6.9282
МррС(ф) := Мрррс(ф) + МррС2(Ф) + МррСЗ(ф)
MpRC(f) = 12.2366
ф:=0,.01..2-я
500
MPRFc^)
Мррс(Ф)
-500
-1000
"1500
ffll II1Ш1М
ti И
и
V
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
>:=0,.2.. 2-я
MPRG2^)
MpRGS^ )
5
0
-5
-10
/У
s ^
У
""** *--
\
X
^
у
/у
О 30 60 90 120 150 180 210 240 270 300 330 360
180
4.3. Рассчитаем приведенный момент движущих сил
4.3.1. Вычислим работу сил сопротивления за цикл:
■2-я
Aq := I Мррс(ф) с!ф
^0
Aq = -837.5959
М,
4.3.2. Найдем приведенный движущий момент:
"АС
PRD -
2-я
MpRD = 133.3075
4.4. Вычислим приведенный суммарный момент:
МРРХ(Ф) := MpRD + Мррс(ф)
Интерполяция:
N1 := 500 J := 0.. N1
Аф := 2-
N1 -2
уф| := Аф-0-1) M1j := MpR2^)
Ms := 1зрПпе(уф,М1) М(ф) := interp(Ms^, М1,ф)
ф:=0,.01..2-я
М(ф)
мРР1(ф) о
-юоо
|Г I""!"""' '**1*м*-1. 1 1 1 J
птк и
1111111II1 Ш
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
5. Рассчитаем момент инерции первой группы
звеньев
5.1. Вычислим работу суммарного момента:
J-Ф
Л
А(ф):= М(ф)с*ф
1:=0,.1..2-я
юоо
500
А(ф)
-500
0 30 60 90 120 150 180 210 240 270 300 330 360
180
5.2. Определим кинетическую энергию второй группы
звеньев:
2
^Isr
Тц(ф) := Лрр||(Ф)-
0 30 60 90 120 150 180 210 240 270 300 330 360
. 180
5.3. Определим изменение кинетической энергии
первой группы звеньев:
ДТ,(ф):=А(Ф)-Т„(ф)
116
1000
ДТ|(ф)
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
5.4. Рассчитаем наибольшее изменение
кинетической энергии первой группы звеньев:
f := 350deg
Given
fmin := MinimizedAT|,f)
Tlmin :=AT,(fmin)
f := 210deg
fmin
deg
353.8212
Tlmin=-79-7131
Given
fmax := Maximize(AT|,f)
Tlmax:=AT|(fmax)
ATlnb := Tlmax " Tlmin
fmax
deg
= 208.5374
T|max = 595.1265
AT,nb = 674.8396
5.5. Определим момент инерции первой группы
звеньев:
AT,
Inb
JPRI:
co1sr 5
JpR, = 3.4188
6. График угловой скорости звена приведения:
(Tlmax+ "Ппгнгу
— Aco(f) = 1.5705
AT ,(ф ) - ■
Дсо (ф ) :=
w1srJPRI
0)(ф) := 0)-|sr + Асо(ф)
w(f) = 64.4023
со(Ф)
Msr
00
64
62
0 30 60 90 120 150 180 210 240 270 300 330 360
. 180
7. График углового ускорения звена приведения:
Мррх(ф)
о>(ФГ
JPRI|W + JPRI 2(JPRI|(*) + JPRl)
e(f) = -3.381
dJpR||(<|))
с(ф)
200
100
0
-100
-200
-300
/\ 1 1 1 1 1 1 1 1 1 1 1
Г MrJ /
\л
0 30 60 90 120 150 180 210 240 270 300 330 360
, 180
8. Выбор электродвигателя
8.1. Рассчитаем необходимую мощность
электродвигателя:
^3
Pc^PRD^Isr
Л := .93.96-.99 -.98
РС
Рп:=
л
Рс = 8.376x10
Л = 0.8575
PD = 9.7675x10
8.2. По результатам расчета выбираем
электродвигатель 4А132М2УЗ:
Р:= 11000
nDH := 2900
Хк := 2.8
nDC := 3000
Хр:= 1.7
JD- 4
М,
8.3. Рассчитаем механическую характеристику:
Р-60-л
DH
2-я-п
DH
MDH = 31.0611
Начальное приближение:
Ь2 := 1 к2 := 1 Ь1 := 1 к1 := 1 nQK := nQC
Given
FF:=
0 = b2+k2nDC
MDH = b2 + k2'nDH
MDHXK=b2+k2'nDK
MDHXP = b1
MDHXK=b1 + k1'nDK
= Find(b2,k2'b1,k1,nDK)
b2:=FF0 b2 = 931.8328
117
FF =
k2 := FF!
b1 := FF2
931.8328
-0.3106
52.8039
0.0126
k2 = -0.3106
b1 = 52.8039
2.72x10
k1 := FF
3
:=FF4
nk12
Mdv(ndv) :=
k1 = 0.0126
nk12 = 2-72xl°
b1 + krndv if ndv<nk12
b2+k2-ncjv otherwise
ndv:=0,.l..nDC
100
50
M
dvl
(ndv)
-50
nDH\
mdh]u
1000 2000
ndv
8.4. Вычислим передаточное отношение:
Начальное приближение:
nDH
ud1 :=
Given
60-rvj
ud1 = 4.8333
M
PRD
ud1
= b2 + k2-60n-| -u^-j
3000
uD1 := Find(ud1) uD1 = 4.8526
8.5. Рассчитаем приведенную механическую
характеристику:
Начальное приближение:
b2PR := 10°
b1pR:=l0
cok:=co1sr
k2PR :" ~10
k1PR :" 10
Given
7Е-П
0 = b2PR + k2pR-
'"DC
30-uD1
7E- П
MDHUD1 =b2PR+k2PR'
DH
30-u
D1
MDHUD1 XK = b2PR + k2PR,(0k
MDHuD1A'P = b1PR
MDHuD1A'K = b1PR+k1PR*cok
FF1 := Findjbgpp.l^pR.b-jpR.k-jpR.wJ
b2pR := FF1
*2PR
о
= FF1,
b2pR = 4.5218x10
k2pR = -69.8451
4.5218x10 ]
b1pR:=FF12
FF1 =
-69.8451
256.2357
2.8246
58.698
b1PR
k1PR
wk12
= 256.2357
= FF13
= FF14
k1PR = 2-8246
cok12 = 58.698
MD(co) :=
b1PR+k1PR.a) if axcok12
b2PR + k2PR'w otberw'se
MPRDn := MDHUD1
0)1 :=0,.01.. co1srl.05
ф:=0,.1..2тс
600
MpRDn = 150.7269
MD(a)1) 400
MPRD
MPRDn
Мр(со(ф))
200
-200
«1st
20 40 60
0)1 ,0)1 ,0)1 ,0)(ф)
80
8.6. Рассчитаем приведенный движущий момент:
>:=0,.1..2тг
118
300
М0(ш(ф))
"PRD
200
0 30 60 90 120 150 180 210 240 270 300 330 360
Ф
deg
9. Расчет маховика
9.1. Найдем момент инерции маховика:
2
JPRr:-Jpud1
Jdop := JPRI " J1 A" JPRr ~ Jred
JpRr = 0.575
Jdop = 20438
9.2. Определим размеры и массу маховика в виде
сплошного диска:
DMV:= .366-Jj
5Jdop
8-Jr
m
MX =
DMX= 0.4222
mMY= 91.7039
-'MX
bMX :~ -2DMX
'MX
bMX= 0.0844
9.3. Определим размеры и массу маховика в виде
обода:
DMXc:= -406/W
bMXc:= -2DMXc
DMX1:= -8DMXc
DMXc= 0.4684
bMXc= 0.0937
DMX1 = 03747
m
MXc
:= 6123
<4
2 2\
MXc "DMX1 JbMXc
>
m
MXc
= 45.3038
Приложение 4
Определение закона движения механизма при переходном режиме работы
Закон движения определяют в соответствии с
разд. 3.4. Кинематический синтез проводят в два этапа.
Вначале рассчитывают размеры кулисного механизма, а
затем четырехшарнирного механизма. Передаточные
функции положения рассчитывают методом проекций.
Для этого звенья, имеющие длину, представляют в виде
векторов, которые затем проецируют на оси декартовой
системы координат. Решение полученных систем
уравнений проводят либо в явном виде (структурная группа
CDL), либо с использованием процедуры Given-Find
(структурная группа KNM). В последнем случае после
использования указанной процедуры проводят сплайн
интерполяцию.
Аналоги скоростей и ускорений рассчитывают
методом численного дифференцирования.
Перед приведением сил проводят расчет начального
и конечного значений движущей силы, обеспечивающих
безударный останов.
Определение закона движения проводят с
использованием дифференциальной формы уравнения
движения. Интегрирование выполняют численным методом
Рунге - Кутта с автоматическим выбором шага. Чтобы
результаты расчетов представить в виде непрерывной
функции времени, проводят сплайн интерполяцию.
1. Исходные данные (рис. П4.1)
*3max:=90de9
Нм:=0.78
!Ш := 1.06
а := 0.35
b := 0.28
1ск:=0.25
Н21 := 0.25
lKN := 078
lMN:=0.35
с:= 1.2
d := 0.2
m3:=45
m 7 := 500
J3S := Ю
J7S := 190
lAB0:= 1.5H21
l2:= 1.2-Н21
!ЕМ := '^LM
град
м
м
м
м
м
м
м
м
м
м
кг
кг
кг-м2
кгм2
lAB0= 0.375
l2 = 0.3
!ЕМ=0.53
м
м
м
Рис. П4.2
'св =0Л77
хА=-0.5
уА =-0.125
Рис. П4.3
д1 := 10
м/с^
хк :
Ук:=
\-=
= 0
_|ск
-ь
УК = -0.25
XL = -0.28
120
yL:=yK-a
yL = -0.6
H
HE:=
'CD
M
He
2sin
Фзтах
V 2
■de := -VL
нЕ =
'CD
'DE
= 0.39
= 0.276
= 0.6
'LM
'EL:
"EL
= 0.53
3. Расчет параметров динамической модели
3.1. Рассчитаем кинематические передаточные
функции. Найдем значения переменных для положения,
задаваемого обобщенной координатой, равной f:
f := Odeg = 0
cleg
3.1.1. Функции положения рассчитываем методом
проекций. Для этого звенья, имеющие длину,
представим векторами (рис. П4.4).
Определение функций положения однотипных групп
DEL и KNM проведем различными методами. В первом
случае введем дополнительный вектор, а во втором -
воспользуемся процедурой Given-Find.
Рис. П4.4
Начальное значение угла фз соответствует крайнему
нижнему положению исполнительного органа:
/гч "Фзтах л *3(f)
Спроецируем вектор ВС на оси координат:
.Л
Ув(Ф):= 'ев*3'11! Фз^Ф)_—
*в(Ф):= 'cbcos Фз<*)"~ *в№ = "0Л25
2)
yB(f) =-0.125
Спроецируем вектор АВ на оси координат:
1АВ(0 := ^К-*в(0)2+(уА-УЬт)2 'AB(f) = °375
yB(f)-yA
Sn2(f) :=
!AB(f)
ф2(ф) :=asin(Sn2W)
Sn2(f) = 0
180 -и
ф2(0- = -4.241 х 10
71
Спроецируем вектор CD на оси координат:
Хр(Ф) := ICdCOS^3W) Xp(f) = 0.195
УЬ(Ф):= ,со8|п(Фз(Ф)) vD<f) = -°195
Введем дополнительный вектор DL:
'DL(f) ==jM)-xL)2+(vb(f)-VL)2
yD(f) - yl
sn8(f):=
"DL(f>
f8(f):=asin(sn8(f))
lDL(f) = 0.624
sn8(f) = 0.649
«(f)
deg
= 40.452
По теореме косинусов из треугольника DLE
определим угол фв:
-,DE2+lDL(f)2+lEL2
cs58 (f) := cs58 (f) = 0.469
2lDL(fHEL
f58(f) := acos(cs58(f)) ~~v ' = 62.008
Рассчитаем угол фб:
ф6(0 := 18(f) - 158(f) —— = -21.557
f58(f)
deg
Ф5№
deg
Спроецируем вектор EL на оси координат:
>fe(f) := \ + lELcos^5(f)) x^f) = 0.213
yE(f) := yL + lELsin(*5<f)) vE<f) = ~0795
Спроецируем вектор DE на оси координат:
*E(f)-*b(f)
cs4(f):=-
'DE
Ф4(0 := -acos(cs4(f))
cs4(f) = 0.03
4>4(f)
deg
= -88.288
Спроецируем вектор LM на оси координат:
Xj^f) := х,_ + 1|_мсоз(ф5(Г)) xM(f) = 0.706
yM(f) •= VL + lLMsin((l)5(f)) V|V|(f) = -°989
Рассчитаем группу звеньев 6-7 с использованием
конструкции Given-Find.
Начальные приближения:
ф17:=^ Ф16:=0
121
Спроецируем векторы KN и NM на оси координат:
Given
ХК+ 1кмсо8(ф16) + 1мм-со8(ф17) = x^f)
УК+ lKNsin(*16) + 'ммЦФ1?) " У|#)
Р2(0:=Нпс1(ф16,ф17)
ф6(0 := F2(f)0
ф7(^ := F2(f)!
Проведем интерполяцию:
N1 := 200 i := 0..
«|:=Фв(«|)
Vf6:= pspline (f1,f6)
ф6(0 := interp(Vf6,f1,f6
N1
,f)
Ф6(0
= -30.07
deg
Ф7(0
= -84.945
deg
Фзтах*'
Hi :=
N1
т7|:=ф7(П|)
Vf7:= pspline (f1,f7)
ф7(т) := interp(Vf7,f1 ,f7,f)
Проверим качество интерполяции:
ф1 :=0,.05..ф3тах
Ф6(ФЧ)
deg
25
0
-25
0 10 20 30 40 50 60 70 80 90
Ф1
deg
Ф7(<П)
deg
84
86
88
0 10 20 30 40 50 60 70 80 90
Ф1
deg
Спроецируем вектор KN на оси координат:
хм(т) :=хк+ lKN-cos(<t6(f)) х^(т) = 0.675
yN(f) -=Ук+ Wsln (46(f)) Ы*) = -°641
Спроецируем вектор МТ на оси координат:
xT(f) := xj^f) + с cos ф7(т) + - xT(f) = 1.901
V 2
yt(f):= Ум(г)+ csjn
( п\
Ф7(0 + -
V 2у
Уу(т) = -0.884
Спроецируем вектор TS7 на оси координат:
xs7(f) := xT(f) + dcos^7(f)) xs7(f) = 1.919
VS7<f) := ^f(f) + с181п(ф7(0) yS7(f) = -1.083
Для проверки построим кинематическую схему и
определим траектории точек:
Х:=
ХА
хв(0
0
t>(f>
X£(f)
к
*M(f)
xT(f)
^S7(f)
xT(f)
хм(0
*N<f>
ф:=0,.1..ф3тах
Y
Ув(Ф) о
у0(Ф)
уЕ(Ф)
ум(Ф)
Уы(Ф)
-05
У37(Ф)
Y:=
f УА Л
yB(f)
0
yD(f)
yE(f)
Уг(0
yS7(f)
Ут(0
yM(f)
yN(f)
Ук
^Н
, \
^
{
л *
\\
-0.5 0 0.5 1 1.5 2
Х,хв(ф), х0(ф),хЕ(ф),хм(ф),хм(ф),х87(ф)
3.1.2. Рассчитаем кинематические передаточные
функции скорости (аналоги скоростей):
vqS7yW:=-yS7W
\S7xW-=-*S7W
vqS7y(f) = 0.125
vqS7x(f) = 0.131
122
VqlAB^) := — 'ав(Ф)
аф
ш а7(ф):=—ф7(ф)
с!ф
ф:= 0,.01.. Фзтах
vq|AB(f) = 0Л25
coq7(f) = -0.213
0.8
06
vqS7x^>
— 0.4
vqS7y(<l>>
/xv 02
^1АВ(Ф)
0
""0.2
0.2
0.1
0
юд7(Ф)
"■■■'""" "0.1
""0.2
в.«
1
L •
0 10 20 30 40 50 60 70 80 90
А 180
Ф
7Г
"О 10 20 30 40 50 60 70 80 90
А 180
Ф
я
3.1.3. Вычислим кинематические передаточные
функции ускорения (аналоги ускорений):
aqS7yW:= —1VS7W
с1ф
d2
aqS7x((t>):=-lxS7((l>)
аф
d2
aqlAB(*):=—11АВ^Ф)
аф
4 dф
ф := 0, .01.. Фзтах
0.21
01
аЯЭ7х(Ф) о
aqlAB<*)-0.1
-0 2
-0.31
aqS7y(0 = 0.665
aqS7x(f) = -°033
aq|AB(f) = 0.167
sq7(f) = 0.174
»ч,
ь^
"%*.
"* ""* х
. %
О 10 20 30 40 50 60 70 80 90
. 180
3.2. Приведение масс
3.2.1. Определим приведенные моменты инерции:
JPRJ3 := J3S
JPRJ3 = 10
JPRm7«>>:= m7-(vqS7x(*)2+ ^в7у(Ф)2)
JPRm7(f) = 16-392
JpRj7(<M:=J7S,(Dq7(*)
JpRJ7(f) = 8.612
JpRZ(4>) := JpRJ3 + JpRm7W + JPRJ7^>
JPRz(f) = 35.003
JPRJ7^> 5
250
200
JPRl(M
^3 15°
JPRJ7^)
100
JPRm7^)
50
Г *
*
S '
4
Л
/•
S*
V
t
Ф * -
ш "* J
0 10 20 30 40 50 60 70 80 90
, 180
123
3.2.2. Вычислим производные приведенных
моментов инерции:
dJPRJ7W := 2J7S'C0q7((l))*8q7((t))
dJpRJ7(f) = -14.066
dJPRm7<*):= 2m7*(vqS7^(l))aqS7^(t)) + vqS7^)aqS7yW)
dJPRm7(f) = 78.472
dJPRlW := dJPRJ7((t)) + dJPRm7^
dJPRI(f) = 64.407
ф:=0,.02..ф3тах
300Г
dJPRE^) 200h
dJPRJ7«l» iqoU-
dJPRm7^>
Of
-100'
?
