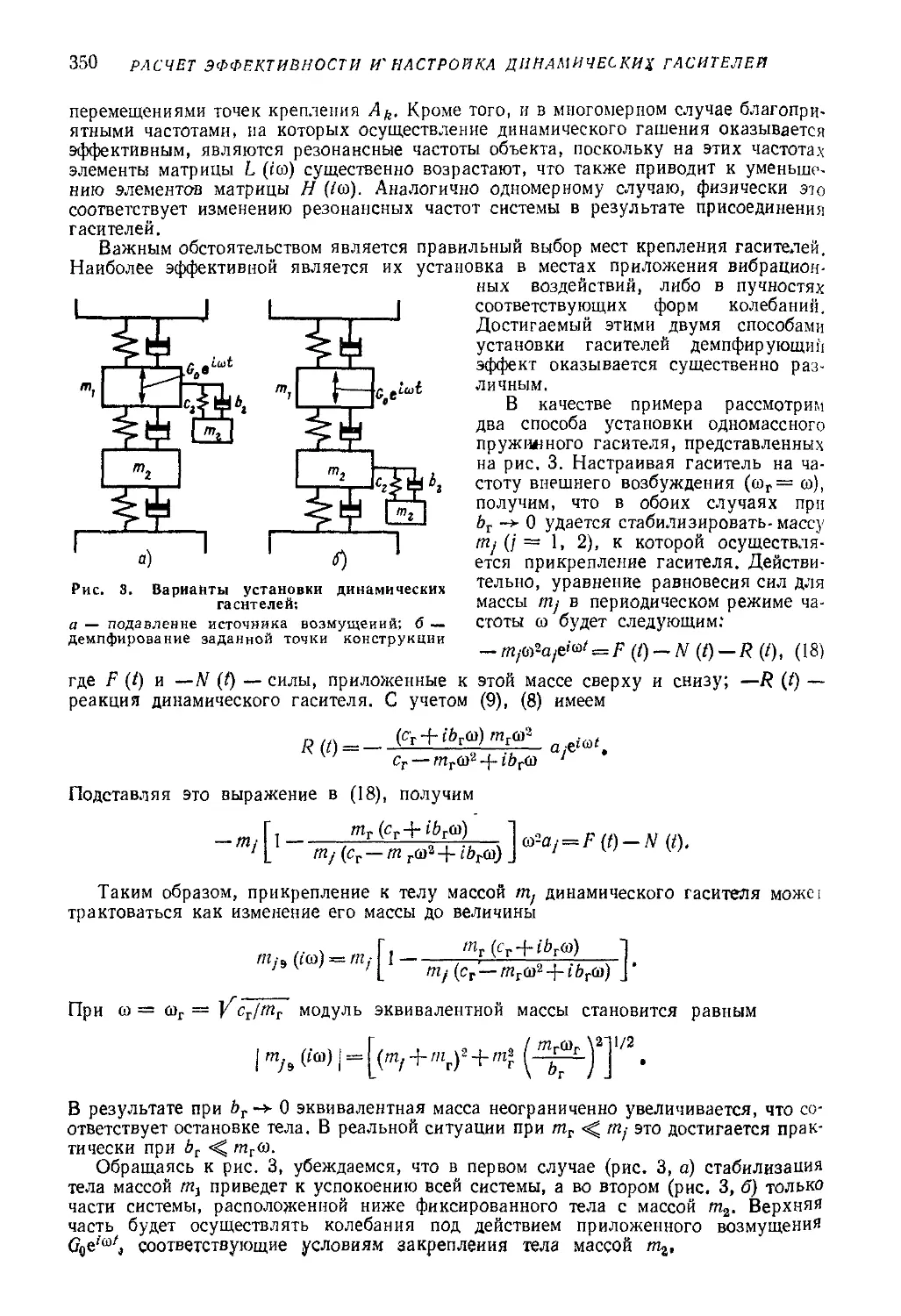
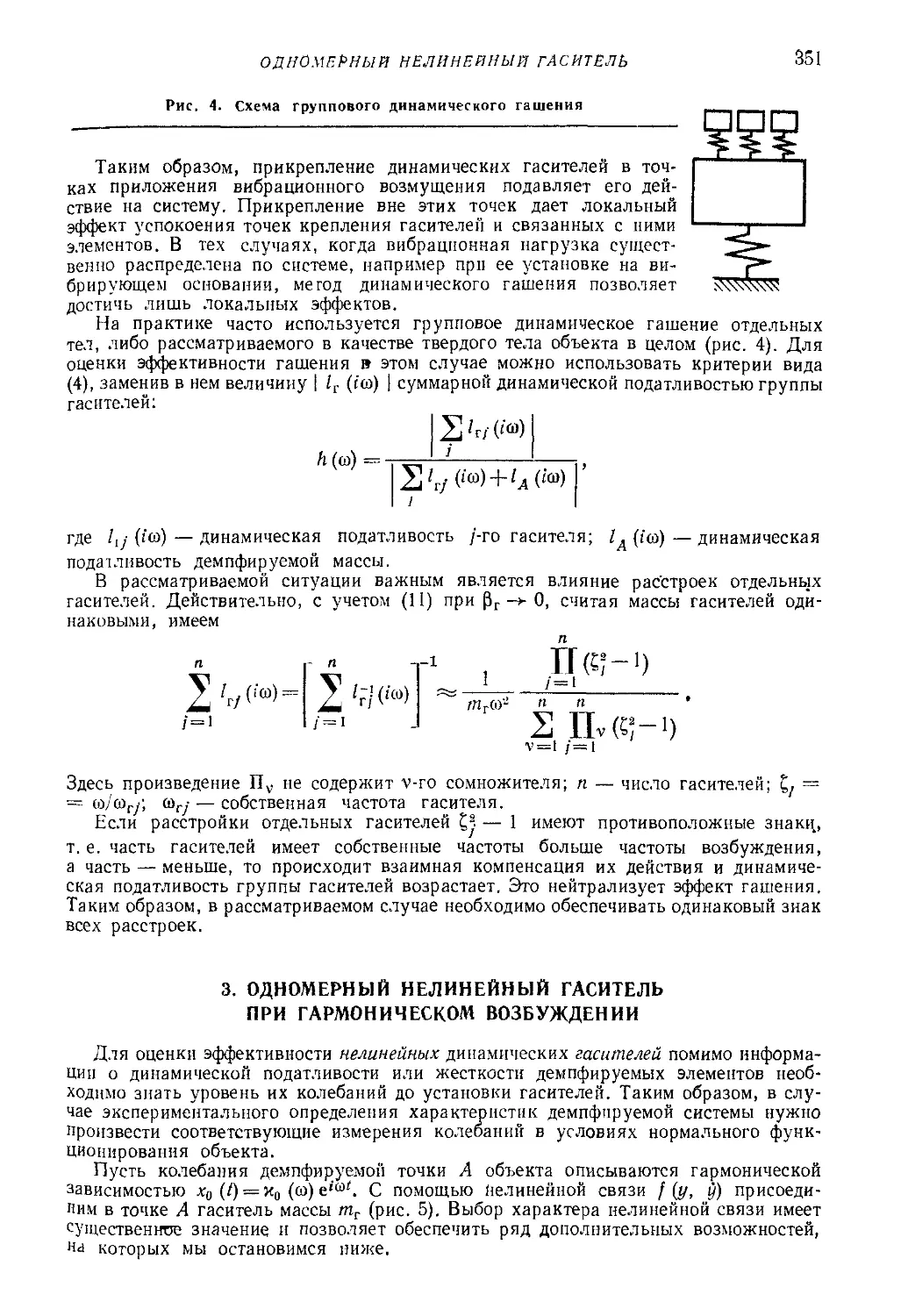
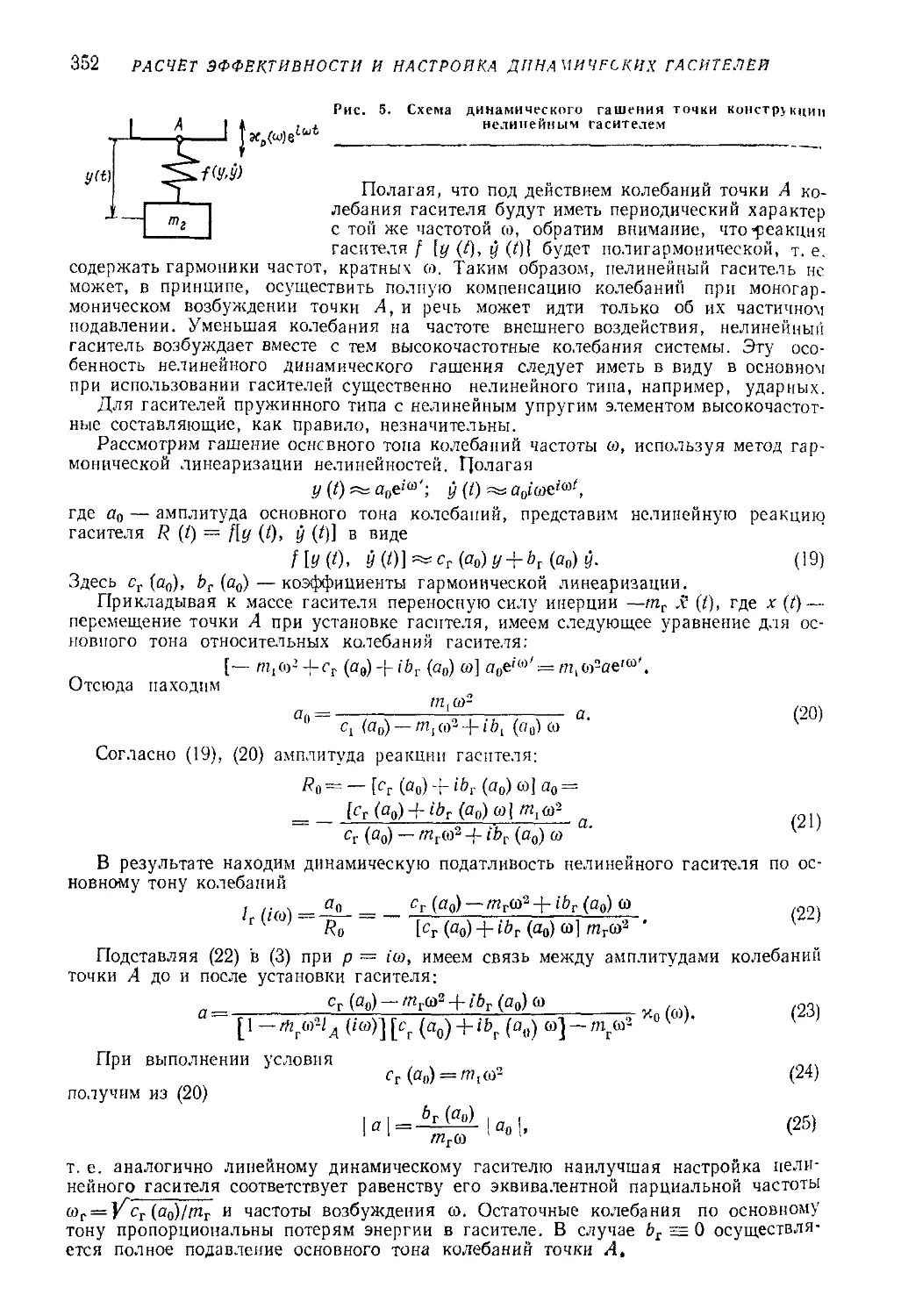
/





























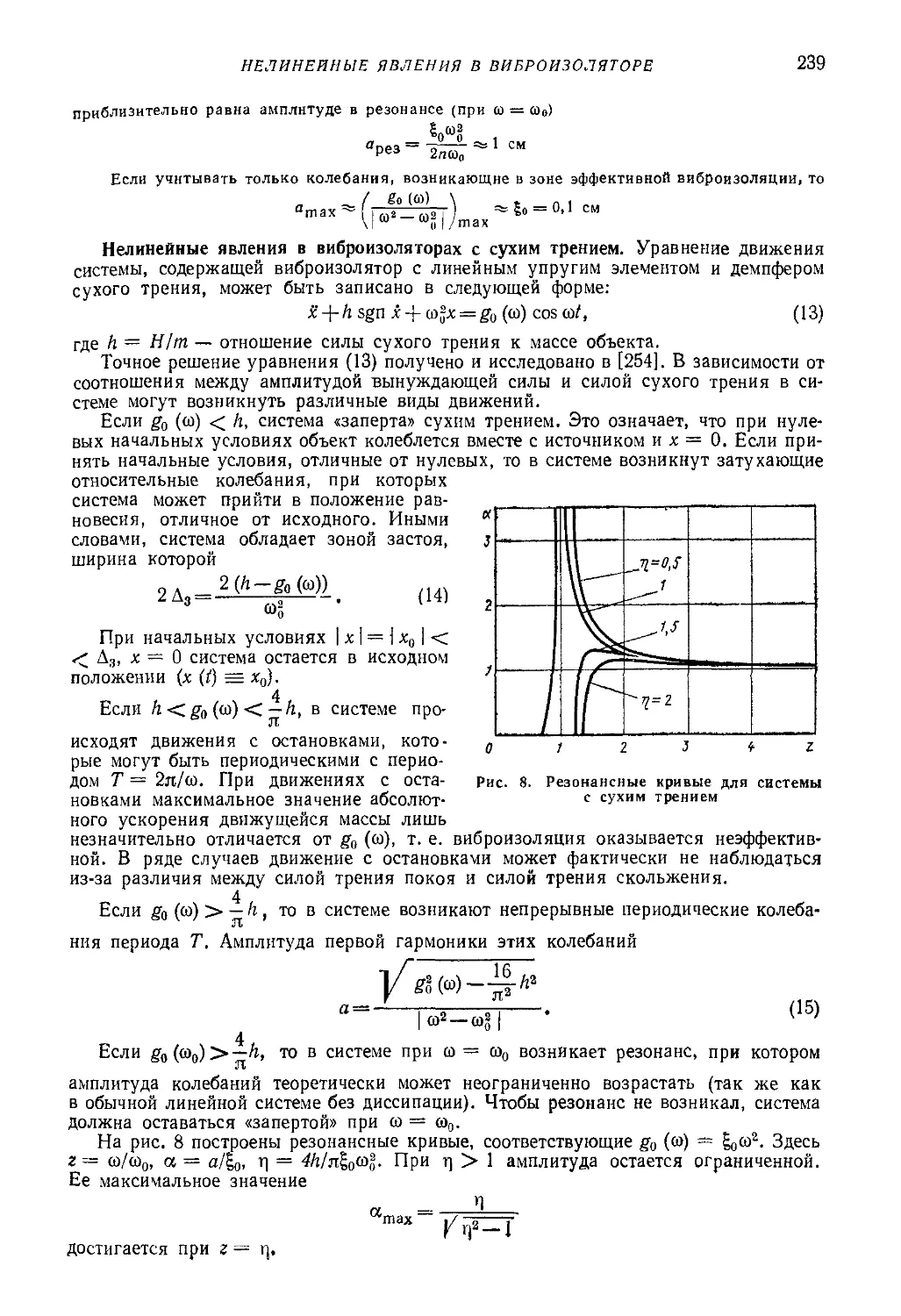
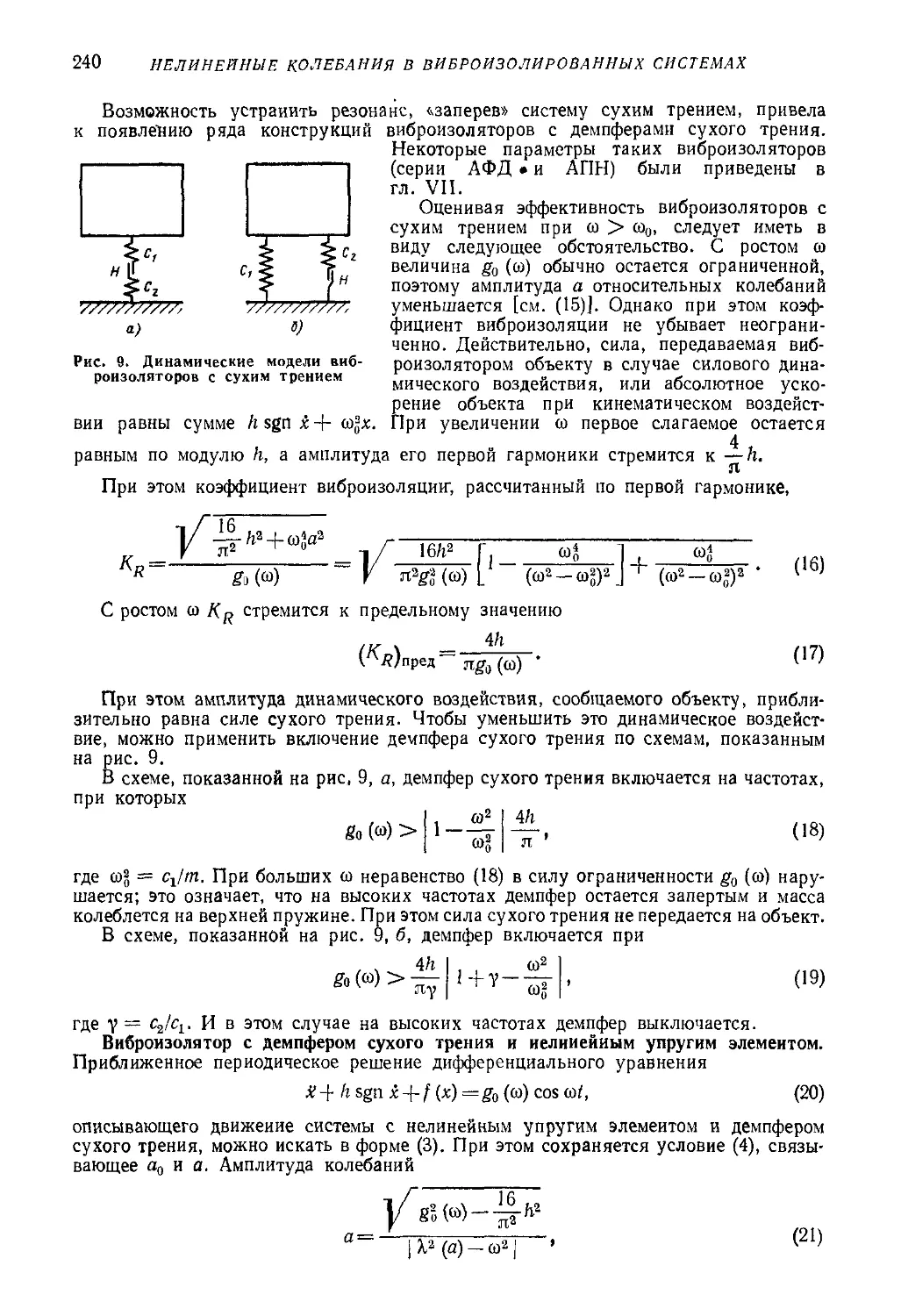

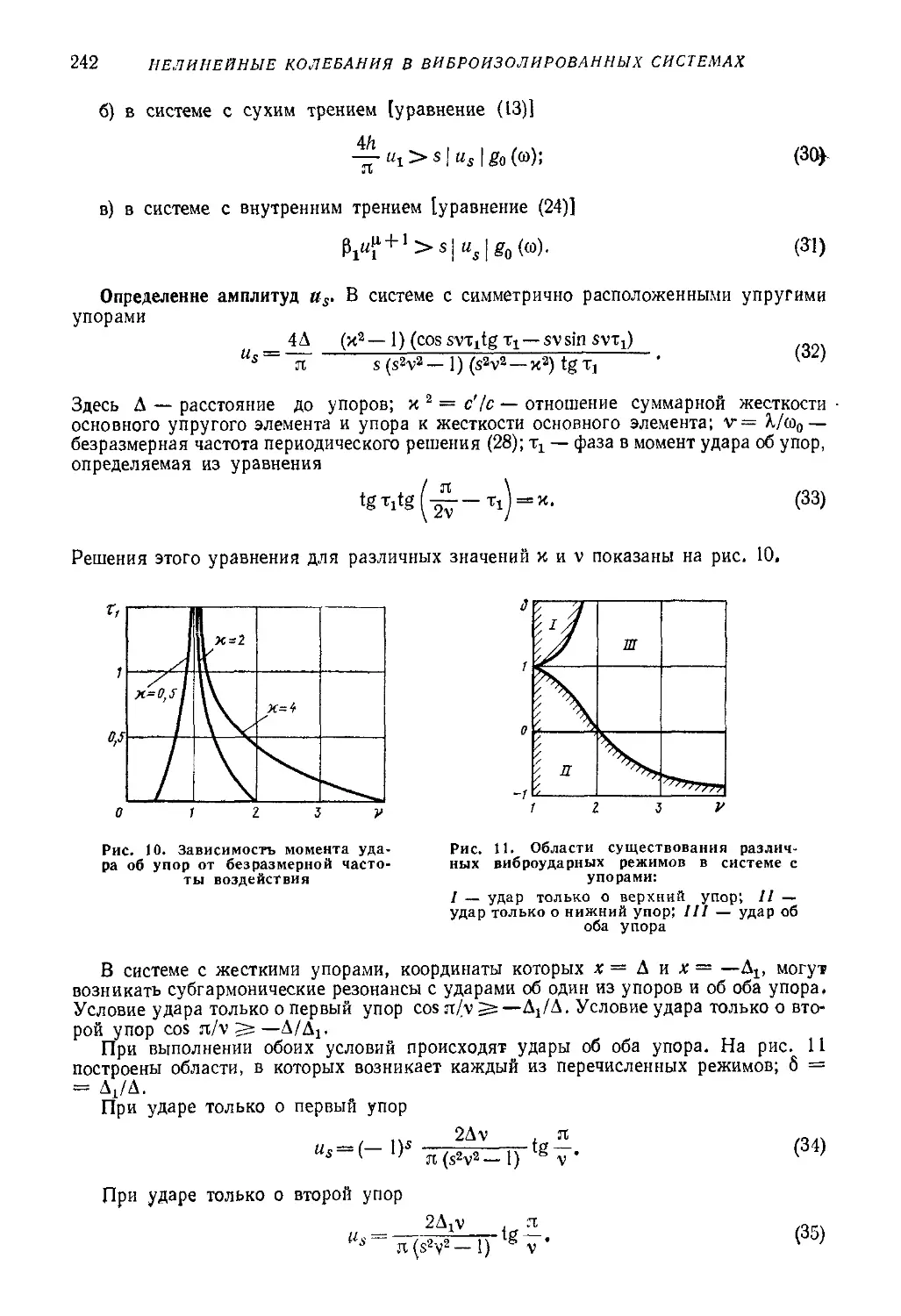































Text
ВИБРАЦИИ
В ТЕХНИНЕ
СПРАВОЧНИК
б
В \J ТОМАХ
Редакционный совет
Председатель — В. Н. Челомей (ьтавный редактор издания)
Члены. В. С. Авдуевский, I И. И. Артоболевский [, И. И. Блехман,
А. Н. Боголюбов, Н. Н. Боголюбов, В. В. Бойцов, В. В. Бологин,
Н. В. Бутенин, И. И. Быховский, Р. Ф. Ганиев, М. Д. Генкин,
Э. И. Григолюк (зам председателя и главного редактора),
Ф. М. Диментберг, А. Е. Кобринский,К. С. Колесников,
М. 3. Коловский, Э. Э. Лавендел, А. И. Лурье ,
Ю. А. Митропольский, Я- Г. Пановко, К. М. Рагульскис,
В. В. Румянцев, Л, И. Седов, I С. В. Серенсен \, К. В. Фролов (зам.
главного редактора)
Москва «Машиностроение» 1981
ЗАЩИТА ОТ ВИБРАЦИИ
И УДАРОВ
том
6
Под редакцией чл.-кор. АН СССР
К. В. ФРОЛОВА
Москва «Машиностроение» 1981
ББК 22.23
В41
УДК 621-752@31)
Авторы:
В. К. Асташев, В. И. Бабицкий, И. И. Быковский, И. И. Вульфсон,
М. Н. Вульфсон, Б. Г. Гольдштейн, А. А. Гоппен, В. В. Турецкий,
A. А. Гусаров, М. 3. Коловский, В. А. Пальмов, Г. Я, Пановко, Я. Г. Пановко,
B. И. Панченко, Г. С. Писаренко, Б. А. Потемкин, А. В. Синев, К. В. Фролов,
Ф. А. Фурман, Р. И. Фурунжиев ¦
Рецензент Г. И. Страхов
Вибрации в" технике: Справочник. В 6-ти т./Ред. совет:
В41 В. Н. Челомей (пред.). —М.: Машиностроение, 1981. — Т. 6.
Защита от вибрации и ударов/Под ред. К. В. Фролова. 1981,
456 с, ил.
В пер.: 2 р. 20 к.
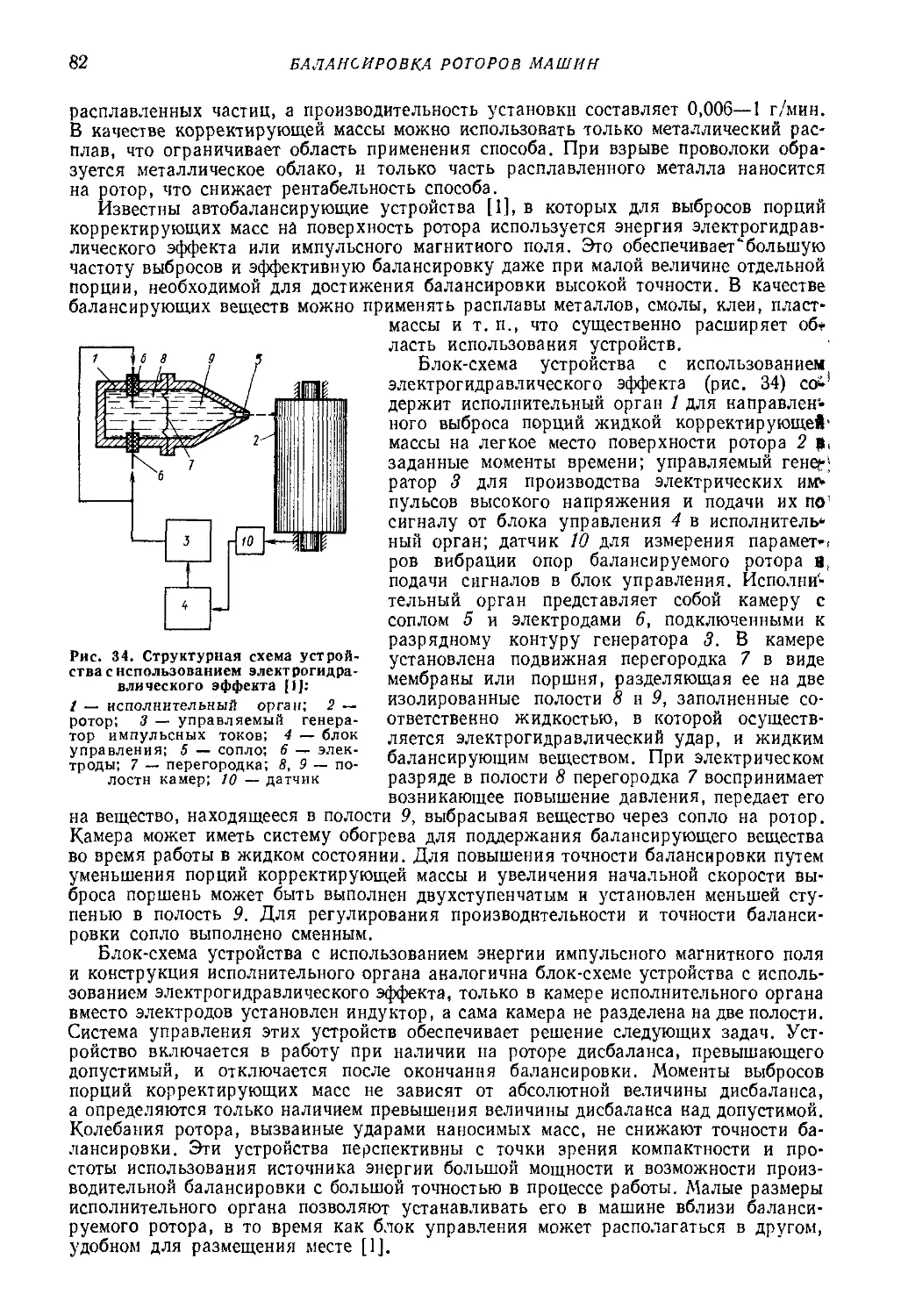
В шестом томе изложены методы снижения виброактивности источников колеба-
колебаний и настройки динамических гасителей. Рассмотрены вопросы балансировки вра-
вращающихся деталей машин, уравновешивания машин и механизмов, выбора рацио-
рациональных законов перемещения рабочих органов машин, изоляции оборудования и
основания, а также проблемы защиты человека от вибрации.
Справочник предназначен для инженерно-технических работников, занятых ра-
расчетами, проектированием, изготовлением и эксплуатацией объектов современной
техники.
31302-602 ББК 22.23
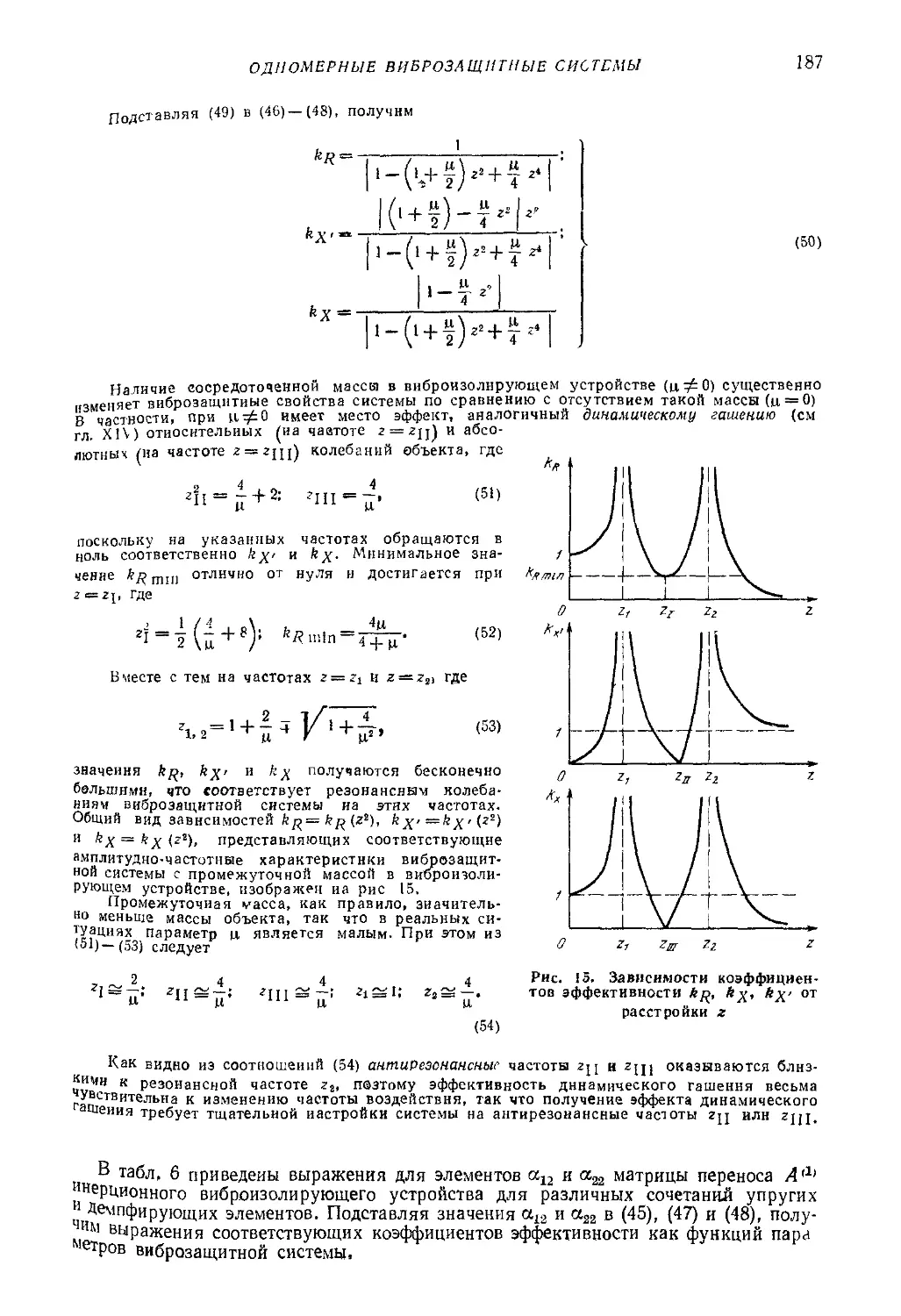
В 038@1)-81 П°ДПИСНОе- 2702000000 6П5.1
ИБ 718
Владимир Константинович Асташев,
Владимир Ильич Бабицкий,
Исидор Иделевич Быховский и др.
ВИБРАЦИИ В ТЕХНИКЕ
ТОМ 6
ЗАЩИТА ОТ ВИБРАЦИИ И УДАРОВ
Редактор И. И. Лесниченко. Художественный редактор С. С. Водчиц.
Технический редактор И. Н. Раченкова. Корректоры А. П. Озерова и Л. Я. Шабашооа.
Переплет художника А. Я. Михайлова
Сдано в набор 05.09.80. Подписано в печать 11.08.81. Т-23615. Формат 60Х90'Аб. Бумага
типографская № 3. Гарнитура литературная. Печать высокая. Усл. печ. л. 28,5. Уч.-изд.
л. 37,65. Тираж 30 000 экз. Зак. 1525. Цена 2 р. 20 к.
Издательство «Машиностроение», 107076, Москва, Стромынский пер., д. 4
Ордена Октябрьской Революции, ордена Трудового Красного Знамени Ленинградское
производственно-техническое объединение «Печатный Двор» имени А. М. Горького
Союзполиграфпрома при Государственном комитете СССР по делам издательств,
полиграфии и книжной торговли. 197136, Ленинград, П-136, Чкаловский пр., 15.
<§) Издательство «Машиностроение», 1981 г,
ОГЛАВЛЕНИЕ
Предисловие . , , ¦ . . , , 9
ЧАСТЬ ПЕРВАЯ
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ ИСТОЧНИКОВ КОЛЕБАНИЙ
Глава I. Механические воздействия и методы виброзащиты (В. И. Ба-
Бабицкий, М. 3. Коловский) ...... . . ..,.,,, 1 •..,.,. 11
1. Источники колебаний и объекты виброзащиты 11
2. Механические воздействия 12
3. Влияние механических воздействий на технические объекты и
