/












































































































































































































Author: Бутырин П.А. Шестаков А.Л. Гафиятуллин Р.Х.
Tags: электротехника электроника
ISBN: 5-696-02928-0
Year: 2004




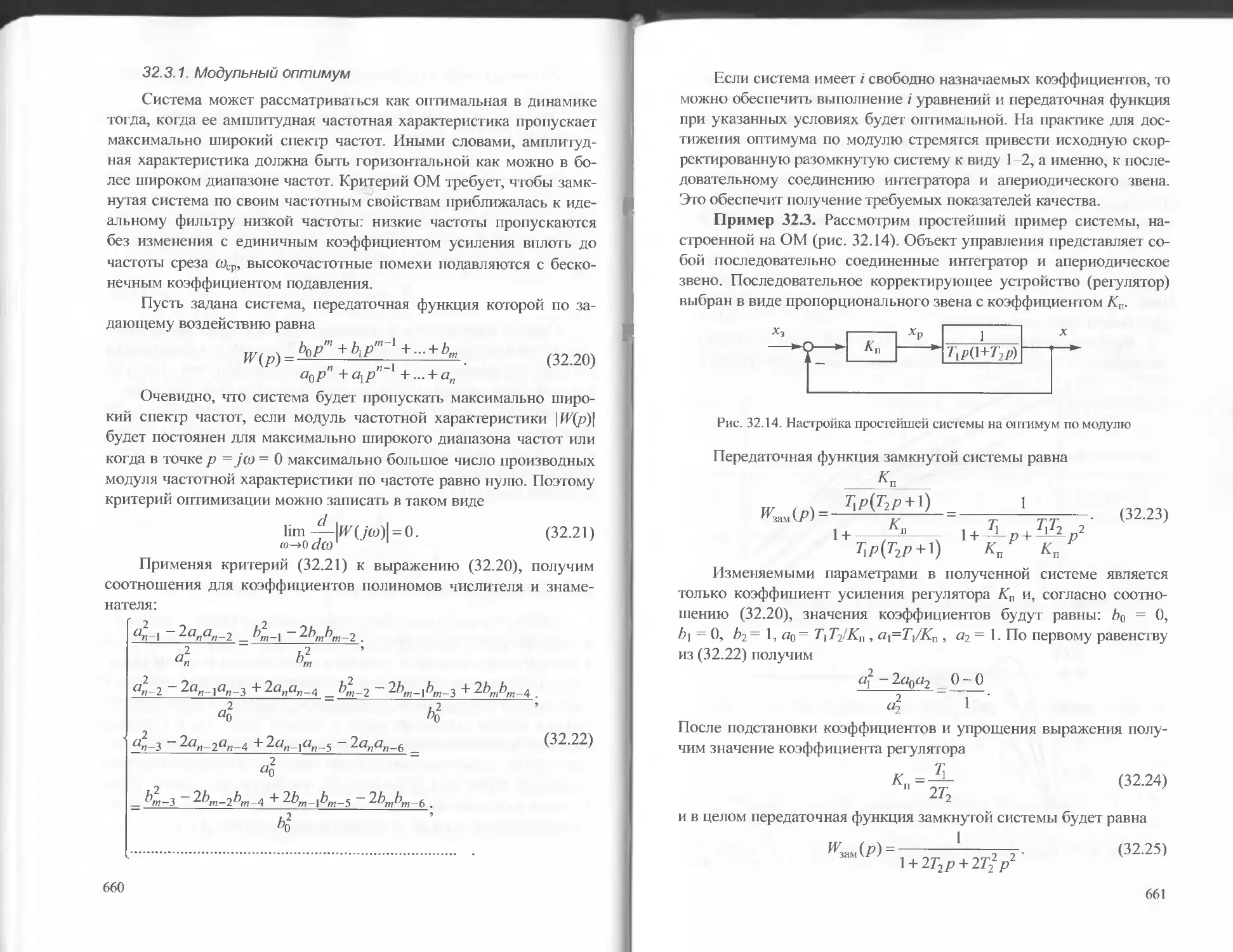
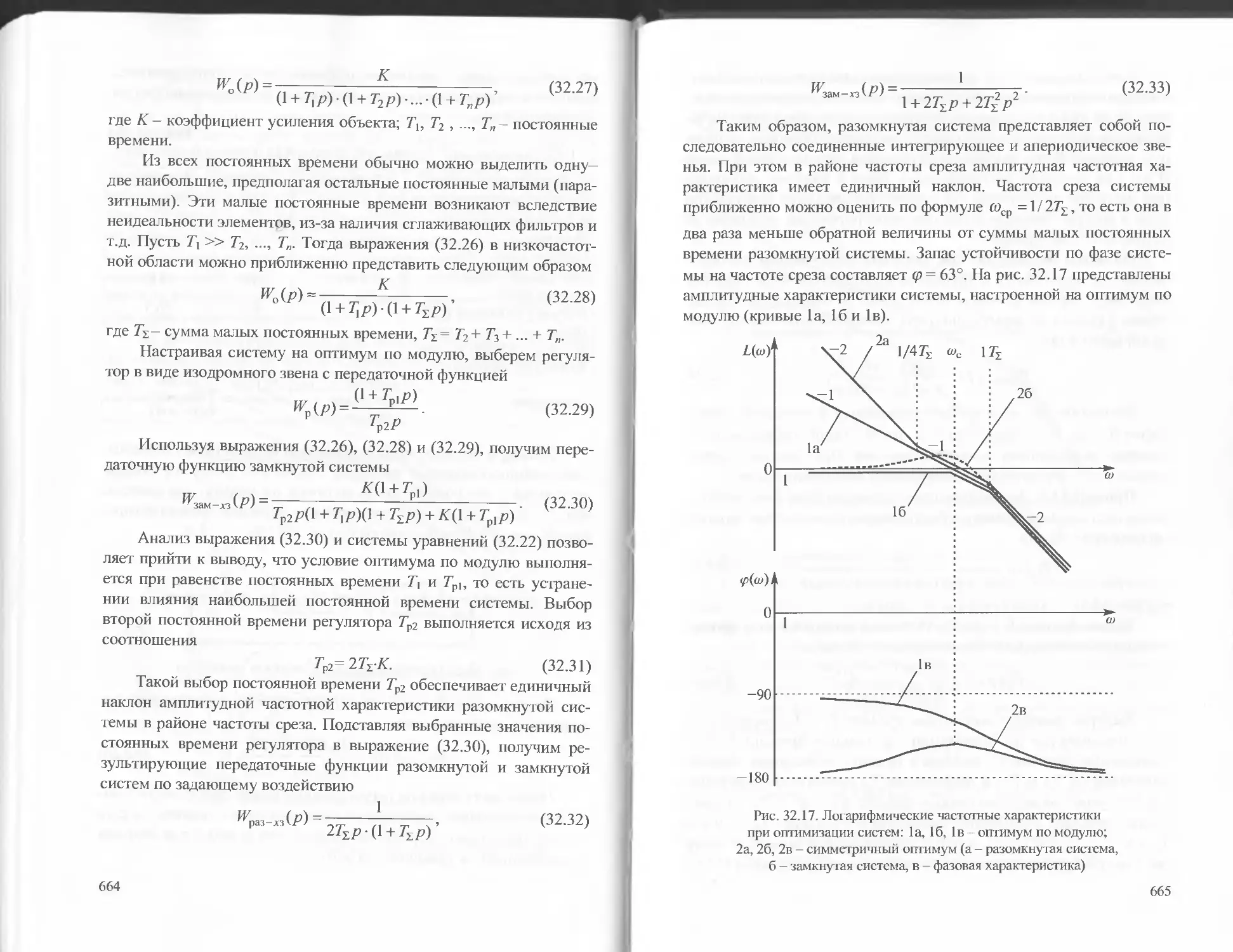
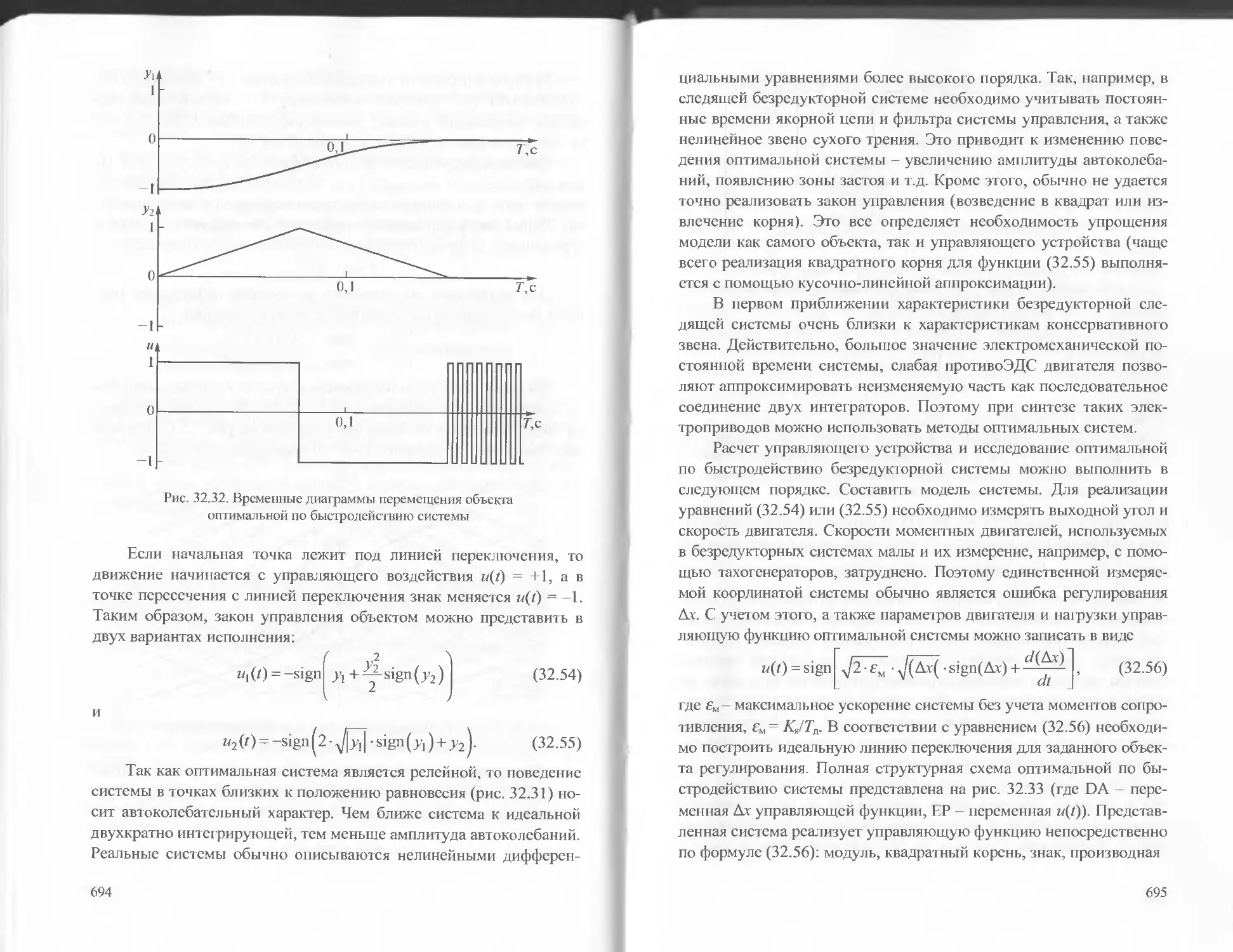
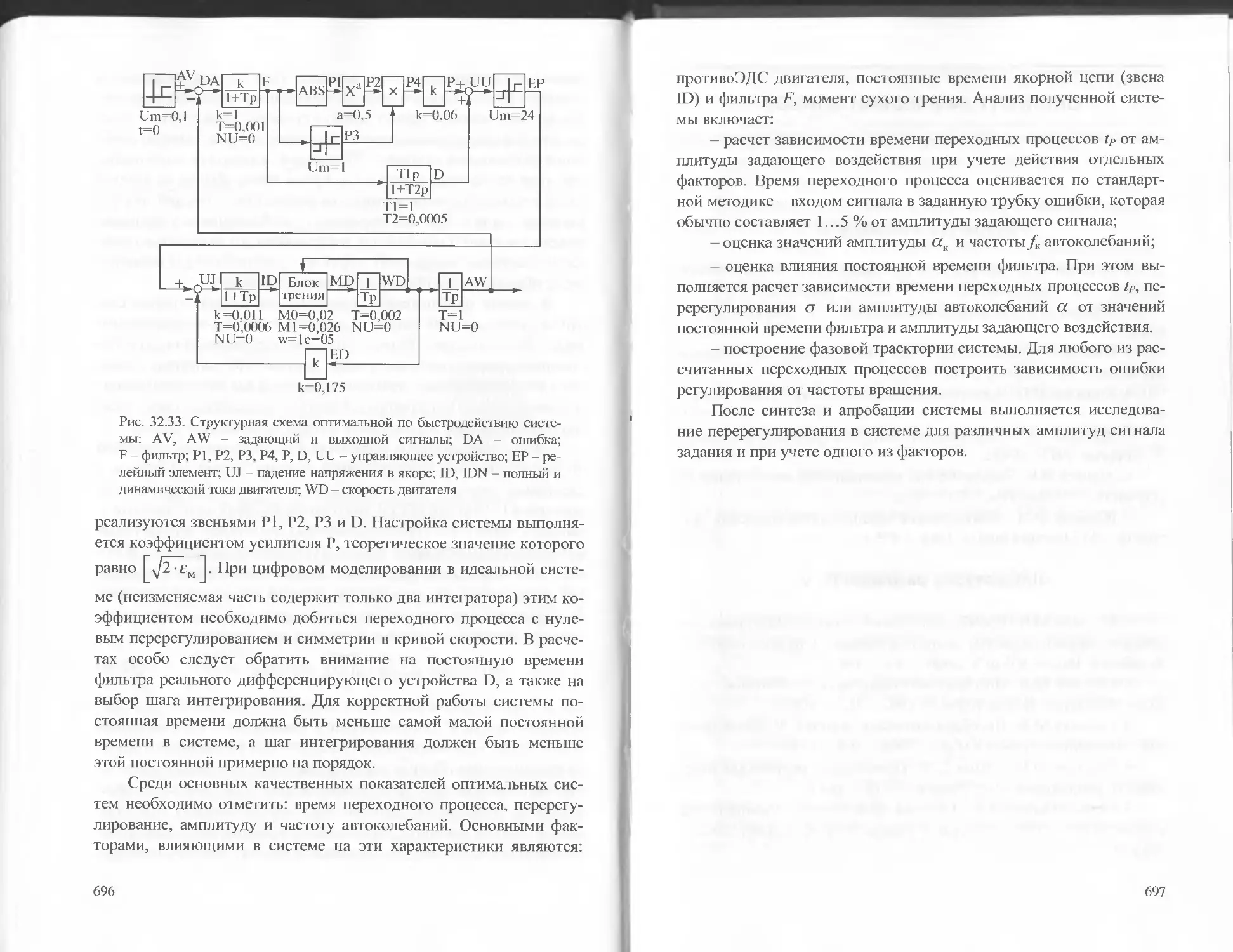
Text
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ЭЛЕКТРОТЕХНИКА
УЧЕБНОЕ ПОСОБИЕ
В ТРЕХ КНИГАХ
Под редакцией
член-корреспондента РАН
П.А. Бутырина,
доктора технических наук, профессора,
заслуженного деятеля науки и техники РФ
Р.Х. Гафиятуллина,
доктора технических наук,
профессора
А.Л. Шестакова
Челябинск-Москва
Издательство ЮУрГУ
ПРЕДИСЛОВИЕ
Уважаемый читатель, предлагаемое Вашему вниманию учеб-
ное пособие «Электрот ехника», состоящее из трех книг, представ-
ляет собой новый вид учебной литературы по электротехническо-
му оборудованию. В нем содержатся сведения по всему циклу
электротехнических дисциплин, что позволяет использовать его в
качестве единого источника знаний. Подробное введение в каж-
дую из дисциплин и практическая направленность в изложении
основного материала рассчитаны на использование книг при пер-
воначальном, самостоятельном изучении этих дисциплин, а также
для переподготовки специалиста-электротехника на современном
уровне. Подобная ориентация учебного материала отвечает целям
большей органичности и непрерывности электротехнического об-
разования. Таким образом, данная учебная литература может ис-
пользоваться в качестве настольной книги электротехника как во
время его учебы в вузе, так и в процессе последующей работы.
Идея и структура книги предложены заслуженным деятелем
науки и техники Российской Федерации, доктором технических на-
ук, профессором Р.Х. Гафиятуллиным и одобрены главными спе-
циалистами (главными энергетиками, главными электриками и др.)
крупнейших промышленных и оборонных предприятий, ведущими
учеными-электротехниками. По его же инициативе были пригла-
шены для работы над книгой известные ученые из Московского
энергетического института (Технического университета), Южно-
Уральского государственного университета и других вузов, кото-
рые впоследствии составили коллектив авторов-единомыш-
ленников, озабоченных состоянием электротехнического образова-
ния, науки и техники в области электротехники, включая управле-
ние сложными электромеханическими системами. Известно, что
существующая ситуация по обеспечению электротехнической ли-
3
1*
тературой за последние десять-пятнадцать лет может быть охарак-
теризована как неблагоприятная.
Учебное пособие написано в соответствии с образовательными
стандартами «Электротехника, электромеханика и электротсхноло-
гии», «Электроэнергетика», «Автоматизированные технологии и
производства», «Автоматизация и управление», «Механотроника и
робототехника», «Электроника и микроэлектроника», «Приборо-
строение» и др.
Данное издание под названием «Электротехника», состоящее
из трех книг, имеет следующую структуру.
Книга I - «Теория электрических и магнитных цепей. Элек-
трические измерения»
Книга II — «Электрические машины. Промышленная электро-
ника. Теория автоматического управления».
Книга III «Электроприводы. Электроснабжение».
В первом разделе книги I «Теория электрических и магнитных
цепей» рассматриваются традиционные и новые, появившиеся в
последние годы, вопросы теории линейных и нелинейных электри-
ческих цепей. К традиционным вопросам линейных цепей относят-
ся свойства цепей и методы их расчетов при постоянных синусои-
дальных, периодических несинусоидальных и импульсных воздей-
ствиях, четырехполюсники, трехфазные цепи, переходные процес-
сы. Рассмотрен расчет нелинейных электрических и магнитных це-
пей при постоянном и периодических воздействиях.
К нетрадиционным вопросам классической электротехники
относятся: диагностика элекзрических цепей, теория цифровых
систем и методы обработки цифровых сигналов.
Объем и содержание первого раздела обеспечивает изучение
курса теоретических основ электротехники (ТОЭ) и его приложе-
ния к другим разделам второй и третьей книг.
Во втором разделе изложены основы теории электрических
измерений, представлены методы и средства измерений электриче-
ских и неэлектрических величин. Рассмотрены основы метрологии
и даны необходимые сведения о системах электроизмерительных
приборов и их применении для измерения различных физических
величин.
Описаны параметрические измерительные преобразователи
для измерения различных неэлсктрических величин.
4
Вторая книга начинается с раздела III, который посвящен
электромагнитным и электромеханическим устройствам: транс-
форматорам, электрическим машинам постоянного и переменного
тока, микромашинам автоматических устройств.
Подробно изложена общая теория трансформаторов. Рассмот-
рены вопросы работы трансформаторов в трехфазных электриче-
ских сетях, включая несимметричные режимы. Охарактеризованы
особенности одно- и трехфазных автотрансформаторов, а также
сварочных и измерительных трансформаторов.
Вопросы теории основных видов электрических машин изло-
жены на основе принципов электромеханического преобразования
энергии. Это позволило уменьшить дублирование материала и дало
возможность больше внимания уделить важным в условиях экс-
плуатации характеристикам электрических машин с учетом раз-
личных способов их возбуждения и регулирования.
Показаны различные схемы соединения обмоток вращающих-
ся трансформаторов и синхронных передач. Описано устройство
синхронного гистерезисного двигателя и двух видов шаговых дви-
гателей и т.д.
В этой же книге весьма развернуто представлены физические
основы электроники и промышленная электроника (IV и V разделы).
Рассмотрено современное состояние полупроводниковых прибо-
ров и основ информационной электроники. Большой объем материала
посвящен энергетической электронике, которая явилась базой для соз-
дания высокоточных широкодиапазонных регулируемых электропри-
водов и электротехнологичсских установок для различных отраслей
промышленности. С помощью электронных энергетических устройств
в настоящее время преобразуется более половины всей вырабатывае-
мой электроэнергии, и поэтому они приобретают решающее значение
в энергосбережении. Таким образом, материалы по промэлектронике
охватывают весь комплекс вопросов, позволяющих решать проблемы
разработки, проектирования и эксплуатации эффективных электро-
механических и электротехнологичсских устройств.
В процессе разработки, проектирования и эксплуатации возни-
кают задачи регулирования и управления сложными электромехани-
ческими и электротехнологическими устройствами. Без знания хотя
бы элементов теории автоматического регулирования не представ-
ляются возможными разработка и создание управляемых электроме-
ханических и электротехнологичсских устройств (раздел VI).
5
По этому разделу знаний представлены элементы классической
теории автоматического управления. Подробно описаны регуляторы,
необходимые для обеспечения устойчивости и точности систем ре-
гулирования (в частности. П-, И-, ПИ- и ПИД-рсгуляторы).
Вполне в удовлетворительном объеме как для студентов, так и
для разработчиков, инженеров изложены вопросы классического
синтеза систем управления.
Синтез же нелинейных систем базируется на цифровом моде-
лировании с соответствующим программным обеспечением.
Третья книга включает разделы VIIXI.
«Физические основы элекэропривода» (VII раздел) начинается
с введения основных понятий, принятых в электроприводе как от-
расли знаний. Физика современного электропривода изложена сна-
чала на примере электроприводов постоянного тока при питании от
нерегулируемого источника, а затем - от регулируемых преобразо-
вателей. Далее те же вопросы рассматриваются на примере элек-
троприводов переменного тока. Последовательность изложения ма-
териала аналогична: сначала рассматриваются электроприводы с
питанием от сети с нерегулируемыми частотой и напряжением, а
затем - при питании от различных регулируемых преобразователей
частоты или напряжения. Наиболее подробно рассмотрен асин-
хронный привод - самый массовый и экономичный. Представлены
и другие типы электроприводов: синхронные, вентильно-
индукторные.
Переходные процессы в разомкнутых системах электроприво-
да классифицируются по четырем группам и рассматриваются с це-
лью получения суждения о возможной производительности рабоче-
го механизма и возникающих в нем перегрузках.
В дополнение к описанию традиционных проблем энергети-
ки (потери в электроприводе в установившихся режимах, потери
при пусках и торможениях) изложены оценки энергетической
эффективности при неоднонаправленных потоках энергии, а так-
же рассмотрен вопрос об энергосбережении средствами электро-
привода.
Весьма объемно и содержательно изложены материалы по
системам управления электроприводов (раздел VIII).
Среди электроприводов постоянного тока наиболее глубоко
представлены современные промышленные вентильные электро-
приводы с подчиненным регулированием координат.
6
Электроприводы переменного тока описаны с позиции век-
торного регулирования электромагнитного момента двигателя.
Следящие электроприводы представлены с точки зрения осо-
бенностей их настройки в режимах позиционирования и слежения.
В разделе IX рассматриваются промышленные частотно-
регулируемые электроприводы. Этот раздел содержит актуальней-
ший, свежий материал, ибо впервые так конкретно анализируются
современные частотно-регулируемые электроприводы.
Излагается теория скалярного и векторного управления асин-
хронным электродвигателем, приводятся математические соотно-
шения, положенные в основу функционирования схем управления.
Достаточно подробно рассмотрены векторные диаграммы асин-
хронного двигателя при питании от преобразователя частоты.
Современные сложные частотно-регулируемые асинхронные
электроприводы требуют от эксплуатационника высокой квалифи-
кации. Их система управления, выполненная на программируемых
контроллерах, имеет богатый набор сервисных функций, которые
изложены в разделе.
Дается краткая техническая характеристика промышленных
преобразователей частоты, выпускаемых отечественными и зару-
бежными фирмами.
Раздел X посвящен электроприводам с фаззи-регулированием.
Рассматриваются вопросы проектирования систем автоматического
управления с фаззи-регулированием, а именно: общие принципы
построения систем, основные характеристики фаззи-регуляторов и
методы синтеза систем с нечеткой логикой.
Приводится ряд характерных примеров использования систем
фаззи-логики: управление движением подъемного крана, система с
«перевернутым маятником», следящая система управления.
XI раздел посвящен системам электроснабжения (СЭС). В нем
рассматриваются вопросы, связанные с производством, передачей и
распределением электрической энергии.
Приведены краткие сведения об источниках и приемниках
электрической энергии, рассмотрены используемые в практике
проектирования методы расчета электрических нагрузок, а также
дано описание типовых схем и конструктивного исполнения
электрических сетей, методика выбора их элементов. Рассмотре-
ны режимы нейтрали электрических сетей, релейная защита и ав-
7
тематика СЭС. Особое внимание уделено вопросам качества
электрической энергии и компенсации реактивной мощности.
Настоящая книга не вышла бы в свет, если бы не подставило
свое плечо и не оказало бы конкретную помощь, порою в сложной
ситуации, руководство ЮУрГУ.
Редакторы настоящей книги выражают искреннюю призна-
тельность ректору Южно-Уральского государственного универси-
тета (ЮУрГУ) член-корреспондснту РАН Герману Платоновичу
Вяткину за всестороннюю поддержку проекта книги; лауреату Го-
сударственной премии СССР, заслуженному деятелю науки и тех-
ники РФ, доктору техн, наук, профессору Николаю Федотовичу
Ильинскому и лауреату Государственной премии СССР, доктору
техн, наук, профессору Владимиру Георгиевичу Миронову (Мос-
ковский энергетический институт - Технический университет),
проявившим интерес к книге, которые согласились войти в коллек-
тив авторов и предоставили ценный материал; доктору техн, наук,
профессору Ивану Яковлевичу Редько - одному из инициаторов
издания книги; директору издательства ЮУрГУ Андрею Геннадье-
вичу Пашнину и его сотрудникам, которые в тесном контакте, по-
рою в неурочное время, работали с нами.
Мы также благодарим коллектив кафедры электропривода и
автоматизации промустановок ЮУрГУ за постоянную помощь в
оформлении книги и за участие в обсуждении материалов рукописи
в процессе написания.
Особая благодарность рецензентам книги — доктору техн, на-
ук, профессору, действительному члену Российской академии элек-
тротехнических наук Федору Никитичу Сарапулову (Уральский го-
сударственный технический университет - УПИ) и заслуженному
деятелю науки и техники РСФСР, доктору техн, наук Михаилу Ми-
хайловичу Тверскому (Южно-Уральский государственный универ-
ситет), взявшим на себя тяжелый труд внимательного ознакомле-
ния со столь объемной работой, замечания и советы которых спо-
собствовали улучшению кни1п.
П.А. Бутырин, Р.Х. Гафиятуллин, А.Л. Шестаков
8
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ЮЖНО УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ)
ЭЛЕКТРОТЕХНИКА
КНИГА II
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ.
ПРОМЫШЛЕННАЯ ЭЛЕКТРОНИКА.
ТЕОРИЯ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Допущено Министерством образова-
ния Российской Федерации в качестве
учебного пособия для студентов высших
учебных заведений, обучающихся по на-
правлениям подготовки и специальностям
в области техники и технологии
Челябинск-Москва
Издательство ЮУрГУ
2004
Под редакцией
член-корреспондента РАН
П.А. Бутырина,
доктора технических наук, профессора,
заслуженного деятеля науки и техники РФ
Р.Х. Гафиятуллина,
доктора технических наук,
профессора
А.Л. Шестакова
Авторы книги:
Ю.П. Галишников. д-р техн, наук, проф. (гл. 13-17);
А.Л. Шестаков, д-р техн, наук, проф. (пп. 13.6.1, 13.6.2);
М.В. Гель ман, канд. техн, наук, проф.. заслуженный работник
высшей школы РФ (гл. 18—28); Р.Х. Гафиятуллин, д-р техн, наук, проф.,
заслуженный деятель науки и техники РФ (гл. 29-32);
Р.З. Хусаинов, канд. техн. наук, доцент (гл. 32)
Учебное пособие подготовлено в рамках
гранта Президента РФ НШ-1511.02003.8
и гранта РФФИ № 04-01-96085
ВВЕДЕНИЕ В КНИГУ II
В разделе III второй книги приведена теория электромагнит-
ных и элекгромеханических устройств.
Рассмотрены вопросы общей теории трансформаторов, начиная
с устройства, принципа действия и условий холостого хода, а также
работы под нагрузкой простейшего двухобмоточного трансформа-
тора. Выведены базовые соотношения для напряжений, токов и
комплексных сопротивлений идеального трансформатора, а также
показаны способы учета особенностей реальных трансформаторов
при практических расчетах. Дан подробный вывод уравнений рав-
новесия напряжений приведенного трансформатора и показаны
наиболее часто применяемые схемы замещения. Рассмотрены во-
просы работы трансформаторов в трехфазных электрических сетях,
включая несимметричные режимы. Охарактеризованы особенности
одно- и трехфазных автотрансформаторов, а также сварочных и
измерительных трансформаторов.
Вопросы теории основных видов электрических машин изло-
жены на основе принципов электромеханического преобразования
энергии, что позволило до известной степени уменьшить дублиро-
вание материала, неизбежное при другом подходе. С другой сторо-
ны, это дало возможность больше внимания уделить важным с точ-
ки зрения эксплуатации характеристикам электрических машин по
способам их возбуждения и регулирования.
Квалифицируются и подробно описываются устройство,
принцип действия и характеристики разнообразных микромашин,
применяемых в системах автоматики, а также в бытовой технике.
Представлены электрические схемы и свойства однофазных асин-
хронных двигателей. Показаны различные схемы соединения об-
моток вращающихся трансформаторов и синхронных передач.
Описано устройство синхронного гистерезисного двигателя и двух
11
видов шаговых двигателей. Таким образом, HI раздел охватывает
вопросы, касающиеся трансформаторов и электрических машин.
Раздел IV второй книги посвящен полупроводниковым прибо-
рам и основам информационной электроники. Изучение электрон-
ных устройств невозможно без знания полупроводниковых прибо-
ров и элементов микроэлектроники.
Основное внимание уделено силовым полупроводниковым
приборам, работающим в ключевом режиме. Рассмотрены новые
типы полупроводниковых приборов, мало описанные в учебной ли-
тературе. Элементы микроэлектроники рассмотрены очень кратко.
Излагаются основы информационной (слаботочной) электро-
ники. Описываются электронные усилители, аналоговые и цифро-
вые интегральные микросхемы. Даны базовые понятия, необходи-
мые для изучения энергетической электроники.
Раздел V второй книги посвящен энергетической электронике.
Энергетическая электроника позволила создать высокоточные ши-
рокодиапазонные регулируемые электроприводы и элсктротехно-
логические установки для различных отраслей промышленности.
С помощью электронных энергетических устройств в настоящее
время преобразуется более половины всей вырабатываемой элек-
троэнергии. Поэтому особенно важна роль этих устройств при ре-
шении проблем энергосбережения.
Рассмотрены ведомые преобразователи, процессы в которых
определяются сетью переменного тока. Изучаются схемы выпрям-
ления, управляемые выпрямители тока при различных нагрузках и
в различных режимах, их внешние и регулировочные характери-
стики. Рассмотрены энергетические показатели выпрямителей и
пути их улучшения.
Приведены рекуперирующие и реверсивные преобразователи,
получившие широкое распространение в электроприводе постоян-
ного тока. Изложены вопросы построения систем управления ве-
домыми преобразователями, особенности систем управления ре-
версивных преобразователей и процессов, происходящих при ре-
версе при различных видах нагрузки.
Рассматриваются понижающие и повышающие преобразовате-
ли постоянного напряжения. Особое внимание уделено реверсив-
ным преобразователям при их работе на различных видах нагрузки.
Излагается теория автономных инверторов, приобретающих
особое значение в связи с интенсивным развитием регулируемого
12
электропривода переменного тока. Рассматриваются вопросы регу-
лирования, различные способы широтно-импульсной модуляции
выходного напряжения.
Значительная часть материала посвящена преобразователям,
получившим развитие в самое последнее время - обратимым пре-
образователем напряжения. Они позволяют потреблять энергию из
сети с высоким cos 9: при минимальном вредном воздействии на
сеть. Они также обеспечивают рекуперацию энергии при работе ре-
гулируемого асинхронного электропривода.
Подробно рассмотрены преобразователи частоты как непо-
средственные, так и двухфазные, состоящие из выпрямителя и ав-
тономного инвертора. Представлены симметричные (четырехквад-
рантные) преобразователи напряжения, состоящие из двух обрати-
мых преобразователей напряжения, включенных на стороне сети и
на стороне асинхронного двигателя.
Приведены тиристорные преобразователи переменного на-
пряжения и пути повышения их энергетических показателей.
Рассмотрены силовые фильтры, стабилизаторы напряжения и
источники вторичного электропитания. Необходимость в этих ис-
точниках возникает при создании источников питания для уст-
ройств управления.
Таким образом, в разделах IV и V охватывается весь комплекс
вопросов по промышленной электронике, знания которого необхо-
димы студентам, разработчикам и эксплуатационникам.
В разделе VI второй книги рассматриваются элементы класси-
ческой теории автоматического управления, приводятся, с одной
стороны, в сжатом виде, с другой, в достаточном объеме основные
сведения по теории линейных систем.
Раскрываются основные понятия ТАУ:
— методы математического описания;
- понятия передаточных функций;
— понятие статических, динамических характеристик элементов;
- описание свойств элементов с помощью временных и частотных
характеристик, амплитудные и фазовые зависимости;
- временные и спектральные характеристики типовых воздействий;
- основные сведения гармонического анализа;
- преобразования Лапласа.
Подробно изложены основные типы динамических звеньев, а
именно, позиционных, интегрирующих, дифференцирующих, не-
13
минимально-фазовых. Приведены их классификация, передаточные
функции, характеристики во временной и частотных областях и
примеры реализации.
Значительная часть раздела посвящена вопросам устойчивости
линейных систем автоматического управления и оценке их качест-
венных показателей. В ней подробно освящены алгебраические и
частотные критерии устойчивости. Особое внимание уделено кри-
терию Найквиста, являющемуся базовым при анализе устойчивости
систем.
Также приведены правила составления структурной схемы
системы, и ее преобразований, понятие качественных показателей
системы во временной и частотных областях. Отдельно рассмотре-
ны точностные показатели статических и астатических систем
управления. Базовыми понятиями ТАУ являются основные типы
регуляторов, используемых для коррекции статических и динами-
ческих характеристик систем, поэтому подробно описаны П-, И-,
ПИ-, ПД- и ПИД- регуляторы.
Рассмотрены вопросы синтеза систем управления. Для линей-
ных систем хорошо разработаны точные и приближенные методы
синтеза последовательной, параллельной коррекции, инвариантных
компенсирующих связей. Особое место в разделе уделено оптими-
зации динамических характеристик САУ с использованием стан-
дартных методов настройки - оптимизации по модулю, симмет-
ричного оптимума и настройки многоконтурных систем по прин-
ципу подчиненного регулирования. Современные методы синтеза
нелинейных систем базируются на их цифровом моделировании с
применением программных средств. Приведены основные сведе-
ния по пакету прикладных программ «Моданс», используемого в
ЮУрГУ и на ряде предприятий и рассмотрены примеры синтеза
нелинейных систем автоматического управления.
Этот раздел предназначен в основном для студентов, инжене-
ров и специалистов в области систем управления.
П.А. Бутырин, Р.Х. Гафиятуллин, А.Л. Шестаков
14
Раздел III
ЭЛЕКТРОМАГНИТНЫЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ
УСТРОЙСТВА
Глава 13
ТРАНСФОРМАТОРЫ
13.1. Принцип действия и основные соотношения
Трансформатор является неотъемлемой составляющей элек-
трической системы. Благодаря трансформатору стало возможным
широкое применение энергосистем переменного тока, так как с
участием трансформаторов производство, передача, распределение
и потребление электрической энергии осуществляются при наибо-
лее экономичных значениях напряжений. Трансформаторы исполь-
зуют также в слаботочных и низковольтных электронных цепях и
цепях управления для согласования комплексных сопротивлений
источника и нагрузки, гальванической развязки цепей друг от дру-
га, развязывания цепей по постоянному току при сохранении связи
между ними по переменному току и т.д. Известны также измери-
тельные, сварочные и др. трансформаторы.
13.1.1. Устройство и принцип действия двухобмоточного
трансформатора
Простейший трансформатор состоит из двух обмоток на об-
щем магнитопроводе (рис. 13.1). Если одна из обмоток, первичная,
подсоединена к источнику переменного напряжения, ток этой об-
мотки г) возбуждает в магнитопроводе (сердечнике) переменный
магнитный поток, который зависит от первичного напряжения их и
числа витков первичной обмотки Hj. Этот поток, будучи сцеплен-
ным одновременно с другой, вторичной, обмоткой, индуктирует в
ней ЭДС, пропорциональную числу вторичных витков w2. Если к
зажимам вторичной обмотки подключить сопротивление ZH как
15
Рис. 13.1. Устройство простейшего
трансформатора
нагрузку, в цепи возникает
ток i2, а на зажимах уста-
навливается напряжение и2,
которое зависит от ЭДС и
падения напряжения на со-
противлении вторичной об-
мотки. Выбором соотноше-
ния между числами первич-
ных и вторичных витков
можно получить любое же-
лаемое отношение напряже-
ний трансформатора.
Ферромагнитный сердечник усиливает магнитную связь меж-
ду обмотками. При наличии такого сердечника магнитный поток
замыкается главным образом по нему, так как сердечник имеет
значительно более высокую магнитную проницаемость, чем воз-
дух. Чтобы уменьшить потери мощности в сердечнике от вихревых
токов, его набирают из тонких (0,35...0,5 мм) листов электротехни-
ческой стали, изолированных друг от друга. Электротехнические
стали имеют достаточно низкую стоимость, малые потери мощно-
сти и высокую магнитную проницаемость при больших значениях
магнитной индукции. Сердечники малых трансформаторов, ис-
пользуемых в маломощных цепях высокой частоты, иногда выпол-
няют прессованными из порошкообразных ферромагнитных спла-
вов. Широко применяемые типы конструкций однофазных транс-
форматоров приведены на рис. 13.2 (а — со стержневым сердечни-
ком, б - с броневым сердечником).
Рис. 13.2. Однофазные трансформаторы с сердечниками:
а — стержневого, б - броневого типов
16
Кроме потока, сцепленного с обеими обмотками, в трансфор-
маторе возникают магнитные потоки рассеяния, замыкающиеся
главным образом по воздуху (или маслу) и сцепленные каждый со
своей обмоткой. Хотя эти потоки малы, они оказывают большое
влияние на работу трансформатора. Рассеяние уменьшают путем
выбора конструкции обмоток.
13.1.2 Холостой ход трансформатора
Рассмотрим трансформатор (рис. 13.1), когда его вторичная
цепь разомкнута, а первичная включена на переменное напряжение
щ. Такой режим работы трансформатора называют холостым хо-
дом (х.х.). При х.х. в первичной обмотке протекает небольшой ус-
тановившийся ток ф, называемый током намагничивания, который
создает в магнитопроводе переменный поток Ф. Этот поток индук-
тирует в первичной обмотке с и) витков ЭДС, мгновенное значе-
ние которой
Дф
• (13-1)
at
Эта ЭДС, называемая противоЭДС, вместе с падением напря-
жения на активном сопротивлении обмотки Rx должна компенси-
ровать приложенное напряжение их:
wi +{-ei') = itlRx+wx-~.
В мощных трансформаторах падение напряжения на Rx при
холостом ходе весьма мало и противоЭДС практически равна при-
ложенному напряжению:
г/Ф
Щ =и’1—.
at
Если мгновенное значение напряжения изменяется по сину-
соидальному закону их = UXm sin cot, магнитный поток также сину-
соидален:
Мгновенное значение индуктированной этим потоком ЭДС (по
модулю)
<7Ф
е, = w,---= сощФ„, sin cot = Ет sin cot,
1 J. j JI til ICC '
dt
17
где Ф„; - амплитуда потока; а> = 2nf - угловая частота при f в герцах.
Действующее значение этой ЭДС
F 2п
£,=?2=72Л',Ф'"=4’44-Л1'1Фт'
Поскольку равенство щ = -ех справедливо также и для дейст-
вующих значений, то есть Ц = Ех, получаем
U
Ф
m 4,44 /л\
(13.2)
где Ц - действующее значение приложенного напряжения.
Таким образом, если к первичной обмотке трансформатора,
работающего вхолостую, приложено синусоидальное напряжение, в
сердечнике устанавливается синусоидально изменяющийся во време-
ни поток, амплитудное значение которого определяется только
приложенным напряжением, его частотой и числом витков обмот-
ки, то есть не зависит от тока в обмотке. Это важное соотноше-
ние применимо к любым индуктивным устройствам, работающим
при синусоидальном напряжении, если падение напряжения на ак-
тивном сопротивлении пренебрежимо мало.
В этих условиях ток намагничивания зависит от магнитных
свойств материала сердечника. Он, в частности, должен быть та-
ким, чтобы его магнитодвижущая сила (МДС) была достаточна для
создания необходимого потока, величина которого определяется
Рис. 13.3. Определение формы кривой
намагничивающего тока
выражением (13.2).
Из-за нелинейных
магнитных свойств ста-
ли сердечника форма
кривой тока намагничи-
вания отлична от сину-
соиды, что можно под-
твердить графическим
построением (рис. 13.3).
При построении принята
идеализированная маг-
нитная характеристика
сердечника Ф(^), не
учитывающая эффект
гистерезиса. Если до-
18
о\
Рис. 13.4. Разложе-
ние кривой намагни-
чивающего тока
пустить также, что вихревые токи в сердечнике и соответствующие
им потери мощности отсутствуют, ток намагничивания оказывается
по характеру чисто индуктивным, отстающим от приложенного на-
пряжения на 90°. Кривая намагничивающего тока в функции ш/, по-
строенная для синусоидального потока Ф (способ построения ясен
из рисунка) приведена в четвертом квадранте.
Полученная кривая, кроме основной гармоники
частоты, содержит также и высшие гармоники,
из которых наиболее заметна третья (рис. 13.4).
В реальности ток намагничивания трансформа-
тора содержит еще и активную составляющую
основной частоты, совпадающую по фазе с
приложенным напряжением. Она обусловлена
потерями активной мощности в сердечнике на
гистерезис и вихревые токи, а также очень ма-
лым активным сопротивлением обмотки 7?].
Ток намагничивания достаточно мал (нс более 5 % номиналь-
ного тока) и не может привести к заметному искажению формы то-
ка трансформатора при нагрузке. Поэтому несинусоидалыюсть то-
ка намагничивания при обычных расчетах не учитывают, представ-
ляя его эквивалентной синусоидой. Она имеет то же действующее
значение и частоту и создает ту же среднюю мощность, что и дей-
ствительная кривая. Такое представление используют для построе-
ния векторной диаграммы.
С другой стороны, наличие высших гармоник в кривой тока
намагничивания необходимо, так как при их отсутствии магнитный
поток сердечника несинусоидален, что влечет за собой несинусои-
дальность вторичных ЭДС и напряжения. Поэтому в силовых
трехфазных трансформаторах принимают специальные меры к то-
му, чтобы в токе намагничивания были токи третьей гармоники.
С этой целью в трехфазных трансформаторах большой мощности
по крайней мере одну из обмоток стремятся соединить треугольни-
ком, так как при соединении звездой в обмотках с изолированной
нейтралью третьи гармоники тока отсутствуют.
13.1.3. Идеальный трансформатор
Рассмотрим трансформатор (рис. 13.1), используя следующие
допущения: I) активные сопротивления обмоток равны нулю;
2) потери активной мощности в сердечнике отсутствуют; 3) весь
19
магнитный поток замыкается только по сердечнику и сцеплен со
всеми витками каждой из обмоток; 4) проницаемость материала
сердечника бесконечна, так что для создания в нем потока требует-
ся исчезающе малый ток намагничивания.
Трансформатор с описанными свойствами называют иде-
альным.
Когда к первичным зажимам идеального трансформатора при-
ложено переменное напряжение щ, в сердечнике должен устано-
виться такой магнитный поток, чтобы индуктированная им в пер-
вичной обмотке противоЭДС была равна приложенному напряже-
нию, так как активное сопротивление принято равным нулю:
г/Ф
Щ=~ех = ™t —.
at
Поток сердечника сцеплен и с вторичной обмоткой и создает в
ней ЭДС е2 и равное ей напряжение на зажимах:
г/Ф
и2~ е2~ W2 ~7~
at
Таким образом, получаем
^- = ^- = К, (13.3)
1^2 ^2
где К - коэффициент трансформации.
Итак, идеальный трансформатор изменяет напряжение
пропорционально числу витков его обмоток.
Допустим теперь, что к вторичной обмотке подсоединена на-
грузка. Тогда во вторичной обмотке возникает ток i2, МДС которо-
го равна w2/2 • Если бы вторичная МДС не компенсировалась пер-
вичной, поток сердечника при нагрузке изменился бы и равновесие
между приложенным напряжением и противоЭДС первичной об-
мотки нарушилось бы. Во избежание этого в первичной обмотке
должен возникнуть некоторый компенсирующий ток ц, который
создаст МДС
и-p'i = w2i2.
Отметим, что на рис. 13.1 МДС токов и i2 имеют противо-
положные направления и компенсируют друг друга. Поэтому ре-
зультирующая МДС, действующая на сердечник, в соответствии с
допущением 4 равна нулю.
Из последнего уравнения получаем
20
i = ^- = l. (13.4)
?2 VV] К
Идеальный трансформатор преобразует ток обратно про-
порционально числу витков обмоток.
Из сопоставления соотношений для напряжений (13.3) и токов
(13.4) получаем
то есть мгновенное значение входной мощности равно мгновенно-
му значению выходной мощности, что справедливо, потому что
всеми потерями мощностей трансформатора мы пренебрегаем.
На рис. 13.1 и 13.5 а знаком «*» показаны зажимы обмоток со-
ответствующей полярности. Если рассматривать первичную и вто-
ричную обмотки, начиная с показанных зажимов, обнаруживается,
что обе обмотки охватывают сердечник в одинаковом направлении
по отношению к потоку. Поэтому первичное и вторичное напряже-
ния в данный момент времени, измеряемые от показанных зажимов
к противоположным, имеют одинаковое направление, то есть нахо-
дятся в фазе. Токи, протекающие в обмотках, также направлены
одинаково. Условие, что их МДС должны компенсировать друг
друга, обеспечивается разным направлением токов по отношению к
обмоткам.
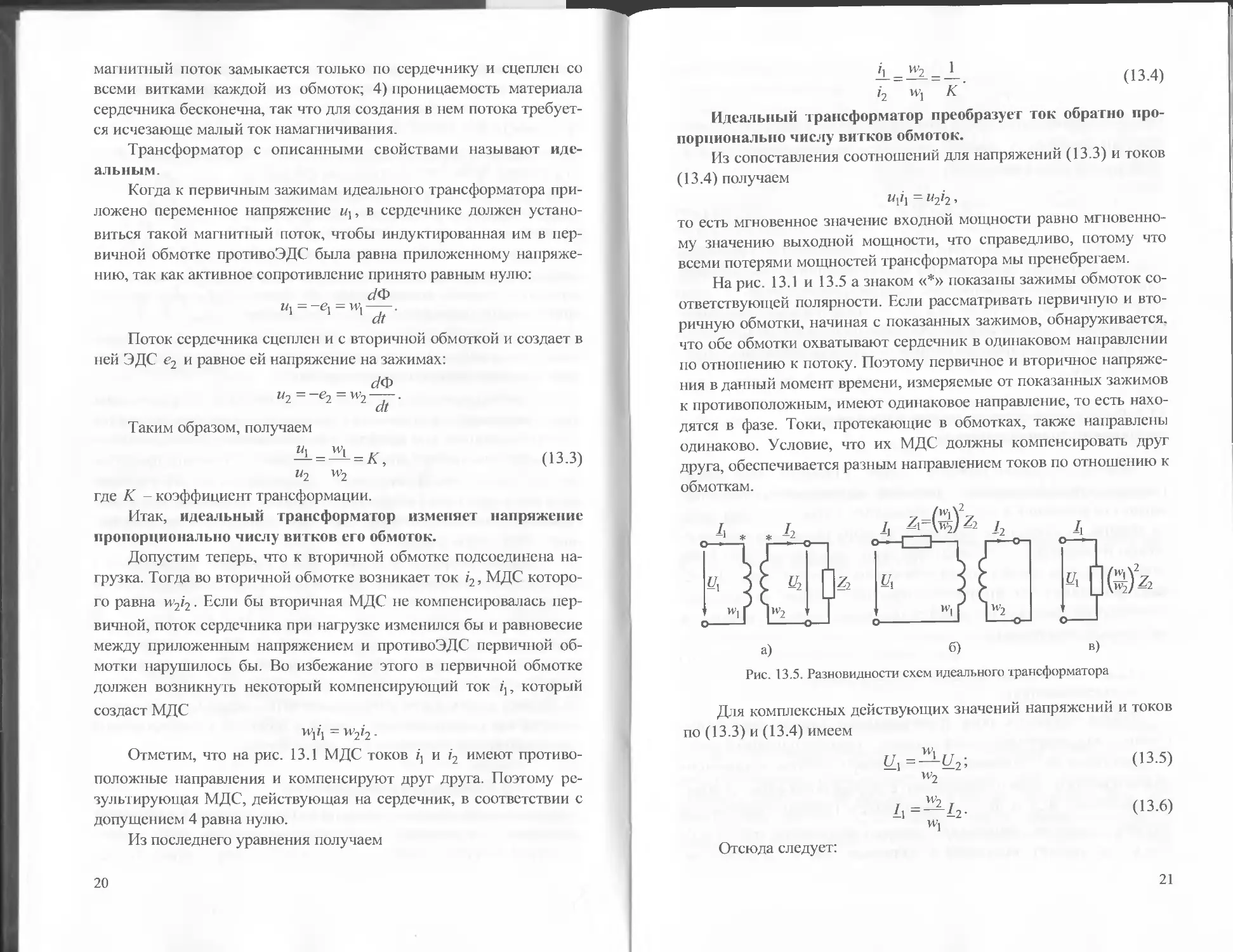
а) б) в)
Рис. 13.5. Разновидности схем идеального трансформатора
Для комплексных действующих значений напряжений и токов
по (13.3) и (13.4) имеем
tZi=—<13-5)
w2
Lx=^L2- (13-6)
W]
Отсюда следует:
21
где Z2 - комплексное сопротивление нагрузки, которое во вторич-
ной цепи может быть замещено эквивалентным сопротивлением Z]
в первичной цепи при условии, что
(13.7)
Таким образом, три схемы (рис. 13.5) совершенно идентичны,
если их состояние рассматривать по отношению к зажимам пер-
вичной обмотки. Сопротивление нагрузки, переносимое с одной
стороны трансформатора на другую, называется сопротивлением,
приведенным к другой стороне. Аналогично по (13.5) и (13.6) к той
или другой стороне трансформатора могут быть приведены напря-
жения и токи.
13.2. Реактивные сопротивления и уравнения
напряжений трансформатора
При практических расчетах следует учитывать особенности
реальных трансформаторов: активные сопротивления обмоток,
магнитное рассеяние и ток намагничивания. Существуют два мето-
да анализа, позволяющие учитывать отличия реального трансфор-
матора от идеального: I) математический, базирующийся на клас-
сической теории цепей с индуктивностями; 2) метод схем замеще-
ния, основанный на физических принципах. Ниже использован
комбинированный подход, который позволяет сочетать строгость и
наглядность рассуждений.
13.2.1. Реактивные сопротивления обмоток
трансформатора
Общее магнитное поле трансформатора можно представить
суммой следующих магнитных потоков: 1) результирующего пото-
ка сердечника Фс, создаваемого совместным действием первично-
го и вторичного токов и сцепленного с обеими обмотками; 2) пото-
ков рассеяния Фст1 и Фст2, замыкающихся, главным образом, по
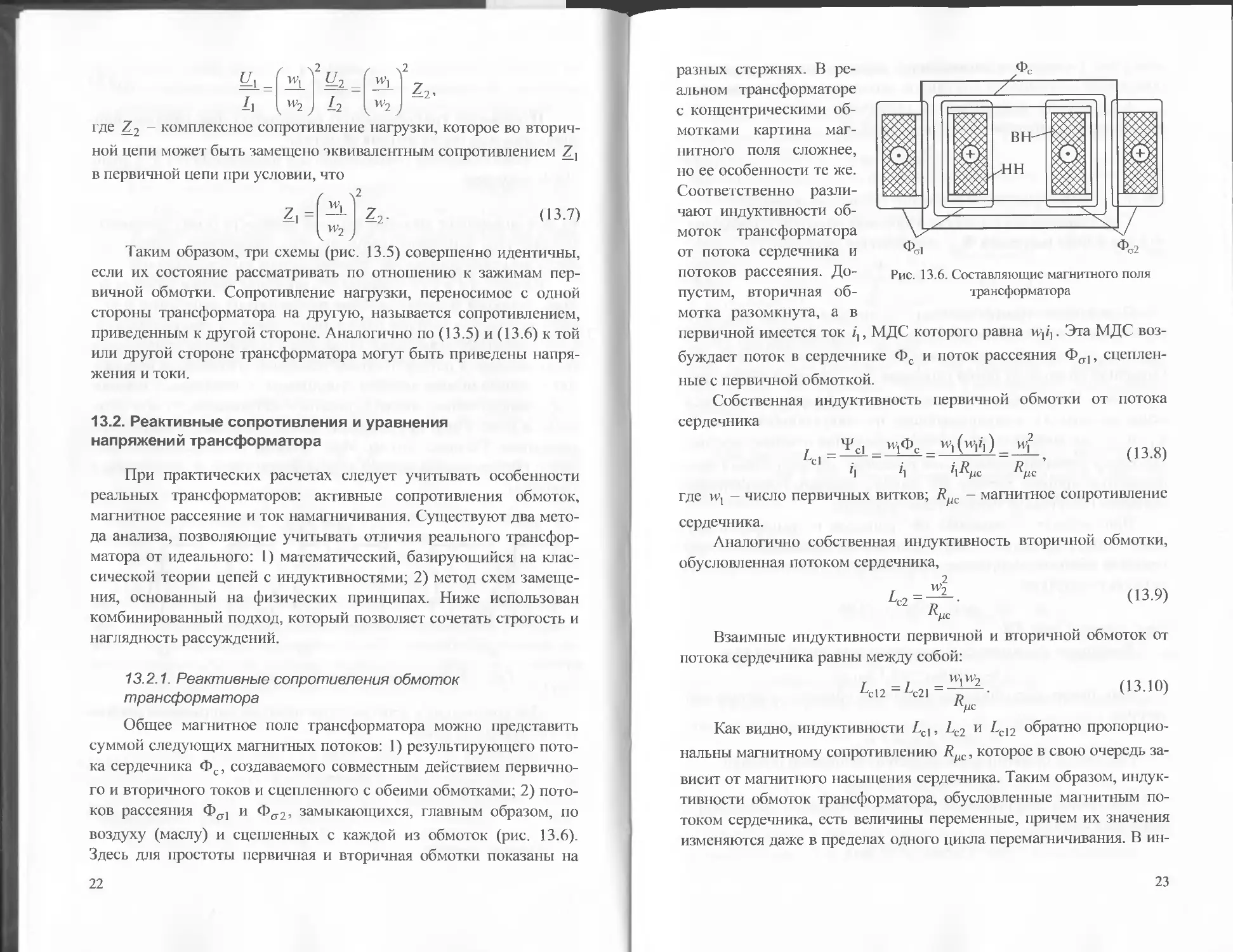
воздуху (маслу) и сцепленных с каждой из обмоток (рис. 13.6).
Здесь для простоты первичная и вторичная обмотки показаны на
22
Рис. 13.6. Составляющие магнитного поля
трансформатора
разных стержнях. В ре-
альном трансформаторе
с концентрическими об-
мотками картина маг-
нитного поля сложнее,
но ее особенности те же.
Соответственно разли-
чают индуктивности об-
моток трансформатора
от потока сердечника и
потоков рассеяния. До-
пустим, вторичная об-
мотка разомкнута, а в
первичной имеется ток i}, МДС которого равна wpj. Эта МДС воз-
буждает поток в сердечнике Фс и поток рассеяния Фст,, сцеплен-
ные с первичной обмоткой.
Собственная индуктивность первичной обмотки от потока
сердечника
(13.3)
Z1 Z1 Zl V
где W] — число первичных витков; Д . - магнитное сопротивление
сердечника.
Аналогично собственная индуктивность вторичной обмотки,
обусловленная потоком сердечника,
2
42=^- (13.9)
Взаимные индуктивности первичной и вторичной обмоток от
потока сердечника равны между собой:
412 =42!=^- (13.10)
Как видно, индуктивности £с1, Лс2 и £с12 обратно пропорцио-
нальны магнитному сопротивлению /^.с, которое в свою очередь за-
висит от магнитного насыщения сердечника. Таким образом, индук-
тивности обмоток трансформатора, обусловленные магнитным по-
током сердечника, есть величины переменные, причем их значения
изменяются даже в пределах одного цикла перемагничивания. В ин-
23
женерных расчетах установившихся режимов их для упрощения
принимаю! постоянными для данной амплитуды потока сердечника.
Собственная индуктивность первичной обмотки от потока
рассеяния Фст1, сцепленного с этой обмоткой:
= (13.11)
'1 '1
где — потокосцепление рассеяния первичной обмотки.
Собственная индуктивность вторичной обмотки от сцепленно-
го с ней потока рассеяния Фст2 определяется аналогично:
£ct2=2^2=Z-2. (13.12)
?2 ?2
В реальных трансформаторах магнитные потоки рассеяния
первичной и вторичной обмоток частично перекрываются, так что
имеет место незначительная взаимная индуктивность первичной и
вторичной обмоток от полей рассеяния Lcl2, которой обычно пре-
небрегают. Поскольку потоки рассеяния замыкаются преимущест-
венно по воздуху, соответствующие им индуктивности обмоток
£СТ1 и Cct2 не зависят от магнитного насыщения и потому постоян-
ны. Ввиду сложной формы полей рассеяния эти индуктивности не
поддаются строгому расчету. Их находят опытным путем или рас-
считывают, используя эмпирические формулы.
При анализе установившихся процессов в трансформаторах
вместо индуктивностей принято использовать реактивные сопро-
тивления обмоток. Реактивное сопротивление первичной обмотки
от потока сердечника
хс1 =(oLc\ - l7ifLcX Ом,
где f- частота тока, Гц.
Реактивное сопротивление рассеяния первичной обмотки
хст1 = /,ст1 = 2л f Lal.
Реактивное сопротивление вторичной обмотки от потока сер-
дечника
хс2 = й) Lc2 = 2л f Lc2 .
Реактивное сопротивление рассеяния вторичной обмотки
хст2 = ы ^ст2 = 2^/ Лт2
Реактивное сопротивление взаимной индукции первичной и
вторичной обмоток
Хс12 =<У^с12 — 2тг / Гс12.
24
13.2.2. Уравнения напряжений двухобмоточного
трансформатора
Ниже рассмотрены уравнения
однофазного трансформатора (рис.
сердечнике пренебрегаем, а ин-
дуктивности обмоток принимаем
постоянными.
Приложенное к первичной
обмотке напряжение щ равно
сумме падения напряжения на ак-
тивном сопротивлении обмотки
/?, и противоЭДС (-6]), индукти-
руемой в первичной обмотке все-
ми сцепленными с ней перемен-
ными магнитными потоками. Поэтому уравнение по второму зако-
ну Кирхгофа для первичной обмотки в мгновенных значениях на-
пряжений и токов имеет вид
Щ =^1+(-в]).
Напряжение на зажимах вторичной обмотки равно ЭДС е2,
напряжений двухобмоточного
13.7). Потерями мощности в
Рис. 13.7. Электрическая схема
двухобмоточного трансформатора
индуктируемой в этой обмотке переменными потоками, минус па-
дение напряжения на активном сопротивлении обмотки:
и2 ~ е2 ~ ^2?2
Мгновенные значения ЭДС обмоток:
( di} di} di2 '
е\ ~~ 4т1~ + 41“Г ’
dt dt dt J
г/Л di2 r di. 'I
w2 —+ £r2 —_4i2—l •
dt c dt cl2 dt J
Знаки «-» перед Lcl2 здесь обусловлены принятыми
е2=- L,
на
рис. 13.7 положительными направлениями токов.
Уравнения равновесия напряжений в мгновенных величинах
после подстановки последних выражений приобретают вид
. r di, di, , di2 . о ....
«I = + Lal—+Lcl (13.13)
dt dt dt
. r dij r di2 T di, z,o
w2 = -^2?2 _^<t2_T’_42_T' + 412_T'- (13.14)
dt dt dt
Полученные уравнения описывают все режимы реального транс-
форматора (рис. 13.7), правда, без учета потерь в магнитопроводе.
25
При анализе установившегося режима трансформатора, когда
напряжения и токи изменяются во времени синусоидально, уравне-
ния напряжений целесообразно записывать в комплексном виде:
£1 +jx<y\Li +.7W1-Aeizb; (13.15)
U.2 - R2L2 jxc2l-2 jxclL2+Jxc\lL\- (13.16)
Для удобства анализа реальный трансформатор заменяют не-
которым условным приведенным трансформатором. Тогда реаль-
ная вторичная обмотка с числом витков и>2 замещается приведен-
ной обмоткой с числом витков w2 - W]. При этом говорят, что вто-
ричная обмотка приведена к первичной.
Коэффициент приведения
М’2 W2
Напряжение на зажимах приведенной обмотки определяется
по выражению
(13.17)
Поскольку полная мощность вторичной обмотки при приведе-
нии должна оставаться неизменной:
77 2/2 ~ ^2 ^2 ’
то имеем
(13-18)
откуда МДС вторичной приведенной обмотки также неизменна
I 2 W2 ~ / 2 W2 .
Активное сопротивления и реактивное сопротивления рассея-
ния вторичной обмотки при приведении к первичной согласно
(13.7) изменяются следующим образом:
R2 = k2R2;
ха2 = хст2 •
При соблюдении этих условий потери активной и реактивной
мощностей во вторичной обмотке неизменны:
/ ]
I2R2 = -±- k2R2=I2R2-,
И J
у
Л ха2 - 12ха2.
7
26
Заменим переменные U_2 и /2 переменными Ц'? и Г2 в урав-
нениях (13.15) и (13.16):
(/2 - —~Г~> /2 ~ ^—2 •
к
Тогда уравнения напряжений трансформатора в комплексной
форме приобретают вид (все члены уравнения (13.16) умножены на к):
(Zi = Rd\ + /W1 + Alli -j412L'2:
4Z-2 = ~^2R2L.2 ~ jk xc2—2 ~ jk XclL-2 +
Введем новые обозначения параметров:
R2=k2R2 - приведенное активное сопротивление вторичной
обмотки;
х'а1 = Л2л'ст2 - приведенное реактивное сопротивление рассея-
ния вторичной обмотки;
2 2
/ 1 2 VVi ^2
хс2 =к хс2 = —2 (О—— = хс1 “ приведенное реактивное сопро-
w2 R^c
тивление рассеяния вторичной обмотки от потока сердечника, рав-
ное аналогичному реактивному сопротивлению первичной обмотки
от потока сердечника;
, , И’| M’llV,
лс|2 = кхс12 -—~ = хс1 ~ приведенное реактивное сопро-
W2 Rfic
тивление взаимной индукции от потока сердечника, равное реак-
тивному сопротивлению первичной обмотки.
Таким образом, комплексные уравнения по второму закону
Кирхгофа приведенного трансформатора приобретают вид
=R^ + ./^,/1 +jxcl(Z, -Г2); (13.19)
C/_2 — — R2^-2 ~ jxa2—2 + Jxcl (11 — Zj)- (13.20)
Полученные уравнения имеют две особенности. Во-первых,
напряжения и токи в них имеют попарно один порядок величин,
тогда как в реальном трансформаторе первичные и вторичные на-
пряжения отличаются друг от друга в к раз. Во-вторых, магнитная
связь между обмотками реального трансформатора заменена элек-
трической связью, выраженной членом jxci^x -/2), что позволя-
ет перейти к электрической схеме замещения трансформатора.
27
13.3. Схемы замещения двухобмоточных трансформаторов
13.3.1. Схема замещения трансформатора
без учета потерь в сердечнике
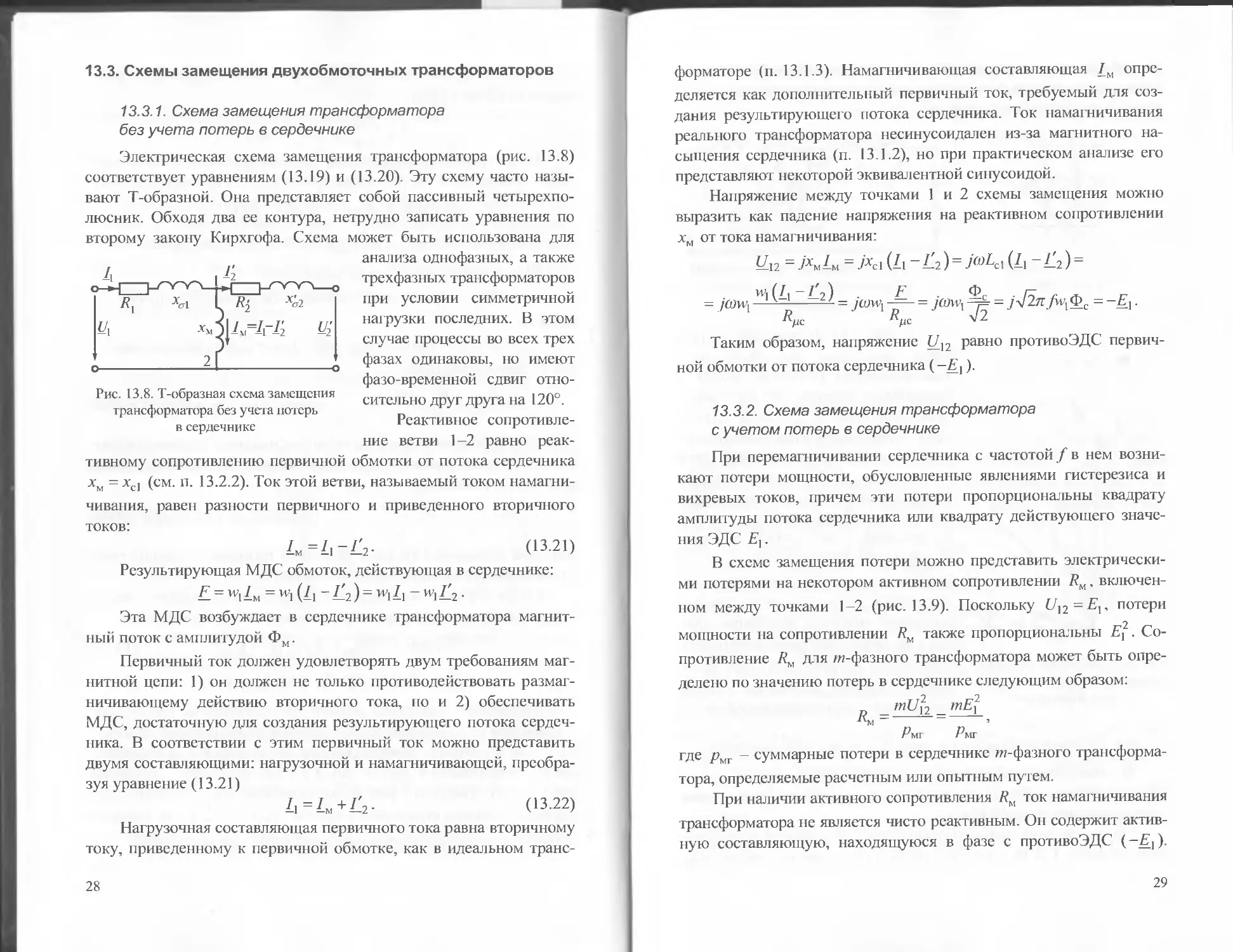
Электрическая схема замещения трансформатора (рис. 13.8)
соответствует уравнениям (13.19) и (13.20). Эту схему часто назы-
вают Т-образной. Она представляет собой пассивный четырехпо-
люсник. Обходя два ее контура, нетрудно записать уравнения по
второму закону Кирхгофа. Схема
Рис. 13.8. Т-образная схема замещения
трансформатора без учета потерь
в сердечнике
может быть использована для
анализа однофазных, а также
трехфазных т рансформаторов
при условии симметричной
нагрузки последних. В этом
случае процессы во всех трех
фазах одинаковы, но имеют
фазо-временной сдвиг отно-
сительно друг друга на 120°.
Реактивное сопротивле-
ние ветви 1-2 равно реак-
тивному сопротивлению первичной обмотки от потока сердечника
хм = хс] (см. п. 13.2.2). Ток этой ветви, называемый током намагни-
чивания, равен разности первичного и приведенного вторичного
токов:
ZM=Zi-r2- (13.21)
Результирующая МДС обмоток, действующая в сердечнике:
£ = w,/м = wi (/] - Г2) = и,/, - W]£2 .
Эта МДС возбуждает в сердечнике трансформатора магнит-
ный поток с амплитудой Фм.
Первичный ток должен удовлетворять двум требованиям маг-
нитной цепи: 1) он должен не только противодействовать размаг-
ничивающему действию вторичного тока, но и 2) обеспечивать
МДС, достаточную для создания результирующего потока сердеч-
ника. В соответствии с этим первичный ток можно представить
двумя составляющими: нагрузочной и намагничивающей, преобра-
зуя уравнение (13.21)
/1=£М+Г2- (13.22)
Нагрузочная составляющая первичного тока равна вторичному
току, приведенному к первичной обмотке, как в идеальном транс-
28
форматоре (п. 13.1.3). Намагничивающая составляющая /м опре-
деляется как дополнительный первичный ток, требуемый для соз-
дания результирующего потока сердечника. Ток намагничивания
реального трансформатора несинусоидален из-за магнитного на-
сыщения сердечника (п. 13.1.2), но при практическом анализе его
представляют некоторой эквивалентной синусоидой.
Напряжение между точками 1 и 2 схемы замещения можно
выразить как падение напряжения на реактивном сопротивлении
от тока намагничивания:
£Zi-2 = АЛ< = Al (Zi - A) = Mi (Zi - A) =
ш (it —IЛ F Ф I—
= ~ = .Mi ~=j= = J'J2я Ai A = -E].
Таким образом, напряжение 1712 равно противоЭДС первич-
ной обмотки от потока сердечника(-£().
13.3.2. Схема замещения трансформатора
с учетом потерь в сердечнике
При перемагничивании сердечника с частотой f в нем возни-
кают потери мощности, обусловленные явлениями гистерезиса и
вихревых токов, причем эти потери пропорциональны квадрату
амплитуды потока сердечника или квадрату действующего значе-
ния ЭДС Е].
В схеме замещения потери можно представить электрически-
ми потерями на некотором активном сопротивлении RM, включен-
ном между точками 1-2 (рис. 13.9). Поскольку Ul2 = Ex, потери
мощности на сопротивлении RM также пропорциональны £2. Со-
противление RM для /и-фазного трансформатора может быть опре-
делено по значению потерь в сердечнике следующим образом:
_ mU\2 _ тЕ?
Ам —-----—-----,
Рмг Рмг
где рмг - суммарные потери в сердечнике /«-фазного трансформа-
тора, определяемые расчетным или опытным путем.
При наличии активного сопротивления RM ток намагничивания
трансформатора не является чисто реактивным. Он содержит актив-
ную составляющую, находящуюся в фазе с противоЭДС (-ЕД
29
Потребляемая трансформатором из сети активная мощность, соот-
ветствующая активной составляющей тока намагничивания, расхо-
дуется в виде потерь в сердечнике.
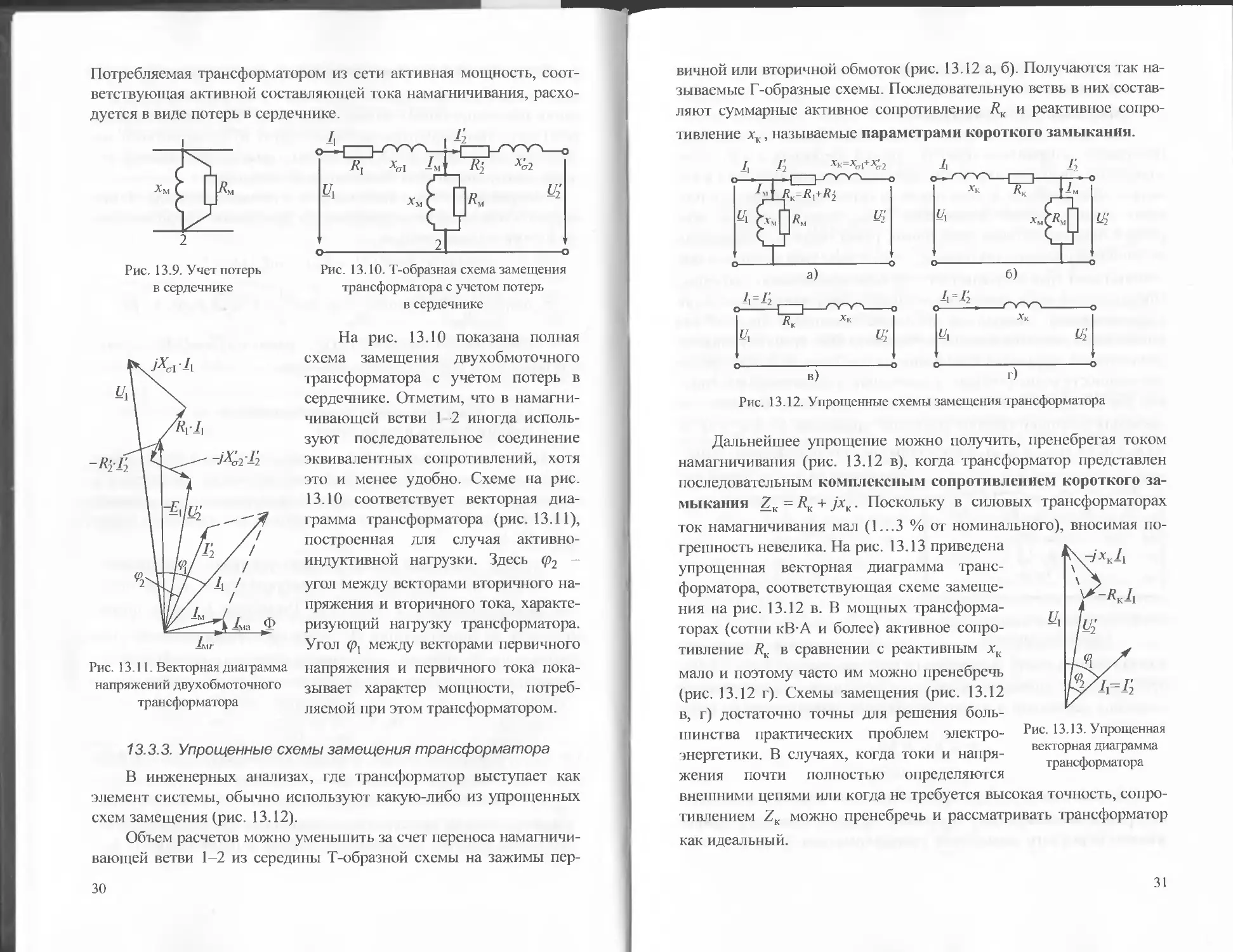
Рис. 13.9. Учет потерь
в сердечнике
Рис. 13.11. Векторная диаграмма
напряжений двухобмоточного
трансформатора
Рис. 13.10. Т-образная схема замещения
трансформатора с учетом потерь
в сердечнике
На рис. 13.10 показана полная
схема замещения двухобмоточного
трансформатора с учетом потерь в
сердечнике. Отметим, что в намагни-
чивающей ветви 1 2 иногда исполь-
зуют последовательное соединение
эквивалентных сопротивлений, хотя
это и менее удобно. Схеме на рис.
13.10 соответствует векторная диа-
грамма трансформатора (рис. 13.11),
построенная для случая активно-
индуктивной нагрузки. Здесь <р2 -
угол между векторами вторичного на-
пряжения и вторичного тока, характе-
ризующий нагрузку трансформатора.
Угол <р( между векторами первичного
напряжения и первичного тока пока-
зывает характер мощности, потреб-
ляемой при этом трансформатором.
13.3.3. Упрощенные схемы замещения трансформатора
В инженерных анализах, где трансформатор выступает как
элемент системы, обычно используют какую-либо из упрощенных
схем замещения (рис. 13.12).
Объем расчетов можно уменьшить за счет переноса намагничи-
вающей ветви 1-2 из середины Т-образной схемы на зажимы пер-
30
вичной или вторичной обмоток (рис. 13.12 а, б). Получаются так на-
зываемые Г-образные схемы. Последовательную ветвь в них состав-
ляют суммарные активное сопротивление RK и реактивное сопро-
тивление хк, называемые параметрами короткого замыкания.
Рис. 13.12. Упрощенные схемы замещения трансформатора
Дальнейшее упрощение можно получить, пренебрегая током
намагничивания (рис. 13.12 в), когда трансформатор представлен
Рис. 13.13. Упрощенная
векторная диаграмма
трансформатора
последовательным комплексным сопротивлением короткого за-
мыкания ZK = RK + jxK. Поскольку в силовых трансформаторах
ток намагничивания мал (1...3 % от номинального), вносимая по-
грешность невелика. На рис. 13.13 приведена
упрощенная векторная диаграмма транс-
форматора, соответствующая схеме замеще-
ния на рис. 13.12 в. В мощных трансформа-
торах (сотни кВ-A и более) активное сопро-
тивление RK в сравнении с реактивным хк
мало и поэтому часто им можно пренебречь
(рис. 13.12 г). Схемы замещения (рис. 13.12
в, г) достаточно точны для решения боль-
шинства практических проблем электро-
энергетики. В случаях, когда токи и напря-
жения почти полностью определяются
внешними цепями или когда не требуется высокая точность, сопро-
тивлением ZK можно пренебречь и рассматривать трансформатор
как идеальный.
31
13.3.4. Опытное определение параметров схем
замещения трансформатора
Опыт короткого замыкания
При замкнутой накоротко вторичной обмотке напряжение,
подводимое к первичной обмотке, должно составлять 2... 12 % но-
минального значения, так чтобы получить номинальные токи в об-
мотках. Для удобства в этом опыте за первичную обычно прини-
мают сторону высшего напряжения. ЭДС, индуктируемая во вто-
ричной обмотке потоком сердечника, равна падению напряжения
на комплексном сопротивлении Z_'2 = Д? + Jxa2 эт°й обмотки и при
номинальном токе составляет от I до 6 % номинального значения.
Поскольку ток намагничивания и потери в сердечнике малы, ветвь
намагничивания, показанную на схеме замещения (рис. 13.14)
штриховыми линиями, можно не учитывать. При этом первичный и
приведенный вторичный токи равны. Потребляемая из сети актив-
ная мощность равна потерям в проводниках первичной и вторич-
ной обмоток, а приложенное напряжение UK равно падению на-
пряжения на сопротивлении короткого замыкания ZK = RK + jxK —
= (R] + R^) + j(xn] + x^2). Таким образом, для однофазного транс-
форматора (или для одной фа-
зы трехфазного) получаем:
Рис. 13.14. Схема замещения для режима
короткого замыкания
=7ZK -^к2 -
В тех случаях, когда необ-
ходимо использовать Т-образную схему замещения (рис. 13.10),
приближенные значения активных и реактивных сопротивлений
рассеяния первичной и вторичной обмоток можно найти из соот-
ношений
/?]=/?'= 0,57?к;
*СТ1=\г2=°,5хк-
Напряжение UK =UKH, при котором ток короткого замыка-
ния равен номинальному значению, принято называть напря-
жением короткого замыкания трансформатора. Векторная диа-
32
грамма фансформатора при коротком замыкании, когда /к = /н,
приведена на рис. 13.15. Напряжение короткого замыкания зависит
от сопротивления короткого замыкания zK и равно относительному
значению этого сопротивления:
т J* _ _ 4 -у*
к ~ и и Z к
ии
Соответственно
U* = С/’cos <n. = R*-
Kd К К К 7
U* - U* sine/).. = х..
tx! IX • IV IX
Таким образом, напряжение ко-
роткого замыкания характеризует па-
раметры обмоток трансформатора и
поэтому входит в паспортные данные
трансформатора.
Рис. 13.15. Векторная диа-
грамма трансформатора
при коротком замыкании
Опыт холостого хода
В опыте холостого хода вторичная цепь фансформатора ра-
зомкнута, а к первичной обмотке подводится номинальное напря-
жение. Если предполагается использовать фансформатор при на-
пряжении, отличном от номинального, опыт холостого хода следу-
ет проводить при этом напряжении. За первичную обмотку удобно
принять обмотку низшего напряжения.
При холостом ходе в первичной обмотке возникает ток намаг-
ничивания, составляющий лишь 1...3% номинального тока. По-
этому падение напряжения на комплексном сопротивлении пер-
вичной обмотки от этого тока мало и противоЭДС, индуктируемая
потоком сердечника, практически равна первичному напряжению
С710. Малы также потери в первичной обмотке от тока намагничи-
вания, и пофебляемая фансформатором из сети активная мощ-
ность Ро почти равна потерям в сердечнике. Таким образом, в схе-
ме замещения на рис. 13.10 для опыта холостого хода величинами
R} и хст] можно пренебречь. Тогда
. Цо .
X.
Ро ’
ZM7?
м м
“ ~ ZM + RM ’
ZM
2 Зак. 50
33
Рассчитанные параметры являются приведенными к первич-
ной (для данного опыта) стороне трансформатора. Иногда при опы-
те холостого хода для определения отношения чисел витков изме-
ряют напряжение на зажимах разомкнутой вторичной обмотки.
73.3.5. Коэффициент полезного действия
трансформатора
Потери активной мощности в трансформаторе включают в се-
бя практически не зависящие от нагрузки потери в сердечнике и
изменяющиеся с нагрузкой электрические потери в обмотках, при-
чем к последним относят также добавочные потери от вихревых
токов в обмотках и от полей рассеяния в элементах конструкции.
ГОСТом установлено, что потери в сердечнике рмг следует оп-
ределять при опыте холостого хода и номинальном напряжении Ц.
Электрические потери в обмотках принимают равными поте-
рям короткого замыкания при соответствующих токах. Если потери
короткого замыкания при номинальных токах в обмотках равны
рк, то электрические потери при любом токе нагрузки /2
Рэл ~ ^нгРк ’
где kw — —— коэффициент нагрузки трансформатора.
Ли
Суммарные потери при рабочем напряжении Ц и произволь-
ной нагрузке
£/’=А,г+.Рэл=/’о+*нг/’к-
Коэффициент полезного действия трансформатора выражается
по общему правилу:
^p-i
Ру Р\ Ру Л+Хр’
где полезная мощность ш-фазного трансформатора равна
Р2 = mU2HkHTI2„ cos<p2 = kwS„ cos<p2.
Тогда для коэффициента полезного действия получаем
2
/} = 1-----Ро+^нгРк ------ (j 3 23)
<„\,COS<p2 +Ро+^,гРк
дл
Используя соотношение ----= 0, можно показать, что КПД
ЭЛг
максимален при нагрузке, которой соответствует равенство
34
^нгРк =Р(Ъ
то есть, когда электрические потери равны потерям в сердечнике.
Таким образом, коэффициент нагрузки, при котором КПД
трансформатора приобретав! максимальное значение, определяется
по выражению
13.3 6 Изменение напряжения трансформатора
при нагрузке
При нагружении реального трансформатора его вторичное на-
пряжение U2 в зависимости от нагрузки изменяется.
Изменением напряжения трансформатора принято назы-
вать разность между вторичными напряжениями при холостом
ходе и номинальной нагрузке при условии, что первичное на-
пряжение неизменно.
В инженерных расчетах изменение напряжения в относитель-
ных единицах определяют посредством следующего соотношения
на основе диаграммы (рис. 12.13)
Д(7* = U*a cos<p2 + t/Kp sin<p2 >
где U*a и t/*p - активная и реактивная составляющие напряжения
короткого замыкания в относительных единицах; <р2 - угол фазо-
вого сдвига между вторичными напряжением и током.
13.4. Трехфазные трансформаторы
13.4.1. Схемы соединения обмоток трехфазных
трансформаторов
Три однофазных трансформатора можно соединить между со-
бой любым из трех способов (рис. 13.16) для образования трехфаз-
ной трансформаторной группы. На рис. 13.16 напряжения и токи
показаны в предположении, что трансформаторы являются идеаль-
ными, а за первичные приняты во всех случаях левые обмотки. От-
метим, что полная мощность каждого из однофазных трансформа-
торов составляет треть мощности группы независимо от схемы со-
единения, но напряжения и токи отдельных трансформаторов зави-
сят от схемы соединений.
35
2*
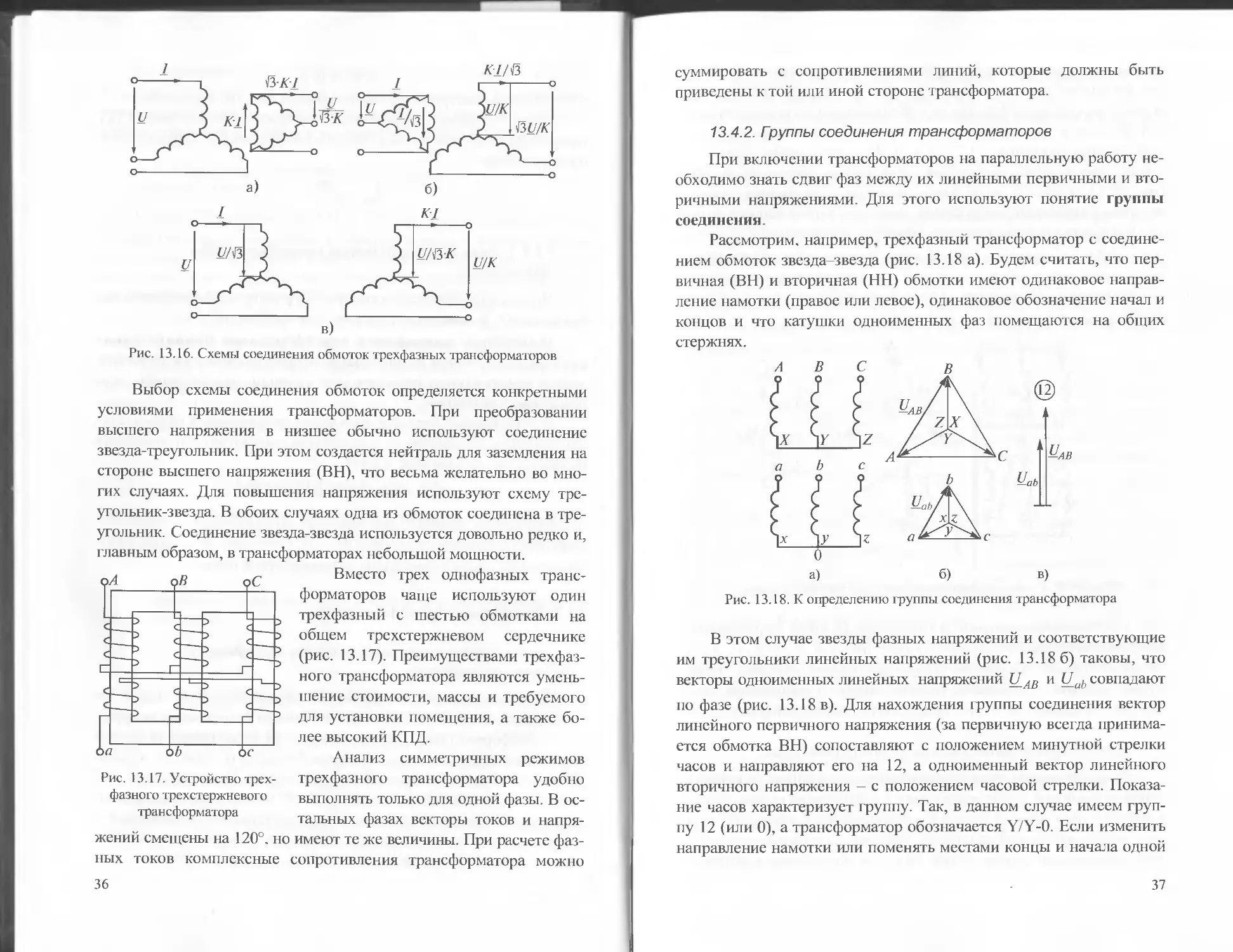
Рис. 13.16. Схемы соединения обмоток трехфазных трансформаторов
Выбор схемы соединения обмоток определяется конкретными
условиями применения трансформаторов. При преобразовании
высшего напряжения в низшее обычно используют соединение
звезда-треугольник. При этом создается нейтраль для заземления на
стороне высшего напряжения (ВН), что весьма желательно во мно-
гих случаях. Для повышения напряжения используют схему тре-
угольник-звезда. В обоих случаях одна из обмоток соединена в тре-
угольник. Соединение звезда-звезда используется довольно редко и,
главным образом, в трансформаторах небольшой мощности.
Рис. 13.17. Устройство трех-
фазного трехстержневого
|рансформатора
Вместо трех однофазных транс-
форматоров чаще используют один
трехфазный с шестью обмотками на
общем трехстержневом сердечнике
(рис. 13.17). Преимуществами трехфаз-
ного трансформатора являются умень-
шение стоимости, массы и требуемого
для установки помещения, а также бо-
лее высокий КПД.
Анализ симметричных режимов
трехфазного трансформатора удобно
выполнять только для одной фазы. В ос-
тальных фазах векторы токов и напря-
жений смещены на 120°. но имеют те же величины. При расчете фаз-
ных токов комплексные сопротивления трансформатора можно
36
суммировать с сопротивлениями линий, которые должны быть
приведены к той или иной стороне трансформатора.
13.4.2 Группы соединения трансформаторов
При включении трансформаторов на параллельную работу не-
обходимо знать сдвиг фаз между их линейными первичными и вто-
ричными напряжениями. Для этого используют понятие группы
соединения.
Рассмотрим, например, трехфазный трансформатор с соедине-
нием обмоток звезда-звезда (рис. 13.18 а). Будем считать, что пер-
вичная (ВН) и вторичная (НН) обмотки имеют одинаковое направ-
ление намотки (правое или левое), одинаковое обозначение начал и
концов и что катушки одноименных фаз помещаются на общих
стержнях.
а)
Uab
~АВ
в)
Рис. 13.18. К определению группы соединения трансформатора
В этом случае звезды фазных напряжений и соответствующие
им треугольники линейных напряжений (рис. 13.18 б) таковы, что
векторы одноименных линейных напряжений U_AB и Uah совпадают
по фазе (рис. 13.18 в). Для нахождения группы соединения вектор
линейного первичного напряжения (за первичную всегда принима-
ется обмотка ВН) сопоставляют с положением минутной стрелки
часов и направляют его на 12, а одноименный вектор линейного
вторичного напряжения - с положением часовой стрелки. Показа-
ние часов характеризует группу. Так, в данном случае имеем груп-
пу 12 (или 0), а трансформатор обозначается Y/Y-0. Если изменить
направление намотки или поменять местами концы и начала одной
37
из обмоток, первичной или вторичной, получается группа 6. Круго-
вое изменение порядка чередования фаз на стороне НН при неиз-
менном чередовании фаз обмотки ВН позволяет получить группы 4
и 8. Вообще в трансформаторе звезда-звезда возможно шесть чет
ных групп соединения - 12. 10, 8, 6, 4, 2. Это справедливо и для
схемы треугольник-треугольник. Для схемы звезда-треугольник
(рис. 13.19а) при тех же условиях намотки и маркировки выводов
векторная диаграмма напряжений имеет вид, изображенный на рис.
12.19 б. Сопоставление векторов линейных напряжений Ц_АВ и U_ub
(рис. 12 19 в) показывает, что получается группа 11. Трансформа-
тор должен иметь обозначение Y/Д-П. При изменении направле-
ния намотки и порядка чередования фаз одной из обмоток можно
получить нечетные группы - 9, 7, 5, 3, 1.
а b с
Рис. 13.19. К определению группы соединения трансформатора
ГОСТом предусмотрено изготовление силовых трансформато-
ров со следующими соединениями обмоток: Y/Yo-0. Y/A-l 1, Yo/ Д-
11. Здесь первым обозначено соединение обмотки высшего напря-
жения, вторым - соединение обмотки низшего напряжения, а ин-
декс «0» указывает на то, что предусмотрен вывод нейтрали.
13.4.3. Параллельная работа трансформаторов
На современных трансформаторных подстанциях для обеспе-
чения надежности электроснабжения и уменьшения потерь энергии
в периоды пониженных нагрузок устанавливается, как правило, два
или несколько трансформаторов, работающих параллельно. При
этом необходимо, чтобы общая нагрузка подстанции распределя-
38
лась между отдельными трансформаторами пропорционально их
номинальным мощностям. Условия этого следующие:
1) группы соединения обмоток трансформаторов должны быть
одинаковыми;
2) первичные и вторичные номинальные напряжения должны
быть равны и соответственно равны коэффициенты трансформации;
3) напряжения короткого замыкания не должны отличаться
более чем на ± 10 % от их среднеарифметического значения.
При первом после монтажа или капитального ремонта вклю-
чении необходимо также проверить порядок чередования фаз каж-
дого из трансформаторов.
При нарушении условий 1 и 2 вторичные напряжения С/21 и
С/2|| отличаются значением или фазой, так что в замкнутых конту-
рах вторичных цепей возникает разность напряжения
Рис. 13.20. Схема параллельной работы
трехфазных трансформаторов
Д(72 “ —21 “—211 • Под
действием ДС72 во вто-
ричных цепях появля-
ются уравнительные то-
ки 7 , трансформируе-
мые также и в первич-
ные цепи (рис. 13.20).
Предположим, что
параллельно включены
трансформаторы Y/Y-0,
Y/A-l 1, имеющие оди-
наковые коэффициенты
трансформации. При
этом их линейные вто-
ричные напряжения, будучи одинаковыми по значению, имеют
сдвиг фаз 30° (рис. 13.21). Разность напряжения, действующая во
вторичных цепях, равна
ДТ/2 = 27/2sinl5°^0,5t/2.
Если пренебречь током намагничивания трансформаторов, то
по упрощенной схеме замещения (рис. 12.12 в) для приведенного
тока получаем
7 = Д[/2
У ?к\ + ^к11
39
4Ц
Рис. 13.21. Уравнитель-
ные токи при парал-
лельной работе транс-
форматоров
Принимая ZKl =ZkI) =0.05, находим
относительное значение тока
Ясно, что при токе, в 5 раз превышаю-
щем номинальный, работа трансформатора
недопустима.
В случае неравенства коэффициентов
трансформации уравнительные токи срав-
нительно меньше, но, суммируясь векторно
с токами нагрузки, они вызывают неравно-
мерность загрузки трансформаторов, что также недопустимо.
Условие 3 прямо касается равномерности нагружения парал-
лельно работающих трансформаторов. Так, используя упрощенные
схемы замещения, можно показать, что относительные нагрузки
параллельных трансформаторов независимо от числа последних
обратно пропорциональны их напряжениям короткого замыкания в
относительных единицах
5| : Sn : 5И| = ——: ——: —* —,
^к! t/KII ^КШ
с* 5
где о =— - относительное значение полной мощности транс-
форматора.
Наиболее неблагоприятная ситуация возникает, когда транс-
форматор меньшей номинальной мощности имеет и наименьшее
напряжение короткого замыкания. В этом случае данный транс-
форматор при возрастании общей нагрузки подстанции быстрее
других достигает номинальной нагрузки, ограничивая тем самым
нагрузку трансформаторов большей номинальной мощности.
С учетом этого ГОСТом не рекомендуется параллельное включе-
ние трансформаторов, номинальные мощности которых отличают-
ся более чем в отношении 1:3.
13.4.4 . Несимметричная нагрузка трансформаторов
Общепринятым методом анализа несимметричных режимов
трансформаторов является метод симметричных составляющих, в
соответствии с которым несимметричные токи в фазах трансфор-
40
матора представляют в виде геометрических сумм векторов пря-
мой. обратной и нулевой последовательностей:
La ~ La\ + —о2 + — аО ’
Lb - Lb\+ Lb2+ Lbo ’
Lc ~ Lc\ + —с2 + — с 0 ’
где векторы I_aX, l_hx, 1_сХ составляют прямую последовательность, а
векторы /о2, 1Ь2, 1^2- обратную и /а0, /й0, 7с0 - нулевую после-
довательности. Аналогичные соотношения используются для фаз-
ных напряжений.
Поскольку метод симметричных составляющих базируется на
принципе наложения (суперпозиции), при анализе полагают, что
индуктивности (реактивные сопротивления) обмоток трансформа-
тора постоянны, то есть не зависят от магнитного насыщения сер-
дечника.
Токи прямой, обратной и нулевой последовательностей нахо-
дят с помощью схем замещения трансформатора. Для прямой по-
следовательности, которая соответствует симметричному режиму,
используется одна из схем замещения (п. 13.3). Обратную последо-
вательность токов можно получить, изменив порядок чередования
двух фаз на первичной и вторичной сторонах трансформатора. При
этом режим работы потребителей и самого трансформатора не из-
меняется, то есть токи обратной последовательности преобразуют-
ся трансформатором так же, как токи прямой последовательности.
Это означает, что для обратной последовательности применимы те
же схемы замещения.
Нулевая последовательность имеет ту особенность, что ее токи
во всех трех фазах трансформатора имеют одинаковый фазо-
временной сдвиг. Отсюда следует, что эти токи в обмотке при со-
единении звездой могут протекать лишь при наличии нейтрального
провода (или заземления нейтрали, играющего роль нейтрального
провода). В обмотке с соединением треугольником эти токи замы-
каются по контуру треугольника, отсутствуя в линиях, и поэтому
могут быть «внесены» в контур треугольника только индуктивным
путем другой обмоткой трансформатора.
Токи нулевой последовательности возбуждают в фазных
стержнях сердечника потоки нулевой последовательности, имеющие
одинаковый сдвиг фаз. В трехфазной трансформаторной группе, со-
ставленной из однофазных трансформаторов, эти потоки замыкают-
ся каждый по своему сердечнику, как при симметричном режиме.
41
В трехстержневом трансформаторе потоки нулевой последователь-
ности вытесняются на пути рассеяния с большим магнитным сопро-
тивлением. Таким образом, реактивное сопротивление ветви намаг-
ничивания схемы замещения для нулевой последовательности зави-
сит от конструкции магнитопровода. Напротив, вид схемы замеще-
ния определяется соединением обмоток трансформатора.
В трехфазной трансформаторной группе с соединением обмоток
Yo/Yo токи нулевой последовательности могут протекать как по пер-
вичной, так и по вторичной обмоткам, а потоки нулевой последова-
тельности свободно замыкаются по фазным сердечникам. В этом
случае схема замещения для нулевой последовательности ничем не
отличается от схем замещения при прямой последовательности. Ес-
ли вторичная обмотка такого трансформатора соединена треуголь-
ником, то вторичные зажимы схемы замещения должны быть замк-
нуты накоротко. Если вторичная обмотка соединена звездой без
нейтрального провода, вторичные зажимы трансформатора для ну-
левой последовательности токов находят обычным опытным путем.
13.5. Специальные трансформаторы
13.5.1. Автотрансформаторы
В рассмотренных выше трансформаторах между первичными
и вторичными обмотками существует только магнитная связь. Ино-
гда выгоднее применять так называемые автотрансформаторы, пер-
вичные и вторичные обмотки которых, кроме магнитной, имеют
также и электрическую (гальваническую) связь.
Наиболее распространенная схема однофазного автотранс-
форматора (рис. 13.22) отличается тем, что к мощности, передавае-
мой от первичной обмотки к вторичной за счет магнитной связи,
как в обычном трансформаторе, здесь добавляется мощность, пере-
даваемая электрической связью. Соответственно, габариты, масса и
стоимость автотрансформатора меньше, чем обычного трансфор-
матора той же номинальной мощности, а КПД, наоборот, выше.
Применение автотрансформаторов тем выгоднее, чем ближе
коэффициент трансформации к единице. На практике автотранс-
форматоры используют при К.1р <2,5. Трехфазные трансформато-
ры (рис. 13.23) широко применяются в электрических сетях напря-
жением ПО...220 кВ.
42
Рис. 13.22. Электрическая
схема однофазного авто-
трансформатора
схема трехфазного авто-
трансформатора
13.5.2. Сварочные трансформаторы
К трансформаторам, применяемым при электрической дуговой
сварке (сварочным трансформаторам), предъявляются особые тре-
бования, которые связаны с необходимостью обеспечивать как на-
дежное зажигание, так и устойчивое горение дуги.
Поэтому, в частности, сварочный
трансформатор должен обладать крутопа-
дающей (мягкой) внешней характеристи-
кой U2 = /(/2) (Рис- 13.24).
Для ограничения сварочного тока в
момент зажигания дуги в цепь вторичной
обмотки сварочного трансформатора мо-
жет быть включена последовательно ин-
дуктивная катушка с магнитным сердеч-
ником, имеющим регулируемый воздуш-
Рис. 13.24. Внешняя харак-
теристика сварочного
трансформатора
ный зазор (рис. 13.25). Когда с помощью специального механизма
воздушный зазор уменьшают, индуктивность катушки увеличива-
ется и, соответственно, возрастает ее токоограничивающее дейст-
вие. Улучшаются также условия горения дуги.
Рис. 13.25. Устройство сварочного трансформатора с последовательно
включенной катушкой индуктивности
43
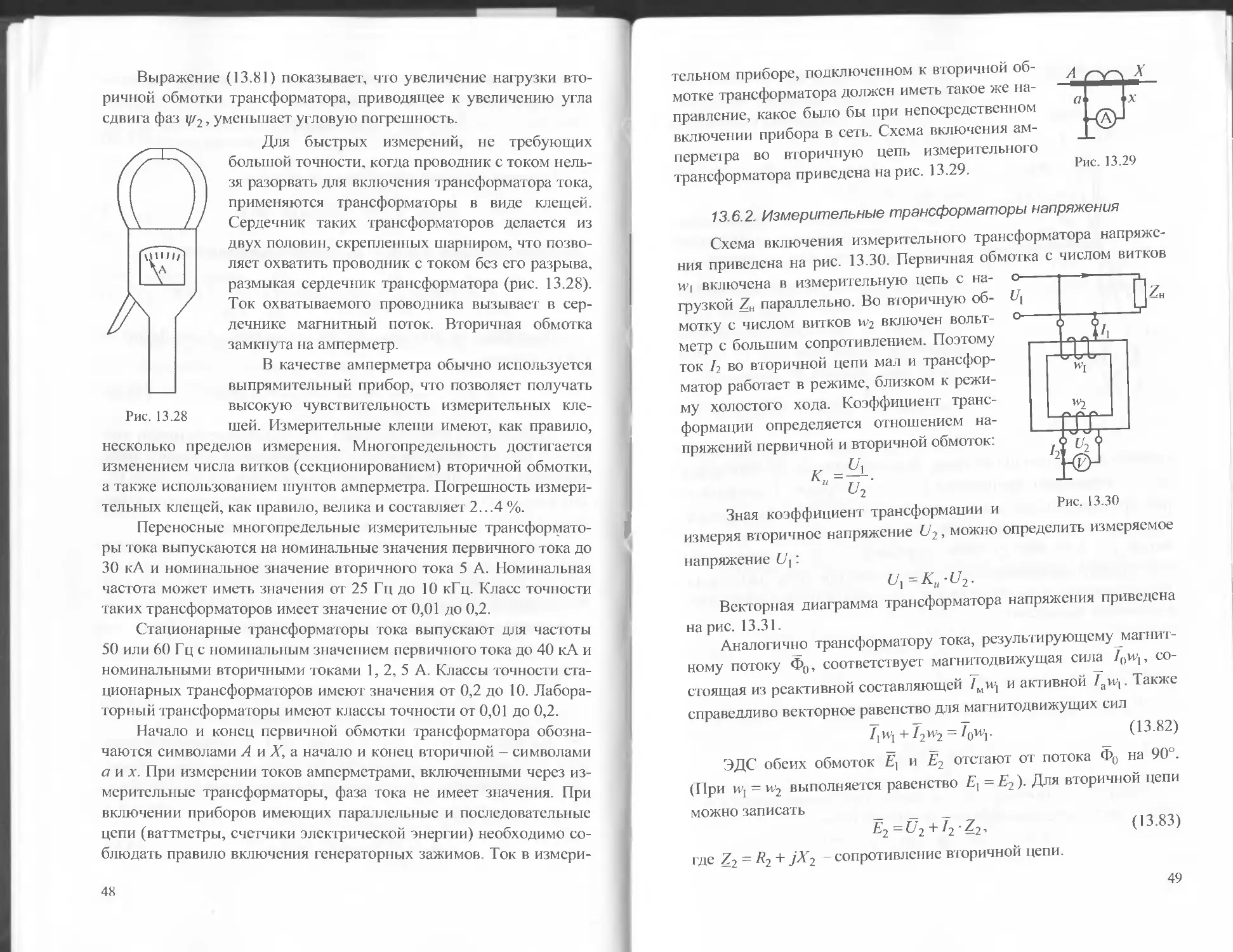
13.6. Измерительные трансформаторы переменного тока
Измерительные трансформаторы переменного тока и напря-
жения используют как преобразователи больших переменных то-
ков и напряжений в относительно малые токи и напряжения, до-
пустимые для измерения приборами с небольшими стандартными
пределами измерений. Применение измерительных трансформато-
ров в цепях высокого напряжения обеспечивает электробезопас-
ность персонала, обслуживающего приборы, так как приборы
включаются при этом в заземляемую цепь низкого напряжения
(рис. 13.26, 13.30).
13.6.1. Измерительные трансформаторы тока
Схема включения измерительного трансформатора тока приве-
дена на рис. 13.26. Трансформатор состоит из двух изолированных
друг от друга обмоток: первичной с числом витков W] и вторичной с
числом витков w2, помещенных на ферромагнитный сердечник.
Первичная обмотка включается в цепь измеряемого тока Ц последо-
вательно, с комплексным сопротивлением нагрузки ZK. Во вторич-
ную обмотку включается амперметр, измеряющий ток /2. Характе-
ристикой трансформатора является коэффициент трансформации,
который определяется как отношение действующих значений токов:
Зная коэффициент трансформации,
измеряя амперметром ток /2 можно оп-
ределить измеряемый ток
Zi=X,.Z2.
Рассмотрим работу трансформатора
более подробно. Вектор тока в первич-
ной обмотке /] с магнитодвижущей си-
лой ZjWi, создает магнитный поток в
сердечнике. Этот поток, пронизывая витки вторичной обмотки, ин-
дуцирует в ней ЭДС Е2. Так как сопротивление амперметра мало,
вторичная обмотка работает в режиме, близком к короткому замы-
канию. По закону Ленца индуцируемая ЭДС порождает токи, на-
правленные таким образом, чтобы воспрепятствовать изменению
магнитного потока. Поэтому магнитодвижущая сила I2 w2 оказывает
44
размагничивающее действие в сер-
дечнике и по фазе отстает от маг-
нитодвижущей силы Ц W! почти на
180°, а результирующий магнитный
поток Фо - мал (рис. 13.27).
Результирующему магнитно-
му потоку Фо соответствует опре-
деленная магнитодвижущая сила
70wb где /0 - некоторый соответ-
ствующий ей ток первичной об-
мотки. Эта магнитодвижущая сила
состоит из реактивной составляю-
щей I^w\, непосредственной соз-
дающей магнитный поток Фо и
совпадающей с ним по фазе, и ак-
тивной составляющей 7awi, опе-
режающей Фо по фазе на 90° и по-
рождаемой активными потерями
на перемагничивание сердечника
Рис. 13.27
при гистерезисе и вихревые токи.
Таким образом, можно записать векторное равенство
7]Wj + /2И'2 = /qW].
(13.71)
Уравнение (13.71) показывает, что при размыкании вторичной
цепи (/2= 0) выполняется равенство /0из = Это означает, что
существенно увеличивается результирующий магнитный поток Фо
и наводимая им ЭДС £2 в0 вторичной обмотке. Это опасно для об-
служивающего персонала и может вызвать пробой изоляции вто-
ричной обмотки. Поэтому размыкание вторичной обмотки транс-
форматора тока недопустимо.
Вектор индуцируемой во вторичной обмотке ЭДС Е2 уравно-
вешивается падением напряжения на вторичной обмотке и ампер-
метре (рис. 13.27):
£2=Z2(7?2+j-y2) + Z2(7?a+7Xa),
где 7?2,%2- активное и реактивное сопротивление вторичной об-
мотки; Ra, Ха — активное и реактивное сопротивление амперметра.
45
При определении измеряемого тока показания амперметра
умножаются не на действительный коэффициент трансформации
Kh а на номинальный коэффициент К1и, указанный на трансформа-
торе. Поэтому определение тока по номинальному коэффициенту
осуществляется с так называемой токовой погрешностью
у7=^у^--100%,
где /] = К1н12, Ц ~
Учитывая последние равенства токовая погрешность может
быть записана в виде
= Kjh~K, ,100о/о
К,
Используя векторную диаграмму найдем выражения для токо-
вой погрешности. Спроектируем вектор Ilwi, на вектор -/2W2- То-
гда можно записать
7iMi=----(13.72)
COSO;
где <5; -угол между векторами —/2 й) и Ли)-
С другой стороны отрезок ОВ состоит из отрезка величиной
I2w2 и отрезка
АВ = low{-cos ABAC. (13.73)
Введем углы: <р0— угол между векторами 70W] и 7aui; i//2
угол между векторами I2w2 и Е2: [3 - угол между векторами
-I2w2 и /qWj . Очевидно, что ABAC = (3. Кроме того, рассматривая
развернутый угол между векторами I2w2 и — l2w2 можно записать
/3 + (90°-<р0) + ^2 =90°.
Откуда
P=<PO~V2-
С учетом последнего равенства выражение (13.73) можно
представить в виде
AB = IGwx-cos(<p0-i//2)- (13.74)
С учетом выражения (13.74) равенство (13.72) можно перепи-
сать в виде
/iWi = ^+7oW1-cos«p0-y2) (13 75)
cos Sj
46
Так как угол 8, — мал, можно считать cos 8j ~ 1. С учетом это-
го из выражения (13.75) можно получить
_ /2и2 + /()Hj • cos (<р0 —i//2)
Л —------------------------
(13.76)
Разделив обе части равенства на /2 запишем
Kj = — + ^-cos(<p0 -1/Л2).
-*2 W] ^2
Тогда, учитывая, что К2 ~К1н, токовая погрешность
(13.77)
К/Н ~ К1
У/= \ 1
100% =
”/н
Подставляя в формулу (13.78) выражение К{из
(13.77) получим
^--100%= 1-----100%. (13.78)
KJH)
формулы
К
(13.79)
100%.
Г/ = 1-
W1 Л) 'COS(^Q ~ УЪ)
)^7н ^2
Выражение (13.79) показывает, что увеличение нагрузки вто-
ричной обмотки трансформатора тока (включение большого числа
приборов) увеличивает индуктивность нагрузки, то есть угол у/2.
Это уменьшает cos (<р0 —1//2) и последнюю составляющую в выра-
жении (13.79), увеличивая величину токовой погрешности.
Кроме токовой погрешности измерительные трансформаторы
тока имеют так называемую угловую погрешность, вызванную не-
точностью передачи фазы тока от первичной обмотки к вторичной.
Из векторной диаграммы рис. 13.27 угловая погрешность представ-
ляет собой угол сдвига фаз 8j между векторами /jWj и -/2w2.
Получим выражение для угловой погрешности. Из векторной
диаграммы рис. 12.27
t -ВС -
1 ОВ I2w2 + cos (<р0 - i//2 )
Так как /0 « I2, w}<w2 и cos(<p0 -i//2) <1, то вторым слагае-
мым в знаменателе выражения (13.80) можно пренебречь. Кроме
того, ввиду малости угла 82 можно считать, что tg<5z ~8j. Тогда
угловая погрешность, выраженная в радианах
2^2
(13.80)
(13.81)
47
Выражение (13.81) показывает, что увеличение нагрузки вто-
ричной обмотки трансформатора, приводящее к увеличению угла
сдвига фаз 1//2 > уменьшает угловую погрешность.
Для быстрых измерений, не требующих
О большой точности, когда проводник с током нель-
зя разорвать для включения трансформатора тока,
применяются трансформаторы в виде клещей.
Сердечник таких трансформаторов делается из
_______ двух половин, скрепленных шарниром, что позво-
к1111 щ ,
v д ляет охва тить проводник с током без его разрыва,
I—j— размыкая сердечник трансформатора (рис. 13.28).
/ Ток охватываемого проводника вызывает в сер-
дечнике магнитный поток. Вторичная обмотка
замкнута на амперметр.
В качестве амперметра обычно используется
выпрямительный прибор, что позволяет получать
высокую чувствительность измерительных кле-
Рис. 13.28 .. т т
шеи. Измерительные клещи имеют, как правило,
несколько пределов измерения. Многопредельность достигается
изменением числа витков (секционированием) вторичной обмотки,
а также использованием шунтов амперметра. Пшрешность измери-
тельных клещей, как правило, велика и составляет 2...4 %.
Переносные многопредельные измерительные трансформато-
ры тока выпускаются на номинальные значения первичного тока до
30 кА и номинальное значение вторичного тока 5 А. Номинальная
частота может иметь значения от 25 Гц до 10 кГц. Класс точности
таких трансформаторов имеет значение от 0,01 до 0,2.
Стационарные трансформаторы тока выпускают для частоты
50 или 60 Гц с номинальным значением первичного тока до 40 кА и
номинальными вторичными токами 1, 2, 5 А. Классы точности ста-
ционарных трансформаторов имеют значения от 0,2 до 10. Лабора-
торный трансформаторы имеют классы точности от 0,01 до 0,2.
Начало и конец первичной обмотки трансформатора обозна-
чаются символами А и X, а начало и конец вторичной - символами
а и х. При измерении токов амперметрами, включенными через из-
мерительные трансформаторы, фаза тока не имеет значения. При
включении приборов имеющих параллельные и последовательные
цепи (ваттметры, счетчики электрической энергии) необходимо со-
блюдать правило включения генераторных зажимов. Ток в измери-
48
тельном приборе, подключенном к вторичной об-
мотке трансформатора должен иметь такое же на-
правление, какое было бы при непосредственном
включении прибора в сеть. Схема включения ам-
перметра во вторичную цепь измерительного
трансформатора приведена на рис. 13.29.
А Л
Рис. 13.29
13.6.2. Измерительные трансформаторы напряжения
Схема включения измерительного трансформатора напряже-
ния приведена на рис. 13.30. Первичная обмотка с числом витков
vvi включена в измерительную цепь с на-
грузкой ZH параллельно. Во вторичную об-
мотку с числом витков w2 включен вольт-
метр с большим сопротивлением. Поэтому
ток /2 во вторичной цепи мал и трансфор-
матор работает в режиме, близком к режи-
му холостого хода. Коэффициент транс-
формации определяется отношением на-
пряжений первичной и вторичной обмоток:
Зная коэффициент трансформации и
измеряя вторичное напряжение 0'2, можно определить измеряемое
напряжение Ц:
Ц=*и’^2-
Векторная диаграмма трансформатора напряжения приведена
на рис. 13.31.
Аналогично трансформатору тока, результирующему магнит-
ному потоку Фо, соответствует магнитодвижущая сила 7owi> с0'
стоящая из реактивной составляющей /МИ| и активной /auj. Также
справедливо векторное равенство для магнитодвижущих сил
/jW] + I2w2 = Iowt. (13.82)
ЭДС обеих обмоток Е{ и Е2 отстают от потока Фо на 90°.
(При Wj = и2 выполняется равенство Е} = Е2). Для вторичной цепи
можно записать
E2=U2 + I2-Z2,
где Z2 = R2 + jX2 - сопротивление вторичной цепи.
(13.83)
49
Рис. 13.31
В первичной цепи измеряемое на-
пряжение U] уравновешивается ЭДС
Е] и падением напряжения в первичной
цепи /](/?[+
Ц -Zj, (13.84)
где Z, =/?, + jXx.
Для трансформатора напряжения,
не имеющего погрешности (при выпол-
нении условия W]=w2), вектор — U2
совпадал бы по величине и направле-
нию с вектором Ux. Фактически, как
это видно из векторной диаграммы,
вторичное напряжение U2 (в общем
случае приведенное к Ц вторичное на-
пряжение с/2 = (72—L) вследствие па-
w2
дения напряжения в сопротивлениях
первичной и вторичной обмоток, будет отличаться по величине и
фазе от первичного напряжения Ц. Таким образом, в измеритель-
ных трансформаторах напряжения вторичное напряжение измеря-
ется с некоторой погрешностью по величине (погрешность напря-
жения у„) и по фазе (угловая погрешность но обусловлены
они другими причинами, чем в трансформаторе тока. Аналогично
трансформатору тока погрешность напряжения можно определить
следующим выражением:
tWA.]0oo/
и,
где Ц=Еы-[/2.
С учетом этих равенств погрешность напряжения запишется в
виде
П=-цн—100%.
Получим выражение для погрешностей трансформатора на-
пряжения. В комплексной форме можно записать
7 - J . р • ф - ф .
У0 ‘От е > Ч () - ‘От 6 ’
50
где а - угол сдвига фаз между током /() и магнитным потоком Фо.
Тогда ЭДС £2 может быть представлена в виде
Ё2 = -w2 . (13.85)
dt
Поток Фо создается током /,; - 10со$а, следовательно
70mW| cos«
4 От “
Км
где магнитное сопротивление магнитопровода Ru - —- (I - длина
магнитопровода; S — площадь его сечения; /7 — магнитная проницае-
мого материала).
Поэтому
— /tow2/0mu,l/7>S'coso:
л2 ~ ’
или, учитывая, что /Оте1101 - /0
Е2 = А070и'1и'2,
(13.86)
где к(1 ~
(i)/iS cosa
I
Аналогично выражению (13.85)
— <7Ф0
dt
Проводя аналогичные преобразования и заменяя в выражении
(13.86) w2 на wt, получим
Е|=Ао/ои’|2. (13.87)
Подставляя выражения (13.86), (13.87), (13.82) в выражение
(13.84), получим
/,(Zj I2hs>w\w2 • (13.88)
Подставляя выражения (13.86), (13.82) в выражение (13.83)
получим
/,^i)HiM2-/2(/2) = С2. (13.89)
Решая уравнения (13.88), (13.89) относительно тока /2 находим
/2 -
^2(^1 )~^1^0wlw2
( кци-| и2 ) - f Z, — и-2 дZ2 - Ари-2
(13.90)
51
Учитывая, что U2 = I2ZH. где ZH - комплексное сопротивле-
ние нагрузки трансформатора и подставляя сюда значение тока /2
из выражения (13.90) после преобразований получим
С/2=-^-——, (13.91)
где
w, Z, 1 Z.Z2 Z.
и = —Ч g =-=!- +— .=L--’-.=L /2
w2 kaw\ -н и
(13.92)
Выражение (13.91) показывает, что погрешность напряжения и
угловая погрешность зависят от вектора Еи, который, как показы-
вает выражение (13.92) обращается в нуль при к0 = °° и ZH=<*>.
Это означает, что для уменьшения погрешности сопротивления на-
грузки должно быть возможно большим, то есть нормальный ре-
жим работы измерительного трансформатора напряжения является
режим холостого хода. Но °°, так как магнитная проницае-
мость материала сердечника /./ Ф °°. Поэтому при ZH - °° е,(
Выражение (13.92) показывает, что для уменьшения Еи необходимо
уменьшить сопротивление Z, и Z2 первичной и вторичной цепи
трансформаторе. Для этого сечения проводов обеих обмоток берут
значительно больше, чем это требуют условия нагрева.
Измерительные трансформаторы напряжения изготавливают
на номинальные первичные напряжения от 220 В до 35 кВ при вто-
Рис. 13.32
ричном напряжении 150; 100; 1()ОД/ЗВ
для номинальной нагрузки 5...25 В-A при
cos<p = 0,8...1,0.
Лабораторные трансформаторы на-
пряжения имеют классы точности от 0,05
до 0,2, стационарные от 0,2 до 10. Класс
точности определяет предельно-допусти-
мые значения как погрешности напряже-
ния, так и угловой погрешности.
Схема включения вольтметра с изме-
рительным трансформатором напряжения приведена на рис. 13.32.
где А, X— начало и конец первичной обмотки; а, х - начало и конец
вторичной обмотки.
52
Глава 14
МАШИНЫ ПОСТОЯННОГО ТОКА
14.1. Общие вопросы теории
Электрической машиной называют вращающееся устройство,
служащее для преобразования механической энергии в электриче-
скую (генератор) или наоборот (двигатель) на основе явления элек-
тромагнитной индукции.
По роду тока отличают машины постоянного и переменного
тока. Последние, в свою очередь, делятся на синхронные машины,
характеризующиеся постоянной скоростью при изменении нагруз-
ки, и асинхронные, скорость которых зависит от нагрузки.
14.1.1. Устройство и принцип действия машины
постоянного тока
Якорная обмотка простейшего двухпо-
люсного генератора постоянного тока (рис.
14.1) состоит из катушки с числом витков w с
активными сторонами сц и a2. Витки катушки
помещаются в диаметрально противополож-
ных пазах якоря так, что их проводники парал-
лельны валу. Якорь вращается с постоянной
скоростью п от первичного двигателя.
Распределение магнитной индукции в воз-
душном зазоре имеет форму, показанную на
рис. 14.2. При вращении катушки в ней индук-
тируется ЭДС, кривая изменения которой во
времени такая же, как и кривая распределения
индукции. Таким образом, хотя это машина по-
стоянного тока, ЭДС, возникающая в отдельной
Рис. 14.1. Устройст-
во простейшей ма-
шины постоянного
тока с коллектором
53
катушке, является переменной, что требует ее выпрямления. Это вы-
прямление иногда производят с помощью полупроводниковых при-
боров. В этом случае машина имеет вид генератора переменного то-
ка с внешними выпрямителями. В традиционных машинах постоян-
ного тока выпрямление осуществляется механически с помощью
Рис. 14.2. Распределение магнитной
индукции вдоль окружности якоря
коллектора. Он представляет собой
цилиндр, собранный из медных пла-
стин - сегментов, изолированных
друг от друга, и укрепленный на ва-
лу якоря. К пластинам коллектора
подсоединены концы катушек обмо-
ток якоря. Неподвижные графито-
вые щетки, скользящие по поверх-
ности коллектора, соединяют об-
мотку с внешними зажимами якоря.
Простейший коллектор (рис. 14.1) имеет вид двух изолирован-
ных друг от друга полуколец. При принятом направлении враще-
ния коллектор в любой момент времени подсоединяет к положи-
тельной щетке сторону катушки, находящуюся под южным полю-
Рис. 14.3. Напряжение между
щетками простейшего генератора
постоянного тока
сом, к отрицательной щетке - сто-
рону под северным полюсом.
С помощью коллектора происхо-
дит двухполупериодное выпрям-
ление (рис. 14.3) и обеспечивает-
ся таким образом постоянное на-
пряжение во внешней цепи. В ре-
альных машинах пульсации этого
напряжения уменьшают путем увеличения числа катушек обмотки
якоря и соответственно числа коллекторных пластин.
Если к зажимам якоря подсоединить некоторое сопротивление
нагрузки, в цепи якоря возникает ток. При этом между зажимами
возникает напряжение U, равное ЭДС якоря минус падение напря-
жения на сопротивлении якоря:
U = Ea-IaR,
(14.1)
где Еа - ЭДС якоря, 1а - ток якоря; R - сопротивление обмотки
якоря.
Вследствие взаимодействия магнитных полей якоря и возбуж-
дения создается препятствующий вращению электромагнитный
54
момент, который при установившемся вращении должен быть
уравновешен моментом приводного двигателя. Электромагнитный
момент есть тот механизм, посредством которого машина при
большей электрической мощности «запрашивает» большую вход-
ную механическую мощность.
Когда при наличии потока возбуждения к цепи якоря подво-
дится постоянный ток. имеет место двигательный режим работы
машины. Если электромагнитный момент, развиваемый машиной,
превышает момент сопротивления на валу, ротор приходит во вра-
щение в направлении действия электромагнитного момента. При
этом в обмотке якоря, вращающейся относительно неподвижного
поля возбуждения, индуктируется противоЭДС, которая вместе с
падением напряжения на сопротивлении якоря Ra уравновешивает
приложенное к цепи якоря напряжение
U = Ea+IaRa. (14.2)
14.1.2. ЭДС якоря
Как отмечалось ранее, ЭДС, индуктируемая в якорной обмотке
машины постоянного тока, является переменной, и поэтому ее вы-
прямляют с помощью либо коллектора, либо полупроводникового
устройства. Действительно, при вращении якоря с постоянной уг-
ловой скоростью со потокосцепление его обмотки изменяется как
косинус угла сс между осью полюса возбуждения и магнитной
осью якорной обмотки (поперечной осью машины)
уса - w0<ycos«’= иФ^созбУС
где Ф<5 - поток возбуждения (для простоты время t выбрано рав-
ным нулю, когда оси совпадают); w — число витков обмотки якоря.
По закону электромагнитной индукции ЭДС якоря
d®x .. .
еа =—— = cow<bssmcot-w- -coscot. (14.3)
dt dt
Первый член в правой части (14.3) есть ЭДС, обусловленная
относительным перемещением поля и обмотки. Второй член -
ЭДС, возникающая только при изменении амплитуды индукции Bs
во времени. При установившемся режиме большинства машин ам-
плитуда магнитной индукции в воздушном зазоре постоянна, так
что индуктируемая в якоре ЭДС
еа = йжФ^ si n cot. (14.4)
55
О 71 2тг cot
Рис. 14.4. ЭДС между щет-
ками машины постоянного
тока с сосредоточенной об-
моткой якоря
Коллектор обеспечивает двухполу-
периодное выпрямление, так что в слу-
чае сосредоточенной обмотки якоря
(рис. 14.1) и при синусоидальном рас-
пределении магнитной индукции кривая
ЭДС между щетками имеет вид, пока-
занный на рис. 14.4. Средняя за полупе-
риод ЭДС между щетками
1 г 2
Еа=— [йжФг8т(ш/р(шг) = —ймФ^, (14.5)
^0 71
Якорную обмотку принято характеризовать общим числом ак-
тивных проводников 2V. Учитывая, что каждый виток состоит из
двух активных проводников, а обмотка в общем случае имеет 2т/
параллельных ветвей, получаем:
N = 2-2a-w. (14.6)
Кроме того, целесообразно ЭДС машины постоянного тока,
имеющей р пар полюсов, выражать через механическую угловую
скорость:
^мех “ • (14.7)
Р
Подставим (14.6) и (14.7) в (14.3):
nN
Е„ = ——Фа„ = с.,ФхГЭмрх , (14.8)
и п о мех м о мех ~ ' /
2ла
pN
где см =------постоянная якоря.
2ла
Используя соотношение шмех = 2яи/60, где п - число оборотов
якоря в минуту, можно получить другую распространенную форму
записи уравнения (14.8):
Еа = у^-Фг.-» = сеФ<5« . (14-9)
2ла
pN 2л
где с„ =---= —с., - постоянная якоря.
60т/ 60
Формулы (14.3) и (14.9) показывают, что ЭДС якоря пропор-
циональна скорости вращения и магнитному потоку полюса в воз-
душном зазоре и не зависит от формы кривой распределения ин-
56
дукции. Хотя эти формулы получены для простейшей машины с
сосредоточенной обмоткой якоря, они справедливы также и для ре-
альных машин с распределенными обмотками.
14.1.3. Магнитодвижущая сила реакции якоря машины
постоянного тока
В машинах постоянного
тока магнитное поле так назы-
ваемой реакции якоря имеет
специфическую форму ввиду
того, что направление токов в
проводниках обмотки опре-
деляется только положением
щеток относительно полюсов.
На рис. 14.5 схематически
показано поперечное сечение
двухполюсной машины. Щет-
ки установлены таким обра-
зом, что изменение направле-
ния токов в проводниках
происходит по геометриче-
Рис. 14.5. Поперечное сечение двухпо-
люсной машины постоянного тока
ской нейтрали, совпадающей с поперечной осью машины q. При
этом результирующая магнитодвижущая сила (МДС) якоря на-
правлена по поперечной оси и называется МДС поперечной реак-
ции якоря. При вращении якоря рассматриваемое поле из-за дейст-
вия коллектора неподвижно в пространстве и, как видно, перпен-
дикулярно полю возбуждения.
На рис. 14.6 а машина показана в развернутом виде. Волна
МДС реакции якоря приведена на рис. 14.6 б. Она состоит из ряда
ступеней, причем высота каждой ступени равна полному току паза
2wKz’K, где wK число витков катушки, a zK - ток катушки. Обмотка
предполагается двухслойной с полным шагом. Пик волны МДС на-
ходится на поперечной оси, посередине между полюсами возбуж-
дения. Действительную кривую МДС можно приближенно пред-
ставить треугольной волной. В обмотке с большим числом пазов на
полюс действительное распределение МДС весьма близко к тре-
угольнику. Волна МДС зависит лишь от исполнения обмотки, по-
ложения щеток и симметрии магнитопровода. Однако форма волны
57
Wmm
И 12 ' -
магнитной индукции зависит не только от МДС, но и от конфигу-
рации магнитной цепи, в первую очередь, от воздушного зазора,
формы пазов и формы полюсных наконечников.
Машины постоянного тока обычно выполняют с числом по-
люсов больше двух. В этом случае, учитывая симметрию обмотки
якоря и полюсов возбуждения, анализ магнитного поля в воздуш-
ном зазоре можно выполнять для пары полюсов, считая, что усло-
вия под другими парами полюсов аналогичны.
Если, в соответствии с
законом полного тока, взять
линейный интеграл по замк-
нутому контуру (рис. 14.6 а),
который дважды пересекает
воздушный зазор и охватыва-
N
ет — проводников с током
1а
— одного направления, мож-
2а
но получить пиковое значе-
ние МДС реакции якоря на
один полюс:
12 3 4 5 6
7 8 9 10 II 12 1 2
Рис. 14.6. Распределение МДС якоря
машины постоянного тока
1
где N - общее число активных проводников якоря; р - число пар
полюсов; 1а - ток якоря; а - число пар параллельных ветвей об-
мотки якоря.
Таким образом, — есть ток параллельной ветви обмотки,
2а
равный току отдельного активного проводника. Пик МДС попе-
речной реакции якоря (рис. 14.6 6) находится строго посередине
между полюсами (по поперечной оси) машины.
Для предварительного анализа целесообразно разложить дей-
ствительную волну МДС в ряд Фурье. При этом амплитуда основ-
ной гармоники составляет 8/л-2 =0,81 пика треугольной волны.
Часто в инженерных расчетах МДС поперечной реакции якоря
на расстоянии х от оси полюса определяют по формуле
Faqx=Ax, (14.11)
58
где А ---------линейная токовая нагрузка якоря, измеряемая
2.алВа
как ток, приходящийся на единицу длины окружности якоря диа-
метром Da.
В соответствии с (14.11) МДС поперечной реакции якоря под
краем полюсного наконечника
(14-12)
где Ьи — ширина полюсного наконечника.
Реакция якоря оказывает определенное влияние как на про-
странственное распределение индукции в воздушном зазоре, так и
на результирующий поток полюсов при нагрузке.
Идеализированная кривая
МДС реакции якоря в предполо-
жении, что щетки находятся на
нейтрали, показана штриховой
линией на рис. 14.7 а. Поскольку
большинство машин постоянного
тока имеют явно выраженные по-
люса, распределение индукции
является отличным от треугольно-
го. В самом деле, считая прони-
цаемость стали равной бесконеч-
ности, имеем
Baq=^Haq=f^,
о
Fa
где Нпа - - напряженность
4 8
поля реакции якоря в воздушном
Рис. 14.7. МДС и магнитная индук-
ция поперечной реакции якоря
зазоре.
Таким образом, индукция обратно пропорциональна величине
зазора и в межполюсном пространстве, где зазор велик, она заметно
ослабляется (рис. 14.7 а, сплошная линия).
Когда щетки располагаются на геометрической нейтрали, ось
МДС реакции якоря смещена на 90° относительно оси главных по-
люсов, то есть ориентирована вдоль поперечной оси машины q.
Линии создаваемого этой МДС потока в полюсных наконечниках
59
Рис. 14.8. Силовые линии поля
поперечной реакции якоря
направлены поперек потока глав-
ных полюсов (рис. 14.8). Поэтому
реакцию якоря этого типа назы-
вают поперечной. Под одним
краем полюса она вызывает
уменьшение результирующей ин-
дукции, под другим - ее увели-
чение.
При работе машины под на-
грузкой существуют поля возбуж-
дения и реакции якоря. Результи-
рующее распределение индукции в зазоре имеет вид BSpc3
(рис. 14.7 б). Строго говоря, кривая В$ не есть алгебраическая
сумма кривых Вё$ и Baq из-за нелинейности магнитной цепи со
сталью. Вследствие насыщения стали индукция под одним краем
полюса увеличивается в меньшей степени, чем уменьшается под
другим. При этом площадь, ограниченная кривой B# , меньше
площади, ограниченной кривой В#о, на площадь заштрихованного
участка. Соответственно, результирующий поток полюса при рабо-
те машины под нагрузкой меньше потока при холостом ходе. Это
явление известно как размагничивающее действие поперечной
реакции якоря. Поскольку оно обусловлено насыщением магнито-
провода, его значение является нелинейной функцией тока возбуж-
дения и тока якоря. В обычных условиях размагничивающее дейст-
вие, как правило, значительно, особенно при больших нагрузках, и
должно быть учтено при анализах.
Искажение формы кривой распределения индукции из-за попе-
речной реакции якоря оказывает нежелательное воздействие на ком-
мутацию и ограничивает способность машины постоянного тока к
кратковременным перегрузкам. Этот эффект наиболее ярко выражен
в машинах, где возбуждение остается постоянным, в то время как
МДС реакции якоря достигает больших значений при больших на-
грузках (пример - двигатели с параллельным возбуждением).
При проектировании машины влияние поперечной реакции
якоря стремятся ослабить, увеличивая воздушный зазор, особенно
под краями полюсных наконечников. Лучшей, но и наиболее доро-
гой мерой является компенсация МДС якоря посредством компен-
60
сапионной обмотки, уложенной в пазах на полюсных наконечни-
ках и включенной последовательно с якорем.
Если щетки находятся не на нейтрали, ось МДС якоря не сов-
падает с поперечной осью машины. При этом создается не только
поперечный, но и продольный поток намагничивания или размаг-
ничивания (в зависимости от направления сдвига щеток). Точность
установки щеток можно проверить опытным путем. Если щетки
находятся на нейтрали, выходное напряжение генератора или ско-
рость двигателя должны быть неизменными при реверсировании и
прочих равных условиях.
14.1.4. Момент машины постоянного тока
Статор машины постоянного тока (рис. 14.5) имеет явно вы-
раженные полюса с помещенными на них катушками возбуждения.
Распределение потока возбуждения в воздушном зазоре симмет-
рично относительно центральной линии полюса возбуждения, ко-
торую называют продольной осью или осью d. Щетки располагают
относительно полюсов так, что коммутация имеет место, когда ак-
тивные стороны катушек (секций) якоря находятся в нейтральной
зоне посередине между полюсами. При этом ось волны МДС якоря
оказывается смещенной от продольной оси на 90°, то есть совпада-
ет с поперечной осью машины q. На рис. 14.5 шетки показаны на
поперечной оси, поскольку таково положение катушек, к которым
подсоединены щетки. В реальной машине шетки часто смещены
примерно на 90° из-за особенностей исполнения реальной обмотки
якоря.
Для удобства будем по-прежнему полагать, что распределение
потока в зазоре синусоидально. Тогда момент можно найти как ре-
зультат взаимодействия потока в зазоре по продольной оси и
основной пространственной гармоники МДС якоря F {. Когда
щетки находятся на поперечной оси, пространственный угол между
этими полями составляет 90° и его синус равен единице. При этом
уравнение электромагнитного момента 2р-полюсной машины при-
обретает вид
(14.13)
Направление этого момента можно определить по правилу ле-
вой руки.
61
Амплитуда основной пространственной гармоники МДС якоря
составляет s/я2 от пикового значения треугольного распределения
этой МДС и с учетом (14.10) определяется по выражению
F = ±F = _L*L.
aqi я2 aq я2 р а'
Подстановка (14.14)в(14 13) дает
М = Р--Фх1 =с
1Ла
(14.14)
(14.15)
pN
где см =-----постоянная якоря; 1а — ток якоря.
2лт/
Формула (14.15), полученная в предположении синусоидаль-
ного распределения магнитных полей в зазоре, справедлива и для
реальных условий. Она широко используется при анализах.
При смещении шеток с поперечной оси (часто называемой в
машинах постоянного тока геометрической нейтралью) на угол
О момент машины уменьшается (sin0<l) и при 0 = ±л/2 вообще
равен нулю. Это является одной из причин того, что в современных
машинах постоянного тока практически всегда щетки устанавли-
вают на нейтрали.