г
<Zs>s*^
^s
*4
0 10 20 30 40 50 60 70 80 90
. 180
Ф~Г
3.3. Приведение сил
3.3.1. Рассчитаем давление в цилиндре двигателя.
Найдем зависимость перемещения s поршня от
обобщенной координаты:
8(Ф) := 1дв(Ф) " 'АВ*0) s(f) = °
«Ф)
U.^5
02
0.15
0.1
0 05
0 10 20 30 40 50 60 70 80 90
Ф
deg
Рассчитаем участок переменной силы давления
(рис. П4.5):
s21zv:= Фзтах) " фзтах " 30de9) s21zv= 0077
U?
р2\
1
и*
i
i
-т—
Н21
У
%Цу
S
Рис. П4.5
Конечное значение силы давления рассчитаем
исходя из условия равенства ее приведенного момента и
момента сопротивления:
_2к:=
m7^1vqS7y(^3max)
vqlAB^3max)
F2k = 2.533 х 10
Начальное значение силы давления рассчитаем
исходя из условия равенства ее работы за цикл работы
сил сопротивления. Работа сил сопротивления:
Aq7 := -m7g1 (у87(ф3тах) " Vs^0))
Aq7 =-3.877 xlO3
Работу движущей силы рассчитаем с
использованием конструкции Given-Find.
Начальные приближения:
F2n := F.
2k
Given
F2n-H21 +--(F2k-F2n)-s21zv=-AG7
F2n := Find(F2n)
F2n = 1.371x10
Зададим зависимость силы давления от
перемещения поршня кусочно линейной функцией:
ss :=
0
Н21 "s21zv
Н
21
FF:=
2п
г2п
VF2ky
F2(s) := linterp(ss,FF,s)
s1 :=0,.01.. .25
3 10
4
25 10
F2<s1> 2 104
4
I 5 10
, ,Л4
0.1 0 15
s1
ф:=0,.001..ф3тах
F2(sft))
4
4
4
4
0 10 20 30 40 50 60 70 80 90
124
3.3.2. Определим приведенные моменты:
MPRG7W :=-m7.g1-vqS7y(4>) MPRG7(f) =-623.137
MpRF2(f) := F2(s(f)).vq|AB(f) MpRF2(f) = 1.714 x 103
МррЕ(ф) := Мрр(37(ф) + Мррр2(ф)
ф:=0,.01..ф3тах
2000
Мррх(ф)
МрРР2(Ф) Q
MPRG7(M
-2000
-4000
I 1 * ^^ 1 L
180
4. Исследование закона движения механизма
4.1. Выполним интерполяцию:
Фзтах
N := 200
I := 0.. N
А2ф:=-
N-2
Эф1 := А2ф (i-1) SMV=MpRI^i)
SM:= lspline(S<|>,SM1) М(ф) := interp(SM,S<|>,SM1,<|>)
М(ф)
1000
SJ1j := JpRx^j) SJ := IspNne (S<|>,SJ1)
JW:=interp(SJ^,SJ1»
juo
200
100
JPRItt)
J(*)
0 10 20 30 40 50 60 70 80 90
180
л
SdJ1 j := dJpR2(s<|>i) SdJ := Ispline (Sф,SdJ1)
dJ(ф) := interp(SdJ,S<|>,SdJ1 ,ф)
200
100
dJPRZ^)
<и(ф)
-100
0
10
20
Ю
И)
. 180
50
60
\
70
\
JO <
4.2. Интегрирование уравнений движения:
2
е1(ф,со) :=
М(ф)
со
•<У(ф)
и(ф) 2и(ф)
Зададим вектор дифференциальных уравнений
( Yi "l
D(t,Y) :=
vs1(Y0>Y,).
Начальное и конечное значения времени
интегрирования. Конечное значение подбирается в процессе
отладки программы:
Ю:=0
t1 := 2.8
Вектор начальных значений обобщенной координаты
и обобщенной скорости
Y01 :=
V0y
Число расчетных точек
N3 := 200
Проведем интегрирование методом Рунге - Кутта с
автоматическим выбором шага:
S1 :=Rkadapt(Y01,tO,t1,N3,D)
<<1>
t2:=S1 col :=S1 ф1 := S1
4.3. Приведем результаты расчетов в виде графиков:
0)1
(01
3
2
1
0
3
2
1
0
0 20 40 60 80
ф1_
125
Для получения непрерывных функций выполним
интерполяцию.
В качестве примера интерполяцию проведем двумя
методами. В первом случае аргументом является
обобщенная координата, а во втором - время.
1. Интерполяция возможна только в диапазоне
возрастания угла ф1:
Vco := cspline (ф1 ,со1)
со(ф) := interp(Vco^1 ,co1 ,ф)
ф:=0,.01..ф3тах-.99
1
со(ф)2
0)1
о'
20 40 60 80
Ф Ф1
deg ' deg
Обобщенное ускорение
\2
82(ф):=
М(ф) (со(ф)Г
Ь^(Ф) 2-^(ф)
си(ф)
б2(ф)
0 10 20 30 40 50 60 70 80 90
. 180
Работа суммарного приведенного момента
-Г
А(ф) := M(f) df
400
2. Ограничений на обобщенную координату нет, т. е.
Vco1 := cspline (t2,co1) \/ф := cspline (12,ф1 )
co2(t) := interp(Vco,t1,co1 ,t) ф(Ц := т!егр(Уф,П,ф1 ,t)
t:=0,.01..4
3
ill
0
20
40 60
Ф1 Ф(Ц
deg ' deg
80
100
Силовой расчет
Приложение 5
Силовой расчет в системе MathCAD проводят
матричным методом.
Общее число уравнений равновесия равно
утроенному числу подвижных звеньев плюс число
поступательных кинематических пар, либо единица плюс удвоенное
число вращательных кинематических пар плюс
утроенное число поступательных кинематических пар.
Формирование матрицы коэффициентов и вектора
свободных членов на примере кривошипно-ползунного
механизма (рис. П5.1).
Рис. П5.1
Строки матрицы коэффициентов соответствуют
уравнениям равновесия: сумме проекций сил на ось
абсцисс для всех звеньев; сумме проекций сил на ось
ординат для всех звеньев; сумме моментов; сумме
проекций сил на направляющие поступательных пар.
Неизвестные в столбцах таблицы располагаются в
соответствии с таблицей кинематических пар. Вначале
идут проекции на ось абсцисс реакций в кинематических
парах, затем проекции тех же реакций на ось ординат.
Далее следуют реактивные моменты в поступательных
кинематических парах и, наконец, активный силовой
фактор, принимаемый за неизвестную величину.
Алгоритм формирования матрицы коэффициентов
основан на таблице кинематических пар. В таблице
строки соответствуют звеньям механизма, а столбцы -
кинематическим парам. Вначале перечисляются все
вращательные кинематические пары, а затем
поступательные. В ячейках на пересечении номера звена и
имени кинематической пары ставится единица, если
данная пара принадлежит данному звену, и нуль - в
противном случае. Если в столбце уже есть единица, то
следующая ставится со знаком минус. Таким образом, в
каждом столбце должно быть по две единицы с разными
знаками.
Кинематические пары
х
СО
А
1
0
0
В
1
-1
0
с
0
1
-1
с
0
0
1
О -1
о о
-1
Пользуясь частью таблицы кинематических пар,
относящейся к подвижным звеньям, сформируем
матрицу коэффициентов.
1. Составим вспомогательные матрицы, являющиеся
частями матрицы коэффициентов:
А11:=
1 1 0 0}
0-110
0 0-11
А13:=
ГО 0
0 0
0 0
А12:=
А33:=
(0 0 0 0\
0 0 0 0
(о о о oj
0 1^
о о
v10y
А41:=(0 0 0 соз(фз)) А42:=(0 0 0 sin(4>3))
А43:=(0 0)
Х:=(хА хв хс хс ) Y:=(yA yB ус ус )
Матрица А11 - часть таблицы кинематических пар,
заключенная в рамку, матрица А12 аналогична А11, но с
нулевыми значениями. Нулевая матрица А13 содержит
число столбцов на единицу больше числа
поступательных кинематических пар.
Последний столбец матрицы АЗЗ содержит единицу
в первой строке, соответствующей звену 1, к которому
приложен неизвестный активный момент /Ifi, а
предшествующие столбцы копируют часть таблицы
кинематических пар, соответствующую поступательным парам.
Матрицы А41 и А42 содержат синусы и косинусы
углов направляющих поступательных кинематических
пар в соответствующих столбцах. Число строк этих
матриц равно числу поступательных кинематических пар.
Число столбцов нулевой матрицы А43 равно числу
столбцов матрицы А13, а число строк - числу строк
матриц А41 или А42.
Векторы X и Y составлены из абсцисс и ординат
кинематических пар в соответствии с таблицей
кинематических пар.
2. Сформируем матрицу коэффициентов путем
объединения по строкам и столбцам вспомогательных
матриц, а также поэлементным перемножением матриц (эти
стандартные процедуры описаны ниже и не зависят от
рассматриваемого механизма):
A1:=augmen<A11,A12,A13)
А2 := augment(A12, А11, А13)
XX:=stack(X,X,X)
YY:=stack(Y,Y,Y)
А31 := (-A11-YY)
А32 := (All-XX)
A3 := augment(A31, A32, АЗЗ)
A4 := augment(A41, A42, A43)
A:=stack(A1,A2,A3,A4)
Число повторов X и Y в матрицах XX и YY равно числу
строк матрицы А11.
127
В первых 2п строках вектора указаны проекции на
оси абсцисс и ординат главных векторов сил инерции,
сил тяжести и активных сил, действующих на звенья. В
следующих п строках указаны моменты перечисленных
сил относительно начала координат, а также главные
моменты сил инерции и активные моменты,
действующие на звенья. Последние строки, число которых равно
числу поступательных кинематических пар, - нулевые.
Таким образом, вектор свободных членов
Ф1Х+Р.Х
Ф2Х+Р2Х
Фзх+Рзх
В:=-
$2Y-G2+F2Y
<&3Y-G3+F3Y
Moi -Ф|Х -Ysi +(^iy -Gi)-*si _Fix -Уп +fiy -xFI
МФ2 ~Ф2Х yS2 +(Ф2У -G2)-XS2 -F2X -УР2 +F2Y -XF2
Мфзз-Фзх -yS3 +(^3Y -G3)-xS3 -F3X -yF3 + F3Y -xF3
0
Решение системы имеет вид
D := lsolve(A,
• юх -= ^o
Ч2Х "= ^1
H23X := ™2
Нзох := ^з
в)
MOY ■"" ™4
Fi2y:=D5
' 23Y -= О 6
' 30Y -= ^7
M30:=D
M,:=D9
Реакции выводятся в соответствии с таблицей
кинематических пар. Вначале идут проекции на ось
абсцисс, затем - ординат, далее следуют моменты в
поступательных кинематических парах и неизвестный
активный момент.
Первый индекс у реакций совпадает с номером
звена, для которого в таблице кинематических пар
проставлена единица, а второй -для минус единицы.
Решение может быть представлено как функция
обобщенной координаты. Для этого все величины,
зависящие от обобщенной координаты (в том числе и
матрицы), записывают как функции этой координаты.
Силовой расчет шестизвенного механизма (рис. П5.2)
приведен ниже.
Рис. П5.2
Таблица кинематических пар этого механизма
приведена ниже.
Кинематические пары
1
2
л 3
СО 4
А
1
0
0
0
0
в
1
-1
0
0
0
с
0
0
1
0
0
D
0
0
1
-1
0
Е
0
0
0
1
-1
В
0
1
-1
0
0
Е
0
0
0
0
1
0-10
-1
0 0 0
-1
1. Исходные данные и результаты кинематического и
динамического анализа, необходимые для проведения
силового расчета, находятся в скрытой области.
2. Расчет ускорений:
а83х(Ф) := ад83х(Ф)со(ф)2+ УЧ53х(ф)-е(ф)
aS3x(f) = 0.0344
aS3yW := aqS3y№)'a)(<W2+ vqS3y(()))'8((,))
aS3y(f) = -°0561
аЕх(ф) := адЕх(ф)-ш(ф)2 + УдЕх(ф).£(ф)
aEx(f) = 0.0748
е3(Ф) •= ед3(ф)-со(ф) + сод3(ф)-е(ф)
£3(f) = -0.0678
е4(Ф) := ед4(Ф)'ю(Ф)2+ ^М'^Ф)
e4(f) = 0.4206
3. Инерционная нагрузка и силы тяжести
3.1. Звено 1:
Ф1х:=0
Ф1у:=0
G1 :=0
4j>i(<l>):=JpR|-e(<l>)
3.2. Звено 2:
Ф2х(Ф):=0
Ф2у(ф):=0
G2:=0
Мф2(ф) := 0
3.3. Звено 3:
Ф3х(Ф):=-т3а3зх(ф)
*3y((W:=-m3aS3y(<l))
Ф1х=0
Ф1у=0
G1 =0
Мф-|(т)= -2.0181
Ф2х(т) = 0
Ф2у(т) = 0
G2 = 0
Мф2(т) = 0
Ф3х(0 =-0.1529
Ф3у(т) = 0.2495
128
G3 := m3g
Мф3(ф):=-и33-
3.4. Звено 4
Ф4х(ф):=0
Ф4у(Ф):=°
G4:=0
Мф4(ф) := 0
3.5. Звено 5
ф5у:=0
Ф5х(ф):=-т5Н
G5 := m5g
Мф5:=0
Pc(f) = -12.4375
е3(ф)
(ф)аЕ
Ф)
G3 = 43.6505
Мф3(0= 0.0199
ф4х(0 = о
O4y(f) = 0
G4 = 0
Мф4(^ = °
Ф5у=0
Ф 5x(f) = -3.7201
G5 = 242.7975
Мф5 = 0
4. Расчет реакций
4.1. Матрица коэффициентов
Создадим вспомогательную матрицу. Заполним ее в
соответствии с таблицей кинематических пар
А11 :=
г\ 1 0 0
0-100
0 0 11
0 0 0-1
vo о о о
о о оЛ
0 1 О
0-10
1 О О
-1 0 1у
Создадим нулевую матрицу размерностью А11.
Заполним указанием последнего элемента
А124,6:=0
0 0 0 0 0 0 0
0 0 0 0 0 0 0
А12 = |0000000
0 0 0 0 0 0 0
v0 0 0 0 0 0 Оу
Создадим нулевую матрицу. Ее число строк, как у
А11, число столбцов на единицу больше числа
поступательных кинематических пар. Заполним указанием
последнего элемента
А134>2:=0
А13 =
Создадим матрицу, содержащую строки
коэффициентов, соответствующих суммам проекций сил на ось
абсцисс для каждого звена. Она образуется
объединением матриц А11, А12, А13. Фрагмент матрицы
приведен ниже.
(°
0
0
0
U
0
0
0
0
0
°1
0
0
0
о)
0
11
|2
3
[4
0
1
0
0
0
0
1
1
-1
0
0
0
2
0
0
1
0
0
3
0
0
1
-1
0
4
0
0
0
1
-1
5
0
1
-1
0
0
6
0
0
0
0
1
7
0
0
0
0
0
8
0
0
0
0
0
'9
0|
о!
0)
0!
0
А1 := augment (A11,A12,A13)
А1-
Создадим матрицу, содержащую строки
коэффициентов, соответствующих суммам проекций сил на ось
ординат для каждого звена. Она образуется
объединением матриц А12, А11, А13. Фрагмент матрицы
приведен ниже.
А2 := augment (A12, А11,А13)
А2:
Сформируем матрицы, содержащие строки
коэффициентов, соответствующих суммам моментов. Создим
строку плеч для проекций сил на ось абсцисс. Ее
элементами являются ординаты кинематических пар в
соответствии с таблицей кинематических пар
Y(f):=(o yB(f) yc yD(f) yE yB(f) уЕ)
Сформируем матрицу плеч. Ее размерность, как у А11,
YY(f) := stack(Y(f),Y(f),Y(f),Y(f),Y(f))
^0 0.1861 -0.6333 0.2542 0.2348 0.1861 0.2348 Л
SO
11
2
3
[4
0
0
0
0
0
0
1
0
0
0
0
0
2
0
0
0
0
0
3
0
0
0
0
0
4
0
0
0
0
0
5
0
0
0
0
0
6
0
0
0
0
0
7
1
0
0
0
0
в
1
-1
0
0
0
05
0
0
1
0
£j
YM0 =
0 0.1861 -0.6333 0.2542 0.2348 0.1861 0.2348
0 0.1861 -0.6333 0.2542 0.2348 0.1861 0.2348
0 0.1861 -0.6333 0.2542 0.2348 0.1861 0.2348
v0 0.1861 -0.6333 0.2542 0.2348 0.1861 0.2348
Сформируем матрицу коэффициентов при проекциях
сил на ось абсцисс. Она получается путем
поэлементного перемножения матриц А11 и YY. Знаки
инвертируются.
>
A31(f):=(-A11-YY(f))
A3Xf):
0 -0.1861
0 0.1861
0
0
\0
0.6333 -0.2542
0
0
0.2542 -0.2348
0 0.2348
0
-0.1861
0.1861
0
0
0 ^
0
о
о
-0.2348у
Создадим строку плеч для проекций сил на ось
ординат. Ее элементами являются абсциссы
кинематических пар в соответствии с таблицей кинематических
пар. Дальнейшие преобразования аналогичны
описанным выше.
X(f):=(0 хв(0 0 xD(f) x^f) x^f) x^f))
X^f) := stack(X(f),X(f),X(f),X(f),X(f))
129
XX[f)
О -0.0605 0 -0.0655 0.2008 -0.0605 0.2008
0 -0.0605 0 -0.0655 0.2008 -0.0605 0.2008
0 -0.0605 0 -0.0655 0.2008 -0.0605 0.2008
0 -0.0605 0 -0.0655 0.2008 -0.0605 0.2008
0 -0.0605 0 -0.0655 0.2008 -0.0605 0.2008
A32(f):=(A11XX(f))
A32(f) =
0 -0.0605 0
0
0
0
0
0 0.0605 0 0 0
0 0 0 -0.0655 0
0 0 0 0.0655 0.2008
-0.0605 0
0.0605 0
0 0
\0
о
о о
-0.2008 0
0.2008
Создадим матрицу, содержащую коэффициенты при
моментах в поступательных кинематических парах и
неизвестных активных моментах. Первые столбцы
соответствуют части таблицы кинематических пар,
соответствующих поступательным парам. Последний столбец
содержит единицу у звена, к которому приложен
неизвестный активный момент.