человека , , , . , 22
4. Анализ действия вибрации ...,...,, 23
5. Основные методы виброзащиты . , , , , , , , . , 33
Глава II. Балансировка роторов машин (А. А. Гусаров) , 35
1. Основные понятия ,,.... 35
2. Допустимая остаточная неуравновешенность _ро.торов ...... ,39
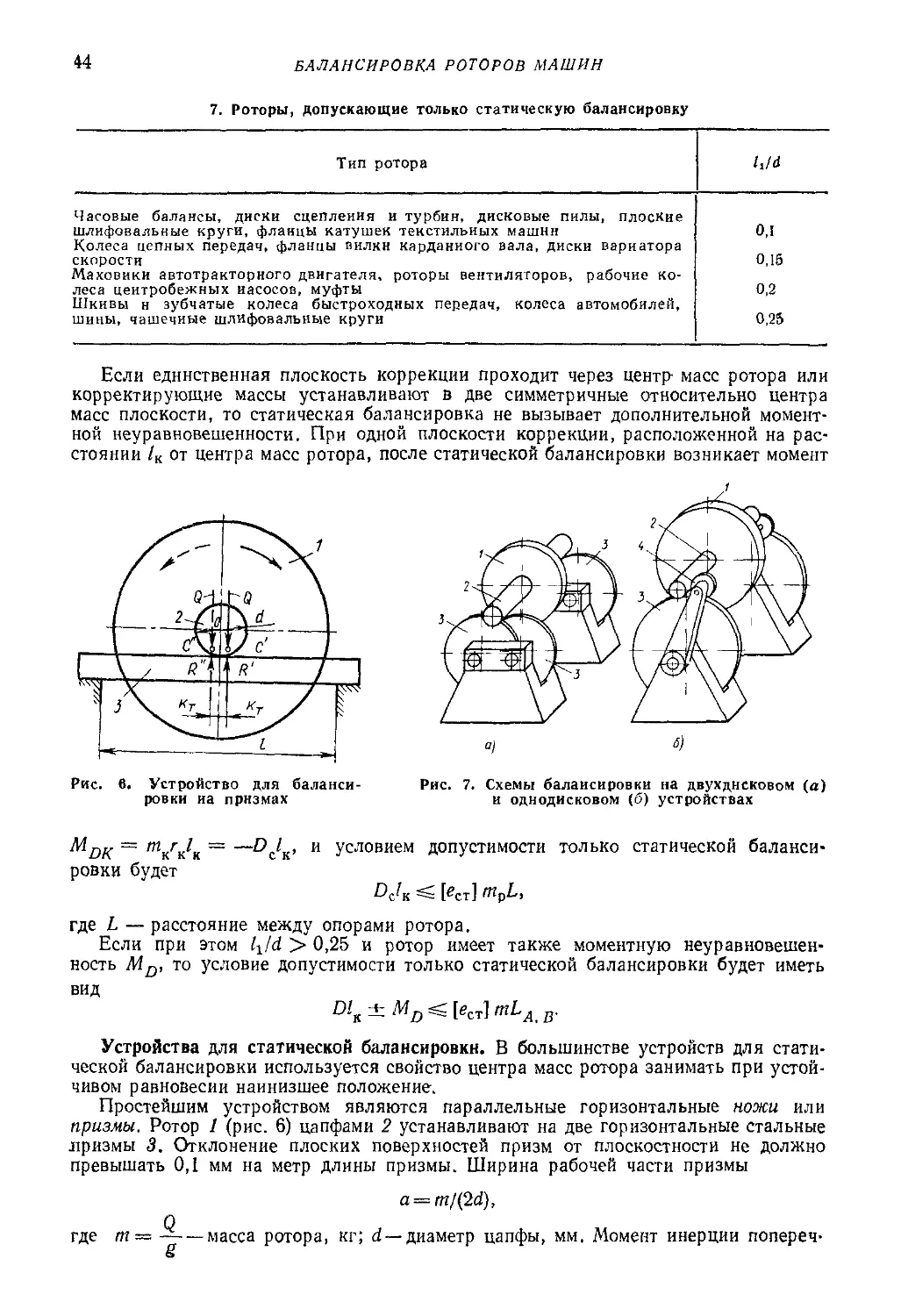
3. Статическая балансировка роторов . г > 43
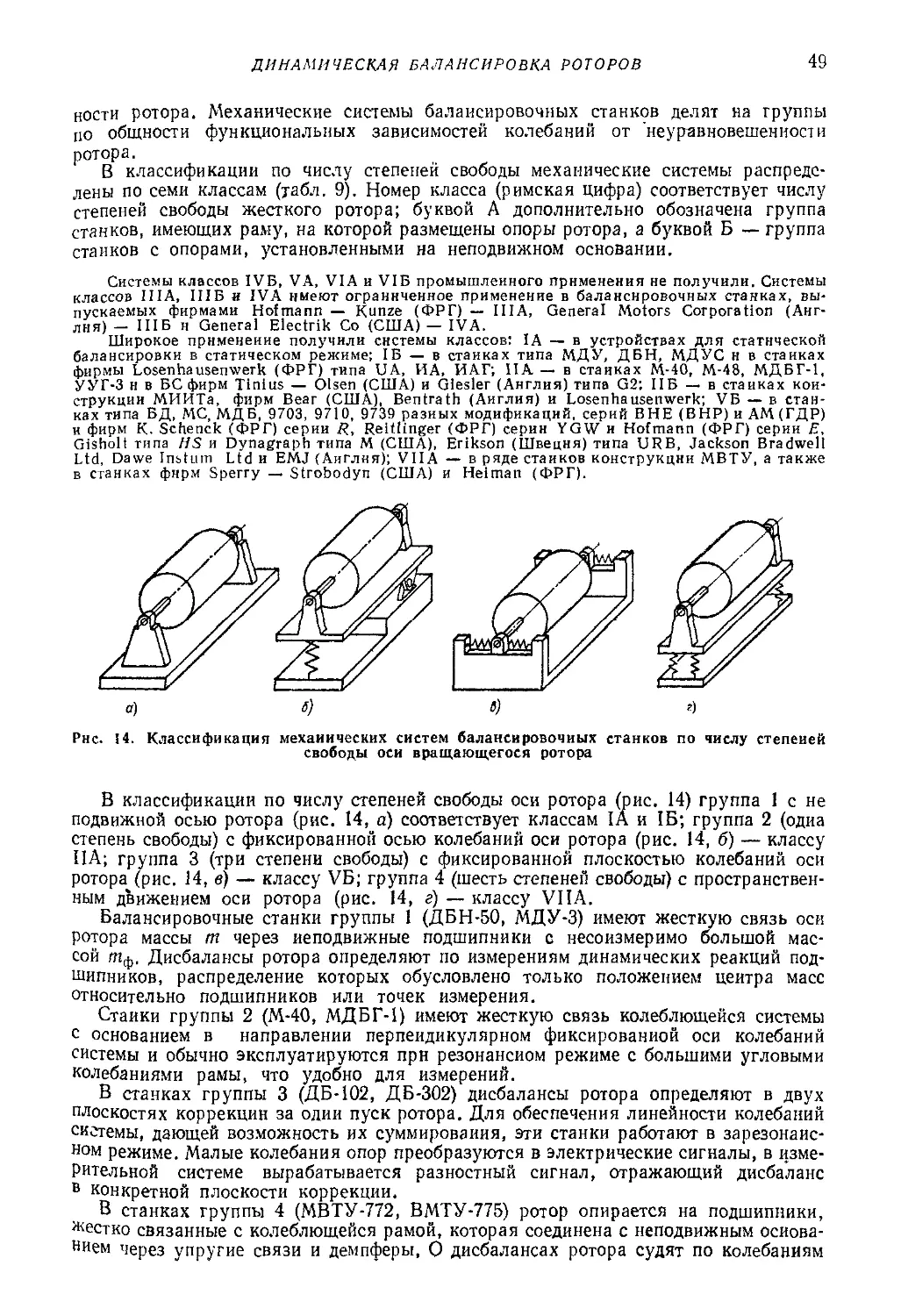
4. Динамическая балансировка роторов . , 48
5. Балансировка гибких роторов 62
6. Автоматическая балансировка роторов ..,,.., ... 72
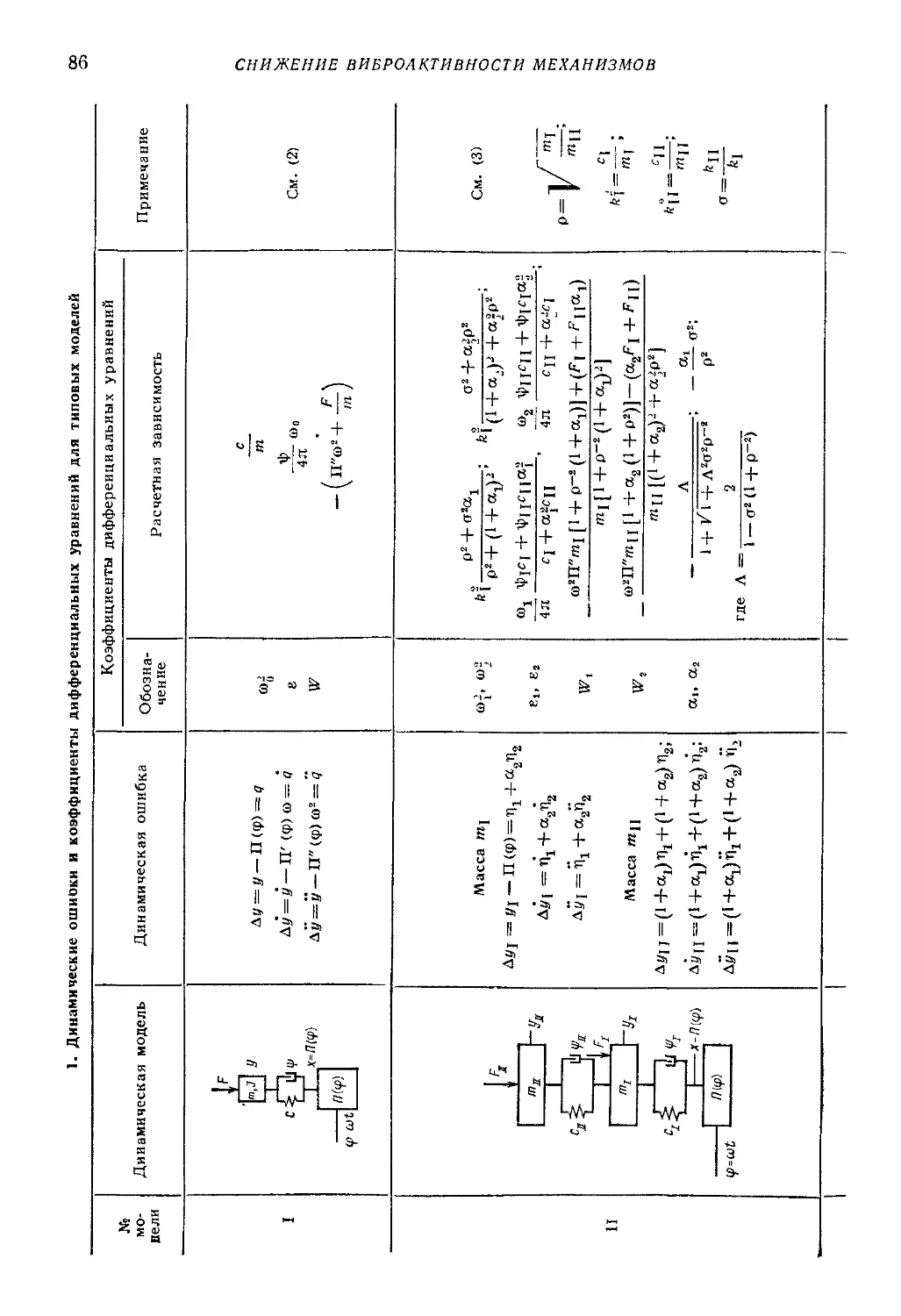
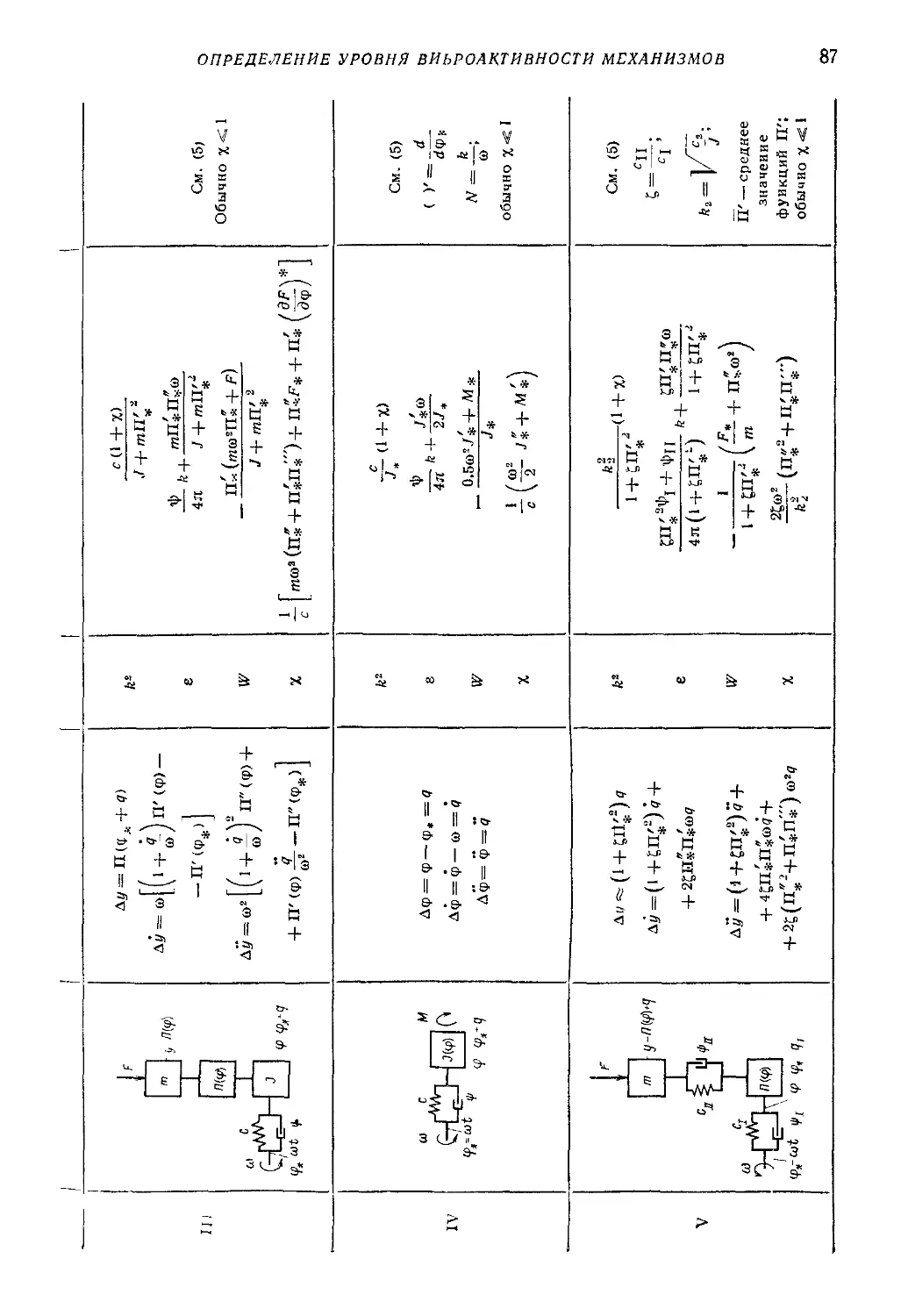
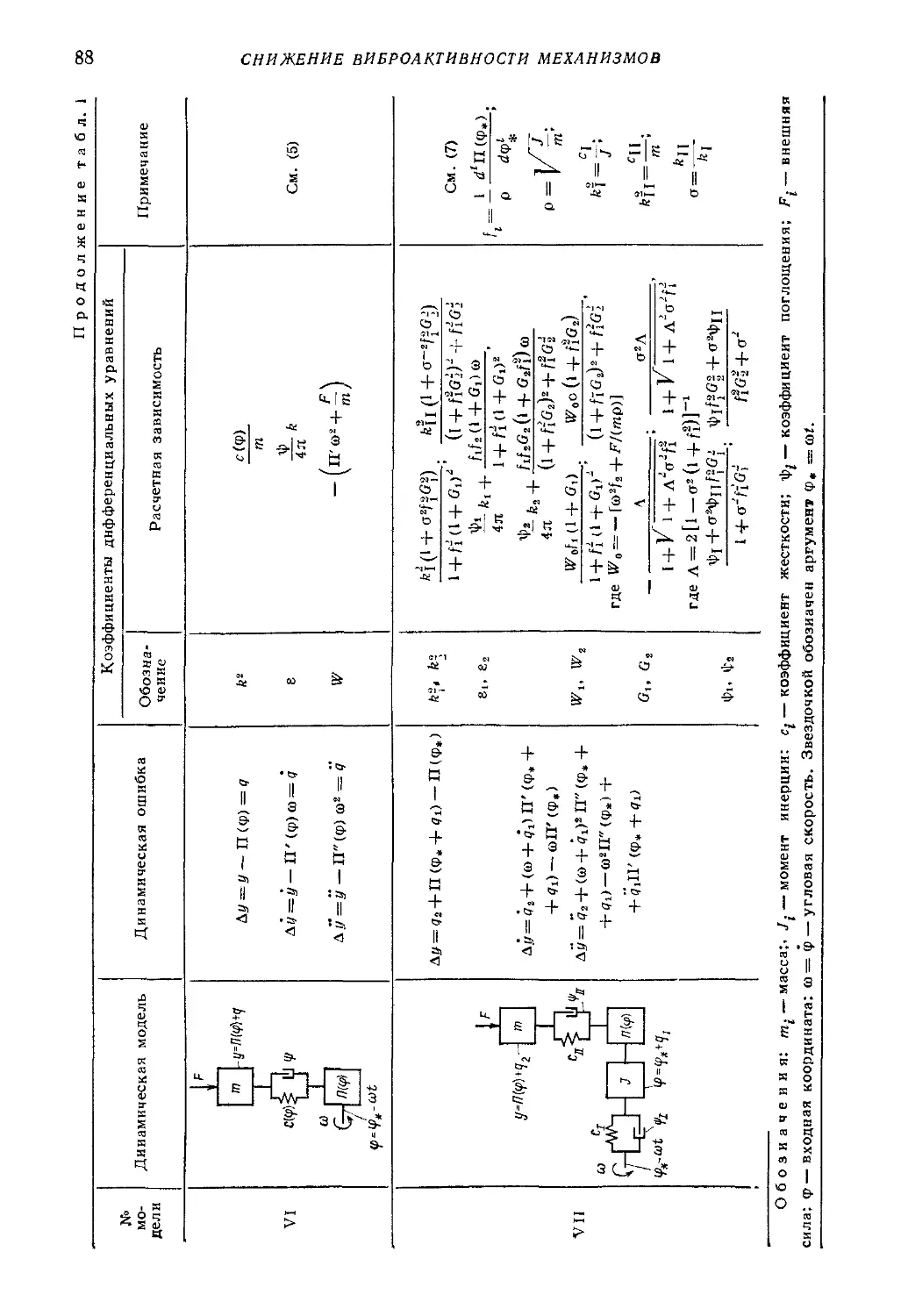
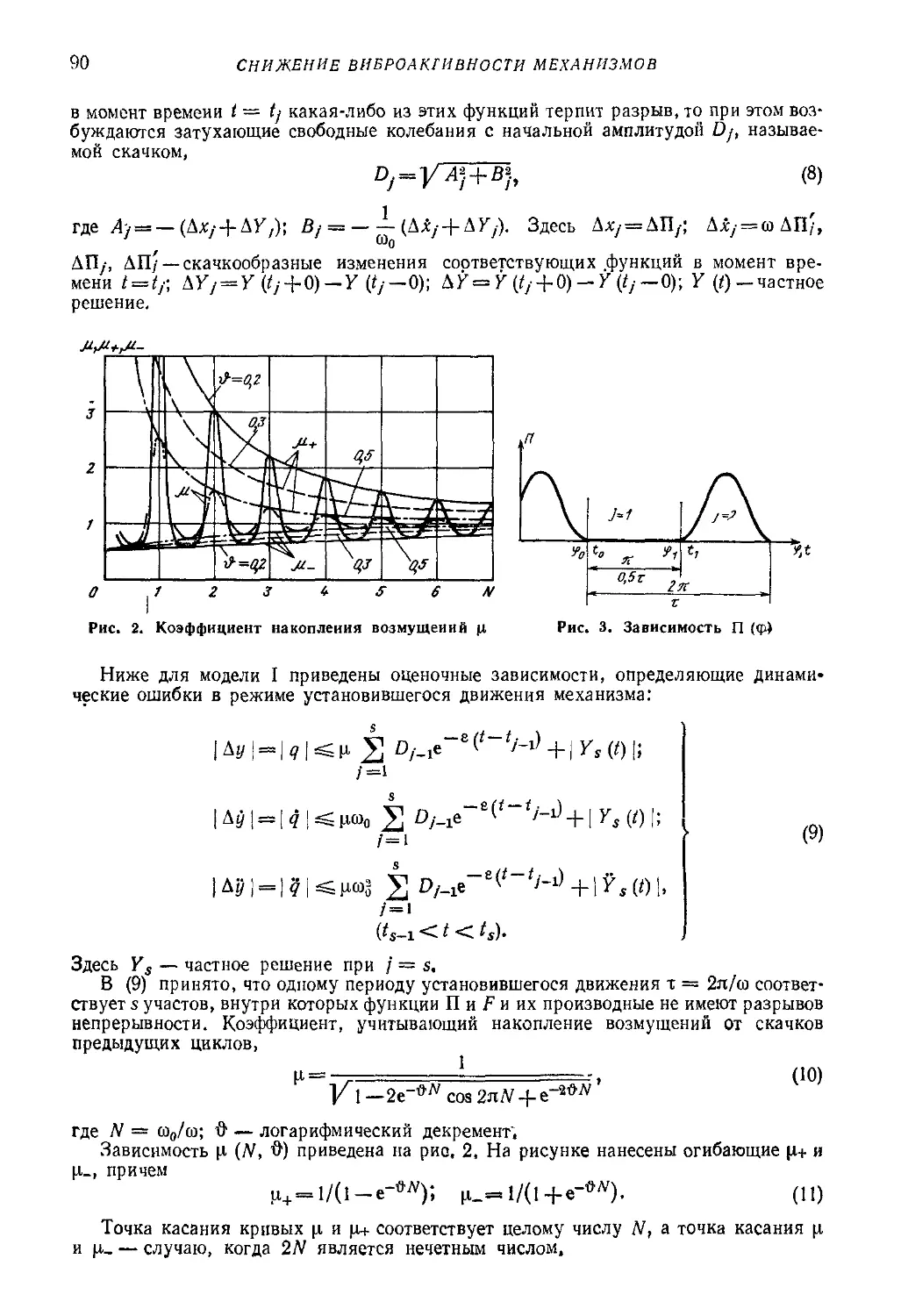
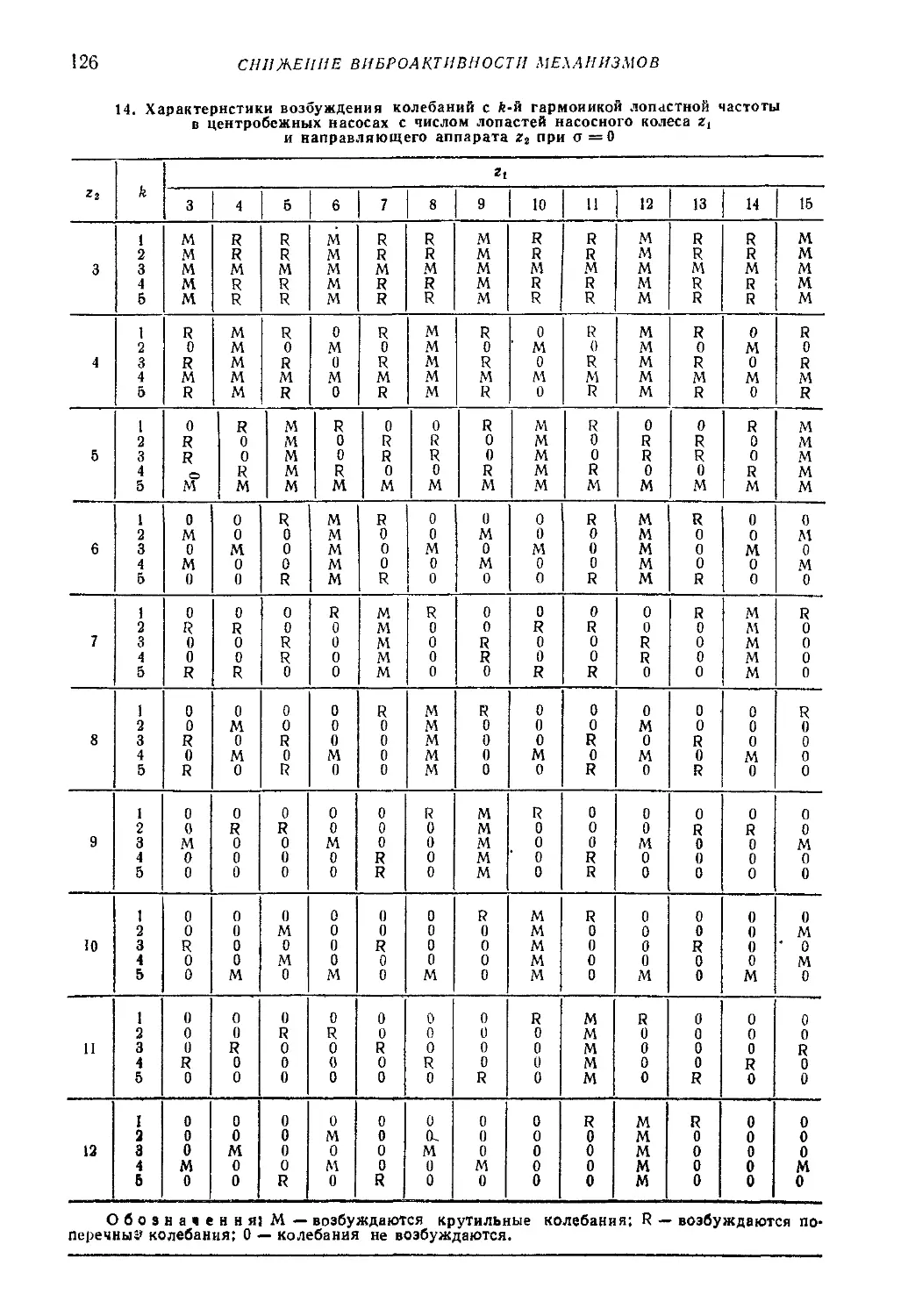
Глава III. Снижение виброактивности механизмов (И. И, Вульфсон). , , 83
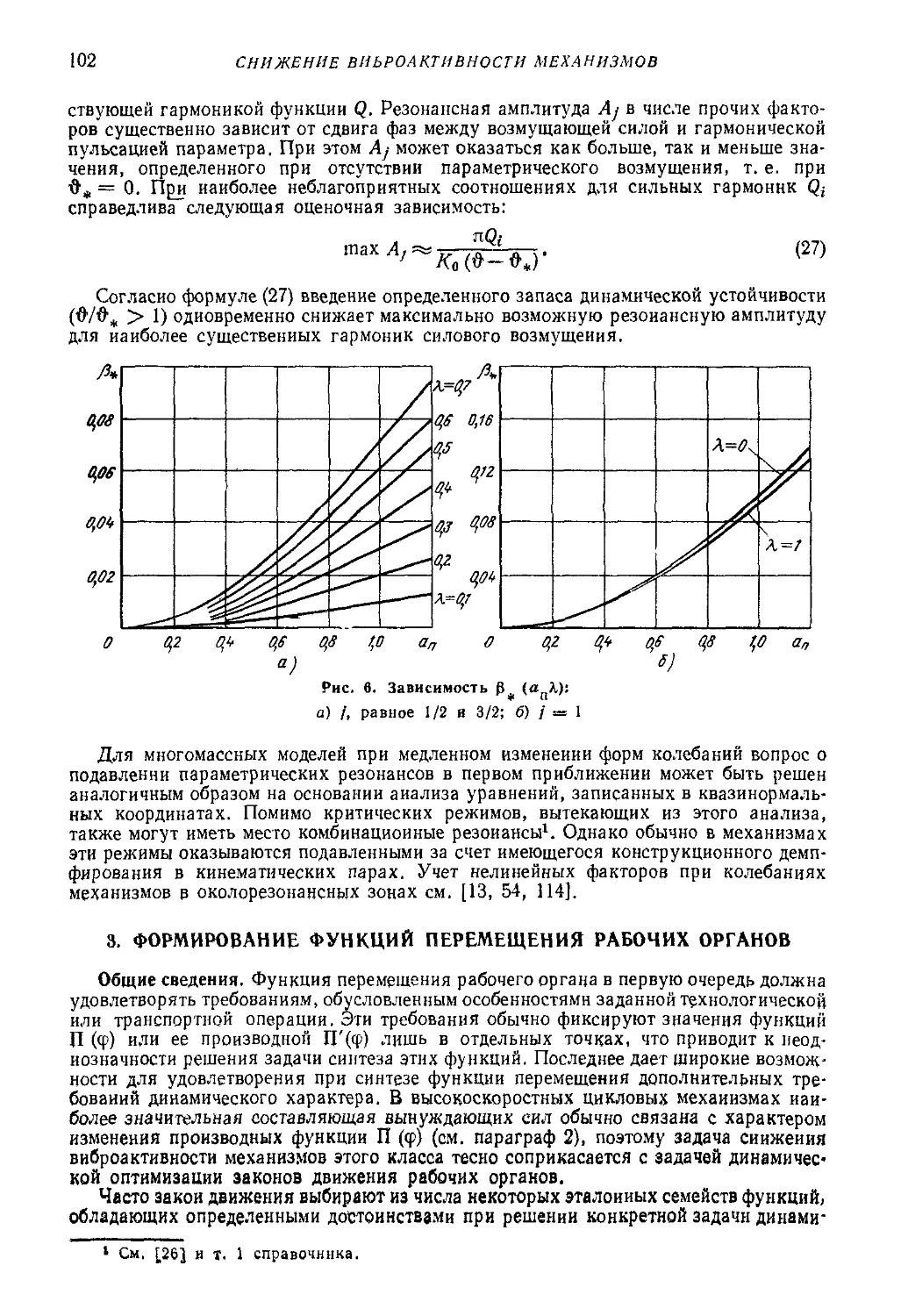
1. Определение уровня виброактивности механизмов .,,,,.., 83
2. Выбор параметров механизмов , , , , , 94
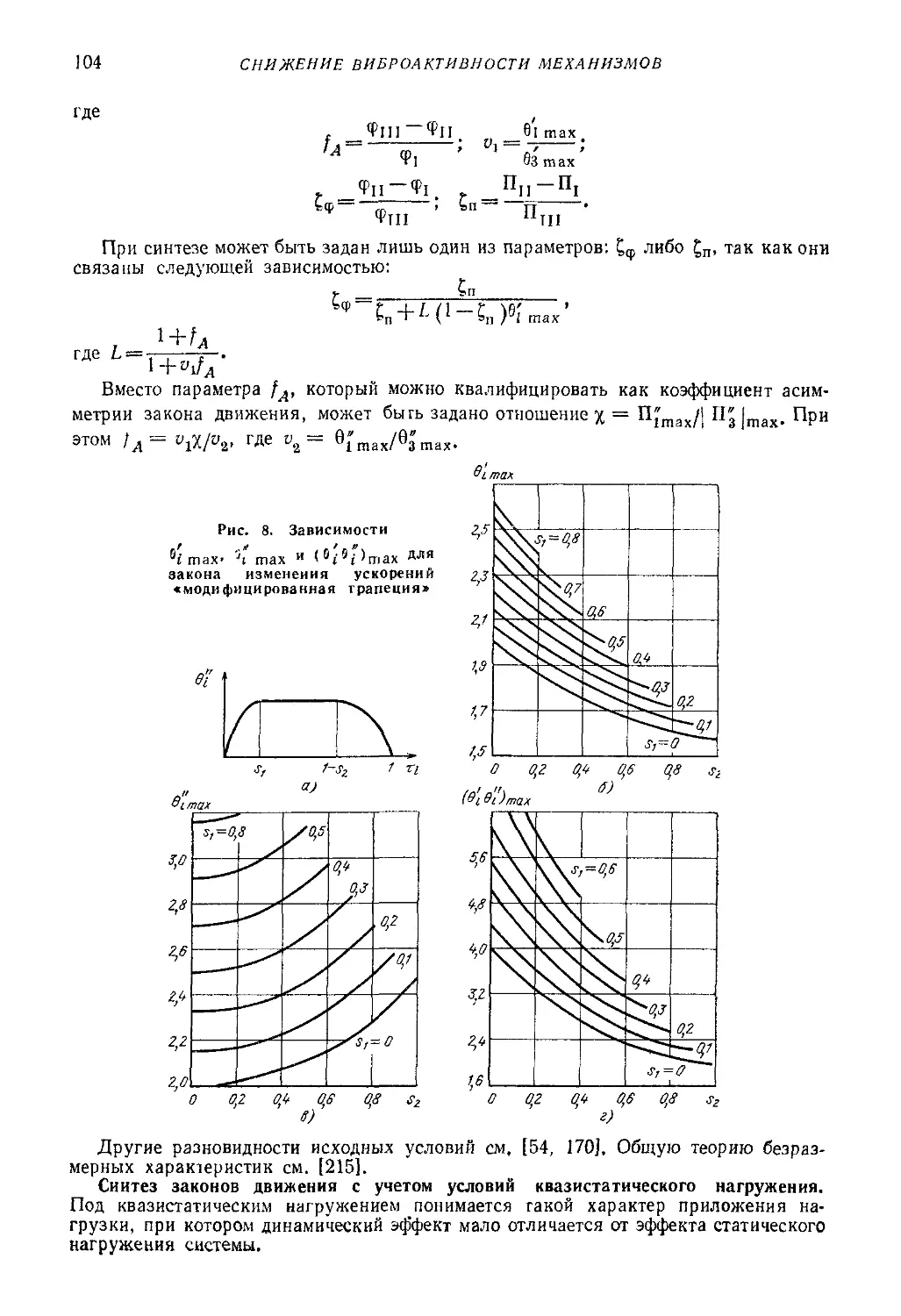
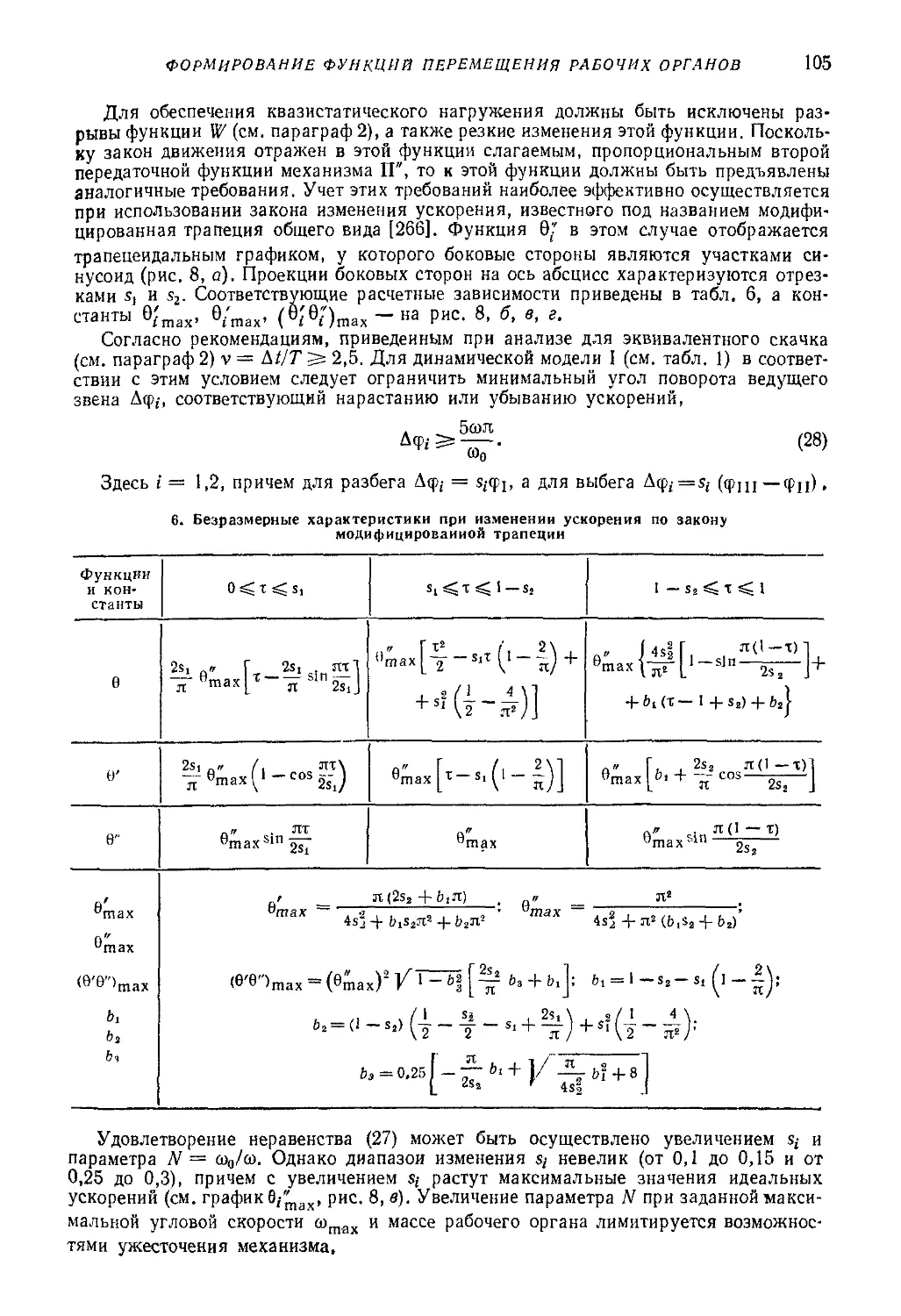
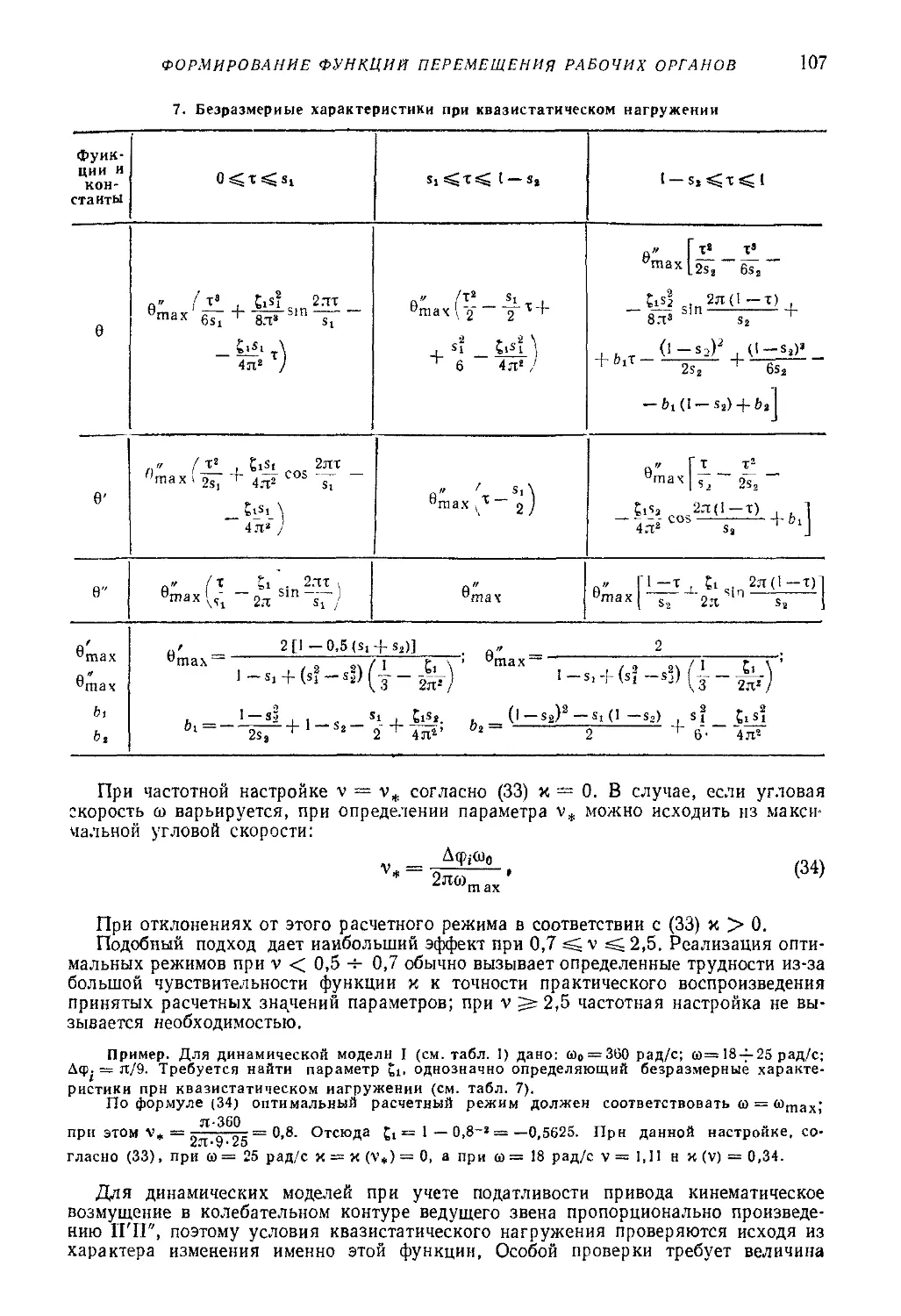
3. Формирование функций перемещения рабочих органов ..... 102
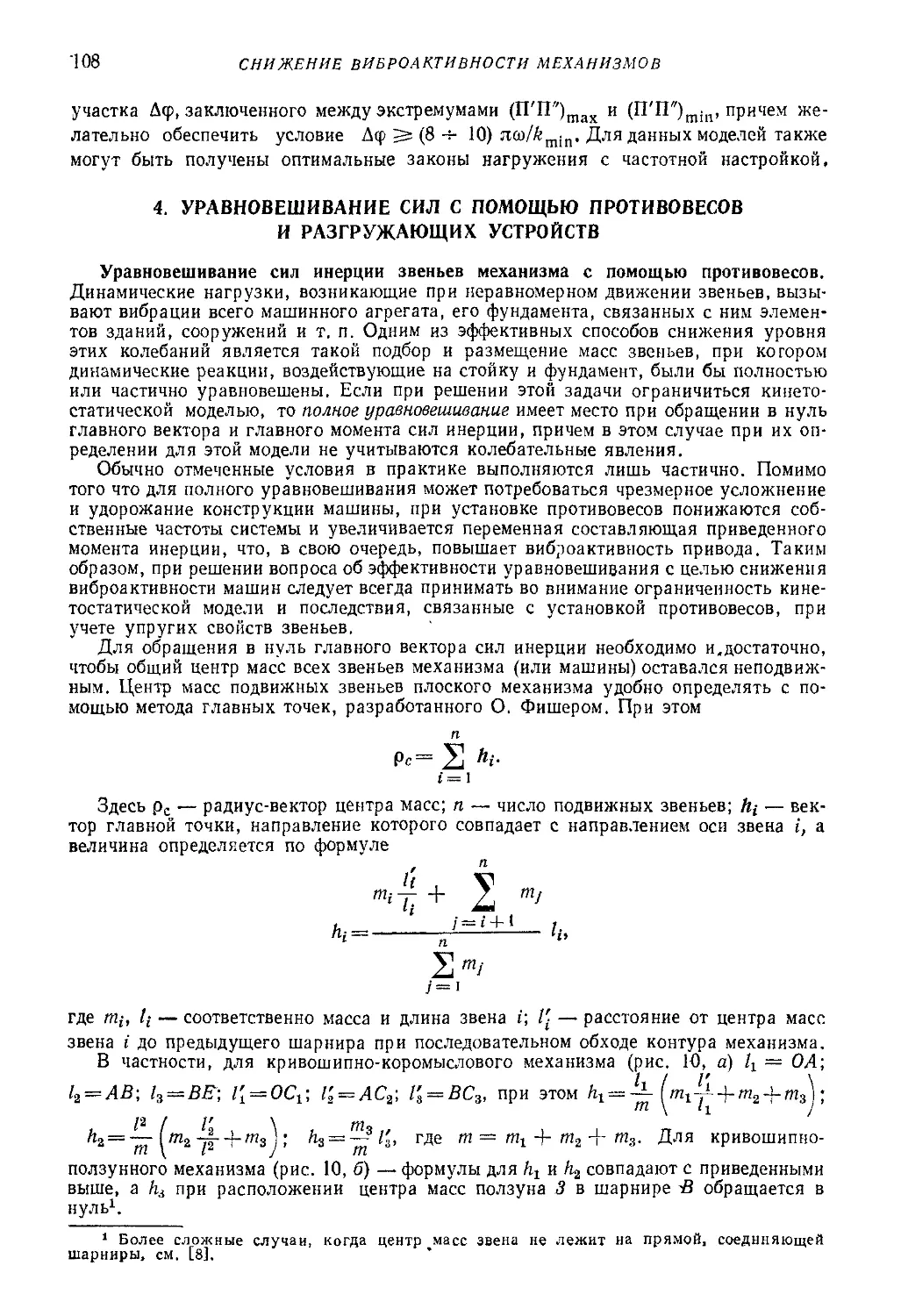
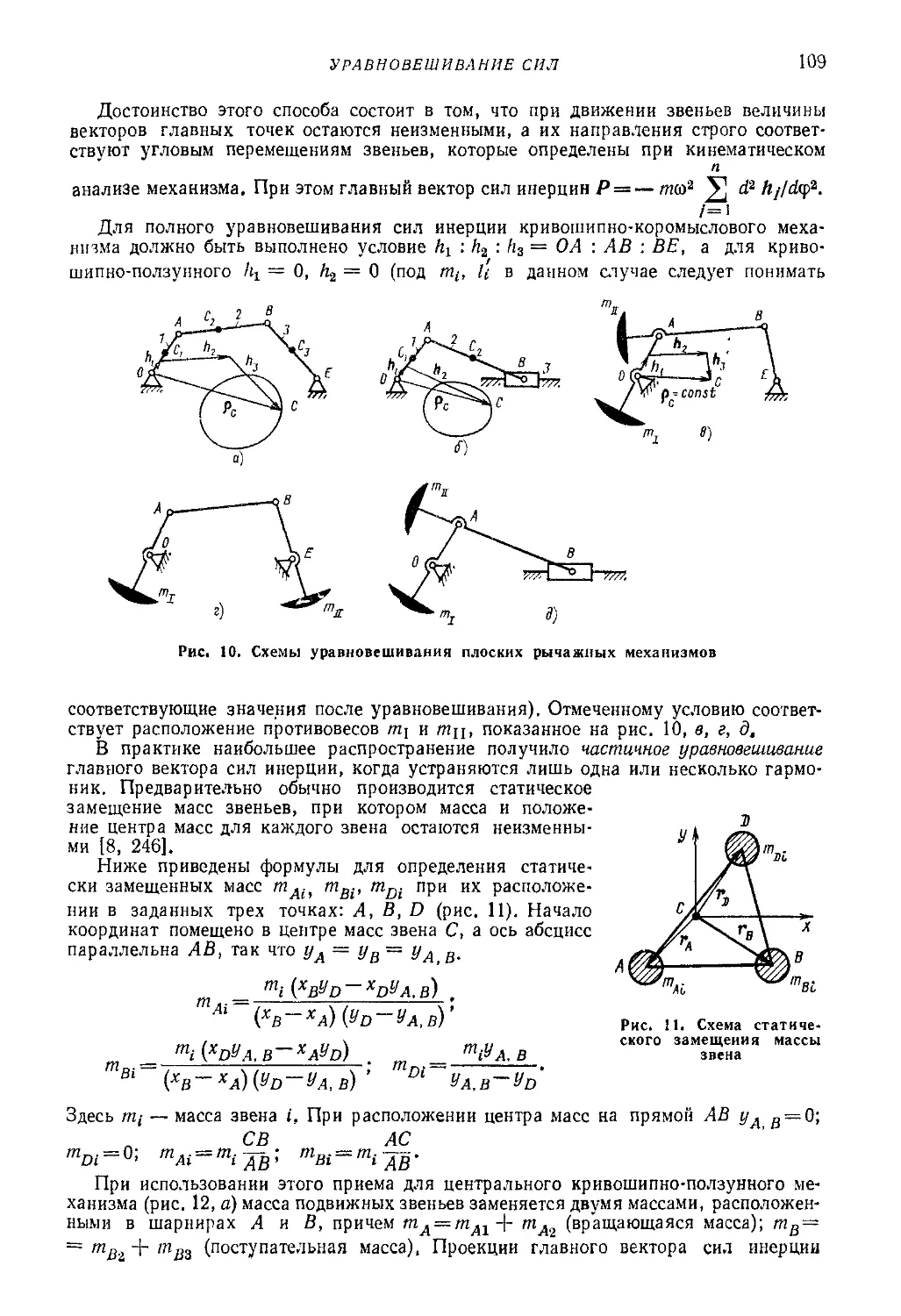
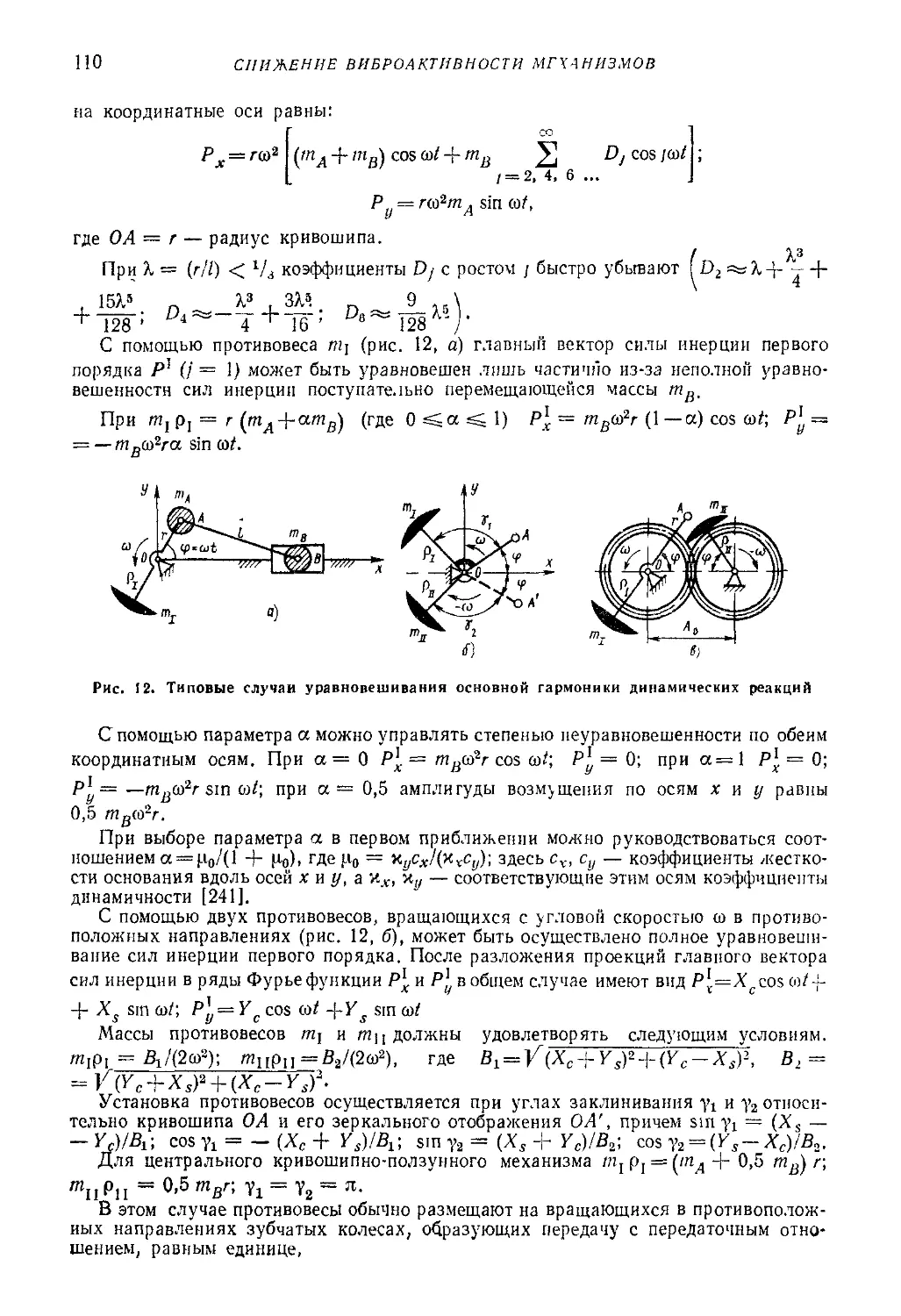
4. Уравновешивание сил с помощью противовесов и разгружающих
устройств ...¦.,,...,,,.,. 108
5. Организация оптимального взаимодействия возмущающих сил
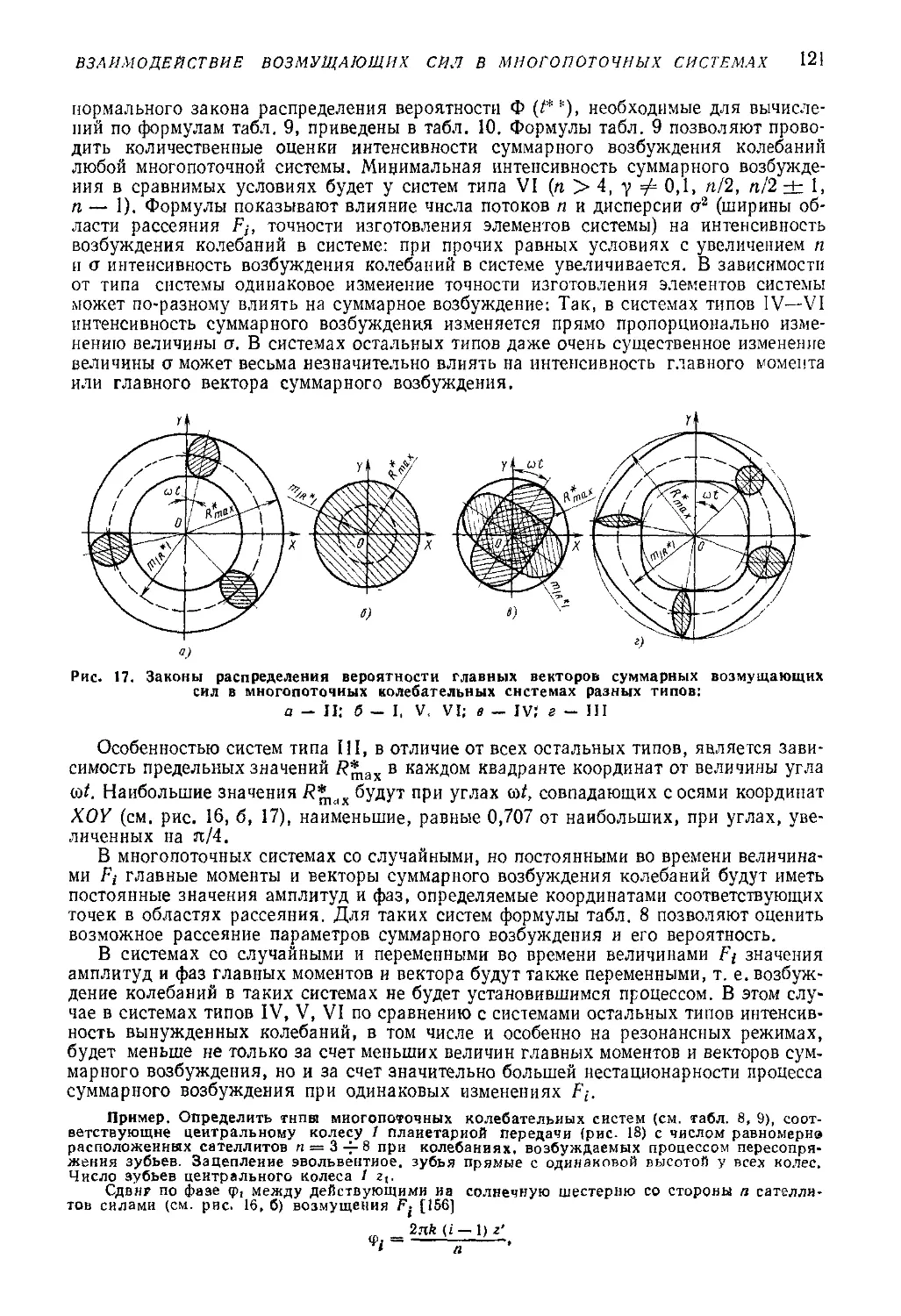
в многопоточных системах (В. И. Панченко) ........... 116
ЧАСТЬ ВТОРАЯ
ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
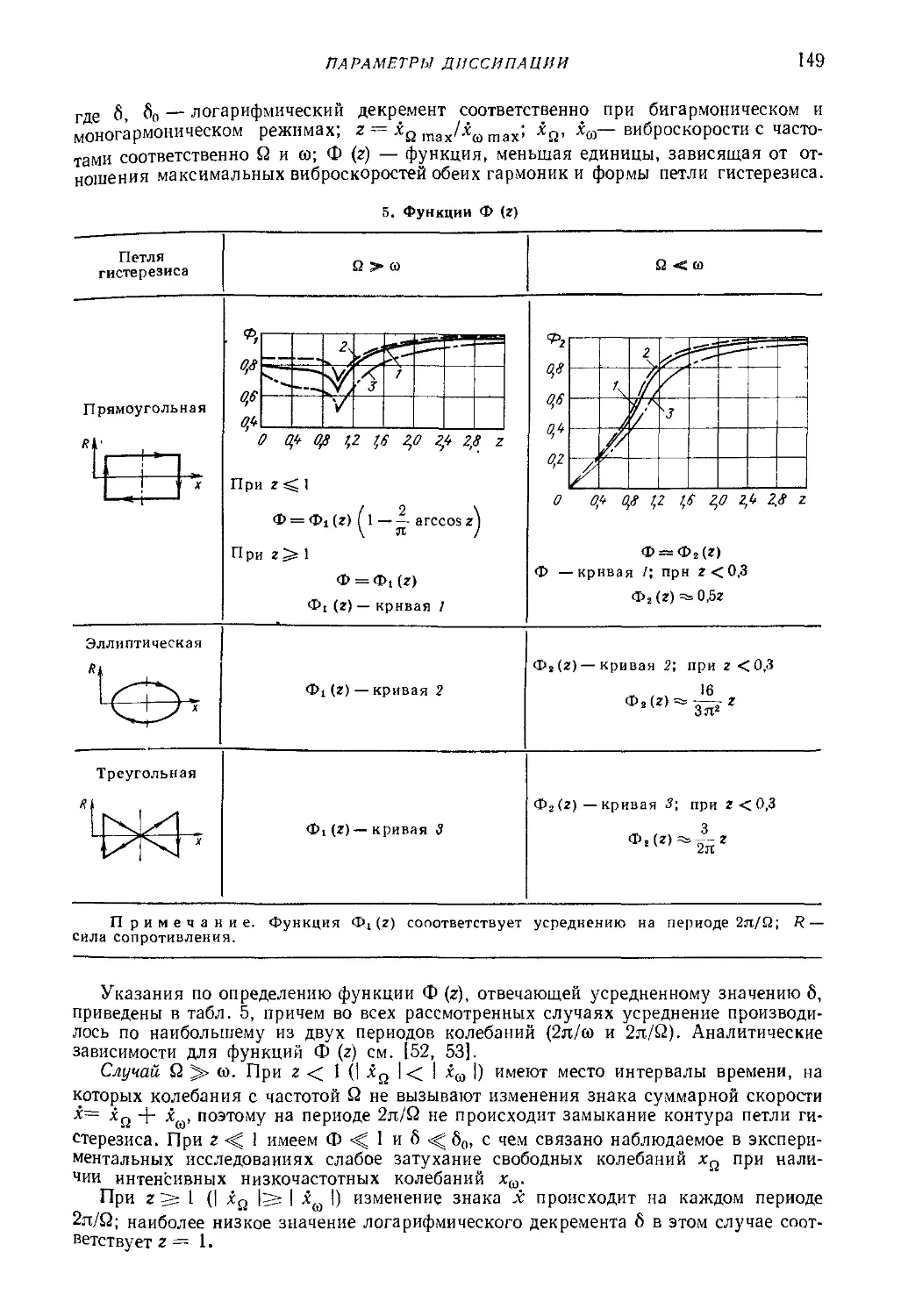
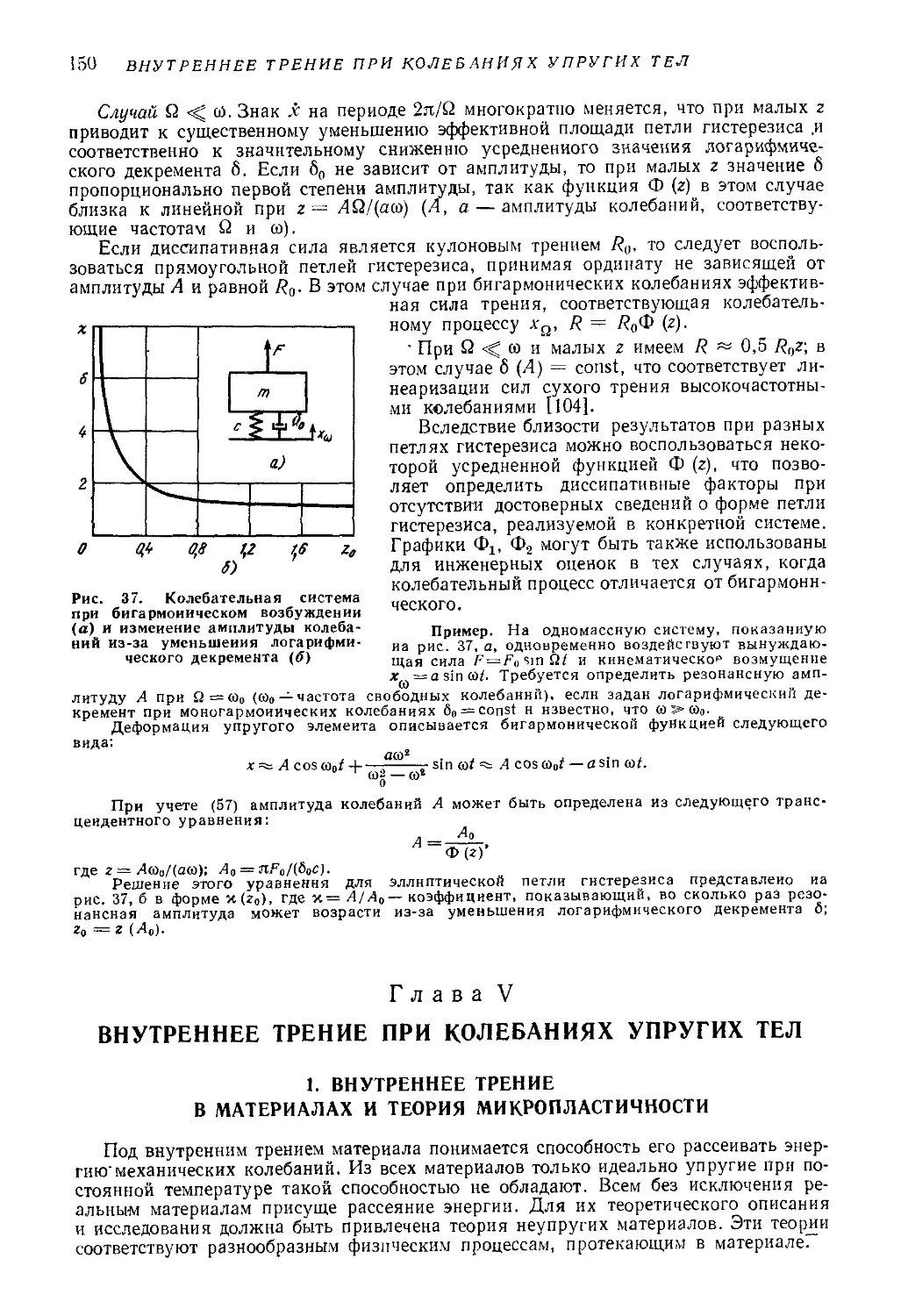
Глава IV. Диссипативные характеристики механических систем .,,»,, 128
1, Основные понятия и определения (В. К. Асташев) ,.,,,,, 128
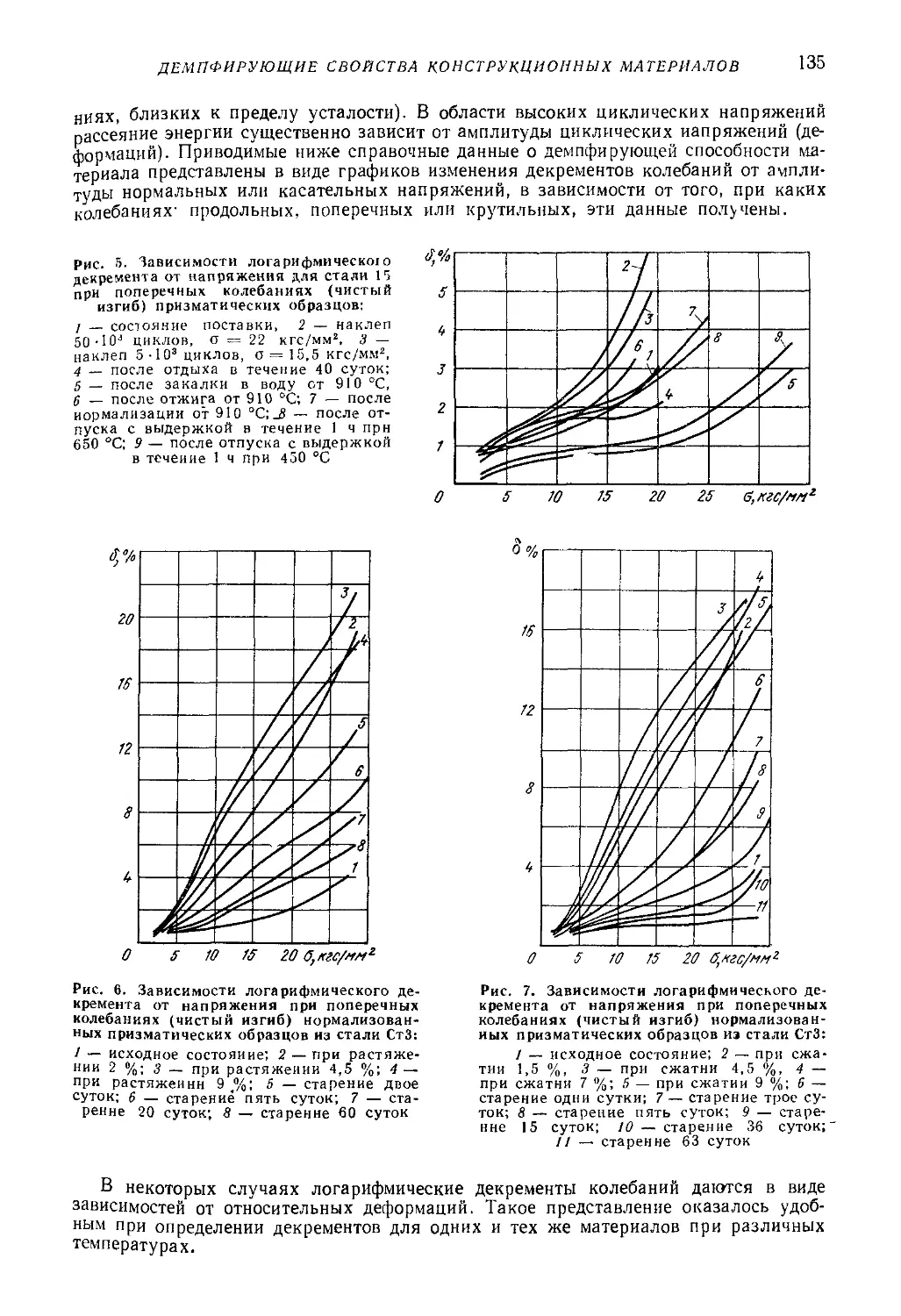
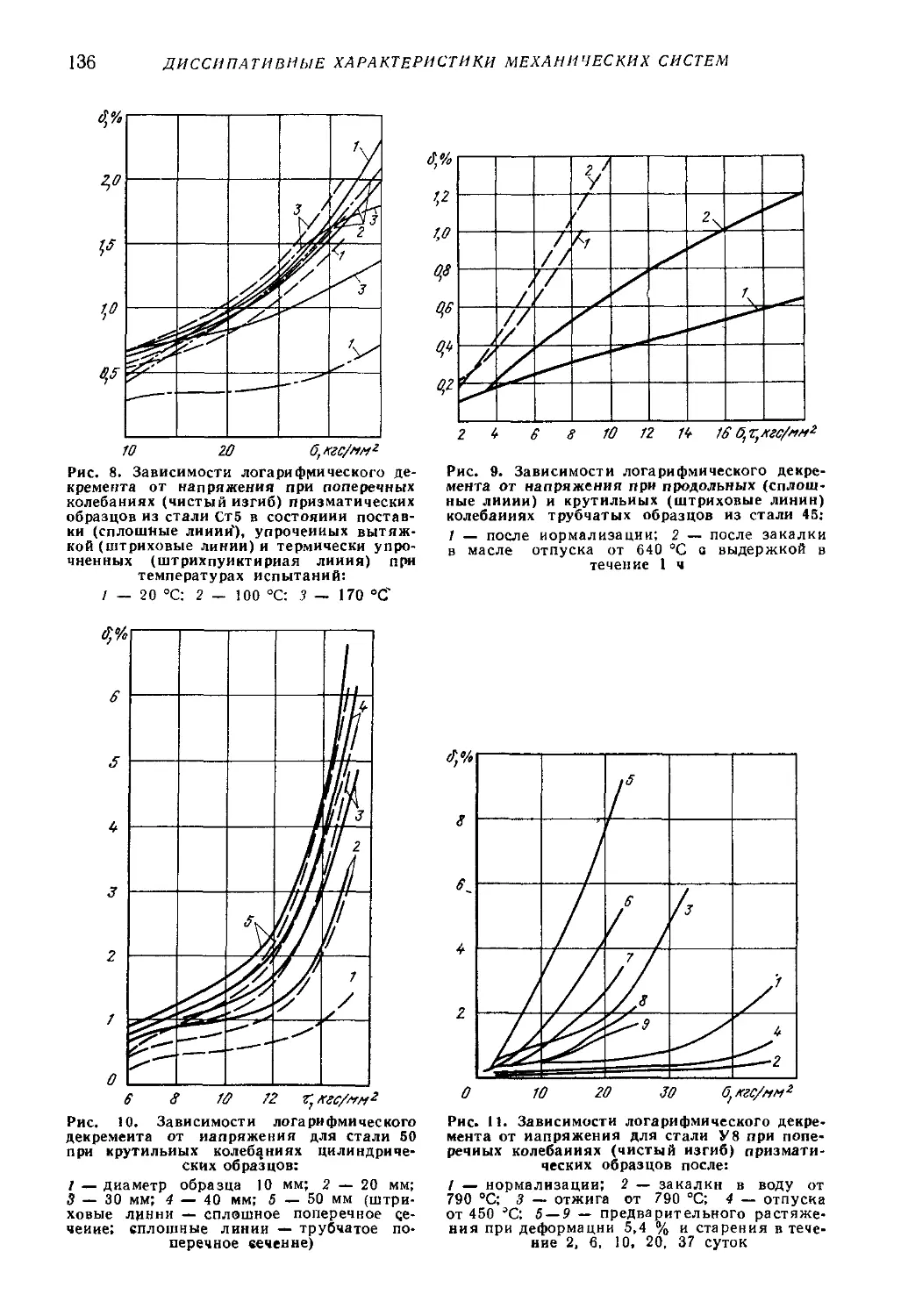
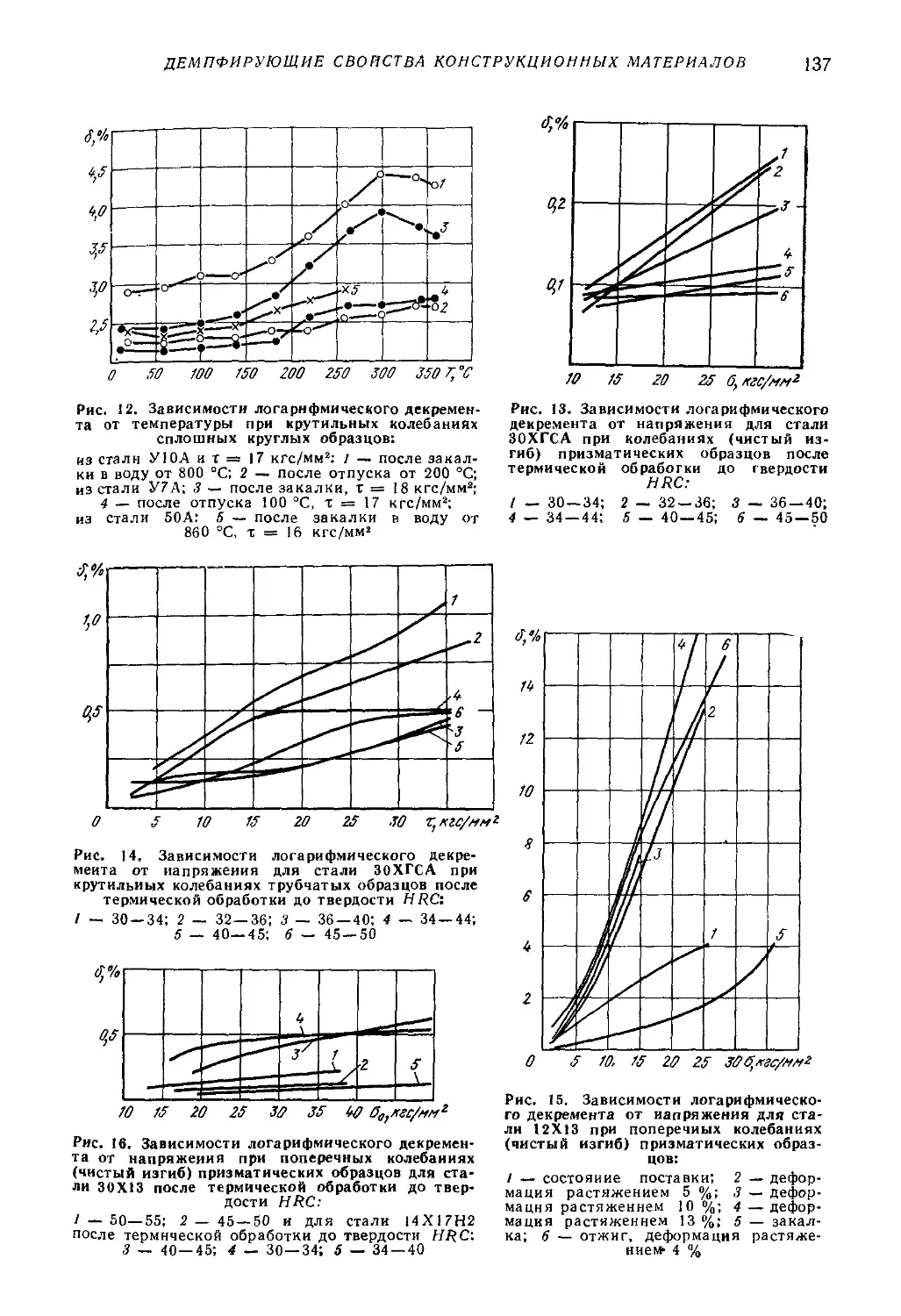
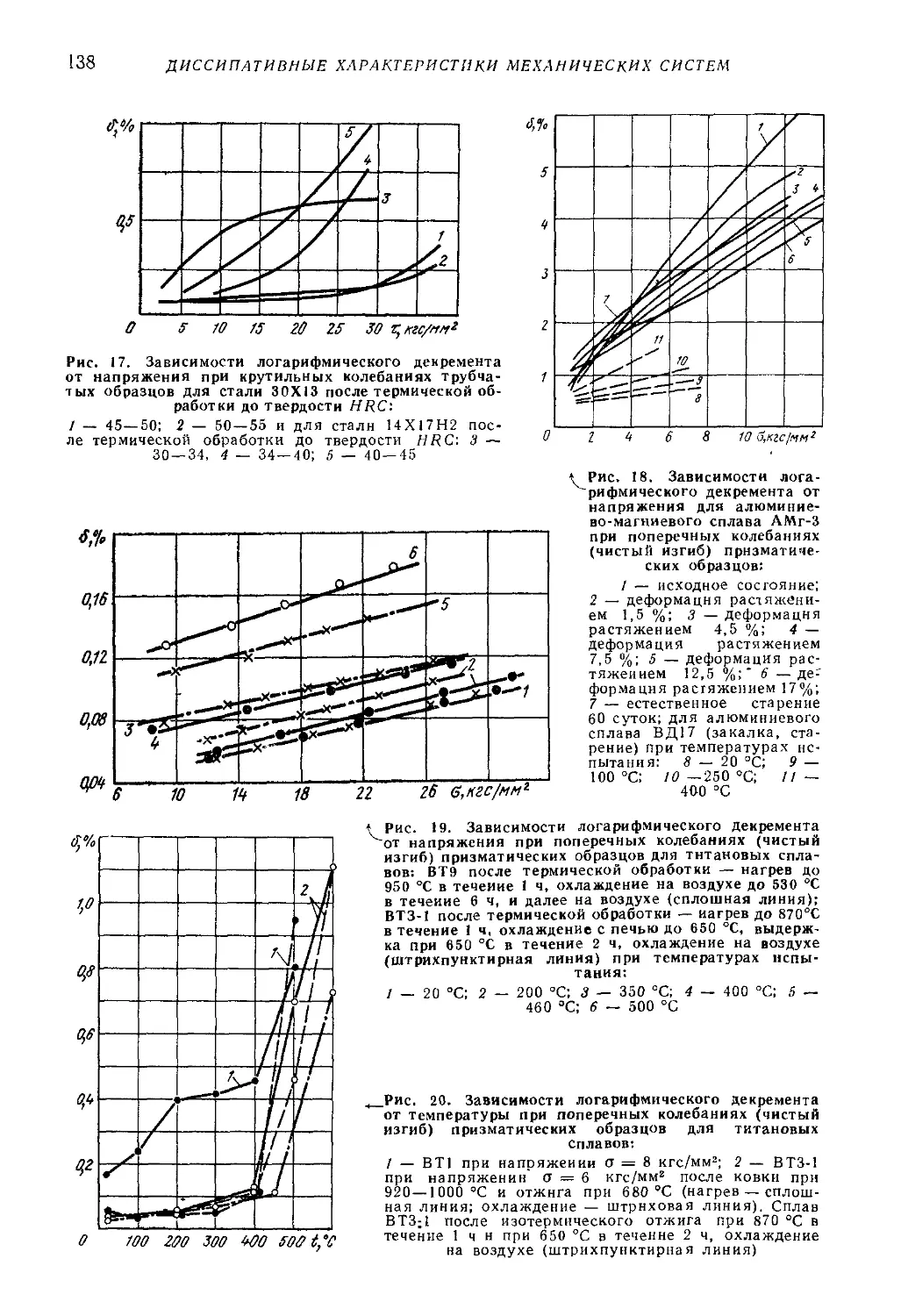
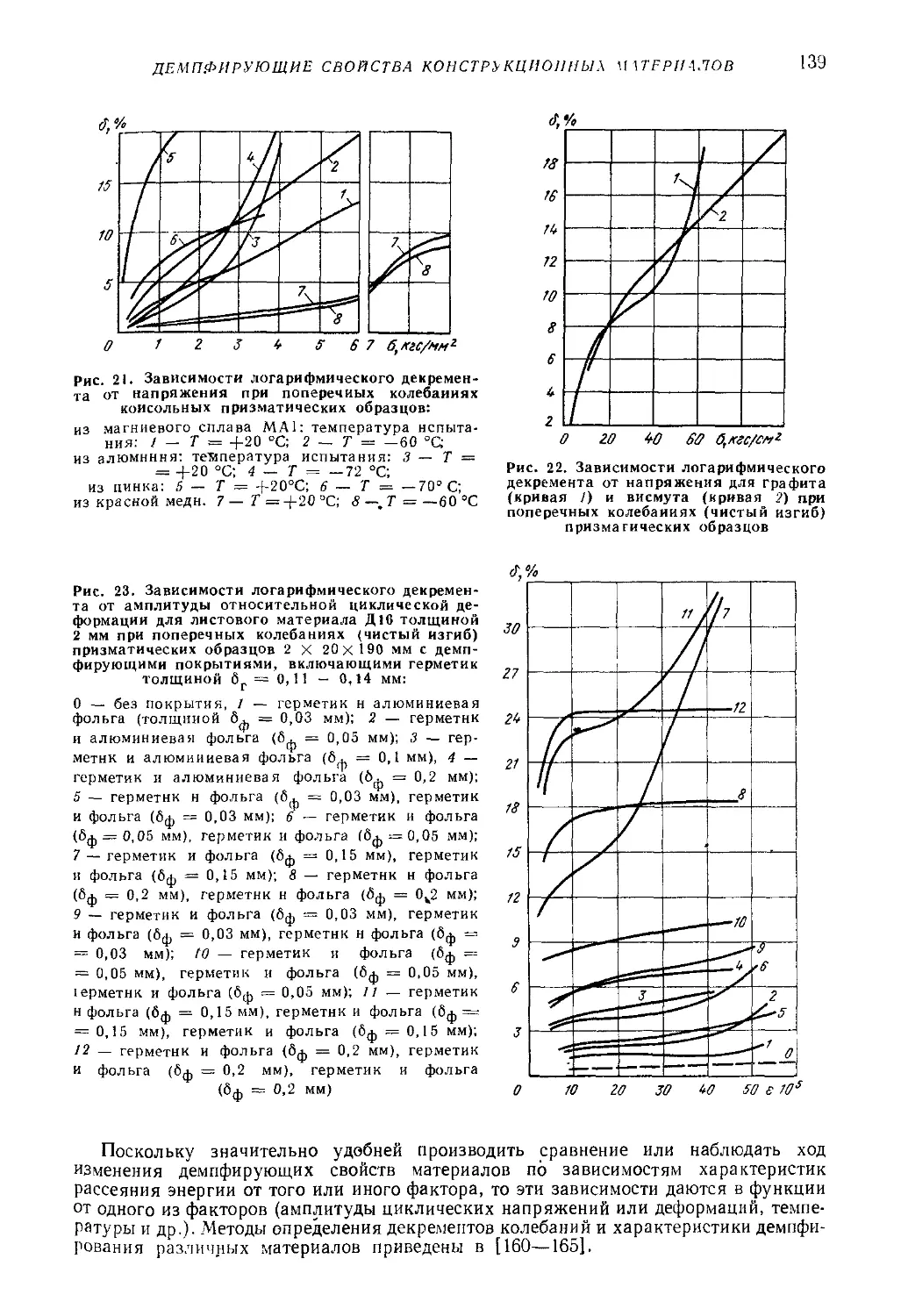
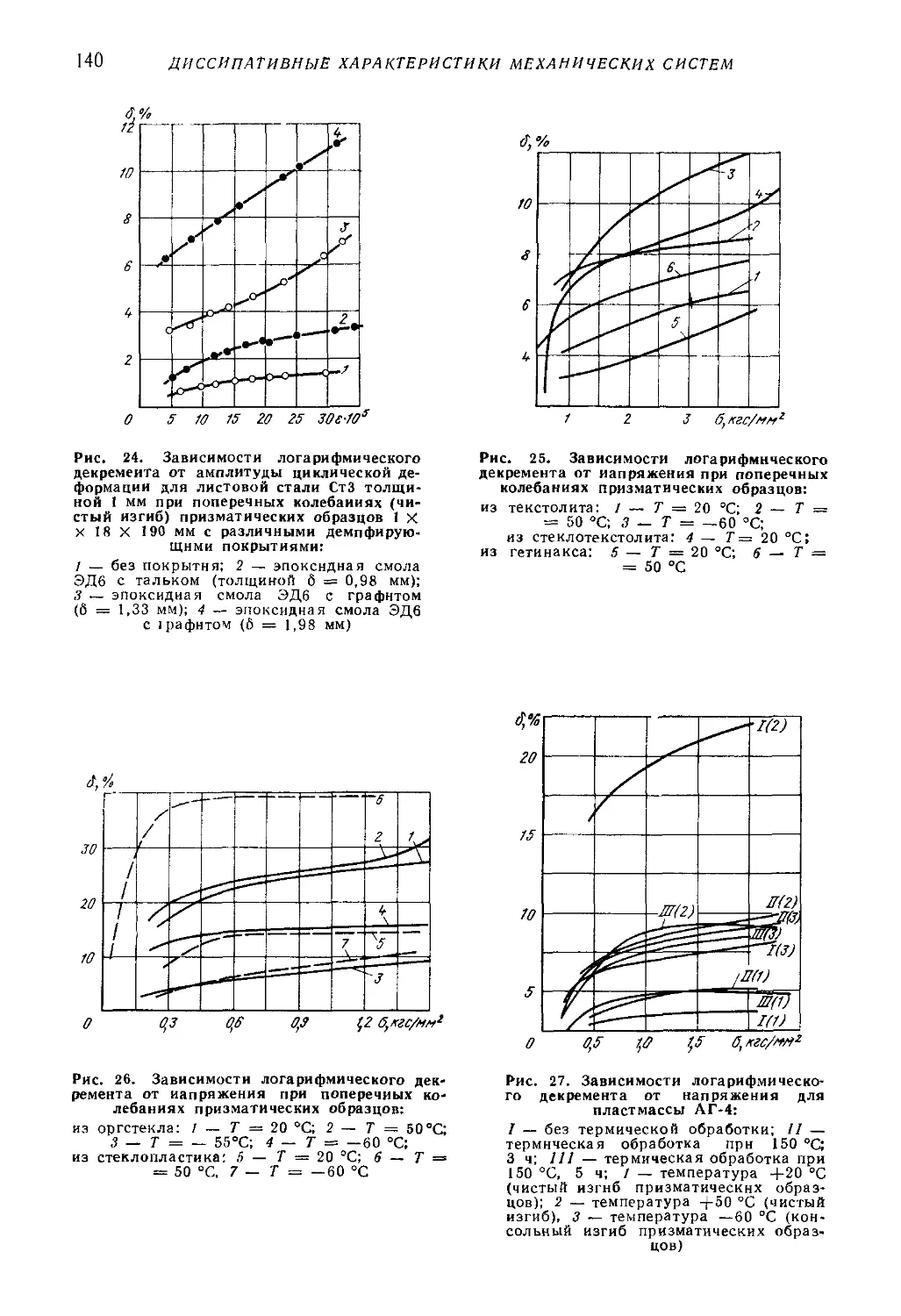
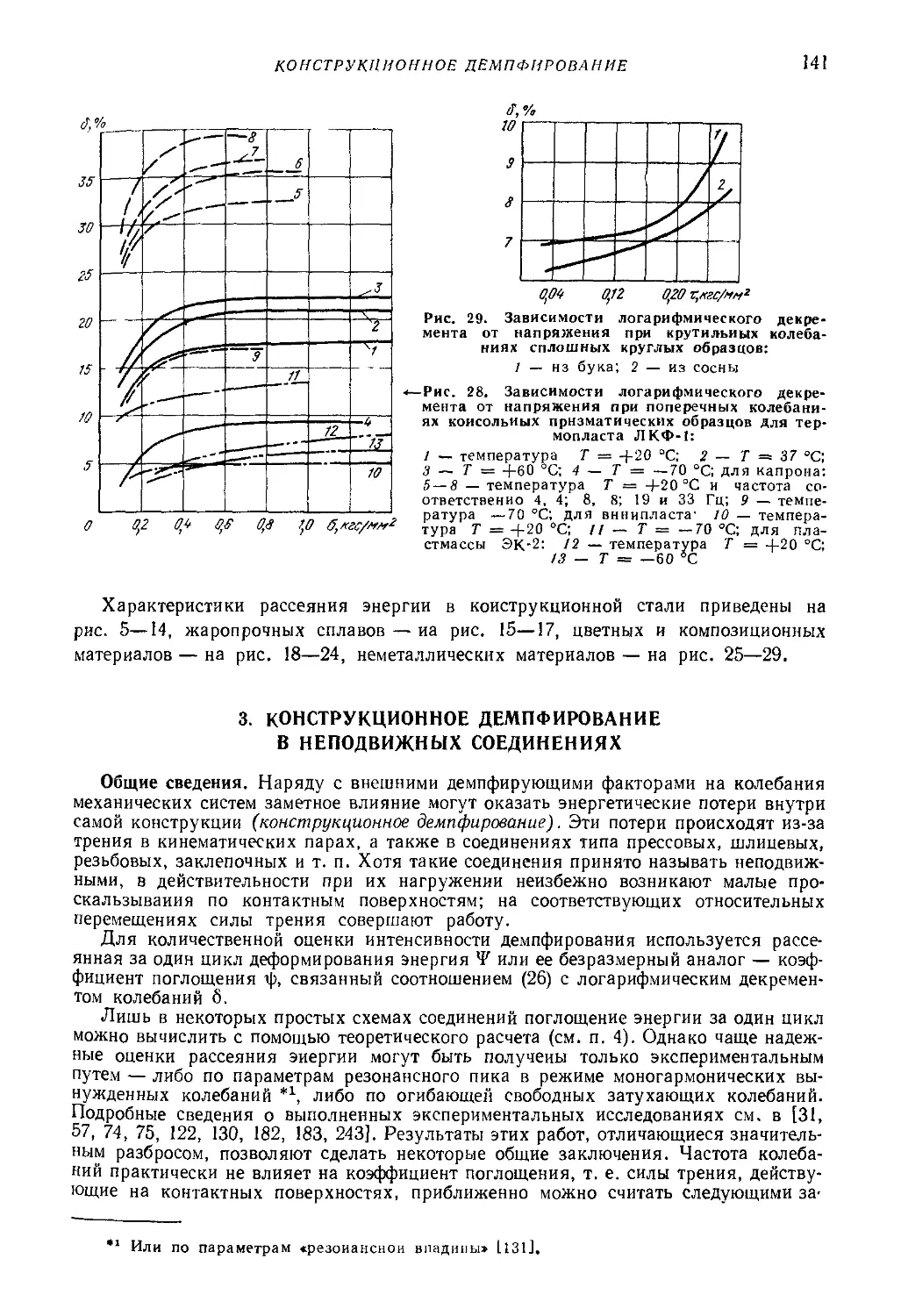
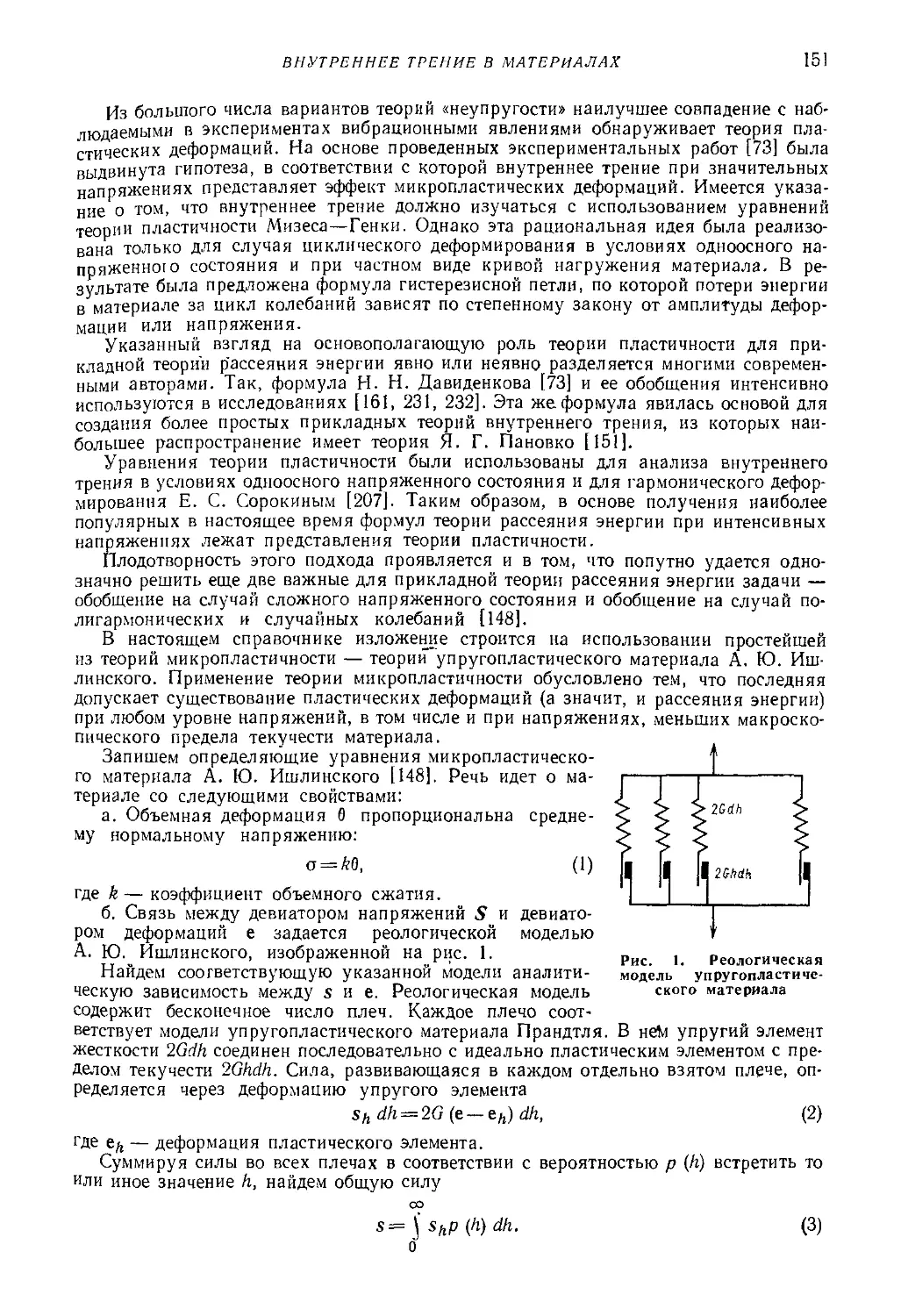
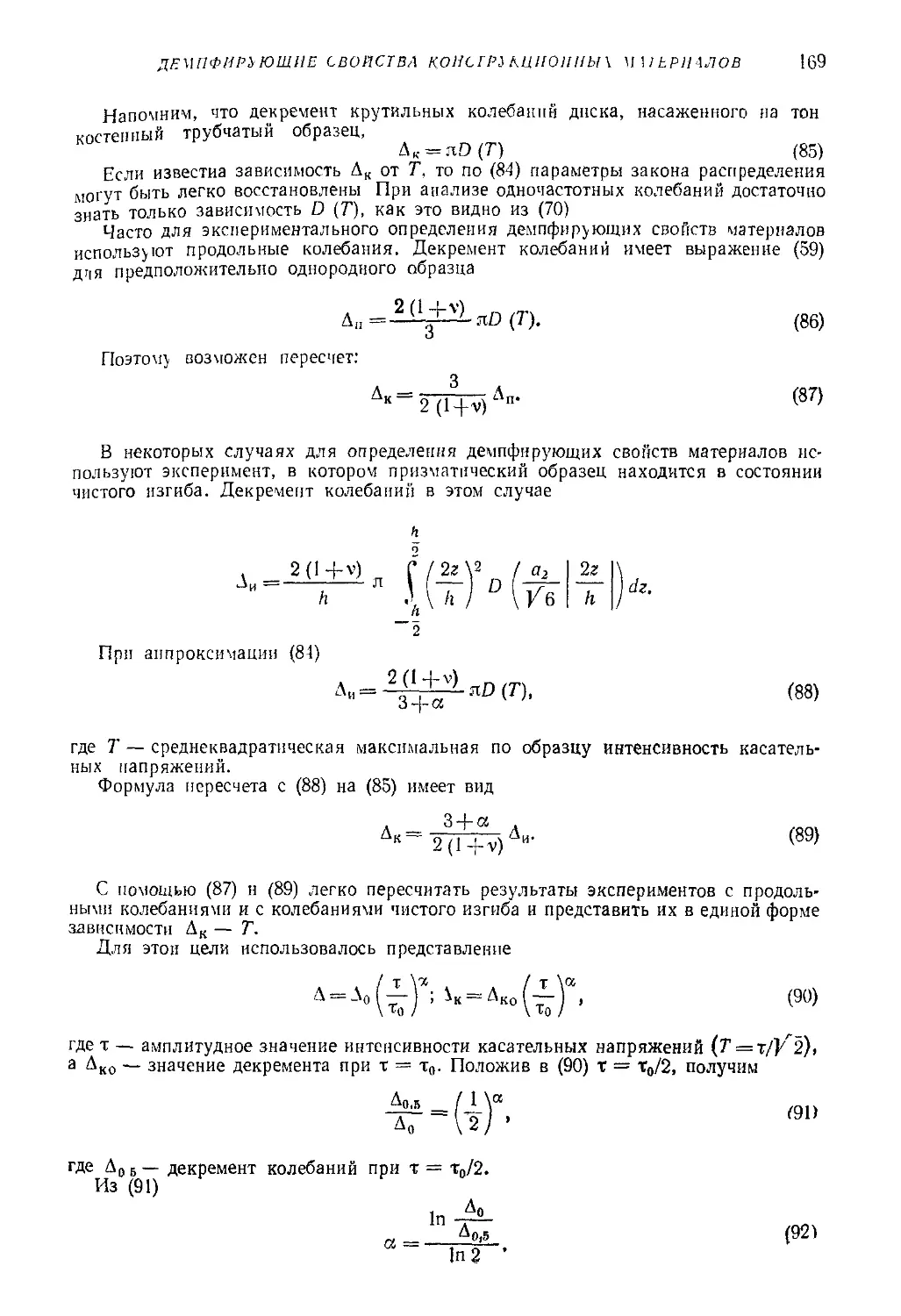
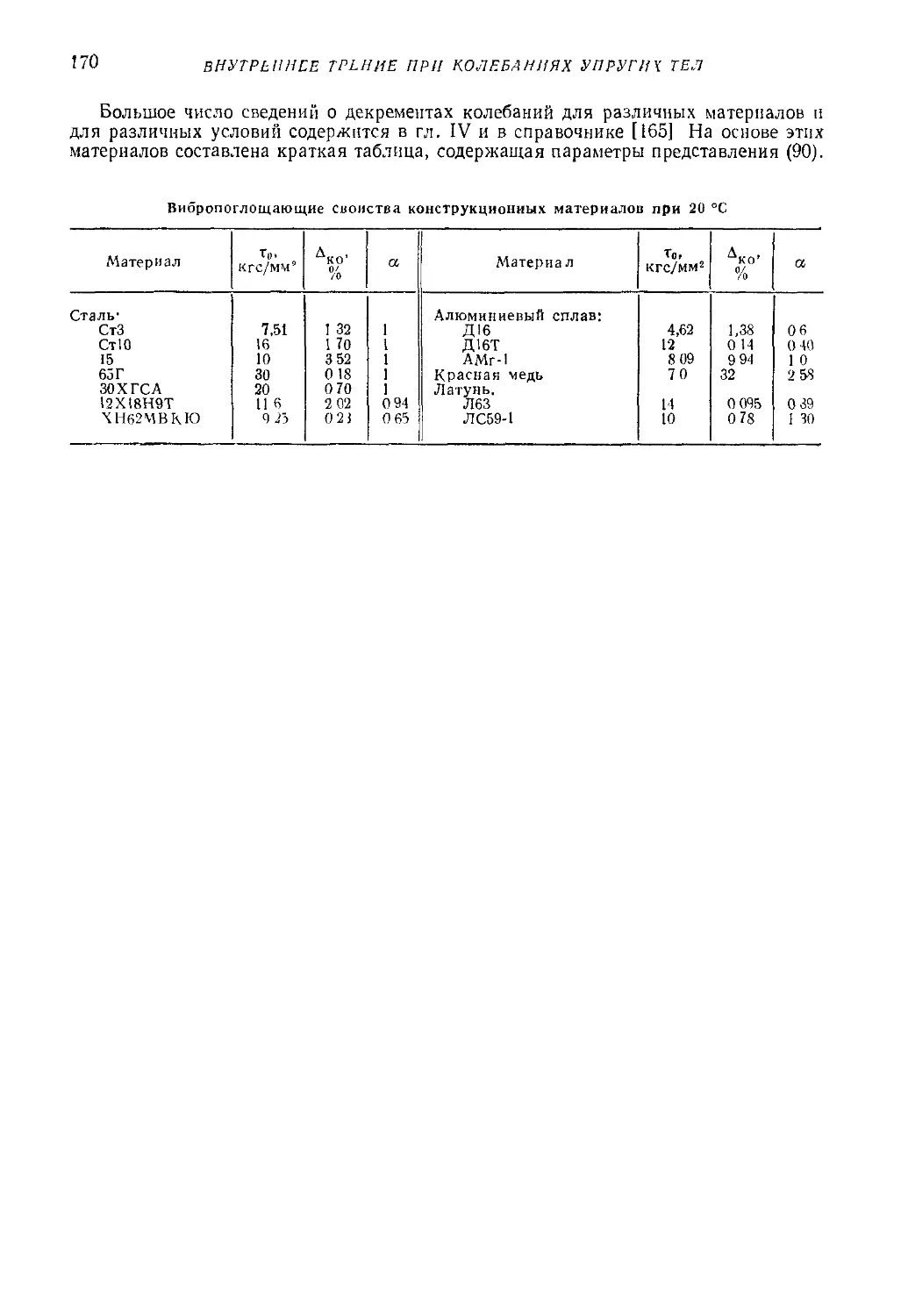
2, Демпфирующие свойства конструкционных материалов (Г. С. Пи-
саренко) , , , . , 134
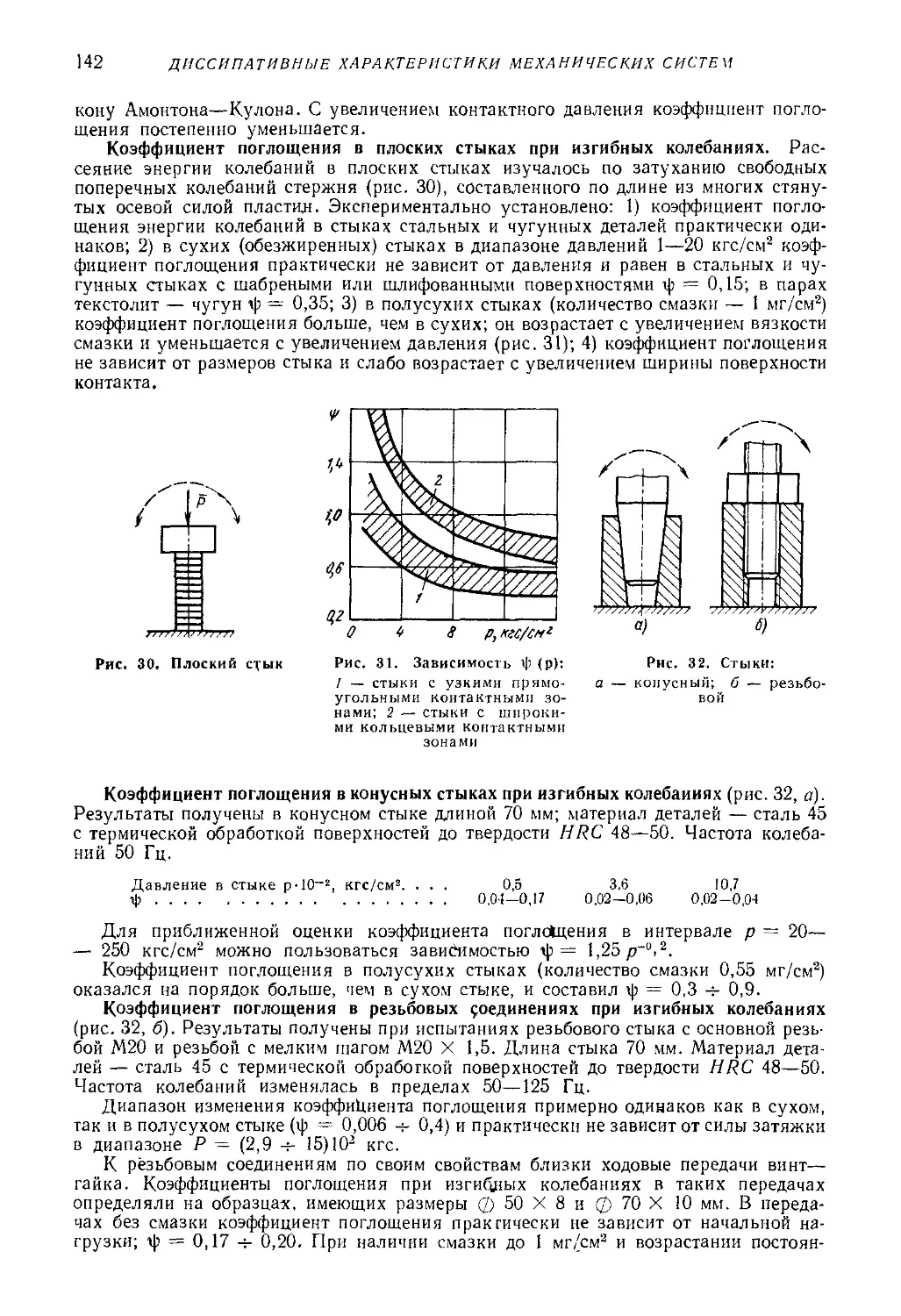
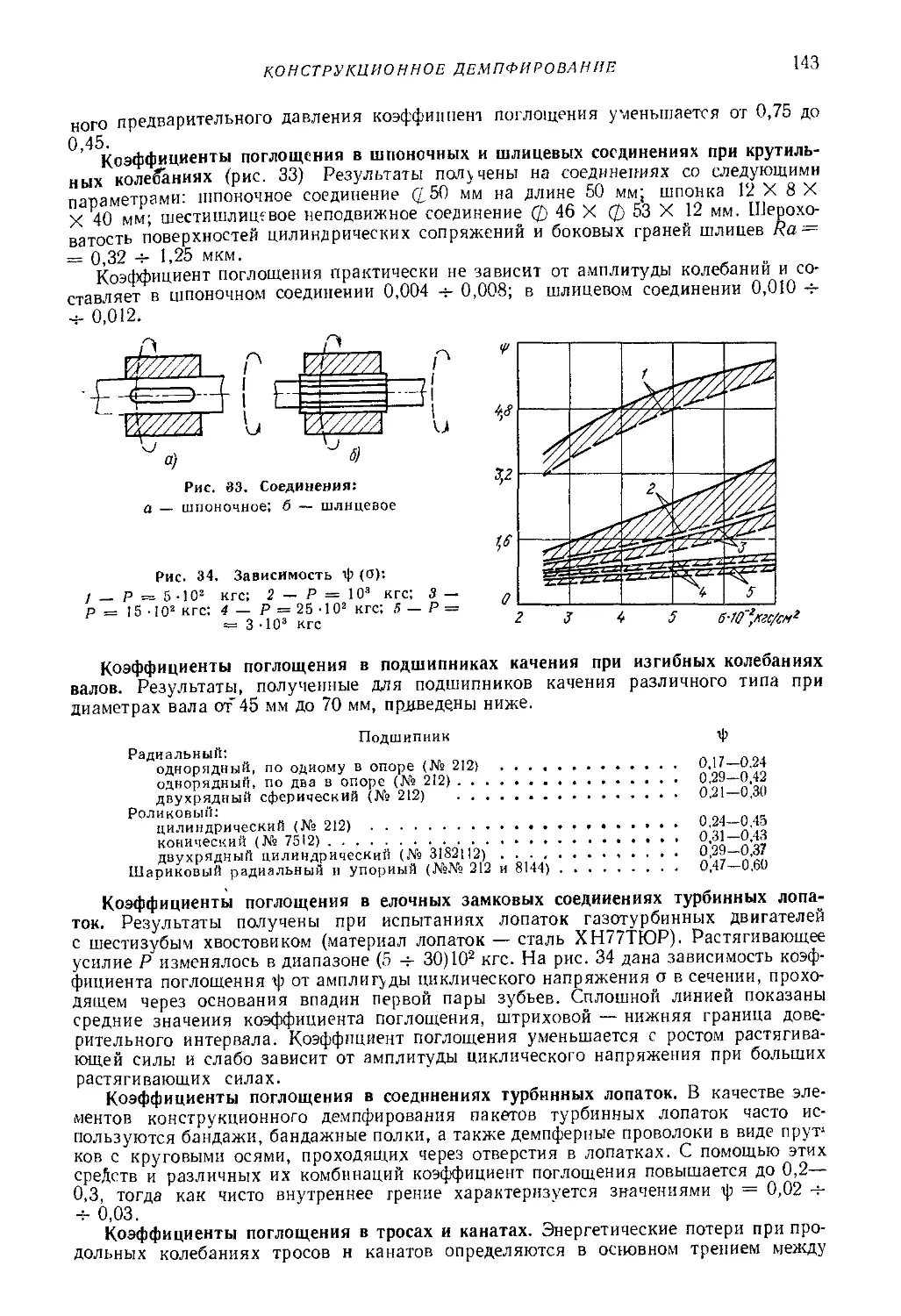
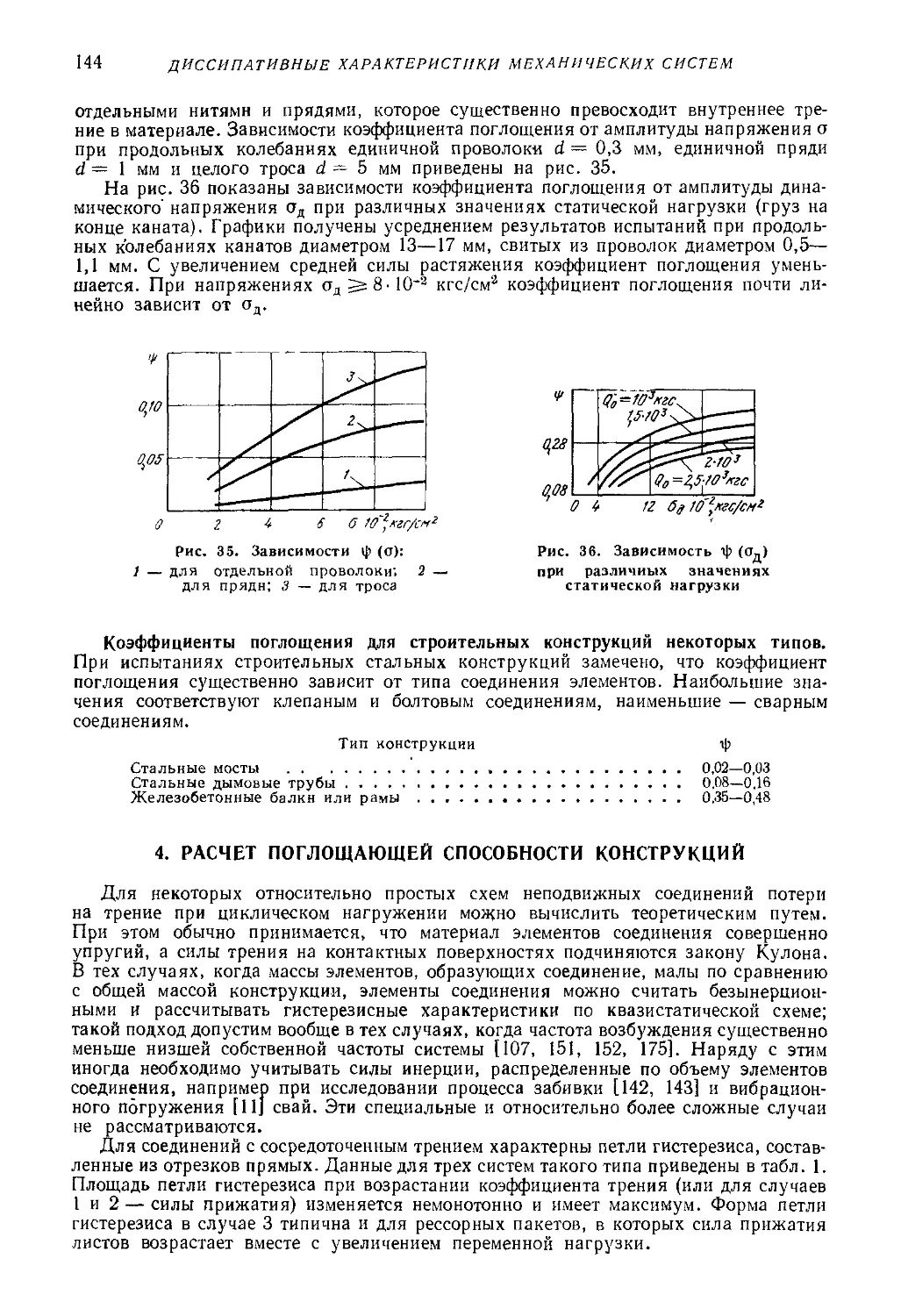
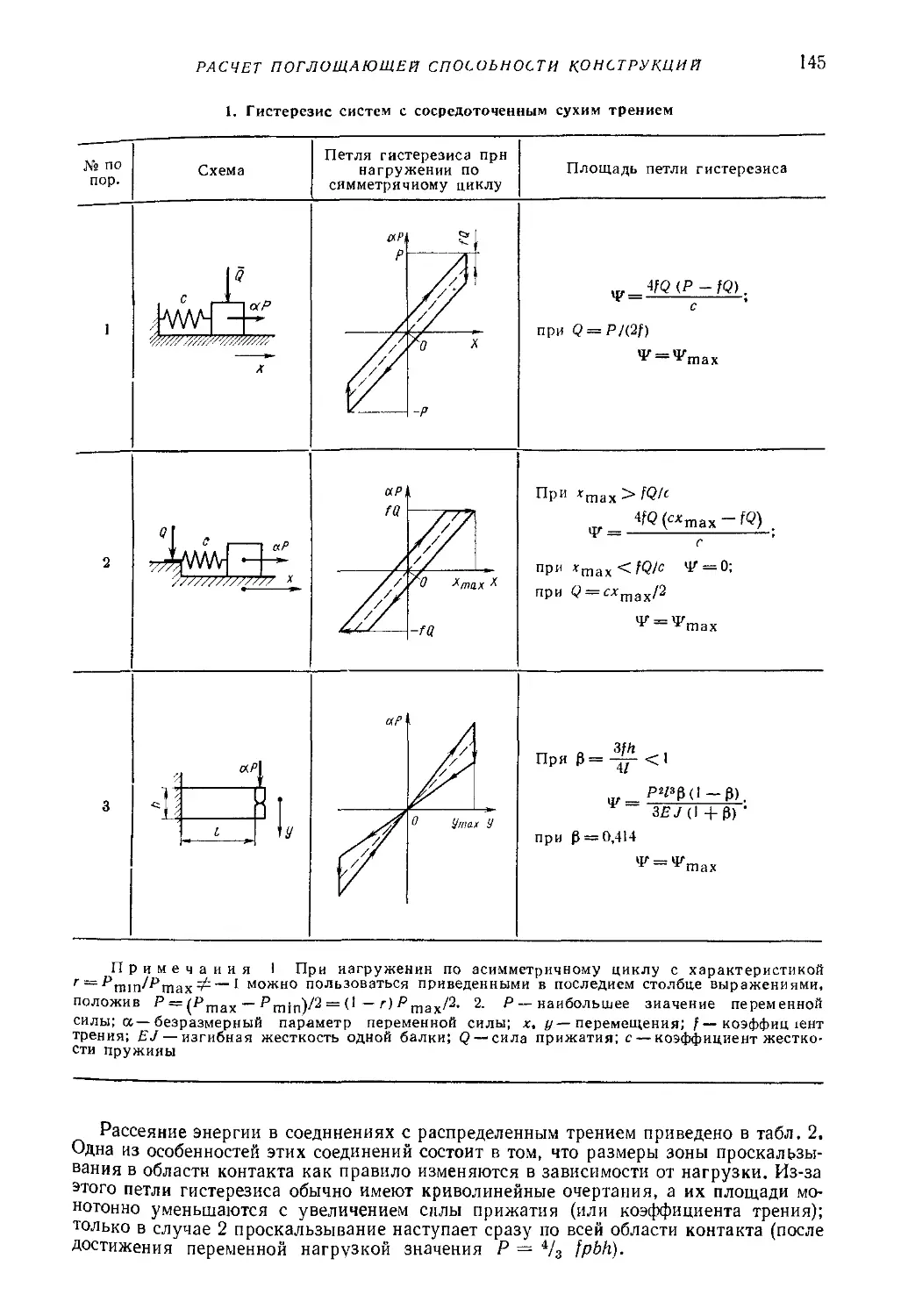
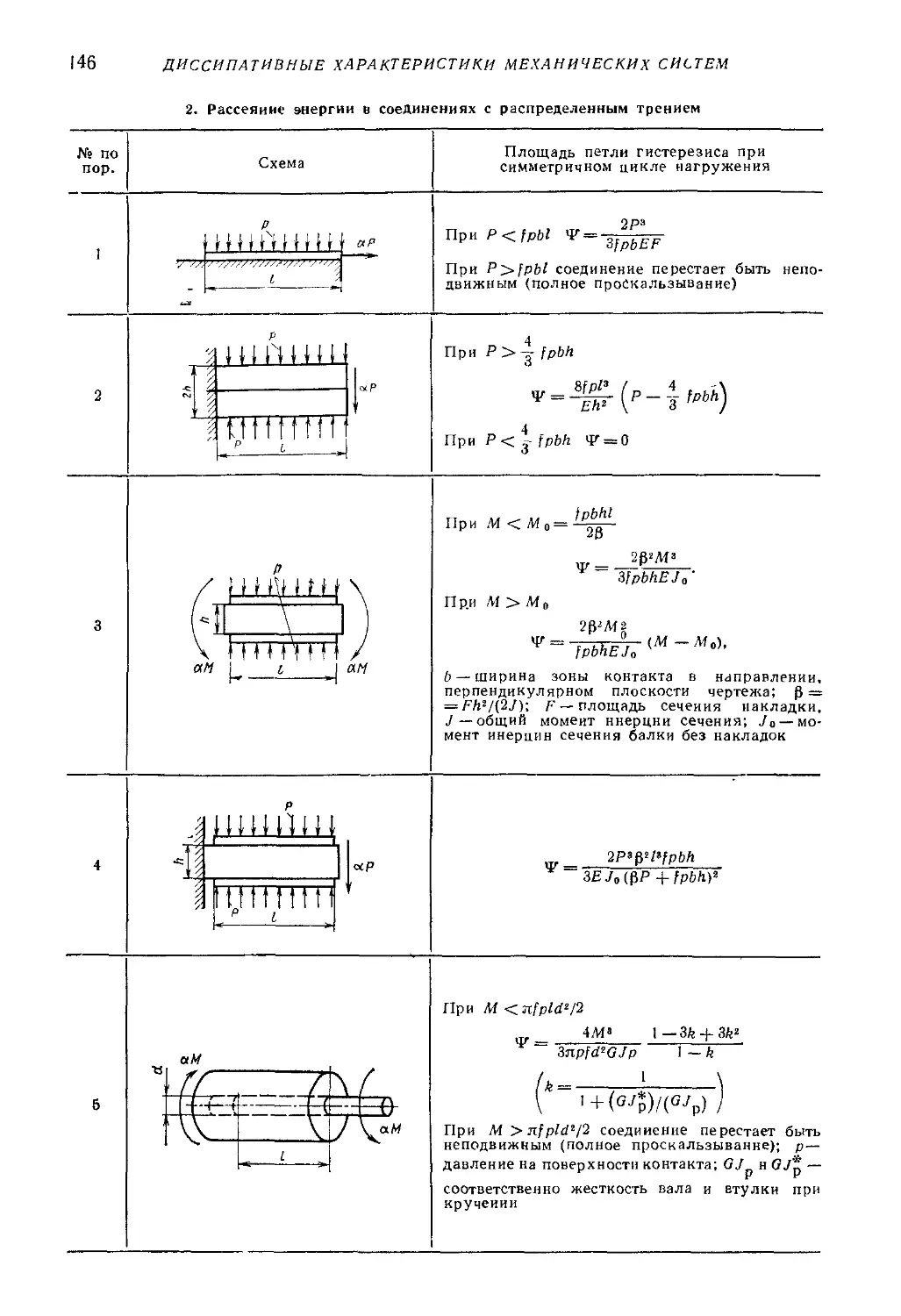
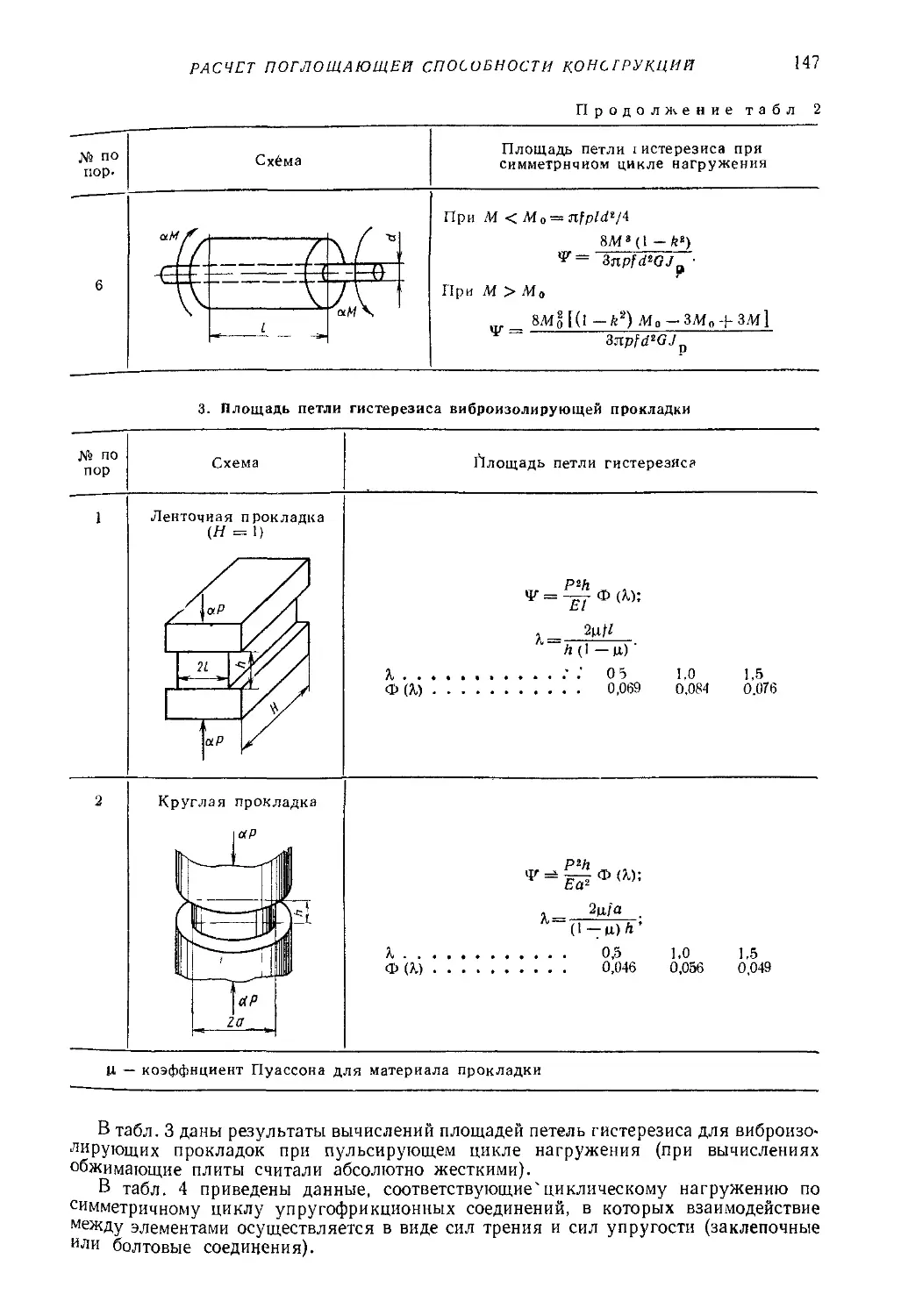
3, Конструкционное демпфирование в неподвижных соединениях
(М, Н, Вульфсон, Я, Г, Пановко) ,....,,,.,. 141
ОГЛАВЛЕНИЕ 7
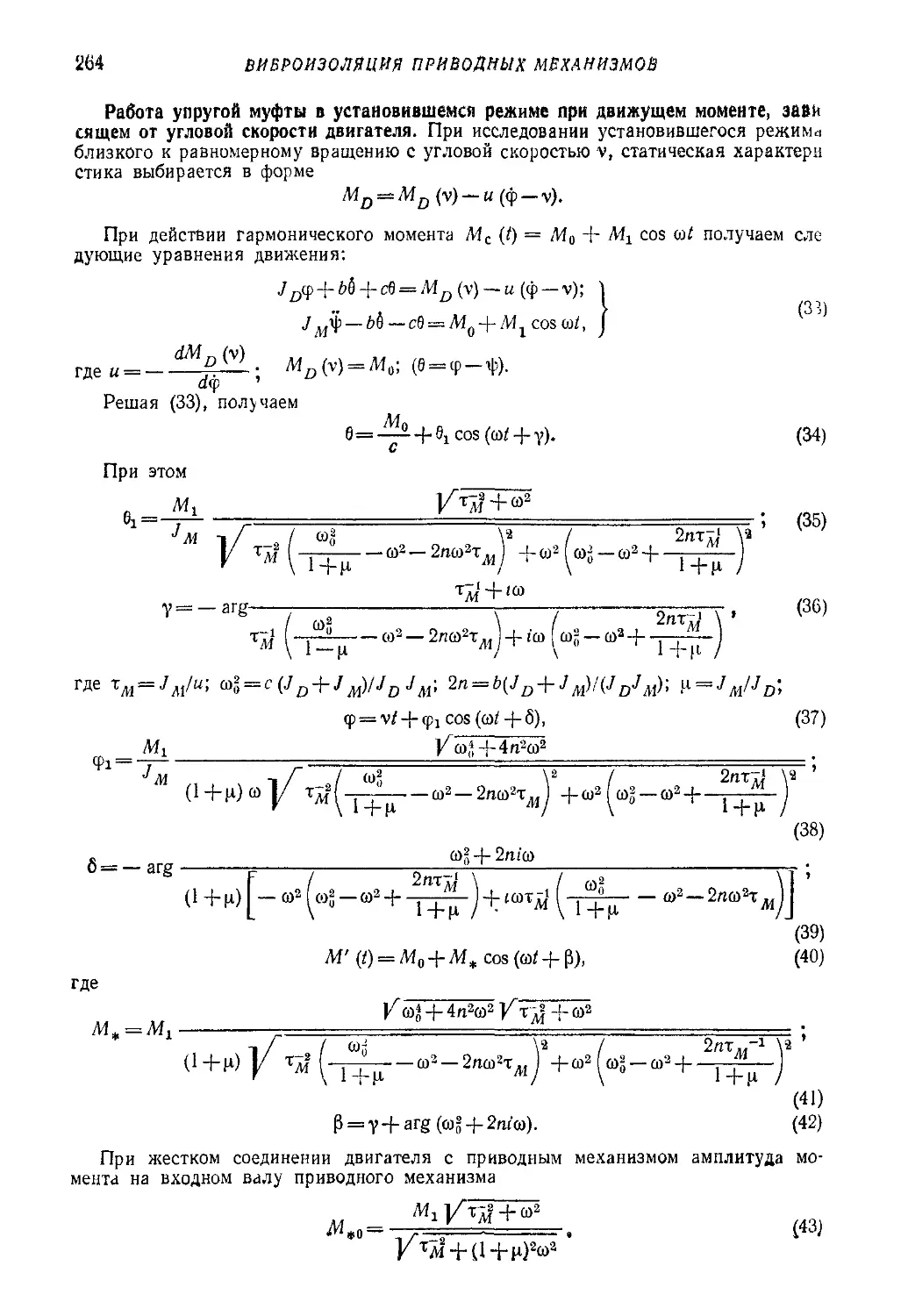
3. Двухмассная система с двигателем 262
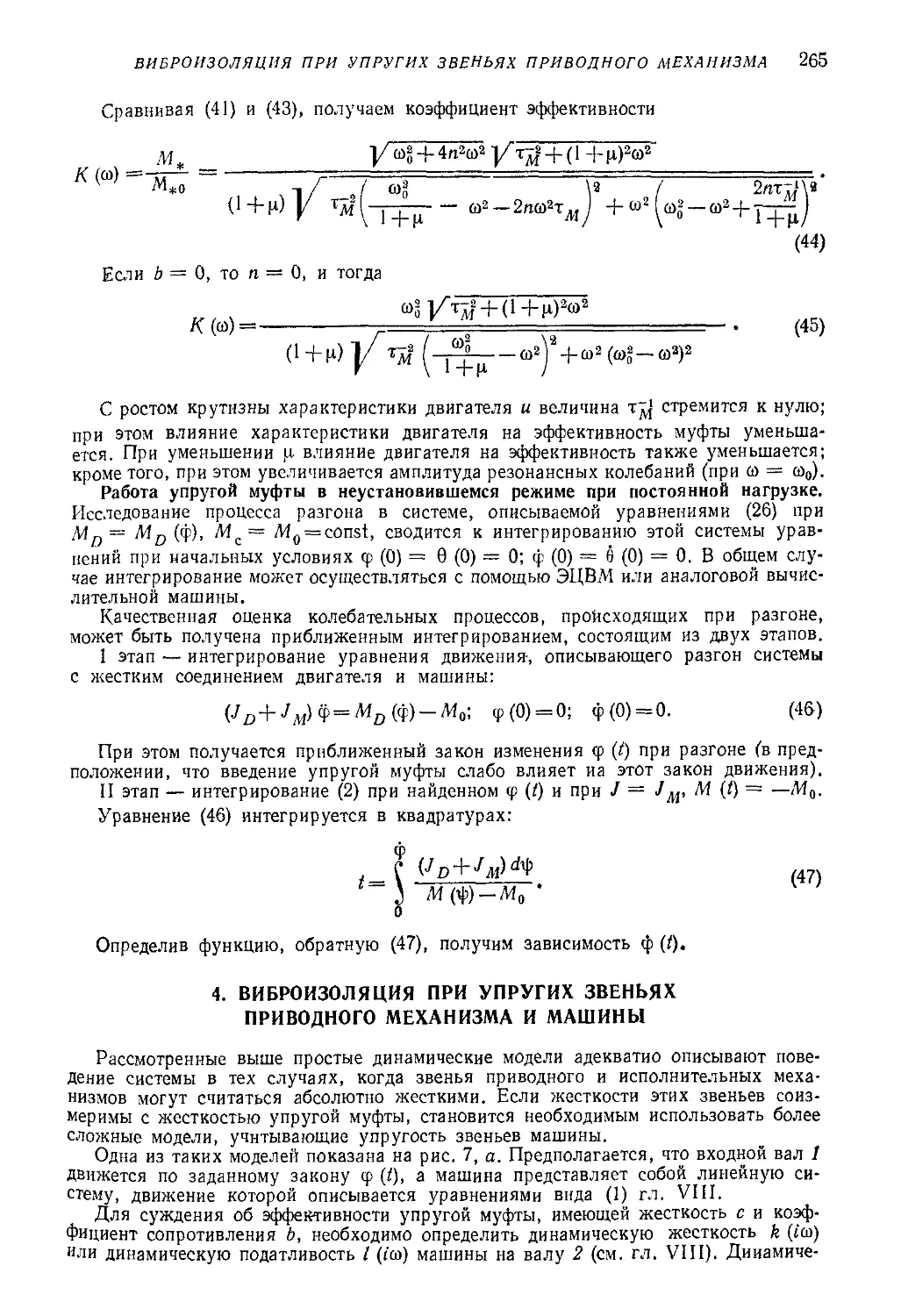
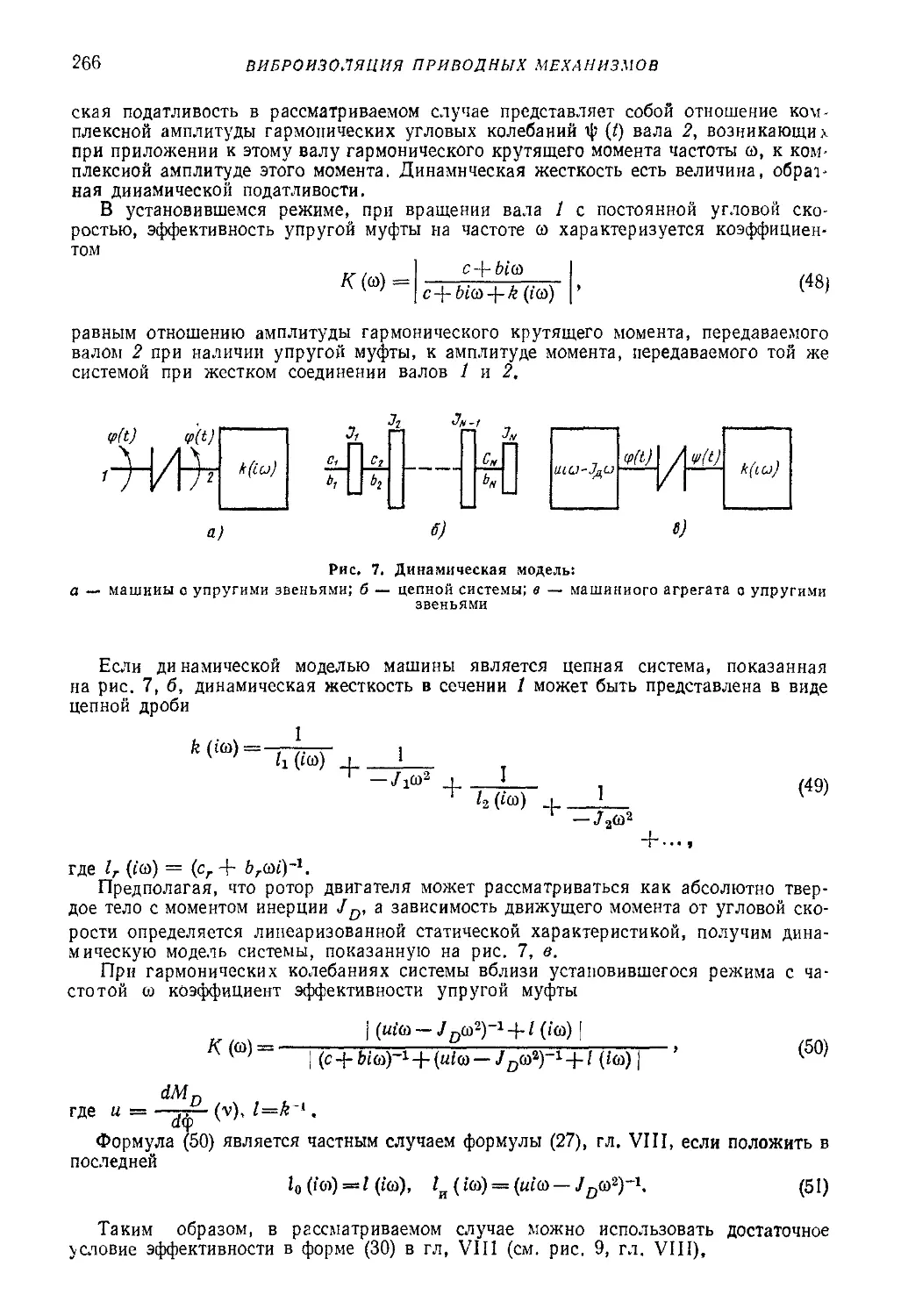
4. Виброизоляция при упругих звеньях приводного механизма и
машины , 265
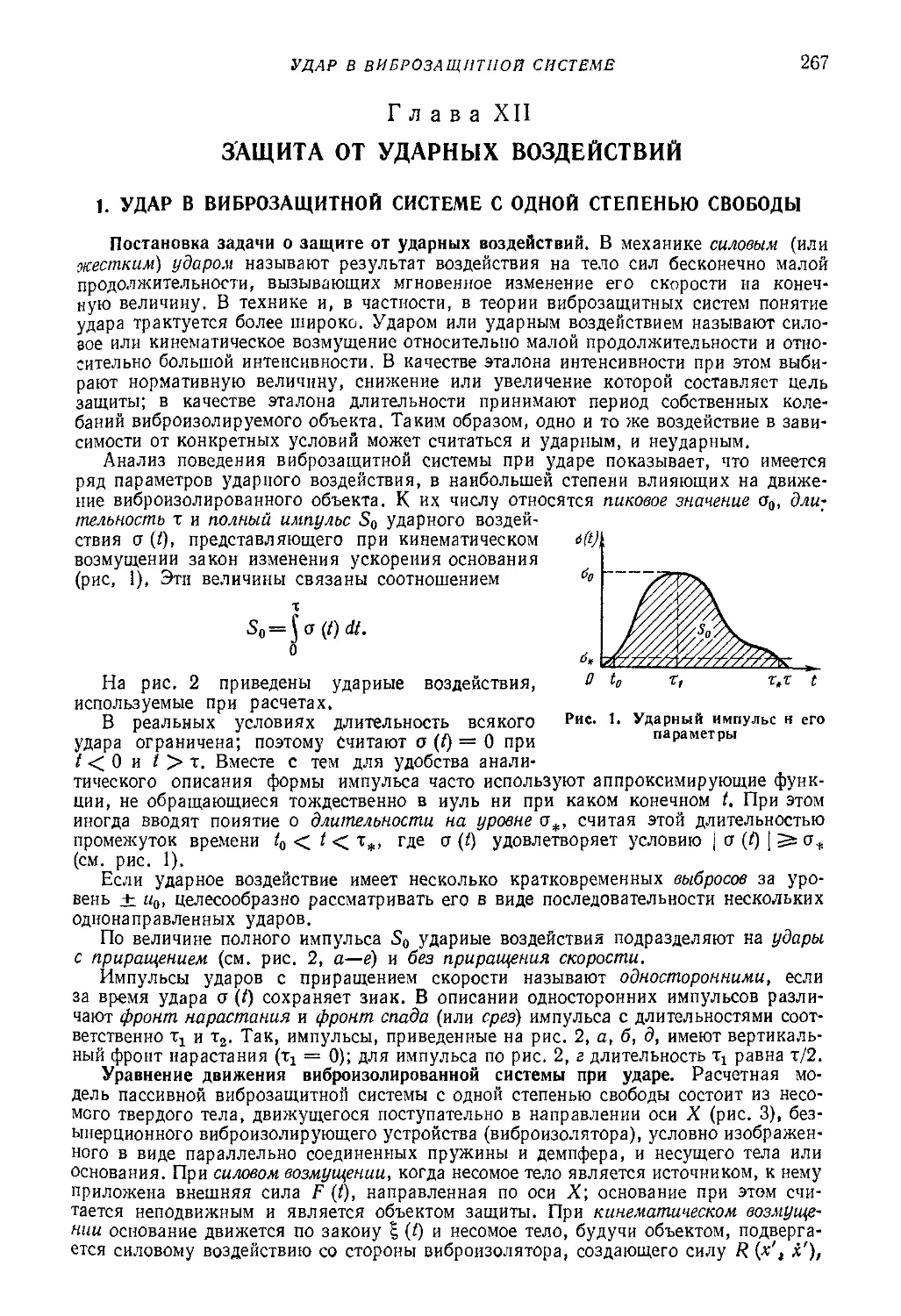
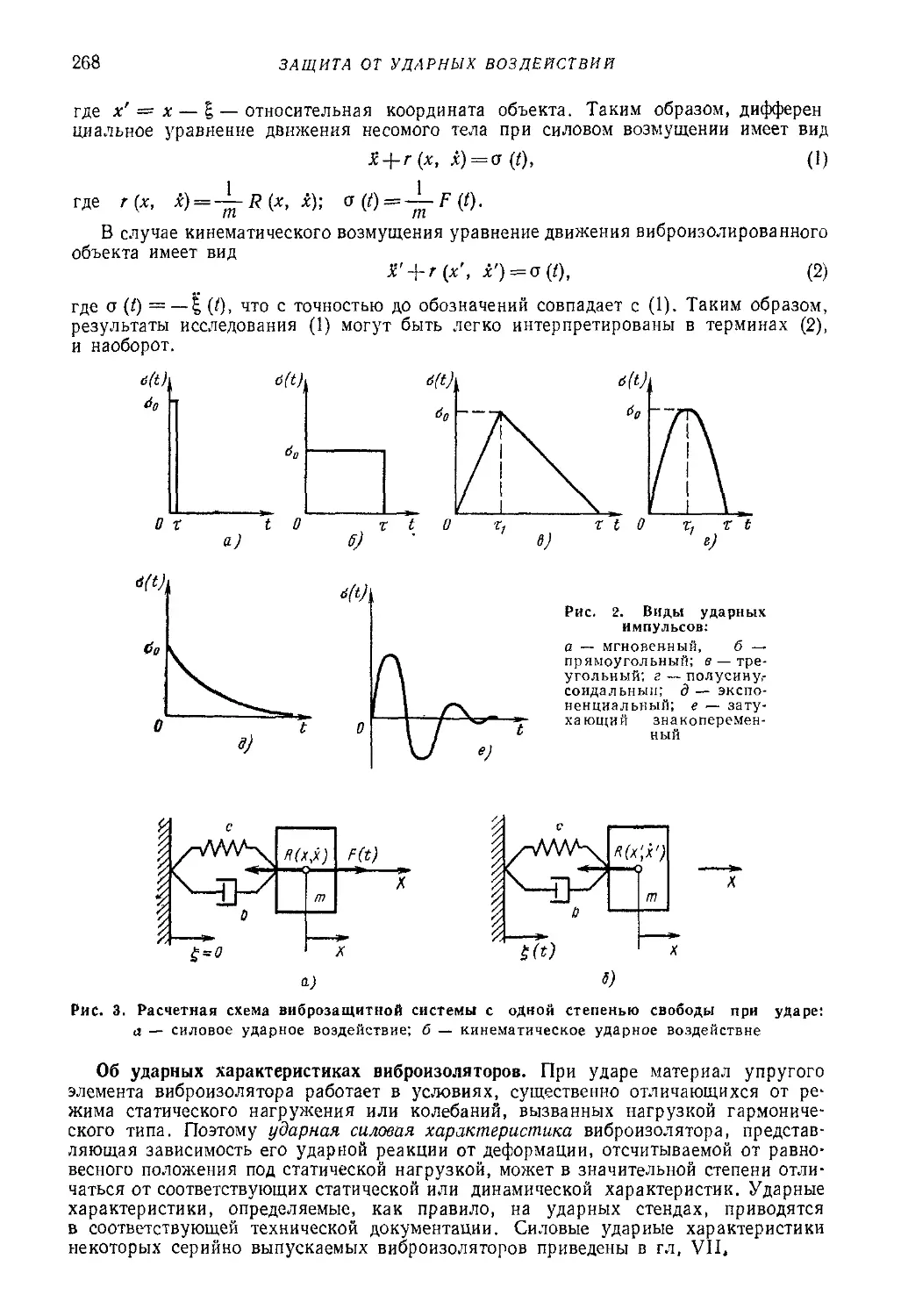
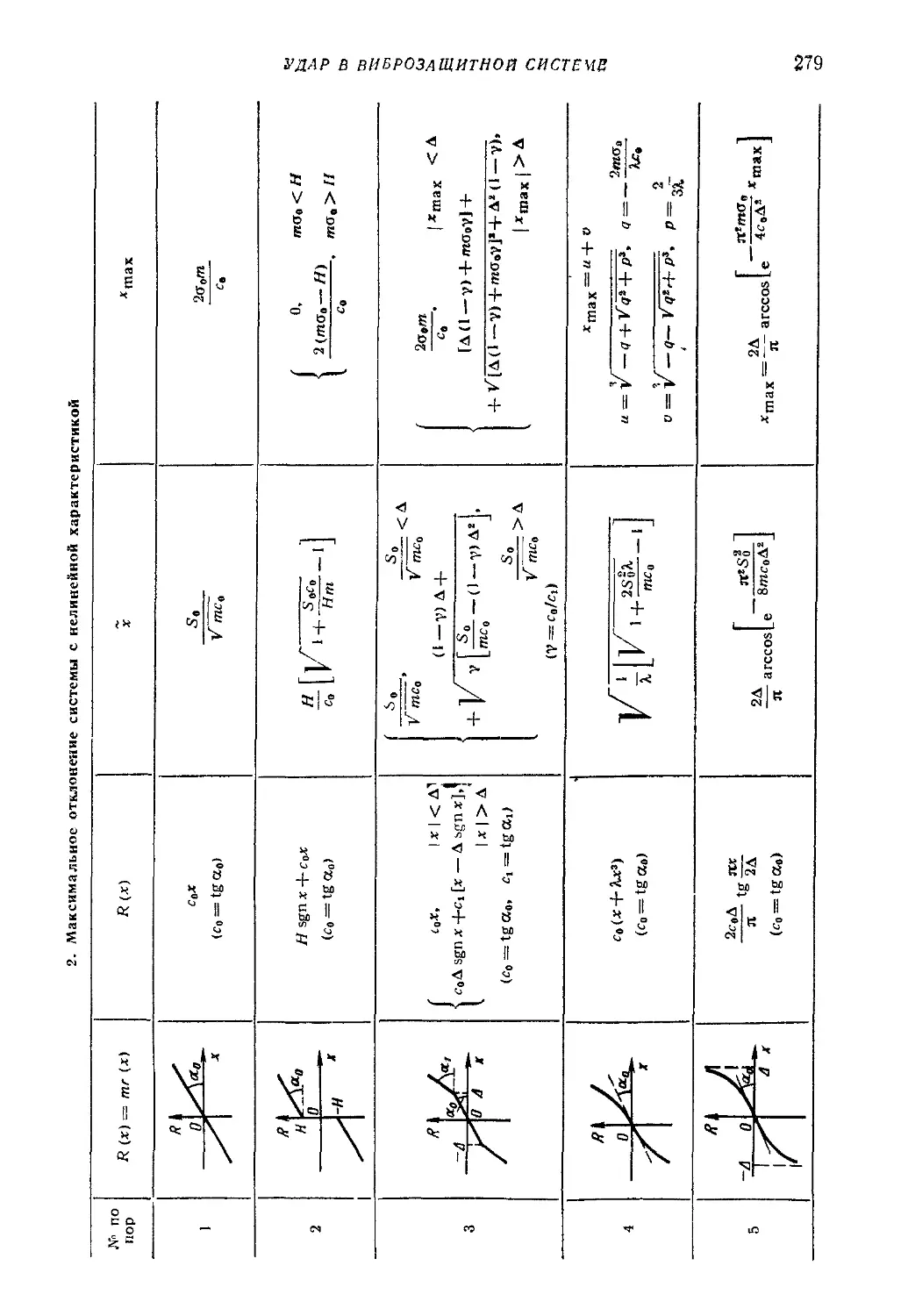
Глава XII. Защита от ударных воздействий (В. В. Турецкий) . ..',,. 267
1. Удар в виброзащитной системе с одной степенью свободы , . . 267
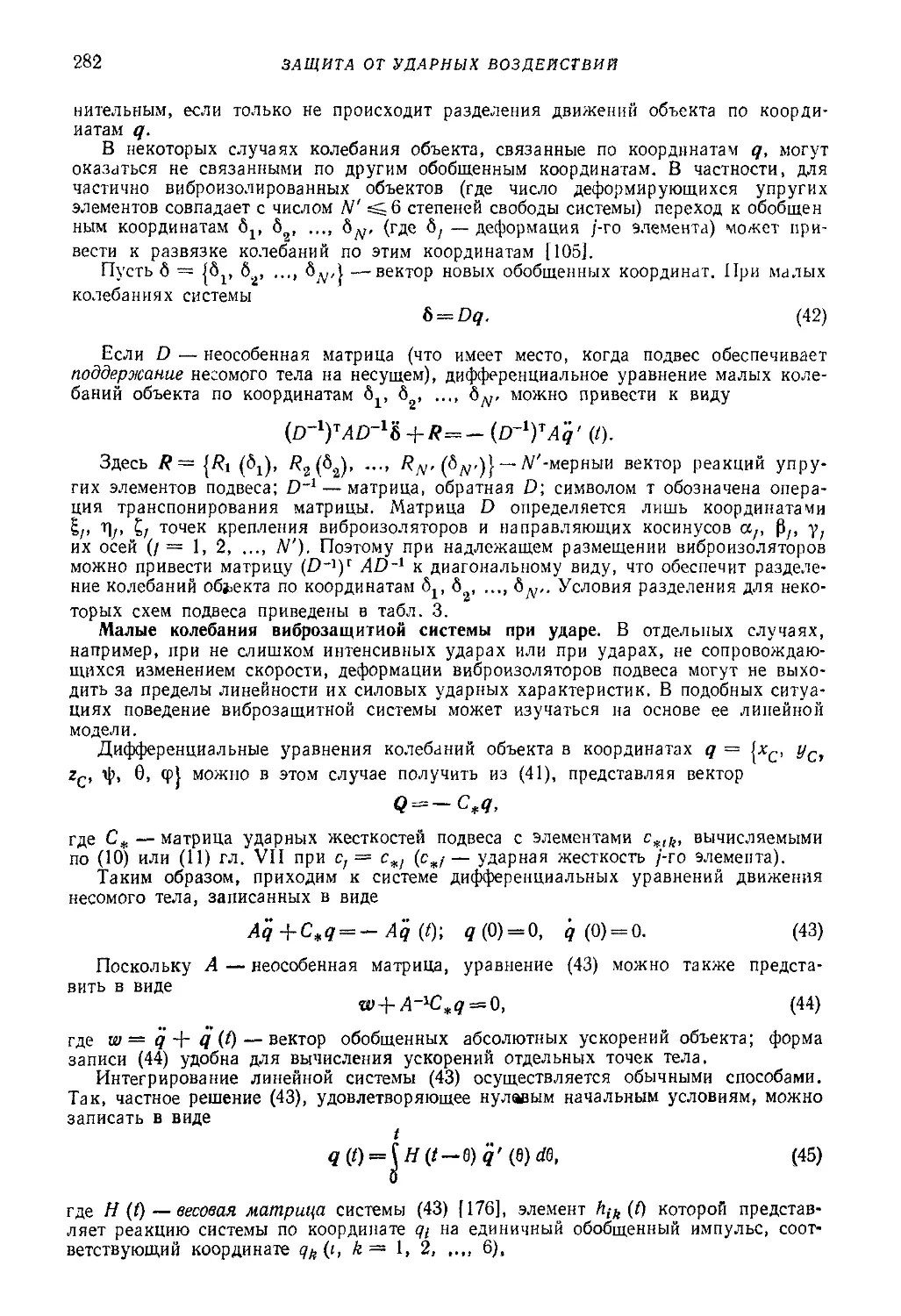
2. Ударное нагружение твердого тела на упругом подвесе 281
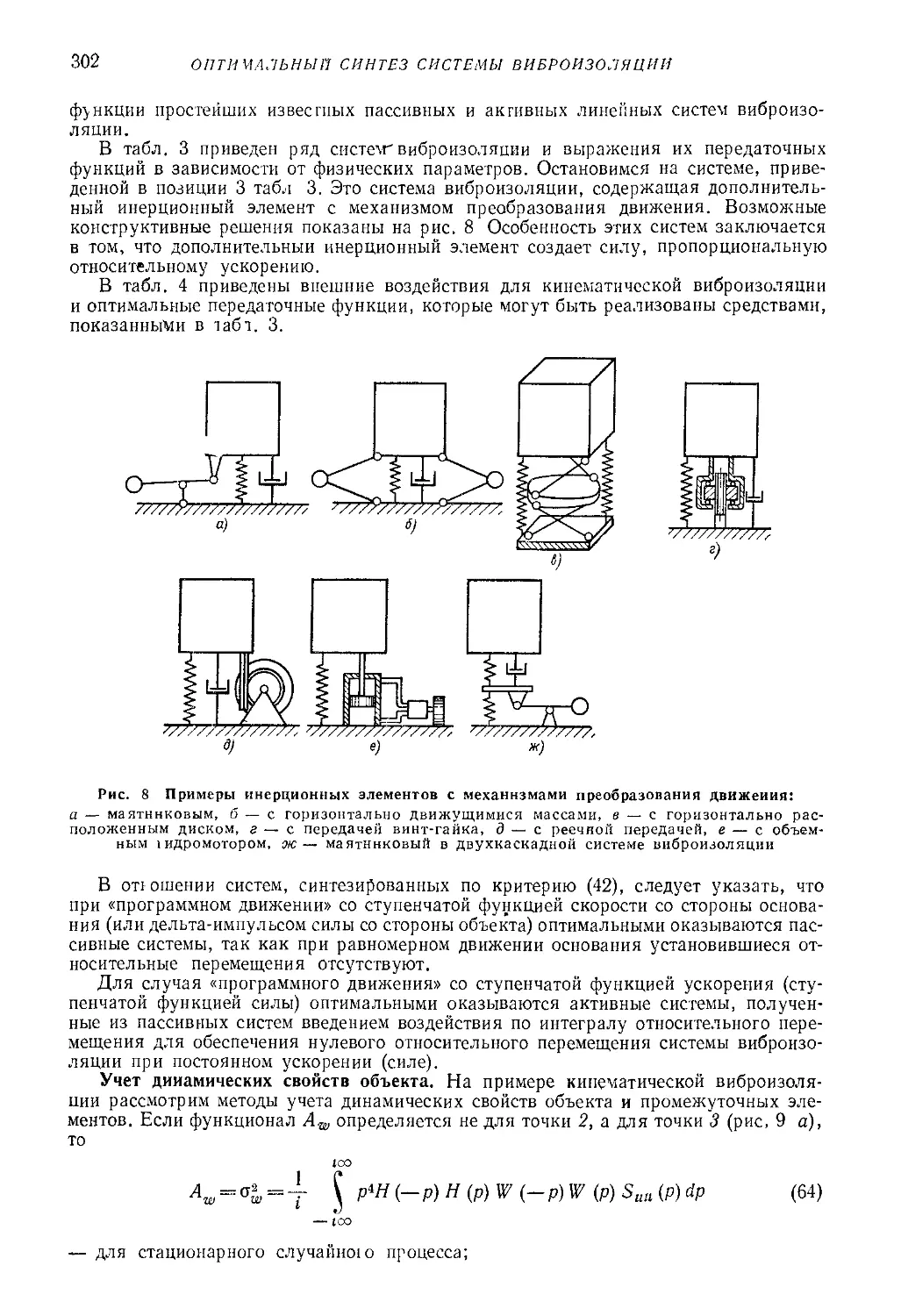
Глава XIII. Оптимальный синтез системы виброизоляции (В. В. Турец-
Турецкий, А. В. Синев, К- В. Фролов, Р. И. Фурунжиев) 286
1. Постановка задачи оптимального синтеза 286
2. Критерии оптимального синтеза 288
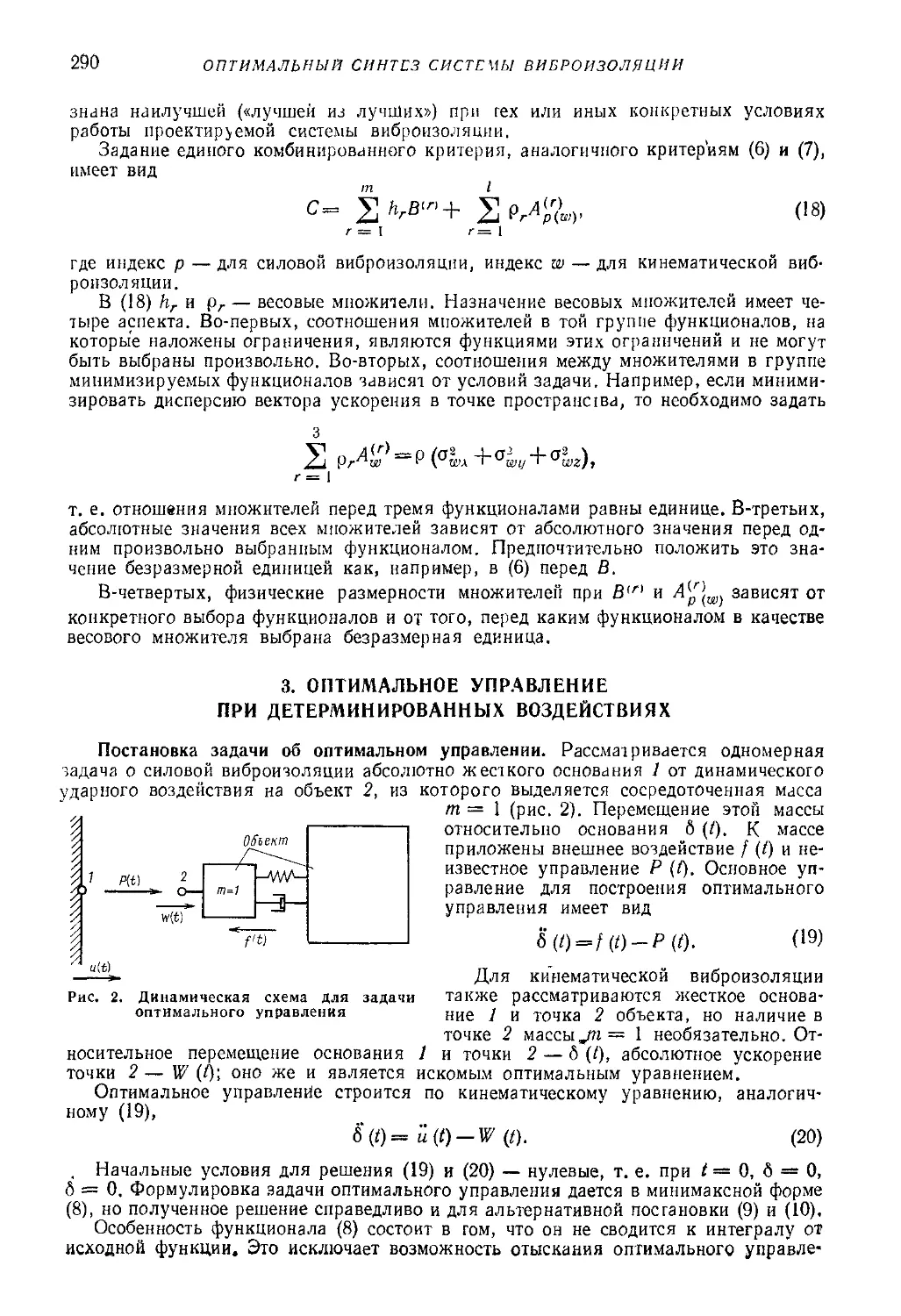
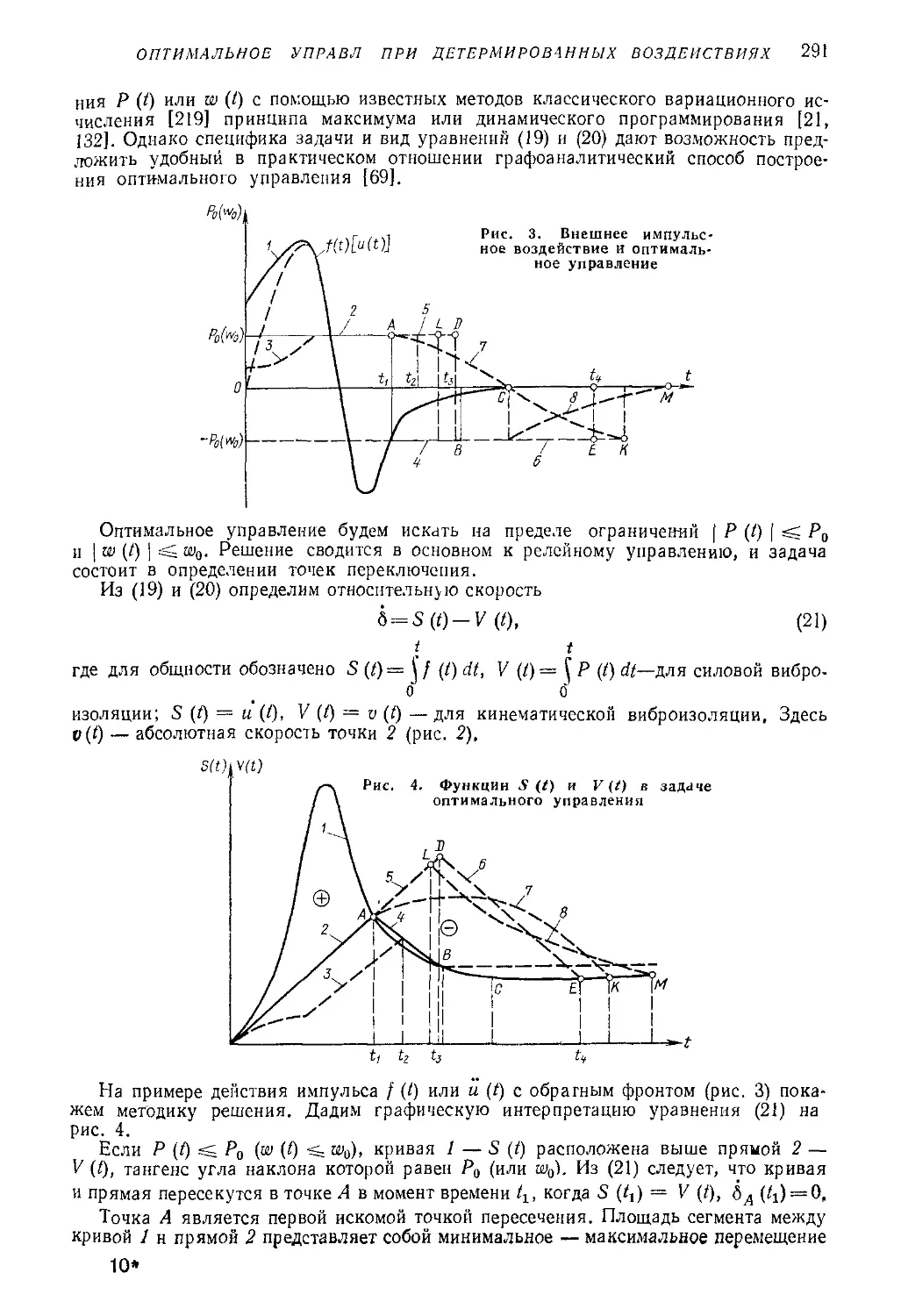
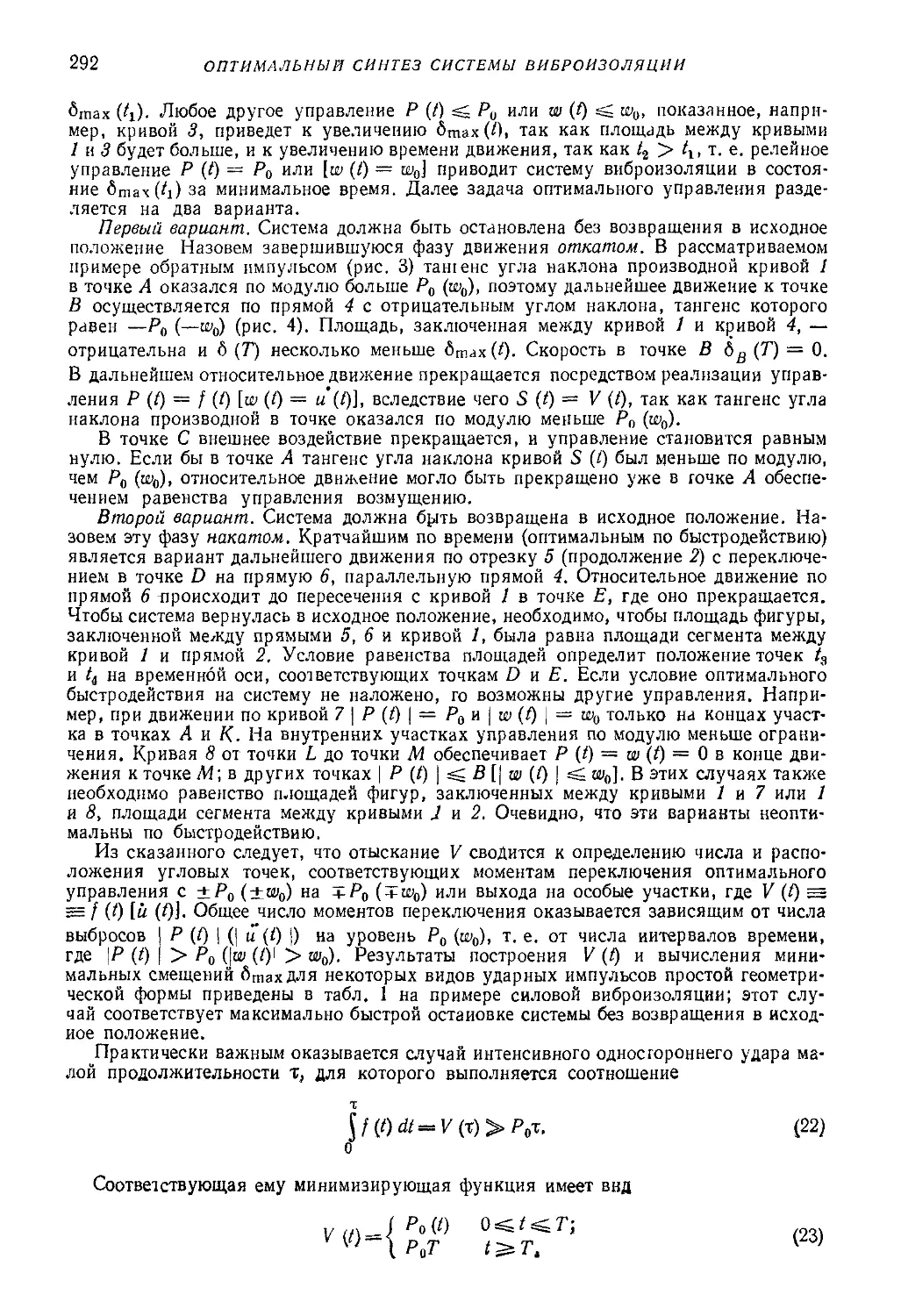
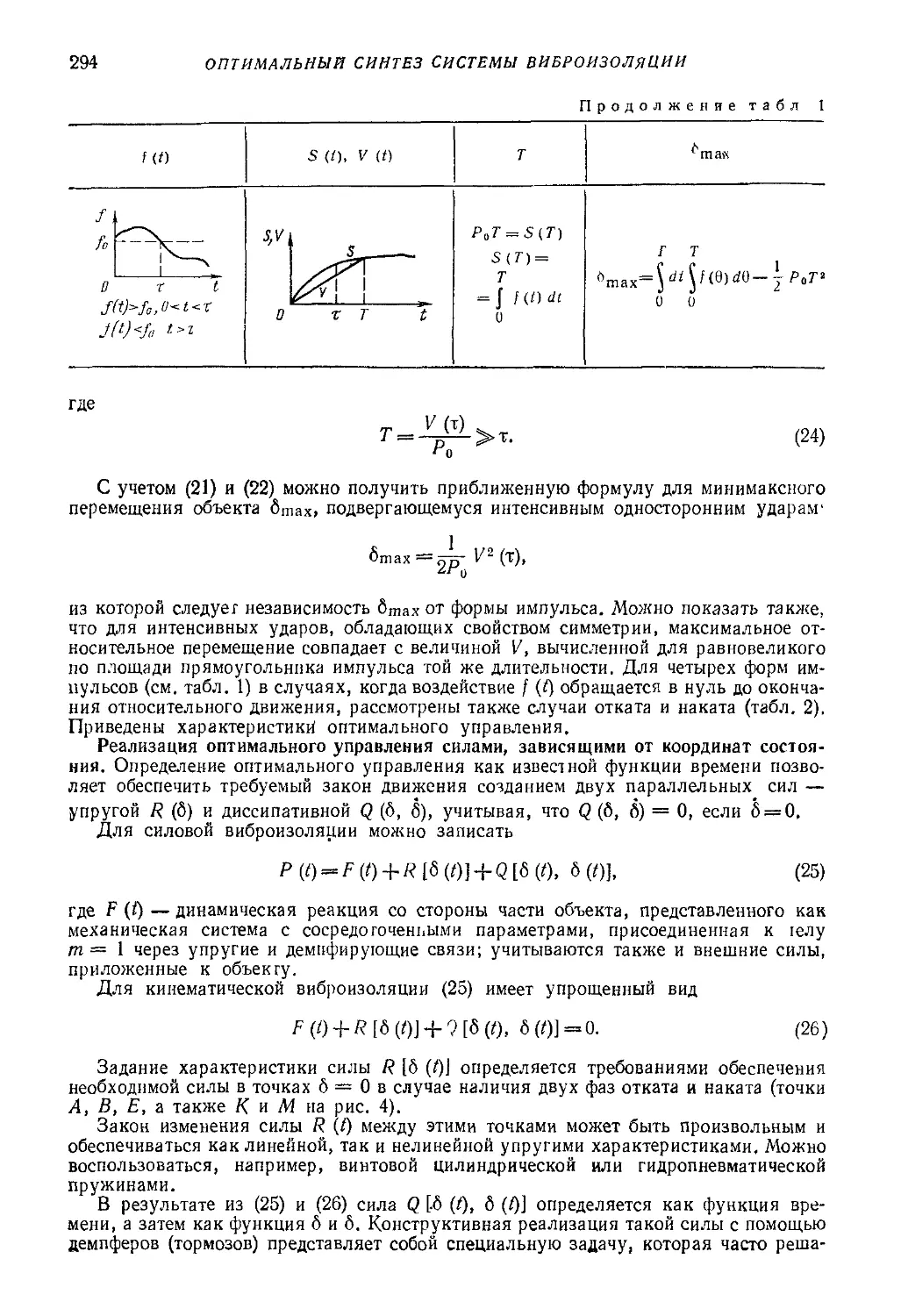