14.1.5. Коммутация в машинах постоянного тока
Назначение коллектора состоит в том, чтобы производить пе-
реключение (коммутацию) катушек обмотки якоря при переходе их
из зоны действия одного полюса в зону действия другого, противо-
положной полярности (п. 14.1.2). В реальных машинах число кату-
шек обычно велико, и в зависимости от схемы обмотки якоря и
числа полюсов эти катушки (секции) составляют то или иное коли-
Рис. 14.9. Упрощенное изо-
бражение якорной обмотки
чество параллельных ветвей обмотки. В
якорной обмотке с двумя параллель-
ными ветвями (рис. 14.9) полный ток
якоря Ia разветвляется по двум ветвям
равными долями ia. Параллельные вет-
ви неподвижны, и их пространственное
положение определяется положением
щеток относительно полюсов. Таким
образом, при вращении якоря каждая
секция обмотки последовательно пере-
62
Рис. 14.10. Кривая изменения тока в сек-
ции обмотки якоря при прямолинейной
ходит из одной параллельной
ветви в другую и т.д. При
этом ток в секции изменяется
(рис. 14.10). В конце периода
коммутации Тк ток секции
равен, но противоположен
току в начале периода. Сек-
ция в течение Тк замкнута
накоротко щеткой.
Процесс перехода секций якорной обмотки из одной парал-
лельной ветви в другую посредством короткого замыкания секций
щетками, сопровождающийся изменением направления тока сек-
ций на противоположное, называется коммутацией.
Короткозамкнутая секция представляет собой индуктивную
цепь с меняющимися во времени активными сопротивлениями ще-
точного контакта и имеет электрические и индуктивные связи с ос-
тальной частью обмотки якоря. В контуре секции внешними по от-
ношению к ней полями, существующими в коммутационной зоне, то
есть на линии геометрической нейтрали машины, индуктируются
ЭДС. Такова, например, ЭДС от поля поперечной реакции якоря.
Коммутация является одним из наиболее важных ограничи-
вающих факторов машин постоянного тока, так как возможное при
коммутации искрение вызывает подгорание и преждевременный
износ коллектора и щеток.
Основная трудность при количественном анализе коммутации
состоит в математическом описании поведения скользящего ще-
точного контакта, природа электрической проводимости которого
весьма сложна. Вольтамперная характеристика контакта нелинейна
и подвержена изменениям в зависимости от влажности и темпера-
туры среды, тока, скорости коллектора и проч. Важнейшая особен-
ность скользящего контакта в том, что повышенная плотность тока
в какой-либо части поверхности щетки вызывает повышенное па-
дение напряжения, которое по достижении определенного предела
ведет к искрению. Тогда для обеспечения безыскровой коммутации
следует уменьшить плотность тока через контактную поверхность
С этой точки зрения условия оптимальны, когда плотность тока под
щеткой неизменна в течение всего периода коммутации. Этому со-
ответствует линейное изменение тока во времени, как при прямо-
линейной коммутации (рис. 14.10).
63
Изменение сопротивлений щеточного контакта, вызываемое
линейным уменьшением площади контакта под сбегающим краем
щетки и увеличением площади под набегающим краем, способст-
вует прямолинейной коммутации. При этом имеются противодей-
ствующие факторы, в частности, индуктивность секции. ЭДС са-
моиндукции коммутируемой секции и ее ЭДС взаимоиндукции от
других секций (особенно лежащих в том же пазу, что и данная)
препятствуют изменению тока коммутируемой секции. В теории
коммутации эти ЭДС
объединяют под названием реактивной
Рис. 14.11. Замедленная
коммутация
ЭДС, которую вычисляют по приближен-
ным формулам. Под действием реактивной
ЭДС ток коммутируемой секции отстает во
времени от тока при прямолинейной ком-
мутации. Коммутацию в этом случае назы-
вают замедленной или недокоммутацией
(рис. 14.11). Повышение плотности тока
под сбегаюшим краем шетки. имеющее ме-
сто при недокоммутации, практически все-
гда приводит к искрению. Таким образом, индуктивность секции
должна быть уменьшена выбором возможно наименьшего числа ее
витков и применением многополюсной конструкции с коротким
якорем. Кроме того, влияние реактивной ЭДС ослабляется, когда
падение напряжения на щеточном контакте больше этой ЭДС.
Другой важный фактор в процессе коммутации - это появле-
ние ЭДС от внешних полей. Так, в коммутационной зоне имеется
поток поперечной реакции якоря. Соответствующая этому потоку
ЭДС также препятствует изменению тока секций. Для улучшения
коммутации в контур секции следует ввести ЭДС, которая компен-
сировала бы реактивную ЭДС и ЭДС от поля поперечной реакции
якоря. Этот принцип используется почти во всех современных ма-
шинах. Необходимую индукцию в коммутационной зоне создают с
помощью узких полюсов, помещаемых между главными полюсами,
то есть по поперечной оси (рис. 14.12). Их называют дополнитель-
ными. МДС дополнительных полюсов должна быть такой, чтобы
нейтрализовать МДС поперечной реакции якоря и создать индук-
цию, которая наводила бы в короткозамкнутой секции ЭДС, не-
сколько превышающую реактивную ЭДС. При этом обеспечивается
ускоренная коммутация (рис. 14.13). Поскольку и МДС реакции
якоря и реактивная ЭДС пропорциональны току якоря, обмотка до-
64
полнительных полюсов должна быть соединена с якорем последо-
вательно Магнитная цепь дополнительных полюсов выполняется
ненасыщенной для сохранения линейной связи между МДС и ин-
дукцией. Тогда коммутация без искрения обеспечивается в широ-
ком диапазоне нагрузок.
Рис. 14.12. Дополнительные полюса
Рис. 14.13. Ускоренная
коммутация
14.1.6. Расчет магнитной цепи электрической машины
Электрические машины, которые содержат вращающиеся час-
ти, имеют сложные сердечники с воздушными зазорами. На
рис. 14.14 показан магнитопровод 4-полюсной машины постоянно-
го тока. Ввиду его симметрии изображена только одна пара полю-
сов, для которой обычно выполняют расчет. Из-за сложной формы
магнитопровода для расчета
его разделяют на пять участ-
ков: воздушный зазор 8, зу-
бец якоря hz, ярмо якоря la,
полюс hn, ярмо станины /я.
Разделение производят так,
чтобы в пределах каждого из
участков магнитная напря-
женность оставалась постоян-
ной. По закону полного тока
Рис. 14.14. Магнитная цепь машины
постоянного тока
2м’L = 2/7 + 2Н h + IH h + 2H h + 'IH h
15 15 1' L L U Ы ft It Л Л
или, из расчета па один полюс:
и-/в = Hs8+Hzhz + Haha + Hnhn + НЯИЯ, (14 16)
где wB и iB - число витков (на один полюс) и ток обмотки возбуж-
дения.
Если пренебречь полями рассеяния, то магнитный поток вдоль
всего магнитопровода неизменен и в общем случае определяется как
3 Зак. 50
65
Ф = J#<7.S ,
где 5 - сечение любого из участков магнитопровода; В — магнитная
индукция на этом участке.
Если индукция по всему сечению участка одинакова, то
Ф = &.
При этом
В Ф
ц /ЛК
Тогда уравнение (14.16) можно записать так:
{ h. la h„ 1Я
-------1-----1------1------1----
ч $ zBz $аВа $пВп >
ГВ=Ф
(14.17)
Сюда входят R =-------магнитные сопротивления участков магни-
SjU
топровода.
Задачей расчета магнитной цепи является нахождение маг-
нитодвижущей силы (МДС), необходимой для «проталкивания»
магнитного потока данной величины вдоль замкнутого магнито-
провода заданной формы и размеров. Иногда приходится решать
обратную задачу. Главная трудность расчета связана с тем, что
магнитная проницаемость стали не постоянна, а нелинейно зависит
от индукции. Поэтому инженерные методики расчета магнитных
цепей являются в той или иной степени приближенными. Отметим,
что при малых значениях потока и, соответственно, индукций на
участках магнитопровода суммарное магнитное сопротивление в
правой части (14.17) определяется в основном магнитным сопро-
тивлением воздушного зазора, которое не зависит от магнитной
индукции. Вообще же приходится учитывать изменение магнитных
сопротивлений участков магнитопровода из-за их магнитного на-
сыщения. По результатам расчета магнитной цепи строят магнит-
ную характеристику машины, которая представляет собой зави-
симость потока в зазоре Фд (или индукции Bs) от необходимой
МДС или тока возбуждения (рис. 14.15). Магнитная характеристика
показывает степень насыщения магнитопровода машины при любом
магнитном потоке. Начальная часть ее практически линейна, по-
скольку при сравнительно малом потоке Фд участки магнитопрово-
да ненасыщены и МДС почти полностью определяется магнитным
66
Рис. 14.15. Магнитная
характеристика
сопротивлением зазора, которое
постоянно. Поэтому прямую линию
Об, касательную к магнитной ха-
рактеристике в ее начальной части,
часто называют линией воздушного
зазора. При этом отрезок аб в мас-
штабе равен МДС Fs, необходи-
мой для «проталкивания» потока Оа
через воздушный зазор. Отрезок ав
характеризует полную МДС ^F,
требуемую для прохождения пото-
ка Фд вдоль всех участков замкнутого магнитопровода. Чем больше
насышение участков магнитопровода, тем больше разница между
отрезками аб и ав. Насыщение магнитопровода принято оценивать
коэффициентом насыщения
= (14.18)
Fs аб
Обычно в машинах =1,15... 1,40. Занижение кр при проек-
тировании машины приводит к недоиспользованию ее полезного
объема, тогда как слишком большое значение к^ увеличивает в не-
допустимых пределах потребляемый ток (и мощность) возбуждения.
14.1.7. Потери мощности и КПД
Все потери в электрических машинах можно подразделить на
основные, связанные с основными электромагнитными и механи-
ческими процессами, и добавочные, обусловленные вторичными
явлениями. К основным относят потери в проводниках обмоток
(электрические потери), механические потери и потери в сердечни-
ке (магнитные потери).
Потери в проводниках обмоток (электрические) I2R имеют
место во всех обмотках машин. Обычно эти потери вычисляют, ис-
пользуя сопротивления обмоток постоянному току при 75 °C. Фак-
тически потери I2R зависят от активного сопротивления обмотки
при данной частоте тока. Дополнительные потери, обусловленные
разницей между сопротивлением постоянному току и активным
сопротивлением, учитываются как добавочные потери при нагруз-
ке. В цепях возбуждения машин постоянного тока учитывают поте-
67
3*
ри собственно в обмотках возбуждения и в регулировочных реоста-
тах. Тесно связаны с потерями в обмотках потери в скользящих
контактах колец и коллекторе.
Механические потери состоят из потерь на трение в подшип-
никах и щеточном контакте, потерь на трение поверхности ротора о
воздух и потерь на вентиляцию, если таковая имеется. Механиче-
ские потери могут быть найдены путем определения потребляемой
мощности машины, работающей при соответствующей скорости,
но ненагруженной и невозбужденной. Обычно их находят опытным
путем совместно с потерями в сердечнике с последующим разделе-
нием. В машинах с постоянной скоростью вращения механические
потери полагают неизменными при всех нагрузках.
Потери в сердечнике (магнитные) при холостом ходе состо-
ят из потерь на гистерезис и вихревые токи, возникающих при из-
менении магнитной индукции в магнитопроводе машины, когда
питается только обмотка возбуждения. В машинах постоянного то-
ка эти потери имеют место главным образом в магнитопроводе
якоря, хотя пульсации потока, обусловленные пазами на поверхно-
сти якоря, вызывают также потери в полюсах, особенно в полюс-
ных башмаках.
При определении магнитных потерь сердечник разделяют на
ряд участков из условия, что в пределах каждого из участков маг-
нитная индукция неизменна. При этом потери на гистерезис и вих-
ревые токи находят одновременно, пользуясь формулами, приво-
димыми в справочной литературе.
Добавочные потери при нагрузке состоят из потерь в сер-
дечнике, возникающих из-за искажения распределения магнитного
поля в зазоре под влиянием реакции якоря, а также потерь, обу-
словленных неравномерным распределением тока в проводниках
обмоток и в скользящем контакте. Точный учет добавочных потерь
весьма труден. Поэтому их принимают равными 1 % от отдаваемой
(для генераторов) и/или подводимой (для двигателей) мощности в
машинах постоянного тока без компенсационных обмоток и 0,5 % в
машинах с компенсационными обмотками.
Суммарные потери
2L Р ~ Рэп + Рмех Т Рмг + Рдоб •
Коэффициент полезного действия (КПД) электрической ма-
шины определяется соотношением
68
где Д — подводимая мощность; Р2 — отдаваемая мощность.
Учитывая, что
Р2=Р1-ХР’
КПД можно выразить в виде
У.р
л = 1 = 1-^- (14.19)
Р, Рх
или
Р = —(14-20)
Л + Ef
Уравнение (14.19) более удобно использовать для двигателя,
(14.20) - для генератора, поскольку в обоих случаях используются
электрические мощности, легко поддающиеся измерениям или
расчету.
КПД электрической машины силь-
но зависит от нагрузки (рис. 14.16).
Здесь 1а/ 1т=кт - коэффициент на-
грузки машины, равный току нагрузки
1а, отнесенному к номинальному току
1ан. Можно показать аналитически, что
КПД машины максимален, когда пере-
менные потери, зависящие от квадрата
тока нагрузки, равны постоянным по-
терям:
^hfF(2) = Р(0) ’
Рис. 14.16. Зависимость КПД
от нагрузки
где - электрические потери в обмотке якоря при номинальном токе
нагрузке; - постоянные потери, равные сумме механических и
магнитных потерь.
14.1.8. Нагрев и номинальные режимы работы
электрических машин
Один из наиболее важных и общих вопросов, возникающих
при использовании машин и другого электрооборудования: «Ка-
кую наибольшую выходную мошность может обеспечить маши-
на?» Ответ зависит от многих факторов, но общее требование та-
69
ково, что срок службы машины не должен уменьшаться из-за
чрезмерных перегревов. Поэтому при определении номинальной
мощности учитывают увеличение температуры, обусловленное
потерями. Рабочая температура машины связана с ожидаемым
сроком службы, поскольку старение изоляции обмоток есть
функция времени и температуры. Во многих случаях долговеч-
ность изоляции S определяется экспонентой
в
S = Ae?,
где А и В — постоянные величины; Т— температура изоляции.
На практике можно пользоваться приближенным правилом, со-
гласно которому время разрушения органической изоляции умень-
шается вдвое при каждом увеличении температуры на 8... 10 °C.
Соотношения «долговечность—температура», получаемые опыт-
ным путем, позволяют классифицировать изоляцию по допустимым
превышениям температур (над температурой окружающей среды).
ГОСТом установлены следующие превышения температур при тем-
пературе окружающей среды +35 °C: класс изоляции А - 65 °C,
класс Е - 75 °C, класс В - 85 °C, класс F - 105 °C, класс Н - 130 °C.
Номинальная мощность машины устанавливается из условия,
что рабочая температура обмотки не превышает допустимую для
данного класса изоляции. Наиболее часто применяется номиналь-
ная продолжительная мощность, определяющая выходную мощ-
ность (в кВт для генераторов постоянного тока и двигателей, в кВА
при заданном коэффициенте мощности для генераторов перемен-
ного тока), которую может обеспечить машина в течение сколь
угодно продолжительного времени без превышения допустимой
температуры изоляции.
14.2. Основы анализа установившейся работы машин
постоянного тока
14.2.1. Классификация машин постоянного тока
по способу возбуждения
Большим достоинством машин постоянного тока является ши-
рокое разнообразие рабочих характеристик, которые можно полу-
чить выбором способа возбуждения. Обмотку возбуждения (ОВ)
можно питать от внешнего источника постоянного тока, получив
70
независимое возбуждение (рис. 14.17 а). ОВ генераторов с само-
возбуждением могут быть включены по трем различным схемам:
последовательно с якорем (рис. 14.17 6), параллельно якорю (рис.
14.17 в) и, при наличии двух ОВ, смешанно (рис. 14.17 г). Любую
из схем возбуждения используют и для двигателей, получая мо-
ментно-скоростные или механические характеристики разнообраз-
ного вида.
Рис. 14.17. Схемы соединения машин постоянного тока
14.2.2. Энергетические диаграммы
При анализе машин постоянного тока базовыми являются со-
отношения для ЭДС якоря и электромагнитного момента, получен-
ные ранее:
£«=£мФДЧ1Сх; (14.21)
Мэы=смФб1а. (14.22)
Электрическую мощность якоря Еа1а можно назвать электро-
магнитной, поскольку она по (14.21) и (14.22) связана с электро-
магнитным моментом соотношением
Еа1а = Мзысоыех = Р.ы (14.23)
и, таким образом, в специфической форме выражает преобразова-
ние электрической мощности в механическую (или наоборот).
Баланс мощностей машины (рис. 14.15 г) соответственно для
режимов генератора и двигателя при установившемся режиме мож-
но представить в форме так называемых энергетических диаграмм
(рис. 14.18, 14.19).
71
Рис. 14.18. Энергетическая диаграмма генератора
постоянного тока со смешанным возбуждением
Рис. 14. 19. Энергетическая диаграмма двигателя
постоянного тока со смешанным возбуждением
Подводимая к валу генератора посредством первичного двига-
теля механическая мощность Р] за вычетом механических рыек, маг-
нитных рыт и добавочных рпо5 потерь преобразуется в электромаг-
нитную мощность Рзы. Последняя частично расходуется в виде элек-
трических потерь на сопротивлении цепи якоря Ra (которое кроме
сопротивления собственно якоря включает в себя сопротивления об-
мотки дополнительных полюсов и компенсационной, а также сопро-
тивление щеточного контакта) и потерь в последовательной и парал-
лельной обмотках возбуждения. Остальная часть электромагнитной
мощности отдается нагрузке, подключенной к генератору, и является
полезной мощностью Р2.
В режиме двигателя первичная мощность Р{ = UIn потребляет-
ся из сети. За вычетом потерь на возбуждение и электрических по-
терь в цепи якоря, эта мощность преобразуется в полную механи-
ческую мощность машины, численно равную электромагнитной
мощности. Полезная механическая мощность на валу двигателя Р2
72
равна полной механической мощности минус мощность механиче-
ских, магнитных и добавочных потерь.
Аналогичные диаграммы можно построить для машин с дру-
гими схемами соединения обмоток.
14.2.3. Уравнения моментов
При установившемся режиме (69МСХ = 2тгп = const) имеет место
равновесие моментов машины.
Для генераторного режима
Мв-ЛДм-7Ио=О, (14.24)
л,
где М в =-----момент, прикладываемый к валу генератора со сторо-
^мех
ны первичного двигателя и действующий в направлении вращения;
Р
Мэы — ——---электромагнитный момент, в режиме генератора дейст-
^мех
вующий против направления вращения; Мо - —^М| + ^до6 _
^мех
тормозящий момент холостого хода, обусловленный механически-
ми, магнитными и добавочными потерями.
Для двигательного режима
Мэм-Мв-Л/о=О, (14.25)
Р
где Мэы =—— - положительный электромагнитный момент;
^мех
Л
Мв =-------тормозящий момент, прикладываемый к валу двигате-
^мех
ля со стороны рабочей машины и называемый в совокупности с Мо
статическим моментом сопротивления ( Мс = Мв + Мо ); Мо - тор-
мозящий момент холостого хода.
В переходном режиме (б9мех = var) появляется так называемый
динамический момент
(14.26)
at
где J- суммарный момент инерции вращающихся частей агрегата.
Динамический момент характеризует изменение (увеличение
или уменьшение) кинетической энергии вращающихся масс. Ди-
намический момент препятствует любым изменениям скорости и
73
при нарастании скорости он положителен, при ее снижении - от-
рицателен.
Таким образом, в неустановившемся режиме уравнения равно-
весия моментов (14.24) и (14.25) приобретают вид
Мв-ЛДм-Л70 = Мдин, (14.27)
Л7эм-Мв-Л70 = Мдин. (14.28)
Отметим, что уравнения (14.24) и (14.25), (14.27) и (14.28)
справедливы для всех типов электрических машин.
14.2.4. Уравнения напряжений и токов
Уравнение равновесия напряжений цепи якоря машины со
смешанным возбуждением имеет вид
^=£„±/„(^ + ^36 2); (П-29)
где знак «+» соответствует двигательному, а знак «—» — генераторному
режиму.
Когда последовательная обмотка возбуждения отсутствует,
сопротивление 7?воз6 2 должно быть опущено.
Соотношение для токов
4 =4 ±4- (изо)
Здесь знак «+» соответствует двигателю, знак «-» - генератору.
14.2.5. Рабочий магнитный поток
При холостом ходе машины результирующая МДС по продоль-
ной оси машины равна алгебраической сумме МДС обмоток главных
полюсов. В машине со смешанным возбуждением, имеющей парал-
лельную обмотку с и’в1 витков на полюс и последовательную обмот-
ку с и’в2 витков на полюс, результирующая МДС на один полюс
£b=41%I±42Wb2- (14.31)
Когда на главных полюсах, кроме названных, имеются другие
обмотки для обеспечения какого-либо управления, в уравнение
(14.31) вводят дополнительные члены. Знак «+» используется при
совпадении направлений МДС (согласное включение обмоток);
знак «-» при противоположной направленности МДС (встречное
включение).
Рабочий поток полюса можно найти с помощью результирую-
щей МДС возбуждения FB и магнитной характеристики. Обычно
74
магнитную характеристику строят в координатах магнитного потока
и тока основной обмотки возбуждения, которой почти неизменно яв-
ляется параллельная обмотка, если таковая имеется вообще. В этом
случае при нахождении потока целесообразно использовать некото-
рый эквивалентный ток возбуждения, получаемый простым делением
всех членов (14.31) на число витков основной обмотки ик1:
И’ о
Акв=41±42 — (14.32)
Нв1
При работе машины под нагрузкой поперечная реакция якоря
оказывает размагничивающее действие по продольной оси машины
(разд. 14.1.4), которое можно выразить в виде эквивалентной МДС
Д/^, действующей по продольной оси навстречу результирующей
МДС возбуждения. Тогда уравнение (14.31) может быть записано в
виде
Fb' = 7b1wb1±/b2wb2-AF9. (14.33)
Находят Д/^ с помощью так
называемой переходной характе-
ристики — зависимости магнитной
индукции в воздушном зазоре Вё
при холостом ходе от суммы МДС
зазора и зубцов FSz (рис. 14.20).
Допустим, что индукция в воз-
душном зазоре при холостом ходе
равна отрезку аб, тогда МДС в за-
зоре и в зубцах, обеспечиваемая
обмоткой возбуждения, равна от-
резку 0о. При работе машины под
нагрузкой МДС, действующая на
Рис. 14.20. К определению размаг-
ничивающего действия поперечной
реакции якоря
оси главного полюса, остается
прежней, а под краями полюсного наконечника МДС
Лсп.=Л>г±^, (14.34)
где Faq = А^- - МДС поперечной реакции якоря под краем полюс-
ного наконечника.
При этом распределение индукции в зазоре под полюсным на-
конечником при нагрузке имеет вид кривой гбе. Поскольку отрезок
вд по построению пропорционален ширине полюсного наконечни-
75
ка bti, площадь криволинейной трапеции вгбеда соответствует маг-
нитному потоку полюса при работе машины под нагрузкой. С дру-
гой стороны, площадь прямоугольника вжбзда характеризует поток
полюса при холостом ходе. Разница площадей составляет умень-
шение потока полюса вследствие размагничивающего действия по-
перечной реакции якоря. Если каким-либо образом найти площадь
трапеции вгбеда и построить подобный ей прямоугольник
вж клз'да, то площадь прямоугольника ж'жбзз'лкж' будет соответ-
ствовать уменьшению потока полюса при нагрузке, а отрезок бл -
уменьшению средней индукции под полюсом. Отрезок кл в мас-
штабе МДС характеризует размагничивающее действие попереч-
ной реакции якоря, так что результирующая МДС по продольной
оси машины уменьшается на значение AFq в соответствии с
(14.33). Таким образом, если при нагрузке машины необходимо
обеспечить тот же поток в полюсах, что и при холостом ходе, МДС
возбуждения должна быть увеличена на AFq. Размагничивающее
действие МДС наибольшее, когда магнитопровод машины нор-
мально насыщен, то есть рабочая точка помещается на перегибе
магнитной характеристики или характеристики холостого хода.
При этом AFq пропорциональна току якоря.
14.3. Генераторы постоянного тока
Скорость генератора обычно задается первичным двигателем и
считается постоянной. Анализ заключается в определении напря-
жения на зажимах, соответствующего данной нагрузке и току воз-
буждения, или нахождению тока возбуждения, требуемого при
данных нагрузке и напряжении на зажимах. Напротив, в случае
двигателя необходимо найти скорость, соответствующую данной
нагрузке и возбуждению, или определить ток возбуждения при дан-
ной скорости и нагрузке, полагая напряжение питания постоянным.
14.3.1. Электрические характеристики генераторов
постоянного тока
Электрические свойства генераторов описываются характери-
стиками холостого хода, короткого замыкания и др.
Характеристика холостого хода есть зависимость ЭДС якоря
от тока возбуждения, когда нагрузка в цепи якоря отсутствует, а
76
скорость постоянна. Поскольку характеристика в соответствующем
масштабе повторяет магнитную характеристику машины и не зави-
сит от способа включения обмотки возбуждения, ее получают
опытным путем, как правило, при независимом питании этой об-
мотки. Цепь якоря при этом разомкнута для нагрузки. Вследствие
магнитного гистерезиса характеристика холостого хода неодно-
значна и поэтому при ее опытном получении сначала увеличивают
ток возбуждения от нуля до значения, когда Еа = 1,1(7Н, затем
уменьшают до нуля, получая восходящую и нисходящую ветви
кривой (рис. 14.21). Для практических целей пользуются усреднен-
ной характеристикой (штриховая линия). Отметим, что при 1В = О
обычно имеется некоторая ЭДС £ост, индуктируемая в якоре пото-
ком остаточного магнетизма. Иногда характеристику снимают и
при отрицательных значениях /в, при этом соответствующая часть
характеристики холостого хода располагается в третьем квадранте.
Характеристика короткого замыкания представляет собой
зависимость тока якоря от тока возбуждения при замкнутой нако-
ротко цепи якоря и постоянной скорости. Характеристика коротко-
го замыкания может быть получена только при независимом пита-
нии обмотки возбуждения, так как в случае параллельного ее вклю-
чения напряжение, прикладываемое к цепи возбуждения при ко-
ротком замыкании якоре, равно нулю. Поскольку при коротком за-
мыкании напряжение на зажимах якоря равно нулю, уравнение
(14.2) записывают в виде
Ea=laKRa-
Сопротивление цепи якоря Ra обычно невелико и при токе ко-
роткого замыкания /ок, близком или равном номинальному току
якоря 1т, ЭДС Еа и создающий ее магнитный поток малы, так что
характеристика короткого замыкания практически прямолинейна. Во
избежание чрезмерных токов в цепи якоря опыт короткого замыка-
ния производят, начиная с нулевого тока возбуждения и плавно уве-
личивая его до тех пор, пока ток якоря не достигнет номинального
значения. При этом характеристику короткого замыкания можно по-
строить по двум точкам (кривая 1 на рис. 14.22). Ее смещение отно-
сительно начала координат объясняется наличием остаточного маг-
нетизма. Ее часто переносят в начало координат (кривая 2).
Внешней характеристикой генератора называют зависимость
напряжения на его зажимах (выходного напряжения) от тока на-
77
грузки при неизменных сопротивлениях цепей возбуждения и по-
стоянной скорости. Вид внешней характеристики существенно
зависит от способа возбуждения. В установившемся режиме для
цепи якоря генератора справедливо соотношение
U = Ea-laRa. (14.35)
Рис. 14.22. Характеристика
короткого замыкания
Рис. 14.21. Характеристика холостого
хода генератора с независимым
возбуждением
Напряжение на зажимах генератора с независимым возбуж-
дением при увеличении тока нагрузки по (14.35) несколько пони-
жается, главным образом из-за падения напряжения на сопротивле-
нии цепи якоря. Кроме того, имеется некоторое уменьшение ре-
зультирующего потока по продольной оси и соответственно
уменьшение ЭДС якоря Еа и выходного напряжения U из-за раз-
СА
Рис. 14.23. Внешние характеристики
генераторов постоянного тока
магничивающего действия попе-
речной реакции якоря (кривая 1
на рис. 14.23). В случае генера-
тора с параллельным возбуж-
дением выходное напряжение
уменьшается в большей степени
(кривая 2), так как при неизмен-
ном сопротивлении обмотки
возбуждения, подключенной к
зажимам якоря, ток возбуждения
при увеличении нагрузки гене-
ратора понижается. В результате
характеристика 2 более мягкая,
чем характеристика 1.
78
Ток возбуждения генератора с последовательным возбужде-
нием равен току якоря, так что поток в воздушном зазоре и, следо-
вательно, ЭДС и напряжение на зажимах изменяются в широких
пределах (кривая 3). Поэтому генераторы с последовательным воз-
буждением практически не применяются.
В генераторах со смешанным возбуждением обмотки возбуж-
дения обычно подключены так, что их МДС суммируются (соглас-
ное включение). В этом случае благодаря действию последователь-
ной обмотки поток полюса может увеличиваться с увеличением на-
грузки, напряжение на зажимах почти постоянно или даже несколь-
ко возрастает при увеличении нагрузки (кривая 4). Напротив, когда
МДС последовательной обмотки вычитается из МДС параллельной
обмотки, являющейся обычно основной (встречное включение), по-
ток полюса с ростом нагрузки заметно уменьшается и напряжение на
зажимах резко понижается, достигая нуля при сравнительно не-
большом токе якоря (кривая 5). На этом основании встречное вклю-
чение обмоток возбуждения используют в тех случаях, когда необ-
ходимо ограничить ток короткого замыкания генератора.
Регулировочная характеристика представляет собой зави-
симость тока основной обмотки возбуждения от тока якоря при по-
стоянном напряжении на зажимах генератора. Она показывает, как
нужно изменять ток возбуждения при изменении нагрузки для под-
держания постоянства выходного напряжения.
Вид регулировочной характеристики определяется внешней
характеристикой. Так, на рис. 14.24 представлены регулировочные
характеристики, соответствующие
веденным на рис. 14.23 (в случае
последовательного возбуждения
регулировочная характеристика
не имеет смысла). Регулировоч-
ная характеристика 1 генератора
с независимым возбуждением
показывает, что при увеличении
нагрузки ток возбуждения необ-
ходимо несколько увеличивать,
иначе выходное напряжение со-
гласно кривой 1 (рис. 14.23)
уменьшается. Если выходное
напряжение с нагрузкой увели-
внешним характеристикам, при-
Рис. 14.24. Регулировочные
характеристики генераторов
постоянного тока
79
чивается по кривой 4 (рис. 14.23), ток возбуждения для поддержа-
ния напряжения постоянным нужно уменьшить (кривая 4 на рис.
14.24). Нелинейность регулировочных характеристик обусловлена
изменением насыщения магнитной цепи при регулировании тока
возбуждения.
Нагрузочная характеристика — это зависимость напряжения
на зажимах генератора от тока возбуждения при неизменном токе
нагрузки и постоянной скорости. Обычно строят семейство нагру-
Рис. 14.25. Нагрузочные
характеристики
зочных характеристик (рис.
14.25) при нескольких значени-
ях тока нагрузки. Нагрузочные
характеристики напоминают ха-
рактеристику холостого хода,
которая, в сущности, является
частным случаем нагрузочной
при 1а = 0. Смещение нагрузоч-
ных характеристик относитель-
но характеристик холостого хо-
да объясняется падением на-
пряжения на сопротивления якоря и размагничивающим действием
поперечной реакции якоря.
14.3.2. Самовозбуждение генератора с параллельным
возбуждением
Самовозбуждение есть лавинообразный и самопроизвольный
процесс нарастания напряжения на зажимах генератора, происхо-
дящий при включении обмотки возбуждения параллельно с якорем.
Одним из необходимых условий самовозбуждения (но недостаточ-
ным) является наличие потока остаточного магнетизма в магнито-
проводе машины, который обычно составляет 2...3 % от номиналь-
ного. Этот поток индуктирует в обмотке вращающегося якоря не-
большую ЭДС, которая, будучи приложенной к обмотке возбужде-
ния, вызывает протекание в ней небольшого начального тока. Если
создаваемый этим током поток совпадает по направлению с оста-
точным потоком, результирующий поток и, следовательно, ЭДС
якоря увеличиваются. Это, в свою очередь, вызывает увеличение
тока возбуждения и т.д. Процесс продолжается до тех пор, пока
ЭДС якоря и напряжение на зажимах генератора не достигнут ус-
80
Рис. 14.26. К определению
критического сопротивления
цепи возбуждения
тановившихся значений. Если обмотка возбуждения подключена к
якорю так, что создаваемый ею поток направлен навстречу потоку
остаточного магнетизма, самовозбуждения не происходит. Тогда
концы обмотки возбуждения следует поменять местами.
Более подробно процесс самовозбуждения рассмотрим на
примере генератора с параллельным возбуждением, цепь якоря ко-
торого не замкнута на нагрузку.
Уравнение напряжений цепи
якоря, по которому протекает
только ток возбуждения, имеет вид
^ = ea~iBRa,
где еа - ЭДС якоря, значение ко-
торой при любых токах возбуж-
дения можно найти по характери-
стике холостого хода (рис. 14.26).
Так как ток /в мал, можно с
достаточной точностью принять
и - еа. Поскольку в процессе са-
мовозбуждения ток возбуждения
возрастает, уравнение цепи запи-
сывают в виде
~ ^в'в "1"
где LB - суммарная индуктивность якоря и цепи возбуждения
(в первом приближении постоянна).
Уравнение (14.36) графически представлено на рис. 14.26, где
прямая линия Оа соответствует функции RBiB = Таким обра-
зом, —----- характеризует скорость изменения тока возбуждения.
dt
По уравнению (14.36)
= ео-Лвгв.
На рис. 14.26 эта производная определяется при любом zB как
разность ординат характеристики холостого хода и линии От/. Ясно,
что положительные значения —-------- соответствуют нарастанию
dt
81
тока возбуждения. Когда —v - = 0. как в точке а, изменения тока
dt
нет, то есть достигнуто установившееся состояние и напряжение на
зажимах генератора равно О. Скорость нарастания /в в процессе
самовозбуждения, во-первых, непостоянна, во-вторых, зависит от
наклона линии Ocz. Если линия 0а занимает положение 0а . само-
возбуждение проходит слабо и установившееся напряжение мало.
При еще большем уменьшении наклона самовозбуждения не про-
исходит вовсе. Поэтому сопротивление цепи возбуждения, соответ-
ствующее линии 0а', называют критическим (7?вкр). Оно может
быть найдено как тангенс угла наклона касательной характеристи-
ки холостого хода в ее начальной части. Процесс самовозбуждения
проходит устойчиво при всех RB < RB .
14.4. Двигатели постоянного тока
14.4.1. Пуск в ход двигателя с параллельным возбуждением
Особенностью процесса пуска являются весьма значительные
токи в обмотке якоря. Так, в начале пуска, когда скорость и ЭДС
якоря равны нулю, уравнение (14.2) принимает вид
^='а.ИлЛ-
Поэтому начальный пусковой ток
(14.37)
определяется малым сопротивлением якоря Ra и при напряжении
U = UH в 10...50 раз превышает номинальный ток. По мере разгона
двигателя ЭДС якоря возрастает, а пусковой ток постепенно
уменьшается, достигая установившегося значения. Несмотря на
сравнительную кратковременность протекания пусковых токов,
они могут вызвать повреждение якоря. Таким образом, при пуске
двигателя в ход стремятся обеспечить требуемый пусковой момент,
ограничив при этом пусковой ток в обмотке якоря.
В соответствии с (14.37) пусковой ток можно ограничить дву-
мя способами: уменьшая на период пуска напряжение питания или
увеличивая Ru путем введения в цепь якоря добавочного пускового
сопротивления. Первый способ требует источника регулируемого
82
напряжения и применяется поэтому срав-
нительно редко, главным образом, для
двигателей большой мощности. Наиболь-
шее распространение имеет второй способ
(рис. 14.27).
Непосредственно перед пуском сопро-
тивление /?„ полностью введено в цепь
якоря. В процессе разгона двигателя
плавно или ступенями выводят. Расчет со-
противлений ступеней производят из усло-
вия обеспечения заданных значений мо-
мента и тока. По достижении установив-
шейся скорости Rn должно быть полно-
Рис. 14.27. Упрощенная
схема пуска двигателя
с параллельным
возбуждением
стью выведено, так как оно не рассчитано
на длительное протекание тока якоря. Регу-
лировочное сопротивление в цепи возбуж-
дсния Дрег на период пуска полностью выводят, обеспечивая наи-
больший ток возбуждения. При этом рабочий поток максимален и
двигатель развивает наибольший возможный при данных токах яко-
ря момент, что существенно сокращает продолжительность разгона.
14.4.2. Скоростные и механические характеристики
Скоростная характеристика двигателя есть зависимость
скорости вращения от тока якоря при неизменных напряжении пи-
тания и сопротивлениях цепей возбуждения.
Уравнение равновесия напряжений цепи якоря имеет вид
U = Ea+IoRa. (14.38)
ЭДС якоря
£й=смф^мех- (14.39)
Подстановка (14.38) в (14.39) после небольших преобразова-
ний даст
(14.40)
Уравнение (14.40) является аналитическим выражением скоро-
стной характеристики двигателя постоянного тока.
При независимом или параллельном низании обмотки воз-
буждения ее ток не зависит от тока якоря (тока нагрузки) и рабочий
83
Рис. 14.28. Скоростные характери-
стикидвш ателей постоянного тока
поток Фл можно считать постоянным. Тогда из уравнения (14.40)
можно видеть, что при увеличении нагрузки скорость двигателя сни-
жается из-за падения напряжения IaRa в цепи якоря. В действитель-
ности поток Ф(!) с ростом тока якоря несколько уменьшается вслед-
ствие размагничивающего действия поперечной реакции якоря, что
вызывает относительное возрастание скорости. Так как размагничи-
вание обычно не столь велико, скоростная характеристика двигателя
в результате имеет падающий характер и почти прямолинейна (кри-
вая 1, рис. 14.28).
В машинах с большим насыщением зубцов якоря размагничи-
вающее действие реакции якоря велико и скоростная характеристи-
ка может иметь вид кривой Г
(рис. 14.28). Поскольку устойчи-
вая работа двигателя с такой ха-
рактеристикой практически не-
возможна (см. разд. 14.4.5), для
компенсации размагничивающего
действия реакции якоря исполь-
зуют согласно включенную по-
следовательную обмотку с не-
большой МДС. Эту обмотку на-
зывают стабилизирующей, имея
в виду ее влияние на скоростную
характеристику. Характерно, что
при идеальном холостом ходе двигателя, когда ток якоря равен ну-
лю, скорость имеет конечное значение шмех0:
й7мехО = • (14.41)
смфЛ
В двигателе с последовательным возбуждением ток возбуж-
дения равен току якоря, так что, пренебрегая насыщением магни-
топровода, можно принять
^S=kla, (14.42)
где к - постоянный коэффициент.
Подставим (14.42) в (14.40):
(14.43)
где си = ксм - постоянная для данной машины.
84
Зависимость скорости от тока якоря в этом случае гиперболи-
ческая. При малых токах скорость большая, с ростом тока скорость
понижается (кривая 2 на рис. 14.28). Ввиду этого скоростную ха-
рактеристику двигателя с последовательным возбуждением име-
нуют мягкой в отличие от жесткой характеристики двигателя с
параллельным возбуждением. Отличительной особенностью двига-
теля с последовательным возбуждением является большая скорость
при холостом ходе, способная привести к механическим поврежде-
ниям якоря. Поэтому работа двигателя при холостом ходе не до-
пускается. Обычно минимальная допустимая нагрузка равна
0,2...0,25Рн.
Двигатели со смешанным возбуждением используют при
согласном включении параллельной и последовательной обмоток,
так как при встречном их включении двигатель имеет скоростную
характеристику, при которой невозможна его устойчивая работа.
Совместное действие обмоток возбуждения таково, что двигатель
имеет скоростную характеристику (кривая 3 на рис. 14.28), которая
сочетает в себе основные особенности характеристик при парал-
лельном и последовательном возбуждении. Двигатель со смешанным
возбуждением имеет конечную скорость идеального холостого хода
подобно двигателю с параллельным возбуждением. Эта скорость по
(14.41) определяется потоком, создаваемым параллельной обмоткой
возбуждения при 1а - 0. С другой стороны, изменение тока якоря со-
провождается значительным изменением скорости аналогично двига-
телю с последовательным возбуждением.
При практических расчетах вместо скоростных используют
обычно механические характеристики. Механическая характери-
стика представляет собой зависимость скорости вращения от элек-
тромагнитного момента двигателя <дмех - /(Л/Эм) или, наоборот,
зависимость момента от скорости М.т = ,/ (<Дмех) при неизменном
напряжении питания. По форме механические характеристики
близки скоростным.
14.4.3. Моментные характеристики
Моментной характеристикой двигателя называют зависи-
мость электромагнитного момента от тока якоря при постоянном
напряжении питания и неизменных сопротивлениях цепей возбуж-
дения.
85
Электромагнитный момент машины постоянного тока по
(14.22) выражается формулой
^эм=СмФ^о.
В двигателе с параллельным возбуждением, если пренеб-
речь реакцией якоря, рабочий поток постоянен при неизменном то-
ке возбуждения. Тогда
Рис. 14.29. Моментные характери-
стики двигателей постоянного тока
момент пропорционален току якоря
Мзм =1а и моментная характе-
ристика (кривая 1 на рис. 14.29)
имеет вид прямой линии.
В двигателе с последова-
тельным возбуждением рабочий
поток, если пренебречь насыще-
нием, пропорционален току яко-
ря, следовательно, момент про-
порционален квадрату тока яко-
ря. Соответствующая моментная
характеристика имеет вид квад-
ратичной параболы (рис. 14.29,
кривая 2). Вследствие насыщения магнитопровода и размагничи-
вающего действия реакции якоря действительные моменты не-
сколько меньше задаваемых графиком, особенно в области боль-
ших токов.
Сопоставление кривых 1 и 2 на рис. 14.29 показывает, что в
рабочем диапазоне токов двигатель с последовательным возбужде-
нием развивает больший момент, чем двигатель с параллельным
возбуждением. Это объясняется значительным уменьшением ско-
рости двигателя с последовательным возбуждением при увеличе-
нии нагрузки. Ввиду этой особенности пусковой момент двигателя
с последовательным возбуждением значительно выше, чем двига-
теля с параллельным возбуждением. Поэтому из-за особенностей
скоростных характеристик двигатели с последовательным возбуж-
дением используются преимущественно как тяговые, например, на
электрифицированном транспорте.
14.4.4. Рабочие характеристики
Рабочими характеристиками двигателя принято называть зави-
симости потребляемой мощности Р}, потребляемого тока I, КПД р,
момента Ммех и скорости о»мех от полезной мощности Р2 при посто-
86
янном напряжении питания и неиз-
менных сопротивлениях цепей воз-
буждения. Рабочие характеристики
двигателя постоянного тока (рис.
14.30) мотуг быть получены как
опытным, так и расчетным путем.
14.4.5. Условие устойчивой
работы агрегата
двигатель-рабочая машина
Рис. 14.30. Рабочие характеристики
двигателя с параллельным
возбуждением
При выборе приводного двига-
теля для рабочей машины возника-
ет вопрос об устойчивости работы данной пары, который разреша-
ют, сопоставляя их механические характеристики: Мэм - f (<Умех) и
Мс= f (сом&у.). Очевидно, что совместная установившаяся работа
двигателя и рабочей машины возможна в точке пересечения харак-
теристик 1 (рис. 14.31 а), где двигатель развивает такой момент, ка-
кой необходим рабочей машине. Это согласуется с уравнением мо-
ментов (14.25). Установившаяся скорость агрегата равна <Умех].
Предположим теперь, что эта скорость по какой-либо причине воз-
росла на A(t). Имевшееся равновесие моментов нарушается, и на
вал агрегата действует динамический момент, равный разности
М)м - Мс. Этот момент отрицательный (то есть тормозящий), так
как Мс > М.т, действует в сторону уменьшения скорости, стремясь
возвратить агрегат в точку 1. Напротив, при уменьшении скорости
появляется положительный динамический момент, способствую-
Рис. 14.31. К определению условия устойчивой работы
87
щий увеличению скорости. Таким образом, при данном соотноше-
нии между механическими характеристиками обеспечивается ус-
тойчивая работа агрегата.
На рис. 14.31 б представлены механические характеристики,
которые не обеспечивают устойчивой работы. В самом деле, здесь
увеличение скорости на Ьм вызывает появление положительного
динамического момента, который стремится еще больше увеличить
скорость. При уменьшении скорости возникает отрицательный ди-
намический момент, содействующий дальнейшему уменьшению
скорости вплоть до полной остановки агрегата.
Сопоставление характеристик (рис. 14.31) позволяет предста-
вить условие устойчивости работы агрегата в виде
(14.43)
ОЙЛ™,
мех мех
которое справедливо для двигателей как постоянного, так и перемен-
ного тока.
14.5. Регулирование скорости двигателей постоянного тока
Двигатели постоянного тока более пригодны для работы с из-
меняющейся скоростью, чем двигатели переменного тока. В этом
одна из главных причин высокой конкурентоспособности машин
постоянного тока, которые используются практически всюду, где
требуется плавное регулирование скорости в широком диапазоне.
Из скоростной характеристики (14.40) можно видеть, что
принципиально возможны три способа регулирования скорости:
1) изменением рабочего магнитного потока; 2) изменением сопро-
тивления цепи якоря; 3) изменением напряжения на зажимах якоря.
Ниже рассмотрены особенности названных способов.
14.5.1. Регулирование скорости изменением
рабочего магнитного потока
Этот способ применяется широко, особенно для двигателей с
параллельным возбуждением. Изменение тока возбуждения, следо-
вательно, рабочего потока Фй- и скорости с помощью реостата в
цепи параллельной обмотки возбуждения осуществляется просто и
без заметного изменения потерь мощности в двигателе.
Согласно (14.40) наименьшая возможная скорость соответству-
88
ет полному потоку или нулевому сопротивлению реостата в це-
пи возбуждения. При уменьшении потока скорость возрастает. Наи-
меньшая скорость ограничена влиянием реакции якоря, вызывающей
при слабом возбуждении неустойчивую работу или неудовлетвори-
тельную коммутацию. Применение стабилизирующей последова-
тельной обмотки возбуждения заметно увеличивает диапазон регу-
лирования скорости. Еще большему увеличению этого диапазона
способствует компенсационная обмотка. При наличии последней ре-
гулирование скорости можно производить в пределах 1:5 и даже 1:8.
Если пренебречь размагничивающим действием реакции якоря,
то скоростные (механические) характеристики двигателя с парал-
лельным возбуждением при
различных значениях маг-
нитного потока (рис.
14.32) имеют вид прямых,
выходящих из общей точки
на оси токов, которая соот-
ветствует току короткого
замыкания
Рис. 14.32. Скоростные (механические)
характеристики двигателя с параллельным
возбуждением при изменении магнитного
потока
Для приближенной
оценки допустимой про-
должительной мощности
двигателя при меняющейся скорости примем, что интенсивность
обдува, а также механические и магнитные потери неизменны. То-
гда по условию допустимого нагрева предельный ток якоря 1а ра-
вен номинальному значению. ЭДС самоиндукции якоря Еа при
любой скорости одинакова, так как изменение скорости компенси-
руется изменением потока. Таким образом, электромагнитная мощ-
ность Еа1а и допустимая выходная мощность двигателя остаются
практически постоянными во всем диапазоне скоростей. Потому
регулирование скорости двигателя постоянного тока посредством
реостата в цепи возбуждения называют регулированием при посто-
янной мощности. Напротив, электромагнитный момент изменяется
пропорционально магнитному потоку и имеет наибольшее значе-
ние при малой скорости. Отсюда вытекает, что данный способ ре-
гулирования наиболее пригоден для приводов, требующих повы-
89
шенных моментов при малых скоростях. Если регулируемый таким
способом двигатель используется в установке, требующей посто-
янного момента в заданном диапазоне скоростей, номинальная
мощность двигателя определяется как произведение момента на
наибольшую скорость. Такой привод является завышенным по
мощности при меньших скоростях. Это главный экономический
фактор, сужающий диапазон регулирования скорости двигателей
большой мощности до 1 ;2.
Описанный способ регулирования применим также для двига-
телей с последовательным возбуждением. В этом случае изменение
рабочего потока обеспечивают, шунтируя последовательную об-
мотку переменным резистором или изменяя число витков этой об-
мотки. На практике чаще всего используют шунтирование.
14.5.2. Регулирование скорости изменением
сопротивления цепи якоря
В соответствии с (14.40) введение добавочного последователь-
ного сопротивления в цепь якоря вызывает уменьшение скорости.
Этот способ применяется для двигателей с последовательным, па-
раллельным и смешанным возбуждением. В последних двух случа-
ях регулировочный резистор должен быть включен так, чтобы на
параллельной обмотке возбуждения было полное напряжение пи-
тающей сети.
Скоростные (механические) характеристики двигателя с парал-
лельным возбуждением при различных значениях сопротивления ре-
гулировочного резистора Rp в цепи якоря (если пренебречь реакци-
ей якоря) прямолинейны (рис. 14.33). При 7?р =0 скоростную харак-
теристику называют естественной. Характеристики, получаемые
при Rp т^О, принято именовать реостатными. Все характеристики
сходятся в общей точке щмех0, так как при малых токах якоря паде-
ние напряжения от этих токов на сопротивлении цепи якоря оказы-
вает малое влияние на скорость двигателя. Отсюда следует, что не-
зависимо от сопротивления в цепи якоря сброс нагрузки сопровож-
дается возрастанием скорости двигателя до значения, близкого к но-
минальному. Эго недостаток данного способа регулирования, при-
емлемый только в двигателях с последовательным возбуждением, по
условиям применения которых часто требуется или допустимо из-
менение скорости с нагрузкой. Фактически при работе с постоянным
90
Рис. 14.33. Скоростные (механические)
характеристики двигателя с параллель-
ным возбуждением при изменении со-
противления в цепи якоря (/?р|<Л’Р2< /?Рз)
моментом потребляемая двига-
телем мощность в сумме с по-
терями в регулировочном рези-
сторе остается постоянной, то-
гда как мощность, отдаваемая
нагрузке, уменьшается пропор-
ционально скорости. Поэтому
эксплуатационная стоимость
при продолжительной работе с
пониженными скоростями от-
носительно высока.
В отличие от предыдуще-
го способа регулирование по-
средством сопротивления в це-
пи якоря является регулиро-
ванием при постоянном моменте, поскольку рабочий поток и, в
первом приближении, допустимый ток якоря остаются постоянны-
ми при изменении скорости.
Разновидностью рассмотренного способа регулирования явля-
ется шунтирование якоря, которое может быть использовано для
двигателей с последовательным (рис. 14.34 а) и параллельным (рис.
14.34 б) возбуждением. Фактически резисторы 7?р1 и /?р2 работают
как делитель напряжения, обеспечивая пониженное напряжение на
зажимах якоря. Регулирование данным способом более гибко, так
как для получения желаемого режима можно регулировать оба рези-
стора. В частности, скорость холостого хода двигателя с последова-
тельным возбуждением может быть уменьшена до некоторого ко-
нечного значения и потому схема применима для получения низких
скоростей при малых нагрузках. Регулирование двигателей с парал-
лельным возбуждением в диапазоне низких скоростей заметно
Рис. 14.34. Регулирование скорости шунтированием якоря
91
улучшается, поскольку скорость холостого хода при шунтировании
якоря ниже, чем при отсутствии регулировочных резисторов.
14 5.3. Регулирование скорости изменением напряжения
на зажимах якоря
Основой такого способа является то, что изменение напряже-
ния на зажимах якоря двигателя с независимым возбуждением со-
провождается в установившемся состоянии практически равным
изменением противоЭДС и, при постоянном рабочем потоке, про-
порциональным изменением скорости.
Для получения регулируемого напряжения необходимо вспо-
могательное оборудование в виде статического управляемого вы-
прямителя или автономного генератора. В традиционной системе
«генератор-двигатель» (рис. 14.35) для питания якоря регулируемого
двигателя Д используется генератор с независимым возбуждением Г,
вращаемый с постоянной скоростью асинхронным двигателем АД.
Изменение напряжения на якоре двигателя Д осуществляется рези-
стором в цепи независимого возбуждения генератора, что обеспе-
чивает регулирование скорости в широком диапазоне. Очевидным
недостатком данного способа является необходимость значитель-
ных первоначальных затрат (три машины полной мощности вместо
одной). Однако плавность и чувствительность регулирования тако-
вы, что данный способ или одна из его разновидностей довольно
часто применяются, особенно в установках большой мощности.
Рис. 14.35. Система «генератор-двигатель»
Скоростные (механические) характеристики двигателя с неза-
висимым возбуждением (рис. 14.36), соответствующие различным
значениям напряжения на якоре, параллельны друг другу, так как
ток короткого замыкания и скорость холостого хода пропорцио-
нальны напряжению на якоре. Пренебрегая реакцией якоря, умень-
шение скорости при переходе от холостого хода к полной нагрузке
можно считать вызванным падением напряжения на сопротивлении
92
якорной цепи. Если регулирова-
ние скорости производится при
постоянном моменте и, следова-
тельно, неизменном токе якоря,
это падение напряжения посто-
янно во всем диапазоне скоро-
стей. Поэтому уменьшение ско-
рости при переходе от холостого
хода к полной нагрузке постоян-
но, то есть не зависит от скоро-
сти холостого хода В этом пре-
имущество данного способа пе-
ред предыдущим.
Рис. 14.36. Скоростные (механические)
характеристики двигателя с парал-
лельным возбуждением при различ-
ных напряжениях на якоре (U\<U2<Ui)
Обычно, чтобы получить возможно наибольший диапазон ско-
ростей, регулирование напряжения на якоре (I) сочетают с регулиро-
ванием возбуждения двигателя (II) посредством реостата в цепи воз-
буждения. При таком двойном регулировании за базовую шбаз при-
нимают скорость двигателя при полном напряжении якоря и полном
возбуждении. Скорость выше базовой можно получить, уменьшая
возбуждение двигателя; скорости ниже базовой - изменением на-
пряжения на якоре. Диапазон скоростей выше базовой характеризу-
ется постоянной мощностью (см. п. 14.5.1), ниже базовой — постоян-
ством момента, поскольку, как и при регулировании резистором в
цепи якоря, поток и допустимый ток якоря примерно неизменны
(рис. 14.37).
Рис. 14.37. Допустимые момент (а) и мощность (б) при комбинированном
регулировании скорости изменением якорного напряжения (I)
и возбуждения двигателя (II)
93
Глава 15
СИНХРОННЫЕ МАШИНЫ
15.1. Устройство и принцип действия синхронных машин
Первоначальное представление о работе синхронного генера-
тора можно получить по рис. 15.1. Обмотка возбуждения, находя-
Рис. 15.1. Устройство простей-
шего синхронного генератора
щаяся на роторе, питается постоян-
ным током, который подводится к ней
через контактные кольца и 1рафито-
вые щетки. Магнитный поток возбу-
ждения показан штриховыми линия-
ми. Якорная обмотка, состоящая из
одиночной катушки с w витков, пока-
зана в сечении двумя сторонами а иг,
помещенными в диаметрально проти-
воположных пазах на внутренней по-
верхности статора. Проводники, со-
ставляющие эти стороны, параллель-
ны валу и с торцов машины соедине-
ны между собой последовательно лобовыми соединениями, не по-
казанными на рисунке. Ротор машины приводится во вращение с
постоянной скоростью с помощью источника механической энер-
гии (первичного двигателя), подсоединенного к валу.
Синусоидальная форма распределения магнитной индукции в
воздушном зазоре вдоль окружности статора как функция некото-
рого пространственного угла показана на рис. 15.2 а. В реальных
синхронных машинах кривую распределения индукции стремятся
приблизить к синусоиде путем выбора соответствующей формы
полюсных наконечников. При вращении ротора магнитный поток
полюсов перемещается относительно сторон катушки а и х. Индук-
94
тируемая в результате этого ЭДС (рис.
15.2 б) является функцией времени,
причем форма кривой ЭДС совпадает с
формой кривой индукции. ЭДС катуш-
ки проходит один полный цикл при
каждом обороте ротора двухполюсной
машины (рис. 15.1). поэтому частота
ЭДС такая же, как скорость ротора, то
есть электрическая частота синхрони-
зирована с механической скоростью,
что является основой названия син-
хронной машины.
Большинство синхронных машин
имеют более двух полюсов. Например,
Рис. 15.2. Распределение маг-
нитной индукции вдоль воз-
душного зазора (а) и соответст-
вующая кривая ЭДС якоря (б)
в четырехполюсной машине вдоль окружности якоря укладывают-
ся две полные синусоиды кривой распределения индукции. При
этом ЭДС обмотки якоря проходит два полных цикла за один обо-
рот ротора, так что ее частота f вдвое больше скорости ротора п.
Одна пара полюсов многополюсной машины или одна полная си-
нусоида кривой распределения индукции соответствует 360° или
171 радиан. Если машина имеет р пар полюсов, то, поскольку од-
ному полному обороту ротора соответствуют р полных синусоид
индукции:
а ~ Ражх >
где а - электрический угол в фадусах или радианах, б/мех - меха-
нический (пространственный) угол.
Частота ЭДС в общем случае
f-P~. 05.1)
где п - механическая скорость ротора,
об/мин.
Ротор (рис. 15.1) имеет явновы-
раженные полюса с сосредоточенны-
ми катушками возбуждения. На рис.
15.3 показан неявнополюсный ротор.
Обмотка возбуждения здесь распреде-
ленная и размещена в пазах так, чтобы
обеспечить приближенно синусоидаль-
Рис. 15.3. Устройство неявно-
полюсного генератора
95
ное распределение индукции. Явнополюсная конструкция типична
для гидрогенераторов, поскольку гидравлические турбины, исполь-
зуемые для привода гидрогенераторов, относительно низкоскоро-
стные и требуется большее число полюсов для обеспечения про-
мышленной частоты 50 Гц. Паровые и газовые турбины наиболее
эффективны при относительно высоких скоростях, поэтому турбо-
генераторы обычно двух-, реже четырехполюсные. Их роторы
обычно изготовляют цилиндрическими.
Синхронные генераторы в основном являются трехфазными.
Для получения системы трех ЭДС, смещенных по фазе друг отно-
сительно друга на 120°, необходимо использовать минимум три ка-
тушки, смешенные в пространстве на 120°. В простейшей трехфаз-
ной двухполюсной машине с одной катушкой на фазу (на рис.
15.4 а начала фаз обозначены А, В, С) катушки могут быть соеди-
нены в треугольник или звезду, как показано на рис. 15.4 б.
Рис. 15.4. Простейший трехфазный синхронный генератор (а)
и схема его обмотки якоря (б)
Когда синхронный генератор питает нагрузку, ток якоря соз-
дает дополнительный магнитный поток, называемый потоком ре-
акции якоря, который вращается с синхронной скоростью. Этот по-
ток взаимодействует с потоком возбуждения, чем создается элек-
тромагнитный момент. В генераторе этот момент противодействует
вращению, и для поддержания вращения вал должен вращаться от
первичного двигателя.
Синхронный двигатель не имеет каких-либо особых конст-
руктивных отличий от генератора. Здесь к обмотке статора подво-
дится переменный ток, а обмотка возбуждения, помещаемая обыч-
96
но на явнополюсном роторе, питается постоянным током. Магнит-
ное поле оттоков якоря вращается с синхронной скоростью. Чтобы
электромагнитный момент был постоянный, поля статора и ротора
должны быть постоянными по амплитуде и неподвижными друг по
отношению другу. В синхронном двигателе установившаяся ско-
рость вращения ротора определяется числом пар полюсов и часто-
той тока якоря (15.1). Таким образом, ротор синхронного двигате-
ля, питаемого от источника переменного тока постоянной частоты,
должен вращаться с постоянной установившейся скоростью. В дви-
гателе электромагнитный момент действует в направлении враще-
ния и уравновешивает противодействующий вращению момент ме-
ханический нагрузки (момент сопротивления). ЭДС вращения в
якоре при этом действует противоположно приложенному напря-
жению.
15.2. ЭДС якорных обмоток
Получение аналитических выражений ЭДС якоря независимо
от типа обмотки сводится по существу к нахождению ЭДС отдель-
ных катушек (или секций) с последующим их суммированием. В со-
временных машинах переменного тока применяются петлевые и
волновые якорные обмотки, отличающиеся формой лобовых со-
единений.
15.2.1. ЭДС сосредоточенной якорной обмотки
Обмоткой якоря (рис.
15.5) является одиночная
катушка с w витков, сторо-
ны которой помещены в
диаметрально противопо-
ложных пазах на поверхно-
сти статора. Следователь-
но, шаг обмотки, опреде-
ляемый как расстояние ме-
тоду активными сторонами
ее катушки, составляет л
рад, то есть является пол-
ным или диаметральным.
Рис. 15.5. Простейшая синхронная машина
с сосредоточенной обмоткой якоря
4 Зак. 50
97
Пусть ротор вращается с постоянной скоростью и об/с. В об-
щем случае, когда машина имеет р пар полюсов, электрическая уг-
ловая скорость ротора
а) = ра)мек = р2лп = 2лf, (15.2)
где f = рп - частота ЭДС якоря в соответствии с (15.1).
Отметим, что электрическая угловая скорость ротора синхрон-
ной машины согласно (15.2) есть одновременно угловая частота то-
ка статора.
Предположим, что обмотка возбуждения обеспечивает сину-
соидальное распределение магнитной индукции в воздушном зазо-
ре вдоль окружности статора. Тогда магнитный поток полюса мож-
но выразить следующим образом:
2
Ф?> = Е^ёт~~ EshT (15.3)
л
где Bs - амплитудное значение магнитной индукции под полюсом;
1 nDa
- расчетная осевая длина пакета статора машины; т------- -
1р
часть длины окружности статора диаметром Da, приходящаяся на
один полюс и называемая полюсным делением.
При анализе установившейся работы машин переменного тока
обычно пользуются не мгновенными, а действующими значениями
напряжений и токов. По (14.4) амплитудное значение ЭДС якоря
Еа,п = ; (15.4)
действующее значение
£°"^L = ^^4J<5 = 4’44^'<I>‘5’ (15’5)
Соотношение (15.5) аналогично соответствующему уравнению
трансформатора. Перемещение обмотки в поле с постоянной ам-
плитудой индукции по отношению к индуктированной ЭДС равно-
сильно изменению во времени магнитного потока, сцепленного с
неподвижными обмотками в трансформаторе. Фактически враще-
ние ротора преобразует пространственное распределение индукции
во временное изменение ЭДС.
В случае трехфазной машины соотношение (15.5) описывает
действующее значение ЭДС фазы якоря, если w - общее число по-
следовательных витков фазы, обмотка является сосредоточенной и
имеет полный (диаметральный) шаг.
98
15.2.2. ЭДС распределенной якорной обмотки
с укороченным шагом
С целью лучшего использования магнитопровода статора и
улучшения формы кривой ЭДС в современных машинах перемен-
ного тока почти всегда используют распределенные обмотки с
укороченным шагом. В реальной обмотке стороны каждой ка-
тушки распределены в нескольких пазах под полюсом. Степень
распределения обмотки принято характеризовать числом пазов на
полюс и фазу:
= (15.6)
2рт
где Za — общее число пазов якоря; р — число пар полюсов; т — чис-
ло фаз.
Катушки, лежащие в q соседних пазах, принадлежащие одной
фазе и соединенные между собой последовательно, составляют так
называемую катушечную группу. Если q - целое число, все кату-
шечные группы обмотки одинаковы. В трехфазной обмотке кату-
л
шечнои группе соответствует угол —.
Распределенная трехфазная двухполюсная обмотка (рис. 15.6)
с полным шагом и q = 2 является двухслойной. Одна сторона ка-
тушки помещается в ниж-
нем слое паза, а другая сторо-
на этой же катушки %] - в
верхнем слое другого паза.
Такое исполнение позволяет
получить лобовые соединения
более простой формы, а ма-
шина оказывается более эко-
номичной в изготовлении, так
что во всех машинах мощно-
стью больше 2...3 кВт приме-
няются двухслойные обмотки.
Катушки at, a2, a3 и а4, на-
ходящиеся в двух соседних
пазах, составляют катушечную
группу фазы А.
Рис. 15.6. Распределенная трехфазная
двухполюсная якорная обмотка
с полным шагом
99
4*
Эффект распределения обмотки таков, что при неизменном
числе витков на фазу ЭДС распределенной обмотки меньше, чем
ЭДС сосредоточенной обмотки с тем же шагом. В самом деле, ЭДС
катушек а} и а2 (рис. 15.6) смещены по фазе относительно ЭДС
катушек а3 и а4 на угол, соответствующий одному зубцовому де-
лению:
р2л р2п п , ,
У=-— = —------=---. (15.7)
Za 2 pmq mq
Эти ЭДС на рис. 15.7 представлены как векторы £о12 и —о34 •
Результирующий вектор £о, равный их геометрической сумме и
представляющий собой ЭДС фазы А, меньше арифметической сум-
мы ЕаП И Е-аЗД'
Уменьшение ЭДС обмотки из-за ее распределения в q пазах
принято характеризовать с помощью коэффициента распределения.
ЭДС £о12 можно выразить следующим образом:
Рис. 15.7. К определению
коэффициента распреде-
ления якорной обмотки
Ясно, что при q > 1
£ol2=2£sin[jj; (15.8)
Тогда ЭДС фазы Еа
£a = 2£sin^ = 2£sin|^), (15.9)
где а = qy - угол фазной зоны обмотки.
Таким образом, коэффициент распре-
деления
Ед
(15.10)
имеем Кр < 1. Следует отметить, что влия-
ние распределения на высшие гармоники ЭДС, которые обусловле-
ны несинусоидальностью действительных кривых распределения
индукций, значительно сильнее, чем на основную гармонику ЭДС.
Поэтому распределение обмотки является эффективным средством
подавления нежелательных высших гармоник ЭДС якоря.
Распределенную обмотку с укороченным шагом можно полу-
чить, если на рис. 15.6 все стороны катушек, лежащие в верхнем
слое пазов, сместить на один паз против часовой стрелки. При
100
этом, например, катушка OjXj будет иметь 5/6 прежнего полного
шага, что соответствует 5/6л-. Вообще говоря, укорочение шага
может быть любым в зависимости от того, какая (или какие) из
высших гармоник ЭДС должна быть подавлена.
Эффект укорочения шага состоит в том, что катушка пронизы-
вается меньшим потоком, чем при полном шаге Следствием явля-
ется уменьшение ЭДС фазы, которое характеризуют коэффициен-
том укорочения. На рис. 15.8 а показана катушка с укороченным
шагом у = (Зт, где
Д = ^<1. (15.11)
т
Поскольку полюсному делению г соответствует угол л, ЭДС
сторон катушки £^кс и Д2КС смещены по фазе на угол (Зл (рис.
15.8 б), и ЭДС катушки £к
£к=£'кс-£"кс, (15.12)
что в соответствии с геометрическим построением дает
£K=2£KCsin^. (15.13)
Рис. 15.8. К определению коэффициента укорочения якорной обмотки
Таким образом, при наличии укороченного шага обмотки ЭДС
I --
катушки в sin—— раз меньше арифметической суммы ЭДС сторон
катушек, и поэтому коэффициент укорочения
101
ATy=sin^-. (15.14)
Шаг обмотки (рис. 15.8 а) равен 4/5 т, поэтому ЭДС от пятой
гармоники поля в обеих катушечных сторонах имеют одинаковые
фазы и полностью нейтрализуют друг друга в контуре катушки. В
практике бывает необходимо подавить одновременно пятую и седь-
мую гармоники ЭДС. Тогда шаг обмотки выбирают равным 5/6 т.
Итак, действующее значение ЭДС фазы распределенной якор-
ной обмотки с укороченным шагом по (15.5), (15.10) и (15.14)
Ео = 4,44>^обФ^. (15.15)
где - обмоточный коэффициент, учитывающий распре-
деление и укорочение шага обмотки.
Часто пазы якоря выполняют несколько скошенными по от-
ношению к магнитному полю возбуждения для ослабления влияния
так называемых зубцовых пульсаций магнитного потока на форму
кривой ЭДС якоря. В подобных случаях в выражение (15.15) вво-
дят коэффициент скоса Кс < 1, учитывающий уменьшение ЭДС из-
за скоса пазов:
£„ = 4,44>адФ^ (15.16)
15.3. Намагничивающие силы распределенных
якорных обмоток электрических машин
Когда по обмотке якоря электрической машины протекает ток
нагрузки, эта обмотка развивает определенную магнитодвижущую
силу (МДС), которая возбуждает в воздушном зазоре машины маг-
нитное поле той или иной формы, называемое полем реакции яко-
ря. Реакция электрической машины по отношению к ее электриче-
скому входу (выходу) есть существенно необходимая часть процес-
са обмена энергией между электрической сетью и машиной.
Мы рассматриваем МДС реакции якоря машин переменного
тока. В большинстве случаев якоря имеют распределенные обмот-
ки. При этом отдельные катушки обмоток соединены между собой
так, что магнитное поле реакции якоря имеет то же число полюсов,
что и обмотка возбуждения. В целях упрощения анализа примем:
1) магнитная проницаемость материала сердечника //ст=оо,
магнитное сопротивление магнитопровода определяется только воз-
душными зазорами;
102
2) магнитная цепь симметрична и поэтому можно рассматри-
вать магнитное поле под парой полюсов, считая, что под всеми
другими парами полюсов оно аналогично;
3) катушки обмоток имеют бесконечно малое сечение.
15 .3.1. Магнитодвижущая сила фазы обмоток якоря
Рассмотрим сначала МДС сосредоточенной обмотки с полным
шагом и числом витков w (рис. 15.9 а). Для простоты построения
ротор принят цилиндрическим.
Для любого из замкнутых кон-
туров, показанных магнитными
силовыми линиями, по закону
полного тока МДС равна wia,
где ia - ток катушки. МДС,
приходящаяся на один полюс,
равна На рис. 15.9 б пред-
ставлена та же обмотка в раз-
вернутом виде. Волна МДС по-
казана прямоугольным распре-
- wia
делением с амплитудой ——.
Рис. 15.9. МДС сосредоточенной
обмотки с полным шагом
В соответствии с допущением 3) при переходе с одной стороны ка-
тушки на другую МДС изменяется скачком на значение wia. В ре-
альных машинах обмотку якоря стремятся выполнить так, чтобы
распределение МДС вдоль окружности якоря было близким к си-
нусоидальному. Поэтому практический интерес представляет глав-
ным образом основная гармоника, которая и будет предметом
дальнейшего рассмотрения. Прямоугольную волну МДС сосредо-
точенной обмотки с полным шагом можно разложить в ряд Фурье,
содержащий основную и ряд нечетных высших гармоник. Основ-
ная гармоника имеет вид
4 wi
Fol=--^cos«, (15.17)
2
где угол а измерен от магнитной оси обмотки (рис. 15.9). Эта гар-
моника представляет собой пространственную синусоидальную
волну с амплитудой
103
^ах=-^ (15.18)
п 2
причем пик волны совпадает с магнитной осью обмотки.
Далее рассмотрим МДС фазы распределенной обмотки якоря
двухполюсной трехфазной машины переменного тока (рис. 15.10 а).
На рисунке показаны катушки только фазы а. Обмотки всех трех
фаз идентичны, и их магнитные оси смещены на 120°. Обмотка вы-
полнена двухслойной, причем каждая катушка имеет ик витков.
Один полюс обмотки показан спрямленным (рис. 15.10 6). Волна
МДС представляет собой серию пиков высотой 2wKiK, равной пол-
ному току одного паза. Как можно видеть, распределенная обмотка
обеспечивает большее приближение МДС к синусоиде, чем сосре-
доточенная обмотка.
К S &WLTJTJWLfU¥¥W
Рис. 15.10. МДС распределенной обмотки переменного тока
Основная гармоника волны МДС распределенной обмотки
меньше суммы основных гармоник отдельных катушек, поскольку
магнитные оси катушек не совпадают с результирующей осью об-
мотки. Аналогичный эффект имеет укорочение шага обмотки. С уче-
том этого формулу МДС фазы распределенной обмотки якоря с
укороченным шагом 2р-полюсной трехфазной машины переменно-
го тока можно записать так:
104
(15.19)
п 2p
где w — число последовательных витков фазы: KaQ = КрКу - обмо-
точный коэффициент (см. п. 15.2).
Формула (15.19) описывает основную пространственную гар-
монику волны МДС, создаваемой током фазы а. Эта МДС представ-
ляет собой неподвижную в пространстве волну, распределение кото-
рой вдоль поверхности якоря описывается функцией coscr. Пик
МДС совпадает с магнитной осью фазы а и пропорционален мгно-
венному току 1О. Если ток синусоидален
1а - sin cot,
временной максимум пика МДС
F^ = 2^WK°^a, (15-20)
л- р
где 1а - действующее значение тока фазы а.
Ясно, что при синусоидальном характере тока ia волна МДС,
будучи неподвижной в пространстве, пульсирует во времени с угло-
вой частотой со.
15.3.2 . Вращающиеся магнитные поля
в машинах переменного тока
Для понимания теории многофазных машин переменного тока
необходимо изучить магнитное поле, создаваемое многофазной об-
моткой. Рассмотрим МДС трех-
фазной обмотки двухполюсной
машины (рис. 15.11), где фазы
для простоты представлены со-
средоточенными катушками ах,
by, cz с полным шагом, сдвину-
тыми относительно друг друга на
120°. Волны фазных МДС также
смещены в пространстве на
120°. Каждая фаза обтекается пе-
ременным синусоидально изме-
няющимся во времени током.
При симметричном режиме мгно-
венные токи
Рис. 15.11. Упрощенная схема двух-
полюсной трехфазной машины
105
ia = -J1Ia cos cot;
где la — действующее значение тока якоря. Отсчет времени для
простоты начат в момент, когда ток фазы а равен положительному
максимуму.
Соответственно волны фазных МДС синусоидально изменяют-
ся во времени, будучи неподвижными в пространстве. Каждая из
фазных МДС может быть представлена направленным вдоль оси
данной фазы пространственным вектором длиной, пропорциональ-
ной мгновенному фазному току. Результирующая МДС якоря равна
сумме МДС всех трех фаз.
Рассмотрим МДС при cot0 =0, когда ток фазы а имеет
2
максимальное значение а/24, а токи фаз Ьис равны ——/о. При
этом МДС фазы а имеет наибольшее значение и показана на рис.
15.12 а вектором Fo =/Imax’ направленным вдоль оси фазы а. МДС
фаз Ьис показаны векторами /Д и Fc, ориентированными вдоль
магнитных осей фаз. Результирующим является вектор F = — F_max,
равный геометрической сумме векторов Fo, и Fc и
совпадающий в данный момент времени с осью фазы а. Вектор F
отображает пространственную синусоидальную волну МДС.
В момент времени cotx = л/3 токи фаз а и b равны положитель-
ным половинам максимумов, а ток фазы с равен отрицательному
максимуму. Векторы фазных и результирующей МДС показаны на
рис. 15.12 б. Результирующий вектор имеет ту же амплитуду, что и
при б9/0 = 0, но повернут в пространстве по часовой стрелке на
тг/3. Аналогично при cot2 =2л/3 (когда ток фазы b имеет положи-
тельный максимум, а токи фаз а и с — отрицательные половины
максимумов) тот же по длине результирующий вектор повернут
еще на я/3 по часовой стрелке (рис. 15.12 в). Таким образом, волна
результирующей МДС, сохраняя свою синусоидальную форму и
106
амплитуду, с течением времени постепенно перемещается вдоль
окружности якоря, что равносильно вращению магнитного поля.
Рис. 15.12. Создание вращающегося поля в трехфазной обмотке
Этот результат можно получить и аналитически. Начало от-
счета пространственного угла а поместим на ось фазы а (рис.
15.11). В любой момент времени t каждая их трех фаз является со-
ставляющей в результирующей МДС в произвольной точке а на
окружности якоря:
\ ( '2.71 । ( ^2.77
r(cr,z) = F_„v cos cot cos a + Crn„.. cos cot-cos a---------+
\ / ITlci-X 111<яХ I I I I
( 4лЛ ( 4яЛ
+F_„V cos \ cot------cos la--------, (15.21)
iiitix i 3 / \ 3 / ' **
где Fmax - временной максимум пика фазной МДС по (15.20). Каж-
дая составляющая в правой части (15.21) является пульсирующей
волной. Функция угла а определяет пространственное распределе-
ние МДС как неподвижное синусоидальное, а функция времени I
указывает, что амплитуда пульсирует во времени.
Используя тригонометрическое преобразование вида
coscrcos/? = ^cos(cr-/?) + cos(cr +
получаем
F(a,t) = — F
\ 7 / 2 IllelA
cos (a - cot) +—Fmax
cos (a - cot) +—Fm„x
\ / 2
2 max
— F
2 max
cos (а - cot) + ^•Fmax cos (a + cot) +
( 2
cos a + cot—7Г +
I 3 J
( 4 >
cos a + cot—7t .
I 3 J
(15.22)
107
Здесь три члена, включающие углы (zz + ш/), + cot - — лJ и
( 4 "I
I a + cot — —л I, есть три равные по амплитуде синусоиды, смещен-
ные друг относительно друга на 2л/3. Так как их сумма равна ну-
лю, выражение (15.22) упрощается до вида
3
F(a,t) = — Fmaxcos(a-cot), (15.23)
что является искомым выражением результирующей волны МДС.
Волна, описываемая уравнением (15.23), есть синусоидальная
функция пространственного угла а. Она имеет постоянную ампли-
туду и фазовый угол cot, являющийся линейной функцией времени.
Угол cot определяет вращение волны МДС вдоль окружности яко-
ря с постоянной угловой скоростью со. В некоторый момент вре-
мени t\ волна МДС синусоидально распределена в пространстве и
ее положительный пик смещен на cot} рад от точки отсчета угла а,
то есть оси фазы а. В более поздний момент времени /2 положи-
тельный пик волны смешен от точки отсчета на cot2, за рассматри-
ваемое время волна прошла путь ш(/2 -/j) вдоль зазора.
За один цикл тока волна МДС в двухполюсной машине делает
один оборот, а в 2р-полюсной - \] р оборота. Угловая скорость
волны МДС со = 2лf рад/с, где / - частота тока якоря. При этом
механическая скорость вращения поля в 2/?-полюсной машине
^мех=—рад/с (15.24)
Р
ИЛИ
п = об/мин, (15.25)
Р
что согласуется с (15.2).
Вращающееся поле постоянной амплитуды в общем случае
будет создается ш-фазной обмоткой, возбуждаемой ш-фазными
симметричными токами, если фазы обмотки смещены в простран-
2zr
стве на — рад. Угловая скорость поля в этом случае прежняя
т
т
(со = 2л/ рад/с), а амплитуда полной МДС в — раз больше ампли-
туды фазной волны МДС:
108
Рис. 15.13. К определению
результирующей МДС
синхронной машины
F = myl2 wK°6 Ia, (15.26)
71 p
где Ia - действующее значение фазного тока якоря; w - число по-
следовательных витков фазы обмотки.
15.4. Момент многофазной синхронной машины
Токи в обмотках статора и ротора электрической машины соз-
дают соответствующие магнитные поля в воздушном зазоре маши-
ны (а именно, поток реакции якоря и поток возбуждения). От
стремления этих полей выровняться в зазоре (совместиться полю-
сами) возникает электромагнитный момент. При синусоидальном
распределении МДС статора F, и ротора F? их можно предста-
вить на векторной диаграмме (рис. 15.13). Электромагнитный мо-
мент в общем случае
4M=-jp2OAF2smtf, (15.27)
где — результирующий поток в
воздушном зазоре; F2 - МДС ротора.
Знак « » показывает, что момент
действует в сторону уменьшения 0.
Как видно, момент пропорционален
взаимодействующим полям и синусу пространственного угла меж-
ду их магнитными осями.
Согласно (15.27) постоянный момент возникает, если магнит-
ные поля статора и ротора постоянны по амплитуде и неподвижны
относительно друг друга.
Синхронный генератор, питающий отдельную нагрузку, рабо-
тает как источник напряжения, частота которого зависит от скоро-
сти приводного двигателя. Ток якоря и коэффициент мощности при
этом определяются возбуждением генератора и сопротивлениями
генератора и нагрузки. Обычно синхронный генератор присоеди-
нен к энергосистеме, содержащей другие синхронные машины. То-
гда значение и частота напряжения на зажимах якоря генератора
определены системой. Источник неизменного (по амплитуде) на-
пряжения и частоты называют шинами бесконечной мощности.
При протекании симметричных многофазных токов обмотка
якоря машины создает магнитное поле в воздушном зазоре (поле
109
реакции якоря), вращающееся с синхронной скоростью, которая
определяется частотой системы и числом пар полюсов машины
(15.22). Поле же, создаваемое обмоткой ротора, вращается вместе с
ротором. Для создания постоянного однонаправленного момента
поля статора и ротора должны быть неподвижны друг относитель-
но друга, то есть ротор должен вращаться со строго синхронной
скоростью. Так, синхронный двигатель, подсоединенный к источ-
нику напряжения постоянной частоты, работает с постоянной уста-
новившейся скоростью вращения независимо от нагрузки. Син-
хронный двигатель не имеет пускового момента в силу разных ско-
ростей вращения полей статора и ротора при пуске, поэтому долж-
ны быть обеспечены средства для приведения его во вращение со
скоростью близкой к синхронной.
Поведение синхронного двигателя при установившемся вра-
щении легко проанализировать с помощью выражения (15.27).
При обычных условиях падение напряжения на активном со-
противлении якоря мало, а поток рассеяния якоря мал в сравнении
с результирующим потоком зазора Ф^. Индуктируемая потоком
в обмотке якоря ЭДС должна почти полностью уравновешивать
напряжение на зажимах якоря U. Тогда по (15.16) получаем:
ф U
8 4,44>Fo6Fc'
Таким образом, когда якорь подсоединен к шинам бесконеч-
ной мощности, поток зазора постоянен, независим от нагрузки
на валу. С другой стороны, МДС ротора F2 определяется постоян-
ным током возбуждения и также постоянна в нормальных услови-
ях. Следовательно, изменение момента, обусловленное нагрузкой,
обеспечивается изменением угла 0, который называют углом ак-
тивной нагрузки. Генераторный режим характеризуется отрица-
тельными моментами и положительными значениями 6*, что соот-
ветствует отставанию волны результирующего потока Ф^ от волны
МДС возбуждения. Двигательному режиму соответствуют положи-
тельные моменты Мж и отрицательные значения 0 (рис. 15.14).
При малой нагрузке на валу двигателя требуется сравнительно
малый электромагнитный момент, и угол 0 мал. При увеличении
нагрузки ротор должен переместиться в пространстве назад по от-
ношению к вращающемуся результирующему потоку, и 0 приоб-
ретает значение, необходимое для создания требуемого момента.
ПО
Процесс изменения в ди-
намический и сопровождается
временным уменьшением мгно-
венной механической скорости
ротора и затухающими механи-
ческими колебаниями ротора от-
носительно его нового простран-
ственно-фазового положения. Пе-
реход ротора к новому положе-
нию вслед за изменением на-
грузки можно наблюдать, на-
пример, с помощью стробоскопа.
Рис. 15.14. Кривая зависимости элек-
тромагнитного момента синхронной
машины от угла нагрузки
При угле 6* = ±— достигается максимально возможный (при
данном напряжении питания и токе возбуждения) момент, назы-
ваемый моментом опрокидывания. Двигатель под влиянием из-
быточного момента сопротивления замедляется, и синхронный ре-
жим нарушается, так как поля ротора и статора не являются больше
неподвижными друг относительно друга. В этих условиях двига-
тель обычно отключают от сети. Описанное явление известно как
выпадение синхронного двигателя из синхронизма. Максималь-
ный момент (момент опрокидывания) может быть увеличен путем
увеличения тока возбуждения или напряжения питания.
Синхронная машина, подсоединенная к системе бесконечной
мощности, отдает энергию в систему как генератор, если ротор
приводится во вращение посредством первичного двигателя. При
этом волна МДС возбуждения оказывается впереди волны резуль-
тирующего потока (<9 > 0).
15.5. Установившаяся работа синхронной
неявнополюсной машины
75.5.7. МДС и потоки синхронной неявнополюсной машины
Будем считать, что обмотка якоря машины является трехфаз-
ной, как при рассмотрении вращающегося поля в п. 15.3.2, и про-
странственное распределение МДС этой обмотки и соответствую-
щего потока синусоидально. Обмотка возбуждения, расположенная
в пазах неявнополюсного ротора, также создает синусоидальное
111
распределение МДС и потока в воздушном зазоре. Предположение,
что МДС и потоки синусоидальные, оправдано, так как в реальных
синхронных машинах, особенно в неявнополюсных, влияние выс-
ших гармоник поля мало.
МДС и поток возбуждения можно представить в виде векторов
F_f и Ф/> направленных вдоль оси главных полюсов (оси d). По-
ток возбуждения при вращении ротора со скоростью со индуктиру-
ет в фазе а обмотки якоря ЭДС возбуждения, которую по общему
правилу можно представить в виде вектора Ef, вращающегося
против часовой стрелки и отстающего от Ф , на 90°. ЭДС возбуж-
дения фазы а в любой момент времени может быть найдена как
проекция вектора Е, на ось
ось фазы а |
।
Рис. 15.15. Упрощенная векторная
диаграмма неявнополюсной
синхронной машины
этой фазы. Векторная диа-
грамма (рис. 15.15) построена
для момента времени, когда
ЭДС возбуждения фазы а
максимальна. ЭДС возбужде-
ния фаз Ь и с в этот же момент
времени можно найти, проек-
тируя вектор E_t на оси этих
фаз, смещенные относительно
оси фазы А на 120° и 240° со-
ответственно.
Симметричные многофазные токи в симметричной многофаз-
ной обмотке якоря создают волну МДС реакции якоря, основная
пространственная гармоника которой вращается с синхронной ско-
ростью и ось которой совпадет с осью той фазы, где ток в данный
момент максимальный. Допустим, что ток фазы а имеет тот же
фазовременнбй угол, что и ЭДС возбуждения этой фазы (чисто ак-
тивная нагрузка), то есть их векторы имеют одинаковое направле-
ние. Тогда векторы МДС £о и потока Ф„ реакции якоря в этот
момент также направлены вдоль оси фазы а.
Результирующий магнитный поток в зазоре машины равен
сумме потоков возбуждения и реакции якоря и представлен векто-
ром Ф^, смещенным относительно вектора Ф^ на угол в.
В общем случае вектор тока якоря 1а может быть смещен от-
носительно вектора ЭДС возбуждения £у на угол от нуля до 360°
112
в зависимости от коэффициента мощности и режима работы маши-
ны (генераторный или двигательный). Векторная диаграмма при
этом показывает, как пространственно-фазовое положение вектора
результирующего потока по отношению к оси полюсов зависит от
фазовременного угла между током якоря и ЭДС возбуждения.
15.5.2. Нагружение синхронной машины
активной мощностью
Векторная диаграмма (рис. 15.15) показывает, как возникает
электромагнитный момент и как машина приспосабливается к ус-
ловиям нагрузки. Как известно (п. 15.4), момент действует в таком
направлении, чтобы выровнять поле возбуждения и результирую-
щее поле зазора. Если полюса возбуждения опережают результи-
рующий поток (рис. 15.15), момент Л/Эм действует против вращения
и машина работает как генератор. Если же полюса возбуждения от-
стают от результирующего потока, момент действует в направле-
нии вращения, то есть машина работает как двигатель. Иначе гово-
ря, в генераторном режиме полюса возбуждения должны вращаться
впереди волны результирующего потока за счет положительного
момента первичного двигателя, тогда как в двигательном режиме
полюса возбуждения должны следовать за результирующим пото-
ком из-за тормозящего момента нагрузки на валу.
Электромагнитный момент можно выразить через основную
гармонику результирующего потока зазора на полюс Фд и ампли-
тудное значение основной гармоники МДС возбуждения Ff. Соглас-
но (15.27), когда Ф^и /у постоянны, машина приспосабливается к
изменениям внешней нагрузки посредством изменения угла в и, со-
ответственно. электромагнитного момента.
Пусть, например, синхронная машина с малыми активным со-
противлением и реактивным сопротивлением рассеяния якоря под-
ключена к шинам бесконечной мощности (то есть к системе, напря-
жение и частота которой не зависят от режима данной машины). Ток
возбуждения поддерживается неизменным на таком уровне, что при
отсутствии нагрузки ток якоря равен нулю. Результирующий поток
зазора Фд индуктирует в каждой фазе якоря ЭДС Eg, которую
обычно называют ЭДС воздушного зазора. При отсутствии активно-
го и реактивного сопротивления якоря эта ЭДС должна оставаться
неизменной (по амплитуде) и равной напряжению на шинах U. Когда
113
нагрузки нет, момент и угол 6 равны нулю. Если ток якоря также ра-
вен нулю, МДС и поток реакции якоря отсутствуют (рис. 15.16 а).
Рис. 15.16. Векторные диаграммы синхронной машины
при различных режимах работы
Когда на валу машины появляется нагрузка, ротор слегка замед-
ляется под действием ее тормозящего момента и полюса смещаются
назад по отношению к волне результирующего потока. Угол 6 уве-
личивается, и машина развивает двигательный момент. После неко-
торого переходного периода возобновляется установившаяся рабо-
та с синхронной скоростью при новом угле 0, который соответст-
вует требуемому моменту нагрузки (рис. 15.16 6). Теперь МДС
возбуждения F/ уже не находится в фазе с результирующим пото-
ком ФЛ, что равносильно появлению МДС реакции якоря Fo и то-
ка якоря /о, смещенного относительно ЭДС Es и напряжения на
шинах U на фазовременнбй угол ср. Поскольку угол (р может при-
нимать значения от 90° до 180°, потребляемая из сети активная
электрическая мощность отрицательна (Р = UIacos<p<0) и маши-
на, таким образом, работает в двигательном режиме. Эта электри-
ческая мощность (если пренебречь потерями) равна механической
мощности на валу двигателя.
Если вал синхронной машины под действием момента первич-
ного двигателя ускоряется, ось полюсов опережает волну результи-
рующего потока на угол в и машина развивает отрицательный мо-
мент, равный моменту первичного двигателя. МДС реакции якоря и
ток якоря для этого случая показаны на рис. 15.16 в, где угол (р
может принимать значения от нуля до 90°. Машина отдает актив-
ную мощность в сеть как генератор. Нагружение явнополюсных
синхронных машин осуществляется аналогично описанному.
114
15.5 3. Синхронная машина как ЭДС за реактивным
сопротивлением. Схема замещения и векторная диаграмма
неявнополюсной синхронной машины
Схему замещения синхронной неявнополюсной машины мож-
но получить, выразив действие потока реакции якоря через индук-
тивное реактивное сопротивление. Для начала положим, что магни-
топровод машины ненасыщен, а в дальнейшем покажем, как учесть
влияние насыщения. Результирующий поток в зазоре машины ФЛ-
можно рассматривать как геометрическую
сумму потока возбуждения Ф и потока ре-
акции якоря Фо (рис. 15.17). Названные по-
токи проявляют себя теми ЭДС, которые
они индуктируют в обмотке якоря. Тогда
результирующую ЭДС воздушного зазора
Ед можно рассматривать как векторную
сумму ЭДС возбуждения Еу и ЭДС Еа,
индуктируемой потоком реакции якоря:
Es = Ef+Ea. (15.28)
Рис. 15.17. Векторная
диаграмма магнитных
потоков и соответст-
вующих ЭДС
Если пренебречь магнитным насыщением, ЭДС Е_а будет про-
порциональна току якоря и отстает от потока реакции якоря на 90°.
В свою очередь, поток реакции якоря находится в фазе с током
якоря 1_а и потому ЭДС реакции якоря отстает от тока якоря на 90°.
Выразив ЭДС реакции якоря Ео через падение напряжения на не-
котором реактивном сопротивлении, (15.28) представим в виде
Eg = Ef-jxadI_a, (15.29)
где xad - реактивное сопротивление реакции якоря.
Уравнение (15.29) эквивалентно части схемы замещения (рис.
15.18 а) слева от Е5.
Рис. 15.18. Схемы замещения синхронной неявнополюсной машины
115
Напряжение на зажимах машины отличается от ЭДС воздушно-
го зазора E^s на величину падения напряжения на активном сопро-
тивлении Ra и реактивном сопротивлении хаа якоря Реактивное
сопротивление рассеяния якоря хаа учитывает ЭДС, индуктирован-
ные потоками, которые не входят в результирующий поток воздуш-
ного зазора. Эти потоки включают в себя не только потоки пазового
и лобового рассеяния, но и высшие гармоники потока зазора, обу-
словленные отличием действительной волны МДС якоря от сину-
соиды (дифференциальное рассеяние). В схеме замещения ненасы-
щенной машины с неявнополюсным ротором при симметричных ус-
ловиях (рис. 15.18 б) фаза представлена посредством ЭДС возбужде-
ния за комплексным сопротивлением (Ra + jxd ). Здесь
Xd=xad+Xu<>
(15.30)
есть синхронное реактивное сопротивление машины, которым
учитываются все потоки, создаваемые симметричными многофаз-
ными токами якоря, тогда как ЭДС возбуждения Ef учитывает по-
ток обмотки возбуждения. В ненасыщенной машине с цилиндриче-
ским ротором при постоянной частоте синхронное реактивное со-
противление постоянно, а ЭДС возбуждения пропорциональна току
возбуждения и равна напряжению на зажимах якоря при холостом
ходе.
Рис. 15.19. Векторная
диаграмма напряжений
синхронной неявнопо-
люсной машины
Схеме замещения соответствует урав-
нение равновесия напряжений
U = Ef-jxdLa-RaLa, (15.31)
которое часто записывают в виде
Ef=LL + JxdLa + RaLu- (15.32)
Тогда векторная диаграмма напряже-
ний (режим генератора, нагрузка активно-
индуктивная) изображается так, как показа-
но на рис. 15.19. Диаграмма может быть ис-
пользована для определения необходимой
ЭДС возбуждения по заданным напряже-
нию, току и коэффициенту мошности или,
наоборот, для определения напряжения на
зажимах генератора при заданных ЭДС воз-
буждения и токе нагрузки.
116
15.6. Установившаяся работа синхронной
явнополюсной машины
В п. 15.1 показано, что при данной частоте сети скорость син-
хронной машины обратно пропорциональна числу пар полюсов.
Поэтому относительно низкочастотные гидрогенераторы выполня-
ются многополюсными. При этом ротор имеет явнополюсную кон-
струкцию (рис. 15.1). Большинство синхронных двигателей также
явнополюсные. Рассмотрим особенности МДС и потоков в маши-
нах явнополюсной конструкции, а также схемы замещения и век-
торные диаграммы напряжений этих машин.
15.6.1. МДС и потоки синхронной явнополюсной машины.
Продольная и поперечная реакции якоря
Поток, создаваемый волной МДС реакции якоря, в машине с
цилиндрическим ротором не зависит от пространственного поло-
жения этой волны относительно полюсов возбуждения. Однако яв-
нополюсная машина имеет предпочтительное направление намаг-
ничивания, . определяемое явновыраженными полюсами ротора.
Магнитная проводимость вдоль оси полюса (ось d) заметно больше,
чем вдоль оси, проходящей посередине между соседними полюса-
ми (ось q).
В общем случае волна потока реакции якоря отстает от волны
потока возбуждения на пространственный угол 90 + (/, где (// -
фазовременнбй угол, на который ток якоря отстает от ЭДС возбуж-
дения. Если, например, ток якоря 7О отстает от ЭДС возбуждения
Е_^ на 90° (чисто индуктивный ток), волна потока реакции якоря
Фо совпадает с продольной осью и противоположна направлению
потока возбуждения Фу (рис. 15.20 а). Соответствующие волны
индукции на поверхности якоря, создаваемые током возбуждения и
синхронно вращающейся основной пространственной гармоникой
МДС реакции якоря, показаны на рис. 15.20 6. При этом влияние
пазов не учитывается. Каждая из волн индукции состоит из основ-
ной пространственной гармоники (штриховые линии) и семейства
нечетных высших гармоник, эффект которых обычно мал. Поэтому
рассматриваются только основные гармоники индукции, которые
представлены на рис. 15.20 а векторами потоков и Фв.
117
Рис. 15.20. Магнитные потоки по продольной оси
явнополюсной синхронной машины
Другие условия возникают, когда ток якоря находится в фазе с
ЭДС возбуждения (рис. 15.21 а). Ось волны реакции якоря здесь сов-
падает с поперечной осью (рис. 15.21 б). Из-за большого радиального
зазора в межполюсном пространстве волна индукции реакции якоря
имеет седлообразную форму и состоит главным образом из основной
и третьей гармоник. Третья гармоника потока индуктирует третью
гармонику ЭДС в фазах якоря, но в линейных напряжениях третьи
гармоники отсутствуют. Поэтому обычно рассматривают лишь ос-
новную гармонику потока (показана штриховой линией).
Из-за большого магнитного сопротивления зазора в межполюс-
ном пространстве основная гармоника потока реакции якоря по по-
перечной оси (рис. 15.21) меньше основной гармоники потока реак-
ции якоря по продольной оси (рис. 15.20) при одном и том же токе
якоря. Следовательно, реактивное сопротивление якоря меньше, ко-
гда ток якоря совпадает по фазе с ЭДС возбуждения (рис. 15.21 а),
чем когда он сдвинут на 90° (см. рис. 15.20 а).
Рис. 15.21. Магнитные потоки по поперечной оси
явноплюсной синхронной машины
118
Влияние явно выраженных полюсов можно учесть, разлагая ток
якоря 1а на две составляющие: сдвинутую на 90° и совпадающую по
фазе с ЭДС возбуждения, как показано на диаграмме (рис. 15.22).
Она построена для ненасыщенного генератора, работающего на ак-
тивно-индуктивную нагрузку. Состав-
ляющая I_d тока якоря создает поток
реакции якоря по продольной оси (рис.
15.20) и называется поэтому продоль-
ной. Составляющая создает поток
реакции якоря по поперечной оси (рис.
15.21) и называется поперечной. Из
рис. 15.21
7f/=/osin^; (15.33)
79=7acos</, (15.34)
Рис. 15.22. Векторная диаграм-
ма токов и магнитных потоков
синхронной и явнополюсной
машины
где ц/ - фазовременнбй угол между 7О и £,.
В ненасыщенной машине в соответствии с принципом нало-
жения (суперпозиции) полный поток реакции якоря Фо равен сум-
ме составляющих Фг/ и Ф . Результирующий поток в зазоре Ф^
равен сумме потока возбуждения Ф и потока реакции якоря Фо.
15.6.2. Продольное и поперечное синхронные
реактивные сопротивления
С составляющими тока якоря l_d и связаны составляющие
падения напряжения на синхронных реактивных сопротивлениях
jxdl_d и jx Ц, где xd и xq есть продольное и поперечное син-
хронные реактивные сопротивления, которые учитывают эффек-
ты всех потоков, создаваемых токами якоря, то есть потоков реак-
ции якоря и потоков рассеяния, включая дифференциальное рас-
сеяние. По аналогии с неявнополюсной машиной действие потоков
продольной и поперечной реакции якоря учитывается реактивными
сопротивлениями продольной xad и поперечной х реакции якоря.
Синхронные продольные и поперечные реактивные сопротивления:
xd=XOd+xaa’ (15.35)
xq=xaq+xaa’ (15.36)
где хаа - реактивное сопротивление рассеяния якоря, принятое
одинаковым для продольного и поперечного токов.
119
Поперечное синхронное реактивное сопротивление xq меньше
продольного xd из-за большего магнитного сопротивления воз-
душного зазора по поперечной оси. Обычно xq = (0,6...0,7)xrf.
Этот эффект имеет место также и в турбогенераторах, так как пазы
на поверхности цилиндрического ротора, в которых располагаются
проводники обмотки возбуждения, несколько увеличивают маг-
нитное сопротивление по поперечной оси.
75.6.3. Уравнения и векторные диаграммы
явнополюсных синхронных машин
Напряжение на зажимах якоря явнополюсного генератора U
равно ЭДС возбуждения Ej минус падения напряжения на син-
хронных реактивных сопротивлениях xd и xq и активном сопро-
тивлении якоря Ru :
U = Ef -jxdLa~jxqLq-RaI_a- (15.37)
В другой записи
Ef=U + jxdLa + jxqLq + RaL^, (15.38)
где Д, - полный ток якоря.
Уравнению (15.38) соответствует векторная диаграмма (рис.
15.23). В крупных машинах падение напряжения на активном со-
противлении якоря при номинальном токе обычно меньше 0,01 но-
минального напряжения, поэтому им, как правило, пренебрегают.
Упрощенная векторная диаграмма приобретает вид, показанный на
рис. 15.24. При построении этой диаграммы ток якоря I_a необхо-
димо представить составляющими I_d и / для чего требуется
знать угол сдвига ц/ тока якоря по отношению к ЭДС возбуждения
Е f. Обычно известен лишь угол ср между током якоря и напряже-
нием на зажимах, который определяется характером нагрузки гене-
ратора. Поэтому удобно использовать некоторые дополнительные
соотношения, которые вытекают из векторной диаграммы. Если из
точки а провести перпендикуляр к вектору тока якоря 7О. то точка
b пересечения этого перпендикуляра с вектором Е? отсекает отре-
зок ab, равный xqla\
, ae xIacosiE
ab =-----— —-------= x
cost// cost//
Л- (15.39)
120
Рис. 15.23. Полная векторная диа-
грамма напряжений синхронного яв-
ноплюсного генератора (нагрузка ак-
тивно-индуктивная
Рис. 15.24. Упрощенная векторная
диаграмма явноплюсного генератора
Используя это соотношение, нетрудно определить положение
вектора ЭДС возбуждения и осей дне/. Такое построение про-
изводят, в частности, при определении необходимого возбуждения
для данных U, 1и и cos(o явнополюсной машины.
Иногда в целях упрощения анализа явнополюсную машину
рассматривают как неявнополюсную, полагая xd — х. Отрезок ас
равен xqIa. Тогда при неизменных условиях на зажимах машины
необходимая ЭДС возбуждения равнялась бы E'j. Поскольку отре-
зок cf перпендикулярен к Ef, разница между приближенным Е'^ и
действительным Ef значениями ЭДС возбуждения мала. Таким
образом, влияние явновыраженных полюсов на соотношения меж-
ду напряжением на зажимах, током якоря, мощностью и возбужде-
нием в нормальном рабочем диапазоне второстепенно и соответст-
вующие характеристики явнополюсной машины могут быть рас-
считаны с удовлетворительной точностью на основе теории машин
с цилиндрическим ротором. Различие теорий явнополюсной и не-
121
явнополюсной машины приобретает важность только при малых
возбуждениях.
Значительная разница в фазовых углах E_f и (рис. 15.24)
вызвана наличием реактивного (параметрического) момента в яв-
нополюсной машине, о котором речь пойдет в п. 15.8.
15.7. Характеристики синхронных машин
в установившихся режимах
15.7.1. Характеристики холостого хода
и короткого замыкания
Характеристика холостого хода синхронной машины есть
кривая зависимости напряжения на зажимах разомкнутой цепи
якоря от тока возбуждения, когда машина работает с постоянной
скоростью. Эту зависимость обычно строят в относительных еди-
ницах, как на рис. 15.25, где Ux= 1,0 соответствует номинальному
напряжению. При этом характеристи-
ки холостого хода синхронных машин
различной мощности являются прак-
тически одинаковыми.
Нелинейность характеристики хо-
лостого хода обусловлена насыщением
магнитной цепи машины, которое воз-
растает при увеличении тока возбуж-
дения. Касательная к начальной части
характеристики холостого хода есть
линия воздушного зазора, характери-
зующая магнитную цепь при отсутст-
вии насыщения.
Для имеющихся в наличии машин характеристику холостого
хода получают экспериментально, приводя машину во вращение и
измеряя напряжения на зажимах, соответствующие различным зна-
чениям тока возбуждения, при разомкнутой цепи якоря.
Характеристика короткого замыкания. Опытное опреде-
ление xd. Если между зажимами якоря синхронной машины, рабо-
тающей как генератор при синхронной скорости, включить ампер-
метры, а ток возбуждения увеличивать до тех пор, пока ток якоря
не достигнет номинального значения, можно получить данные для
122
Рис. 15.25. Характеристика
холостого хода синхронной
машины
построения зависимости тока короткого замыкания якоря от тока
возбуждения. Эта зависимость называется характеристикой ко-
роткого замыкания.
Поскольку активное сопротивление якоря много меньше син-
хронного реактивного сопротивления, ток якоря при коротком замы-
кании отстает от ЭДС возбуждения почти на 90°. Волна МДС реак-
ции якоря совпадает с осью полюсов и противоположна полю возбу-
ждения (см. п. 15.6.1), а ток якоря имеет только продольную состав-
ляющую. Тогда уравнение по второму закону Кирхгофа для цепи
якоря независимо от конструкции ротора (явнополюсная, неявнопо-
люсная) при многофазном коротком замыкании приобретает вид
Ef=jxdI_a + RaI_a. (15-40)
ЭДС воздушного зазора, индуктируемая результирующим по-
током зазора Ф^-, равна сумме падений напряжения на активном
сопротивлении и реактивном сопротивлении рассеяния якоря:
Eg=jxaaLe, + RaLa-
В большинстве синхронных машин активное сопротивление
якоря пренебрежимо мало, а реактивное сопротивление находится в
пределах 0,10...0,20о.е. Другими словами при номинальном токе
якоря падение напряжения на нем составляет 0,10.. .0,20 номинально-
го напряжения. Поэтому ЭДС воздушного зазора Eg при том же токе
якоря в режиме коротком замыкании равна 0,10...0,20 номинального
напряжения. Поток в зазоре в 5... 10 раз меньше его нормального зна-
чения, и машина ненасыщена. В результате ток якоря при коротком
замыкании прямо пропорционален току возбуждения в пределах то-
ков якоря от нуля до номинального и выше, поэтому характеристика
короткого замыкания - прямая
линия (рис. 15.26).
Синхронное продольное
реактивное сопротивление xd
можно найти по данным холо-
стого хода и короткого замыка-
ния. Обычно определяют его
ненасыщенное значение xd<x>,
которое для каждой машины
определенно, тогда как насы-
щенное значение заметно изме-
няется.
Рис. 15.26. К определению xd
123
При токе возбуждения 0/(см. рис. 15.26) ток короткого замыка-
ния якоря равен ОЬ, а ненасыщенное значение ЭДС возбуждения
равно ординате Оа по линии воздушного зазора. Ненасыщенное зна-
чение синхронного продольного реактивного сопротивления по
уравнению (15.40) при учете малости Ru определяют по выражению
*d-=-f~- (15-41)
а
Насыщенное значение xd можно получить, подставив в (15.41)
насыщенное значение Е <, равное 0а'.
Отношением короткого замыкания (ОКЗ) синхронной маши-
ны принято называть отнесенный к номинальному значению ток
установившегося короткого замыкания /к0, получаемый при токе
возбуждения, который требуется для создания номинального на-
пряжения на зажимах при холостом ходе
Рис. 15.27. К определению ОКЗ
ОКЗ=^. (15.42)
4
Его можно определить
как отношение тока возбуж-
дения 1/0, требуемого для
создания номинального на-
пряжения при холостом ходе,
к току возбуждения /д, соот-
ветствующему номинально-
му току якоря при коротком
замыкании (рис. 15.27)
ОКЗ=-^-
0/
(15.43)
Отношение короткого замыкания равно обратной величине на-
сыщенного синхронного реактивного сопротивления xd в относи-
тельных единицах.
15.7.2. Рабочие характеристики синхронных машин
Внешняя характеристика синхронных генераторов устанавли-
вает связь между напряжением на зажимах и током якоря генерато-
ра при неизменных токе возбуждения и коэффициенте мощности
на1рузки, когда скорость вращения синхронная.
124
Внешние характеристики при трех различных коэффициентах
мощности построены каждая для своего тока возбуждения, обеспе-
чивающего номинальное напряжение при номинальном токе якоря
(рис. 15.28). Различный вид харак-
теристик обусловлен разным дейст-
вием реакции якоря. Так, при
cos (р ~ 1 имеет место только попе-
речная реакция якоря, которая влия-
ет больше на фазу напряжения, чем
на его значение (см. рис. 15.19 и
15.23). Поэтому внешняя характери-
стика (кривая 1) сравнительно жест-
кая. При индуктивном характере на-
Рис. 15.28. Внешние характери-
стики синхронного генератора
грузки возникает продольная реак-
ция якоря, размагничивающая ма-
шину, и напряжение на зажимах с
ростом тока якоря уменьшается более ощутимо (кривая 2). Напро-
тив, при емкостном характере нагрузки продольная реакция якоря
является намагничивающей, так что увеличение тока якоря сопро-
вождается увеличением напряжения на зажимах (кривая 3).
Характеристику, показывающую характер изменения ток воз-
буждения, требуемого для поддержания номинального напряжения
на зажимах, при изменении тока якоря (cos(р = const) называют ре-
гулировочной. Различие регулировочных характеристик для раз-
личных коэффициентов мощности (рис. 15.29) так же обусловлено
разным действием реакции якоря.
Номинальные мощности синхронных генераторов обычно ус-
танавливаются в виде наибольших полных мощностей нагрузок в
кВ А, на которые могут быть нагружены генераторы продолжи-
тельное время без перегрева при заданных напряжении и коэффи-
циенте мощности. Активная выходная мощность генератора опре-
деляется мощностью первичного двигателя. При фиксированной
нагрузке по активной мощности допустимая нагрузка генератора
по реактивной мощности ограничена нагревом обмотки возбужде-
ния и якоря. Семейство типичных кривых допустимых реактив-
ных мощностей генератора в относительных единицах показано на
рис. 15.30.
125
Рис. 15.29. Регулировочные
характеристики
Рис. 15.30. Допустимая реактивная
мощность генератора
Рис. 15.31 [/-образные кривые
синхронного двигателя
[/-образные кривые синхронных двигателей. Коэффициент
мощности, при котором работает синхронный двигатель, следова-
тельно, и его ток якоря при данной активной мощности можно изме-
нять, изменяя ток возбуждения. Кривую, показывающую зависи-
мость тока якоря от тока возбуждения при постоянном напряжении
на зажимах и постоянной нагрузке на валу, принято называть U-
образной кривой (рис. 15.31). При неизменной активной мощности
ток якоря минимальный при cos(P = l
и увеличивается с уменьшением
cos (р. Штриховые линии есть гео-
метрические места точек с постоян-
ными коэффициентами мощности.
Это, по сути, регулировочные харак-
теристики синхронного двигателя,
показывающие, как нужно изменять
ток возбуждения при изменении на-
грузки, чтобы поддерживать задан-
ный коэффициент мощности. Точки
справа от регулировочной кривой
для cos^-1 соответствуют перевоз-
буждению (машина генерирует опе-
режающий ток), а точки слева — не-
довозбуждению (машина генерирует
отстающий ток). Регулировочные характеристики синхронного
двигателя весьма похожи на регулировочные характеристики гене-
ратора (см. рис. 15.29). Если пренебречь влиянием активных сопро-
126
тивлений, регулировочные характеристики двигателей и генераторов
можно считать идентичными за исключением того, что кривые для
различных коэффициентов мощности меняются местами.
15.8. Статические угловые характеристики
синхронных машин
Рис. 15.32. Векторная диа-
грамма напряжений син-
хронного явнополюсного
генератора (нагрузка ак-
тивно-индуктивная)
15.8.1. Статические угловые характеристики
Наибольшая возможная кратковременная перегрузка синхрон-
ной машины определяется как наибольшая активная мощность, ко-
торую может обеспечить машина без потери синхронизма. Одна из
целей данного раздела - рассмотреть получение зависимостей для
пределов мощности синхронных машин при постепенно изменяю-
щихся нагрузках. Используем для этого понятие статической угло-
вой характеристики активной мощности.
Статической угловой характеристикой синхронной машины
называют зависимость активной мощности, развиваемой машиной,
от угла нагрузки 3 при постоянном напряжении на зажимах и по-
стоянном возбуждении.
Ограничимся рассмотрением простой
системы, состоящей из явнополюсной
синхронной машины, которая подсоеди-
нена к шинам бесконечной мощности с
напряжением U посредством линии с ма-
лыми активным и реактивным сопротив-
лениями. Примем, что Ra = 0 ввиду его
малости и будем считать, что машина ра-
ботает как генератор (векторная диаграм-
ма показана на рис. 15.32).
Если напряжение на шинах U разло-
жить на составляющие t/sin<9 и Ucos3
(показаны штриховыми линиями), соответ-
ственно находящиеся в фазе с токами I_d и
/ , то активная мощность, отдаваемая ге-
нератором в систему (при числе фаз т):
P = m[lcfUsm3 + JgUsm6y (15.44)
Для нахождения токов Id и Iq спроектируем векторы напря-
127
жений и ЭДС сначала на направление вектора ЭДС возбуждения
Е/, а затем на направление, перпендикулярное ему. При этом по-
лучаем
откуда
Ef = Ucos0 + xdld;
Usin0-x.,In,
ч ч
Е f -t/cos#
ld==L~--------:
xd
, UsmO
(15.45)
(15.46)
(15.47)
(15.48)
1 1 ™
-------sin 2#.
*d)
(15.49)
(15.50)
Подставив (15.47) и (15.48) в (15.44), после несложных преобра-
зований получим формулу статической угловой характеристики
синхронной машины в наиболее общем виде:
mEfU . mU2
Р =----—sin О +---
\ 2
В целях упрощения рассмотрим это соотношение по частям.
Угловая характеристика иеявнополюсной синхронной маши-
ны. Поскольку в случае неявнополюсной машины xd = xq, второй
член в правой части (15.49) обращается в нуль и формула угловой
характеристики приобретает вид
mEfU
Р =--------------------------—sin#.
хч
В отличие от моментов мощность обычно считают положи-
тельной, когда машина работает генератором, то есть отдает мощ-
ность в сеть. Таким образом, положительная полуволна угловой ха-
рактеристики (рис. 15.33) соответствует генераторному режиму.
Вообще же при Ra = 0 положительная и отрицательная полуволны
подобны.
Наибольшую активную мощность Ртах машина развивает при
0 = 90°:
mEfU
(15.51)
хч
Ртах, характеризующая перегрузочную способность машины,
пропорциональна ЭДС возбуждения. Поэтому с точки зрения крат-
128
ковременных перегрузок режим
перевозбуждения является пред-
почтительным.
Полагая, что мощность, раз-
виваемая первичным двигателем
RB, не зависит от угла в (горизон-
тальная линия на рис. 15.33), полу-
чаем точки 1 и 2 совместной рабо-
ты синхронного генератора с пер-
вичным двигателем. Тогда соглас-
Рис. 15.33. Статическая угловая
характеристика активной мощно-
сти неявнополюсной синхронной
машины
но условию (14.43), которое в дан-
ном случае может быть записано
ДЛЯ
устойчивая работа обес-
печивается лишь в точке 1 или на восходяшей части угловой харак-
теристики (0<6<90°). Для оценки предела статической устойчи-
вости используют 6кр, равный в данном случае 90°.
Угловая характеристика явнополюсной невозбужденной ма-
шины. При отсутствии возбуждения (Ef = 0) формула угловой ха-
рактеристики
7 (
mU2 1
sin 26
(15.52)
2
показывает влияние явновыраженных полюсов. Р — мощность, со-
ответствующая моменту, который стремится повернуть полюса так,
чтобы магнитное сопротивление магнитопровода потоку реакции
якоря было минимальным. Этот момент называют реактивным, или
параметрическим, имея в виду, что он обусловлен неравенством
параметров якоря xd и xq. Как видно, реактивный момент не зави-
сит от возбуждения, а определяется исключительно разницей меж-
ду xd и xq. Нетрудно видеть, что при отсутствии возбуждения пре-
делы устойчивой работы сокращаются (0 =45°).
Угловая характеристика явнополюсной возбужденной маши-
ны. В этом случае угловая характеристика описывается соотноше-
нием (15.40) и активная мощность, развиваемая машиной, имеет
составляющие, которые обусловлены полем возбуждения и полем
реакции якоря. Из-за влияния явновыраженных полюсов угловая
5 Зак.50
129
Рис. 15.34. Статическая угловая
характеристика активной мощно-
сти явноплюсной синхронной ма-
шины при наличии возбуждения
характеристика явнополюсной ма-
шины (сплошная линия на рис.
15.34) является несколько более же-
сткой в сравнении с характеристи-
кой неявнополюсной машины в том
смысле, что при равных напряже-
нии, ЭДС и xd явнополюсная маши-
на развивает необходимую мощ-
ность при меньших значениях в, а
ее максимальная мощность несколь-
ко больше. В нормально возбужден-
ной машине влияние явновыражен-
ных полюсов обычно невелико.
15.8.2. Параллельная работа синхронных
генераторов
Современные электроэнергетические системы содержат десят-
ки, а иногда и сотни синхронных генераторов, соединенных между
собой линиями той или иной длины и работающих параллельно на
общую нагрузку. Создаются такие системы для обеспечения беспе-
ребойности электроснабжения потребителей и экономии капиталь-
ных и эксплуатационных затрат.
Особенности параллельной работы синхронных генераторов
рассмотрим на примере простой системы, включающей в себя два
идентичных трехфазных генератора СГ1 и СГ2 с первичными дви-
Рис. 15.35. Параллельная работа
двух синхронных генераторов
гателями ПД1 и ПД2, которые ра-
ботают на нагрузку Н через общие
шины (рис. 15.35). Предположим,
что генератор СГ1 питает нагрузку
при номинальных напряжении и
частоте, а генератор СГ2 отклю-
чен. Генератор СГ2 может быть
включен параллельно СП, если
его ротор вращается с синхронной скоростью, а реостат возбужде-
ния установлен так, чтобы напряжение на его зажимах было равно
напряжению на шинах. Если частота подключаемой машины не
равна частоте на шинах, фазовый сдвиг между напряжением маши-
ны и напряжением на шинах изменяется с частотой, равной разно-
130
сти часто! двух напряжений. Выключатель В2 должен быть замк-
нут, когда два напряжения находятся в фазе и напряжение на пере-
ключателе равно нулю. В противном случае возникают значитель-
ные токи включения в обмотке якоря СГ2. Момент включения оп-
ределяют с помощью так называемого синхроноскопа. После того
как генератор СГ2 синхронизирован описанным способом, каждую
машину можно нагрузить своей долей общей активной и реактив-
ной нагрузки, путем соответствующего изменения моментов пер-
вичных двигателей и токов возбуждения генераторов.
При одинаковом числе полюсов генераторы должны работать
с одинаковой скоростью. Распределение отдаваемой активной мощ-
ности между генераторами полностью зависит от механических ха-
рактеристик их пер-
вичных двигателей.
На рис. 15.36 эти ха-
рактеристики при от-
сутствии регулиро-
вания скорости по-
казаны сплошными
линиями ПД1 и ПД2.
Общая нагрузка ге-
нераторов Рн пока-
зана горизонтальной
линией АВ, а выход-
ные мощности гене-
Рис. 15.36. Механические характеристики
первичных двигателей
раторов (в пренебрежении потерями) равны Д и Р2 . Предположим.
что скорость второго первичного двигателя ПД2 увеличилась, что
соответствует возрастанию момента этого двигателя и перемеще-
нию его механической характеристики в положение штриховой ли-
нии ПД2'. При этом мощность общей нагрузки остается неизмен-
ной (она представлена линией А'В'). Выходная мощность генера-
тора СГ2 увеличилась с Р2 до т2, тогда как мощность генератора
СП уменьшилась с Д до т{. В это же время увеличилась на Дсо
скорость и частота системы. Она можег быть возвращена к номи-
нальному значению за счет дальнейшего перевода нагрузки с гене-
ратора СП на СГ2. Это достигается уменьшением скорости пер-
вичного двигателя ПД1, что вызывает перемещение его механиче-
ской характеристики в положение штриховой линии ПД1'. Теперь
131
5*
общая нагрузка представлена линией А"В", а выходные мощности
генераторов равны т" и т^. Таким образом, частоту системы и
распределение активной мощности между генераторами можно
контролировать посредством регулирования первичных двигателей.
Рис. 15.37. Влияние изменения возбуждения
двух I араллельно работающих генераторов
Изменение токов воз-
буждения генераторов влия-
ет на напряжение на шинах
и распределение реактив-
ной мощности. Пусть два
генератора (рис. 15.35) от-
регулированы так, что ак-
тивная и реактивная нагруз-
ки распределены между ни-
ми поровну. Векторная диа-
грамма для этого режима
показана сплошными ли-
ниями на рис. 15.37, где U —
напряжение на шинах; /н - ток нагрузки; 1_а ток якоря каждого
из генераторов; E_f - ЭДС возбуждения. Падение напряжения на
синхронном реактивном сопротивлении каждого из генераторов
равно jxdI_u, а падениями напряжения на активных сопротивлени-
ях пренебрегаем. Теперь предположим, что возбуждение генерато-
ра СП увеличено. Напряжение на шинах при этом возрастает, и его
можно возвратить к номинальному значению уменьшением возбу-
ждения генератора СГ2. Результат такого регулирования показан
штриховыми векторами. Напряжение на шинах, ток и коэффициент
мощности нагрузки не изменились. Поскольку регулирование пер-
вичных двигателей не производилось, выходные активные мощно-
сти и активные составляющие токов якоря генераторов также оста-
лись неизменны. ЭДС возбуждения Ец и Е/2 изменились по фазе
и величине. Генератор СП с увеличенным возбуждением нагружен
всей реактивной мощностью системы, а генератор СГ2 работает с
коэффициентом мощности, равным единице.
Глава 16
АСИНХРОННЫЕ МАШИНЫ
16.1. Устройство и принцип действия асинхронных машин
Простейшая двухполюсная трех-
фазная асинхронная машина (рис. 16.1)
имеет обмотку статора такую же, как
и синхронная машина. При протека-
нии по ней трехфазных симметричных
токов в воздушном зазоре между ста-
тором и ротором возникает магнитное
поле, вращающееся со скоростью щ,
которая согласно (15.2) зависит от
числа пар полюсов р и частоты тока /j.
Ротор бывает двух типов. Об-
мотка ротора может быть выполнена
трехфазной и с тем же числом полю-
Рис. 16.1. Устройство простей-
шей асинхронной машины
сов, что и обмотка статора. Концы обмотки ротора, обычно соеди-
няемой в звезду, выводятся на контактные кольца, укрепленные на
валу ротора. Щетки, которые установлены на этих кольцах, связы-
вают обмотку ротора с внешней цепью. Асинхронную машину в
этом случае называют машиной с фазным ротором. Обмотка фаз-
ного ротора замкнута накоротко или на некоторое внешнее сопро-
тивление. Машина, изображенная на рисунке, имеет короткозамк-
нутый ротор типа беличьей клетки с обмоткой, состоящей из
алюминиевых или медных стержней, которые помещены в пазах
сердечника ротора и замкнуты накоротко с торцов кольцами из то-
го же материала, что и стержни. Особенностью асинхронного дви-
гателя является крайняя простота конструкции беличьей клетки.
Наиболее типичен двигательный режим асинхронной маши-
133
ны, когда к статору переменный ток подводится непосредственно, а
в роторе наводится за счет взаимной индукции. Предположим, что
ротор асинхронного двигателя вращается с постоянной скоростью
и об/мин в направлении вращения поля статора. Скорость поля, на-
зываемая синхронной, равна п\. Неравенство скоростей нищ при-
нято характеризовать с помощью скольжения:
«1
В другом виде
« = (!-$)«!. (16.2)
При скольжении х Ф 0 (при п Ф ) имеет место перемещение
витков обмотки ротора относительно магнитного поля статора, и в
роторе индуктируется ЭДС с частотой скольжения /2 - sfi Таким
образом, асинхронная машина аналогична трансформатору, но с
дополнительным эффектом трансформирования частоты. Поэтому
асинхронную машину с фазным ротором можно использовать как
преобразователь частоты.
В режиме двигателя обмотка ротора замкнута накоротко, а то-
ки ротора определяются ЭДС и комплексным сопротивлением ро-
тора при частоте скольжения. При пуске, когда ротор неподвижен,
скольжение л = I и частота тока ротора равна частоте статора: /2 = fi •
Поскольку независимо от типа ротора число его полюсов равно чис-
лу полюсов статора, поле, создаваемое токами ротора в воздушном
зазоре, вращается с той же скоростью, что и поле статора. При этом
возникает электромагнитный пусковой момент, который стремится
привести ротор во вращение в направлении поля статора. Если этот
момент достаточен для преодоления момента сопротивления на ва-
лу, ротор разгонится до рабочей скорости. Следует отметить, что
скорость ротора не может быть равна синхронной «1, так как в этом
случае проводники ротора были бы неподвижны по отношению к
полю статора, в них не индуктировались бы ЭДС и электромагнит-
ный момент был бы равен нулю.
Когда ротор вращается в направлении поля статора со сколь-
жением X. частота токов ротора равна sf} и поле ротора вращается
со скоростью хи1 по отношению к ротору в том же направлении.
Таким образом, на вращение ротора со скоростью и накладывается
вращение поля ротора со скоростью sn{. Скорость поля ротора от-
носительно неподвижного статора равна сумме этих скоростей:
134
П + йЩ =(|—л)/7( +5»| = П\. (16.3)
Как видно, поля статора и ротора, имея одинаковую скорость
вращения, неподвижны относительно друг друга. В этом случае, как
известно, создается постоянный электромагнитный момент, поддер-
живающий установившееся вращение. Такой момент, который суще-
ствует при любой механической скорости, отличной от синхронной,
называют асинхронным. Из анализа видно, что двигательному ре-
жиму соответствует диапазон скольжения 0 < х < I. Когда машина
работает как двигатель, электрическая энергия, потребляемая из сети
машиной преобразуется в механическую энергию на валу.
Другой возможный режим асинхронной машины - генератор-
ный. При этом ротор приводится во вращение посредством при-
водного двигателя в направлении поля статора со скоростью боль-
ше синхронной (и >«[). В обмотке статора наводится ЭДС, а элек-
тромагнитный момент противодействует вращению. Генераторно-
му режиму соответствует диапазон скольжения 0 > х > .
Наконец, если ротор асинхронной машины вращается с помо-
щью приводного двигателя в направлении, противоположном полю
статора, машина потребляет из сети энергию как двигатель, а мо-
мент является тормозящим, как у генератора. Такой режим назы-
вают режимом электромагнитного тормоза, или противовклю-
чения. В этом случае скольжение находится в диапазоне 1 < s < 00.
16.2. Момент многофазной асинхронной машины
Факторы, влияющие на форму моментно-скоростной характе-
ристики асинхронного двигателя с беличьей клеткой (рис. 16.2),
можно оценить с помощью
(15.27). Здесь поток в воздуш-
ном зазоре почти неизменный,
если неизменны приложенное
к статору напряжение и часто-
та (15.16). С другой стороны,
МДС ротора пропорциональна
току /2 (см. 15.20), и (15.27)
можно упростить:
Л/Эм = kl2 sin0 , (16.4)
где к - постоянный коэффици-
ент.
Рис. 16.2. Моментно-скоростная харак-
теристика асинхронной машины
с короткозамкнутым контуром
135
Ток в роторе определяется ЭДС, наводимой в роторе потоком
в зазоре Фб, и комплексным сопротивлением ротора при частоте
скольжения. В обычных условиях скольжение мало и в номиналь-
ном режиме не превышает 3...5 %. Поэтому частота ЭДС и тока
ротора равна 1,5...2,5 Гц. Поскольку активное сопротивление рото-
ра от частоты практически не зависит, а реактивное сопротивление
рассеяния пропорционально частоте, то цепь ротора считается чис-
то активной. При этом ток пропорционален ЭДС ротора и совпада-
ет с ней по фазе. В свою очередь, ЭДС пропорциональна скольже-
нию, и ток ротора также пропорционален скольжению. Кроме того,
МДС ротора отстает от потока Фб на 90° и потому sin0 = 1. Таким
образом, при малых скольжениях моментно-скоростная характери-
стика почти прямолинейная. С увеличением скольжения ввиду воз-
растания реактивного сопротивления рассеяния ток по характеру
становится более индуктивным и волна МДС ротора больше отста-
ет от волны потока Фб, sin в уменьшается. В результате момент с
увеличением скольжения сначала увеличивается до максимума, а
затем начинает уменьшаться. Максимальный или перегрузочный
момент определяет способность двигателя к кратковременным пе-
регрузкам. Асинхронный двигатель с беличьей клеткой есть по су-
ществу двигатель постоянной скорости, так как при переходе от
холостого хода к полной нагрузке скорость уменьшается лишь на
несколько процентов.
16.3. Приведенная асинхронная машина
76.3.7. МДС и потоки асинхронной машины
Волны индукции в зазоре В5 и МДС ротора F2 асинхронной
машины показаны (рис. 16.3) на примере двухполюсной трехфаз-
ной обмотки ротора, находящейся в двухполюсном поле зазора.
Волна индукции В5 движется по отношению к обмотке ротора со
скоростью скольжения .
Обмотка ротора на рис. 16.3 а изображена в момент времени,
когда ЭДС фазы а максимальна. Если реактивное сопротивление
рассеяния ротора мало по сравнению с его активным сопротивле-
нием (что справедливо при малых скольжениях), ток фазы а в этот
момент также максимальный и волна МДС ротора совпадает с осью
136
Рис. 16.3. Волны МДС и магнитной
индукции
фазы а. Угол смещения волн
МДС и потока в = 90°.
Если реактивное сопро-
тивление рассеяния ротора
имеет некоторое значение, от-
личное от нуля, ток фазы а от-
стает от ЭДС на угол <//2 Ина-
че говоря, ток фазы а достиг-
нет максимума с запаздывани-
ем и волна потока успеет пе-
реместиться вдоль зазора на
1//2 (рис. 16.3 б). Теперь угол
смещения равен в - 90° +1//2,
то есть в общем случае он отличается от оптимальной величины на
угол 1//2 > определяемый комплексным сопротивлением ротора при
частоте скольжения. Электромагнитный момент в двигательном
режиме действует по направлению вращения поля зазора (вправо
на рисунке).
Аналогичная картина полей в зазоре возникает в случае корот-
козамкнутой обмотки ротора типа беличьей клетки. Число полюсов
ротора с беличьей клеткой всегда равно числу полюсов статора.
По аналогии с трансформатором воздействие МДС ротора на
статор вызывает появление нагрузочной составляющей в токе ста-
тора. Поэтому статор потребляет из сети активную мощность, не-
обходимую для поддержания момента, который создается за счет
взаимодействия волн МДС и потока. Если реальный ротор машины
заменить некоторым условным, имеющим ту же МДС и коэффици-
ент мощности при данной скорости, на поведении статора это не
отразится. Таким образом приводят параметры ротора к статору.
16.3.2. Приведение обмотки неподвижного ротора
к статору
Асинхронная машина с неподвижным ротором имеет почти
полную аналогию с трансформатором. Вращающееся поле воздушно-
го зазора индуктирует ЭДС в обмотках статора и ротора соответст-
венно их числу витков. ЭДС статора вместе с падением напряжения
на реактивном сопротивлении рассеяния и активном сопротивлении
137
обмотки компенсирует приложенное к статору напряжение. Если
цепь неподвижного ротора замкнута на сопротивление нагрузки, то
напряжение на зажимах ротора равно ЭДС ротора за вычетом паде-
ний напряжения на реактивном сопротивлении рассеяния и активном
сопротивлении ротора от тока нагрузки. Поскольку обмотки асин-
хронной машины являются распределенными, коэффициенты приве-
дения параметров ротора к статору отличны от коэффициента приве-
дения трансформатора.
В соответствии с уравнением (15.16) результирующий поток
зазора Фб индуктирует в обмотке неподвижного ротора ЭДС, рав-
ную при наличии скоса пазов на роторе:
Е2 = (16.5)
Если реальная обмотка ротора заменена приведенной обмот-
кой, идентичной обмотке статора, то приведенная ЭДС ротора рав-
на ЭДС статора и определяется по формуле
Г2=Е1=4,44/1^об1Фб. (16.6)
При этом коэффициент приведения по напряжению
= (1б.7)
Е2 Е2 гг2А:о62 Лс
Амплитуда основной гармоники МДС реального ротора по
(15.26)
(168)
л р
где т2 - число фаз ротора (в общем случае т2 Ф тх).
Амплитуда основной гармоники МДС приведенного ротора
^ = ^2х/2 (16 9)
л р
Так как приведенный ротор должен создавать по отношению к
статору ту же МДС, что и реальный ротор со скошенными пазами,
имеем:
F2=kcF2. (16.10)
Следовательно, коэффициент приведения по току
(|6Л1)
I2 m2w2k^2 кс
В общем случае ки Ф к*, ввиду того, что т] Ф т2.
138
16.3.3. Приведение вращающейся асинхронной машины
к неподвижной, работающей как трансформатор
Пусть ротор асинхронной машины вращается со скоростью п,
отличной от синхронной скорости Hj, чему соответствует скольже-
ние s. При этом результирующий поток зазора Фб индуктирует в
обмотке ротора ЭДС, имеющую частоту скольжения sf}:
E2s = = sE2 , (16.12)
где
E2= 4,44/^2^62^5 (16-13)
есть ЭДС, индуктируемая тем же потоком в неподвижном роторе.
Поскольку ток обмотки ротора также имеет частоту скольже-
ния, реактивное сопротивление рассеяния вращающегося ротора
можно выразить следующим образом:
xff2s = 2^/1£<72 = ^<72 ; (16.14)
где
^2=2^2 (16-15)
есть реактивное сопротивление рассеяния неподвижного ротора.
Таким образом, ЭДС и реактивное сопротивление рассеяния
вращающегося ротора пропорциональны скольжению х. Активное
сопротивление обмотки ротора R2 можно считать постоянным,
пренебрегая поверхностным эффектом (вытеснение тока в провод-
никах обмотки ротора). При этом ток в цепи вращающегося ротора
12=---------------------. (16.16)
R2+Jxo2s R2+.Hxct2
Числитель и знаменатель (16.16) разделим на х:
Z2=v^— (1617)
Пэ
— + Jxcs2
S
Нетрудно видеть, что ток ротора /2 ПРИ этом остался неиз-
менным по модулю и фазе. Поскольку в (16.17) присутствует ЭДС
неподвижного ротора Е2, можно сказать, что неизменный ток /2
может быть получен при неподвижном роторе подключением к
R2
ЭДС некоторого комплексного сопротивления — + jxa2 (рис. 16.4).
s
Если принять для определенности s = 0,05 (двигательный режим), то
замена вращающегося ротора неподвижным соответствует увеличе-
139
Рис. 16.4. Электрическая
схема замещения цепи ро-
тора асинхронной машины
Электромагнитная
нию ЭДС и сопротивлений в \/s = 20 раз.
Применительно к активному сопротивле-
нию это означает, что приведение сопро-
вождается введением в цепь ротора доба-
вочного сопротивления
R 1 — V
R2a = —~R2=—R2- (16-18)
5 5
При принятом 5 = 0,05 Т?2д = 197?2 •
мощность машины, передаваемая за счет
взаимной индукции от статора к ротору, равна активной мощности
цепи ротора и в соответствии с рис. 16.4 составляет
7 R1
Дм=^2—• (16.19)
Потери в проводниках ротора при приведении неизменны:
Рэп! - т2^2 R2- (16.20)
Полная (или внутренняя) механическая мощность машины
(мех - Рэм ~ Рэл2 = ~ ~ ^2 = m2I2 R2- (16.21)
Отсюда механическая мощность вращающейся машины чис-
ленно равна мощности электрических потерь на добавочном актив-
ном сопротивлении /?2д=-—~R2- вводимом в цепь неподвижного
5
ротора. Таким образом, сопротивление /?2д моделирует механиче-
скую мощность машины.
В заключение отметим, что при замене вращающегося ротора не-
подвижным частота его ЭДС и тока становится равной частоте стато-
ра. Другими словами, все явления в роторе, если их наблюдать со ста-
тора, происходят с частотой статора. Все параметры неподвижного
ротора можно привести к статору, используя соотношения п. 16.3.2.
16.3.4. Уравнения приведенной асинхронной машины
Примем, что обмотки машин симметричны и обтекаются сим-
метричными токами, и рассмотрим одну фазу статора и ротора. По-
терями в магнитопроводе пренебрегаем.
Напряжение U_x, подводимое к обмотке статора, компенсиру-
ется противоЭДС (-£]), которую индуктирует в обмотке синхрон-
140
но вращающийся поток воздушного зазора, и падениями напряже-
ния на реактивном сопротивлении рассеяния хст1 и активном со-
противлении обмотки /?]:
t/j =-Ei + +7?i7i. (16.22)
Напряжение на зажимах обмотки вращающегося ротора равно
ЭДС sE2, которую наводит поток зазора, минус падения напряже-
ния на реактивном сопротивлении рассеяния лхгг2 и активном со-
противлении R2. Поскольку в нормальном состоянии цепь ротора
замкнута накоротко, уравнение напряжений имеет вид
О = sEx - jsxa2I_2 - R21_2. (16.23)
Разделив все члены уравнения (16.22) на скольжение s, пере-
ходим к неподвижному ротору:
R-,
Q = E2-jxc2I_2-^I_2. (16.24)
х
ЭДС обмоток можно выразить через падения напряжения на
реактивных сопротивлениях этих обмоток:
Ex=-j(xJ_x-xnI_2}- (16.25)
Ег — ~~ x2iZi), (16.26)
где Х| и х2 — собственные реактивные сопротивления статора и ро-
тора от поля воздушного зазора; х21 и х12 — реактивные сопротив-
ления взаимоиндукции статора и ротора от поля воздушного зазо-
ра. Знаки «—» перед х21 и х12 показывают, что при выбранных на-
правлениях токов в обмотках положительный ток ротора создает
отрицательное потокосцепление обмотки статора и наоборот.