^0 0 Л
1 0 0
АЗЗ := I -10 0
0 0 0
0 1 0
Создадим матрицу, содержащую строки
коэффициентов, соответствующих суммам моментов для
каждого звена. Она образуется объединением матриц
А31, А32, АЗЗ. Фрагмент матрицы представлен ниже
A3(f) :=
A3(f) =
0
1
2
3
4
0
0
0
0
0
0
= augment (А31 (f), A32(f), АЗЗ)
1
-0.186
0.186
0
0
0
2
0
0
0.633
0
0
со
0
0
-0.254
0.254
0
4
0
0
0
-0.235
0.235
5
0
-0.186
0.186
0
0
6
0
0
0
0
-0.235
7
0
0
0
0
0
8
-0.06
0.06
0
0
0
9
0
0
0
0
0
Создадим матрицу, содержащую строки
коэффициентов, соответствующих суммам проекций сил в
поступательных кинематических парах на направляющие этих
пар. Число строк равно числу поступательных
кинематических пар. В столбцах, соответствующих
поступательным парам, задаются косинусы углов наклона
направляющих (для А41) или синусы (для А42). Матрица А43
нулевая. Фрагмент матрицы представлен ниже:
A41(f) :=
A42(f) :=
Л) 0 0 0 0 cos(<t>3(f)) 0
0 0 0 0 0
U
0 0 0 0 0 sin(<|>3(f)) (Л
0 0 0 0 0
А43:=
0 0 0
1,0 0 0
A4(f) := augment(A41(f),A42(f),A43)
A4(f)
0
1
=
0
0
0
1
0
0
2
0
0
3
0
0
4
0
0
5
-0.074
0
6
0
0
7
0
0
8
0
0
9
0
0
Создадим полную матрицу коэффициентов путем
объединения строк матриц А1, А2, A3 и А4. Фрагмент
матрицы представлен ниже:
A(f)
A(F)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
:= stack (A1,A2,
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
1
-1
0
0
0
0
0
0
0
0
-0.186
0.186
0
0
0
0
2
0
0
1
0
0
0
0
0
0
0
0
0
0.633
0
0
0
A3(f),A4(f))
3
0
0
1
-1
0
0
0
0
0
0
0
0
-0.254
0.254
0
0
4
0
0
0
1
-1
0
0
0
0
0
0
0
0
-0.235
0.235
0
5
0
1
-1
0
0
0
0
0
0
0
0
-0.186
0.186
0
0
-0.074
6
0
0
0
0
1
0
0
0
0
0
0
0
0
0
-0.235
0
7
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
8
0
0
0
0
0
1
-1
0
0
0
-0.06
0.06
0
0
0
0
9
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
Проконтролируем число строк и столбцов
полученной матрицы.
rows(A(f)) = 17
cols(A(f))= 17
4.2. Вектор свободных членов
Создадим строки, содержащие проекции известных
сил на ось абсцисс для каждого звена.
B1(f):=-
(ф3х(ф
0
Pc(f).i + o5x(fM
B1(f) =
о
о
0.1529
0
v16.1576y
Создадим строки, содержащие проекции известных
сил на ось ординат для каждого звена.
/
B2(f):=-
-Grl
Л
a>3y(f)-i-G3-i
-G5.i
/
B2(f)
0
о
43.401
0
242.7975
Л
Создадим строки, содержащие моменты сил,
приведенных в столбцах В1 и В2, и известные моменты,
действующие на звенья каждого звена.
B3(f):=
M01(f)-1
о
-Ф3х(0-У83(0 1 + (ФЗу(0-1-Сз-1)х83(т) + Мфз(0 1
о
-Рс(0-1-УЕ-е5-хЕ(0-1-Ф5х(0-УЕ-1
130
B3(f) =
2.0181 ^
0
-1.4123
0
44.9527 j
Создадим строки, содержащие проекции известных
сил в поступательных кинематических парах на
направляющие этих пар для каждой кинематической
пары.
В4:
B(f) := stack(B1(f),B2(f),B3(f),B4)
B(f) =
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
[15
0
0
0
0.1529
0!
16.1576!
о|
0|
43.401 !
о!
242.7975 |
2.0181 |
0|
-1.4123!
0;
44.9527 |
0|
4.3. Решение системы
0(ф):=к>о№е(А(ф),В(ф))
Вектор D содержит реакции, располагаемые в
соответствии с таблицей кинематических пар. Вначале
идут проекции на ось абсцисс, затем проекции на ось
ординат, затем моменты в поступательных
кинематических парах и неизвестный активный момент.
D(f):=lsolve(A(f),B(f))
F10x(f)
F12x(f)
F30x(f)
F34x<f)
F45x<f)
F23x<f)
F50x(f)
F10y(f)
F12y(f)
F30v<f)
= D(f)0
= D(f),
= D(f)2
= D(f)3
= D(f)4
= D(f)5
= D(f)6
= D(f)7
= D(f)g
= D(f)9
F10x(1
F12x(f
F30x(f
F34x(1
F45x(f
р23х^
^Ox^
F10y(f
F12y(1
^Oy*1
) = 19.1436
) = -19.1436
) = -2.833
) = -16.1576
) = -16.1576
) = -19.1436
') = 0
) = 1.4128
') = -1.4128
') = 40.8132
F34y(f)
F45y(f)
F23y(f)
F50y(f)
M23(f) :=
M50(f) :=
M.,(f):=
= D(f)10
= D(f)n
= D(f)12
:=D(f)i3
= D(f)14
= D(f)15
D(f)16
"34y<
F45y(
F23y<
r(f) = 1.175
,(f) = 1Л75
,(f) = -1.4128
F50y(f) = 243'9725
M23(f) = 0
M50(f) = o
M^f) = -1.6303
5. Расчет тангенциальных составляющих:
F21T(f) := Р12у(0-со8(фз(0) - F12x(f)-sin^3(f))
F30T(f) := F30y(f)cos(*3(f)) " F30x(f)sin(*3(f))
MPc(0 := Fc(f)vqEx(f)
ф:=0,30с1ед.. 27i
м^ф) -i
-2
0 30 60 90 120 150 180 210 240 270 300 330 360
deg
6. Годографы реакций
6.1. Реакция Fhq. Система стойки:
F10(4>) := 7РЮх(Ф)2+|Г10у(Ф)2 F10(f) = 191956
/ \ ФЮ(0
фЮ(ф) := апд1е(Р10х(ф),Р10у(ф))
х110:=0
х11, :=ф10(т)
deg
у110:=0
у11, :=F10(f)
= 4.2209
71 Л К
п :=0,—..2-я ф:=0,—..2-я
12 12 12
330
270
ф10(ф),х11
131
6.2. Реакция F^- Система стойки
F12W := jFl2x<*)2+F12y(*)2 F12<f) = 19Л956
ф12(ф) := angle(F12xW,F12y(<M)
ф:=0,
х110::
х11! :=
— ..2-я
12
= 0
= Ф12(0
Ф12(0
deg
f
184.2209
deg
у110:=0
y11l:=F12(f)
= 90
270
ф12(ф),х11
6.3. Реакция F12- Система звена 1
F12W :=^12х(ф)2+ Р12у(ф)2
ф12(ф):=апд1е(Р12х(ф),Р12у(ф))-ф1(ф)
ф:= 0,—..2-я-.5
12
х110:=0
х111:=ф12(Г)
у110:=0
y11l:=F12(f)
270
ф12(ф),х11
6.4. Реакция Род- Система стойки
Р34(Ф) := JF34x(*)2+F34y(*)2 F34(f) = 16'2002
ф34(ф) := апд1е(Рз4Х(Ф),Р34у(Ф)) Ф34(0 = 3.069
ф:=0,
х110:=
х11,::
—..2-я
12
= 0
= 434(f)
у110:=0
y11i:=F34(f)
Р34<Ф)
у11
е-е
180
270
ф34(ф),х11
6.5. Реакция F5q. Система стойки
Р50(ф):=^50х(ф)2+Р50у(ф)2
ф50(ф) := апд!е(Р50х(ф),Р50у(ф))
► :=0,—..2-71 -.5
12
xllo^x^f)
xHi-XoCf)
у110:=0
y11i :=F50(f)
300
200
Р50(ф)
ооо
у11
100
Сф-COQ О—В-
о<р q оо—фо о—(ф оовв
-0.3 -0.2
-0.1 0 0 1
х0(ф),х11
0.2
0.3
132
Приложение 6
Проектирование кулачкового механизма с роликовым поступательно движущимся толкателем
Рассмотрено применение системы MathCAD для
проектирования кулачкового механизма с роликовым
поступательно движущимся толкателем. Проектируется
реверсивный механизм минимальных габаритов с
ограничением на углы давления. Схема проектируемого
механизма приведена на рис. 7.1, закон движения
толкателя представлен графиком изменения аналога ускорения
толкателя (рис. П6.1). Основное направление вращения
кулачка - по ходу часовой стрелки.
При определении передаточных функций
максимальные значения аналогов ускорения в фазах удаления и
сближения в начале расчетов принимают единичными.
После двукратного интегрирования по заданному ходу
толкателя рассчитывают необходимые значения
аналогов ускорений и пересчитывают аналоги скоростей и
перемещения толкателя.
В процессе расчетов проводят линейную
интерполяцию графиков аналогов ускорений и скоростей. При
этом скачки на графике ускорений заменяют
наклонными линиями с большим тангенсом угла наклона.
Определение основных размеров кулачкового
механизма (е и So) проводят процедурой Given-Find путем
решения системы двух уравнений для расчета углов
давления, записанных для точек с экстремальными
значениями аналогов скорости. Для иллюстрации
полученных результатов строят фазовый портрет и график
изменения угла давления.
Для расчета координат профиля кулачка используют
метод обращенного движения (см. разд. 7.6.2).
Закон движения толкателя представлен на рис. П6.1.
ая '
со
CD
i
I
0
~т
1
2 3
ru
fd
f
[г
4
с
I
5
"3
1
.
Ф
1
Рис.
1. Исходные данные
Ход толкателя
Допустимый угол давления
Рабочий угол
Угол удаления
Угол сближения
П6.1
h := .015
9m := 30deg
fr:=220-deg
fu:= 115deg
fc := 75deg
M
рад
рад
рад
рад
2. Кинематические диаграммы
Рассчитаем угол дальнего выстоя
U
V=fr"fu
L
deg
30
Рассчитаем углы в характерных точках (см.
рис. П6.1):
ГО
■ = 0
= 57.5
ти := и
fu
f1:= —
2
f2 := t.
u
f3:=fu + fd
f4:=fu + fd +
fF, — f
Jc
2
deg
f1
deg
f2
deg
f3
deg
f4
deg
f5
= 115
= 145
deg
182.5
= 220
Принимаем максимальные значения аналогов
ускорения толкателя в фазах удаления и сближения
равными единице:
ami := 1
am2 := 1
Эти значения уточняются после построения диа-
грамммы перемещений. Проведем интерполяцию
графика аналога ускорений кусочно-линейной функцией
/
аа1 :=
0
ami
ami
-ami
-ami
0
0
-am2
-am2
am2
am2
0
V 0
ff1 :=
0 ^
.0001
f1
f1 + .0001
f2
f2 + .0001
f3
f3+ .0001
f4
f4+ .0001
f5
f5+ .0001
271 J
aq(f) := Iinterp(fa1, aa1, f)
f:=0,.0001..2ti
aq(130deg) = 0
1
0.5
>q(0 0
-0.5
0 30 60 90 120 150 180 210 240 270 300 330 360
f
deg
133
Построим график аналога скоростей:
vq(f) :=
aq(f) df vq(130deg) = 4.325 x 10
-5
'0
f :=0,.01..2ti
vq(0 о
Ш
III Im III 1
0 30 60 90 120 150 180 210 240 270 300 330 360
f
Проведем интерполяцию графика аналога скоростей
кусочно линейной функцией:
'(И
f1
f2
Vv1 := | 0 | Ffl := | f3
f4
f5
K2n;
( ° 1
vq(f1)
0
0
vq(f4)
0
l о J
vq(f):=linterp(Ff1,Vv1,f)
vq(0 о
~i
vq(130deg) = 0
4Ш
N4
0 30 60 90 120 150 180 210 240 270 300 330 360
f
deg
Построим диаграмму перемещений:
ff
S(f) :=
vq(f)df
s(130deg) = 1.007
f :=0,.01..2я
s(f)
5
0 30 60 90 120 150 180 210 240 270 300 330 360
f
deg
Рассчитаем максимальные значения аналогов
ускорения в фазах удаления и сближения и пересчитаем все
кинематические параметры:
ami :=
агл2 :=
ami h
аа1 :=
s(fu)
am2h
s(fuH(fr)
f ° I
ami
ami
-ami
-ami
0
0
-am2
-am2
am2
am2
0
l о J
0.05
aq(f) 0
-0 05
vq(f):= aq(f)df
f :=0,.02..2я
0 02
vq(f)
-0 02
ami = 0.015
am2 = 0.035
/
fa1 :=
0
Л
.0001
fi
f1 + .0001
f2
f2+ .0001
f3
f3+ .0001
f4
f4+ .0001
f5
f5+.0001
V 2n
aq(f) := Iinterp(fa1 ,aa1 ,f) aq(130deg) = 0
f:=0,.0001..2tc
100 200 300
f
vq(130deg) = 0
^
\
A
V
r
VI
0 30 60 90 120 150 180 210 240 270 300 330 360
f
134
Vv1:=
vq(f1)
0
0
vq(f4)
0
l о
Ff1 :=
ti
f2
f3
f4
f5
vq(f):=linterp(Ff1,Vv1,f)
vq(130deg) = 0
0.02
-0.02
-0 04
0 30 60 90 120 150 180 210 240 270 300 330 360
f
deg
s(f) :=
vq(f)df
s(130deg) = 0.015
f := 0, .01.. 2tc
0.02
0.01
s(f)
m
0 30 60 90 120 150 180 210 240 270 300 330 360
f
3. Расчет минимального радиуса кулачка и
смещения толкателя
Выполним расчет с использованием процедуры
Given-Find. Запишем выражения для тангенсов углов
давления в точках с максимальным (1) и минимальным
(4) значениями аналога скорости (рис. П6.2)
Первое приближение для неизвестных:
s0 := h e := О
Given
tan(em) =
tan(em) =
FF:=Find(s0,e)
sO := FF0
e := FFj
r0:=yjs02+e2
vq(f1) + e
s0 + s(f1)
-vq(f4)-e
sO + s(f4)
sO = 0.025
e = 3.873 x 10"
rO = 0.025
Рис. П6.2
Построим фазовый портрет. Уравнения касательных
к фазовому портрету имеют вид
x1(y):=-e-tan(em).(y+s0)
x2(y):=-e+tan(em).(y+s0)
Диапазон изменения аргумента в уравнениях
касательных
y:=-s0,-s0 + .001.. h
0.02
0 01
s(f)
-sO
Q-O
У
-o.oi
-0.02
-о.оз
\
ч
s^"
<r
\
\
\
\
"•—
\
V
"^N
^
f
/
v /
л
-0 03 -0.02 -0.01 0 0.01 0.02
Vq(f),-e,x1(y),x2(y)
Построим график угла давления:
tg0(f) :=
vq(0 + e
sO + s(f)
0(f):=atan(tg6(f))
135
e(f)
deg
deg
-0m
40
20
deg
'-20
-40
J
у
s
\
v
\
1
.
\
>
/
/
f
0 30 60 90 120 150 180 210 240 270 300 330 360
f
deg
4. Построение профиля кулачка
Уравнения окружности, радиус которой равен
смещению:
xA(f) := ecos(f)
yA(f):=esin(f)
Уравнения окружности минимального радиуса:
Xg(f) := xA(f) + sOcos
yB(f):=yA(f) + s0sin f +
2
7C
-У
Уравнения центрового профиля, полученные
методом инверсии:
Xc(f) := хв(0 + s(f)cos
2
yc(f):=yB(f) + s(f)sin|f+7
Построение конструктивного профиля кулачка.
Радиус ролика
rR:=.01
Уравнения конструктивного профиля, полученные
методом инверсии, имеют вид
xo(f) := XQ(f) - rR.cos| f + у - 6(f)
yD(f):=yc(f)-rRsin
f + —-9(f)
2
Угол для изображения ролика и толкателя
f := Odeg
Уравнения окружности, изображающей ролик, имеют
вид
xr(<W:=XQ(f) + rR.cos(<|>)
Уг(Ф):=Ус(0+Гр^п(ф)
Уравнения прямой, изображающей толкатель, имеют
вид
yc(f)
Y:=|
Х:=
xc(f)
xc(f)-h.sin(f)j
yc(f) + hcos(f)
>:=0,—.. 2-7C
24
004
0.03
уА(Ф)
"ув"(Ф)002^
ус(Ф)
0.01
у0(Ф)
УКФ)
Y
е-е
о
0.01
-0 02
"0.03
-0.04
/
/
I
!|
1\
1\
\
\
^ ""
/
1\
1 \
\ \
\ \
\
\.
в -
у
s
ч
\
^ —
X
/_
V
Ль
• (
^-
у
(7\
-i
>->.
^_ ^
J }
г
\
Л
х
' \
"-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03
хА(Ф),хв(ф),хс(ф),хо(ф),хг(ф),Х,0
Приложение 7
Примеры выполнения листов курсового проекта
При выполнении курсового проекта студенту
необходимо полно и грамотно выполнить и оформить
графическую часть работы. Листы проекта должны
выполняться в соответствии с требованиями ГОСТов
системы ЕСКД, включая Правила выполнения
кинематических схем, ГОСТ 2.703-68 и Правила выполнения
диаграмм, Р55-77-88. Схемы и диаграммы должны
размещаться на листах в последовательности, заданной
алгоритмом решения задачи.