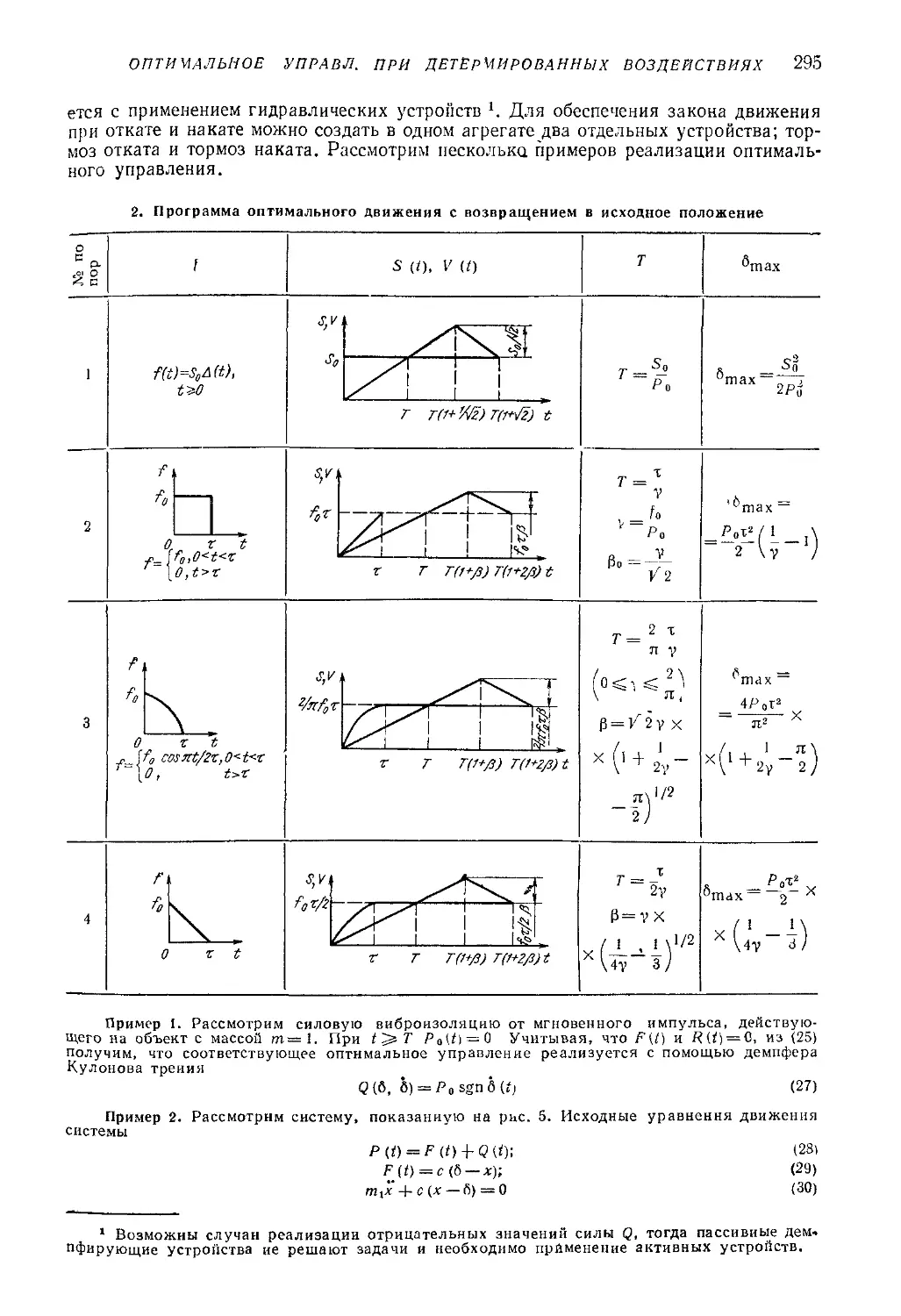
3. Оптимальное управление при детерминированных воздействиях 290
4. Синтез линейных систем виброизоляции с оптимальными пере-
передаточными функциями 298
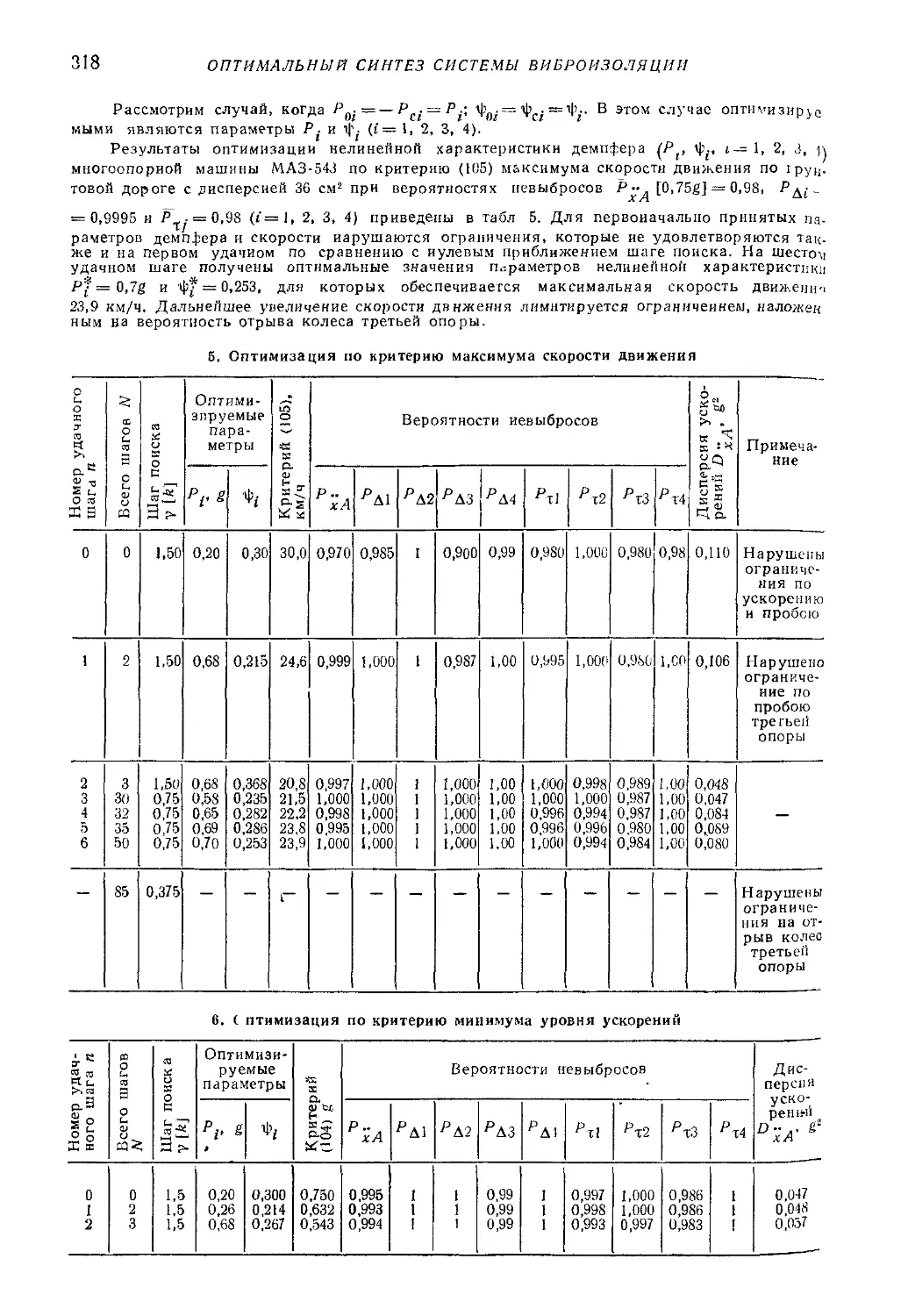
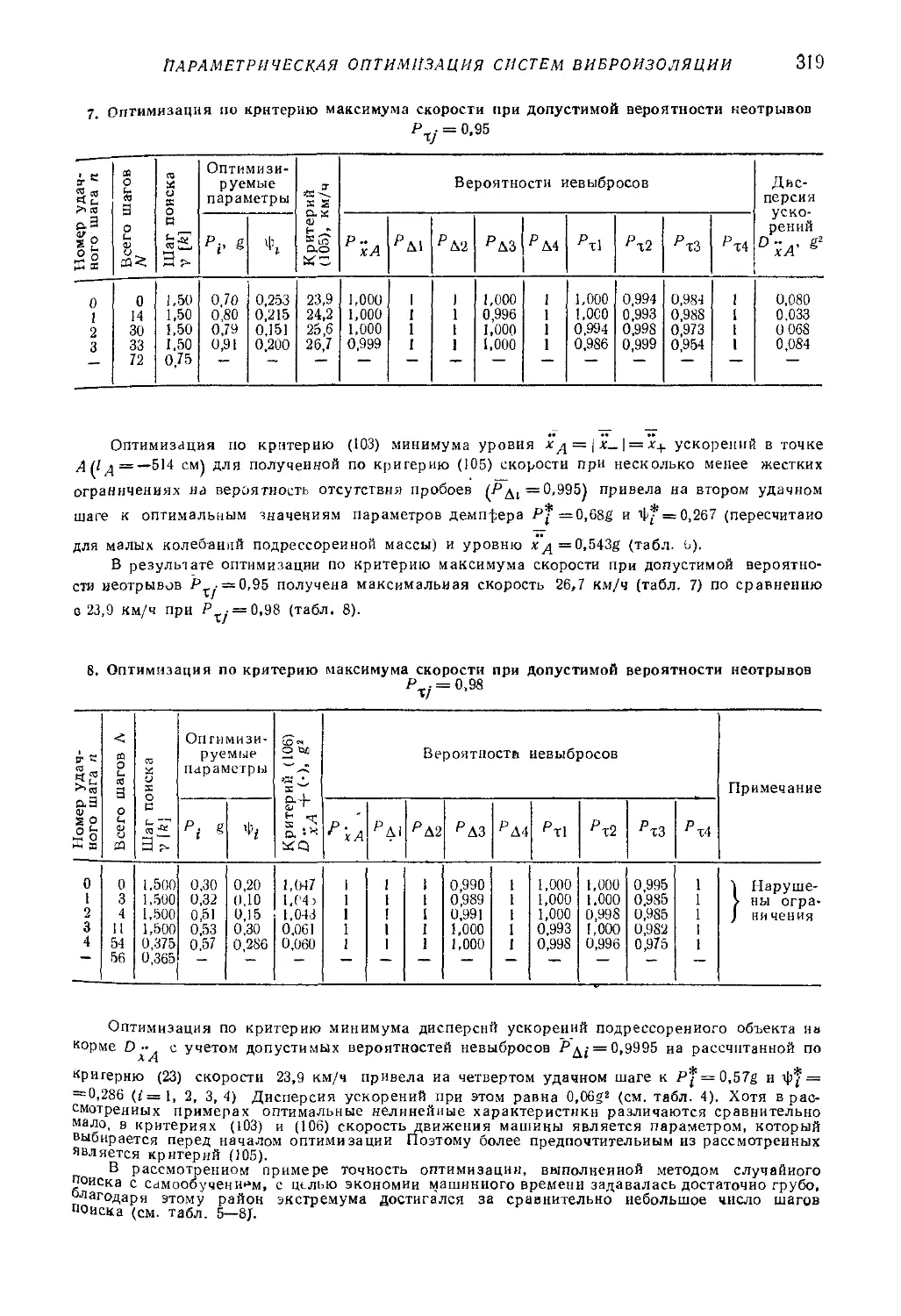
5. Параметрическая оптимизация систем виброизоляции 306
6. Синтез систем виброизоляции по заданному спектру собственных
частот 320
ЧАСТЬ ЧЕТВЕРТАЯ
ДИНАМИЧЕСКОЕ ГАШЕНИЕ КОЛЕБАНИЙ
Глава XIV. Принципы динамического гашения колебаний (В. И. Ба-
Бабицкий) 326
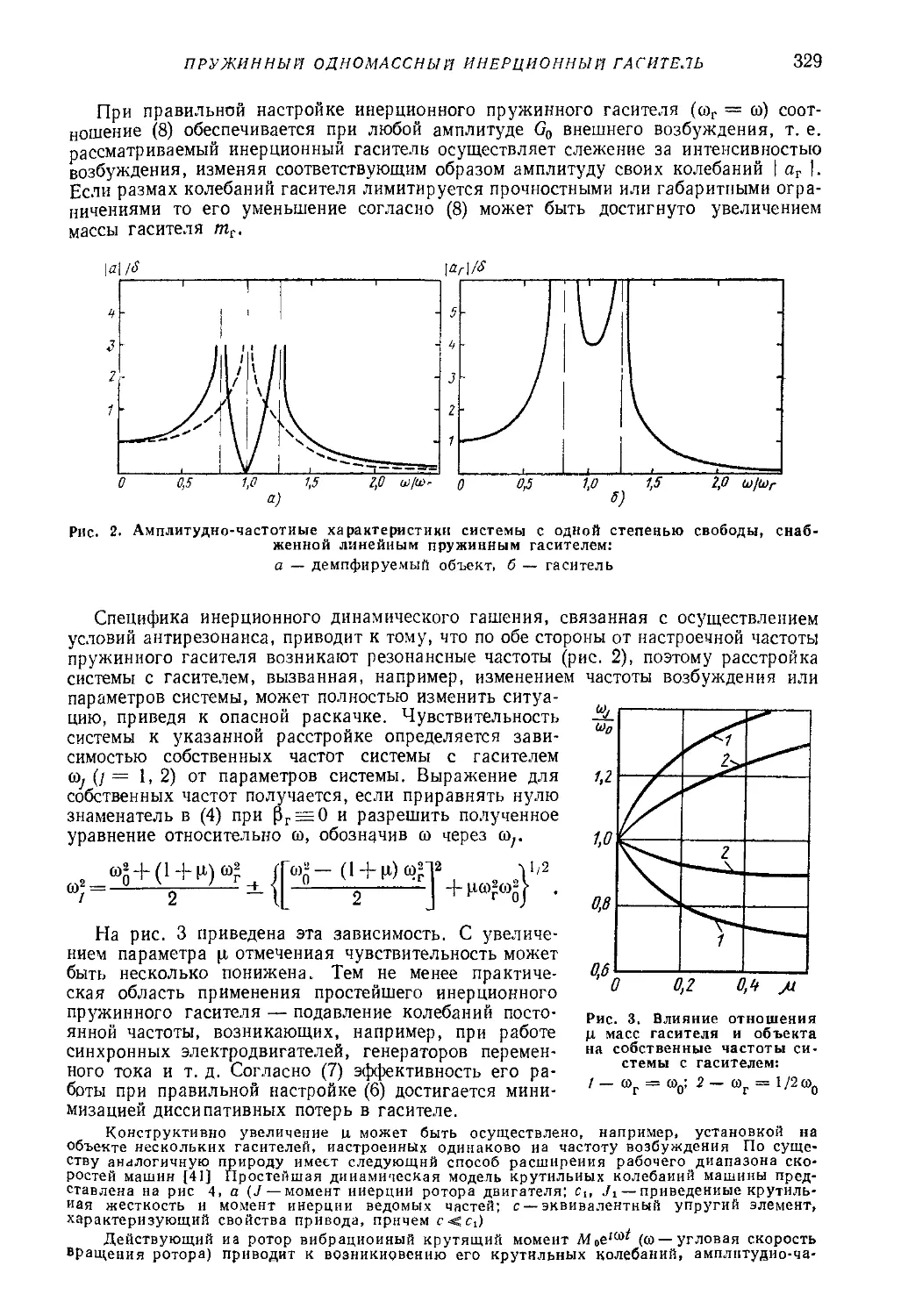
1. Пружинный одномассный инерционный динамический гаситель 327
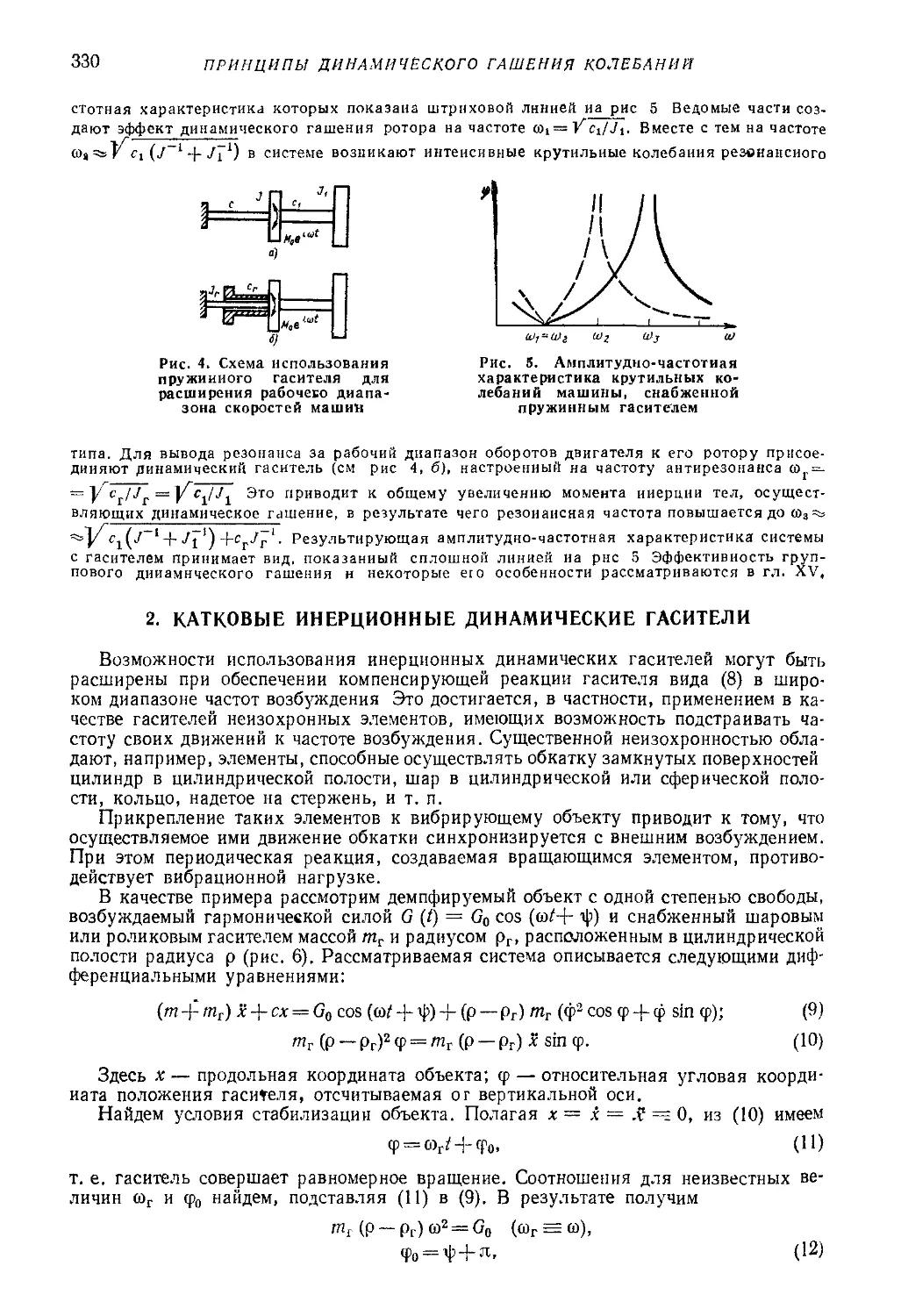
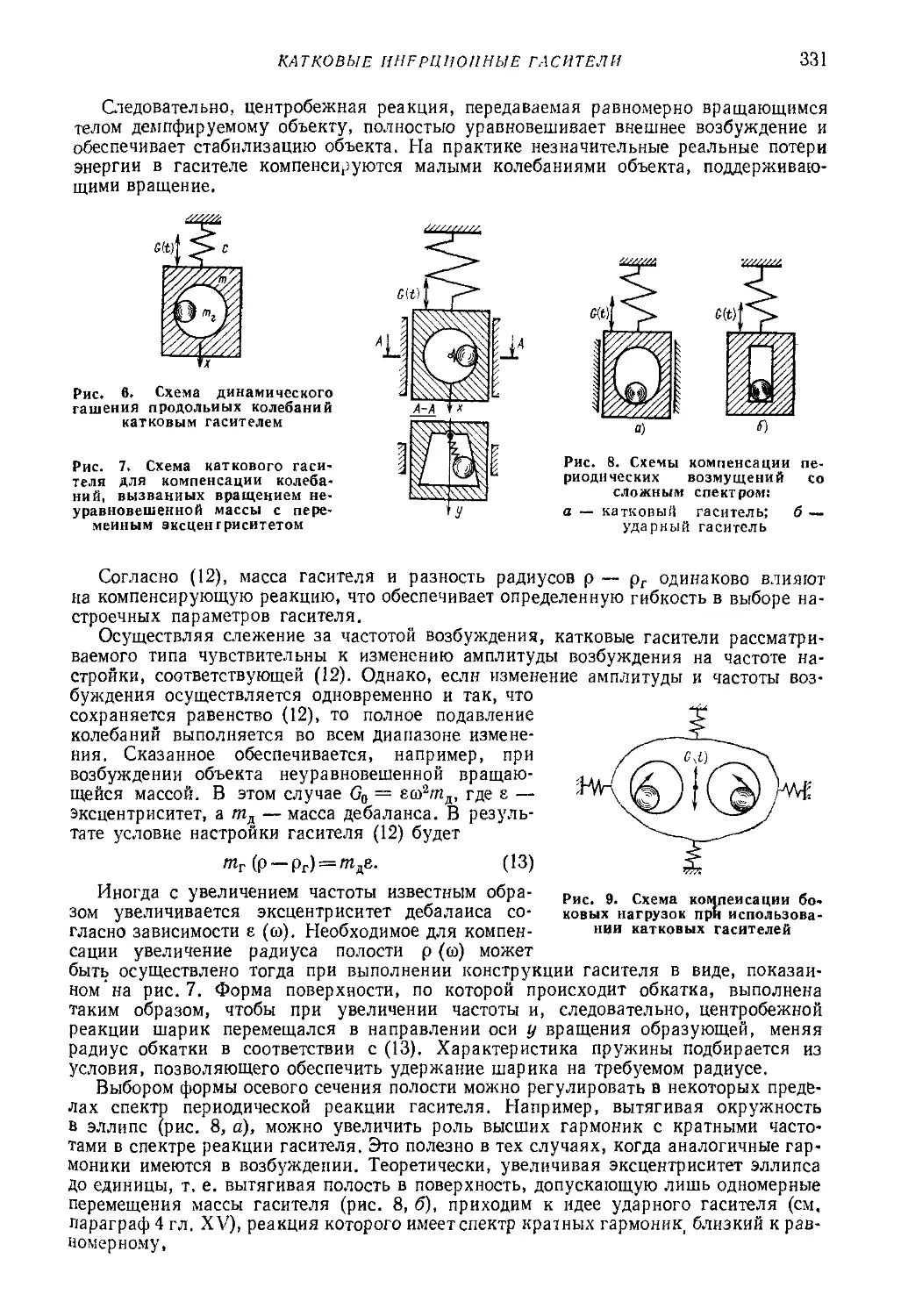
2. Катковые инерционные динамические гасители 330
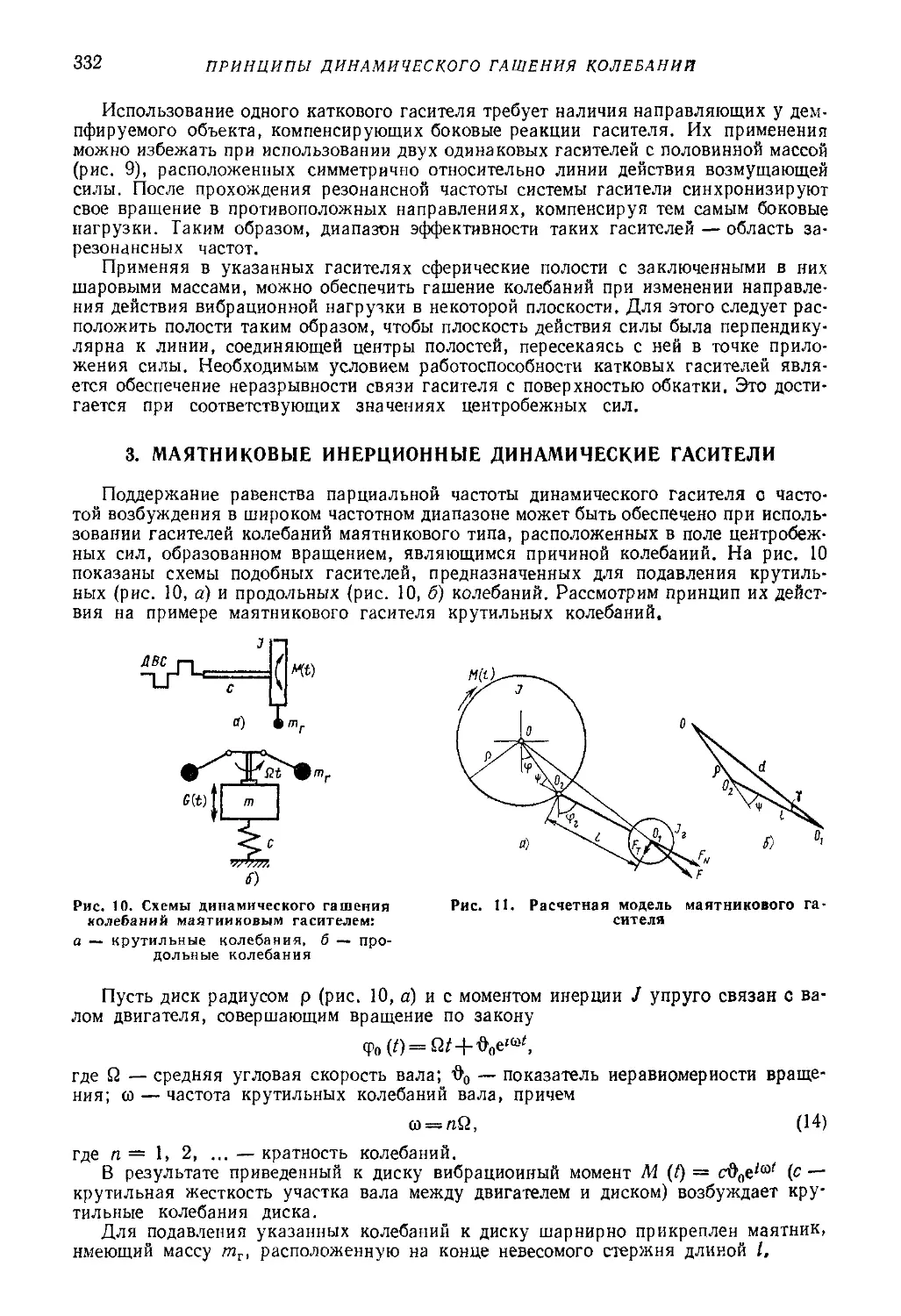
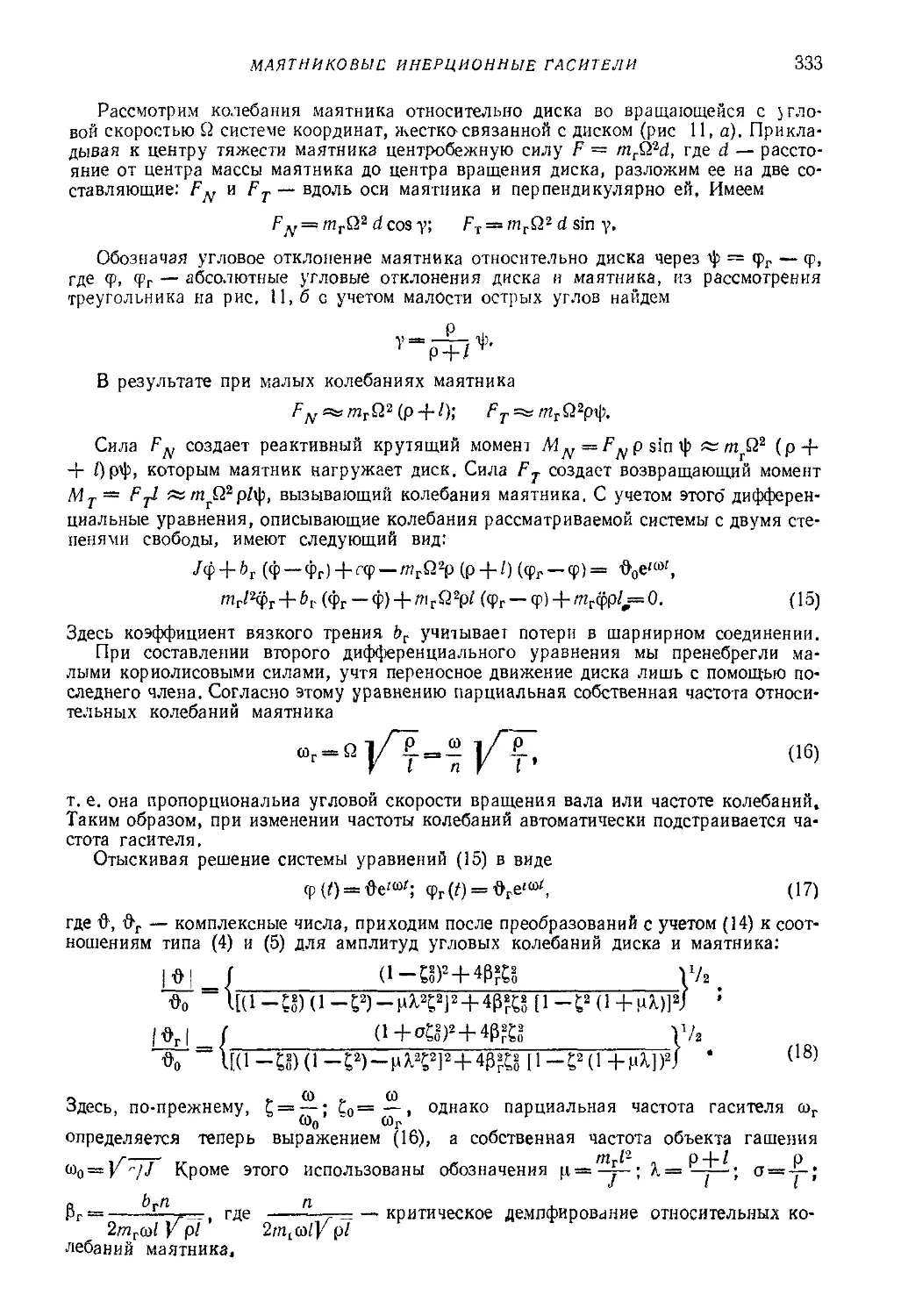
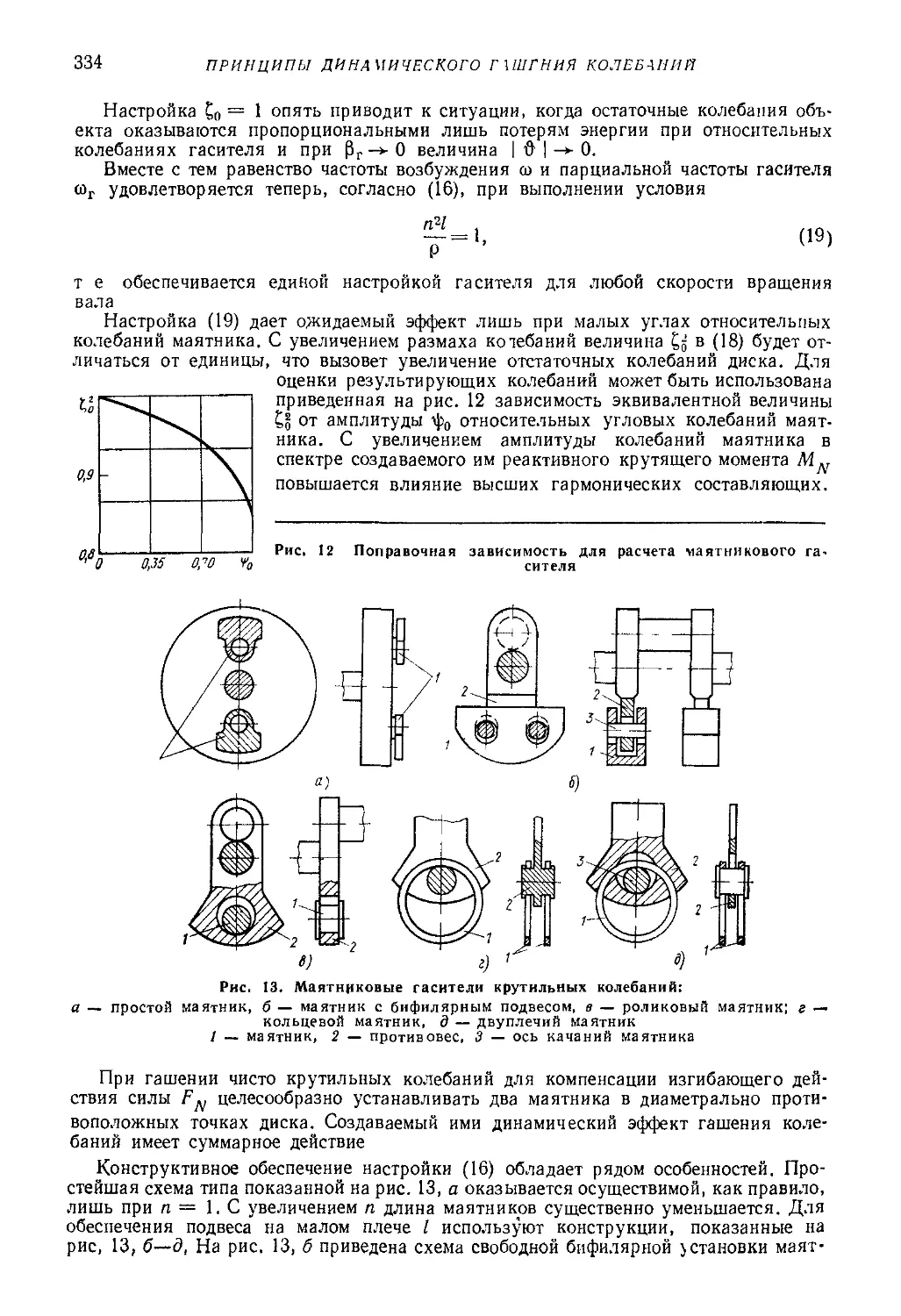
3. Маятниковые инерционные динамические гасители 332
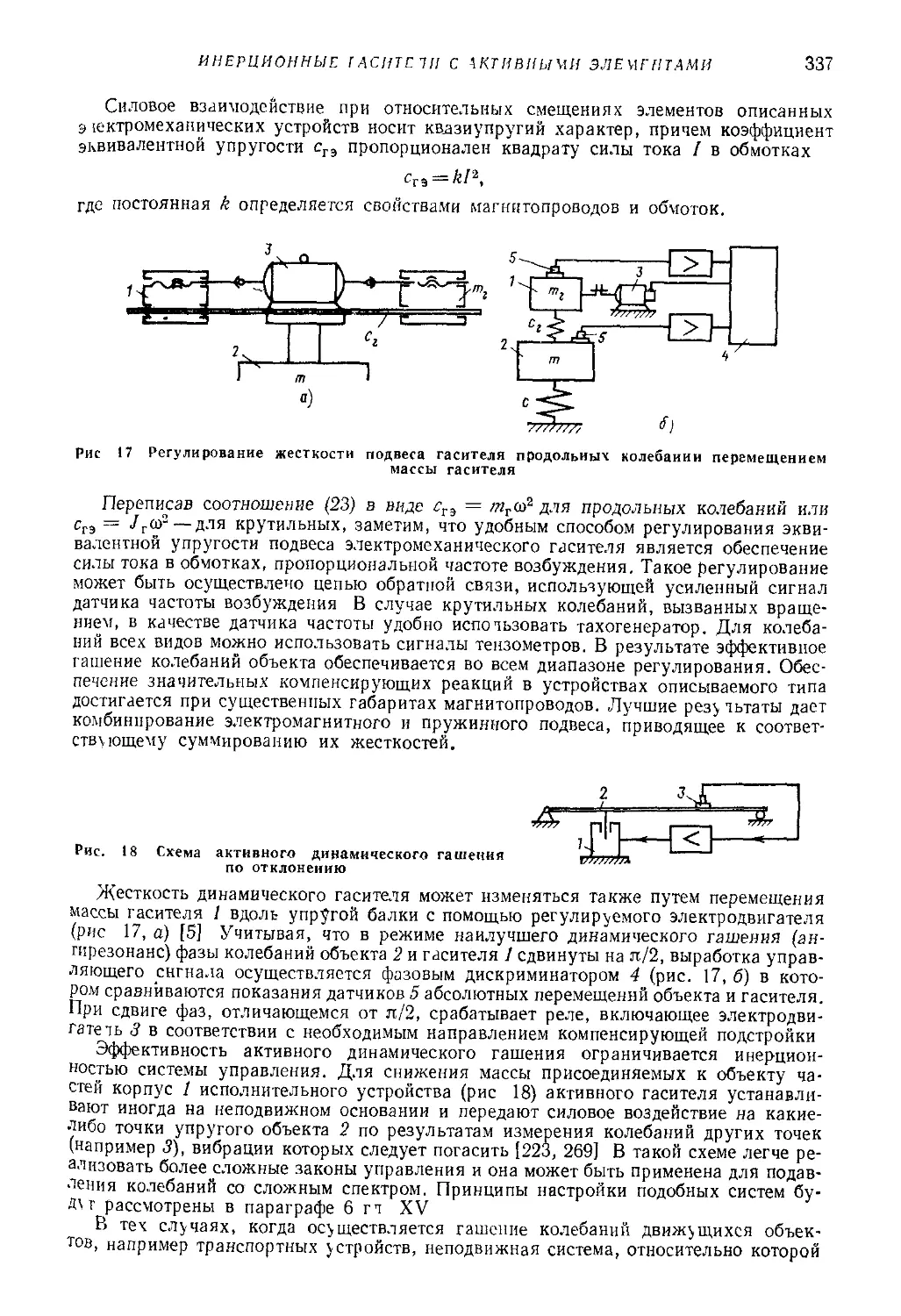
4. Инерционные динамические гасители с активными элементами 336
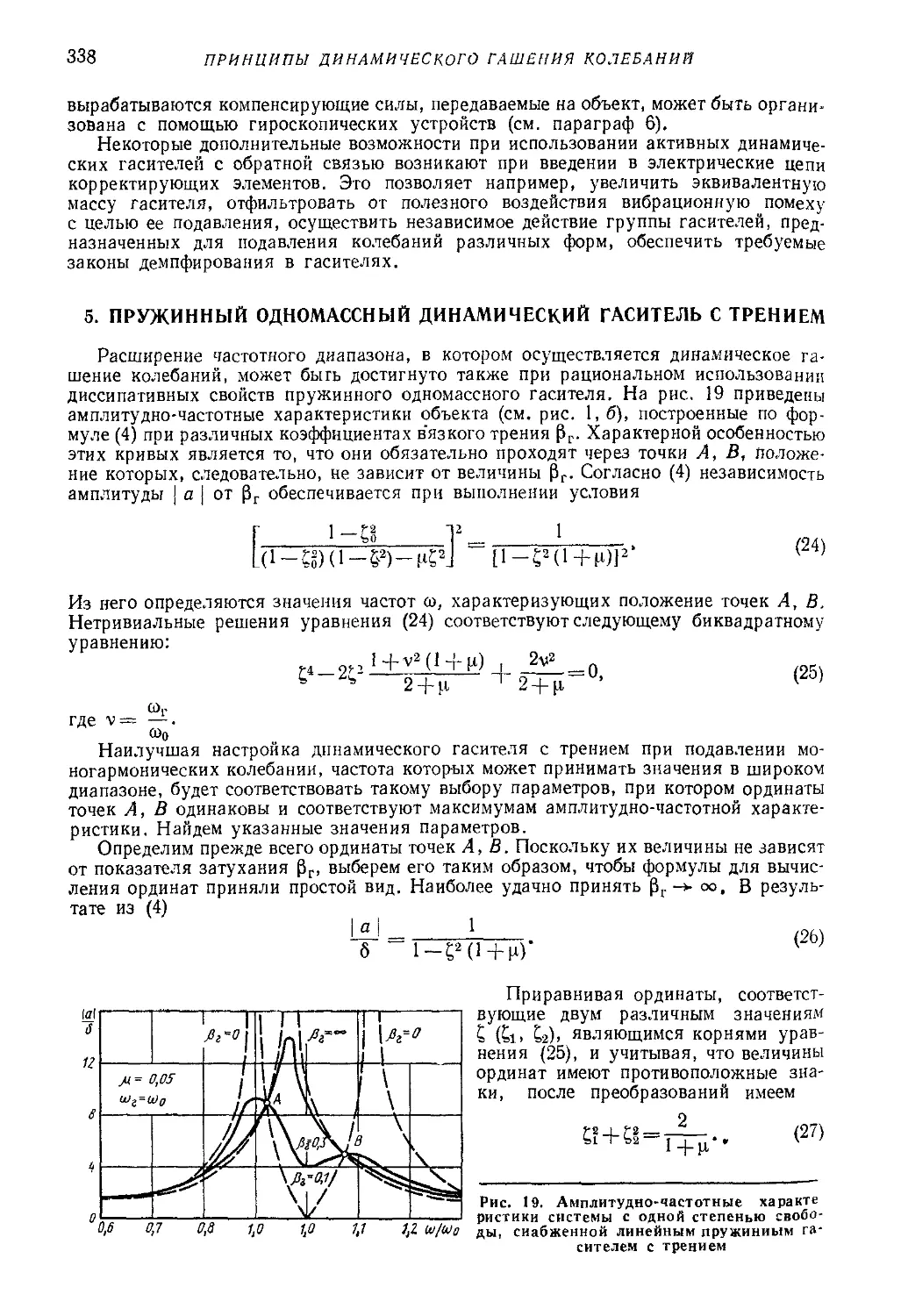
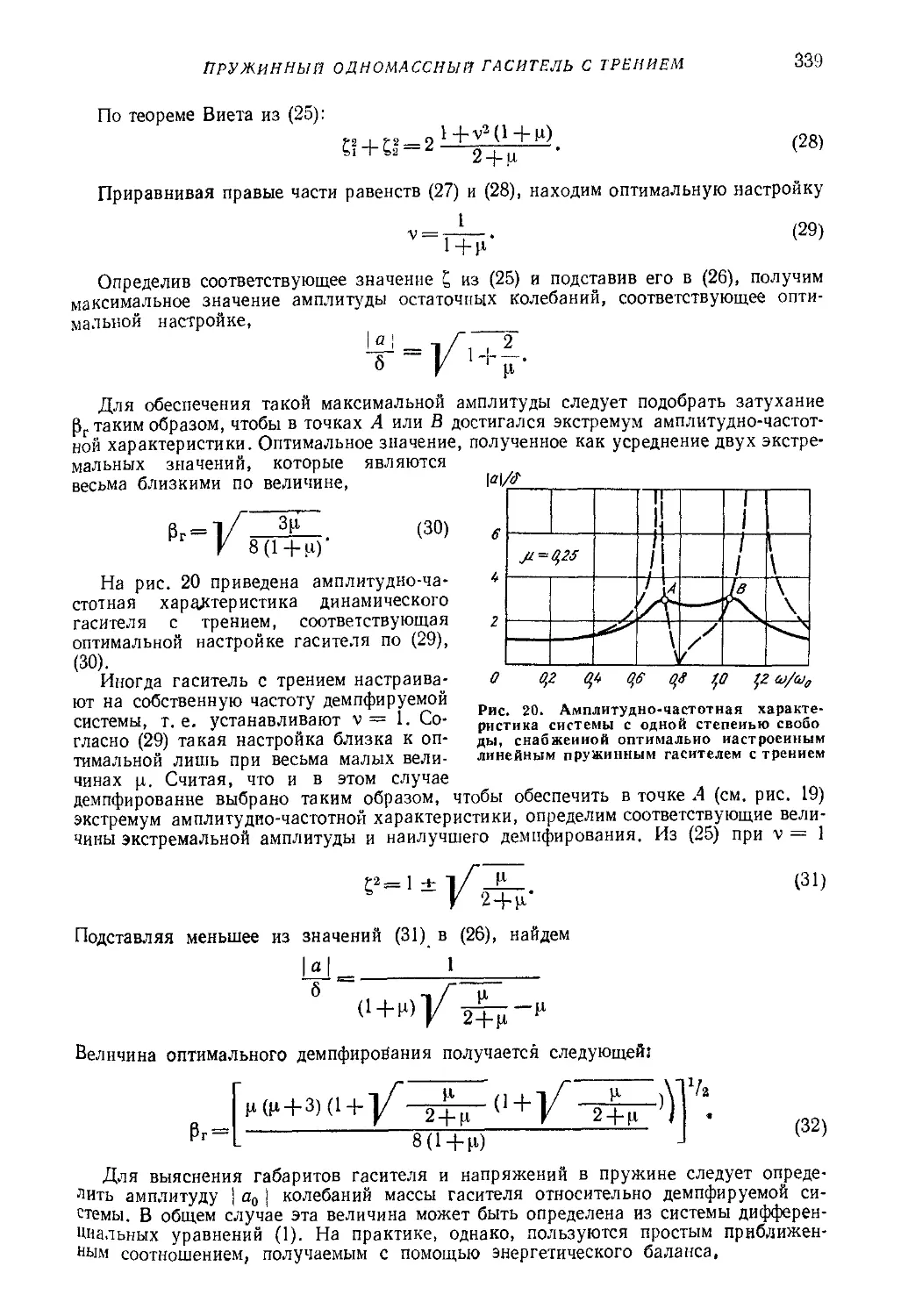
5. Пружинный одномассный динамический гаситель с трением . , 338
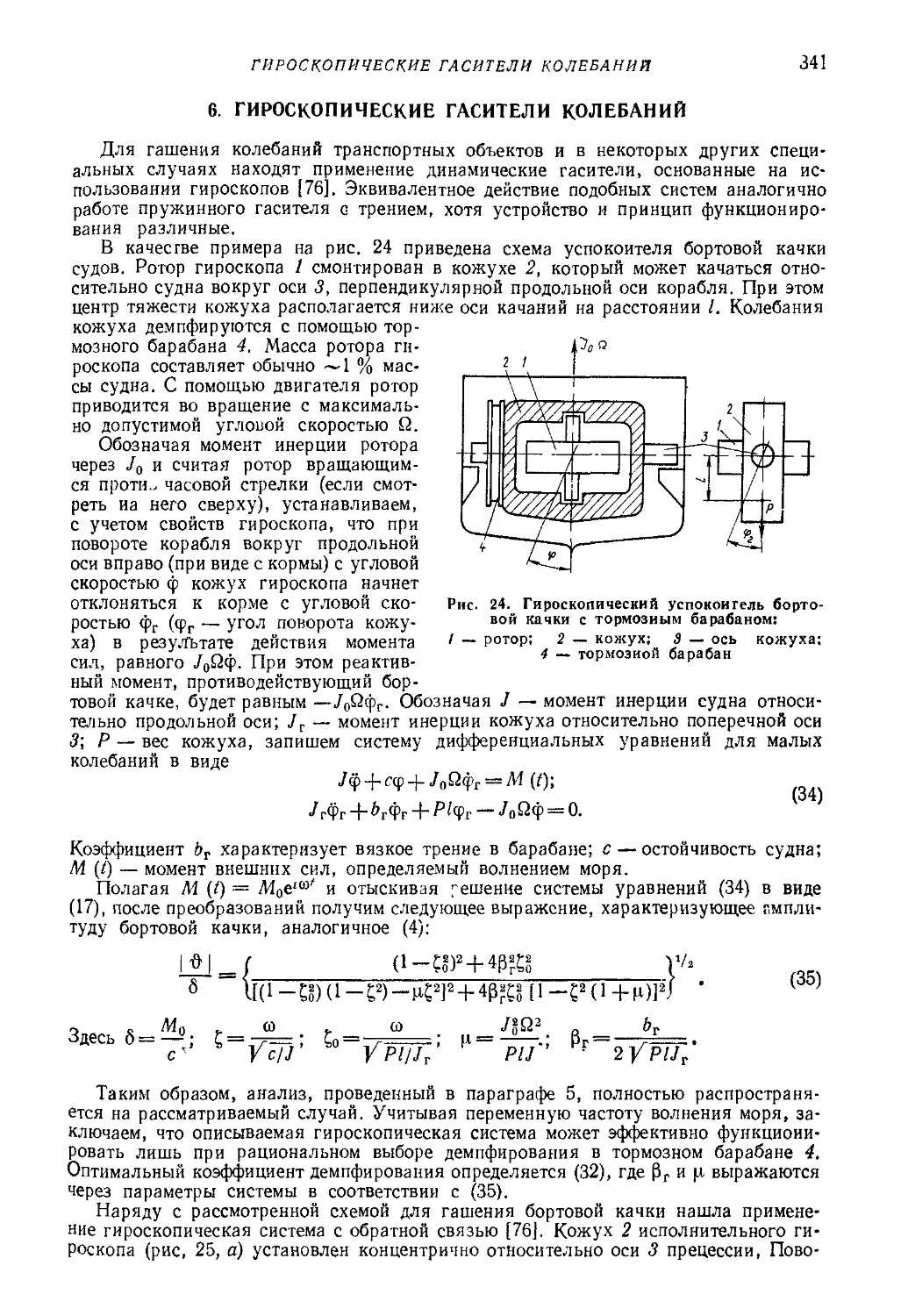
6. Гироскопические гасители колебаний . 341
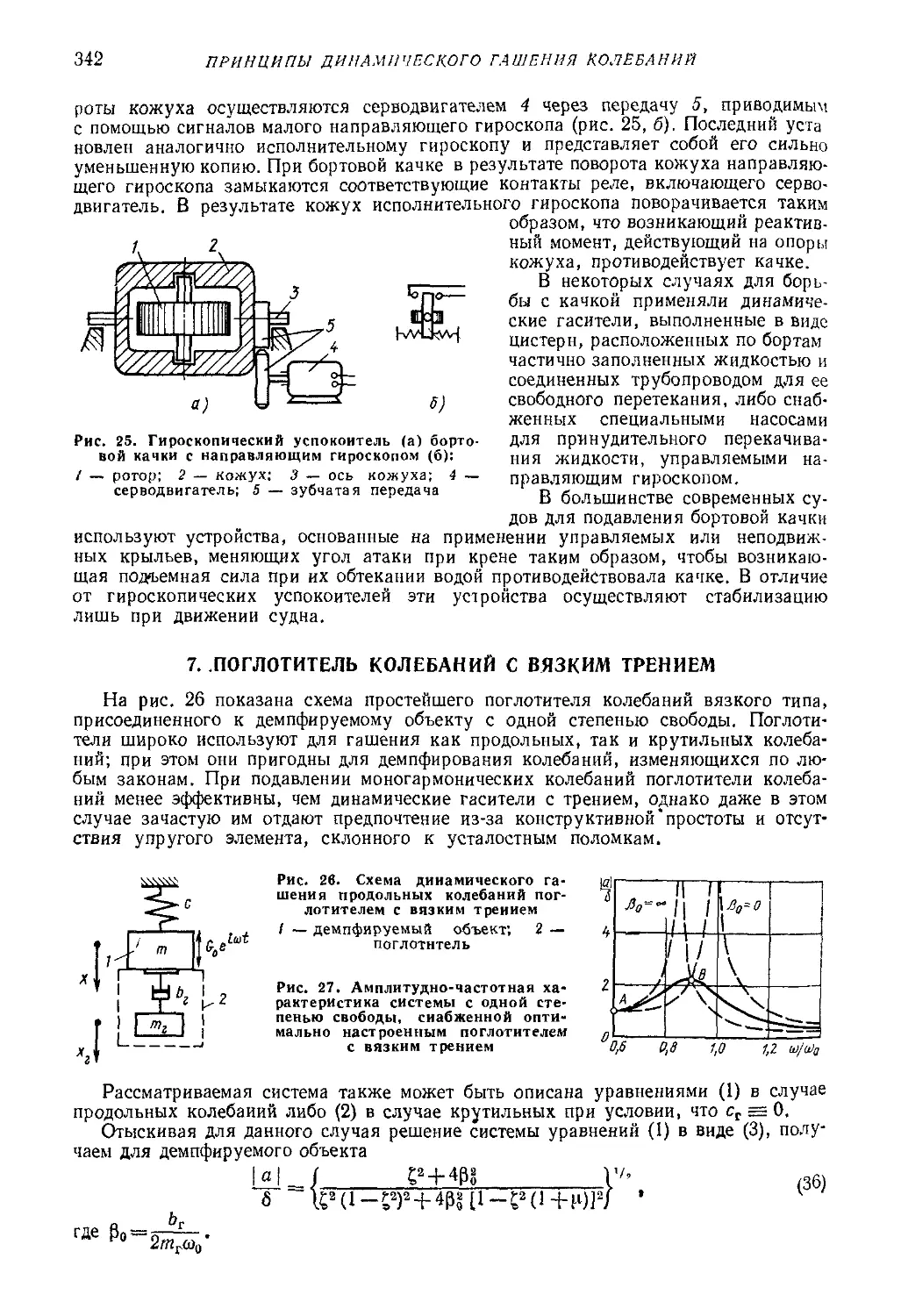
7. Поглотитель колебаний с вязким трением ....,.,...,.. 342
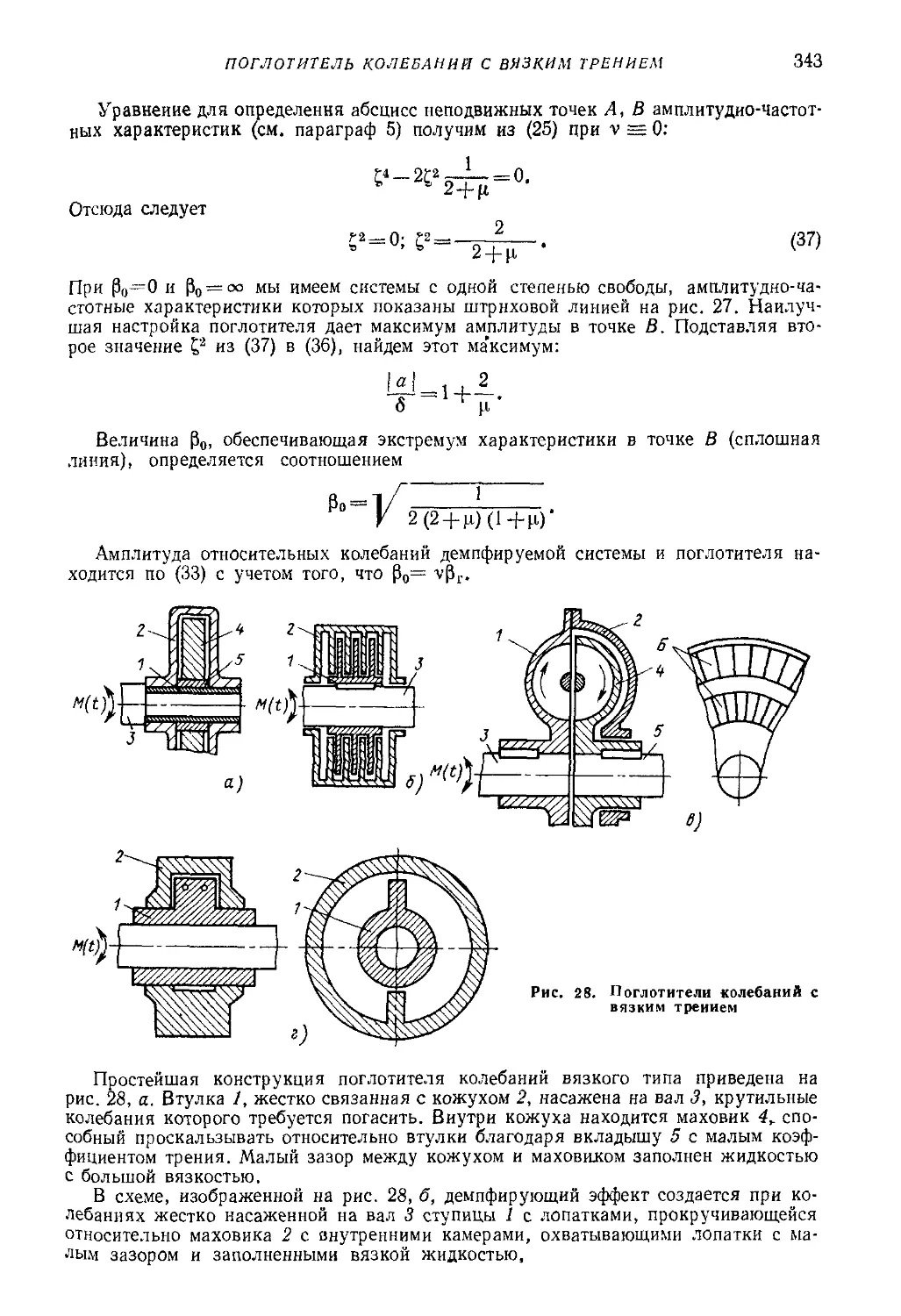
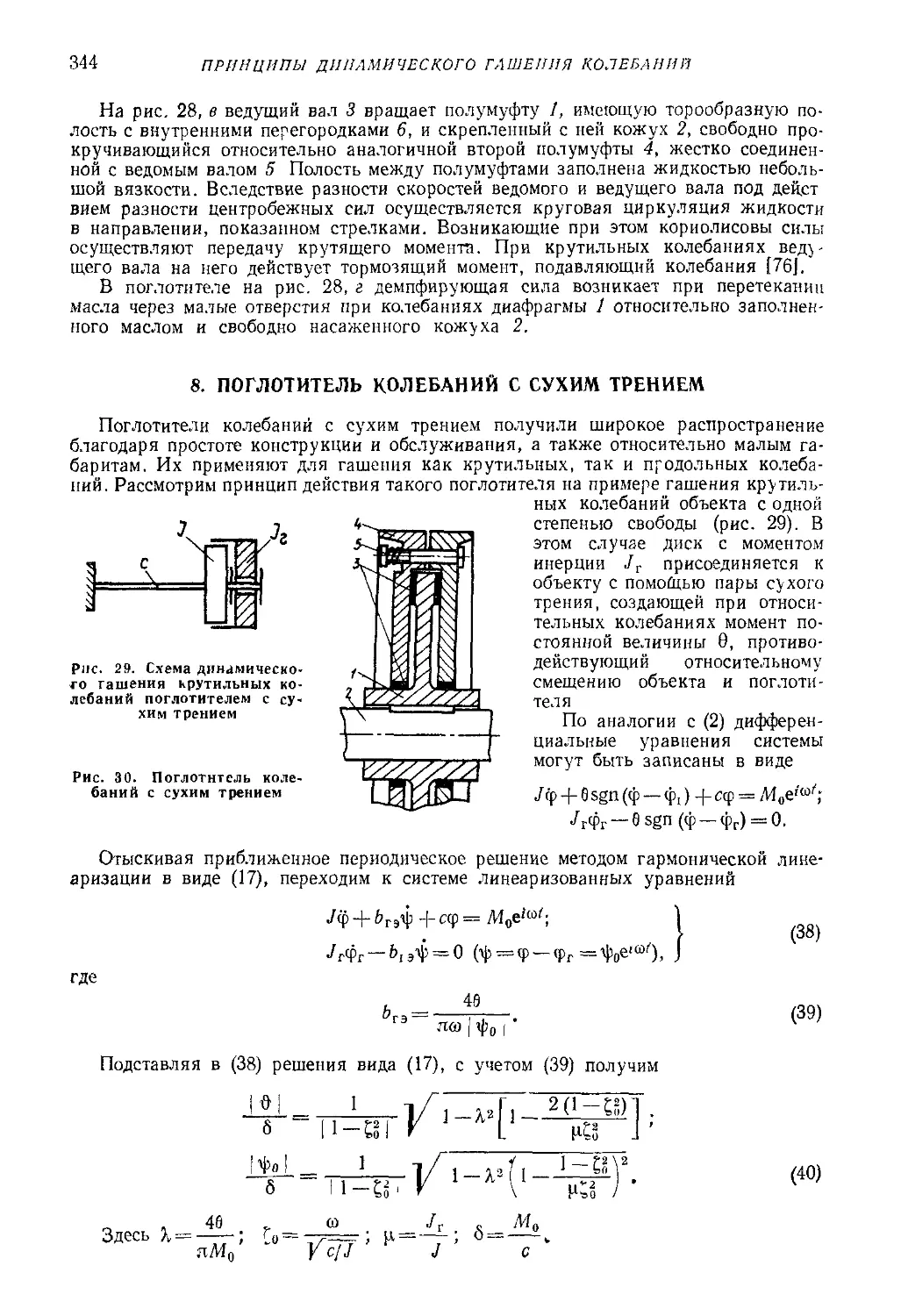
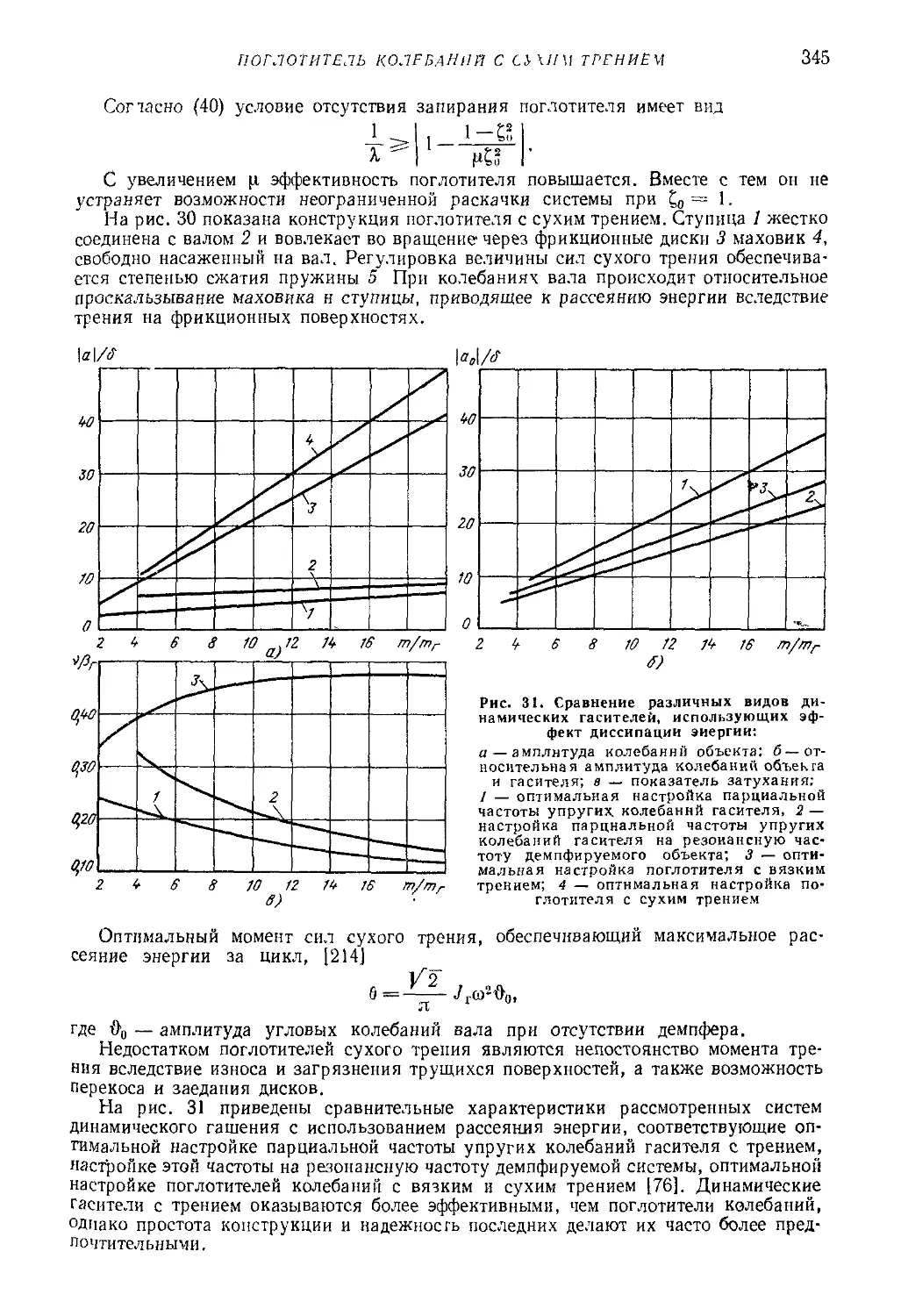
8. Поглотитель колебаний с сухим трением 344
Глава XV. Расчет эффективности и настройка динамических гасителей
(В. И. Бабицкий) 346
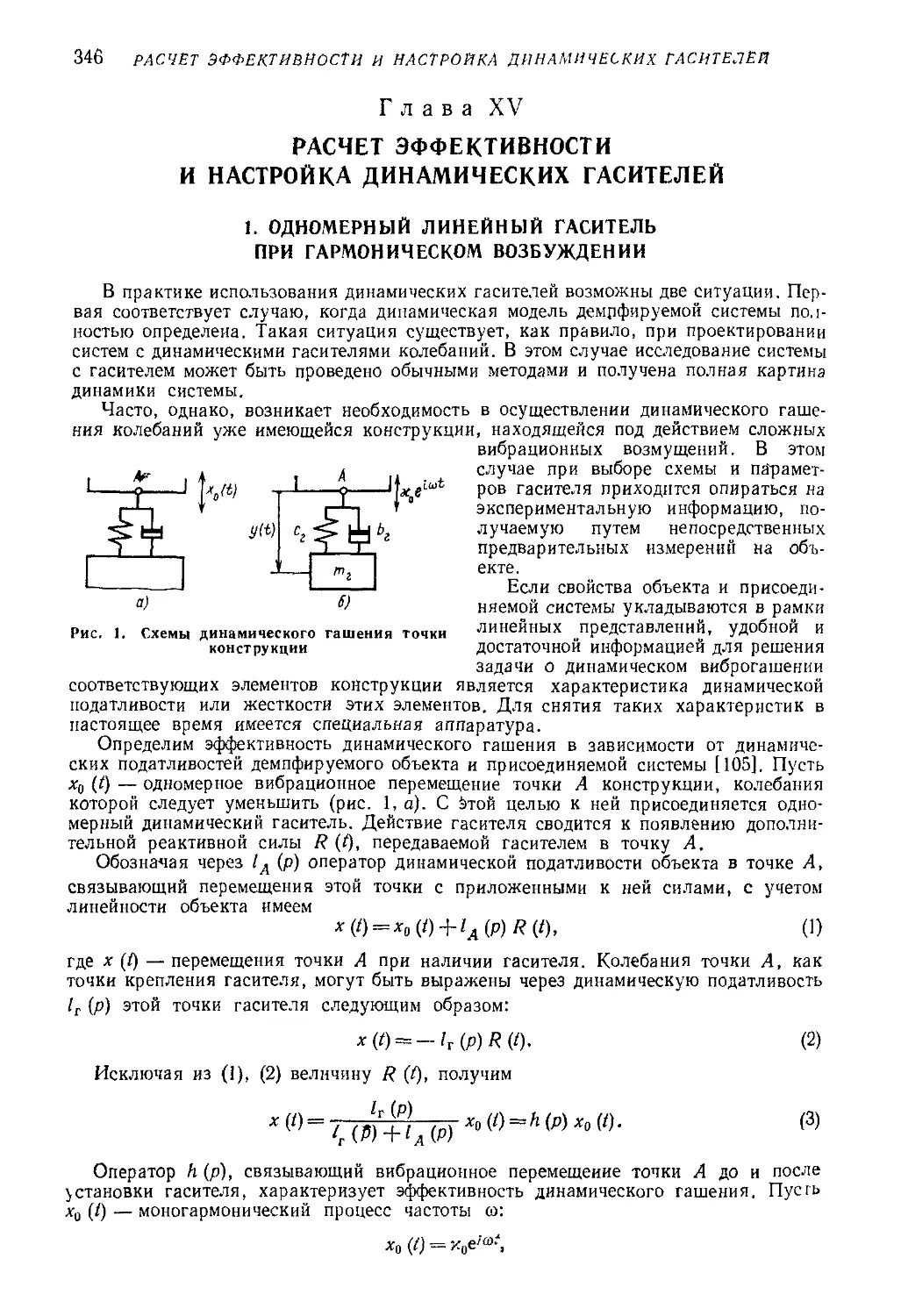
1. Одномерный линейный гаситель при гармоническом возбуждении 346
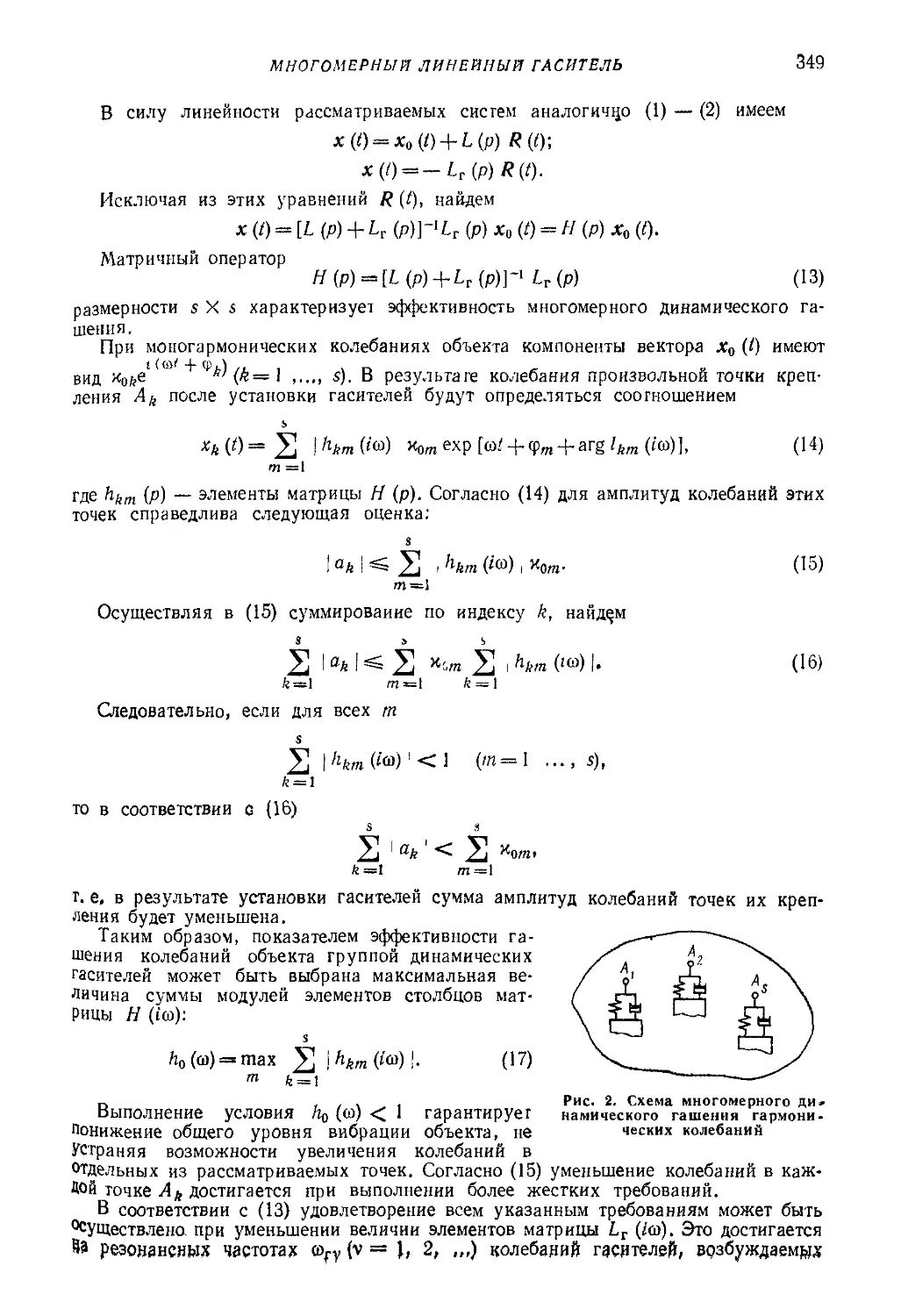
2. Многомерный линейный гаситель при гармоническом возбуждении 348
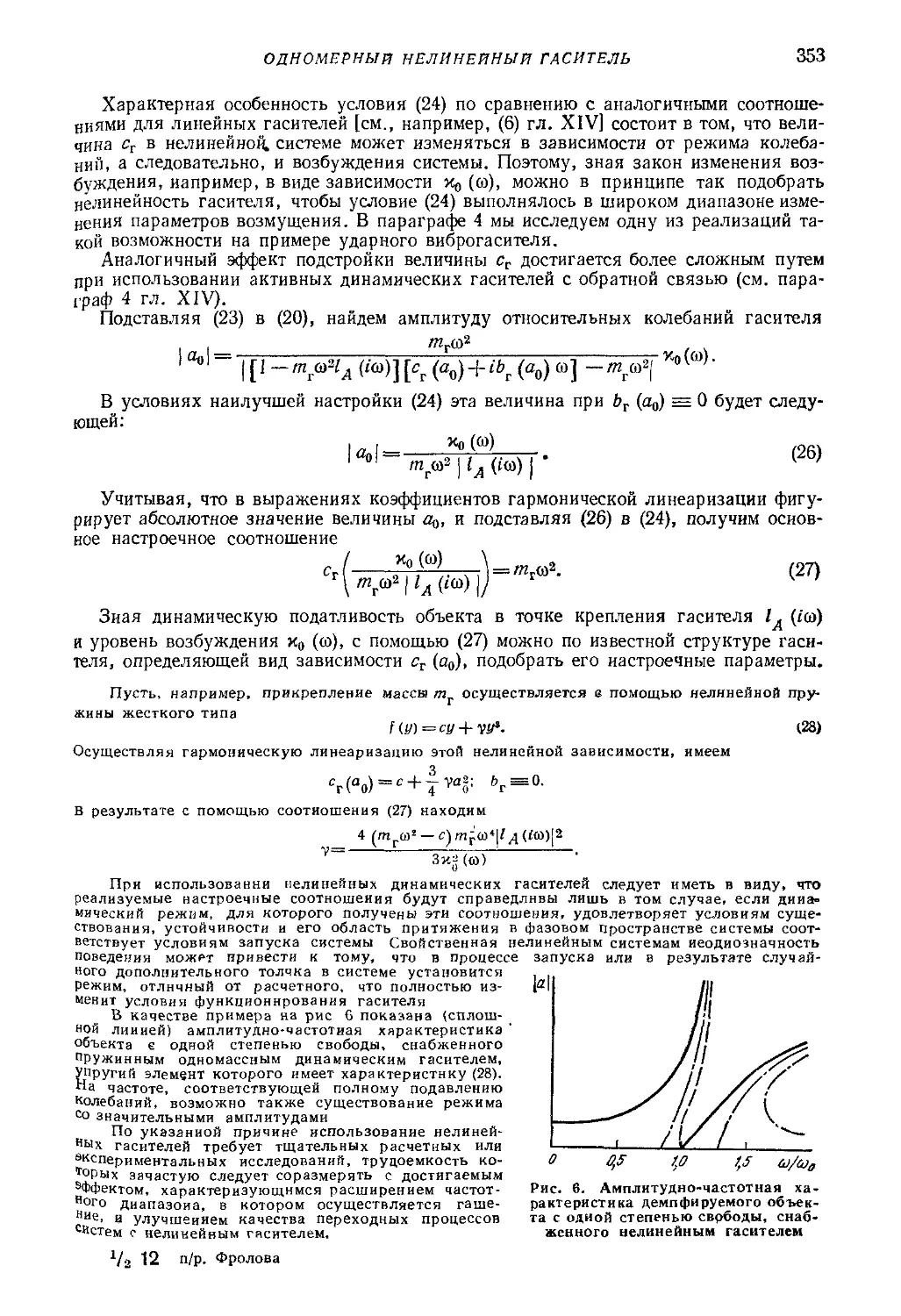
3. Одномерный нелинейный гаситель при гармоническом возбужде-
возбуждении , 351
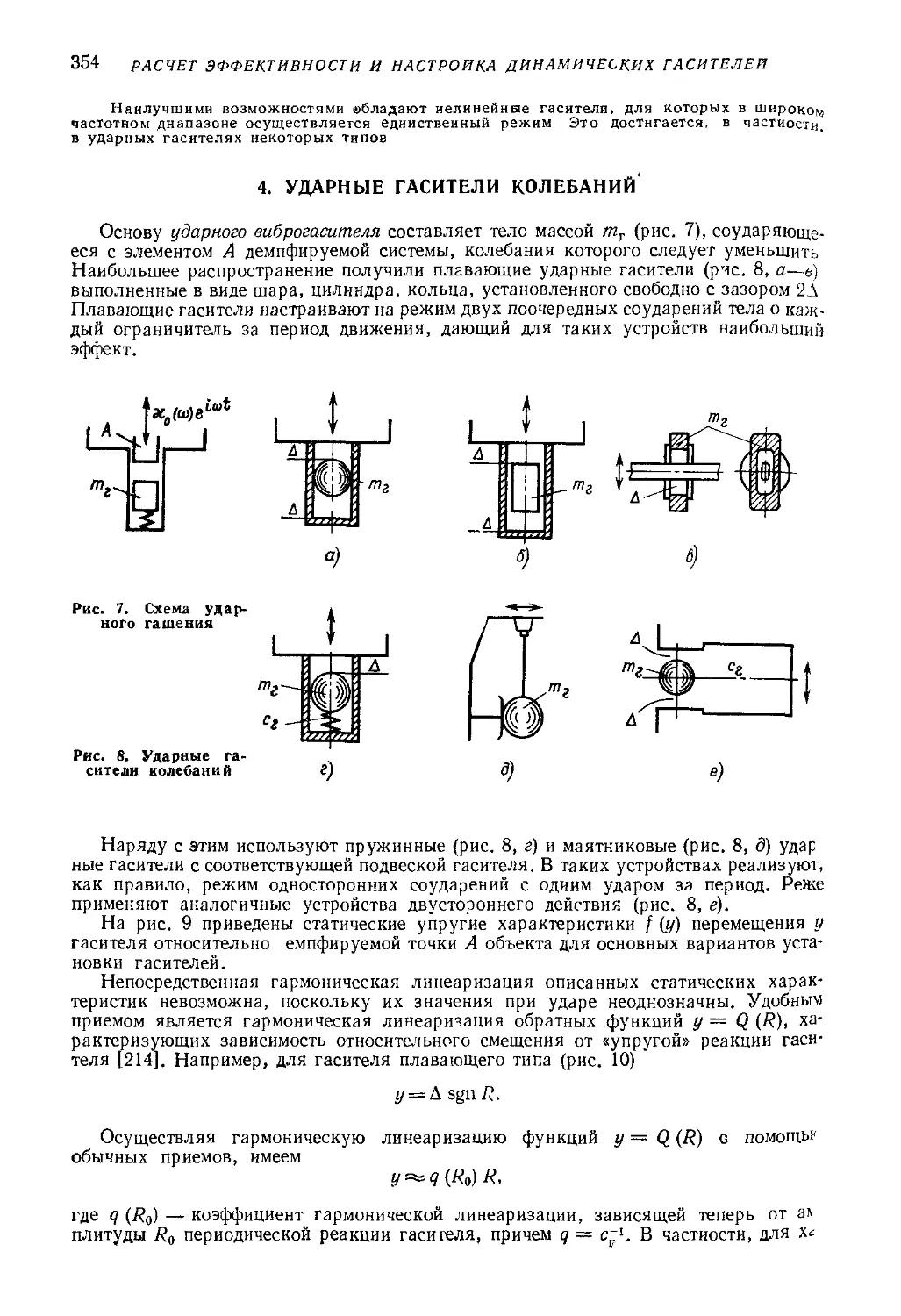
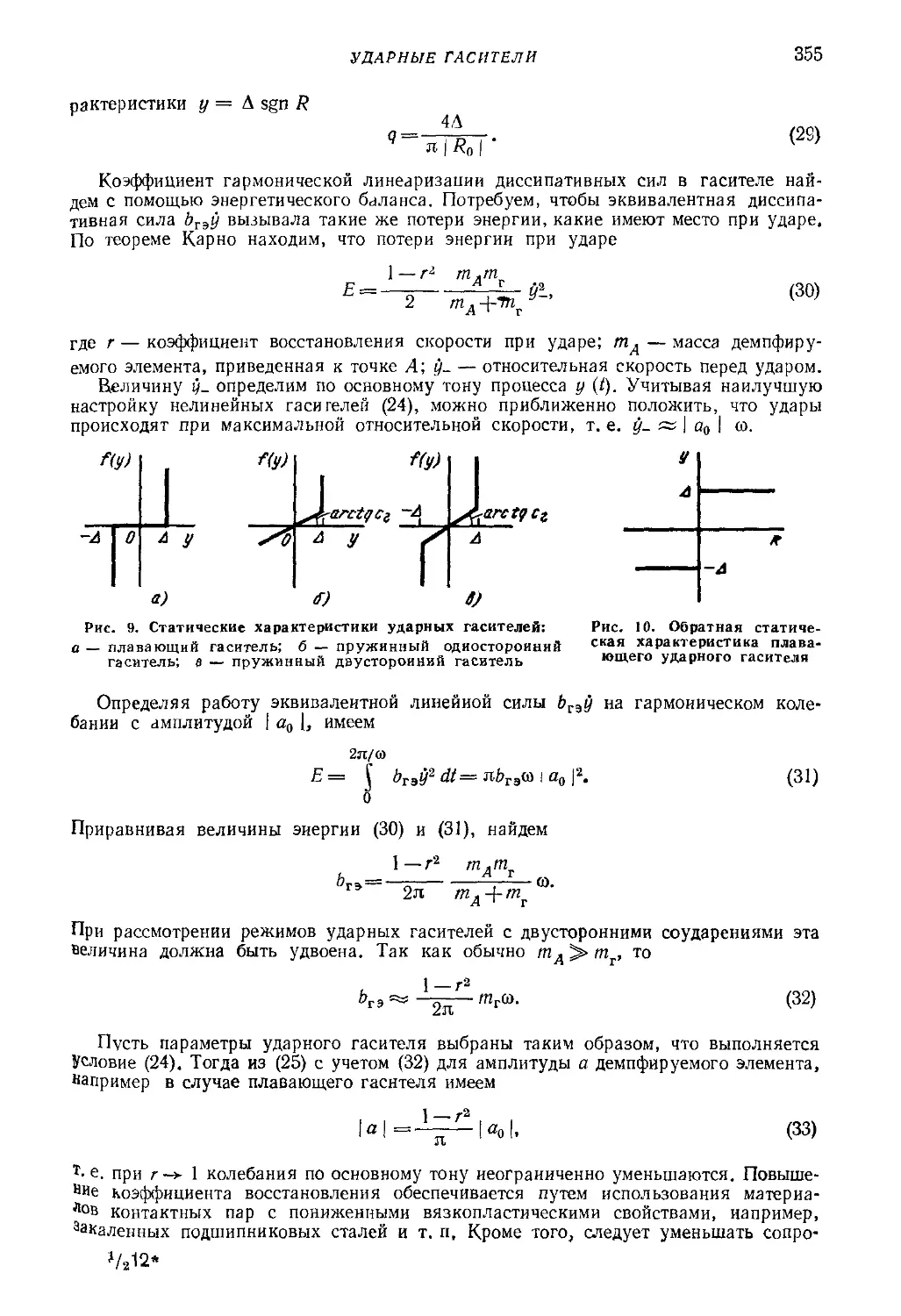
4. Ударные гасители колебаний 354
5. Эффективность динамических гасителей при полигармоническом,
случайном и нестационарном возбуждениях 359
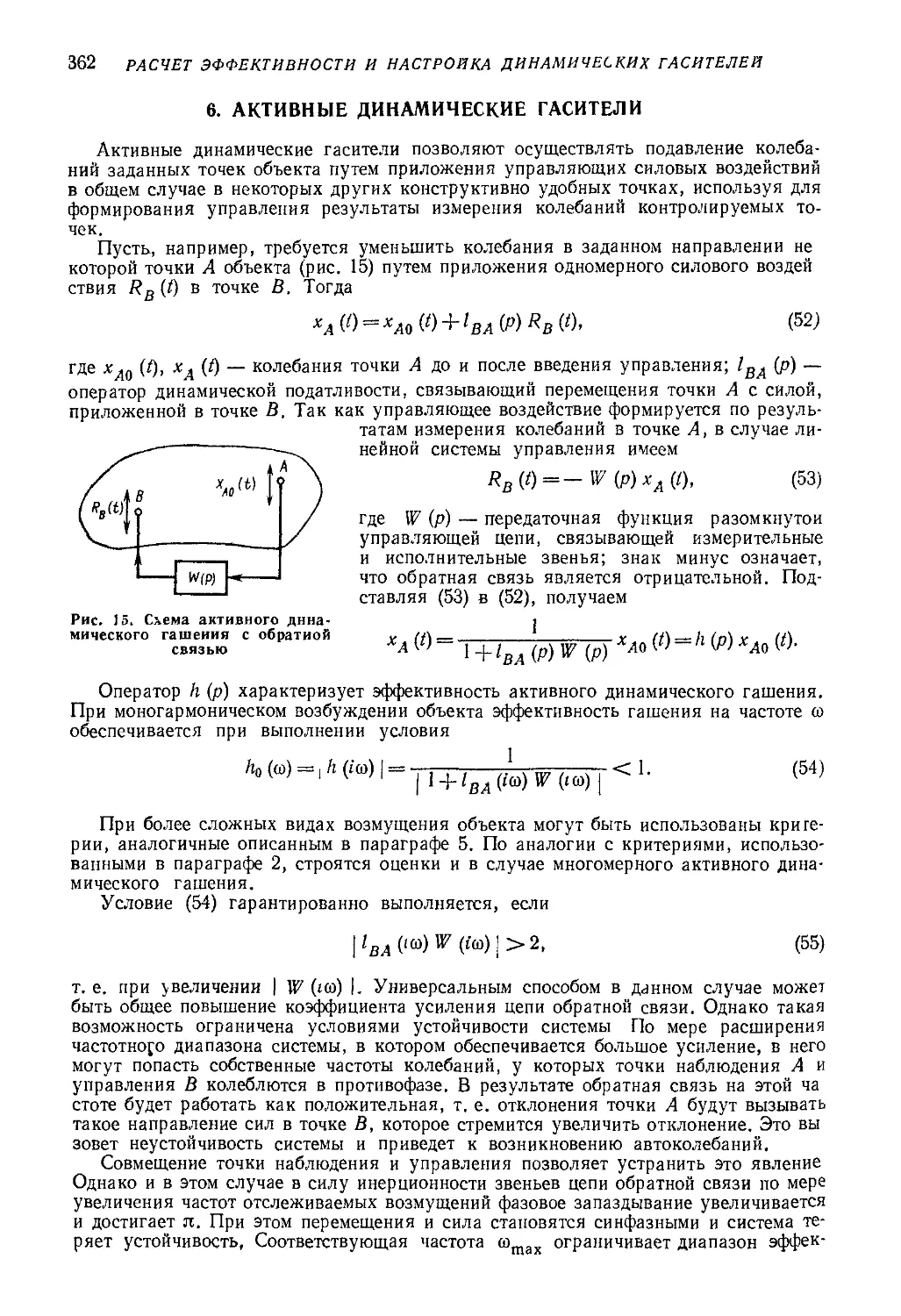
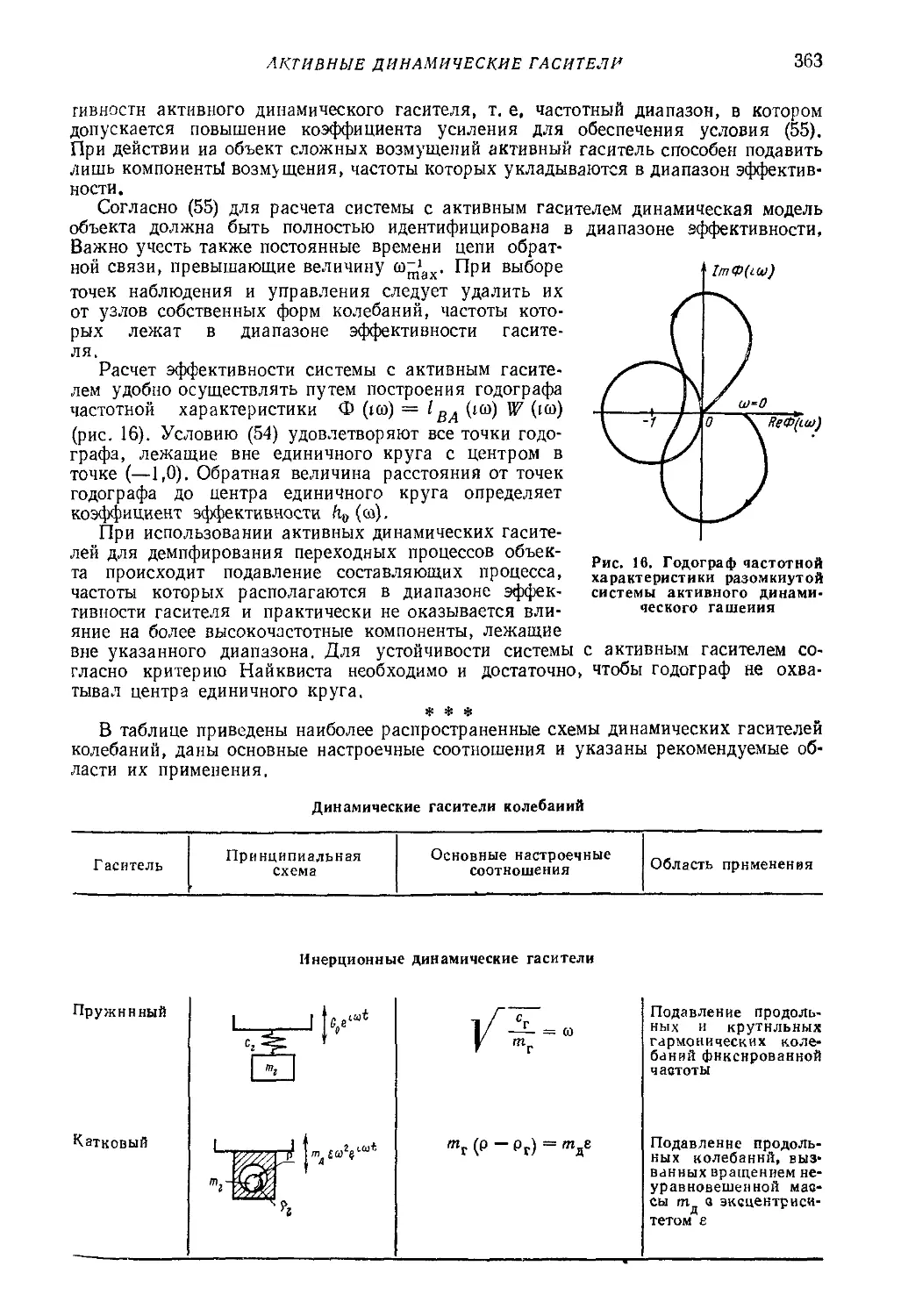
6. Активные динамические гасители .................. 362
ЧАСТЬ ПЯТАЯ
ВОЗДЕЙСТВИЕ ВИБРАЦИИ И ЗАЩИТА ЧЕЛОВЕКА-ОПЕРАТОРА
ОТ ВИБРАЦИИ
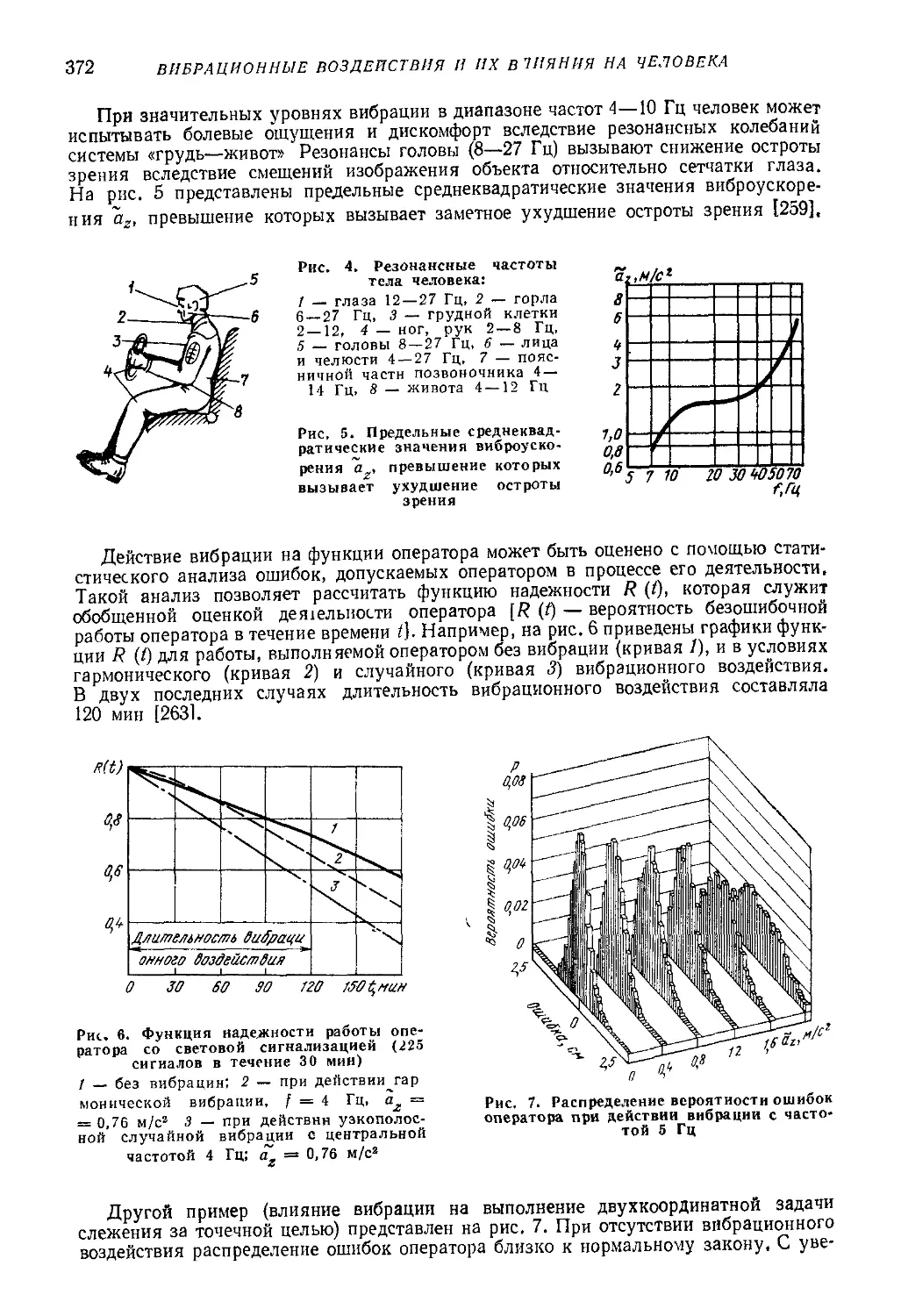
Глава XVI. Вибрационные воздействия и их влияния на человека(Т. Я- Па-
новко, Б. А. Потемкин, К. В. Фролов) 366
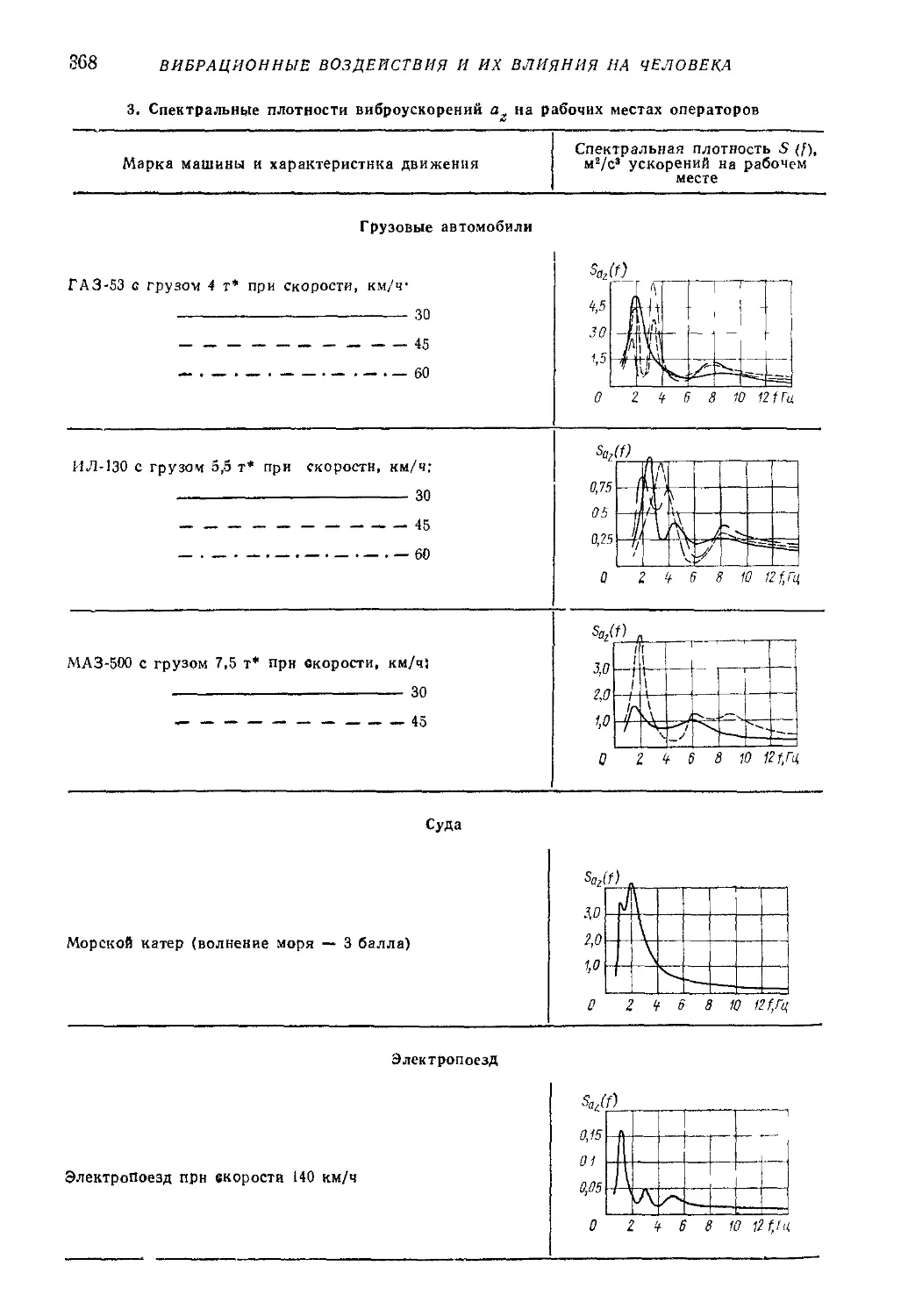
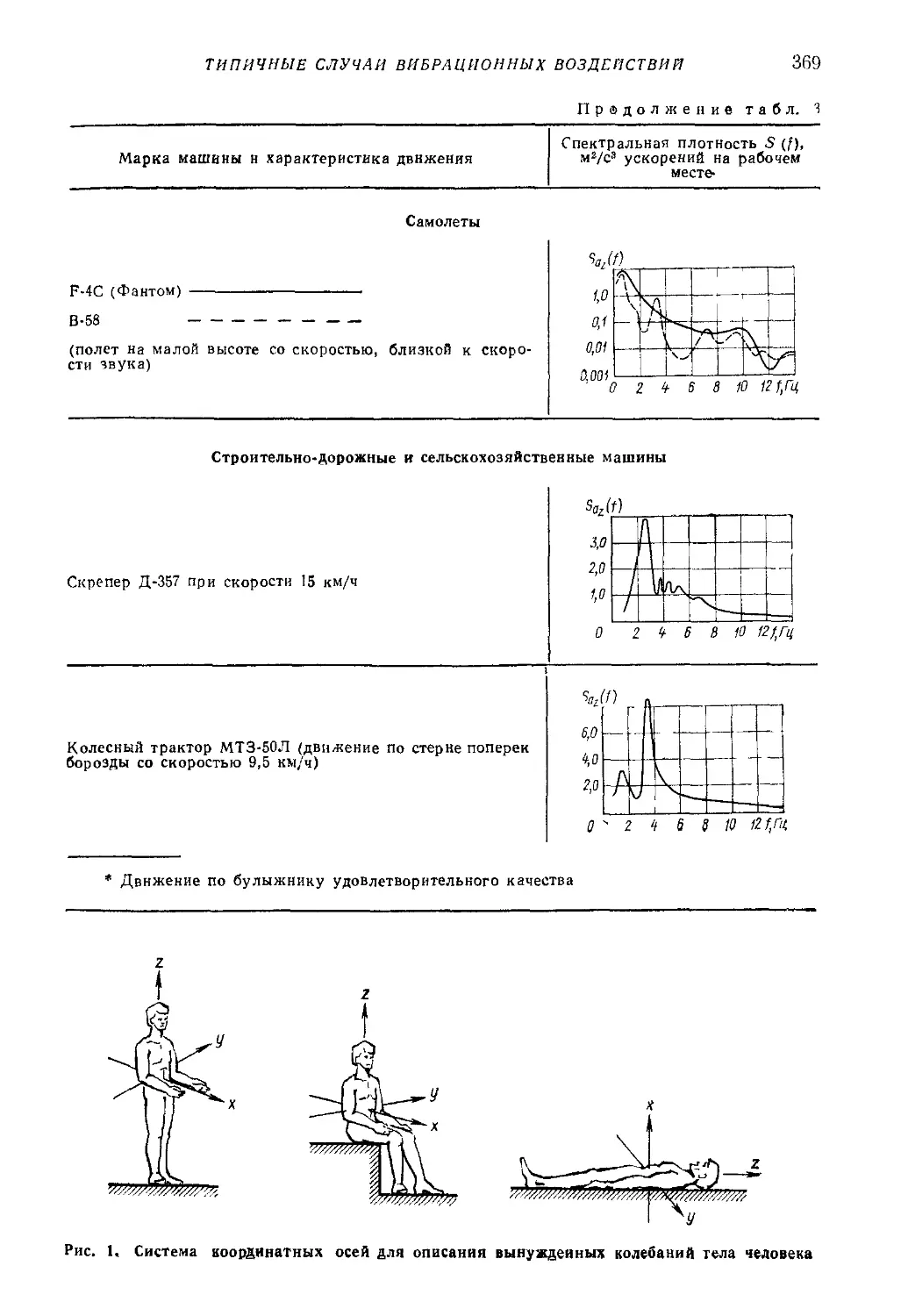
1. Типичные случаи вибрационных воздействий . . 366
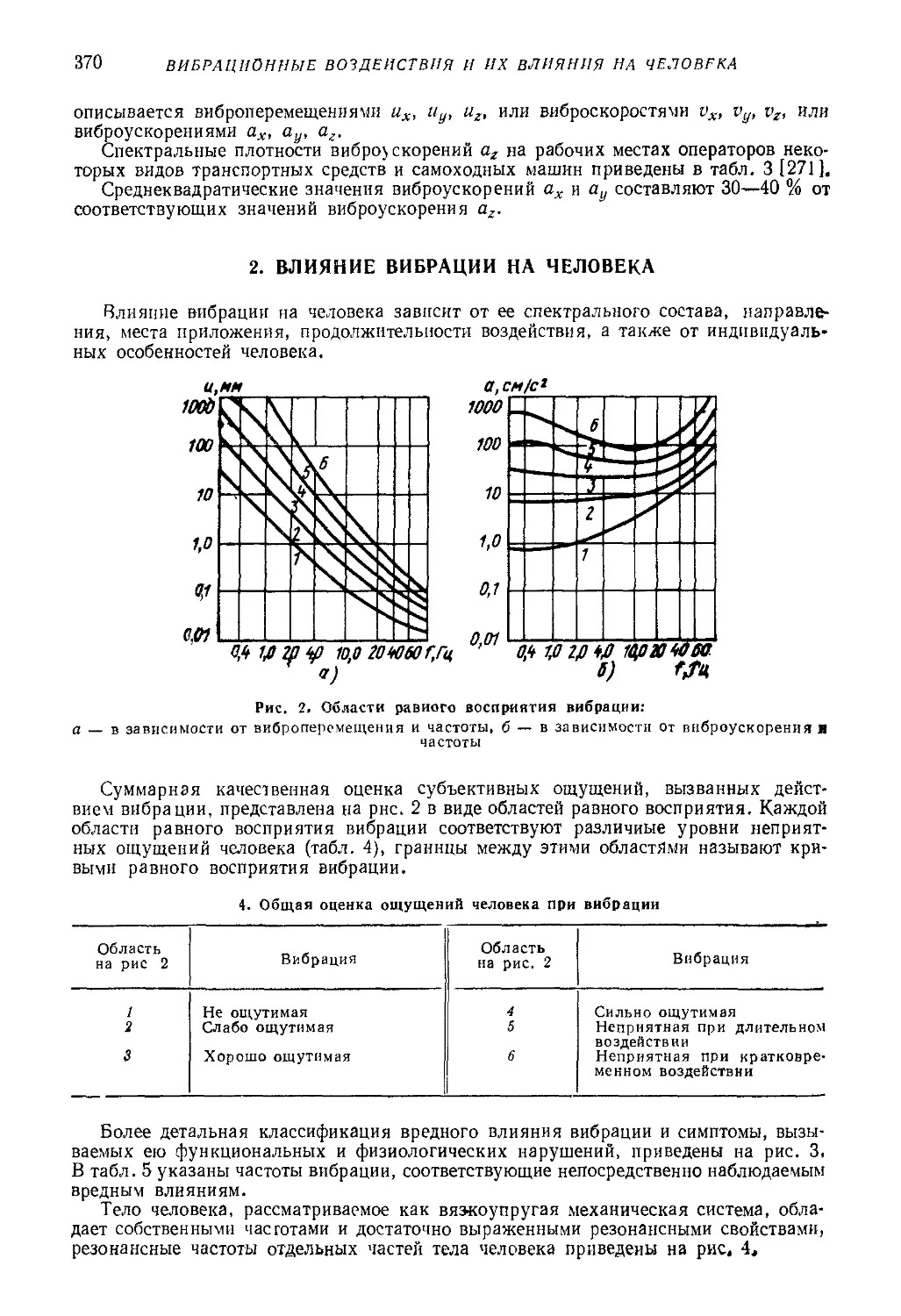
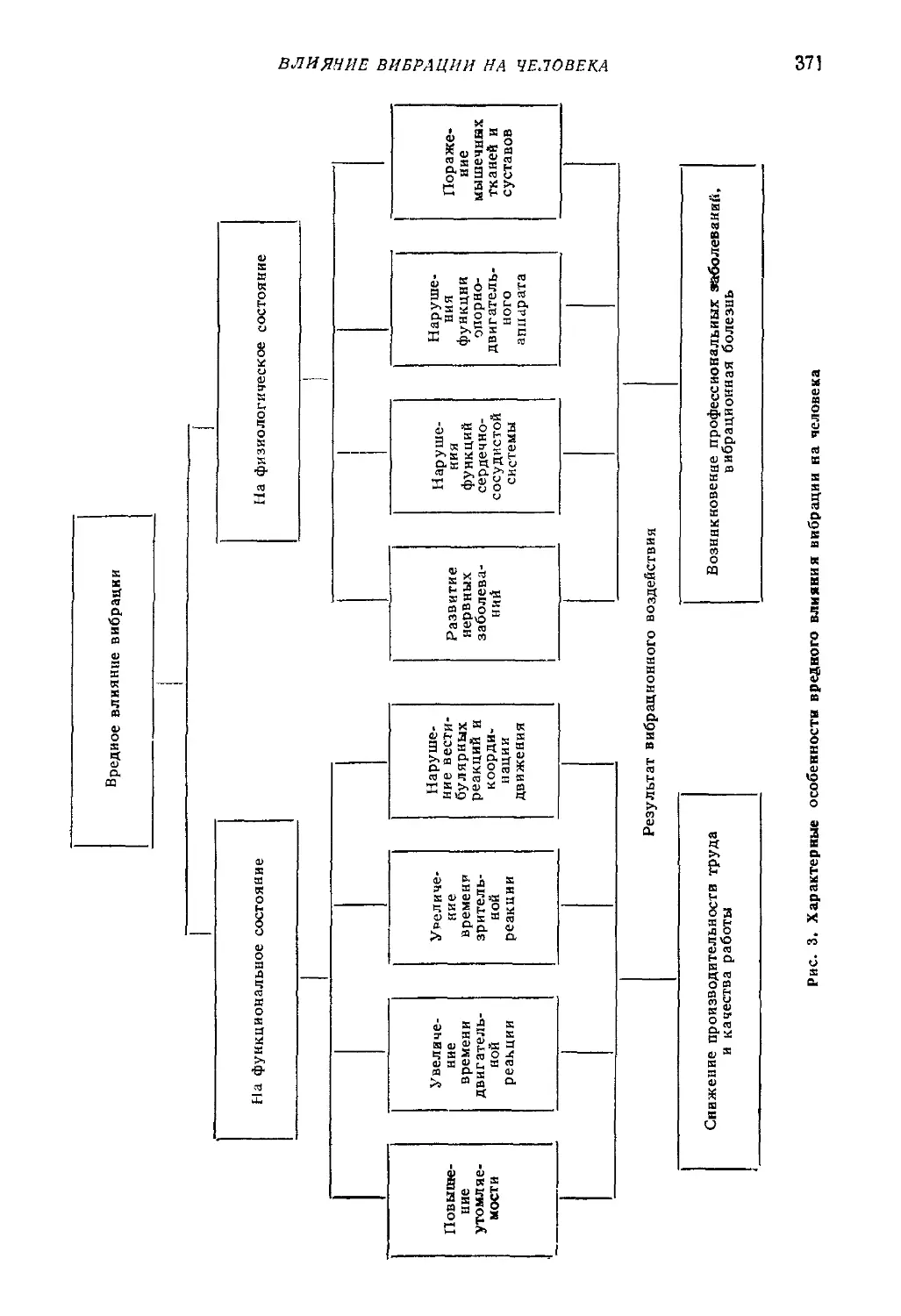
2. Влияние вибрации на человека 370
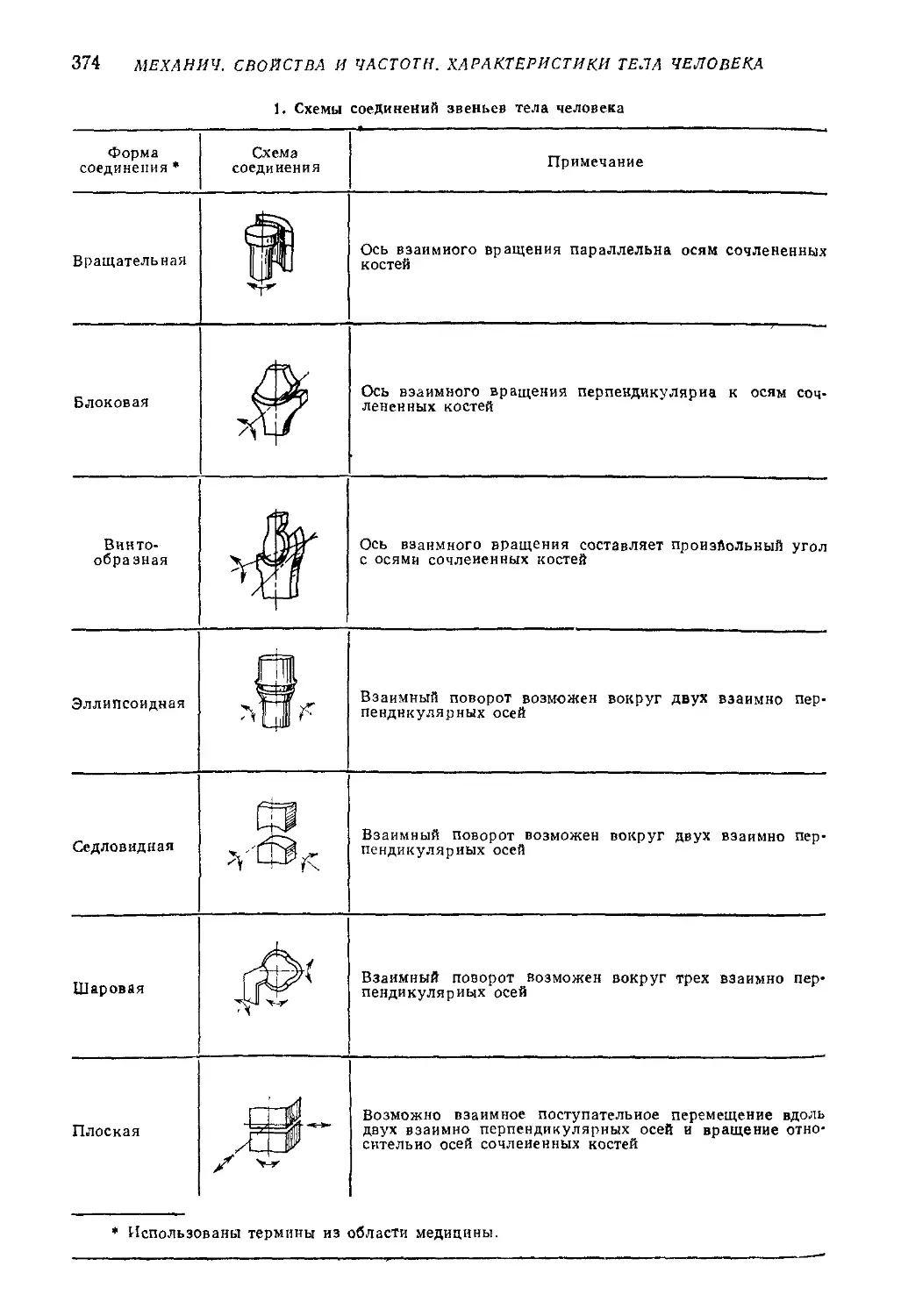
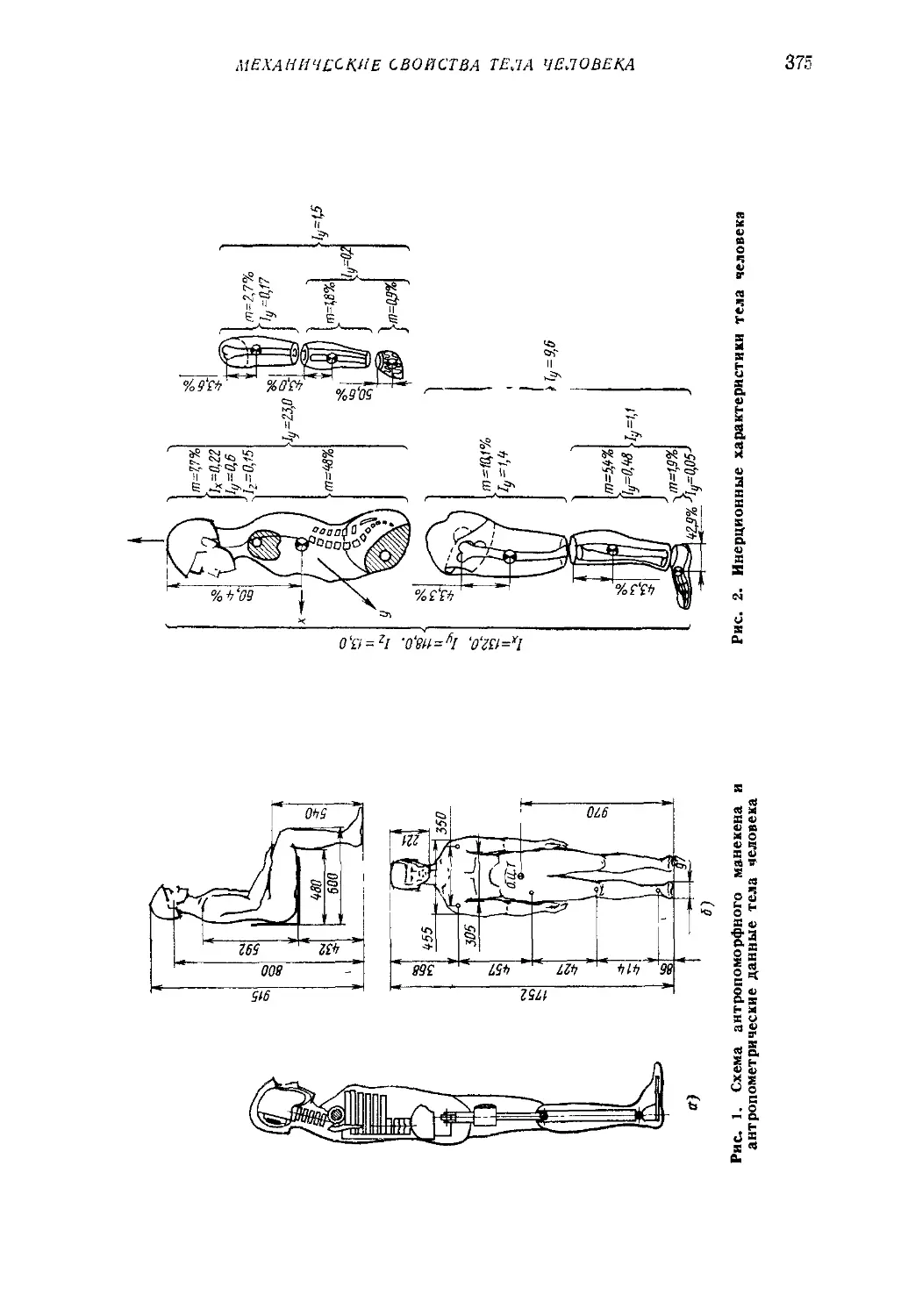
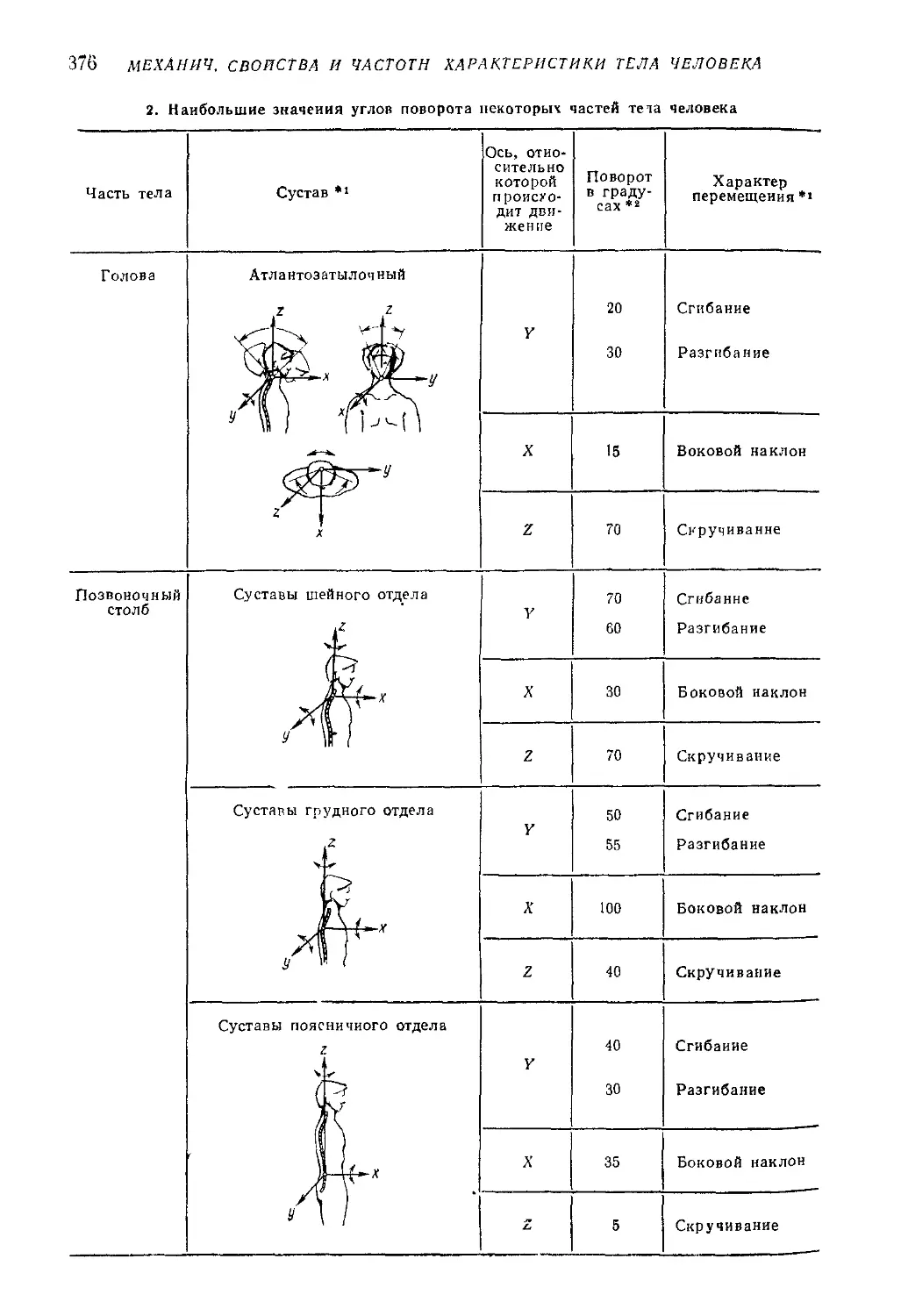
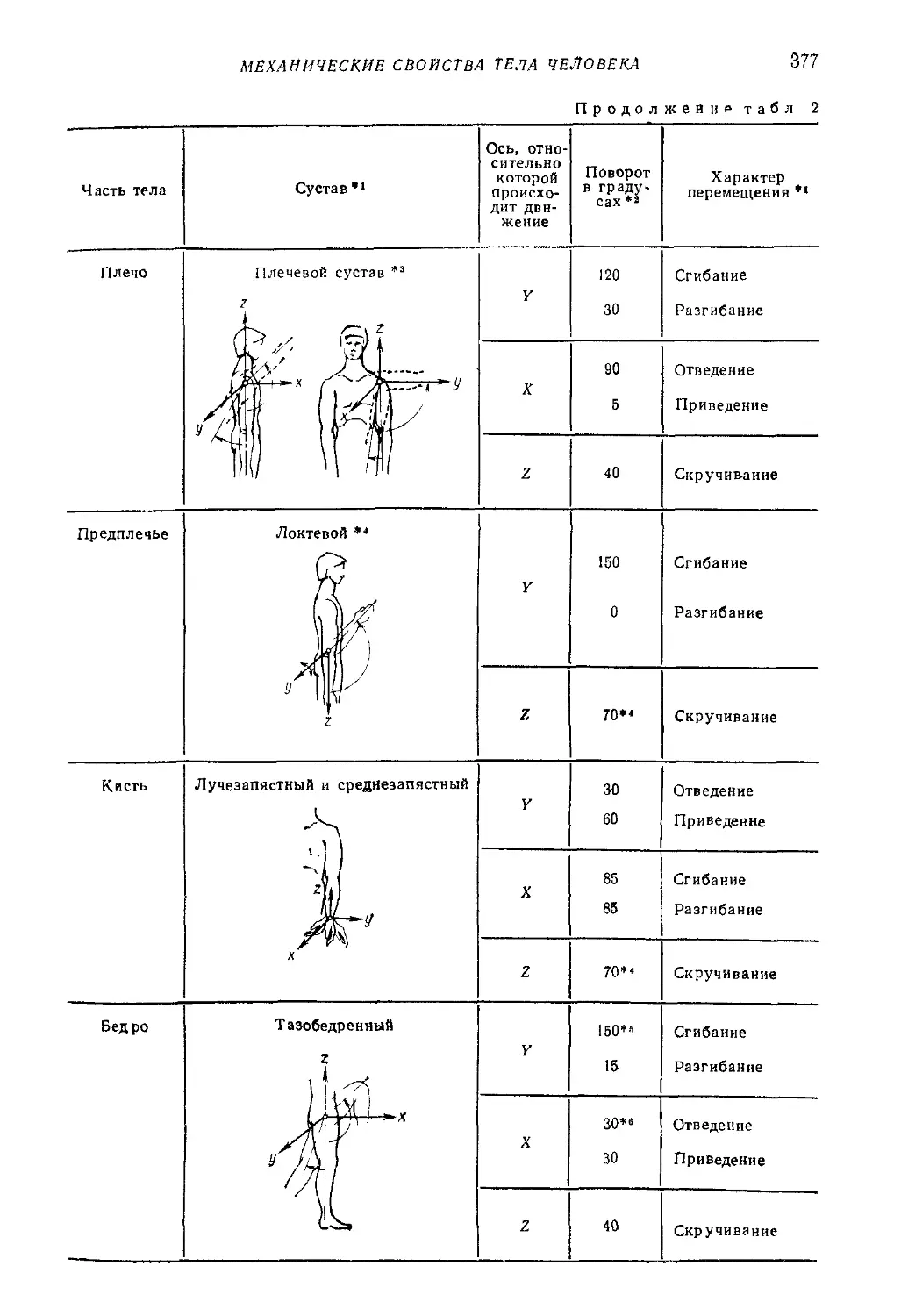
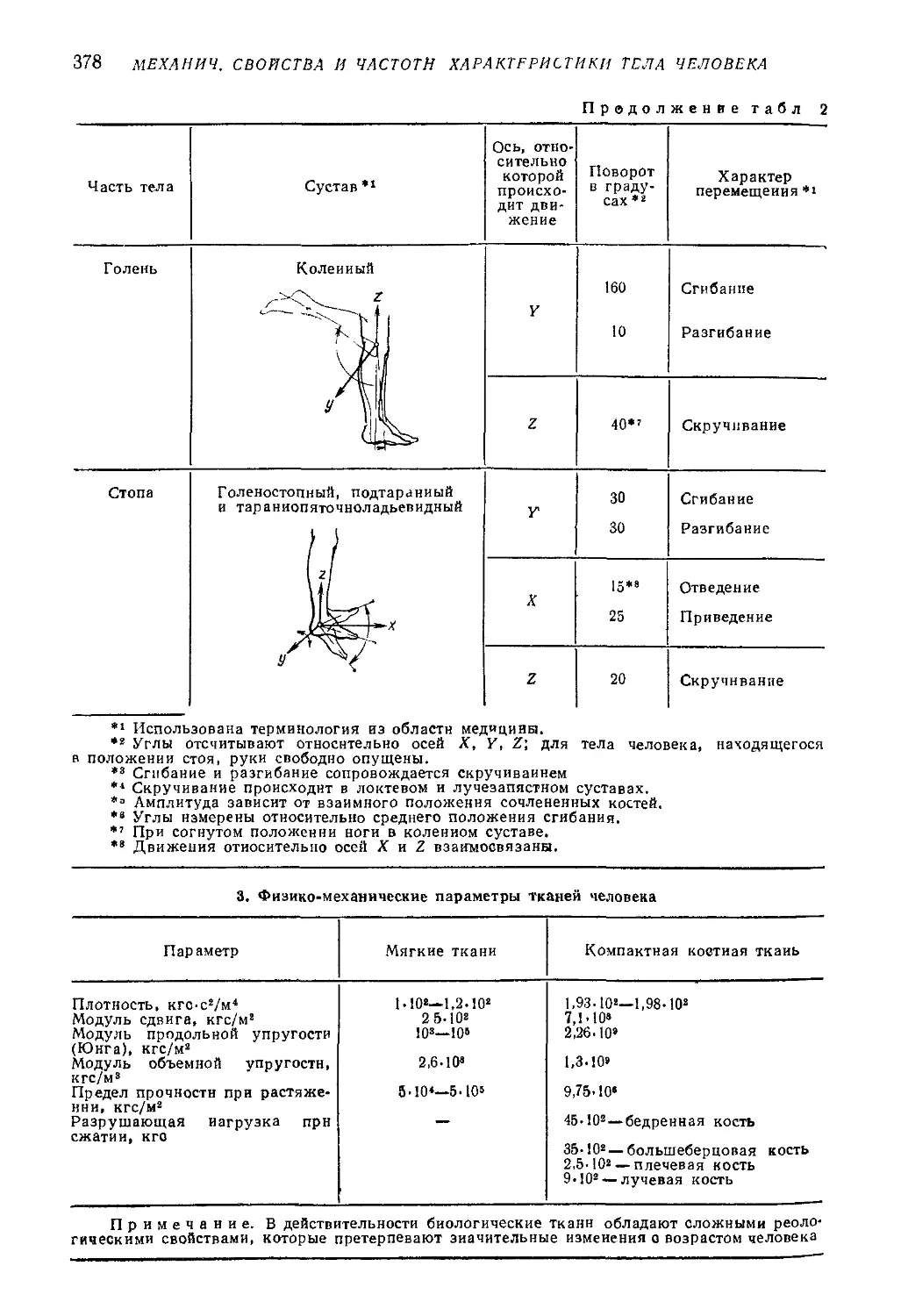
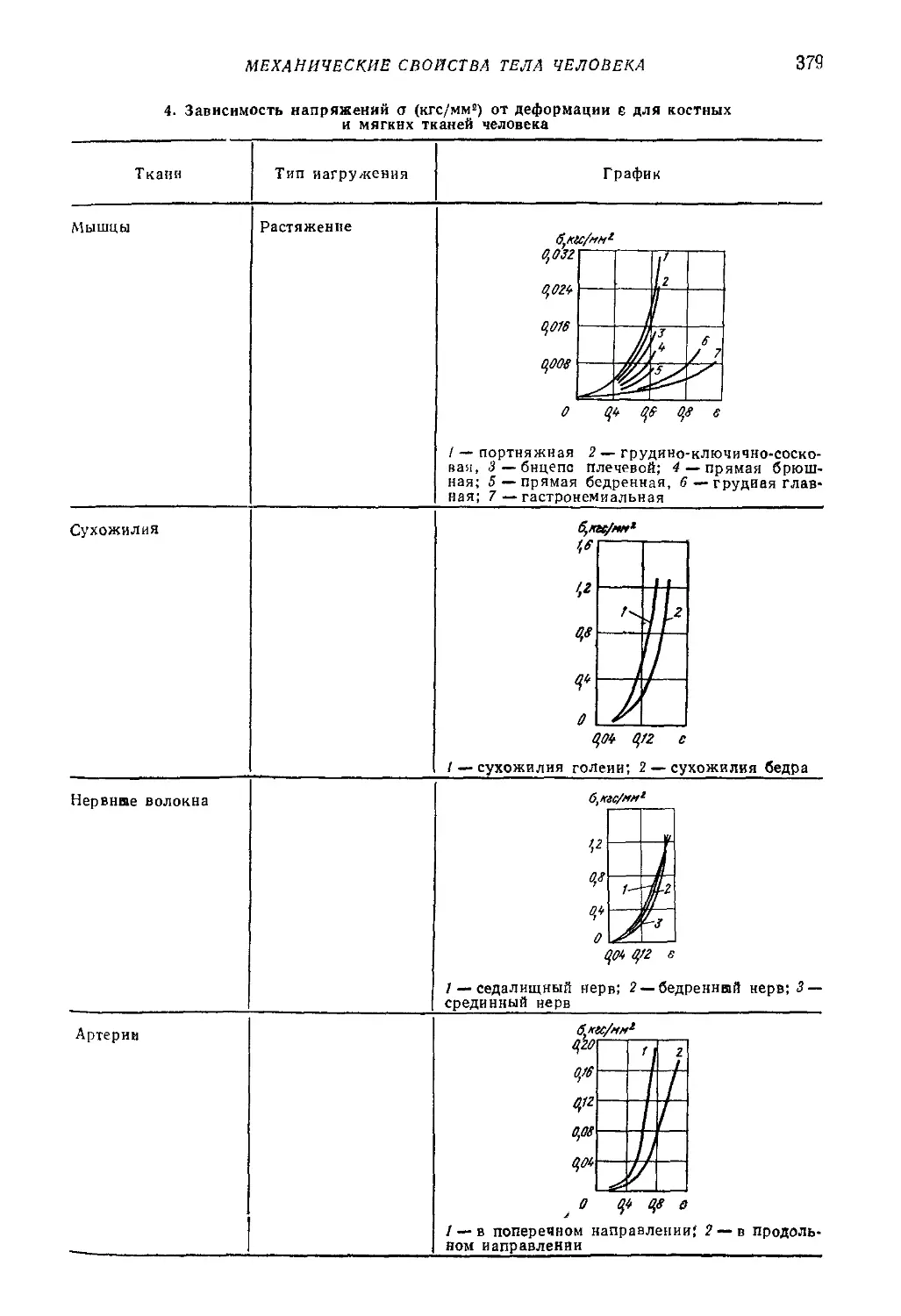
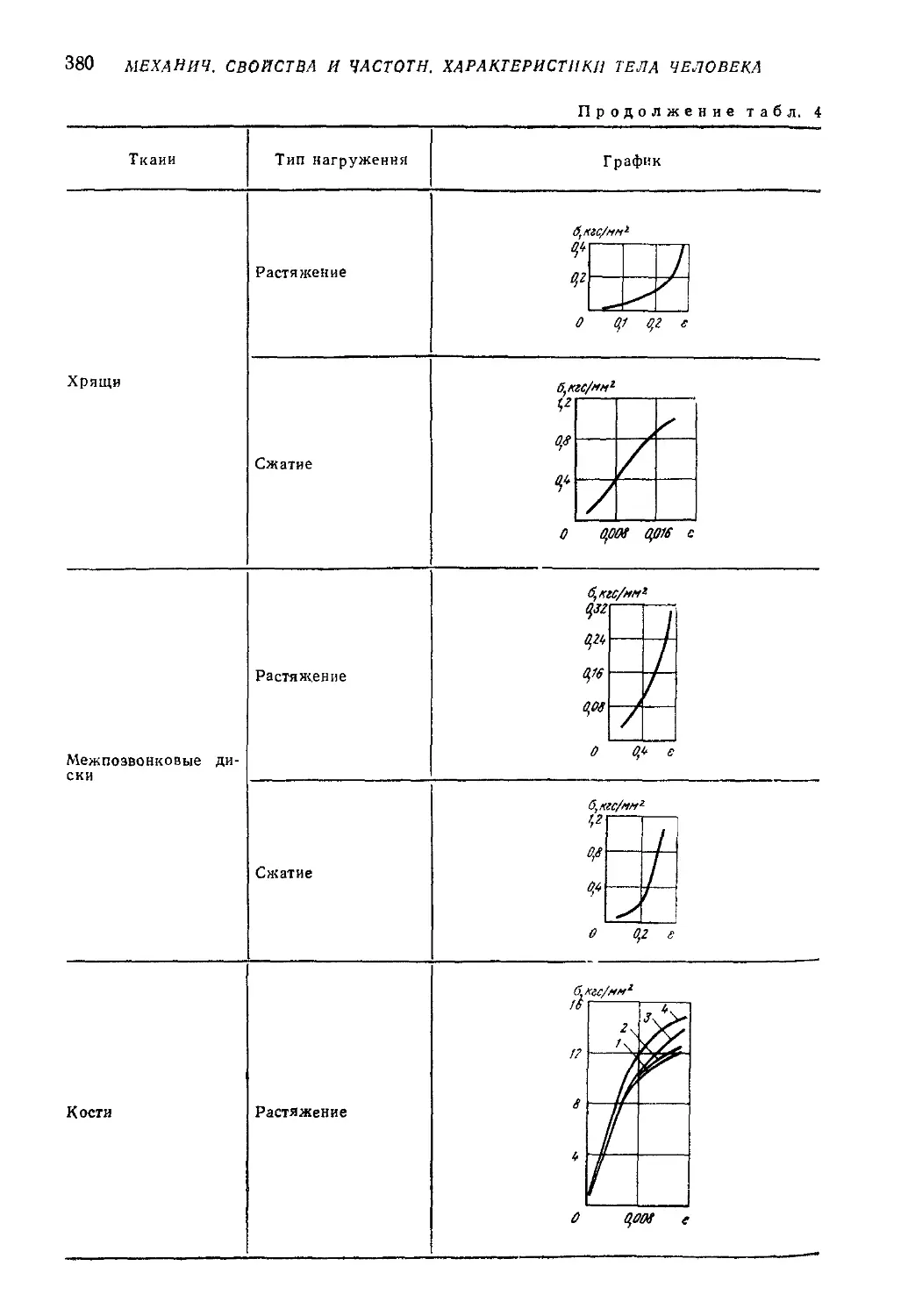
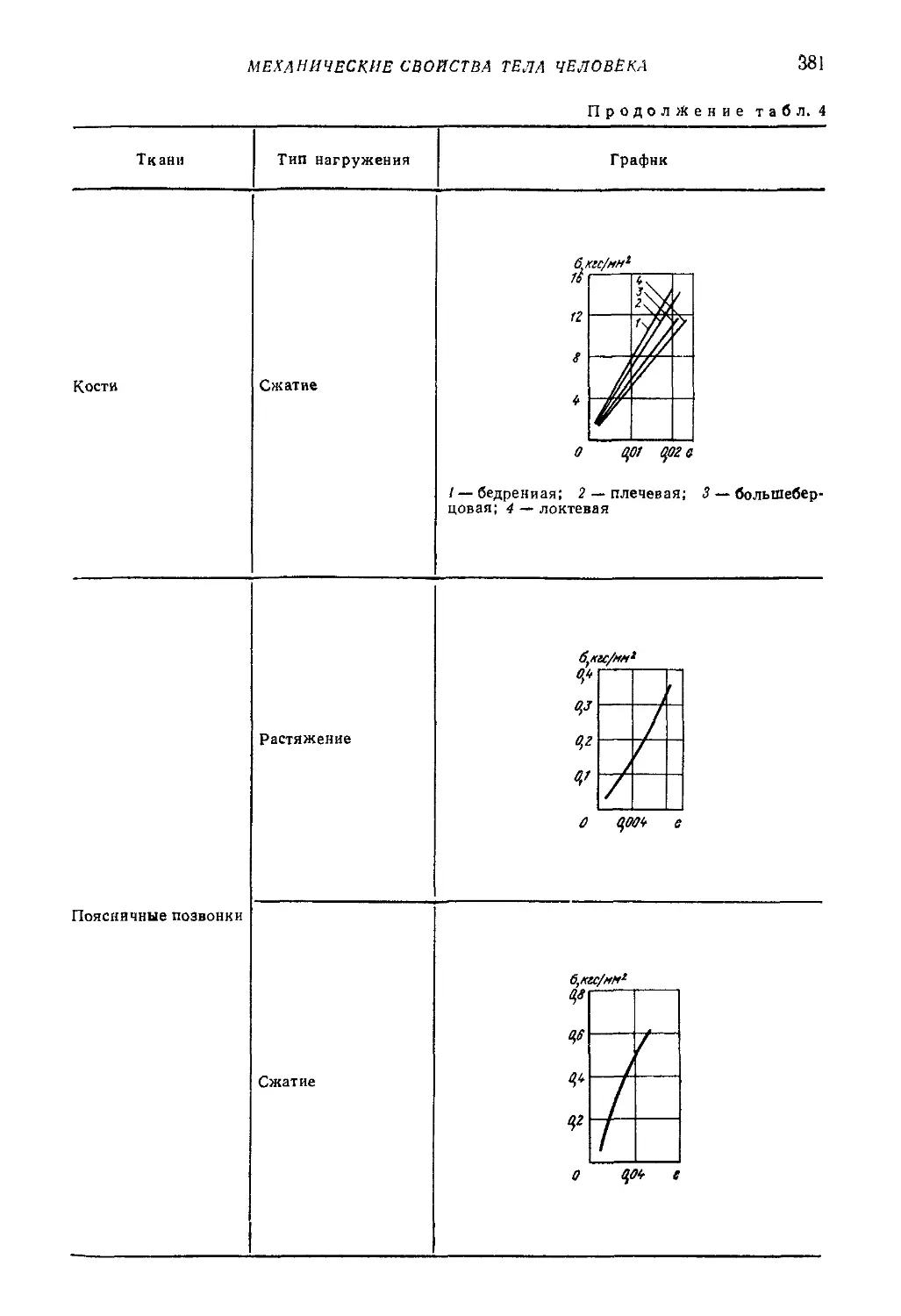
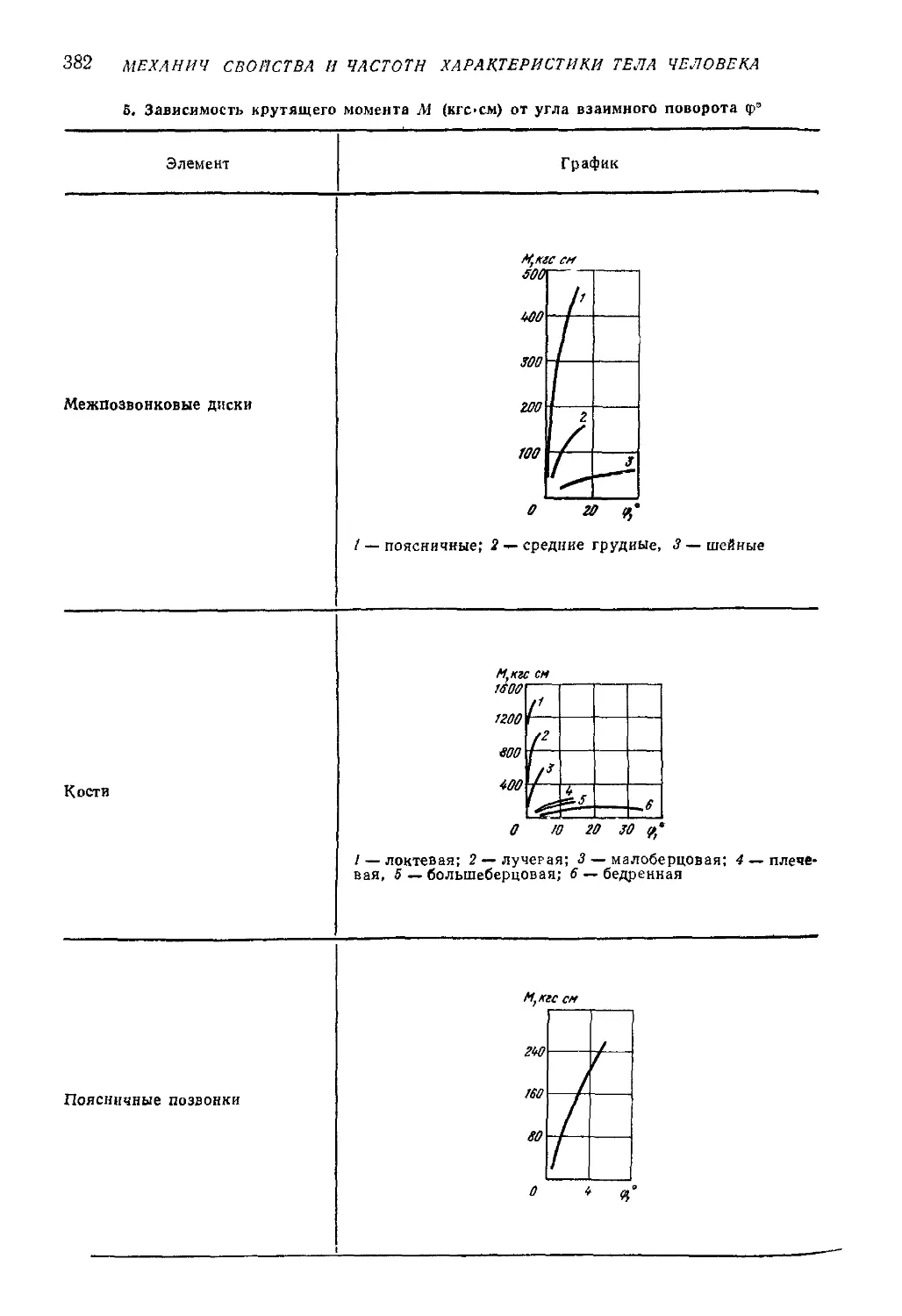
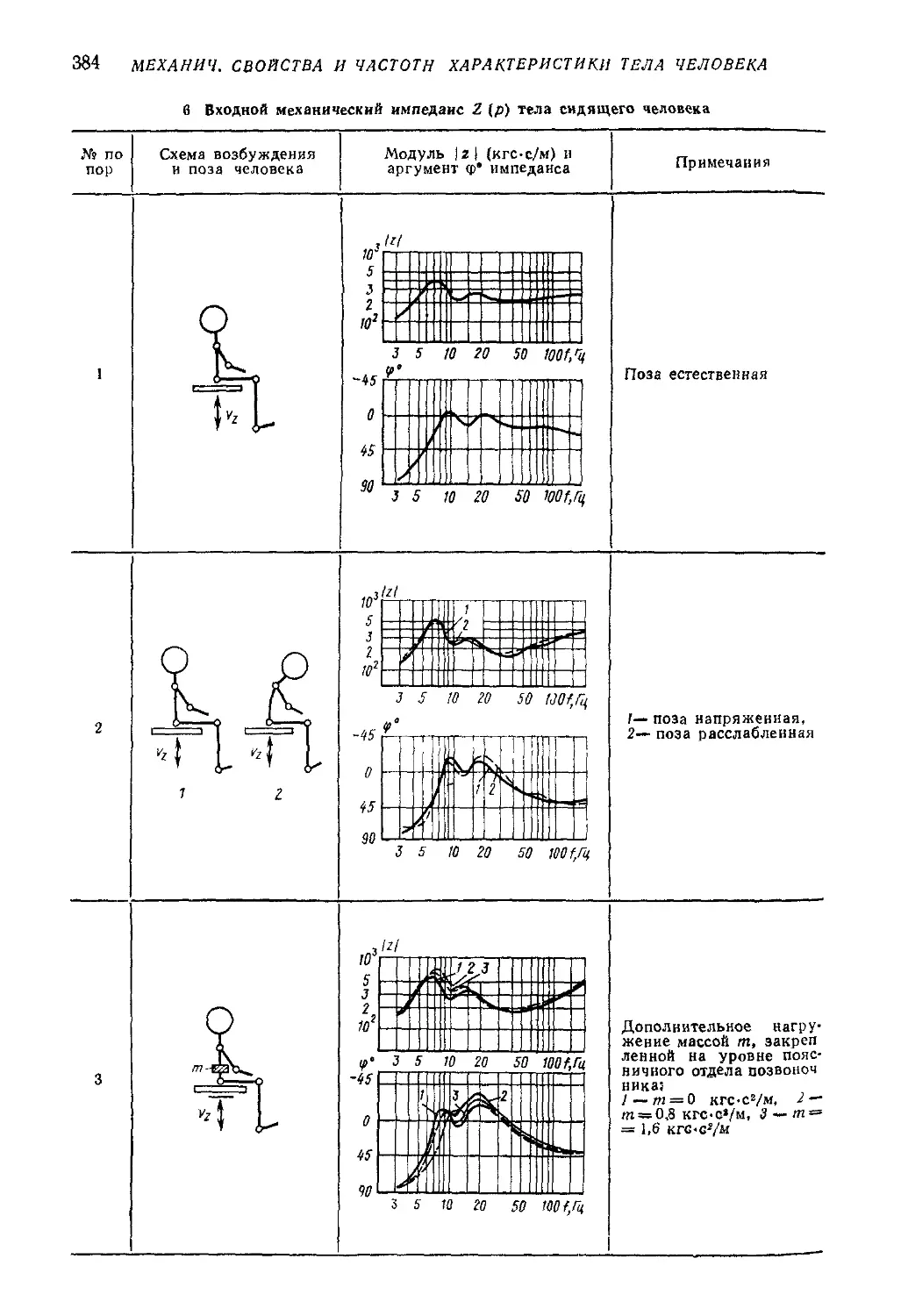
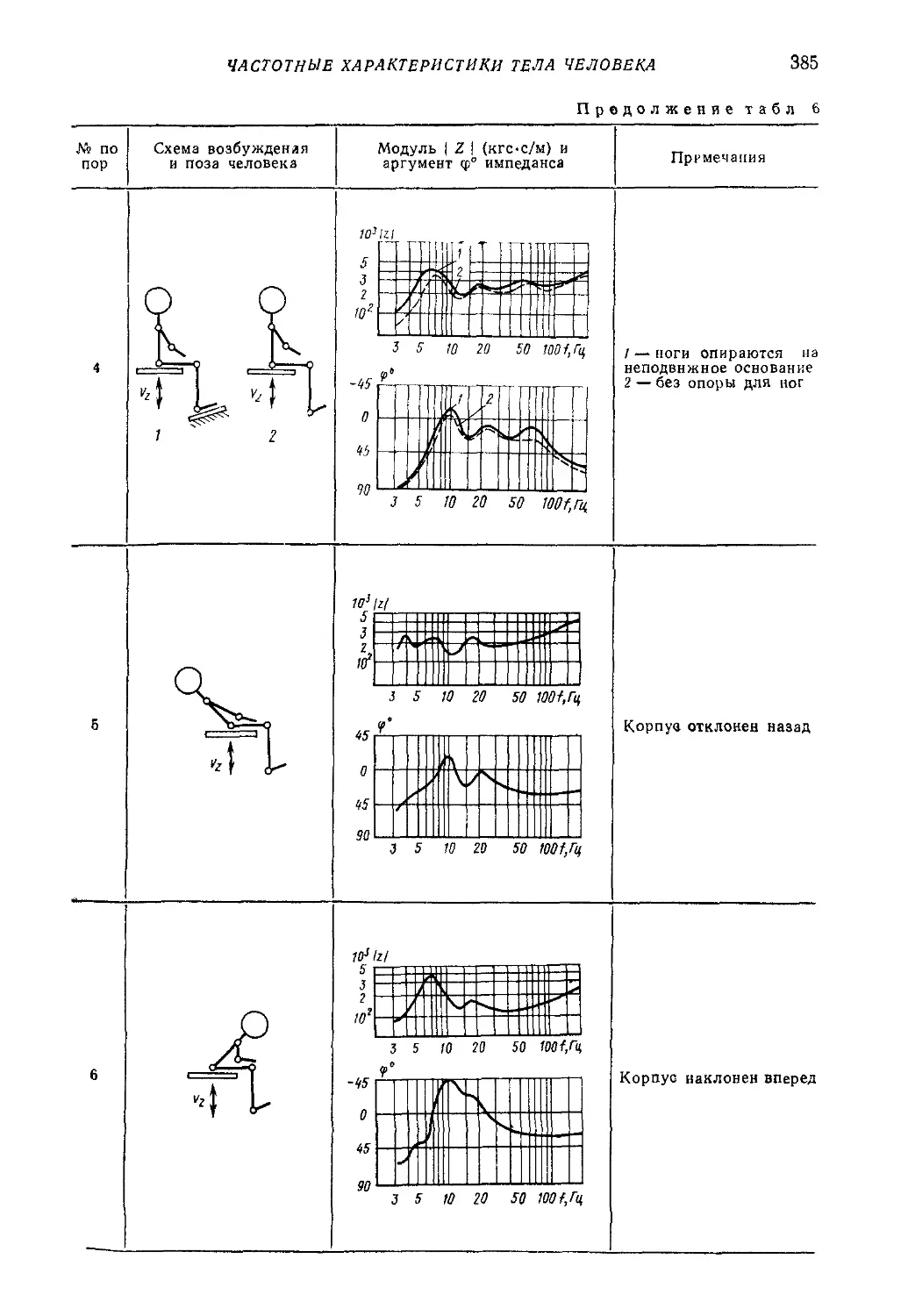
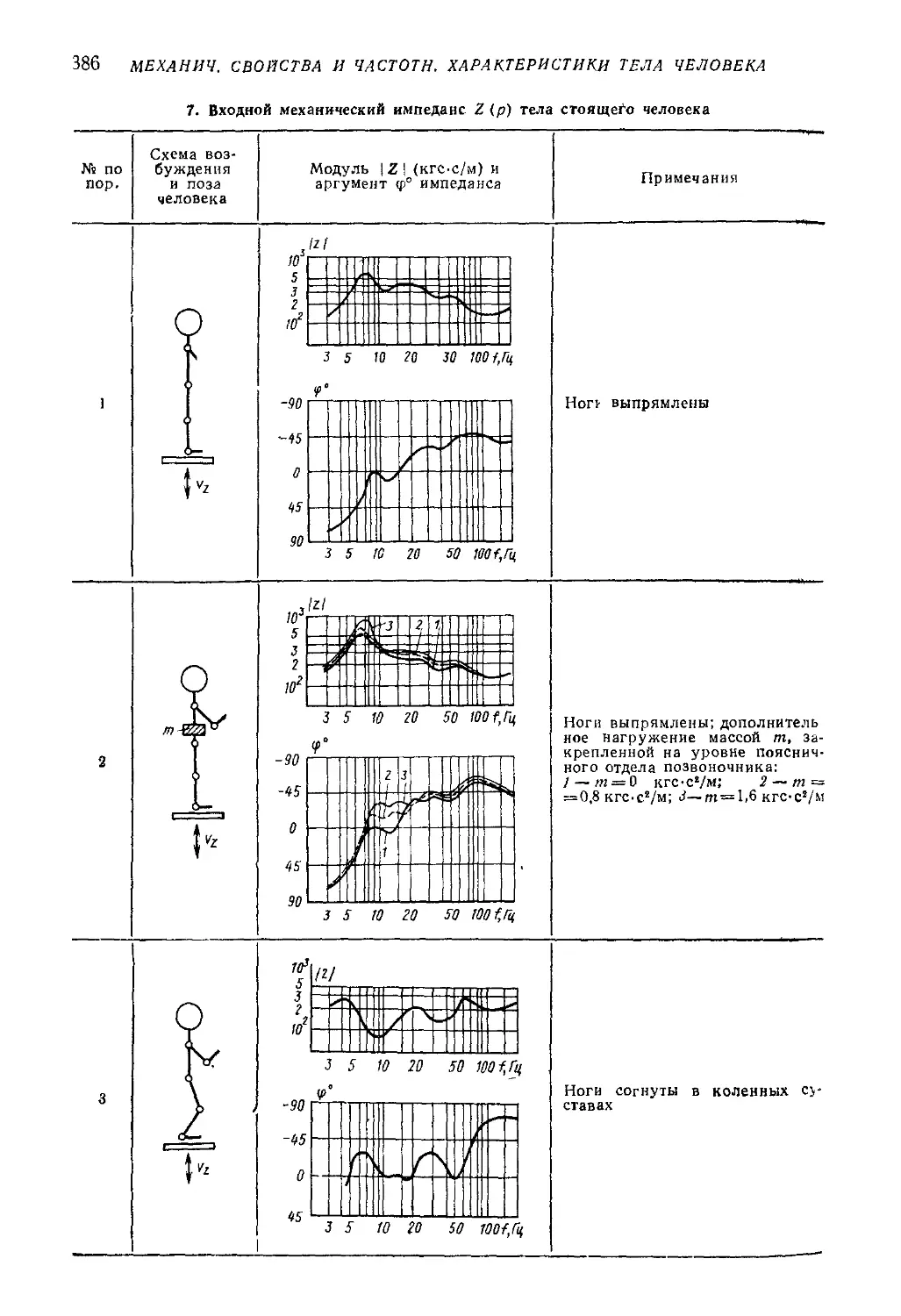
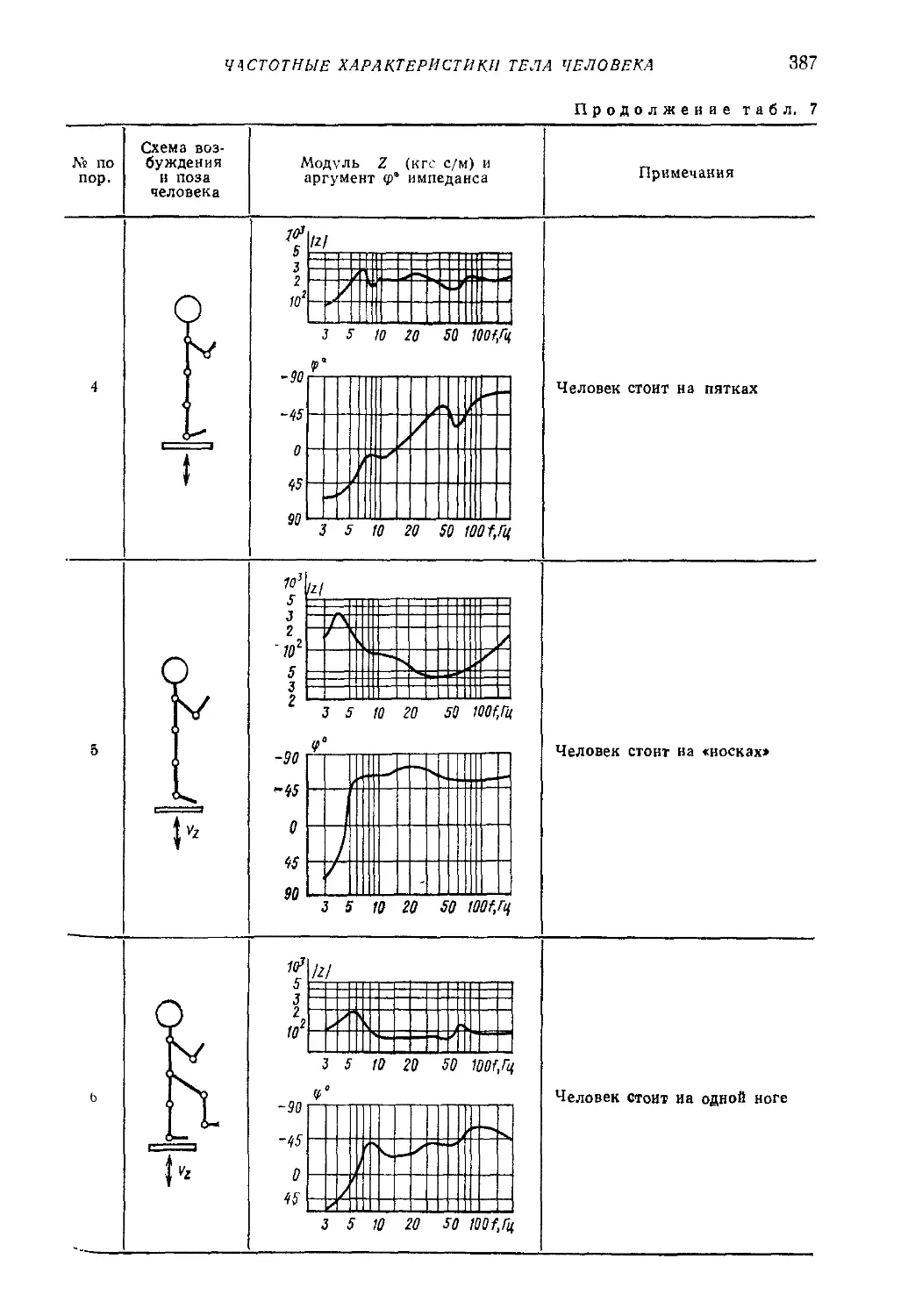
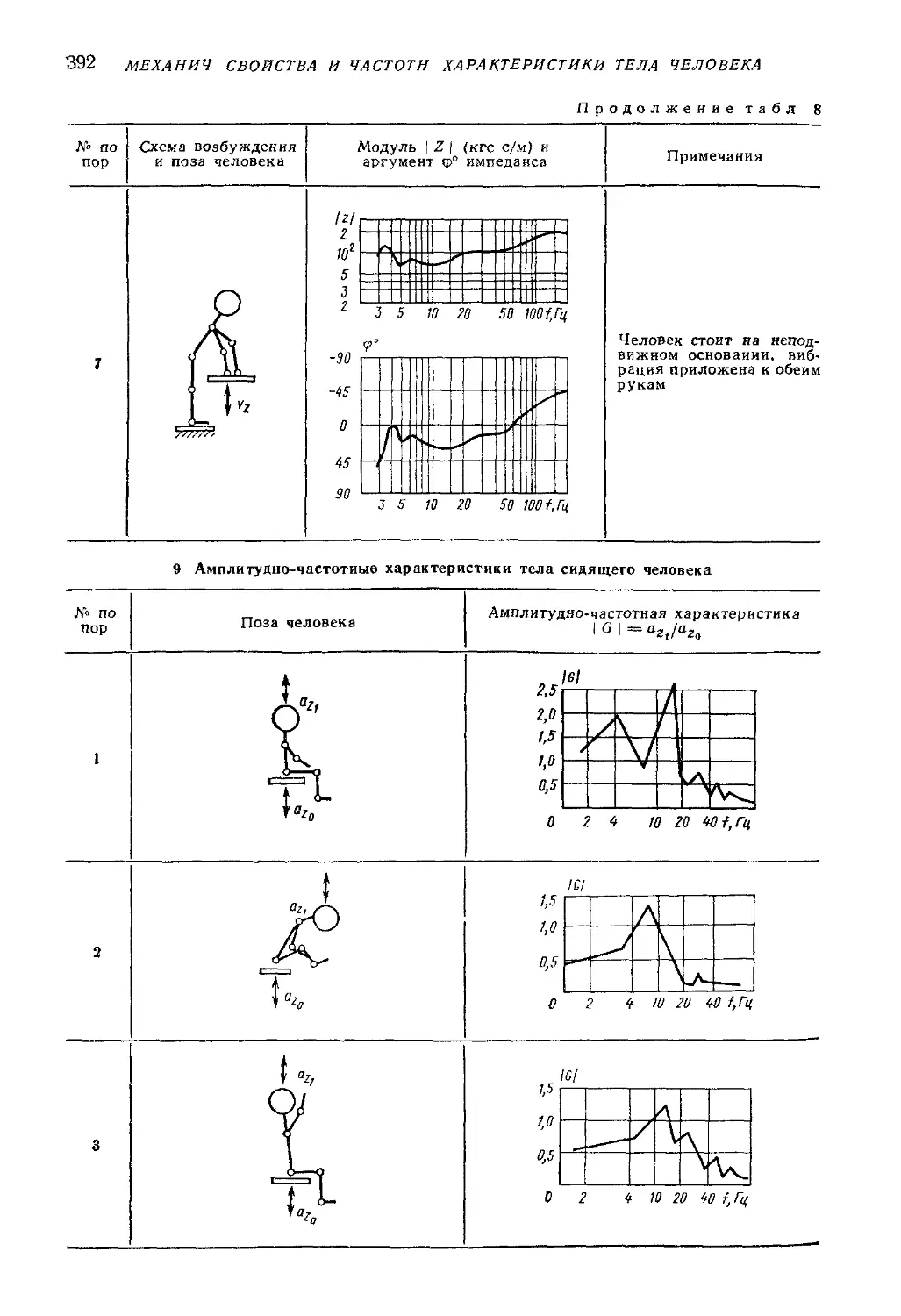
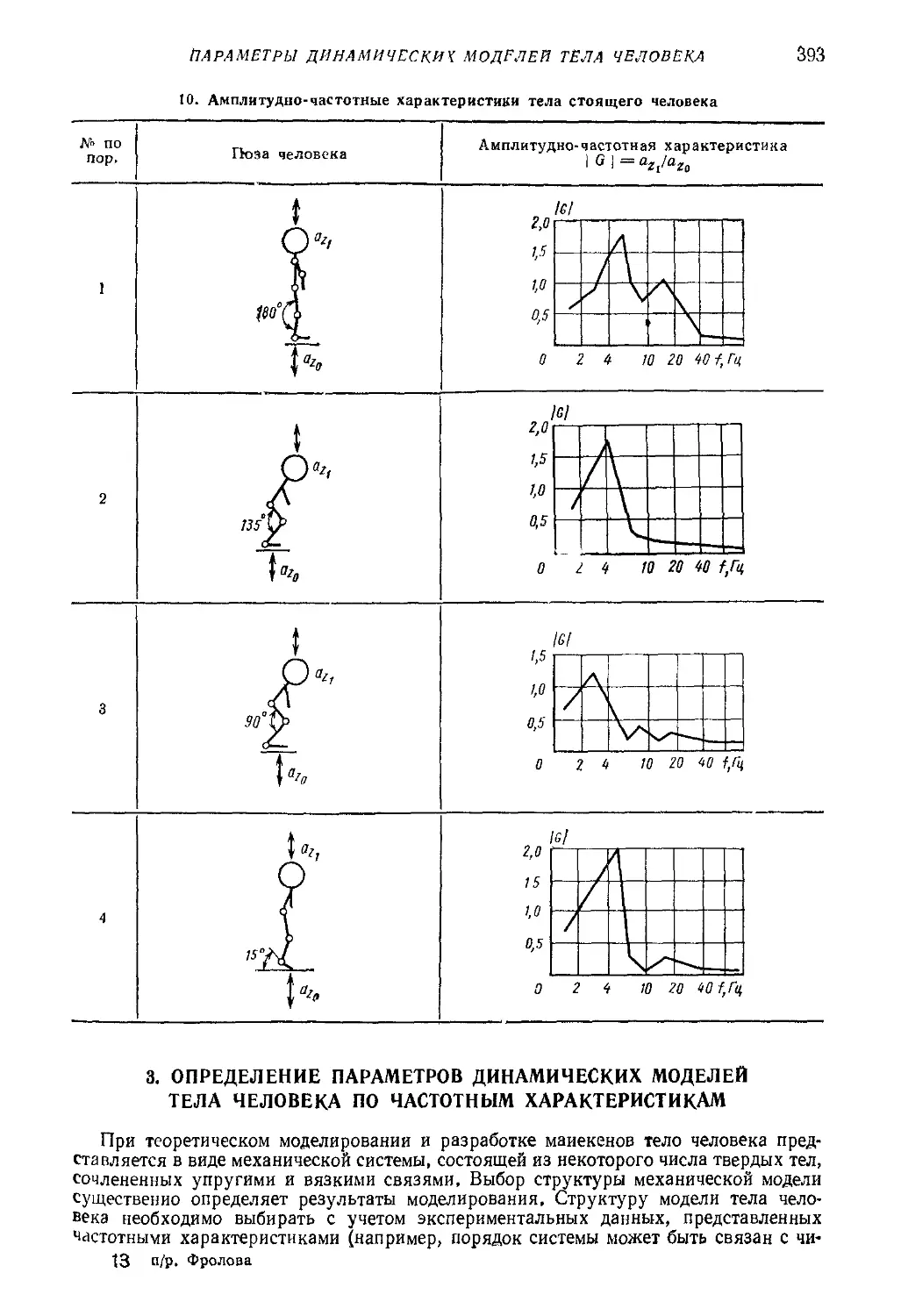
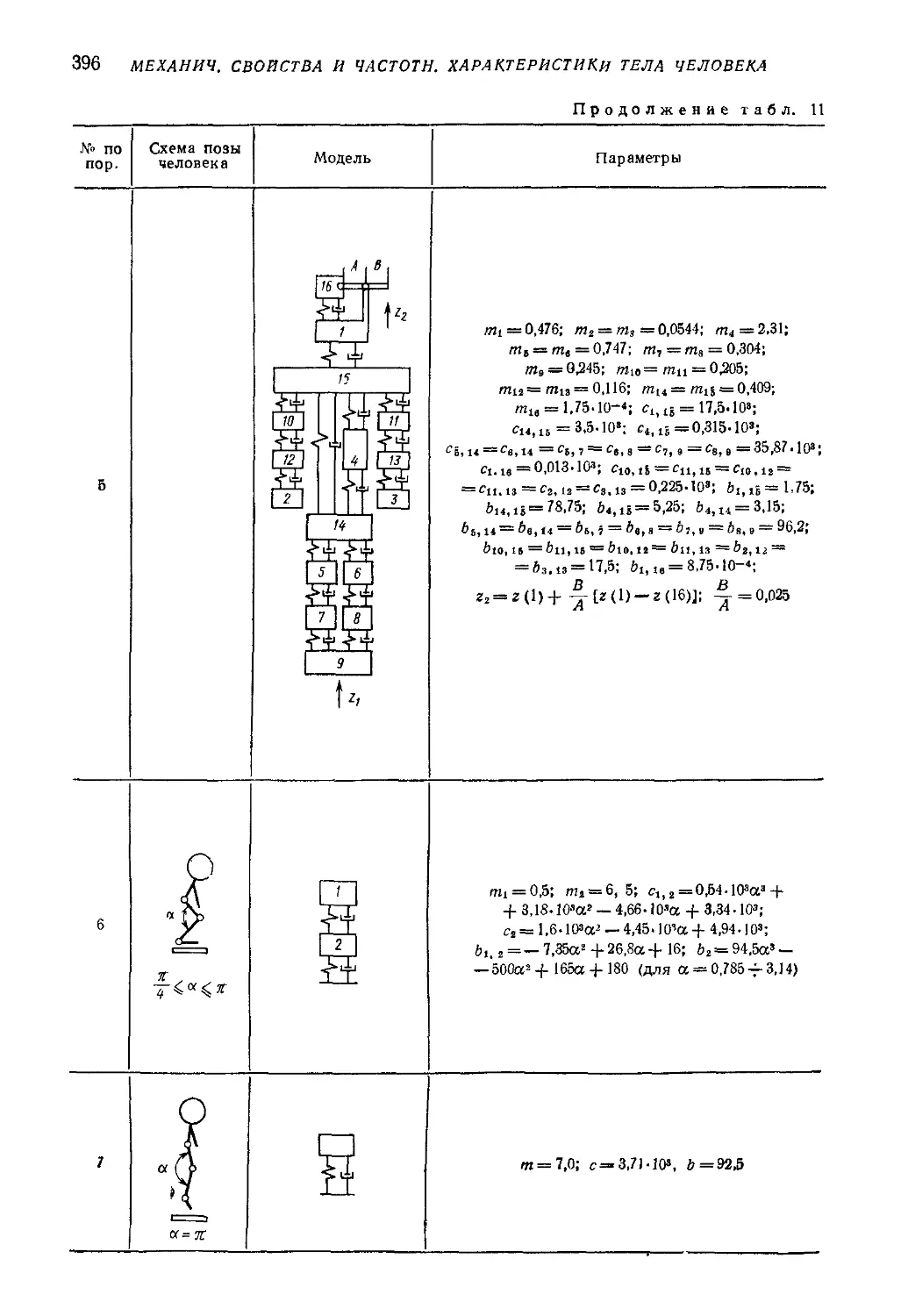
Глава XVII. Механические свойства и частотные характеристики тела
человека (Г. Я. Пановко, Б. А. Потемкин, К. В. Фролов) .... 373
1. Механические свойства тела человека 373