Уравнения (16.22) и (16.24) с учетом (16.25) и (16.26) преобра-
зуем к виду
4^1 = JX\L\ ~ Jx\2Li + jxn\L\ + ^]Z] ’ (16.27)
Ro
0 — jx2\L\ ~ jx2—2 ~ jxa21-2 1-2- (16.28)
Приведение параметров неподвижного ротора к статору по
аналогии с трансформатором означает замену переменных в урав-
нениях (16.27) и (16.28):
/2=^Д2, (16.29)
Е'о
Е2==1. (16.30)
Отсюда получаем:
141
Ux = AZ1 -jkiXnr2 +jxa\L\ +R\L\'-> (16.31)
0 = jktlx2XIx ~]Кких212- (16.32)
Окончательно уравнения для приведенной асинхронной ма-
шины имеют вид
17] = jxx (/] — /_2 ) + jxaX /] + Т^Тд; (16.33)
n'
o=a(Zi-£2)-K2£2-—Г2. (16.34)
где x'n2 = кхкиха2 — приведенное реактивное сопротивление рассея-
ния ротора; /?2 = kiktlR2 - приведенное активное сопротивление ро-
тора.
Приведенные реактивные сопротивления ktx2x, кихх2 и &z#„x2
равны реактивному сопротивлению обмотки статора от основной
гармоники поля воздушного зазора X].
16.4. Схемы замещения и режимы работы
асинхронных машин
16.4.1. Схемы замещения асинхронных машин
Рис. 16.5. Т-образная схема замещения
асинхронной машины без учета потерь
в стали
Уравнения (16.33) и (16.34) описывают поведение асинхрон-
ной машины во всех возможных установившихся симметричных
режимах и соответствуют Т-образной электрической схеме заме-
щения (рис. 16.5). Ветвь 12 схемы называют намагничивающей.
Реактивное сопротивление хм,
численно равное собственно-
му реактивному сопротивле-
нию обмотки статора от пото-
ка зазора, представляет собой
реактивное сопротивление на-
магничивания. По ветви на-
магничивания протекает ток
намагничивания 1, = L -1'3,
МДС которого создает ре-
зультирующий (рабочий) поток в зазоре машины. Можно показать,
что
Un=JxMLu=-Ei- (16.35)
142
Схема замещения по условию записи уравнений (16.33) и
(16.34) не учитывает магнитных потерь, которые возникают в сер-
дечниках статора и ротора. Следует отметить, что потери в стали
ротора при номинальном скольжении в двигательном режиме ма-
лы, так как частота перемагничивания магнитопровода, равная час-
тоте скольжения, не превышает в режиме двигателя 2...3 Гц. Поте-
ри в стали статора учитывают обычно введением некоторого ак-
тивного сопротивления RM между точками 1 и 2 параллельно реак-
тивному сопротивлению хм.
При этом схема замещения
приобретает вид, показанный
на рис. 16.6. Здесь цепь рото-
ра несколько видоизменена,
чтобы разделить активную
мощность ротора на состав-
ляющую потерь в проводни-
ках обмотки и составляющую
полной механической мощ-
Рис. 16.6. Т-образная схема замещения
асинхронной машины с учетом потерь
в стали ротора
ности. Активное сопротивление RM можно определить по потерям
мощности в стали расчетным или опытным путем.
В данной схеме ток намагничивания не является чисто индук-
тивным, как на рис. 16.5, и может быть разложен на активную и ре-
активную составляющие. Иногда от параллельного соединения хм
и RM в ветви намагничивания переходят к последовательному со-
единению их эквивалентных сопротивлений.
Принятые в теории трансформаторов упрощения (исключение
ветви намагничивания или перенесение ее на зажимы первичного
контура) не оправданы для асинхронных машин, поскольку в но-
минальном режиме из-за наличия воздушного зазора ток намагни-
чивания велик (25...40 % номинального тока), а реактивные сопро-
тивления рассеяния обмоток асинхронной машины больше, чем в
трансформаторе. Упрощение при анализе обеспечивается, если ис-
пользовать схему замещения (рис. 16.5). При этом потери в стали
учитывают вместе с потерями на трение, вентиляцию и добавоч-
ными потерями. Подобный подход имеет то преимущество, что при
испытаниях машины нет надобности производить разделение по-
терь, а вносимая погрешность мала. По аналогии с трансформато-
ром параметры схем замещения находят обычно по данным опытов
холостого хода и короткого замыкания.
143
Рис. 16.7. Г-образная схема замещения
асинхронной машины
В литературе приво-
дится Г-образная схема за-
мещения асинхронной ма-
шины (рис. 16.7). Отличи-
тельной особенностью ее
является ветвь намагничи-
вания, вынесенная на за-
жимы статора, что облегча-
ет построение так называе-
мой круговой диаграммы асинхронной машины. Смысл коэффи-
циента С] раскрыт в п. 16.5.1.
16.4.2. Установившиеся режимы работы
асинхронных машин
Двигательный режим. Как показано в п. 16.1, двигательному
режиму соответствует скольжение 0 < s < 1. Рассмотрим процесс
преобразования энергии в асинхронном двигателе с помощью схе-
мы замещения (рис. 16.6).
Активная мощность, потребляемая щ-фазным двигателем из
сети:
/] =/Я|(/|/|СО5ф|, (16.36)
где t/|; У, — фазные действующие значения напряжения и тока ста-
тора; <Д| - угол сдвига фаз между векторами тока и напряжения.
Электрические потери в обмотке статора
p^=m^R}. (16.37)
Потери в стали статора
(16-38)
Электромагнитная мощность (то есть активная мощность, пе-
редаваемая от статора к ротору) равна мощности, потребляемой из
сети, без учета электрических потерь и потерь в стали:
Дм = ^-Ал|-Рмг- (16.39)
В соответствии со схемой замещения Рэы равна активной
мощности цепи ротора:
РэМ=^2— • (16.40)
5
144
Поскольку электрические потери в обмотке ротора
Рэл2 - ^2 ’ (16.41)
полная механическая мощность двигателя равна
о 1 — V
Рмх = - Рэл2 = т212 --R2 (16-42)
Сопоставим формулы (16.40), (16.41) и (16.42) и получим
^Л2=^ЭМ; (16.43)
Рмх=(1-^эм, (16-44)
то есть часть (1-х) электромагнитной мощности преобразуется в
механическую, а часть х рассеивается в виде электрических потерь
в роторе. Отсюда видно, что работа двигателя при больших сколь-
жениях неэкономична.
Механическая мощность на валу двигателя меньше полной
(или внутренней) механической мощности на механические и доба-
вочные потери (в предположении, что потерями в стали ротора
можно пренебречь):
^2=-Рмх-РМех-/’доб- (16.45)
Мощность Д является
полезной мощностью ма-
шины. Составляющие ак-
тивной мощности пока-
заны на энергетической
диаграмме (рис. 16.8).
КПД асинхронного
двигателя равен
Д У р
*7 = Т- = 1" р ’ (16-46)
п и
Рис. 16.8. Энергетическая диаграмма
активной мощности асинхронного
где У р = рэл1 + рм, + рэл2 + рмх + рдоб - суммарные потери мощно-
сти.
Баланс реактивных мощностей асинхронного двигателя вы-
глядит следующим образом.
Потребляемая из сети реактивная мощность
Q = m]U}Ilsixi(pl. (16.47)
Реактивная мощность, используемая для создания полей рас-
сеяния обмотки статора:
=/эт1/12хст|. (16.48)
145
Реактивная мощность, используемая для создания поля в воз-
душном зазоре:
Реактивная мощность,
сеяния обмотки ротора:
Рис. 16.9. Энергетическая диа-
грамма реактивной мощности
асинхронного двигателя
Е1
^="4—- (16.49)
м
используемая для создания полей рас-
(.16.50)
Таким образом,
21=91 + <7м + ?2- (16.51)
Согласно энергетической диа-
грамме (рис. 16.9), большую часть
потребляемой реактивной мощности
Qx составляет мощность дм, необхо-
димая для создания рабочего маг-
нитного поля в воздушном зазоре
машины. Это по существу мощность
возбуждения, которая определяет коэффициент мощности двигате-
ля (его обычные значения составляет 0,80...0,95). Поскольку поток
в зазоре машины с нагрузкой почти не изменяется, реактивная
мощность дм также неизменна. Таким образом, при холостом ходе
Рис. 16.10. Векторная
диаграмма напряжений
асинхронного двигателя
машины, когда активная мощность
мала, коэффициент мощности мини-
мален (0,10...0,15), что неблагопри-
ятно сказывается на работе питаю-
щей сети. Поэтому следует исклю-
чать продолжительную работу асин-
хронных двигателей при холостом
ходе. Схеме замещения (рис. 16.6)
соответствует векторная диаграмма
асинхронного двигателя (рис. 16.10).
Она аналогична диаграмме транс-
форматора (рис. 12.11) за исключе-
нием того, что цепь ротора замкнута
накоротко и активное сопротивление
этой цепи при рабочих скольжениях
является преобладающим (угол 1//2
относительно мал).
146
Генераторный режим. Генераторный режим асинхронной
машины можно обеспечить, вращая ее ротор посредством привод-
ного двигателя в направлении поля со скоростью больше синхрон-
ной. При этом обмотка статора, подключенная к сети, потребляя
реактивную мощность возбуждения, отдает в сеть активную мощ-
ность, которая равна механической мощности приводного двигате-
ля без учета активных потерь. В качестве источника реактивной
мощности возбуждения можно использовать также батарею стати-
ческих конденсаторов, включенную параллельно с обмоткой стато-
ра. В этом случае машина способна обеспечивать активной мощно-
стью автономную нагрузку, подключенную к зажимам обмотки
статора. В генераторном режиме скольжение может принимать
значения 0 > s > . В реальности, поскольку высокие скорости по
механическим соображениям недопустимы, обеспечивают сколь-
жение в диапазоне 0>$>-1.
Асинхронные генераторы облада-
ют худшими характеристиками,
чем синхронные, поэтому приме-
нение их ограничено.
Векторная диаграмма асин-
хронного генератора (рис. 16.11)
построена с учетом того, что век-
тор реактивной (по отношению к
-Е]) составляющей тока ротора
не изменяет направления, а вектор
активной составляющей этого то-
ка повернут на 180е в сравнении с
двигательным режимом. Это соот-
ветствует изменению направления
электромагнитного момента на
противоположное при переходе от
двигательного режима к генера-
торному.
Рис. 16.11. Векторная диаграмма на-
пряжений асинхронного генератора
Режим электромагнитного тормоза. Этот режим обеспечива-
ется. если ротор асинхронной машины вращать от дополнительного
двигателя против поля зазора. При этом 1 < х < °°. Практически
скольжение находится в пределах 1 < х < 2 В режиме электромаг-
нитного тормоза направление движения проводников ротора отно-
147
сительно поля зазора такое же, как и в двигательном режиме, по-
этому электромагнитный момент действует в направлении вра-
щающегося поля и по отношению к ротору является тормозящим.
Обмотка статора, как и при работе двигателем, потребляет из сети
активную мощность. Векторная диаграмма в режиме тормоза ана-
логична диаграмме на рис. 16.10, хотя ток ротора по характеру бо-
лее реактивный (активное сопротивление ротора R'2/s в рассматри-
ваемом диапазоне скольжений сравнительно с х'п2 мало).
Из (16.43) видно, что в режиме тормоза рэл2 > Р-1М- Электриче-
ские потери в роторе рэл2 частично компенсируются за счет меха-
нической мощности приводного двигателя. Поскольку эти потери
относительно велики, режим тормоза в отношении нагрева ротора
является тяжелым, и продолжительная работа машины в этом ре-
жиме не допускается.
Режим электромагнитного тормоза используется для сокраще-
ния времени останова двигателей и обеспечивается путем простого
изменения порядка чередования двух фаз статора включенного в
сеть двигателя. На этом основании режим электромагнитного тор-
моза часто называют режимом противовключения. Сразу после из-
менения порядка чередования фаз машина под действием тормозя-
щего момента начинает интенсивно замедляться и до того, как ро-
тор начнет вращаться в противоположном направлении, ее отклю-
чают от сети.
16.5. Электромагнитные моменты и механические
характеристики асинхронных машин
16.5.1. Энергетические соотношения
Электромагнитной мощности (16.40) соответствует электро-
магнитный момент
Р рР
= (16.52)
^мех I
где сомех| =--механическая угловая скорость магнитного поля в
Р
зазоре; го, - электрическая угловая скорость этого поля, равная уг-
ловой частоте питающей сети: C0j = 2я fx.
Подставим (16.40) в (16.52):
148
(16.53)
Л/ - Pmr !'l R2
^эм - Л
(У| S
Формулу приведенного тока ротора Г2 можно получить, при-
меняя теорему об эквивалентном генераторе (теорема Тевенина) к
схеме замещения (рис. 16.5). Согласно теореме Тевенина, любая
цепь, состоящая из линейных элементов и постоянных источников
напряжения, при рассмотрении с зажимов а и Ъ (рис. 16.12 а) может
быть заменена простым источником ЭДС Еэкв с последовательным
сопротивлением ZBX (рис. 16.12 6). Эквивалентная ЭДС Еэкв равна
напряжению, возникающему между зажимами а и b исходной схе-
мы, когда эти зажимы разомкнуты. ZBX есть комплексное сопро-
тивление между теми же зажимами, когда все источники напряже-
ния внутри исходной схемы замкнуты накоротко. При этом ток не-
которой ветви с сопротивлением ZB, подсоединенной к зажимам а
и Ь, определяется по выражению
Е
J _ —экв
ZBX 4" Z Е
—В ’
(16.54)
а) б)
Рис. 16.12. К теореме Тевенина
В схеме замещения асинхронной машины (рис. 16.5) точки а и
b выбраны, как показано. По теореме Тевенина эквивалентная ЭДС
при разомкнутых цепях ротора определяется соотношением
E™=Ux-(jxox+R^. (16.55)
где /0 - ток статора при разомкнутом роторе;
л ______£1
(16.56)
io ~
П1 т Алст1 -глм/
Таким образом, после подстановки (16.56) в (16.55) имеем
----г- (16.57)
F =U
—эки —1
149
Эквивалентное (по теореме Тевенина) комплексное сопротив-
ление статора между зажимами а и b
7 _
—вх п .
(16.58)
Тогда ток ротора /2 в соответствии с (16.54) найдем из выра-
жения
Li -
U\j*M
Л+ЛХ<т1+Хм)
(16.59)
что после некоторых преобразований дает для действующего зна-
чения этого тока
72 = , - У* (16.60)
L I '
J ^1+с,— +Нщ+С1Лст2)
’Ч s )
где с, - комплексный коэффициент, характеризующий амплитуд-
но-фазовое соотношение между приложенным напряжением (У, и
ЭДС статора Ej 1
с, = 1 -V CT1-^=1 + 1 7 g| . (16.61)
JXM
В инженерных расчетах ввиду малости R} коэффициент q оп-
ределяют приближенно:
q=l + ^-.
хм
(16.62)
Окончательную формулу электромагнитного момента асин-
хронной машины с учетом (16.53) и (16.60) запишем в вид
Л/,м
ЭМ
р”1Ц2 —
5
(16 63)
Общая форма зависимости момента от скольжения показана на
рис. 16.13, где изображены области работы в двигательном
(0<5<1) и генераторном (0>л>°°) режимах, а также в режиме
электромагнитного тормоза (0<s <°°) Здесь же представлена кри-
вая зависимости приведенного тока ротора Г2 от скольжения. Кри-
150
вая момента имеет положительный и отрицательный максимумы
при скольжениях: л = ±лкр, называемых критическими.
Рис. 16.13. Зависимости электромагнитного момента и при-
веденного тока ротора от скольжения асинхронной машины
В двигательном режиме при увеличении скольжения от нуля
до зкр момент прямолинейно возрастает до Л/тах, затем начинает
падать, несмотря на то, что ток ротора продолжает увеличиваться.
Уменьшение момента обусловлено тем, что с ростом скольжения
7?'
активное сопротивление цепи ротора уменьшается и ток ротора
становится по характеру все более индуктивным, а момент, зави-
сящий от активной составляющей тока ротора, уменьшается.
16.5.2 Максимальный электромагнитный момент
Электромагнитный момент машины максимален, когда макси-
мальна электромагнитная мощность, то есть мощность, выделяемая
R'
на сопротивлении ротора — (рис. 16.5). Согласно известному
х
принципу соответствия комплексных сопротивлений активного
двухполюсника и нагрузки эта мощность максимальна, когда ак-
7?'
тивное сопротивление равно комплексному сопротивлению
между этим сопротивлением и источником ЭДС (рис. 16.12):
151
r2
~ —вх + Аст2 >
5кр
_ (Ri+jxffl)jxM
^-вх “ „ . ./
(16.64)
= ~(Л1 + Ат1)-
С1
Подставив (16.65) в (16.64) и произведя элементарные преоб-
разования, получаем формулу для критического скольжения:
. C\R2
(16.65)
^кр
(16.66)
Подстановка (16.66) в (16.63) дает максимальный
асинхронной машины
момент
^Ат>ах
Рт\и\
(16.67)
2<7|('O1 ±7?! +
В (16.66) и (16.67) знак «+» соответствует двигательному, а
знак «» - генераторному режимам. Поскольку Rx обычно мало,
выражения записывают в несколько упрощенной форме:
____________________________,
с СГ -4-__________________________£__
лкр —
(16.68)
*ni +с|4г ’
тЦ2
(16.69)
Отсюда
^Дпах----- - /
2с]ш1 (хп|
Рис. 16.14. Кривые электромагнитного
момента при различных активных
сопротивлениях ротора
критическое
скольжение прямо пропор-
ционально активному со-
противлению ротора, а мак-
симальный момент от Т?2 не
зависит. Если, вводя внеш-
ние добавочные сопротив-
ления в
чивать R'i
цепь ротора, увели-
. -2, максимальный
остается неизмен-
момент
ным, а скольжение изменя-
ется. См., например, кривые
(рис. 16.14). построенные для различных R2 (R2i <R2ll < R'zw)- Эта
особенность асинхронных машин используется для обеспечения
максимального пускового момента и регулирования скорости дви-
гателей с фазным ротором.
152
Максимальный момент характеризует способность асинхрон-
ного двигателя выдержать кратковременные перегрузки. Отноше-
ние максимального момента к номинальному
06.70)
Л/н
называют кратностью максимального момента и используют для
оценки перегрузочной способности асинхронных двигателей. Обыч-
но км = 1,7...3,0. что соответствует лкр=0,06...0,15.
16.5.3. Начальный пусковой момент
Начальным пусковым моментом называют момент, развивае-
мый двигателем сразу после включения, когда ротор еще не начал
вращаться. Его значение может быть найдено по (16.63) подстанов-
кой л> = 1:
2 f
Л/Н.п=—Г-------Рт^' R2---------И- <16-71)
офЯ|+С17?2) +(^1+С142) |
Если сопротивление R2 увеличить так, чтобы л- =1, двига-
тель будет развивать в начале пуска максимальный момент.
16.5.4 Механическая характеристика
асинхронного двигателя
Момент на валу двигателя М2 меньше электромагнитного
Мэм из-за потерь на трение, вентиляцию и добавочных потерь,
обусловленных моментом сопротивления при холостом ходе Л/о:
М2=Мэ!Л-М0. (16.72)
Механической характеристикой двигателя называют зависи-
мость полезного момента от скорости М2 = f ((Умех ) или. наоборот,
wmcx ~ Для удобства момент Л/о часто складывают с мо-
ментом сопротивления рабочей машины, спаренной с двигателем, а
механическую характеристику двигателя (рис. 16.15) рассматрива-
ют как M.)V = f (сомех ). На рисунке показана зависимость момента
сопротивления рабочей машины от скорости Мс -/(fOMCX) и обо-
значены точки a, b и с совместной работы двигателя и машины.
Применяя критерий (14 43), нетрудно установить, что устойчивая
153
Рис. 16.15. Механические характери-
стики асинхронного двигателя
и рабочей машины
работа агрегата возможна в
точках а и с. Однако работа в
точке с неэффективна ввиду
малой скорости и значительных
потерь в цепи ротора, которые
пропорциональны скольжению
(см. (16.43)). Таким образом,
нормальная работа обеспечива-
ется только в точке а. Рабочая
часть механической характери-
стики асинхронного двигателя
показана на рисунке жирной
линией. По ее виду можно заключить, что обычный асинхронный
двигатель - это. в сущности, двигатель постоянной скорости. Его
скорость в рабочем диапазоне нагрузок изменяется обычно в пре-
делах ±5 %. Большее изменение скорости можно получить, исполь-
зуя двигатель с фазным ротором и вводя внешнее активное сопро-
тивление в цепь ротора.
16.6. Асинхронные короткозамкнутые двигатели
с вытеснением тока в обмотке ротора.
Пуск асинхронных двигателей
16.6.1. Двигатели с глубоким пазом и двойной клеткой
К асинхронному двигателю предъявляют противоречивые тре-
бования. С одной стороны, при нормальной работе КПД двигателя
должен быть высоким, что предполагает малое активное сопротив-
ление обмотки ротора. С другой стороны, двигатель должен разви-
вать достаточный начальный пусковой момент, для обеспечения ко-
торого активное сопротивление ротора нужно увеличивать. В двига-
теле с фазным ротором это противоречие разрешается введением на
период пуска добавочного активного сопротивления в цепь ротора,
которая сама имеет малое сопротивление. Однако двигатели с фаз-
ным ротором используются относительно редко из-за их сравни-
тельно высокой стоимости.
Простое решение для короткозамкнутых роторов получают
исходя из того, что при неподвижном роторе частота тока в нем
равна частоте сети, а при номинальной скорости составляет лишь
154
2... 3 Гц. Используя эффект вытеснения тока в стержнях беличьей
клетки и выбирая соответствующую форму стержней, можно до-
биться того, что ее активное сопротивление при частоте 50 Гц бу-
дет в несколько раз больше, чем при частоте 2...3 Гц.
Рассмотрим ротор с беличьей клеткой,
имеющей узкие стержни (рис. 16.16). Здесь
же показаны силовые линии поля пазового
рассеяния, создаваемого током стержня. Ес-
ли принять, что проницаемость магнитопро-
вода бесконечна, все линии потока рассеяния
должны замыкаться под дном паза. Предста-
вим, что стержень состоит из большого чис-
ла слоев малой толщины. Два таких слоя
внизу и вверху стержня показаны заштрихо-
ванными. Нижний слой сцеплен с большим
Рис. 16.16. Стержень
беличьей клетки глу-
бокопазного двигателя
числом линий поля рассеяния, и индуктивность рассеяния этого
слоя больше, чем верхнего. Поскольку слои параллельны, перемен-
ный ток в верхних слоях с низкими реактивными сопротивлениями
рассеяния больше, чем в нижних слоях с высокими реактивными
сопротивлениями. Это равносильно перемещению линий тока к
верху паза и увеличению активного сопротивления стержня. При
этом индуктивность рассеяния стержня несколько снижается. Так
как вытеснение тока в верхнюю часть стержня обусловлено индук-
тивным действием поля рассеяния, активное сопротивление есть
функция частоты тока, высоты стержня, а также магнитной прони-
цаемости и удельного электрического сопротивления материала
стержня. На рис. 16.17 приведена для примера кривая активного
сопротивления, отнесенного к сопротивлению постоянному току, в
функции частоты для медного стержня высотой 25 мм. С целью
усиления эффекта вытеснения часто применяют стержни бутылоч-
ной или трапецеидальной формы, и при разгоне ротора до устано-
вившейся скорости активное сопротивление его беличьей клетки
уменьшается в несколько раз.
Подобный результат можно получить с помощью двойной бе-
личьей клетки (рис. 16.18). которая состоит из двух рядов стерж-
ней, замкнутых кольцами на торцах ротора. Верхние стержни имеют
меньшее поперечное сечение и более высокое активное сопротив-
ление, чем нижние. Поле пазового рассеяния таково, что индуктив-
ность нижних стержней выше, чем верхних. Выбором конструкции
155
Рис. 16.17. Поверхностный эффект
в медном стержне ротора
Рис. 16.18. Стержни двойной
беличьей клетки
паза можно увеличить разницу между этими индуктивностями.
В неподвижном состоянии, когда частота ротора равна частоте ста-
тора (сети), ток в нижних стержнях относительно мал из-за их вы-
соких реактивных сопротивлений рассеяния. При этом активное
сопротивление ротора приближенно равно активному сопротивле-
нию верхней (наружной) беличьей клетки. Однако при низких час-
тотах ротора, соответствующих малым скольжениям, реактивное
сопротивление рассеяния, уменьшаясь, не оказывает влияния, и ак-
тивное сопротивление ротора приближается к суммарному сопро-
тивлению двух параллельных рядов стержней. Причем из-за срав-
нительно малого сечения верхних стержней основная часть тока
при нормальной работе протекает по нижним стержням. Обычно
верхнюю беличью клетку называют пусковой (П), а нижнюю - ра-
бочей (Р).
Эффект вытеснения проявляется при любой конструкции об-
мотки ротора, поэтому, строго говоря, параметры R2 и х'п2 пере-
менные. Но при небольшой высоте стержней зависимостью этих
параметров ротора от частоты можно пренебречь. Что же касается
двигателей с глубоким пазом и с двойной клеткой, то простые схе-
мы замещения (рис. 16.5 и 16.6) применимы и для них, с тем отли-
чием. что Т?2 и х'а2 являются функциями скольжения. Все основ-
ные соотношения по-прежнему справедливы, если должным обра-
зом учитывается изменение R2 и х&2 при изменении скольжения.
Так следует поступать, в частности, при расчете пускового тока и
момента. Напротив, расчет рабочих характеристик в узком диапазо-
не скольжений можно выполнить, полагая R2 и х'п2 неизменными.
156
16.6.2. Способы пуска асинхронных двигателей
Асинхронный двигатель при пуске должен развивать вра-
щающий момент, который превышает момент сопротивления спа-
ренной с двигателем рабочей машины, так как только в этом случае
произойдет разгон агрегата до номинальной скорости. С другой
стороны, пусковые токи в обмотках двигателя не должны превы-
шать допустимых значений во избежание перегрева и повреждения
обмоток, а также чрезмерного понижения напряжения в питающей
сети. Наконец, схема пуска должна быть достаточно простой.
I [роблема пуска двигателей с фазным ротором решается путем
введения добавочных резисторов в цепь обмотки ротора. Это ведет
к увеличению пускового момента и уменьшению пускового тока.
Влияние активного сопротивления ротора на зависимость момента
от скольжения рассмотрено в и. 16.5.2. Если необходим высокий
начальный пусковой момент, активное сопротивление цепи ротора
нужно выбрать таким, чтобы при неподвижном роторе двигатель
развивал максимальный момент. По мере разгона сопротивление
добавочного резистора постепенно (плавно или ступенями) умень-
шают. Поскольку большая часть мощности в цепи ротора рассеива-
ется на внешних реостатах, нагрев ротора при пуске сравнительно
невелик.
Двигатели с фазным ротором ввиду их высокой стоимости ис-
пользуются главным образом в установках с тяжелыми условиями
пуска и в приводах с регулируемой скоростью. Напротив, асин-
хронные двигатели с короткозамкнутым ротором, являясь просты-
ми по конструкции, дешевыми и надежными, имеют широкое рас-
пространение.
Наиболее простым является так называемый прямой пуск
асинхронных короткозамкнутых двигателей, осуществляемый под-
ключением обмотки статора прямо к напряжению сети и не требую-
щий специальной пусковой аппаратуры. Поскольку к статору подво-
дится полное напряжение сети, начальный пусковой ток при прямом
пуске в 5...7 раз превышает номинальное значение. Конструкция со-
временных асинхронных двигателей такова, что ни электродинами-
ческие силы, действующие на обмотки, ни нагрев обмоток при пря-
мом пуске не превышаю! допустимых пределов. Поэтому прямой
пуск возможен, если мощность сети (системы) достаточна.
В некоторых случаях, например, при запуске мощных двигате-
157
лей или малой мощности питающей сети пусковые токи вызывают
понижение напряжения сети (более 10... 15 %). В этих условиях для
ограничения пусковых токов пуск двигателя осуществляют при по-
ниженном напряжении питания.
В практике используются реакторный, автотрансформаторный
способы пуска и пуск переключением обмотки статора со звезды на
треугольник. В случае реакторного пуска (рис. 16.19 а) при замы-
кании выключателя Q1 к статору двигателя подводится питание че-
рез трехфазный реактор Р, реактивное сопротивление хр которого
ограничивает пусковой ток. В той же степени уменьшается подво-
димое к статору двигателя напряжение, вызывая снижение пуско-
вого момента. После разгона двигателя замыкают выключатель Q2,
шунтирующий реактор, и к статору подводится полное напряжения
сети.
а) б) в)
Рис. 16.19. Схемы пуска асинхронных короткозамкнутых двигателей
Автотрансформаторный пуск производят по схеме (рис.
16.19 б). При включенном выключателе Q2 замыкают выключатель
(21 и к статору двигателя подводится с вторичной стороны авто-
трансформатора АТ пониженное напряжение. По достижении дви-
гателем некоторой скорости выключатель Q2 размыкают, и часть
обмотки автотрансформатора, включенная последовательно со ста-
тором двигателя, оказывает токоограничивающее действие как ре-
актор. В конце разгона замыкают выключатель Q3 и напряжение на
статоре становится равным полному напряжению сети.
158
При автотрансформаторном пуске момент уменьшается в той же
степени, что и пусковой ток. Поэтому его применяют в случае, когда
реакторный пуск не обеспечивает требуемого пускового момента.
Пуск с переключением со звезды на треугольник (рис.
16.19 в) применяют в тех случаях, когда обмотка статора соединена
в треугольник. Примером является двигатель с напряжением
380/220 В и соединением обмотки статора звезда -треугольник, пи-
тающейся от сети 220 В. Пуск производят при соединении обмотки
в звезду (нижнее положение переключателя Q). При этом фазные
напряжение и ток оказываются в л/з раз меньше номинальных зна-
чений, а линейный ток за счет схемы соединения статора уменьша-
ется в 3 раза. Таким образом, пусковой момент, пропорциональный
квадрату напряжения, снижается в той же степени, что и пусковой
ток, то есть как при автотрансформаторном пуске. После разгона
двигателя переключатель переводят в верхнее положение, соответ-
ствующее соединению обмотки треугольником. Недостатком опи-
санного способа пуска является возникновение переходных про-
цессов при размыкании цепи статора
16.7. Регулирование скорости асинхронных двигателей
16.7.1. Классификация способов регулирования скорости
Многие установки требуют ступенчатого или даже плавного
регулирования скорости. Поэтому проблема создания асинхронных
двигателей с регулируемой скоростью является весьма важной и
актуальной.
Механическая скорость ротора асинхронного двигателя
и = (1-х)«1, (16.73)
где И]=60у[/р- синхронная скорость двигателя, об/мин; х -
скольжение ротора.
Изменение скорости двигателя можно обеспечить а) измене-
нием синхронной скорости и б) изменением скольжения. В свою
очередь, синхронная скорость может быть изменена посредством
изменения числа полюсов двигателя и частоты питающей сети
Скольжение можно изменять за счет изменения питающего напря-
жения и введением в цепь ротора добавочного резистора или ЭДС
соответствующей частоты. Последние два способа применяют
только для двигателей с фазным ротором.
159
В целом регулирование скорости асинхронного двигателя из-
менением скольжения не вполне экономично, так как потери ак-
тивной мощности в цепи ротора пропорциональны скольжению.
16.7.2. Асинхронные двигатели с изменяющимся
числом полюсов
Машину с изменяющимся числом полюсов можно получить,
просто укладывая в пазах статора две не связанные между собой
обмотки с разными числами полюсов. Однако такой способ мало
пригоден, поскольку из-за ограниченной площади пазов пришлось
бы уменьшить сечение проводников обмоток, что влечет за собой
снижение мощности машины. При другом подходе обмотку статора
проектируют таким образом, чтобы число полюсов можно было
изменить, например, в отношении 2:1, изменяя схему соединения
обмотки. При этом короткозамкнутая обмотка ротора типа беличь-
ей клетки не требует какого-либо переустройства, так как ее маг-
нитное поле всегда имеет то же число полюсов, что и поле статора.
В случае фазного ротора потребовалось бы изменение схемы его
обмотки, поэтому данный способ изменения скорости в двигателях с
фазным ротором не применяется.
Статор
Ротор
Рис. 16.20. Принцип выполнения обмотки
с меняющимся числом полюсов
ное поле. На рис. 16.20 б направление тока в
Выполнение об-
мотки с изменяемым
числом полюсов по-
казано на рис. 16.20,
где и а2х2 — две
катушки, составляю-
щие часть фазы об-
мотки а. Фазы b и с
для простоты не пока-
заны. На рис. 16.20 а
катушки соединены
так, что создают в за-
зоре четырехполюс -
катушке а2х2 измене-
но с помощью переключателя на противоположное. В результате
обмоткой создается двухполюсное поле Одновременно с измене-
нием направления тока в катушке а2х2 можно изменить соедине-
ние катушек с последовательного на параллельное, и соединение
160
фаз — со звезды на треугольник или наоборот. Этим обеспечивается
такая индукция в зазоре, что машина имеет необходимые моментно-
скоростные характеристики при любом числе полюсов. На рис. 16.21
показаны два возможных исполнения обмотки и моментно-
скоростные характеристики, построенные при условии, что двига-
тель имеет одну и ту же характеристику
Скорость Подключение к питающей сети Примечание
А в С
низшая высшая Су с4 Сг с5 с3 С6 Сд, С5 и С6 разомкнуты С], С*2 и Сз замкнуты
Рис. 16.21. Схемы соединения обмоток и механические характеристики
при соединении обмотки, соответствующем высшей скорости щ.
Схема (рис. 16.21 а) обеспечивает неизменный максимальный мо-
мент на обеих скоростях и может быть использована в приводах,
отличающихся постоянством момента (например, когда нагрузка
определяется главным образом трением). Схема (рис. 16.21 б) по-
зволяет получить удвоенный максимальный момент при низшей
скорости и поэтому применима в приводах постоянной мощности
6 Зак. 50
161
(станки, подъемники). Отметим, что схема с постоянной мощно-
стью более дорогая, так как машина в этом случае имеет наиболь-
шие размеры.
16.7.3. Регулирование частоты питающей сети
Синхронную скорость двигателя можно регулировать, изменяя
частоту питающей сети. Для обеспечения постоянного при всех
частотах максимального электромагнитного момента необходимо
поддерживать неизменным поток воздушного зазора Фй. Если
пренебречь небольшими падениями напряжения на активном и ре-
активном сопротивлении рассеяния статора, подводимое к статору
напряжение компенсируется противоЭДС Ех, которая индукти-
руется потоком Ф5:
Ц = Е1 =4,44/1и,1К?об1Фй.
При Фй = const
U,
— = const,
/1
то есть питающее напряжение необходимо изменять пропор-
ционально частоте. Регулируемый таким способом асинхронный
двигатель ведет себя аналогично двигателю постоянного тока с не-
зависимым возбуждением при изменяющемся напряжении якоря.
16.7.4. Регулирование напряжения питания
Поскольку электромагнитный момент асинхронного двигателя
пропорционален квадрату питающего напряжения, механические
Рис. 16.22. Регулирование
скорости изменением пи-
тающего напряжения
характеристики при различных значени-
ях напряжения имеют вид, показанный
на рис. 16.22. Если момент сопротивле-
ния нагрузки Мс зависит от скорости,
при уменьшении напряжения от (7Н до
0,5 скорость привода изменяется от
и, до ип. Данный метод применяется
преимущественно для двигателей малой
мощности. Для регулирования напряже-
ния могут быть использованы автотранс-
форматоры или реакторы с подмагничи-
162
ванием, включаемые последовательно с обмоткой статора. Разновид-
ностью рассмотренного метода является импульсное регулирование
напряжения.
16.7.5. Регулирование скорости двигателя включением
резистора в цепь фазного ротора
О возможности регулирования ско-
рости асинхронного двигателя с фазным
ротором путем изменения активного со-
противления в цепи ротора говорилось в
п. 16.5.2. Механические характеристики
двигателя при трех различных сопротив-
лениях ротора (/?, < /?п < ЛП)) показаны
на рис. 16.23. Если рабочая машина
Рис. 16.23. Регулирование ско-
рости посредством активного
сопротивления фазного ротора
имеет механическую характеристику
Мс = ./(«), скорости, соответствующие
каждому из сопротивлений, равны и,.
нп и иш • Данный метод регулирования скорости обеспечивает ха-
рактеристики, аналогичные характеристикам двигателя постоянно-
го тока с параллельным возбуждением при его регулировании с
помощью резистора в цепи якоря.
16.7.6. Регулирование скорости двигателя
включением ЭДС в цепь фазного ротора
При рассмотрении возможных схем регулирования скорости
путем изменения скольжения следует помнить об основных энерге-
тических соотношениях асинхронной машины. Часть мощности,
передаваемой за счет взаимной индукции от статора к ротору, пре-
образуется в электрическую мощность ротора. Если обмотка ротора
замкнута накоротко, эта мощность, называемая мощностью сколь-
жения, расходуется как потери в проводниках обмотки. Имеется
большое количество схем регулирования скорости, в которых ис-
пользуют мощность скольжения. Все схемы можно подразделить
на два типа (рис. 16.24), где АД есть трехфазный асинхронный дви-
гатель с фазным ротором, скорость которого необходимо регулиро-
вать. На рис. 16.24 а цепь ротора АД подсоединена к устройству
преобразования частоты ПЧ, в котором активная мощность ротора
с частотой скольжения преобразуется в мощность с частотой пи-
163
6*
а) б)
Рис. 16.24. Основные схемы регулирования скорости асинхронных
двигателей посредством вспомогательных устройств
тающей сети и возвращается в эту цепь. На рис. 16.24 б цепь ротора
АД через преобразователь ПУ подсоединена к вспомогательному
двигателю ВД, преобразующему электрическую мощность в меха-
ническую, которая суммируется с мощностью на валу АД. В обеих
схемах скорость и коэффициент мощности основного двигателя
можно регулировать, воздействуя на ЭДС, вводимую в цепь ротора
АД вспомогательным устройством.
Глава 17
МИКРОМАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
17.1. Классификация электрических машин малой мощности
Имеется огромное разнообразие электрических машин посто-
янного и переменного тока, мощность которых колеблется от долей
ватта до нескольких сотен ватт и которые принято называть мик-
ромашинами. Микромашины широко применяются как управ-
ляющие и исполнительные элементы в системах автоматического
управления, а также для многих других целей в промышленности и
в быту.
Наиболее часто микромашины используются как электродви-
гатели, среди которых можно выделить двигатели постоянного то-
ка с электромагнитным возбуждением и магнитоэлектрические,
универсальные коллекторные двигатели, однофазные асинхронные
двигатели различного исполнения, синхронные реактивные и шаго-
вые двигатели, гистерезисные двигатели.
Кроме того, находят применение микрогенераторы постоянно-
го и переменного тока. Таковы, например, тахогенераторы посто-
янного тока и асинхронные тахогенераторы. Часто микрогенерато-
ры используются как специальные источники постоянного тока или
переменного тока повышенной частоты для i штания схем управле-
ния и исполнительных двигателей движущихся устройств. Для этих
же целей применяют электромашинные преобразователи и усили-
тели мощности. В следящих системах широко применяются сель-
сины, представляющие собой разновидность асинхронной машины.
Для получения напряжения переменного тока, являющегося той
или иной функцией угла поворота ротора, используются вращаю-
щиеся трансформаторы, которые выполняются как асинхронные
машины с фазным ротором.
165
Требования, предъявляемые к микромашинам, разнообразны и
определяются назначением машин и условиями их работы. Однако
общим требованием является обеспечение заданных рабочих ха-
рактеристик при высокой надежности работы во всех эксплуатаци-
онных условиях.
17.2. Микромашины постоянного тока
17.2.1. Микродвигатели постоянного тока
Микродвигатели постоянного тока широко используются в
системах автоматического управления в качестве исполнительных
двигателей, а также для привода различных механизмов и машин.
Условия работы микродвигателей весьма разнообразны. Так,
электродвигатели механизмов дистанционного управления и вы-
числительных устройств обычно работают в кратковременном или
повторно-кратковременном режиме с рабочим периодом от одной
до нескольких минут и частым реверсированием. Напротив, двига-
тели привода гироскопических устройств, вентиляторов, сирен и
т.д. имеют продолжительный режим работы при постоянстве ско-
рости вращения. Кроме этого, параметры окружающей среды (тем-
пература, влажность, давление, механические перегрузки и т.д.)
могут изменяться в широких пределах.
Микродвигатели постоянного тока выполняют закрытыми либо
защищенными. При этом конструкция двигателя, как правило, про-
ста и состоит из нескольких элементов. С целью уменьшения массы
и габаритов скорость двигателей обычно выбирают повышенной.
Способ возбуждения определяется условиями применения дви-
гателей. Когда необходим достаточно высокий пусковой момент,
выбирают последовательную обмотку возбуждения. Реверсивные
двигатели нередко снабжены двумя обмотками возбуждения, вклю-
чаемыми поочередно в зависимости от гребуемого направления
вращения. Иногда (особенно при мощностях 20 Вт и менее) наи-
больший пусковой момент удается обеспечить при параллельном
включении обмотки возбуждения. Вообще в тех случаях, когда не-
обходима постоянная скорость вращения, целесообразно параллель-
ное возбуждение. Смешанное возбуждение, как и возбуждение от
постоянных магнитов, в микродвигателях постоянного тока приме-
няется сравнительно редко и только в специальных случаях.
166
Пуск и реверсирование микродвигателей производится путем
прямого подключения к питающей сети. Действительно, сопротив-
ление обмотки якоря таких двигателей, ограничивающее пусковой
ток, сравнительно велико, поэтому необходимости в пусковых рео-
статах нет.
Механические и прочие характеристики микродвигателей опи-
сываются соотношениями, рассмотренными в п. 14.4. Вид механи-
ческих характеристик сильно зависит от способа возбуждения.
В зависимости от конкретного применения необходимы либо
стабилизация либо, напротив, регулирование скорости микродвига-
теля по некоторому заданному закону. Наиболее распространено
регулирование скорости путем изменения напряжения якоря, а
также путем изменения рабочего магнитного потока. Современные
исполнительные двигатели постоянного тока обычно имеют неза-
висимое возбуждение или возбуждение от постоянных магнитов.
17.2.2. Универсальные коллекторные двигатели
Рис. 17.1. Механические ха
рактеристики универсально-
го коллекторного двигателя
на постоянном (I) и пере-
менном (II) токе
Коллекторный двигатель с последовательным возбуждением
может работать при питании как постоянным, так и переменным
током и поэтому называется универсальным. Если питание двига-
теля осуществляется переменным током, магнитные поля обмотки
возбуждения и якоря, создаваемые одним и тем же током, изменя-
ют свое направление одновременно. Электромагнитный момент,
возникающий в результате взаимодействия этих полей, действует
всегда в неизменном направлении, пульсируя с двойной частотой.
При этом обеспечивается средний момент
одного направления, и работа двигателя в
целом подобна работе на постоянном то-
ке. Для уменьшения потерь от гистерези-
са и вихревых токов весь магнитопровод
универсального коллекторного двигателя
целесообразно выполнять шихтованным.
Вследствие этого характеристики двига-
теля на постоянном и переменном токе
близки друг другу. Различия между меха-
ническими характеристиками I (на посто-
янном токе) и II (на переменном токе)
(рис. 17.1) обусловлены двумя причинами:
167
при работе на переменном токе противоЭДС якоря из-за паде-
ния напряжения на реактивных сопротивлениях обмоток возбуж-
дения и якоря меньше, чем на постоянном токе, а скорость при
больших нагрузках несколько ниже;
вследствие насыщения магнитопровода действующее значение
потока возбуждения на переменном токе заметно меньше, чем при
том же значении постоянного тока. Поэтому в диапазоне малых на-
грузок скорость двигателей на переменном токе выше, чем на по-
стоянном токе.
Универсальные двигатели используются там, где необходимо
уменьшить массу, например, в пылесосах, ручном электроинстру-
менте и т.д. и работают обычно на высоких скоростях. За счет вы-
сокой скорости, относительно малого ресурса работы и повышен-
ного шума универсальные двигатели имеют сравнительно низкую
удельную стоимость (на единицу мощности).
17.2.3. Тахогенераторы постоянного тока
Тахогенератором называют электрический тахометр, служащий
для преобразования механической скорости в электрическое напря-
жение. Выходом тахогенератора является напряжение на зажимах
якоря, пропорциональное скорости его вращения. Кроме изменений
скорости, тахогенератор может быть использован как элемент авто-
матической системы управления, например, для обеспечения обрат-
ной связи по скорости. Поскольку ЭДС якоря пропорциональна ско-
рости, которая, в свою очередь, является производной угла поворота
якоря, тахогенератор можно использовать для электрического диф-
ференцирования в вычислительных устройствах.
Тахогенератор постоянного тока представляет собой мало-
мощный коллекторный генератор. Для обеспечения постоянства
рабочего магнитного потока тахогенераторы выполняют с незави-
симым возбуждением или с возбуждением от постоянных магни-
тов. Коллектор тахогенератора имеет большее число коллекторных
пластин, чем генератора общего применения. При этом пульсации
выходного напряжения уменьшаются.
Зависимость напряжения на зажимах тахогенератора от скоро-
сти принято называть выходной характеристикой. Ее аналитиче-
ское выражение может быть получено следующим образом.
Уравнение по второму закону Кирхгофа для цепи якоря тахо-
генератора, замкнутой на сопротивление нагрузки Д,, имеет вид
168
U = Ea-IaRa-MJm,
(17.1)
, (7
где Ia = — “ ток ЯКОРЯ- - сопротивление обмотки якоря;
kUm - суммарное падение напряжения в щеточном контакте
(обычно полагается нс зависящим от 1и).
Учитывая, что
= С..ФЛш„„,
ci м о мех “
после некоторых преобразований получаем
U = ка>ып -AU',
мех щ ’
1 + ^г
Если рабочий поток ФЛ постоянен,
выходная характеристика тахогенератора
согласно (17.3) линейна (рис. 17.2). Ко-
эффициент к в соотношении (17.3), рав-
ный тангенсу угла наклона выходной ха-
рактеристики а, называют крутизной
характеристики. В маломощных тахоге-
нераторах крутизна составляет 3...5 В на
1 000 об/мин. В тахогенераторах общего
применения она достигает 50... 100 В.
(17.2)
(17.3)
(17.4)
Рис. 17.2. Выходная харак-
теристика тахогенератора
Для обеспечения линейности выходной характеристики рабо-
чий поток должен быть строго постоянным при всех режимах рабо-
ты. Поэтому, чтобы устранить температурное влияние, тахогенера-
торы выполняют с возбуждением от постоянных магнитов, или,
если возбуждение электромагнитное, магнитопровод делают силь-
но насыщенным. Тогда колебания тока возбуждения вследствие
температурных изменений сопротивления обмотки возбуждения не
оказывают заметного влияния на поток возбуждения. Однако при
наличии тока в цепи якоря рабочий поток несколько уменьшается
из-за размагничивающего действия реакции якоря, и линейность
выходной характеристики нарушается. Этот эффект проявляется
тем сильнее, чем меньше сопротивление нагрузки R^.
169
Падение напряжения в щеточном контакте вызывает смещение
выходной характеристики относительно начала координат, так что
имеет место так называемая мертвая зона тахогенератора 00\ в
пределах которой выходное напряжение равно нулю. Для умень-
шения мертвой зоны в тахогенераторах применяют щетки с малым
падением напряжения на контактах.
17.3. Однофазные асинхронные микродвигатели
17.3.1. Основы теории
Рис. 17.3. Устройст-
во однофазного асин-
хронного двигателя
Однофазный асинхронный двигатель (рис. 17.3) структурно
напоминает асинхронный двигатель с короткозамкнутой обмоткой
ротора, но имеет однофазную обмотку статора. В большинстве
случаев обмотку статора выполняют распределенной так, чтобы
обеспечить синусоидальное распределение МДС. Работа однофаз-
ного асинхронного двигателя может быть рассмотрена с примене-
нием теории вращающего поля.
Полагая, что обмотка статора двигателя
распределенная, и пренебрегая высшими гар-
мониками, пространственное распределение
МДС статора можно выразить как
= Л'тах c°sa, (17.6)
где а - пространственный угол, измеряемый
от оси обмотки статора; - мгновенное
значение МДС по оси обмотки, пропорцио-
нальное току статора.
Если ток статора синусоидален, Ff^^
также изменяется во времени синусоидально с угловой частотой в):
^Imax — ^"imax COSftlZ . (17.7)
Таким образом, волна МДС статора неподвижна в пространст-
ве, но пульсирует во времени.
Подставим (17.6) в (17.7) и получим зависимость для МДС
статора от времени и пространства:
F] = Flmax cosw/cosa.
С учетом произведения косинусов получаем
Л = Fi nm cos(a - wz) +1 Flmax cos(a + coz). (17.8)
170
Каждая из составляющих в правой части (17.8) является сину-
соидальной функцией угла а и имеет амплитуду, равную половине
амплитуды пульсирующей волны МДС статора. В момент, когда
МДС статора имеет максимальное значение, обе составляющие на-
правлены вдоль оси статора. За счет угла cot обеспечивается вра-
щение каждой из составляющих вдоль окружности статора с посто-
янной скоростью со, причем вращение происходит в противопо-
ложных направлениях. Первая волна (с аргументом a-cot) враща-
ется в положительном направлении, вторая (с аргументом a+cot) —
в отрицательном.
Вращающиеся волны МДС создают электромагнитные момен-
ты, противоположные друг другу. Когда ротор неподвижен, прямая
и обратная волны МДС, создаваемые совместным действием МДС
статора и ротора, равны. При этом равны и противоположны со-
ставляющие момента, а пусковой момент не возникает. Если бы
при вращении ротора прямая и обратная волны поля в зазоре оста-
вались одинаковыми, каждая из волн обеспечивала бы моментно-
скоростную характеристику, подобную характеристике трехфазного
двигателя (штриховые линии на
рис. 17.4 а). Результирующая ха-
рактеристика, равная алгебраи-
ческой сумме прямой и обратной
кривых, показывает, что если
двигатель каким-либо способом
привести во вращение, он будет
развивать момент в направлении
вращения, каким бы оно ни бы-
ло. Вообще же допущение о ра-
венстве прямого и обратного по-
лей является довольно грубым.
Ниже будет показано, что при
Рис. 17.4. Моментно-скоростные ха-
рактеристики однофазного асинхрон-
ного двигателя при равенстве прямо-
го и обратного полей (а) и их нера
венстве (б)
вращении ротора в прямом на-
правлении прямое поле усилива-
ется, а обратное ослабляется, так
что моментно-скоростная харак-
теристика однофазного двигате-
ля не уступает характеристике трехфазного, имеющего такой же
ротор и работающего при той же максимальной индукции в воз-
душном зазоре (рис. 17.4 б).
171
Разложение пульсирующего поля на прямо- и обратновра-
щающуюся составляющие позволяет получить схему замещения
однофазного асинхронного двигателя. Когда ротор неподвижен,
двигатель аналогичен трансформатору с замкнутой накоротко вто-
ричной обмоткой. Поскольку амплитуды прямого и обратного по-
лей равны и составляют половину амплитуды пульсирующего по-
ля, схему замещения двигателей можно представить как на
рис. 17.5 а. Здесь разделение реактивного сопротивления намагни-
чивания и параметров ротора на две составляющие обусловлено
разложением пульсирующего ноля на прямое и обратное поля по-
ловинной амплитуды.
Рис. 17.5. Схемы замещения однофазного асинхронного двигателя
при неподвижном (а) и вращающемся (б) роторе
Предположим, что ротор приведен во вращение в направлении
прямого поля со скольжением .?. Тогда прямое поле индуктирует в
роторе ток с частотой скольжения sf}, где/ - частота тока статора.
Как и в трехфазной машине, этот ток ротора создает волну МДС,
движущуюся относительно ротора со скоростью скольжения, а отно-
сительно статора - с синхронной скоростью. Результирующая МДС,
равная сумме прямовращающихся МДС статора и ротора, возбуждает
в зазоре вращающийся магнитный поток, который индуктирует в об-
мотке статора противоЭДС £inp. Действие ротора при этом может
быть описано при его рассмотрении со статора с использованием
R' ,
комплексного сопротивления 0,5— + j0,5xa2 (рис. 17.5 6).
5
Рассмотрим подробнее поле, вращающееся в обратном на-
правлении. Пусть ротор по-прежнему вращается со скольжением 5
в направлении прямого поля со скоростью
172
«пр = (1-4?|’
где «! синхронная скорость прямого поля.
Тогда скорость ротора по отношению к обратному полю,
имеющему скорость -п1:
«обр=«1+(1-ф1 = (2-Ф1-
Обратное поле индуктирует в роторе ток с частотой (2-х)/,.
При малых скольжениях этот ток имеет частоту, почти вдвое пре-
вышающую частоту тока статора. При рассмотрении со стороны
статора МДС ротора от обратного тока вращается с синхронной
скоростью, но в обратном направлении. Соответствующая этому
схема замещения подобна схеме трехфазной машины, имеющей
скольжение (2-х). ПротивоЭДС статора £’|обр, индуктируемая ре-
зультирующим обратным полем, показана на схеме замещения.
Анализ схемы замещения свидетельствует, что при вращении
ротора прямое поле усиливается, а обратное ослабляется. В самом
деле, когда х мало, эквивалентное активное сопротивление ротора
0,5— для прямого поля больше сопротивления неподвижного ро-
х
R'
тора, тогда как эквивалентное сопротивление 0,5- обратного
2-х
поля меньше. Это справедливо и для эквивалентных комплексных
сопротивлений ротора, так как реактивные сопротивления рассеяния
0.5л'2 от скольжения не зависят. Поэтому противоЭДС от прямого
поля больше, а от обратного поля меньше противоЭДС неподвижно-
го ротора. Это равносильно преобладанию прямого поля над обрат-
ным при вращающемся роторе. Тогда моментно-скоростная характе-
ристика приобретает вид, показанный на рис. 17.4 б.
Схема замещения (рис. 17.5 б) может быть использована для
расчета тока статора, потребляемой мощности и cos<p двигателя,
если известны напряжение питания и сопротивления обмоток.
Кроме этого, по соотношениям, полученным для многофазных ма-
шин, можно рассчитать механическую мощность и момент. Мо-
менты, создаваемые прямым и обратным полями, рассчитываются
отдельно. Взаимодействие прямого и обратного полей вызывает
пульсации момента с двойной частотой статора и не создает сред-
него момента.
173
77.3.2. Пуск и установившаяся работа однофазных
асинхронных двигателей
Однофазные асинхронные двигатели классифицируют и назы-
вают по способу пуска. Двигатели выбирают по требуемым момен-
там при пуске и установившейся работе, а также по токам, потреб-
ляемым двигателями из сети.
Асинхронный двигатель с расщепленной фазой
Двигатель с расщепленной фазой питается от однофазной сети
и имеет главную А и вспомогательную В обмотки, оси которых
смещены в пространстве на 90° (рис. 17.6 а). Вспомогательная об-
мотка имеет большее отношение активного сопротивления к реак-
тивному, чем главная обмотка, так что их токи находятся не в фазе
(рис. 17.6 б). В результате в зазоре машины создается вращающее-
ся эллиптическое поле и возникает пусковой момент. По достиже-
нии двигателем 0,7...0,8 синхронной скорости вспомогательная
обмотка, называемая обычно пусковой, отключается с помощью
центробежного выключателя или реле. Повышенное активное со-
противление пусковой обмотки получают, выполняя ее более тон-
ким проводом или вводя в ее цепь добавочный резистор. Момент-
но-скоростная характеристика показана на рис. 17.6 в. Двигатели с
расщепленной фазой имеют небольшой пусковой момент при низ-
ких пусковых токах.
а) б)
^мех
Рис. 17.6. Асинхронный двигатель с расщепленной фазой:
а - схема соединения обмоток; б - векторная диаграмма
токов при пуске; в - моментно-скоростная характеристика
Конденсаторные двигатели
Разновидностью двигателя с расщепленной фазой является
двигатель с пусковым конденсатором (рис. 17.7 а). Фазовый сдвиг
между токами обмоток здесь обеспечивается с помощью конденса-
тора, включенного последовательно с пусковой обмоткой. После
174
"мех
Рис. 17.7. Асинхронный двигатель с пусковым конденсатором:
а - схема соединения обмоток; б - векторная диаграмма токов
при пуске; в — моментно-скоростная характеристика
разгона двигателя пусковая обмотка отключается. Наилучшим с
точки зрения пускового момента, пускового тока и стоимости явля-
ется фазовый угол между токами несколько меньше 90° (рис.
17.7 б). Его моментно-скоростная характеристика (рис. 17.7 в) от-
личается высоким пусковым моментом.
В двигателе с рабочим конденсатором (рис. 17.8 а) вспомога-
тельная обмотка после пуска не отключается. При этом конструк-
ция двигателя из-за отсутствия выключателя упрощается, а КПД
улучшается. Вспомогательная обмотка и конденсатор могут быть
рассчитаны из условия идеальной двухфазной работы при заданной
нагрузке. Обратное поле в этом случае исчезает, поэтому устраня-
ются пульсации момента с двойной частотой и уменьшаются шу-
мы. Пусковой момент двигателя мал (рис. 17.8 б).
Рис. 17.8. Асинхронный двигатель с рабочим конденсатором: а - схе-
ма соединения обмоток; б — моментно-скоростная характеристика
Получить оптимальные рабочие и пусковые свойства можно,
если использовать два конденсатора - один для пуска, другой - ра-
бочий (рис 17 9 а). Конденсатор малой емкости Ср, необходимый
175
для оптимизации установившейся работы, постоянно включен по-
следовательно с вспомогательной обмоткой. На период пуска па-
раллельно конденсатору Ср подключается конденсатор большей
емкости Сп.
Рис. 17.9. Асинхронный двигатель с рабочим и пусковым конденсатором:
а - схема соединения обмоток; б - моментно-скоростная характеристика
Асинхронный двигатель с экранированными полюсами
Двигатель с экранированными полюсами имеет явновыражен-
ные полюса, причем часть каждого полюса окружена короткозамк-
нутым медным кольцом, называемым экраном. Ток, наводимый в
экране, вызывает отставание потока этой части полюса от осталь-
ного потока. В результате создается вращающееся поле эллиптиче-
ской формы и небольшой пусковой момент. КПД таких двигателей
невысок.
17.4. Асинхронные микромашины автоматических устройств
17.4.1. Исполнительные двигатели автоматических
устройств
Асинхронные микродвигатели благодаря их конструктивной
простоте и надежности широко применяются в качестве исполни-
тельных двигателей систем автоматики, обеспечивая скорость вра-
щения, пропорциональную сигналу управления. Асинхронный ис-
полнительный двигатель имеет две обмотки на статоре, смещенные
на 90°, и короткозамкнутый ротор (рис. 17.10). Одна из обмоток
статора постоянно подключена к питающей сети и называется об-
моткой возбуждения (ОВ). Питание второй обмотки, называемой
обмоткой управления (ОУ), осуществляется через блок управления,
176
посредством которого можно изме-
нять подводимое к ОУ напряжение.
Частоты подводимых к обеим об-
моткам напряжений одинаковы.
Используют различные спосо-
бы управления асинхронными ис-
полнительными двигателями. Осо-
бенность так называемого ампли-
тудного управления состоит в сле-
дующем. Прикладываемые к обмот-
кам ОВ и ОУ напряжения должны
быть смещены относительно друг
Рис. 17.10. Схема устройства
асинхронного исполнительного
двигателя
друга по фазе на 90°. Это смещение можно обеспечить либо с по-
мощью блока управления, либо путем включения конденсатора по-
следовательно с ОВ. Управление двигателем производится измене-
нием амплитуды напряжения на обмотке ОУ. Когда к обмотке ОУ
прикладывается полное напряжение, в зазоре создается вращаю-
щееся круговое поле и скорость двигателя становится наибольшей.
Если, напротив, напряжение на ОУ равно нулю, поле в зазоре пуль-
сирующее, как в однофазном двигателе, и ротор не вращается. Во
избежание самохода (то есть враще-
ния двигателя при отсутствии на-
пряжения на ОУ) активное сопро-
тивление короткозамкнутого ротора
выбирают относительно большим.
Обычно активное сопротивление ро-
тора таково, что критическое сколь-
жение .\кр = 3...4. Тогда обеспечива-
ется эффективное торможение дви-
гателя после снятия напряжения с
ОУ. Кроме того, моментно-скорост-
ные характеристики (рис. 17.11) в ра-
бочем диапазоне скоростей (O.-.w,)
Рис. 17.11. Моментно-скорост-
ные характеристики исполни-
тельного двигателя при ампли-
тудном управлении
имеют отрицательный наклон, что необходимо для устойчивой ра-
боты системы. Помимо рассмотренного способа применяется также
фазовое и амплитудно-фазовое управление.
Асинхронные двигатели с короткозамкнутым ротором наибо-
лее экономичны при работе с малыми скольжениями и потому
177
предпочтительны в приводах постоянной скорости. Они имеют ряд
других достоинств, благодаря которым находят широкое примене-
ние в системах автоматического управления. Так, достоинством
асинхронных исполнительных двигателей является жесткость и
простота конструкции ротора и отсутствие щеточных контактов.
статор
-статор
статор
Рис. 17.12. Схема устрой-
ства асинхронного двига-
теля с полым ротором
Для уменьшения момента инерции и
повышения быстродействия ротор асин-
хронного двигателя часто выполняют в
виде тонкостенного немагнитного стака-
на, укрепляемого с одной стороны на валу
(рис. 17.12). В стенках стакана как в
стержнях беличьей клетки наводятся то-
ки. Для уменьшения воздушных зазоров
внутрь стакана помещают неподвижный
стальной сердечник. Иногда полый ротор
выполняется стальным. В этом случае ра-
бочий поток замыкается по стенкам ротора и необходимость во
внутреннем статоре отпадает.
17.4.2. Асинхронные тахогенераторы
В системах автоматического управления с обратными связями
часто бывает необходимо измерять угловую скорость вала, причем
желательно, чтобы измеряемый электрический сигнал имел вид на-
-U
Рис. 17.13. Схема устрой-
ства асинхронного тахоге-
нератора
пряжения переменного тока постоянной
частоты. Для этой цели может быть ис-
пользована двухфазная асинхронная ма-
шина, называемая асинхронным тахоге-
нератором (рис. 17.13).
На статоре тахогенератора помеща-
ются две обмотки А и В, магнитные оси
которых смещены относительно друг дру-
га на 90°. Если используется конструкция
полого ротора, то обмотка В может быть
помещена на внутреннем статоре. Обмот-
ка А, являющаяся обмоткой возбуждения, питается синусоидаль-
ным напряжением постоянной амплитуды и частоты. При враще-
нии ротора в выходной обмотке В индуктируется ЭДС той же час-
тоты. Зажимы обмотки В подключаются ко входу усилителя или
178
измерительного прибора, имеющему высокое исходное сопротив-
ление. Поэтому в первом приближении цепь выходной обмотки та-
хогенератора можно считать разомкнутой. Требования к тахогене-
ратору таковы, что величина индуктированного в обмотке В на-
пряжения должна быть пропорциональна скорости ротора, а фаза
этого напряжения должна быть неизменна по отношению к напря-
жению на обмотке А.
Работу асинхронного тахогенератора можно рассмотреть по
аналогии с однофазным асинхронным двигателем (п. 17.3.1). При
рассмотрении со стороны обмотки возбуждения А тахогенератор
эквивалентен однофазному асинхронному двигателю, так что мо-
жет быть использована схема замещения (рис. 17.5 б). В соответст-
вии со схемой замещения создаваемое обмоткой возбуждения А
пульсирующее поле представляется в виде прямо- и обратновра-
щающегося полей, которые индуктируют в этой обмотке противо-
ЭДС Е1пр и Л’|обр. Эти поля, будучи сцепленными с выходной об-
моткой В, наводят в ней соответствующие ЭДС. При неподвижном
роторе амплитуды прямого и обратного потоков равны и результи-
рующая ЭДС в обмотке В обращается в нуль. Однако, когда ротор
вращается в направлении прямого поля, это поле усиливается, а об-
ратное ослабляется, причем результирующее поле, равное их раз-
ности, следовательно, и ЭДС обмотки В является функцией скоро-
сти ротора. Изменение направления вращения сопровождается из-
менением фазы ЭДС выходной обмотки на противоположную.
В реальном тахогенераторе выходная обмотка замкнута на не-
которое конечное сопротивление нагрузки, и по ней протекает ток,
а напряжение на зажимах обмотки равно ЭДС за вычетом падения
напряжения на сопротивлениях обмотки. В результате выходная
характеристика тахогенератора £7ВЫХ = /(юмех) нелинейна. Сте-
пень этой нелинейности принято оценивать амплитудной по-
грешностью тахогенератора, выражаемой в %. Изменение фазы
выходного напряжения вызывает фазовую погрешность. Ампли-
тудная и фазовая погрешности зависят от диапазона измеряемых
скоростей и параметров тахогенератора. Основную роль играет со-
отношение между реактивным сопротивлением рассеяния и актив-
ным сопротивлением ротора ^2/^2 • При 0,1 < го/<10 обеспечива-
ется достаточное постоянство угла сдвига фаз и линейность выход-
ной характеристики. Если используется ротор с малым отношением
179
%<т2/^2’ уменьшается крутизна характеристики, но расширяется
диапазон скоростей, в котором она линейна. С другой стороны, при
большом отношении хст2/Л2 диапазон скоростей, в котором обес-
печиваются высокая линейность выходной характеристики и по-
стоянство фазового угла, довольно узок. Следует отметить, что,
при не слишком жестких требованиях, удовлетворительные харак-
теристики можно получить и при промежуточных значениях отно-
шения хст2/^2 •
Дополнительные погрешности тахогенераторов могут быть
вызваны неточностью их изготовления. Так, если оси обмоток А и
В смещены на угол, отличающийся от 90°, в обмотке В индуктиру-
ется трансформаторная ЭДС и при неподвижном роторе выходное
напряжение не равно нулю. Аналогичное влияние оказывает не-
концентричность статора и ротора. В этом случае индуктивная
связь между обмотками устанавливается по полям рассеяния.
17.4.3. Вращающиеся трансформаторы
В системах автоматики, вычислительных устройствах и т.д.
широко применяются вращающиеся (поворотные) трансформато-
ры, которые служат для получения напряжения, пропорционально-
го углу поворота ротора, а также синусу и косинусу этого угла.
Рис. 17.14. Схема уст-
ройства простейшего
вращающегося транс-
форматора
Вращающийся трансформатор представ-
ляет собой разновидность асинхронной ма-
шины и имеет в общем случае по две одно-
фазные обмотки на статоре и роторе. Обмот-
ки статора 1 - Г и ротора 2-2' простейшего
вращающегося трансформатора (рис. 17.14)
выполняются распределенными и создают в
воздушном зазоре синусоидально распреде-
ленные магнитные поля. При этом взаимная
индуктивность обмоток является косинусои-
дальной функцией угла а между магнитны-
ми осями обмоток. Если к первичной обмотке (обычно это обмотка
статора) подведено переменное напряжение, то в обмотке ротора,
которая является вторичной или выходной, индуктируется ЭДС,
пропорциональная cosa. Изменяя угол поворота ротора с помощью
червячной или иной передачи, можно изменять вторичное напря-
жение. Если отсчет угла а вести от оси, перпендикулярной к маг-
180
нитной оси обмотки статора, го выходное напряжение оказывается
синусоидальной функцией угла.
В случае синусно-
косинусного трансфор-
матора (рис. 17.15) к за-
жимам любой из выход-
ных обмоток посредст-
вом контактных колец и
щеток подключается на-
грузка. Ток выходной
обмотки создает в воз-
душном зазоре поток Ф2,
Рис. 17.15. Схема устройства синусно-косинус-
ного вращающегося трансформатора
который по отношению к оси обмотки статора можно разложить на
продольную Ф2(/=Ф2зша и поперечную Ф29=Ф2с°8а состав-
ляющие. Продольная составляющая направлена вдоль оси обмот-
ки статора и вызывает увеличение тока в ней. Поперечная состав-
ляющая потока индуктирует в выходной обмотке противоЭДС
£2 = Ф2? cosa = Ф2 cos2 а, вследствие чего нарушается синусои-
дальная зависимость выходного напряжения от а.
Компенсацию поперечного потока Ф2? осуществляют с по-
мощью короткозамкнутой обмотки К, помещаемой на статоре под
углом 90° к первичной обмотке 1 — Г. Схема на рис. 17.15 называет-
ся трансформатором с первичным симметрированием. Если обе
выходные обмотки синусно-косинусного трансформатора выпол-
нены с одинаковым числом витков и включены на одинаковые на-
грузки, поперечные составляющие их потоков компенсируют друг
друга и надобность в компенсационной обмотке пропадает.
В этом случае имеет место вторичное симметрирование.
Для получения ли-
нейной зависимости вы-
ходного напряжения от
угла поворота а может
быть использована схе-
ма, изображенная на рис.
17.16, которая реализует
Рис. 17.16. Схема устройства линейного
вращающегося трансформатора
зависимость
/(«)-
sin а
1 + cosa
181
17.5. Сельсины
17.5.1. Общее устройство и принцип действия
Работа сельсинов в индикаторной схеме
Сельсины используют в системах автоматического управления
для обеспечения синхронного вращения двух или нескольких ме-
ханически не связанных между собой валов (осей), передачи ин-
формации об угловом положении вала и выполнения арифметиче-
ских операций с углами. Сельсины являются индукционными уст-
ройствами, аналогичными асинхронным машинам. Свое название
они получили за способность самосинхронизации. Трехфазный
сельсин имеет трехфазную обмотку на роторе, называемую обмот-
кой возбуждения, и трехфазную статорную обмотку синхрониза-
ции. Сельсины малой мощности выполняются с однофазной об-
моткой возбуждения и называются однофазными. Простейшая сис-
тема синхронной передачи (рис. 17.17) состоит из двух одинаковых
сельсинов, один из которых является датчиком, второй - прием-
ником. Трехфазныс обмотки синхронизации датчика и приемника
соединены между собой. Обмотки возбуждения подключены к ис-
точнику переменного напряжения через контактные кольца и щет ки.
Датчик Приемник
Рис 17.17. Индикаторная схема синхронной передачи
Пульсирующий поток, создаваемый обмоткой возбуждения,
индуктирует в фазах обмотки синхронизации сельсина ЭДС
еА = у!2Е2 cosOsnw/;
ев= 41Е2 cos^O -120" jsinto/;
ес - -Ле2 cos^O - 240 jsinart, (17-9)
где Е2- действующее значение ЭДС фазы при совпадении осей
182
обмотки возбуждения и данной фазы; в - угол, характеризующий
пространственное положение ротора и измеряемый между осью
обмотки возбуждения и осью фазы а обмотки синхронизации.
Как показывают соотношения (17.9), амплитуды фазных ЭДС
зависят от пространственного угла в. Когда оба ротора (рис. 17.17)
занимают одинаковое положение относительно обмоток синхрони-
зации датчика и приемника (0Д = 0П), ЭДС этих обмоток равны, а
токи в них отсутствуют. Если пространственные положения роторов
не совпадают (0Д ^0П), ЭДС обмоток синхронизации не равны и в
замкнутых контурах обмоток протекают токи. Эти токи, взаимодей-
ствуя с магнитными полями воздушных зазоров, создают так назы-
ваемые синхронизирующие моменты, стремящиеся привести рото-
ры датчика и приемника в одинаковое пространственное положение,
когда ва = вп, а угол рассогласования (0Д - 0П) равен нулю. Обычно
ротор датчика жестко связан с валом задающего механизма, поэтому
под действием синхронизирующего момента поворачивается лишь
ротор приемника, перемещая стрелку или легкий диск с делениями
(отсчетное устройство). Такой режим работы приемника называют
индикаторным (указательным), а схему рис. 17.17 - индикаторной.
Иногда режим сельсина-приемника в индикаторной схеме называют
двигательным. Момент вращения в первом приближении пропор-
ционален синусу угла рассогласования (Зд -6П). Обычно при угле
рассогласования более 1° момент достаточен для поворота ротора
сельсина-приемника. Таким образом, вращение ротора сельсина-
датчика сопровождается вращением ротора сельсина-приемника,
чем и обеспечивается синхронная передача.
Один сельсин-датчик способен работать с несколькими сель-
синами-приемниками. При этом обмотки синхронизации всех сель-
синов соединяются параллельно, а обмотки возбуждения питаются
от общего источника напряжения.
Конструктивно сельсины напоминают двигатели малой мощ-
ности. Сердечники статора и ротора выполняются шихтованными.
Ротор сельсина-приемника обычно снабжен демпфером, служащим
для гашения механических колебаний.
Статическая погрешность системы синхронной передачи (рис.
17.17) обусловлена трением в подшипниках и составляет около 1°.
Эта погрешность возрастает при увеличении числа сельсинов в
системе или заметном увеличении комплексного сопротивления
183
линии между датчиком и приемником. Динамическая погрешность,
вызванная механическими колебаниями вала приемника около его
истинного положения, может в два три раза превышать статиче-
скую. Уменьшению динамической погрешности способствует
демпфер на роторе сельсина-приемника. Когда необходимо, чтобы
сельсин-приемник создавал достаточно большой момент, статиче-
ская погрешность возрастает, так как для передачи момента требу-
ется определенное угловое смешение между роторами сельсина-
датчика и сельсина-приемника.
17.5.2. Работа сельсинов в трансформаторной схеме
Если для вращения вала исполнительного механизма (ИМ) не-
обходим значительный момент, применяют синхронную передачу
по так называемой трансформаторной схеме (рис. 17.18). При
этом ротор сельсина-датчика питается от однофазного источника
Рис. 17.18. Трансформаторная схема синхронной передачи
с однофазными сельсинами
переменного напряжения, создавая пульсирующее поле в зазоре,
которое наводит переменные ЭДС в фазах обмотки статора сельси-
на-датчика. Если пренебречь небольшими падениями напряжения
от токов, протекающих по замкнутой цепи обмоток статоров, одно-
именные ЭДС этих обмоток должны быть равны. Это означает, что
поток, создаваемый токами статора в зазоре сельсина-приемника,
примерно равен потоку в зазоре сельсина-датчика.
В результате эффект таков, что обмотки роторов датчика и
приемника как бы находятся на общем магнитном сердечнике. При
этом ЭДС, индуктируемая в обмотке ротора сельсина-приемника,
184
пропорциональна косинусу угла между магнитными осями ротор-
ных обмоток. Когда этот угол равен нулю, рассматриваемая ЭДС
максимальна. Когда угол составляет 90°, ЭДС равна нулю поло-
жение равновесия роторов. В схеме (рис. 17.18) ротор сельсина-
датчика механически связан с входным валом. Ротор сельсина-
приемника механически соединен с выходным валом, а электриче-
ски - с входом усилителя У. Механическую мощность, необходи-
мую для вращения выходного вала и соединенного с ним исполни-
тельного механизма, обеспечивает управляемый двухфазный асин-
хронный двигатель Д. Обмотка управления двигателя питается от
усилителя У, в схеме которого должны быть предусмотрены фазос-
двигающие конденсаторы. Когда выходной вал находится в равно-
весном положении, то есть повернут на 90° относительно входного
вала, напряжение на входе усилителя и ток в обмотке управления
равны нулю и двигатель не вращается. При рассогласовании валов
на выходе усилителя возникает напряжение такой полярности, что
двигатель приходит во вращение в таком направлении, чтобы уст-
ранить рассогласование валов.
17.5.3. Дифференциальные сельсины
Часто требуется обеспечить вращение вала как сумму или
разность вращения двух других валов. С этой целью в синхрон-
ных передачах используют дифференциальные сельсины. Диффе-
ренциальный сельсин (рис. 17.19) имеет трехфазные роторную и
статорную обмотки. Коэффициент трансформации между этими
обмотками обычно равен единице. Напряжения обмоток одинаковы,
если угол сдвига между осями обмоток равен нулю. При изменении
угла сдвига обмоток напряжения на зажимах обмотки ротора диф-
Рис. 17.19. Индикаторная схема с дифференциальным сельсином
185
ференциала изменяются по закону косинуса. Вообще напряжения
ротора такие, которые существовали бы, если бы дифференциал
был устранен, а ротор датчика повернут на угол, равный сумме или
разности углов рассогласования датчика и дифференциала. Угол
поворота ротора приемника, работающего в схеме (рис. 17.19) в
двигательном режиме, равен алгебраической сумме углов поворота
роторов датчика и дифференциала. В других схемах дифференциал
может быть использован как приемник, питаемый от двух отдель-
ных датчиков и создающий вращение в зависимости от суммы или
разности вращений датчиков.
17.6. Синхронные электродвигатели малой мощности
17.6.1. Синхронные реактивные двигатели
Синхронный реактивный двигатель представляет собой син-
хронную машину с ротором явнополюсной конструкции, который
не имеет обмотки возбуждения или постоянных магнитов. При ус-
тановившемся вращении ротора электромагнитный момент одного
направления возникает вследствие наличия в воздушном зазоре поля
реакции якоря — отсюда название реактивного двигателя. Как было
показано в п. 15.81, этот момент тем выше, чем больше разница ме-
жду продольным xd и поперечным xq синхронными реактивными
сопротивлениями. При проектировании синхронных реактивных
двигателей стремятся обеспечить соотношение xq / xd = 0,5.
Конструкция ротора реактивного двигателя может быть раз-
личной. Так, если часть зубцов ротора асинхронного короткозамк-
нутого двигателя удалить, оставляя стержни и короткозамыкающие
кольца «беличьей клетки» нетронутыми, то ротор приобретет маг-
нитную асимметрию и окажется пригодным для использования в
реактивном двигателе. Разумеется, что в промышленно изготов-
ляемых реактивных двигателях находят применение роторы более
совершенных конструкций.
Статор трехфазного реактивного двигателя аналогичен статору
асинхронного двигателя и имеет распределенную или сосредото-
ченную обмотку.
Синхронный реактивный двигатель пускают в ход как асин-
хронный, то есть прямым включением. При небольшой нагрузке на
валу двигатель, имеющий короткозамкнутую обмотку того или
186
иного вида на роторе, разгоняется под действием асинхронного
момента и работает первоначально с небольшим скольжением. Ре-
активный электромагнитный момент возникает из-за «стремления»
ротора занять такое положение по отношению к синхронно вра-
щающемуся полю реакции якоря, при котором магнитная проводи-
мость ротора для этого поля наибольшая. Когда ротор вращается с
некоторым скольжением, реактивный момент медленно изменяется
(см. п. 15.8.1). В течение полупериода, когда реактивный момент
положителен, ротор ускоряется, в течение отрицательного полупе-
риода - замедляется. Если момент инерции ротора и механическая
нагрузка достаточно малы, скорость ротора увеличивается до син-
хронной уже в течение первого положительного полупсриода. По-
сле втягивания в синхронизм двигатель продолжает работать с син-
хронной скоростью, если момент сопротивления на валу не превы-
шает максимальное значение.
Синхронные реактивные двигатели, выпускаемые промыш-
ленностью, по КПД и коэффициенту мощности аналогичны асин-
хронным и применяются в тех случаях, когда при относительно
стабильной нагрузке требуется постоянная скорость вращения.
17.6.2. Гистерезисные двигатели
Для создания вращающего момента можно использовать явле-
ние гистерезиса. Ротор гистерезисного двигателя (рис. 17.20) в его
простейшей форме представляет собой цилиндр из магнитотвердого
материала без пазов и обмотки. Обычно в целях экономии дорого-
стоящего магнитогвердого сплава ротор выполняют сборным. Он
состоит из сплошного или шихтованного цилиндра 3 из магнито-
твердого материала, насаженного на
втулку 4. В пазах сердечника статора 1
помещается распределенная обмотка 2,
спроектированная так, чтобы созда-
ваемое ею магнитное поле имело рас-
пределение в воздушном зазоре как
можно более близкое к синусоидаль-
ному. Отклонение поля от синусои-
дального резко увеличивает потери
мощности. Однофазный двигатель име-
ет расщепленную обмотку статора с
Рис. 17.20. Устройство
гистерезисного двигателя
187
постоянно включенным конденсатором, который выбран таким, что
в зазоре создается круговое вращающееся поле.
Пусть ось С-С’ волны МДС статора (рис. 17.21) вращается с
синхронной скоростью. Из-за гистерезиса намагничивание ротора
запаздывает и поэтому ось потока ротора отстает от оси МДС ста-
Рис. 17.21. Упрощенная
картина магнитного поля
в зазоре гистерезисного
двигателя
тора на угол магнитного запаздывания в.
Когда ротор неподвижен, возникает пуско-
вой электромагнитный момент, пропорцио-
нальный sin0 согласно (15.27). Если момент
сопротивления нагрузки меньше пускового,
двигатель разгоняется. Пока ротор вращает-
ся со скоростью меньше синхронной, все
его части подвержены перемагничиванию с
частотой скольжения. Угол магнитного за-
паздывания в во время разгона двигателя
при условии постоянства потока нс изменя-
ется, поскольку он обусловлен площадью
петли гистерезиса материала ротора и не зависит от скорости пере-
магничивания. Поэтому двигатель развивает постоянный момент с
начала пуска вплоть до синхронной скорости. Это одно из досто-
инств гистерезисного двигателя, так как в отличие от реактивного
двигателя он синхронизируется при любой нагрузке (если, разуме-
ется, она не выше максимальной) и вне зависимости от момента
инерции. По достижении синхронизма двигатель продолжает вра-
щаться с синхронной скоростью, изменяя угол в так, чтобы всегда
развивался момент, требуемый нагрузкой.
Гистерезисные двигатели в принципе малошумные. Дополни-
тельное их достоинство состоит в том, что ротор имеет то же число
полюсов, что и статор. Если на статоре уложить несколько обмоток
с разным числом полюсов, двигатель становится многоскоростным.
Гистерезисный двигатель хорошо приспособлен для разгона и син-
хронизации высокоинерционных нагрузок.
17.6.3. Шаговые двигатели
Шаговый двигатель представляет собой разновидность син-
хронного двигателя и предназначен для поворо та вала на опреде-
ленный угол при каждом управляющем электрическом импульсе.
Статор шагового двигателя многополюсный, снабжен сосредо-
точенной или распределенной обмоткой, напоминающей обмотки
188
обычных электрических машин. Число полюсов статора определя-
ется требуемым углом поворота ротора на один импульс.
Ротор шагового двигателя имеет явновыраженные полюса и
может выполняться с обмоткой возбуждения или постоянными
магнитами. Используются также роторы реактивного типа, то есть
не имеющие возбуждения.
Двухполюсной ротор четырехфазного шагового двигателя
(рис. 17.22) выполнен с постоянным магнитом. Когда фазы статора
возбуждаются в последовательности А, А + В, В, то ротор зани-
мает положения а = 0°, 45°, 90°,... Если фазы статора возбуждать
поодиночке, ротор будет поворачиваться на 90°. Вообще ротор с
постоянным магнитом стремится повернуться так, чтобы его поле
совместилось в пространстве с полем статора.
Для получения сравнительно малых шагов можно использо-
вать конструкцию, представленную на рис. 17.23. Здесь статор че-
тырехполюсный, а на роторе имеется пять выступающих полюсов.
На рисунке изображен момент, когда возбуждена обмотка статора
А. Если ток направить в обмотку В, ротор повернется на угол
а= 90° - 72° = 18°, чтобы полюс II совместить с осью полюса В
статора. В данной конструкции двигателя ротор может быть как с
постоянным магнитом, так и реактивного типа.
Рис. 17.22. Схема устройства четырех-
фазного шагового двигателя
с двухполюсным ротором
Рис. 17.23. Схема устройства четырех-
фазного шагового двигателя
с пятиполюсным ротором
Достоинствами шаговых двигателей являются относительно ма-
лые размеры и стоимость. Современные конструкции позволяют де-
лать до 200 шагов в секунду без потери шага при внезапных останов-
ках и пусках. Шаговые двигатели применяются в счетно-решающих
устройствах, разомкнут ых системах автоматического управления как
исполнительные двигатели, в ракетной технике и т.д.
189
Раздел IV
ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ
И ОСНОВЫ ИНФОРМАЦИОННОЙ ЭЛЕКТРОНИКИ
ВВЕДЕНИЕ
В настоящее время электронные устройства получили самое
широкое применение в промышленности, быту, медицине и т.д.
Промышленная электроника изучает электронные приборы
и устройства, применяемые в промышленности. На рис. В. 1 приве-
дена классификация электронных приборов и устройств.
Промышленная электроника делится на два раздела: информа-
ционную электронику и энергетическую электронику (преобразо-
вательную технику).
Информационная электроника занимается преобразованием
информации. Это слаботочная ветвь электроники. Без знания ее не-
возможно управление устройствами преобразовательной техники,
электроприводами и другими объектами технологии.
Энергетическая электроника (преобразовательная техни-
ка) - это сильноточная ветвь промышленной электроники. Она
изучает вопросы преобразования электрической энергии. Преобра-
зование электрической энергии - это изменение ее параметров (на-
пряжения, числа фаз, частоты), а также улучшение качества энер-
гии, изменение формы напряжения и т.д. Энергетическая электро-
ника изучается в разделе 5.
Особое значение в современной информационной электронике
приобрели интегральные микросхемы. Они по виду похожи на по-
лупроводниковые приборы, а по существу являются устройствами,
т.е. они находятся на границе между приборами и устройствами
(см. рис. В.1).
Широкое применение электронных устройств обусловлено
преимуществами полупроводниковых приборов и элементов мик-
роэлектроники малыми габаритами, быстродействием, чувстви-
190
Рис. В.1. Классификация полупроводниковых приборов и устройств
тельностью, надежностью, экономичностью и широкими возмож-
ностями преобразования информации.
Изучение электронных устройств невозможно без знания по-
лупроводниковых приборов и элементов микроэлектроники.
К концу изучения курса клеточки приведенной классификации
должны наполниться конкретным содержанием.
Глава 18
ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ
И ИНТЕГРАЛЬНЫЕ МИКРОСХЕМЫ
18.1. Физические основы полупроводниковых приборов
18.1.1. Проводники, диэлектрики и полупроводники
Все вещества делятся по их проводимости на проводники, ди-
электрики и полупроводники. Для пояснения принципа действия
полупроводниковых приборов необходимо рассмотреть различие
этих веществ с точки зрения квантовой физики. На рис. 18.1 приве-
дены диаграммы энергетических зон этих веществ. Показаны толь-
ко валентная зона (ВЗ) и зона проводимости (ЗП) (зона возбуж-
денных состояний). В валентной зоне находятся энергетические
уровни валентных электронов, то есть электронов, находящихся на
внешних орбитах в невозбужденном атоме и определяющих ва-
лентность вещества. В зону возбужденных состояний электроны
переходят при сообщении им дополнительной энергии.
Рис. 18.1. Энергетические зоны в проводнике (а), диэлектрике (б)
и полупроводнике (в). Обозначения: ЗП - зона проводимости;
ВЗ - валентная зона; 33 - запрещенная зона
На рис. 18.1 а видно, что в проводнике валентная зона и зона
проводимости перекрываются, и для перехода из валентной зоны в
7 Зак. 50
193
зону проводимости не требуется сообщать электрону дополнитель-
ную энергию. Поэтому в проводнике имеется много свободных
электронов. На рис. 18.1 б, в видно, что в диэлектрике и полупро-
воднике существует запрещенная зона (33), в которой нет энерге-
тических уровней. Для перехода электрона в зону проводимости
нужно приложить энергию. Если требуемая энергия для перехода
электрона меньше 1,5...2 эВ, то такое вещество называется полу-
проводником, если больше - диэлектриком. Таким образом, разни-
ца между диэлектриками и полупроводниками чисто количествен-
ная, а не качественная.
Если сообщить дополнительную энергию электрону, находя-
щемуся в валентной зоне, то он переходит в зону проводимости.
При этом в зоне проводимости появляется свободный электрон, а в
валентной зоне вакантное место — «дырка». Дырка ведет себя как
единичный положительный заряд. Если пара электрон - дырка об-
разуется при нагревании, то такой процесс называется термогене-
рацией. В полупроводнике существует два вида проводимости:
электронная, обусловленная движением свободных электронов
(как в проводнике), и дырочная, обусловленная движением дырок.
Для изготовления полупроводниковых приборов исходным
материалом служит чистый полупроводник. Он имеет кристалли-
ческое строение. При этом в узлах кристаллической решетки нахо-
дятся атомы, а решетка должна иметь такое строение, чтобы вокруг
каждого атома вращалось 8 валентных электронов. На рис. 18.2 а
показана схема кристаллической решетки четырехвалентного ве-
щества - кремния.
II II II
—(si)—(si)—(si)—
II II II
II II II
=®=(s)=(§)=
II II II
Рис. 18.2. Схема кристаллической решетки в собственном полупроводнике (а);
образование электронов и положительных ионов в полупроводнике типа и (б);
дырок и отрицательных ионов в полупроводнике типа р (в)
Вокруг каждого атома, кроме своих четырех валентных элек-
тронов, вращается четыре электрона соседей. Эта кристаллическая
решетка алмазного типа, характеризующаяся очень низкой прово-
194
димостью, которая может вызываться термогенерацией пар элек-
трон - дырка.
Чистый полупроводник, в котором проводимость вызвана
только термогенерацией пар электрон - дырка, называется собст-
венным полупроводником. В нем количество свободных электро-
нов равно количеству дырок. На зонной диаграмме рис. 18.3 а по-
казано, как при термогенерации появляется свободный электрон в
зоне проводимости и вакантное место — дырка в валентной зоне.
При введении примеси можно в миллионы раз увеличить либо
число свободных электронов, либо дырок, то есть придать полу-
проводнику преимущественно электронную или дырочную прово-
димость. При этом в той же степени меняется величина его прово-
димости. Полупроводник, в который была введена примесь, назы-
вается примесным. Полупроводник, которому придана преимуще-
ственно электронная проводимость, называется электронным или
типа «и» (от слова негативный, отрицательный). Полупроводник,
которому придана преимущественно дырочная проводимость, на-
зывается дырочным или типа «р» (от слова позитивный, положи-
тельный).
ЗП О
ЗП Q
______
вз ©
вз
Рис. 18.3. Термогенерация пар электрон - дырка в собственном полупроводни-
ке (а); появление электронной проводимости в полупроводнике типа и (б);
появление дырочной проводимости в полупроводнике тира р (в)
На рис. 18.2 б показано, как при введении пятивалентной (до-
норной) примеси (Р) появляется свободный электрон и положи-
тельный ион (неподвижный, зажатый в кристаллической решетке).
На рис. 18.2 в показано, как при введении трехвалентной (акцеп-
торной) примеси (В) появляются дырка и отрицательный ион. На
рис. 18.3 б, в это же иллюстрируется на зонной диаграмме, где вид-
но, что с появлением свободного электрона или дырки не появляет-
ся свободный носитель противоположного знака.
195
7*
Носители зарядов, определяющие тип проводимости полупро-
водника. называются основными; носители противоположного
знака называются неосновными.
Возможности изменения вида проводимости и широчайшего
изменения ее величины явились предпосылкой расцвета полупро-
водниковой техники.
18.1.2. Р-п переход
Если в кристалл полупроводника с одной стороны ввести при-
месь, превращающую его в полупроводник типа «п», а с другой, — в
полупроводник типа «р», то в кристалле появляется р-п переход.
Таким образом, р-п переход это граница двух слоев полупроводни-
ка с разным типом проводимости. Обычно р-п переходы бывают
несимметричные, то есть концентрация примесей в слоях отличает-
ся на несколько порядков. В основе всех замечательных свойств
полупроводниковых приборов лежат процессы на р-п переходе.
Для пояснения процессов представим, что р-п переход созда-
ется путем соединения двух кристаллов с разным типом проводи-
мости. При соединении свободные электроны и дырки диффунди-
руют в соседние слои. На р-п переходе они встречаются и реком-
Д67
Рис. 18.4. Процессы на р-п переходе: а - при
отсутствии смещения; б - при прямом смеще-
нии; в - при обратном смещении. Обозначения:
— электроны; + дырки; в кружочках ионы
бинируют. Ионы приме-
сей, зажатые в кристал-
лической решетке, ли-
шаются зарядов, ком-
пенсирующих их поле.
На переходе появляется
нескомпенсированный
объемный заряд ионов,
создающих потенциаль-
ный барьер (рис. 18.4 а).
Этот потенциальный ба-
рьер препятствует даль-
нейшей диффузии. Нар-п
переходе устанавлива-
ется динамическое рав-
новесие: наиболее бы-
стрые электроны и дыр-
ки диффундируют в со-
седние слои, а навстре-
196
чу им под действием электрического поля дрейфуют носители за-
рядов противоположного знака. На рис. 18.4 а условно показано,
что концентрация примесей в слое р больше, чем в слое п.
Приложение внешнего напряжения к р-п переходу называется
смещением р-п перехода. Если внешнее напряжение создает поле
встречное полю потенциального барьера, то смещение называется
прямым, если полярность внешнего напряжения противоположна,
то смешение называется обратным (см. рис. 18.4 б, в).
При прямом смещении основные носители преодолевают по-
тенциальный барьер и переходят в соседний слой. Переход основ-
ных носителей заряда в соседний слой, где они становятся неос-
новными, называется инжекци-
ей. При прямом смешении через
р-п переход протекает прямой
ток. Зависимость тока через р-п
переход от приложенного на-
пряжения 1 = f(U) называется
вольтамперной характеристикой
электронно-дырочного перехо-
да. На рис. 18.5 в первом квад-
ранте показана вольтамперная
характеристика (ВАХ) р-п пере-
хода при прямом смещении. На
участке ОА преодолевается по-
тенциальный барьер и ток мал,
Рис. 18.5. Вольтамиерные характери-
стики р-п перехода
на участке АВ ток резко увеличивается из-за перехода в соседний
слой большого количества носителей заряда и резкого уменьшения
его сопротивления.
При обратном смещении через р-п переход протекает обрат-
ный ток. На рис. 18.5 в третьем квадранте показана вольтамперная
характеристика р-п перехода при обратном смещении. Обратный
ток (ток дрейфа) обусловлен только неосновными носителями,
поэтому он мал и уже при небольшом напряжении быстро дости-
гает значения насыщения (участок ОС) и далее остается постоян-
ным (участок CD).
При достижении высокого напряжения в точке D ток резко
возрастает, происходит лавинный пробой. Лавинный пробой воз-
никает. когда на длине свободного пробега электрон приобретает
энергию достаточную для ионизации атомов (участок DF). Лавин-
197
ный пробой обратим, то есть после снятия обратного смещения р-п
переход не разрушается.
В точке F выделяется большая мощность и может произойти
тепловой пробой (участок FE). Он необратим и приводит к разру-
шению р-п перехода.
При повышении температуры различные участки ВАХ изме-
няются по-разному (см. рис. 18.5).
При прямом смешении с ростом температуры число основных
носителей, определяющих прямой ток, изменяется незначительно,
так как оно определяется числом атомов примеси и мало увеличи-
вается за счет термогенерации пар электрон — дырка. Поэтому па-
дение напряжения на прямо смещенном переходе при повышении
температуры уменьшается незначительно.
Особенно сильно меняется обратный ток, так как он создается
неосновными носителями зарядов, количество которых определя-
ется термогенерацией. Он удваивается при росте температуры на
7...10 °C.
С ростом температуры уменьшается длина свободного пробега
электронов и, чтобы электроны на меньшей длине приобрели энер-
гию достаточную для ионизации, необходимо приложить большее
напряжение. Поэтому при увеличении температуры напряжение
лавинного пробоя растет.
Рассмотрим переходные процессы, происходящие при пря-
мом и обратном смещении р-п перехода.
При приложении прямого смещения происходит процесс на-
копления заряда. На рис. 18.6 а видно, что в начале прохождения
прямого тока падение напряжения на р-п переходе велико, а затем
оно уменьшается. Время установления прямого сопротивления -
это время спада напряжения от максимального значения до задан-
ной величины (например, до 1,2 установившегося значения).
Рис. 18.6. Переходные процессы при прямом (а) и обратном (б)
смещении р-п перехода
198
При приложении обратного смещения происходит процесс
рассасывания заряда. На рис. 18.66 видно, что при приложении
обратного напряжения к проводящему р-п переходу вначале проте-
кает большой обратный ток, который, по мере рассасывания накоп-
ленных ранее зарядов, уменьшается. Время установления обрат-
ного сопротивления (время восстановления вентильной проч-
ности) — это время от начала нарастания обратного тока до спада
его до заданной величины (например, до пятикратного установив-
шегося значения).
Р-п переход обладает емкостью. На рис. 18.4 в видно, что ме-
жду двумя слоями, содержащими свободные носители зарядов, на-
ходится слой, в котором нет свободных носителей зарядов. Таким
образом, р-п переход представляет собой конденсатор, в котором
толщина непроводящего слоя, а, следовательно, и его емкость, за-
висят от величины приложенного напряжения и его знака. При
увеличении отрицательного смещения емкость р-п перехода
уменьшается.
18.2. Полупроводниковые диоды
18.2.1. Классификация диодов
Диод двухэлектродный, неуправляемый полупроводниковый
электропреобразовательный прибор, имеющий два вывода, содержа-
щий р-п переход и обладающий односторонней проводимостью тока.
По материалу, из которого изготовлен р-п переход, диоды де-
лятся на кремниевые, германиевые, арсенидгалиевые и другие.
По назначению и области применения диоды делятся на вы-
прямительные. высокочастотные, стабилитроны, стабисторы, вари-
капы, фотодиоды, светодиоды и другие.
Выпрямительные диоды служат для выпрямления перемен-
ного тока. Высокочастотные диоды применяют для выпрямления
тока высокой частоты. Стабилитроны и стабисторы предназначе-
ны для стабилизации постоянного напряжения. Варикапы пред-
ставляют собой конденсаторы с электрически регулируемой емко-
стью. Фотодиоды применяют для преобразования световой энер-
гии в электрическую. Светодиоды излучают в широком диапазоне
частот, поэтому их применяют для световой индикации и передачи
сигналов. Диоды - размыкатели тока используют для генерации
мощных наносекундных импульсов.
199
18.2.2. Выпрямительные диоды
Выпрямительные диоды применяют для выпрямления пере-
менного тока частотой до 20 кГц. Выпрямление основано на свой-
4
О »
о-
Рис. 18.7. Схема включения диода
в однополупериодном выпрямите-
ле (а) и временные диаграммы,
иллюстрирующие процессы (б)
стве р-п перехода, хорошо пропус-
кать ток в одном направлении и
почти не пропускать его в другом.
Схема включения диода в однопо-
лупериодном выпрямителе показа-
на на рис. 18.7 а, а на рис. 18.7 6
приведены временные диаграммы,
иллюстрирующие процессы в схеме.
ВАХ выпрямительного диода
имеет такой же вид, как и ВАХ р-п
перехода (см. рис. 18.5). Цифры по
осям на рис. 18.5 приведены для
мощных диодов. При расчетах ВАХ
аппроксимируются. На рис. 18.8
показаны реальная ВАХ выпрями-
тельного диода и способы ее ап-
проксимации, применяемые в зави-
симости от решаемых задач. Иде-
альная ВАХ (см. рис. 18.8 6) при-
меняется при расчете схем без уче-
та потерь, а идеализированная (см.
рис. 18.8 в) при учете потерь в про-
водящем состоянии.
Полупроводниковые приборы характеризуются параметрами.
Параметры - это численные значения величин, определяющих ха-
рактерные точки ВАХ и допустимые режимы.
Параметры мощных выпрямительных диодов:
1) повторяющееся импульсное обратное напряжение URffM —
максимальное обратное напряжение, которое каждый период мо-
жет прикладываться к диоду (см. рис. 18.8 а); в современных дио-
дах оно достигает 5 кВ. URRM в сотнях вольт определяет класс вы-
прямительного диода. Например, если диод выдерживает 5000 В, то
он 50 класса;
2) максимально допустимый средний прямой ток (предельный
ток) IFAVm, определяемый в однофазной однополупериодной схеме
200
выпрямления (см. рис. 18.7 а) при синусоидальном токе с частотой
50 Гц, угле проводимости 180° и заданной температуре кристалла
или корпуса. Предельный ток определяет тип вентиля; в современ-
ных выпрямительных диодах он достигает 5 кА;
3) импульсное прямое напряжение UFM — максимальное зна-
чение прямого напряжения, обусловленное предельным током (см.
рис. 18.7 б); оно составляет 1...2 В;
4) пороговое напряжение Uo и дифференциальное сопротивле-
ние гд (см. рис. 18.8 а, в).
Рис. 18.8. Вольтамперные характеристики выпрямительного диода:
реальная (а), идеальная (б) и идеализированная (в)
Примечание. В индексах используются первые буквы английских
слов: первое R (reverse) — обратный; второе R (repetition) - повторение;
F (forth) - вперед; М (maximum) - максимум (т для синусоиды);
А V (average) - среднее значение; BR (breach) - пробой.
Разновидность выпрямительных диодов — так называемые
«диоды Шоттки». Особенностью таких диодов является то, что р-п
переход создается между металлом и полупроводником. Их пара-
метры 1 FAVm до 100 A, Uдо 0,5 В, Upppf до 50 В.
Выпрямительные диоды являются основой неуправляемых вы-
прямителей, а также применяются в других схемах преобразователей.
18.2.3. Стабилитроны и стабисторы
Стабилитроны служат для стабилизации постоянного напря-
жения. В них используется участок обратной ветви ВАХ р-п пере-
хода (см. рис 18.5), на котором из-за лавинного пробоя мало меня-
ется напряжение. Таким образом, в стабилитронах этот участок яв-
ляется рабочим. Поэтому на рис. 18.9 а он приведен в первом квад-
ранте. Это и есть ВАХ стабилитрона.
201
Рис. 18.9. Вольтамперная характе-
ристика стабилитрона (а) и схема
стабилизатора напряжения (б)
На рис. 18.96 показана схема
простейшего стабилизатора напря-
жения. Резистор г5 воспринимает на
себя разность напряжения источни-
ка питания Е и напряжения стабили-
зации стабилитрона. Напряжение на
выходе стабилизатора
Цст=Е-/г6. (18.1)
Напряжение на выходе стаби-
лизатора может быть найдено на ос-
нове совместного решения уравне-
ния (18.1) и уравнения ВАХ стаби-
литрона С/ст =f(l\
Решение из-за нелинейности
ВАХ целесообразно выполнить гра-
фически (см. рис. 18.9 а). Прямая
линия по уравнению (18.1) может
быть построена по двум точкам: при
7 = 0 t/CT = Е; при (7СТ =0 I-E/r&.
Если напряжение источника питания Е изменится, то прямая
линия, построенная по уравнению (18.1), переместится параллель-
но самой себе, но напряжение на выходе стабилизатора изменится
мало (см. рис. 18.9 а).
Описанный стабилизатор имеет недостаток - он не термоста-
билен, так как напряжение лавинного пробоя растет с ростом тем-
пературы. Для повышения температурной стабильности последова-
тельно со стабилитроном включают диод в прямом направлении.
Напряжение на нем падает при повышении температуры и поэтому
компенсируется повышение напряжения на стабилитроне.
Параметры стабилитрона: напряжение стабилизации (5...300 В);
максимальный ток (2 А...20 мА), причем большим напряжениям
соответствуют меньшие токи; дифференциальное сопротивление на
участке стабилизации; температурный коэффициент напряжения
(ТКН) на участке стабилизации (изменение напряжения в % на гра-
дус Цельсия). ТКН обычных стабилитронов составляет порядка
+0,1 %/град, что неприемлемо при больших колебаниях темпера-
туры. Поэтому созданы термокомпенсированные стабилитроны,
имеющие ТКН порядка +0,001 %/град. В них последовательно с р-п
202
переходом, работающим в режиме лавинного пробоя, включены
прямо смещенные р-п переходы.
При напряжениях менее 5 В лавинный пробой не возникает.
Для стабилизации напряжений менее 5 В применяют стабисторы.
Они работают на участке прямой ветви ВАХ р-п перехода (см. рис.
18.5), где напряжение также мало зависит от тока. Стабистор со-
стоит из одного или нескольких последовательно включенных р-п
переходов.
18.3. Транзисторы
18.3.1. Классификация транзисторов
Транзистор - это электропреобразовательный прибор, содер-
жащий два и более р-п переходов, имеющий три и более выводов и
предназначенный для усиления мощности.
Транзисторы по принципу действия делятся на биполярные
(управляемые током), униполярные (управляемые электрическим
полем или полевые), IGBT-транзисторы. Аббревиатура IGBT -
это сокращение названия Insulated gate bipolar transistor. В переводе
это значит биполярный транзистор с изолированным затвором
(БТИЗ).
В биполярных транзисторах ток определяется движением носи-
телей обоих знаков: электронов и дырок, поэтому они называются
биполярными. В полевых транзисторах ток определяется шириной
проводящего канала, по которому движутся носители одного знака,
отсюда их другое название - униполярные. IGBT-транзисторы яв-
ляются гибридными, в них сочетаются положительные свойства би-
полярных и полевых транзисторов.
18.3.2. Биполярные транзисторы
Биполярные транзисторы содержат три
чередующихся слоя с различным типом про-
водимости. В зависимости от порядка их чере-
дования биполярные транзисторы делятся на
транзисторы типа п-р-п и типа р-п-р. Их ус-
ловные обозначения приведены на рис. 18.10.
Принцип действия биполярного транзи-
стора рассмотрим на примере транзистора ти-
па п-р-п (рис. 18.11). Средний слой структуры
а) б)
Рис. 18.10. Условные
обозначения транзи-
сторов: а — типа п-р-п'.
б - типа р-п-р
203
П1 б П2 К
Рис. 18.11. Пояснение принципа
действия транзистора типа п-р-п
называется базой. Крайний слой,
являющийся источником носите-
лей заряда, называется эмиттером.
Другой крайний слой, принимаю-
щий заряды, называется коллек-
тором. Приложенными напряже-
ниями переход эмиттер-база сме-
щен в прямом направлении, а пе-
реход коллектор-база в обратном.
К прямо смещенному переходу достаточно приложить небольшое
напряжение, чтобы пошел большой ток. К обратно смещенному
переходу может прикладываться значительное напряжение. Если ра-
зорвать цепь эмиттера, то под действием этого напряжения через
коллектор будет протекать маленький ток обратно смещенного пе-
рехода /к0. При замыкании цепи эмиттера под действием прило-
женного прямого напряжения основные носители (электроны) ин-
жектируются из эмиттера через эмиттерно-базовый переход П1 в
базу, где они становятся неосновными. Далее носители диффунди-
руют через базу к коллекторно-базовому переходу П2 и попадают в
область действия электрического поля обратно смещенного перехо-
да. Под действием этого поля носители дрейфуют к коллектору. На
этом сложном пути часть носителей теряется — в базе они рекомби-
нируют с носителями противоположного знака, поэтому ток коллек-
тора /к меньше тока эмиттера /э. Разность этих токов - это ток базы
/б. Усилительные свойства транзисторов характеризуют коэффици-
ентом передачи тока а , который связывает приращения токов:
« = (18.2)
А/э
Тогда ток коллектора
/к=а/э+/к0. (18.3)
Из описания принципа действия следует, что коэффициент пе-
редачи тока меньше единицы. У современных транзисторов
а = 0,9...0,99. Может создаться впечатление, что транзистор не
усиливает. Но здесь было только показано, что транзистор не уси-
ливает ток в данной схеме. Оказывается, что усилительные свойст-
ва зависят от схемы включения транзистора.
В схеме рис. 18.11 у эмиттерной (входной) и коллекторной
(выходной) цепи имеется общая точка - база. Поэтому эта схема
204
называется схемой с общей базой. Существуют также схемы с об-
щим коллектором и с общим эмиттером (рис. 18.12). Последняя
схема имеет наилучшие усилительные свойства и поэтому чаще
всего применяется.
Рис. 18.12. Схемы включения транзистора: а - с общей базой (ОБ);
б - с общим эмиттером (ОЭ); в - с общим коллектором (ОК)
Коэффициент передачи тока в схеме с общим эмиттером
Р = (18.4)
А/б
Этот коэффициент, как следует из формулы, составляет 10.. .100.
Сопротивление нагрузки в выходной цепи может быть большим,
так как в этой цепи действует большое напряжение, а во входной
цепи напряжение мало. Поэтому схема с общим эмиттером обеспе-
чивает также усиление напряжения и, следовательно, большой ко-
эффициент усиления мощности.
Основные недостатки схемы с общим эмиттером: низкая тер-
мостабильность и небольшое входное сопротивление. Эти недос-
татки преодолеваются в схеме с общим коллектором, но она не
усиливает напряжение и имеет меньший коэффициент усиления
мощности.
Коэффициенты передачи токов транзисторов а и (3 зависят
от частоты. Из-за инерционности процессов, происходящих в тран-
зисторе при движении зарядов, приращения выходного тока запаз-
дывают по фазе по отношению к приращению входного. При этом
уменьшается и амплитуда. Вводятся понятия предельных частот
усиления в схеме с общей базой fa и в схеме с общим эмиттером
fp, при которых коэффициенты а и /3 уменьшаются в л/2 раз.
/₽=/«(!-«), (18 5)
следовательно, частотные свойства схемы с общим эмиттером су-
щественно хуже, чем схемы с общей базой.
205
При расчете схем на транзисторах используются их статиче-
ские ВАХ. Основные ВАХ - выходная и входная.
Рис.18.13. Выходные характери-
стики транзистора, включенного
по схеме с ОБ
На рис. 18.13 приведено се-
мейство выходных статических
характеристик для схемы с общей
базой /к=/(^к),=сопй- Характе-
ристика при /э = 0 соответствует
обратной ветви ВАХ р-п перехо-
да. При увеличении тока 1Э соот-
ветственно почти на такую же ве-
личину увеличивается ток /к, так
как коэффициент а близок к I.
Поэтому кривые идут параллельно и почти горизонтально.
На рис. 18.14 приведены семейства ВАХ для схемы с общим
эмиттером: выходная 4 =/(^к)/б=сопй и входная 4 =/(^б)/к=соп8Г
Кроме них часто используют характеристику прямой передачи по
току 4=/(7б)ик=со1в(.
Рис. 18.14. Выходные (а) и входные (б) характеристики
транзистора в схеме ОЭ
Основные параметры биполярных транзисторов:
/к тах — максимальный ток коллектора (достигает сотни ампер);
{7К тах - максимальное напряжение на коллекторе (до 1000 В);
/к и б/к не могут достигать одновременно максимальных
значений;
Рк max _ максимальная мощность, которую можно рассеять на
коллекторе;
206
/3 - коэффициент передачи (усиления) в схеме с общим эмит-
тером по току (до сотен, у высоковольтных это единицы);
/к0- ток обратно смешенного коллекторного перехода (через
запертый транзистор);
гг - тепловое сопротивление
\Т
гт =-----;
р
* к. max
АГ - разность температур между окружающей средой и кри-
сталлом.
На рис. 18.14 а нанесена разрешенная область работы транзи-
стора, ограниченная допустимым напряжением, допустимым током
и кривой допустимой мощности.
18.3.3. Линейный режим работы транзистора
Усилительный каскад - это элементарный усилитель, вы-
полненный на транзисторе, имеющий вход и выход. Рассмотрим
работу транзистора в прос-
тейшем усилительном каска-
де (рис. 18.15).
Для пояснения на рис.
18.16 приведена диаграмма
иллюстрирующая процессы.
В первом квадранте предста-
влены выходные характери-
стики. Распределение напря-
жения питания Ек между
транзистором УТ и сопро-
Рис. 18.15. Усилительный каскад
тивлением нагрузки RK можно найти графически из уравнения, за-
писанного по второму закону Кирхгофа:
Тк — 7/к + 7К/?К,
(18.6)
где 1К - ток коллектора, UK - напряжение на коллекторе.
Это уравнение может быть решено графически. Для этого на
рисунке построена линия нагрузки. Уравнение линии нагрузки
UK = EK-IKRK. (18.7)
Точки пересечения выходных характеристик и линии нагрузки
позволяют определить ток коллектора и напряжение на коллекторе
при соответствующих токах базы.
207
Рис. 18.16. Нагрузочная диаграмма. 1 - характеристика прямой передачи по току транзистора;
2 - характеристика прямой передачи по току усилительного каскада
208
По точкам пересечения выходных характеристик и линии на-
грузки во втором квадранте построена характеристика прямой пе-
редачи по току (ХППТ) усилительного каскада /к = f (/б) при дан-
ных Ек и RK.
Состояние транзистора при отсутствии входного сигнала на-
зывается покоем. Рабочая точка покоя Р выбирается на середине
отрезка MN, отсекаемого участками выходных характеристик,
идущими почти горизонтально, или на середине линейного участка
ХППТ усилительного каскада.
Для выбора рабочей точки покоя на базу подается ток /бр че-
рез резистор R\. Конденсатор С на входе устраняет влияние внут-
реннего сопротивления источника входного сигнала на положение
рабочей точки покоя. Диаграмма рис. 18.16 иллюстрирует, как ток,
подаваемый на вход, усиливается в транзисторе. При изменении
входного тока рабочая точка будет перемещаться по участку MN.
При этом будет обеспечиваться изменение тока и напряжения на
выходе пропорционально входному току. Из рисунка видно, что,
если рабочую точку покоя выбрать не так, как указано, то одна из
полуволн может срезаться.
Мощность, выделяемая на коллекторе
Рк=67к/к. (18 8)
Даже, когда отсутствует входной сигнал, в транзисторе выде-
ляется мощность
Ркр=^кр/кр- (18.9)
Поэтому линейный режим энергетически невыгоден.
18.3.4. Классы усиления
В зависимости от выбора положения рабочей точки покоя раз-
личают классы усиления.
В классе А рабочая точка покоя выбирается на середине уча-
стка линейного усиления, как это было описано выше (см. рис.
18.16). На рис. 18.17 эта точка обозначена буквой А. Преимущество
класса А — высокая линейность усиления. Недостаток — как указы-
валось выше, низкая энергетическая эффективность. Энергия по-
требляется от источника питания независимо от величины входно-
го сигнала.
В классе В рабочая точка покоя выбирается при токе базы
близком к нулю (см. рис. 18.17). При этом усиливается только одна
209
полуволна. Для усиления второй полуволны необходимо включение
второго транзистора. Преимущество класса В более высокая энергети-
Рис. 18.17. Выбор рабочей точки по-
коя в различных классах усиления
ческая эффективность. Потребле-
ние энергии от источника питания
пропорционально величине вход-
ного сигнала и весьма мало при
его отсутствии. Недостаток, вы-
званный нелинейностью входной
характеристики транзистора,
искажение усиленной полуволны.
(Длительность полуволны мень-
ше полупериода).
Для уменьшения искажений
переходят к классу АВ, в кото-
ром рабочая точка занимает промежуточное положение (см. рис.
18.17). Длительность полуволны становится равной полупериоду,
но ухудшается энергетическая эффективность.
В классе С рабочая точка покоя выбирается при токе базы
/б = ~1К0’ то есть ПРИ обратно смешенном эмиттерно-базовом пере-
ходе (см. рис. 18.17). При этом искажения увеличиваются, но не-
сколько возрастает энергетическая эффективность.
В классе D рабочая точка покоя выбирается при токе базы
7g = —7к0, то есть при обратно смещенном эмиттерно-базовом пере-
ходе (см. рнс. 18.17), но входной сигнал настолько велик, что тран-
зистор сразу переходит в состояние насыщения (точка 7V). Класс D
по-другому называется ключевым режимом. Этот режим наибо-
лее энергетически эффективен.
78.3.5. Ключевой режим
В ключевом режиме рабочая точка может находиться только в
двух положениях - в точке отсечки о и в точке насыщения н (рис.
18.18). В точке отсечки транзистор заперт, и через него проходит
очень маленький ток /ко. Поэтому, несмотря на значительное на-
пряжение, мощность, выделяемая в транзисторе в состоянии отсеч-
ки, очень мала. Если на базу подан ток, обеспечивающий насыще-
ние, то падение напряжения на транзисторе мало. Поэтому да-
же при существенном токе /кн потери в точке насыщения не вели-
ки. И те и другие потери существенно меньше, чем в точке р в ли-
210
нейном режиме. Следовательно, ключевой режим энергетически
значительно более выгоден, чем линейный. На рис. 18.19 приведе-
на схема, обеспечивающая работу транзистора в ключевом режиме.
Рис. 18.18. Рабочие точки
в ключевом режиме
Рис.18.19. Схема включения тран-
зистора в ключевом режиме
Чтобы оценить преимущества ключевого режима, рассмотрим
пример. Пусть Ек=100В; /кн = 10А; /ко = 0,01 А; 0/кн=1В. При
этом в точке Р /кр = 5 А; £/кр =50В, тогда в линейном режиме в
транзисторе выделяется мощность Ркр = 77кр7кр = 50 • 5 = 250 Вт.
В ключевом режиме в точке насыщения и отсечки выделяется,
соответственно:
^н=^кн=1Ю = ЮВт,
РКо=Ц«Ло = 100.0,01 = 1Вт.
Если время нахождения транзистора в состоянии насыщения и
отсечки одинаково, то средняя мощность, выделяемая в транзисто-
ре (5,5 Вт), почти в 50 раз меньше, чем в линейном режиме, хотя
средний ток через нагрузку в обоих случаях одинаков. Поэтому
применение ключевого режима является основным методом повы-
шения энергетической эффективности в электронных устройствах.
При расчете не учтены коммутационные потери, возникающие при
переключениях ключа, однако, они обычно не превышают 15...25 %
и поэтому не влияют на результаты сравнения.
В связи с уменьшением потерь в ключевом режиме уменьша-
ются и теплоотводящие устройства (радиаторы), а, следовательно,
резко уменьшаются габариты и масса устройств. Поэтому примене-
ние ключевого режима - основной путь улучшения массогаба-
ритных и энергетических показателей электронных устройств.
211
Преимущества ключевого режима.
1. Маленькие потери. Высокий К11Д.
2. Лучшие массогабаритные показатели.
3. Транзисторы не «боятся» разброса параметров при правиль-
ном выборе тока базы (выбор по наименьшему коэффициенту пе-
редачи).
4. Транзисторы не «боятся» изменения температуры при пра-
вильном выборе тока базы (выбор по коэффициенту передачи при
низшей температуре).
18.3.6 . Полевые транзисторы
Полевые транзисторы (ПТ) - приборы, управляемые элек-
трическим полем, делятся по принципу действия на ПТ с затвором
в виде р-п перехода и на ПТ с изолированным затвором (ПТИЗ).
Последние по их структуре называют также МОП-гранзисторами
(металл окисел- полупроводник) или МДП-транзисторами (металл-
диэлектрик-полупроводник).
На рис. 18.20 а, б приведена схема включения и структура ПТ
с затвором в виде р-п перехода. Электрод, из которого выходят ос-
новные носители, называется истоком (и). Электрод, куда прихо-
дят основные носители, называется стоком (с). От истока к стоку
носители движутся по каналу (к). Электрод, регулирующий шири-
ну канала, называется затвором (з).
а)
Рис. 18.20. Схема включения с общим истоком (а), структура (б) и выходные
характеристики полевого транзистора с затвором в виде р-п перехода (в)
При подаче на затвор отрицательного напряжения U3 р-п пе-
реход смещается в обратном направлении, проводящий канал меж-
ду истоком и стоком сужается. Чем больше напряжение на затворе,
тем уже канал и больше сопротивление между истоком и стоком,
следовательно, меньше ток стока 1С при постоянном напряжении
212
на стоке Uc. При этом входной ток 13 очень мал, а входное сопро-
тивление гвх очень велико, так как р-п переход зат вор - исток сме-
шен в обратном направлении.
На рис. 18.20 в приведены выходные Ic= f(Uc\j =const харак-
теристики для ПТ с затвором в виде р-п перехода для схемы вклю-
чения с обшим истоком. Другие схемы практически не применяют-
ся. Выходные характеристики ПТ похожи на характеристики бипо-
лярных, но вместо тока базы у них параметром является напряже-
ние на затворе U3, а вместо тока коллектора и напряжения на кол-
лекторе - ток стока /с и напряжение на стоке Uc.
На рис. 18.21 приведена структура и схема включения ПТИЗ с
индуцированным каналом. Электрод, из которого выходят основ-
ные носители, называется истоком. Электрод, куда приходят ос-
новные носители, называется стоком. От истока к стоку носители
движутся по каналу. Электрод, регулирующий ширину канала, на-
зывается затвором. Затвор изолирован от структуры слоем диэлек-
трика (окисла).
а) б)
Рис. 18.21. Структура ПТИЗ с индуцированным каналом (а)
и схема его включения (б)
Если на затвор не подано напряжение, то между истоком и
стоком включено два встречно включенных р-п перехода, и ток в
этой цепи очень мал. При подаче на затвор положительного напря-
жения U3 электроны из слоя р подтягиваются к затвору и образуют
(индуцируют) проводящий канал между истоком и стоком. Чем
больше напряжение на затворе, тем шире канал и меньше сопро-
тивление между истоком и стоком, следовательно, больше ток сто-
ка /с при постоянном напряжении на стоке Uc. При этом входной
ток 13 очень мал, а входное сопротивление гвх очень велико, так
как затвор подключен к каналу через диэлектрик (окисел).
213
На рис. 18.22 приведены выходные 7С-/((7С)[/ сол ( и пере-
даточные (стоко-затворные) Ic = =cons( характеристики для
ПТИЗ с индуцированным каналом для схемы включения с общим
истоком. Другие схемы практически не применяются. Выходные
характеристики ПТИЗ похожи на характеристики биполярных, но
вместо тока базы у них параметром является напряжение на затво-
ре U3, а вместо тока коллектора и напряжения на коллекторе — ток
стока и напряжение на стоке.
Рис. 18.22. Выходные (а) и передаточные (б) характери-
стики ПТИЗ с индуцированным каналом для схемы с ОИ
Основные параметры ПТИЗ: крутизна передаточной характери-
стики 5 =
dlc
dlL „
л /Uc= const
, дифференциальное сопротивление стока на
участке насыщения гс, допустимый ток /стах, допустимое напря-
жение <7с гпах и допустимая мощность Рс тах. В современных тран-
зисторах допустимые токи достигают сотен ампер, а напряжения со-
тен вольт, однако, эти значения не могут действовать одновременно.
ПТИЗ — это наиболее перспективные полевые транзисторы.
Основные преимущества полевых транзисторов: очень вы-
сокие входные сопротивления, работоспособность до сотен мега-
герц и отсутствие вторичного пробоя (вторичный пробой возни-
кает при работе биполярных транзисторов в ключевом режиме).
18.3.7 . Биполярные транзисторы с изолированным затвором
Биполярные транзисторы с изолированным затвором
(БТИЗ) или, как они сокращенно называются по-английски IGBT,
представляют собой гибрид биполярного транзистора и ПТИЗ, со-
четающий их лучшие свойства. БТИЗ это сложная многослойная
214
структура и процессы в ней весьма сложны. Поэтому на рис.
18.23 а приведена очень упрощенная схема замещения. При подаче
на затвор 3 напряжения, положительного относительно точки Э,
ПТИЗ открывается и начинает проходить ток от точки К через
эмиттерно-базовый переход биполярного транзистора и открытый
ПТИЗ к точке Э. При этом открывается биполярный транзистор,
через который проходит ток от точки К к точке Э. Буквами Э, К, 3
обозначены эмиттер, коллектор и затвор БТИЗ. На рис. 18.23 6
приведено условное обозначение БТИЗ и пример его включения
для прерывания тока в активном сопротивлении.
Рис. 18.23. Упрощенная схема замещения БТИЗ (а) и схема
его включения для прерывания постоянного тока (б)
Выходные характеристики БТИЗ похожи на характеристики
ПТИЗ, но на участке насыщения они идут значительно круче. Это
обуславливает значительно меньшее падение напряжения в ключе-
вом режиме.
Входное активное сопротивление БТИЗ очень велико, но ем-
кость затвора может достигать 1 мкФ, поэтому для быстрого от-
крывания БТИЗ в ключевом режиме требуются токи в несколько
ампер длительностью несколько микросекунд, а для удержания его
в открытом состоянии достаточен ток не превышающий несколько
миллиампер.
Основные параметры БТИЗ: падение напряжения на участке
насыщения А6/Кн при заданном токе /к, допустимый ток /к тах, до-
пустимое напряжение UK max и допустимая мощность Рк тах . В со-
временных БТИЗ предельные токи достигают 1800 А, а напряжения
4,5 кВ.
215
Наблюдается тенденция снижения напряжения на БТИЗ в со-
стоянии насыщения. Они допускают большие скорости нарастания
коллекторного тока и напряжения, что существенно упрощает
снабберы — цепи формирования траекторий переключения (см.
п. 18.3.10).
Основные преимущества БТИЗ: очень высокие входные сопро-
тивления, большие допустимые токи и напряжения. БТИЗ предна-
значены для работы в ключевом режиме и работоспособны до де-
сятков килогерц.
В настоящее время это наиболее перспективные приборы дли
мощных устройств, преобразующих постоянное напряжение.
18.3.8 . Сравнение транзисторов
Рис. 18.24. Сравнение на-
чальных участков выходных
характеристик
На рис. 18.24 для сравнения приве-
дены начальные участки выходных ха-
рактеристик транзисторов различных ти-
пов, а в табл. 18.1 сравниваются основ-
ные параметры транзисторов (в ключе-
вом режиме).
БТ находят основное применение в
области низких напряжений и низких
частот; ПТИЗ применимы в области вы-
соких частот; БТИЗ наиболее перспек-
тивны в области больших напряжений,
токов и мощностей.
Таблица 18.1
БТ ПТИЗ БТИЗ
Я1!Х Мало Велико Велико
\и Мало, (1...2)В Велико, (3-5) В Мало, (2-4) В
max 1000 В 500 В 4500 В
I max 500 А 200 А 1800 А
Частотные свойства Плохие Хорошие Средние
18.3.9 . Переходные процессы в транзисторных ключах
Переходные процессы в транзисторных ключах при активной
нагрузке иллюстрирует рис. 18.25. Рабочая точка перемещается по
216
линии нагрузки. Точки а, Ь, с... на рис. 18.25 б и в соответствуют
друг другу. Коммутационные потери относительно малы.
Рис. 18.25. Переходные процессы в транзисторных ключах при активной
нагрузке: схема (а), временные диаграммы (б) и траектории рабочей точки
на плоскости выходных характеристик (в)
Переходные процессы в транзисторных ключах при активно
индуктивной нагрузке иллюстрирует рис. 18.26. Точки а, Ь, с... на
рис. 18.26 бив соответствуют друг другу. Коммутационные потери
при включении меньше, чем при активной нагрузке, так как замед-
ляется нарастание тока. При выключении возникают огромные пе-
ренапряжения (при мгновенном отключении теоретически беско-
нечно большие). Поэтому такая нагрузка недопустима. Для исклю-
чения перенапряжений она должна быть шунтирована диодом.
Переходные процессы в транзисторных ключах при активно-
индуктивной нагрузке шунтированной диодом иллюстрирует рис.
18.27. Точки а, Ь, с... на рис. 18.27 бив соответствуют друг другу.
Потери при выключении уменьшаются, но растут потери при
включении, так как диод не мгновенно восстанавливает свои запи-
рающие свойства, и по цепи Е—VD-VT протекает импульс тока,
существенно превышающий ток нагрузки.
217
Рис. 18.26. Переходные процессы в транзисторных ключах при активно-
индуктивной нагрузке: схема (а), переходные процессы (б), траектории
рабочей точки на плоскости ВАХ (в)
Рис. 18.27. Переходные процессы в транзисторных ключах при активно-
индуктивной нагрузке, шунтированной диодом: схема (а), переходные
процессы (б), траектории рабочей точки на плоскости ВАХ (в)
218
18.3.10 . Защищенный транзисторный ключ
Схема защищенного транзисторного ключа с улучшенной тра-
екторией движения рабочей точки при переключении приведена на
рис. 18.28. Для ограничения импульса тока, протекающего через
диод при включении транзистора, применяют малую индуктив-
ность £огр. Для уменьше-
ния перенапряжений, воз-
никающих при обрыве
тока, параллельно транзи-
стору включают RCD-
цепочку. Конденсатор С
уменьшает скорость на-
растания напряжения на
транзисторе, а диод D
предотвращает быстрый
разряд конденсатора на
транзистор при его вклю-
чении. Резистор Rm обес-
печивает разряд конден-
сатора к следующему вы-
ключению. Резистор Rp
способствует разряду энергии, запасенной в индуктивности, к сле-
дующему включению. Цепи, обеспечивающие улучшение траекто-
рии движения рабочей точки при переключении транзисторов, по-
лучили название снабберов.
18.4. Тиристоры
18.4.1. Устройство и принцип действия
Тиристор - полупроводниковый прибор, содержащий четыре и
более слоев с разным типом проводимости, способный под дейст-
вием управляющего сигнала переходить из закрытого в открытое
состояние.
Наиболее распространены тиристоры с четырехслойной
структурой (рис. 18.29 а). Если напряжение на аноде (А) по отно-
шению к катоду (К) положительное, то переходы П1 и ПЗ смеща-
ются в прямом направлении, а П2 в обратном. Тиристор закрыт, че-
рез него протекает маленький ток. При увеличении приложенного
219
напряжения происходит лавинный пробой обратно смещенного пе-
рехода П2, ток резко нарастает, так как электроны и дырки из
крайних слоев устремляются в средние.
Рис. 18.29. Структура тиристора (а) и его анодные ВАХ (б)
Сопротивление тиристора резко падает, а напряжение на нем
снижается до 1...2 В. Если подать на управляющий электрод
(УЭ) тиристора положительное напряжение, то через прямо сме-
щенный переход ПЗ проходит ток управления от УЭ к К. Чем
больше ток управления, тем при меньшем напряжении на аноде
включается тиристор. Коэффициент передачи тиристора по току
очень велик (тысячи) После включения тиристора ток управления
можно прекратить, однако, тиристор будет удерживаться во вклю-
ченном состоянии. Чтобы выключить тиристор нужно умень-
шить ток в цепи анода до малой величины или приложить к
нему обратное напряжение. Таким образом, обычный тиристор -
это прибор с неполной управляемостью.
18.4.2. Схемы включения
Наиболее часто тиристоры применяют в управляемых выпря-
мителях. На рис. 18.30 а приведена схема включения тиристора в
однополупериодном управляемом выпрямителе, а на рис. 18.30 6
представлены временные диаграммы, иллюстрирующие процессы в
схеме. Для включения тиристора на его управляющий электрод по-
дают управляющий импульс. Угол, измеряемый от момента пере-
хода напряжения на аноде тиристора через нуль до момента подачи
управляющего импульса, называется углом управления. Чем
220
больше угол управления, а)
тем меньше выпрямленное
напряжение. Неполная управ-
ляемость тиристоров не вы-
зывает затруднений при при-
менении их в схемах вы-
прямления, так как ток через
тиристор сам спадает до ну- g)
ля, а к тиристору приклады-
вается обратное напряжение
(рис. 18.30 6).
18.4.3. Вольтамперные
характеристики и
диаграмма управления
На рис. 18.29 б приве-
дены анодные вольтампер-
ные характеристики тири-
стора при различных токах
управления.
На рис. 18.31 а приве-
дена схема управления ти-
ристором. Управляющие им-
пульсы амплитудой Еу по-
даются на управляющий
электрод через резистор Ry,
Рис. 18.30. Схема включения тиристора в
однополупериодном выпрямителе (а) и
временные диаграммы, иллюстрирующие
процессы (б)
служащий для ограничения
тока. Диаграмма управления
тиристором (см. рис. 18.31 б) служит для выбора параметров схемы
управления. Жирными линиями на рис. 18.31 б показаны границы
области существования входных характеристик соответствующих
минимальному и максимальному сопротивлению управляющего
перехода. Заштрихованная область 1 - это область существования
токов управления, при которых тиристор не включается при мини-
мальных напряжениях на аноде. Кривые 2 - это гиперболы постоян-
ной средней мощности, выделяемой на управляющем переходе при
различной относительной длительности импульсов А - — • 100%
221
Рис. 18.31. Схема управления тиристором (а),
диаграмма управления тиристором (б)
и форма сигнала управления Еу (в)
(см. рис. 18.31 в), где /и- время импульса, а Т период их следова-
ния. На диаграмме показаны также предельно допустимые значения
тока и напряжения управления.
По диаграмме управления выбираются значения Еу, Ry и
/И(Л), при которых ток управления /у и напряжение на управляю-
щем электроде Uy должны находиться внутри разрешенной облас-
ти. Во время действия управляющего импульса справедливо
уравнение, записанное по второму закону Кирхгофа для цепи
управления (рис. 18.31 а):
Ey=IyRy + Uy. (18.10)
или
Uy = Ey-lyRy. (18.11)
Это уравнение прямой, которая может быть построена по двум
Ev
точкам: при 1у = 0, Uy = Еу, при Uy = 0, 1у- —
Ry
222
При значениях Еу, Ry, выбранных на рис. 18.31 б, не превы-
шаются допустимые величины Iy, Uy, а значение А не должно
превышать 0.1 %.
18.4.4. Переходные процессы в тиристоре
Переходный процесс включения. Схема включения тиристо-
ра и переходные процессы при включении тиристором активной
нагрузки приведены на рис. 18.32. Включение происходит не мгно-
венно, так как должны произойти сложные физические процессы,
связанные с накоплением носителей зарядов в средних слоях и
расширением проводящего канала от управляющего электрода по
всему объему. Для количественной оценки процесс включения раз-
бивается на ряд интервалов. Время включения тиристора /вкл -
это время от момента подачи управляющего импульса до момента
спада напряжения на тиристоре до 0,1 начального значения. Оно
составляет несколько микросекунд.
*вкл='з+'н, (18.12)
где t3 - время задержки - это время от момента подачи управляю-
щего импульса до момента спада напряжения на тиристоре до 0,9
начального значения; /н - время нарастания - это время изменения
напряжения на тиристоре от 0,9 до 0,1 начального значения или на-
растания тока от 0,1 до 0,9 установившегося значения.
Однако по истечении времени включения тиристор еще не
полностью включается и напряжение на нем продолжает спадать
до установившегося значения. Время спада напряжения на тири-
сторе от 0,1 начального до установившегося значения называется
временем установления (/уС1 составляет 10. ..500 мкс).
При включении тиристора мгновенная мощность потерь мо-
жет достигать очень больших значений. Например, если £=1000 В,
а / =1000 А, то Втах = 0,5£ -0,5/ = 250 000 Вт = 250 кВт. Чтобы
облегчить условия работы тиристора при включении, целесообразно
включить последовательно с тиристором индуктивность L (см. рис.
18.32). Это снизит скорость нарастания анодного тока и уменьшит
потери при включении. С учетом допустимых потерь при включе-
нии тиристора вводится параметр допустимая скорость нараста-
( л, Л д
— =(10.. .100)-.
И'Лоп мкс
ния анодного тока
223
Рис. 18.32. Переходный процесс включения; схема включения (а)
и переходные процессы включения тиристора (б)
Переходный процесс выключения. На рис. 18.33 показана
схема подачи па включенный тиристор обратного напряжения, и
приведены временные диаграммы переходных процессов, возни-
кающих при выключении тиристора.
Рис. 18.33 Схема подачи на включенный тиристор
обратного напряжения (а) и диаграммы переходных
процессов при выключении тиристора (б)
224
Переходный процесс выключения состоит из двух этапов:
1) восстановление запирающей способности в обратном на-
правлении;
2) восстановление запирающей способности в прямом направ-
лении.
Время обратного восстановления t,r - это время от перехода
прямого тока через нуль до перехода через нуль касательной к
уменьшающемуся обратному току (составляет доли или единицы
микросекунд).
trr = ts+tf, (18.13)
где ts- время запаздывания обратного напряжения; t f- время спа-
да обратного тока.
Заряд, вытекающий из вентиля за время обратного восста-
новления
Qrr = Qs+Qf*
где Qs, Qt - заряды, вытекающие из вентиля соответственно за
время запаздывания обратного напряжения и за время спада обрат-
ного тока. Все сказанное об обратном восстановлении справедливо
и для диодов.
Время выключения tq - это наименьший интервал от момен-
та спада тока до нуля, до момента перехода анодного напряжения
через нуль без включения тиристора. Время выключения тиристора —
это не время прекращения тока, а время восстановления управ-
ляющих свойств тиристора в прямом направлении. Оно составляет
10...500 мкс и ограничивает частотные возможности тиристоров.
Если время, предоставленное для выключения тиристора, меньше
t (рис. 18.33 6), то происходит прорыв анодного тока, то есть
включение тиристора без подачи управляющего сигнала (это ава-
рийный режим).
Переходный процесс при резком нарастании прямого на-
пряжения на тиристоре. При нарастании прямого напряжения на
тиристоре (рис. 18.33 а) центральный р-п переход смещается в об-
ратном направлении и через его емкость С на управляющий элек-
трод протекает ток, определяемый скоростью нарастания прямого
du
напряжения —,
225
8 Зак. 50
г du
Если при каком-то — этот ток достигает достаточной вели-
dt
прямого напряжения
чины, то тиристор включается без подачи управляющего импульса.
Следовательно, существует допустимая скорость нарастания
( du А
>доп
при котором тиристор не вклю-
чится. В современных тиристорах
'du
s. dt > доп
= (20.. .1000) — .
мкс
18.4.5. Параметры тиристоров
Ряд параметров мощных тиристоров аналогичен параметрам
выпрямительных диодов, но имеется много дополнительных пара-
метров. Разобьем параметры тиристоров на группы.
Параметры силовой цепи по току.
1) I'/yiim максимально допустимый средний прямой ток (пре-
дельный ток), определяемый в однофазной однополупериодной
схеме выпрямления при синусоидальном токе с частотой 50 Гц, уг-
ле проводимости 180°, допустимой температуре кристалла или
корпуса и заданных условиях охлаждения. Таким образом, он оп-
ределяется так же, как и у диода. Предельный ток достигает 2 кА.
Допустимый ток тиристора, при условиях не соответствующих
указанным выше, зависит от ряда факторов: частоты, угла прово-
димости, температуры охлаждающей среды и скорости охлаждаю-
щего воздуха.
Зависимость допустимого тока 1ТАГ от частоты в относительных
единицах представлена на рис. 18.34а, где Kt = ^TAV .
iTAVm
С ростом частоты ток 1ТЛ1,- уменьшается так как растут коммутаци-
онные потери. С уменьшением частоты ниже 50 Гц ток ITAV падает
из-за больших колебаний температуры кристалла 6рп, превышаю-
щих допустимую температуру 0ДОП, так как при той же максималь-
ной температуре должна быть уменьшена средняя (сравните рис.
18.35 а и б).
Зависимость допустимого тока ITAV от угла проводимости в
относительных единицах Kt= представлена на рис. 18.34 6.