В этом приложении приведены примеры всех
четырех листов проекта. Они демонстрируют систему
оформления графической части курсового проекта: ее
объем и содержание, расположение на листе схем,
графиков и диаграмм, масштабов и шкал, пояснительных
текстов и заголовков.
Примеры выполнения первого листа проекта
(определение закона движения основного механизма)
приведены на листах 1-7, второго листа (кинетостатический
силовой расчет механизма) - на листах 8, 9; третьего
листа (проектирование эвольвентной зубчатой передачи
и планетарного механизма) - на листах 10, 11;
четвертого листа (проектирование кулачкового механизма) -
на листах 12, 13.
На первом листе изображают диаграммы и графики,
иллюстрирующие ход решения задачи по определению
закона движения механизма:
для установившегося режима движения (листы 1, 3-7)
1) кинематическую схему основного рычажного
механизма в произвольном положении, планы положений
звеньев механизма в начальном и конечном положениях
выходного звена;
2) план возможных скоростей для выбранного
произвольного положения механизма;
3) диаграммы первых передаточных функций1
механизма (всех используемых при построении
динамической модели);
4) индикаторные диаграммы (для поршневых машин)
и диаграммы внешних сил и моментов;
5) диаграммы приведенных моментов сил (отдельно
от каждой силы и момента, а также суммарная
диаграмма);
6) диаграмму приведенных моментов инерции
второй группы звеньев (для каждой составляющей и
суммарная);
7) диаграммы работы силы сопротивления,
движущей силы и суммарной работы;
8) диаграмму кинетической энергии второй группы
звеньев (обычно совмещается с диаграммой
приведенного момента инерции);
9) графики суммарной работы, кинетической энергии
первой группы звеньев, изменения угловой скорости и
угловой скорости звена приведения (обычно эти
графики совмещают на одной диаграмме);
10) диаграмму механической характеристики (для
машин с приводом от асинхронного электродвигателя) и
диаграмму приведенной механической характеристики
(выполняется слева на оси ординат диаграммы
скорости); график движущего момента, уточненный по
приведенной механической характеристике (выполняется на
диаграмме приведенных моментов);
1 Здесь и далее под передаточными функциями понимаются
кинематические (точнее геометрические) передаточные функции -
производные функций положения по обобщенной координате.
для неустановившегося режима движения (лист 2)
(пункты 1-6 такие же, как для установившегося режима
движения)
7) диаграмму приведенных моментов инерции
второй группы звеньев (для каждой составляющей и
суммарная);
8) диаграмму работы суммарного приведенного
момента;
9) диаграмму угловой скорости звена приведения в
функции обобщенной координаты;
10) диаграмму времени в функции обобщенной
координаты;
11) диаграмму угловой скорости звена приведения в
функции времени (обычно выполняется слева от
графика времени и ориентируется так, чтобы ось абсцисс
этого графика была параллельна (или совпадала) с
осью ординат графика времени);
12) диаграмму углового ускорения в функции
обобщенной координаты.
На втором листе (см. листы 8, 9) изображают
следующие расчетные схемы, векторные диаграммы и
графики, иллюстрирующие решение задачи кинетостати-
ческого силового расчета механизма:
1) кинематическую схему механизма в заданном
положении с приложенными внешними силами и
моментами. Рядом со схемой записывают условие
задачи;
2) для заданного положения механизма
вычерчивают план скоростей и план ускорений (с указанием
принятых масштабов);
3) последовательно отражая ход решения,
изображают рассматриваемые элементы механизма (группы
или звенья) с приложенными внешними силами и
моментами (включая расчетные силы и моменты сил
инерции). Рядом записывают уравнения силового
равновесия рассматриваемого элемента. Если решение
векторных уравнений проводят графически, то изображают
векторные диаграммы сил (с указаниями принятого
масштаба). Число изображенных элементов и число
уравнений должно быть согласовано с числом
неизвестных величин в задаче;
4) в нижнем правом углу листа изображают таблицу
результатов расчета, в которой указывают
определенные в силовом расчете значения модулей сил и
моментов, угловые координаты векторов сил (относительно
горизонтальной оси х).
На третьем листе (см. листы 10, 11) изображают
кинематические схемы зубчатых передач и зацеплений,
диаграммы и графики, иллюстрирующие решение
задачи синтеза эвольвентной зубчатой передачи и
планетарного механизма:
1) диаграммы качественных показателей,
построенные по результатам расчета геометрии цилиндрической
эвольвентной зубчатой передачи на ЭВМ. На диаграмм-
мах указывают область ОДР для коэффициента
смещения xi (минимальное и максимальное допустимые
значения коэффициента смещения);
2) схему станочного зацепления для шестерни
(зубчатого колеса, с меньшим числом зубьев) при
выбранном значении xi. На схеме строят профиль зуба
методом огибания (включая переходную кривую);
3) схему эвольвентного зацепления для
спроектированной зубчатой передачи с указанием основных
параметров зубчатых колес;
137
4) кинематическую схему спроектированного
планетарного редуктора в двух проекциях в произвольном
масштабе (модуль зацепления можно принять равным
единице). На схеме изображают кинематическое
исследование редуктора методом треугольников скоростей.
Часто кинематическое исследование дополняется
планом угловых скоростей механизма;
5) основные результаты проектирования зубчатой
передачи и планетарного механизма приводят в таблице.
На четвертом листе (см. листы 12, 13) изображают
диаграммы, графики и схемы, которые иллюстрируют
решение задачи синтеза кулачкового механизма:
1) вычерчивают исходную диаграмму передаточной
функции (первой или второй), которая интегрируется или
дифференцируется. В результате получают диаграммы
функции положения и двух передаточных функций;
2) строят диаграмму зависимости перемещения от
первой передаточной функции. По этой диаграмме с
учетом допустимого угла давления определяют
основные размеры кулачкового механизма;
3) методом обращенного движения строят центровой
и конструктивный профили кулачка. С использованием
построенных профилей вычерчивают кинематическую
схему механизма в произвольном положении;
4) для проверки правильности построения профилей
определяют углы давления и строят диаграмму угла
давления.
На листах удалены основные надписи (или штампы),
так как при принятом масштабе изображения тексты в
них не читаются.
В системе КОМПАС основная надпись
вычерчивается автоматически, поэтому в курсовом проекте
основные графы надписи остаются неизменными. На
рисунке показана основная надпись с размерами по
ГОСТ 2.104-68 и пример заполненной основной
надписи. Цифрами в кружках обозначены графы, которые
заполняются студентом в основной надписи курсового
проекта: 1 - ФИО студента; 2 - ФИО преподавателя; 3 -
курсовой проект по ТММ; 4 - наименование курсового
проекта (полностью, как в задании); 5 - наименование
листа проекта (лист 1 - «Определение закона движения
механизма»; лист 2 - «Силовой расчет основного
механизма»; лист 3 - «Проектирование механизмов с
зубчатыми передачами»; лист 4 - «Проектирование
кулачкового механизма»); 6 - порядковый номер листа;
7 - общее количество листов проекта (обычно 4); 8 -
МГТУ им. Н.Э. Баумана, факультет, группа, вариант
задания.
65
15
50
15 20
kR
®
Им \ Кол
^документа
Подпись
®
Ттнтр.
Лит.
Нхонщ
®
Ш
Масса
Масштаб
/bcmffij \ЛистоЬ (7)
20
185
Нзн
Коя
Разраб.
Проб.
Тжонтр.
Нтщ
М.
АРджумента
Петров ИМ
СидородММ
Подпись
Дата
Курсовой проект по ТММ
Проектирование и исследование
механизмов поршневого
компрессоре
Определение закона движения
/km,
|
\
Масса
MacmnaS
Лист 1 \Ajcmod4
МПУтЮ.6аут
фс
9Lt%
гр. tm-Di
щ. иг
Индикаторная диаграмма Диаграмма дбижущей силы
\Fa7 п р^Юмм/МПа
pF* Юмм/кН
О 100 кН 200
р^3333мм/м
йиаграммы работы дбижущих сил, момента сопротивления
и суммарной роботы
рА * 10 мм/кЛж
1Z5r-
кйж
I
V
/
J
/
*L.
/9
6 ^~
д\
^
'12 I
0,5 л
15 л род 2л
pv= 28.65 мм/рад
йиаграммы кинетической знегрии и углабой скорости
/4,= 37.24 мм/fpodc I Ma * # м/кД*
54
йиаграммы передаточных функций
Ри=200мм/- цщ^00 мм/м
0Jr 0,2'г
м
рг= 29.2 мм/кйж
4- 3
0,5 л
15л рад 2л О
Рф* 28.65 мм/рад
р^ 2865 мм/род 5/1
Придеденные моменты инерции
Pj* 40 мм/кг-м2}
0,5 л
15 л рад 2 л
fjf' 28.65мм/рад
Кинематическая схема механизма
р{ -1000 мм/м
-1500
О л/12
Щ
ру*1500мм/м
ОМ
м
0,06
ОМ
от
рад л/6
р^Ш.59 мм/рад
цу «150мм
0,8 ОМ
°>6, i 0,03
I*
^
«W
/
L
^1/
и21
р^О.6 мм/(радс~)
раде
Ч 50
025л
рад 8,5л
р^Ш.59 мм/рад
025л рад
%
рг3000мм/(кгм2)
0,5л
рф=114.59 мм/рад
150 100 50 0 о,25л
раде'1 -—— Щ Я —
р^О.6 ммДрадс") р^О.ООЗ мм/fpadc "2i
20
103радс~2
10
О
рад 0,5л
р^11459 мм/рад
рг 6000 мм/с
_____j _ л
ш
0,02
с
001
О
рад 0,5л
р' =11459 мм/рад
ол
от
0,25л
рад 0,5л
pp=114S9 мм/рад
и fp
°'2 0,01
о
о
J1 /
Js
.пр
,пр
J2
lA——~——щ
Нинамическая модель
4 *?
0,25л рад 0,5л
щ _ р^1%.59мм/рад
г-——i——t
025л
рад 0,5л
р -114.59 мм/рад
р^ЮОмм/МПа
Индикаторная диаграмма МПа
Диаграмма силы
О, 12~ о,8 Vp-WO мм/МПа
^2.037 мм/кН
/us=3QQмм/м
Ю рР*5.65мм/кН
йиаграммасит
fj 1*300 мм/м
я схема механизма
/и
кк
рад 2л р-28,65мм/рад\
лет с
машинного агрегата
Электрический
дбигатель
о.и ° \
%у
Планетарный
редуктор
РЪ
1
1 "
Кулачкабый
механизм
Зубчатая
передача
ШатзЬенный
рычажный механизм
к*
j,
д/
*с
9
aJ*
\ ^~
12
„и
Шаграмми приведенных момента!) инерции
р Ш5мм/рад g
^ и„
0,
3
Т^
9
^12\
h 50
рад 2л
и =2Щмм/рад
§ 0,06
Я
ом
0,02
12
AJ ~о,5
рад 2я
ры*23.25ш/1рад-с~)
65
>2л\
63
161
и =28,65мм/рад
рад 2л
р ?2Щмм/рад
рад 2л
рад 2л
и =28$мм/рад
Кинематическая схема механизма
\У
Динамическая модель
&%
О 0,05 м 0,1
$в —
fjs=7553 мм/м f V,
И
кН-м\
501
ф 0 i
-50 \
; К
л
7
7
L
L/
V
\
/*Ъ
■
3
М"и
к
J
Mva
Мм
Т
6
=г
Ту
5
s
ч
|
ч
1
JkJ=
-5-
ч
/
/
V
П д2
1—4—
18
^
s
т
-»
/
л
Зл рад 4л
р^28Ммм/рад
рад 2л
р^28Ммм/рад
2л
ц¥*28Ммм/род
150
Иж
50
О
-50
рА*0.5 мм/йж
\°
4
Т"
~~6
А/
i
i
^
%
^
ч
^1
%4-
\12
/Г
рад 2л
рф*28Ммм/рад
цА*0.5 мм/йж
2л
р^28Ммм/рад
Кинематическая схема механизма
4
План дозможных скоростей
Линамическая модель
О 0,1 0,2 м 0,3
SE —- р5*1000мм/м
йиагроммы передаточных функции
j? \ MS
pVq= 100 мм/м
Диаграммы придеденных моментад инерции
1,5л рад 2л
—- р^28,65мм/рад Дж
йиагроммы передаточных отношений
fiT* 0.202мм/йж рг2 мм/Ь.м I
800
0,5 \
0,25\
4
-0,251
-05
ju*100mm/-
I %
к
^
%
//с
и31
400
200
75\
2
:м
50
25
/г
,прт
У
lK7
,ф\\
J2 \\
йиагроммы приведенного суммарного момента сопротивления, и движущего момента
рм*0.02мм/1Нм} Mgf%J
2
кН.м\
15п рад 2п
р=28,65мм/рад
1,5л рад 2л
"*" р^28,65мм/рад
Диаграммы суммарной ройащ кинетической знегрш и угловой скорости
ры*77мм/(радс )
\5
3 2 10 О
кН.м уы1ср=343мм
рм=0.02мм/Ш
0,5л
рА =10 мм/кйж
15л рад 2л
рф=28,65мм/рад
15л род 2л
О
0,5л
1,5л род 2л
р9=28,65мм/рад
0,5л
15л рад 2л
р *28,65мм/рад
fjF= Шмм/кН
Миограмма силы сопротивления йинамичестя модель ^юОммА
0
кН
1 -з
-6
/
/
^-"""^
/у<%? 0,6
0,2 м 0,3 0
ps -500 мм/'м
О
fiA*Q.12 мм/Лж
к
к
^
3l
*-—
N
У
у
^~~
^
^N
<
n/
\
V
У
1
1
О л
О" 9i ~
р^ОЗмм/Шм) Mwdw
О
рг171мм/йж рг60мм/(кг-м2}
3,0
<Pi
0,2
м
0,1
0'
-0J
-О9
£
0
№
^
^
300
3
К"-*""^
Л
мм/
~зу ,
ч
^
7—
К
%
Jk.
/4
54
J
\
/
=300мм
/
**—*
Г
у—
к9
/-
\
\
X
"-».
\У\
и
7\
йж
¥qS3
50 Y
12 L
20
to
род 2л
р *28Ммм/рад
12
род 2л
р*28Ммм/рад
\12
100
Им
п
м
-100
^ опп
-300
о~
J
,NM
?
vS
/
/
Vs
А
У
У"
\
\
L
I
i
6
»——^
b
I
„.,. -ч
, l^
У
^M*r
„^
750
йж
500
250
-250
-500
\o
3
A^
6
A,
A ,
/
Ar
4
12\
9 -A, I
/. г I
У
*
<P1
рад 2л
р^28Ммм/род
ры*82.8 мм/fpodci
500
йж
рад 2л
рф=28Ммм/рад
и
/
3
у
г"—
->-
^>ч
ч
L
и
9
/
L
1
f
L /\
1М*600мм/м
рад*172мм/м
ра=6,8 мм/1м<'2}
0.2
м
0,1
О
-0,1
IX
-02
~0,3
-ОА
\lZm
if4
Т*
Ь
„ЦП
аф.Щ
%Р.%
4
5
}
ад9а9
I f /
ч
i-J
.74-.
J 1
Л
(9\
1
*t
(°
п
1Z11
щ
О л
рщ*250 мм/м
рад 2л
ц,~2?'мм/рад _ш
р,*50 мм/(м*с~1
0,1
*"** 51,112,10 3~9 I 3 5 76"Y м
Vqx-OJ
-0,2
Нинамическая модель
План возможных скоростей
г
г1
3*
<*2
^
V#Vs
ц5
t6
У
I \
\ N
8*
у«у>
\
ч ! /
\!/
9)
р
12[
пу\
т
О
(7\Ud м \
Vl^Nj
Функциональная схема
р
ь
ПР
мс
зп
Мс
ИМ
V*
Fsc
1**1,57 мм/1кг-м1
jur-0,126 мм/йж
750
йж
500
4 250
т,
рад 2/г
О
рр =27 мм/рад
ОА
м
0,3
I 0,2
X
0,1
о
6
кН
4
2
I О
Fr -2
-4
~6
1л*=250 мм/м
рад 2л
pf*27 мм/рад
т4
2
1
4}
3
6
15
W
\ч
<?'
^
'Х9
\!4
У\
Xs\
1
1
10
11
Н
^
/j?*8.6 mm/kH
рад 2л
р9*27 мм/рад
I ;
2
Frs
3
\
4
5
Frs
6
4
kw
In
111
и
■"■'И'"
!!
^{
78
и—н
?=щ
!
I
-Ш
!
I
Р
11
4
0
р^27 мм/рад
Лоно- tpfWty =219.2рад/сЛгШЛ рад/с2,
F&4 76 HF* =12810 Цщ*П.8 кг,т2щ =2.8 кг,
2 2
т3щ=3.1 кг, IS1=362кг/i, /S2=/S4=0035кгм.
Определимы F* /% М*
Qd^Ob + Qbb+Oob
йиаграты изменения бетороб сил Fm, F3Qt F2f за цикл
0,12<
pF= 0.005мм/Н
2я %*Рад
Збено 3
211 lit31-0; F30=1118H
5t6J.IF(2~3}=0; Fd3+F3O^0^G2^F2r 0; .Fg3
Fpynna збеньеб 2-3
45i;
План сил для збеньеб 2-3
11 Iff* 0; М30= ОНм; V^V - Mf^OImm/H
3AUFB)*Q; FJ3^63^F32= 0;
r "f„ План сил для збена 3
' тА д3
/uf*Q.01mm/H
%
МФ2
ХГ; 2
<^\Ч
%
_. &К х.
t hB63
1Цег
\
у^§7
6? X
Fpynna збеньеб 4-5
8!.IMtS}=0; F50 = 1688H.