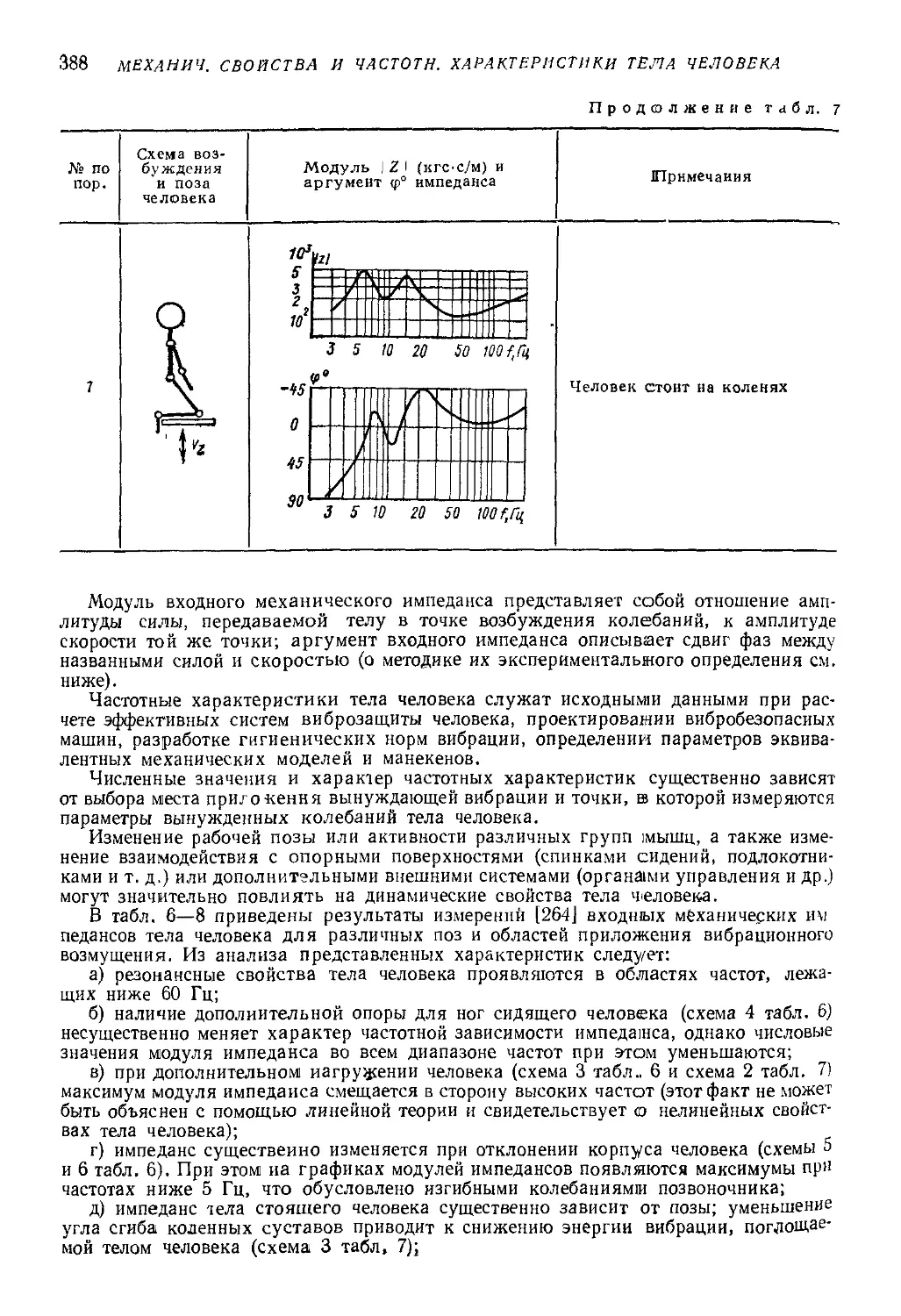
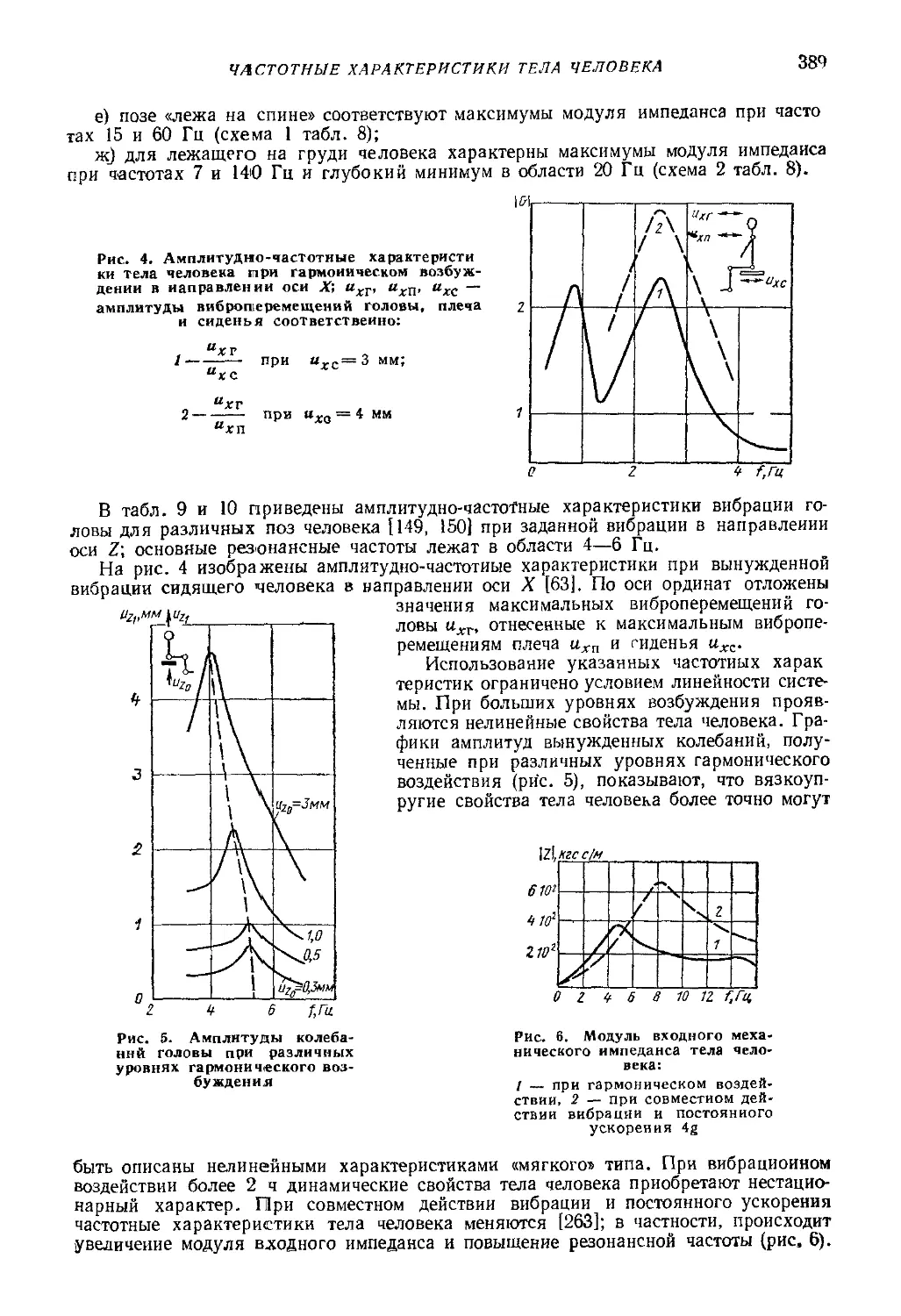
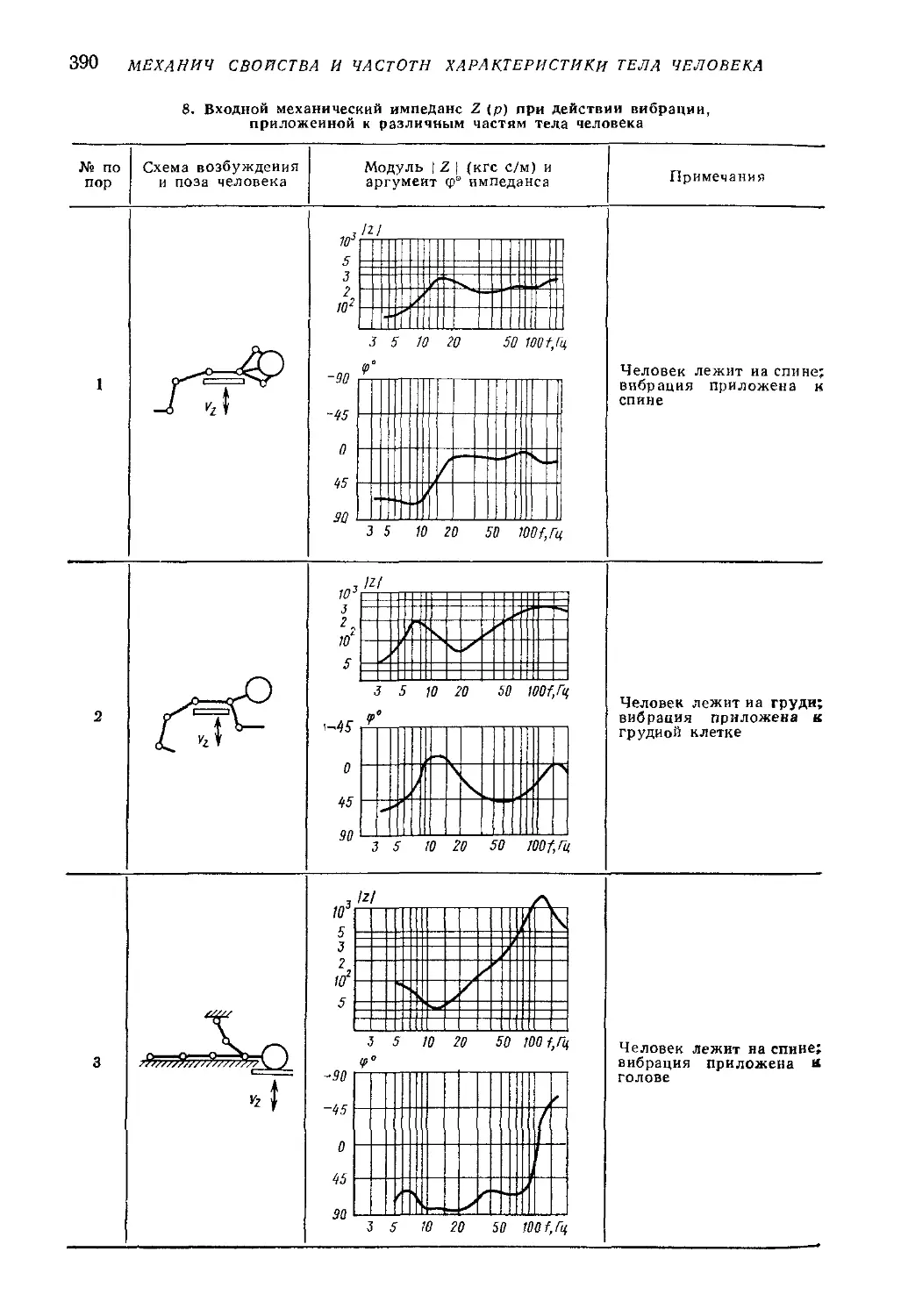
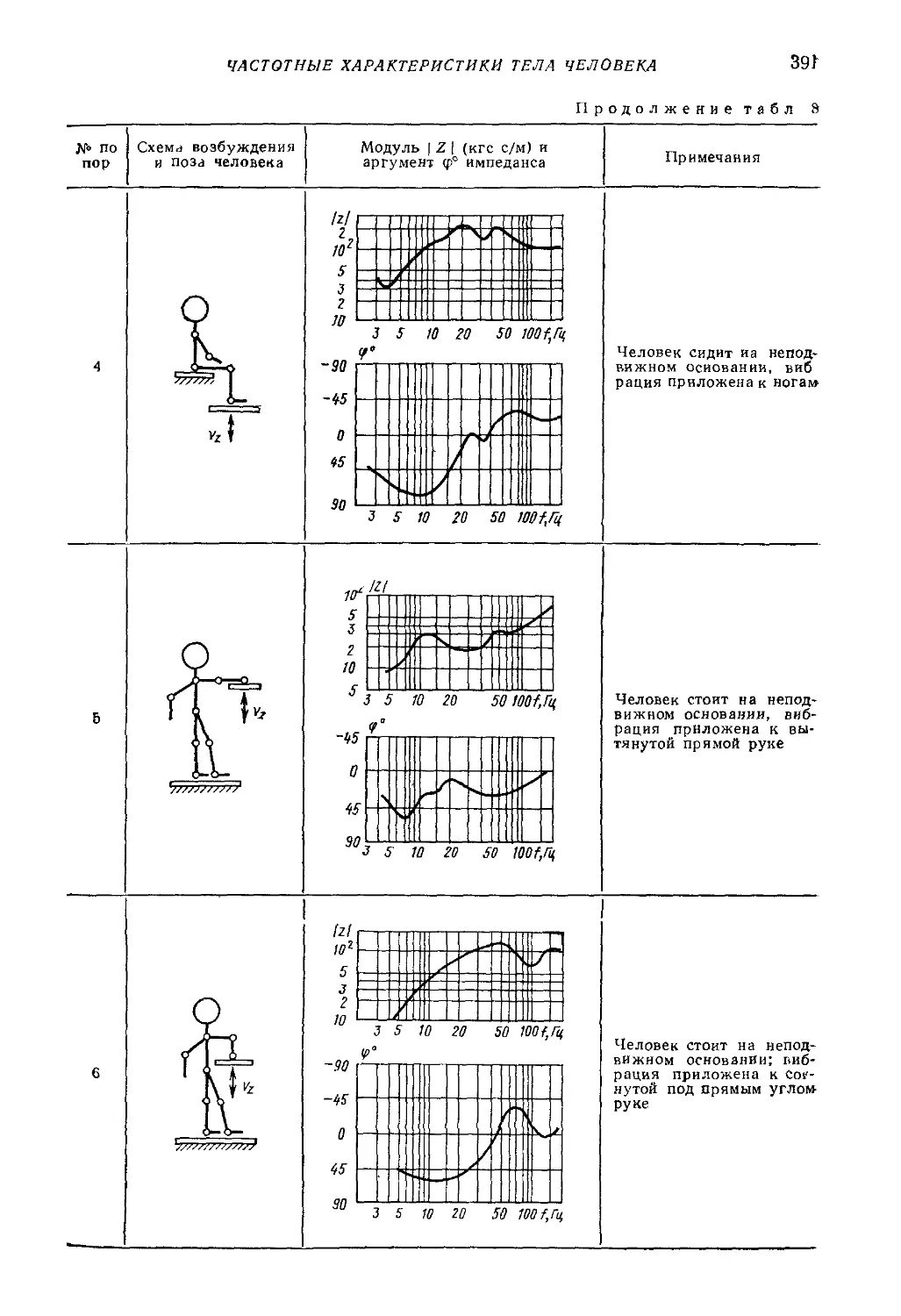
2. Частотные характеристики тела человека ............. 383
8 ОГЛАВЛЕНИЕ
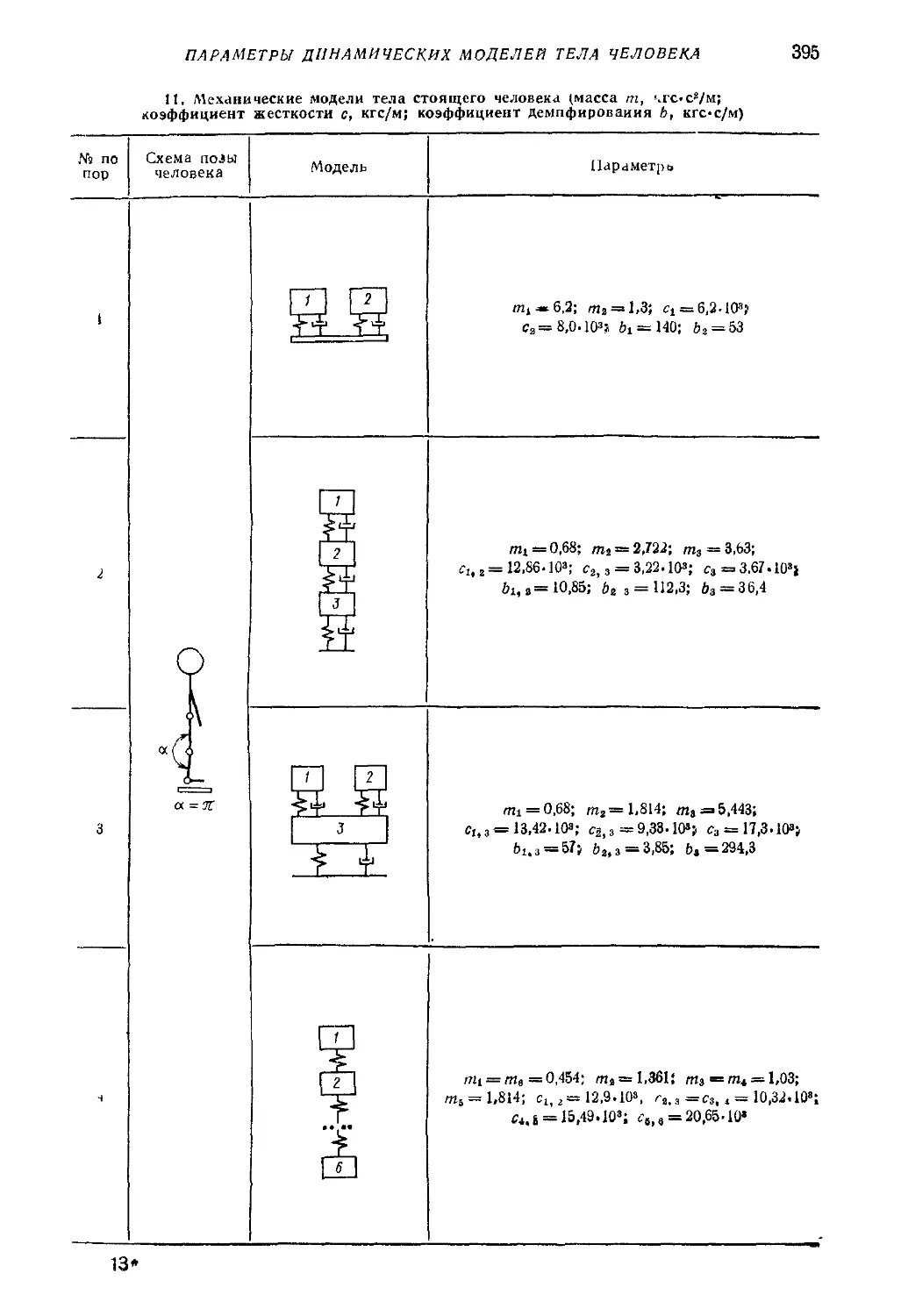
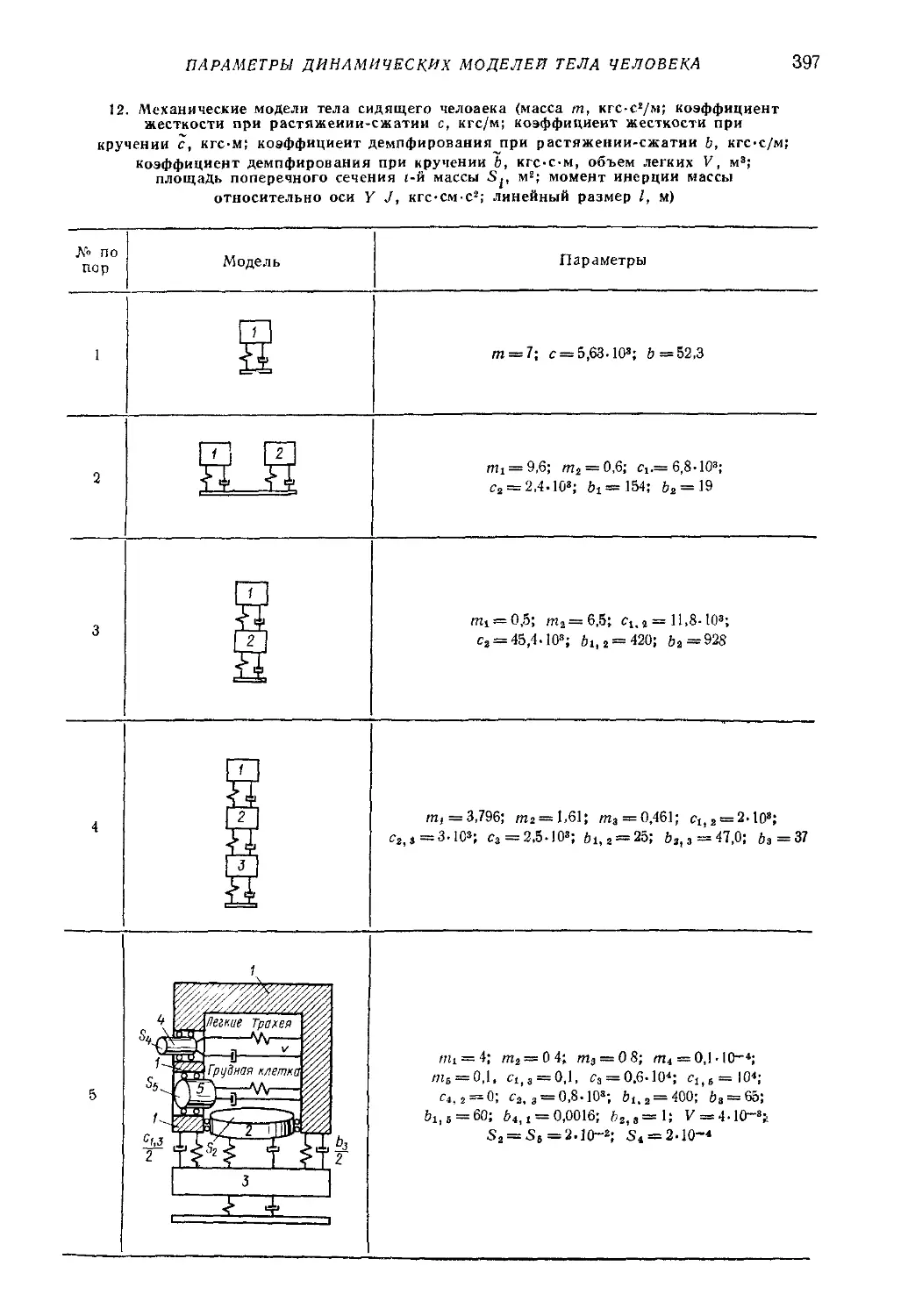
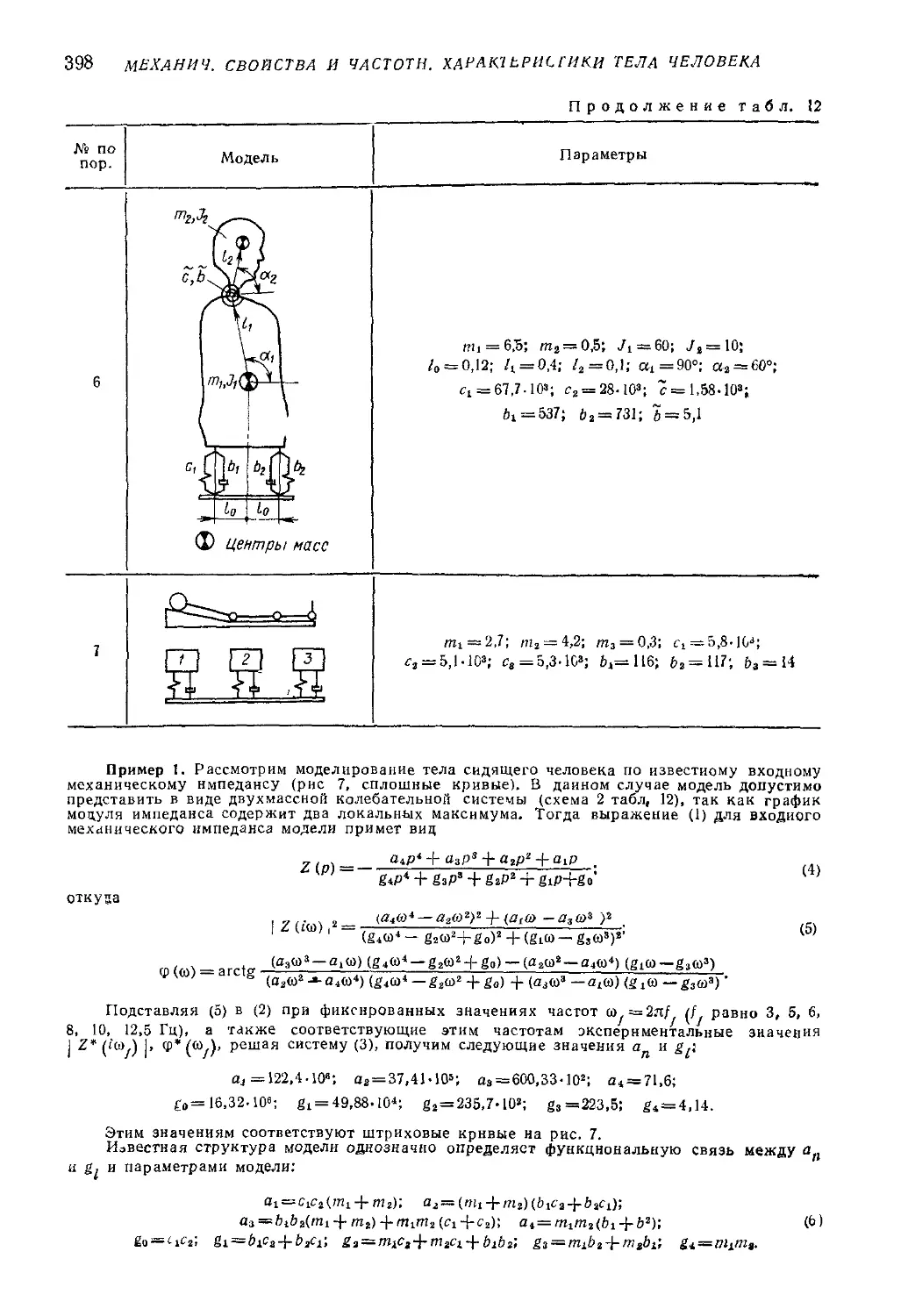
3. Определение параметров динамических моделей тела человека
по частотным характеристикам ,,...,.,.,,,, 393
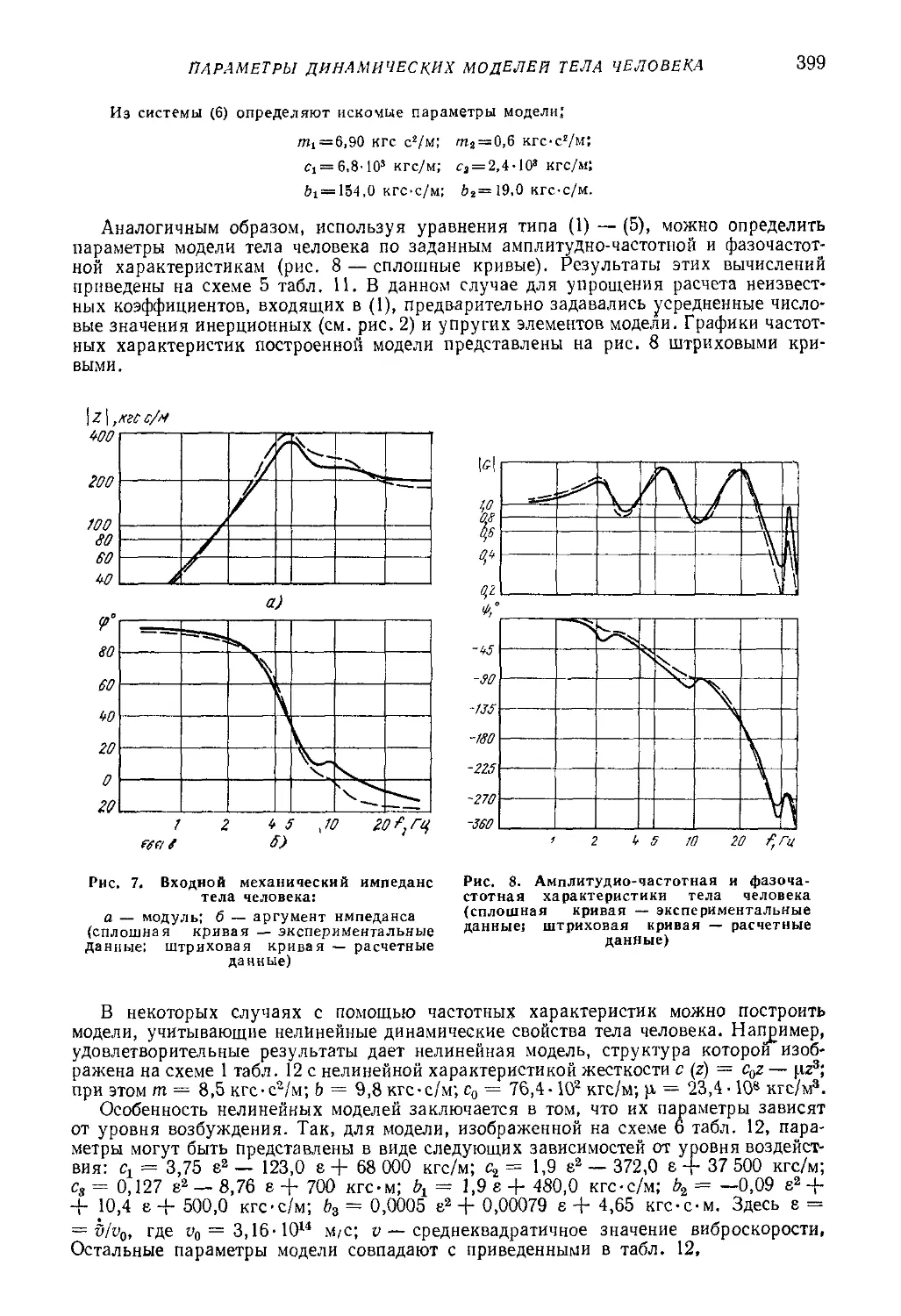
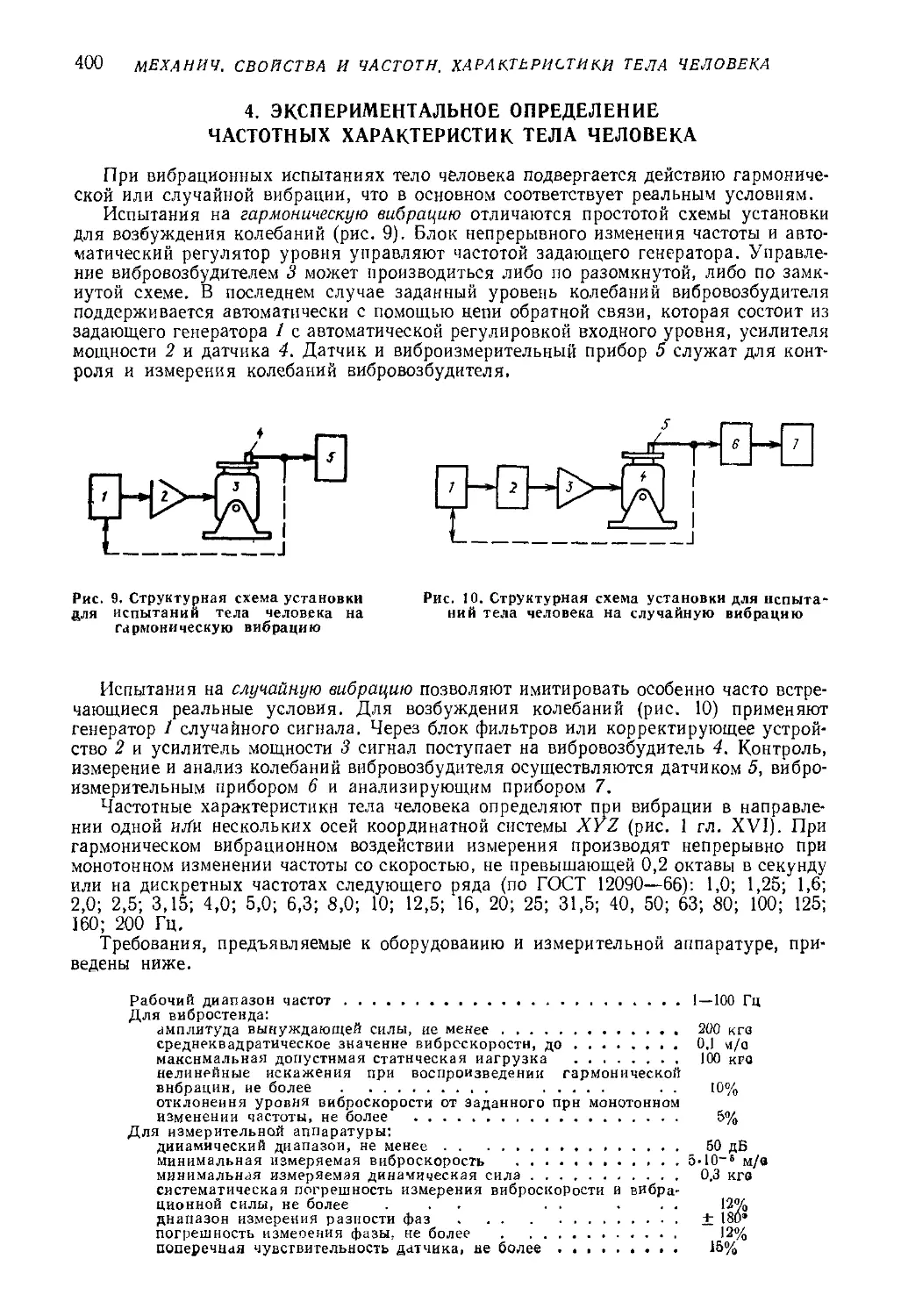
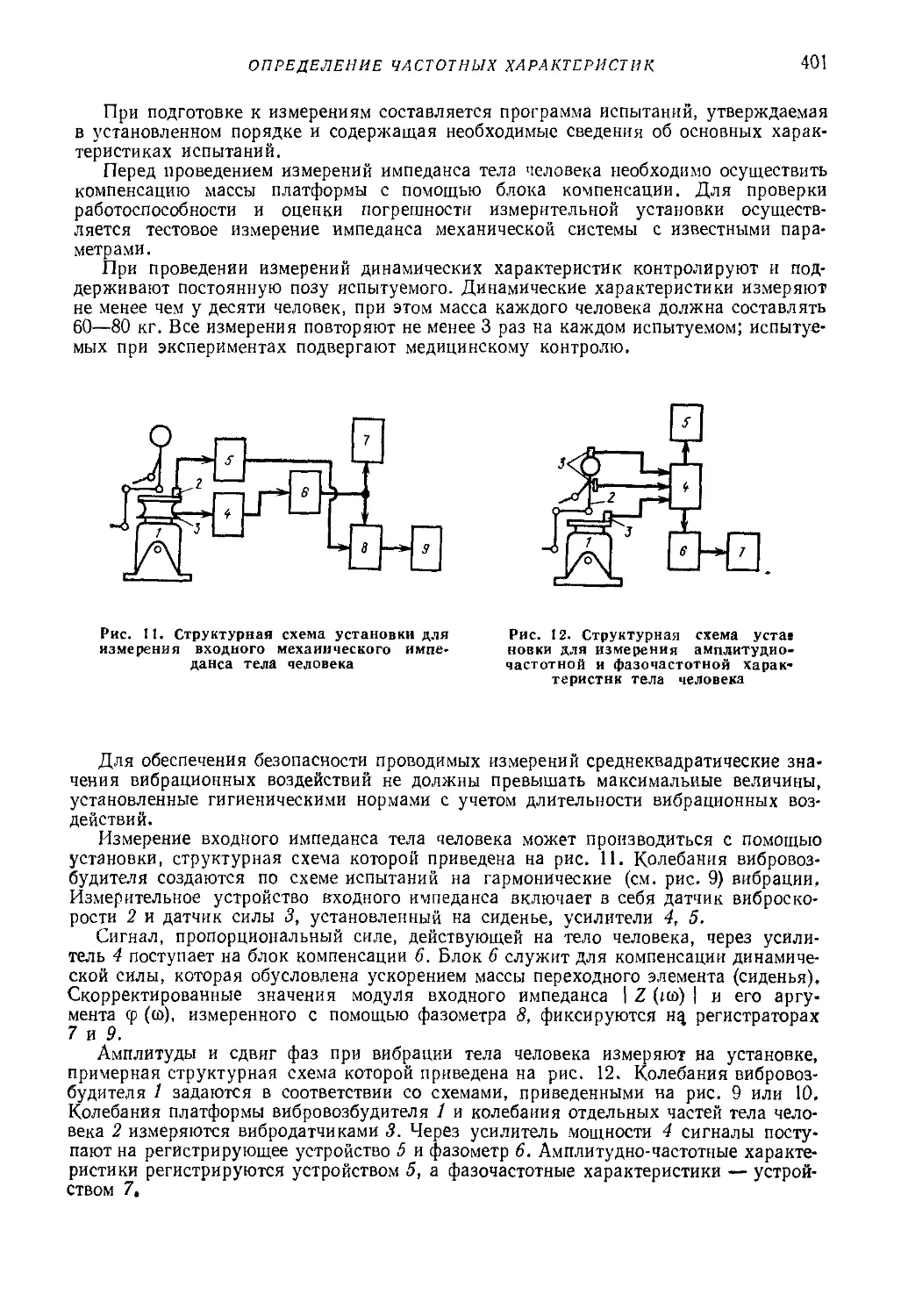
4. Экспериментальное определение частотных характеристик тела
человека ....................... 400
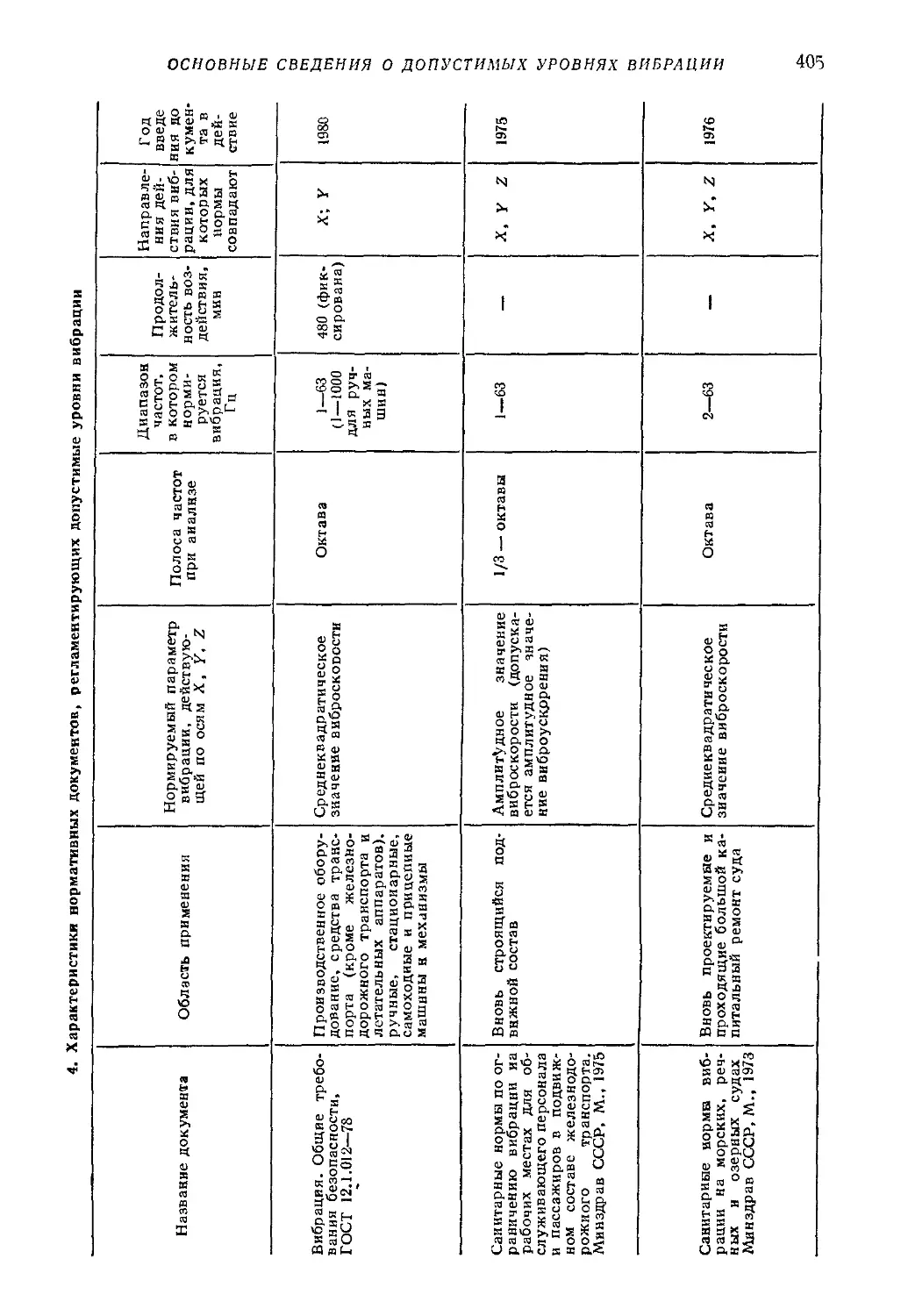
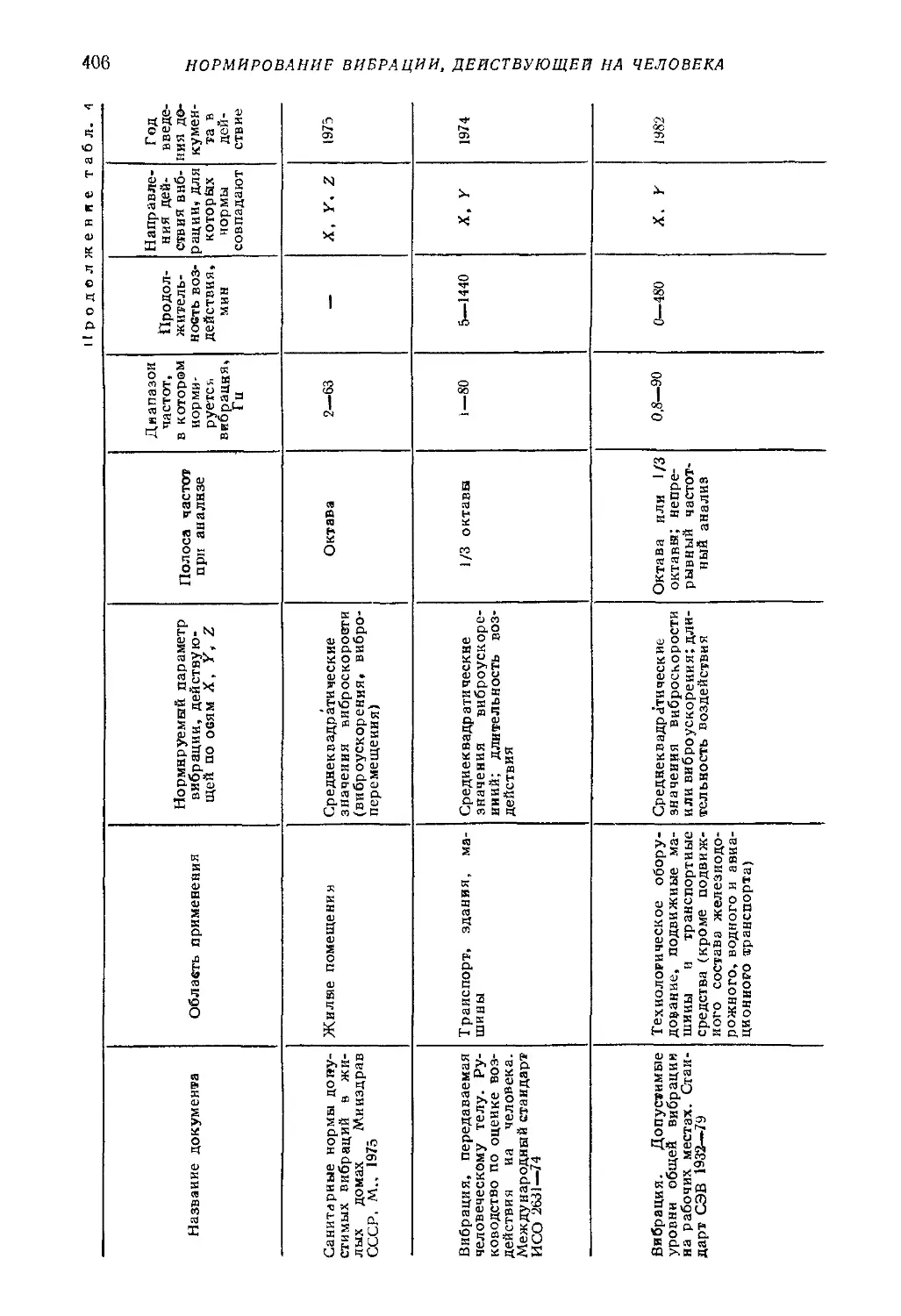
Г л а в-а XVIII. Нормирование вибрации, действующей на человека (Т. Я- Па-
новко, Б. А. Потемкин, К. В. Фролов) 402
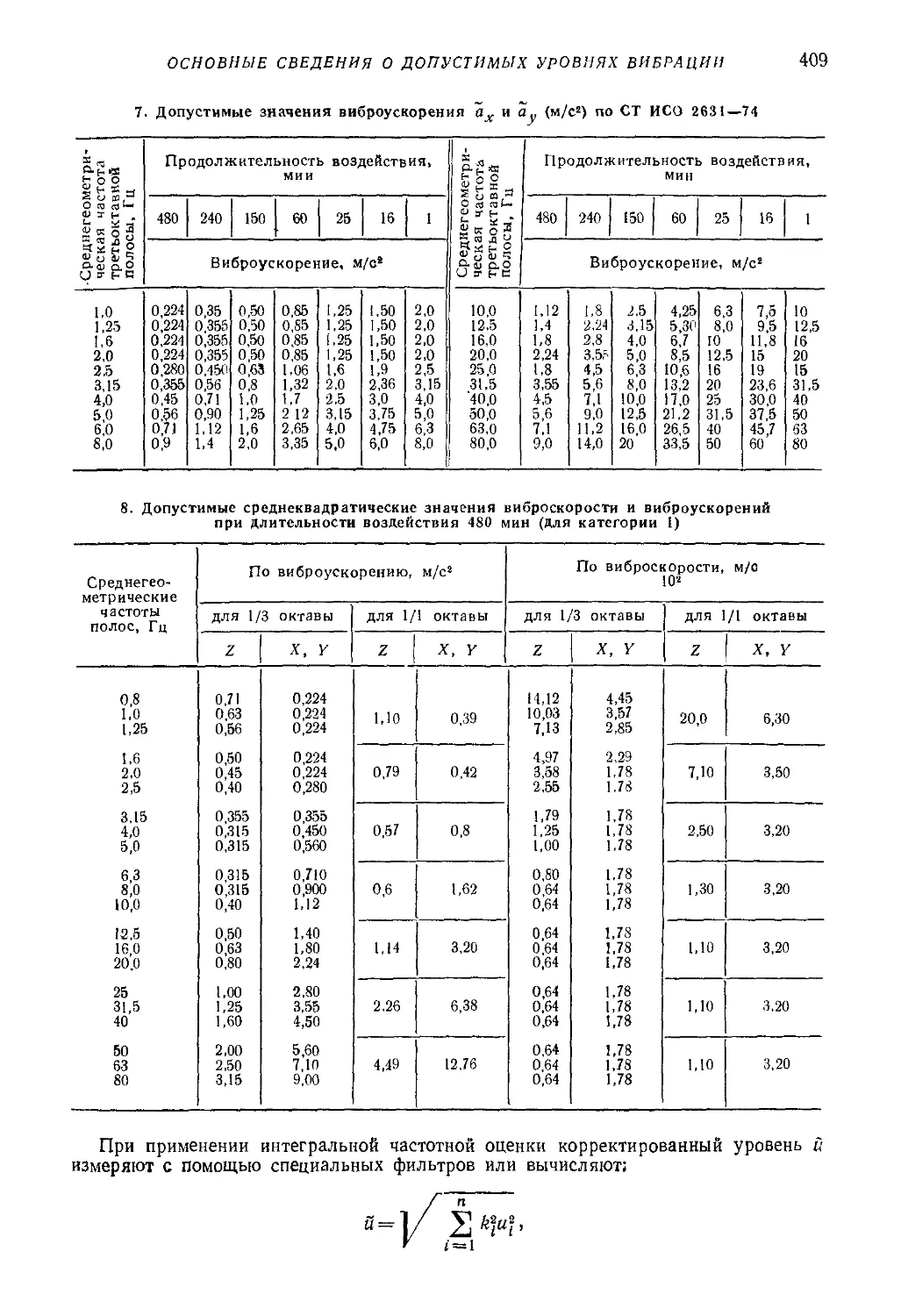
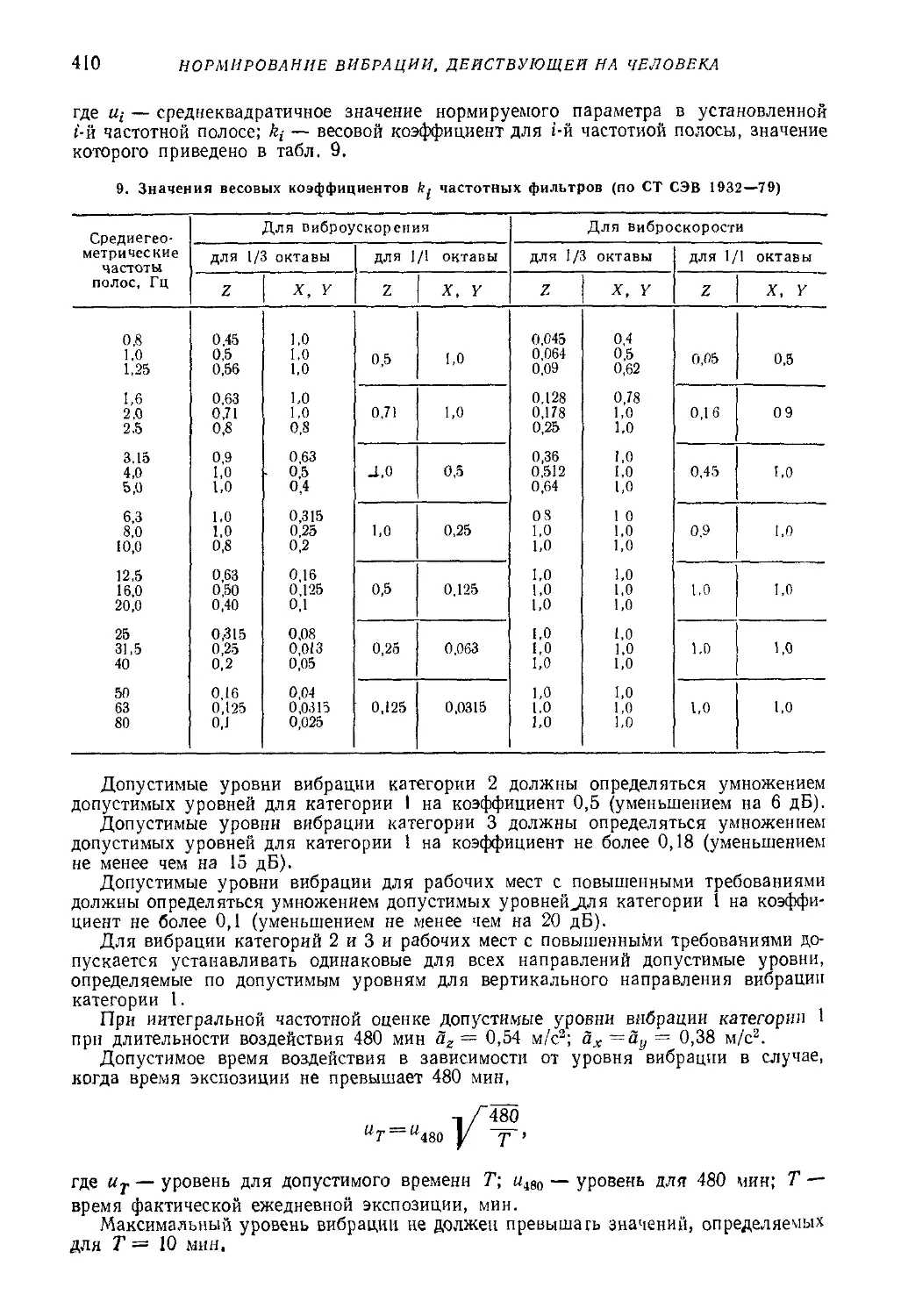
1. Основные сведения о допустимых уровнях вибрации .,..,, 402
2. Контроль вибрации машин . 4И
Глава XIX. Системы виброизоляции человека (Г. Я, Пановко, А. В. Си-
Синев, К. В, Фролов) , , 412
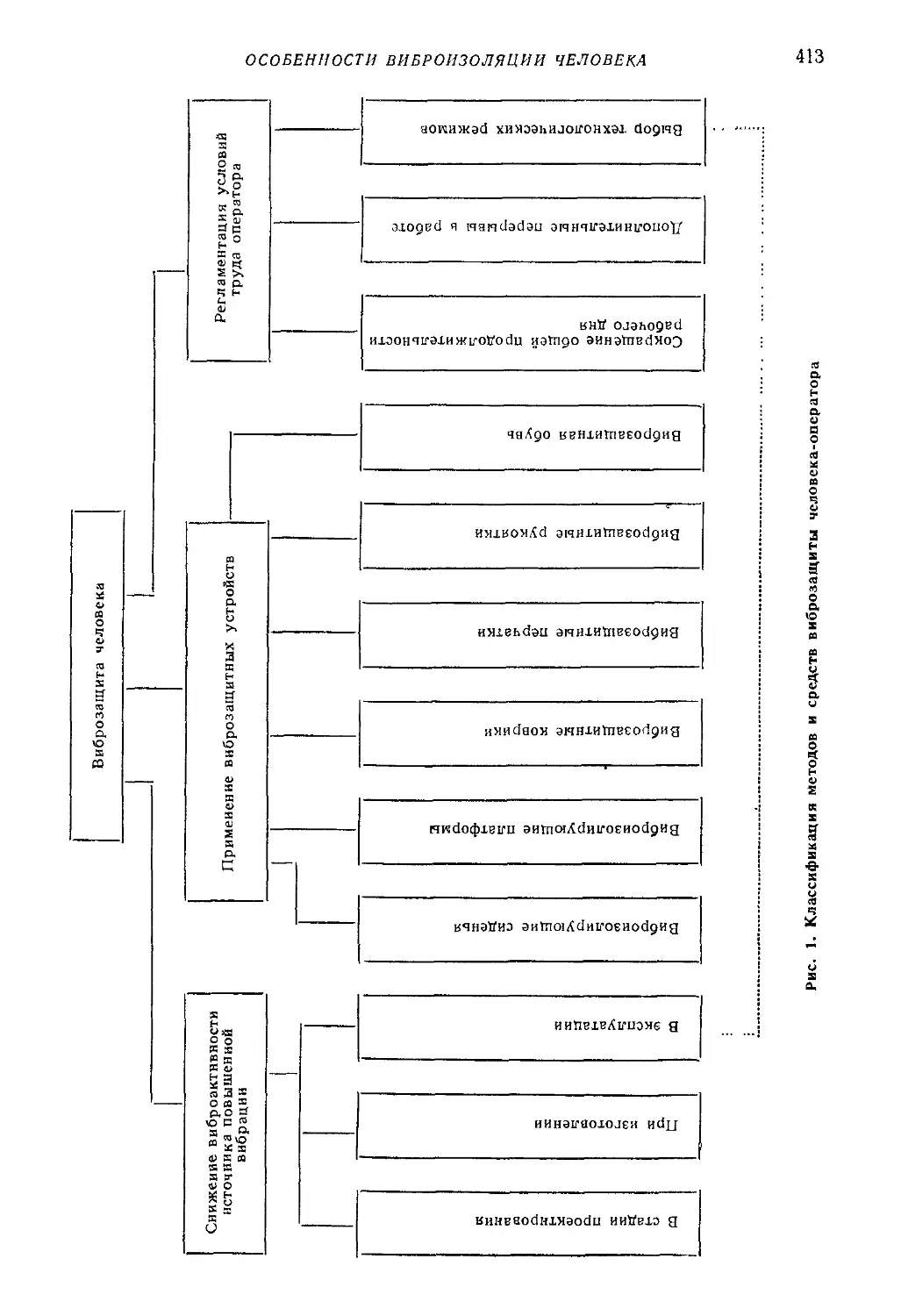
1. Особенности виброзащиты человека .....,.,,,. 412
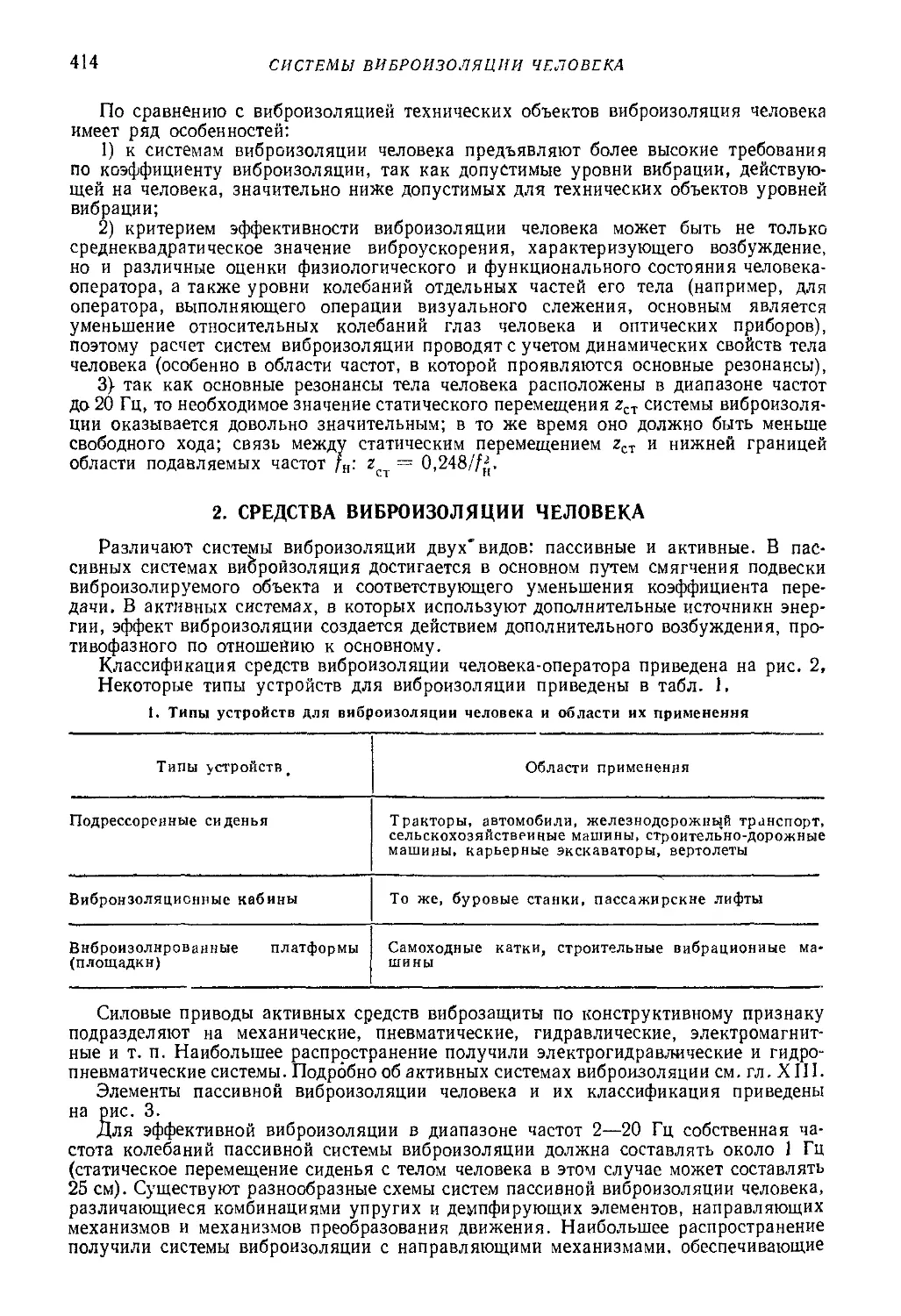
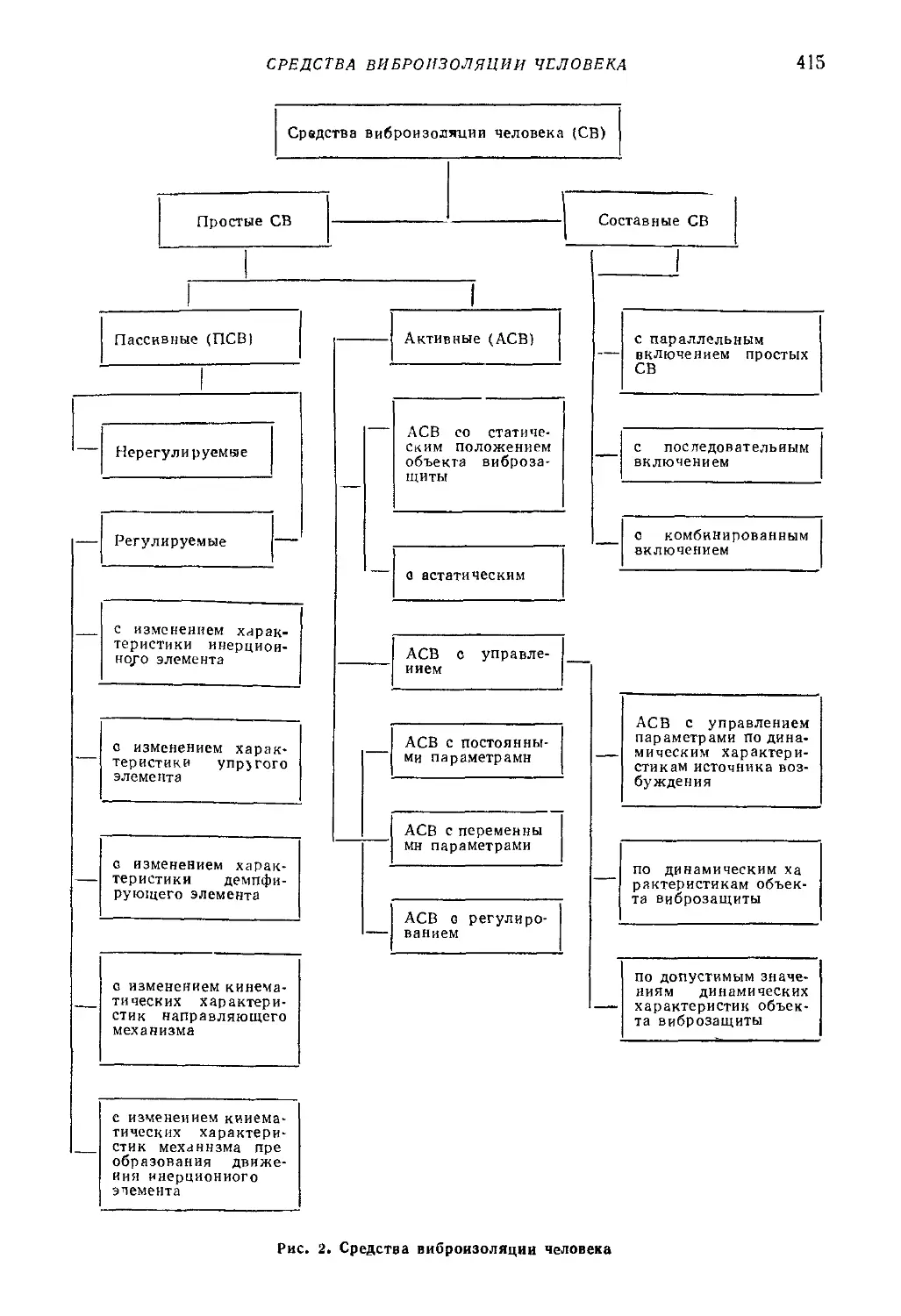
2. Средства виброизоляции человека 414
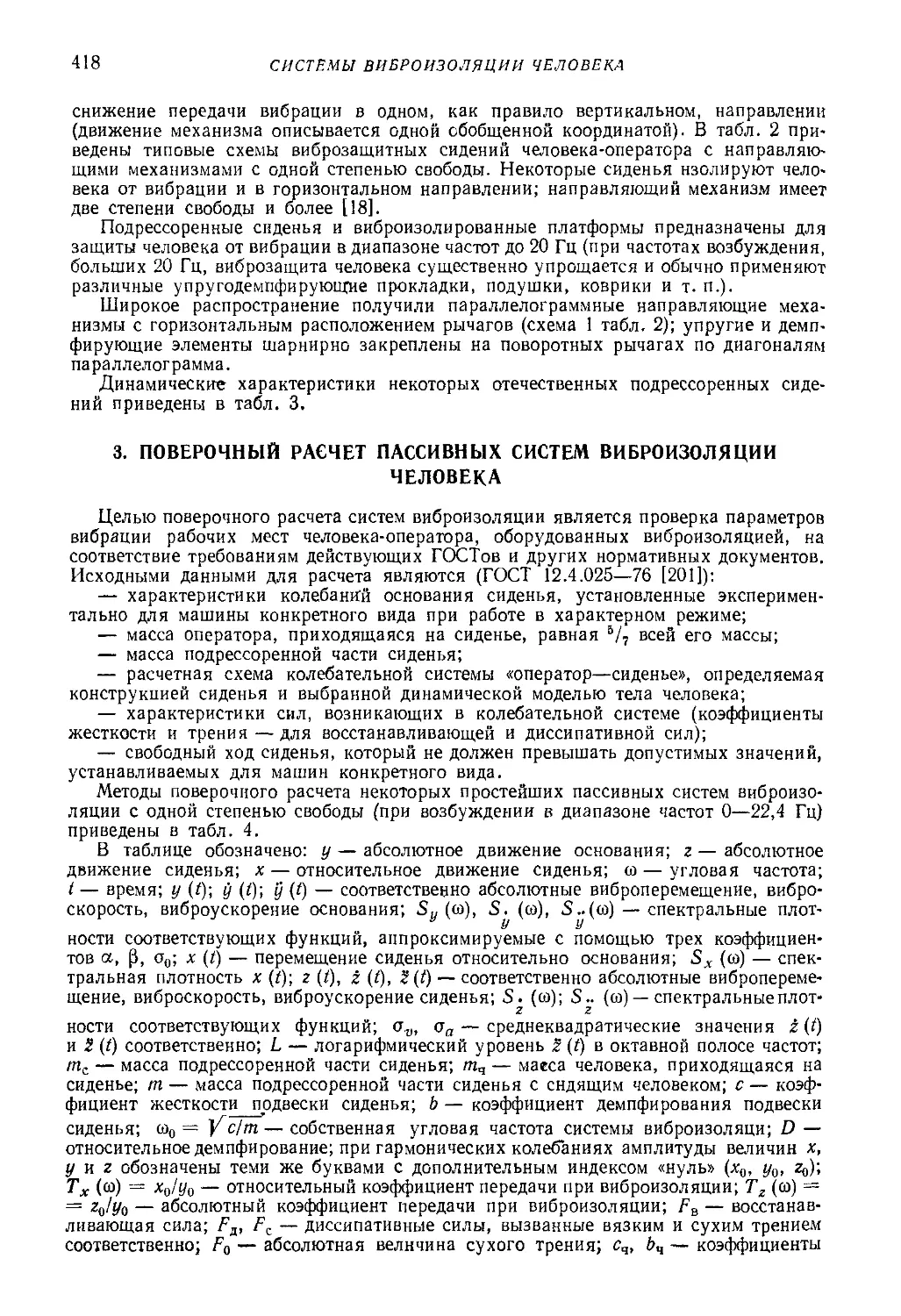
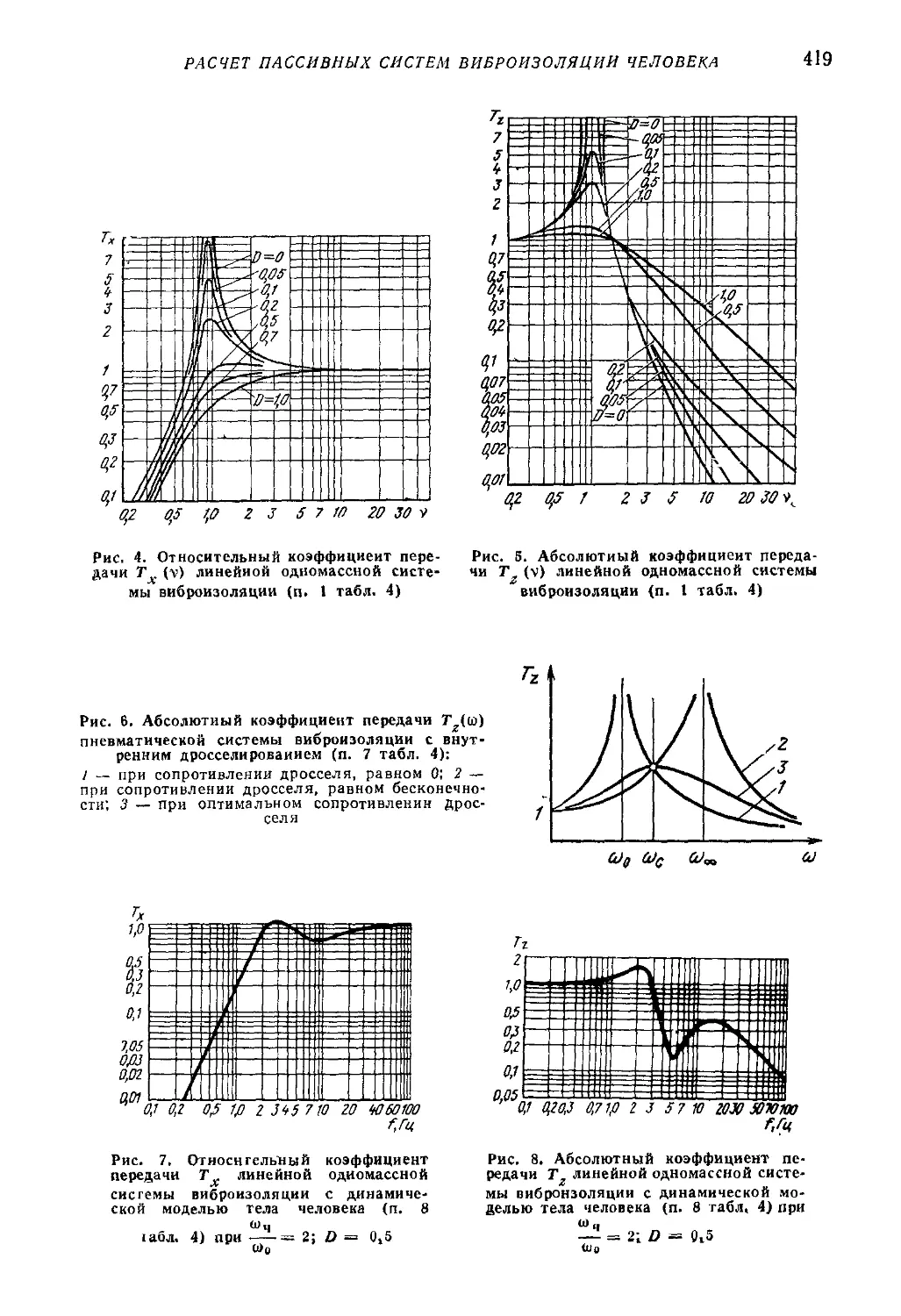
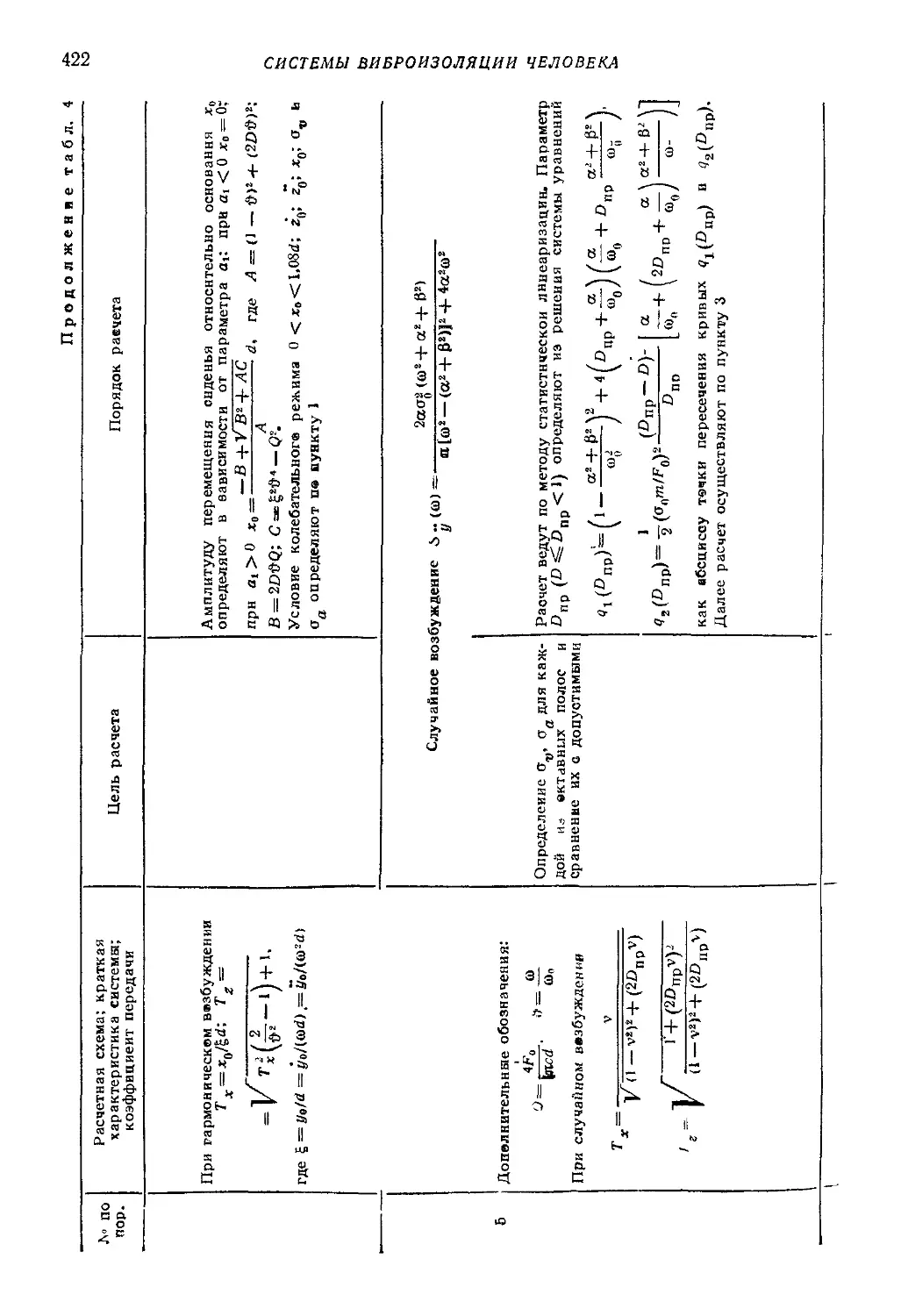
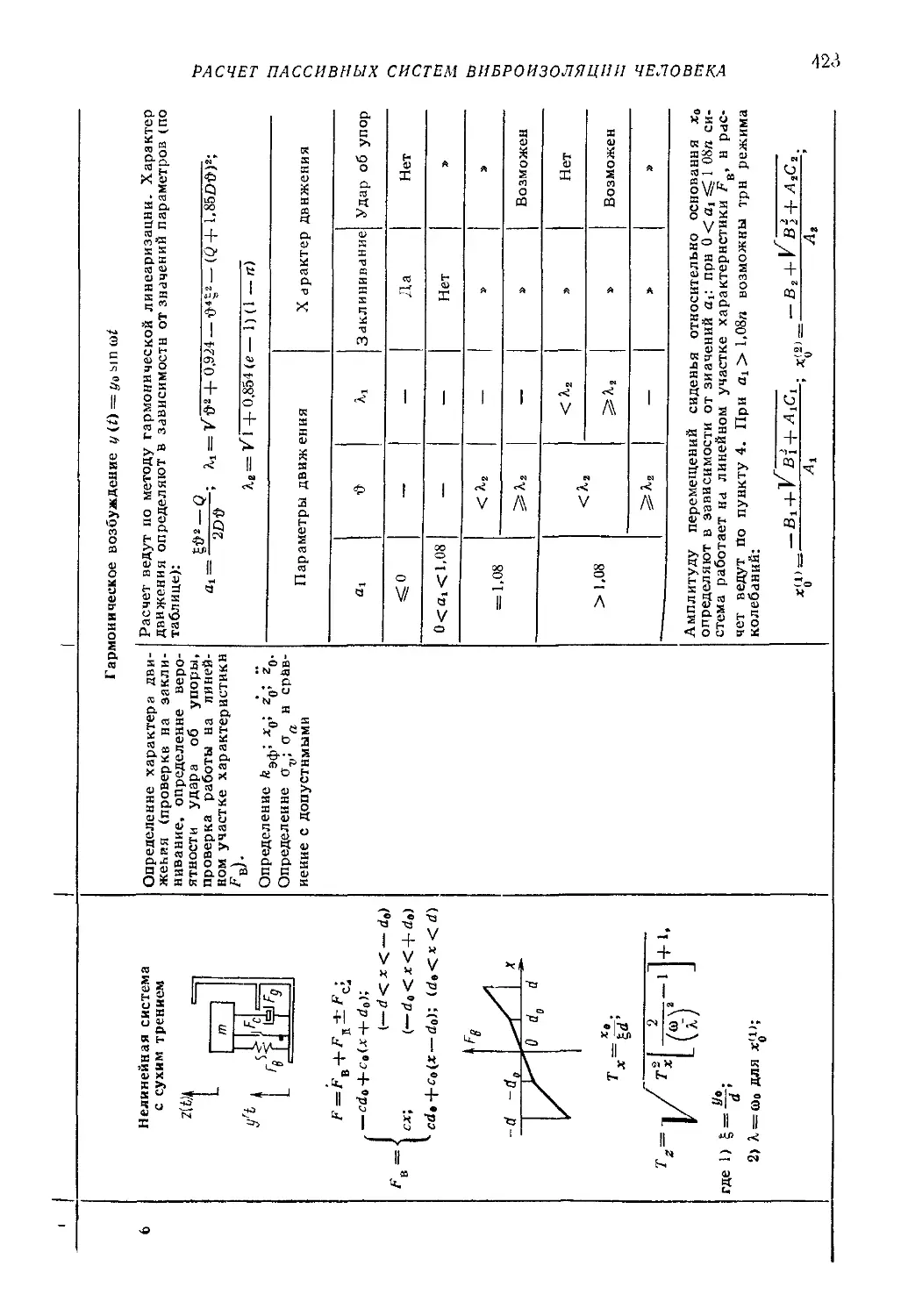
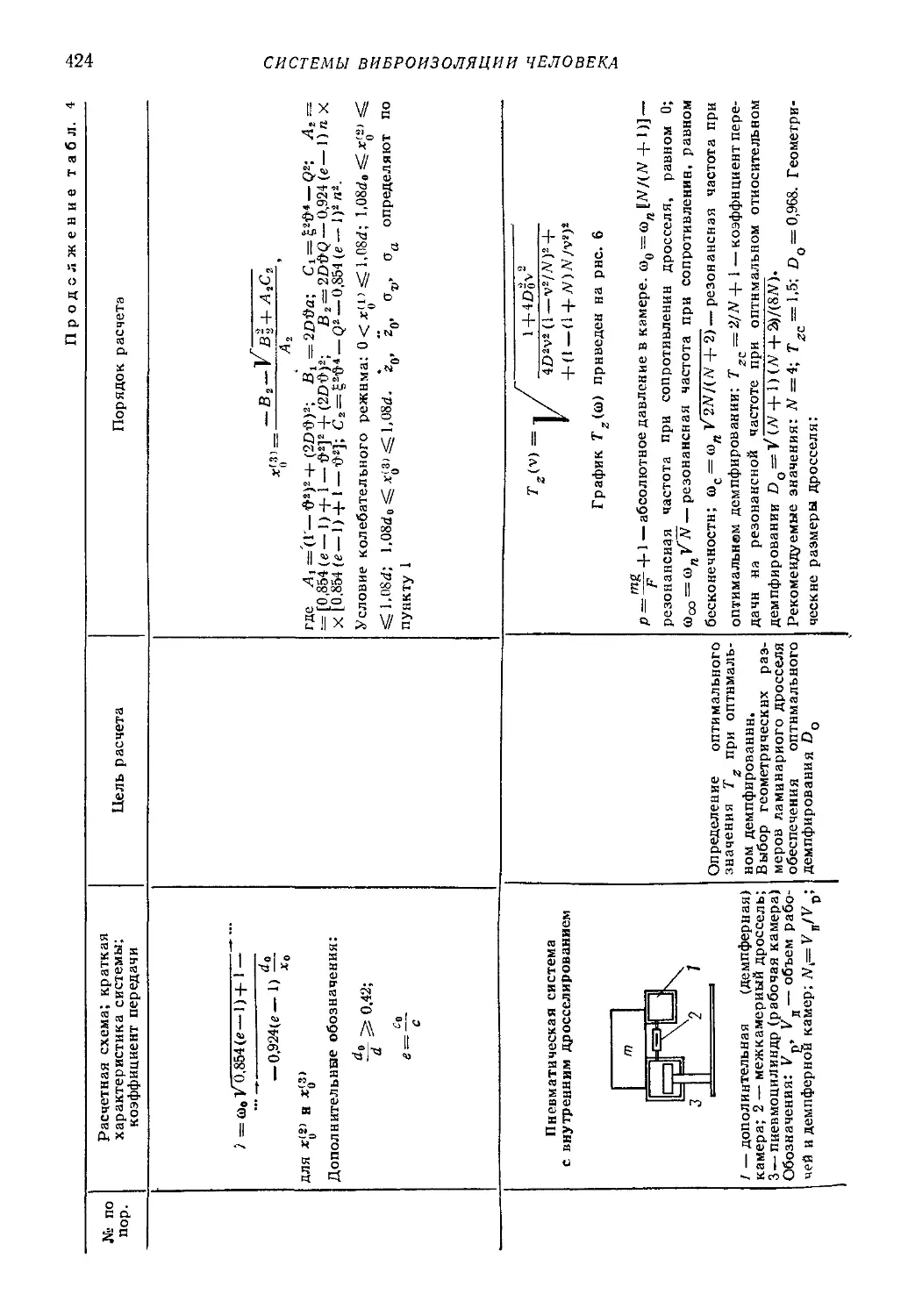
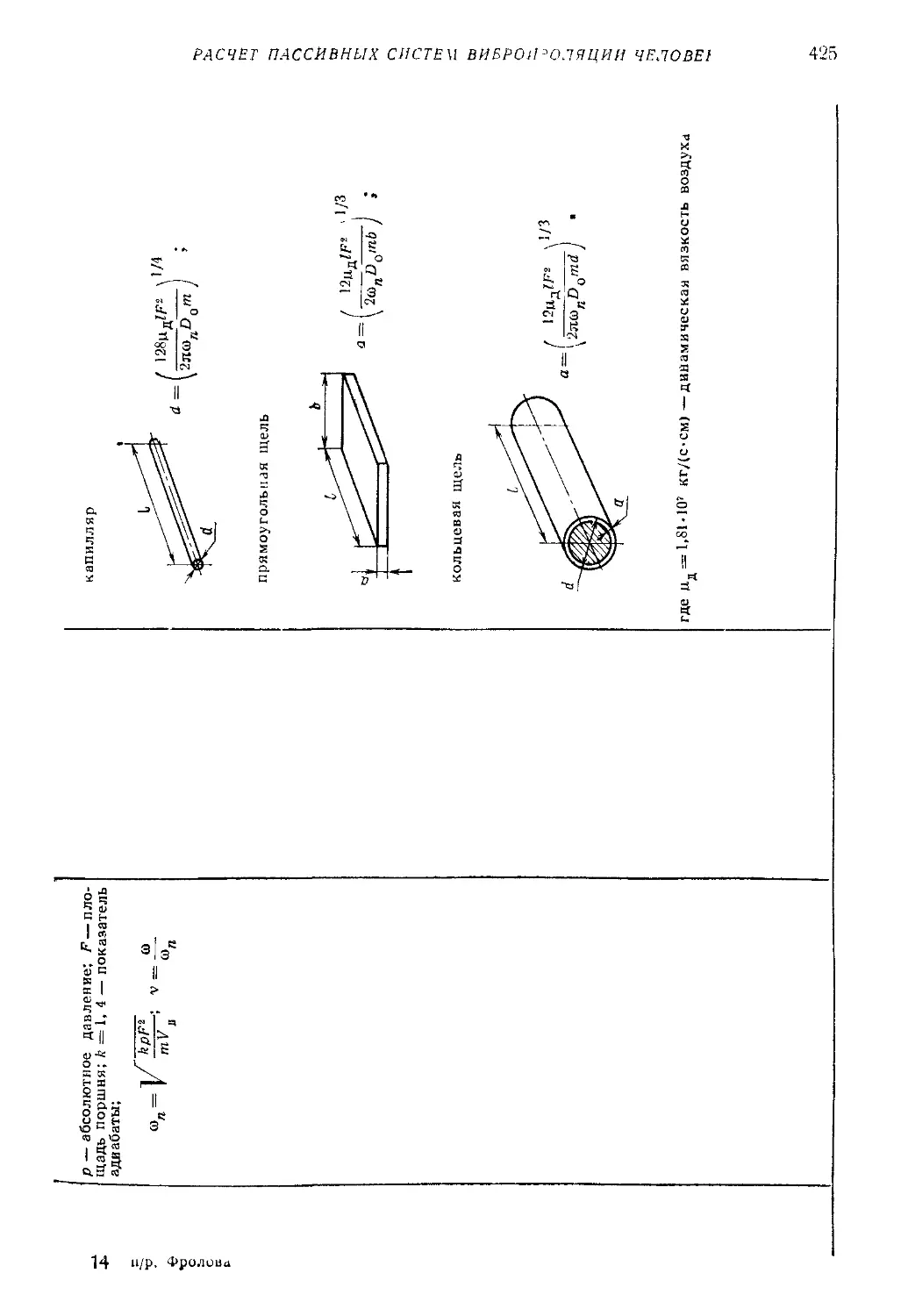
3. Поверочный расчет пассивных систем виброизоляции человека 418
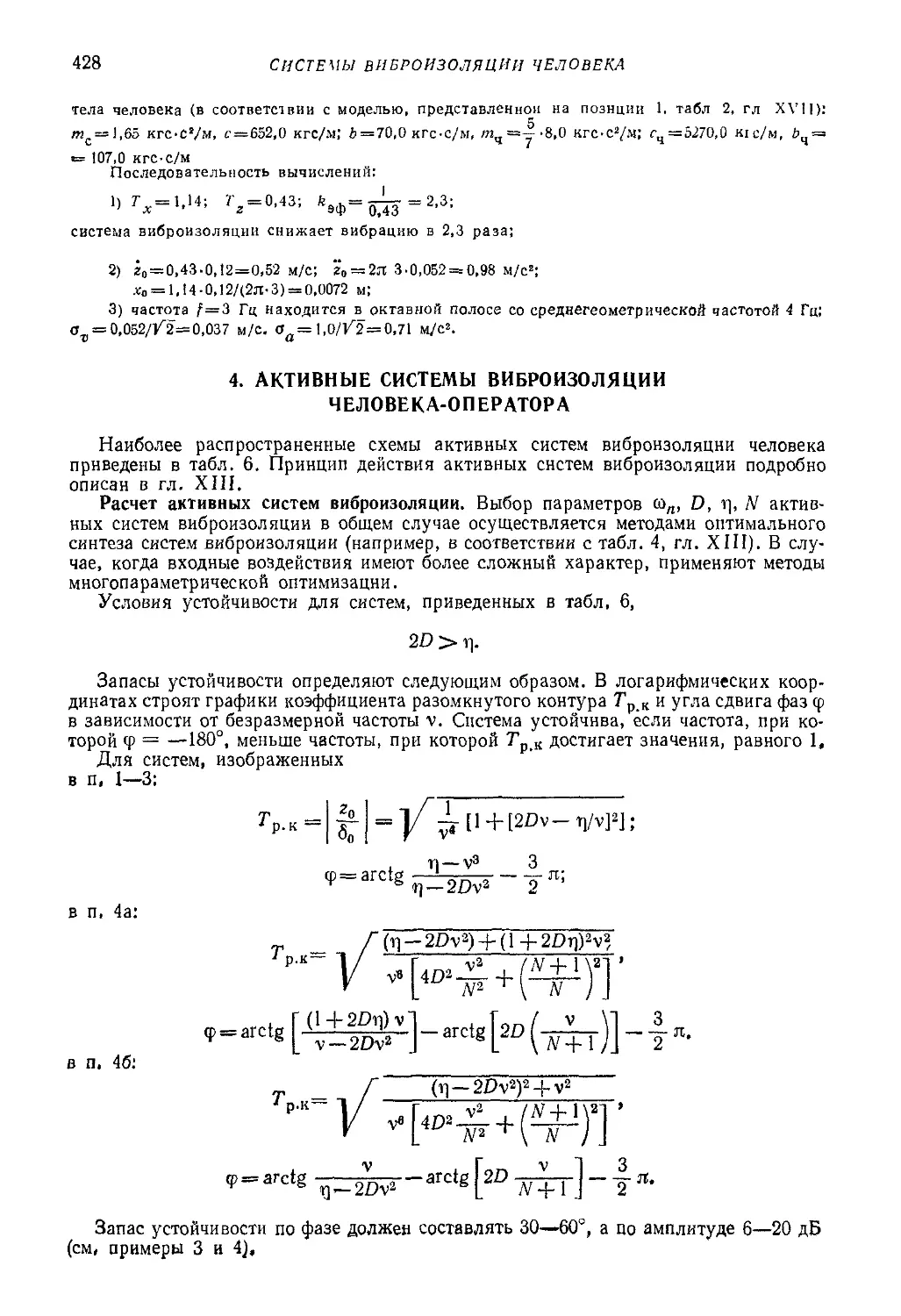
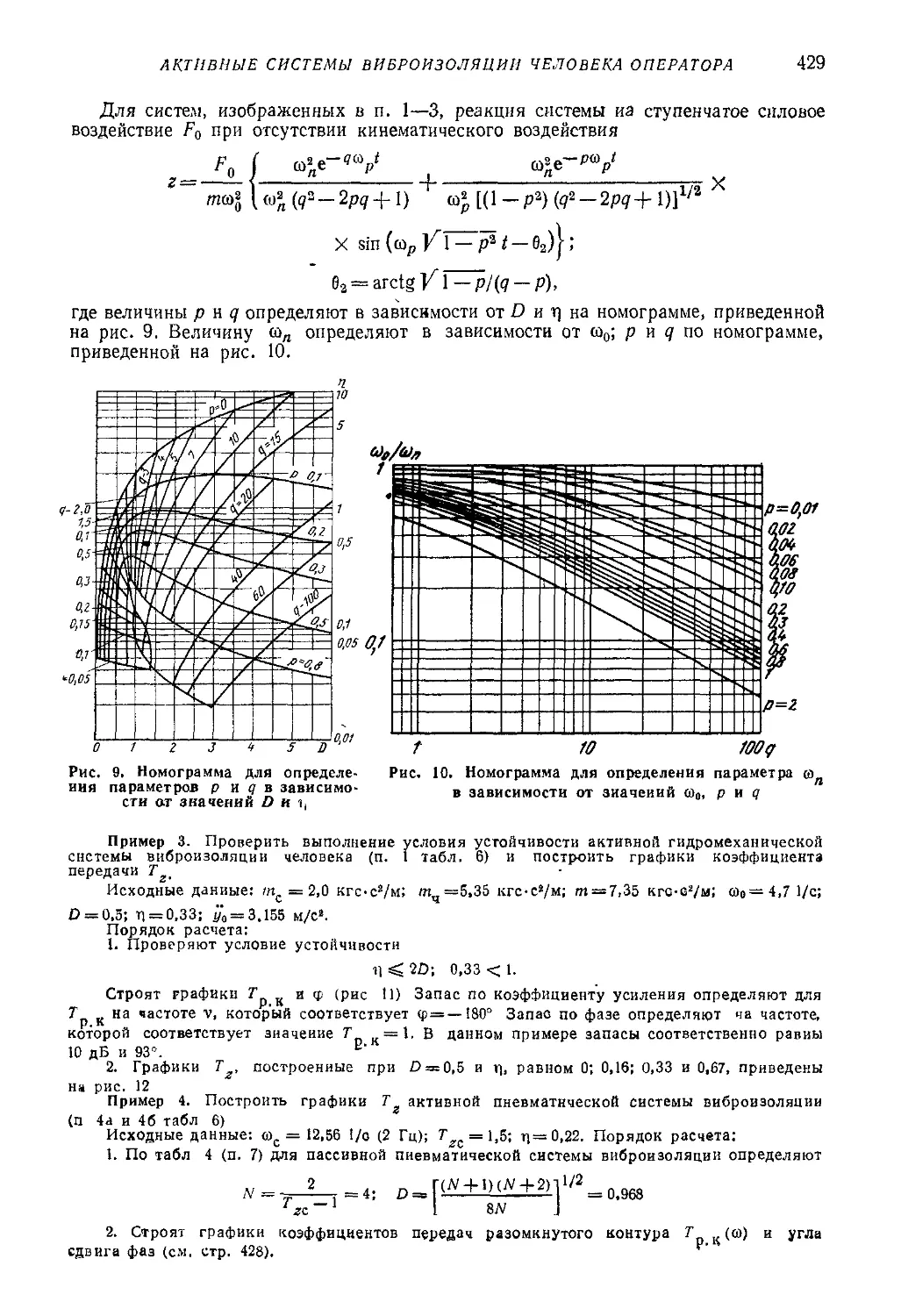
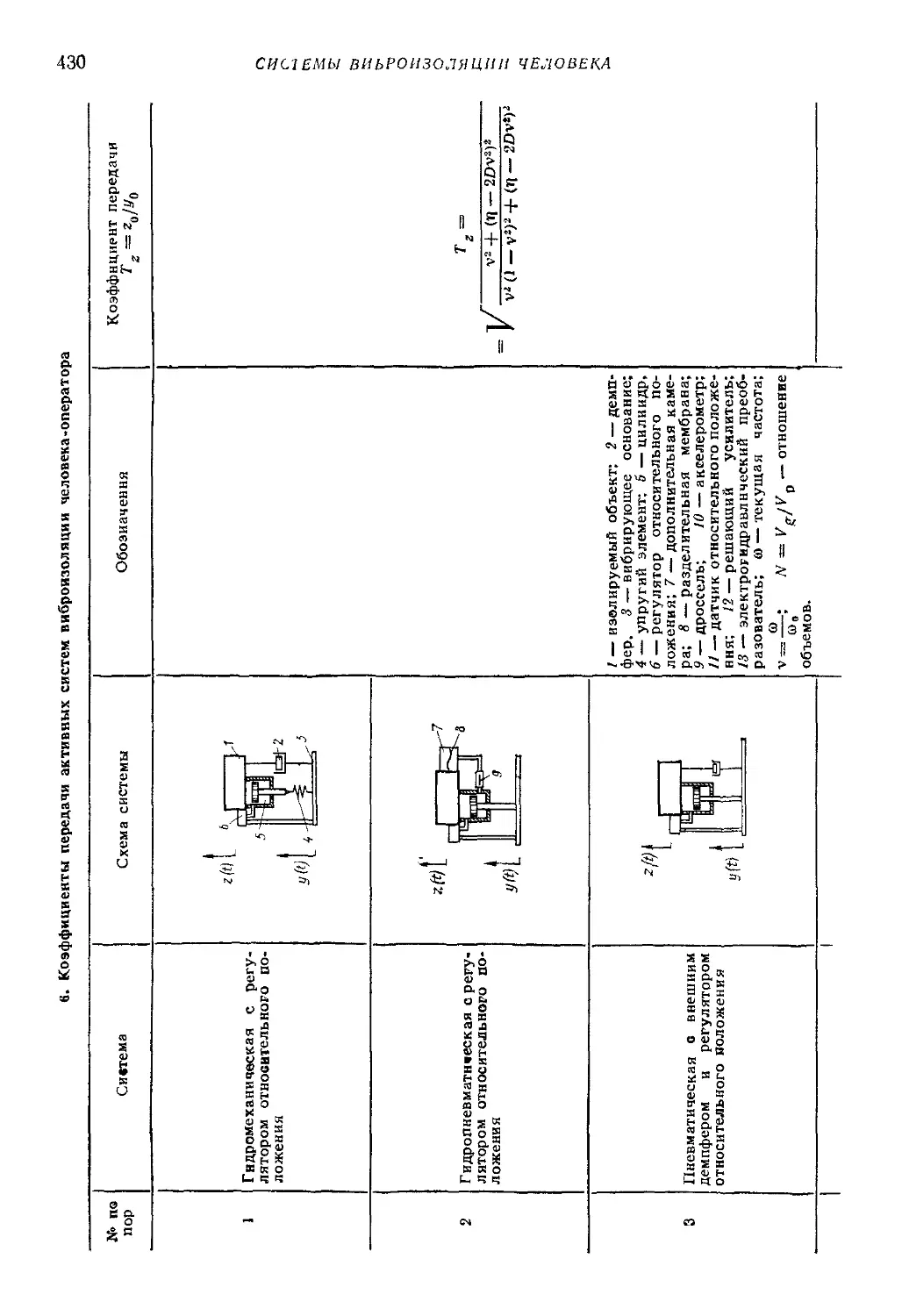
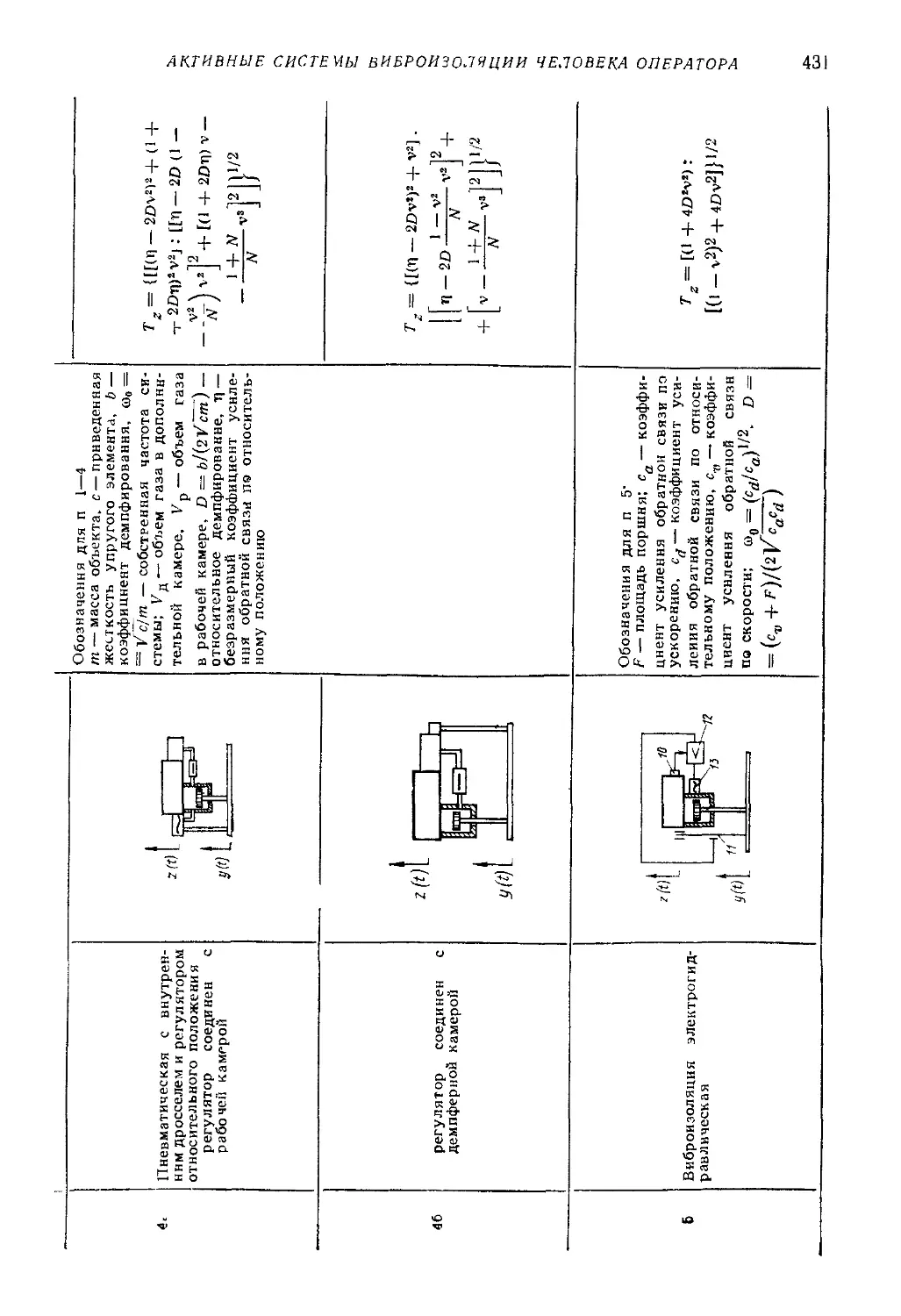
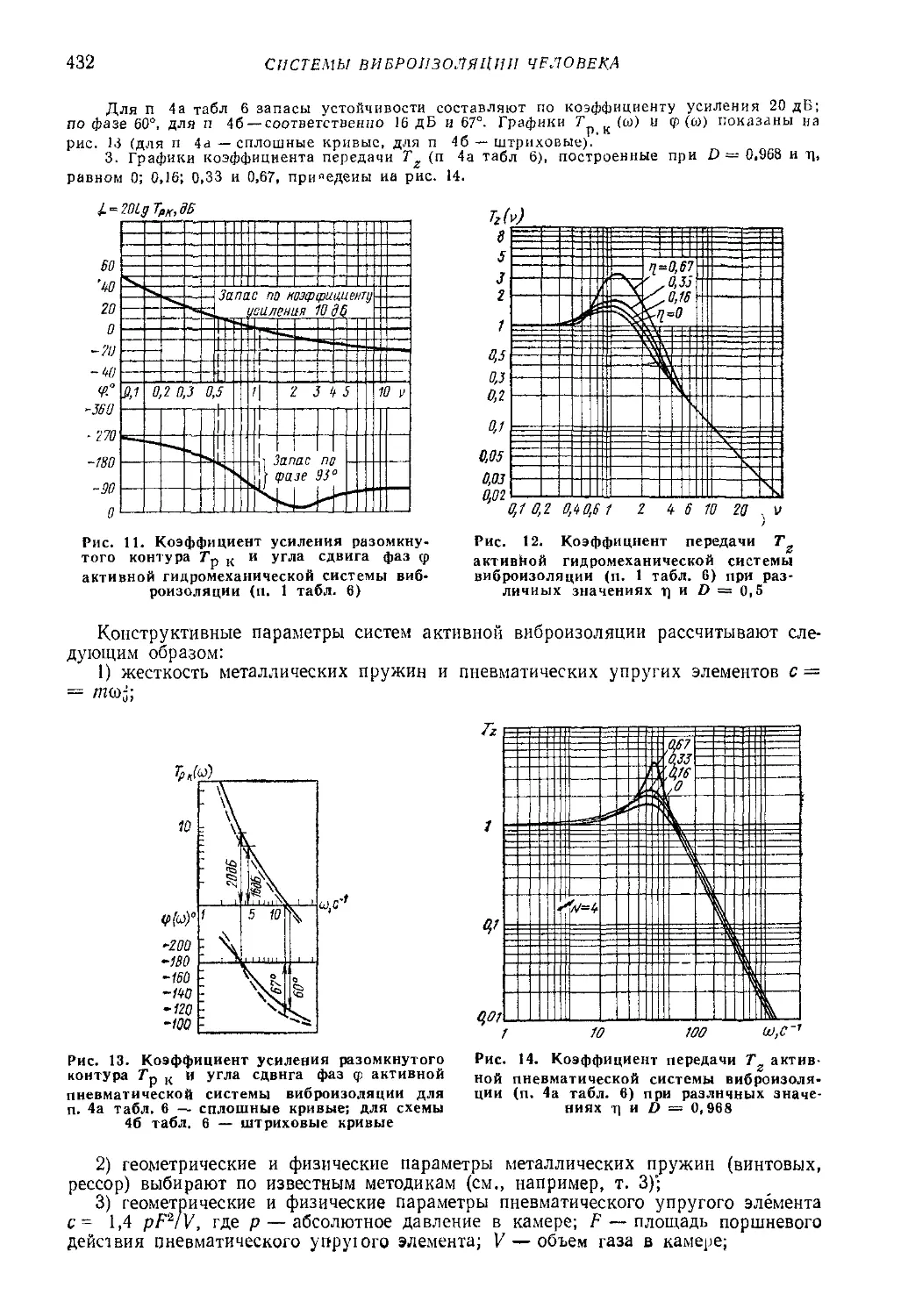
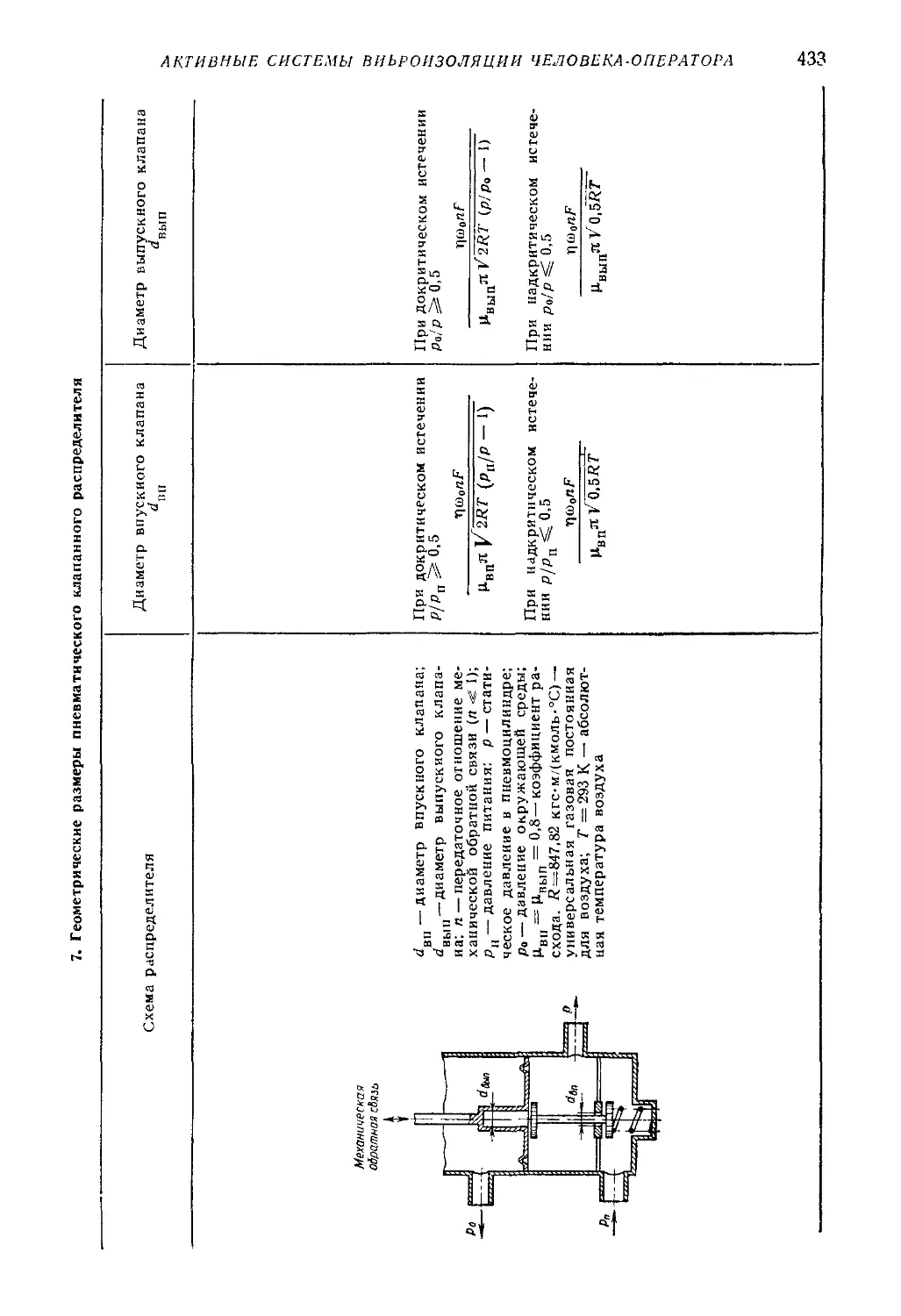
4. Активные системы виброизоляции человека-оператора 428
Глава XX. Защита операторов ручных машин от вибрации (И. И, Быков-
Быковский, Б, Г. Гольдштейн, А. А. Гоппен) 434
1. Нормирование вибрации, передаваемой на руки операторов . . . 434
2. Снижение вибрационной опасности безударных ручных машин 436
3. Снижение вибрационной опасности ручных машин ударного дей-
действия , , , 439
4. Особенности виброизоляции и динамического виброгашения
в ручных машинах 440
5. Получение и оценка вибрационных характеристик ручных машин 442
6. Система обеспечения защиты операторов ручных машин от виб-
вибрации , , , , , t ........... 1 i •¦•• 433
Список литературы .,,,.,... , 445
Предметный указатель .,...,,,, 453
ПРЕДИСЛОВИЕ
Создание высокопроизводительных машин и скоростных транспортных средств,
форсированных по мощностям, нагрузкам и другим рабочим характеристикам,
неизбежно приводит к увеличению интенсивности и расширению спектра вибрацион-
вибрационных и виброакустических полей. Этому способствует также широкое использова-
использование в промышленности и строительстве высокоэффективных вибрационных и вибро-
виброударных процессов. Вредная вибрация нарушает планируемые конструктором за-
законы движения машин, механизмов и систем управления, порождает неустойчивость
процессов и может вызвать отказы и полную расстройку всей системы. Из-за вибра-
вибрации увеличиваются динамические нагрузки в элементах конструкций, стыках и
сопряжениях, снижается несущая способность деталей, инициируются трещины,
возникают усталостные разрушения. Действие вибрации может приводить к тран-
трансформированию внутренней структуры материалов и поверхностных слоев, изме-
изменению условий трения и износа на контактных поверхностях деталей машин, нагреву
конструкций.