С уменьшением угла проводимости растет коэффициент формы то-
226
ка, поэтому при сохранении действующего значения тока снижает-
ся его среднее значение.
Зависимость допустимого тока ITAV от температуры окружаю-
щей среды в относительных единицах Kt= f(T} представлена на
рис. 18.34 в.
Рис. 18.34. Зависимость допустимого тока в относительных единицах
от различных факторов: частоты (а); угла проводимости (б); темпера-
туры окружающей среды (в) и скорости охлаждающего воздуха (г)
Зависимость допусти-
мого тока ITAV от скорости
охлаждающего воздуха в
относительных единицах
ЛГ, = / (Г) представлена на
рис. 18.34 г При отсутст-
вии принудительного ох-
лаждения воздух продол-
жает двигаться из-за кон-
векции. Эта точка на гра-
фике помечена, е.о. (есте-
ственное охлаждение).
2) hsM ~ Ударный
ток — максимально допус-
тимая амплитуда импульса
аварийного тока синусои-
дальной формы длитель-
ностью 10 мс. Этот ток в
Рис. 18.35. Диаграммы тока и температуры
кристалла при f = 50 Гц (а) и при f = 1 Гц (б)
227
8*
15...30 раз превышает предельный ток. Но так как предельный ток -
это среднее значение, то амплитудное значение предельного тока
превышается лишь в 7... 10 раз.
0.01
3) J i2 dt - максимально допустимое значение интеграла ава-
0
рийного тока по времени, обычно за время полупериода промыш-
ленной частоты. Оно определяет энергию, которая может выде-
литься в тиристоре без его разрушения.
Параметры силовой пепи по напряжению.
О Urrm и Udrm~ повторяющееся импульсное напряжение
в обратном и прямом направлении — максимальное напряжение, ко-
торое каждый период может прикладываться к тиристору (рис.
18.36 а).
CW =(0,7...0,8)[/вд ; UDRM = (0,7...0,8)(7ВО,
где UBR - напряжение лавинного пробоя; UBO- напряжение пере-
ключения тиристора. В современных тиристорах повторяющееся
импульсное напряжение достигает 4 кВ. Как и у диодов, оно опре-
деляет класс тиристора;
2) Ursm и dsm ~ неповторяющиеся импульсные напряжения
в обратном и прямом направлениях, которые редко могут прикла-
дываться к тиристору (рис. 18.36 а);
3) URWM и UDWM - рабочие напряжения (рис. 18.36 а). кото-
рые следует использовать в расчетах (составляют 70 % от URRM
или udrm>-
Рис. 18.36. Параметры по напряжению на ВАХ тиристора
в запертом (а) и открытом (б) состоянии
228
4) UTM~ импульсное напряжение в открытом состоянии при
протекании предельного тока (1.. .3) В;
5) пороговое напряжение тиристора (рис. 18.36 6), а
также его дифференциальное прямое сопротивление гт.
Динамические параметры тиристора /вкл
t di°
’ dt'
dua
—— оп-
dt
ределены при описании переходных процессов в тиристоре.
Параметры цепи управления С/удоп, /удоп, Яудоп определе-
ны при описании диаграммы управления.
Примечание. В индексах используются первые буквы английских
слов, приведенные в п. 18.2.2, а также W (working) - работа.
18.4.6. Разновидности тиристоров
Кроме описанных тиристоров существуют их разновидности.
Тиристоры без управляющего электрода называются дини-
сторами. Они включаются при пре-
вышении анодным напряжением оп-
ределенной величины. Это слаботоч-
ные приборы. На рис. 18.37 а приве-
дено их условное обозначение.
Тиристоры, которые могут про-
пускать и не пропускать ток в обоих
направлениях, называются симмет-
ричными или симисторами. Их ус-
а) б) в)
Рис. 18.37. Условные обозначе-
ния динистора (а), симистора (б)
и запираемого тиристора (в)
ловное обозначение приведено на рис. 18.37 б, а вольтамперная ха-
рактеристика приведена на рис. 18.38 а. Они применяются для
управления в цепях переменного тока. Рис. 18.38 б иллюстрируют,
как для регулирования переменного тока можно применить встреч-
нопараллельно включенные тиристоры. Вместо них можно вклю-
чить один симистор.
Существуют тиристоры, которые можно выключать, подавая
на управляющий электрод запирающее напряжение. Такие тири-
сторы называются запираемыми (GTO - Gate Turn-Off Thyristor).
На рис. 18.37 в приведено их условное обозначение.
Возможность выключения — это большое преимущество запи-
раемых тиристоров, но они имеют и существенный недостатки - их
коэффициент усиления по току при выключении не превышает 3...4
(например, если тиристор пропускает ток 1000 А, то для его выклю-
229
Рис. 18.38. ВАХ симистора (а) и схема включения тиристоров,
реализующая такую ВАХ (б)
чения на управляющий электрод надо подать короткий импульс ам-
плитудой 250 А); большое время открывания и закрывания (порядка
20 мкс) и необходимость применение сложных снабберов с емко-
стью 1...2 мкФ/кА. Их частота переключения не превышает 1 кГц.
В последнее время появился новый тип запираемых тиристо-
ров (GCT - Gate Commutated Thyristor). Это запираемые тиристоры
коммутируемые по затвору. Они позволяют достигнуть скорости
коммутации тока 1000...3000 А/мкс. В результате почти на поря-
док, по сравнению с GTO, уменьшаются времена коммутации,
снижаются коммутационные потери и потери на управление.
Запираемые тиристоры выпускаются на токи до 4 кА и напря-
жения до 6 кВ. Запираемые тиристоры целесообразно применять в
преобразователях мощностью I... 100 МВт.
В настоящее время тиристоры являются основными прибора-
ми в мощных преобразователях электрической энергии, особенно, в
преобразователях связанных с сетью переменного тока. Они при-
меняются в управляемых выпрямителях, инверторах (преобразова-
телях постоянного тока в переменный), коммутационной аппаратуре.
18.5. Фотоэлектронные приборы
Фотоэлектронные (фотоэлектрические) приборы предна-
значены для преобразования световой энергии в электрическую.
Все полупроводниковые фотоэлектрические приборы основа-
ны на внутреннем фотоэффекте - возбуждении атомов и росте кон-
центрации свободных носителей заряда под воздействием светово-
го излучения. При этом в полупроводнике растет проводимость, а
нар-п переходах появляется ЭДС.
230
К фотоэлектронным приборам относятся фоторезисторы, фо-
тодиоды, фототранзисторы и фототиристоры.
Фоторезистор - это полупроводниковый фотоэлектрический
прибор, сопротивление которого изменяется под действием светово-
го излучения. На рис. 18.39 показана схема включения фоторезисто-
ра и его характеристики. Фоторезисторы, как и другие фотоэлектри-
ческие приборы, характеризуются световой характеристикой, то
есть зависимостью фототока , протекающего через прибор от све-
тового потока Ф. Она нелинейная и это является недостатком фото-
резистора. ВАХ фоторезистора линейны, а их наклон зависит от ве-
личины светового потока.
Рис. 18.39. Схема включения фоторезистора (а); его световая (б)
и вольтамперная характеристики (в)
Фоторезисторы могут работать и на переменном токе. Фоторе-
зисторы являются самыми простыми и дешевыми фотоэлектриче-
скими приборами.
Фотодиод — это полупроводниковый фотоэлектрический при-
бор, основанный на внутреннем фотоэффекте, содержащий один р-п
переход и имеющий два вывода.
Фотодиоды могут работать в двух режимах: без внешнего ис-
точника электроэнергии (режим фотогенератора) и с внешним ис-
точником (режим фотопреобразователя). На рис. 18.40 а, б пока-
заны эти схемы включения.
При освещении фотодиода в режиме фотогенератора на его вы-
водах появляется фото-ЭДС с полярностью слева «+», справа «—».
При подключении сопротивления нагрузки под действием ЭДС по
нему идет фототок. Именно в таком режиме работают солнечные ба-
тареи. В режиме фотопреобразователя через р-п переход протекает
обратный ток, зависящий от светового потока, определяемого числом
неосновных носителей. Световая характеристика в режиме фотопре-
образователя (рис. 18.40 в) линейна и выражается уравнением
231
/ф = Х-Ф + /ф|, (18.14)
где К - чувствительность (до 20 мА/лм); /фт - темновой ток (на-
чальный ток в темноте).
ВАХ фотодиода в темноте не отличаются от ВАХ р-п перехода
(см. рис. 18.40 г), а при освещении опускается вниз. Режиму фото-
преобразователя соответствуют участки в третьем квадранте, а ре-
жиму фотогенератора - в четвертом.
Рис. 18.40. Схемы включения фотодиода в режиме
фотогенератора (а) и фотопреобразователя (б); его
световая (в) и вольтамперные (г) характеристики
Фотодиоды имеют большее быстродействие, чем фоторези-
сторы (работоспособны при частоте 1 гГц и выше), но менее чувст-
Рис. 18.41. Схема вклю-
чения фототранзистора
вительны.
С целью повышения чувствительности
вместо фотодиодов применяют фототран-
зисторы.
Фототранзистор - фотоэлектронный
прибор, имеющий трехслойную структуру,
как обычный транзистор, в котором ток
зависит от освещения базы. Схема вклю-
чения фототранзистора показана на рис.
18.41. Они имеют линейную световую ха-
232
рактеристику, а выходные ВАХ аналогичны ВАХ обычного тран-
зистора, включенного по схеме с общим эмиттером, но в качестве
параметра вместо тока базы выступает световой поток. Чувстви-
тельность фототранзисторов достигает 1 А/лм. Параметры фото-
транзисторов существенно зависят от температуры.
Фототиристор - фотоэлектронный прибор, имеющий четы-
рехслойную структуру, как обычный тиристор, но управляемый
световыми импульсами. При освещении тиристора он включается.
18.6. Полупроводниковые излучатели
В качестве полупроводниковых излучателей света исполь-
зуются светоизлучающие диоды (светодиоды). Принцип дей-
ствия светодиодов основан на излучении квантов света при пря-
мом токе вследствие рекомбинации носителей заряда. Цвет из-
лучения определяется материалом, из которого сделан фотоди-
од. Индикаторы на фотодиодах бывают точечные и знаковые
(отображающие цифры и буквы). Знаковые содержат диодную
матрицу (несколько диодов с объединенным одним выводом).
Светодиоды работают при напряжении 2... 5 В и токе до 40 мА
на один диод. Они имеют весьма низкий КПД.
На рис. 18.42 при-
ведена схема включения
светодиода и его яркост-
ная характеристика - за-
висимость яркости В от
тока 1.
Основное примене-
б)
R5
Рис. 18.42. Схема включения фотодиода (а)
и его яркостная характеристика (б)
ние светодиодов - уст-
ройства индикации.
18.7. Оптоэлектронные приборы
Оптоэлектронные приборы (оптроны) - приборы с двой-
ным преобразованием энергии, обеспечивающие потенциальную
развязку между двумя электрическими цепями (рис. 18.43).
Оптрон состоит из источника и приемника излучения. В каче-
стве источника используется светодиод, а в качестве приемника
могут быть применены фоторезистор, фотодиод, фототранзистор
или фототиристор.
233
Рис. 18.43. Условные обозначения оптронов:
а - резисторного; б - диодного; в - транзи-
сторного; г - тиристорного
Диодные и транзи-
сторные оптроны харак-
теризуются коэффициен-
том передачи тока. У ди-
одных оптронов он со-
ставляет 0,01...0,03, а у
транзисторных - 5... 10.
Оптроны широко при-
меняются в вычислитель-
ной технике и в автома-
тике. Тиристорные оптро-
ны (оптотиристоры) зна-
чительно упрощают по-
строение систем управле-
ния полупроводниковых
преобразователей электро-
энергии.
18.8. Терморезисторы
Терморезистор — полупроводниковый резистор, сопротивле-
ние которого зависит от температуры. Принцип действия терморе-
зистора основан на увеличении числа свободных носителей при
повышении температуры полупроводника.
а) б)
Рис. 18.44. Схема включения терморезистора (а)
и его температурная характеристика (б)
Схема включения терморезистора для измерения температу-
ры и его температурная характеристика приведены на рис. 18.44.
С ростом температуры сопротивление терморезистора (термисто-
ра) падает.
Терморезисторы используются в диапазоне температур до
200 °C. Их недостаток - большой разброс характеристик.
234
18.9. Элементы микроэлектроники
Микроэлектроника — область электроники, изучающая во-
просы создания и применения микроэлектронных изделий.
Микроэлектронное изделие — электронное устройство с вы-
сокой степенью интеграции.
Интегральная микросхема (ИМС) - микроэлектронное изде-
лие, выполняющее определенную функцию преобразования и об-
работки сигнала и имеющее высокую плотность упаковки элемен-
тов (активных и пассивных), изготовленное в едином технологиче-
ском процессе и заключенное в общий корпус.
Активные элементы — транзисторы, диоды; пассивные - рези-
сторы, конденсаторы.
Элемент ИМС — часть микросхемы, реализующая функцию
электро-радиоэлемента, которая выполнена нераздельно от кри-
сталла и не может быть выделена как самостоятельное изделие.
Компонент ИМС — часть микросхемы, которая может быть
выделена как самостоятельное изделие.
Серия ИМС — совокупность типов ИМС, которые могут вы-
полнять различные функции, имеют единое конструктивно-
технологическое исполнение и предназначены для совместного
применения.
ИМС классифицируются по различным принципам.
1. По технологии ИМС делятся на:
а) полупроводниковые микросхемы, все элементы и соеди-
нения в которых выполнены в объеме и на поверхности полупро-
водника;
б) пленочные микросхемы, все элементы и соединения в ко-
торых выполнены в виде пленок (толстопленочные и тонкопленоч-
ные);
в) гибридные микросхемы содержат, кроме элементов, ком-
поненты и кристаллы.
Полупроводниковая ИМС представляет собой кристалл полу-
проводника, непосредственно в котором за счет введения примесей
формируются элементы схемы. В нем создаются и активные и пас-
сивные элементы. В пленочной схеме на поверхность диэлектрика
наносятся проводящие и непроводящие пленки, что позволяет
формировать только пассивные элементы. Гибридная ИМС созда-
ется путем присоединения активных элементов, компонентов и
кристаллов к пленочной схеме.
235
2. По степени интеграции (количеству элементов в одном кор-
пусе) ИМС делятся на:
а) схемы малой интеграции (до 100 элементов):
б) схемы средней интеграции (100.. .1000 элементов);
в) схемы большой интеграции (1000... 100000 элементов);
г) сверхбольшие интегральные схемы (свыше 100000 элемен-
тов).
3. По выполняемым функциям ИМС делятся на:
а) аналоговые интегральные микросхемы (АИМС);
б) цифровые интегральные микросхемы (ЦИМС).
Аналоговые интегральные микросхемы предназначены для
преобразования и обработки сигналов, изменяющихся по закону
непрерывной функции. В них любому допустимому значению
входного сигнала соответствует определенное значение выходного.
К АИМС относятся линейные ИМС. В них входной и выходной
сигналы связаны коэффициентом передачи.
Цифровые интегральные микросхемы предназначены для пре-
образования и обработки сигналов, изменяющихся по закону дис-
кретной функции, то есть сигналов, которые могут принимать
только два значения, условно называемые 0 и 1. К ЦИМС относят-
ся и логические микросхемы. Устройство ИМС рассматривается в
следующей главе.
18.10. Гибридные силовые схемы
При создании силовой части преобразователей полупроводни-
ковые приборы (диоды, транзисторы, тиристоры) соединяются ме-
жду собой по определенным схемам. Как альтернатива дискретным
приборам и схемам с внешними по отношению к приборам соеди-
нениями, появились гибридные силовые модули, совмещающие в
одном корпусе несколько силовых ключей и различные вспомога-
тельные элементы. Применение гибридных силовых модулей уп-
рощает конструкции преобразователей и повышает надежность их
работы.
Существуют выпрямительные диодные модули, содержащие 2,
4 и 6 диодов, соединенных по схемам: два последовательно соеди-
ненных диода, однофазный мост, трехфазный мост.
По таким же схемам соединяют транзисторно-диодные ключи,
содержащие IGBT-транзисторы с встречнопараллельно соединен-
236
ними диодами. Эти схемы применяются в автономных инверторах,
преобразующих постоянный ток в переменный, и в преобразовате-
лях. преобразующих величину постоянного напряжения. Мощность
таких модулей достигает 1000 кВт.
Для преобразователей частоты выпускаются модули, содержащие
комбинацию диодного моста и моста на IGBT-транзисторах. Они вы-
полняются на мощности до 30 кВт. Такие модули могут дополняться
температурными датчиками, датчиками тока и цепями защиты.
Существуют специальные микросхемы (драйверы) предна-
значенные для управления силовыми ключами. Дальнейшим разви-
тием гибридных силовых модулей является введение в них цепей
управления. Модули, включающие систему управления транзисто-
рами или тиристорами, называют интеллектуальными (IPM
Intelligent Power Modules). Обычно они имеют на входе гальваниче-
скую оптронную развязку и не требуют отдельных источников пи-
тания. Часто они содержат устройства защиты, датчики температу-
ры, тока и др. устройства. Модульная конструкция минимизирует
паразитные индуктивности в силовых цепях, благодаря чему сни-
жаются перенапряжения и коммутационные потери.
В последнее время появились новые типы запираемых тири-
сторов (IGCT - Integrated Gate Commutated Thyristor). В IGCT с си-
ловым прибором объединена схема управления (драйвер). Кроме
этого в IGCT имеется интегрированный на одном кристалле с GCT
обратный быстровосстанавливающийся диод. Эти приборы выпус-
каются на токи до 4 кА и напряжения до 5 кВ. В этих приборах
возможна работа без снабберов. 1GCT целесообразно применять в
преобразователях мощностью 1... 100 МВт.
Интеграция микропроцессоров и силовых модулей позволяет
создавать схемы непосредственно управляющие маломощными
двигателями постоянного и переменного тока. При необходимости
мощность электроприводов может быть увеличена за счет приме-
нения промежуточных драйверов и мощных силовых ключей.
18.11. Рекомендации по применению
полупроводниковых приборов
Полупроводниковые устройства работают надежно, если вы-
полняются определенные условия. Рекомендации по применению
полупроводниковых приборов можно разбить на несколько групп.
237
1. Тепловые рекомендации:
а) обеспечивать хороший отвод тепла;
б) устанавливать приборы вдали от сильно нагревающихся
элементов;
в) применять преимущественно кремниевые приборы, особен-
но при высокой температуре окружающей среды;
г) при пайке приборов применять теплоотвод между местом
пайки и корпусом прибора.
2. Рекомендации по току:
а) ограничивать токи короткого замыкания, применять быст-
родействующую защиту;
б) при работе выпрямителя на емкостной фильтр применять
диоды с большим запасом по току; по возможности избегать такие
режимы;
в) не применять слишком больших запасов по току, но при
этом токи должны быть существенно выше, чем токи утечки.
3. Рекомендации по напряжению:
а) ни в коем случае не превышать допустимое напряжение;
применять запас 1,5...2;
б) не подавать на коллектор транзистора напряжение обратно-
го знака;
в) не допускать разрыва цепи базы транзистора во избежание
накопления заряда и самооткрывания транзистора;
г) при пайке полевых транзисторов применять низковольтные
паяльники; защищать от электростатических полей.
4. Общие рекомендации по проектированию:
а) учитывать возможный разброс параметров приборов, а не
рассчитывать на фиксированные значения;
б) по возможности применять ключевые режимы.
Приведенные краткие советы не претендуют на полное осве-
щение вопроса, но дают полезные начальные сведения.
Глава 19
ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ И АНАЛОГОВЫЕ
ИНТЕГРАЛЬНЫЕ МИКРОСХЕМЫ
19.1. Классификация электронных усилителей
Устройства, усиливающие мощность входного сигнала за счет
энергии источника питания называются электронными усили-
телями.
В электронном усилителе
имеется два канала: информа-
ционный канал (ПК) и энер-
гетический канал (ЭК) (рис.
19.1). По первому от входа к
выходу передается информа-
ция за счет энергии, посту-
пающей по второму каналу от
источника питания (ИП).
Все усилители делятся на
усилители мгновенных значе-
ний сигнала и усилители дейст-
вующих или средних значений
сигнала. В усилителях мгно-
венных значений выходной
сигнал соответствует входному
(рис. 19.2).
В усилителях средних зна-
чений выходной сигнал про-
порционален входному, но мо-
жет по форме существенно от-
личаться.
Рис. 19.1 Структурная схема
электронного усилителя
Рис. 19.2. Входной и выходной сигналы
239
Далее мы будем рассматривать только усилители мгновенных
значений. Усилители мгновенных значений делятся по ряду при-
знаков
1. По назначению на:
а) усилители напряжения (УН), обеспечивающие существен-
ное увеличение напряжения при малых уровнях тока;
б) усилители тока (УТ), обеспечивающие существенное уве-
личение тока;
в) усилители мощности (УМ), обеспечивающие существенное
увеличение мощности при, по возможности, высоком коэффициен-
те полезного действия (КПД).
2. По числу каскадов на:
а) однокаскадные усилители;
б) многокаскадные усилители.
Усилительный каскад - это один или несколько транзисторов с
навесными элементами (резисторами и конденсаторами), выпол-
няющий законченную функцию. Например, двухкаскадный усили-
тель может содержать УН на входе и УМ на выходе.
3. По межкаскадным связям на:
а) усилители с емкостной связью, в которых между каскадами
включен конденсатор;
б) усилители с трансформаторной связью, в которых между
каскадами включен трансформатор;
в) усилители с резонансной связью, в которых между каскада-
ми включен резонансный контур;
г) усилители с гальванической (непосредственной) связью, в
которых каскады связаны непосредственно.
4. По рабочему диапазону частот на усилители:
а) низкой частоты (НЧ), которые работают в области звуковых
частот (20 Гц.. .20 кГц);
б) высокой частоты (ВЧ), которые работают в области частот
выше 100 кГц;
в) постоянного тока (ПТ), усиливающие, как постоянный, так
и переменный ток вплоть до высоких частот.
5. По ширине диапазона частот на усилители:
а) апериодические (или широкополосные), которые усиливают
переменный ток в широком диапазоне частот (например, от 20 Гц
до 20 кГц), когда высшая частота диапазона во много раз больше
низшей;
240
б) избирательные (узкополосные), которые усиливают пере-
менный ток в узком диапазоне частот (например, от 1000 кГц до
1020 кГц), когда высшая частота диапазона близка к низшей.
19.2. Характеристики и параметры усилителей
Свойства усилителей определяются их характеристиками и па-
раметрами, которые ниже рассматриваются по группам, связанным
между собой.
1. Коэффициент усиления (коэффициент передачи) усилителя -
это отношение выходного и входного сигналов
^ = ^вых_, (19.1)
Ах
где А„„ и сигналы на входе и на выходе усилителя (в общем
случае комплексные величины).
Ах = Ах • ^вх; Аь,х = Аых • ; <19-2)
k=keJ4>: к=^-,(р=(рвых-(рвх, (19.3)
^вх
где к модуль коэффициента усиления, а (р его фаза.
Бывают коэффициенты усиления по напряжению, току, мощ-
ности (последний коэффициент - скалярная величина) к,, к^, кр.
Коэффициент усиления последовательного ряда каскадов ра-
вен произведению их коэффициентов усиления
к = кук2-... (19.4)
Коэффициент усиления часто измеряется в логарифмических
единицах — децибелах. Коэффициенты усиления по мощности и на-
пряжению в децибелах:
^(д6)=Ю-1ё^, А(дб)=20-1ёА. (19-5)
2. Линейные искажения. Линейные (частотные) искажения
являются важнейшим показателем качества усилителей. Это такие
искажения, при которых сохраняется форма синусоидального
входного сигнала, но коэффициент усиления изменяется при изме-
нении частоты. При этом, если входной сигнал несинусоидален, то
выходной сигнал будет отличаться и по форме.
Линейные искажения определяются по амплитудно-частот-
ной характеристике (АЧХ) = (рис. 19.3, а). Снижение ко-
241
эффициента усиления в определенной области частот называется
завалом АЧХ. По коэффициентам усиления при средней, низкой и
высокой частотам диапазона /<0, кн, кв можно определить соответ-
ствующие коэффициенты частотных искажений:
мн=^;Мв=^ (19.6)
кн кв
Коэффициенты частотных искажений в децибелах:
Л/н(дб) = 20 • 1g Л/н; Л/в(дб) = 20-lg7WB. (19.7)
Рис. 19.3. Амплитудная (а) и фазочастотная (б)
характеристики
Диапазон частот, в котором коэффициент частотных искаже-
ний не превышает заданного, называется полосой пропускания
(см. рис. 19.3 а).
Зависимость (р — F(О)) называется фазочастотпой характе-
ристикой и характеризует изменение сдвига по фазе между выход-
ным и входным сигналами при изменении частоты (см. рис. 19.3 б).
Частотные искажения характеризует и переходная характе-
ристика. Переходная характеристика - это выходной сигнал при
единичном скачке входного сигнала (рис. 19.4). Вид переходной
242
Рис. 19.4. Переходная характеристика:
1,2,3 выходные сигналы при разных АЧХ
характеристики зависит от вида АЧХ. При завале АЧХ в области
высоких частот плохо воспроизводится передний фронт входного
сигнала (кривая 1), при за-
вале АЧХ в области низ-
ких частот плохо воспро-
изводится вершина (кри-
вая 2), а при появлении на
АЧХ резонансных подъе-
мов (см. рис 19.3 а при
частоте со) появляются
колебания(кривая 3).
3. Нелинейные ис-
кажения. Нелинейные ис-
кажения определяются амплитудной характеристикой (АХ)
(7 = f(Um (рис. 19.5 а). Нелинейные искажения возникают,
когда усилитель начинает работать на нелинейных участках АХ и
форма выходного сигнала начинает отличаться от формы входного
синусоидального сигнала (см. рис. 19.5 б).
ftf
пл
а) б)
Рис. 19.5. Амплитудная характеристика (а) и входной и выходной
сигналы при наличии нелинейных искажений (б)
Когда сигнал на входе имеет произвольную форму, то пользу-
ются понятием передаточная характеристика (ПХ) (7ВЬ1Х - f(Uвк).
Для количественной оценки нелинейных искажений вводится
понятие коэффициент нелинейных искажений К:
К = ^2 +Ь +-Г.]00О/о (19.8)
243
Он определяет процентное содержание высших гармоник в
выходном сигнале, отнесенное к первой гармонике, при подаче на
вход синусоидального сигнала.
4. Уровень шума (С'ш). Это выходной сигнал при отсутствии
входного (см. рис. 19.5 а). Его источники: пульсации напряжения
источников питания, собственные шумы элементов и т.д. Уровень
шума, приведенный к входу
(19.9)
5. Динамический диапазон
£) = £вх.,».тах , (19.10)
^вх.т. min
где C/Bx m max — максимальная амплитуда входного сигнала, опреде-
ляемая линейным участком АХ; (7ВХ т min — минимальная амплиту-
да входного сигнала, определяемая уровнем шума
^BX.m.min=(5-.10)t/-.
Чем больше динамический диапазон, тем усилитель лучше.
Описанные параметры и характеристики относятся к инфор-
мационному каналу. Следующие относятся к энергетическому.
6. Выходная мощность
^Bb.x=^L-E£^iL, (19.11)
2 ZH
где z„, <рн - параметры нагрузки.
7. Коэффициент полезного действия
г1 = ^, (19.12)
и.п
где Р п мощность, потребляемая от источника питания.
Рис. 19.6. Структурная
схема усилителя с ОС
19.3. Обратные связи в усилителях
Обратная связь (ОС) - это передача
части мощности с выхода или промежуточ-
ного звена на вход (рис. 19.6). Усилитель с
коэффициентом усиления к,охватывается
цепью обратной связи с коэффициентом пе-
редачи у.
244
Классификация образных связей. Обратные связи делятся:
1. По способу получения сигнала обратной связи
а) по напряжению;
б) по току;
в) комбинированная.
2. По способу подачи сигнала обратной связи по отношению к
входному сигналу
а) последовательная;
б) параллельная.
3. По соответствию знаков входного и выходного сигнала
а) положительная (если знаки соответствуют);
б) отрицательная (если знаки противоположны).
4. По происхождению
а) полезные;
б) паразитные (которые мешают нормальной работе усилителя).
Коэффициент усиления усилителя, охваченного обратной
связью. На рис. 19.7 приведена функциональная схема усилителя.
охваченного последователь-
ной обратной связью по на-
пряжению. Определим коэф-
фициент усиления усилите-
ля, охваченного последова-
тельной обратной связью по
напряжению.
Обозначим (см. рис. 19.7):
Рис. 19.7. Функциональная схема усили-
теля, охваченного последовательной ОС
по напряжению
U- напряжение на вхо-
де усилителя, неохваченного
обратной связью;
(7вх - напряжение на входе усилителя, охваченного обратной
связью;
U_oc - напряжение на выходе цепи обратной связи;
ПВЬ1Х- напряжение на выходе усилителя.
Тогда коэффициент усиления усилителя, охваченного обрат-
ной связью
—вх
Коэффициент усиления усилителя, неохваченного обратной
связью
245
k = ^i». (19.14)
" U
коэффициент передачи цепи обратной связи
У=^-- (19.15)
—ВЫХ
Напряжение на входе усилителя, неохваченного обратной связью
(/=EBX+(Zoc- (19.16)
Разделим левую и правую части равенства на (7ВЫХ. Получим
^у^ + У- (19.17)
к кос _
Отсюда
if
(19.18)
Отрицательная обратная связь (ООС). Если произведение
ук в формуле (19.18) вещественное отрицательное число, то обрат-
ная связь называется отрицательной, а коэффициент усиления
усилителя, охваченного отрицательной обратной связью
Недостаток ООС: она уменьшает коэффициент усиления в
(1+|уЛ|)раз.
Преимущества ООС:
I) если Н-1. то Д то есть от6ил1,зируетс. коэффи-
циент усиления, расширяется полоса пропускания;
2) уменьшаются нелинейные искажения и помехи, возникаю-
щие внутри усилительного тракта, так как они подаются на вход в
противофазе;
3) при последовательной отрицательной обратной связи растет
входное сопротивление zBX и падает выходное сопротивление zBbIX
в (1 + уЛг) раз.
Положительная обратная связь (ПОС). Если произведение
ук в формуле (19.18) вещественное положительное число, то об-
ратная связь называется положительной, а коэффициент усиле-
ния усилителя, охваченного положительной обратной связью
246
k
^=7^7- (19.20)
1-yA-
Рассмотрим два случая:
1) пусть 0 < ук < 1, тогда повышается коэффициент усиления
кпос, но при этом он очень не стабилен, и усилитель имеет очень
узкую полосу пропускания;
2) пусть у к = 1, /<пос стремится к бесконечности, усилитель
превращается в генератор. При у к > 1 происходит самовозбужде-
ние колебаний.
19.4. Усилители переменного тока
19.4.1. Одиночные усилительные каскады
Усилители переменного тока служат для усиления сигналов, в
которых нет постоянной составляющей. Усилители состоят из оди-
ночных каскадов, через которые последовательно проходит усили-
ваемый сигнал. В соответствии со схемами включения транзисто-
ров бывают каскады с ОЭ, ОК, ОБ.
Усилительный каскад с общим эмиттером из-за нетермо-
стабильности требует применения схемы стабилизации рабочей
точки покоя (рис. 19.8 а). В этой схеме введена отрицательная об-
ратная связь по току эмиттера. Сопротивление обратной связи R3
служит для создания ООС по постоянной составляющей для стаби-
лизации рабочей точки покоя; R}, R2 - делитель, задающий рабо-
чую точку покоя. При данной температуре и отсутствии входного
сигнала через базу протекает ток /бр, остальные токи и напряжения
показаны на рис. 19.8 б. При повышении температуры выходная ха-
рактеристика при том же /бр идет выше, рабочая точка покоя Р
перемещается в точку Р'. Ниже условно показана цепочка измене-
ний токов и напряжений, приводящая к переходу рабочей точки
покоя в точку Р”:
Чтобы уменьшить вредную ООС по переменной составляю-
щей, уменьшающую коэффициент усиления усилителя, параллель-
но /?э включен конденсатор Сэ, уменьшающий сопротивление для
переменного тока.
247
Рис. 19.8. Каскад с ОЭ (а) и определение положения
рабочей точки покоя при увеличении температуры (б)
Расчет усилительного каскада производится на основе его
схемы замещения. Схема замещения каскада с общим эмиттером
приведена на рис. 19.9 а. Она построена для переменных состав-
ляющих при следующих допущениях: R} и R2 очень велики, и их
можно не учитывать; Q и Сэ тоже очень велики и являются корот-
кими замыканиями для переменной составляющей; между плюсом
источника питания и землей стоит конденсатор Сф, также создаю-
щий короткое замыкание для переменной составляющей. Резистор
RK подключен к земле, так как сопротивление Сф по переменной
составляющей равно нулю.
На схеме рис. 19.9 а транзистор заменен его схемой замеще-
ния, на которой приведены физические параметры транзистора -
248
сопротивление базы тб, сопротивление эмиттера z3, дифференци-
альное сопротивление коллектора zj, емкость коллекторного пере-
хода Cd; Д/б - источник тока, учитывающий передачу тока от ба-
зы к коллектору.
Для упрощения расчета, схема разбита на схемы замещения
для входной и выходной цепи (рис. 19.9 6, в). При преобразовании
должно выполнятся условие: 7Э • z3 = /б • гэ.
Рис. 19.9. Схема замещения каскада с ОЭ (а) и схемы замещения
для входной (б) и выходной (в) цепей
На основе расчета схемы рис. 19.9 б получены основные соот-
ношения для входной цепи. Входное сопротивление каскада
где
^вх
f'd
'б ' + /3
fd+KH
(19.21)
(19.22)
249
R' = R>,Rk . (19.23)
RH + RK
В схеме с общим эмиттером RBK= 100... 1000 Ом.
Для дальнейшего упрощения последующие расчеты ведутся
отдельно для средней, низшей и высшей частоты диапазона.
При средней частоте емкость Cd еще не сказывается (действу-
ет как разрыв), а емкость Сс уже не сказывается (действует как ко-
роткое замыкание).
Схема замещения выходной части для средних частот (см.
рис. 19.9 в) получается, если допустить, что г3 равно нулю. На схе-
ме /к - переменная составляющая тока через коллектор; /н - пе-
ременная составляющая тока через нагрузку. 1=1 — -н -к Як+< Коэффициент усиления по току в нагрузке £ = ft rd Rk " rd+R'H RK + RH- Коэффициент усиления по напряжению , / RH ки = kjtl ——. ^вх Выходное сопротивление Явых = R— 1 + Д Лк + гД ^ + r6 + rj (19.24) (19.25) (19.26) (19.27)
Выходное сопротивление в схеме с общим эмиттером состав-
ляет десятки килоом. Входное и выходное сопротивления зависят
друг от друга.
Недостаток каскада с общим эмиттером: большое выходное
сопротивление и малое входное.
При низких частотах малая емкость Cd не сказывается, а ем-
кость Сс начинает сказываться. Коэффициент усиления падает так
как растет емкостное сопротивление Сс. Аналогично влияют кон-
денсаторы Q, Сф и Сэ (см. рис. 19.8 а).
При высоких частотах коэффициент усиления транзистора па-
дает, следовательно, падает и коэффициент усиления всего каскада.
АЧХ усилительного каскада приведена на рис. 19.10.
250
Рис. 19.10. АЧХ усилительного каскада с ОЭ
Усилительный каскад с общим коллектором (эмиттерный
повторитель) повторяет форму входного сигнала в отличие от кас-
када с общим эмиттером, который инвертирует (переворачивает)
фазу входного сигнала. В каскаде с общим коллектором действует
последовательная ООС по напряжению (рис. 19.11). Поэтому
ки<\; kt = p + l.
Рис. 19.11. Усилительный каскад с ОК
Преимущества этого усилительного каскада:
1) большое входное и очень маленькое выходное сопротивле-
ния (на входе 10... 100 кОм, на выходе 100 Ом);
2) малые искажения;
3) повторяет форму входного сигнала.
Недостаток:
Малое усиление по напряжению (усиливается только ток).
Преимущества и недостатки определяются тем, что в усили-
тельном каскаде применена глубокая отрицательная обратная связь
по напряжению.
Каскад с общим коллектором применяется в качестве согла-
сующего.
251
19.4.2. Многокаскадные усилители
Двухкаскадный усилитель переменного напряжения с ем-
костной связью приведен на рис. 19.12. Он представляет собой два
каскада с общим эмиттером, соединенных через конденсатор. Вклю-
чение конденсатора позволяет устанавливать режим покоя в каждом
каскаде независимо. Расчет двухкаскадного усилителя можно свести
к расчету однокаскадного. В качестве сопротивления нагрузки каж-
дого каскада при этом принимается входное сопротивление после-
дующего каскада (7?н] на рис. 19.12).
/’к1+/к2 +
Рис. 19.12. Двухкаскадный усилитель переменного тока
с емкостной связью
Многокаскадные усилители переменного напряжения
строятся аналогично. Они могут содержать, как каскады усиления
напряжения, так и другие, например, каскады усиления мощности.
Коэффициент усиления многокаскадного усилителя равен про-
изведению коэффициентов усиления отдельных каскадов.
19.4.3. Паразитные обратные связи
и развязывающие фильтры
Паразитные обратные связи возникают благодаря передаче
энергии электромагнитного поля с выхода на вход, в частности че-
рез паразитные емкости и взаимоиндуктивности, которые не указа-
ны на схеме, но возникают из-за того, что, например, между любы-
ми проводами имеется емкость. Если при этом один провод идет к
входу, а второй к выходу, то через эту емкость возникает паразит-
ная обратная связь.
252
Методы борьбы с такими паразитными обратными связями:
1. Правильное взаимное расположение элементов (например,
входные и выходные провода должны проходить перпендикулярно
друг Другу).
2. Экранирование (излучающие и воспринимающие элементы
окружаются проводящим или ферромагнитным экраном). Экрани-
рование позволяет устранить взаимное влияние источников сигна-
ла, но. применяя экранирование, мы ухудшаем частотную характери-
стику, поэтому, по возможности, следует применять первый способ.
Паразитные обратные связи возникают и через внутреннее со-
противление источника питания Авн. За счет падения напряжения
на внутреннем сопротивлении источника питания появляются пе-
ременные составляющие, передаваемые по цепям питания на вход
(см. рис. 19.12). Для борьбы с ними непосредственно в месте под-
вода питания к каскаду подключается конденсатор С . Он служит
развязывающим фильтром. Переменные составляющие, прихо-
дящие от источника питания, замыкаются через него и не проходят
на вход.
19.5. Усилители постоянного тока (УПТ)
19.5.1 Особенности УПТ. Дрейф нуля
УПТ - это усилитель с полосой про-
пускания, включающей нулевую частоту.
На рис. 19.13 приведена его АЧХ. УПТ
очень широко применяются в системах ав-
томатического регулирования.
В УПТ применяется только гальвани-
ческая связь каскадов. Из-за этого возника-
ет ряд проблем:
а)трудность согласования потенциалов
независимого выбора рабочей точки покоя;
б) нестабильность выходного сигнала при изменении напря-
жения питания, температуры, параметров элементов, получившая
название дрейф нуля.
Дрейф нуля - это изменение выходного напряжения при не-
изменном входном.
Абсолютный дрейф - это максимальное изменение выходно-
0)
Рис. 19.13. АЧХ УПТ
соседних каскадов и
253
го напряжения за определенный промежуток времени при закоро-
ченном входе.
jyBblX
Дрейф, приведенный к входу: L7®* = др .
Он определяет чувствительность усилителя.
Причины дрейфа:
I. Колебания напряжения питания.
2. Изменение параметров транзисторов и резисторов при из-
менении температуры.
3. Изменение параметров транзисторов и резисторов во време-
ни (старение).
Пути уменьшения дрейфа нуля:
1. Стабилизация напряжения источника питания.
2. Применение термостабильных элементов и применение
температурной компенсации.
3. Применение элементов стабильных во времени.
4. Применение глубоких отрицательных обратных связей.
5. Применение мостовых (балансных) схем.
6. Применение усилителей с промежуточным преобразованием.
Очевидно, что первые три метода являются прямым ответом
на причины. Применение глубоких отрицательных обратных связей
является общим методом борьбы со всякой нестабильностью. При-
менение специальных балансных схем будет рассмотрено ниже. В
усилителях с промежуточным преобразованием входное постоянное
напряжение вначале преобразовывается в переменное, затем усили-
вается без дрейфа нуля и вновь превращается в постоянное.
В соответствии с этим УПТ по построению делятся на:
1. Усилители прямого усиления.
2. Усилители с промежуточным преобразованием.
В усилителях прямого усиления входной сигнал усиливается
без преобразований.
19.5.2. Усилители постоянного тока прямого усиления
На рис. 19.14 приведена упрощенная схема трехкаскадного
усилителя постоянного тока прямого усиления. Первый каскад —
дифференциальный (балансный) усилительный каскад (ДУ)
представляет собой мост, выполненный на резисторах RKl, Rk2 и
транзисторах УТ1, VT2. Если мост сбалансирован, то напряжение на
254
его выходе £7выхд11ф равно нулю независимо от изменения напря-
жения питания и других факторов одновременно действующих на
оба плеча (например, изменения температуры).
Рис. 19.14. Трехкаскадный УПТ
Для дальнейшего уменьшения дрейфа нуля в цепь эмиттеров
включен, стабилизатор тока, выполненный на транзисторе Р73. Для
температурной компенсации в стабилизаторе тока включен диод,
выполненный на транзисторе VT4.
На рис. 19.15 приведена схема замещения дифференциального
усилительного каскада, в котором стабилизатор тока заменен на ис-
точник тока.
Рассмотрим режим покоя в этом каскаде, когда евх) - 0,
евх2 =0. За счет одинакового напряжения на базах через транзисто-
ры протекают равные токи, создающие равные падения напряжения
на резисторах 7?к], Rk2- Поэтому напряжение на выходе ^ВЬ1ХДИф,
равное разности этих падений, равно нулю.
Нетрудно увидеть, что любые симметричные воздействия в схе-
ме не изменят выходной сигнал, если плечи совершено одинаковы.
Если подать входной сигнал евх1 >0, то ток /к| увеличивается,
а, так как Ц = const, то /к2 уменьшается, и выходное напряжение
имеет полярность: слева «-», справа «+».
255
Рис. 19.15. Схема замещения дифференциаль-
ного усилительного каскада
Выходное напря-
жение в схеме (см. рис.
19.15) снимается между
коллекторами и не свя-
зано с землей. Это явля-
ется недостатком данно-
го каскада. Дифферен-
циальный усилитель-
ный каскад, в котором
выходное напряжение
снимается между кол-
лекторами. называется
симметричным.
В несимметрич-
ном дифференциаль-
ном усилительном кас-
каде выходной сигнал (7вых1 снимается с одного коллектора отно-
сительно земли (см. рис. 19.14). Несимметричный ДУ имеет два
входа. Если на вход транзистора Р71 подать сигнал евх] >0, то ток
7К1 увеличивается, а, так как 1Э = const, то /к2 уменьшается, и вы-
ходное напряжение на коллекторе VT2 увеличивается, то есть на-
правление изменения выходного сигнала соответствует входному.
Поэтому этот вход называется неинвертирующим (прямым, повто-
ряющим).
Если на вход транзистора ГТ2 подать сигнал евх2 >0, то ток
/к2 увеличивается, а выходное напряжение на коллекторе ГТ2
уменьшается, то есть направление изменения выходного сигнала
противоположно входному. Поэтому этот вход называется инвер-
тирующим.
Если положительные сигналы поданы на оба входа, то сигнал
на выходе пропорционален их разности (дифференциалу). Отсюда
и название усилителя — дифференциальный. Разность входных сиг-
налов называется дифференциальным сигналом. Коэффициент
усилении дифференциального сигнала.
(19-28)
где 7?вх - входное сопротивление каскада, определяемое по форму-
ле (19.21).
256
На рис. 19.16 показаны временные диаграммы, при усилении
дифференциального сигнала. При отсутствии входных сигналов в
момент выходное напряжение не равно нулю: С'вых1 = С/6ал. При
подаче входного сигнала на неинвертирующий вход на выходе по-
является напряжение пвых1.
Рис. 19.16. Временные диаграммы при усилении
дифференциальных и синфазных сигналов
бал
г
^синф
т —
синф
Два одинаковых сигнала, подаваемых на оба входа называются
синфазными (см. рис. 19.16). За счет неполной симметрии в реаль-
ном каскаде на выходе появляется ненулевой сигнал Ко-
эффициент передачи синфазного сигнала
(19.29)
где £синф — свх| — свх2 •
Степень ослабления синфазного сигнала характеризует коэф-
фициент ослабления синфазного сигнала
г
£OCJ1=201g-^. (19.30)
кид
В усилителях на интегральных схемах синфазный сигнал ос-
лабляется на 80... 100 дБ, то есть в10 000...100 000 раз.
Преимущества дифференциального усилительного каскада:
1. Входной сигнал подается относительно земли.
2. Малый дрейф нуля.
3. Ослабляется синфазный сигнал, что обеспечивает высокую
9 Зак. 50
257
помехоустойчивость, так как помехи одновременно поступают на
оба входа.
Недостаток:
В выходном сигнале присутствует постоянная составляющая
при отсутствии входного сигнала.
Каскад сдвига уровня сигнала (КСУ на рис. 19.14) позволяет
устранить эту постоянную составляющую. На транзисторе VT5 вы-
полнен стабилизатор тока, создающий на резисторе падение на-
пряжения, равное (7бал. Это напряжение вычитается из выходного
напряжения ДУ Свых1. Поэтому выходное напряжение КСУ £7ВЬ1х2
при отсутствии входных сигналов равно нулю.
Выходной каскад усиления мощности с заземленной на-
грузкой (УМ на рис. 19.14) обеспечивает усиление мощности. При
этом выходной сигнал снимается относительно земли. УМ пред-
ставляет собой двухтактный эмиттерный повторитель, выполнен-
ный на транзисторах РТ6; F77. Если, поступающее на его вход на-
пряжение Свых2 положительно, то открывается транзистор VT6 и на
нагрузку подается положительное напряжение, если СВЬ1х2 отрица-
тельно, то открывается VT1 и на нагрузку подается отрицательное
напряжение.
Структура УПТ, приведенная на рис. 19.14, является основой
создания операционных усилителей.
19.6. Аналоговые интегральные микросхемы (АИМС)
19.6.1. Классификация АИМС
По решаемым задачам АИМС делятся на:
а) операционные усилители (ОУ);
б) инструментальные схемы (ИС);
в) силовые схемы (СС);
г) радиочастотные схемы (PC).
ОУ - это многоцелевой усилитель, предназначенный для вы-
полнения математических операций.
ИС - это многоцелевые устройства, осуществляющие высоко-
точные преобразования аналоговых сигналов. От операционных
усилителей отличаются наличием цифровых цепей и большей ста-
бильностью.
258
СС - применяют для блоков питания и в каскадах усиления
мощности.
PC - служат для усиления и преобразования радиосигналов.
19.6.2. Операционные усилители
Операционный усилитель (ОУ) - это усилитель постоянного
тока прямого усиления с дифференциальным входом. На рис. 19.17
приведена функциональная схема операционного усилителя. На
схеме ДУ - дифференциальный усилительный каскад; КСУ - кас-
кад сдвига уровня; УМ - усилитель мощности. Из рис. 19.17 видно,
что структура ОУ соответствует структуре, рассмотренного ранее
УПТ (см. рис. 19.14), однако, современные ОУ имеют гораздо бо-
лее сложные схемы.
Рис. 19.17. Функциональная схема ОУ
На рис. 19.18 а приведены передаточные характеристики ОУ по
инвертирующему (1) и неинвертирующему (2) входам t/BbIX =
Рис. 19.18. Передаточные характеристики идеального (а)
и реального (б) ОУ
Характеристики, приведенные на рис. 19.18 а, справедливы
для идеального ОУ. Передаточные характеристики реального ОУ,
показанные на рис. 19.18 6 штрихами (два варианта) не проходят
через нуль. Из-за малости смещения нуля, его можно определить
только косвенно:
259
9*
т т
I I _ __DDlA
^СМО — , »
к
где к - коэффициент усиления ОУ.
Для устранения смещения нуля применяют схемы балансиров-
ки. В лучших образцах ОУ балансировка нс требуется.
Современные ОУ характеризуются очень высоким коэффици-
ентом усиления (к —103...107) и очень большим входным сопро-
тивлением (7?вх =до 107 Ом).
На рис. 19.19 приведена схема включения операционного уси-
лителя и его условное обозначение. Через резисторы Rx и на
входы подаются входные сигналы, а выходной сигнал появляется
на нагрузке RK . Цепи питания и присоединения к земле обычно на
схемах не изображают.
При анализе схем с ОУ обычно применяют допущения, суще-
ственно упрощающие расчеты:
1) входное сопротивление /?вх оу = °°, оно действительно вели-
ко, см. выше;
2) напряжение непосредственно на входе в точке суммирова-
ния =0. Оно мало по сравнению с выходным и с входным на-
пряжениями, так как к очень велико).
Чтобы ОУ выполнял различные операции, его по-разному
включают, охватывают различными обратными связями. Глубокие
обратные связи позволяют обеспечить малый дрейф нуля.
19.6.3. Инвертирующий усилитель
На рис. 19.20 приведена схема инвертирующего усилителя на
базе ОУ.
Усилитель охвачен отрицательной параллельной обратной
связью по напряжению, так как выходное напряжение подается на
260
инвертирующий вход параллельно входному сигналу. Определим
коэффициент усиления для этой схемы.
Входной ток (с учетом допущения = 0 )
^вх~^_^х
вх /?, 7?!
Ток в цепи обратной связи
_С/ВЬ1Х-С/У U,
‘ос р
‘'ос
С учетом допущения, 7?вх оу =1
коэффициент усиления
(19.31)
ВЫХ X _ вых
” Яос
очевидно, что /вх = , тогда
(19.32)
*ос
UBX Ri
Таким образом, коэффициент усиления определяется отноше-
нием резисторов и не зависит от коэффициента усиления операци-
онного усилителя.
Так как RBX оу = °°, то сопротивление Т?2 можно закоротить.
I, _ ^вых _
ки
(19.33)
19.6.4. Неинвертирующий усилитель
На рис. 19.21 а приведена схема неинвертирующего усилителя
на базе ОУ. В этой схеме действует отрицательная последователь-
ная обратная связь по напряжению. Поэтому можно воспользовать-
ся формулой (19.19)
, к 1 1
п ------ ------— —— - • ------
UOOC 1,» 1
1 + ук у J_ + 1
ук
(19.34)
261
где у - коэффициент передачи цепи обратной связи:
Пусть к = 104, у = 0,01, тогда у к = 100 и второй сомножитель
в выражении (19.34) близок к единице.
(19.36)
У Ri
Этот усилитель позволяет с высокой степенью точности уси-
ливать сигнал без изменения знака.
19.6.5. Повторитель на ОУ
б)
Рис. 19.21. Схемы неинвертирующего
усилителя (а) и повторителя (б)
Повторитель (рис.
19.21 б) — это неинверти-
рующий усилитель, у кото-
рого коэффициент переда-
чи цепи обратной связи у
равен единице. Определим
коэффициент усиления по-
вторителя
^оос=^7 = -Ц-- (19.37)
1 + * i+l
к
Если А'= 103...107, то,
очевидно, что повторитель
воспроизводит входной сиг-
нал с очень большой точно-
стью. Он применяется для
согласования, так как имеет
очень большое входное со-
противление и достаточную
выходную мощность.
19.6.6. Интегратор
На рис. 19.22 а приведена схема интегратора, выполненная на
базе ОУ. В цепь обратной связи включен конденсатор С. Пусть в
262
момент t = 0 (рис. 2.22 б)
на вход подается скачок
напряжения U. Входной
ток с учетом допущения
их=^о
i (19.з8)
вх Rx Rx
С учетом допущения
7?вх Оу = 00,ток через конден-
сатор
1с=/ос=Чх- (19.39)
Напряжение на кон-
денсаторе с учетом перво-
го допущения
wr = » -[/у = пвых . (19.40)
С учетом формул
(19.38-19.39)
Рис. 19.22. Интегратор (а) и его временные
диаграммы (б)
(19.41)
Таким образом, напряжение на выходе равно интегралу вход-
ного сигнала.
19.6.7. Компараторы
Компаратор — это устройство для сравнения двух сигналов.
Рассмотрим компаратор для сравнения сигналов одинаковой по-
лярности (рис. 19.23 а). На временной диаграмме (см. рис. 19.23 б)
видно, что пока входное напряжение пвх, подаваемое на инверти-
рующий вход, меньше опорного Uon напряжение на выходе макси-
мальное положительное. Из-за большого коэффициента усиления
ОУ под действием большой разности напряжений он находится в
глубоком насыщении. Когда напряжения становятся очень близки-
ми, компаратор выходит из насыщения и быстро переключается, то
есть напряжение на выходе меняет знак. На рис. 19.23 в представ-
лена передаточная характеристика компаратора.
Недостаток компаратора — низкая помехоустойчивость (чем
263
в)
Рис. 19.23. Компаратор (а), его временные диа-
граммы (б) и передаточная характеристика (в)
чувствительнее компара-
тор, тем ниже помехо-
устойчивость). Это вы-
звано тем, что помеха на-
кладывается на полезный
сигнал и вызывает мно-
гократные ложные пере-
ключения.
Регенеративный
компаратор (триггер
Шмидта) (рис. 19.24 а)
применяется для повы-
шения помехоустойчиво-
сти. В нем используется
положительная обратная
связь, подаваемая на вход
через резистор . Ко-
эффициент передачи це-
пи обратной связи
(19-42)
•*'2 + лос
На временной диа-
грамме (см. рис. 19.24 6)
видно, что пока входное
напряжение ивх, подавае-
мое на инвертирующий
вход, меньше опорного Uon, напряжение на выходе максимальное
положительное. Через цепь обратной связи на неинвертирующий
вход подается дополнительное напряжение At/ = у t/BbIX max. По-
этому на входе действует сумма Uon + At/ и компаратор срабаты-
вает при ивх = t/cp. После срабатывания напряжение на выходе ста-
новится отрицательным. Положительное напряжение на неинвер-
тирующем входе уменьшается до напряжения отпускания
t/0Tn = t/on - At/. Следующее переключение произойдет, если
входное напряжение станет меньше напряжения отпускания. Если
амплитуда помехи не превышает At/, то ложных переключений не
происходит.
264
Рис. 19.24. Регенеративный компаратор (а),
его временные диаграммы (б) и передаточная
характеристика (в)
За счет положительной обратной связи переключения в регене-
ративном компараторе происходят очень быстро.
Передаточная характеристика регенеративного компаратора
имеет петлю гистерезиса (см. рис. 19 24 в) Ширина петли гисте-
резиса
^r=2t/eblxmax/- (19.43)
Преимущества регенеративного компаратора: большая поме-
хоустойчивость и быстрое переключение.
Недостаток: меньшая точность.
265
Временные диаграммы и передаточная характеристика для слу-
чая: Uon = 0 приведены на рис. 19.25.
Рис. 19.25. Временные диаграммы (а) и передаточная характеристика (б)
регенеративного компаратора при С/оп=0
19.6.8. Мультивибратор
Мультивибратор - это генератор прямоугольных колебаний
(рис. 19.26 а). Он представляет собой регенеративный компаратор,
в котором на инвертирующий вход подается сигнал обратной связи
через интегрирующую цепь RC, а опорное напряжение равно нулю.
Мультивибратор является автогенератором и работает без по-
дачи входного сигнала. Временные диаграммы мультивибратора
показаны на рис. 19.26 б. Пусть в момент 6 напряжение на выходе
положительное, тогда напряжение на неинвертирующем входе то-
же положительное. Оно определяется коэффициентом передачи це-
пи обратной связи
Напряжение с выхода, подаваемое на RC цепь, вызывает на-
растание напряжения на инвертирующем входе. В момент t2, когда
это напряжение превысит напряжение на неинвертирующем входе,
произойдет переключение. Напряжение на выходе и на неинверти-
руюшем входе станет отрицательным, конденсатор начнет переза-
ряжаться в противоположном направлении.
266
где
Рис. 19.26. Мультивибратор (а) и его времен-
ные диаграммы (б)
Выходное напряжение мультивибратора имеет частоту
^=Tlg [1 + 2^ , (19.46)
т = RC. (19.47)
На основе описанных простейших аналоговых схем строятся
более сложные схемы различного назначения.
267
19.7. Цифровые интегральные микросхемы
19.7.1. Классификация цифровых интегральных микросхем
и элементы алгебры логики
Цифровые интегральные микросхемы (ЦИМС) оперируют
комбинацией символов «О» и «1» двоичной системы счисления.
Рис. 19.27. Определение поня-
тий 1 и 0 в цифровых схемах
Этим значениям соответствуют край-
ние значения входных и выходных на-
пряжений. На рис. 19.27 приведен вид
сигнала, подаваемого на вход ЦИМС.
Участок сигнала, имеющий уровень
выше напряжения соответствующего
единице, принимается за 1, а ниже на-
пряжения соответствующего нулю, при-
нимается за 0.
К ЦИМС относятся логические
схемы, реализующие логические опе-
рации И, ИЛИ, НЕ и т.д. Цифровые
схемы, которые управляются уровнями напряжения, называются
потенциальными.
Логические микросхемы делятся на:
1) комбинационные микросхемы (однотактные или без па-
мяти), в которых выходной сигнал является функцией входных
сигналов. К ним относятся ЦИМС реализующие логические опера-
ции И, ИЛИ, НЕ и т.д;
2) последовательностные микросхемы (многотактные или с
памятью), где выходной сигнал дополнительно зависит от состоя-
ния схемы в предыдущем интервале времени. К ним относятся
счетчики, триггеры и т.д.
ЦИМС подразделяются на:
1) синхронные, в которых переключение происходит после
воздействия тактового импульса;
2) асинхронные, в которых переключение происходит в про-
извольный момент времени, когда приходит сигнал.
Ключевые элементы в ЦИМС называют вентилями.
Логические элементы можно выполнить на основе различных
схем. Рассмотрим основные типы логик.
РТЛ — резистивно-транзисторная логика, выполненная на ре-
зисторах и транзисторах (устаревшая, теперь не используется).
268
ДТЛ - диодно-транзисторная логика, выполненная на диодах и
транзисторах.
ТТЛ - транзисторно-транзисторная логика, выполненная как
на обычных, так и на специальных многоэмиттерных транзисторах.
рМДПТЛ и пМДПТЛ - транзисторные логики на основе МДП-
транзисторов с каналами типа р и п.
КМДПТЛ - комплиментарная (взаимодополняющая) логика,
выполненная на основе сочетания МДП-транзисторов с каналами
типа р и п.
И2 Л - интегральная инжекционная логика. Применяется в
больших интегральных схемах. У нее наилучшие показания по
плотности упаковки элементов и быстродействию.
Логические элементы осуществляют простейшие логические
операции над цифровой информацией. Логические преобразования
двоичных сигналов составляют набор трех операций:
1)ИЛИ - логическое сложение (дизъюнкция), обозначаемое
знаком «+» (рис. 19.28 а):
y = xt + x2: (19.48)
2) И - логическое умножение (конъюнкция), обозначаемое
знаком «•» (рис. 19.28 б):
y = Xj-x2; (19.49)
3) НЕ - логическое отрицание (инверсия), обозначаемое чер-
той над переменной (рис. 19.28 в):
у = х. (19.50)
а) б) в)
Рис. 19.28. Условные обозначения логических элементов,
выполняющих операции ИЛИ (а), И (б). НЕ (в)
19.7.2. Комбинационные ЦИМС
Принцип действия комбинационных схем рассмотрим на при-
мере схемы типа ТТЛ. На рис 19.29 а приведена упрощенная схема
элемента ЗИ -НЕ. На входе реализуется операция И над тремя сиг-
налами, на выходе производится операция НЕ.
269
Рис 19.29. Упрощенная схема элемента ЗИ НЕ (а)
п его условное обозначение (б)
Если на всех входах многоэмиттерного транзистора VT\ дей-
ствует сигнал 1 (высокий потенциал близкий к £'), то все переходы
эмиттер-база транзистора ЕЛ закрыты, через базо-коллекторный
переход VT\ проходит ток, открывающий VT2. На выходе появля-
ется низкий потенциал, соответствующий уровню 0. Если хотя бы
на одном входе появляется сигнал 0, то потенциал на базе ЕЛ по-
нижается и закрывается транзистор VT2. На выходе появляется вы-
сокий потенциал, соответствующий уровню 1. Состояние входов и
выходов логического элемента характеризуется таблицей истин-
ности (табл. 19.1).
Таблица 19.1 Условное обозначение эле-
А В с F мента ЗИ-НЕ приведено на рис.
1 1 1 0 19.29 б.
0 1 1 1 На основе простейших ком-
1 0 1 1 бинационных схем строятся более
1 1 0 1 сложные: дешифраторы, мультип-
0 0 0 1 лексоры, сумматоры и другие
элементы ЭВМ.
270
19.7.3. Статические и динамические характеристики
и параметры ЦИМС
Статические параметры ЦИМС:
Ul,UQ - значения высокого и низкого уровня напряжений;
^пор’^иор ~ пороговые напряжения - это наименьшее значе-
ния высокого уровня напряжения и наивысшее значение напряже-
ния низкого уровня на входе ЦИМС, при котором схема переходит
из одного устойчивого состояния в другое.
t/пст’^пст “ статическая помехоустойчивость (допустимый
уровень помех на входе) при уровнях входных сигналов, соответ-
ствующих 1 и 0.
Передаточная (амплитудная) характеристика С/вых = /(J7BX)
Передаточная характеристика для схемы И-НЕ приведена на
рис. 19.30.
Передаточные характеристики имеют разброс даже для одного
типа МС и изменяются при изменении температуры. На рис. 19.31
показана область существования передаточных характеристик для
микросхем данного типа. По значениям напряжений, определен-
ным по рис. 19.31 устанавливают основные параметры микросхемы
данного типа.
Рис. 19 30. Передаточная харак-
теристика схемы И-НЕ и опре-
деление пороговых напряжений
^'вых
Рис. 19 31. Область существования пере-
даточных характеристик и определение
параметров ЦИМС
271
Входная характеристика = Для схем ТТЛ она
приведена на рис. 19.32 а. /вх - максимальный ток на входе, проте-
кающий при нулевом уровне входного сигнала.
Выходная характеристика б/ВЬ1Х = /(/ВЬ1Х). Выходная харак-
теристика для схем ТТЛ приведена на рис. 19.32 6. Выходная ха-
рактеристика снимается путем подключении к выходу входов дру-
гих ИМС. Когда на выходе МС сигнал 1, то из ИМС вытекает ма-
лый обратный ток эмиттерно-базовых переходов нагрузок. Поэто-
Рис. 19.32. Характеристики схемы ТТЛ:
входная (а) и выходная (б). Цифры по оси
абсцисс - количество подключаемых
элементов
точным для насыщения, транзистор
му внешняя характеристика
проходит в области малых
токов и имеет малый наклон
(1 квадрант). Если на выходе
О, через транзистор VT2 (см.
рис. 19.29 а)протекает посто-
янный ток базы, определяе-
мый резистором RI, который
значительно больше мини-
мально необходимого для
поддержания транзистора в
насыщенном состоянии. При
подключении к выходу схе-
мы входов других ИМС по-
являются достаточно боль-
шие входные токи 7ВХ, вте-
кающие в ИМС, и ток кол-
лектора Е72 растет. Когда
ток базы становится недоста-
КГ2 выходит из режима насы-
щения и напряжение на нем превышает (7ВЫХ тах. Таким образом.
напряжение на выходе при состоянии соответствующем 0 опреде-
ляет максимально допустимый ток 7ВЫХ тах и характеризует нагру-
зочную способность микросхемы.
Коэффициент разветвления по выходу краз - это количество
единичных нагрузок, которые можно одновременно подключить к
выходу
__ ^вых.гпах
Краз - .0
*вх
(19.51)
272
Динамические пара-
метры ЦИМС характеризу-
ют скорость переключения на
выходе при изменении вход-
ного сигнала. На рис. 19.33
показано, как измеряется
время задержки распростра-
нения сигнала в ИМС И НЕ.
Среднее время задержки
распространения сигнала
^=0,5^+^), (19.52)
где /зд’р,40р - время задерж-
ки при переключении ИМС
из состояния 0 в состояние 1
и наоборот.
Рис. 19.33. Определение времени задерж-
ки распространения сигнала в ИМС И-НЕ
19.7.4. Последовательностные ЦИМС
Логические схемы с памятью могут создаваться на основе
комбинационных схем.
Триггер - это элементарная последовательностная схема с
двумя устойчивыми состояниями выходов. Выходы триггеров на-
ходятся в противоположном состоянии (в противофазе). Входной
сигнал может перевести триггер из одного устойчивого состояния в
другое.
Триггеры имеют один или несколько информационных вхо-
дов. Информационные входы делятся на:
1) установочные S и R;
2) счётные - Т;
3) тактирующие - С.
По структуре триггеры делятся на: RS-триггеры, JK-триггеры,
Т-1 рип еры. D-трип еры и др.
По способу синхронизации триггеры делятся на: асинхронные
и синхронные (тактируемые). Асинхронные могут переключаться
при изменении входного сигнала в произвольный момент времени,
синхронные только в момент прихода синхроимпульса.
В асинхронных системах возможны ложные переключения из-
за задержки переключения логических элементов. Для устранения
273
Таблица 19.3
S” R" Qn
0 0 Qn\
1 0 1
0 1 0
1 1 H.O.
ложных переключений применяют синхронизацию логических эле-
ментов, в том числе триггеров Синхронные триггеры делятся на:
тактируемые потенциалом (импульсом) и тактируемые фронтом
(с внутренней памятью).
В тактируемых потенциалом выполнение команд происходит с
задержкой (delay) до появления общего для всех ЦИМС синхроим-
пульса (применяется, например, в D-триггерах);
В тактируемых фронтом при появлении синхроимпульса пред-
варительно запускается триггер внутренней памяти (хозяин -
master), а команда затем выполняется выходным триггером (рабом -
slave) по заднему фронту синхроимпульса; такие триггеры образу-
ют семейство MS-триггеров, представителем которого является JK-
григгер.
Асинхронный RS-триггер может быть создан на основе двух
комбинационных схем 211 НЕ (рис. 19.34 а). Он имеет два устано-
вочных входа: S (set) - установка, R (reset) - возврат. Два выхода
триггера находятся в противофазе и обозначаются Q и Q. Схема
находится в устойчивом состоянии. Переключения триггера опре-
деляются по табл. 19.2, которая называется таблицей переключе-
ний. S”, R", Q" — состояния входов и выхода в и-м интервале
времени; Qn+l - в и+1-м; н.о. (не определено) - запрещенная ком-
бинация входных сигналов, при которой теряется противофазность
выходных. Рассмотрение таблицы по-
казывает, что реакция системы зави-
сит от предыдущего состояния. По
таблице на рис. 19.34 в построены
временные диаграммы. Триггер пере-
ключается при подаче на входы R и S
нулевых сигналов. Такой триггер на-
зывается триггером с инверсным
управлением. Условное обозначение
триггера с инверсным управлением
показано на рис. 19.34 б.
Схема RS-триггера с прямым
управлением и его условное обозна-
чение показаны на рис. 19.35, а пере-
ключения триггера определяются по
табл. 19.3.
Таблица 19.2
S" R" Q"
1 1
0 1 1
1 0 0
0 0 н.о.
274
Рис. 19.34. Схема асинхронного RS-триггера
с инверсным управлением (а), его условное
обозначение (б) и временные диаграммы
напряжений на входах и выходах (в)
Рис. 19.35. Схема асинхронного RS-триггера с прямым
управлением (а) и его условное обозначение (б)
275
Схема синхронного RS-триггера с прямым управлением и
его условное обозначение показаны на рис. 19.36 а. б, а переключе-
ния триггера определяются по табл. 19.3, однако, они могут проис-
ходить только при приходе синхроимпульса. По таблице на рис.
19.36 в построены временные диаграммы.
в)
Рис. 19.36. Схема синхронного RS-триггера с прямым управ-
лением (а), его условное обозначение (б) и временные диа-
граммы напряжений на входах и выходе (в)
Таблица 19.4
С" Q”
0 Qn~l
1 Dn~x
Схема D-триггера и его условное обозначение
показаны на рис. 19.37 а, б, а переключения тригге-
ра определяются по табл. 19.4. По таблице на рис.
19.37 в построены временные диаграммы. Сраба-
тывание происходит по переднему фронту синхро-
импульса. В D-триггере выходной сигнал повторяет
входной с задержкой (до прихода синхроимпульса).
276
Рис. 19.37. Схема D-триггера (а), его условное обозначение (б)
и временные диаграммы напряжений на входах и выходе (в)
Условное обозначение Т-триггера показано на рис. 19.38, а
переключения триггера определяются по табл. 19.5. Это триггер со
Таблица 19.5
С" с О)
0 7 Ъ)
1 7 S:
Рис. 19.38. Услов-
ное обозначение
Т-триггера
счетным входом и внутрен-
ней памятью. При приходе
импульса на вход Т меняет-
ся состояние выходов, т.е.
он снижает частоту следо-
вания импульсов в два раза
(считает).
277
Таблица 19.6
J" к” Q"
0 0 Qn-1
1 0 1
0 1 0
1 1 ё"-’
Условное обозначение JK-
триггера показано на рис. 19.39 а, а
переключения триггера определя-
ются по табл. 19.6. JK-триггер со-
стоит из двух триггеров - триггера
внутренней памяти и выходного
триггера.
а)
б)
Рис. 19.39. Условное обозначение JK-триггера (а) и временные
диаграммы напряжений на входах и выходе (б)
При приходе синхроимпульса запускается триггер внутренней
памяти, а команда выполняется выходным триггером по заднему
фронту синхроимпульса. По таблице на рис. 19.39 6 построены
временные диаграммы. JK-триггер является универсальным. Он
может заменить RS-триггер и при этом не имеет запрещенных ком-
бинаций сигналов. Он может быть превращен в Т-триггср и D-
триггер.
19.7.5. Цифровые интегральные схемы - элементы ЭВМ
На основе комбинационных схем и элементарных последова-
тельностных схем - триггеров строятся более сложные цифровые
схемы: счетчики, регистры и другие элементы ЭВМ.
Счетчик - устройство, выполненное на основе цепочки триг-
геров, осуществляющее счет импульсов и фиксирующее это число
278
в коде. Счетчики применяются в различных областях цифровой тех-
ники, в частности, в электроизмерительной аппаратуре, управляю-
щих системах ЭВМ, датчиках технологических параметров и т.д.
Наибольшее распросзранение получили двоичные и двоично-
десятичные счетчики.
По выполняемой функции счетчики делятся на суммирующие,
вычитающие и реверсивные. В суммирующих счетчиках число
увеличивается на одну единицу с приходом каждого нового счет-
ного импульса. Вычитающие счетчики содержащееся в них число
уменьшают на одну единицу под воздействием очередного счетно-
го импульса. Реверсивные счетчики в зависимости от поданной ко-
манды могут работать как в режиме суммирования, так и в режиме
вычитания счетных импульсов.
Основу счетчиков составляют триггеры, как правило, D- или
JK-типов, включаемые в счетном режиме (Т-триггеры). Каждый
григгер образует соответствующий разряд счетчика. В дальнейшем
символом Qo будем обозначать младший, символом Qn_{ - стар-
ший разряд счетчика, где п — общее число разрядов.
По принципу построения счетчики подразделяются на асин-
хронные и синхронные. Асинхронные счетчики представляют собой
последовательное включение триггеров, где каждый последующий
триггер переключается под действием выходного сигнала предыду-
щего триггера. В синхронных счетчиках счетный импульс одновре-
менно подается на управляющие входы триггеров всех разрядов.
Рассмотрим асинхронный двоичный суммирующий счетчик на
основе JK-триггеров, работающих по заднему фронту импульса на
входе С (рис. 19.40 а). Вход С каждого последующего триггера
подключается к прямому выходу триггера предыдущего разряда.
Для организации Т-режима в JK-триггерах на входы J и К пода-
ется «1» (рис. 19.40 б). При этом источник счетных импульсов под-
ключается к выходу С триггера младшего разряда. Для триггеров
более старших разрядов источником счетных импульсов является
информационный сигнал с выхода триггера предыдущего разряда.
Считаем, что в начальный момент времени счетчик находится
в нулевом состоянии Qo = Q - Q2 =... = Q„_t = 0 .Триггер младшего
разряда изменяет свое состояние синхронно с задним фронтом каж-
дого счетного импульса, поступающего на его вход С. Триггер вто-
рого и последующих разрядов счетчика реагируют на задний фронт
279
Рис. 19.40. Асинхронный двоичный суммирующий счетчик (а)
и JK-триггер в Т-режиме (б)
Рис. 19.41. Условное
обозначение двоич-
ного счетчика
импульсов с инверсных выходов предыдущих разрядов. В результа-
те уровень сигнала Q изменяется с приходом каждого второго счет-
ного импульса Хс, сигнала Q2 с приходом каждого четвертого
импульса Хс, сигнала Q3 приходом каждого восьмого импульса
Хс. При этом каждый импульс Хс вызывает увеличение содержи-
мого счетчика на одну единицу до тех пор, пока не произойдет пере-
ход всех разрядов в состояние «1» (десятичное число 15).
Частота импульсов на выходе каждого последующего разряда в
два раза меньше частоты выходного сигнала предыдущего разряда.
На схемах двоичные счетчики однонаправленного действия (сум-
мирующие или вычитающие) имеют условное графическое обозна-
чение (рис. 14.41). Цифра 2 при символе СТ обозначает, что счет-
чик работает в двоичном коде, R — вход установки счетчика в со-
стояние 0; S — вход установки счетчика в со-
стояние 1; С - счетный вход; Q}...Q5 — выходы
соответствующего разряда счетчика, где Q -
младший разряд.
Регистр устройство, выполненное на ос-
нове цепочки триггеров, предназначенное для
записи и хранения в виде кода «слова» (двоич-
ного числа, например, 101
Регистры делятся на параллельные и последовательные. Ес-
ли информация записывается и считывается со всех триггеров од-
новременно, то регистр называется параллельным, или регистром
памяти. Для записи в регистр числа, например, Nt = 1011, оно по-
R S С СТ2 Qi Q> Qi Qi Qs
280
дается на информационные шины регистра (рис. 19.42), подклю-
ченные к D-входам триггеров. После этого следует подача сигнала
«1» разрешения записи на первый вход и синхроимпульса Хс на
второй вход элемента «2И». В результате выходы триггеров пере-
ключаются в состояние, в котором находятся их D-входы. Измене-
ние содержимого регистра на число N2 =1010 не требует предвари-
тельной установки триггеров в исходное нулевое состояние и проис-
ходит автоматически после подачи следующего синхроимпульса за-
писи. Для считывания содержимого регистра подается сигнал 1 раз-
решения считывания, что приводит к переводу элементов «2И»,
включенных на выходных шинах регистра, в открытое состояние.
Рис. 19.42. Регистр памяти
Один регистр памяти образует элементарную ячейку памяти
оперативного запоминающего устройства (ОЗУ). В регистре
хранится 8, 16, 32 двоичных разряда (бита) информации (1, 2, 4
байта). Каждая ячейка памяти ОЗУ имеет свой номер (адрес), а все
информационные входы и выходы ячеек подключены к одним и
тем же входам и выходам (шинам) ОЗУ, имеющим ту же разряд-
ность, что и регистры. Емкость ОЗУ определяется числом ячеек
памяти и не зависит от разрядности регистров. Емкость ОЗУ изме-
ряется в килобайтах (1 Кбайт =1 К = 210 = 1024 ячеек памяти).
В последовательном регистре информация поступает на один
вход последовательно во времени, начиная со старшего разряда: I,
Ю, 101. 1011 и сдвигается с каждым тактом но цепочке триггеров.
Поэтому этот регистр называют регистром сдвига.
281
Однонаправленный регистр сдвига «вправо» (рис. 19.43) пред-
ставляет собой последовательное включение D-триггеров. Прямой
выход предыдущего триггера подключается ко входу D последую-
щего триггера, а синхроимпульс подается на все входы С одновре-
менно.
Выходы
При последовательном способе загрузки регистра «вправо»,
например, числом 1011, первым на D-вход триггера младшего раз-
ряда подается старший разряд Q3 записываемого числа. Затем сле-
дует импульс Хс и значение Q3 переписывается в триггер младше-
го разряда. Следующим на информационный вход регистра подает-
ся значение Q2 и под действием второго синхроимпульса Хс дан-
ные продвигаются «вправо» по регистру. Последним вводится
младший разряд записываемого числа, и после воздействия сигнала
Хс данные занимают положение в триггерах соответствующих
разрядов регистра.
Для параллельного считывания информации на вторые входы
выходных элементов «2И» подается сигнал «1» разрешения считы-
вания.
Дешифратор (декодер) - устройство, с помощью которого
осуществляется преобразование какого-либо кода, состоящего из
последовательности нулей и единиц, в удобную для человека фор-
му представления информации - десятичное число. Часто исполь-
зуется для управления индикаторами информации. Дешифраторы и
кодопреобразователи широко применяются в ЭВМ, цифровых из-
мерительных приборах, электронных часах, датчиках технологиче-
ских параметров, электронных табло и т.д.
282
Рис. 19.44. Условное обо-
значение дешифратора
Кодопреобразователь - устройство, которое осуществляет
преобразование одной системы кодирования в другую без пред-
ставления конечного результата в привычной для человека системе
счисления.
Условное обозначение дешифратора че-
тырехпроводного двоичного кода в десятич-
ный показано на рис. 19.44. Символ DC обо-
значает дешифрацию входной информации
(Decoder).
С левой стороны прямоугольника пока-
зываются веса разрядов в той системе коди-
рования, которая преобразуется в десятичную
систему счисления, а с правой стороны при-
водятся значения чисел в десятичной форме.
Мультиплексор - это электронный переключатель, позволяю-
щий последовательно опросить логические состояния многих уст-
ройств и передать их на один выход.
В системах промышленной автоматики часто возникает задача
опроса большого числа данных с их последующей передачей на
один выход. Для этих целей служит устройство, называемое мульти-
плексором (MUX - multiplexer), который по сути дела представляет
собой переключатель каналов (рис. 19.45 а), где положение ключе-
вого элемента «Кл.» определяется адресом канала, с которого ведет-
ся прием информации. Условное обозначение мультиплексора при-
ведено на рис. 19.45 б. На рисунке С - вход стробирования (разре-
шения) передачи сигнала с одного из входов данных DO, DI, D2, ...;
SE 1, 2,... - адресные входы (выходы выборки).
Канал 1
Канал 2
Канал w
----о
Выход
I---[Адрес канала (5Е)[
С D 0 1 2 SE 1 2 MUX
а) б)
Рис. 19.45. Эквивалентная схема (а) и условное обозначение мультиплексора (б)
283
Цифро-аналоговый преобразователь (ЦАП) преобразует
информацию из цифровой формы в аналоговую. Условное графи-
ческое изображение ЦАП показано на рис. 19.46 а. Символом пре-
образования является обозначение «Х/Y». В ряде случаев исполь-
зуется символ «DA» (Digital-to-Analog Converter). Слева обознача-
ются веса разрядов преобразуемого кода, например, 8-4-2-1.
а) б)
Рис. 19.46. Условные обозначения ЦАП (а) и АЦП (б)
Аналого-цифровой преобразователь (АЦП) предназначен для
представления аналоговых величин (напряжения, тока, скорости,
температуры и т.д.) в соответствующий им цифровой эквивалент.
Условное графическое изображение АЦП показано на рис. 19.46 б.
Вместо символа «Х/Y» используется также обозначение «DA».
Запоминающие устройства (ЗУ) являются важнейшим эле-
ментом вычислительных устройств. Они применяются для записи и
хранения цифровой или аналоговой информации в течение задан-
ного интервала времени и могут выполняться на магнитных, полу-
проводниковых и других элементах. Рассмотрим полупроводнико-
вые ЗУ, применяемые в цифровой электронике.
Классификация ЗУ приведена на рис. 19.47: Программируемые
логические матрицы (ПЛМ) представляют собой специальный тип
ЗУ ограниченной сферы применения, где входные переменные
подвергаются обработке в соответствии с требуемой логической
функцией. Содержимое памяти ПЛМ может заранее программиро-
ваться на стадии изготовления микросхемы или непосредственно
пользователем.
Постоянные запоминающие устройства (ПЗУ) в отличие от
ПЛМ могут выполнять широкий спектр функций. Содержимое па-
мяти ПЗУ программируется однократно при изготовлении микро-
схемы или пользователем и перепрограммированию не подлежит.
Перепрограммируемые запоминающие устройства (ППЗУ) от-
личаются от ПЗУ тем, что содержимое их памяти может неодно-
кратно изменяться в соответствии с требованиями пользователя.
284
Для этого ППЗУ извлекается из вычислительного устройства и пе-
репрограммируется с помощью специального устройства - про-
грамматора.
Рис. 19.47. Классификация ЗУ
Оперативные запоминающие устройства (ОЗУ) позволяют за-
писывать или считывать содержимое памяти непосредственно при
работе вычислительной машины путем подачи адреса требуемой
ячейки памяти и команд, определяющих режим работы ОЗУ (счи-
тывание или запись).
Главный узел ЭВМ - процессор. Процессор - это устройство
для обработки информации по определенной программе. Микро-
процессор - это процессор, выполненный в виде большой инте-
гральной микросхемы.
Микропроцессор содержит арифметико-логическое устройст-
во, регистры команд, адресов и данных, а также устройства управ-
ления.
Однокристальные микроЭВМ и микроконтроллеры являются
высшим достижением электроники и содержат, кроме процессора,
ряд внешних устройств.
Микроконтроллеры встраиваются непосредственно в элек-
тротехнические устройства.
Раздел V
ЭНЕРГЕТИЧЕСКАЯ ЭЛЕКТРОНИКА
Полупроводниковая преобразовательная техника является
одним из разделов промышленной электроники.
Энергетическая электроника, силовая электроника - все это
синонимы термина преобразовательная техника, но, пожалуй, бо-
лее точно отражающие ее смысл. Например, по-английски соответ-
ствующий термин «power electronics», по-немецки - «Leistung
Elektronik», что точно переводится, как мощная электроника. Энер-
гетическая электроника — это сильноточная ветвь промышленной
электроники.
Энергетическая электроника начала свою историю в начале
XX века после создания электронного диода, а затем ртутного вен-
тиля, но подлинное ее развитие и широкое внедрение связано с по-
явлением полупроводниковых приборов.
Преобразователи электрической энергии являются основным
предметом изучения энергетической электроники. Преобразова-
тельная техника изучает вопросы преобразования электрической
энергии. Преобразование электрической энергии - это изменение
ее параметров (напряжения, числа фаз, частоты, включая нулевую,
то есть постоянный ток), а также улучшение качества энергии, из-
менение формы напряжения и т.д.
Преобразование электрической энергии может осуществлять-
ся, как электромеханическими (динамическими), например, элек-
тромашинными преобразователями, так и электронными (статиче-
скими) преобразователями.
С помощью устройств преобразовательной техники 30...50 %
вырабатываемой электроэнергии преобразовывается в другие виды.
Поэтому особенно велика роль устройств преобразовательной тех-
ники в деле энергосбережения.
Преобразовательная техника является основой современного
электропривода и находит в нем все более широкое применение.
Полупроводниковые преобразователи энергии применяются на
286
транспорте, в электротехнологических установках, на электростан-
циях. Устройства преобразовательной техники являются основой
бытовой электроники. Современные источники питания телевизо-
ров, радиоприемников, компьютеров неосуществимы без примене-
ния устройств преобразовательной техники.
Широкое применение устройств преобразовательной техники
обусловлено преимуществами полупроводниковых приборов и
элементов микроэлектроники - малыми габаритами, быстродейст-
вием, чувствительностью, надежностью, экономичностью и широ-
кими возможностями преобразования информации.
Поэтому изучение преобразовательной техники невозможно
без знания полупроводниковых приборов и элементов микроэлек-
троники.
Энергетическая электроника (преобразовательная техни-
ка) изучает методы преобразования электрической энергии и уст-
ройства, реализующие эти методы. Полупроводниковые преобра-
зователи электрической энергии предназначены для преобразова-
ния параметров электрической энергии (напряжения, частоты,
числа фаз, формы напряжения и тока).
В полупроводниковой преобразовательной технике использу-
ются диоды, тиристоры и транзисторы в ключевом режиме. Прибо-
ры, работающие в ключевом режиме (открыт, закрыт), называются
вентилями. Преобразователи, выполненные на вентилях, называ-
ются вентильными преобразователями.
Основное применение вентильные преобразователи нашли в
качестве источников питания различных устройств. Современный
электропривод немыслим без вентильных преобразователей. В
нем органически сливаются электрическая машина, вентильный
преобразователь и устройство управления.
Вентильные преобразователи классифицируются по ряду при-
знаков.
1. По связи с сетью вентильные преобразователи делятся на
11реобразователи:
а) ведомые сетью, в которых процессы происходят синхронно
с частотой сети;
б) автономные, которые либо не связаны с сетью, либо не за-
висят от частоты сети.
287
2. По назначению вентильные преобразователи делятся:
а) на выпрямители, которые преобразуют переменный ток в
постоянный ток;
б) на инверторы, которые преобразуют постоянный ток в пе-
ременный ток;
в) на преобразователи частоты, которые преобразуют пере-
менный ток одной частоты в переменный ток другой частоты;
г) на преобразователи переменного напряжения, изменяю-
щие величину переменного напряжения; при этом частот а и число
фаз остаются неизменными;
д) на преобразователи числа фаз, изменяющие число фаз при
неизменной частоте;
е) на преобразователи постоянного напряжения, изменяю-
щие величину постоянного напряжения;
ж) на генераторы импульсов, формирующие импульсы про-
извольной формы и частоты.
Из всех видов преобразователей энергии пока самые распро-
страненные - выпрямители. Но другие виды преобразователей на-
ходят все более широкое применение.
Глава 20
ВЫПРЯМИТЕЛИ ТОКА
20.1. Классификация и структурные схемы выпрямителей
Выпрямители делятся на выпрямители тока и выпрямители
напряжения.
В выпрямителях тока ток на выходе протекает в одном на-
правлении, а мгновенные значения напряжения на выходе могут
менять полярность. В качестве вентилей в них применяют диоды и
тиристоры.
В выпрямителях напряжения напряжение на выходе не ме-
няет полярность, а ток на выходе может менять направление. В
качестве вентилей в них применяют диоды и транзисторы или за-
пираемые тиристоры.
В настоящее время основное применение имеют выпрямители
тока. Именно они рассматриваются в данной и последующих гла-
вах. Для сокращения в дальнейшем будем называть их просто вы-
прямителями, опуская слово тока.
Выпрямители напряжения сложнее и будут рассмотрены позже.
Выпрямители тока классифицируются по ряду признаков.
1. По числу фаз выпрямители делятся:
а) на однофазные, которые питаются от однофазной сети;
б) на многофазные, которые питаются от многофазной сети.
2. По числу выпрямляемых полуволн выпрямители делятся:
а) на однополупериодные;
б) на двухполупериодные.
3. По построению схем выпрямители делятся на следующие:
а) нулевые (однотактные, в которых ток по вторичной обмотке
трансформаторов протекает в одном направлении);
б) мостовые (двухтактные, в которых ток по вторичной обмот-
10 Зак. 50
289
ке трансформаторов протекает в двух направлениях). В мостовой
схеме трансформатор может отсутствовать.
4. По мощности выпрямители делятся на следующие:
а) малой мощности (до сотен ватт);
б) средней мощности (до десятков киловатт);
в) большой мощности (сотни и тысячи киловатт).
5. По возможностям управления выпрямители делятся:
а) на неуправляемые, выполненные на диодах;
б) на управляемые, выполненные на тиристорах.
На рис. 20.1 приведена обобщенная структурная схема вы-
прямителя, содержащая сетевой фильтр СФ, трансформатор Т,
вентильный блок ВБ, сглаживающий фильтр СГФ, стабилиза-
тор СТ, нагрузку Н. Энергия из сети подается через сетевой
фильтр, служащий для уменьшения вредного влияния выпрямителя
на питающую сеть, на трансформатор. Трансформатор служит для
согласования выпрямленного напряжения и напряжения сети, а
также для потенциального разделения нагрузки и сети. Вентильный
блок служит для выпрямления переменного тока. Сглаживающий
фильтр осуществляет фильтрацию (сглаживание) выпрямленного
напряжения. Стабилизатор обеспечивает поддержание с необходи-
мой точностью требуемой величины постоянного напряжения на
нагрузке в условиях изменения напряжения питающей сети и тока
нагрузки.
Рис. 20.1. Обобщенная структурная схема выпрямителя
Не все указанные блоки обязательно присутствуют в схеме. В
зависимости от предъявляемых требований могут отсутствовать все
блоки, кроме ВБ. Однако в большинстве случаев необходим и
трансформатор. Поэтому в дальнейшем процессы рассматриваются
для комплекта Т - ВБ. Наличие сглаживающего фильтра оказывает
значительное влияние на режим работы выпрямителя и его элемен-
тов. Существенным при этом является характер входной цепи
сглаживающего фильтра, определяющий совместно с внешней на-
грузкой вид нагрузки выпрямителя.
290
Возможны следующие виды нагрузок выпрямителя (с учетом
фильтра):
а) активная;
б) активно-индуктивная (например, выпрямитель работает на
обмотку возбуждения двигателя);
в) активно-индуктивная с противоЭДС (выпрямитель работает
на якорь двигателя);
г) активно-емкостная (емкостный фильтр).
Ввиду сложности расчетов выпрямителей, анализ процессов в
них в первом приближении выполняется при упрощающих допу-
щениях об индуктивности нагрузки. Принимается, что-либо ин-
дуктивность в цепи выпрямленного тока Ld = 0, либо Ld=^.
20.2. Однофазные выпрямители тока
20.2.1. Однофазная однополупериодная схема выпрямления
На рис. 20.2 а приведена однофазная однополупериодная
схема выпрямления, а временные диаграммы токов и напря-
жений при чисто активной нагрузке (Ld = 0) на рис. 20.2 б.
Диаграммы построены при следующих допущениях: вентиль
и трансформатор идеальны (падение напряжения на проводящем
вентиле равно нулю, а обратное сопротивление - бесконечности,
потери и ток холостого хода в трансформаторе равны нулю, то есть
в его схеме замещения индуктивность намагничивания равна бес-
конечности, а индуктивность рассеяния равна нулю). Эти же допу-
щения приняты при рассмотрении и расчете последующих схем.
Условные обозначения на схеме:
Z] — первичное напряжение и первичный ток;
е2, z2 - ЭДС на вторичной стороне трансформатора и вторич-
ный ток;
ia - анодный ток;
иа — напряжение на вентиле;
ud' 4/ _ выпрямленное напряжение и выпрямленный ток.
Когда на вторичной стороне трансформатора действует поло-
жительный полупериод, диод проводит и все напряжение прикла-
дывается к нагрузке; когда отрицательный - ток в цепи отсутству-
ет и к диоду прикладывается обратное напряжение. Ток через на-
ю*
291
грузку в соответствии с законом Ома повторяет форму напряжения
на нагрузке.
Рис. 20.2. Однофазная однополупериодная схема выпрямления (а)
и временные диаграммы токов и напряжений, иллюстрирующие
ее работу при /.j= 0 (б)
Вентиль выбирается по среднему току, для трансформатора
важно действующее значение, для нагрузки важно среднее значе-
ние тока и напряжения.
Расчет схемы производится в несколько этапов.
1. Определение токов и напряжений на стороне нагрузки:
среднее значение идеального выпрямленного напряжения
292
1 r U
UM=— U2m-cosa)t dcot = -^!!- = QA5-U1, (20.1)
27Г А 71
2
где С2т - амплитуда напряжения на вторичной стороне трансформа-
тора.
U2m=Jl-U2. (20.2)
Здесь С2 - действующее значение напряжения на вторичной сторо-
не трансформатора.
Амплитуда выпрямленного напряжения
^Л/max = ^2т = П ’ ^d0 (20.3)
Среднее значение выпрямленного тока
(20.4)
а его амплитуда по аналогии с формулой (20.3)
(20.5)
2. Определение токов и напряжений для вентиля: среднее и
амплитудное значение анодного тока
~Id’ Лгтах drwax ~77'^d' (20.6)
По среднему значению тока определяется тип вентиля.
Амплитуда обратного напряжения на вентиле
^max=^2m=V2-C/2=7r-^0- (20-7)
Преимущество схемы - простота; недостатки - низкое каче-
ство выпрямленного напряжения и плохое использование вентилей
и трансформатора.
Эта схема применяется для выпрямителей очень малой мощ-
ности, у которых выпрямленный ток мал и удовлетворительное
сглаживание пульсаций может быть обеспечено при помощи про-
стейшего фильтра.
20.2.2. Учет неидеальности вентилей и трансформатора
На рис. 20.3 приведена схема замещения однофазного одно-
полупериодного выпрямителя с учетом неидеальности вентиля и
активного сопротивления обмоток трансформатора (а) и ее преоб-
разование (б).
На схеме Uq и ra - пороговое напряжение и дифференциаль-
293
ное сопротивление вентиля, га - активное сопротивление обмоток
трансформатора, приведенное ко вторичной стороне,
га = г\ + г2 • (20.8)
Здесь Fi и г2 — активные сопротивления первичной и вторичной
обмоток.
Напряжение на выходе реального выпрямителя
^ = ^о-^о-^-(га + гд). (20.9)
Формула (20.9) является уравнением внешней характеристики
выпрямителя. Внешняя характеристика - это зависимость вы-
прямленного напряжения от выпрямленного тока.
Рис. 20.3. Схема замещения однофазного однополупериодного выпрямителя
с учетом неидеальности вентиля и трансформатора (а) и ее преобразование (б)
Из формулы (20.9) видно, что если определено среднее значе-
ние идеального выпрямленного напряжения, то, зная параметры
схем замещения вентиля и трансформатора, можно найти реальное
выпрямленное напряжение.
20.2.3. Однофазная нулевая схема выпрямления
На рис. 20.4 а приведена однофазная нулевая схема выпрямле-
ния, а временные диаграммы токов и напряжений при чисто актив-
294
ной ( Ld = 0) и активно-индуктивной (Ld = °° ) нагрузке изображены
на рис. 20.4 б, в.
Рассмотрим случай Ld = 0. При построении диаграмм для
вторичных ЭДС и выпрямленного напряжения потенциал ну-
левого вывода трансформатора принят за 0. На вторичной сто-
роне трансформатора действуют противофазные напряжения. Ко-
гда напряжение в точке а положительно по отношению к точке 0,
Рис. 20.4. Однофазная нулевая схема выпрямления (а) и диаграммы токов
и напряжений, иллюстрирующие ее работу при Lj= 0 (б) и Lj= <*> (в)
295
вентилей показано на рис. 20.4 б. Ток через нагрузку в соответст-
вии с законом Ома повторяет форму напряжения на нагрузке При
построении диаграммы для напряжения на вентиле потенциал
катода принят за 0. Когда один из вентилей проводит, напряжение
на нем равно нулю. К запертому вентилю через проводящий вен-
тиль прикладывается двойное напряжение. Токи через вентиль и вто-
ричную обмотку трансформатора на участке проводимости повторя-
ют ток нагрузки. Первичный ток складывается из двух вторичных.
Расчет схем выпрямления позволяет установить связь между
токами и напряжениями на стороне переменного и на стороне по-
стоянного тока, определить ток и напряжение на вентиле, а также
расчетную мощность трансформатора. В связи с близким видом
диаграмм расчет всех схем выпрямления аналогичен. Расчет прове-
дем на примере однофазной нулевой схемы для случая Ld = 0
(рис. 20.4 а, б), принимая допущения об идеальности вентилей и
трансформатора.
Среднее значение идеального выпрямленного напряжения
л
+—
Ud0= — f и2т-coswt-dcot = —— = o,9t/2. (20.10)
71 л 71
2
Среднее значение выпрямленного тока
(20.П)
Kd
В соответствии с диаграммами (рис. 20.4 б) и формулой
(20.10) амплитудные значения выпрямленного напряжения и вы-
прямленного тока
(20-12)
Л/тах=^- (20-13)
Среднее и амплитудное значения тока через вентиль
/а=^, (20.14)
max — I d max — 77 ' а • (20.15)
296
Амплитуда напряжения на вентиле
^отах = 2 • и2т = 2 • ^.U2 -H-Ud0. (20.16)
Действующее значение вторичного напряжения с учетом
(20.10)
C72-1J1’^o- (20.17)
Действующее значение вторичного тока с учетом диаграммы
(рис. 20.4 б)
I 1 2л 1 п
7? = — I • d(ot = |— [/2 ях • sin2w/ • da)t =
2 °max
= = (20.18)
2 2 ° 4 d
Амплитудное значение первичного тока (с учетом коэффици-
ента трансформации п)
1 _ Л) max
ylmax
П
Тогда действующее значение первичного тока
j _ Л; max _ 'Л/ _ ' х/2
y/l-n 2х/2-и и
Для трансформатора рассчитываются действующие
токов, так как они определяют нагрев трансформатора.
Действующее значение первичного напряжения
Ц = U2-n.
Введем понятия: расчетные мощности первичных и вто-
ричных обмоток S2 и расчетная мощность трансформатора
ST. Расчетная мощность обмоток трансформатора определяется ка-
жущейся мощностью обмоток переменного тока. Расчетные мощ-
ности обмоток могут отличаться:
S =ЦI. = =1,23-/L, (20.22)
2х/2-«
S2=2C/2./2=2.1,ll^^./^l,74.^, (20.23)
где Pd - мощность на выходе выпрямителя.
(20.24)
Расчетная (типовая) мощность трансформатора равна полу-
сумме расчетных мощностей обмоток.
(20.19)
(20.20)
значения
(20.21)
297
ST = = i, 48. pd. (20.25)
Коэффициент при Pd показывает, во сколько раз можно
было бы увеличить мощность, пропускаемую через обмотки
трансформатора, если бы он работал не на выпрямитель, а на
активную нагрузку при синусоидальном токе. Увеличение рас-
четной мощности трансформатора вызвано:
1) плохим использованием вторичных обмоток трансформато-
ра, пропускающих ток не все время;
2) загрузкой трансформатора гармониками тока, которые не
используются. На выходе выпрямителя нужна только постоянная
составляющая.
Рассмотрим случай Ld=°° (рис. 20.4 в). Временные диаграм-
мы напряжений не отличаются от диаграмм (рис. 20.4 б). Выпрям-
ленное напряжение содержит постоянную составляющую и гармо-
ники. Так как Ld = °°, а, следовательно, xd =co-Ld =°°, то ток от
гармоник равен нулю и id строго постоянен. Следовательно, токи
вентилей и трансформатора прямоугольные.
Расчетные значения токов, напряжений и мощностей для этого
случая, а также для других схем приведены в табл. 20.1.
20.2.4. Однофазная мостовая схема выпрямления
На рис. 20.5 а приведена однофазная мостовая схема вы-
прямления, а временные диаграммы токов и напряжений при чис-
то активной (Ld = 0) и активно-индуктивной (Ld = °° ) нагрузке
изображены на рис. 20.5 б, в.
Когда напряжение на верхнем выводе вторичной обмотки
положительно, ток проходит от этого вывода через вентиль V\,
нагрузку, вентиль VI на нижний вывод. Когда напряжение на
нижнем выводе вторичной обмотки положительно ток проходит
от этого вывода через вентиль ИЗ, нагрузку, вентиль V4 на верх-
ний вывод. При этом ток через нагрузку всегда идет в одном на-
правлении.
Большинство диаграмм в однофазной нулевой и мостовой
схемах одинаково. Только амплитуда обратного напряжения на
вентиле в мостовой схеме вдвое меньше, и по вторичной обмотке
протекает переменный ток. Поэтому формулы для Id, U^, Ia, 4 max, h,
298
Таблица 20.1
Коэф- фици- ент А 1 0,35 1 сп о 0,87 0,87 о 1,23 о 1
Нагрузка о <2 о 52 о гч о ГЧ о S о S о о о о о
о о о о о о о о си о о си о о с о 40
а" 04 о 04 о г- г- гч" г- 1
S S я О д Е к: | сч *—' fci | О) •—* — у—* — 1 1
— | <ч — I СО —11 со — | еп — 1 — | чэ 1
гч
Е S’ к к: | <ч Оч CD гч" О\ о гч" о 04 О, гч" 1
оматор I со °? ОО сн гч ч УЭ о £ 1,26++ 0,07 1
cSlo? СП к I <ч СП гч U' оо о 00 ОО 1
со «С сн гч СП гч ^7 гч гч о оо Г4 о 1
Трансфо: ’“Ч 1 о о оо о оо О о о 1
гч о о о оо о 00 о 00^ о" О 04 гч о 1
-Г оо о й о СИ о о й о" 1
£ гч гч СП СП 40 40 ГЧ
Схема выпрямления с II и и о II К 8 II н 8 II i? 8 II >? 8 II и 8 II и 8 11 и 8 II >?
Однофазная нулевая Однофазная мостовая Трехфазная нулевая Трехфазный зигзаг Трехфазная мостовая Шестифаз- ная нулевая Двойная трехфазная Условно- двенадцати- фазная
Примечание:* без учета влияния потока вынужденного намагничивания. Фактически эти значения больше.
299
Рис. 20.5. Однофазная мостовая схема выпрямления (а) и диаграммы
токов и напряжений, иллюстрирующие ее работу при Lj= 0 (б) и Lj= °° (в)
полученные для однофазной нулевой схемы, справедливы и для
однофазной мостовой схемы.
Коэффициенты в формулах для Ua max, h, S\, S2, Sr приведены в
табл. 20.1.
20.2.5. Сравнение и применение однофазных схем выпрямления
Преимущество однофазной однополупериодной схемы - просто-
та, недостаток - очень низкое качество выпрямленного напряжения.
300
Преимущества однофазной мостовой схемы:
1) меньше амплитуда обратного напряжения на вентилях;
2) меньше расчетная мощность трансформатора и проще его
изготовление;
3) схема может работать без трансформатора.
Преимущества однофазной нулевой схемы:
1) меньше падение напряжения на вентилях, что особо важно
при низких напряжениях;
2) меньше вентилей (но они более высоковольтные).
Однофазные схемы выпрямления находят применение в вы-
прямителях малой мощности, а также там, где нет многофазного
напряжения.
Однофазная однополупериодная схема применяется в выпря-
мителях самой малой мощности (единицы ватт) или в специальных
устройствах.
При сравнительно низких выходных напряжениях, когда ва-
жен КПД схемы, а обратное напряжение, прикладываемое к венти-
лям, несущественно, целесообразно использовать однофазную ну-
левую схему, в которой ток нагрузки протекает через один вентиль,
и потери в вентилях оказываются в 2 раза меньше. Правда, при
этом растут потери в трансформаторе.
Указанные выше преимущества однофазной мостовой схемы
компенсируют ее недостаток, заключающийся в большем числе
диодов. Поэтому однофазная мостовая схема нашла преобла-
дающее применение в выпрямителях однофазного тока.
20.3. Многофазные выпрямители тока
20.3.1. Трехфазная нулевая схема и ее разновидности
Трехфазная схема выпрямления с нулевым выводом (трехфаз-
ная нулевая схема) приведена на рис. 20.6 а, а временные диа-
граммы токов и напряжений при Ld = °° - на рис. 20.6 б.
В каждый момент времени в схеме проводит вентиль той фа-
зы, которая наиболее положительна. За нуль принят потенциал ну-
левого вывода трансформатора. Выпрямленное напряжение фор-
мируется из верхушек полуволн. Ток ld постоянен, т.к. Ld =°° (см.
выше). Напряжение на первом вентиле - это потенциал точки а от-
носительно точки к. Потенциал точки а относительно нуля изобра-
301
Рис. 20.6. Трехфазная нулевая
схема выпрямления (а) и диа-
граммы токов и напряжений,
иллюстрирующие ее работу
при Ld=°o (б)
жен кривой е2«, потенциал точки к относительно нуля изображен
верхушками полуволн е2а, е2Ь,е2с. Напряжение между точками а и
к равно отрезкам ординат, заключенным между вышеназванными
кривыми. При построении вначале на диаграмме иа всегда нужно
отметить участки проводимости, где падение напряжения равно
нулю, а затем отложить заштрихованные ординаты.
Токи через вентили и вторичные обмотки изображаются пря-
моугольниками, соответствующими участкам проводимости.
Для определения первичного тока ix рассмотрим электромаг-
нитные процессы в трехфазном трансформаторе при работе трех-
фазной нулевой схемы. Рассмотрение проведем для момента, когда
проводит первый вентиль. Примем допущение, что ток холостого
хода трансформатора равен нулю. Для электрической цепи на пер-
вичной стороне по первому закону Кирхгофа справедливо:
Ча + Чв + Чс = 0 • (20.26)
Уравнения для магнитных цепей по второму закону Кирхгофа:
Ча wi ~Чв' wi - ha • и’2 = 0, (20.27)
302
‘\в ’ И’1 _ zic ’ wi = 0 > (20.28)
где И| и w2 — числа витков первичных и вторичных обмоток.
Примем для упрощения допущение, что Wj = и2 = w, тогда по-
лучим систему уравнений для токов. Отсюда
6 Я = ЧС’ 'lA ~ ~^'1В> 'lA + ’ 'lA = '2а ~ 'al' (20.29)
После преобразований получим, что
2 . . 1
Ча ~ ’ 'ai '> Чв ~Чс ='"'' 'ai (20.30)
Зная значения токов фаз в рассматриваемый момент, можно
определить токи при проводимости других вентилей. На рис. 20.6 б
первичный ток z'( повторяет вторичный с точностью до постоянной
составляющей.
В трансформаторе трехфазной нулевой схемы ампервитки
вторичной обмотки не компенсируют ампервитки первичной.
Суммарные ампервитки на каждом стержне составляют ~Idw и
направлены в одну сторону. В трансформаторе возникает одно-
направленный поток вынуященного намагничивания, вызван-
ный нескомпенсированными ампервитками на каждом стерж-
не. Этот поток замыкается по воздуху, приводит к несимметрично-
му перемагничиванию трансформатора, увеличивает индукцию,
ток холостого хода и потери в трансформаторе.
В общем случае нулевая схема может содержать число фаз
большее трех. Введем обозначения: - число фаз первичной об-
мотки; т2 — число фаз вторичной обмотки; т - произведение числа
фаз на число выпрямляемых полупериодов (пульсность схемы).
Основные соотношения в схеме при Ld = °° (см. рис. 20.6):
Ud0=—!— - Г Jl-U2-cosa)t-da)t = -^2-sm /w (20.31)
In tn J n m
' -я/m '
Так как в трехфазной нулевой схеме т=Ъ, то
Ud0 = 1,17-С/2. (20.32)
Среднее и амплитудное значения выпрямленного тока
ld=Id^=^- (20.33)
Rd
303
Среднее и амплитудное значения тока через вентиль при /и=3
Ia=^ Iam^=ld, (20.34)
а амплитуда напряжения на вентиле
Действующее Ц,тах=2,О9-^о. (20.35) значение вторичного напряжения, с учетом
(20.32) U2=^- (20.36)
Действующее значение вторичного тока для трехфазной нуле-
вой схемы, с учетом диаграммы (рис. 20.6 б)
J1 2я/3 1
----[ (20.37)
2Я i 7з
Действующее значение первичного тока
(— . ld_)2.27Г + (1. Ld_\2 . / з' п 3 3 п 3 _ 3/7 (20.38)
Действующее значение первичного напряжения 1 1,17 Расчетные мощности обмоток и трансформатора: (20.39)
S2 = 3 (7, Д = 3-^---^ = 1,48-Л, 1,17 7з (20.40)
•V -3-Ц-/t 1,17 3/7 = 2 d =1,21-pd, (20.41) (20.42)
Полученные результаты для расчетных мощностей не отража-
ют реального расхода активных материалов, так как в трансформа-
торе имеется поток вынужденного намагничивания, который при-
водит к несимметричному перемагничиванию сердечника, увели-
чению тока холостого хода и потерь в стали. Это вызывает увели-
чение расхода меди и стали. Таковы недостатки схемы.
Преимущества схемы:
1) качество выпрямленного напряжения лучше, чем в одно-
фазных схемах;
2) простота;
304
3) возможность применения бестрансформаторных схем для
питания двигателей напряжением 220 В от стандартной сети.
Схема широко применяется в электроприводах малой и сред-
ней мощности.
Поток вынужденного намагничивания устраняется в схеме
грехфазный зигзаг, приведенной на рис. 20.7. В этой схеме на вто-
ричной стороне трансформатора ток всегда проходит через две полу-
обмотки, находящиеся на разных стержнях. Это позволяет компенси-
ровать ампервитки первичных обмоток на соответствующих стерж-
нях. На каждом из стержней ток проходит через полу обмотки снача-
ла в одном направлении, а потом - в другом. Недостатки схемы: ус-
ложняется конструкция трансформатора и возрастает расход меди.
Рис. 20.7. Выпрямитель по схеме трехфазный зигзаг (а), диаграммы
первичного тока и напряжения (б) и векторные диаграммы (в),
иллюстрирующие его работу
При применении бестрансформаторных схем для питания
двигателей напряжением 220 В от общей сети осуществляется па-
раллельная работа трехфазных схем выпрямления с нулевым выво-
дом от одного общего цехового трансформатора (рис. 20.8). При
разном включении вентилей потоки вынужденного намагни-
чивания взаимно компенсируются и условия работы трансфор-
матора не ухудшаются.
305
Рис. 20.8. Параллельная работа трехфазных нулевых схем выпрямления
от общей сети при отдельных нагрузках и разном включении вентилей (а);
поясняющие диаграммы первичного тока и напряжения (б)
На вторичной стороне трехфазного трансформатора может
быть создана шестифазная система напряжений. Для этого на схеме
рис. 20.9 а нужно соединить между собой точки О}, О2 и О. При
этом схема выпрямления превращается в схему шестифазпая звез-
да с нулевым выводом (шестифазная нулевая схема).
б)
ДЛЯ "
elae2be2c SPoi-0;
е2хе2у-е2г <РО2^’->
иа 'Ро =0- 0
i
а) А В С
Рис. 20.9. Выпрямитель по схеме двойная звезда с уравнительным реактором (а)
и диаграммы токов и напряжений, иллюстрирующие его работу при Ld= ос (б)
306
Преимущества этой схемы — лучше качество выпрямленного
напряжения (шестифазные пульсации), проще управление, так как
все вентили имеют общий катод.
Недостатки - наличие переменного по знаку потока вынуж-
денного намагничивания трехкратной частоты, плохое использова-
ние трансформатора и вентилей (работают 1/6 периода), плохая
(круто падающая) внешняя характеристика.
Последний недостаток превратился в преимущество и обусло-
вил применение схемы в сварочных трансформаторах, где требует-
ся ограничение тока при коротких замыканиях.
20.3.2. Схема две обратные звезды с уравнительным
реактором
Схема выпрямления две обратные звезды с уравнитель-
ным реактором (схема Кюблера), приведенная на рис. 20.9 а, по-
зволяет устранить недостатки схемы шестифазная звезда с нулевым
выводом.
Уравнительный реактор служит для уравнивания мгно-
венных значений выпрямленного напряжения обеих звезд от-
носительно нагрузки и обеспечения параллельной работы звезд
на общую нагрузку. Для этого в каждый момент в каждой из звезд
должен проводить один вентиль.
Доказательство этого проведем в два этапа.
1-й этап. Пусть уравнительный реактор выполняет поставлен-
ную задачу, и в момент a>tl проводят вентили Vx и V2 (рис. 20.9 б).
ЭДС е2а самая положительная, a e2z тоже положительная, но
меньше е2а. Тогда между точками С\ и О2 действует разность по-
тенциалов с указанной на рис. 20.9 а полярностью. Уравнительный
реактор делит эту разность пополам. По отношению к нагрузке у
большей ЭДС вычитается, а к меньшей прибавляется полуразность.
При этом выпрямленные напряжения звезд относительно нагрузки
уравниваются. В момент a)t2 е2а < e2z, полярность напряжения на
уравнительном реакторе меняется. Выпрямленное напряжение на
нагрузке идет посередине между мгновенными значениями ЭДС
работающих фаз.
2-й этап. Напряжение на уравнительном реакторе треугольное
с тройной частотой 150 Гц (рис. 20.9 6). Чтобы на индуктивности
создавалось такое напряжение, через нее должен идти переменный
307
ток, для которого должен существовать контур. Если Ld=°°, То
переменный ток на участке ...сс>/2 может проходить только по
контуру через Pj, К2. Условие прохождения этого тока - достаточ-
ная величина выпрямленного тока нагрузки, на который он накла-
дывается. Это возможно, если выполняется условие
Лтах=4/2>/дтах, (20.43)
где /дтах - амплитуда тока намагничивания уравнительного реак-
тора.
Ток намагничивания добавляется к анодному току одного
вентиля и вычитается из анодного тока другого вентиля (см.
рис. 20.9 б). Ток, при котором прекращается возможность совме-
стной параллельной работы звезд, называется критическим
( d Крит )’
Ъкр„т=27мтах. (20.44)
Если ld > Id крит, то схема работает в режиме двойной
трехфазиой звезды, т.е. две трехфазные нулевые схемы работают
параллельно на общую нагрузку. При этом каждый вентиль прово-
дит 1/3 периода и обеспечивается взаимокомпенсация первичных и
вторичных ампервитков в трансформаторе, а, следовательно, нет
потока вынужденного намагничивания.
Если !d < Id крнт, то схема переходит в режим шестифазной
звезды с нулевым выводом. Каждый вентиль и фаза на вторичной
стороне проводят 1/6 периода. Напряжение на выходе резко повы-
шается.
Чтобы схема в основном работала в режиме двойной трехфаз-
ной звезды, критический ток должен быть мал. Обычно
h Крит = (1 • • 3)%/j ном •
Выпрямленное напряжение при 7j=0
(7^0 =1,35(72; (20.45)
выпрямленное напряжение при /j>4/Kpilr
=1,17С/2. (20.46)
Среднее и амплитудное значения выпрямленного тока
</=Лйпах=^- (20 47)
Kd
308
Среднее и амплитудное значения тока через вентиль
4=^; 4тах=^- (20.48)
О 2
Амплитуда напряжения на вентиле и действующее значение
вторичного напряжения, как и в трехфазной нулевой схеме, опре-
деляются по формулам (20.35), (20.36).
Действующие значения вторичного и первичного токов с уче-
том диаграммы (рис. 20.9 б)
Л=-^; /.=—(20.49)
2-V3 п-у/6
Действующее значение первичного напряжения определяется
по формуле (20.39).
Расчетные мощности обмоток, трансформатора и уравнитель-
ного реактора
S =6-(72-/2=6--^--—^= = 1,48-Л; (20.50)
1,17 2-л/з
S, =3-Ц-/1 =2-^-n---^ = l,045-Pd; (20.51)
1,17 и <6
ST = 51 ^2- = 1,26 Pd; (20.52)
5yp=0,07-Prf; £^=1,35-^. (20.53)
Преимущества этой схемы: отсутствие потока вынужденного
намагничивания, лучшее качество выпрямленного напряжения и
малый средний ток через вентиль.
Недостатки схемы: подъем напряжения при малых токах,
сложнее трансформаторное оборудование.
20.3.3. Трехфазная мостовая схема
Трехфазная мостовая схема выпрямления (схема Ларионова)
приведена на рис. 20.10 а, а временные диаграммы токов и напря-
жений при Ld =°° - на рис. 20.10 б. Вентили К2,К6,К4, у которых
соединены аноды, называют анодной тройкой вентилей;
у которых соединены катоды, - катодной тройкой вентилей. В
катодной тройке вентилей проводит вентиль, у которого анод са-
мый положительный; в анодной тройке вентилей проводит вентиль,
у которого катод самый отрицательный. Если в данный момент фаза
а самая положительная, а с - самая отрицательная, то ток проходит
309
Рис. 20.10. Трехфазная мостовая схема выпрямления (а) и диаграммы
токов и напряжений, иллюстрирующие ее работу при Ld= ос (б)
от фазы а через V{ в нагрузку, через И2 на фазу с. Нумерация вен-
тилей соответствует порядку их работы.
Выпрямленное напряжение формируется из верхушек линей-
ных напряжений. Ток нагрузки Id из-за наличия в схеме индуктив-
ности сглажен. На рисунке он представлен прямой линией. Токи
через вентили изображаются прямоугольниками, соответствующи-
ми участкам проводимости. Вторичный ток переменный, а первич-
310
ный имеет такую же форму. В отличие от трехфазной нулевой схе-
мы трансформатор работает в нормальных условиях.
Расчет проведем для случая Ld = «> (рис. 20.10 а, б), принимая
допущения об идеальности вентилей и трансформатора.
Среднее значение идеального выпрямленного напряжения в
многофазной схеме
UM=—V• f 41-U2n coscot-dM = y^'U2;''Sm^m , (20.54)
2n m \ n/m
—n/m '
где U2n - линейное напряжение на вторичной стороне трансформатора.
В трехфазной мостовой схеме т-6, тогда
C/rf0 = l,35-(Z2jl=2,34-t72. (20.55)
Среднее значение выпрямленного тока
(20-56)
Kd
Среднее и амплитудное значения тока через вентиль
4=^; Липах = Л/- (20-57)
Амплитуда напряжения на вентиле
Uamax = VI-Jw2 =1,О45-^о. (20.58)
Действующее значение вторичного напряжения, с учетом (20.55)
U2=^-. (20.59)
2 2,34
Действующее значение вторичного тока, с учетом диаграммы
(рис. 20.10 6)
(20-60)
V 2л 3 V 3
Действующее значение первичного тока
Ц=^-. (20.61)
п
Действующее значение первичного фазного напряжения
U{=U2-n. (20.62)
Расчетная мощность обмоток и расчетная (типовая) мощность
трансформатора
Sl=S2=Sr = 3-^-^-/d = 1,045-/^. (20.63)
311
20.3.4. Сравнение многофазных схем выпрямления
В табл. 20.1 приведено сравнение основных показателей рас-
смотренных многофазных схем выпрямления.
Преимущества трехфазной мостовой схемы:
1) минимальная расчетная мощность трансформатора, транс-
форматор работает в хорошем режиме, нет потока вынужденного
намагничивания;
2) самое маленькое обратное напряжение на вентиле;
3) самое большое выпрямленное напряжение при том же фазном;
4) малые пульсации;
5) возможность применения бестрансформаторной схемы.
Недостаток: двойное падение напряжения на вентилях, что
особенно важно при малых напряжениях.
Преимущества трехфазной нулевой схемы (по сравнению с
мостовой):
1) простота;
2) меньше падение напряжения на вентилях, что особо важно
при низких напряжениях;
3) меньше вентилей, но они рассчитаны на большее напряжение;
4) возможность применения бестрансформаторной схемы.
Недостаток: наличие потока вынужденного намагничивания.
Трехфазные схемы выпрямления находят широкое применение
в выпрямителях средней и большой мощности. В большинстве
случаев применяется трехфазная мостовая схема. Трехфазная
нулевая схема может оказаться целесообразной при низких напря-
жениях, а также в бестрансформаторных выпрямителях.
Схема с уравнительным реактором имеет преимущества при
больших токах и низких напряжениях.
20.4. Управляемые выпрямители тока
20.4.1. Режимы работы выпрямителей
В зависимости от вида выпрямленного тока существует три
режима. Обозначим угол проводимости вентилей - Л.
Режим работы, при котором токи вентилей следуют друг за
другом без пауз, но выпрямленный ток спадает до нуля, называется
граничным (рис. 20.11 а). В граничном режиме угол проводимости
вентилей
312
(20.64)
. 2я
Ар ~
т
Режим работы, при котором токи вентилей следуют друг за
другом с паузой, называется прерывистым (рис. 20.11 б). В пре-
рывистом режиме угол прово-
димости вентилей
2тг
АР<— • (20.65)
т
Режим работы, при кото-
ром выпрямленный ток не спа-
дает до нуля, а анодные токи
соседних вентилей перекрыва-
ются или следуют без пауз, на-
зывается непрерывным (рис.
20.11 в). В непрерывном режи-
ме угол проводимости венти-
лей
7.71
А> —. (20.66)
т
Режим работы существен-
но влияет на все характеристи-
ки выпрямителя.
Рис. 20.11. Режимы работы управляе-
мых выпрямителей: граничный (а),
прерывистый (б) и непрерывный (в)
20.4.2. Регулировочные характеристики идеального
управляемого выпрямителя при активно-индуктивной
нагрузке
Во всех описанных схемах выпрямления вместо диодов могут
быть включены тиристоры. При этом выпрямители становятся
управляемыми. Управляемые выпрямители позволяют не толь-
ко выпрямлять напряжение, но и изменять его величину.
Регулировочная характеристика - это зависимость вы-
прямленного напряжения от угла управления a : Ud = /(О').
На рис. 20.12 а приведена схема управляемого выпрямителя,
выполненного по трехфазной нулевой схеме. Временные диаграм-
мы токов и напряжений при Ld=°° приведены на рис. 20.12 б. При
построении приняты допущения, что вентили и трансформатор иде-
альны. Рассмотрим процессы, происходящие в этой схеме. Всегда
313
Рис. 20.12. Управляемый вы-
прямитель по трехфазной ну-
левой схеме (а) и диаграммы
токов и напряжений, иллюст-
рирующие его работу
при Ld= оо, Lu = 0 (б) и La = 0,
La= 0(в)
проводит тот вентиль, анод которого самый положит ельный, а на
управляющий электрод которого подан управляющий импульс.
Угол управления а измеряется от точки естественной ком-
мутации (в которой начал бы проводить вентиль в неуправляемом
выпрямителе) до момента подачи управляющего импульса и вклю-
чения тиристора.
В момент щ/, (см. рис. 20.12 6) включается 1-й вентиль, так
как потенциал его анода самый положительный и на его управ-
ляющий электрод подан импульс. Этот момент задержан на угол сс
по отношению к моменту, когда бы вентиль включился в неуправ-
ляемом выпрямителе. Ток в цепи нагрузки непрерывен (Ld =оо) и
314
постоянен. В момент a)t2 напряжение е2а достигает 0. но ток про-
должает проходить за счет энергии, запасенной в индуктивности, а
выпрямленное напряжение становится отрицательным. На участке
проводимости cut। — cot3 напряжение на вентиле равно 0, а далее оно
определяется ординатами, заключенными между кривыми е2а
(тонкая линия) и ud (жирная линия). При этом потенциал катода
принимается за нуль. В момент напряжение на вентиле меняет
знак и становится положительным.
Для изменения выпрямленного напряжения нужно изменять
угол управления. Диаграмма рис. 20.12 б иллюстрирует работу вы-
прямителя в непрерывном режиме. В соответствии с диаграммой
идеальное значение выпрямленного напряжения при угле управле-
ния а
Л
+—+а
Uda0-—'— [ ^2 U2 cosO)t-d(j)t. (20.67)
2?r/w /
—+a
m
После преобразований с учетом (20.31)
t<ta0=^0cos«- (20-68)
Выражение (20.68) является уравнением регулировочной
характеристики выпрямителя в непрерывном режиме. Его час-
то записывают в относительных единицах (^g0 = f \ принимая
за базу напряжение Ud0:
^^ = cosa. (20.69)
^d0
Диаграмма рис. 20.12 в иллюстрирует работу выпрямителя в
прерывистом режиме при Ld~0. Из диаграммы видно, что если
угол управления станет меньше
30°, то прерывистый режим сме-
нится непрерывным. Угол управ-
ления, при котором меняется
режим, называется граничным.
В табл. 20.2 приведены значения граничного угла (7.гр для схем вы-
прямления с различной пульсностью при чисто активной нагрузке.
Если угол управления меньше а1р, то при любой активно-
Таблица 20.2
т 2 3 6
«п, 0° 30° 60°
315
индуктивной нагрузке режим будет непрерывным. При углах
больше <7,р возникает прерывистый режим.
В прерывистом режиме при чисто активной нагрузке выпрям-
ленное напряжение,
iTt/m
—+а
т
1 - sin(«---)
т
- Л
2 • sin —
т
(20.70)
Выражение (20.70) является уравнением регулировочной ха-
рактеристики выпрямителя в прерывистом режиме при чисто ак-
тивной нагрузке.
На рис. 20.13 представлены регулировочные характеристики в
относительных единицах для различных схем выпрямления. За ба-
Рис. 20.13. Регулировочные
характеристики управляемых
выпрямителей
нагрузки замедляется спад
зовое принято выпрямленное напря-
жение неуправляемого выпрямителя.
Таким образом, вид регулировочной
характеристики зависит от режима.
В непрерывном режиме регу-
лировочная характеристика иде-
ального выпрямителя не зависит от
вида нагрузки.
В прерывистом режиме регули-
ровочная характеристика зависит от
схемы (пульсности) и величины ин-
дуктивности. С ростом индуктивности
анодных токов, и, поэтому растет гра-
ничный угол. Одновременно из-за появления отрицательных участ-
ков выпрямленного напряжения уменьшается угол управления, при
котором среднее значение выпрямленного напряжения становится
равным нулю.
Таким образом, диапазон изменения угла управления, необхо-
димый для полного регулирования выпрямленного напряжения оп-
ределяется регулировочной характеристикой выпрямителя.
Следует отметить, что рассмотренные регулировочные харак-
теристики справедливы только для идеального выпрямителя при
активно-индуктивной нагрузке.
Регулировочные характеристики реального выпрямителя, в
том числе для других видов нагрузки, будут рассмотрены ниже.
316
В)
20.14. Схема замещения транс-
Рис,
форматора, приведенная к первичной
стороне (а), ее упрощение (б) и упро-
щенная схема, приведенная к вторич-
ной стороне (в)
20.4.3. Внешние и регулировочные характеристики
в непрерывном режиме
Для анализа процессов в реальном выпрямителе необходимо
учесть параметры трансформатора. Схема замещения однофазного
трансформатора приведена на рис. 20.14 а. На схеме и г2 - ак-
тивное сопротивление первич-
ной и приведенное активное
сопротивление вторичной об-
моток; и х'2 - индуктивное
сопротивление рассеяния пер-
вичной и приведенное индук-
тивное сопротивление рассея-
ния вторичной обмоток; хм и
ги — индуктивное и активное
сопротивление в контуре на-
магничивания.
Для упрощения пренебре-
жем током холостого хода и
потерями в контуре намагни-
чивания, то есть примем, что
гм - 0, хм = «>. Тогда схема за-
мещения преобразуется к виду
рис. 20.14 б. При этом в транс-
форматоре не учитывается
контур намагничивания.
Схема замещения транс-
форматора, приведенная к сто-
роне вентилей, показана на рис. 20.14 в. На схеме е2 и и2 - вторич-
ная ЭДС и вторичное напряжение; ги и хо - анодные активное и
индуктивное сопротивления.
ra ~ rl + r2 ’ Ха = Х1 + Х2 • (20.71)
Анодное активное сопротивление - это активное сопротив-
ление обмоток трансформатора, приведенное ко вторичной сторо-
не, а анодное индуктивное сопротивление - это индуктивное со-
противление рассеяния, приведенное ко вторичной стороне. Анод-
ному индуктивному сопротивлению ха соответствует анодная ин-
дуктивность La.
317
Напряжение короткого замыкания трансформатора ик состоит
из активной иа и реактивной ир составляющих. В мощных транс-
форматорах основная составляющая реактивная, а в мало-
мощных - активная. Это позволяет, в зависимости от мощности
выпрямителя, пренебрегать одним из сопротивлений в схеме заме-
щения рис. 20.14 в.
Схема замещения трехфазного трансформатора аналогична
рис. 20.14, но содержит три фазы.
Выпрямленное напряжение изменяется при изменении тока из-
за наличия внутреннего сопротивления выпрямителя, вызванного
неидеальностью вентилей и трансформатора.
На рис. 20.15 а представлена схема замещения, полученная из
схемы рис. 20.12 а, при приведении трансформатора большой мощ-
ности к стороне вентилей. Так как индуктивность в цепи нагрузки
принята бесконечной, то ток в ней можно заменить источником тока.
Рис. 20.15. Схема замещения управляемого выпрямителя, выполненного
по трехфазной схеме с нулевым выводом, при допущении Lj= со, £о & 0, га= 0 (а)
и диа!раммы токов и напряжений, иллюстрирующие его работу (б)
На рис. 20.15 б приведены временные диаграммы, учитываю-
щие невозможность мгновенного изменения тока через вентиль из-
за наличия в цепи каждого вентиля индуктивностей La (см.
рис. 20.15 а). Коммутация - это переход тока с одного вентиля
318
2£
Рис. 20.16. Схема замещения
цепи коммутации
па другой. В выпрямителе он происходит под действием напряже-
ния сети (естественная коммутация). Угол коммутации у - это
угол, в течение которого вентили, участвующие в коммутации, од-
новременно проводят ток.
Коммутация в вентилях осуществляется под действием линей-
ной ЭДС (рис. 20.15) Поскольку ток в нагрузке неизменен, цепь
нагрузки в переходном процессе не участвует. Поэтому на рис. 20.16
приведена схема замещения контура
коммутации. Эта схема замещения
справедлива до момента, когда ток во
включающемся вентиле достигнет ве-
личины тока нагрузки, а в выключаю-
щемся достигнет нуля. На этом участке
переходный процесс описывается
дифференциальным уравнением
2£o^ = E2j]m-sin((y/+a), (20.72)
at
где Е^т — амплитуда линейной ЭДС, ia — ток во включающемся
вентиле.
Решение дифференциального уравнения (20.72)
(20.73)
состоит из i'a — принужденной составляющей и i" - свободной со-
ставляющей. Принужденная составляющая равна установившемуся
значению тока:
F ( 7Г 3 F
4=-^™.sin cot + ct----=—^--cos(ft)Z + a). (20.74)
2-^а ч 2 - 2хи
В момент включения a)t = O ia=0, поэтому с учетом (20.73)
i" = -i'a. Отсюда: i”a = ^2лт cos а. Тогда
2хй
zo =-^2^-^cos(o')-cos(fD/ + O')J. (20.75)
2хо
Формула (20.75) определяет закон нарастания тока во вклю-
чающемся вентиле на участке коммутации. Коммутация заканчива-
ется при ia = ld в момент cot = у .
у - угол коммутации, в течение которого ток переходит с од-
ного вентиля на другой. Он может быть определен из уравнения
319
(20.76)
£,
Id ~ т [cos о: - cos(a + у)].
2Д,
В период коммутации мгновенное значение выпрямленного
напряжения падает и находится посредине между фазными ЭДС:
- е2с + е2а
d 2
Мгновенное значение коммутационного падения напряжения
(20.77)
(20.78)
Среднее значение коммутационного падения напряжения
1 “7 Е-, “7
\UX -------- Г An -dcot = —~~ Г sinow dcot =
2-л/т J о 2л- J
т
_ Еът .j~cosa — cos(cz + y)J, (20.79)
2- —
m
и после подстановки из (20.76) в (20.79) получим:
= (20.80)
2л/т
В фазных напряжениях в моменты коммутаций также появля-
ются провалы и выбросы. На рис. 20.17 представлены временные
диаграммы напряжений и токов в трехфазной мостовой схеме. На
диаграммах видны провалы и выбросы в фазных и линейных вто-
ричных напряжениях при синусоидальных первичных напряжениях.
Уточним теперь понятие «внешняя характеристика».
Внешняя характеристика - это зависимость выпрямленно-
го напряжения от выпрямленного тока при постоянном угле
управления.
Для мощных выпрямителей с учетом (20.80) уравнение
внешней характеристики:
Ud=Udo-cosa~Iz-^L- (20.81)
2л/т
Внешние характеристики, построенные по уравнению (20.81)
приведены на рис. 20.18.
Для выпрямителей средней мощности с учетом падения на-
пряжения на активных сопротивлениях, коммутационного падения
320
Рис. 20.17. Диаграммы напряжений и токов, иллюстрирующие работу управ-
ляемого выпрями теля, выполненного по трехфазной мостовой схеме
и падения на вентилях (см. формулу (20.9)) уравнение внешней ха-
рактеристики
Ud = Udo 'cosa “ aUo ~Id' (а,т + ara + ) > (20.82)
2л/m
где Uo - пороговое напряжение; rT - дифференциальное сопротив-
ление тиристора.
I 1 Зак. 50
321
Коэффициент а учитывает, через сколько вентилей и сколько
обмоток схемы проходи! ток. Например, в трехфазной нулевой
схеме а = 1, в трехфазной мостовой - а = 2.
При напряжениях в сотни вольт можно пренебречь падением
fd
Рис. 20.18. Внешние
характеристики управ-
ляемого выпрямителя
напряжения на тиристорах. В маломощных
выпрямителях можно не учитывать ха, а в
мощных можно пренебречь га.
Удобно перейти к записи внешней ха-
рактеристики в относительных единицах,
принимая за базу идеальное значение вы-
прямленного напряжения Ud0 и номиналь-
ный выпрямленный ток IdH и использовав
напряжение короткого замыкания транс-
форматора UK°/o.
Ud
—— = COSO! - А
^dO
J_d_
100 idn
(20.83)
Здесь А — коэффициент, зависящий от схемы (например, для
трехфазной мостовой - А=0,5, для других схем приведен в
0,2 0,4 0,6 0,8 1,0
Рис. 20.19. Внешние характеристи-
ки управляемого выпрямителя в
непрерывном режиме в относи-
тельных единицах при допущении
идеальности вентилей
табл. 20.1). На рис. 20.19 приведе-
но семейство внешних характери-
стик мощного выпрямителя в от-
носительных единицах.
Выражение в скобках в фор-
муле (20.82) может быть рассмот-
рено как эквивалентное сопротив-
ление, определяющее наклон внеш-
ней характеристики. Тогда внеш-
ним характеристикам можно при-
вести в соответствие схему эквива-
лентного генератора рис. 20.20.
Эквивалентная ЭДС и эквивалент-
ное сопротивление соответственно
равны:
£э = Ud0 coscr - aL/0, гэ = arT + ctra + ———. (20.84)
2я/ш
Теперь можно уточнить определение понятия регулировочная
характеристика с учетом неидеальности выпрямителя. Регулиро-
322
вечная характеристика - это зави-
симость выпрямленного напряжения
от угла управления а при постоянст-
ве выпрямленного тока. Она может
быть построена по уравнениям (20.81)—
(20.83). С ростом тока регулировочная
характеристика смещается вниз по от-
ношению к идеальной (см. рис. 20.13) и
тем сильнее, чем больше гэ.
Рис. 20.20. Эквивалентная
схема выпрямителя
Так как при экспериментально^ исследовании трудно обеспе-
чить постоянство тока, то часто регулировочные характеристики
снимают приближенно при постоянстве сопротивления нагрузки.
20.4.4 . Внешние и регулировочные характеристики
в прерывистом режиме
Прерывистый режим возникает:
1) в однофазной однополупериодной схеме при любой нагрузке;
2) в ///-фазной схеме при активно-индуктивной нагрузке, если
«>«гр и
3) в /л-фазной схеме при активно-индуктивной нагрузке с про-
тивоЭДС (ПЭДС), если a > amin или a > arp, a xd < xd rp;
Прерывистый режим при активно-индуктивной нагрузке был
рассмотрен в п. 20.4.2.
Рассмотрим диаграммы токов и напряжений в трехфазной ну-
левой схеме (рис. 20.21 а) при работе на активно-индуктивную на-
грузку с ПЭДС Е. Анализ проведем при допущении об идеальности
трансформатора и вентилей.
При Ld = 0 ток через нагрузку проходит с момента подачи
управляющего импульса до момента, когда мгновенное значение
фазной ЭДС станет меньше ПЭДС (рис. 20.21 б). Угол управления
а должен быть не меньше anijn, при котором мгновенное значение
фазной ЭДС станет равно ПЭДС. Режим работы прерывистый.
При Rcl = 0 и Ld > 0 (рис. 20.21 в) ток через тиристор, за счет
энергии запасенной в индуктивности, продолжает проходить и по-
сле момента, когда мгновенное значение фазной ЭДС станет меньше
ПЭДС. Площадки, ограниченные кривой ud выше и ниже ПЭДС
и
323
Рис. 20.21. Трехфазная нулевая
схема выпрямления при работе на
активно-индуктивную нагрузку с
ПЭДС (а); диаграммы токов и
напряжений при допущении La = 0,
Ra = 0 для режимов: прерывистого
при La = 0 (б); прерывистого при
Rd= 0 (в); граничного при Rd= 0 (г);
непрерывного при Ld=00 (д);
граничного при Rd= 0 и а = amin (е)
равны. При Rd > 0 нижняя площадка меньше верхней. Режим рабо-
ты прерывистый.
При уменьшении ПЭДС растет ток нагрузки, увеличивается
угол проводимости вентиля Л. Когда он становится равным 120
градусам режим становится граничным (рис. 20.21 г). Этому режи-
му соответствует угол управления агр, а также соответствующая
индуктивность Ldrp
Если теперь увеличивать Ld, то ток становится непрерывным,
а форма напряжения на нагрузке не меняется (рис. 20.21 д). При
324
сравнении диаграмм рис. 20.21 д и рис. 20.12 б можно сделать вы-
вод, что в непрерывном режиме процессы в выпрямителях не за-
висят от характера нагрузки и одинаковы при активно-
индуктивной и активно-индуктивной с ПЭДС. Поэтому все соот-
ношения, полученные при активно-индуктивной нагрузке в не-
прерывном режиме, справедливы и для нагрузки с ПЭДС в непре-
рывном режиме.
Как указывалось выше при работе на ПЭДС существует мини-
мальный угол управления amin, при котором еще может быть
включен тиристор. На рис. 20.21 е показан граничный режим, когда
а = amin = агр. При меньшем угле управления тиристор просто не
включится (при узких управляющих импульсах). Минимальный
угол управления czmin = f (£).
Из рис. 20.21 б видно, что максимальная ПЭДС, на которую
может работать выпрямитель, выполненный по трехфазной нуле-
вой схеме, при ofmill =60° равняется Если уменьшать вели-
чину ПЭДС, одновременно увеличивая угол а, то при Е = 0 угол а
достигнет 150°. На рис. 20.22 а приведена регулировочная характе-
ристика, соответствующая работе выпрямителя, выполненного по
трехфазной нулевой схеме, на ПЭДС через активное сопротивле-
ние. На участке характеристики, показанном пунктиром, при углах
управления меньших amin тиристоры не могут включаться. Но ес-
ли при этих углах подавать широкие управляюшие импульсы, то
тиристоры будут включаться в моменты, соответствующие Qfmin.
