/




























































































































































































Author: Бутырин П.А. Шестаков А.Л. Гафиятуллин Р.Х.
Tags: электротехника
ISBN: 5-696-02841-1
Year: 2003




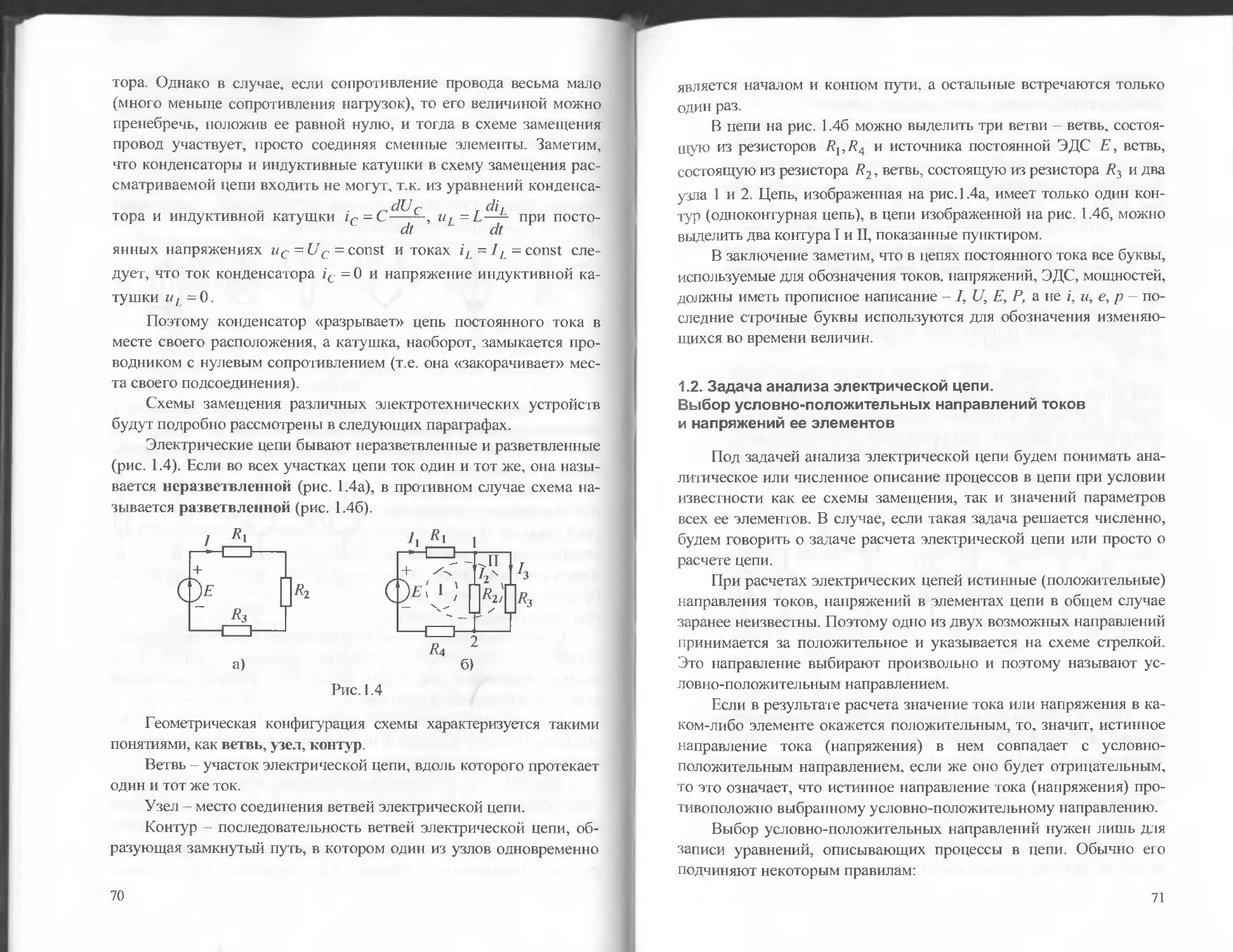
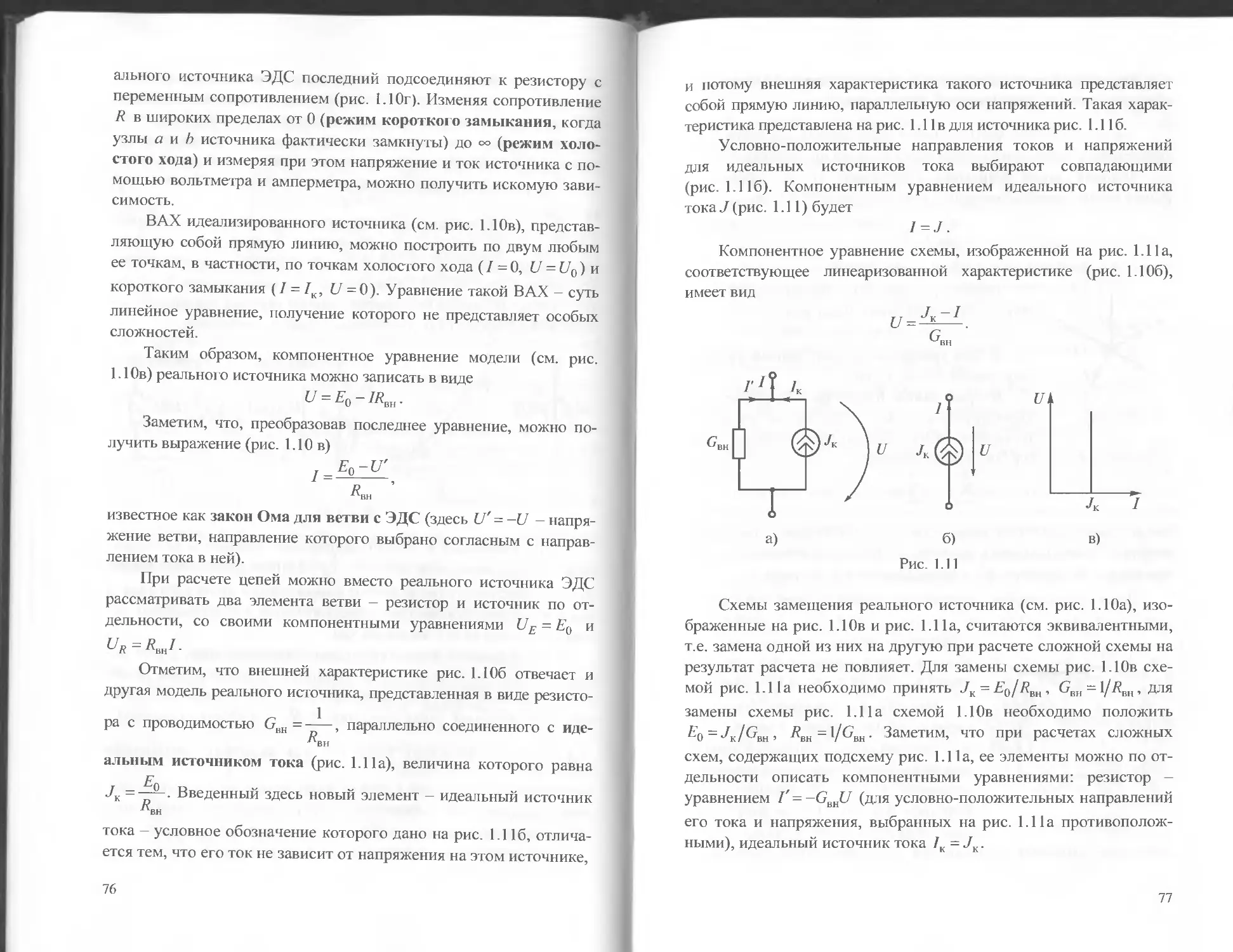
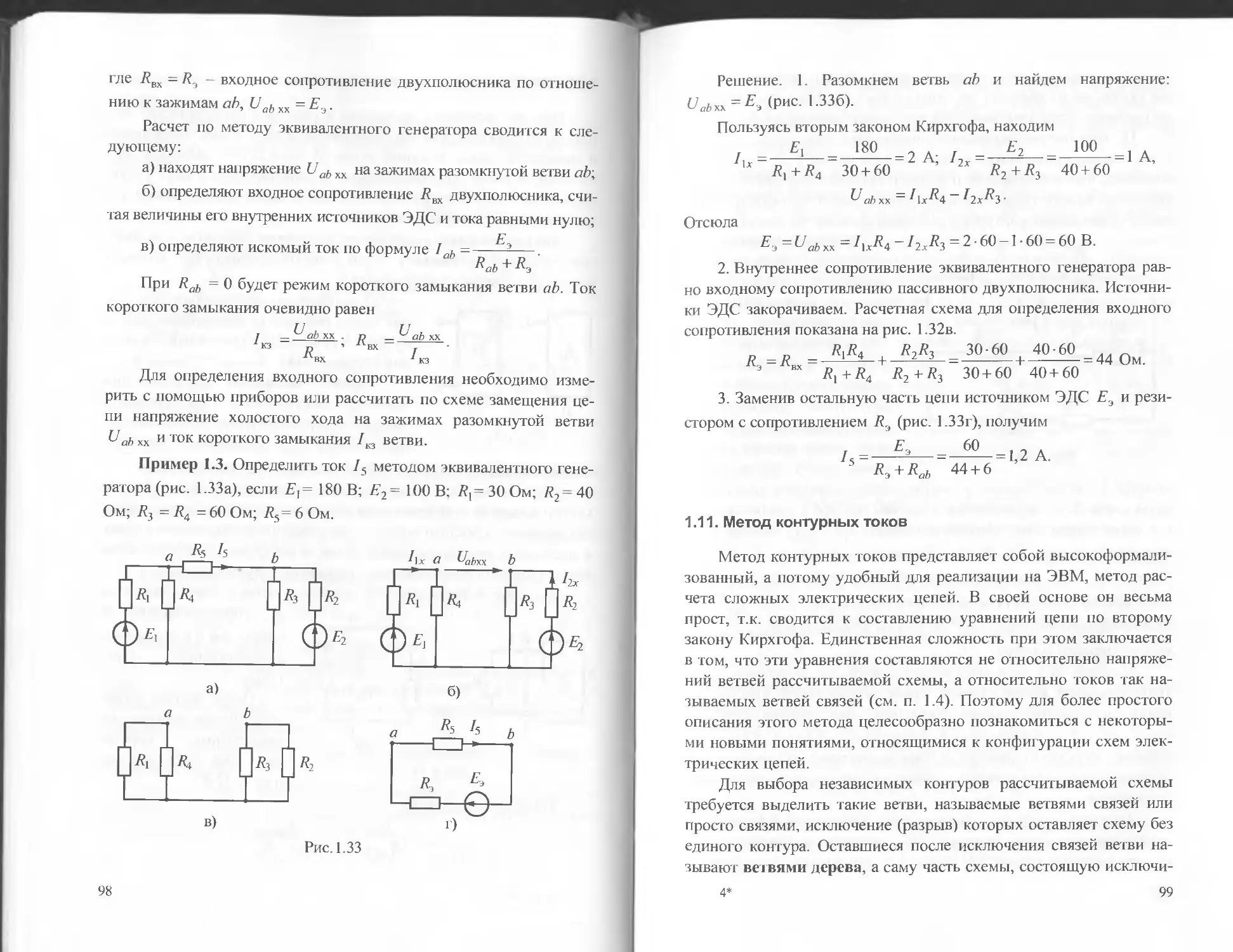
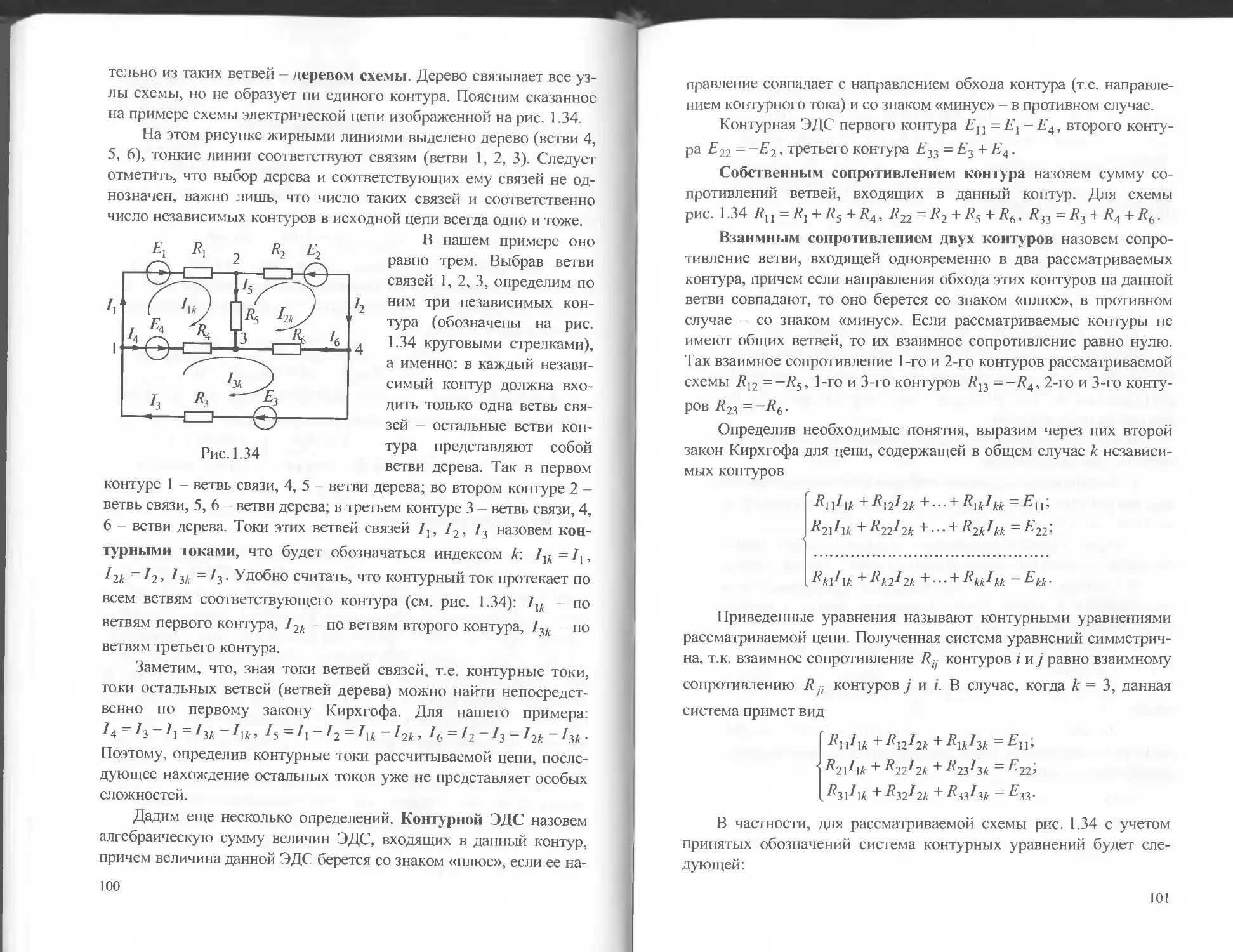
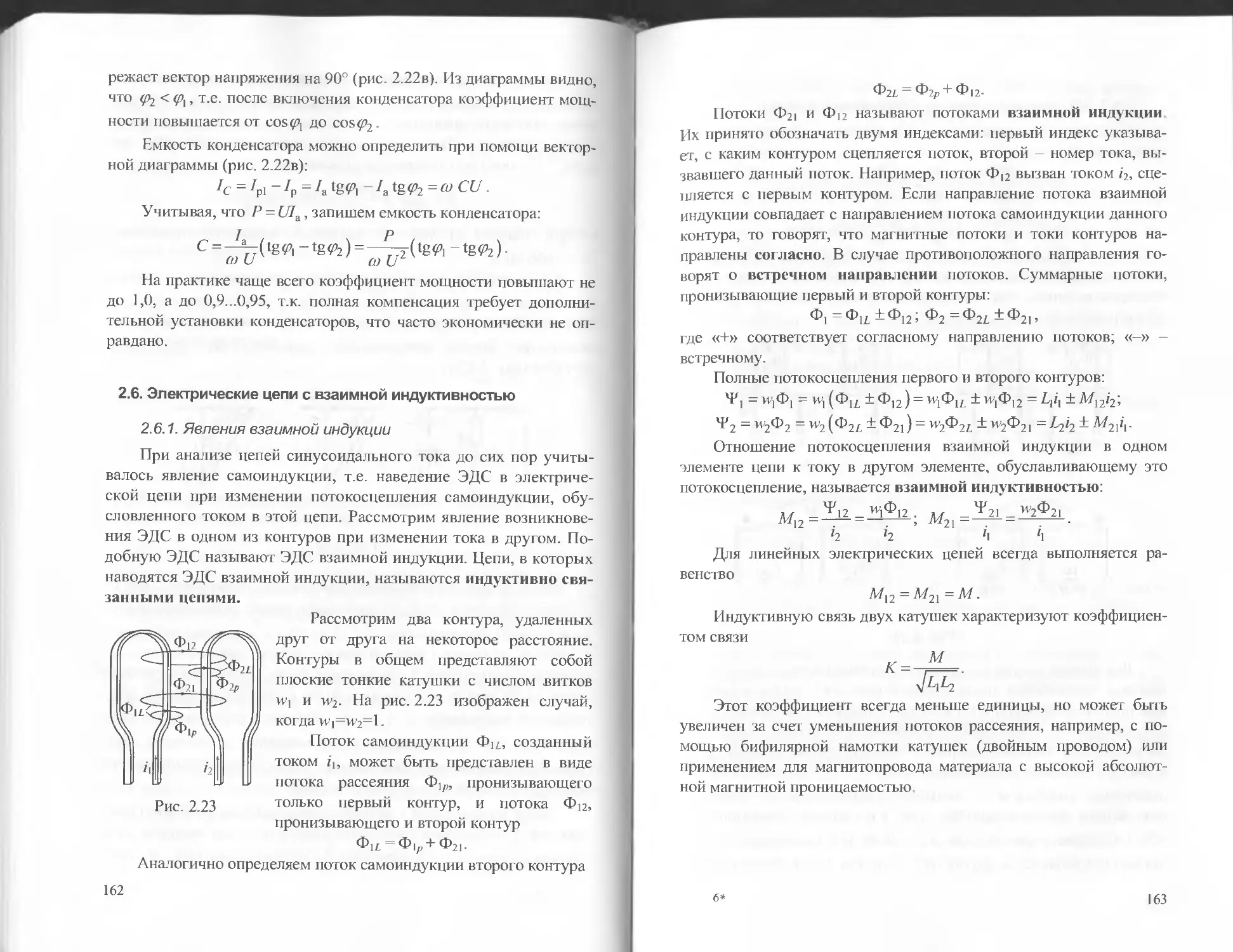
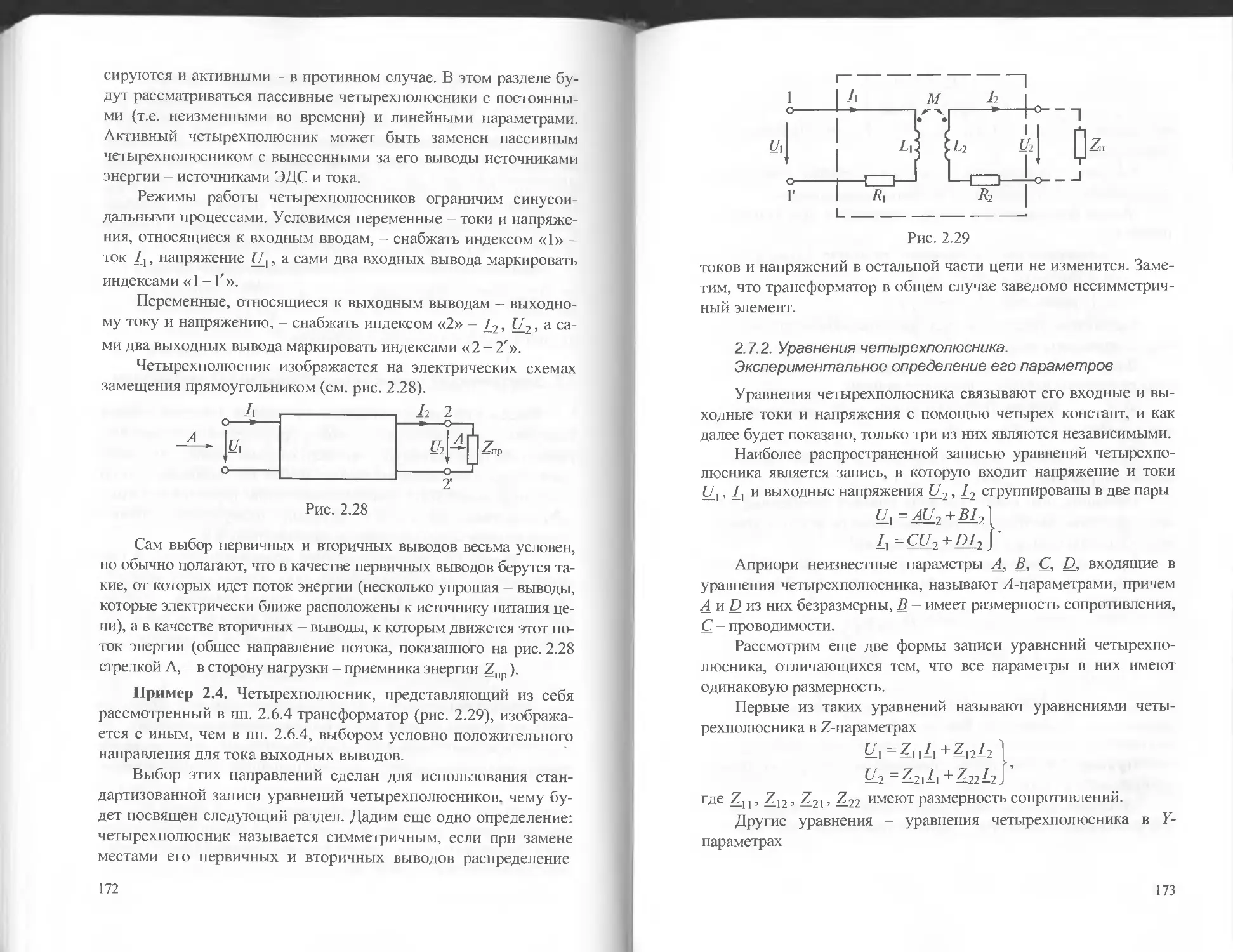
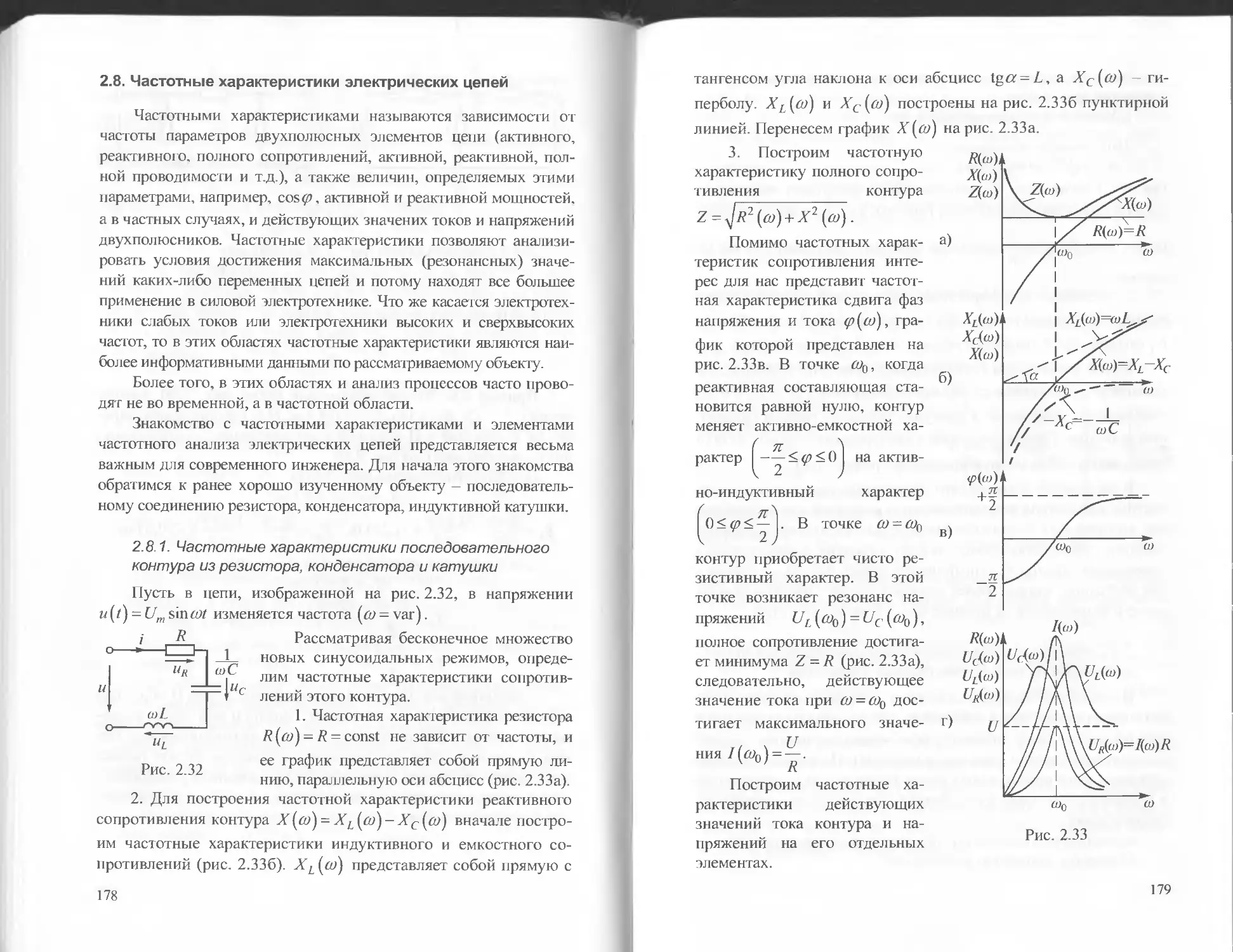
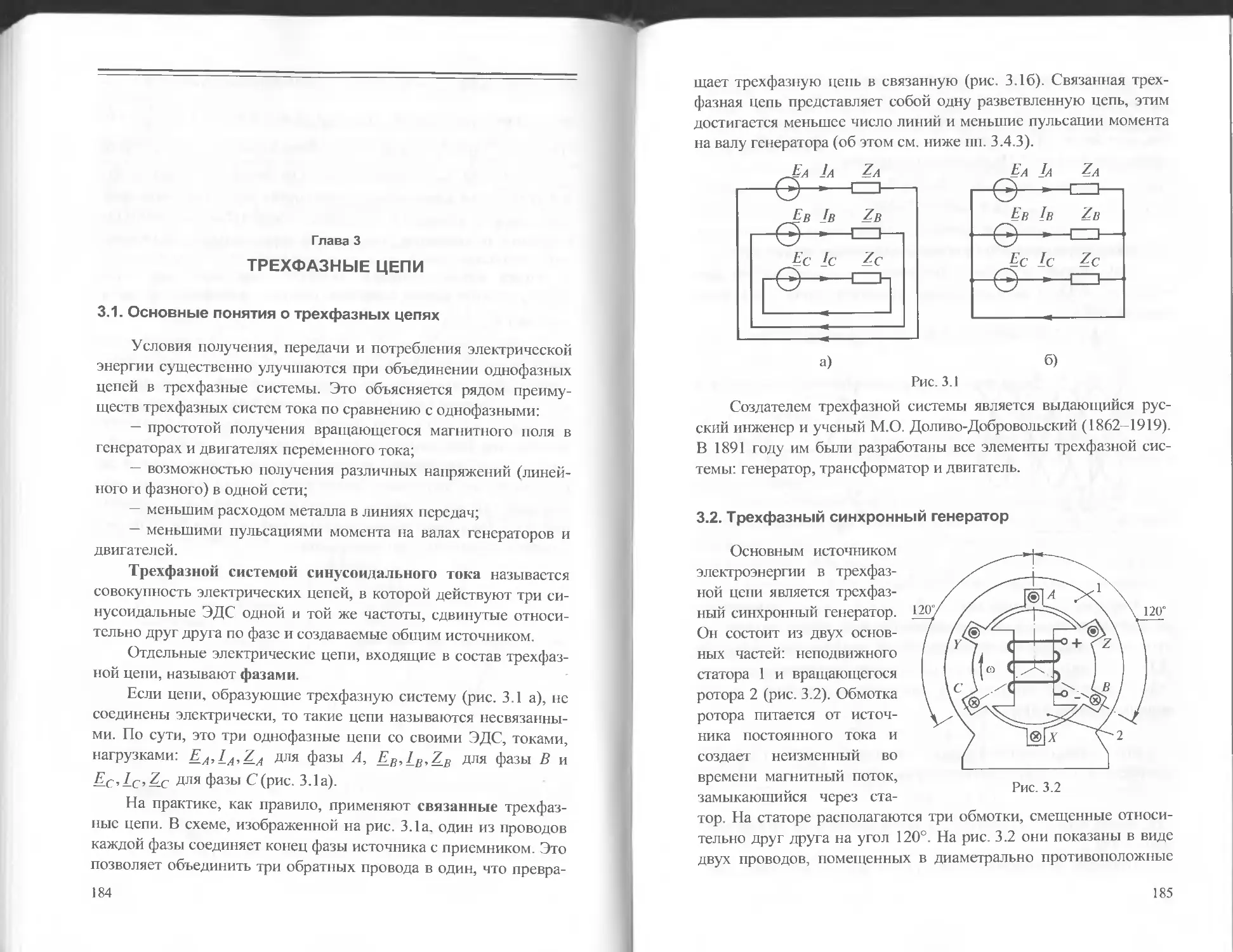
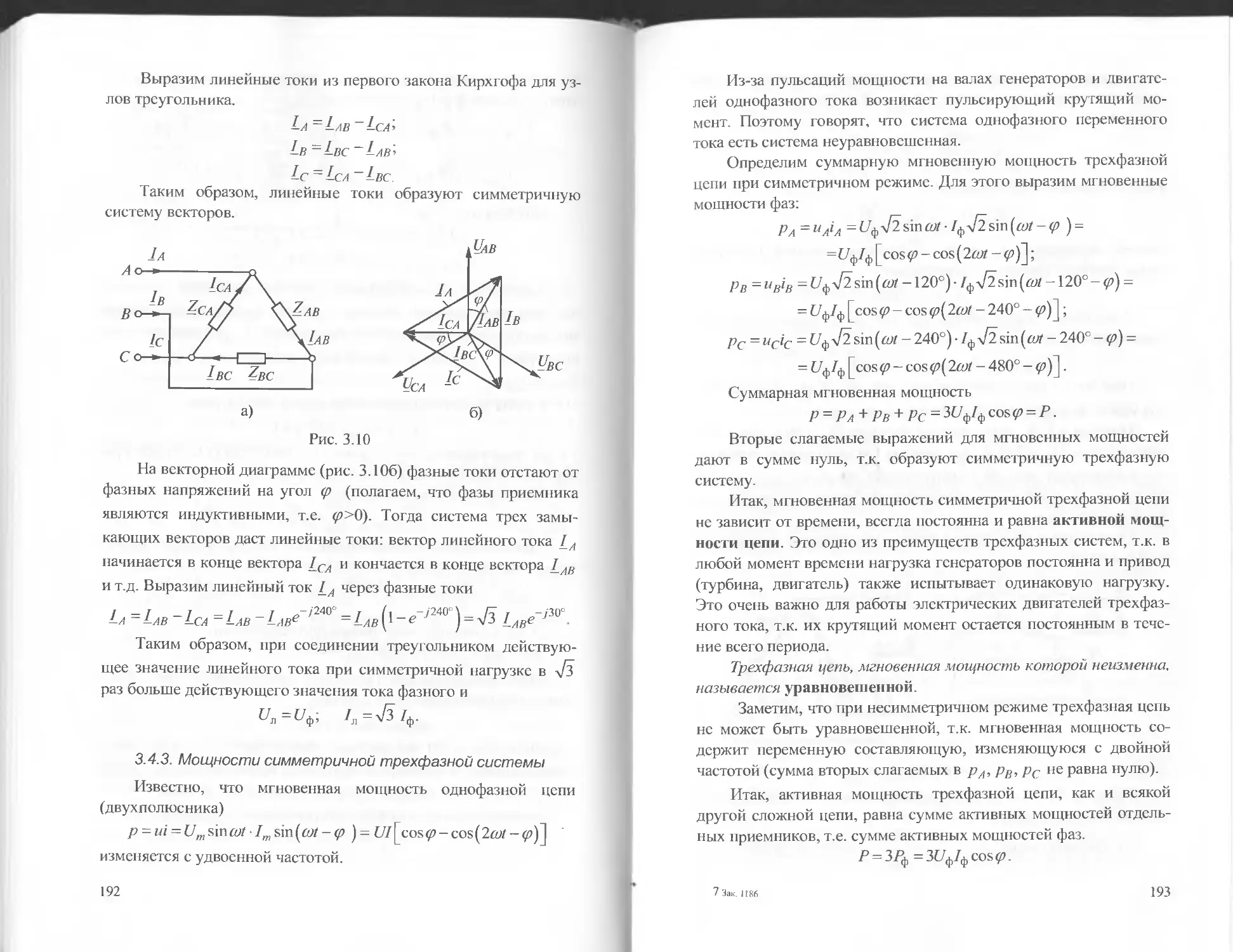
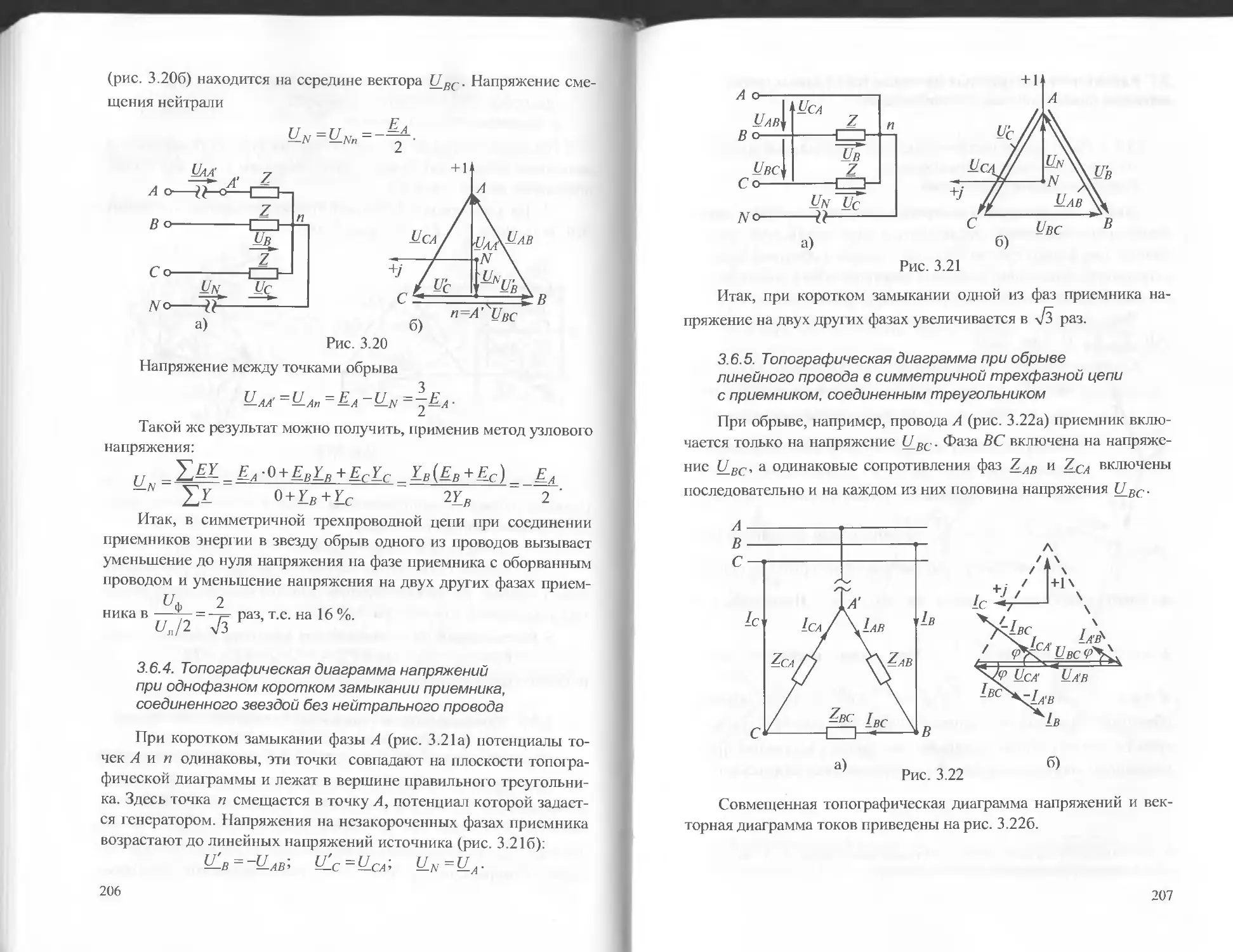
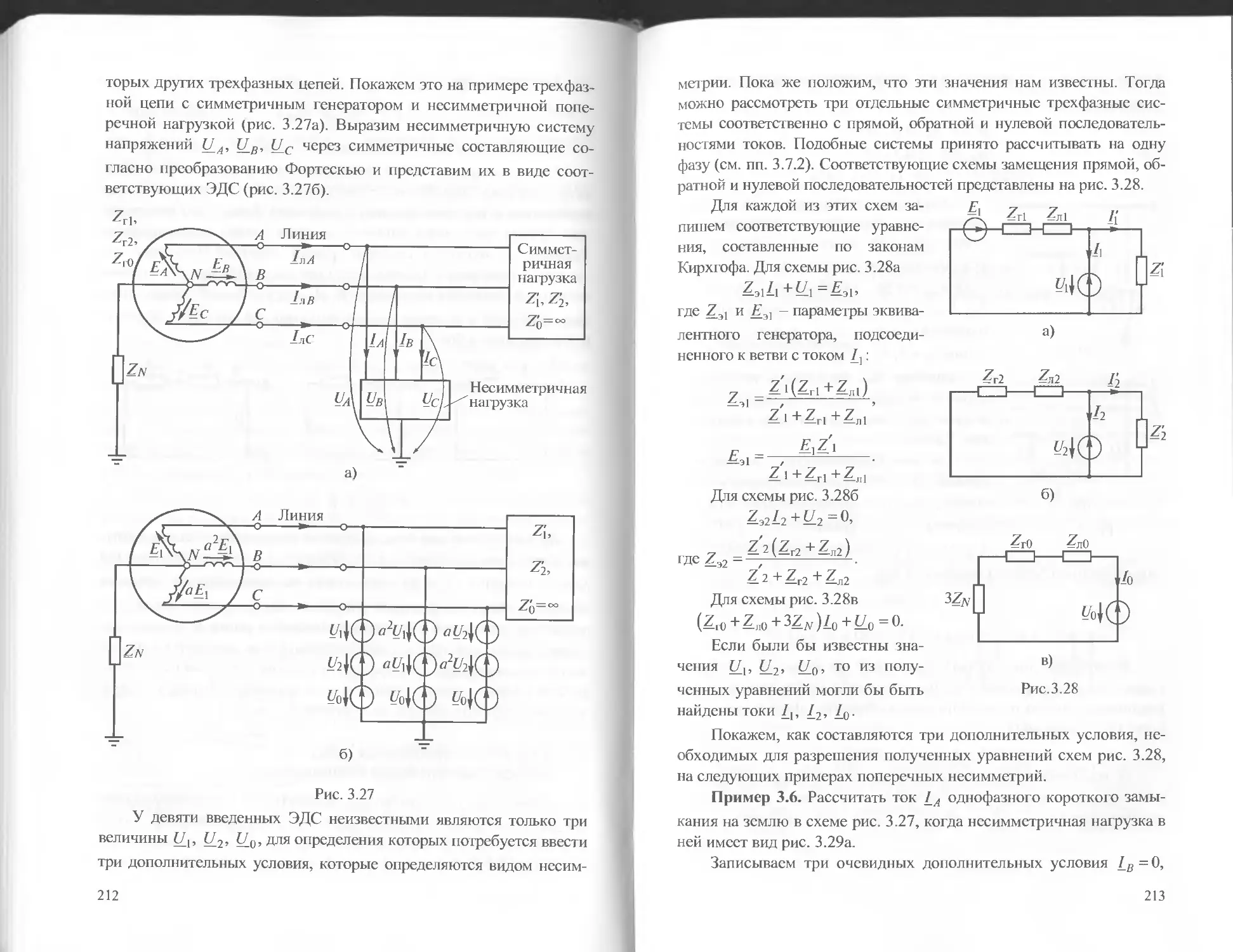
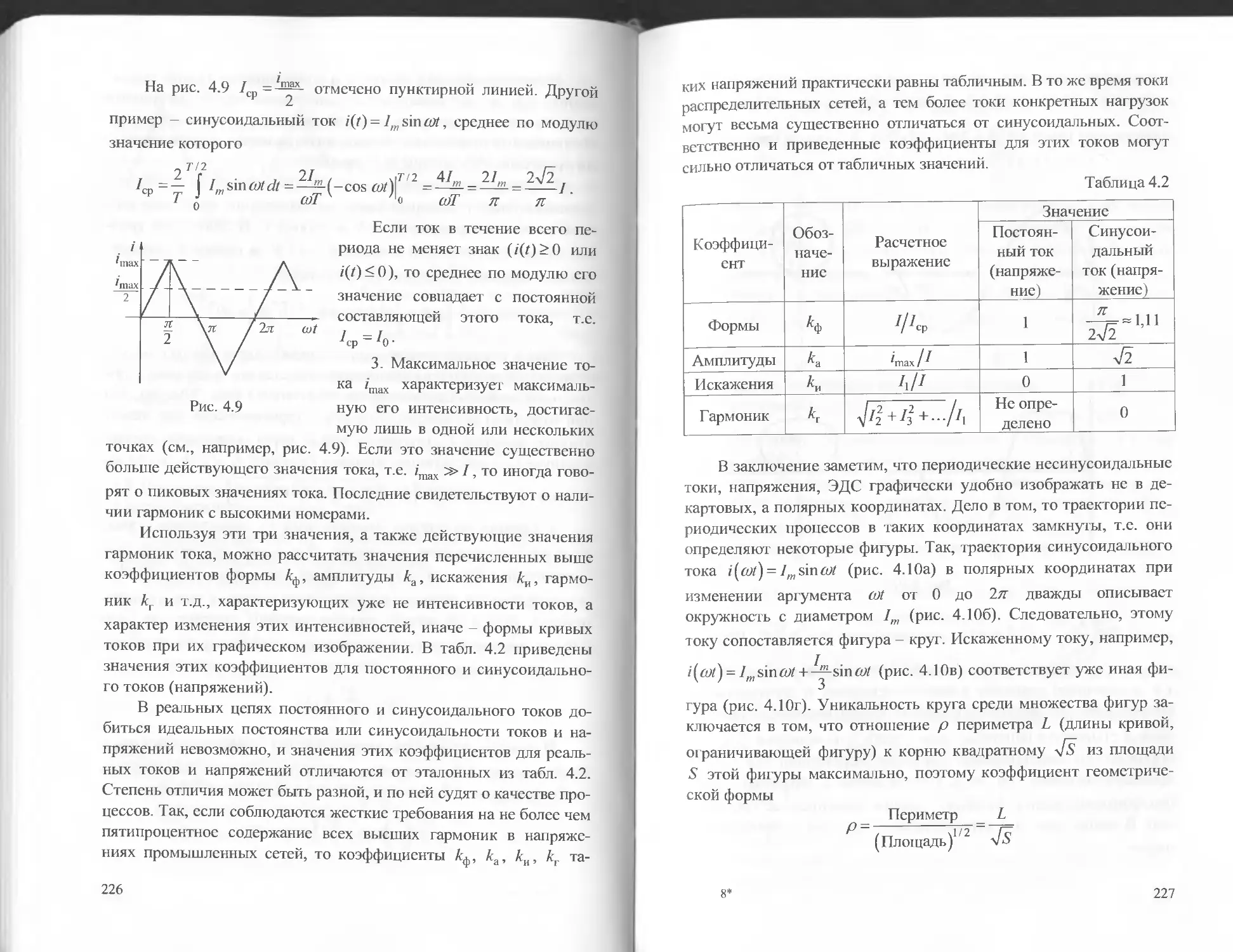
Text
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ЭЛЕКТРОТЕХНИКА
УЧЕБНОЕ ПОСОБИЕ В ТРЕХ КНИГАХ
Под редакцией
член-корреспондента РАН П.А. Бутырина, доктора технических наук, профессора, заслуженного деятеля науки и техники РФ Р.Х. Гафиятуллина, доктора технических наук, профессора
А.Л. Шестакова
Челябинск-Москва
Издательство ЮУрГУ
К 60-летию
Южно-Уральского государственного университета
ПРЕДИСЛОВИЕ
Уважаемый читатель, предлагаемое Вашему вниманию учебное пособие «Электротехника», состоящее из трех книг, представляет собой новый вид учебной литературы по электротехническому оборудованию. В нем содержатся сведения по всему циклу электротехнических дисциплин, что позволяет использовать его в качестве единого источника знаний. Подробное введение в каждую из дисциплин и практическая направленность в изложении основного материала рассчитаны на использование книг при первоначальном, самостоятельном изучении этих дисциплин, а также для переподготовки специалиста-электротехника на современном уровне. Подобная ориентация учебного материала отвечает целям большей органичности и непрерывности электротехнического образования. Таким образом, данная учебная литература может использоваться в качестве настольной книги электротехника как во время его учебы в вузе, так и в процессе последующей работы.
Идея и структура книги предложены заслуженным деятелем науки и техники Российской Федерации, доктором технических наук, профессором Р.Х. Гафиятуллиным и одобрены главными специалистами (главными энергетиками, главными электриками и др.) крупнейших промышленных и оборонных предприятий, ведущими учеными-электротехниками. По его же инициативе были приглашены для работы над книгой известные ученые из Московского энергетического института (Технического университета), Южно-Уральского государственного университета и других вузов, которые впоследствии составили коллектив авторов-единомышленников, озабоченных состоянием электротехнического образования, науки и техники в области электротехники, включая управление сложными электромеханическими системами. Известно, что существующая ситуация по обеспечению электротехнической ли-
1*
3
тсратурой за последние десять-пятнадцать лет может быть охарактеризована как неблагоприятная.
Учебное пособие написано в соответствии с образовательными стандартами «Электротехника, электромеханика и электротехнологии», «Электроэнергетика», «Автоматизированные технологии и производства», «Автоматизация и управление», «Механотроника и робототехника», «Электроника и микроэлектроника», «Приборостроение» и др.
Данное издание под названием «Электротехника», состоящее из трех книг, имеет следующую структуру.
Книга I - «Теория электрических и магнитных цепей. Электрические измерения».
Книга II - «Электрические машины. Промышленная электроника. Теория автоматического управления».
Книга III - «Электроприводы. Элек троснабжение».
В первом разделе книги I «Теория электрических и магнитных цепей» рассматриваются традиционные и новые, появившиеся в последние годы, вопросы теории линейных и нелинейных электрических цепей. К традиционным вопросам линейных цепей относятся свойства цепей и методы их расчетов при постоянных синусоидальных, периодических несинусоидальных и импульсных воздействиях, четырехполюсники, трехфазные цепи, переходные процессы. Рассмотрен расчет нелинейных электрических и магнитных цепей при постоянном и периодических воздействиях.
К нетрадиционным вопросам классической электротехники относятся: диагностика электрических цепей, теория цифровых систем и методы обработки цифровых сигналов.
Объем и содержание первого раздела обеспечивает изучение курса теоретических основ электротехники (ТОЭ) и его приложения к другим разделам второй и третьей книг.
Во втором разделе изложены основы теории электрических измерений, представлены методы и средства измерений электрических и неэлектрических величин. Рассмотрены основы метрологии и даны необходимые сведения о системах электроизмерительных приборов и их применении для измерения различных физических величин.
Описаны параметрические измерительные преобразователи для измерения различных неэлектрических величин.
4
Вторая книга начинается с раздела III. который посвящен электромагнитным и электромеханическим устройствам: трансформаторам, электрическим машинам постоянного и переменного тока, микромашинам автоматических устройств.
Подробно изложена общая теория трансформаторов. Рассмотрены вопросы работы трансформаторов в трехфазных электрических сетях, включая несимметричные режимы. Охарактеризованы особенности одно- и трехфазных автотрансформаторов, а также сварочных и измерительных трансформаторов.
Вопросы теории основных видов электрических машин изложены на основе принципов электромеханического преобразования энергии. Это позволило уменьшить дублирование материала и дало возможность больше внимания уделить важным в условиях эксплуатации характеристикам электрических машин с учетом различных способов их возбуждения и регулирования.
Показаны различные схемы соединения обмоток вращающихся трансформаторов и синхронных передач. Описано устройство синхронного гистерезисного двигателя и двух видов шаговых двигателей и т.д.
В этой же книге весьма развернуто представлены физические основы электроники и промышленная электроника (IV и V разделы).
Рассмотрено современное состояние полупроводниковых приборов и основ информационной электроники. Большой объем материала посвящен энергетической электронике, которая явилась базой для создания высокоточных широкодиапазонных регулируемых электроприводов и электротехнологических установок для различных отраслей промышленности. С помощью электронных энергетических устройств в настоящее время преобразуется более половины всей вырабатываемой электроэнергии, и поэтому они приобретают решающее значение в энергосбережении. Таким образом, материалы по промэлектронике охватывают весь комплекс вопросов, позволяющих решать проблемы разработки, проектирования и эксплуатации эффективных электромеханических и электротехнологических устройств.
В процессе разработки, проектирования и эксплуатации возникают задачи регулирования и управления сложными электромеханическими и электротехнологическими устройствами. Без знания хотя бы элементов теории автоматического регулирования не представляются возможными разработка и создание управляемых электромеханических и электротехнологических устройств (раздел VI).
5
По этому разделу знаний представлены элементы классической теории автоматического управления. Подробно описаны регуляторы, необходимые для обеспечения устойчивости и точности систем регулирования (в частности, П-, И-, ПИ- и ПИД-регуляторы).
Вполне в удовлетворительном объеме как для студентов, так и для разработчиков, инженеров изложены вопросы классического синтеза систем управления.
Синтез же нелинейных систем базируется на цифровом моделировании с соответствующим программным обеспечением.
Третья книга включает разделы V1I-XI.
«Физические основы электропривода» (VII раздел) начинается с введения основных понятий, принятых в электроприводе как отрасли знаний. Физика современного электропривода изложена сначала на примере электроприводов постоянного тока при питании от нерегулируемого источника, а затем - от регулируемых преобразователей. Далее те же вопросы рассматриваются на примере электроприводов переменного тока. Последовательность изложения материала аналогична: сначала рассматриваются электроприводы с питанием от сети с нерегулируемыми частотой и напряжением, а затем - при питании от различных регулируемых преобразователей частоты или напряжения. Наиболее подробно рассмотрен асинхронный привод - самый массовый и экономичный. Представлены и другие типы электроприводов: синхронные, вентильноиндукторные.
Переходные процессы в разомкнутых системах электропривода классифицируются по четырем группам и рассматриваются с целью получения суждения о возможной производительности рабочего механизма и возникающих в нем перегрузках.
В дополнение к описанию традиционных проблем энергетики (потери в электроприводе в установившихся режимах, потери при пусках и торможениях) изложены оценки энергетической эффективности при неоднонаправленных потоках энергии, а также рассмотрен вопрос об энергосбережении средствами электропривода.
Весьма объемно и содержательно изложены материалы по системам управления электроприводов (раздел VIII).
Среди электроприводов постоянного тока наиболее глубоко представлены современные промышленные вентильные электроприводы с подчиненным регулированием координат.
6
Электроприводы переменного тока описаны с позиции векторного регулирования электромагнитного момента двигателя
Следящие электроприводы представлены с точки зрения особенностей их настройки в режимах позиционирования и слежения.
В разделе IX рассматриваются промышленные частотно-регулируемые электроприводы. Этот раздел содержит актуальнейший, свежий материал, ибо впервые так конкретно анализируются современные частотно-регулируемые электроприводы.
Излагается теория скалярного и векторного управления асинхронным электродвигателем, приводятся математические соотношения, положенные в основу функционирования схем управления. Достаточно подробно рассмотрены векторные диаграммы асинхронного двигателя при питании от преобразователя частоты.
Современные сложные частотно-регулируемые асинхронные электроприводы требуют от эксплуатационника высокой квалификации. Их система управления, выполненная на программируемых контроллерах, имеет богатый набор сервисных функций, которые изложены в разделе.
Дается краткая техническая характеристика промышленных преобразователей частоты, выпускаемых отечественными и зарубежными фирмами.
Раздел X посвящен электроприводам с фаззи-регулированисм. Рассматриваются вопросы проектирования систем автоматического управления с фаззи-регулированием, а именно: общие принципы построения систем, основные характеристики фаззи-регуляторов и методы синтеза систем с нечеткой логикой.
Приводится ряд характерных примеров использования систем фаззи-логики: управление движением подъемного крана, система с «перевернутым маятником», следящая система управления.
XI раздел посвящен системам электроснабжения (СЭС). В нем рассматриваются вопросы, связанные с производством, передачей и распределением электрической энергии.
Приведены краткие сведения об источниках и приемниках электрической энергии, рассмотрены используемые в практике проектирования методы расчета электрических нагрузок, а также дано описание типовых схем и конструктивного исполнения электрических сетей, методика выбора их элементов. Рассмотрены режимы нейтрали электрических сетей, релейная защита и ав-
7
тематика СЭС. Особое внимание уделено вопросам качества электрической энергии и компенсации реактивной мощности.
Настоящая книга не вышла бы в свет, если бы не подставило свое плечо и не оказало бы конкретную помощь, порою в сложной ситуации, руководство ЮУрГУ.
Редакторы настоящей книги выражают искреннюю признательность ректору Южно-Уральского государственного университета (ЮУрГУ) член-корреспонденту РАН Герману Платоновичу Вяткину за всестороннюю поддержку проекта книги; лауреату Государственной премии СССР, заслуженному деятелю науки и техники РФ, доктору техн, наук, профессору Николаю Федотовичу Ильинскому и лауреату Государственной премии СССР, доктору техн, наук, профессору Владимиру Георгиевичу Миронову (Московский энергетический институт - Технический университет), проявившим интерес к книге, которые согласились войти в коллектив авторов и предоставили ценный материал; доктору техн, наук, профессору Ивану Яковлевичу Редько - одному из инициаторов издания книги; директору издательства ЮУрГУ Андрею Геннадьевичу Пашнину и его сотрудникам, которые в тесном контакте, порою в неурочное время, работали с нами.
Мы также благодарим коллектив кафедры электропривода и автоматизации промустановок ЮУрГУ за постоянную помощь в оформлении книги и за участие в обсуждении материалов рукописи в процессе написания.
Особая благодарность рецензентам книги - доктору техн, наук, профессору, действительному члену Российской академии электротехнических наук Федору Никитичу Сарапулову (Уральский государственный технический университет - УПИ) и заслуженному деятелю науки и техники РСФСР, доктору техн, наук Михаилу Михайловичу Тверскому (Южно-Уральский государственный универ-стет), взявшим на себя тяжелый труд внимательного ознакомления со столь объемной работой, замечания и советы которых способствовали улучшению книги.
П.А. Бутырин, Р.Х. Гафиятуллин, А.Л. Шестаков
8
ВВЕДЕНИЕ.
КРАТКАЯ ИСТОРИЯ И ПЕРСПЕКТИВЫ РАЗВИТИЯ ЭЛЕКТРОТЕХНИКИ
Электротехника - важнейшая область науки и практики, связанная с изучением и использованием электрических и магнитных явлений в технических устройствах. Она востребована практически во всех сферах жизнедеятельности человека — в быту и производстве, медицине и военном деле, транспорте и связи и т.д., во многом определяя уровень и перспективы их развития. Сама электротехника имеет неограниченный потенциал для развития, а ее влияние на общество, его благосостояние, комфортность, безопасность будут только возрастать. В этом смысле выбор профессии, связанной с электротехникой, представляется исключительно разумным. Следует, однако, отметить, что эта отрасль нс только динамично развивается, но и имеет дело с наиболее организованной формой материи - электрическим полем. Поэтому как профессионалу, уже работающему в этой отрасли, так и молодому человеку, только собирающемуся связать с ней свою судьбу, надо непрерывно расширять свой научный и технический кругозор, овладевая все увеличивающимся объемом специальных навыков и знаний, а также иметь хорошую базовую подготовку в области электротехники с тем, чтобы быть достойно востребованными на рынке занятости.
Настоящее учебное пособие призвано дать картину достижений электротехнической мысли по некоторой совокупности направлений (электротехнических дисциплин), по сути, оно задумывалось как настольная книга электротехника. В данном первом издании этой книги удалось осветить далеко не все научные направления электротехники и, возможно, не вполне добиться методического совершенства как в их изложении, так и в связях этих направлений. В последующих изданиях авторы надеются с помощью
9
откликов читателей решить и эти проблемы. Главное же здесь было собрать материал по фундаментальным основам (теории электрических и магнитных цепей) и специальным направлениям электротехники, чтобы в процессе обучения студентов, а также переподготовки или самостоятельного совершенствования знаний специалистов можно было бы использовать единый книжный источник. Представляя его широкой читательской аудитории, предварим его основное содержание краткими сведениями по истории, основным положениям и понятиям электротехники, а также по направлениям, проблемам и перспективам ее развития.
История возникновения и становления электротехники
Первым получившим широкое распространение техническим устройством, использующим магнитные свойства вещества, был, по-видимому, компас, которым в Китае пользовались еще четыре тысячи лет назад. Но лишь в начале XVII века вышел первый фундаментальный труд английского ученого (врача королевы Елизаветы) Вильяма Гильберта «О магните, магнитных телах и о большом магните - Земле», в котором сделана попытка не только научного объяснения поведения магнитной стрелки компаса и магнитных явлений вообще, но также исследованы явления, названные автором «электрическими», в частности, установлено различие «степени электрической силы». Процесс технического освоения электромагнетизма резко усилился с изобретением в середине XVII века электростатической машины, сконструированной магдебургским мэром Отто фон Герике, и чуть позднее с появлением другого источника электрической энергии, созданного голландским профессором из г. Лейдена Питером Мюнсхенбруком и получившего название «лейденской» банки. Экспериментируя с лейденской банкой, П. Мюнсхенбрук впервые испытал и силовое воздействие на организм электрического разряда. Сообщение об этих опытах произвело подлинную сенсацию, а повторение одного из опытов аббатом Нолле в присутствии французского короля породило один из самых главных электротехнических терминов - «электрическая цепь». В этом повторении была образована живая цепь из 180 гвардейцев, взявшихся за руки, причем первый из них держал лейденскую банку в руке, а последний прикасался к ее электроду. Электрический разряд почувствовали все гвардейцы цепи одновременно. К этим
10
же годам относятся и исследования атмосферных электрических явлений нашим великим соотечественником М.В. Ломоносовым, который вместе со своим учеником Г.В. Рихманом создал, в частности, «громовую машину», позволяющую фиксировать «большую или меньшую степень электричества». Экспериментируя с этим первым электроизмерительным прибором во время грозы 25 июня 1753 года, Г.В. Рихман был убит «бледно-сиреневым огненным шаром», став первой жертвой, принесенной на алтарь электротехнической науки. В 1756 году М.В. Ломоносов сформулировал, но, к сожалению, не опубликовал трактат «Теория электричества, разработанная математическим путем». В нем, по сути, обоснована «эфирная теория электричества», которой затем придерживался М. Фарадей и ряд других крупнейших ученых. В 1759 году известность получил трактат петербургского академика Ф.У. Эпинуса «Опыт теории электричества и магнетизма», в котором впервые указана связь между электрическими и магнитными явлениями.
В конце XVIII начале XIX веков выдающихся результатов в исследованиях электромагнетизма достигли итальянский физик А. Вольта, русский ученый В.В. Петров и французский военный инженер Ш.О. Кулон. А. Вольта можно считать основателем электрической метрологии, его имя связывают с возникновением понятий «потенциал» («напряжение») и «емкость», с созданием достаточно совершенных электроскопов и электрофоров, но, главное, он в 1799 году построил первый источник непрерывного электропитания («вольтов столб»). В.В. Петрову принадлежит открытие электрической дуги (1802 г.), а Ш.О. Кулону - установление закона о связи силы взаимодействия наэлектризованных тел с «количеством электричества».
В первой половине XIX века устанавливается связь между электрическими и магнитными явлениями, формулируются основные законы для электрических цепей и тем самым закладывается теоретический фундамент для практического освоения явления электромагнетизма, приведшего к созданию во второй половине века электротехнической промышленности. В 1820 году доктор философии Г.Х. Эрстед публикует всего пятистраничный труд «Основы, касающиеся действия электрического конфликта на магнитную стрелку», который произвел сенсацию в мире науки. В этом же году французские ученые Ж.Б. Био и Ф.С. Савар устанавливают количественные зависимости действия электрического тока
11
на магнит, а А. Ампер вводит понятия электрического тока и его направления и находит зависимости взаимодействия двух токов. А. Ампер вводит также понятие электрических явлений, отличных от явлений электростатических, доказывает единство природы электричества и магнетизма, изобретает гальванометр, представляющий собой магнитную стрелку, на которую действует поле проводника с измеряемым током. В 1821 году профессор Берлинского университета Т.И. Зеебек открывает явление термоэлектричества. а другой немецкий физик Г.С. Ом начинает исследования проводимости различных проводников, завершившиеся выходом в свет в 1827 году фундаментального труда «Теоретические исследования электрических цепей», в котором описан закон, носящий ныне его имя и устанавливающий связь величины тока проводника, приложенного напряжения и сопротивления проводника. В 1831 году английский ученый М. Фарадей открывает явление электромагнитной индукции, а уже в 1832 году французами братьями Пикси на основе этого явления была создана электрическая машина- электрогенератор, в 1834 году ученым из Кенигсберга Б.С. Якоби, впоследствии работавшим в России, создан электродвигатель. В 1842 году английский предприниматель Д.С. Вулрич соединил генератор постоянного тока через ременную передачу с паровой машиной и использовал такую установку для питания промышленных гальванических ванн. Этот год по праву может считаться годом рождения электроснабжения промышленных установок. Начинается стремительное развитие теории и практики использования электромагнитных явлений. В 1834-1838 годах физик, будущий президент американской Национальной академии наук Д. Генри, дополняя открытие М. Фарадея, устанавливает явления самоиндукции и взаимной индукции, позднее в 1842 году показывает, что при искровом разряде конденсатора возникают электромагнитные колебания. В 1841 году английский ученый Д. Джоуль открывает закон пропорциональности теплоты, выделяемой проводником с током, квадрату этого тока, повторяя результат 1833 года российского физика Э.Х. Ленца (в настоящее время закон носит имя Джоуля-Ленца). В 1847 году немецким ученым Г.Р. Кирхгофом устанавливаются два основополагающих закона теории электрических цепей, носящие ныне его имя (первый и второй законы Кирхгофа). Конец XIX-начало XX века ознаменовались открытием целого ряда фундаментальных положений в области элек
12
тромагнитных явлений и их математического описания. В 1873 году в «Трактате об электричестве и магнетизме» английского ученого Д.К. Максвелла вводится фундаментальная система уравнений электромагнитного поля (система уравнений Максвелла), обобщающая законы и идеи Ш. Кулона, А. Ампера, М. Фарадея и др. В 1888 году немецкий физик Г. Герц показывает, что искровые разряды, создаваемые специальным прибором - вибратором, могуг быть воспроизведены на расстоянии нескольких метров другим прибором - резонатором, позднее Г. Герц устанавливает, что электромагнитные волны обладают всеми свойствами волн световых. В 1884 году в статье английского физика Д. Пойнтинга «О переносе энергии в электромагнитном поле» вводится понятие потока электромагнитной энергии и доказывается теорема о связи скоростей изменения электрической и магнитной энергии с джоулевым теплом. Еше ранее понятие потока электромагнитной энергии независимо использовали русский физик Н.А. Умов и английский математик и физик О. Хевисайд. Последний предсказал также явление скин-эффекта, обнаруженное позднее Д. Юзом. О. Хевисайда, наряду с американским ученым Ч. Штейнмецом, можно считать основателем специального математического аппарата электротехники: в 90-е годы XIX века первый из них обосновал векторное и операционное исчисление, а второй комплексный (символический) метод расчета характерных для электротехники синусоидальных процессов. В 1911 году голландский физик Г. Камерлинг-Оннес открыл явление сверхпроводимости, существенно расширившее представление об энергетической эффективности использования электромагнетизма.
К числу достижений, оказавших огромное воздействие на культуру и цивилизацию в целом, следует отнести изобретения наших выдающихся соотечественников П.Л. Шиллинга (электрический телеграф - электросвязь, 1828 1832 гг.), П.Н. Яблочкова (электрическая свеча - освещение, 1876 г., позднее в 1879 году американский изобретатель Т. Эдисон усовершенствовал электрическую свечу, практически придав ей вид современной лампы накаливания), А.С. Попова (радио, 1896 г., независимо радиосвязь реализовал и итальянский инженер Г. Маркони), Б.Л. Розинга (система передачи изображения - телевидение, 1911 г.), а также американского профессора А.Г. Белла (телефон, 1876 г.).
В конце XIX века начинается электрификация наиболее рас
13
пространенных в промышленности процессов. Появляется транспорт на электрической тяге: в 1879 году немецким инженером Э.В. Сименсом была построена небольшая электрическая железная дорога, а в 1880 году в России изобретателем Ф.А. Пироцким осуществлен пуск опытной линии электрического трамвая. Практическое использование этих и других достижений в области электромагнетизма потребовало создания системы производства, передачи, распространения, преобразования электрической энергии для электроснабжения городов и промышленных предприятий. Элементом такой системы, производящим электроэнергию, становилась электростанция. Первая электростанция была сооружена в 1873 году на электромашиностроительном заводе французского изобретателя и предпринимателя З.Т. Грамма для нужд заводского освещения, причем се основу составляли генераторы собственного изготовления этого изобретателя. В России первая подобная станция была построена в 1876 году на Сормовском машиностроительном заводе. Важную роль в электроснабжении играет электрический трансформатор, позволяющий преобразовывать величины переменного напряжения и тока. Изобретение трансформатора в 30 40-х годах XIX века связано с именами ряда ученых, в частности венгерских инженеров О. Блати, М. Дери, и К. Зинерновским (см. также ниже), но наиболее совершенную его конструкцию предложил еще в 1848 году немецкий механик Г. Румкорф. По достоинству это изобретение было оценено в 80-е годы XIX века при решении весьма острых споров о рациональности электроснабжения на основе переменных либо постоянных токов. Эти споры известны как «трансформаторные битвы», поскольку именно наличие такого устройства как трансформатор предопределило их окончание и предпочтение переменным токам. Эффективному решению проблемы электроснабжения способствовала и разработка трехфазных электрических систем переменного тока - наиболее распространенных в наши дни. Основоположником этих систем был наш соотечественник М.О. Доливо-Добровольский. В 1889 году им был построен первый трехфазный электродвигатель мощностью 100 Вт и изобретен трехфазный трансформатор, затем были разработаны и другие элементы трехфазной системы - генератор и линия. Следует отметить, что история транспорта электрической энергии на большие расстояния изначально была связана с постоянным током. Теоретические основы создания электропередачи, состоящей из элсктриче-
14
ской машины и линии, включающие оценку ее коэффициента полезного действия (КПД), условий повышения КПД были разработаны в 1880 году независимо французским инженером М. Депре и русским профессором Д.А. Лачиновым. В 1882 году М. Депре осуществляет опытную передачу электроэнергии постоянным током по линии длиной 57 км при напряжении генератора 2400 В и КПД электропередачи 20-22 %, но уже в 1881 году М.О. Доливо-Добровольский демонстрировал на Международной выставке в г. Франкфурт-на-Майне работу трехфазной электропередачи переменного тока с длиной линии 170 км, напряжением 25 100 В и КПД электропередачи до 79 %. Большой вклад в развитие многофазных электрических систем внес югославский инженер Н. Тесла, открывший в 1888 году явление вращающегося магнитного поля и тогда же получивший патенты на создание двухфазных генераторов, двигателей, трансформаторов. Работая над созданием многофазных машин, Н. Тесла изучил и особенности переменного тока высокой частоты, положив начало технике высоких и сверхвысоких частот, в том числе и радиотелемеханике.
В 1879 г. Эдисон поставил перед собой широкую программную задачу разработки мощных систем централизованного электроснабжения со всеми средствами генерации, передачи и распределения электроэнергии, обеспечения надежности питания потребителей и защиты элементов системы. В этой же программе он поставил задачу создания системы стандартизации параметров и размеров ламп, электрических аппаратов, деталей проводки и т.д. С программы Эдисона берет свое начало развитие прикладной науки об электроснабжении. Важная роль в практической реализации электроснабжения отводилась созданию крупных электростанций.
Первой крупной электростанцией общего пользования стала станция, сооруженная Эдисоном в 1882 году в Нью-Йорке, имевшая шесть генераторов общей мощностью 540 кВт и предназначенная для электроснабжения территории около 2 км2. В России элек-тростанция общего пользования впервые была сооружена в Петербурге в 1883 году.
На развитие электроснабжения большое влияние оказал технический переворот в области первичных двигателей электростанций - вместо поршневых паровых машин, КПД которых тогда не превышал 8 %, стали применяться паровые турбины. Первую при
15
годную для этой цели многоступенчатую реактивную турбину создал и запатентовал в 1884 году английский инженер Ч.А. Парсонс. Соединив турбину с генератором, он получил турбогенератор -важнейший агрегат современных электростанций. Впервые такой агрегат мощностью 75 кВт был установлен в Англии в 1888 году, а в России мощностью 630 кВт - в 1904 году в Петербурге.
Для повышения надежности электроснабжения и для взаимного выравнивания нагрузок вскоре началось соединение районных электростанций между собой и включение их на параллельную работу. В результате этого стали возникать энергетические системы, первая из которых сформировалась созданием сети напряжением 33 кВ в 1899 году в Южной Калифорнии. Первая энергосистема в России была создана под руководством Р.Э. Классона на напряжении 20 кВ в 1902 году в Баку.
Электротехника стремительными темпами входила в жизнь общества, коренным образом меняя ее.
В настоящее время современное электромашиностроение и электроснабжение нельзя представить без электронной и преобразовательной техники.
Вентильные и вентильно-индукторные двигатели содержат полупроводниковые элементы, поэтому без современной электроники, особенно без энергетической электроники, невозможно как создание современных электрических машин, так и электроснабжение. В связи с этим рассмотрим историю такой интенсивно развивающейся отрасли науки и техники, как электроника.
Электроника - очень молодая наука. Ее история насчитывает немногим более ста лет. Появление электроники было вызвано потребностями радиотехники. В первом радиоприемнике А.С. Попова в 1895 году использовалось устройство для детектирования (выпрямления) сигналов переменного тока - когерер. По существу это был полупроводниковый прибор, в котором выпрямление происходило на границе окисла и металла. Конечно, теория этих процессов была создана гораздо позже.
В 1904 г. англичанин Джон Флеминг изобрел электронный диод. Но его создание было основано на предшествующих работах Томаса Эдисона, открывшего термоэлектронную эмиссию, и Лодыгина, создавшего лампу накаливания. В 1906 г. Ли де Форест изобрел трехэлектродную электронную лампу (триод) - первый управляемый электронный прибор. В 1921 г. в СССР под руководством
16
Бонч-Бруевича были созданы самые мощные в мире генераторные лампы с водяным охлаждением. Хотелось бы еще более оттенить успехи в электронике следующим.
В 1907 г. в России Борис Розинг разработал телевизионную систему, использующую механическую развертку в передающем устройстве и электронную трубку в приемнике. Его ученик Владимир Кузьмич Зворыкин, эмигрировавший в США, в 1923 г. запатентовал первую в мире передающую электронно-лучевую трубку (иконоскоп), а в 1924 г. - приемную электронно-лучевую трубку (кинескоп). Таким образом, В.К. Зворыкин стал создателем основных элементов электронного телевидения.
В начале 1900-х годов в США Купером Юитом были разработаны стеклянные ртутные выпрямители, ставшие по существу родоначальниками приборов для энергетической электроники. Стеклянные ртутные выпрямители разрабатывались в СССР сразу после октябрьской революции под руководством В.П. Вологдина. Первый металлический ртутный выпрямитель появился в Германии в 1911г. Его создатель — инженер Б. Шеффер. Выпуск металлических ртутных выпрямителей в СССР был начат в 1924 г. под руководством В.К. Крапивина.
В середине 20-х годов начался выпуск первых полупроводниковых выпрямителей - купроксных, выполненных в виде последовательно соединенных медных пластин, покрытых окисью меди. Инженер Лосев открыл явление генерации и усиления на полупроводниковых кристаллах в 1922 г. Развитие полупроводниковой техники сдерживалось из-за отставания теории, а также отсутствия технологий.
Год рождения транзистора - 1948. За это изобретение его создатели Уолтер Браттейн. Джон Бардин и Вильям Шокли были удостоены Нобелевской премии. Этот транзистор был биполярным. Работы по созданию полевого транзистора велись длительное время, но только в 1958 г. польскому ученому Станиславу Тешнеру, работавшему во Франции, удалось создать прибор, пригодный для практического применения.
В 1958 г. фирмой Westinghouse были разработаны тиристоры-мощные полупроводниковые приборы, пришедшие на смену управляемым ртутным выпрямителям и совершившие подлинную революцию в управляемом электроприводе и элсктротехнологии. Достаточно сказать, что ртутный вентиль на 1000 А имел массу
17
300 кг, а тиристор на тот же ток вместе с охладителем — всего 5 кг. В СССР тиристоры начали выпускаться уже в 1961 г. Симметричные тиристоры появились в СССР на несколько месяцев раньше, чем за рубежом.
Под руководством И.В. Грехова в РФ разработаны полупроводниковые генераторы мощных наносекундных импульсов.
90-е годы ознаменовались изобретением Ниидзавой (фирма «Тошиба», Япония) IGBT-транзистора. Появление этого прибора привело к настоящей революции в электроприводе переменного тока и вызвало его бурное развитие.
В 1960-е годы возникла совершенно новая область электроники - опто-электроника. Она позволила создать элементы, позволяющие разделить электрически отдельные части системы, и вместе с тем обеспечить информационную связь между ними.
В 1959 г. Джек Килби и Роберт Нойс изобрели первую цифровую интегральную микросхему. Создание операционных усилителей связано с именем Роберта Видлара, который определил на многие годы структуру аналоговых интегральных микросхем.
Первые микропроцессоры появились в начале 70-х годов. Они были разработаны фирмой Intel под руководством Марчиана Хоффа. Конец XX и начало XXI века - это время расцвета компьютерной техники и широчайшего применения ее во всех областях деятельности человека, в частности, в виде микроконтроллеров в системах управления электроприводов и технологическими процессами.
Большой путь за минувшие сто лет прошла и схемотехника энергетической электроники. Трудно назвать здесь всех инженеров и ученых, внесших основополагающий вклад в ее развитие. Отмстим лишь авторов самых распространенных силовых схем, ставших классическими: Грстца - автора однофазной мостовой схемы и Ларионова и Греша авторов трехфазной мостовой схемы.
Электропривод в России развивался в следующей последовательности. Как было отмечено ранее, трудами академика Б.С. Якоби (1801-1874 гг.) при ближайшем участии академика Э.Х. Ленца был создан первый электродвигатель постоянного тока с вращательным движением (1834-1838 гг.). Этот первый двигатель был применен Б.С. Якоби для приведения в движение катера на реке Неве как привод винта катера («электромагнетической лодки») с гребными колесами. Катер перемещался двигателем мощностью 3/4 лошадиной силы с 12 пассажирами на борту со скоростью около 4 км/ч.
18
Таким образом, родиной первого электродвигателя, а вместе с этим и первого электропривода является Россия.
Упомянутая работа Б.С. Якоби получила мировую известность, и многие работы в области электропривода иностранных электротехников были вариацией или развитием идей Б.С. Якоби.
Однако несовершенство электродвигателя (он имел длину 8 м и высоту 1,25 м), а главное, неэкономичность источника электроэнергии по времени - гальванических батарей, состоящих из 320 гальванических элементов, - явились причиной того, что эти работы Б.С. Якоби не получили практического развития.
Вопросы электрификации механического движения были поставлены лишь спустя значительное время после того, как был создан электромагнитный генератор - экономичный источник для питания электродвигателей. При этом нашел практическое использование принцип обратимости электрических машин, открытый академиком Э.Х. Ленцом в 1833 г. и объединивший пути развития двигателей и генераторов. Примерно к середине второй половины XIX в. конструкции генераторов и двигателей постоянного тока получили формы, весьма близкие к современным. Конец этого периода и последующие годы характеризуются рядом достижений в области электропривода в России. Так, талантливым русским изобретателем А.П. Давыдовым в 1867 г. на плавучей артиллерийской батарее были произведены давшие хорошие результаты испытания системы автоматической стрельбы. Совершенствуя эту систему, А.П. Давыдов создал автоматизированный электропривод в форме синхронно-следящей системы для управления артиллерийским огнем. Система А.П. Давыдова, на много лет опередившая иностранную технику, была установлена на судах «Россия» и «Веста» (1877 г.) и несколько позже - в Выборгской крепости и в Порт-Артуре. К практическим же работам того времени в области электропривода относятся работы выдающегося русского электротехника В.Н. Чиколева (1845 1898 гг.). Им был создан сервопривод швейной машины (1882 г.) и вентилятора (1886). В конце XIX и в начале XX в. одиночный привод постоянного тока получил некоторое распространение в трамвайном транспорте и на морских судах. Из числа последних можно отметить электропривод зарядников для подъема боезарядов, установленный на эскадренном броненосце «Сисой Великий» (1890-1894 гг.), первый рулевой электропривод на броненосце «12 Апостолов» (1892 г.), первую отечественную электролебедку для подъема грузов на
19
транспорте «Европа» (1897 г.), а также электровентиляторы на крейсерах «Лейтенант Ильин», «Адмирал Корнилов», «Адмирал Нахимов». Указанные достижения в разработке электроприводов для отдельных механизмов были лишь развитием частных, ограниченных задач и не затрагивали основного вопроса вытеснения из производства парового привода с присущей ему механической системой распределения энергии. Революционный вклад в развитие электротехники внес МО. Доливо-Добровольский, о котором было уже сказано. Огромный шаг в этом направлении сделал крупнейший русский электротехник того времени Д.А. Лачинов (1842-1902 гг.) в труде «Электромеханическая работа», опубликованном в 1880 г. в журнале «Электричество». В этой статье впервые были изложены результаты исследования важных вопросов теории электропривода. Им дано выражение для механической характеристики двигателя постоянного тока с последовательным возбуждением, рассмотрены условия питания двигателя от генератора и представлена классификация электрических машин по способу возбуждения.
Этот выдающийся труд Д.А. Лачинова заложил первые основы науки об электроприводе - теории электропривода (ТЭП).
Профессора Петербургского электротехнического института П.Д. Вайнаровский, В.В. Дмитриев в 1900-1903 гг. выпустили учебное пособие по курсу «Электрическая передача и распределение механической энергии», а в 1915 г. В.В. Дмитриев издал книгу «Электрическое распределение электрической энергии на фабриках и заводах».
Позднее ТЭП была доведена до современного состояния трудами российских ученых (С.Л. Ринкевича, Р.Л. Аронова, Д.П. Морозова, А.Т. Голована, Е.К. Попова, В.П. Андреева, Ю.А. Сабинина, А.С. Сандлера, М.Г. Чиликина, А.В. Башарина, В.И. Ключева, Н.Ф. Ильинского и др.), что дает основание вести историю науки об электроприводе с даты опубликования работы Д.А. Лачинова. т.е. с 1880 г.
Последнее двадцатилетие XIX века было периодом зарождения и некоторого развития электропривода постоянного тока.
В этот период А.В. Шубиным был разработан первый в России электропривод по системе генератор двигатель для рулевого устройства морского судна, установленный в дальнейшем на броненосцах «Князь Суворов», «Слава» и др.
ТЭП изучает и систематизирует данные исследований сложно-
го
го технического объекта, составляющего силовую основу всей промышленности и имеющего важное экономическое значение. В этом объекте синтезируются в единое целое достижения базовых для электропривода областей науки и техники - электротехники, электромашиностроения, электроаппаратостроения, преобразовательной, электронной, вычислительной техники и теории автоматического управления. Первым систематизированным и фундаментальным трудом, в котором с большой полнотой рассматривались вопросы теории электропривода, была изданная в 1925 г. книга С.Л. Ринкевича «Электрическое распределение механической энергии». Дальнейшее развитие теория электрического привода получила в трудах отечественных ученых В.К. Попова, А.Т. Голована, Д.П. Морозова, М.Г. Чиликина, В.С. Кулебакина, В.П. Андреева, Ю.А. Сабинина, А.В. Башарина, Н.П. Петрова и др.
В 1922 г. в Петроградском электротехническом институте (ЛЭТИ им. В.В. Ульянова (Ленина)) была создана первая в нашей стране кафедра электропривода, которая начала подготовку инженеров по электрификации промышленности и промышленному использованию электроприводов. Организатором кафедры был профессор С.А. Ринкевич (1886-1955 гг.).
В 1929 г. в Ленинградском политехническом институте аналогичную кафедру создал профессор В.К. Попов (1895-1948 гг.). В 1930 г. в Московском энергетическом институте кафедра электропривода была организована профессором Д.П. Морозовым.
Современные сложные электромеханические системы оснащены уникальными системами управления. В связи с этим дадим краткую информацию о развитии теоретических основ управления.
Основополагающие подходы к проблеме и методологии теории управления намечены в трех фундаментальных работах: Дж. Максвелла «О регуляторах» (1866 г.) и И.А. Вышнеградского «Об общей теории регуляторов» (1876 г.) и «О регуляторах прямого действия» (1877 г.). Кстати, следует отметить вклад в теорию управления Раусса (1877 г.) и Гурвица (1895 г.), разработавших алгебраические критерии устойчивости, а также А. Стодола, исследовавшего систему непрямого регулирования (1893 г.).
Выдающимися исследованиями в теории управления являются работы А.М. Ляпунова «Общая задача об устойчивости движения» (1892 г.) и Н.Е. Жуковского «Теория регулирования хода машин» (1909 г.).
21
К началу XX в. и в первые его десятилетия теория автоматического регулирования формируется как общая дисциплина с рядом прикладных разделов, таких, как регулирование электрических машин и систем - X. Тома (1914 г.), Р. Жюильяр (1933 г.), В.С. Куле-бякин (1926 г.), С.А. Лебедев и П.С. Жданов (1932 г.), Н.М. Крылов и Н.Н. Боголюбов (1932 г.); регулирование двигателей — М. Толле (1905 г.), У. Тринке (1919 г.), Г. Вюнш (1930 г.), Ю.Г. Корнилов и В.Д. Пивень (30-е годы), управление различными процессами — В. Оппельт (1939 г.), А.А. Андронов и его школа.
В эти годы интенсивное развитие получили частотные методы X. Найквиста (1932 г.), А.В. Михайлова (1938 г.).
Даже для краткой информации о последующих достижениях в области теории автоматического управления потребовалось бы несколько печатных листов. Эта информация общеизвестна, ограничимся приведенным.
Такого бума, как в развитии нечетких методов, нечеткой логики, не наблюдалось со времен развития теории автоматического управления в послевоенные годы.
Впервые в 1965 г. профессор Лотфи Заде из университета в Беркли (США) издал статью «Нечеткие множества». В этой работе Л. Заде утверждал, что очень большое количество множеств в мире, который окружает нас, определяются нечеткой границей. Поэтому вместо обычной двузначной логики, принимающей только два дискретных значения 0 и 1, необходимо использовать многозначную, непрерывную логику: принадлежность или непринадлежность некоторого элемента множеству определяется значением в пределах от 0 до 1. Таким образом, логические переменные могут принимать значения не только «Истина» или «Ложь», но «скорее Истина, чем Ложь», «Может быть», «Вероятнее всего» и подобные, т.е. между значениями «Истина» и «Ложь» выполняется постепенный переход. Далее в следующих работах Л. Заде ввел понятие лингвистической переменной, определил возможность использования фаззи-логики при формировании приближенных логических выводов.
Первое применение фаззи-логики в системах автоматического управления было выполнено американским ученым Мамдани в 1974-1976 гг., а промышленное применение нечеткой логики было осуществлено в Дании в 1979 г. для управления печью на цементном заводе. После этого начался настоящий бум научных публикаций и использования в промышленности систем с нечеткой логи
22
кой. Уже к 1993 г. было опубликовано более 30 000 работ по данной тематике! Создано несколько ассоциаций и научных обществ по нечетким системам (BISC в США, ELITE - в Европе), издается специальный журнал «Нечеткие множества и системы», состоялись международные конференции и т.д.
Промышленное применение охватывает практически все отрасли. Известны нечеткие системы для управления кондиционерами, управления электроприводами поездов метро, лифтами, кранами, электроприводами сборочных и сварочных роботов, установками для очистки воды, автомобильных трансмиссий, ядерных реакторов и т.п.
Отечественная электротехника XX века и ее роль в развитии страны
История XX века - века электричества — выявила жесткую связь между уровнем жизни, эффективностью производства, развитием экономики страны и ее электрификацией. Отечественная история в этом отношении - богата и поучительна. На рубеже XIX и XX веков Россия по перечисленным показателям являет собой пример страны отсталой, слабо электрифицированной (в 1913 году в ней было около 100 км воздушных сетей напряжением более 10 000 В), со слаборазвитой электротехнической промышленностью, к тому же на 70 % контролируемой иностранным капиталом. Во второй половине XX века наша страна - экономически мощная держава с передовой промышленностью (электротехнической промышленностью, в частности) и достаточно высоким уровнем жизни населения. Она занимает второе место в мире (после США) по выработке электроэнергии, имеет передовую организацию электроснабжения - единую электроэнергетическую систему (ЕЭС) с центральным диспетчерским управлением (ЦДУ), гигантскую протяженность высоковольтных сетей (в 1970 году протяженность сетей только напряжением ПО 000 В и выше достигала 270 тыс. км). Опыт электрификации страны, давший столь впечатляющий эффект в ее развитии, впоследствии заимствовался разными странами и не только из числа развивающихся стран. В основе электротехнических успехов страны не только и не столько достижения отдельных выдающихся ученых и инженеров-электротехников, сколько консолидированные усилия их больших творческих кол
23
лективов, реализующих или разрабатывающих научные идеи, зачастую сформулированные еще в XIX веке, а также адекватная интересам страны организация и поддержка таких коллективов со стороны государства. Анализ этого опыта заставляет обратить внимание на предысторию и предпосылки столь бурного развития электротехники России в XX веке.
В 1880 году по инициативе выдающихся ответственных электротехников - ученых и инженеров Д.А. Лачинова, А.Н. Лодыгина, О.Д. Хвольсона, В.Н. Чиколева, П.Н. Яблочкова и др. в составе Императорского Русского технического общества создается новый Электротехнический отдел. Этот отдел - первое объединение представителей электротехнической мысли России, в его состав входили такие видные деятели науки и техники, как А. В. Винтер, Б.Е. Веденеев, Г.О. Графтио, В.В. Дмитриев, М.О. Доливо-Добро-вольский, С.Я. Жук, Р.Э. Классон, Г.Ф. Макарьев, А.С. Попов, М.А. Шателен. В феврале 1880 года на втором заседании этого общества В.Н. Чиколев внес предложение об издании специального электротехнического журнала, и уже в июле этого года вышел первый номер журнала «Электричество» - старейшего русского научно-практического журнала. Создание общества специалистов-электротехников со своим печатным органом - одна из предпосылок последующего быстрого развития электротехники. Другая предпосылка - начатая во время Александра III по инициативе С.Ю. Витте реализация двух стратегических проектов - транспортного, в первую очередь связанного со строительством Транссибирской железной дороги, и военно-морского, давших на долгие годы импульс общему подъему промышленности, в особенности, тяжелой, а также инженерному делу, в том числе в области электротехники. Третья предпосылка - развертывание массового электротехнического образования. Пионерами такого образования были Московское высшее техническое училище и открытые на рубеже XIX и XX веков но инициативе С.Ю. Витте в С.-Петербурге Политехнический и Электротехнический институты. Особо следует отметить зарождение в 1904 1905 гг. благодаря двум выдающимся ученым К.А. Кругу (МВТУ) и В.Ф. Миткевичу (Политехнический институт) новой дисциплины - «Теоретические основы электротехники» (ТОЭ), придавшей отечественному электротехническому образованию фундаментальный характер.
Для России XX век начался с тяжелых потрясений: двух рево-
24
люпий. русско-японской, Первой мировой и Гражданской войн. В подъеме страны огромную роль сыграл План государственной электрификации России (ГОЭРЛО) - первый в истории человечества план коренного повышения благосостояния народа и уровня экономики страны, имевший в своей основе сознательное увеличение роли технического использования наиболее организованной материи - электромагнитного поля. Планом предусматривалось строительство электростанций и электрических сетей, скоординированное с развертыванием промышленности, с освоением перспективных источников энергоресурсов и направлений движения товаров и т.д. Для разработки Плана ГОЭРЛО в 1920 году под председательством выдающегося ученого и государственного деятеля Г.М. Кржижановского была создана специальная комиссия, в которую вошли такие видные специалисты в области электротехники. как А.В. Винтер, А.А. Горев, Г.О. Графтио, К.А. Круг, В.Ф. Миткевич, А.А. Смуров, М.А. Шателен. За 15 лет План был перевыполнен, и наша страна по выработке электроэнергии в 1935 году заняла второе место в Европе и третье в мире. Получив столь мощный импульс, электроэнергетическое хозяйство страны непрерывно развивалось и интегрировалось. Создавались новые электростанции, электрические сети, появлялись электроэнергетические системы. Первые Московская и Петроградская энергосистемы были созданы в 1921 году, в 30-е годы начался процесс объединения энергосистемы Центра с энергосистемами Средней Волги, Урала и Предуралья, чем было положено начало формирования Единой электроэнергетической системы (ЕЭС) Европейской части страны. Соответственно интегрировались и службы диспетчерского управления энергосистемами, в результате чего было образовано Центральное диспетчерское управление (ЦДУ). Созданная электроэнергетическая система с ЦДУ отличалась столь высокой надежностью, что за все время ее эксплуатации в ней практически не было крупных системных аварий, столь характерных для энергосистем Северной Америки. В момент написания этих строк, в августе 2003 года, очередная такая авария оставила без электроэнергии два крупнейших мегаполиса Северной Америки - Нью-Йорк и Торонто - ситуация для России немыслимая, по крайней мере в веке ХХ-м.
Оценим эффект электрификации. В социальной области электрическое освещение («лампочка Ильича») удвоило суточную норму деятельности человека, увеличив время для культурного досуга,
25
образования, в производственной области освещение позволило организовать при необходимости круглосуточную работу; электрификация улучшила комфортность жилища (отопление, бытовая электротехника), дала возможность пользования современными средствами связи (телефон, телеграф) и информации (радио, телевидение), электротранспорт (метро, трамвай, троллейбус, электропоезда) предоставил возможность выбора места работы, не столь жестко связанного с местом проживания, попутно разрешив экологическую проблему городов, электропривод качественно изменил облик города (лифты дали возможность строительства высоких зданий) и производства (конвейеры, станки). Электротехнологии, приборостроение, компьютеры, системы управления и связи, космические, транспортные и медицинские электротехнологии и т.д. -все эти достижения электротехники в нашей стране возникли в результате проведения ее ускоренной электрификации. Высокое развитие получила электротехническая промышленность, электромашиностроение. Электрификация способствовала и интенсивному развитию тяжелой промышленности, специального машиностроения, авиационной и судостроительной промышленности и, в конечном итоге, подготовке страны к новому испытанию — Великой Отечественной войне. Заметим, что заложенный в предвоенные годы научно-технический и кадровый потенциал был столь высок, что нанесенные войной тяжелые разрушения энергетике были ликвидированы в кратчайшие сроки, и в 1947 году страна вышла на первое место в Европе по производству электроэнергии. Отметим персональный вклад отечественных ученых и специалистов в развитие электротехники XX века.
В исследования электромагнитных процессов в веществе и динамики заряженных частиц большой вклад внесли П.А. Флоренский, А.Ф. Иоффе, В.А. Фок, Н.Н. Семенов, Ю.Н. Вершинин, И.В. Курчатов, Я.И. Френкель, Л.П. Александров, ГА. Месяц, Н.С. Лидоренко, А.Н. Лагарьков, И.В. Грехов, Г.С. Кучинский (физические процессы в диэлектриках, полупроводниках, многофазных средах, теория пробоя, электронная эмиссия, синтез электротехнических материалов с заданными свойствами), В.К. Аркадьев, Л.Р. Нейман, П.Л. Калантаров (физические процессы в ферромагнитных материалах), Л.Д. Ландау, В.Л. Гинзбург, Л.П. Горьков, А.А. Абрикосов, В.А. Альтов, В.В. Сычев, Н.А. Черноплеков (явление сверхпроводимости, от
26
крытое в 1911 г. Г. Камерлинг-Оннесом (Голландия)), В.И. Попков, Н.Н. Тиходеев, Г.Н. Александров, А.С. Коротеев (динамика заряженных частиц).
В разработку теоретических основ электротехники и электрофизики большой вклад внесли В.Ф. Миткевич, К.А. Круг, И.Е. Тамм. Я.И. Френкель, К.М. Поливанов, Л.Р. Нейман, К С. Демирчян, О.В. Тозони, Э.А. Меерович. Ф.Т. Рутберг, В.А. Глухих, Г.А. Шнеер-сон, А.Н. Диденко, В.Г. Миронов, в изучение импульсных генераторов - Е.П. Велихов, в области электромеханики - Г.Н. Петров, М П. Костенко, Л.М. Пиотровский, А.И. Вольдек, А.И. Важнов, Е.Я. Казовский, П.С. Сергеев, А.Е. Алексеев, А.А. Горев, И.А. Глебов, И.П. Копылов, И.А. Сыромятников, Н.С. Сиунов, Д.А. Бут, Г.А. Сипайлов, И.Н. Орлов, К.И. Шенфер, А.Г. Иосифьян, В.И. Радин, Я.Б. Данилевич, В.Я. Беспалов, В.А. Кузнецов и др., в области электропривода - С.Н. Ринкевич, Р.Л. Аронов, Д.П. Морозов, А.Т. Голован, Е.К. Попов, В.П. Андреев, Ю.А. Сабинин, А.С. Санд-лер, М.Г. Чиликин, Д.А. Завалишин, А.В. Башарин, В.И. Ключев, В.В. Рудаков, Н.Ф. Ильинский, И.И. Петров, В.А. Шубенко, О.В. Слежановский, М.Г. Юньков, Н.Н. Дружинин, А.С. Филатов, С.А. Ковчин, В.М. Терехов, Ю.А. Борцов, В.А. Кучумов, В.П. Феоктистов, Б.Н. Авилов-Карнаухов, С.В. Хватов, С.Н. Вешеневский и др.
Выдающееся значение для мировой науки имеют работы и многих других отечественных специалистов-электротехников, в том числе в таких областях, как электротехнология, транспортная и космическая электротехника, светотехника, техника высоких напряжений, промышленная электротехника и др.
По всем названным выше направлениям электротехники отечественные достижения науки и практики во второй половине XX века отвечали мировому уровню, а по некоторым превосходили его.
Проблемы и перспективы развития электротехники в XXI веке
В начале 70-х годов прошлого века Римским клубом были выдвинуты два положения - о грядущих ресурсном и экологическом кризисах и о зависимости качества жизни от эффективности энергопотребления. Использование этих положений позволяет лучше понять проблемы и перспективы электротехники, особенно в областях, связанных с производством и потреблением электроэнер
27
гии, а также оценить социальные последствия принимаемых в этих областях решений.
В начале XXI века три четверти электроэнергии в мире вырабатывается на тепловых и атомных электростанциях (ТЭС и АЭС) путем сжигания органических или ядерных видов топлива с последующим преобразованием тепла сначала в механическую работу, а затем в электроэнергию. Прогнозируется, что подобная картина сохранится ближайшие несколько десятилетий, но соотношение мощностей ТЭС и АЭС, а также структура топлив ТЭС кардинально изменится. Это связано с тем, что разведанных запасов нефти и газа, являющихся основными видами топлива в современной электроэнергетике, хватит не более чем на 70 лет (в России до 2020 года будет отработано 4/5 запасов действующих месторождений нефти и газа), но еще раньше они могут быть выведены в стратегический или военный резерв. Во внутреннем энергопотреблении России особенно важна доля газа (более половины) и проблема ее снижения вышла на уровень проблемы обеспечения энергетической безопасности страны. Согласно принятой Энергетической стратегии Российской Федерации до 2020 года ТЭС будут постепенно переводиться на уголь, запасов которого предположительно может хватить на столетия. Одновременно планируется увеличение производства электроэнергии на АЭС, запасы ядерного топлива для которых полагаются неограниченными. В более долгосрочной перспективе рассматривается и возрастание доли электроэнергии, производимой на основе возобновляемых источников энергии (см. ниже). Реализация этой стратегии сопряжена с рядом трудностей. Во-первых, угольная и ядерная технологии производства электроэнергии почти в три раза по требуемым инвестициям дороже газовой технологии. Во-вторых, реализация ядерной технологии связана с проблемой утилизации отработанного ядерного топлива, а также рисками крупномасштабных аварий и террористических актов на АЭС. В-третьих, переход от экологически достаточно чистой газовой технологии к угольной технологии выработки электроэнергии чреват для России, располагающей в основном низкосортными углями, решением серьезной экологической проблемы. Суть ее заключается в том, что общественное мнение связывает наблюдаемое в наши дни глобальное потепление, носящее возможно долгопериодический характер, с выбросами в атмосферу тепловыми и атомными электростанциями различных веществ. Согласно рамоч
28
ной Конвенции по климату (Рио-де-Жанейро, 1992 г.) и принятому на ее основе Киотскому протоколу (1997 г.) такие выбросы должны сокращаться под угрозой применения к странам-нарушителям больших штрафных санкций. Отсюда следует, что на рынке оборудования для АЭС и ТЭС скоро окажутся только изделия, удовлетворяющие как высоким энергетическим требованиям, так и жестким экологическим ограничениям. Производство таких изделий будет по силам только фирмам, обладающим самыми высокими технологиями, в их числе российских фирм может не оказаться. Менее тревожна ситуация с АЭС, поскольку в последние пятнадцать лет в Европе и США они практически не строились, и наши разработки, например, реакторы на быстрых нейтронах (РБН) рассматриваются как перспективные. Иное дело ТЭС. Общая стагнация научно-технических разработок в России в упомянутые годы обусловила существенное отставание в параметрах (даже в КПД) отечественного оборудования для производства электроэнергии на ТЭС от зарубежных аналогов. Выход специалисты видят в обращении к конверсионным технологиям, в частности к газотурбинным установкам (ГТУ), которые уже полвека успешно используются в авиационном двигателестроении.