Збено 5
ИМ lFf"~SJ=0; FJS+FsO+Gs+<P5+Gj+04+F4r 0; F50 \/$К Ч<^
5 План сил
для збеньеб 4-5 к 50
Ki
Pf=0.01mm/H
pgs для збена 5
Pf*0.01mm/H
71 I ho =0; М50=0НМ;
9Л IF* = 0; Fm+F5D+G5+<P5+F%= 0;
Збено 1 W- £F s 0; F% +Ff2+Gf+ F10= 0;
Pf=0.005mm/H
План сил для збена 1 ?ю
Результат/ силового расчета
Кинем, пара
ч
Vi
. й
-
кН
'
На
Аю
21Л
131
125
4?
119
330
-
с*
7.3
143
-
Вя
112
t>5
0
в*
8.7
277
-
DiS
9.52
235
-
L$o
1.69
315
0
151 lh" = 0; М1с = 125Нм.
AMt = 0; Mt = 16 %;
Исходные данные: tAB*0.2 м, 1А0*0А м. 1ВЕ*1.2м. 1EF*0.8 м,
щ - 10(1+01 sin 2(р) * 9 134 рад/с. щ - 120: е1 - -9134 рад/с,
т^5кг, т2*20кг, т3*0 кг, т4*20кг, т5*50 кг, F5*10000 И
0 15Г0кгм2!52=2.4 кгм2153^0кгм2154 =1.067кгм2lsi*0кгм2.
ЗЬено 3.
1 Вг
Iff,
6,
X
^So
QfS5
Инерционные характеристики-- F
Мф1*0 <Pt-0
Мф2-Ь*2 -24-6.234 - 14.97Им Ь = ®2%2 -20-1132«226.42И
Мфз *0 Ф2х* т2-aS2x ш 20-7.29 = 145.8 Н
Мф4 - (S4 Ъ ' W67-6.944 = 7.41 Им Ф2у - т2%2У ' 20-8.66 * 173.26 И
Ф3*0
Ф4 *m4aS4 *20-2.267* 45.34 И
Ф,х *ЩЩ4х *20-1.17 = 23.4 И
Ф4у = m4aS4y *20-1895 = 379И
Ф5 - %% . 50-2.312 - 115.6 И
ЗЬено 1
Мф5=0
ЗЬено 5.
QAS,
Г** Or
с 5
rQy ,
<PSFS
й FBx+Fs + <Ps*0;
21 Fay-6s-FFy*0;
31. MF = 0;
13). FM
Ш F.
Ay
-Fey
6, = 0;
15). ms-ih FBfxBS1+FBxyBS1 *м,-а
Fqx
1
FQy
1
MF
1
Ffy
-1
F&x
-1
Yest
FBy
-1
XBS1
Fa.
1
FAy
1
Mf
1
ЗЬено 4.
& k-tto-Fta-O;
51 FEy +Ф4у
\FEx
1
Ус$4
FCy
1
~XES4
Fqx
-1
y*S4
Fgy
-1
~xm
*
ЗЬено 2.
CD
^Cy
101 FDx -Fcsin (p2 = 0;
111 F0y -Frcos ip2 =0;
121 Mc * 0;
71 F8x+Fcsin(p2^2x~FEx=0;
81 FBy *FEcos(p2 + Ф2у +G2+FEy*0;
91 Dig*0; ~F¥xBS2 -FBxyBS2 -FrlCS2 -Мф2~FEyxES2 -F£xyES2 *0:
Fqx
1
Fffy
1
Fc
-sin §2
-CQSfy
"r|
;
Fa
-1
-УЕ52
Fey
-f
~%2
Fbx
1
~yBS2
Fay
1
~XBS2
Fc
sinp2
C0Sf2
~k$2
\Fqx
I /
-/
fm
Fgy
1
-1
~%
MF
1
Ffy
-1
Fcx
1
Ы
-/
-hi
Fey
1
~xm
-/
~%2
Fc
Щ
COSfy
"k$2
-Щ
-СЩ
Mc
/
Fqx
1
Fgy
/
F&x
1
-hsi
-/
Ы
Fey
1
"%?
-/
%1
Fax
1
FAy
1
M,
1
Fgx
Fgy
FCx
Fey
Fc
ll
Fox
Foy
\Fbx
\ Fey
Щ_
\ FAy
Щ
-
-Р5-Ф5
Gs
0
Ьх
G4 - Ф4у
Мф*
**
62~ Ф2у
Нф2
0
0
0
0
Ь
0
Результаты силодого расчета (силы б кН моменты б Им}-
Gi~FQy*0;
61 Щ4=0; FEx-yES4 ~FE-xES4 -Fg-xSS4 +FQxyQS4 -МФ4 * Q;
FqX
10.12
FQ
тя
Fgy
2.97
ft
Ш*
MF
0
MF
0
Fry
U7
Ъ
3A7
FEx
10.09
Fc
10Л7
Fc)
2.61
4>C
15.6'
Fc
Bit
Fc
Bit
Mc
0
Mc
0
Fm
4.39
F„
13.4
Fgy
12.7
%
70.8°
Fbx
5.56
Fs
1134
FBy
9.88
%
606'
Fax
5.56
Fa
5.56
FAy
9.96
(Pa
Mi
25.5
Mi
68.7\25.5
Станочное зацепление шестерни z* 11с реечным инструментом
р=пт
-6000 мм/м
Л бух рядный планетарный редуктор с одним бнешним
и с одним внутренним зацеплениями
*2
щь*щ/иь * tgtpt/ 1дфь* АА'/АА"*50А55* 10.98
zr 21, z2= 61 zr 36, z^ 120
Зацепление шестерни /; * 11 с колесом z2 * 15
Станочное зацепление шестерни z1 * % с реечным инструментом ,™ ,
Графики качественных показателей
зубчатой передачи
^/
£
^
* *
|
&
ч"
Л1:
/ V
vl
К ^
ш
\ д-^Ш^1
V- ^31—
/w
m
•% 3?
Po^T T~Z Л
ХЗСЖг~Х /
~\*ss*/ л X
г?
a*a / /
/ / / X
a
г
i
\\
\ *
4)
x.
Планы скоростей при подъеме Планы скоростей при спуске
% вщ/ц, = АА'/АА"*3.5
Zf* 36; Z2* 27;Z3* 90.
% щщ/щ - 1 * z3/zf*3S
4 щ/% - М '/М" - 25/-10 - -25
Зацепление зубчатых колес /7- % и z2* 24,
модуль т*8мм, fcO°, XfO£x2*0M5t ow*156mm, ca*1,3U.
0.075
%
1
(I
*?
мм/м
1
1|
£
мм/м
1
м
0.05
J 0.025
°Ф 0
-0.025
-0.05
от
м
0.02
|
1
-0.02
-от
ом
I "
с 0.02
О
пв=0035м; $0*200-; ЪгЮ: уу=(рс; [Ф20°
Определишь-' г0; гр,- конструктибный и центрабой профили
Диаграмма бторой передаточной функции толкателя
Определение радиуса начальной шайды кулачка па углу дабления
ps= //иг 1500 мм/м
Ut
-6Jt
\д
I Ь
\ 5
<Рра5
<Р®
1.
Г
[
т
Ъ !
15 |
5у^
К^
10
й20^
^v/5
ы
от м ом от
to
2.0
Р^ 3.0
Диаграмма пербой передаточной функции толкателя Ф
и = 68,76 мм/рад
1 -
/i\5
\°/ !
\ 10
N./5" |
ом
м
0.02
О -0.02 у -ОМ -0.06
О
Построение центробого и конструктибного профиля кулачка
Pi =1500 мм/м
1.0
Диаграмма пермещения толкателя
5,
\l^^
ТО
\Ум
^\^5
Конструктибный профиль кулачка
20 рад 3.0 рт* 68,76 мм/рад
Центробой профиль кулачка
\20
1.0
Диаграмма угла добления но фазах удаления при реберсибном бращении кулачка
_ 6.0 Ш^ 50
30° ^^
2.0 рад 3.0 и ш 68.76мм/рад
м бращении кула
10 30
У
4 -9 -10"
3> -20"
-30°
20° \
■zmz
~L)1
^,g j
Результаты праектиробания кулачкобого механизма
20
1 Радиус начальной шайды центробого профиля
2 Радиус конструктибного профи/т при нижнем дыстое
J Эксцентриситет толкателя
4. Радиус ролика толкателя
г0
Г
е
г1
0.026м
0.020 м
0.005м
0.006 м
1.0
№j ъ
2.0
род 3.0
и * 68,76 мм/рад
Лиограмма бторой передаточной функции толкателя
1
Лано- (ру* 35°, <РС* 70°, (рра5= 129* (а -0.12м,
hB* 0.039 ц[у-Юс]-3(Г
Определимы rg/- rp,- конструктивный
и центробой профили
Определение радиуса начальной
шайбы кулачка по углу дабления
ps= fjVg * 8626 мм/м
Результаты проектиробания кулачкобого механизма.
0,05.
-0.05
%
15 род 2,0
и * 28,65 мм/рад
Лиограмма первой передаточной функции толкателя
tO 1,5 рад 2,0
щ _ р= 28,65 мм/рад
1
0,05
м
0,025
Лиограмма пермещения толкателя
->в
и
~~~ 6
6'
>\
**">^
0,5
W
Лиограммо угла дабления
1,5 рад 2,0
и « 28,65мм/рад
\т
г
2
3.
4.
Наименобание параметра
Радиус нашной шайбы центробого профит
Радиус ролика
Радиус нашной шайбы конапрутийнога профит
Межосебое расстояние
Значение !
га*0,12м \
ср = 0,03м |
г* 0,09м
а»*0,16м I
Построение центробого и конструктибного профилей кулачка
Ю
<Рг
1,5 род 20
р * 28,65мм/рад
fi. * 862.6 мм/м
1 ~ кулачок,- 2 - толкатель,-
3 ~ ролик; 0 - стойка.
Основные этапы выполнения курсового проекта
Задача 1. Определение закона движения
механизма под действием заданных внешних сил (на примере
одноцилиндрового вертикального поршневого
компрессора при установившемся режиме работы).
1. Анализ исходных данных и выбор из них данных,
необходимых для решения задачи: структурная схема
основного рычажного механизма, размеры его звеньев,
массы звеньев и моменты инерции, максимальное и
минимальное значения силы или момента (движущего
или сопротивления) и закон его изменения и др.
2. Метрический синтез основного рычажного
механизма (определение недостающих размеров). Проводят
графически методом засечек или аналитически - по
уравнениям синтеза механизма этого типа. В ходе
решения задачи определяют положения звеньев
механизма в начальном и конечном положении (или в
предельных или «мертвых» положениях).
3. Построение в масштабе на первом листе планов
положений звеньев механизма (в произвольном и
предельных положениях). В произвольном положении
изображают кинематическую схему механизма. Для
этого на план наносят условные обозначения звеньев и
кинематических пар, обозначают звенья механизма,
кинематические пары и центры масс. Наносят оси
координат, начальное значение обобщенной координаты и
ее значение для произвольного положения. На схеме
показывают направление вращения звена 1 и
приложенного к нему движущего момента, а также векторы сил
тяжести звеньев и сил сопротивления, приложенных к
выходным звеньям. Показывают полное и рабочее
перемещение выходного звена.
4. Построение диаграммы силы сопротивления и
индикаторной диаграммы в проекционной связи с
перемещением выходного звена. В большинстве заданий на
проект эта диаграмма задана в виде таблицы
относительных значений силы (в долях от максимальной) и
относительных значений перемещения (в долях от хода
выходного звена). По рассчитанному значению хода
выходного звена и заданному максимальному значению
силы строят диаграмму силы сопротивления от
перемещения. Масштаб перемещения принимают равным
масштабу кинематической схемы. В поршневых машинах
вначале строят индикаторную диаграмму, которую затем
перестраивают в диаграмму силы. Один оборот
начального звена делят равномерно на 12 интервалов, в
каждом положении строят план механизма и определяют
соответствующее положение выходного звена. В этих
положениях по диаграмме силы находят значения силы
сопротивления и определяют ее зависимость от
обобщенной координаты (рис. П7.1).
Индикаторная диаграмма
цр= им мм/МПа
О 1,0 2,0 3,0 4,0 МПа 6,0
Диаграмма силы сопротивления
г pF= 4,617мм/кН
1,0 0 1,0 кН 2,0
Кинематическая схема механизма
и планы положений
Рис. П7.1
152
5. Построение для произвольного положения
механизма плана возможных скоростей или плана аналогов
скоростей (последний вычерчивают в масштабе).
6. Определение графически или аналитически
необходимых для построения динамической модели первых
передаточных функций. В качестве звена приведения
(или начального звена) обычно принимают кривошип 1.
Для приведения масс определяют полное значение
передаточных функций центра масс, для моментов
инерции - угловую передаточную функцию звена, для сил
тяжести - проекцию вектора передаточной функции на
вертикальную ось, для силы сопротивления - проекцию
передаточной функции на направление силы. При
графическом решении строят не менее 12 планов
возможных скоростей и по отношению отрезков планов
определяют значения передаточной функции (рис. П7.2). Эти
планы чертят на миллиметровке и в качестве
приложения помещают в пояснительной записке к курсовому
проекту. Аналитическое решение обычно выполняют
методом проекций векторных контуров. Схему векторных
контуров, уравнения проекций и их производных
приводят в записке. На первом листе в виде одной или двух
диаграмм изображают первые передаточные функции
и передаточные отношения, необходимые для
построения динамической модели механизма (рис. П7.3).
_ dsc _ Vc _ Vc _ рус .
4 deft c^ VB fyb
v .dSS2_V<
S2 _ VS2
</(pi CO! VB
l _AVS2 / .
'AB ~ —-Г- MB>
Pvb
C0q2 = "21
_ сУф2 _ (02 _ Vqd Iab _ cb Ub
С/ф-j Щ
Рис. П7.2
VB /ее
Pvb /j
ВС
0,1
M
pu= 300 мм/- //иг 60° mm/m
0,2
0,05
0
-0,05
-0.1
0.1
0
r
-0,1
-0,2
Vq
Jk/
J 6
/\ 9
\w
V
\%_ 1
pad 2n
p9= 28,65мм/рад
Рис. П7.3
7. Определение с помощью графических построений
(см. 1.4) или аналитическим методом зависимости силы
сопротивления от обобщенной координаты. В каждом
положении кривошипа 1 находят значения силы
сопротивления и передаточной функции точки ее приложения (или
проекции передаточной функции на направление силы).
Эти величины перемножают, определяют значения
приведенного момента от силы сопротивления и
аналогично находят приведенные моменты от сил тяжести:
Mg2=G2VqS2cos(G2,VS2),
М& = G3^S3cos(G3yS3) = О, М% = FcVqCcos(Fc,\7c).
Все составляющие приведенного момента и их
сумму представляют в виде графиков на одной диаграмме
(рис. П7.4).
(1^, = 50мм/(кН-м1
0,5
кН-му
1П
\
-1.5
7е
f.
L
^L
| |
■J
"Wcp
I
/
/
6 "nL
N
У
Vh
1
^
U
/
4-
П
1
11 1c
pad 2jt
р9=28,65мм/рад
Рис. П7.4
8. Расчет для подвижных звеньев механизма,
имеющих массу или момент инерции, приведенных моментов
инерции по формулам, приведенным ниже:
/ip=/cP+/"p=/|np+/||P»
/,ПР =/сПР =^+/pnePA+/S? + Cax = COnst,
/42Р = /42<1 = /42"41. С = С = ^ +№ +'? = ™>
'Ж^^, /3ПР=^3^2С /2^=^2^2.
Все составляющие приведенного момента инерции
второй группы звеньев (зависящие от обобщенной
координаты) и их сумму приводят в виде графиков на одной
диаграмме (рис. П7.5).
рг = 3422 мм/кДж р„р = 1000 мм/1кг-м 2)
0,6
кйж
ОА
0,2
/V /OP
'1 =1гз
рад 2п
рф= 28,65 мм/рад
Рис. П7.5
153
9. Решение задач динамики с использованием
параметров динамической модели М£р и /£р. При
установившемся режиме движения определяют момент инерции
дополнительной маховой массы или маховика /мах и
зависимость угловой скорости начального звена со1 от
обобщенной координаты. Эту задачу решают методом,
предложенным Н.И. Мерцаловым, согласно
следующему алгоритму:
графически или численно интегрируют приведенный
момент сопротивления и определяют его работу за
цикл А%
приведенный движущий момент принимают
постоянным (среднеинтегральным) и определяют по условию
установившегося движения Ацс = -Ацд, Ацд = М^цср(о^ср и
Цдср = ^дМсР;
суммируют ординаты графиков работы силы
сопротивления и работы движущего момента, строят график
суммарной работы А\ (рис. П7.6);
1.5
кйж
1.0
0.5
О
-0.5
-W
-1.5
рА=50 мм/кЛж
I s"
ф^
Аг
А.
\
v \ |
А
Ад - -Ас
<Р1
pad 2n
fif= 28.65мм/pad
Рис. П7.6
по теореме об изменении кинетической энергии
определяют кинетическую энергию первой группы
звеньев Т| = Ат - Гц, где Гц - кинетическая энергия второй
группы звеньев. Согласно методу Мерцалова, эта
энергия рассчитывается по /|"р при допущении, что со-] « со1ср.
Тогда /|"р и Гц связаны между собой соотношением
Гц ~ /мро)?ср/2 или Гц ~ /|"РС, где С- константа. При этом
график /|"р в масштабе \iT= |X|-2/cofcp соответствует
графику Гм (см. рис. П7.5);
график Гм пересчитывают в масштаб суммарной
работы ДЕ, из ординат суммарной работы вычитают
ординаты Гм и получают график Г| (рис. П7.7);
по графику Г, определяют максимальное изменение
кинетической энергии за цикл АГ|Нб и по заданному
допустимому коэффициенту неравномерности [5]
рассчитывают необходимый момент инерции первой группы
звеньев /,пн£х;
из полученного значения /,„£х вычитают
приведенные моменты инерции ротора двигателя /дР, редуктора
/ред. коленчатого вала /01 и определяют момент инерции
маховика /мах, находят его размеры и массу;
график угловой скорости Ащ получают из графика
АГ,. Если щ ~ со1ср, то Г| = /|Прсо1срЛсо1 и график
изменения кинетической энергии первой группы звеньев АГ, в
другом масштабе будет графиком изменения угловой
скорости Асо^ Так как ординаты диаграмм АГ| и Ао^
равны, то |1Ш = |i|/|npco1cp;
ри= 29.% мм/lpadc') ЦА - 50 мм/кДж
78
рад/с
77
AiWfa'l
кЦж
рад 2п
р9= 28.65мм/рад
Рис. П7.7
для преобразования графика Дс^ в график со1
определяют положение оси абсцисс х. Ординату
наибольшего изменения АГ)нб, равную ординате наибольшего
изменения Аа)1} делят пополам и через ее середину
проводят прямую, изображающую со1ср От этой линии
откладывают у^ср = Цсо^ср и проводят ось абсцисс
графика о)! (ось переменной cpj* на рис. П7.7).