На рис. 20.22 а приведены также регулировочные характеристики
для непрерывного и прерывистого режима при других видах на-
грузки. На рис. 20.22 а выполнено приближенное построение
внешних характеристик для соответствующих видов нагрузки и
режимов. При увеличении тока прерывистый режим переходит в
непрерывный, и далее внешняя характеристика не зависит от вида
нагрузки.
На рис. 20.22 б приведены соответствующие регулировочные
характеристики и построение внешних характеристик для трехфаз-
ной мостовой схемы.
Участки внешних характеристик, соответствующие преры-
вистому режиму, могут быть рассчитаны путем решения системы
трансцендентных уравнений. Ток, при котором меняется режим,
325
30 60 90 120а,град 4/lp0,2 0,4 0,6 0,8 1,0
Рис. 20.22. Регулировочные и внешние характеристики при различных видах
нагрузки в прерывистом и непрерывном режимах для трехфазной нулевой (а)
и трехфазной мостовой (б) схем
называется граничным и может быть определен по приближенной
формуле
/t/rp = sin а. (20.85)
+ xd
Коэффициент В зависит от схемы выпрямления: если т=3, то
5=0,46, если /л=6, то 5=0,22.
При анализе формулы можно сделать вывод, что для умень-
шения граничного тока Z(frp нужно увеличивать xd.
Вывод: основное влияние на вид регулировочных и внешних
характеристик оказывает режим работы.
326
20.5. Энергетические показатели выпрямителей, качество
выпрямленного напряжения и пути их улучшения
Энергетические показатели выпрямителя — это коэф-
фициент полезного действия (КПД), коэффициент мощности и
cos <р.
Качество выпрямленного напряжения характеризует ко-
эффициент пульсаций.
20.5.1. КПД выпрямителя
кпд выпрямителя определяется по формуле
Pd
0 =
(20.86)
где ДР — мощность потерь в выпрямителе, Pd - мощность на выхо-
де выпрямителя.
Pd=Ud-Id. (20.87)
КПД выпрямителя равен произведению КПД вентильной части
rjB и КПД трансформатора t]T
О=Т1вДт- (20.88)
КПД вентильной части
где ДРВ — потери в вентильной части.
APB=a-^Ua-Id, (20.90)
где \Ua - падение напряжения на проводящем вентиле, а - коли-
чество вентилей через которые последовательно проходит ток.
Учитывая (20.89)-(20.90), получим:
(20'91)
1+- -
При напряжениях в сотни вольт КПД вентильной части со-
ставляет 0,98...0,99, а, учитывая, что КПД трансформатора средней
мощности имеет примерно ту же величину, можно сделать вывод,
что КПД выпрямителя больше 0,96. Следовательно, уже при на-
пряжениях в сотни вольт полупроводниковый выпрямитель по
КПД близок к идеалу.
327
Рис. 20.23. Зависимость КПД вен-
тильного (ВП) и электромашинного
преобразователя (ЭМ) от загрузки
Из формулы (20.91) видно,
что КПД полупроводникового
выпрямителя не зависит от тока.
С учетом имеющихся постоян-
ных потерь (в трансформаторе,
системе управления и т.д.) КПД
все же зависит от тока нагрузки.
Но эта зависимость существенно
слабее, а КПД гораздо выше, чем
в электромашинном преобразо-
вателе (рис. 20.23).
20.5.2. Гармонические составляющие в выпрямленном
напряжении и первичном токе
В выпрямленном напряжении имеются постоянная (полезная)
и переменная (вредная) составляющие. Переменные составляю-
щие в кривой выпрямленного напряжения (тока) называются пуль-
сациями. Они содержат ряд гармоник. При частоте сети f основная
частота пульсаций
(20.92)
где т - пульсность, равная произведению числа фаз на число вы-
прямляемых полупериодов.
При т>1 амплитуда n-ой гармоники пульсаций в неуправляе-
мом выпрямителе (в относительных единицах)
U 2
-^ =----------, (20.93)
Ud (тп}-\
где п - номер гармоники по отношению к основной частоте пуль-
саций. Он соответствует натуральному ряду чисел: 1, 2,3...
Номер гармоники по отношению к частоте сети
к = тп. (20.94)
С ростом номера гармоники ее амплитуда резко убывает, по-
этому в дальнейшем мы будем рассматривать только первую гар-
монику. Коэффициент пульсаций q — это отношение амплитуды
первой гармоники пульсаций к среднему значению выпрямленного
напряжения.
328
q=^=
Ud m
В табл. 20.1 приведены величины
q vi f для некоторых значений т.
С точки зрения улучшения ка-
чества выпрямленного напряжения
увеличение пульсности выгодно, т.к.
увеличивается частота пульсаций и
уменьшается их амплитуда. Коэф-
фициент пульсаций резко растет с
увеличением угла управления а. На
рис. 20.24 видно, что при т = 6 из-
менение глубины регулирования от 1
до 0,4 вызывает увеличение коэффи-
циента пульсаций от 0,057 до 0,8.
(20.95)
Рис. 20.24. Зависимость коэффи-
циента пульсаций от глубины
регулирования для различных
схем; wi - для схемы рис. 20.30 а
Ток, потребляемый из сети вы-
прямителем, в общем случае неси-
нусоидален (см., например,
рис. 20.17). Он содержит ряд гармо-
ник. Номера гармоник по отноше-
нию к частоте сети
к = тп±1. (20.96)
Низшие гармоники имеют частоты
/низ=/(щ±1). (20.97)
Выпрямители генерируют гармоники и посылают их в сеть.
Чем выше пульсность, тем выше частота и меньше амплитуда гар-
моник, генерируемых в сеть, тем легче с ними бороться.
Гармоники первичного тока искажают напряжение сети. Чем
выше внутреннее сопротивление сети, тем сильнее искажения. На-
пряжение в сети становится несинусоидальным
Недостатки полупроводниковых выпрямителей тока: вред-
ное влияние на питающую сеть за счет потребления несинусои-
дальных токов и пульсации в выпрямленном напряжении (токе).
20.5.3. Коэффициент мощности выпрямителя
Коэффициент мощности и cos<p определяют эффективность
передачи электроэнергии через сеть: чем выше коэффициент мощ-
ности, тем большую активную мощность можно пропустить через
329
ту же сеть при сохранении потерь в сети. Коэффициент мощности -
это отношение активной мощности Р, потребляемой из сети к пол-
ной мощности У Установим связь между коэффициентом мощно-
сти и cos<p.
Примем допущение, что напряжение сети синусоидально. То-
гда для трехфазной сети справедливы формулы
Р} = 3 • Ux - /1(1) • costp; (20.98)
^-З-Ц-Zj, (20.99)
где Z1(]) - действующее значение первой гармоники первичного
тока, потребляемого из сети, (р - угол сдвига первой гармоники
первичного тока относительно напряжения сети.
Коэффициент мощности
% = — = cos<p v • cos , (20.100)
S Ix
где v - коэффициент несинусоидальности тока.
Коэффициент несинусоидальности тока
v = -— 1 , (20.101)
I со г2
,>+27^
V п=2 ;1<1)
где 11(пу - действующее значение и-ой гармоники первичного тока.
Чем меньше v, тем сильнее искажения. Отметим, что при пря-
моугольной форме первичного тока (см. рис. 20.5 в; 20.10 б) при т=2
v =0,9, а при т=6 v =0,955. Если ток с учетом коммутации трапе-
циидальный (см. рис. 20.17), то v будет приближаться к единице.
Из рис. 20.25 а видно, что в идеальном выпрямителе может воз-
никать сдвиг между напряжением и первой гармоникой первичного
тока. Этот сдвиг определяется только углом управления и не зависит
от индуктивности нагрузки. Следовательно, если выпрямитель идеален
(р = а. (20.102)
Учитывая (20.69), получим:
coscp = cos а = . (20.103)
Ud0
Следовательно, cos<p определяется глубиной регулирования.
Уменьшение cos<p при регулировании является серьезным не-
достатком управляемых выпрямителей тока.
330
Рис. 20.25. Диаграммы напряжений и токов в управляемом выпрямителе
по однофазной нулевой схеме с естественной коммутацией при ct=30°
для случая La= °0, La= 0 (а) и La *0 (б)
На рис. 20.26 показаны зависимости энергетических показате-
лей идеального выпрямителя от глубины регулирования.
Временные диаграммы, построенные с учетом индуктивности
рассеяния, приведены на рис. 20.25 б. Из диаграмм следует, что в
реальном выпрямителе coscp еще более ухудшается, и
ср = а + ^. (20.104)
Рис. 20.26. Энергетические показатели управляемых выпрямителей
в функции глубины регулирования (при La= °0, La= 0)
Выводы
Преимущества полупроводниковых выпрямителей: высо-
кий КПД и малая зависимость КПД от нагрузки.
331
Недостатки: уменьшение cost/), коэффициента мощности и
ухудшение качества выпрямленного напряжения с ростом глубины
регулирования; генерация высших гармоник, ухудшающих качест-
во напряжения в сети.
20.5.4. Пути улучшения энергетических показателей
выпрямителей и уменьшения их вредного влияния
на питающую сеть
Условно двенадцатифазная схема. Снижение содержания гар-
моник в первичном токе и в выпрямленном напряжении возможно за
счет применения условно двенадцатифазной схемы рис. 20.27 а.
В этой схеме две трехфазные мостовые схемы, фазные ЭДС кото-
рых сдвинуты на 30° из-за разных схем соединений трансформатора,
Рис. 20.27. Условнодвенадцатифазная схема выпрямления (а) и диаграммы пер-
вичных токов трансформаторов и суммарного тока, потребляемого из сети (б)
работают на общую нагрузку. Это улучшает форму общего тока, по-
требляемого из сети (см. рис. 20.27 б).
В результате пульсации на нагрузке становятся 12-кратными, а
5-я и 7-я низшие гармоники первичных токов каждого из мостов
взаимно компенсируются в общем токе, потребляемом из сети. Низ-
шими гармониками, генерируемыми в сеть, становятся 11 -я и 13-я.
Таким образом, пульсации выпрямленного напряжения и гармо-
ники тока, искажающие напряжение сети, существенно уменьшаются
и соответствуют двенадцатифазной схеме (см. табл. 20 1). Схема
332
применяется при питании мощных электроприводов. Улучшаются
только гармонические составляющие, но на совфэто не влияет.
Схемы с нулевыми вентилями. Применение схем с нулевыми
вентилями, шунтирующими выход выпрямителя (рис. 20.28 а), по-
зволяет убрать отрицательные участки выпрямленного напряжения
и сокращает длительность прохождения вторичного и первичного
тока трансформатора, отрезая задний участок тока. При этом первая
гармоника тока сдвигается вперед, угол <р уменьшается, cos <р уве-
личивается (см. рис. 20.28 б). Это простейший способ некоторого
улучшения коэффициента мощности управляемых выпрямителей.
Рис. 20.28. Однофазная
мостовая схема с нулевым
вентилем (а) и диаграммы
токов и напряжений, ил-
люстрирующие ее работу
при Lj= оо, £о= 0 (б)
Фазоступенчатое регулирование. Применение фазоступенча-
того регулирования иллюстрируется на примере однофазной нуле-
вой схемы с отпайками на вторичной стороне трансформатора
(рис. 20.29 а). Если отпайки сделаны от середин вторичных полу-
обмоток, то выпрямленное напряжение при включении вентилей,
подключенных к ним, с углом управления равным нулю будет со-
333
ставлять половину полного напряжения, получаемого при включе-
нии крайних тиристоров. При этом в обоих случаях, если выпрями-
тель идеален, costp = 1
Рис. 20.29 б иллюстрирует вид выпрямленного напряжения
при совместной поочередной работе всех вентилей. На рис. 20.29 в
показано насколько повышаются энергетические показатели при
применении этой схемы по сравнению с обычной однофазной ну-
левой схемой.
Рис. 20.29. Однофазная нуле-
вая схема с фазоступенчатым
регулированием выпрямлен-
ного напряжения (а), диа-
граммы выпрямленного на-
пряжения при a-i = 0 (б) и
энергетические показатели в
функции глубины регулиро-
вания (в) при Ld= 00. Штрихо-
вые кривые соответствуют
обычной однофазной нулевой
схеме
На рис. 20.30 а приведена схема, в которой та же идея реализу-
ется в многофазных схемах. Когда в схеме работают вентили
И1...И12, то она сводится к двум трехфазным мостовым схемам,
работающим через уравнительный реактор ЛУР1 на общую нагрузку.
Когда в схеме работают вентили И7... И14, то она сводится к схеме
две обратных звезды с уравнительным реактором ЛУР2.
334
Рис. 20.30. Трехфазная схема с фазоступенчатым регулированием (а),
энергетические показатели данной схемы (сплошные линии) и трехфазной
мостовой схемы (штриховые) в функции глубины регулирования (б)
Выпрямленные напряжения в этих случаях отличаются в два
раза. При этом в обоих случаях, если выпрямитель идеален, cos<p =1.
На рис. 20.30 б показано насколько повышаются энергетические
показатели при применении этой схемы по сравнению с обычной
трехфазной мостовой схемой.
335
Все описанные выше схемы улучшают коэффициент мощ-
ности и cos^j, но не позволяют получить опережающий угол
сдвига. Это невозможно при естественной коммутации, то есть
при коммутации вентилей с неполной управляемостью за счет
энергии сети.
Применение искусственной коммутации для улучшения
cos(p. Если обеспечить выключение вентилей до точки естествен-
ной коммутации, то можно до этой точки включить другой вентиль.
Тогда угол а становится меньше нуля, следовательно, и угол (р ста-
новится меньше нуля, и выпрямитель для сети становится емкост-
ной нагрузкой. Такое выключение вентилей называют искусствен-
ной коммутацией и для выключения используют узлы коммута-
ции, содержащие конденсаторы.
Применение искусственной коммутации иллюстрируется на
примере однофазной нулевой схемы (рис. 20.31 а). В обычной схе-
ме процессы при угле управления а иллюстрируются временными
диаграммами рис. 20.31 б. Но если параллельно вентилям подклю-
чить узлы искусственной коммутации, выключающие вентили в
Рис. 20.31. Однофазная нулевая схе-
ма с искусственной коммутацией (а)
и диаграммы напряжений и токов в
схеме при а = 30° (б) и а = —30° (в).
Диаграммы даны для случая Ld=
Д> = 0
336
определенные моменты, то в эти же моменты с углом опережения
а можно включить очередные вентили.
Это направление из-за сложности пока не получило широкого
применения в электроприводе. Однако оно находит применение в
электротехнологии. В литературе рассмотрены возможности полу-
чения опережающего угла сдвига без применения дополнительных
коммутирующих вентилей.
Применение запираемых тиристоров открывает новые пер-
спективы. Но развитие в этом направлении затрудняется возникно-
вением перенапряжений при разрыве индуктивных цепей. Для пре-
одоления этих трудностей приходится включать конденсаторы
большой емкости, что приближает решения к схемам с искусствен-
ной коммутацией на незапирасмых тиристорах.
Глава 21
ВЕДОМЫЕ ИНВЕРТОРЫ, РЕВЕРСИВНЫЕ
И РЕКУПЕРИРУЮЩИЕ ПРЕОБРАЗОВАТЕЛИ
21.1. Классификация инверторов
Инвертирование - это преобразование постоянного тока в
переменный. Существует два типа инверторов: ведомые и авто-
номные.
Ведомые инверторы (ВИ) работают на сеть, в которой есть
другие источники электроэнергии. Коммутации вентилей в них
осуществляются за счет энергии этой сети. Частота на выходе ВИ
равна частоте сети, а напряжение - напряжению сети.
Автономные инверторы (АИ) - это инверторы, которые ра-
ботают на сеть, в которой нет других источников электроэнергии.
Коммутации вентилей в них осуществляются благодаря примене-
нию полностью управляемых вентилей или устройств искусствен-
ной коммутации. При этом частота на выходе АИ определяется
частотой управления, а напряжение - параметрами нагрузки и сис-
темой регулирования.
Наиболее часто ведомые инверторы применяются, когда нуж-
но отдать механическую энергию, запасенную в маховых массах
электродвигателя и рабочей машины, обратно в сеть. Торможение
электропривода, осуществляемое таким образом, является наиболее
энергетически эффективным. Количество возвращаемой энергии
может быть весьма велико.
Автономные инверторы применяются для получения регули-
руемой частоты в электроприводах переменного тока, а также для
получения более высоких частот в электротермических и электро-
технологических установках. Они являются основной частью пре-
образователей частоты.
338
21.2. Переход от выпрямительного к инверторному режиму
Рассмотрим, как можно изменить направление потока мощно-
сти в системе, содержащей электрическую машину и аккумулятор
(рис. 21.1).
Если электрическая машина работает в двигательном режиме,
питаясь от аккумулятора, то для того, чтобы изменить направление
потока мощности, нужно привести машину во вращение, подводя
механическую энергию. При этом изменится направление тока и
начнется зарядка аккумулятора (см. рис. 21.1 а). Если необходимо
чтобы направление тока сохранилось, то необходимо привести
электрическую машину во вращение в противоположном направ-
лении (изменить направление ЭДС) и поменять полярность акку-
мулятора (изменить направление ПЭДС) (см. рис. 21.1 б).
Рис. 21.1. Изменение направ-
ления потока мощности при
изменении направления тока
(а) и ЭДС (б)
Таким образом, чтобы изменить направление потока мощности
в системе нужно подвести механическую энергию и либо изменить
направление тока, либо изменить направление ЭДС и ПЭДС.
Ведомые инверторы выполняются по тем же схемам, что и
управляемые выпрямители. Переход от выпрямительного к ин-
верторному режиму возможен в системе (рис. 21.2 а), содержащей
выпрямитель и электрическую машину (ЭМ). Реактор (индуктив-
ность Ld) между выпрямителем и ЭМ воспринимает на себя разни-
цу мгновенных значений ЭДС выпрямителя и ПЭДС двигателя. На
рис. 21.26 приведены диаграммы токов и напряжений, иллюстри-
рующие процессы в выпрямителе, нагруженном на ЭМ, работающую
в двигательном режиме. ЭДС выпрямителя создается в основном по-
ложительными участками полуволн напряжения и ее среднее значе-
ние положительно. Также положительна ПЭДС двигателя.
Если угол управления увеличить до 90°, то ЭДС выпрямителя
уменьшится до нуля, и двигатель остановится. При этом ЭДС вы-
прямителя в одинаковой степени создается положительными и от-
рицательными участками полуволн напряжения (рис. 21.2 в).
339
Изменение направления потока мощности в системе, содер-
жащей вентили, возможно только по второму способу, описанному
выше. Для того чтобы перейти из выпрямительного режима в ин-
верторный нужно:
1) привести во вращение ЭМ в другом направлении, подведя к
ней механическую энергию и переведя ее в генераторный режим;
Рис. 21.2. Переход из вы-
прямительного в инвер-
торный режим в трехфаз-
ной нулевой схеме (а);
б, в, г - диаграммы токов и
напряжений при различ-
ных углах а, иллюстри-
рующие процессы в схеме
340
2) увеличить угол управления (больше 90°), чтобы в основ-
ном использовать отрицательные участки полуволн напряжения
сети и сделать среднее значение ЭДС инвертора отрицательным
(рис. 21 2 г).
При описании процессов в ведомом инверторе, кроме угла
управления а (угла запаздывания), используется угол управления
Д (угол опережения), отсчитываемый от точки, находящейся через
180° от точки естественной коммутации. Следовательно,
Д=180°-а. (21.1)
Угол управления Д не может достигать 0°, так как требуется
время на восстановление запирающих свойств тиристора в прямом
направлении (см. рис. 21.2 г).
21.3. Регулировочные и внешние характеристики
ведомого инвертора
Преобразователь, который может работать как в выпрямитель-
ном, так и в инверторном режиме назовем ведомым преобразова-
телем. На рис. 21.3 приведены внешние и регулировочные харак-
теристики ведомого инвертора в режиме непрерывного тока совме-
стно с характеристиками выпрямителя.
Рис. 21.3. Регулировочные характеристики ведомого преобразователя (а)
в непрерывном (н.р.) и прерывистом (п.р.) режиме при работе на ПЭДС
и его внешние характеристики в непрерывном режиме (б)
Напряжение на зажимах постоянного тока инвертора назовем
инвертируемым напряжением. Так как оно измеряется между теми
341
же точками, чго и выпрямленное, то будем обозначать их одинако-
во — Ud. Закон изменения этого напряжения при изменении угла
управления тот же, что и в выпрямительном режиме. Поэтому ре-
гулировочная характеристика ведомого преобразователя в непре-
рывном режиме (см. рис. 21.3 а) определяется тем же уравнением
^dao = udo-c°sa- (21-2)
Коммутация вентилей происходит за счет напряжения сети, и
на участке коммутации напряжение идет посредине между фазны-
ми ЭДС (рис. 21.4 а, б). За счет дополнительной коммутационной
площадки с ростом тока напряжение по модулю увеличивается.
Внешние характеристики приведены на рис. 21.3 б. В первом
квадранте (для выпрямителя) они связывают выходные величины и
являются выходными. Характеристики в 4-м квадранте (ведомого
инвертора) связывают входные величины (по энергетическому ка-
налу) и поэтому являются входными. Внешние характеристики вы-
прямителя по смыслу являются выходными, и поэтому выходное
напряжение за счет внутреннего сопротивления с ростом тока пада-
ет. Внешние характеристики инвертора являются по смыслу вход-
ными и поэтому, если необходимо «загнать» в инвертор больший
ток, нужно подать на вход большее напряжение.
Внешние характеристики с учетом наличия области прерыви-
стого режима приведены на рис. 21.5.
21.4. Условия устойчивой работы инвертора
В инверторном режиме изменяется вид напряжения на венти-
ле. В течение угла 8 (см. рис. 21.4 а, б) должны восстановиться
управляющие свойства тиристора.
<5 - угол, предоставляемый на выключение или восста-
новление управляющих свойств тиристора, может быть опреде-
лен по формуле
S = P~Y, (21.3)
где у - угол коммутации.
Обозначим <5min - минимальный угол, предоставляемый на
выключение, при котором инвертор может еще устойчиво работать.
Ограничительная характеристика (ОХ) - это геометрическое
место точек, при котором угол <5min постоянен. Эта характеристика
342
ограничивает область устойчивой работы ведомого инвертора (рис.
21.3 б). Ведомый инвертор может работать только в области выше
ограничительной характеристики.
Рис. 21.4. Диаграммы токов и напряжений в ведомом инверторе
при Х= X* 0 для трехфазной нулевой (а) и мостовой (б) схем
343
Рис. 21.5. Внешние характеристики ведомого преобразователя, выполненного
по трёхфазной нулевой (а) и трехфазной мостовой (б) схемам
Обычно минимальный угол, предоставляемый на выключение,
составляет 15°...25°. Угол <51П1П выбирается с учетом как времени
выключения тиристора, так и других факторов. При выборе <5min
учитывают: 1) время выключения тиристора, 2) возникающие пере-
грузки по току, 3) несимметрию напряжения сети, 4) несинусои-
дальность напряжения сети, 5) несимметрию управляющих им-
пульсов.
Если S < <51тап, то происходит прорыв анодного тока в венти-
лях и опрокидывание инвертора. Прорыв - это включение вентиля
без подачи управляющего импульса. При преждевременном вклю-
чении возникает аварийный режим — короткое замыкание в цепи
постоянного тока, т.к. ЭДС генератора и ЭДС трансформатора на-
правлены согласно. Этот аварийный режим называется опрокиды-
ванием инвертора. Единственная возможность прекращения
анодного тока - выключение автоматического выключателя в цепи
постоянного тока. Выключение выключателя на стороне перемен-
ного тока не прерывает ток короткого замыкания.
Для предотвращения опрокидывания инвертора максимальный
угол управления атах выбирается так, чтобы ни в каких режимах
не был возможен выход за пределы ограни чизельной характери-
стики.
344
21.5. Классификация рекуперирующих преобразователей
Рекуперирующий преобразователь электроэнергии - это
преобразователь, допускающий передачу мощности в обоих на-
правлениях, т.е. от сети к электрической машине и обратно. Реку-
перирующие преобразовал ели бывают 2-х видов:
1) однокомплектные рекуперирующие преобразователи,
обеспечивающие протекание тока в питающей или приемной цепи
только в одном направлении (см. и. 21.2 «Переход из выпрямитель-
ного в инверторный режим»);
2) двухкомплектные рекуперирующие преобразователи,
обеспечивающие протекание тока в питающей или приемной цепи
в обоих направлениях.
Двухкомплектные рекуперирующие преобразователи делятся:
1) на обратимые преобразователи, обеспечивающие переда-
чу мощности в обоих направлениях за счет изменения направления
постоянного тока при неизменной полярности постоянного напря-
жения;
2) на реверсивные преобразователи, обеспечивающие пере-
дачу мощности в обоих направлениях, как за счет изменения на-
правления напряжения, так и за счет изменения направления тока.
21.6. Схемы реверсивных преобразователей
и их характеристики
Реверсивный преобразователь содержит два комплекта венти-
лей; второй комплект нужен для того, чтобы изменять направ-
ление тока. Схемы реверсивных преобразователей приведены на
рис. 21.6. Схемы носят названия перекрестной и встречно-
параллельной. Наиболее часто комплекты вентилей проводят ток
по очереди. Проследите направление токов при работе каждого
комплекта вентилей. Комплекты могут выполняться на основе ра-
нее изученных схем выпрямителей. В перекрестной схеме требует-
ся применение более сложного трансформатора. Во встречно-
параллельной схеме сложнее система управления. В настоящее вре-
мя преимущественно применяется встречно-параллельная схема.
Регулировочные и внешние характеристики реверсивного пре-
образователя в непрерывном режиме представлены на рис. 21.7.
Они аналогичны характеристикам нереверсивных преобразовате-
345
лей, но учитывают наличие двух комплектов вентилей с противо-
положным направлением токов и напряжений.
Рис. 21.6. Реверсивные преобразователи по перекрестной (а)
и встречно-параллельной (б) схемам
а)
Рис. 21.7. Внешние, ограничительные (а) и регулировочные (б) характеристики
реверсивного преобразователя. Участки внешних характеристик в прерыви-
стом режиме при раздельном управлении даны пунктиром
В реверсивном преобразователе имеется угол атах, который
выбирается из условий инвертирования, чтобы не произошло опро-
кидывание инвертора. Чтобы произвести реверс, необходимо вна-
чале произвести рекуперативное торможение, при этом двигатель
переходит в генераторный режим, напряжение мгновенно изме-
346
няться не может, а ток проходит через 2-й комплект, работающий в
инверторном режиме. На рис. 21.7 б при этом происходит переход
из точки 1 в точку 2.
Переход из точки Г в точку 2' невозможен из-за опрокидыва-
ния инвертора. Поэтому в выпрямительном режиме вводится ми-
нимальный угол управления amin из условий предотвращения оп-
рокидывания инвертора.
21.7. Способы управления реверсивными
преобразователями
Существует два способа управления комплектами вентилей:
1) раздельное управление, при котором всегда работает толь-
ко один комплект вентилей. Чтобы включить второй комплект, на-
до подождать, пока через первый полностью прекратится ток, и
выдержать для надежности бестоковую паузу;
2) совместное управление, при котором одновременно рабо-
тают оба комплекта. При этом один комплект работает в выпрями-
тельном, а второй — в инверторном режиме.
При совместном управлении работают одновременно два ком-
плекта «Вперед» и «Назад», один в выпрямительном, другой - в
инверторном режиме (рис. 21.8 а).
Ток, проходящий между комплектами «Вперед» и «Назад» по-
мимо двигателя, называется уравнительным. Он бесполезен и,
желательно, чтобы он был минимальным. Этот ток зависит от вза-
имного положения внешних характеристик комплектов. Поэтому
углы управления комплектов не могут выбираться независимо друг
от друга. Существует два способа согласования характеристик:
1) линейное согласование, при котором ав + ссн = л ;
2) нелинейное согласование, при котором ав +ан Фл .
На рис. 21.86 показаны три случая взаимного расположения
внешних характеристик комплектов: 1 соответствует линейному
согласованию при огв + ан = л, 2 — соответствует нелинейному со-
гласованию при ав + ан < л, 3 - соответствует нелинейному согла-
сованию при ав + аи >л .
347
б)
Рис. 21.8. Реверсивный преобразователь при совместном управлении (а)
и характеристики и диаграммы для него: б) внешние характеристики
в) уравнительный ток при различном согласовании характеристик;
г) диаграммы напряжений и уравнительного тока при линейном согласовании
На рис. 21.8 в построены зависимост и уравнительного тока от
разности ЭДС комплекта, работающего в выпрямительном режиме
и противо-ЭДС (ПЭДС) комплекта, работающего в инверторном
режиме. /ур0 - составляющая уравнительного тока, протекающего
под действием разности средних значений ЭДС выпрямителя и
ПЭДС инвертора. Из диаграмм рис. 21.8 г видно, что, даже при ра-
348
венстве средних значений ЭДС выпрямителя и ПЭДС инвертора,
под действием разности мгновенных значений ЭДС выпрямителя и
противо-ЭДС проз екаез уравнительный ток. На рис. 21.8 в показан
суммарный уравнительный ток, вызванный разностью мгновенных
и средних значений ЭДС выпрямителя и ПЭДС инвертора 1.
Уравнительный ток существует при любых способах со-
гласования характеристик. Нелинейное согласование характери-
стик при ак + ан < л, нецелесообразно, т.к. увеличивает уравни-
тельный ток. Нелинейное согласование характеристик при
ав +ан >л уменьшает уравнительный ток. Для уменьшения урав-
нительного тока при любых видах согласования применяю! токоо-
граничивающие уравнительные реакторы, включенные в кон-
тур уравнительного тока (рис. 21.8 а).
Таким образом, для уменьшения уравнительного тока приме-
няют нелинейное согласование характеристик и токоограничиваю-
щие уравнительные реакторы (рис. 21.8 а).
Из рис. 21.9 видно, что при линейном согласовании внешние
характеристики линейны, а при нелинейном согласовании внешние
характеристики нелинейны. При этом за счет уравнительного тока
во всем диапазоне токов нагрузки может сохраняться режим непре-
рывного тока.
Для полного устранения уравнительного тока целесообразен
переход на раздельное управление.
При раздельном управлении во внешних характеристиках
имеются участки прерывистых токов (см. рис. 21.7 а).
При раздельном управлении нельзя одновременно включить
оба комплекта, т.к. возникает короткое замыкание. Необходимы
устройства, контролирующие прекращение тока через комплекты
вентилей, что усложняет схему управления. Появляется бестоковая
пауза, что уменьшает быстродействие.
Преимущества раздельного управления: отсутствие токо-
ограничивающих уравнительных реакторов, снижение потерь и га-
баритов из-за отсутствия реакторов.
Недостатки раздельного управления: усложнение схемы
управления, связанное с необходимост ью учета проводимости пре-
дыдущего комплекта; наличие бестоковой паузы, ухудшающей ди-
намические характеристики преобразователей (замедляется ре-
верс).
349
ox 1,0
1 о (7В ^inir =30°
<ZK=«max=150
120° в=60
<ХН U,tr (1
0.4' Id
«Н— 90° * 0,2ч о.: 0. 4 0, 5 0,
-0,8 -0,( -о 4 -0 ,2 0 «в=9 0°
(7,,=
0,4
0 6-1 =120
^-mi — =30° СЕ,
ол «в=< 7 max 150 ox
dmiir =15" - 1- •—Г "
Рис. 21.9. Внешние и ограничительные характеристики реверсивного
преобразователя с совместным управлением: а) при линейном согласовании
(ав+ан =180°), б) при нелинейном согласовании (ае + ан = 190°)
Преимущества совместного управления: большее быстро-
действие (нет бестоковых пауз), проще система управления, устра-
няется участок прерывистых токов на внешней характеристике.
В настоящее время применяется в основном раздельное управ-
ление, и, только если очень важны динамические показатели, при-
меняется совместное управление.
350
Глава 22
СИСТЕМЫ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ
22.1. Назначение, функциональные схемы и требования,
предъявляемые к системам управления преобразователей
Системы управления (СУ) преобразователей предназначе-
ны для включения вентилей в заданные моменты времени. Все СУ
преобразователей делятся на СУ ведомых преобразователей и СУ
автономных преобразователей. Функциональные схемы СУ пре-
образователей представлены на рис. 22.1.
б) ИП
Рис. 22.1. Функциональные схемы систем управления ведомых (а)
и автономных (б) преобразователей
СУ ведомого преобразователя (рис. 22.1 а) содержит фазос-
двигающее устройство (ФУ), обеспечивающее изменение фазы
управляющего импульса, и генератор импульсов (ГИ), генери-
рующий импульс требуемой мощности и формы. В зарубежной ли-
тературе генераторы импульсов часто называют драйверами. Од-
нако, драйверы могут выполнять более широкий круг функций.
СУ автономного преобразователя (рис. 22.1 б) содержит за-
351
дающий генератор (ЗГ), задающий частоту управляющих импуль-
сов, и генератор импульсов (ГИ).
СУ ведомых преобразователей часто называю! системами
импульсно-фазового управления (СИФУ).
Требования, предъявляемые к СИФУ, определяются рядом
факторов:
1) физическими процессами в полупроводниковых приборах;
2) особенностями самой схемы преобразователя;
3) особенностями нагрузки.
СИФУ должна обеспечивать:
1) достаточную амплитуду управляющих импульсов, выби-
раемую для тиристоров по диаграмме управления;
2) достаточную крутизну управляющих импульсов (не менее
0,5-1 А/мкс). Крутизна особенно важна при параллельном и после-
довательном соединении тиристоров:
3) достаточную длительность управляющих импульсов:
а) с точки зрения физики работы тиристора - 20 мкс, б) исходя из
особенностей схемы, в трехфазной мостовой схеме требуется дли-
тельность импульсов более 60 град, эл., или нужно применять сдво-
енные импульсы, в) исходя из особенностей нагрузки, при активно-
индуктивной нагрузке с большой индуктивностью необходимо при-
менять длинные импульсы (120 град. эл. в трехфазных схемах);
4) требуемый диапазон регулирования в зависимости от назна-
чения преобразователей до 170 град, эл.;
5) достаточное быстродействие, чтобы за время до включения
очередного тиристора в полном диапазоне сдвинулся управляющий
импульс (не более 3...6 мс);
6) достаточную симметрию управляющих импульсов (допус-
тимая несимметрия меньше 1 град. эл.).
22.2. Способы управления
Существует 2 способа управления фазой управляющих им-
пульсов: горизонтальное и вертикальное управление.
В аналоговых СУ, реализующих горизонтальный принцип
управления, управляющий импульс формируется в момент, когда
опорное напряжение поп переходит через нуль (рис. 22.2 а). Для
сдвига управляющего импульса необходимо сдвинуть по фазе (по
352
горизонтали) опорное напряжение. В аналоговых СУ, реализующих
вертикальный принцип управления, управляющий импульс форми-
руется в момент, когда напряжение, равное сумме опорного напря-
жения поп и напряжения управления Сунр, переходит через нуль
(рис. 22.2 б).
Рис. 22.2. Временные диаграм-
мы при горизонтальном (а) и
вертикальном (б) управлении
Таким образом, при горизонтальном управлении опорное на-
пряжение сдвигается по горизонтали, при вертикальном - по вер-
тикали. Сдвинуть опорное напряжение по фазе гораздо труднее,
чем просуммировать его с напряжением управления. Поэтому в СУ
ведомых преобразователей чаще всего применяется вертикальное
управление.
В настоящее время все шире применяются цифровые системы
управления, где вертикальный принцип управления реализуется
программно на основе сравнения чисел.
12 Зак. 50
353
22.3. Регулировочные характеристики при различных формах
опорных напряжений
Принцип вертикального управления иллюстрируют диаграм-
мы рис. 22.3 а, б. Из диаграмм видно, что опорное напряжение
может быть как пилообразным, так и синусоидальным (косину-
соидальным). Напряжение управления (7 суммируется с опор-
Рис. 22.3. Диаграммы напряжений (а, б), регулировочные характеристики
СИФУ (в. г), регулировочные характеристики всего преобразователя вместе
с СИФУ (д, е) при линейном и косинусоидальном опорных напряжениях
354
ным напряжением г/оп на входе компаратора. В момент равенства
нулю суммарного напряжения формируется передний фронт
управляющего импульса.
Получить стабильное опорное пилообразное напряжение про-
ще, т.к. оно может быть получено с помощью интегратора и допол-
нительного транзистора, разряжающего емкость при питании от
источника стабильного постоянного напряжения. Получить ста-
бильное косинусоидальное напряжение, синхронизируемое сетью,
трудно из-за колебаний напряжения сети и искажения его формы.
Для изучения систем управления, кроме ранее введенного по-
нятия регулировочная характеристика преобразователя (РХП)
Ud = f(cc), введем понятия регулировочная характеристика систе-
мы управления (РХСУ) сс = /(С^) и регулировочная характери-
стика преобразователя вместе с системой управления (РХПСУ)
C/j =/(С/упр). В дальнейшем в курсе электропривода последняя
характеристика, связывающая сигналы на входе и выходе преобра-
зователя, будет называться статической характеристикой преобра-
зователя. Форма опорного напряжения влияет на вид регулировоч-
ных характеристик (кроме РХП). Найдем уравнения регулировоч-
ных характеристик.
При пилообразном опорном напряжении, рассмотрев подоб-
ные треугольники на рис. 22.3 а, получим соотношение
_ ^Лш.тах ^'упр ,
п у.ТТ ’ \ • 7
’(-уоп. max
где С7ОП тах - амплитуда опорного напряжения, 0 - длительность
рабочего участка пилообразного напряжения.
Тогда
а=?(1'7Г^)- (22’2)
on. max
Для упрощения анализа примем 0=п, тогда уравнение для
РХСУ
а=у(1--^-). (22.3)
^оп.тах
Учитывая, что уравнение РХП в относительных единицах
^o=cosa, (22.4)
355
12*
получим уравнение для РХПСУ в относительных единицах
^o=cos-(l—(22.5)
Ud0 2 ^оп.тах
Регулировочные характеристики РХСУ и РХПСУ, построен-
ные по уравнениям (22.3, 22.5), приведены на рис. 22.3 в, д.
Если опорное напряжение косинусоидально, то из рис. 22.3 б
следует, что
Г'уг|р =cosa. (22.6)
^ori.max
Тогда уравнение для РХСУ
ci' = arccos >rip . (22.7)
^on.max
Учитывая уравнение РХП в относительных единицах (22.4),
получим уравнение для РХПСУ в относительных единицах
.^унр . (22 8)
и II 7
dO on. max
Регулировочные характеристики РХСУ и РХПСУ, построен-
ные по уравнениям (22.7, 22.8), приведены на рис. 22.3 г, е.
Если опорное напряжение системы управления косинусои-
дальное, то РХПСУ линейная (рис. 22.3 е). Это является преимуще-
ством такой формы опорного напряжения.
Недостаток косинусоидального опорного напряжения, полу-
чаемого из сетевого напряжения - искажения формы и колебания
напряжения. При резком понижении напряжения в сети возможно
пропадание управляющих импульсов, так как перестанет переклю-
чаться компаратор. Чтобы при уменьшении опорного косинусои-
дального напряжения не прекратилось формирование управляю-
щих импульсов, применяют дополнительные импульсы, подавае-
мые на вход компаратора. Для устранения влияния высших гармо-
ник на форму опорного напряжения применяют фильтры на входе
системы управления.
На рис. 22 3 в е видны ограничения, вводимые для предот-
вращения опрокидывания инвертора (атах), а также для предот-
вращения превышения выпрямленным напряжением допустимого
значения (amin).
На рис. 22.4 приведена детализированная функциональная
схема СУ ведомых преобразователей.
356
сеть
Рис. 22.4. Детализированная функциональная схема системы
управления ведомого преобразователя
На вход компаратора К подается управляющее напряжение,
ограниченное ограничительным элементом ОЭ. Оно сравнивается с
опорным напряжением, формируемым генератором опорного на-
пряжения ГОН. Сигнал с выхода компаратора подается на форми-
рователь импульсов ФИ, который устанавливает длительность им-
пульса, подаваемого на вход усилителя мощности УМ.
Для того, чтобы сместить регулировочную характеристику, на
компаратор К дополнительно подают напряжение смешения (7СМ.
22.4. Системы управления и регулировочные характеристики
реверсивных преобразователей при раздельном управлении
В реверсивных преобразователях имеется два комплекта вен-
тилей: «Назад» и «Вперед». Особенность системы управления ре-
версивным преобразователем при раздельном управлении - СУ не
должна позволять включиться другому комплекту вентилей, пока
ток проходит через предыдущий. Таким образом, переключение
возможно только после перехода в прерывистый режим.
На рис. 22.5 приведена функциональная схема СУ реверсив-
ным преобразователем с раздельным управлением. Датчик проводи-
мости ДП служит для определения состояния вентилей комплекта
Рис. 22.5. Функциональная схе-
ма СУ реверсивного преобразо-
вателя с разделительным управ-
лением
сеть
357
(проводят, не проводят) и передачи этой информации на логиче-
ское переключающее устройство ЛПУ. ЛПУ служит для выдачи
разрешения и запрета на переключение комплектов по сигналу ДП
на ФУ и ГИ. Комплект, который должен включаться, определяется
в зависимости от знака напряжения С/, подаваемого на ЛПУ.
Регулировочные характеристики РХСУ и РХПСУ реверсивно-
го преобразователя в непрерывном режиме приведены на рис. 22.6.
Рис. 22.6. Регулировочные характеристики СИФУ (а, б) и регулировочные
характеристики всего реверсивного преобразователя вместе с СИФУ (в, г)
при различном согласовании и косинусоидальном спорном напряжении
Они построены по аналогии с характеристиками при косинусои-
дальном опорном напряжении для однокомплектного преобразова-
теля (рис. 22.3 г, е). Особое значение имеет согласование РХСУ и
РХПСУ комплектов преобразователя. Характеристики, приведен-
ные на рис. 22.6 а, в, соответствуют линейному согласованию, ко-
гда сумма углов управления комплектов при одном напряжении
С/упр равна 180 град. эл. При этом начальный угол управления а0
при С/упр = 0 равен 90 град, эл., так как
358
(22.9)
aB +ан
ао= ------“•
2
Выпрямленное напряжение равно нулю при (7упр = 0 и при уг-
ле управления равном 90 град. эл. только у идеального выпрямителя
в непрерывном режиме. Чтобы обеспечить остановку двигателя при
£7упр = 0 с учетом возможности перехода в прерывистый режим, не-
обходимо выбрать начальный угол управления а0 и, соответствен-
но, напряжение смещения UCM таким образом, чтобы при С/ = 0
напряжение Ud на якоре двигателя было мало и, протекающий под
его влиянием ток Id не вызывал вращения (трогания) якоря. Ток
трогания /тр составляет 1...5% от номинального тока якоря двигате-
ля. При таких токах преобразователь переходит в режим прерыви-
стого тока и РХП изменяется. На рис. 22.7 а штриховой линией
показано как изменяется при этом РХПСУ. Чтобы остановить якорь
Рис. 22.7. Регулировочные характеристики двухкомплектного реверсивного
преобразователя (вместе с системой управления) при различных начальных
углах согласования: а) сс0 =90 град, эл.; б) а0 = 120 град, эл.;
в) а0 =105 град. эл.
359
двигателя при t/yiip =0, нужно, чтобы этому напряжению соответ-
ствовал начальный угол управления а0>90 град. эл. Такое согласо-
вание, при котором сумма углов управления комплектов при одном
и том же напряжении С7упр больше 180 град, эл., называется нели-
нейным (ав +ан >п). Для его осуществления нужно сдвинуть
РХСУ с помощью напряжения смещения С7см.
РХСУ при наличии напряжения смещения могут быть рассчи-
таны с учетом (22.3, 22.7). Для косинусоидального опорного на-
пряжения
а = arccos —----—, (22.10)
^оп.тах
а для пилообразного опорного напряжения с длительностью рабо-
чего участка равной тт
а=£(1-^р-^сМ
По формулам (22.10, 22.11) можно найти напряжение смеще-
ния для выбранного угла а0.
При выборе угла а0 необходимо также учитывать, что если
CZq — 90 град, эл, то в режиме непрерывного тока характеристики
комплектов практически совпадают, что обеспечивает высокое ка-
чество регулирования. Смена комплекта возможна только при пе-
реходе в режим прерывистого тока. Однако, в режиме прерывисто-
го тока характеристики неоднозначны. На рис. 22.7 приведены
РХПСУ для трехфазной мостовой схемы. Если, например, ток на-
грузки комплекта «В» был равен 0 (точка а на рис. 22.7 а), и про-
изошло переключение комплектов, то при неизменном напряжении
управления комплект «Н» откроется с углом а0 = 60 град. эл. и
произойдет скачек тока под действием напряжения, равного поло-
вине напряжения холостого хода. При а0 = 120 град. эл. бросок то-
ка будет отсутствовать, а при а0 = 105 град. эл. бросок тока будет
очень мал (рис. 22.7 б, в).
Неоднозначность характеристик (расширение зоны нечувстви-
тельности) затягивает время переключения, ухудшает динамику.
Поэтому угол начального согласования нужно выбирать из ком-
промиссных соображений. Если бы преобразователь был идеален,
индуктивности в цепи отсутствовали, то при т=6 нужно было бы
360
выбрать а0 = 120 град. эл. Но с учетом неидеал внести преобразо-
вателя и наличия индуктивности выбирается меньшее значение
а0 В системах с повышенными требованиями к качеству регули-
рования при применении трехфазной мостовой схемы устанавли-
вают ао=95...1ОО град, эл., а в массовом электроприводе -
о,, = 105... 115 град. эл. (в трехфазной нулевой схеме больше).
На рис. 22.6 б, г приведены РХСУ и РХПСУ реверсивного пре-
образователя при нелинейном согласовании с ос0 = 105 град. эл. Ха-
рактеристики, приведенные на рис. 22.6 г, являются аппроксимиро-
ванными. Участки выпрямительного режима показаны сплошной
линией, а инверторного — штриховой. Если преобразователь все вре-
мя работает в режиме непрерывного тока, то на РХПСУ наблюдается
гистерезис, если он переходит в прерывистый режим, то возникает
люфт. То есть, в зависимости от режимов преобразователь может
быть представлен нелинейностью типа люфт или гистерезис.
22.5. Переходные процессы в реверсивных преобразователях
Рассмотрим качественно переходные процессы при реверсе в
преобразователях с совместным и раздельным управлением при
различных видах нагрузки. Процессы рассмотрим во времени и на
плоскости внешних характеристик ld,Ud.
Реверс при активно-индуктивной нагрузке (совместное
управление). Примем допущение, что индуктивность нагрузки ве-
лика (например, происходит реверс тока в обмотке возбуждения).
На рис. 22.8 а, б приведены внешние характеристики реверсивного
преобразователя при линейном согласовании в непрерывном ре-
жиме и временные диаграммы, иллюстрирующие переходный про-
цесс. До момента 1 на вход СУ преобразователя подается заданное
напряжение управления. Через нагрузку под действием установив-
шегося значения выпрямленного напряжения Udy протекает уста-
новившийся ток Id Комплект «Вперед» работает в выпрямитель-
ном режиме с углом управления ав1, а комплект «Назад» — в инвер-
торном режиме с углом управления ан5.
Для реверса тока в момент 1 изменяется знак С7упр и происхо-
дит переход в точку 2 При этом на плоскости внешних характери-
361
Рис. 22.8. Переходные процессы при реверсе тока в активно-индуктивной
нагрузке при совместном (а, б) и раздельном (в, г) управлении. Процессы
показаны на плоскости внешних характеристик (а, в) и во времени (б, г).
Индуктивность нагрузки Ld - велика
стик видно, что угол управления изменяется от ав1 до ав5. Ком-
плект «Вперед» переходит в инверторный режим, напряжение
меняет знак. За это время ток остался неизменным, т.к. индуктив-
ность нагрузки велика, а процесс занимает доли периода. Начина-
362
ется процесс рекуперации энергии и снижение тока. В точке 3 ток
равен нулю. Начиная с момента 3 и до момента 4, нарастает ток в
комплекте «Назад», работающем в выпрямительном режиме. С мо-
мента 4 устанавливается новое значение выпрямленного тока. При
этом комплект «Вперед» остается в инверторном режиме и через
него протекает уравнительный ток.
Реверс при активно-индуктивной нагрузке (раздельное
управление). Примем те же допущения, что и при совместном
управлении. На рис. 22.8 в, г приведены внешние характеристики
реверсивного преобразователя при линейном согласовании в не-
прерывном режиме и временные диаграммы, иллюстрирующие пе-
реходный процесс. До момента 3 все процессы происходят так же,
как при совместном управлении (только комплект «Назад» не про-
пускает ток). В момент 3 ток спадает до нуля. Начинается бестоко-
вая пауза. Оба комплекта выключены, ток и напряжение на нагруз-
ке равны нулю. В момент 3' id = 0 и в соответствии со знаком t/yiip
датчик проводимости разрешает включить комплект «Назад». По-
сле бестоковой паузы начинается нарастание тока в комплекте «На-
зад», работающем в выпрямительном режиме. Процессы происхо-
дят так же, как при совместном управлении (только комплект
«Вперед» не пропускает ток).
Реверс при активно-индуктивной нагрузке с ПЭДС (совме-
стное управление). Этот случай соответствует работе на якорь
двигателя. Индуктивность якоря мала. Поэтому для упрощения
примем допущение, что индуктивность в цепи нагрузки равна нулю.
На рис.22.9 а, б приведены внешние характеристики реверсив-
ного преобразователя при линейном согласовании в непрерывном
режиме и временные диаграммы, иллюстрирующие переходный
процесс. Как будет показано ниже, при работе на ПЭДС нельзя
мгновенно изменять напряжение управления. Поэтому мгновенно
будем изменять входное напряжение нвх на входе СУ электропри-
вода (СУЭП), а соответствующее ему напряжение управления и
на входе СУ преобразователя (СУП) будет изменяться с допусти-
мой скоростью. До момента 1 на вход СУЭП подается заданное
входное напряжение UBX, а на вход СУП - соответствующее ему
напряжение управления 6/уир. Через нагрузку под действием уста-
новившегося значения выпрямленного напряжения Udy протекает
363
Рис. 22.9. Переходные процессы при
реверсе тока в цепи якоря двигателя (ак-
тивно - индуктивная нагрузка с ПЭДС
при Ld близком к нулю) при совместном
(а, б) и раздельном управлении (в, г).
Штриховой линией показаны участки
переходных процессов при отсутствии
задатчика интенсивности
установившийся ток Id Комплект «Вперед» работает в выпрями-
тельном режиме с углом управления ав1, а комплект «Назад» - в
инверторном режиме с углом управления ан5.
Для реверса двигателя в момент 1 изменяется знак пвх, при
этом уменьшается w р', а, следовательно, и угол управления, и
364
ПЭДС комплекта «Назад», работающего в инверторном режиме. Но
скорость вращения двигателя и его ЭДС не могут мгновенно изме-
ниться, поэтому при изменении углов управления изменяет направ-
ление и резко возрастает ток, который может достичь очень боль-
шой величины, начинается отдача энергии в сеть. Для ограничения
тока необходима токоограничивающая обратная связь, входящая в
состав СУЭП. Токоограничивающая ОС запрещает дальнейшее бы-
строе изменение wynp. В точке 2 ток ограничивается на уровне
/^огр’ чтобы не пересечь ОХ. В дальнейшем напряжение управле-
ния изменяется, угол ан падает, уменьшается ПЭДС инвертора, но
ток Id огр поддерживается на постоянном уровне. В точке 2' якорь
останавливается, комплект «Назад» переходит из инверторного ре-
жима в выпрямительный. С момента 2 до момента 2' происходит
процесс рекуперации энергии, запасенной в маховых массах элек-
тродвигателя и рабочей машины. С момента 2' начинается разгон с
этим же током /^огр. В момент 3 устанавливается заданное значе-
ние С/унр, соответствующее С7ВХ, прекращается действие токоогра-
ничивающей обратной связи, и к моменту 4 ток спадает до устано-
вившегося значения. С момента 4 устанавливается новое значение
выпрямленного тока. При этом комплект «Вперед» остается в ин-
верторном режиме и через него протекает уравнительный ток.
Малая индуктивность цепи нагрузки практически не повлияет
на характер процессов, лишь несколько медленнее будет происхо-
дить изменение тока, и облегчится работа токоограничивающей ОС.
Реверс при активно-индуктивной нагрузке с ПЭДС (раз-
дельное управление). Как и в предыдущем случае примем допуще-
ние, что индуктивность в цепи нагрузки равна нулю. На рис. 22.9 в, г
приведены внешние характеристики реверсивного преобразователя
при линейном согласовании в непрерывном режиме и временные
диаграммы, иллюстрирующие переходный процесс.
До момента 1 на вход СУЭП подается заданное входное на-
пряжение С7ВХ, а на вход СУП — соответствующее ему напряжение
управления Супр. Через нагрузку под действием установившегося
значения выпрямленного напряжения Udy протекает установив-
шийся ток Id Комплект «Вперед» работает в выпрямительном
режиме с углом управления ав1, а комплект «Назад» выключен.
365
Если мгновенно изменить входное напряжение t/BX, то ток че-
рез комплект «Вперед» практически мгновенно спадет до нуля (ин-
дуктивность в цепи мала). Рабочая точка на плоскости внешних ха-
рактеристик переместится из точки 1 через точку Г в точку1".
Комплект «Вперед» выключится, а комплект «Назад» включится с
углом ан1, если напряжение управления Uyur изменится соответст-
венно UBX. Пойдет очень большой ток, т.к. токоограничивающая
ОС не успеет ограничить ток (показано штрихами на рис. 22.9 в, г).
Поэтому в СУЭП вводится задатчик интенсивности (ЗИ), замед-
ляющий изменение сигнала на входе СУП и облегчающий работу
токоограничивающей ОС. Напряжение управления Су||р на входе
СУП будет изменяться с допустимой скоростью.
Для реверса двигателя в момент 1 изменяется знак ивх, при
этом начинает изменяться напряжение на выходе ЗИ пзи, поэтому
несколько уменьшается wynp, а. следовательно, немного увеличива-
ется угол управления ав, уменьшается ЭДС выпрямителя. Но ско-
рость вращения двигателя и его ЭДС не могут мгновенно изменить-
ся, поэтому ток спадает до нуля. После бестоковой паузы начинается
отдача энергии в сеть. Для ограничения тока необходима токоогра-
ничивающая обратная связь, входящая в состав СУЭП. Токоограни-
чивающая ОС запрещает дальнейшее быстрое изменение С7упР- В
точке 2 ток ограничивается на уровне /^огр, чтобы не пересечь ОХ.
В дальнейшем напряжение управления изменяется, угол ап падает,
уменьшается ПЭДС инвертора, но ток Id огр поддерживается на по-
стоянном уровне. Процессы происходят так же, как и при совмест-
ном управлении, но работает один комплект вентилей. Малая индук-
тивность цепи практически не повлияет на характер процессов, лишь
несколько медленнее будет происходить изменение тока.
22.6. Функциональная схема СУЭП постоянного тока
На рис. 22.10 приведена упрощенная функциональная схема
СУ реверсивного электропривода постоянного тока, реализующая
требования, обоснованные при рассмотрении переходных процес-
сов. Схема позволяет изменять число оборотов двигателя и осуще-
ствлять реверс без нарушения нормальной работы преобразователя.
366
Рис. 22.10. Функциональная схема СУ реверсивного электропривода
постоянного тока
Командоаппарат КА выдает сигнал С7ВХ, подаваемый на вход
задатчика интенсивности ЗИ. ЗИ выдает сигнал С7ЗИ. Сигнал ЗИ
сравнивается с сигналом датчика тока нагрузки ДТ и разностный
сигнал проходит на регулятор тока РТ. Если сигнал ОС превышает
задание по току, то наступает ограничение тока. На выходе РТ вы-
дается напряжение управления Оупр, поступающее на вход систе-
мы управления преобразователем СУП. Управляющие импульсы с
выхода СУП подаются на управляющие электроды тиристоров вен-
тильного блока ВБ. ВБ питает электрическую машину ЭМ.
22.7. Цифровые и микропроцессорные СУ
Повышение требований к автоматизированным электроприво-
дам привело к широкому применению в них цифровых устройств,
при этом используются как аппаратные, так и программные методы
реализации требуемых алгоритмов управления.
Аппаратные методы построения цифровых систем близки к мето-
дам построения аналоговых систем управления: для выполнения каж-
дой функции применяется отдельный элемент или группа элементов, и
добавление новой функции требует введения новых элементов.
Системы управления, реализованные аппаратными методами,
имеют высокое быстродействие, надежность; традиционные прин-
ципы их построения не вызывают трудностей при разработке и
эксплуатации. В то же время они состоят из большого числа элек-
тронных компонентов, громоздки, имеют высокую стоимость и ма-
лую гибкость, требуют индивидуальной разработки функциональ-
ных модулей, образующих функционально законченную систему.
Аппаратные системы управления обычно выполняются с примене-
нием микросхем малой и средней степени интеграции.
Развитие систем управления электроприводами характеризуется
тенденциями повышения степени интеграции элементов. Для массо-
367
вых применений с относительно невысокими требованиями по точ-
ности эффективно применение специализированных, функциональ-
но законченных интегральных схем (ИС). Выпускается ряд ИС для
непосредственного управления маломощными приводами. Эти ИС
обеспечивают множество функций и позволяют легко создавать бо-
лее дешевые по сравнению с дискретной реализацией системы
Более гибкое решение базируется на микроконтроллерах. При
этом происходит переход от «жесткой» логики алгоритмов управ-
ления к более гибкому управлению, максимально учитывающему
требования конкретного применения и реализуемому программным
способом. Применяемая для управления микроЭВМ состоит из
центральной части (процессор и память) и ряда периферийных уст-
ройств, обеспечивающих связь микроЭВМ с управляемым объек-
том. Системы управления, реализованные на основе микроЭВМ,
имеют меньшие габариты, чем реализованные с применением аппа-
ратных методов, значительную гибкость, требуют небольшого числа
функциональных модулей, однако обладают меньшим быстродейст-
вием, определяемым последовательным характером вычислений.
Микропроцессор представляет собой функционально закон-
ченное устройство, предназначенное для программной обработки
цифровой информации, аналогичное по составу и структуре про-
цессорам ЭВМ и выполненное с применением технологии больших
интегральных схем) БИС. Микропроцессор состоит из одной или
нескольких БИС и рассчитан на совместную работу с устройствами
памяти и ввода-вывода. Обычно изготовители МП разрабатывают и
производят другие БИС, образующие совместно с МП функцио-
нально законченный набор микросхем, предназначенный для по-
строения МП-системы. Такой набор включает в себя собственно
МП, оперативное и постоянное запоминающее устройство (ОЗУ и
ПЗУ), микросхемы управления вводом-выводом и др.
На рис 22.11 приведена функциональная схема системы мик-
ропроцессорного управления вентильным электроприводом посто-
янного тока. Эта система обеспечивает не только управление пре-
образователем, но и всем электроприводом. От устройства управ-
ления УУ, представляющего собой пульт или вычислительную ма-
шину более высокого уровня, сигналы задания поступают на мик-
ропроцессорный комплект МП К. МПК включает в себя собственно
микропроцессор, оперативное и постоянное запоминающее устрой-
ство (ОЗУ и ПЗУ), микросхемы управления вводом-выводом и др.
368
От МПК управляющие импульсы подаются на вентильный блок ВБ
через устройство связи с объектом УСО 1 УСО 1 (набор драйве-
ров) служит для потенциальной развязки и формирования импуль-
сов заданной мощности. На вход МПК кроме сигналов управления
подаются сигналы обратных связей, синхронизации и других пара-
метров состояния системы.
Рис. 22.11. Функциональная схе-
ма системы микропроцессорного
управления вентильным электро-
приводом постоянного тока
Эти сигналы формируются с помощью датчиков сети ДС, дат-
чиков вентильного блока ДВБ и датчиков электрической машины
дэм.
Между датчиками и МПК включено устройство связи с объек-
том УСО 2, обеспечивающее гальваническую развязку и преобра-
зование сигналов. От МПК на УУ передается информация о со-
стоянии системы.
Формирование фазового сдвига управлякнцих импульсов от-
носительно напряжения сети осуществляется программно с помо-
щью алгоритма реализующего вертикальный способ управления.
При этом сравниваются не аналоговые величины, а цифровые коды.
Управление электроприводом осуществляется в реальном
масштабе времени при наличии определенной многозадачности.
Одновременное регулирование нескольких координат электропри-
вода, диагностика функционирования системы, связь с другими
объектами наиболее рационально организуются с помощью много-
уровневой системы прерываний. Наибольший приоритет имеют
369
сигналы аварийных ситуаций, вызывающие защитные процедуры,
когда от времени реакции зависит дальнейшая работоспособность
всей системы.
В значительном числе случаев электропривод работает не ав-
тономно, а в составе некоего технологического комплекса. Если
процессорной мощности микроконтроллера недостаточно для
управления собственно электроприводом и одновременного реше-
ния задач технологического управления, то реализация технологи-
ческого контроллера на базе микроконтроллера может потребовать
некоторого дополнительного числа входов аналого-цифрового пре-
образователя (АЦП) и дискретных входов/выходов.
При применении микроЭВМ полностью меняется методика
проектирования систем, разработчики и эксплуатационники долж-
ны владеть основами программирования, изменяются способы на-
ладки систем, для наладки и эксплуатации необходимо специаль-
ное оборудование и т. п.
В настоящее время в эксплуатации находится много вентиль-
ных преобразователей с аппаратной системой управления. Поэтому
в течение некоторого времени будут применяться и аппаратно, и
программно реализуемые цифровые системы управления вентиль-
ными преобразователями и электроприводами.
Глава 23
ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО НАПРЯЖЕНИЯ
23.1. Классификация преобразователей постоянного
напряжения
Преобразователи постоянного напряжения (ППН) предна-
значены для преобразования постоянного напряжения одного
уровня в постоянное напряжение другого уровня с высоким КПД.
Иногда их называют конверторами. Они служат для питания на-
грузки постоянным напряжением UH, отличающимся по величине
от напряжения источника питания Ud.
По построению ППН делятся:
а) на двухзвенные ППН, состоящие из автономного инверто-
ра (АИ), преобразующего постоянное напряжение в переменное, и
выпрямителя. Трансформатор, стоящий между выпрямителем и
АИ, позволяет получить на выходе напряжения как меньшие, так и
большие входного. Их недостаток - двойное преобразование энер-
гии, что приводит к увеличению потерь;
б) на непосредственные ППН, выполненные на основе пре-
рывателей.
Двухзвенные ППН чаще всего применяются в источниках пи-
тания систем управления и автоматики и будут рассмотрены позже.
23.2. Непосредственные ППН
23.2.1. Понижающий ППН
На рис. 23.1 а показана схема непосредственного ППН, пони-
жающего напряжение, а на рис. 23.1 б - диаграммы напряжений
на нагрузке иИ и на коллекторе пк и токов: потребляемого от ис-
371
точника питания id, коллектора zK, диода /д и нагрузки zH. По-
строения выполнены при допущении, что транзистор и диод иде-
альны, емкость конденсатора Сф = °°, а ток в цепи нагрузки непре-
рывен. Диод KD служит для пропускания тока, проходящего при
выключении транзистора VT за счет энергии, запасенной в индук-
тивности нагрузки. Конденсатор Сф уменьшает потери в источнике
питания, делая потребление энергии от него более постоянным.
Рис. 23.1. Схема понижающего П1IH (а) и диаграммы напряжений
и токов, иллюстрирующие его работу (б)
372
Когда транзистор I Т включается в момент , напряжение источни-
ка питания прикладывается к нагрузке (к нагрузке прикладывается
импульс напряжения), когда он выключается в момент t2, ток на-
грузки протекает за счет энергии, запасенной в индуктивности LH, и
замыкается через диод КО. В момент t3 процессы повторяются.
Для регулирования напряжения на выходе ППН изменяют
длительность включенного состояния транзистора. Регулирование
напряжения, при котором частота подачи импульсов на нагрузку
постоянна, но изменяется их длительность, называется широтно-
импульсной модуляцией (ШИМ). ППН, в которых применяется
такой способ регулирования, называют широтно-импульсными
преобразователями (ШИП). Таким образом, при ШИМ частота и
период следования импульсов постоянны. Возможны и другие спо-
собы регулирования, при которых регулирование среднего значе-
ния напряжения на выходе производится изменением частоты сле-
дования импульсов постоянной длительности (частотно-
импульсная модуляция) или одновременным изменением частоты
и длительности импульсов (частотно-широтно-импульсная мо-
дуляция). Наиболее часто применяется ШИМ. Поэтому далее рас-
сматривается только ШИМ.
Все соотношения ниже рассматриваются для непрерывного
тока в нагрузке, когда за время прохождения тока через диод он не
спадает до нуля (см. рис. 23.1 б). Ширина области прерывистых то-
ков обычно весьма мала, и даже токи холостого хода двигателя
обычно не попадают в эту область, поэтому при проектировании
электропривода она, как правило, не учитывается.
Чем больше длительность включенного состояния транзисто-
ра, тем больше среднее значение напряжения на нагрузке UH.
UH=Y-Ud, (23.1)
где у — относительная длительность включенного состояния
транзистора. Так как у не может быть больше 1, то этот ППН на-
зывается понижающим.
В понижающем ППН у соответствует относительной дли-
тельности импульсов напряжения, прикладываемых к нагруз-
ке, то есть
У=—, (23.2)
Т
373
где Ги — длительность импульсов напряжения прикладываемых к
нагрузке или длительность включенного состояния транзистора,
Т- период следования импульсов.
Регулировочная характеристика ППН - это зависимость
напряжения на нагрузке от относительной длительности вклю-
ченного состояния транзисторов или в понижающем ППН от
относительной длительности импульсов напряжения, прикла-
дываемых к нагрузке. Следовательно, уравнение (23.1) является
уравнением регулировочной характеристики. Тогда уравнение
регулировочной характеристики в относительных единицах (при
принятии за базовое напряжения Ud)
— = у. (23.3)
Если вентили идеальны, то КПД ППН равен единице. При
этом мощность, потребляемая от источника питания, равна мощно-
сти выделяемой в нагрузке
U„IH=UdId, (23-4)
где Id - ток, потребляемый от источника питания, /н - ток нагрузки.
Из выражений (23.3), (23.4) может быть определен ток нагрузки
i^Idl~ = LL- (23-5)
у
В соответствии с формулой (23.3) диапазон регулирования
выходного напряжения ППН с ШИМ теоретически начинается от
нуля (при 1п= 0, у = 0) и достигает Ud (при /и =Т, у = 1), т.е. эта
схема понижает напряжение и, в соответствии с формулой (23.5),
увеличивает ток. Схема работает как .«трансформатор постоянного
тока».
Введем понятие коэффициента преобразования напряжения Ки.
к„-~- (23-6)
Тогда уравнение регулировочной характеристики
Ки=У- (23.7)
На рис. 23.2 показаны регулировочные характеристики раз-
личных ППН в зависимости от относительной длительности вклю-
ченного состояния транзисторов. На кривых отмечены точки, соот-
ветствующие построенным диаграммам на рис. 23.1,23.3, 23.4.
374
Внешняя характеристи-
ка ППН - это зависимость
среднего значения напряже-
ния на нагрузке от тока на-
грузки при постоянной отно-
сительной длительности
включенного состояния
транзисторов.
Внешняя характеристика
понижающих ППН весьма же-
сткая. Они имеют достаточно
высокий КПД. Подробнее эти
вопросы будут рассмотрены
ниже.
4
3
2
1
О 0,25 0,5 0,75 1
Рис. 23.2. Регулировочные характери-
стики ППН: 1 - понижающего, 2 - по-
вышающего, 3 - инвертирующего
23.2.2. Повышающий ППН
На рис. 23.3 а показана схема непосредственного ППН, по-
вышающего напряжение, а на рис. 23.3 б - диаграммы напряже-
ний на нагрузке ин и на коллекторе uv и токов: потребляемого от
источника питания id, коллектора zK, диода /д и нагрузки zH. Рас-
смотрим работу схемы. В момент ц включается транзистор VT, ток
через дроссель L нарастает. В момент г2 выключается транзистор и
за счет энергии, запасенной в индуктивности, под действием суммы
напряжения источника питания Ud и ЭДС самоиндукции через
вентиль VD заряжается конденсатор Сн, а ток, потребляемый от ис-
точника питания, спадает.
В момент ?3 процессы повторяются. В этой схеме, в отличие от
предыдущей, можно только поднять напряжение.
Таким образом, в течение времени /н ток id идет через транзи-
стор, и запасается энергия в индуктивности. Затем, в течение ин-
тервала времени T-tu ток id идет через диод на зарядку конденса-
тора и на нагрузку. Постоянная составляющая тока id не проходит
через конденсатор, поэтому среднее значение тока протекающего
через нагрузку
T-t
(23-8)
375
Рис. 23.3. Схема повышающего ППН (а) и диа1раммы напряжений
и токов, иллюстрирующие его работу (б)
или
7н=Л,(1-у). (23.9)
Здесь у - относительное время включенного состояния тран-
зистора.
С учетом справедливости равенства мощностей на входе и вы-
ходе (см. 23.4)
UH=-^—Ud. (23.10)
1-у
376
Тогда уравнение регулировочной характеристики в относи-
тельных единицах
К =^- = — . (23.11)
ud 1-/
Из формулы (23.11) следует возможность бесконечного увели-
чения напряжения на нагрузке. Однако из-за роста потерь в дрос-
селе (он не может быть выполнен без потерь) при увеличении у
получить очень большое напряжение невозможно. Целесообразно
увеличение напряжения максимум в 3...4 раза. Регулировочная ха-
рактеристика показана на рис. 23.2.
Внешняя характеристика этого ППН очень мягкая.
Нужно также отметить, что у этой схемы хуже КПД.
23.2.3. Инвертирующий ППН
На рис. 23.4 а показана схема непосредственного ППН, ин-
вертирующего напряжение (т.е. меняющего не только величину,
но и знак напряжения на выходе), а на рис. 23.4 б - диаграммы
напряжений на нагрузке wH и на коллекторе ик и токов: потреб-
ляемого от источника питания id, коллектора /к, диода /д и на-
грузки /н.
Рассмотрим работу схемы. В момент б включается транзистор
VT, ток через индуктивность L нарастает. В момент /2 выключается
транзистор, и за счет энергии, запасенной в индуктивности, прохо-
дит ток по цепи L, С, VD. Следовательно, на участке Z2-Z3 происхо-
дит заряд емкости С, и ток спадает. В момент /3 процессы повторя-
ются. На участке /3-/4 одновременно с запасанием энергии в дрос-
селе происходит разряд конденсатора на сопротивление нагрузки.
Здесь так же у - относительное время включенного состояния
транзистора.
Из формулы (23.12) следует возможность бесконечного увели-
чения напряжения на нагрузке Однако, из-за роста потерь в реак-
торе (он не является идеальной индуктивностью) при увеличении у
получить большое напряжение невозможно. Целесообразно увели-
чение напряжения максимум в 2...3 раза. Регулировочная характе-
ристика показана на рис. 23.2.
Эта схема имеет мягкую внешнюю характеристику и КПД,
аналогичные предыдущей.
377
Рис. 23.4. Схема инвертирующего ППН (а) и диаграммы напряжений
и токов, иллюстрирующие его работу (б)
23.3. Нереверсивные понижающие ППН
23.3.1. Регулировочные, внешние и энергетические
характеристики нереверсивных понижающих ППН
Рассмотрим вначале непрерывный режим, при котором ток на-
грузки не спадает до нуля. Такой режим обеспечивается во всем
диапазоне токов, если Ln=°°.
378
Регулировочная характеристика понижающего ППН, постро-
енная по уравнению (23.3), приведена на рис. 23.5 а. Так как для
переключения транзистора требуется определенное время, то при
плавном изменении у невозможно получить крайние значения
у = 0 и у = 1. Поэтому диапазон плавного изменения у обычно не
превышает 0,05...0,95. Нерабочие участки характеристики по кра-
ям диапазона регулирования (см. рис. 23.5 а) показаны пунктиром.
Рис. 23.5. Регулировочные характеристики понижающего ППН (а), его систе-
мы управления (в) и преобразователя совместно с системой управления (г),
а также диаграммы напряжений, иллюстрирующие работу модулятора (б)
Система управления ППН должна обеспечивать включение
транзисторов с заданным значением у в зависимости от напряже-
ния управления Су||р. Для этого в системе управления должен быть
модулятор. На рис. 23.5 б показано, как реализуется процесс моду-
ляции. От генератора опорного пилообразного напряжения пода-
ется пилообразное напряжение с частотой, называемой несущей.
Опорное напряжение иоп сравнивается на входе компаратора с на-
пряжением управления С7у1]р. На выходе компаратора появляется
379
импульс требуемой длительности, который после усиления подает-
ся на входы силовых транзисторов. Напряжение управления назы-
вается модулирующим, и оно может изменяться по любому зако-
ну. При этом пропорционально ему будет изменяться у.
Для модуляции могут быть использованы и другие формы пи-
лообразного напряжения, но данная форма опорного напряжения
наиболее часто используется в ППН. При этом транзисторы вы-
ключаются передним фронтом пилообразного напряжения, поэто-
му такая модуляция называется модуляцией передним фронтом.
Если при модуляции напряжение на нагрузке однополярно
(см. рис. 23.5 б), то такая модуляция называется однополярной.
Существует и двуполярная модуляция, но она будет рассмотрена
позже.
Регулировочная характеристика системы управления
(РХСУ) с учетом рис. 23.5 б выражается уравнением
У=7Г^’ (23ЛЗ)
^оптах
Регулировочная характеристика системы управления приведе-
на на рис. 23.5 в.
Регулировочная характеристика преобразователя вместе с
системой управления (РХПСУ) с учетом уравнений (23.3) и
(23.13) выражается уравнением (23.14) и приведена на рис. 23.5 г.
Цц _ ^упр
Ud ^оптах
Она также линейна при непрерывном токе нагрузки.
На рис. 23.6 приведена принципиальная схема силовых цепей
понижающего ППН. Конденсатор Сф на входе являегся обяза-
тельным элементом преобразователей, в которых применяются
ключи с полной управляемостью (по цепи управления прину-
дительно выключаются ключи). Он имеет двоякое назначение.
Во-первых, он обеспечивает постоянное потребление энер-
гии от источника питания даже при запертом состоянии ключа.
Если бы не было Сф, то ток, потребляемый от источника питания,
соответствовал бы току коллектора /к (см. рис. 23.16). Если
Сф -°°, то ток id, потребляемый от источника питания, становится
постоянным (см. рис. 23.1 б). Это уменьшает потери в источнике
питания, так как они определяются действующим, а не средним
(23.14)
380
значением тока. При устранении пульсаций действующее значение
постоянного тока равно среднему.
Рис. 23.6. Принципиальная схема силовых цепей понижающего ППН
с учетом индуктивности соединительных проводов
Во-вторых, между источником питания, транзистором и дио-
дом имеются соединительные провода, имеющие собственную ин-
дуктивность Lc. Она показана на рис. 23.6. При выключении тран-
зистора от перенапряжений на индуктивности нагрузки LH защи-
щает диод, а от перенапряжений на индуктивности соединительных
проводов ничто не защищает. Эти перенапряжения могут быть
весьма велики. Например, если длина соединительного провода
равна 1 м, то его индуктивность примерно 1 мкгн. Если при этом за
1 мкс выключается ток, равный 100 А, то перенапряжения составят
100 В (uL даже если напряжение питания равно 10 В. Та-
ей
ким образом, конденсатор Сф защищает полупроводниковые
элементы и должен быть включен как можно ближе к ним,
чтобы уменьшить величину Lc.
На рис. 23.7 а приведены временные диаграммы напряжений и
токов с учетом неидеальности вентилей при допущении Сф
L^-oo, На участке проводимости транзистора напряжение на на-
грузке меньше идеального на величину падения напряжения на
транзисторе &UK, а на участке проводимости диода оно отрица-
тельное и равно падению напряжения на диоде АСЙ.
Для упрощения примем, что
\UK=MJa=bU. (23.15)
Тогда, с учетом того, что
АСк=/к-гк, (23.16)
381
Рис. 23.7. Временные диаграммы в понижающем ППН при неидеальных
ключах (а), эквивалентная схема ППН (б) и его внешние характеристики (в)
и на участке проводимости транзистора /к = /н уравнение внешней
характеристики:
UH=UH0-IH-rK=Y-Ud-IH-rK. (23.17)
Здесь UhQ - напряжение на нагрузке на холостом ходу,
определяемое по формуле (23.1).
На рис. 23.7 б приведена эквивалентная схема ППН, соответ-
ствующая уравнению (23.17).
На рис. 23.7 в приведены внешние характеристики понижающе-
го ППН, построенные в относительных единицах. За базовые вели-
чины приняты напряжение Ud и ток короткого замыкания /кз = .
Г
к
При работе на активно-индуктивную нагрузку с ПЭДС все по-
лученные раннее соотношения и характеристики остаются спра-
ведливыми, если сохраняется непрерывный режим. В прерывистом
режиме соотношения и характеристики изменяются. Участки
внешних и регулировочных характеристик, соответствующие пре-
рывистому режиму при работе на ПЭДС на рис. 23.5 а и рис. 23.7 в
показаны штриховыми линиями. Граничный ток может быть опре-
делен по приближенной формуле
382
(23.18)
Основным энергетическим показателем ППН является
КПД Т].С учетом равенств (23.17) и (23.5)
ЛЛ =1_Лл =1_1 АН
Udld UdY Y Ud'
(23.19)
Зависимости КПД ППН от у и тока /н показаны на рис. 23.8.
Схема имеет достаточно высокий КПД при больших значениях у.
При малых значениях у КПД существенно падает.
Рис. 23.8. Зависимости КПД ППН от у (а) и тока 7Н (б)
б)
При расчете КПД не учтены коммутационные потери. При их
учете общие потери в правильно спроектированных преобразовате-
лях увеличиваются не более чем на 15...30 %.
С точки зрения уменьшения пульсаций напряжения и тока на
выходе ППН, а, следовательно, и потерь в двигателе целесообразно
повышение несущей частоты. Однако при этом растут коммутаци-
онные потери в транзисторах. Поэтому несущая частота выбирает-
ся из компромиссных соображений.
На характеристики ППН влияет внутреннее сопротивление ис-
точника питания. На рис. 23.9 а, б приведены схема замещения и
эквивалентная схема ППН с учетом внутреннего сопротивления ис-
точника питания гип. Анализ проведем при допущении Сф = °°,
£н =°°.
Учтем равенство потерь во внутреннем сопротивлении источ-
ника питания для схемы замещения и эквивалентной схемы ППН:
^тип = 7н2-4> (23-20)
383
Рис. 23.9. Схема замещения (а) и экви-
валентная схема ППН (б), а также его
внешние характеристики (в) с учетом
внутреннего сопротивления источника
питания
где г'п- внутреннее сопротивление источника питания, приведен-
ное к стороне нагрузки. Отсюда с учетом (23.5)
4-W2- (23.21)
Уравнение внешней характеристики ППН с учетом внутренне-
го сопротивления источника питания:
<4 = <4о - 4 • (гк + 4) = <4о 7 4 ’ (гк + гип • У2) - (23.22)
Эквивалентная схема (см. рис. 23.9 б) соответствует этому
уравнению.
Внешние характеристики понижающего ППН даже при учете
внутреннего сопротивления источника питания остаются жесткими
(см. 23.9 в). Их наклон определяется внутренним сопротивлением
источника питания, сопротивлением включенного транзисторного
ключа и относительной длительностью включенного состояния
транзистора.
ППН может также выполняться на запираемых и обычных
незапираемых тиристорах. Схема ППН на обычных тиристорах и
соответствующие ей временные диаграммы приведены на
рис. 23.10.
384
Рис. 23.10. Схема ППН на тиристорах (а) и диаграммы напряжений
и токов, иллюстрирующие его работу (б)
В схеме применено устройство для искусственной коммутации ти-
ристоров, выполненное на основе резонансного автономного ин-
вертора (см. гл. 24).
1 3 Зак. 50
385
23.3.2. Рекуперирующие нереверсивные ППН
Понижающие одноключевые ППН нашли применение в элек-
троприводе постоянного тока, но они не обеспечивают при тормо-
жении рекуперацию (возврат энергии в источник питания). Эта
проблема решается в двухключевом ППН (рис 23.11 а), представ-
ляющем комбинацию понижающего и повышающего ППН.
Рис. 23.11. Двухключевой рекуперирующий ППН (а), а также диаграммы
напряжений (б) и токов, иллюстрирующие его работу на якорь двигателя
в двигательном (в) и тормозном (г) режимах
386
В двигательном режиме схема работает, как обычный пони-
жающий ППН, то есть поочередно проводят транзистор КП и диод
VD2. Процессы иллюстрируют диаграммы рис. 23.11 б, в. В тор-
мозном режиме электромашина переходит в режим генератора, но
ее ЭДС не может мгновенно измениться. ЭДС генератора ниже на-
пряжения источника питания, поэтому диод VD\ закрыт и ток от
генератора не может проходить в источник питания. При включе-
нии транзистора 1Т2 генератор замыкается на индуктивность LH и
ток в цепи нарастает. При выключении Р72 ЭДС самоиндукции
действует согласно с ЭДС генератора, диод EDI открывается, энер-
гия передается в источник питания. Процессы иллюстрируют диа-
граммы рис. 23.11 б, г. При торможении рекуперирующий преобра-
зователь работает, как повышающий ППН.
23.4. Реверсивные ППН
23.4.1. Схема и способы управления реверсивными ППН
В электроприводах применяют реверсивные ППН, позво-
ляющие менять не только величину, но и знак напряжения на на-
грузке. На рис. 23.12 а приведена схема реверсивного ППН, полу-
чившая наибольшее распространение. Пары транзисторов VI, V2 и
ИЗ, V4 образуют диагонали моста, а пары транзисторов И, V4 и
И2, ИЗ образуют стойки моста. При попарном включении транзи-
сторов И1, И2 или ИЗ, И4 знаки напряжения на нагрузке противо-
положны.
Существуют симметричный и несимметричный способы
управления ключами.
Если транзисторы диагонали моста включаются и выключа-
ются одновременно, то такой способ управления называется сим-
метричным. При этом напряжение на нагрузке всегда двуполяр-
ное, а проводят либо два транзистора, либо два диода. Таким об-
разом, при симметричном управлении происходит двуполярная
модуляция.
Если выключение транзисторов происходит неодновременно, то
такое управление называется несимметричным. При этом напряже-
ние на нагрузке всегда однополярное. Таким образом, при несим-
метричном управлении происходит однополярная модуляция.
Несимметричное управление бывает обычным и поочередным.
387
13*
Рис. 23.12. Реверсивный ППН (а), диаграммы напряжений и токов, иллюстри-
рующие его работу при активно-индуктивной нагрузке при симметричном (б)
и несимметричном (в) управлении
При обычном несимметричном управлении переключение
транзисторов производится только в одной стойке или вообще пе-
реключается один ключ.
Существует поочередное управление с характеристиками
388
аналогичными обычному несимметричному управлению, но ус-
ложненным алгоритмом переключения. При поочередном управле-
нии коммутация транзисторов в четном и нечетном периоде проис-
ходит в различных стойках.
23.4.2. Работа реверсивного ППН на активно-индуктивную
нагрузку при симметричном управлении
Анализ проведем при следующих допущениях: все вентили и
источник питания идеальны, индуктивность в цепи нагрузки очень
велика и, поэтому, ток в нагрузке непрерывен.
При включении транзисторов VI, V2 (см. рис. 23.12 а) ток про-
ходит по цепи «+» источника питания, VI, LH, RH, V2, «-» источ-
ника питания. После выключения транзисторов ток проходит по
цепи £н, VD3, источник питания, VD4, RH. Энергия, запасенная в
индуктивности нагрузки, возвращается в источник питания. Затем
снова включаются транзисторы VI, V2.
Для реверса после спада тока нагрузки до нуля включают
транзисторы V3, V4.
Временные диаграммы тока нагрузки и напряжения на нагруз-
ке приведены на рис. 23.12 б. Видно, что в напряжении на нагрузке
имеются отрицательные участки.
Уравнения регулировочных характеристик преобразователя в
относительных единицах для непрерывного режима, полученные
по временной диаграмме (см. рис. 23.11 б) для первого и четвертого
квадрантов (направлений вперед «В» и назад «Н»)
^ = 2-у12-1, ^ = -(2.Уз4-1), при 1>у>0,5, (23.23)
ud ud
где у — относительное время включения транзисторов, а индексы
указывают номера включенных транзисторов.
При у <0,5 непрерывный режим при активно-индуктивной на-
грузке невозможен. Регулировочные характеристики преобразовате-
ля, построенные по уравнениям (23.23), приведены на рис. 23.13 а.
Уравнения регулировочных характеристик системы
управления при пилообразном опорном напряжении имеют сле-
дующий вид:
если б/унр >0, у12 = ( +1)• 0,5,
^оп max
389
^упр
max
Регулировочные характеристики системы управления преобра-
зователя, построенные по уравнениям (23.24), приведены на
рис. 23.13 б.
Уравнение регулировочной характеристики преобразователя
вместе с системой управления имеет следующий вид:
£н_ =
если С/унрСО, у34 =
Ud
-1 0,5.
(23.24)
Рис. 23.13. Регулировочные характе-
ристика реверсивного преобразовате-
ля (а), системы управления (б) и пре-
образователя с системой управления
(в) при симметричном управлении и
активно-индуктивной нагрузке
Регулировочная характеристика преобразователя вместе с
системой управления, построенная по уравнению (23.25), приведе-
на на рис. 23.13 в. Участок характеристики соответствующий на-
правлению вперед «В» находится в первом квадранте, а соответст-
вующий направлению назад «Н» — в третьем.
23.4.3. Работа реверсивного ППН на активно-индуктивную
нагрузку при несимметричном управлении
При работе на активно-индуктивную нагрузку и несимметрич-
ном управлении все время проводят либо один, либо два транзи-
стора. Если в данный момент проводили транзисторы VI, V2 (см.
390
рис. 23.12 а), то после выключения транзистора И ток проходит по
цепи £н, И2, ID4, /?н, и энергия, запасенная в индуктивности, ис-
пользуется в нагрузке. Временные диаграммы тока нагрузки и на-
пряжения на нагрузке приведены на рис. 23.12 в. На диаграммах
видно, что нет отрицательных участков напряжения.
Преимущество несимметричного управления заключается в
уменьшении пульсаций и потерь.
Уравнения регулировочных характеристик преобразователя в
относительных единицах, полученные по временной диаграмме
(см. рис. 23.12 в), соответственно для положительного и отрица-
тельного напряжения на нагрузке:
TT = Yi приу2=1, тт- = -Уз приу4=1. (23.26)
ud ud
Регулировочные характеристики преобразователя, построен-
ные по уравнениям (23.26), приведены на рис. 23.14 а.
Рис. 23.14. Регулировочные характе-
ристики реверсивного преобразовате-
ля (а), системы управления (б) и пре-
образователя с системой управления
(в) при несимметричном управлении
и активно-индуктивной нагрузке
Уравнения регулировочных характеристик системы
управления при пилообразном опорном напряжении, соответствен-
но для положительного и отрицательного напряжения управления
имеют следующий вид:
391
У| = и~ ' 72 =1’ Уз =
^оптах
^'у"Р
^оптах
у4=1.
(23.27)
Регулировочные характеристики системы управления преобра-
зователя, построенные по уравнениям (23.27), приведены на
рис. 23.14 б.
Уравнение регулировочной характеристики преобразователя
вместе с системой управления имеет следующий вид:
= . (23.28).
II II
^d on max
Регулировочная характеристика преобразователя вместе с
системой управления, построенная по уравнению (23.28), приведе-
на на рис. 23.14 в.
Сравнив рис. 23.13 в и рис. 23.14 в, можно увидеть, что регу-
лировочная характеристика преобразователя с системой управле-
ния не зависит от способа управления.
23.4 4. Работа реверсивного ППН на ПЭДС
при симметричном управлении
На рис. 23.15 приведена схема реверсивного ППН, работающе-
го на якорь двигателя. Временные диаграммы, иллюстрирующие
его работу при симметричном управлении, приведены на
рис. 23.16.
Рис. 23.15. Схема реверсивного ППН, работающего на якорь двигателя
На рис. 23.16 а показано напряжение на нагрузке, а на рис.
23.16 б показан ток нагрузки в двигательном режиме при направле-
нии вращения «Вперед». В момент t\ при включении транзисторов
V\, V2 ток нарастает под действием напряжения Ud в цепи «+» ис-
точника питания, И, ЭМ, LH, RH, V2, «-» источника питания. По-
лярность ПЭДС двигателя Ед показана на рис. 23.15. В момент/2
392
Рис. 23.16. Диаграммы напряжений и токов, иллюстрирующие работу ППН
на двигатель при симметричном управлении: а) напряжение на нагрузке,
б) ток в нагрузке в двигательном режиме, в) ток в нагрузке при торможении,
г) напряжение на нагрузке и ток после реверса
при выключении транзисторов И, И2 ток начинает проходить за
счет энергии, запасенной в индуктивности нагрузки, по контуру £н,
RH, VD3, «+» источника питания, «-» источника питания, ED4, ЭМ.
При переходе на торможение ЭДС генератора £г = Ед, так
как скорость не может мгновенно измениться, а ток должен изме-
нить направление на противоположное. При подаче сигнала на
393
торможение снимаются управляющие импульсы с И и Г2 и пода-
ются на ИЗ и И4. Но транзисторы не включаются, так как за счет
энергии, запасенной в индуктивности, ток продолжает проходить
через l'D4. VD3. Индуктивность якоря мала, поэтому ток быстро
спадает до нуля. Генератор не может отдавать энергию в источник
питания, так как его ЭДС Ет ниже ЭДС источника питания. По-
этому для рекуперации энергии необходима дополнительная ЭДС.
Рис. 23.16 в иллюстрирует установившийся режим при торможе-
нии. В момент /3 включаются транзисторы 13 и V4 и ток быстро
нарастает, так как возникает контур короткого замыкания по цепи
«+» источника питания, V3, RH, LH, ЭМ, Г4, «-» источника пита-
ния. При этом ЭДС источника питания и ЭДС электрической ма-
шины действуют согласно. Ток в цепи нагрузки нарастает в проти-
воположном направлении и стремится к значению тока установив-
шегося короткого замыкания. В момент t4 выключаются транзи-
сторы V3, V4, но ток проходит в том же направлении за счет со-
гласного включения ЭДС генератора и ЭДС самоиндукции по цепи
Сн, ЭМ, EDI, «+» источника питания, «- » источника питания, 1792,
7?н. Энергия возвращается в источник питания.
При симметричном управлении во время рекуперации прихо-
дится то потреблять энергию от источника, то возвращать ее об-
ратно, но в большем количестве.
За счет рекуперации энергии двигатель тормозится, Ег
уменьшается до нуля, а у3>4 растет. При у3 4 >0,5 начинается разгон
двигателя в противоположном направлении. Временные диаграммы
рис. 23.16 г иллюстрируют напряжение на нагрузке и ток в нагруз-
ке после реверса и разгона до той же скорости.
Уравнения регулировочных характеристик такие же, как при
работе на активно-индуктивную нагрузку, но снимается ограниче-
ние на величину у. При у <0,5 полярность напряжения меняется и
начинается рекуперация.
Регулировочные характеристики преобразователя, построен-
ные по уравнениям (23.23), приведены на рис. 23.17 а.
Регулировочные характеристики системы управления преобра-
зователя, построенные по уравнениям (23.24), приведены на рис.
23.17 6.
Регулировочная характеристика преобразователя вместе с
394
системой управления, построенная по уравнению (23.25), приведе-
на на рис. 23.17 в.
Рис. 23.17. Регулировочные ха-
рактеристики преобразователя,
работающего на двигатель, (а),
системы управления (б) и пре-
образователя с системой управ-
ления (в) при симметричном
управлении
23.4.5. Работа реверсивного ППН на ПЭДС
при несимметричном управлении
Несимметричное управление реализуется в той же силовой
схеме рис. 23.15. На рис. 23.18 а показаны напряжения, подаваемые
на управляющие электроды транзисторов (базы или затворы) и на-
пряжение на нагрузке при направлении вращения «Вперед», а на
рис. 23.18 б ток нагрузки в двигательном режиме. Как видно из рис.
23.15, транзисторы стойки П, V4 включаются по очереди с часто-
той модуляции и определяют глубину регулирования, а транзисто-
ры стойки V2, V3 включаются или запираются длительно и опреде-
ляют направление тока в нагрузке.
В момент t\ при включении транзисторов И, V2 ток нарастает
под действием напряжения Ud в цепи «+» источника питания, И,
ЭМ, LH, RH, V2, «-» источника питания. Полярность ПЭДС двига-
395
Рис. 23.18. Диаграммы напряже-
ний и токов, иллюстрирующие
работу ППН на двигатель при не-
симметричном управлении:
а) напряжения на входах транзи-
сторов и на нагрузке, б) ток в на-
грузке в двигательном режиме,
в) ток в нагрузке вблизи холосто-
го хода, г) ток в нагрузке при
тормозном режиме
теля Ед показана на рис. 23.15. В момент /2 транзистор И выключает-
ся, и ток начинает проходить за счет энергии, запасенной в индук-
тивности нагрузки, по контуру Ен, 7?н, Е2, VD4, ЭМ. Далее процесс
повторяется. Транзистор V4, хотя и получает отпирающие импульсы,
но ток не проводит. Ток обходит его через диод ED4.
Если ток нагрузки мал (см. рис. 23.18 в), то процессы видоизменяют-
ся. С момента /3 при включенных транзисторах VI, V2 ток нараст ает
под действием напряжения Ud в цепи «+» источника питания, VI,
ЭМ, LH, RH, V2, «-» источника питания. В момент /4 транзистор VI
выключается, и ток начинает проходить за счет энергии, запасенной в
индуктивности нагрузки по контуру £н, Лн, V2, VD4, ЭМ. В момент
396
t$ ток спадает до нуля и начинает проходить под действием ЭДС ЭМ
по цепи ЭМ, V4, 102, RH, LH, ЭМ. В момент /6 выключается V4, и
ток идет по контуру ЭМ, KD1, «+», «-» источника питания, 1792, /?н,
£н за счет совместного действия ЭДС двигателя и ЭДС самоиндук-
ции. В момент ?7 ток спадает до нуля и все повторяется сначала.
На рис. 23.18 г показано, что для рекуперации в момент ts
включается транзистор V4, ток идет по контуру ЭМ, И4, VD2, /?н,
£н. При этом происходит короткое замыкание для генератора, и
ток нарастает. После этого выключается V4 в момент /9. Согласно
действующие ЭДС генератора и ЭДС самоиндукции через VD1 и
VD2 возвращают энергию в источник питания.
На рис. 23.19 приведены регулировочные характеристики ре-
версивного ППН при несимметричном управлении, построенные с
учетом рассмотренных процессов. На характеристиках 2 3 4 - от-
носительная длительность включенного состояния соответствую-
щих транзисторов. В первом квадранте (см. рис. 23.19 в) реализует-
ся двигательный и тормозной режим при движении «Вперед», а в
третьем - при движении «Назад».
Рис. 23.19. Регулировочные харак-
теристики реверсивного ППН (а),
системы управления (б) и преобра-
зователя с системой управления (в)
при работе на двигатель и несим-
метричном управлении. В вперед
и Н - назад - направления враще-
ния двигателя
397
23.4.6 Работа реверсивного ППН на ПЭДС
при поочередном управлении
Поочередное управление реализуется в той же силовой схеме
рис. 23.15. При поочередном управлении частота переключений
каждого из коммутирующих транзисторов в два раза меньше часто-
ты импульсов выходного напряжения. На рис. 23.20 показаны на-
пряжения, подаваемые на базы транзисторов, напряжение на на-
грузке и ток нагрузки в двигательном режиме при направлении
вращения «Вперед». Транзисторы стоек V2, V3 и И, V4 включают-
ся по очереди в противофазе с частотой вдвое меньшей частоты
модуляции выходного напряжения. То есть период следования им-
пульсов управления Т вдвое длиннее периода модуляции выход-
ного напряжения Т.
Рис. 23.20. Диаграммы напряжений и токов, иллюстрирующие работу
реверсивного ППН с поочередным управлением при формировании
положительного напряжения в двигательном режиме
В момент t\ (начало первого такта) при включении транзисто-
ров И, V2 ток нарастает под действием напряжения Ud в цепи «+»
источника питания, И, ЭМ, LH, RH, V2, «-» источника питания. В
398
момент /2 транзистор VI выключается, и ток начинает проходить за
счет энергии, запасенной в индуктивности нагрузки по контуру LH,
/?н, V2, VD4, ЭМ. В момент t3 (начало второго такта) при включении
транзисторов VI, V2 ток нарастает под действием напряжения Ud в
той же цепи «+» источника питания, VI, ЭМ, £и, RH, V2, « » источ-
ника питания. В момент /4 транзистор V2 выключается, и ток начина-
ет проходить за счет энергии, запасенной в индуктивности нагрузки,
по контуру LH, R„, VD3, VI, ЭМ. Далее процессы повторяются.
Транзисторы V3, V4 хотя и получают отпирающие импульсы,
но ток не проводят. Их проводимость потребуется в тормозных
режимах аналогично несимметричному управлению.
Для включения комплекта «Назад» приходится изменять алго-
ритм управления транзисторами, а именно транзисторы диагоналей
меняются ролями.
Вид управления (несимметричное или поочередное) не влияет
на регулировочные характеристики преобразователя вместе с сис-
темой управления и на работу двигателя.
Преимущества поочередного управления - снижение ком-
мутационных потерь в транзисторах и равномерная их загрузка.
Недостаток поочередного управления - усложнение алго-
ритма управления.
23 4.7. Внешние характеристики реверсивных ППН
Рассмотрим непрерывный режим. На рис. 23.21 а приведена
временная диаграмма напряжений на нагрузке в реверсивном ППН
при xd =°°, симметричном управлении и неидеальных ключах. На
участке проводимости транзисторов напряжение на нагрузке
меньше идеального на величину двойного падения напряжения на
транзисторе &UK, а на участке проводимости диода оно отрица-
тельное и больше идеального (по модулю) на величину равную
двойному падению напряжения на диоде Д[/о.
Уравнение внешней характеристики с учетом допущений,
принятых в п.23.3.1, и уравнений (23.15, 23.23) имеет вид:
С/н=^-(2у-1)-2/нтк. (23.29)
Здесь у - относительная длительность положительного им-
пульса напряжения на нагрузке.
399
Рис. 23.21. Диаграммы напря-
жения на нагрузке с учетом
неидеальности ключей при
симметричном (а) и несиммет-
ричном (б) управлении
На рис. 23.21 б приведена вре-
менная диаграмма напряжения на на-
грузке в реверсивном ППН при
несимметричном управлении
и неидеальных ключах. На участке
проводимости транзисторов напряже-
ние на нагрузке меньше идеального на
величину двойного падения напряже-
ния на транзисторе А£7К, а на участке
проводимости транзистора и диода
оно меньше нуля на сумму падений
напряжений на транзисторе AL/K и
диоде А(7Я.
При несимметричном управлении
уравнение внешней характеристики
соответственно для положительного и
отрицательного импульса напряжения на нагрузке с учетом (23.15):
^н=/(+)-^-2/н-''к.
ин = -Y(-) Ud + 2/н • '1
(23.30)
где у(+) — относительная длительность положительного импульса
напряжения на нагрузке, а - относительная длительность от-
рицательного импульса напряжения на нагрузке.
На рис. 23.22 приведены внешние характеристики реверсив-
ных ППН при симметричном и несимметричном управлении и раз-
личных видах нагрузки.
Реверсивный ППН, работающий на якорь двигателя, при сим-
метричном управлении всегда работает в режиме непрерывного то-
ка. Однако при малых нагрузках, когда ток нагрузки становиться
меньше граничного, ток становится переменным. На рис. 23.22 а
показана область существования переменных токов штриховыми
линиями. В зоне между граничными токами в цепи якоря двигателя
протекает переменный ток.
Область существования переменных токов при несимметрич-
ном управлении показана штриховыми линиями на рис. 23.22 б.
Внутреннее сопротивление источника питания в реверсивных
преобразователях влияет на наклон внешних характеристик так же,
как и в нереверсивных.
400
Рис. 23.22. Внешние характеристики реверсивных ППН при двигательной
нагрузке и симметричном (а) и несимметричном (б) управлении
Достоинством реверсивного ППН с симметричным управ-
лением является свободный переход двигателя в любой другой
квадрант внешних характеристик без изменения алгоритма
управления. Недостаток - большие пульсации тока, вызываю-
щие большие потери от высших гармоник.
Несимметричное управление обеспечивает более высокий
КПД.
23.4.8. Реверсивный двухключевой ППН
На рис. 23.23 приведена схема реверсивного двухключевого
ППН с разделенным источником питания. В этой схеме возможно
только симметричное управление. Все процессы и характеристики
в таком ППН аналогичны рассмотренным для четырехключевого.
Рис. 23.23. Схема реверсивного двухключевого ППН
с разделенным источником питания
Преимущества схемы - меныпее количество ключей и, со-
ответственно, меньшие пот ери в них. Недостат ки - усложнение
источника питания и двуполярное напряжение на нагрузке.
401
Глава 24
АВТОНОМНЫЕ ИНВЕРТОРЫ
24.1. Классификация и принципы построения автономных
инверторов
Автономные инверторы (АИ) - это, как указывалось выше,
преобразователи постоянного тока в переменный, которые работа-
ют на сеть, в которой нет других источников электроэнергии. Ком-
мутации вентилей в них осуществляются благодаря применению
полностью управляемых вентилей или устройств искусственной
коммутации. При этом частота напряжения на выходе АИ опреде-
ляется частотой управления, а величина напряжения - параметрами
нагрузки и системой регулирования.
Автономные инверторы (АИ) классифицируются по ряду при-
знаков
1. По виду входного тока или напряжения АИ делятся:
а) на автономные инверторы тока (АИТ). На входе АИТ
действует источник тока, образованный источником ЭДС и боль-
шой индуктивностью, форма тока на выходе вентильной группы
прямоугольная, а форма напряжения определяется характером на-
грузки (рис. 24.1 а, б). Нагрузка может быть только активной или
активно-емкостной, т.к. при активно-индуктивной нагрузке ток не
может мгновенно изменить направление. Рассмотрим работу схемы
при активно-емкостной нагрузке. В момент t{ начинают проводить
тиристоры И, V2; в момент t2 тиристоры V\, V2 выключаются, а
тиристоры ИЗ, И4 включаются. Ток через нагрузку меняет направ-
ление. Под действием проходящего тока напряжение на нагрузке
изменяется по экспоненте;
б) на автономные инверторы напряжения (АИН). На входе
АПН действует источник ЭДС, напряжение на выходе вентильной
402
группы прямоугольное, а форма тока определяется характером на-
грузки. Напряжение на нагрузке переключается мгновенно, поэто-
му нагрузка может быть активной или активно-индуктивной
(см. рис. 24.1 в, г). Рассмотрим работу схемы при активно-индук-
тивной нагрузке. В момент начинают проводить тиристоры И,
V2. Под действием приложенного напряжения ток нарастает по
экспоненте.
Рис. 24.1. Принципиальные схемы идеальных автономных инверторов тока (а),
напряжения (в), резонансного (д) и диаграммы напряжений и токов,
иллюстрирующие их работу (б, г, е)
403
В момент t2 тиристоры К1, К2 выключаются, но ток через на-
грузку идет в том же направлении через диоды КПЗ, VD4 за счет
энергии, запасенной в индуктивности, при этом напряжение на на-
грузке уже изменило знак, а ток постепенно спадает. В момент
ток равен нулю и включаются тиристоры КЗ и К4, полярность на-
пряжения при этом не меняется, а ток меняет направление. Диоды
предназначены для возврата реактивной энергии в источник пита-
ния. Конденсатор Cd ее воспринимает;
в) на резонансные (колебательные) автономные инверторы
(РАИ). РАИ — это инвертор, на входе и на выходе вентильной
группы которого ток прерывистый, а форма напряжения на выходе
определяется нагрузкой (см. рис. 24.1 д, е). В РАИ должно выпол-
няться условие:
^н<2-Д. (24.1)
V
При выполнении условия (24.1) процессы при включении ти-
ристоров носят колебательный характер. При включении К1 и И2
проходит полуволна тока и конденсатор Ск заряжается с указанной
полярностью. После перехода тока через нуль тиристор запирается.
При включении КЗ и К4 напряжение источника и напряжение на
конденсаторе Ск действуют согласно, ток проходит в противопо-
ложном направлении, конденсатор перезаряжается, V3 и К4 запи-
раются при спаде тока до нуля. Напряжение на нагрузке 7?н повто-
ряет форму тока.
Как видно из описания работы в РАИ могут работать обычные
(незапираемые) тиристоры.
2. По применяемым вентилям АИ делятся:
а) на АИ на вентилях с неполным управлением (обычных
тиристорах);
б) на АИ на вентилях с полным управлением (транзисторах
и запираемых тиристорах.
3. По способу коммутации АИ на незапираемых тиристорах
делятся:
а) на АИ с одноступенчатой коммутацией, в которых комму-
тация осуществляется с помощью коммутирующих конденсаторов
основными вентилями схемы без применения дополнительных ти-
ристоров;
404
б) на АИ с двухступенчатой коммутацией, в которых для
коммутации применяются специальные коммутирующие вентили.
4. По месту включения коммутирующих конденсаторов АИ с
одноступенчатой коммутацией делятся:
а) на параллельные АИ (коммутирующие конденсаторы
включены параллельно нагрузке);
б) на последовательные АИ (коммутирующие конденсаторы
включены последовательно с нагрузкой).
В электроприводе в настоящее время наибольшее приме-
нение находят АИН на IGBT транзисторах.
24.2. Автономные инверторы на тиристорах
с одноступенчатой коммутацией
24.2.1. Параллельные автономные инверторы тока
На рис. 24.2 а приведена схема однофазного параллельного
АИТ на обычных тиристорах с неполной управляемостью, а на рис.
24.2 б — временные диаграммы токов и напряжений в схеме. Запи-
рание происходит с помощью энергии, запасенной в конденсаторе
Ск. Рассмотрим работу схемы. В момент t} после подачи управ-
ляющего импульса начинают проводить тиристоры KI, V2. Ток
идет по пути «+», Ld, И, RH || Ск, Р2, «-». Под действием проходя-
щего тока напряжение нс на коммутирующем конденсаторе полу-
чает полярность, показанную на рис. 24.2 а знаками «+», «-» без
скобок. В момент t2 включаются тиристоры ТЗ, F4, и конденсатор
Ск подключается к цепочкам V2, Р4 и РЗ, И так, что его разряд-
ный ток короткого замыкания направлен навстречу току в ранее
проводивших тиристорах И, Г2. Они выключаются. Коммутация
происходит практически мгновенно, так как мала индуктивность в
контуре коммутации. Поэтому за время коммутации напряжение на
конденсаторе практически не успевает измениться. Ток через на-
грузку меняет направление и конденсатор перезаряжается (знаки в
скобках). Таким образом, коммутирующий конденсатор служит для
выключения предыдущего вентиля при включении последующего.
На диаграмме (см. рис. 24.2 б) показано, что в момент выключения
И к нему прикладывается отрицательное напряжение, которое при
перезарядке конденсатора меняет знак. Во избежание опрокидыва-
405
ния инвертора за время ts должна восстановиться запирающая спо-
собность тиристоров в прямом направлении. Это время ограничи-
вает частотные возможности тиристоров. АИТ могут работать до
частот 2-2,5 кГц. При больших частотах тиристор не успевает вос-
становить запирающие свойства.
а)
Рис. 24.2. Параллельный автономный инвертор тока (а), диаграммы токов
и напряжений (б), его упрощенная схемы замещения (в), векторная диаграмма (г),
внешние (д) и регулировочные (частотные) (е) характеристики
д)
Рассмотрим качественно область возможной работы АИТ.
АИТ «боится» коротких замыканий (КЗ), т.к. при этом комму-
тирующий конденсатор закорочен и нечем коммутировать. При
уменьшении сопротивления нагрузки (приближении к КЗ) умень-
шается время t5. При достижении времени 4^™, равного времени
406
восстановления запирающей способности тиристоров в прямом на-
правлении, коммутация становится невозможной.
Для оценки возможности работы на холостом ходу (XX) пред-
положим, что АИТ идеален и 7?н =°°. При этом ничего не мешает
коммутации, энергия непрерывно потребляется от источника, но
нигде не рассеивается, следовательно, запасается в реактивных
элементах. Поэтому напряжение на конденсаторе стремится к бес-
конечности. Таким образом, на холостом ходу АИТ работать не
может.
При расчете АИТ примем следующие допущения: тиристоры
идеальны, потери в элементах схемы отсутствуют.
На рис. 24.2 в приведена схема замещения АИТ. учитываю-
щая, что через диагональ (выход) моста проходит прямоугольный
ток /вых. Его действующее значение равно Id. Если разложить в
ряд Фурье кривую фазного тока, то амплитуда первого члена ряда
4ых(1)т = (24.2)
Для дальнейшего расчета АИТ применим метод основной
гармоники. Действующее значение первой гармоники тока
4b.x(n=^1 = 0.9/rf. (24.3)
По схеме замещения можно построить векторную диаграмму
(см. рис. 24.2 г). Угол сдвига выходного тока инвертора относи-
тельно напряжения на нагрузке <ри можно определить из векторной
диаграммы
tg% = 7^ = —= «упрСк7?„ • (24.4)
7н(ц _—£—
^упр^к
Активная мощность, передаваемая в нагрузку,
^н=^н(1/вых(1)со8Фи- (24.5)
Мощность, потребляемая от источника питания,
Pd=UdId. (24.6)
Коэффициент полезного действия идеального преобразователя
?? = 1.
Тогда можно записать уравнение баланса мощностей на входе
и выходе АИТ
407
Ud^d ~ Ц{(1/вых(1) COS<A< ' (24.7)
Отметим, что в равенстве (24.7) мы пренебрегли всеми выс-
шими гармониками. Поэтому фактически всегда правая часть
меньше Pd. Чем ближе к синусоиде формы напряжений, тем точнее
расчет.
Угол сдвига (рн примерно равен углу управления (углу опере-
жения) /3 (см. рис. 24.2 б). Угол /3 определяет, насколько раньше
переходит через нуль ток (выключается тиристор), чем переходит
нуль напряжение на вентиле.
Учитывая (24.3) и (24.7), а также то, что <ри = /3 можно найти
первую гармонику напряжения на нагрузке
Амплитуда тока через вентиль
Липах = Л/> (24.9)
а среднее значение
Л=у- (24.10)
Амплитуда напряжения, прикладываемого к запертому вентилю
t2omax=>/2C7H(l). (24.11)
Угол, предоставляемый на восстановление запирающих
свойств тиристоров в прямом направлении, с учетом (24.4) и
(ри ~ (3 определится по формуле
Д = arctg(toynp/?HCK), (24.12)
а соответствующее ему время
tS= — • (24.13)
^упр
Емкость конденсатора Ск выбирается исходя из самой высо-
кой частоты диапазона соупртах и времени выключения тиристора
ZB по условию
Ртт — ^упр max А • (24.14)
Из (24.12) и(24.14) можно найти Ск.
408
Внешняя характеристика АИТ UH = f (—) крутопадающая
(см. рис. 24.2 д). Как указывалось выше, на холостом ходу выход-
ное напряжение идеального ЛИТ стремится к бесконечности. Регу-
лировочная (частотная) характеристика U„ = /(шупр) приведена на
рис. 24.2 е. Обе характеристики доходят до ограничительной харак-
теристики ОХ.
Недостаток АИТ - плохая внешняя характеристика.
Для улучшения внешних характеристик АИТ применяют усо-
вершенствованные схемы — с обратными выпрямителями, с индук-
тивно-тиристорными компенсаторами и с отсекающими диодами
(рис. 24.3 и 24.4).
Рис. 24.3. Параллельные АИТ с обратным выпрямителем (а), индуктивно-
тиристорным компенсатором (б) и внешняя характеристика АИТ
с обратным выпрямителем (в)
409
Рис. 24.4. Параллельные автономные инверторы тока с отсекающими диодами,
выполненные по однофазной мостовой (а) и трехфазной мостовой (б) схемам,
и диаграммы токов и напряжений в однофазной схеме (в)
24.2.2. Автономные инверторы напряжения на тиристорах
На рис. 24.5 а приведена схема однофазного параллельного
АНН на обычных тиристорах с неполной управляемостью, а на рис.
24.5 в - временные диаграммы напряжений в схеме. Конденсатор
Ск служит для коммутации вентилей, индуктивности LK - для ог-
раничения тока при перезарядке конденсатора. В момент ц вклю-
чаются вентили И, V2. Ток идет по цепочке «+», £к1, И, 7?и|| Ск,
V2, Lk2, «-». В момент £ конденсатор заряжается до напряжения Ud
и открываются диоды EDI, VD2. В дальнейшем напряжение на на-
410
грузке остается постоянным до момента /3. В этот момент времени
включаются КЗ, К4, коммутирующая емкость выключает И1, К2.
Конденсатор перезаряжается, процессы повторяются. Напряжение
на нагрузке в отличие от идеального АНН трапецеидальное (см.
рис. 24.5 в). Чем меньше значение индуктивности LK, тем все более
трапеция стремится к прямоугольнику, и зарядный ток больше.
О
>пр
Рис. 24.5. Параллельный автономный инвертор напряжения на тиристорах (а),
и его модификация (б), диаграммы напряжений (в), внешняя (г) и регулиро-
вочная (д) характеристики
В идеальном ЛИН действующее значение напряжения на вы-
ходе инвертора
UH=Ud. (24.15)
Внешняя характеристика АИН жесткая (см. рис. 24.5 г).
Наклон ее определяется внутренним сопротивлением источника
411
питания, а также падением напряжения на активных сопротивлени-
ях реакторов и вентилей.
На рис. 24.5 д показана регулировочная (частотная) характери-
стика. При повышении частоты напряжение на нагрузке мало меня-
ется.
Предельная частота у АПН ниже, чем у АИТ. т.к. время ts,
предоставляемое на восстановление запирающих свойств тиристо-
ров меньше. Предельная частота достигает значений 500-1000 Гц.
В схеме (см. рис 24.5 а) после открытия диодов ИО появляется
замкнутый контур VD, LK, И, в котором бесполезно тратится энер-
гия. Усовершенствованная схема (см. рис. 24.5 б) устраняет этот
недостаток.
24.2.3. Резонансные автономные инверторы
На рис. 24.6 а приведена схема последовательного резонансно-
го АИ, выполненного по полумостовой схеме (схеме с разделенным
источником питания). Условие его работоспособности:
к-<2Л- <241<|
Схема «боится» холостого хода и короткого замыкания. На хо-
лостом ходу схема неработоспособна, так как нарушается условие
(24.16). В идеальном РАИ при коротком замыкании напряжения на
реактивных элементах стремятся к бесконечности, так как энергия
непрерывно потребляется от источника питания, но нигде не рассеи-
вается, а следовательно, накапливается в реактивных элементах.
В РАИ самое большое время ts за счет паузы в прохождении
тока (см. рис. 24.6 б), поэтому схема может работать до частот по-
рядка 20 кГц.
Внешняя характеристика достаточно жесткая (см. рис. 24.6 в).
Для ограничения напряжений на реактивных элементах, а сле-
довательно, и на вентилях, при коротком замыкании применяется
обмотка сброса Lc, индуктивно связанная с £к. Если напряжение
на обмотке сброса uLc >Ud, то начнется возврат энергии в источ-
ник, и напряжение будет ограничиваться (см. рис. 24.6 в, штрихо-
вые линии). При этом схема работоспособна даже при коротком
замыкании.
412
Рис. 24.6. Последовательный резонансный автономный инвертор по полумосто-
вой схеме (а), диаграммы напряжений и токов, иллюстрирующие его работу (б)
и внешние характеристики и зависимости амплитуды напряжения на вентиле
от нагрузки (в)
РАИ применяют в высокочастотных электротермических ус-
тановках, а также в качестве узлов искусственной коммутации.
24.3. Автономные инверторы на тиристорах
с двухступенчатой коммутацией
На рис. 24.7 а приведена схема трехфазного мостового ЛИН с
двухступенчатой коммутацией. Узел искусственной коммутации
выполнен на тиристорах Р7, И8 по схеме последовательного РАИ с
закороченной нагрузкой. При поочередном включении вентилей
Р7, И8 на индуктивностях Лк появляются напряжения (см. рис.
24.7 б), которые включаются последовательно в цепь тиристоров
Н-И6. и в моменты, когда требуется выключить тиристоры, соз-
дают на них обратное напряжение. Вид выходного напряжения без
учета процессов коммутации представлен на рис. 24.7 в.
413
Рис. 24.7. Трехфазный мостовой автономный инвертор напряжения с двухсту-
пенчатой коммутацией и общим коммутирующим устройством (а), диаграммы
напряжения и тока в коммутирующем устройстве, иллюстрирующие его рабо-
ту (б) и диаграммы линейного напряжения (без учета коммутационных
процессов) (в)
24.4. Автономные инверторы напряжения на транзисторах
24.4.1. Однофазные транзисторные АИН
Автономный инвертор напряжения преобразовывает постоян-
ное напряжение, подаваемое на его вход, в пропорциональное по
величине переменное напряжение. Существует ряд схем однофаз-
ных ЛИН на полностью управляемых вентилях (транзисторах
или запираемых тиристорах). На рис. 24.8 приведена однофазная
мостовая схема и диаграммы токов и напряжений, иллюстрирую-
щие ее работу.
414
Пары транзисторов И, VI и КЗ, К4 образуют диагонали мос-
та, а пары транзисторов И, К4 и V2, КЗ образуют стойки моста.
При попарном включении транзисторов И, V2 или ИЗ, И4 знаки
напряжения на нагрузке противоположны.
Рис. 24.8. Однофазный мостовой АИН (а) и диаграммы напряжений
и токов, иллюстрирующие его работу (б)
Рассмотрим подробнее процессы при работе АИН на активно-
индуктивную нагрузку. При включении транзисторов VI, К2 с мо-
мента ток проходит по цепи «+», И, 7?н, £н, V2, « » источника
питания. После выключения транзисторов VI, V2 в момент /2
управляющие импульсы подаются на транзисторы V3, V4, но они не
могут включиться, так как ток в индуктивности не может мгновен-
но изменить направление. Поэтому, после выключения транзисто-
ров VI, V2 ток проходит по цепи Лн, VD3, источник питания, VD4,
RH . Энергия, запасенная в индуктивности нагрузки, возвращается в
415
источник питания. После спада тока до нуля в момент открыва-
ются транзисторы ИЗ, V4 и ток в нагрузке меняет направление. Да-
лее процессы идут аналогично.
Конденсатор Cd на входе является обязательным элемен-
том АИН. Он имеет двоякое назначение. Подробно назначение
конденсатора рассматривалось в п.23.3.1. Здесь только напомним,
что он обеспечивает постоянное потребление энергии от источ-
ника питания даже при запертом состоянии ключей и защищает
полупроводниковые элементы от перенапряжений, возникаю-
щих на соединительных проводах между источником питания и
блоком вентилей. Он должен быть включен как можно ближе к
блоку вентилей.
На рис. 24.9 приведена схема АИН с разделенным (симмет-
ричным) источником питания и диаграммы токов и напряжений,
иллюстрирующие ее работу. Средняя точка источника питания
(нуль источника питания) может быть искусственной, то есть соз-
данной одинаковыми резисторами или конденсаторами.
При включении транзистора И с момента tx ток проходит по
цепи «+», VI, ZH, RK, средняя точка источника питания. После вы-
ключения транзистора VI в момент t2 управляющий импульс пода-
ется на транзистор V2, но он не может включиться, так как ток в
индуктивности не может мгновенно изменить направление. Поэто-
му, после выключения транзистора V] ток проходит по цепи £н.
7?н, нижняя половина источника питания VD2. Энергия, запасенная
в индуктивности нагрузки, возвращается в источник питания. После
спада тока до нуля в момент открывается транзистор V2, и ток в
нагрузке меняет направление. Далее процессы идут аналогично.
Как видно из сравнения рис. 24.8 б и рис. 24.9 б временные
диаграммы одинаковы по форме и отличаются амплитудой напря-
жения.
24.4.2. Трехфазный мостовой АИН
Автономный инвертор напряжения преобразовывает постоян-
ное напряжение, подаваемое на его вход, в пропорциональное по
величине переменное напряжение. Существует много схем АИН.
Однако, наибольшее применение в электроприводе переменного
тока получила трехфазная мостовая схема на полностью
416
управляемых вентилях (транзисторах или запираемых тиристо-
Рис. 24.9. Схема АИН с разделенным источником питания (а)
и диаграммы напряжения и тока, иллюстрирующие его работу (б)
Рис. 24.10. Транзисторный трехфазный мостовой автономный
инвертор напряжения при соединении нагрузки звездой
14 Зак. 50
417
Из эквивалентных схем видно, что при соединении нагрузок
звездой каждая фаза включена либо параллельно другой фазе и по-
следовательно с третьей, либо последовательно с двумя другими
параллельно соединенными фазами. Поэтому к каждой фазе при-
кладывается напряжение равное Ud/?> или 2Ud/3 (при симметрич-
ной нагрузке), и фазное напряжение на нагрузке имеет двухступен-
чатую форму (см. рис. 24.11 а).
Рис. 24.11. Диаграммы токов и напряжений в трёхфазном мостовом АИН (а)
и эквивалентные схемы при нагрузке соединённой звездой (б)
и треугольником (в)
418
При соединении нагрузки треугольником к каждой фазе на-
грузки либо прикладывается напряжение источника питания, либо
в течение 1/6 периода фаза оказывается замкнутой на себя, т е. фаз-
ное напряжение прямоугольное с паузой длительностью 1/6 перио-
да (см. рис. 24.11 а). Линейное напряжение при соединении нагруз-
ки звездой имеет такую же форму.
24.4.3. Расчет идеального трехфазного мостового АИН
При расчете АИН примем следующие допущения:
1) полупроводниковые ключи (встречно-параллельно вклю-
ченные транзистор и диод) идеальны;
2) угол проводимости полупроводниковых ключей А = 180°;
3) нагрузка АИН активно-индуктивная.
На рис. 24.11 а приведены диаграммы фазного и линейного
напряжения трехфазного мостового АИН, полученные при этих
допущениях. Фазное напряжение имеет указанный вид при схеме
соединения нагрузки звездой, а линейное — не зависит от схемы со-
единений.
Действующее значение линейного напряжения на нагрузке ис-
ходя из диаграммы линейного напряжения пнл (см. напряжение
иАВ на рис. 24.11 а)
| 1 2? [2
= -Ud = 0,816Ud. (24.17)
2я ' V 3
Дальнейший расчет выполняется методом основной гармони-
ки. Если разложить в ряд Фурье кривую напряжения пнл, амплиту-
да первого члена ряда
UHnWm=^-Ud. (24.18)
В разложении имеются, кроме первой, гармоники с номерами
к = пт±1, (24.19)
где т — произведение числа фаз на число пропускаемых полуволн
(т = 3 • 2 = 6); и = 1, 2, 3... - натуральный ряд чисел.
Действующее значение первой гармоники линейного напря-
жения
^нл(1) = = = 0,78^. (24.20)
419
14*
Оно весьма близко к действующему значению линейного на-
пряжения (7НЛ (отличается меньше, чем на 5 %), т.к. амплитуды
гармоник с ростом номера быстро убывают. Действующее значение
первой гармоники фазного напряжения
^нФ(1) =^ = 2/2 Ud =о,45^. (24.21)
х/3 я
В дальнейших расчетах индекс «(!)» опускаем, т.к. расчет ве-
дется везде по первой гармонике. Отмечая идеальность схемы, бу-
дем применять индекс «0».
Тогда
^нф0=Ц,ф(1)- (24‘22)
Фазный ток при активно-индуктивной нагрузке имеет кусоч-
но-экспоненциальную форму (рис. 24.12 а). Форма тока ближе к
синусоидальной, чем форма напряжения из-за фильтрующего дей-
ствия индуктивной нагрузки. Такой будет форма тока при работе на
заторможенный асинхронный двигатель.
Ток вращающегося асинхронного двигателя существенно от-
личается от тока заторможенного из-за различия схем замещения
Рис. 24.12. Диаграммы напряжений и токов в трехфазном мостовом автоном-
ном инверторе напряжения при угле проводимости вентилей 180 град. эл. и
различных коэффициентах мощности нагрузки: а) / > 0,528 ; б) % < 0,528
420
асинхронного двигателя по 1-й и высшей гармоникам. Поэтому
высшие гармоники тока при вращении двигателя выражены силь-
нее. чем у неподвижного. По литературным данным из-за высших
гармоник потери в меди обмоток статора возрастают на 10... 15 %, а
в стали - на 13...50 %. Тем не менее, для упрощения по-прежнему
не будем учитывать высшие гармоники. После расчета по методу
основной гармоники можно учесть это увеличение потерь.
Тогда фазный ток при активно-индуктивной нагрузке
(24.23)
^нф
где 7нф - полное сопротивление фазы нагрузки.
Активная мощность, передаваемая в нагрузку
рн = 3^нфо7ф со^н (24.24)
Здесь (рн — угол сдвига тока нагрузки относительно напряже-
ния. Мощность, потребляемая от источника питания
Pd=Udld, (24.25)
где Id - среднее значение тока потребляемого от источника пита-
ния.
Коэффициент полезного действия (КПД) идеального преобра-
зователя г/ = 1.
Тогда можно записать уравнение баланса мощностей на входе
и выходе АИН
ud]d = 3^нфо7ф cos<Ph • (24.26)
Отметим, что в равенстве (24.26) мы пренебрегли всеми выс-
шими гармониками. Поэтому фактически всегда
ад>36/нф0/фСО8<рн. (24.27)
Равенство (24.26) выполняется тем точнее, чем ближе по фор-
ме к синусоиде ток .
Из равенства (24.26) с учетом (24.21,24.22) следует
Зл/2
Id=-----7фСО8<?н = 1,357ф cos<pH. (24.28)
71
Амплитуда тока через полупроводниковый ключ
Лешах = Л>т = ^ф = (24.29)
cos<pH
где /фП1 - амплитуда фазного тока.
421
Амплитуда напряжения на полупроводниковом ключе
UKmax=Ud. (24.30)
Остановимся подробнее на входном токе инвертора /н. В мо-
мент выключения вентиля V4 и включения вентиля И (см.
рис. 24.10) за счет ЭДС самоиндукции ток в фазе А сохраняет на-
правление и протекает через диод VDI, тиристор Е5 и фазу С. Та-
ким образом, ток фазы А составляет часть тока фазы С и от источ-
ника потребляется ток, меньший на величину этого реактивного
тока. При этом если реактивный ток переключаемой фазы iA боль-
ше тока фазы ic, то в момент коммутации ток источника питания
изменит направление. Если АИН питается от выпрямителя, то на
его входе устанавливается конденсатор Cd, и в него ответвляется
часть реактивного тока нагрузки. По литературным данным ток на
входе инвертора не меняет знак, если коэффициент мощности на-
грузки % > 0,528. Если принять, что коэффициент несинусоидально-
сти кривой линейного напряжения на выходе инвертора vH = 0,955,
то граничное значение cos<pH составит 0,522, что соответствует уг-
лу фнгр = 56°. На рис. 24.12 а, б показано как изменяется вид вход-
ного тока инвертора при разных углах (рн. При расчете по методу
основной гармоники <рнгр = 60° и мало отличается от точного зна-
чения 56°.
Конденсатор на входе инвертора рекомендуется выбирать по
формуле
Q=0,13-^-, (24.31)
r„AtZc
где MJC - допустимые колебания напряжения на конденсаторе,
Тп - постоянная времени нагрузки.
, (24.32)
'н
где Ен - индуктивность нагрузки.
Формула (24.31) дает максимальное значение емкости с уче-
том самых низких выходных частот.
Таким образом, полученные соотношения позволяют выпол-
нить расчет идеального трехфазного мостового АПН.
422
24.4.4. Расчет трехфазного мостового АИН
с учетом потерь
На рис. 24.13 а приведена схема замещения трехфазного мос-
тового АИН с учетом потерь в инверторе и с неидеальным источ-
ником питания. Ток фазы нагрузки всегда проходит либо через
транзистор, либо через диод. Примем для упрощения, что их со-
противления в проводящем состоянии равны друг другу и равны
гк. Идеальный АИН преобразует без потерь постоянное напряже-
ние в трехфазное. В идеальном преобразователе на входе стоит
конденсатор, что позволяет
считать напряжение Ud посто-
янным (без пульсаций). На рис.
24.13 а идеальный АИН пита-
ется от источника питания,
представленного его схемой
замещения, характеризующей-
ся напряжением холостого хо-
да Ud0 и внутренним сопро-
тивлением гип.
ип
Выполним вначале расчет,
Рис. 24.13. Схема замещения трехфазно-
го АИН (а) и векторная диаграмма для
стороны переменного напряжения (б)
полагая, что источник питания
идеален (гип=0). Векторная
диаграмма для стороны пере-
менного напряжения приведе-
на на рис. 24.13 б.
Суммарное сопротивление фазы
2фх ~ дД'к "l" ^нф) + ^-нф — + ^нф cos<j?H ) + 7.иф sin (рн . (24.33)
Ток фазы
7 £нфо_ (24.34)
Тогда фазное напряжение на нагрузке
2
Ц,ф = ЛЛф = ^нФо . ..-нф2 , • (24.35)
у (^нф cos<pH + /к) + 2нф sin (рн
В теории АИ, как указывалось выше, часто внешней характе-
ристикой называют зависимость фазного напряжения на нагрузке
от сопротивления (или точнее проводимости) нагрузки
423
С7нф = /(l/rH). Но для АИН в качестве внешней характеристики бо-
лее удобна, особенно при экспериментальных исследованиях, более
привычная зависимость фазного напряжения на нагрузке от тока
нагрузки С7нф=/(7н).
Как видно из формулы (24.35) и схемы замещения (см. рис.
24.13) вид внешней характеристики зависит от соотношения гк,
7нф и <Рн-
Для упрощения рассмотрим случай чисто активной нагрузки
(cos<pH =1, 7нф =гнф). Тогда с учетом формулы (24.35) и схемы за-
мещения (см. рис. 24.13) можно получить уравнение внешней ха-
рактеристики в относительных единицах
Ц;фо 1 + 2L
^нф
или после преобразований
-^- = 1—(24.37)
^ЛзфО Лфкз
где /фкз- ток КЗ на выходе АИН.
— (24.38)
Из (24.37) видно, что внешняя характеристика в функции тока
линейная. Из (24.36) видно, что жесткость внешней характеристики
К. г
определяется соотношением ——, а так как обычно гк «г гН(Ь, то она
Гнф
достаточно жесткая. Обобщая на общий случай, можно сказать что же-
сткость внешней характеристики определяется соотношением ——.
2^ ,ф
Потери в АИН определяются потерями в ключах
А^и=3^гк. (24.39)
Исходя из баланса мощностей, определим ток на входе неиде-
ального АИН.
= З6/Нф7ф cos<pH + 3/JrK, (24.40)
ИЛИ
^d^d ~ ЗЦ1ф(/ф cos<fc,
(24.41)
424
где
COS^ = ^+^нфСО8ф (24 42)
V(ZH<j>cos<pH+rK) +ZH(t)sin <рн
При записи уравнения энергетического баланса (24.40) не уч-
тены коммутационные потери в транзисторах и потери в конденса-
торах. Однако, при отсутствии широтно-импульсной модуляции и
относительно низких частотах (до ~ 200 Гц) такое допущение
вполне оправдано. Для более точного расчета гк, определенное по
справочнику для транзисторов, можно увеличить на 30...50 %.
Из формул (24.21), (24.41), (24.42) найдем среднее значение
тока на входе инвертора
г.+Z,l(hcos<pH
Id = 1,357ф к нф н . (24.43)
у/(^нф COS(Pa + 'к )2 + 7иф sin2 <Рн
Если источник питания не идеален, то должно быть известно
или определено его внутреннее сопротивление гип. С учетом этого
сопротивления напряжение на входе АИН
^=^o-V«n- (24-44)
Найдем уравнение внешней характеристики с учетом внутрен-
него сопротивления источника питания. Для упрощения, как и вы-
ше, рассмотрим случай чисто активной нагрузки (cos<pH =1,
Zik|) =/нф)‘
Подставив в формулу (24.35) из (24.21), (24.43), (24.44), полу-
чим после преобразований
-^- =----------1— ------. (24.45)
^нфо (i + 2L)(i + JLZiin_)
'нф 'нф
При пренебрежении малыми величинами второго порядка
уравнение может быть преобразовано к виду
-^- =-------!—----. (24.46)
^нфО ,-к+
1 +---------
'нф
По аналогии с (24.37) это уравнение может быть преобразова-
но к виду
425
-^- = 1---(24.47)
IT J v 7
^нфО 7фкз£
где /фкзх - ток КЗ на выходе АИН с учетом внутреннего сопротив-
ления источника питания.
W = • (24.48)
F Н---Г
'к. 1 о 'ип
71
Таким образом, наклон внешних характеристик определяется
внутренним сопротивлением источника питания и сопротивлением
полупроводниковых ключей.
24.5. Регулирование величины и формы напряжения в АИН
24.5.1. Импульсная модуляция в АИН
Регулирование напряжения на выходе АИН может осуществ-
ляться с помощью импульсной модуляции. Из импульсных методов
регулирования выходного напряжения наибольшее распростране-
ние получили широтно-импульсное регулирование (ШИР) и
широтно-импульсная модуляция (ШИМ). Частота модуляции
(несущая частота) должна быть хотя бы на порядок выше, чем
наибольшая частота выходного напряжения.
Модуляция при ШИМ и ШИР осуществляется подачей на вход
системы управления напряжения управления (модулирующего
напряжения) определенной формы. Это напряжение сравнивается
с пилообразным опорным напряжением (развертывающим на-
пряжением). При изменении амплитуды модулирующего напря-
жения изменяется величина выходного напряжения.
При ШИР кривая выходного напряжения инвертора формиру-
ется в виде серии импульсов определенной частоты и одинаковой
амплитуды и длительности. Регулирование напряжения осуществ-
ляется изменением относительной длительности импульсов. На
рис. 24.14 а показан вид напряжения пн на выходе однофазных
АИН, выполненных по однофазной мостовой схеме (см. рис. 24.8 а)
или схеме с разделенным источником питания (см. рис. 24.9 а). Там
же показана гладкая составляющая напряжения на нагрузке ин1,
полученная усреднением средних значений напряжения за период
426
несущей частоты. Она остается прямоугольной и повторяет форму
управляющего (модулирующего) напряжения.
Рис. 24.14. Диаграммы напряжений на нагрузке (г/н), опорного (г/оп)
и управляющего (иу) в однофазном мостовом инверторе напряжения
при ШИР (а) и ШИМ (б)
При широтно-импульсной модуляции (ШИМ) одновременно
обеспечивается регулирование напряжения на выходе АИН и измене-
ние его по квазисинусоидалыюму закону. На рис. 24.14 б показан вид
напряжения ин на выходе однофазных АИН, выполненных по одно-
фазной мостовой схеме (см. рис. 24.8 а) или схеме с разделенным ис-
точником питания (см. рис. 24.9 а). При ШИМ кривая выходного на-
пряжения ин формируется в виде импульсов переменной длительно-
сти, модулированных чаще всего по синусоидальному закону. Регули-
рование напряжения осуществляется изменением длительности им-
пульсов при сохранении закона модуляции (см. рис. 24.14 б). Там же
показана гладкая составляющая, полученная усреднением средних
значений напряжения за период несущей частоты. Она оказывается
синусоидальной и повторяет форму управляющего (модулирующего)
напряжения. По существу это первая гармоника напряжения.
427
Модуляция может быть синхронной, когда несущая частота
кратна частоте управления и изменяется одновременно с ней. При
асинхронной модуляции несущая частота неизменна при измене-
нии частоты управления, но всегда хотя бы на порядок выше наи-
высшей частоты управления. Наиболее широко применяется
асинхронная модуляция.
Опорное напряжение при импульсной модуляции в автоном-
ных преобразователях всегда имеет пилообразную форму.
Однако, форма «пилы» может быть разной. В зависимости от
формы «пилы» модуляция управляющего импульса пуи происходит
по переднему фронту, как показано на рис. 24.15 а, или аналогично
по заднему фронту. Такая модуляция обычно применяется в одно-
фазных схемах и в преобразователях постоянного напряжения.
В трехфазных АИН для исключения одновременного пере-
ключения транзисторов в разных фазах применяют модуляцию по
обоим фронтам. Эту ШИМ называют центрированной (см. рис.
24.15 6).
Из рис. 24.14 видно, что при выключении одного транзистора
сразу подается сигнал на включение противофазного. При этом
возможно короткое замыкание источника питания на время пере-
ходного процесса переключения транзисторов. Для исключения
возникающего при этом выброса тока применяют задержку вклю-
чения очередного транзистора. На рис. 24.16 показано, как форми-
руется время задержки. Это время составляет несколько микросе-
кунд или доли микросекунды в зависимости от частотных свойств
транзисторов.
Рис. 24.15. Фронтовая (а) и центрированная (б) Рис. 24.16. Формирова-
ШИМ ние времени задержки
428
24.5.2. Регулирование напряжения в трехфазных АИН
В трехфазных АИН может применяться как ШИР. так и ШИМ.
Наибольшее применение в настоящее время имеет ШИМ. Поэтому
в основном только он рассматривается ниже. Существует много
способов реализации ШИМ. Мы рассмотрим три:
1) формирование средних напряжений на выводах (формиро-
вание средних за период несущей частоты напряжений по отноше-
нию к средней точке источника питания);
2) формирование фазных напряжений с помощью пространст-
венного вектора;
3) формирование фазных токов.