Надвигающиеся ресурсный и экологический кризисы обуславливают повышение внимания к использованию для генерации электроэнергии возобновляемых источников энергии (ВИЭ): гидравлической энергии (потенциальной и кинетической энергии воды), энергии морских волн, течений, приливов и отливов, солнечной, ветровой энергии, энергии биомассы (дрова, торф, бытовые отходы и т.д.), выделяемой при ее сжигании, геотермальной энергии (тепловой энергии ядра Земли, доставляемой в ее верхние слои горячими источниками воды, парогазовых смесей) и т.д. В начале XXI века доля выработки электроэнергии с помощью ВИЭ не превышает 1/20 общего объема ее генерации, но уже в первое десятилетие второй половины этого века она может достичь одной трети. Наиболее освоена генерация электроэнергии с помощью гидравлической энергии на ГЭС, малых ГЭС и микроГЭС (ГЭС - гидроэлектростанция с мощностью более 30-106 Вт, малая ГЭС - менее 30-106 Вт, микроГЭС - менее 100-103 Вт). Стоимость генерации электроэнергии на ГЭС весьма низка, но сооружение ГЭС связано с большими капитальными, временными затратами и экологическими воздействиями, а поэтому генерация электроэнергии с использованием ГЭС
29
обычно рассматривается отдельно от ее генерации с использованием других ВИЭ. Доля же генерации электроэнергии с использованием малых и микро ГЭС в мире непрерывно возрастает (исключение - Россия, где за последние полвека их число было сокращено более чем в 15 раз и только с рубежа XX и XXI веков началось восстановление и строительство новых малых и микроГЭС). Лидер в этой области Китай, где в первом десятилетии нового века должно быть построено более 40 000 таких электростанций. Динамично развивается производство фотоэлектрического преобразования. Наблюдается ежегодный 30%-ный прирост мощности с единицы площади фотоэлектрических преобразователей. Лидируют в этой области Япония, США, Израиль - страны с гораздо большей, чем в России, солнечной активностью, что. однако, не объясняет более чем 100-кратное наше отставание от перечисленных стран в генерации электроэнергии с использованием энергии солнца. Еще более заметно наше отставание - в 1 000 раз - от страны - лидера в области генерации электроэнергии на ветроэлектрических станциях (ВЭС) - Германии. В области генерации электроэнергии на геотермальных электростанциях (ГеоЭС) наше отставание от страны-лидера - США почти 100-кратное. Следует отметить, что высокой доле ВИЭ в генерации электроэнергии в ряде стран способствует государственная поддержка. Так, в Германии реализуется программа «100 тысяч фотоэлектрических крыш» и финансовая политика способствует ее реализации. В Японии и США планируется установка 1 млн. таких крыш. Подобные программы не столько решают сиюминутные проблемы энергетики, сколько ориентированы на будущее, формируя экологическое мышление населения. А крыш промышленных предприятий, часто весьма неэстетичного вида, и в России очень много. Производство электроэнергии с использованием ВИЭ - большой резерв и для электроснабжения России, особенно для ее удаленных (Крайний Север, Дальний Восток, Сибирь), а также энергонапряженных районов. Подобное производство выгодно отличает экологическая чистота и неисчерпаемость источников. Однако увеличение генерации электроэнергии с использованием ВИЭ сопряжено с относительно высокой стоимостью такой генерации (особенно с использованием энергии Солнца) и ее зависимостью от природных факторов (напора воды, интенсивности солнечного излучения, скорости ветра и т.д.). Последнее обстоятельство ставит перед электротехникой задачи поиска путей повышения
30
эффективности такой генерации электроэнергии, разработки методов ее аккумулирования для поддержания стабильности отпуска, создания комплексов производства электроэнергии на базе комбинированных источников, разработки вторичных преобразователей энергии, осуществляющих, например, стабилизацию электроэнергии по частоте и амплитуде.
Таким образом, важной задачей отечественной электротехники становится научно-техническое обеспечение перехода на более экономичную и экологичную генерацию электроэнергии, использующую иную, чем в настоящее время, структуру потребления энергоресурсов (снижение доли нефти и газа с увеличением долей угля, ядерного топлива, ВИЭ). Сложность такого перехода усугубляется двумя обстоятельствами - выработкой проектного ресурса генерирующих мощностей электростанций (в 2000 году - 1/5, в 2020 году уже 9/10 мощностей выработают такой ресурс) и начавшимся реформированием электроэнергетики. Первое обстоятельство требует от электротехники решения вопросов продления срока службы электротехнического оборудования при одновременном обеспечении надежности и качества отпуска электроэнергии. Важная роль в решении этих вопросов отводится контролю качества электроэнергии и его метрологическому обеспечению, а также диагностике электрооборудования, в том числе под нагрузкой в режиме реального времени. Рассмотрим подробнее второе обстоятельство. 11 июля 2001 года было принято Постановление Правительства РФ № 526, запустившее механизм формирования рыночных отношений в электроэнергетике. Мировая практика рыночной торговли электроэнергией еще весьма мала (порядка 10 лет) и ранее затрагивала страны и регионы с избытком мощностей ее выработки (Норвегия, Англия, Калифорния, Пенсильвания и ряд других штатов США). Опыт ведения рынка электроэнергии неоднозначен. Настораживает в нем, в частности, имевшие место нарушения стабильности электроснабжения (яркий пример веерные отключения в Калифорнии в 2000 году), снижение инвестиций в развитие электрических сетей, повышение розничных цен на электроэнергию. В России — стране с самой большой в мире электроэнергетической системой - ЕЭС, обладающей сложной организацией управления ее режимами и развитием, одновременное проведение модернизации источников и реформирования отношений собственности будет успешным лишь при условии исключительной согласованности и от-
31
ветственности всех принимаемых решений. Важной задачей, стоящей перед электротехнической наукой и направленной на обеспечение надежного электроснабжения в рассматриваемом переходном периоде, будет поиск компромиссов. Этот период характеризуется несовпадением интересов собственников объектов электроэнергетики в сфере управления режимами работы систем, планирования ремонтов, модернизации и замены электрооборудования. Поиск компромиссов должен вестись в направлении выбора наиболее адекватной новым экономическим реалиям иерархии и принципов управления электроэнергетическими системами. Неопределенность планов реорганизации электроэнергетики, в частности, касающейся будущей интеграции отдельных электроэнергетических систем, управления их развитием и интересов конкретных собственников затрудняют прогнозирование развития транспорта электроэнергии. Специалистами прорабатываются лишь вопросы эффективности усиления связей между отдельными электроэнергетическими системами (Северо-Запад, Центр, Северный Кавказ, Средняя Волга, Урал, Сибирь, Восток), реализация же этих новых связей носит лишь вероятный характер, поскольку зависит от слишком многих обстоятельств, в том числе от строительства ТЭЦ, АЭС, ГЭС в этих системах, желания собственников интегрировать последние и т.д. Более конкретный прогноз можно сделать о перспективных конструкциях воздушных линий электропередач (ВЛ). Требование сбережения ресурсов как материальных, энергетических, так и природных (сокращение отчуждаемых под ВЛ площадей, снижение объемов вырубки лесов при их строительстве и т.д.) определяет изменения конструкций опор ВЛ, в том числе востребованными окажутся опоры для «компактных» ЛЭП, высокие опоры для прохождения ВЛ над лесными массивами и т.д.
Рассмотрение вопросов потребления электроэнергии предварим сведениями по эффективности использования энергии вообще. Россия в настоящее время по душевому потреблению энергии вполне сопоставима с такими странами, как Германия, Франция, Япония, но по приходящемуся на человека валовому внутреннему продукту (ВВП) мы отстаем от каждой из этих стран более чем на порядок. Подобной «энергоэффективности», определяющей соответствующее качество жизни в нашей стране, мы «достигли» в основном в последние пятнадцать лет, снизив душевую выработку ВВП в разы. Даже учитывая более тяжелые климатические условия
32
России, гораздо большую площадь занимаемой ей территории, подобное отставание в энергоэффективности от передовых стран недопустимо. Поэтому одним из направлений энергетической стратегии России выбрано повышение энергоэффективности.
Реализация этого направления энергетической стратегии позволит России достичь в конце первой четверти XXI века того уровня энергоэффективности, который был в стране в 1990 году. Применительно к электротехнике эта реализация потребует вначале проведения всестороннего аудита расхода электроэнергии, когда востребованными окажутся разработки систем мониторинга качества электроэнергии и метрологического обеспечения этого мониторинга, системы диагностики под нагрузкой самих электротехнических установок и их элементов. Далее - проведение в жизнь мероприятий по снижению потерь электроэнергии за счет управления ее качеством, потоками, режимами систем, модернизации электроустановок, повышающей их КПД и т.д. Большое значение будет иметь ориентация на высокие технологии, например, на промышленное использование в генерации, передачи, распределении и преобразовании электроэнергии явления сверхпроводимости. В настоящее время в России сверхпроводимость, в том числе «теплая», применяется в основном в опытных и исследовательских, но не в промышленных электроустановках. По оценкам Всемирного банка объем продаж сверхпроводникового оборудования с 2000 по 2020 год возрасте! в 100 раз и составит почти 250 млрд, долларов. Лидер продаж этого оборудования - США. В прошлом наша страна занимала лидирующие позиции в области разработки сверхпроводникового электротехнического оборудования и создала, в частности, в 1979 году первый в мире электрогенератор мощностью 20-106 Вт. Важно не растерять накопленный кадровый, научный и производственный потенциал в этой области и правильно оценить ее возможности хотя бы в области снижения потерь электроэнергии (сейчас на отечественных электростанциях только треть первичной энергии переходит в электрическую энергию, на передаче электроэнергии теряется почти пятая ее часть). Большой резерв повышения энергоэффективности заложен в возможности использования новых приборов силовой электроники - одной из наиболее динамично развивающихся областей электротехники. Сейчас параметры ЭТИХ приборов (рабочее напряжение до 10 000 В, рабочий ток больше 5000 А, а в импульсе до 300 000 А, время включения - де
2 Зак. Л 86
33
сятки наносекунд, а у импульсных приборов - десятки пикосекунд, рабочие частоты до мегагерц) таковы, что диапазон их применения может быть существенно расширен. Поскольку в настоящее время высока доля электромеханического преобразования энергии, то эти приборы должны быстрее внедряться в машиновентильные системы, в частности, электроприводы, что даст заметный эффект энергоэффективности.
Приоритетным направлением является разработка высокопроизводительных, компактных и экономичных систем электропривода. Рост степени интеграции цифровых элементов систем управления (СУ) сделали необратимой массовую замену аналоговых СУ на системы прямого цифрового управления. В пределе встроенные СУ интегрируются вместе с силовыми преобразователями и исполнительными двигателями в одно целое — механотронный модуль движения.
В массовом электроприводе (ЭП) благодаря ожидаемому резкому удешевлению вентильных статических преобразователей значительно увеличится доля асинхронных частотно-регулируемых ЭП.
Для рабочих механизмов, требующих точного движения, на смену ЭП постоянного тока придут ЭП с синхронными электродвигателями с возбуждением от постоянных магнитов и синхронными реактивными двигателями, в том числе нетрадиционных решений, например, с независимым возбуждением.
Приводом следующего века, по прогнозам большого числа специалистов, станет привод на основе вентильно-индукторного двигателя. Двигатели этого типа просты в изготовлении, технологичны, а, следовательно, дешевы.
Они имеют пассивный ферромагнитный ротор, не содержащий обмоток. Вместе с тем их высокие потребительские качества могут быть обеспечены только при применении мощной микропроцессорной СУ в сочетании с современной силовой электроникой.
Рост вычислительных возможностей встроенных СУЭП сопровождается расширением их функций: решением задач АСУ ТП, диагностированием, повышением надежности, оптимизации режимов и т.д. Перспективные СУЭП разрабатываются с ориентацией на комплексную автоматизацию технологических процессов и согласованную работу нескольких ЭП.
Основные затраты при разработке СУЭП приходятся не на создание аппаратной части, а на разработку алгоритмического и
34
программного обеспечения. Это приводит к увеличению роли специалистов в области теории прямого цифрового управления электроприводами и смежных дисциплин.
В связи с возрастающей степенью сложности электромеханических устройств огромное значение будет иметь и скорейшее внедрение информационных и компьютерных технологий в проектирование, конструирование, производство, эксплуатацию электроустановок.
Рассмотрим теперь тенденции в изменении с труктуры потребления электроэнергии. В США и развитых странах Европы доля бытового электро потребления составляет около трети от общего электропотребления, в России эта доля сейчас меньше одной десятой. На структуру бытового электропотребления накладывают отпечаток климатические особенности страны — у нас массовое использование электронагревательных приборов, в южных штатах США -кондиционеров. Но все же наша структура электропотребления не современна и будет претерпевать изменения, в частности, за счет увеличения электровооруженности кухонь и жилых помещений (кухонные комбайны, посудомоечные машины, кондиционеры и т.д.), соответственно общая доля бытового электропотребления тоже будет меняться в сторону увеличения. Ожидаемые экологический и ресурсный кризисы обусловливают увеличение в структуре электропотребления расходов энергии на электротехнологии. Одна из проблем здесь - утилизация все возрастающей массы бытовых отходов. Перспективный путь ее решения - обращение с ними как с ВИЭ для решения и экологической, и энергетической проблемы. Энергетический потенциал здесь достаточно велик - в России начала XXI века житель делает около 1 м3 или около 250 кг бытовых отходов в год, что эквивалентно 50 кг угля. Генерация энергии (электрической и тепловой) на основе этого низкокалорийного топлива - достаточно непростая в технологическом отношении задача ввиду сложности морфологического состава отходов. Твердые бытовые отходы могут сжигаться в специальных энергетических установках, другая часть отходов вначале размещается на полигонах, где путем метанового брожения дает биогаз, состоящий на 50-80 % из метана, который потом сжигается в энергоустановках. Разработка энергокомплексов, работающих на основе этих ВИЭ, - насущная и весьма сложная задача современности. Перспективно использование в этих комплексах комбинированных энергоресурсов, например, биогаза и ветровой
2*
35
энергии. Другая решаемая с помощью электротехнологий проблема - обеззараживание питьевых, сточных и оборотных вод. К середине XXI века чистая вода будет рассматриваться как стратегический товар в силу ее дефицита и поэтому названная проблема станет одной из самых актуальных. Общее ухудшение экологической обстановки и снижение ресурсов требует и существенного вмешательства в биотехнологические процессы - все более востребованным будет использование электротехнологий для обеззараживания продуктов, дезинфекции зерна, управления сроками прорастания семян и т.д.
Приведенный выше анализ современной ситуации показывает необходимость непрерывного роста расхода энергии, электроэнергии в частности, для обеспечения жизнедеятельности одного человека в условиях нарастания ресурсного и экологического кризисов (говорят и о «ресурсной и экологической катастрофах»). Этот душевой расход энергии иногда называют «энергетической ценой выживания», отсюда берет основание и происхождение теории «золотого миллиарда человечества», который реально может быть в будущем обеспечен необходимой энергией и ресурсами.
В XXI веке, несомненно, будут развиваться все традиционные области электротехники XX века, а также некоторые специальные области - микроэлектротехника, космическая электротехника (генерация электроэнергии в космосе, в том числе на основе солнечной энергии, электроактивное движение космических аппаратов, электромеханические системы, включая роботов-манипуляторов и т.д.).
Одну из специальных областей электроники рассмотрим подробнее.
В XXI веке существенно возрастет роль электротехники в области обеспечения гражданской, военной и государственной безопасности. История использования явления электромагнетизма в этих областях необычайно богата и поучительна. Она восходит ко второму тысячелетию до нашей эры, когда в древнем Китае создали специальные магнитные ворота, препятствующие прохождению людей со спрятанным под одеждой оружием. Устройствами подобного типа ныне оснащены службы безопасности аэропортов. Интересно, что именно в сфере безопасности находят первоначальное применение многие научно-технические разработки, известные впоследствии гражданским применением. Пример трансформатор, впервые использованный Б.С. Якоби для дистанционного взрыва мин (за счет
36
искры во вторичной цепи при прерывании тока в первичной его цепи). Другой пример - следящий электропривод, впервые созданный русским изобретателем А.П. Давыдовым для управления артиллерийским огнем и установленный на судах «Россия» и «Веста» в 1877 году. Сейчас специалисты, занимающиеся проблемами военной электротехники, изначально прорабатывают вопросы гражданского применения своих разработок (в этой связи говорят о научно-технических разработках двойного назначения). В свою очередь специфика и опыт этих разработок, обеспечивающих электроустановкам максимальную надежность, минимальность массогабаритных показателей, достижение предельно возможных параметров и т.д., равно как и принципы организации разработок, позволяющие проводить их в сжатые сроки и с использованием новых физических принципов, представляют интерес для всех электротехников.
Заметим, что появление электроустановок, реализующих новые физические принципы, способно оказать существенное влияние не только на техническое обеспечение вооруженных сил, но даже не концепции и доктрины самих военных действий. Пример - появление концепции «звездных войн» (1960-е годы) после изобретения лазеров. Различные современные концепции «дистанционных», «гуманных», «ресурсных» и т.д. войн, в которых победа должна достигаться без нанесения противнику больших людских потерь и/или разрушений, также во многом базируется на достижениях в области элекгромагнетизма. Поскольку системы управления, связи, жизнеобеспечения вооруженных сил и государства в целом строятся на технике, использующей явление элекгромагнетизма, то искажение или подавление этих явлений с помощью высокотехнологичного оружия (электромагнитных и графитовых бомб и т.д.) выводит из строя эту технику, нанося поражение противнику. Защитой от подобного оружия служит, в частности, обеспечение работоспособности этих систем в условиях сильных электромагнитных воздействий или способность быстрого восстановления их работоспособности после поражения от таких воздействий. Важной задачей становится выбор конфигурации, источников, материалов защиты и маскировки таких систем с учетом современных средств электромагнитного обнаружения и поражения. Все это задачи, решаемые современной электротехнической наукой в интересах обороны страны. Пример -задача маскировки военной техники от средств радиоэлектронного обнаружения с помощью СТЭЛС-технологий. Рассмотрим этот
37
пример подробнее. Впервые такая маскировка была применена в самом конце второй мировой войны для рубок немецких подводных лодок, до того хорошо обнаруживаемых радарами союзной авиации. В настоящее время СТЭЛС-технологии широко применяются для маскировки судов воздушного («самолет-невидимка»), морского и подводного флотов. Суть их заключается в покрытии поверхности судов тонким слоем новых электротехнических материалов - композитов. Композиты обладают способностью изменять свои электромагнитные свойства в зависимости от параметров внешних полей, чем и объясняется эффект «невидимости» при радарном наблюдении. Работа над СТЭЛС-технологиями открыла возможность использования композитов и для гражданских целей, например, для решения проблем энергоснабжения в зданиях с оконными стеклами: покрытые тонким слоем композитов стекла приобретают способность пропускать световой поток, но теплоотдачу допускать лишь в одном направлении, поддерживая нужный тепловой режим. Для снижения заметности летательных аппаратов - ракет, самолетов -используется и другой электромагнитный способ - генерация ими искусственных плазменных образований, которые поглощают или искажают зондирующие сигналы радиолокаторов.
Упомянем ряд других разработок в рассматриваемых областях. Важными разработками двойного назначения являются накопители электромагнитной энергии, предназначенные для ее одновременного высвобождения. В военной области высвобождение осуществляется для «электромагнитного метания» - придания различным телам, в частности, несущим боевые заряды, огромных ускорений. Фундаментальное значение имеют разработки источников и систем электросбережения специальных военных объектов (командных пунктов, аэродромов, военно-космических комплексов, стартовых сооружений ракет, узлов связи и т.д.), военной техники и даже военных снаряжений бойцов (говорят о «системах электроснабжения бойцов»). Главным в подобных разработках является обеспечение максимальной надежности и живучести, часто они должны иметь минимальные массогабаритные параметры и обеспечивать высокое качество электроэнергии при импульсных воздействиях. Принципы действия источников могут быть самыми различными - электрохимическими, термоэлектрическими и т.д. и изощренными - в годы второй мировой войны, например, для электропитания раций использовалась даже мускульная сила человека («солдат-мотор»). Еще
38
одно направление
разработок
- создание нелегального электро-
магнитного оруэкия Для служб охраны правопорядка. Сейчас это электро шокеры пора>^'ааял^^ действие которых обусловлено высо-ковольтным разрядом, в ближайшем будущем возможно лазерное оружие. Разработка пр0ИЗв0дств0’ обслуживание всего этого много-
образия техники cneilfiaJlbH0r0 назначения - новое большое поле
деятельности электротгХННКИ
XXI века.
Рассмотренный материал показывает, сколь глубоки традиции
и масштабны планы рЛзвития электротехники, сколь велика ее роль в жизни общества и сК°ль высока цена ответственности за применяемые в этой облает^1 Решения. Несомненно, что эту ответственность можно принимав на себя’ только располагая глубокими знаниями в области элек"1Ротехники- Сопричастность же к принятию столь фундаментальна’* решений и развитию нашей области опре-
деляет то высокое поЛ°жение специалиста-электротехника в жизни
нашей страны, которой он заслуженно занимает.
Заканчивая введе!1Ие’ предварим последующий теоретический материал книги словЛми выдающегося русского электротехника Д.А. Лачинова: «СвойСтвенная Русскому человеку отвага и отчасти жажда славы и увлечСние грандиозными планами заставляют людей, не обладающих теоретическими, а часто и практическими сведениями, браться за исполнение крупных предприятий, для которых знание абсолютно необходимо. Не то ли это самое, что взяться выстроить мост через НевУ’ не имея понятия об инженерном искусстве. Мы полагаем, ч<° в деле наУки подобная храбрость должна иметь лишь самое ограниченное применение» (Электричество. -1880.-№ 7.-С. 106).
/7^4 Бутырин, Р.Х. Гафиятуллин, А.Л. Шестаков
39
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ЭЛЕКТРОТЕХНИКА
КНИГА I
ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
Допущено Министерством образования Российской Федерации в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлениям подготовки и специальностям в области техники и технологии
Челябинск-Москва Издательство ЮУрГУ 2003
Под редакцией
член-корреспондента РАН П.А. Бутырина, доктора технических наук, профессора, заслуженного деятеля науки и техники РФ Р.Х. Гафиятуллина, доктора технических наук, профессора
А.П. Шестакова
Авторы книги:
П.А. Бутырин, д-р техн, наук, проф., член-корр РАН (Введение, гл. 1—5); А.Н. Горбунов, доц. (гл. 2-3); И.Д. Кабанов, д-р техн, наук, проф. (гл. 5); |Г.Л/. Торбенков, д-р техн, наук, проф. (гл. 6-9);
В.Г. Миронов, д-р техн, наук, проф., лауреат Государственной премии СССР (гл. 10); А.Л. Шестаков, д-р техн, наук, проф. (гл. 11-12)
Учебное пособие подготовлено в рамках гранта Президента РФ НШ-1511.02003.8 и гранта РФФИ№ 04-01-96085
ВВЕДЕНИЕ В КНИГУ I
Первый раздел книги I посвящен теории электрических и магнитных цепей и начинается с изложения физических основ электротехники, где рассматривается связь теории электромагнитного поля с теорией цепей.
Представлены основные свойства и методы расчета линейных цепей с источниками постоянных напряжений и токов. Рассмотрены также вопросы диагностики электрических цепей, т.е. определения параметров электрических цепей по данным ряда физических экспериментов.
Рассматриваются свойства и методы расчета электрических цепей с источниками гармонических напряжений и токов одинаковой частоты. Поясняются основные свойства простейших цепей синусоидального тока, векторные диаграммы и комплексная форма расчета. В продолжение включены цепи с взаимной индукцией, частотные характеристики двухполюсников и основы общей теории четырехполюсников.
Материал о трехфазных цепях сжат, уплотнен за счет уменьшения объема информации о методах симметричных составляющих. Приведены векторные диаграммы трехфазных цепей при различных режимах.
Далее рассматриваются особенности анализа и расчета цепей несинусоидального тока с помощью рядов Фурье.
Изложены основы теории переходных процессов в линейных электрических цепях. Приведены классический, операторный и частотный методы расчетов переходных процессов. Значительная часть материала посвящена анализу характеристик и свойств нелинейных резистивных и реактивных элементов. Описаны способы аппроксимации характеристик нелинейных элементов.
Достаточно подробно рассмотрены графические, численные и
43
аналитические методы расчета нелинейных электрических и магнитных цепей при постоянных токах и напряжениях.
В достаточном объеме изложены основные процессы, протекающие в ферромагнитных материалах при переменных магнитных потоках. Приведены уравнения, векторные диаграммы и схемы замещения катушки с ферромагнитным сердечником. Рассмотрены резонансные цепи с нелинейными элементами; измерительные трансформаторы.
Часть материала книги посвящена основным методам расчета нелинейных цепей при переменных токах и напряжениях. Проведен анализ установившихся процессов в цепях переменного тока с различными нелинейными элементами.
Если до сих пор книга характеризовалась классическим материалом, то в заключении приводятся оригинальные материалы, основные положения цифровых систем (цепей) и методы обработки цифровых сигналов. Цифровая обработка электрических сигналов в настоящее время является крупным научно-техническим направлением, связанным с генерацией, передачей, приемом, хранением и преобразованием информации.
Как уже отмечалось, книга содержит нетрадиционные материалы, вышеупомянутую теорию цифровых систем (цепей) и методов обработки цифровых сигналов, а также диагностику электрических цепей. Объем и содержание первого раздела обеспечивает изучение курса ТОЭ и его приложения к другим разделам второй и третьей книг.
Во втором разделе изложены основы теории электрических измерений, методы и средства измерения электрических и неэлектрических величин.
Рассмотрены основы метрологии и даны необходимые сведения о системах электроизмерительных приборов и их применение для различных физических величин. Описаны параметрические измерительные преобразователи для измерения различных неэлектрических величин.
П.А. Бутырин, Р.Х. Гафиятуллин, А.Л. Шестаков
44
Раздел I
ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ
Введение
ФИЗИЧЕСКИЕ ОСНОВЫ ЭЛЕКТРОТЕХНИКИ
В.1. Связь теории электрических и магнитных цепей с теорией электромагнитного поля
Промышленная революция рубежа XVIII-XIX веков, связанная с практическим освоением явлений электромагнетизма, потребовала массовой подготовки соответствующих инженерных кадров и обусловила необходимость создания специальных учебных дисциплин для подготовки нового инженерного корпуса. Базисной дисциплиной в образовании инженеров электротехников, электромехаников, электротехнологов и электроэнергетиков стала дисциплина «Теоретические основы электротехники» - сокращенно ТОЭ. Предметом изучения этой дисциплины стали электромагнитные явления и процессы в устройствах и системах электротехники, электроэнергетики, электрофизики. Помимо самостоятельной ценности, ТОЭ дает фундаментальную основу знаний, единый язык и методологию, необходимую для усвоения материала других дисциплин в инженерном образовании по названным специализациям.
Начиналась дисциплина ТОЭ с двух курсов лекций - «Теория электрических и магнитных явлений», прочитанного В.Ф. Митке-вичем в 1904 г. в Политехническом институте (С.-Петербург) и «Теория переменных токов», прочитанного в 1905 г. К.А. Кругом в Московском высшем техническом училище. В этих курсах, по сути, были сформулированы основные положения двух разделов ТОЭ -теории электромагнитного поля и теории электрических и магнитных цепей. Со времени появления этих курсов в учебные программы высших учебных заведений, занимающихся подготовкой инженеров названных специализаций, неизменно входит курс ТОЭ или
45
отдельные его части, как, например, теория электрических и магнитных цепей. Теория электрических и магнитных цепей имеет исключительно большое значение для практики, а в методическом отношении достаточно самостоятельна. Однако, являясь частью ТОЭ, она в своей основе содержит ряд допущений и предположений, связанных с теорией электромагнитного поля; первичные ее понятия также описываются с использованием категорий электромагнитного поля. Поэтому в настоящем введении описываются необходимые для полноценного восприятия последующих глав книги сведения из теории электромагнитного поля, хотя и в самом минимальном объеме, лишь частично дополняющие сведения из соответствующего раздела школьного или вузовского курса физики. Подобное изложение физических основ электротехники призвано сыграть роль фундамента книги, и начать его необходимо со знакомства с основными понятиями курса ТОЭ, а именно понятиями электромагнитного поля и электрической и магнитной цепи.
Электромагнитное поле — это особый вид материи (вещества), отличающийся непрерывным распределением в пространстве, обнаруживающий дискретность структуры (кванты излученного электромагнитного поля) и характеризующийся способностью оказывать на заряженные частицы силовое воздействие, зависящее от их скорости.
Заметим, что всякая заряженная частица окружена электромагнитным полем, составляющим с ней одно целое. Однако электромагнитное поле может существовать и в свободном, отдельном от заряженных частиц состоянии в виде движущихся со скоростью, близкой к скорости света, фотонов или электромагнитных волн. Электромагнитное поле является носителем определенного количества энергии, которая способна преобразовываться в другие виды энергии - механического движения, тепловую и т.д. Являясь носителем энергии, это поле обладает и определенной массой, которая может быть определена из общей связи Е = тс2 полной энергии Е и полной массы т, причем с = 3108 м/с - скорость света в пустоте. Следует заметить, что плотность этой массы из-за большого значения с2 в обычных электромагнитных полях весьма невелика. Поэтому на практике этой характеристикой поля обычно не интересуются, сосредотачивая внимание на силовой стороне проявлений энергии поля.
46
В тех случаях, когда электромагнитное поле локализовано в совокупности устройств, предназначенных для прохождения электрических токов, говорят об электрических цепях. Строгие определения электрическим и магнитным цепям можно дать лишь позднее, когда будут введены, в частности, понятия токов, магнитных потоков и т.д., здесь же обратим внимание на отмеченную реализацию электромагнитных процессов в специальных устройствах в случаях, когда говорят об электрических и магнитных цепях.
В.2. Электрическое и магнитное поле
При изучении электромагнитных явлений принято выделять две стороны - электрическую и магнитную, между которыми существует тесная связь. В соответствии с этим выделяют и две стороны электромагнитного поля - электрическое и магнитное поле.
Электрическое поле - это одна из сторон электромагнитного поля, обусловленная электрическими зарядами и изменением магнитного поля, оказывающая силовое воздействие на неподвижные заряженные тела и частицы. Для выявления этого поля необходимо рассмотреть неподвижное заряженное тело, поскольку на движущееся тело действует не только электрическое, но и магнитное поле.
Исследуем поле некоторого основного тела с зарядом q. Для этого в различные точки окрестности этого тела будем помещать пробное точечное тело (т.е. тело со столь малыми размерами, что в его пределах исследуемое поле можно считать однородным) с положительным зарядом qG. В каждой точке на пробное тело будет действовать механическая сила. В случае, когда основное тело так же имеет точечные размеры, величина этой силы определяется по закону Кулона
f _ Wo
J1 . 2 ’
4лег
где г - расстояние между зарядами, а £ * - постоянная, называемая абсолютной диэлектрической проницаемостью, характеризует среду, в которой находятся эти заряды. Рассматриваемая сила позволяет определить основную физическую величину, характери-
, 12 Ф
Для вакуума эта постоянная принимает значение £0 = 8,85 10 — и носит
м
название электрической постоянной
47
зующую электрическое поле и называющуюся его напряженностью (рис. В.1).
Напряженность электрического поля Е есть векторная величина, сонаправленная с силой f, действующей на неподвижное положительно заряженное пробное тело, помещенное в данную точку поля к величине этого заряда.
Таким образом, Е =—.
<7о
Рассмотренное электрическое поле, обусловленное исключительно неподвижными зарядами, называют так же электростатическим полем. Помещая пробный заряд в самые разные точки поля и определяя в них напряженность электрического поля, можно провести ряд линий так, чтобы в каждой точке линий касательная к совпадала по направле-с вектором напряженноэлектрического поля
Рис. В.2
ним нию сти
(рис. В.2). Эти линии, являющиеся, по сути, силовыми линиями, называют линиями напряженности электрического поля. На рис. В.2 они снабжены стрелками, указывающими направление век
тора Е. Совокупность таких линий образует картину электрического поля.
Магнитное поле — одна из двух сторон электромагнитного поля, обусловленная движущимися заряженными частицами и изменением электрического поля, оказывающая силовое воздействие на движущиеся заряженные частицы, и выявляемая по силовому воздействию, направленному нормально к направлению движения частиц и пропорциональному их скорости.
Эрстедом, а затем Ампером было установлено, что на магнитную стрелку, расположенную вблизи проводника с током, оказывается силовое воздействие, в результате которого стрелка ориентируется относительно проводника с током вполне определенным образом.
48
/>0
(х)
ST
Рис. В.З
На рис. В.З изображены проводник с постоянным током /. уходящим за плоскость чертежа (что принято отмечать косым крестом), и ориентация распложенной в плоскости чертежа стрелки в магнитном поле такого тока. Для выявления силовой ха- N рактеристики этой стороны электромагнитного поля необходимо рассмотреть движущиеся заряды, например, движущиеся по некоторому проводнику длиной
I. Напомним, что движение зарядов является электрическим током. Пусть I - вектор, имеющий длину, равную длине отрезка проводника /, и направленный по оси проводника в направлении тока i,aq - заряд в объеме проводника, движущийся вдоль его оси
_ т , - Т
со скоростью v. Если заряд q проходит путь / за время / , то v =—,
a z = —. При этом оказывается, что на проводник с током, располо-t
женный в магнитном поле действует сила /2, величина которой пропорциональна току i (или заряду q), а направление перпендикулярно оси проводника.
Существует определенное направление (обозначим его единичным вектором й), такое, что если ось проводника оказывается перпендикулярной этому направлению, то сила /2 будет максимальной по величине.
Заметим, что направление вектора п оказывается совпадающим с направлением N магнитной стрелки в магнитном поле (рис. В.4). Это позволяет говорить об основной физической величине, характеризующей магнитное поле в -„ „ 77 В
данной точке - магнитной индукции В.
Магнитная индукция — векторная величина, направление которой совпадает с на- п правлением п. В общем случае сила f2 on- NI ределяется из соотношения f2 -i[l, S] или fl ~ • г^е [, ] знак векторного ум- S *
поженил. Рис- В-4
49
Если направление проводника с током выбрано таким образом, что сила /2 оказывается максимальной по величине (т.е. когда векторы 1, В, fвзаимно перпендикулярны - см. выше), то
величина магнитной индукции находится как Z? = — или г •/
Л
В =----. Определив, таким образом, направление вектора магнит-
q-v
ной индукции в каждой точке магнитного поля, можно затем построить картину этого поля по линиям магнитной индукции. Линиями магнитной индукции называются линии, касательные к которым в каждой их точке совпадают по направлению с вектором В. Эти линии на рис. В.5 снабжены стрелками, указывающими направление вектора В. На рис. В. 5а изображены линии вектора В линейного проводника с током, уходящим за плоскость чертежа (сравним их направление с направлением магнитной стрелки на рис. В.З).
На рис. В.56 изображены линии магнитной индукции кольцевого проводника с током. Направление этих линий определено по правилу правого винта, согласно которому поступательное движение
винта связывается с направлением движения тока, а вращательное -определяет направление вектора В.
Заметим, что выделение из электромагнитного поля двух сторон - электрического и магнитного поля - оказывается весьма удобным по методическим соображениям. Кроме
того, в инженерной практике встречаются ситуации, когда фактиче
ски проявляется только одна из этих сторон (как, например, в случае электростатического поля - см. выше). Но в общем случае эти две стороны связаны и проявляются совместно. Так на движущуюся в
электрическом поле частицу с зарядом q и скоростью v действует
50
сила Лоренца f - fx+ j2 =qE + q\y, 5], одна из составляющих которой fx обуславливается электрическим, а другая /2 — магнитным полем. Отметим, что действие сил f\ и /2 различно. Сила f\, обусловленная электрическим полем, может изменять как направление вектора скорости, так и его величину, а, следовательно, и кинетическую энергию частицы. Сила /2, обусловленная магнитным полем, направлена всегда перпендикулярно вектору скорости частицы и изменяет только направление движения частицы.
В.З. Электрическое напряжение, электрический потенциал, электродвижущая сила, источник ЭДС, электрическая емкость, конденсатор
Познакомимся с рядом понятий, связанных с электрическим
полем и являющихся фундаментальными
электрических цепей.
Пусть частица с зарядом q переносится в электрическом поле из точки А в точку В вдоль некоторого пути (рис. В.6).
Действующие на нее силы совершают работу А, величина которой пропорциональна заряду q-, а именно А = qUАВ, где величину UАВ называют электрическим напряжением.
понятиями для теории
Рис. В.6
Электрическое напряжение - это физическая величина, характеризующая электрическое поле вдоль рассматриваемого пути и равная линейному интегралу напряженности электрического поля вдоль рассматриваемого пути. В нашем случае (см. в
рис. В.6) Uab = |е<7/ . Заметим, что в электрическом поле инте-А
грал не зависит от выбора пути между точками
А и В, т.е. j Edl = j Edl (рис. В.7), и соот-АпВ АтВ
ветственно (^Edl = j Edl = 0.
АпВтА
Рис. В.7
51
При этом величину, равную этому интегралу, называют разностью электрических потенциалов точек Л и В и обозначают в _
Uав = a~Vb~ \Edl .
А
В электрическом поле понятие напряжения между двумя точками тождественно понятию разности потенциалов U АВ - VA-VB-При этом, если в поле выбрана некоторая особая точка Р (часто р это бесконечно удаленная точка), тогда значение интеграла ^Edl А является только функцией координат (х, у, z) точки А. Обозначив р
эту функцию через УА, можно записать ^Edl = УА=У(х, у, z).
А
Величину УА называют электрическим потенциалом точки А. Потенциал же особой точки Р, очевидно, равен нулю, т.к. р
VP = $Ed/ =0. На практике равным нулю обычно принимают по-р
тенциал поверхности земли, а не бесконечно удаленной точки, как в теории. Заметим, что если в электрическом поле потенциал каждой точки А определяется после выбора особой точки Р, то такое поле называют потенциальным полем. В потенциальных полях линейный интеграл напряженности электрического поля по любому замкнутому контуру равен нулю. Однако это не относится к областям пространства, в которых расположены так называемые источники электродвижущих сил - сокращенно ЭДС. В областях пространства, заключающих такие источники, электрические поля носят не потенциальный характер. Возникновение ЭДС обусловлено наличием в соответствующих областях пространства электрических полей не потенциального характера. Говорят, что в замкнутом контуре действует электродвижущая сила е, если линейный интеграл напряженности электрического поля по этому контуру не равен нулю; причем величину ЭДС полагают равной этому интегралу, т.е.
e = (^Edl ^0.
Подобное оказывается возможным, когда наряду с потенци
52
альным полем с напряженностью Епот в этих областях имеется стороннее электрическое поле с соответствующей сторонней напряженностью Ecrov и сторонней силой /стор, действующей на заряды. Именно сторонние силы совершают работу по переносу зарядов, что и обеспечивает появление ЭДС е = естор:
е = с[ Edl = с[(£пот + Ёстор )dT = с[ £стор<£ Ф 0;
здесь <^£потс(/ =0. Эти сторонние силы могут быть обусловлены электрохимическими, электротермическими, электромеханическими и т.д. процессами. В технике создают специальные устройства (аккумуляторы, генераторы и т. д.) с локализованными в ограниченных областях сторонними полями, которые называют источники ЭДС или в общем случае - источники энергии. Таким образом, в этих источниках происходит преобразование энергии химических процессов («химической энергии»), энергии механической, тепловой и т.д. в электрическую энергию. Как можно заметить из представленных выше выражений, если подобный источник в пространстве локализован между двумя точками - точкой А с координатами (хА’Уа’2а) и точкой В с координатами - например,
двумя электролитическими аккумуляторами, имеющими соответствующие потенциалы VA = VА(х А,у A,z А) и VB =Ув(хВ’Ув,2в\ то электродвижущая сила подобного элемента равна разности потенциалов
e = VA ~ Vb-
Здесь точки А и В считаются расположенными на границе потенциального (вне источника) и не потенциального (внутри источника) полей.
Единицей напряжения, потенциала, разности потенциалов, ЭДС в системе СИ (система интернациональная) принят вольт (Volt), обозначается 1 В или 1 V. Так разность потенциалов VA — VB двух точек А и В потенциального электрического поля (рис. В.6) равна 1 В, если при перемещении заряда в 1 кулон (обозначается 1 Кл) против сил поля необходимо совершить работу в 1 джоуль (1 Дж). Тогда связь электрического напряжения с напряженностью электрического поля ® _ в
U Ав= \Edl дает единицу напряженности - вольт на метр (1 —). • м
53
При исследовании электрического поля в веществе необходимо в полной мере учитывать его электрические свойства. По этим свойствам вещества делят на проводники (проводящие вещества), диэлектрики (изолирующие вещества) и полупроводники (полупроводящие вещества). Основной характеристикой проводника является электропроводность, т.е. способность проводить электрический ток под действием постоянного электрического поля. В проводниках носители заряда (электроны, а также положительные и отрицательные ионы) находятся в свободном состоянии. Под действием электрического поля они приходят в упорядоченное движение и образуют электрический ток. В диэлектриках свободные частицы с зарядами практически отсутствуют, заряды находятся в связанном состоянии, и под действием электрического поля происходит лишь поляризация связанных зарядов (положительные и отрицательные частицы, испытывая механические силы со стороны поля, начинают двигаться, но совершенно разойтись не могут, удерживаемые внутренними силами). Основной характеристикой диэлектрика выступает абсолютная диэлектрическая проницаемость е, отражающая, в частности, влияние среды на силовые взаимодействия зарядов в законе Кулона (см. выше). Полупроводники занимают некоторое промежуточное положение между проводниками и диэлектриками.
Заметим, что напряженность электрического поля внутри проводников в статическом состоянии зарядов может быть равна только нулю Е = 0. Иначе был бы ток и, следовательно, состояние зарядов не было бы статическим. Поэтому в электростатическом состоянии проводящее тело имеет один и тот же потенциал (разность потен-в
циалов между его любыми точками равна нулю VA — VB = $Ed/ =0).
А
Рассмотрим теперь некоторое проводящее тело с зарядом q, окруженное диэлектриком, в предположении, что диэлектрическая постоянная последнего не зависит от напряженности электрического поля. Тогда оказывается, что величина напряженности всюду в диэлектрике и на границе с проводником, в частности, будет пропорциональна заряду тела q, следовательно, пропорциональным заряду этого тела окажется и потенциал V тела. Отношение q к V называют электрической емкостью тела и обозначают
54
с=1
V
В случае двух таких проводящих тел с равными по величине, но противоположными по знаку зарядами qx = -q2, которые окружены диэлектриком, электрической емкостью называют величину q_ Ч\ _ ^2
И-И2 Иг-И'
Электрическая емкость как уединенного проводящего тела, так и двух проводящих тел зависит от параметров среды (г), геометрии тел, а в последнем случае и от взаимного расположения. Система двух проводящих тел, специально созданная для использования в практических целях ее емкости, называется конденсатором.
Единицей электрической емкости служит фарада (1 Ф), , Л 1 Кл 1 Ф =---.
1В
Конденсатор с заряженными пластинами является носителем электрической энергии. Если напряжение между двумя его обкладками равно и = И] — V2, а их заряды равны по величине, но противоположны по знаку q = qx = -q2, то можно показать, что энергия конденсатора равна ^2 2
3 2 2 2С ’
Конденсатор как элемент электрической цепи принято изображать так, как показано на рис. В.8, а связь между его током и напряжением в случае их изменения во времени (i=i(f), и=и(Г)У\ называемую компонентным уравнением, можно полу-
С •?
чить, продифференцировав выражение q = —. Таким , +
и 1<с I —Г~—
образом, компонентное уравнение конденсатора име- А
ет вид i = С—, где i Рис. В.8
dt dt
Отметим, что неизменные во времени электромагнитные величины - токи, напряжения, ЭДС изображаются большими (прописными) буквами: I, U, Е; переменные во времени - малыми (строчными) буквами - z, и, е.
55
В.4. Магнитный поток, потокосцепление, ЭДС самоиндукции и взаимной индукции, индуктивность и взаимная индуктивность
Познакомимся с рядом понятий, связанных с магнитным полем
и являющихся фундаментальными для теории магнитных цепей.
Пусть магнитная индукция В пронизывает некоторую поверхность S, образованную тонким проводником I. Тогда интеграл маг
Рис. В.9
нитной индукции по этой поверхности (рис. В. 9)
= р cos/^ = Ф
называют потоком магнитной индукции и обозначают буквой Ф. Единицей магнитного потока служит вебер (Вб), а единицей магнитной индукции, т.е. плотности этого потока в данной точке, является тесла (Тл). Таким образом 1 Вб=1^4. м
Рассмотрим случай, когда поток Фп
создается собственным
током проводника q контура /, (рис. В. 10а), и случай, когда поток Ф12 в первом контуре Ц есть часть потока, созданного током z2 второго контура /2.
Рис. В. 10
Если эти потоки Фн (рис. В. 10а) и Ф12 (рис. В. 106) изменяются во времени, что можно трактовать как относительное движе
56
ние самих контуров относительно поля с потоками Фц,Ф12> то на заряды в проводниках будут действовать силы со стороны магнитного поля (см. раздел В.2), и в контуре !} (рис. В. 106) будет индуцироваться ЭДС Еинд. Общее выражение для ее расчета дается законом электромагнитной индукции: если магнитный поток Ф, проходящий сквозь замкнутую поверхность 5' , ограниченную контуром / (рис. В.11), изменяется во времени, то в этом контуре индуктируется ЭДС, равная взятой со знаком минус скорости изменения этого потока
гг. л/
e = QEnHA-al =--
? dt
Поскольку величина этой ЭДС зависит от потока сквозь замк
нутую поверхность, то эту поверхность стараются сделать слож
ной, придав ей форму многослойной катушки (рис. В.11) с тем,
чтобы обеспечить максимальную по величине индуктируемую ЭДС. Поскольку каждое кольцо этой катушки пронизывает почти один и тот же поток (почти, потому что некоторые линии индукции замыкаются и вокруг отдельных колец - см. рис. В.Н, линия 5), то вводят понятие о потокосцеплении Д'. Применительно к данной катушке можно для уп-
Рис. В.11
рощения положить, что все линии магнитной индукции сцепляются со всеми витками катушки, тогда Д' = w-Ф, где тушки. Тогда для индуктируемой ЭДС имеем dvV d®
е =----= — w----.
dt dt
w — число витков ка-
В случае, когда ЭДС индуктируется собственным током (см. рис. В. 10а), ее называют электродвижущей силой самоиндукции и обозначают eL . Потокосцепление катушки при этом называют потокосцеплением самоиндукции и обозначают Оно оказывается пропорциональным току катушки. Представим его в виде Д' L = L • z.
Величину L называют собственной индуктивностью или просто индуктивностью, ЭДС самоиндукции при этом имеет вид
57
dx¥ L d(Li) di ,dL
eL ---— = —1—- = -L-----1—,
dt dt dt dt
или при наиболее понятном для практики случае L = const имеем
, di е, = -L—. L dt
В частности для контура, изображенного на рис. В. 1 Оа,
Ll 'dt
В случае, когда с рассматриваемым контуром (/1; рис. В. 106) сцеплен поток (потокосцепление) другого контура (контура 12, рис. В. 106), говорят о потоке (потокосцеплении) взаимной индукции.
Потокосцепление обозначается буквой Т12 с двумя индексами, первый из которых указывает, с каким контуром рассматривается сцепление потока (у нас с контуром 1), второй индекс (2) показывает, током какого контура создается данное потокосцепление (у нас током второго контура). Потокосцепление также оказывается пропорциональным вызывающему току
= Мп-i2,
где величина Л/]2 называется взаимной индуктивностью контуров. Заметим, что если бы мы рассматривали поток Ф21 ’ сцепленный со второй катушкой и обусловленный током q первой катушки, то величина М2Х из равенства Ф21 = ^2izi оказалась бы равной величине М}2, т.е. M2l -Ml2 -М. Таким образом, эта величина зависит только от геометрии катушек, их взаимного расположения и параметров среды. Изменение потокосцепления в контуре вызывает в нем электродвижущую силу взаимной индукции. Так ЭДС в первом контуре (рис. В. 106), обусловленная изменением тока во втором контуре, может быть представлена как
di2 . dMn
—= —-~12——
dt dt " dt
12 dt или при Ml2 = const
, z di2 eu dt
Единицей индуктивности и взаимной индуктивности является генри (Гн).
58
Специальный элемент, созданный для использования его индуктивности, носит название индуктивной катушки или просто катушки. Катушка с индуктивностью L и током i (и потокосцеплением Т = Ы) является носителем магнитной энергии, которая в этом случае равна
WM=-Li2 м 2 2L
В случае системы из двух контуров с токами q, z2, индуктивностями L}, L2 и взаимной индуктивностью М запасенная в них
энергия определяется выражением
1 .? 1 .7
WM = +2^2г2 + Mlil2 •
Индуктивную катушку, как элемент электрической цепи, принято изображать в виде, показанном на рис В. 12. Компонентное уравнение, составляющее связь между током и напряжением катушки, имеет
Т di
вид uL = L—, где и = -eL.
dt
Рис. В. 12
В.5. Электрические токи и магнитные потоки в различных физических средах
Полный электрический ток представляет собой скалярную
величину, равную сумме тока проводимости, тока переноса и тока смещения сквозь замкнутую поверхность. Познакомимся с этими видами токов и со средами, где они наиболее ярко проявляются.
Электрическим током проводимости называют явление направленного движения свободных носителей заряда в веществе или в пустоте. Вещества, обладающие свойством проводить под дей-
ствием не изменяющегося по времени электрического поля не изменяющийся во времени электрический ток, принято называть проводниками, само это свойство - электропроводностью, а ток
_ dq np~~di
- током проводимости. Хотя ток - величина скалярная,
но в разных элементах поверхности S, выделенной в проводнике (рис. В. 13), он может иметь свое направление. Таким образом, можно ввести в рассмотрение векторную величину плотность тока, равную пределу отношения тока сквозь элемент поверхности
59
Рис. В. 13
Ал, нормальный к направлению движения заряженных частиц, к этому элементу, когда последний стремится к нулю
-f .. Az di J = lim — = —.
Да->о Да ds
и имеющую направление, совпадающее с направлением движения положительно заряженных частиц или,
соответственно, противоположное направлению движения отрицательно заряженных частиц. Если единицей тока служит ампер (1 А), то единицей плотности тока -д
ампер на квадратный метр (—у). В изотропной среде (среде, свой-м
ства которой одинаковы во всех направлениях) вектор плотности тока оказывается пропорциональным вектору напряженности электрического поля J -уЕ.
Эту зависимость, называемую еще законом Ома в дифференциальной форме, записывают еще и в таком виде
E-pJ.
Здесь величина у - удельная электрическая проводимость, ее ,СмА
единицей является сименс на метр (-), а р — удельное электри-
м
ческое сопротивление, его единицей является ом-метр (Ом-м). Вещества, для которых характерен ток проводимости - это металлы (носители тока в них - свободные заряды), уголь и электролиты (в электролитах проводимость обеспечивается положительными и отрицательными ионами). Если ток проводимости znp имеет место в прямолинейном отрезке длиной / и сечением s, то напряжение на этом участке будет и=Е1, а сам ток I=Js. Таким образом.
и - рЛ = (pH): а , а величину R- — называют электрическим coz'
противлением (для краткости просто сопротивлением) рассматриваемого отрезка проводника. Единицей сопротивления является ом (Ом). Соотношения и = Ri или i = Gu называют законом Ома для такого участка проводника, здесь G - проводимость, ее единицей является сименс (См). При наличии тока в рассматриваемом
60
a (u-q) n-2
проводнике справедливо соотношение р = — =-------— иг - кг , на-
зываемое законом Джоуля-Ленпа. Здесь р - мощность, определяется количеством энергии, выделяемой в проводнике в единицу времени. Единицей мощности служит ватт (Вт). +
Специальный элемент электрической цепи, соз- f i данный для использования его электрического сопро- will/? тивления, называют резистором. Условное изобра- у жение резистора показано на рис. В. 14, а его компо-
нентное уравнение имеет вид и = Ri. Рис- В-14
Током переноса 7пер называют явление переноса электрических зарядов движущимися в свободном пространстве заряженными частицами или телами. Пример - движение элементарных частиц, обладающих зарядом в пустоте, электрический ток в газах, движение заряженных частиц пыли (угольной, мучной и т.д.). Плотность этого тока можно описать выражением J = p+v+ + p_v-, где р+ и р_ - объемные плотности положительно и отрицательно заря
женных частиц, a v+ и v- - их соответствующие скорости.
Электрический ток смещения zCM имеет место в диэлектриках при переменных электрических полях, но возникает и в пустоте. Электрическим током смещения называют совокупность электрического тока смещения в пустоте и электрического тока поляризации. Количественно эта совокупность характеризуется скалярной величиной, равной производной по времени от потока электрического смещения через замкнутую поверхность. Таким образом, для знакомства с этим видом тока необходимо познакомиться с понятиями поляризации и электрического смещения. Эти понятия не относятся к числу элементарных, и ниже они излагаются несколько упрощенно.
В ряде веществ заряды, входящие в состав молекул в отсутствие внешнего поля, не создают поля во внешнем по отношению к молекуле пространстве. Дело в том, что центр электрического действия электронов этих молекул совпадает с центром действия положительных ядер этих молекул. Но при наличии внешнего поля центр положительных и отрицательных зарядов несколько смещается, и во внешнем пространстве молекула будет восприниматься как диполь, т.е. система из двух равных, но противоположных по
61
знаку зарядов +q и -q, расположенных на некотором расстоянии d. Произведение qd называют электрическим моментом диполя. Этот момент можно рассматривать и как векторную величину р, направленную в сторону смешения положительного заряда. Вещества с молекулами, рассматриваемыми как диполи, оказываются в поляризованном состоянии. Степень поляризации этих веществ в каждой точке характеризует векторная величина, называемая поля-ризованностью и обозначаемая буквой Р. Поляризованность равна пределу отношения электрического момента некоторого объема вещества, содержащего данную точку, к этому объему, когда последний стремится к нулю. Оказывается, что для интересующей нас группы веществ (см. ниже) поляризованность пропорциональна напряженности поля Р = %Е; коэффициент % называется абсолютной диэлектрической восприимчивостью вещества.
Вещество, основным электрическим свойством которого является способность поляризоваться под действием электрического поля, называется диэлектриком.
Обозначим через D = £$E + р = Do +Р, Do-£0Е вектор, который назовем вектором электрического смещения. Для изотропного вещества D = eE, где £ — абсолютная диэлектрическая проницаемость вещества, и направления векторов D и Е совпадают. Вектор плотности тока смещения в диэлектрике определяется как _ d~D dDo dP д... —----------------------—------1----,
__ см dt dt dt
c dDo
где o0 —------называют плотностью тока смещения в пустоте.
dt
,, V dP г
Вторая составляющая в этом выражении J обусловлена
движением обладающих зарядом частиц в диэлектрике.
Если теперь обозначить через ./1|р, /пер и JCM - соответственно плотности токов проводимости, переноса и смещения, а через 8 ПЛОТНОСТЬ ПОЛНОГО тока (8 = Jnp + /пер +<5СМ), то для полного тока будет справедлив принцип: полный электрический ток сквозь взятую в какой угодно среде замкнутую поверхность равен нулю
i = (jddS -0.
5
62
Таким образом, линии тока не имеют ни начала, ни конца, они принципиально являются замкнутыми линиями. Обратим
внимание теперь на связь электрического тока с магнитным по
лем. Этот ток и поле всегда появляются одновременно и, по сути, характеризуют единый физический процесс. Остановимся на этом
подробнее, рассмотрев расположенную в пустоте рамку с током i
(рис. В. 15), вокруг которой существует магнитное поле. Выберем
произвольный замкнутый контур (пунктирная линия на рис. В. 15) и возьмем интеграл вектора индукции вдоль этого контура.
При этом оказывается, что ток в рамке и линейный интеграл индук
Рис. В. 15
ции по рассматриваемому контуру связаны соотно
шением
t^Bdl = <^Bcosa dl - fai.
Величину /70 называют магнитной постоянной, она равна
_ А Гн
//0 = 4я • 1 (Г' =1,257-10 ’ —, ее размерность связана с размерностью м
электрической постоянной, а именно [//0] =
Я Г 1 м
—,где [Р] =—.
J с
Рассмотрим теперь случай, когда в катушку с током z, имеющую w витков, внесено тело из какого-либо вещества (рис. В. 16). Оказывается, под воздействием магнитного поля, создаваемого током i катушки, вещество намагничивается, т.е. происходит определенная ориентация его элементарных токов. Такие токи всегда сущест
вуют в веществе (движение электронов по орбитам и внутри атомов, или вращение электронов вокруг своих осей), но ориентирова-
63
ны хаотически. В данном случае эта ориентация элементарных электрических токов упорядочивается. Более того, существует такая группа веществ - ферромагнетики, в которых элементарные токи под действием внешних токов располагаются таким образом, что резко усиливают внешнее поле. Именно на основе таких материалов и реализуются магнитные цепи, которые также будут предметом изучения в этой книге.
Рассмотрим механизм взаимодействия магнитного поля с токами, в том числе элементарными, подробнее. Составим линейный интеграл вектора магнитной индукции вдоль замкнутого контура, охватывающего витки катушки, намотанной на цилиндр из интересующего нас материала. Тогда вместо тока / рамки (см. рис. В. 15) в создании поля участвуют токи wi, создаваемые всеми витками катушки, а также ток i — эквивалентирующий элементарные токи на участке. Таким образом
<^Bdl = /LL^Wl + jLIqI .
Рассмотрим второе слагаемое правой части этого уравнения подробнее. Пусть di' - суммарный элементарный ток на отрезке dl
линии АтС. Оказывается, что величина производной этого тока
в некотором определенном направлении, которое на рис. В. 16 обозначено вектором и0, имеет наибольшее значение. Обозначим отрезок dl в этом направлении dn и введем векторную величину 77 -т-
м =----я0, которую назовем намагниченностью вещества. Так
dn
как на участке СпА контура интегрирования (рис. В. 16) нет элементарных токов, то Bdl= j Md~l, следовательно
АтСпА АтС
(^Bdl = + В& = Bowi+ Bo^Mdl или С^(— -M)d~l = wi.
Здесь подынтегральную величину называют напряженностью магнитного поля
й=А-м.
Ао
Для изотропного вещества В = цН, где у/=//0(1+ 2'), % -магнитная восприимчивость, т.е. направления В и Н совпадают.
64
переноса, линейный
Рис. В. 17
Тогда C^Hdl = 0. Если при этом контур интегрирования охватывает часть проводника с током (рис. В. 17). то выражение §Hd l = i, где под токами понимаются все токи: проводимости, смещения, называют законом полного тока, при этом интеграл напряженности магнитного поля называют магнитолвижушей силой (МДС) вдоль этого контура. Магнитодвижущую силу будем обозначать буквой F, МДС играет в теории магнитных цепей примерно ту же роль, что и ЭДС в теории электрических цепей. МДС вдоль замкнутого контура равна полному току, охватываемому этим контуром. Можно рас-
сматривать МДС и применительно к отрезку линии между точками в
- ^Hdl . Единицей МДС F служит ампер (А), а А
А и В, тогда Fab
А единицей напряженности Н магнитного поля ампер на метр (—). м
В.6. Основные уравнения электромагнитного поля
В теории электромагнитного поля принято выделять четыре основных закона (постулата, принципа) и три связи участвующих в ней величин.
Закон полного тока устанавливает связь между напряженностью магнитного поля и электрическим током
^Hdl = i, и обычно формулируется следующим образом: линейный интеграл напряженности магнитного поля по любому замкнутому контуру равен полному току сквозь поверхность, ограниченную этим контуром. В полный ток здесь включены все виды токов, включая смещения в пустоте.
Закон электромагнитной индукции устанавливает связь между напряженностью электрического поля и изменением магнитного потока:
ту:,} d<&
<зЕс11 -------
dt
3 Зак. 1186
65
и утверждает, что при всяком изменении магнитного поля во времени в той же части пространства возникает связанное с ним электрическое поле.
Постулат Максвелла о связи электрического поля окружающего тела и частицы с их электрическим зарядом
(§DdS = q
гласит: поток вектора электрического смещения сквозь любую замкнутую поверхность в любой среде равен свободному заряду, заключенному в объеме, ограниченном этой поверхностью.
Принцип непрерывности магнитного потока
$Bd~S = 0.
утверждает: линии магнитной индукции всюду непрерывны.
Перечисленные четыре фундаментальных положения дополняются связями
— между векторами D иЕ (Е> = еЕ, для изотропной среды);
— между векторами В и Н (В = pH, для изотропной среды);
— для плотностей токов проводимости (Jnp = уЕ), переноса
— - - ,~г- dD
(/пер - p+v+ + P-V-) и смещения (осм =-), по которым при не-
dt
обходимости и находится полный электрический ток.
В заключение введения в раздел по теории электрических и магнитных цепей необходимо заметить, что все рассматриваемые в нем главы будут представлять собой описания частных случаев проявления электромагнитного поля, интересные для электротехнической практики. Своему возникновению они обязаны в значительной мере идеализации и упрощению картины электромагнитного поля применительно к данным средам, данным интенсивностям и скоростям процессов. Умение от общих закономерностей теории поля перейти к весьма простым картинам электрических и магнитных цепей определенного класса, исследование которых достигается более простыми средствами, во многом определяет теоретическую подготовленность современного инженера.
Глава 1
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА
1.1. Элементы и схемы замещения электрической цепи постоянного тока
Электрической цепью называется совокупность устройств и объектов, образующих тть для электрического тока, электромагнитные процессы в которых могут быть описаны с помощью понятий об электродвижущей силе (ЭДС), токе и напряжении.
Основными элементами электрической цепи являются источники и приемники электрической энергии (и информации).
Электрические цепи, в которых получение электрической энергии в источниках, ее передача и преобразование в приемниках происходят при постоянных во времени токах и напряжениях, называют электрическими цепями постоянного тока.
Постоянный ток широко используется во многих отраслях техники. Его применяют для питания устройств связи, транзисторных приборов, электрооборудования автомобилей, транспорта и др.
Источниками электрической энергии служат устройства, в которых происходит преобразование различных видов энергии в электрическую. По виду преобразуемой энергии источники электрической энергии можно разделить на химические и физические. Химическими источниками электрической энергии принято называть устройства, вырабатывающие электрическую энергию за счет окислительно-восстановительного процесса между химическими реагентами. К химическим источникам относятся первичные (гальванические элементы и батареи), вторичные (аккумуляторы и аккумуляторные батареи) и резервные (при хранении электролит никогда гальванически не связан с электродами), а также электрохимические генераторы (топливные элементы).
з*
67
Физическими источниками электрической энергии называют устройства, преобразующие энергию механическую, тепловую, электромагнитную, световую, радиационного излучения, ядерного распада в электрическую. К физическим источникам относятся электромашинные генераторы (турбо-, гидро- и дизель-генера-торы), термоэлектрические генераторы, термоэмиссионные преобразователи, МГД-генераторы, а также генераторы, преобразующие энергию солнечного излучения и атомного распада.
Приемники электрической энергии (электродвигатели, электрические печи, нагревательные приборы, лампы накаливания, резисторы и др.) преобразуют электрическую энергию в другие виды энергии.
В электрической цепи источники и приемники соединяются с помощью проводов, кабелей, шин и т.д., называемых в дальнейшем просто проводами, которые обеспечивают передачу электрической энергии от источников к приемникам.
Электрические цепи могут содержать:
а) коммутационную аппаратуру для включения и отключения отдельных элементов цепей (рубильники, выключатели и т.д.);
б) контрольно-измерительные приборы (амперметр, вольтметр и т.д.);
в) аппаратуру зашиты (плавкие предохранители, автоматы и т.д.).
Рассмотрим простейшую электрическую цепь постоянного тока, состоящую из аккумулятора, фары автомобиля, выключателя, амперметра и соединительных проводов (рис. 1.1 а).
а) б) в)
Рис. 1.1
Графическое изображение электрической цепи, в которой реальные элементы представлены в виде условных обозначений (рис. 1 1 б), называется схемой электрической цепи.
Для упрощения изображения электрической цепи каждое элек
68
тротехническое устройство заменяют (по правилам, отраженным в различных стандартах и, прежде всего, в Государственном стандарте - ГОСТе) его условным обозначением.
На рис. 1.2 приведены условные обозначения источников и приемников постоянного тока: гальванического элемента и аккумулятора (рис. 1.2 а), генератора постоянного тока (рис. 1.2 б), термопары (рис. 1.2 в), резистора (рис. 1.2 г), лампы накаливания (рис. 1.2 д). электрической печи (рис. 1.2 е).
Л
т
Рис. 1.2
РА
PV
б)
Рис. 1.3
а)
в)
г)
Условные обозначения некоторых измерительных приборов и коммутирующих устройств представлены на рис. 1.3: амперметра (рис. 1.3а), вольтметра (рис. 1.36), выключателя (рис. 1.3в), предохранителя (рис. 1.3 г).
Чтобы облегчить изучение процессов в электрической цепи, ей ставят в соответствие схему замещения электрической цепи, отображающую свойства цепи при определенных условиях.
Схема замещения состоит из совокупности различных идеализированных элементов, т.е. элементов, описываемых одним параметром, выбранных так, чтобы можно было описать физические процессы в реальном устройстве.
В схемах замещения цепей постоянного тока основными элементами являются идеальные источники энергии и резисторы, которыми, в частности, заменяются приемники энергии.
Провода также замещаются резисторами, поскольку в них энергия потребляется. Так схему замещения для цепи, изображенной на рис. 1.1 можно представить в виде рис. 1.1 в, где RA, R$, Rn сопротивления резисторов, замещающих соответственно амперметр, фару и все соединительные провода, а Е - величина ЭДС аккумуля-
69
тора. Однако в случае, если сопротивление провода весьма мало (много меньше сопротивления нагрузок), то его величиной можно пренебречь, положив ее равной нулю, и тогда в схеме замещения провод участвует, просто соединяя сменные элементы. Заметим, что конденсаторы и индуктивные катушки в схему замещения рассматриваемой цепи входить не могут, т.к. из уравнений конденса-„ z-’ dUс г dir
тора и индуктивной катушки ic-C-------—, ul=L—— при посто-
dt dt
янных напряжениях ис - Uс = const и токах iL = IL — const следует, что ток конденсатора ic — 0 и напряжение индуктивной катушки и L — 0.
Поэтому конденсатор «разрывает» цепь постоянного тока в месте своего расположения, а катушка, наоборот, замыкается проводником с нулевым сопротивлением (т.е. она «закорачивает» места своего подсоединения).
Схемы замещения различных электротехнических устройств будут подробно рассмотрены в следующих параграфах.
Электрические цепи бывают неразветвленные и разветвленные (рис. 1.4). Если во всех участках цепи ток один и тот же, она называется неразветвленной (рис. 1.4а), в противном случае схема называется разветвленной (рис. 1.46).
Рис. 1.4
Геометрическая конфигурация схемы характеризуется такими понятиями, как ветвь, узел, контур.
Ветвь - участок электрической цепи, вдоль которого протекает один и тот же ток.
Узел - место соединения ветвей электрической цепи.
Контур - последовательность ветвей электрической цепи, образующая замкнутый путь, в котором один из узлов одновременно
70
является началом и конном пути, а остальные встречаются только один раз.
В цепи на рис. 1.46 можно выделить три ветви - ветвь, состоящую из резисторов RX,R4 и источника постоянной ЭДС Е, ветвь, состоящую из резистора Т?2, ветвь, состоящую из резистора Л3 и два узла 1 и 2. Цепь, изображенная на рис. 1.4а, имеет только один контур (одноконтурная цепь), в цепи изображенной на рис. 1.46, можно выделить два контура I и II, показанные пунктиром.
В заключение заметим, что в цепях постоянного тока все буквы, используемые для обозначения токов, напряжений, ЭДС, мощностей, должны иметь прописное написание -1, U, Е, Р, а не i, и, е, р - последние строчные буквы используются для обозначения изменяющихся во времени величин.
1.2. Задача анализа электрической цепи.
Выбор условно-положительных направлений токов и напряжений ее элементов
Под задачей анализа электрической цепи будем понимать аналитическое или численное описание процессов в цепи при условии известности как ее схемы замещения, так и значений параметров всех ее элементов. В случае, если такая задача решается численно, будем говорить о задаче расчета электрической цепи или просто о расчете цепи.
При расчетах электрических цепей истинные (положительные) направления токов, напряжений в элементах цепи в общем случае заранее неизвестны. Поэтому одно из двух возможных направлений принимается за положительное и указывается на схеме стрелкой. Это направление выбирают произвольно и поэтому называют условно-положительным направлением.
Если в результате расчета значение тока или напряжения в каком-либо элементе окажется положительным, то. значит, истинное направление тока (напряжения) в нем совпадает с условноположительным направлением, если же оно будет отрицательным, то это означает, что истинное направление тока (напряжения) противоположно выбранному условно-положительному направлению.
Выбор условно-положительных направлений нужен лишь для записи уравнений, описывающих процессы в цепи. Обычно его подчиняют некоторым правилам:
71
- условно-положительные направления токов и напряжений на каждом резисторе принимают совпадающими;
- совпадающими принимают условно-положительные направления токов (напряжений) резисторов одной ветви, т.е. так называемых последовательно соединенных резисторов (пример последовательного соединения трех резисторов представлен на рис. 1.1 в);
— совпадающими полагают и условно-положительные направления токов (напряжений) параллельно соединенных резисторов, т.е. резисторов ветвей, которые подсоединены только к двум узлам (пример - резисторы R^R-i на рис. 1.5а,б);
- совпадающими с ЭДС принимают условно-положительные направления токов (напряжений) резисторов в одной с этой ЭДС ветви;
- для источников ЭДС условно-положительное направление тока принято выбирать совпадающим с направлением ЭДС (указанным стрелкой), а условно-положительное направление напряжения принято выбирать противоположным направлению ЭДС.
На рис. 1.5а показаны обозначения условно-положительных направлений токов и напряжений на примере простейшей цепи постоянного тока.
Рис. 1.5
Иногда условно-положительные направления напряжения указывают двойными индексами Uab. Каждый индекс соответствует точке, обозначенной на схеме. Считают, что условно-положительное направление принято от точки с первым индексом к точке со вторым:
Uab=-Uba-
Так как условно-положительные направления тока и напряжения резисторов обычно принимают совпадающими, то на схе
72
ме достаточно указать только направления токов (рис. 1.56). Если на схеме не указывается источник, то на его выходных зажимах обязательно стрелкой указывается истинное направление напряжения (рис. 1.56).
Для решения задачи анализа нам потребуется знание как уравнений отдельных элементов (компонентных уравнений) цепи, так и обших законов для ее токов и напряжений (законов Кирхгофа).
1.3. Компонентные уравнения элементов цепи постоянного тока. Схемы замещения источников энергии
Компонентным уравнением элемента электрической цепи называется уравнение, связывающее ток и напряжение рассматриваемого элемента цепи. В случае, если коэффициенты, входящие в эти уравнения, оказываются постоянными, не зависящими от интенсивности процессов (от токов и напряжений цепи), то говорят о линейности рассматриваемых элементов электрической цепи, в противном случае элементы цепи считаются нелинейными. Рассматривая цепь постоянного тока, мы имеем дело только с резисторами и источниками энергии.
1.3.1. Компонентное уравнение резистора
Компонентное уравнение резистора дается законом Ома. Для изображенного на рис. 1.6 а резистора с выбранным условноположительным направлением тока и напряжения согласно этому закону компонентное уравнение имеет вид
U = R1, R(G) R(G)
если в качестве параметра резисто- 1~^С Х~1_/ 1~Х
ра выбрано сопротивление, и вид U I* U l"
1 = GU, ’ ’
а) б)
если в качестве этого параметра
выбрана проводимость. Напомним, Рис. 1.6
что проводимость есть величина, обратная сопротивлению G = R1, единицей сопротивления является ом (1 Ом = 1 В/1 А), а единицей проводимости является сименс (1 См =1/1 Ом).
У нелинейного элемента - резистора, изображенного на рис. 1.66 — сопротивление R (проводимость G) могут сколь угодно сложно зависеть от токов и напряжений, т.е. в этом случае R = R(U, Г); G = G(U, 1).
73
Зависимость напряжения резистора U от его тока I называется его волЕ>т-амперной характеристикой (ВАХ).
Если сопротивление резистора (рис. 1.6 а) не зависит от тока, то его ВАХ представляет собой прямую (рис. 1.7а), проходящую через начало координат, где tga=R, ctga = G. Такой резистор яв-
ляется линейным элементом.
Резистор, изображенный на рис. 1.66, ВАХ которого не является прямой линией (рис. 1.76), будет уже нелинейным. Электрические цепи, содержащие только линейные элементы, называются линейны
ми. Если в цепи имеется хотя бы один нелинейный элемент, вся цепь называется нелинейной.
Особо разберем случай, когда резистор (рис. 1.6а) в схеме замещения цепи эквивалентирует провод длиной /, сечением s (рис. 1.8), имеющий удельное сопротивление р=— (его единица Ом м). Тогда в
У
приведенных выше компонентных уравнениях сопротивление рези-
стора определяется как R — р а соответствующая проводимость s
как G = у —, где у - удельная проводимость (ее единица См м).
5
1.3.2. Компонентные уравнения источников энергии
В схемах замещения электрических цепей вводят два типа иде-
Рис. 1.9
альных источников энергии -идеальный источник ЭДС и идеальный источник тока.
Идеальным источником ЭДС (рис. 1.9) называют такой источник энергии, величина ЭДС которого не зависит от тока источника и равна ЭДС ре
74
ального источника с нулевым током (не подсоединенного к цепи). На рис. 1.9 показаны условное обозначение идеального источника ЭДС и его внешняя характеристика (зависимость напряжения на этом источнике от его тока при выборе условно-положительных направлений тока и напряжения источника, показанных на рис. 1,9а).
Компонентное уравнение идеального источника ЭДС имеет вид U = E.
Внешняя характеристика реального источника (рис. 1.10а) оказывается иной, величина ее напряжения падает с ростом тока (пунктирная линия на рис. 1.106). Если несколько идеализировать эту зависимость, сделать ее линейной, то в качестве линейной модели такого нелинейного элемента можно принять идеальный источник ЭДС, последовательно соединенный с резистором.
Рис. 1.10
ЭДС принимается равной напряжению реального источника (рис. 1.10а) при нулевом токе, т.е. Ео = 17(0) - Uo, подобное напряжение в электротехнике называют напряжением холостого хода, а все переменные, соответствующие холостому ходу, помечают индексом «0» или «хх» - холостой ход.
Сопротивление резистора схемы замещения (рис 1.1 Ов) реального источника называют внутренним сопротивлением реального источника ЭДС, оно равно тангенсу угла наклона идеализированной внешней характеристики a /?BI1-tg(Z или отношению
/?вн = (см. рис. 1.10в). Здесь /к - ток короткого замыкания источника, т.е. ток, при котором напряжение последнего становится равным нулю (переменные, соответствующие такому току, обозначают индексом «к» или «кз» - короткое замыкание).
Для практического определения внешней характеристики ре
75
ального источника ЭДС последний подсоединяют к резистору с переменным сопротивлением (рис. 1.10г). Изменяя сопротивление R в широких пределах от 0 (режим короткого замыкания, когда узлы а и b источника фактически замкнуты) до оо (режим холостого хода) и измеряя при этом напряжение и ток источника с помощью вольтметра и амперметра, можно получить искомую зависимость.
ВАХ идеализированного источника (см. рис. 1.10в), представляющую собой прямую линию, можно построить по двум любым ее точкам, в частности, по точкам холостого хода (7 = 0, 7/ = (70) и короткого замыкания (7 = ZK, U = 0). Уравнение такой ВАХ - суть линейное уравнение, получение которого не представляет особых сложностей.
Таким образом, компонентное уравнение модели (см. рис. 1.1 Ов) реального источника можно записать в виде а = £0-7/?вн.
Заметим, что, преобразовав последнее уравнение, можно получить выражение (рис. 1.10 в)
7?вн
известное как закон Ома для ветви с ЭДС (здесь U' - -U - напряжение ветви, направление которого выбрано согласным с направлением тока в ней).
При расчете цепей можно вместо реального источника ЭДС рассматривать два элемента ветви - резистор и источник по отдельности, со своими компонентными уравнениями UE = Ео и ur=Rbhi.
Отметим, что внешней характеристике рис. 1.106 отвечает и другая модель реального источника, представленная в виде резисто-1
ра с проводимостью GBH =----, параллельно соединенного с иде-
^вн
альным источником тока (рис. 1.11а), величина которого равна £
JK =——. Введенный здесь новый элемент - идеальный источник
тока - условное обозначение которого дано на рис. 1.116, отличается тем, что его ток не зависит от напряжения на этом источнике,
76
и потому внешняя характеристика такого источника представляет собой прямую линию, параллельную оси напряжений. Такая характеристика представлена на рис. 1.11 в для источника рис. 1.116.
Условно-положительные направления токов и напряжений для идеальных источников тока выбирают совпадающими (рис. 1.116). Компонентным уравнением идеального источника тока J (рис. 1.11) будет
I = J.
Компонентное уравнение схемы, изображенной на рис. 1.11а, соответствующее линеаризованной характеристике (рис. 1.106), имеет вид
Схемы замещения реального источника (см. рис. 1.10а), изображенные на рис. 1.1 Ов и рис. 1.11а, считаются эквивалентными, т.е. замена одной из них на другую при расчете сложной схемы на результат расчета не повлияет. Для замены схемы рис. 1.1 Ов схемой рис. 1.11а необходимо принять JK = Ео/RBH, GBH = 1//?нн, для замены схемы рис. 1.11а схемой 1.1 Ов необходимо положить ^о~Л/^вн> ^вн-'/^вн- Заметим, что при расчетах сложных схем, содержащих подсхему рис. 1.11а, ее элементы можно по отдельности описать компонентными уравнениями: резистор — уравнением — (для условно-положительных направлений его тока и напряжения, выбранных на рис. 1.11а противоположными), идеальный источник тока lK=JK.
77
1.4. Анализ электрической цепи на основе законов Кирхгофа и компонентных уравнений ее элементов
Законы Кирхгофа устанавливают соотношения для токов и напряжений в разветвленных электрических цепях произвольного типа.
Первый закон Кирхгофа утверждает, что алгебраическая сумма токов ветвей, сходящихся в любом узле, равна нулю:
п
1=1
где п — число ветвей, сходящихся в данном узле.
Например, для узла электрической цепи , (рис. 1.12) первый закон имеет вид
71-Z2+/3-/4 + Z5 = 0.
В этом уравнении положительными приняты х— уЦ токи, направленные к узлу.
\ Второй закон Кирхгофа утверждает, что
Рис. 1.12 алгебраическая сумма напряжений отдельных элементов любого замкнутого контура равна алгебраической сумме ЭДС в этом контуре:
т к
/=1 /=1
где т - число элементов (резисторов и источников тока), входящих в контур и число идеальных источников ЭДС этого контура; Ц - на
пряжение г-го элемента: £)- напряжение z-й ЭДС контура.
Здесь принимаются положительные знаки перед теми напряжениями и ЭДС, направления которых совпадают с направлением
выбранного обхода контура. Так для контура, изображенного на рис. 1.13, имеем Ц - U2 + £73 -С/4 - Ех - Е2 + Е3.
При анализе электрической цепи, схема которой содержит q узлов, р ветвей и п элементов, по законам Кирхгофа можно составить только р независимых уравнений: (q - 1) - по первому закону Кирхгофа и(/?-^+1)-по второму закону Кирхгофа. По второму закону
Кирхгофа уравнения составляются для независимых контуров, в
78
каждом из которых есть ветвь, входящая только в данный контур и не входящая в другие контуры. Такие ветви называют ветвями связей или просто связями. Если ветви связи разорвать, в схеме не останется ни одного контура.
Уравнения, составленные по законам Кирхгофа, дополняются компонентными уравнениями всех элементов цепи. Полученная система из р + п уравнений позволяет найти все неизвестные токи и напряжения элементов цепи.
Общая методика анализа цепи выглядит следующим образом.
1. Выбираются условно-положительные направления токов и напряжений схемы цепи (с учетом рекомендаций, данных в п. 1.2).
2. Выбираются (q - 1) независимый узел и (р - q + 1) независимый контур цепи (см. выше), и для них составляются соответственно (q - 1) уравнение по первому закону Кирхгофа и (р - q + 1) уравнение по второму закону Кирхгофа.
3. Записывается и компонентных уравнений элементов цепи.
4. Полученная система р + п уравнений решается численно либо аналитически любым известным из математики методом.
Проиллюстрируем сказанное на примере анализа схемы, изображенной на рис. 1.14а и содержащей <? = 4 узла, р = 5 ветвей и и = 5 элементов (два из которых - последовательно соединенные резистор и источник тока (ветвь 5) и параллельно соединенные резистор и источник ЭДС (ветвь 1) - можно было бы рассмотреть как 4 независимых элемента: два резистора, источник тока и источник ЭДС; но в этом случае увеличилось бы число ветвей на две ветви и число узлов на один узел).
79
1. Выбираем условно-положительные направления токов и напряжений элементов схемы (см. рекомендации п. 1.2).
2. Выбираем q - 1 3 независимых узла (для определенности
узлы 1, 2, 3) и р - q + 1 = 2 независимых контура (рис. 1.146) (для определенности контуры I и II) и составляем уравнения по первому -/1-/4 = 0; /1+/3-/2=0; /2+/5 = 0
и второму законам Кирхгофа
(74-(7з-Ц =0; U3-U5-U2 =0.
3. Дополняем полученную систему из 5 уравнений еще пятью компонентными уравнениями (и = 5) элементов:
Ц =-i— U2 = R2I2~, =£3; /4 = J4; U5 = Е5-R5I5.
Решая полученную систему из 10 уравнений, находим 10 неизвестных токов и напряжений ветвей:
I - J I +£з'Ь5. j , .
2“к2+< i 4R2 + R,’
U2=R2^~—U3-E3‘,
G] Я2+Л5 3 3
G4 = £3+^-^; G5=£s-£5-5~-3 .
G, 5 5£2+£5
,=^;Ц = Л2+Л,
1.5. Преобразование последовательно и параллельно соединенных элементов электрической цепи
Задача анализа электрической цепи существенно упрощается, если некоторые конфигурации соединений ее элементов заменить более простыми так, чтобы распределение токов и напряжений в оставшейся части цепи осталось неизменным. В простейшем случае это может быть сделано для последовательно или параллельно соединенных элементов.
1.5.1. Последовательное соединение резисторов
Если несколько элементов цепи, резисторов в частности, соединены таким образом, что по тем проходит один и тот же ток, то такое соединение элементов (резисторов) называется последовательным (рис. 1.15а). Обозначим сопротивления отдельных резисторов в этом соединении через RX,R2,R3, а напряжения на зажимах соответственно - G1; U2, U3.
80
По второму закону Кирхгофа имеем {7-Ц + [72 +(73.
Если обе части формулы этого уравнения разделить на ток I, получим
U U. U, и3
1111
или
7?э=7?1+7?2 + /?3, где 7?э - эквивалентное сопротивление последовательно соединенных резисторов.
R\ R2 R3 R3
a) 6)
Рис. 1.15
Таким образом, при последовательном соединении резисторов эквивалентное или общее их сопротивление равно сумме сопротивлений отдельных резисторов, а само соединение может быть заменено одним резистором 7?э (рис. 1.156). В общем случае
/7 яэ=£я,, i=i
где п число последовательно соединенных резисторов.
Ток в таком соединении
где U- общее напряжение.
Напряжения на отдельных резисторах определяют по формулам
UX=IRX; U2=1R2; U3=IR3.
Последовательное соединение приемников энергии широко применяется в различных областях техники, оно используется в тех случаях, где расчетное напряжение приемника меньше напряжения источника электрической энергии.
81
15 2. Параллельное соединение резисторов
Параллельным соединением элементов цепи, резисторов в частности, называется такое соединение, при котором к одним и тем же двум узлам электрической цепи присоединяется несколько элементов (резисторов) (рис. 1.16).
Рис. 1.16
В соответствии с законом Ома и первым законом Кирхгофа:
I = "- I =^- I = "-
1 7?, 2 R2 R3
1 — /| +I2 + I з имеем
U U
R3 ~ R} + R2 + R3 ’
где 7?э - эквивалентное сопротивление рассматриваемого соедине
ния резисторов.
Сократим обе части равенства на U:
J__J_ 1 1
7?э /?! R2 R3
нии
6э=С1+62 + С3-
Таким образом, общая (эквивалентная) проводимость параллельного соединения резисторов равна сумме проводимостей параллельных ветвей.
Из формулы определяем общее сопротивление трех ветвей
r ________RiR2R3_____
R\R2 + R\R3 + R2R3
Если параллельно включены п равных резисторов, то эквивалентное сопротивление этого соединения 7?э в п раз меньше сопротивления одной ветви:
R3=^.
п
Во всех случаях параллельного соединения эквивалентное сопротивление меньше самого малого из параллельно включенных.
82
I
Рис. 1.17
Практический интерес представляет цепь с двумя параллельными сопротивлениями (рис. 1.17).
Эквивалентное сопротивление рассчитывается по формуле
я, + я2
Токи ветвей можно выразить через обший ток:
J -U _/R? _ !R2 j _U = fR3_ tRl
7?j 7?] /?| + Т?2 У?2 R\ Т R2
Подобную формулу расчета тока в ветви 1(2) называют иногда «формулой разброса».
Параллельное соединение имеет важное преимущество перед последовательным: все приемники находятся под одним напряжением; при неизменном напряжении отключение одного или нескольких приемников энергии не нарушает режима работы оставшихся включенными приемников.
1.5.3. Смешанное соединение резисторов
Смешанным соединением элементов цепи, резисторов в частности, называют сочетание последовательного и параллельного соединений.
Большое разнообразие этих соединений не позволяет вывести общую формулу для определения эквивалентного сопротивления цепи. Поэтому в каждом конкретном случае, используя методы расчета для последовательного и параллельного соединений, можно рассчитать эквивалентное сопротивление для смешанного соединения. Поясним это на конкретном примере расчета электрической цепи (рис. 1.18а).
83
Электрическую цепь постепенно упрощают и приводят к простейшему виду (рис. 1 . 18б,в), где
к23 = — ‘ ; R3 = Ri+R4 + R-n;
д2 + Л3
Для соответствующих токов и напряжений имеем:
Ц=—-, /3=-^21;
R3 R2 R3
U\=I\R\; ^4 - ^R^ ^23=Л^23‘
Покажем теперь, каким образом можно использовать эквивалентные преобразования соединений резистивных элементов в расчетах разветвленных цепей.
Пример 1.1. Определить токи ветвей цепи (рис. 1.19а), если: у?! = Т?2 = 4 Ом; R3 = 6 Ом; R4 = R5= 12 Ом; R( = 2 Ом; Е = 100 В.
б) в)
Рис. 1.19
Решение. Резисторы Rx и Л2 соединены последовательно и образуют ветвь с током Ц. Резисторы Т?4 и У?5 включены параллельно, а относительно резистора Л6 — последовательно. Вычислим
эквивалентные сопротивления:
R\2 ~ R\ Р R2 = 4 + 4 = 8 Ом;
А45б = /?6 + = 2 + -’^-^- = 8 Ом.
7?4 + 7?5 12 + 12
Резисторы /?12 и У?456 соединены параллельно, а по отношению к У?3 последовательно, поэтому (рис. 1 19 б, в)
^12456 =-^^ = —= 4 ОМ.
Т?12 + /?456 8 + 8
84
Эквивалентное сопротивление цепи
/?э = + ^?12456 — 6 + 4 = 10 Ом.
Ток в ветви источника
Так как сопротивления Т?12 и Т?456 одинаковы, то /1=/6=Ь. = 5 А-
Аналогично (R4 = Т?5)
/4 ==—= —= 2,5 А.
4 5 2 2
Отметим, что предложенный подход к расчету разветвленной цепи оказывается существенно более простым, нежели описанный ранее (см. п. 1.4) подход, основанный на непосредственном использовании законов Кирхгофа. Однако рассмотренный подход не формализован, требует некоторого анализа соединений элементов.
1.5.4. Последовательное соединение источников электрической энергии
В практике последовательное и согласное включение источников применяют для увеличения напряжения. При наличии нескольких последовательно включенных (встречно или согласно) источников ЭДС они могут быть заменены одним эквивалентным источником ЭДС.
Рассмотрим схему с двумя согласно и одним встречно включенными источниками (рис. 1.20).
Ei ^вн1 Е2 Авн2 Е3 RBIi3 Ei Е2 Е3 Еэ
R3 1 R3
а) б) в)
Рис. 1.20
85
Заменим последовательно соединенные резисторы одним эквивалентным резистором с сопротивлением /?, (рис. 1.206):
7?э - 7? + Авн1 + Лвн2 + 7?вн3.
Пользуясь вторым законом Кирхгофа, для полученной схемы можно записать Ех + Е2 -£3 - (7Э или E3=U3, где £э = Ех + Е2 - £3, a Uэ = IR , - компонентное уравнение резистора R.t. Уравнению С7Э = IR3 соответствует эквивалентная схема на рис. 1,20в.
Если последовательно включены источники тока (рис. 1.21 а), то для получения эквивалентной схемы замещения их можно вначале преобразовать в последовательно включенные источники ЭДС (рис. 1.21 6) с параметрами (см. и. 1.3)
^=7^; ^н1=свй1; е2=-^--, rbh2=g~22.
(jbh1 (zbh2
б)
Рис. 1.21
последовательную + /?вн2, а затем пре-
Затем нетрудно получить эквивалентную схему (рис. 1.21 в), где Еэ -Ех + Е2 и R.t = £Blll образовать ее (см. п. 1.3) в эквивалентную схему, изображенную на рис. 1.21 гс параметрами
j _ _ '^lfi.n2 ~1~ •Л'б'ви! q _ 1 _ бгвн] • Свн2
Gbh1+Gbh2 ВН 7?ен.э <?вн1 + Gbh2
1.5.5. Параллельное соединение источников электрической энергии
Пусть параллельно включены п источников тока Jx,J2,...Jn с внутренними проводимостями GBHi>Gbh2,.. 6ЕН„ (рис. 1.22а).
86
Рис. 1.22
Тогда все параллельно соединенные резисторы можно заменить одним с эквивалентной проводимостью GBH э = GBH1 + Gbh2 +... + GBH „ (см. пн. 1.5.2). Согласно первому закону Кирхгофа можно просуммировать все токи источников, получив значение ,/э = ./j + ./2 , которое можно отождествить со значением
эквивалентного источника тока и получить эквивалентную схему соединения (рис. 1 226)
Если параллельно соединенными оказываются не идеальные источники ЭДС, например, изображенные на рис. 1.23а, то их можно в начале заменить источниками тока (рис. 1.236) с параметрами
Рис. 1.23
Далее последние заменить одним эквивалентным источником тока с параметрами ./э = ./, + J2 и G., = GBH1 +Gbh2 (рис. 1.23в), а затем последний преобразовать в источник ЭДС (рис. 1.23г) с параметрами £э = и = G-1 = *вн1 ' ^вн2
G-t RBIIi+Rw2 ^bii1 + 7?bh2
При наличии смешанного соединения источников их также можно заменить одним эквивалентным источником, используя (поочередно) правила замены последовательно и параллельно соединенных источников.
87
1.6. Преобразования треугольника резисторов в эквивалентную звезду и наоборот
Рассмотрим две электрические цепи (рис. 1.24). Одна из них имеет вид треугольника, другая - трехлучевой звезды. В дальнейшем такие соединения будем называть соответственно соединением в треугольник и соединением звездой.
Соединения такого вида очень распространены в так называемых трехфазных цепях, в которых часто возникает необходимость перехода от одного вида соединения к другому (эквивалентному). Эквивалентность треугольника и звезды резисторов заключается в том, что их замена не меняет потенциалов узловых точек {а, Ь, с), являющихся вершинами треугольника и эквивалентной звезды, а также токов, напряжений и мощностей в остальной части схемы, не затронутой преобразованием.
Формулы пересчета сопротивлений ветвей треугольника Rab, Rbc, Rca в эквивалентную звезду Ra, Rb, Rc имеют вид:
R — RabRca _ RbcRab yj __ RcaRbt
Rab + Rbc + Rca Rab + Rbc + Rca ' Rab + Rbc + Rca
При переходе от звезды к треугольнику можно воспользоваться следующими формулами:
^=Л„+^+^; Rhc=Rh + Rc+M±- Rca=Rc + Ra+^.
Кс Ка Rb
Если сопротивления всех ветвей цепи по схеме треугольник одинаковы, т.е. Rab = Rbc = Rca = Яд, тогда Ra=Rh = Rc = 7?Л и
^а= —
Л 3
88
Доказательства приведенных здесь утверждений основываются исключительно на законах Кирхгофа и Ома и опушены лишь по причине их некоторой громоздкости.
Проиллюстрируем теперь возможности применения этого метода эквивалентного преобразования схем совместно с ранее рассмотренными методами на примере решения конкретной задачи.
Пример 1.2. Определить эквивалентное сопротивление цепи (рис. 1.25а), если R{ = R2 - R3 = 1 Ом; RA = R5- R6= 3 Ом.
^23ic
Ra
Решение. Преобразуем треугольник сопротивлений R4,R5,R(> в эквивалентную звезду сопротивлений Ra,Rb, R^ (рис. 1.246). Так
как /?4 = R5 = R6, то
R4RS 3-3 -----—-------=---------= 1 Ом.
R4 + Т?5 + 3 + 3 + 3
89
Дальнейшее решение производим методом замены последовательно и параллельно соединенных сопротивлений эквивалентными сопротивлениями (путем «свертывания» схемы). Резисторы Т?2 и Rb, Ry и Rt соединены последовательно, поэтому их общие сопротивления
/?2^ = R2 + Rb = 1 +1= 2 Ом; R3c = Ry + Rc =1 + 1 = 2 Ом.
Схема приобретает вид (рис. 1.25в).
Сопротивления R2b и Ric соединены параллельно, поэтому (рис. 1.24г)
Эквивалентное сопротивление всей цепи
Аэ - 7?i + Т?23бс + -1 +1 +1 - 3 Ом.
1.7. Обобщенный закон Ома. Обобщенная ветвь цепи постоянного тока
Два следующих обобщения - закона Ома и понятия ветви -оказываются полезными при практических расчетах цепей постоянного тока.
1.7.1 Обобщенный закон Ома (закон Ома для ветви
с несколькими резисторами и источниками ЭДС)
Рассмотрим ветвь (рис. 1.26 а), содержащую несколько резисторов и источников ЭДС. Условно положительные направления тока и напряжения ветви будем считать выбранными согласованно.
Рис. 1.26
Заменив последовательно соединенные резисторы одним эквивалентным резистором с сопротивлением R3 = R\ + R2 + Ry + R4, a последовательно соединенные источники ЭДС одним источником, величина ЭДС которого Еэ = Е, + Е2 - Е3, получим эквивалентную схему (рис. 1.266).
90
Для подобной схемы в п 1.3 было получено компонентное уравнение, которое в нашем случае с учетом выбранных направлений тока и напряжений и обозначений принимает вид
Полученное выражение носит название обобщенного закона Ома для участка (ветви) схемы с ЭДС.
1.7.2. Обобщенная ветвь цепи постоянного тока
В целях унификации элементной базы рассчитываемой цепи часто вводят так называемые обобщенные ветви, содержащие сразу все возможные элементы цепи данного класса.
Составляя из таких ветвей схему замещения цепи, можно параметры отдельных ее элементов полагать равными нулю, достигая тем самым соответствия с истинной схемой замещения цепи. По-
скольку цепь постоянного тока может содержать три идеальных элемента - резистор, идеальный источник ЭДС и идеальный источник тока, то обобщенная ветвь такой цепи (рис. 1.27) как раз и состоит из этих элементов.
Рис. 1.27
R(G) Е
Если эта ветвь должна моделировать резистивную ветвь, то достаточно положить нулевыми параметры источников (J=0, Е = 0), т.е. фактически «разорвать» ветвь с источником тока и заменить проводником («закоротить») источник ЭДС.
Запишем теперь компонентное уравнение для обобщенной вет-
E + U ви. Для чего вначале запишем обобщенный закон Ома Г =----
R для ветви с резистором и ЭДС. Учтя первый закон Кирхгофа Г — I + J , получим искомое уравнение в любом из двух видов:
U = R(1 +f)-E или С=—(7 + J)-£.
G
Обобщенные ветви позволяют компонентные уравнения всех элементов записать в одинаковом виде, что позволяет формализовать описание цепи и оказывается важным, например, при машинном расчете цепей.
91
1.8. Энергетические соотношения в цепях постоянного тока
Эффективность решения наиболее фундаментальных задач современной электротехники и электроэнергетики, связанных с производством, передачей, распределением и потреблением (преобразованием) электрической энергии, оценивается, прежде всего, в энергетических категориях. Знакомству с этими категориями и простейшими их соотношениями и посвящен настоящий параграф.
1 8.1. Электрическая энергия
Рис. 1.28
Рассмотрим схему простейшей электрической цепи, состоящей из источника ЭДС с внутренним сопротивлением 7?вн и приемника с сопротивлением R (рис. 1.28).
Записав уравнение второго закона Кирхгофа E-U + 1)ък для рассматриваемой схемы и умножив обе его части на It, получим
Elt = Ult + Свн//.
Поскольку работа по перемещению заряда q связана с напряжением соотношением А - qU, а
. q постоянный ток в цепи, очевидно, равен I = — ,
... A q
то выражение Ult =-----t-A описывает совершаемую работу в
Q t
приемнике. Приравняв ее энергии А = W. можно определить энергию. передаваемую приемнику как W - Ult. Аналогично Wr = Elt работа (энергия) источника, а ЛИ7Г = UBHIt = (RBH l)lt = RBHI2t -энергия, покрывающая потери на тепло во внутреннем сопротивлении источника. Таким образом, можно записать
Wr = W + EWr,
т.е. электрическая энергия, вырабатываемая источником за время г, расходуется на энергию, отдаваемую приемнику, и энергию, преобразуемую в тепловую энергию в самом источнике согласно закону Джоуля- Ленца. Тем самым соблюдается баланс энергии в рассматриваемой системе, состоящей из источника и приемника энергии.
Следует отметить, что работа и энергия — понятия в некотором смысле равноценные. Энергия - способность источника совершать
92
работу. Чтобы измерить энергию источника, надо измерить работу, которую он совершает, расходуя эту энергию.
Размерность энергии [IE] = [L7/] = В А с = Дж (джоуль).
На практике за единицу энергии принимают 1 кВт ч = 3,6-106 Дж.
1.8.2. Электрическая мощность. Баланс мощностей
Электрическая мощность - это физическая величина, характеризующая скорость передачи или преобразования электрической энергии. Для цепи, схема которой дана на рис. 1.28,
где Рг — мощность, развиваемая источником.
Единица мощности - ватт. Один ватт - мощность, при которой за одну секунду совершается работа в один джоуль.
Мощность, отдаваемая (полезная) источником энергии приемнику,
/2 Т j2
P = U1 = 12r= — = U2G = .
G R
Потери мощности во внутреннем сопротивлении ДР — 12RB„.
Таким образом, имеет место равенство РГ = Р + ДР, называемое балансом мощностей.
Баланс мощностей является следствием закона сохранения энергии и в более общем случае, когда в цепи имеются п источников и к приемников (резисторов), математически записывается как п к
tPH=tPni-i=\ 1=1
При этом мощности всех приемников заведомо положительны, т.к. Рп, = UniIni = RniI„j, где Rnj, lni, Uni - соответственно сопротивление, ток и напряжение /-го приемника, в то время как мощности отдельных источников PTi=-UriITi могут оказаться и отрицательными, если их токи и напряжения имеют разные знаки, т.е. ряд источников вместо выработки энергии могут ее потреблять.