Задача 2. Определение уравновешивающего
момента, обеспечивающего заданный закон движения, и сил
в кинематических парах механизма.
1. Определение исходных данных для силового
расчета. По ординатам соответствующих графиков для
заданного значения обобщенной координаты ф1
рассчитывают величины Fc, co^ М£р, /£р, производную
сУ/^р/с/ф1 и угловое ускорение
<Ч =
,пр
0)!
dl?
2lf с/ф1
2. Постановка задачи на втором листе (рис. П7.8) с
указанием, что дано и что требуется определить. В
масштабе вычерчивают кинематическую схему рычажного
механизма в положении с заданной обобщенной
координатой. На схему наносят внешние силовые факторы:
силу сопротивления Fc, силы тяжести G, и движущий
момент М1д. Указывают направления со^ е-, и угловую
координату щ.
3. Построение планов скоростей и ускорений для
заданных о)1 и е1 в рассматриваемом положении
механизма в масштабе. Записывают векторные уравнения, на
основании которых построены планы скоростей.
4. Расчет сил тяжести звеньев, главных моментов и
главных векторов сил инерции.
5. Определение на основе структурного анализа
механизма числа неизвестных компонентов реакций в
кинематических парах и числа уравновешивающих
моментов. В рассматриваемой задаче число неизвестных
переменных равно 9. Для каждого элемента системы
можно записать одно векторное уравнение сил и одно
уравнение моментов. Следовательно, нужно
рассмотреть равновесие трех элементов: одной структурной
группы 2-3 и двух звеньев 3 и 1.
6. Кинетостатический силовой расчет. Проводят,
начиная со звеньев и групп механизма, для которых
известны внешние нагрузки (в рассматриваемом случае -
группа звеньев 2-3). Изображают схему группы или
звена, к ней прикладывают внешние силы и моменты, век-
154
UQHO'tpr 180° Ur 52.529рад/с, €,=7,008рад/с2, Fx= 15,371 кН,
n\f % % кг, m2= 20 кг, m3= 30 кг, l^= 194, 16 кг-м f lz= 1,0 кг-м 2
Определить- /у, h~9, Мь
План скоростей
pv= 7,94 mm/Imc'1!
\PV3
•ИНЬ
' b.c,s2
План ускорений
ра= 05мм/(м-с~У
р(= 470 мм/м
ас =ав+ асв + асв
Рис. П7.8
Группа зденьеб 2-3
1Цм*а FX*3117H
IF™* 0; F3O+F3d+63+03+G2+<P2+F21 - О,
План сил для зденьеб 2-3
Рг0д2мм/Н
3
е2 I
г /
' 2 1
_Ал-
1 /
в
62
hBG2
Ьвбз
С
aj
ь
s3
ф>
ь
ь
А
J
ЗбеноЗ
щ«а мх = онм;
План сил для збена 3
pF=0.02мм/И
Рис. П7.9
155
План сил для звена 1
fjF = 0,005 мм/Н
Звено 1
Щ*0. Мк=860Нм,
4 Sf LFns 0 Fl2+Gi+Fio=0t
AM *ЙМ?-М?1/М$ • 100% =5А %,
Рис. П7.10
торы и моменты сил инерции, реакции связей
отсоединенных звеньев. Вначале рассматривают звено 3 и из
суммы моментов определяют момент в поступательной
паре D - М30 = 0 Нм. Затем рассматривают группу
звеньев 2-3. Из суммы моментов относительно точки В
определяют реакцию F30, а из векторной суммы -
величину F21 и направление ср21 реакции в шарнире Б. После
этого из векторной суммы сил для звена 3 находят
значение F32 и направление ср32 реакции в шарнире С. На
завершающем этапе рассматривают равновесие
начального звена 1 (рис. П7.10). Из суммы моментов
относительно точки А определяют уравновешивающий момент
М1д, а из векторной суммы - величину F10 и
направление ф10 реакции в шарнире А.
7. Сравнение значения движущего момента,
полученного при силовом расчете, с его значением, полученным
на первом листе. Момент на втором листе не должен
отличаться от момента на первом более чем на 5... 10 %.
Результаты силового расчета сводят в таблицу:
Пара Л
/=«. Н
33 650
Фю
77°
М1г, Нм
860
Пара в
F21,H
20132
Ф21
67,7°
-
-
Пара С
F32, H
18 226
Ф32
80°
-
-
ПараО
F30» H
3117
М30, Нм
0
-
-
Задача 3. Проектирование цилиндрической
эвольвентой зубчатой передачи и вычерчивание схемы
станочного зацепления и схемы передачи.
1. Проектирование цилиндрической эвольвентной
зубчатой передачи. При заданном межосевом
расстоянии и передаточном отношении выбирают число зубьев
колес, модуль и значения коэффициентов смещения х1
и х2. При свободном выборе межосевого расстояния
выбирают значения коэффициентов смещения х-, и х2,
обеспечивающие наилучшее сочетание значений
качественных показателей.
2. Построение в масштабе схемы станочного
зацепления для шестерни (зубчатого колеса с меньшим
числом зубьев) при выбранном значении х^ и методом
огибания построить профиль зуба (включая переходную
кривую). На схему наносят основные геометрические
характеристики и их обозначения в соответствии с ГОСТ
16531-83.
3. Построение в том же масштабе схемы эвольвент-
ного зацепления для спроектированной зубчатой
передачи. На ней указывают основные параметры зубчатых
колес и передачи в соответствии с ГОСТ 16531-83.
Задача 4. Проектирование планетарного редуктора.
Для заданной схемы планетарного редуктора по
передаточному отношению и числу сателлитов подбирают
число зубьев колес (при отклонении передаточного
отношения не более ±5 %). Строят кинематическую схему
редуктора в масштабе (приняв модуль зацепления
равным единице), проводят кинематическое исследование
редуктора методом треугольников скоростей и
проверку передаточного отношения графическим методом.
Последовательность выполнения третьего листа.
1. Расчет геометрии зацепления эвольвентной
зубчатой передачи по одной из существующих
компьютерных программ. В программу вводят следующие
исходные данные: модуль зацепления т, мм; угол наклона
линии зуба (3°; числа зубьев шестерни z-j и колеса z2;
параметры исходного контура (угол профиля а = 20°,
коэффициент высоты зуба h* = 1, коэффициент
радиального зазора с* = 0,25). Расчет проводят при заданном
значении коэффициента смещения х2 = 0,5 (или 0) в
диапазоне изменения значений от х1 = 0 до х<\ = 1,1 с
шагом Ах<\ =0,1. По распечатке результатов расчета на
одной диаграмме строят безразмерные графики
качественных показателей, причем графики еа = f(x^),
sfl1 2/m = f(xA), Ф = f(x<i) выполняют в одном масштабе, а
графики Х<\ 2 = f(x-\) в другом. На графики наносят
ограничения по подрезанию x1min, технологическому
заострению x1maxsfl при [sa/m] = 0,2 и допустимому
коэффициенту перекрытия х1тахе(Х при [ej = 1,05... 1,1. В
полученной ОДР выбирают коэффициент x1t соответствующий
оптимальному сочетанию качественных показателей с
учетом рекомендаций ГОСТ 16532-70 (рис. П7.11).
2. Построение для шестерни (зубчатого колеса с
меньшим числом зубьев zA) в выбранном масштабе щ схемы
станочного зацепления. Масштаб щ выбирают так,
чтобы высота зуба на чертеже находилась в пределах
50...70 мм и при этом линия межосевого расстояния в
рабочем зацеплении не выходила за пределы листа
(< 750...800 мм). Затем расчетные размеры
пересчитывают с учетом масштаба. Из выбранного центра О^
проводятся дуги оружностей гаЬ гЬ1, г, и гп. Касательно к
окружности гп проводят прямую вершин инструмента. От
нее в масштабе откладываются размеры cm, h*m, h^m
и cm, через полученные точки проводят прямые
граничных точек, впадин и делительную. Параллельно этим
прямым касательно к делительной окружности прово-
0ДРпоЫ=Ю5
15
10
Л12
Х1=ХШ/ /Xf = 0tb\ yiy
I / \ л/- лтш
Рис. П7.11
156
/// = 6000 мм/м
р=пт
J5
#JS>
<:
kj
* *
£
kj
1 6
i5>.
^
^
V
«
A-
^i^f&¥
4F< x
Л \ \\
/ W
\ >^
tyjfJLr
^Jff-yjtZ^i
Г " i\//fji ■ —l—
, \ S \*~JH
v ,JZ~~—"—
X\
■% 3?
Ро^Л 1
/ \
АЛ
3W}- /X /
IV"S^ \ /
a»osot / /
/X
X
Г/7- i
"XX/
У
a
f~
/
'
v
v..
\ T
M\
Рис. П7.12
дят станочно-начальную прямую. Расстояние между
делительной прямой инструмента и станочно-начальной
прямой равно х^т. От вертикали, проходящей через центр
0<|, по тангенсу откладывают угол станочного зацепления
ос^о, равный углу профиля в торцевом сечении
инструментальной рейки at. По делительной прямой от
пересечения ее с вертикалью откладывают отрезки, равные pt/4.
От двух полученных точек вправо и влево откладывают
по два отрезка pt/2. Через полученные шесть точек
проводят прямые под углами at к вертикали и получают
эвольвентные части профилей рейки. Прямые проводят
от прямой впадин до нижней прямой граничных точек.
Эти прямые сопрягаются с прямой вершин дугами
окружности радиуса pf. Построенный контур является
производящим контуром инструментальной рейки.
Через точку пересечения станочно-начальной
прямой с вертикалью (точку Р0) проводят две касательные
к основной окружности (линии B-jA/ - линии станочного
зацепления соответственно для правых и левых
профилей зубьев). На линиях отмечают точки Б1 -
пересечения с окружностью вершин, N - касания с основной
окружностью, в/ - пересечения с прямой граничных точек,
Р0 - полюс станочного зацепления (точка пересечения
с вертикалью).
Для точки центра скругления профиля L и
произвольной точки эвольвентной (прямолинейной) части
профиля W строят траектории при движении рейки
относительно неподвижного колеса. В этом движении
точка L описывает удлиненную эвольвенту, точка W -
укороченную. Траектории строят графически методом
обращенного движения или рассчитывают с помощью
компьютерной программы. Из /-й точки L, удлиненной
эвольвенты проводят дугу окружности радиусом pf. Из
соответствующей точки W, укороченной эвольвенты
проводят касательную к этой дуге и получают /-е
относительное положение профиля инструмента. После
построения профиля в 8-11 положениях к этим положениям
строят огибающую - профиль зуба шестерни. По
полученному профилю создают шаблон для вычерчивания
зубьев шестерни.
От точки Р0 по делительной окружности вправо и
влево откладывают шаги по хорде р1х, через
полученные точки и центр колеса 01 проводят оси зубьев
колеса. От осей зубьев вправо и влево откладывают
половины толщин зубьев по окружности вершин sfl1/2 и
по делительной окружности s^/2. Шаблон профиля зуба
ориентируют по полученным точкам и вычерчивают
профили зубьев. На схему станочного зацепления
наносят основные размеры зубчатого колеса и их
обозначения по ГОСТ 16351-83 (рис. П7.13).
3. Построение схемы рабочего зацепления в таком
же масштабе, как и схемы станочного зацепления. От
центра колеса 1 влево по горизонтали или наклонно
проводят линию межосевого расстояния, на ней
откладывают величину межосевого расстояния и
определяют центр второго колеса точку 02. Из центров O-j и 02
поводят дуги окружностей: делительных г1>2, основных
гЬ12, вершин rfl1 2, впадин rn 2 и начальных'rw12. Через
полюс зацепления точку Р (точка касания начальных
окружностей) касательно к основным окружностям гЬ12
проводят две линии зацепления (одна для зацепления
правых профилей зубьев, вторая - левых). На одной из
линий зацепления обозначают точки касания основных
окружностей A/1f2> точки пересечения с окружностями
вершин (точка В^ с окружностью rfl1 и точка В2 с
окружностью гя2), полюс зацепления Р и точка касания
профилей на выбранной линии зацепления К. На первом
колесе достраивают до зоны рабочего зацепления три-
четыре зуба. Профиль зуба второго колеса получают так:
эвольвента строится графически как развертка основной
окружности гЬ2, начальную точку эвольвенты соединяют
прямой с центром колеса 02, окружность впадин
колеса 2 с этой прямой или с рабочим участком эвольвенты
сопрягается дугой окружности радиусом 0,4лг По этому
профилю делают^шаблон для зуба второго колеса.
Шаблон ориентируют по окружности вершин и окружности
впадин и располагают касательно к профилю зуба
первого колеса, ближайшему к полюсу зацепления. В этом
положении по нему вычерчивают профиль зуба второго
колеса. От этого профиля по окружности вершин га2 от-
157
Рис. П7.13
кладывают половину толщины зуба по окружности
вершин sa2/2, а по делительной окружности - половину
толщины зуба s2/2. Через полученные точки и центр
колеса 02 проводят ось зуба. От точки пересечения этой оси
с делительной окружностью по делительной
окружности вправо и влево откладываются шаги по хорде р2х,
через полученные точки и центр колеса 02 проводятся оси
зубьев второго колеса. От осей зубьев вправо и влево
откладывают половину толщины зуба по окружности
вершин sfl2/2 и половину толщины зуба по делительной
окружности s2/2. Шаблон профиля зуба ориентируют по
полученным точкам и вычерчивают профили зубьев. На
схему рабочего зацепления наносят основные размеры
зубчатых колес и передачи, их обозначения по ГОСТ
16531-83 (рис. П7.13).
4. Проектирование планетарного редуктора. По
заданной схеме механизма, передаточному отношению и
числу сателлитов подбирают числа зубьев колес, которые
удовлетворяют ограничениям по условиям сборки,
соседства, заклинивания, подрезания и обеспечивают
минимальные габариты механизма. Затем вычерчивают
кинематическую схему механизма в произвольном масштабе,
проводят кинематическое исследование механизма
методом треугольников скоростей, проверяют по схеме и
треугольникам скоростей правильность подбора чисел
зубьев, обеспечение заданного передаточного
отношения с требуемой точностью ±5 % (рис. П7.14).
Основные результаты проектирования зубчатой
передачи и планетарного механизма приводят на листе
или в записке в виде таблицы.
Задача 5. Проектирование кулачкового механизма
по допустимому углу давления.
1. Постановка задачи проектирования кулачкового
механизма. Указывают исходные данные для
проектирования (hB - ход толкателя, (рраб - рабочий угол, сру -
угол удаления, фс - угол сближения, [Ь] - допустимый угол
давления, 1ВС - длина толкателя и др.) и параметры,
определяемые в процессе проектирования
(определить: г0 - минимальный радиус центрового профиля, г-
минимальный радиус конструктивного профиля, aw -
межосевое расстояние, центровой р0(ф1) и
конструктивный р(ф^ профили кулачка, гр - радиус ролика).
2. Исследование кулачкового механизма методом
диаграмм кинематических функций. По заданной диа-
158
«-**
zf=2tz2=63.z3=36.z4 =120
иь= u/cjf, = tgfy/ Гдфл= АА '/АА =50A 55 =
Рис. П7.14
i
II
1
i
0.050
м
0.025
Диаграмма дторой передаточной функции толкателя
«U
Диаграмма пербой передаточной функции толкателя
-wk
W
2.0
Диаграмма пермещения толкателя
Ш\
YsBmx
3.0 рад
20
4.0 р= 57,3 мм/рад
4.0 р =57.3 мм/рад
20
W
2.0
3.0 рад 4.0 р= 57.3 мм/рад
Рис. П7.15
159
Vs^Vvq* ЮООмм/м
-0,0251-0,050-0,075
Рис. П7.16
грамме закона движения толкателя (обычно
диаграмма ускорения или 2-й передаточной функции) строят
аналитическим или графическим интегрированием
диаграммы первой передаточной функции и
перемещения (рис. П7.15).
3. Построение по диаграммам sB = ffa) и vqB = f (ср.,)
диаграммы sB = f(vqB) для фаз удаления с учетом
реверсивного движения кулачка и по допустимому углу
давления [Щ определяют зону допустимого
расположения центра вращения кулачка Ол. В этой зоне
выбирают положение центра О^ которое обеспечивает
минимальный радиус теоретического профиля кулачка г0
(рис. П7.16) и находят межосевое расстояние aw. По
значению г0 выбирают в рекомендованном диапазоне
радиус ролика гр или радиус скругления рабочего
профиля толкателя гс.
4. Построение центрового и конструктивного
профилей кулачка методом обращенного движения при
остановленном кулачке (рис. П7.17). Построение проводят в
указанной последовательности:
выбирают масштаб построения jj,/, мм/м;
из произвольного центра проводят в масштабе
окружности с радиусами г0 и aw;
из произвольной точки на окружности aw в
направлении -ф-| откладывают рабочий угол, угол делят на
п интервалов, из каждой точки деления радиусом 1ВС
проводят дуги, на этих дугах от точки пересечения с
окружностью г0 откладывают в масштабе д/
соответствующие перемещения толкателя sa/;
полученные точки соединяют плавной кривой и
получают центровой профиль кулачка;
/ - кулачок; 2 - толкатель,
3 - ролик; 0 - стойка
р^ЮОО мм/м
профиль кулачка
Конструктивный профиль кулачка
Рис. П7.17
160
из произвольных точек, выбранных равномерно по
центровому профилю кулачка, проводят окружности
радиусом гр;
конструктивный профиль кулачка получают как
кривую, огибающую к этим окружностям (положениям
ролика толкателя).