24.5.3. Формирование средних напряжений на выводах
по отношению к средней точке источника питания
На рис. 24.17 изображен трехфазный АИН с симметричным
источником питания. Средняя точка источника питания (нуль ис-
точника питания) может быть искусственной, то есть созданной
одинаковыми резисто-
рами или конденсато-
рами. Напряжения на
выводах U А0, иво,
Uco по отношению к
средней точке ИП при
отсутствии модуляции
показаны на диаграм-
мах рис. 24.18. Они от-
личаются от фазных
напряжений, построен-
ных относительно нуля
нагрузки и показанных
Рис. 24.17. Трехфазный АИН с симметричным
источником питания
здесь же. Построения линейных и фазных напряжений выполнены
так же, как и на рис. 24.11.
Кроме значимых состояний (нормальных), есть состояния за-
корачивания фаз либо включением вентилей И, КЗ, И5, либо К2,
К4, Кб. При этом напряжение на выходе равно нулю.
На каждом фазном выводе независимо от других фаз форми-
руется синусоидальное напряжение по отношению к средней точке
источника питания. При этом процессы полностью аналогичны
429
Рис. 24.18. Временные диа-
граммы напряжений в трех-
фазном АИН с симметричным
источником питания
ШИМ в однофазных АИН. На рис.
24.17 видно, что напряжения на фаз-
ных выводах по отношению к средней
точке источника питания UA0, UB0
вырезаются из соответствующих на-
пряжений, приведенных на рис. 24.18.
При ШИР и ШИМ (см. рис. 24.19)
гладкие составляющие (средние за пе-
риод несущей частоты значения)
логово г повторяют управляющие
напряжения UyA и UyB.
В линейном напряжении UАВ при
суммировании UA0, UB0 исчезли отри-
цательные прямоугольные участки, то
есть улучшилась форма напряжения.
Максимальная амплитуда напря-
жения на фазном выводе по отноше-
нию к средней точке источника пита-
ния, как следует из описания способа
модуляции
Ц>о™=^-- (24.49)
Его действующее значение, опре-
деленное по гладкой составляющей
f/фОтах (24-50)
Тогда максимальное действующее
значение линейного напряжения, соз-
даваемое сдвинутыми на 120° фазными напряжениями Ц|)От.1Х
U =
лтах
Тогда максимальное действующее значение фазного напряже-
ния
(24.51)
U = ^-
фтах 2х/2'
(24.52)
430
Из формул (24.50, 24.52) видно, что максимальное действую-
щее значение фазного напряжения, измеренного относительно нуля
нагрузки, соединенной звездой (/фтах, определенное по гладкой
составляющей, равно максимальному действующему значению
фазного напряжения, измеренного относительно средней точки ис-
точника питания t/фошах • Следовательно, напряжение действующее
между средней точкой источника питания и нулем нагрузки не со-
держит основной гармоники. Между ними действуют только выс-
шие гармоники, создаваемые разностью мгновенных значений этих
напряжений.
Для регулирования напряжения на выходе АИН необходимо
регулировать амплитуду управляющего (модулирующего напряже-
Рис. 24.19. Диаграммы напряжений в трехфазном АИН с симметричным
источником питания при ШИР (а) и ШИМ (б)
Глубина регулирования определяется коэффициентом мо-
дуляции
^у»и _ Уф _
Куттах ^фтах ^Aimax
(24.53)
На рис 24.20 приведена схема управления, позволяющая реа-
431
лизовать данный способ управления. Задание по частоте ш, пода-
ется на вход трех формирователей максимальных управляющих
напряжений фаз ФУН А, ФУН В, ФУН С. В множительных устрой-
ствах МУ мгновенные значения максимальных управляющих на-
пряжений фаз умножаются на заданный коэффициент модуляции
р3 и на входах компараторов К сравниваются с опорным напряже-
нием подаваемым от генератора опорного напряжения ГОН. Им-
пульсы сформированные на выходе компараторов подаются на
усилители мощности (не показанные на рисунке), а с усилителей
мощности на верхние транзисторы (нечетные транзисторы) стоек
АИН. Нижние транзисторы, работающие в противофазе получают
управляющие импульсы через инверторы И и соответствующие
усилители мощности.
Рис. 24.20. Функциональная схема системы управления, формирующей
напряжения на выводах по отношению к средней точке источника питания
24.5.4. Формирование фазных напряжений с помощью
пространственного вектора
Трехфазный АИН с ШИМ должен формировать мгновенные
значения напряжений (средние за период несущей частоты) на трех
фазах. Переключение каждого вентиля изменяет напряжения на
всех фазах. Это осложняет разработку алгоритма управления вен-
тилями. Управление упрощается, если формировать не фазные на-
432
пряжения (векторы фазных напряжений), а перейти к формирова-
нию пространственного (не временного вектора), введенного в
теории электрических машин. Согласно этой теории три симмет-
ричных фазных напряжения при отсутствии нулевого провода мо-
гут быть представлены одним пространственным вектором (space
vector), однозначно определяющим эти напряжения. В литературе
этот вектор называют также обобщенным вектором, результи-
рующим вектором, коммутирующим вектором. Пространствен-
ный вектор U расположен в плоскости перпендикулярной оси
вращения ротора.
Вектор, расположенный на плоскости, имеет две координаты.
В полярной системе - это модуль U и угол #, отсчитываемый про-
тив часовой стрелки от полярной оси до направления вектора. В
прямоугольной системе координат вектор выражается через проек-
ции на вещественную ось а и мнимую ось /3 .
Вещественную ось обычно совмещают с осью фазы «А». Тогда
для фазы «А» угол & = 0. Для произвольного угла за период несу-
щей частоты вектор U запишется так
и = UZ& = Ua+ jUp . (24.54)
Если известны мгновенные значения фазных напряжений иА,
Ив, uc, то пространственный вектор находится геометрическим
суммированием мгновенных значений, направленных по осям фаз-
ных обмоток (сдвинутых на 120 град.), с последующим умножени-
ем на 2/3.
2
U = —(u А+аив + аис ), (24.55)
где а - оператор поворота на 120 град.
л/з 2л
а = -0,5 + у —= exp(j—) = Z120°. (24.56)
Проекции вектора на фазные оси дают мгновенные значения
фазных напряжений.
Это справедливо, если в трехфазной системе отсутствует нуле-
вой провод и обеспечивается равенство нулю суммы мгновенных
значений фазных напряжений:
и а +ив +ис ~ 0 (24.57)
Убедимся в этом на примерах.
На рис. 24.21 а приведена расчетная схема для состояния 1, ко-
433
гда проводят вентили Уб, И1,Г2 (см. рис. 24.10). При этом фаза А
соединена с шиной «+», а фазы В, С с шиной «-». Пусть напряже-
ние питания [7^=300 В. Тогда иА = 2005, ив = -1005, ис = -1005
(см. рис. 24.21 б). Геометрическая сумма этих напряжений с учетом
множителя 2/3 (см. рис. 24.21 б, в)
2 х/з Гз
и = - (200 + (-0.5 + j —)(-100) + (-0,5- jJ- )(-100)) = 200Z0°.
3 2 V 2
Рис. 24.21. Иллюстрация понятия обобщенный вектор: схема соединений при
включении вентилей Уб, И, +2 (а); построение обобщенного вектора (б); обоб-
щенный вектор для этого случая (в); схема соединений при включении вентилей
И, У2, УЗ (г); построение обобщенного вектора (д) и обобщенный вектор
для этого случая (е)
434
Проекции вектора на оси обмоток дают исходные мгновенные
значения напряжений:
иА = Ucos# = 200 В,
uB=U cos( 120°-#) = -! 00 В,
ис = U cos(240° -#) =-100 В.
На рис. 24.21 г приведена расчетная схема для состояния 2, ко-
гда проводят вентили И, V2, V3. При этом фазы А. В соединены с
шиной «+», а фаза С с шиной «-». Тогда иА =100 В, ив = 100 В,
ис =-200 В (см. рис. 24.21 д). Геометрическая сумма этих напря-
жений с учетом множителя 2/3 (см. рис. 24.21 д, е)
2 х/з [3
и = - (100 + (-0,5 + j ~ )(100) + (-0,5 - j J- )(-200)) = 200Z600.
Проекции вектора на оси обмоток дают исходные мгновенные
значения напряжений:
иА = U cos 60° = 100 В,
ив = U cos(120° - 60°) = 100 В,
ис = U cos(240° - 60°) = -200 В.
Таким образом, пространственный вектор находится гео-
метрическим суммированием мгновенных значений напряже-
ний, направленных по осям фазных обмоток (сдвинутых на 120°),
с последующим умножением на 2/3. То есть, он однозначно опре-
деляет мгновенные значения фазных напряжений трех фаз. Заме-
тим также, что этот вектор не требует синусоидальности напряже-
ний.
При каждом изменении состояния схемы вектор поворачива-
ется на 60° (см рис. 24.22 а). Модуль вектора остается неизмен-
ным. Направление вектора совпадает с осью той фазы, которая од-
на подключена к источнику питания. Состояния схемы нумеруются
7=1. 2, 3, 4, 5, 6. Причем номер состояния определяется номером
вентиля, единолично подключенным к одному из выводов источ-
ника питания. Изменение порядка чередования состояний схемы
меняет направление поворота вектора и чередование фаз, а, следо-
вательно, направление вращения двигателя.
Если закоротить все фазы, включив все верхние или все ниж-
ние вентили, мгновенные значения напряжений фаз будут равны
нулю, а вектор их определяющий назовем нулевым вектором.
Для формирования синусоидальных фазных напряжений сред-
435
Рис. 24.22. Базовые пространст-
венные векторы (а) и формиро-
вание промежуточного про-
странственного вектора (б)
ствами ШИМ нужно плавно регулировать средние за период несущей
частоты значения модуля и фазы пространственного вектора выход-
ного напряжения, так чтобы он не скакал на 60°, а плавно вращался.
Этот способ получил название модуляция с помощью про-
странственного вектора (space vector modulation).
Величина модуля формируется
в каждом z-м состоянии схемы изме-
нением относительной продолжи-
тельности у- этого состояния за пе-
риод несущей частоты.
Среднее значение модуля за пе-
риод несущей частоты
2 t 2
U = -Ud^ = -Ud7i, (24.58)
где tj — длительность i-ro состояния
за период несущей частоты, Т — пе-
риод несущей частоты.
Г,=|. (24.59)
Фаза вектора
й* =60°(г-1) (24.60)
позволяет определить проекции на
координатные оси умножением на
модуль cos??- и sin г?, .
Если в течение периода несу-
щей частоты используется два со-
стояния, например, /=1 и 1=2 с отно-
сительными продолжительностями
У] и у2, то на выходе АИН формируются два вектора с фазами й] и
г?2 (см. рис. 24.22 б). Средние значения проекций на оси прямо-
угольной системы координат будут:
2
t/a=jt/j(ricos?91+y2cos??2), (24.61)
2
ир = +y2sm??2). (24.62)
Нулевые состояния не учитываются, так как они не влияют на
модуль и фазу.
436
Среднее значение фазы и модуля пространственного вектора
выходных напряжений
# = arctg—(24.63)
Ua
U^yju^+Up. (24.64)
Если г?! =0°, a г92 =60°, то после подстановки в (24.61, 24.62)
получим
Ua-^Ud(Yl+^y2), (24.65)
Up=judY2^- = -^UdY2, (24.66)
г? = arctg , (24.67)
2/1+Г2
u=jud J/12 + /1Г2+Г2 (24.68)
Таким образом, величина модуля пространственного вектора
выходных напряжений определяется значениями относительных
продолжительностей ненулевых состояний схемы, а фаза — их со-
отношением. Порядок чередований состояний в течение периода
несущей частоты не влияет на средние значения модуля и фазы.
Анализ с учетом того, что Yi +/2 не могут быть больше 1, по-
казывает, что максимальное значение модуля, которое можно по-
лучить во всем диапазоне изменения фазы соответствует
У1=/2=0,5.
Тогда максимальное значение модуля
^тах=4-Ч/-
IILdA И
(24.69)
2
Оно в раза меньше получаемого при Yi или равном
V3
единице. Все возможные значения пространственного вектора на-
О
пряжения находятся внутри шестиугольника со сторонами ^Ud и
началом в его центре. Эти значения определяют максимально воз-
можную амплитуду фазного напряжения при модуляции по сину-
соидальному закону
^фттах=^ах=^^- (24-70)
437
Тогда максимальное действующее значение фазного напряжения
^max=-U^- (24.71)
yjb
Действующее значение линейного напряжения в л/з раз больше:
^лтах=^^- (24-72)
Если пропорционально уменьшать у, и у2 без изменения их
соотношения, то можно пропорционально уменьшать величину
пространственного модуля до нуля без изменения его фазы, а, сле-
довательно, соответственно регулировать мгновенные значения
фазных напряжений одновременно во всех фазах.
Назовем коэффициент /1, уменьшающий и у2, коэффици-
ентом модуляции. Тогда
^ф=^фтах (24.73)
ИЛИ
с/ф
д=77^- (24-74)
'-'фтах
То есть коэффициент модуляции определяет глубину регули-
рования выходного напряжения.
Если в каждом периоде несущей частоты изменять угол 1) по
линейному закону, то на выводах формируются три фазных сину-
соидальных напряжения. Конечно, имеются в виду гладкие (усред-
ненные) составляющие. При этом коммутация ключей с несущей
частотой осуществляется на каждом интервале длительностью
60° только в одной фазе. Это снижает коммутационные потери.
В связи с необходимостью быстрых непрерывных расчетов та-
кое управление может быть осуществлено только с помощью мик-
ропроцессорной системы.
24.5.5. Формирование фазных токов
В электроприводе переменного тока получило широкое при-
менение частотно-токовое управление. При этом импульсная моду-
ляция осуществляется путем сравнения фазных токов электриче-
ской машины с заданными синусоидами фазных токов. Силовая
схема выполняется с выведенной средней точкой источника пита-
ния (см. рис. 24.15). Если действительный ток какой-то фазы ока-
зывается меньше заданного, то на эту фазу через включаемый вен-
438
тиль подается напряжение с шины «+» источника питания; если
действительный ток в какой-то момент станет больше заданного, то
управляемый вентиль от-
ключается, а на фазу по-
дается напряжение с ши-
ны «-» источника пита-
ния (см. рис. 24.23).
Таким образом, дей-
ствительный ток оказыва-
ется почти равным задан-
ному. Отклонения от за-
данного значения Д/ мо-
гут быть также заданы и
составляют 5... 10 %. Чем
меньше Д/, тем выше
частота коммутации,
больше потери в АИН, но
меньше потери в двигате-
ле. Преобразователь рабо-
тает в режиме ЧШИМ.
Рис. 24.23. Формирование фазного тока
На рис. 24.24 приведена функциональная схема системы
управления ЛИН, формирующая выходные токи. Она выполняется
Рис. 24.24. Функциональная схема системы управления АИН,
формирующей выходные токи
439
замкнутой. Сигналы от датчиков фазных токов ДТ А, ДТ В, ДТ С
подаются на один из входов триггеров Шмидта (регенеративных
компараторов) РК А, РК В, РК С, а на вторые входы подаются сиг-
налы заданных токов. Выходные сигналы триггеров усиливаются и
обеспечивают переключение силовых транзисторов. Суммы мгно-
венных и средних значений токов фаз в трехфазной системе без ну-
левого провода всегда равны нулю
G+ZB+/C=O, IA + IB + IC=O. (24.75)
Поэтому два заданных тока iA3, 1Вз задаются, а третий форми-
руется по формуле
«Сз = -0из+'вз)- (24.76)
Формирование выходного тока позволяет осуществить самые
быстродействующие системы электропривода.
24.5.6. Основные соотношения в АИН с ШИМ
Мощность на входе и мощность на выходе идеального АИН
независимо от способа модуляции связаны соотношением (24.26).
Если учесть потери в ключах в проводящем состоянии и не учиты-
вать коммутационные потери, то эта связь выражается соотноше-
нием (24.37). Поэтому в АИН с ШИМ для расчета входного тока
можно также пользоваться формулой (24.40), а внутреннее сопро-
тивление источника питания учитывать по формуле (24.41).
Коммутационные потери обычно составляют не более 30 % от
потерь в проводящем состоянии и могут быть приближенно учтены
соответствующим увеличением сопротивлений ключей.
24.6. Сравнение АИ
Наибольшие частоты в тиристорных АИ могут быть получены
при применении резонансных АИ. Они получили применение в
электротермии и электротехнологии.
Автономные инверторы тока выполняются на тиристорах и
применимы в электроприводе переменного тока, но в последнее
время это направление мало развивается в связи с их недостатками
и бурным развитием транзисторов.
АИН имеюз наилучшие внешние и регулировочные характе-
ристики. АИН на IGBT-транзисторах в настоящее время явля-
ются наиболее перспективным видом АИ.
440
Применение ШИМ в АИН позволяет формировать на выходах
достаточно синусоидальные токи и напряжения.
При отсутствии ШИМ максимальное действующее напряже-
ние на выходе трехфазного АИН (t/HJ] = 0,81617^, С/Нл(1) -0,78t7j),
но в нем очень велико содержание высших гармоник. Амплитуды
пятой и седьмой гармоник составляю! 20 и 14 % от амплитуды ос-
новной гармоники. Регулирование выходного напряжения возмож-
но только регулированием напряжения источника питания. Комму-
тационные потери в транзисторах минимальные.
При формировании фазных напряжений с помощью простран-
ственного вектора максимальное напряжение на нагрузке меньше в
2
раз (на 13,4%), чем без модуляции. Этот способ вызывает
д/З
меньшие коммутационные потери в транзисторах, чем другие спо-
собы ШИМ, так как в каждый момент коммутируется только одна
стойка транзисторов. Система управления наиболее сложная, прак-
тически реализуется только на микроконтроллерах.
Формирование средних напряжений на выводах по отноше-
нию к средней точке источника питания уменьшает максимальное
напряжение на нагрузке по сравнению с предыдущим способом
2
еще в раз (на 13,4 %).
V3
При формировании фазных токов максимальные напряжения и
потери близки к соответствующим показателям при формировании
фазных напряжений.
Очень малые времена переключения силовых транзисторов в
АИН с ШИМ приводят к большим скоростям изменения напряже-
ния и токов. Поэтому в системе АИН-двигатель стали проявляться
новые явления. Кабель, соединяющий АИН с двигателем, следует
рассматривать как цепь с распределёнными параметрами. В таких
цепях при неблагоприятных сочетаниях параметров импульсов на-
пряжения и длины кабеля возникают волновые процессы, приво-
дящие к возникновению перенапряжений. Напряжение на обмотках
двигателя может достигать двойной величины по сравнению с на-
пряжением источника питания.
Глава 25
УПРАВЛЯЕМЫЕ ВЫПРЯМИТЕЛИ НАПРЯЖЕНИЯ.
ОБРАТИМЫЕ ПРЕОБРАЗОВАТЕЛИ НАПРЯЖЕНИЯ
25.1. Управляемые выпрямители напряжения
Все существующие управляемые выпрямители можно разде-
лить на управляемые выпрямители тока и управляемые выпрямите-
ли напряжения.
Изученные ранее классические тиристорные выпрямители яв-
ляются управляемыми выпрямителями тока. В них ток на выходе
может протекать только в одном направлении, а напряжение может
менять знак.
Управляемые выпрямители напряжения выдают на выходе на-
пряжение одной полярности, а ток в них может менять направле-
ние. Они выполняются на вентилях, которые могут проводить ток в
обоих направлениях. Такими вентилями являются транзисторы
(или запираемые тиристоры) со встречно-параллельно включенны-
ми диодами. Обычно они выполняются в виде диодно-
транзисторных модулей. В качестве транзисторов чаще всего ис-
пользуются ЮВТ-транзисторы.
На стороне переменного напряжения управляемого выпрями-
теля напряжения обязательно должна быть индуктивность, а на
стороне постоянного - ёмкость.
В литературе управляемые выпрямители напряжения называ-
ют также активными выпрямителями.
Управляемые выпрямители напряжения могут выполняться по
тем же схемам, что и управляемые выпрямители тока. На рис. 25.1
приведены однофазные мостовые схемы управляемого выпрямите-
ля тока и управляемого выпрямителя напряжения. Силовые схемы
442
управляемых выпрямителей напряжения не отличаются от силовых
схем АИН, только у них меняются местами вход и выход.
Для пояснения принципа действия управляемого выпрямителя
напряжения на рис. 25.2 приведена упрощенная несимметричная
Рис. 25.1. Управляемые выпрямители тока (а) и напряжения (6)
Рис. 25.2. Однофазный управляемый выпрямитель напряжения по несиммет-
ричной мостовой схеме (а) и диаграммы токов и напряжений в нем при пита-
нии от источника постоянного (6) и переменного напряжений (в)
443
однофазная мостовая схема управляемого выпрямителя напряже-
ния и временные диаграммы, иллюстрирующие ее работу. Предпо-
ложим вначале, что на вход схемы подается постоянное напряже-
ние щ с указанной полярностью. На выходе включена противоЭДС
Е (аккумулятор, параллельно которому включен конденсатор).
Пусть Е > их, тогда тока в цепи не будет. Если в момент tx (см. рис.
25.2 б) включить транзистор ЕЗ, то в цепи возникнет короткое за-
мыкание и ток пойдет по контуру: «+», £, EDI, ЕЗ. «-». Если вен-
тили идеальные, напряжение между точками а и b равно нулю. Ток
в индуктивности нарастает. При достижении заданного значения
тока Дадтах в момент г2 транзистор ЕЗ выключается, и на индук-
тивности L возникает ЭДС самоиндукции uL со знаками, указан-
ными на рисунке, суммирующаяся с напряжением щ. Под действи-
ем суммарного напряжения (п1 +иЛ) происходит заряд конденсато-
ра и аккумулятора (участок /2/з)- При спаде тока z’j до заданного
значения ЕЗ включается снова, процессы повторяются. По
существу схема работает, как повышающий преобразователь по-
стоянного напряжения (см. п. 23.2.2).
Пусть теперь на вход схемы подается переменное напряжение
щ . На выходе включена противоЭДС Е (аккумулятор, параллельно
которому включен конденсатор). Пусть противоЭДС больше ам-
плитуды напряжения на входе (£ тогда тока в цепи не бу-
дет. Если в момент tx при положительной полуволне напряжения
(см. рис. 25.2 в) включить транзистор ЕЗ, то в цепи возникнет ко-
роткое замыкание и ток пойдет по контуру: «+», L, EDI, ЕЗ, «-».
Ток в индуктивности нарастает. Зададим максимальные и мини-
мальные значения тока не постоянными, а изменяющимися по си-
нусоиде, например, по синусоиде, совпадающей по фазе с напря-
жением w,. При достижении в момент t2 заданного значения тока
г’задтах транзистор ЕЗ выключается, и на индуктивности L возни-
кает ЭДС самоиндукции uL со знаками, указанными на рисунке.
Под действием суммарного напряжения (их + uL) происходит заряд
конденсатора и аккумулятора (участок Д-/3). При спаде тока i} до
заданного значения z3aflmin транзистор ЕЗ включается снова, про-
цессы повторяются.
При подаче на вход отрицательной полуволны напряжения
444
процессы происходят аналогично, но ток проходит через другие
вентили.
Если на выходе вместо аккумулятора включить активное со-
противление, то процессы в вентильной части не изменятся. Одно-
временно будет происходить разряд ёмкости на на1рузку. Если ем-
кость достаточно велика, то пульсации напряжения будут очень
малы, и ими можно пренебречь. Для упрощения при дальнейшем
анализе будем предполагать, что Cd = °°.
Рассмотрим теперь процессы в полной однофазной мостовой
схеме (см. рис. 25.3). На вход схемы подается переменное напряже-
ние щ. На выходе включена противоЭДС Е (аккумулятор, парал-
лельно которому включен конденсатор). Пусть противоЭДС боль-
ше амплитуды напряжения на входе (Е > Ulm), тогда тока в цепи не
будет. Все диоды заперты напряжением на аккумуляторе. Если в
момент /| при положительной полуволне напряжения (см. рис.
25.4 а) включить транзисторы ЕЗ, Е4, то ток пойдет по контуру:
«+» аккумулятора, ЕЗ, «-» источника переменного напряжения, «+»
источника переменного напряжения, L, Е4, «-» аккумулятора. Ток в
индуктивности L нарастает. При этом полярность в точке h «+», а в
точке а «—». Зададим максимальные и минимальные значения тока
не постоянными, а изменяющимися по синусоиде, например, по
синусоиде, совпадающей по фазе с напряжением щ. При достиже-
нии в момент /2 заданного значения тока /аадтах транзисторы ЕЗ,
Е4 выключаются, и на индуктивности L возникает ЭДС самоин-
дукции uL со знаками, указанными на рисунке. Под действием
суммарного напряжения (и{ + uL) происходит заряд конденсатора
Рис. 25.3. Однофазный мостовой УВН
445
Рис. 25.4. Осциллограммы токов и напряжений в однофазной мостовой
схеме при симметричном (а) и несимметричном (б) управлении
и аккумулятора (участок /2-/3) по цепи: «+» источника переменного
напряжения, L, PD1, «+» аккумулятора, «—» аккумулятора, VD2, «—»
источника переменного напряжения. На этом участке напряжение ме-
жду точками а и b меняет знак, так как эти точки подключаются вен-
тилями к другим шинам. При спаде тока z'j до заданного значения
'зад min транзисторы F3, Р'4 включаются снова, процессы повторяются.
При подаче на вход отрицательной полуволны напряжения
446
процессы происходят аналогично, но ток проходит через другие
вентили. При формировании выходного напряжения происходит
двуполярная модуляция в отличие от рис. 25.2 в.
Как и в преобразователях постоянного напряжения здесь приме-
нимо несимметричное и поочередное управление, при котором форма
напряжения будет соответствовать рис. 25.4 б (аналогичен рис. 25.2 в)
и модуляция будет однополярной. При этом каждый из транзисторов
будет коммутировать реже, что уменьшит коммутационные потери.
Рассмотрим еще ра-
боту однофазного управ-
ляемого выпрямителя на-
пряжения по полумосто-
вой схеме (с удвоением
напряжения или с нагруз-
кой в виде разделенной
противоЭДС), приведен-
ного на рис. 25.5.
Рассмотрим вначале
работу этой схемы при
Рис. 25.5. Однофазная полумостовая схема
запертых (отсутствующих) транзисторах. Пусть на вход схемы пода-
ется переменное напряжение щ. На выходе включены конденсато-
ры, при заряде которых создается противоЭДС, разделенная на две
части. При положительных полупериодах заряжается один конден-
сатор. а при отрицательных второй. Так как каждый из конденсато-
ров может зарядиться до амплитуды переменного напряжения х/2Ц,
то на выходе на холостом ходу можно получить напряжение 2х/2Ц.
Для нормальной работы схемы в режиме управляемого выпря-
мителя напряжения необходимо, чтобы каждая половина противо-
£
ЭДС была больше амплитуды напряжения на входе (— >UXm). При
этом тока в цепи не будет. Если в момент при положительной по-
луволне напряжения (см. рис. 25.6) включить транзистор Е2 (см. рис.
25.5), то в цепи возникнет короткое замыкание, и ток пойдет по кон-
туру: «+» источника переменного напряжения, L, EDI, Е2, «—» ис-
точника переменного напряжения. Ток в индуктивности начнет на-
растать. Зададим максимальные и минимальные значения тока изме-
няющимися по синусоиде, совпадающей по фазе с напряжением w1.
447
При достижении в момент /2 заданного значения тока /задтах тран-
зистор VI выключается, и на индуктивности L(. возникает ЭДС са-
моиндукции uL со знаками, указанными на рисунке. Под действием
суммарного напряжения (щ+иь) происходит заряд конденсатора и
аккумулятора (участок t2-t3). При спаде тока до заданного значе-
ния z3a4min И2 включается снова, процессы повторяются.
100
50
0
-50
-100
100
50
0
-50
-100
5
0
-5
5
0
-5
0 0,002 0,004 0,006 0,008 0,010 0,012 0,014 0,016 0,018 0,020
Рис. 25.6. Осциллограммы токов и напряжений в однофазной
полумостовой схеме
При подаче на вход отрицательной полуволны напряжения про-
цессы происходят аналогично, но ток проходит через другие вентили.
Трехфазная мостовая схема, как показано на рис. 25.7 может
быть выполнена на базе трех однофазных полумостовых схем (с раз-
деленным источником противоЭДС). При этом процессы в них
практически не отличаются от рассмотренных. Трехфазная мостовая
схема может быть выполнена и без разделения источника питания.
Реакторы на входе всех схем управляемых выпрямителей на-
пряжения являются обязательными элементами схемы, так как
именно в них происходит накопление энергии, необходимой для
повышения напряжения. Их роль могут выполнять индуктивности
рассеяния трансформатора, включенного между сетью и входом
вентильного моста.
Если заданный ток совпадает с напряжением питания по фор-
ме и по фазе, то cosip = 1, и схема обладает высокими энергетиче-
скими показателями. Для регулирования напряжения на выходе
448
достаточно изменять амплитуду заданного тока. При этом сохраня-
ется высокий cos<p.
Рис. 25.7. Трехфазная мостовая схема УВН
Вместо рассмотренного релейного регулирования может при-
меняться ШИМ. При этом формируется гладкая составляющая на-
пряжения на зажимах ab так, чтобы под действием разности этого
напряжения и напряжения сети протекал синусоидальный ток,
сдвинутый на заданный угол, например, на угол равный нулю.
Таким образом, управляемые выпрямители напряжения
позволяют потреблять из сети ток заданной формы и обеспечи-
вать при регулировании cost/) = 1.
Чем меньше разница между максимальными и минимальными
значениями формируемого тока, то есть, чем меньше допустимые
отклонения тока от заданного значения, тем выше частота комму-
тации и больше коммутационные потери. Одновременно уменьша-
ется амплитуда и растет частота высших гармоник тока. Поэтому
приходится искать оптимальные соотношения.
25.2. Обратимый преобразователь напряжения АИН-УВН
Если сравнить схемы управляемых выпрямителей напряжения
и автономных инверторов напряжения (см. например, рис. 25.1 би
рис. 24.8 а), то можно увидеть, что они идентичны. Их различие
состоит в том, что в управляемых выпрямителях напряжения на
входе действует источник переменного напряжения, а нагрузкой
является противоЭДС; в автономных инверторах напряжения на
входе действует источник постоянного напряжения, а на выходе
15 Зак. 50
449
нагрузка, роль которой может выполнять двигатель или сеть пере-
менного напряжения (их противоЭДС). Если автономный инвертор
работает на сеть переменного напряжения, в которой есть другие
источники переменного напряжения, то частота и величина напря-
жения на его выходе определяются напряжением этой сети. Таким
образом, автономный инвертор как бы превращается в ведомый.
Следовательно, управляемый выпрямитель напряжения и авто-
номный инвертор напряжения являются обратимыми преобразовате-
лями напряжения. Иными словами обратимый преобразователь
напряжения (ОПН) может работать в выпрямительном и инвертор-
ном режиме, передавая энергию из сети переменного тока в цепь по-
стоянного и обратно, то есть, меняя направление потока мощности.
При этом изменяется направление тока при неизменной полярно-
сти напряжения. Обратите внимание на то, что в однокомплектном
рекуперирующем тиристорном преобразователе, работающем в вы-
прямительном и инверторном режиме, также обеспечивается измене-
ние направления потока мощности. Но при этом изменяется поляр-
ность напряжения при неизменном направлении тока.
В п. 24.5.5 было показано, как можно сформировать на выходе
АИН ток нужной частоты и величины.
ОПН могут применяться в двух случаях:
1) для получения постоянного напряжения от сети переменно-
го с возможностью рекуперации энергии;
2) для питания асинхронного двигателя от сети постоянного
напряжения с возможностью рекуперативного торможения.
В первом случае основным является выпрямительный режим, а
инверторный - вспомогательным; во втором случае основным явля-
ется инверторный режим, а выпрямительный — вспомогательным. В
первом случае частота и напряжение на выходе инвертора опреде-
ляются частотой и напряжением сети, и автономный инвертор пре-
вращается как бы в ведомый. Во втором случае частота и напряже-
ние на выходе инвертора определяются системой управления и регу-
лирования. Напряжение в цепи постоянного тока с помощью систе-
мы автоматического регулирования обычно поддерживается посто-
янным или при переходе из одного режима в другой изменяется в
небольших пределах. В отличие от обычного ведомого инвертора
коммутация в автономном инверторе, работающем на сеть перемен-
ного тока, в которой есть другие источники энергии, осуществляется
не за счет энергии сети, а с помощью управляющих импульсов.
450
В ОПН для формирования переменного тока может приме-
няться как ШИМ, так и релейное регулирование.
На рис. 25.8 приведены осциллограммы токов и напряжений в
однофазном мостовом ОПН при его работе в выпрямительном и ин-
верторном режиме и релейном регулировании. На осциллограммах
б)
О 0,012 0,014 0,016 0,018 0,020 0,022 0,024 0,026 0,028 0,030
Рис. 25.8. Осциллограммы токов и напряжений в однофазной мостовой схеме
в выпрямительном (а) и инверторном (б) режимах
451
15*
видно, что преобразователь работает с углом сдвига между напря-
жением и током, потребляемым из сети, равным 0°, или возвра-
щаемым в сеть, равным 180°, при высокой синусоидальности тока.
25.3. Анализ процессов в обратимом однофазном мостовом
преобразователе напряжения
Управляемый преобразователь напряжения работает, как опи-
сано выше, только при выполнении определенных условий. Рас-
смотрим процессы на примере обратимого однофазного мостового
преобразователя напряжения.
Если принять допущение об идеальности всех элементов, то
должен выполняться баланс мощностей на входе и выходе схемы:
ту2
t71/1cos<p=t/rf/<y--^. (25.1)
Kd
Здесь Uy - напряжение питающей сети, 1у — ток, потребляе-
мый из сети (или отдаваемый в сеть), Ud - выпрямленное напря-
жение (или инвертируемое напряжение), Id - выпрямленный (или
инвертируемый) ток, <р - угол сдвига между напряжением сети и
током, потребляемым из сети (или отдаваемым в сеть).
При выполнении равенства (25.1) одновременно не должно
нарушаться соотношение
^>Цт, (25.2)
где Uym - амплитуда напряжения сети.
Если нарушится соотношение (25.2), то нарушается описанная
работа схемы. Поэтому в области нормальной эффективной работы
управляемого выпрямителя напряжения должно выполняться со-
отношение (25.2).
Таким образом, управляемый выпрямитель напряжения регули-
рует выпрямленное напряжение выше выпрямленного напряжения
неуправляемого выпрямителя, работающего на емкость, а управляе-
мый выпрямитель тока ниже выпрямленного напряжения неуправляе-
мого выпрямителя. Иными словами управляемые выпрямители тока
позволяют только понижать напряжение, управляемые выпрямители
напряжения, как правило, позволяют только повышать напряжение.
Если транзисторы не включаются, то выпрямленное напряжение
равно выпрямленному напряжению неуправляемого выпрямителя,
452
работающего на емкость. Если транзисторы включать с углом управ-
ления а = 180°, то они будут переходить в проводящее состояние
одновременно с диодами, которые они шунтируют, и будут прово-
дить 180°, то работа выпрямителя не изменится. Внешняя характери-
стика выпрямителя, работающего на емкостной фильтр, при большой
индуктивности в цепи переменного тока весьма крутопадающая.
Равенство (25.1) будет справедливо, если задать форму тока,
потребляемого из сети или передаваемого в сеть переменного тока.
Используя датчики тока и систему автоматического pei-улирования,
можно формировать входной ток заданной формы. Формируемая
синусоида тока сравнивается с током /), получаемым от датчика
тока, и их разность подаётся на модулятор, который формирует
управляющие импульсы для транзисторов. Схемные решения будут
рассмотрены позже.
На рис. 25.9 а представлена схема замещения ОПН. В выпря-
мительном режиме энергия передается из сети переменного напря-
жения в цепь постоянного, в инверторном - наоборот. В схеме за-
мещения учтено активное сопротивление R реактора Р в цепи пе-
ременного тока, а вентили по-прежнему приняты идеальными. Ли-
бо можно считать, что их сопротивление в проводящем состоянии
входит в R. Тогда уравнение баланса мощностей на входе и выходе
схемы с учетом потерь в реакторе преобразуется к виду
t/1/1cos<p = t7j/j + /12/?. (25.3)
Рис. 25.9. Схема замещения однофазного ОПН (а), эквивалентная схема (б)
и векторные диаграммы для выпрямительного (в) и инверторного (г) режимов
453
Энергетически наиболее целесообразно в выпрямительном
режиме (при потреблении энергии из сети) иметь на входе coscp = 1,
а в инверторном режиме (при отдаче энергии в сеть) cos<p = -1. В
дальнейшем рассмотрим только эти случаи.
Тогда уравнение (25.3) запишется так
+Ulli=Udld+I2R. (25.4)
Знак «+» соответствует выпрямительному режиму, а «-» ин-
верторному. Перейдем от действующих к амплитудным значениям
токов и напряжений
Г/ J /2
± =ud[d+-^-R. (25.5)
Все соотношения удобнее получить в относительных едини-
цах. Перейдем к относительным единицам, приняв за базовые ве-
личины амплитуду напряжения сети Ц,„, амплитуду сетевого тока
при коротком замыкании за реактором /1ттах и полное внутреннее
сопротивление фазы Z, определяемое параметрами реактора. Пол-
ное внутреннее сопротивление фазы
Z = ^2+(а)Ь)2 , (25.6)
а амплитуда тока, потребляемого
за реактором,
Лттах
Отсюда
из сети при коротком замыкании
Д1т Z (25.7)
j—(±1 (25.8)
Введем обозначения для относительных величин:
'1m* , •> г* 7 ’ d* . . ’ *d* J • (45.9)
'Immax U Im 'Immax
Тогда при записи через принятые относительные величины
/^^±1^(1 +/1тЛ). (25.10)
2 ud*
Здесь верхние знаки соответствуют выпрямительному режиму,
а нижние — инверторному.
454
Рис. 25.10 иллюстрирует связь между выпрямленным (инвер-
тируемым) напряжением Ud„ и выпрямленным (инвертируемым)
током Id. при формировании сетевого тока с заданной амплитудой
и при определенном значении г* =0,1. Из рисунка видно, что
ОПН позволяет существенно повышать постоянное напряжение
при выпрямлении, а также существенно понижать переменное на-
пряжение при инвертировании.
Рис. 25.10. Зависимости относительного значения выпрям-
ленного напряжения от относительного значения выпрям-
ленного тока при различных относительных значениях ам-
плитуды тока, потребляемого из сети. ВР - выпрямитель-
ный режим, ИР - инверторный режим
Проведенный анализ подтверждает работоспособность ОПН
при формировании сетевого тока и определяет область существо-
вания нормальных режимов работы. Задание сетевого тока воз-
можно при релейном регулировании.
Рассмотрим теперь, как формировать напряжение при ШИМ,
чтобы обеспечить те же возможности регулирования. Анализ про-
ведем методом основной гармоники. Схема рис. 25.9 а может быть
преобразована в эквивалентную схему рис. 25.9 б, если учесть, что
на входе вентильного моста действует основная гармоника напря-
жения (гладкая синусоидальная составляющая) (см. рис. 25.8).
Назовем это напряжение эквивалентным напряжением [7Э. Тогда
максимальная амплитуда этого напряжения равна Ud, а действующее
значение напряжения 67э с учетом глубины модуляции /и (см. п. 2.5)
U3=^. (25.11)
V2
455
На рис. 25.9 в, г построены векторные диаграммы для выпря-
мительного режима, когда энергия передается от Ц к U3, и для
инверторного режима., когда энергия передается от U3 к Ц. В со-
ответствии с векторными диаграммами и формулой (25.11)
(Ui±IiR)2+(ll(oL)2=(^-)2. (25.12)
Здесь знак «-» соответствует выпрямительному режиму, а «+»
инверторному.
Перейдем от действующих к амплитудным значениям. Тогда
(25.12) приведется к виду:
(Цт ± + (А,/^)2 = (Ж/)2 • (25.13)
Если раскрыть скобки и разделить все члены выражения на
U2m, то, учтя (25.6) получим:
/ I2 72 11
1±2Я-^+-1*£- = /?(-^-)2. (25.14)
С Ц„,
С учетом (25.7) уравнение (25.14) перепишется в виде:
1 ± 2 + (-^)2 = Д2 (^)2 (25.15)
'Im max Чттах ^1т
Если учесть принятые относительные величины, то с учетом
(25.9) уравнение (25.15) запишется в виде:
1±2гД1т, + 72„*=Д2Ц^- (25.16)
Уравнение (25.16) определяет требуемую глубину модуляции
Д для получения сетевого тока с заданной амплитудой 1Хт при
данном значении Udst и величине п. Однако, остается неизвестной
фаза модулирующего (управляющего) напряжения.
Для определения фазы управляющего напряжения найдем угол
сдвига 1// между напряжением сети и эквивалентным напряжением
U3 по векторным диаграммам (см. рис. 25.9 в, г). Из треугольников
напряжений найдем
[/. +ик
ctg^-1^ R, (25.17)
где UL и UR - падение напряжения на индуктивности и активном
сопротивлении реактора. Верхний знак соответствует выпрями-
тельному режиму. После преобразований
456
ctgVA=-Д-+Л- (2518)
Am coL coL
Am max
Имеют смысл только малые значения R так как с ростом R
резко падает КПД. Тогда Z~coL. Если учесть принятые относи-
тельные величины, то с учетом (25.9) и малости R уравнение
(25.18) запишется в виде:
ctgi//±г*. (25.19)
Ат*
При этом, судя по векторным диаграммам, в выпрямительном
режиме напряжение U3 отстает от напряжения Ц, то есть угол I/
отрицательный, а в инверторном режиме U3 опережаетЦ, следо-
вательно, угол у/ положительный.
Таким образом, можно с помощью ШИМ сформировать на-
пряжение U3 нужной величины и фазы так, чтобы обеспечить про-
текание тока требуемой величины при cos<p = ±l. На рис. 25.11
приведены осциллограммы токов и напряжений в однофазном мос-
товом ОПН при его работе в выпрямительном и инверторном ре-
жиме и ШИМ. На осциллограммах видно, что преобразователь ра-
ботает с углом сдвига между напряжением и током, потребляемым
из сети, равным 0°, или возвращаемым в сеть, равным 180°, при вы-
сокой синусоидальности тока.
Найдем теперь КПД обратимого преобразователя напряжения.
Для режима выпрямления (при cos<p = 1)
77 = ^. (25.20)
ЦА
Тогда с учетом (25.5) после перехода к относительным едини-
цам получим
77 = 1-гД1и». (25.21)
Аналогично в инверторном режиме
(25-22)
Ud‘d
Тогда с учетом (25.5) после перехода к относительным едини-
цам получим
Г) =------. (25.23)
l + ^Am*
457
Рис. 25.11. Осциллограммы токов и напряжений в однофазной мостовой схеме
при ШИМ в выпрямительном (а) и инверторном (б) режимах
Анализ формул (25.21), (25.23) показывает, что при г* = 0.1
даже при токе, достигающем половину тока короткого замыкания
(Zlm*=0,5) КПД не хуже 0,95. Эти формулы не учитывают постоян-
ные потери, имеющиеся в схеме, и справедливы для достаточно
больших токов. При очень малых токах г] стремится к нулю.
458
25.4. Схемы управления ОПН
На рис. 25.12 приведена функциональная схема системы
управления ОПН, обеспечивающей стабилизацию напряжения на
нагрузке при заданном cos<P] на входе с помощью релейного регу-
лирования.
Рис. 25.12. Функциональная схема системы управления однофазного ОПН
со стабилизацией выпрямленного напряжения и заданным углом сдвига первич-
ного тока относительно напряжения сети на основе релейного регулирования
Сигнал от датчика напряжения ДН1 подается на формирова-
тель синусоидального напряжения ФСН. Заданные углы сдвига
первичного тока относительно сетевого напряжения <р1зад (для ре-
жимов выпрямления и инвертирования) выбираются в блоке выбо-
ра режима ВР и подаются на блок (р{, где формируется синусои-
дальный сигнал с заданным сдвигом по фазе.
459
Для стабилизации выпрямленного напряжения сигнал с датчи-
ка напряжения ДН2 сравнивается с UdydR. Отклонение MJd воз-
действует на изменение амплитуды заданного тока /131д. В блоке
перемножения формируются мгновенные значения заданного тока.
В модуляторе М сравниваются мгновенные значения фазного тока с
мгновенными значениями заданного тока. Сигнал с выхода модуля-
тора усиливается в усилителе мощности УМ и подается на транзи-
сторы ОПН. Сигнал с датчика тока ДТ2. подаваемый через фильтр
Ф, на блок выбора направления тока НТ определяет направление
тока и позволяет определить режим в блоке выбора режима ВР.
На рис. 25.13 приведена функциональная схема системы
управления, обеспечивающей стабилизацию напряжения на на-
грузке при заданном coscp на входе с помощью ШИМ. Проведенные
Рис. 25.13. Функциональная схема системы управления однофазного УВН
со стабилизацией выпрямленного напряжения и заданным углом сдвига
первичного тока относительно напряжения сети с применением ШИМ
460
исследования показали, что основное влияние на величину тока по-
требляемого из сети оказывает угол у/, а основное влияние на cosy?
оказывает глубина регулирования /л. Соответственно и вводятся
связи в системе стабилизации напряжения на нагрузке и поддержа-
ния cosy? =1.
Угол сдвига первичного тока относительно напряжения сети
у? определяется в блоке у?] при подаче на него сигналов от датчи-
ков тока ДТ и напряжения ДН1. В блоке д определяется разность
между заданным значением у?1зад и измеренным значением y?j и
уточняется требуемое значение д. Сигнал от датчика напряжения
ДН1 подается также на блок Um, где формируется синусоидальное
модулирующее напряжение с максимальной амплитудой сов-
падающее по фазе с напряжением сети. В блоке умножения форми-
руется модулирующее напряжение с требуемой амплитудой Опи-
санная часть системы обеспечивает отработку заданного угла у?13ад -
Для стабилизации выпрямленного напряжения сигнал с датчи-
ка напряжения ДН2 сравнивается с Ud3&R- Отклонение At/j воз-
действует на изменение угла у/. В ячейке сдвига ЯС требуемое мо-
дулирующее напряжение сдвигается на угол у/. В модуляторе М
оно сравнивается с опорным напряжением, приходящим от генера-
тора опорного напряжения ГОН. Сигнал с выхода модулятора уси-
ливается в усилителе мощности УМ и подается на транзисторы
управляемого выпрямителя напряжения УВН.
Описанная схема применима и для управления ОПН, если на
стороне постоянного напряжения будет источник энергии, и при
изменении режима будет изменяться у?1зад .
Глава 26
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
26.1. Классификация и принципы построения
Преобразователи частоты (ПЧ) предназначены для преобразо-
вания переменного напряжения одной частоты в переменное на-
пряжение другой частоты. Преобразователи частоты для частотно-
регулируемых электроприводов преобразуют электроэнергию, по-
ступающую из сети переменного тока, в электроэнергию с меняю-
щейся по заданным законам частотой и напряжением.
Преобразователи частоты по построению могут быть разбиты
на 2 типа: а) двухзвенные преобразователя частоты (ДПЧ) и
б) непосредственные преобразователи частоты (НПЧ).
В ДПЧ первое звено представляет собой выпрямитель (управляе-
мый или неуправляемый) с фильтром на выходе, а второе - автоном-
ный инвертор. Таким образом, нагрузка связана с сетью через 2 звена,
и происходит двукратное преобразование энергии. Второе звено в
ДПЧ может быть выполнено как на основе автономною инвертора на-
пряжения (АИН), так и на основе автономного инвертора тока (АИТ).
ДПЧ позволяют получить на выходе частоты как меньшие, так
и большие входных. Их недостаток — двойное преобразование
энергии, ведущее к увеличению потерь.
НПЧ выполняются на основе реверсивных преобразователей.
Однофазный НПЧ представляет собой двухкомплектный реверсив-
ный преобразователь, на выходе которого подключена нагрузка.
Каждый комплект вентилей пропускает одну полуволну тока.
Трехфазный НПЧ представляет собой три реверсивных преобразо-
вателя, каждый из которых питает одну фазу нагрузки.
НПЧ позволяют получить на выходе частоты только меньшие
входных. В НПЧ происходит однократное преобразование энергии.
462
26.2. Двухзвенные преобразователи частоты
26.2.7. Функциональные схемы ДПЧ
Двухзвенный преобразователь частоты на основе АИН содер-
жит выпрямитель, сглаживающий фильтр и АИН (рис. 26.1).
Рис. 26.1. Функциональная схема двухзвенного преобразователя часто-
ты на основе АИН, работающего на двигатель переменного тока.
В - выпрямитель; Ф - фильтр; АИН - автономный инвертор напряже-
ния; ЭМ - электрическая машина; СУВ, СУИ - системы управления
выпрямителем и автономным инвертором. Штриховой линией показаны
воздействия и связи, которые могут отсутствовать
Сглаживающий фильтр обычно представляет собой
Г-образный £С-фильтр. Выпрямитель может быть управляемым и
неуправляемым, если функции регулирования напряжения возла-
гаются на АИН. Если требуется рекуперация энергии в питающую
сеть, то выпрямитель превращается в двухкомплектный реверсив-
ный преобразователь, обеспечивающий двухсторонний энергооб-
мен. Рекуперация энергии в питающую сеть возможна также, если
вместо тиристорного двухкомплектного реверсивного преобразова-
теля включить второй АИН, который используется в качестве обра-
тимого преобразователя напряжения.
Регулирование напряжения на выходе ПЧ на основе АИН мо-
жет осуществляться как с помощью управляемого выпрямителя,
так и с помощью АИН с импульсной модуляцией. Из импульсных
методов регулирования выходного напряжения наибольшее рас-
пространение получила широтно-импульсная модуляция (ШИМ).
Частота модуляции должна быть хотя бы на порядок выше, чем
463
наибольшая частота выходного напряжения. Частота выходного
напряжения задается системой управления.
Двухзвенный преобразователь частоты на основе АИТ содер-
жит управляемый выпрямитель, индуктивный сглаживающий
фильтр и АИТ (рис. 26.2).
Рис. 26.2. Функциональная схема двухзвенного преобразователя час-
тоты на основе АИТ, работающего на двигатель переменного тока.
УВ - управляемый выпрямитель; Ф - фильтр; АИТ - автономный ин-
вертор тока; ЭМ - электрическая машина; СУВ, СУИ - системы
управления выпрямителем и автономным инвертором
Управление амплитудой выходного тока осуществляется с по-
мощью управляемого выпрямителя, управление частотой выходно-
го тока - частотой подачи управляющих импульсов на тиристоры
автономного инвертора.
26.2.2 ДПЧ на основе управляемого выпрямителя и АИН
На рис. 26.3 приведена схема двухзвенного преобразователя
частоты для питания асинхронного двигателя. Он состоит из
управляемого выпрямителя (В), автономного инвертора (АИН),
сглаживающего фильтра (СФ) и блока тормозного резистора (БТР),
применяемого при торможении. Управляемый выпрямитель вы-
полнен на тиристорах И81—РУб, автономный инвертор на транзи-
сторах РТ1-РТ6. Фильтр £фСф служит для сглаживания напряжения
выпрямителя. Диоды ИД1-ИД6 служат для пропускания тока при
выключении транзисторов. Одновременно они играют роль обрат-
ного выпрямителя при торможении двигателя. Регулирование на-
пряжения на выходе ПЧ осуществляется с помощью управляемого
464
выпрямителя. Диод 1Т)0 ставится для повышения коэффициента
мощности выпрямителя при глубоком регулировании.
Рис. 26.3. Двухзвенный транзисторный преобразователь частоты, обеспечи-
вающий регулирование скорости и торможение асинхронного двигателя
Торможение обеспечивается путем включения параллельно
конденсатору фильтра цепи, содержащей тормозной резистор 7?б и
транзистор VT7. [Три превышении напряжением на конденсаторе
заданного значения транзистор IT7 включается и энергия, переда-
ваемая от электрической машины, рассеивается в тормозном рези-
сторе. При этом выпрямитель на входе ПЧ выполняется одноком-
плектным.
Недостатки данного ПЧ - невозможность рекуперации энергии
в сеть при торможении, ухудшение коэффициента мощности при
регулировании, большее содержание гармоник в выходном напря-
жении и наличие двух систем управления преобразователями.
Если выпрямитель на входе ПЧ выполнить двухкомплектным,
то становится возможным рекуперативное торможение.
В настоящее время эта схема является устаревшей.
26.2.3. ДПЧ на основе неуправляемого выпрямителя
и АИН с ШИМ
На рис. 26.4 приведена схема двухзвенного преобразователя час-
тоты для питания асинхронного двигателя. Он состоит из неуправ-
ляемого выпрямителя (В), автономного инвертора (АИН), сглажи-
465
вающего фильтра (СФ) и блока тормозного резистора (БТР), приме-
няемого при торможении. Неуправляемый выпрямитель выполнен на
диодах (D7-KD12, автономный инвертор на транзисторах РТ1-ГТ6,
шунтированных диодами KD1-PD6. Диоды служат для пропускания
тока при выключении транзисторов. Одновременно они играют роль
обратного выпрямителя при торможении двигателя. Фильтр £фСф
служит для сглаживания напряжения выпрямителя. За счет примене-
ния ШИМ осуществляется регулирование напряжения на выходе ПЧ
и приближение его формы к синусоидальной.
Рис. 26.4. Двухзвенный транзисторный преобразователь частоты с ШИМ,
обеспечивающий регулирование скорости и торможение асинхронного
двигателя
Торможение обеспечивается переводом АИН в режим управ-
ляемого выпрямителя напряжения, обеспечивающего повышение
напряжения на конденсаторе фильтра, несмотря на уменьшение
скорости вращения двигателя. Роль фазных индуктивностей при
этом выполняют индуктивности рассеяния фаз двигателя. При пре-
вышении напряжением на конденсаторе заданного значения тран-
зистор VT1 включается и энергия, передаваемая от электрической
машины, рассеивается в тормозном резисторе
Описанное торможение получило в литературе название ин-
верторного торможения, хотя очевидно, что при этом торможе-
нии не происходит инвертирования. Термин динамическое тор-
можение является в системах с асинхронными двигателями заня-
466
тым, так как под ним понимается пропускание постоянного тока
через обмотки двигателя.
В настоящее время в таких ПЧ обычно применяются силовые
модули, содержащие один или несколько ключей, выполненных на
БТИЗ шунтированных диодами.
Недостаток такого ПЧ - невозможность рекуперации энергии
в сеть при торможении. В настоящее время эта схема наиболее пер-
спективна в электроприводах с редкими торможениями
26.2.4. Рекуперирующий ДПЧ на основе АИН
Для обеспечения рекуперации энергии в двухзвенном ПЧ на
основе АИН на входе можно включить дополнительный комплект
тиристоров, работающий в инверторном режиме. Однако на инвер-
тирующий комплект вентилей необходимо подавать повышенное
напряжение с помощью дополнительного трансформатора, либо не
допускать работу выпрямителя с углом меньшим amin .
На рис. 26.5 приведена схема ДПЧ, обеспечивающего передачу
энергии в обоих направлениях - от питающей сети к двигателю и
АИН
ДТ 2
и1(А.В.С)
-»~]ФСН|-
Id
и\
СУ АИН
и САР АД
Опрощенный
АИН
[УМ |
/|(А,В,С)~ 4 -3
___,(4ДО ,
Л
Р1
|'i '
\Д~б| | ВМ
if!
{дБ
режим
СШ
V’laaa
Рис. 26.5. Функциональная схема рекуперирующего преобразователя частоты
с регулируемым коэффициентом мощности
от электрической машины в генераторном режиме в сеть. Такие
ДПЧ получили название четырехквадрантных, так как их внешние
характеристики расположены во всех квадрантах. Эти преобразова-
тели на сегодняшний день являются самыми идеальными.
467
В схеме имеются следующие элементы: обращенный АИН,
АИН, датчики тока ДТ, датчики напряжения ДН, фильтр Ф, изме-
ритель мощности на выходе выпрямителя ВМ, вычислитель тока
ВТ, формирователь эталонной синусоиды «sin», частотно-широтно-
импульсный модулятор М, система управления СУ АИН.
Требуемая мощность на стороне постоянного тока определяет-
ся измерением средних значений [Д и 1Л а затем и мощности Pd. По
действующему значению напряжения сети U\ и с учетом заданного
угла (/?) определяется ток Д, обеспечивающий заданную мощность.
Блок ФСН формирует заданную синусоиду с учетом (р{, а в блоке
«ЗАД. /)» формируется заданная синусоида тока. В блоке М она
сравнивается с сигналом датчика тока /Д и формируются управ-
ляющие импульсы, которые через усилитель мощности УМ посту-
пают на транзисторы. Блок НТ выявляет направление тока и опре-
деляет режим (выпрямительный или инверторный).
Преимущества двухзвенного ПЧ: независимость выходной
частоты от входной, возможность получения высокого коэффици-
ента мощности на стороне сети.
26.2.5. Рекуперирующий ДПЧ на основе АИТ
На рис. 26.6 приведена схема двухзвенного преобразователя
частоты для питания асинхронного двигателя, выполненного на ба-
зе АИТ. Автономный инвертор тока, преобразовывает постоянный
Рис. 26.6. Двухзвенный ПЧ на основе АИТ с отсекающими диодами
468
ток, подаваемый на его вход, в пропорциональный по величине пе-
ременный ток. Режим источника тока на входе обеспечивается за
счет большой индуктивности L и применения токостабилизирую-
щей обратной связи поддерживающей заданное значение тока Ifa.
АИТ выполнен по схеме с отсекающими диодами.
Рекуперация энергии при торможении в АИТ возможна при
сохранении направления тока за счет сдвига токов и напряжений,
т.е. переводом АИТ в режим выпрямления за счет сдвига управ-
ляющих импульсов относительно фазных ЭДС электрической ма-
шины. Энергия, передаваемая от электрической машины на сторо-
ну постоянного тока, должна быть далее передана в сеть перемен-
ного тока. Для этого управляемый выпрямитель на входе ПЧ дол-
жен быть переведен в инверторный режим. При этом сохраняется
направление тока и не требуется установка дополнительного ком-
плекта вентилей. Схема применяется в двигателях достаточно
большой мощности. Недостатками схемы являются ее не очень хо-
рошие характеристики, поэтому она не является перспективной.
Преобразователи частоты на основе инверторов тока наиболее
применимы в электроприводе синхронных машин, где на выходе
вместо автономного инвертора тока включается инвертор тока, ве-
домый электрической машиной. Таким образом, на входе и на вы-
ходе ПЧ включаются однокомплектные рекуперирующие преобра-
зователи (ОРП) на тиристорах. При этом, как видно из рис. 26.7,
ведомый инвертор полностью аналогичен выпрямителю, подклю-
ченному к сети. Коммутация вентилей ведомого инвертора осуще-
ствляется за счет ЭДС электрической машины. 11ри низкой скоро-
сти вращения электрической машины эта ЭДС недостаточна для
коммутации вентилей. Поэтому при пуске коммутация осуществля-
ется путем прерывания тока в цепи постоянного тока отпиранием и
запиранием выпрямителя.
Рис. 26.7. Двухзвенный пре-
образователь частоты на ос-
нове ведомых преобразова-
телей
469
26.3. Непосредственные преобразователи частоты
26.3.1. Принцип действия НПЧ
В НПЧ напряжение сети подается непосредственно на двига-
тель через управляемые вентили. Каждая фаза НПЧ выполняется на
основе реверсивного двухкомплектного преобразователя с раздель-
ным или совместным управлением комплектами.
На рис. 26.8 а приведена схема трехфазно-однофазного НПЧ,
выполненного на основе трехфазных нулевых схем, преобразующего
трехфазное напряжение сети частотой 50 Гц в однофазное с регули-
руемой частотой. При переключении комплектов В и Н на выходе
Рис. 26.8. Схема трехфазно-однофазного НПЧ (а), диаграммы напряжения
и тока нагрузки при прямоугольном управлении (б) и диаграмма напряжения
на нагрузке при синусоидальном управлении (в)
формируется двуполярное напряжение. Возможны два закона
управления - прямоугольный и синусоидальный. При прямо-
угольном управлении в течение полуволны тока на один комплект
подаются управляющие импульсы с углом управления (углом за-
держки) а = const пока этот комплект работает в выпрямительном
режиме, а затем с углом управления (углом опережения) (3 =а, ко-
гда для снижения тока необходим переход в инверторный режим
(рис. 26.8 б). После бестоковой паузы аналогично подаются управ-
ляющие импульсы на второй комплект.
При синусоидальном управлении угол управления а непре-
рывно меняется так, чтобы гладкая составляющая выходного на-
пряжения изменялась по синусоидальному закону (рис. 26.8 в).
Схема трехфазно-трехфазного НПЧ, выполненного на основе
трехфазных мостовых схем приведена на рис. 26.9.
Д1 В\ С]
9 9 9
Рис. 26.9. Схема трехфазно-трехфазного НПЧ
26.3.2. Расчет идеализированного НПЧ
Достаточно точный расчет НПЧ вызывает большие трудности.
Дело в том, что если частота сети и выходная частота не кратны, то
в схеме вообще не наступает установившийся режим - кривая вы-
ходного напряжения все время вырезается из различных участков
входного.
Поэтому, при расчете идеализированного НПЧ приходится
принимать гораздо более сильные допущения, чем при расчете дру-
гих преобразователей.
Кроме обычных допущений об идеальности вентилей и транс-
471
форматора, принимается допущение о бесконечной пульсности. То
есть принимается, что выходное напряжение формируется из бес-
конечного числа фаз (т^ —><»). Пусть на рис. 26.8 пульсность т не
равна 3, а число фаз —><*>. В выпрямителе с бесконечной пульс-
ностью выходное напряжение постоянно, не имеет пульсаций и
изображается горизонтальной прямой.
В соответствии с теорией (гл. 20) выпрямленное напряжение
идеального неуправляемого выпрямителя для нулевой схемы
yj2U2 sin —
^о=------(26.1)
т
а для мостовой
y/2U2n sin—
=(26.2)
т
где U2 и U2n - фазное и линейное вторичные напряжения транс-
форматора; т - пульсность схем (произведение числа фаз на число
выпрямляемых полупериодов).
Если выходное напряжение идеального НПЧ будет «вырезать-
ся» из этого напряжения, то его максимальная амплитуда (макси-
мальная амплитуда напряжения на нагрузке)
^AtOmmax ~^d0 • (26.3)
В дальнейшем рассматриваем синусоидальное управление и
применяем метод основной гармоники.
При синусоидальном управлении и синусоидальной форме
максимальное действующее значение 1-й гармоники напряжения на
нагрузке
тт _^нОттах /9/
12н0(1)тах - • (26.4)
Однако это максимальное напряжение может быть получено,
если при изменении а достигается агп111 = 0. Но это невозможно,
т.к. в инверторном режиме при этом должно быть /3-0. Поэтому
amin>0-
Действующее значение первой гармоники напряжения на на-
грузке
472
^нО(1) ~Р^нО(1)тах’ (26.5)
где р - глубина регулирования.
Тогда
^и0(1)тах
Минимальное значение угла управления аП11П = 18...25°. По-
этому дтах = 0,9...0,95.
С учетом (26.1, 26.2) действующее значение первой гармоники
напряжения на нагрузке в НПЧ, выполненных по нулевым схемам,
. л
pU2 Sin —
Ц,0(1)=---(26.7)
т
а в НПЧ, выполненных по мостовым схемам,
^H2jlsin-
Ц,0(1)=---(26.8)
т
Действующее значение первой гармоники тока нагрузки
'«(1)=^- (26.9)
Определение действующего и среднего значения входного то-
ка i2 вызывает существенные трудности, оно сильно зависит от со-
отношения частоты сети со и выходной частоты сон
р=—. (26.10)
В токе z2 появляется постоянная составляющая при
р — 2т2к, (26.11)
где т2 - число фаз на вторичной стороне трансформатора; к= 1, 2, 3 ...
Наиболее близок к синусоидальному входной ток в трехфазно-
трехфазном НПЧ. Действующее значение первичного тока /, зави-
сит от глубины регулирования и угла сдвига нагрузки <рн
А=«р7н(1), (26.12)
где п - коэффициент трансформации; р - коэффициент зависящий
°т ср„ и р.
473
Для трехфазно-трехфазных НПЧ коэффициент р изменяется в
пределах 1. 1,27.
При этом величина р растет с уменьшением глубины регули-
рования р и угла сдвига нагрузки <рн. При приближенных расчетах
можно принимать, что р =1,27.
Рассмотрим энергетические показатели НПЧ.
В трехфазно-трехфазном НПЧ в течение интервала повторяе-
мости выходного напряжения активная составляющая мощности
потребляется равномерно, а реактивная составляющая изменяется.
Коэффициент мощности / даже при р =1 не достигает 1. Наи-
большее идеальное значение / = 0,85 при р = 1. Зависимости ко-
эффициента мощности трехфазно-трехфазного НПЧ от угла сдвига
нагрузки <рн и глубины регулирования р приведены на рис. 26.10.
Ток и особенно напряжение на выходе НПЧ содержат широ-
кий спектр гармоник, точный расчет которого весьма затрудните-
лен. Тем не менее, для асинхронного двигателя нормального ис-
полнения погрешности расчета по методу основной гармоники в
определении первичных токов и полной мощности не превышает
5...7% и могут быть учтены соответствующим их увеличением. Та-
ким образом, метод основной гармоники позволяет выполнить ори-
ентировочные расчеты НПЧ с достаточной для практики точно-
стью. Для точных проектных расчетов, безусловно, целесообразно
применение ЭЦВМ.
Рис. 26.10. Зависимости коэффици-
ента мощности трехфазно-трехфаз-
ного НПЧ от угла сдвига нагрузки и
глубины регулирования при допу-
щении синусоидальности выходного
напряжения
474
Преимущества НПЧ однократное преобразование энергии,
позволяющее получить более высокий КПД, однотипность приме-
няемых вентилей.
Недостатки НПЧ - низкая предельная частота (25 Гц в НПЧ на
основе трехфазных мостовых и 15 Гц в НПЧ на основе трехфазных
нулевых схем при питании от сети с частотой 50 Гц), низкий коэф-
фициент мощности, вызванный непрерывным регулированием угла
управления. Последний недостаток, ухудшая энергетические пока-
затели, сводит на нет преимущества, обусловленные однократным
преобразованием энергии.
В рассматриваемых НПЧ применена естественная коммутация,
то есть такая же, как в управляемых выпрямителях, выполненных
на тиристорах с неполной управляемостью. Переход на полностью
управляемые вентили или применение устройств искусственной
коммутации, как это делается в автономных инверторах, позволяет
преодолеть указанный частотный предел. Однако, такие преобразо-
ватели пока не нашли распространения.
Глава 27
ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ
Преобразователи переменного напряжения (регуляторы пе-
ременного напряжения) предназначены для изменения величины
переменного напряжения.
На рис. 27.1 а приведена схема однофазного преобразователя
переменного напряжения, а на рис. 27.2 а диаграмма напряжения на
нагрузке. Изменение действующего значения напряжения на на-
грузке осуществляется изменением угла управления а . Такое регу-
лирование называется фазовым или импульсной модуляцией на ос-
новной частоте (ИМ-ОЧ). При этом даже при активной нагрузке
ухудшается cos<p и коэффициент мощности. При таком регулиро-
вании даже печь сопротивления, имеющая практически чисто ак-
тивное сопротивление, представляет для сети как бы индуктивную
нагрузку. Тем не менее, такая схема применяется для регулирова-
ния активных и активно-индуктивных нагрузок — печей сопротив-
ления, ламп накаливания, а также однофазных двигателей перемен-
ного тока, например, в электроинструментах.
В схеме рис. 27.1 б применены запираемые тиристоры, что по-
зволяет получить на нагрузке напряжение в соответствии с
рис. 27.2 б или рис. 27.2 в. При этом cos<p может быть меньше или
равен 1, но угол сдвига (р получается опережающим (фазовое регу-
лирование с опережающим углом сдвига) или равным нулю. При
таком регулировании печь сопротивления представляет для сети
как бы емкостную нагрузку. В связи со сложностью быстрого пре-
рывания тока в цепи, в которой имеется хотя бы небольшая индук-
тивность, схема усложняется за счет применения дополнительных
элементов и поэтому не получила распространения.
В описанных способах изменение действующего значения на-
пряжения на нагрузке осуществляется за счет изменения формы
напряжения, что нежелательно для ряда потребителей.
476
Импульсная модуляция на высокой частоте (ИМ-ВЧ)
(см. рис. 27.2 г) позволяет получать при небольшом фильтре сину-
соидальную гладкую составляющую тока, потребляемого из сети, и
напряжения на нагрузке при cos<p=l. Однако, в связи со сложно-
стью прерывания тока в индуктивной цепи схема усложняется и
поэтому также не получила распространения.
Импульсная модуляция на низкой частоте (ИМ-НЧ) иллюст-
рируется рис. 27.2 д. Эта модуляция реализуется в схеме рис.
27.1 а. Уменьшение мощности, выделяемой в активной нагрузке,
Рис. 27.1. Преобразователи переменного напряжения- однофазные на неполно-
стью (а) и полностью управляемых (б) тиристорах; однофазные на первичной
стороне трансформатора (в) и трансформатора с отпайками (г); трехфазныс
для регулирования напряжения на активной нагрузке (д) и двигателе (е)
477
Рис. 27.2. Диаграммы напряжений на нагрузке ППН при различных способах
управления (модуляции): ИМ-ОЧ (фазовое регулирование) с отстающим
(а > 0), опережающим (Д > 0) и равным нулю (а = Д) углом сдвига <р (а, б. в);
ИМ-ВЧ (г); ИМ-НЧ (д); ИМ-НЧ на первичной стороне трансформатора (е);
многозонные ИМ-ОЧ (ж), ИМ-ВЧ (з) и ИМ-НЧ (и)
производится включением и выключением тиристоров в моменты
перехода тока и напряжения через нуль. При питании активной на-
грузки и ИМ-НЧ сохраняется cos<p=l. Однако, за счет возникаю-
щих гармоник с частотами ниже частоты напряжения сети, коэф-
фициент мощности ухудшается. В литературе доказано, что коэф-
фициент мощности одиночного регулятора не зависит от способа
импульсной модуляции, а определяется глубиной регулирования.
Импульсная модуляция на низкой частоте применима для инерци-
онных объектов (например, печей сопротивления).
Диапазон номинальных значений напряжений и токов электри-
ческих нагрузок чрезвычайно широк. Для согласования с напряжени-
ем сети применяются трансформаторы. При малых или очень боль-
ших напряжениях нагрузки для регулирования целесообразно вклю-
чать тиристорные ключи на первичной стороне трансформатора, од-
478
нако при этом возникает ряд проблем, связанных с насыщением
трансформатора. Эти проблемы обостряются при ИМ- НЧ, когда
включения трансформатора происходят очень часто.
При включении трансформатора начальная магнитная индукция
имеет определенные значения. В переходном процессе изменения
индукции после включение с произвольным углом управления може)
быть превышено максимальное значение индукции установившегося
цикла перемагничивания. Это вызывает насыщение трансформатора
и резкое увеличение (выброс) тока намагничивания, который снижа-
ется до установившегося значения за десятки периодов. Выбросы то-
ка намагничивания могут в десятки раз превышать номинальный ток
трансформатора. Введением определенного угла управления в пер-
вом полупериоде в начале каждого цикла включение можно практи-
чески устранить выбросы тока намагничивания. При этом диаграмма
напряжению на нагрузке соответствует рис. 27.2 е.
Качество напряжения на выходе тиристорного регулятора пе-
ременного напряжения и коэффициент мощности могут быть
улучшены при применении многозонной импульсной модуляции.
Такая модуляция может быть реализована в схеме рис. 27.1 г. При
этом вид напряжения на нагрузке будет соответствовать диаграммам
рис. 27.2 ж, з. и. Диаграмма рис. 27.2 з может быть реализована, если
в схеме рис. 27.1 г заменить обычные тиристоры на запираемые.
На рис. 27.1 д приведена схема трехфазного преобразователя
переменного напряжения. Если нагрузка при этом имеет нулевой
вывод, то процессы и диаграммы напряжений на нагрузке ничем не
отличаются от процессов в однофазной схеме. При отсутствии ну-
левого вывода процессы и диаграммы существенно усложняются.
Фазовое регулирование может быть применено для регулирова-
ния скорости асинхронного двигателя (см. рис. 27.1 д). Однако, из-за
большого содержания высших гармоник в токе, протекающем через
фазы двигателя при таком регулировании, понижение скорости может
быть весьма кратковременным во избежание перегрева двигателя. Та-
кое регулирование получило очень широкое применение в устройст-
вах для ограничения пусковых токов асинхронных двигателей. В уст-
ройствах для плавного пуска асинхронных двигателей угол управле-
ния плавно уменьшается от начального значения до полного включе-
ния тиристоров. При этом пусковые токи снижаются в 2.. .3 раза.
При импульсной модуляции на низкой частоте вредное влия-
ние на сеть может быть ослаблено при синхронизации группы ти-
479
ристорных регуляторов переменного напряжения. На рис. 27.3 а
показаны диаграммы токов при синхронизации трех ППН и приве-
ден суммарный ток, потребляемый из сети. Колебания амплитуды
суммарного тока потребляемого из сети не превышают амплитуду
тока одного регулятора. При независимой работе регуляторов скач-
ки тока могли бы достигать суммы токов трёх регуляторов. На рис.
27.3 б показана зависимость результирующего коэффициента мощ-
ности от глубины регулирования при независимой работе регулято-
ров, а на рис. 27.3 в при синхронизированном управлении. Из срав-
нения рисунков видно, что достигается существенный эффект.
Рис. 27.3. Диаграммы токов при синхронизации трех ППН (а) и результирую-
щий коэффициент мощности группы при независимой работе (б) и синхрони-
зированном управлении (в)
480
Глава 28
ФИЛЬТРЫ, СТАБИЛИЗАТОРЫ, ИСТОЧНИКИ
ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ
28.1. Фильтры
Фильтры включаются на входе и на выходе преобразователей.
Входные фильтры служат для уменьшения вредного влияния пре-
образователей на питающую сеть. Выходные фильтры улучшают
форму выходного напряжения.
Выходные фильтры, применяемые для улучшения качества по-
стоянного напряжения, называются сглаживающими. Сглаживаю-
щие фильтры бывают емкостные, индуктивные, Г-образные и др.
Емкостной фильтр.
Включение емкостного фильтра показано на рис. 28.1 а. На рис.
28.2 показан переходный процесс нарастания напряжения на выходе
выпрямителя при наличии емкостного фильтра. В момент включе-
ния конденсатор создает короткое замыкание и первый импульс
Рис. 28.1. Схемы присоединения сглаживающих фильтров к выпрямителям:
емкостного (а), индуктивного (б), Г-образного (в)
16 3ак. 50
481
тока весьма велик. Вентили отпираются в моменты, когда ЭДС на
вторичных обмотках превышает напряжение на конденсаторе, и
запираются в моменты, когда ЭДС на вторичных обмотках снижа-
ются ниже напряжения на конденсаторе. Выпрямитель работает в
режиме прерывистого тока. Во время переходного процесса ток по-
степенно уменьшается, вместе с ним уменьшается угол проводимо-
сти вентилей Л.
Рис. 28.2. Временные диаграммы токов и напряжений в однофазной
мостовой схеме, работающей на емкостной фильтр. ПП - переходный
процесс. УР - установившийся режим
Выполним приближенный расчет фильтра. В установившемся
режиме угол проводимости вентилей Л весьма мал, соответственно
малы колебания напряжения на конденсаторе. Так как почти весь
период частоты пульсаций вентили заперты, .то можно считать, что
ток разряда конденсатора равен току нагрузки
(28.1)
Изменение напряжения на конденсаторе при его разряде с уче-
том (28.1)
= (28.2)
с о с
где Тп период пульсаций.
482
(28.3)
(28.4)
Т„ = —
" mf
Как указывалось в главе 20 коэффициент пульсаций q - это
отношение амплитуды первой гармоники пульсаций к среднему
значению выпрямленного напряжения. Так как к конденсатору
приложено выпрямленное напряжение, то можно записать
_ ^(l)m _ C(l)m
ч~~иГ~~йГ'
Приближенно можно принять, что
U =
Uc(V)m 2
Тогда с учетом (28.2-28.5)
Ц I
а --------=-------.
2mfCUd 2mfCRd
Отсюда требуемая емкость фильтра для получения заданного
коэффициента пульсаций
(28.5)
(28.6)
1
2mfqRd
(28.7)
Как показывают уточненные расчеты, емкость, рассчитанная
по формуле (28.7) несколько завышена, т.е. полученный коэффици-
ент пульсаций будет лучше заданного.
Требуемая емкость растет с уменьшением сопротивления на-
грузки.
Недостатки фильтра - начальный бросок тока при включении,
тяжелые условия работы вентилей выпрямителя и вредное влияние
на питающую сеть из-за малого угла проводимости вентилей.
Преимущество фильтра - его простота.
Для уменьшения начального броска тока применяется предва-
рительный заряд конденсатора.
Основное применение емкостных фильтров — маломощные
выпрямители.
Индуктивный фильтр.
Включение индуктивного фильтра показано на рис. 28.16. Ко-
эффициент сглаживания фильтра — это отношение коэффициента
пульсаций на входе фильтра и коэффициента пульсаций на выходе
фильтра:
483
16
s=%-. (28.8)
Q2
_ U\ l(l)m . ^22(1 )m _ 7(ww£j)2 zQ8 Q.
ud ' Ud = R„ • <28-9)
где Ц ](]),„ и J722(i)m - амплитуды первых гармоник напряжения на
входе и на выходе фильтра.
Для сглаживания необходимо, чтобы выполнялось соотношение
mO)Ld»Rd. (28.10)
Тогда
mcoL,
s—~- (28.11)
Rd
Отсюда
Ld=^- = -^-. (28.12)
то) m(Oq2
С уменьшением величины Rd (ростом мощности) индуктив-
ность Ld падает, но одновременно растет ток нагрузки Id и, следо-
вательно, растут габариты дросселя, так как они зависят от квадра-
та тока. Индуктивные фильтры применяется в схемах большой
мощности, например при питании двигателей постоянного тока.
Г-образный фильтр.
Включение Г-образного фильтра показано на рис. 28.1 в. Ко-
эффициент сглаживания фильтра
5 = 5/11(1> (28.13)
^22(1 )т
При проектировании фильтра должны выполняться следую-
щие соотношения, обеспечивающие индуктивный характер нагруз-
ки для выпрямителя и шунтирование активного сопротивления на-
грузки по переменной составляющей:
m(oLd
1
тсоС
----
тО)С
(28.14)
и
Тогда амплитуды первых гармоник напряжения на входе и вы-
ходе фильтра
Ц1(1> = ^22(l)m =~ (28.15)
тО)С
Подставив полученные значения в (28.13) получим:
484
Ldc=-U-. (28.16)
m (0
Принимаемые значения Ld и С должны удовлетворять нера-
венствам (28.14).
Г-образные фильтры обеспечивают достаточно хорошее сгла-
живание и находят широкое применение, в частности, в преобразо-
вателях частоты.
28.2. Стабилизаторы напряжения и тока
Стабилизаторы напряжения и тока служат для стабилизации со-
ответствующих величин. В их построении много общего, поэтому
рассмотрим только стабилизаторы на-
пряжения. На рис. 28.3. приведена
схема включения стабилизатора на-
пряжения.
Основные статические параметры
стабилизатора напряжения - коэффи-
циент стабилизации и выходное со-
противление.
Рис. 28.3. Схема включения
стабилизатора напряжения
Коэффициент стабилизации характеризует насколько изменя-
ется напряжение на выходе стабилизатора ЛСст при изменении пи-
тающего напряжения AUd и постоянном токе нагрузки /H=const:
-( Wd
СД^с,
(28.17)
7 =const
Выходное сопротивление стабилизатора, характеризует каче-
ство стабилизации при изменении тока нагрузки и постоянном на-
пряжении питания:
р
“вых
ДЧт
Д'н
(28.18)
JUj =const
Стабилизаторы делятся на:
а) параметрические, в которых стабилизация осуществляется
за счет какого-либо параметра;
б) компенсационные или стабилизаторы с обратными связями.
Параметрические стабилизаторы напряжения не обеспечивают
высокое качество стабилизации и применимы при малых мощно-
485
стях. Они были рассмотрены в главе 18 и поэтому далее не рас-
сматриваются.
Компенсационные стабилизаторы напряжения обеспечивают
более высокое качество стабилизации, чем параметрические. В них
достижимы такие показатели качества стабилизации как
Кста10000, Лвых = 10"6Ом.
Компенсационные стабилизаторы напряжения классифициру-
ются по месту включения регулирующего элемента относительно
нагрузки:
а) последовательного типа;
б) параллельного типа.
Компенсационные стабилизаторы по способу регулирования
напряжения делятся на:
а) непрерывные (регулирующий транзистор работает в линей-
ном режиме);
б) импульсные (регулирующий транзистор работает в ключе-
вом режиме).
Преимущества импульсного стабилизатора: меньшие потери,
а, следовательно, более высокий КПД и меньшие габариты.
Преимущества непрерывного стабилизатора: выше качество
стабилизации, меньше пульсации.
На рис. 28.4 приведены функциональные схемы непрерывно-
го (а) и импульсного (б) стабилизаторов напряжения. От источни-
ка питания ИП энергия передается на нагрузку Н через регули-
рующий элемент РЭ. В качестве РЭ в непрерывном стабилизаторе
используется транзистор, а в импульсном стабилизаторе транзи-
стор, дополненный диодом, шунтирующим нагрузку и индуктив-
ный фильтр. На выходе РЭ в импульсном стабилизаторе обяза-
тельно ставится Г-образный сглаживающий силовой фильтр СФ.
Напряжение U„ с выхода стабилизатора через слаботочный
фильтр Ф подается на компаратор К, где сравнивается с сигналом
задания U3. Разностный сигнал усиливается усилителем обратной
связи УОС, а затем в непрерывном стабилизаторе подается на
усилитель мощности УМ, воздействующий на РЭ. В импульсном
стабилизаторе сигнал с выхода УОС сравнивается в компараторе
К1 с пилообразным напряжением, генерируемым генератором
опорного напряжения ГОН. Полученный ШИМ-сигнал поступает
на УМ, воздействующий на РЭ.
486
Стабилизаторы напряжения являются важнейшими узлами ис-
точников питания систем автоматики и радиоэлектроники.
Рис. 28.4. Схемы непрерывного (а) и импульсного (б)
стабилизаторов напряжения
28.3. Источники вторичного электропитания (ИВЭП)
28.3.1. Общая характеристика ИВЭП
Источники вторичного питания преобразуют переменное или
постоянное напряжение, получаемое от первичных источников пи-
тания, в переменные или постоянные напряжения, требуемые для
нагрузок.
ИВЭП выполняются на мощности от нескольких ватт до де-
сятков киловатт.
Требования, предъявляемые к ИВЭП
1. Высокий КПД.
2. Высокое качество выходного напряжения.
3. Высокие динамические параметры.
4. Минимальные массогабаритные показатели.
5. Минимальная стоимость.
487
6. Надёжность (наличие защит).
7. Совместимость с сетью.
Задачи, решаемые при проектировании ИВЭП.
1. Обоснование выбора структуры и схемы.
2. Обеспечение безопасных траекторий переключения транзи-
сторов.
3. Предотвращение сквозных токов в силовых транзисторах.
4. Симметрирование силовых транзисторов в двухтактных
схемах.
5. Учет температур и разброса характеристик.
ИВЭП в зависимости от вида преобразования энергии делятся на:
1) бестрансформаторные источники питания, в которых на
вход подается переменное напряжение, а на выходе выдается одно
или несколько постоянных напряжений, но применено промежу-
точное преобразование частоты;
2) централизованные стабилизаторы постоянного напряжения,
в которых на вход подается постоянное напряжение, а на выходе
выдается одно или несколько постоянных напряжений, но приме-
нено промежуточное преобразование частоты.
28.3.2. Принципы построения бестрансформаторных ИВЭП
На рис. 28.5 приведены функциональные схемы бестрансфор-
маторных ИВЭП. Приведены примеры с тремя каналами на выходе.
При этом третий канал наиболее мощный, первый канал наиболее
точный, а второй канал без особых требований к стабильности.
Рис. 28.5 Бестрансформаторные ИВЭП: с РИН на входе (а), с ИСН на входе (б),
с ИСН и НСН на выходе (в). РИН - регулируемый инвертор напряжения,
ИСН - импульсный стабилизатор напряжения, НСН - непрерывный стабили-
затор напряжения, НВ - неуправляемый выпрямитель, Ф - фильтр, ИН - ин-
вертор напряжения, В выпрямитель, Тр - трансформатор, Н - нагрузка
488
На рис. 28.5 а на входе ИВЭП после неуправляемого выпрями-
теля (НВ) и сглаживающего фильтра (Ф) включен регулируемый
инвертор напряжения РИН. РИН выдает на выходе напряжение вы-
сокой частоты, что позволяет во много раз уменьшить габариты
трансформатора Тр. Поэтому и возникло название бестрансформа-
торные ИВЭП, т.е. в них отсутствуют громоздкие трансформаторы
на частоту 50 Гц. На вторичной стороне трансформатора включены
неуправляемые выпрямители В со сглаживающими фильтрами Ф
на выходе. Обратная связь с третьего наиболее мощного канала по-
дается на РИН, таким образом обеспечивается стабилизация на-
пряжения на этом канале. Напряжение на выходе второго канала не
будет столь стабильным. Напряжение на выходе наиболее точного
первого канала дополнительно стабилизируется с помощью непре-
рывного стабилизатора напряжения НСН.
На рис. 28.5 б на входе ИВЭП после неуправляемого выпрями-
теля (НВ) и сглаживающего фильтра (Ф) включен импульсный ста-
билизатор напряжения ИСН. К его выходу после сглаживающего
фильтра Ф подключен нерегулируемый инвертор напряжения ИН.
ИН подает на трансформатор напряжение высокой частоты. Обрат-
ная связь с третьего наиболее мощного канала подается на ИСН. На
вторичной стороне трансформатора схема совпадает со схемой рис.
28.5 а.
На рис. 28.5 в на входе ИВЭП после неуправляемого выпрями-
теля (НВ) и сглаживающего фильтра (Ф) включен нерегулируемый
инвертор напряжения ИН. ИН подает на трансформатор напряже-
ние высокой частоты. Таким образом, на первичной стороне транс-
форматора нет регулирующих элементов. На вторичной стороне
трансформатора предусмотрена стабилизация напряжения по двум
каналам: с помощью импульсного стабилизатора напряжения ИСН
по мощному каналу и с помощью непрерывного стабилизатора на-
пряжения НСН по точному каналу.
Все описанные структуры находят применение на практике в
зависимости от конкретных условий.
Во всех описанных схемах содержатся двухзвенные преобра-
зователи постоянного напряжения (ППН), содержащие регулируе-
мый или нерегулируемый автономный инвертор напряжения,
трансформатор и один или несколько выпрямителей на его вторич-
ной стороне. Часто они составляют неразрывное целое и выполня-
ются по специальным схемам.
489
28.3.3. Регулируемые и нерегулируемые двухзвенные ППН
малой мощности
Регулируемые ППН малой мощности в зависимости от приме-
няяемого в них АИН делятся на однотактные и двухтактные.
На рис. 28.6 а приведена схема регулируемого ППН на базе
АИН с прямым включением диода.
Рис. 28.6. ППН на базе однотактного инвертора напряжения с прямым
включением диода (а), диаграмма тока коллектора (б) и характеристика
перемагничивания трансформатора (в)
При включении транзистора VT на обмотках трансформатора
появляются напряжения (со знаками, указанными без скобок). Диол
PD1 открывается и через ZC-фильтр на нагрузку проходит ток.
Диоды VD2 и ПОЗ заперты. Под действием напряжения, приложен-
ного к обмотке , нарастает ток намагничивания трансформатора,
а, следовательно, и ток коллектора (см. рис. 28.6 б, в) При выклю-
чении VT за счёт энергии запасённой в индуктивности намагничи-
вания трансформатора на всех обмотках трансформатора наводятся
ЭДС (со знаками, указанными в скобках). Диод PD1 запирается.
Под действием ЭДС на обмотке ИЗ трансформатора открывается
диод ИОЗ и энергия, запасённая в индуктивности намагничивания
грансформатора, возвращается в источник питания. Напряжение на
транзисторе VT при этом равно сумме напряжения питания и ЭДС
самоиндукции на обмотке ИЗ и может в несколько раз превышать
490
напряжение питания. За время выключенного состояния транзисто-
ра энергия, запасенная в индуктивности намагничивания транс-
форматора, должна полностью возвратиться в источник питания. За
счет энергии, запасённой в дросселе фильтра L, продолжает прохо-
дить ток через диод VD2. При следующем включении транзистора
процессы повторяются.
В этой схеме передача энергии в нагрузку происходит через
диод, когда транзистор включен, отсюда название схема с прямым
включением диода. Такие ППН применяются для мощностей до
70-100 Вт.
На рис. 28.7 приведена схема регулируемого ППН на базе
АИН по однотактной мостовой схеме с прямым включением
диода.
Рис. 28.7. ППН на базе АИН по однотактной мостовой схеме
с прямым включением диода (а) и диаграмма тока коллектора (б)
При включении транзисторов VT\ и VT2 на обмотках транс-
форматора появляются напряжения с полярностями указанными на
рисунке без скобок. Диод КОЗ открывается и в нагрузку идёт ток,
при запирании VT\ и VT2 за счёт энергии запасённой в индуктив-
ности намагничивания трансформатора возникает ЭДС самоиндук-
ции, полярность указана в скобках, диоды ГО1 и VD2 открываются
и эта энергия отдаётся в источник питания. ЭДС на обмотке W1 за-
491
пирает диод ПОЗ и открывает диод Г'О4, питание нагрузки продол-
жается за счёт энергии запасённой в дросселе Lj.
Преимуществом этой схемы является то, что напряжение на
транзисторах не превышает напряжения источника питания. Чтобы
энергия, запасённая в индуктивности намагничивания трансформа-
тора, полностью возвращалась в источник питания, относительное
время включения транзисторов у должно быть меньше 0,5. Данная
схема применяется в одноканальных источниках питания мощно-
стью до 200 Вт.
На рис. 28.8 приведена схема регулируемого ППН на базе
АИН с обратным включением диода.
При включении VT на обмотках появляются напряжения, со
знаками указанными без скобок, диод VD закрыт, энергия запасает-
Рис. 28.8. ППН на базе однотактно-
го инвертора напряжения с обрат-
ным включением диода (а) и диа-
грамма тока коллектора (б)
ся в индуктивности намагничива-
ния трансформатора. При выклю-
чении КТ возникает ЭДС самоин-
дукции, с полярностью указанной
в скобках, и энергия, запасённая в
индуктивности намагничивания
трансформатора, передаётся в на-
грузку.
В этой схеме при включении
транзистора ток через диод на на-
грузку не идет, поэтому схема на-
зывается с обратным включением
диода. Преимуществом этой схе-
мы является простота. Применяет-
ся такая схема в многоканальных
источниках питания при мощно-
стях до 100 Вт.
На рис. 28.9 приведена схема регулируемого ППН на базе
АИН по комбинированной однотактной мостовой схеме.
При открытых транзисторах КП, VT2 на обмотках трансформа-
тора появляются напряжения с полярностями, указанными без ско-
бок, ПОЗ открывается и энергия передаётся в нагрузку. Одновремен-
но запасается энергия в индуктивности намагничивания трансфор-
матора. При закрывании транзисторов И71, КП на обмотках транс-
форматора появляется ЭДС самоиндукции, с полярностью указанной
492
в скобках, диод 1773
закрывается, а диод
ГО4 открывается,
энергия, запасённая в
индуктивности намаг-
ничивания трансфор-
матора отдаётся в на-
грузку, а если ток в
нагрузке мал (режим
холостого хода) она
через IDI и 1772 воз-
вращается в источник
питания.
Данная схема
применяется в одно-
канальных источниках
t
Рис. 28.9. Комбинированная однотактная мосто-
вая схема (а) и диаграмма тока коллектора (б)
питания мощностью до 200 Вт. Для умень-
шения габаритов фильтров применяют сдвоенные ячейки, работаю-
щие в противофазе.
На рис. 28.10 приведена схема регулируемого ППН на базе
АИН по двухтактной полумостовой схеме.
При поочерёдном включении транзисторов VT1 и VT2 пооче-
рёдно проводят диоды 17)1 и 1772, а конденсаторы Cl, С2 создают
искусственную сред-
нюю точку источника
питания. Преимуще-
ством этой схемы яв-
ляется то, что невоз-
можно несимметрич-
ное перемагничивание
трансформатора. Схе-
ма применяется при
мощностях до 500 Вт.
При больших
Рис. 28.10. Схема регулируемого ППН на базе
АИН по двухтактной полумостовой схеме
мощностях применя-
ются АИН по одно-
фазной мостовой схе-
ме (см. гл. 24). Основной трудностью в двухтактных схемах являет-
ся несимметричное перемагничивание трансформатора, при кото-
ром ток намагничивания нарастает и достигает величины тока ко-
493
роткого замыкания. В полумостовых схемах это явление предот-
вращается конденсаторами С1 и С2, не пропускающими постоян-
ную составляющую тока.
28.3.4. Централизованные стабилизаторы
постоянного напряжения
В централизованных стабилизаторах постоянного напряжения
(ЦСПН) на вход подается постоянное напряжение, а на выходе вы-
дается одно или несколько постоянных напряжений, но применено
промежуточное преобразование частоты.
В них могут применяться те же схемы, что и в бестрансформа-
торных источниках питания, только без входных выпрямителей. В
ЦСПН обычно обеспечивается гальваническая развязка между пер-
вичным источником питания и нагрузкой.
Однако есть ряд случаев, когда не требуется гальваническая
развязка, и тогда применяются упрощённые схемы.
В ЦСПН с целью повышения надежности часто применяют мно-
гофазные преобразователи постоянного напряжения (см. рис. 28.11).
На рис. 28.11 силовые преобразовательные ячейки (СПЯ)
представляют собой маломощные двухзвенные ППН, описанные
выше. Многофазный широтно-импульсный модулятор обеспечива-
Рис. 28.11. Многофазный преобразователь
постоянного напряжения
ет их работу со сдвигом
во времени. Все ячейки
получают питание че-
рез общий входной
фильтр (Вх. Ф) и рабо-
тают на общий выход-
ной фильтр (Вых. Ф) и
нагрузку Н. Стабилиза-
ция напряжения обес-
печивается за счет об-
щей обратной связи
(ОС). Работа ячеек со сдвигом обеспечивает повышение результи-
рующей частоты пульсаций, что уменьшает габариты фильтров.
Раздел VI
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Глава 29
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
29.1. Понятие об автоматическом управлении.
Основные определения, термины
Теория автоматического регулирования (ТАР) и теория авто-
матического управления (ТАУ) входят в науку под общим названи-
ем техническая кибернетика.
Техническая кибернетика изучает общие закономерности
сложных динамических систем управления технологическими и
производственными процессами.
Автоматическим регулированием называется процесс под-
держания заданного значения какой-либо физической величины в
машинах, агрегатах или иных технических устройствах без непо-
средственного участия человека, с помощью регуляторов.
Автоматическим управлением называется процесс измене-
ния по некоторому закону какой-либо физической величины в
машинах, агрегатах или иных технических устройствах без непо-
средственного участия человека, с помощью специальных авто-
матических управляющих устройств.
Машины, агрегаты и технические устройства, требуемый ре-
жим которых необходимо поддерживать или регулировать, назы-
ваются объектами управления (ОУ).
Предписания, правила, определяющие характер воздействий
извне на ОУ, называются алгоритмом управления.
Процесс осуществления, реализации воздействий на ОУ в со-
ответствии с алгоритмом управления называют управлением.
Совокупность технических средств, устройств, осуществляю-
495
щих в соответствии с алгоритмом управления воздействие на ОУ.
называют управляющим устройством (УУ).
В свою очередь, совокупность ОУ и УУ, взаимодействующих
между собой, образует систему автоматического управления (САУ).
Физическая величина, значение которой необходимо поддер-
живать или изменять по заданному закону, называется регулируе-
мой, управляемой величиной и обычно обозначается
У1
У2
Уп
(29.1)
Воздействие, оказываемое управляющим устройством (УУ) на
ОУ, называется управляющим воздействием:
г/.
Воздействие, подаваемое на вход САУ, называется задающим:
(29.3)
Причины, вызывающие отклонение регулируемой величины
от предписанного закона ее изменения, называют возмущением:
(29.4)
Воздействие, пропорциональное главному возмущению, назы-
вается компенсирующим воздействием.
Под главным возмущением подразумевается нагрузка, под
второстепенным помехи.
Совокупность технических устройств, осуществляющих связь
выхода систем автоматического управления (САУ) с ее входом, об-
разуют обратную связь (ОС) (рис. 29 1).
496
Рис. 29.1. Блок-схема системы автоматического управления
УУ включают в себя:
1) чувствительные устройства (ЧУ), служащие для измерения
переменных Y, G и F;
2) вычислительное устройство (ВУ), которое реализует алго-
ритм работы управляющего устройства (УУ); в простейшем слу-
чае - это устройство сравнения;
3) исполнительные устройства (ИУ) предназначены для непо-
средственного управления ОУ. При этом изменяется его состояние
в соответствии с алгоритмом, выдаваемым ВУ.
С учетом изложенного блок-схему представим в виде рис. 29.2.
Рис 29 2. Блок-схема системы автоматического управления
29.2. Статические системы
Системы, в которых регулируемая величина в установившемся ре-
жиме зависит от величины нагрузки, возмущения, называются стати-
ческими, а отклонение регулируемой величины от заданной ста-
тической ошибкой.
497
Рассмотрим статические свойства САУ в более общем виде на
примере приведенной блок-схемы (рис. 29.3).
Рис. 29.3. Функциональ-
ная схема системы авто-
матического управления
Коэффициенты усиления (передачи) звеньев:
Л'уу - коэффициент передачи управляющего устройства (УУ);
коу - коэффициент передачи объекта управления (ОУ);
кж - коэффициент передачи обратной связи (ОС).
Необходимо получить функциональную связь типа JrBblx(z) =
= /(Лвх(/))-
Дх(/) = хвх(/)-хОс(');
х(/) = ЛууАг(/);
•*пс(Н (И-
UC \ ВЫЛ \ /
Исключив из (29.5) все промежуточные переменные, получим:
Дх(/) =
1
1 + ^УУ^оу^ос
(29.7)
На конкретном примере показано, как влияет на уменьшение
статической ошибки принцип обратной связи (рис. 29.4 а).
Найдем величину статической ошибки, которая пропорцио-
нальна углу наклона статической характеристики (рис. 29.4 б). На-
пряжение генератора пропорционально напряжению отклоне-
ния, или ошибке:
Ux=k\u, (29.8)
где к - к„кукт - коэффициент усиления, равный произведению ко-
эффициентов усиления потенциометра, усилителя и генератора.
498
Рис. 29.4 Автоматическая система регулирования напряжения
генератора (а) и статическая характеристика системы (б)
Напряжение ошибки
Aw=w3—Wj, (29.9)
где и3 — напряжение задания.
Исключив из уравнений щ, находим напряжение ошибки:
Дг/= —— г/3. (29.10)
1 +А:
Подставим Ан из (21.8) в (21.10) и получим выражение для
напряжения генератора:
Щ=-^-и3. (29.11)
I /с
Из сравнения уравнений (29.8) и (29.10) видно, что статиче-
ская ошибка в замкнутой системе уменьшается в (1 + к) раз по
сравнению с ошибкой в разомкнутой системе.
Отсюда следует, что для уменьшения статической ошибки
нужно увеличивать общий коэффициент усиления к. Статическая
ошибка может стать равной нулю только тогда, когда коэффици-
ент усиления будет равен бесконечности.
Предположим теперь, что напряжение генератора приняло
значение и{ - a z/j вследствие какой-либо причины (например,
вследствие изменения скорости вращения якоря генератора в а
раз). Так как угловая скорость вращения ротора определяет его ко-
эффициент усиления, то коэффициент усиления (передачи) станет
равным а к , а новое значение напряжения согласно (29.11)
499
и'х=~^-и3. (29.12)
\+ак
При этом изменение напряжения, определяемое разностью и}
(29.11) и и{ (29.12):
А , 1 - Ct
Az/, = zz, - zz, = zzj-. (29.13)
1 + ak
Если бы регулятор отсутствовал, то указанное изменение име-
ло бы вид
Аг/, = их -их=к(\-а)и3 = щ (1 - а). (29.14)
Из сравнения (29.13) и (29.14) следует, что наличие регулятора
уменьшает ошибку в (1 + а к) раз.
Пусть, например, скорость вращения якоря генератора упала
до 70 % от своего рабочего значения. Это соответствует а =0,7.
При отсутствии регулятора изменение напряжения генератора было
бы таким:
их — и{ = 0,3 z/j,
т.е. напряжение изменилось бы пропорционально скорости вращения
генератора, т.е. на 30 %. Установившееся значение напряжения гене-
ратора будет составлять 70 % от первоначального. Если коэффициент
усиления системы к = 20, то при наличии регулятора изменение на-
пряжения (29.13) будет равно
, 1-0,7 0,3
и, - и, - и,-------- и,--- 0,02 и,.
1 + 0,7-20 15
Отсюда следует, что напряжение генератора изменится лишь
на 2 % и установившееся значение напряжения генератора будет
составлять 98 % от первоначального. Таким образом, наличие регу-
лятора значительно уменьшает изменение регулируемой величины,
вызываемое внешними воздействиями.
Возможны ли автоматические системы, имеющие в устано-
вившемся режиме ошибку, равную нулю? Разумеется, да. Но в них
должна быть устранена пропорциональность между регулирующим
воздействием и отклонением регулируемой величины. Этого мож-
но достичь, если включить в систему устройство, способное при
нулевом входном воздействии выходную величину поддерживать
на любом уровне. Таким свойством обладает интегратор. Действи-
тельно, уравнение интегратора имеет вид
500
I
(29.15) V Г
о 0--- -----------0
или --------
Ф’(/) . Рис. 29.5. Интегратор
—^ = u(t). (29.16)
В качестве интегратора часто используются операционные усили-
тели. Условное обозначение интегратора показано на рис. 29.5, а сама
система, в которой усилитель заменен интегратором (рис. 29.6 а), в ус-
тановившемся режиме всегда будет иметь ошибку, равную нулю.
Выходная величина интегратора будет изменяться до тех пор,
пока в системе не наступит установившийся режим при м3 = их, т.е.
при ошибке Aw, равной нулю. Введение интегратора позволяет
«развязать» вход и выход управляющего устройства. В такой авто-
матической системе нагрузочная характеристика будет параллельна
оси абсцисс (рис. 29.6 б). Системы, в которых установившееся зна-
чение управляемой величины постоянно и не зависит от величины
нагрузки, называются астатическими.
Рис. 29.6. Автоматическая система с интегратором (а)
и нагрузочная характеристика генератора (б)
Компенсация статической ошибки от нагрузки реализуется
комбинированной системой (рис. 29.7):
Y(О = F(Z) + = F(f) + куукоу [G(') + kFF(') - У (')] ;
r(/)(! + £„Лоу) = F(t) + A^oyA>F(r) + kn,koyG(t);
У(/) =
к к
УУ оу
1 ^УУ^оу
«(')+
1 + k^k^kp
\ + кУУкоу
F(ty
(29.17)
501
Рис. 29.7. Комбинированная система
автоматического управления
Компенсация статической ошибки от нагрузки возможна в
случае, когда 1 + kyykoykF = 0, т.е. при условии
kF=--±~. (29.18)
К к
УУ оу
Таким образом, в этом случае статическая ошибка уменьшается
за счет отрицательной обратной связи (ООС) и на линейном участке
характеристики системы (ОУ) компенсируются за счет контура ком-
пенсации. Такие системы принято называть комбинированными.
29.3. Методы математического описания и моделирования
линейных элементов и систем управления
29.3.1. Общие понятия о передаточных свойствах
(функциях) элементов и систем
Любая автоматическая система управления представляет собой
совокупность нескольких устройств, в которых происходят явления
различной физической природы. Одна и та же система может
включать в себя механические, электрические и гидравлические
элементы. Эти части системы взаимодействуют между собой по
сложным законам механики, электротехники, гидравлики. Взаимо-
действие частей автоматической системы между собой так же, как
и процесс функционирования самого объекта управления, выража-
ется в преобразовании энергии одного вида в энергию другого ви-
да. Но процессы преобразования и перераспределения энергии в
автоматической системе строго ориентированы, т.е. энергия и воз-
действия передаются только в определенном направлении.
Направленность передачи воздействий в автоматической сис-
теме обеспечивается благодаря наличию у одного или нескольких
502
конструктивных элементов системы так называемого детектирую-
щего свойства. Это свойство заключается в том. что рассматривае-
мый элемент не оказывает обратного действия на предыдущий эле-
мент, а его выходная величина не влияет на входную. Например,
электрический четырехполюсник обладает однонаправленностью
передачи воздействий, если он не нагружает предшествующий че-
тырехполюсник, т.е. если выходное сопротивление предшествую-
щего элемента существенно меньше входного сопротивления рас-
сматриваемого четырех полюснпка.
Обычно свойством однонаправленности обладают те элементы
автоматической системы, которые передают информационные воз-
действия. К таким элементам относятся измерители и преобразова-
тели сигналов. Конструктивные части системы, через которые пе-
редаются энергетические воздействия, этим свойством, как прави-
ло, не обладают.
Вследствие наличия элементов направленного действия в ав-
томатической системе создается замкнутый контур передачи воз-
действий, при помощи которого и осуществляется целенаправлен-
ный процесс управления. Без таких элементов автоматические сис-
темы были бы неработоспособны или малоэффективны.
Рассмотрим процесс передачи воздействий в конкретной авто-
матической системе (рис. 29.8). В этой системе электрическая энер-
гия, поступающая из сети, преобразуется при помощи двигателя в
механическую, которая через редуктор Р передается на вал шнеко-
вого питателя П. Питатель перемещает зерно или руду из бункера
Рис 29 8. Функциональная схема автоматической
системы стабилизации подачи руды
503
на весоизмеритель В и далее в технологический аппарат, перераба-
тывающий сыпучие материалы. Количество энергии, передаваемой
двигателем питателю, зависит от значения величин управляющего
сигнала иу и момента сопротивления, действующего на вал шнека.
Момент сопротивления зависит от механических свойств материа-
ла (плотности, крупности, вязкости) и частоты вращения шнека.
Это означает, что в электромеханической части системы, состоя-
щей из усилителя мощности УМ, приводного двигателя Д, редук-
тора Р и питателя П. действует внутренняя обратная связь (см.
пунктирную линию), т.е. рассматриваемая часть системы не обла-
дает свойством однонаправленности.
Свойством однонаправленности передачи воздействия в данной
автоматической системе обладают ленточный весоизмеритель В,
магнитоупругий датчик МД и электронный усилитель ЭУ: никакие
искусственные изменения выходных величин этих элементов не мо-
гут изменить их входные величины. Например, сила F не может из-
менить количество материала, проходящего через весоизмеритель, а
напряжение на выходе датчика не может повлиять на силу F.
Глубокий анализ процессов, происходящих в системах, и эффек-
тивное решение задач расчета и проектирования автоматических сис-
тем возможны лишь с применением языка и методов математики.
Причем, первым этапом при исследовании или конструировании ав-
томатической системы является составление математического описа-
ния (математической модели) ее элементов и системы в целом.
Составление математического описания конструктивного эле-
мента автоматической системы состоит из следующих последова-
тельных процедур: принятие исходных допущений, выбор входных и
выходных переменных, выбор систем отсчета для каждой перемен-
ной, применение физического принципа, отражающего в математи-
ческой форме закономерности преобразования энергии или вещества.
Наиболее распространенной формой описания передаточных
свойств автоматических систем и их элементов являются обыкно-
венные дифференциальные уравнения. Для элемента, имеющего
один входной х(/) и один выходной сигнал >(г), обыкновенное
дифференциальное уравнение записывается в общем случае сле-
дующим образом:
Фу(/),У(/),...,У ")(z);x(/),x'(/),...,x('" (z),/] = 0. (29.19)
504
Уравнение (29.19) связывает неизвестную функцию у(/) и ее
производные y'(r), ...,j’^(r) с независимой переменной t и извест-
ной (заданной) функцией времени х(/). Уравнение (29.19) называ-
ют уравнением динамики или движения элемента. При этом поня-
тие «движение» употребляют в самом обобщенном смысле.
Уравнение (29.19) может быть линейным и нелинейным. Ли-
нейным оно является в том случае, если функция Ф линейна по от-
ношению ко всем ее аргументам. Если переменные у(/), х(/)и их
производные входят в выражение функции Ф в виде произведений,
частных или степеней, то уравнение является нелинейным.
В выражение функции Ф, кроме основных переменных, входят
постоянные величины, называемые параметрами. Числовые значе-
ния параметров зависят от конструктивных данных описываемого
элемента - масс, индуктивностей, емкостей и т.д.
Если переменная у, характеризующая состояние элемента, кро-
ме времени, зависит и от другой независимой переменной, которая
является пространственной координатой, то элемент описывается
дифференциальным уравнением с частными производными. Сам
описываемый элемент называют в этом случае элементом с распре-
деленными (в пространстве) параметрами. Такими элементами яв-
ляются, например, сушильные барабаны, флотомашины, смесители и
другие аналогичные установки, в которых процессы преобразования
энергии и вещества происходят по всей длине аппарата.
Почти все реальные объекты автоматического управления яв-
ляются элементами с распределенными параметрами. Однако при
практических расчетах с большей или меньшей степенью прибли-
жения их рассматривают как элементы с сосредоточенными пара-
метрами.
Рассмотрим схему электромагнита (рис. 29.9 а), состоящего из
обмотки, неподвижного сердечника и подвижного якоря. В автома-
тике такие электромагниты используют в качестве исполнительных
устройств систем управления.
Составим уравнение и алгоритмическую схему, отражающие
физические связи между входной и выходной величинами электро-
магнита и характеризующие его передаточные свойства.
Входной величиной является напряжение приложенное к
обмотке электромагнита. Напряжение п(/) в процессе работы элек-
505
тромагнита изменяется в соответствии с алгоритмом управления
системы (в общем случае - по произвольному закону). Будем счи-
тать, что источник напряжения 1 обладает достаточно большой
мощностью, и напряжение w(/) не зависит от электромагнитных
процессов, происходящих в обмотке.
Рис. 29.9. Конструктивная (а) и алгоритмическая (б)
схемы электромагнита
В качестве выходной величины целесообразно принять элек-
тромагнитную силу F3(/), которую создает магнитное поле и кото-
рая действует через подвижный якорь на последующий элемент 2
системы управления.
Согласно второму правилу Кирхгофа алгебраическая сумма
ЭДС и напряжений в цепи обмотки в каждый момент времени рав-
на нулю:
w(/)-z(/)r + e(/) = 0. (29.20)
ЭДС самоиндукции равна скорости изменения потокосцепления:
е(')= <29-21’
а потокосцепление самоиндукции 'P(z) равно произведению тока
/(/) и индуктивности L'.
Li(t). (29.22)
506
Индуктивность цепи зависит от величины зазора между сер-
дечником и якорем, т.е. от перемещения якоря /(г) и тока в цепи.
Эта зависимость в общем случае имеет довольно сложный харак-
тер. Однако при наличии воздушного зазора насыщение в магнито-
проводе не наступает, ток практически не влияет на индуктивность,
и индуктивность можег рассматриваться как функция только одной
переменной - перемещения /(/),т.е. /.[/(/)].
Индуктивность зависит также от размеров, формы и магнит-
ных свойств сердечника. Но эти факторы в процессе работы элек-
тромагнита не меняются, и поэтому при описании передаточных
свойств электромагнита учитываются коэффициенты уравнений.
Подставив выражения (29.21) и (29.22) в равенство (29.20), по-
лучим нелинейное дифференциальное уравнение цепи обмотки:
(29.23)
Электромагнитная сила F3(t), как известно из электротехники,
пропорциональна в каждый момент времени квадрату тока и об-
ратно пропорциональна величине зазора (перемещения):
(2’24)
где сэ - коэффициент, учитывающий число витков обмотки и пло-
щадь сечения сердечника.
Алгебраическое соотношение (29.24) и дифференциальное
уравнение (29.23) совместно описывают электромагнит как преоб-
разователь сигнального (информационного) воздействия в силовое
(энергетическое) воздействие. Выразив из соотношения (29.24) ток
через силу и перемещение и подставив ток в уравнение (29.23), по-
лучим одно общее уравнение электромагнита в форме (29.19):
ф[^э(/),£,'(/),п(/),/(/),/'(/),£(/),г,сэ] = 0. (29.25)
Нетрудно убедиться, что в левую часть уравнения (29.25) вой-
дут произведения и степени переменных F3(t), l(t) и их производ-
ных. Следовательно, полученное дифференциальное уравнение яв-
ляется нелинейным. Причем, один из параметров уравнения явля-
ется переменным: индуктивность L зависит от меняющейся вели-
чины /(/). Использовать такое уравнение для анализа передаточ-
ных свойств электромагнита трудно.
507
Более наглядно представление о внутренних процессах элек-
тромагнита и его передаточных свойствах дает алгоритмическая
схема (рис. 29.9 б), которая соответствует уравнениям (29.23) и
(29.24).
Особенностью электромагнита, рассматриваемого как струк-
турное звено автоматической системы, является наличие у него
внутренней обратной связи: электромагнитная сила F3(z) создает
перемещение /(z), а перемещение /(z) в свою очередь влияет на
силу F3(z) и индуктивность L. поэтому при математическом опи-
сании электромагнит рассматривают обычно совместно с конст-
руктивным элементом 2, на который действует сила F3(z), а ин-
дуктивность L считают неизменной и равной некоторой средней
величине £0.
В заключение сформулируем ряд положений, определяющих
методологию формализованного представления и математическо-
го описания элементов и систем управления:
1. Система рассматривается как цепь взаимодействия (физиче-
ски и информационно) элементов, которая обладает способностью
передать физические воздействия и информационные сигналы в
одном строго определенном направлении.
2. Каждый конструктивный элемент системы рассматривается
как преобразователь входного воздействия в выходную реакцию.
3. На основе априорных сведений о физической природе каждо-
го элемента и закономерностях его функционирования составляется
математическая модель, которая на языке соответствующей научной
дисциплины отражает существенные для данной цепи взаимосвязи
между входными и выходными переменными элемента.
4. При составлении математического описания отдельных
элементов и системы в целом всегда приходится прибегать к не-
которой идеализации реальных физических процессов, происхо-
дящих в элементах, определенным упрощениям физических зако-
номерностей. отбрасыванию второстепенных факторов. Удач-
ность и допустимость всех этих упрощений зависят от глубины
знаний исследователя системы в данной области физики и техно-
логии, его инженерной интуиции и всегда подлежат эксперимен-
тальной проверке.
508
29.3.2. Временные и спектральные характеристики
типовых воздействий и сигналов
Виды воздействий и режимов в системах управления.
Большое разнообразие конструкций и условий работы автоматиче-
ских систем управления определяет многообразие воздействий и
сигналов, наблюдаемых в системах. Изучение и математический
анализ конкретных автоматических систем существенно упроща-
ются, если пользоваться разработанной в теории управления типи-
зацией воздействий и сигналов.
Рассмотрим основные разновидности сигналов и воздействий.
В зависимости от характера изменения сигнала во времени и фор-
мы его математического представления различают регулярные и
нерегулярные сигналы.
Регулярный (детерминированный) сигнал изменяется по опре-
деленному закону и может быть описан конкретной математиче-
ской функцией времени. К классу регулярных сигналов относятся
различные периодические сигналы и непериодические импульсы
конечной длительности. Пример регулярного сигнала - импульс,
описываемый экспонентой (рис. 29.10 а).
Рис. 29.10. Виды сигналов и типовых воздействий
Нерегулярный (случайный) сигнал изменяется во времени слу-
чайным образом и не может быть представлен в виде конкретной
математической функции. Характер изменения случайного сигнала
во времени показан на рис. 29.10 б.
509
Если значение регулярного или случайного сигнала определе-
но в каждый момент времени (рис. 29.10 в), то сигнал называется
непрерывным или аналоговым. Если же значения сигнала заданы
лишь в некоторые моменты времени (рис. 29.10 г), он называется
дискретным.
При экспериментальном и теоретическом исследовании автома-
тических систем и их элементов используют ряд стандартных сигна-
лов, называемых типовым воздействием. Эти воздействия описы-
ваются простыми математическими функциями и легко воспроизво-
дятся при испытании систем. Использование типовых («эталонных»)
воздействий позволяет унифицировать расчет различных систем и
облегчает сравнение передаточных свойств систем.
Наибольшее применение в теории и практике автоматического
управления находят четыре типовых воздействия: ступенчатое, им-
пульсное, гармоническое и линейное.
Ступенчатое воздействие - это воздействие, которое мгно-
венно возрастает от нуля до некоторого значения и далее остается
постоянным (рис. 29.10 д). Ступенчатому воздействию соответст-
вует функция
хс(/) =
0 при t < 0;
а0 при t > 0.
(29.26)
При анализе и расчете систем удобно использовать ступенча-
тое воздействие, у которого а^ = 1. Его называют единичным сту-
пенчатым воздействием (единичным скачком) и обозначают 1(/).
Математическое выражение, описывающее единичный скачок,
имеет вид
, [ 0 при t < 0;
1/) = ^ (29.27)
' [1 при t > 0.
Любое неединичное ступенчатое воздействие можно обозна-
чить Единичное ступенчатое воздействие, возникающее в
момент времени t = t{, обозначают 1(/ — ).
Ступенчатое воздействие чаще всего используют при испыта-
ниях и расчетах систем стабилизации, т.к. эти воздействия наибо-
лее близки к реальным входным (задающим и возмущающим) воз-
действиям систем стабилизации.
Импульсное воздействие представляет собой одиночный им-
пульс прямоугольной формы (рис. 29.10 е), имеющий достаточно
510
большую высоту и весьма малую продолжительность (по сравнению
с инерционностью испытываемой системы). Очевидно, что площадь
такого импульса всегда равна а0.
При математическом анализе автоматических систем исполь-
зуют единичное воздействие, которое описывается так называемой
дельта-функцией
„. . О при t Ф 0;
S(t (29.28)
[оо при / = 0,
причем
р(г)б// = 1. (29.29)
Согласно выражениям (29.28) и (29.29) дельта-функцию мож-
но рассматривать как импульс, имеющий бесконечно большую вы-
соту, бесконечно малую длительность и единичную площадь.
Дельта-функцию можно определить также как производную еди-
ничного скачка:
= (29.30)
dt
Неединичное импульсное воздействие с площадью <з0 обозна-
чается
Если единичный импульс действует в момент t - tt, то ему со-
ответствует так называемая смещенная дельта-функция
которая также удовлетворяет условию (29.29).
Основное свойство дельта-функции выражается соотношением
Jx(z9)^(z7-/)c/z9 = x(/), (29.31)
которое означает, что неединичная импульсная функция
х(г9)£(?9-/), полученная как произведение произвольной функции
х(г9) на дельта-функцию, существует только в момент d = t, а пло-
щадь ее равна значению функции х(г?) в точке d = t. Это свойство
дельта-функции называют фильтрующим или «выхватывающим».
Выражение (29.31) можно также рассматривать как разложение
некоторой функции х(/) на сумму бесконечно большого числа эле-
ментарных импульсов вида х(г9)<5(г9 — /)<7г9. Каждый элементарный
511
импульс действует лишь в момент времени г9 = t и имеет площадь
х(г9)с/г9.
В качестве стандартного гармонического воздействия исполь-
зуют обычно сигнал синусоидальной формы, описываемый функ-
цией
x(/) = xmsin£9/(-<»</<°о), (29.32)
где хт — амплитуда сигнала; со = 2л/Т — круговая частота, рад/с;
Т — период сигнала, с.
Гармонический сигнал, начинающий действовать в момент вре-
мени t = 0 (рис. 29.10 ж), описывают при помощи единичной сту-
пенчатой функции:
x(/) = l(/)xmsintztf (0<Z<°o), (29.33)
Гармонические воздействия (29.32) и (29.33) широко использу-
ются при исследовании точности и устойчивости как стабилизирую-
щих, так следящих и программных автоматических систем. Это объ-
ясняется двумя обстоятельствами: во-первых, реальные возмущения
часто имеют периодический характер и поэтому могут быть пред-
ставлены в виде суммы гармонических составляющих; во-вторых,
математический аппарат анализа автоматических систем хорошо раз-
работан именно для случая гармонических воздействий
Для следящих и программных систем типовым является ли-
нейное воздействие (рис. 29.10 з)
х(/) = 1(/)о,/ (0</<~), (29.34)
Коэффициент С] характеризует скорость нарастания воздейст-
вия х(/).
Рассмотрим возможные состояния и режимы перехода авто-
матических систем от одного состояния к другому. Состояние
системы характеризуется изменением управляемой величины во
времени. Очевидно, что состояние и режимы перехода зависят как
от формы задающего или возмущающего воздействия, так и от
свойств самой системы.
Различают два режима работы автоматических систем и их
элементов: статический и динамический. Статическим режимом
называют состояние системы (элемента), при котором управляе-
мая (выходная) величина у не изменяется во времени, то есть
у(/) = const.
512
Очевидно, что статический режим (или состояние равновесия)
может иметь место лишь тогда, когда входные воздействия постоян-
ны во времени. Связь между входными и выходными величинами в
статическом режиме описывают алгебраическими выражениями.
В динамическом режиме работы системы (элемента) управ-
ляемая (выходная) величина непрерывно изменяется во времени -
= var.
Динамические режимы имеют место, когда в системе после
нанесения внешних воздействий происходят процессы установле-
ния заданного состояния или заданного изменения выходной вели-
чины Эти процессы называются процессами управления и описы-
ваются в общем случае дифференциальными уравнениями.
Динамические режимы разделяются на неустановившиеся и
установившиеся (рис. 29.11). Неустановившиеся, или переходные,
режимы имеют место сразу после изменения внешних воздействий.
Конкретный вид функции у(/) в переходном режиме зависит от
типа воздействия и собственных динамических свойств системы.
Установившийся режим работы наступает после окончания пере-
ходного процесса, когда выходная величина элемента или системы
изменяется во времени по такому же закону, что и входное воздей-
ствие. При этом говорят, что элемент (система) совершает вынуж-
денное движение.
Нетрудно заметить, что статический режим является частным
случаем установившегося (вынужденного) режима при x(z)=const.
Понятия «переходный режим» и «установившийся режим» ил-
люстрируются графиками изменения величины при трех типо-
вых воздействиях (рис. 29.11). Граница между переходным и уста-
новившимся режимами показана вертикальной пунктирной линией.
Рис. 29.11. Переходные и установившиеся режимы
при типовых воздействиях
17 Зак. 50
513
Основные сведения из гармонического анализа воздейст-
вий и сигналов. В инженерной практике при описании и исследо-
вании систем управления широко применяется разложение реаль-
ных сигналов сложной формы на элементарные сигналы синусои-
дальной формы. Математический метод представления сложных
сигналов (периодических и непериодических) в виде совокупности
элементарных гармонических составляющих (гармоник) называет-
ся гармоническим анализом.
Рассмотрим основные положения этого метода. Как известно из
курса высшей математики, любая периодическая функция с периодом
Т (рис. 29.12 а)
x(/) = x(/ + zT) (z = 0; 1; 2;...), (29.35)
удовлетворяющая условиям Дирихле (конечное число разрывов на
интервале периода Г). может быть разложена в бесконечный схо-
дящийся тригонометрический ряд - ряд Фурье:
х(/) = — + X(ak cosa>}kt + bk svcico}kty, (29.36)
2 л=|
где со} -Iti/T ; сок = со}к - круговые частоты соответственно основ-
ной и А-й гармоник, рад/с; aG, ак, Ьк - независимые от t коэффициен-
ты (коэффициенты Фурье), которые определяются по формулам:
2-Г/2
— J x(&)cos (А? = 0;1;2;...); (29.37)
Т -Т/2
2 т/2
bk=— J x(z9)sinW|Az%/z? (А = 1; 2;...). (29.38)
Т -Т/2
Переменная интегрирования & в (29.37) и (29.38) рассматри-
Т Т г, °0
вается в интервале от - — до —. Постоянная составляющая — ря-
да, соответствующая к = 0, равна среднему за период Т значению
сигнала.
Если функция х(?9) в интервале ; —j четная, то в разло-
жении (29.36) будут присутствовать только косинусоиды, если не-
четная, то ряд будет содержать только синусоиды.
Таким образом, при помощи ряда Фурье можно сложный пе-
риодический сигнал выразить аналитически в виде суммы простых
гармонических сигналов, называемых гармониками.
514
Рис. 29.12. Периодический (а) и непериодический (в) сигналы
и их амплитудные спектры (б, г)
Ряд Фурье обладает важным свойством: при заданном конечном
числе членов дает лучшее приближение (по критерию суммы квад-
ратов отклонений), чем любое другое разложение функции х(/).
Ряд Фурье удобно использовать, если он записан не в триго-
нометрической форме (29.36), а в виде суммы экспоненциальных
функций e^'’'kt, соответствующих, как известно, единичным вра-
щающимся векторам. С помощью формулы Эйлера
e±ja — cos а± j sin» (29.39)
и ее модификаций
PJa + p~ia eia _ e-ia
cos се =--------, sin се =-------- (29.40)
2 2j
ряд (29.36) можно преобразовать к комплексной форме ряда Фурье:
х(/) = XXkeja'h (& = 0;± 1; ± 2;...), (29.41)
*=-~
где
+ 7/2
Хк=- j х(г9)е~у^г9=а*~Ж (29.42)
Т -т/2 2
В формуле (29.41) суммирование производится как по поло-
515
17*
жительным, так и по отрицательным значениям к. Это означает, что
комплексная форма ряда Фурье допускает существование и поло-
жительных, и отрицательных частот сок — C0\k. Так как каждому
комплексному слагаемому с положительным к соответствует со-
пряженное слагаемое с отрицательным к, то при суммировании в
(29.41) останутся только действительные величины.
Слагаемые в (29.41) называются комплексными гармониками, а
сомножители Хк — комплексными амплитудами.
Зависимость модуля | Хк | комплексной амплитуды от частоты
(Ок = (Охк называют амплитудным спектром сигнала х(/).
Для периодического сигнала спектра амплитуд, равных на каж-
дой частоте
Хк=*кт=--2 , (29.43)
удобно изображать их в виде так называемой решетчатой функ-
ции - последовательности отрезков (спектральных линий) длиной
хАта, перпендикулярных к оси а)к (рис. 29.12 б). На этом рисунке
показан амплитудный спектр конкретного сигнала - периодической
последовательности прямоугольных импульсов (см. рис. 29.12 а) с
Т л
амплитудой хи и скважностью — = 4.
Амплитудный спектр любой последовательности прямоуголь-
ных импульсов описывается следующей функцией аргумента к:
хкт
sin —-
______2
а>1ктИ
2
(29.44)
Анализируя общее выражение (29.44) и конкретный график
амплитудного спектра (см. рис. 29.12 б), можно установить ряд ха-
рактерных свойств спектра любых периодических сигналов:
1. Спектры всегда дискретны — они содержат только такие гар-
моники, частоты которых кратны основной частоте со]. Некоторые
гармоники могут отсутствовать.
2 Чем больше период Т сигнала, тем меньше интервал - 1л/Т
между соседними частотами, следовательно, «гуще» спектр. При
Т оо; то есть для единственного импульса, описываемого непе-
516
риодической функцией, спектр становится сплошным, но амплиту-
ды хкт при возрастании периода будут уменьшаться.
3. С уменьшением длительности импульсов Тп (при неизмен-
ном Т) амплитуды гармоник также уменьшаются, а спектр стано-
вится «гуще».
4. Если одновременно с уменьшением длительности ги прямо-
угольных импульсов увеличивать амплитуду хи, например, по за-
кону хи——, то их последовательность (см. рис. 29.12 а) будет
стремиться к последовательности дельта-функций, а амплитудный
1
спектр - к постоянному для всех частот значению хкт=~.
Перейдем к характеристикам непериодических сигналов. Лю-
бой непериодический сигнал в виде импульса конечной длительно-
сти (рис. 29.12 в) можно рассматривать как предельный частный
случай соответствующего периодического сигнала (см. рис.
29.12 а), если устремить период Т к бесконечности, не изменяя при
этом длительности импульса. Очевидно, что при Т —> °° расстояние
между соседними спектральными линиями (см. рис. 29.12 6), рав-
» 2^ _ .
ное ДбУ = = — , будет уменьшаться и стремиться к а(О, а дис-
кретная переменная а>к - к непрерывной а>. Дискретный спектр
становится непрерывным. Так как при этом модули хЬй стремятся
к нулю, то для непериодических сигналов вместо комплексных ам-
плитуд Хк используют относительные амплитуды:
X(jcolk)=^-. (29.45)
ДЩ
, 2я 1 Дщ
Учитывая, что Дщ =— и — =-------, сумму (29.41) при пре-
Т Т 2л
дельном переходе Т —> можно заменить интегралом Фурье
1 °°
х(/) =— f X(ja))ej(OtdcD, (29.46)
2л J
а выражение (29.42) для комплексной амплитуды - так называемым
преобразованием Фурье
X(jco) = J x(t)e~jMdl. (29.47)
517
Непериодический сигнал х(/), представленный в виде инте-
грала (29.46), по аналогии с периодическим сигналом, разложен-
ным в ряд (29.41), можно рассматривать как сумму бесконечно
большого числа комплексных гармоник с бесконечно малыми ком-
плексными амплитудами:
dX = X^^ dco. (29.48)
2л
Так как амплитуда dX характеризует спектр, приходящийся на
интервал от со до со + dco, то величину
= (29.49)
dco
называют комплексной спектральной плотностью, а зависимость ее
модуля от частоты-спектральной плотностью амплитуд.
Спектральная плотность амплитуд (рис. 29.12 г) для одиночного
прямоугольного импульса (см. рис. 29.12 в) описывается функцией
рб(»|-хити • (ОТИ sin— и 2
щги 2
(29.50)
Спектральные свойства непериодического сигнала имеют сле-
дующие особенности:
1. Спектр всегда непрерывен и характеризуется не абсолют-
ными значениями амплитуд гармоник (они бесконечно малы), а
плотностью амплитуд гармоник, приходящихся на интервал dco.
2. При уменьшении длительности импульса его спектр расши-
ряется вдоль оси со, а значения плотности амплитуд уменьшаются.
3. Если одновременно с уменьшением длительности ги прямо-
угольного импульса (см. рис. 29.12 в) увеличивать его амплитуду хи
1
по закону хИ =—, то импульс будет стремиться к дельта-функции, а
его спектральная плотность к постоянной величине, равной единице
во всем диапазоне частот от — °° до °°.
Формулы (29.46) и (29.47), называемые соответственно обрат-
ным и прямым преобразованием Фурье, являются основными в
гармоническом анализе непериодических сигналов и широко ис-
пользуются в ТАУ. С помощью прямого преобразования (29.47)
для любого сигнала x(z), удовлетворяющего условиям Дирихле и
518
F\x —
Т
\,1 м .
являющегося интегрируемым, можно найти его изображение по
Фурье, которое символически обозначается так:
Z(» = F{x(/)}. (29.51)
Процедура обратного преобразования Фурье соответственно
обозначается с помощью символа F 1:
x(/) = F-'{*(>)}. (29.52)
Если прямое преобразование (29.47) записать для относитель-
- t —
кого времени 1 = — и относительной частоты со = С01ы, где Ты -
некоторый масштабный множитель, то можно получить одно из
важнейших свойств преобразования Фурье:
> = TMX(jcoTM). (29.53)
которое означает, что при растяжении (сжатии) в Ты раз графика
функции х(Г) вдоль оси времени график спектральной плотности
|Ar(j<y)|, во-первых, сжимается (растягивается) вдоль оси частот
в Тм раз и, во-вторых, увеличиваются (уменьшаются) в Тм раз ее
значения, то есть чем короче импульс х(/), тем шире и ниже гра-
фик |2f(j<y)|.
Другое важнейшее свойство преобразования Фурье выражает-
ся равенством Парсеваля
оо оо
f|x(/)|26// = -— ffx(jcofdco. (29.54)
Соотношение (29.54) имеет следующий физический смысл. Во
многих практических задачах автоматики сигнал х(/) характеризу-
ет электрический ток или скорость перемещения, соответственно
квадрат такого сигнала пропорционален мощности, а его интеграл -
энергии. Согласно такому смыслу левую и правую части равенства
(29.54) рассматривают как сумму энергий отдельных гармоник,
частоты которых расположены в полосе dco около со. Поэтому
функцию |Аг(у<у)|2, характеризующую распределение энергии сре-
ди гармоник сигнала х(/), называют энергетической спектральной
плотностью (спектральной плотностью мощности).
519
Пример 29.1. Найдем спектральные характеристики
и |А"(/7у)|2 экспоненциального импульса, возникающего в
момент t = 0:
Г 0 при t < 0;
х(/) = 1(/)хие~да= (29.55)
хие при />0(сг>0)
Функция (29.55) удовлетворяет условиям применимости преоб-
разования Фурье. Изображение функции (29.55) по Фурье согласно
(29.47) следующее:
X(jco) = [x^e^dt = = ; (29.56)
о « + 0 a + jcu
то есть
L J а + jco
Спектральная плотность амплитуд
*и _ _ -*н
а + ja> J а + jco yjo? +(l)2
Энергетическая спектральная плотность
2
и
|щ<»)Г=
2 2 '
а + со
(29.57)
(29.58)
(29.59)
29.3.3. Статические характеристики элементов
Передаточные свойства элементов и систем в статическом ре-
жиме описывают при помощи статических характеристик. Стати-
ческой характеристикой элемента называют зависимость его вы-
ходной величины у от входной величины х
У = Д*) = у(х) (29.60)
в установившемся статическом режиме.
Статическая характеристика конкретного элемента может быть
задана в формулярном виде (например, в виде алгебраической
функции у = сх2) пли в виде графика (рис. 29.13 а).
В общем случае, когда состояние элемента или системы зави-
сит от нескольких входных воздействий х}, х2,..., хт, статическая
характеристика представляет собой функцию нескольких незави-
симых переменных:
520
y = f(xx,x2,...,xm). (29.61)
Функция двух переменных jq и х2 может быть изображена в
виде поверхности в трехмерном пространстве с декартовыми коор-
динатами у, х(, х2 (рис. 29.13 б) или в виде семейства линий сече-
ний этой поверхности, соответствующих нескольким фиксирован-
ным значениям одного из аргументов (рис. 29.13 в).
Рис. 29.13. Статические характеристики элементов
с одной (а) и двумя (б, в) входными величинами
Так как статический режим является частной формой динами-
ческого режима, то соответствующая статическая характеристика
может быть получена как частный вид дифференциального уравне-
ния (29.19). Для этого необходимо в дифференциальном уравнении
элемента приравнять все производные по времени нулю (что соот-
ветствует определению понятия статический режим), и тогда полу-
чим уравнение статики элемента
ф[у, х] = 0, (29.62)
из которого можно получить аналитическое выражение статиче-
ской характеристики в явном виде (29.60).
Большинство конструктивных элементов автоматических сис-
тем в статическом режиме характеризуется строгими однозначными
соотношениями между значениями входной и выходной величины
(рис. 29.14 а, б, в). Эти элементы называются статическими, или по-
зиционными. Но некоторые элементы систем не обладают опреде-
ленными передаточными свойствами в статическом режиме- при
различных значениях входной величины х выходная величина у мо-
жет принимать одно и то же значение (рис. 29.14 г) или, наоборот, -
при одном и том же значении х величина у может принимать любые
значения (рис. 29.14 д). Такие элементы называются астатически-
ми. К ним относятся, например, интегрирующие звенья.
521
Рис. 29.14. Виды статических характеристик
По виду статических характеристик элементы разделяют на ли-
нейные и нелинейные. Статическая характеристика линейного эле-
мента (см. рис. 29.14 б) описывается линейной функцией у = b + ах.
У нелинейных элементов связь между входной и выходной величи-
ной выражается обычно в виде степенных функций, степенных поли-
номов, дробных рациональных функций и более сложных функций.
Нелинейные элементы в свою очередь подразделяю! на эле-
менты с существенно нелинейной статической характеристикой и
элементы с несущественно нелинейной (линеаризуемой) характе-
ристикой.
Статическая характеристика является несущественно нелиней-
ной, если она описывается непрерывной дифференцирующей
функцией. Практически это математическое условие означает, что
график функции у = /(л) должен иметь гладкую форму (см. рис.
29.14 а). В ограниченном диапазоне изменения входной величины х
такая характеристика может быть приближенно заменена (аппрок-
симирована) линейной функцией. Приближенная замена нелиней-
ной функции линейной называется линеаризацией. Линеаризация
нелинейной характеристики правомерна, если в процессе работы
элемента его входная величина меняется в небольшом диапазоне
вокруг некоторого значения х - х0.
Статическая характеристика считается существенно нелиней-
ной, если она имеет изломы или разрывы. Примером может слу-
жить характеристика реле (см. рис. 29.14 в), которое при достиже-
нии входного сигнала х (ток в обмотке реле) некоторого значения
522
X] изменит выходной сигнал у (напряжение в коммутируемой це-
пи) с уровня у1 до уровня у2. Замена такой характеристики прямой
линией с постоянным углом наклона привела бы к существенному
несоответствию между математическим описанием элемента и ре-
альным физическим процессом, происходящим в элементе.
Линеаризацию гладких статических характеристик можно осу-
ществлять либо по методу касательной, либо по методу секущей.
Линеаризация по методу касательной заключается в разложе-
нии функции у(х) в интервале вокруг некоторой точки х0 в ряд
Тейлора и в последующем учете первых двух членов этого ряда:
у(х) = у(х0) + у'(х0)(х - х0), (29.63)
где у'(х0) = /'(х0) - значение производной функции /(х) в задан-
ной рабочей точке А с координатами х0 и у0. Геометрический
смысл такой линеаризации заключается в замене кривой /(х) каса-
тельной ВС, проведенной к кривой в точке Л (рис. 29.15 а).