Здесь предполагается, что условно-положительные направления токов и напряжений источников тока, ЭДС и резисторов (приемников) выбраны согласными.
93
Поясним сказанное на примере составления баланса мощностей для схемы, изображенной на рис. 1.29.
Анализ схемы дает сле-
дующие результаты:
Рис 1.29
Л
= ^2== IB-
Мощность, потребляемая в приемнике
Р2=(/2/2=Я2/2Е 2 = 1 Вт.
Мощность, создаваемая источником тока Р3 = -Е3/3=-(-1)-2 = 2Вт.
Мощность источника ЭДС Рх = —U х = —1 Вт - потребляется, а не вырабатывается. При этом баланс мощностей соблюдается.
Р{ + Е3 - Р2 или (-1) + 2 = 1 Вт.
1.8.3. КПД источника энергии
Отношение мощности приемника (полезной мощности Р) к мощности источника энергии (см. рис. 1.28) называется его коэффициентом полезного действия (КПД):
Р UI U IR R
Г] =— = — = —=-----------=--------
РТ El Е IR + IRB„ R + Rm
Из последней формулы видно, что чем меньше внутреннее сопротивление Авн, тем выше КПД источника.
Определим, при каком условии источник энергии развивает максимальную полезную мощность. Для этого запишем выражение мощности приемника Р = 1Л = (Е- IRBH)I с учетом того, что
R + R™
в виде
Е2
R + ZR^^-
Исследуем полученное выражение на экстремум.
94
dR
d R + 27?вн I
rd = 1—^- = 0. R2
Находим R-RBH.
Тогда максимальное значение мощности приемника
р тйХ 4Т?ВН
Таким образом, источник ЭДС развивает максимальную полезную мощность, когда внешнее сопротивление 7? равно внутреннему сопротивлению источника.
Однако такой режим является невыгодным, т.к. в этом случае 50 % энергии идет на потери во внутреннем сопротивлении источника:
7?
=-----------
2? + 7?BH
— = 0,5. 27?
Режим цепи, при котором внешнее сопротивление цепи равно внутреннему сопротивлению источника энергии, называется режимом согласованной нагрузки. Такой режим используется в телемеханике, электросвязи и автоматике, где передаются малые мощности. Мощные источники, как правило, работают на приемник сопротивлением 7? = (10...20)7?вн. обеспечивая КПД более 95 %.
1.9. Принцип наложения и основанный на нем метод расчета электрических цепей
Для линейных электрических цепей справедлив принцип наложения, согласно которому ток (напряжение) любой ветви оказывается равным алгебраической сумме так называемых частичных токов (напряжений), создаваемых в этой ветви каждым из источников в отдельности.
На основе этого принципа можно предложить соответствующий метод расчета схем электрических цепей, называемый методом наложения. Суть его заключается в том. что в схеме поочередно оставляют только по одному идеальному источнику, в то время как величины других источников полагаются равными нулю (т.е. ветви с источниками ЭДС «закорачиваются», а с источниками тока «разрываются»), В качестве примера рассмотрим схему
95
электрической цепи с двумя источниками - источником ЭДС и источником тока (рис. 1.30).
Для расчета этой схемы сначала исключают источник тока, полагая его значение равным нулю (рис. 1.306) и находят частич-
ные токи
Рис. 1.30
Затем исключают источник ЭДС, полагая его значение равным нулю и оставляя в схеме только источник тока (рис. 1.30 в). Соответствующие частичные токи в этом случае будут равны
2 — 1 —---------
+1
Окончательное решение имеет вид
г' , ~G\Ey I , г" _ Л — ^^3 .
G]7?2 + l 2 Gj.R2 + 1
GXE,-JX GXR2 +1
Порядок расчета по методу наложения:
1) поочередно рассчитывают частичные токи, возникающие от действия каждого источника, для чего мысленно удаляют все ос
тальные источники из схемы, но оставляют при этом их внутренние сопротивления(проводимости);
2) определяют токи в ветвях путем алгебраического сложения
частичных токов.
Заметим, что методом наложения нельзя пользоваться для вычисления мощностей, т.к. мощность - квадратичная функция тока или напряжения. Например,
Р = /2/? = (/, + Г)27?^(/,)2Л + (Г)27?.
96
1.10. Метод эквивалентного генератора
При исследовании процессов в сложных электрических цепях часто появляется необходимость определить ток, напряжение и мощность только в одной ветви. В этом случае выделяют исследуемую ветвь, присоединенную к сложной цепи в двух узлах. Остальная часть электрической схемы с двумя выделенными узлами называется двухполюсником.
Двухполюсники, содержащие источники электрической энергии, называют активными. Если в двухполюсниках нет источников, то их называют пассивными.
В дальнейшем активный двухполюсник будем обозначать прямоугольником с буквой А (рис. 1.31а), пассивный — с буквой П (рис. 1.316).
Всякий пассивный
является потребителем электрической энергии и характеризуется величиной сопротивления 7?вх, называемого внутрен
Рис.1.31
двухполюсник
ним или входным сопротивлением пассивного двухполюсника.
По отношению к выделенной ветви активный двухполюсник можно заменить эквивалентным генератором, ЭДС которого равна
напряжению холостого хода, т.е. напряжению на выделенных узлах в отсутствии рассматриваемой ветви, а внутреннее сопротивление
равно входному сопротивлению пассивного двухполюсника.
Выделим в электрической цепи одну ветвь с сопротивлением
Ток выделенной ветви
И ab хх
Rab + Rbx
lab-
Rah, присоединенную в точках а и b к активному двухполюснику (рис. 1.32а).
После замены активного двухполюсника эквивалентным генератором схема принимает вид (рис. 1.32 б).
R3
Rab + Rэ
4 Зак 1186
97
где 7?вх - R3 - входное сопротивление двухполюсника по отношению к зажимам ah, U„h vv =Е„.
7 Ci U ЛЛ J
Расчет по методу эквивалентного генератора сводится к следующему:
а) находят напряжение U аЬ хх на зажимах разомкнутой ветви ab\
б) определяют входное сопротивление Rm двухполюсника, считая величины его внутренних источников ЭДС и тока равными нулю;
Е
в) определяют искомый ток по формуле IаЬ ------—.
Rab + R3
При Rab = 0 будет режим короткого замыкания ветви аЬ. Ток короткого замыкания очевидно равен
j _ U аЬ хх . n _ U аЬ хх
1 КЗ n ’ 2VBX .
Лвх * КЗ
Для определения входного сопротивления необходимо измерить с помощью приборов или рассчитать по схеме замещения цепи напряжение холостого хода на зажимах разомкнутой ветви U аЬ хх и ток короткого замыкания /ю ветви.
Пример 1.3. Определить ток /5 методом эквивалентного генератора (рис. 1.33а), если Е} = 180 В; Е2 = 100 В; 7?(= 30 Ом; R2 = 40 Ом; = R4 = 60 Ом; Т?5= 6 Ом.
98
Решение. 1. Разомкнем ветвь ah и найдем напряжение: Uab^ = E3 (Рис- 1.336).
Пользуясь вторым законом Кирхгофа, находим
А1 + 7?4 30 + 60 Т?2+Л3 40 + 60
Uabxx ~ Лх-^4 “ ^2хЕ3'
Отсюда
Е, = иab хх = Л Л 4 - Л.Лз - 2 • 60 -1 • 60 = 60 В.
2. Внутреннее сопротивление эквивалентного генератора равно входному сопротивлению пассивного двухполюсника. Источники ЭДС закорачиваем. Расчетная схема для определения входного сопротивления показана на рис. 1,32в.
„ „ K,T?4 R2R, 30-60 40-60 лл
R = R = —+ —2_J__ _----------+------= 44 QM
/?! + R4 R2 + R3 30 + 60 40+60
3. Заменив остальную часть цепи источником ЭДС Е3 и резистором с сопротивлением R3 (рис. 1.33г), получим
/5 =—— = -^- = 1,2 А.
R3 + Rab 44 + 6
1.11. Метод контурных токов
Метод контурных токов представляет собой высокоформали-зованный, а потому удобный для реализации на ЭВМ, метод расчета сложных электрических цепей. В своей основе он весьма прост, т.к. сводится к составлению уравнений цепи по второму закону Кирхгофа. Единственная сложность при этом заключается в том, что эти уравнения составляются не относительно напряжений ветвей рассчитываемой схемы, а относительно токов так называемых ветвей связей (см. п. 1.4). Поэтому для более простого описания этого метода целесообразно познакомиться с некоторыми новыми понятиями, относящимися к конфигурации схем электрических цепей.
Для выбора независимых контуров рассчитываемой схемы требуется выделить такие ветви, называемые ветвями связей или просто связями, исключение (разрыв) которых оставляет схему без единого контура. Оставшиеся после исключения связей ветви называют ветвями дерева, а саму часть схемы, состоящую исключи-4* 99
тельно из таких ветвей - деревом схемы. Дерево связывает все узлы схемы, но не образует ни единого контура. Поясним сказанное на примере схемы электрической цепи изображенной на рис. 1.34.
На этом рисунке жирными линиями выделено дерево (ветви 4, 5, 6), тонкие линии соответствуют связям (ветви 1, 2, 3). Следует отметить, что выбор дерева и соответствующих ему связей не однозначен, важно лишь, что число таких связей и соответственно число независимых контуров в исходной цепи всегда одно и тоже.
В нашем примере оно равно трем. Выбрав ветви связей 1, 2, 3, определим по ним три независимых контура (обозначены на рис. 1.34 круговыми стрелками), а именно: в каждый независимый контур должна входить только одна ветвь связей - остальные ветви кон-
Рис । тура представляют собой
ветви дерева. Так в первом контуре 1 — ветвь связи, 4, 5 - ветви дерева; во втором контуре 2 — ветвь связи, 5, 6 - ветви дерева; в третьем контуре 3 - ветвь связи, 4, 6 - ветви дерева. Токи этих ветвей связей Ц, /2, /3 назовем контурными токами, что будет обозначаться индексом к: Цк = Ц, 12к Цк = Л- Удобно считать, что контурный ток протекает по всем ветвям соответствующего контура (см. рис. 1.34): 11к - по ветвям первого контура, 12к - по ветвям второго контура, /ЗА — по
ветвям третьего контура.
Заметим, что, зная токи ветвей связей, т.е. контурные токи, токи остальных ветвей (ветвей дерева) можно найти непосредственно по первому закону Кирхгофа. Для нашего примера: h=^~^2~hk~^2k->^(>-^2~h-^k~hk-Поэтому, определив контурные токи рассчитываемой цепи, последующее нахождение остальных токов уже не представляет особых сложностей.
Дадим еще несколько определений. Контурной ЭДС назовем алгебраическую сумму величин ЭДС, входящих в данный контур, причем величина данной ЭДС берется со знаком «плюс», если ее на
100
правление совпадает с направлением обхода контура (т.е. направлением контурного тока) и со знаком «минус» - в противном случае.
Контурная ЭДС первого контура Е}1 =ЕХ -ЕА, второго контура Е22 --Е2, третьего контура Е33 = Е3 + Е4.
Собственным сопротивлением контура назовем сумму сопротивлений ветвей, входящих в данный контур. Для схемы рис. 1.34 /?| ] = А] + А5 + А4, А22 = А2 + А5 + А6, R33 — R3 + R4 + А6.
Взаимным сопротивлением двух контуров назовем сопротивление ветви, входящей одновременно в два рассматриваемых контура, причем если направления обхода этих контуров на данной ветви совпадают, то оно берется со знаком «плюс», в противном случае - со знаком «минус». Если рассматриваемые контуры не имеют общих ветвей, то их взаимное сопротивление равно нулю. Так взаимное сопротивление 1-го и 2-го контуров рассматриваемой схемы А12 =-А5, 1-го и 3-го контуров А13 =-А4, 2-го и 3-го контуров А23 = -А6.
Определив необходимые понятия, выразим через них второй закон Кирхгофа для цепи, содержащей в общем случае к независимых контуров
R\yhk +RnI2k + ••• +
R2lhk + R22^2k + --- + R2khk = E22>
Eklhk + Rk2J2k + --- + Rkkfkk ~Ekk-
Приведенные уравнения называют контурными уравнениями рассматриваемой цепи. Полученная система уравнений симметрична, т.к. взаимное сопротивление А/; контуров z и j равно взаимному сопротивлению А/( контуров j и /. В случае, когда к = 3, данная система примет вид
Rnhk +Ri2^2k + Rlkhk
‘ R2\hk + R22^2k + R2^3k = ^22’
.^31Ла + ^32^2A + Riihk ~ E33.
В частности, для рассматриваемой схемы рис. 1.34 с учетом принятых обозначений система контурных уравнений будет следующей:
101
(Aj +T?5 + — RsI2k = E\
' ~Rihk + (R2 + R5 + Re) 12k ~Rf,hk -~R4hk ~R6J2k + (R3 + R4+Rb)I3k =R3+R4-
Убедимся в том, что полученная система представляет собой систему уравнений второго закона Кирхгофа. Для этого перегруппируем в ней ряд слагаемых
RJlk + R5^]k ~ ?2к) + Rl(jlk ~hk) = Е\ ~^4»
' R5^2k ~ I\k) + R2^2k + Rb(hk ~ hk) = ~R2^
RAhk~hk) +Rf>(I3k ~hk) + Rihk =R3 +R4-
Учтя полученные выше соотношения Ilk - I2k = /5; Iik ~^зк~Ц ’> ^2k ~ hk =If>' несложно убедиться в том, что последняя система представляет собой действительно систему уравнений, составленную по второму закону Кирхгофа для трех независимых контуров схемы рис. 1.34.
Формализуем методику расчет сложных электрических цепей методом контурных токов.
1. Нумеруются все ветви, выбираются условно-положительные направления токов ветвей, источники тока заменяются эквивалентными источниками ЭДС.
2. Осуществляется выбор дерева схемы и соответственно ветвей связи, токи которых ассоциируются с контурными токами.
3. Контурные токи и соответствующие им независимые контуры нумеруются, направление обхода этих контуров задается направлением контурных токов.
4. Находятся контурные ЭДС, собственные и взаимные сопротивления контуров.
5. Составляется и затем решается система контурных уравнений.
6. По известным контурным токам (токам ветвей! связей) с помощью первого закона Кирхгофа находятся остальные токи (токи ветвей дерева схемы).
102
1.12. Метод узловых напряжений
Метод узловых напряжений представляет собой наиболее формализованный метод расчета электрических цепей и поэтому наиболее часто реализуется в машинном анализе сложных цепей самой разнообразной природы.
Теоретическая основа его проста и основана на использовании уравнений первого закона Кирхгофа.
Для описания метода нам понадобится ввести некоторые новые понятия. Будем полагать, что узлы рассматриваемой цепи пронумерованы последовательно, начиная с нуля, т.е. их номерами будут 0, 1, 2,...т. Узел с номером 0 называют базисным.
Напряжения между остальными узлами и базисным узлом С/10, U20, Uо назовем узловыми напряжениями и, для простоты, будем обозначать их только одним индексом, опуская второй, общий для них, индекс «О» (ноль), т.е. Ui0=U}, U20=U2, , Umo = Uni.
Заметим, что, зная узловые напряжения, можно по второму закону Кирхгофа найти и напряжения ветвей, не подсоединенных к базисному узлу. Так, напряжение некоторой ветви а (рис. 1.35), узлами которой являются узлы к и р, очевидно, равно Ukp-Uk- Uр. Бу
дем полагать, что в схеме отсутствуют источники ЭДС или что они
уже преобразованы в источники тока.
Сумму проводимостей ветвей, подсоединенных к некоторому узлу к, назовем собственной узловой проводимостью узла к и обозначим Gkk, проводимость между узлами к и р назовем общей узловой проводимостью узлов к и р и обозначим Gkp. Очевидно, что Gkp = Gpk (для рис. 1.35
GkP = GPk = <Лг)-
Алгебраическую сумму величин токов источников тока, подходящую к узлу к, назовем задающим з оком к-го узла и обозначим как Jкк. Слагаемое в этой сумме берется со знаком «плюс», если соответствующий источник направлен к узлу к, и со знаком «минус» - в противном случае. Для примера величина Jа источника
103
тока на рис. 1.35 войдет в задающий ток Jк узла к со знаком «минус», а в задающий ток Jр узла р — со знаком «плюс».
Для цепи с узлами 0, 1, 2,...т система узловых уравнений примет вид
СцС/1 -GX2U2 -,..-GimUm =Jn;
+ G22U2 -...-G2mUm =J22,
. ^Jm2^2 ••• + GmnfJm Jmm.
Пример 1.4. Составить систему узловых уравнений для цепи, изображенной на рис. 1.36.
Согласно данным определениям имеем: Сц =Gj +С4;
С22 — С| + G2;
G33 = G2 + G3;
G12 = G21 - Gj;
^23 = ^'32 = ^2’ ^13 =^3i =0;
1 = - J] - J4;
J22 = ~ J2 ~ 5 » ^33 = A •
Так как m = 3, то система трех узловых уравнений
Gl2G2 Gl3U3-Jli;
-G2iG[ + G22U2 - G23G3 = J22;
—G3 ]G] — G32U 2 + G33U 3 = J 33
имеет в данном случае вид
(G] +G4)[/j -GxU2 -0-U3 =-J] — J4;
—GiUl +(G] +G2)U2 —G2U3 =J\ - J2 —J5',
-0 G, - G2U2 + (G2 + G3 )U3 = J2.
Удостоверимся, что полученная система уравнений действительно представляет собой систему уравнений, составленную по
104
первому закону Кирхгофа, но выраженную через иные переменные. Для этого перегруппируем слагаемые в этих уравнениях
[G1(C/1-C/2)+J,] + [G4t/1 + J4] = 0;
[G, (С/2 - [/,) - J, ] + [G2(U2 - U3) + J2] + J5 = 0;
[б2(с/3-(/2)-д2]-ед=о
и, учитывая компонентные уравнения элементов рассматриваемой схемы, последнее уравнение можно переписать в виде
/,+/4=о;
—/, +12 + /5 ~ 0;
/3 _/2 = 0, что и требовалось доказать.
Формализуем методику расчета сложных электрических цепей с помощью метода узловых напряжений.
1. Последовательно, начиная с нуля, нумеруются все узлы схемы. Источники ЭДС заменяются эквивалентными источниками тока.
2. Находятся значения задающих токов, собственных узловых проводимостей и общих узловых проводимостей.
3. Составляется и затем решается система узловых напряжений.
4. По найденным узловым напряжениям находят с помощью второго закона Кирхгофа напряжения всех ветвей, непосредственно не соединенных с базисным узлом (узлом с номером 0).
Заметим, что описанная методика существенно проще методики реализации метода контурных токов, т.к. не требует анализа схемы (выбора ее дерева и связей). Более того, собственно система узловых уравнений обладает рядом свойств, облегчающих как ее формирование так и последующую числовую обработку.
1.12.1. Матричная форма записи узловых уравнений
Систему узловых уравнений удобно формировать в матричном виде
G11 G\2 • - ~Glm~ ~ux *Л1
-С2] с22 ~G2m U2 — J 22
~GmX -Gml • trim Vm_ mm _
105
или
G = UJ, где G матрица узловых проводимостей, U — вектор-столбец узловых напряжений, J — вектор-столбец задающих токов.
Дело не только в том, что такой вид наиболее предпочтителен для ввода в ЭВМ с последующим численным решением узловых уравнений. Дело еще и в том, что элементы матрицы узловых проводимостей обладают рядом свойств, позволяющих как сравнительно просто проверить правильность ее заполнения, так и обеспечивающих эффективность численной обработки уравнений, что немаловажно при машинном анализе цепей. Укажем эти свойства.
1. Диагональные элементы матрицы (собственные узловые проводимости) всегда положительны.
2. Все недиагональные элементы матрицы - отрицательны и симметричны (т.е. -Gkp - -Gрк ).
3. Матрица G имеет диагональное преобладание, т.е. любой диагональный элемент, например, к-й элемент Gkk, к= 1, 2,... т всегда больше или равен модулю суммы всех недиагональных элементов к-й строки или к-го столбца, т.е.
^кк -Gk2 - ...-GfoJ.
Равенство наступает только в том случае, если к-й узел не соединен с базисным узлом.
4. Матрица R, обратная к матрице узловых проводимостей G. называемая матрицей узловых сопротивлений, оказывается положительной (т.е. все ее элементы положительны) и симметричной, что можно использовать как проверочный факт при решении узловых уравнений в виде U = G 'j.
Заметим, что матрица R = G играет самостоятельную большую роль в теории электрических цепей, например, в задачах их диагностики. Для задач математической обработки узловых уравнений немаловажным оказывается тот факт, что перечисленные выше свойства определяют матрицу G как так называемую IM-матрицу, алгоритмы численной обработки которой отличаются простотой и надежностью.
1.12.2. Метод двух узлов
Частная реализация метода узловых напряжений для случая, когда схема содержит всего два узла, называется методом двух уз-106
лов. Пусть в такой схеме имеется п параллельно соединенных ветвей с проводимостями G; и источниками Jj,i= 1,2,...л.
Выбрав один из узлов за базисный (т.е. присвоив ему номер 0) для определения напряжения другого узла (номер 1) можно согласно методу узловых напряжений составить уравнение
(G1+G2+... + G„)[71=±J1±J2±...±J„, где знак «плюс» берется для величины источника тока, подходящего к данному узлу, а знак «минус» - для источника, направленного от узла.
Искомое напряжение будет равно
Ц =^-; с =Ус.; J3 = Y±Ji-1 Z-T ’ Э J ’ Э J
/=1 7=1
Если в схеме параллельно соединены и ветвей источников ЭДС Ej с внутренними сопротивлениями Rt, то по методу двух
узлов имеем
t±E-G-
что можно получить, предварительно заменив каждый источник ЭДС на эквивалентный источник тока с параметрам
J.= E,G.; G, = — ;j= 1,2,...и.
J J J J R .
Правило определения знаков у такое же
Пример 1.5. Для схемы (рис. 1.37) с параметрами Е} = 25 В, £2=30В,- £3 = 15В: Rt=R2 = = 100 Ом; R3 = 200 Ом; Д4 = 150 Ом рассчитать ток /4.
Решение. По методу двух узлов находим
источников здесь в точности
107
I Z7 1 1
Е, — + Е->-------Ет,
R{ R2 3 R3 _
1 1 1
/?2+7?з + Л4
_1
25 20 15
100 100 100
1111
100 100 200 150
В,
Искомый ток находится по закону Ома
Л =
Ц _ 15
R4 ~ 150
= 0,1 А.
1.13. Диагностика электрических цепей
Диагностика сравнительно новое и исключительно актуальное для современной электротехники и электроэнергетики направление теории электрических целей. В этой теории под диагностикой цепи с известной топологией (схемой замещений) понимается задача определения неизвестных параметров ее элементов (сопротивлений или проводимостей резисторов, емкостей конденсаторов и т.д.) по известным реакциям цепи на заданное воздействие. При этом иногда к подлежащим к определению параметрам относят и ряд ненаблюдаемых параметров режимов. При диагностике цепей исключительно важным представляется размещение измерительной аппаратуры и организации измерений наблюдаемых параметров. В этом смысле диагностика оказывается полезной не только для этапа эксплуатации электрических цепей, но и для этапа проектирования соответствующих устройств. Так, она позволяет, например, выбрать минимальное число измерительных приборов, позволяющих оценивать как параметры режима цепи, так и значения параметров ее элементов, изменяющихся в ходе ее эксплуатации. Таким образом, специфическими вопросами диагностики являются вопросы наблюдаемости отдельных частей цепей по напряжениям и токам, вопросы доступности этих частей для проведения диагностических тестов, опытов, экспериментов, вопросы точности получения экспериментальных данных и т.д. Из сказанного становится ясным, что решение задачи диагностики предполагает наличие двух этапов — экспериментального и расчетного. На одном из них - экспериментальном этапе — организуются или наблюдаются воздействия на цепь, а также наблюдаются (измеряются) реакции цепи, на другом - расчетном этапе - составляется математическая модель цепи, обработка которой дает значения искомых параметров, например, сопротивлений
108
или проводимостей резисторов. Рассмотрим эти этапы решения задачи диагностики подробнее.
Экспериментальный этан диагностики: тестовая или функциональная диагностики. По возможностям проведения экспериментального этапа диагностики последнюю принято подразделять на тестовую и функциональную. В тестовой диагностике исследователь волен сам задавать режимы работы цепи, т.е. выбрать воздействие на цепь (подключать источники ЭДС или тока между теми или иными узлами). Проводимые обычно на специальных стендах, оборудованных высокоточной аппаратурой, в условиях свободы проведения экспериментов, результаты такой диагностики, как правило, более информативны, чем результаты функциональной диагностики при реальных нагрузочных режимах цепи. Проведение функциональной диагностики усложнено, как правило, неблагоприятными воздействиями (вибрационными, тепловыми, электромагнитными) внешней среды на цепь, использованием стандартной, часто не протестированной измерительной аппаратуры, ограниченностью вариации исследуемых режимов. Усложненным в этом случае оказывается, соответственно, и последующее выполнение расчетного этапа диагностики. Однако ценность функциональной диагностики для практики заключается в ее оперативности, особенно если ее организация позволяет вести непрерывное наблюдение за искомыми параметрами цепи и их изменениями, что исключительно важно для прогнозирования работы цепи, управления ее режимами и т.д.
Расчетный этан диагностики: формирование и обработка математических моделей цепей. При диагностике, также как при анализе, важную роль играет формирование канонических математических моделей, т.е. таких моделей, которые отличаются лаконичностью, а также простотой последующей их обработки. Подобные диагностические модели также формируются на основе законов теории электрических цепей, но в отличие от моделей, используемых в анализе, в качестве неизвестных содержат не токи и напряжения, а например, сопротивления и проводимости. Подобные модели можно получить из известных моделей, используемых при анализе, совершив перестановку («рокировку») параметров схем и параметров режимов.
Далее мы познакомим читателей не только с практической постановкой задачи диагностики цепей, но и с тем, как из извест
109
ных методов, используемых в анализе (метода узловых напряжений, метода преобразования схем) можно получить эффективные методы диагностики.
В заключение необходимо отметить, что в результате решения задач диагностики определяются только параметры цепей, никакие выводы об их техническом состоянии, работоспособности, надежности не делаются. Эти задачи относятся к другой области науки — технической диагностике. Наша цель - лишь эффективно обеспечивать последнюю требуемой информацией.
1.13.1. Задача размещения амперметров и вольтметров в цепи для обеспечения полной ее наблюдаемости
При функциональной диагностике цепей исключительно важным представляется оптимальное размещение измерительной аппаратуры (для простоты — амперметров и вольтметров) и организация измерений наблюдаемых параметров в данном режиме. Теоретическая проработка этих вопросов является полезной и для проектирования соответствующих устройств. В результате оказывается возможным выбрать минимальное число измерительных приборов, позволяющих оценивать как параметры режима цепи, так и значения параметров ее элементов, изменяющихся в процессе эксплуатации цепи. Типичной задачей такого рода является определение минимального числа измерений токов и напряжений цепи, содержащей q узлов и р ветвей (например, цепи с q = 5 узлами и р = 8 ветвями, изображенной на рис. 1.38а), необходимых для однозначного определения токов и напряжений всех ветвей, а также параметров соответствующих элементов цепи.
Для решения этой задачи достаточно выполнить положение анализа цепей (см. метод контурных токов) однозначного расчета токов всех ветвей по известным токам ветвей дополнений любого дерева цепи. Таким образом, разместив амперметры в ветвях дополнений дерева (ветвях связей), можно решить эту задачу. Так, если выбрать в качестве ветвей деревьев ветви 2, 7, 5, 8 (выделены жирно на рис. 1.386), а амперметры разместить в ветвях 1, 3, 4, 6, то, измерив соответствующие токи /ь 73, /4, 76, можно определить по первому закону Кирхгофа:
/2 +z3); z5 =z-(/4 + /6); /7 = z,-z4; z8 = /3-z6.
но
Аналогично, если разместить вольтметры в ветвях дерева, то в каждом контуре будет неизвестным только одно напряжение ветви связи, и его можно определить по второму закону Кирхгофа. Так, разместив вольтметры в ветвях уже выбранного дерева и измерив напряжения ветвей U2, U7, U5, Us, можно рассчитать напряжения остальных ветвей
ut=u2-u7-, u3=u2-us-, u6=us+u5-,u4=u7+u5.
Зная токи и напряжения всех ветвей цепи, можно по закону Ома рассчитать сопротивления всех резисторов цепи, в данном
случае /?, = —, i = 1, 2,..., 8. Таким образом, для решения рассмат-Л
риваемой общей задачи достаточно произвести p-q+\ измерений
111
токов (p-q+l - число ветвей дополнений (связей) дерева, равное числу независимых контуров), и q-\ измерений напряжений, равное числу ветвей дерева. Так, в рассматриваемом примере было измерено 1=4 тока и д-1=4 напряжения. Всего для определения параметров резисторов требуется р измерений (в нашем примере 8 измерений).
В заключение два замечания. Из того факта, что минимальное число измерений токов, позволяющих восстановить все токи, требуется проводить в ветвях дополнений деревьев, а минимальное число измерений напряжений, позволяющих восстановить все напряжения ветвей, нужно проводить в ветвях дерева, не следует, что эти дерево и дополнение дерева составляют пару, т.е. их ветви есть все ветви схемы. На самом деле ветви связей при измерениях токов можно брать для любого дерева, совсем необязательно того, что используется при измерениях напряжений. Ветвями связей (дополнений дерева) в нашем примере могли быть ветви 4, 6, 7, 2, а ветвями дерева - ветви 2, 4, 6, 7. В этом случае достигается максимальное пересечение связей и ветвей дерева — 4, т.е. только в четырех вегвях (вместо 8 как в ранее решенной задаче) можно разместить измерительные приборы, т.е. только 4 (а не 8) ветви должны быть доступны (наблюдаемы). Факт немаловажный для практики.
Другое замечание заключается в том, что совсем необязательно использовать такой внушительный парк измерительных приборов. Если все узлы схемы доступны для подключения вольтметра, то он может быть только один. Им могут быть измерены, в частности, узловые напряжения, т.е. напряжения фиктивного дерева из резисторов с нулевыми проводимостями, соединяющими каждый узел с базисным. Так, если в цепи рис. 1.38г вольтметром измерить узловые напряжения ЕД, Е/п, Е7П1, Uw, то напряжение ветвей найдутся как
Ц “_ Ц > ^2 = ^-ni - Цу » t/з = Цп ~ Цт’ ^4 ->
Е/5 = E/IV, Е/6 = Е/п ,U1=Ui~ U^j, Us - Utt - Uw.
1.13.2. Диагностика электрических цепей, основанная на замыкании ее отдельных узлов
При тестовой диагностике пассивной цепи часто имеется возможность физически объединить ряд узлов, «закоротив» их с тем, чтобы облегчить диагностирование оставшихся вегвей. Рассмотрим фрагмент схемы диагностируемой цепи, содержащий резистор,
112
проводимость G которого требуется определить, не разбирая схему цепи (рис. 1.39а). Замкнем узлы 1х,12,...,1т, кх,к2,...,кт между собой (см. рис. 1.39а). Поскольку резисторы 1{,12,...,1т соединены между собой параллельно, то их эквивалентную проводимость обозначим Gh, аналогично проводимость резисторов кх,к2,...,кт обозначим G^. Рассматриваемый фрагмент цепи можно представить схемой, изображенной на рис. 1.396.
Для определения искомой проводимости к узлу к подведем источник тока (об этом несколько ниже), равный J = 1 А (или иной другой единице тока), и измерим напряжения и\ и и] узлов к и I в
Рис. 1.40
первом диагностическом эксперименте (рис. 1.40а). Во втором аналогичном эксперименте (рис. 1.406) источник подсоединяется к узлу /, и измеряются напряжения этих же узлов С/2 и uj. Составим
113
систему уравнений по первому закону Кирхгофа для узла к схем (рис. 1.40а,б)
U2kGk} + (u2k-U2)G = 0.
Решая эти уравнения относительно искомого параметра, получим
G=X
Л
где b = u'kU? -Ulu].
Таким образом, для определения искомой проводимости потребовалось провести два диагностических эксперимента, 4 измерения напряжения (на самом деле достаточно трех, т.к. Uk =Uj) и 3 мультипликативных вычислительных операции (операции деления, умножения) на обработку данных экспериментов. Следовательно, при диагностике схемы с N ветвями, последовательно применяя данный метод, потребуется 22V экспериментов, 3N измерений узловых напряжений и 3N вычислительных операций.
В заключение два замечания. Первое из них касается подсоединения к узлам источников тока. На самом деле этот источник эк-вивалентирует цепь типа цепи, изображенной на рис. 1.40в с ЭДС, регулируемым резистором и амперметром, контролирующим требуемый задающий узловой ток. Второе относится к наиболее ущербному месту такого подхода - закорачиванию граничных узлов (рис. 1.41а) - процедуре трудоемкой и часто весьма непросто реализуемой на практике. Обычно эту процедуру можно полностью исключить, если измерять узловые уравнения граничных узлов /], /2,..., 1т, к}, к2,..., кт. Зная эти Hai i ряжения, можно также упростить схему, заменив межузловые напряжения соответствующими источниками ЭДС. Но такой подход несколько усложняет алгоритмическую сторону диагностирования.
1.13.3 Тестовая диагностика параметров электрических цепей методом узловых сопротивлений
Пусть имеется некоторая пассивная цепь, все узлы которой доступны для проведения диагностических экспериментов. Представим ее в виде многополюсника (рис. 1.41а).
114
Задачу диагностирования будем считать решенной, если в результате определим матрицу узловых проводимостей этой цепи
G =
с,, gi2 .
_с21 g22 • -с2„
-С„2 • С„„
где n + 1 - общее число узлов цепи. Для нахождения этой матрицы предварительно сформируем обратную к ней матрицу R=G \ называемую матрицей узловых сопротивлений. Метод диагностики, основанный на экспериментальном определении элементов матрицы R, называют методом узловых сопротивлений. Алгоритмически он очень прост.
1. Между узлами 0 и 1 включают регулируемый источник энергии, с помощью которого устанавливают задающий ток ./}, равный 1 А (в общем случае одной единице тока). Измерив все узловые напряжения цепи (рис. 1.416), можно согласно методу узловых напряжений составить систему уравнений
Си
-G2|
G|2
Сг22
-С„2
-cnl
где Uj, U2, Uxn - измеренные узловые напряжения в первом диагностическом эксперименте, а все элементы G- матрицы узловых проводимостей считаются неизвестными.
Аналогично между узлами 0 и у, где j = 2, 3, ..., п включают ре
115
гулируемый источник энергии, с помощью которого устанавливают задающий ток у-го узла, равный 1 А (рис. 1.41 в). Соответственно измеряют напряжения Ц7, Щ, U]n всех «-узловых в у-м эксперименте. Соответствующая система узловых уравнений примет вид
Gl2 - -G.y • • -Gi/ O'
G2i G2i ~G2j . • ~g2>, щ 0
~gj2 • GjJ • Gjn = 1
~G„X -Gn2 • -Gnj •• • G„n Pn. _0
2. Объединив все п систем уравнений подобного вида, получим
Gu G12 ... -GXn u} U2 ... U" '1 0 ... 0
-G2i G22 ... -G2„ u\ ... = 0 1 ... 0
~G„i ~G„2 ... Gn„ _ u' U2 Un L n n • • • J 0 0 ... 1
или в сокращенной записи
GU=1,
решение которой дает искомую матрицу G = 1Г1 с точностью до размерностей (поскольку единичный вектор токов имел размерность тока). Для большей корректности будем считать, что все величины заданы в относительных единицах. 1Г1 численно равно R 1. Следовательно, измеряя напряжение узла у, обусловленное единичным задающим током, мы измеряем узловые сопротивления которые всегда положительны. Таким образом, искомая
матрица G равна
и2
и} Ц2 ... Ц" и\ и} ... ип2 их и2 . ип
Ац Ai2 ... Rln ^21 ^22 &2п
_Rni R„2 • • • Аиг
Поскольку по определению матрица G симметричная (т.е. Gy =G/; ), то, определив матрицу узловых напряжений U или, что
116
то же самое, матрицу узловых сопротивлений R, экспериментальным путем их предварительно симметрируют, т.е. принимают
R = (u + U')/2, где знак t - знак транспонирования матрицы.
Пример 1.6. Пусть диагностируется цепь, изображенная на рис. 1.42. Проводимости ветвей, также как и матрица G, считаются неизвестными и подлежат определению.
0,75 -0,25
G = -0,25 0,775
0 -0,125
0 -0,125 0,225
Положим, что токи в диагностических экспериментах были выставлены достаточно точно, а соответствующие узловые напряжения измерены с точностью порядка 10 4 В.
0
Рис. ] .42
По данным этих экспериментов была сформирована матрица
1.5119 0,5357
U= 0,5357 1,6071
0,2976 0,8928
0.2976
0,8930
4,9405
Для
приведения матрицы узловых
сопротивлений к симмет-
ричному виду проведем следующую операцию
_ и + и' 2
1,5119 0,5357 0,2976
0,5357 1,6071 0,8929
0,3976 0,8929 4,9405
Элементы матрицы R определены с точностью до 0,01%. Обратив матрицу R, получим искомую матрицу
0,75
-0,25
0
G- -0,25 0,775 -0,125
0 -0,125 0,225
117
совпадающую с истинной матрицей. Искомые проводимости ветвей (пронумерованные по своим узлам) при этом будут равны:
G10 ~ — ^12 — = 75 — 0,25 = 0,5 См;
G20 = G22 - G21 - G23 = 0,775 - 0,25 - 0.125 = 0.4 Cm;
G30 = G33 - <713 - G23 = 0,225 - 0,125 = 0,1 Cm;
G12 = 0,25Cm; G23 = 0.125Cm.
Следует заметить, что на практике трудно достичь столь высокой точности задания воздействий и измерений напряжений. Поэтому решение задачи диагностики находится с погрешностью.
Оценим теперь трудоемкость решения задачи диагностирования (n + 1) — узловой цепи максимальной связности, когда каждый узел связан с каждым. Для нахождения ее матрицы проводимостей требуется и диагностических экспериментов, п измерений узловых напряжений и порядка и3 математических операций на обработку данных измерений. Сразу следует заметить, что это очень большие затраты, особенно для цепей высокой размерности, и поэтому разработка экономических методов диагностирования цепей является исключительно важной для практики задачей.
Другая проблема диагностики - неполная доступность цепи для подсоединения необходимой диагностирующей аппаратуры, но и здесь методами теории цепей удается частично снять эту проблему. Покажем это на примере следующего параграфа.
1.13.4. Использование методов преобразования электрических цепей для решения задач диагностики
Преобразование «звезда-треугольник». Пусть в диагностируемой цепи имеется звезда из трех резисторов (рис. 1.43) с недоступным центральным узлом р и граничными узлами k, I, т, которые
Рис. 1.43
118
будем считать непосредственно несвязанными между собой ветвями. Покажем, как можно диагностировать параметры резисторов этой звезды, полагая, что все остальные узлы рассматриваемой цепи доступны для диагностики методом узловых сопротивлений. Выделим эту подцепь и мысленно преобразуем ее в эквивалентный треугольник (рис. 1.436), полагая, что в диагностируемой цепи просто отсутствует узел р.
Решив задачу диагностики цепи с незамеченным узлом р, мы найдем проводимости ветвей G^Cki^im (рис. 1.436). Параметры же реально существующих элементов звезды (рис. 1.43а) можно найти, пользуясь известными формулами
С = ±-G = А
^кр „ ’ ^!р ’ ^тр '
^кт '-’к!
где А = GuGlm + GklGkm + GlmGkm.
Таким образом, использование преобразования «звезда - треугольник» позволило решить, казалось бы, неразрешимую задачу определения проводимостей ветвей, один узел которых недоступен для подсоединения измерительной аппаратуры.
На самом деле и другие методы преобразования схем могут сыграть положительную роль в решении рассматриваемого класса задач, в частности, снизить трудоемкость такого решения. Покажем
это на следующем примере.
Диагностика цепи из последовательного соединения резисторов. Если в диагностируемой цепи имеются участки из последовательно соединенных резисторов (рис. 1.44а) с проводимостями G}, G2, ... Gk, то целесообразно вначале найти эквивалентную проводимость методом, рассмотренным в п. 1.13.2. При этом надо мысленно считать, что между узлами т и т+к имеется только один резистор с проводимостью Сэк (рис. 1.446). Для ее определения потребуется два диагностических эксперимента, три измерения узловых напряжений и три математические операции на обработку этих данных. Если при этом в одном (например, первом) диагностическом эксперименте дополнительно измерить и напряжения внутренних узлов , ..., U1m+k_i этого участка (рис. 1.44в), то искомые проводимости определятся как
119
т+к-2 1 ffl+jc—11 ।т+^.
^т+к-\ Uпи к
В)
Рис. 1.44
Таким образом, достигается сокращение числа экспериментов, измерений, вычислительных операций в сравнении с этими данными при непосредственном применении метода узловых сопротивлений для диагностирования цепи, содержащей участок из подобных последовательно соединенных резисторов.
1.13.5. Решение задач диагностики цепей при противоречивой и неполной информации
При решении задач на практике не все части цепи являются наблюдаемыми, часто нет практической возможности разместить в них измерительные приборы, а также косвенно рассчитать режимы, т.е. имеет место неполнота информации. Так, например, в цепи, изображенной на рис. 1.45, может оказаться недоступным для измерения напряжения узел с. В результате заведомо экспериментальная
информация оказывается неполной.
В этом случае вводят дополнительную информацию, исходя из инженерного опыта, она может быть самая разнообразная. Например, такая, что сопротивления Rt и /?2 относятся как R\/R2 = к. Тогда определив, например, по закону Ома R, = R\+ R2, затем решается уравнение kR2 + R2 = R3, следовательно, R2 = RJ^X+k) и, далее, R\ = kR,/(X+k). Здесь важен инженерный опыт, задачи подобного типа трудно формализовать.
120
Л, R2
a~~Е=3—Н=}— b
Рис. 1.45
Другой пример противоречивой информации представлен на рис. 1.46.
Казалось бы, зная токи и напряжения, можно было бы решить задачу диагностики непосредственно по ui
закону Ома R -—i-1,2,3, но
может оказаться так, что показания приборов не подчиняются первому закону Кирхгофа, т.е. Ц - /2 ~ I3 * 0 • В этом случае также необходимо обратиться к инженерному опыту и ввести коррективы в данные. В самом простом случае, когда
подозрение на фальшивость показания амперметра PAt, его заменяют на рассчитанное 1Х =12 + /3, и сопротивление R\ определяют
есть
как /?| = —. К сожалению, для задач диагностики подобные ситуа-
ции скорее типичны, чем исключительны. Общий подход к их решению всегда основывается на введении дополнительных сведений, корректировании показаний, исходя из инженерного опыта решения определенного класса задач. Имеется и специальный математический аппарат обработки подобных математических моделей ~ метода решения некорректных задач. Но эти вопросы диагностики цепей выходят за рамки учебника.
Глава 2
ЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
СИНУСОИДАЛЬНОГО ТОКА
2.1. Общие сведения
Основную роль в практической электротехнике играет переменный ток. В настоящее время почти вся электрическая энергия вырабатывается в виде энергии переменного тока. Это объясняется преимуществом его производства и распределения. Основное преимущество переменного тока по сравнению с постоянным заключается в возможности просто и с минимальными потерями преобразовывать напряжение (повышать или понижать его значения, менять частоту) при передаче энергии. Кроме того, генераторы и двигатели переменного тока более просты по устройству, надежней в работе и проще в эксплуатации по сравнению с машинами постоянного тока.
2.7.7. Амплитуда, частота и фаза синусоидального тока и напряжения
В современной технике широко используются разнообразные по форме переменные токи: синусоидальные, прямоугольные (рис. 2.1), треугольные и др. Значение тока, напряжения, ЭДС в любой
Рис. 2.1
момент времени t называется мгновенным значением. Мгновенные значения тока, напряжения. ЭДС обозначаются малыми строчными буквами, соответственно z = z(/), п = п(/),е = е(/).
122
Токи, мгновенные значения которых повторяются через равные промежутки времени, называют периодическими, а наименьший промежуток времени, через который эти повторения происходят, называют периодом Т.
Если кривая изменения периодического тока описывается синусоидой, то ток называется синусоидальным. Если кривая отличается от синусоиды, то ток - несинусоидальный. В электрических цепях переменного тока наиболее часто используют синусоидальную форму, характеризующуюся тем, что все напряжения и токи являются синусоидальными функциями времени. В генераторах переменного тока стремятся получить ЭДС, изменяющуюся во времени по закону синуса и тем самым обеспечить наиболее выгодный эксплуатационный режим работы электрических установок.
Для синусоидального тока имеем:
/ = Im sin(<7?r + (//), где /- мгновенное значение тока; 1т - максимальное (амплитудное) значение тока (рис. 2.2); со - угловая частота; Ц/ - началь-
отсчиты-
Рис. 2.2
пая фаза.
Аргумент синусоидального тока, ваемый от точки перехода тока через нуль к положительному значению, называется фазой. Угол ц/ равен фазе в начальный момент времени t- 0 и поэтому называется на
чальной фазой. Фаза с течением времени растет (рис. 2.2). После ее увеличения на 2л весь цикл изменения тока повторяется. В течение периода Т фаза увеличивается на 2л.
Скорость изменения фазы тока, равная частоте синусоидального тока, умноженной на 2л. называется угловой частотой рад -1 со-2л f, —— = с , с
г ।
где / -----частота, 1 ц.
Т
При стандартной частоте f = 50 Гц угловая частота
<w = 2tt-50 = 314, с-1.
123
За аргумент синусоидальной функции принимают время t или угол cot.
Аналогичным образом характеризуются другие синусоидальные величины, напряжения, ЭДС и т.д.
Таким образом, для определения мгновенных значений е, и и / необходимо определить их параметры: амплитуду, угловую частоту и начальную фазу.
Постоянный ток можно рассматривать как частный случай переменного тока, частота которого равна нулю. В современной технике используется широкий диапазон частот переменных токов — от сотых долей до миллиардов герц. В электроэнергетике нашей страны и Европы стандартная частота 50 Гц, США - 60 Гц.
2.1.2. Действующее значение синусоидального тока
Мгновенное значение переменного тока, изменяясь, принимает все значения в диапазоне -lm
Тем не менее переменный ток, как и постоянный, измеряется в амперах. Тогда что же означает термин «переменный ток»? Можно было бы характеризовать переменный ток его амплитудой. Принципиально это вполне возможно, но практически очень неудобно, потому что трудно построить приборы, непосредственно измеряющие амплитуду переменного тока. Удобнее для характеристики переменного тока использовать какое-нибудь его свойство, не зависящее от направления тока, например, способность тока нагревать проводник, по которому он проходит . Рассмотрим переменный ток в некотором проводнике с сопротивлением R. В течение периода ток выделяет в проводнике определенное количество теплоты
т
W= \i2Rdt.
о
Пропустим через тот же проводник постоянный ток, подобрав его таким, чтобы он выделил за это же время в проводнике такое же количество теплоты
W = I2RT.
По тепловому действию оба тока равны, поэтому величины постоянного тока, выделяющего в проводнике такое же количество теплоты, что и ток переменный, называют действующим значением переменного тока.
124
Приравняв друг к другу два последних выражения, найдем действующее значение синусоидального тока:
Таким образом, действующее значение синусоидального тока определяется как среднее квадратичное значение этого тока за период. Установим связь между действующим значением I и амплитудой 1т синусоидального тока:
1 7" Т
I2 = — р2бй = — jsin 2 (cot + iy)dt = о о
т2 Т г 2 т2
= -^f[l-cos (2м + 2ус)]Л=-^(Т-0)=-^-.
27 О 27 2
Следовательно
1=^ = 0, л/2
Действующее значение синусоидального тока меньше его амплитуды в V2 раз. Аналогично определяется действующее значение синусоидального напряжения:
С/=|2[и2Л; =
Vi -Ji
На практике синусоидальные токи и напряжения электротехнических устройств характеризуют, как правило, их действующими значениями.
2.1.3. Векторное представление синусоидальных величин
Как известно из математики, синусоидальная функция аргумента cot определяется как проекция радиуса единичной длины на ось ординат, если этот радиус поворачивается против часовой стрелки на cot радиан. Синусоидальному току / соответствует непрерывное вращение радиуса длиной 1т с угловой частотой со - const против часовой стрелки. Синусоида в координатной плоскости (i, cot) изображается (рис. 2.3) вращающимся вектором в декартовой системе (х,у). Под углом у/, отсчитываемым от положительного направле-
125
ния оси абсцисс х, строится* вектор 1т. Положительные начальные фазы при построении откладываются от оси х против вращения часовой стрелки, отрицательные - по часовой стрелке. Проекция вектора 1т на ось у равна мгновенному значению тока /(0) = lm sin в момент времени t= 0. Пусть, начиная с момента t= 0, вектор 1т вращается вокруг начала координат 0 с постоянной угловой частотой со в положительном направлении (против часовой стрелки). К моменту времени вектор повернется относительно оси х на угол (сд fj -цу), и его проекция на ось у будет равна мгновенному значению функции z(/j) = Im sin(<y /j + у/). Таким образом, проекция вращающегося с угловой частотой со вектора 1т на ось ординат в любой момент времени равна мгновенному значению синусоидальной функции i(t) - Im sin(<y t +1//) в этот момент времени.
При изображении синусоидальной функции в виде вращающегося вектора достаточно изобразить его в плоскости х, у только в
начальный момент времени (рис. 2.4). В этом случае вращающийся
вектор представляет или отображает синусоиду, т.е. дает информацию о двух отличительных ее параметрах: амплитуде /т и начальной фазе I//.
Задача суммирования (вычитания) двух синусоидальных функций одной частоты упрощается, если изобразить их векторами на плоскости, и сводится к операции сложения векторов, изобра-
Здесь и далее векторные величины отмечаются: в тексте чертой, а на рисунке - стрелкой над соответствующими переменными.
126
жающих эти функции. В качестве примера рассмотрим сложение двух синусоидальных токов.
/] = Im sin(69 Г] + ^); i2 = 12т sin(69 t2 +1//2).
На рис. 2.4 /] и i2 изображены в виде векторов на плоскости. Вектор, модуль которого равен 1т, расположенный под углом у/ к оси х, является суммой этих векторов и изображает суммарную синусоиду тока i: i - i{ +i2 = sin(z/jZ + .
В электротехнике бывает важно знать не мгновенные, а действующие значения токов и ЭДС. Поэтому складываю! (вычитают) не векторы амплитуд, а векторы действующих значений.
2.2. Резистор, индуктивная катушка и конденсатор в цепи синусоидального тока
В отличие от цепи постоянного тока элементами цепей синусоидального тока являются не только резистор, но и индуктивная катушка и конденсатор. Для упрощения исследования процессов в реальной электрической цепи переменного тока эту цепь, как и цепь постоянного тока, представляют схемой замещения, составленной из перечисленных элементов, а также источников синусоидальных ЭДС и токов. Перед тем, как приступить к изучению основ расчета цепей синусоидального тока, рассмотрим соотношения между токами и напряжениями в простейших цепях.
2.2.1 Синусоидальный ток в резисторе
Синусоидальное напряжение и - Um sin(co t + i/s) (рис. 2 5a) и ток в резисторе связаны законом Ома (компонентным уравнением резистора)
z = = ^sin(zy t + y/) = Im sin(zz> t + {/); /m = .
К К к
Следовательно, напряжение и ток резистора имеют одинаковую начальную фазу, или, как говорят, совпадают по фазе- они одновременно достигают своих амплитудных значений и соответственно одновременно проходят через нуль (рис. 2.56,в).
Разность начальных фаз двух синусоид называют углом сдвига фаз. В данном случае угол сдвига фаз между напряжением и током равен нулю
127
Амплитуды и действующие значения тока и напряжения также связаны законом Ома:
I = i=LL т R R
Скорость поступления электромагнитной энергии в рассматриваемый момент времени в элемент цепи называют мгновенной мощностью. Она равна произведению мгновенных значений тока и напряжения резистора
р = ш = UmIm sin2 (тут + {/) = L7 [l - cos(2ft# + 2у/)\.
Мгновенная мощность резистора имеет постоянную составляющую UI и составляющую Ulcos(2cot + 2ip), изменяющуюся с удвоенной частотой 2со (рис. 2.5г).
Так как w и i совпадают по фазе, т.е. всегда имеют одинаковый знак, то их произведение всегда неотрицательно, следовательно, р > 0, и о резисторе можно сказать, что он потребляет энергию (преобразует ее в тепло).
Среднее значение мгновенной мощности за период любого двухполюсника, резистора в частности,
P = ^\pdt,
1 о называется активной мощностью двухполюсника (резистора) и измеряется в ваттах (Вт). В данном случае активная мощность
Р = UI = I2R, Вт.
Активным сопротивлением двухполюсника называют отношение его активной мощности к квадрату действующего значения тока двухполюсника 128
R =
P
I1
Следует заметить, что активное сопротивление проводника может оказаться большим, чем его сопротивление на постоянном токе, вследствие таких явлений как поверхностный эффект, возникновение вихревых токов и излучение электромагнитной энер
гии в пространство при высоких частотах.
В цепях синусоидального тока, также как и в цепях постоянного тока, принято задаваться условно-положительными направлениями токов и напряжений с тем, чтобы иметь возможность записывать уравнения цепей. Рекомендации выбора этих направлений те же, что и в цепях постоянного тока.
2.2.2. Индуктивная катушка в цепи синусоидального тока
Пусть в цепь переменного тока (рис 2.6а) включена индуктивная катушка с бесконечно малым сопротивлением провода R = 0. Непрерывное во времени изменение тока вызывает появление в витках катушки ЭДС самоиндукции. В соответствии с правилом Ленца эта ЭДС противодействует всякому изменению тока.
7/1 z
Рис. 2.6
Допустим, ток катушки изменяется по закону i = .
В этом случае ЭДС самоиндукции и ее напряжение соответственно равны
eL = ~^LIm + 90°) •
uL = -eL = coLIm sin(&# + 90°) = Um sin(cot + 90°).
5 Зак 1186
129
Сравнивая ток и напряжение на катушке: напряжение опережает ток на угол я/2 (или говорят: ток отстает от напряжения по фазе на угол тг/2) (рис 2.66). Угол сдвига фаз в данном случае положительный (рис. 2.6в):
<p = Vu -у,= 90° = л72.
Сопротивление coL называют индуктивным сопротивлением катушки и обозначают XL -coL. Оно имеет размерность Ом. Индуктивное сопротивление зависит от частоты и равно отношению амплитуд или действующих значений напряжений и токов на катушке
Мгновенная мощность цепи с катушкой изменяется с двойной частотой
р = ui = UmIm sin(ft#)sin(69/ + 90°) = 2UI sin cot coscot = UIsin 2coi.
Из графика (рис 2.6 г), построенного по этому выражению, видно, что за первую четверть периода, когда и > 0 и i> 0, площадь, ограниченная кривой р и осью абсцисс, представляет собой энергию, потребляемую катушкой на создание магнитного поля. Во вторую четверть периода (ток убывает от максимума до нуля) энергия магнитного поля отдается внешней цепи. При этом мгновенная мощность отрицательна. Далее процесс повторяется. Таким образом, происходит колебание энергии между внешней цепью и катушкой, причем активная мощность, поступающая в идеальную катушку, равна нулю.
Для пассивного двухполюсника, катушки в частности, с синусоидальным током и напряжением произведение действующих значений этих токов и напряжений на синус сдвига фаз между углами напряжения и тока называют реактивной мощностью.
Поскольку для катушки sin ср = 1, то ее реактивная мощность равна
Q = (7/sin^ = UI = I2XL .
Реактивную мощность в отличие от активной выражают в вар (вольт-ампер реактивный). О рассматриваемой цепи говорят, что она носит чисто индуктивный характер.
130
2.2.3. Конденсатор в цепи синусоидального тока
Пусть к конденсатору приложено напряжение (рис. 2.7а) и - Um sin cot.
Рис. 2.7
Тогда из компонентного уравнения конденсатора следует i=— = С— = Ct)CU„, cos cot - ^-sin\ cot + — | = sin| cot+—\
dt dt m 1 I 2j m I 2j coC
и можно сделать вывод о том, что ток опережает приложенное напряжение на угол я/2 (рис. 2.76, в).
Под сдвигом фаз напряжения относительно тока здесь подразумевается разность начальных фаз напряжения и тока:
Таким образом, в отличие от катушки, где ср = л/2, угол сдвига фаз между напряжением и током на конденсаторе отрицателен. Величину называют емкостным сопротивлением и обознача-
ют Хс = ——. Емкостное сопротивление имеет размерность Ом.
соС
Мгновенная мощность, поступающая в конденсатор, изменяется с двойной частотой
р = ui = UmIm sincotsin(ft# + л!2) - UI sin 2cot, колеблется синусоидально с угловой частотой 2 со, имея амплитуду, равную U1 (рис. 2.7г). Поступая от источника, энергия временно запасается в электрическом поле конденсатора, а затем возвращается в источник при уменьшении электрического поля. Та-5* 131
ким образом, здесь, как и в цепи с катушкой, происходит колебание энергии между источником и конденсатором, причем активная мощность Р = 0.
Определим реактивную мощность конденсатора. Напомним, что для пассивного двухполюсника при синусоидальных токе и напряжении реактивная мощность представляет собой величину, равную произведению действующего значения тока, умноженного на действующее значение напряжения и на синус сдвига фаз между напряжением и током
Qc = UI sin (р = -UI = -Хс12.
В данном случае это величина отрицательная Q<0, т.к. sin ^7 - -1. Цепь носит чисто емкостный характер
2.3. Анализ цепей синусоидального тока с помощью векторных диаграмм
Совокупность векторов, изображающих синусоидальные ЭДС, напряжения и токи одной частоты и построенных на плоскости с соблюдением их ориентации друг относительно друга, называют векторной диаграммой. Векторные диаграммы широко применяют при анализе режимов работы цепей синусоидального тока, что делает расчет цепи наглядным и простым.
2.3.1. Цепь, содержащая резистор и индуктивную катушку
Реальную катушку в цепи переменного тока представляют сочетанием резистора и идеальной индуктивной катушки. Схема замещения реальной катушки приведена на рис 2.8а. Пусть ток катушки изменяется по закону
i = I„, sin(ry/ + у/,).
а)
Рис. 2.8
132
В соответствии со вторым законом Кирхгофа для мгновенных значений имеем
•П 7 u = Up+u, = iR + L—, R L dt
где uR - напряжение на резисторе; uL - напряжение на идеальной катушке.
Для векторов действующих значений согласно этому уравнению можно записать
u=ur+ul = Tr+ul.
Построение векторной диаграммы проведем в такой последовательности. Начнем с изображения вектора тока 1 (основной вектор) в координатной системе (х, у) (рис. 2.86). Затем строим вектор напряжения UR на резисторе с сопротивлением R. Он совпадает по фазе с током. Вектор напряжения UL опережает вектор тока на 90°. Сумма двух векторов дает вектор напряжения источника, который опережает вектор тока на угол <р. Из векторной диаграммы по теореме Пифагора следует:
и2 = и2 + и{= I2R2 + 12х{,
отсюда
z
где Z - полное сопротивление цепи, равное отношению действующего значения напряжения к действующему значению тока z=Jr2+x2l=j.
Треугольник ОЛВ (рис. 2.86) назовем треугольником напряжений. Составляющая напряжения, находящаяся в одной фазе с током, называется активной составляющей напряжения (7а; она представляет собой величину проекции вектора напряжения на вектор тока
и,л=и R=U cos (р = IR.
Составляющая напряжения, перпендикулярная вектору тока, называется реактивной составляющей напряжения:
Up=UL=Usm(p = IXL, при этом U2 - U2 + U2.
133
Если величины напряжений сторон треугольника (рис. 2.86) разделить на действующее значение тока, получим треугольник сопротивлений (рис. 2.8в). Из зреугольника сопротивлений получают соотношения, определяющие угол сдвига фаз и связь между параметрами цепи:
%
R = Z cosqr, XL - Zsin cp\ ;
R . X, X,
cos^=—; sin(3 =——; (p =arctg— Z Z R
Цепь носит активно-индуктивный характер, если 0 <(р<л!2. Крайние значения ^=0и^ = я/2 соответствуют чисто резистивному и чисто индуктивному характеру цепи.
Разберем теперь отдельно случай, когда схема, изображенная на рис. 2.8а, соотносится с реальной индуктивной катушкой, а сопротивление R определяет потери последней. Для того, чтобы характеризовать степень близости реальной катушки к идеальной (см. пп. 2.2.2) вводят безразмерную величину QL, называемую добротностью катушки. Добротность равна отношению действующего значения напряжения на индуктивном элементе UL к действующему значению напряжения на активном сопротивлении UR в последовательной схеме замещения (рис. 2.8а) реальной катушки или, что то же, - тангенсу угла (р (рис. 2.86), т.е. чем больше добротность катушки, тем меньше в ней относительные потери и тем, следовательно, она ближе . 71 . _
к идеальному элементу ((р у). Заметим, что с ростом частоты со в схему замещения приходиться включать еще и емкость, поскольку емкостные связи между отдельными ее витками начинают играть все более значительную роль. Таким образом, оказывается, что задача составления адекватной математической модели даже для столь простого элемента, как катушка, может оказаться весьма непростой.
2.3.2. Цепь, содержащая резистор и конденсатор
Напряжение на входе цепи (рис. 2.9а) согласно второму закону Кирхгофа для векторных величин определяется уравнением
U = UR+UC.
Построим векторную диаграмму, полагая, что в цепи протекает ток i = Imsin(co Г+j/j), а < 0. Вектор тока откладываем под углом
134
yrj к оси х в отрицательном направлении - по часовой стрелке (рис. 2.96). Вектор напряжения на резисторе UK совпадает по фазе с вектором тока, а вектор напряжения на конденсаторе Uc отстает от вектора тока на угол 90е. При сложении этих двух векторов получим вектор напряжения источника U.
Из векторной диаграммы
I2R2 + 12Xq-U2 ,
далее
где Z - полное сопротивление цепи.
Вектор напряжения источника отстает от вектора тока на угол ср, поэтому говорят, что цепь носит активно-емкостный характер, если -90° < (р < 0, чисто емкостный - при <р = 90° и чисто активный при (р =0.
Для треугольника напряжений (рис. 2.96) и треугольника сопротивлений (рис. 2.9в) можно получить выражения для активных и реактивных составляющих напряжения
ua=uR=iR-,uv=uc = ixc.
Остановимся теперь на случае, когда схема на рис. 2.9а составлена для реального конденсатора, и сопротивление R определяет потери в нем. Отличие такого конденсатора от идеального емкостного элемента, рассмотренного в пп. 2.2.3, принято характеризовать так называемым углом потерь S (см. рис. 2.96), дополняющим угол сдвига фаз тока и напряжения на конденсаторе до угла 90°. Несложно показать, что тангенс этого угла равен отношению активного сопротивления R к емкостному
tg 5 = RcdC .
135
Величину, обратную этому тангенсу, называют добротностью конденсатора Qc
RcoC UR
Она также равна отношению действующих значений напряжений на емкостном и резистивном элементах последовательной схемы замещения реального конденсатора. Чем больше добротность конденсатора, тем меньше в нем потерь и, следовательно, тем ближе он к идеальному емкостному элементу.
2.3.3. Последовательное соединение резистора, катушки и конденсатора
При синусоидальном токе i = 7m sin cot в электрической цепи, состоящей из последовательно соединенных элементов резистора, катушки и конденсатора (рис. 2.10а), создастся синусоидальное напряжение, равное алгебраической сумме синусоидальных напряжений на отдельных элементах (второй закон Кирхгофа):
u = uR + uL+uc.
Запишем это выражение в векторном виде
U ~ UR + U q + U.
Рис. 2.10
Построим векторную диаграмму с учетом известных фазовых соотношений (рис. 2.106). Вектор напряжения на резисторе совпадает по фазе с вектором тока, на конденсаторе он отстает от вектора тока на 90°. а на катушке опережает вектор тока на 90°. Суммируя три вектора напряжения на элементах цепи, получим вектор напряжения источника.
Из векторной диаграммы определяем действующее значение входного напряжения двухполюсника (рис. 2.10а)
U = y]uR+(UL-Uc)2 = ^I2R2 +(JXL-IXC)2,
136
далее - действующее значение тока и полное сопротивление:
/= , 2 — =у; Z = ,Jr2+(Xl-Xc)2 =^R2 + X2 ,
^R2 + (XL-XC)2 Z
где X = XL — Хс — разность индуктивного и емкостного сопротивлений, называемая реактивным сопротивлением двухполюсника Заметим, что если индуктивное XL - coL и емкостное Хс ——- со-(йС противления представляют собой арифметические величины (они положительны), то реактивное сопротивление — величина алгебраическая, она может быть и положительной при X L > Хс, и отрицательной при Хс > XL, равной нулю при XL = Хс.
Сдвиг фаз определяем из треугольника напряжений: UL-UC t XL-XC . х ср =arctg—---------— = arctg— ----— = arctg—.
U R R R
Если XL > Xc, т.е. X > 0, то цепь носит активно-индуктивный характер. В этом случае UL > Uc (рис. 2.106), а сдвиг фаз ср > 0. Если XL < хс , т е- X < 0, то цепь носит активно-емкостный характер и сдвиг фаз (р < 0 (рис. 2.10в). Таким образом, реактивное сопротивление X может быть положительным (рр > 0) и отрицательным ((р < 0).
Наконец, если XL - Хс, то реактивное сопротивление цепи X = XL - Хс - 0. В этом случае цепь носит чисто активный характер, а сдвиг фаз <р = 0. Такой режим называется резонансом напряжений, поскольку векторы напряжений на реактивных элементах - катушке и конденсаторе - равны по величине, противоположно направлены и самокомпенсируются.
Угловая частота, при которой в цепи наступает резонанс, называется резонансной угловой частотой
Все величины, соответствующие резонансному режиму, будем в дальнейшем помечать индексом 0.
Полное сопротивление цепи при резонансе будет чисто активным и имеет минимальное значение
Z = ylR2+(XL-Xc)2 =R.
137
При этом ток i-i(t) в цепи будет иметь максимальное действующее значение /тах = /0
/ = = -° Z R
и совпадает по фазе с входным напряжением и = и (г).
Напряжение на резисторе равно напряжению источника w/?o = ioR = u-
При резонансе напряжений действующие значения напряжения на реактивных элементах могут существенно превышать действующее значение напряжения на входе цепи U, равное действующему значению напряжения резистора UR.
Отношение
р Uc0 _UP> _ 1
U U I0R R a)0CR определяет кратность превышения напряжения на индуктивном и емкостном элементах над напряжением на резистивном элементе (т.е. над входным напряжением). Эту безразмерную величину принято называть добротностью контура. Иногда рассмазривают об-r J 1
ратную к добротности величину а = , называемую затуханием контура, тоже характеризующую резонансные свойства данного контура.
2.3.4. Неразветвленная цепь синусоидального тока
Рассмотрим цепь из трех последовательных элементов (рис. 2.11а), первые два из которых имеют активно-индуктивный характер, а третий является последовательным соединением резистора и идеального конденсатора. Проведем анализ цепи по векторной диаграмме. Произвольно изобразим вектор тока, который является базовым в построениях всех векторов диаграммы. Затем в соответствии со вторым законом Кирхгофа
U = UX+U2 + U3,
где Ux =URl + ULi; U2 = IR2+TXL2; U3 = IR3+LXC3,
строим составляющие векторы, модули которых можно рассчитать.
Суммарный вектор строим по правилу многоугольника. Век
138
торы напряжений на резисторах цепи совпадают по фазе с вектором тока, векторы напряжений на катушках опережают вектор тока на 90°, а вектор напряжения на конденсаторе отстает от него на угол 90° (рис. 2.116) Действующее значение напряжения источника (модуль вектора U) по диафамме находится из треугольника напряжений О АВ:
U = Jl2(R} + R2 +R3)2+I2(XfA + XL2-XC3)2 = 1^R2 + X2 = IZ.
a)
Рис. 2.11
В этом выражении R = Rt + R2 + R3 - активное сопротивление цепи, равное арифметической сумме сопротивлений последовательно включенных резисторов. В общем случае для и последовательных приемников
п
£1
Выражение X = XLl + ^£2 — Хсз - реактивное сопротивление цепи, равное алгебраической сумме реактивных сопротивлений последовательно включенных реактивных элементов (катушек и конденсаторов). В общем случае п п
X^(XLk-XCk)-YXK-к=\ к=\
В нашей схеме сумма векторов напряжений на катушках меньше вектора напряжения на конденсаторе, поэтому X < 0. В таком случае говорят, что реактивное сопротивление носит емкостный характер.
139
2.3.5. Параллельное включение ветвей с резисторами, катушками и конденсаторами
Рассмотрим цепь из двух параллельных ветвей (рис. 2.12а). Допустим, что известны напряжение источника и параметры схемы. Нужно определить действующее значение тока /, потребляе-
мого от источника, и угол сдвига фаз напряжения и тока (р на входе цепи. Для получения расчетных соотношений построим векторную диаграмму токов. Предварительно рассчитаем токи в параллельных ветвях и углы их
сдвига относительно приложенного напряжения. Для первой ветви
характер нагрузки активно-индуктивный, ток отстает от напряжения на угол 0 < (р <л/2:
(Pi =arctg—->0.
R\
Для второй вегви характер нагрузки активно-емкостный, вектор /2 опережает U на угол -л/2 < (р2 < 0:
U I------ X
I2=—^ Z2 = 4Rl + xc ; <p2=-^ctg^<0.
Z2 Л2
В качестве основного вектора принимаем вектор напряжения источника U, являющегося общим для двух параллельных ветвей (рис. 2.126). Тогда относительно него нетрудно сориентировать векторы токов Ц,12-
Вектор тока второй ветви 72 ориентируем относительно вектора напряжения U под углом ip2. В соответствии с первым законом Кирхгофа определяем вектор входного тока I = +12. В дальнейшем все расчетные соотношения получим из векторной диаграммы. Для этого представим каждый вектор проекциями на взаимноперпендикулярные оси. Проекцию вектора тока на направление вектора напряжения назовем вектором активной составляю
140
щей тока /а, проекцию на перпендикулярное направление - вектором реактивной составляющей тока / . На диаграмме
(рис. 2.126) эти составляющие показаны для всех векторов токов. По диаграмме активная составляющая входного тока определяется
как сумма активных составляющих токов в параллельных ветвях
, U R, U R?
4 = 41 + 4г = Л cos <Р\ + 4 cos^2 = ~ 1+——= zl Z| z2 z2
где G — активная проводимость цепи. Активной проводимостью
двухполюсника называют отношение его активной мощности (в
2 2 2
данном случае Р = Ix Rx + /2 R2 ~ U
у 2 у 2
VZ1 Z2 J
к квадрату его дей-
ствующего напряжения.
Она равна арифметической сумме активных проводимостей отдельных ветвей:
G = G1+G2; G=^Gk,
k=l
где Gk - —- - активная проводимость А-и вегви. А
Заметим, что только в частном случае, когда сопротивление ветви чисто активное ZA = Rk, ее активная проводимость обратна
активному сопротивлению.
Реактивная составляющая входного тока определяется как алгебраическая сумма реактивных составляющих токов в параллельных ветвях. Реактивную составляющую тока в индуктивной ветви считают положительной, а в емкостной — отрицательной. Знаки учитывают при подстановке соответствующих значений:
4 = 41 + 4г = A sin + 4 sin «’г =
= U
л1Л ЛС2
. Z1 z2 7
= V(BLX-BC2) = UB,
где В = BLX- ВС2 - реактивная составляющая проводимости цепи, равная алгебраической сумме реактивных проводимостей отдельных ветвей.
141
В общем случае
в=±вк,
А =1
где Вк - реактивная проводимость отдельной к -й ветви;
Вк=^-.
Если рассматриваемая ветвь чисто реактивная: Zk = Хк, проводимость Вк обратна ее реактивному сопротивлению. Ток на входе цепи (см. векторную диаграмму на рис. 2.126)
I = yjl2+I2 = slu2G2+U2B2 = U<Jg2 + B2 = UY,
U
G
<P>Q б)
Рис. 2.13
G
У<0 в)
где Y - \G2 + В2 — полная проводимость цепи, равная геометрической сумме активной и реактивной проводимостей.
Угол сдвига фаз (р также определяется из векторной диаграммы. На рис. 2.13а изображена векторная диаграмма входного тока I, его составляющих /а и 1р и напряжения источника U. Треугольник, образованный вектором тока и векторами его проекций I,
1а и /р, называется треугольником токов (рис. 2.13а). Если величины 1, 1а, 1р сторон этого треугольника разделить на напряжение U, получится подобный треугольник - треугольник проводимостей. Он образован проводимостями B,G,Y, модули которых равны соответствующим проводимостям, а стороны совпадают с векторами I, /а, /р треугольника токов (рис. 2.136).
На рис. 2.1 Зв изображен треугольник проводимостей при <p<G. Из него находим соотношения между параметрами и формулы для определения угла сдвига фаз:
Л-'ЛЛ О УЛ • 4. В В G В
G = Ycoscp-, B = Ys\x\(p\ tg^ =—; sin$? =—; cos(p =—; #> = arctg—.
G Y Y G
Чтобы найти (p с учетом знака, следует использовать формулы тангенса и синуса.
142
Рассмотрим теперь цепь, схема которой изображена на рис. 2.14а в предложении, что приложенное к ней напряжение изменяется по синусоидальному закону. Тогда для токов в резисто-
ре. конденсаторе, катушке получим
'G = /Gmsin^ гс = Icm sin^ + y^; iL = ILmsin
где IG = GU- Ic = BCU = ~U = coCU- 1L = B,U = ~U = X. q L COL/
G, Bc=ct)C, BL =—--проводимости соответствующих элементов.
a>L
в)
Пусть для определенности BL> Вс, т.е. -> шС, тогда век-
coL
торная диаграмма для амплитудных значений токов может быть изображена в виде (рис. 2.146).
Здесь
।------------- 1
I / . \2 ---- -СОС
/=С/. С2+-----щС ; = ----.
у \. coL J G
При этом величину
y = — =G2+(——соС U \ \a>L
называют полной проводимостью цепи, а проводимость G в данном случае является активной проводимостью цепи.
Рассмотрим теперь случай равенства индуктивной проводимо-
сти BL = —— и емкостной проводимости Вс = соС. В этом случае cdL
143
реактивная проводимость цепи В - BL- Вс~
-----соС = 0 и цепь coL J
носит чисто активный характер. При равенстве BL = Вс в цепи воз
никает резонанс токов (см. рис. 2.14в).
Все параметры цепи, при которых достигается резонанс принято помечать индексом «О» («нуль»): а»0,£0, Со. Величину
, при которой обеспечивается равенство емкостной и ин-
дуктивной проводимостей со0С =---, называют резонансной час-
тотой. Заметим, что при резонансе токов токи реактивных элементов IL = 1С могут значительно превышать значение полного тока цепи I, равного его активной составляющей I - IG, т.е. возможен случай,когда
il=ic»i = gu.
Безразмерную величину, показывающую кратность превышения этими реактивными токами (токов в катушке и конденсаторе) полного тока I, называют добротностью рассматриваемого контура и обозначают Q.
Величину, обратную добротности = называют затухани-
ем контура. Таким образом,
Q _ ^0 _ ^Со _ 1
/0 70 UG0 UGa>0L0 G co0L0G’
d ~ = —
2.3.6. Мощности в цепях синусоидального тока
Рассмотрим участок цепи из трех последовательно соединенных элементов: резистора с сопротивлением R, катушки с индуктивностью L и конденсатора с емкостью С. Пусть напряжение участка и = Um sin a> t и ток i - Im sin(&tf - <p). Определим мгновенную мощность участка
2 г, -т di и
P = Pr+Pl + Pc~1 R + 1L— + 1-. at с
144
При этом pR~i2R - величина заведомо неотрицательная,
d иг иг С. v ~
п, -—W- И<, ~----- может быть как положительной величиной
Ldt 1
при накоплении энергии в магнитном поле в катушке (—1КМ >0), dt
так и отрицательной - при ее расходовании (—WM < 0); рс =—1Рэ; dt dt
г
И' =—----также может быть положительной величиной при нако-
э 2С
плении энергии электрического поля в конденсаторе (—W3>0) и dt
отрицательной - при ее расходовании (—<0). dt
Выразим теперь мгновенную мощность р через действующие значения тока и напряжения
р = ui = UmIm sin a) t sin(fttf - <p)=UI [cos tp - cos(2ftX - (p)\.
Полученное значение содержит две составляющие: постоянную и косинусоидальную, имеющую удвоенную частоту по отношению к частоте тока и напряжения. Мгновенные значения тока, напряжения и мощности при активно-индуктивном характере цепи (ср > 0) показаны на рис. 2.15а.
В промежутках времени, когда и и i имеют одинаковые знаки,
мгновенная мощность положительна, энергия поступает от источни-
ка в приемник, потребляется резистором и запасается в магнитном поле катушки. В промежутках времени, когда и и i имеют разные знаки, мгновенная мощность отрицательна и энергия частично возвращается от приемника к источнику. Активная мощность, поступающая в приемник (резистор),
145
равна среднему значению мгновенной мощности цепи за период
1 т
Р = — \pdt - t//C0S(9.
Т о
Множитель cos^9 называется коэффициентом мощности. Как видно из полученного выражения, активная мощность равна произведению действующих значений напряжения и тока, умноженному на коэффициент мощности. Чем ближе угол (р к нулю, тем ближе cos (р к единице, следовательно, тем большая при заданных значениях напряжения и тока активная мощность передается от источника к нагрузке.
Формулу активной мощности можно преобразовать с учетом полученных ранее соотношений
Р = Wcos$9 = L7a = U J = I2R, Вт.
При расчетах электрических цепей синусоидального тока пользуются понятием реактивной мощности, представляющей собой величину, равную произведению действующего значения напряжения на действующее значение тока и синус сдвига фаз между напряжением и током, и вычисляемой по формуле
Q = UI sin (р, вар.
Реактивная мощность характеризует собой энергию, которой обмениваются источник энергии и приемник. Она в данном случае равна
Q = UpI = lpU = I2X.
Реактивная мощность цепи может быть положительной и отрицательной в зависимости от знака угла ср. При индуктивном характере входного сопротивления (<р > 0) реактивная мощность положительна, при емкостном характере (<р < 0) - отрицательна. Произведение действующих значений тока и напряжения на входе цепи называется полной мощностью
S = UI.
Единицей полной мощности служит вольт-ампер (В-Л).
Графически полная мощность характеризует амплитуду колебаний мгновенной мощности относительно средней (активной) мощности (см. рис. 2.15). Полная мощность является важной расчетной величиной для электрических установок (генераторов, трансформаторов и др.), для которых она указывается в качестве
146
номинальной, например, для генератора номинальная (полная) мощность равна его максимальной активной мощности, которая может быть получена при cos^ = 1. Однако для большинства потребителей cosy? < 1. Поэтому даже при номинальных значениях напряжения и тока энергетические возможности источника используются не полностью, т.к. Р < Уном.
Сравнив выражения Р = UI cos(p, Q=UIsin<p, S = UI, нетрудно установить связь между активной, реактивной и полной мощностями:
52 = с2/2 = (CVcosy?)2 + (Wsiny?)2 = Р2 +б2; 5 = y]p2+Q2 .
Это соотношение удобно отобразить в виде прямоугольного треугольника мощностей (рис. 2.156), который можно получить из треугольника напряжений умножением величин сторон на ток. Из треугольника мощностей имеем соотношения, широко используемые при расчетах:
Q = Js2-P2 ; tgy? =^; cos<p=^.
Активная мощность, потребляемая приемником, не может быть отрицательной, поэтому всегда cosy? > 0, т.е. на выходе цепи -90° < (р < 90°. Активная мощность отображает совершаемую работу или передаваемую энергию в единицу времени.
2.3.7. Преобразования линейных электрических цепей синусоидального тока
Установим связь между входными сопротивлениями и проводимостями пассивного двухполюсника (рис. 2.16а).
Под входным сопротивлением двухполюсника понимается отношение действующего значения входного напряжения к действующему значению тока на входе, под входной проводимостью — обратное отношение.
Построим векторную диаграмму, полагая, что двухполюсник носит активно-индуктивный характер, т.е. (р > 0 (рис. 2.166). По вектору тока и его проекциям построим треугольник токов (рис. 2.16в), а по вектору напряжения и его активной и реактивной составляющим -треугольник напряжений (рис. 2.16г), а также подобные им треугольники проводимостей и сопротивлений.
Действующие значения тока и напряжения на входе цепи
147
можно связать соотношениями (законом Ома для действующих величин токов и напряжений)
C7 = Z/; Z= —,
Y где Z и Y- соответственно полное входное сопротивление и полная входная проводимость двухполюсника.
Рис. 2.16
Найдем активное и реактивное сопротивления двухполюсника: Р UI U I cosip
Р = ^с = ~^- =-------— = Zcos^;
I2 I2 I I
X = Z sin ip, и т.к. <р>0и _Y>0, то схему замещения двухполюсника можно представить в виде последовательного соединенных резистора и
X катушки (рис. 2.16 д), где L- —. со
Найдем теперь активную и реактивную проводимости двухполюсника
„ Р IU I U cosip
G = —у = —f-=—-------— = Y cosip-,
и2 и2 и и
B = Ysmip, и т.к. ^>0и В>0, то схему замещения двухполюсника можно представить в виде параллельно соединенных резистора и конденсатора (рис. 2.1 бе), где С = В/со.
148
Учитывая эти соотношения, получаем связь между эквивалентными сопротивлениями и проводимостями
R R „ А X
(X — О _
V/ — Z2 ~ R2+X2’ Z2 ~ r2 + x2
G G В в
Р — У —
Г\ — Y2 В2 + G2’ у! Э Y2 В2+ G2'
2.4. Комплексный метод расчета цепей синусоидального тока
Исключительно широкое распространение на практике получил метод расчета цепей синусоидального тока, который принято называть комплексным или символическим. Этот метод был предложен американским электротехником Штейнмецом. Сущность метода состоит в том, что синусоидальные токи, напряжения и ЭДС изображаются комплексными числами, а геометрические операции над векторами заменяются алгебраическими операциями над комплексными числами. Этот метод позволяет рассчитывать цепи синусоидального тока с использованием алгебраических уравнений аналогично цепям постоянного тока.
2.4.1. Векторное изображение синусоидальных величин на комплексной плоскости
Вращающийся вектор, который изображает синусоидальную функцию, можно поместить на комплексную плоскость, в систему перпендикулярных осей: х - действительных чисел, у - мнимых чисел. Положительные направления осей на комплексной плоскости обозначаются индексами’ + 1 — ось действительных чисел; + j -ось мнимых чисел, где j=х/-1 мнимая единица (рис. 2.17).
Рис. 2.17
149
Известно, что координаты точки на комплексной плоскости определяются радиус-вектором этой точки, т.е. вектором, начало которого совпадает с началом координат, а конец находится в точке, соответствующей заданному комплексному числу (рис. 2.17а).
При этом вектор А, изображенный на комплексной плоскости в виде комплексного числа А, в показательной форме может быть записан как
А = Aeja,
где А - модуль комплексного числа А; а - его аргумент, отсчитываемый от оси +1 против часовой стрелки.
Применив формулу Эйлера, можно получить тригонометрическую и, соответственно, алгебраическую форму записи комплексного числа
А - Acosa + jAsince = А{ + jA2, где Ах = Acosa; А2 = Asina.
Очевидно
А = J А\ + А2 ; а = arctg—.
4
Синусоидальному току i = Im sin(c;/ + (//) можно сопоставить комплексный ток
= т
1 •>
который является символическим (комплексным) изображением функции i и носит название комплекса мгновенного значения тока. Знак «=» — знак сопоставлений функций вещественного и комплексного переменного. Комплексы обозначаются прописными подчеркнутыми снизу буквами, идентичными буквам соответствующих функций вещественного переменного. Модуль комплекса мгновенного значения i равен амплитуде синусоидального тока 1т, а его переменный аргумент + - аргументу изображаемой
синусоиды (рис. 2.17 б). В тригонометрической форме для тока i = Im sin(c9/ + ц/) имеем
i = 1те^т,+ч^ = Im cos(a>t + Vz) + sin(ftrf + y/) .
Таким образом, для получения функции - оригинала i надо взять мнимую часть (обозначается Im в отличие от обозначения вещественной части Re) комплекса мгновенного тока
/ = Im sin(a»/ + (/) = Im (i) = Im (Imej(a”+V) j
150
Мгновенное значение тока равно мнимой части комплекса мгновенного значения тока. Если этот комплекс представить в виде / = , jv not _ , jot
то = 1те'ч> называю г комплексной амплитудой тока. Это аналитическое представление неподвижного вектора, длина которого равна амплитуде тока, а угол между направлениями вектора и осью +1 на комплексной плоскости равен начальной фазе у/ (рис. 2.17 в). Комплексное действующее значение тока дается формулой
~ V2 V2
Пример 2.1. Записать комплексные действующие значения тока и напряжения, если их мгновенные значения представлены функциями
w =282 sin (314/-120°), В; г =20 sin (314/-60°), А.
Решение. Действующее значение напряжения [/=-^=-=200 В, начальная фаза = -120°. В соответствии с определением комплексное действующее значение напряжения
U_=UeiVu = 200е"у|2°°.
Аналогично для тока 7=-^- = 14.1 А, начальная фаза тока V2
r//i = -60°, а комплексное действующее значение =14,1А7б0°.
Пример 2.2. Для комплексного действующего значения напряжения
7/= -120 + >160 В
записать мгновенное значение.
Решение. От алгебраической формы переходим к показательной:
7/ = 77еЛ' = 200е/127°, В,
где U = х/1202 + 1602 = 200 В; у/ =180°- arctg= 127°.
Комплекс находится во второй чегверти комплексной плоскости. Тогда мгновенное значение напряжения
i/ = 200V2sin(/y/ + 127°), В.
В заключение обратим внимание на равенства, которые удоб
151
но использовать при решении практических задач
j = ; / = -1; / =-j И т.д.;
e/9n = cos 90° + j sin 90° - j;
e~/9° = cos90° - j sin 90° --j
Отметим, что умножение на j означает поворот вектора на 90° против часовой стрелки, умножение на -j - по часовой стрелке, поэтому иногда мнимую единицу j называют оператором поворота (поворота на л 12).
2.4.2. Законы Ома и Кирхгофа в комплексной форме
Основой комплексного метода расчета цепей синусоидального тока является переход от уравнений, составленных для мгновенных значений и являющихся интегро-дифференциальными, к алгебраиче-
Рис. 2.18
ским уравнениям, составленным для комплексных значений тока и напряжения. Например, для схемы на рис. 2.18 уравнение для мгновенных значений на основании второго закона Кирхгофа можно записать в виде
uR + uL +ис=е или iR + L~ + ~ fydt = е, где i - Im sin( + ^); uR = RJm sinfcDt + ^ );
uL = a> LIm sin(fttf + + 90°); uc =---Im sin(cj/ + - 90°).
cdC
При записи мгновенных значений напряжений учтено, что напряжение uR совпадает по фазе с током, напряжение и, опережает ток на 90°, а напряжение ис отстает от тока на 90°. Запишем эти
уравнения в комплексной форме:
= ^=RLm, ULm = cd LIm = co LIm = jco LI_m;
Ur =—I e^-90°) = -L/ =_ 1 /
—Cm „ m m e e J r,~m n—m'
CD C CD C CD C JCD C
Сопоставив уравнения для мгновенных напряжений uL и ис с комплексными амплитудами U_Lm и U_Cm, можно установить пра
152
вило перехода от производной и интеграла синусоидальной функции к изображающим их комплексным величинам. Дифференцирование заменяется умножением на jet), интегрирование - делением на jet) комплекса этой функции.
Соотношение
LLrm + LLlhi + LLc'm ~ —т
представляет собой уравнение, составленное по второму закону Кирхгофа для цепи рис. 2.18 в комплексной форме. Для комплексов действующих значений
Up + Uf + UC=E.
Подставив в это уравнение законы Ома U_R - Rj; UL - jcoLI;
U_c = -j-~L, получим
/?/ + j(o LI_—j—I_ = U_. cdC
Отсюда
/=______"________
- D . r О z
R+ /\ eoL-----—
I coC J
Используемые соотношения называют законами Ома в комплексной форме. Отношение комплекса напряжения к комплексу тока называегся комплексным сопротивлением цепи
(I [J IJpiVu
Z = ^== = ^— = ZeJ(p.
~ Lm L IeJVi
Модуль комплексного сопротивления цепи равен полному сопротивлению Z - U/I, его аргумент - углу сдвига фаз ер.
Комплексное сопротивление в алгебраической форме выглядит следующим образом:
Z = Zcos#> + j'Zsin^ = 7? + jX.
Следовательно, активное сопротивление есть вещественная часть, а реактивное - мнимая часть комплексного сопротивления цепи. Частные случаи приведены в табл. 2.1.
Величина, обратная комплексному сопротивлению, называется комплексной проводимостью
У = —=—^—= Уе+7^ = Y cosep + jYsintp -G + jB, Z_ Ze
где Y полная; G активная; В - реактивная проводимости цепи.
153
Таблица 2.1
Участок электрической цепи Комплексное сопротивление
О_1 Дд Z = 7?
Z = j(oL = JXL = XLejW
Z = -j— = -jXc = Xce"y90i! ~ coC
c-CZZl^po И — R + — R jcuL,
o-CZb-j[—о Z = R-jXc=R-j — coC
Для цепей синусоидального тока законы Кирхгофа формулируются так же, как и для цепей постоянного тока, но только для комплексных амплитуд или действующих значений токов и напряжений. Первый закон Кирхгофа: алгебраическая сумма комплексных значений тока в узле электрической цепи равна нулю:
Ьл-О. А=1
Второй закон Кирхгофа: в любом замкнутом контуре электрической цепи алгебраическая сумма комплексных значений ЭДС равна алгебраической сумме комплексных значений напряжений на всех пассивных элементах этого контура: п п
YEk = Yikzk.
Г=1 к=\
Таким образом, при комплексном представлении всех параметров методы расчета сложных цепей постоянного тока, основанные на законах Ома и Кирхгофа (контурных токов, узловых потенциалов, эквивалентного генератора, преобразования и др.), можно применять для расчета цепей синусоидального тока.
2.4.3. Мощности в комплексной форме.
Баланс мощностей в цепях синусоидального тока
Ранее были получены формулы для определения активной, реактивной и полной мощностей:
P-UIcosrp; Q - UI sirup; S = UI.
Рассмотрим простой прием, позволяющий найти активную и реактивную мощности по комплексным напряжению и току. Для
154
этого умножим комплексное напряжение на сопряженный комплекс тока:
S = UP = UeV" 1е = UIei(Vu~v>} = Vie'* * = Sejvi =
= UI cos (p + jUI sin (p - P + jQ.
S называют комплексной мощностью. Из этого выражения следует, что вещественная часть комплексной мощности равна активной мощности, мнимая часть - реактивной:
Л * \ Л *
P = Re\UI = ReS; £> = Im\UL = ImS.
\ / I /
Пример 2.3. Определить активную, реактивную и полную мощности двухполюсника, если мгновенные значения тока и напряжения заданы уравнениями:
i/ = 141sin(314/ + 60°), В; / = 7,07sin(314/+ 30°), А.
Решение. Запишем комплексные дейст вующие значения напряжений и тока:
c/=H!e760^100e7w в / = 2^е730° = 5е;з(г А
“ х/2 " V2
Тогда комплексная мощность определится так
S - Ш = ЮОе76О° • 5е~у30° = 500е'зо° = 500cos30° +
+;500sin30o = 433 + j’250. В-A.
Соответственно активная, реактивная и полная мощности двухполюсника будут равны
P = Re5 = 433BT; Q= Im5 = 250 вар; S = |S| = 500 B A.
Баланс мощностей в цепях синусоидального тока
Пусть в сложной цепи синусоидального тока имеется и источников энергии (источников ЭДС и источников тока) и к приемников. Тогда оказывается справедливым следующие утверждения (теорема Телледжена):
и к
7=1 7=1
т.е. сумма всех генерируемых мощностей оказывается равной суммарной потребляемой мощности в нагрузках . Если комплексную
Условно положительные направления токов 7. и напряжений U_j в произве-
*
дениях S = Lj полагаются совпадающими для приемников (п) и противоположными для источников (и).
155
мощность каждого генератора и приемника представить в виде суммы действительной части (активной мощности) и мнимой части (реактивной мощности), то последнее выражение перепишется в виде двух равенств, выражающих теорему Ланжевена л к п к
7=1 7=1 7=1 7=1
Заметим, что если j-й приемник с током Ij представляет собой последовательное соединение резистора с сопротивлением /?,, катушки с индуктивностью Li и конденсатора с емкостью Q, то для него
( 1 "I
Рассмотренные в настоящем разделе два утверждения (теорема Телледжена и теорема Ланжевена) представляют собой наглядную иллюстрацию закона сохранения энергии.
2.4.4. Расчет цепей синусоидального тока комплексным методом
Несмотря на общность методов расчета цепей постоянного и синусоидального токов, расчеты цепей синусоидального тока значительно сложнее и обладают рядом особенностей. Покажем специфику расчетов цепей комплексным методом на конкретных примерах.
Расчет неразветвленной цепи. Топографическая векторная диаграмма напряжений. Проведем расчет цепи (рис. 2.19а), в которой последовательно включены комплексные сопротивления , Z2, Z3. Напряжение источника, параметры приемников, выбор условно-положительных направлений комплексных токов и напряжений считаем заданными.
Комплексное сопротивление цепи:
Z = Z, + Z2 + Z3 = ~jXCl + ^i + + Л2 + jXL, + 7?3 =
= R + jX = ZeJtp,
X где /? = /?,+ R2 + Ry, X = -XCl + XL2 + XL3; (p-arctg—.
R
По закону Ома комплексные действующие значения тока и напряжения на участках цепи:
156
L==', Ux=LZ^L(R}-jXciy, u2=LZ2=l(r^jXL2y U3 = LZ3=L(R3 + jXL3). Мощности при этом определяются следующим образом:
S — UI — Р + JQ — + S^2 + £3 ~ LL\ L+ LL2 — —3 —’
P = ReS = £/4 = i>* = ^+P2 + P3; *=l t=l
Рис. 2.19
Для графического представления процессов в цепи построена векторная диаграмма напряжений (рис. 2.196). При этом положено, что общий ток цепи имеет нулевую начальную фазу, т.е. z = Zmsinfitf, а угол (р - отрицателен, т.е. цепь имеет активноемкостный характер. В этой векторной диаграмме любой вектор может быть перенесен параллельно самому себе в любое место плоскости. При векторном представлении второго закона Кирхгофа векторы строят друг за другом в произвольной последовательности или даже исходящими из одной точки.
Топографической векторной диаграммой напряжений называется векторная диаграмма, в которой векторы напряжений соединяют друг с другом в том же порядке, в каком соединены соответствующие элементы цепи. В этом случае векторная диаграмма напряжений соответствует цепи таким образом, что если в данной
157
точке на векторной диаграмме соединяются несколько векторов, то атому соответствует определенная точка на схеме, в которой соединяют соответствующие элементы цепи друг с другом.
Принципы построения векторной диаграммы напряжений рассмотрим при совмещении векторной диаграммы с потенциальным полем на комплексной плоскости. Каждая точка цепи в месте соединения характеризуется комплексным значением электрического потенциала. Пусть, например, в схеме (см. рис. 2.19а) за полюс принята точка ст.
^=0-
Отметим на комплексной плоскости (см. рис. 2.196) точки а. Ь, с. d, к, т, и, координаты которых определяются потенциалами соответствующих точек схемы:
Vb = Va + I_R.- Vc = Vb + j(oL£ Vd = Vc + I_R2-
Vk =Vd + Ут=Ук+ \V„ = Vm- j^-L
(oC
Отложим вектор тока по оси вещественных чисел. Порядок расположения векторов напряжений на диаграмме строго соответствует порядку соединения элементов цепи в схеме. Начало вектора напряжения последующего элемента соединяем с концом вектора напряжения на каждом предыдущем элементе.
Топографическая диаграмма позволяет весьма просто находить напряжение между любыми точками цепи. Для этого достаточно соединить соответствующие точки топографической диаграммы отрезком прямой и придать этому отрезку надлежащее направление. Например, на рис. 2.196 вектор напряжения U_dn представлен отрезком прямой между точками d и и. взятым в направлении от п к d. Следует заметить, что если на схеме напряжение U drj направлено от точки d к точке п электрической цепи, на топографической диаграмме то же напряжение изображают вектором, направленным от точки и к точке d.
Расчет цепи при параллельном соединении приемников. При параллельном соединении нескольких ветвей, например, трех, с проводимостями У], У2, Yj (рис. 2.20) общий ток на входе цепи равен сумме токов в отдельных ветвях. Учитывая, что напряжение на всех участках одно и то же, можно записать
158
Таким образом, при параллельном соединении комплексная проводимость всей цепи равна алгебраической сумме комплексных проводимостей отдельных участков цепи:
У = У, +У7 + У, =_!_+--!----+jcoCy
_ -1 _2 _3 + 3
Вычислив комплексную проводимость всей цепи, легко рассчитать комплексное значение тока / при заданном комплексном значении напряжения U .
Эквивалентное или полное сопротив-
ление рассматриваемой цепи определяется по формуле Z&Zy
о-*—J-----
|/1
Л1 1
и у,
л
Ri
7з
Рис. 2.20
О
z=
Z|Z2 + 2^3 +Z.2Z3
Комплексная мощность цепи равна сумме комплексных мощностей всех ветвей
* * * *
S=Ul=Si + S2 + s3=ULi+LLL2+LLL3 = p+ jQ
/1 R\ XLX a
b
Рис. 2.21
где активная и реактивная мощности:
P = I2RX + I2R2, Q-I2Xlx-13ХС3.
Расчет цепи со смешанным соединением приемников. Последовательность расчета общего сопротивления при смешанном соединении в цепях синусоидального тока такая же, как и в цепях постоянного тока: сначала рассчитывается эквивалентное сопротивление ветвей, соединенных параллельно, затем, после замены параллельных ветвей элементом с эквивалентным сопротивлением — сопротивление полученного последовательного соединения. В качестве примера рассмотрим цепь на рис. 2.21. Определим сначала эквивалент
ное комплексное сопротивление двух параллельных ветвей, включенных между узлами а и b 7 7 = =
Z.2 +Zl3
где Z2, Z3 - комплексные сопротивления параллельных ветвей; z2 = r2 - jXC2, Z3 = R3 +jXL2.
159
Комплексное сопротивление всей цепи Z = Zx+Zab, где Zx=Rx+jXLl.
Комплексные значения тока в неразветвленной части цепи и напряжения на участке аЬ найдутся как:
11 ^=^2-^з=11^; ^1=2,1!.
Применив закон Ома, найдем комплексные значения токов в каждой параллельной ветви:
у __ . j ___ U_ab
-2“ Z2 ’ -3 z3
Комплекс мощности всей цепи равен сумме комплексных мощностей всех ветвей
-4. “2* -2-
S = UL, =5, + S2 + 53 =UxL^UabL2^UabL-i, где активная и реактивная мощности:
Р = РХ+Р2+Р3 = l2^i + ^2^2 +
Q~Q\ +(?2 + бз =^\^L\ ~I2XC2 + ^3^L3'
2.5. Повышение коэффициента мощности в цепях синусоидального тока
Большинство современных потребителей электрической энергии имеют активно-индуктивный характер нагрузки, токи которой отстают по фазе от ее напряжения. Активная мощность таких потребителей при заданных значениях тока и напряжения зависит от cos <р:
P = U1 cos<p.
При этом повышение коэффициента мощности при неизменном напряжении приводит к уменьшению тока, т.к.
1 =-----—.