Затем на фазе удаления в произвольном положении
вычерчивают кинематическую схему кулачкового
механизма, на которую наносят обозначения звеньев и ки-
о
t
Ч"-^
И
^
30'
20
10
0
-10
-20
9 -30
-40
нематических пар, фазовые углы, контактную нормаль
и угол давления.
5. Построение диаграммы угла давления. Чтобы по
этой диаграмме можно было проверить правильность
синтеза кулачкового механизма, ее строят, измеряя
углы давления в различных положениях на профиле
кулачка. Максимальное значение угла давления не
должно превышать его допустимого значения [#]
(рис. П7.18).
W
^^
X
zhL
/У/////
-^,^
~1S A////A
ZX20
W
го
ч>1
3,0 рад 4,0
№ р= 57,3 мм/рад
Рис. П7.18
Приложение 8
Основные технические характеристики общепромышленных двигателей
Таблица П8.1. Технические характеристики электродвигателей АИРС с нормальным скольжением
Тип
"ном>
кВт
^НОМ'
об/мин
Чпах
Чюм
Мп
Чюм
Момент
инерции,
кгм2
1000 об/мин (6 полюсов)
AMP90L6
АИР1001.6
АИР112МА6
АИР112МВ6
AMP132S6
АИР132М6
AMP160S6
АИР160М6
АИР180М6
АИР200М6
AMP200L6
АИР225М6
AMP250S6
АИР250М6
AMP280S6
АИР280М6
AMP315S6
АИР315М6
AMP355S6
АИР355М6
1,5
2,2
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
160
200
925
925
960
960
950
960
970
970
970
970
970
980
980
980
985
980
980
—
—
—
2,8
3,1
2,6
2,6
2,5
3,1
2,9
3
3
2,5
2,7
2,5
2,5
2,8
2,8
3,6
3,5
2,3
2,3
2,3
2,4
2,9
2,2
2,2
2,2
2,8
1,9
2,3
2,2
2
2
2
2,4
2,7
2,7
2
2,2
—
—
—
0,0066
0,0200
0,0380
0,0425
0,0500
0,0597
0,0700
0,0750
0,0900
0,2000
0,2500
—
—
—
—
—
—
—
—
—
750 об/мин (8 полюсов)
AMP90LA8
AMP90LB8
AMP100L8
АИР112МА8
АИР112МВ8
AMP132S8
АИР132М8
AMP160S8
АИР160М8
АИР180М8
АИР200М8
AMP200L8
АИР225М8
AMP250S8
АИР250М8
AMP280S8
АИР280М8
AMP315S8
АИР315М8
AMP355S8
АИР355М8
0,75
1,1
1,5
2,2
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
110
132
160
200
705
705
705
705
700
710
710
730
730
730
730
730
730
735
735
740
740
—
—
—
—
2,3
2,4
2,5
2,3
2,3
1,9
2,1
2,4
2,4
2,7
2,5
2,5
3
2,5
2
3,2
2,7
2
2,2
2,2
2
2
2
2,2
1,7
1,7
1,6
1,7
1,8
1,8
2
2,1
2
2
1,7
1,7
2,2
1,7
—
—
—
—
0,0063
0,0090
0,0123
0,0221
0,0288
0,0690
0,0935
0,0800
0,0850
0,1000
0,3000
0,3500
—
—
—
—
—
—
—
—
—
600 об/мин (10 полюсов)
АИР280М10
AMP315S10
АИР315М10
АИР315МВ10
AMP355S10
АИР355М10
45
55
75
90
90
110
—
—
—
—
—
—
—
1,9
1,9
—
1,9
1,9
—
—
—
—
—
—
—
—
—
—
—
—
500 об/мин (12 полюсов)
АИР160М12
АИР180МА12
АИР180МВ12
АИР200М12
AMP200LA12
AMP200LB12
АИР225М12
AMP315S12
АИР315М12
АИР315МВ12
AMP355S12
АИР355М12
5,5
7
9
11
13
15
18,5
45
55
75
75
90
480
485
480
480
480
480
480
—
—
—
—
—
2,1
2,6
2
2,5
2
3
2,5
1,8
1,8
—
1,9
1,9
1,4
1,9
1,8
2
1,6
2
1,7
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
Тип
'НОМ'
кВт
^НОМ'
об/мин
Чпах
Нюм
Мп
Чюм
Момент
инерции,
кгм2
3000 об/мин (2 полюса)
АИР56А2
АИР56В2
АИР63А2
АИР63В2
АИР71А2
АИР71 В2
АИР80А2
АИР8032
АИР90.2
AMP103S2
AMP100L2
АИР112М2
АИР132М2
AMP16DS2
АИР16ЭМ2
AMP18DS2
АИР18ЭМ2
АИР203М2
AMP200L2
АИР225М2
AMP250S2
АИР25ЭМ2
AMP28DS2
АИР280М2
AMP315S2
АИР315М2
AMP355S2
АИР355М2
0,18
0,25
0,37
0,55
0,75
1,1
1,5
2,2
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
160
200
250
315
2730
2730
2730
2730
2815
2800
2835
2820
2835
2820
2860
2895
2890
2940
2940
2940
2940
2950
2940
2955
2965
2960
2970
2970
2970
—
—
—
1500 об/мин
АИР56А4
АИР56В4
АИР63А4
АИР63В4
АИР71А4
АИР71В4
АИР80А4
АИР80В4
AMP90L4
AMP100S4
AMP100L4
АИР112М4
AMP132S4
АИР132М4
AMP160S4
АИР160М4
AMP180S4
АИР180М4
АИР200М4
AMP200L4
АИР225М4
AMP250S4
АИР250М4
AMP280S4
АИР280М4
AMP315S4
АИР315М4
AMP355S4
АИР355М4
0,12
0,18
0,25
0,37
0,55
0,75
1,1
1,5
2,2
3
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
160
200
250
315
1350
1350
1320
1320
1410
1415
1420
1420
1390
1395
1425
1450
1455
1440
1460
1460
1460
1460
1460
1460
1470
1470
1470
1470
1470
—
—
—
—
2,2
2,2
2,2
2,2
2,7
2,8
3
3,4
3,2
3,2
2,2
3,2
3,5
3,2
3,2
3,5
3,5
3,2
3,3
4
4
4
4
3
2,7
—
—
—
2,2
2,2
2,2
2,2
2,5
2,6
2,8
3,2
2,9
3
1,8
2,5
2,8
2
2
2,1
2,2
2,3
2,4
2,3
2,6
2,7
3
2,5
2,6
—
—
—
—
—
—
—
—
—
0,0015
0,0018
0,0024
0,0070
0,0080
0,0185
0,0227
0,0500
0,0550
0,0620
0,0700
0,1400
0,1600
—
—
—
—
—
—
—
—
—
4 полюса)
2,2
2,2
2,2
2,2
2
2,5
2,6
2,8
2,6
3
3
3
3,2
3,3
2,9
2,9
2,8
3
3,5
3,2
3,4
3,5
3,2
3,3
2,7
2
2,2
2,3
3
2,2
2,2
2,2
2,2
1,7
2
2,3
2,3
2,2
2,7
2,5
2,4
2,8
2,8
1,9
1,9
2,1
2,4
2,2
2,2
2,6
2,5
2,5
2,7
2
—
—
—
—
—
—
—
—
—
—
0,0034
0,0042
0,0056
0,0100
0,0130
0,0236
0,2270
0,0349
0,0600
0,0650
0,0700
0,0800
0,1500
0,1800
—
—
—
—
—
—
—
—
—
1000 об/мин (6 полюсов)
АИР63А6
АИР63В6
АИР80А6
АИР80В6
0,18
0,25
0,75
1,1
860
860
930
930
2,2
2,2
2,4
2,4
2,2
2,2
2
2
—
—
0,0040
0,0049
162
Таблица П8.2. Технические характеристики
Марка
двигателя
^ном. кВт, при
40 % скольжения
лном>
об/мин
Цном
Чпах
Масса,
кг
3000 об/мин
АИРС71А2
АИРС71В2
АИРС80А2
АИРС80В2
AMPC90L2
AMPC100S2
AMPC100L2
AMPC160S2
АИРС160М2
1,00
1,20
1,90
2,50
3,50
4,80
6,30
17,0
20,0
2700
2770
2840
2800
2790
2810
2810
2860
2850
2,0
2,0
2,1
2,1
2,0
2,0
2,0
2,6
2,7
2,2
2,2
2,2
2,2
2,2
2,2
2,2
3,0
3,0
8,7
9,5
12,4
15,0
19,0
26,0
31,5
95,0
96,9
1500 об/мин
АИРС71А4
АИРС71В4
АИРС80А4
АИРС80В4
AMPC90L4
AMPC100S4
AMPC100L4
AMPC132S4
АИРС132М4
AMPC160S4
АИРС160М4
0,60
0,80
1,32
1,70
2,40
3,20
4,25
8,50
11,8
17,0
20,0
1400
1350
1380
1380
1380
1400
1400
1440
1445
1400
1400
2,0
2,0
2,1
2,1
2,2
2,0
2,5
2,0
2,0
2,8
2,8
2,2
2,2
2,2
2,2
2,2
2,2
2,5
2,5
2,5
2,8
2,8
8,1
9,4
11,9
13,8
18,1
23,0
29,0
53,5
66,3
93,9
103,9
АИРС с повышенным скольжением
Марка
двигателя
Рном> кВт, при
40 % скольжения
пном«
об/мин
Мном
Члах
Масса
кг
1000 об/мин
АИРС71А6
АИРС71В6
АИРС80А6
АИРС80В6
АИРС901.6
АИРС1001.6
AMPC132S6
АИРС132М6
AMPC160S6
АИРС160М6
0,40
0,63
0,80
1,25
1,70
2,60
6,30
8,50
12,0
16,0
930
930
910
890
900
940
950
955
910
900
1,9
1,9
2,0
2,1
2,0
2,0
2,3
1,9
2,8
2,5
2,1
2,1
2,1
2,1
2,2
2,2
2,4
2,2
2,8
2,8
8,6
9,9
11,6
15,3
19,0
27,0
52,3
64,5
88,9
113,9
750 об/мин
АИРС71В8
АИРС80А8
АИРС80В8
АИРС901.А8
AMPC90LB8
AMPC100L8
AMPC160S8
АИРС160М8
0,37
0,45
0,60
0,90
1,20
1,60
7,50
11,0
670
680
680
690
680
680
690
690
1,8
1,4
1,4
1,6
1,6
1,9
2,5
2,8
2,0
1,7
1,7
1,9
1,9
2,0
2,5
2,8
9,9
12,8
14,8
17,7
20,5
24,0
86,9
108,9
!. Критическое скольжение 40 %.
грс
Приложение 9
Вопросы для подго!
Лист1
1. Назовите особенности рычажного механизма вашей
установки (назначение механизма, название звеньев,
число степеней свободы, условия связи в кинематических
парах, количество кинематических пар в механизме).
2. Расскажите о структурном анализе механизма,
использованного в проекте (входные и выходные звенья,
начальное звено и обобщенная координата, структурные
группы, образующие механизм, избыточные связи).
3. Какие конструктивные ограничения наложены на
плоскую схему рычажного механизма (число степеней
свободы для плоской и пространственной схемы
механизма, наличие избыточных связей)? Какие ограничения
на движение звеньев или относительное расположение
элементов кинематических пар наложены при плоском
варианте схемы механизма?
4. Внесите изменения в кинематическую схему
рычажного механизма, необходимые для устранения
избыточных связей в случае отсутствия ограничений на
относительное расположение осей кинематических пар
и поверхностей элементов кинематических пар
(параллельность, соосность, перпендикулярность и т. д.).
5. Поясните, как вы проводили синтез рычажного
механизма (исходные данные для проектирования,
ограничения на движение входного и выходного звеньев,
основное условие синтеза, дополнительные условия
синтеза, положения центров масс звеньев, массы и моменты
инерции звеньев).
6. Назовите кинематические характеристики
рычажного механизма (входное и выходное звенья,
кинематические передаточные функции звеньев, совершающих
вращательное, поступательное, плоское движение, как
определялись кинематические передаточные функции).
7. Как определить кинематические передаточные
функции рычажного механизма графическим методом
(планы возможных положений и скоростей)? Какова
последовательность кинематического анализа? Какие
уравнения использованы при построении планов возможных
скоростей?
8. В какой последовательности выполнен
кинематический анализ рычажного механизма вашей установки?
Какие использованы векторные уравнения? Как
определены направления векторов относительных скоростей
точек и угловых скоростей звеньев? Как пользовались
масштабами (или масштабными коэффициентами) при
графическом методе кинематического анализа
рычажного механизма?
9. Расскажите об алгоритме определения
кинематических характеристик с применением специализированных
компьютерных программ. Какие соотношения в
аналитической форме использованы?
10. Какие параметры рассчитаны с помощью ЭВМ при
выполнении этапа «Определение кинематических
характеристик рычажного механизма»?
11. Расскажите об использовании в курсовом проекте
методов численного и графического
дифференцировании и интегрирования функций. Покажите связь между
масштабами (или масштабными коэффициентами) при
графическом дифференцировании и интегрировании.
12. Проанализируйте силы, действующие на входные
и выходные звенья механизма. Расскажите о способе
запей к защите проекта
дания исходных данных и их преобразовании для
решения задачи об определении закона движения механизма
под действием заданных сил.
13. Как классифицируют силы, действующие на
звенья механизма? От каких факторов зависят действующие
силы?
14. Запишите уравнение движения динамической
модели механизма в энергетической форме.
15. Как осуществить переход от реального механизма
к его динамической модели, которая использована при
анализе движения механизма? Какие параметры
характеризуют динамическую модель и от каких переменных
они зависят?
16. Как определить кинетическую энергию отдельных
звеньев вашего рычажного механизма, механизма в
целом? При каком значении обобщенной координаты
кинетическая энергия достигает максимального значения?
17. Что называют приведенным моментом инерции
динамической модели? Охарактеризуйте его
составляющие. Какие уравнения использованы при определении
приведенного момента инерции механизма (модели)?
18. Что называют приведенным суммарным моментом
сил, приложенным к динамической модели?
Охарактеризуйте составляющие суммарного приведенного момента
сил и напишите уравнения, которые использованы при
расчетах.
19. Запишите уравнения движения звеньев
механизма и динамической модели в форме интеграла энергии.
Какая последовательность решения этих уравнений
была вами реализована при динамическом анализе
поставленной задачи?
20. Расскажите о режиме движения механизма. Какие
условия необходимы для обеспечения установившегося
режима движения? Как они обеспечивались при
выполнении курсового проекта?
21. Дайте определение коэффициента
неравномерности движения механизма. Какие параметры оказывают
влияние на коэффициент неравномерности движения?
22. Как вы определяли необходимый момент инерции
маховика? Как изменится неравномерность движения
механизма, если маховик установить на тихоходном (или
на быстроходном) валу вашей установки?
23. Как определить движущий момент на входном
валу и суммарную работу сил, приложенных к звеньям
механизма?
24. Как рассчитать мощность приложенных сил и
моментов на входном и выходном звеньях механизма?
25. Как определить продолжительность
кинематического цикла при движении механизма при переходном
режиме?
26. Назовите причины, влияющие на изменение
угловой скорости входного звена. Можно ли уменьшить
колебания угловой скорости входного звена при
установившемся режиме? От каких параметров механизма это
зависит при заданных размерах звеньев?
27. Как влияют масса и сила тяжести звеньев
механизма на изменение угловой скорости входного звена?
28. Объясните назначение и роль маховика при
движении механизма. От каких переменных и постоянных
параметров зависит необходимый момент инерции
маховика? Как можно уменьшить массу маховика при за-
164
данном коэффициенте неравномерности движения в
машине?
29. Какие параметры машин можно определить с
помощью индикаторной диаграммы ДВС (компрессора) в
соответствующих масштабах и частоту вращения
кривошипа?
30. Как найти максимальную мгновенную
индикаторную мощность поршневой машины?
31. Покажите, как изменятся графики J2nP(<Pi) и ш^),
если центр масс шатуна перенести в точку В или С (конец
кривошипа или ползун).
32. Как можно изменить коэффициент
неравномерности хода главного вала машины?
33. Как учитывается момент трения в каком-либо
шарнире рычажного механизма при определенном М£р одно-
массовой динамической модели машины?
Лист 2
1. Расскажите о силовом расчете механизма
(задача силового расчета, использованный метод и основные
уравнения).
2. Как вы определяли главные векторы и главные
моменты инерции для каждого из звеньев рычажного
механизма?
3. В какой последовательности выполнен силовой
расчет механизма? Как использовалось условие
статической определимости группы звеньев?
4. Проанализируйте векторные уравнения сил,
использованные при силовом расчете. В чем состояла цель
силового анализа и как она была достигнута?
5. Была ли проведена вами оценка погрешностей
вычислений при силовом расчете относительно расчетов,
выполненных при определении закона движения
механизма под действием заданных сил? Каковы результаты
этой оценки?
6. В какой последовательности проведен силовой
расчет с учетом сил трения в кинематических парах? От
каких параметров зависят силы трения в кинематических
парах?
7. Как определить механический коэффициент
полезного действия? Как определить среднюю мощность
трения в механизме?
8. Поясните, как влияет угловое ускорение звеньев
первой группы (связанных с начальным звеном
постоянным передаточным отношением) на реакции в
кинематических парах входного звена.
9. Расскажите о методе определения угловых
ускорений звеньев при силовом расчете механизма.
10. Как определить вектор ускорения точки шатуна
(точка задана вне линии, соединяющей центры
шарниров шатуна)?
11. Определите точку на шатуне по заданному для
нее ускорению на плане ускорений.
12. Как изменится главный вектор сил инерции для
шатуна, если угловая скорость кривошипа станет од\ =
= -00-1, а £'<| =-£<!?
13. Как изменится главный вектор силы инерции
шатуна (или ползуна), если угловая скорость кривошипа
станет w'-i = 20^?
14. Как определить направление момента сил трения
в шарнире, если учитывать трение?
ЛистЗ
1. Проиллюстрируйте применение основной теоремы
зацепления на примере спроектированной эвольвентной
зубчатой передачи (покажите сопряженные профили,
контактную точку и ее геометрическое место в процессе
взаимодействия профилей, полюс зацепления, отрезки,
отношение которых определяет передаточное
отношение передачи).