Вибрация приводит к индуцированию шума, являющегося важным экологиче-
экологическим показателем среды обитания человека. Вибрация оказывает и непосредственное
влияние на человека,*снижая его функциональные возможности и работоспособность.
В условиях вибрации нарушается острота зрения и светоощущения, ухудшается
координация движений, меняется реакция и пороги чувствительности, ослабевает
память, повышаются энергетические затраты. Длительное действие вибрации может
привести к ухудшению самочувствия и поражению отдельных систем организма:
сердечно-сосудистой, нервной, кровеносной, вестибулярного аппарата и других,
изменению мышечных и костных тканей. Поэтому особое значение приобретают
методы и средства уменьшения вибрации. Совокупность таких методов и средств
принято называть виброзащитой.
Проблемы виброзащиты возникают практически во всех областях современной
техники, и их решение существенно опирается на специфику системы или реализуе-
реализуемого ею динамического процесса. Выбор законов движения исполнительных орга-
органов машин, механизмов, реализующих эти движения, геометрических форм деталей
и конструкций, вида их сопряжений и механических характеристик, материалов и
способов обработки наряду с функциональными требованиями должен отвечать тре-
требованиям вибронадежности и вибробезопасности. Изложению методов рациональ-
рационального проектирования и настройки машин посвящены в значительной мере т. 3 и
частично т. 4 справочника."Однако только указанных методов, как правило, ока-
оказывается недостаточно и тогда необходимо прибегнуть к использованию более об-
общих подходов, зачастую связанных с введением в конструкцию специальных вибро-
виброзащитных устройств и систем. Этим вопросам и посвящено главным образом содер-
содержание т. 6.
При отборе материала данного тома предпочтение отдавалось наиболее универ-
универсальным подходам, обеспеченным серийно выпускаемыми средствами виброзащиты,
К таким подходам относится балансировка деталей и узлов машин, конструкцион-
конструкционное демпфирование, виброизоляция оборудования, использование средств и систем
Динамического гашения колебаний, В томе излагаются новые задачи и подходы,
10 ПРЕДИСЛОВИЕ
вызванные х жизни проблемами создания новой техники и ужесточением норм на
вибрацию, — это прежде всего различные аспекты проблемы защиты человека от
вибрации, а также вопросы определения и рационального выбора демпфирующих
характеристик материалов, широко используемых и специально разрабатываемых
в настоящее время для поглощения вибрации.
Изложение ведется таким образом, чтобы не только предоставить инженеру до-
достаточный набор методов и средств уменьшения виброактивноста и соответствую-
соответствующие нормативные данные, но и познакомить его с теорией и принципами, лежа-
лежащими в их основе, способами оценки эффективности различных подходов, реализуе-
реализуемыми динамическими закономерностями, методами расчета и настройки. По замыслу
авторов, это позволит использовать материал справочника как специалистам, так
и инженерам, впервые столкнувшимся с проблемой виброзащиты. Для удобства
последних в болвшинстве разделов более общие положения и рекомендации выне-
вынесены в начало изложения. Авторы стремились наиболее полно отразить состояние
проблемы виброзащиты на сегодняшний день. Однако быстрое развитие техники
ставит новые задачи, и если данный том справочника поможет найти ключи к их ре-
решению, то основную цель можно считать достигнутой,
К, В, ФРОЛОВ
Часть первая
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ
ИСТОЧНИКОВ КОЛЕБАНИЙ
Глава I
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
I. ИСТОЧНИКИ КОЛЕБАНИЙ И ОБЪЕКТЫ ВИБРОЗАЩИТЫ
При постановке задач виброзащиты в исследуемой механической системе обычно
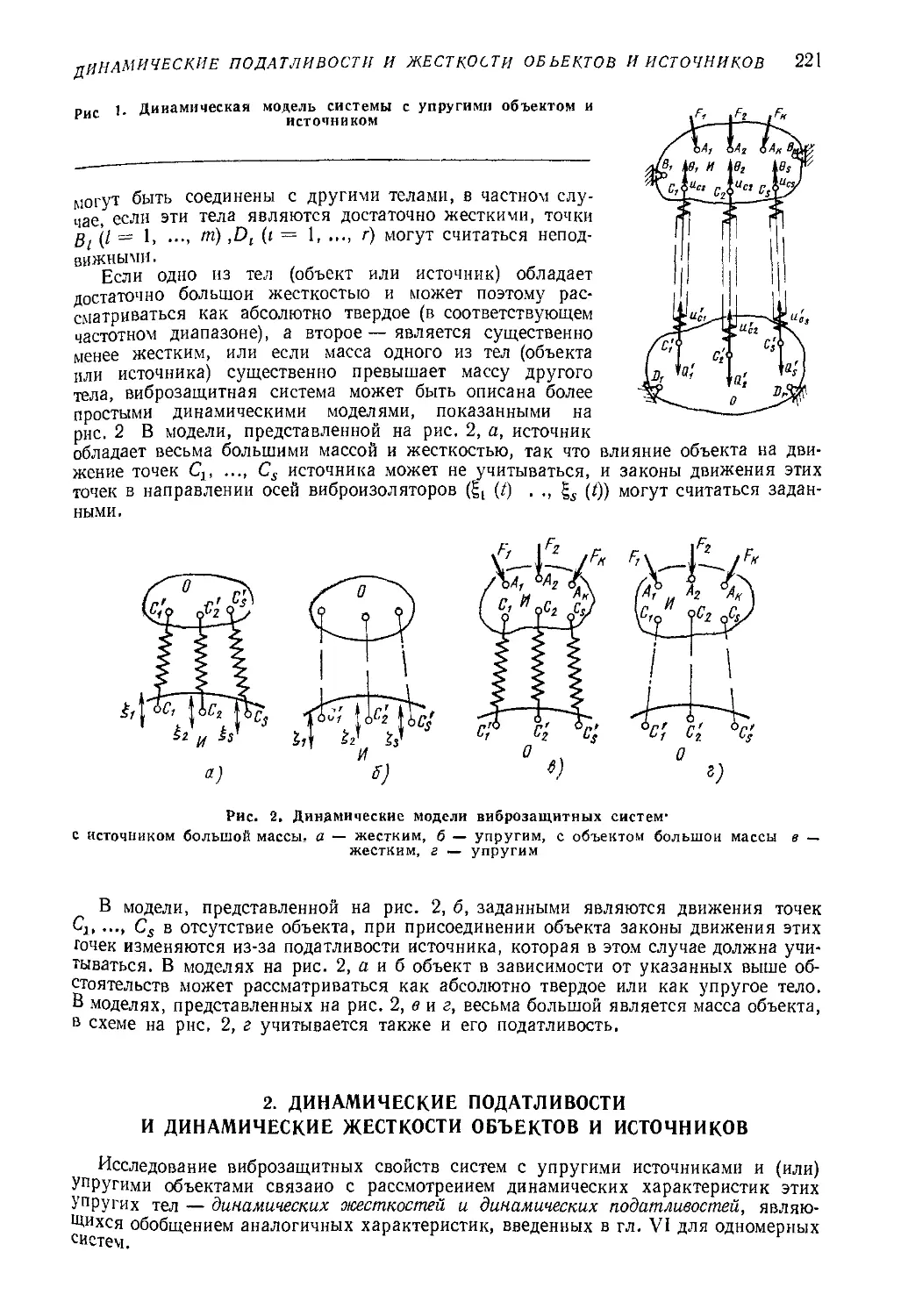
выделяют две подсистемы: И и О (рис. 1), соединенные между собой связями С.
К подсистеме И относят ту часть механической системы, в которой непосредственно
происходят физические процессы, вызывающие колебания; эта подсистема называется
источником колебаний. Подсистема О — та часть механической системы, колебания
Рис. 1. Система источник—объект
которой требуется уменьшить; она называется объектом виброзащиты. В дальней-
дальнейшем, для сокращения, подсистемы И к О будут называться источником и объектом.
Силы, возникающие в связях С, соединяющих объект с источником, и вызывающие
колебания объекта, называются динамическими воздействиями.
Рассмотрим некоторые примеры.
1. Двигатель, установленный на фундаменте, имеет неуравновешенный ротор. Задача
виброзащиты — уменьшение колебаний корпуса двигателя, вызванных неуравновешен-
неуравновешенностью ротора. Здесь источником является ротор, объектом виброзащиты — корпус дви-
двигателя, связанный с фундаментом, динамическими воздействиями —динамические реакции
опор ротора.
2. Для той же системы задача виброзащиты может быть поставлена по-другому: требуется
уменьшить колебания фундамента, вызванные как'неуравновешенностью ротора двигателя,
так и силами магнитного происхождения, возникающими в двигателе. В этом случае объект
виброзащиты — фундамент, связанный с основанием, на котором он установлен, источник —
двигатель, динамические воздействия — силы, возникающие в узлах крепления двигателя
к фундаменту.
3. Навигационный прибор установлен на самолете. Задача виброзащиты — уменьше-
уменьшение колебаний корпуса прибора Здесь источник — самолет со всеми установленными на нем
агрегатами, вызывающими колебания той точки корпуса самолета, в которой устанавли-
устанавливается прибор; объект — прибор; динамические воздействия — силы, возникающие в узлах
крепления прибора, акустические воздействия, связанные с колебаниями воздушной среды,
окружающей прибор, силы, возникающие в «побочных» связях прибора (кабелях, трубопро-
трубопроводах, коммуникационных системах и т. п ).
4. В той же системе ставится задача уменьшить колебания корпуса самолета в том месте,
где устанавливают прибор. В этом случае объектом виброзащиты становится корпус самолета
или часть корпуса с установленными на нем приборами, источником — остальная часть рас-
рассматриваемой системы.
5 Ставится задача о защите от вибрации тракториста, управляющего движущимся
трактором. Эта задача виброзащиты может решаться различными путями. Можно добиваться
Уменьшения колебаний шасси со всеми установленными на нем агрегатами; можно стре-
стремиться к уменьшению колебаний кабины водителя или только сиденья тракториста. В кв.-
ждом случае объект, источник и динамические воздействия будут определяться по-разному.
12
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
В некоторых случаях свойства объекта и связей не влияют на колебания тех
точек источника, в которых он соединяется с объектом. Например, колебания кор-
корпуса самолета в месте установки прибора при определенных условиях могут счи-
считаться независящими от свойств прибора и конструкции узлов креплений. В этих
случаях можно рассматривать движение объекта, считая заданными не динамиче-
динамические воздействия, а перемещения точек крепления связей к источнику; такие воз-
воздействия называются кинематическими.
Таким образом, задачи виброзащиты решаются при заданных динамических
или кинематических воздействиях. В дальнейшем динамические и кинематиче-
кинематические воздействия будут объединяться общим термином — механические воздействия,
2. МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ
Классификация механических воздействий. Механические воздействия принято
делить на три класса: а) линейные перегрузки; б) вибрационные воздействия; в) удар-
ударные воздействия.
Линейные перегрузки. Линейными перегрузками называются кинематические
воздействия, возникающие при ускоренном движении источника. Существенные
линейные перегрузки возникают на транспортных машинах, в особенности на лета-
летательных аппаратах, при увеличении скорости, торможении, а также при различных
маневрах летательного аппарата (вираж, разворот).
3
1
1
1
1
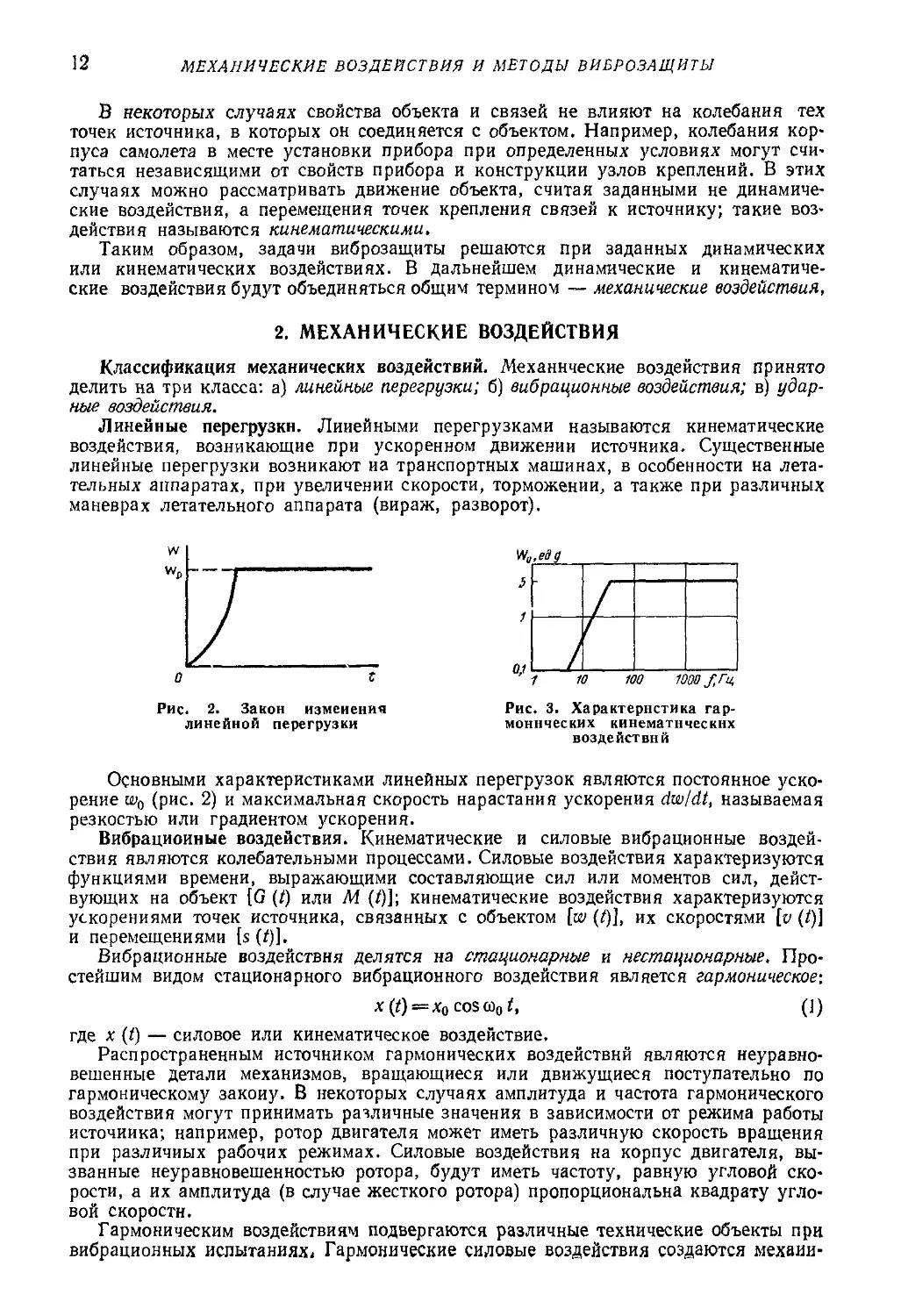
Рис. 2. Закон изменения
линейной перегрузки
ю то юоо /,гц
Рис. 3. Характеристика гар-
гармонических кинематических
воздействий
Основными характеристиками линейных перегрузок являются постоянное уско-
ускорение w0 (рис. 2) и максимальная скорость нарастания ускорения dw/dt, называемая
резкостью или градиентом ускорения.
Вибрационные воздействия. Кинематические и силовые вибрационные воздей-
воздействия являются колебательными процессами. Силовые воздействия характеризуются
функциями времени, выражающими составляющие сил или моментов сил, дейст-
действующих на объект [G (t) или М (<)]; кинематические воздействия характеризуются
ускорениями точек источника, связанных с объектом [w (t)], их скоростями [v (t)\
и перемещениями [s (/)].
Вибрационные воздействия делятся на стационарные и нестационарные. Про-
Простейшим видом стационарного вибрационного воздействия является гармоническое;
X (t)=X0 COS (i>ot, (I)
где х (f) — силовое или кинематическое воздействие.
Распространенным источником гармонических воздействий являются неуравно-
неуравновешенные детали механизмов, вращающиеся или движущиеся поступательно по
гармоническому закону. В некоторых случаях амплитуда и частота гармонического
воздействия могут принимать различные значения в зависимости от режима работы
источника; например, ротор двигателя может иметь различную скорость вращения
при различных рабочих режимах. Силовые воздействия на корпус двигателя, вы-
вызванные неуравновешенностью ротора, будут иметь частоту, равную угловой ско-
скорости, а их амплитуда (в случае жесткого ротора) пропорциональна квадрату угло-
угловой скорости.
Гармоническим воздействиям подвергаются различные технические объекты при
вибрационных испытаниях. Гармонические силовые воздействия создаются механи-
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ 13
ческими, электромагнитными или электродинамическими вибраторами, а гармони-
гармонические кинематические воздействия — механическими, электродинамическими или
гидравлическими вибрационными стендами. Сравнительная простота устройств,
воспроизводящих гармонические воздействия, обусловливает широкое распрост-
распространение испытаний на гармоническую вибрацию. При этом нормативными докумен-
документами определяются диапазон изменения частоты вибрационного воздействия и зна-
значение амплитуд в этом частотном диапазоне. График, задающий гармоническое
кинематическое воздействие (рис. 3), строится обычно в логарифмических коорди-
координатах; при этом степенные зависимости амплитуды от частоты изображаются отрез-
отрезками прямых.
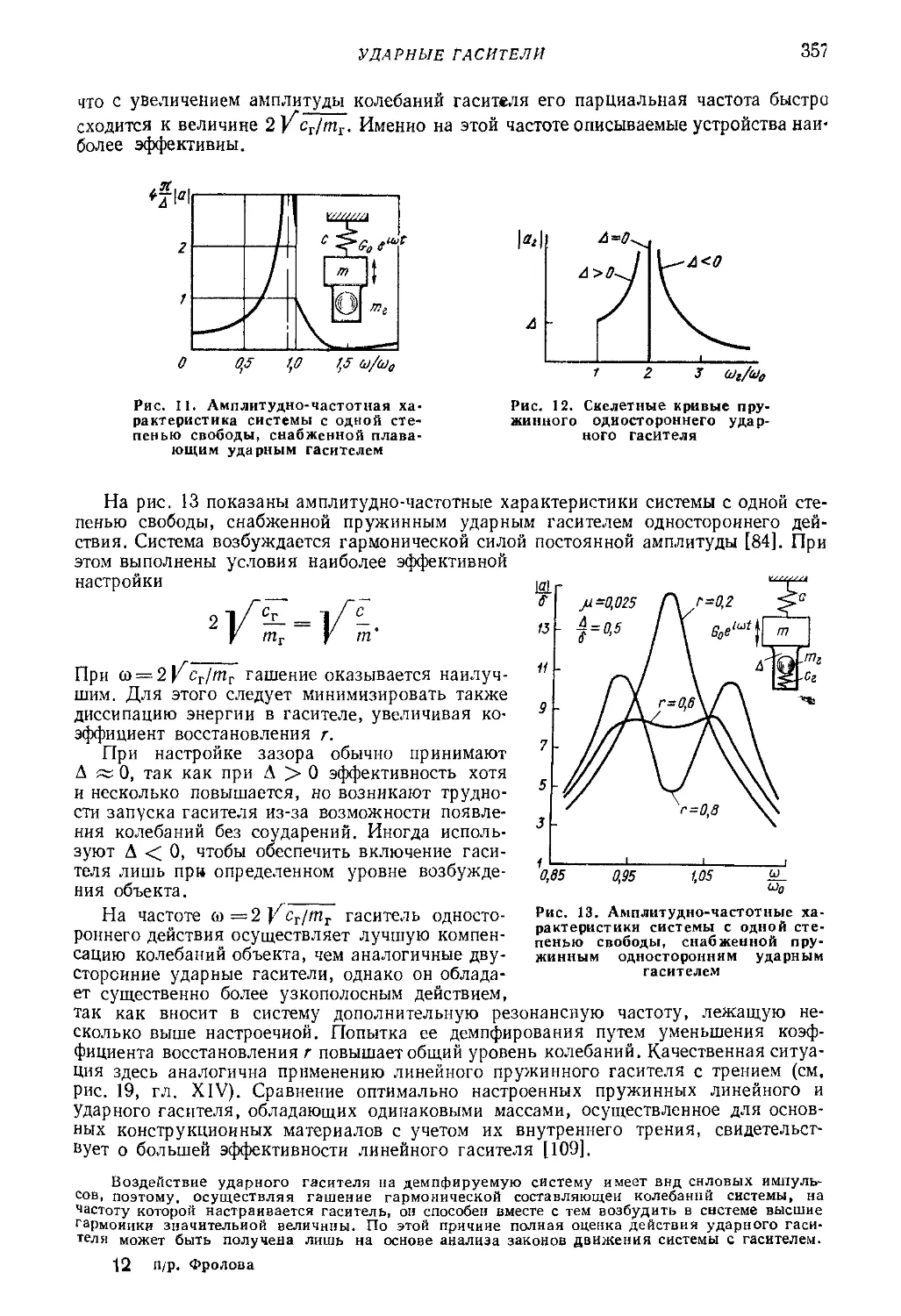
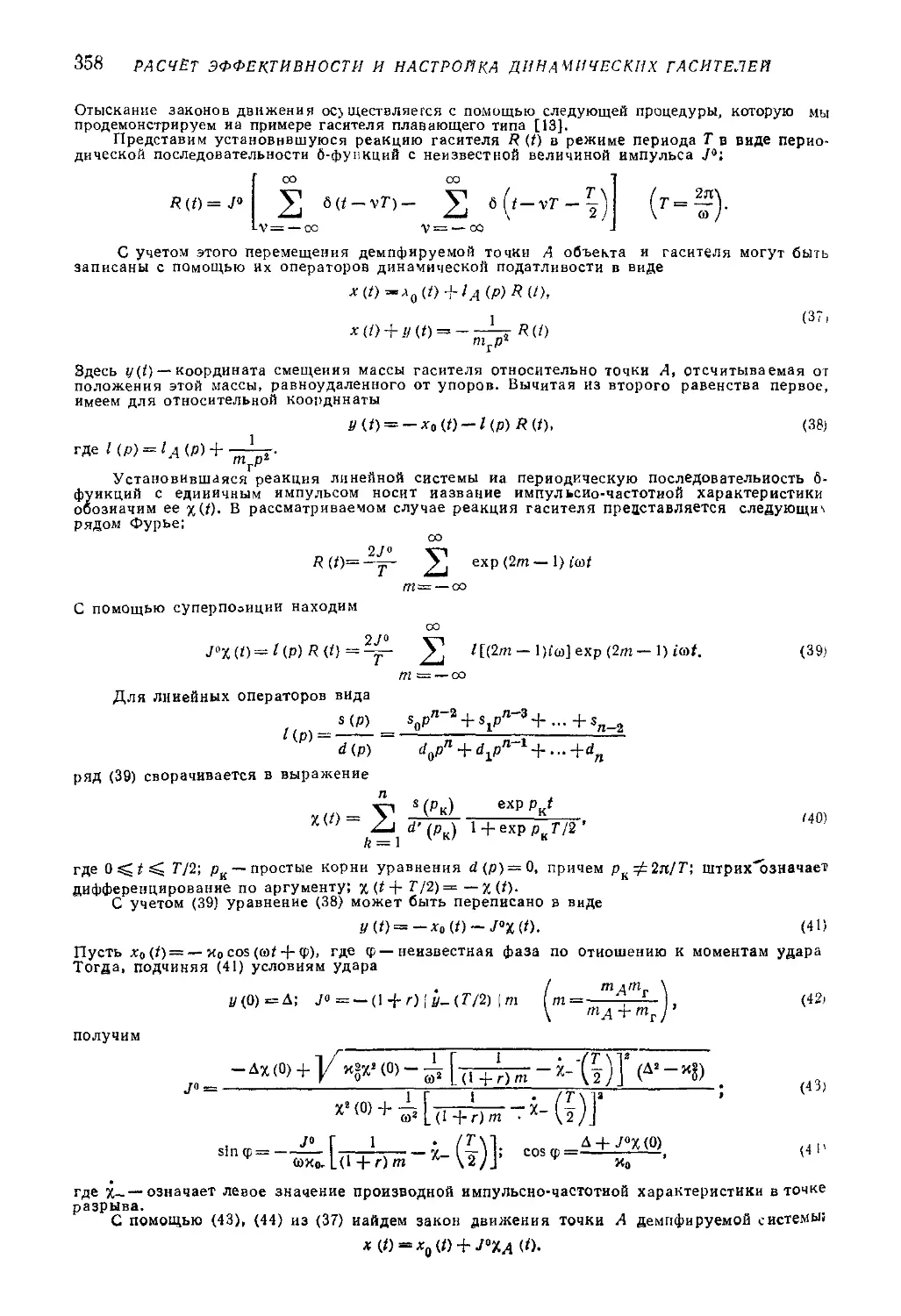
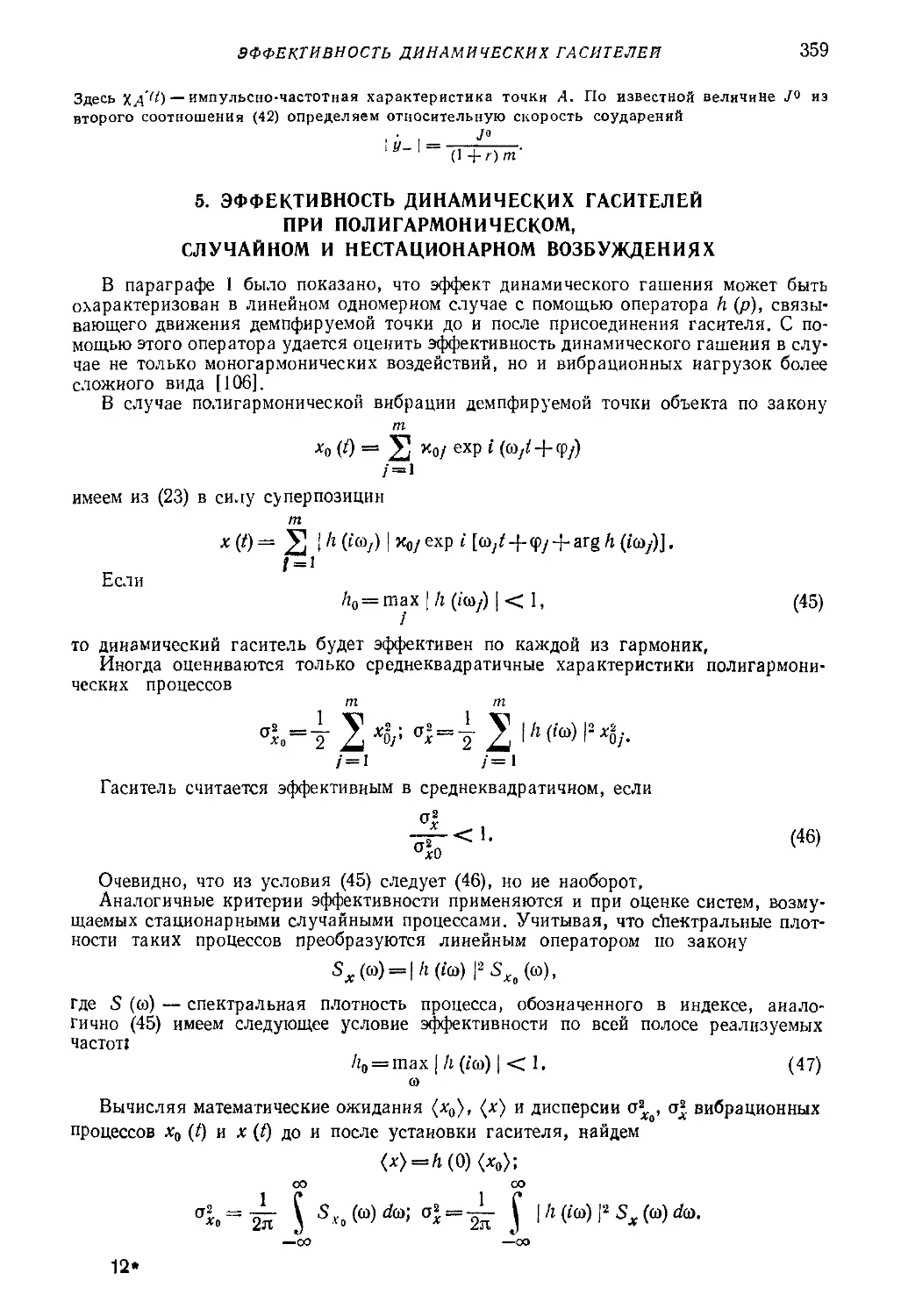
О кинематических характеристиках гармонических котебанпй и их комплексном
представлении см. т. 1, гл. I, параграф 4.
В машинах, содержащих цикловые механизмы, при установившемся движении
возникают периодические механические воздействия
*(<)=¦ 2 (eftcosfta>o/ + &*slntoo0. B)
*=i
Часто в таких системах можно пренебречь влиянием всех гармоник, кроме одной,
и считать воздействие гармоническим. Это возможно в тех случаях, когда одна из
гармоник (обычно первая) превалирует над остальными или когда одна из гармоник
воздействия является резонансной для данного объекта.
При спектральном анализе периодических процессов (см. т. 1, гл. I, параграф 4)
можно ограничиться определением коэффициентов Фурье для тех гармоник воздей-
воздействия, частоты которых попадают в область спектра собственных частот объекта.
На многих современных технических объектах стационарные вибрационные воз-
воздействия не являются периодическими, закон их изменения во времени носит нере-
нерегулярный, хаотический характер. Основными причинами этой хаотичности являются
существование большого числа независимых источников вибрации и нерегулярность
некоторых физических процессов, вызывающих появление вибрационных воздейст-
воздействий (например, процессов горения в реактивном двигателе, аэродинамических сил
при турбулентности потока и т. п.).
Во многих случаях достаточно адэкватным описанием хаотической вибрации
может служить полигармоническая функция времени
N
*@= 2 (akcosakt + bks\n(akt) C)
*= 1
(предполагается, что в вибрационном воздействии постоянная составляющая отсут-
отсутствует). В частности, таким образом может быть приближенно представлена сумма
конечного числа периодических процессов
S 00
х @ =• 2 2 (ам cos Ш^ + ьмsin 1й)^- D)
А=1/=1
Если среди частот (о# окажутся несоизмеримые, то эта сумма будет описывать
почти периодический процесс (см. т. 1, гл. I, параграф 5). Полигармонический про-
процесс с несоизмеримыми частотами адэкватно описывает вибрационное воздействие,
возбуждаемое несколькими независимыми источниками, поскольку при этом моде-
моделируются изменения фазовых сдвигов («набегание» фазы) между отдельными компо-
компонентами.
Нестационарные вибрационные воздействия возбуждаются чаще всего переход-
переходными процессами, происходящими в источниках. Например, силовое воздействие
на корпус двигателя с неуравновешенным ротором, возникающее при разгоне, может
быть приближенно описано выражением
х — а((о) tosa>(l)t, E)
где и [t) — закон изменения угловой скорости ротора.
14 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
При торможении самолета, совершившего посадку, возникают колебания, вызы-
вызывающие нестационарные вибрационные воздействия на аппаратуру и экипаж само-
самолета.
Сложность представления вибрационных воздействий в виде явных функций вре-
времени привела к широкому использованию различных характеристик, отражающих
наиболее существенные свойства этих процессов. Характеристиками вибрационного
процесса х (t) называются функционалы от х (t), зависящие от некоторых парамет-
параметров %, .,„ ut:
Фх(иьи3 щ)=Фх{х@,и1 «J. F)
Аналогичным образом определяются совместные характеристики процессов хх (t), ,„
.... хк (f):
Ф*г. ,, хк («1. - . "<) = % ,,. ... , хь {*(<) **«}• G)
Определение характеристик процессов по записям их реализаций является зада-
задачей анализа вибрации (см. т. 5).
Преобразование Фурье. Преобразованием Фурье абсолютно интегрируемого на
бесконечном интервале процесса х (t), называется комплексная функция со:
f x(t)e-ie>tdt = 2m{x(t)u-'«>t} = U((>>)-iV((i>). A0)
j t/1(<a)-iVi((o). (8)
—;оо
Вещественные функции
ОО 00
?/х(й>)= $ х @ cos Ш dt; Vi(co)= $ x (t) sin atdt (9)
— ОО —00
называются соответственно косинус-преобразованием и синус-преобразованием. Для
процессов A) — D) интеграл (8) расходится; для этих процессов под преобразова-
преобразованием Фурье понимается функция
X(iw)=> lira tL
т-"х>
Здесь m { } — функционал, равный среднему значению функции, стоящей в скоб-
скобках, на бесконечном интервале;
?/(fi>)=»2m{;c@cosarf}; V (a) =*2m{x(f) sinco*}. A1)
Для гармонической функции A)
(/(со0) = х0; (У(о)=0 при й)^со0; V(o)) = O.
Для периодического процесса B)
U(kao) = ak; V (кщ) — Ьк\ U (со) = V (со) = 0 при
Для полигармонического процесса C)*
?/(юА) = а?', V @)^) = 6^; i/ (u>) = V (a») = 0 при
В дальнейшем используется также функция
т
j-H-'Vz-M. A2)
i f
г
-г
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ
15
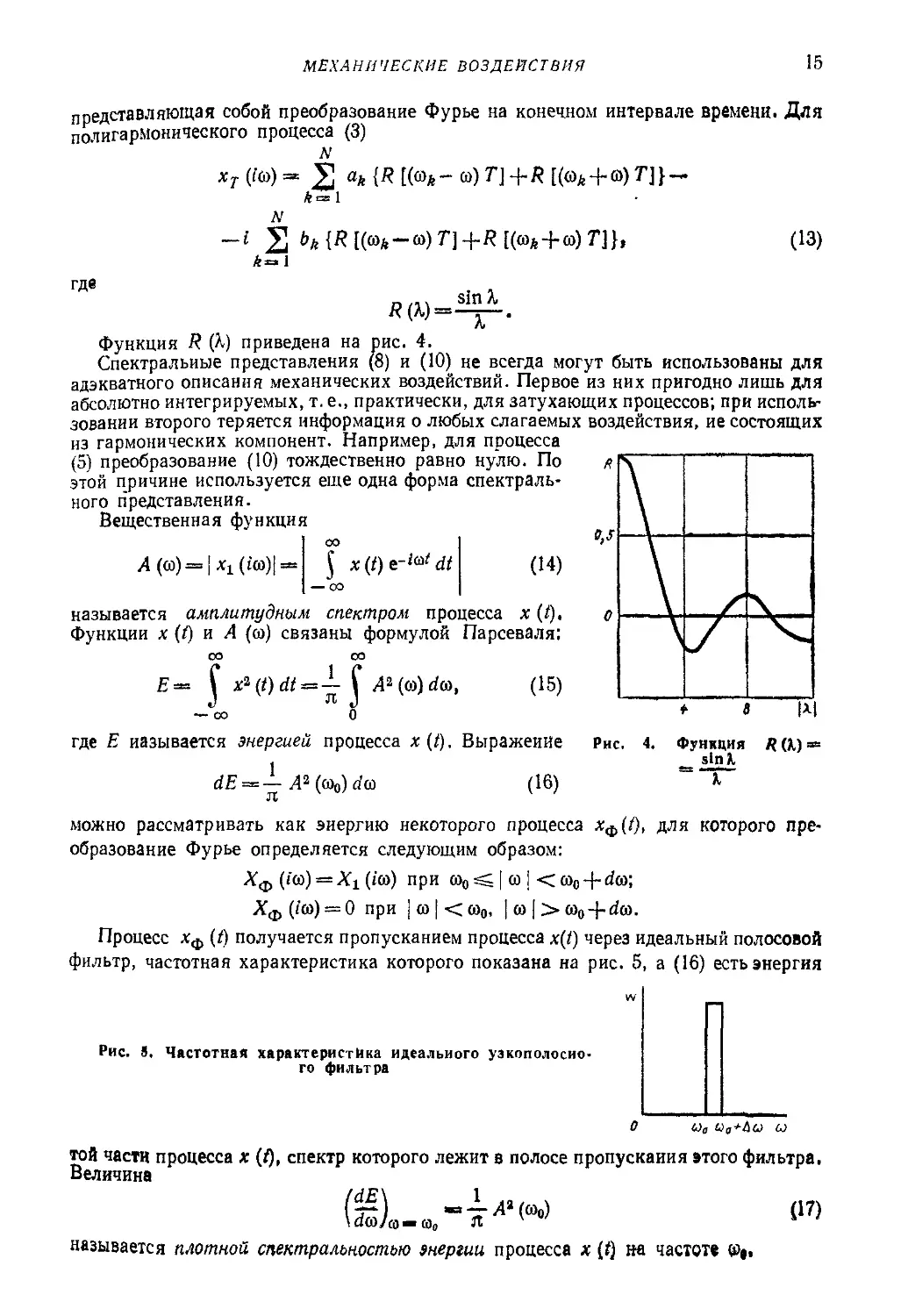
представляющая собой преобразование Фурье на конечном интервале времени. Для
полигармонического процесса C)
N
A3)
где
sin А,
Функция Я (Я) приведена на рис. 4.
Спектральные представления (8) и A0) не всегда могут быть использованы для
адэкватного описания механических воздействий. Первое из них пригодно лишь для
абсолютно интегрируемых, т. е., практически, для затухающих процессов; при исполь-
использовании второго теряется информация о любых слагаемых воздействия, не состоящих
из гармонических компонент. Например, для процесса
E) преобразование A0) тождественно равно нулю. По
этой причине используется еще одна форма спектраль-
спектрального представления.
Вещественная функция
B,S
A4)
называется амплитудным спектром процесса х (t).
Функции х (t) и А (ш) связаны формулой Парсеваля:
оо оо
A5)
-!¦ Г
\
\
\
У
IM
где Е называется энергией процесса x(t). Выражение
1
Рис. 4.
Функция
sin».
можно рассматривать как энергию некоторого процесса хф({), для которого пре-
преобразование Фурье определяется следующим образом:
Хф (но) = Хх (iw) при ш0 г$ | со | <; соо+rfco;
^ф(/со) = 0 при |и|<ш0, |ш|>со0 + й(о.
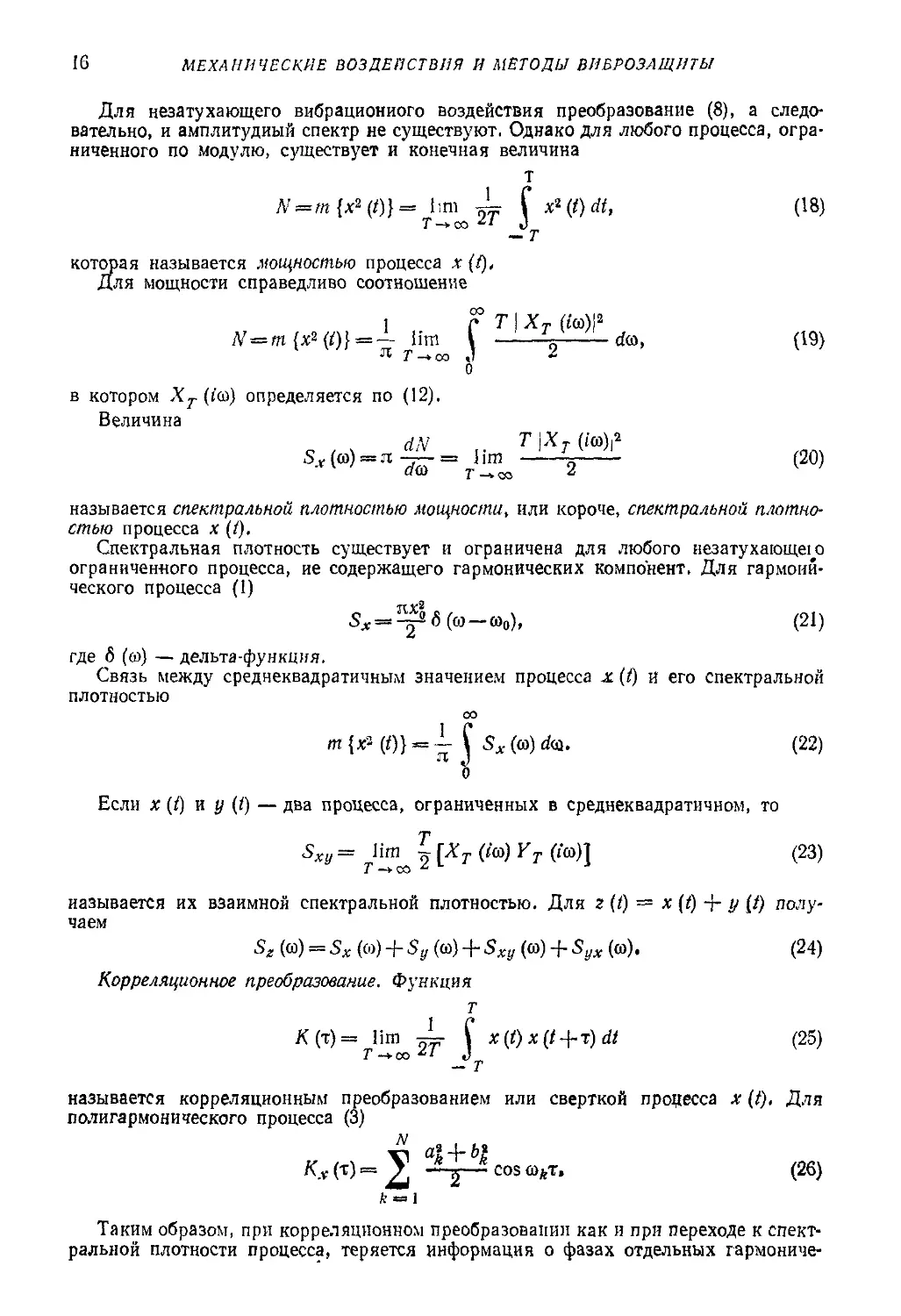
Процесс хф (t) получается пропусканием процесса x(t) через идеальный полосовой
фильтр, частотная характеристика которого показана на рис. 5, а A6) есть энергия
Рис. S. Частотная характеристика идеального узкополосно-
узкополосного фильтра
той части процесса х (f), спектр которого лежит в полосе пропускания этого фильтра,
Величина
/ЛР\ 1
A7)
называется плотной спектральностью терши процесса х (t) на частоте №».
16 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВЛБРОЗАЩИТЫ
Для незатухающего вибрационного воздействия преобразование (8), а следо-
следовательно, и амплитудный спектр не существуют, Однако для любого процесса, огра-
ограниченного по модулю, существует и конечная величина
т
#-/» {*»(/)}- lim -L f ifl(f)dt, A8)
— г
которая называется мощностью процесса х (t),
Для мощности справедливо соотношение
~* о
в котором ХТ (to) определяется по A2).
Величина
dN T\XT (to)i4
Sv((o) = n -j— = Jim -ц B0)
называется спектральной плотностью мощности, или короче, спектральной плотно-
плотностью процесса х (/).
Спектральная плотность существует и ограничена для любого незатухающею
ограниченного процесса, не содержащего гармонических компонент. Для гармони-
гармонического процесса A)
Sx = -рт-2 б (со—ю0), B1)
где б (со) — дельта-функция.
Связь между среднеквадратичным значением процесса & (i) и его спектральной
плотностью
со
Sx (со) d<a. B2)
Если х (t) и у @ — два процесса, ограниченных в среднеквадратичном, то
Sxy = TUm^ ~ [ХТ (ш) Ут ((а)] B3)
называется их взаимной спектральной плотностью. Для г (f) = x (f) -j- у (t) полу-
получаем
S, (а) = 5Л (со) + Sy (a) + S,,, (<в) + S^ (со). B4)
Корреляционное преобразование. Функция
Г
К(т)= Ига т4 f x(i)x(t+j)dt B5)
называется корреляционным преобразованием или сверткой процесса х (f). Для
полигармонитеского процесса C)
Кх (х) = У ¦¦¦ ^ ¦¦ cos coftT, B6)
Таким образом, при корреляционном преобразовании как и при переходе к спект-
спектральной плотности процесса, теряется информация о фазах отдельных гармониче-
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ 17
ских компонент. Для процесса, не содержащего гармонических компонент,
Нт Кх(т)=0-
Корреляционное преобразование и спектральная плотность процесса связаны
между собой преобразованием Фурье:
00
S* (й)) = 2л \ Kx{t)t~imdx. B7)
— 00
При т = О Кх (т) достигает максимального значения;
Кх@) — т{хЦ()}, B8)
Функция распределения и плотность распределения. Функцией распределения
Wx (и) механического воздействия х (t) называется относительная продолжитель-
продолжительность интервалов времени, в течение которых х sg и. При этом
т
Wx{u)= lim -,= С f\[u — x(t)]dt=m{i\[u-x(t)]}< B9)
Г->со *' J
где ii (и) — единичная функция,
Производная
dW * (и) 1 Г
называется плотностью распределения процесса x(t).
Если ф (х) — некоторая ограниченная функция, то
Г х*
m {<Р [х (t)]) — Hm -урр \ ф [x(t)] dt— \<p (u)wx(u)du, C1)
где х,, и дс* — наименьшее и наибольшее значения х (f).
Наибольший практический интерес представляют моментные характеристики
вибрационных воздействий, являющиеся средними значениями целых степеней
от х (t):
X*
Mk = m{xk @}=j ukw(u)du. C2)
xt
В силу сделанного ранее предположения
Mi = tn {x (t)\ =0. C3)
^Функция распределения процесса х (t) совпадает с функцией распределения слу-
случайной величины — значения х (t) при случайном выборе ( (т. е. если i случайная
величина, значения которой равномерно распределены на бесконечном интервале).
Поэтому wx (и) обладает всеми свойствами плотности распределения случайной
величины. В частности,
х*
\ w (и) d« = l,
Плотность распределения полигармонического процесса C) является функцией ak
и bk и не зависит от частот соЛ. Если все (йк несоизмеримы между собой (что можно
принять в случае, когда отдельные гармоники механического воздействия возбуж-
возбуждаются независимыми источниками), то моментные характеристики и плотность рас-
18 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
пределения не зависят от фаз. В этом случае для процесса C)
при lul<A; C4)
а>л («)=0 при | и , ^ Л,
Здесь /„ — функция Бесселя нулевого порядка,
Первые моменты полигармонического процесса с несоизмеримыми частотами
Л' , N .
U
2
;
Здесь 2' означает сумму тех членов, для которых г, k, l различны.
Совместная функция распределения процессов х (t) и у (t)
W (и, и) = т{ц [и-хф] ц [v~y(t)}t C6)
представляет собой относительную продолжительность интервалов времени, в те-
течение которых одновременно выполняются неравенства
х @ sc и, у @ =? v.
Совместная плотность распределения
d2W (и г/1
W{U'V) = дидо ="И6 [«-*(/)] 6 ft.-j/(/)]}. C7)
При исследовании вибрационных воздействий наибольший интерес представляет
совместная плотность распределения процесса х (t) и его производной х (i):
wx(u, v) = m{8[u-x(t)]8[v~x(t)}}. C8)
Через wx (и, v) выражается такая важная характеристика вибрационного воз-
воздействия, как среднее число пересечений уровня х = а за единицу времени:
со
v(a)= j vwx(a,v)dv. C9)
— со
Эта характеристика имеет непосредственное отношение к исследованию устало-
усталостных явлений в объекте. Величина
оо
<n = yv@) = i. j.vw(9,v)dv D0)
— оо
называется средней частотой вибрационного воздействия.
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ 19
Плотность распределения большого числа независимых вибрационных воздей-
воздействий, сравнимых по уровню, может считаться близкой к гауссовскому нормальному
закону:
wx («) = __, ехр/-^-), D1)
У 2 V 2*21
где х* = Mt. При этом
Wx {Ut v)wa l exp f^Jt-Xr) D2)
где ia — среднее значение квадрата к (t). Средняя частота нормального процесса
D3)
Близость суммы большого числа независимых вибрационных воздействий (на-
(например, полигармонического процесса с большим числом гармоник, возбуждаемых
независимыми источниками) к нормальному процессу не обеспечивается при боль-
больших значениях х (/) (в «хвостах» закона распределения).
Диапазон, в котором располагаются частоты полигармонических воздействий,
возникающих в современных технических объектах, весьма широк. Полигармони-
Полигармонические воздействия, охватывающие диапазон, превышающий несколько октав
(Итах/wmin >Ю), называются широкополосными; если ширина диапазона мала
по сравнению со средней частотой процесса, воздействие называется узкополосным.
Узкополосные воздействия проявляются в форме биений (см. т. 1, гл. I, параграф 5).
При решении задач виброзащиты учет ширины полосы механических воздейст-
воздействий имеет первостепенное значение. В частности, от широкополосности воздействия
зависит выбор динамической модели (расчетной схемы) защищаемого объекта; она
должна выбираться с таким расчетом, чтобы были учтены собственные частоты объ-
объекта, расположенные в полосе спектра воздействия.
Высокочастотные вибрационные воздействия могут передаваться объекту не
только через элементы механических соединений его с источником, но и через окру-
окружающую среду (воздух, аоду). Такие воздействия, называемые акустическими, ока-
оказываются особенно интенсивными на современных реактивных летательных аппа-
аппаратах. Интенсивность акустических воздействий характеризуется величиной дав-
давления акустического поля; относительная эффективность измеряется в децибеллах.
Связь между абсолютной и относительной интенсивностями выражается фор'мулой
p^po-iA D4)
где р — давление, кгс/см2; D — относительное давление, дБ; р0 — пороговое дав-
давление, соответствующее D =-0; обычно принимают р0 = 2-10~10 кгс/см2.
Примерные значения амплитуд отдельных гармоник полигармонических кине-
кинематических воздействий, лежащих в различных частотных диапазонах, следующие:
тт г- Амплитуды,
Диапазон частот, Гц е„ J
0,1—10 0,001—1
10—150 0,5—5
150—500 4—15
500—2000 7—20
Случайные вибрационные воздействия. Характеристики механических виб(ицион-
ных воздействий, необходимые для расчета виброзащитных систем, определяются
либо расчетным путем, либо непосредственными измерениями в натурных условиях.
В обоих случаях существенную роль играют случайные факторы, влияние которых
заранее предопределить невозможно: разброс параметров источника и объекта, раз-
различие в режимах работы источника и т. п, Невозможность точного учета всех фак-
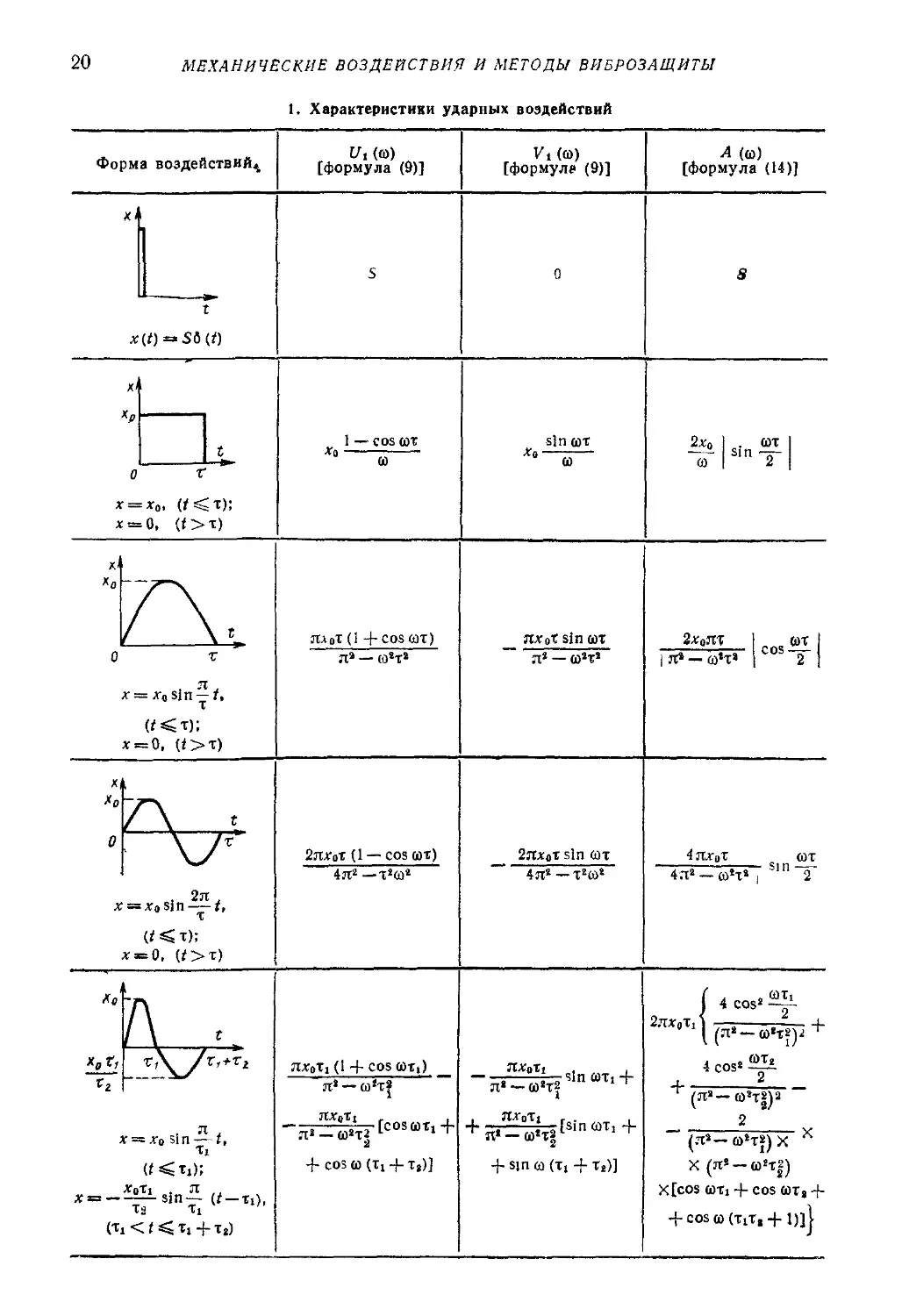
20 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
1. Характеристики ударных воздействий
Форма воздействий^
u. ».
t
*(O=>So(f)
X
0
* = *„. (*<т);
x = 0, « > т)
"о
/ \.
0 Г
X = Хп Sin — Г.
т
х — 2Я
(i^T);
л,
h ¦¦
* —лг.ип —*.
[формула (9)]
S
1 — COS COT
со
ЛЛ0ТA + COS СОТ)
л» — ю«т«
2ял-оТ A — cos сот)
4лг-12и"
n*0Ti(l + COS СОТ,)
л8 — со*т?
+ cos« (т, + та)]
[формул» (9)]
0
sin сот
А" со
«„т sin сот
Л* — ШаТ*
2лдгоТ sin сот
4 л* — тгсо*
л« —со'т| '
nxoit
+ sin со (Tj -Ь Ti)]
А (со)
[Формула A4)]
8
2*0
sin
COT
9
2хж
1 л% — со'т»
»T
cos 2
4лдгот ____ сот
4ла — со!т« " 2
2лх,хЛ j
\ (
icos2^
If—C0'T2)J
4 cos2 —~
2
X (Я! — «гт|)
X[COS COTi + COS COTj +
+ COS (В (TiT, + 1)]|
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЙ
21
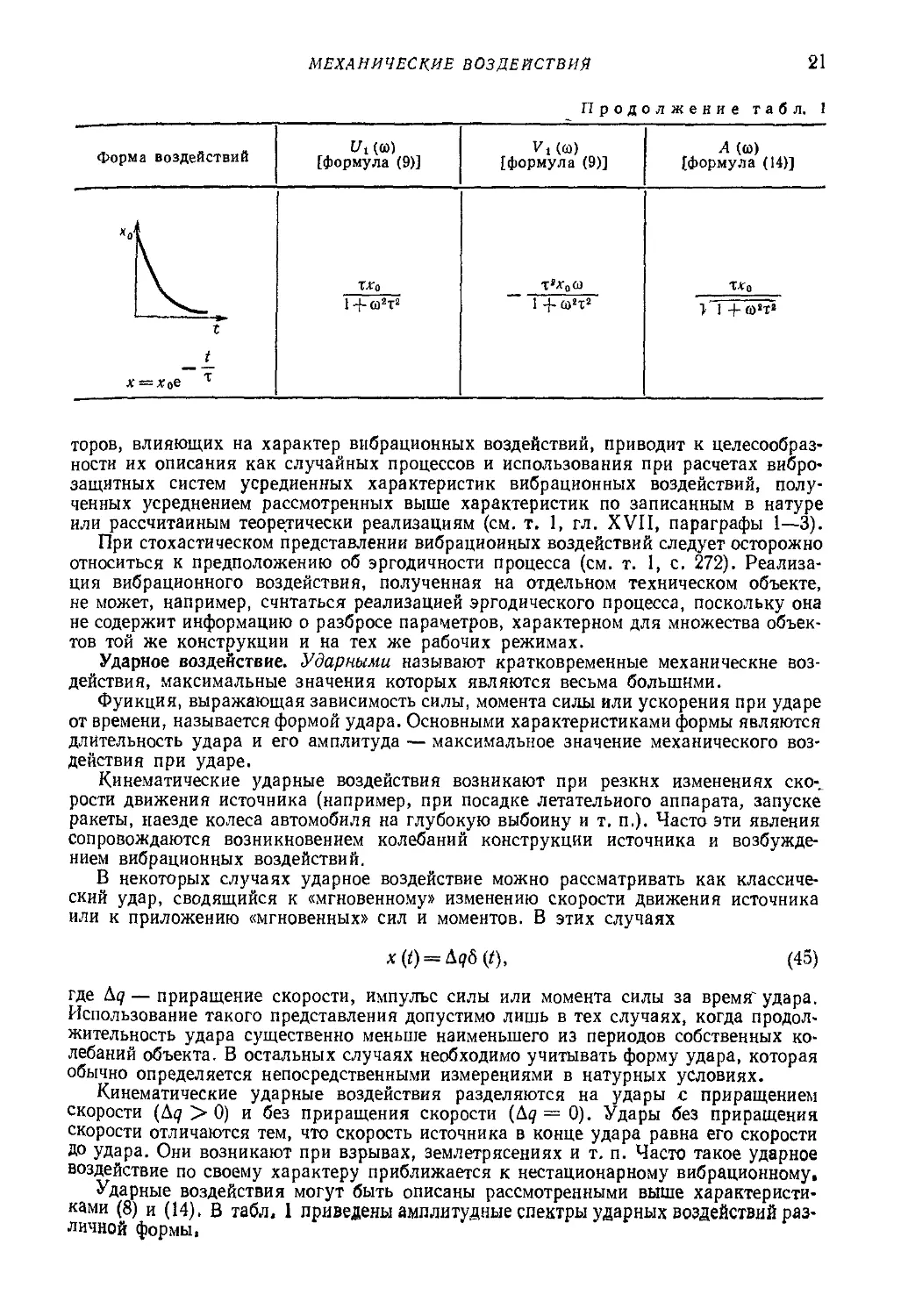
Продолжение табл. !
Форма воздействий
"о1
1
\
t
t
[формула (9)]
хха
[формула (9)]
1 + щ'х2
А (со)
[формула A4)]
XX,
торов, влияющих на характер вибрационных воздействий, приводит к целесообраз-
целесообразности их описания как случайных процессов и использования при расчетах вибро-
виброзащитных систем усредненных характеристик вибрационных воздействий, полу-
полученных усреднением рассмотренных выше характеристик по записанным в натуре
или рассчитанным теоретически реализациям (см. т. 1, гл. XVII, параграфы 1—3).
При стохастическом представлении вибрационных воздействий следует осторожно
относиться к предположению об эргодичности процесса (см. т. 1, с. 272). Реализа-
Реализация вибрационного воздействия, полученная на отдельном техническом объекте,
не может, например, считаться реализацией эргодического процесса, поскольку она
не содержит информацию о разбросе параметров, характерном для множества объек-
объектов той же конструкции и на тех же рабочих режимах.
Ударное воздействие. Ударными называют кратковременные механические воз-
воздействия, максимальные значения которых являются весьма большими.
Функция, выражающая зависимость силы, момента силы или ускорения при ударе
от времени, называется формой удара. Основными характеристиками формы являются
длительность удара и его амплитуда — максимальное значение механического воз-
воздействия при ударе.
Кинематические ударные воздействия возникают при резких изменениях ско-_
роста движения источника (например, при посадке летательного аппарата, запуске
ракеты, наезде колеса автомобиля на глубокую выбоину и т. п.). Часто эти явления
сопровождаются возникновением колебаний конструкции источника и возбужде-
возбуждением вибрационных воздействий.
В некоторых случаях ударное воздействие можно рассматривать как классиче-
классический удар, сводящийся к «мгновенному» изменению скорости движения источника
или к приложению «мгновенных» сил и моментов. В этих случаях
x(t) — &q8(t), D5)
где Aq — приращение скорости, импульс силы или момента силы за время" удара.
Использование такого представления допустимо лишь в тех случаях, когда продол-
продолжительность удара существенно меньше наименьшего из периодов собственных ко-
колебаний объекта. В остальных случаях необходимо учитывать форму удара, которая
обычно определяется непосредственными измерениями в натурных условиях.
Кинематические ударные воздействия разделяются на удары с приращением
скорости (Д? > 0) и без приращения скорости (Aq=0). Удары без приращения
скорости отличаются тем, что скорость источника в конце удара равна его скорости
до удара. Они возникают при взрывах, землетрясениях и т. п. Часто такое ударное
воздействие по своему характеру приближается к нестационарному вибрационному.
Ударные воздействия могут быть описаны рассмотренными выше характеристи-
характеристиками (8) и A4). В табл. 1 приведены амплитудные спектры ударных воздействий раз-
различной формы,
22 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗЛЩИТЫ
3. ВЛИЯНИЕ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ
НА ТЕХНИЧЕСКИЕ ОБЪЕКТЫ И ЧЕЛОВЕКА
Рассмотрим, как влияют механические воздействия на различные технические
объекты (машины, приборы, аппараты) и человека.
1. Действие линейных перегрузок эквивалентно статическому нагружению объ-
объекта. Статические нагрузки должны учитываться при расчете объекта на прочность.
В некоторых случаях, главным образом при наличии в объекте соединений с сило-
силовым замыканием, действие линейной перегрузки может вызвать нарушение нормаль-
нормального функционирования системы (размыкание пружины электрических контактов,
ложные срабатывания релейных устройств и т. п.).
2. Наиболее опасными для технических объектов оказываются вибрационные
воздействия. Знакопеременные напряжения, вызванные вибрационными воздейст-
воздействиями, приводят к накоплению повреждений в материале, что вызывает появление
усталостных трещин и разрушение.
Кроме усталостных разрушений в механических системах наблюдаются и дру-
другие явления, вызываемые вибрационными воздействиями. Например, эти воздействия
приводят к постепенному ослаблению («разбалтыванию») неподвижных соеди-
соединений. Вибрационные воздействия вызывают малые относительные смещения сопря-
сопряженных поверхностей в соединениях деталей машин, при этом происходит измене-
изменение структуры поверхностных слоев сопрягаемых деталей, их износ и, как результат,
уменьшение силы трения в соединении, что вызывает изменение диссипативных
свойств объекта, смещает его собственные частоты и т. п.
Если в объекте имеются подвижные соединения с зазорами (например, кинема-
кинематические пары в механизмах), вибрационные воздействия могут вызвать соударения
сопрягаемых поверхностей, приводящие к их разрушению.
В большинстве случаев разрушение объекта при вибрационных воздействиях
связано с возникновением резонансных явлений. Поэтому при полигармонических
воздействиях наибольшую опасность представляют те гармоники, которые могут
вызвать резонанс объекта, в связи с этим лабораторные испытания объектов на
вибропрочность часто проводят при гармонических воздействиях в резонансных ре-
режимах. В сложных объектах, обладающих широким спектром собственных частот,
возможно одновременное возбуждение нескольких резонансных режимов при дей-
действии полигармонического возмущения. Поэтому для таких объектов замена поли-
полигармонического воздействия гармоническим недопустима.
3. Ударные воздействия также могут явиться причиной разрушения объекта.
Часто повреждения, вызываемые ударом, носят характер хрупких разрушений.
Однако многократные удары могут приводить и к усталостным разрушениям, осо-
особенно в тех случаях, когда периодическое ударное воздействие оказывается способ-
способным вызвать резонансные колебания объекта.
4. Вибрационные и ударные воздействия, не вызывая разрушений объектов, могут
приводить к нарушению их нормального функционирования. Это свойство механи-
механических воздействий проявляется в разнообразных формах.
Приведем некоторые характерные примеры
Вибрации металлорежущих станков и другого технологического оборудования, вызван-
вызванные действием различных источников, приводят к снижению точности и чистоты обработки,
а также и к другим нарушениям технологических процессов.
Вибрации корпуса электрического прибора или аппарата могут привести к разнообраз-
разнообразным нарушениям его работы Например, может произойти нарушение контактных соедине-
соединений, замыкание неизолированных проводов и т. п.
Высокочастотные воздействия возбуждают колебания электродов и сеток электронных
ламп. Это явление, называемое микрофонным эффектом, приводит к нарушению нормаль-
нормального функционирования соответствующих приборов.
Механические воздействия существенно влияют на точность приборов, устанавливае-
устанавливаемых в системах управления движением и служащих для измерения параметров движения.
Под действием вибраций и ударов резко увеличивается «уход» гироскопических приборов,
а следовательно, и ошибка измерений, производимых этими приборами. Приборы, содержа-
содержащие измерительное устройство маятникового типа, обнаруживают склоаность к смещению
нулевого положения под действием вибрации.
Нарушение функционирования объекта, не связанное с разрушениями или с дру-
другими необратимыми изменениями, называется отказом,
АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ 23
Таким образом, механические воздействия могут вызвать как разрушения, так
и отказы машин, приборов и аппаратов. Способность объекта не разрушаться при
механических воздействиях называется вибропрочностью, а способность нормально
функционировать — виброустойчивостью. Цель виброзащиты технических объек-
тов — повышение их вибропрочности и виброустойчивости.
5. Вибрация, возникающая при работе машин различных типов и оборудования,
влияет не только на технические объекты, но и на людей, находящихся вблизи источ-
источника вибрации или в непосредственном контакте с ним. Длительное воздействие виб-
вибрации нарушает нормальное состояние человека, непосредственно влияет на произ-
производительность труда и качество выполняемой работы. Различают вредные наруше-
нарушения физиологического и функционального состояния человека-оператора, вызываемые
вибрацией. Стойкие вредные физиологические изменения называются вибра-
вибрационной болезнью. К симптомам вибрационной болезни относятся головная боль,
онемение пальцев рук, боли в кистях и предплечье, возникновение судорог, сме-
смещение порогов болевой чувствительности, повышение чувствительности к охлажде-
охлаждению, появление бессоницы. При вибрационной болезни возникают патологические
изменения спинного мозга, сердечно-сосудистой системы, костных тканей и суста-
суставов, изменяется капиллярное кровообращение. Функциональные нарушения, свя-
связанные с действием вибрации на человека-оператора, могут выражаться в ухудше-
ухудшении зрения, изменении реакции вестибулярного аппарата (нарушение координации
движений; возникновение галлюцинаций, относящихся к ориентации тела и т. п.),
а также в более быстрой утомляемости.
В первую очередь вибрация оказывает вредное влияние на рабочих, использующих
ручные механизированные инструменты, на персонал, обслуживающий вибрационные ма-
машины (виброгрохоты, вибромолоты, виброштамповки, вибропогружатели свай, труб, шпун-
шпунтов и т. п., виброконвейеры виброкатки, виброуплотнители, вибросепараторы, вибраторы
жидкого металла, средства вибрационной очистки, глубинные вибраторы, вибрационные
мельницы и т п.), а также многие строительные дорожные и сельскохозяйственные машины
(бульдозеры, грейдеры, скреперы, тракторы, комбайны и т. д ).
В несколько меньшей степени действие вибрации обычно испытывает персонал, связан-
связанный с работой машин и механизмов, содержащих неуравновешенные движущиеся элементы,
а также с работой всех видов транспортных средств В перечисленных случаях возникает
необходимость ограничения вредного воздействия вибрации на человека.
Допустимые для человека динамические воздействия регламентируются санитар-
санитарными нормами и правилами. Эти нормы подразделяют по признаку особенностей
рабочей позы и в зависимости от способа передачи вибрации телу человека. Имеются
нормы воздействий для оператора, использующего ручной механизированный инст-
инструмент; для сидящего человека (операторы транспортных средств, строительных,
дорожных машин и т. п.); для стоящего человека (операторы, находящиеся вблизи
источника вибрации) и т. п.
Создание эффективных методов и средств индивидуальной и комплексной вибро-
виброзащиты человека-оператора является одной из важнейших технико-экономических
и социальных задач современной техники.
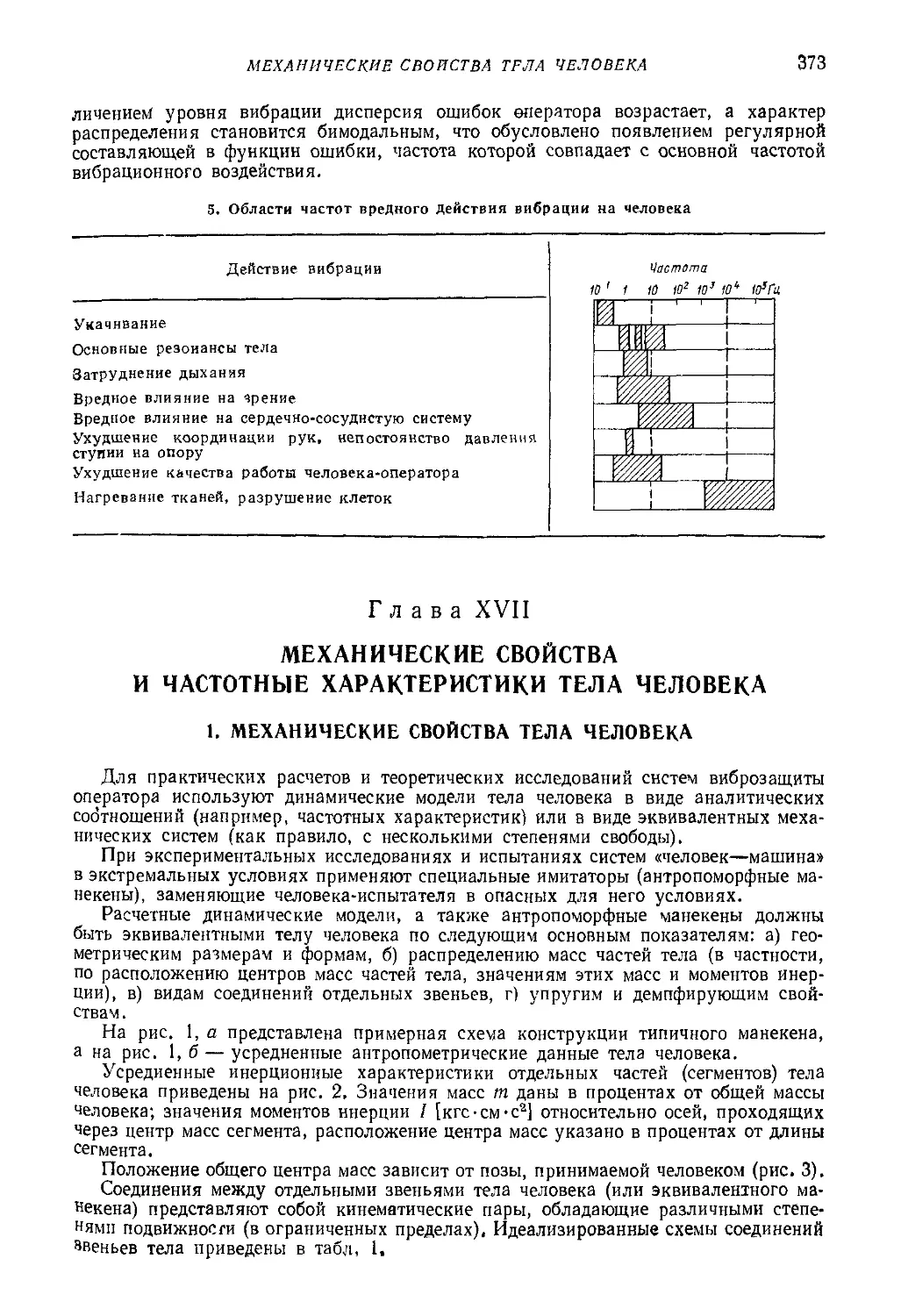
4. АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ
Характер нарушений условий функционирования объектов под действием вибра-
вибрации определяется видом механических воздействий и свойствами объекта. Анализ
возможных нарушений связан с построением модели объекта, изучением его реак-
реакции на заданное воздействие, формированием критерия качества и сравнением по
Данному критерию результирующих показателей с допустимыми величинами. Рас-
Рассмотрим последовательные этапы указанного анализа.
Модели объектов виброзащиты и их частотные характеристики. Модель объекта
Должна отражать основные черты реальной системы, влияющие на оценку ее дина-
динамической реакции, и вместе с тем быть удобной для анализа и интерпретации резуль-
результатов. Наиболее приемлемой п этих условиях является линейная модель, достаточно
хорошо передающая свойства широкого класса конструкций при малых колебаниях
(см. т. 1). Удобной формой описания свойств линейного объекта в условиях вибра-
вибрационных воздействий являются операторы динамической податливости („д (р), свя-
связывающие силу GB (t), приложенную в заданном направлении в точке В объекта
24 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
с проекцией перемещения хА (t) точки А на некоторое направление хА (I) =
= lBA (р) 0B (f). Обратные операторы kBA (р) = 1В1А (р) называются операторами
динамической жесткости. Характеристики lA (р), kA (p), связывающие силу, при-
приложенную в точке А, с проекцией перемещения той же точки на направление дейст-
действия силы, называются операторами динамической податливости и динамической
жесткости в точке А.
Выражения операторов 1ВА (р), 1А (р) совпадают с отношением преобразований
Лапласа для преобразуемых операторами функций.
Например:
Здесь L — оператор преобразования Лапласа; р — комплексное число.
В силу свойств преобразования Лапласа
= j hBA (^-T) GB W dx = \hBA W GB (^-T) dT- D7)
где hBA (t) — импульсная переходная функция, являющаяся реакцией системы
в точке А на приложение в точке В воздействия в виде б-функции.
Функция hBA (t) связана с оператором 1ВА (р) формулами преобразования Лап-
Лапласа:
со . q-\-ioo
lRi(p) = [hli,<t)e-Ptdt;hR,(t)=7r-. \ ln . (p) tP'dp, (t>0),
BA ^r/ J BA \ ' ' BA ^ ' 2zli * "™ —
0 q — too
где q ¦»- абсцисса сходимости, выбираемая так, чтобы удовлетворялось условие
оо
\ \hBA(t)\t-9'dt <со.
Для механических систем, у которых любое движение сопровождается рассея-
рассеянием энергии, можно принять q = 0. В этом случае преобразование Лапласа при
р = № переходит в преобразование Фурье, а операторы динамической податливо-
податливости и жесткости становятся частотными характеристиками объекта lBA (ico), kBA (ico),
называемыми соответственно динамической податливостью и динамической жестко-
жесткостью. Модуль этих выражений равен отношению амплитуд гармонических перемен-
переменных на «входе» и «выходе» объекта на частоте ю, а аргумент характеризует величину
фазового искажения при передаче гармонического воздействия на этой частоте.
Создавая нормированное гармоническое воздействие GB (t) = Go cos a>i и изме-
измеряя соответствующую установившуюся реакцию хА (t) = а0 cos (co< + ф), экспери-
экспериментально снимают частотные характеристики объекта:
1 D8)
Ф = arg kBA (ico) = — arg lBA (i(o). J
Выражение для оператора динамической податливости может быть представлено
в виде (см. гл. VIII)
D9)
АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ
25
Здесь o>v — собственные частоты консервативной системы; gBv, gAv — нормиро-
нормированные коэффициенты v-й формы кодебаний в точках В и A; pv — безразмерный
коэффициент линейного демпфирования на v-й форме колебаний.
При р = ш, опуская малые величины второго порядка, имеем частотную харак-
характеристику объекта
п.
ВА
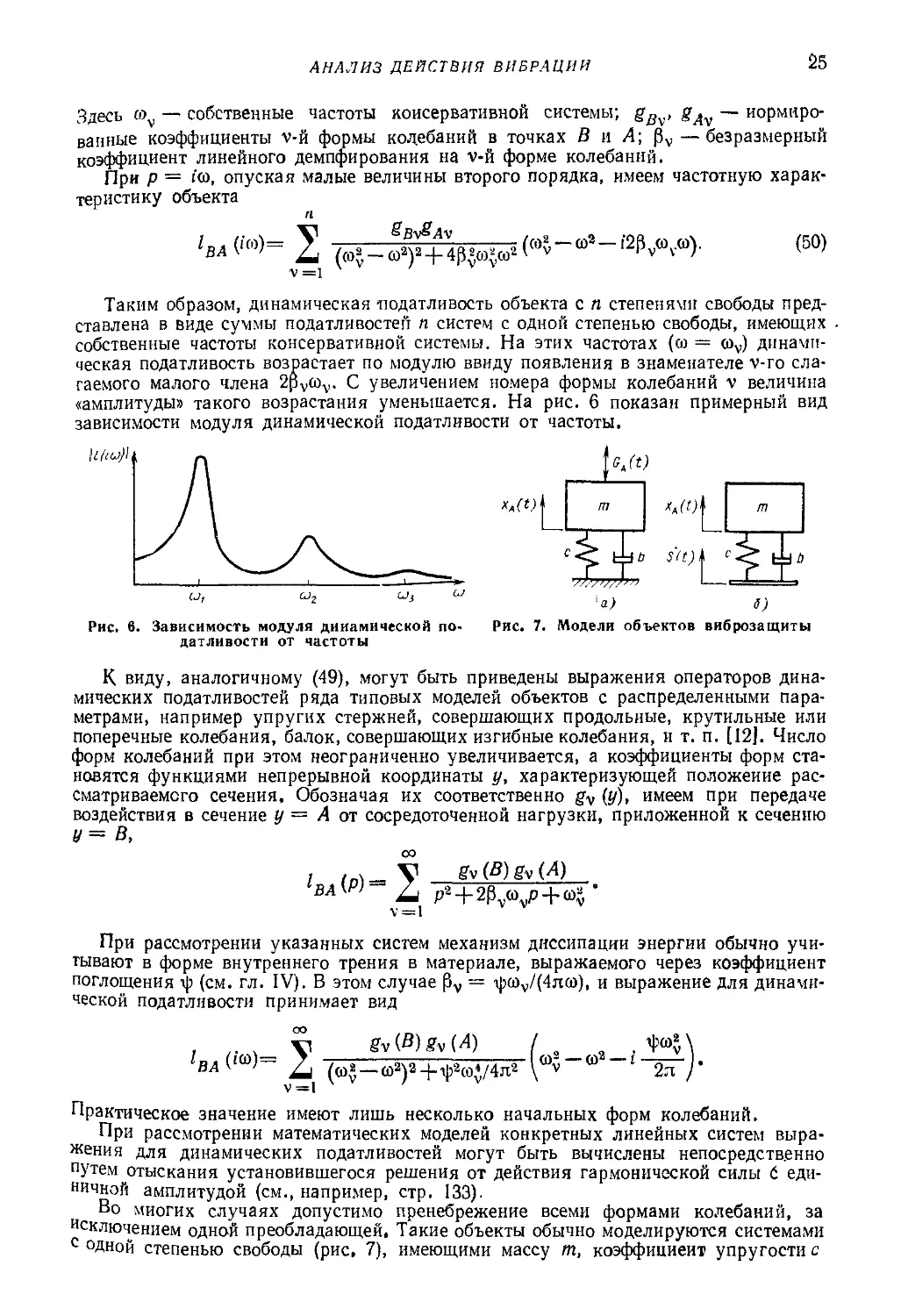
Таким образом, динамическая податливость объекта с п степенями свободы пред-
представлена в виде суммы податливостей п систем с одной степенью свободы, имеющих
собственные частоты консервативной системы. На этих частотах (со = cov) динами-
динамическая податливость возрастает по модулю ввиду появления в знаменателе v-ro сла-
слагаемого малого члена 2pvwv. С увеличением номера формы колебаний v величина
«амплитуды» такого возрастания уменьшается. На рис. 6 показан примерный вид
зависимости модуля динамической податливости от частоты.
Шш)\
хА(Ы
Bjt)
Рис. 6. Зависимость модуля динамической по-
податливости от частоты
'а> 6)
Рис. 7. Модели объектов виброзащиты
К виду, аналогичному D9), могут быть приведены выражения операторов дина-
динамических податливостей ряда типовых моделей объектов с распределенными пара-
параметрами, например упругих стержней, совершающих продольные, крутильные или
поперечные колебания, балок, совершающих изгибные колебания, и т. п. [12J. Число
форм колебаний при этом неограниченно увеличивается, а коэффициенты форм ста-
становятся функциями непрерывной координаты у, характеризующей положение рас-
рассматриваемого сечения. Обозначая их соответственно gv ({/)> имеем при передаче
воздействия в сечение у = А от сосредоточенной нагрузки, приложенной к сечению
У= В,
При рассмотрении указанных систем механизм диссипации энергии обычно учи-
учитывают в форме внутреннего трения в материале, выражаемого через коэффициент
поглощения ф (см. гл. IV). В этом случае pv = i])u)v/Dnffl), и выражение для динами-
динамической податливости принимает вид
'ВА
«»>= 11^
— (О* — i
2л
Практическое значение имеют лишь несколько начальных форм колебаний.
При рассмотрении математических моделей конкретных линейных систем выра-
выражения для динамических податливостей могут быть вычислены непосредственно
путем отыскания установившегося решения от действия гармонической силы с" еди-
единичной амплитудой (см., например, стр. 133).
Во многих случаях допустимо пренебрежение всеми формами колебаний, за
исключением одной преобладающей. Такие объекты обычно моделируются системами
с одной степенью свободы (рис, 7), имеющими массу т, коэффициент упругости с
26 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
и коэффициент вязкого трения Ь. При возбуждении системы силой G (f) (рис. 7, а)
модуль динамической податливости имеет следующий вид'
Аналогичный вид имеет частотная характеристика реакции системы на кинема-
кинематическое возбуждение основания с ускорением s (i) [рис. 7,6; при этом в E1) т
отсутствует]. Зависимость E1) формально следует из D9) при gBv = gAv — gv;
g$ = Mm; (в — a>0; Pv = P. Выражения динамических податливостей для некото-
некоторых наиболее распространенных линейных механических моделей объектов вибро-
виброзащиты приведены в гл. VIII* Более сложные модели, учитывающие пластические
свойства конструкционных материалов, рассмотрены в гл. V.
Реакция объекта на механическое воздействие. Вычисление реакции объекта
на заданное механическое воздействие может осуществляться как во временных,
так и в частотных представлениях. Первое производят по D7) и выполняют в тех
случаях, когда закон изменения механического воздействия во времени имеет суще-
существенное значение. Как правило, его применяют при рассмотрении ударных воз-
воздействий, длительность которых соизмерима с периодами собственных колебаний
объекта (см. гл. XII).
Реакцию системы на вибрационное воздействие удобнее вычислять в частотных
представлениях. Для гармонических и полигармонических воздействий вычисления
амплитудных и фазовых искажений осуществляют для каждой гармонической ком-
компоненты процесса по D8). В силу линейности объекта эффект от действия несколь-
нескольких гармонических компонент равен сумме воздействий от каждой из них.
Для стационарных случайных воздействий, характеризуемых, как правило,
спектральной плотностью So (со), спектральная плотность реакции [206]
5*л(©) = |'вд(«о)|0в(ю). E2)
С помощью B2) находят среднеквадратичное значение реакции
СО
«\*\ Щ = *а = 7F ? I 1ba W I2 soB H rfM- E3)
о
Для системы, показанной на рис. 7, а, предполагая спектральную плотность
воздействия SQ (со) достаточно плавной функцией, имеем, например
) [К
о
Дисперсия напряжений в упругом элементе
Q (ш0) соо
E5)
Качество объектов виброзащиты. Критерии качества объекта, испытывающего
вибрацию, формулируются в виде величин, характеризующих реакцию объекта
или его элементов на данное механическое воздействие. В тех случаях, когда необ-
необходимо обеспечить ограниченные перемещения, в качестве критерия принимают
максимальное отклонение от положения равновесия. Прочность конструкции или
ее элементов характеризуется максимальными напряжениями.
Вычисление максимальных отклонений, деформаций и напряжений при случай-
случайных воздействиях осуществляется лишь в вероятностном смысле, т. е. с той или иной
надежностью [28]. Задавшись допустимыми максимальными величинами, параметры
системы выбирают тавдм образом, чтобы вероятность превышения допустимых зна-
значений была достаточно мала. В большинстве случаев закон распределения вероят-
вероятности допустимо принимать нормальным, что позволяет ограничиться для его фор-
АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ
27
мирования вычислением величины дисперсии соответствующего процесса по форму-
формулам типа (S3). В результате надежность обеспечения системой заданного качества
Характерным видом разрушения конструкции под действием вибрации является
усталость, представляющая собой эффект накопления малых повреждений при
большом числе циклов переменного напряжения. Для выбора допустимых норм испы-
испытания на усталость проводят обычно на специальных образцах, подвергаемых мно-
многоцикловой деформации по гармоническому закону до разрушения.
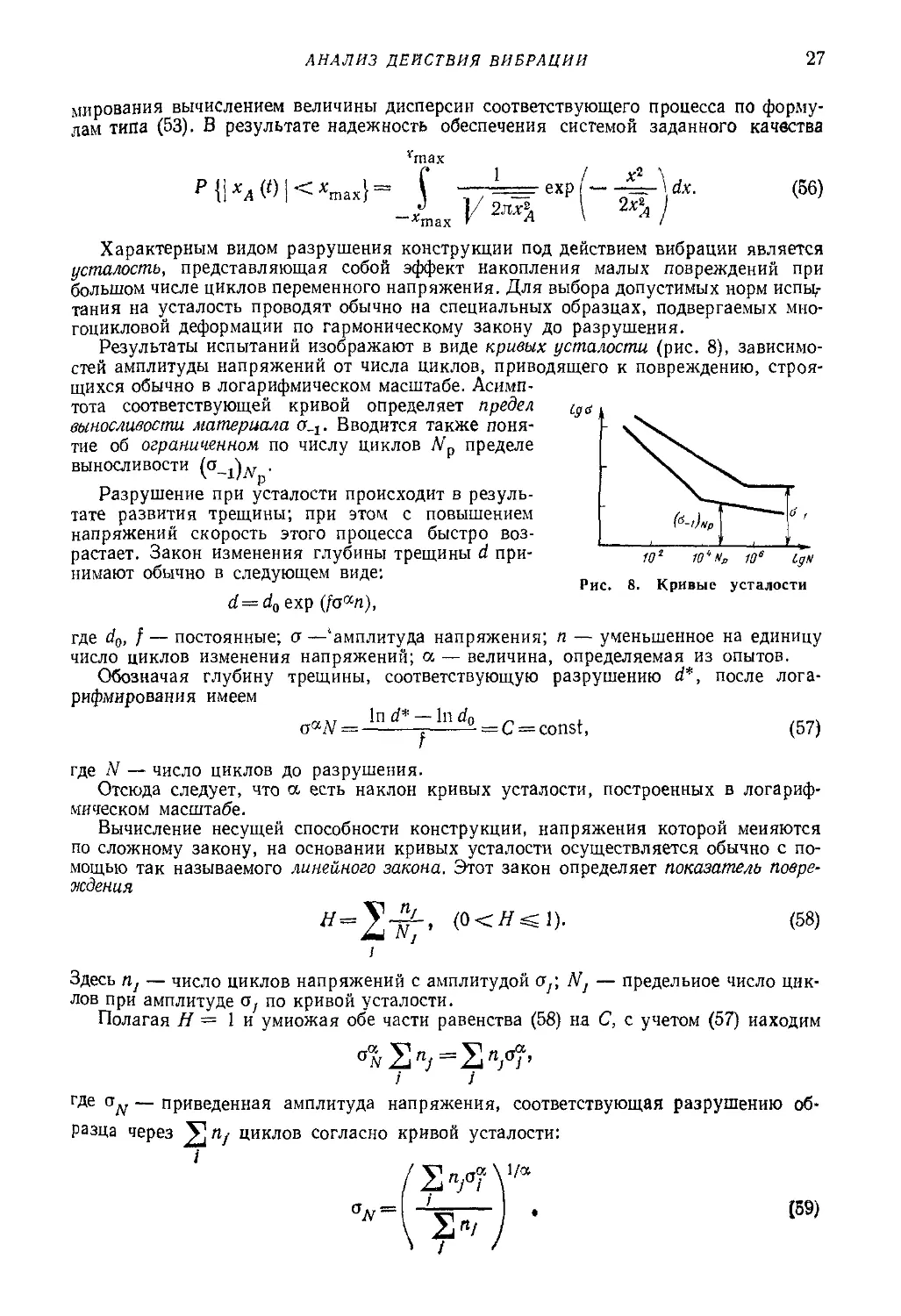
Результаты испытаний изображают в виде кривых усталости (рис. 8), зависимо-
зависимостей амплитуды напряжений от числа циклов, приводящего к повреждению, строя-
строящихся обычно в логарифмическом масштабе. Асимп-
Асимптота соответствующей кривой определяет предел
выносливости материала а_х. Вводится также поня-
понятие об ограниченном по числу циклов Np пределе
выносливости (p_^N .
Разрушение при усталости происходит в резуль-
результате развития трещины; при этом с повышением
напряжений скорость этого процесса быстро воз-
растает. Закон изменения глубины трещины d при-
нимают обычно в следующем виде:
(faan),
Рис. 8. Кривые усталости
где d0, f — постоянные; а —'амплитуда напряжения; п — уменьшенное на единицу
число циклов изменения напряжений; о. — величина, определяемая из опытов.
Обозначая глубину трещины, соответствующую разрушению d*, после лога-
логарифмирования имеем
In d* — In d0 ^ i /t.,4
= C = const E7)
;
= C = const,
где N — число циклов до разрушения.
Отсюда следует, что а есть наклон кривых усталости, построенных в логариф-
логарифмическом масштабе.
Вычисление несущей способности конструкции, напряжения которой меняются
по сложному закону, на основании кривых усталости осуществляется обычно с по-
помощью так называемого линейного закона. Этот закон определяет показатель повре-
повреждения
Здесь tij — число циклов напряжений с амплитудой df, Nj — предельное число цик-
циклов при амплитуде ot по кривой усталости.
Полагая Н = 1 и умножая обе части равенства E8) на С, с учетом E7) находим
; i
гДе о-^ — приведенная амплитуда напряжения, соответствующая разрушению об-
образца через 2п/ циклов согласно кривой усталости:
"N =
28
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
В тех случаях, когда вибрация осуществляется по случайному закону, величину
njl"S\nl\ в E9) можно рассматривать как вероятность осуществления циклов напря-
напряжений с амплитудами от сг/ до О/ + da;-. Характерным режимом стохастических
колебаний объекта с преобладающей собственной частотой является узкополосная
случайная вибрация. Если процесс является нормальным, распределение амплитуд-
амплитудных значений напряжений в так^м режиме колебаний некоторой точки А конструк-
конструкции описывается рэлеевским законом с плотностью распределения
\
2о»
С учетом этого выражение E9) для узкополосного случайного процесса примет
вид
Вычисляя этот интеграл через гамма-функцию, получаем после ряда упрощений,
учитывающих малость величины 1/а [206],
°3л. F0)
.Определяя с помощью соотношении типа E5) величину о*А, с помощью F0) по
кривой усталости находят число циклов N узкополосной случайной вибрации, при-
приводящей к разрушению образца. Существуют предложения по модификации фор-
формул E9), F0), придающей большее значение напряжениям высокого уровня. Более
подробно вопросы прочности конструкций при переменных напряжениях рассмот-
рассмотрены в т. 3 (см. также [100]).
Защита от виброударных режимов. Расчет надежности работы объекта в усло-
условиях вибрации на основе описанных линейных представлений не исключает воз-
возможности нарушения условий функционирования из-
за действия нелинейных факторов. Наиболее опасным
является возможность выхода объекта или его элемен-
элементов на ограничительные упоры и возникновение вибро-
виброударных режимов, характеризующихся систематиче-
систематическими соударениями об упоры. Возбуждение вибро-
виброударных режимов может произойти под влиянием
дополнительного запускающего импульса («жесткого
возбуждения») при тех же значениях параметров, при
которых осуществляются расчетные малые колебания
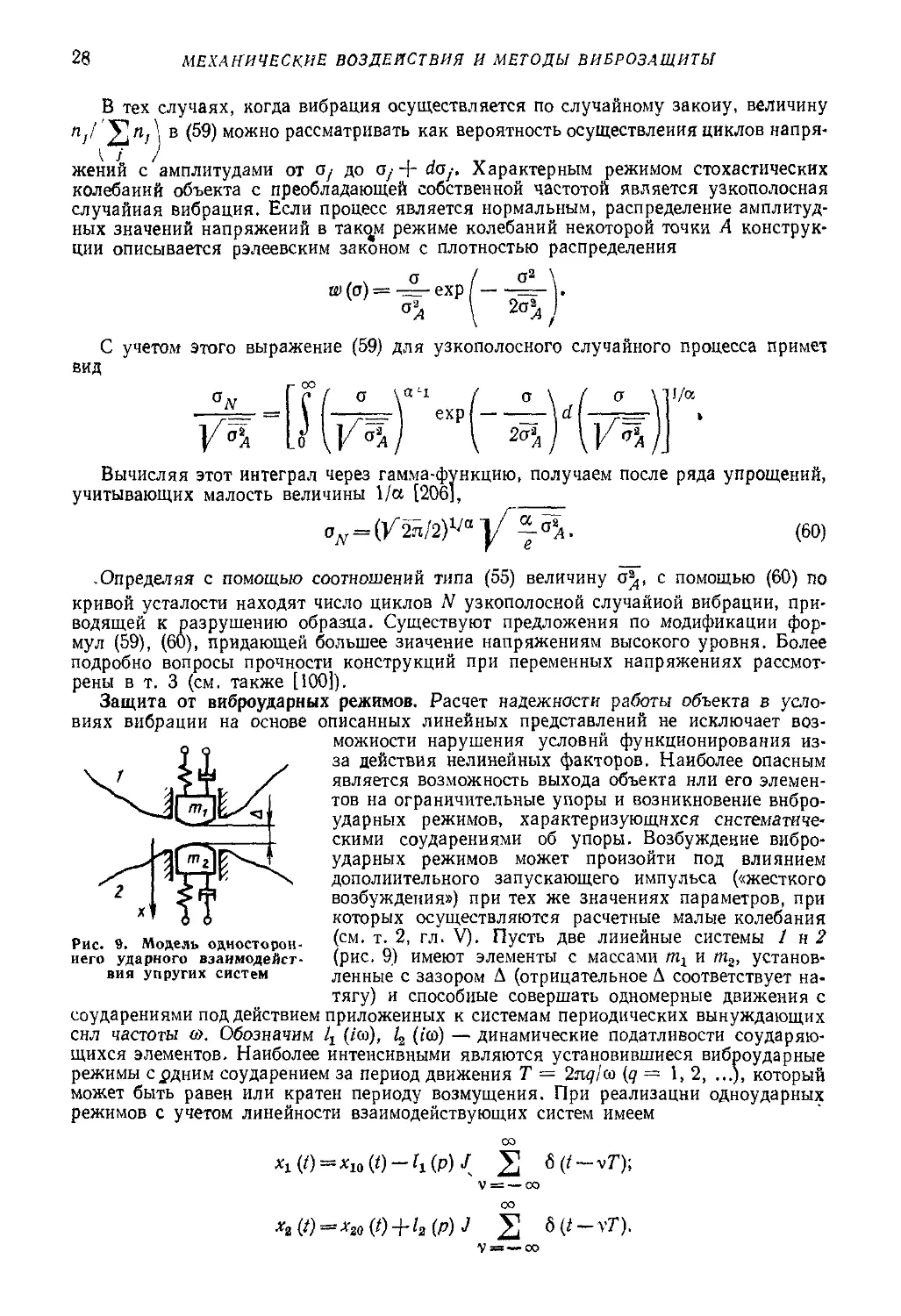
(см. т. 2, гл. V). Пусть две линейные системы 1 и 2
(рис. 9) имеют элементы с массами гп1 и та, установ-
установленные с зазором Д (отрицательное Д соответствует на-
натягу) и способные совершать одномерные движения с
соударениями под действием приложенных к системам периодических вынуждающих
сил частоты и>. Обозначим lx (to), l2 (ш) — динамические податливости соударяю-
соударяющихся элементов. Наиболее интенсивными являются установившиеся виброударные
режимы с .одним соударением за период движения Т = 2щ1ю (q = 1,2, ...), который
может быть равен или кратен периоду возмущения. При реализации одноударных
режимов с учетом линейности взаимодействующих систем имеем
Рис. 9. Модель одиосторон
него ударного взаимодейст
вия упругих систем
ч @=%о (<) - к (р) / 2 6((~ хТУ>
V = — ех>
ч it)=х20 (t)+h(P)j 2 s с -vr )¦
АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ 29
Здесь аг10 (/), %) @ — колебания элементов при пренебрежении ударным взаимо-
взаимодействием; J — величина ударного импульса; Ь (t) — импульсная функция,
Для относительной координаты х (t) — хх (() — xt (t) получим
x(t) = xo(t)-l(p)J 2 6(i-vT) = Aro(O-Jx1(O. F1)
— 00
где x0 (/) = x10 (t) — %, (/); / (p) = /2 (p) + /2 (p); Xi @ — установившаяся реакция
линейной системы на периодическую последовательность 6-функций1
00
* = —00
Для линейных операторов вида
W- D (р) ~
ряд F2) сворачивается в выражение
S
(p/) 1_ехр(р/Г) •
/ =1
где 0 sg (гё Т; ру — простые корни уравнения D (р) = 0, причем р; ^ 2я/Г; штрих
означает дифференцирование по аргументу; %i (/+ Т) = fa (t).
Одноударные режимы носят резонансный характер [13J, причем частоты, на
которых они осуществляются, отличаются от собственных частот линейной системы.
По этой причине первый член в правой части F1) существенно меньше второго, и
приближенное решение для резонансных виброударных режимов может отыскиваться
в виде х (t) да —J%x (t), Для определения значения импульса воспользуемся усло-
условием удара х = Д при / = 0, Используя его, находим / = —Д/Xi (О), и, следова-
следовательно,
(t) F4)
Условия существования такого режима определяются из баланса энергии за пе-
период движения Т, Потери энергии при ударе находим по теореме Карно:
_ (]-,)Ji (]-г)Л*
д1 2(\ + r)m~ 2(l+r)mxJ@) ' к ]
где пг— m1m2/(ml-[- m2); r— коэффициент восстановления скорости при ударе,
Работа диссипативных сил, действующих в линейных системах 1 и 2 (рис, 9),
с учетом F2) примет вид
во
JM^V? @) ^^ \ Q I \ \ Q I
fc=l \ ч п \ Ч }
Работа вынуждающих сил
т
№6)
30
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
зависит от фазы периодического процесса .v0 (t) по отношению к моменту удара.
Пусть, например, xo(t) «= a cos (co*+ <р), тогда с учетом F2)
sin ф, ($ = ф — arg / (ко)). F7)
В результате уравнение баланса энергии ?д1 + Ею ~ Ев будет следующим:
00 1
соаД
Д2
х!@)
\ q
k\.
Отсюда находим значение установочного зазора (натяга) Д, при котором описы-
описываемые режимы не реализуются:
1— г
пдг
> Im /-1 /
А. \ я J \ g j
fe=i
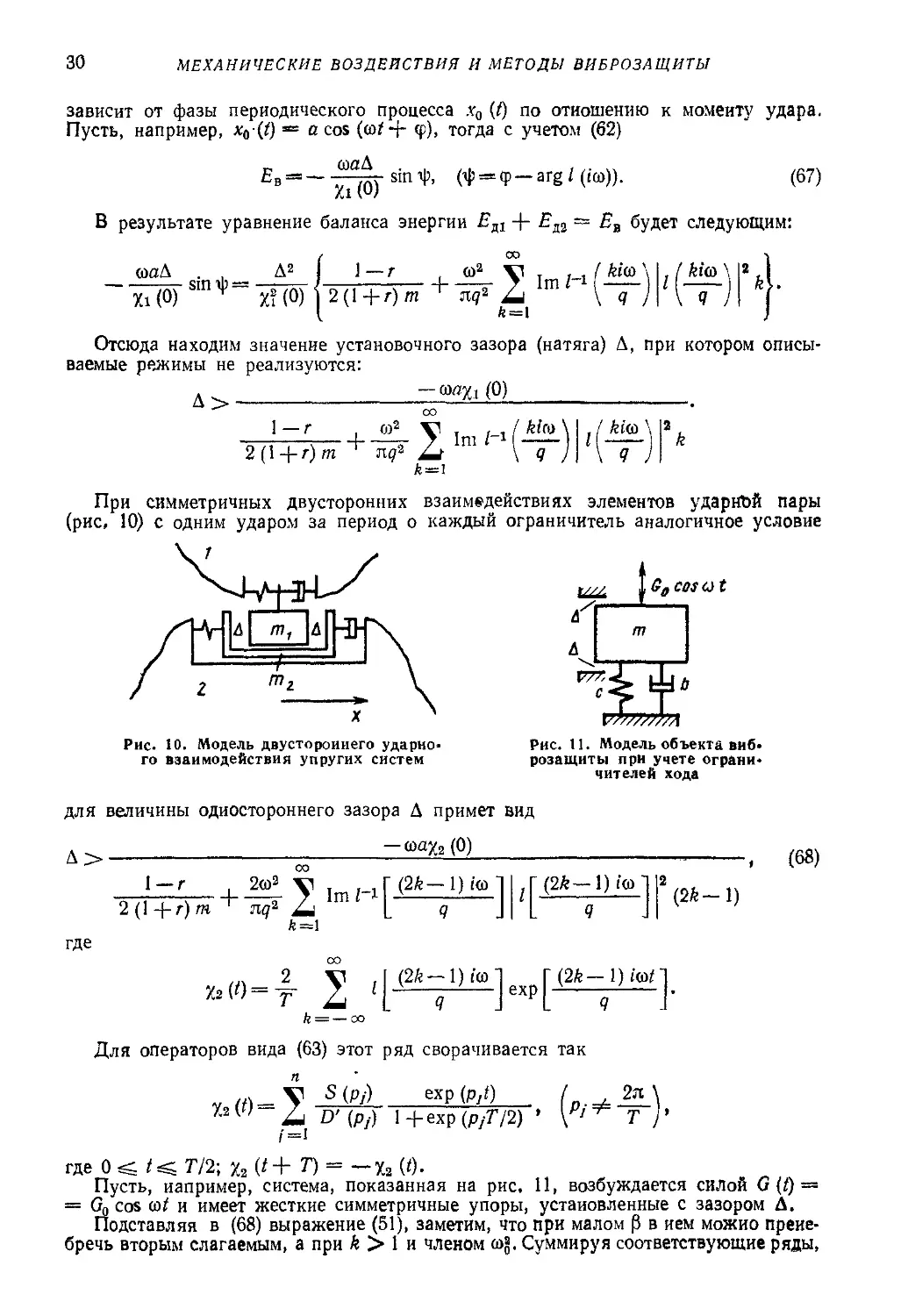
При симметричных двусторонних взаимодействиях элементов ударной пары
(рис, 10) с одним ударом за период о каждый ограничитель аналогичное условие
V7T,
с
Рис. 10. Модель двустороннего ударно-
ударного взаимодействия упругих систем
Рис. П. Модель объекта виб-
виброзащиты при учете ограни-
ограничителей хода
для величины одностороннего зазора Д примет вид
л ^ -<МЪ @)
где
2A
nq*
F8)
Для операторов вида F3) этот ряд сворачивается так
(Pj)
exp(p;Q
} —I
1+ехр(Р/Г/2) '
где 0 ^ ^ Г/2; х2 U + Т) = — Х2 (О-
Пусть, например, система, показанная на рис, 11, возбуждается силой G (t) =
= Go cos со/ и имеет жесткие симметричные упоры, установленные с зазором Д.
Подставляя в F8) выражение E1), заметим, что при малом Р в нем можно прене-
пренебречь вторым слагаемым, а при k > 1 и членом cog. Суммируя соответствующие ряды,
АНАЛИЗ ДЕЙСТВИЯ ВИБРАЦИИ 31
имеем
А Got"X2 @)
со' I4*0* \ l I * i
Здесь "/а @) «а —— tg -^ •
При случайном характере вибрационных воздействий виброударные режимы
ьак правило не носят установившегося характера и после серии соударений сры-
срываются на безударный режим. Инженерный анализ подобных движений связан с оп-
определением условий, при которых стук на упорах был бы сведен к минимуму.
Пусть в системе, показанной на рис. 9, приведенное внешнее воздействие G (t) =
«= t-1 (p) x0 (t) представляет собой стационарный нормальный эргодический случай-
случайный процесс с нулевым средним значением. Допустим, что в результате случайного
толчка в системе возник виброударный режим с частотой utfq. При низком уровне
возбуждения (по сравнению с амплитудами инерционных и упругих сил) такой ре-
режим может осуществляться только по резонансным законам, и, следовательно, коле-
колебания по относительной координате х (t) соударяющихся элементов можно аппро-
аппроксимировать соотношением F4). Найдем условие поддержания этого режима с по-
помощью случайного воздействия G(t). Обозначая мощность G (t) на движении х (t)
через NB, имеем
JVB = ^L f G(t)x(t)dt,
1 о J
где То — время наблюдения.
Определим математическое ожидание и дисперсию jVbi
, То То
о о
То , То То
x(t)x(t')K(t, t')dtdt'.
V t> I ' 0 ш) t)
0 0 0 0
Здесь угловые скобки означают операцию статистического усреднения; К (t, t') —
автокорреляционная функция процесса G (t). Учитывая периодичность х (t) и ста-
стационарность Q (t), имеем
m{Nl} = Nl = ~ f f x(t)x(t + i)G{T)dT. F9)
о о
Величина Ne лмеет нормальный закон распределения:
(о (ti) = _- ехр / ^
\
\
Отсюда вероятность срыва виброударного режима (надежность)
где ЛДД (ш/<7) = (?Д1+ E^IT — мощность диссипативных сил.
В тех случаях, когда процесс G (t) не содержит периодических составляющих
^lim /С(т) = О и, следовательно, с ростом времени наблюдения То величина Щ
32
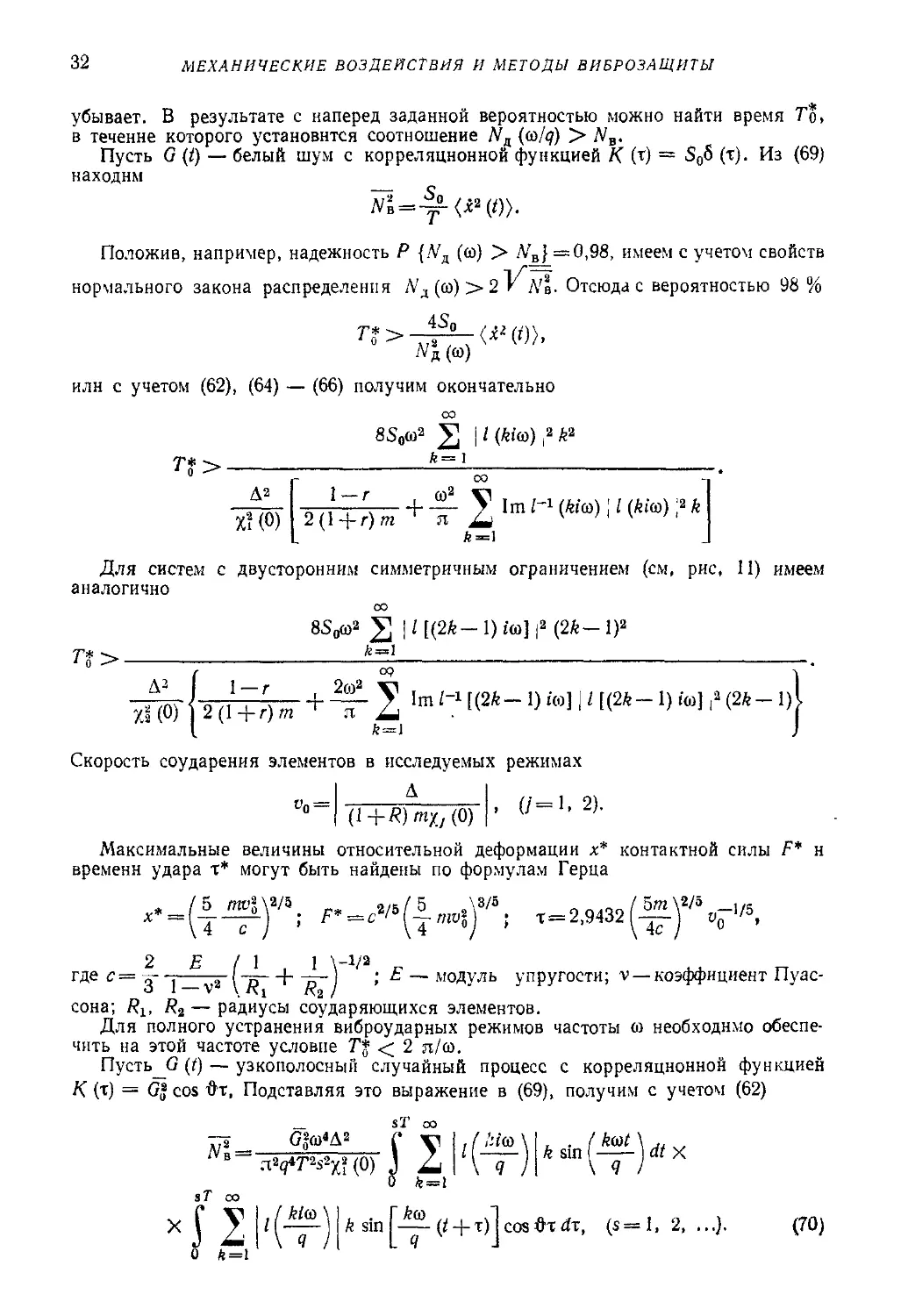
МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
убывает. В результате с наперед заданной вероятностью можно найти время То,
в течение которого установится соотношение Ыл (w/q) > N3.
Пусть G {t) — белый шум с корреляционной функцией К (т) = 50б (т). Из F9)
находим
Положив, например, надежность Р {МА (со) > jVb}=0,98, имеем с учетом свойств
нормального закона распределения Л'д (со) > 2 г Л'в. Отсюда с вероятностью 98 %
Tt>wL){*4t)}'
или с учетом F2), F4) — F6) получим окончательно
со
8S0co2 ^Vj j I (кш) i2 /г2
[со
2(l+r)m ~ я ^
А-1
(Ww),' / (Ato) ;2 A
XI@) [ 2,
Для систем с двусторонним симметричным ограничением (см, рис, 11) имеем
аналогично
A- IJ
Tf>-
7J @)
Iml~l
Uo]'
Bk~
Скорость соударения элементов в исследуемых режимах
Д
, (/=1. 2).
Максимальные величины относительной деформации х* контактной силы F* и
времени удара т* могут быть найдены по формулам Герца
*-«'4~
2 ?
где <? = ^- —
1,1 \-1
— модуль упругости; v —коэффициент Пуас-
\ Аа /
сона; /?х, #2 — радиусы соударяющихся элементов.
Для полного устранения виброударных режимов частоты со необходимо обеспе-
обеспечить на этой частоте условие Т% < 2 л/со.
Пусть О (t) — узкополосный случайный процесс с корреляционной функцией
К (т) = GJ cos йт, Подставляя это выражение в F9), получим с учетом F2)
«Г 00
№
k sin
dtx
sf 00
, (s=l, 2, ...}.
G0)
ОСНОВНЫЕ МЕТОДЫ ВИБРОЗАЩИТЫ
33
При й^ш величина Л??-»¦ 0 по мере увеличения s, и, следовательно, устано-
установившийся режим на частоте a>/q невозможен. При д = ш из G0) имеем
G1)
@)
В результате из условия Na>2 V NB получим с надежностью 98 % величину Д,
обеспечивающую отсутствие виброударного режима:
д>
1 \—
k=\
Для симметричной системы (см. рис. 10) аналогичное выражение имеет следующий
вид:
-2l/"og(dxa@)[/(ico)l
\~г
2(l+r)m ' щ*
fc=i
BА-1)
Анализ вибрационного состояния объекта позволяет сформулировать требова-
требования к выбору типа и характеристики виброзащитного устройства.