U cos ср
Если обозначить сопротивление проводов линии, расположенной между источником энергии и нагрузкой, через 7?л, то потери мощности в ней можно определить так:
160
Таким образом, чем выше cos#? потребителя, тем меньше потери мощности в линии и дешевле передача электроэнергии. Коэффициент мощности показывает, как используется номинальная мощность источника. Так, для питания приемника 1000 кВт при cos#? = 0,5 мощность генератора должна быть
5 = —^- = 1292 = 2ооо кВ А, cos#? 0,5
а при cos#? = l и той же активной мощности приемника, 5 = 1000 кВ-А.
Следовательно, с повышением cos#? увеличивается эффективность использования генераторов. Чтобы повысить экономичность энергетических установок, принимают меры для повышения cos#?: используют батареи конденсаторов, подключаемые параллельно нагрузке (рис. 2.22а).
Рис. 2.22
Емкость конденсатора, необходимую для повышения cos#? от заданного значения cos#?! до требуемого cos#?2, можно определить по векторной диаграмме (рис. 2.226, в). При построении диаграммы в качестве исходного вектора принят вектор приложенного комплексного напряжения. Если нагрузка носит активно-индуктивный характер, то вектор комплексного тока Ц отстает от вектора комплексного напряжения на угол #?р Активная составляющая комплексного тока /а совпадает по направлению с вектором комплексного напряжения, реактивная составляющая комплексного тока /р| отстает от него на 90° (рис. 2.226).
После подключения к потребителю конденсатора С комплексный ток I определяется как геометрическая сумма векторов комплексных токов 7д и /с. При этом вектор емкостного тока 1С опе-
6 Зак 1186
161
рсжает вектор напряжения на 90° (рис. 2.22в). Из диаграммы видно, что cpi<c[\, т-е- после включения конденсатора коэффициент мощности повышается от cos#?] до cos#?2.
Емкость конденсатора можно определить при помощи векторной диаграммы (рис. 2.22в):
1С = 7Р1 - 4 = 4 tg^i - 4 tg<Рг = COCU.
Учитывая, что Р = 1ЛЯ, запишем емкость конденсатора:
I Р
С = —77(ш - tg^) = —~2 (ш - tg^2) • со С/ со U
На практике чаще всего коэффициент мощности повышают не до 1,0, а до 0,9...0,95, т.к. полная компенсация требует дополнительной установки конденсаторов, что часто экономически не оправдано.
2.6. Электрические цепи с взаимной индуктивностью
2.6.1. Явления взаимной индукции
При анализе цепей синусоидального тока до сих пор учитывалось явление самоиндукции, т.е. наведение ЭДС в электрической цепи при изменении потокосцепления самоиндукции, обусловленного током в этой цепи. Рассмотрим явление возникновения ЭДС в одном из контуров при изменении тока в другом. Подобную ЭДС называют ЭДС взаимной индукции. Цепи, в которых наводятся ЭДС взаимной индукции, называются индуктивно свя-
занными цепями.
Рис. 2.23
Рассмотрим два контура, удаленных друг от друга на некоторое расстояние. Контуры в общем представляют собой плоские тонкие катушки с числом витков W| и w2. На рис. 2.23 изображен случай, когда W|=W2=1.
Поток самоиндукции Фи, созданный током ц, может быть представлен в виде потока рассеяния Ф1/и пронизывающего только первый контур, и потока Ф|2, пронизывающего и второй контур
Ф]£ — Ф|;)+ Ф21.
Аналогично определяем поток самоиндукции второго контура
162
Ф2Л = ®2р + Фи-
ПоТОКИ Ф2| и Ф|2 называют потоками взаимной индукции Их принято обозначать двумя индексами: первый индекс указывает, с каким контуром сцепляется поток, второй — номер тока, вызвавшего данный поток. Например, поток Ф,2 вызван током /2, сцепляется с первым контуром. Если направление потока взаимной индукции совпадает с направлением потока самоиндукции данного контура, то говорят, что магнитные потоки и токи контуров направлены согласно. В случае противоположного направления говорят о встречном направлении потоков. Суммарные потоки, пронизывающие первый и второй контуры:
Ф| = Ф|£ ± Ф]2 ’ Ф2 ~ Ф2£ ~ Ф2] ’ где «+» соответствует согласному направлению потоков; «—» -встречному.
Полные потокосцепления первого и второго контуров:
Т] = И^Ф, = W| (ф|£ ± Ф]2)- ^Фц i И’|Ф]2 = Л*1 ± ^12z2i
Ч'г = И^2Ф2 = W2 (Ф2Л i Ф21) = W2®2L ± v’^21 = ^2г2 — ^21г1-
Отношение потокосцепления взаимной индукции в одном элементе цепи к току в другом элементе, обуславливающему это потокосцепление, называется взаимной индуктивностью:
М12=212=2Л.
*2 12 it «I
Для линейных электрических цепей всегда выполняется равенство
Л/1-> = ^^21 = •
Индуктивную связь двух катушек характеризуют коэффициентом связи
Этот коэффициент всегда меньше единицы, но может быть увеличен за счет уменьшения потоков рассеяния, например, с помощью бифилярной намотки катушек (двойным проводом) или применением для магнитопровода материала с высокой абсолютной магнитной проницаемостью
6*
163
2.6.2. ЭДС взаимной индукции. Одноименные выводы
ЭДС, индуктируемые в первом и втором контурах, можно записать в виде
^1 г ^1 _ ,,<^2 .
е1 =--7- = -^- , +^-T = elL±elM’
at dt dt
e2 - , - ^2~T+ ^~~e2L~e2M-
dt dt dt
Таким образом, ЭДС каждой катушки определяется алгебраической суммой ЭДС самоиндукции и ЭДС взаимной индукции. Для определения знака ЭДС взаимной индукции размечают зажимы индуктивно связанных элементов цепи.
а) б)
Рис. 2.24
Два вывода катушек называют одноименными, если при одинаковом направлении токов относительно этих зажимов магнитные потоки самоиндукции и взаимной индукции оказываются со-направленными. Такие выводы обозначают на схемах одинаковыми условными значками, например, точками или звездочками (рис. 2.24а,б). Одинаково направленные токи г, и i2 (см. рис. 2.24а) относительно выводов а и с вызывают совпадающие по направлению потоки самоиндукции Ф|£ (Ф2£) и взаимной индукции Ф12 (Ф21). Следовательно, выводы аис являются одноименными. Одноименной является и другая пара выводов Ь и d, но условными
164
значками обозначают только одну пару одноименных выводов, например, аис (см. рис. 2.24а).
Если токи г) и /2 направлены неодинаково относительно одноименных выводов (см. рис. 2.246), то это приводит к встречному направлению потоков самоиндукции и взаимоиндукции.
Таким образом, для рассматриваемых случаев можно представить схемы соединения катушек Они показаны на рис. 2.24в и г.
Определим знаки ЭДС и напряжения взаимной индукции. Допустим, первая катушка (рис. 2.24а) разомкнута, а во второй протекает ток i2. Выберем условно-положительные направления для е1М, uXM, i2 одинаковыми относительно одноименных выводов. ЭДС и напряжение взаимной индукции равны, но противоположны по знаку. Действительно, когда ехм >0, потенциал зажима h больше потенциала зажима а. следовательно, ихм < 0.
По правилу Ленца знаки е1М и —/2 всегда противоположны, dt
поэтому
. ,di2
Щм - е\м ~М~.
dt
В комплексной форме получим:
LL]M ~ = № М[_2 - Z-mLi-
При встречном включении катушек (рис. 2.24 б)
LLim = ~Е\М - -jco MI_2 - .
Из последних уравнений видно, что вектор напряжения взаимной индукции U_XM сдвинут по фазе относительно вектора тока /2 на угол ± 90°.
Сопротивление Хм - соМ называется сопротивлением взаимной индукции, a Z_M = jcoM - комплексным сопротивлением взаимной индукции.
Таким образом, при согласном направлении токов падение напряжения на взаимной индуктивности имеет знак «плюс», при встречном знак «минус».
165
2.6.3 Последовательное соединение
двух индуктивно связанных катушек
Рассмотрим две катушки, соединенные последовательно и имеющие активные сопротивления A,, R2, индуктивности Ly,!^ и взаимную индуктивность М. Возможны два вида их включения — согласное (рис. 2.25а) и встречное (рис. 2.256).
а) б)
Рис. 2.25
При согласном включении ток в обеих катушках направлен одинаково относительно одноименных зажимов. Поэтому падение напряжения на взаимной индуктивности в уравнениях Кирхгофа для мгновенных значений запишем со знаком «плюс»:
... г di ^di Т di ..di
Uy — iRy + Ly h Af—\ u2 — iR2 + L2-F Л/—:
dt dt dt dt
и — iiy + u2 — i{Ry + R2) + (/.j + L2 + 2А/
Эти же уравнения в комплексной форме:
= IRy + jco Lyl_ + jco MR, U2 - IR2 + jco L2L + jco MR, u = C/1 + U2 = Z(7?1 + R2) + jml(Ly + L2 + 2M) = /Zcorjl. Комплексное входное сопротивление цепи при согласном включении катушки
—согл - = = Ry + ^2+ + L2 + 2М).
При встречном включении ток в катушках направлен противоположно относительно одноименных зажимов, поэтому напряжения на взаимной индуктивности будем записывать со знаком «минус». В этом случае уравнения Кирхгофа в комплексной форме имеют вид:
С/, = IRy + jco Lyl - jco MR, IJ_2 = I_R2 + jco L21_ - jco MR, U^+U2^L(Ry+R2)+jcoL(Ly + L2-2M) = IZBClv.
166
Комплексное входное сопротивление цепи при встречном включении катушки
^встр = + jco (Д + £2 - 2М).
Комплексное сопротивление цепи при согласном включении больше, чем при встречном. Этим можно пользоваться для определения опытным путем одноименных зажимов индуктивно связанных катушек.
На рис. 2.26 построены векторные диаграммы для согласного и встречного включения катушек. Начальная фаза вектора тока, являющегося общим для всех элементов цепи, принята равной нулю. По вектору тока сориентированы в порядке записи все слагаемые напряжений и U_2. Упрощает выбор направления векторов правило о том, что умножение комплекса на ± j соответствует его повороту на ±90°. Многоугольники векторов t/2, U_, построенные на диаграмме в соответствии с законом Кирхгофа, для наглядности заштрихованы.
Векторная диаграмма (рис. 2.266) при встречном включении катушек построена в предположении, что Ц<М <L2. При таком соотношении параметров в первой катушке наблюдается емкостный эффект, т.к. напряжение отстает от тока . В цепи нет конденсаторов, но эквивалентная индуктивность первой катушки L\ = L\- М получается отрицательной, что равносильно включению конденсатора. Однако в целом цепь всегда имеет индуктивный характер, т.к. вектор тока отстает от вектора напряжения на входе в силу того, что (£, + £2 — 27W) > 0.
При согласном включении катушек емкостный эффект невозможен.
167
2.6.4. Воздушный трансформатор и магнитная развязка магнитосвязанных цепей
В электрической практике важнейшую роль играет такое соединение магнитосвязанных обмоток (катушек), которое называют трансформатором. Если эта связь обмоток осуществляется по воздуху без участия специализированных магнитопроводов, то такой трансформатор называют воздушным трансформатором.
На рис. 2.27а изображен воздушный трансформатор, одна из обмоток которого подсоединена к источнику энергии - такую обмотку называют первичной (все индексы параметров ее элементов, токов и напряжений помечают индексом «1»); другая - к приемнику - нагрузке ZH - ее называют вторичной обмоткой (все индексы параметров ее элементов, токов и напряжений помечают индексом «2»), Обе обмотки трансформатора представляют собой неподвижные катушки, между которыми существует индуктивная связь.
R2 2' Г Ri
а) б)
Рис. 2.27
Положим, что величинами Ц и обозначены индуктивности соответственно первичной и вторичной обмоток трансформатора. /?! и /?2 - активные сопротивления его обмоток, а величина М — взаимная индуктивность между обмотками. Уравнения таких магнитосвязанных контуров, каковым является трансформатор, были достаточно подробно изучены в п. 2.6. 11рименительно к данному случаю, они согласно второму закону Кирхгофа имеют вид
= 7?]/] + + jcoMLy,
U2 — R2—2 "Р j^^2— 2 jTwA/Y] j
—2Т~—2—и"
Рассмотрим идеализированный случай, ярко иллюстрирующий основное инженерное предназначение трансформатора. Пусть сопротивления обмоток равны нулю, т.е. = R2 = 0, а коэффициент связи
168
м
Ц.2 jcoM
и I = j^Ly
±2’
характеризующий степень магнитной связи контуров, равен единице (К = 1).
Тогда уравнения контуров, составленные по второму закону Кирхгофа, несколько упрощаются
Uy = jo)Lxly + U2 = jcoL2l2 + .
Выразив C7 j и Ц через U_2 w получим
+ jcoMI_2 = ^U_2 + jCO^l
. ^2 ^2 j
' jcoM M~2'
При К = '= i имеем M2 - LL? =0; то обо-
ТмГ М
значив лт - —последние два уравнения перепишем в виде М
Uy=KTU2; Iy=^^-—I2.
т-2’ -1 jcoLy К.-2
Трансформатор, для которого соблюдаются подобные соотношения называется совершенным трансформатором. Если при этом индуктивность его первичной обмотки столь велика ,т ч _ кли2
(Л —> оо), го можно пренебречь членом —, и полученные
уравнения предельно упрощаются
IL\=^tU-2-' L\=-—L2-
Кт
Трансформатор, описываемый уравнениями последнего типа, называют идеальным трансформатором В его уравнениях участвует только один параметр - Кт, называемый коэффициентом трансформации.
Из уравнений идеального трансформатора, как модели трансформатора реального, становится ясным, что основное инженерное назначение последнего — осуществлять изменение значений токов и напряжений его обмоток и иногда весьма значительное изменение (в разы, десятки и сотни раз) независимо от величины нагрузочного сопротивления.
169
При этом у идеального трансформатора такое масштабирование напряжений осушествляется без потерь и без изменения фазы. Разумеется, у реальных трансформаторов из-за наличия сопротивлений обмоток А], R2, неидеальности связи К < 1, конечной индуктивности первичной обмотки Ц < °° и многих других причин эта функция трансформатора - изменение напряжений и токов ею обмоток по величине - выявляется не в столь идеальном виде, но достаточно значимо для того, чтобы этот элемент энергетики и электротехники играл в них одну из важнейших ролей.
При изучении трансформаторов часто пользуются так называемой магнитной развязкой, когда два, связанные магнитной, но не гальванической связью контура заменяют одной гальванически связанной цепью, не имеющей магнитных связей между отдельными ее элементами.
Главное здесь - чтобы уравнения таких цепей совпадали, т.е. были бы эквивалентными, особенно это касается частей цепи, связанных с источниками и нагрузкой. Не сложно убедиться в том, что изображенная на рис. 2.276 гальванически связанная цепь представляет собой магнитную развязку исходных гальванически не связанных контуров (рис. 2.27а).
В самом деле, уравнения новой цепи (см. рис. 2.276), составленные по второму закону Кирхгофа имеют вид
= jat^Ly - M)LX + + RXI_X;
c/2 = j<»(l2 - M)I_2 + jcoMLM + r2i_2 .
После подстановки значения тока /л/ = 7j + /2 эти уравнения дадут в точности такие же уравнения, как и рассмотренные выше уравнения воздушного трансформатора (см. рис. 2.27а). На практике этим приемом пользуются очень широко, поскольку составление систем уравнений сложных цепей, содержащих трансформаторы, оказывается намного проще после проведения такой развязки, т.к. для магниторазвязанной цепи могут быть использованы все рассмотренные методы расчета цепей - контурных токов, узловых напряжений, эквивалентного генератора и т.д. без выяснения в них какой-либо специфики, позволяющих адаптировать эти методы к магнитосвязанным цепям.
Но все же ряд замечаний по использованию этого столь популярного у инженеров метода эквивалентных преобразований цепей сделать следует. Первое - это то, что после магнитной развязки цепь оказалась гальванически связанной и, следовательно,
170
возможным оказалось однозначное определение напряжений между двумя ее любыми точками, например, между точками 1 и 2, в то время как в исходной схеме это напряжение С7]2 принципиально невозможно однозначно рассчитать (теоретически оно может быть любым). И второе, может оказаться так, что одна из индуктивностей схемы рис. 2.276 (Д — М или Ь2~М) будет отрицательной по величине, т.е. фактически играть роль емкости. Этот случай возникает, если величина взаимной индуктивности М лежит между величинами индуктивностей обмоток и Л2.
Заметим, что степень магнитной связи контуров принято ха-, м
рактеризовать коэффициентом связи К = —! , который в ре-
альных случаях всегда меньше единицы.
2.7. Электрические цепи с четырехполюсными элементами
Ранее в книге рассматривались, в основном, элементы с двумя выводами - двухполюсники, и лишь в предыдущем napai-рафе был рассмотрен трансформатор — чстырехполюсный элемент, имеющий два входных и два выходных вывода. Любой двухполюсник, если он пассивный, может быть заменен только одним параметром - входным сопротивлением, а если он активный - то двумя параметрами -эквивалентным сопротивлением и эквивалентной ЭДС.
С четырехполюсниками картина несколько сложнее, а широкое практическое использование даже только одного из представителей этого класса элементов - трансформатора - требует внимательного отношения к особенностям анализа как самих четырехполюсников, так и электрических цепей их содержащих.
2.7.1. Четырехполюсники. Основные понятия
Четырехполюсники - это часть электрической цепи, имеющая две пары выводов, которые могут быть входными и выходными*.
Четырехполюсники могут быть пассивными, если они не содержат источников энергии или эти источники взаимно компен
* Выделение двух пар выводов у рассматриваемой части цепи дает основание называть ее 2х2-полюсник, в отличие от более общего случая четырехполюсника как части цепи с четырьмя выводами. Термин 2х2-полюсник используется в переводной литературе.
171
сируются и активными - в противном случае. В этом разделе буду! рассматриваться пассивные четырехполюсники с постоянными (т.е. неизменными во времени) и линейными параметрами. Активный четырехполюсник может быть заменен пассивным чегырехполюсником с вынесенными за его выводы источниками энергии - источниками ЭДС и тока.
Режимы работы четырехполюсников ограничим синусоидальными процессами. Условимся переменные - токи и напряжения, относящиеся к входным вводам, — снабжать индексом «1» -ток /,, напряжение 67], а сами два входных вывода маркировать индексами «1 - Г».
Переменные, относящиеся к выходным выводам — выходному току и напряжению, - снабжать индексом «2» - /2, U_2, а сами два выходных вывода маркировать индексами «2-2'».
Четырехполюсник изображается на электрических схемах замещения прямоугольником (см. рис. 2.28).
/1 о--»
о
Рис. 2.28
Сам выбор первичных и вторичных выводов весьма условен, но обычно полагают, что в качестве первичных выводов берутся такие, от которых идет поток энергии (несколько упрощая - выводы, которые электрически ближе расположены к источнику питания цепи), а в качестве вторичных - выводы, к которым движется этот поток энергии (общее направление потока, показанного на рис. 2.28 стрелкой А, - в сторону нагрузки - приемника энергии Znp).
Пример 2.4. Четырехполюсник, представляющий из себя рассмотренный в пн. 2.6.4 трансформатор (рис. 2.29), изображается с иным, чем в пп. 2.6.4, выбором условно положительного направления для тока выходных выводов.
Выбор этих направлений сделан для использования стандартизованной записи уравнений четырехполюсников, чему будет посвящен следующий раздел. Дадим еще одно определение: четырехполюсник называется симметричным, если при замене местами его первичных и вторичных выводов распределение
172
токов и напряжений в остальной части цепи не изменится. Заметим, что трансформатор в общем случае заведомо несимметричный элемент.
2.7.2. Уравнения четырехполюсника.
Экспериментальное определение его параметров
Уравнения четырехполюсника связывают его входные и выходные токи и напряжения с помощью четырех констант, и как далее будет показано, только три из них являются независимыми.
Наиболее распространенной записью уравнений четырехполюсника является запись, в которую входит напряжение и токи t/j, /, и выходные напряжения U_2 > Li сгруппированы в две пары
<7, =AU2+BI?
L\ =CU?+D1?'
Априори неизвестные параметры А, В, С, D, входящие в уравнения четырехполюсника, называют Л-параметрами, причем А и D из них безразмерны, В - имеет размерность сопротивления, С - проводимости.
Рассмотрим еще две формы записи уравнений четырехполюсника, отличающихся тем, что все параметры в них имеют одинаковую размерность.
Первые из таких уравнений называют уравнениями четырехполюсника в Z-параметрах
LLi -Za\L\ +Z12Z2
4^2 = —21—I +Z22Z2.
где Z] ], Z12, Z2l, Z22 имеют размерность сопротивлений.
Другие уравнения — уравнения четырехполюсника в Y-параметрах
173
Zi -211 i^Zi+Ki2^2
Z.2 = M21C/1 + 1-22^2.
все параметры которого Уц, ZI2, —21, —22 имеют размерность проводимости.
Как выше оговаривалось, только три из че тырех/-параметров, Z-параметров или У-параметров являются независимыми.
Можно показать, что условия зависимости этих параметров имеют вид
- для /-параметров: справедливо уравнение AD-B^Q = 1;
- для Z-параметров: Z21 = -Zl2;
- для У-параметров: У2| =_21i2-
Рассмотрим теперь, как экспериментально-расчетным путем можно определить искомые Л, Z, У-параметры четырехполюсников.
Для этого будем искусственно устраивать опыты холостого хода со стороны нагрузки, полагая ее равной:
а) ZH -00 (режим холостого хода), тогда заранее известен ток /20 = 0;
б) ZH = 0 (режим короткого замыкания), тогда заранее известно напряжение Ц_2к =0.
Напомним, что в этих режимах принято переменные снабжать индексом «0» или «к», указывающими на режим соответственно холостого хода и короткого замыкания.
Уравнения четырехполюсников в этих режимах существенно упрощаются. Так, уравнения четырехполюсника в /-параметрах примут вид
кю = 21^20 б(1к = ——2к’
£io = Ct/2OJ 71k=W2k.
Отсюда
Л = С = ^-; 5=^-; О = — —20 —20 12к ^2к
Пример 2.5. Рассчитать /-параметры четырехполюсника, изображенного на рис. 2.30а.
Мысленно проведем два опыта - холостого хода (рис. 2.306) и короткого замыкания (рис. 2.30в), считая ЭДС Е известной.
174
1. Рассчитаем схему рис. 2.306.
С20=^Ье;
-20 j\ - j2 -
t/io= ^’ —го = 0;
2. Рассчитаем схему рис. 2.30в.
С/2к=0; С/1К=£;
/1к=—+—^-Л2£-
-,к j5 j\
3. Находим иско
мые Л-параметры.
Л = ^ = А = 0,5;
" —20 2£
с = Z1O_ = 221^ =уо, 4 См;
“ t/20 2£
д = = /Ом;
" Ьк -7^
£) = Z1K- = Z11^ = 1 2.
“ —2к ~JE
4. Осуществляем
Рис. 2.30
проверку найденных параметров
(AD—BC- 1). Имеем
AD-В С=0,5 1,2-j0,4-7 = 1-
Параметры рассчитаны верно.
Аналогичным образом находятся Z и К-параметры четырехполюсника; мысленные опыты можно разнообразить, подсоединяя ЭДС Е к вторичным выводам и устраивая режимы короткого замыкания и холостого хода на первичной стороне четырехполюсника. Можно вместо ЭДС между зажимами 1-1' и 2-2' включать источник тока J и т.д. Главное, чтобы такие опыты (мысленные или реальные) способствовали наиболее простому нахождению искомых параметров.
175
В заключение заметим, что A, Z, У-парамезры четырехполюсников не являются независимыми и при необходимости могут быть пересчитаны.
Покажем, как это может быть сделано, но сначала введем некоторые новые параметры.
Обозначим через Z1K и Ущ соответственно сопротивление короткого замыкания и проводимость холостого хода
7 у =1io_=£
Z1K £ ^10 Л
Проведем еще два опыта, устроив короткое замыкание выводов 1 — Г или холостой ход со стороны этих зажимов при условии питания четырехполюсника со стороны вторичных выводов 2-2'. Рассчитав или измерив соответствующие параметры ^2к и у —20, ПОЛуЧИМ
z -I у -£
-2к-Л’ -20“d-
Из уравнений четырехполюсника в Z-параметрах или Y-параметрах следуют очевидные соотношения
7 — — 7 7 -1 — 7 7 —7 —12 '—21
—ю - у ~Ац; —20— у _ А22; £щс-±д1 7 ;
3-10 2-20 Z-22
1 1 У . У
у —______—У У —_______— —У у -у —12 —21
—1к ~ 7 ~ 2_ц; 2_2к - 7 - L-12-, 2-10-2-11
А] к =.2к 2-22
2.7.3. Эквивалентные схемы четырехполюсников
Поскольку в уравнениях пассивного четырехполюсника участвуют в качестве независимых только три параметра, то, следовательно, его схема замещения должна содержать три независимых элемента.
Две наиболее простые схемы замещения четырехполюсника получили название Т-образной (рис. 2.31а) и П-образной эквивалентных схем замещения четырехполюсника (рис. 2.316).
Записав уравнения связи первичных тока и напряжения и вторичных тока /2 11 напряжения б/2 для Т- и I [-образных схем и сравнив эти связи с уравнениями четырехполюсника в А-параметрах, можно выразить параметры Т- и П-образных схем замещения четырехполюсника через его А-параметры.
176
Рис. 2.31
Для Т-образной схемы (рис. 2.31 а) получим
Io = C; Zj=^—-;
_о _1 с
Д-1 С
?2 =
Для П-образной схемы (рис. 2.316)
Z0=B; Y,=^—^;
-о - -i 8
А-1 В
Ь =
Пример 2.6. По найденным для схемы рис. 2.30 Л-пара-метрам А = 0,5; В = j Ом; С = j 0.4 См; D = 1,2 определить параметры Т-образной и П-образной схем замещения четырехполюсника, изображенного на рис. 2.30.
Для Т-образной схемы (рис. 2.31а)
y0=C = j’0,4 См;
„ А-1 0,5-1 , Д-1 1,2-1
Z, =—— =------= /1,25Ом; Z? =—— =-----------= -/0,5Ом.
С /0,4 С /0,4
Для П-образной схемы (рис. 2.316) получим
Zo =^ = 7Ом’
v Д-1 1,2-1
Y, =----=-------= - /0,2 См
В j
v А-1 0,5-1 .п.„
Y-, - =— =-------- - /0,5 См.
~2 В j
Сопоставив каждому четырехполюснику Т- или П-образную эквивалентную схему его замещения, можно и всю схему, содержащую наряду с двухполюсными также и четырехполюсные элементы, свести к схеме, состоящей исключительно из двух полюсных элементов. Расчету таких схем были посвящены предыдущие главы книги, и он может быть проведен по любому из рассмотренных выше методов.
177
2.8. Частотные характеристики электрических цепей
Частотными характеристиками называются зависимости от частоты параметров двухполюсных элементов цепи (активного, реактивного, полного сопротивлений, активной, реактивной, полной проводимости и т.д.), а также величин, определяемых этими параметрами, например, cos<p, активной и реактивной мощностей, а в частных случаях, и действующих значених токов и напряжений двухполюсников. Частотные характеристики позволяют анализировать условия достижения максимальных (резонансных) значений каких-либо переменных цепей и потому находят все большее применение в силовой электротехнике. Что же касается электротехники слабых токов или электротехники высоких и сверхвысоких частот, то в этих областях частотные характеристики являются наиболее информативными данными по рассматриваемому объекту.
Более того, в этих областях и анализ процессов часто проводят не во временной, а в частотной области.
Знакомство с частотными характеристиками и элементами частотного анализа электрических цепей представляется весьма важным для современного инженера. Для начала этого знакомства обратимся к ранее хорошо изученному объекту - последовательному соединению резистора, конденсатора, индуктивной катушки.
a>L
4l
Рис. 2.32
2.8.1. Частотные характеристики последовательного контура из резистора, конденсатора и катушки
Пусть в цепи, изображенной на рис. 2.32, в напряжении u(t) = Um smeot изменяется частота - var).
Рассматривая бесконечное множество новых синусоидальных режимов, определим частотные характеристики сопротивлений этого контура.
1. Частотная характеристика резистора R (<у) — R = const не зависит от частоты, и ее график представляет собой прямую линию, параллельную оси абсцисс (рис. 2.33а).
2. Для построения частотной характеристики реактивного сопротивления контура X(<у) = XL - Хс вначале построим частотные характеристики индуктивного и емкостного сопротивлений (рис. 2.336). XL (<у) представляет собой прямую с
178
тангенсом угла наклона к оси абсцисс tgcr = £, а Хс(со) -- гиперболу. XL (со) и Хс (бу) построены на рис. 2.336 пунктирной линией. Перенесем график X(бу) на рис. 2.33а.
3. Построим частотную характеристику полного сопротивления контура
Z = ^/?2 (<y) + Jf2 (<у).
Помимо частотных характеристик сопротивления интерес для нас представит частотная характеристика сдвига фаз напряжения и тока <р(со), график которой представлен на рис. 2.33в. В точке бУ0, когда
реактивная составляющая становится равной нулю, контур меняет активно-емкостной ха-( П
рактер I -—<cp<v I на актив-
но-индуктивный характер ^0 < ср < у j. В точке со - 0)^ контур приобретает чисто резистивный характер. В этой точке возникает резонанс напряжений UL (со0) — Uc (бУ0), полное сопротивление достигает минимума Z = R (рис. 2.33а), следовательно, действующее значение тока при со = со0 достигает максимального значе-
Т1 \ U
ния £(<У0) =—.
К
Построим частотные характеристики действующих значений тока контура и напряжений на его отдельных элементах.
179
Эти характеристики также называют резонансными характеристиками (рис. 2.33г).
1. Частотная характеристика тока
при со — 0 равна нулю, т.к. конденсатор не пропускает постоянного тока (Агс(0) = °°); при со^^ 1(со)^0, т.к. XL = coL-^ <». Мак-
\ U симум тока I (ш0) = —,
как было отмечено, наступает в точке ре
зонанса.
2. Частотные характеристики действующих значений напряжения на конденсаторе Lc (щ) = %с (щ)/(щ) и катушке UL (ш) = XL (co)I(co) имеют общую точку Uc (ш0) = UL (ш0).
В этой резонансной точке напряжения на этих элементах, находящиеся в противофазе, самокомпенсируются (Uc + UL = 0), и
приложенное напряжение к контуру становится равным напряжению резистора. График частотной характеристики UR (ш) = I (cd) К представляет собой масштабированный график I (со).
В заключение заметим, что построенные частотные характеристики параметров рассматриваемого контура и тот беглый анализ, который был сделан на их основе, дал очень много для качественного объяснения процессов в этом контуре, происходящих с изменением частоты. Сходный подход может быть использован и при частотном анализе более сложных цепей. Покажем некоторые его возможности на примере чисто реактивных цепей.
2. 8.2. Частотные характеристики электрических цепей, состоящих только из реактивных элементов
На практике электрические цепи с малыми потерями (слабодиссипативные цепи) достаточно часто идеализируют, представляя состоящими только из реактивных элементов (идеальных конденсаторов и идеальных катушек). Подобные чисто, реактивные цепи представляют собой исключительно интересный в теоретическом плане класс цепей (схем замещения цепей), поскольку в них:
а) полностью отсутствуют потери энергии (диссипация);
б) имеется множество резонансов.
180
Частотный анализ как нельзя лучше подходит к исследованию подобных цепей, особенно в части изучения их резонансных свойств В цепи, содержащей только реактивные элементы, угол сдвига между напряжением и током может принимать только л л
значения <р = ±—. При (р = у цепь будет носить индуктивный ха-
Л „
рактер, при (р = -— - емкостный характер. Резонансы в такой це-
пи ((3 = 0) наступают только в моменты изменения от +— до
л л л _
---1______ .
2 2 2
тотная характеристика (з(щ)
л л , л
или от до +—. Поэтому если при 69 = 0 <р — —— , то час-выглядит следующим образом
(рис. 2.34)
В реактивных цепях для входного реактивного сопротивления имеет место замечательное свойство
^ВХ > Q dco
Это означает, что частотная характеристика входного сопротивления хвх(щ) представляет собой возрастаю
щую функцию. Увеличиваясь от значения -©° (полюс функции, обозначенный на рисунке значком х) функция проходит через значение нуль (нуль функции, обозначенный значком 0) и далее достигает значения +°© (полюс функции). В этом случае нули и полюсы функции хвх (щ) могут только чередоваться. При пере
ходе частоты через полюс хвх (щ) меняет знак, затем процесс
повторяется. Знак у хвх (щ) меняется и при переходе через нуль.
Следовательно, резонансы в реактивных цепях возникают исключительно в нулях и полюсах функции хвх (щ). Заметим, что нули и полюсы чередуются (см. рис. 2.34). Это позволяет строить такие функции качественно, еще до вычисления их нулей и полюсов. Рассмотрим два примера построения частотных характеристик реактивных сопротивлений.
181
Пример 2.7. Построить зависимость хвх (л?) для цепи, изображенной на рис. 2.35а.
При со = 0 конденсаторы разрывают цепь (они нс пропускают постоянного тока), а индуктивности представляют собой за-коротки. Таким образом, путь для тока имеется и, более того, сопротивление ему равно нулю (имеет нуль функции). Далее идет чередование полюсов и нулей функции (общее их количество равно четырем, т.е. числу реактивных элементов). График частотной характеристики представлен на рис. 2.356.
Рис. 2.35
Пример 2.8. Построить зависимость хвх (я?) для цепи, изо-
Рис. 2.36
При со = 0 в цепи отсутствует путь для постоянного тока, и т к. -хс = — при со 0, то хвх (0) = -“°. То есть в этой точке цепь имеет чисто емкостный характер, а сама точка со = 0 суть -
182
полюс функции хвх(бд). Далее следует чередование нулей и полюсов этой функции. При бд —> xL = coL , а х, - - ' —> 0,
соС
поэтому xBX (бд)^+°° при бд—><». Чередование нулей и полюсов характеристики хвх (бд) представлено на рис. 2.366. Заметим, что для точного, не качественного построения частотной характеристики хвх (бд), ее нулей и полюсов и, следовательно, точного определение резонансных точек необходимо получить выражение этой характеристики в виде рациональной дроби от переменной со. Поиск корней полинома числителя этой дроби дает нули хвх (бд), а поиск корней полинома, стоящего в знаменателе дроби, - полюса лвх (бд)
В заключение заметим, что поиск частотных характеристик цепей более общего вида, содержащих резисторы, гораздо более сложен. Здесь может оказаться предпочтительнее путь не качественного, а точного численного построения этих характеристик.
Знание же этих характеристик, раскрывающих, в частности, резонансные особенности цепей, исключительно важно хотя бы потому, что само явление резонанса широко используется в современной электротехнике. Кроме того, помимо положительных функций, оно может играть в некоторых случаях и отрицательную роль. Частотные характеристики дают об этом явлении достаточно исчерпывающую информацию.
Глава 3
ТРЕХФАЗНЫЕ ЦЕПИ
3.1. Основные понятия о трехфазных цепях
Условия получения, передачи и потребления электрической энергии существенно улучшаются при объединении однофазных цепей в трехфазные системы. Это объясняется рядом преимуществ трехфазных систем тока по сравнению с однофазными:
— простотой получения вращающегося магнитного поля в генераторах и двигателях переменного тока;
— возможностью получения различных напряжений (линейного и фазного) в одной сети;
— меньшим расходом металла в линиях передач;
— меньшими пульсациями момента на валах генераторов и двигателей.
Трехфазной системой синусоидального тока называется совокупность электрических цепей, в которой действуют три синусоидальные ЭДС одной и той же частоты, сдвинутые относительно друг друга по фазе и создаваемые общим источником.
Отдельные электрические цепи, входящие в состав трехфазной цепи, называют фазами.
Если цепи, образующие трехфазную систему (рис. 3.1 а), не соединены электрически, то такие цепи называются несвязанными. По сути, это три однофазные цепи со своими ЭДС, токами, нагрузками: BLa,La,ZlA для фазы A, E_b,Lb,Z_b Д™ фазы В и E_c^Lc->Zlc Д™ фазы С (рис. 3.1а).
На практике, как правило, применяют связанные трехфазные цепи. В схеме, изображенной на рис. 3.1а. один из проводов каждой фазы соединяет конец фазы источника с приемником. Это позволяет объединить три обратных провода в один, что превра-
184
щаст трехфазную цепь в связанную (рис. 3.16). Связанная трехфазная цепь представляет собой одну разветвленную цепь, этим достигается меньшее число линий и меньшие пульсации момента на валу генератора (об этом см. ниже пп. 3.4.3).
Создателем трехфазной системы является выдающийся русский инженер и ученый М.О. Доливо-Добровольский (1862-1919). В 1891 году им были разработаны все элементы трехфазной системы: генератор, трансформатор и двигатель.
3.2. Трехфазный синхронный генератор
Основным источником электроэнергии в трехфазной цепи является трехфазный синхронный генератор. Он состоит из двух основных частей: неподвижного статора 1 и вращающегося ротора 2 (рис. 3.2). Обмотка ротора питается от источника постоянного тока и создает неизменный во времени магнитный поток, замыкающийся через ста
Рис. 3.2
тор. На статоре располагаются три обмотки, смещенные относительно друг друга на угол 120°. На рис. 3.2 они показаны в виде
двух проводов, помещенных в диаметрально противоположные
185
пазы. Начала и концы обмоток обозначают соответственно А, В, С и X, У, Z, а сами обмотки называют фазными обмотками.
По закону электромагнитной индукции в этих обмотках (фазах) наводятся ЭДС, сдвинутые во времени на треть периода, т.е. по фазе на угол 120°. Их мгновенные значения
еА = Emsincot, ев - Ет sin (cot -120°), ес = Ет sin (cot - 240°).
Начальную фазу ЭДС А обычно принимают равной нулю.
ЭДС можно изобразить графически в зависимости от времени (рис.3.3а) и на комплексной плоскости (рис. 3.36). Комплексы ЭДС:
EA-Eej0°=E; ЕВ=Е^ПО°‘, Ес = Ee~JM0°.
Система синусоидальных ЭДС одной частоты, равных по амплитуде и сдвинутых относительно друг друга по фазе на угол 120°, называется симметричной трехфазной системой ЭДС. Основным свойством симметричной трехфазной системы ЭДС является то, что суммы их мгновенных значений в любой момент времени равны нулю:
ел+£>я+ес=°-
Это хорошо иллюстрируется графически (рис. 3.3а). Для комплексов ЭДС такой системы справедливо
Е.а + Ев + —с ~ 0, что также хорошо отображается топографической диаграммой (рис 3.36).
Порядок, в котором наведенные в фазах генератора ЭДС
186
проходят через одинаковые значения, называют последовательностью фаз, или порядком чередования фаз. При принятом на рис. 3.2 направлении вращения ротора получаем последовательность фаз АВС и т.д.
При изменении направления вращения ротора на противоположное последовательность фаз получается обратной — АСВ. Роторы генераторов вращаются всегда в одном направлении, поэтому последовательность фаз остается неизменной.
Частота ЭДС зависит от числа полюсов генератора и частоты вращения ротора:
f = EL
J 60 ’
где р — число пар полюсов; п — частота вращения
3.3. Способы соединения трехфазных цепей
Существуют два основных способа соединения обмоток генераторов, двигателей, трансформаторов и приемников в трехфазных цепях — соединения «звездой» и соединения
«треугольником».
Если соединить вместе концы обмоток генератора, то получается соединение звездой (рис. 3.4а). Для этого на щитках электрических машин достаточно перемычкой соединить между собой выводы концов обмоток (рис. 3.46). Общая точка фазных обмоток называется нейтральной точкой генератора и обозначается буквой 7V.
В дальнейшем фазы генератора для простоты на схемах будем часто изображать не под углом 120°, а параллельно (рис. 3.4в).
Рис. 3.4
187
Фазы приемника в трехфазной цепи также могут быть соединены звездой (рис. 3.5). Общая точка соединения фаз приемника называется нейтральной точкой приемника п.
Рис. 3.5
Провод Nn, соединяющий нейтральные точки генератора и приемника, называется нейтральным проводом.
Провода АА' ВВ'СС' соединяющие начала фаз
генератора и приемника, называются линейными, а
токи в них 1_А, 1_в, 1_с - линейными токами. Напряжения между
линейными проводами U_AB, U_bc> U-CA называются линейными (рис. 3.4а). За положительное направление токов в линейных проводах примем направление от источника к приемнику, а в нейтральном проводе — от приемника к источнику (рис. 3.5). Токи в фазах генератора или приемника называют фазными токами. Очевидно, что при соединении звезда звезда и согласованности условно-положительных направлений токов линейные и фазные
токи совпадают.
Соединение треугольником получают путем последовательного соединения фазных обмоток источника, как показано на рис. 3.6а,б.
Несмотря на то, что обмотки образуют замкнутую цепь, в контуре ток не протекает, т.к. геометрическая сумма трех ЭДС равна нулю. Если одна из фаз включена наоборот, то в треугольнике будет протекать ток. Соединение фаз приемника треугольником выполняют аналогично. При соединении фаз треугольником фазное напряжение равно соответствующему линейному U^=Un.
Токи в фазах приемника I_ab-> Lbc Lca' как Уже отмечалось, называют фазными токами (рис. 3.7). Положительное направление фазных и линейных токов примем в соответствии с рис. 3.7.
188
На практике используют различные комбинации соединения обмоток генератора и приемника: звезда—треугольник, треугольник-звезда, звезда-звезда, треугольник треугольник.
Соотношения между линейными и фазными напряжениями и токами при соединении звездой и треугольником можно установить, рассматривая различные схемы и режимы трехфазной цепи.
Различают симметричные и несимметричные режимы трехфазных цепей.
3.4. Симметричный режим трехфазной цепи
Трехфазная цепь называется симметричной, если комплексные сопротивления каждой ее фазы одинаковы. Симметричным режимом трехфазной цепи называется режим, когда к симметричной цепи приложена симметричная система напряжений. В такой цепи будет протекать симметричная система токов.
3.4.1. Симметричный режим при соединении
фаз приемника звездой
При симметричных фазах приемника, соединенного звездой (рис. 3.8),
ZA=ZB=Zc=Ze*.
Пусть сопротивление фаз индуктивное (^>0). Построим векторную диаграмму напряжений и токов, в предположении, что напряжение U_A имеет нулевую начальную фазу.
Фазные напряжения U_A, U_c образуют симметричную систему векторов’
= LLa = V°°; Ив = - Ц^’7120°; Ис = ULc = ^ф^7240° •
189
Фазные токи отстают от фазных напряжений на угол <р и образуют симметричную систему токов. По первому закону Кирхгофа (см. рис. 3.8) их сумма равна току в нейтральном проводе
Ln=La+Lb + Lc-
Но сумма трех равных по модулю векторов, сдвинутых относительно друг друга на 120°, равна нулю, следовательно, /у = 0, т.е. в нейтральном проводе в трехфазной симметричной
системе ток отсутствует.
Построим топографическую диаграмму. За точку нулевого потенциала принимаем точку п. Векторы nA, нВ, пС (рис. 3.9) соответствуют фазным напряжениям Ц_А, U_B, ILc- Соединив между собой точки А, В, С, получим соответственно векторы линейных напряжений иАВ, и_вс, иСА.
Из диаграммы на рис. 3.9 следует, что линейные напряжения равны между собой и сдвинуты от
носительно друг друга на 120°. Напомним, что U_AB - это вектор,
начинающийся в точке В и кончающийся в точке А, т.е. первая буква индекса обозначает точку конца вектора, вторая начало. Аналогично для векторов (7ВС и U_CA.
Из топографической диаграммы (см. рис. 3.9) определим соотношение между линейными и фазными напряжениями:
Uab-Ua-ILb-, LLbc=Ub-^ Uca=Uc-Ua,
190
т.е. векторы линейных напряжений равны разности векторов соответствующих фазных напряжений
Уав-УА-Ув=Уф^ -^,20° =^ф(1-е->,20”) =
V3 = /7ф 1 + 0,5 + j^-
д/3
= Уф 1,5+ 7^
\ 2 /
V3 Ц/зо°.
Аналогично
Увс=4зивУ3(Г=у1з ифе^° ;
Таким образом, действующие значения линейных напряжений при симметричном режиме в -Тз раз больше действующих значений фазных напряжений. Напряжение U_AB опережает на
пряжение Ц_А на угол 30°, аналогично для напряжений U_CA и U_c УвС И У-В-
Сумма линейных напряжений всегда равна нулю:
У ав + У вс + Уса ~ ’ т.к. на топографической диаграмме соответствующие им векторы образует замкнутый треугольник (см. рис. 3.9).
Итак, при соединении звездой
/ф=7л; С7Л=ТЗС7Ф.
Отечественными стандартами установлены следующие номинальные напряжения для систем до 1000 В:
(7л=380В; Сф = 220 В; (7л=220В; 17ф = 127 В.
3.4.2. Симметричный режим при соединении
фаз приемника треугольником
При соединении фаз приемника треугольником (рис. 3.10) симметрия имеет место при условии
У АВ = ZlBC = ZlCA =
Линейные (они же фазные) напряжения УАВ, УВс> Уса симметричны и их векторная диаграмма приведена на рис. 3.106. Здесь принято, что напряжение УАВ имеет нулевую фазу.
Система фазных токов будет также симметрична, т.е.
L. 1В + Lbc + Lca = 0 •
191
Выразим линейные токи из первого закона Кирхгофа для узлов треугольника.
La = Lab ~ Lca ;
Lb ~Lbc ~Lab',
Lc = Lca ~ Lbc
Таким образом, линейные токи образуют симметричную систему векторов.
Рис. 3.10
На векторной диаграмме (рис. 3 106) фазные токи отстают от фазных напряжений на угол <р (полагаем, что фазы приемника являются индуктивными, т.е. (Р>0). Тогда система трех замыкающих векторов даст линейные токи: вектор линейного тока 1_А начинается в конце вектора и кончается в конце вектора 1_АВ и т.д. Выразим линейный ток через фазные токи
La =Lab ~Lca-Lab-Lab?4™ =Lab^~^W ) = ^ Lab^jW
Таким образом, при соединении треугольником действующее значение линейного тока при симметричной нагрузке в л/з раз больше действующего значения тока фазного и
3.4.3. Мощности симметричной трехфазной системы
Известно, что мгновенная мощность однофазной цепи (двухполюс ника)
р = ui = U• Imsin(ft#-(р ) = {7/[cos^-cos(26z?/-^)J изменяется с удвоенной частотой.
192
Из-за пульсаций мощности на валах генераторов и двигателей однофазного тока возникает пульсирующий крутящий момент. Поэтому говорят, что система однофазного переменного тока есть система неуравновешенная.
Определим суммарную мгновенную мощность трехфазной цепи при симметричном режиме. Для этого выразим мгновенные мощности фаз:
Ра =ua'a - sin М [cot - )-=иф1ф [cos ср - cos (2ал - <?>)];
Рв ~ив1в ~^фу/2 sin [cot -120°)- /ф-\/25т(щ/ -120°-^) =
= г7ф/ф[со8(Р-со5(з(2щ/ -240°-^)];
Рс = ис‘с = ^/фл/28т(щг-240°)-/фл/25т(щг-240с-^) =
= {7ф/ф coscp-coscp[2cot -480°-#»)].
Суммарная мгновенная мощность
Р = Ра + Рв + Рс = ЗЦ/ф cos^ = Р •
Вторые слагаемые выражений для мгновенных мощностей дают в сумме нуль, т.к. образуют симметричную трехфазную систему.
Итак, мгновенная мощность симметричной трехфазной цепи не зависит от времени, всегда постоянна и равна активной мощности цепи. Это одно из преимуществ трехфазных систем, т.к. в любой момент времени нагрузка генераторов постоянна и привод (турбина, двигатель) также испытывает одинаковую нагрузку. Это очень важно для работы электрических двигателей трехфазного тока, т.к. их крутящий момент остается постоянным в течение всего периода.
Трехфазная цепь, мгновенная мощность которой неизменна, называется уравновешенной.
Заметим, что при несимметричном режиме трехфазная цепь не может быть уравновешенной, т.к. мгновенная мощность содержит переменную составляющую, изменяющуюся с двойной частотой (сумма вторых слагаемых в рА, рв, рс не равна нулю).
Итак, актив! гая мощность трехфазной цепи, как и всякой другой сложной цепи, равна сумме активных мощностей отдельных приемников, т.е. сумме активных мощностей фаз.
Р = ЗРф =3^ф/фСО8^.
7 Зак. J186
193
При расчетах трехфазных цепей удобно пользоваться линейными значениями напряжений и токов. Так как при соединении звездой
а при соединении треугольником
Ц>=^л;
причем независимо от схемы соединения активная мощность симметричного трехфазного приемника
Р-урЗ UnIncos(p.
Аналогично определяются реактивная и полная мощности симметричной трехфазной цепи:
С = х/3 S = y/3Unln.
При этом следует иметь в виду, что здесь (р - угол сдвига фаз между фазным напряжением и фазным током.
Пример 3.1. К симметричной трехфазной цепи с линейным напряжением Un = 380 В подключены три одинаковых приемника, соединенных звездой с нейтральным проводом (рис. 3.11а). Активное и реактивное сопротивление каждого приемника: 7? = 6 0м;У=8 0м.
Определить токи в фазах и нейтральном проводе и мощность всей системы.
Рис. 3.11
Решение. Так как нагрузка симметричная, то достаточно рассчитать ток одной фазы.
U 380
Фазное напряжение (Л =-Д = -j=- = 220 В, или в комплекс-Т /э /э
194
ной форме, приняв начальную фазу напряжения для фазы <рА=0, получим U_A = - 220е/0 В.
Комплексное сопротивление фазы приемника
Z = R + jX = ZeJ<p = 6 + /8 = 10е753 Ом, #> = arctg—.
Токи
~A Z 10e/53
LB = 22c”7173 A; £c = 22e '7'293° = 22e+767° A. Ток в нейтральном проводе
Ln = La + Lb + Lc ~ 0 »
т.к. нагрузка симметричная.
Активная мощность цепи
Р = 3€/ф/ф cos<p = 3 220 •22•cos53° = 8712 Вт.
Реактивная мощность
Q = 377ф/ф sin<р = 3 220 • 22 • sin53° = 11616 вар.
Полная мощность
S = 3£7ф7ф = 3•220•22 = 14520 В-А.
Пример 3.2. Сопротивления фаз симметричного приемника, соединенного треугольником (рис. 3.116): R = 6 Ом; X = 8 Ом. Определить фазные и линейные токи и мощности всей системы, если линейное напряжение £7л=38О В.
Решение. Модуль полного сопротивления фазы приемника Z = Jr2+X2 =7б2+82 =10 Ом.
Фазный угол
X 8 ср = arctg— = arctg— = 53°.
Так как фазные и линейные напряжения нагрузки равны, то фазные токи
,ф=!4 =5^ = 38 А
ф Z 10
Линейные токи при симметричной нагрузке в д/з раза больше фазных:
/л=л/з/ф = л/з-38 = 66 А.
Активная мощность
Р = а/3£/л7л cos<р = л/з • 380 • 66 • cos53° = 26 064 Вт.
7’
195
Реактивная мощность
Q = у/зил1п sin^ = у/з • 380 • 66 • sin53° = 34 752 вар.
Полная мощность
S = л/367л/л = %/з • 380• 66 = 43 440 В А.
Для сравнения приведем расчет токов в комплексной форме, положив начальную фазу напряжения U^AB равной нулю. Выра
зим комплексы действующих напряжений:
UAB =илне^' =380е/0° В; 6/вс =380е“7,20° В; UCA - 380е"у240° В.
Комплекс полного сопротивления фазы
= R + jX = 6 + j8 = 10еу53° Ом.
Фазные токи:
1-вс ~ Lab'
IАВ =2§2^ = 38^53° A; IBC =IABe-jnv' =38e^,73° А;
Z^p 10еу53 с -А
Lca= Z^'24°p =38е^293° =38^'67° А.
3.5. Расчет несимметричных режимов трехфазных цепей
Несимметрия в трехфазной цепи может быть вызвана различными причинами: неодинаковыми сопротивлениями фаз (несимметричная нагрузка); неравенством ЭДС; коротким замыканием (например, между двумя фазами или между фазой и нейтралью); размыканием фазы и др.
Расчет токов и напряжений в трехфазной цепи при несимметричном режиме обычно выполняют теми же методами, что и расчет сложных электрических цепей с несколькими ЭДС. Рассмотрим несколько конкретных примеров расчета несимметричных режимов, считая нагрузку неизменной.
3.5.1. Соединение фаз приемника звездой
с нейтральным проводом
Рассмотрим схему (рис. 3.12а), в которой несимметричный приемник, фазы которого соединены звездой с нейтральным проводом (ZN = 0), питается от системы симметричных фазных напряжений.
Наличие нейтрального провода без сопротивления означает, что каждую фазу можно рассчитывать независимо от других.
196
Важное достоинство системы с нейтральным проводом — постоянство напряжения любой фазы нагрузки при изменении нагрузок в других фазах.
а)
Рис. 3.12
Принимаем
t/B=^-/,20C; Uc =ифе-]24°с-, ZA*ZB*ZC*ZA.
Токи в фазах приемника:
Ток в нейтральном проводе
Ln ~ La + Ln + Lc
Таким образом, нейтральный провод обеспечивает симметрию фазных напряжений при несимметричной нагрузке. Поэтому однофазные потребители (осветительная, бытовая нагрузка и др.) включают в четырехпроводную сеть.
При учете сопротивления в цепи нейтрального провода (рис. 3.126) появляется напряжение смещения нейтрали U_N ~ LNZN , которое определяют по методу двух узлов:
_uaya+ubyb+ucyc ya + yb + yc + yn
„ 1 ,z 1 ,z 1 ,z 1
где Ya =--; YB =---; ; Y_N ----комплексные про-
—A —в Zc Zw водимости фаз.
На топографической диаграмме (рис. 3.13a) смещение нейтрали, т.е. напряжение между нейтральными точками N и п, показывает смещение потенциала нейтральной точки приемника относительно потенциала нейтральной точки генератора. Чем больше смещение нейтрали, тем больше асимметрия фазных напряжений.
197
. 1а Za
А о » I-----I
1в Zb
-с —с
б)
и
Напряжения на фазах приемника
ILa~^-a~ILn’ LLb ~LLb ~LLn’’ LLc=LLc~^-n-Токи в ветвях по закону Ома:
Lb=U—bYb> Lc=lLcY-C’ Ln=LLnY_n-При симметричной нагрузке U_N = 0; 1N = 0.
3.5.2. Соединение фаз приемника звездой без нейтрального провода
Расчет схемы (рис. 3.136) можно выполнить так же, как для схемы, изображенной на рис. 3.126, но следует учесть, что проводимость Y_n = 0. При этом напряжение смещения нейтрали
v JLaYa+UbLb+UcYc
~N YA + YB + YC
В остальном порядок расчета аналогичен рассмотренному в пп. 3.5.1.
Если заданы линейные напряжения , (7ВС и Ц_СА на зажимах приемника, соединенного звездой (рис. 3.136), то напряжение на его фазах определяют следующим образом:
vA=ил-и„ -I ..
_Л —Л -» -A Ya+Y„ + Yc
_y_bu_ab -ycuca
Ya + Yb + Yc
Пользуясь круговой заменой индексов, можно получить остальные фазные напряжения:
U' _ Гс^вс ~YaUab _
~в~ ya + yb + yc ’ тт' _ yauca -ybu_bc -с ya + yb + yc
198
По фазным напряжениям определяют токи 1_А, £в, 1_с. Отме-
тим, что обычно задают действующие значения линейных напряжений, а для расчета нужны их комплексы. В этом случае треугольник линейных напряжений следует расположить на комплексной плоскости (рис. 3.14), направив напряжение Ц_АВ по оси
Рис. 3.14
вещественных чисел.
Линейные напряжения в комплексной форме примут вид: U ав = UABej0°-, UBC=UBCe~j(\ Иса =UCAeja\
3.5.3. Соединение фаз приемника треугольником
Фазные токи при несимметричных фазах приемника ZAB *^вс * —СА ^Z-ab-> соединенных треугольником (см. рис. 3.10), определяют по закону Ома:
г _ ИАВ . i _ Иве. , _ Иса
Lab ~ ’ Lbc ~ 7 ’ Lca ~ 7
Llab —вс L±ca
В схеме (см. рис. 3.10а) за положительное направление фазных токов принято направление от А к В. от В к С и от С к А, о чем говорит порядок букв в индексах: 1_АВ, 1_вс, £Са.
Линейные токи определяют по первому закону Кирхгофа:
La ~ Lab ~ Lca'-> Lb~Lbc~Lab'^ Lc=Lca~Lbc-
Проверка расчета: La+ Lb+Lc = ®
При симметричной нагрузке линейные токи по модулю в л/з раз больше фазных. При несимметричной нагрузке это соотношение не соблюдается.
3.5.4. Мощности несимметричной трехфазной системы
Мощности фаз при несимметричном режиме неодинаковы, поэтому комплексная мощность несимметричной четырехпроводной цепи (см. рис. 3.12а) определяется как сумма комплексных мощностей фаз
5=SA + SB+S с=UaLa + uBLB + HcLc, где активная мощность
Р = UAIA cos<pA +UBIB cos<pB + UCIC cos<pc = PA + PB + Pc.
199
Соответственно реактивная мощность равна алгебраической сумме реактивных мощностей фаз:
Q = Qa + Qb + Qc = UAJA sin (pA + UB1B sin (PB + Uclc sin ipc.
Если фазы приемника соединены треугольником, то соответственно
£ — —АВ + —ВС + $£А ~ ILabLab + ILbcLbC + ILcA-CA ;
Р = Рав + Рве + Рса = Uab^ab cos<Pab + ^вс^вс cos<Pbc + ^са^са COS(Pca-> Q = Qab+Qbc + Qca = ^ab1ab^<Pab+ubcibc^<Pbc+ucaica^(Pca\ S = yjp2 + Q2 .
Пример 3.3. К трехфазной линии с линейным напряжением Un = 380 В подключен несимметричный приемник, соединенный
звездой с нейтральным проводом (рис. 3.15а). Активные и реактивные сопротивления фаз приемника: RA = 0; ХА = 11 Ом; RB = 8
Определить токи в фазах приемника и в нейтральном проводе. Построить топографическую диаграмму напряжений и векторную диаграмму токов.
Решение. Токи в фазах приемника рассчитываем по закону Ома: г _^А. , _ив. , _ис
-а~ 7 , Lb - 7 > -с ~ у
LlA LlB LlC
Действующее значение фазного напряжения
[/. =^ = 2^2 = 220 В.
Положим U_A = 220е7° В, тогда
UB =22Oe~j'20' В и Uc = 220е'/,2(Г В.
200
Комплексы полных сопротивлений фаз:
ZA = 0 + у11=711 = 11еу90° Ом;
Z/j = 8 + 7'11 = 10еу36 52' Ом;
Zc = 9-7'12 = 15е-753°8' Ом.
Токи в фазах приемника:
_ 220е'°- _ ж
~А ~ 11еу90° ’
_220е /12(' _ 7i56°52' А.
~В ~ 10е>36°52'
7С = 22(кС~Г = 14,67еу66°52' А.
15е'53 8
Ток в нейтральном проводе
Ln = La + Lb + Lc = 20e*y90° + 22e’yl56°52' + +14,67e766"52'= 20,98e~746°87' A.
Для построения топографической диаграммы выбираем масштаб напряжений и на комплексной плоскости строим векторы фазных и линейных напряжений: 77^, U_B, Uc, ILab-> LLbc> LLca- На этой же плоскости в масштабе токов строим векторы токов: 7 , 7 в, 7 с, Ln-
Совмещенная топографическая диаграмма напряжений и векторная диаграмма токов приведены на рис. 3.156.
Пример 3.4. К симметричной трехфазной системе напряжений подключены резистор, катушка и конденсатор (рис. 3.16а). Токи в каждой фазе приемника одинаковы - 1 А.
Определить ток в нейтральном проводе для: а) заданной схемы; б) схемы, в которой конденсатор и катушка поменялись местами.
201
Решение. Выразим комплексы фазных токов для варианта а, приняв UA=UA. Решение будем сопровождать построением векторной диаграммы (рис. 3.166). Так как в фазе А включен конденсатор, то вектор тока в ней опережает на 90° вектор напряжения:
La А.
Вектор тока в фазе В отстает на 90° от вектора напряжения. Последний отстает на 120° от вектора фазы А. В результате комплекс тока
I_B = 1е~7120° -1е“у90" =1е^2,0° =-0,87 + у'0,50 А.
Ток в фазе С совпадает по фазе с напряжением этой фазы и, следовательно, в комплексной форме
7С = 1е7120° =-0,50 + у’0,87 А.
Геометрическая сумма комплексов всех токов дает ток в нейтральном проводе:
Ln = La + Lb + Lc ~ ./1 — 0,87 + у 0,50 — 0,50 + у 0,87 -
= -1,37 + /2,37 = 2,73e7l20° А.
При расчете токов для варианта б имеем: /л=1е-^=-71 А;
LB = le“7120° -le7'900 = 0,87- /0,50 А;
7С = 1е7120° =-0,50 + у'0,87 А.
Ln =La + Lb + Lc = ~j^ + 0,87 — у 0,50 — 0,50 + =
= 0,37 - /0,63 = 0,73е~7'60° А.
Несмотря на то, что фазы звезды представляют собой симметричную (по модулю) систему и по ним протекают одинаковые по модулю токи, перемена мест катушки и конденсатора повлияла на значение тока в нейтральном проводе.
3.5.5. Трехфазная цепь с трехфазными
и однофазными приемниками
Рассматриваемая трехфазная трехпроводная система (рис. 3.17) содержит симметричный трехфазный приемник - для определенности электродвигатель с сопротивлением фаз Z] и два однофазных приемника с сопротивлениями Z2 и Z3. При заданных сопротивлениях приемников и фазных напряжениях источника определим токи в фазах и на участках цепи.
202
La
Порядок расчета следующий.
1. Выбираем условно-положительное направление токов.
2. Принимаем U_A - UА и записываем в комплексной форме
фазные и линейные напряжения:
ис=и^'20°-. илв=^ v^-Ubc-^> ^-у90°;
иСА-^> <V150°-
3. Определяем комплексы действующих значений токов трехфазного приемника:
j = I =UjL- 1 -—С
-Д1 , -В\ ’ -С1
Токи однофазных приемников:
гдеС/лс=-^=^[/ф^30°.
4. Определяем линейные токи в участках цепи: La~La]+L1’ Lb=Lb\+L$\ Lc=Lc\~L-2~L3’
L\2 = ~L1 ~Li ИЛИ Ll2=Lc~Lei’ -23 = ~Li
3.6. Топографические диаграммы трехфазных цепей
Для построения топографической диаграммы напряжений достаточно определить положение соответствующих точек на плоскости. Векторы токов строят относительно напряжений. Ниже рассмотрен способ построения диаграмм.
203
3.6.1. Топографическая диаграмма трехфазной цепи при соединении генератора и приемника звездой с нейтральным проводом
Расчет и построение топографической диаграммы цепи, изображенной на рис. 3.18а, выполняют в следующем порядке.
I. На комплексной плоскости строят векторную диаграмму ЭДС источника Е_Д, Ев, Ес (рис. 3.186).
2. Определяют вектор напряжения смещения нейграли U_N и откладывают его на векторной диаграмме.
3. Строят векторы фазных напряжений приемника как разность между соответствующим вектором ЭДС и вектором напряжения смещения нейтрали:
LLa -Еа ~En; ЕЕв = Ев ~En '> ELc~Ec~En-
4. Вычисляют фазные токи;
La=U1aYa- Lb=ULbYb\ Lc=ULcY.c-
5. Векторы фазных токов ориентируют относительно соответствующих векторов фазных напряжений с учетом углов сдвига фаз
<РВ, (Рс
6. Определяют ток в нейтральном проводе по закону Ома
Ln = EnE-n>
или по первому закону Кирхгофа
Ln ~La+ Lb +Lc и строят его на векторной диаграмме.
7. Строят векторы линейных напряжений как разность соответствующих фазных напряжений:
—ав ~ ELa ~ ЕЕв ’ Евс = LLb ~ ЕЕс ’ Еса = ЕЕс ~ ЕЕа
204
3.6.2. Топографическая диаграмма трехфазной цепи при соединении генератора звездой, а приемника треугольником
Приводим порядок расчета и построения топографической диаграммы напряжений и векторной диаграммы токов для схемы, показанной на рис. 3.19а.
1. На комплексной плоскости строят векторную диаграмму ЭДС источника ЕА , Е_в, Ес (рис. 3.196).
Рис.3.19
2. Строят векторы линейных напряжений U_ab,U_bc,LLca как разность соответствующих векторов ЭДС.
3. Вычисляют фазные токи:
Lab = LLab^ab '> Lbc = LLbc^bc > Lca = U-ca Lca
4. Определяют положения векторов Lab-> 1_вс- 1_СА на векторной диаграмме. Их удобнее строить относительно векторов линейных напряжений, а не вектора ЭДС Е_А .
5. Рассчитывают по первому закону Кирхгофа линейные токи: La = Lab ~ Lca '> Lb ~ Lbc ~ Lab '> Lc = Lca ~ Lbc и по ним строят векторы линейных токов.
3.6.3. Топографическая диаграмма напряжений при обрыве линейного провода в симметричной трехфазной цепи, приемник которой соединен звездой без нейтрального провода
При обрыве линейного провода, например, фазы А (рис. 3.20а) сопротивления других фаз оказываются соединенными последовательно и находятся под линейным напряжением U_BC- Так как Zlb ~ Zlc - Z, то напряжение на каждом из них равно половине линейного напряжения, и точка п на топографической диаграмме
205
(рис. 3.206) находится на середине вектора U_bc- Напряжение смещения нейтрали
Напряжение между точками обрыва
LLaA' = ^-Ап ~ 1^А~ U-N ~ —ЕА
Такой же результат можно получить, применив метод узлового напряжения:
у ^^.^-O + E^ + EcYc _ Ув(Ев + Ес) = Еа
~Л О + Ь+Zc 2ГВ 2'
Итак, в симметричной трехпроводной цепи при соединении приемников энергии в звезду обрыв одного из проводов вызывает уменьшение до нуля напряжения на фазе приемника с оборванным проводом и уменьшение напряжения на двух других фазах ирием-2
ника в —= —у= раз, т.е. на 16 %.
«7л/2 Л'
3.6.4. Топографическая диаграмма напряжений при однофазном коротком замыкании приемника, соединенного звездой без нейтрального провода
При коротком замыкании фазы А (рис. 3.21а) потенциалы точек А и и одинаковы, эти точки совпадают на плоскости топографической диаграммы и лежат в вершине правильного треугольника. Здесь точка п смещается в точку А, потенциал которой задается генератором. Напряжения на незакороченных фазах приемника возрастают до линейных напряжений источника (рис. 3.216):
^Lb=~LLab'’ LLn=LLa-
206
+1
Итак, при коротком замыкании одной из фаз приемника напряжение на двух других фазах увеличивается в х/з раз.
3.6.5. Топографическая диаграмма при обрыве линейного провода в симметричной трехфазной цепи с приемником, соединенным треугольником
При обрыве, например, провода А (рис. 3.22а) приемник включается только на напряжение U_BC. Фаза ВС включена на напряжение и_Вс, а одинаковые сопротивления фаз и Zc?j включены последовательно и на каждом из них половина напряжения U_BC.
Совмещенная топографическая диаграмма напряжений и векторная диаграмма токов приведены на рис. 3.226.
207
3.7. Расчет несимметричных режимов трехфазных цепей методом симметричных составляющих
3.7.1. Разложение несимметричных трехфазных систем на симметричные составляющие
Преобразование Фортескью
Любую несимметричную трехфазную систему ЭДС, напряжений или токов можно представить в виде суммы трех симметричных трехфазных систем: нулевой, прямой и обратной последовательности. Последние называют симметричными составляющими рассматриваемой несимметричной трехфазной системы.
Рассмотрим некоторую несимметричную трехфазную систему ЭДС Еа,Ев,Ес (рис. 3.23).
Соответствующие симметричные составляющие обозначим у через £0,£0,£0 - систему нулевой поеледовательно-/£а сти, E_x,a2Ex,aEx — систему прямой последователь-Ег / 2
/ ности и а Е_2 ~ систему обратной последо-
Д вательности. Здесь Е0,Ех,Е2 — действующие значе-
ния ЭДС введенных симметричных систем, а
\в 271 1 И
1 7-Г 1 v3
а = е 3 =----1- )--комплексный множитель (опе-
Рис.3.23 2 ' 2
ратор поворота), умножение на который увеличивает 2тг
аргумент комплексного числа на угол —. Например, если
/ 2я)
j <р+— E_ = Ee'v, то аЕ = Ее' 3 2. При этом очевидно: а°=1,
,2л Ал .2л
а =а~е 3, а2 -е 3 =е 3 , «3 = е/2я =1. Тогда прямой и обратный переходы от несимметричной системы £Л,£в->Е_с к трем ее симметричным составляющим дается следующим преобразованием, называемым иногда преобразованием Фортескью*:
* Преобразование названо именем американского ученого С.Л. Фортескью (C.L. Fortescue), предложившим его в 1918 году.
208
E„=^EA+EB + Ecy, Е^=Е0 + Е1 + Е2;
El = ~(ea + aEB + a2 Ec);
E_b = Eo + 6,2 Ei + aE2',
E2=^EA + a2EB + aEc);
E-C = 2kO + a—\ + q2^2’
Пример 3.5. Построить симметричные составляющие для несимметричной трехфазной системы ЭДС, заданных графически на рис. 3.23.
1. Просуммировав векторы Е_А, Ев, Ес согласно преобразования Фортескью, найдем вектор ЗЕ0 (рис. 3.24а).
2. Просуммировав векторы Ел,аЕ^в, а2Е^с, найдем вектор ЗЕ)
3. Просуммировав векторы Е_А, а2 Е^в, аЕс, найдем вектор ЗЕ2.
4. Уменьшив в три раза найденные векторы, построим иско-
209
мне симметричные составляющие Е0,Е0,Е0 - нулевой последовательности (рис. 3.24г), Е\, а2Ех, аЕ_{ — прямой последовательности (рис. 3.24д) и Е2,аЕ_2,а2Е2 - обратной последовательности (рис. 3.24е).
Аналогичным образом по известным векторам Е^,ЕХ,Е2 можно, пользуясь преобразованием Фортескью, построить трехфазную систему Е^а,Е^в, Ес.
3. 7.2. Сопротивления трехфазной цепи для токов прямой обратной и нулевой последовательности
Если к симметричной трехфазной цепи (рис. 3.25) подключить симметричный трехфазный генератор с напряжениями фаз то в нев возникнет симметричная система токов той же последовательности, что и у напряжений. Отношения комплексных фазных напряжений прямой, обратной и нулевой последовательности к соответствующий комплексным фазным токам называют комплексными сопротивлениями цепи прямой (Zj), обратной (Z2 ) и нулевой (Zo) последовательностей.
В цепях со статическими нагрузками, т.е. в цепях, приемники
которых не содержат вращающиеся машины, изменение порядка чередования фаз приложенного напряжения с прямого на обратный и наоборот изменит только последовательность токов, но не значения комплексных сопротивлений цепи, т.е. Z] = Z2.
Так для цепи (рис. 3.25) при ZA - ZB =ZC = Z^ имеем Z1 = Z2, так как = 0 в силу симметрии режима. Рассмотрим теперь, каково будет для такой цепи значение сопротивления нулевой последова-
тельности Zo. Положим
тогда La=Lb = Lc=Lo и 7л=3/0. Записав уравнение второго закона Кирхгофа для контура AnNA:
У-A -Z.aLa +ZlnLn
иучтягл-г, la=l0, Ln=La + +Lb + Lc~ получим
U0=(Z + 3ZN)l0.
210
Следовательно
ZO==^ = Z + 3Z7V.
Io
Заметим, что в цепях без нейтрального провода /0 = 0 и Zo = °°.
Симметричные режимы трехфазных цепей принято рассчитывать, пользуясь однофазной схемой для фазы А. Поскольку, зная комплексный ток (напряжение) одной этой фазы, токи (напряжения) других фаз можно записать, изменив только значение фазы. Такие схемы называют схемами прямой, обратной и нулевой последовательностей. Учитывая сказанное, для цепи рис. 3 24 с симметричной статической нагрузкой Z = ZB = Zc = Z схемы прямой, обратной и нулевой последовательностей примут соответственно вид (рис. 3.26а, б, в).
7, Z1=Z
А о—*—EZ3-
А о--------
а)
/2 Z2=Z
А о—~—[ZZF
^2
А о--------
б)
Рис.3.26
В заключение заметим, что при наличии динамических нагрузок сопротивления прямой Zj и обратной Z2 последовательностей уже отличаются (Zj A Z2), поскольку во вращающихся машинах магнитное поле, создаваемое системой токов прямой последовательности, вращается в одном направлении с ротором, а поле, создаваемое обратной последовательностью токов, вращается в противоположном направлении. Ясно, что реакция ротора на цепь статора будет в этих случаях разной. Аналогично дело обстоит и с внутренними сопротивлениями генераторов (Zr] ^Zr2).
3. 7.3. Расчет трехфазных цепей
методом симметричных составляющих
Возможность разложения несимметричных трехфазных систем на три симметричные системы соответственно прямой, обратной и нулевой последовательностей позволяет сводить расчет цепей с не-симметрией фаз к расчету трех симметричных режимов и для неко
211
торых других трехфазных цепей. Покажем это на примере трехфазной цепи с симметричным генератором и несимметричной поперечной нагрузкой (рис. 3.27а). Выразим несимметричную систему напряжений U_A, U_B, U_c через симметричные составляющие согласно преобразованию Фортескью и представим их в виде соответствующих ЭДС (рис. 3.276).
У девяти введенных ЭДС неизвестными являются только три величины U2, U_o, для определения которых потребуется ввести
три дополнительных условия, которые определяются видом несим-
212
метрии. Пока же положим, что эти значения нам известны. Тогда можно рассмотреть три отдельные симметричные трехфазные системы соответственно с прямой, обратной и нулевой последовательностями токов. Подобные системы принято рассчитывать на одну фазу (см. пп. 3.7.2). Соответствующие схемы замещения прямой, обратной и нулевой последовательностей представлены на рис. 3.28.
Для каждой из этих схем запишем соответствующие уравнения, составленные по законам Кирхгофа. Для схемы рис. 3.28а
где Z31 и Еэ1 - параметры эквива
лентного генератора, подсоединенного к ветви с током :
2 _ — ‘(—г! + 2±л1)
Z. 1 +Zri +Zjii
Е _ E}Z\
-t'jl - ,
Z. i + Zrl +Znl
Для схемы рис. 3.286 z32/2 + t/2=o,
7 ^2(Zr2 +Z 2)
где £э2 = ~Н---------
2 + Zr2 + z^
Для схемы рис. 3.28в
(ZrO + —лО + ^л)^о —о =0-
Если были бы известны значения С], С2, (70, то из полученных уравнений могли бы быть найдены токи /2, /0.
в)
Рис.3.28
Покажем, как составляются три дополнительных условия, необходимых для разрешения полученных уравнений схем рис. 3.28, на следующих примерах поперечных несимметрий.
Пример 3.6. Рассчитать ток 1_А однофазного короткого замыкания на землю в схеме рис. 3.27, когда несимметричная нагрузка в ней имеет вид рис. 3.29а.
Записываем три очевидных дополнительных условия 1_в = О,
213
Lc=^’ LLa ~^-aLa’ выражение которых через симметричные со
ставляющие дает
а2/1 + а72 + 70 =0;
aLi +«2 Li +-0 = 0;
tZi + t/2 + t/0=^U1+72+70).
б)
Рис.3.29
Дополнив полученными тремя уравнениями три уравнения, составленные для схемы рис. 3.28, получим шесть уравнений, по которым можно однозначно определить шесть неизвестных 7И 72, /0, С7], V2, и0 и далее по преобразованию Фортескью найти интересующие нас значения J_A = 7д + 72 + 70.
Пример 3.7. Рассчитать ток между-фазного металлического замыкания в схеме рис. 3.27, когда последнее имеет вид рис. 3.296.
Так как приемники не соединены с землей, то 70 = 0 и, следовательно, С/о = 0. Четыре других дополнительных условия получим из уравнений 70 = 0 и U_B _ILc = LbZ. , выражение которых через
симметричные составляющие имеет вид 7| + 72 = 0;
«2£/| + aU_2 — (aU_\ +o2t/2 j = Z^a271 +a72 j.
Решая уравнения, составленные выше для схем рис. 3.28а, б, в, совместно с полученными условиями можно найти токи всех последовательностей и далее по преобразованию Фортескью - ток короткого замыкания
7В =а27, +а72 +70, где 70 =0.
В заключение заметим, что метод симметричных составляющих аналогичным образом применяется и в случаях других видов несимметрии как нагрузок, так и питающих цепи генераторов.
Глава 4
ЭЛЕКТРИЧЕСКИЕ ЦЕПИ НЕСИНУСОИДАЛЬНЫХ ПЕРИОДИЧЕСКИХ ТОКОВ
4.1. Основные понятия
Периодические несинусоидальные токи и напряжения достаточно типичны для практической электротехники. Своему возникновению они часто обязаны: невозможности достижения идеаль
ных форм синусоидальности у ЭДС из-за несовершенства конструкций генераторов, присутствия в электрических цепях нелинейных элементов, внешних несинусоидальных воздействий на цепи через магнитные связи и т.д. Подобное отличие от требуемой по условиям функционирования цепей синусоидальности токов и на
пряжений стремятся уменьшить.
С другой стороны, во многих электротехнических и радиотех нических устройствах генераторы конструируют так, чтобы напря жения и токи в электрической
цепи были заведомо несинусоидальными. Форма импульсов может быть самой различной: пилообразной (рис. 4.1а), прямоугольной (рис. 4.16) и др., но она необходима для работы данного устройства.
Рис. 4.1
Наконец, включение в электрическую цепь генераторов синусоидальной ЭДС разной частоты также приводит к появлению в ней несинусоидальных напряжений и токов. Пусть, например, на входе пассивного двухполюсника с линейными параметрами (рис. 4.2а) включены два источника ЭДС разной частоты:
е1 “ ^\т sin е2~ ^2т S'n
215
Рис. 4.2
Напряжение на зажимах двухполюсника равно сумме этих двух ЭДС и = £lm sin cot + Е2т sin 2cot, заведомо несинусоидально, как будет несинусоидаль-и ным и ток i = — цепи при
чисто резистивном характере двухполюсника П.
Таким образом, к появлению несинусоидальных периодиче
ских токов и напряжений могут приводить самые разные причины,
сама несинусоидальность периодических процессов также может быть желательной и нежелательной.
В данной главе мы установим понятия, с помощью которых описываются подобные процессы, математический аппарат, позволяющий эффективно рассчитывать электрические цепи подобного класса, категории, позволяющие оценивать качество электрической энергии в таких цепях, и ее баланс.
К основным понятиям функций x(t) рассматриваемых токов и напряжений относится их период, т.е. такое положительное конечное число, которое обеспечивает выполнение равенства x(t + Г) = x(t), понятие основной частоты / = у и основной круговой частоты co = 2nf. Обычно эти величины - T,f,co определяются источником энергии. Другим основным понятием, используемым при анализе цепей рассматриваемого класса, является понятие гармоники (гармонической составляющей). Гармоникой называется синусоидальная функция вида
4sin(<yA./ + ^).
Здесь Ак (обычно принимается Ак > 0) - амплитуда к -й гармоники; С0к - ее круговая частоты (далее просто частота); 1//к - начальная фаза, а к = 1,2... номер гармоники. Если сок = ксо, то со называют основной частотой или частотой первой гармоники; гармонику с номером к = 1 - основной или первой гармоникой, гармонику с номером к = 2 — второй гармоникой, с номером к = 3 третьей гармоникой и т.д.
216
Гармоники с к >2 называют высшими гармониками. Гармоники с нечетными номерами 1, 3, 5, 7... - нечетными, гармоники с четными номерами 2, 4, 6, 8... - четными гармониками. Если в числе гармоник присутствует гармоника с меньшей, чем у основной гармоники частотой, то ее называют субгармоникой.
Иногда появляются и дробные гармоники — т.е. такие гармоники, отношение частот которых к частоте основной гармоники — суть т
дроби вида —. Субгармоники и дробные гармоники появляются, как и
правило, в нелинейных электрических цепях.
Поскольку ранее был досконально разработан аппарат исследования электрических цепей с синусоидальными функциями токов и напряжений, т.е. функциями, описываемыми только одной гармоникой, то в данном разделе ставится задача свести несинусоидальные периодические функции к ряду гармоник. Затем для каждой из них провести известными методами расчет процессов в цепи, а затем, воспользовавшись принципом суперпозиции (наложения), просуммировать результаты этих расчетов и получить решение задачи анализа рассматриваемой цепи с несинусоидальными ЭДС, токами и напряжениями.
4.2. Метод расчета мгновенных значений токов и напряжений в линейных электрических цепях при действии периодических несинусоидальных ЭДС
4.2.1. Представление ЭДС источников в виде ряда Фурье
Пусть в электрической цепи имеется источник ЭДС с несинусоидальной формой сигнала е(/). Положим, что функция e(t) удовлетворяет условиям Дирихле (т.е. имеет на периоде конечное число разрывов первого рода и конечное число максимумов и минимумов). Подобным условиям на практике всегда удовлетворяют как ЭДС, так и токи и напряжения цепей. Тогда эту ЭДС можно представить в виде ряда Фурье
e(/)=£0+£lm sin(<y/ +у/х) +£2m sin(2<y/ +(//2 )+...+
+Ekmsm(k«)t+y/k)+...
Здесь £0 - постоянная составляющая ЭДС; EXm sin(&»/ +iy\) - основная или первая гармоника; £fow sin(Z:6J/+) высшая гармони
217
ка порядка к (к-я гармоника); Ект и Ц/к - амплитуда и начальная фаза к -й гармоники.
Для удобства последующих расчетов электрических цепей целесообразно преобразовать отдельные гармоники ряда Фурье, представив их в виде суммы двух функций без начальных фаз. Имеем
Ект sin(kcot +i//k) = Ект cosy/k sin кал + E^sin^. cos кол =
- Bk sin kcot + Ck cos kcot;
Bk=Ekm cos vk; Ck = Ekm sin wk .
Таким образом, рассматриваемый ряд Фурье можно представить в виде сю сю
е(0 = Ео + Вк sin kcot + С к cos kcot.
t=l k=l
Постоянная составляющая Ео и коэффициенты Вк и Ск в общем случае находятся по формулам
1 т 2т 2т
Ео - — Jc(/)c/Z; Вк -— Je(/)sin kcot dt; Ск =— ^e(t)coskcotdt.
о о Т v
Зная коэффициенты Вк иСк, можно рассчитать амплитуду и начальную фазу к -й гармоники:
Ект=у)Вк +Ск', tgiEk=^-вк
4.2.2. Сопротивления элементов цепи и их соединений
для различных гармоник
Поскольку в определениях комплексных сопротивлений элементов цепей участвует частота, то для расчета цепей необходимо найти общие выражения для этих сопротивлений с изменением частоты.
Таблица 4.1
Элемент Col 1ротивление на основной частоте Сопротивление на высших частотах
Резистор R R
Конденсатор 1 угуС 1 jkcoC
Катушка jcoL jkcoL
218
Таким образом, сопротивление R не зависит от номера гармо-
ники к, смкосз ное сопротивление Хс = —-— уменьшается обратно ксоС
пропорционально росту номера к, индуктивное сопротивление XL = kcoL растет по величине пропорционально росту номера к. Сложнее обстоит дело с соединениями этих элементов. Комплексное сопротивление последовательного участка из резистора, конденсатора и катушки для к -й гармоники равно
„ „ . 1 „ -Г, г On .k2(o2LC~l
~k ксоС 4 kcoC) ka>C
Очевидно, при к > —1= цепь приобретает активно-OhjLC
индуктивный характер и с ростом к она все более проявляет себя как индуктивное сопротивление. Активно-емкостный характер она может иметь при к<—1=. Рассмотрим теперь комплексное со-
противление параллельно включенных катушки и конденсатора для к -й гармоники
г 1
ik(i)L — __
jkcuC _ c
7
-* ik<»L + —^— >-t2^LC 1-kVLC
jkOjC
При 1 > к 2cd2LC это соединение может быть заменено соответствующим емкостным сопротивлением, однако с ростом к (при , 1 ч
к>——г) соединение ведет себя как конденсатор, величина ко-ClNLC
торого увеличивается.
Как можно заметить, простота выражений для комплексных сопротивлений на к -х гармониках для простых элементов - резисторов, конденсаторов, катушек — уступает место значительной сложности аналитических выражений комплексных сопротивлений для участков цепи. Но самое главное, что на отдельных гармониках комплексные сопротивления отличаются не только знаками, но и существенно разнятся величинами, возможен и резонансный случай (равенство нулю неактивного сопротивления).
219
4.2.3. Расчет электрической цепи несинусоидальных токов с использованием гармонического разложения токов, напряжений, ЭДС и принцип суперпозиции
Представим все токи, напряжения, ЭДС рассматриваемой цепи в виде рядов
': = Ф+ А + Ф + • • •+’к + • • -;
и = и0 +Uf + и2 + ... + ик + ...;
е = е0 + et + е2 + -.. + ек +..., где члены рядов с индексом «0» представляют собой постоянные составляющие (постоянные токи, напряжения, ЭДС); с индексом «1» - синусоидальные функции основной частоты о\ с индексом « к » - синусоидальные функции частоты ко и т.д.
Если ЭДС е(/) задана, то значения членов ее ряда Фурье находятся так, как это было ранее показано в пп. 4.2.1. Величины индуктивных, емкостных, реактивных и т.д. сопротивлений любого пассивного элемента цепи для каждой к -й гармоники легко могут быть определены так, как это было показано в пп. 4.2.2. Таким образом, имеется возможность рассчитать цепь для режима постоянного тока и синусоидальных токов любой частоты, а затем сложить полученные результаты, используя принцип суперпозиции. При расчете отдельных гармоник тока целесообразно воспользоваться комплекс
ным методом, но затем результат непременно перевести во временную область. Суммировать полученные комплексные токи в комплексной области нельзя, т.к. каждый из них имеет свою частоту. Суммирование гармоник возможно лишь во временной области.
Пример 4.1. Рассчитаем цепь, изображенную на рис. 4.3. Составляющие разложения e(t) =е0+е1+е2+... + ек+... несинусои-
дальной ЭДС e(t) будем считать известными (определенными согласно пп. 4.2.1).
Представим искомый несинусоидальный периодический ток в виде аналогичного ряда i = z0 + z, + i2 +... + ik +... . Ток z0 заведомо равен нулю, т.к. конденсатор не пропускает постоянный ток.
Полное сопротивление рассматриваемого контура для любой к-й гармоники будет иметь вид (см. пп. 4.2.2)
Г~2 f 1 У
Z, =, Я2+ \ koL-----.
\ коС J
220
Если положить, что к-я гармоника ЭДС известна и имеет вид ек =Ект sm (ka)t + iyke), то к-ю гармонику тока ik = 1кт sin[ka>t + i//ki -<рк) можно рассчитать, определив ее ампли-, , 1
Е X kcoL-------
туду =—— и сдвиг фаз <рк = arctg- - или фк =arctg---------,
zk R R
к=\, 2,...
Совокупности найденных амплитуд {7]т, 72т, } и начальных фаз <«2)’ •••}’ соответствующие данным гармоникам, образуют спектральный состав тока (иначе дискретную выборку из частотных характеристик 7т(щ) и (</>)).
4.2.4. Особенности сходимости гармонических составляющих несинусоидальных токов, напряжений, ЭДС
Представив как исходное воздействие ЭДС e(t), рассчитываемые переменные - токи /(/) и напряжения u(t) рассматриваемой цепи - в виде сумм гармоник, мы подразумеваем, что подобное представление, во-первых, корректно и, во-вторых, позволяет достаточно эффективно вычислять искомый результат. Отметим две особенности в рассматриваемом подходе, создающие определенные трудности его реализации.
1. Корректность разложения в ряд Фурье разрывных функций. В электротехнике, особенно связанной с преобразовательной техникой, достаточно часто для описания процессов и функций источников привлекают разрывные функции (см. рис. 4.1 а, б). Полагая, что эти функции удовлетворяют условиям Дирихле, их раскладывают в ряд Фурье, производят действия с их гармоническими составляющими и часто получают не вполне достоверные результаты. Дело в том, что в месте разрыва функции е(/), точке /0: е^о+j - е+ и е^_ j = е_; е+ - е_ Ф 0 считается, что ряд Фу
рье сходится к среднему значению, т.е.
, , е, - е_
gfa)= 2
(е(/о+), - значение исходной функции справа и слева от
точки /0).
221
Однако оказывается, что гармонический ряд, переходя через разрыв, делает скачок. Этот скачок в случае, например, единичной ступенчатой функции (рис. 4.4) достигает почти 18% при беско
нечном числе суммируемых гармоник.
Точность аппроксимации этой функции рядом из к -1, 3, 7,15, °° гармоник представлена на рис. 4.4.
Анализ этой картины убеждает в весьма относительной точности использования гармонического анализа, основанного на разложении Фурье, при расчете цепей с воздействиями, имеющими разрывы. Это
явление неадекватной аппроксимации рядами Фурье разрывных функций было обнаружено в конце XVIII века американским физиком Гиббсом и носит его имя - явление Гиббса. Разумеется, к настоящему времени, математиками разработаны достаточно эффек
тивные, но и весьма непростые методы нивелирования этого явления. Но дело в том, что обычно практики применяют традиционные гармонические методы расчета процессов в цепях с разрывными функциями, не вполне отдавая себе отчет о точности полученных
результатов в окрестностях точек разрыва.
2. Корректность суммирования гармонических составляющих. На практике при разложении в ряды Фурье функций источников ЭДС и последующем расчете гармоник тока методами теории цепей, число суммируемых гармоник рассчитываемого тока всегда конечно. Обычно достоверность расчета не вызывает сомнения, особенно в том случае, когда это число к, а отброшенные частичные суммы ряда ф+1 + ik+2 +... + ik+N оказываются су-
щественно (скажем, на порядок) меньше сумм, учитываемых чле-
к
нов ряда i — ij (т.е.
7=0
Eg (О
/с+1
для любых /). Однако
гарантировать отсутствие резонансов для гармоник с номером, большим чем к + N, например, для гармоники с номером
222
£ + tv +1, обычно не удается. Частотный анализ применяется, к сожалению, еще редко.
Сказанное в этом разделе не снижает ценности столь эффективного инструмента по расчету электрических цепей с несинусоидальными периодическими токами, но акцентирует внимание на деликатность обращения с ним.
4.3. О составе высших гармоник токов и напряжений
Симметрия того или иного вида несинусоидальных периодических кривых токов и напряжений определяет состав членов ряда Фурье, т.е. гармонический состав этих токов и напряжений.
1. Симметрия кривых относи-тельно оси абсцисс, когда выполня-
( ТУ ется условие zl Z+—J = —z(r), т.е. отрицательная полуволна кривой тока является зеркальным отображением сдвинутой на половину периода положительной полуволны (рис. 4.5). Поскольку кривая симметрична относительно оси абсцисс, то ряд Фурье функции не может содержать постоянной составляющей и четных гармоник, как не удовлетворяющих этому условию
В качестве примера рассмотрим график тока, изменяющегося по закону меандра (рис. 4.6).
Ряд Фурье для такой функции имеет ;С) вид
41 ( 1 1
z(Z )=—sin cut 3— sin Ъм н— sin 5М +...
тг у 3 5
Как видно из этого разложения, в нем нет четных гармоник.
2. Симметрия кривых относительно Рис. 4.6
оси ординат.
Для симметричной относительно оси ординат функции (рис. 4.7) справедливо z(-T) = z(/). Такую функцию называют четной функцией. В ее ряде Фурье должны присутствовать только те составляющие, которые также являются функциями четными, а это постоянная составляющая и косинусные члены, т.е.
/(/) = До + С] coszzzZ + С2 cos2zztf + С3 cos3zz>Z +...
223
Рис. 4.7 дальные функции
3. Симметрия кривых относительно начала координат, когда функция является нечетной, т.е. z(-/) = -/(/) (рис. 4.8). В разложении Фурье в этом случае должны остаться гармо
ники, удовлетворяющие этому свойству, т.е. только синусои-
/(/) = В, sin оЯ + В2 sin 2cut + Bi sin Зтд/ +...
Использование отмеченных видов симметрии в практике разложения реальных функций в гармонические ряды существенно упрощает эту задачу, а следовательно, и задачу исследования рассмат риваемого класса цепей.
4.4. Интегральные оценки качества процессов в цепях несинусоидальных токов
Периодический ток /(/) (напряжение п(г), ЭДС e(t) и т.д.) принято характеризовать тремя значениями:
— действующим значением
1==а//о+А2+^2+А2+-;
V о
- средним по модулю значением
/сР=7Л'(ф;
о
— максимальным значением zmax;
а также рядом коэффициентов:
- коэффициентом формы - Z//cp 5
- коэффициентом амплитуды ка = zmax //;
- коэффициентом искажения кн=1х/1 \
- коэффициентом гармоник kr - y]l2 ++.../'Ц и т.д.
224
В совокупности эти значения и коэффициенты (токов, напряжений, ЭДС и т.д.) позволяют количественно оценить различные
аспекты интенсивности, степени «несинусоидальности» и т.д. рас
сматриваемых процессов, т.е. дают интегральные оценки качества процессов. Рассмотрим их подробнее.
1. Действующее значение тока z(z) численно равно такому постоянному току /, который давал бы аналогичное выделение теплоты в цепи с сопротивлением R за период Т. В самом деле, среднее значение мгновенной мощности p = i2R за период Т, опреде-
ляющее подобное выделение теплоты, равно т т
Р = — ^pdt = — ^i2Rdt - R о ? о
( , т \
- \i2dt = R12.
Т J
\ о 7
Таким образом, действующее значение характеризует интенсивность периодических процессов, сопоставляя последние с интенсивностями процессов в цепях постоянного тока. Заметим, что при известном разложении тока z(Z) в гармонический ряд, действующее значение 1 выражается только через постоянную составляющую 70 и действующие значения гармоник 7,, /2, 73, но не зависит от фаз последних G - +J2 + J2 +12 +...
2. Среднее по модулю значение тока 7 характеризует среднюю его интенсивность на периоде. Для токов, удовлетворяющих соотношению z(Z) = —z(z + 7’/2) (графики таких токов симметричны относительно оси абсцисс), в случае, когда в течение первого полупериода z’(Z)>0, а начало отсчета времени выбрано так, что z(0) - 0. среднее по модулю значение равно среднему значению то
ка за этот полупериод, т.е.
2 772
7 = — [ idt.
ГГ J
О
В качестве примера рассмотрим ток z(z), график которого представлен на рис. 4.9; для простоты положим со = 1 рад/с. Здесь на первом полупериоде 0 < Z < п ток z(Z) > 0, причем z(0) = 0. Имеем
-772 .Т/4
7 =- [idt=- [zz7z=-^.
СР т J т J э о о
8 Зак 1186
225
На рис. 4.9 /cp=-E!2i- отмечено пунктирной линией. Другой пример - синусоидальный ток i(t) = lm sin cot, среднее по модулю
значение которого
/ =— [ I sin Atf<7/=-?^-(-cos
cp T 0J 7|o
4/„,_2/„,_2>/2/ wT л n
Если ток в течение всего периода не меняет знак (/(?)> О или /(/) < 0), то среднее по модулю его значение совпадает с постоянной составляющей этого тока, т.е. 4Р = А)
3. Максимальное значение тока zmax характеризует максималь-
Рис. 4.9 ную его интенсивность, достигае-
мую лишь в одной или нескольких точках (см., например, рис. 4.9). Если это значение существенно больше действующего значения тока, т.е. zmax »I, то иногда гово
рят о пиковых значениях тока. Последние свидетельствуют о наличии гармоник с высокими номерами.
Используя эти три значения, а также действующие значения
гармоник тока, можно рассчитать значения перечисленных выше коэффициентов формы к$, амплитуды ка, искажения кК, гармоник кг и т.д., характеризующих уже не интенсивности токов, а характер изменения этих интенсивностей, иначе - формы кривых токов при их графическом изображении. В табл. 4.2 приведены значения этих коэффициентов для постоянного и синусоидального токов (напряжений).
В реальных цепях постоянного и синусоидального токов добиться идеальных постоянства или синусоидальности токов и напряжений невозможно, и значения этих коэффициентов для реальных токов и напряжений отличаются от эталонных из табл. 4.2. Степень отличия может быть разной, и по ней судят о качестве процессов. Так, если соблюдаются жесткие требования на не более чем пятипроцентное содержание всех высших гармоник в напряжениях промышленных сетей, то коэффициенты к$, ка, ки, кг та
226
ких напряжений практически равны табличным. В то же время токи распределительных сетей, а тем более токи конкретных нагрузок могут весьма существенно отличаться от синусоидальных. Соответственно и приведенные коэффициенты для этих токов могут сильно отличаться от табличных значений.
Таблица 4.2
Коэффициент Обозначение Расчетное выражение Значение
Постоянный ток (напряжение) Синусоидальный ток (напряжение)
Формы '/А 1 -4= = 1,11 2V2
Амплитуды К Zmax 1^ 1 л/2
Искажения К '/' 0 1
Гармоник К. 722 +732 +...//i Не определено 0
В заключение заметим, что периодические несинусоидальные токи, напряжения, ЭДС графически удобно изображать не в декартовых, а полярных координатах. Дело в том, то траектории периодических процессов в таких координатах замкнуты, т.е. они определяют некоторые фигуры. Так, траектория синусоидального тока z(rw/) = 7msinft>/ (рис. 4.10а) в полярных координатах при изменении аргумента cot от 0 до 2я дважды описывает окружность с диаметром 1т (рис. 4.106). Следовательно, этому току сопоставляется фигура - круг. Искаженному току, например, z(zw/) = 7msinzwZ + -y-sin<w/ (рис. 4.10в) соответствует уже иная фигура (рис. 4.10г). Уникальность круга среди множества фигур заключается в том, что отношение р периметра L (длины кривой, ограничивающей фигуру) к корню квадратному yfs из площади S этой фигуры максимально, поэтому коэффициент геометрической формы
Периметр _ L
(Площадь)'2 \ls
8*
227
также можно использовать при оценке качества процесса. Так, для синусоидального тока i(cot) -lm sin cot периметр кривой (две длины окружное™) равен Лл—=2л[т = 2-JlnI, а площадь (две площади
высших гармоник «портит» геометрию траекторий (см. рис. 4.10г), т.к. увеличивает периметр (длину траектории) и соответственно коэффициент р. Электротехнический смысл введенного коэффициента становится понятным, если учесть, что величина Js пропорциональна действующему значению переменной (т.е. действующему значению i(t), u(t), e(Z)), а длина L определяется для быстроизменяющейся функции средним значением ее производной. В самом деле, для периодического тока /'(/) с периодом 2я имеем
228
127
S= — ]i2(cot)d(ci)t) = 7rl2;
2 о
2я ।----------------— 2л
£ = + i'(6rf)] d(cot)> [|/'(щ/)|<7(л#).
о о
Учитывая, что величины i(wt) и имеют разную размерность,
при использовании этой оценки следует переменные (в данном случае z(fix)) брать в относительных единицах. Другая особенность введенного коэффициента р - его чувствительность к быстрым осцилляциям и, следовательно, шумам измерений. В тех случаях, когда шумы отделить сложно, этот коэффициент лучше не использовать.
4.5. Понятие реактивной мощности для цепей несинусоидальных токов
Общепринятого определения реактивной мощности для цепей с периодическими несинусоидальными токами и напряжениями не существует. На практике, однако, таким понятием пользуются, определяя его по-разному в зависимости от решаемой задачи. Наибольшую известность получили два таких определения.