2. Назовите параметры исходного производящего
контура. Какие поверхности называют сопряженными и
производящими поверхностями?
3. Что называют зубчатым и станочным зацеплением?
Какие линии являются начальными в зубчатом и
станочном зацеплениях? Покажите их на чертеже.
4. Рассмотрите основные свойства эвольвентного
профиля на примере спроектированного зубчатого колеса.
5. Перечислите основные свойства эвольвентного
зацепления и проиллюстрируйте их применение в
спроектированном зубчатом зацеплении.
6. Как влияет относительное положение исходного
производящего контура на размеры проектируемого
колеса и качественные показатели зубчатой передачи?
7. Какие технологические методы используют для
образования боковых поверхностей цилиндрических
зубчатых колес?
8. Отличаются ли угол зацепления и угол станочного
зацепления? При каких условиях они равны?
9. Покажите углы профиля в точках эвольвенты на
делительной окружности и на окружности вершин.
10. Покажите основные параметры зубчатого
зацепления и расскажите, от каких факторов они зависят.
11. Расскажите о подрезании зубьев. Как
обеспечивается в станочном зацеплении образование зуба без
подрезания? Покажите на чертеже отрезки,
пропорциональные смещениям исходного контура относительно
заготовки в радиальном направлении и в направлении
движения контактной точки профилей.
12. Расскажите о линии зацепления в эвольвентном и
станочном зацеплении. От каких величин зависит длина
активной линии зацепления?
13. Что характеризует коэффициент торцевого
перекрытия? Покажите отрезки на чертеже, отношение
которых равно коэффициенту перекрытия в эвольвентном
зацеплении. Сопоставьте отношение этих отрезков с
расчетным значением Eq.
14. Что характеризует коэффициент удельного
скольжения профилей в зубчатом зацеплении? Покажите, от
каких параметров на чертеже зависит скорость
скольжения в контактной точке профилей. Как определить
коэффициент скольжения в граничных точках активной линии
зацепления?
15. Что характеризует коэффициент удельного
давления в зубчатом зацеплении? Как он определяется?
Покажите отрезки на чертеже, характеризующие кривизну
профилей в контактной точке.
16. Поясните, как выбраны коэффициенты смещения
исходного производящего контура при расчете зубчатой
передачи? Имеется ли запас смещения по условиям
ограничения от подрезания и как его можно оценить по
изображенной схеме станочного зацепления?
17. Расскажите о последовательности графических
построений при синтезе сопряженных профилей в
станочном зацеплении. Какие траектории описывают
отдельные точки исходного производящего контура при
движении огибания? Как получена сопряженная
поверхность зубчатого колеса?
18. Назовите особенности сложных зубчатых
механизмов, зубчатых планетарных редукторов и дифференциа-
165
лов. Как описать структурную формулу для определения
числа степеней свободы зубчатого механизма?
Используйте эту формулу для анализа спроектированных
зубчатых передач и планетарного механизма.
19. Используя графические построения
распределения линейных скоростей звеньев планетарного
редуктора, покажите направления угловых скоростей звеньев в
относительном движении на примере следующих
кинематических пар: водило — стойка, центральное входное
колесо — стойка, водило — блок сателлитов, сателлит —
опорное зубчатое колесо. Какое звено имеет
наибольшую угловую скорость в абсолютном и относительном
движениях?
20. Покажите на схеме планетарного редуктора оси
мгновенного вращения звеньев в относительном
движении: Р21, Р\а* ^24» Рн4> ^2н Как вы их использовали при
кинематическом анализе планетарного механизма?
21. Пользуясь схемой рабочего и станочного
зацеплений, определите коэффициенты перекрытия через
отношение соответствующих отрезков. Какая из этих величин
больше и почему?
22. На схеме рабочего зацепления колес гл и z2
покажите углы профиля аа1 и аа2 и их эвольвентные функции
inv аа1 и inv аа2.
23. На профиле зуба шестерни ZA обозначьте
произвольную точку и графическим методом найдите
сопряженную точку на профиле зуба колеса. Укажите место
контакта этих двух точек на линии зацепления.
24. Сопоставьте выбранное смещение х*т с
минимальным смещением x*mjnm и покажите на схеме
станочного зацепления отрезок, пропорциональный разности
этих смещений.
25. Расскажите о назначении уравнительного
смещения Аут.
26. На линии зацепления N^N2 покажите точки
пересопряжения профилей зубьев. Как они расположены
относительно граничных точек Б-j и В2 рабочего участка линии
зацепления?
27. Схематично покажите, как изменяются форма зуба
и его размеры S-i и S2 при увеличении смещения
исходного производящего контура.
28. Для точки эвольвенты колеса Z2 покажите радиус
кривизны профиля в этой точке, угол профиля
эвольвенты ау, угол давления ау и inv ау .
29. Найдите на профиле зуба колеса точку ЬАЪ
сопряженную с заданной точкой Мл на профиле зуба шестерни.
Определите VCK точки М2.
30. По чертежу (или части чертежа) зубчатого
зацепления определите l/12; m; X-i; X2; £а.
31. Если на чертеже зубчатого зацепления уменьшить
радиус окружности вершин одного из колес (га1 или га2),
будет ли работать такая передача? По какому параметру
это можно определить?
32. Найдите по чертежу зубчатого зацепления
максимальное и минимальное значения скорости скольжения
профилей для одного из колес.
33. Определите по чертежу станочного зацепления
торцевой коэффициент перекрытия.
34. Рассчитайте число избыточных связей в
планетарном механизме при значении К= 1; 2; 3.
35. На сателлите задайте точку М и определите
вектор ее скорости VM.
Лист 4
1. Расскажите о назначении и основных этапах
синтеза кулачкового механизма. В каких пределах изменяется
угол давления и почему введено ограничение на его
значение?
2. Какие размеры механизма влияют на величину угла
давления в спроектированном кулачковом механизме?
Возможно ли заклинивание выходного звена и при каких
условиях это явление наступает?
3. Поясните алгоритм определения основных
размеров кулачкового механизма. Покажите области
дозволенных положений оси вращения кулачка относительно
фазовой кривой перемещение — скорость выходного звена
при трех случаях вращения кулачка: только по часовой
стрелке, только против часовой стрелки, реверсивный
режим вращения.
4. Расскажите о геометрической интерпретации
кинематической передаточной функции скорости движения
толкателя VqB = VB /шк. В каких единицах она
выражается? Покажите график изменения этой функции. Как
вычисляли масштабы по обеим координатным осям?
5. Расскажите о методике расчета координат
центрового и конструктивного профилей кулачка. Как эти
координаты находят при графическом методе синтеза
кулачкового механизма?
6. Поясните алгоритм вычислений основных размеров
кулачкового механизма с использованием ЭВМ.
7. Проанализируйте алгоритм вычислений координат
центрового профиля кулачка с использованием ЭВМ.
8. Расскажите о циклограмме работы рычажного,
кулачкового и других механизмов установки (машины).
9. Проанализируйте графики изменения скорости
выходного звена в кулачковом механизме. Какие
ограничения наложены на площадь под кривой на участке
ускоренного и замедленного перемещений выходного
звена?
10. Для произвольно выбранной точки на
конструктивном профиле кулачка покажите угол давления щ и
отрезок, пропорциональный кинематической передаточной
функции vg/w/f в масштабе чертежа |jh = vqv.
11. Можно л и изменить назначенные вами основные
размеры (r1f е, а = 1оюг)в сторону их увеличения и
уменьшения? В каких пределах и при каких условиях можно
изменить эти размеры?
12. Покажите, что изменится на листе, если w'k =
= 1/2шк.
13. Измените схему толкателя и для какого-либо
положения постройте на чертеже кулачкового механизма
угол давления.
14. При условии постоянства силы (момента)
сопротивления на толкателе определите на конструктивном
профиле кулачка точку, где сила контактного давления
имеет максимальное значение.
15. При заданной массе (моменте инерции) толкателя
и условии постоянства силы (момента) сопротивления на
толкателе и возрастании угловой скорости кулачка
определите на конструктивном профиле точку возможного
отрыва толкателя от профиля кулачка.
ЛИТЕРАТУРА
Гавриленко В.А. Основы теории эвольвентной
зубчатой передачи. М.: Машиностроение, 1969.
Использование системы MathCAD в курсовом
проектировании и выполнении домашних заданий по
теории механизмов и машин: Учеб. пособие / О.О.
Барышникова, Н.В. Леонов, В.В. Кузенков и др.; Под ред.
ГА. Тимофеева. М.: Изд-во МГТУ им. Н.Э. Баумана,
2004.
Планетарные передачи: Справ. / Под ред.
В.И. Кудрявцева и Ю.Н. Кирдяшева. Л.:
Машиностроение, 1977.
Попов С.А., Тимофеев ГА. Курсовое
проектирование по теории механизмов и механике машин. М.:
Высш. шк., 1998.
Приводы машин: Справ. / Под ред. В.В. Длоугого.
Л.: Машиностроение, 1982.
Проектирование кулачковых механизмов: Учеб.
пособие / ГА. Тимофеев, М.В. Самойлова; Под ред.
С.А. Попова. М.: Изд-во МГТУ им. Н.Э. Баумана,
1998.
Решение задач динамики для инерционных
транспортеров: Учеб. пособие / В.В. Кузенков, ГА.
Тимофеев, О.О. Барышникова; Под ред. А.К. Мусатова. М.:
Изд-во МГТУ им. Н.Э. Баумана, 2003.
Силовой расчет механизмов: Учеб. пособие /
Д.М. Лукичев, ГА. Тимофеев, И.Н. Ермакова и др.; Под
ред. К.В. Фролова. М.: Изд-во МГТУ им. Н.Э. Баумана,
1991.
Силовой расчет механизмов: Учеб. пособие /
ГА. Тимофеев, В.Б. Тарабарин, Л.А. Черная и др.; Под
ред. ГА. Тимофеева. М.: Изд-во МГТУ им. Н.Э.
Баумана, 2000.
Теория механизмов и машин / К.В. Фролов,
С.А. Попов, А.К. Мусатов и др.; Под ред. ГА.
Тимофеева. М.: Изд-во МГТУ им. Н.Э. Баумана, 2009.
Тимофеев Г.А., Яминский Ф.В., Каганова В.В.
Проектирование зубчатых передач и планетарных
механизмов с использованием ЭВМ: Учеб. пособие / Под
ред. ГА. Тимофеева. М.: Изд-во МГТУ им. Н.Э.
Баумана, 2000.
Учебное пособие для курсового проектирования
по теории механизмов: Ч. 1 / Д.М. Лукичев, ТА.
Архангельская, С.А. Попов и др.; Под ред. ТА.
Архангельской. М.: Изд-во МВТУ им. Н.Э. Баумана, 1985.
Учебное пособие для курсового проектирования по
теории механизмов и механике машин: Ч. 1 / ТА.
Архангельская, С.А. Попов, М.В. Самойлова и др.; Под
ред. ГА. Тимофеева. М.: Изд-во МГТУ им. Н.Э.
Баумана, 2000.
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию 3
Введение 4
1. Определение недостающих размеров механизма с учетом дополнительных
условий 7
1.1. Кривошипно-ползунные механизмы 7
1.1.1. Синтез механизма по заданным геометрическим параметрам 7
1.1.2. Синтез механизма по средней скорости движения ползуна и углам
давления 9
1.2. Четырехшарнирные механизмы 9
1.2.1. Синтез механизма по заданным положениям его звеньев 9
1.2.2. Синтез механизма по угловой скорости выходного звена и углу
давления 10
1.3. Четырехзвенные кулисные механизмы 11
1.3.1. Проектирование механизма по коэффициенту изменения средней
скорости выходного звена 11
1.3.2. Проектирование механизма с качающимся цилиндром 12
1.4. Шестизвенные механизмы 12
1.4.1. Синтез механизма с дополнительной двухповодковой группой 12
1.4.2. Синтез механизма по заданному коэффициенту изменения средней
скорости ползуна дополнительной группы и ходу ползуна 13
1.4.3. Определение положения направляющей ползуна механизма
с вращающейся кулисой 13
2. Анализ кинематики механизма и заданных внешних сил 15
2.1. Кинематический анализ 15
2.1.1. Функции положения звеньев 15
2.1.2. Кинематические передаточные функции 16
2.1.3. Определение аналогов скоростей и ускорений с помощью
вычислительной техники 19
2.2. Режимы движения машины 20
2.3. Силы, действующие на звенья механизма 20
2.4. Характеристики сил 21
2.4.1. Механическая характеристика 21
2.4.2. Определение знака силы 26
2.4.3. Математические пакеты для расчета характеристик 26
3. Определение закона движения механизма под действием заданных внешних сил 27
3.1. Уравнения движения и динамическая модель 27
3.1.1. Общие уравнения движения машины 27
3.1.2. Пример построения динамической модели 30
3.1.3. Приведенные моменты сил 32
3.2. Определение закона движения механизма в переходном режиме 33
3.3. Определение закона движения механизма в установившемся режиме 36
3.3.1. Общие положения 36
3.3.2. Работа суммарного приведенного момента 36
3.3.3. Кинетическая энергия звеньев механизма 38
3.3.4. Построение приближенного графика зависимости ^(ф*) 39
168
3.3.5. Определение необходимого момента инерции маховых масс 39
3.3.6. Определение момента инерции дополнительной маховой
массы (маховика) 39
3.3.7. Габариты и масса маховика 40
3.3.8. Определение закона движения механизма при различных режимах
движения 40
3.4. Последовательность определения закона движения механизма 41
3.4.1. Указания к выполнению первого листа курсового проекта 41
3.4.2. Пример проектирования и выполнения первого листа проекта 42
3.5. Выбор электрического двигателя и анализ влияния его механической
характеристики на движение механизма 45
4. Силовой расчет механизма 49
4.1. Силы, действующие в кинематических парах плоского механизма 49
4.2. Виды и этапы силового расчета 50
4.3. Силовой расчет кинематических групп 51
4.3.1. Группы Ассура 51
4.3.2. Группа первого вида 51
4.3.3. Группа второго вида 52
4.3.4. Группа третьего вида 53
4.3.5. Группа четвертого вида 54
4.3.6. Группа пятого вида 54
4.3.7. Начальное звено 55
4.4. Прямые аналитические методы кинетостатического расчета 56
4.5. Использование вычислительной техники для решения задач силового расчета
механизма 57
4.5.1. Специализированные программы 57
4.5.2. Особенности применения математических пакетов общего назначения .... 58
4.6. Указания к выполнению второго листа курсового проекта 58
5. Анализ зубчатых зацеплений механизмов 61
5.1. Виды зубчатых передач и их свойства 61
5.2. Исходный производящий контур инструмента и станочное зацепление 62
5.3. Геометрический расчет эвольвентной зубчатой передачи внешнего зацепления ... 64
5.3.1. Расчет передачи при свободном выборе межосевого расстояния 64
5.3.2. Расчет передачи при заданном межосевом расстоянии 65
5.4. Качественные показатели 65
5.5. Выбор коэффициентов смещения с учетом качественных показателей 67
5.6. Построение профиля зуба колеса, изготовляемого реечным инструментом 71
5.7. К построению зубчатой передачи на третьем листе проекта 72
5.8. Расчет профилей цилиндрических зубчатых колес и геометрии переходной
кривой, нарезанных инструментом реечного типа 73
5.8.1. Построение эвольвентной части профиля зуба 73
5.8.2. Вывод уравнения переходной кривой профиля зуба 74
5.8.3. Вывод уравнения переходной кривой профиля косозубого колеса 75
6. Проектирование планетарных зубчатых механизмов с цилиндрическими
колесами 77
6.1. Основные характеристики 77
6.2. Общие условия кинематического синтеза 79
6.3. Методика проведения кинематического синтеза 81
6.4. Критерии оптимальности 83
7. Проектирование кулачковых механизмов 85
7.1. Исходные данные и этапы проектирования четвертого листа 85
7.2. Выбор закона движения толкателя 86
7.3. Определение кинематических передаточных функций 87
7.3.1. Построение графиков по аналитическим зависимостям 87
7.3.2. Построение графиков методом графического интегрирования 95
7.4. Определение основных размеров кулачкового механизма по условию
ограничения угла давления 95
7.4.1. Построение фазового портрета 95
7.4.2. Определение минимальных габаритов 97
169
7.5. Определение координат профиля кулачка 99
7.6. Проектирование кулачковых механизмов графическим методом 100
7.6.1. Определение основных размеров 100
7.6.2. Построение профиля кулачка 100
7.6.3. Построение графика угла давления 102
Приложение 1. Решение задач кинематического синтеза 103
Приложение 2. Построение характеристик сил и определение
приведенных моментов 107
Приложение 3. Определение закона движения механизма
компрессорной установки 112
Приложение 4. Определение закона движения механизма
при переходном режиме работы 120
Приложение 5. Силовой расчет 127
Приложение 6. Проектирование кулачкового механизма с роликовым
поступательно движущимся толкателем 133
Приложение 7. Примеры выполнения листов курсового проекта 137
Приложение 8. Основные технические характеристики общепромышленных
двигателей 162
Приложение 9. Вопросы для подготовки к защите проекта 164
Литература 167
Учебное издание
Кузенков Владимир Васильевич
Самойлова Марина Валерьевна
Тарабарин Валентин Борисович
Тимофеев Геннадий Алексеевич
Умнов Николай Владимирович
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Курсовое проектирование
Редактор Г. А. Нилова
Технический редактор Э.А. Кулакова
Художник КГ. Столярова
Корректор О.В. Солдатова
Компьютерная графика О.В. Левашовой
Компьютерная верстка К Ф. Бердавцевой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана.
Санитарно-эпидемиологическое заключение № 77.99.60.953.Д.003961.04.08 от 22.04.2008 г.
Подписано в печать 17.05.12. Формат 60x90 1/8- Печ. л. 21,5. Тираж 1500 экз. Заказ №361
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
http://www.press.bmstu.ru E-mail: press@bmstu.ru
Отпечатано в типографии МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
E-mail: baumanprint@gmail.com