б. ОСНОВНЫЕ МЕТОДЫ ВИБРОЗАЩИТЫ
Уменьшение интенсивности колебаний объекта может быть достигнуто следую-
следующими способами:
а) уменьшением уровней механических воздействий, возбуждаемых источни-
источником; такой способ виброзащиты называется снижением виброактивности источника;
Рис. 12. Схема динамическо-
динамического гашения
Рис. 13. Схема виброизоля-
виброизоляции
б) изменением конструкции объекта, при котором заданные механические воз-
воздействия будут вызывать менее интенсивные колебания объекта или отдельных его
частей; этот метод называется внутренней виброзащитой объекта;
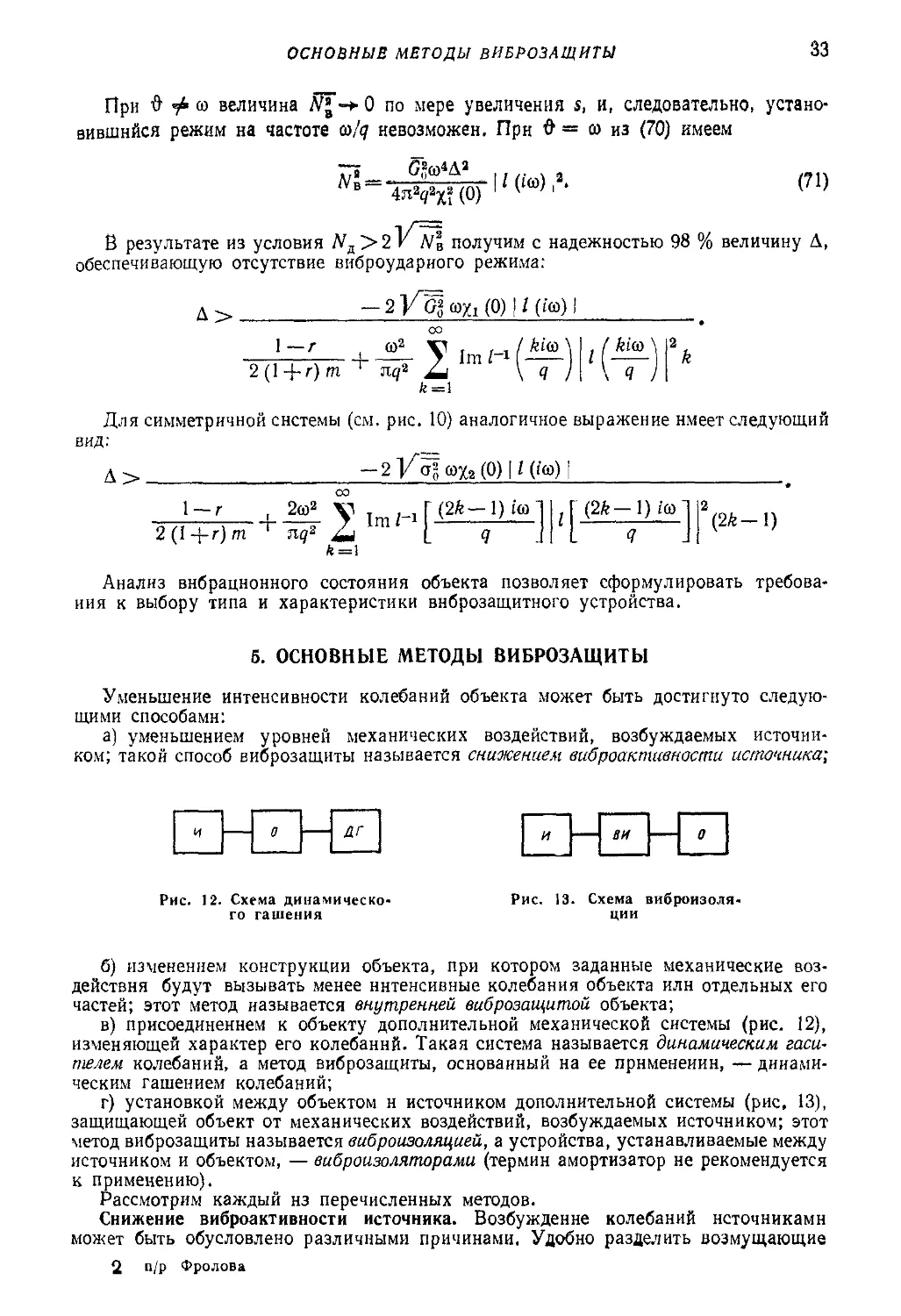
в) присоединением к объекту дополнительной механической системы (рис. 12),
изменяющей характер его колебаний. Такая система называется динамическим гаси-
гасителем колебаний, а метод виброзащиты, основанный на ее применении, — динами-
динамическим гашением колебаний;
г) установкой между объектом и источником дополнительной системы (рис, 13),
защищающей объект от механических воздействий, возбуждаемых источником; этот
метод виброзащиты называется виброизоляцией, а устройства, устанавливаемые между
источником и объектом, — виброизоляторами (термин амортизатор не рекомендуется
к применению).
Рассмотрим каждый из перечисленных методов.
Снижение виброактивности источника. Возбуждение колебаний источниками
может быть обусловлено различными причинами. Удобно разделить возмущающие
2 п/р Фролова
34 МЕХАНИЧЕСКИЕ ВОЗДЕЙСТВИЯ И МЕТОДЫ ВИБРОЗАЩИТЫ
факторы на две группы, К первой можно отнести различные физико-химические про-
процессы, происходящие в источнике: процессы горения в реактивных двигателях
и двигателях внутреннего сгорания, процессы взаимодействия жидкости или газа
с лопатками турбин (сопровождающиеся такими побочными явлениями, как кави-
кавитация), пульсацию жидкости или газа в трубопроводах, электромагнитные явления
в двигателях и генераторах, разнообразные технологические процессы (например,
процесс резания металлов на металлорежущих станках, процессы обработки мате-
материала в горнообогатительном оборудовании и т. п.). К этой группе относятся и явле-
явления, связанные с трением в кинематических парах, которое также служит источни-
источником возникновения колебаний. Снижение виброактивности факторов этой группы
связано с изменением параметров физико-химических процессов и может быть до-
достигнуто способами, специфическими для каждого частного случая. Эти способы
изложены в т. 3 и 4 справочника при рассмотрении колебаний машин и агрегатов
различных классов.
Вторая группа возмущающих факторов связана с движущимися телами. Движе-
Движение тел внутри источника (вращение роторов, перемещение звельев механизмов)
сопровождается возникновением динамических реакций связей, соединяющих источ-
источник с другими телами, в частности с объектом. Снижение виброактивности источника
в этом случае заключается в уменьшении динамических реакций с помощью так
называемого уравновешивания движущихся тел. Методы уравновешивания явля-
являются, таким образом, способами снижения виброактивности, общими для всех источ-
источников, содержащих движущиеся тела Эти методы будут рассмотрены в первой
части.
При решении задач уравновешивания приходится учитывать динамические
свойства источников, и в первую очередь нежесткость их элементов.
Изменение конструкции объекта. Проблему уменьшения колебаний объекта пу-
путем изменения его конструкции необходимо рассматривать в каждом случае особо,
с учетом особенностей объекта и конструктивных возможностей его изменения.
Однако можно указать два способа снижения колебаний, общих для всех механи-
механических систем. Первый способ состоит в устранении резонансных явлений. Если
объект обладает линейными свойствами, то задача сводится к соответствующему
изменению его собственных частот (т. 3 и 4). Для нелинейных объектов должны вы-
выполняться условия отсутствия резонансных явлений, рассмотренные в т. 2. Вто-
Второй способ заключается в увеличении диссипации механической энергии в объекте.
Этот способ виброзащиты, называемый демпфированием, будет рассмотрен во вто-
второй части. В ряде случаев демпфирование осуществляется введением в конструкцию
объекта специальных устройств, называемых демпферами (см. четвертую часть).
Динамическое гашение колебаний. Динамический гаситель, присоединяемый
к объекту, формирует дополнительные динамические воздействия, прикладываемые
к объекту в точках присоединения гасителя. Динамическое гашение осуществляется
при таком выборе параметров гасителя, при котором эти дополнительные воздей-
воздействия частично уравновешивают (компенсируют) динамические воздействия, воз-
возбуждаемые источником (см. четвертую часть).
Виброизоляция. Действие виброизоляции сводится к ослаблению связей между
источником и объектом; при этом уменьшаются динамические воздействия, переда-
передаваемые объекту. Ослабление связей обычно сопровождается возникновением неко-
некоторых нежелательных явлений: увеличением статических смещений объекта отно-
относительно источника, увеличением амплитуд относительных колебаний при низко-
низкочастотных воздействиях и при ударах и связанным с этими явлениями, увеличением
габаритов системы. Поэтому применение виброизоляции как метода виброзащиты,
в большинстве случаев связано с нахождением компромиссного решения, удовле-
удовлетворяющего всю совокупность требований. Подробно о виброизоляции см. третью
часть.
Виброзащитные устройства и их эффективность. Демпферы, динамические га-
гасители и виброизоляторы образуют в совокупности виброзащитные устройства.
Пассивными называют устройства, состоящие из инерционных, упругих и дисси-
пативных элементов. Активные устройства могут, кроме того, содержать элементы
немеханической природы и, как правило, обладают независимым источником энергии.
Эффективность виброзащитных систем принято оценивать отношением величины
ОСНОВНЫЕ ПОНЯТИЯ
35
какого-либо характерного параметра колебаний объекта, происходящих при при
менении данного виброзащитного устройства, к величине того же параметра при
отсутствии виброзащиты. Это отношение называется коэффициентом эффективности
вибрационной защиты.
Глава II
БАЛАНСИРОВКА РОТОРОВ МАШИН
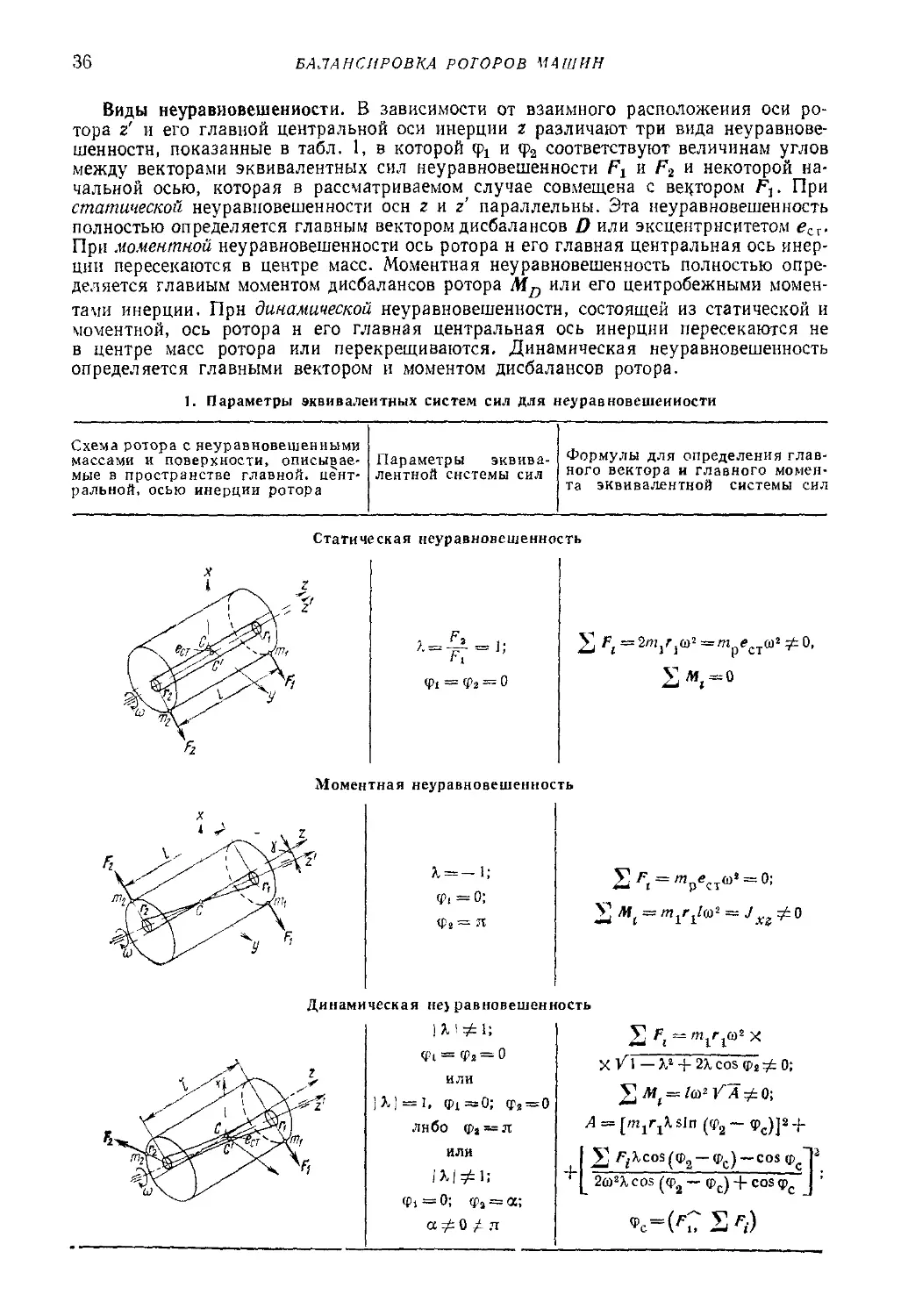
I. ОСНОВНЫЕ ПОНЯТИЯ
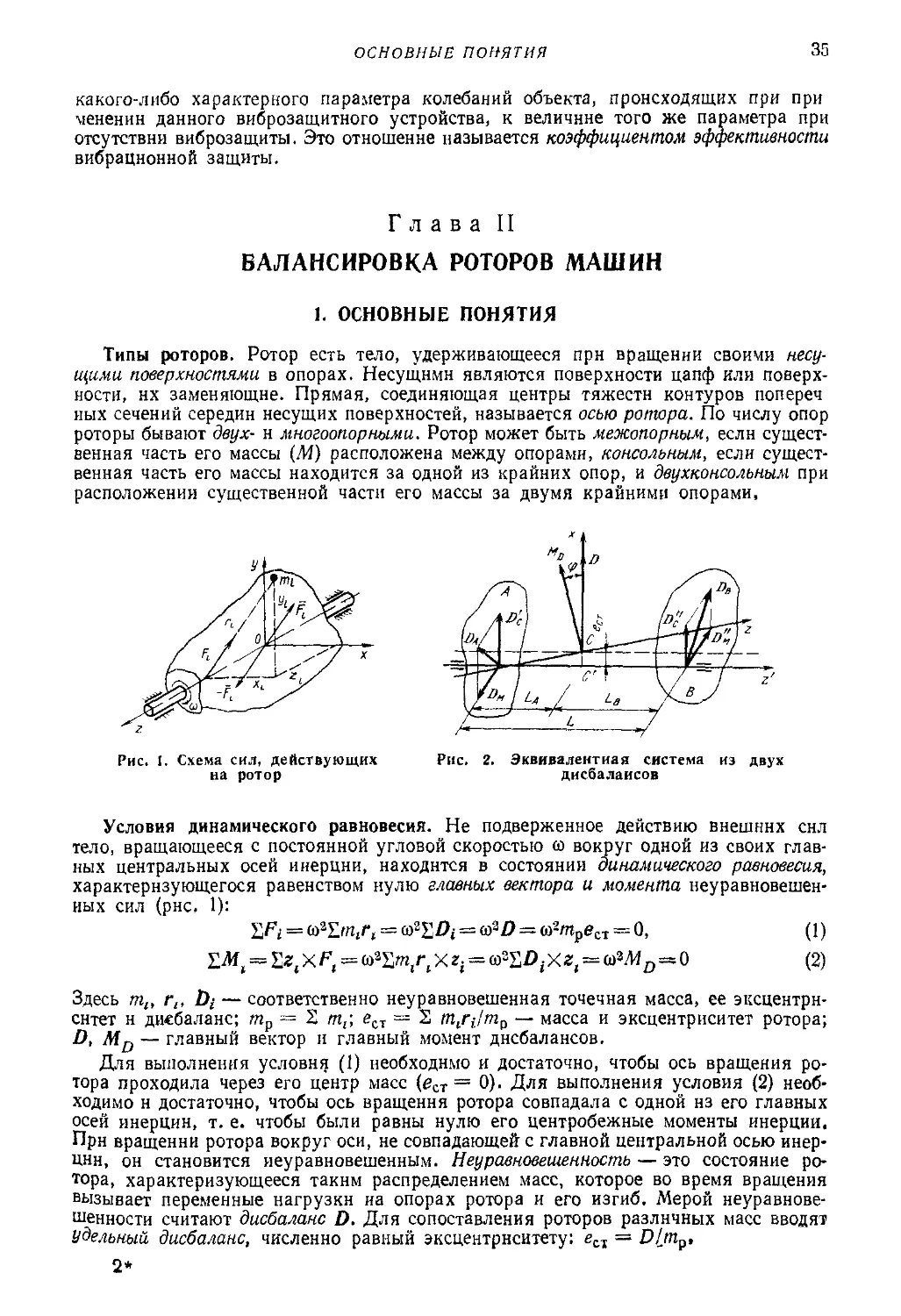
Типы роторов. Ротор есть тело, удерживающееся при вращении своими несу-
несущими поверхностями в опорах. Несущими являются поверхности цапф или поверх-
поверхности, их заменяющие. Прямая, соединяющая центры тяжести контуров попереч
ных сечений середин несущих поверхностей, называется осью ротора. По числу опор
роторы бывают двух- и многоопорными. Ротор может быть межопорным, если сущест-
существенная часть его массы (М) расположена между опорами, консольным, если сущест-
существенная часть его массы находится за одной из крайних опор, и двухконсольным при
расположении существенной части его массы за двумя крайними опорами,
Рис. 1. Схема сил, действующих
на ротор
Рис. 2. Эквивалентная система из двух
дисбалансов
Условия динамического равновесия. Не подверженное действию внешних сил
тело, вращающееся с постоянной угловой скоростью со вокруг одной из своих глав-
главных центральных осей инерции, находится в состоянии динамического равновесия,
характеризующегося равенством нулю главных вектора и момента неуравновешен-
неуравновешенных сил (рис, 1):
?Fi = w2?m,rt = w3S/?j = <B3/?==o>2mpeCT==O, A)
?М, = Ег, X F, = (ааГт,г, X г; = сог??>г х г, = <вШ о=0 B)
Здесь т,, г,, /),• — соответственно неуравновешенная точечная масса, ее эксцентри-
эксцентриситет и дисбаланс; тр = 2 т,; еСТ = 2 m,rt7/np — масса и эксцентриситет ротора;
D, MD — главный вектор и главный момент дисбалансов.
Для выполнения условия A) необходимо и достаточно, чтобы ось вращения ро-
ротора проходила через его центр масс (ест = 0). Для выполнения условия B) необ-
необходимо и достаточно, чтобы ось вращения ротора совпадала с одной из его главных
осей инерции, т. е. чтобы были равны нулю его центробежные моменты инерции.
При вращении ротора вокруг оси, не совпадающей с главной центральной осью инер-
инерции, он становится неуравновешенным. Неуравновешенность — это состояние ро-
ротора, характеризующееся таким распределением масс, которое во время вращения
вызывает переменные нагрузки на опорах ротора и его изгиб. Мерой неуравнове-
неуравновешенности считают дисбаланс D. Для сопоставления роторов различных масс вводят
Удельный дисбаланс, численно равный эксцентриситету; eCI = D[m9,
2*
36
БАЛАНСИРОВКА РОТОРОВ МАШИН
Виды неуравновешенности. В зависимости от взаимного расположения оси ро-
ротора г' и его главной центральной оси инерции г различают три вида неуравнове-
неуравновешенности, показанные в табл. 1, в которой фх и <р2 соответствуют величинам углов
между векторами эквивалентных сил неуравновешенности Ft и F2 и некоторой на-
начальной осью, которая в рассматриваемом случае совмещена с вектором Ft. При
статической неуравновешенности оси гиг' параллельны. Эта неуравновешенность
полностью определяется главным вектором дисбалансов D пли эксцентриситетом есс.
При моментной неуравновешенности ось ротора и его главная центральная ось инер-
инерции пересекаются в центре масс. Моментная неуравновешенность полностью опре-
определяется главным моментом дисбалансов ротора MD или его центробежными момен-
моментами инерции. При динамической неуравновешенности, состоящей из статической и
моментной, ось ротора и его главная центральная ось инерции пересекаются не
в центре масс ротора или перекрещиваются. Динамическая неуравновешенность
определяется главными вектором и моментом дисбалансов ротора.
1. Параметры эквивалентных систем сил для неуравновешенности
Схема ротора с неуравновешенными
массами и поверхности, описывае-
описываемые в пространстве главной, цент-
центральной, осью инерции ротора
Параметры эквива-
эквивалентной системы сил
Формулы для определения глав-
главного вектора и главного момен-
момента эквивалентной системы сил
Статическая неуравновешенность
ф1 = <J>2
Моментная неуравновешенность
ti =0;
Динамическая неуравновешенность
= ф2 = 0
или
<Pi=0; Фг = 0
либо
а -ф- 0 / л
X /1 — V + 2Я cos фг ф 0;
А = [m^r^X sin (Ф2 - фс)]2 -f-
I У, /?,-Хсоз(Фг-Ф(.)-соз фТ
"|_ 2а'Х cos (ф2 — Фс) + cos фс J '
ОСНОВНЫЕ ПОНЯТИЯ 37
Эквивалентные системы дисбалансов. Главные вектор и момент дисбалансов
можно заменить эквивалентной системой, состоящей из двух дисбалансов: DA и DBt
расположенных в двух произвольных, перпендикулярных оси ротора плоскостях А
и В (рис. 2). Расчет эквивалентной системы производится по правилам статики:
Перпендикулярная оси ротора плоскость, в которой задают значение и угол
дисбаланса, называется плоскостью приведения дисбаланса. Зачастую необходимо
переходить от одной эквивалентной системы к другой, расположенной в иных пло-
хкостях приведения. При таком переходе могут меняться не только величины дис-
дисбалансов, но и углы между ними. Подробно этот вопрос изложен в Методических
указаниях к ГОСТ 22061—76 и в работе [147]. Для частных случаев статической и
моментной неуравновешенности формулы пересчета дисбалансов приведены в
табл. 2.
Балансировка ротора. Так как неуравновешенность твердого тела может быть
заменена эквивалентной системой двух дисбалансов, расположенных в двух попе-
поперечных сечениях ротора, то всегда ротор может быть приведен в состояние динами-
динамического равновесия с помощью двух корректирующих масс, расположенных в двух
произвольных плоскостях коррекции. Корректирующие массы можно добавлять
или удалять из тела ротора или перемещать по нему. Процесс определения значений
и углов дисбалансов ротора и уменьшения их корректировкой масс называют балан-
балансировкой ротора. Измерять дисбаланс и уменьшать его при балансировке можно
последовательно как самостоятельные операции и одновременно, как при автомати-
автоматической балансировке.
Балансировку можно выполнять двумя методами. 1. Корректирующие массы
устанавливают, удаляют или перемещают таким образом, чтобы главная централь-
центральная ось инерции приближалась к оси ротора. Корректировку масс производят в од-
одной или нескольких точках одной плоскости коррекции либо в нескольких плоско-
плоскостях коррекции одновременно или последовательно. Корректировку масс произво-
производят сверлением, фрезерованием, наплавкой, наваркой, завинчиванием или вывин-
вывинчиванием винтов, выжиганием "электрической искрой, лучом лазера, электронным
пучком, электролизом и т. п. 2. Цапфы перемещают или обрабатывают так, чтобы
ось ротора совпала с главной центральной осью инерции. Метод имеет ограничения
в применении, так как он вызывает общее смещение ротора, недопустимое, например,
из-за изменения геометрии зубчатых зацеплений и лабиринтных уплотнений, зазо-
зазоров между ротором и статором, опасности задевания в лопаточном аппарате турбин
и т. д.
Дисбалансы, имеющие место до и после балансировки, называют соответственно
начальным и остаточным дисбалансами. Наибольший остаточный дисбаланс, при-
приемлемый по нормам балансировки, называется допустимым дисбалансом или соот-
соответственно допустимым удельным дисбалансом.
Гибкость ротора. Роторы делятся на жесткие и гибкие в зависимости от приме-
применяемых методов балансировки. Жестким считают ротор, который может быть сбалан-
сбалансирован на частоте вращения пБ, меньшей первой критической пх в двух произволь-
произвольных плоскостях коррекции и у которого остаточные дисбалансы не будут превышать
допустимых на всех частотах вращения до наибольшей эксплуатационной пъ. Иногда
жестким называют ротор, у которого пь s= kn^. Значение коэффициента k прини-
принимается 0,2—0,7. Соответственно гибким считают ротор, который не может быть сба-
сбалансирован на частоте иБ < пх в двух произвольных плоскостях коррекции так,
чтобы значения его остаточных дисбалансов не превышали допустимых на некото-
некоторых частотах вращения до пь. Методы балансировки жестких и гибких роторов су-
существенно различаются.
Существуют роторы с изменяющейся геометрией или изменяющейся массой, для
которых применяют специальные методы балансировки, в частности автоматическую
балансировку на ходу.
38 БАЛАНСИРОВКА РОТОРОВ МАШИН
2. Формулы пересчета дисбалансов из одних плоскостей в другие
Схема взаимного
расположения плоокостей
х 1
т
т
2д=в Z,=l, Z
V
If
2
~J~ Z
41 z
f
г
4
T
z
D A^^
UB
O,=
D2 =
UB
D,=
DB =
Di =
Oi =
Дисбалансы от неуравновешенности
атати«еакоA
L
h~l,
DJt ¦}- Dilj ,
L
li — U
Di(L-h) + D (L-l)
L
DAlL-DB(L-l)
г.-л
л.
L
DAll+VB\L + ,d
l, + l,
D
РП-Г
С
o, = -
?
D
D A
DB
I
D
моментной
D./.4
L
г
,(L-
L
Al! +
h
Dtl,+
L
1
ill + i
L
и
M-o.it
L
¦ D2l,.
DB(L~l
i-h
DB(L—l
L
DB(L-
7b\l-i
L
Diti ¦
¦DB(L-
L
D ft (L — /
+ /i
f DB (L -t
. + Л
j
~ г ;¦
г)
i}
—J
x)
ДОПУСТИМАЯ ОСТАТОЧНАЯ НЕУРАВНОВЕШЕННОСТЬ РОТОРОВ
39
2. ДОПУСТИМАЯ ОСТАТОЧНАЯ НЕУРАВНОВЕШЕННОСТЬ РОТОРОВ
Требования к качеству балаисйровки, В реальных Машинах невозможно пол*
ностью устранить неуравновешенность, поэтому возникает вопрос о назначении
допусков на остаточную неуравновешенность. Для снижения динамических негру*
зок желательно иметь наименьшие дисбалансы, но повышение точности баланси-
балансировки увеличивает время и затраты на ее проведение. Точность балансировки должна
соответствовать точности изготовления ротора. Чувствительность балансировочных
станков имеет определенные пределы. Таким образом, назначаемые допустимые
дисбалансы должны учитывать требования эксплуатации, технические возможности
производства и экономические факторы.
Допустимые дисбалансы должны обеспечивать уравновешенность ротора за все
время эксплуатации, несмотря на допустимые износы в кинематических парах, и
воздействия температурных и силовых полей; точность выполнения основных функ-
функций прибора или машины; допустимый уровень вибраций установки во время экс-
эксплуатации на всех режимах; долговечность работы подшипников ротора; допустимые
напряжения в теле ротора и давления на подшипники.
Качество балансировки можно определить двумя способами:
1) указанием величины допустимого дисбаланса в заданных плоскостях — для
балансировочных станков с компенсацией колебаний опор и с неподвижными опо-
опорами, а также для балансировки ротора в собственных жестких опорах;
2) указанием допустимых амплитуд колебаний подшипников — для балансиро-
балансировочных станков с упругими опорами при электрической компенсации колебаний опор
и для балансировки ротора на собственных упругих опорах.
Коэффициент неуравновешенности. На основе изучения работы подшипников
с зазорами было введено [239] понятие коэффициента неуравновешенности k, рав-
равного отношению динамической нагрузки F^ на подшипник от неуравновешенных
центробежных сил к статической реакции Рст от веса ротора k — FjPZT. Для обес-
обеспечения работы подшипника в наиболее выгодном режиме необходимо, чтобы k < 1.
Однако различные специалисты предлагают предельные значения k от 0,01 до 0,5,
так как этот коэффициент имеет определенное значение лишь для роторов конкрет-
конкретного типа.
Допустимые дисбалансы. В ФРГ приняты рекомендации (VDI — Richtlinien—2056)
по допустимым удельным дисбалансам [?ст] с учетом назначения машины (табл. 3',
3. Допустимые удельные дисбалансы по нормам VDI
К
А
В
С
D
Е
F
Высокооборотные гироскопы
Якори, валы и шлифовальные круги презиционных станков, быстро-
быстроходные центрифуги
Якори микродвигателей, малые и средние газовые турбины, быстро-
быстроходные воздуходувки, шлифовальные станки
Жесткие роторы малых электродвигателей, турбин воздуходувок, тур-
турбогенераторов
Роторы серийных электродвигателей, вентиляторы, детали машин, стан-
станков, скоростных передач, коленчатые валы двигателя о четырьмя ци-
цилиндрами и более, детали транспортных средств
Карданные валы, коленчатые валы трехцилиндровых двигателей, тихо-
тихоходные части текстильных машин
Автомобильные колеса, шины, колесные скаты, детали дробилок
0,05—0,25
0,2—1,0
0,5-2,5
2—10
5—23
20—100
50—250
Фирма Рейтлингер (ФРГ) рекомендует выбирать допустимый удельный дисбаланс
с учетом назначения машины и частоты вращения п (об/мин) ротора.
Для общего машиностроения, где не предъявляется особых требований к уровню
вибраций, усталостная прочность материала обеспечивается, если виброускорения
не превышают 0,1 g; при этом условии и равенстве весов вращающейся и невращаю-
Щейся частей [evT] = 2- Ю8 п-2,
40
БАЛАНСИРОВКА РОТОРОВ МАШИН
Для высокоскоростных роторов с целью обеспечения заданной долговечности
Т шариковых подшипников принимается
te?T] = 22,8 ¦ 10»С
где С — коэффициент работоспособности подшипника; G — вес ротора, кг.
Для машин и приборов, с которыми человек соприкасается во время работы,
в том числе для бытовых приборов, [ест] = 6000//г мкм.
Класс
0
I
II
III
4.
п, об/мин
Св 10 000
7500—10 000
5000—7500
3000—5000
Допустимые удельные
И. %
г!
3
4
[«„], мкм
До 0,2
0,4—0,2
1-0,45
4-1,4
дисбалансы по ьс-кксру
Класс
IV
V
VI
о, об/мин
1500—3000
750—1500
До 1000
[А]. %
5
6,5
[«„]. мкм
20—5
100—25
250—50
Для металлообрабатывающих станков
[ест] = 3-10M/(Gn2) при п< 1000 об/мин и п> 10000 об/мин;
[ecr]=10M/(Gn2) при 1000 s?ns? I0000 об/мин.
Коэффициент А зависит от п, типа станка и нахождения деталей вблизи (Ах)
или вдали (Л2) от обрабатываемой детали. Для особо точных шлифовальных станков
при п < 5000 об/мин Ах = 15, А2 = 30. Для точных сверлильных, токарных и фре-
фрезерных станков Лх = 30, А2 = 50. Для прочих
fe,J «w машин /4Х = 50, Л2 = 100. Для шпинделей внутри-
шлифовальных станков Ах — 100 — 200.
Г. Беккер [256] делит роторы на классы (табл. 4)
в зависимости от п, принимая для каждого класса
допустимые значения коэффициента неуравновешен-
неуравновешенности k и удельного дисбаланса [ест].
Допустимые дисбалансы электрических машин.
ГОСТ 12327—79 устанавливает три класса точно-
точности балансировки @, 1, 2) для каждой из трех групп
электрических машин: микромашины с массой ро-
ротора до 0,1 кг, малые машины с массой от 0,1 до
3 кг и средние машины с массой от 3 до 1000 кг.
Допустимые удельные дисбалансы заданы на рис. 3.
Нулевому классу точности соответствуют прямые:
0 — для микро- и малых роторов и / — для средних
роторов; первому классу — прямые; / для микро-
и малых роторов и 3 — для средних роторов; вто-
второму классу — прямые 2, 3 и 4 для микро-, малых
и средних роторов соответственно. Для роторов с
п < 750 об/мин допустимый удельный дисбаланс
70
so
w
30
го
w
V
-V-
•А
л—\
\
1\
ч
S
s
\
S
S
ч
s
s s
>
-
\
\ \
\
¦\ч
\
\
\
\
V
s
\
Ц75/
Z J It 5 S S Ю ц
сot?//iu/<
Рис. 8. Допустимые дисбалансы
жестких роторов электромашин
[е„]=75О[ео]/п,
где [е0] — допустимый дисбаланс для данного ро-
ротора при п = 750 об/мин.
По классу 2 балансируют электромашины общего назначения. Балансировка
по классу 1 рекомендуется для электромашин с повышенными требованиями по
уровню вибраций (для точных станков и приводов полиграфических машин, неко-
некоторых бытовых электродвигателей, микромашин, электромашин с подшипниками
классов 5 и 6 по ГОСТ 520—71*, а также машин в малошумном исполнении). По
классу 0 балансируют электромашины с особо жесткими требованиями по уровню
вибрации и надежности (машины, работающие на подшипниках классов 2 и 4),
ДОПУСТИМАЯ ОСТАТОЧНАЯ НЕУРАВНОВЕШЕННОСТЬ РОТОРОВ
41
Допустимая неуравновешенность шлифовальных кругов. ГОСТ 3060—75 для
шлифовальных кругов устанавливает четыре класса допустимой неуравновешен-
неуравновешенности, мерой которой служит м'асса в граммах по периферии круга, возвращающая
центр масс на ось вращения. Допустимые неуравновешенные массы приняты в за-
зависимости от массы круга. По нормам для классов 1, 2, 3 и 4 соотношение неуравно-
неуравновешенных масс составляет приблизительно 1 : 1,57 : 2,47 : 4,94.
Для алмазных шлифовальных кругов ГОСТ 16181—70 устанавливает предель-
предельные значения допустимого удельного дисбаланса 40, 32, 25 и 20 мкм при массе круга
до 1 кг, 1—3 кг, 3—10 кг и 10—50 кг соответственно. Для плоских алмазных кру-
кругов, применяемых в оптикомеханической промышленности ГОСТ 17007—71 преду-
предусматривает [ест] = 30 мкм.
А,мкм
700
500
300
гоо
ю1
80
60
ио
30
го
ю
9
6
it
J
2
V
¦ .
——-—
¦
—,
—*-
N
s
1
\
к
>
S
s
,\\
»Ч^^Ч^
чs
V
\-
s
S
s
Л
s
ч
\
1 (
Ч
\
SS
V
\
s
j.
s
\
*
L_
Z J <• 5678 10 W SO
№000
7000
юоо
г ооо
Г2Ш
700
ш
гоо
гго
?0
т
го
п
7
г
1,2
V
rt j
0,11
0,07
ОМ
\
—
\
s
s
р
s
S
ч
\
\
Л
S
S
\
s
ч
V
к4
s
V
\
0,15мм раё/с
10
\
S
Ь000ммуад/с
\2М-
\
К
s
\
-\
\
s
\ ?\
too-
s
s.
s
V
s
S
^
N
w?
i 4
XI
Л
\
s
s
IS
^x
s
S
m
\
\
\
»/
s
H
Рис. 4. Вибрационные состояния агре.
гата по Т. Ратбову
Рис. 5. Поля классов точности балан-
балансировки по ГОСТ 22091—76
Допустимые амплитуды колебаний подшипников. Допустимая неуравновешен-
неуравновешенность ротора может определяться не только допустимым дисбалансом, но и наиболь-
наибольшей амплитудой колебаний подшипников, что характерно для балансировки круп-
крупного энергетического оборудования.
Диаграмма на рис. 4 составлена Т. Ц. Ратбоном [256] на основе измерений на
крупных энергетических агрегатах. Зона а соответствует очень неспокойной работе
машины и необходимости срочного ремонта; b — неспокойной работе и ремонту в бли-
ближайшее время; с — немного неспокойной работе и планированию ремонта; d — до-
допустимым колебаниям; е — хорошему состоянию; / — отличному состоянию. Пря-
Прямая / на рис. 4 соответствует вибрациям с ускорениями, равными 0,05 g, прямая // —
вибрациям, которые становятся опасными для строений.
Для двухполюсных паротурбинных электрогенераторов измеряемая в трех на-
направлениях вибрация на верхних крышках подшипников у разъема при всех режи-
режимах работы не должна превышать 40 мкм (ГОСТ 533—76), для синхронных компен-
42
БАЛАНСИРОВКА РОТОРОВ МАШИН
саторов — 80 мкм (ГОСТ 609—75*), для электромашинных преобразователей —
15 мкм (ГОСТ 16313—70*).
Классы точности балансировки. Система классов точности балансировки для
жестких роторов машин и технологического оборудования (ГОСТ 22061—76) уста-
установлена в соответствии с международным стандартом ИСО 1940—73. ГОСТ преду-
предусматривает 13 классов точности — с нулевого по двенадцатый. Каждый класс опре-
определяет наименьшие и наибольшие значения произведения удельного дисбаланса ест
на наибольшую эксплуатационную угловую скорость штах, составляющие геометри-
геометрическую прогрессию со знаменателем 2,5. Расположение полей классов точности
показано на рис. 5. В области левее прямой Я — Я, где ест<а^ах < g, роторы в опо-
опорах создают динамические нагрузки от дисбалансов меньшие, чем статические на-
нагрузки от веса ротора.
В табл. 5 приведены рекомендации ИСО 1940—73 по предварительному назначе-
назначению класса точности проектируемых изделий. Окончательно класс точности уста-
устанавливают после экспериментальных исследований опытного образца или опытной
серии.
5. Классы точности балансировки жестких роторов
Класс
точ-
точности
0
1
2
3
4
5
6
7
8
9
10
и
12
есг <">max' мм .рад/с
наи-
наименьшее
0,064
0,16
0,40
1,00
2,50
6,30
16.0
40,0
100
250
630
1600
4000
наи-
наибольшее
0,16
0,40
1,00
2,50
6,30
16,0
40,0
100
250
630
1600
4000
10 000
Типы роторов (рекомендации ИСО 1940—73)
Применяется факультативно
Шпиндели, шлифовальные круги и роторы электродвигате-
электродвигателей презиционных шлифовальных станков, гироскопы
Приводы шлифовальных станков, магнитофонов и проигры-
проигрывателей, малые электродвигатели специального назначения
Газовые и паровые турбины, турбогенераторы с жесткими
роторами, турбокомпрессоры, приводы станков, средние и
крупные электродвигатели специального назначения
Маховики, крыльчатки центробежных насосов, роторы обыч-
обычных электродвигателей и авиационных газотурбинных двига-
двигателей в сборе, части станков и машин общего назначения и
технологического оборудования, главные редукторы турбин
торговых судов, барабаны центрифуг, вентиляторы
Части дробилок, сельскохозяйственных машин, двигателей
автомобилей и локомотивов, коленчатые валы двигателя
с шестью цилиндрами и более, гребные валы и карданные
валы
Колеса легковых автомобилей, ободы колес, бандажи, ко-
колесные пары, приводные валы, тормозные барабаны и ко-
коленчатые валы для автомобиля и локомотива и установлен-
установленного на виброизоляторах высокооборотного четырехтактного
двигателя с шестью цилиндрами и более
Коленчатый вал дизеля с шестью цилиндрами и более, дви-
двигатели в сборе для автомобилей и локомотивов
Коленчатый вал жестко установленного высокооборотного
четырехцилиндрового двигателя
Коленчатый вал жестко установленного мощного двигателя
и виброизолированного судового дизеля
Коленчатый вал жестко установленного двухтактного двига-
двигателя большой мощности
Коленчатый вал низкооборотного судового дизеля с нечетным
числом цилиндров без виброизоляции
Применяется факультативно
Учет полигармонического состава вибраций. При оценке интенсивности вибра-
вибраций машин по размахам вибросмещений опор, предельные значения которых заданы
в зависимости от частоты вращения, предполагают, что вибрация синусоидальная
с частотой, равной частоте вращения ротора. Для оценки полигармонической виб-
СТАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
43
рации удобно пользоваться эффективным значением виброскорости
Г . 1/2
у- f И
где Г — период; и — мгновенное значение виброскорости.
Для вибраций с конечным числом гармоник
где Л;, Ш/ — соответственно амплитуды и частоты составляющих гармоник.
Для синусоидальной вибрации Vb = А^а^/У^й.
Использовать У9 для оценки эффективно при наличии высокочастотных соста-
составляющих. Значения Vt не зависят от фазовых сдвигов гармоник, мало изменяются
от случайных помех в виде толчков и ударов и измеряются непосредственно. Эффек-
Эффективные значения позволяют сравнивать синусоидальную и сложногармоническую
вибрации и однозначно оценивать их через эквивалентное значение виброскорости
У*™ = Y2 Va.
Эти преимущества позволили СЭВ рекомендовать в качестве критерия интенсив-
интенсивности'вибрации Vs (PC 2557—70), что учтено при разработке ГОСТ 16921—71* на
допустимые вибрации электромашин, имеющих массу 0,25—200 кг и частоту вра-
вращения 600—1200 об/мин.
Нормируемым параметром вибрации является наибольшее из эффективных зна-
значений виброскорости Vemax, измеренных в соответствии с ГОСТ 12379—75 для диа-
диапазона частот от рабочей до 2000 Гц.
Для оценки вибрации собранных электромашин установлено восемь классов от
0,28 до 7,0, составленных по шкале нормо-чисел с равным коэффициентом увеличе-
увеличения 1,6. Индексы классов соответствуют максимально допустимой для данного класса
виброскорости, например, класс 0,28 соответствует F8tnax = 0,28 мм/с.
Класс вибрации выбирают с учетом назначения машины, эксплуатационных
требований н результатов испытаний опытных образцов. Например, для машин вида
М10 в зависимости от высоты расположения оси вращения h (в мм) и от назначения
рекомендуются классы, приведенные в табл. 6,
в. Рекомендуемые классы вибрации (^9тах' мм/с)
Тип машины
Общеяромышленного назначения
С повышенными требованиями
С особо жесткими требованиями
Высота А, мм
До 80
1,1
0.7
0,45
80—132
1.8
1.1
0.7
132—225
2,8
1.8
1.1
Св. 225
4,5
2,8
1.8
3. СТАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
Условие допустимости одной статической балансировки. Для роторов диско-
дискообразной формы, масса которых размещена приблизительно в одной плоскости, до-
достаточной является статическая балансировка, состоящая в приведении центра
масс ротора на ось вращения с помощью корректирующей массы, устанавливаемой
в одной плоскости коррекции. Обычно это допустимо для роторов (табл. 7), у кото-
которых отношение длины /t к диаметру d меньше 0,20—0,25.
При статической балансировке на радиусе rs в плоскости коррекции устанав-
устанавливают корректирующую массу
тре„ ?>с
44 БАЛАНСИРОВКА РОТОРОВ МАШИН
7. Роторы, допускающие только статическую балансировку
Тип ротора
Часовые балансы, диски сцепления и турбин, дисковые пилы, плоские
шлифовальные круги, фланцы катушек текстильных машин
Колеса цепных передач, фланцы вилки карданного вала, диски вариатора
скорости
Маховики автотракторного двигателя, роторы вентиляторов, рабочие ко-
колеса центробежных насосов, муфты
Шкивы и зубчатые колеса быстроходных передач, колеса автомобилей,
шины, чашечные шлифовальные круги
0,1
0,15
0,2
0,25
Если единственная плоскость коррекции проходит через центр- масс ротора или
корректирующие массы устанавливают в две симметричные относительно центра
масс плоскости, то статическая балансировка не вызывает дополнительной момент-
ной неуравновешенности. При одной плоскости коррекции, расположенной на рас-
расстоянии /к от центра масс ротора, после статической балансировки возникает момент
Рис. 6. Устройство для баланси-
балансировки на призмах
Рис. 7. Схемы балансировки на двухдисковом (а)
и однодисковом (б) устройствах
MDK = tnKrKlR = —DclK, и условием допустимости только статической баланси-
балансировки будет
?>Л s? [eCT] mvL,
где L — расстояние между опорами ротора.
Если при этом lxld > 0,25 и ротор имеет также моментную неуравновешен-
неуравновешенность MD, то условие допустимости только статической балансировки будет иметь
вид
Устройства для статической балансировки. В большинстве устройств для стати-
статической балансировки используется свойство центра масс ротора занимать при устой-
устойчивом равновесии наинизшее положение.
Простейшим устройством являются параллельные горизонтальные ножи или
призмы. Ротор 1 (рис. 6) цапфами 2 устанавливают на две горизонтальные стальные
лризмы 3. Отклонение плоских поверхностей призм от плоскостности не должно
превышать 0,1 мм на метр длины призмы. Ширина рабочей части призмы
a = m/Bd),
где т— ——масса ротора, кг; d—диаметр цапфы, мм. Момент инерции попереч-
LI АТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
ного сечения принимают из условия,
шал величину у == 0,02 •+¦ 0,03 мм:
/3=
чтобы прогиб в середине призм не превы
1 QP
2Еу '
где / — расстояние между опорами призм.
Если дать возможность ротору перекатываться по призмам, то из-за наличия
трения качения (коэффициент трения качения для стальных вала и приш kT =
= 0,01 -т- 0,05 мм) ротор после нескольких качаний остановится в позиции, не сов-
совпадающей с наинизшим положением центра масс С (h = kT). На рис. 6 показаны по-
положения центра масс С" и С", в которых возможно равновесие ротора при враще-
вращении его в двух направлениях (R' и R" — реакции). Среднее положение соответ-
соответствует истинному положению центра масс С.
"Наибольший остаточный эксцентриситет при балансировке на призмах e0CI = kT.
Недостатком балансировки на призмах является необходимость точной установки
их в горизонтальной плоскости. На них нельзя балансировать детали с разными
диаметрами цапф из-за различия длин дорожек перекатывания. Этих недостатков
лишен способ статической балансировки ротора 1 на двухдисковом устройстве
(рис. 7), выполняемый аналогично балансировке на призмах, но с меньшей точ-
точностью из-за дополнительного трения в под-
подшипниках дисков 3:
1
¦ |*т-
Рис. 8. Схемы балансировки в цент-
центрах ротора с закрытыми (а) и от-
открытыми (б) цапфами
где г, гл и гп — радиусы цапфы 2, диска 3 и
его подшипника; / — приведенный коэффициент
трения (для шарикоподшипников / = 0,0001 -f-
-г- 0,0004), р = arcsin [В/2 (г + лд)] — угол меж-
между вертикалью и прямой, соединяющей центры
цапфы и диска; В — расстояние между осями
дисков.
Повысить точность балансировки можно,
увеличив радиусы дисков 3, что одновременно
уменьшает величины f> и г!гА. При этом диски 3
устанавливают так, что они перекрывают друг друга (рис. 7, а). Дальнейшее усо-
усовершенствование устройства заключается в применении одного опорного диска 3
увеличенного диаметра (рис. 7, б), на который устанавливают цапфу ротора, под-
подпертую для устойчивости диском 4 малого диаметра, не несущим нагрузки; при
этом Р«2+3°.
Известны устройства для статической балансировки в подшипниках качения
(рис. 8). Точность балансировки в этом случае определяется моментом трения в под-
подшипниках, для снижения которого применяют вибрацию основания устройства с по-
помощью электромагнита или двигателя с эксцентриком, или принудительное враща-
вращательное или качательное движение наружных колец подшипников в противополож-
противоположные стороны.
Для статической балансировки с повышенной точностью применяют баланси-
балансировочные весы (рис. 9). Весы (рис. 9, а) имеют две стойки / с калеными клиновидными
опорами, в которых установлена опор-ная призма коромысла 2. На коромысле укреп-
укреплены шкала 3 и стрелка 4, а также могут передвигаться гири 5 и 6. Для обеспе-
обеспечения устойчивого равновесия центр масс коромысла с балансируемым ротором рас-
расположен ниже центра колебаний. Подъемом груза 7 эти центры можно сближать,
повышая чувствительность весов. Коромысло уравновешивают гирей 5 при нуле-
нулевом положении гири. 6, При установке ротора под влиянием момента от неуравно-
неуравновешенности коромысло наклонится. Поворотом ротора добиваются нулевого поло-
положения стрелки 4, при котором центр масс ротора и опора коромысла находятся на од-
одной вертикали. Отметив положение плоскости дисбаланса, ротор поворачивают
на 90°, так что неуравновешенность действует на наибольшем плече, уравновеши-
уравновешивают весы гирей 6 и по шкале 3 определяют необходимою корректирующею массу,
46
БАЛАНСИРОВКА РОТОРОВ МАШИН
Конструкция весов для ротора с собственными опорными шейками показана
на рис. 9, б. Ротор / шейками помещают на подшипники рычага 2, поворачиваю-
поворачивающегося вокруг опоры 3. Груз 4 позволяет компенсировать массу ротора и ставить
рычаг в горизонтальное положение, определяемое инцикатором 5. Поворотом ротора
находят положение, при котором центр масс С находится ближе всего к опоре 3
и создает наименьший момент М' = Qp, компенсируемый с помощью груза 6. Отме-
Отметив плоскость дисбаланса, ротор поворачивают на 180° и момент, равный М" =
= Q (р + 2ест), снова компенсируют грузом 6. По длине перемещения груза 6
непосредственно определяют значение дисбаланса.
*=»
Рис. 9. Батансировочные весы
Для роторов без собственных шеек применяют весы, показанные на рис. 9, в.
Ротор 1 посадочным местом центрируют на платформе 2, которая может повора-
поворачиваться в вертикальной плоскости вокруг опоры 3. По указателю 5 путем пере-
перемещения груза 4 по шкале 6 платформу устанавливают в горизонтальное положе-
положение. Дисбаланс определяют при повороте ротора вокруг оси.
Удельные остаточные дисбалансы, получаемые при статической балансировке
на различных устройствах, приведены в табл. 8.
8. Точность статической балансировки без вращения ротора
Устройство
С призмами
Роликовое
Двухдисковое
Эднодисковое
Балансировочные весы
еосг ш
т
80
80
to, при типе ротора
с
30
50
25
20
10
*
л
Ш
30
15
10
5
• Роторы; т — тяжелые; с —средние; л —легкие.
СТАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
47
Недостаток рассмотренных приспособлений состоит в необходимости удовлетво-
удовлетворения трудносовместимых требований — получения наименьшего момента трения
при большой нагрузке. Значительного повышения точности и производительности
определения дисбаланса ротора достигают при балансировке вращающегося ротора
в динамическом режиме на станках для динамической балансировки.
Методы статической балансировки характеризуются способом определения
величины корректирующей массы; положение центра масс во всех случаях опре-
определяют одинаково.
Наиболее простым является метод подбора корректирующей массы, устанавли-
устанавливаемой диаметрально противоположно положению центра масс, для получения рав-
равновесного состояния ротора в любых положениях.
Рис. 10. Схема и номограмма для определения
корректирующей массы с помощью пробной массы
mm
2!0T,,c2W
от,, г
WOO
-wo
¦700
¦600
-ЩО
¦too
~300
zoo
too
о
ч
111! I
Рис. 11. Номограмма для опре-
определения корректирующей массы
по периодам колебаний
При применении пробной массы тП корректирующую массу тк можно опре-
определить расчетом. Для этого фиксируют два равновесных положения ротора: без та
(рис. 10, а) и с тп, установленной под углом 90° к «легкому месту» (лм) ротора
(рис. 10, б). Из рис. 10, б следует mar sin q> = mnr cos <p, откуда тк = тн — тп ctg ц>,
где mH — неуравновешенная масса, ф — угол поворота ротора при установке проб-
пробной массы. На рис. 10, в дана номограмма для определения тк.
При методе расчета корректирующей массы по колебаниям измеряют периоды
колебаний Т{ и Г2 ротора, отклоненного от положения равновесия на угол а без тп
и с пробной массой, установленной в «тяжелом месте». Корректирующая масса
Величину /ик можно определить по номограмме (рис. 11). Для этого через точки,
соответствующие времени 10 двойных качаний на шкалах Т\ и Тг, проводят пря-
прямую / и параллельно ей через точку, соответствующую величине пробной массы
на шкале тп, прямую //, Точка пересечения прямой // со шкалой тк определяет
необходимую корректирующую массу,
При статической балансировке серии одинаковых роторов достаточно по изме-
измерениям для первого ротора определить коэффициент k — пгкТ\ и последующие
роторы серии балансировать по измерениям только перехода Тц, вычисляя кор-
корректирующую массу по формуле
k
Дифференциальный метод удобен для статической балансировки тяжелых ро-
роторов, которые из-за большого сопротивления не могут самоустановиться в поло-
48
БАЛАНСИРОВКА РОТОРОВ МАШИН
жение равновесия. Для приведенных к поверхности ротора сил (рис. 12) это озна-
означает, что GHcosa<"FT( где 0н — неуравновешенный груз, FT— эквивалентная
сила сопротивления, a — угол дисбаланса относительно горизонтальной плоскости
для данного положения ротора. Наружную поверхность ротора делят на несколько
равных частей, например 12, и обвивают гибкой лентой, один конец которой за-
закреплен, а к другому, свободно свисающему, крепят пробные массы mm-. Ротор
устанавливают так, что прямая 1—7 принимает горизонтальное положение (рис.
12, а) и на ленту вешают такую пробную массу тп1, чтобы ротор начал движение.
ч
?
//* \<*
**•!) k - r-
f Тт Ъ
В„, a) Enr S)
Рис. 12. Схема и круговая диаграмма дифференциального метода балансировки
Для этих условий действительно равенство gmal = F-s — G4 cos а. Аналогично для
точки 7(рис.12,6) получаютgmn7 = FT + GH cos а.Отеюда g (mn7 — mnl) = 2GH cosa.
Этим влияние сопротивлений исключается, что является преимуществом дифферен-
дифференциального метода. Подобную операцию повто-
повторяют для всех точек и данные измерений нано-
наносят на круговую диаграмму (рис. 12, в). Для
этого произвольную окружность kx делят на 12
равных частей. Из_охдельных точек на соответ-
соответствующих диаметрах в масштабе откладывают
отрезки, равные найденным разностям для про-
противолежащих точек:
т17,1
70
so
so
\
\
/
птах*
э и
— mni].
Рис. 13. Кривая зависимости та
от точек приложения при методе
кругового обхода
Положительные значения а откладывают сна-
снаружи, а отрицательные — внутри окружности
&!. Соединив отложенные точки, получают кри-
кривую feg, подобную кардиоиде. Из центра О проводят окружность k3, касающуюся
кривой k2 в точке N. Прямая ON соответствует плоскости дисбаланса, а отрезок
MN — его величине в выбранном масштабе.
Метод кругового обхода аналогичен дифференциальному, только пробную массу
крепят на поверхности ротора. Зависимость тп; от точек приложения i наносят
на рис. 13, получая кривую, подобную синусоиде. Максимум кривой соответствует
«легкому месту», в которое следует установить корректирующую массу
4. ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
Классификация механических систем балансировочных станков. Балансировоч-
Балансировочный станок по существу является измерителем колебаний механической системы,
связанной с ротором, по характеристикам которых можно судить о неуравновешен-
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ 49
ности ротора. Механические системы балансировочных станков делят на группы
по общности функциональных зависимостей колебаний от неуравновешенности
ротора.
В классификации по числу степеней свободы механические системы распреде-
распределены по семи классам (табл. 9). Номер класса (римская цифра) соответствует числу
степеней свободы жесткого ротора; буквой А дополнительно обозначена группа
станков, имеющих раму, на которой размещены опоры ротора, а буквой Б — группа
станков с опорами, установленными на неподвижном основании.
Системы классов IVB, VA, VIA и VIB промышленного применения не получили. Системы
классов ША, ШБ и IVA имеют ограниченное применение в балансировочных станках, вы-
выпускаемых фирмами Hofmann — Kunze (ФРГ) — ША, General Motors Corporation (Анг-
(Англия) - IIIБ и General Electrik Со (США) — IVA.
Широкое применение получили системы классов: IA — в устройствах для статической
балансировки в статическом режиме; 1Б — в станках типа МДУ, ДБН, МДУС и в станках
фирмы Losenhausenwerk (ФРГ) типа UA, ИА, ИАГ, ПА — в станках М-40, М-48, МДБГ-1,
УУГ-3 и в БС фирм Tinius — Olsen (США) и Glesler (Англия) типа G2; ПБ — в станках кон-
конструкции МИИТа, фирм Bear (США), Bentrath (Англия) и Losenhausenwerk; VB — в стан-
станках типа БД, МС, МДБ, 9703, 9710, 9739 разных модификаций, серий ВНЕ (ВНР) и AM (ГДР)
и фирм К. Schenck (ФРГ) серии /?, Reitlinger (ФРГ) серии YGW и Hofmann (ФРГ) серии Е,
Gisholt типа HS и Dynagraph типа М (США), Erikson (Швеция) типа URB, Jackson Bradwell
Ltd, Dawe Instum Ltd и EMJ (Англия); VIIA — в ряде станков конструкции МВТУ, а также
в станках фирм Sperry — Strobodyn (США) и Heiman (ФРГ).
Рис. 14. Классификация механических систем балансировочных станков по числу степеней
свободы оси вращающегося ротора
В классификации по числу степеней свободы оси ротора (рис. 14) группа 1 с не
подвижной осью ротора (рис. 14, а) соответствует классам IA и 1Б; группа 2 (одна
степень свободы) с фиксированной осью колебаний оси ротора (рис. 14, б) — классу
ПА; группа 3 (три степени свободы) с фиксированной плоскостью колебаний оси
ротора (рис. 14, в) — классу VB; группа 4 (шесть степеней свободы) с пространствен-
пространственным движением оси ротора (рис. 14, г) — классу VIIA.
Балансировочные станки группы 1 (ДБН-50, МДУ-3) имеют жесткую связь оси
ротора массы т через неподвижные подшипники с несоизмеримо большой мас-
массой /Лф. Дисбалансы ротора определяют по измерениям динамических реакций под-
подшипников, распределение которых обусловлено только положением центра масс
относительно подшипников или точек измерения.
Станки группы 2 (М-40, МДБГ-1) имеют жесткую связь колеблющейся системы
с основанием в направлении перпендикулярном фиксированной оси колебаний
системы и обычно эксплуатируются при резонансном режиме с большими угловыми
колебаниями рамы, что удобно для измерений.
В станках группы 3 (ДБ-102, ДБ-302) дисбалансы ротора определяют в двух
плоскостях коррекции за один пуск ротора. Для обеспечения линейности колебаний
системы, дающей возможность их суммирования, эти станки работают в зарезонанс-
ном режиме. Малые колебания опор преобразуются в электрические сигналы, в изме-
измерительной системе вырабатывается разностный сигнал, отражающий дисбаланс
в конкретной плоскости коррекции.
В станках группы 4 (МВТУ-772, ВМТУ-775) ротор опирается на подшипники,
жестко связанные с колеблющейся рамой, которая соединена с неподвижным основа-
основанием через упругие связи и демпферы, О дисбалансах ротора судят по колебаниям
50
БАЛАНСИРОВКА РОГОРОВ МАШИН
9. Классификация механических систем балансировочных станков по числу
степеней свободы ротора
Класс
Конструктивная группа
V////////////A
'////////////////Л
[II
IV
ft
VI
V///////////////A
VII
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
51
любой точки рамы. Можно найти точки, движение которых зависит или от стати-
статической, или от моментной неуравновешенности, что повышает точность измерения.
Отсутствие жестких связей с полом делаег систему мало чувствительной к воздей-
воздействию внешних вибраций.
Технические характеристики ряда отечественных и зарубежных универсальных
балансировочных станков приведены в табл. 10—13, где т, d, L, rftt — соответ-
соответственно масса, наибольший диаметр, расстояние между опорами и диаметр цапф
балансируемого ротора; п—балансировочная скорость; N — мощность привода;
/К — масса станка.
В последнее время разработаны балансировочные станки-автоматы, в которых
совмещены операции по определению и устранению неуравновешенности. Техниче-
Технические характеристики таких станков приведены в табл. 14 и 15.
10. Балансировочные станки советского производства
Модель
станка
Параметры балансируемого ротора
d,
а, тыс,
об/МИ!!
N, кВт
0,05
0,08
1 1
1,7
1,7
1,7
2,5
2,8
1,7
10
13
4,5+0,2
20,25+0,6
14+1
45+2,8
400+20
Точность
ост'
мкм
0,1
0,05
0,2
0,3
0,3
05
Класс
0,05
0,3
0,06
0,5
—
1,0
0,5
1,0
1,0
0,5
л
"ост'
Г'СМ
0,3
0,3
0
1,3
2-6
5—30
10-30
—
7-50
м,
т
9703
ДБГ-2 *
ДБ-1,5
9710
ДБ-10
ДБН-10
ДБС-4 •
ДБН-50
ДБ-50
МДУС-6
ДБ-102
9В725
ДБ-302
ДБ-303
9А730
МДУ-210
ДБ-1001,
9А734
9А736
9739
0.01—0,3
0,1—2
0,1—1,6
0,3-3
0,3—10
0 5—20
3-30
0,5—50
5-50
0,5—60
10—100
10-100
30—300
100—300
30—320
10—1000
100-1000
300—3200
1000—10 000
10 000-100 000
80
250
135
270
500
200
200
540
300
1000
800
1500
1500
1200
1400
2000
2500
3200
2000
16
30
200
100
100
200
200
100
250
350
125
270
300
300
360
600
12—130
10-300
30—150
50—360
50—500
80—600
100—800
50— 700
170—800
80—1000
180-1250
150—1400
200-2300
250—2000
150-2050
2500
350—4000
350—6300
2000-11500
1,4-5
6,6
6,6
1,4-2,6
1,5-2,5
2—12
ДоЗ
2—12
1—2
3-30
0,8—1,2
0,8—1,6
0,45—0,9
0,6-0,8
0,6—0,9
0,45—0,8
0,45-0,6
0,36—0,6
0,3-0,45
0,3—0,45
0,013
0,215
0,13
0,05
0,68
1,28
1 23
1,2
2,5
5,8
2,0
2,5
1.1
6,5
10
35
• Станки предназначены для балансировки прецизионных электродвигателей (ДБс-4)
и гидромоторов (ДБГ-2) с собственным приводом.
11. Балансировочные станки предприятий ВНР и ГДР
Модель
станка
Параметры балансируемого ротора
т, кг
п, об/мин
N.
кВт
ост'
мкм
М, т
ВНР
BHEl
ВХЕ-1
0,01-1
До 1
300
300
1—20
1-15 ;
20—300
20-380
750—6000
1000—6000
0,08
0,08
0,3
—
0,053
0,05
АМ-10
АМ-50
АМ-500
AM-1000
АМ-2000
АМ-6000
^МЧ
0,2-!0
5-50
60—500
10—1000
150-2000
300—6000
2000—30 000
330
1000
1000
1500
1000
3060
4000
4-45
15-90
30—150
40—150
30-150
ГДР
40—460
120-1500
200—1950
2250
240—1900
600—4500
1500-7500
3700
320
360/410
375/750/1500
290/350/410
450
450
0,3
1,0
1,5
5
2,5
40
123
-1,0
1,0
1,0
1,0
1,0
3,0
3,0
0,12
1,0-
1,3
5,0
1,6
5,1
25,7
52
БАЛАНСИРОВКА РОТОРОВ МАШИН
12. Балансировочные станки фирм ФРГ
Модель
станка
Параметры балансируемого ротора
т, кг
UA1
UA3
UA10
UA30
U А100
ГА300
U А1000
UA3000
UA10000
До 1
0.03—3
0,1 — 10
0,3-30
1-100
3-300
10—1000
30-3000
100—10 000
Е000
EGO
ЕО
Е1
Е2
ЕЗ
Е4
0,2—5
0,3-20
0,6—60
3-300
10-1000
15—1500
30-3000
HI
Н20
Н4
Н40
Н6О
Н70
Н8О
Н90
До 10
> 150
» 750
> 2 000
16 000
32 000
40 000
100 000
L
мм
150
150
400
600
800
1200
1500
2000
3000
300
400
500
1000
1600
2000
2500
360
630
IO50
1260
2400
2900
3500
4000
Losenhausenwerk
200
200
400-600
500—800
900—1500
1400—2200
2000-3000
2400—3600
3800—5300
3—10
3—20
4—30
5-50
8-100
20—120
30—150
50—200
70—300
Hofmann
335
520
620
1100
1800
2100
2700
4-25
6—40
10-70
20-120
20—140
40-180
50—250
С. Schenck
45—380
70—710
70-800
70—1300
200—4300
250—5780
320-5740
1000—11 000
8-30
9-70
12-100
15—120
50—200
60-250
60—360
63-450
• Наименьший измеряемый дисбаланс в г>мм при п >
об/мин
15Q0
1500
1500
1000
600
450
350
300
200/400
900/1800
700/1400
630/1250
450/900
355/710
315/630
250/500
До 1740
» 2100
» 1900
» 950
> 2300
» 2300
» 2300
185/410
800 об/мин
N,
кВт
0 05
0,07
0,22
0,5
0,85
1,5
4
8
20
0,1
0,33
0,55
2,7
5
10
18
0,18
1,1
4
7,5
30
55
110
500
«ост'
мкм
1
0,5
0,5
0,5
0,5
1
1
1
1
0,2
0,2
0,2
0,2
0,2
0,2
0,2
0,3»
0,8*
2,5*
4*
15'
25»
40*
250»
М, 1
0,05
0 05
0,23
0,34
0.55
0,85
2
3,6
8
_
—
—
Разделение дисбалансов ротора. Измерительную аппаратуру балансировочных
станков обычно выполняют для раздельного измерения дисбалансов в двух плоско-
плоскостях коррекции. В результате исключения влияния одной из плоскостей коррек-
коррекции в измерительной цепи дейст-
действуют только сигналы, пропорцио-
пропорциональные дисбалансам в контроли-
контролируемой плоскости коррекции.
Механическое разделение дис-
дисбалансов двух плоскостей коррек-
коррекции на рамных балансировочных
станках. Ротор устанавливают в
раме станка так, чтобы исключае-
исключаемая плоскость коррекции // совме-
совместилась с плоскостью подвеса ра-
рамы (рис. 15). При этом неуравно-
неуравновешенная центробежная сила Pj
создает момент Р/ h cos ш* относи-
относительно подвеса рамы, а момент от
силы Рц равен нулю. Амплитуда
линейных перемещений рамы с
вращающимся в ней неуравнове-
неуравновешенным ротором в точке измере-
измерения (показания индикатора) при резонансной частоте м0 = hVc/I^ равна
Aj = kwlD1, где ?>i —дисбаланс в плоскости /; /м —момент инерции рамы с ро-
ротором в первом положении относительно шарнира 0; kwi — масштабный коэффи-
Рис. 15. Схема разделения дисбалансов двух пло-
плоскостей коррекции на рамном балансировочном
станке; устраняется дисбаланс в плоскости Г
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
13. Балансировочные станки зарубежных фирм для приборостроения
Страна,
фирма
США
Gisholl
Annis
Micro-
Balancing
Япония
Nagahama
Англия
Dawe
Jnstr. Ltd
Giesler
Jackson
Bradwell Ltd
EMJ
Италия
CEMB
Mandello
Rava
Швеция
Erikson
Модель
станка
HS-I
HS
1
m2-S
M2-S
К
Micro—Namic
SU-6
ND-1E
ND-5E
ND-20E
1250
1251
G-l
G-2
O/E
0/1E
O/2E
CS-1
2B
ВС
YRB-10
YRB-50
FOA
FOB
S
10
Параметры балансируемого ротора
m, кг
0,02—0,46
0,014-4,5
0,125—2,5
0,14—2,25
1-6
0,07—0,45
0,01-10
0,1-40
0,03-1
0,1-5
0,2—20
0,028-4,5
0,226—9
0 085—1,8
0,225-7,2
0,113-11,25
0,226-22,5
0,452—45
0,113—2,25
0.014-2,3
до 2,3
0,05-1
0,1-5
0,057-3,15
0,057—3,15
0,028-9,9
0,05-1
d
L
мм
300
200
200
-
150
250
450
127
254
127
170
508
508
508
3S1
154
140
60
270
254
254
152
60
6,35
6,35
300
250
250
-
200
300
700
82-330
254
203
356
38—660
38-660
51—660
381
210
210
20-50
35—300
305
305
55-203
20—50
-
1,5-5
4-7
-
3-15
3—20
6—40
25
19
13
25,4
6-44
6—44
13—63
13
—
19
19
19
-
"max-
об/мин
12 000
3 000
12 000
-
24 000
10 000
10 000
3 600
2 500
2 000
2 700
3 600
1 000
1 000
1 500
1500
1 500
2 000
2 500
2 400
9 000
1 800
1 450
1 450
3 600
9 000
"ост'
мкм
0,05
0,05
0,6
0,05
0,05
0,006
0,005
1,25
0.5
05
0.5
1,3
1.3
0,06
0,06
0,6
0,6
0,6
0,6
0,25
0,37
О.ОЗ
2,0
0,5
5,0
54 БАЛАНСИРОВКА РОТОРОВ МАШИН
циент дисбаланса в плоскости коррекции /;
Для балансировки в ранее исключавшейся плоскости // ротор переставляю!
так, чтобы плоскости I к II поменялись местами относительно шарнира О (на рис. 15
это положение показано штриховыми линиями). При этом А/;= kwiD2, причем
kwi = kwXYhilhb r*e ^02—момент инерции рамы с ротором во втором положе-
положении.
14. Балансировочные станки-автоматы конструкции ЭНИМС
Параметр
9А719
9А720
9722
МАB3—25)
МАB3—26)
Балансируемый ротор:
масса, кг:
наибольшая
наименьшая
наибольший диаметр, мм
длина, мм:
наименьшая
наибольшая
Частота вращения, об/мин!
при балансировке
при сверлении
Остаточный дисбаланс, г-см
Общая мощность приводов, кВт
Длительность цикла, с
Система координат
Направление сверления
Число:
групп сверления
сверл в группе
Радиус расположения сверл, мм
Диаметр сверла наибольший, мм
Глубина сверления наибольшая, мм
Размеры станка, мм
длина
ширина
высота
Масса станка, кг
Балансируемые изделия
12
2
125
150
230
1600
645
3—8
6
35
Полярная
Осевое
35
7
180
190
350
1Ь00
565
4-15
8 71
35
Косо\г
2
2—3
19—30
U
25
2
2
27—45
14
Неогра-
ничена
3060 3450
1580 2000
1480 1650
4000 5500
Роторы электродви-
электродвигателей
I, II, III | III, IV, V
габаритов
25
405
800
600
15
7,35
78
ольная
10
45
2320
2350
1980
4000
Коленца ые
Автомо-
Автомобиля
Волга
68
198
566
600
300
100
9 56
Ы
68
198
566
600
300
30
11,4
67
Полярная
Радиальное
20
42
5000
3200
2450
8000
12
42
6600
3200
2450
10000
валы двигателей
V-образного
Предва-
Предварительная
баланси-
балансировка
Оконча-
Окончательная
баланси-
балансировка
15. Автоматические балансировочные станки с использованием лазера (тип ЛБС)
Параметры баланси-
балансируемого ротора
т, кг
0.01-0,5
0,5-1,0
1-10
10—100
d
L
мм
60
120
200
500
180
280
300
500
л»
тыс.
об/мнн
7,5-24
7,5-12
0,3—1,5
0,3—1,5
"ост1
мкм
0,02
1,5-0,5
3,5-1,5
5
Произво
дитель-
ность Q,
роторов/ч
30
30
8
6
Характеристики излучателя
Режим
Импульс-
Импульсный
Непре-
Непрерывный
То же
Ча-
Частота
излу-
излучения,
имп/с
20
N,
кВт
0,03
0.1
0.10
1-10
кпд,
1,5
30
7о"
Длина
волны,
мкм
1,06
10,6
10 6
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
55
Разделение дисбалансов двух плоскостей коррекции в электрической цепи. Элек-
Электрическим аналогом ротора в цепях измерения дисбалансов является потенцио-
потенциометр с двумя источниками ЭДС, развиваемых датчиками станка и пропорциональных
действующим в опорах силам. В соответствующих точках решающей электросхемы
действуют напряжения, пропорциональные неуравновешенным центробежным силам
в плоскостях коррекции. Для исключения влияния одной из плоскостей коррекции
ползунок потенциометра устанавливают так, что напряжение на нем от состав-
составляющих ЭДС, вызванных дисбалансом исключаемой плоскости, равно нулю, а от со-
составляющих ЭДС, вызванных дисбалансом другой плоскости, отлично от нуля. Это
положение ползунка моделирует положение узла колебаний ротора между опорами
балансировочного станка от дисбаланса исключаемой плоскости коррекции.
Напряжение сигнала дисбаланса пропорционально амплитуде колебаний ротора
в плоскости, пересекающей этот узел.
Рис. 16. Схемы роторов:
а — а внутренним расположением плоскостей коррекции; б — с одной плоско-
плоскостью коррекции, расположенной на консоли; в — о двумя плоскостями коррек-
ции, расположенными на одной консоли; е — с расположением плоскостей кор-
коррекции на двух консолях
Для дорезонансного балансировочного станка в плоскости измерения можно
составить пять уравнений статики: одно — равновесия сил и четыре — равновесия
моментов относительно опор А, В и точек /, // (рис. 16). При этом вместо сил
можно записать пропорциональные им напряжения UA, U B, Up Uu электрической
цепи разделения плоскостей коррекции:
C)
в=о; D)
E)
F)
= 0. G)
Сочетания из уравнений C) — G) по два дают пять различных схем цепей раз-
Деления, приведенных на рис. 17,
Схема на рис. 17, а, составленная по уравнениям C) и D), характерна возмож-
возможностью настройки по размерам ротора а, Ь, с. Схема, составленная по уравнениям
w) и E), отличается от предыдущей возможностью настройки двумя потенциометрами
вместо трех (рис. 17, б).
На рис. 17, в приведен один из четырех вариантов схемы, составленной по урав-
уравнениям D) и F). Схемы различаются отсутствием кольцевой обратной связи, охва-
охватывающей оба канала измерения, и разделением функций потенциометров, два
из которых служат для разделения плоскостей коррекции, а два — для установ-
установления масштабов. Схема на рис. 17, г составлена по уравнениям E) и F). Сумми-
Суммирующие усилители в ней играют роль масштабных усилителей.
Симметричная схема с суммирующими усилителями (рис. 17, д, вариант 1) пред-
тавляет уравнения D) и G). Она содержит два потенциометра для разделения пло-
костей коррекции и два — для установления масштабов. Масштабные потенциометры
56
БАЛАНСИРОВКА РОТОРОВ МАШИН
можно исключить, подавая в цепь обратной связи разность выходного напряже
ния и напряжения с потенциометра разделения плоскостей коррекции, так как
эта разность равна напряжениям, снимаемым с масштабных потенциометров в цепях
обратных связей. Такое вычитание можно осуществить (рис. 17, д, вариант 2), пода
вая в цепь суммирования полное выходное напряжение суммирующего усилителя,
а на противофазный вход этого же усилителя — напряжение с ползунка потенциометра
разделения плоскостей коррекции. В такой схеме одновременно с настройкой на раз-
разделение плоскостей коррекции устанавливается и масштаб измерения значения
дисбаланса.
Для зарезонансного балансировочного станка можно составить шесть урав-
уравнений равновесия, группируя которые попарно получают восемь основных вариан-
вариантов цепей разделения плоскостей коррекции, построенных аналогично приведенным.
Вариант 1
а Вариант Z
Рис. 17. Схемы цепи разделения плоскостей коррекции дорезонансных балансировочных
станков
Каждая из схем имеет свои преимущества и недостатки в отношении устойчивости,
удобства настройки на конкретный тип ротора, точности измерения дисбалансов,
что обусловливает выбор схем.
Измерение углов дисбаланса. Регистрацию угла дисбаланса можно получать как
на самом роторе, так и отсчетом показаний специальных приборов.
Перо, оставляющее на закопченной поверхности ротора метки резонансных
колебаний рамы балансировочного станка во время выбега ротора, является про-
простейшим регистратором угла дисбаланса. Средняя точка между двумя метками,
полученными при вращении ротора в прямом и обратном направлениях, соответ-
соответствует истинному углу.
Для получения физической отметки «тяжелого места» ротора можно использо-
использовать метку от искры, проскакивающей между иглой и поверхностью ротора, во время
резонансных колебаний рамы станка, при которых с помощью установленных на раме
контактов игла подключается к батарее конденсаторов. Отметку угла дисбаланса
можно получать также~на станках для автоматической балансировки с помощью
лазера или направленного взрыва проволочки,
Динамическая балансировка роторов 57
В ряде отечественных (типа БС, ДБН, 9703, 9710 и др.) и зарубежных балан-
балансировочных станков с двумя подвижными опорами применяется отметка угда дис-
дисбаланса с помощью стробоскопа путем наблюдения меток на вращающемся роторе,
освещаемом один раз за оборот короткими вспышками света от неоновых и специ-
специальных импульсных ламп или строботронов. Момент вспышки связан с определенной
фазой колебаний. Замечая положение меток на роторе относительно визира стробо-
стробоскопа, ставят остановленный ротор в такое же положение и против визира находят
угол дисбаланса. На станках типа UA и МДБ-1А угол дисбаланса определяют не по
меткам на роторе, а по специальной шкале на шпинделе привода балансировочного
станка.
Для определения угла дисбаланса на электронном осциллографе с синхрониза-
синхронизацией хода развертки индукционный датчик начальных импульсов включают в цепь
синхронизации развертки, так что момент начала линейной развертки совпадает
с моментом прохождения перед катушкой датчика, установленного на роторе маг-
магнита. Фаза синусоиды дисбаланса находится по положению максимума синусоиды
относительно начала или конца линии развертки. Угол дисбаланса отсчитывается
от магнита на роторе.
В балансировочном станке А-21 и некоторых зарубежных моделях применена
схема с яркостной модуляцией электронного луча при линейной развертке. Фото-
Фотодатчик начальных импульсов подключен к сетке электронно-лучевой трубки, в резуль-
результате чего на синусоиде дисбаланса появляется светлая или темная точка, положе-
положение которой относительно максимума синусоиды определяет ее фазу или угол дис-
дисбаланса.
В станке «Луна» для балансировки гироскопов [147] на входы х и у осцилло-
осциллографа подаются два квадратурных синусоидальных напряжения, отличающихся
по фазе на 90°. По радиусу круговой развертки на экране определяют значение
дисбаланса, а по уголовому расположению фазовой отметки начального импульса —
угол дисбаланса.
В векторметре П. В. Грязева [147], в индикаторах некоторых отечественных
и в балансировочных станках фирмы Schenck применен принцип взаимодействия
напряжения опорного сигнала вращающегося магнитного поля, получаемого с по-
помощью квадратурных составляющих с одной или двумя подвижными катушками,
питаемыми током, пропорциональным дисбалансу.
Пропорциональность угла дисбаланса времени поворота ротора от начальной
метки до направления вектора дисбаланса положена в основу устройств, регистри-
регистрирующих это время на базе интегральной или цифровой схемы [147]. Первый изме-
измеритель реализован в станке МДУ-210 и некоторых зарубежных моделях, второй —
в станке ДБУ-01.
В балансировочных станках с подвижными опорами и осевым приводом рас-
распространена ваттметрическая схема. Работа ваттметра основана на электромаг-
электромагнитном взаимодействии двух катушек, обтекаемых током. При измерении значения
и угла дисбаланса неподвижная катушка ваттметра питается током генератора
опорного сигнала, а подвижная—током сигнала дисбаланса. Ротор генератора
представляет собой постоянный магнит, вращающийся со скоростью балансируемого
ротора. Статор имеет две взаимно перпендикулярные обмотки и может поворачиваться
вместе с лимбом отсчета угла дисбаланса. Индикатором совпадения фаз обоих сиг-
сигналов является ваттметр.
Методы динамической балансировки основаны на предположении линейности
системы При этом амплитуды колебаний считаются пропорциональными значению
дисбаланса, а фазы — независимыми от его величины.
Существуют одноплоскостная и двухплоскостная балансировки. В первом слу-
случае расчет корректирующих масс производится последовательно для каждой пло-
плоскости коррекции, во втором — одновременно.
По параметрам, измеряемым при динамической балансировке, различают ме-
методы амплитуд и фаз, применяемые как при одноплоскостной балансировке, так
и при двухплоскостной балансировке с использованием балансировочных станков
или без установки роторов на станки.
Методы одноплоскостной балансировки. I. Методы амплитуд требуют
измерения амплитуд Ао начальной вибрации при пуске ротора без пробной массы
S8
ЁАЛАНСИРОВКЛ РОТОРОВ МАШИН
н амплитуд Aoi при пусках с пробными массами, устанавливаемыми а ойредел*
ных положениях на роторе.
Метод кругового обхода аналогичен применяемому ори статической баланси-
ровке, ио при динамической балансировке измеряют амплитуды вибрации опор Аа
и Aai при пусках ротора с пробной массой шп) переставляемой последовательно
на равные углы. По данным измерений Строят зависимость Ло; от положения проб-
пробной массы аналогично рис. 13. Корректирующая масса ставится в положение, соот-
соответствующее А , , а ее величина
¦м„
при
ИЛИ
, — Ar
тк=
при
Для балансировки двух сторон ротора необходимо 13—17 пусков, если не потре-
потребуется исправления компенсирующей массы в первой плоскости из-за влияния вто-
второй.
Рис. 18. Схема балансировки
по методу четырех пусков
Рис. 19. Схемы балансировки по методу трех
пусков:
а — построение методом подбора; б — с исполь-
использованием специальной линейки
Метод четырех пробных пусков заключается в измерении величин Ло и Л01> Л02,
Доз и ^04 ПРИ четырех пусках с одинаковой пробной массой тП, последовательно
переставляемой по одному и тому же радиусу под углом 90°. Относительные вели-
величины вибраций—j^-=а, —
6, -~- = с, —~- = dрасполагают в убывающий ряд
о Лд Ло Aq
а sg 6 sg с sg d. Искомая величина корректирующей массы mK = kmn, а угол ее
21Й3
установки
-¦ arcsin -
2k
При расхождениях величин подкоренных выражений берут среднее значение k.
Угол §0 отсчитывают от положения пробной массы, при котором была наименьшая
вибрация Ат, в направлении установки пробной массы с вибрацией Ат.
Другой вариант метода четырех пробных пусков заключается в измерении ам-
амплитуд Ло, Л01, Лог, Ай3 (с пробной массой та, переставляемой последовательно
под углом 120°) и /4Д при четвертом пуске с пробной массой тд < тп, установ-
установленной в найденной плоскости дисбаланса на стороне «легкого места» ротора. По
величинам А01, Ащ, Aos в полярных координатах с началом О строят треугольник ABC
(рис. 18), для которого находят центр описанной окружности Oj. Отрезок 001 ле-
лежит в плоскости дисбаланса, причем «легкое место» расположено со стороны точки О,
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ 59
корректирующая масса
л
При методе «грел: пробных пусков измеряют амплитуды Ао и Ао1, Аю, А03 при
пусках с пробной массой тп, переставляемой под углом 120°. Величина коррек-
корректирующей массы и угол б между плоскостью дисбаланса и первым положением проб-
пробной массы соответственно будут
m« = ma-f; 6 = arctg(l,732
7/j
где амплитуду А} колебаний от действия только пробной массы определяют из
уравнения
Для графического решения этой задачи из центра 0 описывают три окружности
с радиусами, соответствующими Ло1, Аоа и А03 (рис. 19, а). На этих окружностях
путем подбора располагают вершины равноегороннего треугольника ABC, вписан-
вписанного в окружность о центром Ot, радиус которой г в масштабе изображает тП. Вели-
mn00i ., , ,.
чина корректирующей массы тк =—-—-. Угол дисбаланса о относительно первого
положения пробной массы находится по чертежу. Построения облегчаются при
использовании специальной прозрачной линейки (рис. 19, б).
Метод двух пробных пусков состоит в измерении амплитуд Ло и Ао!, Ам при двух
положениях пробной массы тп, расположенных под углом 180°. Затем строят тре-
треугольник ABC (pita. 20), длины сторон которого
АС — 2А0, АВ = Ао1, 6С=АО2. Длина медианы
ВО равна амплитуде колебаний, вызванных проб-
пробной массой, т. е. пропорциональна величине тп.
Корректирующая масса тк — тпАй1В0. Положе-
Положение корректирующей массы неопределенно, так
как по трем сторонам можно построить два тре-
треугольника ABC и АВ'С и получить два значения .. а о а '
угла дисбаланса \ и 6[. Эта неопределенность ' '
снимается контрольным пуском с корректирующей Рис. 20, Схемы определения дис-
массой, установленной по одному из углов Oj или баланса по методу двух пусков
SJ, при этом проверяется и ее величина.
П. Методы фаз требуют нахождения положений бьющих точек (при я < «х
бьющая точка соответствует тяжелому месту) при начальном и пробных пусках для
разных положений пробной массы и для определения углов сдвига фазы колебаний а,-
по сравнению с пуеком без тП.
Метод двух пусков е перестановкой пробной массы под углом 180° состоит в опре-
определении углов сдвига фаз щ и а2 по сравнению о начальным пуском. Первое поло-
положение пробной массы расположено под углом а к положению бьющей точки. На
окружности в центром О (риа. 21, а) отмечают положения пробной массы mal и тпг,
бьющих точек Ао, Ау и А.г, еоответствующих колебаниям при начальном и проб-
пробных пусках, и проводят прямые ОА^ OAit ОАг. Затем подбирают секущую а^
гак, чтобы она разделилаеь прямой ОА0 пополам. Отрезки ao<Zi и a0ot соответствуют
векторам пробных масс, а Оао — вектору, дисбаланса. Угол 6j определяет место
Установки корректирующей массы mK= mn0a0/a0ai.
Метод трех пусков а перестановкой пробной массы под углом 120° (рис. 21, б)
требует отметки на окружности с центром О трех положений пробной массы (/, 2, 3)
и точек иъ а2, а8, соответствующих значениям фазовых углов aly ct2> a3 относительно
прямой Ooq, соответствующей фазе начальных колебаний. Первое положение пробной
массы расположено под углом а к прямой Оа0. На прямых, проведенных из центра О
через точки ait a2> аз> путем подбора строят равносторонний треугольник А^АгА3,
вписанный в окружность с центром О^ Радиус окружности 0^= г в масштабе
соответствует величине пробной массы, отрезок ОО± — корректирующей массе
50
БАЛАНСИРОВКА РОТОРОВ МАШИН
тк = mn00Jr, а положение (угол б) отсчитывается от точки 3. Построения обле
чаются с помощью линейки (см. рис. 19).
III. Метод одновременного измерения амплитуд
фаз вибраций требует двух пусков: с начальным дисбалансом и с пробном
массой тп, во время которых измеряют амплитуды Ао, Aoi и относительное изменение
угла сдвига фазы колебаний а. По этим данным строят векторный треугольник вибрл-
ций, из которого находят амплитуду Alt соответствующую вибрациям от действия
одной массы тп. Корректирующая масса тк = тпА0/А01, а угол р между векторами
Ао и Ai определяет место ее установки относительно пробной массы.
Двухплоскостная балансировка [256]. Принимают, что система позволяет испо.п
зовать принцип суперпозиции и выражать векторы Ао и Во колебаний опор а и /
вызванных дисбалансами D/ и Djj в выбранных плоскостях коррекции / и //, ypai
нениями
где «а1 — а^з — коэффициенты влияния, представляющие векторы колебани
опор а и Ь, вызванных единичными массами тп1 = 1 или тпз = 1 в плоскости
или // и зависящие от частоты вращения ротора.
Рис. 21. Схема определения дисбаланса по методу:
а — двух фаз; б — трех фаз
Метод единичных масс требует для балансировки три пуска: начальный и две
пробные с пробными массами тп1 и тпг, устанавливаемыми последовательно в дв^ ч
плоскостях коррекции I и II. Измерения проводятся на одной частоте вращения яБ
Пробная масса тпА =S 18M А/ (п^гА), где МА— масса ротора, приходящая^
на опору а, кг; гА— радиус установки пробной массы, м; пБ — частота вращения
об/мин. При известной величине коэффициента чувствительности аа1 (мкм/кг) под
шипника к грузу, установленному в ближайшей плоскости коррекции пробная массе
тп1 5г 0,5 | Ао | /aai, где |Л0| — начальная вибрация подшипника, мкм.
При пусках измеряют амплитуды и фазы колебаний опор: Ао, Во, <ра0, ф/,0
Ль В\, фо1, фы; Аг, Вг, фа2, ф(,2. По измеренным величинам определяют коэффи
циенты влияния
1 — All) ralmnl;
: r,nmnh
Корректирующие массы определяют из решения системы уравнений (8);
:[(l-alX«n)XV ' (Ш)
где al = oftl : ool; a,, = aa2 i ai2; rai, rKi — радиусы установки пробных и кор-
корректирующих масс.
Практическое определение коэффициентов влияния и корректирующих масс
достаточно сложно, поэтому ниже приведен пример числового расчета с примене-
применением-графоаналитического метода. При этом для упрощения принято, что пробные
ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
61
и корректирующие массы устанавливают на одинаковом радиусе, как это обычно
,i делают на практике.
Пример. Измеренные при пусках амплитуды и фазы вибраций опор а и Ь
начальные AQ = 25 мкм, Фп0 = 270°, В„ = 30 мкм, Фйо = 60°;
с пробной массой т . = 10 г, о? . = 0° в плоскости коррекции 1. А, ~ 70 мкм, (/> * =
= 315°. Вх = 50 мкм, ф41 = 90°;
с пробной массой mJl2 = 10 г, Фп2 = 0' в плоскости коррекции //, Л2= 15 мкм, Фй2 =
= 210°, Въ = 60 мкм, фб2 = 15°.
На векторной диаграмме (рис 22) в определенном масштабе A мкм = 1 мч) строим
векторы измеренных амплитуд вибрации опор и векторы коэффициентов в.гияния «а1 =
= А1 ~ Ао- %2 = А2~ Ао- аЫ = В1 - \ Hi = вг "Со-
"Соизмеряя полученные векторы, находим их модули
и углы аа1 = 55 мм, <р'а1 = 334°; аа2= 22 мм, y'ai*= 128°,
ай1 = 20 мм, 4>bi — 137°; а^ = 44 мм; щ^ — 319*.
В результате расчета получаем
С
• = 0,36,
= 9,1 мм;
8 = 15 мм;
0,18;
<Р]
1 — сра, = -197* = 163";
-191е
169°;
<рд = фг -f Ф
а0
433° •» 73*;
i+<Pfco=229'-'
+ фи = 332°.
ПО'
Рис. 22. Диаграмма для двух
плоскостной балансировки
Графически (рис. 22) находим векторы D = B — Д„; ? =Л —В»; Н= F—C (где F= !,
Ф;?=0°) и их модули и углы (масштаб векторов С, f и Н принят 1 ед = 50 мм)
D = 17 мм, Фо = 127°, ? = 21 мм; ф? = 235°; Н = 0,84; фЯ = 6е.
В результате расчета находим
Л1 = — = 20 мм,
25 мм,
М
0!„,
= фдг -
= 121*;
-= 229°,
= —213°= 147°;
, —90° = 270°.
Параметры корректирующие масс
5'7 г:
= 270».
Метод групповых масс или нулевых приращений заключается в том, что при ба-
балансировке оперируют одновременно двумя пробными массами [256]; основной,
устанавливаемой в ближайшей к рассматриваемой опоре плоскости коррекции,
и дополнительной, устанавливаемой в другой плоскости для компенсации действия
основной массы на удаленную опору.
Первые три пуска и определение коэффициентов влияния aal -j- a^ проводят
так же, как в предыдущем методе. Составляют две группы пробных масс: пг'п1 = шп1;
тпз ~ —тп1(«ы : «й) и тпъ — тП2; mni =~тпг («оа : «ai). первая из которых
не вызывает колебаний опоры Ьу а вторая — опоры а. С установленной первой груп-
группой пробных масс проводят пуск ротора и измеряют амплитуду А\ и фазу <pai коле-
колебаний подшипника а. При этом вектор колебаний опоры Ь должен остаться таким же,
как при втором пуске: Во, <Р40.
При пятом пуске со второй группой пробных масс измеряют вектор Bi,<pji виб-
Рации опоры Ь и проверяют вектор вибрации опоры а, По измеренным величинам
62 БАЛАНСИРОВКА РОТОРОВ МАШИН
графоаналитическим способом определяют корректирующие массы:
где aa = aai~аа2 X a&i: щ^* «й = «й2 —a*i X аа2: ael.
Корректирующие массы в каждой плоскости коррекции складывают, получая
по одной массе в плоскости.
Балансировка многоопорных роторов. В этом случае число плоскостей коррекции
принимают равным числу опор. Для /г-опорного ротора аналогично формулам (8)
получают
+ + Ат — 0;
Оп = 0,
где тк; — искомые корректирующие массы, устанавливаемые в п плоскостях кор-
коррекции; Ani — векторы амплитуд вибраций п опор при начальном пуске; а,-р —
коэффициенты влияния (балансировочные чувствительности); здесь i = 1 -г- п;
р — 1 -г- п.
Для определения коэффициентов щр проводят п пусков с устанавливаемой в каж-
каждой плоскости коррекции массой и определяют приращения векторов амплитуд виб-
вибраций каждой опоры от установки массы в данную плоскость. Значения щр находят
по описанному выше методу. Общее число пусков для решения системы уравнений A1)
равно п + 1. Решение этой векторной системы уравнений целесообразно находить
с помощью ЭЦВМ.
5. БАЛАНСИРОВКА ГИБКИХ РОТОРОВ
Особенности балансировки гибких роторов. 1. При балансировке гибких рото-
роторов, как и в случае жестких роторов, в первую очередь необходимо уменьшить
до допускаемых значений силы реакций в опорах. При балансировке гибких роторов
действие неуравновешенных сил с изменением частоты вращения изменяется не толь-
только количественно, как у Жестких роторов, но и качественно. Дисбаланс и коррек-
корректирующие массы могут вызывать разные прогибы ифеакции, соотношения между
которыми меняются в зависимости от частоты вращения, и достигнутая на одной
скорости уравновешенность может нарушиться на другой.
2. Уменьшение реакций в опорах не всегда уменьшает изгибающие усилия в гиб-
гибком роторе. Поэтому при балансировке гибких роторов решаются две основные
задачи: по результатам измерений упругой линии или реакций при вращении ротора
определяется закон распределения дисбалансов. Для ротора, распределение дис-
дисбалансов которого найдено, определяют, где, в каком порядке и количестве нужно
установить корректирующие массы, чтобы устранить реакции опор, снизить изги-
изгибающие моменты в гибком роторе и обеспечить его сбалансированность в некотором
диапазоне скоростей.
Учет особенностей гибких роторов, применяемых в различных отраслях про-
промышленности, привел к созданию большого числа специфических способов их балан-
балансировки. Рассмотрим только основные принципы балансировки, являющиеся об-
общими с качественной стороны для гибких роторов разных типов.
Решение уравнений изгиба гибкого ротора. Балансировка гибкого ротора должна
осуществляться с учетом формы его изгиба, а также соотношений между баланси-
балансировочной, рабочей и критическими скоростями и собственных форм, соответствую-
соответствующих этим скоростям. Для этого приходится решать дифференциальные уравнения
колебаний гибкого ротора с Дисбалансом или корректирующими массами, распре-
распределенными по его длине по тому или иному закону. Решение этой задачи сущест-
существенно облегчается благодаря свойству ортогональности собственных форм (см. спра-
справочник, т. 1). Распределенную неуравновешенность можно разложить в ряд по соб-
собственным формам, каждая из составляющих вызывает колебания только по своей
форме. Балансировку гибкого ротора можно проводить раздельно по каждой из со-
ВАЛАИСИРОВКЛ ГИБКИХ РОТОРОВ 63
на каждой критической скорости, где эта составляющая имеет пре-
преобладающее значение. Балансировка, выполненная таким образом с помощью рас-
распределенных по длине корректирующих масс, приводит к уравновешенности гибкого
ротора на всех скоростях. Эти положения лежат в основе многих методов баланси-
балансировки гибких роторов по собственным формам.
Дифференциальное уравнение колебаний гибкого ротора с равномерно распре-
распределенными массами и жесткостью на двух шарнирных опорах имеет вид [78]
EJz: -f-m2 = mco2e (s) exp i [cV-f-i|> (s)], A2)
где EJ, m — изгибная жесткость и погонная масса ротора; г — х + iy — комплекс-
комплексный прогиб, ш — угловая скорость; е (s), ф (s) — эксцентриситет и угол расположе-
расположения неуравновешенных масс по длине ротора.
Функцию распределения дисбаланса разлагают в ряд по собственным формам:
00
е (s) exp ?i|) (s) = 2, Ил + ^п) sul ~r~• №)
Тогда решение уравнения A2) будет
со
г = ехр i(tit / 1—~~v (¦'in + iB/j) sin—j—t A4)
**. l—Tn l
n — \
где у„ = ш/сол; сол = (/гл//J К EJ/m-
Уравнение A2) можно решить, не разлагая дисбаланс по собственным формам,
с помощью подстановки г = Z (s) exp Ш, которая приводит уравнение A2) к виду
2'V_A4Z = 9(S), A5)
где внешняя возмущающая сила q (s) — k*e (s) exp n|) (s); /г4 = ma?l(EJ),
Решение уравнения отыскивается в форме [78]
Z = AS (ks) + ВТ (ks) + CU (ks) + DV (ks) + Ф (s), A6)
где А, В, С, D — постоянные, определяемые из граничных условий; S (ks), T (ks),
О (ks), V (ks) — функции А, Н, Крылова [6]; Ф (s) — частное решение при нулевых
начальных условиях;
S
Ротор с меняющимися по длине размерами поперечных сечений или нагрузкой
и многоопорные роторы необходимо разбивать на участки, границами которых слу-
служат сечения, в которых меняется диаметр ротора, либо расположена опора, либо
приложена сосредоточенная сила или меняется нагрузка. В пределах участков
размеры поперечного сечения, погонные массы, моменты инерции и нагрузки неиз-
неизменны. Длина я-го участка обозначена /„. Для каждого участка составляют урав-
уравнение типа A2) с началом координат на границе участка. Записывая в форме A6)
решения уравнений для каждого участка, получают п уравнений упругой линии
ротора по участкам:
Zn = AnS (knsn) + ВпТ (knsn) + CnU (knsn) -f DnV (knsn) + Ф„ (sn), A8)
где
kn = mnv>'ilEJn. A9)
Постоянные Ап, Bn, Cn, Dn определяют из условий сопряжения на границах
участков и на опорах. Значения Ф„ (sn) находят по нагрузке данного участка, для
свободного от нагрузки участка Фл (sn) = 0, Приравнивая нулю определитель си-
64 БАЛАНСИРОВКА РОТОРОВ МАШИН
стемы уравнений A8), получают трансцендентное уравнение частот. При подста-
подстановке в уравнение A8) значений постоянных получают уравнение упругой линии
ротора по участкам, умножение которой на временную функцию дает уравнение
колебаний ротора.
При записи уравнений упругой линии, моментов, частот и реакций используют
табулированные функции В обозначениях Прагера и Гогенемзер: А (Р), В Р),
С (р), Si (Р), таблицы значений которых приведены в работе [6], В дальнейшем
использованы также обозначения
S' (pp) = sh p cos pp— sin p ch pp; I
cosp; j '
О Ui, Q ОТ, Oft / // /О 1 \
Изгибающие моменты и реакции определяются соотношениями
M(s) = — EJl"(s); tf@) = —?/Z'"@). B2)
Действие некоторых типов нагрузок на гибкий ротор. С учетом выражений A4)
и B2) прогибы, изгибающие моменты и реакции двухопорного ротора при действии
произвольной неуравновешенности равны
со
\fne>an . tins
2апУпе /яп\2 tins
1 " от •
¦ а \ I I ~/ '
R@) = EJ 2| °,^Г (т
где а^-К^И1^-
При действии дисбаланса одной /t-й формы изгиба прогибы, моменты и реак-
реакции определяются п-м слагаемым сумм B3). Вращающийся гибкий ротор под дей-
действием сил инерции изгибается по пространственной кривой, сохраняющей двою
конфигурацию при постоянной скорости. Изменение скорости приводит к изме-
изменению соотношений модулей и фаз собственных форм изгиба и общей формы упругой
линии.
Для ротора, несущего 2п симметричных (кососимметричных) сосредоточенных
масс тс/ (тк/), имеющих эксцентриситеты «с/ (ек/) и расположенных попарно в одной
осевой плоскости на одинаковых расстояниях /с/ (/к/) от левой и правой опор
(рис.23, а, б), из уравнений A8) получаем:
zP w=»v'pip i rPi кsh ks~Kv-sin ks- ч (* - iPJ)v p (s~ iPf)\}'
MP (s) = -Hpleplfik*EJ S V {Kf, sh fe + KP- sin *s_t, (S-ip/) T [* (S-Je/)]} ;
/ = i
EJ s
БАЛАНСИРОВКА ГИБКИХ РОТОРОВ
65
где
Xp/=2tp//l,
/<Г/ = сЬ [Р A -Ясу)]/сИ
KJ^sh [р A -
(P = c, k);
^cosf^l-^/cosp;
^з/ = sin [p A — XKy)]/sin p; B5)
т| (s — Ipj) — единичная функция Хевисайда, равная нулю при s </p/ и единице
при sS=/p/.
В табл. 16 приведены формулы для определения опорных реакций при уста-
установке на гибком роторе некоторых систем корректирующих масс, применяемых при
балансировке. Системы 8 и 12 используют для балансировки в двух плоскостях
коррекции. Системы 10 и 13 применяют для статической и моментной балансировок
на частотах, значительно меньших резонансной. Системы 11 и 14 ортогональны пре-
предыдущей паре и применяют их для устранения дисбаланса, распределенного по 1-й
и 2-й формам после компенсации статического и моментного дисбаланса. Системы
15 и 16 позволяют увеличить число плоскостей коррекции у консольных роторов.
Рис. 23. Ротор с сосредоточенными симметричными (а) и косоаимметричными (б) неуравно-
неуравновешенными массами в пролете
Системы 1—7 применяют при необходимости распределения корректирующих масс
по длине ротора. Дисбалансы по более высоким собственным формам балансируют
ортогональными системами, выбирая их с помощью формул табл. 16.
Перенос корректирующих масс на гибком роторе [72]. Динамическое действие
неуравновешенных масс зависит от их положения по длине ротора и частоты вра-
вращения. Это следует учитывать, когда определенные ранее корректирующие массы
нужно перенести в другие плоскости коррекции или распределить по длине ротора
при необходимости уменьшить их суммарную массу, при совпадении плоскостей
коррекции с нечувствительными, при переносе масс в оптимальные плоскости и
т. п.
В табл. 17 приведены формулы для расчета заменяющих систем корректирую-
корректирующих масс, не изменяющих достигнутую ранее уравновешенность, полученные из усло-
условия равенства реакций от действия начальной и заменяющей систем при одной ско-
скорости; номера систем — по табл. 16.
Расчет переноса масс по коэффициенту гибкости fy основан также на обеспе-
обеспечении неизменности колебаний опор до и после переноса [147], Формула переноса
л
в этом случае ^] «<ег = 2/1тлеп, где тп и От; — массы, устанавливаемые в каждой
' =1
из начальных плоскостей коррекции и в каждой из I плоскостей после переноса;
еп и е,- — эксцентриситеты установки масс. Величина /х зависит от конструкции
ротора, относительной скорости и системы заменяющих масс.
Более точен метод, учитывающий ортогональность собственных форм, на осно-
основании которого работа масс до и после переноса на перемещениях по устраняемой
3 п/р. Фролова
ВО БАЛАНСИРОВКА РОТОРОВ МАШИН
16. Динамические реакции от некоторых видов неуравновешенности [72]
си-
системы
Схема дисбаланса
«(s)
«Л
15.
Hl
при lt
EJ
при /t =0
<¦. 2t, t,
enr = const
EJ
PC (
0 < s < 1/2
при ифО
EJ
при /i==0
e' f'
= GOnst
-«л
a(s)=a'
(-f)
-«л
БАЛАНСИРОВКА ГИБКИХ РОТОРОВ 67
Продолжение табл. 16
№
си-
системы
8
9
10
11
13
13
16
Схема дисбаланса
9mci
L
i
^ <•/> 1
i
А ¦.¦¦¦ "¦
Т. к—
Т-¦<!« ¦
Ь2тю
Чток
9mci
4i J
T
J
J2m.
I?!
mo«
mcp
UC1
"'cp
mK2
ОС
«(S)
= 2mcl
mcl
ml
= 2mcl
mKi
'"ki
m/
— 2m
™H
moc
ml
~—t~
*Л
W(P)
~?У 2/3
* *b i (p)
EJ 2J«
«, •, »'V
B! »•¦'-"'" ч
-4a
3*
68 БАЛАНСИРОВКА РОТОРОВ МАШИН
составляющей k-a формы [147|
а на перемещениях по составляющей s-й формы (s Ф k) ^ mieizsi- Здесь г^, гАг, гА;—
i = i
ординаты прогиба k-й формы в начальных и перенесенных плоскостях, Метод требует
знания собственных форм.
Система
№
си-
систем ш
8х//
8
15
2
2
3
4
1
8-9
17. Расчет заменяющих систем корректирующих масс
8 (тс, е , 1А заменяется системой
Формула для расчета
а
mcl = /V<!cl..?|'c/;'(fW)
'»С/=РС/есЗС'(р2сз)
тос = - 2 V*oc [В\>сВ № - С Щ
еос = 2$Рс/т1А (Р); при /t=0
eQC = 'ifiPJmlA' (|32); (j ^ 0
4О = ЗРР /т<[В(Р)-В'Ш.Н
с
в1=яA-у!)Яс/я1/С(Р)
Система 12 (mK> eR
си-
системы
Uxn
12
16
5
5
6
1
при переносе
, /R), заменяется системой
Формула для расчета
'"ок = -2
еок=2
еок = ^
п
Рк/ек1 S ''k/-SI (Р2к/)
3 = PK/eK3s;(p2K3)
ЪРк1т1 [В (р) + 2 V (р)];
при Л =0
PK/W[B'(P2)-2V(P)];
3Рк/тЦВ(Р,+В'(Р2)]
Примечание. Рс = т^е^' (Р2С);
Коэффициенты чувствительности и нечувствительные скорости. При баланси-
балансировке гибких роторов пользуются коэффициентами чувствительности опор к систе-
системам или отдельным массам, получаемыми экспериментально или теоретически и
равными по величине амплитуде вибрации опоры, вызываемой единичной массой
(а = А/тп). Величина а зависит от конструкции ротора, системы масс и частоты
вращения. В табл. 18 приведены средние экспериментальные значения коэффи-
коэффициентов чувствительности к парам пробных масс, установленных в торцовых пло-
плоскостях: acv a" для симметричной пары при частоте вращения, близкой к 1-й кри-
критической tii и при рабочей частое вращения яр; apQ для кососимметричной пары
при пр. Для двухполюсных генераторов пр = 3000 об/мин, а для четырехполюсных
пр = 1500 об/мин.
Практика балансировки показывает, что роторы в определенных диапазонах
скоростей мало реагируют на действие установленных на них систем корректирую-
корректирующих масс. Такие скорости называются нечувствительными. Плоскости, при уста-
установке в которых на данной скорости вибрации опор или реакции изменяются мало,
называются нечувствительными плоскостями для данных грузов и скорости. Неко-
Некоторым типам генераторов присущи малые коэффициенты чувствительности (см.
табл. 18), Это показывает, что для них торцовые плоскости являются нечувствитель-
нечувствительными при данной скорости. Близость нечувствительной скорости к балансировочной
БАЛАНСИРОВКА ГИБКИХ РОТОРОВ
69
>s
или рабочей значительно осложняет балансировку гибких роторов, поскольку
устанавливаемые в плоскостях коррекции значительные корректирующие массы
не дают существенного балансировочного эффекта, и в этом случае приходится вы-
выполнять балансировку другой скорости, переносить массы в другие плоскости или
заменять систему корректирующих
МаСС. Him
Значения нечувствительных ско-
скоростей для конкретных систем гру-
зов можно получить из формул
1абл. 16, приравнивая нулю вели-
величину реакции. Нечувствительных
скоростей не имеют распределенные
по синусоиде или по треугольнику
нагрузки (системы 1 и 4), а также
сосредоточенная масса в среднем се-
сечении и кососимметричная пара масс
в опорных сечениях (системы 9 и
13). Оценку значений относитель-
относительных нечувствительных скоростей
/
/
-—*
—=;
12
'-И
Л——
= ¦ ¦
/
//
J
1
f
У
_?
==
'/
/
7
1—1 —
у1н
дЛя некоторых систем
°>г
?
Рис. 24. Зависимость нечувствительных скоро
стей от нагрузки
грузов можно получить по рис. 24
(цифры у кривых соответствуют но-
номерам систем в табл. 16, а Х,х = lxll).
Расчетные я1н и экспериментальные nfa [90] значения нечувствительных ско-
скоростей турбогенераторов для пары симметричных неуравновешенных масс в тор-
торцовых плоскостях и для равномерно распределенных неуравновешенных масс по
бочке ротора nqa приведены в табл. 18.
18. Коэффициенты чувствительности и нечувствительные скорости
роторов турбогенераторов {72J
Тип
генератора
Частоты вращения, об/мин
1560
1300
1300
1600
1150
780
1400
1000
1350
1150
1330
1300
1275
900
750
1210
1040
93ft
790
2400
1320
7/0
680
680
3750
2970
3670
1690
1590
3540
1360
2890
1760
1840
2570
1700
1530
1390
1560
1380
1070
800
2540
1650
1510
890
930
1270
лГн
3000
1800
2200
1200
1400
1300
_
_
_
—
—
qu
Коэффициенты
чувствительности
к системам масс,
мкм/кг
ТВС-30
ТВ-50-2
Т2-50-2
ТВФ-60-2
ТВ2-100-2
ТВ-100-2
ТВФ-100-2
ТВ2-150-2
ТВВ-165-2
ТВФ-200-2
ТГВ-200
ТВВ-220-2
ТГВ-300
ТВВ-320-2
ТВВ-500-2
ТГВ-500
ТГВ-800
ТГВ-1200
ТГВ-2000
ТГВ-500-4
ТГВ-800-4
ТГВ-1000.4
ТГВ-1600-4
ТГВ-2000-4/1
ТГВ-2000-4/П
12 530
9 450
12 180
5 030
6 400
12 390
3 8Г0
9 910
5 470
5 000
8 600
4 760
5 000
4 480
4 250
3 980
2 850
2 210
7 180
4 570
4 250
2 490
2 640
3 650
2,40
2,28
2,30
1,47
2,04
2,53
1,36
2,14
1,53
1,39
1,98
1,33
1,70
1,85
1,29
1,32
1,14
1,01
1,06
1,14
1,15
1,37
1.87
1,25
0,99
1,24
0,56
0,53
1,18
0,45
0,96
0,59
0,61
0,86
0,57
0,51
0,46
0,52
0,44
0,36
0,27
1,69
1,10
1.01
0,59
0,62
0,85
4,18
3,15
4,06
1,68
2,13
4,13
1,29
3,30
1,82
Ш
2,87
1,59
1,67
1,49
1,42
1,33
0,95
0,74
4,79
3,05
2,83
1,66
1,76
2,44
108
25
25
20
23
20
15
22
44
100
26
50
5
5
5
25
10
10
44
55
15
13
5+
140
50
30
100
67
106
60
100
60
70
БАЛАНСИРОВКА РОТОРОВ МАШИН
Эквивалентные системы корректирующих масс [72]. Идеальное распределение
корректирующих масс для полной балансировки гибкого ротора во всем диапазоне
скоростей должно точно повторять форму распределения и величину неуравнове-
неуравновешенных масс. Практически такую балансировку осуществить невозможно, так как
неизвестны точное расположение и величина неуравновешенных масс и не всегда
возможно должным образом распределить корректирующую массу по длине ротора.
Поэтому необходимо выбирать эквивалентные системы корректирующих масс,
т. е. такие системы, которые, не повторяя точно неуравновешенность ротора, имеют
в определенном диапазоне скоростей приблизительно такой же закон изменения
реакций, как и начальная неуравновешенность. Применение эквивалентных систем
корректирующих масс обеспечивает сбалансированность ротора в заданном диапа-
диапазоне скоростей. Теоретические исследования показывают, что при этом существенно
снижаются и изгибающие моменты.
Применительно к компенсации синусоидального или равномерно распределен-
распределенного дисбаланса такие системы, содержащие минимальное число корректирующие
масс или распределенные по простому закону массы, получили название оптималь-
оптимальных систем корректирующих масо (табл. 19). В табл. 19 номера систем соответ-
соответствуют номерам схем по табл. 16, номер основной системы подчеркнут. Величина
основной корректирующей массы или суммы распределенных корректирующих
масс принята за единицу, величина дополнительной массы составляет часть основ-
основной. Знак минуо при величине массы означает, что она стоит в противофазе с ос-
основной.
19. Оптимальные системы корректирующих часе
Дисбаланс
схемы
1
Й1 S1II —
. 2jts
а, ч, —
bo = const; l1 = 0
Система KM*
схемы
8
9+10
8+10
8+10
2
2+10
12
В
8
Положение KM (Irfl)
OCHOBHOli
0,294
0,5
025
0,5
0,126
0,5
0,2
0,013
дополни-
тельяоЛ
о"
0
0,2
0
-
-
Величина
дополнитель-
дополнительной КМ
0,137
-0,10
0,52
-0,095
-
-
* КМ — корректирующая масса
Теоретически доказано G2], что эквивалентные системы нагрузок для данного
ротора характеризуются одинаковым относительным увеличением реакций, рав-
равным коэффициенту изменения реакций p2l = R"/R[, где R[ и R" соответствуют
величинам реакций ротора, измеренным на двух фиксированных относительных
скоростях вращения у[ и -у*.
Расчетные зависимости коэффициента р21 для некоторых типов симметричной
нагрузки на гибком роторе постоянного сечения при измерениях реакций на ско-
скоростях у[ = 0,707 и vl = 0,866 приведены на рис. 25. Такие же зависимости можно
построить и для кососимметричных корректирующих масо.
Использование эквивалентных систем корректирующих масс позволяет произ-
производить балансировку без точного определения типа неуравновешенности на ро-
роторе. Для этого при пробном пуске балансируемого ротора измеряют амплитуды
и фазы реакций опор на двух выбранных частотах y'i и V*i>H по результатам измерений
вычисляют величину р2А, которую сравнивают с эталонными кривыми для данного
БАЛАНСИРОВКА ГИБКИХ РОТОРОВ
71
ротора, подобными приведенным на рис. 25. Для этого через точку, соответствую-
соответствующую величине p2i, на оси ординат, проводят горизонтальную прямую. Абсциссы
пересечения этой прямой с кривыми определяют положения Х1 = -у- систем кор-
корректирующих масс, эквивалентных дисбалансу гибкого ротора. Из найденных ва-
вариантов систем корректирующих масс выбирают наиболее подходящий по условиям
распределения для балансировки. Затем обычными приемами определяют пло-
плоскость расположения и величину выбранной системы корректирующих масс для
окончательной балансировки. Такая система корректирующих масс балансирует
ротор в заданном диапазоне скоростей.
Вместо эталонных кривых можно пользо-
пользоваться формулами [72] для определения
параметров системы корректирующих
масс, характеризующейся таким же зна-
значением коэффициента p2i> как и дисбаланс
ротора.
Практическая балансировка гибких ро-
роторов в собственных опорах. Общие тех-
технические вопросы подготовки роторов,
пробных и корректирующих масс, изме-
измерительной аппаратуры и балансировочной
документации изложены в различных ин-
инструкциях и литературе по балансировке
[33, 34, 90]. Методика проведения вибра-
вибрационных исследований, измерения векто-
векторов вибраций, построения векторных диа-
диаграмм для определения составляющих ви-
вибраций, определения бьющей точки так-
также описаны в литературе и в инструк-
инструкциях по балансировке и по эксплуатации
балансировочной аппаратуры [32, 64, 187,
256].
Ниже кратко изложены вопросы, ка-
касающиеся порядка балансировки гибких
роторов.
Роторы с рабочей скоростью пр, мень-
меньшей первой критической nlt балансируют
при /гр. По измерениям векторов вибраций
опор, концов вала или реакций, выпол-
выполненным на рабочей скорости при первом пуске с начальным дисбалансом, с помощью
векторных диаграмм определяют симметричные и кососимметричные составляющие
вибрации и бьющие точки для них. По коэффициентам чувствительности к сим-
симметричным и кососимметричным (а? и а*0) системам грузов определяют пробные
массы. С установленными симметричными и кососимметричными системами пробных
масс производят второй и третий пуски ротора. По измеренным при этих пусках
вибрациям строят векторные диаграммы, по которым определяют величину и поло-
положение соответствующих корректирующих масс. Четвертый пуск производят с уста-
установленными корректирующими массами. Если при этом пуске вибрации превышают
допустимые, то балансировку повторяют в том же порядке, считая четвертый пуск
за первый во втором этапе.
Роторы с пр > п-у балансируют на двух скоростях (% и пр). Для этого снимают
амплитудно-частотную характеристику вибраций опор, концов вала или реакций
ротора о начальным дисбалансом. Если по величине вибраций возможен переход
через критическую скорость, то характеристика снимается за один пуск для всего
Диапазона частот, а противном случае сначала балансируют неуравновешенность
по первой собственной форме изгиба на критической скорости или вблизи нее.
По величине амплитуд на частотах п± и пр и по фазовому сдвигу определяют
величину и положение симметричных и кососимметричных составляющих дисбаланса
Рис. 25. Зависимость коэффициента рп
нагрузки
72 БАЛАНСИРОВКА РОТОРОВ МАШИН
и пробные массы. G установленными пробными массами снимают амплитудно-ча-
амплитудно-частотную характеристику и по этим данным рассчитывают корректирующие массы.
С ними осуществляют контрольный пуск и измеряют вибрации. Если при пх сим-
симметричные вибрации выше нормы, то проводят повторную балансировку по первой
собственной форме. Так же поступают и при наличии больших кососимметричных
вибраций на частоте яр, повторяя балансировку по второй собственной форме изгиба
на этой частоте.
Когда плоскости коррекции являются оптимальными хотя бы для симметричных
корректирующих масс, тогда не вносится дополнительная неуравновешенность по
высшим собственным формам. Однако обычно плоскости коррекции не совпадают
с оптимальными, поэтому возможно внесение неуравновешенности по высшим фор-
формам. Эти же формы могут содержаться и в начальном дисбалансе. Их влияние про-
проявляется в том, что после балансировки при-rtj остаются повышенные симметричные
вибрации на частоте пр, В этом'случае по формулам переноса необходимо распреде-
распределить найденные при балансировке на пг корректирующие массы вдоль ротора, рас-
располагая их по первой собственной форме изгиба. Если при контрольном пуске сим-
метричные вибрации оааются выше нормы, то производят повторную балансировку
на лр с помощью такой системы корректирующих масс, которая в основном вызы-
вызывает третью собственную форму изгиба и мало влияет на колебания по первой соб-
собственной форме изгиба.
Весь процесс балансировки значительно ускоряется и упрощается при исполь-
использовании систем корректирующих масс, эквивалентных начальному дисбалансу.
6. АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
Необходимость применения автоматической балансировки. Современные методы
и средства балансировки позволяют довести конструкционную и технологическую
составляющие дисбаланса вновь изготовленного или отремонтированного ротора
до величины, соответствующей допустимому дисбалансу по заданному классу точ-
точности балансировки (ГОСТ 22061—76).
Однако при эксплуатации роторной машины может возникать режимное изме-
изменение дисбаланса из-за несимметрии деформаций под действием центробежных сил
и температурных полей, ослабления соединений, неравномерности обжатия, кор-
коррозии, износа и ряда других причин. В центрифугах, сепараторах, отжимочных
машинах, шлифовальных станках и т. п. режимное изменение дисбаланса является
следствием выполняемого ими технологического процесса. При этом режимное изме-
изменение дисбаланса во времени происходит с различными скоростями и имеет, как
правило, случайный характер.
Для устранения компенсации режимного изменения дисбаланса проводят до-
дополнительную балансировку, которая связана с остановкой машины. В ряде слу-
случаев, когда остановка агрегата нежелательна или недопустима по условиям экс-
эксплуатации, применяют автобалансирующие устройства, автоматически компенси-
компенсирующие изменение дисбалансов ротора в процессе работы без его остановки.
Классификация автобалансирующих устройств. На рис. 26 приведена классифи-
классификация основных видов автобалансирующих устройств.