1. Реактивной мощностью Q некоторого двухполюсника с напряжением
w(/) = Uo + U}m sin (лХ + ) + U2m sin(2fttf + </„2) +
+t/3msin(3^ + </„3) + ...
и током
i(t) = /() + Ilm sin (cot + i//n) + I2m sin (2щ/ + i//i2) + +73msin(3cX + </,3) + ...
называется сумма реактивных мощностей отдельных гармоник
7=1 7=1
где
Такая мощность впервые введена К. Будяну (Budeany С.) в 1929 г., и поэтому специалисты называют ее реактивной мощностью по Будяну.
229
Пример 4.2. Пусть и - 100sin&» + 2sin(3cx +я/З), a i = 10sin(69/-7r/6) + 5sm(3cw/ + 7r/6) + 2sin5zw/. Тогда P = O1+ft = ^~sin-+-^--^sin- = 250 + 2,5 = 252,5 вар.
13л/2л/2б72>/2б Р
Подобным определением часто пользуются при оценке эффективности передачи энергии от источника к приемнику. В промышленных сетях, где жестко нормируется содержание высших гармоник напряжения, действующие значения которых весьма малы по сравнению с действующим значением первой гармоники, используют и более упрощенное выражение Q = sin . Заметим, что данное
со
определение реактивной мощности Q-^Q, не обеспечивает ра-7=1
венства квадратов мощностей, т.е. P2 + Q2^S2. Это послужило причиной введения еще одного понятия - мощности искажения
D = y]s2-Р2-Q2 .
2. Реактивной (пассивной) мощностью называют корень квадратный из разности квадратов полной и активной мощностей
I----- 1 т
Q = \]s2-P2; S = U1; P = -^uidt Т о
Рассмотрим подробнее последнее выражение, представив ток /(?) в виде суммы i = ia + zp двух слагаемых активной составляющей тока za = ia(t) и реактивной составляющей тока / = zp(f) с соответствующими действующими значениями
Причем положим, что кривая активной составляющей тока za(/) имеет ту же форму, что и кривая напряжения u(t), а сама она равна za =(p/u2^u, тогда zp = i~ia =i-^P/u2^u При этом оказывается, что активную мощность создает только активная составляющая тока. В самом деле,
Такая мощность впервые введена С. Фризе в1932 г., и поэтому специалисты называют ее реактивной (пассивной) мощностью по Фризе.
230
„ 1 Г . , 1 Г, . . V , 1 Г Р J 1 f ( . Р ) J
Р =— \uiat = — \\ui„+ui„\dt-— г/—-nett— г; z----\at.
т J т J\ а Р/ т ' TJ2 Т J I TJ2 )
О О 0 й О 4 7
Здесь первый интеграл равен Р, второй равен нулю. Равенство нулю второго интеграла означает, что напряжение u(t) и ток z(z) ортогональны, как ортогональны и составляющие токов za и zp j т
(— jiaipdt = 0). Тогда справедливы следующие выражения:
Т о
Z2 =/2 +/р ; S2=[/2Z2=t72(/a2+/2); P2=U2I2a.
И для реактивной мощности получаем
q = Js2-p2 =uiv.
Введенное разложение тока оказывается практически очень важным, поскольку дает инструмент компенсации реактивной мощности: скомпенсировав реактивную составляющую тока, мы полностью исключаем и реактивную мощность. Покажем это на примере простейшей электропередачи (рис. 4.11а), состоящей из генератора Г синусоидального напряжения и = Um sin cot (рис. 4.12а), линии электропередач ЛЭП и нелинейной нагрузки Н, ток которой zH(/) изменяется по закону (рис. 4.12а)
0,
*н(') =
Imsmct)t,
Т Т Т
если k—<t<k—I—, к = 0,1, 2, 3...
2 2 4
к— + — <Z<(£ + 1)-, £ = 0,1, 2,3...
2 4 v '2
Положим, что напряжение генератора практически равно напряжению нагрузки u(t)~uH(t), тогда ЛЭП в схеме замещения электропередачи (рис. 4.116) можно заменить идеальным проводником. Нагрузка Н в этой схеме заменена источником тока J(z) = zH(A). Активная мощность, потребляемая нагрузкой Н электропередачи (рис. 4.11а), или. что то же - источником тока J(t) = iH (/) в схеме ее замещения (рис. 4.116) равна
Возможность замены двухполюсника идеальным источником тока или идеальным источником ЭДС с параметрами, соответствующими току или напряжению этого двухполюсника, являет суз ь теоремы компенсации (иначе теоремы об эквивалентном источнике).
231
1 т Г Т/2 Т \
р = у =- J UmImsin2cotdt + j UmImsin2COtdt
' о ' \T/4 3T/4 >
Umlm
4
Рис. 4.11 Рис. 4.12
Найдем активную /на(/) и реактивную iHp(/) составляющие тока нагрузки:
'на (0 = = ~UmIm , Um sin cot = ^2-sin cot,
и Си Y 2
4 m
Ia/2 J
232
»нр(') = /н (0-'«,(') =
7 Т Т Т
——sinzy/, если к—<t<k—F—, 2 2 2 4
J т т т
k- + -<t<(k + l)-
l 2 2 4 ' '2
(см рис. 4.126, в).
Действующие значения этих составляющих равны
r — I — ™ Ha“ Hp 2y/2~
Тогда действующее значение тока нагрузки
Таким образом, действующее значение тока ЛЭП /л = I (рис. 4.11а, б) и, соответственно, тока генератора оказывается в л/2 раз больше
действующего значения активной составляющей тока нагрузки
2л/2'
Электропередача работает крайне неэффективно,
т.к. действующее значение тока линии и генератора оказывается почти в полтора раза большим, чем требуется для обеспечения
мошности нагрузки Р = . Кроме того, резко несинусоидаль-
4
ный характер этого тока будет неблагоприятно сказываться на эксплуатации генератора напряжения. Рассмотрим возможность повышения эффективности работы электропередачи за счет компенсации реактивной составляющей тока нагрузки zHp(Z). Для этой цели параллельно с источником тока J(Z) (рис. 4.116), имеющим на
грузку Н электропередачи (рис. 4.11а), подключим источник тока Jp(Z) = zHp(/) (рис. 4.11 в) с тем, чтобы обеспечить равенство тока линии току активной составляющей нагрузки, т.е. i'n(t) = zHa(Z) • При этом очевидно, что ток zH и мощность Р нагрузки не изменяются, а дополнительный источник Jp(z) = zHp(Z) не будет потреблять актив-т
ной мощности, т.к. JzzzHpz7z = 0 Устройство, соответствующее тако-0
му источнику тока, иногда называют источником реактивной мощности (ИРМ на рис. 4.11г). Подключение такого устройства позволяет не только в д/2 раз снизить действующее значение тока линии
233
и генератора
Aia
_ 1т 2л/2
, но и обеспечить его синусоидаль-
ность, а также совпадение по фазе с напряжением генератора u(t).
Поскольку подобное устройство осуществляет функции фильтрации высших гармоник в токе линии и компенсации реактивной мощности электропередачи, его называют также фильтрокомпенсирующим устройством (ФКУ).
4.6. Высшие гармоники в трехфазных цепях
В предыдущих разделах рассматривались несинусоидальные периодические процессы в однофазных цепях. В трехфазных цепях гармонический состав токов и напряжений имеет некоторые особенности, которые требуют специального рассмотрения.
Пусть фазные ЭДС симметричного трехфазного генератора t \ ( 2лЛ ( 1л\
ел=е\оЛ), ев=е\М——I, ес =e\cot +— I - периодические с
периодом Т = 1л функции, отличные от синусоидальных. ЭДС реальных генераторов всегда отличны от синусоидальных функций, но в силу малости этого отличия картину идеализируют, полагая их синусоидальными по форме, что сильно упрощает последующий анализ процессов. Однако в ряде случаев - необходимости проведения более точного анализа или значительной несину-соидальности ЭДС — требуется оценить поведение высших гармоник в трехфазных цепях.
1. Симметричные системы гармоник ЭДС.
В теории трехфазных систем принято выделять три симметричные системы. В симметричной системе прямой последовательности 2тг
фазные углы уменьшаются на — в порядке следования фаз А, В, С.
В симметричной системе обратной последовательности фазные углы 1л
уменьшаются на — в порядке следования фаз А, С, В. В симмет-
ричной системе нулевой последовательности ЭДС совпадают по фазе. Заметим теперь, что рассматриваемые ЭДС eA(a>t), ec(cot} одинаковы по форме и сдвинуты в сторону уменьшения ар
234
гумента на -у в прямом порядке фаз А, В, С, где 2тг— период и собственно функции и ее первой гармоники.
Так как период к -й гармоники в к раз меньше периода первой гармоники, то угол сдвига к -й гармоники в последующей фазе по „ , ,2тг
отношению к предыдущей фазе равен к —.
Таким образом, гармоники можно разбить на три группы, образующие системы прямой, обратной и нулевой последовательностей (табл. 4.3).
Таблица 4.3
Симметричная система Номера гармоник Общая формула для определения номера гармоник
Прямой последовательности 1,4, 7,10,13,16,19, 22, 25,... А-1 — п = 0,1,... 3
Обратной последовательности 2,5,8, 11, 14, 17, 20,23,26, ... А+1 — п = 1, 2,... 3
Нулевой последовательности 3,6, 9, 12, 15, 18,21,24, 27,... А — —п = 1, 2,... 3
ед(М
Рис. 4.13
2. Гармонический состав линейных напряжений обмоток генератора, соединенных треугольником (рис. 4.13).
Для всех гармоник как прямой, так и обратной последовательности сумма фазных ЭДС равна нулю, и ток в контуре из обмоток генератора не возникает. Ток /(/) вызывается суммарным действием всех гармоник порядка Зи (даже при отсутствии нагрузки генератора), образующих нулевые последовательности фаз. Этот ток вызывает падение напряжения на обмотках фаз, чем компенсирует суммарную ЭДС этих гармоник. Поэтому на внешних выводах обмоток, т.е. в линейных напряжениях,
этих гармоник (3, 6, 9, 12, ...) нет. Заметим, что если генератор устроен симметрично и ЭДС его фаз симметрична относительно оси абсцисс (т.е. если е(щг + тг) = -е(щ/)), то в гармоническом составе ЭДС нет и четных гармоник (см. раздел 4.4). Поэтому линейное на
235
—---------о А
ев(шг)
—---------о В
erfwf)
----оС
Рис. 4.14
пряжение в этом случае может содержать только гармоники с номерами к = 5, 7, 11, 13, 17, 19,23,25, ...
3. Гармонический состав линейных напряжений обмоток генератора, соединенных в звезду (рис. 4.14).
При симметрии фазных ЭДС в линейных напряжениях отсутствуют гармоники порядка Зи. Эти гармоники присутствуют в фазных напряжениях, и поскольку линейные напряжения есть разность фазных напряжений, то в данном случае она равна нулю, поскольку эти гармоники образуют систему нулевой последовательности. Нет в линейных напряжениях
и четных гармоник по тем же причинам, что и у напряжений генератора, обмотки которого соединены в треугольник (см. выше). Таким образом, в линейных напряжениях могут присутствовать только гармоники с номерами к — 1, 5, 7, 11, ... Интересно, что соотношение Un = э/3 (7ф, справедливое для симметричных систем прямой и обратной последовательностей, здесь нарушается. Дело в том, что гармонический состав линейных и фазных напряжений разный, и если для гармоник номеров, отличных от Зп, это соотношение вы
держивается, то с учетом сказанного имеем
Сл _ э/Зд/ц2 + 0 + С2 + С2 + 0 + С2+...
иФ -Jи I + П32 + и] +172 + Ug + U
Несколько слов о влиянии нейтрального провода. В его отсутствие в линейных токах и токах приемника нет гармоник с номером Зп, т.е. гармоник, образующих нулевую последовательность фаз, т.к. их нет в линейных напряжениях. Следовательно, нет этих гармоник и в фазных напряжениях приемника, даже если он соединен звездой. В последнем случае между нейтралью трансформатора и нейтралью генератора появляется напряжение тройной частоты, которое может достигать очень больших значений, опасных для персонала. Наличие нейтрального провода избавляет от этой опасности, поскольку для токов нулевой последовательности появляется путь (нейтральный провод - линейные провода). Заметим, что при наличии обмотки генератора или трансформатора, соединенной треугольником, гармоники порядка Зп удастся погасить в обмотках этих треугольников.
236
Глава 5
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
5.1. Общие понятия
В предыдущих разделах рассматривались установившиеся режимы электрических цепей с сосредоточенными параметрами, т.е. режимы, которые устанавливаются в таких цепях под воздействием постоянных или периодических ЭДС, и математически описываются периодическими функциями токов и напряжений.
Например, установившийся ток в цепи с последовательно соединенными резистором и катушкой (рис. 5.1) при питании от источника постоянного напряжения постоянен
Ц
R ’
а)
и, — о-
Рис. 5.1
Теоретически такой ток установится в цепи через бесконечно большое время после включения, а практически — через конечное время. Если после наступления установившегося неизменного тока вновь изменить напряжение Ц на большее напряжение U2, то соответственно изменится и ток. Переход от одного установившегося режима к другому происходит не мгновенно, а в течение некоторого времени (рис. 5.2) . Электромагнитные процессы, возникающие
Практический критерий окончания переходного процесса будет сформулирован позднее, начиная с пп. 5.3.1.
237
в цепях при переходе от одного установившегося режима к другому, называются переходными процессами. Переходные процессы возникают при всяком внезапном изменении параметров цепи,
Установившийся режим 1
Переходный процесс
Установившийся режим 2
Рис. 5.2
или отключении ветвей, при коротком внезапного изменения режима работы
цепи и
включении, переключении замыкании и др. Момент электрической цепи принимают за начальный (нулевой) момент времени, относительно которого характеризуют состояние
описывают сам переходный процесс. Электрические токи, возникающие во время переходного процесса, называют переходными токами. Токи, напряжения, ЭДС, переменные во времени, обозначают малыми буквами. Ток в момент времени, предшествующий изменению режима, обозначают z(0_), в первый момент времени после изменения режима - z(0+), в заданный момент времени t обозначают /'(/). Для рассматриваемого рис. 5.2
Продолжительность переходного процесса может быть очень малой и исчисляться долями секунды, но токи и напряжения или другие параметры, характеризующие процесс, могут достигать экстремальных значений с точки зрения последствий для электрической цепи. Наглядным примером является перенапряжение, возникающее при отключении цепи с большой индуктивностью. ЭДС самоиндукции тем больше, чем быстрее изменяется ток, а именно:
е, = -L—.
dt
238
При внезапном отключении цепи, когда ток резко спадает до нуля, эта ЭДС может достигнуть больших значений, недопустимых для изоляции электроустановки, и привести к короткому замыканию. Примерами значительных скачков тока при переходных про
цессах могут служить внезапные короткие замыкания в электрических машинах и трансформаторах, включение цепей с конденсаторами и др. В некоторых случаях переходный процесс является желаемым режимом, и цепь выполняется таким образом, чтобы в ней возникал требуемый переходный процесс. Поэтому анализ переходных процессов и их последствий является важной инженерной проблемой.
Переходные процессы в цепях часто вызываются коммутацией, под которой понимают любое изменение в цепи; причем пред
полагается, что это изменение происходит мгновенно, т.е. соверша-
ется за интервал времени Д? = 0. Для простоты в схемах замещения электрических цепей специально включают в необходимых местах ключи (рис. 5.3), замыкание (рис. 5.3а) или размыкание (рис. 5.36) которых производит необходимое изменение параметров элементов или структуры цепи.
Рис. 5.3
т.е. коммутацию.
Поскольку после замыкания или размыкания ключа меняются также и уравнения, описывающие процессы в цепи, то весьма важно знать, какие же из переменных токов, напряжений останутся неизменными во время коммутации. Именно такие переменные целесообразно было бы выбрать в качестве основных переменных при расчетах переходных процессов. Следующее утверждение, известное так же, как законы коммутации, дает ответ на поставленный вопрос. В момент коммутации остаются неизменными напряжения на обкладках конденсатора и токи в индуктивных катушках. Математически это записывается следующим образом
«с(°+)="с(0-); д(о+)=д(о_).
С энергетической точки зрения невозможность скачков тока на катушке и напряжения на конденсаторе объясняется невозможностью мгновенного изменения запасенных в них энергии магнитного поля катушки Li2/1 и энергии электрического поля конденсатора
239
Си2/2. Для этого потребовалась бы бесконечно большая мощность, что лишено физического смысла.
Поскольку после коммутации все остальные переменные - напряжения на индуктивных катушках, токи в конденсаторах, токи и напряжения на резисторах - могут скачком изменить свое значение, то неизменные при коммутациях напряжения на конденсаторах zzc(O) = zzc(O+) = wc(CL) и токи катушек д(0) = /А(0+) = /£(0_) называют независимыми начальными условиями. Независимые начальные условия нужны для математически корректной постановки задачи расчета переходных процессов в электрических цепях после коммутации.
5.2. Классический метод расчета переходных процессов в линейных электрических цепях
Согласно классическому методу расчета переходных процессов искомый переходный ток zA (/)* некоторой к-й ветви представляется в виде суммы установившегося тока (установившейся составляющей ziy (/) тока) и преходящего тока (преходящей составляющей) й (Н, т.е.
Лпрех ' '
4 (0=4(0+^ (О-
Установившимся током называют периодический или постоянный электрический ток, устанавливающийся в электрической цепи после окончания переходного процесса при воздействии на цепь периодических или постоянных ЭДС или напряжений.
Преходящим током называют разность между переходным и установившимся токами.
В главах 1, 2, 4 были досконально разобраны методы и проблемы расчета установившегося тока. Таким образом, в данной главе для нас интерес представляет определение именно преходящего тока ik^ (г), поскольку решение задачи определения тока ik будем считать известным.
Все вводимые в данном разделе определения, связанные с током й, могут быть распространены и на напряжения любой ветви.
240
5.2.1. Определение преходящей составляющей тока
Для определения преходящей составляющей тока ik (/) для него, пользуясь законами Кирхгофа и компонентными уравнениями отдельных элементов, составляют дифференциальное уравнение вида d" d"~' . d2 . d . . . .
°" Ht"'k + a''-1 ~df^lk + ’' ’+ °2 ~dt2'k + a' ~dt‘k + ’
Правила составления такого уравнения основываются на использовании законов Кирхгофа, компонентных уравнений элементов: ре-о • ndu 7 di
зистора u-Ri, конденсатора i = C—, катушки i-L —, источни-dt dt
ков и т.д., а также процедуре последовательного исключения всех лишних переменных за исключением тока ik. Стоящий в правой части уравнения свободный член определяется функциями источников энергии. Если формально его отбросить, и производные
—ik, i = 0,1,..., п заменить на степенные функции р', то можно dt'
получить так называемое характеристическое уравнение а„р" + а„-\Р"~Х + • • • + <hP2 + aiP' + «о = 0 •
В случае, если все п корней phi-1,2,.,.,п характеристического уравнения, называемые также спектром собственных частот анализируемой цепи, окажутся простыми (различными), то общий вид преходящей составляющей тока k-тл ветви примет вид
411рех = + А2еРг‘ +-+
S=l
Здесь As - некоторые пока неизвестные константы, называемые постоянными интегрирования.
При наличии в множестве корней характеристического уравнения корней кратных, выражение для преходящего тока несколько усложнится, но к нему можно прийти, используя предельные переходы и независимые начальные условия, но об этом позже.
Рассмотрим некоторые частные случаи при расчете цепей с одним-двумя носителями энергии:
а) п-1 - цепь описывается дифференциальным уравнением первого порядка и преходящая составляющая тока будет иметь вид ik =Aept-
Лпрех
241
б) цепь описывается дифференциальным уравнением второго порядка с кратными корнями рх- рх = р, тогда
Чрех=(А + Л/)^';
в) цепь описывается дифференциальным уравнением второго порядка с комплексно сопряженными корнями рх 2 — —8± jco, тогда
'к = AePl‘ + или 'к р =Ае St s’n> где А и у - некоторые константы.
5.2.2. Методика расчета переходных процессов классическим методом
Итак, в классическом методе искомый ток ik (/) представляется в виде суммы двух составляющих
4(0=Ч(0+4прех(0-
1. Рассчитываем цепь до коммутации с тем, чтобы найти все напряжения на конденсаторах и токи в катушках для момента / = -0, предшествующего коммутации, т.е. определяем независимые начальные условия.
2. Любым из известных методов находим установившуюся составляющую тока ik (/) для послекоммутационного режима.
3. Составляем характеристическое уравнение, находим его корни и записываем общий вид преходящей составляющей ik (/) искомого решения.
4. Записав общий вид искомого решения fl
4=1
для определения констант As используем независимые начальные условия, выразив через них значение /Д+О). Таким образом, искомое решение найдено.
Проиллюстрируем применение этой методики на примерах решения конкретных задач. Но при этом заметим, что строгому (по пунктам) следованию этой методики мы будем придерживаться только в самых первых примерах, на стадии обучения ее использования, затем можно более вольно менять последовательность ее действий.
242
5.3. Переходные процессы в электрических цепях с последовательно соединенными резисторами и катушками
В данном разделе предполагается не только практическое знакомство с классическим методом расчета переходных процессов, но и с особенностями самих процессов в рассматриваемых задачах.
5.3.1. Короткое замыкание в цепи с резистором и катушкой
Исследуем электромагнитные процессы в цепи, изображенной на рис. 5.4, происходящие после замыкания ключа. Расчет переходного процесса проведем классическим методом (см. пп. 5.2.2).
1. Рассчитаем установившийся режим в цепи до коммутации (до замыкания ключа) и определим из него независимое начальное условие - ток в катушке в момент t = 0_, непосредственно предшествующий коммутации
2. Найдем установившийся ток i после коммутации. Так как во вновь образованном контуре из катушки А и резистора R нет источника, то iy = 0.
3. Для определения преходящей составляющей запишем уравнение по второму закону Кирхгофа:
L^y + Ri о
dt прех
Характеристическое уравнение имеет вид:
pL + R = 0.
Общее решение уравнения для преходящей составляющей: ^=Аер',
л Я -1
где А - постоянная интегрирования; /> = -—, с - корень характеристического уравнения.
4 Записав общий вид переходного тока катушки г — + ?прех — ’
243
приравниваем его значение i(0+)-A в точке / = 0+ к значению /(0_), найденному в п. 1. Получаем искомую константу
А= Е =10.
Квн+*
Переходный ток i = iy + /прех при этом равен я _t_ i^Ioe L =Joe т,
L где г = — - постоянная времени цепи.
Постоянная времени - время, в течение которого преходящая составляющая процесса уменьшается в е = 2,72 раза по сравнению с начальным значением.
График изменения переходного тока показан на рис. 5.5.
Определим ЭДС самоиндукции катушки
di R ~~ ~~
е, = —L—=--------Ее т =ERe т, />0.
dt RBH + R 0
В момент коммутации эта
i ЭДС равна напряжению на со-
_- противлении R, а в дальнейшем
\ уменьшается по экспоненциаль-
\ ному закону. На основании из-
/0 ] 'ч воженного можно сделать сле-
е дующие выводы.
,, * ----- 1. При коротком замыкании
О г ? в рассматриваемой цепи ток в
ней изменяется по экспоненци-Рис. 5.5
альному закону, уменьшаясь от начального значения до нуля.
2. Скорость изменения тока определяется постоянной времени цепи, которая равна индуктивности катушки, деленной на активное сопротивление цепи.
3. Практически можно считать, что переходный процесс заканчивается при t ~ (3 -ь 5)г, когда первоначальное значение тока
уменьшается по модулю на порядок.
4. Напряжение на катушке в начальный момент времени равно напряжению на активном сопротивлении:
«г(О+) = 7оД.
244
С энергетической точки зрения рассматриваемый переходный процесс характеризуется расходом энергии магнитного поля катушки на тепловые потери в резисторе. Следует отметить, что сопротивление резистора влияет не на количество выделенной теплоты, а на начальное значение напряжения катушки и длительность процесса. В самом деле
“ °° т /2
w = \i2Rdt = IqR \e~2‘lrdl = -2-.
о о 2
5.3.2. Включение цепи с резистором и катушкой на постоянное напряжение
Переходный ток в цепи, изображенной на рис. 5.6, представим
в виде
Рис. 5.6
1 ~ ty + Срех
1. До коммутации тока в катушке не было, следовательно,
д(О_) = о.
2. Установившаяся составляющая тока после коммутации
. U
3. Преходящая составляющая тока для цепи, описываемой дифференциальным уравнением первого порядка (см. пп. 5.2.1),
~~ R
^ = Ае Т^Лер‘, Р = ~-
4. По начальным условиям определим постоянную интегрирования А и преходящий ток:
/(0) = /у(0) + /Прех(0); z(0) = z(0+) = /(0_)
или
О — — + А", А — —zn R R пРех
Переходный ток получается в виде
-Ve~ R
1-е R
245
Напряжение на катушке
и, = L— = Ue т.
L dt
Кривые изменения токов г, гу, znpex и напряжения на катушке
показаны на рис. 5.7.
При включении рассматриваемого контура под постоянное напряжение ток в нем нарастает от нуля до установившегося значения. Интересно, что скорость нарастания тока
= LLe~<lr _ Ke~'/r dt Rt L
осуществляется по экспоненте с отрицательным показателем. В момент / = О
U эта скорость максимальна и равна —
(А/с), со временем она падает практически до нуля, процесс выходит на установившийся режим. В первый после
коммутации момент t = 0+ ток в цепи еще равен нулю, и напряже
ние на катушке максимально uL-U, далее оно экспоненциально
снижается до нуля.
5.3.3. Включение цепи с резистором и катушкой на синусоидальное напряжение
Если напряжение источника цепи (рис. 5.8) и = [/msin(t9 t + ^), то установившийся ток
= -^-sin(cot + у - ср},
Рис. 5.8
- полное сопротивление
где Z =
цепи; <р =arctg(L>L/R - угол сдвига между напряжением и током.
Преходящий ток определяется как и в пп 5.3.1, 5.3.2
i — Ар 'прех с
246
Суммируя установившуюся и преходящую составляющие, получим выражение для переходного тока:
t
i = iy+inpex=^sin(M + V-<P) + Ae г, используя независимые начальные условия при t = О /(о_)=/(о+)=о,
находим постоянную интегрирования:
>4 = ~^sin(^-0).
Тогда переходный ток:
и и--
Um . --
Z Г,-
Зависимости переходного тока от времени при различных значениях разностей у -ср показаны на рис. 5.9. Их анализ позво-
ляет сделать следующие выводы.
Рис. 5.9
1. Если в момент включения установившийся ток равен нулю {у—(р = § или — ср = я), то преходящий ток не возникает, и в цепи сразу возникает режим (рис. 5.9а):
i = L — Isincot = .
У m 7
247
2. Если в момент включения установившийся ток имеет наибольшее значение (</ - (р = л/ 2), переходный ток достигает максимального по модулю значения приблизительно через половину периода, однако ни при каких условиях он не может превышать удвоенной амплитуды установившегося тока (рис. 5.9в).
5.4. Переходные процессы цепи с последовательно включенными резисторами и конденсаторами
£вн
Рис. 5.10
5.4.1. Разряд конденсатора на резистор
Рассмотрим переходный процесс при коротком замыкании в цепи с конденсатором и резистором (рис. 5.10). если предварительно конденсатор был заряжен до напряжения ис (0+) = (70 = £.
Установившийся ток и напряжение на конденсаторе равны нулю. Для построения характеристического уравнения запишем уравнение по второму закону Кирхгофа для вновь образованного контура
Ri + ис =0.
Учитывая, что i = — = С —— = 0, запишем: dt dt
RC^- + uc = 0.
dt C
Характеристическое уравнение имеет вид:
£Ср + 1 = 0.
Общее решение для преходящей составляющей напряжения: / ис = Aept - Ае Т, 1прех
„ т, 1
где А — (Jq — постоянная интегрирования; р =---корень харак-
RC
теристического уравнения; t=RC - постоянная времени цепи.
С учетом ис = иСу + wCnpex, нулевого значения установившегося напряжения получим напряжение на конденсаторе:
248
l‘c = uoe т-
Переходный ток в цепи
i-Cdl‘c - U,lcr dt R
Кривые изменения напряжения на конденсаторе и тока в цепи
во времени имеют вид экспонент (рис. 5.11).
С энергетической точки зрения переходный процесс характеризуется переходом энергии электрического поля конденсатора в тепловую энергию в резисторе. Следует отметить, что сопротивление резистора влияет не на количество выделенной теплоты, а на начальное значение тока и длительность разряда. В самом деле
оо 2 °° 2/
W = ]?ЯЛ = -2- fe RCdt = о о
си20
2
5.4 2. Включение цепи с резистором и конденсатором на постоянное напряжение (заряд конденсатора)
Из схемы, приведенной на рис. 5.12а, следует, что установившаяся составляющая напряжения на конденсаторе
Рис. 5.12
249
а преходящая составляющая, очевидно, равна t
иг - Ае т, T = RC.
'-прех
Полагаем, что до замыкания ключа конденсатор был не заряжен {ис(0_) = 0). На основании законов коммутации при t = 0
ZZC(O_) = Z/c(0+) = 0, следовательно
zzc(O) = zzc (O) + zzc^ (О) или 0-U+A, откуда А = —U.
Тогда переходное напряжение на конденсаторе Г ис = U 1-е т , \ 7
а переходный ток в цепи
. duc U
г = С—— =—е т.
dt R
Зависимости напряжений и токов от времени показаны на рис. 5.126. Из них видно, что напряжение на конденсаторе возрастает по экспоненциальному закону от нуля до напряжения источника, а ток уменьшается от начального значения до нуля также по экспоненте. Длительность их изменения определяется постоянной времени т = RC; здесь как и в пп. 5.3.1 время переходного процесса принимается равным t ~ (3 5)г.
5.4.3. Включение цепи с резистором и конденсатором на синусоидальное напряжение
Пусть напряжение источника изменяется по закону
Рис. 5.13
я
2 )’
u = Umsm^M + iy).
Установившаяся составляющая напряжения на конденсаторе (рис. 5.13)
Um „ ( я}
ис =—^Хсsm ОЛ + //-(р---,
у У. у 2 у
где Z = J??2 + Xq - полное сопротивление
цепи; Хс= —-----емкостное сопротивление; <р - -arctg
соС
зовый сдвиг тока.
250
Преходящая составляющая напряжения на конденсаторе
_t
ис = Ае т, т = RC.
Mipex
Переходное напряжение на конденсаторе
Um . ( я^1 , -7
иг-иг +иг =——sin cot-vw-cp-------1 + Ае т
- су спрех 7соС 2)
Полагая, что нс(0_) = 0, для постоянной интегрирования
получим
А = --^~ ZcoC
( л sml ty-cp--^
Окончательно напряжение на конденсаторе можно записать
в виде
м = -^-с ZcoC
- Г л
sml cot + i//-cp-—
Um ZcoC
I я I sml Щ-<р~— 1е
Ток в цепи
„duc U„, . , , . . f Я] ~
/ = С-^ = -^- cos^sin(69/ + ^-^) + sm#>sml y-cp~— \e r
Зависимости переходного напряжения на конденсаторе от времени при различных значениях разностей 4/-^ показаны на рис. 5.14. Их анализ позволяет сделать следующие выводы.
251
1. Если в момент включения установившееся напряжение на конденсаторе равно нулю (у/-ср-л! 2 = 0), то и преходящее напряжение равно нулю. В цепи сразу устанавливается режим (рис. 5.14а).
2. Если в момент включения установившееся напряжение имеет наибольшее значение (у/-(р-л/ 2- л/ 2). то переходное напряжение достигает максимального значения приблизительно через половину периода и может приблизиться к удвоенной амплитуде установившегося напряжения, но не превысит его (рис. 5.14в).
5.5. Разряд конденсатора на цепь с резистором и катушкой
Пусть в цепи, изображенной на рис. 5.15, конденсатор был заряжен до напряжения пс(О_) = [/о. Исследуем процессы в контуре, образованном резистором, конденсатором и катушкой после замыкания в момент t = 0 ключа. Так как источники в цепи отсутствуют, то установившиеся составляющие решений равны нулю. Решение будет состоять из одной преходящей составляющей.
5.5.1. Составление характеристического уравнения. Определение собственных частот цепи
По второму закону Кирхгофа t > 0 имеем:
Ri + L— + ис =0. dt С dur , получаем
дифференциальное уравнение второго порядка для преходящего напряжения d2ur R duc 1
---+------- +---ис=0. dt2 L dt LC с
Рис. 5.15
Учитывая, что
Характеристическое уравнение при этом имеет вид:
2 R 1 „
р + — р + = 0.
L LC
Характер электромагнитных процессов в контуре зависит от соотношения параметров R, L, С, входящих в выражение для корней характеристического уравнения
252
_ I r2______L
P'-2 ~ 2L~\4L2 LC
В зависимости от знака подкоренного выражения корни могут быть вещественными или комплексно-сопряженными. Они определяют характер преходящих составляющих переходных токов и напряжений.
5.5.2. Апериодический разряд конденсатора на катушку и резистор
Рассмотрим процесс разряда конденсатора на резистор R и катушку L. Если параметры контура из резистора, катушки и конденса-
R2 1 9
тора удовлетворяю! условию —— > или R > 2.
то корни ха-
ракгеристического уравнения контура вещественные, различные, т.е. Ф р2, и отрицательные. В этом случае напряжение на конденсаторе описывается уравнением
ис = ис = A,eP}t + А2еР2‘, k *-прех 1
где А{ и А2 - постоянные интегрирования, определяемые из начальных условий.
Преходящий ток равен
=с( А,р'еп'+)
Установившиеся составляющие напряжения на конденсаторе и тока равны нулю. Поэтому их переходные значения равны преходящим составляющим:
up — и г j i — znnex.
1 cnpex npex
Определим из начальных условий постоянные интегрирования Ах и А2. При t-0 zzc(0) = t/o и z(0) = 0. Подставив их в выражения для переходных напряжений и токов при 1 = 0 имеем
Uo = А} + А2; 0 - А1р1 + А2р2.
Отсюда
4=^—Л-—^о-
Р1 ~Р\ Р2~ Pl
С учетом начальных условий запишем
ис ^-^—1 р2ер'‘ - PleP2‘\, i=CPiP2U0(ePi‘ _еРА\
P2~Pi ' Pi-Pl ' '
253
Произведение корней по теореме Виета /?,р2 =—— > следова
тельно, ток
L(P2~P\r '
Напряжение на катушке
dt Р2~ Piх
Графики зависимости тока и напряжения от времени, показанные на рис. 5.16. позволяют говорить об апериодическом разряде конденсатора. Апериодическим называется такой разряд, при котором конденсатор все время разряжается, т.е. функция пс(/)
- убывающая, а ток i не меняет своего направления, в нашем случае он отрицателен. Сделаем некоторые выводы.
1. Апериодический разряд конденсатора в цепи R, L, С возникает при вещественных, отрицательных и неравных корнях характеристического уравнения.
2. При апериодическом разряде напряжение на конденсаторе
уменьшается от начального значения до нуля, а ток сначала возрастает по модулю, затем уменьшается, проходя через максимальное
значение.
3. Напряжение на катушке уменьшается от начального значения, проходит через нулевое значение, изменяя знак и, достигнув наибольшего значения, уменьшается до нуля.
5.5.3. Предельный апериодический разряд конденсатора на катушку и резистор
При соотношении параметров контура из конденсатора, катушки и резистора
R ^кр
254
где /?кр - критическое сопротивление резистора R, корни характеристического уравнения контура вещественные, равные и отрицательные:
R
Pi = P2 = P = -~-
Переходный процесс получается апериодическим, но граничным с колебательным процессом. Переходный ток и переходное напряжение в этом случае имеют вид:
мс=(Л1 + Л2?)е₽';
z = = С(Л + рА\ + pA2t)ep>.
При начальных условиях z/c(O) = J7o; z(0) = 0 находим:
-Uo; А2 =-pU0. С учетом найденных постоянных интегрирования получаем решения:
wc={70(l-p/)ep';
z = -Q2t/0/e₽,=-^-te₽';
uL =L^ = -UO(1 + pt)ept.
Зависимости i, uc, uL = такие же, как для апериодического разряда.
5.5.4. Периодический (колебательный) разряд конденсатора на цепь с резистором и катушкой
При соотношении параметров контура из конденсатора, катушки и резистора R < RKp - 2^L/C, где Якр - критическое сопротивление цепи, корни характеристического уравнения комплексные сопряженные:
/?12 =-«±#90,
R . . „
где a = - коэффициент затухания преходящей составляющей;
I 1 R2
со0 = ---2 - угловая частота собственных колебаний
контура; Го - период собственных колебаний.
255
/2 "* 1
Поскольку yja + щ(у = -j==, то можно ввести обозначения
Щ. Г—— О. ГГ— Ш.
sin/// = = o)0\lLC, cosy/ = , = ad LC, tgyc = —Д.
у] a2 + col у®2 + а)о а
Преходящая составляющая переходного напряжения при комплексно-сопряженных корнях (см. пп. 5.2.1)
ncnpex=^-“sin(q)/ + ^).
Для преходящей составляющей тока in = С—имеем
dt
z'npex = САе~а' (-c/sin (щ()/ +у/) + <w0 cos(fi90/ + !/))•
С учетом начальных условий при / = 0 uc=Uq, i = 0 из последних двух уравнений находим константы интегрирования:
[/0 = Л sin///; 0 = G4(-arsin/// + zy0cos^).
и далее
А=-^-sin ^4
Запишем переходные напряжения и ток:
ис = исте ^sm^fOff+y/)-, ' = ~Ime~a' sin(zy0/ + Д’);
11 l = ULme~a 1 sin(w-у/},
ГПР ТТ — гг _ Ц) _ ^0
ГДе Lm~ /777’
co0dLC co0L
Зависимости переходных напряжения и тока ис, i показаны на рис. 5.17. Они представляют собой затухающие синусоиды. Скорость затухания колебаний оценивают декрементом колебаний. Декремент колебания — это постоянная, зависящая от параметров R, L, С и равная отношению амплитуд переходных параметров, отстающих друг от друга на период колебания То, например:
д = цс(0 = ucme a'sm((O(J + y') = еат0
lic(t + To) UCme~a^,+T^ sin (/ + ?()) г ///]
Часто пользуются логарифмическим декрементом колебания:
v = In Д = In—Uy = a TQ.
Uc^t + T^
256
В предельном случае чисто консервативной системы (R = 0) Д = 1 и колебания в параллельно соединенных предельных конденсаторе и катушке носят незатухающий характер. Период этих колебаний дается формулой Томпсона То = 2ял/£С, а частота не-
затухающих колебаний 69О
=\/4lc.
5.6. Включение контура из конденсатора, резистора, катушки на постоянное напряжение
Рассмотрим электромагнитные процессы, возникающие после замыкания ключа в цепи, изображенной на рис. 5.18 в предположении, что конденсатор был предварительно не заряжен, т.е. wc(0_) = 0. Характеристическое уравнение и вид его корней будут такими же, как и в цепи, рассмотренной в п. 5.5.
5 6.1. Апериодический процесс
Между разрядом конденсатора на резистор с катушкой и включением на постоянное напряжение контура (см. рис. 5.18) существует аналогия. Так же, как при разряде конденсатора, устано
9 Зак. 1186
257
вившаяся составляющая тока равна нулю. Установившееся напряжение на конденсаторе ис = U. Следовательно, начальное значение преходящей составляющей напряжения на конденсаторе
“Cnpex(0+) = Wc(°+)-»Cy(0-)
равно ис (0+) = -(/. То есть знаки постоянных интегрирования Л, и А2 в отличие от рассмотренного в пи. 5.5 случая изменяются
Рис. 5.19
на противоположные В этом случае переходное напряжение на конденсаторе, ток и напряжение на катушке определяются по формулам:
“с= U+ —-—(p2ePl‘-pieP2');
Р\ - Pi' '
U / n-yt \
-е
[р\^ ~Р^
L(.P\ ~Рг)
U 11 l =-------
Р\ -Pi
Кривые uc(t), uL(t) и z(f) приведены на рис. 5.19.
5.6.2. Колебательный процесс
Включение рассматриваемого контура на постоянное напряжение может сопровождаться колебательным переходным процессом. При этом в отличие от процесса разряда конденсатора (см. и. 5.5) знак начального значения преходящего напряжения, следовательно, и коэффициента А, изменится на противоположный. Переходные напряжения и ток приобретут вид:
ис =U------^=e~a'sin(rwoz + ^);
уLC
. U -at • i =---е smtfW;
UL =—^=e“msin(q/-^).
LC
Кривые zzc(/) и z(/) показаны на рис. 5.20. Кривая тока отображает затухающие колебания относительно нулевого значения, а напряжения на конденсаторе — относительно установившегося
258
значения. Следует отметить, что за время переходного процесса контура часть энергии источника переходит в тепло, а другая - запасается в электрическом поле конденсатора в виде:
$Uidt = + U[i + uci}dt =
о о
оо О U
= fi2Rd/ + $Lidt + JCz/c<7i/c , ООО
“г “г 7 си2
т.е. jUidt= ji2Rdt +--.
оо 2
5.7. Некорректно поставленные задачи расчета переходных процессов
Согласно сформулированным в п. 5.1 законам коммутации токи в индуктивных катушках и напряжения на конденсаторах скачком не меняются. Так дело обстоит в реальных цепях, но с заменой этих цепей электрическими схемами замещения физическая картина упрощается, что может привести к неполной адекватности схем исходным цепям, а иногда и к серьезным проблемам понимания процессов, отображенных схемами, и к проблемам расчета самих схем.
Поясним сказанное на примере расчета процессов в схеме, изображенной на рис. 5.21, параметры элементов которой следующие: R = 40 Ом, Q = 20 мкФ, С2 = 30 мкФ, напряжение источника Е = U= 100 В, напряжение на конденсаторе С2 до
Рис. 5.21 замыкания ключа было 20 В. Прежде
всего определим напряжение на конденсаторе Q до замыкания
ключа, считая предшествующий режим установившимся. Тогда ток в резисторе R отсутствовал и все напряжение источника было приложено к конденсатору С,, т.е. г/С](0_) = [/. Обратим внимание на
9*
259
некорректность, связанную с заведомой невыполнимостью закона коммутации. В самом деле, в соответствии с законом коммутации мы должны были бы записать:
wcl(0_) = i/cl(0+)= 100 В; wC2(0_) = wC2(0+)= 20 В.
Но вследствие параллельного соединения напряжения на конденсаторах после коммутации должны быть равны, а в нашем примере
Mci (0+) * г/С2 (0+) •
Противоречие! Оно появилось в связи с некорректно поставленной задачей, т.к. считалось, что контакт замыкается мгновенно. В действительности сопротивление между контактами изменяется от бесконечности до нуля не скачком, а в течение некоторого времени. С другой стороны, в схеме не учтены сопротивления проводов, соединяющих конденсаторы. Как разрешить противоречие? Выход находят, исходя из законов сохранения электрических зарядов: сумма зарядов до коммутации равна сумме зарядов после коммутации, когда на обоих конденсаторах одинаковые напряжения пс(0+). Следовательно q} (0) + q2 (0_) = qx (0+) + </2 (0+), а т.к. ^=C,z/,-,to
wCl(0-)’G +«C2(O-)’Q =mc(0+)’(G +Q)-
Отсюда находят напряжение на конденсаторах после коммутации
"сК)=«О (о.)=(0,)==
_ 100-20-lO^-b 20-30-10-6 ----------------7----— 52В.
(20+ 30)-IO-6
Следовательно, после коммутации схему можно заменить эквивалентной, изображенной на рис. 5.22, где С = СХ + С2 = 50 мкФ,
z/c(0+)=52B, R = 40 Ом, U= 100 В.
Установившееся напряжение на емкости будет ис = 100 В Вид преходящей С у
составляющей напряжения данной цепи с одним накопителем энергии известен (см. пп. 5.4.2) ис = Ае~^т, где t = RC. '-прсх
Рис. 5 22 Для определения постоянной интегриро
260
вания воспользуемся найденным значением напряжения на емкости и(,(0+)=52 В. Имеем
г/с(О+) = г/Су(О+) + нСпрех(О+),
или 52 = 100 + А, отсюда А = 52 - 100 = -48. Так как t-RC= 2-10 3,
то — 500 Следовательно, т
= Ue’500', А.
пс = 100 —48е-500/, В;
. U-ur 100-100+ 48e-50()z
1 ~ R 40
Графики полученных зависимостей представлены на рис. 5.23.
В заключение заметим, что приведенный в начале параграфа закон о неизменности суммарного заряда конденсаторов до и после коммутации, наряду с законом о неизменности суммарного потокосцепления на катушках до и после коммутации, иногда называют обобщенными законами коммутации. Их применяют тогда, когда после коммутации образуются новые контуры
рассмотренном случае) или новые звезды из катушек.
из конденсаторов (как в
5.8. Интегрирующие и дифференцирующие цепи
В предыдущих параграфах мы ознакомились с классическим методом расчета переходных процессов в линейных электрических цепях и характером этих процессов для ряда простых, но имеющих определенное инженерное значение цепей с конденсаторами, резисторами, катушками. Здесь же мы покажем, как, зная особенности процессов в подобных цепях, из этих элементов можно конструировать функциональные устройства, имеющие большое практическое применение. Будем полагать, что в рассматриваемых ниже цепях (рис. 5.24, 5.25) сопротивление приемников столь велико, что ток много меньше тока /, т.е. ~0.
На рис. 5.24 изображена интегрирующая ЛС-цепь. Напряжение на ее входе равно
1{вх ~ 'R + ис
261
Рис. 5.24
Рис. 5.25
Если выбрать iR » ис, то
«вых = ис = jidt \u™dt>
т.е. напряжение на выходе цепи пропорционально интегралу от напряжения на ее входе.
На рис. 5.25 изображена дифференцирующая /?С-цепь. При
„ ~dur
iR « ис получим г/вых ~ ис. С учетом i - С —— и г/вх = iR напря-dt
жение на выходе запишем в виде
n„duKX dum
г/вых ~ RC—= т—
dt dt
т.е. в цепи осуществляется операция дифференцирования.
5.9. Операторный метод расчета переходных процессов в линейных электрических цепях
В операторном методе каждой функции времени f (/) - переходному току, напряжению и т.д., — ставится в соответствие изображение F{p), где р - некоторое комплексное число, таким образом, что операции дифференцирования и интегрирования во временной области заменяются чисто алгебраическими операциями в комплексной области. Ясно, что при этом проблемы составления интегро-дифференциальных уравнений, описывающих переходные процессы в электрических цепях, проблемы решения этих уравнений сводятся к проблемам составления и решения чисто алгебраических уравнений, которые гораздо проще. Затем от найденного решения в операторной области по формальным правилам переходят к решению рассматриваемых процессов во временной области, наиболее нас интересующей. Метод привлекателен высокой степенью формализованное™, что позволяет при его использовании не рассматривать многочисленные исключения и
262
частности. Для существования изображения F(p} функции f(t) последняя должна удовлетворять условиям Дирихле и, кроме того, возрастать не быстрее, чем некоторая экспоненциальная функция, т.е. |/(z)| < Аем , где А и а — некоторые положительные числа.
5.9.1. О связи оригиналов и изображений
Пусть /(/) - некоторая функция. Назовем интегралом Лапласа
этой функции выражение вида (t)dt, где р = т + jr] - неко-о
торое комплексное число. Полученную при интегрировании функции вещественной переменной t функцию комплексного переменного F(p)~ ^e~pt f(t)dt назовем изображением fit), а саму функ-о
цию f(t) — оригиналом. Некоторые свойства соответствий оригиналов и изображений представлены в табл. 5.1.
Таблица 5.1
№ Оригинал flf) Изображение Flp)
1 Линейность «/1(0 + А/2(0 aFi(p) + fF21p)
2 Дифференцирование оригинала f'{t) pF Ip) -f (0)
3 Дифференцирование п -кратное Г /(0) /(О) L p p2 pn \
4 И нтегрирование t оригинала jf(t)dt 0 Flp) p
5 Сдвиг оригинала fit-а) e~apF1p)
Примеры изображений некоторых функций даны в табл. 5.2.
263
Таблица 5.2
№ Оригинал /(/) Изображение F(p)
1 А Alp
2 Аем Al{p-a)
3 t i/f2
4 sin М щ/(/?2+щ2) I
5 cos cut f/(f2 + ^2) j
Замечание. Соответствие изображения оригиналу принято обозначать в виде F(/>) = /(/).
5.9.2. Законы Кирхгофа и компонентные уравнения элементов цепи в операторной форме
Первый закон Кирхгофа о равенстве нулю алгебраической суммы токов, подтекающих к данному узлу,
2л=°
в операторной форме примет вид
E4(f)=°,
где Ik (/>) — изображение функции ^(/)-
Второй закон Кирхгофа о равенстве алгебраической суммы ЭДС алгебраической сумме напряжений других элементов для данного контура
в операторной форме приобретает вид
где Ек(р) - изображение ek(t), a Uk(p) - изображение uk(t). Компонентные уравнения резистора, конденсатора, катушки во временной и вещественной областях представлены в табл. 5.3.
264
Таблица 5.3
№ Элемент Компонентные уравнения
оригиналы изображения
1 Резистор и = Ri U(p) = Rl(p)
2 Конденсатор i = C— dt l{p) = pCU(p)-Cu(Q)
3 Катушка di u — L — dt U(p) = pLl(p)-Li(O)
5.9.3. Операторные схемы замещения. Операторные сопротивления. Операторный закон Ома
Записав компонентные уравнения элементов цепи в операторной форме, представим в табл. 5.4 графические изображения схем замещения основных элементов цепи.
Таблица 5.4
№ Элемент Схемное изображение элемента
Временная область Операторная область
1 Источник ЭДС -е^
2 Источник тока
3 Резистор и -с=н^-ад
4 Конденсатор С ; II „ . , 1 »с(0) рС Р и (7) >
II * 11С 11 Ш Urfp)
5 Катушка ~UL IlW) UL(p)
265
Таким образом, ветви из последовательно соединенных резистора, конденсатора, катушки (рис. 5.26а) можно сопоставить ветвь ее операторного аналога (рис. 5.266).
Обратим внимание, что в операторной области в схеме ветви оказались две ЭДС, обусловленные ненулевыми на-
чальными условиями то-
ка 0.(0) _ в катушке и напряжения г/с(0) - на конденсаторе, а
также три сопротивления - R, - и pL. Для этой схемы спра-
/?С
ведлив обобщенный закон Ома
Чр)=---------j-----
R ч----ь pL
Рс
Схему рис. 5.266 можно заменить эквивалентным генератором, операторная ЭДС которого равна
Е(₽) = Щ(0)_-ЛД
а операторное сопротивление Z(/>) - соответственно суммой сопротивлений Z(p\ = R + -^— + pL. Таким образом, при составлено
нии и преобразовании операторных схем замещения электрических цепей можно руководствоваться всем тем набором приемов (преобразование звезда-треугольник, теорема об активном двухполюснике (метод эквивалентного генератора) и т.д.), которыми пользуются в аналогичных случаях в цепях постоянного тока.
266
5.9.4. Расчет переходных процессов электрических цепей операторным методом
Подобный расчет предполагает:
а) по заданной схеме замещения электрической цепи составить
ее операторную схему;
б) рассчитать операторную схему любым из изученных в главе 1 методов (методом контурных токов, узловых напряжений, преобразований электрических схем и т.д.);
в) пользуясь табл. 5.2, от полученного решения в операторной области перейти к решению во временной области.
Проиллюстрируем подобную методику на ряде примеров, сначала тех из них, что были подробно разобраны при изучении клас
сического метода расчета переходных процессов.
Пример 5.1. Рассчитать операторным методом переходный процесс в схеме рис. 5.12, полагая U = const, г/с(0) = 0 (как и в
R
пп. 5.4.2). Пользуясь соответствиями электрических и операторных изображений элементов схем (см. табл. 5.4). а также операторным к и
изображением — воздействующего напря-Р
жения (см. табл. 5.2), получим операторную схему рассчитываемой цепи (рис. 5.27). По обобщенному закону Ома в операторной
Рис. 5.27 форме (см. пп. 5.9.3), имеем
— Е
R ч---р ч------
рС RC
г- г- U . \
Если теперь обозначить — = А, -----= —(%, то выражению
R RC
U Р
/(д)
о
1(р> — р-сс
по табл. 5.2 соответствует оригинал
i(t) = Aeat =-e~RC ’ R
Пусть теперь требуется найти еще и напря
жение на емкости. По закону Ома в операторной форме имеем
ис(р) = -уАр) =
U
рС1 Rp + —
и и
р р+—
RC
261
По табл. 5.2 находим соответствующее изображение
uc(t) = U 1-е Rc
Пример 5.2. Рассчитать операторным методом переходный процесс в схеме рис. 5.21 (некорректно поставленная задача). Составляем операторную схему замещения (рис. 5.28а). Преобразуем две параллельные ветви 1, 2 в одну с эквивалентным сопротивлени-
ем ---, где С = С] + С2 - 50 мкФ (рис. 5.286)
рС
uc(G+) _ ЦС| (°)С1 +ис2 (°)С2 Р рС
Пользуясь вторым законом Кирхгофа, находим операторный ток в
контуре
и мм
—р—
R + -—
U-uc(0+) _ U-ис(0+)
а)
б)
Рис. 5 28
Пользуясь табл. 5.2, находим оригинал
' ’ R
или, учитывая, что U= 100 В; R= 40 Ом; C = Cj+C2= 50 мкФ; ис(0+)=52 В; /(/) = 1,2е-500' А.
Для нахождения операторного изображения напряжения на конденсаторе воспользуемся вторым законом Кирхгофа
-- + RI(P) + UC(P) = O, Uc(p) = ^-Rj(p).
268
Переходя к оригиналам, получаем
г/с (/) = 100 - 40 1,2е“500' =100- 48е“500'.
Рассмотренные два примера показывают, насколько формально проще использовать операторный метод в сравнении с классиче
ским методом для расчета процессов в цепях относительно небольшой размерности и с простыми зависимостями от времени функций источников. Заметим, что рассмотренная во втором примере задача с некорректно поставленными условиями коммутаций решалась по обычному алгоритму, и его реализация особых проблем не вызвала. Однако, с ростом сложности цепи (увеличением числа узлов, ветвей, контуров) и, особенно, с ростом сложности функций, описывающих источники энергии, применение оператор
ного метода становится не таким элементарным в части перехода
от изображений к оригиналам.
Пример 5.3. Рассчитать операторным методом процесс разряда конденсатора на последовательно соединенный резистор с индуктивной катушкой (см. и. 5.5, рис. 5.15). Составляем оператор-
ную схему (рис. 5.29), учитывая, что 4(0_) = 0. Далее, пользуясь вторым законом Кирхгофа, находим операторный ток в контуре
г'с(°)
I (р) =----——— = ----------—----у,
R + pL + — Р +W + ^o рС
Рис. 5.29
где t/o=wc(O); £ = ~^С та^л- ^-2 такого изображения
нет; в таблицах вообще предусмотреть изображения всевозможных функций оригиналов сложно, а если у исследователя имеется достаточно фундаментальная таблица интегралов Лапласа, то поиск в ней нужного изображения весьма трудоемок, т.к. связан с его классификацией - весьма непростой задачей. Поэтому на практике идут другим путем, переходя от изображений к оригиналам по так называемой теореме разложения.
269
5.9.5. Переход от изображений к оригиналам. Теорема разложения
Пусть изображение F(p) некоторой функции оригинала /(f) задано правильной рациональной дробью, т.е. отношением двух полиномов G(/>) и Н(р), причем степень т полинома числителя G(/>) меньше степени п полинома знаменателя (т<п). Тогда оригинал функции в случае, если все корни рк, к = 1, 2,..., п полинома Н (р) простые, можно найти по формуле
ft; «'(а) ’
называемой теоремой разложения. Напомним, что корни полинома Н(рк) должны удовлетворять уравнению Н{рк}=0, а всего таких корней, согласно основной теореме алгебры, должны быть п. Под выражением Н'(рк} здесь понимается значение производной полинома Н(р} попеременной р в точке р = рк,т.е.
др
, £ = 1,2, р=Рк
п.
В случае, если корни этого полинома не простые (т.е. среди них есть кратные - равные друг другу корни), формула разложения несколько усложняется и здесь не приводится. Однако и в этом случае можно воспользоваться приведенной формулой, если рассмотреть предельный переход при стремлении одного простого
корня к другому, ниже это показывается на примере.
Пример 5.4. Пользуясь теоремой разложения, найти оригинал для изображения
I (р} = —z---------у,
р1 + 28р + о)^ полученного в примере 5.3 при решении задачи исследования процесса разряда конденсатора на цепь из резистора и катушки. Здесь F(p} = 1(р), следовательно, в результате мы должны получить
/(f) = z(f); G(/?) = -^-; Н(р) = р2+ 28p + a)Q. Находим корни полинома Н(р) из уравнения
р1 + 23р + о)^ = 0.
270
Имеем рх 2 = S±-со$ . Далее находим Н'^р^ = 2р + 23. Сле-
G(/?) т __
довательно —у-*- = ——-—-. По теореме разложения имеем
Н (Р) ЛР + 3)
_^о
z (/) = L к + L P2t =--------------Д_(е^ _ еР^\;
2(а+£) 2(^2 +3) 2Lyl82-(^ ' '
где 2у]<32 -&»о = рх - Р2.
Решение в общем случае найдено, в частности в зависимости с2 2
от соотношения между о и со возможны различные упрощения этого результата. Рассмотрим случай, когда р = рх = р2 = -8 - -со0 (т.е. случай кратных корней). Для того, чтобы воспользоваться теоремой разложения, которая на этот случай не рассчитана, положим, что Р| р2 Считая р2 — постоянной, а рх - переменной величиной, применим правило Лопиталя к раскрытию неопределенности
0 •/ X
типа — в выражении i[tj при рх = р2. Имеем
77 PPi{—РР2{ тт с
z(H = -— lim £-------e = ^te~8t
L pt~>P2—8 P\~ Рг L
Полученный результат совпадает с критическим апериодическим током, найденным в пи. 5.5.3 и демонстрирует универсальность приведенной выше теории разложения.
5.10. Расчет переходных процессов в цепи при воздействии ЭДС произвольной формы с помощью интеграла Дюамеля
Рассмотрим электрическую цепь, представленную в виде пассивного двухполюсника (рис. 5.30) с нулевыми начальными условиями для всех накопителей энергии. Структура и параметры двухполюсника могут быть в общем случае и неизвестными. Пусть на
271
вход его в момент / = 0 подастся скачкообразная ЭДС e(t), которую мы математически опишем следующим образом:
где 1(/) - единичная функция
О, t < О;
Тогда график ЭДС е(/) можно представить в виде (рис. 5.31). Реакцию цепи на подобную ЭДС можно описать в виде e(t)
Е
О, t < 0;
ЕТ(/), ?>0,
где У(/) = -^ при />0 называют переходной
Е
проводимостью. Она может быть рассчитана для цепи с заданной схемой и параметрами (классическим или операторным), а может быть измерена, если включение подобного источника
t
О
Рис. 5.31
любым методом непосредственно осуществляется на реальной, физической установке. Зная переходную проводимость, можно рассчитать реакцию цепи на воздействие ЭДС самой произвольной формы, если воспользоваться интегралом Дюамеля
t
i(t) = e(O)Y(f) +
о
, а е(О) значение воздействующей ЭДС в ну-
левой момент времени, т.е. е
t=o'
Пример 5.5. Рассчитать процесс включения цепи, изображенной на рис. 5.32, на ЭДС е(/) = (/^1-
е j (рис. 5.33). Ранее в пп. 5.4.2 рассматривалась задача расчета переходного процесса при включении подобного соединения резистора с незаряженным конденсатором на
постоянное напряжение (/-const. При этом = r, t = RC. Согласно определению переходную проводимость можно найти как
2-!- =—е
U R
272
Рис. 5.32
Для использования интеграла Дюамеля находим функции е'(')=уе т и
I _(^ j -L £
= —е т =—е т -ет . Поскольку R R
е(0) = e(?)|z 0 = 0, то интеграл Дюамеля дает искомое решение
\ U ~т , следовательно, е \х)-—е ‘
. Далее из У(г) = -^-е т
следует, что
t IX X t Г1 О ft t\
/ A Н 4 г и U f U Т ~Т ~Т
—е т -ет —е 1dx =---- г 7 dx =---------е т - е т .
v' *R Т RTJ R Т-т
о о \ )
Интегралу Дюамеля иногда придают и другой вид x=t
i(t) = У(О)г/(/)+ j Y'(t-x)u(x)dx, л-0
„ X dY(t}
где выражение Y {t)= называют импульсной проводимостью. Основная идея использования интеграла Дюамеля для расчета реакции цепи на сложное воздействие сводится к решению более простой задачи - расчету этой цепи на постоянное воздействие.
Следует отметить, что если начальные условия на отдельных накопителях энергии двухполюсника П (см. рис. 5.30) окажутся ненулевыми, то искусственно обнулив их, пользуясь интегралом Дюамеля, можно рассчитать одну из составляющих переходного тока, называемую принужденной составляющей этого тока. Другую - свободную составляющую искомого переходного тока, обусловленную исключительно ненулевыми начальными условиями накопителей, можно рассчитать, например, классическим или операторным методом. Подобный случай будет рассмотрен в следующем параграфе.
273
5.11. Свободные процессы в электрических цепях
Электромагнитные процессы в цепях без источников энергии, обусловленные начальным запасом энергий электрических и магнитных полей накопителей (конденсаторов и катушек), назовем свободными процессами.
5.11.1. Свободные и принужденные составляющие переходных токов и напряжений
Свободная* составляющая z*CB(?) переходного электрического тока 4(/) некоторой k-й ветви линейной электрической цепи обусловлена начальным запасом энергий электрических и магнитных полей в элементах цепи. Если при этом в цепи отсутствуют источники энергии, т.е. имеют место свободные процессы, то свободная составляющая переходного тока равна последнему, т.е. 'ксв (О= zz. (0 • Если же в цепи имеются источники, то она отличается от переходного тока ik (?) на его принужденную составляющую ^.nfl||H(z), обусловленную действием исключительно источников и равную разности переходного электрического тока и его свободной составляющей, т.е. 4Прин(0 = ^(<)_^св(/)- Таким образом, переходный ток можно представить в виде суммы его свободной и принужденной составляющих
'к (0 — св ( 0 Ч прин (О и искать последние по отдельности. Заметим, что здесь используется иное, чем в п. 5.2.2 разбиение переходного тока. Напомним, что там он представлялся в виде суммы установившейся 4у(/) и преходящей z’jtnpex (0 составляющих. Каждая из этих четырех составляющих 4СВ, /А.прин, iky, iknpex двух представлений переходного тока zt(/) = z;y(0 + ^npex(0 и 4(') = 4св(') + 4прин(0 имеет вполне очевидный физический смысл и методику расчета. Предпочтение тому или иному представлению тока может отдаваться как из физических соображений (когда, например, самоценными являются
Аналогично определяются свободные составляющие переходных напряжений, магнитных потоков, электрических зарядов и т.п.
274
собственно та или иная составляющая переходного тока), так и из соображений удобства расчета переходного процесса. Рассмотрим, как можно рассчитать такой процесс в случае представления тока в виде /д. — /д св (/) + /дприн (^)
1. Принужденная составляющая 4npHH(f) может быть найдена операторным методом или с использованием интеграла Дюамеля в предположении, что начальные условия всех накопителей энергии (напряжение конденсаторов и токи катушек) нулевые.
2. Свободная составляющая рассчитывается любым методом с учетом истинных начальных условий накопителей, но в предположении отсутствия источников энергии: ветви с источниками тока полагаются «разорванными», а с источниками ЭДС - «стя
нутыми».
3. Найденные в пп. 1, 2 составляющие переходного тока суммируются. Проиллюстрируем описанную методику на примере расчета переходного тока z(z) в цепи, изображенной на рис. 5.34.
Пример 5.6. Положим, что в цепи рис. 5.34 е(?) = (7 1-е т
а «с(0) ^0-
1. Воспользовавшись полученным
в примере 5.5 результатом, положим
Рис. 5.34
?А-прин V ) ~ „
2. Воспользовавшись результатом расчета схемы рис. 5.10 после замыкания в ней ключа (см. пп. 5.4.1), положим /св (/) = е г.
3. Искомый переходный ток равен
г(0 *св (0 + ;прин (0 „ е
К
и т
— ---е
R Т-т У
275
5 11.2. Характер свободной составляющей тока
и свойства корней характеристического уравнения цепи
Составив для свободной составляющей тока 4св(0 = 4(0 = 'л некоторой как угодно сложной линейной электрической цепи без источников дифференциальное уравнение (см. пи. 5.2.1)
d" . dn~x . d2 . d . . Л
"dt" df 1 dt2 dt k °k
запишем соответствующее характеристическое уравнение anpn + an_xpn~X +... + 772j>2 + 77] px + 77O = 0.
Свойства корней полученного уравнения определяет характер поведения рассматриваемой свободной составляющей тока. При отсутствии источников в цепи процессы в ней обусловливаются наличием ненулевых начальных условий на некоторых накопителях и поэтому для тока k-й ветви имеет место соотношение
(0 — ^ксв (0 — гА прех (О’ 'А'прин (1) — 0 .
Положим, что все корни ph i = \,2,...,n характеристического уравнения различны, тогда (см. п. 5.2.1)
ik - A.ePl‘ + A2eP2t +...+ AnePr,t,
и становится очевидным следующее.
1. Вещественные части всех п корней должны быть неположительны (Re Pj < 0 ), т.к. процесс в отсутствии источников, исходя из энергетических соображений, не может быть нарастающим.
2. Все комплексные корни должны быть попарно сопряженными, так рассматриваемое выражение тока должно принадлежать вещественной области.
Рассматривая случай возможной т-й кратности некоторого корня (т > 2), необходимо исключить возможность мнимости этого корня. В самом деле, пусть чисто мнимые корни /?, = jcOj и р* = (см. п. 2) имеют кратность т и соответствующая группа слагаемых в выражении для /св(/) имеет вид
(Ao + Axt + A2t2 +... + Am_]tm~x jsin (Djt
и определяет колебания с нарастающей к бесконечности амплитудой (при Отсюда следует, что такое невозможно с энерге-
тической точки зрения.
276
3. Чисто мнимые корни должны быть простыми. Итак, если корни характеристического уравнения:
- все вещественные, то свободный процесс носит не возрастающий апериодический характер;
— все комплексные, попарно сопряженные, то процесс носит колебательный характер, причем если среди них встречаются пары чисто мнимых корней, то в свободном процессе присутствуют незатухающие колебания;
— носят смешанный характер, т.е. наряду с комплексно-сопряженными есть и чисто вещественные корни, то однозначно определить свободный процесс как апериодический или колебательный сложно, все зависит от соотношения модулей вещественных и мнимых частей различных корней (см. пп. 5.11.3).
В заключение обратим внимание на связь корней рассмотрен-к
ного выше характеристического уравнения цепи а^р' = 0 с кор-7=0
нями знаменателя //(/>) = 0 в операторном выражении для тока
/ х G(p)
h\P) =—Следует иметь в виду, что среди корней
pJ, j = > п уравнения Н(р) = 0 наряду с рассмотренными
выше корнями р,, определяемыми пассивными параметрами цепи, присутствуют и корни, определяемые изображениями источников (подробнее этот факт будет рассмотрен в п.5.12).
5.11.3. «Жесткие» и «дребезжащие» модели электрических цепей. Особенности поведения свободных составляющих переходных токов в некоторых предельных случаях
В инженерном искусстве составления математических моделей электродинамических систем и электрических цепей в частности важную роль играет умение выделить значимые факторы, пренебрегая второстепенными. Часто не понимая физических особенностей моделируемых процессов, стараются учесть как можно больше параметров, гипотетически влияющих на процесс. При этом математическая модель усложняется не только по размерности (числу уравнений), но и по свойствам; из-за чего численная ее обработка становится весьма сложной. В этом отношении особенно показательны два типа моделей - «жесткие» и «дребезжащие» мо
277
дели цепей. Проиллюстрируем особенности поведения свободных составляющих решений уравнений таких моделей применительно к простейшему случаю ранее изученного процесса разряда конденсатора на /?Л-цепь (см. и. 5.5).
Жесткими называются системы (математические модели, уравнения цепей в частности), траектории процессов которых имеют два выраженных участка:
- участок пограничного слоя /е [0,гпс] с большой скоростью процессов (большими по модулю значениями производных переходных токов, напряжений и т.д.);
- участок гпс < / < Т, г||С « Г с относительно медленными
скоростями процессов.
Здесь гпс - длительность пограничного слоя, а Т - заданное время исследования.
в)
Рис. 5.35
Пример 5.7. Рассмотрим апериодический разряд предварительно заряженного до напряжения С70 конденсатора на катушку с резистором (рис. 5.35) в случае малой добротности контура 0<сО,5
. Р L
р~ J— - волновое сопротив-
ление). Корни характеристического урав-
нения р, ? ~-d±Jd2 ——, S = — в этом V LC 2L
е R
случае приблизительно равны р} ~
1 ю
р2 =-----. Отношение модулей этих кор-
RC
ней, иногда называемое коэффициентом жесткости,
кж = -О- = d2 »4, Р2
где d = — - затухание контура. Налицо явление «жесткости». В самом деле, на участке noi раничного слоя, который можно положить равным (3 э- 5)гП1|П, где ГП1|П - минимальная постоянная времени
278
цепи. т.е. на участке гпс = (3 + 5)—— = (3 + 5)— происходит разное I Р\ I R
(со скоростью it=^-eP{t) нарастание тока i~ ( R
жении на конденсаторе. После прохождения пограничного слоя ток ио <
i - -^-е плавно (со скоростью
симального значения
до мак-
при практически неизменном напря-
^-еР2*) спадает до нуля
Е>2/^
практически за время Т - (3 + 5)ггаах = (3 + 5)—-— = (3 + 5)7?С. Ин-I Рг I
дуктивность катушки при этом не оказывает влияния на характер
R 1
процесса. Итак, вслучае когда [pj~ — »|/?2| =-, имеем
L RC
причем
L(P2~P\)
ер*
1-е
R
RC
R ____1_
е L — е RC
ПС
ПС
цепи с двумя накопителями
-^SLe RC . R
Таким образом, вместо одной
энергии (рис. 5.35а) можно было бы рассмотреть две цепи с одним
накопителем: первую (рис. 5.356) - на интервале /е [0, гпс), а вторую (рис. 5.35в) - на интервале [гпс, Т].
Переходный ток /(/) = zCB(/) цепи рис. 5.35а изображен на рис. 5.36а, ток цепи рис. 5.356 на рис. 5.366, а ток цепи рис. 5.35в - на рис. 5.36в.
Рассмотренный пример хорошо иллюстрирует тот факт, что жесткие модели появляются в случае неадекватного представления о характере процессов в цепи: одной моделью сделана попытка описания по сути двух процессов с существенно разными скоростями, и если при аналитическом решении подобных уравнений особых сложностей не встречается (сложности скорее в воспроиз-
R \
—/
L
1
279
ведении траекторий подобных процессов, особенно если коэффициент жесткости достигает тысяч и миллионов), то численное решение для данного уравнения второго порядка
d2 Rd 1
—=-< +----1+----1 = 0;
dt2 L dt LC
/(0) = 0,Г(0) = -Ж
в случае подобной жесткости сталкивается со значительными трудностями и требует специального подбора методов интегрирования.
Термином «дребезжащая» математическая модель цепи будем пользоваться в случае, если решение со
ответствующих уравнений имеет быстроосциллирующий характер.
Пример 5.8. Рассмотрим процесс разряда конденсатора, предварительно заряженного до напряжения 7/0, на катушку с резистором (рис. 5.37а) в j»0,5, P = При лебательный характер, Т =—, щ0 =
огибающей их амплитуды г = <?“', т.е. k = ST «1. На рис. 5.376 изображен график подобного свободного тока i(z) = /me
Im для случая, когда R = 1 Ом, L = 0,2 Гн, С = 0,2-10"’ Ф, co0L
f70 = 10а/10 В. Соответственно /и =—=1А, r = J-l=0,4c, щ0£
условиях, когда добротность контура
1 с R
этом ----» о = —, и процесс носит ко-
JZc 2Z
причем период возникающих колебаний
1
-~-j== много меньше постоянной времени
—s2 LC
2тг
T =— = 0,04 с.
280
Заметим, что быстроосциллирующие траектории процессов подобных «дребезжащих» систем с предельно высокими добротностями (£):»0,5), также как и траектории процессов «жестких» систем с предельно низкими добротностями (£)<?: 0,5), весьма трудно как фиксировать в физических экспериментах, так и строить при численных решениях соответствующих уравнений. Особо следует подчеркнуть, что «дребезжащие» и, особенно, «жесткие» модели цепей весьма часто встречаются на практике. Поэтому умение правильно идентифицировать такие модели и системы и выбирать наиболее адекватные физике процессов методы физического либо математического их исследования весьма актуально для современного инженера.
281
5.12. Установившиеся составляющие токов и напряжений электрических цепей
5.12.1. Математические модели линейных электрических цепей с одним накопителем энергии
Линейные электрические цепи, содержащие только один накопитель энергии (катушку или конденсатор) условно можно представить в виде активного двухполюсника, состоящего из резисто-
Рис. 5.38
На первом этапе расчета этих цепей заменим двухполюсник соответствующими эквивалентными генераторами и получим простейшие цепи с одним накопителем (рис. 5.39а,б). Математическое описание цепей рис. 5.39а,б элементарно и эквивалентно описанию исходных цепей рис. 5.38а,б в части процессов и накопительных элементов. Математические модели полученных простейших цепей имеет смысл составлять относительно тех переменных, которые
„ ш “ ы/ О'2
определяют запасы магнитной гкм - —— и электрической - —— энергий, т.е. относительно тока iL катушки и напряжения ис кон-
Рис. 5.39
Полученные при этом уравнения dn R . 1
= л(°) = *ог. ^0;
282
dllr 1 1 /о\ л
—— =----и, ч--М, иг 0) = нпг, />(.)
dt RCcRCy/
называют уравнениями состояния рассматриваемых простейших цепей.
На втором этапе расчета процессов в цепях рис. 5.38а,б решают полученные уравнения состояния, т.е. находят функции времени /t(/) и г/с(/)- На третьем этапе заменяют накопители в цепях рис. 5.38а,б соответствующими источниками J = iL(t) и e = »c(z) и находят токи и напряжения внутренних элементов двухполюсников А резистивных цепей (рис. 5.40а,б), эквивалентных исходным цепям, но не содержащих накопителей энергии, и потому описываемых чисто алгебраическими уравнениями.
а) б)
Рис. 5.40
Рассмотренная методика показывает, что самым сложным ее этапом является второй этап - этап решения уравнений состояния. Однако этот этап является и наиболее формализованным, даже полученное уравнение состояния можно в обобщенном виде записать как
х-ах + /; х(О) = хо; />0.
Здесь положено
R , 1 . .
x = lL-,a = -—; 7=-w; *о=гот
1,1 их = пс;а = -—; f = хо = иос-
Рассмотрим подробнее решение этого простейшего дифференциального уравнения, пояснив при этом смысл ранее введенных четырех составляющих решений уравнений, описывающих переходные процессы в цепях.
283
5.12.2. Свободные, принужденные и преходящие, установившиеся составляющие переходных токов и напряжений простейших электрических цепей
Полагая, что x = x(f) представляет собой переходный ток (x-ir) или переходное напряжение (х-ис) простейшей цепи с одним накопителем, решение полученного уравнения х = ах + /, х(0) = х0 представляем в двух видах:
Л — ^СВ +^прин’ ^СВ -^0’ Дтрин —
0
Л ” Дтрех + %у» Дтрех — где очевидна следующая связь составляющих решения
Д1рех — ^св & ^у(^)’ Д:в — Дурех + ^у(®)’
Дурин-^у—Лу(®)’ Д' — е Д (0+ Дурин
Пример 5.9. Пусть в цепи рис. 5.39а и = U0 - const, тогда для
уравнения
х — ax + J, R Г hr где x = iL; а =-----; j =—Uo имеем
L L
--i'-
Д св ~ е (0 /. ’ Д прин — J 0
Окончательно для переходного тока имеем
- Д {
~ г£ св + гС прин ~ г0£ —
Л
R Л t
L
1 L
1-е
L R
R Л
—t L
Составляющие хсв и хприн из известной формулы Коши
at
л'о — ху(0)| тоже можно найти в
\еа{,~Т) f(t)dz о
можно рассматривать и как составляющие формулы интеграла Дюамеля. Составляющую хпрех
аналитическом виде. Отсутствует только выражение для определения в замкнутом аналитическом виде установившейся составляющей решения. Для рассмотренного элементарного примера 5.9 эта со-
ставляющая хорошо известна (см. пп. 5.3.2) ху - iL у
284
R
Тогда л„рсх =г£прех = у L
и выражение переходного
тока, полученного с ее участием
'L (') = 4 прех +4 у = е £ f‘01
\ К J к
совпадает с полученным ранее для него выражением из суммы 4 (0 — 4 св + 4 прин •
Таким образом, из четырех используемых здесь составляющих решения простейшего уравнения состояния отсутствует только выражение для определения в замкнутом аналитическом виде одной составляющей - установившейся составляющей ху(/). Вместе с тем именно эта составляющая представляет наибольший интерес как с инженерной точки зрения, поскольку установившиеся процессы для многих, если не большинства электроустановок, являются наиболее характерными, так и с математической точки зрения, поскольку через нее могут выражаться преходящая, принужденная и свободная составляющие решения рассматриваемого уравнения (см. выше).
5.12.3. Определение в замкнутом аналитическом виде установившихся составляющих решений простейшего уравнения состояния электрических цепей
Рассмотрим правое преобразование Лапласа функ-
ции /(/)
F(p/)= р pTf(t + r)dT.
о связанное с обычным преобразованием Лапласа соотношением
Подробнее о преобразованиях Лапласа F(/>./)= |е~рт/(/±г)Дг и их ис-о
пользовании при решении задач электродинамики см. в кн.: Демирчян К.С., Бутырин П.А. Моделирование и машинный расчет электрических цепей. - М.: Высшая школа, 1988; Михайлов Ф.А., Теряев Е.А., Булеков В.П. и др. Динамика непрерывных линейных систем детерминированными и случайными параметрами. - М.: Наука, 1971.
285
на основе которого можно построить некоторую таблицу связи функций-оригиналов / (/) и их изображений F(pz/).
Таблица 5.5
Ко Оригинал /(/) Изображение F( pjt'j
1 А A/p
2 Аеа<
3 t t 1 p + p2
4 sin 69/ p sin cot + CD cos cot 2 2 p +0)
5 cos cot p cos cot + co sm cot 2 2 p +0)
Можно показать, что изображением производной f'(t) функции /(/) будет функция pF -/(/). Используя введенное преобразование Лапласа, можно формально просто находить установившуюся составляющую решения уравнения состояния
x = ax + f, х(О) = хо.
Запишем изображение этого уравнения
F^(p?) - *(0 = аХ(р/) + f(f/) и преобразуем его к виду
(p-a)%(p/) = x(/) + F(p/).
Теперь дадим математическое (не физическое, как ранее) определение искомой составляющей решения, а именно: под установившейся составлякицей х (/) решения
*(') = ху (/) + хпрех (г) = ху (/) + еа1 [х0 - ху (0)] будем понимать составляющую решения, удовлетворяющую уравнению х-ах + f и не содержащую членов вида е“'^, определенных на всем интервале t > 0, в то время как другая составляющая решения хпрех (/) должна представлять собой именно такую экспоненту.
е"Гх0-х (0)1
Поскольку в области изображений х I р ,t\ -—k-------
F ' p-а
286
имеет полюс в точке р = а, то изображение Ху ( pjt j установившейся составляющей в этой точке полюса иметь не должно. Итак, положив в последнем уравнении X(р^ = Ху(pft^ и р -а, имеем
°-A'y(/7/) = xy(Z) + F(v)-
Поскольку Ху (pjt^ при р = а полюса не имеет по определению, то левая часть последнего уравнения образуется в нуль, следовательно,
xy(/) = -F(a/).
Таким образом, для построения установившейся составляющей решения уравнения х = ах + f со сколь угодно сложным аналитически заданным воздействием (даже не периодическим!) достаточно:
1) найти его изображение pytj;
2) заменить в нем р на коэффициент а;
3) поменять перед этим изображением знак.
Пр имер 5.10. Для данных примера 5.9 x = ax + f, x — iL,
R - 1
а =---, t - —Un находим:
L L
' ' pL
2) F(a,t) = ^ = ;
' 7 7 aL R
I L)
3) xy -Il у
К
Пример 5.11. Пусть в примерах 5.9, 5.10 u(t) = at - непериодическая линейная функция. Посмотрим, какой смысл будет иметь в этом случае установившаяся составляющая, найденная согласно полученной формуле и методике ее использования.
СК/
1. Для ^=-£” находим по табл. 5.5 изображе-
„/ \ а( t 1
«Г(р/)=7 -+-2 .
Ъ\Р р J
287
2. Подставляем в это изображение значение р-а =--, полу-
1 (-Л/£)2
L-Rt
= а—Т~ R2
3. Меняем перед полученным выражением знак. Получаем
Для того чтобы понять смысл установившейся составляющей решения в случае, когда воздействие носит непериодический характер, найдем переходный ток
Rt-L ~l( aL
lL~lLy+lL прех “ а~ п~ + е г0Т+^Г
К \ к
Поскольку iL прсх —>0 при /—>0, становится ясным, что в ка
честве установившейся составляющей решения нами была найдена
асимптота переходного тока.
Разработанный подход к определению в замкнутой аналитической форме установившейся составляющей переходного тока может быть распространен и на более сложные уравнения цепей, содержащих несколько накопителей энергии (подробности см. в книгах, ссылки на которые были даны в начале данного параграфа).
5.13. Метод переменных состояний
5.13.1. Уравнения состояния электрических цепей
Под уравнениями состояния линейных электрических цепей понимается каноническая (разрешенная относительно производных) система обыкновенных дифференциальных уравнений, описывающих переходные процессы в этих цепях относительно таких переменных, которые однозначно определяют запасы электрической и магнитной энергий в цепях. В качестве подобных переменных, называемых переменными состояния, принимают токи индуктивных катушек и напряжения конденсаторов. Подобные уравнения формируются достаточно просто, если в схеме цепи отсутствуют особые контуры, проходящие исключительно по конденса-
Уравнения состояния электрических цепей и основанный на их использовании метод анализа переходных процессов предложил в 1957 году Т.Р. Башков (T.R. Bashkow).
288
торам и источникам ЭДС, и особые разрезы (сечения), проходящие исключительно по катушкам и источникам тока. В случае отсутствия в схеме цепи таких особых контуров и особых разрезов суммарное число т катушек и конденсаторов, называемое порядком сложности цепи, и определит размерность (т.е. число уравнений) уравнений состояния. Таким образом, в общем случае уравнение состояния некоторой цепи имеет вид
x=Ax+f, х(О) = хо, />0,
где А = | - т х т -вещественная матрица (матрица коэффици-
ентов уравнения состояния), х = х(/) = [х1 (/)...- ш-мерный
вектор переменных состояния; / = /(/) = [/[ - т-
мерный вектор воздействий; х0 — вектор начальных значений (токов катушек и напряжений конденсаторов в момент / = 0). Коэффициенты матрицы А определяются топологией электрической цепи и параметрами ее элементов. Вектор воздействий можно пред
ставить также в виде
f = Bv,
где В - т х и-вещественная матрица, определяющая вклад входных величин в баланс токов и напряжений; v = v(t) = [ц(/)...цДО] /7-мерный вектор входных величин, коэффициенты которого суть функции источников ЭДС и тока.
Уравнение состояния можно составлять по специально разработанным для этой цепи алгоритмам, в простейших же случаях достаточно целенаправленно преобразовывать переменные в уравнениях Кирхгофа и компонентных уравнениях цепи. Так, для цепи, изображенной на рис. 5.41, уравнение состояния можно составить непосредственно по второму закону Кирхгофа о jdi Ki + L— + иг = и dt
„ duc и компонентному уравнению конденсатора С —— = i. dt
Рис. 5.41
Преобразовав эти уравнения, получаем
г£1=Г-Л/Л dt[uc\ L Vе
-1Д1Г 4
° JL“c
и
L
О
10 Зак. 1186
289
5.13.2. Решение уравнений состояния электрических цепей
Формальное соответствие простейшего уравнения состояния для цепи с одним накопителем
x = ax + f, л(О) = хо и уравнение состояния
x-Ax + f, л(О) = хо позволяет решение последнего х(/), описывающего переходный процесс, представить в виде
х = Асв + *прин = еА'хо + |ел(/“г)/(г)с/г;
о
х = *прех + *у = еА' [л-о - Ху (0)] + Ху (?), где еАг — матричная экспонента, равная в случае простого спектра матрица А (отсутствия у ней кратных собственных чисел Qfy, j-1,2,...,т) сумме
At V" о ai‘ е =Lpje > j=i
где Pj - квадратные mxm-матрицы, называемые проекторами, т
т П
7=1 П («/ -^) »=!./*/
1 - диагональная единичная матрица порядка.
Метод, основанный на формировании уравнений состояния и последующем их численном или аналитическом решении, носит название метода переменных состояний. Исторически он был создан для численного анализа переходных процессов в цепях, в настоящее же время машинный анализ цепей не требует формирования уравнений именно в канонической форме. Сейчас ценность его усматривают в ином. Во-первых, по уравнениям состояния сложных цепей формально просто получить в замкнутом аналитически виде описание переходного процесса и всех четырех составляющих этого процесса . Во-вторых, уравнения состояния весьма удобны для решения задач управления цепями.
См. ссылку в п. 5.12.3 на книгу К С. Демирчян, П.А. Бутырин.
290
Глава 6
НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ И ИХ ХАРАКТЕРИСТИКИ
Сушествует обширный класс элементов и устройств, параметры которых являются функциями тока и напряжения в самой цепи, т.е. функциями часто заранее неизвестных переменных. Электрические цепи, в которых содержится хотя бы один такой элемент, относятся к классу нелинейных. Нелинейные электрические цепи описываются нелинейными алгебраическими, дифференциальными или интегро-дифференциальными уравнениями, к которым в отличие от линейных, не применим принцип наложения. Следовательно, известные методы расчета: комплексный, операторный, интегралы Фурье, Дюамеля, основанные на принципе наложения, в чистом виде к нелинейным цепям применять нельзя. В связи с этим для расчета нелинейных электрических цепей используют специальные методы расчета: графические, аналитические и численные.
Графические методы позволяют наглядно и просто выполнять расчеты нелинейной цепи первого, а в ряде случаев, и второго порядка. Численные методы позволяют рассчитать цепь любого порядка, т.е. найти приближенное решение конкретного уравнения, в котором заданы конкретные начальные условия. Если начальные условия или значения параметра изменились, расчет необходимо проводить заново.
Аналитические методы позволяют найти решение уравнений в общей форме, которое дает возможность исследовать поведение цепи при изменении ее параметров и начальных условий. Однако нужно заметить, что лишь для небольшого числа уравнений, описывающих нелинейную цепь, можно найти решение, выраженное через известные функции.
Значение нелинейных цепей и систем для практики огромно.
ю* 291
Только в них возможно осуществлять преобразование переменного тока в постоянный и наоборот, преобразование частоты тока, стабилизацию токов и напряжений, модуляцию и детектирование колебаний, умножение и деление частоты и т.д. Такое широкое применение нелинейных цепей в технике является причиной пристального внимания к их изучению.
6.1. Общая характеристика нелинейных элементов
Произвольная электрическая цепь обычно содержит источники электромагнитной энергии в сочетании с резистивными, емкостными и индуктивными элементами. Каждый элемент цепи количественно определяется своим параметром: резисторы — сопротивлением R (или проводимостью G), конденсаторы - емкостью С, катушки — индуктивностью L.
При заданной геометрической конфигурации элемента его параметр является количественной характеристикой взаимодействия электрического и магнитного поля с материалом (веществом), из которого сделан тот или иной элемент. Например:
- сопротивление прямоугольного провода сечением а на участке АВ длиной I
в
[ЁД
где Е - вектор напряженности электрического поля; 8 - вектор плотности тока; у - удельная электрическая проводимость материала проводника;
- емкость плоского конденсатора с площадью пластин .v и расстоянием между обкладками d
ds
Q =Ч__ S_____ _
и [Ё di ~ d ’
d
где f0 абсолютная диэлектрическая проницаемость вакуума: Ег -относительная диэлектрическая проницаемость вещества между электродами конденсатора;
292
- индуктивность катушки с числом витков w, расположенной на тороидальном сердечнике с сечением 5 и длиной средней линии I
j-V - s
i i -
w2s
dl d w у
где B,H — вектор индукции и напряженности магнитного поля; абсолютная магнитная проницаемость материала сердечника.
Нелинейные элементы могут быть инерционные и безынерционные. Инерционные элементы не обладают возможностью быстрого изменения параметра. Впредь под инерционными будем понимать такие элементы, у которых это свойство основано на температурной инерционности характеристик материала.
Более подробно описание свойств инерционных или безынерционных элементов будет дано по мере необходимости в последующих главах.
Свойства нелинейных элементов удобно описывать с помощью характеристик (или семейства характеристик), связывающих входные и выходные пара-,/1 1 з метры элемента. Так. на рис.
I I 'у 6.1 представлены снятые при \ I постоянных токе и напряже-
/ нии характеристики инерци-
I / j онных нелинейных элементов:
_______ .. 2.' -г ---------► ] - лампы накаливания с
s''""/ V вольфрамовой нитью; 2 -
j лампы накаливания со сталь-
ной нитью в водородной сре-f \ де; 3 — лампы накаливания с
^3 ] 2^ угольной нитью.
Особенностью этих ха-
Рис. 6.1 рактеристик является их сим-
метрия относительно начала координат, т.е. независимость свойств данных нелинейных элементов от полярности приложенного напряжения и направления протекания тока.
Во многих областях практического использования нелинейные элементы находятся под воздействием переменных величин токов и напряжений. В этих условиях свойства нелинейных элементов
293
описываются в отличие от предыдущего случая (рис. 6.1) с помощью характеристик, связывающих мгновенные значения /(/), .
Данные характеристики можно наблюдать на экране осциллографа. Они могут быть симметричными и несимметричными относительно начала координат, могут представлять собой одну линию либо семейство кривых.
При решении целого ряда электротехнических задач важно определить законы изменения действующих значений токов и напряжений в схемах с нелинейными элементами. Для этого необходимо иметь вольт-амперные характеристики, связывающие действующее значение напряжения на нелинейном элементе с действующим значением тока, протекающего через этот элемент. Эти характеристики имеют ряд особенностей. Во-первых, они всегда расположены в первом квадранте, т.к. по определению действующих величин они в принципе не могут быть отрицательными. Во-вторых, вольт-амперные характеристики для действующих значений зависят от формы напряжения и тока. Так, характеристики одного и того же нелинейного элемента, полученные, например, при синусоидальном и прямоугольном напряжениях, будут различны. В связи с этим при экспериментальном получении данных характеристик необходимы приборы, измеряющие действующие значения напряжения и тока.
6.1.1. Нелинейные резистивные элементы и их параметры
Одним из характерных примеров нелинейного резистивного бе
зынерционного двухполюсника, у которого ток, проходящий через него, нелинейно зависит от приложенного напряжения, является по-
лупроводниковый диод. Из рис. 6.2 видно, что диод обладает несимметричной нелинейной характеристикой, и при переменном (двухполярном) напряжении происходит преобразование - получение однополярного тока. Такое преобразование называют выпрямлением. Диод может выполнять и более сложную обратную опера
294
цию — детектирование, т.е. выделение переменной низкочастотной составляющей сложного несинусоидального сигнала.
Следующим весьма сложным нелинейным элементом является электрическая дуга. Характеристики дуги представлены на рис. 6.3.
Нелинейность характеристик объясняется сложным процессом ионизации в разрядном пространстве. Характеристики будут симметричны, если электроды одинаковы (рис. 6.3а) и несимметричны, если они различны (рис. 6.36). При низкой частоте точки характеристики устанавливаются практически безынерционно. При повышенной частоте проводимость ионизированного межэлектродного пространства вследствие теплового процесса запаздывает по отношению к напряжению. Поэтому характеристика получается в виде своеобразной петли, называемой петлей гистерезиса (рис. б.Зв). Электрическая дуга применяется в сварочном процессе, при создании электрических ламп с мощным световым потоком, для высококачественной плавки металлов и сплавов и т.п.
Типичными представителями безынерционных нелинейных резистивных двухполюсников являются тиритовые и вилитовые сопротивления. Они состоят из смеси графитового карборундового порошка. Их вольт-амперная характеристика имеет симметричный вид и показана кривой 1 на рис. 6.1.
Каждому значению тока и напряжения в нелинейном элементе соответствует определенная рабочая точка на характеристике. Область возможных положений рабочей точки на характеристике образует рабочую зону или рабочий участок. Для описания практически важных свойств нелинейного элемента на рабочем участке вводят так называемые статические, динамические и дифференциальные параметры. Причем каждый из этих параметров соответствует тем условиям, в которых может работать нелинейный элемент.
295
Режиму постоянного тока соответствуют статическая проводимость
( т т \ О 1П;
Gct(^o) = 77 =—tg«
и статическое сопротивление нелинейного двухполюсника (рис. 6.4)
я
2 )
n / г т \ О I I
7?ctG7o) = -7 =—tg • /0 mi у 2 J
Как видно из рис. 6.4, статическая проводимость (сопротивление) определяется углом наклона прямой, проходящей через начало координат и рабочую точку. При изменении координаты рабочей точки статическая проводимость (сопротивление) изменится, что является следствием нелинейных свойств элемента.
Понятие динамической проводимости (сопротивления) вводят для описания режима работы нелинейного элемента при больших значениях переменных токов и напряжений. Динамические параметры вычисляются по формулам:
di Gd= — = du mv
_ dU т,. (л
Ra=—=—tg 7
dl Ш: k 2
Динамическая проводимость (сопротивление) может быть как положительной, так и отрицательной (см. рис. 6.4).
В тех случаях, когда рабочий участок на нелинейной характеристике имеет сравнительно малую величину и расположен в окрестности статического режима с координатами 10, Uo, удобно оперировать понятием дифференциальной проводимости (дифференциального сопротивления). Кроме того, характеристики нелинейных элементов, как правило, снимают экспериментально при достаточно медленном изменении входных величин. В связи с этим статические и динамические характеристики безынерционных нелинейных элементов совпадают, поэтому в дальнейшем мы будем опери-
296
ровать понятиями статических и дифференциальных параметров. На рис. 6.5 показана нелинейная зависимость г'(гг), для которой
Gd =
Аг
Ан
tg/:
Ан т
Rd=—=—ctgr-А/ nij
Очевидно, что чем меньше приращения Ан, Аг, тем ближе значение дифференциальной проводимости к динамической проводимости в данной рабочей точке. Действительно, в окрестности рабочей точки U0,I0 нелинейную характеристику можно представить в виде ряда Тейлора:
г'(гг) = i(U0 + Ан) = Агг + -^^Агг2 +....
V V ° ’ Uo dU0 2! dU20
При малых значениях Агг члены ряда (6.10) быстро убывают. Поэтому, ограничившись двумя слагаемыми, получим:
i{u^G„U0 + Gd^u.
Из последнего выражения легко усматривается взаимосвязь статических и дифференциальных параметров нелинейного элемента.
6.1.2. Нелинейные реактивные элементы и их параметры
Нелинейные реактивные двухполюсные элементы используют в своей основе нелинейную зависимость магнитных или электрических характеристик веществ и материалов от интенсивности электромагнитного поля.
Известно, что в ферромагнитных телах зависимость между индукцией В и напряженностью Н магнитного поля не только нелинейна, но и многозначна. Эта зависимость В = или у/ - f(i) носит название петли гистерезиса (рис. 6.6). Более того, для магнитных полей с различными амплитудами Нт перемагничивание осуществляется по различным частным гистерезисным циклам. Вершины всех петель гистерезиса лежат на основной кривой на-
297
Рис. 6.6
перемагничивающего
магничивания, а сами частные петли находятся внутри предельной петли гистерезиса.
Петлю гистерезиса принято характеризовать рядом параметров: индукцией насыщения Bs или индукцией Вт при заданной напряженности Нт, остаточной индукцией Вг, коэрцитивной силой Нс. Все эти параметры в обшем случае не яв-
ляются строго неизменными, а зависят от конфигурации магнитопровода, частоты тока, окружающей температуры и многих
параметров участка.
Неоднозначная зависимость магнитной индукции от напряжен-
ности магнитного поля значительно усложняет задачу анализа и расчета характеристик ферромагнитных устройств. Как правило, приходится прибегать к тем или иным допущениям, упрощающим решение конкретной задачи. Чаще всего пренебрегают явлением гистерезиса и считают магнитную индукцию однозначной нечетной функцией напряженности поля: = -В(-Н). Если в качестве
такой функции взята основная кривая намагничивания, то можно ввести понятия статической и дифференциальной магнитной проницаемости. Как и ранее, под статической магнитной проницаемостью //ст в заданной точке нелинейной характеристики будем понимать
В тк Н тн
На рис. 6.7 представлена кривая зависимости статической магнитной проницаемости от интенсивности поля. Начальное значение статической магнитной проницаемости определяется выражением
В Внач= lim —. нач н->о Н
Начальная магнитная проницаемость тесно связана с его коэрцитивной силой, уменьшаясь с повышением Нс. При этом в широком диапазоне Нс (от 0,5 до 2-105 А/м)
298
в среднем оказалось, что произведение //нач/7с ~ 0,1 Тл. Дифференциальная магнитная проницаемость характеризуется мгновенными значениями индукции и напряженности магнитного поля.
Для большинства конструкций трансформаторов, управляемых и неуправляемых магнитных устройств, или просто катушек с ферромагнитным магнитопроводом выполняются простые соотношения между потокосцеплением у/ и индукцией поля В, а также между током i и напряженностью поля Н.
у/ = wsB; iw = Hl.
При заданных размерах магнитопровода s, I и числе витков катушки w нелинейная зависимость ys = f(i) будет целиком повторять (в другом масштабе) зависимость В = f(H). Но тогда статической магнитной проницаемости /уст будет соответствовать статическая индуктивность:
, у/ w2s
Arr ~~~ ВоВст ~ 5
I I
а дифференциальной магнитной проницаемости p.d — дифференциальная индуктивность:
т dw w2s
Ld -~г~ di I
Особо подчеркнем, что статическая и дифференциальная индуктивности являются параметрами нелинейного электрического устройства — трансформатора, катушки и пр., в то время как соответствующие магнитные проницаемости являются только лишь параметрами материала, в данном случае — характеристиками электротехнической стали.
Кроме рассмотренного нелинейного индуктивного элемента, в группы реактивных двухполюсников входят нелинейные емкостные элементы, у которых связь между зарядом и приложенным напряжением выражается нелинейной зависимостью q = Для этих емкостных элементов также вводят понятия статической и дифференциальной емкости
Г -У • г - d(l с и du
Последние прямо пропорциональны соответствующей диэлектрической проницаемости:
D dD
ест ~ ’
Е dE
299
6.2. Аппроксимация нелинейных характеристик
6.2.1. Задачи аппроксимации
Для осуществления аналитического расчета электрической цепи с нелинейным элементом необходимо описать его характеристику (получаемую, как правило, экспериментально в виде таблицы или графика) некоторой математической зависимостью, т.е. формулой. Замена графика (таблицы) аналитическим выражением -аппроксимация — составляет неотъемлемую часть большинства электротехнических расчетов.
В целом процесс аппроксимации разбивается на два этапа:
- подобрать класс функций, т.е. выбрать подходящую структуру аппроксимирующего выражения;
— рассчитать неизвестные коэффициенты, входящие в выражение аппроксимирующей функции.