При расчете автоматических систем удобно линейные статиче-
ские характеристики вида (29.63) рассматривать в отклонениях пе-
ременных у и х от значений х0 и у0:
J'-J’o = Т'(хо)(х--^о) (29.64)
или
Ду = АгДх, (29.65)
где Дх = х - х0; Ду = у - у0; к = у'(х0).
Рис. 29.15. Линеаризация статических характеристик
проведением касательной (а) и секущей (б)
523
Следовательно, переход от записи (29.64) к записи (29.65)
уравнения статики соответствует переходу от исходной системы
координат хОу к системе ЛхА Ду.
Коэффициент пропорциональности Л между отклонениями
входной и выходной величины в статическом режиме называют пе-
редаточным коэффициентом.
Передаточный коэффициент является основным параметром
линейных и линеаризованных элементов статического типа: его
числовое значение полностью характеризует передаточные свойства
элемента в статике.
Размерность передаточного коэффициента равна отношению
размерности выходной величины к размерности входной величины:
Н = И- (29.66)
И
Например, для электрического двигателя передаточный коэф-
фициент по каналу «напряжение-частота вращения» имеет размер-
ность (об/с)/В.
Если исходная статическая характеристика задана в формульном
виде, то передаточный коэффициент находят как значение производной
в рабочей точке:
^ = /Ъ) = ^ (29-67)
^Х)х=хо
Если характеристика задана графически, то передаточный ко-
эффициент может быть определен как тангенс угла а наклона ка-
сательной (см. рис. 29.15 а):
fc = -^-tgtf, (29.68)
где ту и тх - масштабные коэффициенты величин у и х.
Линеаризация может быть выполнена и в том случае, если вы-
ходная величина является гладкой функцией нескольких перемен-
ных. Линеаризованная статическая характеристика в отклонениях
имеет вид
Ду = Л|Дл‘| + А'2Дх2+...+^тДхт, (29.69)
где к}, к2,..., кт - передаточные коэффициенты, равные значени-
ям частных производных вида (29.67) функции (29.61) в рабочей
точке (y0,x10,x20,...,jc
mo)'
524
Линеаризацию по методу секущей осуществляют непосредст-
венно на графике проведением прямой линии (рис. 29.15 6) таким
образом, чтобы в некотором заданном диапазоне изменения аргу-
мента х спрямленная характеристика была в среднем как можно
ближе к исходной линеаризуемой характеристике /(х). При этом
передаточный коэффициент линеаризованной характеристики опре-
деляют как отношение прирашений. соответствующих друг другу:
к = ^. (29.70)
Ах
Формулу (29.70) для определения коэффициента к можно при-
менять и при использовании метода касательной.
Метод секущей можно применять и при аналитическом решении
задачи линеаризации. При этом указанное выше нестрогое условие
близости линеаризованной характеристики к исходной формализует-
ся в виде критерия минимума суммы квадратов отклонений.
Линеаризация по методу касательной дает хорошее совпаде-
ние вблизи рабочей точки и худшее у границ рабочей зоны. Ап-
проксимирующая прямая, полученная по методу секущей (наи-
меньших квадратов), имеет меньшее среднее расхождение с исход-
ной характеристикой, хотя ее наклон может и не совпадать с на-
клоном кривой в рабочей точке.
Пример 29.2. Линеаризуем нелинейное уравнение электро-
магнита, рассмотренного в п. 29.3.1. Уравнение статики электро-
магнита можно получить, приравняв в уравнении (29.23) производ-
ные по времени нулю и подставив в него значение тока из (29.24).
Уравнение статики связывает две входные величины - напряжение
и и перемещение / с одной выходной величиной F3:
2
(29-71)
И’2Ц S
где сэ = — конструктивный параметр электромагнита, завися-
щий от числа витков w, площади сечения сердечника S и магнитной
проницаемости воздуха ; г - активное сопротивление обмотки.
Передаточные коэффициенты электромагнита для рассматри-
ваемых двух входных воздействий определим как значение част-
ных производных функций (29.71) в точке, соответствующей неко-
торому заданному установившемуся режиму и0, 10:
525
ки
*/ =
/“=«0 /=/0 г2/о ’ (29.72)
и=«0 2сэмо 2,3 ' г /0 (29.73)
'о
Размерность ки - Н/В, kt - Н/м.
Линеаризованное уравнение статики электромагнита в откло-
нениях от заданного режима имеет вид
AF, = ки\и-ьк1М. (29.74)
29.3.4. Линейные дифференциальные уравнения
Наиболее общей и полной формой математического описания
автоматических систем и их элементов является дифференциальное
уравнение вида (29.19). Для большинства реальных элементов ис-
ходное уравнение (29.19), составленное строго в соответствии с за-
конами физики, оказывается нелинейным, что значительно услож-
няет все последующие процедуры анализа. Поэтому всегда стре-
мятся перейти от трудно разрешимого нелинейного уравнения
(29.19) к линейному дифференциальному уравнению вида
dny(t)
dln
+ ^|-—_! + ... + a„y(t) =
ао
dm~xx(t}
dlm~'
+ ... + bmx(t),
(29.75)
где и - входная и выходная величины элеменга или сис-
темы; Gj, bt - коэффициенты уравнения.
Уравнение (29.75) устанавливает связь между входной и вы-
ходной величиной как в переходных, так и в установившихся ре-
жимах.
Коэффициенты дифференциального уравнения называются
параметрами. Они зависят от различных физических констант, ха-
рактеризующих скорость протекания процессов в элементах. Таки-
ми константами являются массы движущихся частей, индуктивно-
сти и емкости электрических цепей, теплоемкости нагреваемых
элементов и др.
Иногда параметры некоторых элементов систем изменяются во
526
времени, причем скорость их изменения соизмерима со скоростью
процессов управления в системе. Такую систему называют неста-
ционарной, или системой с переменными параметрами. Системой с
переменными параметрами является, например, автоматическая сис-
тема управления приводом поворота мощного экскаватора, если в
процессе его поворота одновременно происходит выдвижение руко-
яти с ковшом. По мере удаления ковша от центра вращения платфор-
мы экскаватора существенно увеличивается маховой момент вра-
щающихся вокруг вертикальной оси масс, следовательно, существен-
но меняется один из коэффициентов дифференциального уравнения.
Манипуляторы роботов тоже относятся к системам с переменными
параметрами.
В большинстве случаев коэффициенты уравнения существенно не
изменяются и системы являются системами с постоянными парамет-
рами. В дальнейшем будут рассматриваться только такие системы.
Если при составлении линейного дифференциального уравне-
ния (29.75) использованы линеаризованные статические характери-
стики или приняты допущения о линейности тех или иных взаимо-
связей, то уравнение справедливо лишь для малых отклонений
входной и выходной величин от их значений в статическом режи-
ме: Дх(/) = х(/) - х0; Лу(?) = у(/) - у0 - Однако с целью упрощения
записей в линейном уравнении отклонения часто обозначаются те-
ми же символами (без знака А), что и сами величины.
Для автоматических систем управления, описываемых линей-
ным уравнением (29.75), справедлив принцип наложения или супер-
позиции, согласно которому
изменение выходной величины y(t), возникающее при дейст-
вии на систему нескольких входных сигналов xt(t}, равно сум-
ме изменений yt(t) величины вызываемых каждым сиг-
налом в отдельности
Это свойство линейных систем имеет большое практическое зна-
чение, так как благодаря ему значительно облегчаются все расчеты.
Рассмотрим типовые формы записи линейного дифференци-
ального уравнения (29.75), используемые в различных задачах тео-
рии автоматического управления.
Как и в других областях науки и техники, все физические пе-
ременные, входящие в уравнение, могут быть выражены в относи-
тельных единицах. Для этого каждое слагаемое делят на постоян-
527
ную величину, имеющую размерность той переменной, которая
входит в это слагаемое. Постоянные величины называют базовыми.
В качестве базовых величин принимают обычно номинальные или
установившиеся значения переменных у их.
Удобной формой записи линейных дифференциальных уравне-
ний является символическая, или операторная. Переход к этой форме
осуществляют введением сокращенного условного обозначения опе-
рации дифференцирования: ^22 = р Соответственно k-ю производ-
ил
ную переменной у обозначают
^Г = Рку№- (29.76)
dtk
Тогда уравнение (29.75) в символической форме имеет вид
(айр" + а}р"' + ...+ a„)y(t) = (bopm +blPm~' +... +bm)x(t). (29.77)
Многочлены от p степени и и т, находящиеся в левой и правой
частях уравнения (29.77), называются дифференциальными опера-
торами. Каждый такой оператор устанавливает соответствие меж-
ду функцией времени и определенной совокупностью производных
этой функции. Многочлен
aGp" + aiPn~l +... + a„=D(p) (29.78)
называют собственным оператором, а многочлен
Vm+61pm-1 + ... + 6m = /r(p) (29.79)
- входным оператором, или оператором воздействия.
Название собственный обусловлено тем, что многочлен
характеризует собственное движение элемента, то есть движение
при отсутствии внешних воздействий. Оператор D(p) называют
также характеристическим.
У всех реальных элементов и систем порядок наивысшей произ-
водной во входном операторе не может быть больше порядка наи-
высшей производной в собственном операторе, то есть всегда
т<п. Если в процессе каких-либо формальных выкладок образу-
ется уравнение, у которого т > п, то говорят, что это уравнение со-
ответствует физически нереализуемой системе.
Уравнения элементов невысокого порядка (п < 3) в теории ав-
томатического управления принято записывать в так называемой
стандартной форме. При стандартной форме записи уравнение
528
преобразовывают таким образом, чтобы коэффициент при выход-
ной величине был равен единице. При этом коэффициент перед
входной величиной в правой части уравнения становится равным
передаточному коэффициенту, а коэффициенты при производных
выходной величины будут иметь размерность времени в степени,
равной порядку соответствующей производной. Например, уравне-
ние второго порядка
+«1Р + «2 )y(t) = (bop + bl)x{t) (29.80)
путем деления всех членов на коэффициент а2 может быть приве-
дено к стандартной форме
(722/72 + Г1/? + 1)у^) = Л(Т72 + 1)х(/), (29.81)
/ ^1 . т <?! 2 а0
где к = —; Т = —; Тх = —; Т2 = — .
а2 О] а2 а2
Коэффициенты Т, 7), Т2 принято называть постоянными вре-
мени, характеризующими динамические свойства элемента.
Часто при исследовании автоматических систем оказывается
удобным переход от естественного времени t, измеряемого в се-
кундах, минутах и т.д., к так называемому безразмерному (относи-
тельному) времени t. Этот переход осуществляется с помощью не-
которого постоянного (в общем случае - произвольно выбранного)
множителя Ты, имеющего размерность времени
/ = —. (29.82)
В качестве множителя Ты часто принимают постоянную вре-
мени одного из элементов, входящих в систему. Величину, обрат-
ную множителю Тм, называют масштабом времени и обозначают
1
т, = —.
Т
м
Оператор Д-кратного дифференцирования по безразмерному
—к dk _ , ,
времени р = , связан с обычным оператором дифференциро-
dt
к dk
вания р - —— соотношением
dtk
~рк=ркТк. (29.83)
Используя соотношение (29.83), можно любое дифферснциаль-
529
ное уравнение записать в безразмерном времени, измеряемом в ус-
ловных единицах Ты. Например, уравнение (29.80) будет иметь вид
Если коэффициент преобразования времени выбирать по оп-
ределенному правилу, а именно:
(29.85)
V67»
то можно максимально упростить дифференциальное уравнение.
Так, уравнение (29.84) примет вид
у^ = (вор + В})х(1), (29.86)
bn ь,
где Ах = =---- Во = ------; В{ = —.
•у°0°2 yla0a2 а2
В левой части уравнения вместо трех числовых коэффициен-
тов «о, О|, «2 остался лишь один коэффициент Л |. Такая компактная
форма записи была впервые применена И.А. Вышнеградским (для
уравнения 3-го порядка) и называется формой Вышнеградского.
Важным преимуществом этой формы является то, что введе-
ние безразмерного времени t в дифференциальное уравнение не
влияет на характер искомой функции у(/) (меняется только мас-
штаб независимой переменной I). Поэтому изменение масштаба
времени широко применяют при исследовании автоматических
систем на вычислительных машинах. При этом прибегают как к ус-
корению времени (Тм>1 с и ш,<1), гак и к замедлению времени
(Тм<1 с и /77, >1).
Изменение масштаба времени облегчаез во многих случаях ана-
лиз динамики автоматических сисгем, позволяет получить результа-
ты в наиболее общем, универсальном виде.
Пример 29.3. Составим дифференциальное уравнение камеры
смесителя (рис. 29.16 а), рассматривая ее как устройство непрерыв-
ного действия с идеальным перемешиванием жидкой среды. В каме-
ру с рабочим объемом И (м3) поступаег пульпа, содержащая частицы
некоторого компонента с концентрацией свх = х (кг/м3). В камере
происходит выделение этого компонента в пенный слой по закону
530
реакции первого порядка: расход q (кг/с) компонента пропорциона-
лен концентрации его с в камере и объему К:
q = kpcV, (29.87)
где кр - константа скорости реакции.
Рис. 29.16. Схема флотационной камеры (а)
и механического колебательного устройства (б)
Будем считать, что расход пульпы через камеру постоянен:
Qi = 02 = Q = const. Тогда уравнение материального баланса рас-
сматриваемого компонента
о'Гс(/)г’| . ч ,
L у—= свх (001 - Свь.х (002 - Vbmx (0 V • (29.88)
Концентрация сВЬ|Х в выходном потоке пульпы благодаря ин-
тенсивному перемешиванию равна в каждый момент времени кон-
центрации с внутри камеры, то есть свых=с = у. Учитывая это,
можно уравнение (29.88) привести к стандартной форме:
7]^ + y(/) = fcc(t), (29.89)
, 0 , ,
где к = ——------передаточный коэффициент камеры по рассмат-
О + крУ
V
риваемому каналу «свх - свых»; Тх =--------постоянная времени
Q + kpV
камеры.
Пример 29.4. Составим дифференциальное уравнение меха-
нического колебательного устройства (рис. 29.16 б), состоящего из
подвижной части массой m (кг) и упругого элемента с коэффициен-
том упругости куп. В качестве входной переменной х будем рас-
сматривать силу F (Н), выходной у перемещение / (м) центра массы.
531
Согласно принципу Д’Аламбера активная (внешняя) сила F
уравновешивается суммой сил инерции F11H, трения Frp и упругой
реакции Fy!l:
^(0 + 77ip(0 + FynW = ^(/)- (29-90)
Сила инерции пропорциональна ускорению и массе:
Л,н 0 = (29.91)
dt
Силу трения будем считать пропорциональной скорости дви-
жения:
_ , , , dl(t\
(29-92)
Сила упругой реакции пропорциональна перемещению:
М'МуЖ (29-93)
Подставив выражения (29.91), (29.92) и (29.93) в уравнение
сил (29.90), получим линейное дифференциальное уравнение обще-
го вида
d2l(t\ , dl(t)
w-TI2 + 4-42 + M? 0’ (29-94)
dt dt
а после деления на kyu - в стандартной форме:
T^^^ + Ti^ + I^ = kF^’ (2995)
где &=—!— - передаточный коэффициент устройства, м/Н;
*уп
ктр Гт~
/) =---, t2 = I----постоянные времени, с.
куп \ ^уп
29.3.5. Временные характеристики
Дифференциальное уравнение является самой общей формой
описания элемента и не дает наглядного представления о переда-
точных свойствах элемента. Наглядное представление об этих
свойствах дает функция y(t), являющаяся решением дифференци-
ального уравнения. Но одно и то же дифференциальное уравнение
может иметь множество решений, конкретный вид которых зависит
от начальных условий и характера функции x(t), то есть от началь-
532
ного состояния элемента и вида внешнего воздействия. Поэтому
принято динамические свойства элементов и систем характеризо-
вать решением, соответствующим нулевым начальным условиям и
одному из типовых воздействий. В качестве типового воздействия
принимают единичное ступенчатое, дельта-функцию или гармони-
ческое воздействие.
Наиболее наглядное представление о динамических свойствах
элемента дает его переходная функция (характеристика). Переходной
функцией h(t] называют изменение выходной величины у(7) во вре-
мени, возникающее после подачи на вход единичного ступенчатого
воздействия, при нулевых начальных условиях. Переходная функция
может быть задана в виде графика (рис. 29.17 а) или в формульном
виде. Формульное выражение для конкретного элемента можно
найти, решая его дифференциальное уравнение при х (0 = ’(0 и
у(-0) = уО(-0) =... = у^п ^(-0) = 0. Второе условие означает, что
выходная величина у и ее производные до (и - 1)-го порядка непо-
средственно перед подачей ступенчатого воздействия равны нулю.
Рис. 29.17. Переходная (а) и импульсная
переходная (б) характеристики
Переходная функция Л(/), как и любое решение неоднородно-
го дифференциального уравнения вида (29.75), имеет две состав-
ляющие: вынужденную Лв(/) и свободную Лс(/). Вынужденная со-
ставляющая переходного процесса представляет собой частное ре-
шение исходного уравнения. При ступенчатом воздействии вынуж-
денная составляющая равна установившемуся значению выходной
величины, которое для статических элементов определяется непо-
533
средственно из дифференциального уравнения (при нулевых про-
изводных):
М') = Я~) =—• (29.96)
Свободная составляющая Лс(/) может быть найдена как ре-
шение соответствующего однородного дифференциального урав-
нения в следующем виде (при отсутствии одинаковых корней):
и
hc(t)^CkeAk‘, (29.97)
Л=1
где Лк - корни характеристического уравнения; Ск - постоянные
интегрирования, зависящие от начальных условий.
Характеристическое уравнение, соответствующее определен-
ному дифференциальному уравнению, представляет собой алгеб-
раическое уравнение, степень и коэффициенты которого совпадают
с порядком и коэффициентами левой части этого дифференциаль-
ного уравнения. Для дифференциального уравнения, записанного в
форме (29.75), характеристическое уравнение имеет вид
о0Я" + о1Я"’1+... + о„ = 0. (29.98)
Структура характеристического уравнения (29.98) совпадает со
структурой левой части дифференциального уравнения, записанного
в символической форме (29.77), и со структурой собственного ха-
рактеристического оператора D (р) (см. (29.78)). Поэтому при записи
характеристического уравнения часто вместо символа Л, обозна-
чающего неизвестную переменную алгебраического уравнения, ис-
пользуют символ р. Но при этом р означает уже не операцию диф-
ференцирования, а некоторое комплексное число, которое является
решением (корнем) характеристического уравнения.
Для линейных элементов и систем, кроме принципа суперпо-
зиции, справедливо еще одно общее правило: реакция у(/) на не-
единичное ступенчатое воздействие а01(/) равна произведению пе-
реходной функции /?(/) на величину множителя а0: y(t)= о0/г(/).
Это свойство широко используется при исследовании и расчете ли-
нейных систем.
Импульсной переходной функцией называют изменение
выходной величины y(z), возникающее после подачи на вход
дельта-функции, при нулевых начальных условиях (рис. 29.17 б).
534
Если входное воздействие представляет собой неединичный
импульс <70<J(z), то ординаты функции выходной величины y(z) бу-
дут в а0 раз больше ординат функции w(z), то есть y(z)= aovv(z)
Импульсная переходная функция w(z) равна производной от
переходной функции /?(z):
= (29.99)
и наоборот, переходная функция равна интегралу от импульсной пе-
реходной:
h(t) = (29.100)
о
При помощи импульсной переходной функции элемента мож-
но определить его реакцию на входное воздействие произвольного
вида. Связь между изменениями входной и выходной величин во
времени устанавливается интегралом свертки
y(t)= Jx($)m’(z-j"x(z - $)и’(гУ)б/г?. (29.101)
о о
Интегральное соотношение (29.101) вытекает из следующих
рассуждений. Любое входное воздействие x(z) можно рассматри-
вать как непрерывную последовательность коротких импульсов
x(?9)t/z9<5(z-zy), имеющих площадь х(г9)б/г? и действующих в мо-
менты t = &, где 0<г9<°°. Так как смещенная дельта-функция
<J(z-$), действующая на входе элемента, создает на его выходе
смещенную импульсную переходную функцию w(z-?y), то каж-
дому неединичному входному импульсу x($)d&8(t — г) на выходе
будет соответствовать реакция, пропорциональная импульсной
функции, то есть реакция dy = x(&)w[t-т]М. Полный переход-
ный процесс на выходе согласно принципу суперпозиции получа-
ется в результате суммирования реакций на все входные импульсы,
то есть как результат их интегрирования по аргументу & от 0 до °°,
что и требовалось доказать (см. первую запись интеграла (29.101).
Изложенное обоснование интеграла свертки (29.101) объясняет
второе распространенное название функции u (z) - весовая. Дейст-
вительно, эта функция определяет вес (долю), с которым каждый
535
входной импульс, полученный при разложении сигнала x(z), уча-
ствует в формировании результирующего выходного сигнала у (z).
Так как следствие не может опережать причину, действует ус-
ловие физической осуществимости’. при Z < О весовая функция
w(z) = 0 или при г? > Z w(z - г9) = 0. С учетом этого верхний предел
интегрирования в (29.101) может быть уменьшен до Z.
Переходные характеристики Л(z) и w(z) называют также вре-
менными.
Пример 29.5. Найдем переходную функцию /?(z) элемента,
описываемого уравнением
(o072 + t71)y(z)^fe0x(z). (29.102)
Переходная функция имеет две составляющие:
/2(z) = /7b(z) + Ac(z). (29.103)
Вынужденная составляющая согласно (29.96) в данном случае
AB(z) = — = const. (29.104)
а\
Свободная составляющая
&c(z) = Ce °' .
(29.105)
Учитывая начальное условие у(0) = 0, получим C = -bG/a}.
Тогда
f -SsC
h(t)=^- 1-е °'
а1
к /
(29.106)
Пример 29.6. Определим при помощи интеграла свертки реак-
цию элемента (29.102) на воздействие вида x(z) = all(t):
w(z) =
( ~а^'
1-е °'
4 J
(29.107)
Функцию, описывающую изменение выходной величины по-
сле подачи линейного воздействия, получим, подставив выражение
(29.107) в интеграл (29.101):
y(t)= \о&^е а' d& = a^-
0 ао «1
z_£o
«1
1-е °'
l(z). (29.108)
536
29.3.6. Операционный метод и передаточная функция
Наиболее распространенным методом описания и анализа авто-
матических систем является операционный метод (метод операцион-
ного исчисления). В основе метода лежит преобразование Лапласа:
X(p) = 9’{x(t)} = °jx(t)e~pldt. (29.109)
о
которое устанавливает соответствие между функциями действи-
тельной переменной t и функциями комплексной переменной р.
Функцию времени входящую в интеграл Лапласа (29.109), на-
зывают оригиналом, а результат интегрирования — функцию А'(р) —
изображением функции по Лапласу.
Преобразование Лапласа выполнимо для функций времени,
которые равны нулю при t < 0. Это условие обеспечивается обычно
умножением функции на единичную ступенчатую функцию
1(/). С математической и физической точек зрения такой искусст-
венный прием вполне корректен, так как функции х(/) описывают
процессы в автоматических системах, начинающиеся с некоторого
момента времени, а этот момент времени всегда может быть принят
за начало отсчета.
Изображение простейших функций времени, наиболее часто
используемых в расчетах автоматических систем, приведены в
табл. 29.1.
Основные свойства преобразования Лапласа, используемые
при анализе автоматических систем, указаны в табл. 29.2.
Наиболее важными свойствами преобразования Лапласа явля-
ются свойства, формулируемые обычно в виде правил:
при нулевых начальных условиях дифференцированию оригинала
x(z) по переменной t соответствует умножение изображения
(у?) на комплексную переменную р, а интегрированию ориги-
нала соответствует деление Х(р) нар.
Именно на этих двух свойствах основан операционный метод
решения дифференциальных уравнений, который заключается в
следующем. Исходное дифференциальное (или интегро-дифферен-
циальное) уравнение, записанное относительно искомой выходной
функции у(/), заменяют на алгебраическое уравнение относительно
537
Таблица 29.1
Изображение простейших функций времени по Лапласу
Наименование функции *(') %(p) = L.{x(/)}
Дельта-функция <?(/) 1
Ступенчатая функция <яоф) ap P
Степенная функция ,"1(0 n\ Pn+'
Экспонента 1 p+a
Синусоида sin6yd(z) co p2 +ct)2
Косинусоида COS (Dtl (?) p2 p2 +co2
Периодическая функция x(/) = x(f + 7") *(p) \~e~pT
Таблица 29.2
Основные свойства преобразования Лапласа
Наименование Оригинал Изображение
Линейность ах(/) Х1(/)±Х2(/) ^1(P)±^2(P)
Правило дифференцирования (при нулевых начальных условиях) dkx(t\ dtk X(p)Pk
Правило интегрирования (при нулевых начальных условиях) J... J х(г?)Л9* 0 к раз к P
Изменение масштаба времени (теорема подобия) f t X — т 7 ApT«K
Смещение аргумента оригинала (теорема запаздывания) x{t-T X{p)e~^
Теорема о начальном значении оригинала limx(? lim pA'(p)
Теорема о конечном значении оригинала lim x(t lim pX(p\ p-^Q
538
изображения У(д>) (это называется алгебраизацией дифференциаль-
ного уравнения), затем, решая алгебраическое уравнение при задан-
ном Jf(p), находят изображение и, наконец, по изображению
Y(p) определяют функцию Этот обратный переход от изо-
бражений к оригиналам в большинстве практических задач может
быть осуществлен при помощи таблиц, имеющихся в специальных
справочниках по операционному исчислению.
Широкое распространение операционного метода в теории ав-
томатического управления обусловлено тем, что с его помощью
определяют так называемую передаточную функцию, которая яв-
ляется самой компактной формой описания динамических свойств
элементов и систем.
Применим преобразование Лапласа к линейному дифференци-
альному уравнению (29.75), полагая, что до приложения внешнего
воздействия система находилась в покое и все начальные условия
равны нулю. Используя свойство линейности и правило дифферен-
цирования (см. табл. 29.2), можно получить алгебраическое урав-
нение в изображениях:
D(p)Y(p) = K(p)X(p), (29.110)
где D(p) = aop" + aip”^ +... + ап; K(p) = bopm + Ь1рт~1 + ... + Ьт.
Сравнивая уравнение (29.110) с уравнением в символической
форме (29.77), можно заметить полную аналогию их структур. Раз-
личие уравнений лишь в значении символа р: в первом уравнении
он обозначает операцию дифференцирования, во втором - ком-
плексную переменную.
Введем понятие передаточной функции. Передаточной функци-
ей W(p) называют отношение изображения выходной величины к
изображению входной величины при нулевых начальных условиях:
. ч Y(p)
М₽) г'Щ/)}
Для системы, описываемой уравнением (29.75), передаточная
функция равна отношению входного оператора К (у) к собствен-
ному оператору D(p):
^(р) =
K(p)_bopm+blPm-l+... + bm
D(p) аорп + а\р"~} + ... + ат
(29.112)
539
Как следует из (29.111) и (29.112), передаточная функция пред-
ставляет собой некоторый динамический оператор, характеризую-
щий прохождение сигналов через линейный элемент (рис. 29.18 а).
Передаточную функцию формально можно получить из диф-
ференциального уравнения путем замены в нем символа кратного
дифференцирования на соответствующую степень р и деления об-
разованного таким образом многочлена правой части уравнения на
многочлен левой части.
Передаточную функцию электрических четырехполюсни-
ков удобно получить, пользуясь понятием операторного сопро-
тивления. Для этого четырехполюсник необходимо представить в
виде схемы делителя напряжения (рис. 29.18 6), состоящей из
операторных сопротивлений Zjp) и Z2(p). Тогда передаточная
функция между напряжениями щ и и2 может быть определена
как отношение выходного сопротивления ZBbIX (p) = Z2(p) к вход-
ному zbx(p) = zi(p) + Z2(/0:
v (29.113)
wi(jh) Zbx(p) zi(/’) + Z2(p)
где Z,(/>) и Z2(p) найдены как эквивалентные операторные со-
противления входного и выходного участков, состоящих из типо-
вых элементов электрических цепей (рис. 29.18 в).
а)
>(е)
Z(p)=r Z(p)=pL Z(p)=l/pC
Рис. 29.18. Схемы для определения передаточной функции
Рассмотрим теперь основные свойства и особенности пере-
даточных функций автоматических систем и их элементов.
Передаточная функция элемента связана с его импульсной пе-
реходной функцией преобразованием Лапласа:
540
W(p) = l{w(/)}= Jw(/)<Tp'dz. (29.114)
о
Для реальных элементов, описываемых обыкновенными диф-
ференциальными уравнениями вида (29.75), передаточная функция
представляет собой правильную рациональную дробь, у которой
степень многочлена числителя меньше или равна степени много-
члена знаменателя, то есть т<п. Все коэффициенты передаточной
функции - действительные числа, характеризующие параметры
элемента.
Передаточная функция является функцией комплексной пере-
менной р-а+jp, которая может при некоторых значениях пере-
менной р обращаться в нуль или бесконечность. Значение перемен-
ной р, при которой функция W\p) обращается в нуль, называют
нулем, а значение, при котором обращается в бесконечность, полю-
сом передаточной функции. Очевидно, что нулями передаточной
функции являются корни полинома а полюсами - корни по-
линома Корни полиномов числителя и знаменателя могут
быть комплексными, мнимыми и вещественными числами (в том
числе и нулевыми). Если эти корни известны, то передаточная
функция может быть представлена в следующем виде:
FP(p) = /?0(р ~К~)• (29.115)
где Yj - корни многочлена К\р) (нули JV(p)); Д- - корни много-
члена £>(/?) (полюсы W(p)).
Таким образом, каждой конкретной передаточной функции с
заданными коэффициентами соответствует вполне определенное
сочетание нулей и полюсов. По распределению нулей и полюсов
передаточной функции на комплексной плоскости с координатами
а и jp можно судить о свойствах элемента или системы.
Если полиномы £)(/?) и имеют один или несколько ну-
левых корней, то передаточную функцию удобно записывать в та-
кой форме, чтобы полюсы и нули были выделены в явном виде.
Так, если передаточная функция имеет в точке р = 0 полюс кратно-
сти v, то такую передаточную функцию удобно записать в виде
541
^(p) = kW (29.116)
P
где W (p) при p—>0 стремится к единице.
Передаточная функция (29.115) имеет полюсы в точке р = 0,
когда один или несколько младших коэффициентов многочлена
Z>(p) равны нулю: ап = ап_} =... = an_v+1 = 0 (v = 0;l;2;...). Такую
передаточную функцию можно представить в виде
= ьоР'”+^Р'"^+--- + ьтР
аорп+а}р"~' +... + а„р
или после преобразований:
/ V \' > V A n-v , л и-v-l .
р р А)Р +Ар н
(29.117)
(29.118)
где В, при i - 0; 1; 2;т; At = при i = 0; 1; 2; n-v,
an-v
®n-v
Величину v называют порядком астатизма. Коэффициент к
имеет размерность
(29.119)
и с некоторой условностью может быть назван передаточным ко-
эффициентом. Условность заключается в том, что понятие «переда-
точный коэффициент» было введено в качестве характеристики
статического режима, а у элементов с V Ф 0 статический режим ра-
боты не существует.
Если v = 0, то элемент называется статическим, а его переда-
точная функция при р = 0 равна передаточному коэффициенту:
1Е(0) = ИЕ*(0) = ^- = £. (29.120)
Пример 29.7. Определим передаточную функцию механиче-
ского устройства, рассмотренного в 29.3.4. Для этого запишем его
дифференциальное уравнение (29.95) в изображениях:
7’2У/(р) + 7’1р/(р) + /(р) = ЛГ(р) (29.121)
542
к
(29.122)
и найдем отношение изображения выходной величины /(/?) к изо-
бражению входной величины /'’(/>):
W (р) = Ае! =-------------
F(p) r2V+Tip + l
Пример 29.8. Найдем передаточную функцию электрического
колебательного контура, который представлен в виде четырехпо-
люсника (см. рис. 29.18 б), причем входной участок образован по-
следовательным соединением резистора г и индуктивности L, а вы-
ходной - емкостью С.
Операторные сопротивления участков:
Z1(£>) = r + £>Z; Z2(p) = -^-.
р'-'
Согласно (29.113) передаточная функция
1
^(z) = ^44 =------Г = ’ (29.123)
wi(z) r+p£ + _L T2p2+TlP + l
PC
1
29.3.7. Частотные характеристики
Частотные характеристики описывают передаточные свойства
элементов и систем в режиме установившихся гармонических ко-
лебаний, вызванных внешним гармоническим воздействием. Зная
частотную характеристику элемента, можно определить реакцию
элемента на гармоническое воздействие любой частоты, а также на
сумму гармонических воздействий различной частоты. Частотные
характеристики широко используются в теории и практике автома-
тического управления, так как реальные возмущения, действующие
на автоматические системы, могут быть представлены как сумма
гармонических сигналов.
Рассмотрим физическую сущность и разновидности частот-
ных характеристик. Пусть на вход линейного элемента (рис.
29.19 а) в момент времени t = 0 подано гармоническое воздействие
определенной частоты со
x(z) = xwsinzwZ. (29.124)
Через некоторое время, необходимое для протекания переход-
543
ного процесса (то есть для исчезновения свободной составляющей),
элемент войдет в режим установившихся вынужденных колебаний,
а выходная величина у(/) будет изменяться по гармоническому за-
кону с той же частотой ш, но с отличающейся амплитудой ут и со
сдвигом по оси времени (рис. 29.19 б):
Я') = Л, sin (^+ <?>), (29.125)
АС
где (р - 360 фазовый сдвиг между входным и выходным сиг-
налами, градус.
Рис. 29.19. Схема для определения понятий частотного метода
Повторяя такой эксперимент при фиксированном хт для раз-
личных значений частоты (от 0 до «). можно установить, что ам-
плитуда ут и фазовый сдвиг (р выходного сигнала конкретного
элемента зависят от частоты воздействия. Подавая гармоническое
воздействие на вход различных элементов, можно убедиться, что
величины ут и ср зависят также от типа и параметров элемента.
Следовательно, зависимость амплитуды ут и сдвига ip от значений
частоты а) могут служить характеристиками динамических свойств
элементов.
Так как амплитуда выходного сигнала ут зависит еще от ампли-
туды входного сигнала хт, то целесообразно при описании переда-
у
точных свойств элементов рассматривать отношение амплитуд .
хт
Зависимость отношения амплитуд выходного и входного сигна-
ла от частоты называют амплитудной частотной характеристикой
(сокращенно - АЧХ) и обозначают (рис. 29.20 а). Зависимость
фазового сдвига между входным и выходным сигналами от частоты
называют фазовой частотной характеристикой (ФЧХ) (рис.
544
29.20 6). Аналитические выражения Л(сФ) и (р(а)) называют соот-
ветственно амплитудной и фазовой частотными функциями.
АЧХ показывает, как элемент пропускает сигналы различной
частоты. Оценка пропускания производится по отношению ампли-
туд ут/хт . АЧХ имеет размерность, равную отношению размерно-
сти выходной величины к размерности входной. ФЧХ показывает,
какое отставание или опережение выходного сигнала по фазе соз-
дает элемент при различных частотах.
Амплитудную и фазовую частотные характеристики можно объ-
единить в одну общую - амплитудно-фазовую частотную характери-
стику (АФЧХ или АФХ). Ахтлитудно-фазовая частотная характе-
ристика представляет собой функцию комплексного пере-
менного j(t>, модуль которой равен Л(ш), а аргумент равен <р(а)).
Каждому фиксированному значению частоты соответствует
комплексное число W^jco^, которое на комплексной плоскости
можно изобразить вектором, имеющим длину и угол пово-
рота (р(а),} (рис. 29.20 в). Отрицательные значения соответ-
ствующие отставанию выходного сигнала от входного, принято от-
считывать по часовой стрелке от положительного направления дей-
ствительной оси.
Рис. 29.20. Частотные характеристики: а - амплитудная,
б - фазовая, в - амплитудно-фазовая, г - логарифмическая
18 Зак. 50
545
При изменении частоты от нуля до бесконечности вектор
W(jco) поворачивается вокруг начала координат, при этом одно-
временно увеличивается или уменьшается длина вектора. Кривая,
которую при этом опишет конец вектора, и есть АФХ. Каждой точке
характеристики соответствует определенное значение частоты.
Проекции вектора W(jco') на действительную и мнимую оси на-
зывают соответственно действительной и мнимой частотной харак-
теристиками и обозначают P(o>) = RclV(joP), Q((o) = lmW[ja)).
Отметим, что действительная частотная характеристика - все-
гда четная функция частоты, мнимая характеристика Q(ct)) - всегда
нечетная функция.
Аналитическое выражение для АФХ конкретного элемента
можно получить из его передаточной функции путем подстановки
p = j(t):
lfr(j^ = W(p)lp=ja). (29.126)
АФХ W (jeo), как и любая комплексная величина, может быть
представлена в показательной форме:
W(jw) = A(w)eJv(f0\ (29.127)
алгебраической:
W(jct)) = P(cl)) + jQ(ct}) (29.128)
или тригонометрической:
17(j7y) = 71(&))cos(i?(&>) + jA(ct))sin(p(ct)). (29.129)
Связь между различными частотными функциями следующая:
А (со) = |^(>)| = у]р2 (ю) + Q2 (со) ; (29.130)
#»(&>) = arg (Jet)) = aretg-j^j. (29.131)
Поскольку АФХ W (/7д), гак же как и передаточная функция,
представляет собой обычно дробь, то се модуль может быть найден
как отношение модуля числителя к модулю знаменателя:
£>(>)
(29.132)
а аргумент функции W (- как разность аргументов числителя и
знаменателя:
546
<р(со) - arg W (ja)') = arg A'(ju)) - arg/.)(/w). (29.133)
[ 1ри практических расчетах автоматических систем удобно ис-
пользовать частотные характеристики, построенные в логарифми-
ческой системе координат. Такие характеристики называют лога-
рифмическими. Они имеют меньшую кривизну и поэтому могут быть
приближенно заменены ломаными линиями, составленными из не-
скольких прямолинейных отрезков. Причем, эти отрезки в боль-
шинстве случаев удается построить без громоздких вычислений
при помощи некоторых простых правил. Кроме того, в логарифми-
ческой системе координат легко находить характеристики различных
соединений элементов, так как умножению и делению обычных ха-
рактеристик соответствует сложение и вычитание ординат лога-
рифмических характеристик.
За единицу длину по оси частот логарифмических характери-
стик принимают декаду. Декада - интервал частот, заключенный
между произвольным значением и его десятикратным значени-
ем 10гд; . Отрезок логарифмической оси частот, соответствующий
одной декаде, равен 1.
Обычно в расчетах используют логарифмическую амплитуд-
ную частотную характеристику’ (ЛАЧХ)
А(ш) = 20-1ёЛ(гд), (29.134)
ординаты которой измеряются в логарифмических единицах - бе-
лах (Б) или децибелах (дБ).
Бел - единица измерения отношения мощностей двух сигна-
лов. Если мощность одного сигнала больше (меньше) мощности
другого сигнала в 10 раз, то эти мощности отличаются на 1 Б
(1g 10= 1). Так как мощность гармонического сигнала пропорцио-
нальна квадрату его амплитуды, то при применении этой единицы
для измерения отношения амплитуд перед логарифмом появляется
множитель 2. Например, если на некоторой частоте Л(й)) = 100, то
это означает, что мощности входного и выходного сигналов отли-
чаются в 1002 раз, то есть на 2 • IglOO = 4 Б или на 40 дБ, соответст-
венно и £(гу) = 20-^Л(ш)= 40 дБ.
При построении фазовой частотной характеристики логариф-
мический масштаб применяют только для оси абсцисс.
На рис. 29.20 г показаны ЛАЧХ L(oj') (толстая линия) и соот-
ветствующая ей приближенная (асимптотическая) характеристика
547
18*
La(co) в виде прямолинейных отрезков (тонкая линия). Частоты,
соответствующие точкам стыковки отрезков, называют сопрягаю-
щими и обозначают сос.
Правила и примеры построения приближенных логарифмиче-
ских характеристик конкретных элементов приведены в следую-
щих параграфах.
АФХ устанавливает связь между входным и выходным сигна-
лом не только для случая, когда они являются гармоническими функ-
циями, но и для случая, когда они имеют произвольный вид. Поэтому
АФХ можно определить как отношение изображения по Фурье вы-
ходной величины Y^jw) к изображению входной величины
(29 135)
В этом случае комплексная переменная jeo изменится от
до +°°, так как любой реальный сигнал может быть разложен на
сумму только попарно сопряженных вращающихся векторов.
АФХ элемента связана с его импульсной переходной функци-
ей преобразованием Фурье:
«(>)= (29.136)
о
При применении двухстороннего преобразования (29.47) к
функции w(z) учтено, что при t<Q w[t) = Q, и поэтому нижний
предел интегрирования принят равным нулю.
Если формулу (29.136) использовать для импульсной переход-
ной функции, записанной в безразмерном времени t ~ , то АФХ
станет функцией безразмерной частоты со = :
W(jcoT„) =
О 'м \-'м 7
(29.137)
где Тм - масштабный множитель, принятый за единицу времени.
Соотношение (29.137) означает, что если растягивать (сжи-
мать) график функции w(/) вдоль оси времени в Ты раз, то графи-
ки амплитудной и фазовой характеристик будут сжиматься (рас-
тягиваться) вдоль оси частот со в Гм раз. Это свойство использу-
ется при построении безразмерных частотных характеристик и
548
анализе связи переходных процессов с частотными характеристи-
ками систем.
По виду частотных характеристик все элементы и системы
делятся на две группы: минимально-фазовые и неминимально-
фазовые. Минимально-фазовыми являются элементы (системы), у
которых все полюсы и нули передаточной функции И^(р) имеют
отрицательные действительные части. Такие элементы дают ми-
нимальный фазовый сдвиг ф(а>) по сравнению с любыми други-
ми элементами, имеющими такую же амплитудную характери-
стику А (ц>), но у которой действительная часть хотя бы одного
полюса или нуля положительна.
Минимально-фазовые элементы обладают важным для прак-
тических расчетов свойством: их частотная передаточная функ-
ция полностью определяется одной из трех составляющих —
А(а>), т(а>) или £>(щ). Это существенно упрощает задачи ана-
лиза и синтеза минимально-фазовых систем.
Пример 29.9. Найдем аналитические выражения для частот-
ных характеристик элемента, передаточная функция которого име-
ет вид
W(p\=b(iP + bi . (29.138)
“оР + а1
Амплитудно-фазовая функция элемента
W(ja))=b°jO} + bl . (29.139)
aujco + al
Выражение для амплитудной частотной характеристики най-
дем как отношение модулей числителя и знаменателя:
(29 140)
Но + °i ф а2 + а^со2
для фазовой - как разность аргументов числителя и знаменателя:
= агс(Л0/щ + Ь~) - агс(аоубУ + а}) = aretg^y^ - arctg^^.
Анализируя последнее выражение, нетрудно убедиться, что
элемент (29 138) с положительными коэффициентами а, и Ь, явля-
ется минимально-фазовым. Если хотя бы один из коэффициентов
отрицательный, то фазовый сдвиг уже не будет минимальным.
549
Рассмотренные временные, передаточные и частотные харак-
теристики однозначно связаны между собой прямыми и обратными
преобразованиями Лапласа и Фурье. Эти взаимные связи и соответ-
ствия сведены в табл. 29.3.
Таблица 29.3
Взаимные соответствия динамических характеристик
Характери cthki i /?(/) w(0 W(p)
Переходная *(') = 1 0 I p J I i(!> J
Импульсная w(/) = dh(t)/dt 1 £-*(^(p)) F1^»)
Передаточная ^(f)= PL№)} £(w(0) 1
Частотная ^(>) = F(w(z)) «-«и 1
Глава 30
ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
СИСТЕМ УПРАВЛЕНИЯ
30.1. Классификация звеньев
Функциональные элементы, используемые в автоматических
системах, могут иметь самые различные конструктивное выполне-
ние и принципы действия. Однако общность математических вы-
ражений, связывающих входные и выходные величины различных
функциональных элементов, позволяет выделить ограниченное
число так называемых типовых алгоритмических звеньев. Каждому
типовому алгоритмическому звену соответствует определенное ма-
тематическое соотношение между входной и выходной величиной.
Если это соотношение является элементарным (например, диффе-
ренцирование, умножение на постоянный коэффициент), то и звено
называется элементарным.
Алгоритмические звенья, которые описываются обыкновен-
ными дифференциальными управлениями первого и второго по-
рядка, получили название типовых динамических звеньев. Методи-
ка анализа, основанная на расчленении автоматической системы на
типовые звенья, широко вошла в практику инженерных расчетов и
в настоящее время является доминирующей.
Типовые динамические звенья являются основными состав-
ными частями алгоритмических структур непрерывных систем
управления, поэтому знание их характеристик существенно облег-
чает анализ таких систем.
Классификацию типовых звеньев удобно осуществить, рас-
сматривая частные формы дифференциального уравнения
dy(t) dx(t\
а0—Тг +а1~Г2 + а2Т(О = /?о—т- + ь1х(*)- (301)
dt dt dt
551
Значения коэффициентов уравнения (30.1) и названия для наи-
более часто встречающихся звеньев приведены в табл. 30.1.
Таблица 30.1
Значения коэффициентов уравнения (30.1) типовых звеньев
Наименование звена а0 а\ а2 ^0 Ьу Приме- чание
1. Безынерционное
(пропорциональное) 0 0 1 0 к
2. Инерционное 1-го порядка
(апериодическое) 0 т 1 0 к
3. Инерционное 2-го порядка
(апериодическое) Г22 ?i 1 0 к 7\ >1Т2
4. Инерционное 2-го порядка
(колебательное) 7/ Ту 0 0 к 7] < 2Г2
5. Идеальное интегрирующее 0 1 0 0 к
6. Реальное интегрирующее Т 1 0 0 к
7. Идеальное дифференцирующее 0 0 1 к 0
8. Реальное дифференцирующее 0 т 1 к 0
9. Изодромное (пропорционально-
интегрирующее) 0 1 0 ку к
10. Форсирующее (пропорционально-
дифференцирующее) 0 0 1 ку к
11. Интегро-дифференцирующее
с преобладанием интегрирующих
свойств 0 т 1 ку к kt/k<T
12. Интегро-дифференцирующее
с преобладанием дифференцирую-
щих свойств 0 т 1 ку к ку/к>Т
Отметим ряд общих закономерностей. Звенья, у которых ко-
эффициенты а2 Ф 0 и 6| Ф 0, обладают статизмом, т.е. однозначной
связью между входной и выходной переменными в статическом
режиме. Поэтому к их названиям часто добавляют выражение
статическое или позиционное. К этим звеньям относятся 1, 2, 3, 4,
10, И, 12.
Звенья, у которых а2 Ф 0, ах Ф 0 и а§ Ф 0, обладают инерцион-
ностью (замедлением). К ним относятся звенья 2, 3, 4, 6, 8, 11, 12.
У звеньев 1,5,7 только два коэффициента не равны нулю. Они
являются простейшими или элементарными. Все остальные типовые
звенья могут быть образованы из элементарных путем последова-
тельного, параллельного и встречно-параллельного соединения.
552
Если один из коэффициентов левой части уравнения (30 1) от-
рицательный, то звено будет неустойчивым или неминимально-
фазовым.
30.2. Типы позиционных звеньев и их характеристики
Позиционные звенья характеризуются тем, что в каждом из
них при подаче на вход постоянной величины с течением времени
устанавливается постоянное значение выходной величины.
1. Идеальное усилительное, пропорциональное (безынерцион-
ное) звено (рис. 30.1). Уравнение и передаточная функция звена:
у(/) = Ьс(/); w(p) = k.
h(t)
к
ki(t)
А (со)
к
L(co)
ьо
° д) lg<°
1V(O
<р(со)
jQ(C0)
kS(t)
t 0 <p(co) = 0
г)
___________к
0 e(
Рис. 30.1. Характеристика безынерционного звена
Амплитудно-фазовая частотная характеристика (рис. 30.1): за-
меним Р-jo); w(ja)) = k; <p(<y) = 0.
Примерами таких безынерционных звеньев являются жесткие ме-
ханические передачи, потенциометры, электронные усилители и т.д.
2. Апериодическое (инерционное) звено (рис. 30.2, 30.3).
Дифференциальное уравнение звена имеет вид
+у (/) = &(/), (30.2)
где к — передаточный коэффициент, характеризующий свойства
звена в статическом режиме, Т — постоянная времени, характери-
зующая инерционность звена.
Переходную функцию звена можно найти как сумму общего и
частного решений уравнения (30.2):
553
h(t) = k 1-е т
(30.3)
\ 7
Импульсная переходная функция звена может быть получена
путем дифференцирования функции й(/).
Рис. 30.2. Характеристики инерционного (апериодического)
звена первого порядка
а) б) в)
Рис. 30.3. Инерционные звенья первого порядка
Для инерционного звена первого порядка импульсная функция
имеет вид (рис. 30.2 б)
w(')=ye г- (зо.4)
Применим к левой и правой частям уравнения (30.2) преобра-
зование Лапласа и получим уравнение динамики звена в операци-
онной форме:
(7р + 1)У(р) = ЛУ(р).
(30.5)
554
Из уравнения (30.5) находим передаточную функцию звена:
w(p) = Y\P\ (30.6)
k ' Х(р) Тр + \
Подставляя в передаточную функцию Р = jco, получим ампли-
тудно-фазовую функцию
к
”'0to)=7—д- <30-7)
IjCD + l
Умножив числитель и знаменатель функции (30.7) на выраже-
ние (1-у77ц), сопряженное со знаменателем, можно избавиться от
величины j в знаменателе и представить амплитудно-фазовую
функцию в виде суммы действительной и мнимой части:
W(jco) = P(co) + jQ(co),
Р(щ) = Ее1Е(7щ) = Д-2;
1 + 7 ы (30.8)
Q(a) = Im W (jco) = TV
I 1 + 7 a)
Выражения (30.8) можно рассматривать как уравнение АФХ
W(jco), заданное в параметрической форме в системе координат
Р(со) и jQ(co). Роль третьей переменной (параметра) играет час-
тота со.
Если выразить мнимую составляющую Q(o) через действи-
тельную Р(со), то можно убедиться, что амплитудно-фазовая ха-
рактеристика представляет собой полуокружность с центром в точ-
(к А
ке I у’./0 I и диаметром к (рис. 30.2 е). На графике показаны ха-
рактерные точки: со = 0, а) — °° и сос = Т~1.
Выражения для АЧХ можно получить по формулам:
А (о) = \W(jco)\ = yjp2 (со) + Q2 (со);
<зо’)
Анализируя график функции А(со) (рис. 30.2 в), видим, что
555
гармонические сигналы малой частоты (&><<wc) пропускаются зве-
ном без подавления с отношением амплитуд выходной и входной
величин, близким к передаточному коэффициенту к. Сигналы
большой частоты (ш>щс) плохо пропускаются звеном: отношение
амплитуд существенно меньше коэффициента к. Таким образом,
это звено является фильтром низкой частоты.
ФЧХ инерционного звена первого порядка
^H=arctg7y-
График функции (30.10) показан рис. 30.2 г. Чем больше час-
тота входного сигнала, тем больше отставание по фазе выходной
величины от входной. Максимально возможное отставание равно
90°. При частоте ас - \/Т сдвиг фазы равен - 45°.
Рассмотрим теперь ЛАЧХ звена. Точная ЛАЧХ описывается
выражением
£(щ) = 20 • 1g Л(щ) = 20 • 1g А - 20 • lgx/1 + Тгш2 . (30.11)
(30.10)
В практических расчетах используют приближенную или
асимптотическую характеристику £(щ), представляющую собой
ломаную в виде двух асимптот (рис. 30.2 д). Первая асимптота
(низкочастотная) получается при малых частотах, когда величи-
ной Т2ы2 в выражении (30.11) можно пренебречь и принять
£(&>) ~ £нч (щ) = 20 - 1gк.
Низкочастотная асимптота от частоты не зависит и представ-
ляет собой прямую, параллельную оси частот и отстоящую от нее
на расстоянии 20 • 1g к.
Вторая асимптота (высокочастотная) заменяет точную харак-
теристику при больших частотах, когда Г2щ2»1, и единицу под
корнем в формуле (30.11) можно не учитывать. Выражение для
этой асимптоты имеет вид
£(й?) = £вч (ш) = 20 • 1g£ - 20 • IgTVu. (30.12)
Эта асимптота зависит от частоты. В логарифмической систе-
ме координат она представляет собой прямую, имеющую отрица-
тельный наклон и проходящую через точку с координатами
гус = Г-1, Цш) = 20• IgA. Подставляя в формулу (30.12) значения
частоты гц и =ЮгУ1, можно убедиться, что приращение высоко-
556
частотной асимптоты, приходящееся на одну декаду, равно - 20 дБ,
т.е. наклон равен — 20 дБ/дек.
Значение сопряженной частоты а)с, при которой пересекаются
обе асимптоты, найдем из условия Лн ч (щ) = LB ч (щ):
20-lg£ = 20-lg£-20-lg7ft?c, (30.13)
отсюда
щс=1 (30.14)
Можно показать, что наибольшая ошибка, получающаяся от
приближенной замены точной характеристики (30.11) двумя асим-
птотами, равна 3 дБ (при частоте &>с).
Простейшим примером такого элемента является электриче-
ский пассивный четырехполюсник (рис. 30.3)
ы2(р) = К = 1 = 1
W](/>) R + PL \ + pL \ + РТ'
R
где Т = L]R.
По рис. 30.3
„ иМ 1 иМ _иМ.
2^Р 1 CR к + CR \ + тр'
к н----
CR
щ (р) 1 + ТР'
где Т = RC.
Более сложным примером звена такого рода является электри-
ческий генератор постоянного тока (рис. 30.3 в), у которого вход-
ной переменной является напряжение возбуждения ив, выходной -
ЭДС ег, наводимая в обмотке якоря генератора. Передаточный ко-
эффициент генератора (В/В) по указанному каналу
с пк w
Аг = с н в , (30.15)
'в
где се - константа, зависящая от конструктивных параметров генера-
тора, В Вб ' (об/с) и - частота вращения якоря, об/с; кн - коэффи-
циент наклона линеаризованной характеристики намагничивания ге-
нератора, Вб/А; ив - число витков обмотки возбуждения, приходя-
щееся на один полюс; гв - сопротивление обмотки возбуждения, Ом.
557
Постоянная времени генератора, с:
Т =
' Г ’
где £в - индуктивность обмотки возбуждения, Гн.
Таким образом: — (30.16) «в(р) 1+TjP
3. Инерционные звенья второго порядка
Дифференциальному уравнению звена
соответствуют уравнения динамики в изображениях (30.17) по Лапласу
(или в операционной форме) (г22р2+т1р+1)у(р) = ^(р) (30.18)
и передаточная функция Ир)=Л₽)= * . ' Х(р) Т2Р2 + 1\Р + \ (30.19)
Характеристическое уравнение звена Т2Р2 + Г1Р+1 = 0 (30.20)
имеет два корня: _-Т1±а/г,2-4Т22 П .2 (30.21)
2Т2 Общее решение дифференциального уравнения, определяю-
щее свободное движение звена, имеет вид у(/) = + с2еР1‘. (30.22)
Характер переходного звена зависит от вида корней (30.20),
которые могут быть действительными или комплексными. Если
7] > 2Г2, то оба корня действительные. Обозначим их
(30-23)
где Г3 и 7^ - некоторые условные постоянные времени, причем
Ъ>тА.
При 7j > 2Г2 переходная функция звена имеет монотонный,
558
апериодический характер. Поэтому звено в данном случае называ-
ется апериодическим звеном второго порядка.
При Г)>2Г2 знаменатель передаточной функции (30.19) мож-
но разложить на два множителя и представить функцию в следую-
щих двух эквивалентных формах (рис. 30.4 б, в):
^(р) = 7------А-------(30.24)
' ' (г3р+1)(т;р+1)
W(p\^---------------------------—. (30.25)
v ' Т3-Т4Т3Р + \ Т3-Т4ТАР + \
Согласно этим уравнениям инерционное звено второго порядка
(рис. 30.4 а) можно представить как последовательное (рис. 30.4 б) и
параллельное (рис. 30.4 в) соединение двух инерционных звеньев
первого порядка.
Рис. 30.4. Алгоритмические схемы инерционных звеньев второго порядка
Если 7] < 2Т2, то корни уравнения (30.20) комплексные:
Pl2=-a+j/3, (30.26)
7] о ЛИ1 "4Г2
где а-——; 6=-^--------
2Т2 2Т2
Решение (30.22) в этом случае содержит гармонические со-
ставляющие, а звено называют колебательным (рис. 30.4 г).
При 7j = 0 оба корня будут мнимыми, а переходная функция
будет представлять собой незатухающую синусоиду. Инерционное
звено второго порядка с Т\ — 0 называется идеальным колебатель-
ным, или консервативным.
559
Наряду с общими признаками (статизм, инерционность) апе-
риодическое и колебательное звенья имеют и существенные разли-
чия. Рассмотрим в отдельности характеристики этих звеньев.
Переходная функция апериодического звена второго порядка
может быть получена сложением общего решения (30.22) с част-
ным решением, соответствующим вынужденной составляющей при
х(/) = !(/). Переходная функция имеет вид
h(f)=c}e Тз + с2е Та +£!(/).
Подставив начальные условия
/г(0) = 0 и
в выражение (30.27), находим;
... «?(').
Л'(0) = 0
(30.27)
(30.28)
т3~т4
Переходная функция
_ «Л(')
с2--------
Т3-Г4
(30.29)
h(t) = k 1-
~^~еТз
т3-т4
-Ь—е
т3-т4
(30.30)
Временные характеристики Л(/) и и(/) апериодического зве-
на показаны на рис. 30.5 а, б. В соответствии с представлением
апериодического звена второго порядка в виде последовательного
соединения двух звеньев первого порядка (рис. 30.4 б) все его час-
тотные характеристики (рис. 30.5 в-е) могут быть получены по
аналогичным характеристикам звеньев первого порядка по прави-
лам умножения комплексных (векторных) величин.
Апериодическое звено второго порядка так же, как и звено
первого порядка, хорошо пропускает сигналы низкой частоты и
плохо — сигналы высокой частоты.
Дифференциальное уравнение колебательного звена записы-
вают обычно в следующем виде:
2 АО) 2г7Ж0
dt2 dt
где Т-Т2 — постоянная времени, характеризующая инерционность
звена; £ = 7\]?.Т2 - относительный коэффициент демпфирования,
характеризующий колеба тельность звена (0 < £ < 1).
(30.31)
560
Рис. 30.5. Характеристики апериодического звена второго порядка
Передаточная функция колебательного звена
= . (30.32)
' ’ Х(р) Т2Р2 + 2^ТР+]
Корни соответствующего характ еристического уравнения
Л I
рхл =-a±j/3 = -^±j^-^, (30.33)
Л I
где а - — - коэффициент затухания; /3 = J1 ——— круговая часто-
та затухания колебаний, рад/с.
Подставим в общее решение (30.22) значения комплексных
корней (30.33) и, складывая его с частным решением полу-
чим переходную функцию колебательного звена
Л(/) = c^~a+jP}' + c2e{~a~iP)' + к •1(f). (30.34)
С помощью формулы Эйлера e±ja = coscr±ysin<z функцию
(30.34) преобразуем к виду
fc(/) = ce“"'sin(/?f + ^) + Al(f). (30.35)
По начальным условиям А(0) = 0 и Л'(0) = 0 найдем:
561
(р = arctg— = arctg/?? = arccos £.
a
(30.36)
(30.37)
Окончательно переходная функция может быть записана в
следующей форме:
h(t) = k
+ 1(/).
(30.38)
Свободная составляющая переходной функции (рис. 30.6 а)
представляет собой синусоиду, амплитуда которой убывает по экс-
поненциальной огибающей (пунктирная линия). Период затухаю-
щих колебаний
т _ 171 _ 1лТ
(30.39)
Чем больше коэффициент £ и меньше постоянная Г, тем бы-
стрее затухают колебания.
Рис. 30.6. Характеристики колебательного звена второго порядка
562
Если коэффициент демпфирования £, = 0 (что соответствует
Г] = 0), то на выходе звена после подачи единичного ступенчато-
го воздействия возникают незатухающие колебания с частотой
С90 — Т
Скорость затухания колебательных переходных процессов
принято оценивать степенью затухания
у = = ]_А, (30.40)
4 4
представляющей собой отношение разности двух соседних ампли-
туд к первой из них. Чем ближе величина Т к единице, тем быст-
рее затухают колебания.
Степень затухания Т зависит от соотношения действительной
и мнимой частей комплексного корня. Действительно, если в выра-
жение для огибающей в формуле (30.38) подставить два значения t,
отличающиеся на период затухающих колебаний Т = 2л/ fi. можно
получить
1па _тт
Т = 1-е р = 1-е (30.41)
Отношение ji — fi/a называют степенью колебательности.
Используя выражения (30.33), можно установить связь между сте-
пенью колебательности р и коэффициентом демпфирования £:
— (30.42)
Определим зависимость максимального значения /гтах переход-
ной функции от коэффициента демпфирования £. Дифференцируя
выражение (30.38) по 1 и приравняв производную нулю, получим:
ъ.
max
л
^(^max) 1+е
(30.43)
(30.44)
АФХ колебательного звена (рис. 30.6 е) описывается функцией
W (jco) =------3-----------• (30-45)
7 T2(jco) +2gTjco+l
563
Ей соответствуют АЧХ
к
А (ш) = (30.46)
^(l-rYO2)2 + 4%Г2ы2
и ФЧХ (рис. 30.6 г)
Y (си) = -arctg^ ) • (30.47)
АЧХ при частоте
^.nax^^J1'2^2 (30.48)
имеет максимум (резонансный пик):
4™ = А (со^) =------^==. (30.49)
Максимум существует, если 1 -2^2 >0, т.е. если £ < 0,707.
Из выражений (30.48) и (30.49) следует: чем меньше коэффи-
циент Е,, тем ближе резонансная частота о>^ - гмтах к собственной
частоте незатухающих колебаний го0 = 1/7 и тем больше резонанс-
ный пик.
Таким образом, по графику АЧХ (рис. 30.6 в) видно, что коле-
бательное звено, как и все инерционные звенья, хорошо пропускает
сигналы низкой частоты и плохо — сигналы высокой частоты; если
частота гармонического входного сигнала близка к частоте собст-
венных колебаний звена, то отношение амплитуды выходного сиг-
нала к амплитуде входного сигнала больше передаточного коэффи-
циента к.
Инерционными звеньями второго порядка являются обычно та-
кие конструктивные элементы автоматических систем, которые со-
держат два накопителя энергии или вещества. Если в одном из них
накапливается потенциальная энергия, а в другом — кинетическая, то
элемент системы может обладать колебательными свойствами. Ко-
лебательность элемента зависит от условий обмена энергии между
указанными накопителями: если канал передачи энергии обладает
существенным сопротивлением (энергетическим или механическим),
то в нем происходит заметное поглощение или рассеивание энергии,
и элемент близок по своим свойствам к апериодическому звену вто-
рого порядка; если же потери энергии при обмене незначительны, то
процесс обмена имеет колебательный характер.
564
Мерой потерь энергии в канале передачи служит коэффициент
демпфирования £,: чем меньше потери, тем меньше £, в пределе,
когда сопротивление канала равно нулю и потерь нет, коэффициент
£ = 0. При этом элемент сохраняет в себе неизменным первона-
чальный запас энергии, и колебательный процесс обмена энергией
между накопит елями не затухает.
Классическим примером инерционного звена второго порядка
служит четырехполюсник, состоящий из резистора А, индуктивно-
сти L и конденсатора С (рис. 30.7 а). Коэффициенты дифференци-
альных уравнений (30.17) и (30.31) для этого четырехполюсника:
к=\; Т2=Т = у[ЬС; Тх = 2^Т = гС; g = . (30.50)
При г = 0 параметры 7] = 0 и £ = 0, и четырехполюсник стано-
вится идеальным колебательным контуром.
Другим распространенным примером инерционного звена вто-
рого порядка является электрический двигатель постоянного тока с
независимым возбуждением (рис. 30.7 б). Если в качестве входной
рассматривать ЭДС еи источника регулируемого напряжения, а в
качестве выходной - частоту вращения вала п (об/с), то двигатель по
этому основному каналу описывается передаточной функцией
—Л—’ (з°-51)
ТыТяР2+ТыР + \
1 1
где к =---- — передаточный коэффициент двигателя по управ-
сеФ
ляющему воздействию, (об/с)/В; Тя=— — электромагнитная по-
гя
_ 2яУг,
стоянная времени якорной цепи; Гм =-----у - электромеханиче-
ская постоянная времени, с; J - динамический момент инерции
вращающихся масс (якоря, редуктора, рабочей машины), приве-
денный к валу двигателя, кг-м2; гя, Ья — соответственно активное
сопротивление и индуктивность всей якорной цепи (включающей в
себя и выходную цепь источника напряжения), Ом и Гн; се и
см —— конструктивные постоянные двигателя, ВВб '-(об/с)’1,
1л
(Н м)/(А Вб); Ф магнитный поток возбуждения, Вб.
565
R
Рис. 30.7. Инерционные звенья второго порядка
Инерционность двигателя обусловлена процессами накопле-
ния электромагнитной энергии в индуктивности якорной цепи и
кинетической во вращающихся массах. Потери энергии происхо-
дят в активном сопротивлении якорной цепи.
Параметры передаточной функции (30.191) для серийных двига-
телей постоянного тока находятся в пределах: Ад = 0,01.. .0,3 (об/с)/В;
Тя =0,01...0,1 с; Тм = 0,01...0,1 с. Причем, для двигателей средней
и большой мощности всегда Тм >4ТЯ и коэффициент демпфирова-
ния £ = 0,5 /у1 >1, т.е. двигатель эквивалентен апериодическому
звену второго порядка.
В автоматических системах часто встречаются механические
устройства, которым соответствует схема замещения (рис. 30.7 в).
Составляя уравнение равновесия моментов, можно показать, что
такое устройство описывается уравнениями инерционного звена
второго порядка с параметрами
А-=-Ь(град/Н-м); Т2 = Т = 1-^— (с); Т1=2^’=-^(с), (30.52)
^уП Куп
где Ауп - коэффициент упругости вала, Н-м/град; А.|р коэффици-
ент трения, Нм/(град/с).
Коэффициент трения учитывает потери механической энергии,
подводимой к валу, на преодоление силы трения в подшипниках и
566
силы внутреннего (вязкого) сопротивления, возникающего в самом
валу при его деформации. От этих потерь, называемых диссипатив-
ными, зависит колебательность рассматриваемого устройства.
В заключение отметим общие свойства рассмот ренных стати-
ческих (позиционных) звеньев:
- в установившемся режиме выходная переменная у звена од-
нозначно связана с входной х уравнением статики у - кх;
- передаточный коэффициент звена связан с передаточной
функцией соотношением А = ;
- звенья являются фильтрами низкой частоты (кроме безынер-
ционного), т.е. хорошо пропускают низкочастотные сигналы и пло-
хо - высокочастотные; в режиме гармонических колебаний они
создают отрицательные фазовые сдвиги.
30.3. Интегрирующие звенья
Различают два вида интегрирующих звеньев: идеальные и ре-
альные. Обшей особенностью интегрирующих звеньев является
пропорциональность производной выходной величины мгновенно-
му значению входной величины. Причем у идеального интегри-
рующего звена пропорциональность существует в любой момент
времени после подачи ступенчатого воздействия, у реального
только после завершения переходного процесса в звене.
Дифференциальное уравнение идеального интегрирующего
звена
^^-=kx(t). (30.53)
Коэффициент пропорциональности А- зависит от конструктив-
ных параметров звена и имеет размерность
Уравнению (30.53) равносильно интегральное соотношение
t
у(?) = Ар(гУ)б/гУ + у(О), (30.55)
о
которое в явной форме выражает зависимость выходной величины
от входной и объясняет название звена: интегрирующее входной
сигнал.
567
Подставив в соотношение (30.55) х(#) = 1(/), можно получить
переходную функцию
= (30.56)
график которой показан на рис. 30.8 а.
Импульсная переходная функция звена (рис. 30.8 б) имеет вид
w(/) = Al(/). (30.57)
Рис. 30.8. Характеристики идеального (1) и реального (2)
интегрирующих звеньев
АФХ звена
W(ja)) = — = -^ (30.59)
jco О>
на комплексной плоскости изображается в виде прямой, совпа-
дающей с мнимой осью (рис. 30.8 е).
АЧХ звена
Л(щ) = |(Р(уй>)| = — (30.60)
представляет собой гиперболу (рис. 30.8 в), которая при щ^0
стремится к бесконечности. Эту особенность можно условно (по
аналогии со статическими звеньями) объяснить наличием переда-
точного коэффициента, равного бесконечности.
568
При увеличении частоты значения А(со) стремятся к нулю.
Это свойство сближает интегрирующие звенья с инерционными.
ФЧХ идеального интегрирующего звена
к
<р(со) = arctg—= -90°
(30.61)
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах
одинаков и равен -90° (рис. 30.8 г).
ЛАЧХ
= 20 1g Л (й?) = 20 • 1gк - 20 • 1gсо
представляет собой прямую с наклоном -20 дБ/декаду, проходя-
щую через точку с координатами со = 1, L(co] = 20 1gк (рис.
30.8 д).
Рассмотрим характеристики реального интегрирующего звена,
дифференциальное уравнение которого
A(Q dy(t)
dt2 dt
= kx(t)‘,
передаточная функция
(Т> + 1)Л
(30.62)
Рис. 30.9. Реальное
интегрирующее звено
Нетрудно заметить, что звено с
передаточной функцией (30.62)
можно рассматривать как после-
довательное соединение двух эле-
ментарных звеньев (рис. 30.9):
идеального интегрирующего с
передаточной функцией 1/р и статического инерционного звена
первого порядка с постоянной Т и передаточным коэффициентом к.
Поэтому все частотные характеристики реального интегрирующего
звена могут быть получены по характеристикам этих простых
звеньев по соответствующим правилам перемножения комплекс-
ных (векторных) величин.
Интегрирующие свойства присущи всем объектам управления,
в которых происходит накопление вещества или энергии без ее од-
новременной отдачи в окружающую среду. Классическим приме-
ром объекта с интегрирующими свойствами являются резервуар с
жидкостью (рис. 30.10 а), если в качестве входной переменной рас-
569
сматривать подачу жидкости Q (м3/с), а выходной - уровень жид-
кости /? (м). Действительно, уравнение баланса жидкости
Sdh(t) = Q(t)dt, (30.63)
где S - площадь поверхности жидкости (м2) легко приводится к
уравнению вида (30.53) или (30 55). При этом коэффициент (м 2)
А=|. (30.64)
в)
Рис. 30.10. Интегрирующие звенья
Интегрирующими звеньями являются также различные испол-
нительные двигатели и механизмы - устройства, которые переме-
щают регулирующие органы (шиберы, заслонки, вентили и т.д.).
Входной величиной этих устройств служит обычно количество энер-
гии или вещества, поступающее в устройство, а выходной - линей-
ное или угловое перемещение какого-либо элемента. Степень иде-
альности (безынерционное™) таких интегрирующих звеньев зависит
от масс перемещающихся (вращающихся) частей исполнительного
устройства и приводимого им в движение регулирующего органа.
Идеальным интегрирующим звеном можно считать (с некото-
рыми допущениями) гидравлический исполнительный механизм
(рис. 30.10 б), для которого входной величиной является количест-
во жидкости Q (м3/с), поступающей в единицу времени в полость
цилиндра, выходной величиной — перемещение / (м) поршня со
штоком. Действительно, если масса перемещающихся частей пре-
небрежимо мала и усилие, создаваемое давлением гидронасоса, су-
570
щественно больше сил сопротивления, то перемещение поршня оп-
ределяется уравнением баланса жидкости (30.63), коэффициент к -
выражением (30.64).
Идеальное интегрирующее звено обычно реализуется на базе
операционного усилителя (рис. 30.10 в) с передаточной функцией
I-
W(p) = -, (30.65)
Р
где к =----. (30.66)
RC
Изодромное звено (П11-регулятор) (рис. 30.11 а).
Рис. 30.11. Изодромное звено (ПИ-регулятор) (а) и его временная (б)
и логарифмическая (в) характеристики
Звено широко используется в системах электроприводов и ав-
томатики. Описывается оно уравнением
сф(/) , . dx(t)
<30б7>
Передаточная функция звена
(30.68)
Х(р) Р Р
„ к
где Т =---постоянная времени изодромного звена.
571
Из этих выражений видно, что звено можно условно предста-
вить в виде совокупности двух звеньев, действующих параллельно:
идеального интегрирующего с коэффициентом передачи к и безы-
нерционного с коэффициентом передачи к}. Временная характери-
стика звена (переходная функция) представлена на рис. 30.116.
ЛАХ строится по выражению (рис. 30.11 в)
£(^) = 201g^1 + fi? Т . (30.69)
со
Из рассмотрения ЛАХ и ЛФХ видно, что в области малых час-
тот (меньших, чем сопрягающая частота) звено ведет себя как иде-
альное интегрирующее и тем точнее, чем меньше частота.
В области больших частот (больших, чем сопрягающая частота)
звено ведет себя как безынерционное с коэффициентом передачи к}.
Свойство звена вводить интегрирующее действие в области
малых частот используется для улучшения качественных показате-
лей систем автоматического управления.
Общие свойства и особенности интегрирующих звеньев:
1. После подачи ступенчатого входного воздействия x(z) = xol(z)
выходная переменная y(f) неограниченно возрастает и по оконча-
нии переходного процесса изменяется по линейному закону
у(г) = £г0/. (30.70)
При снятии входного воздействия выходная переменная со-
храняет достигнутое значение, поэтому интегрирующие звенья
можно использовать в качестве запоминающих элементов (элемен-
тов с памятью).
2. В передаточную функцию обязательно входит сомножитель
1/ р, поэтому
1F(/2)|/=o*A-, FF(0) = oo. (30.71)
3. Интегрирующие звенья, как и инерционные статические, яв-
ляются фильтрами низкой частоты; в режиме гармонического коле-
бания они вносят отрицательные фазовые сдвиги.
30.4. Дифференцирующие звенья
Дифференцирующие звенья могут быть идеальными (безынер-
ционными) и реальными (инерционными). Мгновенные значения
выходной величины идеального дифференцирующего звена про-
572
порционально в каждый момент времени мгновенному значению
входной величины:
y(t) = k^-. (30’72)
Коэффициент пропорциональности к зависит от конструктив-
ных параметров звена и имеет размерность
Переходную функцию звена получают непосредственно из
уравнения (30.72) подстановкой и дифференцированием единичной
ступенчатой функции
h(t) = kd(t). (30.74)
График переходной функции идеального дифференцирующего
звена показан на рис. 30.12 а.
Импульсная переходная функция (рис. 30.12 б)
w(t) = —(30.75)
Передаточная функция звена
1К(/2) = /7?. (30.76)
Амплитудно-фазовая функция
W(jct)) = kj(O (30.77)
совпадает с положительной частью мнимой оси (рис. 30.12 е).
АЧХ (рис. 30.12 в)
= (30.78)
показывает: чем больше частота входного сигнала, тем больше ам-
плитуда выходного сигнала. Эта особенность дифференцирующих
звеньев вытекает из основного уравнения (30.72): чем быстрее из-
меняется во времени сигнал х(/), тем больше его производная в
правой части и выходной сигнал у(/).
Сдвиг фаз, создаваемый идеальным дифференцирующим зве-
ном, на всех частотах одинаков (рис. 30.12 г):
к
^(w) = arctg-^- = 90°. (30.79)
ЛАЧХ звена
L(ro) = 20-lgA-6O (30.80)
573
представляет собой прямую линию с наклоном + 20 дБ/декаду, прохо-
дящую через точку с координатами (О = к~1, £(щ) = 0 (рис. 30.12д).
Рис. 30.12. Характеристики идеального (1) и реального (2)
дифференцирующих звеньев
Реальное дифференцирующее звено представляет собой по-
следовательное соединение идеального дифференцирующего звена
инерционного звена первого порядка (рис. 30.13 а). Его уравнение
Рис. 30.13. Модели реального дифференцирующего звена
574
dt v ’ dt
(30.81)
передаточная функция
W(p)=-^—. (30.82)
ip +1
Нетрудно убедиться, что звено с передаточной функцией
(30.82) можно представить в виде параллельного соединения безы-
нерционного и инерционного звеньев (рис. 30.13 б).
На рис. 30.13 в приведено инерционное дифференцирующее
звено с параметрами: к = R2C; Т = (R\ + R2 )С.
На рис. 30.14 приведены реальные дифференцирующие звенья.
Особенности дифференцирующих звеньев:
1. При подаче на вход звена ступенчатого воздействия на его
выходе возникает большой кратковременный импульс, а по окон-
чании переходного процесса выходная переменная становится рав-
ной нулю. Если входной сигнал не изменяется во времени, то вы-
ходной равен нулю. Если же входной сигнал возрастает по
линейному закону = а/, то выходной
Рис. 30 14. Дифференцирующие звенья
2. В передаточную функцию всегда входит сомножитель Р,
поэтому W(p)\ _о
= 0 и дифференцирующие звенья в статике не
передают входные сигналы.
3. Дифференцирующие звенья являются фильтрами высокой
частоты, т.е. хорошо пропускают высокочастотные сигналы и пло-
хо - низкочастотные. Они вносят положительные фазовые сдвиги.
575
30.5. Неминимально-фазовые звенья. Звено запаздывания
В отличие от рассмотренных выше, любое звено, передаточная
функция которого имеет хотя бы один корень числителя или зна-
менателя с положительной вещественной частью, называется не-
минимально-фазовым звеном. Приведем пример:
W(p\ = -^—
V ’ Тр-1
Здесь имеется положительный полюс (корень) знаменателя
Н
Частотные характеристики такого звена:
/ Л ;
(30.83)
(30.84)
(30.85)
<р - -arctg^p = -(180° - arctgTjro) = arctgTjro -180°,
в то время как для обычного апериодического звена имеем:
(30.86)
Разница между ними, как видим, в величине фазы. Амплитудно-
частотные характеристики (АЧХ) одинаковы. Оказывается, что из
всех возможных звеньев с одинаковыми АЧХ обычные типовые зве-
нья обладают наименьшими по абсолютному значению фазовыми
характеристиками. В этом и состоит смысл введенных терминов.
Важным свойством минимально-фазовых звеньев является од-
нозначное соответствие амплитудной и фазовой частотных харак-
теристик. Другими словами, по заданной АЧХ всегда можно опре-
делить фазовую и наоборот. То же самое свойство относится и к
вещественной и мнимой частям амплитудно-фазовой
частотной характеристики минимально-фазовых звеньев.
Заметим, что для данного неминимально-фазового звена (30.83)
переходная функция будет расходящейся (рис. 30.15 а) вместо обыч-
ной затухающей (рис. 30.15 б).
Звено запаздывания также относится к неминимально-фазовым
звеньям. Оно как безынерционное статическое звено передает сигнал
с входа на выход без искажения его формы. Однако все мгновен-
ные значения входной величины выходная величина принимает с
некоторым отставанием (запаздыванием). Способностью задерживать
576
Рис. 30.15. Переходные функции неминимально-фазового (а)
и минимально-фазового (б) звеньев
сигнал во времени, не изменяя его формы, обладают многие элемен-
ты промышленных автоматических систем. К ним относятся транс-
портирующие устройства (конвейеры, ленточные питатели, трубо-
проводы), при помощи которых подают различные материалы (зер-
но, сырье, топливо, реагенты) в технологические аппараты. Запаз-
дыванием обладают и сами технологические аппараты. Особенно
заметно запаздывание проявляется в аппаратах, которые имеют
большие размеры и в которых происходят распределенные в про-
странстве процессы массообмена (шаровые, вальцовые мельницы,
флотомашины, сушильные барабаны).
Уравнение звена запаздывания
y(z) = x(z-r), (30.87)
где г - длительность запаздывания.
Уравнение (30.87) не является дифференциальным и относится
к классу особых уравнений со смещенным (запаздывающим) аргу-
ментом. Оно указывает, что выходной сигнал >'(/) повторяет все
изменения входного сигнала x(t), но с отставанием на время т.
Подставим в уравнение звена x(z) = l(/) и получим его пере-
ходную функцию
/z(z) = l(/-r), (30.88)
если подставим = <*>(/), получим импульсную функцию
ш(/) = ^(г-г). (30.89)
Обе эти временные характеристики показаны на рис. 30.16 а, б.
Применяя теорему запаздывания, можно записать уравнение
(30.88) в изображениях по Лапласу:
Y(p) = X(p)e~pT. (30.90)
Отсюда передаточная функция звена
= (30.91)
•Г(р)
19 Зак. 50
577
АФХ звена
W(jco) = e jaT = cos сот-j sin cor (30.92)
представляет собой окружность с центром в начале координат и
радиусом, равным единице (рис. 30.16 е)
Л(/)
1
А(®)
L (ю)=0
1g С)
Д)
Сравнивая выражение (30.92) с показательной формой записи
АФХ общего вида И’(у'щ) = A(co)eJf>^v , легко установить, что для
рассматриваемого звена АЧХ (рис. 30.16 в)
А (со) = 1 - const (30.93)
и для ФЧХ (рис. 30.16 г)
<р(со) = -сот. (30.94)
Таким образом, отсутствует взаимосвязь АЧХ и ФЧХ, и звено,
естественно, относится к классу неминимально-фазовым звеньям.
Характеристики (30.93) и (30.94) можно получить и известным
способом:
А (со) = \ cos2 сот + sin2 шт = 1; (30.95)
( sin fi)T ।
ср(со) = - arctgj----= -сот. (30.96)
coswr)
Звенья запаздывания в большинстве случаев ухудшают устой-
чивость систем и делают их трудноуправляемыми.
578
Если звено запаздывания входит в контур системы управле-
ния, то характеристическое уравнение системы будет не простым
алгебраическим, а трансцендентным. Решение и анализ трансцен-
дентных уравнений связаны с большими трудностями, поэтому
часто в практических расчетах трансцендентную передаточную
функцию (30.91) раскладывают в ряд Пада и, учитывая только два
или три члена ряда, приближенно заменяют ее дробной рациональ-
ной функцией
°’597
V ' 1+0,5177
(30.97)
или
(30.98)
w(p\ = е-рг = 1-0,5^ + 0,83гУ
' 1 + 0,51р + 0,83т2 р2
Другим возможным способом приближенной аппроксимации
звена запаздывания является представление его в виде последова-
тельного соединения п инерционных звеньев первого порядка с
одинаковыми постоянными времени Т\=г/п\
]____
\П ’
(30.99)
-Р + 1
уп )
причем чем больше п, тем точнее такая аппроксимация (рис.
30.17 а, б)
а) б)
Рис. 30.17. Звено запаздывания (а) и его аппроксимация (б)
Наиболее характерным примером звена запаздывания является
ленточный питатель (рис. 30.18 а), транспортирующий сыпучий
материал (зерно, муку, песок, руду, концентрат). Запаздывание г(с)
между количеством материала Qt (кг/с), высыпающимся в единицу
времени на питатель, и количеством материала (кг/с) на сходе
питателя зависит от длины L (м) и скорости движения V(м/с):
L
т = —
V
(30.100)
579
19*
Другим распространенным примером звена запаздывания яв-
ляется трубопровод (рис. 30.18 б), по которому в технологический
объект управления подается жидкая среда (пульпа, раствор реаген-
та) в количестве £?2=Q(m3/c) с концентрацией полезного компо-
нента x2(j) = xl(t -т) (кг/м3).
Отметим, что необходимость рассматривать питатель, трубо-
провод и другие транспортирующие устройства как звенья запаз-
дывания возникает лишь в тех случаях, когда они являются элемен-
тами замкнутых автоматических систем управления.
Рис. 30.18. Звенья с запаздыванием
Таким образом, звено запаздывания имеет свои особенности:
- передает любые входные сигналы без искажения их формы,
но задерживает их на интервал т; в установившемся режиме (при
t > г) выходной сигнал
у = х; (30.101)
- как и для других статических (позиционных) звеньев, пере-
даточная функция звена
^(д)|р=0 = А- = 1; (30.102)
- по свойствам АЧХ звено запаздывания эквивалентно безы-
нерционному: пропускает высокочастотные и низкочастотные сиг-
налы с одинаковым отношением амплитуд, равным единице. По
свойствам ФЧХ оно эквивалентно инерционным звеньям: создает
отрицательный фазовый сдвиг, пропорциональный запаздыванию
г и частоте (о.
580
30.6. Сводные данные по типовым динамическим звеньям
В табл. 30.2-30.8 приведены временные и частотные характе-
ристики типовых динамических звеньев.
Таблица 30.2
Типовые звенья
№ Тип звена Передаточная функция
1 Позиционные Безынерционное W(p) = к
2 Апериодическое 1-го порядка 1 + 7р
3 Апериодическое 2-го порядка W(p) = = - l + Tjp + T/p2 (l + T^Ml + Tip)’
где T3i4=i±^-T22, Tt>2T2, Т3>Т4
4 Колебательное W(P) 1 + 2£Тр + Т2р2 2£ р^ L Т у Т _ Я q 1 где q = ~ Т
5 Консервативное 7
6 Интегрирующие Идеальное интегрирующее р
7 Интегрирующее с замедлением W(p)=- р(1 + Тр)
8 Изодромное ГР(р) = ± + ^=А0±2£), гдеГ = ^ Р Р к
9 Дифференцирующие Идеальное дифференцирующее W(p) = кр
К) Дифференцирующее с замедлением W(p) = -^P- \ + Тр
581
Таблица 30.3
Временные характеристики позиционных звеньев
582
Окончание табл. 30.3
583
Частотные характеристики
584
Таблица 30 4
позиционных звеньев
Амплитудная и фазовая
Логарифмические
Л * г
А(<о) = к, <р-0 0
Lo ।
201g А:
А
, (P(&)) = -arctg а>Т
yll + (i)2T2
1
1
л<й>) = |-—л ^=0 "Р" -q<a><q,
\-со2Тг\
д>=-1№Р при ct)>q, <з = +180° при a)<-q
585
Таблица 30 5
Временные характеристики интегрирующих звеньев
586
Таблица 30 6
Временные характеристики дифференцирующих звеньев
587
Частотные характеристики
588
Таблица 30.7
589
Глава 31
АНАЛИЗ УСТОЙЧИВОСТИ И ОЦЕНКА КАЧЕСТВА
ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
31.1. Понятие, виды и общее условие устойчивости
Раскроем физический смысл понятия «устойчивость».
Устойчивость авто.матической системы — это свойство
системы возвращаться в исходное состояние равновесия по-
сле прекращения воздействия, выведшего систему из этого
состояния.
Рассмотрим математическую сущность устойчивости и неус-
тойчивости. Согласно данному физическому определению устой-
чивость зависит только от характера свободного движения систе-
мы. Свободное движение линейной или линеаризованной системы
описывается однородным дифференциальным уравнением
"Х^ I a , а
dt" ' dtn~} 2 dt"~2
х(/) - xc (/) - свободная составляющая выходной величины системы.
г„х(/) = О, (31.1)
ао
Вынужденная составляющая выходной величины, зависящая
от вида внешнего воздействия и правой части дифференциального
уравнения, на устойчивость системы не влияет.
Дадим математическое определение понятия «устойчивость».
Система является устойчивой, если свободная составляющая xc(z)
переходного процесса с течением времени стремится к нулю:
limxt(/) = 0. (31.2)
t—>°°
Очевидно, что при этом выходная величина системы стремит-
ся к вынужденной составляющей, определяемой внешним воздей-
ствием и правой частью неоднородного дифференциального урав-
590
нения. Устойчивость в смысле условия (31.2) принято называть
асимптотической.
Если свободная составляющая неограниченно возрастает:
limxc(z) = °°, (313)
t—>°°
то система неустойчива.
Наконец, если свободная составляющая не стремится ни к ну-
лю, ни к бесконечности, система находится на границе устойчиво-
сти. Найдем общее условие, при котором система, описываемая
уравнением (31.1), устойчива. Решение уравнения равно сумме
*с (0 = ’ (314)
*=1
где ск — постоянные, зависящие от начальных условий; рк - корни
характеристического уравнения
а{)р'! + а1р" 1 + а2р'‘ 2+... + а„=0. (31.5)
Корни характеристического уравнения могут быть действи-
тельными (рк = (Хк), мнимыми (рк = j/3k) и комплексными:
причем комплексные корни всегда попарно сопряжены между со-
бой: если есть корень с положительной частью, то обязательно су-
ществует корень с такой же по модулю, но отрицательной мнимой
частью.
Переходная составляющая (31.4) при t стремится к нулю
лишь в том случае, если каждое слагаемое вида скеРк‘ —» 0. Харак-
тер этой функции времени зависит от вида корня рк. Рассмотрим
все возможные случаи расположения корней рк на комплексной
плоскости (рис. 31.1) и соответствующие им функции x^(z), кото-
рые показаны внутри кругов (как на экране осциллографа).
1. Каждому действительному корню рк=ак в решении (31.4)
соответствует слагаемое вида
х(/) = С,е^'. (31.7)
Если сск < 0 (корень PJ, то функция (31.7) при t —> °° стремит-
ся к нулю. Если ак > 0 (корень Р3), то функция (31.7) неограничен-
но возрастает. Если ак 0 (корень Р2), функция остается постоян-
ной (см. рис. 31.1).
591
Область устойчивости Область неустойчивости
Рис. 31.1. Влияние корней характеристического уравнения системы
на составляющие ее свободного движения
2. Каждой паре сопряженных комплексных корней Рк - ак + j/Зк
и /д.+1 = ак - //Зк в решении (31.4) соответствуют два слагаемых,
которые могут быть объединены в одно:
хк (t) = 2скеак' sin( Д/ + i//k). (31.8)
Функция (31.8) представляет собой синусоиду с частотой /Зк и
амплитудой, изменяющейся во времени по экспоненте. Если
действительная часть двух комплексных корней ак (см. рис. 31.1,
корни Р4 и Р5), то касательная составляющая (31.8) будет затухать.
Если ак> 0 (корни и Рд), то амплитуда колебаний будет
неограниченно возрастать. Наконец, если ак -0 (корни Рь и Р7).
то есть оба сопряженных корня мнимые {рк- j{3k, Pk+i = -j0k), то
хк (/) представляет собой незатухающую синусоиду с частотой Д.
Если среди корней характеристического уравнения (31.5)
имеются / равных между собой корней то в решении (31.4) вме-
сто / слагаемых вида скеРк‘ появится одна составляющая
(с0 + + c2Z2 + ...+ )еЛ'. (31.9)
Учитывая, что функция вида е bl при любом b убывает быст-
рее, чем возрастают слагаемые вида f, можно показать, что и в слу-
чае кратности корней решение (31.4) будет стремиться к нулю лишь
при отрицательности действительной части кратных корней Рк.
592
На основании проведенного анализа можно сформулировать
общее условие устойчивости:
для устойчивости линейной автоматической системы управ-
ления необходимо и достаточно, чтобы действительные
части всех корней характеристического уравнения системы
были отрицательными.
Устойчивость системы зависит только от вида корней характе-
ристического уравнения и не зависит от характера внешних воз-
действий на систему. Устойчивость есть внутреннее свойство сис-
темы, присущее ей вне зависимости от внешних условий.
Еще одно определение, связанное с расположением корней на
комплексной плоскости: для устойчивости линейной системы не-
обходимо и достаточно, чтобы все корни характеристического
уравнения находились в левой плоскости.
В теории автоматического управления разработан ряд правил,
с помощью которых можно судить о знаках корней, не решая ха-
рактеристическое уравнение и не находя числовые значения самих
корней. Эти правила называются критериями устойчивости. Крите-
рии устойчивости бывают алгебраические и частотные.
31.2. Алгебраические критерии устойчивости
Наиболее распространены в инженерной практике критерии
Гурвица и Рауса. Ограничимся рассмотрением критерия Гурвица.
Он был сформулирован и доказан в 1895 г. немецким математиком
А. Гурвицем.
Применительно к задачам теории управления критерий Гурви-
ца можно сформулировать так:
автоматическая система, описываемая характеристическим
уравнением
аорп +aipn~1 +а2р”~2 + ... + ап =0, (31.10)
устойчива, если при а0 > 0 положительны все определители
А,, Д2,..., Д„ вида
«1 аз а5 • a2i-l
ао а2 а4 . a2i-2
А,= 0 а\ аз • a2i-3
0 ai-2a
, i=\,2,...,n. (31.11)
593
Если хотя бы один из определителей (31.10), называемых оп-
ределителями Гурвица, отрицателен, система неустойчива.
Матрицы (31.11), по которым вычисляют определители Гур-
вица, составляют следующим образом: на главной диагонали запи-
сывают все коэффициенты характеристического уравнения от ах до
а, (в порядке возрастания индекса), затем в каждом столбце выше
диагональных коэффициентов записывают коэффициенты с после-
довательно возрастающими индексами, ниже - с последовательно
убывающими индексами; на место коэффициентов с индексами,
большими п или меньшими нуля, проставляют нули. При этом ка-
ждая г-я матрица получается квадратной размером i х г.
Так как последний столбец главного определителя Ди содер-
жит всегда только один элемент ап, отличный от нуля, то согласно
известному свойству определителей
Д„=«А-1- (31.12)
Если главный определитель Д,; = 0, а все остальные определи-
тели положительны, то система находится на границе устойчиво-
сти. С учетом выражения (31.12) это условие распадается на два:
«„=0 и Ди_! = 0. (31.13)
Условию ап= 0 соответствует один нулевой корень, то есть
апериодическая граница устойчивости, условию Д„_] = 0 - пара
мнимых корней, то есть колебательная граница устойчивости.
Рассмотрим частные случаи критерия Гурвица для п = 1; 2; 3; 4.
Раскрывая определители, фигурирующие в общей формулировке
критерия, можно получить следующие условия.
1) для уравнения первого порядка
+ (31.14)
условие устойчивости
а0>0 и Д|=а!>0, (31.15)
то есть положительность коэффициентов уравнения является в
данном случае и необходимым и достаточным условием. Действи-
тельно, при а0> 0 и «]> 0 единственный корень уравнения будет
отрицательным: Д = < 0;
йо
2) для уравнения второго порядка
а0Р2 +а}Р + а2=0 (31.16)
594
условие устойчивости
ап >0, Д. = а, > 0,
0 11’ (31.17)
Д2 — ИЛИ а2 > 0-
Таким образом, и для системы второго порядка необходимое
условие устойчивости (положительность коэффициентов) является
одновременно и достаточным;
3) для уравнения третьего порядка
а^Р2, + а^Р2 + а2Р + п'з — 0 (31.18)
условие устойчивости
а0 >0, Д| = ах > 0,
<7.
д2 = 1 j = а}а2- аоат, >0, Д3 = «3Д2 > 0.
а2
Последнее неравенство при а3> 0 эквивалентно неравенству
(31.19)
Д2 > 0. Следовательно, для системы третьего порядка, кроме по-
ложительности всех коэффициентов, требуется, чтобы Д2 > 0.
Учитывая выражение для Д2, можно сформулировать мнемониче-
ское правило оценки устойчивости систем третьего порядка:
произведение средних коэффициентов уравнения должно быть
больше произведения крайних.
4) для уравнения четвертого порядка
а^РЛ + л,П3 + а2Р2 + я3Р + я4=0 (31.20)
кроме положительности всех коэффициентов требуется выполне-
ние условия
Д3 = а}а2а^ — аоа2 -а2а4 >0. (31.21)
Нетрудно доказать, что при положительности всех коэффици-
ентов условие (31.21) обеспечивает выполнение условия Д2 >0.
Таким образом,
для устойчивости систем не выше четвертого порядка необ-
ходимо и достаточно, чтобы все коэффициенты характери-
стического уравнения и определитель Д„_] были положитель-
ными.
Критерий Гурвица целесообразно применять для анализа ус-
тойчивости систем не выше пятого порядка. При п > 5 вычисление
определителей становится громоздким.
Критерий устойчивости Льенара-Шипара. Для исследова-
ния устойчивости систем автоматического управления, имеющих
595
порядок характеристического уравнения и а 5, удобно применять
одну из модификаций алгебраического критерия устойчивости
Гурвица, предложенную в 1914 г. П. Льенаром и Р. Шипаром.
Доказано, что в том случае, когда все коэффициенты характе-
ристического уравнения положительны (а0 >0, at >0, ..., ап >0),
из того факта, что положительны все определители Д]5 Д3, Д5, ... с
нечетными индексами, следует положительность определителей
Гурвица Д2, Д4, Д6, ... с четными индексами, и наоборот.
Поэтому в тех случаях, когда выполнены необходимые условия
устойчивости (л()>0, ^>0, ..., л„>0), необходимые и доста-
точные условия устойчивости сводятся к тому, чтобы среди оп-
ределителей Гурвица А,, Д2, ... Ди были положительными все оп-
ределители с четными (или же все определители с нечетными) ин-
дексами.
Таким образом, для того, чтобы система автоматического
управления была устойчива, необходимо и достаточно, чтобы вы-
полнялись следующие неравенства а и б:
ас. > 0, а-, >0....,а„ > 0;
0 2 " (а)
Д( >0, Д3 >0, Д5 >0,...
или
<7а > 0, а7 > 0,..., а„ > 0;
J ° 2 " (б)
Д2 >0, Д4 >0, Д6 >0,...
Последняя формулировка критерия устойчивости, называемая
критерием устойчивости Льенара -Шипара, требует раскрытия
меньшего числа определителей, чем обычный критерий Гурвица, и
поэтому особенно удобна при исследовании устойчивости систем
автоматического управления высокого порядка.
Пример 31.1. Пусть характеристическое уравнение системы
12/ + 2р2 + 4/j + 50 = 0.
Система неустойчива, так как коэффициент at =0.
Пример 31.2. Характеристическое уравнение системы
3/ + 10/ + 5/-7/?2 + /7 + 100 = 0.
Система неустойчива, так как коэффициент а3= -7 <0.
Пример 31.3. Характеристическое уравнение системы
2/?3 +6р2 +10/2 + 15 = 0.
596
Все коэффициенты этого характеристического уравнения по-
ложительны, и определитель Гурвица Д2 с четным индексом
Д2 -
«1
«о
а3
а2
= аха2 -аоа3 = 6 • 10 — 2 15 = 30 >0.
Следовательно, система устойчива.
31.3. Критерий Михайлова
Критерий Михайлова относится к группе частотных критериев
устойчивости. Он был сформулирован и обоснован в 1936 г. совет-
ским ученым А.В. Михайловым в работе «Гармонический метод в
теории регулирования», которая получила высокую оценку и по-
служила началом широкого применения частотных методов в тео-
рии автоматического управления.
Критерий Михайлова так же, как критерии Гурвица и Рауса,
основан на анализе характеристического уравнения системы, по-
этому с его помощью можно судить об устойчивости замкнутых и
разомкнутых систем.
Пусть левая часть характеристического уравнения, называемо-
го характеристическим полиномом, имеет вид
F(p)-aopn +а}рп~1 +а2рГ1 2 +... + ап =0. (31.22)
Подставим в этот полином вместо переменного р чисто мни-
мый корень, который в дальнейшем будем обозначать jco. Полу-
чим функцию комплексного переменного
F(ущ) = а0 (jco)" + (jco)" ' + а2 (jco)n 2 +... + а„ = 0, (31.23)
которую можно так же, как амплитудно-фазовую характеристику,
представить в виде действительной и мнимой частей:
F(jco) = P(co) + jQ(co). (31.24)
Действительная часть Р(со) содержит только четные степени
переменного со:
Р(со) = ап - ап_2со2 + а„_4щ4 +..., (31.25)
мнимая часть Q(co) - только нечетные:
Q (со) = а„_}со - а„_3а? +.... (31.26)
Каждому фиксированному значению переменного со соответ-
ствует комплексное число, которое можно изобразить в виде век-
тора на комплексной плоскости. Если теперь изменять параметр со
597
от 0 до <*>, то конец вектора F(jco) опишет некоторую линию (рис.
31.2), которая называется характеристической кривой, или годо-
графом Михайлова. По виду этой кривой можно судить об устой-
чивости системы.
Рис. 31.2. Характеристические кривые (годографы) Михайлова
Формулировка критерия Михайлова:
автоматическая система управления, описываемая уравнением
п-го порядка, устойчива, если при изменении со от 0 до °° ха-
рактеристический вектор системы F(jco) повернется против
часовой стрелки на угол пл/?., не обращаясь при этом в нуль.
Это означает, что характеристическая кривая устойчивости
системы должна при изменении со от 0 до °° пройти последова-
тельно через п квадрантов. Из выражений (31.25) и (31.26) следует,
что кривая F(jco) всегда начинается в точке на действительной
оси, удаленной от начала координат на величину аг.
Характеристические кривые, соответствующие устойчивым
системам (рис. 31.2 б), имеют плавную спиралеобразную форму и
598
уходя!' в бесконечность в том квадранте, номер которого равен по-
рядку уравнения. Если характеристическая кривая проходит п
квадрантов не последовательно или проходит меньшее число квад-
рантов, то система неустойчива (рис. 31.2 в).
Если кривая F(jco) проходит через начало координат, то сис-
тема находится на границе устойчивости. Действительно, если ха-
рактеристическое уравнение имеет один нулевой корень рк =О
(апериодическая граница устойчивости) или одну пару чисто мни-
мых корней рк - ±j[5k (колебательная граница устойчивости), то
функция при 69 = 0 или со = /Зк обратится в нуль.
В практических расчетах удобно применять следствие из кри-
терия Михайлова:
система устойчива, если действительная и мнимая части ха-
рактеристической функции F)jco) обращаются в нуль пооче-
редно (рис. 31.2 в), то есть, если корни уравнения
P(co)=Q и Q(co) (31.27)
перемежаются.
Это утверждение вытекает непосредственно из формулировки
критерия Михайлова - из условия последовательного прохождения
кривой F( jco) через п квадрантов.
Критерий Михайлова целесообразно применять для анализа
устойчивости систем высокого порядка (и > 0).
Пример 31.4. Определим с помощью критерия Михайлова ус-
тойчивость системы, характеристический полином которой имеет вид
F(p) = n0/?5 +а1р"1 +а2р4 +а3р3 +а4р + а5, (31.28)
где а0 = 0,16; щ = 1,7; а2 = 6,0; а3 = 9,6; а4 = 6,7; а5 = 8.
Подставив в выражение (31.28) р = jco, найдем мнимую и
действительную составляющие характеристической функции:
Q(co) = a0co5 -а2со3 + а4со; (31.29)
Р(<у) = а}со4 — а3СО2 + а5. (31 30)
Подставив значения параметра со, можно вычислить коорди-
наты ряда точек кривой F(jco) и по ее виду оценить устойчивость
системы. Однако этот путь требует сравнительно много вычисле-
ний (обычно 10...15 точек в интервале 69 = 0.,.°°), поэтому вос-
пользуемся следствием из критерия Михайлова.
599
Найдем положительные корни уравнений
affix' — + а^ш = 0; (31.31)
а/л4 — а3<у2 + а5 = 0. (31.32)
Первое уравнение всегда имеет один нулевой корень гу..( = 0.
Вычислим корни уравнения
- а2сог + а4 = 0, (31.33)
7 2
для чего введем промежуточную переменную Z = со :
a0Z2 -a2Z + a4 -0. (31.34)
Корни вспомогательного уравнения (31.34)
_a2±7^2 -4аос/4
Л1,2 “ ~ •
2а0
После подстановки числовых значений получим:
^=1,15; Z2=35. (31.35)
Положительные корни исходного уравнения (31.33):
4,2 4,3=5,9. (31.36)
Аналогично найдем положительные корни уравнения (31.32):
41 = 1,0; 4й=2>2- (31.37)
Нетрудно заметить, что корни мнимой и действительной со-
ставляющих чередуются, следовательно, система устойчива.
Если хотя бы один из корней вспомогательного уравнения полу-
чился отрицательным или комплексным, это будет означать, что не
существует соответствующего положительного корня со, при котором
кривая F(jco) пересекает оси Р(со) и Q(co). Кривая F(jco) в этом
случае не пройдет через п квадрантов, и система будет неустойчивой.
31.4. Критерий Найквиста
Критерий был сформулирован в 1932 г. американским физи-
ком X. Найквистом, занимавшимся исследованиями свойств элек-
тронных усилителей с обратной связью.
В отличие от критериев Гурвица, Рауса и Михайлова, которые
основаны на анализе характеристического уравнения системы, кри-
терий Найквиста позволяет судить об устойчивости системы по
амплитудно-фазовой характеристике разомкнутого контура систе-
мы. В этом заключается существенное преимущество критерия, так
как построение амплитудно-фазовой характеристики разомкнутого
600
контура для большинства реальных систем оказывается проще, чем
построение годографа Михайлова. Особенно упрощается это по-
строение для одноконтурных систем, состоящих из типовых звень-
ев. А в тех случаях, когда неизвестно математическое описание од-
ного или нескольких конструктивных элементов системы и оценка
их свойств возможна только путем экспериментального определе-
ния частотных характеристик, критерий Найквиста является един-
ственно пригодным.
Основная формулировка критерия Найквиста:
автоматическая система управления устойчива, если ампли-
тудно-фазовая характеристика W ( угу) разомкнутого конту-
ра не охватывает точку’ с координатами (-1, /0).
Эта формулировка справедлива для тех систем, которые в ра-
зомкнутом состоянии устойчивы. Таковыми являются большинство
реальных систем, состоящих из устойчивых элементов.
На рис. 31.3а изображены амплитудно-фазовые характеристики
разомкнутого контура, соответствующие трем различным случаям:
система устойчива (кривая 1); система находится на колебательной
границе устойчивости (кривая 2); система неустойчива (кривая 3).
Рис. 31.3. Амплитудно-фазовые характеристики разомкнутого
контура (а) и физическая трактовка (б) критериев Найквиста
601
Употребленное в формулировке критерия Найквиста понятие
охвата точки имеет некоторую неопределенность, из-за чего в слу-
чаях сложной формы кривой IV (jco) могут возникнуть затрудне-
ния в суждении устойчивости систем. Поэтому для большей ясно-
сти рекомендуется следующий прием. Надо проследить мысленно
за движением вектора И/1(у<у) = 1 + И7(убу), вращающегося вокруг
точки (-1, у'О) и скользящего по кривой IV (jco). Угол поворота
вектора W\(jco), равный я, означает охват точки (-1, /0), угол,
меньший я неохват.
Для использования изложенного приема применительно к ас-
татическим системам, которые содержат интегрирующее звено, и
амплитудно-фазовые характеристики которых начинаются в -оо на
мнимой оси, характеристику IV (jco) предварительно дополняют в
четвертом квадранте дугой окружности бесконечно большого ра-
диуса.
Для суждения об устойчивости систем, имеющих АФХ слож-
ной конфигурации, когда кривая АФХ пересекает действительную
ось левее точки (-1, у’О) несколько раз, можно также использовать
правило переходов, сформулированное Я.З. Цыпкиным: АФХ не
охватывает точку (-1, у'О), то есть система устойчива, если при
возрастании со разность между числом положительных (сверху
вниз) и отрицательных (снизу вверх) переходов АФХ через ось
абсцисс слева от точки (-1, у'О) равна нулю.
Если АФХ начинается или заканчивается на отрезке (-«>; -1),
считают, что характеристика совершает полперехода. Частота, при
которой амплитудная характеристика А (со) = |FE (у&>)[ принимает
значение 1, называется частотой среза и обозначается <wcp. Частота,
при которой фазовый сдвиг ср(со) = — л, обозначается соп.
Пользуясь введенными обозначениями, можно записать усло-
вие нахождения системы на границе устойчивости:
а>ср=оол. (31.38)
Частота, с которой система колеблется на границе устойчиво-
сти, называется критической и обозначается гукр.
Дадим физическую трактовку основной формулировки крите-
рия Найквиста. Предположим, что на входе системы (рис. 31.3 6)
602
действует гармонический сигнал g(t) = gmsin&¥ с малой амплиту-
дой gm. Пусть частота а> равна частоте при которой фазовый
сдвиг <р(со), создаваемый W(jco), равен -л. Тогда сигнал отрица-
тельной обратной связи окажется в фазе с сигналом g(/), и мгно-
венные значения сигналов будут суммироваться.
Если на частоте ал=О)п модуль (yzz?)| = 1, то есть выполняет-
ся условие (31.38), то в контуре системы будут поддерживаться не-
затухающие колебания даже после исчезновения внешнего воздей-
ствия g(z), то есть система будет находиться на границе устойчи-
вости. Характеристика (годограф) 1Е(ущ) при этом проходит через
точку (-1, у’О).
Если на частоте а)~а)я модуль (уТу^. )| < 1, после исчезнове-
ния внешнего воздействия колебания в контуре затухнут, то есть
система устойчива, характеристика не охватывает точку (-1, у’О).
Если же модуль |1Е (у’щ^ )| > 1, амплитуда сигналов в контуре
будет неограниченно возрастать, то есть система будет неустойчи-
вой. Характеристика W в этом случае охватит точку ( 1, у’О).
Таким образом, особая роль точки (-1, у’О) заключается в том,
что она, во-первых, соответствует превращению отрицательной об-
ратной связи в положительную, и, во-вторых, является i-раничной
между режимами усиления и ослабления сигналов звеном 1Т(у'ш).
Иногда встречаются системы, в контуре которых имеется один
или несколько неустойчивых элементов. Такие системы в разомкну-
том состоянии неустойчивы. Для суждения об их устойчивости не-
обходимо использовать другую формулировку критерия Найквиста:
автоматическая система управления устойчива, если ампли-
тудно-фазовая характеристика W (у’щ) разомкнутого конту-
ра охватывает 1/2 раз точку’ с координатой (—1, у’О), где I
число правых корней характеристического уравнения разомк-
нутого контура.
Количество охватов при этом можно определять по правилу
Цыпкина как разность между числом положительных и отрица-
тельных переходов.
Данная формулировка критерия Найквиста является более об-
щей, чем предыдущая. Действительно, если разомкнутая система
603
устойчива (то есть 7 = 0), то для устойчивости замкнутой системы
АФХ W (ущ) должна точку (-1, уО) охватывать нуль раз, то есть не
охватывать. Из обеих формулировок следует, что для суждения об
устойчивости системы необходимо предварительно установить ус-
тойчивость ее в разомкнутом состоянии. Обычно эта вспомога-
тельная задача решается сравнительно легко, при помощи критерия
Гурвица: для этого приравнивают к нулю знаменатель передаточ-
ной функции ^Г(р) разомкнутого контура и анализируют данное
характеристическое уравнение.
Во многих практических случаях устойчивость разомкнутого
контура может быть оценена без каких-либо вычислений непосред-
ственно по виду входящих в контур звеньев.
Пример 31.5. Определим с помощью критерия Найквиста
максимально допустимое значение общего передаточного коэффи-
циента системы, состоящей из трех инерционных звеньев первого
порядка с одинаковыми постоянными времени 7] = Т2 = Т3.
Передаточная функция разомкнутого контура
IV(p) = - * „. (31.39)
(1 + 7р)’
Амплитудная частотная характеристика контура
Л(щ) = |1Г(./щ)| = - - 3, (31.40)
(Vi + rW
фазовая частотная функция
(р (со) = arg W (jco) = -3arctgfi)7. (31.41)
Система будет находиться на границе устойчивости, если АФХ
разомкнутого контура пройдет через точку (-1, уО), то есть если при
некоторой частоте со = сокр одновременно выполняются условия:
Л(шкр) = 1; <р(шкр) = -я. (31.42)
Для рассматриваемой системы условия (31.42) имеют вид:
~ ~к з=Е <31-43)
(V1+7’X)
-3arctg®Kp7 = -п. (31.44)
Из условия (31.44) имеем
тукрГ = л/з. (31.45)
604
Подставим выражение (31.45) в условие (31.43) и получим ис-
комое значение передаточного коэффициента к = 8.
Из приведенного решения следует также, что предельное зна-
чение передаточного коэффициента не зависит от абсолютного
значения постоянных времени Т.
Сравним это утверждение с помощью критерия устойчивости
1'урвица. Пусть характеристическое уравнение системы
Я(р) = (1+7]р)(1 + Г2р)(1 + Тз/,) + * = 0, (31.46)
перепишем в виде
D( р) = 1\Т2ТзР3 + (Т]Т2 + 7]Т3 + Т2Т3) р2 + (7i + Т2 + Т3) р +1 + к =
= а{]р~ + а3р2 + а2р + а3 =0, (31.47)
где а0 = Т{Г2Т3; л, = 7]Г2 + Т1Т3 + Т2Т3; а2 = Т} + Т2 + Т3;а3 = 1 + к .
Согласно критерию устойчивости Гурвица система третьего по-
рядка будет устойчива, если выполняются следующие неравенства:
а0 > 0,0] > 0, а2 > 0, а3 > 0, аха2 - аоа3 > 0.
(31.48)
Последнее неравенство можно переписать в виде
1 1
-1,
Ti >
(31.49)
r2 Т3
где т2 =-±; т3 =-±.
7] 7]
Предельное (критическое) значение коэффициента усиления,
при котором система будет находиться на границе устойчивости:
*кр=(1 + г2 + гз)
-1.
(31.50)
Из последнего выражения следует, что предельный коэффици-
ент усиления системы определяется не абсолютной величиной по-
стоянных времени динамических звеньев, а их относительными зна-
чениями.
Чем более резко отличаются постоянные времени друг от дру-
га, тем больше ккр. В частном случае, когда т2 = т3 = 1, то есть
Т, = Т, = 7\ значение к^ минимально: = 8.
1 Z. -J 1X17 1X17
Критерий Найквиста удобно использовать для анализа устойчи-
вости систем, содержащих звено запаздывания. Если звено запаздыва-
ния включено последовательно с остальными звеньями (рис. 31.4 а).
605
амплитудно-фазовая функция разомкнутого контура может быть
представлена как произведение
W(jco) = W'(jco)eJO>T, (31.51)
где W'^jco^ - эквивалентная амплитудно-фазовая функция осталь-
ных звеньев
Характеристику строят следующим образом: сначала
строят кривую W'(jco), затем каждый вектор, соответствующий
частоте <у,, поворачивают на угол сот (рис. 31.4 б).
Звенья запаздывания, как правило, ухудшают устойчивость
систем.
Рис. 31.4. Оценка устойчивости с запаздыванием:
а - структура системы: б - АФХ разомкнутого контура
Пример 31.6. Определим, будет ли устойчива статическая
система, состоящая из пропорционального управляющего устрой-
ства и статического инерционного объекта первого порядка с за-
паздыванием
ке~рг°
(3L52)
7^ + 1
при последующих значениях параметров:
к=кук0-Т\ 7’о = 1ООс; г0=20с.
АФХ разомкнутого контура
W (jco) = Wy (jco) Wo (jco) =
ke~^ _
T^co + l"
(31.53)
606
АЧХ контура
к
1 + Го2®2
фазовая функция
(р (а)) = -arctg®r0 - <дт0.
(31.54)
(31.55)
Найдем сначала частоту сол, при которой (р((Ол } = -л . Решая ме-
тодом последовательных приближений трансцендентное уравнение
-arctgct^ 100 - 20 = -л, (31.56)
получим =0,085 с”1.
Теперь вычислим значение Л(ш) при частоте (Ол = 0,085:
м 7
= 0,82<1. (31.57)
V Лу=О,О85 I 77 \2
ф002 (0,085)
Следовательно, АФХ не охватит точку (—1, /0). Система ус-
тойчива.
Найдем критическое запаздывание т0 кр - значение т0, при ко-
тором рассматриваемая система станет неустойчивой. Для этого из
условия Л(шср) = 1 определим шср = 0,069 с1. При этой частоте
инерционная часть разомкнутого контура создает фазовый сдвиг
<ри (®ср ) = ~arctSt()cp7J) - -82°. Соответственно на запаздывающую
часть приходится угол <р3 (<дср ) = -180° - (-82°) = -98°. Отсюда кри-
тическое запаздывание
Рзк,,)
Д)кп- v ^ = 25 с. (31.58)
°кр 57, Зш
Если разомкнутый контур системы образован последователь-
ным соединением типовых динамических звеньев, то целесообразно
частотную характеристику контура строить в логарифмической сис-
теме координат и об устойчивости системы судить по виду этой ха-
рактеристики (в дальнейшем будет изложен материал по построе-
нию результирующей ЛАХ). При этом используют разновидность
основной формулировки критерия Найквиста:
система устойчива, если при достижении фазовой частот-
ной характеристики значения — 180° логарифмическая ам-
плитудная характеристика (ЛАХ) будет отрицательной (рис.
31.5, кривые 1).
607
Действительно, если L(ш) < 0, то А (со) < 1. Поэтому отрица-
тельность при ср(соп) = -180° свидетельствует о том, что
АФХ разомкнутого контура не охватывает точку (-1; J0).
Рис. 31.5. Логарифмические частотные характеристики
статических систем: 1 — устойчивой; 2 - находящейся
на границе устойчивости; 3 - неустойчивой
Логарифмические частотные характеристики L(co) и ср(со) ра-
зомкнутого контура находят суммированием ординат соответст-
вующих характеристик отдельных звеньев (далее будет показано).
Фазовые характеристики отдельных звеньев строят либо по не-
скольким вычисленным точкам, либо при помощи специальных
шаблонов, а в последние годы - программным путем на ЭВМ. Ам-
плитудные характеристики отдельных звеньев строят приближенно
в виде совокупности прямолинейных отрезков по правилам, изло-
женным ранее, чаще же всего этот процесс выполняется компью-
терной технологией.
Критерий Найквиста, применяемый в логарифмической систе-
ме координат, называют часто логарифмическим критерием.
Пример 31.7. Определим по логарифмическим частотным ха-
рактеристикам (ЛАЧХ) устойчивость статической системы, со-
стоящей из трех инерционных звеньев первого порядка с постоян-
608
ними времени 7] =0,2 с; Г2 = 0,1 с; Г, =0,05 с. Передаточный ко-
эффициент разомкнутого контура к = 20.
Сопрягающие частоты звеньев
й>£1 = 7’"1 = 5 с а)с2 = г;1 = 10 с1; ft>c3 = Г3-1 = 20 с '.
В соответствии с этими значениями построены ЛАЧХ 7,(гу)
(рис. 31.6 а) и фазовая характеристика (рис. 31.6 б) разомкну-
того контура, которая получена согласно выражению
(р((о) = -arctgroT] - arctgrwT^ - arctgTW?^. (31.59)
По графику видим, что при = -180° функция £(&>)>0,
следовательно, система неустойчива.
Рис. 31.6. Пример расчета устойчивости по логарифмическим
частотным характеристикам
31.5. Способы соединения и преобразования структурных схем
31.5.1. Цепь из последовательно соединенных звеньев
Системы автоматического управления и регулирования явля-
ются замкнутыми системами. Но при их проектировании часто
предварительно рассматривается разомкнутая цепь звеньев, кото-
рая затем замыкается. Составим сначала передаточные функции ра-
зомкнутой цепи звеньев (рис. 31.7).
Vs 19
609
Рис. 31.7. Последовательное соединение звеньев
Пусть заданы передаточные функции всех звеньев:
л Л1 лп-1
где X, = Xi (р) - изображения по Лапласу переменных х( (?).
Если перемножить между собой все левые части и все правые
части этих равенств, получим искомый результат
^=^(р)^2(р)...л;(р).
Обозначим передаточную функцию всей цепи ГТ(р). Тогда
п
^(р)=П^(р)’ (31-6°)
/=1
т.е. передаточная функция разомкнутой цепй последовательно со-
единенных звеньев равна произведению передаточных функций
всех звеньев.
31.5.2. Цепь из параллельно соединенных звеньев
Пусть заданы передаточные функции звеньев
= 0=1,2,..., и).
Поскольку выходная величина цепи равна
Рис. 31.8. Параллельное
соединение звеньев
п
i=l
то и передаточная функция цепи получит
вид
у "
w(p)=-=£W(p), (31-61)
А 1=1
т.е. передаточная функция разомкнутой
цепи из параллельно соединенных звень-
ев (рис. 31.8) равна сумме передаточных
функций всех звеньев.
610
31.5.3. Цепь с местной связью
Запишем сначала передаточную функцию звена, охваченного
обратной связью (часть схемы, обведенная на рис. 31.9 пунктиром).
Обратная связь называется отрицательной, если (см. рис. 31.9)
х2 =*1-*ос-
Рис. 31.9. Цепь с местной обратной связью
Согласно схеме имеем в изображениях по Лапласу
^0с=^ос(р)^3-
Но далее
х3 = w2 (Р)х2 = w2(p)[x, - Woc (р)Х3].
Отсюда получаем
Х3_ У2(р)
Ъ 1 + ^ос(рМ(р)’
Перемножив правую часть данного выражения с передаточ-
ными функциями остальных звеньев цепи (согласно формуле
(31.60)) получаем окончательно формулу
~ \+irx(p)w2(P) ' ' ’
т.е. передаточная функция разомкнутой цепи с местной отрица-
тельной обратной связью равна произведению передаточных функ-
ций всех звеньев прямой цепи, деленному на единицу плюс произ-
ведение передаточной функции обратной связи на передаточную
функцию охватываемого ею звена.
Если в той же схеме (рис. 31.9) местная обратная связь будет
положительной, т.е. если х2=х1 + хос, то получим
„,м
Отличие получается в знаке второго слагаемого знаменателя.
611
Это, как увидим потом, весьма важно. Главное применение в авто-
матических системах имеют отрицательные обратные связи.
В общем случае, сложная разомкнутая цепь звеньев может
включать в себя комбинации всех трех рассмотренных случаев.
31.5.4. Частотные характеристики
разомкнутой цепи звеньев
Рассмотрим получение частотных характеристик на примере,
из которого ясен общий метод. Пусть задана передаточная функция
разомкнутой цепи в виде
K(rip + l)(T2p + l)
p(TiP + 1)(г2р2 + 2{Т2р + 1)(Г3р +1) ’
причем £ = 0,6 (при таком можно будет не учитывать горба ам-
плитудной характеристики колебательного звена).
Амплитудная и фазовая частотные характеристики имеют вид
<р - -90° + arctg тхсо + arctg тую -
_ 2ЕТ2со _
-arctg 7]гу - arctg — , - arctg Т3со.
1 - Т2CD
Их можно изобразить графически (рис. 31.10), а по ним - по-
строить и амплитудно-фазовую частотную характеристику (рис.
31.11).
Рис. 31.10. Результирующая частотная
характеристика в натуральном мас-
штабе разомкнутой цепи звеньев
Рис. 31.11. АФЧХ разомкнутой
цепи звеньев
612
Логарифмическую амплитудную частотную характеристику
можно строить непосредственно по заданной передаточной функции.
Для этого надо помнить, что, согласно характеристикам типовых
звеньев каждому сомножителю типа (7/2 + 1 ) в знаменателе соответ-
ствует точка излома характеристики при со = \/Т с последующим на-
клоном —20 дБ/дек, а каждому сомножителю такого же типа в числи-
теле соответствует точка излома при cd = \/Т с последующим накло-
ном +20 дБ/дек. Сомножителю же типа (Г22р2 + 2^Т2р +1) в знамена-
теле соответствует излом с наклоном -40 дБ/дек, если 0,5<^<1.
При ^<0,5 нужно добавочно строить горб, вычислив превышение Н.
Таким образом, пронумеровав по порядку все сомножители
передаточной функции
1 2 з
^(г,р + 1)(г2р + 1)
р(7]р + 1)(т22р2 + 2^Т2р + 1)(Т3р +1) ’
4 5 6 1
для каждого из них получим характеристики, показанные на рис.
31.12 а и обозначенные цифрами в кружках. Простое сложение их
дает искомую логарифмическую амплитудную частотную характе-
ристику данной разомкнутой цепи звеньев, показанную на рис.
31.12 б. На рис. 31.12 в согласно написанной выше формуле изо-
бражена фазовая частотная характеристика .
Из рис. 31.12 6 видно, что легко можно строить непосредст-
венно суммарную характеристику по передаточной функ-
ции (помня указанное выше правило изломов), не изображая
отдельных частей характеристики), т.е. можно обойтись без рис.
31.12 а). При этом частоты в точках изломов (1/г,, \/1\, ...) назы-
ваются сопрягающими частотами.
При более сложных формах передаточной функции №(р), на-
пример, при наличии внутренних обратных связей, построение
ЛАХ усложняется. Однако часто можно и сложные формы И'(р)
приводить к аналогичному виду, разложив на множители много-
члены числителя и знаменателя (с заданными числовыми коэффи-
циентами). Имеются и другие инженерные приемы.
Для любой разомкнутой цепи звеньев, как и для отдельного
звена, можно определить также переходные и весовые функции.
613
20 Зак. 50
Рис 31 12. Логарифмические амплитудные (а, б)
и фазочастотная (в) характеристики
31.5.5. Структурный метод составления уравнений систем
Для исследования устойчивости и качества систем управления
необходимо знать уравнения динамики и статики систем. Уравнения
систем могут быть получены двумя методами. Один из них заклю-
чается в том, что совокупность уравнений отдельных элементов
приводят к одному уравнению относительно управляемой величины
путем последовательного исключения промежуточных переменных.
При наличии в системе большого числа элементов такое преобразо-
вание совокупности уравнений к одному уравнению представляет
собой трудоемкую задачу. Поэтому в инженерной практике чаще
применяют так называемый структурный метод, согласно которо-
614
му уравнение всей системы получают на основе алгоритмической
схемы системы при помощи нескольких простых правил.
Рассмотрим основные процедуры структурного метода. Преж-
де всего составляют алгоритмическую схему системы и определя-
ют передаточные функции отдельных конструктивных элементов
системы. При выполнении этих процедур необходимо учесть вза-
имное влияние элементов и обеспечить направленность передачи
сигналов всеми звеньями алгоритмической схемы. Затем при по-
мощи трех основных правил преобразования (31.60), (31.61) и
(31.62) заменяют последовательные, параллельные и встречно-
параллельные соединения элементов эквивалентными звеньями. В
результате получают одноконтурную замкнутую цепочку, состоя-
щую из нескольких эквивалентных звеньев. Отметим, что эта це-
почка может иметь несколько входов и несколько выходов
Далее согласно одноконтурной схеме записывают передаточ-
ные функции между различными входами и выходами системы.
Передаточная функция замкнутой системы, представленной в ви-
де эквивалентной одноконтурной схемы,
Ф((,,)=4±=---------(31.63)
xk(P) 1 + ^(р)^(р)
где Wnk (р) ~ эквивалентная передаточная функция звеньев, нахо-
дящихся в прямой цепи между рассматриваемым А-м входом хк и
выходом х; Wok(p] — эквивалентная передаточная функция звень-
ев, образующих обратную (по отношению к рассматриваемой пря-
мой цепи) связь.
Знак «+», как было отмечено ранее, в формуле (31.63) прини-
мают потому, что главная обратная связь в любой автоматической
системе всегда отрицательна.
В знаменатели передаточных функций ФА(р), записанных
для различных входов одноконтурной системы, входит одно и то
же произведение: произведение передаточных функций всех звень-
ев, стоящих последовательно друг за другом в главном контуре
системы. Это произведение называют передаточной функцией ра-
зомкнутого контура.
В дальнейшем будет показано, что от вида передаточной
функции разомкнутого контура зависит устойчивость системы. По-
этому эта функция является одной из главных характеристик замк-
нутой автоматической системы.
615
20!
После определения передаточных функций между всеми вхо-
дами и выходом системы на основании принципа суперпозиции за-
писывают уравнение динамики системы
= (31.64)
Л=1
Та как знаменатели передаточных функций ФДр) одинаковы,
то уравнение (31.64) можно записать и в таком виде:
т
х(Р)[1 + Wp (р)] = £xk\р) РуД р), (31.65)
*=1
где И^ (/?) - передаточная функция разомкнутого контура.
Выражение в квадратных скобках в левой части уравнения
(31.65) представляет собой не что иное, как собственный оператор
системы. Если приравнять его нулю, то получим характеристиче-
ское уравнение одноконтурной системы в обобщенном виде
1 + ИЛ(р) = 0. (31.66)
Если передаточная функция разомкнутого контура предвари-
(ад)
(ад)
тельно записана в виде отношения двух полиномов
то ха-
рактеристическое уравнение системы будет иметь вид
£>(р) + ад = 0. (31.67)
Проиллюстрируем основные процедуры структурного метода
на конкретном примере. На рис. 31.13 а приведена алгоритмическая
схема замкнутой системы, имеющей один выход х и два входа jq и
х2 Звено И) стоиг вне главного контура системы.
Звенья W2 и Из, стоящие внутри главного контура, соединены
(31.68)
между собой параллельно, а звенья W4 и - встречно-парал-
лельно. Эквивалентные передаточные функции этих соединений с
учетом знаков, указанных на схеме, равны:
^23(p) = IV2(p)-^(p);
'w Ы-
\-W4(p)W5(P\
После этих эквивалентных замен полная алгоритмическая
схема (рис. 31.13 а) может быть преобразована к виду, представ-
ленному на рис. 31.13 б. Теперь, пользуясь правилом (31.63), мож-
но записать передаточные функции системы:
616
между входом Xj и выходом х
ФМ^ГМ—у»(р)^(р)^(р) 3169
V ' х,(р) Ц /1 + ^2.з(р)^.5(рК(р)^7(р)
и между входом х2 и выходом х
ф2(р)=2М=ж,(р)-----^(р)^(р) (31 70)
[ J *2(р) [ ^ + ^2,з(р)^5(рК(р)^7(р)
Передаточная функция разомкнутого контура для данной сис-
темы
^Р(р) = ^2,з(р)^(р)^б(р)^(р)- (31-71)
Обратим внимание на важное обстоятельство: передаточная
функция звена Wx, расположенного вне главного контура, не вхо-
дит в выражение передаточной функции разомкнутого контура.
На этом примере мы смогли убедиться в справедливости об-
щего правила: передаточная функция замкнутой системы зависит
от выбора входной и выходной величин, а передаточная функция
разомкнутого контура всегда одна и та же.
На основании принципа суперпозиции уравнение динамики
рассматриваемой системы
^(р) = ^1(р)Ф1(р) + л2(р)Ф2(р)- (31.72)
617
Характеристическое уравнение данной системы
1 + ^3(р)^5(р)^6(р)^7(р) = 0. (31.73)
Если автоматическая система имеет так называемые перекрест-
ные обратные связи, то кроме описанных выше главных приемов
приходится использовать некоторые дополнительные правила струк-
турных преобразований (табл. 31.1). Справедливость этих правил
очевидна и не требует доказательств (рис. 31.14).
Таблица 31.1
Правила структурных преобразований
618
Рис. 31.14. Пример структурных преобразований схемы
с перекрестными связями
31.6. Оценка качества управления в линейных
системах управления
31.6.1. Понятие и показатели качества управления
В теории автоматического управления и в практике автомати-
зации под терминами «качество системы», «качество управления»
понимают только статические и динамические свойства системы.
Показатели качества рассмотрим применительно к типовой одно-
контурной системе (рис. 31.15).
Рис. 31.15. Типовая одноконтурная система
к опенке показателей качества
Точность системы в переходных режимах оценивают при по-
мощи прямых и косвенных показателей. Прямые показатели опре-
619
деляют по графику переходного процесса, возникающего в системе
при ступенчатом внешнем воздействии. Косвенные показатели ка-
чества определяют по распределению корней характеристического
уравнения или по частотным характеристики системы.
На рис. 31.16 приведены переходные процессы по заданию (а)
и возмущению (б).
При самой общей оценке качества обращают внимание прежде
всего на форму переходного процесса. Различают следующие типо-
вые переходные процессы (рис. 31.16): колебательный (кривая 1),
монотонный (кривая 2) и апериодический (кривая 3).
Рис. 31.16. Типовые переходные процессы:
а - по заданию; б - по возмущению
Прямые показатели. На графиках переходных процессов
(рис. 31.17), вызванных ступенчатым задающим воздействием
х3 (/) = !(/) (а) и возмущающим воздействием ув(1) (б) за начало
отсчета для выходной величины х(1) принято значение х(-0), ко-
торое было до подачи ступенчатого воздействия.
Одним из главных прямых показателей качества является перере-
гулирование гт, %, которое равно отношению первого максимально-
го отклонения управляемой величины х(1) от ее установившегося
значения х(°°) к этому установившемуся значению (рис. 31.17а):
(Т = Лм ~/Л 100 = "тЧ100 • (31.74)
х(°°) х(°°)
Качество управления считается удовлетворительным, если пе-
ререгулирование не превышает 30...40 %.
Для переходных процессов, вызванных возмущающим воздей-
ствием у'в на входе объекта (рис. 31.17 6), перерегулирование можно
определять как отношение второго (отрицательного) максимального
отклонения А2 к первому максимальному отклонению Л,:
620
<т =---100 = —100. (31.75)
*м-х(°°) А
Длительность переходного процесса (время регулирования) гп
определяется из следующего неравенства:
|х(/)-х(°о)|<£п. (31.76)
В промышленной автоматике величину принимают обычно
равной 5 % от установившегося значения х(°°): 4 = 0,05х(°°).
Прямым показателем качества служит также степень затухания
Т = 4-Л2=1-4, (3177)
4
где Ах и Д2 - соседние максимальные отклонения (амплитуды) од-
ного знака (рис. 31.17).
Рис. 31.17. Прямые показатели качества процесса регулирования:
а - по каналу задания; б - по каналу возмущения
Интенсивность затухания колебаний в системе считается
удовлетворительной, если Т = 0,75...0,95.
621
Колебательность системы можно оценивать, наряду с показа-
телями ст и 'К, числом переходов N величины х(/) через устано-
вившееся значение х(°°) на интервале /п.
31.6.2. Частотные показатели
Наиболее важными и одновременно удобными косвенными
показателями являются частотные показатели, которые определя-
ются по частотным характеристикам замкнутого и разомкнутого
контура системы.
По АЧХ А(ш) замкнутой системы по основному каналу х3 -х
(рис. 31.18) оценивают частотный показатель колебательности М,
равный отношению максимума Ам характеристики к ее начально-
му значению Л (0):
М=-4±-_ (31.78)
Л(0)
Качество системы считается обычно удовлетворительным, ес-
ли показатель Л/= 1,1... 1,5 при t = /п.
Косвенными частотными показателями быстродействия сис-
темы служат характерные частоты (рис. 31.18): резонансная часто-
та сир, частота среза &»ср, полоса пропускания системы от ш - 0 до
OJ = й)0, при которой
(31.79)
Следует отметить роль тср: чем меньше она, тем хуже быст-
родействие системы
622
/р=(1..,2)—. (31.80)
Й?ср
Если переходный процесс имеет одно два колебания, то время
достижения переходной характеристикой первого максимума
^ах= — (31.81)
&4р
По АФХ IV (jco) разомкнутого контура определяют запас ус-
тойчивости по амплитуде (рис. 31.19а)
ДЛ = |1-Л(бУя)| (31.82)
и запас устойчивости по фазе (рис. 31.19 6)
А^ = я-|у7(ц?ср)|, (31.83)
которые вместе характеризуют удаленность кривой IV (jco) от кри-
тической точки (-1,/0). При проектировании систем обычно зада-
ются запасом по амплитуде ДЛ>0,5...0,6 и по фазе Д^9>30...60°.
При этом обеспечивается и удовлетворительное качество регули-
рования.
Рис. 31.19. Запасы устойчивости системы:
а - по АФЧХ: б по ЛАФЧХ
При решении задач синтеза запасы устойчивости удобней за-
давать в логарифмических координатах (рис. 31.19 б). В этом слу-
чае запас устойчивости по амплитуде определяют по выражению
ДЕ = 20-|1ёЛ(^)|. (31.84)
Указанным выше значениям ДЛ соответствует ДА >6...8 дБ.
623
31 6.3. Диаграмма Вышнеградского
Рассмотрим характеристическое уравнение третьего порядка
аор}+ сир1 + атр + а3=0. (31.85)
Приведем его к нормированному виду. Для этого разделим все
члены на и введем новую переменную
9 = P-fi-
В результате получим нормированное уравнение
qi+Aq1 + Bq+ 1=0, (31.86)
где коэффициенты Л = - °* , В = называют параметрами
\аоаз \аоаз
Вы шнеградс кого.
На плоскости параметров А и В нанесем границу устойчиво-
сти. Условия устойчивости системы третьего порядка были сфор-
мулированы Вышнеградским еще в 1876 г., до появления в 1895 г.
критерия Гурвица. Эти условия: А > 0, В > 0 и АВ > 1. Уравнение
границы устойчивости (колебательной): АВ = 1 при А > 0, В > 0.
Это есть равнобокая гипербола, для которой оси координат служат
асимптотами (рис. 31.20). Область устойчивости системы, согласно
написанным выше условиям, лежит вне этой кривой.
Разобьем область устойчивости на отдельные части, соответ-
ствующие различному расположению корней характеристического
уравнения. Заметим, что в точке С, где А = 3 и В = 3, характеристи-
ческое уравнение (31.86) принимает вид (д+1)3 = 0. Следовательно,
в этой точке все три корня равны: q\ = q2 = q2 = -1. При этом для ис-
ходного характеристического уравнения согласно (31.86) получаем
Р1 = Р2=Рз=-^аз/ао-
В общем случае возможны два варианта: 1) все три корня ве-
щественные; 2) один корень вещественный и два комплексных.
Граница между этими двумя случаями определяется равенст-
вом нулю дискриминанта уравнения третьей степени (31.86), кото-
рый может быть получен, например, по формуле Кардана для ре-
шения кубического уравнения
Л2В2-4(Л3 + 53) + 18Л5-27 = О.
Это уравнение дает на плоскости параметров А. В две кривые: СЕ и
CF (рис. 31.20). Внутри области ECF дискриминант положителен.
624
Следовательно, в этой области имеется три вещественных корня
(область III). В остальной части плоскости дискриминант отрица-
телен, что соответствует наличию пары комплексных корней.
Существенное значение имеет взаимное расположение веще-
ственного и комплексных корней. Будем различать здесь два слу-
чая: I - пара комплексных корней лежит ближе к мнимой оси, чем
вещественный, II - вещественный корень лежит ближе к мнимой
оси, чем пара комплексных. Границей между этими случаями явля-
ется расположение всех трех корней на одинаковом расстоянии от
мнимой оси. Уравнение этой границы можно найти, положив зна-
чения корней q} = -а и </2,з = -ОС ± j/З- Тогда характеристическое
уравнение (31.86) будет
q2, + Aq2 + Bq+\=(q + a)(q + Ol+ j/3}(q + Cl - j(З} =
= q2 +3>aq2 + (з«2 + (32^q + a{a2 + /?2) = 0.