По способу компенсации дисбаланса различают устройства, балансирующие
ротор путем совмещения его оси с главной центральной осью инерции (ГЦОИ) (при-
(принудительное центрирование) и балансирующие ротор путем совмещения главной
центральной оси инерции с осью вращения.
В зависимости от характера слежения и воздействия на дисбаланс автобалан-
автобалансирующие устройства делят на пассивные — со свободным перемещением коррек-
корректирующих масс, и активные — с их принудительным перемещением, присоедине-
присоединением или удалением.
Пассивные устройства являются регуляторами прямого действия, так как в них
чувствительный элемент непосредственно создает достаточное для балансировки
ротора усилие, Питание их энергией осуществляется за счет энергии самого ротора,
передаваемой на чувствительный элемент. Пассивные устройства работают за счет
стремления корректирующих масс, участвующих в движении ротора, занять наи-
наинизшее положение. Поэтому они снижают вибрации ротора только в зоне угловых
АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
73
Гидравличе-
Гидравлические
Механическое
Механическое
Свободное перемеще-
перемещение корректирующих
масо
Совмещение
оси вращения
с ГЦОИ
Жидкостные —
Перераспре-
Перераспределение
масс ротора
Автобаланси-
Автобалансирующие
устройства
Случайный
поиск
Принудительное
перемещение коррек-
корректирующих масс
Направленное
перемещение
Совмещение
ГЦОИ с осью
вращения
Механическое
Удаление MaGC
Физическими
методами
Изменение
масс ротора
В твердом
состоянии
Добавление масо
В жидком
состоянии
Маятниковое
С деталями /
качения
Кольцевые
Леблана
Дункан
Сирла
С легко-
легкоплавким
материалом
Поиск по
программе
Одновременное
перемещение
корректирующих
масс по углу
и радиусу
Управление
за счет
отклонений
ротора
Управление
0 помощью
следящих
систем
Электро-
Электроэрозионное
Электро-
Электрохимическое
Электронно-
Электроннолучевое
Лазерное
Пневматиче-
Пневматическое
Механическое
Взрывом
тонкой
проволочки
С помощью
электрогидра-
электрогидравлического
эффекта
С помощью
импульсного
магнитного
ПОЛЯ
Последовательное
перемещение
корректирующих
масс по углу
и радиусу
Рис. 26. Классификация автобалансирующих устройств
74 БАЛАНСИРОВКА РОТОРОВ МАШИН
скоростей, лежащих выше критической, что является их существенным недостат-
недостатком. Однако простота конструкции делает целесообразным их применение в слу-
случаях, когда рабочая скорость машины выше критической, а режимное изменение
дисбаланса связано с наработкой ресурса. Кроме того, пассивные автобалансирую-
автобалансирующие устройства применяют в качестве чувствительных элементов, управляющих
работой исполнительных механизмов в устройствах с принудительным перемеще-
перемещением корректирующих масс. В этом случае они имеют малые размеры, достаточные
лишь для управления, и не влияют на динамику ротора.
К активным относятся устройства с принудительным перемещением или изме-
изменением масс ротора, а также устройства^ принудительного центрирования. Обычно
они содержат элемент, обеспечивающий'перестройку цепи уравления на критиче-
критической скорости, так что балансировка выполняется в областях как ниже, так и выше
ее. Конструкция активных автобалансирующих устройств сложнее конструкции
пассивных, но они обеспечивают более точную и, главное, всережимную баланси-
балансировку.
Автобалансирующие устройства принудительного центрирования [118]. В этих
устройствах совмещение оси вращения с главной центральной осью инерции дости-
достигается путем размещения между цапфами ротора и внутренними обоймами подшип-
подшипников качения или между валом и балансируемым диском устройства, позволяющего
создавать эксцентричность цапфы и диска относительно обоймы или вала.
Устройства принудительного центрирования применимы в случаях, когда кон-
конструкция машины не позволяет размещать корректирующие массы в требуемом месте
и при этом допустимо изменение положения оси вращения. Устройства достаточно
просты, надежны и пригодны для балансировки как жестких, так и гибких рото-
роторов. Жесткие роторы балансируются полностью. У гибких роторов реакции в опо-
опорах полностью устраняются только в определенном диапазоне скоростей, так как
принудительное центрирование эквивалентно установке на ротор корректирую-
корректирующих масс, распределенных по трапецеидальному закону, балансировка которыми
имеет ограничения на некоторых скоростях. Эти ограничения заложены в оснозе
метода и никакими конструктивными мерами не устраняются.
Автобалансирующие устройства со свободным перемещением корректирующих
масс [78]. Устройство Леблана разработано для балансировки отжимающих жид-
жидкость экстракторов, в которых наблюдается большой изменяющийся дисбаланс.
В качестве корректирующих масс в нем используют отжимаемую жидкость. В кони-
коническом корпусе экстрактора один под другим расположены два ряда отжимных
отверстий. Концентрично с корпусом установлены и жестко с ним скреплены две
обоймы разной высоты. Наклон образующей корпуса и высота отверстий такие,
что на докритических скоростях отжимаемая жидкость поступает во внутреннюю
обойму и удаляется из системы, не меняя ее дисбаланса. Выше критической ско-
скорости жидкость через верхние отверстия попадает во внешнюю обойму, перетекая
в наиболее удаленную от оси вращения ее часть, противоположную вектору дисба-
дисбаланса, и способствуя приведению центра масс системы к оси вращения.
Эффективность устройства при ш > со0, характеризуемая отношением эксцентри-
эксцентриситета центра масс вращающихся частей при действии авгобалансирующего уст-
устройства и без него,
=
е0 (.т/т0)
где уо — а}^т/с; т, т0—масса вращающихся частей, включая автобалансирующее7
устройство, с жидкостью и без нее; с— радиальная жесткость упругого элемента,
приведенная к центру масс экстрактора; R, h — соответственно радиус и высота
внешней балансирующей обоймы; р — плотность балансирующей жидкости.
Формула B6) показывает, что выше критической скорости устройство доста-
достаточно эффективно, но не полностью устраняет дисбаланс.
fl устройстве Сирла (рис. 27) балансировочная обойма разделена на несколько
отсеков, в которые балансирующая жицкость, получаемая из отжимаемой, направ-
направляется через распределительный диск в дне корпуса экстрактора и неподвижную
питающую обойму, прижимаемую к диску пружинами, Система впускных отвер-
АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
75
стий в распределительном диске и направляющих лопаток выполнена таким обра-
3ov, что балансирующая жидкость поступает в отсек, расположенный диаметрально
противоположно вектору дисбаланса, как при докритической, так и при закрити-
ческой скорости вращения экстрактора. Однако необходимость обеспечения пере-
перекрытия впускных отверстий при уравновешенном роторе и трение между распреде-
распределительным диском и неподвижной питающей обоймой приводят к наличию отно-
относительно большого остаточного дисбаланса. В эгом устройстве во время баланси-
балансировки скорость вращения ротора уменьшается, так как выходящая из неподвижной
части машины балансирующая жидкость увеличивает момент инерции вращающейся
системы и оказывает на нее тормозящее действие.
Устройство Дункан представляет собой поплавок-контейнер с неуравновешенной
массой, помещенный в сосуд с тяжелой жидкостью и имеющий свободу перемеще-
перемещения по радиусу под давлением вращающейся жидкости. Так как под поплавком
снизу нет жидкости, то выталкивающая его
вверх сила отсутствует.
Принцип действия устройства следующий.
Если в заполненном жидкостью вращающемся
сосуде жесткой стенкой, не имеющей толщины
и массы, изолировать объем жидкости с массой
/%, то равновесие сил не нарушится. На оболоч-
оболочку изнутри действуют внутреннее давление и
центробежные силы, равнодействующая которых
тж «о2 направлена от оси вращения Эти силы
уравновешиваются действующими на наружную
поверхность силами, препятствующими ее взры-
взрыву и перемещению от оси вращения. Если обо-
оболочку заменить контейнером такого же объема
с грузом, общая масса которых тк меньше
Рис. 27. Экстрактор с автобалансирующим устройст-
устройством Сирла:
/ — резервуар; 2 — корпуо экстрактора; 3 — рас-
распределительный диск; 4, 5 — направляющие лопаг-
ки; в — балансировочный отсек; 7 — горизонталь-
горизонтальная перегородка; 8 — дно отсека; 9 — пружина;
10 — кольцевой канал; // — питающая обойма;
12 — шланг; 13 — корпус; 14 — упругий элемент;
16 — вал; 16 — двигатель
массы вытесненной жидкости, то избыточное внешнее давление воспримет контей-
контейнер. Центробежные силы внутри контейнера уменьшатся пропорционально измене-
изменению массы, и равнодействующая их будет /пкесо2. Появится сила F= (тж — тк)е<»2,
приложенная к центру масс контейнера с грузом, стремящаяся переместить их к
оси рращения, пока эксцентриситет не станет равным нулю.
Устройство Дункан работает во всем диапазоне скоростей. Однако трение между
контейнером и сосудом, а также различие скоростей вращения контейнера и жид-
жидкости приводит к наличию остаточного дисбаланса, Дисбаланс внешнего сосуда
не компеисируегся.
Большинство жидкостных автобалансирующих устройств применяется только
на роторах с вертикальной осью вращения.
Шаровое устройство (рис. 28, а) представляет собой заполненную маслом обойму
g несколькими шарами, центр которой совпадает с центром ротора. Диаметр ниж-
нижней цилиндрической части обоймы такой, что лежащие в ней на малых скоростях
шары прижаты друг к другу и равномерно распределены по окружности, не увели-
увеличивая дисбаланс. При скорости, превыш<дащей критическую и определяемой углом
наклона р" конической части, шары переходят в верхнюю цилиндрическую часть
обоймы, имеющую больший ди<шетр. При достаточной емкости устройства шары,
перемещаясь по окружности, займут положение, автоматически устраняющее дис-
76
БАЛАНСИРОВКА РОТОРОВ МАШИН
баланс системы. При я шарах условия равновесия определяются уравнениями
Me
А„ = cos a. + cos а, +... + cos ап-) тв г — 0;
" г ' п m(R — r) B7)
Вп = sin a1 -\- sin а2 +... + sin an = 0;
где «!, Ог ая — углы, определяющие положения шаров относительно вектора
дисбаланса; Мят — соответственно масса ротора и шара; е — эксцентриситет
центра масс ротора; R и г — соответственно радиусы обоймы и шара.
Для многошарового устройства имеется множество положений шаров, соот-
соответствующих балансировке, а для двухшарового — только одно такое положение.
Рис. 28. Механические автоба-
автобалансирующие устройства:
а — механические; б — маятни-
маятниковые
А-А
Маятники
Если вместимость обоймы недостаточна, то шары будут соприкасаться и про-
прогиб ротора
где vn =
m(R-r)
B8)
, с — коэффициент жесткости
вала.
Выражения B7), B8) получены без учета трения. Наличие трения качения ша-
шаров снижает чувствительность устройства — оно начинает работать только после
появления эксцентриситета <?min. Для двухшарового устройства мера чувствитель-
чувствительности
emin
где k± — коэффициент трения качения; \i = т/М, ех = Me/ (М + 2т),
Наибольший устраняемый дисбаланс двухшарового устройства
^2 max —
где р — плотность материала шаров.
АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ 77
Маятниковое устройство (рис. 28, б) содержит закрепленные на валу два диска
с осями, на которых свободно вращаются маятники массой т. Расстояние от осей
маятников до центров дисков г должно быть больше максимально возможного экс-
эксцентриситета центра вала в месте установки устройства. Эффективность его опреде-
определяется формулой
е уг— 1
где (х = т/М.
Уравнения B9) и B6) по форме подобны, т. е. устройства Леблана и маятнико-
маятниковое имеют похожие характеристики. Маятники увеличивают дисбаланс системы
на дорезонансных скоростях и ухудшают условия перехода через критическую ско-
скорость. При закритических скоростях маятники уменьшают вибрацию системы,
но не очень эффективно.
При уменьшении величины г до нуля маятниковое устройство превращается
в кольцевое, которое может быть выполнено так, что оно не будет увеличивать дис-
дисбаланс на малых скоростях. Однако из-за трения между кольцами и валом эффек-
эффективность балансировки уменьшается, а для устранения большого дисбаланса коль-
кольцевое автобалансирующее устройство получается громоздким.
Автобалансирующие устройства с принудительным перемещением корректи-
корректирующих масс. Принудительное перераспределение корректирующих масс на роторе
может производиться как случайным образом, так и направленно с учетом динами-
динамических свойств ротора.
Устройство со случайным поиском положений корректирующих масс [179] со-
содержит систему подвижных масс, расположенных на роторе и способных по команде
изменять свое положение. Перемещение корректирующих масс производится испол-
исполнительными механизмами, получающими команды с генераторов случайных вели-
величин блока управления с равной вероятностью движения в каждом направлении.
Воспринимаемые датчиками сигналы вибрации опор хх и хг через усилители подаются
в блок сравнения и сравниваются с их предыдущим значением. При этом в блок
управления поступает информация об изменении уровня вибраций. Если направ-
направление движения корректирующих масс выбрано неправильно и уровень вибраций
не уменьшается, то случайный поиск продолжается по другому, также случайно
выбранному варианту движения до тех пор, пока выбранное направление движе-
движения не приведет к уменьшению уровня вибраций. Такое направление движения
корректирующих масс становится предпочтительным и сохраняется все время,
пока вибрации уменьшаются. Если балансировка приводит к достижению необ-
необходимого уровня вибраций, то подача сигналов прекращается и исполнительные
механизмы останавливаются. Если после некоторого уменьшения вибраций они
начинают увеличиваться, то блок управления выдает другой случайный вариант
перемещения корректирующих масс и балансировка продолжается, как описано
выше.
Случайный поиск обеспечивает независимость работы автобалансирующего
устройства от скорости вращения и устраняет вибрации не только от дисбаланса,
но и от таких факторов, как нагрев, трение и т. п. Система не требует измерения
фаз и может работать с аппаратурой, показывающей только наличие вибраций
опор и изменение их амплитуд. Однако она достаточно сложна и требует наличия
каналов передачи энергии и информации с неподвижных частей машины не вращаю-
вращающиеся. В силу случайного характера поиска время балансировки непостоянно и
нет гарантии достижения уравновешенности в практически приемлемое время.
В процессе балансировки дисбаланс может возрастать на неопределенную вели-
величину. Эти свойства ограничивают использование метода. Однако конструкция уст-
устройства может быть упрощена, а процесс балансировки стать более надежным,
если в метод случайного поиска ввести некоторую закономерность, например задать
траекторию движения массы, оставив случайным только выбор направления ее
движения.
Автобалансирующие устройства с направленным перемещением корректирующих
масс. Достаточно точная и производительная автоматическая балансировка рото-
роторов в работающей машине на всех скоростях обеспечивается устройствами с направ-
78
БАЛАНСИРОВКА РОТОРОВ МАШИН
г
f- 5
'На.
ь
г.
8
2
л
\
4
1
Рис. 29. Структурная схема замк-
замкнутой системы автоматического ре-
регулирования непрямого действия
ленным перемещением корректирующих масс, управляемых с помощью следящих
систем [1]. Такие устройства (рис. 20) являются замкнутой системой автоматиче-
автоматического регулирования непрямого действия, питающейся от внешнего источника энер-
энергии /. Система содержит чувствительный элемент 2, определяющий положение
и величину вектора дисбаланса 3 в результате учета динамических свойств балан-
балансируемой роторной системы 4, исполнительный механизм 5, обеспечивающий тре-
требуемое перемещение корректирующих масс 6, усилительно-преобразующее уст-
устройство для усиления снимаемых .с чувствительного элемента сигналов 7 и про-
программное устройство 8 —¦ регулятор, с помощью которого корректируется работа
системы для учета изменения фазы между векторами дисбаланса и прогиба на раз-
разных скоростях вращения.
В качестве чувствительных элементов применяют автобалансирующие устрой-
устройства со свободным перемещением малых масс. На докритических скоростях чувстви-
чувствительный элемент показывает тяжелую, а на закритических — легкую стороны ро-
ротора. При уравновешенном состоянии ротора
чувствительный элемент отключает испопнитель-
ныи механизм.
Жидкостный исполнительный механизм уп-
управляется с помощью клапанов для пропуска
жидкости, подача которой производится прину-
принудительно от насоса или под действием центро-
центробежных сил. Механический исполнительный ме-
механизм имеет электродвигатели, перемещающие
тем или иным способом корректирующие массы
и управляемые с помощью системы контактов.
Переключение клапанов или контактов произ-
производится чувствительным элементом.
Для работающих на закритических скоро-
скоростях роторов с изменяющимся дисбалансом при-
применяется регулятор типа центробежного, отрегу-
отрегулированный так, что на критической скорости он изменяет настройку системы уп-
управления на обратную для учета изменения фаз при переходе через эту скорость.
Автобалансирующее устройство с направленным перемещением корректирующих
масс балансирует ротор на всех скоростях. Применение его не требует измеритель-
измерительной и управляющей электронной аппаратуры. Вся система расположена на роторе
и не требует каналов передачи информации, поэтому ее можно применять для балан-
балансировки роторов в действующей машине. Функциональная зависимость между ско-
скоростью вращения, положением и величинами дисбаланса и прогиба и устойчивое
положение чувствительного элемента обеспечивают перемещение корректирующих
масс всегда в сторону уменьшения дисбаланса.
Автоматическая балансировка удалением корректирующей массы с поверхности
ротора [147]. В автоматических балансировочных станках применяют метод умень-
уменьшения дисбаланса путем удаления частиц материала с поверхности ротора во время
его вращения, осуществляемого различными способами.
Наибольшую производительность обеспечивает применение специальной головки,
оснащенной вращающимся режущим или абразивным инструментом, с помощью
которого производится съем материала с поверхности ротора в «тяжелом месте».
Однако точность балансировки при этом невелика, так как режущий инструмент
оказывает давление на ротор. Этого недостатка лишены бесконтактные (физиче-
(физические) методы удаления материала. Так как измерение и устранение дисбаланса
происходят во время вращения, число циклов балансировки может быть большим
и точность балансировки высокой при невысокой точности измерения дисбаланса
в каждом цикле.
Электроэрозионный способ применяют в приборостроении. При этом дисбаланс
уменьшается с помощью электрической искры, возникающей между поверхностью
металлического ротора в месте дисбаланса и положительным электродом. Примене-
Применение этого метода ограничено тем, что необходимо пропускать значительные токи
через опоры ротора, недопустимые в точном приборостроении. Метод неприменим
для роторов, изготовленных из токонепроводящих материалов.
АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ
79
Электрохимический способ осуществляется анодным растворением металлов.
К ротору / (рис. 30) подводятся два рабочих электрода 3, расположенные в плоско-
плоскостях коррекции, и центральный токоподводящий электрод 5. В зазор между рото-
ротором и электродами через отверстия в них подается электролит. Вращение ротора
создает условия для хорошей эвакуации продуктов анодного растворения и пре-
препятствует поляризации, что позволяет подавать электролит под давлением 0,1—
0,5 кгс/см3 и избежать помех измерений от воздействия струи. Система управле-
управления 4 по командам датчиков 2 формирует ток съема, отрицательная полуволна кото-
которого на электродах совпадает с прохождением «тяжелого места» ротора перед ними.
Способ не лимитирует скорость вращения ротора; его призводительность зависит
от площади поверхности электродов и межэлектродного зазора (его производитель-
производительность более чем в 10 раз превышает производительность других электрофизических
Рис. 30. Схема электрохимического ус-
устройства
Рис.31. Структурная схема электрон-
электронно-лучевого устройства:
/ — ротор; 2 — вакуумная каме-
камера; 3 — электронно-оптические си-
системы; 4 — блоки питания; 5 —
блоки управления; 6 — блоки из-
измерения дисбаланса; 7 — схема раз-
Деления; в — датчики
способов). Однако возможности применения электрохимического процесса ограни-
ограничиваются конструкцией и материалом объектов балансировки. Кроме того, тре-
требуются специальные меры защиты окружающей среды от продуктов анодного раство-
растворения.
Электронно-лучевой метод автоматической балансировки малогабаритных рото-
роторов поясняется схемой, приведенной на рис. 31. Ротор с системой подвеса
помещен в вакуумную камеру так, что линии действия электронных лучей нахо-
находятся в соответствующих плоскостях коррекции, частота вращения ротора равна
эксплуатационной. Разрежение в камере 5 ¦ 10~6 мм рт. ст. Колебания оси ротора
воспринимаются датчиками, выделенные сигналы которых, характеризующие вели-
величину и фазу дисбаланса в каждой плоскости коррекции, запускают электронно-
оптическую систему в момент прохождения тяжелого места через линии действия
электронных лучей. Взаимодействие лучей с твердым телом характеризуется уда-
удалением материала из зоны действия луча, обеспечивающего высокую степень локаль-
локальности нагрева. В зоне испарения металла температура достигает 6000 "С, а на рас-
расстоянии 1 мкм от нее 300 °С. Балансировка осуществляется с высокой точностью,
но с небольшой производительностью, а необходимость помещения ротора в вакуум-
вакуумную камеру ограничивает область применения способа.
Лазерные методы [147] позволяют балансировать роторы, выполненные из любых
материалов. Возможность управления энергией и длительностью импульса свето-
светового луча обеспечивает высокую точность и производительность балансировки.
Процесс балансировки можно осуществлять по двум схемам — когда световой луч
вращается синхронно с балансируемым ротором, и когда луч неподвижен (рис. 32).
В первом случае (рис. 32, а) луч ОКГ 1 через оптическую систему 2 и фокуси-
фокусирующую оптику 3 поступает на балансируемый ротор 4. С Помощью привода бопти-
80
БАЛАНСИРОВКА РОТОРОВ МАШИН
ческая головка 5 вращается синхронно с ротором. При этом на поверхности ротор*
от действия луча образуется след в виде глухого отверстия. В данной схеме каж-
каждый последующий импульс ОКГ имеет энергию излучения меньшую, чем предыду»
щий. Автоматическое регулирование энергии предусмотрено во всех балансировоч-
балансировочных станках и осуществляется
пропорционально изменению
дисбаланса. В качестве ОКГ
здесь применяются твердотель*
ные лазеры, работающие в ре-
режиме свободной генерации.
Во втором случае (рис. 32, б)
луч лазера непосредственно воз-
воздействует через оптическую си-
систему на поверхность вращаю-
вращающегося ротора. ОКГ при этом
могут работать как в режиме
свободной генерации, так и в
Рис. 32. Способы балансировки роторов с помощью режиме Модулированной ДОброТ;
ОКГ с вращающимся (а) и с неподвижным (б) све- НОСТИ. При режиме свободной
товым лучом генерации на поверхности рото-
ротора образуется след в виде не-
непрерывного реза каплевидной или конической формы. Общая длина следа при час-
частоте вращения ротора пр, его диаметре D = 2R и длительности х излучения ОКГ
С р
При режиме регулируемой добротности за счет сокращения длительности им-
импульса уменьшается длина следа — масса удаляется непосредственно в зоне тяже-
тяжелого места. Однако при этом в зоне взаимодействия возникают давления от 10° кгс/м2,
Рис. 33. Автобалансирующее устройство в положении
заряжения (а) и выброса (б) корректирующих масс:
/ — корпус; 2 — камера; 3 — изолятор; 4 — электро-
электроды, 5 — затвор, 6 — магазин; 7 — выемка, 8 — кор-
корректирующая масса; 9 — ствол; 10 — паз; // — ротор;
12 — батарея, 13 — конденсатор; 14 — коммутирующее
устройство
что оказывает нежелательное воз-
воздействие на подшипники ротора и
снижает точность балансировки,
которая на лазерных балансиро-
балансировочных станках может достигать
0,02—0,2 мкм.
Производительность балансиров-
балансировки обусловливается частотой им-
импульсов ОКГ, малой величиной сни-
снимаемой массы и находится в преде-
пределах 10—20 роторов в час. Характе-
Характеристики некоторых лазерных балан-
балансировочных станков приведены в
табл. 15.
Автоматическая балансировка добавлением корректирующих масс на ротор.
В устройстве, показанном на рис. 33 [Пат. 62471 (ГДР)], корректирующие массы,
выполненные из пластичного материала в виде шариков, выстреливаются в нужные
моменты в концентричный оси ротора паз с V-образным выступом, имеющийся на
балансируемом роторе. В положении заряжения (рис. 33, а) вращающийся затвор 5
из магазина 6 принимает в выемку 7 корректирующую массу 8 и затем с помощью
поворотного магнита переходит в рабочее положение (рис, 33, 6). По сигналу с дат-
АВТОМАТИЧЕСКАЯ БАЛАНСИРОВКА РОТОРОВ 81
чика вибрации опор коммутирующее устройство 14 подключает конденсатор 13,
заряженный от батареи 12, к цепи разряда с электродами 4. Происходит разряд
конденсатора через разрядный промежуток между электродами, создающий в ка-
камере 2 волну сжатия, которая выбрасывает шарики через ствол 9 в направлении
паза 10 в роторе //. При размыкании цепи поворотного магнита затвор возвраща-
возвращается под действием пружины в положение заряжания, а коммутатор включает цепь
заряда конденсатора. Система подготовлена для зарядки и выброса следующей массы.
Наличие в устройстве вращающегося затвора снижает надежность его работы
и ограничивает частоту выбросов масс. Для повышения производительности необ-
необходимо увеличить корректирующие массы, а это снижает точность балансировки.
Эксплуатация устройства осложняется и удорожается необходимостью обеспечения
его калиброванными шариками.
Имеются автобалансирующие устройства, в которых в качестве корректирую-
корректирующей массы используется жидкий материал, наносимый на поверхность ротора в «лег-
«легком месте».
Известно устройство, имеющее два электрода, подключенных к сети постоян-
постоянного тока: вращающийся с частотой ротора и неподвижный. Для установки вращаю-
вращающегося электрода в положение, при котором он проходит мимо неподвижного элек-
электрода несколько раньше легкого места ротора, служит специальный механизм.
Кроме того, имеется сопло, через которое непрерывно подается струя воздуха.
В момент прохождения вращающегося электрода перед неподвижным между ними
возникает дуга, и продукты расплавления электрода струей воздуха наносятся
на «легкое место» ротора. Из-за короткого времени существования дуги произво-
производительность устройства мала, хотя точность может быть высокой. Кроме того, для
работы требуется большой расход воздуха.
В другом устройстве через сопло непрерывно подается струя жидкой коррек-
корректирующей массы, которая перекрывается диском с отверстием, вращающимся син-
синхронно с ротором; положение отверстия может быть отрегулировано так, что оно
проходит перед соплом одновременно с легким местом ротора и пропускает на него
струю жидкой корректирующей массы. В остальное время струя, перекрытая ди-
диском, отбрасывается в защитный кожух, обусловливая этим большой непроизводи-
непроизводительный расход корректирующей массы. Налипающая на диске и в зазорах коррек-
корректирующая масса может заклинить диск, что делает работу устройства ненадежной.
Автобалансирующее устройство [Пат. 3130075 (США)] содержит датчик вибра-
вибрации опор ротора, регулирующий механизм с электродвигателем, приводным и ку-
кулачковым дисками с катушкой возбуждения и ударным элементом, камеру с порш-
поршнем, служащую резервуаром для корректирующей массы, расплавляемой с помощью
нагревательного элемента, и механизм для выбрасывания жидкой массы, представ-
представляющий собой цилиндр с внутренним каналом, заканчивающимся соплом, и поршень,
с помощью которого корректирующая масса выталкивается через сопло. Во время
вращения балансируемого ротора сигнал датчика вибрации опор через контроль-
контрольное устройство подается на обмотки возбуждения кулачкового диска, последний
притягивается к приводному диску и, поворачиваясь на некоторый угол, ударяет
по головке поршня, перемещая его в цилиндре и выбрасывая порцию корректирую-
корректирующей массы. Одним из недостатков этого устройства является малая частота выбро-
выбросов, так как механизм содержит ряд деталей, связанных между собой механически.
Величина порций определена объемом цилиндра и не регулируется в зависимости
от размеров ротора и дисбаланса. Большое число подвижных деталей и узлов делает
устройство ненадежным в работе.
В одном из устройств [145] в качестве корректирующей массы использован ме-
металлический расплав, наносимый на «легкое место» ротора посредством взрыва
тонкой (d = 0,12 мм) проволоки, происходящего при электрическом разряде. Уст-
Устройство содержит электромагнит, в сердечнике которого имеется зазор. По обе
стороны от зазора установлены направляющие ролики, между которыми электро-
электроприводом протягивается тонкая проволока, подающаяся к высоковольтным кон-
контактам, подключенным к батарее конденсаторов. В момент касания проволоки высо-
высоковольтных контактов между ними происходит короткое замыкание и взрыв прово-
проволоки, а образующийся при этом жидкий металл выбрасывается на ротор. За один
Цикл в зависимости от степени диафрагмирования пучка наносится от 0,01 до 1,5 мг
82
БАЛАНСИРОВКА РОТОРОВ МАШИН
расплавленных частиц, а производительность установки составляет 0,006—1 г/мин.
В качестве корректирующей массы можно использовать только металлический рас-
расплав, что ограничивает область применения способа. При взрыве проволоки обра-
образуется металлическое облако, и только часть расплавленного металла наносится
на ротор, что снижает рентабельность способа.
Известны автобалансирующие устройства [1], в которых для выбросов порций
корректирующих масс на поверхность ротора используется энергия электрогидрав-
электрогидравлического эффекта или импульсного магнитного поля. Это обеспечивает'большую
частоту выбросов и эффективную балансировку даже при малой величине отдельной
порции, необходимой для достижения балансировки высокой точности. В качестве
балансирующих веществ можно применять расплавы металлов, смолы, клеи, пласт-
пластмассы и т. п., что существенно расширяет об*
ласть использования устройств.
Блок-схема устройства с использованием
электрогидравлического эффекта (рис. 34) со*!
держит исполнительный орган / для направлен-
направленного выброса порций жидкой корректирующей"
массы на легкое место поверхности ротора 2 Щ,
заданные моменты времени; управляемый гене»-;
ратор 3 для производства электрических им-
импульсов высокого напряжения и подачи их по'
сигналу от блока управления 4 в исполнитель*
ный орган; датчик 10 для измерения парамет-г
ров вибрации опор балансируемого ротора Я,
подачи сигналов в блок управления. Исполни-
Исполнительный орган представляет собой камеру с
соплом 5 и электродами 6, подключенными к
разрядному контуру генератора 3. В камере
установлена подвижная перегородка 7 в виде
мембраны или поршня, разделяющая ее на две
изолированные полости 8 и 9, заполненные со-
соответственно жидкостью, в которой осуществ-
осуществляется электрогидравлический удар, и жидким
балансирующим веществом. При электрическом
разряде в полости 8 перегородка 7 воспринимает
возникающее повышение давления, передает его
на вещество, находящееся в полости 9, выбрасывая вещество через сопло на ротор.
Камера может иметь систему обогрева для поддержания балансирующего вещества
во время работы в жидком состоянии. Для повышения точности балансировки путем
уменьшения порций корректирующей массы и увеличения начальной скорости вы-
выброса поршень может быть выполнен двухступенчатым и установлен меньшей сту-
ступенью в полость 9. Для регулирования производительности и точности баланси-
балансировки сопло выполнено сменным.
Блок-схема устройства с использованием энергии импульсного магнитного поля
и конструкция исполнительного органа аналогична блок-схеме устройства с исполь-
использованием электрогидравлического эффекта, только в камере исполнительного органа
вместо электродов установлен индуктор, а сама камера не разделена на две полости.
Система управления этих устройств обеспечивает решение следующих задач. Уст-
Устройство включается в работу при наличии на роторе дисбаланса, превышающего
допустимый, и отключается после окончания балансировки. Моменты выбросов
порций корректирующих масс не зависят от абсолютной величины дисбаланса,
а определяются только наличием превышения величины дисбаланса над допустимой.
Колебания ротора, вызванные ударами наносимых масс, не снижают точности ба-
балансировки. Эти устройства перспективны с точки зрения компактности и про-
простоты использования источника энергии большой мощности и возможности произ-
производительной балансировки с большой точностью в процессе работы. Малые размеры
исполнительного органа позволяют устанавливать его в машине вблизи баланси-
балансируемого ротора, в то время как блок управления может располагаться в другом,
удобном для размещения месте [1].
Рис. 34. Структурная схема устрой-
устройства с использованием электрогидра-
электрогидравлического эффекта [IJ:
/ — исполнительный орган; 2 —
ротор; 3 — управляемый генера-
генератор импульсных токов; 4 — блок
управления; 5 — сопло; 6 — элек-
электроды; 7 — перегородка; 8, 9 — по-
полости камер; 10 — датчик
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ 83
Глава III
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
При проектировании механизмов задачу снижения виброактивности приходится
решать как для устранения аварийных режимов, так и для обеспечения нормальных
условий работы машины и ее обслуживания, вытекающих из требований высокока-
высококачественного и надежного осуществления заданной технологической или транспортной
операции и защиты человека-оператора от вредного воздействия вибраций.
Механизмы, с помощью которых в машине преобразуется движение звеньев и
осуществляется заданное (программное) перемещение рабочих органов, в колеба-
колебательной системе являются, с одной стороны, источником возмущения для привода
машины, ее основания и несущих конструкций, а с другой — ответственным техно-
технологическим объектом, подверженным воздействию вибраций.
Проявление механизма как источника колебаний может быть в известной степени
подавлено за счет дополнительных уравновешивающих сил и моментов, при воздей-
воздействии которых суммарные нагрузки, передаваемые на опоры или привод, умень-
уменьшаются либо перераспределяются желательным образом. С этой целью используется
рациональное размещение дополнительных масс (противовесов) или специальные
разгружающие устройства.
Во многих случаях существенное снижение динамических нагрузок в механи-
механизмах может быть достигнуто оптимизацией непосредственно самих программных дви-
движений звеньев; при этом должны быть приняты во внимание заданные технологи-
технологические и компоновочные ограничения.
При рассмотрении механизма как объекта колебаний задача снижения его вибро-
виброактивности тесно соприкасается с задачей минимизации динамических ошибок, под
которыми понимают искажения воспроизводимых программных кинематических
характеристик, вызванные колебаниями звеньев. Особенно значительными обычно
являются динамические ошибки в ускорениях звеньев, что может иногда привести
к многократному возрастанию максимальных динамических нагрузок по сравнению
с результатами, полученными без учета колебаний звеньев. Кроме того, минимизация
динамических ошибок является необходимой предпосылкой для того, чтобы синтези-
синтезируемые оптимальные законы движения звеньев оказались практически реализуе-
реализуемыми. С учетом условий формирования динамических ошибок одновременно опреде-
определенным образом должны корректироваться сами критерии оптимальности, исполь-
используемые при выборе как кинематических характеристик программного движения,
так и параметров механизма. Поэтому вопросы оптимизации механизма с учетом
отмеченных факторов, как правило, приходится рассматривать в рамках единой
динамической задачи.
1. ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
Динамические модели механизмов. Первый этап решения задачи снижения вибро-
виброактивности механизмов состоит в отборе одной или нескольких динамических моделей,
являющихся идеализированными отображениями рассматриваемых систем.
Динамические модели механизмов имеют отличительную особенность, которая
заключается в том, что абсолютная координата при прохождении кинематической
Цепи преобразуется в соответствии с заданными геометрическими характеристиками
механизма. Ниже рассмотрены лишь такие модели, в которых отмеченная особенность
при снижении виброактивности механизма оказывается определяющей.
Кинетостатическая модель, являющаяся наиболее простой динамической мо-
моделью, рассматриваемой в классической теории механизмов и машин [8,246], представ-
представляет собой абстрактный механизм с недеформируемыми звеньями. При рассмотрении
подобных моделей обычно решается первая задача динамики, когда при заданном
движении определяются возникающие при этом инерционные силы. Анализ кинето-
статической модели дает исходное оценочное представление о динамике механизма,
которое оказывается достаточно совершенным лишь при характере нагруЭкения,
близком к статическому.
84 СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
Для кинетостатической модели механизма с одной степенью свободы связь между
координатами входного и выходного звеньев (фх, ф2) устанавливается так называемой
функцией положения П, где ф2 = П (ф!). Функции П (ф!), П" (фД П'" (%) называют
аналогами скорости, ускорения и ускорения второго порядка, или соответственно пер-
первой, второй и третьей передаточными функциями звена (штрихом обозначены произ-
производные по фО. Эти функции вместе с функцией П являются геометрическими харак-
характеристиками механизма.
Если угловая координата фх задается в радианах, то ее размерность совпадает
с размерностью П. Об определении геометрических характеристик механизмов см,
[8, 246].
Кинематические характеристики выходного звена — скорость, ускорение и произ-
производная функции ускорения по времени, называемая ускорением второго порядка, —
связаны с геометрическими характеристиками следующими зависимостями:
A)
ф2 = П'" (ф1) ф? + ЗП" (ф1) ф1ф1 -f П'
В зависимости от того, является ли функция П (ф1) линейной или нелинейной,
все механизмы делятся на две группы. При линейной функции положения (например,
в зубчатых передачах с постоянным передаточным отношением) dnyjdtn = il'dnylldtn.
Если ф! = const, то в подобных механизмах в рамках кинетостатической модели воз-
возникновение инерционных нагрузок возможно только из-за ошибок при изготовлении
и сборке или других погрешностей.
При нелинейной функции положения, свойственной так называемым цикловым
механизмам — кулачковым, рычажным, шаговым и т. д., динамические условия ра-
работы оказываются более напряженными, так как даже при фх = const и идеальном
изготовлении на выходных звеньях в соответствии с A) возникают ускорения, причем
нередко значительные. При прочих равных условиях сила инерции на выходном звене
пропорциональна функции П", а момент на входном звене, вызванный этой силой, —
функции П'П". Момент на входном звене, уравновешивающий постоянную силу F,
приложенную к выходному звену, М = ГГ (Ф1)/7. При П' =? const даже постоянная
сила F приводит к возникновению переменного возмущающего момента, способного
возбуждать колебания привода.
Константы I П' 'гаах, | П" imax , | П'П" |тах могут быть использованы в качестве
простейших динамических критериев, с помощью которых производится сопоставле-
сопоставление законов движения, а также синтез новых законов движения, обладающих в опре-
определенном смысле оптимальными свойствами.
На рис. 1 приведен ряд типовых динамических моделей механизмов и их приводов.
Принятые в этих моделях инерционные характеристики 3, коэффициенты жесткости с
и коэффициенты поглощения г|5 следует трактовать как приведенные значения. Помимо
кинетостатической модели (рис. !, а) могут оказаться эффективными динамические
модели при учете податливости ведомой части и абсолютно жесткой ведущей части
механизма (рис. 1, б) или при податливой ведущей и абсолютно жесткой ведомой части
(рис. 1, в). Эти модели являются частными случаями модели более общего типа
(рис. 1, г), которая позволяет описать сложные колебательные явления, возни-
возникающие при взаимном влиянии двух подсистем, связанных функцией положения.
Наряду с последовательным соединением элементов во многих случаях воз чикает
необходимость анализа параллельно-последовательного соединения (рис. 1, д).
Подобная модель встречается, например, при анализе колебаний в приводах с рас-
распределительным валом, от которого получает движение ряд механизмов. Особый
класс механизмов со своими особенностями образуют механизмы, работающие в зам-
замкнутой схеме (рис. 1, ё).
При схематизации механизмов отдельные звенья иногда целесообразно представ-
представлять в виде подсистем с распределенными параметрами.
В приведенных моделях функция положения П (ф) может быть как линейной,
так и нелинейной, а приведенные инерционные, упругие и диссипативные характерис-
характеристики — постоянными или переменными.
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
85
В системах с переменными параметрами определенное упрощение модели иногда
достигается использованием усредненных значений параметров. При этом, однако,
степень идеализации механизма не должна вступать в противоречие о возможностями
принципиального характера при описании с помощью данной модели тех или иных
колебательных явлений.
Дифференциальные уравнения для определения динамических ошибок в меха-
механизмах. Для ряда типовых динамических моделей в табл. 1 приведены зависимости,
устанавливающие связь между динамическими ошибками и решениями соответствую-
соответствующих дифференциальных уравнений; кроме того, даны формулы для определения ко-
коэффициентов этих уравнений. Построение решений см. справочник т, 1, а также [54,
56, 93, 102,-222].
Л с, Л,
ОЙ-
Рис. 1. Типовые динамические модели механизмов
Для модели I при условии, что приведенное значение ведомой массы т (или момен-
момента инерции) и приведенную жесткость с можно считать постоянными, соответствующее
дифференциальное уравнение имеет вид
где <7 — деформация упругого элемента; (о„ = ]Л;/т; в — коэффициент эквивалент-
эквивалентного линейного сопротивления 1.
При записи функции W @ (см. табл. 1) угловая скорость входного звена со при-
принята постоянной. Частота свободных колебаний с поправкой на диссипацию сое =
= ю0 У~1 — Р2, однако, поскольку в механизмах обычно |3 < 0,1, то ше « щ.
Для модели II и других многомассных моделей с постоянными параметрами при
достаточно сложном виде кинематических возмущений и внешних сил целесообразно
осуществить переход к нормальным (главным) координатам (см. справочник т. 1).
На этапе перехода к нормальным координатам диссипативные силы из-за их малого
влияния на собственные частоты и формы колебаний могут быть опущены и учтены
позже соответствующими членами дифференциальных уравнений.
Для приведенной двухмассной модели нормальные координаты % и х\2 определяют
из следующих дифференциальных уравнений (табл, 1, модель II):
^r+2e,rr]r + (osrr]r = Wr(t), (r=l, 2). C)
Коэффициенты 8j и е2 получены при использовании допущения о том, что между
главными формами колебаний не происходит перекачки энергии, обусловленной
силами сопротивления [26, 54],
1 Обычно в качестве исходной информации о диссипативных свойствах механизмов
используют один из следующих параметров: относительное демпфирование 0 = е/аа; лога-
логарифмический декремент О = 2яР; коэффициент поглощения ф =& 2# = 4nfl.
86
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
4)
I
|
овых
АЛЯ ТИП
«
s
1
х
ых ypai
альн
s
¦у
5
а
•§•
¦&
S
CU
S
Я"
5-
«
о
X
S
о
S
о
0)
3
S
?
Дина
я
X
вне
х ура
иальны
я
Е
а
01
•&
•©¦
к
3
н
X
ицие
•В
1?
Коэс*
0J
к
и
то
сг
0J
Е
к
а
|
К
я завис:
та
X
ь
&
и
та
Он
Обос
чен
шибка
ческая о
в
S
Дина
1
к
и
си
И1
к
СО
X
X
> s
4'ОЧ
^ s й>
а
S
Е
О
i
"з= м &
•
—
-
в__
•о it»
* II II
II 3 =Ь
§ § 6
В м Г
i \ C
11 7 !?
" < !3
^ 3- *
3
s-
s
E _
о
Q.
N
Q.
tif'
О
% B~
в" Г
+ ^г
3
"а1
+
¦5
с
+
С*
s
3~' u
ra ^ r«
о e <sr
I ? U
S 1 „
5Г '<
II
'
8_
с
1
т
о.
„
в
3
в"
: р"
II
•<
84
т
а
-(-
=-.
г
Is"
II
С
С
т
о.
вэт
г" .
В
3
3
о
—
—
в'
?
S
в'
с
8
<
а
а
5"
<!
+ эт
+
<
т
+
?
0
1
где
8
8
1 . '^ :Р1
|Ч 1-4 рЧ
р -р IP
-j-
II
Г
i
+ +
т т
•1" !5
с:
J
ли
- 1-
С:
1 э-
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИЬРОАКТИВНОСТИ МЕХАНИЗМОВ
87
5 I
и
!1
1 i i
в
ч X
в
ч*
В
Я
vb
+
3
в
ч Ж
ч*
В
+
+
3
в
+
ids
в
+
в
I
+
в
I
+
•»|д
+
h
I
«Чэ
&
Б
+
& 3 II
I | :»
t -Э- II
II II :»
< <
—^
и*
+
II
<
3
в
В
+
В*
АЛ
-f
т
5 *' *
"Г 4J)
s
-
с"
-
9-
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
с*
\О
та
CD
S
X
CU
ч
о
ч
о
О.
С
внени
та
о.
>>
X
к
аль
к
=г
X
а
ффе
a
ч
3
н
<и
К
a
•&
•э
о
СУ
a
a
сО
3"
Приме
п
)СТ1
S
к
о
Я
3ai
к
со
X
щ
Расч
та
Ss
0 а
О "
га
ибк
кая ош
амичес
X
I
О
S
к
СО
о
<и
3"
к
Дин;
¦ я
Si
о-
&
й
I
II
<
=»
е
ю
См.
'—^
its
S Тй
!•¦
•о-
||
3
&
В
1
•И!
II
II
• а-
-о-
"&- .
3
В
1
II
3
&
В
1
la,
II
«а,
О
1
3
а-
>
^ м
и __
1-
1
ь
+
-1-1
¦§
X 3
°5
5Г^
ь
+
4- *
~т" «
"^
в
1
в
г
1
и
-
f k
Q.
3
+ _j_
;
'к :
+
8
В
II
E
1
s ^
.5"
r-^ II |
II aiJ± g?Z ь
*
i^ i—i
-i
< jf
+ to
+ т Я!"
+ f -hz'S
-4 *~
О
~1—. IN
if
b
«-, "f ..
¦^ IT 5"
< e> с
- if
p^ <N +
+ II ^T
Ж
'о
—
"Г Э — ^
"~ 1)
So ^
-
^ <5 4-
+
? +
э- к # о
!* 4-
ii
II
, \
-ГП-
U^~l
1
- -
cP
s!
и
Э-
1 ч
1 1 2
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ 89
Модели III, IV, V, VII реализуются в механизмах с нелинейной функцией поло-
положения П (ф) при достаточно податливом приводе. Динамическая ошибка в этих мо-
моделях зависит от угловой деформации привода, которая для модели III определяется
из следующего дифференциального уравнения:
/? + й^ + с9 = -П'(ф){[@) + 9JП"(ф) + Р'(ф)]т + ^(ф, 0}, D)
где J — момент инерции ведущего звена; m — масса ведомого звена; Ь — коэффи-
коэффициент линейного сопротивления; с — коэффициент жесткости привода; ф = ф„ + q,
Ф* = «'.
Поскольку обобщенная координата q является аргументом нелинейных функций
П' (ф), П" (ф), дифференциальное уравнение D) является нелинейным. Однако с до-
достаточной точностью может быть осуществлена линеаризация в окрестности текущего
значения фазового угла ф^. = Ы [54]. С этой целью выделяют участки по оси ф, внут-
внутри которых П (ф*), F (ф.,., t), и по крайней мере несколько первых производных этих
функций по ф„ не имеют разрывов непрерывности, после чего эти функции представ-
представляют в виде двух первых членов в рядах Тейлора по степеням q. Этим приемом D)
приводят к виду дифференциального уравнения с переменными коэффициентами
q + 2z(t)q + k*{t)q = W(t). E)
Дифференциальное уравнение E) при соответствующих значениях коэффициентов
(см, табл. 1) отвечает также моделям IV—VI, При этом модель IVотображает привод
g переменным приведенным моментом инерции; модель V отвечает случаю, когда кине-
кинематический аналог механизма расположен между двумя упругодиссипативными
элементами, один из которых соответствует приводу (cj, ifij), а другой — выходному
звену (сц, г|)ц). В динамической модели VI привод механизма принимается абсолютно
жестким, а приведенная жесткость ведомого звена с„ является функцией угла ф*.
Такая ситуация возникает, в частности, при анализе многих рычажных механизмов
как плоских, так и пространственных [235].
В модели VII в простейшей форме учтены упругие и диссипативные характерис-
характеристики ведущей и ведомой частей механизма. Динамические ошибки в этом случае яв-
являются функциями угловой деформации в подсистеме привода qt и деформации в под-
подсистеме ведомого звена q2. Эти координаты входят в систему нелинейных дифферен-
дифференциальных уравнений
(ep)]+F (<p, f) + Ru\, I (
где ф= <at+ qL; Rlt Ru —диссипативные силы, соответствующие коэффициентам
поглощения % и \fи (остальные условные обозначения см. табл. I).
При решении задач снижения виброактивности систему уравнений F) удобно
линеаризовать в окрестности текущего значения фазового угла ф* = at. Пои атом
предварительно находят решение дифференциальных уравнений в квазинормальных
координатах г\г:
i + 2er@i + ^ (f)\ = Wr(Q, (/•=!, 2) G)
(функции er(Q, ksr(f), Wr(l) см. табл. 1), после чего определяют обобщенные координа-
координаты, входящие в выражения динамических ошибок,
Для всех рассмотренных моделей дополнительная нагрузка, связанная с динами-
динамическими ошибками, равна АР — —а,-Ду,-, где а,- — инерционный коэффициент (масса,
момент инерции); Д{/(- — соответствующая динамическая ошибка функции ускорений.
Оценочные зависимости для определения динамических ошибок. В формирова-
формировании динамических ошибок моделей g постоянными параметрами (модели I, II,
табл. 1) наиболее существенное значение обычно принадлежит разрывам непрерыв-
непрерывности функций П (Ф), F (ф, Q и их производных, Так, например, если для модели I
90
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
в момент времени t — tj какая-либо из этих функций терпит разрыв, то при этом воз-
возбуждаются затухающие свободные колебания с начальной амплитудой D/, называе-
называемой скачком,
(8)
где Л/ = — (Лх,- + йУ /); В/ — — (Д^/+ДУ/). Здесь Дл;/ = ДП/| Дх/ = ыДП/,
ДП/, ДП/ —скачкообразные изменения соответствующих .функций в момент вре-
мени t = t,-, AYj =
решение.
-Y (tj-0); bY =
р
y, Y (<)-частное
\
л
\
Г
л*
л-
$
о 1 г з « s s /V
Рис. 2. Коэффициент накопления возмущений ц
J-t
«. ^ У,
O,5v
J-?
Рис. 3. Зависимость П (<Й
Ниже для модели I приведены оценочные зависимости, определяющие динами-
динамические ошибки в режиме установившегося движения механизма:
2] O/-i
-^+1^@1!
¦'/-1) + |У,(/)|;
(9)
Здесь Ys — частное решение при / = s.
В (9) принято, что одному периоду установившегося движения т = 2я/ш соответ-
соответствует s участов, внутри которых функции П и F и их производные не имеют разрывов
непрерывности. Коэффициент, учитывающий накопление возмущений от скачков
предыдущих циклов,
} A0)
где iV = оH/ш; О — логарифмический декремент.
Зависимость (л (Л/, Ф) приведена на рио, 2, На рисунке нанесены огибающие ц+ и
ц_, причем
ц+-1/A-е-*"); ц_=1/A+е-^). A1)
Точка касания кривых ц и [г+ соответствует целому числу Af, а точка касания f*
и |я_ — случаю, когда 2N является нечетным числом,
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
При N > 4 -5- 6 частное решение
A2)
В табл. 2 для ряда типовых случаев приведены частное решение и функции, с по-
помощью которых определяют скачки на границах участка / (//_( < / < tj). Если воз-
возмущение W может быть представлено в виде суммы приведенных в таблице эталон-
эталонных функций, то частное решение и скачкообразные изменения на границах интервала
в соответствии в принципом суперпозиции определяются как сумма соответствующих
табличных значений.
Пример. Пусть в модели 1 (см. табл. 1) с = 6-103 кгс/м; от=0,6 кгС'С2/м; со=20 рад/с;
F = 0; логарифмический декремент Ф = 0,2. Программное движение массы т описывается
функцией положения П (Ф) (рис. 3):
П<Ф) = |о',5ПгоахA -СО5 2Ф). л~< Ф - ф7< 2л, (/=2),
причем Птах = 0,01 м
Требуется произвести эценку динамических ошибок и вызванной ими дополнительной
динамической нагрузки.
Каждый цикл т=2я/<» делится на два участка: /=1 и /=2, в пределах которых
функция П (Ф) и ее производные не имеют разрывов непрерывности. Согласно (9) для вто-
второго участка
UKli [Doe-еУ~'»> + Dte-е«-*i>] + \Y,\t
I « I < ЦИ§ [Doe-« « - 'о) + о,е-8 « - /.)] + | К, |.
Найдем коэффициента и функции, входящие в эти зависимости.
1. Определение и,. Предварительно находят собственную частоту Mo = Vc/m ч= 100 рад/с;
W = @o/<o=5. Поскольку N — целое число, согласно A1) д = ц+ = 0—е *^)—1=1,68.
2. Определение частных решений Кь У2. Предварительно находят функцию VS^
(ом. табл. 1, мадель I). В нашем случае W = 0 при О^ф — фо^я в W = —в cos 2 (ф — qij
при п < ф — ф1 ^ 2я. При этом
nJnaxco2cos Г2и U — t.\ - Д1
Г, = 0; Yt = L V 1; — = -9,52 - Ю cos [2 (q> - ()>,) - 4].
<o§ /A — N-')* + 16p2iV-2
Здесь р = #/2л= 0,032; tg Д = 40W-«/(l — W-«) =&0,027.
3. Определение скачков Do и Dt. В нашем случае согласно (8) 00=|ДКо! =
= | К, (<0) - К (@) | =9,52.10-» м; О,= | ДК, |= | У, «,) - К, «,) | = 9,52-10—» м.
4. Определение коэффициента e-s = в(йо/2л = 3,2 рад/с. Для максимальных значений
I * Imax (в окрестности /= <,) имеем if !max < й»о [йое~s <'• — <о) + oj+ | Yt\ max. При-
Принимая во внимание, что tf — /0= (<pt — Ф0)/м = п/и= 0,157 с; | ?i'max= 1.52 м/e2, получаем
I' Imax ^ ^'' м/°а- Этот результат в 2,76 раза превосходит заданное максимальное уско-
ускорение в прврраммном движении, равное ПщлхОJ = 8 м/с2. Максимальная дополнительная
динамическая нагрузка, визванная колебательным процессом, | АР 'тах = т | q lmax =
= 13,26 крс.
Медленное изменение параметров, при котором приращение переменных коэффи-
коэффициентов дифференциальных уравнений за период мало по сравнению с их средним
значением на этом периоде, характерно для многих механизмов, отображаемых моде-
моделями типа II, IV—VII (см. табл. 1), Для моделей III—VI ниже приведены оценочные
формулы, определяющие функции \q\, \q\, \q\\
i] A3)
1= I
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
т
т
<
-&
а
а
?—
о
3°
о
3
h
Э
const
II
~*М
Г
*
-•
<
3
3°
13
3
о
#
3
*
Ue--^
l -
\
\
3
О
э°
3
—N.
is
^~
Ю
3
—ч
*
+
/
/
¦+-J
ОПРЕДЕЛЕНИЕ УРОВНЯ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
93
ю
«
9*
V
S
г
(U
дол
о
а
i
7
>•
К
•е
СО
о,
U
о
м
1
¦•*•
1
%
ю
3
7
1
i
о
3
с
1
з"
7
1
г
_
¦н-
X *Я
X
о
о
о
X
-*¦*
ю
о
oil ^
о
8
-• и
=2 X
-ю
3
Л
— Ч"
I
1
*
X
3
7
1
о
3
о
о
»
1
,16v
3=
о
3
¦Ч"
о
о
04
to
1
i°
г
•>
о
X |
^*
СО |
О
О
Z
о
з
q
3
са
-A-е
W
СО
" О
- V
II
со
О
и
*
+.
г
--С'—г
1t
*
i
3
О
*
7
1
О
о ^
3 <м
¦я
J
ч*
3°
1
-.
CN
>
о
х R
ч «
з 1
X
о
о
о
3
1 СО!
¦О
1
3°
1
II
?¦
г-
*м
^—
—^—
1
94 СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
где
t
J l(t)dt
[fi, s, K;- — см. пояснения к (9)].
При определении коэффициента накопления возмущений jx следует пользоваться
A0) и A1^при параметре ./V, найденном исходя из усредненного за цикл значения Q,
равного Q:
_ 2л
При N > 6
(¦¦>
[*-¦'*§ + •(«»'•§•-*¦)]•
При этом обычно Q (О «А @ [функцию & (Q см. табл. 1].
Общие вопросы, связанные с построением приближенных решений системы неодно-
неоднородных дифференциальных уравнений с переменными коэффициентами и их обосно-
обоснование см. т. 1 справочника, а также [54, 93, 111, 138, 139].
2. ВЫБОР ПАРАМЕТРОВ МЕХАНИЗМОВ
Динамические модели с постоянными параметрами. Снижение уровня вибро-
виброактивности в таких моделях обычно связано с ограничением коэффициента накопле-
накопления возмущений (х, значения скачков Dj и частного решения У.
Условие ц ^ [|х], где [ц] — допускаемое значение коэффициента |х, может быть
представлено в виде
Неравенство A6) при заданном значении логарифмического декремента О следует
решить относительно частотного критерия N = ауш.
Если принять [|я] = 1 (см. рис. 3), то свободные сопровождающие колебания,
возбужденные на предыдущих циклах движения, не приводят к увеличению ампли-
амплитудного уровня на рассматриваемом цикле.
В этом случае
0,5е-ол/ ==? cos 2nN. A7)
Если QN -*¦ 0, неравенство A7) удовлетворяется при N eg ?—^- и при N > Е +
+ -?-, где Е — целое число. В другом предельном случае, когда UN -*¦ оо, A'sg
D
^-Е-~ и N
Приведенная частотная настройка практически оказывается достаточно эффек-
эффективной лишь при малых значениях-N (N sg 4 -+¦ 6), так как с ростом N существенно
ВЫБОР ПАРАМЕТРОВ МЕХАНИЗМОВ 95
возрастает чувствительность результата к отклонениям от принятых расче!ных зна«
чений. Поэтому при значениях Л/^44- 6 целесообразно ориентироваться на макси»
мальное значение \х = [х+ [см. A1)]. При этом
Здесь Afi = [fi] — 1, причем 0 < Ay, s? @,05, „., 0,1),
Пример. При исходных данных механизма, соответствующих примеру на стр. 91, тре-
требуется выбрать новое значение коэффициента жесткости с, при котором коэффициент на-
накопления возмущений ц не превысит значения 1,05.
По формуле A8) N ^ ~ In ~ = 15,2. Отсюда с ^ mJV'B1 = 55,6-10» кгс/м.
Для ограничения скачков при со < <в0 (N > 1) можно воспользоваться зависимо-
зависимостями для А/ и В), геометрическая сумма которых образует Df.
(—1)
Здесь AWy ''—скачкообразное изменение функции dtl~i>Wj/dtu-1) в момент вре-
времени t = if, остальные обозначения см. (8),
При N > 6 -г 10 можно ограничиться несколькими членами ряда. При этом
Dt = VА) + Ъ)*=Л/ [Ах/—Jjr + -^J+["^ — Ijr + lyrj ' A9>
Наиболее существенный эффект от скачка Dj проявляется в ускорениях
| Aqj |max яв Dj<j>l. B0)
Максимальная дополнительная динамическая нагрузка, вызванная скачком Dj,
равна по абсолютной величине т ]Aq/ |max, поэтому минимизация скачков играет
существенную роль при снижении общего уровня виброактивности механизма.
Обычно функции к = П (ф) и х = шП' (ф) являются непрерывными. В этом слу-
случае Ах/ = 0, Ax,j = 0 и снижение | Aqj |max может быть осуществлено соответствую-
соответствующим увеличением собственной частоты. Иногда разрывы функции х возникают при
изменении динамической структуры механизма, например, при установке рабочего
органа на упор, фиксации звеньев и т. п. Тогда Ах/ Ф 0, причем основной динамичес-
динамический эффект, как правило, определяется именно этим членом.
В форме скачка A&j в первом приближении может быть также учтен динамический
эффект, связанный с наличием зазоров в кинематических парах в соответствии со
при
Здесь As предельное значение зазора в окрестности ф =
1 Зазоры нарушают линейность рассматриваемой колебательной системы (см. [13, 56,
99] и т. 2 справочника). Однако при N > 6 * 10 переход через зазор обычно происходит
лишь несколько раз на протяжении кинематического цикла — в зоне смены знака функ-
функции W, тогда, за исключением малых зон переключения, система сохраняет линейные свой-
свойства, реагируя на эазер как на некоторое импульсное возмущение.
96
снижение виброактивности механизмов
Средством снижения уровня виброактивности в подобных случаях является умень-
уменьшение собственной частоты ш0. При этом, однако, под контролем должен находиться
коэффициент \i, максимальное значение которого при уменьшении шв возрастает.
Встречаются случаи, когда функция W резко изменяется за конечный, хотя и
достаточно малый промежуток времени At. Динамическое последействие от такого
изменения может быть оценено по (9) с помощью эквивалентного скачка D/ = D, оп-
определяемого следующей зависимостью:
D--
¦k(v),
B1)
где AW — перепад функции W на отрезке времени At; v = At/T; T = 2я/ш0; х —
коэффициент, меньший единицы, который показывает, во сколько раз максимальная
амплитуда колебаний при At > 0 меньше,
чем при Д^ = О, и зависит от характера
нагружения на рассматриваемом отрезке.
В табл. 3 приведены расчетные зависи-
зависимости для типовых случаев резкого изме-
изменения функции W; соответствующие зави-
зависимости х (v) даны на рис. 4. При фикси-
фиксированном значении AW динамический эф-
эффект от резкого и скачкообразного изме-
изменения W при v sg 0,25 -т- 0,30 практиче-
практически идентичен независимо от вида функ-
функции W @; поэтому на данном интервале
значений v наблюдается повышенная виб-
виброактивность механизма.
Если в целях снижения виброактивно-
?
V-
"Ч-
/
\ч
\ >
\
\
2
\
к
Ofi B,S 0,8 tfi 1,2 {•(¦ 1,6 f/ V
Рис. 4. Зависимость и (v)
сти задаться условием и sg [x], где [ус] —
допускаемое значение этого коэффициента, то с помощью рис. 4 или по формулам
табл. 3 следует определить параметр v. Пользуясь соотношением сооД? = 2itv, можно
при заданном At найти требуемое значение собственной частоты соо, либо при заданном
значении <в0 определить отрезок времени At.
Убывание максимумов v. (у) может быть оценено с помощью формулы 1/(jw),
При v > 2,5 значение х с учетом демпфирования независимо от W не превышает 0,10.
Помимо отмеченных факторов в формировании скачков большую роль играют
выбранные функции перемещения звеньев и законы нагружения (см. параграф 3).
Согласно A2) уровень Утах зависит от степени гладкости функции W и значения
собственной частоты ш0.
Для многомассных систем с постоянными параметрами помимо перечисленных
факторов виброактивность также зависит от степени связанности отдельных колеба-
колебательных подсистем, которая может быть оценена с помощью коэффициентов формы.
При прочих равных условиях для снижения виброактивности следует исключить
возможность появления близких значений парциальных частот.
Динамические модели с медленно меняющимися параметрами. Для снижения
виброактивности механизмов, отображаемых моделями с медленно меняющимися
параметрами, в первом приближении могут быть использованы ограничения и рекомен-
рекомендации, приведенные выше, если под собственной частотой понимать соответствующее
значение функции Q (I). Например, параметр N в A7), A8) и B1) соответствует ус-
усреднению О за период т, а параметр v в B1) — усреднению Q за время At.
В данных моделях помимо приведенных в параграфе 1 существуют некоторые
дополнительные источники виброактивности механизмов, связанные с переменностью
параметров, для подавления которой должны быть приняты меры, рассмотренные
ниже.
Согласно A3) при dZj/dt > 0 возможно нарастание амплитуд колебании, связан-
связанное с локальными нарушениями условий динамической устойчивости. При медленном
периодическом изменении параметров такое условие возможно лишь на ограничением
отрезке времени, поэтому зона раска"чки сменяется зоной затухания; при этом наблю-
ВЫБОР ПАРАМЕТРОВ МЕХАНИЗМОВ
97
дается амплитудная модуляция, напоминающая режим биений. Интенсивный рост
амплитуд исключается, если dZfldt < 0.
8. Коэффициент х (V) для типовых случаев нагружения
Это условие приводятся к виду
Вид нагружения
/
X
0 At t
W = W @) + Д W 4-r
At
I/
V
0 At t
W =W @) + AW мп ^ ~
/
У
0 At t
\ 7 At )
И
A
0 At t
W=* W @) -f 0.5 AW (l — со? я-— ^
Коэффициент к
/ sin xcvt
nv
V1 + 16v2 — 8v sin 2яv
| 1 — I6v2
V\ + 16v2 —8vsin 2nv
cos nv
1_4V2
W кривой
по рис 4
2
2
3
5
B2)
Аналогичные условия могут быть записаны для виброскоростей d {QZfildt < 0
и для виброускорений d (Q,2Zf)/dt < 0, что эквивалентно е — 0,5fl/fi > 0, 8 —
—1,5Q/Q > 0. Последнее неравенство обычно является наиболее сильным, Для ряда
4 п/р. Фролова
98
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
динамических моделей с переменными параметрами, приведенных в табл. 1, это усло-
условие может быть представлено как Q > в„; функция $„ приведена ниже.
Модель
—5л ¦
III
П'П»
IV
-2,5 л
N J,
—5я
VI
-1,5л: -
Штрихом обозначена производная по углу <р„ = (at; Q — логарифмический декре-
декремент; остальные условные обозначения см, табл. 1.
При нарушении условия Л > Ь„ следует увеличить параметр Л' = Q/ш за счет
увеличения усредненной собственной частоты Q или понижения угловой скороаи со
fr=/,s
о о;2 qj аь о:б qs / г,2/,ь г з ь s г б —а
Рис. S. Отношение *т|П/*ц в *nlln/*j
Существенное уменьшение значений функций Qr^kr является нежелательным
по следующим причинам. Во-первых, при этом возрастает амплитуда дополнитель-
дополнительных ускорений в зонах резкого изменения функции W (() из-за уменьшения параметра
v [см. B1)]; во-вторых, уменьшается среднее за цикл значение функции kr (t), что,
в свою очередь приводит к возрастанию коэффициента накопления возмущений
цгтах; в-третьих, при значительном перепаде значений функции kr (t) возрастает
вероятность резкого изменения этой функции, что может привести к дополнитель-
дополнительному возбуждению системы.
Для динамических моделей III—VI (см. табл. 1) ограничение вида *max^miti ** ''
может быть реализовано с помощью зависимостей табл. 1. Для динамической модели
УЩсм.табл, 1) отношения fcm,n/6[ и km-mlku приведены на рис. 5. При прочих равных
условиях зона резкого понижения рассматриваемых функций отвечает 0,7 г? о г^ 1,4,
что должно быть учтено при синтезе параметров системы. Ограничение перепада
экстремальных значений низшей частоты приводит к следующим условиям: при
о > 1; а-2 < h < 1
р;
при а < 1
(условные обозначения см. табл. 1),
Значение параметра h целесообразно выбирать не ниже 0,8—0,9.
Примгр. Для динамический модели VII (ом табл. 1) дано. <-[ -= 175 рад/с; *jj = 350 рад/cs
m—0.39J лгс-с»/м |П'1тах~ 2,46.16—2 м," Требуется яайти момент инерции ведущего звена !,
ВЫБОР ПАРАМЕТРОВ МЕХАНИЗМОВ 99
Определив параметр a = fejj/?j = 2 и задавшись 4=0,8, получаем
Р > I П> !тах ]/^= 2.46. ,0-^ /«^g»-Э.52..0Н, „.
Отсюда, принимая с запасом р = 0,04 м, J JS трг= 0,39Ы6-10~4 = 6,25-10-* кгС'М-сг.
Дополнительные ускорения выходного звена могут вызываться крутильными
колебаниями входного звена. Относительная динамическая ошибка выходного звена
w —
Если задаться некоторым допускаемым значением параметра [ш], то для динами-
динамической модели V в первом приближении должно обеспечиваться неравенство cj >
> [c\]w, где [с1]ш = 4 [w]~l | (Щ2 + П;п;") co2m + (F*II? + f *1Ц) |max; штрихом
отмечена производная по ф* = (at.
Для механизмов с силовым замыканием при преобладании динамических нагру-
нагрузок над прочими
где х =
| ax/n^in |; ? — коэффициент запаса силового замыкания; Рч — макси-
максимальное идеальное значение силы инерции выходного звена без учета упругости при-
привода, т. е. при ql з 0 (при угловых перемещениях выходного звена PjjJ соответствует
моменту инерционных сил).
Если принять [ее] = 0,05; §= 1,5, то при равенстве максимальных ускорений
программного движения на разбеге и выбеге (% = 1)
Пример. Рассматривается механизм с параметрами, заданными в примере на стр. 91.
Требуется найти коэффициент жесткости привода cj (см. табл. 1, модель VII). Предвари-
Предварительно определяем П^ах = 0,02 м и максимальную силу инерции в программном движении:
I Ри = m\l"meLX<j? = 4,8 кгс. Отсюда, принимая [ш]= 0,05 и 5= 1,5, находим Cj > [С1]щу **•
ч=?00П^ах (я* |= 200-0,02.4,8= 19,2 кгем.
В инженерной практике встречаются случаи, когда параметры динамической мо-
модели механизма в целом изменяются медленно, за исключением некоторых незначи-
незначительных зон, где такое предположение оказывается неправомерным. В этих случаях
периодичность резких параметрических возмущений имеет второстепенное значение,
так как колебания в течение одного кинематического цикла оказываются сильно за-
демпфированными; в то же время локальные возмущения системы в отмеченных зонах
могут быть весьма значительными.
Снижение виброактивности механизмов в зонах параметрического резонанса.
Параметрический резонанс, возникающий при определенной пульсации параметров
системы (например, приведенного момента инерции или приведенной жесткости), в
ряде случаев может служить не только источником нарушений нормального функцио-
функционирования механизмов, но и приводить к серьезным авариям, угрожающим безопас-
безопасности обслуживающего персонала.1 Периодические изменения приведенных упругих
и инерционных характеристик механизмов в основном вызываются переменностью
первой передаточной функции звеньев П' (см. параграф 1), которая для цикловых
механизмов является периодической функцией угла поворота ведущего звена.
Для многих цикловых механизмов динамические нагрузки и уровень искажений
заданных кинематических характеристик оказываются недопустимо большими еще
на достаточно большом удалении от основных зон параметрического резонанса. Од-
Однако имеется класс механизмов, работающих на повышенных скоростях, достигающих,
1 Основные сведения из теории параметрического резонанса см. т. i оправочника,
4*
100 СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
а иногда и перекрывающих критические значения. К этому классу можно отнести ме-
механизмы, у которых функции положения звеньев П обладают повышенной гладкостью,
т. е. не имеют существенных скачков и быстрых изменений производных достаточно
высокого порядка. Последнее характерно для эксцентриковых и некоторых рычажных
механизмов.
Для одномассных моделей, описываемых дифференциальным уравнением вида
G (at) q + P (at) 4 + К (cot) q = Q (at), B3)
параметрические резонансы имеют место в окрестности частот, определяемых выраже-
выражением
G0, (/=1, 2, 3 ...5 / = у, 1. |-, 2 ...), B4)
где i — номер гармоники при представлении периодических коэффициентов в виде
рядов Фурье; Ко, Go — свободные члены соответствующих рядов Фурье (/ = 0),
В формуле B4) учтено характерное для механизмов пренебрежимо малое влияние
функции Р на усредненную собственную частоту.
Для динамических моделей механизмов при установившихся режимах коэффициен-
коэффициенты дифференциального уравнения B3) в общем случае можно представить в виде
следующих рядов Фурье:
СО 00
G (оH = Go + 2 Gt cos tat; P (at) = P0-{- 2 P,-sin tatfj
oo
/C(coO = Ko+ 2 (KCi cos Ш-{• К* sin lat) .
{ = l
При /= V2; 3/г; Б/2; .•• должно быть удовлетворено условие
я
где Ф — логарифмический декремент; r\i = K\jlKo, 'ij — ^l/^o- Здесь принято,
что K\j и K\-t равны составляющим соответствующих коэффициентов Фурье K\j и
/е|;-, не зависящим от со; индекс при коэффициентах отвечает ( = 2/. В частности,
для динамических моделей III, IV (см. табл. 1) r\t = {K\f — JaPy)/K0; r\j = K\jlK0.
При /'= 1, 2, 3...
B5)
Здесь, в дополнение к ранее введенным обозначениям: Гу = КУКа\ rs = Ks/KOt
где Щи К) — составляющие коэффициентов Фурье K-t при / = /, не зависящие от со.
Для динамических моделей III, IV /j = (К* — 0,5 jaPJ)IK0\ г) = КIК0.
Для многих механизмов К\ — 0 либо К] < К^. Тогда
B6)
При целых значениях / определенное влияние оказывают не только гармоники
/ = 2/, но и i — j, однако, если члены, отвечающие этим гармоникам, имеют одина-
одинаковый порядок малости, то определяющую роль в зависимостях B4), B5) играют
члены с индексом 2/. В то же время при решении задач динамики механизмов не ис-
исключены случаи, когда члены с индексом / существенно больше членов с индексом 2/,
ВЫБОР ПАРАМЕТРОВ МЕХАНИЗМОВ
101
Обширный класс механизмов, который в связи с возможностью параметрического
возбуждения представляет особый интерес, описывается функцией положения бигар-
монического вида:
П(ф) = 0,5Пгаах[1—cos<p + 0,25A,(l—cos2<p)].
Для механизма с бигармонической функцией положения, отображаемого моделью
III (см. табл. 1), в табл. 4 приведены зависимости, определяющие коэффициенты
рядов Фурье функций G, Р, К, Q при F = const. В этом случае К] = 0. Наиболее
существенное влияние на уровень параметрического возмущения оказывает параметр
П
П
2р рУ
где p = yj/m — при линейном перемещении ведомого звена и р = }/Г///в — при
угловом (JB — момент инерции ведомого звена). Параметр аа объединяет свойства
кинематической и динамической характеристик: он стремится к нулю либо при бес-
бесконечном уменьшении хода ведомого звена (Птах->-0), либо при неограниченном рос-
росте соотношения между моментом инерции привода и массой (моментом инерции)
ведомой части механизма — (р-> °о). Наиболее значительны в полученных рядах
члены, отвечающие гармонике i = 2. Амплитуда пульсации параметрического воз-
возмущения, соответствующая первой и третьей гармоникам, в основном пропорцио-
пропорциональна а^к; четвертая гармоника зависит уже от А,2, поэтому, если имеется ограни-
ограничение % < 0,25 -*- 0,40, эта гармоника выражена уже гораздо слабее, Последующие
члены ряда обычно практического интереса не представляют,
4. Коэффициенты Фурье для механизмов с бигармон и ческой ^функцией положения
;
0
1
2
3
4
°t
l + 0,5af,(l+0,25X2)
0,Ъа%%.
-0,54
— 0 ,&»„*,.
Pi
2Э/г„
шап
К0
kl
aFanl+a'asn
2,23а ^Л
0
-а^п+0,25<вХ^
—0,5а/гапХ—О,5ш2ап
—О,75со2а|\
Обозначения:
Vj/m; ko =
= FlVJn
Для режимов /= 1/2; 1; s/2 графики критических значений р^ = '&4/Bя) приве-
приведены на рис. 6.
В качестве ориентировочного соотношения, определяющего критический уровень
пульсации при коэффициенте поглощения ijj > 0,3 -=- 0,4 и некотором запасе устой-
устойчивости, можно воспользоваться условием, согласно которому параметр ап не должен
превышать значения 0,5. При этом для динамической модели III (см. табл. I) J >
> Птахт; для динамической модели IV />4А/тах, где /и Д/тах—соответственно
среднее значение приведенного момента инерции и его максимальное отклонение
от этого значения; для динамической модели VCj> с2Птах.
В качестве приближенного критерия в более сложных условиях может быть также
использовано условие B2), обеспечивающее достаточное (но не необходимое) условие
динамической устойчивости.
В механизмах периодического действия зоны параметрического резонанса при
целых /, как правило, совпадают с зонами силового резонанса, вызванного соответ-
102
СНИЖЕНИЕ ВИЬРОАКТИВНОСТИ МЕХАНИЗМОВ
ствующей гармоникой функции Q. Резонансная амплитуда Aj в числе прочих факто-
факторов существенно зависит от сдвига фаз между возмущающей силой и гармонической
пульсацией параметра. При этом Aj может оказаться как больше, так и меньше зна-
значения, определенного при отсутствии параметрического возмущения, т. е. при
О* = 0. Пр_и наиболее неблагоприятных соотношениях для сильных гармоник Qj
справедлива следующая оценочная зависимость:
max A,
nQ{
B7)
Согласно формуле B7) введение определенного запаса динамической устойчивости
У* > 1) одновременно снижает максимально возможную резонансную амплитуду
для наиболее существенных гармоник силового возмущения.
А
0,16
0,>2
0.3 Ц08
0,8 t,D ап
0,08
0,06
0,02
——
¦ -
——¦
/
У
"
_——
/
\
0,2
о,е
а)
0,2
0,6 0,8 Г,0
Рис. в. Зависимость р^ («„Я.);
а) /, равное 1/2 я 3/2; б) / = 1
Для многомассных моделей при медленном изменении форм колебаний вопрос о
подавлении параметрических резонансов в первом приближении может быть решен
аналогичным образом на основании анализа уравнений, записанных в квазинормаль-
квазинормальных координатах. Помимо критических режимов, вытекающих из этого анализа,
также могут иметь место комбинационные резонансы1. Однако обычно в механизмах
эти режимы оказываются подавленными за счет имеющегося конструкционного демп-
демпфирования в кинематических парах. Учет нелинейных факторов при колебаниях
механизмов р околорезонансных зонах см. [13, 54, 114].
3. ФОРМИРОВАНИЕ ФУНКЦИЙ ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ
Общие сведения. Функция перемещения рабочего органа в первую очередь должна
удовлетворять требованиям, обусловленным особенностями заданной технологической
или транспортной операции. Эти требования обычно фиксируют значения функций
П (ц>) или ее производной П'(ф) лишь в отдельных точках, что приводит к неод-
неоднозначности решения задачи синтеза этих функций. Последнее дает широкие возмож-
возможности для удовлетворения при синтезе функции перемещения дополнительных тре-
требований динамического характера. В высокоскоростных цикловых механизмах наи-
наиболее значительная составляющая вынуждающих сил обычно связана с характером
изменения производных функции П (<р) (см. параграф 2), поэтому задача снижения
виброактивности механизмов этого класса тесно соприкасается с задачей динамичес-
динамической оптимизации законов движения рабочих органов.
Часто закон движения выбирают из числа некоторых эталонных семейств функций,
обладающих определенными достоинствами при решении конкретной задачи динами-
1 См, [26] и т. 1 справочника.
ФОРМИРОВАНИЕ ФУНКЦИИ ПЕРЕМЕЩЕНИЯ РАБОЧИХ OPI АНОВ
103
чсского синтеза. Вместе с тем возможен и другой подход,
когда в каждом отдельном случае на базе решения варла-
ционкой задачи создается принципиально новый тип за-
закона движения [234].
Учет динамических факторов при выборе структуры
закона движения. Согласно B0) наиболее значительные
дополни!ельные ускорения при вибрациях возникают
при нарушении непрерывности функций П (<р) и П' (ф),
что должно быть учтено уже в самой структуре закона
движения. Достаточно общей оказывается трехпериодная
структура интервала движения, при которой ход звена
расчленяется на три участка (рис. 7): участок ускорен-
ускоренного движения / (разбег), участок равномерного движе-
движения 2 и участок замедленного движения 3 (выбег).
Д б б
Рис. 7. Типовая функ-
функция положения II iff)
у ()
Для описания движения на разбеге и выбеге вводятся две безразмерные ф\ нкции:
() и 63 (т3), причем
П П|11-П
Ф
где т, =
Ф!
Функции 0; (т,-) (i = 1; 3 — номер участка) выбираются таким образом, чтобы
0,@)'= 0; 9,-A)=1; 6J @) = 0; в[ A) = 6',-тах (штрихом обозначена произ-
производная пот,), причем во всех случаях функция б'^Л является монотонно возрастаю-
возрастающей.
Функция положения и передаточные функции, выраженные через безразмерные
характеристики, приведены в табл. 5.
Функция
п
П'
П"
5. Расчетные
Разбег
П1 ,
— Gi (тi)
ф|
вГ (т,)
зависимости для функции П, П
Участок постоянной
скорости
п пп -ni
П„-П,
0
', П"
Выбег
п„,-п„о
тш-Ш °
пш-п„
(фш-фпJ
d(T.)
9s'(T3)
Функция П (ф) и ее производные помимо безразмерных характеристик содержат
шесть структурных параметров: Пг, Пц, Пщ (ход),ф1, фц, фщ, которые должны быть
связаны двумя условиями непрерывности функции ГГ на границах участков при
Ф = ф[ и ф = фц. Учет этих условий приводит к следующим зависимостям;
1-г
^.4
п
Ш i
104
где
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
.Фщ-Фп.
Ф1
S3,
п
III
При синтезе может быть задан лишь один из параметров: ?ф либо ?п, так как они
связаны следующей зависимостью:
где L-
Вместо параметра fA, который можно квалифицировать как коэффициент асим-
асимметрии закона движения, может быть задано отношение х = Щтах/\ П" jma При
этом lA= VjX/v^ где v% = Q"lmax/%m.dx.
Рис. 8. Зависимости
sfmax. 5f max
закона изменения ускорений
«модифицированная трапеция»
l-s.
3,0
2,8
2,6
2/t
2,2
2,0
•
—
s
у*
у'
—*
/0,5
у
У
У
о,*
0,3
/
/
/
/
/
У
0,2
/0,1
= 0
0,2 Ofi OS
2,3
1.5
r, = 0,8
i
0,6
S, = l
0,2
Г*.
О 0,2 4* °>s °,s si
г)
Другие разновидности исходных условий см, [54, 170]. Общую теорию безраз-
безразмерных характеристик см. [215].
Синтез законов движения с учетом условий квазистатического нагружения.
Под квазистатическим нагружением понимается такой характер приложения на-
нагрузки, при котором динамический эф'фект мало отличается от эффекта статического
иагружения системы.
ФОРМИРОВАНИЕ ФУНКЦИЙ ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ
105
Для обеспечения квазистатического нагружения должны быть исключены раз-
разрывы функции W (см, параграф 2), а также резкие изменения этой функции. Посколь-
Поскольку закон движения отражен в этой функции слагаемым, пропорциональным второй
передаточной функции механизма П", то к этой функции должны быть предъявлены
аналогичные требования. Учет этих требований наиболее эффективно осуществляется
при использовании закона изменения ускорения, известного под названием модифи-
модифицированная трапеция общего вида [266]. Функция 9(* в этом случае отображается
трапецеидальным графиком, у которого боковые стороны являются участками си-
синусоид (рис. 8, а). Проекции боковых сторон на ось абсцисс характеризуются отрез-
отрезками Sj и Sj. Соответствующие расчетные зависимости приведены в табл. 6, а кон-
станты e;max> 9/max, (9?е;)тах-на рис. 8, б, в, г.
Согласно рекомендациям, приведенным при анализе для эквивалентного скачка
(см. параграф 2) v = htjT ^ 2,5. Для динамической модели I (см. табл. 1) в соответ-
соответствии с этим условием следует ограничить минимальный угол поворота ведущего
звена Аф,-, соответствующий нарастанию или убыванию ускорений,
. 5сол,
Дф; $= .
B8)
Здесь i = 1,2, причем для разбега Дф; = s/tpj, а для выбега Дфг=5,- (фщ—Фп).
6. Безразмерные характеристики при изменении ускорения по закону
модифицированной трапеции
Функции
и кон-
константы
е
9"
ft'
Dmax
°max
6,
0 ^ т ^ S\
2Si a» Г 2st . jttI
ГПЭХ """" о—
2s, „» Л пх\
я "max ^' tu- 2Sl I
emaxsin|i;
fl'
"max 2
--
(lmax 1 ~2 ~~ SiX y- "" "^) *^"
«.„[-,(- ?)]
^max
nBs2+6,n) . »
, . , 2 • "max "
,-u.[-?».+)/^r
1 — Sg ^ X ^ 1
Usir . Ж1-ТП
тих ( «г 1 Jn _ ) j
„ Г 2s2 я A-х)]
max L ' я " 2s2 J
aff jn Я{1 — T)
"max" 2s2
»! + »]
Удовлетворение неравенства B7) может быть осуществлено увеличением st и
параметра N = «о/03- Однако диапазон изменения s,- невелик (от 0,1 до 0,15 и от
0,25 до 0,3), причем с увеличением s,- растут максимальные значения идеальных
ускорений (см. график 6,-^ах, рис. 8, в). Увеличение параметра Af при заданной макси-
максимальной угловой скорости штах и массе рабочего органа лимитируется возможнос-
возможностями ужесточения механизма,
106
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
Возможности обеспечения условий квазистатического нагружения могут быть
расширены, если при решении этой задачи использовать законы движение с частот-
частотной настройкой. Способ синтеза подобных законов основан на решении следующей
вариационной задачи: при заданном на отрезке времени Uo, t0 -j- At] перепаде функции
AW необходимо найти такую функцию W @> при которой значение эквивалентного
скачка D было бы минимальным. Это условие может быть усилено дополнительным
требованием, согласно которому значение минимума должно быть равно нулю. При
^о =S t =s: t + At искомая функция
W (t) = W (to)-\-iWg (t) exp {б [At —(t — (у)]}. B9)
Здесь е — коэффициент сопротивления в дифференциальном уравнении B),
а функция | (t) определяется из условия
= min(xj+xl), C0)
где
o +
(и) sin
o+
— u)du—l; и2 = coo jj g (u) cos co0 (/t — u) du.
При рассматриваемом резком изменении функции W (t) отрезок М мал, поэтому
экспоненциальный множитель в формуле B9) мало отличается от единицы.
06
- Ofi
о, г
7
1,2-
А
/
w
0,8
v'=0,5
'1,0
0,2
Ofi 0,6
б)
Рис. 9. Семейства характеристик квазистатического нагружения
Условию C0) удовлетворяет бесконечное множество функций. Ниже приводятся
два семейства оптимальных характеристик этого вида, соответствующие к2 . =0,
= 0,5 fl-
, cos я ¦
t-t,
C1)
C2)
где ?х = 1 — v-2; t2 = 1 — 0,25 \'г; v = /.
Величины | для семейства C1) приведены на рис. 9, а, а для семейства C2) — на
рис. 9, б.
Зависимости C1) и C2) могут быть использованы для формирования переходных
кривых трапециевидных законов изменения ускорений.
Безразмерные характеристики закона движения, отвечающие C1), приведены
в табл. 7, При этом коэффициент х (v), входящий в B1), имеет вид
I sin 2лг I
vj — v2
Здесь
2.-TWJ
соответствует расчетному оптимальному режиму,
C3)
ФОРМИРОВАНИЕ ФУНКЦИЙ ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ 107
7. Безразмерные характеристики при квазистатическом нагружении
Функ-
Функции и
кон-
константы
е
е-
в"
й'
"max
"max
max 6s, ' 8л» s,
~ 4л2 Х)
maxi 2s, + 4л2 C0S sT ~
4 л2 J
„» /т ?, 2лт 1
"max '^ 2л s, '
"max [ 2~ ^
~*~ 6 4л! У
ета.х ^"/
"max
ft" Гx! t'
raaxl2s2~6s2~"
E.4 2яA-т)
8л> s2 ^
„ Г x T2
ft -- — —
maч с Ос
ii.as | ,л 2S,
?,s2 2лA-т) . . 1
— ~-f cos —5 L. л, (,
4л2 ss J
"max
—T , ti _. 2ЯA— TI
s2 2я m s2 |
г 2[1 — 0,5(s, + s2)] п„ 2
1 ?, ч > "max / , j . •
3 ~ S№ / 1 - Si т Ui ~sj; ^ j - ^
1 , tlSl. . (I —S2J — S, A -Sj) sf ?,s!
2 ' 4Л2' * 2 'б' 4 л'-
При частотной настройке v = v^ согласно C3) и = 0. В случае, если угловая
скорость ш варьируется, при определении параметра v,, можно исходить из макси-
максимальной угловой скорости:
v* = ^ > C4>
При отклонениях от этого расчетного режима в соответствии с C3) я > 0.
Подобный подход дает наибольший эффект при 0,7 ^ v =g 2,5. Реализация опти-
оптимальных режимов при v < 0,5 -г- 0,7 обычно вызывает определенные трудности из-за
большой чувствительности функции к к точности практического воспроизведения
принятых расчетных значений параметров; при v ^ 2,5 частотная настройка не вы-
вызывается необходимостью.
Пример. Для динамической модели I (см. табл. 1) дано: @0 = 360 рад/с; оо= 18-f-25 рад/С;
Дф. = я/9. Требуется найти параметр ?,, однозначно определяющий безразмерные характе-
характеристики при квазистатическом нагружении (см. табл. 7).
По формуле C4) оптимальный расчетный режим должен соответствовать ш = итах;
при этом V, — Я' = 0,8. Отсюда J, = 1 — 0,8~г= —0,5625. При данной настройке, со-
согласно C3), при и= 25 рад/с х = и (v,)= 0, а при ш= 18 рад/с v = 1,11 и и (V) = 0,34.
Для динамических моделей при учете податливости привода кинематическое
возмущение в колебательном контуре ведущего звена пропорционально произведе-
произведению П'П", поэтому условия квазистатического нагружения проверяются исходя из
характера изменения именно этой функции. Особой проверки требует величина
'108 СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
участка Дф, заключенного между экстремумами (П'П")тах и (П'П")т111, причем же-
желательно обеспечить условие Дф ^ (8 -f- 10) na>/kmin. Для данных моделей также
могут быть получены оптимальные законы нагружения с частотной настройкой,
4. УРАВНОВЕШИВАНИЕ СИЛ С ПОМОЩЬЮ ПРОТИВОВЕСОВ
И РАЗГРУЖАЮЩИХ УСТРОЙСТВ
Уравновешивание сил инерции звеньев механизма с помощью противовесов.
Динамические нагрузки, возникающие при неравномерном движении звеньев, вызы-
вызывают вибрации всего машинного агрегата, его фундамента, связанных с ним элемен-
элементов зданий, сооружений и т. п. Одним из эффективных способов снижения уровня
этих колебаний является такой подбор и размещение масс звеньев, при котором
динамические реакции, воздействующие на стойку и фундамент, были бы полностью
или частично уравновешены. Если при решении этой задачи ограничиться кинето-
статической моделью, то полное уравновешивание имеет место при обращении в нуль
главного вектора и главного момента сил инерции, причем в этом случае при их оп-
определении для этой модели не учитываются колебательные явления.
Обычно отмеченные условия в практике выполняются лишь частично. Помимо
того что для полного уравновешивания может потребоваться чрезмерное усложнение
и удорожание конструкции машины, при установке противовесов понижаются соб-
собственные частоты системы и увеличивается переменная составляющая приведенного
момента инерции, что, в свою очередь, повышает виброактивность привода. Таким
образом, при решении вопроса об эффективности уравновешивания с целью снижения
виброактивности машин следует всегда принимать во внимание ограниченность кине-
тостатической модели и последствия, связанные с установкой противовесов, при
учете упругих свойств звеньев.
Для обращения в нуль главного вектора сил инерции необходимо и,достаточно,
чтобы общий центр масс всех звеньев механизма (или машины) оставался неподвиж-
неподвижным. Центр масс подвижных звеньев плоского механизма удобно определять с по-
помощью метода главных точек, разработанного О. Фишером. При этом
п
Рс= 2j hi-
i = 1
Здесь рс — радиус-вектор центра масс; п — число подвижных звеньев; ft,- — век-
вектор главной точки, направление которого совпадает с направлением оси звена (', а
величина определяется по формуле
'7Т+ 2
т'
7=1
где m,-, /,- — соответственно масса и длина звена i\ l't — расстояние от центра масс
звена i до предыдущего шарнира при последовательном обходе контура механизма.
В частности, для кривошипно-коромыслового механизма (рис. 10, а) 1Х = ОА;
III' \
12 = АВ; 13 = ВЕ; 1[ = ОС1; Ц = АС2; 1'Ь = ВС3, при этом А1==— m7±
т
кг = —\Щ-рг-\гтЛ; h3 = ~ l'it где т = тх + т2 + т3. Для кривошипно-
ползунного механизма (рис. 10, 6) — формулы для hx и А2 совпадают с приведенными
выше, а Л3 при расположении центра масс ползуна 3 в шарнире -fl обращается в
нуль1.
1 Более сложные случаи, когда центр масс звена не лежит на прямой, соединяющей
шарниры, см. [8].
УРАВНОВЕШИВАНИЕ СИЛ
109
Достоинство этого способа состоит в том, что при движении звеньев величины
векторов главных точек остаются неизменными, а их направления строго соответ-
соответствуют угловым перемещениям звеньев, которые определены при кинематическом
и
анализе механизма. При этом главный вектор сил инерции Р = — тсо2 ^] ^а A//d<j>2.
/=|
Для полного уравновешивания сил инерции кривошипно-коромыслового меха-
механизма должно быть выполнено условие ht : /i2 : ha = ОА : АВ : BE, а для криво-
шипно-ползунного hx = 0, Л2 = 0 (под mlt l\ в данном случае следует понимать
2 в
Рис. 10. Схемы уравновешивания плоских рычажных механизмов
соответствующие значения после уравновешивания). Отмеченному условию соответ-
соответствует расположение противовесов mj и тц, показанное на рис. 10, в, г, д,
В практике наибольшее распространение получило частичное уравновешивание
главного вектора сил инерции, когда устраняются лишь одна или несколько гармо-
гармоник. Предварительно обычно производится статическое
замещение масс звеньев, при котором масса и положе-
положение центра масс для каждого звена остаются неизменны-
неизменными [8, 246].
Ниже приведены формулы для определения статиче-
статически замещенных масс tnAit mBi, tnDi при их расположе-
расположении в заданных трех точках: А, В, D (рис. 11). Начало
координат помещено в центре масс звена С, а ось абсцисс
параллельна АВ, так что уД = ув = уА в.
Рис. 11. Схема статиче-
статического замещения массы
звена
(хв-ха)(Ур-Уа,в) '
Уа,в~Ур
Здесь /п; — масса звена (, При расположении центра масс на прямой АВ уд в = 0;
СВ АС
При использовании этого приема для центрального кривошипно-ползунного ме-
механизма (рис. 12, а) масса подвижных звеньев заменяется двумя массами, расположен-
расположенными в шарнирах Л и В, причем гпд — тД1-{- тд,2 (вращающаяся масса); тв=
= тВг + твз (поступательная масса). Проекции главного вектора сил инерции
по
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МГХЛНИЗМОВ
на координатные оси равны:
\(mA + mB)cosat + mB
Рх =
2
= 2. 4, 6 ...
Dycosya)/j;
Р =ra2m. sin cctf,
где О А — г — радиус кривошипа.
При Я = (r/l) < Vj коэффициенты Dj с ростом \ быстро убывают f D2 яяЯ,+ — +
15Я5 ., У ЗИ, D Э-Л
+ 128 ' 4Яа 4 + 16 ' ° 128 '/'
С помощью противовеса пц (рис. 12, а) главный вектор силы инерции первого
порядка Я' (/ = 1) может быть уравновешен лишь частично из-за неполной уравно-
уравновешенности сил инерции поступательно перемещающейся массы тв_
При т1 Pj = г (i
= — твы2га. sin at.
(где 0
1) ?\ =
A —а) cos at; P*y =
Рис. 12. Типовые случаи уравновешивания основной гармоники динамических реакций
С помощью параметра а можно управлять степенью неуравновешенности по обеим
координатным осям. При а = О Р\= тва2г cos at; Py = 0; при а= 1 Р] = 0;
Р\= —mBa2r sin at; при а= 0,5 амплитуды возмещения по осям х и у равны
0,5 тва2г.
При выборе параметра а в первом приближении можно руководствоваться соот-
соотношением a =(.io/(l + (а0)» гДе Н-о — 5V;*/('*vci/); здесь сх, Су — коэффициенты жестко-
жесткости основания вдоль осей х и у, а ~лх, tiy — соответствующие этим осям коэффициенты
динамичности [241].
С помощью двух противовесов, вращающихся с угловой скоростью со в противо-
противоположных направлениях (рис. 12, б), может быть осуществлено полное уравновеши-
уравновешивание сил инерции первого порядка. После разложения проекций главного вектора
сил инерции в ряды Фурье функции Р\ и Pj в общем случае имеют вид P'=Xccos otf-f-
+ Xs sin at; P]/ = YC cos co^ -j-Ys sin co^
Массы противовесов /nj и Шц должны удовлетворять следующим условиям.
= В2/Bш2), где S1 = Vr(Xc4-1
(C + s) + (Csf
Установка противовесов осуществляется при углах заклинивания уг и уг относи-
относительно кривошипа ОА и его зеркального отображения О А', причем sin Yi = (Xs —
- Kc)/fii; cos Yi = - (Xc + Fs)/Si; sin v2 = (Xs + Yc)/B2; cos Va = (^- Xc)/B2.
Для центрального кривошипно-ползунного механизма т1р1 = ^тд-\- 0,5 пЛг;
тпрп = 0,5 mBr; Yl = Y2 = я.
В этом случае противовесы обычно размещают на вращающихся в противополож-
противоположных направлениях зубчатых колесах, образующих передачу с передаточным отно-
отношением, равным единице,
УРАВНОВЕШИВАНИЕ СИЛ II1
При статическом замещении масс звена t остается нескомпенсированныч некото-
некоторый фиктивный момент инерции AJ = Jc{ — J*{, где Jci, J*c — момент инерции
звена и суммарный момент инерции статически замещенных масс относительно оси,
проходящей через центр масс. В частности, для шатуна кривошипно-ползунного ме-
механизма (см. рис. 10, б) ДУ = Jcl — miAC2-BC2. При этом дополнительный момент
неуравновешенных сил относительно оси г, перпендикулярной плоскости движения,
будет равен М2 = —Ыег, где е2 — угловое ускорение шатуна. Первая гармоника
момента М2 определяется зависимостью M\ — ar\JE sin at, где ?=» f 1 + -«-
)
В. А. Щепетилышков предложил схему полного уравновешивания силы инерции
Р] и момента М](рис. 12,в) [244].При этомтх р, = (/Яд + 0,5 mfi) r, mnpu—0,5mBr,
а межосевое расстояние
твг
В плоском \еханизме для уравновешивания составляющих главного момента от-
относительно осей хну необходимо и достаточно, чтобы центробежные моменты инер-
инерции масс всех звеньев относительно плоскостей кг и yz были постоянными [8]. В прос-
простейшем случае это достигается при наличии общей продольной плоскости симметрии
движущихся звеньев.
Метод уравновешивания механизмов, основанный на применении теории наилуч-
наилучшего среднего приближения функции и теории наилучшего равномерного прибли-
приближения предложен в [60, 241]. Задача уравновешивания механизмов с переменными
массами звеньев рассмотрена в [23].
Снижение виброакгивности с помощью разгружающих устройств. Разгружающие
устройства применяют для уменьшения вынуждающих сил в механизмах и в приводе
машины. Установка разгружателей в значительной мере локализует участки кинема-
кинематической цепи, подверженные воздействию больших пульсирующих нагрузок; при
этом помимо уменьшения реакций в кинематических парах и износа снижается уро-
уровень шума и вибраций, что в целом и создает предпосылки для повышения рабочих
скоростей машин.
В качестве программоносителя в разгоужателях обычно используют какой-либо
цикловой механизм, например кулачковый или рычажный. Независимо от конструк-
конструктивных особенностей разгружатечь, как правило, является аккумулятором энергии —
либо потенциальной, либо кинетической. В первом случае применяют пружинные
или пневматические устройства Если сила, развиваемая в разгружателе, оказы-
оказывается функцией положения ведущего звена и не зависит от его угловой скорости,
то при компенсации кинематических возмущений должна быть произведена настройка
на определенный скоростной режим. Во втором случае используют звенья (с опре-
определенным образом выбранными инерционными характеристиками), приводимые
в движение с помощью специальных уравновешивающих механизмов. Поскольку
при этом усилие пропорционально квадрату угловой скорости ведущего звена, то
по отношению к кинематическому возмущению оно оказывается следящим.
В общем случае достаточно полная компенсация возмущающих сил может быть
осуществлена при аккумуляции как кинетической, так и потенциальной энергии
При выборе схемы разгружателя и его синтезе в первую очередь должна быть
решена задача снижения виброактивности уравновешивающего механизма (см. па-
параграфы 2 и 3), так как в противном случае он вопреки своему назначению может
служить источником дополнительных возмущений. Поэтому для высокоскоростных
режимов в качестве уравновешивающих наиболее эффективными оказываются ме-
механизмы с повышенной гладкостью геометрических характеристик, например кри-
вошипно-ползунный, кривошипно-коромысловый, кулисный, эксцентриковый и
кулачковые механизмы с динамически оптимальными законами движения. В некото-
некоторых схемах упругий элемент разгружателя присоединяется непосредственно к вы-
выходному звену,
112
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
Среди различных разновидностей разгружателей следует особо выделить пневма-
пневматические, в которых изменением давления в рабочей камере наиболее просто осу-
осуществляются регулирование параметров и автоматическая настройка на расчетный
режим.
Для повышения эффективности разгружающего устройства и устранения возмож-
возможности дополнительного возбуждения колебательной системы место установки раз-
гружателя должно быть, по-возможности, приближено к источнику колебаний.
По виду присоединения к основной системе разгружающие устройства mofjt
быть отнесены к трем разновидностям схем разгружения: 1) «выходное звено — стой-
стойка»; 2) «входное звено — стойка»; 3) «входное звено — выходное звено».
На рис. 13 показана общая схема разгружения «выходное звено — стойка» и не-
некоторые ее конкретные реализации (на рис. 13, а выделен лишь упругий элемент,
относящийся к разгружающему устройству). Элемент Щ соответствует функции
положения основного механизма, а элемент Пр — передаточному механизму, соеди-
соединяющему упругий элемент разгружателя с выходным звеном, причем х = Пр (ср2),
где х — текущая координата, характеризующая деформацию упругого элемента;
. ф2 — координата выходного звена.
Рис. 13. Динамическая модель и схемы разгружающих устройств типа выходное звено —
стоика
Для компенсации инерционных нагрузок выходного звена разгружающее устрой-
устройство устанавливается таким образом, чтобы при установившемся режиме оно могло
аккумулировать энергию в период выбега и возвращать ее системе в период разбега.
Для разгружателя, показанного на рис. 13, б, смена знака разгружающего момента
достигается при прохождении линией действия усилия пружины оси качания рычага.
Нередко более удачные конструктивные решения дают разгружатели, использую-
использующие пружины сжатия (рис. 13, в, г). При реверсивном вращательном движении тяже-
тяжелых рабочих органов рассматриваемая схема разгружения нередко реализуется
с помощью торсионов, использование которых позволяет осуществлять хорошую
компоновку механизма.
Общим достоинством рассмотренного типа подсоединения яв.Тяется возможность
компенсации возмущений непосредственно на рабочем органе; при этом механизм
и привод могут быть существенно разгружены. В то же время большие возмущения
со стороны разгружателя могут передаваться на стойку. При синтезе разгружателей
данного типа следует стремиться, по возможности, к малым ходам и облегченным
конструкциям уравновешивающего механизма с целью исключить искажающее
влияние его инерционных нагрузок.
Для модели, показанной на рис. 13, а, выбор параметров разгружателя должен
быть произведен так, чтобы минимизировать движущий момент, воздействующий
со стороны основного механизма на выходное звено; модуль этого момента
; q ' = | _ /2ф2 _ м2(ф2)+Л!р (ф2)!,
где М2 (ф2); Мр (фг) — соответственно мемент сопротивления и момент от сил разгру-
разгружателя.
УРАВНОВЕШИВАНИЕ СИЛ 113
Минимизация этого функционала обычно производится на базе кинетостатическои
модели, т. е. при координате ср2 = <р24., определенной без учета колебаний звеньев.
В этом случае отмеченная процедура одновременно соответствует минимизации
вынуждающей силы (см. параграф 1).
Если ф2,. (фа*) и Мг (ф2„) являются однозначными функциями от аргумента ф2*
(что имеет место лишь при полной симметрии нагружения на прямом и обратном
ходе), для определения параметров пружинного разгружагеля можно воспользо-
воспользоваться условием
-к- h №*-ФЗ* @)] + \ М2 (фа„) dq>it = т ср [х2 @)-л;2 (ф2,)], C5)
2 oJ
где ср, лг — соответственно коэффициент жесткости и деформация упругого элемента
разгружателя.
Условие C5) в этом случае записывается для участка, на котором рабочий орган
движется в одном направлении (например, для прямого хода), и соответствует для
кинетостатическои модели обращению в нуль работы, совершаемой (без учета потерь
на трение) моментом, приложенным к выходному звену со стороны исполнительного
механизма.
Если, например ф2* = Ь A — cos at); Мг = 0, то условие C5) удовлетворяется
при х = со |/^г/ср(ф2*—6); при использовании в этом случае торсиона, непосред-
непосредственно присоединенного к выходному звену, его коэффициент жесткости должен
быть ст = /2оо2.
В общем случае функция Q2 (ф2) = — /Зф2 — Мг оказывается многозначной. При
этом условие C5) может быть выполнено лишь приближенно. Нередко к приближен-
приближенному методу приходится прибегать также из-за ограничений, связанных с возмож-
возможностью практической реализации функции х = Пр (ф2*) в конкретном разгружающем
устройстве.
В подобных случаях задачу выбора параметров разгружателя можно осуществить
с помощью метода квадратичного приближения [55]. Пусть функция Мр помимо ф2„
зависит от ряда параметров и1: ..., us, с помощью которых производится минимиза-
минимизация функционала Q- =i (Q2 + 7ИрJ. При этом
-=г-^- I *Р2* I = 0, A = 1, ...,s). C6)
Oil;
Для практических расчетов нередко более удобна следующая форма условия C6):
2л 2л
С
- J
где Щ = dUi/dffi.
Если функция Q2 двузначна и различается на прямом и обратном ходах, то
а -.. а
р _ дМр р
C7)
Здесь Q2 и Qi — функция Q2 соответственно при прямом (ф24. > 0) и обратном
(Ф>* < 0) ходах, а = (ф2*)тах-
Если аппроксимировать функцию Мр многочленом третьей степени: Мр = % +
"Ь Ф2* "Т" "аФа*» то ПРИ учете C7) может быть получена следующая система линей-
114
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
ных относительно ui алгебраических уравнений:
2 + iu + a*u S
2 2
1 + у а3«2 + у а5«з
где
Si = — § Q2
I; S2 = — § Q2qJ*
делитель системы C8) в нуль не обращается [228]).
= s3.
s3 =
C8)
(опре-
(опре<Я1Р
<ЯР
Для определения функции Мр служит зависимость Мр = Р -т , где Р — уси-
"Ф2*
лие, развиваемое непосредственно в разгружателе.
Во многих случаях функция Мр (ф2:(.) точно или приближенно описывается ли-
линейной зависимостью. Так, например, приближенно при | ф2„ —у | < 25° для ки-
кинематически эквивалентных схем, показанных на рис. 13, б, в,
C9)
"X- l_y ' - 1-A2 '
а для схемы, приведенной на рис. 13, г,
«i = <V2 Л С +Л.) Voi «2 = —СрА2 A+Л) Д. D0)
Здесь принято X = /¦//; Д = хо/л; х0 — предварительная деформация упругого эле-
элемента; Yo — частное значение у, соответствующее положению рычага г при ф2„ = 0.
Оптимальные значения их и и2 для данного случая определяются из первых двух
уравнений системы C8) при и3 = 0:
a3
D1)
Параметры разгружагеля ср, у0, г, Д, X выбирают на основании совместного учета
D1) и C9) или D0) и конструктивных соображений.
Если функция Q2 имеет сложный аналитический вид, функции Si, S2 при учете
= j nf | </ф] можно определять приближенным интегрированием по ф^
2л
i = - j Q2, Щ ,
- ДФ,
о
2л
п — 1
1=0
я-1
ТТ' I (
11, I (
; п;
D2)
Здесь Дфх = 2л/п; фху = 2я//л.
Формулы D2) могут быть использованы, когда вынуждающая сила представлена
в табличной форме.
В рамках рассмотренного метода возможно выделение наиболее ответственных
участков движения рабочего органа, на которых подавлению возмущений предъяв-
предъявляются повышенные требования. С этой целью в минимизируемый функционал вклю-
включается весовая функция / (ф2*), которая принимает большее значение в тех зонах,
где минимизацию следует выполнить более точно. Например, при минимизации
функции (Q2 + МрJ (ф2* — 0,5 аJ, где а = (ф2ф)гаах, будут более существенно сни-
снижены экстремальные нагрузки в окрестности фг„ = 0 и ф2„ = а.
В схеме входное звено — стойка разгружающее устройство представляет собон
присоединяемый к приводному валу уравновешивающий механизм (рис, 14), с по-
УРАВНОВЕШИВАНИЕ СИЛ
115
мощью которого может быть осуществлено выравнивание суммарных возмущений,
действующих со стороны исполнительных механизмов. При этом удается снизить
переменные составляющие общей нагрузки, действующей на привод машины. Однако
условия нагружения каждого из исполнительных механизмов остаются почти неиз-
неизменными.
При расчете разгружающих устройств этого вида стремятся к тому, чтобы внутри
цикла установившегося движения изменение кинетической энергии системы и работа
сил технологического сопротивления, по возможности, ботее полно компенсировались
работой разгружающих сил. Другой подход состоит в том, чтобы после присоедине-
присоединения разгружающего устройства амплитуда одной или нескольких основных гармоник
вынуждающих сил обратилась в н>ль При таком подходе относительно соответст-
соответствующей гармоники обеспечивается наилучшее уравновешивание, соответствующее
методу наименьших квадратов.
Разновидность разгружающих устройств входное звено — выходное звено реа-
реализуется, например, в кулачковом механизме, показанном на рис. 15, при условии,
что профили кулачка / и контр-кулачка 2 выполнены так, чтобы упругий элемент 3
деформировался заданным образом.
Рис. 14. Схемы разгружающих уст.
ройств типа входное звено — стой-
ка с механическим (а) и пневмати-
пневматическим (б) элементом
Рис. 15. Схема разгружаю-
разгружающего устройства типа «вход-
«входное звено — выходное звено»
Такие разгружатели целесообразно применять совместно с динамически нагру-
нагруженными исполнительными механизмами, имеющими определяющее значение в дан-
данной машине.
Динамическая разгрузка может осуществляться в данном случае с целью умень-
уменьшения нагрузки, передаваемой через основной исполнительный механизм, или для
уменьшения суммарной нагрузки, воздействующей на привод. В зависимости от
постановки задачи могут быть использованы соответствующие приемы, указанные
выше.
Простейшей динамической моделью для анализа колебаний исполнительного
механизма совместно с разгружающим устройством данного вида является модель
замкнутого типа, показанная на рис. 1, е.
Общие вопросы теории разгружающих устройств и возможности осуществления
почти полной динамической разгрузки рассмотрены в работах [215, 216]. В работе
[102] исследованы вопросы, связанные с уравновешиванием динамических нагрузок
главного привода стана холодной прокатки труб с помощью пневматических разгру-
жателей. Использование вариационных методов и теории оптимального управления
при синтезе механизмов, обладающих оптимальными свойствами, освещается в ра-
работах [213, 234].
При проектировании и применении разгрузочных устройств должны быть приняты
специальные меры для подавления сопутствующих колебательных процессов (см.
параграфы 2 и 3); кроме того, следует учитывать, что задача уравновешивания нагру-
нагрузок на входных и выходных звеньях по своим целям не совпадает с задачей уравно-
уравновешивания реакций, действующих на основание машины. Нередко эти оптимиза-
оптимизационные задачи имеют противоположные тенденции, требующие компромиссных
решений.
Помимо разгружающих устройств для снижения виброактивности механизмов
могут быть применены виброизолирующие устройства, демпферы и гасители,
116 СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
5. ОРГАНИЗАЦИЯ ОПТИМАЛЬНОГО ВЗАИМОДЕЙСТВИЯ
ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ
Предварительные сведения. В механизмах и машинах с параллельными потоками
мощности, таких как планетарные и переборные зубчатые передачи, гидродинами-
гидродинамические машины и др., в местах взаимодействия разделительных и суммирующих
звеньев одновременно с несколькими, по числу потоков, сопрягаемыми элементами
(см. рис, 18 и 19) возникают возмущающие силы периодического характера, дейст-
действующие с одинаковой частотой. В зубчатых передачах — это приложенные к цент-
центральным колесам механизмов силы, вызываемые процессом пересопряжения зубьев
рабочих колес (см. рис. 18), эксцентричностью окружностей их обкатывания и цент-
центровки (сателлиты в планетарных передачах) или периодической неравномерностью
их жесткостей по углу поворота. В гидродинамических машинах — это подъемные
силы (см. рис. 19), действующие на лопасти различных колес. В зависимости от точек
приложения, направленности, величины и фазовых характеристик отдельных воз-
возмущающих сил их суммарное воздействие на разделительные и суммирующие звенья
будет различным. Это позволяет для снижения виброактивности многопоточных ме-
механизмов и машин применять наряду с такими универсальными методами, как умень-
уменьшение величины возмущающих сил и улучшение виброизолирующих свойств, также
метод организации оптимального взаимодействия указанных возмущающих сил.
Необходимое взаимодействие этих возмущающих сил достигается определенным
выбором ряда параметров суммирующих или разделительных звеньев и сопрягаемых
с ними элементов [155]. Так, для снижения виброактивности зубчатых механизмов
планетарного и переборного типов на частотах пересопряжения зубьев в ряде слу-
случаев достаточно определенным образом подобрать числа зубьев рабочих колес. В дру-
других случаях, кроме подбора чисел зубьев, необходимо подобрать и некоторые размеры
колес [156]. Для снижения виброактивности гидравлических центробежных насосов
на лопастных частотах и их высших гармониках требуется подбор определенных
чисел лопастей насосного колеса и направляющего аппарата [89].
Осуществление оптимального взаимодействия возбуждающих сил, действующих
с одинаковой частотой, может дать в многопоточных системах большой эффект по
снижению виброактивности на режимах работы с установившимся вибрационным
процессом. Примерами практического достижения высокой эффективности взаимно-
взаимного уравновешивания возбуждающих сил могут служить широко применяемые в про-
промышленности балансировка вращающихся роторов и взаимное уравновешивание
динамических нагрузок в многоцилиндровых поршневых машинах. Теоретическим
пределом эффективности этого метода является полная взаимная компенсация воз-
возбуждающих сил и устранения из спектра колебаний механизмов и машин состав-
составляющих с частотой их действия или некоторых гармоник этой частйты. Практическая
возможность достижения теоретического предела эффективности зависит от схемы
и конструкции механизма (машины), от стабильности рассматриваемых колебатель-
колебательных процессов, и от степени соответствия расчетных параметров действительным.
Существенной особенностью метода является независимость его эффективности
от абсолютной величины возмущающих сил и, следовательно, от точности изготовле-
изготовления деталей механизма, определяющих их значения, поскольку эффективность ме-
метода основывается на глубокой локализации результатов действия отдельных воз-
возмущающих сил. Поэтому для снижения рассматриваемой виброактивности важны
относительные, а не абсолютные значения возмущающих сил.
Общий вид расчетной модели. Для рассматриваемых многопоточных механиз-
механизмов и машин определение оптимального взаимодействия между возмущающими си-
силами, одновременно действующими на разделительные и суммирующие звенья, в об-
общем виде сводится к решению задачи, в которой к закрепленному в точке О жесткому
телу (рис. 16, а) в п точках (при п параллельных потоках мощности) с координатами
/•;, в; приложены периодические возмущающие силы Qj, i = 1, 2, ,.., п с одинаковой
частотой со и постоянными линиями действия, расположенными под углами C,- к ра-
радиусам /-,-. Решение задачи заключается в нахождении оптимальных соотношений
между параметрами возмущающих сил по критерию нагруженности точки О суммар-
суммарной поперечной силой (вектором) R и суммарным крутящим моментом М. Искомые
оптимальные соотношения должны наилучшим образом обеспечивать удовлетворе-
ВЗАИМОДЕЙСТВИЕ ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ 117
ние требований к суммарным возбуждениям крутильных М (kca, fj и поперечных
R (кш, /) колебаний тела, закрепленного в точке 0, с разными гармониками k часто-
частоты со. Преобразование периодических возмущающих сил Q; с частотой со в суммы
гармонических составляющих осуществляется разложением соответствующих функ-
функций в ряды Фурье.
Дальнейшее рассмотрение проводится в применении к гармоникам, при которых
колебания имеют длину волны значительно большую, чем геометрические размеры
разделительных и суммирующих звеньев.
Рис. 16. Схемы действия возбуждающих сил в многопоточных колебательных
системах:
а — общий случай; б — геометрически симметричной системе
Главный момент и модуль главного вектора суммарного возбуждения колебаний
с частотой few соответственно будут
Р*< sin
i=\
R,
: = I / 2 Fi, k sin 9/ sin (Ш + ф,-,
I
itk COS в,- Sin (Ш4- ф;, k) ,
D3)
где Fi,k sin (kat + cp,-, k) — возмущающая сила, действующая в г'-й точке с частотой
k со.
Значительно упрощаются расчетная модель и решение задачи для геометрически
симметричных систем, которым обычно соответствуют многопоточные механизмы
и машины.
Расчетная модель геометрически симметричных систем. Для многопоточных гео-
геометрически симметричных механизмов и машин (рис. 16, б), выполненных с достаточ-
достаточной точностью,
где ф; — фазовый сдвиг i-й возмущающей силы; г — число периодов возмущающей
силы, соответствующих одному относительному обороту рассматриваемого раздели-
разделительного или суммирующего звена.
При независимых случайных величинах Ft1, имеющих нормальное распределение
с математическими ожиданиями at = а и средними квадратическими отклонениями
1 Здесь и дальше рассматривается только гармоническая составляющая одной частоты и,
поэтому индекс к опускается.
118
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
ст, = о, главный момент и проекции главною векгора являются суммами независимых
случайных функций:
l = r sin [5 2j ^iSin
1=1
RK = 2j f, sin (co^ + fliY) cosSi'
Ry= ^ Fl sin (co/ + 6,y) sin e,,
D5)
где у = z — to —• коэффициент, характеризующий несинфазность взаимодействия
рассматриваемого звена с одновременно сопрягаемыми элементами (y — целое не-
неотрицательное число ^ё-п — 1); b — целое неотрицательное число.
Вероятностные характеристики главного момента и главного вектора. Выраже-
Выражения D5) главного момента и проекций главного вектора являются суммами элемен-
элементарных случайных функций с независимыми случайными величинами F,-. Их вероят-
вероятностными характеристиками [43] будут математические ожидания тм, mR , mR ,
дисперсии DM, DR ,DR , корреляционные функции Км (t0, k)> Kr Co. k), KR (to,ti),
корреляционный момент KR R составляющих Rx и R и коэффициент корреляции
Математические ожидания:
— ar sin fS ? sin
m
p =a У] sin («it + 6/y) cos 6,-;
x il
'^ S'n ®'-
mp =
1=1
D6)
Дисперсии:
,-Y) cos2 6,;
DR =
D7)
Корреляционные функции:
KM(t0, t1) = a*r* sin2
sin
sin
n (t0, U)=<5*- Y sin (o>4 + diy)sin(G>t1 + 6,y) cos2 e,-;
v f=i
sin
D8)
ВЗАИМОДЕЙСТВИЕ ВОЗМЕЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИС1ЕМЛХ 119
Корреляционный момент
п
X + e,-Y)sine;Cos6,. D9)
Коэффициент корреляции
р в =°2 X sin
х У i=\
sin2 (a>t + 9,у) sin 9; cos fy
sin2
sin2
E0)
Математические ожидания D6), дисперсии D7), корреляционный момент D9) и
коэффициент корреляции E0) для различных значений я и у приведены в табл. 8.
Корреляционные функции D8) преобразовываются к виду
(t0, h) =
(cos т-
E1)
где /1 = 0 при
-д- и
+1 и S = cos|u>(t+2/oI при v=l.
= cos [<а(т+2/0)] при у=п— 1, у— 1;
при у = 0, —; 6 = 0 при у^'.
: С = 0 при у-^п-1, ~-1 и
— /0, т.е. Л-/ является стационар-
стационарной случайной функцией при
—, a /?v и
при у =?0,1, — _н 1,
п-1.