Определение коэффициентов аппроксимации обусловливает ее точность. Эти условия конкретизируются в описанных ниже методах аппроксимации. Важно отметить, что требования к точности аппроксимации обычно не являются сверхжесткими, т.к. относительно велик разброс характеристик нелинейных элементов. Точность аппроксимации должна быть одного порядка с точностью задания характеристики нелинейного элемента и с разбросом параметров всех элементов схемы.
6.2.2. Виды аппроксимирующих функций
В нелинейной электротехнике для целей аппроксимации чаще всего применяют следующие функции.
1. Степенной полином
у = a0 + арс + а^х1 +... + апхп.
Часто к степенному полиному приводит разложение функции в ряд Тейлора.
2. Экспоненциальный полином
у = А0 + 4eO|JC + А2е°2Х +... + Апеа"х.
Данную функцию удобно применять, когда имеется несколько воздействий, т.к. можно использовать равенство
3. Тригонометрический полином
у = А0 + 4sin(x + ^]) + Л2 sin (2.х+(р2) + ... + An sin (их + #>„)
300
Если аппроксимируемая функция проходит через начало координат, то коэффициент а0 в степенном полиноме должен быть принят равным нулю.
4. Дробно-степенная функция у = Аха, где а дробное число.
5. Различные трансцендентные функции: у - rzsh/?x;
у = а + b th/?x;
у = а + barctgflx.
6. Кусочно-аналитическая функция (метод сплайнов).
Суть метода заключается в том, что вся экспериментальная нелинейная характеристика у(х) (рис. 6.8) в рабочем интервале х{...х6 разбивается на участки, каждому из которых соответствует
аппроксимирующая функция уа(х), выбираемая таким образом, чтобы различие между у(х) и уа(х) было минимальным. Число участков выбирается по точкам нелинейной характеристики характеризуемым
. . (dy_) (dyA
- изломами характеристики (х2), гДе - >
\ dx J \ dx J
— экстремумами (х3, х4), где — = 0;
dx
2
- точками перегиба (х5), где —у = 0.
dx1
301
Погрешность аппроксимации в текущей точке х можно определить по формуле
где Ду = уа - у, Дг - ха - х; у, х - координаты текущей точки нелинейной характеристики; уа, ха — соответствующие ей значения аппроксимирующей функции.
В общем виде решить задачу по подбору кусочно-аналитических функций для аппроксимации сложной нелинейной функции довольно трудно. Так, в большинстве случаев требуется получить, помимо минимального расхождения функций у(х) и уа(х), еще и непрерывность производных аппроксимирующей функции.
6.2.3. Кусочно-линейная аппроксимация характеристик нелинейных элементов
Рассмотрим подробнее наиболее простой и часто используемый метод кусочно-линейной аппроксимации. Применение этого
метода проиллюстрируем на примере. Пусть задана вольт-амперная
характеристика нелинейного резистивного двухполюсника — тун
Рис. 6.9
нельного диода (рис. 6.9). Аппроксимируем ее тремя участками прямых ОА, АВ, ВС. Запишем уравнения этих прямых, используя координаты точек аппроксимации 0 (0,0), А(7Ь Ui),B(h,UJ), C(IS,US\.
для прямой ОА и—0 _/-О
-О- 7,-О’ для прямой АВ u-Uv _ г — 1Х и3-иГ~^’ для прямой ВС ~4 7
U5-U3 15-13'
302
Эти уравнения легко преобразовать:
- для участка 0 < z < 7,
U.i т,,
и = —— = —— = R\i,
Л т,
- для участка 73 < г < 7,
+ tg«2(z-71) + l7i-7?2(z-7i) + 7/i;
- для участка /| < z < 75
^_14^1(г_/з) + с/з=Гк tg«3(z-73)+7/3=7?3(z-73) + 7/3, 75~73 т1
где 7?i, /?2, Rs - эквивалентные сопротивления соответствующих прямолинейных участков аппроксимации.
Каждому уравнению для трех участков токов соответствует своя расчетная схема замещения - рис. 6.10а,б,в. Таким образом, заданный нелинейный элемент можно заменить на определенном рабочем участке эквивалентной двухполюсной схемой, состоящей из линейных элементов и идеальных источников энергии. Правда, некоторые сопротивления в этих расчетных схемах могут быть отрицательными (см. рис. 6.106), что лишний раз подтверждает их математическую (а не физическую) природу. Очевидно, что схема а) на рис. 6.10 является частным случаем схем б) и в), когда в них отсутствуют источники энергии.
Рис. 6.10
Главный недостаток этих схем (рис. 6.10) связан с наличием в них двух разнотипных источников. На примере уравнения для участка /3 < z < 15 покажем, каким образом можно этого избежать. Рас
кроем скобки в правой части уравнения и перегруппируем члены:
—/?2z + (+ /?27]) = —Т?2г + + 7j —— tgz^ 1.
/и, I
и =
303
Но из треугольника Л С/i СД (см. рис. 6.9) следует, что
ш
Ui+Ix—!Ltga2=U4.
mt
Подставив последние уравнения, найдем новое уравнение для участка АВ аппроксимации характеристики нелинейного элемента:
u = -R2i + U4'.
Как следует из рис. 6.9, напряжение (74 определяется точкой пересечения координатной оси и с продолжением прямой АВ. Последнему уравнению соответствует простейшая схема замещения (см. рис 6.10г). Наконец, это уравнение можно решить относительно тока:
1 U4 „
i =---и А—- - -Gnu + h,
R2 r2
где 14 определяется точкой пересечения координатной оси i с продолжением аппроксимирующей прямой АВ.
По данному уравнению может быть поставлена в соответствие простейшая схема, содержащая проводимость G2 и идеальный источник тока 14.
Аналогичные простейшие схемы замещения нелинейного элемента могут быть получены при кусочно-линейной аппроксимации для каждого участка.
Глава 7
РАСЧЕТ НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ ПРИ ПОСТОЯННОМ ТОКЕ
7.1. Основные методы расчета
Как известно из главы 6, нелинейные цепи можно рассчитывать различными методами: графическим, аналитическим, численным или их комбинацией. Метод расчета нелинейной цепи в значительной мере зависит от того, как представлены характеристики нелинейных элементов, получаемые обычно опытным путем: в виде графиков, таблиц или в аналитическом виде.
Графические методы основаны на представлении уравнений Кирхгофа в графическом виде. Решение системы уравнений Кирхгофа и определение токов и напряжений в ветвях сводятся, по существу, к суммированию абсцисс и ординат соответствующих кривых, нахождению точек пересечения кривых и т.п. Графические методы отличаются своей наглядностью. При этом достигаемый результат имеет точность, которая в большинстве случаев удовлетворяет предъявленным требованиям. Недостатком графических методов является то, что они не дают возможности решить задачу в общем виде.
Аналитические методы расчета основаны на представлении характеристик нелинейных элементов в виде математических функций. При этом имеется возможность составить необходимые уравнения, описывающие поведение нелинейной цепи. Решение этих уравнений может дать ответ на все вопросы, связанные с расчетом нелинейной цепи. Основным преимуществом аналитических методов является то, что они дают возможность получить решение в общем виде и сравнительно легко исследовать влияние различных параметров на поведение электрической системы. Однако ана
305
литическая аппроксимация характеристик нелинейных элементов практически может быть выполнена лишь приближенно. Решение нелинейных уравнений цепи во многих случаях связано с большими трудностями. Чем выше требуемая точность, тем более трудоемкую математическую задачу приходится решать.
Например, если характеристика нелинейного резистора аппроксимирована аналитической функцией вида
I = 67^ + U\U + Cl",U +_,
то для определения тока / при заданном напряжении U решение находится сразу, путем подстановки U в это уравнение. При заданном токе I для определения входного напряжения нужно решать квадратное, кубическое и т.д. уравнения, и решение может оказаться неоднозначным. Во многих практических задачах для решения подобных уравнений используют различные численные методы и итерационные процедуры; метод последовательных приближений; метод Ньютона; метод спуска и т.д. Практически во всех случаях численное решение требует значительной вычислительной работы.
При решении задач для нелинейной цепи постоянного тока необходимо помнить, что напряжение на катушке и ток через конденсатор равны нулю:
d'V „ . dq и 7 =--- 0; I = — = 0.
dt dt
Кроме того, существующая аналогия между электрическими и магнитными цепями на постоянном токе позволяет рассчитывать их одними и теми же методами.
7.1.1. Гоафический метод расчета
нелинейных электрических цепей постоянного тока
Нелинейные цепи простой конфигурации удобно рассчитывать известными из курса математики методами графического решения уравнений. Расчет нелинейной цепи сводится к нахождению токов и напряжений на участках цепи с помощью вольт-амперной характеристики. В основу метода решения сложных цепей положено их систематическое упрощение, выполняемое иногда в несколько этапов. Это относится, например, к преобразованию последовательного или параллельного соединения двух и более нелинейных элементов с известными характеристиками в один элемент, к представлению нелинейного активного двухполюсника в виде простого
306
нелинейного сопротивления и источника и т.д. Таким образом, все сложные цепи стремятся заменить возможно более простыми.
Последовательное соединение. Для нахождения тока в цепи и напряжения на нелинейных последовательно соединенных элементах (НЭ) НС1 и НС2 (рис. 7.1а), вольт-амперные характеристики которых показаны на рис. 7.16, необходимо воспользоваться вторым законом Кирхгофа для данной цепи U -Ux + U2. Задаваясь произвольными значениями токов (ординат), суммируют соответствующие им значения напряжений (абсцисс). В результате суммирования получается ВАХ, соответствующая всей цепи, которая может рассматриваться как один эквивалентный элемент НСЭ (см. рис. 7.1а). Далее по напряжению U, приложенному к цепи, находят ток / и напряжение на каждом элементе Ux и U2. Аналогично может быть построена эквивалентная характеристика участка цепи с несколькими последовательно соединенными нелинейными элементами.
Рис. 7.1
Рис. 7.2
При фиксированном значении приложенного напряжения U ток и напряжение на НЭ могут быть найдены без построения результирующей характеристики. При этом используется второй закон Кирхгофа в виде U -Ц - U2. Для определения тока в цепи одну из заданных ВАХ (рис. 7.2) следует перенести параллельно самой себе вдоль оси абсцисс вправо от начала координат на
307
значение приложенного напряжения U и повернуть ее так, чтобы получилось зеркальное отображение этой кривой относительно вертикали. Тогда точка пересечения зеркально отображенной характеристики /(С/2) = I(U-С/2) одного НЭ с характеристикой другого 7(Ц) определит искомый ток и напряжения U{ и U2, причем U{+U2=U. Если последовательно с НЭ включен источник постоянной ЭДС, то ВАХ участка цепи с этим НЭ и источником получается смещением характеристики НЭ влево на значение ЭДС источника, если направление ЭДС источника совпадает с током, и вправо, если не совпадает (рис. 7.3).
Параллельное соединение. Для нахождения тока в неразветв-ленной части цепи (рис. 7.4а) при параллельном соединении двух нелинейных элементов НС 1 и НС2 вольт-амперные характеристики
Рис. 7.4
308
которых заданы (рис. 7.4в), необходимо применить первый закон Кирхгофа I = Ц + /2. Задаваясь произвольными значениями напряжений (абсцисс), суммируют соответствующие им значения токов (ординат). Полученная ВАХ соответствует эквивалентному НЭ (рис. 7.46). Далее по заданному току I находят напряжение U и токи ветвей Ц и /2 (см. рис. 7.4в).
Если же задано напряжение U, то строить эквивалентную ВАХ не надо, т.к. токи 1\ и Z2 определяются из характеристик и 72((7), а суммарный ток 1 = 1х+1г. Аналогичный подход может быть использован при параллельном соединении нескольких НЭ.
Если параллельно с НЭ включен источник постоянного тока, то ВАХ участка цепи, содержащего НЭ и источник, получается смещением характеристики вверх на значение тока источника, если его направление совпадает с напряжением, и вниз, — если не совпадает (рис. 7.5).
Смешанное соединение. Применяя описанные приемы расчета, можно определить рабочий режим для любой цепи со смешанным соединением нелинейных элементов.
На рис. 7.6а показана схема для случая смешанного соединения трех НЭ, характеристики которых показаны на рис. 7.66. После замены двух параллельно соединенных НЭ одним эквивалентным A + 72 = Z3(t71) схема со смешанным соединением приводится к рассмотренной ранее схеме последовательного соединения двух
309
НЭ. Затем два последовательных НЭ также заменяются одним эквивалентным 73(С7). По заданному U находят ток 73, затем напряжения Ui и Uy. Зная напряжение (Д, находят токи Ц и /2.
7.1.2. Расчет сложной нелинейной цепи с двумя узлами
Для схем, содержащих только два узла, или схем, приводящихся к двухузловым, широко применяется метод двух узлов. Рассмотрим цепь с двумя узлами, между которыми имеются три параллельные ветви, содержащие НЭ и источники постоянной ЭДС (рис. 7.7а). Вольт-амперные характеристики НЭ изображаются
кривыми рис. 7.76. Для определенности положим, что Ех > Е2 > Е3. Положительные направления токов 1Х и 12 выберем к узлу а, тока /3 -к узлу Ь.
310
Для расчета цепи предварительно строится ВАХ каждой ветви /2((7) и Л(^)- При этом можно пользоваться уравнениями
Ц = Е,-С/; U2 = E2-U; U3 = E3+U.
Согласно этим уравнениям ВАХ первой и второй ветвей получают путем зеркального отображения характеристик 7|(Ц) и /2(С/2) относительно вертикальных осей, сдвинутых соответственно на значения заданных ЭДС Et и Е2 вправо от начала координат. ВАХ третьей ветви получают путем смещения характеристики I3(U3} на значение Е3 влево от начала координат (рис. 7.8). Затем строится результирующая характеристика 1\ + 12, показанная на рис. 7.8 пунктиром. Так как по первому закону Кирхгофа /, + /2 = /3, то пересечение этой характеристики с характеристикой Z3(t/) дает напряжение U между узлами а и Ь. Ток в каждом НЭ определяется по соответствующей вольт-амперной характеристике при известном напряжении U.
Метод двух узлов применим и в том случае, когда источники ЭДС содержатся не во всех параллельных ветвях.
7.1.3. Применение метода эквивалентного генератора
к расчету сложных нелинейных цепей
Произвольная цепь с одним нелинейным элементом. Сложную электрическую цепь с одним нелинейным элементом удобно рассчитывать с помощью теоремы об эквивалентом источнике. При
ЗИ
этом выделяется нелинейный элемент, а оставшаяся линейная цепь представляется в виде активного двухполюсника (рис. 7.9).
Рис. 7 9
Рис. 7.10
Схему линейного активного двухполюсника по отношению к зажимам а и b выделенной ветви можно представить в виде последовательного соединения источника Ет, резистора с линейным сопротивлением Rr и нелинейного элемента НС (рис. 7.10). Как известно, величина ЭДС эквивалентного источника равна напряжению на зажимах аЬ при разомкнутой ветви: £х = UabjiJi. Напряжение холостого хода определяется любым из методов расчета линейных цепей. Сопротивление резистора Rr равно входному сопротивлению линейного пассивного двухполюсника (источники ЭДС закорочены, источники тока разомкнуты). Расчет полученной цепи может быть выполнен графически, как при последовательном соединении элементов. Сумма падений напряжений на Rr и НС должна быть равна ЭДС эквивалентного генератора Ег.
Произвольная цепь с двумя нелинейными элементами. Пусть имеется сложная электрическая цепь, в которой наряду с произвольным числом ЭДС и линейных сопротивлений содержатся только два нелинейных элемента, которые с помощью простого преобразования не могут' быть заменены одним нелинейным элементом.
Определение токов в двух НЭ может быть выполнено, если выделить эти НЭ, а оставшуюся цепь представить в виде активного линейного четырехполюсника, у которого к входу и выходу присоединено по одному НЭ (рис. 7.11).
Известно, что линейный активный четырехполюсник может быть заменен эквивалентной схемой с двумя источниками ЭДС £г1 и Ег2, равными соответствующим напряжениям [7lv и U2x холостого хода четырехполюсника при одновременном размыкании ветвей с нелинейными элементами и пассивным Г-образным (или /7-образным) четырехполюсником (рис. 7.12). После такого преоб-
312
разевания получается нелинейная цепь с двумя узлами, расчет которой был показан выше.
Рис. 7.12
Рис. 7.11
Цепь с тремя нелинейными элементами. Если сложная электрическая цепь содержит три нелинейных элемента, то их также можно выделить, а оставшуюся линейную цепь рассматривать как линейный шестиполюсник (рис. 7.13).
Все внутренние источники активного шестиполюсника заменяются тремя эквивалентными источниками ЭДС: Ег1, Ег2 и Ег3, которые включаются в ветви с нелинейными элементами. ЭДС Ег1, Ег2 и £г3 равны соответствующим напряжениям холостого хода шестиполюсника при одновременном размыкании ветвей с нелинейными элементами. Оставшаяся часть цепи представляет собой пассивный шестиполюсник (рис. 7.14). Каждый линейный пассивный шестиполюсник можно представить в виде схемы замещения, которая содержит шесть сопротивлений. Эти сопротивления можно определить из опытов или расчетов режима холостого хода и короткого замыкания. Полученную схему можно рассчитать, используя метод двух узлов.
313
7.2. Магнитные цепи при постоянном токе
7.2.1. Основные понятия и законы магнитных цепей
Магнитная цепь представляет собой совокупность устройств, содержащих ферромагнитные тела, электромагнитные процессы в которых могут быть описаны при помощи магнитодвижущей силы, магнитного потока и разности магнитных потенциалов. Если весь магнитопровод выполнен из какого-либо одного ферромагнитного материала, то магнитную цепь называют однородной. При включении в магнитопровод материалов с различными магнитными свойствами магнитную цепь называют неоднородной. Магнитная цепь, во всех сечениях которой магнитный поток одинаков, называется неразветвленной. В разветвленной магнитной цепи потоки в различных частях неодинаковы.
Если в полностью размагниченном ферромагнитном материале монотонно увеличивать напряженность и определять индукцию в установившемся режиме, то зависимость магнитной индукции от напряженности магнитного поля В = называемая кривой начального намагничивания, нелинейна. Поэтому магнитные цепи являются нелинейными.
Магнитная цепь и ее параметры при постоянном токе и напряжении внешне аналогичны электрической цепи. Поэтому рассмотренные ранее методы и приемы расчета электрических цепей с нелинейными элементами применимы и для расчета магнитных цепей.
В основу расчета магнитных цепей положены известные из курса физических основ электротехники закон полного тока
i
и принцип непрерывности магнитного потока Ср^ = О.
Закон полного тока говорит о том, что линейный интеграл (циркуляция) вектора напряженности вдоль произвольного замкнутого контура равен алгебраической сумме токов, пронизывающих этот контур. Линейный интеграл напряженности характеризует намагничивающее действие электрического тока, называется магнитодвижущей силой (МДС) вдоль данного замкнутого контура и обозначается буквой F.
314
Поток вектора магнитной индукции В через некоторую поверхность л называется магнитным потоком
Ф= р ds.
Принцип непрерывности говорит о том, что магнитный поток через произвольную замкнутую поверхность равен нулю; линии вектора В (или магнитные силовые линии) всегда замкнуты.
При расчете магнитных цепей в большинстве случаев принимают допущения, которые позволяют перейти от интегральных выражений к алгебраическим и пользоваться методами расчета электрических цепей.
Допущения, принимаемые при приближенном расчете магнитной цепи, следующие.
1. Пренебрегают потоками рассеяния, т.е. принимают магнитный поток в любом поперечном сечении неразветвленного магни-топровода постоянным.
2. Магнитную индукцию во всех точках сечения магнитопровода принимают постоянной и расчет магнитной цепи ведут по средней линии магнитопровода.
3. Магнитное поле в воздушном зазоре принимают однородным, т е. пренебрегают явлением гистерезиса и вихревыми токами.
При принятых допущениях под магнитной индукцией понимают некоторое среднее по сечению магнитопровода значение
8Л,
а под линейным интегралом напряженности вдоль некоторой длины ab магнитной цепи - магнитное напряжение на этой длине
p™F=t/MOfc
ab
ИЛИ
filab-UMab-
По аналогии с электрическим сопротивлением вводят понятие магнитного сопротивления:
где /л - магнитная проницаемость материала магнитопровода; / -длина средней линии.
315
Сравнивая между собой основные соотношения для постоянного тока и магнитного поля, можно видеть, что соотношения, соответствующие законам Ома и Кирхгофа для электрического поля постоянных токов в проводящих средах (стационарное поле), аналогичны соотношениям для магнитной цепи (табл. 7.1)
Таблица 7.1
Электрическое поле постоянного тока в проводящей среде Магнитное поле
7 = 8 ds Ф = В ds
С 8 ds~0 С В ds = 0
с Edl -е §Hdl = F
8=уЕ ~В-/1Н
Для неразветвленной магнитной цепи аналог закона Ома принимает вид
как и в законе для электрической цепи, сумма в числителе алгебраическая, в знаменателе - арифметическая.
При разветвленной магнитной цепи аналогами законов Кирхгофа будут:
для узла
£ф = 0;
для замкнутого контура
EO/?m=EF или Е^м^Е^’
Перед тем как для магнитной цепи записать уравнения по законам Кирхгофа, следует произвольно выбрать положительные направления потоков в ветвях магнитной цепи и положительные направления обхода контуров.
Если направление какого-либо потока или МДС совпадает с направлением обхода, то соответствующее слагаемое входит в уравнение со знаком «плюс», в противном случае - со знаком «минус».
При расчете магнитных цепей встречается два вида задач: прямая задача - нахождение потоков в участках по заданным намагничивающим силам и обратная — определение необходимой намагничивающей силы по заданному потоку в одном из участков.
316
7.2.2. Неразветвленная магнитная цепь
Рассмотрим графоаналитический метод решения обратной задачи для неразветвленной магнитной цепи.
Пусть задана индукция Вв, которую надо получить в воздуш
ном зазоре электромагнита с участками магнитопровода, выполнен-
Рис. 7.15
ными из разных материалов (рис. 7.15). Требуется найти намагничивающий ток. При этом число витков намагничивающей катушки, геометрические размеры магнитопровода и магнитные свойства его отдельных участков известны.
Расчет проводим в такой последовательности:
1. Разбиваем магнитную цепь на участки постоянного сечения и определяем длины /к и площади поперечного сечения хк участков. Длины участков бе
рем по средней силовой линии.
2. Исходя из постоянства потока вдоль всей цепи, по заданно
му потоку и сечениям хк находим магнитные индукции на каждом участке:
3. По кривой намагничивания определяем напряженности поля для ферромагнитных участков магнитной цепи.
Напряженность поля в воздушном зазоре находим по формуле
Я = — = — 107-Д.
Ао
4. Подсчитываем сумму падений магнитных напряжений вдоль всей магнитной цепи ^/7К/К и на основании закона полного тока приравниваем эту сумму полному току Iw:
^HKlK=Iw.
Для удобства расчета составим таблицу. Например, для заданной цепи таблица выглядит так:
ф 51 н{ В2 Н В3 н3 Hili Н212 Нв1в ХН1
317
Намагничивающий ток для этой цепи:
7_//,/1 + /72/2+2Яв/в
w
Прямая задача расчета этой магнитной цепи - нахождение
индукции в воздушном зазоре по заданной намагничивающей силе - решается графическим методом (рис. 7.16).
Характеристики ФК(ЛК) для отдельных участков магнитной цепи строят по кривым намагничивания ВК(НК) материала участка. Для этого ординаты Вк кривой намагничивания умножают на площадь сечения участка 5 и откладывают 5К‘5'к=Фк по оси ординат; абсциссы кривой намагничивания Нк умножают на длину участка /к и откладывают HKlK=FK по оси абсцисс. Для воздушного
зазора получается прямая линия. Суммированием F (абсцисс) для разных значений Ф (ординат) строится вебер-амперная характеристика Ф(Д) всей цепи и для заданного значения lw находится значение Ф' и искомая ин
дукция в воздушном зазоре
«.=-S,
7.2.3. Разветвленная магнитная цепь
Пусть для разветвленной магнитной цепи (рис. 7.17а) известны геометрические размеры магнитопровода, материалы и их кривые намагничивания.
Необходимо определить потоки в ветвях и индукцию в воздушном зазоре при заданных МДС F{ и Р2.
По аналогии применим графоаналитический метод расчета нелинейной цепи с двумя узлами. Эквивалентная схема этой магнитной цепи приведена на рис. 7.176.
Узловые точки обозначим буквами а и Ь. Выберем положительные направления потоков Фь Ф2 и Ф3. Построим зависимость 318
потока Ф| от падения магнитного напряжения первой ветви. Для построения произвольно задаемся рядом числовых значений Ф,. Для каждого его значения находим индукцию В\. По кривой намагничивания находим напряженность Н\.
Магнитное напряжение на первом участке
имаЬ=нх1х, где 1Х — средняя длина магнитопровода первой ветви.
Таким образом, для каждого значения потока Ф, подсчитываем Ф](С/М1) (рис. 7.18).
Рис. 7.18
319
Аналогично строим зависимости Ф2(О'м2) и фз(^мз);
иы2^Н212-, им3=н313, где /2 и /3 - средние длины магнитопроводов второй и третьей ветви.
Для расчета магнитной цепи по методу двух узлов необходимо построить графики зависимостей потоков от магнитного напряжения между двумя узлами (а и Ь): Ф}(имаЬ), Ф2(^м«/>) и ф3(ПмоЛ).
Используя второй закон Кирхгофа для магнитной цепи, составим уравнения относительно узлов а и Ь:
UмаЬ = Л™1
маЬ = ^2W2 ~ ^2^2 ;
имаЬ=н313 + нв1в.
Согласно первым двум уравнениям вебер-амперные характеристики ®i(UMab) и Ф2(0'моЛ) получаются путем зеркального отображения характеристик Ф,(С'м1) и Ф2(С'м2) относительно вертикальных осей, сдвинутых соответственно на заданные намагничивающие силы и I2w2 вправо от начала координат.
Запишем уравнение по первому закону Кирхгофа:
Oj + ф2 =ф3.
Для нахождения магнитного напряжения необходимо построить график Ф, +Ф2 =f(UMah) путем сложения ординат кривых ф1(Ци«/>) и фг(Ц^)- точка пересечения с кривой Ф3(б/М^) дает значения UMab и потока Ф3. При известном ИыаЬ по кривым ф1(^мол) и ф2(Ц^) находим потоки Ф, и Ф2.
Индукцию в воздушном зазоре определяем по формуле
7.3. Применение аналитических и численных методов расчета для нелинейных электрических и магнитных цепей постоянного тока
Обилие методов расчета, разработанных в настоящее время, объясняется значительной трудностью решения нелинейных уравнений Кирхгофа, описывающих нелинейную цепь. Успех расчета зависит как от составления уравнений цепи, так и от того, какой
320
метод расчета используется для решения. Ниже приводятся примеры, в которых рассмотрены некоторые особенности анализа нелинейных цепей.
7.3.1. Расчет нелинейной электрической цепи при малых нелинейностях
В ряде случаев необходимо исследовать цепь при малых нелинейностях. При малых отклонениях рабочая точка на статической
ВАХ нелинейного элемента лишь незначительно перемещается в
окрестности точки А исходного режима (рис. 7.19). Этот небольшой участок характеристики приближенно можно заменить отрезком прямой, касательной к характеристике в точке А. При этом зависимость приращений напряжения AU и тока А/ принимается линейной с коэффициентом пропорциональности, равным дифференциальному сопротивлению Ra в точке А.
В качестве примера воспользуемся
данным методом для ана-
литического исследования работы нелинейного элемента вблизи
некоторого заданного режима в схеме стабилизации напряжения (рис. 7.20а), где Т?2 является сопротивлением нагрузки.
Принцип стабилизации показан графически на рис. 7.206.
Из графических построений видно, что при значительных из
11 Зак 1186
321
менениях входного напряжения О', выходное напряжение U2 меняется незначительно. Качество работы стабилизатора напряжения характеризуют так называемым коэффициентом стабилизации К, рав-ДЦ
ным отношению относительного изменения входного напря-
Д[72
жения к относительному изменению -—- выходного напряжения:
к = ДЦ . Д^2 = ^2 . А^2
Ц ’ U2 ~ Ux' ДЦ ’
Уравнения, записанные по законам Ома и Кирхгофа для схемы рис. 7.20 а, имеют вид:
Ц = u2=u0+rj-, u2 = r2i2- ix = i+i2.
Решив совместно эти уравнения, получим
и =-------»---------v +------------------и
RxR2 + RxR,l + R2Rn RXR2 + RxRn + R2Ra
Дифференцируя полученное выражение, находим:
dU2 _ R2Rn
dUx RXR2 + RxRa + R2 RJ{
далее
£1 = R^ + № uo = j + АИ)'
Ux RXR2 + RxRa + R2Rn RXR2 +RxRJl + R2RJlUx ДЦ [ Ra Ux >
Коэффициент стабилизации
Желательно иметь К возможно большим, т.к. при этом относительному изменению входного напряжения соответствует относительное изменение выходного напряжения.
7.3.2. Расчет силы тяги электромагнита
Определить силу F притяжения якоря к магнитопроводу в зависимости от величины воздушного зазора /3, если известны ток /, число витков катушки w и геометрические размеры магнитной цепи (рис. 7.21): сечение якоря и магнитопровода 5s = sM = s3 = s, длина средней линии магнитопровода /м и якоря /я.
Электромагнитную силу притяжения якоря найдем по произ
322
водной энергии магнитного поля, запасенной в объеме всей магнитной цепи:
/=const
ZJ2 где =—^—.
Так как магнитная цепь неразветвленная, то на основании закона полного тока <^Н dl = Iw запишем
HMlM + HKln + H3l3 = lw.
Считая магнитное поле однородным и магнитную проницаемость неизменной ц - jli0 , последнее уравнение запишем в виде
—L — +—1я~ + —13— =
Ам Ая Ля Аз ^3
АМЛМ
+-^+-Ц = ф—[—(/я+4,) + 4
I^3S3 ) _Hr
= Iw.
Тогда индуктивность катушки с учетом магнитопровода в за
висимости от зазора определяем по выражению
_ Т и-ф _ Ао5И?2
1 1 —Рм+/я) + /з
Аг
Как видно из рис. 7.22, индуктивность резко уменьшается с увеличением воздушного зазора. Электромагнитную силу, действующую на якорь, с учетом закона полного тока при / = const запишем в виде
2 2
г = MpSW I
1з+~(1м +^я) Аг
и*
323
Знак «-» означает, что сила F стремится уменьшить зазор /3, т.е. якорь притягивается к магнитопроводу. Другими словами, электромагнитная сила стремится изменить конфигурацию магнитопровода так, чтобы полученная система увеличила магнитный поток при том же неизменном токе.
7.3.3. Расчет нелинейных цепей методом итерации
Разнообразные итерационные методы анализа нелинейных цепей нашли широкое применение при расчетах цепей постоянного и переменного тока как в установившихся, так и в переходных режимах. Идея метода итерации или последовательного приближения заключается в том, что при решении одного нелинейного уравнения с одним неизвестным
/(*) = 0
(М1)-е приближение решения х^+1^ записывают в виде итерационной формулы
,(**)=(ф(‘ф
где к - номер приближения; (р - некоторая специально подобранная функция.
Сходимость вычислений будет обеспечена, если по модулю Их)1<к
Необходимо заметить, что переход от уравнения /(х) = 0 к итерационной формуле x^+l^ = 0>(х^) должен быть осуществлен так, чтобы выполнялось последнее условие. Во многих случаях удобно реализовать такой переход, если обе части умножить на неопределенный коэффициент Л и прибавить х. Тогда получим
х- Л f(x) + х.
Полагая, что
^>(х) = Л f(x) + x, для производной функции (р получим
<р\х) = Л f'(x) + 1 •
Учитываем, что чем меньше производная, тем меньше потребуется приближений для нахождения корня уравнения. Очевидно, что лучшим вариантом является условие <р'(х) = 0. Тогда Л можно найти из уравнения
$/(х) = 1 + Я/'(х) = 0,
324
/
Рис. 7.23
которое обеспечит условие сходимости. Если имеется система нелинейных уравнений Р(х) = О, то по методу итераций эта система преобразуется к виду
х = F(x), где х - вектор неизвестных функций; Р(х) и F(x) - известные вектора функций.
Для нахождения корней строится итерационный процесс х(*+1) = F(xA), который сходится, если одна из норм
где 1\ - матрица Якоби.
Используем метод итераций для расчета нелинейной цепи, показанной на рис. 7.23. Дапо: U= 10 В; R\ = 2 Ом; U2 = 0,3/3. Определить ток /.
По второму закону Кирхгофа запишем уравнение
U = RJ + O,3I3.
Составим уравнение вида f (х) = 0: (7-/?1/-0,3/3 = 0.
Преобразуем полученное уравнение путем умножения на коэффициент А и прибавления к обеим частям неизвестного тока Г.
J+A^U-RiI- О.З/3) = J = ^(/).
По производной от полученного выражения (р\1) = 1-Я(я, + 0.9/2) = 1 - Af'(T} = 0, определяем
Л- 1 - 1 /'(/) 7?!+ 0,9/2
Запишем итерационную формулу:
\ , 1//; \ , U-R{Ik-^Ik
к)~ к+\ ~ к + Af (^А+1) — Л "* “ 2
«I
Выберем начальное приближение, например, /о = О. Тогда /1 = 5,0, которое и примем за второе приближение. Подставляя последовательно полученные значения, имеем с достаточной точностью значение корня, удовлетворяющего решению при /6 = 2.54049.
Для расчета более сложных цепей применяются аналогичные процедуры с использованием систем уравнений.
325
Глава 8
ЦЕПИ ПЕРЕМЕННОГО ТОКА С ФЕРРОМАГНИТНЫМИ ЭЛЕМЕНТАМИ
8.1. Некоторые особенности цепей переменного тока с ферромагнитными элементами
Цепи переменного тока с ферромагнитными элементами нашли широкое применение на практике, например, в электрических машинах, трансформаторах, измерительных приборах и других электрических аппаратах.
В основу цепей с ферромагнитными элементами входит магнитопровод, участки которого выполняются из различных ферромагнитных материалов и могут включать воздушные зазоры или прокладки из диамагнитных материалов. Магнитные потоки возбуждаются токами катушек, охватывающих отдельные участки магнитных цепей. При переменном токе в катушке возникающий в магнитопроводе переменный магнитный поток индуктирует в объеме сердечника вихревое электрическое поле. Вихревые токи согласно закону Джоуля Ленца сопровождаются выделением тепла, нагревающего сердечник. Кроме того, при перемагничивании ферромагнитного сердечника зависимость В = f(H) во многих случаях нелинейная и носит гистерезисный характер (рис. 8.1). Применяемые в технике магнитные материалы имеют настолько разнообразные характеристики В = по насыщению и виду гистерезисной петли, что просто невозможно все их перечислить и проанализировать. При всем их разнообразии общее у них то, что при изменении магнитного поля в ферромагнитном материале часть энергии магнитного поля преобразуется в тепло. Эти потери от гистерезиса пропорциональны частоте и вызываются необратимыми процессами в стали
326
Рис. 8.1
при перемене ориентации областей самопроизвольного намагничивания. Таким образом, если катушка имеет ферромагнитный сердечник, необходимо считаться с наличием потерь, связанных с магнитным гистерезисом и вихревыми токами, т.к. оба эти явления сопряжены с превращением части электромагнитной энергии, подводимой к зажимам катушки, в тепло.
8.1.1. Потери на гистерезис
Рассмотрим потери на гистерезис в катушке с ферромагнитным сердечником. Пусть сердечник катушки набран из листов электротехнической стали тороидальной формы (рис. 8.2). Здесь толщина листа d, длина средней линии 1С, число витков VT, сечение магнитопровода s.
Для упрощения считаем, что активное сопротивление обмотки Аобм и магнитный поток рассеяния равны нулю. При расчете также не будем учитывать вихревые токи (см. пп. 8 1 2) В этом случае можно записать:
iw
dФ
е — w--
и -
327
Активная мощность катушки при указанных допущениях бу-
дет равна потерям на гистерезис:
dB HL J ------dt dt vv
=fslc^H dB = fti^H dB,
где = slc - объем материала тороида;
dB = srmBmH = Г)Впт.
sr — площадь петли гистерезиса (рис. 8.3); тв, тн - масштабные коэффициенты; /7=1,6 При Вт < 1 Тл и и = 2 при Вт> 1 Тл - коэффициент, зависящий от сорта 5 материала.
С учетом последнего уравнения потери на гистерезис определяются по формуле
Pr=f»M
Потери на гистерезис можно уменьшить за счет улучшения качества железа (пермаллой, аль-сифер), т.е. за счет снижения коэффициента ту, что фактически означает Н уменьшение площади петли гистерезиса.
Рис. 8.3
328
8.1.2. Потери от вихревых токов
Рассмотрим пластину электротехнической стали в увеличенном размере (рис. 8.4), которая пронизывается магнитным потоком
Ф =Ф„. sinfttf.
Изменяющийся магнитный поток наводит в контуре, показанном пунктиром на рис. 8.4, с удельной проводимостью у вихревую ЭДС
р
E = -^ = 4,44Bmfs, где s' = h-2x.
Эта ЭДС вызывает в контуре сечением ,sB = lcdx элементарный вихревой ток di, который вызывает потери в контуре
dP = dl>r ,Д = (4,44^,.2х)г в к .. 2h
ЛК ----
yldx
Полные потери в пластине находим по формуле
4/
/2
Рв = f dP = l,64B^f2d2yd,
о где d = dhlc - объем железа.
Рис. 8.4
Потери в единице объема магнитопровода пропорциональны удельной проводимости, квадрату частоты, квадрату максимальной магнитной индукции и квадрату толщины листа. Поэтому сердечники набирают из тонких листов стали. При высоких частотах применяются ферриты - неметаллические соединения из смеси окислов железа, никеля, цинка, меди и других металлов. Их удельное сопротивление значительно больше, чем у ферромагнитных материалов.
329
Разная зависимость потерь в магнитопроводе Рт и Рв от частоты позволяет довольно просто разделить их на потери от гистерезиса и потери от вихревых токов.
Если учесть, что потери в магнитопроводе
Рс = Рг + Рв=а/ + Ь/2, то разделить их можно, измерив общие потери при двух разных частотах.
Очевидно, чтобы найти потери в магнитопроводе, используя последнюю формулу, нужно при каждой частоте из общей мощности потерь в катушке вычесть мощность потерь в проводах обмотки ^Си ~ ^2^обм •
8.1.3. Влияние потерь на эквивалентные параметры катушки
Говоря о потерях на перемагничивание (гистерезис), имеют в виду потери, определяемые по так называемой квазистатической петле гистерезиса, которая снимается при медленном изменении входных сигналов (со —э 0). При быстрых изменениях (со Ф 0) характер динамической петли определяется как гистерезисом, так и потерями на вихревые токи. Площадь такой динамической петли позволяет определить полные потери в магнитопроводе, обусловленные магнитной вязкостью. Форма динамической петли зависит от частоты. Так, в слабых полях и при повышении частоты (рис. 8.5) при В = Вт sin cot форма петли близка к эллипсу.
Учитывая, что за счет потерь в магнитопроводе индукция отстает от напряженности на угол потерь, запишем:
H = Hmsrn(cot + 3) = Hm^HmejS.
В координатах В(Н) эти функции будут описывать эллипс. С эллиптической зависимостью связано понятие комплексной магнитной проницаемости:
/л = ^т--——е~jS = = /л - j /" = /.icosS - j/zsin^,
— £Lm нт
где S - угол потерь; /л' = jucosd - составляющая магнитной проницаемости, обуславливающая реактивную составляющую сопро
Рис. 8.5
330
тивления катушки с сердечником, ju" =/.isinS — вязкая (поглощающая) проницаемость, характеризующая потери в сердечниках.
Площадь эллиптической петли определяет потери в материале сердечника за один период.
Вихревые токи в соответствии с правилом Ленца оказывают размагничивающее действие, что уменьшает индуктивность катушки. Наличие потерь вызывает нагрев сердечника, что формально может быть учтено эквивалентным сопротивлением катушки. Петля гистерезиса искажает форму кривой тока в катушке, что осложняет исследование электромагнитных процессов в катушке. Во многих случаях для упрощения анализа токи и напряжения в катушке принимают синусоидальными, т.е. вводят эквивалентные синусоиды или учитывают только первые гармоники. Однако нужно помнить, что эквивалентные параметры катушки с ферромагнитным сердечником существенно зависят от частоты. Поэтому параметры катушки, измеренные на одной частоте, нельзя использовать при другой частоте.
8.2. Уравнения, векторные диаграммы, схемы замещения катушки с ферромагнитным сердечником
8.2.1. Катушки со стальным магнитопроводом без учета насыщения, потерь и потоков рассеяния
Пусть в катушке (рис. 8.6) отсутствуют явление гистерезиса,
вихревые токи и поток рассеяния Фр, а зависимость В(Н) (рис. 8.7 а) на рабочем участке линейная. В этом случае
В ц = — = const Н
и при синусоидальном напряжении
r, . dy/ и = sin cot = m dt
потокосцепление, ток и ЭДС будут определяться соотношениями:
f , CL • I Л
у/ = \udt ---—coscot = тт sin cot--
1 co I 2
л I-
2 )’
331
—— cos cot = coscot,
coL
dt// r .
e, =----= -u - -Em sin cot;
dt m
L
r w и2Ф и2 sB uw~s где L = — = -r7T--= —— = const;
IH
IH
= 4,MBmswf.
U
Рис. 8.7
Согласно полученным соотношениям построены эквивалентная схема замещения (рис. 8.76) и векторная диаграмма (рис. 8.7в) катушки с ферромагнитным сердечником. Ток в катушке обычно называют намагничивающим током.
8.2.2. Влияние насыщения на форму кривой тока в катушке со стальным магнитопроводом
Предположим, что в катушке со стальным магнитопроводом отсутствуют явление гистерезиса и вихревые токи, сопротивление обмоток и поток рассеяния. Зависимость ^(/), представленная на рис. 8.8, учитывает насыщение стали.
Тогда при приложенном напряжении
Г 7 и------Umcoscot
dt
потокосцепление можно определить по формуле
t//\ = \udt = — "sin cot = х¥т sin cot.
J co
332
V
V
/I
Рис. 8.8
Кривая тока i{, построенная в пределах 0 < t < —, имеет пикообразную форму и явно содержит третью гармонику.
При аналитической аппроксимации зависимости </(/) в виде i\ =ciy/ + bi//i,
используя соотношение = 'Pm sin 69/, получим:
/] - 1Хт sin cot - I3m sin 3cot.
Если предположить, что по катушке протекает синусоидальный ток i2 = 12т sin cot, то при той же зависимости </(/) график потокосцепления будет иметь более плоский вид и содержать первую и третью гармоники:
ц/2 - Tlm sin cot + T3m sin 3cot.
В обоих случаях ток и потокосцепление проходят одновременно через нулевые и максимальные значения, т.е. находятся в фазе. Для упрощения расчетов и использования возможности по-сгроения векторных диаграмм вводят эквивалентные синусоиды, применяя соотношения для действующих значений. Так, для тока, содержащего первую и третью гармоники, имеем:
[/2 j2 j
/ — I 1я1 । 3m _ j _ J m3
V 2 2 э х/2
333
Тогда
/э = lyfl sin cot, где 1^2 = 1тэ меньше максимального значения 1т, соответствующего графику Zj(/) (см. рис. 8.8). На рис. 8.9 показано, как по зависимости ?/(/) определены эквивалентные индуктивности:
Замена несинусоидального тока на эквивалентный позволяет построить векторную диаграмму и эквивалентную схему замещения (рис. 8.10а,б).
8.2.3. Учет явления гистерезиса в катушке
со стальным магнитопроводом
На рис. 8.11 дано построение кривой тока по кривым и учитывающей явление гистерезиса. Каждому значению потокосцепления на петле гистерезиса соответствуют два значения тока: одно для первой четверти периода, когда возрастает, другое для второй четверти, когда уменьшается. Из построения видно, что зависимость /(/) несимметрична относительно начала координат, но симметрична относительно оси абсцисс. Из-за гистерезиса кривая i(t) опережает ?/(/), кроме того, она несинусоидальная и содержит нечетные гармоники.
Для удобства дальнейших расчетов зависимость i(t) представим в виде эквивалентной синусоиды
г э = тэ sin {COt + ar ) , где /тэ=/эТ2.
334
Эквивалентная синусоида, показанная на рис. 8.11 пунктиром, опережает потокосцепление ^(z) на угол «г. Опережение тока относительно потокосцепления обусловлено потерями на гистерезис. В дальнейшем при анализе потерь на гистерезис и построении схемы замещения катушки со сталью используем комплексную запись необходимых величин:
(// = Tmsin«/;
= cosM; U = Uej90;
dt т ~
Комплексная мощность
S = U_ /э = W,ey(90-ar > = UI.le],p = UI3 cos (p + +j UI3 sin cp = ll Rr + jllxn, где (р = 90-«г. I3 Rr
„ O------1 I----1
Эквивалентная схема замещения пред- S
ставлена на рис. 8.12. Сопротивления Rr и j
хн представляют собой составляющие ком- г 5
плексного сопротивления потерь на гисте- о| резне и намагничивание. Для практических расчетов чаще всего используется эквива- ^ис' ^-12
лентная схема замещения, показанная на рис. 8.13. На рис. 8.14 построена векторная диаграмма этой схемы. Составляющие тока 13 и параметры схемы замещения могут быть найдены из соотношения
Z-, Яг+jAh ^Z3 Z3 J
335
Рис. 8.13
Здесь /г и /н - активная и реактивная составляющие намагничивающего тока. Они представляют собой проекцию тока на напряжение и проекцию на ось, перпендикулярную к ней.
8.2.4. Катушка со стальным магнитопроводом при учете всех потерь и потоков рассеяния
Как отмечалось выше (см. рис. 8.6), общий поток делится на два потока: Фс - поток в магнитопроводе (стали) и Фр - поток рассеяния, замыкающийся в основном по воздуху.
С учетом сопротивления обмотки катушки гк и общих потерь в магнитопроводе напряжение на катушке запишем в виде
dy/ ,n d / \
и = iRK + - iRK +—у/с + ,
к dt к dr с р>
где (// = 1//с + 1/р = щФс + иФр;
. 2 llJw iw
= wBvsp = = и«р = —-£—/ = Lpi.
'p 'p
Обычно потоки рассеяния большей частью замыкаются по воздуху, поэтому принимают £р = const. Тогда напряжение на ка
тушке можно описать уравнением
г, г
к р dt dt Rk р
с!Ф
где ис - w----- - напряжение, компенсирующее намагничиваю-
dt
щую составляющую и потери в магнитопроводе.
Заметим также, что насыщение магнитопровода и гистерезис приводят к искажению формы тока и потокосцепления. Однако для
336
упрощения анализа используют эквивалентные синусоиды. В этом случае в комплексной форме последнее уравнение примет вид
и = IRK + ЦХГ + tZc = LRK +L/XT+LZ3.
Ток катушки обычно представляют в виде двух составляющих: ( R X 'I
Z3 Z3 j
где активные Gc и реактивные Вн проводимости учитывают суммарные потери в магнитопроводе на гистерезис и вихревые токи. Полная схема замещения катушки и ее векторная диаграмма представлены на рис. 8.15.
1R*
Рис. 8.15
Общее напряжение U равно сумме напряжения Ц_с и напряжений на сопротивлении рассеяния Хр и сопротивлении обмотки катушки RK. Обычно составляющие С/ + С7К «Uс и в мощных трансформаторах малы. Потери в катушке уменьшают сдвиг фаз между приложенным напряжением и током /.
Катушка с магнитопроводом нелинейный элемент, поэтому параметры схемы замещения зависят от тока, магнитного потока и режима работы. Для мощных трансформаторов составлены таблицы и кривые, определяющие зависимость удельной мощности потерь Ро и удельной намагничивающей мощности Qo от частоты и магнитной индукции В. Зная вес магнитопровода G, можно найти удельные потери:
Рс = PqG = U2GC; 2СТ = Q0G = U2BH,
337
откуда
Наиболее сложно определить индуктивность рассеяния Lp. Однако, если экспериментально измерить ток I, напряжение U, сопро-Р тивление катушки RK и общие потери Р — UI cos <р, то cos ^9 = — .
Учитывая потери в магнитопроводе Рс = Р- I2RK, находим составляющие тока: =UcGr, /н =UCB,. и ток I = J/2 + I2 . Угол между U и U^c можно найти как разность 90 -(<3 + <*>с), где Sc = arctg—.
Ai
Учитывая, что U = 1RK + IjXT + U_C = IRK + JJXI + LZ3, и приняв фазу напряжения U равной пулю, можно найти хр ~coLp и £р. Катушку с ферромагнитным сердечником используют в реакторах для ограничения токов короткого замыкания, в фильтрах, в различных устройствах автоматики, в качестве трансформаторов, двигателей и т.д.
В заключение следует заметить, что эквивалентные схемы замещения получены из условия равномерного распределения магнитной индукции по сечению магнитопровода. В действительности при переменном магнитном потоке в каждом произвольном контуре сечения пластины магнитопровода индуктируется ЭДС, и соответственно появляются вихревые токи, которые противодействуют изменениям магнитного потока. Наибольшее противодействие проявляется в центре пластин, в результате чего переменный магнитный поток распределяется по пластинам и по сечению магнитопровода неравномерно: в центре магнитная индукция наименьшая, у боковых поверхностей - наибольшая. Степень проявления такого эффекта, называемого поверхностным эффектом, зависит от частоты переменного магнитного потока. Расчет поверхностного эффекта для магнитного поля в магнитопроводе является задачей теории электромагнитного поля. Даже при замене неравномерного распределения магнитной индукции на усредненное равномерное распределение в расчетных формулах, полученных из уравнений теории поля, будут присутствовать параметры, отражающие степень проявления поверхностного эффекта и интенсивность действия вихревых токов и гистерезиса. Другими словами, проведенный анализ катушки с железом справедлив только при неизменной частоте входного сигнала.
338
Пример 8.1. При включении катушки, намотанной на магнито-проводе (ее называют электрический реактор) на синусоидальное напряжение U = 200 В в ее обмотке с w = 600 витков и сопротивлением обмотки RK = 6 Ом, возникает ток 7 = 5 А, потребляемая мощность Р = 300 Вт. Измеренная амплитуда магнитного потока катушки Фт = 12-10-4 Вб. Считая приближенно магнитный поток и ток синусоидальным, определить параметры эквивалентной схемы замещения, представленной на рис. 8.15а.
Решение.
1. Находим напряжение Uc, уравновешивающее составляющие в материале сердечника по формуле
Uc = 4,44fwsB„, = 4,44 50 600 • 12 • 104 = 160 В.
2. Активная проводимость схемы замещения
Сс=Д- = =300~^50 = 5,85-10~3 1/Ом.
С2 t/2 1602
3. Ток проводимости схемы
I _= — = 0,937 А.
4. Ток намагничивания
/н=^/2-/с2 =752 -0,9372 =4,92 А.
5. Реактивная проводимость 1 4 92 1
В =—а- = —= ЗО,7-1О-3 1/Ом.
Uc 160
6. Реактивная мощность катушки
Q = UI sin (р = Ul -у/1-cos2^ = UI J1 - f
2
= 955 вар.
200-5. 1-
300
200-5
7. Намагничивающая мощность в магнитопроводе
Qc = 1нис = 4,92 • 160 = 785 вар.
8. Реактивная мощность, обусловленная потоком рассеяния QP=Q-6c =955-785 = 170 вар.
9. Реактивное сопротивление рассеяния
X =^- = — = 6,8 Ом.
Р /2 52
339
10. Для построения векторной диаграммы, аналогичной диаграмме на рис. 8.15 б. необходимо дополнительно определить напряжения на сопротивлении катушки /?к и индуктивности рассеяния:
i/K =7ЯК =5-6 = 30 В,
Ц,=/Ар =5-6,8 = 34 В.
8.3. Резонансные цепи с нелинейными элементами
8.3.1. Феррорезонанс напряжений
Феррорезонанс напряжений возникает в цепи с последовательным соединением катушки с ферромагнитным сердечником и конденсатором. В отличие от резонанса в линейной цепи, которого можно достичь, изменяя частоту, индуктивность или емкость, феррорезонанс вызывается при изменении приложенного напряжения. Явление феррорезонанса характерно тем, что при определенных условиях возникает скачкообразное изменение тока и напряжения на элементах цепи, обусловленное нелинейностью катушки с ферромагнитным сердечником. Рассмотрим цепь (рис. 8.16а), представляющую собой последовательное соединение линейного сопротивления, линейной емкости и нелинейной индуктивности, имеющей зависимость (7£(Z), пока-
занную на рис. 8.166. Вольт-амперные характеристики конденсатора и сопротивления есть прямые линии, т.к.
UC=I— = Ixc, Ur = IR, ыС
где Хс = const; R = const.
340
При анализе необходимо помнить, что вследствие симметрии нелинейной зависимости катушки с магнитопроводом кривые тока и напряжений на всех элементах цепи будут несинусоидальными с нечетными гармониками. Примем, что эквивалентное сопротивление катушки с магнитопроводом за счет потерь на гистерезис и вихревые токи входит в общее активное сопротивление R (см. рис. 8.16а).
При анализе рассматриваемой цепи будем обращать внимание главным образом на качественную сторону происходящих явлений, а для расчетов используем приближенный метод эквивалентных синусоид.
Действующие значения напряжений и тока, определяющие эквивалентные синусоиды, запишем следующим образом:
^с = л/Ц2с + ^зс + ^с + -;
Ur ~ + ^Ir + ^5R + • • • i
/ = +/ЗД +/52Z. +••• •
Показанное на рис. 8.166 напряжение на реактивных элементах (7z(/) = |C/A-t/c| определено как абсолютное значение разности ординат характеристик 6/^(7) и Uc(l) при одних и тех же значениях тока 7. Действительно, т.к. напряжения на конденсаторе и катушке чисто реактивные, то их эквивалентные синусоиды также находятся в противофазе. Входное напряжение можно найти, записав второй закон Кирхгофа для эквивалентных синусоид:
U — Up + и г + и с
Последнее соотношение показано на векторной диаграмме (рис. 8.17а) для случая, когда |(7С| > |б/Л|, а в катушке отсутствуют потери в магнитопроводе и обмотке, т.е. Рс = О, Рк = 0. Компенсация напряжений UL=UC будет соответствовать точке А (рис. 8.18а). При наличии потерь в катушке действительная характеристика 6/(7) проходит несколько выше. Напряжения и Uc находятся уже не в противофазе, и сумма их действующих значений будет всегда больше, чем \UL - t/c| для реактивных элементов (рис. 8.176). Минимум характеристики 7/(7), примерно соответствующий резонансу, смещается влево и вверх (см. точки Аь А2 рис. 8.18а). На характер кривой
341
(7(7) в области резонанса (минимума) влияют также высшие гармонические составляющие.
Зависимость (7Х(7) является многозначной, т.е., например, одному значению UX(I} (рис. 8.16а) соответствуют три значения тока: 7], 72, 73. Характеристики (/'(7), U”(l) (рис. 8.18а) построены для двух значений сопротивления R и определяются они суммированием ординат кривой Ux(l) и прямой UR при одном значении тока 7, т.е. U(7) = ^(7^ + [Ux (7)J2 . Многозначность характеристики исчезает при увеличении сопротивления R, т.е. при увеличении наклона характеристики (7Д(7) к оси абсцисс. Так, с учетом зависимости (7^(7) характеристика фактически не имеет минимума и становится однозначной. На рис. 8.186 показана экспериментально снятая характеристика (7(7). При плавном повышении напряжения 0 < (7 < (7Б ток в цепи плавно нарастает: 0<7<7Б. При дальнейшем увеличении входного напряжения наблюдается скачкообразное нарастание тока до значения 7С, которое объясняется наличием падающего участка от Б до А с неустойчивым равновесием. При дальнейшем повышении напряжения ток также плавно возрастает (7 >7С). При уменьшении напряжения наблюдается скачкообразное уменьшение тока от значения 7А до значения 7Е. Таким образом, экспериментально снять характеристику на падающем участке нельзя, если питание цепи осуществляется от источника ЭДС. При питании от источника тока характеристику снять можно.
342
и "(I)/ Ur
Отметим также, что в диапазоне изменения тока 0 < I < /А он является активно-индуктивным (UL>UC и <?<()), а при />/А характер тока станет активно-емкостным (Uc >UL и <р>0). Заметим, что скачкообразные изменения тока сопровождаются изменением знака угла сдвига между напряжением и первой гармоникой тока. На скачкообразное изменение тока в цепи оказывает влияние сопротивление. Область неустойчивых состояний исчезает, если общая характеристика б/(/) становится относительно тока однозначной, т.е. каждому значению приложенного напряжения соответствует только одно значение тока.
8.3.2. Феррорезонанс токов
Явление феррорезонанса токов возникает при параллельном соединении линейного конденсатора емкости и нелинейной катушки (рис. 8.19). Если несинусоидальные периодические величины,
343
Рис. 8.19
возникшие за счет нелинейной катушки, заменить эквивалентными синусоидальными, то можно воспользоваться законами Кирхгофа, векторными диаграммами и комплексным методом. Обратимся к первому закону Кирхгофа
L=Ll+Le-
na рис. 8.20 построены характеристики UL(lL), UC(IC} и U(/) для действующих значений напряжений и токов.
На идеализированной характеристике U(T), построенной как разность I = |/£ (U) - 1С (б/)|
(рис. 8.21), видно, что резонанс произойдет в точке т. В действительности, пренебрегая даже потерями, общий ток при феррорезонансе не получим равным нулю, т.к. ток через катушку содержит еще и высшие гармоники (см. рис. 8.20, пунктир). При плавном изменении входного напряжения U ток во
всем диапазоне изменяется плавно и скачков не наблюдается. Если
питание осуществляется от источника тока, в цепи наблюдаются скачки напряжения. Например, при токе I = возможны три раз-личных напряжения: U\, U2, Uj, причем U2 — находится на неустойчивом участке харак-
теристики U(I).
В заключение заметим, что явления, аналогичные феррорезонансу напряжений и токов, могут наблюдаться и в цепях, содержащих линейную катушку и нелинейный Рис 8 21
конденсатор или нелинейные L и С. Явление феррорезонанса находит широкое применение на практике, например, в устройствах стабилизации напряжений.
344
8.4. Трансформатор с ферромагнитным сердечником
В электротехническом устройстве, называемом трансформатором, происходят преобразования токов и напряжений. Трансформатор без ферромагнитного сердечника был рассмотрен в первой части курса. Наличие ферромагнитного сердечника в трансформаторе позволяет значительно увеличить магнитный поток, следовательно, увеличить и мощность, передаваемую из одной ветви в другую. Диапазон мощностей трансформаторов очень широк - от долей ватт до сотен мегаватт. На практике используются самые разнообразные трансформаторы: силовые, измерительные, импульсные, специальные, предназначенные для работы в преобразователях частоты, при преобразовании переменного тока в постоянный и т.д. У всех трансформаторов магнитопровод изготавливается из ферромагнитных материалов и, значит, при анализе их работы необходимо учитывать потери на гистерезис и вихревые токи, а также нелинейную зависимость В(Н). В большинстве случаев стремятся сконструировать трансформатор таким образом, чтобы нелинейность мало влияла на его работу. Тогда при анализе работы трансформатора можно пренебречь его нелинейностью и представить токи, напряжения и магнитный поток в виде эквивалентных синусоид. Введение эквивалентных синусоид позволяет использовать в расчетах комплексный метод и векторные диаграммы.
8.4.1. Уравнения, параметры, векторная диаграмма и схема замещения трансформатора
с ферромагнитным сердечником
Рассмотрим работу простейшего двухобмоточного трансформатора, имеющего две изолированные обмотки и w2 с сопротивлениями /?, и Т?2 (рис. 8.22). Реальная картина распределения магнитного поля в таком трансформаторе достаточно сложна. С целью упрощения анализа работы предполагаем, что магнитное поле в трансформаторе содержит три составляющие: основной магнитный поток Ф, поток рассеяния первичной обмотки Ф1р, пропорциональный току г), и поток рассеяния вторичной обмотки Ф2р, пропорциональный току z2. Для потокосцепления обмоток можно написать:
= ^1р + и)Ф = Др/j + щФ ;
~ ^2р + w2® “ ^2р*2 + »
345
где L]p, Z2p ~ индуктивности первичной и вторичной обмоток, определяемые потоками рассеяния.
Рис. 8.22
Уравнения трансформатора запишем по законам Кирхгофа для мгновенных значений:
. п r di, d<&
ui^hRi + kp-r+wi — -, dt dt
c n г di2 с!Ф
0 - i2R2 + I2p —— + u2 + w2 ——, dt dt
б/Ф ^Ф
где tp2—— = -e2; ex--uc - —wx-----ЭДС, индуктируемые основ-
dt dt
ным потоком Ф во вторичной и первичной обмотках.
В общем случае уравнения трансформатора нелинейны вследствие нелинейной связи потока Ф и токов i\ и i2. Поэтому токи, напряжения и магнитные потоки несинусоидальны. Заменив их эквивалентными синусоидами, можем записать уравнения трансформатора в комплексной форме:
б/[ = I_\R\ + + U г'ч Е-> = I_2R2 + jwL2pI_2 + U2.
Важным параметром трансформатора является коэффициент трансформации
И'| п = —-.
И2
Если пренебречь сопротивлением обмоток и потоками рассеяния, то
t/j = Ц_с = -Ех; U_2 = £2, где Е{ = ; Е2 = 4,4>2Фт;
Wi U, Е, п - —- = —- = —L.
W2 Id2 Е2
346
Из этого соотношения видно, что при и < 1 напряжение больше L/ь Такой трансформатор называется повышающим. При и > 1 - трансформатор понижающий. В теории трансформаторов широко используется понятие приведенного трансформатора, для которого п = 1. Для приведенного трансформатора можно строить схему замещения и векторную диаграмму без учета магнитных связей. Так как в реальных трансформаторах п Ф1, то обычно осуществляют приведение парамегров вторичной обмотки к числу витков первичной или наоборот. При преобразовании параметров МДС вторичной обмотки должна остаться без изменения:
i2w2 = z2w2,
где w2 = и’|.
Обозначим все приведенные величины штрихом и запишем
следующее:
., . ич 1 .
г2 ='2 —= -<2;
п
лЧЙ
-W2— = пе2; at )
ГЦ
, ДФ гц ।
е2 =e1=_w = —
at rv21
~ e2z2 = пе2 = е2г2 = ^2 • п
С учетом последнего соотношения уравнение трансформатора для вторичного контура можно представить в виде
„ г, , di2 е2
0 = R2ni2 + L2 ^+и2------;
at п
„ . 2 di2 ,
R2m2 + L2n — + mi2 = e2.
dt
Отсюда параметры вторичного контура, приведенные к пер
вичному, примут вид:
Л2 = Л2л2; Z2p = L2pz?2; и2=пи2.
Намагничивающая сила приведенного трансформатора ziwi +z2wi = и'1(г1 +,г) = иУо’
где /0 - намагничивающий ток, обычно небольшой, т.к. токи ц и z2 находятся почти в противофазе.
Ток z’o = Z] при разомкнутой вторичной обмотке (z2 = 0). Строим векторную диаграмму по следующим уравнениям:
LL\ - + AipZi + > —2= ^2—2 + Jx2pL.2+ ^-2>
где xlp = <жДр х2р = ялС2р; t/2 = nU = w/2ZH = / 2Z_'H.
347
При построении векторной диаграммы (рис. 8.23а) учитываем, что составляющие первого уравнения строятся так же, как для катушки с ферромагнитным сердечником. При использовании второго уравнения полагаем, что нагрузка активно-индуктивная, т.е. ток Л2 отстает от Ц'2 на угол <р2 Вектор выходного напряжения (7'2 определяем вычитанием напряжений R2R_2 и #2р^2 из ^ 2 = ^1 •
Рис. 8.23
Из выражения для намагничивающей силы следует £о =/| +/2 - Ток /0 опережает магнитный поток на угол потерь ас. В соответствии с уравнениями и векторной диаграммой на рис. 8.23 б показана эквивалентная схема замещения трансформатора. Параметры схемы
348
замещения обычно находят экспериментально путем исследования трансформатора в режимах холостого хода и короткого замыкания.
При холостом ходе /2 = 0 схема замещения превращается в схему замещения катушки с магнитопроводом. Эквивалентные параметры определяются в соответствии с приведенной методикой расчета. Так как индуктивность рассеяния обычно мала, то режим холостого хода используют для определения проводимостей 6’с и Вк. В режиме короткого замыкания принимают - i'2 из-за малости тока /0. Пренебрегая контуром намагничивания и потерями в стали, получают: £1р = Z2p м Rr = R2.
Пример 8.2. Двухобмоточный трансформатор в номинальном режиме имеет следующие данные: £7]н = 36 кВ; U2h = 5 кВ; SH = 60 MBA. При холостом ходе и коротком /1хх = 0.05/н; Р1КЗ= 150 кВт; Цкз= 0,09 UK. Определить приведенные параметры эквивалентной схемы замещения (рис. 8.24) трансформатора: Z( - сопротивление первичной обмотки; Z^2 - сопротивление вторичной обмотки, приведенной к первичной; ZM - сопротив
замыкании
Рис. 8.24
ление рассеяния.
Решение. Коэффициент трансформации
n = i = £L = ^ = 7>2 w2 U2 5
Потери в стали и меди равны мощности холостого хода:
Дх = Рс + Рм.
Так как Рс » Ры, то в режиме холостого хода можно считать
Р1х = Рс. Поэтому
Z = Zi + Z = ZM .
Следовательно:
=Ин = _Н«_ = Ин = 36’10 = 432 Ом;
71хх 0,05/ 0,055 83,3
cos (Ах = Р'хх = 0,06667;
ИнАхх
ZM=RM + jXM = (7,2 + 7432) Ом.
349
В режиме короткого замыкания ZK3 = Z] + Z^2 > значит |zJ = ^- = l,95 Ом; cos^= Р‘кз =0,0278. I—КЗ] J ^кз ТТ J
71кз с/1кз71кз
ZK3 =Zl\ =(0,054 + jl,95) Ом.
Обычно в силовых трансформаторах
Z, = Zf_2 =|(0,054 + ;1,95) Ом.
8.4.2. Измерительные трансформаторы
Трансформаторы напряжения (TV), применяемые в энергоустановках, используются для преобразования измеряемого напряжения (до 100 В) и для гальванической развязки (изоляции) контрольно-измерительной аппаратуры. Трансформаторы напряжения работают в режиме, близком к холостому ходу. Короткое замыкание для них является аварийным режимом. Предположим, что числа витков первичной и вторичной обмоток равны (= w2) и потоки рассеяния отсутствуют, тогда уравнения трансформатора при Л1р ~ Л2р - 0 запишем в следующем виде:
E2=U2+L2(R2 + jX2)-U2^I2(RH + jXH), где 7?!, Х{, R2, Х2, RH, Хн — активные и реактивные сопротивления первичного и вторичного контуров и нагрузки.
Качество работы измерительного трансформатора напряжения зависит от того, насколько точно отображается приложенное напряжение (7j напряжением U2, снимаемым с обмотки w2 (рис. 8.25).
350
Как видно из векторной диаграммы (рис. 8.26), неравенство этих напряжений возможно как по величине, так и по углу (6и).
Полное равенство напряжений возможно только в идеальном трансформаторе, не имеющем потерь. Наибольшее влияние на погрешность измерения оказывает нагрузка вторичной цепи трансформатора.
Трансформаторы напряжения выпускаются следующих классов точности: 0,05; 0,1; 0,02; 0,5; 1; 3. Угловая погрешность в зависимости от класса составляет от ±2' до ±100\
Трансформаторы тока (ТА) предназначены для преобразования больших измеряемых переменных токов в относительно малые токи (обычно не более 5 А), благодаря чему расширяется предел измерения по току. В энергосистемах трансформаторы тока используются как датчики контролируемого тока в устройствах релейной зашиты. Первичная обмотка гц включается последовательно в ли
нию (зажимы Л] - Л2). Зажимы вторичной обмотки (z/| ~и2) вклю
чаются последовательно с токовыми цепями контрольноизмерительных приборов, имеющих малое сопротивление (рис. 8.27). Поэтому ТА работает в режиме, близком к режиму ко-
Рис. 8.27
351
роткого замыкания. Разрыв вторичной цепи для ТА является аварийным. Трансформаторы тока характеризуются коэффициентом трансформа-Ли
ции п - ——, который зависит Ли
от нагрузки вторичной цепи и тока в первичной обмотке. Векторную диаграмму (рис. 8.28) строим, начиная с /2w2 — намагничивающей силы вторичной обмотки. Напряжение на этой обмотке получено как сумма падений напряжений на сопротивлениях нагрузки. ЭДС Е_2, индуктируемая потоком Ф, по
лучена сложением вектора С/2 и падений напряжений на сопротивлениях обмотки w2
Поток Ф создается полной намагничивающей силой
/(|И’| = /] Wj + /2и ’2 •
При неизменном Ц и увеличении ZH уменьшается ток 12 и увеличивается намагничивающая сила Z0Wj. В пределе, когда ZH —> 00 /2 —> 0 и /0 —> /j, резко возрастают поток Ф и ЭДС Е2.
Погрешность трансформатора тока зависит от угла 8t, который тем меньше, чем меньше ток 70. Трансформаторы тока изго
тавливаются на следующие классы точности: 0,05; 0,1; 0,2; 0,5; 1; 3; 10. На токи более 500 А обмотка Wj имеет один виток.
Пример 8.3. Трансформатор тока типа ТФН 110-0,5/1-300-600/5 (рис. 8.29) имеет следующие параметры: W] = 3; и’2 = 360; /ср = 80см; s = 18,7 см2;
Z2=(0,59 + j’0,38) Ом; Zh = 1,2Om;
352
cos^?H =0,8: f = 50 Гц. Зависимость и угловая погрешность А(//) заданы графиками рис 8.30а,б. В энергосистеме произошло короткое замыкание и ток по первой обмотке увеличился до /1кз=15кА. Определить ток /2- Эквивалентная схема замещения представлена на рис. 8.31.
Рис. 8.30
2
Рис. 8.31
Определим следующие параметры.
1. Коэффициент трансформации „=“2=^ = 120.
3
2. Приведенный ток первичной обмотки ко вторичной Л'кз=^ = 125 А.
п
3. /2 =Z^iкз Так как намагничивающий ток /0 мал, считаем, что
2=4з= —= 125 А. п
12 Зак. 1186
353
4. Находим напряжение С/12 = -Е_2 > через которое определим индукцию и напряженность в сердечнике трансформатора тока:
-Е2 = Un = U2 + L2Z2 = I_2[(7?н + R2) + j(%н + %2)] = 237,e>35°20'
Для опенки влияния намагничивающего тока на ток 72 рассчитаем ток До.
5. ЭДС самоиндукции связана с потоком следующим соотношением:
Ф
—12 = 7^2 ^=" ,
откуда
Ф 7/п
В=—^ =-----— = 1,59 Тл.
5 4.44 fsw.
6. По кривой В(Н) находим напряженность поля /7= 5,4 А/см, которой соответствует угол 8 = 8°, характеризующий потери на вихревые токи и гистерезис.
7. Приведенный намагничивающий ток
/о =—^ = 1,2 А.
w2
Этот ток, опережающий магнитный поток на угол 8 = 8°, и является источником погрешности. Его составляющие:
7'=/osin<5 = O,17 А; 7' = I'Ocosy = 1,27 А.
Следовательно, при коротком замыкании первичный приведенный ток и соответственно вторичный ток превышают намагничивающий ток на несколько порядков. Ток 72 не зависит от сопротивления нагрузки.
Глава 9
РАСЧЕТ УСТАНОВИВШИХСЯ ПРОЦЕССОВ В НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ ПРИ ПЕРИОДИЧЕСКИХ ВОЗДЕЙСТВИЯХ
9.1. Общие свойства нелинейных цепей переменного тока
В установившемся режиме цепи переменного тока электрические величины изменяются по периодическому закону. Следовательно, при расчете установившегося режима необходимо решить систему уравнений, составленных для полного цикла перемещения рабочей точки по нелинейной характеристике, т.е. для одного периода изменения электрической величины. При этом оказывается, что если через нелинейный элемент протекает синусоидальный ток, то напряжение на нем будет несинусоидальным и наоборот.
Следовательно, нелинейный элемент обладает способностью преобразовывать спектр воздействующих на него колебаний. Эта важная особенность нелинейных элементов является основой использования нелинейных цепей в современных электротехнических устройствах.
В качестве примера на рис. 9.1 показана электрическая цепь, содержащая два идеальных трансформатора Т-1 и Т-2, с нелинейными элементами НЭ1 и НЭ2, которые имеют квадратичные нелинейные характеристики, т.е.
/ = ки2.
Если предположить, что щ - Um\cos>a\t, а и2 =Um2£Os(a)2l-(p), то на вторичной стороне трансформаторов Т-1 и Т-2 должна происходить операция суммирования:
ис = 1/| + и2, ир — iit - i/2 •
С учетом нелинейности элементов имеем:
12*
355
z = Z] - z2 = к (zz, + zz2 )2 - к (z/j — z/2 )2 = 4fe[Z/2 = =4kUmiUm2 coscoxt cos (a>2t-<p) = 2Zr?7ml?7m2cos[(zz>1 + 692)/-^] + +2Ш,„|С/т2 cos[(^ - (O2) t + qj].
В таком преобразователе имеет место явление преобразования частот, которые можно выделить с помощью фильтров, а именно:
- высокие частоты
сох + со2 > сох; сох + со2 > ю2;
— низкие частоты
„1 1 2л f Тх [ Тх
сох-со2- 2л-------= — 1 —L = со, 1 —L .
I ГТ~1 ГТ~] гт-, гт~1 1 гт-t
Vl l2j Л k l2j k 12j
Если в последнем соотношении Д —> Т2, то в таком преобразователе появятся колебания весьма низких частот (субгармонические колебания).
Преобразователь при равных угловых частотах со - сох -со2 может быть использован как преобразователь мощности, если измерить среднее значение общего тока, т.е.
1 Т
4р " 7 \idt = kUm\L’m2 COS«9 .
1 О
В этой формуле амплитуда одного из напряжений (любого) пропорциональна току.
Другая особенность нелинейных элементов обусловлена изменением температуры в результате нагрева их током. Так как тепловые процессы (нагревание и охлаждение) являются инерционными процессами, то даже при сравнительно низкой частоте температура НЭ и их сопротивление в течение периода практически не изменяются. Поэтому зависимость между мгновенными значениями тока и
356
напряжения сохраняется линейной. Зависимость между действующими значениями I(U) будет нелинейной. Нелинейные элементы с такими свойствами называют инерционными. Для нелинейных элементов характеристика выражает зависимость между мгновенными значениями тока и напряжения даже при широком изменении температуры. Отметим, что характеристики безынерционного НЭ для мгновенных и действующих значений будут различными. Такая особенность безынерционных элементов обусловлена искажением формы кривых тока и напряжения. Если нет насыщения и исследуются нерезонансные цепи, то действующие значения тока в цепи сравнительно мало отличаются от действующего значения первой гармоники тока. Анализ такой цепи приближенно можно провести по результатам расчета первой гармоники. Например, если ток в цепи имеет первую и третью гармоники, то их действующие значения отличаются на 40 %, т.е. /3 = 0,4/,. Действующее значение несинусоидального тока I = + /| = 1,075/[, т.е. на 7,5 % больше действующего значения первой гармоники. При наличии резонансных цепей соотношения между действующими значениями могут быть
значительными.
Третья особенность заключается в том, что НЭ может иметь несимметричную характеристику. В этом случае сопротивление НЭ зависит от знака приложенного напряжения. Иначе говоря, НЭ обладает вентильными свойствами. Это свойство используется в преобразователях переменного тока в постоянный. Такие преобразователи нашли широкое применение во всех отраслях народного хозяйства. Если учесть, что нелинейные элементы обладают потерями, т.е. при расчетах следует учитывать явление гистерезиса, то становится ясным, что даже элементарные электрические нелинейные цепи требуют индивидуального метода расчета. Особенно сложным
вопросом при анализе нелинейных цепей переменного тока является вопрос об энергетических соотношениях. Расчет процессов и анализ энергетических соотношений, даже в такой простой схеме, как схема, изображенная на рис. 9.2, представляют собой достаточно сложную задачу.
Рис. 9.2
При расчете нелинейных цепей принимают те или иные допу
357
щения так, чтобы используемый математический аппарат давал возможность относительно просто решать задачи в целом и не искажал бы физическую сущность того или иного явления.
Ниже приводится расчет некоторых нелинейных цепей, выполненный с известной степенью приближения.
9.2. Особенности процессов в нелинейных инерционных элементах
Инерционность нелинейных элементов может иметь самую различную природу и проявляется по-разному. Во многих случаях один и тот же НЭ в зависимости от режима работы может быть отнесен и к инерционным, и к безынерционным. Строго говоря, все нелинейные элементы проявляют инерционность или безынерцион-ность, если частота входного воздействия изменяется в широких пределах. Инерционность НЭ проявляется в различии их статических и динамических характеристик. Так, например, статические и динамические характеристики полупроводникового диода могут совпадать при частоте 50 Гц и заметно отличаться при частоте более 10 кГц. Следовательно, диод будет безынерционным при частоте 50 Гц, а на высоких частотах он уже инерционный НЭ.
У ламп накаливания, термисторов, терморезисторов инерционность обусловлена тепловой инерцией и связана с их нагревом от источника тепла. Сопротивление их зависит от температуры. При неизменной температуре их можно считать линейными элементами.
Рассмотрим более подробно механизм инерционности на конкретных примерах. Для обычной лампы накаливания уравнение теплового равновесия при нагревании нити имеет вид
С^у + /ст50 = /2Я(0), где 0 - превышение температуры над температурой окружающей среды; С - удельная теплопроводность; k7 - коэффициент теплопередачи; S - поверхность тела; P = z2/?(0) - мощность источника; /?(0) - сопротивление, являющееся функцией температуры.
Найдем его частное решение для случая, когда /?(0) = 7? = const, т.е. сопротивление в течение периода не меняется, а ток изменяется по синусоидальному закону i = Im sincot.
358
Решение уравнения имеет две составляющие: постоянную
I2R Р >о — —
k,S kTS и переменную с амплитудой
Р
0,
0т
00
2 ’
yl(kTS)+(2aC)~ I ! 2ыС N Ч kTS ) которая уменьшается с ростом частоты, теплоемкости и улучшением теплоотдачи.
2а)С ,
При условии ----»1 сопротивление резистора будет оста-
kTS
ваться практически неизменным в течение периода. Это означает, что по отношению к мгновенным значениям тока и напряжения такой резистор представляет собой линейный элемент. Но относительно действующих значений он будет нелинейным элементом.
В качестве другого примера рассмотрим соленоид с подвижным сердечником (рис. 9.3) при питании его обмотки синусоидальным током i = lmsmcot. Инерционность катушки обусловлена инертной массой сердечника весом G. Если якорь полностью погружен в катушку якоря, ее индуктивность будет максимальной. При некотором значении x = производная dL/dx будет также максимальной (рис.
9.4а). На якорь действуют сила тяжести G и электромагнитная сила
f_dWm_d ( Li
•2 Л
Рис. 9.3
I2 dL „ x -----(1- cos 2a)tj.
2 dx
Если принять, что в течение периода тока положение якоря ма-dL
ло изменяется, т.е. — = const, то можно записать среднее значение
2
электромагнитной силы:
1 TtI2 dL , „ . ,
FcP=- I——(!-cos2^)^ =
T ’ 2 dx
Fcp т J О
PyJL_ 2 dx
и соответственно
/ = Fcp(l-cos2^).
359
Равновесие - равенство веса G и средней электромагнитной силы Fcp - возможно в точках 1 и 2 (рис. 9.4 б). Устойчивое равновесие будет в точке 2, т.к. при случайном отклонении якоря на величину Лх возникает сила, стремящаяся вернуть якорь в исходное состояние. Колебания якоря около положения равновесия находим из уравнения движения (без учета сил сопротивления)
с72х _ /2 dL,, \
т—=- = -Сч---------(l-cos2ritf)
dt1 2 dxK ’
или
d2x
т-^-~-С + Fcp (l-cos2rttf).
Учитывая, что
Fc?=G = mg, где g — ускорение силы тяжести, после сокращения получим б/2х
—^- = gcos2(Ot.
dt
Интегрируя последнее уравнение дважды при нулевых начальных условиях, получим
—^y(cos2<z#-l).
При частоте f= 50 Гц хт =-----0,025 мм, т.е. положение
4(0
якоря в течение периода остается практически неизменным. При /= 5 Гн хт~2,5 мм, т.е. амплитуда значительно увеличилась, что может сказаться на зависимости Г(х). Уравнение катушки на промышленной частоте можно записать в виде $/ = £(/)/, т.к. L зависит
360
от действующего значения тока, т.е. катушка по отношению к мгновенным значениям является линейной. Она будет нелинейной относительно действующих значений у = . Если это уравнение ум-
ножить на со, то получим вольт-амперную характеристику U = coL(l)l = XL (l)I, связывающую реактивную составляющую напряжения на катушке с действующим значением тока.
9.3. Расчет электрической цепи, содержащей инерционные элементы
Расчет цепи с инерционными элементами рассмотрим при смешанном соединении двух нелинейных инерционных элементов и линейного резистора R2 (рис. 9.5а). Характеристики элементов для действующих значений показаны на рис. 9.56. Там же приведен графический расчет. Заметим, что уравнения, связывающие мгновенные значения токов и напряжений, будут линейными, т.к. сопротивления нелинейных элементов /?|(/,) и 7?3(73) в течение периода не меняются:
М = /?1(71)?1+п23;
м23 =^2Z2 -^з(А)?3’ Z = Z2+Z3-
Для действующих значений токов и напряжений уравнения будут нелинейными:
U = R\ (Д)/, + t/23; u23=r2i2=r3(i3)i3-, I = I2+I3.
Заметим, что последние уравнения записаны для случая питания от источника синусоидального напряжения и останутся такими 361
Z=R+jX
Рис. 9.6
же, если питание будет от источника постоянного напряжения. Порядок расчета заключается в том, что цепь сворачивается в эквивалентную C7(Z|) путем суммирования характеристик на основании первого и второго законов Кирхгофа.
Рассмотрим также нелинейную цепь с инерционным нелинейным элементом и безынерционным линейным элементом (рис. 9.6а). Так как при синусоидальной ЭДС ток в течение периода в нелинейном элементе предполагается синусоидальным, то используем комплексную запись:
Z = R + jX = Zej<p',
<Р = arctg
Д = t (/„.
Уравнение, составленное по второму закону Кирхгофа, является нелинейным, его решение показано графически на рис. 9.66. При решении используем зависимости: 7(t7z), где Uz=IZ- I^R2 + х2 -линейная, /((7Н) - (нелинейная) полученная экспериментально.
При построении общей характеристики 1(E) учитываем, что (7Н(/) совпадает, a Uz(l) сдвинуто относительно тока на угол ср, т.е. между U_H и U_z всегда угол (р (рис. 9.7). Учитывая это, значение Е\ для произвольного значения тока /] определяем как геометрическую сумму Uz и С7н1 (показано на рис. 9.66). Заметим, что расчет можно провести, используя статическое сопротивление нелинейного
362
элемента Rc = . Общее сопротивление цепи
Z06m=yl(R + Rcf + х? и £/ = /Zo6m- Подбираем Rc и Е' при различных значениях тока, пока не получим равенство Е'=Е.
Цепь, изображенную на рис. 9.6а, можно также проанализировать, используя теорему об эквивалентном источнике.
9.4. Особенности периодических процессов в цепях с нелинейными безынерционными элементами
Как отмечалось ранее, при периодических процессах в цепи с нелинейными безынерционными элементами необходимо решать систему нелинейных уравнений для полного цикла изменения электрических параметров. Трудности в решении уравнений обусловлены тем, что статические и дифференциальные параметры нелинейных элементов изменяются непрерывно при переходе от одного участка характеристики НЭ к другому. Отсутствие общей методики решения нелинейных дифференциальных уравнений не позволяет создать универсального метода расчета нелинейных электрических цепей. В связи с этим при расчетах используют приближенные методы: аналитические, численные, графические и машинные. Предпочтение необходимо отдавать аналитическим методам, которые позволяют найти решение в общей, т.е. в алгебраической форме. Общее решение дает возможность исследовать свойства и поведение нелинейной цепи при изменении ее параметров и начальных условий. Понятно, что аналитические методы требуют математического описания нелинейных элементов. Так как точная аппроксимация нелинейных характеристик невозможна, то и решение получается приближенным.
Численными методами рассчитывают сложные электрические цепи при заданных значениях параметров.
Графические методы позволяют наглядно и просто представить расчеты цепей первого и второго порядка и чаще всего их используют для оценки качества работы цепи.
При расчете установившихся режимов характеристики нелинейных элементов часто аппроксимируют кусочно-линейными прямыми. Кусочно-линейная аппроксимация нашла широкое применение, т.к. для прямолинейных участков уравнения цепи получаются
363
линейными. Полученные значения конца одного участка припасовываются (сопрягаются) с соответствующими параметрами начала следующего участка.
В некоторых случаях (при малых нелинейностях) для нахождения решения можно использовать метод линеаризации, т.е. замену нелинейного элемента линейным. Такую замену осуществляют по принципу гармонического или энергетического баланса, в предположении, что через нелинейный элемент или его эквивалент протекает синусоидальный ток.
9.5. Расчет установившихся процессов методом эквивалентной линеаризации
Метод применяется для расчета нелинейных цепей с безынерционными элементами, когда наличие высших гармоник составляет не более 30 %, т.е. когда коэффициент гармоник
п
Кг=^—
Кроме того, в эквивалентной цепи должны отсутствовать резонансные контуры с частотой, равной или кратной основной частоте:
1
= - -г— = кос, yjLC
где к= 1, 2, 3,...
В основу метода положен принцип замены нелинейного элемента эквивалентным линейным. Эквивалентный линейный элемент подбирается так, чтобы амплитуда напряжения основной гармоники на линейном элементе была равна амплитуде напряжения на нелинейном элементе. Принятие только основной (первой) гармоники означает замену нелинейной характеристики линейной для каждого значения амплитуды напряжения: в этом и состоит сущность гармонической линеаризации, предложенной Н.И. Крыловым и Н.И. Боголюбовым. Другими словами, при входном гармоническом сигнале f = A sin cot реакция нелинейного элемента, содержащая бесконечное число гармоник, заменяется приближенной эквивалентной гармонической функцией
/2 (0 - Л cos 69/+ В{ sin cot,
где Д = /1(Л); =/2(Л).
364
Так как реакция является гармонической функцией, то можно
ввести комплексные амплитуды:
£1 = А; F2 =ai+jbl - F2e}<p.
Заметим, что при таком подходе можно использовать передаточную функцию нелинейной системы
H(jco,A) = ^- = \H\e*
£1
Рассмотрим эквивалентную линеаризацию для различных нелинейных элементов.
1. Пусть нелинейный резистор имеет характеристику u(i) = + a2i3, где а1»а2- При действии гармонического тока
i = Im sin cot получим напряжение на НЭ
ur (') = I «14 +7«2^ |sin69/ -^-4 sin3t9i.
V 4 ) 4
Приравниваем амплитуду первой гармоники к R3Im и находим
эквивалентное линейное сопротивление
Эти же соотношения можно записать в комплексной форме:
< 3 2 А
—т ~ ’ —т ~ —т I «1 + «2 Лп I ’
тогда
и „-и _а .^11
—т
Следует обратить внимание на то, что значение R3 расположе
но между двумя крайними значениями дифференциального сопротивления нелинейного элемента:
7?ДО)<Л,</?Д7т),
„ /лЧ du Г, / Т \ 9 ,2
™ я‘'(0)=^(Б)=о'; =
2. Для нелинейной индуктивности, имеющей характеристику
= bj- b2ii, при i = Im sin cot напряжение на элементе
dw (, T 3b2I3} 3cob.il
И, = — CO bd cos cot н cos 3cot = co LI cos cot, Zj 1. 1 III л л rn-
Л I 4 J 4
3 2
где L = bx--b2Im.
365
Комплексное сопротивление
Т1 — (
Z, = =^ = coLe2 = со\ b, --b.il —L , I 1 . z m
—ТП X
т.е. зависит от амплитуды, частоты и фазы.
3. Для нелинейной емкости, имеющей характеристику
ис = C\q + e2q2 (q »с2), при токе i = Imsincot получим:
г I
q = \idt-——coscot; J со
( q . Зс2 с. ,з
и. . - - —l„. +—cosfetf-----cos3o>/.
U'J W ) bo?
Приравняем амплитуду основной гармоники :
сое
с =
J____
Зс2 г2 4гу2 m
= — е сое
—W
Емкостное сопротивление также зависит от 1т, со и имеет фа-
п
зу , т.е. первая гармоника напряжения отстает от синусоидального тока на 90°.
4. В качестве примера эквивалентной линеаризации рассчитаем последовательную цепь L, R и С, в которой катушка и активное сопротивление обладают нелинейностью, показанной в пунктах 1 и 2, т.е.
(z) = + а2?; t/(z) = bp- b2?.
где
Для данной цепи уравнение имеет вид
е = Ет sin cot = Д — + RJ + — [tdt, dt э сJ
3 7 3 7
Решение уравнения для установившегося режима: £
z = Im sin(cot + ср) = . - =
Rl + co Д----
------sin(69/ + ^>),
соС J
1
1 ( г 1
ср - arctg — coL--------
п 1 соС
где
366
Подробный анализ такой нелинейной цепи можно провести, анализируя йэи£э.
В заключение отметим, что одной из особенностей метода эквивалентной линеаризации является то, что при его использовании нет необходимости записывать дифференциальное уравнение системы. Каждый элемент может быть линеаризован отдельно и описан одним параметром. Несмотря на указанные ограничения, метод нашел широкое применение при расчете нелинейных цепей благодаря простому подходу к определению параметров.
9.6. Метод гармонического баланса
Рис. 9.8
Метод гармонического баланса применяется для расчета нелинейных цепей переменного тока. Точность расчета этим методом зависит от количества учитываемых гармоник и точности аппроксимации нелинейной характеристики. В результате использования этого метода получим аналитическое выражение нелинейной системы. Суть метода рассмотрим на примере последовательного соединения линейного конденсатора и нелинейной катушки (рис. 9.8), имеющей характе
ристику i - ./ (/#) При линейном синусоидальном напряжении и = Um sin cot поставим задачу провести анализ такой цепи.
Дифференциальное уравнение цепи du d'w 1 . ---------------------—---т-4--1. dt dt2 С
Аппроксимируем экспериментальную зависимость функцией i - ацг‘ и уравнение цепи запишем в виде du d2iif 1 з
— = —3-+ — ац/ . dt dt2 С
Полученное уравнение нелинейно и в его решении относительно и /(/) будет содержаться сумма гармонических составляющих. Для простоты дальнейшего решения пренебрегаем высшими гармониками и полагаем у = *Pml sin (щ/ + О,), тогда
— = coUm cos cot; dt
367
aw 2 / \ 7 /
—— = sm(c9/ + ©!) = -co Tml (sinfttfcosQj + coscot sin 01);
^i = ^3 =^tFmisin(^+ ®i) = ^'F^i(sin6y/cos01+cos^sin01). В последних трех уравнениях сгруппируем коэффициенты при одинаковых гармониках и тем самым решим уравнения аит =^^1 ;
°=(if4/'”' ~ Л-)СО80> •
Из последнего уравнения следует, что 0[ = ±—, тогда
ит=±
sin0! = ±1.
Учтя этот результат, для Um получим
ыш3 г '
~’С 1 ml _ .-.fit 1 ml
. (,JV ml ,
4 “ (0 I ml )
=+{UCm-ULm)=± —
\ й)С )
41 =
З^т! u< J3a/ml
----— - амплитуда тока; Тт1 = 3--— - амплитуда пото-
4 V 4
косцепления.
Индуктивность цепи нелинейная и зависит от амплитуды тока
£ = Х^=з|
4i v
' 4 3°^ml
Напряжения на конденсаторе и катушке: и =/ 1 _3^m. 1
Ст т1 соС 4 соС ’
Т1 _1 ,
Lm ~ ImlC°L - —- СО 3|
4 V
1 4
3^1
4 -, 2 41®
з°41 у
т.к. Um > 0, то в выражении для Ит ставят знак «-», когда XL > Хс; знак «+», когда Хс > XL. Из этого выражения для амплитуды тока
получим
I -Т
ml *L - ХС
При этом XL = coL = f(Iml).
Представленные на рис. 9.9 векторные диаграммы построены
368
для случаев, когда coL>-^— (рис. 9.9а) и coL<-^— (рис. 9.9Q- В (оС соС
первом случае UmL = lmXcoL > 1тХ , во втором - UmC > UmL. cot
Рис. 9.9
Порядок построения графика (рис. 9.10) следующий:
1. Задаваясь 1т1, по опытной характеристике ?($/) нах°ДНм Tml или используем аналитическую зависимость:
г = /т1=аТ3 4и1.
W
2. По формуле L = —— Лн1 каждый раз определяем индуктивность и вычисляем XL - coL.
3. Вычисляем напряжения
ULm = ’> ^Ст ~ ml ’
СОС строим графики и вычисляем
и =(и, -иг ) Рис. 9.10
Lm ^Ст/
4. Мгновенные значения /'(/) и ^(/) запишем, используя Исходное уравнение цепи для случая Хс > XL:
[4/
и - Um sin cot; цг = sin (cot + 0t) = л—— coscot;
V 3a
з 3a ...3 dt/s 1 r
i = aiy =—T mlcoscot; uL------; uc = — ydt.
4 dt (J
369
9.7. Расчет установившегося режима в нелинейной цепи при кусочно-линейной аппроксимации нелинейности
В схеме (рис. 9.11) к источнику u-Um sinotf подключены последовательно соединенные линейное сопротивление R и нелинейная катушка с характеристикой, показанной на рис. 9.12. Проведем анализ работы цепи и определим среднее значение тока за полупериод.
Дифференциальное уравнение цепи dye „ т7 --------------------\-iR = Um sin®. dt
При решении уравнения будем учитывать кусочно-линейные зависимости (/(?) по участкам.
На участке I: = uL=^- = 0', i = ^I!Lsmcot; cot<Q;
dt R
к концу участка i = 0 при cot = 0.
На участке II все напряжение приходится на нелинейную индуктивность:
di/f тт .
Ut =-----= 81ПШ/ ,
L dt
откуда
у = [udt = cos cot + С.
J co
Постоянную С находим из условия, что при t = 0
</ = -Tm=-^ + C,
со
C = -Wm+^.
со
370
Учитывая, что —— > Tm, получим со
у = ——^-coscot +1 - Т,и
СО V 69 tfyr тт . ит =---= Um smcot.
L dt
В конце интервала cotx потокосцепление у = Т,и = -^-cosfttf, +1 — -
CO V co
откуда
COStftfj = 1 -
или
cotx = arccos 1 -
на
Um ) всем интервале
Ток
О < cot < cotx равен нулю.
На участке III потокосцепление остается постоянным ц/ — Тт и на всем интервале времени
п тт
cot{ <со1<л uL —--= 0. Из урав-
dt Um нения цепи имеем z =--sm cot.
R
Кривые ^(/), z(/) и uL(t) показаны на рис. 9.13.
Среднее значение тока
I =1 fZ6to/=_L си л J л J R Cldyt
лК
co ~
sin cotdcot =
= ^-(1 + cos 69/) = лК
Таким образом, при расчете установившегося режима
нейных цепях следует учитывать то, что для каждого участка с не-
Um
в нели-
371
линейным элементом должно быть составлено уравнение состояния цепи. Решение такого уравнения должно учитывать конечные значения предыдущего участка. При этом стыковку следует проводить для тех параметров, которые не могут изменяться скачком: напряжение и заряд на конденсатора, потокосцепление и ток через катушку.
9 8. Цепи с вентилями
Вентиль - это выпрямитель, который широко применяется при преобразовании переменного тока в постоянный и наоборот. Выпрямители, как нелинейные сопротивления, имеют несимметричные характеристики, которые могут быть аппроксимированы на отдельных участках отрезками прямых линий или аналитической функцией.
На рис. 9.14а показаны диод и его вольт-амперные характеристики при кусочно-линейной аппроксимации (рис. 9.146,в,г). На рис. 9.14д показана характеристика идеального вентиля.
Рис. 9.14
9.8.1. Выпрямление переменного тока
Однополупериодный выпрямитель, включенный последовательно с сопротивлением R на синусоидальное напряжение.
На рис. 9.15 показан графический расчет токов и /2 на сопротивление R для двух значений приложенного напряжения щ и и2
Как видно из графиков i} и z2, наибольший эффект от выпрямления получается при большей амплитуде входного сигнала.
Рис. 9.15
Если аппроксимировать характеристику диода идеальной ВАХ (рис. 9.14д), то его схема замещения (рис. 9.16) будет подобна управляемому ключу, который замыкается при любом ид >0 и размыкается при любом пд <0.
Рис. 9.16
Для такого выпрямителя напряжение и ток показаны на рис. 9.17.
При 0<М<л иа=0;
г ит .
z = / sin cot - —— sm cot;
R
uR= iR = Um sin cotS.
При 7t<cot< 2л ид -u<0; i = 0; uR = 0.
Запишем основные соотношения, используемые в практических задачах.
373
1. Средние значения:
, 1 . 1 sin cotacot = -
2л-0J m 2л-
U - I V-I™R-U™
Uro- - ----
77 71
2. Действующие значения:
—7m|-cos^=^;
J,/L J
— \i2tda)l = 277 i 2
Ur= — -
2
3. Средняя мощность в нагрузке (полезная мощность)
U J I2 R г> т т г m1 m _ 1 тп1х 1(> ~ uR0J0 ~ ~ 2~ ’
77 77
4. Действующая мощность в нагрузке Т] J Т? D
D —JI I _ 17 _ 1 rt',
*0 ~ UR
4
5. Мощность на входе схемы
4
i2mR
5 2 2V2'
Сравнивая соотношения мощностей, можно заметить, что источник должен иметь мощность большую, нежели мощность, потребляемая нагрузкой; соответственно коэффициент мощности Р V2
— =---= 0,707 меньше единицы. Объясняется это не наличием
S 2
реактивной мощности, а присутствием мощности искажения:
T = Js2-Q2-P2=I2mR.
Для оценки эффективности преобразования переменного тока в постоянный вводят коэффициент эффективности:
Р 4
Кэ =-2-100% = -V-100% = 40,6%.
Рн 772
Однополупериодное выпрямление сопряжено с сильной пульсацией. Для уменьшения пульсаций используют двухполупериод-ный выпрямитель или фильтры, сглаживающие пульсации и увеличивающие постоянную составляющую.
При двухполупериодном выпрямлении ток в нагрузке (см.
374
рис. 9.18а,б) в течение обоих полупериодов протекает в одном направлении, в результате среднее и действующее значения будут
б)
Рис. 9.18
увеличены в два раза по сравнению с однополупериодным выпрямлением. Коэффициент эффективности
К., = —-100% = 81,2%,
Р н
т.е. вырастает в два раза.
Для лучшего использования оборудования и уменьшения пульсаций в промышленности широко применяют многофазные выпрямители. С увеличением числа фаз форма кривой тока получается более сглаженной. На рис. 9.19а,б показана схема с тремя
cot
б)
Рис. 9.19
диодами, имеющими идеальные характеристики. На временной диаграмме показаны положительные полуволны фазных напряжений.
9.8 2. Регулирование выпрямленного тока
Регулирование выпрямленного тока или напряжения в силовых цепях можно проводить различными способами.