Уравнивание коэффициентов при одинаковых степенях дает
Л = 3«, В = 3сг2 + Д \-а[сс2 + (З2^.
В результате совместного решения последних трех равенств
после исключения а и (3 получаем искомое уравнение, соответст-
вующее граничному случаю:
2Л3-9АВ + 27 = О, Л<3.
Написанное равенство дает на плоскости параметров кривую CD.
В результате область устойчивости разбивается на три части:
Г, II, III (см. рис. 31.20). Этот
график называется диаграммой
Вышнеградского. Он построен
им в работе, которая положила
начало развитию теории авто-
матического регулирования. На
рисунке показан характер рас-
положения корней внутри каж-
дой из этих частей области ус-
тойчивости.
В области III. где все корни
вещественные, в зависимости от
начальных условий получим апериодический переходный процесс, в
одной из форм, показанных на третьем графике рис. 31.21. Область III
носит название области апериодических процессов.
625
Рис. 31.21. Переходные процессы в различных областях устойчивости
В областях I и II, где имеется один вещественный корень и два
мнимых, переходный процесс будет соответственно формы, пока-
занные на двух первых ( рафиках рис. 31.21. В области I быстрее за-
тухает экспонента, переходный процесс в основном будет опреде-
ляться колебательной оставляющей. Это будет область колебатель-
ных процессов. В области II, наоборот, быстрее затухает колеба-
тельная составляющая. Это будет область монотонных процессов.
31.7. Точность статических и астатических систем управления
при типовых воздействиях
Типовая одноконтурная система. Запишем передаточные
функции и уравнение динамики типовой одноконтурной системы
(рис. 31.15).
Передаточная функция системы по задающему
имеет вид
воздействию
(31.87)
(31.88)
ф ^p(p)W0(p)
хЛ х3(р) i + wp(P)w0(Py
по возмущающему воздействию
ф (п) = ^Я =_________________
ув(р) 1 + 1Гр(р)1Го(р)‘
Согласно принципу суперпозиции общее изменение выходной
величины х, возникающее при совместном действии входов х3 и ув,
равно сумме изменений, создаваемых каждым воздействием в от-
дельности. Отсюда уравнение динамики систем в краткой записи:
(31.89)
4/’)=хз(/’)Фх3(р)+к(р)фхв(р)
или в развернутом виде:
xW=J (г) <Мр)
’’ (₽,1 + »'р(р)»’0(р)
Часто при расчете систем передаточные функции и уравнения
.(31.90)
626
динамики записывают не для управляемой величины х, а для сиг-
нала ошибки:
г = х3-х, (31.91)
который также может рассматриваться как сумма двух составляющих:
£ = £3 + £в, (31.92)
где £3, £в - составляющие сигнала ошибки, обусловленные изме-
нениями соответственно задающего и возмущающего воздействий.
Для каждой составляющей запишем их передаточные функции:
Фе(Р)=^44=—х • (з 1 -94)
” Ув(р) 1 + ^р(рЖ(р)
Уравнение динамики системы, записанное для сигналов ошиб-
ки, имеет вид
<Р) = (р) + (р) = *зфг3 (р) + Ув (р) (31 -95)
или
£(р) = х3(р)---4-----+ VB(Р)--------, (31.96)
v ; 3UJ1 + 1Tp(pH(/?) bV ;1 + ^р(/М(р)
Сравнивая выражения (31.93) и (31.94), можно установить, что
ф₽з(р) = 1-фх»; (31.97)
Ф,в(р) = -ФХв(р). (31.98)
Рассмотрим типовые алгоритмы управления (законы регули-
рования), применяемые в линейных автоматических системах.
Простейший закон регулирования реализуется при помощи бе-
зынерционного звена с передаточной функцией
«/р(/’) = 44 = Ап=Ар- (31.99)
£(/?)
Согласно выражению (31.99) управляющие воздействия и в
статике и в динамике пропорциональны сигналу ошибки £. По-
этому такой закон регулирования называется пропорциональным
(П-регулятор).
Достоинства П-регулятора - простота и быстродействие, не-
достатки - ограниченная точность.
Закон регулирования, которому соответствует передаточная
функция
627
к к
Wp(p) = ^- = ^-. (31.100)
называется интегральным (И-регулятор).
Преимущества И-регулятора - лучшая (по сравнению с П-
регулятором) точность в установившихся режимах, недостатки —
худшие свойства в переходных режимах.
Наибольшее распространение в промышленной автоматике
получил пропорционально-интегральный закон регулирования (ПИ-
регулятор) - изодромное звено:
1Ир(р) = А-п+^ = Кр+^- = Лр^±1. (31.101)
Р Тир Тир
Благодаря наличию интегральной составляющей ПИ-регу-
лятор обеспечивает высокую точность в установившихся режимах,
а при определенном соотношении коэффициентов кп и ки — хоро-
шие показатели и в переходных режимах.
Наилучшее быстродействие достигается пропорционально-
дифференциальным (ПД) законом регулирования (ПД-регулятор):
Wp {Р) = А’п + клр = кр + крТар. (31.102)
ПД-регулятор реагирует не только на величину сигнала ошиб-
ки, но и на скорость его изменения. Благодаря этому при управле-
нии достигается эффект упреждения. Недостатком пропорциональ-
но-дифференциального закона регулирования является ограничен-
ная точность.
Наиболее гибким законом регулирования (в классе линейных
законов) является пропорционально-интегрально-дифференциаль-
ный закон (ПИД-регулятор):
Wp(p) = knJ± + кар = кр Т«Р + 1 + Т^Р (3i.!оз)
Р 1 иР
или
W (р) = к' + + = к' Т«+ ТЯ + + к'Т'р (31Л04)
Р \ г / Р Т г) р Т Т п р v 7
1 иР 1 и 1иР
который сочетает в себе преимущества более простых законов
(31.99)-(31.102).
Коэффициенты и постоянные времени, входящие в передаточ-
ные функции типовых регуляторов, называются настроечными па-
раметрами и имеют следующие наименования: кп, ки, кд - коэф-
фициенты пропорциональной, интегральной и дифференциальной
628
части; кр, к'р - передаточные коэффициенты регулятора; Гн, Т7' -
постоянные времени интегрирования; Тп, Т'д - постоянные време-
ни дифференцирования.
Параметры, входящие в (31.103) и (31.104) ПИД-закона, связа-
ны между собой соотношениями:
Т' +Т' к к'
кп=кр = к'р-^—А; Ли (31.105)
* И * и и
из которых следует: кр к'р, Тн Ф Т'К, ТД^Т'Д.
31.7.1. Общие понятия о точности управления
Назначение любой автоматической системы управления - из-
менение выходной величины х(/) в соответствии с изменениями
задающего воздействия. В большинстве случаев эта задача системы
заключается в поддержании равенства
х(/) = х3(?) (31.106)
при любых изменениях задающего и возмущающих воздействий.
При анализе точности различают две функции системы: вос-
произведение задающего воздействия и подавление (компенсацию)
возмущений.
Из-за инерционности объекта и регулятора обе эти функции
выполняются любой реальной системой с погрешностью: в каждый
момент времени после внешнего воздействия существует разность
f(/) = x3(/)-x(/), (31.107)
характеризующая точность системы. Чем меньше мгновенные зна-
чения сигнала ошибки f(/), тем выше (лучше) точность системы.
Как было показано, сигнал ошибки £(/) в типовой системе
управления (рис. 31.15) содержит составляющую которая ха-
рактеризует точность воспроизведения задающего воздействия, и
несколько составляющих, которые в сумме характеризуют точ-
ность выполнения функций подавления возмущений.
Из формул (31.93)-(31.96) следует одно из важнейших правил
ТАУ:
в типовой одноконтурной системе, состоящей из объекта
f^o(p) и регулятора Wp(p), полная ошибка регулирования
£(/) и ее составляющие и в статике и в динамике обратно
629
пропорциональны выражению 1 + Яр(р)1Тс, (/?), то есть точ-
ность регулирования тем выше, чем больше усилительные
свойства регулятора.
Точность систем принято оценивать по значениям £3 и Ев в
статическом и установившемся динамическом режимах работы
системы. Соответственно различают статическую и динамическую
точности.
31.7.2. Статическая точность
В статическом режиме ошибки возникают только в статиче-
ской системе, в астатической системе они равны нулю (при опре-
деленных условиях), поэтому статическую точность оценивают
только при анализе статических систем.
Статической системой управления называется система, объект
и регулятор которой являются статическими элементами;
Wo(0) = ko, Wp(0) = kp. (31.108)
Подставив в уравнения динамики (31.90) и (31.96) однокон-
турной системы (рис. 31.15) р = 0 и учитывая выражения (31.108),
получим уравнения статики статической системы:
для управляемой величины
Мо . К
х = х„ — --+ v ----2—;
1 + А'р&0 1 + А’рА’о
для сигнала ошибки
---------1- у ----2—.
1 + АрА0 ?в1 + АрА0
(31.109)
(31.110)
Первое слагаемое в правой части уравнения (31.110) характе-
ризует статическую ошибку по задающему воздействию, второе -
статическую ошибку по возмущению. Обе эти ошибки тем больше,
чем больше внешнее воздействие, и тем меньше, чем больше зна-
менатель (1+ АрА0).
Точность статической системы принято оценивать коэффици-
ентом статизма
5 = —3-, (31.111)
где Дх, - отклонение управляемой величины, создаваемое тем же
возмущением ув0 в замкнутой системе; Дхр - отклонение управ-
630
ляемой величины х от заданного значения, создаваемое возмуще-
нием ув = ув0 при разомкнутом контуре регулирования.
Коэффициент статизма показывает, во сколько раз отклонение
выходной величины управляемого объекта меньше отклонения
этой величины неуправляемого объекта. Очевидно:
ДХр=ДувоА-0; (31.112)
и Ду = АУвОк° . (31.113)
1 + АрА-0
Отсюда коэффициент статизма
5 = (1 + АрА0) * =(1 + А') *, (31.114)
где А' = АрА0 — передаточный коэффициент разомкнутого контура.
Точность статической системы считается удовлетворительной,
если коэффициент S= 0,1...0,01. Следовательно, обший передаточ-
ный коэффициент разомкнутого контура статической системы
должен находиться в диапазоне 10... 100.
Пример 31.8. Пусть система содержит объект с передаточной
функцией Wo(p) и астатический регулятор с передаточной функци-
ей в виде интегрирующего звена Wp(p) = кр/р (рис. 31.22). Пусть
объект не имеет интегрирующих свойств и Wo(0)=ko. На систему
действует два возмущения: / и/, а задающий сигнал равен нулю,
при этом в замкнутой системе ошибка е и выходная координата х
связаны равенством s = -х. Поэтому об ошибке работы системы
можно говорить по значению х.
Рис. 31.22. Структурная схема системы
с астатическим регулятором
В замкнутой системе выходное значение х будет равно
^о(р)- у/1(р) + /2(р)
х(р) =
к_ / \
1+—р
р
631
Отсюда по теореме предельного перехода при р —э 0 и учиты-
вая, что возмущения являются величинами постоянными f(t) = /ю =
= const, f2{t) =/20 ~ const, получим
х
Луст
= lim
р—>0
А/ш+Ло
Р
-fio-
1 +
Р
Таким образом, первое возмущение дает статическую ошибку,
второе возмущение системой подавляется. Из рисунка видно, что
первое возмущение f приложено до интегрирующего звена, второе
/2 - после него. Отсюда можно сформулировать следующее прави-
ло: для устранения статической ошибки от какого-либо возмуще-
ния необходимо, чтобы интегрирующий элемент был включен в
замкнутый контур до точки приложения данного возмущения.
31.7.3. Динамическая точность
Динамическую точность систем оценивают по величине сиг-
нала ошибки в установившемся динамическом режиме. Этот режим
наступает, как известно, после окончания переходного процесса.
В этом режиме управляемая величина и сигнал ошибки имеют
только вынужденную составляющую.
В зависимости от свойств системы и точки приложения внеш-
него воздействия вынужденная составляющая сигнала ошибки ли-
бо равна постоянной величине, либо неограниченно возрастает.
Постоянную вынужденную составляющую можно определить при
помощи теоремы о конечном значении оригинала. Возрастающую
вынужденную составляющую находят при помощи метода коэф-
фициентов ошибок.
Постоянные составляющие сигнала ошибки определяем по
следующей методике: находим установившееся значение сигнала
ошибки типовой одноконтурной системы управления (рис. 31.15)
при изменении внешних воздействий x3(t) и >’„(/) по закону сту-
пенчатой функции
х3(/) = ц01(') (31-115)
и по закону степенной функции
х3(/) = о^1(/). (<? = 1:2:3; ...). (31.116)
Пусть передаточная функция регулятора имеет вид
632
^(p)=—p^’ oil 17)
р р
а объекта
01.118)
где множители llzp(/?) и W*(р) при р—>0 стремятся к единице.
Показатели vp и v0 характеризуют порядок статизма регуля-
тора и объекта.
Согласно выражениям (31.117) и (31.118) передаточная функ-
ция разомкнутого контура имеет вид
(31.119)
где к = кркп - передаточный коэффициент разомкнутого контура;
v-vp + v0 - порядок статизма контура; fV(p) = Wp (p)W„ (/?) -
множитель, который при р —э 0 стремится к единице.
Типовая система управления называется астатической v-ro
порядка, если ее регулятор обладает астатизмом v-ro порядка, то
есть содержит v интегрирующих звеньев. В промышленной авто-
матике обычно используются системы с V, равной 1 и 2. Астатиче-
скими являются системы с И-, ПИ- и ПИД-регуляторами.
Подставив передаточные функции (31.117) и (31.118) в выраже-
ние (31.96), получим изображение сигнала ошибки типовой системы:
£(р) = х3 (р)-pV — + к (р) Р ' k°W° . (31.120)
> +kW*(p) W,Pv + kW\p)
Из выражения (31.119) следует, что составляющая £3, обу-
словленная изменением задающего воздействия х3, зависит от об-
щего порядка статизма v, а составляющая £в, обусловленная изме-
нением возмущающего воздействия ув, зависит только от порядка
астатизма регулятора.
Установившееся значение сигнала ошибки определяем, ис-
пользуя теорему о конечном значении оригинала (см. табл. 29.2);
lim £(/)= lim/?£(/?). (31.121)
t—р—>0
Знаменатели обоих слагаемых в выражении (31.120) при
р —> 0 стремятся к 1 + к (при v = 0) или к значению к (при v > 0).
633
Предельное значение числителей зависит от вида функций х3(г) и
ув(/) и показателей астатизма vc и vp.
Если подставить вместо х3(?) и ув(г) в формуле (31.120) изо-
бражения ступенчатой функции
хз(р) = Ув(р)=у (31.122)
или степенной функции
xM = yB(p}=-j^Aq = 1;2;...), (31.123)
то можно найти установившиеся значения сигнала ошибки.
Установившиеся значения составляющих Е3 и Ев для ряда
распространенных случаев (<? = 0; 1; 2 и v =0; 1; 2) приведены в
табл. 31.2.
Таблица 31.2
Установившиеся значения ошибки типовой системы (рис. 31.22)
С оставляющая сигнала ошибки Порядок астатизма Вид воздействия
аоф) «2^1(0
и = 0 «0 l + /< oo oo
и = 1 0 al к oo
и = 2 0 0 к
vp=0,vo=0 д(Ло l + /c oo OO
vp=0,vo=l «0 *p oo oo
£в Vp =l,v0 =0 0 «1 kp oo
Vp = l, Vo=l 0 al kp oo
^P=2,vo = 0 0 0 2n2 к
На основании анализа приведенных результатов можно сфор-
мулировать общие правила:
634
1. Если суммарный порядок астатизма типовой системы равен
показателю q степенного задающего воздействия, то система в ус-
тановившемся режиме имеет ошибку воспроизведения
a q\
£,(«>) = —-— = const,
которая тем меньше, чем больше передаточный коэффициент ра-
зомкнутого контура системы.
2. Постоянная ошибка подавления £в(°°), возникающая в ус-
тановившемся режиме при q - vp, обратно пропорциональна пере-
даточному коэффициенту регулятора.
3. Если порядок астатизма vp регулятора больше показателя q воз-
действия, то установившиеся значения ошибок: Е3 (°°) = 0 и Ев (°°) = 0.
4. Если порядок астатизма vp меньше показателя q, то
6’з(оо)“о° и 6’в(оо) = о°-
Сформулированные правила иллюстрируются установивши-
мися участками переходных функций статической (v = 0) и астати-
ческой ( v = 1 и v = 2) систем при ступенчатом изменении задающе-
го воздействия (рис. 31.23 а) и линейно нарастающим задающим
воздействием (рис. 31.23 б).
Рис. 31.23. Переходные процессы в статической и астатической системах
при ступенчатом (а) и линейном (б) изменении задающего воздействия
635
Пример 31.9. Определим установившееся значение сигнала
ошибки типовой системы (рис. 31.15) при изменении задающего
воздействия по закону
x3(z) = 20z2l(z). (31.124)
Пусть передаточная функция разомкнутого контура
W(p) = -y-------^77-------7- (31.125)
р2(Г1Р + 1)(Г2р + 1)
В данном случае показатель воздействия q = 2, порядок аста-
тизма системы v = 2, поэтому согласно табл. 31.2 установившаяся
ошибка воспроизведения
£в(~) = — = ^^ = 4. (31.126)
к 10 V 2
31.7.4. Точность при движении по гармоническому закону
Такой режим используется весьма часто, так как он позволяет
наиболее полно оценить динамические свойства системы регули-
рования. Задающее воздействие принимается в следующем виде
*з(') = *зтаХ81п(М- (31.127)
Возмущающее воздействие рассматривается в таком режиме
постоянным. Это приводит к появлению некоторой статической
ошибки.
Рассмотрим составляющую ошибки, определяемую только за-
дающим воздействием:
Е(р) =----(31.128)
V ’ 1 + 1Р(р) 2
В линейной системе при задающем воздействии (31.127)
ошибка в установившемся режиме также будет меняться по гармо-
ническому закону с частотой (Ок:
£(/) = £maxsin(^r + <?’)- (31.129)
Точность работы системы в этом режиме может быть оценена
по амплитуде ошибки, найденной подстановкой р = Ja)k в выраже-
ние (31.128)
_ з max
f ~
^max
|1+^(м)Г
(31.130)
Обычно режим гармонического воздействия рассматривается
636
для низких частот шк, в которых разомкнутая система имеет боль-
шой коэффициент передачи W (ja>k)»1. Поэтому знаменатель вы-
ражения (31.130) значительно больше единицы и с большой точно-
стью выражение можно записать приближенным
с ~ з max з max
j-
(31.131)
где ) - модуль частотной характеристики разомкнутой систе-
мы При (О = О)к.
Эта формула позволяет легко вычислить амплитуду ошибки в
установившемся режиме. Для этого необходимо располагать либо
аналитическим выражением для передаточной функции разомкну-
той системы, либо иметь экспериментальную амплитудную частот-
ную характеристику разомкнутой системы.
Формула (31.131) широко используется при расчете систем
методом логарифмических частотных характеристик. В этом слу-
чае модуль А(в)к) в децибелах,
то есть L(a>k) = 20 )), ра-
вен ординате ЛАХ при частоте
0) = а)к (рис. 31.24).
Простота выражения (31.131)
позволяет легко решить обрат-
ную задачу — задачу синтеза, то
есть сформулировать требования
к ЛАХ, которые необходимо вы-
полнить, чтобы амплитуда ошиб-
ки в установившемся режиме
была не больше заданной. Для
Рис. 31.24. Расчет ошибки регулиро-
вания по амплитудной частотной ха-
рактеристике разомкнутой системы
этого необходимо по заданному значению амплитуды задающего
воздействия и допустимой ошибке fmax вычислить требуемое
значение модуля частотной характеристики разомкнутой системы в
децибелах:
L(fi)k) = 201g А(а)к) = 201g . (31.132)
^max
Значение модуля необходимо отложить на логарифмической
сетке при частоте управляющего воздействия а> =(ок. Полученная
точка Ак обычно называется контрольной (рис. 31.25).
637
Рис. 31.25. Синтез амплитудной частотной
характеристики разомкнутой системы
Для того чтобы амплитуда ошибки в системе не превосходила
допустимого значения £™к, ЛАХ должна пройти не ниже кон-
трольной точки Ак. Если ЛАХ пройдет через эту точку, то амплиту-
да ошибки будет как раз равна допустимому значению. Все что ле-
вее и ниже точки Ак является запретной областью для амплитудной
характеристики - ошибка регулирования не будет удовлетворять
заданным требованиям.
Такой способ расчета системы на основании взаимного распо-
ложения контрольной точки и амплитудной частотной характери-
стики можно использовать и для статических систем. В этом случае
предполагается, что контрольная точка Ак будет иметь координаты
(O=ct)k = 0 и коэффициент в соответствии с формулой статической
ошибки (31.129)
Z(0) = 201g^(0) = 201g^-. (31.133)
^ст
Глава 32
СИНТЕЗ И ЦИФРОВОЕ МОДЕЛИРОВАНИЕ
СИСТЕМЫ УПРАВЛЕНИЯ
32.1. Основные понятия о синтезе систем управления
Все математические задачи, решаемые в теории автоматиче-
ского управления, можно объединить в два больших класса — зада-
чи анализа и синтеза. В задачах анализа полностью известна струк-
тура системы, заданы все ее параметры и требуется оценить какие-
либо ее статические или динамические характеристики. К задачам
анализа относятся, например, расчет точности в установившихся
режимах, определение устойчивости, оценка качества системы. За-
дачи синтеза можно рассматривать как обратные задачам анализа —
в них требуется определить структуру и параметры системы по за-
данным показателям качества. Простейшими задачами синтеза яв-
ляются, например, задача определения передаточного коэффициен-
та разомкнутого контура по заданной ошибке или условие мини-
мума интегральной оценки.
Синтезом автоматической системы называют процедуру опре-
деления рациональной структуры системы и оптимальных значе-
ний параметров ее отдельных звеньев, при которых обеспечивают-
ся требуемые показатели качества системы в целом.
В более узком смысле под синтезом обычно понимают инже-
нерную задачу, заключающуюся в выборе типа и расчете парамет-
ров корректирующих устройств, обеспечивающих требуемые ста-
тические и динамические характеристики. Сначала, исходя из тре-
бований к назначению системы и учитывая условия ее работы, вы-
бирают функционально необходимые элементы: исполнительное
механизм ИМ, усилительное устройство У и датчики Дь Д2 и Д3
(рис. 32.1). Эти элементы вместе с объектом управления ОУ обра-
639
зуют «неизменяемую часть системы». Затем на основании требова-
ний к статическим и динамическим свойствам системы определяют
ее «изменяемую часть», в которую входят корректирующие уст-
ройства.
Корректирующие устройства это элементы с легко изменяемы-
ми параметрами и характеристиками, которые вводятся в систему
для придания требуемых динамических и статических свойств. Кор-
ректирующие устройства включают в систему по-разному. Это мо-
жет быть устройство, включенное последовательно в прямой канал
КУ| (см. рис. 32.1) или устройство, охватывающее обратной связью
часть элементов системы КУ2, в таком варианте оно называется па-
раллельным. Кроме этого для повышения точности системы в сис-
тему может быть включено компенсирующее устройство КУ3, уст-
раняющее и ли уменьшающее действие возмущения. Техническая
реализация этой части осуществляется с использованием стандарт-
ных унифицированных регуляторов. Часто для получения требуемо-
го качества системы выбор структуры и параметров корректирую-
щих устройств приходится выполнять несколько раз. Окончательно
решение о структуре системы принимается, как правило, на основе
компромисса между точностью и качеством, с одной стороны, и
простотой и надежностью, с другой. После решения задачи синтеза
обычно выполняют анализ синтезированной системы.
Рис. 32.1. Функциональная схема синтезируемой системы
автоматического управления
640
На всех этапах синтеза и анализа систем целесообразно приме-
нение вычислительных машин. Моделирование систем на ЦВМ по-
зволяет исследовать большое количество вариантов структур и па-
раметров, учесть нелинейные, импульсные, цифровые звенья систе-
мы и тем самым существенно ускорить решение задачи синтеза.
Наиболее ответственным этапом и наименее подверженным
машинным методам проектирования является выбор структуры
корректирующих устройств, здесь существенную роль играет опыт
проектировщика, его профессиональная подготовка. После этого
выполняется цифровое моделирование полученной системы, кото-
рое может выполняться с учетом всех существенных нелинейно-
стей. Однако моделирование нельзя использовать в отрыве от ана-
литических исследований полученных результатов или упрощен-
ных моделей системы. В отличие от моделирования аналитические
методы исследуют вопросы повышения качества системы в общем
виде. Они позволяют обеспечить оптимальное решение, уменьша-
ют количество просмотренных вариантов при моделировании.
32.2. Общие принципы синтеза систем управления
32.2.7. Идеальная структура системы
Для решения задачи синтеза должны быть известны переда-
точная функция Wo(p) объекта управления, входные и возмущаю-
щие воздействия хв и у„, действующие на объект (см. рис. 31.15).
В простейшем случае, когда возмущающие воздействия на
объект, отсутствуют управление можно осуществлять по разомкну-
той схеме (рис. 32.2 а). Если при этом передаточную функцию
1Еу(р) управляющего устройства принять
= (32. D
то обеспечится полная (структурная) компенсация инерционности
объекта, и система управления будет мгновенно воспроизводить на
выходе объекта задающее воздействие /
При действии возмущения /, которое поддается измерению,
теоретически можно синтезировать идеальную разомкнутую сис-
тему с полной компенсацией возмущения (32.2 б). При этом пере-
даточная функция управляющего устройства (32.1) оказывается
наилучшей и для компенсации возмущения f Действительно, при
641
равенстве Wy(p)- Wo(p) = 1 возмущение f будет полностью уравно-
вешено.
Однако измерение возмущений представляет собой сложную
задачу, подчас невыполнимую, да и кроме этого обычно на систему
действует не одно, а несколько возмущений, измерить которые не-
возможно. Поэтому систему управления приходится строить с ис-
пользованием обратных связей. Полную компенсацию всех возму-
щений и инерционностей объекта можно выполнить при помощи
отрицательной обратной связи, если управляющее устройство бу-
дет иметь бесконечный коэффициент усиления (рис. 32.3). Дейст-
вительно, как не трудно убедиться передаточная функция замкну-
той системы с единичной обратной связью и бесконечным коэффи-
циентом усиления управляющего устройства будет равна
единице, то есть в каждый момент времени выходной сигнал в точ-
ности повторяет входной.
Рис. 32.2. Идеальная структура разомкнутой системы
Рис. 32.3. Идеальная структура замкнутой системы
Так как выполнить теоретические условия ку = °° физически
невозможно, на практике применяют частичную (параметриче-
скую) компенсацию инерционности: устраняют влияние одной-
двух обычно самых больших постоянных времени объекта. Для
этого последовательно с инерционным объектом
W0(p) =----------------, (32.2)
(1 + То1р)-(1 + Го2р)-...-(1 + То„р)
642
где Го|, ТО2, ... То„, - постоянные времени неизменяемой части сис-
темы, при этом То\> ТО2> ...>ТО„2, включают корректирующее уст-
ройство в виде форсирующего звена первого второго порядка с пе-
редаточной функцией
WK(p) = ky(l + TKlp) (1 + Гк2р), (32.3)
у которого постоянные времени должны быть равны большим по-
стоянным времени объекта
?К1= ТоЬ ?к2= ТО2-
Коэффициент усиления корректирующего устройства дол-
жен быть как можно больше, что определяется условиями устой-
чивости полученной системы.
Нетрудно убедиться, что при такой компенсации инерцион-
ности в замкнутой системе с единичной обратно связью устраня-
ется влияние больших постоянных времени T(,i и Г(,2. При малых
частотах передаточная функция системы близка к единице, ска-
зывается только влияние малых постоянных времени 7))3, ... То„.
Следует заметить, что практическая реализация систем с иде-
альной структурой и применение метода компенсации инерцион-
ности связаны с определенными техническими ограничениями и
препятствиями, которые не всегда могут быть преодолены. В част-
ности, невозможно точно реализовать обратную передаточную
функцию объекта (32.1), большой коэффициент усиления ку, фор-
сирующие звенья вида (32.3). Тем не менее, несмотря на невоз-
можность практической реализации систем с идеальной структурой
эти системы являются теоретическим пределом, к которому необ-
ходимо стремиться при синтезе высококачественных систем управ-
ления. В соответствии с идеальной структурой можно сформулиро-
вать основной принцип синтеза систем автоматического управле-
ния: управляющее устройство должно содержать динамическое
звено с передаточной функцией, равной или близкой обратной пе-
редаточной функции объекта.
32.2.2. Синтез корректирующих устройств
по логарифмическим частотным характеристикам
Одним из наиболее простых и удобных методов проектирова-
ния системы автоматического управления является метод синтеза по
логарифмическим частотным характеристикам. Суть метода состоит
в том, что на основе предъявляемых требований к системе синтези-
руют желаемые частотные характеристики, а разность между исход-
643
ними характеристиками и желаемыми определяет структуру и па-
раметры корректирующего устройства. Если известны временные
показатели качества, предъявляемые к системе, то самой сложной и
ответственной частью этого метода является определение требова-
ний к желаемой частотной характеристике, так как между времен-
ными и частотными показателями качества существует относитель-
но сложная зависимость. Синтез выполняется в три этапа.
1. Построение ЛАЧХ неизменяемой части системы. По
известной передаточной функции Wo(p) неизменяемой части сис-
темы строится асимптотическая ЛАЧХ Ьо(ы). Наиболее часто на
практике встречаются два типа передаточных характеристик:
- последовательное соединение апериодических звеньев
г
л; (л)=---------------------------; (32.4)
° (1 + Г1Р)-(1 + Т2р)-...-(1 + Г„р)
- последовательное соединение интегрирующего и аперио-
дических звеньев
р-(1 + Г1Р)-(1 + Г2р)-...-(1 + Г„р)
2. Построение желаемой ЛАЧХ. Желаемой характеристи-
кой называют асимптотическую ЛАЧХ разомкнутой системы
£ж(<у), имеющей требуемые статические и динамические свойст-
ва. Желаемую частотную характеристику условно делят на три
части: низкочастотную, среднечастотную и высокочастотную.
Построение выполняется на основе требований, предъявляемых к
системе управления.
Построение начинается с низкочастотной области, в которой
положение желаемой ЛАЧХ разомкнутой системы определяется
в основном требованиями по точности работы. Требования по
точности подразделяются на требования по статической и дина-
мической точности (см. п. 31.7).
Для простейшей структуры (см. рис. 31.14), ранее было по-
казано, что полная ошибка регулирования в системе обратно
пропорциональна суммарной передаточной функции объекта
(неизменяемой части) регулятора. В частотной области это пра-
вило можно сформулировать следующим образом: полная ошиб-
ка регулирования обратно пропорциональна амплитудной час-
тотной характеристике разомкнутой системы. Или другими сло-
вами. чем выше коэффициент усиления разомкнутой системы,
тем меньше ошибка регулирования.
644
Как было показано в п. 31.7.4 требование обеспечения необ-
ходимой динамической ошибки системы с передаточной функци-
ей вида (32.4) означает охват амплитудной характеристикой ра-
зомкнутой системы контрольной точки Ак с координатами:
(У = (1)к,
LK = £(шк) =20-lg(^(<yK))= 20-lg(x3niax/fmax ), (32.6)
где fmax - требуемое значение ошибки, хзтах - максимальное
значение входного воздействия.
Для статических систем значение частоты сок = 0, а ошибка
£тах представляет собой статическую ошибку системы.
Например, рассмотрим статическую ошибку системы по вход-
ному воздействию. На рис. 32.4 а приведены ЛАЧХ неизменяемой
части системы (сплошная кривая) для статической системы с ко-
эффициентом усиления Л=10. Статическая ошибка замкнутой сис-
темы при максимальном значении входного сигнала 4max=l со-
ставляет l/k = 0,1. Для получения ошибки по входному воздейст-
вию £тах =0,025 (контрольная точка Ак условно показана на малых
частотах) необходимо увеличить коэффициент усиления разомкну-
той системы до 40 (пунктирная кривая).
Аналогичным образом выдвигаются требования к форме же-
лаемой ЛАЧХ в низкочастотной области и для систем с заданной
динамической точностью. Желаемая характеристика таких сис-
тем (обычно следящих) также должна охватить некоторую кон-
трольную точку Ак, с координатами, определяемыми теми же са-
мыми выражениями (32.6), но в этом случае частота сок отлична
от нуля. Например, при отработке гармонического задающего
воздействия (см. п. 31.7.4) требования по динамической ошибке
предполагают охват ЛАЧХ разомкнутой системы точки Ак (рис.
32.4 б), с координатами (32.6). В этом случае значение fmax пред-
ставляет собой установившееся значение максимальной динами-
ческой ошибки в системе при гармоническом задании.
Еще одним из условий формирования как низкочастотной,
так и среднечастотных частей желаемой ЛАЧХ является упроще-
ние требований к корректирующему устройству, то есть форма
желаемой характеристики ЕЖ((У) должна быть максимально близ-
ка к ЛАЧХ неизменяемой части £о(ш).
Далее необходимо сформировать желаемую ЛАЧХ разомкну-
той системы в среднечастотной области. Среднечастотная состав-
645
ах 20 Зак. 50
ляющая определяет динамические свойства системы — условия ус-
тойчивости и показатели качества переходной характеристики.
Рис. 32.4. Формирование низкочастотной части
желаемой ЛАЧХ системы
Построение этой части желаемой ЛАЧХ начинают с выбора
частоты среза системы wcp. Значение частоты среза определит
время переходного процесса в системе, которое в первом при-
ближении будет равно
^=(1...2)-2л/(УСр.
646
Из заданного времени переходного процесса рассчитывают
приближенное значение частоты среза. Чем больше частота шср,
тем меньше время процесса.
После этого в среднечастотной области через точку шср про-
водится асимптота с наклоном -20 дБ/дек (рис. 32.5). При боль-
шем наклоне обеспечить будет трудно обеспечить устойчивость
системы. Протяженность этого участка с единичным наклоном
определяется необходимым перерегулированием в системе. Чем
этот участок будет больше, тем большие запасы устойчивости
будут обеспечены и соответственно будет меньшее перерегули-
рование. Контроль устойчивости выполняется по значению запа-
са по фазе, который обычно находится в пределах А<р > 30...60°.
Если запас по фазе меньше требуемого значения, то уменьшают
область действия низкочастотной части. С другой стороны, чем
большую область занимает низкочастотная составляющая, тем
лучше системы отрабатывает входные воздействия.
Рис. 32.5. Синтез желаемой ЛАЧХ системы
Высокочастотная часть желаемой ЛАЧХ системы мало влия-
ет на ее свойства, поэтому ее обычно выбирают с минимальными
изменениями исходной характеристики системы.
647
3. Выбор корректирующего устройства. Из сравнения
ЛАЧХ неизменяемой части системы и желаемой рассчитываются
частотные характеристики корректирующего устройства. Наиболее
просто выполняется синтез последовательного корректирующего
устройства - ЛАЧХ может быть найдена как разность характери-
стик L.Jco) и Lo(ib). Используя стандартные типовые П-, И-, ПИ- и
ПИД-регуляторы на основе полученной ЛАЧХ последовательного
корректирующего устройства выполняется выбор его структуры и
параметров. Следует отметить, что иногда вместо последовательно-
го корректирующего устройства проще использовать параллельное.
Так как выбор типа и параметров корректирующего устрой-
ства обычно выполняется приближенно, то после расчета необ-
ходимо выполнить проверку полученных качественных показа-
телей системы. Проверку проще всего выполнить цифровым мо-
делированием. При существенном невыполнении требований к
системе — по перерегулированию, точности времени переходного
процесса - необходимо изменить параметры, а при необходимо-
сти и структуру корректирующего устройства.
Пример 32.1. Неизменяемая часть системы описывается пе-
редаточной функцией
Wo (р) =-------------------------------•
0 (1 + 0,05 /Д • (1 + 0,01р) • (1 + 0,003р)
Требуется выбрать последовательное корректирующее уст-
ройство, обеспечивающее статическую ошибку в замкнутой систе-
ме равную Стах = 0,1 при единичном максимальном значении за-
дающего воздействия х3 max = 1.
Расчет начнем с построения ЛАЧХ неизменяемой части сис-
темы (рис. 32.6), у которой наклон амплитудной частотной харак-
теристики меняется с 0 до -60 дБ/дек.
Далее перейдем к построению желаемой ЛАЧХ. Контрольная
точка Ак имеет координаты
(Ук —> 0,
LK =£(0)=20-lg(^(0))=20-lg(x3max/Emax)=20-lg(l/0,l)=20 дБ.
В низкочастотной области желаемая ЛАЧХ должна пройти
выше точки Ак. Если форму желаемой ЛАЧХ оставить без измене-
ния, обеспечив при этом простоту реализации корректирующего
устройства (см. ЛАЧХ £ж| на рис. 32.6), то на частоте среза (Уср| ра-
зомкнутая система имеет наклон амплитудной характеристики
—40 дБ/дек. Полученная система будет колебательной, но устойчи-
648
вой, запас по фазе на частоте среза <уср| ~ 125 рад/с составит
А<р ~ 30° (разность между желаемой £ж] и исходной Ц, характери-
стиками даст пропорциональное звено LKyi - наиболее простой ва-
риант реализации).
Рис. 32.6. Расчет корректирующих устройств синтезируемой системы
Для повышения устойчивости системы необходимо обеспе-
чить наклон -20дБ/дек в районе частоты среза (характеристика Ьж2
на рис. 32.6). В высокочастотной области характеристику оставим
без изменения. При этом на частоте среза (Уср2 =160 рад/с запас по
фазе составит А<р ~ 70°. Разница между желаемой £ж2 и исходной Lo
амплитудными характеристиками дает частотную характеристику
последовательного корректирующего устройства Лку2. В данном
случае это будет реальное форсирующее звено (пропорционально-
дифференциальный регулятор) с передаточной функцией
(14-0,001/7)
Числитель этой функции (форсирующее звено) обеспечивает
компенсацию одной из инерционностей неизменяемой части. Зна-
менатель выбирается исходя из двух условий: наименьшее влияние
649
21 Зак. 50
на устойчивость замкнутой системы в районе частоты среза и огра-
ничение коэффициента усиления корректирующего звена на высо-
ких частотах
С точки зрения реализации форсирующее звено представляет
собой не самый лучший вариант, так оно подчеркивает сигналы вы-
сокочастотных помех. Так как требований по быстродействию к сис-
теме не предъявляется, то можно получить высокую статическую
точность отработки входных воздействий, выполнив систему астати-
ческой. Для этого в низкочастотной области обеспечим наклон же-
лаемой ЛАЧХ равный -20 дБ/дек (характеристика £ж3 на рис. 32.6). В
среднечастотной области полученная система уже имеет требуемый
наклон, поэтому коррекции в этой части не требуется. Характери-
стика корректирующего устройства для этого варианта реализации
£к3 представляет собой изодромное звено (ПИ-регулятор). Запас по
фазе А<р ~ 70° на частоте среза wcp2 ~ 40 рад/с достаточен для полу-
чения необходимой устойчивости системы. Передаточная функция
полученного корректирующего устройства равна
к3 0,05р
На рис 32 7 представлены результаты цифрового моделирова-
ния переходных характеристик в рассмотренных трех вариантах
построения корректирующего устройства. Система с пропорцио-
нальным звеном в корректирующем устройстве имеет наибольшую
колебательность (кривая 1). Наилучшие показатели по быстродей-
ствию и колебательности обеспечивает второй вариант реализации
с реальным форсирующим звеном (кривая 2). Система с изодром-
ным звеном (кривая 3), с одной стороны, имеет наибольшее время
переходного процесса, но с другой — обеспечивает нулевую стати-
ческую ошибку.
Рис. 32.7. Переходные характеристики для вариантов исполнения
корректирующего устройства синтезируемой системы
650
Последовательная и параллельная коррекция. Корректи-
рующее устройство включается в систему управления по-разному,
возможно последовательное включение устройства в прямой канал
или параллельное включение. На рис. 32.8 представлены структур,
ные схемы системы с различными вариантами корректирующих
устройств. Последовательные корректирующие устройства наибо-
лее просты при расчете и их удобно использовать в системе когда
имеется электрический сигнал в виде напряжения постоянного то-
ка, величина которого пропорциональна ошибке регулирования.
Такие корректирующие устройства были подробно рассмотрены
ранее. Применение параллельных корректирующих устройств
предполагает ввод обратных связей, обычно отрицательных, кото-
рые охватывают один или несколько элементов прямого канала
системы. Этот тип корректирующего устройства иногда ецде назы-
вают местными обратными связями.
Рис. 32.8. Структурные схемы системы с последовательным
и параллельным корректирующими устройствами
Передаточная функция цепи с параллельной коррекцией равна
i + if02(p)»;,(p)
Обычно в наиболее существенном для качества системы диа-
пазоне малых и средних частот верно неравенство
» 1
и поэтому
^02 .
^ку(^)
21*
651
Таким образом, свойства участка цепи системы с параллель-
ным корректирующим устройством определяются лишь свойства-
ми этого корректирующего устройства.
Параллельные корректирующие устройства подразделяются на
жесткие и гибкие. Жесткая обратная связь влияет на работу систе-
мы, как в переходном режиме, так и установившемся и реализуется
безынерционным или инерционным звеньями. Чаще всего жесткая
обратная связь используется для уменьшения постоянных времени
звеньев цепи с большими инерционностями. Если жесткая обратная
связь охватывает апериодическое звено (рис. 32.9), то результи-
рующая ЛАЧХ будет иметь меньшую постоянную времени. Одно-
временно уменьшается и коэффициент усиления звена.
Рис. 32.9. Применение жесткой обратной связи
для уменьшения постоянной времени
Действительно,
w (р)- Ь^ + Ър) __ к2 _ К
3 I + ^2/(l + r2p) 1 + ккук2 + Т2р 1 + Тэр'
где кэ = к2 /(1 +к2 кКу), Т3=Т2 /(1 + к2 Аку).
Аналогичным образом можно рассмотреть варианты влияния
жесткой на обратной связи на другие элементы. Так, например, ох-
ват жесткой обратной связью интегрирующего звена превращает
его в инерционное звено. Кроме этого, местные обратные связи
снижают влияние нелинейных характеристик, уменьшают чувстви-
тельность системы к изменению параметров элементов, охвачен-
ных обратной связью.
Гибкая обратная связь действует лишь в переходных режи-
мах. Обычно она реализуется на дифференцирующем или реально
дифференцирующем звеньях. Рассмотрим вариант применения
гибкой обратной связи при компенсации апериодического звена
(рис. 32.10).
652
L(o)
Рис. 32.10. Применение гибкой обратной связи
l/л 1/Ткуг l/r2
I I ।
О)
Передаточная функция звена с параллельным корректирую-
щим устройством будет равно
^з(р) =
^1/(1+ 7]р)___________
1 +_____________________________________+ T’l/’Xl + ^кУ2Р)]
^10 + Гку2Р) *10 + ^ку2Р)
(1 + TjpXl + Т’кугР) + klT«ylP 0 + Л1РХ1 + Гз2Р)
Гибкая обратная связь не изменяет коэффициент усиления
апериодического звена на низких и высоких частотах (кривая £3(ш)
на рис. 3.10). На средних частотах происходит трансформация ха-
рактеристики - она становится аналогичной характеристике изо-
дромного звена. С одной стороны, результирующая характеристика
имеет нулевой наклон, что облегчит условия устойчивости при на-
стройке основного контур системы. С другой, амплитудная харак-
теристика на частотах сопряжения низких и средних частот имеет
наклон -20 дБ/дек, что обеспечит высокий коэффициент усиления
разомкнутой системы на малых частотах. Следовательно, в данном
случае гибкая обратная связь эквивалентна вводу в прямой канал
изодромного звена.
Из этих простейших примеров можно заключить, что парал-
лельные корректирующие устройства могут существенно изменить
свойства элементов системы. Еще больший эффект дают сложные
и положительные обратные связи. Параллельные корректирующие
устройства позволяют уменьшить влияние нестабильности и нели-
нейности характеристик отдельных элементов на динамические
свойства всей системы в целом.
653
32.2.3. Инвариантность
и комбинированные системы управления
Одним из способов получения высокой точности в системах
управления является использование теории инвариантности и ком-
бинированного управления. Теория инвариантности является од-
ним из разделов теории автоматического управления, в котором
решается задача синтеза системы с целью повышения точности.
При выполнении условий инвариантности достигается независи-
мость (инвариантность) регулируемой координаты от внешнего
возмущения или точное воспроизведение задающего воздействия.
Система является инвариантной по отношению к задающему
воздействию, если после завершения переходного процесса ошибка
системы не зависит от этого воздействия. Условие абсолютной ин-
вариантности по отношению к задающему воздействию соответст-
вует тому, что передаточная функция по ошибке будет равна нулю.
В иной записи это означает, что замкнутая система имеет переда-
точную функцию, равную единице — система должна иметь беско-
нечную полосу пропускания.
Система управления является инвариантной по отношению к
возмущающему воздействию, если после завершения переходного
процесса регулируемая координата и ошибка системы не зависят от
этого воздействия. Для достижения абсолютной инвариантности от-
носительно возмущающего воздействия необходимо и достаточно,
что бы передаточная функция по возмущению была равна нулю.
В реальных системах условие абсолютной инвариантности
выполнить невозможно, поскольку для этого необходимо выпол-
нять операции идеального дифференцирования высокого порядка.
Поэтому на практике обычно достигается условие частичной инва-
риантности.
Основным методом, используемым при построении инвари-
антных систем, является применение комбинированного управле-
ния. Сущность комбинированного управления заключается в том,
что при построении замкнутых систем наряду с регулированием по
отклонению используется регулирование по задающему или воз-
мущающему воздействиям.
Рассмотрим комбинированную систему управления по задаю-
щему воздействию (рис. 32.11 а).
Передаточная функция замкнутой системы по задающему воз-
действию при регулировании только по отклонению равна
654
^замСР) =
W0(p)
1 + И/0(р)'
При введении инвариантного сигнала по задающему воздейст-
вию передаточная функция замкнутой системы изменится
= (32.7)
зам z \ ’ V /
1 + ^о(р)
где WKC(p) - передаточная функция компенсирующей связи.
Рис. 32.11. Комбинированное управление по задающему воздействию
Из выражения (32.7) видно, что введение регулирования по за-
дающему воздействию не меняет знаменателя передаточной функ-
ции, то есть характеристическое уравнения системы остается
прежним. Таким образом, качественные показатели переходной ха-
рактеристики, условия устойчивости системы при введении ком-
пенсирующей связи по задающему воздействию останутся без из-
менения.
По известным соотношениям выражение (32.7) позволяет най-
ти передаточную функцию по ошибке
^ош (р) = = 1 - ^зам (р) = — (32.8)
х3(р) 1 + №0(р)
655
и эквивалентную передаточную функцию разомкнутой системы
^ам(Р) _*№)-(1+^кс(Р)) (329)
' 1-^эам(Р) 1-^о(Р)-^кс(Р) ‘
Выражение (32.9) позволяет перейти к эквивалентной переда-
точной функции разомкнутой системы 1Гэ(р) и заменить структур-
ную схему системы комбинированного управления эквивалентной
схемой системы с регулированием только по отклонению (рис.
32.116).
Передаточная функция по ошибке (32.8) позволяет определить
условие полной инвариантности системы по задающему воздейст-
вию, а именно
Wm(p) = о или (1 - Wo(p) - Гкс(р)) = 0.
Тогда передаточная функция компенсирующей связи должна
быть обратно пропорциональна передаточной функции исходной
разомкнутой системы
- (32.10)
^о(р)
Разложив выражение (32.10) по возрастающим степеням опе-
ратора р, получим необходимую передаточную функцию по управ-
ляющему воздействию
WKC(p)^k0+kip + k2p2+k33p3+... , (32.11)
где Л, - постоянные коэффициенты.
Таким образом, при введении регулирования по задающему
воздействию для получения полной инвариантности необходимо
вводить первую, вторую и т.д. производные от этого воздействия.
На практике обычно удается реализовать только первую производ-
ную, поэтому может быть получена только частичная инвариант-
ность. Например, при введении производной от задающего воздей-
ствия можно получить нулевую статическую ошибку регулирова-
ния, то есть повысить астатизм системы на единицу. Вводя допол-
нительно вторую производную можно увеличить астатизм системы
на два порядка и т.д.
В общем случае инвариантный сигнал в систему управления
подается не на вход, а через некоторое звено W](p) (рис. 32.11 в).
В этом случае передаточная функция замкнутой системы бу-
дет иметь вид
^0(p)-^(p)-(i + ^KC(p)/^(P))
1 + и;(р)-и!(р)
1И (р)
зам \ г /
(32.12)
656
передаточная функция по ошибке
0Ш 1 + ^о(Р)-^(Р) ’
а эквивалентная передаточная функция разомкнутой системы
w(. = шшо+вдвд
™ э \Р )
(32.13)
(32.14)
1-ед -^кс(р)
Таким образом, условие полной инвариантности (32.10) оста-
нется без изменений - передаточная функция компенсирующей
связи должна быть обратно пропорциональна передаточной функ-
ции 1Го(р) неизменяемой части системы.
Пример 32.2. Рассмотрим комбинированную систему с аста-
тизмом первого порядка, в которой измеряется первая производная
задающего воздействия с коэффициентом /сд(рис. 32.12).
Согласно формуле (32.12) передаточная функция замкнутой
системы
К(1 + 7р)
^зам(Р) л/Тз-Т\ 2а-ТТ
К + р + (Т1+Т2)р +Т\Т2р
где К - коэффициент усиления; К = k0- к\, Т' - постоянная времени;
Т' =кя/к\.
Рис. 32.12. Пример комбинированной системы управления
Передаточная функция по ошибке
(32.15)
К + р + (Т\+Т2)р +Т}Т2р
Скоростная ошибка будет равна нулю при равенстве нулю в
числителе (32.15) коэффициента при операторе р первой степени, то
есть условие частичной инвариантности, определяется выражением
1 .1
Т = — или к = —
К к0
Из (32.14) найдем эквивалентную передаточную функцию ра-
зомкнутой системы
(32.16)
iv3(p) =
K(l + T'p)
Р^ + Т}р)(1 + Т2)-Т'р
При выполнении условия равенства нулю ошибки (32.16) пе-
редаточная функция разомкнутой системы приводится к виду
(Т^Т^+Т^р3 р2(1 + Гр)
где Т'-эквивалентная постоянная времени; Г'=Г]Г2/(Г1+Г2).
Таким образом, эквивалентная передаточная функция разомк-
нутой системы будет соответствовать астатизму второго порядка.
Введение производной по задающему воздействию позволило уве-
личить порядок астатизма на единицу.
Комбинированное управление может быть использовано для
уменьшения ошибки при действии возмущающих воздействий.
Обычно в этом случае компенсируется только главное возмущение,
оказывающее наибольшее влияние на точность работы системы.
На рис. 32.13 приведена структурная схема системы с компен-
сацией влияния возмущения ftp) в системе с регулированием по от-
клонению. Звено с передаточной функцией Wof(p) определяет
влияние возмущения на работу системы. Компенсирующая связь с
передаточной функцией FKKC(p) действует на выходную координату
со знаком, который всегда противоположен знаку влияния возму-
щения Др).
Рис. 32.13. Комбинированное управление по возмущающему воздействию
Передаточная функция по возмущению в замкнутой системе
будет иметь вид
W (р\-_ -^ор(Р)-^кс(Р)-^о(Р) (32 17)
f f(.p) l + ^0(p)-Wt(p) ’
где W0(p), W\(p) - передаточные функции неизменяемой части сис-
темы.
658
Условие полной инвариантности будет получено при условии
ихр) = о.
Это возможно при равенстве нулю числителя правой части
выражения (32.17), то есть
^OF(P)-^Kc(P)-^o(P) = 0. (32.18)
Условие (32.18) означает, что для получения независимости
выходной координаты х(р) от возмущающего воздействия J{p) не-
обходимо, чтобы динамические свойства двух параллельных кана-
лов, по которым действует возмущение ftp), были одинаковыми.
Для этого необходимо обеспечить выполнение равенства
= (32.19)
Обычно инерционность неизменяемой части системы больше,
чем инерционность канала возмущения. Поэтому для выполнения
условия инвариантности (32.19) передаточная функция компенси
рующей связи должна содержать дифференцирующие звенья высо-
кого порядка и может быть представлена в виде ряда (32.11). На
практике используется, как правило, частичная инвариантность при
реализации первых членов этого ряда. Так, например, для статиче-
ской системы условие инвариантности по возмущению требует вы-
полнения равенства
32.3. Структурно-параметрическая оптимизация систем
Наиболее просто выполнить синтез системы можно с использо-
ванием частотных характеристик. Рассчитывая желаемую частотную
характеристику системы и применяя последовательную или парал-
лельную коррекции, существует возможность получения системы с
заданными качественными показателями. Однако в ряде случаев
процесс выбора корректирующих устройств может быть упрощен.
При этом скорректированная система приводится к некоторой фик-
сированной, характеристики которой известны еще на этапе проек-
тирования. Такие методы расчета систем получили название опти-
мумов и наиболее часто на практике используются два критерия:
оптимум по модулю (ОМ) и симметричный оптимум (СО).
659
32.3.1. Модульный оптимум
Система может рассматриваться как оптимальная в динамике
тогда, когда ее амплитудная частотная характеристика пропускает
максимально широкий спектр частот. Иными словами, амплитуд-
ная характеристика должна быть горизонтальной как можно в бо-
лее широком диапазоне частот. Критерий ОМ требует, чтобы замк-
нутая система по своим частотным свойствам приближалась к иде-
альному фильтру низкой частоты: низкие частоты пропускаются
без изменения с единичным коэффициентом усиления вплоть до
частоты среза шср, высокочастотные помехи подавляются с беско-
нечным коэффициентом подавления.
Пусть задана система, передаточная функция которой по за-
дающему воздействию равна
(32 20)
аоР +а}р +... + а„
Очевидно, что система будет пропускать максимально широ-
кий спектр частот, если модуль частотной характеристики |1Г(р)|
будет постоянен для максимально широкого диапазона частот или
когда в точке р =Ja) = 0 максимально большое число производных
модуля частотной характеристики по частоте равно нулю. Поэтому
критерий оптимизации можно записать в таком виде
lim—|^(ую)| = 0. (32.21)
а>—>о dco
Применяя критерий (32.21) к выражению (32.20), получим
соотношения для коэффициентов полиномов числителя и знаме-
нателя:
an-\ ^апап-2 _ ^т-1 2ЬтЬт 2
ап Ьт
^п—2 + ^^и^и-4 _ ^т—2 ~ ^m-l^m-3 + ^/n^m-4 .
«0
^и-3 ~ 2ди-2^и-4 2ди-1Ди-5 ~ _ (32.22)
__ 3 2&m~2^m-4 3~ З.Ьт_\Ьт_с1 2ЬтЬт_е .
bl
660
Если система имеет i свободно назначаемых коэффициентов, то
можно обеспечить выполнение i уравнений и передаточная функция
при указанных условиях будет оптимальной. На практике для дос-
тижения оптимума по модулю стремятся привести исходную скор-
ректированную разомкнутую систему к виду 1 -2, а именно, к после-
довательному соединению интегратора и апериодического звена.
Это обеспечит получение требуемых показателей качества.
Пример 32.3. Рассмотрим простейший пример системы, на-
строенной на ОМ (рис. 32.14). Объект управления представляет со-
бой последовательно соединенные интегратор и апериодическое
звено. Последовательное корректирующее устройство (регулятор)
выбран в виде пропорционального звена с коэффициентом Кп.
Рис. 32.14. Настройка простейшей системы на оптимум по модулю
Передаточная функция замкнутой системы равна
^зам(Р) =
Г]р(Г2р + 1)
1 +
Т\р(Т2р + \)
, т\ Т\Т2 2
14 -р + — 1 2 р
Кп
(32.23)
Изменяемыми параметрами в полученной системе является
только коэффициент усиления регулятора К„ и, согласно соотно-
шению (32.20), значения коэффициентов будут равны: Ло = 0,
Ь\ = 0, А2 = L «о= T\T2IKn , a\=T\/Kn , а2 = 1. По первому равенству
из (32.22) получим
67] 2б7р772 0 0
После подстановки коэффициентов и упрощения выражения полу-
чим значение коэффициента регулятора
Кп=^- (32.24)
272
и в целом передаточная функция замкнутой системы будет равна
^зам(Р)-
________1_______
1 + 2Т2р + 2Т?р2 '
(32.25)
661
На рис. 32.15 а представлены частотные характеристики ра-
зомкнутой и замкнутой системы со следующими параметрами:
Т\ = 0,1 си Г2= 0,05 с. Для сравнения характеристики приведены с
различными параметрами регулятора: с оптимальным значением
Кп= 10 (кривые 2), в два раза меньшим значением (кривые 1) и в
два большим (кривые 3). Максимальные значение амплитудной ха-
рактеристики для первого и второго вариантов не превышают еди-
ничного значения, в то время как для третьего составляет 1,15. В то
же время система с оптимальным значением имеет большую поло-
су пропускания частот, чем для первого варианта. Таким образом,
можно констатировать, что оптимальная настройка (кривые 2 на
рис. 32.15 а) действительно обеспечивает наибольшую равномер-
ную полосу пропускания частот.
Во временной области (см. рис. 32.15 б) система, настроенная
на оптимум по модулю, также обеспечивает наилучшие показатели
662
по величине перерегулирования и времени переходного процесса.
В табл. 32.1 приведены показатели качества рассчитанных трех ва-
риантов системы.
Таблица 32.1
Показатели качества системы, настроенной на оптимум по модулю
Показатели качества 1 вариант 2 вариант 3 вариант
Частота среза разомкну- той системы 0)со, рад/с 5 10 20
Показатель колебательности М, 1 1 1.15
Запас устойчивости по фазе град 76 63 44
Перерегулирование о, % 0 4,3 16,3
Время переходного про- цесса /пп, с (5% от устано- вившегося значения) 0,48 0,21 0,27
Примечание Система с по- ниженным бы- стродействием Оптимум по модулю Система с не- рав1 юмерностью 15% АЧХ
Оптимум по модулю при задающем воздействии (компенса-
ция больших постоянных времени). Рассмотрим выбор параметров
регулятора с настройкой его на оптимум ио модулю для системы
обшего вида, содержащей передаточные функции нескорректиро-
ванной системы Иф и регулятора 1Рр (рис. 32.16).
Рис. 32.16. Настройка системы на оптимум по модулю
Передаточная функция замкнутой системы относительно за-
дающего воздействия равна
^зам-хз(Р)
^Р(Р)-^О(Р)
1 + 1Рр(р) ^0(р)
(32.26)
Очень часто объекты регулирования можно представить в ви-
де последовательно соединенных апериодических звеньев, то есть
удается представить передаточную функцию разомкнутой системы
с разложением на линейные множители:
663
(32.27)
ж, (р)=----------------------------,
(1 + Г|р)(1 + Г2р)-...-(1 + Гир)
где К — коэффициент усиления объекта; 7), Т2 , ..., Т„- постоянные
времени.
Из всех постоянных времени обычно можно выделить одну-
две наибольшие, предполагая остальные постоянные малыми (пара-
зитными). Эти малые постоянные времени возникают вследствие
неидеальности элементов, из-за наличия сглаживающих фильтров и
т.д. Пусть Т\ » Т2, ..., Т„. Тогда выражения (32.26) в низкочастот-
ной области можно приближенно представить следующим образом
1РО G7) =------~,
(l + 7jp).(l + 7ip)
где Ts- сумма малых постоянных времени, Т^ = Т2 + Г3 + ... + Т„.
Настраивая систему на оптимум по модулю, выберем регуля-
тор в виде изодромного звена с передаточной функцией
(32.28)
(32.29)
Гр2Р
Используя выражения (32.26), (32.28) и (32.29), получим пере-
даточную функцию замкнутой системы
К(1 + Тр1)
^зам-« (Р) =------------- х- '-----------—. (32.30)
Гр2р(1 + Г,р)(1 + Т^р) + /С(1 + 7р,р)
Анализ выражения (32.30) и системы уравнений (32.22) позво-
прийти к выводу, что условие оптимума по модулю выполня-
при равенстве постоянных времени Т\ и Тр|, то есть устране-
влияния наибольшей постоянной времени системы. Выбор
ляет
ется
НИИ
второй постоянной времени регулятора Гр2 выполняется исходя из
соотношения
Тр2=2ТгА. (32.31)
Такой выбор постоянной времени Тр2 обеспечивает единичный
наклон амплитудной частотной характеристики разомкнутой сис-
темы в районе частоты среза. Подставляя выбранные значения по-
стоянных времени регулятора в выражение (32.30), получим ре-
зультирующие передаточные функции разомкнутой и замкнутой
систем по задающему воздействию
^Оаз-хз(р) =-------------, (32.32)
раз хз^2 2Т^р-(\ + Т^р) 7
664
^зам-хз(Р)
_______1______
l + 2Txp + 27£p2
(32.33)
Таким образом, разомкнутая система представляет собой по-
следовательно соединенные интегрирующее и апериодическое зве-
нья. При этом в районе частоты среза амплитудная частотная ха-
рактеристика имеет единичный наклон. Частота среза системы
приближенно можно оценить по формуле <Уср = 1/27^, то есть она в
два раза меньше обратной величины от суммы малых постоянных
времени разомкнутой системы. Запас устойчивости по фазе систе-
мы на частоте среза составляет (р = 63°. На рис. 32.17 представлены
амплитудные характеристики системы, настроенной на оптимум по
модулю (кривые 1а, 16 и 1в).
Рис. 32.17. Логарифмические частотные характеристики
при оптимизации систем: 1а, 16, 1в - оптимум по модулю;
2а, 26, 2в - симметричный оптимум (а - разомкнутая система,
б - замкнутая система, в - фазовая характеристика)
665
Если в передаточной функции объекта регулирования необхо-
димо устранить влияние двух больших постоянных времени, то ис-
пользуется ПИД-регулятор, в котором постоянная времени диффе-
ренцирующего канала настраивается на вторую большую постоян-
ную времени. В том случае, когда исходная передаточная функция
W0(p) уже содержит интегрирующее звено в качестве регулятора
при настройке на оптимум по модулю используется П-регулятор.
Если в системе имеется двукратное интегрирование, настройка на
оптимум неосуществима.
Оптимум по модулю при действии возмущений. Оптимум
по модулю может быть использован и для оптимизации переход-
ных процессов при действии возмущений. В этом случае переда-
точная функция по возмущению для замкнутой системы (см. рис.
32.16) имеет вид
W (М- 27^ + 2TzV
Изам- /л/?) .07'2 „2 ’
1 + 2^72 + 27^/2
Возмущающие воздействия подавляются в диапазоне низких
частот 0... сдср. Чем меньше частота, тем больший коэффициент по-
давления обеспечивает замкнутая система. При частотах, превы-
шающих щр, эффективность парирования возмущений мала.
Пример 32.4. Рассмотрим случай компенсации с двумя боль-
шими постоянными времени. Пусть задана передаточная функция
системы (рис. 32.18):
(32.34)
К
(32.35)
17о(р) =
(1 + Ttp)(l + T2p)(l + T3p)
где К = 2,5; Тх = 0,4 с; Т2= 0,1 с; Т3 = 0,02 с.
Таким образом, 7) > Т2> Т3. Регулятор выберем в виде пропор-
ционально-интегрально-дифференциального звена
(1 + Тр1Р)-(1 + Тр3р)
Wp = —т и —
(32.36)
Выбирая равными постоянные времени 7) и Гр1, а также Г2 и
Трз скомпенсируем две наибольшие постоянные времени 7) и Т).
Постоянную времени Тр4 выбираем на порядок меньшей, чем ми-
нимальная из ГР1 и Грз, а постоянную Гр2 рассчитаем по формуле
(32.31) сумму малых постоянных времени 7% = 7з + Тр$. Оконча-
тельно получим следующие параметры регулятора: Гр| = 0,4 с;
Tj,2 = 0,15 с; Грз= 0,1 с; Т’р4= 0,01 с. Разомкнутая и замкнутая систе-
мы в целом будут определяться передаточными функциями (32.32)
666
и (32.33). Амплитудная характеристика разомкнутой системы ап-
проксимируется последовательным соединением интегрального и
апериодического звеньев. Частота среза системы будет в два раза
меньше обратной величины от суммы малых постоянных времени
разомкнутой системы: шср = 1/(27^) = 1/(2(7’3 <-7р4)) ~ 16 рад/с.
Рис. 32.18. Компенсация больших постоянных времени
с оптимизацией системы по модулю
32.3.2. Симметричный оптимум
Критерий симметричного оптимума эффективен при использо-
вании в системах с замедлением по каналу входного или возмущаю-
щего воздействий, а также при построении астатических систем.
Пусть задана система, в которой объект управления в переда-
точной функции имеет интегрирующее звено, и возмущающее воз-
действие приложено до объекта (рис. 32.19). Необходимо обеспе-
чить нулевую статическую ошибку при приложении возмущения
/=Уо= const.
Рис. 32.19. Настройка системы на симметричный оптимум
667
Обычно передаточная функция объекта управления помимо
интегратора содержит апериодические звенья:
(р) =------------------------------=--------------, (32.37)
р-(1 + Т{р)-(\ + Т2р)-....(} + Тпр) " /
рПО + ^р)
i=0
где 1\» Т2 Т„.
Проанализируем значение статической ошибки при выборе ре-
гулятора в виде пропорционального звена lVp(p)=Klt. При постоян-
ном значении задающего воздействия х, = const и отсутствии воз-
мущения f = 0 ошибка в системе будет нулевая — это свойство
обеспечивает интегрирующее звено в объекте. Действительно, зна-
чение ошибки регулирования по каналу входного воздействия оп-
ределяется передаточной функцией
WX3-M = ^^- =
Х,\р} i + KnWo(p)
р- П(1+?;./>)
----,=0 ------------, (32.38)
р-П(1 + 7]р) + Хп/С
1=0
1
и при р = 0 значение ошибки будет равно И^дфО) = 0.
Однако при приложении постоянной нагрузки значение вы-
ходной координаты будет отличаться от сигнала задания, величина
статической ошибки будет пропорциональна величине возмущаю-
щего воздействия f
х(р) = №о(р)
f(p) l + Kn-FF0(p)
------------------------, (32.39)
p-Y[(l + TiP) + Kn-K
1=0
В статике передаточная функция примет значение Д^х(0)=1/Хп
и соответственно ошибка будет отлична от нуля и пропорциональ-
на величине возмущения.
В целях получения нулевой статической ошибки по возмуще-
нию необходимо в регулятор ввести интегрирующий канал. Выбе-
рем регулятор в виде изодромного звена (32.29) и тогда передаточ-
ная функция разомкнутой системы будет содержать два интегри-
рующих звена. Как уже говорилось ранее, двукратно интегрирую-
щую систему нельзя настроить на оптимум по модулю. В этом слу-
чае используется симметричный оптимум.
Представим передаточную функцию изодромного звена в виде
суммы пропорционального и интегрального каналов:
668
(1 + Т ,р) |
Wp(P) = — Р‘ =кп +—. (32.40)
Тр2Р ТкР
где Кп - коэффициент пропорционального канала; Kn = Tpi/Tpp,
Тк- постоянная времени интегрального канала; Ги= 1/Гр2.
Синтез рассматриваемой системы проще всего выполнить в
два этапа:
Этап 1. Расчет оптимальной системы по модулю, при котором
выбирается пропорциональный канал регулятора К,,. В первом при-
ближении передаточную функцию объекта можно представить в виде
где — сумма малых постоянных времени объекта; Т^= 7\ + 1\ +
+...+Т„.
Используя выражения (32.26) и (32.41) получим передаточную
функцию замкнутой системы относительно входного воздействия
"------ (32.42)
ИСям_„(р) =
зам " р(1 + 1±р) + К-Кп
При оптимизации системы по модулю согласно выражению
(32.41) необходимо обеспечить выполнение равенства 1/(Кп-К) =2Т^
и, следовательно,
После этого передаточные функции разомкнутой и замкнутых
систем будут определяться выражениями (32.32) и (32.33), а часто-
та среза той же формулой, что и ранее: <wcp = 1 / 27^.
Этап 2. Выбор постоянной времени интегрального канала Ти.
Для получения устойчивой системы амплитудная частозная характе-
ристика разомкнутой системы должна иметь единичный наклон в
районе частоты среза. Для этого постоянную времени 7^ форсирую-
щего звена регулятора выбирают в два раза большей значения 1/<дср:
*—= 4-7^. (32.44)
2'Чр
И тогда постоянная времени интегрального канала регулятора
будет равна
Т’
^=7р2=-Г- = 8-^ (32-45)
669
Результирующие передаточные функции разомкнутой и замк-
нутой систем по каналу задающего воздействия при настройке на
симметричный оптимум будут равны
1 + 4?кР
^раз-хз(/’) гг 2’
(1 + Т^р} (2а/27^/>)
1 + 4Г£р
(32.46)
(32.47)
W 1п) =
Зам’” 1+ 47^ + 87^/?+8ГХ3/?’
а по каналу возмущающего воздействия
w ^Р2+8т1р3
™~f \ + ^р + зт1р2+^р3
Таким образом, разомкнутую систему можно представить по-
следовательным соединением интегратора второго порядка и фор-
сирующего звена. Полученные амплитудные частотные характери-
стики разомкнутой и замкнутых систем представлены на рис. 32.17
(кривые 2а и 26). АЧХ разомкнутой системы симметрична относи-
тельно точки пересечения с осью частот, откуда и появилось назва-
ние симметричного оптимума.
Различие между оптимумом по модулю и симметричным ста-
новится ясным из сравнения частотных характеристик. Разомкну-
тые характеристики совпадают в высоко- и среднечастотных облас-
тях (кривые 1а и 2а на рис. 32.17). В низкочастотной области спек-
тра симметричный оптимум обеспечивает больший коэффициент
усиления. Это, с одной стороны, позволяет получить меньшие ди-
намические ошибки регулирования по входу, с другой уменьшает
запас устойчивости по фазе с 63° до 42°. Соответственно система
становится более колебательной - значение показателя колебатель-
ности для СО составляет М = 1,15 (М = 1 для ОМ). Следует отме-
тить, что в системе с симметричным оптимумом любое изменение
коэффициента усиления (как его увеличение, так и уменьшение от-
носительно оптимального значения) ведет к уменьшению запаса
устойчивости по фазе.
Пример 32.5. Рассчитать параметры регуляторов с оптимизацией
по ОМ и СО для системы, представленной структурной схемой рис.
32.19 и имеющей передаточную функцию объекта регулирования
10
Wo(p) =
/>• (1+ 0,0 !/>)(! +0,003/>)
Такая передаточная функция характерна для контура регули-
рования тока в электроприводах постоянного тока (не учитывается
670
влияние обратной связи по противоЭДС). Сравнить показатели в
частотной и временной областях при действии входного воздейст-
вия х3= 1 и возмущающего/= 0,5.
Вариант 1. Рассмотрим регулятор, частотная характеристика
которого оптимизирована по модулю. Так как объект уже содержит
интегратор, то регулятор с ОМ выбирается пропорционального типа
Wv{p) = Kn.
Рассчитаем суммарное значение малых постоянных времени
7^ = 0,01 + 0,003 = 0,013 с. Частота среза разомкнутой системы
щср = 1/2TS = 38 рад/с. Используя формулы (32.42) и (32.43) рассчи-
таем значение коэффициента усиления регулятора
К - 1 - 1 ~38
п 27±К 2-0,013-10 ’
Передаточные функции разомкнутой и замкнутых систем бу-
(32.48)
дут равны
^паз-ЛР) =--------------------- Г32.49)
раз «?+? 0,026/?-(1 + 0,013/?)
И
^зам-лз (Р) =--------------------' (32.50)
зам " 1 + 0,026/?-(1+0,013/?)
Статическая ошибка регулирования по каналу входного воздей-
ствия равна нулю, а по каналу возмущения Дх = f /Кп= 0,5/3,8 = 0,17.
Вариант 2. Рассмотрим регулятор, настроенный на симмет-
ричный оптимум. Передаточную функцию его выберем в виде изо-
дромного звена (32.29), что обеспечит отрицательной двойной на-
клон амплитудной характеристики на низких частотах. По первому
этапу расчета регулятора значение коэффициента усиления про-
порционального канала будет аналогично (32.48): = 0,013 с;
Кп = = 3,8; ct?ep= 1/2Г£= 38 рад/с.
Согласно формулам (32.44) и (32.45) постоянные времени изо-
дромного звена равны:
ГР1 = 47^ = 0,052,
7р2=8-10-712 = 0,014.
Передаточные функции разомкнутой и замкнутых систем бу-
дут равны
1 + 0,052/?
^паз-хз (Т7) =---------------------+ ’
р (1+ 0,014/?)-(0,037/?)2
671
W _ (p) =-------------- p------------------
зам X3 ’ 1 + 0.052/? + 0.0014/?2+2,2-10“6/?3
Статическая ошибка регулирования как по каналу входного
воздействия, так и каналу возмущения равны нулю: Дх = f /К„ =
=0,5К = 0.
На рис. 32.20 представлены модель рассматриваемой системы,
частотные характеристики и переходные процессы.
0 0,5 Г,с
Рис. 32.20. Сравнение показателей системы с оптимумом по модулю
и симметричным оптимумом: а - модель; б - амплитудные частотные
характеристики; в — переходные характеристики
672
Частотные характеристики системы (см. рис. 32.20 б) с сим-
метричным оптимумом имеют больший коэффициент усиления на
низких частотах (кривая 2а), большее значение показателя колеба-
тельности (кривая 26) и меньшие коэффициенты передачи по кана-
лу возмущения (кривая 2в) чем аналогичные характеристики сис-
тем с оптимумом по модулю (соответственно, кривые 1а, 16 и 1в).
В переходных характеристиках (см. рис. 32.20 в) в первый
момент времени задается входное воздействие, и спустя время
t = 0,5 с вводится возмущающее воздействие f. С одной стороны,
реакция системы на входное воздействие при симметричном оп-
тимуме имеет значительно большие перерегулирование и время
переходного процесса. В отношении реакции системы на задаю-
щее воздействие оптимум по модулю является наилучшим спосо-
бом настройки. Поэтому симметричный оптимум желательно ис-
пользовать при наличии медленных задающих сигналов. С другой
стороны, симметричный оптимум обеспечивает нулевую статиче-
скую ошибку и хорошее подавление низкочастотных составляю-
щих (кривые СО и ОМ при t > 0,5 с на рис. 32.20 в). Статическая
ошибка системы при ОМ составляет Дх = 17 %. По сравнению с
ОМ настройка системы на СО более эффективна в отношении от-
работки возмущающих воздействий, особенно в области низко-
частотных составляющих.
32.3.3. Принцип подчиненного регулирования
Подчиненное регулирование нескольких переменных выпол-
няется по обобщенной структуре, представленной на рис. 32.21.
Рис. 32.21. Система подчиненного регулирования
673
Объект регулирования в этом случае представлен в виде ряда от-
дельных звеньев с передаточными функциями Иоь JK02, ^оз- Каж-
дому звену Ио/ соответствует свой регулятор и оптимизация каждо-
го контура выполняется раздельно. Звенья насыщения в регулято-
рах используются в целях ограничения максимальных значений от-
дельных координат объекта регулирования.
Так как каждый контур регулирования является звеном сле-
дующего, внешнего по отношению к нему контура, оптимизация
начинается с самого внутреннего контура. Контуры регулирования,
которые отрабатывают в основном задающие воздействия, на-
страиваются на оптимум по модулю. Контуры, отрабатывающие в
основном возмущающие воздействия, настраиваются на симмет-
ричный оптимум.
Деление объекта на звенья по возможности должно осуществ-
ляться таким образом, чтобы каждое звено Ио/ содержало только
одну большую постоянную времени. В этом случае для настройки
контура может быть использован ПИ-регулятор, технически легко
реализуемый.
После оптимизации самого внутреннего контура необходимо
перейти к настройке следующего. При этом замкнутый внутренний
контур входит в состав нового контура регулирования и его при-
ближенно можно заменить апериодическим звеном. Для устойчи-
вой работы системы в целом необходимо обеспечивать меньшее
быстродействие второго контура по отношению к внутреннему
примерно в 2...4 раза. Следующий третий контур настраивается
аналогично по отношению ко второму. Таким образом, быстродей-
ствие контуров уменьшается в направлении от внутреннего контура
к внешнему. И наоборот, требования по точности, предъявляемые к
внешним контурам, увеличиваются.
32.4. Цифровое моделирование нелинейных систем
32.4.1. Особенности синтеза нелинейных систем
Система управления является нелинейной, если она хотя бы
один ее элемент описывается нелинейным уравнением. Практиче-
ски все реальные системы содержат один или несколько нелиней-
ных элементов (нелинейностей). На рис. 32.22 приведены типовые
нелинейности.
674
Рис. 32.22. Характеристики типовых нелинейных звеньев:
а - релейный элемент; б - реле с петлей гистерезиса;
в - звено насыщения; г - зона нечувствительности
Нелинейными могут быть как элементы неизменяемой части
системы, так и элементы синтезируемой (изменяемой) части. В
первом случае говорят о сопутствующих нелинейностях, например,
675
ограничение максимального напряжения управления двигателем,
кинематические зазоры, сухое трение и т.д. Во втором случае нели-
нейные элементы вводятся конструктором в систему преднамерен-
но, например, релейные управляющие элементы, обеспечивающие
высокое быстродействие системы.
Главная особенность нелинейных САУ заключается в том, что
в них не выполняется принцип суперпозиции (наложения). Харак-
тер и показатели переходного процесса зависят от величины вход-
ного и возмущающего воздействий, от начальных условий в систе-
ме. Соответственно и условия устойчивости также зависят от вели-
чины воздействий: при одних значениях система устойчива, при
других — неустойчива. В связи с этим в нелинейных САУ исполь-
зуются понятия «устойчивость в малом» и «устойчивость в боль-
шом». Система устойчива в малом, если она устойчива только при
малых начальных отклонениях. Система устойчива в большом, ес-
ли она устойчива при больших отклонениях. Система устойчива в
целом, если она устойчива при любых отклонениях.
Нелинейные САУ описываются нелинейными дифференци-
альными уравнениями, теория которых разработана не столь полно,
как теория линейных дифференциальных уравнений. Существует
ряд точных и приближенных методов, позволяющих решать лишь
некоторые частные задачи анализа и синтеза нелинейных систем.
Из аналитических методов наибольшее распространение нашли ме-
тоды фазовой плоскости, гармонической линеаризации, корневого
годографа. Однако их применение ограничено малым порядком
дифференциальных уравнений системы и ограниченным количест-
вом учета нелинейностей. В том случае, когда требуется выполнить
синтез системы высокого порядка с большим количеством уравне-
ний, фактически единственным методом расчета является цифровое
моделирование.
При цифровом моделировании математическая модель с уче-
том всех статических и динамических звеньев, включая существен-
ные нелинейности, вводится в цифровую вычислительную машину.
Ввод выполняется обычно в виде структурной схемы. Далее с ис-
пользованием численных методов расчета дифференциальных
уравнений выполняются приближенные вычисления.
В настоящий момент существует ряд прикладных программ
для цифрового моделирования систем автоматического управления,
среди них можно назвать «Matlab» («Simulink»), «Vissim» и др. Па-
676
кет прикладных программ разработан на кафедре электропривода
ЮУрГУ и используется в учебном процессе и в научно-исследова-
тельских работах.
32.4.2. Пакет прикладных программ «Моданс»
для моделирования систем управления
Пакет прикладных программ «Моданс» (Моделирование Ана-
логовых Нелинейных Систем) предназначен для цифрового и физи-
ческого моделирования нелинейных систем автоматического регули-
рования. Пакет содержит специфические для электропривода узлы и
элементы (типовые нелинейности, модель сухого трения, интегратор с
обнулением, АЦП, ЦАП), что упрощает моделирование таких систем.
Программа позволяет:
- рассчитывать переходные процессы в нелинейных САР (при
необходимости можно учитывать импульсные и цифровые звенья);
— рассчитывать амплитудные и фазовые частотные характери-
стики САР с предварительной ее линеаризацией;
- выполнять физическое моделирование реальных систем, при
котором первая часть системы выполняется в виде модели на ЦВМ,
а другая - в виде реальных электрических или электромеханиче-
ских устройств (в этом случае пакет работает в реальном масштабе
времени и используется плата аналогового ввода—вывода).
Основные характеристики пакета:
- максимальный порядок дифференциального уравнения - 50;
- максимальное количество уравнений модели - 100;
- расчет переходных процессов выполняется численным ин-
тегрированием методом Рунге-Кутта 4-го порядка;
— расчет частотных характеристик выполняется методом Гаус-
са с преобразованием результатов в показательную форму;
- моделирование в реальном масштабе времени с вводом-вы-
водом реальных аналоговых сигналов (ввод до 16 аналоговых сиг-
налов, вывод — до 2 сигналов; максимальная частота дискретизации
по времени, обеспечиваемая пакетом, составляет не менее 1 кГц).
Пакет содержит библиотеку типовых звеньев, содержащую
более 50 различных блоков: динамические звенья, статические не-
линейности, алгебраические функции, импульсные и логические
звенья, генераторы входных воздействий и звенья реального вре-
мени.
677
Пакет «Моданс» состоит из графического редактора, програм-
мы для расчета переходных процессов, программы для расчета час-
тотных характеристик, программы для расчета переходных процес-
сов в реальном масштабе времени.
На рис. 32.23 приведен пример модели следящей системы, на-
бранной в программе «Моданс».
Рис. 32.23. Пример математической модели
системы автоматического управления
Библиотека типовых звеньев программы «Моданс». В табл.
32.2 приведены типовые звенья пакета «Моданс», среди которых:
- динамические звенья (интегрирующее, апериодическое, иде-
ально дифференцирующее, реально дифференцирующее, форси-
рующее, колебательное, изодромное, интегрирующее с обнулением,
среднеквадратическое значение, звено чистого запаздывания);
- статические нелинейности (насыщение, зона нечувствитель-
ности, кусочно-линейные, реле, блок сухого трения, максимальное
и минимальное значения, максимум по модулю, реле с петлей гис-
терезиса);
- импульсные звенья (квантование по времени, квантование по
уровню, ввод/вывод реальных сигналов с помощью звеньев ЦАП,
АЦП);
- цифровые звенья (компаратор, ключ, конъюнкция, дизъюнк-
ция, инвертирующий элемент, триггер, формирователь импульсов);
678
— алгебраические звенья;
генераторы задающих воздействий (ступенчатый, линейно
нарастающий, импульсный, синусоидальный, прямоугольный, тре-
угольный сигналы).
32.4.3. Синтез нелинейной астатической следящей системы
Приборные следящие электроприводы обычно выполняются с
применением исполнительных двигателей постоянного тока с по-
стоянными магнитами (двигатели серий ДПР, МИГ и ЭДМ и др.).
Основными режимами работы следящих систем являются режим
слежения (отработка гармонических или случайных задающих сиг-
налов малой амплитуды) и режим позиционирования (отработка
обычно ступенчатых задающих сигналов большой амплитуды). Ка-
чество следящей системы в режиме слежения оценивается в первую
очередь по динамической точности поддержания заданного углово-
го положения. Качество следящей системы в режиме позициониро-
вания определяется временем переходного процесса, перерегули-
рованием, статической точностью.
Типовая схема построения следящего электропривода обычно
содержит внешний контур регулирования положения и внутренние
(местные) обратные связи по току и скорости. Рассмотрим упро-
шенный вариант построения системы - одноконтурную следящую
систему, выполненную на двигателях серии ЭДМ (табл. 32.3).
Таблица 32.3
Параметр Тип двигателя
Э ДМ-54 ЭДМ—34 ЭДМ-12 ЭДМ-14
Номинальное напряжение с/„,в 27 27 27 27
Номинальная мощность Рк, Вт 16 40 90 180
Номинальный момент Мк, Н-м 0,026 0,13 0,15 0,58
Номинальная скорость враще- ния 0)н, об/мин 6000 3000 6000 3000
Номинальный ток /н, А 1,45 2,7 6,4 И,7
Сопротивление якоря 7?я, Ом 3,74 2,7 0,72 0,53
Момент инерции якоря ./я, 10 5 кг-м2 0.3 1,4 1,4 4,7
Электромапштная i юстоянная времени Гя, 10 с 1,0 1,0 1,0 1,0
679
Таблица 32.2
Типовые звенья программы «Моданс»
680
22 Зак. 50
681
На рис. 32.24 приведена математическая модель в программе
«Моданс» одноконтурной следящей системы (в относительных
единицах).
В неизменяемой части системы в отличие от системы регули-
рования частоты рращения добавляется интегрирующее звено, что,
естественно, ухудшает ее устойчивость. Кроме этого, существен-
ным для следящей системы является наличие в прямом канале зве-
на насыщения (ограничения максимального напряжения преобра-
зователя). Поэтому следящую систему необходимо рассматривать
как нелинейную и традиционные методы исследования линейных
систем в этом случае неприменимы.
Рис. 32.24. Структурная схема нелинейной астатической следящей сис-
темы: AV, AW - задающее воздействие и выходной угол;
DA - ошибка регулирования; WD - скорость двигателя;
KU - корректирующее устройство; ЕР - ЭДС преобразователя;
UJ - падение напряжения в якорной цепи: ID - ток двигателя;
1ST, IDI - статический и динамический токи двигателя
Для исследования устойчивости нелинейных систем можно
воспользоваться приближенными аналитическими методами (на-
пример, методом гармонической линеаризации). В данной работе
рассматривается методика синтеза нелинейной следящей системы с
использованием математического моделирования на ЦВМ.
Для оценки устойчивости нелинейной следящей системы ис-
пользуем понятие устойчивости в малом и в большом. Система ус-
тойчива в малом, если она устойчива при малых задающих воздей-
ствиях. В этом случае диапазон изменений входных сигналов звена
насыщения не превышает зону его линейной работы и, как следст-
вие, в такой системе можно не учитывать звено насыщения. Систе-
ма устойчива в большом, если она устойчива при больших задаю-
щих воздействиях. При этом диапазон изменения входных сигна-
лов охватывает как линейную зону, так и зону насыщения. В дан-
ном случае пренебречь влиянием звена насыщения уже нельзя.
682
Последовательное корректирующее устройство рассматривае-
мой следящей системы выбирается в виде пропорционального или
изодромного звеньев. Как известно, недостатком использования
пропорционального звена является наличие статической ошибки
регулирования. Нулевую статическую ошибку регулирования сле-
дящей системы можно получить с помощью изодромного звена.
Однако в нелинейной системе введение в корректирующее устрой-
ство интегрального канала качественным образом изменяет пове-
дение системы - значительно ухудшается условие устойчивости в
большом. В первом приближении изменение устойчивости в боль-
шом объясняется следующим. При больших задающих сигналах
эквивалентное значение коэффициента усиления звена насыщения
значительно падает (кривые 2 и 3 на рис. 32.25 а). Это приводит к
изменению частоты среза шср линеаризованной следящей системы
(кривые 2 и 3 на рис. 32.25 б) и, как следствие, к уменьшению по-
ложительных фазовых сдвигов при новых значениях госр. Поэтому,
чем большее значение имеез задающий сигнал, тем меньший запас
устойчивости обеспечивается в системе и соответственно система
становится более колебательной.
Для получения устойчивой системы при любом задающем
воздействии в следящих электроприводах используют корректи-
рующие устройства с переключаемой структурой, в которых в за-
висимости от амплитуды ошибки регулирования изменяется пере-
даточная функция регулятора. Наиболее простая структура КУ
представлена на рис. 32.26 а, в которой используется интегратор с
обнулением I. При больших по модулю ошибках регулирования
|Да|>хО, где Да - ошибка регулирования системы по углу,
хО установка компаратора, компаратор К выдает единичный сиг-
нал и устанавливает коэффициент передачи интегратора 1 равным
нулю (интегральный канал КУ отключен). При малых ошибках
|Да| < хО интегратор работает с заданной постоянной времени и КУ
в целом эквивалентно звену изодромного типа.
Необходимое корректирующее устройство можно реализо-
вать и другими способами, например, с помощью переключателя
каналов (рис. 32.26 б). Особенность такой реализации КУ состоит в
том, что интегратор при больших ошибках регулирования не обну-
ляется (на вход второго канала коммутатора КОМ, подается нуле-
вой входной сигнал) и интегратор переходит в режим хранения
683
22*
Рис. 32.25. Влияние звена насыщения на устойчивость следящей
системы: а - аппроксимация нелинейного звена при различных
амплитудах задающего воздействия; б - ЛАЧХ и ФЧХ разомкну-
той следящей системы при различных амплитудах задающего
воздействия
текущего значения выходного сигнала). В сравнении с первым ва-
риантом исполнения КУ эта схема обеспечивает меньшие динами-
ческие ошибки регулирования.
Основная проблема при синтезе системы с нелинейным кор-
ректирующим устройством состоит в выборе зоны переключения
каналов хО компаратора К. При выборе слишком малой зоны воз-
можно отключение интегрального канала в режиме слежения за за-
дающими сигналами и соответственно увеличение динамических
ошибок регулирования. При выборе слишком большой зоны пере-
ключения увеличивается колебательность привода в режиме пози-
ционирования.
684
Рис. 32.26. Корректирующее устройство с переключаемой структурой:
а - с обнулением интегратора, б - с переключателем каналов:
DA - ошибка регулирования; К - компаратор; I - интегральный канал;
Р - пропорциональный канал; KU - корректирующее устройство;
КОМ — коммутатор (переключатель) каналов
Настройку следящей системы необходимо выполнить по сле-
дующей методике:
- частотными методами рассчитывается линеаризованная сле-
дящая система с КУ в виде изодромного звена. При выборе посто-
янной времени числителя изодромного звена используется методи-
ка настройки системы на симметричный оптимум (то есть эта по-
стоянная времени в 2...4 раза больше значения 1/<Уср)- Цифровым
моделированием проверяется устойчивость линеаризованной сис-
темы с рассчитанными параметрами КУ;
— в системе с учетом звена насыщения и КУ в виде пропор-
ционального звена с коэффициентом, равным П/72 (где Т\, Т2 -
постоянные изодромного звена), рассчитать переходный процесс
для любого значения задающего воздействия. При значении пере-
регулирования, превышающем допустимое, скорректировать зна-
чение коэффициента усиления;
- в системе с учетом звена насыщения и изодромным звеном в
КУ рассчитываются переходные процессы при различных ампли-
тудах задающего сигнала и фиксируется значение перерегулирова-
ния <7. При значениях перерегулирования, превышающих допусти-
мое, увеличивается значение постоянной Т\ изодромного звена;
- на основе данных о перерегулировании выбирается значение
зоны переключения каналов;
— в системе с учетом звена насыщения и переключаемым КУ
рассчитываются переходные процессы при различных амплитудах
задающего сигнала. При перерегулированиях, превышающих тре-
685
буемое значение, скорректировать значение зоны переключения и
повторить расчеты;
окончательная проверка настройки системы выполняется
проверкой максимальной динамической ошибки регулирования
при гармоническом задающем воздействии с нулевым и единичным
значением статического момента сопротивления (для рассматри-
ваемого класса электроприводов амплитуда задающего воздействия
обычно выбирается в диапазоне 0,01...0,05, частота - в диапазоне
0,5...2 Гц).
32.4.4. Исследование устойчивости
нелинейной безредукторной следящей системы
В целях повышения статической и динамической точности ра-
боты современные высокоточные следящие системы часто выпол-
няются в безредукторном исполнении. Это позволяет устранить от-
рицательное влияние редуктора в электроприводе (люфт, нежест-
кость и сухое трение). При этом в качестве исполнительного двига-
теля используются специальные двигатели - моментные, отличаю-
щиеся от обычных быстроходных двигателей большими значения-
ми момента на единицу массы.
Согласно определению, моментным двигателем называется
электромеханический преобразователь, у которого на вход подает-
ся электрический сигнал постоянного или переменного тока, а вы-
ходом является электромагнитный момент, при этом в рабочем ре-
жиме ротор двигателя либо неподвижен, либо вращается с малой
частотой. Основной конструктивной особенностью этих двигателей
является превышение значения внешнего диаметра двигателя рабо-
чей длины якоря. Моментные двигатели выпускаются как у нас в
стране, так и за рубежом (фирмами Clifton, Inland, Wright и др.). В
табл. 32.4 приведены параметры отечественной промышленной се-
рии моментных двигателей постоянного тока типа ДБМ.
При использовании моментных двигателей в составе следящих
систем наряду с положительными чертами появляются и отрица-
тельные. В первую очередь это значительное ухудшение условий ус-
тойчивости следящей системы, обусловленное большим значением
электромеханической постоянной времени привода. Действительно,
в безредукторных системах моменты инерции нагрузки и ротора
двигателя связаны неравенством J„ »JP и значение электромехани-
686
ческой постоянной времени привода составляет Гм^>0,1 с. Частота
среза контура положения бсзредукторных систем обычно превышает
значение 100 рад/с, поэтому при расчете устойчивости системы об-
ратной связью по противоЭДС двигателя можно пренебречь. В рай-
оне частоты среза неизменяемая часть безредукторной следящей
системы аппроксимируется двумя интегрирующими звеньями.
Таблица 32.4
Параметр Тип двигателя
ДБМ 120-1-0,4 ДБМ 150-4-0,3 ДБМ185-6-0,2 ДБМ185-16-0,15
Момент Л-/ц, Н-м 1,0 4,0 6,0 16,0
Ток/н, А 2,5 6,7 7,2 10,7
Частота вращения <Ун, об/мин 200 100 80 70
Электромагнитная постоянная времени Гд, с 0,0006 0,0015 0,002 0,003
Момент инерции ротора Jp, 10 3 кг-м2 1,0 3,0 9,0 15,0
Номинальное напряжение Uh, В 27 27 27 27
Сопротивление обмотки статора Re, Ом 5,4 2,3 2,54 1,48
Диаметр D, мм 120 150 185 185
Длина якоря L, мм 15 25 25 50
Структурная схема безредукторного следящего электроприво-
да приведена на рис. 32.27. Система содержит два нелинейных зве-
на - звено насыщения (ограничение максимального напряжения
преобразователя) и звено сухого трения (блок трения). Блок трения
определяет действие в системе пассивного момента сопротивления.
Модель трения учитывает разные действия моментов зрения покоя
МО и трения движения Ml. На малых скоростях (обычно принима-
ется | со | < 10 5...10~4) в системе действует момент трения покоя,
равный МО = 1,3-М1,
Для обеспечения устойчивости системы и получения высоких
динамических показателей в последовательное корректирующее
устройство вводится дифференциальный канал в виде реального
форсирующего звена 2-го порядка с опережающей фазой. В целом
передаточная функция КУ вместе с пропорциональным и инте-
687
тральным (для получения нулевой статической ошибки) каналами
приобретает вид:
»;у(/о=
(1 + Г1Р)-(1 + ТзР)2
^а+Тд)2
где 7), Т2 - постоянные времени изодромного звена (пропорцио-
нальный канал с коэффициентом 7С= Г]/Г2 и интегральный с посто-
янной Г2); Гз, - постоянные времени дифференциального канала,
Гз>Г4.
Рис. 32.27. Струюурная схема нелинейной безре дукторной следящей
системы: AV, AW - задающий и выходной сигналы; DA - ошибка
ретулирования; KU 1, KU2, K.U - сигналы корректирующего устрой-
ства; F - фильтр; ЕР - ЭДС преобразователя; UJ- падение напряже-
ния в якорной цепи; ID, IDN - полный и динамический токи двига-
теля; WD - скорость двигателя
Частотная характеристика корректирующего устройства сис-
темы приведена на рис. 32.28.
Предварительный выбор параметров КУ для линеаризованной
следящей системы выполняется традиционными частотными мето-
дами с использованием логарифмических амплитудных и фазовых
частотных характеристик. Расчет можно выполнить в следующем
порядке:
— расчет ожидаемой частоты среза контура положения
I
оср= ——в) у, > те F - суммарное значение малых постоянных
времени системы, 7). = Т'я+Т’ф; 7ф~ постоянная фильтра F, 7^= 0,002 с;
688
Рис. 32.28. Частотные характеристики корректирующего устройства:
Ц - аппроксимированная ЛАЧХ, £2 - точная ЛАЧХ
- выбор полосы дифференцирования кТ=1\П\. Ширина поло-
сы дифференцирования обычно выбирается в диапазоне 4... 10, ниж-
нее значение ограничено требованиями устойчивости, верхнее - ус-
ловиями помехозащищенности системы (при слишком большой
полосе дифференцирования значительно увеличивается коэффици-
ент усиления КУ на высоких частотах Квч и, соответственно,
уменьшается соотношение сигнал шум);
- расчет постоянных времени 7\, Т4. Задавшись значением по-
лосы А Г, значения постоянных Tj и Г4 проще всего выбрать из ус-
ловия симметрии полосы дифференцирования относительно ожи-
даемой частоты среза <Уср. Реально наилучшие условия устойчиво-
сти обеспечиваются при значениях постоянной дифференцирова-
1
ния 1, =---------;
(1-2)-шср
- расчет коэффициента усиления пропорционального канала К.
При выборе коэффициента необходимо обеспечить рекомендуемый
по заданию запас по фазе Д<р. Полученные значения коэффициента
обычно достаточно велики К > 100;
689
— расчет постоянных времени изодромного звена. Интеграль-
ный канал не должен оказывать значительного влияния на устойчи-
вость системы. Расчет выполняется по следующим соотношениям
10^0 7,
<»«, 1 К
Более точно значения постоянных времени рассчитываются на
ЦВМ по показателю колебательности М. Показателем колебательно-
сти системы называется максимальное значение амплитудной харак-
теристики замкнутой системы (рис. 32.29). Между устойчивостью
системы, ее перерегулированием и показателем колебательности
существует прямая связь: чем меньше значение М, тем лучше усло-
вия устойчивости в ней реализованы. Настройка системы по пока-
зателю колебательности упрощает расчет системы, т.к. оценивается
только один параметр настройки частотной характеристики. Не-
удобство его использования в том, что требуется точный расчет
замкнутой системы регулирования. В пакете «Моданс» значение
показателя колебательности выводится на графике частотных ха-
рактеристик при нажатии клавиши F2.
Рис. 32.29. Частотные характеристики разомкнутой
и замкнутой систем
690
Для выполнения требований задания по показателю колеба-
тельности при анализе на ЦВМ варьируются параметры дифферен-
циального канала - сдвигается полоса дифференцирования и изме-
няется ее ширина.
Анализ устойчивости нелинейной системы выполняется по пе-
реходным процессам. В расчетах необходимо определить предель-
ное значение ступенчатого задающего сигнала, при котором на вы-
ходе наблюдаются незатухающие автоколебания одной амплитуды.
Фазовые траектории координат привода в этой точке описывают
неустойчивый предельный цикл. При меньших амплитудах сигнала
задания система устойчива (система имеет устойчивый фокус), при
больших амплитудах — неустойчива. Для этих трех возможных ва-
риантов амплитуды необходимо рассчитать переходные процессы
и на их основе построить фазовые траектории.
Расчет динамической точности в следящих системах предпо-
лагает отработку гармонических задающих сигналов (обычно с ам-
плитудами 0,002.„О,02 и частотами 0,1...1 Гц). В работе необходимо
рассчитать переходные процессы и найти ошибку слежения в сис-
теме с учетом сухого трения и без него.
32.4.5. Синтез оптимальной по быстродействию
следящей системы
Характерной особенностью следящих систем с линейными
корректирующими устройствами является значительная колеба-
тельность. Это определяется рядом факторов. Пренебречь влияни-
ем нелинейных звеньев (насыщение преобразователя, сухое трение)
в следящих системах невозможно - анализ и синтез линеаризован-
ных следящих дает весьма приближенные, далекие от практики ре-
зультаты. С другой стороны, в сравнении со скоростными система-
ми условия устойчивости следящих систем значительно хуже (в
прямом канале установлено дополнительное интегрирующее зве-
но). Поэтому традиционными линейными методами реализовать
высококачественную следящую систему не удается.
Одним из возможных методов получения быстродействующей
следящей системы является реализация оптимального управляющего
устройства (оптимального регулятора). В общем случае под опти-
мальной автоматической системой управления понимается наилучшая
в некотором определенном смысле система. Критерии оптимальности
691
зависят от особенностей решаемой задачи. Это могут быть минимиза-
ция ошибок регулирования, минимизация массо-габаритных показате-
лей. В данном случае рассматривается вариант построения системы
регулирования с максимальным быстродействием.
Пусть система регулирования представлена структурной схе-
мой, изображенной на рис. 32 30.
Рис. 32.30. Упрощенная структурная схема оптимальной
по быстродействию системы Wy - передаточная функция
управляющего устройства; - передаточная функция
неизменяемой части системы
Задача синтеза оптимальной по быстродействию системы сво-
дится к реализации управляющего устройства, обеспечивающего
минимум времени Т переходных процессов при заданных гранич-
ных условиях у(0) и у(Т). В качестве критерия оптимальности вы-
бирается время переходного процесса и синтез управляющего уст-
ройства предполагает минимизацию функционала
т
I=$dt = T. (32.51)
о
Принимая в качестве цели отработку угла Оо (то есть ступен-
чатое задание по углу следящей системы) и нулевые начальное и
конечное значения скорости изменения выходной координаты
ji’(0) = 0, у(Т) — 0, получим оптимальный закон регулирования
т
$y(t)dt = а0. (32.52)
о
На практике реализовать управляющее устройство, удовлетво-
ряющее выражениям (32.51) и (32.52) для любой передаточной
функции 11’о(р), не представляется возможным. Существует точное
решение для системы второго порядка. Пусть объект управления
представляет собой консервативное звено (коэффициенты и посто-
янные времени приравнены единице):
d1y/dt + у = и. (32.53)
692
Требуется перевести выходную координату из начального по-
ложения >’(()) = j’o в конечное положение у(7) = 0 при нулевых зна-
чениях производной в начале и конце перемещения. Предполагает-
ся. что управление u(t) лежит в пределах u(J) < 1.
Введем в рассмотрение фазовую плоскость: у> = у, у2= dy/dt. На
фазовой плоскости эта задача будет заключаться в быстрейшем пе-
реводе точки с заданными начальными условиями в центр коорди-
нат. Решая дифференциальное уравнение для заданных условий и
ограничений, получим оптимальное время переходного процесса
Т = 2-у[с^.
Для реализации оптимального по времени переходного про-
цесса необходимо задать следующий закон управления
+ 1 при 0<t<T/2,
u(t) =
-1 при T/2<t <Т.
Фазовые траектории перемещения объекта с оптимальным бы-
стродействием для положительного (А}-В1 0) и отрицательного
(Л2-Вг-0) задающих сигналов представлены на рис. 32.31. Времен-
ные диаграммы траектории (At-Bi-0) приведены на рис. 32.32.
Рис. 32.31. Фазовые траектории перемещения объекта
оптимальной по быстродействию системы
Точки переключения управляющего воздействия u(t) с одного
знака на другой образуют непрерывную линию, называемую лини-
ей переключения. Она описывается уравнением
Ti+ysign(y2) = 0.
693
Рис. 32.32. Временные диаграммы перемещения объекта
оптимальной по быстродействию системы
Если начальная точка лежит под линией переключения, то
движение начинается с управляющего воздействия u(t) = +1, а в
точке пересечения с линией переключения знак меняется ?/(/) = -!.
Таким образом, закон управления объектом можно представить в
двух вариантах исполнения:
< 2
"1(/) = -sign У1 + ^-sign(у2)
(32.54)
И
W2(z) = -sign (2 • sign( у,) + у2 ). (32.55)
Так как оптимальная система является релейной, то поведение
системы в точках близких к положению равновесия (рис. 32.31) но-
сит автоколебательный характер. Чем ближе система к идеальной
двухкратно интегрирующей, тем меньше амплитуда автоколебаний.
Реальные системы обычно описываются нелинейными дифферен-
694
циальными уравнениями более высокого порядка. Так, например, в
следящей безредукторной системе необходимо учитывать постоян-
ные времени якорной цепи и фильтра системы управления, а также
нелинейное звено сухого трения. Это приводит к изменению пове-
дения оптимальной системы - увеличению амплитуды автоколеба-
ний, появлению зоны застоя и т.д. Кроме этого, обычно не удается
точно реализовать закон управления (возведение в квадрат или из-
влечение корня). Это все определяет необходимость упрощения
модели как самого объекта, так и управляющего устройства (чаще
всего реализация квадратного корня для функции (32.55) выполня-
ется с помощью кусочно-линейной аппроксимации).
В первом приближении характеристики безредукторной сле-
дящей системы очень близки к характеристикам консервативного
звена. Действительно, большое значение электромеханической по-
стоянной времени системы, слабая противоЭДС двигателя позво-
ляют аппроксимировать неизменяемую часть как последовательное
соединение двух интеграторов. Поэтому при синтезе таких элек-
троприводов можно использовать методы оптимальных систем.
Расчет управляющего устройства и исследование оптимальной
по быстродействию безредукторной системы можно выполнить в
следующем порядке. Составить модель системы. Для реализации
уравнений (32.54) или (32.55) необходимо измерять выходной угол и
скорость двигателя. Скорости моментных двигателей, используемых
в безредукторных системах малы и их измерение, например, с помо-
щью тахогенераторов, затруднено. Поэтому единственной измеряе-
мой координатой системы обычно является ошибка регулирования
Дх. С учетом этого, а также параметров двигателя и нагрузки управ-
ляющую функцию оптимальной системы можно записать в виде
w(/) = sign 72' gM ' V(M ' sign(AO +
(32.56)
где Ем- максимальное ускорение системы без учета моментов сопро-
тивления, £м = KJTa. В соответствии с уравнением (32.56) необходи-
мо построить идеальную линию переключения для заданного объек-
та регулирования. Полная структурная схема оптимальной по бы-
стродействию системы представлена на рис. 32.33 (где DA — пере-
менная Дх управляющей функции, ЕР - переменная н(/)). Представ-
ленная система реализует управляющую функцию непосредственно
по формуле (32.56): модуль, квадратный корень, знак, производная
695
к=0,175
Рис. 32.33. Структурная схема оптимальной по быстродействию систе-
мы; AV, AW - задающий и выходной сигналы; DA - ошибка;
F - фильтр; Pl, Р2, РЗ, Р4, Р, D, UU — управляющее устройство; ЕР - ре-
лейный элемент; UJ - падение напряжения в якоре; ID IDN - полный и
динамический токи двигателя; WD - скорость двигателя
реализуются звеньями Pl, Р2, РЗ и D. Настройка системы выполня-
ется коэффициентом усилителя Р, теоретическое значение которого
равно ^2 • ем J. При цифровом моделировании в идеальной систе-
ме (неизменяемая часть содержит только два интегратора) этим ко-
эффициентом необходимо добиться переходного процесса с нуле-
вым перерегулированием и симметрии в кривой скорости. В расче-
тах особо следует обратить внимание на постоянную времени
фильтра реального дифференцирующего устройства D, а также на
выбор шага интегрирования. Для корректной работы системы по-
стоянная времени должна быть меньше самой малой постоянной
времени в системе, а шаг интегрирования должен быть меньше
этой постоянной примерно на порядок.
Среди основных качественных показателей оптимальных сис-
тем необходимо отметить' время переходного процесса, перерегу-
лирование, амплитуду и частоту автоколебаний. Основными фак-
торами, влияющими в системе на эти характеристики являются:
696
противоЭДС двигателя, постоянные времени якорной цепи (звена
ID) и фильтра F, момент сухого трения. Анализ полученной систе-
мы включает:
- расчет зависимости времени переходных процессов tP от ам-
плитуды задающего воздействия при учете действия отдельных
факторов. Время переходного процесса оценивается по стандарт-
ной методике - входом сигнала в заданную трубку ошибки, которая
обычно составляет 1 ...5 % от амплитуды задающего сигнала;
- оценка значений амплитуды ак и частоты^ автоколебаний;
- оценка влияния постоянной времени фильтра. При этом вы-
полняется расчет зависимости времени переходных процессов tP, пе-
ререгулирования ст или амплитуды автоколебаний а от значений
постоянной времени фильтра и амплитуды задающего воздействия.
- построение фазовой траектории системы. Для любого из рас-
считанных переходных процессов построить зависимость ошибки
регулирования от частоты вращения.
После синтеза и апробации системы выполняется исследова-
ние перерегулирования в системе для различных амплитуд сигнала
задания и при учете одного из факторов.
697
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Литература к разделу III
1. Брускин Д.Э., Захаревич А.Е., Хвостов В.С. Электрические
машины - М.: Высшая школа, 1987. -Ч. I. - 319 с; Ч. II. - 355 с.
2. Вольдек А.И. Электрические машины. - Л.: Энергия, 1978.
832 с.
3. Иванов-Смоленский А.В. Электрические машины: Учебник
для вузов. - М.: Энергия, 1980. - 928 с.
4. Копылов И.П. Электрические машины. - М.: Логос, 2000. -
607 с.
5. Костенко М.П., Пиотровский Л.М. Электрические машины. -
Л.: Энергия, 1973. - 543 с.
6. Хрущев В.В. Электрические микромашины автоматических
устройств. - Л.: Энергия, 1976. -383 с.
7. Юферов Ф.М. Электрические машины автоматических уст-
ройств. -М.: Высшая школа, 1988. -475 с.
Литература к разделам IV, V
1. Гельман М.В. Преобразовательная техника. Полупроводни-
ковые приборы и элементы микроэлектроники: Учебное пособие. —
Челябинск: Изд-во ЮУрГУ, 2000. - Ч. 1. - 106 с.
2. Гельман М.В. Преобразовательная техника: Учебное посо-
бие. - Челябинск: Изд-во ЮУрГУ, 2002. - 4.2. - 106 с.
3. Гельман М.В. Преобразовательная техника: Учебное посо-
бие. - Челябинск: Изд-во ЮУрГУ, 2004. - Ч.З. - 155 с.
4. Гельман М.В., Лохов С.П. Тиристорные регуляторы пере-
менного напряжения. - М.: Энергия, 1975. - 104 с.
5. Герман-Галкин С.Г. Силовая электроника: Лабораторные
работы на ПК. - СПб.: Учитель и ученик. КОРОНА-принт, 2002. -
304 с.
698
6. Горбачев Г.Н., Чаплыгин Е.Е. Промышленная электроника. -
М.: Энергоиздат, 1988. - 320 с.
7. Жемеров Г.Г. Тиристорные преобразователи частоты с не-
посредственной связью. - М.: Энергия, 1977. — 280 с.
8. Забродин Ю.С. Промышленная электроника. - М.: Высшая
школа, 1982 -496 с.
9. Зиновьев Г.С. Основы силовой электроники: Учебное посо-
бие. - Новосибирск: Изд-во НГТУ, 2004. - 672 с.
10. Лихошерст В.И. Полупроводниковые преобразователи элект-
рической энергии с импульсным регулированием: Учебное пособие. —
Екатеринбург: Изд-во УГТУ, 2000. - 116с.
И. Розанов Ю.К. Основы силовой электроники. - М.: Энерго-
атомиздат, 1992. 296 с.
12. Руденко В.С., Сенько В.И.. Чиженко И.М. Основы преоб-
разовательной техники. - М.: Высшая школа, 1980. — 423 с.
13. Терехов В.М. Элементы автоматизированного электро-
привода. - М.: Энергоатомиздат, 1987. - 224 с.
14. Тиристорные преобразователи частоты в электроприводе/
А.Я. Бернштейн, Ю.М. Гусяцкий, А.В. Кудрявцев, Р.С. Сарбатов;
Под. ред. Р.С. Сарбатова. М.: Энергия, 1980. - 328 с.
15. Шубенко В.А., Браславский И.Я. Тиристорный асинхрон-
ный электропривод с фазовым управлением. - М.: Энергия, 1972. —
200 с.
Литература к разделу VI
1. Андрющенко В.А. Системы автоматического управления
технологическим оборудованием. - Л.: Машиностроение. Ленингр.
отд., 1983. - 256 с.
2. Бесекерский В.А. Динамический синтез систем автоматиче-
ского регулирования. - М.: Наука. Гл. редакция физ.-матем. лите-
ратуры, 1970. - 576 с.
3. Бесекерский В.А., Попов Е.П. Теория систем автоматиче-
ского регулирования. М.: Наука, 1972. 768 с.
4. Лукас В.А. Теория автоматического управления. Учебник
для вузов.- 2-е изд., перераб. и доп. - М.: Недра, 1990,- 416 с.
5. Попов Е.П. Теория линейных систем автоматического регу-
лирования и управления. — М.: Наука. Гл. редакция физ.-матем. ли-
тературы, 1978. - 256 с.
699
6. Теория автоматического управления/ Под ред. А.В. Нету-
шила. - М.: Высшая школа, 1976. - 400 с.
7. Теория автоматического управления: Учебник для вузов по
спец. «Автоматика и телемеханика»: В 2-х ч. - Ч 1. Теория линей-
ных систем автоматического управления/ Н.А. Бабаков, А.А. Воро-
нов, А.А. Воронова и др , Под ред А.А. Воронова. - М.: Высшая
школа, 1986. - 367 с.
8. Цыпкин 51.3. Основы теории автоматических систем. — М.:
Наука, 1977.-560 с.
9. Шенфельд Р., Хабигер Э. Автоматизированные электропри-
воды/ Пер. с нем ; Под ред. Ю.А. Борцова. - Л.: Энергоатомиздат.
Ленингр. отд., 1985. - 464 с.
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ................................................ 3
КНИГА II. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ.
ПРОМЫШЛЕННАЯ ЭЛЕКТРОНИКА.
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ВВЕДЕНИЕ В КНИГУ II...................... ..................... 11
Раздел III. ЭЛЕКТРОМАГНИТНЫЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ
УСТРОЙСТВА
Глава 13. ТРАНСФОРМАТОРЫ
13.1 Принцип действия и основные соотношения............ 15
13.1.1. Устройство и принцип действия двухобмоточного
трансформатора...................................... 15
13.1.2. Холостой ход трансформатора................. 17
13.1.3. Идеальный трансформатор..................... 19
13.2 Реактивные сопротивления и уравнения напряжений
трансформатора......................................... 22
13.2.1. Реактивные сопротивления обмоток трансформатора.. 22
13.2.2. Уравнения напряжений двухобмоточного трансформатора .. 25
13.3 . Схемы замещения двухобмоточных трансформаторов
13.3.1. Схема замещения трансформатора без учета потерь
в сердечнике................................... 28
13.3.2. Схема замещения трансформатора с учетом потерь
в сердечнике................................... 29
13.3.3. Упрощенные схемы замещения трансформатора... 30
13.3 4. Опытное определение параметров схем замещения
трансформатора...................................... 32
13.3.5. Коэффициент полезного действия трансформатора.... 34
13.3 6. Изменение напряжения трансформатора при нагрузке. 35
13.4 . Трехфазные трансформаторы
13.4.1. Схемы соединения обмоток трехфазных трансформаторов ... 35
13.4.2. Группы соединения трансформаторов........... 37
13.4.3. Параллельная работа трансформаторов......... 38
13.4 4. Несимметричная нагрузка трансформаторов..... 40
13.5 Специальные трансформаторы
13.5.1. Автотрансформаторы.......................... 42
13.5 2. Сварочные трансформаторы.................... 43
701
13.6. Измерительные трансформаторы переменного тока......... 44
13.6.1. Измерительные трансформаторы тока.............. 44
13.6.2. Измерительные трансформаторы напряжения........ 49
Глава 14. МАШИНЫ ПОСТОЯННОГО ТОКА
14 1. Общие вопросы теории................................. 53
14.1.1 . Устройство и принцип действия машины постоянного тока ... 53
14.1.2 . ЭДС якоря................................... 55
14.1.3 . Магнитодвижущая сила реакпии якоря машины
постоянного тока........................................ 57
14.1.4 . Момент машины постоянного тока................ 61
14.1.5 . Коммутация в машинах постоянного тока......... 62
14.1.6 . Расчет магнитной цепи электрической машины... 65
14.1.7 . Потери мощности и КПД........................ 67
14.1.8 . Нагрев и номинальные режимы работы электрических
машин................................................... 69
14.2. Основы анализа установившейся работы машин постоянного тока
14.2.1. Классификация машин постоянного тока по способу
возбуждения............................................. 70
14.2.2. Энергетические диаграммы....................... 71
14.2.3. Уравнения моментов............................. 73
14.2.4. Уравнения напряжений и токов................... 74
14.2.5. Рабочий магнитный поток........................ 74
14.3. Генераторы постоянного тока........................... 76
14.3.1. Электрические характеристики генераторов
постоянного тока........................................ 76
14.3.2. Самовозбуждение генератора с параллельным
возбуждением............................................ 80
14.4. Двигатели постоянного тока
14.4.1. Пуск в ход двигателя с параллельным возбуждением. 82
14.4.2. Скоростные и механические характеристики....... 83
14.4.3. Моментные характеристики....................... 85
14.4.4. Рабочие характеристики......................... 86
14.4.5. Условие устойчивой работы агрегата двигатель-рабочая
машина.................................................. 87
14.5. Регулирование скорости двигателей постоянного тока.... 88
14.5.1. Регулирование скорости изменением рабочего магнитного
потока.................................................. 88
14.5.2. Регулирование скорости изменением сопротивления
цепи якоря.............................................. 90
14.5.3. Регулирование скорости изменением напряжения
на зажимах якоря........................................ 92
Глава 15. СИНХРОННЫЕ МАШИНЫ
15.1. Устройство и принцип действия синхронных машин........ 94
15.2. ЭДС якорных обмоток 97
15.2.1. ЭДС сосредоточенной якорной обмотки .......... 97
15.2.2. ЭДС распределенной якорной обмотки с укороченным
шагом................................................... 99
702
15.3. Намагничивающие силы распределенных якорных обмоток
электрических машин........................................ 102
15.3.1. Магнитодвижущая сила фазы обмоток якоря........ 103
15.3.2. Вращающиеся магнитные поля в машинах переменного
тока............................................. 105
15.4. Момент многофазной синхронной машины................. 109
15.5. Установившаяся работа синхронной неявнополюсной машины
15.5.1. МДС и потоки синхронной неявнополюсной машины...... 111
15.5.2. Нагружение синхронной машины активной мощностью .... 113
15.5.3. Синхронная машина как ЭДС за реакпгвным сопротивлением.
Схема замещения и векторная диаграмма неявнополюсной
синхронной машины................................ 115
15.6. Установившаяся работа синхронной явнополюсной машины..... 117
15.6.1. МДС и потоки синхронной явнополюсной машины.
Продольная и поперечная реакции якоря............ 117
15.6.2. Продольное и поперечное синхронные реактивные
сопротивления......................................... 119
15.6.3. Уравнения и векторные диаграммы явнополюсных
синхронных машин...................................... 120
15.7. Характеристики синхронных машин в установившихся режимах
15.7.1. Характеристики холостого хода и короткого замыкания .... 122
15.7.2. Рабочие характеристики синхронных машин........ 124
15.8. Статические угловые характеристики синхронных машин
15.8.1. Статические угловые характеристики............. 127
15.8.2. Параллельная работа синхронных генераторов..... 130
Глава 16. АСИНХРОННЫЕ МАШИНЫ
16.1. Устройство и принцип действия асинхронных машин...... 133
16.2. Момент многофазной асинхронной машины................ 135
16.3. Приведенная асинхронная машина
16.3.1. МДС и потоки асинхронной машины................ 136
16.3.2. Приведение обмотки неподвижного ротора к статору... 137
16.3.3. Приведение вращающейся асинхронной машины
к неподвижной, работающей как трансформатор...... 139
16.3.4. Уравнения приведенной асинхронной машины....... 140
16.4. Схемы замещения и режимы работы асинхронных машин
16.4.1. Схемы замещения асинхронных машин.............. 142
16.4.2. Установившиеся режимы работы асинхронных машин..... 144
16.5. Электромагнитные моменты и механические характеристики
асинхронных машин
16.5.1. Энергетические соотношения..................... 148
16.5.2. Максимальный электромагнитный момент........... 151
16.5.3. Начальный пусковой момент...................... 153
16.5.4. Механическая характеристика асинхронного двигателя. 153
16.6. Асинхронные короткозамкнутые двигатели с вытеснением тока
в обмотке ротора. Пуск асинхронных двигателей
16.6.1. Двигатели с глубоким пазом и двойной клеткой... 154
16.6.2. Способы пуска асинхронных двигателей........... 157
703
16.7. Регулирование скорости асинхронных двигателей
16.7.1. Классификация способов регулирования скорости...... 159
16.7.2. Асинхронные двигатели с изменяющимся числом полюсов . 160
16.7.3. Регулирование частоты питающей сети.......... 162
16.7.4. Регулирование напряжения питания............. 162
16.7.5. Регулирование скорости двигателя включением резистора
в цепь фазного ротора............................... 163
16.7.6. Регулирование скорости двигателя включением ЭДС
в цепь фазного ротора............................... 163
Глава 17 МИКРОМАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
17.1. Классификация электрических машин малой мощности... 165
17.2. Микромашины постоянного тока
17.2.1. Микродвигатели постоянного тока.............. 166
17.2.2. Универсальные коллекторные двигатели......... 167
17.2.3. Тахогенераторы постоянного тока.............. 168
17.3. Однофазные асинхронные микродвигатели
17.3.1. Основы теории................................ 170
17.3.2. Пуск и установившаяся работа однофазных асинхронных
двигателей......................................... 174
17.4. Асинхронные микромашины автоматических устройств
17.4.1. Исполнительные двигатели автоматических устройств. 176
17.4.2. Асинхронные тахогенераторы................... 178
17.4.3. Вращающиеся трансформаторы................. 180
17.5. Сельсины
17.5.1. Общее устройство и принцип действия. Работа сельсинов
в индикаторной схеме................................ 182
17.5.2. Работа сельсинов в трансформаторной схеме.... 184
17.5.3. Дифференциальные сельсины.................... 185
17.6. Синхронные электродвигатели малой мощности
17.6.1. Синхронные реактивные двигатели.............. 186
17.6.2. Гистерезисные двигатели...................... 187
17.6.3. Шаговые двигатели............................ 188
Раздел IV. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ И ОСНОВЫ
ИНФОРМАЦИОННОЙ ЭЛЕКТРОНИКИ
ВВЕДЕНИЕ................................................. 190
Глава 18. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ И ИНТЕГРАЛЬНЫЕ
МИКРОСХЕМЫ
18.1. Физические основы полупроводниковых приборов
18.1.1. Проводники, диэлектрики и полупроводники..... 193
18.1.2. Р-п переход...................................196
18.2. Полупроводниковые диоды
18.2.1. Классификация диодов......................... 199
18.2.2 Выпрямительные диоды.......................... 200
18.2.3. Стабилитроны и стабисторы.................... 201
18.3. Транзисторы
18.3.1. Классификация транзисторов................... 203
704
18.3.2. Биполярные транзисторы........................ 203
18.3.3. Линейный режим работы транзистора ........... 207
18.3.4. Классы усиления............................... 209
18.3.5. Ключевой режим................................ 210
18.3.6. Полевые транзисторы........................... 212
18.3.7. Биполярные транзисторы с изолированным затвором..214
18.3.8. Сравнение транзисторов.........................216
18.3.9. Переходные процессы в транзисторных ключах.... 216
18.3.10. Защищенный транзисторный ключ................ 219
18.4. Тиристоры
18.4.1. Устройство и принцип действия................. 219
18.4.2. Схемы включения............................... 220
18.4.3. Вольтамперные характеристики и диаграмма управления .... 221
18.4.4. Переходные процессы в тиристоре............... 223
18.4.5. Параметры тиристоров.......................... 226
18.4.6. Разновидности тиристоров.......................229
18.5. Фотоэлектронные приборы............................ 230
18.6. Полупроводниковые излучатели.........................233
18.7. Оптоэлектронные приборы..............................233
18.8. Терморезисторы...................................... 234
18.9. Элементы микроэлектроники........................... 235
18.10. Гибридные силовые схемы............................ 236
18.11. Рекомендации по применению полупроводниковых приборов .... 237
Глава 19. ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ И АНАЛОГОВЫЕ
ИНТЕГРАЛЬНЫЕ МИКРОСХЕМЫ
19.1. Классификация электронных усилителей................ 239
19.2. Характеристики и параметры усилителей................241
19.3. Обратные связи в усилителях..........................244
19.4. Усилители переменного тока
19 4.1 Одиночные усилительные каскады................. 247
19.4.2. Многокаскадные усилители.......................252
19.4.3 Паразитные обратные связи и развязывающие фильтры.252
19.5. Усилители постоянного тока (УПТ)
19.5.1 Особенности УПТ. Дрейф нуля.................... 253
19 5.2 Усилители постоянного тока прямого усиления.... 254
19.6. Аналоговые интегральные микросхемы (АИМС)
19.6.1. Классификация АИМС............................ 258
19.6.2. Операционные усилители........................ 259
19.6.3. Инвертирующий усилитель....................... 260
19.6.4. Неинвертирующий усилитель..................... 261
19.6.5 Повторитель на ОУ.............................. 262
19.6.6. Интегратор.................................... 262
19.6.7. Компараторы....................................263
19 6.8 Мультивибратор.............................. 266
19.7. Цифровые интегральные микросхемы
19 7.1. Классификация цифровых интегральных микросхем
и элементы алгебры логики..............................268
705
19.7 2. Комбинационные ЦИМС...........................269
19.7.3. Статические и динамические характеристики
и параметры ЦИМС...................................... 271
19.7.4. Последовательностные ЦИМС................... 273
19.7.5. Цифровые интегральные схемы - элементы ЭВМ......... 278
Раздел V. ЭНЕРГЕТИЧЕСКАЯ ЭЛЕКТРОНИКА........................ 286
Глава 20 ВЫПРЯМИТЕЛИ ТОКА
20.1. Классификация и структурные схемы выпрямителей...... 289
20.2. Однофазные выпрямители тока
20.2.1. Однофазная однополупериодная схема выпрямления.....291
20.2.2. Учет неидеальности вентилей и трансформатора.. 293
20.2.3. Однофазная нулевая схема выпрямления.......... 294
20.2.4. Однофазная мостовая схема выпрямления......... 298
20.2.5. Сравнение и применение однофазных схем выпрямления.300
20.3. Многофазные выпрямители тока
20.3.1. Трех фазная нулевая схема и ее разновидности.. 301
20.3.2. Схема две обратные звезды с уравнительным реактором .. 307
20.3.3. Трехфазная мостовая схема..................... 309
20.3.4. Сравнение многофазных схем выпрямления........ 312
20.4. Управляемые выпрямители тока
20.4.1. Режимы работы выпрямителей..........................312
20.4.2. Регулировочные характеристики идеального управляемого
выпрямителя при активно-индуктивной нагрузке.....313
20.4.3. Внешние и регулировочные характеристики
в непрерывном режиме.................................. 317
20.4.4. Внешние и регулировочные характеристики
в прерывистом режиме.................................. 323
20.5. Энергетические показатели выпрямителей, качество
выпрямленного напряжения и пути их улучшения............... 327
20.5.1. КПД выпрямителя............................... 327
20.5.2. Гармонические составляющие в выпрямленном
напряжении и первичном токе......................328
20.5.3. Коэффициент мощности выпрямителя...............329
20.5.4. Пути улучшения энергетических показателей выпрямителей
и уменьшения их вредного влияния на питающую сеть...... 332
Глава 21. ВЕДОМЫЕ ИНВЕРТОРЫ, РЕВЕРСИВНЫЕ
И РЕКУПЕРИРУЮЩИЕ ПРЕОБРАЗОВАТЕЛИ
21.1. Классификация инверторов............................ 338
21.2. Переход от выпрями гельного к инверторному режиму... 339
21.3. Регулировочные и внешние характеристики ведомого инвертора ..341
214. Условия устойчивой работы инвертора............... 342
21.5. Классификация рекуперирующих преобразователей....... 345
21.6. Схемы реверсивных преобразователей и их характеристики... 345
21.7. Способы управления реверсивными преобразователями....347
706
Глава 22. СИСТЕМЫ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ
22.1. Назначение, функциональные схемы и требования,
предъявляемые к системам управления преобразователей...... 351
22.2. Способы управления............. .................... 352
22.3. Регулировочные характеристики при различных формах
опорных напряжений.........................................354
22.4. Системы управления и регулировочные характеристики
реверсивных преобразователей при раздельном управлении.... 357
22.5. Переходные процессы в реверсивных преобразователях...361
22.6. Функциональная схема СУЭП постоянного тока...........366
22.7. Цифровые и микропроцессорные СУ..................... 367
Глава 23. ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО НАПРЯЖЕНИЯ
23.1. Классификация преобразователей постоянного напряжения. 371
23.2. Непосредственные ППН
23.2.1. Понижающий ППН................................ 371
23.2.2. Повышающий ППН................................ 375
23.2.3. Инвертирующий ППН............................. 377
23.3. Нереверсивные понижающие ППН
23.3.1. Регулировочные, внешние и энергетические
характеристики нереверсивных понижающих ППН............ 378
23.3.2. Рекуперирующие нереверсивные ППН................ 386
23.4. Реверсивные ППН
23.4.1. Схема и способы управления реверсивными ППН..... 387
23.4.2 Работа реверсивного ППН на активно-индуктивную
нагрузку при симметричном управлении...................389
23.4.3. Работа реверсивного ППН на активно-индуктивную
нагрузку при несимметричном управлении.................390
23.4.4. Работа реверсивного ППН на ПЭДС при симметричном
управлении.............................................392
23.4.5. Работа реверсивного ППН на ПЭДС при несимметричном
управлении.............................. . .......... 395
23.4.6. Работа реверсивного ППН на ПЭДС при поочередном
управлении.............................................398
23.4.7. Внешние характеристики реверсивных ППН........ 399
23.4.8. Реверсивный двухключевой ППН...................401
Глава 24. АВТОНОМНЫЕ ИНВЕРТОРЫ
24.1. Классификация и принципы построения автономных инверторов 402
24.2. Автономные инверторы на тиристорах с одноступенчатой
коммутацией
24.2.1. Параллельные автономные инверторы тока.........405
24.2.2. Автономные инверторы напряжения на тиристорах .410
24.2.3. Резонансные автономные инверторы.............. 412
24.3. Автономные инверторы на тиристорах с двухступенчатой
коммутацией............................................... 413
24.4. Автономные инверторы напряжения на транзисторах
24.4.1. Однофазные транзисторные АИН.................. 414
707
24.4.2. Трехфазный мостовой АИН...................... 416
24.4.3 Расчет идеального трехфазного мостового АИН... 419
24.4.4. Расчет трехфазного мостового АИН с учетом потерь. 423
24.5. Регулирование величины и формы напряжения в АИН
24.5.1. Импульсная модуляция в АИН.......................426
24.5.2. Регулирование напряжения в трехфазных АИН.....429
24.5.3. Формирование средних напряжений на выводах
по отношению к средней точке источника питания........ 429
24.5.4. Формирование фазных напряжений с помощью
пространственного вектора.......................... 432
24.5.5. Формирование фазных токов.................... 438
24.5.6. Основные соотношения в АИН с ШИМ..............440
24.6 Сравнение АИ........................................ 440
Глава 25. УПРАВЛЯЕМЫЕ ВЫПРЯМИТЕЛИ НАПРЯЖЕНИЯ.
ОБРАТИМЫЕ ПРЕОБРАЗОВАТЕЛИ НАПРЯЖЕНИЯ
25.1. Управляемые выпрямители напряжения................. 442
25.2. Обратимый преобразователь напряжения АИН-УВН........449
25.3. Анализ процессов в обратимом однофазном мостовом
преобразователе напряжения................................452
25.4. Схемы управления ОПН.............................. 459
Глава 26. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
26.1. Классификация и принципы построения.................462
26.2. Двухзвенные преобразователи частоты
26.2.1. Функциональные схемы ДПЧ......................463
26.2.2. ДПЧ на основе управляемого выпрямителя и АИН.....464
26.2.3. ДПЧ на основе неуправляемого выпрямителя
и АИН с ШИМ..........................................465
26.2.4. Рекуперирующий ДПЧ на основе АИН..............467
26.2.5. Рекуперирующий ДПЧ на основе АИТ............. 468
26.3. Непосредственные преобразователи частоты
26.3.1. Принцип действия НПЧ......................... 470
26.3.2. Расчет идеализированного НПЧ..................471
Глава 27. ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ............... 476
Глава 28. ФИЛЬТРЫ, СТАБИЛИЗАТОРЫ, ИСТОЧНИКИ
ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ
28.1. Фильтры............................................ 481
28.2. Стабилизаторы напряжения и тока.................... 485
28.3. Источники вторичного электропитания (ИВЭП)
28.3.1. Общая характеристика ИВЭП.................... 487
28.3.2. Принципы построения бестрансформаторных ИВЭП..... 488
28.3.3. Регулируемые и нерегулируемые двухзвенные ППН
малой мощности.......................................490
28.3.4. Централизованные стабилизаторы постоянного
напряжения.......................................... 494
708
Раздел VI. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Глава 29. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
29.1. Понятие об автоматическом управлении. Основные определения,
термины....................................................495
29.2. Статические системы.....................................497
29.3. Методы математического описания и моделирования линейных
элементов и систем управления
29.3.1. Общие понятия о передаточных свойствах (функциях)
элементов и систем.................................... 502
29.3.2. Временные и спектральные характеристики типовых
воздействий и сигналов................................ 509
29.3.3. Статические характеристики элементов...........520
29.3.4. Линейные дифференциальные уравнения........... 526
29.3.5. Временные характеристики...................... 532
29.3.6. Операционный метод и передаточная функция......537
29.3.7. Частотные характеристики.......................543
Глава 30. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ СИСТЕМ
УПРАВЛЕНИЯ
30.1. Классификация звеньев............................. 551
30.2. Типы позиционных звеньев и их характеристики........ 553
30.3. Интегрирующие звенья................................ 567
30.4. Дифференцирующие звенья..............................572
30.5. Неминимально-фазовые звенья. Звено запаздывания......576
30.6. Сводные данные по типовым динамическим звеньям...... 581
Глава 31. АНАЛИЗ УСТОЙЧИВОСТИ И ОЦЕНКА КАЧЕСТВА
ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
31.1. Понятие, виды и общее условие устойчивости...........590
31.2. Алгебраические критерии устойчивости.................593
31.3. Критерий Михайлова...................................597
31.4. Критерий Найквиста.................................. 600
31.5. Способы соединения и преобразования структурных схем
31.5.1. Цепь из последовательно соединенных звеньев... 609
31.5.2. Цепь из параллельно соединенных звеньев........610
31.5.3. Цепь с местной связью......................... 611
31.5.4. Частотные характеристики разомкнутой цепи звеньев.612
31.5.5. Структурный метод составления уравнений систем....614
31.6. Оценка качества управления в линейных системах управления
31.6.1. Понятие и показатели качества управления..... 619
31.6.2. Частотные показатели...........................622
31.6.3. Диаграмма Вышнеградского.......................624
31.7. Точность статических и астатических систем управления
при типовых воздействиях................................ 626
31.7.1. Общие понятия о точности управления...... .....629
31.7.2. Статическая точность.......................... 630
31.7.3. Динамическая точность......................... 632
709
31.7.4. Точность при движении по гармоническому закону..636
Глава 32. СИНТЕЗ И ЦИФРОВОЕ МОДЕЛИРОВАНИЕ
СИСТЕМЫ УПРАВЛЕНИЯ
32.1. Основные понятия о синтезе систем управления...... 639
32.2. Общие принципы синтеза систем управления
32.2.1. Идеальная структура системы..................... 641
32.2.2. Синтез корректирующих устройств
по логарифмическим частотным характеристикам......... 643
32.2.3. Инвариантность и комбинированные системы управления 654
32.3. Структурно-параметрическая оптимизация систем..... 659
32.3.1. Модульный оптимум........................... 660
32.3.2. Симметричный оптимум.........................667
32.3.3. Принцип подчиненного регулирования.......... 673
32.4. Цифровое моделирование нелинейных систем
32.4.1. Особенности синтеза нелинейных систем....... 674
32.4.2. Пакет прикладных программ «Моданс»
для моделирования систем управления................. 677
32.4.3. Синтез нелинейной астатической следящей системы. 679
32.4.4. Исследование устойчивости нелинейной безредукторной
следящей системы.....................................686
32.4.5. Синтез оптимальной по быстродействию следящей системы 691
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.................................. 698
УДК 621.3(075.8)
Э 455 Электротехника: Учебное пособие для вузов. - В 3-х кни-
гах. Книга II. Электрические машины. Промышленная элек-
троника. Теория автоматического управления/ Под ред.
П.А. Бутырина, Р.Х. Гафиятуллина, А.Л. Шестакова. - Че-
лябинск: Изд-во ЮУрГУ, 2004. - 711 с.
ISBN 5-696-02928-0
В этой книге изложены теория электрических машин, полу-
проводниковых приборов и информационной электроники, а также
основы энергетической электроники. В необходимом объеме для
студентов и инженеров изложены элементы теории автоматического
управления, в частности, вопросы анализа и синтеза линейных сис-
тем, а также методы синтеза нелинейных систем, базирующиеся на
цифровом моделировании с соответствующим программным обес-
печением.
Книга предназначена для студентов высших технических учеб-
ных заведений, в первую очередь, электротехнического и электро-
энергетического направлений и инженеров.
ISBN 5-696-02928-0
© Коллектив авторов, 2004.
© Издательство ЮУрГУ, 2004.
ЭЛЕКТРОТЕХНИКА
Книга II
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ. ПРОМЫШЛЕННАЯ ЭЛЕКТРОНИКА.
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Издательство Южно-Уральского государственного университета
ИД № 00200 от 28.09.99.
Подписано в печать 24.08.04. Формат 60X90 1/16.
Печать офсетная. Бумага ВХИ. Гарнитура Таймс.
Усл. печ. л. 41,39. Уч.-изд. л. 41,82.
Тираж 2000 экз. Заказ 50. Цена С.
Отпечатано с готового оригинал-макета в полиграфическом объединении «Книга».
454000, г. Челябинск, ул. Постышева, 2.