1. При неизменном входном сигнале плавное регулирование
375
осуществляют с помощью управляемых вентилей (тиристоров) (рис. 9.20). Управляемый вентиль закрыт, пока на управляющий электрод не подан сигнал (рис. 9.21), который заставит тиристор
Рис. 9.21
работать в режиме идеального диода. Обычно управляющий импульс подается с частотой входного сигнала и с некоторым углом задержки 03. В результате выходной сигнал на нагрузке будет функцией от 03. При входном синусоидальном сигнале и угле задержки 03 вентиль будет закрыт в промежутке О<щ/<03 и ток i = 0. Так как wT = 0, при (t)t = &3 по нагрузке пройдет ток
Um
i=—smM, соответственно напряжение на нагрузке станет
wH =iR. Тиристор закроется, когда ток станет равным нулю (/ = 0), т.е. при cot = n, и вновь откроется через период. Среднее значение напряжения на нагрузке
С = — f Um sin cotdcot = (1 + cos 0,).
cp 2л- J m 2л V '
^3
Коэффициент пульсаций выходного сигнала также зависит от угла задержки:
к
п (7ср C/m(l + cos03) l + cos03
Как видно из рис. 9.22, выходной сигнал уменьшается с ростом 03 и одновременно увеличивается коэффициент пульсации.
2. Регулировать выходное напряжение можно с помощью включения встречной ЭДС. Приведем пример расчета работы
376
вентиля на нагрузку, имеющую в евоем составе постоянную ЭДС, включаемую встречно.
На рис. 9.23а показана схема, которую используют для зарядки аккумулятора. Необходимо при входном напряжении и= 16sin314rB и ЭДС аккумулятора £=12 В определить сопротивление шунта £ш, который обеспечит отношение амплитуд прямого тока к обратному
0,05, если внутреннее сопротивление аккумулятора £, = 0,04 Ом, а
диод имеет идеальную характеристику.
Рис. 9.23
Прямому току (г/д=0) соответствует расчетная схема
(рис. 9.236). В этой цепи протекает ток
= 400sinro/-300
[А],
график которого показан на рис. 9.24. Амплитуда прямого тока /+ =400-300= 100 А.
Прямой ток протекает в интервале 0( < cot < 02, поэтому cot
находим из уравнения и-Е = 0 или - Е,
откуда
cot, =0i =arcsin-= 0,848;
U т
02 =^-0] =2,29.
377
и
Рис. 9.24
Обратный ток (рис. 9.23в) в интервале 02 <&»/<©! + 2тг
. _ и — Е 7?ш + R,
1____
+ Rl
(Umscot)-E.
Амплитуда обратного тока при cot = 1,5тг
п rt
= 0,051^,
откуда
= Um+E 0,05/^Л,. = Om Ш I J.I 7
0,05/W
Среднее значение тока за период
®2 Г
[ —----dcot +
I R>
1Л
1,5 л- „
- и-Е , -----------dCOt
R,n + Ri
= 10,5 А.
'cot = —
7T
_ 2
Как видно из последнего соотношения, ток можно изменять путем изменения ЭДС.
9 8.3. Сглаживание пульсаций выпрямленного тока
При выпрямлении переменного тока по любой схеме на выходе получаются пульсирующие ток и напряжение. Для уменьшения пульсаций используются сглаживающие фильтры (индуктивный, емкостный и др.).
Индуктивный фильтр включает в себя катушку, которая оказывает большое сопротивление гармоникам тока. Для схемы на
378
рис. 9.25а с идеальным вентилем дифференциальное уравнение цепи имеет вид
При открытом диоде (ид=0) решение уравнения (9.51) можно
записать так:
-J/?2 + (гцЛ)2
R ---1
I sin(cot + <?) + single L
coL где 69 = arctg---.
R
Диод закроется тогда, когда ток, определяемый последним выражением, будет равен нулю. При этом момент отсечки по времени можно найти, решив трансцендентное уравнение
R --
i = 0 = sin(cot2-(p) + sin<pe L ,
откуда находим t2 или соответственно cot2 = сс2 (см. кривую 1 на рис. 9.25). При уменьшении сопротивления R угол отсечки возрастает. В пределе при R = 0, ср = тг/2 ток соответствует закону
Uт • ( | , ^9 ... /, \
/ =—— sin\ cot-----+1 =——(1 -coscot).
coL L у 2) J coL
В этом случае угол отсечки «2 = 2тг из условия, что
i = 0 = ^2-(1- cos«2) сохраняется в течение всего периода (см. кри-coL
вую 2 на рис. 9.25) за счет энергии, накопленной в катушке. При
379
уменьшении тока через катушку наводится ЭДС самоиндукции, которая поддерживает ток.
Если L = 0 и R Ф 0, то выпрямитель нагружен на активное сопротивление. При этом #? = 0. сг2 = л.
В силовых электрических сетях в качестве фильтра используют трансформатор, включаемый через вентиль на активную нагрузку.
Емкостный фильтр (рис. 9.26) применяется также для сглаживания пульсаций тока и напряжения на нагрузке. Сглаживающее действие фильтра основано на том, что сопротивление конденсатора мало для гармоник высокого по-рядка и ток замыкается через конденсатор. Через сопротивление нагрузки замыкается в основном постоянная составляющая.
При включении фильтра на синусоидальное напряжение диод открыт и включен в прямом направлении. Происходит заряд конденсатора до напряжения ис = Um (сечение А-А на рис. 9.27). Через диод протекает ток
После того как напряжение на конденсаторе достигнет максимального значения, начнется его разряд с момента М2 > сс2, определяемого из уравнения
и - ис = мд = 0.
Так как |мс| > |м|, то диод остается закрытым (мд< 0 и i = 0), конденсатор разряжается на сопротивление R (сечение Б Б на рис. 9.27). 380
В момент М\>ах ип>0 = и-ис и диод открывается, вновь происходит заряд конденсатора до момента а2 = М2
Установившийся процесс можно разделить на ряд участков по времени.
Первый участок. < М < а2 диод открыт. ис =и = Umsinci)t, ~dur иг ~т. U...
i~ir +/„ -С——+ — = (oCU,„ cos a>t + ~—s\na)t =
с R dt R m R
где <p = arctgft>/?C.
Диод закрывается при ол2 - ct2:
i = 0 = UmcoCcosa2 + -^-sincr2.
о Un.
Разделим последнее уравнение на -^-coscr2:
C(L)Um tga2=-----—^ = -Oyr,
U m
R
тогда
a2 = arctg (-CcoR) = -arctg (CcoR).
Учитывая, что (p = arctgcoRC = -a2, запишем ток в следующем виде:
i = ——^l + ((ttCR) sin(rt?/-cr2).
R
Второй участок: a2l <cot<a{ +2л, диод закрыт и напряжение на конденсаторе изменяется по экспоненте:
——('-<2)
ис = Ае RC .
Так как при cot2 - а2 ис = Um sinrw/2 - А, то
ис = Umsina2e RC ,
О) О) О)
Третий участок. Угол момента открывания диода находим
381
из интервала повторяемости а=а1+2л, приравняв выражения для ис на первом и втором участках:
Um sin гд/, = Um sinzy/2e RC
Решение трансцендентного уравнения позволит определить /1 или a)t{ =а1 и a)t2 = сс2 Необходимо заметить, что а, и а2 зависят от R и С. При увеличении R угол о\ растет, а2 уменьшается. В
Г. л л
предельном случае а2^> — , ZZ|—, т.е. после первого
полупериода конденсатор зарядится до максимального значения и не будет разряжаться. Этот принцип положен в способ измерения максимального значения напряжения (пиковые вольтметры). Если R мало, то емкость успевает разрядиться, т.к. скорость изменения напряжения на конденсаторе больше скорости изменения входного сигнала. В результате а2 —> л, т.е. напряжение на конденсаторе следует за входным сигналом. В общем случае среднее значение напряжения на нагрузке можно определить, проинтегрировав выражение для ис на периоде:
«2 +2?г __Ef а )
U -— \umsm(tridctri + f t7msincr9e co)^ t
p 2zr •* J 2
«I CI2
Для снижения коэффициента пульсаций выпрямителей используют различные комбинации индуктивно-емкостных фильтров. В источниках малой мощности (радиоэлектронные устройства) для сглаживания пульсаций используют активные фильтры, имеющие в своем составе усилители.
Итак, расчет установившихся процессов в нелинейных цепях наиболее просто можно проводить, используя кусочно-линейную аппроксимацию нелинейных элементов. Эта аппроксимация дает возможность с достаточной точностью определить действительные формы напряжений и токов. Трудности использования аппроксимации возникают при решении трансцендентных уравнений, которые получаются, если питание цепей осуществляется от источников переменного напряжения.
Глава 10
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ЦИФРОВЫХ СИСТЕМ (ЦЕПЕЙ) И МЕТОДОВ ОБРАБОТКИ ЦИФРОВЫХ СИГНАЛОВ
10.1. Предварительные понятия
10.1.1. Преимущества цифровой обработки сигналов
Цифровая обработка электрических сигналов (ниже рассматриваются только электрические сигналы, что не снижает общности содержания, учитывая различные датчики и преобразователи) в настоящее время является крупным научно-техническим направлением, связанным с генерацией, передачей, приемом, хранением и преобразованием информации, содержащейся в таких сигналах -электромагнитных колебаниях. Аналоговая обработка теряет свои позиции и сохраняется только там, где применение цифровой аппаратуры невозможно.
В чем преимущества цифровой обработки сигналов (ЦОС) и цифровой аппаратуры по сравнению с другой элементной базой?
1. В первую очередь это универсальность, т.к. все задачи обработки сигналов можно решать с помощью аналогичных цифровых сигнальных процессоров (ЦСП), которые изготавливаются современной промышленностью с непрерывно возрастающими вычислительными ресурсами (быстродействием и памятью). Для изменения функционального назначения изделия во многих случаях необходимо изменить только программу для ЦСП.
2. Упрощение и удешевление процесса проектирования; не требуются заказные или полузаказные микросхемы, в том числе электрически программируемые большие интегральные системы (БИС).
3. С помощью одного ЦСП можно решать различные задачи одновременно (например, анализ и синтез речевых сигналов).
383
4. Высокая точность и стабильность характеристик, отсутствие проблемы допусков, повторяемость характеристик при замене одного ЦСП на другой.
К недостаткам аппаратуры на ЦСП следует отнести шумы квантования, ошибки округления, нелинейные эффекты переполнения памяти и предельных циклов. Эти недостатки могут быть минимизированы при качественном проектировании изделий [12].
Применение ЦОС будет увеличиваться и расширяться для решения самых разнообразных задач во многих областях техники, в том числе в электроэнергетике и электротехнике.
10.1.2. Классификация сигналов
Электрический сигнал - это электромагнитное колебание, несущее в себе информацию. Такие сигналы делятся на два больших множества: детерминированные и стохастические, случайные. Детерминированный сигнал можно предсказать в любой момент времени с вероятностью 1; такие сигналы информации не содержат. Только случайные сигналы несут информацию.
Важное значение имеет деление сигналов на два других множества: аналоговые и дискретные. Аналоговый (непрерывный) сигнал х(?) имеет непрерывные область определения (интервал 7) и область значений — континуумы. У дискретного сигнала область определения - дискретное множество значений аргумента /, а область значений может быть континуальной. Если дискретный сигнал квантуется по уровню, т.е. представляется некоторым числом с заданным количеством разрядов, то он называется цифровым.
На рис. 10.1а—в показаны графики соответственно аналогового, дискретного и цифрового сигналов (у цифрового сигнала значения выборок ограничены).
Рис 10.1
384
Различают сигналы одномерные, которые описываются функцией одного аргумента (времени /), и многомерные, которые являются функциями нескольких аргументов. Например, яркость изображения — двумерный сигнал, описываемый функцией двух пространственных координат. Ниже рассматриваются только одномерные сигналы.
Сигналы можно также классифицировать по названию, происхождению, диапазону волн и т.д.
10.1.3. Преобразование Фурье аналогового сигнала. Спектры
Для непериодического аналогового сигнала x(z) определяют прямое преобразование Фурье
Х(й)) = \x(t)e~'CMdt, (10.1)
где (О - 1л f - круговая частота; f - частота [Гц].
При этом интеграл Фурье
х(/) = — (10.2)
2#
называют еще обратным преобразованием Фурье. Преобразование Фурье (10.1) существует, и обратное преобразование (10.2) дает x(z), если выполняется условие
(Ю.З)
т.е. функция x(z) абсолютно интегрируемая [6].
Преобразование Фурье
определяет важные характеристики сигнала |х(<у)| — mod X (/у) — амплитудный (амплитудно-частотный, АЧХ) спектр и ^(zy) = argA'(zy) - фазовый (фазочастотный, ФЧХ) спектр. Непериодические сигналы имеют непрерывные спектры.
Периодические сигналы разлагают в ряды Фурье. Их спектры - дискретные.
13 Зак. 1186
385
10.1.4. Примеры цифровых сигналов
Цифровые сигналы будем обозначать х(А), где А - дискретная переменная. Период дискретизации удобно считать равным 1, тогда Ае{...,-3,-2,-1, 0, 1, 2, 3,...}.
Простейший цифровой сигнал - единичный импульс <5(А), определяемый как (рис. 10.2а)
1, к = 0;
0, А ^0.
Рис. 10.2
Соответственно, единичный импульс
х fl, к = 1;
8(к-1) = \ v ’ [0, к*0.
Это импульс 8 {к), задержанный на I периодов дискретизации.
Импульс 8 (к) не следует путать с единичной импульсной функцией Дирака <5(z), которая принадлежит к множеству обобщенных функций (распределений) [6].
Единичная ступенчатая функция (рис. 10.26)
Функция
представляет собой единичную функцию, сдвинутую на I периодов.
Единичная дискретная функция 1(A) является дискретизированным вариантом аналоговой единичной «ступеньки» Хевисайда 1 (z).
Очевидно, что
1(0=W)-
1=0
386
Дискретной функцией является множество выборок (дискрет) произвольного аналогового сигнала
т(А) = {^( А )} = {..., *(_2), х(-1), х(0), х(1), •••}
Это последовательность может быть выражена с помощью единичного импульса:
х(А) = х(/)<5(А-/).
/=-~
Часто находит применение дискретизированная экспонента
f (к] = ejak = coscok - jsinaik, -<*> <к <<*>.
10.2. Импульсная и частотные характеристики цифровой системы
10.2.1. Импульсная характеристика
Линейная цифровая система с постоянными параметрами во временной области описывается импульсной характеристикой h(k). Если входной и выходной сигналы такой системы обозначить соответственно через г(А) и у (к), то импульсная характеристика представляет собой реакцию системы (выходной сигнал) на входной сигнал в виде единичного импульса, т.е. v(A?) = <5(А). Таким образом,
v(A) = 8 (к]=>у(к} = h(k).
При этом система называется цифровой, если ее входные, выходные и внутренние сигналы являются цифровыми. Отметим, что у физически реализуемых систем h (А) = 0 при А < 0.
Входную последовательность импульсов v(A) можно представить в виде суммы
v(A)= X v(Z)<5(A-Z). (10.4)
/=-оо
Поскольку А (А) - реакция цифровой системы на импульс 8(А), реакцией системы на импульс 8 (к —Г) будет h(k — l), что означает инвариантность системы к сдвигу сигнала во времени. В случае линейной системы произведение v(/)/?(А-/) - ее реакция
13*
387
на сигнал v (/)<?> (А -/). Поэтому при входной последовательности (10.4) выходная последовательность (реакция)
сю
у(к) = X v(l)h(k-l). (10.5)
/=-~
После замены переменных (10.5) принимает вид
у(А) = £ A(Z)v(A-Z). (10.6)
/=-~
Выражения (10.5) и (10.6) называются дискретными свертками и могут рассматриваться как алгоритмы системы во временной области. Свертка - коммутативная операция:
у (А) = v*h = h *v, где знак «*» обозначает свертки (10.5) и (10.6).
10.2.2. Передаточная функция и частотные характеристики цифровой системы
Пусть входная последовательность v(A) имеет вид
г(А) = е-/й9^, —оо<А'<о°. (Ю.7)
Если (10.7) подается на вход цифровой системы с импульсной характеристикой Л (А), то выходная последовательность
у(А)= X A(Z)v(/c-Z) = X Ь(Г)е^к~1}. (10.8)
/=-оо /=-оо
Выражение (10.8) можно представить в виде
y(k) = eJcok £ h{iy~Jco1 = я(е7®)г(А). (10.9)
/=-~
где
я(е7й>) = £ h(k)e~j0}k.
к=-^
Функция T7^e7“j называется комплексной передаточной функцией цифровой системы, модуль которой определяет ее амплитудно-частотную характеристику (АЧХ), а аргумент (фаза) — фазочастотную характеристику (ФЧХ).
Пример 10.1. Построить частотные характеристики системы, алгоритм которой задан разностным уравнением
y(k) = ay(k — l) + v(A), |а|<1
и начальным условием у(1)=0.
388
Решение. Найдем импульсную характеристику системы. Если v(A') = <5(A), то
у(А') = ау(А-1) + £(£).
Из этого соотношения получаем при к = О
y(0) = y(-l) + £(0), у(0) = 1;
у(А) = ау(А-1), к>1
или
у(1) = а-1 = а, у(2) = а-а = а2,..., у(к) = ак
По определению,
Я(е^)= £ h{k)e~icok ^ake~jak = Y(ae-j(0^ к=-^ к=0 к=0'
или
н (eJa>) =--J-— =----------1.
' ! \-ае JC0 l-acosry + jasinry
Отсюда АЧХ
|т/(е7й9)| = (1 + а2-2acos<y)/ ,
ФЧХ
argН(е]ю) = -arctg( asintV .
' ' yl-acosryj
Частотные характеристики показаны на рис. 10.3 а,б.
Функция - периодическая функция частоты с перио-
дом 2тг. Это обусловлено тем, что входная последовательность с частотой а) + 2тл, т = ±1, ±2,... не отличается от входной последовательности с частотой (о. Внутри периода где{0, 2тг} АЧХ
389
симметрична относительно л, а ФЧХ — отрицательно симметрична относительно л.
Вместо АЧХ часто используется характеристика за-
тухания (ХЗ)
zz(zy) = -20^|я(е7")|, дБ, (10.10)
а вместо ФЧХ — характеристика группового времени запаздывания (ХГВЗ)
г(ю) = _^4Д (10.11)
da>
Характеристика (10.11) показывает сдвиги составляющих сигнала по частоте. При этом линейной ФЧХ соответствует постоянная ХГВЗ и все составляющие сдвинуты одинаково (отсутствие фазовых искажений).
10.3. Дискретное преобразование Фурье
10.3.1. Соотношения для ДПФ
Для анализа и расчета частотных характеристик и спектров при использовании машинных вычислений применяют не аналоговые преобразования Фурье (10.1), (10.2), а соответствующие прямое и обратное дискретные преобразования (ДПФ).
Пусть g(z) - некоторая аналоговая функция, для которой существует прямое преобразование Фурье
G(a))=°]g(t)e~jeotdt. (10.12)
Первоначальная функция может быть найдена с помощью обратного преобразования
g(z) = — [ G(aAejeotdct). (10.13)
2тг д
Обычно функция g(z) рассматривается на конечном интервале 0<1<Т. Предположим, что задано N выборок функции g(/) и каждая выборка сдвинута по отношению к соседней на Az, с. Пусть tk = kAt, где /с = 0,1, 2,..., А-1. Для простоты предположим также, что N = 2Г, где у - целое число. Считаем, что имеется N выбо
390
рок функции П(щ), каждая выборка сдвинута по отношению к соседней на Д<у рад/с и (оп = п&0), где и = 0,1,N — 1. При записи и произведен сдвиг этого индекса с интервала [-7V/2, N/2\ на интервал [О, N -1]. Это не ограничивает общность, т.к. изменение пределов суммирования соответствует сдвигу частоты; при этом О переходит в N/2.
Полагаем теперь Ащ = 2л/Т, т.к. \t = T/N,
(Оп =п&а) = 2лп/Т; (10.14)
tk-k\t-kTlN\ (10.15)
a)ntk = 2лпк/ N. (10.16)
Обозначим через П(и) = П(щп) и g(k) = g(tk}. Учитывая (10.14^(10.16) и эти обозначения, из соотношений (10.12) и (10.13) получаем
G(n) = A/^g(/c)e"'2’r'!A/Ar, и = 0,1,...,А-1, (10.17)
к=0
л N— 1
g^ = — ^G{n)elmklN, k = 0,l,---,N-l . (10.18)
n=0
Выражения (10.17) и (10.18) представляют прямое и обратное дискретные преобразования Фурье [3]. Свойства ДПФ подобны свойствам аналоговых преобразований и приведены в литературе [3].
10.3.2. Быстрое преобразование Фурье
Нетрудно убедиться, что с помощью ДПФ вычисляются спектры сигналов по выборкам во временной области. Кроме того, решается обратная задача - по частотным выборкам вычисляются временные. Однако объем вычислений достаточно большой. Действительно, для нахождения прямого ДПФ С(и) требуется выполнить N операций умножения комплексных чисел в соответствии с (10.17). Для определения всей частотной выборки длиной N требуется N2 таких операций. Аналогичная ситуация имеет место и с обратным преобразованием. Возникает вопрос: нельзя ли уменьшить объем вычислений по сравнению с непосредственным применением выражений (10.17) и (10.18)?
Предположим, что число N равно произведению целых чисел N{ и N2, т.е. N = N\N2. Тогда выразим п и к в равенствах (10.17) и (10.18) через N\ и N2:
391
И = 77^2+ИО,
где
к - k}N} + к0, где
77О = 0,1,...,TV2-1; nt = 0,
/ф=О, 1,...,М>-1;
кА =0,1,..., TV, -1.
Тогда (10.18) можно преобразовать к виду [3]
G(n) = G(n1,«0) = Ar^ gA(k0,n0)e 1 0(12 “Vw,
*0=°
где
gi(*o,«o)= E Жлк 7 '1 n/4 Jt,=O
(10.19)
(10.20)
(10.21)
(10.22)
g(/c0, A,) = g(A) = g(A]M + Ao).
Определим число операций, требуемых для вычисления G (77) по формулам (10.21) и (10.22). В уравнении (10.22) для каждого g(k0,k}) требуется выполнить N2 умножений, а число всех значений g] (А0,и0) составляет N. Таким образом, для вычисления всего множества g(k0,nQ) требуются A7V2 операций умножения. Из (10.17) следует, что для вычисления множества G(n), число элементов которого равно N, необходимо выполнить (с учетом затрат вычислений на g(A0,«0)) N(Na + N2) операций комплексного умножения. Например, если N = 10000, = N2 =100, произведение N (TV, + TV2)= 2 • 106, однако Л'2 = 10*, что значительно больше.
Такой процесс можно продолжить, разлагая N на большее число сомножителей. Пусть N = 7V17V2...7VZ, тогда аналогично предыдущему можно показать, что вместо 7V2 умножений требуется выполнить М = N (Л’| + N2 +... + Nr) операций умножения. Если
принять TV] = N2 =... = NY = 2, то N = 2Г и у = logy N. В этом случае число операций умножения
М = у2М = 27Vlog2 N. (10.23)
Для большого числа N такой процесс вычислений существенно уменьшается по сравнению с непосредственным вычислением по формуле (10.17). Выигрыш в объеме вычислений составляет
N2/m = N2/2N log2 W = N/2 log2 N .
392
Все, что говорилось применительно к прямому ДПФ, справедливо и для обратного ДПФ. Если ДПФ выполняется с применением рассмотренной здесь методики уменьшения количества вычислительных операций, то такое ДПФ называют быстрым преобразованием Фурье (БПФ). Однако от формул (10.12) и (10.13) нужно перейти к алгоритмам и программам БПФ, чтобы получить конкретные результаты.
Отметим, что БПФ - весьма часто применяемая операция обработки цифровых сигналов.
10.3.3. Теорема Котельникова
Если преобразование Фурье функции равно нулю в некоторой области частот, т.е. если Х{сТ) = 0 при |ш|>шс, то мо-
жет быть однозначно определена своими дискретами хи=х(щгДус), которые образуют последовательность равноотстоящих точек с расстоянием л](ос между соседними точками:
' пл 'j sin (coct — пл)
x(z) =
CDct ~ ПЛ
(10.24)
Выражение (10.24) называют рядом Котельникова; он выражает непрерывную функцию через ее отсчеты. Доказательство формулы (10.24) см., например, в [3].
10.4. Структура ЦОС и свойства ее характеристик
10.4.1. Структурная схема ЦОС
Упрощенная структурная схема ЦОС приведена рис. 10.4 а.б. Она содержит три основных блока: аналого-цифровой преобразователь (АЦП) и фильтр, ограничивающий ширину спектра входного аналогового сигнала; цифровой процессор обработки сигнала (ЦСП); цифроаналоговый преобразователь (ЦАП) и фильтр, сглаживающий выходной аналоговый сигнал. Первый блок преобразует входной аналоговый сигнал г(/) в дискретный v(AT0), где Го - интервал дискретизации, & = (), 1,2,... В результате получается выборка дискретных значений исходного сигнала, которая квантуется по уровню и превращается в цифровой сигнал г(Л), т.е. дискретный сигнал, выборки которого представляют числа с конечным ко
393
личеством разрядов, как правило, в двоичной системе счисления. Цифровой сигнал обрабатывается центральным блоком схемы ЦСП
б)
Рис. 10.4 по заданной программе, в результате чего получается выходной цифровой сигнал >(£)• Он проходит через третий блок системы ЦАП и сглаживается выходным фильтром, после чего получается выходной аналоговый сигнал y(z) (см. рис. 10.46).
10.4.2. Спектры сигналов
Дискретизации сигнала на входе соответствует математическая модель амплитудно-импульсной или дельта-модуляции
v*(z) = w(z)v(z), (10.25)
где m(t) = TQ - моделирующая функция; v*(z) -дис-
кретизированная функция; S(z) - импульсная единичная функция.
Преобразование Фурье функции (10.25) имеет вид [3]
S vV_¥“r v{co-kcoT'), (10.26) V *=-оо
где лу = 2л/Т0 - частота (круговая) дискретизации (тактовая частота).
Как видим из (10.26), в отличие от спектра аналогового сигнала, спектр дискретизированного сигнала является периодическим с периодом по частоте fT = 1/7}, или тГ.
На рис. 10.5 показаны модуль спектра аналогового низкочас-
394
копий исходного спектра отсутствует - рис. 10.56) и fT<2fc
в)
Рис. 10.5
(имеется наложение спектров из-за низкой частоты дискретизации - рис. 10.5в), где fc - частота среза спектра аналогового сигнала. Очевидно, что приемлемым для практики является соотношение частот сигнала и тактовой частоты fT > 2fc, когда можно выделить спектр исходного сигнала. Частоту 2fc называют частотой Найквиста. Если в отличие от рис. 10.5а спектр аналогового сигнала не ограничен по частоте, то при любой частоте дискретизации спектр исходного сигнала будет «засорен хвостами» смешенных копий и невозможно выделить спектр исходного сигнала. Поэтому во входном блоке обработки (рис. 10.4а) необходим фильтр, ограничивающий спектр сигнала v(z). Аналогичная картина имеет место, если аналоговый сигнал не является низкочастотным, т.е. в общем случае.
После дискретизации производится квантование, т.е. представление сигнала в двоичной системе счисления словами конечной длины. Квантование при округлении или при усечении вносит ошибку [12]
Величина ошибки -Q/2<l{k^<Q/2 при округлении или
G<l(k)<Q/2 - при усечении, где Q - шаг квантования, т.е. зави
395
сит от амплитудной характеристики квантователя в составе АЦП. Ошибка квантования является случайным сигналом, распределение которого, как можно доказать, равномерно, а его дисперсия составляет Q1 /12. Ошибка квантования не только снижает точность обработки, но и уменьшит динамический диапазон системы ЦОС, особенно при небольшом числе разрядов системы.
10.4.3. Свойства частотных характеристик систем ЦОС
Как уже отмечалось, передаточная функция систем ЦОС - периодическая функция частоты с периодом 2я. Поэтому ее можно разложить в ряд Фурье, причем коэффициенты разложения в соответствии с (10.9) будут отсчетами импульсной характеристики h(k):
h (А) = — j Н (ejco j eJcokda>. (10.27)
—я
Равенства (10.9) и (10.27) определяют пару преобразований Фурье. Такая пара справедлива для произвольной последовательности сигналов, например, для входной последовательности:
v (к ) = — j V (ejco ) ejC0kdco; (10.28)
—я
и(е7<у) = J v(k)e~J<ok. (10.29)
к=-°°
Поскольку реакцией системы на последовательность v(A') = e7<z* является произведение ^ejeuk, то реакцию на произвольную последовательность (10.28) с учетом линейности системы можно записать в виде
у (А:) = — J Y (е7® ) ejcokd(O, (10.30)
—я где
У(е7/и) = я(е7?и)г(е7<у), (10.31)
Из (10.31) следует свойство дискретных систем, аналогичное свойству непрерывных систем: свертке во временной области (10.6) соответствует умножению (10.31) в частотной области.
В ряде случаев спектральный состав последовательности й(А)
396
выражается в единицах частоты, связанной с интервалом дискретизации То. В этом случае (10.9) и (10.27) преобразуются к виду
H^eJeoT°) = J /г(/сГо)е~7йЛ7О; (10.32)
к=-^
т л/Т0
h(kT0) = -V- J H(ejaT°)eJakT°d(o. (10.33)
-я/т0
Функция H(eJcoT° j периодична по частоте с периодом 2я/Т0 .
Частотные характеристики дискретной системы обычно совпадают (возможно с точностью до постоянного множителя) с характеристиками некоторой аналоговой системы. Поэтому дискретную систему можно реализовать, дискретизируя ее импульсную характеристику. Это полностью аналогично процессу дискретизации аналогового сигнала с помощью дельта-модуляции. Поэтому легко доказать периодичность передаточной функции цифровой системы
(10.34)
где H(aj) - передаточная функция аналоговой системы, —< к < °°.
Частотные характеристики соответствующих цифровых и аналоговых систем совпадают в диапазоне частот \(0<7т/Тц, если Н (со) ~ 0 для |гд| > л/Г0
10.4.4. Z-преобразование, передаточная функция Hz(z)
Для алгебраизации линейных дифференциальных уравнений можно применить преобразование Лапласа, что облегчает их решение. При этом передаточная функция аналоговой системы в комплексной области равна Н(р), где р = <7 + ja>. Такую же роль играет z-преобразование для разностных уравнений, которые описывают цифровые системы.
Для произвольной последовательности х(£), заданной при к = 0,±1,±2,..., определяется z-преобразование следующим образом [3]:
X(z)= £ x(£)z~*, (10.35)
*=-о= где z = ерТ° - комплексная переменная.
397
В частности, z-преобразование импульсной характеристики й(А ) имеет вид
Hz(z)= Е h(k)z к•
*=-~
(10.36)
Если /?(&) отлична от нуля только при Q<k<°°, то ряд (10.36)
сходится всюду вне круга, радиус R которого зависит от положения особых точек функции Hz (z) - полюсов (строго следует рассмот
реть разложение комплексной функции в ряд Лорана [3]). Индекс z у функции Hz (z) пишем, чтобы не путать ее с функцией Н(р}.
Обратное z-преобразование определяется соотношением
(10.37)
j?Jf(z)z* ''dz.
В правой части (10.37) записан контурный интеграл по любому замкнутому контуру С в области сходимости, охватывающему начало координат. Например, контуром интегрирования может быть окружность радиуса R$ > R, где R - радиус сходимости z-преобразования.
Практически обратное z-преобразование находят, вычисляя интеграл с помощью теоремы о вычетах, или раскладывая A"(z) на простые дроби и суммируя оригиналы, соответствующие каждой дроби, или с помощью таблиц.
Из формулы (10.35) следует, что z-преобразование, вычисленное на единичной окружности плоскости z, т.е. при z = eJC0, дает
= ^(^) = X (10.38)
к=-°°
что совпадает с преобразованием Фурье исходной последовательности. Свойства z-преобразования (10.35) аналогичны свойствам преобразования Фурье.
Для последовательностей х(А), заданных при А >0, выражение (10.35) принимает вид
Ar(z) = ^x(/c)z“* (10.39)
к=0
и называется односторонним z-преобразованием в отличие от двустороннего преобразования (10.35). Свойства одностороннего z-преобразования эквивалентны свойствам одностороннего преобра
398
зования Лапласа. Ниже будем использовать одностороннее z-преобразование.
Переменную z 1 можно рассматривать как оператор задержки сигнала на время То, т.к. в преобразовании Лапласа множитель е~рТ° соответствует задержке (при нулевых начальных условиях). Подробнее свойства одностороннего z-преобразования см. в [3].
Рассмотрим разностное уравнение порядка и:
— z) = ^^ау>(к — z). (10.40)
z=o i=0
Применяя к (10.40) z-преобразование при нулевых начальных условиях, получаем
^Zz,-z"'r(z) = ^a,z 'K(z). 1=о <=0
откуда передаточная функция цифровой системы в z-области (в области комплексной переменной z):
Г(г) я.(!)=4т=^ <ю.41)
V\z) Lbiz i
ИЛИ
, .ар-Ьа,? [+... + a„,z~m л ’ ьо+ь12-1+...+ь„2-п '
Как видим, функция (10.42) представляет собой отношение двух полиномов переменной z-1 с вещественными коэффициентами. Как можно доказать [3], у реализуемой системы m < п; если система устойчива, то все ее полюсы расположены внутри круга единичного радиуса с центром в начале координат плоскости z, т.е. при |z| < 1.
10.5. Определение передаточных функций цифровых фильтров
10.5.1. Постановка задачи синтеза цифровых фильтров
Цифровая фильтрация - одна из основных операций обработки сигналов [12]. Она, как правило, состоит в выделении цифровых сигналов с заданным частотным спектром из смеси сигналов,
399
имеющих произвольный спектр. Задача синтеза цифровых фильтров, как и аналоговых, состоит из двух этапов, этап аппроксимации, когда по заданным требованиям к характеристикам фильтра определяется передаточная функция Hz (z) в численно-символьной форме, удовлетворяющая некоторым критериям близости к требуемым характеристикам, как правило, в частотной области. Этот этап имеет множество решений, поэтому в общем случае вводятся различные критерии оптимальности [4]. На втором этапе (реализации) определяется структура алгоритма фильтра. Этот этап также не имеет однозначного решения.
Передаточные функции цифровых фильтров (ЦФ) во многих случаях определяются на основе передаточных функций аналоговых фильтров-прототипов Н(р) путем преобразования комплексной частоты р = <у + jco в комплексную частоту z, хотя возможна и непосредственная аппроксимация в плоскости z. В связи с широким применением частотных преобразований вначале рассмотрим кратко задачу аппроксимации аналоговых фильтров-прототипов.
10.5.2. Аппроксимация характеристики затухания аналоговых фильтров нижних частот
Самой простой, но и наиболее распространенной является задача аппроксимации характеристики затухания (ХЗ) сг(<у) фильтров нижних частот (ФНЧ). Требования к этой характеристике задаются так, как показано на рис. 10.6. В полосе пропускания й?е[0, tyj затухание < crmax; в полосе задерживания ^е[б92,°°) затухание rz(fo>) > rzmill. Частоты и <у2 называют граничными; диапазон частот <уе (<У1; а>2) - переходная область, где вид а(со) не
задается. У идеального ФНЧ ю1 = со2, crmax = 0, <zmitl —> °°.
Известны различные методы аппроксимации сг(бу) [4]. При максимально плоской характеристике затухания в начале координат (Баттерворта) ХЗ имеет вид
а(<у) = 10-lg(l + C2eu2nj. (10.43)
400
При этом характеристика называется максимально плоской, если а (а)) и ее(и -1) производных в начале координат равны нулю: сг(О) = сг'(О) = сг"(О) = ... = а^п~^ (0) = 0.
По заданным значениям crmax и rzmin из (10.43) необходимо
определить Сип. Нетрудно показать [4], что
п >
1g
№
(10.44)
где К} =
|Q°roax/l°_| ] Q^min/l0 _ |
К2= — • Знак «>» в (10.44) означает, а>2
что нужно округлять п (порядок фильтра) до целого числа в боль
шую сторону.
После округления только одно из требований к ХЗ удовлетворяется со знаком равенства. Если выбрать второе (в полосе задерживания), то
Влияние п на характеристику затухания показано на рис. 10.7, где частота нормирована к 1.
Полюсы передаточной функции Н(р) расположены на ок
ружности в плоскости р с центром в начале координат и радиусом С-1/". Они, как можно показать [4], определяются по формуле
Pk = С~}/п exp -1 к = 1,2,..., 2п.
\,2 п )
Полюсы отделены друг от друга равными углами; для устойчивой схемы отбирают только полюсы, расположенные в левой полуплоскости. Комплексные корни входят сопряженными парами.
Отобрав полюсы из левой полуплоскости, находим передаточную
функцию
а(р)
Ь(Р)
1
СП(^-а)
к-1
(10.45)
401
где а(р) и Ь(р) полиномы переменной р с вещественными коэффициентами (корни уравнений а(/ = 0 и /?(/?) = О называют соответственно нулями и полюсами Н (р)).
Пример 10.2 [5]. Найти п и Н (р) ФНЧ Баттерворта, если ^тах^ДдБ при f <ЗМГц и crmin = 60 дБ при />12МГц.
Решение. Здесь щ = 2яг • 3 • 106, С92 = 2яг • 12 • 106. Вычисляем 1100-1/10 _ 1
“«По------= 0,15262-10 3,
V 1О60'10 — 1
К7 = — = 0,25.
2 12
Из (10.44) находим п >6,33888, т.е. и = 7. Нормируя частоту так, чтобы С = 1, получаем
.( л 2k -1А , , „
Pk = ехР/[2+7!'~4 ’ Л =
Передаточная функция
/ 7
/ *=1
= 1Д/2 +1)(/ + 0,4450/2 +1)(/?2 + 1,247/? + 1)(/ +1,8019/2 +1) содержит один вещественный полюс (множитель первого порядка) и три пары сопряженных полюсов, объединяя каждую пару в один множитель, получаем три множителя второго порядка. Функцию //(/?) можно записать и по-другому:
Н(р) = 1Д р1 +4,4940/ +10,0978/25 +14,5920/ + +14,5920/ +10,0978/ + 4,4940р +1).
Здесь р и рк нормированы. При денормировании р следует заменить на /269О, где со0 - нормирующая частота.
10.5.3. Равноволновая аппроксимация ХЗ ФНЧ (Чебышева)
При равноволновой в полосе пропускания аппроксимации ХЗ, как можно показать [4], полюсы передаточной функции удовлетворяют соотношениям
Рк = ° к + Щ = J^i cos (vk + ja>k);
(7k = 6У[ sin vk sh a)k;
a)k = a>\ cos vk ch a>k,
402
. 2Jt-l л ,1 , ( 1
где vk =±-----сок = ±—arsh —
п 2 и \С
С - постоянный множитель
передаточной функции
/ « ( у '
Н(р} = \ СП — -sinту.sh69A -jcosvA. ch69A.
/ )
Порядок фильтра
> arch(l/X1) arch(l/X2) ’
(10.46)
(1047)
множитель
с = 1/(ю^тах/10-1У/2
где Кх и К2 находятся, как для фильтра Баттерворта.
Значения сгк и сок показывают, что полюсы ФНЧ Чебышева
расположены на эллипсе с центром в начале координат; главная ось эллипса находится на оси jco, ее длина равна гц chrzy, а малая ось расположена на оси су и ее длина равна сох sh сок. Для определения устойчивой передаточной функции Н (р) отбираем полюсы рк из
левой полуплоскости р.
Пример 10.3 [8]. Найти п и Н (р) для ФНЧ Чебышева, исходя из условий предыдущего примера.
Решение. Из (10.47) следует, что arch6552,2212 arch 4 поэтому п = 5.
Нормируя частоту к 1, т.е. выбирая нормирующую частоту (Oq = 2л • 3 • 106, из соотношения (10.46) получаем
Н (р) = 1/(0,152620 (р + 0.538914) (р + 0,166534 - j 1,0803 72) х х(р + 0,166534 + jl,080372)(p + 0,43591-J0,667707)x х(р +0,43591 + j 0.667707)).
Здесь С = л/1О0,1/10 — 1 = 0,152620. ХЗ найденного фильтра приведена на рис. 10.8. В полосе пропускания ХЗ имеет равноволновый характер, т.е. колеблется между 0 и rzrnax. За счет этого фильтр Чебышева имеет меньший порядок по сравнению с фильтром Баттерворта.
403
а(и),дБ
0 Ид w2 w
Рис. 10.8
лосно-пропускаюшего
Известен ряд других численносимвольных методов аппроксимации ХЗ [4, 12]. Широко применяются численные методы оптимизации в задачах аппроксимации. Возможна также аппроксимация нескольких характеристик, например, ХЗ и ХГВЗ, заданных одновременно [4, 12].
Если необходимо аппроксимировать ХЗ фильтра верхних частот (ФВЧ), по-(ППФ) или полосно-задерживающего
(ПЗФ), то вначале аппроксимируется ХЗ некоторого ФНЧ-прототипа, затем производится преобразование комплексной переменной р [4].
10 5.4. Преобразование функции Н(р) в функцию Hz(z)
Для получения передаточной функции ЦФ Hz (z) могут быть применены различные z-преобразования (комплексная плоскость р преобразуется в комплексную плоскость z). Устойчивой функции //(у?) соответствуют полюсы у?;, расположенные в левой полуплоскости. Для устойчивости Н2 (z) ось jco плоскости р должна отображаться в единичную окружность (окружность радиуса 1 с центром в начале координат) плоскости z; левая полуплоскость р (Rep < 0) должна отображаться внутри единичного круга |z| < 1.
Наибольшее применение нашли стандартное (описано выше), согласованное и билинейное z-преобразования.
При стандартном z-преобразовании дискретизируется импульсная характеристика /г(г) аналоговой схемы (метод инвариантности импульсной характеристики). Эта характеристика находится обычно с помощью разложения Н(р) на простые дроби и применения к ним обратного преобразования Лапласа. В конечном итоге соответствующие слагаемые Н, (z) находятся с помощью преобразовани я
1 1
Р +Pi l-z~le~PiT° '
Соотношение (10.48) справедливо для простых полюсов р, функции /7 (у?).
404
Пример 10.4. Функция //(/2) = 2£>/(/> + 1)(/2 + 2). Определить Я-(4
Решение. Разлагаем Н (/?) на простые дроби:
Н(р] = — + ^—, v ' р+\ р+2
откуда полюсы рх = -1, р2=-2. Применяя (10.48) к каждой дроби, после простейших преобразований получаем
2 + {2е~2т° -4e"7’°)z“1
Hz(z) = То '-------- - ,
1-(е т° +е 2T°jz 1 + е 3T°z 2
где постоянный множитель Го вводится для точного согласования импульсных характеристик /г(?) и /г(А).
В методе стандартного z-преобразования связь между полюсами передаточных функций f/(p) и A/Z(z) вытекает из соотношения z = exp(/?70) (см. выше). Однако для нулей этих функций такое соотношение не справедливо. При согласованном z-преобразовании нули и полюсы находятся с использованием равенства z = ехр (рТ0).
Особенности отображения плоскости р в плоскость z при этих преобразованиях см. в [4].
Часто применяется z-преобразование, называемое билинейным:
2 1-z-1
р=~—— (10-49)
1 + z
Нетрудно показать, что при использовании (10.49) мнимая ось плоскости р преобразуется в единичную окружность плоскости z, а левая полуплоскость — внутрь единичного круга с центром в начале координат. Передаточная функция ЦФ
//Z(z) = /7(^=2(l-z-1)/(l + z-1)7o. (10.50)
Из (10.49) следует, что связь между частотой аналоговой цепи со и частотой цифровой цепи со. оказывается нелинейной:
э
co = ^cozTJ2). (10.51)
'о
Если необходимо, нелинейность можно учесть при аппроксимации ЦФ. Для этого граничные и другие особые частоты cozi ЦФ принимаются за основу определения соответствующих частот
405
аналогового прототипа по соотношению (10.51). По частотам а), и требованиям к ХЗ цифрового фильтра находится Н(р)-
Пример 10.5. Необходимо реализовать цифровой ФНЧ с граничными частотами fiz =400 Гц, f2z =600 Гц и тактовой частотой /о = 2кГц. Определить граничные частоты для решения задачи аппроксимации прототипа.
Решение. Как следует из (10.51), граничная частота полосы пропускания
у;=-^-1ёя/21Т0 = 462,53Гц.
Граничная частота полосы задерживания прототипа y2=-Ltgzr/z270 =876,23rU.
Такой подход применяют, если особые частоты составляют более 10 % от тактовой частоты.
Пример 10.6. Сомножитель знаменателя Н(р), соответствующий комплексно-сопряженным полюсам p}1--c/.±jp, равен (р + сг)2 +/?2. Найти сомножитель //Z(z) после применения билинейного z-преобразования.
Решение. Подставляя вместо р правую часть (10.49), находим
I \2 о2 1 + biZ-1 + 62z 2 (р + а) + /Г=>с----1|--------,
где
c = (2/T0)d, d = (1 + оЯ0/2)2+ (/ЗТ0/2)2 А1=-2[1-(«7о/2)2-()07о/2)2уб7; />2=[1-(«Т0/2)2+(/?70/2)2]/б/.
Учитывая результат примера, легко рассчитать И, (z) любого порядка.
Сравнение рассмотренных методов определения H-(z} см. в [4, 8].
Кроме применения z-преобразований для получения функции Hz (z) используют различные оптимизационные методы непосредственно в плоскости z [4].
406
10.6. Реализация рекурсивных ЦФ
10.6.1. Непосредственный и канонический методы реализации
Цифровые фильтры делятся на рекурсивные или фильтры с бесконечными импульсными характеристиками (БИХ-фильтры), и нерекурсивные, или фильтры с конечными импульсными характеристиками (КИХ-фильтры), называемые еще трансверсальными [5, 8].
Пусть заданы реализуемая передаточная функция A/Z(z) рекурсивного фильтра в виде т
яг(2) = -7-Т = —-----• (10.52)
г(г) tv-
(=0
где H(z), Y (z) - соответственно z-преобразования входного г(А) и выходного у (А) сигналов, b0 = 1. По этой функции можно составить разностное уравнение, описывающее фильтр:
£ bty (k-i) = ^atV(k-i). (10.53)
/=0 1=0
При записи (10.53) учитывалось, что слагаемому z-/Iz(z) соответствует сигнал v(A —7) в случае нулевых начальных условий. Учитывая, что А(| = 1, из (10.53) получаем т п
^(A') = Sa<v(A'_z)_Z^(A'_/)- (10.54)
z=0 1=0
По этому соотношению легко построить структурную схему алгоритма цифрового фильтра (ЦФ), называемую непосредственной реализацией. Эта схема приведена на рис. 10.9 и содержит элементы задержки на один отсчет z-1, операторы умножения (ориентированные ветви с указанным множителем) и суммирования (кружки со знаком «плюс»).
Алгоритм (10.54) реализуется на сигнальном процессоре.
Соотношение (10.52) перепишем в виде
^z(z) = H1(z)/72(z), (10.55)
где
И\ (z) = w(z)lv(z)=у ;
/ 1=0
407
rn
H2 (z) = Y(z)/W(z) = £a,z"',
r=0
где W(z) z-преобразование промежуточного сигнала w(A). Этим выражениям соответствуют разностные уравнения
и'(А) = v{k^-'^blw(k-iy, (10.56)
i=0
т
По уравнениям (10.56) и (10.57) строится структурная схема алгоритма ЦФ (рис. 10.10), называемая канонической реализацией, поскольку содержит минимально возможное число элементов задержки.
10.6.2. Каскадный и параллельный методы
Третью структурную схему алгоритма ЦФ можно построить, записывая (10.52) как произведение сомножителей второго порядка и, если необходимо, одного сомножителя первого порядка: м
Hz(z) = Y[Hi(z), (10.58)
i=i
408
где
. -1 . -2
, = aOi+aliZ + a2jz (10.59)
l + Z^z +^2/Z
сомножитель второго порядка, или
Н: (z) = a°/+ai,Z1 - (10.60)
i + V1
сомножитель первого порядка.
Выражению (10.58) соответствует структурная схема алгоритма ЦФ, называемая каскадной (рис. 10.11), при этом каждый блок второго порядка (передаточная функция которого имеет пару комплексно-сопряженных полюсов) и блок первого порядка можно реализовать схемами по рис. 10.9 или 10.10. Примеры структурных схем второго и первого порядка приведены на рис. 10.12а,б.
Следующая структурная схема ЦФ получается на основе разложения (10.60) на простые дроби м
= (10.61)
i=0
где слагаемые Hi (z) отвечают блокам второго порядка
Я (z) = + a"z 1 (10.62)
1 + buz + b2iz 2
409
Рис. 10.13
или блокам первого порядка
(1О-63)
1 + Z>1;z
Сумме (10.61) соответствует параллельное соединение блоков; в результате получается параллельная реализация ЦФ (рис. 10.13).
Из рассмотренных выше структур следует отметить каскадную. Она обладает малой чувствительностью к ошибкам квантования и округления и простотой расчета, что определяет ее широкое применение. Кроме рассмотренных, следует отметить еще лестничную и решетчатую схемы ЦФ [5], которые также характеризуются низкой чувствительностью. Проблема чувствительности особенно актуальна для низкоразрядных процессоров.
10.7. Цифровые нерекурсивные фильтры
Нерекурсивные ЦФ имеют импульсную характеристику конечной длины (с конечным числом отсчетов). Они часто применяются в том случае, если ЦФ должен иметь линейную фазочастотную характеристику. Можно доказать, что если импульсная характеристика Л (л) удовлетворяет условию
h(n) = h(N-1-и)
для и = 0,1,..., (7V/2) — 1 , когдаNчетное, и для и = 0,1,..., (7V-l)/2. когда N нечетное, то ЦФ будет обладать линейной ФЧХ.
Нерекурсивный фильтр имеет в общем случае передаточную функцию 7/(z) = a(z), 6(z) = l и реализуется как частный случай схем на рис. 10.9 и 10.10.
Наиболее просто цифровые КИХ-фильтры рассчитываются с помощью рядов Фурье [5]. Для четных функций |//(j7y)| (относительно начала координат) запишем ряд
|Hz(j7y)| = 4 + ^Acos,ay7o. (10.64)
77 — 1
410
а для нечетных -
|//z(jYy)| = ^B„sin/7(yr0, (10.65)
п=1
где То период дискретизации. Выражая косинусы и синусы по формуле Эйлера, получим п . п п -п
_ Z + Z . Z —z
cos пй)Т0 -------; sin псоГ^ =------,
2 2;
где z - exp(ja>n). В результате из (10.64) и (10.65), находим
\hz (»| = л + S v(z"+ z’") (10 66)
л=1 1
ИЛИ
lWz(H = iTL(z"-r”)- <'0.67)
л=1 2 2
Чтобы получить фильтры с вещественными коэффициентами, в (10.67) исключаем j при суммировании. При этом фильтр будет обладать фазовым сдвигом на 90° по сравнению с функцией (10.67), однако форма ФЧХ не изменится.
Функции (10.66) и (10.67) физически не реализуются, т.к. содержат операторы опережения на п тактов z” и бесконечные суммы. На практике суммы округляют до N членов. При этом
N А
<10-68>
ИЛИ
N ту
(10.69)
Вынося за скобки из (10.68), получаем
(10.70)
Аналогичное выражение получается из (10.69). Множитель
Z
1г=ехр(убУ7’)
_ ejN(0T
имеет единичную амплитуду, т.е. не влияет на АЧХ, и линейную фазу. Если этот член исключить, то потребуется ввести линейный фазовый сдвиг множителем ехр(-уАбУТ’) или, что эквивалентно,
411
задержку на NT или N интервалов дискретизации. После исключения zA из (10.70) имеем
У J
4 + Zv(z"+z") и=1 2
(10.71)
Функция (10.71), очевидно, является реализуемой в отличие от (10.70). Коэффициенты выражения (10.71) симметричны относительно средней точки фильтра.
Реализация (10.71) показана на рис. 10.14 для N= 3. Подобная
Рис. 10.14
конфигурация получается и для фильтра на основе синусного ряда. Использование в любой физической реализации конечного числа членов ряда Фурье вносит в частотную характеристику ошибки квантования (округления), появляющиеся в виде колебаний на плоской части характеристики. Кроме того, в точках резких переходов от участков
пропускания к участкам задерживания частотного диапазона
также будут обнаруживаться выбросы и колебания (явление Гиббса) [5, 8]. Такие колебания могут быть совершенно неприемлемыми.
Чтобы уменьшить колебания Гиббса, необходимо придать коэффициентам ряда дополнительные веса с помощью весовых функций (функций окна). Поскольку умножение двух последовательностей во временной области эквивалентно свертке их спектров в частотной области, метод взвешивания коэффициентов обеспечивает сглаживание выбросов и колебаний первоначальной частотной характеристики.
В качестве весовых функций используют различные функции, например, [5]
412
окно Ханна:
w(n) = — 1 — cos v ’ 2
2тги ) 7V-1JJ’
n > N -1;
(10.72)
окно Хемминга:
1
2ЛП
А-1
w(/?) = 0, и<0, п> N -1;
w(n) = — 0,54 + 0,46cos
(10.73)
окно Кайзера:
0<и<А-1,1 (Ю.74)
2
где /0 (•) — модифицированная функция Бесселя нулевого порядка первого рода, й)а — параметр формы окна.
Пример 10.7. Рассмотрим аппроксимацию косинусоидальным рядом АЧХ идеального ФНЦ, т.е. функции А(<у) = 1(ш + б9с), где !(•) - единичная функция Хевисайда, й)с = 2я/'с — угловая частота среза, /с = 400 Гц; тактовая частота /0 = 2 кГц [5].
Решение. Коэффициенты фильтра
л 2 "К/ М
4) =---- dd) =—-
«Г ' й)г
л COf. _ _ _
4 г 2mia) , 2 . 2лпсог
Ап = — cos----------ай) = —sin---------.
OJj’ (Jjj1 COj1
На рис. 10.15а приведена АЧХ при А = 10 без взвешивания коэффициентов. Соответствующая характеристика при взвешивании окном Хемминга изображена на рис. 10.156.
413
Недостатком цифровых КИХ-фильтров является существенно больший объем вычислений по сравнению с БИХ-фильтрами, однако они могут обеспечить линейную ФЧХ и всегда устойчивы. Дополнительные сведения о расчете КИХ-фильтров читатель может найти в литературе [3—6, 8, 12] и др.
Кроме цифровых фильтров, широко применяются другие цифровые системы в различных областях техники.
Раздел II
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
Глава 11
ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
11.1. Общие сведения об измерениях
Измерением называется нахождение значения физической величины опытным путем с помощью специальных технических средств.
Измерения должны выполняться в общепринятых единицах этих физических величин. В России принята Международная система единиц - СИ. В качестве основных в этой системе используются семь единиц, через которые выражаются все остальные единицы, называемые производными. Основными единицами СИ являются:
длина — метр (м);
масса - килограмм (кг);
время секунда (с);
сила электрического тока - ампер (А);
термодинамическая температура - кельвин (К);
сила света - кандела (кд);
количество вещества — моль (моль).
Средствами измерения (СИ) называют технические средства, используемые при измерениях и имеющие нормированные метрологические характеристики. К средствам измерений относятся меры, измерительные приборы, измерительные преобразователи, измерительные установки, измерительные системы.
Мерой называется средство измерений, предназначенное для воспроизведения физической величины заданного размера. Это, например, измерительная катушка сопротивления (мера сопротивления), конденсатор (мера электрической емкости), гиря (мера массы). Мера, воспроизводящая единицу физической величины с наибольшей возможной в стране точностью, называется эталоном.
415
Измерительным прибором называется средство измерений, предназначенное для выработки сигналов измерительной информации в форме, доступной для непосредственного восприятия наблюдателем. Это, например, амперметр, вольтметр, ваттметр.
Измерительным преобразователем называется средство измерений, предназначенное для выработки сигналов измерительной информации в форме, удобной для дальнейшего преобразования, передачи, хранения, но не поддающейся непосредственному восприятию наблюдателем. Измерительными преобразователями являются датчики различных неэлектрических величин.
Измерительной установкой называется совокупность функционально объединенных средств измерений (мер, измерительных приборов, измерительных преобразователей) и вспомогательных устройств. Она предназначена для выработки сигналов измерительной информации в форме, удобной для непосредственного восприятия наблюдателем. Например, установка для градуировки и поверки приборов.
Измерительной системой называется совокупность средств измерений и вспомогательных устройств, соединенных между собой каналами связи. Примером такой системы может служить система измерения и учета тепловой энергии, потребляемой предприятием. Как правило, измерительные системы кроме сбора измерительной информации выполняют ее обработку и хранение, имея в своем составе контроллеры или компьютеры.
11.2. Основные характеристики средств измерений
Существует целый ряд общих для всех средств измерения характеристик, значения которых влияют на результат измерения. Такие характеристики называются метрологическими. Рассмотрим основные из них.
Функция преобразования средства измерений. Она определяет связь между входной х и выходной а величинами средства измерений:
ог = /(х).
Наиболее предпочтительна линейная функция а = кх. Однако часто встречаются и нелинейные.
416
Чувствительность S' средства измерения к измеряемой величине х определяется как производная _ da о —------------------------------.
dx
Чувствительность характеризуется отношением приращения da выходного сигнала средства измерения к вызвавшему его приращению входного сигнала dx. Для линейной функции преобразования чувствительность постоянна во всех точках диапазона измерений, для нелинейной функции чувствительность зависит от расположения точки внутри диапазона.
Погрешности средств измерений. По способу выражения погрешности делятся на абсолютные, относительные и приведенные.
Абсолютная погрешность А равна разности между показанием прибора и истинным значением измеряемой величины. На практике истинное значение неизвестно и заменяется действительным значением, устанавливаемым по образцовым средствам или градуировочным таблицам. Таким образом,
А = х — х.,, где А — значение абсолютной погрешности; х — результат измерения; хи - истинное (действительное) значение измеряемой величины.
Абсолютная погрешность, взятая с обратным знаком, называется поправкой
С = -А.
Относительная погрешность СИ 8 представляет собой отношение абсолютной погрешности к истинному значению измеряемой величины, выраженное в процентах:
s = x-x^ wo%
ХИ
Приведенная погрешность СИ у представляет собой отношение абсолютной погрешности А к нормирующему значению XN, выраженное в процентах:
2L2^lioo%.
xN
Нормирующее значение зависит от шкалы прибора. Например, для приборов с нулем в начале шкалы (рис. 11.1) нормирующее значение равно конечному: XN = хк; для приборов с нулем внутри шкалы нормирующее значение равно арифметической сумме
14 Зак 1186
417
О хк
llllllll lllllllllllll
*к1 О хк2
llllllll lllllllllllll
Рис. 11.1
конечных значений:
Лу=хк Xn = |хк1| + |хк2|; для неравномерных шкал
XN—|хк1|+|хк2| a = \OgX или а = — норми-
X
рующее значение равно
длине шкалы (XN - /ш) и выражается в единицах длины.
Зависимость абсолютной погрешности А от входной величины
х может быть представлена некоторой полосой неопределенности,
внутри которой может находиться погрешность конкретного прибора (рис. 11.2). Абсолютная погрешность А может быть ограниче-
Рис. 11.2
на прямыми 1 или 2. В общем случае предельное значение абсолютной погрешности
Дтах=±(а + ^)>
где а - предельное значение аддитивной погрешности; Ьх - предельное значение мультипликативной погрешности.
Источники аддитивной погрешности — трение в опорах, шум,
наводки и вибрации.
Источники мультипликативной погрешности — отклонение действительной функции преобразования от номинальной, вызванное старением элементов прибора.
Класс точности - это обобщенная характеристика (СИ), определяющая его точность. Средству измерения, у которого допускаемая основная приведенная погрешность постоянна в любой точке
шкалы, присваивают класс точности в виде одного числа из ряда 1-10''; 1,5-10"; 210"; 2,510"; 410"; 510"; 6-10", где и = 1; 0; -1; -2 и т.д. В этом случае класс точности определяет предельное значение основной приведенной погрешности СИ. выраженное в процентах. Слово основная означает, что данная погрешность определена для нормальных условий эксплуатации средства измерения, например, для большинства электроизмерительных приборов температура окружающей среды 20 ± 5 °C, атмосферное давление 84... 106 кПа, влажность 30.. .80 %.
418
Класс точности средств измерения, у которых мультиплика
тивная составляющая погрешности оказывает существенное влияние, обозначается в виде отношения чисел c/d. В этом случае класс точности определяет предельное значение основной относительной
погрешности средства измерения, выраженное в процентах, по сле
дующей формуле:
С
i-l
X
(11.1)
где хк — предел измерения; х — измеренное значение физической
величины.
Например, для прибора класса точности 0,1/0,05
С
*'тах
Дополнительная погрешность — погрешность, возникающая в результате выхода хотя бы одной из влияющих на результат измерения величин из области нормальных значений. Она возникает при отклонении условий эксплуатации от нормальных. Почти всегда одной из влияющих величин является температура.
Информацию о том, какие условия эксплуатации средств измерения считаются нормальными и о том, как от влияющих величин зависит дополнительная погрешность, можно найти в ГОСТах и технической документации на средства измерения.
В западных странах в 1993 г. под эгидой Международного комитета Мер и Весов и ряда других организаций разработано «Руководство по выражению неопределенности измерений». В соответст
вии с ним принято оценивать точность измерения понятием «неопределенность» измерений. В настоящее время все российские ГОСТы оперируюч с понятием «погрешность». Учитывая процесс интеграции России в мировое экономическое пространство, существует тенденция перехода в оценке точности измерений от понятия «погрешность» к понятию «неопределенность». Существующие между ними соотношения определены в рекомендации МИ 2552-99 «Руководство по выражению неопределенности измерений» (ВНИ-ИМ им. Д.И. Менделеева, Санкт-Петербург, 1999).
Диапазон измерений - область значений между верхней и нижней границами, для которой нормированы допускаемые погрешности средства измерений.
Вариация показаний средств измерения определяется как
14*
419
разность показаний средства измерений при одном и том же значении измеряемой величины. Вариация определяется при плавном подходе указателя в его движении от начальной и конечной отметок шкалы к измеряемой величине. Неизменность значения измеряемой величины в обоих случаях контролируется более точным образцовым средством. Причиной вариации является, в основном, трение в опорах электромеханических приборов, гистерезис намагничивающихся элементов.
Здесь следует также отметить, что термин «погрешность средства измерения» обусловлен только несовершенством данного средства измерения. При этом изменение режима электрической цепи при включении средства измерения, погрешность отсчета и т.п. не учитываются. Погрешность измерения и способы ее оценки являются предметом науки «Метрология» и в данной книге не рассматриваются.
11.3. Магнитоэлектрические приборы
Магнитоэлектрические приборы имеют в своей основе магнитоэлектрический измерительный механизм, схема устройства которого приведена на рис. 11.3. Между полюсами постоянного магнита N-S
Рис. 11.3
расположены полюсные наконечники 1 из магнитомягкой стали, снабженные цилиндрической выточкой. В центре выточки неподвижно закреплен сердечник 2, выполненный также из магнитомягкой стали. На оси сердечника крепится подвижная катушка 3, по проводникам которой протекает измеряемый постоянный электрический ток. На оси жестко укрепле
на стрелка прибора. При протекании тока по катушке 3 в результате
взаимодействия тока с магнитным полем создается вращающий мо
420
мент М, действующий на катушку 3. Пусть а - угол, определяющий некоторое произвольное положение подвижной части. Тогда при перемещении ее на малый угол da совершается работа Mda, численно равная изменению энергии электромагнитного поля dWe, обусловленному перемещением на da (закон сохранения энергии), т.е.
Mda = dWe.
Таким образом, выражение для вращающего момента, справедливое для измерительных механизмов всех типов, имеет вид dW
M=^JL. (11.2)
da
Для катушки с током, находящейся в поле постоянного магнита, энергия электромагнитного поля
где у/ - потокосцепление магнитного поля с катушкой 3; 7- ток ка
тушки.
Подставив We в выражение (11.2) и считая ток 7 постоянным, получим:
М=1<*. (11.3)
da
При повороте рамки на угол da в равномерном воздушном зазоре изменение потокосцепления с катушкой, учитывая наличие двух рабочих сторон катушки, запишем в виде
dy/ = IwBrlda, где В - индукция в зазоре; w — число витков катушки; г — радиус катушки; / - длина витков катушки в направлении, перпендикулярном чертежу.
Подставим dy/ в (11.3):
M = BswI, (11.4)
где 5 = 2г/ - площадь витка катушка. *
Для установления положения стрелки на некото-
рой отметке вращающий момент Муравновешивается JJ
противодействующим моментом Л/пр, который чаще
всего создается плоской пружиной (рис. 11.4). В этом
Рис. 11.4 случае
Л7пр=1Г«, (11.5)
где W- удельный противодействующий момент пружины.
421
Приравняв моменты из (114) и (11.5), получим угол а, определяющий показания прибора:
Bsw т
а =---1
W
или
a = S/l, (11.6)
( Bsw где о/ - чувствительность по току I о;
Из (11.6) следует, что угол отклонения а пропорционален току I, т.е. прибор имеет равномерную шкалу с одинаковой чувствительностью механизма во всех ее точках.
При изменении направления тока I угол отклонения а меняется на противоположный. Поэтому такие механизмы пригодны только для измерения в цепях постоянного тока.
При повышении температуры уменьшаются удельный противодействующий момент W и индукция магнитного поля В. Эти факторы почти компенсируют друг друга, поэтому температурное влияние на измерительный механизм мало.
Достоинствами магнитоэлектрического механизма являются большая чувствительность, малое собственное потребление мощности, малое влияние внешних магнитных полей благодаря малому воздушному зазору и сильному собственному магнитному полю, линейность шкалы.
Недостатки - чувствительность к перегрузкам (подвод тока осуществляется через спиральные пружины), сравнительно высокая сложность и стоимость.
Рис 11.5
Наивысший класс точности магнитоэлектрических приборов 0,1. Маркируются приборы на шкале буквой М и знаком СИ.
Широкое применение находят также магнитоэлектрические логометры (рис. 11.5). Логометр состоит из двух жестко укрепленных на оси катушек 1, нахо
дящихся в поле постоянного магнита tV- S. В приборе не пре
дусмотрены противодействующие пружины. Форма сердечника 2 и
422
полюсных наконечников 3 выбрана такой, чтобы индукция в воздушном зазоре, создаваемая токами катушек 1, была неравномерной:
Si =/!(«), B2=f2(a),
где а - угол поворота подвижной части.
Моменты, действующие на подвижную часть, можно выразить следующим образом:
Мх = («); М2 - I2F2 (сг) ,
причем действуют они в противоположных направлениях.
Из условия равенства моментов
IxF\a) = I2F2(a)
получаем:
A
I2 Fx(a)
= FA.aY
Из последнего выражения:
a = F
Таким образом, угол отклонения подвижной части логометра
определяется отношением токов в рамках.
Магнитоэлектрические амперметры. Для измерения малых токов (до 100 мА) измерительный механизм включается в измерительную цепь непосредственно (рис. 11.6а). В амперметрах на большие токи используются шунты, представляющие собой четырехзажимные резисторы. Токовые зажимы Т включаются в цепь изме
ряемого тока, потенциальные П подсоединяются к измерительному механизму (рис. 11.66). Равенство напряжений на шунте и измерительном механизме позволит записать:
АЛ = Antin'
Коэффициент шунтирования n=zJ_- ^0+^ш _ -А А
Шунты имеют малое сопротивление и применяются для расширения пределов измерения по току. Многопредельность ампер
423
метров достигается использованием нескольких переключаемых шунтов.
Изготавливаются шунты из манганина, материала, мало изменяющего сопротивление от температуры. Катушка измерительного механизма изготавливается из меди с большим температурным изменением сопротивления. Поэтому при изменении температуры окружающей среды в схеме (рис. 11.6 б) происходит перераспределение токов между измерительным механизмом и шунтом, что вызывает дополнительную погрешность. Эта погрешность в амперметрах, использующих измерительный механизм без шунтов, отсутствует.
Магнитоэлектрические вольтметры. Измеряемое напряжение преобразуется в пропорциональный ему ток, на который реагирует измерительный механизм. Это осуществляется последовательным включением добавочного резистора из ман-° j* ганина по схеме, изображенной на рис. 11.7.
^7?0 Пусть измерительный механизм имеет предел jy измерения по напряжению I0R0. Тогда коэффи-
циент расширения предела измерения включением Яд
и RG + Rn и =----=------—.
Рис. 11.7 ЛЛ *о
При изменении температуры изменяются сопротивление /?0 и ток /0. В вольтметрах, рассчитанных на большие напряжения, применяют добавочное сопротивление из манганина, у которого /?д»7?о. В результате температурная погрешность мала. При уменьшении предела измерения температурная погрешность увеличивается.
Шунты и добавочные резисторы имеют классы точности: 0,01; 0,02; 0,1... Класс точности определяется относительной погрешностью сопротивления, выраженной в процентах:
^^•100%,
О
7VHOM
где АТ? — абсолютная погрешность; /?ном — номинальное сопротивление шунта или добавочного резистора.
Магнитоэлектрический гальванометр. Гальванометрами называются электроизмерительные приборы высокой чувствительности к току или напряжению, имеющие неградуированную шкалу. Устройство зеркального гальванометра приведено на рис. 11.8.
424
Рис. 11.8
Рамка 1 закреплена на подвесе 2. Ток к рамке подводится через подвес 2 и без-моментную нить 4 На подвесе жестко укреплено зеркало 3. Противодействующий момент в механизме создается за счет закручивания подвеса, выполненного в виде тонкой нити из фосфористой бронзы или кварца (покрытого слоем металла). Высокая чувствительность гальванометра обеспечивается за счет малого противодействующего момента и увеличенной длины указателя (светового луча).
При отсутствии тока через рамку (/г= 0) луч света от источника 1 (рис. 11.9), отражаясь от зеркала 2, попадает на середину шкалы 3. При протекании тока отраженный от зеркала луч перемещается по шкале. При этом
tg2« = -где / - расстояние между зеркалом и подвижной части.
Из рис. 11.9 видно, что чем больше I, тем больше при том же значении а отклонение х. Таким образом, чувствительность гальванометра может быть увеличена за счет увеличения расстояния между зеркалом и шкалой.
Чувствительность зеркального гальванометра может достигать Ю^.-.Ю-9 А/мм. Наиболее удобны переносные гальванометры с внут-
ренним световым отсчетом Рис. 11.9
Гальванометры используются главным образом в качестве нуль-индикатора, фиксирующего отсутствие тока в цепи, поэтому им класс точности не присваивается. Качество же гальванометра характеризует чувствительность и стабильность нулевого положения указателя. Под стабильностью нуля понимают число делений невозвращения указателя к нулевой отметке при плавном движении
шкалой; а - угол поворота
425
его от крайней отметки шкалы. Стабильность нуля указывается на шкале в виде одного из чисел 0,5; 1; 1,5, заключенного в рамку в виде ромба.
Выпрямительные приборы. Выпрямительные приборы представляют собой сочетание магнитоэлектрического измерительного механизма и полупроводникового выпрямителя (рис. 11.10) и предназначены для работы в цепях переменного тока. Выпрямление переменного тока происходит с помощью диодного моста. В положи-
Рис.11.10 тельную полуволну тока i напряжение на диагонали ab положительно, диоды EDI и ГОЗ открыты, диоды VD2 и PD4 закрыты. В измерительном механизме полуволна тока /о имеет ту же полярность, что и ток /. В отрицательную полуволну тока открыты диоды VD2 и VD4, а закрыты VD1 и PD3.
Полуволна тока ф в измерительном механизме имеет то же направление, что и в предыдущий полупериод. Отклонение подвижной части измерительного механизма ввиду его инерционности пропорционально среднему значению тока а = А7ср. Градуируются приборы переменного тока в действующих значениях. При синусоидальном токе между средним и действующим значениями тока существует прямая зависимость. Отклонение формы тока от синусоидальной приводит к дополнительной погрешности.
Параметры диодов (сопротивление в прямом и обратном направлении) зависят от температуры. Поэтому наличие диодов в измерительной цепи существенно увеличивает погрешность. Наивысший класс точности выпрямительных приборов 1,0.
Омметры. Приборы для измерения электрического сопротивления называются омметрами. Принципиальная схема омметра приведена на рис. 11.11. Измеряемое сопротивление Rx включается по
426
следовательно с магнитоэлектрическим измерительным механиз-
мом Показания прибора в соответствии с (11.6)
U
Rx + ^0 + R д
c^S^S,
зависят от измеряемой величины Rx.
При постоянстве величины S[U шкала прибора может быть проградуирована в омах. Из формулы (11.8) видно, что при Rx = 0 отклонение подвижной части а будет наибольшим.
С течением времени напряжение источника может уменьшаться, .и необходимо будет перед каждым измерением устанавливать его указатель на нуль. Для этого омметр имеет магнитный
Рис. 11.11
шунт - металлическую пластинку, положение ко
торой относительно полюсов постоянного магнита можно изменять, регулируя этим индукцию В в радиальном воздушном зазоре механизма и чувствительность механизма. Для настройки прибора перед
измерением зажимы, к которым подключается измеряемое сопротивление, замыкаются накоротко (Rx= 0), и регулировкой положения магнитного шунта добиваются установки стрелки прибора на нулевую отметку в крайнем правом положении. Омметры с приведенной схемой более пригодны для измерения больших сопротивлений, т.к. изменение малого Rx » R(l + R практически не изменяет а.
Шкала омметров нелинейная. Приведенная погрешность нормируется в процентах от длины шкалы. Класс точности омметров 1,5...2,5.
Рассмотренные схемы с использованием магнитоэлектрическо
го измерительного механизма применяются в универсальных приборах для измерения в цепях постоянного и переменного тока.
11.4. Электромагнитные приборы
Работа электромагнитных измерительных механизмов основана на взаимодействии магнитного поля, созданного неподвижной катушкой, по обмотке которой протекает измеряемый ток, с одним или несколькими ферромагнитными сердечниками, укрепленными на оси. Принцип действия измерительного механизма с замкнутым магнитопроводом поясняет рис. 11.12. Катушка 1 расположена на не-
427
подвижном магнитопроводе 3 с двумя полюсными наконечниками 4 и 5 из магнитомягкого материала. Подвижный сердечник 2 из магни-
9
Рис. 11.12
Подвижный сердечник
томягкой стали закреплен на оси и в исходном положении несимметричен относительно наконечников 4 и 5.
На оси укреплены две спиральные пружины (на рис. 11.12 не показаны). При протекании постоянного тока I через катушку возникает магнитное поле, энергия которого
LI1
W = — е 2 ’ где L - индуктивность катушки.
2 намагничивается этим полем, в ре
зультате чего создается вращающий момент . . dWe I2 dL da 2 da
При протекании в катушке 1 переменного тока i - Im sinrzx
подвижная часть вследствие инерционности реагирует на среднее
значение вращающего момента
l^fl, 1 dL 1 Т. /1 dL
ср Т *t2da 2 da Т о 2 da
где I - действующее значение переменного тока.
Из условия равенства моментов
/2 dL 11Г ----- На, 2 da
откуда угол отклонения подвижной части
I2 dL а =------,
2W da
где W - удельный противодействующий момент спиральной пру
(11.9)
жины.
Электромагнитные приборы могут использоваться для измерений в цепях как постоянного, так и переменного тока.
Достоинства электромагнитных механизмов - пригодность для работы в цепях постоянного и переменного тока, большая перегрузочная способность (нет токоподвода к подвижной катушке), простота конструкции.
428
Недостаток - неравномерная шкала, влияние внешних магнитных полей, большое собственное потребление мощности.
Электромагнитные амперметры. Поскольку катушка измерительного механизма неподвижна, ее наматывают проводом большого сечения. Такие амперметры могут использоваться для прямого включения на токи до 200 А. Шунты для расширения диапазонов измерения в электромагнитных амперметрах не используются по двум причинам. Во-первых, на переменном токе коэффициент шунтирования зависит от угла отклонения подвижной части а, следовательно, и от измеряемого тока I, т.к. индуктивность механизма L = Z,(«). Во-вторых, большая потребляемая мощность потребовала бы крупногабаритные шунты. Многопре-дельность амперметров достигается секционированием катушки и последовательно-параллельным соединением секций (рис. 11.13).
Рис. 11.13
Для расширения диапазонов измерения амперметров на переменном токе до 60 000 А применяются измерительные трансформаторы тока (рис. 11.14). Первичная обмотка трансформатора, обозначаемая буквами Л] - Л2 (линия), включается в измеряемую цепь последовательно. Во вторичную обмотку И( -И2 (измерение) включают амперметры, токовые обмотки ваттметров, счетчиков электрической энергии и других приборов. Измеряемый ток Zj определяется по формуле
где /2 - показания амперметра; К, - коэффициент трансформации, указываемый на щитке трансформатора в виде дроби: числитель -номинальное значение первичного тока, знаменатель - вторичного тока.
Измерительные трансформаторы тока являются средствами
429
измерения и имеют класс точности. Наивысший класс точности лабораторных трансформаторов 0,01, стационарных - 0,2.
Более подробно принцип действия измерительных трансформаторов изложен в главе 13.
Температурная погрешность амперметров обусловлена изменением упругих свойств противодействующих пружин. Изменение сопротивления катушки погрешности не вызывает, т.к. ток не перераспределяется в ее секциях.
Частотная погрешность обусловлена наличием вихревых токов в сердечнике, ослабляющих магнитное поле.
В цепи постоянного тока имеет место погрешность от гистерезиса, которая проявляется в вариациях показания прибора.
Электромагнитные вольтметры. В вольтметрах электромагнитной системы последовательно с измерительным механизмом также включен добавочный резистор Ад из манганина (рис. 11.15), сопротивление которого определяет предел измерения. Для расширения диапазонов измерения вольтметров на переменном токе до 35 кВ используют измерительные трансформаторы напряжения (рис. 11.16). Первичная обмотка трансформатора, обозначаемая А -X(начало - конец), включается в измерительную цепь параллельно. К зажимам вторичной обмотки а - х подключают вольтметры, параллельные цепи ваттметров и других приборов. Измеряемое напряжение определяется выражением
где U2 - показания вольтметра; Ки - коэффициент трансформации, указываемый на щитке трансформатора.
Рис.11.15 Рис.11.16
Наивысшие классы точности лабораторных трансформаторов напряжения - 0,05; стационарных - 0,2.
Для ограничения температурной погрешности необходимо обеспечить достаточно большое отношение сопротивления доба-
430
вечного резистора 7?д из манганина к сопротивлению катушки прибора Ro из меди. Частотная погрешность вольтметров несколько больше, чем амперметров, т.к. с увеличением частоты увеличивается реактивное сопротивление катушки, что вызывает уменьшение тока.
Наивысший класс точности электромагнитных приборов 0,5. Маркируются приборы на шкале буквой Э (например, Э59) и знаком
11.5. Электродинамические и ферродинамические приборы
Рис. 11.17
Работа измерительных механизмов электродинамической и ферродинамической систем основана на взаимодействии магнитных полей двух катушек с токами: неподвижной и подвижной. Электродинамический измерительный механизм (рис. 11.17) состоит из неподвижной катушки 1, разделенной на две части, внутри которой укреплена на оси подвижная катушка 2. На оси укреплены две спиральные пружины (на рис. 11.17 не показаны). При протекании токов /, и 12 в обеих катушках создаются магнитные потоки, силы взаимодействия которых стремятся повернуть подвижную часть так, чтобы магнитные потоки катушек совпали.
Энергия электромагнитного поля двух катушек с токами ^=^ + ^ + ^7/2,
где £i и £2 — индуктивности катушек; М\2 — взаимная индуктивность катушек.
Дифференцируя в соответствии с (11.2) We по а, получим вращающий момент при включении прибора в цепь постоянного тока Д и /2-
(11.10)
^ = 7/^12 da
От угла а зависит только взаимная индуктивность М\2. Индуктивности £i и £2 от а не зависят.
431
При протекании по катушкам переменных токов q = /lmsin6WZ и z2 = ^2msin(^ — <г>) подвижная часть из-за инерционности будет реагировать на среднее значение вращающего момента
= 7 \м№ = 7 рi,J2m sin cot - sin(fitf - <р)^^. (11.11)
То 7 о da
Учитывая, что sin(zy/-^) = sin6y/cos$9-cos6y/sin(z\ из (11.11)
получим:
м _ ЛтЛт dMl2 1V1 ср
da
Т
т т '
cos ср jsin 2 cotdt - sin ср jsin cot • cos cotdt . о о ,
т т Т
Так как pinzy/-cos6y/J/=0; pin2 cotdt= —, то о о 2
о
лт г г dMу2
MCp=I}I2c^<p—-iL, F da
где /1, 12 - действующие значения токов.
(11.12)
Противодействующий момент создается упругими пружинами, поэтому для установившегося отклонения (М = М11р) получим:
Т Т dM.2 ...
I\I2 cos(i?-— = IVa,
da
откуда
/|/2cos<p<7A/l2 г..
a--^-------—---(11.13)
IV da 2
При протекании по катушкам постоянных токов и /2 от-клонение подвижной части в соответствии с (11.10)
бУ=ЛЬЛ12 (1114)
W da где /(, /2 - действующие значения токов.
Основные достоинства электродинамических приборов - одинаковость показаний в цепях постоянного и переменного тока и высокая точность, т.к. погрешности от гистерезиса и вихревых токов отсутствуют.
Недостатки - невысокая чувствительность, большое потребление мощности, чувствительность к перегрузкам.
Наивысший класс точности электродинамических приборов 0,1.
Ферродипамический измерительный механизм отличается от электродинамического тем, что неподвижная катушка имеет магнитопровод из магпитомягкого материала и может выполняться без
432
разделения на две части (рис. 11.18). Так как исходное уравнение энергии электромагнитного поля и принцип получения вращающего момента для ферродинамического измерительного механизма совершенно аналогичны электродинамическому механизму, то и уравнения (11.13) и (11.14) для него так же справедливы. Кроме того, воздушный зазор, где перемещается подвижная катушка, равномерный и радиальный.
поэтому dMx2/da = C\ = const. Отсюда отклоне- Рис. 11.18
ния подвижной части в ферродинамическом измерительном меха
низме в цепи переменного и постоянного тока соответственно:
V- 11 11 2 Vi/ 11 2
a- cos^; а =
W W
Достоинствами фсрродинамических приборов является мень
шее, чем у электродинамических, влияние на них внешних магнитных полей, малое потребление мощности и больший вращающий
момент.
Недостатки - наличие дополнительных погрешностей от гисте-ризиса и вихревых токов. Ферродинамическис приборы применяются чаще всего в качестве ваттметров и самопишущих приборов.
Наивысший класс точности 0,5. Маркируются оба типа приборов на шкале буквой Д и знаками - электродинамический; -ферродинамический.
Рис. 11.19
и ферродинамические амперметры и
Электродинамические
вольтметры имеют одинаковые схемы включения катушек.
Амперметры. В миллиамперметрах до токов 0,5 А подвижная 1 и неподвижная 2 катушки соединены последовательно (рис. 11.19а).
При этом через обе катушки протекает один и тот же ток /, угол <р = 0, и отклонение стрелки прибора
I1 dMl2 а =-----—
W da
(11.15)
433
В амперметрах на токи больше 0,5 А катушки соединены параллельно (рис. 11.196). Здесь /[ = кх1, 12 = к21. Отклонение стрелки прибора
k,k2I2 dM'2 а = ——--------—
(11.16)
W da
Из (11.15) и (11.16) видно, что показания приборов пропорциональны /2. Для ферродинамических приборов dMx2 /da = = 0)= const и шкала квадратичная. Для электродинамических dMx2/da* const и это приближает шкалу к равномерной. Амперметры обычно выпускаются двухпредельными с переключением
катушек по рассмотренным схемам.
В амперметрах с последовательным соединением катушек изменение активного и реактивного сопротивления, вызванное изменением температуры и частоты, не влияет на показания прибора, т.к. через обе катушки течет весь измеряемый ток. Температурная погрешность определяется только изменением упругих свойств противодействующих пружин.
В амперметрах с параллельным соединением катушек может иметь место температурная погрешность за счет перераспределения токов /[ и 12. Для ее компенсации используют добавочные резисторы Лд1 и /?д2 из манганина и меди, которые выравнивают температурные коэффициенты параллельных ветвей. Для уменьшения частотной погрешности при выборе сопротивлений /?д1 и /?д2 обеспечивают и второе равенство - равенство постоянных времени параллельных ветвей:
_ L2
/?1 R2
где L\, L2 - индуктивности; Rx, R2 - полные активные сопротивления параллельных ветвей.
Вольтметры. Схема вольтметра представляет собой последова-
Рис. 11.20
тельное соединение неподвижной и подвижной катушек и добавочного резистора из манганина (рис. 11.20). Ток в катушках
где Z - полное сопротивление вольтметра.
434
Подставив его значение в (11.13) и учитывая, что ip = 0, по-
лучим:
а =
U2 dMn
WZ2 da
Характер шкалы вольтметра - такой же, как амперметра. Температурная погрешность вольтметра обусловлена изменением сопротивления катушек и упругости пружин, создающих противодействующий момент. Эта погрешность тем меньше, чем больше добавочное сопротивление из манганина по сравнению с сопротивлением катушек. Изменение частоты вызывает изменение реактивной составляющей полного сопротивления цепи вольтметра и создает частотную погрешность. Для ее компенсации часть добавочного сопротивления шунтируют емкостью Ск. Следует также отметить, что влияние частоты в ферродинамических приборах больше, чем в электродинамических, вследствие большого значения индук
тивности катушек.
Ваттметры. Для измерения мощности постоянного тока элек-
тродинамический или ферродинамиче-ский измерительный механизм включается по схеме, приведенной на рис. 11.21. Неподвижная катушка 1 включается в цепь нагрузки Н последовательно, а подвижная катушка 2 с добавочным резистором /?д - параллельно. Отклонение подвижной части в соответствии с (11.14)
//2 dMn (11.17)
W da
Здесь Д = I; 12 = ———, где - сопротивление катушки 2, включенной параллельно нагрузке.
С учетом этого
UI dM 12
a~W(Rli+RJ da ’
т.е. отклонение подвижной части прибора пропорционально мощности P = UI.
435
При работе в цепи переменного тока отклонение подвижной
части прибора
dMn da
L IX 9 a-——cos б?
W
(11.18)
Так как Ц = /; 12 = — , где Zu
— полное комплексное сопро-
тивление параллельной цепи прибора, включая Лд, то
а~
IU
WZU
COS(3
dMn da
и показание прибора пропорционально мощности в нагрузке Н на переменном токе Р = U1 cos#?.
Выражения (11.17) и (11.18) показывают, что при смене направления одного из токов знак отклонения а меняется на противоположный. Поэтому для правильного включения один из каждой пары зажимов обозначается символом «*» и называется генераторным. При включении ваттметра в измерительную цепь генераторные зажимы всегда подключаются к одному полюсу источника.
Наивысший класс точности электродинамических однофазных ваттметров 0,1; ферродинамических - 1,0.
11.6. Однофазный счетчик электрической энергии
Рис. 11.22
Для учета потребления электрической энергии в однофазных цепях переменного тока применяются счетчики, построенные на базе индукционного измерительного механизма. Механизм состоит из двух неподвижных электромагнитов 1 и 2 (рис. 11.22) и алюминиевого диска 3, вращающегося вокруг оси 4. Переменные токи и 12 электромагнитов создают магнитные потоки Ф| и Ф2, сдвинутые по фазе на угол ц/ (рис. 11.23). Пересекая диск, они индуцируют в нем ЭДС
436
Ei и E2, которые отстают от своих потоков на 90°. Сопротивление диска активное, поэтому токи 712 и 722 совпадают по направлению с соответствующими ЭДС Ел и Ь2. Токи создают вторичные магнитные потоки, у которые, взаимодействуя с первичными, создают вращающий момент. Мгновенное £, значение вращающего момента от взаимодействия потока Ф] и 712 можно записать выражением
Mt = C^bil2, (11.19)
где С, - коэффициент пропорциональности.
Учитывая, что
фп = ф im sinter J *12 = А2», sin(^ - Г) ’
где у — угол между векторами Ф, и 712, выражение (11.19) представим в виде
Mt = sinftrfsin(ft¥ - у).
Ввиду инерционности подвижная часть реагирует на среднее значение вращающего момента
М = — \Mtdt = lm^12 [sin cot sin (cot - у )dt. (11.20)
Г / J T 1
О О
Выражение (11.20) аналогично исходному выражению (11.11) для среднего значения вращающего момента электродинамического измерительного механизма. Поэтому проведем подобные преобразования и среднее значение вращающего момента запишем аналогично (11.12):
Л/ср=С1Ф1/12со8Г
Для потока Ф| и индуцированного им тока 712 угол у = 90° и их вращающий момент равен нулю. Аналогично поток Ф2 и ток 122 также не создают вращающий момент.
Поток Ф| и ток 122 создают вращающий момент
Мх = C2®|/22cos[90° + ^/) = -С2Ф|/225ту/, (11.21)
поток Ф2 и ток /12 — вращающий момент
М2 = C3®2712cos[90° -{/) = С3Ф27128пц/. (11.22)
437
В формулах (11.21) и (11.22) Фи Ф2, /12, /22 -действующие значения потоков и токов.
Моменты Мх и М2 имеют разные знаки. Это означает, что если поток Ф[ и ток /22 притягиваются, то поток Ф2 и ток /12 - отталкиваются. Следовательно, оба момента (рис. 11.22) вращают диск в одном направлении.
Учитывая, что 712 = С4/Ф| и /22=С5уФ2, из выражений (11.21) и (11.22), суммируя моменты М} и М2, можно записать выражение для результирующего вращающего момента:
М = С2Ф |С5 /Ф 2 sin у/ + С3Ф 2С4 /Ф [ sin ц/, где С4, С5 - коэффициенты пропорциональности; f — частота.
Таким образом, величина вращающего момента, создаваемого в диске двумя переменными магнитными потоками, пропорциональна действующим значениям этих магнитных потоков Ф] и Ф2 и синусу угла сдвига фаз между ними:
Л/ = С6Ф1Ф28Щ^. (11.23)
Счетчик электрической энергии. На основе рассмотренного выше индукционного измерительного механизма разработана схе-
Рис. 11.24
ма счетчика электрической энергии, приведенная на рис. 11.24. Магнитопроводы двух электромагнитов 1 и 2 расположены в перпендикулярных плоскостях. Электромагнит 1 включен в цепь тока I нагрузки и создает поток Фz, пересекающий диск 3 в двух местах (рис. 11.25). Электромагнит 2 включен под напряжение нагрузки U. В нем создаются поток Фй, пересекающий диск, и поток Фь, его не пересекающий. Так как сердечники магнитопроводов имеют
438
воздушные зазоры, то магнитные потоки пропорциональны токам, которые их создают:
Ф/=Ау7; (11.24)
4ц
Рис. 11.25
где к[, кц - коэффициенты пропорциональности; Zf7 - комплексное сопротивление катушки 2.
Рассматривая попарно взаимодействие магнитных потоков,
пересекающих диск, выражение для вращающего момента с учетом (11.23) можно записать в следующем виде:
Л/ = С 7Ф/Ф[/ sinФу, Ф^у j + С g ( Фу)Фц sin Ф у, Фу/ j + +С9Фу(-Фу)8т(фу,~Фу), (11.26)
где С7,С8,С9 -коэффициенты пропорциональности; зт^Фу.Ф^) синус угла между векторами Ф, и Фс,.
Учитывая, что 8щ^Фу,-Фу j = 0, а также зависимости (11.24) и (11.25), выражение (11.26) можно преобразовать:
М = С107С/8т(ф^Фу). (11.27)
При работе на переменном токе ферромагнитный сердечник характеризуется потерями на перемагничивание и вихревые токи. Вектор полного тока I (рис. 11.26) имеет реактивную составляющую / отстающую на 90° от напряжения U и совпадающую по фазе с потоком Ф, и активную составляющую тока 1а, совпадающую по фазе с напряжением U. В результате поток Ф отстает от тока I на некоторый угол потерь а. Учитывая это, построим векторную диаграмму счетчика (рис. 11 27). Ток в нагрузке I отстает от напряжения U на угол (р. За счет потерь поток Ф, катушки 1 отстает от тока I на угол потерь «у. Ток 1и катушки 2 за счет большой ее индуктивности отстает от напряжения U на угол, близкий к 90°. Потоки Ф(/ и Ф£ отстают от тока /£;, причем аи>аь, т.к. поток Фи созда
ет дополнительные потери в диске на вихревые токи.
439
Из векторной диаграммы угол ц/, определяемый как угол между векторами потоков Ф7 и Фи = Фг, Фсj, запишем в виде
-(р.
Если выполнить условие P~at = 90°, то в выражении (11.27) вращающий момент будет пропорционален активной мощности:
A/ = C1(l/t/cos^ = Cl0F (11.28)
При этом значение [’> > 90° достигается наличием нерабочего потока Ф£, а выполнение равенства /З-dj = 90° - регулировкой угла потерь сг7. Для этого на последовательной катушке есть несколько короткозамкнутых витков, сопротивление в цепях которых регулируется.
Тормозной момент создается постоянным магнитом 4. При движении диска в нем индуцируется ток 1М, величина которого пропорциональна скорости диска. Этим током создает магнитный поток, который, взаимодействуя с первичным потоком магнита, создает тормозной момент
Му=к^-, (11.29)
где к - коэффициент пропорциональности.
Приравняем (11.28) и (11.29):
CwP = k^. (11.30)
at
Интегрируя (11.30) за интервал , t2, получим CwjPdt = kj^, '1 '1
откуда
440
CwW = k2nN, где W - активная энергия, измеренная счетчиком за время от tx до t2; N - число оборотов диска.
В окончательном виде
W-CN, (11.31)
где С = k2jrfCXG - постоянная счетчика.
Следовательно, для учета израсходованной энергии необходимо подсчитать число оборотов диска, что осуществляется с помощью счетного механизма. Обычно на щитке счетчика указывается передаточное число - количество оборотов диска, приходящееся на единицу энергии. Например, 1 кВт ч = 2000 оборотов. В этом случае постоянная счетчика С из (11.31) определится следующим образом:
ЮООВт-ЗбООс 1QnnD ,
С =--------------= 1800 Вт • с/об.
2000 об
11.7. Мосты постоянного тока
Мосты постоянного тока предназначены для измерения сопротивлений. Различают два вида мостов: четырехплечий (одинарный) и двойной.
Четырехплечий (одинарный) мост. Принципиальная схема
моста представлена на рис. 11.28. Четыре резистора R\, R2, R3, R4 образуют плечи моста. Один из этих резисторов = Rx является измеряемым, остальные должны быть известны. В диагональ моста ab включен источник питания, в диагональ cd (измерительную) включен нулевой индикатор. Обычно это высокочувствительный гальванометр. При измерении сопротивления Rx регулируют сопротивление одного из известных резисторов до тех пор, пока
Рис. 11.28
ток в гальванометре 1Г не станет равным нулю. При токе 1Г - 0 на-
пряжение в измерительной диагонали = 0. Поэтому Z]7?i = I^R^', = •
(11.32)
(11.33)
441
Учитывая, что при /г = О J] =/2 и /3 =/4, разделив (11.32) на (11.33), получим условие равновесия моста:
^1 _ ^4
Т?2 А3 или в более распространенном виде:
R}R. = R2Ra. (11.34)
Отсюда сопротивление измеряемого резистора Rx может быть вычислено по формуле
Rx = Ri=R2^.
Одно из плеч моста выполняется в виде многодекадного магазина сопротивлений, которое можно изменять, добиваясь нулевого
тока гальванометра, и одновременно считывать неизвестное значение сопротивления. Два других сопротивления и выполняют в виде набора резисторов, отношение сопротивлений которых выбирается кратным 10", где п - целое число. С их помощью выбирается
диапазон измерения.
Следует отметить, что в измеряемое сопротивление Rx входят также сопротивления соединительных проводов и контактов. Суммарное значение этих сопротивлений может достигать 0,01 Ом. Поэтому для измерения малых сопротивлений с высокой точностью используются двойные мосты.
Двойной мост. Влияние сопротивления соединительных проводов и контактов сведено к минимуму в схеме двойного моста (рис. 11.29). Здесь Rx - резистор, сопротивление которого неиз
вестно; Rn - образцовый резистор (оба чстырехзажимные, см. рис. 11.66); R\, R2, R2, Ra - плечи моста; R - сопротивление соединительного проводника перемычки. Резистором R^ регулируют ток
в мостовой схеме. При равновесии моста, когда ток гальванометра
1Г= 0, неизвестное сопротивление Rx определяется в результате
расчета мостовой схемы следующим образом:
о =R *1 , [*, V
Т?2 R + R3+R4 ^R2 Rj у Если
^1 _ ^4
/?2 R2 ’
(11.35)
(11.36)
442
то второй составляющей в уравнении (11.35) можно пренебречь и измеряемое сопротивление вычислить из простого равенства:
Для удовлетворения равенства (11.36) выбирают R2=R3. Уравновешивается мост регулировкой с обеспечением равенства /?| = R4. Это достигается выполнением обоих резисторов в виде многодскадных магазинов сопротивлений с общей ручкой регулировки. Однако точно удовлетворить равенству (11.36) не удается из-за неточности изготовления резисторов. Поэтому для уменьшения влияния второй составляющей в (11.35) сопротивление R выполняют очень малым, соединяя токовые зажимы Т сопротивлений Rx и Rn коротким проводником большого сечения. Расширение диапазонов измерения моста достигается выбором сопротивлений резисторов R2 - R3 из ряда возможных.
Сопротивления резисторов R]...R4 не менее 10 Ом. Поэтому соединительные провода и контакты потенциальных зажимов П не оказывают существенного влияния на погрешность.
Соединительные проводники и контакты токовых зажимов П не оказывают существенного влияния на точность, т.к. одна часть их включена в цепь нижнего контура схемы (см. рис. 11.29), определяющего ток в плечах моста, а другая часть может быть отнесена к малому сопротивлению R, влиянием которого пренебрегают.
Для мостов постоянного тока нормируется относительная по
443
грешность, а класс точности указывается двумя числами del в соответствии с формулой (11.1). Если d <0,01 С, то класс точности указывается одной цифрой с - 8. Отечественная промышленность выпускает комбинированные мосты, в которых простыми переключениями может быть использована схема как одинарного, так и двойного моста. (Например, мост Р329 с диапазоном измерения сопротивлений от 10 8 до 106 Ом). Класс точности мостов весьма высок и достигает значения 0,005 в зависимости от типа моста и диапазона измерения. Их высокая точность обусловлена высокой чувствительностью гальванометра и, соответственно, высокой точностью определения положения равновесия, а также высокой точностью изготовления резисторов.
11.8. Мосты переменного тока
Мосты переменного тока предназначены для измерения пара
метров конденсаторов и индуктивных катушек, а также активных
—o-U си-
Рис. 11.30
сопротивлений. Схема моста приведена на рис. 11.30. Плечи моста в общем случае содержат комплексные сопротивления Zh Zz, Z3, Z4, где Zi = Rj + jXt, i = 1, 2, 3, 4. В качестве нуль-индикатора чаще всего используются высокочувствительные электронные милливольтметры. Равновесие моста будет получено при отсутствии тока в измерительной диагонали, аналогично условию равновесия одинарного моста постоянного тока (11.34):
2,Z3=Z2Z
(11.37)
Выразив комплексное сопротивление в показательной форме ^=|г,.|е7й,
условие равновесия можно представить в виде |z1|.|z3|-Hf’’+^)=|z2|-|z4|-e^+^). (11.38)
Равенство (11.38) выполняется, если выполняются два равенства одновременно:
|г1|'кз| = |^2|-к4|; ^+%=^2+^4- (И-39)
Наличие двух уравнений равновесия означает, что для уравновешивания моста необходимо регулировать два параметра. Однако,
444
не всякий мост переменного тока может быть уравновешен. Например, если Zi и Z3 имеют индуктивный характер ((р} > 0, (р? > 0), a Z? и Z4 - активное сопротивление (<р2 = (Р1 =0), то такой мост не
может быть уравновешен ни при каком значении его параметров.
Мосты для измерения индуктивности. Реальная катушка обладает некоторым активным сопротивлением L R (рис. 11.31). Поэтому при измерении индук- о—1 Ь~°
тивности катушки определяют значения соб- рис ц ствснной индуктивности L и добротности:
coL
R ’ где а) = '1л/ — круговая частота.
Одна из возможных схем моста для измерения индуктивно-
сти катушки приведена на рис. 11.32. Измеряемая катушка включена в плечо моста Z,.
Чтобы можно было выполнить условие равновесия (11.39), в плечо Z3 моста включен конденсатор. При этом (рх > 0; (р2 = 0;
ср3 < 0; ^4=0; Zj = Rx + ja)Lx; Z 2 = R2;
2?3 ——
Z - У ^з ______________
R 4.__1— 1 +
Рис. 11.32
*з z - p
> Z4 “ Л4 '
Подставим эти значения в уравнение (11.37)
1 + jcoR3C3
Умножив обе части равенства (11.40) на (1 + ja>R3C3), полу
(11.40)
чим
(Яд. + ja)Lx)R3 = 7?2А4(1 + ja)R3C3). (11.41)
Приравняем действительные и мнимые части равенства (11.41) и получим два уравнения
rxr3 = r2r4,lx=R2R4c3.
Используем Lx и Rx для вычисления добротности катушки:
С = ^ = <у/?3С3.
В качестве регулируемых параметров здесь можно выбрать R3 и R2. При этом R3 может быть проградуировано в единицах доброт
445
ности, R2 - в единицах индуктивности. Регулируемый конденсатор выполнить сложнее.
Мосты для измерения емкости. Реальный конденсатор обладает некоторым активным сопротивлением, которое может быть учтено с помощью последовательной или параллельной схемы замещения (рис. 11.33). Из-за наличия активного сопротивления R вектор тока опережает вектор напряжения на угол, меньший 90°. Угол S, дополняющий угол между векторами тока и напряжения до 90°, называется углом потерь и характеризует соотношение активного и реактивного сопротивлений. Поэтому при измерениях емкости определяют собственную емкость С и тангенс угла потерь tgZ>
Рис. 11.34
Рис. 11.33
Схема моста с последовательной схемой замещения приведена на рис. 11.34. Для этой схемы
Z, = Rx 4----j Z, = R2Z, = R-,Zл — R« 4-----:
j(DCx -2 2 -3 3 -4 j(OC,
где C4- емкость образцового конденсатора
Подставим эти значения в уравнение равновесия моста (11.37):
1 I 1 I
7? 4-------= R2 Ra 4------------
ja>Cx) ~ jcoCj
(1142)
Приравняем действительные и мнимые части (11.42)
Отсюда емкость неизвестного конденсатора Сх выражается через емкость образцового следующим образом:
446
СХ=С4^-;
х 4 R2 тангенс угла потерь
tg<5" - coRxCx = ct)C4R4.
В качестве настраиваемых параметров удобно выбрать R4 и 7?3, градуируя Т?4 в значениях tg5, а - в единицах емкости.
Мосты переменного тока выпускаются промышленностью в виде приборов для измерения индуктивности, емкости и активного сопротивления (например, мост Р5066). При измерении L, С, R и Q нормируется относительная погрешность, при измерении tg£ - абсолютная. Погрешности существенно зависят от диапазонов измерения и схемы замещения. Так, для моста Р5066 относительная погрешность измерения L и С составляет от 0,5 до 2 % в зависимости от предела измерения, а относительная погрешность А - от 1 до 5 %.
11.9. Компенсатор постоянного тока
Компенсатор постоянного тока - это прибор для точного измерения постоянного напряжения и ЭДС. Его схема, дающая представление о принципе работы, приведена на рис. 11.35. Здесь Е„ - ЭДС нормального элемента, известная с большой точностью; Ех — измеряемая ЭДС; RH - сопротивление образцового резистора; R - сопротивление компенсационного резистора; ВБ — вспомога
тельная батарея; R\ - сопротивление регулировочного резистора.
Методика измерения заключается в следующем. Сначала пере
ключатель П устанавливают в положение 1, включая в измерительную цепь нормальный элемент, и с помощью резистора Rt устанавливаю! указатель гальванометра в нулевое положение. При этом будет выполняться равенство
IRH = E>. (11.43)
Этим устанавливается рабочий ток / компенсатора.
Далее переключатель П переводят в положение 2, подключая в
447
схему измеряемую ЭДС Ех. Резистором Rx также добиваются нулевого показания гальванометра. В этом случае
IRX = EX.
Подставив значение тока I из (11.43), получим
Е EX=-±RX.
RH
Резистор Rx выполняется в виде многодекадного магазина, а
перемещение его подвижного контакта градуируется в вольтах.
Достоинством компенсатора является отсутствие тока в цепи измеряемой ЭДС Ех в момент компенсации (нулевая потребляемая мощность от измеряемой ЭДС). Это означает, что компенсатор не изменяет режима работы в измеряемой цепи и не порождает связанной с этим дополнительной погрешности, о
Измеряемое напряжение
их r2
ЭДС нормального элемента Е„ близка к 1 В. Поэтому по схеме (см. рис. 11.35) можно измерять напряжения также порядка 1 В. Для увеличения диапазона измерения используются делители напряжения, включаемые по схеме, показанной на рис. 11.36. Делитель напряжения яв-
ляется средством измерения и также имеет класс точности, который численно равен относительной погрешности коэффициента деления.
Компенсатор применяется также для точного измерения тока и сопротивления. При измерении тока 1Х его пропускают через образ-
j. Напряжение, измеряемое компенсатором
а
Рис. 11.36
о Ux о
Д Ro а) о Uo о
их
«О Rx б)
о
цовый резистор Д() с известным сопротивлением, а напряжение Ux измеряют компенсатором (рис. 11,37а).
Для измерения сопротивления компенсатором измеряют напряжение Ux и напряжение Uo на образцовом резисторе До (рис. 11.376). Так как в момент компенсации ток из измерительной цепи не потребляется, то
Ro Rx' откуда сопротивление измеряемого резистора
Рис. 11.37 R _ о их
°Ц)
448
Высокая точность измерения компенсатором обусловлена высокой чувствительностью гальванометра, высокой точностью резисторов и нормального элемента и отсутствием потребления мощности в момент измерения. Класс точности нормального элемента численно равен предельно допустимому отклонению ЭДС нормального элемента в процентах от 1 В в течение одного года.
Класс точности компенсатора численно устанавливаю! по предельно допускаемой основной относительной погрешности 8. Он определяется по двучленной формуле (11.1) двумя числами с/d. При d < 0,01с 8 = ±с. Наиболее точные компенсаторы имеют класс точности 0,0005.
11.10. Цифровые приборы
В цифровых измерительных приборах происходит автоматическое преобразование измеряемой величины в цифровой код, который отображается на отсчетном устройстве и может передаваться в измерительную систему. Широкое распространение получили цифровые частотомеры и вольтметры, счетчики электрической энергии.
11.10.1. Цифровой вольтметр
Упрощенная структурная схема вольтметра время-импульс-ного преобразования приведена на рис. 11.38а.
Рис. 11.38
Постоянное измеряемое напряжение их подается на один из входов сравнивающего устройства СУ, на другой вход которого
15 Зак 1186
449
подается напряжение с выхода генератора линейно изменяющегося напряжения (ГЛИН). В начальный момент времени происходит запуск ГЛИН. На выходе сравнивающего устройства СУ появляется скачок напряжения , который открывает ключ К. Через ключ К на счетчик СЧ начинают проходить импульсы с генератора импульсов стабильной частоты (ГИСЧ) частотой /0 = —. В момент времени /2, когда напряжение а(/) сравняется с
Tq
их, напряжение щ скачком изменяется до нуля и счет импульсов в счетчике СЧ прекращается. Интервал времени, в течение которого происходит счет импульсов А/ = , где к - коэффициент накло-
к
на прямой «(/)• Временная диаграмма вольтметра, отражающая процесс счета импульсов, приведена на рис. 11.38 б. За время А/ на вход счетчика СЧ пройдет п импульсов генератора ГИ:
А/ Ux п = —= —— .
Таким образом, количество импульсов п пропорционально измеряемому напряжению их, которое отображается на отсчетном устройстве ОУ.
Основные составляющие погрешности вольтметра обусловлены нелинейностью и нестабильностью прямой ?/(/), наличием порога срабатывания СУ. В меньшей степени на точность влияют нестабильность периода Го и погрешность дискретизации интервала А/.
Класс точности таких вольтметров обычно 0,1.
11.10.2. Цифровой счетчик электрической энергии
Электронные счетчики электрической энергии строятся по принципу преобразователей электрической мощности в напряжение. Преобразователи мощности реализуются на основе датчика Холла, аналоговых множительных устройств и др. способами. Схема одной из распространенных реализаций счетчика приведена на рис. 11.39.
Преобразователь Холла ПХ (см. раздел 12.8) включается в каждую фазу трехфазной нагрузки. Сигнал с выхода преобразователя Ехл =кР, пропорциональный мгновенной мощности Р, преобразуется преобразователем напряжения-частота ПНЧ в частоту импуль-
450
Рис. 11.39
сов, которые подсчитываются счетчиком СЧ и хранятся в энергонезависимой памяти ИМ. Специализированный модуль СМ осуществляет обработку информации, включая разделение по времени суток для многотарифной оплаты, выдает информацию на оптикоэлектронный интерфейс (оптопорт), который отображает информацию и используется при перепрограммировании счетчика. Модуль СМ формирует также выходной сигнал в виде последовательности импульсов в канал связи.
Наивысший класс точности электронных счетчиков - 0,2.
11.10.3. Учет электрической энергии с помощью цифровых счетчиков
Системы учета энергии предназначены для организации автоматизированного мониторинга и коммерческого учета электрической энергии. Типовая структура такой системы приведена на рис. 11.40.
Рис. 11.40
Цифровые счетчики электрической энергии 3C1-3CN подключаются к контроллеру К, который обеспечивает ввод информации по каждому из N каналов и ее первичную обработку. Кон
15*
451
троллер через модем по стандартному каналу соединен с компьютерной рабочей станцией РС учета энергии. Рабочая станция ведет сбор, обработку, хранение поступающих данных об измеряемой счетчиками электроэнергии, коммерческий учет энергии в зависимости от тарифа в разнос время суток. Система осуществляет также мониторинг энергопотребления с выводом информации о неисправностях устройств, отклонениях потребителей от заданных режимов, об отличии режима от оптимизированного и многие другие функции. Кроме счетчиков электрической энергии, такие системы через специализированные контроллеры могут содержать счетчики тепловой энергии (п. 12.12), газа и других энергоресурсов.
11.11. Регистрирующие приборы
При контроле технологических процессов, проведении испытаний в научно-исследовательской работе находят применение регистрирующие приборы, позволяющие не только отсчитывать значение измеряемой величины, но и получать график изменения из-
Рис. 11.41
меряемой величины X в функции времени t, т.е. получать график Измеряемая величина регистрируется на диаграммной бумаге, которая выпускается в форме ленты или диска (рис. 11.41). Лента имеет по краям отверстия (перфорацию), в
которые входят штифты вращающегося валика. Дисковая диаграм-
ма вращается вместе с металлическим диском, на котором она закреплена. Лентопротяжный механизм и металлический диск приводятся в движение электродвигателем. Координатная сетка выполняется обычно в криволинейных координатах.
В качестве регистрирующего устройства часто используется чернильное перо (рис. 11.42), у которого наконечник представляет собой металлическую или стеклянную капиллярную трубку с внутренним диаметром 0,1...0,15 мм, соединенную с чернильницей. Недостатком такого способа регистрации является сравни-
452
тельно большая ширина линии (до 0,8 мм), высыхание чернил, засорение капиллярного отверстия, задир ленты.
В настоящее время получают распространение фломастерные регистрирующие устройства (рис. 11.43). В пластмассовом корпусе 1 помещается волокно 2, пропитанное специальными чернилами и служащее их накопителем. В контакте с ним находится волоконный наконечник 3, контактирующий с бумажной лентой 4. Преимуществом таких устройств является меньшая толщина линии
Рис. 11.42
7\ 71
---~V
Рис. 11.43
(0,3...0,5 мм), отсутствие задиров бумаги, подтекания и засыхания
чернил.
Развитие техники регистрирующих устройств привело к появлению электрокаплеструйных головок, которые все больше приме-
няются в регистрирующих измерительных приборах. Рассмотрим работу многосопловой каплеструйной головки с эмиссией капель импульсным давлением. Такие головки имеют расположенные в одну линию сопла (рис. 11.44), из которых импульсным давлением выбрасываются капли чернил. При этом не все капли могут достигать бумажного носителя. Некоторые из них от
Рис. 11.44
клоняются заряженными электродами и возвращаются в чернильный баллон. Принцип работы каждого из сопел поясняет рис. 11.45.
Пьезоэлектрический преобразователь 1, выполненный в виде тонкого пьезоксрамического диска, при подаче на него импульсного напряжения U вызывает движение мембраны 2. Мембрана создаст разряжение в цилиндрической полости 3,
Рис.11.45
453
соединенной с резервуаром чернил 4. В результате чернила заполняют полость 3. Ответный ход мембраны создает в полости импульсное давление, которое через выходное сопло 5 выбрасывает каплю на бумажный носитель. Если на заряжающий электрод подано напряжение U3, то капля приобретает электрический заряд и отклоняющий электрод 8 направляет каплю в улавливатель 9, соединенный с резервуаром чернил 4, минуя бумажный носитель. Пьезоэлемент 1 и мембрана 2 являются в головке общими для всех сопел, число которых достигает 12. Вся головка устанавливается на направляющей регистрирующего устройства и, перемещаясь, обеспечивает регистрацию на бумажном носителе буквенных символов и графиков.
Глава 12
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
12.1. Общие сведения об измерениях неэлектрических величин
При контроле технологических процессов, создании систем автоматизации и во многих других случаях необходимо измерять различные неэлектрические величины. Разновидностей электрических приборов для измерения неэлектрических величин значительно больше, чем приборов для измерения электрических величин. Это обусловлено большим разнообразием неэлектрических
величин.
Неэлектрические величины целесообразно измерять электрическими приборами. Это объясняется тем, что электрические величины легче передать на сравнительно большие расстояния. Над
электрическими величинами можно проводить различные матема
тические операции, что позволяет автоматически корректировать
результаты. Электрические величины легко регистрировать.
Упрощенная структурная схема электрического прибора для измерения неэлектрических величин приведена на рис. 12.1. Такой
электрический прибор обязательно содержит измерительный преобразователь НП неэлектрической величины в электрическую. В устройствах автоматики ИП часто называют датчиком. Измеряемая
ИП -U-ШУ
Рис. 12.1
неэлектрическая величина х подается на вход ИП. Выходная электрическая величина у преобразователя измеряется электрическим измерительным устройством ЭИУ.
455
Свойства измерительного прибора во многом определяются измерительным преобразователем. Поэтому рассмотрим основные виды измерительных преобразователей и измерения, выполняемые на их основе.
Рис. 12.2
12.2. Реостатные преобразователи
Реостатный измерительный преобразователь представляет собой резистор особой конструкции, подвижный контакт которого перемещается под воздействием измеряемой величины х (рис. 12.2). На каркасе реостата намотана обмотка из проволоки с малым температурным коэффициентом сопротивления (манганин или константан).
Провод изолирован эмалью или оксидной пленкой. После изготовления обмотки изоляция провода очищается в местах соприкосновения его с подвижным контактом. Подвижный контакт реостата изготавливается из плоских пружинных полосок, причем используются как чистою металлы (платина, серебро),
так и сплавы (фосфористая бронза и т.п.). Качество контакта определяется контактным давлением, которое может быть от тысячных долей до нескольких ньютонов.
Погрешности. Погрешность дискретности обусловлена тем, что сопротивление преобразователя изменяется нс плавно, а ступенчато. Эта погрешность уменьшается с увеличением числа витков на единицу измеряемого перемещения.
Температурная погрешность определяется прежде всего температурным коэффициентом сопротивления (ТКС) провода, который обычно меньше 0,05 % на 10 °C.
В процессе работы может иметь место контактный шум, обусловленный тем, что в процессе движения изменяется площадь контакта и контактное сопротивление, что влияет на ток в измерительной цепи. При перемещении подвижного контакта с большой скоростью может возникать вибрационный шум за счет отскакивания подвижного контакта от дорожки.
Повышение требований к точности привело к созданию пленочных реостатных преобразователей. Они представляют собой со-456
четание тонкой металлической пленки, нанесенной на каркас, и скользящего контакта.
Класс точности реостатных преобразователей может достигать величины 0,05.
Области применения. Реостатные преобразователи можно включать в любую цепь, служащую для измерения сопротивления. Используются они в приборах, где измеряемое перемещение преобразуется в электрическое сопротивление. Например, в уровнемере, где линейное перемещение движка задается движением поплавка, или в приборах для измерения сил и давлений.
12.3. Тензорезисторы
Принцип работы тензорезистора основан на зависимости элек
трического сопротивления проводника или полупроводника от деформации. Металлические тензорезисторы подразделяются на про-
Рис. 12.3
волочные и фольговые. Проволочные тензорезисторы (рис. 12.3) представляют собой тонкую зигзагообразную проволоку 2, называемую решеткой, приклеенную к полоске бумаги (подложке) 1. В качестве подложки используется тонкая бумага (0,03...0,05
мм). Проволоку для тензорезистора изготавливают из константана, нихрома, платиноиридисвого сплава и т.п. Проволока вместе с подложкой наклеивается на деформируемую поверхность и воспринимает ее деформацию. Тснзорсзистор включается в схему с помощью приваренных или припаянных контактов 3. Входной величиной преобразователя является деформация, выходной - изменение сопротивления. Одним из основных параметров тензорсзисторов является коэффициент тснзочувствительности
s,=^,
т AZ/Z
где А/?/7? - относительное изменение сопротивления преобразователя; А/// - относительная деформация проволоки.
Механические напряжения в тензорезисторе не должны превышать предела упругости, иначе в материале происходят необратимые деформации. В связи с этим допустимое напряжение в мате
457
риале ограничивают 20...30 % предела упругости. Значение коэффициента тензочувствительности S, для различных материалов находится в пределах 0,5...4.
Тензорезисторы являются преобразователями разового действия, т.к. они наклеиваются на деталь и не могут быть сняты без повреждения. Измерительные цепи тензорезисторов почти всегда мостовые (рис. 12.4). В равновесном режиме, когда напряжение на нуль-индикаторе и в диагонали cd равно нулю, выполняется равенство (11.34)
= Т?2Т?4
Следовательно, в неравновесном режиме напряжение на измерительной диагонали (12.1) где км — коэффициент моста, зависящий от его сопротивлений.
Для малых изменений сопротивлений А/? коэффициент кы можно считать постоянным. Для увеличения чувствительности моста тензорезисторы R\ и Д3 должны работать на растяжение (У?! = Rw + AT?]; Т?3 - К-ю + А/?3), а тензорезисторы R2 и /?4 - на сжатие (Т?2 = Т?20 - А/?2; Д4 = Т?40 - А7?4).
Для увеличения напряжения питания моста и повышения чувствительности схемы применяют фольговые тензорезисторы, представляющие собой приклеенные к подложке зигзагообразные полоски фольги. Они имеют более надежный механический контакт с деталью и допускают большую мощность.
Еще большую чувствительность имеют мосты с полупроводниковыми тензорезисторами из монокристаллов кремния, германия и др. Для них коэффициент тензочувствительности находится в пределах 200...850. Существенными недостатками полупроводниковых тензорезисторов является их хрупкость и сильная зависимость коэффициента тензочувствительности ST от температуры.
Погрешности. Погрешность тензорезисторов, вызванная неодинаковостью их характеристик и использованием среднего коэффициента тензочувствительности, может достигать 1,5 %. Поэтому для большей точности измерений необходима индивидуальная градуировка чувствительного элемента с наклеенными тензоре-
458
зисторами, соединенными по мостовой схеме. В этом случае основная погрешность чувствительного элемента определяется по
грешностью градуировки.
Тензорезисторы обладают поперечной чувствительностью, обусловленной тем, что в направлении, перпендикулярном направлению основной деформации (см. рис. 12.3), также имеется проволока, длина которой не равна нулю. Поперечная чувствительность составляет 0,25...1 % от основной и обусловливает погрешность, если при измерениях имеют место деформации в разных направлениях.
Температурная погрешность тензорезисторов вызвана разностью температурных коэффициентов линейного расширения материала тензорезистора и поверхности, на которую он приклеен. При колебаниях температуры из-за неодинаковости температурного изменения объекта и тензорезисторов последние будут воспринимать температурные изменения как деформацию, что и дает температурную погрешность. Температурная погрешность полупроводниковых тензорезисторов существенно больше, чем металлических.
В настоящее время тензорезисторы в большинстве случаев по
ставляются в составе датчиков для измерения различных параметров. Тензорезисторы наклеены на чувствительный элемент и соединены по мостовой схеме со встроенными цепями температурной коррекции. Погрешность таких датчиков в широком температурном диапазоне не превышает 0,1 %.
Области применения. Тензорезисторы применяются для измерения сил, давлений, вращающих моментов, ускорений и других величин, преобразуемых в упругую деформацию. Одним из таких
Рис. 12.5
высокоточных датчиков является датчик перепада давлений Метран-45-ДД (рис. 12.5). Давления и Р2 подаются в камеры Ф и ©, которые разделены мембраной 1. Под действием разности давлений Pt -Р2 шток 2, соединенный с
центральной частью мембраны, вызывает деформацию чувствительного элемента 3 - консольной балки с наклеенными у ее основания кремниевыми тензорезисторами. Тензорезисторы соединены в мостовую схему 4. Разность давлений Р\ и Р2 вызывает деформа
459
цию тензорезисторов и разбаланс мостовой схемы. Сигнал разбаланса поступает в электронный усилитель 5. Усиленный сигнал преобразуется в ток (0...5) мА или (4...20) мА в преобразователе 6. Устройство 8 осуществляет компенсацию температурных воздействий на тензомост. Питание всех звеньев схемы осуществляется от блока 7.
Классы точности датчика модели 5420 (предел допускаемой основной приведенной погрешности в %) могут быть 0,25; 0,5; 1,0.
12.4. Индуктивные и трансформаторные преобразователи
Рис. 12.6
Работа индуктивных и трансформаторных преобразователей основана на изменении индуктивности или взаимной индуктивности катушек под воздействием измеряемой величины. Простейший индуктивный преобразователь изображен на рис. 12.6.
Электромагнит 1 с обмоткой 2 имеет подвижный якорь 3, перемещающийся под действием измеряемой величины. Линейное перемещение х изменяет воздушный зазор 8, меняя тем самым индуктивность катушки. Индуктивность катушки L, как коэффициент пропорциональности между током в катушке и ее потокосцеплением, может быть представлена в виде
где w - число витков катушки, I и Ф - действующие значения тока
и магнитного потока катушки.
Уравнение закона полного тока для магнитной цепи (аналог закона Ома для электрической) может быть записано в виде
Zw = OZM, (12.3)
где Iw - магнитодвижущая сила катушки с током; Ф - магнитный поток; ZM — магнитное сопротивление замкнутой магнитной цепи, определяемое формулой
ZM= — + —, (12.4)
где / - длина магнитопровода; 8 - значение воздушного зазора, з -площадь поперечного сечения магнитопровода; //, //0 - магнитные
проницаемости сердечника и воздуха соответственно (//»juv).
460
Подставим Ф из (12.3) в (12 2) и получим w2
L = ^-, (12.5)
Al
Полное электрическое сопротивление катушки
2
Z = R + jwL = R + J 2S (12.6)
—— н----
Mos
Формула (12.6) показывает, g что полное электрическое сопротивление катушки уменьшается \ с увеличением зазора 5, причем \ эта зависимость близка к гипер- \
болической (рис. 12.7). Линей- х. I
ный участок находится лишь в небольшой окрестности 8.8 на- чального зазора 80: <50 й
А<5' = (О,1...О,15)<Уо. Рис.12.7
Наибольшее распространение получили дифференциальные индуктивные преобразователи с двумя катушками и общим якорем, включаемые в мостовую цепь (рис. 12.8).
Рис. 12.8
Напряжение на измерительной диагонали в неравновесном режиме аналогично (12.1)
Uu=kM(Z&-Z2Z<).
461
Если выбрать Z3 = Z4, то
Uu=kx(Zx-Z2}. (12.7)
Для величин Zx и Z? графическая зависимость Z[-Z2, определяющая величину напряжения в измерительной диагонали, показана на рис. 12.9. Здесь линейный участок значительно больше:
Д^ = (О,З...О,4)<5’о.
Кроме того, такой ИП имеет большую чувствительность.
Простейший трансформаторный преобразователь изображен на рис. 12.10. В первичной обмотке преобразователя с числом витков и-'i протекает переменный ток Д, который в соответствии с (12.3) создает магнитный поток
(12.8)
где ZM - магнитное сопротивление магнитопровода; Ф,, Д — дейст-
вующие значения магнитного потока и тока.
Переменный поток Ф1 индуцирует во вторичной обмотке с числом витков w2 мгновенное значение ЭДС
г,(12-9) at
где у/2 ~ потокосцепление потока Ф, со второй катушкой.
Учитывая, что
= и'гФ^втщ/,
462
из (12.9) можно записать:
е2 = ~шш2Ф1т coscot.
Действующее значение ЭДС получим в виде
£ = слг2Ф|. (12.10)
Подставив Ф| из (12.8), получим действующее значение ЭДС во вторичной обмотке:
Подставим ZM из выражения (12.4):
E = JOWlWI / 10
--_|---- ДУ /V
Значение Е зависит от воздушного зазора 8 нелинейно. При малых перемещениях 83 относительно исходного положения 8й зависимость Е от 88 линейна, что и используется в трансформаторных ИП. Выражение (12.12) также показывает, что для однозначной зависимости Е от 88 необходимо постоянство действующего значения тока Д. Для этого на первичную обмотку подают переменное напряжением U стабильной амплитуды и включают большое активное сопротивление. Для повышения линейности и чувствительности трансформаторные преобразователи выполняются дифференциальными аналогично индуктивным. При этом первичные обмотки соединяются последовательно, а вторичные включаются в соседние плечи моста.
Погрешности и области применения. Наибольшее влияние на погрешность индуктивных преобразователей оказывает нелинейность их характеристик.
Температурная погрешность связана с зависимостью магнитной проницаемости сердечника от температуры, а также с изменением активного сопротивления обмотки. В дифференциальном преобразователе эта погрешность в значительной степени компенсируется, а в равновесном положении при идеальной симметрии — отсутствует. Нестабильность напряжения питания моста, частоты питания, а также отклонение формы кривой от синусоидальной также вызывает погрешность ИП.
Индуктивные измерительные преобразователи для измерения перемещений выпускают от десятых долей микрометров до санти-
463
Рис. 12.11
метров. Классы точности таких ИП: 0.1; 0.2; 0,5; 1; 2. Индуктивные ИП находят широкое применение в микрометрах и измерительных системах для контроля размеров в машиностроении. Они используются для измерения перемещений в станках с числовым программным управлением. Изготавливаются индуктивные динамометры, датчики давления с индуктивными ИП и акселерометры.
Преобразователи с изменяющимся зазором используют для измерения толщины покрытий материалов (рис. 12.11). Если подложка 1 выполнена из ферромагнитного материала, а покрытие 2 - из неферромагнитного, то можно измерять толщину
покрытия, т.к. на индуктивность катушки будет влиять величина неферромагнитного покрытия.
12.5. Емкостные преобразователи
К емкостным относятся измерительные преобразователи, у которых электрическая емкость или диэлектрические потери изменяются под действием входной величины.
Емкость С между двумя параллельными проводящими плоскостями площадью s, разделенными малым зазором 8, определяется выражением
ре
с = ^, (12.13)
о
где е - диэлектрическая проницаемость среды между электродами.
Схемы емкостных преобразователей приведены на рис. 12.12.
Рис. 12.12
Одинарный преобразователь (рис. 12.12а) представляет собой конденсатор, один электрод которого перемещается под действием измеряемой величины х относительно неподвижного электрода.
464
В соответствии с (12.13) функция преобразования C = F(3) гиперболическая, что ограничивает диапазон изменения 3. Чувст-_ de eS
вительность преобразователя —- = ——- резко возрастает с умень-d8 3
шением 3 и уменьшается с его увеличением. Поэтому такие ИП используются для измерения малых перемещений (<1 мм). В одинарных емкостных ИП между электродами возникает сила притяжения. Она значительно меньше действует на подвижный средний электрод в дифференциальных преобразователях (рис. 12.126). Кроме того, аналогично дифференциальному индуктивному преобразователю такие ИП обладают меньшей нелинейностью, более высокой чувствительностью.
Обычно емкостные преобразователи включаются в мостовые измерительные цепи, работающие в неравновесном режиме. Основная погрешность емкостных ИП вызвана нелинейностью функции преобразования.
Изменение температуры вызывает погрешность, обусловленную изменением геометрических размеров преобразования (s и 3). Эта погрешность не выше 0,1 %. При реальной работе преобразователя в большей степени на погрешность влияют паразитные емкости соединительных проводов. Для уменьшения этого влияния ста
раются уменьшить длину соединительных проводов и используют специальные измерительные цепи. Наивысший класс точности емкостных ИП равен 0,1.
Области применения. Емкостные преобразователи с изме
няющимся воздушным зазором используются для измерения малых перемещений (от долей микрометра до долей миллиметра), для из-
мерения величин, которые могут быть преобразованы в перемещения (сила, давление, ускорение). Преобразователи с изменяющейся площадью используются для измерения больших угловых и линейных перемещений (рис. 12.13). Емкостные преобразователи могут
Рис. 12.13
использоваться для измерения уровней жидкости и влажности веществ (см. п. 12.13, 12.4).
465
12.6. Пьезоэлектрические преобразователи
Действие пьезоэлектрических преобразователей основано на свойстве некоторых кристаллов создавать на гранях электрические заряды под действием механических усилий. Пьезоэффект наблюдается у кристаллов кварца, турмалина, титаната бария и некоторых других веществ.
В кристаллах кварца (рис. 12.14а) различают продольную или оптическую ось Z; электрическую ось X, проходящую через ребра шестигранной призмы; нейтральную ось У, проходящую нормально граням кристалла.
Рис. 12.14
Если из кристалла кварца вырезать параллелепипед так, чтобы его грани были параллельны указанным выше осям, то под действием силы Fx в направлении оси X на гранях, параллельных нейтральной оси У, появится электрический заряд
4 = kFx, где к - пьезоэлектрический модуль.
Пьезоэффект, наблюдаемый под действием силы Fx, носит название продольного. Значение заряда при этом не зависит от геометрических размеров пьезоэлемента, а определяется лишь значением силы. Знак заряда изменяется с изменением направления силы Fx.
Сила Fx, приложенная к параллелепипеду по направлению нейтральной оси У, вызовет так называемый поперечный пьезоэффект, заряд которого на тех же гранях, что и при продольном пьезоэффекте, имеет величину
qY=-kFY-,
х
где у и х - размеры пьезоэлемента в направлении осей У и X. Знак «-» означает, что сила, сжимающая пьезоэлемент по оси У, вызыва-
466
ст заряд, противоположный по знаку силе, сжимающей пьезоэлемент по оси X. Возникающие заряды очень малы, и их прямое измерение затруднительно. Поэтому в средствах измерения с пьезоэлементами измеряют не заряд, а напряжение на пьезоэлементе
где Сп — емкость пьезоэлемента; Ск — емкость соединительного кабеля; Су - входная емкость усилителя; Сд - добавочная емкость.
В реальных условиях при нагрузке силой 10 Н напряжение на обкладках пьезоэлемента достигает единиц вольт. При действии больших усилий напряжение на входе усилителя может достигать сотен вольт. Для его уменьшения параллельно пьезоэлементу можно включать дополнительную емкость Сд.
Так как внутреннее (выходное) сопротивление пьезоэлсмента очень велико, а развиваемая преобразователем мощность чрезвычайно мала, то для усиления выходного напряжения необходим усилитель с большим входным сопротивлением - 108...1014 Ом.
Эквивалентная электрическая схема пьезопреобразователя и входной цепи усилителя приведена на рис. 12.15. Здесь Сп, Rn — емкость и сопротивление пьезоэлемента; Ск, RK - емкость и сопротивление соединительного кабеля; Су, Ry - емкость и входное сопротивление усилителя.
Рис. 12.15
Наряду с преобразователями, в которых пьезоэлемент испытывает растяжение - сжатие, широко используются конструкции с элементом, работающим на изгиб (рис. 12.16). Они обладают значительно большей чувствительностью. Следует иметь в виду, что пьезоэффект обратим. Внешнее электрическое поле, действующее на грани кристалла, вызывает его деформацию.
Рис. 12.16
467
Погрешности и области применения. Свойства кристаллов, особенно кварца, практически не зависят от температуры в диапазоне до 200 °C. Поэтому температурная погрешность мала. Верхняя граница частотного диапазона определяется частотой резонанса механической системы крепления пьезокристалла в модуле преобразователя. Нижняя граница частотного диапазона также не равна нулю. Это объясняется тем, что напряжение на гранях пьезоэлемента при воздействии постоянной силы сохраняется неизменным лишь при отсутствии утечки заряда через сопротивление как самого кристалла, так и нагрузки. Область рабочих частот пьезопреобразователей от 0,5 Гц до 100 кГц.
Пьезоэлектрические преобразователи используются для измерения переменных сил, давлений и других величин, которые преобразуются в силовые воздействия. Наивысший класс точности - 0,1.
12.7. Преобразователи температуры
Температура - важнейший параметр технологических процессов во многих отраслях. По оценке специалистов, измерения температуры составляют до 40 % общего числа всех измерений неэлектрических величин. В данном разделе рассматриваются два наиболее важных вида температурных преобразователей: термоэлектрические и терморезисторные.
12.7.1. Термоэлектрические преобразователи температуры
Их действие основано на явлении термоэлектрического эффекта, суть которого в следующем. Если в цепи, состоящей из двух разнородных проводников А и В (рис. 12.17), соеди-aJo ненных между собой в двух точках, температуру точек X соединения сделать разной, то в этой замкнутой цепи I появится термо-ЭДС
I J ЕАВ(ТЬТ0)-ЕАВ(Т})-ЕАВ(Т0). (12.14)
XX В каждой точке контакта разнородных материа-
^1 лов возникает контактная ЭДС, например, ЕАВ(7\), Рис. 12.17 вызванная переходом некоторого количества электронов из одного материала в другой. Такая цепь называется термопарой, проводники, составляющие ее - термоэлектродами, а места их соединений - спаями. Если поддерживать температуру
468
То постоянной, то £л д (Го ) = const и термо-ЭДС, наводимая в
замкнутом контуре, будет зависеть от измеряемой температуры
Д. Таким образом, входной величиной термопреобразователя является температура Т} рабочего спая, выходной - термо-ЭДС. Измеряется термо-ЭДС компенсатором постоянного тока или милли-вольтмезром. Подключение к свободным концам термопары осуществляется по схеме (рис. 12.18) медным проводом С. В точках его соединения с проводниками А и В также образуется термо-ЭДС. Рассмотрим ее влияние на показания милливольт
Рис. 12.18
метра. На милливольтметр действует суммарная термо-ЭДС
Е = ЕСА(ТО) + ЕАВ^) + ЕВС(ТО). (12.15)
Так как ЕВС(ТО) + ЕСА[Т()) = ЕВА(Т0), то формулу (12.15) мож
но представить в виде
£ = £ЛВ(Г1) + £ВДГО). (12.16)
Учитывая, что ЕВА (Го) = ~ЕЛВ (Го), запишем:
£ = £/)В(Г1)-£лв(Г0). (12.17)
Формула (12.17) совпадает с (12.14). Это означает, что включение в цепь термопары дополнительного проводника с одинаковыми температурами на концах не вызывает искажения термо-ЭДС.
Промышленностью выпускаются следующие основные термопары (табл. 12.1).
Таблица 12.1
Материал термопары Верхний предел температуры, °C
П л ати н а-п латин ород и й (90 % Pt + 10 % Rh) 1700
Платинородий (30 % Rh)-платинородий (6 % Rh) 1800
Вольфрамрений (5 % Re)-вольфрамрений (20 % Re) 2000
Длина термопар 450; 900; 1200 мм. Чтобы обеспечить постоянную температуру свободных концов и облегчить термостатиро-вание, их желательно отвести дальше от зоны высокой температуры. Так как термопары выполняют из благородных материалов, то
469
Рис. 12.19
пользоваться удлинительными проводами из того же материала невыгодно. Термопары включают в цепь по схеме с удлинительными термоэлек-гродами С и D. Причем эти термоэлектроды должны удовлетворять условию термоэлектрической идентичности с основной термопарой в диапазоне возможных температур Т2 и То от нуля до 100 °C. Покажем
необходимость этого. Термо-ЭДС цепи на рис. 12.19
я = Еав (Д) + Ebd (Т2 } + Edc(T^ + Eca(T2Y (12.18)
Здесь не учитывался проводник, соединяющий милливольтметр с проводникам С и D, т.к. при одинаковой температуре То он не вносит искажений в термо-ЭДС.
Прибавим к правой части уравнения (12.18) Edc(T2) + +^c/j(^2) = 0:
E = Eab(Tx) + Ebd(T2) + Edc(T0) +
+^сл(^2) +^Cd(^2) + ^Dc(^2)-
Учитывая, что
^BD (^2 ) + ^DC ( ^2 ) + ^СА (^2 ) = ^ВА (^2 ) ’ преобразуем (12.19) к виду
Ь = Eab(7Y) + Ева (Г2) + ECD(T2) + Edc(T0). (12.20)
Если термопары CD и АВ идентичны, то их термо-ЭДС при температурах Т2, То равны, т.е. справедливо равенство
Ecd (?2) + Edc (Го) = Еав (Т2) + Ева(Т^. (12.21)
Подставив (12.21) в (12.20), получим
Е = Еав(7]) + Ева(Т2) + Елв(Т2} + Eba(T0Y (12.22)
Учитывая,что ЕАВ{Т2^ + ЕВА(Т2^ = 0, из (12.22) запишем
e=eab(tx)+eba(t0Y
Последнее равенство показывает, что ЭДС в цепи с удлинительными термоэлектродами такая же, как в цепи без них. При этом удлинительные термоэлектроды должны быть специально
470
подобранными для термопары и соединять их необходимо с соблюдением полярности.
Градуировка термопары (зависимость термо-ЭДС от температуры) осуществляется для температуры свободных концов То — 0. Если температура свободных концов То + 0 (обычно То >0), то необходимо вводить поправку на значение этой температуры. Для автоматического введения поправки существуют специальные схемы на основе неравновесных мостов.
Применяются термопары для измерения температур до 1800 °C. Основная погрешность при эксплуатации вносится непостоянством температуры свободных концов, область размещения которых необходимо термостатировать. Предел допускаемой основной погрешности в °C наиболее точных платиновых и платино-родиевых термопреобразователей составляет ±0.004 Г, где Т— измеряемая температура.
12.7.2. Терморезисторы
Терморезистор - это проводник или полупроводник, включенный в электрическую цепь, находящийся в теплообмене с окружающей средой.
В качестве материала проводниковых терморезисторов используют чистые металлы, главным образом медь, платину и никель. Медные терморезисторы в диапазоне температур от -50 °C до +180 °C имеют линейную зависимость сопротивления от температуры
= Я0(1+«Т). (12.23)
где Л,, - сопротивление при 0 °C; а - температурный коэффициент электрического сопротивления, равный для меди 4,3-10 3 1/°С.
Медь допускается нагревать не более чем до 180 °C во избежание окисления. Платина допускает нагрев до 1200 °C. Зависимость сопротивления от температуры для платины в диапазоне 0.. .600 °C имеет вид
Rt = R,^\ + AT+BT2), (12.24)
где А.В - постоянные.
Никелевые терморезисторы применяются до температур 250...300 °C.
Нелинейность уравнения преобразования является основным недостатком платиновых терморезисторов. Однако высокая
471
стабильность характеристик и химическая стойкость делают их в ряде случаев незаменимыми.
Полупроводниковые терморезисторы имеют экспоненциальную зависимость сопротивления Rr от абсолютной температуры (рис. 12.20). Их температурный коэффициент в
Рис 12 20 8... 10 раз больше, чем у металлов. Они имеют
большое сопротивление при малых размерах и небольшую инерционность. Недостатком полупроводниковых тер
морезисторов является большой разброс параметров, что затрудняет
их стандартную градуировку.
Измерительные цепи терморезисторов - главным образом мосты, работающие в равновесном и неравновесном режиме (рис. 12.21).
Рис. 12.21
В двухпроводной схеме (рис. 12.21а) оба провода, включающие терморезистор в мост, входят в одно и то же плечо. При изменении температуры окружающей среды изменение сопротивлений линии связи 7?Л1 и /?л2 вызывает дополнительную погрешность. Так как сопротивление линии связи влияет на результат измерения, то градуировку прибора производят при сопротивлении линии связи 5 Ом. Уравнивающее сопротивление Ry служит для подгонки сопротивления линии связи к этому значению. В трехпроводной схеме (рис. 12.216) сопротивления линий связи 7?л1 и RIl2 включены в разные плечи моста. Если R2 = Rj и = R„2, то температурная погрешность от изменения сопротивлений линии связи полностью отсутствует.
Преобразователи с терморезисторами применяются для изме
472
рения температуры от -200 до +500 °C. Платиновые ТСП и медные преобразователи ТСМ соответственно имеют следующий предел допускаемого значения основной абсолютной погрешности (°C) для наиболее высокого класса допуска А:
ТСП: АГ = ±(0,15+ 0,0027’);
ТСМ: ЛТ = ±(0,25+ 0,00357 ), где Т — измеряемая температура.
12.8. Гальваномагнитные преобразователи
В гальванических преобразователях используются эффекты, возникающие в проводниках или полупроводниках с током при воздействии на них магнитного поля. Для измерительных преобразователей используются в основном два эффекта: эффект Холла, заключающийся в появлении ЭДС, и эффект изменения электриче
ского сопротивления.
Преобразователь Холла представляет собой четырехполюс-
ник (рис. 12.22), выполненный в виде тонкой пластины из полупроводникового материала. Два токовых вывода 1 и 2 служат для подключения преобразователя к внешнему источнику тока. Если пластину при этом поместить в магнитное поле, вектор индукции которого В направлен перпендикулярно плоскости преобразователя, то носители тока под действием сил Лоренца отклонятся к одной из боковых граней. В результате между выводами 3 и 4
Рис. 12.22
появится ЭДС , называемая ЭДС Холла. Ее величина опреде
ляется следующим выражением:
£хл=А/5, где к - коэффициент чувствительности датчика Холла, величина которого зависит от свойств материала и конструктивных размеров элемента. Максимальная ЭДС Холла в зависимости от типа преобразователя бывает от 50 мВ до 0,5 В, выходное сопротивление от десятков Ом до единиц кОм.
473
Погрешности и области применения. На коэффициент чувствительности к влияет температура. У лучших типов преобразователей температурная погрешность составляет (0,02...0,1) %/°С в диапазоне температур от 40 °C до +100 °C.
Так как потенциальные выводы 3, 4 не удается укрепить точно в точках с одинаковыми потенциалами, то возникает погрешность неэквипотенциальности, которая носит характер постоянного смещения, пропорционального величине тока I. Эта погрешность компенсируется специальными схемами.
Нестабильность коэффициента чувствительности составляет 0,2... 1,0 % в течение года и зависит от технологии изготовления.
Нелинейность коэффициента чувствительности к составляет 0,5...4 % в диапазоне индукций В 0.. .2 Тл.
Преобразователи Холла находят применение для измерения тока, мощности, используются для модуляции сигналов. При измерении мощности токовые выводы 1, 2 включаются в цепь тока нагрузки /, а на электромагнит, создающий индукцию В, подается напряжение нагрузки и. Тогда на выводах мощности 3, 4 появляется ЭДС Холла, пропорциональная мгновенной мощности:
Ехл =k}iu.
Для модуляции медленно меняющегося сигнала тока /(/) создают поле с индукцией
B-Bmsvn.a)t.
Переменная ЭДС Холла, модулированная током, будет иметь пропорциональную току амплитуду
£хл=Л/(0®т81П^-
Преобразователи используются также в приборах для измерения линейных и угловых перемещений, вибраций, крутящих моментов и т.п. с предварительным преобразованием измеряемой величины в магнитную индукцию или ток. Известно их применение в измерительных устройствах для умножения.
12.9. Оптоэлектронные преобразователи
Оптоэлектронные преобразователи — это устройства, электрические параметры которых (ток, сопротивление, ЭДС) изменяются под воздействием электромагнитного излучения. В настоящее время получили распространение следующие виды оптоэлектронных 474
преобразователей: фотоэлементы, фоторезисторы, волоконно-оптические датчики, ПЗС матрицы (приборы с зарядовой связью) и др.
Фотоэлементы. Фотогальванические элементы с одним р-п переходом называются фотодиодами, с двумя и тремя р-п переходами - фототранзисторами. Вольт-амперная характеристика фотодиода приведена на рис. 12.23. Когда световой поток Ф = 0, то увеличение напряжения в положительном направлении вызывает значительное возрастание тока и падение сопротивления диода.
Увеличение отрицательного напряжения вызывает очень малый обратный ток р-п перехода. Такая темновая характеристика фотодиода аналогична вольт-амперной характеристике обычного диода.
Если на фотодиод попадает световой поток Ф, то при отрицательном напряжении на нем (или равном 0) в его цепи будет неизменный ток, зависящий от потока Ф. Увеличение напряжения в положительном направлении увеличивает ток, меняя его знак, и
уменьшает сопротивление.
Различают два режима работы фотодиода. Первый соответствует четвертому квадранту вольт-амперной характеристики. При этом напряжение и ток имеют разные знаки и потребляемая мощность отрицательна, т.е. фотоэлемент является источником электрической энергии. Его схема включения приведена на рис. 12.24а. Режим работы фотодиода определяется точкой пересечения вольт-амперной характеристики, соответствующей интенсивности светового потока, например, Ф[, и нагрузочной характеристикой U = IRH. При этом зависимость фототока I от величины светового потока Ф называется световой характеристикой. Эта характеристика (см. рис. 12.23) линейна только на начальном участке. Нелинейность
Ф^.
а)
Ф
[-^
Пя"
-Б L7n ^-1
б)
Рис. 12.24
475
при больших световых потоках объясняется уменьшением сопротивления р-п перехода.
Второй режим работы фотодиода соответствует третьему квадранту вольт-амперной характеристики (см. рис. 12.23). Зависи-у. мость величины фотопотока / от светового по-
тока Ф приведена на рис. 12.25 (световая харак-/*_ теристика). В этом режиме токи и напряжения / п имеют одинаковые отрицательные знаки, а по-/ ложительная мощность характеризует фотоэле-
/ мент как потребителя энергии - сопротивление.
-----------♦ В этом случае в цепь фотодиода должен быть включен источник постоянного напряжения U„
Рис 12 25
(рис. 12.246). Режим работы фотодиода определяется точкой пересечения вольт-амперной характеристики соответствующей интенсивности, например, Ф1? и нагрузочной характеристики U =Un-IRH.
На линейном участке световой характеристики при коротком замыкании цепи нагрузки (7?н = 0) определяется интегральная
чувствительность фотоэлемента для постоянного потока:
К = —.
Ф
Чувствительность фотоэлемента при монохроматическом облучении называется спектральной чувствительностью:
где Ф1 — поток монохроматического излучения.
Рис. 12.26
График зависимости спектральной чувствительности от длины волны Л называется спектральной характеристикой. Типовая относительная спектральная характеристика фотоэлемента приведена на рис. 12.26. Ее учет необходим для согласования фотоэлемента с источником излучения.
476
Наибольшее распространение получили германиевые и кремниевые фотоэлементы, имеющие интегральную чувствительность 30 мА/лм и 7 мА/млм соответственно и длины волн максимальной
спектральной чувствительности 1,4 мкм и 0,95 мкм (диапазон чувствительности человеческого глаза 0,380...0,780 мкм).
Фоторезисторы. Фоторезисторами называются полупроводниковые светочувствительные элементы, электрическое сопротивление которых уменьшается под воздействием излучения. Типовая люкс-амперная характеристика, показывающая зависимость тока I от освещенности Е при постоянном напряжении, приведена на рис. 12.27.
Здесь
где Ф — световой поток; .v — площадь светочувствительной поверх
Рис. 12.28
ности.
Недостатком фоторезисторов является нелинейность их сопротивления от освещенности. Однако они обладают высокой чувствительностью в относительно широкой области спектра: от ультрафиолетовой до близкой к инфракрасной. Одна из наиболее распространенных схем включения фоторезисторов приведена на рис. 12.28. Характерной особенностью фотоэлементов и фоторезисторов является сильная зависимость их параметров от температуры.
Волоконно-оптические датчики. Это сравнительно новый тип оптоэлектронных преобразователей. Их появлению способствовали достижения в изготовлении стеклянных волокон и их системных компонентов — разъемов, источников света, детекторов. Универсальная схема волоконно-оптического датчика приведена на рис. 12.29.
Попадающий в волоконно-оптический детектор световой луч от источника света под действием измеряемого параметра (например, уровня, давления, температуры и т.п.) претерпевает изменения по интенсивности, цвету, фазе, которые определяются детектором, обеспечивая появление информации об измеряемом параметре. Оптическое волокно в датчиках может выполнять две функции - быть
477
световодом, передающим оптический сигнал, и чувствительным элементом.
Рис. 12.29
Погрешности и области применения. В настоящее время опто
электронные устройства применяются в первую очередь для измере
ния геометрических параметров. Как пример рассмотрим устройство для подсчета количества детален (рис. 12.30). Световой поток от ис
точника 1 через оптическую систему 2 и щелевую диафрагму 3 пада
Рис. 12.30
ет на фотодиод 4. При движении детали 5 щелевая диафрагма 3 перекрывается, фототок диода 4 падает практически до нуля. После прохождения детали фототок и напряжение на резисторе R
восстанавливаются до прежнего уровня. Эти импульсы обратной полярности подсчитываются цифровым счетчиком СЧ. При правильной настройке допусков счетчика по наличию или отсутствию сигнала температурная нестабильность фотоэлемента и фоновая освещен
Рис. 12.31
ность не влияют на точность счета.
Принцип действия устройства для точного измерения размера детали поясняет схема на рис. 12.31. При установке измерительного наконечника 2 на измеряемую деталь 1 рычаг 3 поворачивает зеркало 4. Свет от источника 5, отраженный зеркалом, падает на один из фоторезисторов 6, заставляя сработать реле, в цепь которого включен этот фоторези
478
стор. Номер включенного реле зависит от угла поворота зеркала, т.е. от измеряемого размера детали. Устройство, содержащее 52 фоторезистора, позволяет рассортировать контролируемые детали на 52 группы с погрешностью 0,5 мкм.
Для уменьшения влияния на точность измерения фонового из
лучения, изменения яркости источника излучения, напряжения питания, параметров фотоэлементов разработаны оптоэлектронные
измерительные устройства с амплитудной модуляцией светового
потока. Погрешность измерения ими линейных быть снижена до 0,1 мкм.
Один из наиболее простых волоконно-оптических датчиков — сигнализатор уровня жидкости (рис. 12.32). Свет от источника 1 по световоду 2 проходит к коническому окончанию 3 и, отразившись от него, попадает на детектор 4 в виде фотодиода. При погружении окончания 3 в жидкость разность показателей преломления света окончанием 3 и средой изменяется, и свет выходит из него в жидкость, не попадая на фотодиод. Это является сигналом о достижении жидкостью заданного уровня.
размеров может
Рис. 12.32
12.10. Измерение температуры
Наиболее разработанными и освоенными промышленностью в области низких и средних температур являются методы измерения, использующие терморезисторы и термопары. Для получения достоверных результатов важны условия измерения. Любой термопреобразователь по отношению к температурному полю является инородным телом, искажающим это поле. Поэтому объем измеряемого тела должен быть достаточно большой, а глубина погружения термопреобразователя должна обеспечивать хороший теплообмен между ним и объектом измерения. При измерении температуры потока жидкости или газа термопреобразователь устанавливается против направления движения. Измерение температуры твердых тел и поверхностей требует обеспечения хорошего теплового контакта. Если же объект измерения мал, то необходим термопреобразователь соответствующего размера. В этом случае применяется термопара, термочувствительная часть которой может быть выполнена очень неболь-
479
шой. Наиболее сложно измерить температуру движущихся поверхностей, например, вальцов. В этом случае применяются термопары специальных конструкций, в том числе и вращающиеся. На основе термопреобразователей, описанных в п. 12.7. в промышленности для измерения температуры используются приборы - термометры сопротивления и термоэлектрические термометры.
Термометры сопротивления. В качестве чувствительного элемента в этих средствах измерения используется платиновый или медный терморезистор, который подключается к мостовой цепи по двух- или трехпроводной схеме (пп. 12.7.2). Мостовая схема может работать в неравновесном режиме с милливольтметром в измерительной диагонали или в режиме автоматического уравновешивания, сопрягаемой с самопишущими устройствами, регистрирующими температуру на круговой или ленточной диаграмме. Медные термометры сопротивления позволяют измерять температуру в диапазоне -50...+180 °C с наименьшей погрешностью 0,25 %. Платиновые термометры сопротивления измеряют температуру от -200 до 500 °C с наименьшей погрешностью 0,25 %.
Термоэлектрические термометры. Эти средства измерения имеют второе название - термоэлектрические пирометры. В качестве термопреобразователя здесь используется термопара, а в качестве измерительной цепи - милливольтметры или низкоомные компенсаторы с пределом измерения до 100 мВ, с ручным или автоматическим самопишущим устройством. Термоэлетрические термометры с платиновой термопарой позволяют измерять температуру в диапазоне от 0 до 1600 °C с погрешностью 0,25 %. Термометры с термопарой из тугоплавких металлов измеряют температуру в диапазоне от -40 до 1200 °C с наименьшей погрешностью 0,5 %.
Измерение высоких температур в диапазоне от 1000 до 10 000 °C производится бесконтактным методом - радиационными, яркостными или цветовыми параметрами.
12.11. Измерение расхода жидкости и газа
Измерение расхода жидкости и природного газа в условиях ограничения ресурсов и повышения цен на них приобретает чрезвычайно важное значение. В настоящее время техника измерения расхода интенсивно развивается, используются несколько принципов измерения расхода. Рассмотрим основные из них.
480
12.11.1. Расходомер с сужающим устройством
Принцип действия расходомеров этого типа основан на измерении перепада давлений в сужающем устройстве (рис. 12.33). Здесь в трубе 1 площадью сечения F установлена диафрагма 2 с площадью
отверст ия Fo. В сечении I-I перед диафрагмой поток имеет первоначальную конфигурацию и давление Р\. Сечение Illi и отверстие отбора давления Р2 находятся в месте наибольшего сжатия потока, находящегося на некотором расстоянии от диафрагмы. Различают объемный и массовый расходы жидкости или газа.
Рис. 12.33
Объемный расход
e=vcpr,
где vcp - средняя скорость потока (единица измерения Q - м3/с).
Массовый расход
QM=pQ, где р - плотность вещества (единица измерения QM - кг/с).
Чем больше расход Q, тем больше будут отличаться скорости потока и давления и F2 в сечениях I I и П-П. Исследования гидродинамики и аэродинамики сужающих устройств дают следующую общую формулу измерения объемного расхода
Q = kau^^-. (12.25)
Здесь к - числовой коэффициент; аи - исходный коэффициент рас
хода, значение которого определяется типом и геометрическими размерами диафрагмы.
Кроме плоских диафрагм, применяются и другие типы сужающих устройств; нормальное сопло, нормальная труба Вентури. Расходомер данного типа содержит датчик перепада давления и вычислитель, определяющий расход по формуле (12.25) и учитывающий необходимые поправки.
Расходомеры с сужающим устройством применяются для измерения расхода однофазных жидкостей, сухих газов и сухого перегретого пара на трубопроводах диаметром более 50 мм. Предел до
16 Зак. 1186
481
пускаемой основной погрешности 1,5...8 %. Лучшие образцы не требуют индивидуальной градуировки.
12.11.2. Турбинные расходомеры
Принцип действия турбинного (роторного) расходомера поясняет рис. 12.34. Поток измеряемой среды воздействует на наклонные лопасти турбины 3, установленной на подшипниках 2, и
Рис. 12.34
сообщает ей вращательное движение с угловой скоростью 0), пропорциональной расходу Q. При пересечении магнитного поля катушки 4 лопастями ферромагнитной турбины в катушке наводится пикообразный ток. Частота его пульсаций пропорциональна угловой скорости. Импульсы тока подсчи
тываются и регистрируются отсчетной системой 1. Число зареги
стрированных импульсов за время t пропорционально суммарному количеству вещества, прошедшего за это время через трубопровод. Турбинный расходомер требует индивидуальной градуировки. На погрешность измерения существенно влияет вязкость среды. Турбинные расходомеры являются наиболее точными приборами для измерения расхода жидкости. Известны расходомеры с погрешностью 0,1 ...0,2 %.
12.11.3. Электромагнитные расходомеры
Принцип действия электромагнитного расходомера показан на рис. 12.35. Поток проводящей жидкости проходит по трубопроводу 1 между полюсами магнита 2, магнитное поле которого создается источником питания 6. По закону электромагнитной индукции в проводнике (роль
которого выполняет проводящая жидкость), движущемся в постоян
482
ном магнитном поле, наводится ЭДС. Она пропорциональна скорости движения проводника, т.е. скорости движения потока жидкости. Эта ЭДС, создаваемая между электродами 3, определяется по формуле
£' = -BJvcp, (12.26)
где В - индукция магнитного поля; d - внутренний диаметр трубопровода; vcp — средняя скорость потока жидкости.
Учитывая, что
ж/2
2 = ^-vcp, (12.27)
подставим vcp из (12.27) в (12.26):
Индуцируемая ЭДС, пропорциональная объемному расходу Q, усиливается электронным усилителем 4 и регистрируется в отсчетной системе 5. Интегрирование ее по времени дает количество жидкости, протекшей по трубопроводу.
Сушествуют расходомеры и с переменным магнитным полем. Электромагнитные расходомеры не имеют механических частей внутри трубопровода и поэтому малоинерционны. На их показания не влияют взвешенные в жидкости частицы и пузырьки газа, а также вязкость, плотность и температура (если они не изменяют электропроводность жидкости). Погрешность измерения - 0,5; 1,0 %.
12.11.4. Ультразвуковые расходомеры
Схема ультразвукового расходомера приведена на рис. 12.36. Звуковые колебания высокой частоты (20 кГц и выше) создаются электроакустическим виб- ратором-излучателем И1.
Они проходят через теку- ------------------------------
щую по трубе среду и ре- И1(П2)П —ПП1 (И2) гистрируются приемником
П1, отстоящим от излуча- г----------------
теля на расстояние /. Про- рис J2 3g
должительность распространения звуковой волны по направлению движения потока от излучателя И1 к приемнику П1 определяется по выражению
16*
483
I
C + vcp где с - скорость звука в данной среде; v - средняя скорость
потока.
Продолжительность распространения звуковой волны в обратном направлении от излучателя И2 к приемнику П2
/ / I
t\ ------, t2 t\-------------------.
C“Vcp C-Vcp C + vcp
Приведем последнее уравнение к общему знаменателю:
2/v
(12.28)
с -vcp
Учитывая (12.27) и пренебрегая в знаменателе (12.28) vcp (т.к. vcp « с ), получим:
Таким образом, измерение интервала (/2 - Ч) дает значение расхода Q. Основные трудности практического использования ультразвуковых расходомеров состоят в том, что скорость распространения звука зависит от физико-химических свойств измеряемой среды (температуры, давления, концентрации).
Ультразвуковые расходомеры, входящие в состав теплосчетчика ИТС-1 (АО «Центроприбор»), имеют предел допускаемой основной приведенной погрешности 1...2 %.
12.11.5. Вихревые расходомеры
Вихревыми называются расходомеры, основанные на измерении колебаний, возникающих в процессе вихреобразования. Тело, нахо
дящееся на пути потока, изменяет направление движения обтекаю-
щих его струй, увеличивает их скорость за телом, соответственно уменьшая давление (рис. 12.37). Пограничный слой, обтекающий тело, под влиянием пони-
Рис 12 37 женного давления за телом изменяет на-
правление движения, образуя вихрь. Частота образования вихрей пропорциональна скорости потока, значит, и расходу. Далее вихревые колебания преобразуются в выходной
484
сигнал различными способами. В качестве чувствительных элементов используются тензорезисторы, емкостные преобразователи и другие преобразователи, воспринимающие пульсации давления при образовании вихрей.
Достоинствами вихревых расходомеров являются линейность шкалы и небольшие погрешности (1...2 %). В вихреакустическом расходомере СВА (ПГ «Метран») вихри потока взаимодействуют с ультразвуковой волной, формируя сигнал, частота которого пропорциональна расходу.
12.12. Измерение потребления тепловой энергии
В современных условиях при постоянном росте цен на энергоносители практическую важность повсеместно приобрела задача измерения количества тепловой энергии в системах теплопотребле-ния зданий. Измерение тепловой энергии осуществляется теплосчетчиками по измерению расхода воды и температуры горячей и холодной воды. Принцип измерения в закрытых системах теплопо-требления (без забора воды на горячее водоснабжение) поясняет схема на рис. 12.38. Горячая вода из подающего трубопровода проходит через теплообменник 1 и, отдав тепло, попадает в обратный трубопровод. При отсутствии в системе водопотребления утечек воды достаточно измерять объемный расход Q (или массовый G), температуру 1\ в подающем трубопроводе и в обратном трубо-
тепл осети
Узел! учета!
Подающий трубопровод^^ 1X1
теплосети
Рис. 12.38
485
проводе. Количество потребляемой тепловой энергии определяется формулой
Е=}сОДр[7](г)-72(г)]Л, 'н
где р, С - плотность и теплоемкость воды; tH, /к - начальное и конечное время интервала учета теплопотребления.
Количество потребленной тепловой энергии рассчитывается в тепловычислителе ТВ по среднечасовым показаниям расходомера и датчиков температур. В настоящее время погрешность теплосчетчиков составляет 4-6 %.
12.13. Измерение уровня
Измерение уровня жидкости или сыпучих материалов позволяет определить их количество в занимаемых емкостях. Кроме того, системы поддержания уровня заданной величины требуют в своем составе средств его измерения. Существует большое число видов
уровнемеров, различающихся типом чувствительного элемента. Рассмотрим основные виды электрических уровнемеров.
Пьезометрические уровнемеры. В этих приборах уровень измеряется по величине давления, создаваемого столбом жидкости
АР = hpg,
(рис. 12.39). Дифференциальный датчик давления установлен так, что своими входными камерами воспринимает разность давлений ДР между дном резервуара и его верхней частью:
где h - измеряемый уровень; р — плотность жидкости; g - ускорение свободного падения;
й = —. (12.29)
Pg
Сигнал разности давления преобразуется датчиком в сигнал тока 1, который усиливается и подается на отсчетное устройство,
486
например, миллиамперметр, градуированный в единицах длины Таким образом, можно измерять уровень жидкости как в открытых резервуарах, так и в сосудах под давлением.
Изменение температуры влияет на погрешности всего измерительного тракта от преобразователя давления до миллиамперметра. Кроме того, здесь имеет место дополнительная методическая температурная погрешность в результате изменения плотности р. Однако, если по уровню жидкости определяется ее масса с учетом температурного изменения плотности, то методическая погрешность определения массы отсутствует. Расчетная масса
m = psh, (12.30)
где s - плошадь дна резервуара, или
АР т -----s.
g
Расчетная масса т не зависит от плотности жидкости р и ее
температуры.
Емкостные уровнемеры. Принцип действия емкостных уровнемеров основан на измерении емкости, зависящей от уровня жидкости в резервуаре (рис. 12.40). Здесь две плоские пластины образуют конденсатор, емкость которого состоит из двух составляющих:
Рис. 12.40
(12.31) а а
Преобразуем выражение (12.31) и получим линейную зависимость емкости от измеряемого уровня h:
с=ДЫ + (^|)*;,
а а
Конденсатор подключается к плечу неравновесного моста, градуированного в единицах длины.
Если жидкость электропроводка, то пластины конденсатора покрывают тонким слоем изолятора. Применяется цилиндрическая форма конденсатора с коаксиальным расположением трубчатых обкладок, в котором также сохраняется линейная зависимость емкости от уровня. В баках сложной формы для сохранения линейной зависимости емкости от объема конденсатор подвергается специальному профилированию.
487
Увеличение температуры приводит к увеличению уровня жидкости и уменьшению ее диэлектрической проницаемости. Эти факторы обусловливаю! противоположные приращения емкости конденсатора и почти компенсируют друг друга. Наряду с небольшой температурной погрешностью может иметь место погрешность, вызванная изменением положения резервуара в пространстве относительно горизонтального, а также движением с ускорениями. Кроме того, емкость конденсатора зависит от наличия на его поверхности осадков солей и грязи, а также от попадания воды в бензин, масло и другие жидкости. Диэлектрическая проницаемость воды £н?0 = 81, диэлектрическая проницаемость названных жидкостей ~ 2.
Емкостный уровнемер позволяет измерять суммарное количество жидкости в нескольких баках, т.к. емкости параллельно соединенных конденсаторов суммируются.
Основная погрешность емкостных уровнемеров составляет ±2,5%.
Ультразвуковые уровнемеры. На днище бака устанавливают два пьезоэлектрических преобразователя, один из которых является излучателем импульсов ультразвуковых колебаний постоянной частоты f, другой — приемником этих же импульсов, отраженных от плоскости раздела двух сред (поверхности жидкости). Измеряя время t между началом излучения и началом приема отраженного сигнала, находим высоту уровня
h = ~,
2 где с — скорость распространения звуковых колебаний в среде, уровень которой измеряется.
Для определения времени t используются электронные устройства, градуированные в линейных или объемных единицах.
Ультразвуковые уровнемеры имеют высокую точность и могут применяться для измерения уровня жидкости или сыпучего вещества в герметичных сосудах или уровня агрессивной среды.
12.14. Измерение влажности
Влажность часто является показателем качества материала, характеризует его чистый вес, оказывает влияние на технологические процессы. Поэтому количественное определение влажности приобретает все большую актуальность.
488
Под влажностью W понимают отношение веса влаги, содержащегося в теле, к весу влажного тела, выраженное в процентах:
100%,
Р
где Р - вес влажного тела; Ро - вес абсолютно сухого тела.
Под влажностью газа понимают отношение парциального давления водяного пара р к парциальному давлению Р насыщенного при данной температуре водяного пара:
W=^~ 100%.
Р
Существует большое число способов определения влажности. Рассмотрим наиболее распространенные из них, ориентированные
на автоматические измерения.
Кондуктометрические влагомеры. Их принцип действия основан на зависимости удельного электрического сопротивления от величины влажности. Характерный пример зависимости электрического сопротивления Rx образца джута от его влажности приведен
на рис. 12.41. Даже в логарифмическом масштабе график имеет резко меняющийся характер. В реальных условиях сопротивление материала может отличаться на 12... 18 порядков. Свойства материала изменяется по электропроводности от изолятора до проводника. При этом наибольшая чувствительность средств измерений имеет место на начальном, падающем участке зависимости при небольших значениях влажности.
Igtfx 12
11
10
9
8
7
6
Рис. 12.41
Применяется несколько схем кондуктометрических влагомеров.
Схема магнитоэлектрического омметра. Она полностью аналогична схеме на рис. 11.11. В качестве измерительного механизма используется магнитоэлектрический микроамперметр. В качестве резистора Rx используется специально подготовленный образец ис
следуемого материала.
Схема электронного мегометра (рис. 12.42) основана на измерении сопротивления образца Rx электронным вольтметром PV или компенсатором постоянного напряжения. Измеренное напряжение
489
Rx
-о
Ux=— R + R* A + i
R*
имеет при постоянстве питающего напряжения U монотонную зависимость от сопротивления Rx, и шкала может быть проградуирована в процентах влажности.
Рис. 12.42
Существенным недостатком кондуктометрических влагомеров является падение тока в сопротивлении образца Rx со временем с
приближением его к некоторому асимптотическому значению. Это объясняется поляризацией электрических зарядов во влажном материале. Процесс поляризации аналогичен заряду емкости. Начальный ток заряда и падение тока в образце могут составлять 10...30 % от установившегося тока. Для уменьшения влияния эффекта поля
ризации на точность измерения применяю! различные конструктивные меры, включая привязку к определенному моменту времени процессов градуировки и измерения. Свободным от отрицательного эффекта поляризации заряда является измерение влажности на переменном токе.
Емкостные влагомеры. В основе действия емкостных влаго
меров лежит использование зависимости величины диэлектрической проницаемости материала от его влажности. Так, диэлектрическая проницаемость воды Е = 81 значительно выше диэлектрической проницаемости сухих веществ (для бумаги Е = 2; для древесины Е =2,5; для жиров Е = 3). Преобразователем емкостного влаго
Рис. 12.43
мера служит сосуд (рис. 12.43), в котором пространство между цилиндрическими электродами 1 и 2 заполнено испытуемым веществом. Реальные конструкции преобразователей более сложны и обеспечивают регулируемую степень сжатия вещества. Влажность вещества оказывает влияние как на величину емкости конденсаторов, так и на тангенс угла потерь tg£, т.е. на обе составляющие комплексного сопротивления преобразователя. Величина емкости преобразователя Сх
обычно составляет единицы пикофарад, т.к. расстояние между электродами преобразователя нельзя сделать ниже определенного уровня. Измерение столь малых емкостей при низких частотах затруд-
490
нительно. В мостовых схемах на высоких частотах проявляются паразитные емкости между элементами и утечки тока. Поэтому наибольшее распространение нашли измерительные схемы на основе явления резонанса в L - R - С цепях. Один из примеров такой схемы приведен на рис. 12.44. Генератор Г высокой частоты индуктивно связан с колебательным контуром, содержащим катушку L и параллельно включенные переменный конденсатор Сп и датчик влажности (CX,RX). Контур настраивается в резо
нанс конденсатором Сп. Состояние резонанса определяется по максимуму напряжения на преобразователе, измеряемому электронным вольтметром PV. Отсчетное устройство, механически связанное с конденсатором Сп, градуируется в % влажности.
Электрические психрометры. Электрические психрометры -это средства измерения влажности газов и газовых смесей. В основе психрометрического метода лежит выражение, связывающее влажность газа IV с показаниями сухого (tc) и мокрого (tM) термометров
С с
Здесь Рм, Рс — максимально возможные парциальные давления пара при температурах tM и tc соответственно; А — психрометрическая постоянная; р - атмосферное давление.
Сухой термометр с температурой /с помещен в среду исследуемого газа. Мокрый термометр температуры tM помещен в среду газа с насыщенными парами воды, что создается специальной конструкцией психрометра посредством распыления воды, всасывающего фитиля или другими способами.
Психрометрическая постоянная А зависит от скорости потока газа. Поэтому в преобразователях электрических психрометров предусмотрены устройства для обеспечения постоянной скорости потока.
Наиболее просто значение влажности газа можно определить
491
по раздельному измерению tc и /м и специальным психрометрическим номограммам. Измерительные цепи автоматических психрометров, как правило, мостовые, в которых терморезисторы, измеряющие /с и /м, включены в разные плечи моста или даже разные мосты. Изменение атмосферного давления р учитывается настройкой напряжения питания моста.
Погрешность влагомеров в диапазоне влажности до 30 % в соответствие с ГОСТ 29027-91 должна быть не более 1 %.
12.15. Газоанализаторы
Газоанализаторы приборы для измерения концентрации компонентов газовой смеси. По количеству определяемых газов различают одно-, двух- и многокомпонентные приборы. По принципу действия чувствительных элементов они разделяются на химические и физические. В химических газоанализаторах одна или несколько составных частей газовой смеси вступают в химическое соединение с определенным компонентом. Концентрация этих частей определяется изменением теплового эффекта, тока электролиза или ионизации электродных потенциалов. С помощью физических газоанализаторов определяют концентрацию искомых компонентов на основе изменения ими физических свойств газовой смеси таких как
теплопроводность, скорость распространения и затухания ультразвуковых волн, степени поглощения инфракрасного излучения и
других.
В качестве примера рассмотрим газоанализатор для определения окиси углерода СО в выхлопных газах автомобилей. Принцип
Рис. 12.45
его действия основан на термохимическом эффекте. Две измерительные платиновые спирали 1, помещенные в измерительную камеру 2, включены в разные плечи измерительного моста (рис. 12.45). Одна из спиралей покрыта слоем активного катализатора А, вторая - пассивного катализатора П. Находящаяся в выхлопных газах окись углерода СО реагирует с кислородом воздуха на активном ка
492
тализаторе А, образуя диоксид углерода СО2, выделяя тепловую энергию и увеличивая сопротивление спирали. На пассивной спирали П химической реакции и выделения тепла не происходит. В результате разбаланса моста на измерительном механизме, шкала которого проградуирована в % СО, считывается измеряемая концентрация.
Для анализа многокомпонентных смесей все более широкое применение находит хроматографический метод анализа, основанный на предварительном разделении смеси на составные компоненты с использованием явления сорбции (рис. 12.46). Определенное
Рис. 12.46
количество исследуемой смеси перемещается инертным газоноси-телем через хроматографическую колонку 1, выполненную в виде длинной трубы, и заполненную неподвижным сорбирующим веществом. Сорбент с различной скоростью поглощает исследуемые газы А. В, С и D. В результате происходит химическое разделение смеси, когда малопоглощаемые газы установки В и D уходят вперед, а хорошо поглощаемые остаются (А и С). Разделенные газы по очереди выносятся газом-носителем к преобразователю 2, в котором концентрация и разделенного компонента преобразуется в электрический сигнал, например, напряжения U. Сигналы с выхода преобразователя записываются регистрирующим прибором 3. Хроматограмма состоит из отдельных пиков. Каждый пик соответствует определенному компоненту. Концентрация компонента определяется площадью пика.
493
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Литература к разделу I
1. Демирчян К.С., Бутырин П.А. Моделирование и машинный расчет электрических цепей. - М.: Высшая школа, 1988.
2. Зевеке Т.В., Ионкин П.А., Нетушин А.В., Страхов С.В. Основы теории цепей. - М.: Энергоатомиздат, 1989.
3. Миронов В.Г. Математическое описание цифровых сигналов// Электричество. - 2001. - № 8.
4. Миронов В.Г. Определение передаточных, функций цифровых фильтров// Электричество. - 2002. - № 2.
5. Миронов В.Г. Реализация устройств цифровой обработки сигналов// Электричество. - 2002. — № 9.
6. Миронов В.Г. Современные технические средства обработки и свойства сигналов// Электричество. - 2001. - № 3.
7. Нейман Л.Р., Демирчян К.С. Теоретические основы электротехники. Т. 1, 2. - Л.: Энергоиздат, 1981.
8. Современная теория фильтров и их проектирование/ Ред. Г. Темеш, С. Митра. - М.: Мир, 1987.
9. Теоретические основы электротехники. В 3-х т.: Учебник для вузов/ К.С. Демирчян, Л.Р. Нейман, Н.В. Коровкин, В.Л. Чечу-рин. - СПб.: Питер, 2003.
10. Теоретические основы электротехники: Учебное пособие в 4-х ч./ Под ред. Г.М. Торбенкова. - Челябинск: Изд-во ЮУрГУ, 2001.
11. Торбенков Г.М., Сафонов В.И. Теоретические основы электротехники: Сборник задач и упражнений в 3-х ч. - Челябинск: Изд-во ЮУрГУ, 2001.
12. Цифровой процессор обработки сигналов TMS32010 и его применение/ Под ред. А.А. Ланнэ - Л.: ВКАС, 1990.
494
Литература к разделу II
1. Аш Ж. Датчики измерительных систем: В 2-х кн. - М.: Мир, 1992.
2. ГОСТ 16263-70 ГСИ. Метрология. Термины и определения.
3. ГОСТ 8.401-80 ГСИ. Классы точности средств измерений. Общие требования.
4. Измерения в промышленности: Справочник в 3-х кн./ Под ред. П. Профоса. - М.: Металлургия. 1990.
5. Измерения электрических и неэлектрических величин/ Под ред. Н.П. Евтихеева. - М.: Энергоатомиздат, 1990.
6. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи. - Л.: Энергоатомиздат, 1984.
7. Основы метрологии и электрические измерения/ Под ред. Е.М. Душина. - Л.: Энергоатомиздат, 1987.
8. Справочник по электроизмерительным приборам/ Под ред. К.К. Илюхина. - Л.: Энергоатомиздат, 1983.
9. Харт X. Введение в измерительную технику. - М.: Мир, 1999.
10. Электрические измерения/ Под ред. В.И. Малиновского. -М.: Энергоатомиздат, 1985.
11. Электрические измерения/ Под ред. Е.Г. Шрамкова. - М . Высшая школа, 1972.
495
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ................................................. 3
ВВЕДЕНИЕ. КРАТКАЯ ИСТОРИЯ И ПЕРСПЕКТИВЫ РАЗВИТИЯ ЭЛЕКТРОТЕХНИКИ.................................. 9
История возникновения и становления электротехники....... 10
Отечественная электротехника XX века и ее роль в развитии страны .... 23
Проблемы и перспективы развития электротехники в XXI веке.27
КНИГА I. ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
ВВЕДЕНИЕ В КНИГУ I........................................ 43
Раздел 1. ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ
ВВЕДЕНИЕ. ФИЗИЧЕСКИЕ ОСНОВЫ ЭЛЕКТРОТЕХНИКИ
В. 1. Связь теории электрических и магнитных цепей с теорией электромагнитного поля...................................45
В.2. Электрическое и магнитное поле..................... 47
В.З. Электрическое напряжение, электрический потенциал, электродвижущая сила, источник ЭДС, электрическая емкость, конденсатор. 51
В.4. Магнитный поток, потокосцепление, ЭДС самоиндукции и взаимной индукции, индуктивность и взаимная индуктивность... 56
В.5. Электрические токи и магнитные потоки в различных физических средах.................................................. 59
В.6. Основные уравнения электромагнитного поля.......... 65
Глава 1.ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА
1.1. Элементы и схемы замещения электрической цепи постоянного тока.. 67
1.2. Задача анализа электрической цепи. Выбор условноположительных направлений токов и напряжений ее элементов .... 71
1.3. Компонентные уравнения элементов цепи постоянного тока. Схемы замещения источников энергии...................... 73
1.3.1. Компонентное уравнение резистора............. 73
1.3.2. Компонентные уравнения источников энергии.... 74
1.4. Анализ электрической цепи на основе законов Кирхгофа и компонентных уравнений ее элементов................... 78
1.5. Преобразование последовательно и параллельно соединенных элементов электрической цепи.......................... 80
1.5.1. Последовательное соединение резисторов....... 80
496
1.5.2. Параллельное соединение резисторов.............. 82
1.5.3. Смешанное соединение резисторов................... 83
1.5.4. Последовательное соединение источников электрической энергии.................................................. 85
1.5.5. Параллельное соединение источников электрической энергии.................................................. 86
1.6. Преобразования треугольника резисторов в эквивалентную звезду и наоборот.................................................. 88
1.7. Обобщенный закон Ома. Обобщенная ветвь цепи постоянного тока 90
1.7.1. Обобщенный закон Ома (закон Ома для ветви с несколькими резисторами и источниками ЭДС)......................... 90
1.7.2. Обобщенная ветвь цепи постоянного тока............ 91
1.8. Энергетические соотношения в цепях постоянного тока..... 92
1.8.1. Электрическая энергия............................. 92
1.8.2. Электрическая мощность. Баланс мощностей.......... 93
1.8.3. КПД источника энергии........................... 94
1.9. Принцип наложения и основанный на нем метол расчета электрических цепей.......................................... 95
1.10. Метод эквивалентного генератора........................ 97
1.11. Метод контурных токов................................. 99
1.12. Метод узловых напряжений............................ 103
1.12.1. Матричная форма записи узловых уравнений....... 105
1.12.2. Метод двух узлов............................... 106
1.13. Диагностика электрических цепей....................... 108
1.13.1. Задача размещения амперметров и вольтметров в цепи для обеспечения полной ее наблюдаемости................ 110
1.13.2. Диагностика электрических цепей, основанная на замыкании ее отдельных узлов..................................... 112
1.13.3. Тестовая диагностика параметров электрических цепей методом узловых сопротивлений.......................... 114
1.13.4. Использование методов преобразования электрических цепей для решения задач диагностики.................... 118
1.13.5. Решение задач диагностики цепей при противоречивой и неполной информации.................................. 120
Глава 2. ЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
СИНУСОИДАЛЬНОГО ТОКА
2.1. Общие сведения....................................-.... 122
2.1.1. Амплитуда, частота и фаза синусоидального тока и напряжения............................................ 122
2.1.2. Действующее значение синусоидального тока........ 124
2.1.3. Векторное представление синусоидальных величин.... 125
2.2. Резистор, индуктивная катушка и конденсатор в цепи синусоидального тока..................................- -.. 127
2.2.1. Синусоидальный ток в резисторе................... 127
2.2.2. Индуктивная катушка в цепи синусоидального тока... 129
2.2.3. Конденсатор в цепи синусоидального тока.......... 131
497
2.3. Анализ цепей синусоидального тока с помощью векторных диаграмм.................................................... 132
2.3.1. Цепь, содержащая резистор и индуктивную катушку... 132
2.3.2. Цепь, содержащая резистор и конденсатор.......... 134
2.3.3. Последовательное соединение резистора, катушки и конденсатора......................................... 136
2.3.4. Неразветвленная цепь синусоидального тока........ 138
2.3.5. Параллельное включение ветвей с резисторами, катушками и конденсаторами....................................... 140
2.3.6. Мощности в цепях синусоидального тока............ 144
2.3.7. Преобразования линейных электрических цепей синусоидального тока................................... 147
2.4. Комплексный метод расчета цепей синусоидального тока... 149
2.4.1. Векторное изображение синусоидальных величин на комплексной плоскости............................... 149
2.4.2. Законы Ома и Кирхгофа в комплексной форме.........152
2.4.3. Мощности в комплексной форме. Баланс мощностей в цепях синусоидального тока................................... 154
2.4.4. Расчет цепей синусоидального тока комплексным методом ... 156
2.5. Повышение коэффициента мощности в цепях синусоидального тока...................................................... 160
2.6. Электрические цепи с взаимной индуктивностью
2.6.1. Явления взаимной индукции.......................... 162
2.6.2. ЭДС взаимной индукции. Одноименные выводы........ 164
2.6.3. Последовательное соединение двух индуктивно связанных катушек.................................................166
2.6.4. Воздушный трансформатор и магнитная развязка магнитосвязанных цепей................................. 168
2.7. Электрические цепи с четырехполюсными элементами....... 171
2.7.1. Четырехполюсники. Основные понятия............... 171
2.7.2. Уравнения четырехполюсника. Экспериментальное определение его параметров............................. 173
2.7.3. Эквивалентные схемы четырехполюсников............ 176
2.8. Частотные характеристики электрических цепей........... 178
2.8.1. Частотные характеристики последовательного контура из резистора, конденсатора и катушки................... 178
2.8.2. Частотные характеристики электрических цепей, состоящих только из реактивных элементов......................... 180
Глава 3. ТРЕХФАЗНЫЕ ЦЕПИ
3.1. Основные понятия о трехфазных цепях................ 184
3.2. Трехфазный синхронный генератор........................ 185
3.3. Способы соединения трехфазных цепей.................... 187
3.4. Симметричный режим трехфазной цепи..................... 189
3.4.1. Симметричный режим при соединении фаз приемника звездой 189
3.4.2. Симметричный режим при соединении фаз приемника треугольником.......................................... 191
3.4.3. Мощности симметричной трехфазной системы......... 192
498
3.5. Расчет несимметричных режимов трехфазных цепей....... 196
3.5.1. Соединение фаз приемника звездой с нейтральным проводом 196
3.5.2. Соединение фаз приемника звездой без нейтрального провода 198
3.5.3. Соединение фаз приемника треугольником......... 199
3.5.4. Мощности несимметричной трехфазной системы..... 199
3.5.5. Трехфазная цепь с трехфазными и однофазными приемниками........................................... 202
3.6. Топографические диаграммы трехфазных цепей........... 203
3.6.1. Топографическая диа,рамма трехфазной цепи при соединении генератора и приемника звездой с нейтральным проводом ... 204
3.6.2. Топографическая диа1рамма трехфазной цепи при соединении генератора звездой, а приемника треугольником...........205
3.6.3. Топографическая диаграмма напряжений при обрыве линейного провода в симметричной трехфазной цепи, приемник которой соединен звездой без нейтрального провода 205
3.6.4. Топографическая диаграмма напряжений при однофазном коротком замыкании приемника, соединенного звездой без нейтрального провода....................................— 206
3.6.5. Топографическая диаграмма при обрыве линейного провода в симметричной трехфазной цепи с приемником, соединенным треугольником...........................................207
3.7. Расчет несимметричных режимов трехфазных цепей методом
симметричных составляющих
3.7.1. Разложение несимметричных трехфазных систем
на симметричные составляющие. Преобразование Фортескью 208
3.7.2. Сопротивления трехфазной цепи для токов прямой, обратной и нулевой последовательности.................. 210
3.7.3. Расчет трехфазных цепей методом симметричных составляющих.............................................211
Глава 4. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ НЕСИНУСОИДАЛЬНЫХ ПЕРИОДИЧЕСКИХ ТОКОВ
4.1. Основные понятия..................................... 215
4.2. Метод расчета мгновенных значений токов и напряжений
в линейных электрических цепях при действии периодических несинусоидальных ЭДС
4.2.1. Представление ЭДС источников в виде ряда Фурье... 217
4.2.2. Сопротивления элементов цепи и их соединений для различных гармоник................................. 218
4.2.3. Расчет электрической цепи несинусоидальных токов с использованием гармонического разложения токов, напряжений, ЭДС и принцип суперпозиции..................220
4.2.4. Особенности сходимости гармонических составляющих несинусоидальных токов, напряжений, ЭДС................ 221
4.3. О составе высших гармоник токов и напряжений......... 223
4.4. Интегральные оценки качества процессов в цепях несинусоидальных токов..................................................... 224
4.5. Понятие реактивной мощности для цепей несинусоидальных токов 229
4.6. Высшие гармоники в трехфазных цепях.................. 234
499
Глава 5. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ 5.1. Общие понятия.............................................237
5.2. Классический метод расчета переходных процессов в линейных электрических цепях.......................................240
5.2.1. Определение преходящей составляющей тока.......... 241
5.2.2. Методика расчета переходных процессов классическим методом 242 5.3. Переходные процессы в электрических цепях с последовательно соединенными резисторами и катушками.........................243
5.3.1. Короткое замыкание в цепи с резистором и катушкой. 243
5.3.2. Включение цепи с резистором и катушкой на постоянное напряжение.............................................. 245
5.3.3. Включение цепи с резистором и катушкой на синусоидальное напряжение.............................................. 246
5.4. Переходные процессы в цепи с последовательно включенными резисторами и конденсаторами
5.4.1. Разряд конденсатора на резистор................... 248
5.4.2. Включение цепи с резистором и конденсатором на постоянное напряжение (заряд конденсатора)......................... 249
5.4.3. Включение цепи с резистором и конденсатором на синусоидальное напряжение.................................250
5.5. Разряд конденсатора на цепь с резистором и катушкой.... 252
5.5.1. Составление характеристического уравнения. Определение собственных частот цепи..................................252
5.5.2. Апериодический разряд конденсатора на катушку и резистор 253
5.5.3. Предельный апериодический разряд конденсатора на катушку и резистор............................................ 254
5.5.4. Периодический (колебательный) разряд конденсатора на цепь с резистором и катушкой..........................255
5.6. Включение контура из конденсатора, резистора, катушки на постоянное напряжение......................................257
5.6.1. Апериодический процесс............................ 257
5.6.2. Колебательный процесс..............................258
5.7. Некорректно поставленные задачи расчета переходных процессов.. 259
5.8. Интегрирующие и дифференцирующие цепи..................261
5.9. Операторный метод расчета переходных процессов в линейных электрических цепях.......................................... 262
5.9.1. О связи оригиналов и изображений.................. 263
5.9.2. Законы Кирхгофа и компонентные уравнения элементов
цепи в операторной форме........................... 264
5.9.3. Операторные схемы замещения. Операторные
сопротивления. Операторный закон Ома............... 265
5.9.4. Расчет переходных процессов электрических цепей операторным методом..................................... 267
5.9.5. Переход от изображений к оригиналам. Теорема разложения 270 5.10. Расчет переходных процессов в цепи при воздействии ЭДС произвольной формы с помощью интеграла Дюамеля.............. 271
5.11. Свободные процессы в электрических цепях.............. 274
500
5.11.1. Свободные и принужденные составляющие переходных токов и напряжений.................................... 274
5.11.2. Характер свободной составляющей тока и свойства корней характеристического уравнения цепи.....................276
5.11.3. «Жесткие» и «дребезжащие» модели электрических цепей. Особенности поведения свободных составляющих
переходных токов в некоторых предельных случаях..277
5.12. Установившиеся составляющие токов и напряжений
электрических цепей
5.12.1. Математические модели линейных электрических цепей с одним накопителем энергии........................... 282
5.12.2. Свободные, принужденные и преходящие, установившиеся составляющие переходных токов и напряжений простейших электрических цепей................................... 284
5.12.3. Определение в замкнутом аналитическом виде установившихся составляющих решений простейшего уравнения состояния электрических цепей............... 285
5.13. Метод переменных состояний
5.13.1. Уравнения состояния электрических цепей.........288
5.13.2. Решение уравнений состояния электрических цепей.290
Глава 6. НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ ЭЛЕКТРИЧЕСКИХ
И МАГНИТНЫХ ЦЕПЕЙ И ИХ ХАРАКТЕРИСТИКИ.................291
6.1 Общая характеристика нелинейных элементов............. 292
6.1.1. Нелинейные резистивные элементы и их параметры...294
6.1 2. Нелинейные реактивные элементы и их параметры.... 297
6.2 . Аппроксимация нелинейных характеристик
6.2.1. Задачи аппроксимации............................ 300
6.2.2. Виды аппроксимирующих функций................... 300
6.2.3. Кусочно-линейная аппроксимация характеристик нелинейных элементов.................................. 302
Глава 7 РАСЧЕТ НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ
И МАГНИТНЫХ ЦЕПЕЙ ПРИ ПОСТОЯННОМ ТОКЕ
7.1. Основные методы расчета...............................305
7.1.1. Графический метод расчета нелинейных электрических цепей постоянного тока................................ 306
7.1.2. Расчет сложной нелинейной цепи с двумя узлами... 310
7.1.3. Применение метода эквивалентного генератора к расчету сложных нелинейных цепей...............................311
7.2. Магнитные цепи при постоянном токе
7.2.1. Основные понятия и законы магнитных цепей........314
7.2.2. Неразветвленная магнитная цепь.................. 317
7.2.3. Разветвленная магнитная цепь.....................318
7.3. Применение аналитических и численных методов расчета для
нелинейных электрических и магнитных цепей постоянного тока .. 320
7.3.1. Расчет нелинейной электрической цепи при малых нелинейностях......................................... 321
7.3.2. Расчет силы тяги электромагнита................. 322
7.3.3. Расчет нелинейных цепей методом итерации........ 324
501
Глава 8. ЦЕПИ ПЕРЕМЕННОГО ТОКА С ФЕРРОМАГНИТНЫМИ ЭЛЕМЕНТАМИ
8.1. Некоторые особенности цепей переменного тока с ферромагнитными элементами................................................326
8.1.1. Потери на гистерезис........................... 327
8.1.2. Потери от вихревых токов........................329
8.1.3. Влияние потерь на эквивалентные параметры катушки...330
8.2. Уравнения, векторные диаграммы, схемы замещения катушки с ферромагнитным сердечником
8.2.1. Катушки со стальным магнитопроводом без учета насыщения, потерь и потоков рассеяния................. 331
8.2.2. Влияние насыщения на форму кривой тока в катушке со стальным магнитопроводом........................... 332
8.2.3. Учет явления гистерезиса в катушке со стальным магнитопроводом....................................... 334
8.2.4. Катушка со стальным магнитопроводом при учете всех потерь и потоков рассеяния............................ 336
8.3. Резонансные цепи с нелинейными элементами 8.3.1. Феррорезонанс напряжений...........................340
8.3.2. Феррорезонанс токов............................ 343
8.4. Трансформатор с ферромагнитным сердечником.......... 345
8.4.1. Уравнения, параметры, векторная диаграмма и схема замещения трансформатора с ферромагнитным сердечником 345
8.4.2. Измерительные трансформаторы................... 350
Глава 9. РАСЧЕТ УСТАНОВИВШИХСЯ ПРОЦЕССОВ В НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ ПРИ ПЕРИОДИЧЕСКИХ ВОЗДЕЙСТВИЯХ
9.1. Общие свойства нелинейных цепей переменного тока.... 355
9.2. Особенности процессов в нелинейных инерционных элементах. 358
9.3. Расчет электрической цепи, содержащей инерционные элементы ... 361
9.4. Особенности периодических процессов в цепях с нелинейными безынерционными элементами................................363
9.5. Расчет установившихся процессов методом эквивалентной линеаризации............................................. 364
9.6. Метод гармонического баланса.........................367
9.7. Расчет установившегося режима в нелинейной цепи при кусочно-линейной аппроксимации нелинейности...............370
9.8. Цепи с вентилями.....................................372
9.8.1. Выпрямление переменного тока.................. 372
9.8.2. Регулирование выпрямленного тока .............. 375
9.8.3. Сглаживание пульсаций выпрямленного тока....... 378
Глава 10. ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ЦИФРОВЫХ СИСТЕМ (ЦЕПЕЙ) И МЕТОДОВ ОБРАБОТКИ ЦИФРОВЫХ СИГНАЛОВ
10.1. Предварительные понятия 10.1.1 Преимущества цифровой обработки сигналов.......... 383
10.1.2. Классификация сигналов............................384
502
10.1.3. Преобразование Фурье аналогового сигнала. Спектры. 385
10.1.4. Примеры цифровых сигналов...................... 386
10.2. Импульсная и частотные характеристики цифровой системы
10.2.1. Импульсная характеристика...................... 387
10.2.2. Передаточная функция и частотные характеристики цифровой системы........................................388
10.3. Дискретное преобразование Фурье
10.3 1 Соотношения для ДПФ.............................390
10.3.2. Быстрое преобразование Фурье....................391
10.3.3. Теорема Котельникова............................393
10.4. Структура ЦОС и свойства ее характеристик 10.4.1. Структурная схема ЦОС...............................393
10.4 2. Спектры сигналов.............................. 394
10.4.3. Свойства частотных характеристик систем ЦОС.... 396
10.4.4. Z-преобразование, передаточная функция Щг)..... 397
10.5. Определение передаточных функций цифровых фильтров
10.5.1. Постановка задачи синтеза цифровых фильтров.....399
10.5.2. Аппроксимация характеристики затухания аналоговых фильтров нижних частот................................. 400
10.5.3. Равноволновая аппроксимация ХЗ ФНЧ (Чебышева)..... 402
10.5.4. Преобразование функции Н(р) в функцию Hz(z).... 404
10.6. Реализация рекурсивных ЦФ
10.6.1. Непосредственный и канонический методы реализации.407
10.6.2. Каскадный и параллельный методы.................408
10.7. Цифровые нерекурсивные фильтры...................... 410
Раздел II. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
Глава 11. ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
11.1. Общие сведения об измерениях......................... 415
11.2. Основные характеристики средств измерений............ 416
11.3. Магнитоэлектрические приборы....................... ... 420
11.4. Электромагнитные приборы............................. 427
11.5. Электродинамические и ферродинамические приборы.......431
11.6. Однофазный счетчик электрической энергии..............436
11.7. Мосты постоянного тока............................... 441
11.8. Мосты переменного тока 444
11.9. Компенсатор постоянного тока......................... 447
11.10. Цифровые приборы.....................................449
11.10.1. Цифровой вольтметр...........................449
10.10.2. Цифровой счетчик электрической энергии...... 450
11.10.3. Учет электрической энергии с помощью цифровых счетчиков........................................451
11.11. Регистрирующие приборы...............................452
Глава 12. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ НЕЭЛЕКТРИЧЕСКИХ
ВЕЛИЧИН
12.1. Общие сведения об измерениях неэлектрических величин. 455
12.2. Реостатные преобразователи............................456
503
12.3. Тензорезисторы...................................... 457
12.4. Индуктивные и трансформаторные преобразователи........460
12.5. Емкостные преобразователи.... ....................... 464
12.6. Пьезоэлектрические преобразователи..... ............. 466
12.7. Преобразователи температуры.......................... 468
12.7.1. Термоэлектрические преобразователи температуры..468
12.7.2. Терморезисторы................................. 471
12.8. Гальваномагнитные преобразователи.....................473
12.9. Оптоэлектронные преобразователи.......................473
12.10. Измерение температуры............................... 479
12.11. Измерение расхода жидкости и газа................... 480
12.11.1. Расходомер с сужающим устройством............ 481
12.11.2. Турбинные расходомеры.... ....................482
12.11.3. Электромагнитные расходомеры..................482
12.11.4. Ультразвуковые расходомеры................... 483
12.11.5. Вихревые расходомеры......................... 484
12.12. Измерение потребления тепловой энергии.............. 485
12.13. Измерение уровня.... ............................. 486
12.14. Измерение влажности..................................488
12.15. Газоанализаторы..................................... 492
БИБЛИОГРАФИЧЕСКИЙ СПИСОК......................................494
УДК 621.3(075.8)
Э 455 Электротехника: Учебное пособие для вузов. - В 3-х книгах. Книга 1. Теория электрических и магнитных цепей. Электрические измерения/ Под ред. П.А. Бутырина, Р.Х Гафиятуллина, А Л. Шестакова. - Челябинск Изд-во ЮУрГУ, 2003. - 505 с.
ISBN 5-696-02841-1
В первой книге обобщены сведения об электромагнитных явлениях и сформулированы основные понятия и законы теории электрических и магнитных цепей. Описываются свойства линейных электрических цепей, приводятся методы анализа и диагностики электрических цепей. Рассмотрены инженерные методы расчета цепей постоянного, синусоидального, трехфазного и несинусоидального тока; четырехполюсники и переходные процессы. Анализируются элементы нелинейных электрических цепей, приводится расчет нелинейных электрических и магнитных цепей. Рассмотрены основные положения теории цифровых систем (цепей) и методов обработки цифровых сигналов. Изложены основы теории электрических измерений, методы и средства измерений электрических, магнитных и неэлектрических величин.
Книга предназначена для инженеров и студентов высших технических учебных заведений, в первую очередь, электротехнического и электроэнергетического направлений.
ISBN 5-696-02841-1
© Коллектив авторов, 2003.
© Издательство ЮУрГУ, 2003.
ЭЛЕКТРОТЕХНИКА
Книга I
ТЕОРИЯ ЭЛЕКТРИЧЕСКИХ И МАГНИТНЫХ ЦЕПЕЙ. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
Издательство Южно-Уральского государственного университета
ИД №00200 от 28.09.99.
Подписано в печать 17.11.03. Формат 60x90 1/16.
11ечать офсетная. Бумага ВХИ. Гарнитура Таймс.
Усл. печ. л. 31,6. Уч.-изд. л. 26,5.
Тираж 2000 экз. Заказ 641/142. Цена С.
Отпечатано с готового оригинал-макета в полиграфическом объединении «Книга».
454000, г. Челябинск, ул. Постышева, 2.