При других значениях у М, Rx, Ry — нестационарные случайные функции.
Классификация многопоточных систем. Все разнообразие рассматриваемых
многопоточных систем по параметрам л и у их разделительных и суммирующих звень-
звеньев можно представить шестью типами (см. табл. 8), отличающимися математическими
ожиданиями, дисперсиями и коэффициентами корреляции главного момента М и
составляющих главного вектора Rx, Ry. Системы всех типов имеют нормальные за-
законы распределения вероятностей амплитудных значений главных моментов М*
(одномерные законы) и векторов R* (двумерные законы). Двумерные законы распре-
распределения вероятностей главного вектора R* могут быть четырех видов (рис. 17), отли-
отличающихся эллипсами рассеяния. Системам типов I, V, VI соответствует круговое
распределение вероятностей вектора R* (рис. 17, б). У систем типов II, IV величины
осей симметрии эллипсов рассеяния вектора R* постоянные, а направление большой
оси при у = п — 1 и ni2 — 1 совпадает с направлением вращающегося радиус-
вектора математического ожидания m ^ » или при у = 1 и и/2 + 1 перпендикулярно
ему (рис. 17, а, в). Эллипсы рассеяния у систем типа III (рис. 17, е) имеют вращаю-
вращающийся центр и переменные величины осей симметрии, зависящие от значения <ot,
но их оси при любом at остаются соответственно параллельными осям X0Y. Фор-
Формулы для определения максимально возможных значений Л1*1ах, R^,ax и математи-
математических ожиданий m м, > m ц*\ их абсолютных величин для различных типов систем
приведены в табл. 9.
Значения аргумента t* функции одномерного нормального закона распределения
вероятности —интеграла вероятности Ф (t*) и аргумента t** функции двумерного
!20
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
ч
Of
а
si
a;
Q
a;'
Q
Q
of
s
s
ъ
ю
о
е
О
to
о
CQ
"с
to
с
а
с
ю
о
§
о
за
с
1
с
Тип
си-
системы
о
о
3
с
3
'с
CN
3
с
о
о
3
с
о
СЧ
Л
-
1
с
3
см
ъ
1
3
с
+1
3
о
о
ю
о
Э
ъ
о
0,5
3
о
о
+1
sin at
о
t
Ч"
л
о
о
3
1
3
п
¦5!
о
3
S
+1
sin (of
о
т
с;
ш
sin 2at
I
1
Я
+1
3
1
о
3
с
О
0,5
о
о
о
t
Л
о
о
3
'.Г
3
'с
3
=
о
?1
Л
в
о
-
о
о
о
о
Z- +1»
с
А
ВЗАИМОДЕЙСТВИЕ ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ 121
нормального закона распределения вероятности Ф (t*b), необходимые для вычисле-
вычислений по формулам табл. 9, приведены в табл. 10. Формулы табл. 9 позволяют прово-
проводить количественные оценки интенсивности суммарного возбуждения колебаний
любой многопоточной системы. Минимальная интенсивность суммарного возбужде-
возбуждения в сравнимых условиях будет у систем типа VI (п > 4, у Ф 0,1, я/2, /г/2 ± 1,
п — )). Формулы показывают влияние числа потоков п и дисперсии ст3 (ширины об-
области рассеяния Fit точности изготовления элементов системы) на интенсивность
возбуждения колебаний в системе: при прочих равных условиях с увеличением п
н (J интенсивность возбуждения колебаний в системе увеличивается. В зависимости
от типа системы одинаковое изменение точности изготовления элементов системы
может по-разному влиять на суммарное возбуждение: Так, в системах типов IV—VI
интенсивность суммарного возбуждения изменяется прямо пропорционально изме-
изменению величины ст. В системах остальных типов даже очень существенное изменение
величины а может весьма незначительно влиять на интенсивность главного момента
или главного вектора суммарного возбуждения.
Рис. 17. Законы распределения вероятности главных векторов суммарных
сил в многопоточных колебательных системах разных типов:
а _ Ц; 6-1, V, VI; в — IV! г - III
юз му тающих
Особенностью систем типа III, в отличие от всех остальных типов, является зави-
зависимость предельных значений /?^ах в кажД°м квадранте координат от величины угла
isst. Наибольшие значения #*,dX будут при углах со/, совпадающих с осями координат
X0Y (см. рис. 16, б, 17), наименьшие, равные 0,707 от наибольших, при углах, уве-
увеличенных на п/4.
В многопоточных системах со случайными, но постоянными во времени величина-
величинами F{ главные моменты и векторы суммарного возбуждения колебаний будут иметь
постоянные значения амплитуд и фаз, определяемые координатами соответствующих
точек в областях рассеяния. Для таких систем формулы табл. 8 позволяют оценить
возможное рассеяние параметров суммарного возбуждения и его вероятность.
В системах со случайными и переменными во времени величинами Ft значения
амплитуд и фаз главных моментов и вектора будут также переменными, т. е. возбуж-
возбуждение колебаний в таких системах не будет установившимся процессом. В этом слу-
случае в системах типов IV, V, VI по сравнению с системами остальных типов интенсив-
интенсивность вынужденных колебаний, в том числе и особенно на резонансных режимах,
будет меньше не только за счет меньших величин главных моментов и векторов сум-
суммарного возбуждения, но и за счет значительно большей нестационарности процесса
суммарного возбуждения при одинаковых изменениях F-t.
Пример. Определить типа многопоточных колебательных систем (см. табл. 8, 9), соот-
соответствующие центральному колесу / планетарной передачи (рис. 18) с числом равномернв
расположенных сателлитов л —3-J-8 при колебаниях, возбуждаемых процессом пересопря-
пересопряжения зубьев. Зацепление эвольвентное, зубья прямые с одинаковой высотой у всех колес.
Число зубьев центрального колеса / г,.
Сдвиг по фазе <pt между действующими на солнечную шестерню со стороны п сателли-
сателлитов силами (см. рис. 16, б) возмущения F(- [156]
122
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
где ?' — остаток от деления числа зубьев ?i центрального колеса на число сателлитов п
(при п сателлитам г' может быть любым целым неотрицательным числом до п —- 1 включи-
включительно), k — номер гармоники частоты перссопряжения зубьев, тогда
V " г ~ Ьп = 2Й1Г=Т) ~ Ьа = **' ~ Ьп
Типы колебательных систем, соответствующие планетарным передачам с разными зна-
значениями п и z', для различных к, представлены в табл II Другие примеры выбора опти-
оптимальных значений параметров планетарных зубчатых передач, влияющих на их вибро-
чктивность, приведены в [156].
9. Характеристики суммарных позч.ущающих сил;
h — 0,5 при у — 1; h — 0,866 при у = п — 1
Тип
си-
системы
I
[1
III
IV
V
VI
п
>2
>2,
4
>5
>3
>4
V
0
1, п — \
1, п—\
I*
п
?
ФО; 1;
—' 1
-«max
/rtOrsinp
0,707/*
0,707*•
O,7O7i*
t*i
0,707/»
m M*
Vn or 4n P
о
0,282
0,282
0 282
0,398
0,282
"max
Yne
YF*
0.5^? +
0,5 /Й i- +
+ /Г"
0 866 Yt**
VF~'
0,707 /Г**
m д.!
0,884
0,5 /« i
о
0,5 /Я 5.
a
0 766
0,884
0,625
10. Значения аргументов и функций одномерного и двумерного
нормальных законов распределения вероятностей
Функц ии
ф«*),
ф (*••)
0,99
0,95
0,90
0,85
0,80
Ар гументы
*•
2,576
1,960
1,645
1,440
1,282
*•*
4,605
2,996
2,302
1,896
1,610
Ф> нкции
ф (* * ),
ф (* * *)
0,75
0,70
0,60
0,50
0,40
Аргументы
**
1,150
1,035
0 842
0,675
0,525
**•
1.387
1,204
0,918
0,694
0,510
Функции
Ф(***)
0,30
0,20
0,10
0,110
Аргументы
/*
0,385
0,254
0 126
0000
0,356
0,224
0,105
0,000
Пример. Определить типа многопоточных колебательных систем, соответствующие кор-
корпусам центробежных насосов (рис 19) с числом лопастей направляющего аппарата zt =
== 5 -f- 12 и числом лопастей насосного колеса г1= 3-^15 при колебаниях с гармониками
лопастной частоты.
При равномерном расположении лопастей центробежного насоса для ft-й гармоники
лопастной частоты фазовый сдвиг возмущающей сипы h\ (динамической составляющей
подъемной силы не лопасти направляющего аппарата) будет [89J
ф. -= 2л/г- (г — 1);
тогда y = kz1 — bzB. i гг
ВЗАИМОДЕЙСТВИЕ ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ 123
Результаты определения типов многопоточных колебательных систем, соответствующих
центробежным насосам с рассмотренными параметрами, приведены в табл. 12.
Пример. Определить наибольшие возможные амплитудные значения главного мо-
мосуммарного возбуждения для геометрически
Рис. 18. Схема планетарной зубчатой пе-
передачи
Рис, 19, Схема приложения возмущающих
сил к корпусу центробежного насоса
симметричных многопоточных систем (см. рис. 16,6) различных типов (см. табл.9), на кото-
которые одновременно воздействуют п = ЗЧ-Ю независимых случайных возмущающих сил F.f
имеющих нормальное распределение с математическими ожиданиями а- = а и средними
квадратическими отклонениями о"(- = о". Практически достоверная область рассеяния сил F,
равна 20 % от математического ожидания а.
11. Типы колебательных многопоточных систем (см. табл. 8 и 9),
соответствующие колебаниям с &-й гармоникой частоты пересопряжения зубьев
центральных колес зубчатых планетарных передач с л сателлитами
п
>1
3
4
5
6
7
S
г'
0
1B)
1C)
1D)
2C)
1E)
2A)
3
1F)
2E)
3D)
1G)
2F)
3E)
k
1
I
II
III
V
II
VI
11
IV
V
II
VI
VI
II
VI
IV
V
2
I
II
V
I
VI
II
IV
IV
I
VI
VI
11
VI
V
VI
3
I
I
III
V
VI
11
V
I
V
VI
11
VI
IV
VI
II
V
4
I
II
I
I
II
VI
IV
IV
I
VI
11
VI
V
V
I
5
I
II
III
V
1
II
IV
V
VI
VI
11
IV
VI
II
V
6
I
I
V
I
.1
VI
I
I
I
II
VI
VI
VI
V
VI
7
I
II
III
V
VI
11
,'v
V
I
I
I
II
VI
IV
V
8
I
II
I
I
VI
II
IV
IV
I
II
VI
VI
I
I
I
I
124
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
12. Типы колебательных систем (ем. табл. 8 и 9) центробежных насосов
при колебаниях с ft-й гармоникой лопастной частоты в зависимости от числа лопастей
насосного колеса г( и направляющего аппарата Zt
5
6
7
8
ч
9
10
11
12
k
1
2
3
4
5
I
2
3
4
5
1
2
3
4
6
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
*
3
VI
II
II
VI
I
V
I
V
I
V
VI
II
VI
VI
II
IV
VI
II
V
II
VI
VI
I
VI
VI
VI
VI
II
VI
V
WI
VI
VI
11
VI
VI
V
VI
I
VI
4
II
VI
VI
II
I
IV
IV
I
IV
IV
VI
II
VI
VI
II
V
I
VI
I
VI
VI
II
VI
VI
VI
IV
IV
VI
IV
I
VI
VI
II
VI
VI
VI
VI
I
VI
VI
5
I
I
I
I
I
II
IV
V
IV
II
VI
VI
II
II
VI
IV
VI
II
V
II
VI
II
VI
VI
VI
V
1
VI
I
V
VI
II
V I
VI
VI
IV
VI
VI
VI
II
6
II
V
VI
II
I
II
VI
VI
VI
VI
VI
V
VI
I
VI
VI
VI
I
\I
VI
IV
VI
VI
IV
I
VI
II
VI
VI
VI
V
I
V
I
VI
7
VI
II
II
\ I
I
II
IV
V
IV
II
I
I
I
I
I
II
VI
IV
V
IV
VI
VI
VI
II
II
VI
IV
II
\ I
V
VI
VI
11
VI
VI
IV
VI
VI
VI
II
8
VI
II
II
VI
I
IV
IV
I
IV
IV
II
VI
VI
VI
VI
I
I
I
I
I
II
V I
VI
VI
VI
VI
IV
IV
VI
1
VI
VI
VI
II
VI
VI
VI
I
VI
VI
9
II
VI
VI
II
I
V
I
V
I
V
VI
VI
II
II
VI
II
VI
IV
V
IV
II
VI
VI
IV
V
VI
VI
\1
VI
II
VI
V
VI
I
VI
10
I
I
I -
I
I
IV
IV
I
IV
IV
VI
II
VI
VI
II
VI
V
VI
I
VI
II
VI
\I
VI
VI
I
I
I
I
II
\ I
VI
VI
VI
VI
VI
V
VI
VI
11
II
VI
VI
II
I
II
IV
V
IV
II
VI
II
VI
VI
II
IV
VI
II
V
II
VI
VI
VI
II
II
II
VI
VI
IV
V
I
I
I
I
I
II
VI
VI
VI
IV
12
\
II
II
VI
I
VI
VI
II
II
VI
V
I
VI
I
VI
VI
VI
I
VI
VI
VI
IV
IV
V
I
II
\ I
VI
VI
VI
I
I
I
I
I
13
VI
II
II
VI
I
II
IV
V
IV
11
II
VI
VI
\ I
VI
IV
VI
II
V
II
VI
II
VI
VI
VI
VI
IV
II
и
V
VI
VI
\ I
VI
11
II
VI
VI
VI
IV
14
II
VI
VI
II
I
IV
IV
I
IV
IV
I
I
I
I
I
VI
V
VI
I
VI
VI
II
VI
VI
VI
IV
VI
VI
IV
1
VI
V I
VI
II
VI
VI
VI
V
VI
VI
15
I
I
I
I
I
V
I
V
I
V
II
VI
VI
VI
VI
II
VI
IV
V
IV
VI
VI
I
VI
VI
V
1
VI
I
V
VI
\ I
II
V 1
VI
VI
V
VI
I
VI
ВЗАИМОДЕЙСТВИЕ ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ 125
Расчеты провидятся по формулам табл. 9
для М^,ах и #п\ах с учетом, что 0= malta,
где 2т = 0,2 — практически достоверная об-
область возможных значений амплитудных вели-
величин возмущающих сил F- (в долях о); <0 —
аргумент функции нормального распределе-
распределения с вероятностью, соответствующей обла-
области 2т.
Практически достоверными областями
возможных значении случайных величин при-
примем области, соответствующие вероятности,
равной 0,95. Результаты выполненных расче-
расчетов приведены на рис. 20 Максимальные
суммарные силы Mmax " ^max> возбуж-
возбуждающие колебания в многопоточных меха-
механизмах и машинах, при выборе оптималь-
оптимальных параметров и и у снижаются в десятки
раз.
Рис. 20. Наибольшие амплитудные значения
главных момента и вектора в практически
достоверных областях рассеяния
0,30
0,25
о,го
0,15
0,10
0,05
13. Характеристики возбуждения колебаний с ft-й гармоникой частоты
пересопряженйя зубьев центральных колес зубчатых планетарных передач
с п сателлитами при а = 0
п
> 1
3
6
7
г'
0
1 B)
1 C)
2
1D)
2C)
1 E)
2D)
3
1 F)
2 E)
3D)
1G)
2F)
3E)
4
k
1
М
R
R
0
R
0
R
0
0
R
0
0
R
0
0
0
2
М
R
0
М
0
R
0
0
м
0
0
R
0
0
0
М
3
М
м
R
0
0
R
0
м
0
0
R
0
0
0
R
0
4
М
' R
М
м
R
0
0
0
М
0
R
0
0
М
0
м
5
М
R
R
0
М
м
R
0
0
0
0
R
0
0
R
0
6
М
М
0
м
R
0
м
м.
м
R
0
0
0
0
0
м
7
М
R
R
0
0
R
R
0
0
м
м
м
R
0
0
0
8
М
R
М
м
0
R
0
0
м
R
0
0
м
м
м
м
Обозначения! М — возбуждаются крутильные
поперечные колебания; 0 —колебания не возбуждаются
колебания; R — возбуждаются
126
СНИЖЕНИЕ ВИБРОАКТИВНОСТИ МЕХАНИЗМОВ
14. Характеристики возбуждения колебаний с fc-й гармоникой лопастной частоты
в центробежных насосах с числом лопастей насосного колеса г,
и направляющего аппарата га при а =0
г,
3
4
5
6
7
8
9
10
И
12
k
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
4
б
1
2
3
4
5
1
2
3
4
5
1
2
3
4
б
1
2
3
4
б
1
2
3
4
б
г,
3
м
м
м
м
м
R
0
R
М
R
0
R
R
М
0
м
0
м
0
0
R
0
0
R
0
0
R
0
R
0
0
м
0
0
0
0
R
0
0
0
0
0
R
0
0
0
0
м
0
4
R
R
м
R
R
М
М
М
М
М
R
0
0
R
М
0
0
М
0
0
0
R
0
0
R
0
М
0
м
0
0
R
0
0
0
0
0
0
0
м
0
0
R
0
0
0
0
м
0
0
б
R
R
М
R
R
R
0
R
М
R
М
М
м
м
м
R
0
0
0
R
0
0
R
R
0
0
0
R
0
R
0
R
0
0
0
0
м
0
м
0
0
R
0
0
0
0
0
0
0
R
6
м
м
м
м
м
0
м
0
м
0
R
0
0
R
М
Ж
м
м
м
м
R
0
0
0
0
0
0
0
м
0
0
0
м
0
0
0
0
0
0
м
0
R
0
0
0
0
м
0
м
0
7
R
R
м
R
R
R
0
R
М
R
0
R
R
0
М
R
0
0
0
R
М
м
м
м
м
R
0
0
0
0
0
0
0
R
R
0
0
R
0
0
0
0
R
0
0
0
0
0
0
R
8
R
R
М
R
R
М
м
м
м
м
0
R
R
0
М
0
0
м
0
0
R
0
0
0
0
м
м
м
м
м
R
0
0
0
0
0
0
0
0
м
0
0
0
R
0
0
0,
м
0
0
9
м
м
м
м
м
R
0
R
м
R
R
0
0
R
М
0
м
0
м
0
0
0
R
R
0
R
0
0
0
0
М
м
м
м
м
R
0
0
0
0
0
1)
0
0
R
0
0
0
м
0
10
R
R
м
R
R
0
1 м
0
м
0
м
м
м
м
м
0
0
м
0
0
0
R
0
0
R
0
0
0
м
0
R
0
0
0
0
м
м
м
м
м
R
0
0
0
0
0
0
0
0
0
11
R
R
М
R
R
R
0
R
М
R
R
0
0
R
М
R
0
0
0
R
0
R
0
0
R
0
0
R
0
R
0
0
0
R
R
R
0
0
0
0
М
м
м
м
м
R
0
0
0
0
12
м
м
м
м
м
м
1Л
м
м
м
0
R
R
0
М
м
м
м
м
м
0
0
R
R
0
0
М
0
М
0
0
0
м
0
0
0
0
0
0
м
R
0
0
0
0
м
м
м
м
м
13
R
R
М
R
R
R
0
R
М
R
0
R
R
0
М
R
0
0
0
R
R
0
0
0
0
0
0
R
0
R
0
R
0
0
0
0
0
R
0
0
0
0
0
0
R
R
0
0
0
0
14
R
R
М
R
R
0
М
0
м
0
R
0
0
R
м
0
0
м
0
0
м
м
м
м
м
0
0
0
м
0
0
R
0
0
0
0
0
0
0
м
0
0
0
R
0
0
0
0
0
0
15
м
м
м
м
м
R
0
R
М
R
М
М
М
М
м
0
м
0
м
0
R
0
0
0
0
R
0
0
0
0
0
0
м
0
0
0
м
• о
м
0
0
0
R
0
0
0
0
0
м
0
Обозначения) М— возбуждаются крутильные колебания; R
перечные колебания; 0 — колебания не возбуждаются.
- возбуждаются по-
ВЗАИМОДЕЙСТВИЕ ВОЗМУЩАЮЩИХ СИЛ В МНОГОПОТОЧНЫХ СИСТЕМАХ 127
Рекомендации. Для наибольшего снижения виброактивности многопоточного
механизма (машины) на частотах, определяемых действием рассмотренных (см.
рис. 16, б) возмущающих сил, параметры п и у этого механизма должны обеспечивать
его соответствие тому типу (см. табл. 9), при котором наилучшим образом удовлет-
удовлетворяются требования по интенсивности возбуждения крутильных и поперечных
колебаний и их спектральному составу. При известных характеристиках возмущаю-
возмущающих сил оптимальный тип многопоточного механизма выбирают по табл. 11 и 12
или подобным им, с использованием формул табл. 9 для количественной оценки
интенсивности возбуждения крутильных и поперечных колебаний с той или иной
гармоникой. Если характеристики действующих возмущающих сил неизвестны,
но силы одинаковы, оптимальный тип механизма можно выбирать исходя из каче-
качественной оценки возбуждения колебаний. Для этого в формулах табл. 9 следует при
нять значения средних квадратических отклонений равными нулю (а — 0). Это бу-
будет соответствовать теоретически предельным случаям, при которых крутильные
или поперечные колебания с той или иной гармоникой вообще не будут возбуждаться.
При этом в таблицах, подобных табл, 11 и 12, вместо типа системы будут обозначе-
обозначения, характеризующие возбуждаются или нет колебания с той или иной гармони-
гармоникой, а если возбуждаются, то какого вида — крутильные или поперечные [9, 89].
Результаты качественной оценки возбуждения колебаний с k-й гармоникой частоты
пересонряжения зубьев для зубчатых планетарных передач с п сателлитами приве-
приведены в табл. 13, а с fe-й гармоникой лопастной частоты для центробежных насосов
с разными числами лопастей насосного колеса гх и направляющего аппарата 2г —
в табл, 14,
Часть вторая
ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
Глава IV
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ
МЕХАНИЧЕСКИХ СИСТЕМ
1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Диссипативные силы. При колебаниях упругих систем происходит рассеяние
энергии в окружающую среду, а также в материале упручих элементов и в узлах
сочленения деталей конструкции. Эти потери вызываются силами неупругого со-
сопротивления — диссипативными силами, на преодоление которых непрерывно и
необратимо расходуется энергия колебательной системы или возбудителя колебаний.
Для описания диссипативных сил используют характеристики, представляющие
зависимость диссипативной силы от скорости движения масс колебательной системы
или от скорости деформации упругого элемента. Вид характеристики определяется
природой сил сопротивления. Наиболее распространенные характеристики дисси-
диссипативных сил показаны на рис. 1.
Вязкое сопротивление (рис. 1, а) характеризуется коэффициентом сопротивления
&х и описывается выражением
FA(i)-.M. A)
Такую характеристику имеют диссипативные силы, возникающие при малых
колебаниях в вязкой среде (газе или жидкости) а также в ряде гидравлических
демпферов.
При больших виброскоростях имеет место квадратичная зависимость (рис, 1, б)
диссипативной силы от скорости!
. B)
Часто в конструкциях демпферов используют элементы сухого трения, харак-
характеристика которого (рис. 1, в) имеет вид
% C)
где b0 = const — сила сухого трения.
Все приведенные зависимости можно представить единой нелинейной харак№
ристикой
?л (i) = &nMFsgni,
где (г, by, — постоянные.
При |л, равном 1, 2 и 0, соответственно получаются характеристики (I)—C).
Гистерезис. Во многих случаях разделение полной силы на упругую и диссипа-
тивную силы является условным, а зачастую и вообще физически неосуществимым.
Последнее относится прежде всего к силам внутреннего трения в материале упругого
элемента и к силам конструкционного демпфирования, связанного с диссипацией энер-
энергии при деформации неподвижных соединений (заклепочных, резьбовых, прессовых
и т,д.) [151, 161],
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
129
Если провести циклическое деформирование упругодиссипативного элемента
(рис. 2), например, по закону
х = a cos со/, E)
то обнаруживается различие линий нагрузки и разгрузки на диаграмме сила—пе-
сила—перемещение (рис. 3). Это явление называется гистерезисом. Площадь, ограниченная
1 X
~ь„
а) 6) В)
Рис. 1. Характеристики диссипативных сил
петлей гистерезиса, выражает энергию V, рассеянную за один цикл деформирования,
и определяет работу диссипативных сил
г
•Р = § F (х, к) dx = Ij f d (x) x it, (ttj
о
где T = 2п/со — период деформирования.
Рис. 2. Упругодиссипативный элемент
Пусть, например, динамическая характеристика упругодиссипативнога элемента
имеет вид
F(x, k) = Fy{x) + FA(x), G)
где Fy (x) — сх — линейная упругая составляющая.
Петля гистерезиса такого элемента с линейной диссипативной силой A) при
деформации по закону E) имеет вид эллипса (рис. 3, а). Угол а наклона его большой
оси характеризует жесткость элемента
(с= tga). Рассеянная за цикл энергия F)
Т т
<F = f bii2 (t) dt = 6, (аиJ [ sin2 wt dt =
о о
= Kaaw&!. (8)
На рис. З, б показана петля гистере-
гистерезиса элемента с сухим трением C). Для
iero рассеянная энергия
xV = 4ab0, (9)
Для элемента с диссипативной характеристикой вида D) рассеянная за период
1ергия
? = /(^-и<о%, A0)
Рис. 3. Петли гистерезиса
где /С
ц
| sin т
Б п/р. Фролова
. Некоторые значения /Сд приведены ниже.
0 0,5 1,0 1,5 2 2,5 Л
4,000 3,500 3,142 2,874 2,666 2,498 2,356
130 ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ CUWEM
Коэффициент поглощения. Рассеяние энергии при колебаниях упругодиссипа-
1ивной системы удобно оценивать с помощью коэффициента поглощения, равного
отношению потерянной за цикл энергии V к наибольшему значению потенциальной
энергии П упругого элемента. При упругой линейной характеристике
A1)
коэффициент поглощения
2Ч7B) A2)
Согласно (8)—A0) в зависимости or вида характеристики диссипативной силы
коэффициент поглощения является функцией
частоты при вязком демпфировании ( 1)
гр = 2яш&1/с> A3)
амплитуды при сухом трении C)
г|) = 860/(са), A4)
амплитуды и частоты в общем случае D)
Эквивалентная упруговязкая модель При отыскании периодических колебаний
вида E) системы, диссипативные свойства которой заданы одним из изложенных
выше способов, исходную динамическую характеристику F (х, х) заменяют эквива
лентной уприговнзкой моделью
F (х, k)z=cx + bx A6)
Коэффициент Ь эквивалентногс демпфирования подбирают так, чтобы исходная
и заменяющая схемы обладали одинаковой поглощающей способностью Энергия
(8), рассеянная линейным эквивалентным демпфером,
? = па2сой A7)
Согласно A2) исходный диссипатчвный элемент, имеющий коэффициент погло
щения ф рассеивает энергию
У 1|2 A8)
Приравнивая A7) и A8) получаем эквивалентный коэффициент сопротивления
Ь=~-. A9)
Коэффициент Ь зависит не только от характеристик диссипативных сил, но и от
параметров процесса Так, для силы сухого трения с учетом A4) находим
6 = ^-. B0)
Для квадратичного трения B) из A9), A5) и данных на стр 129 при ц = 2 имеем
й=0 85ашй2 B1)
Учитывая E), F), A2), выражению A9) можно придать вид
г
Ь== I Fя (— асо sin шО sm at dt B2)
о
Полученное выражение совпадает с коэффициентом гармонической линеаризации
диссипативных характеристик (см т. 2). Формулой B2) пользуются в том случае,
когда диссипативные характеристики заданы соотношениями типа B)—D) либо кон
фигурацией петли гистерезиса, Зависимость A9) удобно использовать, если рассей-
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ 131
вающая способность задана коэффициентом поглощения г|з, при этом можно не ите
ресоваться ни исходной характеристикой, ни формой петли гистерезиса, а исполь-
использовать известные, например, из эксперимента зависимости величины ty от парамет-
параметров процесса Здесь, однако, весьма существенно, чтобы условия эксперимента мак-
максимально приближались к условиям работы рассчитываемой системы.
Вынужденные колебания системы с одной степенью свободы. Уравнение движе-
движения массы m записывается в виде
m2-t-cx + F (x) = Qn cos (Ш — <р) B3)
Отыскивая решение E) и проводя линеаризацию A6) нелинейной функции F (х),
вместо B3) получим
тх + ЬЛ + сх =*= Qo cos (со/ — <р). B4)
В результате решения линеаризованного уравнения B4) амплитуда
„ Qo
1 V I «J +[т)
где а>0 — Ус/т — собственная частота системы
С помощью A9) выражению B5) можно придать вид
+ 1,2л
B5)
B6)
Величины 6и1|) в B5), B6) являются функциями амплитуды и частоты, т. е. Ь =
= 6 (а, со), г|) = г|) (а со) Поэтому эти соотношения в общем случае представляют со
бой уравнения, решение которых и определяет искомую амплитуду
Для резонансной амплитуды, достигаемой при малом демпфировании на частоте
со яг <в0, имеем
Q/(b) B7)
B8)
Для линейной системы соотношение B7) можно записать в виде (см. т. 1)
ар = л<?0/(с6), B9)
где S = 2ял/(й0 — логарифмический декремент колебаний, n = i/2/n — коэффици
ент демпфирования
Из сравнения B8), B9) видно, что
*[>=25 C0)
В общем случае величиной б можно пользоваться только для отыскания резо
нансной амплитуды, так как логарифмический декремент характеризует темп зату
хания собственных колебаний частоты а>0. Однако в тех случаях, когда поглощаю
щие свойства системы не зависят от частоты, т. е. tf = г|з (а), величины г|> и 6 оказы
ваются равноправными, и с помощью B6), C0) можно отыскивать амплитуду на лю
бой частоте
Учет внутреннего трения в материалах. Многочисленными экспериментами уста
новлено, что поглощающие свойства большинства материалов не зависят от частоты
деформирования. Поэтому диссипативные свойства материала удобно характеризо
вать с помощью коэффициента поглощения \р или связанного с ним равенством C0)
логарифмического декремента колебаний б. Эти величины, определяемые, как пра
вило, экспериментально, представляют в виде зависимостей от амплитуд относитель
ных деформаций, нормальных или касательных напряжений (см параграф 2) *1
Используя такое представление, реальную характеристику материала заменяют
эквивалентной упруговязкой моделью, аналогичной рассмотренной выше При этом
*' Способ определения демпфирующих свойств материалов через упругопласгическйе
гарактеристики приведен в гл V
5*
132 ДИССИПАТИВНЫВ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
в задачах о продольных и изгибных колебаниях нормальные напряжения а связы-
связывают с относительной деформацией е равенством
C1)
В задачах о крутильных колебаниях касательные напряжения
t=g(Y + p2V C2)
В C1), C2) обозначено: Е — модуль упругости; О—модуль сдвига; у — сдвиг;
— линеаризованный параметр диссипации.
Дифференциальные уравнения продольных, крутильных и изгибных вынуж-
вынужденных колебаний стержня с учетом диссипации записывают в виде
где и — и (х, 0 — перемещение сечений стержня; 6 = в (х, f) — угол поворота се-
сечений стержня; S — площадь поперечного сечения; /0, /к — полярный момент инер-
инерции сечения и момент инерции при кручении; J — момент инерции относительно
центральной оси, перпендикулярной плоскости изгиба (геометрические характери-
характеристики поперечных сечений (см. т. 1, гл. VIII); р — плотность материала; q (x) — ин-
интенсивность распределенной вынуждающей силы.
Решения уравнений C^4) — C6) подчиняются краевым условиям, аналогичным
приведенным в гл. VIII, т. 1, в которых переменные и и 9 следует умножить на опе-
I д'
ратор I 1 +р
Поскольку коэффициент поглощения \р зависит от амплитуды относительной де-
деформаций или напряжения и, следовательно, является переменной вдоль стержня
величиной, ее заменяют постоянным приведенным значением г|H, подбираемым из ус-
условия неизменности рассеиваемой энергии. Приведенный коэффициент поглоще-
поглощения
I
C7)
где П — максимальная потенциальная энергия деформации, определяемая при из-
известной форме' X (х) продольных, крутильных и изгибных колебаний соотноше-
соотношениями:
<з9)
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
133
Линеаризованный параметр диссипации р вычисляют затем g помощью C3)
р = г|H/Bпш). D1)
Найденьые таким путем приведенные величины i|j0 и fJ зависят не только от дис-
сипативных характеристик материала, но и от параметров колебательного процесса,
формы колебаний и геометрических характеристик рассчитываемой системы. При
отыскании форм колебаний можно использовать разнообразные приближенные при-
приемы, в частности, пренебрегать диссипацией, полагая, что форма колебаний мало чув-
чувствительна к слабому демпфированию.
Пример 1. Рассмотрим продольные колебания стержня (рис. 4, a)j возбуждаемого силой
Q(()= Q^e'. Уравнение движения C4) и краевые условия запишем в виде
•dt
1 = 0;
D2)
D3)
где С = YE/q — скорость распространения продольной волн^ы в стержне.
Отыскивая решение D 2) в виде
и (х. t)-= QiJLx ('<¦>) е"°' = ах?Ш, D4)
где 1^хA(О)—динамическая податливость, связывающая перемещение сечения х с силой,
действующей в сечении L, вместо D2), D3) получим
d4Lx (to)
(коJ lLx (to) - С2 A + (соЭ) —=^-г— = 0;
D5)
(to) = О, ES (
(to
D6)
Запишем решение уравнения D5), удовлетворяю-
удовлетворяющее граничным условиям D6),
(Хх _ е— 1.x
lLx *'ш> —
ГТ7 Г7Т
ESX (е^ + е- Щ
<47)
где К = to/C /l + (шЗ-
Полагая коэффициент поглощения tJ^o малым и
учитывая D1), из D7) при х= L с точностью до ве-
величин первого порядка малости получим
r. D8)
iwt
где I = coL/C.
После подстановки D8) в D4) находим амплитуду
{iti>)', = Ts-{^ctg^ + [%
Рис. 4. Расчетные схемы
крайнего сечения х= L:
(? + 0,5 sin 20121-1/2
5 sin 20 21-
D9)
Если коэффициент поглощения <)> = ifo = const, формула D9) сразу определяет ампли-
ТУДУ \aL\ на лю^ои частоте Для резонансных амплитуд, достигаемых на частотах ? =
= — B/ — 1), имеем
16
QLL
ЯЛ|>„ B/ - 1) ES '
(/= 1, 2, ...).
E0)
Если коэффициент поглощения \|.1=г|)(е), то для нахождения приведенного коэффи-
коэффициента \|>о необходимо использовать C7), C8). Положив в D7) 3 = 0, имеем
E1)
и из D4) выражаем форму колебаний через амплитуду а^ свободного конца
, sin IxlL
X (*)= \aL\
Пусть, например.
I sin Z I '
E2)
E3)
Где (
— постоянные.
134 ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
Согласно E2)
dX ' e/i J cos &/L
° = 1п = -1-ТШТ7- E4)
После подстановки E3) и E4) в C7) и C8) получим
L
{ \ cos ixlL |^+2 dx
o
-L • E5)
J (cos txlLY dx
0
С учетом E3) из D9) получаем уравнение для нахождения амплитуды а^ I,
Пример 2. Рассмотрим продольные колебания стержня с присоединенной к его концу
массой m (рис. 4, б) Отыскивая движения сечений стержня вида u (x, t) =0^"°^' запишем
с помощью оператора динамической податливости
и (х, t) = lLx (to) [QLeiat — m (коJ и (L. о].
При х = L находим
q еШ
« (L. О = ггт г-
'LL (!0)' — @
С учетом D8) получаем выражение для амплитуды а^ массы m
^{ [4ЙБ1]} . E6,
где М = mJ(pLS)
Форма колебаний определяется соотношением E2), и дальнейший анализ аналогичен
приведенному в предыдущем примере.
Остановимся на случае, когда частота « -< - (? << 1) Ограничивая в E6) разложения
величин, содержащих Z. членами первого порядка малости, и учитывая принятые обозначе-
обозначения, получаем выражение, совпадающее с B6)
.±'\*4-(*ЛЛ
где с= ES/L — статическая жесткость стержня; <о0 — Yc/m-
Согласно E2) форма колебаний точно соответствует эпюре статической деформации'
X (х) = aL *-,
aL
и. следовательно, относительная деформация s= — = const. При этом из C7), C8), E3) ла>
ходим ф0 = г|) I -у- I , и для амплитуды а^ имеем следующее уравнение.
aL =
СУ
Резонансная амплитуда определяется при й>*=о0'
Различные аспекты теории внутреннего трения изложены в [148, 151, 161] Примеры
расчета разнообразных систем можно найти в [10—13, 105, 153, 160—163)
2. ДЕМПФИРУЮЩИЕ СВОЙСТВА КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ
При рассмотрении демпфирования колебаний, обусловленного необратимыми
процессами, происходящими в циклически деформируемом материале, представляет
практический интерес рассеяние энергии при значительных напряжениях, которые
могут возникать в элементах колебательной системы вблизи резонанса (при напряже-
ДЕМПФИРУЮЩИЕ СВОЙСТВА КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ
135
ниях, близких к пределу усталости). В области высоких циклических напряжений
рассеяние энергии существенно зависит от амплитуды циклических напряжений (де-
(деформаций). Приводимые ниже справочные данные о демпфирующей способности ма-
материала представлены в виде графиков изменения декрементов колебаний от ампли-
амплитуды нормальных или касательных напряжений, в зависимости от того, при каких
колебаниях- продольных, поперечных или крутильных, эти данные полечены.
Рис. 5. Зависимости логарифмическою
декремента от напряжения для стали 15
при поперечных колебаниях (чистый
изгиб) призматических образцов:
/ состояние поставки, 2 — наклеп
50'Ю3 циклов, о = 22 кгс/мм2, 3 —
наклеп 5-103 циклов, о = 15,5 кгс/мм2,
4 — после отдыха в течение 40 суток;
3 _ после закалки в воду ст 910 °С,
5 _ после отжига от 910 °С; 7 — после
нормализации от 910 °С;_? — после от-
отпуска с выдержкой в течение 1 ч при
650 "С; 9 — после отпуска с выдержкой
в течение 1 ч при 450 °С
d'/e
/
S
1,
//
'/и
6>
_
V
//
8
У
>
/s
w
15
20
25 в,кгс/»/1г
4%
20
16
12
Л
It
/
Y,
_.—-
//
к/
/^
-~
)
/
//
/
у,
7
/*
/
О 5 10 15 20 О,кгс/мм*
Рис. 6. Зависимости логарифмического де-
декремента от напряжения при поперечных
колебаниях (чистый изгиб) нормализован-
нормализованных призматических образцов из стали СтЗ:
/ — исходное состояние; 2 — при растяже-
растяжении 2 %; 3 — при растяжении 4,5 %; 4 —
при растяжении 9 %; 5 — старение двое
суток; б — старение пять суток; 7 — ста-
старение 20 суток; 8 — старение 60 суток
/г
Л
1
/
i/f
/
//
'//
7
f
у
3
/А
У
/ /
/
s
7
У',
/
Ло
5 10 15 20 б,
Рис. 7. Зависимости логарифмического де-
декремента от напряжения при поперечных
колебаниях (чистый изгиб) нормализован-
нормализованных призматических образцов из стали СтЗ:
/ — исходное состояние; 2 — при сжа-
сжатии 1,5 %, 3 — при сжатии 4,5 %, 4 —
при сжатии 7 %; 5 — при сжатии 9 %; 6 —
старение одни сутки; 7 — старение трое су-
суток; 8 — старение пять суток; 9 — старе-
старение 15 суток; 10 — старение 36 суток;"
// — старение 63 суток
В некоторых случаях логарифмические декременты колебаний даются в виде
зависимостей от относительных деформаций. Такое представление оказалось удоб-
удобным при определении декрементов для одних и тех же материалов при различных
температурах.
136
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
4%
2,0
5^
У,
Ю 20 б,кгс/нмг
Рис. 8. Зависимости логарифмического де-
декремента от напряжения при поперечных
колебаниях (чистый изгиб) призматических
образцов из стали Ст5 в состоянии постав-
поставки (сплошные линии"), упроченных вытяж-
вытяжкой (штриховые линии) и термически упро-
упрочненных (штрихпунктирная линия) при
температурах испытаний:
/ — 20 °С: 2 — 100 "С: 3—170 °С
1,2
',0
<?
0,6
<?*
0,2
/
'/ i
/
V
V
/
—--
A
--
8 10 1Z
Рис. 9. Зависимости логарифмического декре-
декремента от напряжения при продольных (сплош-
(сплошные линии) и крутильных (штриховые линии)
колебаниях трубчатых образцов из стали 45:
/ — после нормализации; 2 — после закалки
в масле отпуска от 640 °С а выдержкой в
течение 1 ч
Рис. 10. Зависимости логарифмического
декремента от напряжения для стали 50
при крутильных колебаниях цилиндриче-
цилиндрических образцов:
/ — диаметр образца 10 мм; 2 — 20 мм;
S — 30 мм; 4 — 40 мм; 5 — 60 мм (штри-
(штриховые линии — сплошное поперечное се-
сечение; еплошные линии — трубчатое по-
поперечное сечение)
и
1
/,
=====
r
s
_ —'
=====
/s
=—=:
/
10
20
Рис* 11. Зависимости логарифмического декре-
декремента от напряжения для стали У8 при попе-
поперечных колебаниях (чистый изгиб) призмати-
призматических образцов после:
/ — нормализации; 2 — закалки в воду от
790 °С; 3 — отжига от 790 °С; 4 — отпуска
от 450 'С: 5 — 9 — предварительного растяже-
растяжения при деформации 5,4 % и старения в тече-
течение 2, 6. 10, 20, 37 суток
ДЕМПФИРУЮЩИЕ СВОЙСТВА КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ
137
О SO 100 150 200 Z50 300 350 Г,°С
Рис. 12. Зависимости логарифмического декремен-
декремента от температуры при крутильных колебаниях
сплошных круглых образцов:
из стали У10А и т = 17 кгс/мм2: 1 — после закал-
закалки в воду от 800 °С; 2 — после отпуска от 200 °С;
из стали У7А; 3 — после закалки, X = 18 кгс/мм2;
4 — после отпуска 100 "С, т = 17 кгс/мм2;
из стали 50А: 5 — после закалки в воду от
860 °С, т = 16 кгс/мм2
——--^
Ml — 1—
4
—s
№ /5 20
Рис. 13. Зависимости логарифмического
декремента от напряжения для стали
ЗОХГСА при колебаниях (чистый из-
изгиб) призматических образцов после
термической обработки до твердости
HRC:
I — 30—34; 2 — 32 — 36; 3 — 36—40;
4 — 34—44; 5 — 40—45; б — 45—50
0,5
О
г:
-**
.
Г
¦ /,
'.S —
-3
¦5
10
15
20
25
30 Г,
Рис. 14. Зависимости логарифмического декре-
декремента от напряжения для стали ЗОХГСА при
крутильных колебаниях трубчатых образцов после
термической обработки до твердости ИКС:
I — 30 — 34; 2 — 32 — 36; 3 — 36 — 40; 4 — 34 — 44;
5 — 40—45; 6 — 45 — 50
.
¦¦ -
.—
"г
-V
г
.—¦—
——
5
\
Ю /5 20 25 30 35 40 О„,лгс/м»1
Рис. 16. Зависимости логарифмического декремен-
декремента от напряжения при поперечных колебаниях
(чистый изгиб) призматических образцов для ста-
стали 30X13 после термической обработки до твер-
твердости HRC:
/ — 50—55; 2 — 45 — 50 и для стали 14Х17Н2
после термической обработки до твердости ННС:
3 — 40—45; 4 — 30—34; 5 — 34—40
12
10
i
i
1
1
У
_—-
. ¦
1
k
f
/j
1
у
s
2
1
/
5
О
5 Ю, № 20 25
Рис. 15. Зависимости логарифмическо-
логарифмического декремента от напряжения для ста-
стали 12X13 при поперечных колебаниях
(чистый изгиб) призматических образ-
образцов:
/ — состояние поставки; 2 — дефор-
деформация растяжением 5 %; 3 — дефор-
деформация растяжением 10 %; 4 — дефор-
деформация растяжением 13 %; 5 — закал-
закалка; 6 — отжиг, деформация растяже-
растяжением- 4 %
138
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
/
у
-
-—7
/
/
==
J
S ГО Г5 20 25 SO
Рис. 17. Зависимости логарифмического декремента
от напряжения при крутильных колебаниях трубча-
трубчатых образцов для стали 30X13 после термической об-
обработки до твердости HRC:
I — 45—50; 2 — 50 — 55 и для стали 14Х17Н2 пос-
после термической обработки до твердости HRC: 3 —
30 — 34, 4 — 34 — 40; 5 — 40 — 45
4?»
5
3
г
1
Л
7
У
^^
у
'4.
У
Л
S
18 22 26 6,кгс/ммг
8 ГО б,хгс/нм!
(Рис. 18. Зависимости лога-
логарифмического декремента от
напряжения для алюминие-
во-магниевого сплава АМг-3
при поперечных колебаниях
(чистый изгиб) призматиче-
призматических образцов:
/ — исходное состояние;
2 — деформация растяжени-
растяжением 1,5 %; 3 — деформация
растяжением 4,5 %; 4 —
деформация растяжением
7,5 %; 5 — деформация рас-
растяжением 12,5 %;" 6 — де-
деформация растяжением 17%;
7 — естественное старение
60 суток; для алюминиевого
сплава ВД17 (закалка, ста-
старение) при температурах ис-
испытания: 8 — 20 °С; 9 —
100 °С; 10 —250 °С; // —
40-0 °С
',0
0,6
/
——•
л,
г i
IV/
//
///
//
//
/
wo гоо soo m soot;c
\ Рис. 19. Зависимости логарифмического декремента
от напряжения при поперечных колебаниях (чистый
изгиб) призматических образцов для титановых спла-
сплавов: ВТ9 после термической обработки — нагрев до
950 "С в течение 1 ч, охлаждение на воздухе до 530 °С
в течение 6 ч, и далее на воздухе (сплошная линия);
ВТЗ-1 после термической обработки — нагрев до 870°С
в течение 1 ч, охлаждение с печью до 650 °С, выдерж-
выдержка при 650 °С в течение 2 ч, охлаждение на воздухе
(штрихпунктирная линия) при температурах испы-
испытания:
/ — 20 "С; 2 — 200 "С; 3 — 350 °С; 4 — 400 °С; 5 —
460 "С; 6 — 500 °С
_Рис. 20. Зависимости логарифмического декремента
от температуры при поперечных колебаниях (чистый
изгиб) призматических образцов для титановых
сплавов:
/ — ВТ1 при напряжении а = 8 кгс/мм2; 2 — ВТЗ-1
при напряжении а — 6 кгс/ммг после ковки при
920—1000 "С и отжига при 680 °С (нагрев — сплош-
сплошная линия; охлаждение — штриховая линия). Сплав
BT3;t после изотермического отжига при 870 °С в
течение 1 ч и при 650 °С в течение 2 ч, охлаждение
на воздухе (штрихпунктирная линия)
ДЕМПФИРУЮЩИЕ СВОЙСТВА КОНСТРУКЦИОННЫХ 1П7ТР/М.7ОВ
139
S в 7 6,кгс/»мг
Рис. 21. Зависимости логарифмического декремен-
декремента от напряжения при поперечных колебаниях
консольных призматических образцов:
из магниевого сплава МА1: температура испыта-
испытания: / — Т — +20 °С; 2 — Т = — 60 °G
из алюминия: температура испытания: 3 — Т =
= +20 °С; 4 — Т = —72 °С;
из цинка: 5 — Т = + 20°С; б — Т = —70° С;
из красной меди. 7 — Г = +20°С; «—.Г = —60 "С
70
8
6
?
/
/
/
/
N
/
J
J
A
/
О 20 40 60 б,кгс/смг
Рис. 22. Зависимости логарифмического
декремента от напряжения для графита
(кривая О и висмута (кривая 2) при
поперечных колебаниях (чистый изгиб)
призматических образцов
&,%
Рис. 23. Зависимости логарифмического декремен-
декремента от амплитуды относительной циклической де-
деформации для листового материала Д16 толщиной
2 мм при поперечных колебаниях (чистый изгиб)
призматических образцов 2 X 20 X 190 мм с демп-
демпфирующими покрытиями, включающими герметик
толщиной 6Г = 0,11 — 0, И мм:
0 — без покрытия, / — герметик и алюминиевая
фольга (толщиной б. = 0,03 мм): 2 — герметик
и алюминиевая фольга F. = 0,05 мм); 3 — гер-
герметик и алюминиевая фольга F^ = 0,1 мм), 4 —
герметик и алюминиевая фольга F^ = 0,2 мм);
5 — герметик и фольга Fф = 0,03 мм), герметик
и фольга Fф = 0,03 мм); б — герметик и фольга
Fф = 0,05 мм), герметик и фольга Fф = 0,05 мм);
7 — герметик и фольга Fф = 0,15 мм), герметик
и фольга (бф = 0,15 мм); 8 — герметик и фольга
(бф = 0,2 мм), герметик и фольга (бф = 0v2 мм);
9 — герметик и фольга (бф = 0,03 мм), герметик
и фольга (бф = 0,03 мм), герметик и фольга (бф =
= 0,03 мм); to — герметик и фольга (бф =
= 0,05 мм), герметик и фольга (бф = 0,05 мм),
1ерметик и фольга (бф = 0,05 мм); // — герметик
и фольга (бф = 0,15 мм), герметик и фольга (бф =
= 0,15 мм), герметик и фольга (бф = 0,15 мм);
12 — герметик и фольга (бф = 0,2 мм), герметик
и фольга (бф = 0,2 мм), герметик и фольга
<6Л = 0,2 мм)
SO ? Ю*
Поскольку значительно удобней производить сравнение или наблюдать ход
изменения демпфирующих свойств материалов по зависимостям характеристик
рассеяния энергии от того или иного фактора, то эти зависимости даются в функции
от одного из факторов (амплитуды циклических напряжений или деформаций, темпе-
температуры и др.). Методы определения декрементов колебаний и характеристики демпфи-
демпфирования различных материалов приведены в [160—165].
140
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
to
6 -
с
J
-0
•-•
НО-
у*
.—'
и
——<
to ~
/
1-
.—-
-
.—
**
i"
.—¦
, ¦
^-
-J
——¦
i7 5/0/5 20 25
Рис. 24. Зависимости логарифмического
декремента от амплитуды циклической де-
деформации для листовой стали СтЗ толщи-
толщиной 1 мм при поперечных колебаниях (чи-
(чистый изгиб) призматических образцов 1 X
X 18 X 190 мм с различными демпфирую-
демпфирующими покрытиями:
/ — без покрытия; 2 — эпоксидная смола
ЭД6 с тальком (толщиной б = 0,98 мм);
3 — эпоксидная смола ЭД6 с графитом
(б = 1,33 мм); 4 — эпоксидная смола ЭД6
с 1рафиточ (б = 1,98 мм)
12 3 б,кгс/»мг
Рис. 25. Зависимости логарифмического
декремента от напряжения при поперечных
колебаниях призматических образцов:
из текстолита: / — Т = 20 °С; 2 — Т —
= 50 <>С; 3 — Т — —60 °С;
из стеклотекстолита: 4 — Т— 20 "С;
из гетинакса: 5 — 7" = 20 °С; 6 — Т =
= 50 "С
Л,1/.
30
20
/О
1
/
/
/
/
/
/
/?
-г:
7
- g;
и
2
—
11
B б,хгс/мм1
Рис. 26. Зависимости логарифмического дек-
декремента от напряжения при поперечных ко-
колебаниях призматических образцов:
из оргстекла: / — 3" = 20 °С; 2 — Т = 50°С;
3 — Г = — 55°С; 4 — Г = —60 °С;
из стеклопластика: 5 — Т — 20 °С; 6 — Т =
= 50 "С, 7 — Т = —60 °С
20
75
10
У
ШB)
^—
да*
ШA)
ко
^7 0,5 !,0 7,f б,
Рис. 27. Зависимости логарифмическо-
логарифмического декремента от напряжения для
пластмассы АГ-4:
/ — без термической обработки; // —
термическая обработка при 150 °С;
3 ч; /// — термическая обработка при
150 °С, 5ч;/ — температура +20 °С
(чистый изгиб призматических образ-
образцов); 2 — температура +50 °С (чистый
изгиб), 3 — температура —60 °С (кон-
(консольный изгиб призматических образ-
образцов)
КОНСТРУКЦИОННОЕ ДЕМПФИРОВАНИЕ
141
i
А
/-
/у
/ ^
—
—8
• з
¦
-
6
5
;;
12
2
—4
10
—э
.—¦
—*
.—'
/
у
7
ffi б,«гс/»я2
0,04 О/г 0,20 т,«гс/нн*
Рис. 29. Зависимости логарифмического декре-
декремента от напряжения при крутильных колеба-
колебаниях сплошных круглых образцов:
/ — из бука; 2 — из сосны
-Рис. 28. Зависимости логарифмического декре-
декремента от напряжения при поперечных колебани-
колебаниях консольных призматических образцов для тер-
термопласта ЛКФ-1:
/ _ температура Т = -f 20 °С; 2 — Т = 37 "С;
3 — Т = +60 °С; 4 — Т = —70 °С; для капрона:
5 — 8 — температура Т = +20 °С и частота со-
соответственно 4, 4; 8, 8; 19 и 33 Гц; 9 — темпе-
температура — 70 °С; для винипласта' 10 — темпера-
температура Г = +20 °С; // — Т = —70 'С; для пла-
пластмассы ЭК-2: 12 — температура Т — +20 °С;
13 — Т = —60 °С
Характеристики рассеяния энергии в конструкционной стали приведены на
рис. 5—14, жаропрочных сплавов — на рис. 15—17, цветных и композиционных
материалов — на рис. 18—24, неметаллических материалов — на рис. 25—29.
3. КОНСТРУКЦИОННОЕ ДЕМПФИРОВАНИЕ
В НЕПОДВИЖНЫХ СОЕДИНЕНИЯХ
Общие сведения. Наряду с внешними демпфирующими факторами на колебания
механических систем заметное влияние могут оказать энергетические потери внутри
самой конструкции (конструкционное демпфирование). Эти потери происходят из-за
трения в кинематических парах, а также в соединениях типа прессовых, шлицевых,
резьбовых, заклепочных и т. п. Хотя такие соединения принято называть неподвиж-
неподвижными, в действительности при их нагружении неизбежно возникают малые про-
проскальзывания по контактным поверхностям; на соответствующих относительных
перемещениях силы трения совершают работу.
Для количественной оценки интенсивности демпфирования используется рассе-
рассеянная за один цикл деформирования энергия W или ее безразмерный аналог — коэф-
коэффициент поглощения -ф, связанный соотношением B6) с логарифмическим декремен-
декрементом колебаний б.
Лишь в некоторых простых схемах соединений поглощение энергии за один цикл
можно вычислить с помощью теоретического расчета (см. п. 4). Однако чаще надеж-
надежные оценки рассеяния энергии могут быть получены только экспериментальным
путем — либо по параметрам резонансного пика в режиме моногармонических вы-
вынужденных колебаний *1, либо по огибающей свободных затухающих колебаний.
Подробные сведения о выполненных экспериментальных исследованиях см. в [31,
57, 74, 75, 122, 130, 182, 183, 243]. Результаты этих работ, отличающиеся значитель-
значительным разбросом, позволяют сделать некоторые общие заключения. Частота колеба-
колебаний практически не влияет на коэффициент поглощения, т. е. силы трения, действу-
действующие на контактных поверхностях, приближенно можно считать следующими за-
Или по параметрам «резонансной впадины» L131].
142
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
кону Амонтона—Кулона. С увеличением контактного давления коэффициент погло-
поглощения постепенно уменьшается.
Коэффициент поглощения в плоских стыках при изгибных колебаниях. Рас-
Рассеяние энергии колебаний в плоских стыках изучалось по затуханию свободных
поперечных колебаний стержня (рис. 30), составленного по длине из многих стяну-
стянутых осевой силой пластин. Экспериментально установлено: 1) коэффициент погло-
поглощения энергии колебаний в стыках стальных и чугунных деталей практически оди-
одинаков; 2) в сухих (обезжиренных) стыках в диапазоне давлений 1—20 кгс/см2 коэф-
коэффициент поглощения практически не зависит от давления и равен в стальных и чу-
чугунных стыках с шабреными или шлифованными поверхностями г)з = 0,15; в парах
текстолит — чугун ip — 0,35; 3) в полусухих стыках (количество смазки — ! мг/см2)
коэффициент поглощения больше, чем в сухих; он возрастает с увеличением вязкости
смазки и уменьшается с увеличением давления (рис. 31); 4) коэффициент поглощения
не зависит от размеров стыка и слабо возрастает с увеличением ширины поверхности
контакта.
S р, кгс/смг
Рис. 30. Плоский стык
Рис. 31. Зависимость ф (р):
/ — стыки с узкими прямо-
прямоугольными контактными зо-
зонами; 2 — стыки с широки-
широкими кольцевыми контактными
зонами
Рис. 32. Стыки:
а — конусный; б — резьбо-
резьбовой
Коэффициент поглощения в конусных стыках при изгибных колебаниях (рис. 32, а).
Результаты получены в конусном стыке длиной 70 мм; материал деталей — сталь 45
с термической обработкой поверхностей до твердости HRC 48—50. Частота колеба-
колебаний 50 Гц.
Давление в стыке p-10~2, кгс/см2. ... 0,5
•ф 0,04—0,17
3,6
О.02—0.06
10,7
0,02-0,04
Для приближенной оценки коэффициента поглощения в интервале р = 20—
— 250 кгс/см2 можно пользоваться зависимостью ty = 1,25 р~0,2.
Коэффициент поглощения в полусухих стыках (количество смазки 0,55 мг/см2)
оказался на порядок больше, чем в сухом стыке, и составил я|) = 0,3 -s- 0,9.
Коэффициент поглощения в резьбовых соединениях при изгибных колебаниях
(рис. 32, б). Результаты получены при испытаниях резьбового стыка с основной резь-
резьбой М20 и резьбой с мелким шагом М20 X 1,5. Длина стыка 70 мм. Материал дета-
деталей — сталь 45 с термической обработкой поверхностей до твердости HRC 48—50.
Частота колебаний изменялась в пределах 50—125 Гц.
Диапазон изменения коэффициента поглощения примерно одинаков как в сухом,
так и в полусухом стыке (\[> = 0,006 -=- 0,4) и практически не зависит от силы затяжки
в диапазоне Р - B,9 -г- 15) 102 кгс.
К резьбовым соединениям по своим свойствам близки ходовые передачи винт-
гайка. Коэффициенты поглощения при изгиблых колебаниях в таких передачах
определяли на образцах, имеющих размеры 0 50 X 8 и ф 70 X 10 мм. В переда-
передачах без смазки коэффициент поглощения практически не зависит от начальной на-
нагрузки; i|) = 0,17 -и 0,20. При наличии смазки до 1 мг/см2 и возрастании постоян-
КОНСТРУКЦИОННОЕ ДЕМПФИРОВАНИЕ
143
ного предварительного давления коэффициент поглощения уменьшается от 0,75 до
0,45.
Коэффициенты поглощения в шпоночных и шлицевых соединениях при крутиль-
крутильных колебаниях (рис. 33) Результаты получены на соединениях со следующими
параметрами: шпоночное соединение (?50 мм на длине 50 мм; шпонка 12 X 8 X
X 40 мм; шестишли1квое неподвижное соединение ф 46 X ф 53 X 12 мм. Шерохо-
Шероховатость поверхностей цилиндрических сопряжений и боковых граней шлицев Ra =
= 0,32 -*¦ 1,25 мкм.
Коэффициент поглощения практически не зависит от амплитуды колебаний и со-
составляет в шпоночном соединении 0,004 -т- 0,008; в шлицевом соединении 0,010 -s-
ч- 0,012.
Рис. 83. Соединения:
а — шпоночное; б — шлицевое
Рис. 34. Зависимость ф (о):
/ _ р = 5-Ю2 кгс; 2 — Р = 103 кгс; з —
р = 15 -102 кгс: 4 — Р = 25 -102 кгс: 5 — Р =
= 3-Ю8 кгс
52
ш
i
5
S-W,хгс/см2
Коэффициенты поглощения в подшипниках качения при изгибных колебаниях
валов. Результаты, полученные для подшипников качения различного типа при
диаметрах вала от5 мм до 70 мм, прдоеде.ны ниже.
Подшипник i|)
Радиальный:
однорядный, по одному в опоре (№ 212) 0,17—0.24
однорядный, по два в опоре (№ 212) 0,29—0,42
двухрядный сферический (№ 212) 0.21—0,30
Роликовый:
цилиндрический (№ 212) 0,24—0,45
конический (№ 7512) 0,31—0,43
двухрядный цилиндрический (№ 3182112) 0,29—0,37
Шариковый радиальный и упорный (№№ 212 и 8144) 0,47—0,60
Коэффициенты поглощения в елочных замковых соединениях турбинных лопа-
лопаток. Результаты получены при испытаниях лопаток газотурбинных двигателей
с шестизубым хвостовиком (материал лопаток — сталь ХН77ТЮР). Растягивающее
усилие Р изменялось в диапазоне E -н 30) 102 кгс. На рис. 34 дана зависимость коэф-
коэффициента поглощения г|> от амплитуды циклического напряжения а в сечении, прохо-
проходящем через основания впадин первой пары зубьев. Сплошной линией показаны
средние значения коэффициента поглощения, штриховой — нижняя граница дове-
доверительного интервала. Коэффициент поглощения уменьшается с ростом растягива-
растягивающей силы и слабо зависит от амплитуды циклического напряжения при больших
растягивающих силах.
Коэффициенты поглощения в соединениях турбинных лопаток. В качестве эле-
элементов конструкционного демпфирования пакетов турбинных лопаток часто ис-
используются бандажи, бандажные полки, а также демпферные проволоки в виде прут1
ков с круговыми осями, проходящих через отверстия в лопатках. С помощью этих
среДств и различных их комбинаций коэффициент поглощения повышается до 0,2—
0,3, тогда как чисто внутреннее грение характеризуется значениями ib = 0,02 -f-
-ь 0,03.
Коэффициенты поглощения в тросах и канатах. Энергетические потери при про-
продольных колебаниях тросов и канатов определяются в основном трением между
144
ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
отдельными нитями и прядями, которое существенно превосходит внутреннее тре-
трение в материале. Зависимости коэффициента поглощения от амплитуды напряжения а
при продольных колебаниях единичной проволоки d = 0,3 мм, единичной пряди
d = 1 мм и целого троса d — 5 мм приведены на рис. 35.
На рис. 36 показаны зависимости коэффициента поглощения от амплитуды дина-
динамического' напряжения ад при различных значениях статической нагрузки (груз на
конце каната). Графики получены усреднением результатов испытаний при продоль-
продольных колебаниях канатов диаметром 13—17 мм, свитых из проволок диаметром 0,5—
1,1 мм. С увеличением средней силы растяжения коэффициент поглощения умень-
уменьшается. При напряжениях aa^8-10 кгс/сма коэффициент поглощения почти ли-
линейно зависит от о"д.
—. '
о/о —
qos
О Z 4 6 б W~z,rcer/c»2
Рис. 35. Зависимости ф (а):
— для отдельной проволоки; 2 —
для пряди; 3 — для троса
б# to ytec/см*
Рис. 36. Зависимость ф (од)
при различных значениях
статической нагрузки
Коэффициенты поглощения для строительных конструкций некоторых типов.
При испытаниях строительных стальных конструкций замечено, что коэффициент
поглощения существенно зависит от типа соединения элементов. Наибольшие зна-
значения соответствуют клепаным и болтовым соединениям, наименьшие — сварным
соединениям.
Тип конструкции i|)
Стальные мосты , 0,02—0,03
Стальные дымовые трубы 0,08—0,16
Железобетонные балки или рамы 0,35—0,48
4. РАСЧЕТ ПОГЛОЩАЮЩЕЙ СПОСОБНОСТИ КОНСТРУКЦИЙ
Для некоторых относительно простых схем неподвижных соединений потери
на трение при циклическом нагружении можно вычислить теоретическим путем.
При этом обычно принимается, что материал элементов соединения совершенно
упругий, а силы трения на контактных поверхностях подчиняются закону Кулона.
В тех случаях, когда массы элементов, образующих соединение, малы по сравнению
с общей массой конструкции, элементы соединения можно считать безынерцион-
безынерционными и рассчитывать гистерезисные характеристики по квазистатической схеме;
такой подход допустим вообще в тех случаях, когда частота возбуждения существенно
меньше низшей собственной частоты системы [107, 151, 152, 175]. Наряду с этим
иногда необходимо учитывать силы инерции, распределенные по объему элементов
соединения, например при исследовании процесса забивки [142, 143] и вибрацион-
вибрационного погружения [11] свай. Эти специальные и относительно более сложные случаи
не рассматриваются.
Для соединений с сосредоточенным трением характерны петли гистерезиса, состав-
составленные из отрезков прямых. Данные для трех систем такого типа приведены в табл. 1.
Площадь петли гистерезиса при возрастании коэффициента трения (или для случаев
1 и 2 — силы прижатия) изменяется немонотонно и имеет максимум. Форма петли
гистерезиса в случае 3 типична и для рессорных пакетов, в которых сила прижатия
листов возрастает вместе с увеличением переменной нагрузки.
РАСЧЕТ ПОГЛОЩАЮЩЕЙ СПОСОЬНОСТИ КОНСТРУКЦИЯ 145
1. Гистерезис систем с сосредоточенным сухим трением
№ по
пор.
Схема
Петля гистерезиса при
нагружении по
симметричному циклу
Площадь петли гистерезиса
47 =
4/(? (Р - fQ) .
при Q =
ар
fa
При *max>fQ/(
4№ («max '
47 =
при xmax<fQ/c
при Q = cxmax/2
-fQ
Ита, У
при 0 = 0,414
Примечания I При нагружении по асимметричному циклу с характеристикой
'¦ = ^>rnln/Pmax^t —1 можно пользоваться приведенными в последнем столбце выражениями,
положив Р = (Ртах — Pmin)/2 = A — л)Ртах/2. 2. Р — наибольшее значение переменной
силы; а—безразмерный параметр переменной силы; х, ^—перемещения; /— коэффиц 1ент
трения; EJ — изгибная жесткость одной балки; Q — сила прижатия; с — коэффициент жестко-
жесткости пружины
Рассеяние энергии в соединениях с распределенным трением приведено в табл. 2.
Одна из особенностей этих соединений состоит в том, что размеры зоны проскальзы-
проскальзывания в области контакта как правило изменяются в зависимости от нагрузки. Из-за
этого петли гистерезиса обычно имеют криволинейные очертания, а их площади мо-
монотонно уменьшаются с увеличением силы прижатия (или коэффициента трения);
только в случае 2 проскальзывание наступает сразу по всей области контакта (после
Достижения переменной нагрузкой значения Р = 4/3 fpbh).
146 ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
2. Рассеяние энергии в соединениях с распределенным трением
Схема
Площадь петли гистерезиса при
симметричном цикле нагружения
При P<fpbl
ZfpbEF
При P>fpbl соединение перестает быть непо-
неподвижным (полное проскальзывание)
1. У
л
шпнн
Hfftfflf
При Р>-о- fpbh
О
„ = «{р ¦
Eft2
При Р< \ fpbh
О
i i i\i IN
V
"ttttttT
j i ,\ «I
При М < Л,=
П р.и
3fpbhEJ0'
2РШ2
¦ (М — Af0),
6 —ширина зоны контакта в направлении,
перпендикулярном плоскости чертежа; р =
= Fft2/BV); F —площадь сечения накладки,
J—общий момент инерции сечения; Jo — мо-
момент инерции сечения балки без накладок
11UUI1U
\р\ \ t птт
При М <nfpld*/2
4Л18
inpfd'GJp 1 — ft
1
При М >nfpld2/2 соединение перестает быть
неподвижным (полное проскальзывание); р —
давление на поверхности контакта; GJ и бУр —
соответственно жесткость вала и втулки при
кручении
РАСЧЕТ ПОГЛОЩАЮЩЕЙ СПОСОБНОСТИ КОНСТРУКЦИИ 147
Продол жение т а б л 2
№ по
пор.
6
Схема
\\
- -\
ч
При
При
Площадь петли 1истерезиса при
симметричном цикле нагружения
М <Mo — nfpld*jA
8Л(8A -
* — 3npfd*G
м >м0
topfdH
-к')
— 3M0 + 3Af]
' P
3. Площадь петли гистерезиса виброизолирующей прокладки
№ по
пор
Схема
Площадь петли гистерезис?
05 1,0 1,5
0,069 0,084 0.076
2ц/а
"(l-U)ft'
0,5 1,0 1,5
0,046 0,056 0,049
ц — коэффициент Пуассона для материала прокладки
В табл. 3 даны результаты вычислений площадей петель гистерезиса для виброизо-
виброизолирующих прокладок при пульсирующем цикле нагружения (при вычислениях
обжимающие плиты считали абсолютно жесткими).
В табл. 4 приведены данные, соответствующие4циклическому нагружению по
симметричному циклу упругофрикционных соединений, в которых взаимодействие
между элементами осуществляется в виде сил трения и сил упругости (заклепочные
или болтовые соединения).
148 ДИССИПАТИВНЫЕ ХАРАКТЕРИСТИКИ МЕХАНИЧЕСКИХ СИСТЕМ
4. Площадь петли гистерезиса заклепочных и болтовых соединений
№ по
пор.
Схема
Площадь петли гистерезиса
47 =
fpbEF
V=—p- y ; с—коэффициент жесткости упру-
упругих связей (на единицу длины); EF— жесткость
сечения полосы
fpbE.F,
2 + 71п-
Vd-I
xP Г
L
II
1
aP
-_Е_ 2 + vln-
1-Р\
ния листа; ?2^2 — жесткость общего сечения обеих
накладок
—жесткость сече-
(i'EJ
2ВЛ1 + In -
(при проскальзывании на части длины накладки);
Р = . .. I/ „„",; h—высота балки; Jo, J — мо-
ТРип г trJ
менты инерции соответственно сечения балки беч
накладок и с накладками; F — глощадь сечения
балки; v fb/(PP)
Примеч<1Ние. f — коэффициент трения; Ь — ширина зоны контакта в направлении,
перпендикулярном плоскости чертежа
5. ПАРАМЕТРЫ ДИССИПАЦИИ ПРИ НЕОДНОЧАСТОТНЫХ КОЛЕБАНИЯХ
Если исходная информация о нелинейных диссипативных силах базируется на
экспериментальных данных, полученных в режиме моногармонических колебаний,
то при использовании этой информации для анализа других режимов требуются не-
некоторые коррективы. Наиболее часто встречается случай, когда имеет место наложе-
наложение двух колебательных процессов, из которых один (с частотой Q) существенным
образом зависит от диссипативных факторов, а другой (с частотой ш) от них практи-
практически не зависит. Подобный случай наблюдается, например, в нерезонансных зонах
моногармонических вынужденных колебаний, которым сопутствуют достаточно интен-
интенсивные свободные колебания; при резонансе на определенной гармонике возбужде-
возбуждения и одновременном воздействии достаточно интенсивного возбуждения другой
частоты; при совместных параметрических и вынужденных колебаниях и в ряде дру-
других случаев.
При бигармонических колебаниях для определения расчетного значения логариф-
логарифмического декремента колебательного процесса с частотой Q может быть исполь-
использована следующая зависимость, которая получена в предположении, что частоты
Q и со различаются существенно и практически не зависят от диссипативных сил
151, 52]:
б = 60Ф(г), E7)
ПАРАМЕТРЫ ДИССИПАЦИИ
149
где 6, 6о — логарифмический декремент соответственно при бигармоническом и
моногармоническом режимах; г = xQ max/*M max; xQ, ха—виброскорости с часто-
частотами соответственно Q и ш; Ф (г) — функция, меньшая единицы, зависящая от от-
отношения максимальных виброскоростей обеих гармоник и формы петли гистерезиса.
5. Функции Ф (г)
Петля
гистерезиса
Q 59-ш
Q < 0)
Ф'Г
Прямоугольная
——
_
2,
V
А
—¦—
див
0,6
О ЦЬ 0,8 1,2 1,6 2,0 2/, 2,8 Z
При zsg I
/
к
2
/
-—
/2 \
Ф = Ф, (г) ( I arccos гj
При
0,8
0,6
0,2
0 Ofr 0,8 1,2 1,6 2,0 г,', 2.8 2
Ф = Ф2(г)
Ф —кривая /; при г<0,3
Ф, (г)— кривая
Эллиптическая
! (г) —кривая 2
Ф2 (г) — кривая 2; при г<0,3
16
ФгЫ^ — г
Треугольная
! (г)— кривая 3
Ф2 (г)—кривая 3; при г < 0,3
Примечание,
сила сопротивления.
Функция Oi (г) сооответствует усреднению на периоде 2я/й; R —
Указания по определению функции Ф (г), отвечающей усредненному значению б,
приведены в табл. 5, причем во всех рассмотренных случаях усреднение производи-
производилось по наибольшему из двух периодов колебаний Bя/со и 2я/й). Аналитические
зависимости для функций Ф (z) см. [52, 53].
Случай Я ;> <о. При г < 1 (I xQ I < I хш I) имеют место интервалы времени, на
которых колебания с частотой Q не вызывают изменения знака суммарной скорости
*= xQ + xa, поэтому на периоде 2я/Я не происходит замыкание контура петли ги-
гистерезиса. При г < 1 имеем Ф < 1 и 5 < 60, с чем связано наблюдаемое в экспери-
экспериментальных исследованиях слабое затухание свободных колебаний ха при нали-
наличии интенсивных низкочастотных колебаний ха.
При г Э= 1 (I xQ |>r | ха I) изменение знака х происходит на каждом периоде
2n/Q; наиболее низкое значение логарифмического декремента б в этом случае соот-
соответствует z = 1.
150 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
Случай Q << а. Знак х на периоде 2jx/Q многократно меняется, что при малых г
приводит к существенному уменьшению эффективной площади петли гистерезиса ,и
соответственно к значительному снижению усредненного значения логарифмиче-
логарифмического декремента б. Если б0 не зависит от амплитуды, то при малых z значение б
пропорционально первой степени амплитуды, так как функция Ф (г) в этом случае
близка к линейной при г= /Ш/(асо) (А, а — амплитуды колебаний, соответству-
соответствующие частотам Q и со).
Если диссипативная сила является кулоновым трением Ro, то следует восполь-
воспользоваться прямоугольной петлей гистерезиса, принимая ординату не зависящей от
амплитуды А и равной Ro. В этом случае при бигармонических колебаниях эффектив-
эффективная сила трения, соответствующая колебатель-
колебательному процессу xa, R = R0O (г).
¦ При Q < со и малых г имеем R *» 0,5 ??„г; в
этом случае б (А) = const, что соответствует ли-
линеаризации сил сухого трения высокочастотны-
высокочастотными колебаниями 1104].
Вследствие близости результатов при разных
петлях гистерезиса можно воспользоваться неко-
некоторой усредненной функцией Ф (г), что позво-
позволяет определить диссипативные факторы при
отсутствии достоверных сведений о форме петли
гистерезиса, реализуемой в конкретной системе.
Графики Фх, Ф2 могут быть также использованы
для инженерных оценок в тех случаях, когда
колебательный процесс отличается от бигармони-
ческого.
X
S
2
1
l
r
m
a)
0,1,
0,8 Г,2
ffS
Рис. 37. Колебательная система
при бигармоническом возбуждении
(а) и изменение амплитуды колеба-
колебаний из-за уменьшения логарифми-
логарифмического декремента {б)
Пример. На одномассную систему, показанную
на рис. 37, а, одновременно воздействуют вынуждаю-
вынуждающая сила F — Fasin&t и кинематическое возмущение
х^ = a sin at. Требуется определить резонансную амп-
амплитуду А при Q = coo ((о» — частота свободных колебаний), если задан логарифмический де-
декремент при моногармонических колебаниях бо = const и известно, что (о»шо-
Деформация упругого элемента описывается бигармонической функцией следующего
вида:
t +
_
sin (of ^ A cos aot — a sin at.
При учете E7) амплитуда колебаний А может быть определена из следующего транс-
трансцендентного уравнения:
А ¦¦
Ф(г)'
где г = АааЦаа); Aa = jo/(o)
Решение этого уравнения для эллиптической петли гистерезиса представлено на
рис, 37, б в форме хBо), где х= А1А0— коэффициент, показывающий, во сколько раз резо-
резонансная амплитуда может возрасти из-за уменьшения логарифмического декремента 6;
го~г (Ао).
Глава V
ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
1. ВНУТРЕННЕЕ ТРЕНИЕ
В МАТЕРИАЛАХ И ТЕОРИЯ МИКРОПЛАСТИЧНОСТИ
Под внутренним трением материала понимается способность его рассеивать энер-
энергию'механических колебаний. Из всех материалов только идеально упругие при по-
постоянной температуре такой способностью не обладают. Всем без исключения ре-
реальным материалам присуще рассеяние энергии. Для их теоретического описания
и исследования должна быть привлечена теория неупругих материалов. Эти теории
соответствуют разнообразным физическим процессам, протекающим в материалеГ
ВНУТРЕННЕЕ ТРЕНИЕ В МАТЕРИАЛАХ 151
Из большого числа вариантов теорий «неупругости» наилучшее совпадение с наб-
наблюдаемыми в экспериментах вибрационными явлениями обнаруживает теория пла-
пластических деформаций. На основе проведенных экспериментальных работ [73] была
выдвинута гипотеза, в соответствии с которой внутреннее трение при значительных
напряжениях представляет эффект микропластических деформаций. Имеется указа-
указание о том, что внутреннее трение должно изучаться с использованием уравнений
теории пластичности Мизеса—Генки. Однако эта рациональная идея была реализо-
реализована только для случая циклического деформирования в условиях одноосного на-
напряженного состояния и при частном виде кривой нагружения материала. В ре-
результате была предложена формула гистерезисной петли, по которой потери энергии
в материале за цикл колебаний зависят по степенному закону от амплитуды дефор-
деформации или напряжения.
Указанный взгляд на основополагающую роль теории пластичности для при-
прикладной теории р'ассеяния энергии явно или неявно разделяется многими современ-
современными авторами. Так, формула Н. Н. Давиденкова [73] и ее обобщения интенсивно
используются в исследованиях [161, 231, 232]. Эта жеформула явилась основой для
создания более простых прикладных теорий внутреннего трения, из которых наи-
наибольшее распространение имеет теория Я. Г. Пановко [151].
Уравнения теории пластичности были использованы для анализа внутреннего
трения в условиях одноосного напряженного состояния и для гармонического дефор-
деформирования Е. С. Сорокиным [207]. Таким образом, в основе получения наиболее
популярных в настоящее время формул теории рассеяния энергии при интенсивных
напряжениях лежат представления теории пластичности.
Плодотворность этого подхода проявляется и в том, что попутно удается одно-
однозначно решить еще две важные для прикладной теории рассеяния энергии задачи —
обобщение на случай сложного напряженного состояния и обобщение на случай по-
полигармонических и случайных колебаний [148].
В настоящем справочнике изложение строится на использовании простейшей
из теорий микропластичности — теории упругопластического материала А. Ю. Иш-
линского. Применение теории микропластичности обусловлено тем, что последняя
допускает существование пластических деформаций (а значит, и рассеяния энергии)
при любом уровне напряжений, в том числе и при напряжениях, меньших макроско-
макроскопического предела текучести материала.
Запишем определяющие уравнения микропластическо- I
го материала А. Ю. Ишлинского [148]. Речь идет о ма- "-
териале со следующими свойствами:
а. Объемная деформация б пропорциональна средне-
среднему нормальному напряжению:
где k — коэффициент объемного сжатия.
б. Связь между девиатором напряжений S и девиато- I
ром деформаций е задается реологической моделью т
А. Ю.ц Ишлинского, изображенной наирис. 1. Рис ,_ реологическая
Найдем соответствующую указанной модели аналити- модель упругопластиче-
ческую зависимость между s и е. Реологическая модель ского материала
содержит бесконечное число плеч. Каждое плечо соот-
соответствует модели упругопластического материала Прандтля. В нем упругий элемент
жесткости 2Gdh соединен последовательно с идеально пластическим элементом с пре-
пределом текучести 2Ghdh. Сила, развивающаяся в каждом отдельно взятом плече, оп-
определяется через деформацию упругого элемента
где е/, — деформация пластического элемента.
Суммируя силы во всех плечах в соответствии с вероятностью р (ft) встретить то
или иное значение ft, найдем общую силу
152 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
Подставляя выражение S/, по B) и учитывая свойство плотносги вероятности
\p(h)dh=*\, D)
получим окончательно
s = 2Ge — 20 \ елр (h) dh. E)
о
Перейдем к определению пластической деформации е/, в плече h. Если пластиче-
пластическая деформация в нем развивается, то она определяется уравнением
а если не развивается, то уравнением
«; = 0. G)
В F) г] — положительный множитель, для определения которого служит условие
текучести Мизеса
A/2S,,- -sftI/a=2GA, (8)
где произведение в скобках — двойное скалярное произведение. Уравнения F),
G), (8) естественны "для теории течения Прандтля—Рейсса.
Исключая г] из F) с помощью (8) и подставляя результат в B), получим
где обозначено
Таким образом, для определения развивающейся пластической деформации в плече
h служит уравнение (9). Если оно не имеет решения, то это значит, что пластиче-
пластическая деформация не развивается, и тогда следует пользоваться уравнением G).
2. ВНУТРЕННЕЕ ТРЕНИЕ ПРИ ДЕФОРМИРОВАНИИ МАТЕРИАЛА
ПО СЛУЧАЙНОМУ ЗАКОНУ
Допустим, что девиатор деформации е — стационарная случайная функция вре-
времени. Положим для простоты, что математическое ожидание равно нулю. Пусть тре-
требуется выяснить поведение материала при таком законе деформирования. Прямое
использование уравнений E) — A0) для этой цели наталкивается на значительные
трудности в силу нелинейности этих уравнений. Поэтому целесообразно применить
приближенные методы. Одним из наиболее простых и эффективных методов анализа
нелинейных систем является метод статистической линеаризации [192]. Ниже этот
метод используется в задаче анализа поведения упругопластического материала при
случайном законе деформирования.
Единственной нелинейной функцией в уравнениях параграфа 1 является тензор-
тензорная функция Яе'/f/,. В соответствии с методом статистической линеаризации аппрок-
аппроксимируем эту нелинейность линейной функцией:
где kh — постоянная называемая коэффициентом линеаризации,
ВНУТРЕННЕЕ ТРЕНИЕ ПРИ ДЕФОРМИРОВАНИИ МАТЕРИАЛА 153
Коэффициент kh находим из условия минимума среднеквадратичной ошибки
аппроксимации A1):
1 /А . , .\ (h . , _.\\ (J2)
где угловые скобки — символ операции математического ожидания
Используя A0) для vh, условие A2) можно упростить-
(hlvh-kh)*vl = m\n.
Реализуя требование минимума по параметру kh, получаем
kh=4vh)/(vh). A3)
В это выражение входят математическое ожидание ч/, и его средний квадрат.
Для их вычисления достаточно знать одномерный закон распределения v^, но этот
закон до решения задачи в целом остается неизвестным. В методе статистической
линеаризации вид этого закона обычно задают. Поскольку V/, — неотрицательная
случайная величина, приемлемой аппроксимацией ее одномерного закона распреде-
распределения является распределение Рэлея:
где D| — средний квадрат v^.
Коэффициент линеаризации по формуле A3)
Рассмотрим функцию распределения
A4)
л ущ-vl
Это закон распределения абсолютных значений гармоники фиксированной ампли-
амплитуды со случайной фазой, имеющей равномерное распределение. В этом случае по-
получаем
близкое к A4). Проведенное сравнение свидетельствует о слабой чувствительно-
чувствительности п к выбору того или иного закона распределения v^ среди разумно допустимых.
В результате проведенной линеаризации (9) принимает вид*
^лел + ел = е- A5)
Его линейность, а также линейность остальных уравнений параграфа 1 делает
возможным использование методов спектральной теории стационарных случайных
функций в комплексной форме. Зададим девиатор деформации е его спектральным
представлением
оо
е= "^ Е (со) е'и' do, A6)
— со
где Е — тензор коррелированных белых шумов.
Средний квадрат интенсивности касательных деформаций, определенный ра-
равенством
154 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
в силу представления A6) имеет выражение
оо
Г2 = (уе- -еЛ= J S(o>)Ao. A7)
— со
При выводе этой формулы использовано соотношение
Е(ш)- ¦.E*((ol)\ = 5(«)S((B-Wl)) A8)
/
где звездочкой отмечена комплексно-сопряженная величина; 6 —дельта-функция Ди-
Дирака; S (со) — неслучайная функция, называемая ниже условно спектральной плот-
плотностью деформации.
Внося представление A6) в уравнение A5) и вычисляя стационарное решение,
найдем
— CO
Определяя средний квадрат Уд, в силу (.10), A8) получим
Это равенство следует рассматривать как уравнение относительно D^. Неизвест-
Неизвестная входит в его левую часть непосредственно, а в правую — через коэффициент
линеаризации kh. Нетрудно убедиться, что уравнение A9) не всегда имеет решение.
Действительно, отбрасывая единицу в знаменателе подынтегрального выражения
B0), придем к неравенству
DJDj
Последнее при Dh Ф 0 не может выполняться при h Зг Г/га. Следовательно, при
h 2? Г/л уравнение B0), а значит и A5), A9) не имеют решения, и нужно обратиться
к уравнению G), из которого при нулевом начальном условии имеем
eft==0; А=г Г/л. B2)
Внося A9), B2) в E), получаем
s= \ 2GK?e"°'da, B3)
— 00
где комплексный модуль сдвига
Г/л
р (Л) dh
Gk = G I- -f??H- B4)
Решение поставленной задачи определяется формулами B3), B4). Возможна их
простая интерпретация в терминах теории линейной вязкоупру'гости: мнимая часть
комплексного модуля сдвига характеризует демпфирующую способность материала,
тогда как интегральная добавка к вещественной части определяет так называемый
дефект модуля.
1 Соотношение B3) можно записать также в условной форме
s = 2GKe, B5)
истолковывая его как равенство для каждой гармонической составляющей е и s
в отдельности.
ВНУТРЕННЕЕ ТРЕНИЕ ПРИ ДЕФОРМИРОВАНИИ МАТЕРИАЛА 155
Выясним структуру комплексной жесткости B4). Для этого обратимся сначала
к B0). Умножая числитель и знаменатель правой части на k'^ и затем добавляя в чис-
числителе единицу, преобразуем его к следующему виду:
со
Отсюда хорошо видна структура решения
Вводя эти переменные, перепишем B6)
со
S(co)
П J
и выражение комплексного модуля сдвига
I + М)ф (Т)) '
•- и
в более удобной форме.
Формула B8) показывает, что комплексный модуль сдвига зависит от частоты
и от среднего квадрата интенсивности касательных деформаций.
Рассмотрим вопрос -о плотности распределения р (А). Для теории внутреннего
трения первостепенный интерес представляет знание р (Л) в области малых значений
безразмерного предела текучести А. Для функции распределения А в этой области це-
целесообразно принять выражение
F (h) = Hha; Н > 0, а >¦ О,
поскольку подобные выражения используются в теориях усталостного и хрупкого
разрушения в качестве функций распределения дефектов [28]. Дифференцируя F,
находим
р (А) = aHha~1. B9)
Подставляя его в B8), получим
GK = G[l-H(r/n)a(R-if)]; C0)
СО
R — iJ = a \ _J*. _ drj. C1)
Эти формулы представляют обобщение на случай негармонических колебаний из-
известной в теории внутреннего трения закономерности о степенной зависимости демп-
демпфирующих свойств материала от амплитуды деформации [149, 207]. Однако в рассма-
рассматриваемом случае сохраняется частотная зависимость: различные гармонические
составляющие имеют различное демпфирование.
Рассмотрим некоторые простейшие виды деформирования. При полигармони-
полигармоническом деформировании с частотами гармонических составляющих Ш/ и статистиче-
статистически независимыми фазами, имеющими равномерное распределение в промежутке
10,2jt], уравнение B7) принимает вид
1_тJ = 26П1 + (с»/ф)-]-х. 2>2 = Ь C2)
156 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
причем bi характеризуют соотношения между интенсивностями гармонических
составляющих, так что (й;ГJ равно среднему квадрату интенсивности касательных
деформаций составляющей частоты со/.
В случае моногармонического деформирования I = 1, bt = 1 решение уравне-
уравнения C2) приводит к следующему выражению комплексного модуля сдвига на частоте
деформирования:
или
=g i-f (i-vf-
L о
(зз)
Он не зависит от частоты, а зависит только от амплитудного значения интенсив-
интенсивности касательных деформаций Г. Как известно, независимость от частоты и зависи-
зависимость от амплитуды деформации является характерным свойством внутреннего тре-
трения в металлах при больших напряжениях [149, 207].
При распределении B9) интеграл в C3) вычисляется, и если представить резуль-
результат в форме C0), то можно записать
Здесь В — бета-функция Эйлера. Тогда C0) предписывает степенную зависимость
комплексного модуля сдвига от амплитуды деформации.
Степенная зависимость эффекта внутреннего трения от амплитуды деформации
для одномерного напряженного состояния широко используется в литературе по
теории внутреннего трения. Формула C0) обобщает эту зависимость для случая слож-
сложного напряженного состояния.
Для бигармонического деформирования с частотами ш1 и и2 решение C2) сле-
следующее:
- т]2))?),
-A-тJ)A+?2)]2 + 4#У A-т]2))^, C4)
где отношение частот
Ввиду сложности C4) дальнейший анализ с помощью B8) возможен только с ис-
использованием численного интегрирования даже при простейших распределениях
B9). Однако структура выражений C4) иB8) позволяет сделать важный вывод: зна-
значения комплексного модуля сдвига для гармонических составляющих с частотами
Ш] и а>2 зависят не от индивидуальных частот, а только от их отношения k.
Некоторый интерес представляет случай сильно разнящихся частот. Пусть, на-
например, о>! <; ш2- Тогда k мало, и вычисление асимптотических значений в C4) при-
приводит к следующему результату:
1/2
' ^>Ь2). C5)
ВНУТРЕННЕЕ ТРЕНИЕ ПРИ ДЕФОРМИРОВАНИИ МАТЕРИАЛА
157
Найденные по C5) выражения 0к на частотах гармонических составляющих а>х
и со2 таковы:
Заменяя в последнем выражении переменную ц на Ь2ц, получим
I ti2
Это в точности совпадает с выражением комплексного модуля сдвига C$) для
моногармонического деформирования интенсивностью &2Г, равной интенсивности вы-
высокочастотной составляющей деформации в бигармоническом процессе. Таким обра-
образом, наличие очень низкочастотной составляющей в законе деформирования не вли-
влияет на демпфирующие свойства материала по высокочастотной составляющей. Мни-
Мнимая часть GKI отлична от нуля. Следовательно, наличие высокочастотной составляю-
составляющей не подавляет способность материала демпфировать колебания на очень низкой
частоте.
RJ
V
Ч
Ir
(
—•
=-—-
*¦
я
ю
Рис. 2. Зависимость действительной R и мнимой / частей комплексного модуля сдвига Ок
2
от частоты:
а — при а = 1; б — при а
Рассмотрим, наконец, широкополосное случайное деформирование со спектраль-
спектральной плотностью
Уравнение B7) принимает вид
и, следовательно,
гДе безразмерная частота Q =¦ соC.
158 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
При плотности распределения B9) интеграл сводится к комбинации гипергеоме-
гипергеометрических функций. Особенно простые результаты получаются при целых значениях
а. Если комплексный модуль сдвига представить в виде C0) и C1), то
при а = 1
при а = 2
Результаты вычислений по этим формулам представлены на рис. 2, а и б сплош»
ными линиями, а штриховыми линиями — значения для гармонического деформи-
деформирования с интенсивностью Г. Зависимости / (й) определяют демпфирующую способ-
способность материала. В той части спектра, где заключена основная энергия случайного
процесса, демпфирующие свойства материала не слишком сильно зависят от частоты
и близки к их значениям для гармонического деформирования той же интенсивности,
хотя и несколько меньше последних по величине.
3. СЛУЧАЙНЫЕ КОЛЕБАНИЯ УПРУГОПЛАСТИЧЕСКИХ ТЕЛ
Переходя к рассмотрению краевых задач, воспользуемся вариационным уравне-
уравнением механики сплошной среды:
\'p(a"-tf)-6adV+ (т- -6erfV = 0. C6)
v v
Здесь интегрирование распространено по всему объему рассматриваемого тела|
р — плотность материала; и — вектор перемещения; К — интенсивность массовой
силы; х — тензор напряжений; би — вектор возможных перемещений, бе — соот-
соответствующая ему деформация. В специальном учете поверхностной нагрузки в C6)
нет необходимости, так как она может быть включена в массовую путем введения
обобщенных функций.
Разложим нагрузку К и искомый вектор перемещения в ряд по формам свобод-
свободных колебаний упругого тела М/, построенным без учета пластических свойств его
материала:
1k 2"/(°| C7)
где Q и q— функции одного только времени.
Формы упругих колебаний удовлетворяют известным условиям ортогональности
\9Un-UidV=mibnl; \{№rfii + 2Gtn- -e,) dV = cfinh C8)
v v
где 6/ — объемная деформация для 1-й формы колебаний; е; — девиатор тензора де-
деформаций Е; этой формы; k и G — коэффициент объемного сжатия и модуль сдвига;
bnt — символ Кронекера.
Рассматривая в C6) только те вариации, которые принадлежат к классу фу-нк-
ций C7) и учитывая произвольность вариаций bqi, получим с помощью условий C8)
систему уравнений для определения неизвестных:
miq^+B, = Qr, B;= $т • .etdV. C9)
v
Она нелинейна, так как связь напряжений с деформациями дается нелинейными
соотношениями параграфа 1. Предполагая стационарность случайных функций q
СЛУЧАЙНЫЕ КОЛЕБАНИЯ УПРУГОПЛАСТИЧЕСКИХ ТЕЛ 159
и О а также проводя статистическую линеаризацию соотношении параграфа I еще до
вычисления объемного интеграла в C9), получим из уравнений C9)
ntqn = Qi; D0)
n- .e,dV.
$
Разумеется, коэффициенты Dnt комплексны и зависят от частоты, так что запись
в форме уравнений D0) в той же мере условна, что и в B5).
Эффект пластических деформаций учитывается в D0) членами с Dnl. Полагая
ниже везде этот эффект малым и разыскивая только асимптотически главную часть
решения, найдем, что она дается уравнениями (при разных G>i = Vci/mi)
= Qh D1)
С помощью спектральных представлений случайных функций
оо
Q/= j е"о'К/(ю)Ло, D2)
— оз
где Vi (со) — коррелированные белые шумы, найдем стационарное решение системы
D1), а вместе с ним и спектральное представление девиатора деформации
Первое выражение является спектральным представлением обобщенной коорди-
координаты. С его помощью по стандартной методике спектральной теории находятся ве-
вероятностные характеристики интересующих величин' [192]. Детали вычислений за-
зависят от спектральных свойств нагрузки. Следует, однако, иметь в виду, что на этом
вычисления не заканчиваются, поскольку в выражение GK, а значит, и Оц также
входят некоторые вероятностные характеристики движения Для их определения
должны быть составлены надлежащие уравнения. Ниже этот вопрос рассматрива-
рассматривается на примерах.
Значительный интерес представляет тот случай, когда нагрузки D2) широкопо-
широкополосны, т. е. имеют место плавные спектральные и взаимные спектральные плотности.
Тогда, вычисляя с помощью D3), A7) асимптотические значения интегралов A7),
B7) при малых йц в соответствии с общей методикой [27], получим
Здесь собственные частоты упругого телаа1; = 1/ — ; S; — значения спектраль
ных плотностей S; (<o) нагрузок Q; на соответствующих собственных частотах со/;
Ч, — интенсивность касательных деформаций для 1-й формы колебаний; Г[ =
~ (ег •ег/2I'2; di — значения на частотах Ш; мнимых частей Dilt которые по D0)
B8) имеют выражение
__^-; 1_ТJ = ^ р______. D4)
Уравнения D4), D5) образуют искомую замкнутую систему для определения не-
неизвестных элементов задачи Г, dh ф (ц). Уравнение D4) для определения <р имеет ту
160 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
же структуру, что и уравнение C2) для полигармонического деформирования. Этот
факт, конечно, неслучаен, а отражает то очевидное обстоятельство, что при широко-
широкополосной нагрузке и слабом демпфировании результирующие колебания тела пред-
представляют комбинацию узкополосных колебаний со средними частотами, близкими
к его собственным частотам (О/.
Для практики лабораторного экспериментирования некоторый интерес представ-
представляет случай действия на тело нескольких гармонических составляющих, настроен-
настроенных в резонанс с колебаниями тела nd нескольким формам колебаний и имеющих
случайные и независимые фазы. Полагая что фазы равномерно распределены в про-
промежутке [0, 2л], из A7), B7) получим
2г1а1
D6)
ТЫ
1-п2= *¦
2Г2
Здесь
cti= Aildi. D7)
В этих равенствах Я; и А/ представляют соответственно амплитуды гармониче-
гармонических составляющих частоты со; в выражении обобщенной координаты qt и обобщен-
обобщенной силы Q/.
Уравнения D6) вместе с D5) образуют в этом случае систему для определения
Г, d[, ф (т)).
Рассмотрим случай одночастотной внешней нагрузки, имеющей частоту со, близ-
близкую к 1-й собственной частоте. В этом случае в спектральном представлении C7)
достаточно учесть лишь одно 1-е слагаемое, поскольку здесь условия близки к резо-
резонансу.
Тогда
Г2 1 1
~~ 2
причем
= l.-Ln..!»,.,.^ • D9>
Значение Dlt должно быть взято на частоте со. Уравнения D0), D8), D9) обра-
образуют замкнутую систему для Г, D^, ф.
Уравнения D1) могут быть использованы и для анализа медленно затухающих
свободных колебаний упругопластического тела. Полагая Qi = 0 и разыскивая их
решение в виде
получаем с помощью метода медленно меняющихся коэффициентов уравнения для
амплитуды а/ и фазы ф^:
Ф/ = °V Щ Ф/ = — aidil{2rnt).
Отсюда легко найти логарифмические декременты медленно затухающих колеба-
колебаний по каждой из форм колебаний:
Д/ = яф/сг. E0)
Уравнения A7), B7) для данного случая найдем, предполагая, что начальные
значения фаз ф; @) независимы в вероятностном смысле и имеют равномерное распре-
распределение, В результате придем к D6),
ССОБОДНИГ ЬСЛГРАНИЯ ( И( TF\U1 С БИЧ I'F ПННМ ТРЕНИЕМ И>1
В ряде случаев более удобны соотношения, в которых фигурируют характери-
характеристики напряженного, а не деформированного состояния. С достаточным приближе-
приближением из A) и B5) следуют формулы
r = 2Gr; Tl = 2GTl; at = kbh E1)
где f2 — средний квадрат интенсивности касательных напряжений; Г; и ot — соот-
соответственно интенсивность касательных напряжений и среднее нормальное напряже-
напряжение для 1-й формы упругих колебаний.
В новых переменных D6) принимают вид
Приведем явные выражения через Т, Т; величин, попавших в результирующие
формулы:
E3)
E4)
где v — коэффициент Пуассона.
Приведенные формулы применимы к анализу колебаний как однородных, так
и неоднородных тел, причем в последнем случае модуль сдвига G, коэффициент Пуас-
Пуассона v и вид функции р (Л) зависят от координат точек тела.
4. СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ВНУТРЕННИМ ТРЕНИЕМ
При одночастотных колебаниях по 1-й форме из E2) имеем
т__Т1а1 ш j_i2 ,[ , юг ,._!.
тогда коэффициент
о
dt= i -~D(T)dV, E6)
v
где универсальная функция
1
О
Применим полученные общие формулы для теоретического анализа некоторых
частных случаев, встретившихся в экспериментах.
Результаты исследования консольного длинного тонкостенного трубчатого образца
с насаженным на конце массивным диском приведены в [160П Масса диска значи-
значительно превосходит массу образца, так что при колебаниях по первым формам кру-
крутильных и продольных колебаний в образце реализовалось практически однородное
напряженное состояние.
в пр Фролова
162
BinTPFlltlFF. ТРГН11Ё ПРИ hO 1Г ПАН И ЯX ШГЧГПХ Г ЕЛ
При колебаниях по форме крутильных колебаний в тонкостенном образце наблю-
наблюдается состояние чистого сдвига с амплитудой касательного напряжения
т=
/2' l~" ^
Подставляя эти значения в E0), E3), E6) и E7), получим следующее выражение
декремента крутильных колебаний:
Дк = ^ { D(T)dV. E8)
v
Здесь и ниже принимается, что упругие характеристики Guv постоянны по
образцу, тогда как пластические свойства, определяемые функциями р (h) и D (Т),
переменны.
При колебаниях по первой форме продольных колебаний в образце реализуется
одноосное напряженное состояние с амплитудой нормального напряжения а, так что
1 1
По E0), E3), E6) и E7) находим декремент продольных колебаний
E9)
Сопоставление выражений E8) и E9) показывает, что при одном и том же зна-
значении интенсивности касательных напряжений и v = 0,3 декремент ^продольных
колебаний составляет 0,87 декремента крутильных, т. е. примерно равен'ему. Следо-
Следовательно, приблизительно одно и то же значение декремента может быть при отноше-
отношении амплитуд касательных и нормальных напряжений рав-
равном
JL^'^0,58. F0)
а КЗ
Эта закономерность более пли менее устойчиво подтверж-
подтверждается экспериментами [160]. Сравнение демпфирующей спо
собиости материала при чистом сдвше и одноосном напряжен-
напряженном состоянии проведено в [229]. Сопоставлялось затухание
крутильных колебаний сплошного круглого образца и изгиб-
ных колебаний призматического образца с сечением, пока-
показанным на рис. 3 (плоскость изгиба вертикальна). Условия
эксперимента были такими, что в обоих случаях напряжения
не изменялись по длине образца.
При крутильных колебаниях круглого образца напря-
напряжения
Т— ТР . Т -п- п — П
1 — _ , 1Х — р, а1 — и,
Рис. 3. Поперечное
сечение призматиче-
призматического образца, под-
подвергаемого изгибным
колебаниям [229]
причем р — безразмерный радиус, изменяющийся в интервале [0, 1]; т — максималь-
максимальная в пределах образца амплитуда касательного напряжения.
Полагая, что пластические свойства материала образца переменны, но зависят
только от радиальной координаты, по E0) получим следующий декремент крутильных
колебаний:
F1)
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ВНУТРЕННИМ ТРЕНИЕМ
!63
При изгибных колебаниях образца с сечением, показанным на рис. 3, напряжения
т = -
Здесь о — максимальная амплитуда изгибного напряжения; | — относительная
координата, отсчитываемая в вертикальном направлении и изменяющаяся в интер-
интервале [—1. И-
Полагая, что пластические свойства материала зависят только от вертикальной
координаты, по E0) получим логарифмический декремент колебаний
ди=-
ё±)?
F2)
В эксперименте [229] обнаружены близкие значения декрементов при выполне-
выполнении условия F0). Сравнение выражений F0) и F2) показывает, чго это возможно,
если зависимости вида функции D (Т) от переменной р в первом случае и от % во вто-
втором одинаковы.
В работе [233] экспериментально сравнивались лснарифмическни декремент по-
полярно-симметричных колебании тонкостенной сферической оболочки и декремент
колебаний изготовленного из оболочки плоского образца, находящегося в условиях
чистого изгиба. При колебаниях в оболочке реализуется двуосное изотропное напря-
напряженное состояние. Следовательно,
Т- й1 ¦ Т - 1 ¦ гт - 2
где aij — амплитуда нормального напряжения.
Полагая, что пластические свойства материала оболочки переменны по толщине,
по E0) получим декремент колебаний
h
F3)
l-v) h J
1г
' Т
2г
При колебаниях плоского образца в условиях чистого изгиба единственное дей-
действующее нормальное напряжение линейно изменяется по толщине, так что
2г
ЗЛ'
Здесь а2 — максимальная по образцу амплитуда нормального напряжения.
Есть все основания полагать, что пластические свойства материала здесь так же
изменяются по толщине, как и в оболочке, и тогда по E0) получим логарифмический
Декремент колебаний
h
2
\&г.
h
F4)
Сравнить значения F3) и F4) в общем случае не представляется возможным.
Поэтому рассмотрим крайние случаи. Если пластические свойства материала одно-
однородны по толщине и функция D (Т) линейна, находим
1+у
3A-v)
ziD
164 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
При равных амплитудах напряжения и v — 0,3 эти величины приблизительно
равны. В другом крайнем случае, когда значения функции D (Т) отличны от нуля
только в тонких слоях толщиной t около поверхности, пол>чим
Л, = '¦ U I т= ; И*— ¦ U | —у^г
3A-v) h \Ув I h \/6
При равных амплитудах напряжений и v = 0,3 декремент изгибных колебании
полоски примерно в 4,2 раза больше декремента колебаний оболочки. При экспери-
эксперименте обнаружено различие декрементов примерно в 2 раза. Приведенное сравнение
подтверждает общий вывод работы [129] о существенном влиянии поверхностных слоев
образца на суммарные потери.
В работе [163] экспериментально исследовались одночастотные изгибно-крутиль-
ные колебания в системе, состоящей из консольного круглого стержня с эксцен-
эксцентрично насаженным массивным диском. Построим теорию этого эксперимента. Массой
образца пренебрегаем ввиду ее малости по сравнению с массой диска. Тогда в по-
полярной системе координат г, б, г с осью г, направленной по оси стержня, распреде-
распределение экстремальных напряжений следующее'
причем х — амплитуда касательного напряжения на поверхности образца; о — мак-
максимальная амплитуда нормального напряжения в заделке при изгибе; р ->- безраз-
безразмерный радиус, изменяющийся в промежутке [0, 1]; 6 — полярный угол; | — без-
безразмерная осевая координата с промежутком изменения [0, 1]; остальные напряже-
напряжения пренебрежимо малы.
Среднеквадратическая интенсивность касательных напряжений и среднее нор-
нормальное напряжение соответственно равны:
j ^f F5)
где отношение
Подставляя F5) в E0), получим логарифмический декремент колебаний
я
1 I 2
0 ° F6)
При о -*¦ 0 отсюда находим декремент крутильных колебаний Дк, значение ко-
которого определяется F1), а при т -*¦ 0 — декремент изгибных колебаний Д„.
Значения указанных декрементов колебаний могут быть вычислены, если из-
известна зависимость D = D (Т) для материала. Часто полагают, что она имеет степен-
степенной вид
Часть интегралов в F6) может быть вычислена, и тогда
J "
4(l-v)
F7)
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ВНУТРЕННИМ ТРЕНИЕМ
165
причем
К 14-х2
р.л (z) — функция Лежандра первого рода; декремент крутильных колебаний
1
F8)
При получении этих формул было принято, что пластические свойства материала
зависят от радиуса, причем так, что g = g (p), a a = const.
По F7) н F8) при а = 1 и v = 0,30 были выполнены вычисления'. Их результаты
представлены на рис. 4. Увеличение любого из напряжений — нормального или ка-
касательного — приводит к росту декремента колебаний. Этот эффект наблюдался
экспериментально [163]. На рис. 4, а и б кружками показаны результаты этих экс-
экспериментов.
л/ли
20
1,0'
?
2,0
V
W
/
/
/
О 0,5 1,0
1,0
Рис. 4. Зависимость декремента колебаний от нормальных (а) и касатель-
касательных F) напряжений при сложном напряженном состоянии
Проанализируем еще одну серию экспериментов по сложным колебаниям. Рас-
Рассмотрим изгибные и крутильные колебания защемленного по концам сплошного
круглого стержня с массивным диском посередине. В первой группе экспериментов
диск был насажен на стержень эксцентрично и при колебаниях возбуждалась форма
изгнбно-крутильных колебаний [230]. Дадим теоретическин анализ этого экспери-
эксперимента. Экстремальные напряжения распределены следующим образом
т.-е = тр; ог = а (I -1 g |)p cos 6. F9)
Обозначения здесь те же, что и выше, с тем лишь отличием, что теперь безраз-
безразмерная осевая координата | должна изменяться в интервале [—2, 2]; сечение 5 = О
совпадает с плоскостью диска. В этом случае
* A —161) cos a
— [ ? lK cosSS; 0-! =
Подставляя эти выражения в E0) и упрощая результат, придем к выражению
Декремента колебаний F6). Следовательно, и в этом случае можно использовать
рис. 4, а и б.
В экспериментах работы [230] реализовался случай, когда [3 = 0,13 Результаты
экспериментов для тех материалов, у которых а *» 1, показаны крестиками
на рис. 4, о.
166 ВНУТРЕННЕЕ ТРЕНИЕ ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
В заключение проведем общее исследование декремента одночастотных колеба
ний. Его "явное выражение легко получить подстановкой представлений E3), E6)
в E0) и умножением числителя и знаменателя на а|/2, В результате
~D(T)dV
G0)
где
s=w G1)
— среднеквадратическое среднее нормальное напряжение.
Чрезвычайно простая формула для декремента колебаний получается в случае
однородного деформирующегося объема и однородного напряженного состояния
в нем, После вычисления объемных интегралов получаем
3A-2v)
G2)
Из G2) следует, что при одном и том же значении Т максимум декремента коле-
колебаний имеет место при 2 = 0, т. е. в условиях чистого сдвига, причем
G3)
Пусть D (Т) — монотонная возрастающая функция; материал однороден, То1да
из G0) легко получить неравенство
Д,<1Ш<Гт„), G4)
где Tmsx — максимальное в пределах тела значение Т,
Оказалось, что декремент колебаний по любой форме не может быть больше де-
декремента чисто сдвиговых колебаний при максимальном для тела значении Т.
Обратимся к экспериментам, описанным в работах [39, 92, 230, 231], где изуча-
изучались одночастотные колебания диска, концентрично насаженного на защемленный
по концам круглый стержень.
Колебания возбуждались по двум формам — первой форме крутильных и пер
вой форме изгибных; и в этом случае имеем распределение напряжений F9), но те-
теперь
r1=p; ai=0; ri_(i-i:Op«»_B. Of_(i-iEl)Pcc.a G5)
У о о
и
т=~рУ1+?,ц1-\1\)*Со5*е. G6)
Декременты колебаний по каждой из форм должны находиться по E0) с учетом
выражений G5) и G6). Результат таков
<">
32(l-fv)ovp / Тц \ Грз A—5J cos2 8
С С С С
]) ) J
АМПЛИПДНО ЧАСТОТНЫ F ХАРАКТГРПП НКП КОЛГСАНИП ТЕЛА
167
Здесь ш, и со_, — частоты свободных крутильных и изгибных колебаний соответ-
соответственно, а функция q> определяется уравнением
1
1
ЛА,
которое легко сводится к биквадратному.
Вычисления по G7) и G8) могут быть выполнены только с использованием
ленного интегрирования. При вычислениях принималось, что р (h) = const. В
случае при одночастотных колебаниях получа-
получается линейная зависимость декремента колеба-
колебаний от интенсивности напряжений, часто встре-
встречающаяся на практике. При вычислениях при-
принималось, что пластические свойства материала
образца изменяются только в функции радиу-
радиуса, причем по произвольному закону. Резуль-
Результаты вычислений представлены на рис. 5, а и б.
На рисунке Дк.о — декремент крутильных коле-
колебаний при отсутствии изгибных; А„.о — декре-
декремент изгибных при отсутствии крутильных.
Числа около кривых дают отношение coj/co2.
В экспериментах [92, 229, 231] реализовал-
реализовался случай, когда отношение частот для всех
обследованных материалов было близко к зна-
значению 0,5. Результаты экспериментов представ
лены на рис. 5, а я б точками [229], крестиками
[92], кружочками [231]. Следует констатировать
хорошее качественное согласие расчетов и экс-
экспериментов.
чис-
чисэтом
X
——-—
0
рис. 5. Декремент колебании при изгибнг-ьрутиль-
пых колебаниях:
а — крутильных колебаний, б — изгибных колеба-
шш
У
S. АМПЛИТУДНО-ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ КОЛЕБАНИИ ГЕЛА
С ВНУТРЕННИМ ТРЕНИЕМ
Рассмотрим околорезонансные одночастотиые стационарные колебания системы
с внутренним трением. Для определения амплитуды а{ обобщенной координаты qi
имеем D9). Входящее в него значение йц на чаэтоте вынужденных колебаний со имеет
следующее явное выражение (с учетом замен E1)).
D,
"р (л) т dv,
\1Gnl 2Gn
G9)
гричем
/2 '
Обращаем внимание на то, что Dn не зависит от частоты колебаний. Мнимая
часть G9) совпадает с E6), Обозначая вещественную часть bt, имеем
(80)
168 BHi'TPEIIHTF TPII1IIE ПРИ Л0 1FE Afll/ЯХ ilJPirUX ГЬА
причем
В силу G9) hi и d; зависят от амплитуды а/ и не зависят от частоты.
С использованием (80) уравнение D9) можно переписать так.
[(ci — bt — rn^co2J + df \щ = Ai.
Разрешая его относительно частоты, попучич уравнение ачппитудно-частотной
характеристики
»
у Ai — afdf.
Если произведение atdi является монотонно возрастающей функцией амплитуды
го максимачьная амплитуда определяется уравнением
Ai = ald,(at), (81)
а частота, на которой достигается этот максимум,
) (82)
Обычно эта частота крайне мало отличается от соответствующей собственной
частоты Ш), так что отличием почти всегда можно пренебречь.
Уравнение (81) можно переписать следующим образом, вводя выражение декре
мента колебаний.
^Л? (83)
Вычисление резонансной амплитуды возможно, если известна зависимость де-
декремента колебаний от амплитуды.
в. ОПРЕДЕЛЕНИЕ ДЕМПФИРУЮЩИХ СВОЙСТВ
КОНСТРУКЦИОННЫХ МАТЕРИАЛОВ ПО ЭКСПЕРИМЕНТАЛЬНЫМ ДАННЫМ
Для успешного проведения вычислении, предписываемых приведенными выше
общими формулами, необходимы сведения о свойствах материалов. Необходимо
знать плотность, модуль сдвига, коэффициент Пуассона и плотность распределения
р (h), характеризующую пластические свойства. В справочной литературе можно
найти все величины, кроме плотности р (h). В литературе имеются сведения о декре-
декрементах свободных колебаний. Как показано в параграфе 4, декремент одночастот-
ных колебаний является оператором от р (h).
Если известна зависимость декремента колебаний от амплитуды напряжения
в условиях чистого сдвига, то р (К) вычисляется по несложной формуле [148], Во
многих случаях можно использовать аппроксимацию B9)
р (/;) = aHha'1.
Тогда по E7) получим
2GI 2ла \ 2 ' 2 1'
где В — бета функция Эйлера,
ДЕМПФИРУЮЩИЕ СВОЙСТВА KOHCTPi КЦПОПНЫ \ \l\lbPHWOB
169
Напомним, что декремент крутильных колебаний диска, насаженного на тон
костенный трубчатый образец,
Дк = яО(Г) (85)
Если известна зависимость Дк от Т, то по (84) параметры закона распределения
могут быть легко восстановлены При анализе одночастотных колебаний достаточно
знать только зависимость D (Г), как это видно из G0)
Часто для экспериментального определения демпфирующих свойств материалов
используют продольные колебания. Декремент колебаний имеет выражение E9)
дня предположительно однородного образца
Поэтому возможен пересчет:
;АП.
(86)
(87)
В некоторых случаях для определения демпфирующих свойств материалов ис-
используют эксперимент, в котором призматический образец находится в состоянии
чистого изгиба. Декремент колебаний в этом случае
2г\2
D
/6
2г
dz.
При аппроксимации (84)
(88)
где Т — среднеквадратическая максимальная по образцу интенсивность касатель-
касательных напряжений.
Формула пересчета с (88) на (85) имеет вид
(89)
2A-И)
С помощью (87) и (89) легко пересчитать результаты экспериментов с продоль-
продольными колебаниями и с колебаниями чистого изгиба и представить их в единой форме
зависимости Ак — Т.
Для этой цели использовалось представление
(90)
(91)
где т — амплитудное значение интенсивности касательных напряжений (Т = т,
а Дко — значение декремента при т = т0. Положив в (90) Т = То/2, получим
2,
где До 5 — декремент колебаний при т = то/2.
Из (91)
ш -А.
170
ВНУТРЕННЕЕ TPLHHE ПРИ КОЛЕБАНИЯХ УПРУГИХ ТЕЛ
Большое число сведений о декрементах колебаний для различных материалов и
для различных условий содержится в гл. IV и в справочнике [165] На основе этих
материалов составлена краткая таблица, содержащая параметры представления (90).
Виоропоглощающие свойства конструкционных материалов при 20
Материал
Сталь1
СтЗ
СтЮ
15
65Г
30 X ГС А
12Х18Н9Т
ХН62ЧВКЮ
То.
кгс/мм9
7,51
16
10
30
20
Ив
Ч Л
Дко'
%
1 32
170
3 52
0 18
0 70
2 02
0 2i
а
1
1
1
1
1
0 94
0 65
Матер и а л
Алюминиевый сплав:
Д16
Д16Т
АМг-1
Красная медь
Латунь.
Л63
ЛС59-1
То,
кгс/мм2
4,62
12
8 09
70
14
10
°С
ДКО'
%
1,38
014
9 94
32
0 095
0 78
а
06
0 40
1 0
2 58
0 39
1 30
Часть третья
ВИБРОИЗОЛЯЦИЯ
Глава VI
ПРИНЦИПЫ ВИБРОИЗОЛЯЦИИ
1 ВИБРОЗАЩИТНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Элементы расчетной модели и их характеристика. В расчетной модели вибро-
виброзащитной системы можно выделить три основные части: источник возмущений (или
кратко источник), объект защиты (объект) и виброизолирующее устройство (ВУ).
В простейшем случае источник и объект считаются твердыми телами, движущимися
поступательно вдоль некоторой оси X (рис. 1, а). Приложенные к системе внешние
силы F (возмущения), а также внутренние силы R и R', с которыми виброизолирую-
виброизолирующее устройство, расположенное между источником и объектом, воздействует на них,
считаются направленными вдоль оси X; тем самым ось X служит осью рассматри-
рассматриваемого виброизолирующего устройства.
В большинстве случаев масса одного из тел системы—источника или объекта —
существенно превышает массу другого тела — соответственно объекта или источ-
источника. Тогда движение тела «большой» массы может считаться не зависящим от дви-
движения тела «малой» массы. Если, в частности, «большую» массу имеет объект, то его
обычно считают неподвижным, движение системы вызывается в этом случае приложен-
приложенными к источнику внешними силачи, представляющими силовое возбуокдение F =
= F (t) (рис. 1, б). Если «большую» массу имеет источник, то закон его движения
| = § (/) можно считать заданным; это движение играет роль кинематического воз-
возбуждения системы (точнее — объекта, рис. 1, в). В обоих случаях тело «большой»
массы называют несущим, или основанием, тело «малой» массы — несомым.
Схему, представленную на рис. 1, б, обычно используют тогда, когда речь идет
о защите зданий, сооружений, перекрытий или фундаментов от динамических воздей-
воздействий, возбуждаемых установленными на них машинами с неуравновешенными дви-
движущимися частями или иным виброактивным оборудованием. Схему, изображенную
на рис. 1, в, используют в задачах виброзащиты приборов, аппаратов, точных меха-
механизмов или станков, т. е. оборудования, чувствительного к вибрациям и устанавли-
устанавливаемого на колеблющихся основаниях или на движущихся объектах.
Виброизолирующее устройство представляет важнейшую часть виброзащитной
системы, его назначение состоит в создании такого режима движения, инициируемого
заданными возмущениями, при котором реализуется цель защиты объекта. Во многих
случаях это оказывается достижимым при использовании безынерционного вибро-
виброизолирующего устройства, которое для схем, изображенных на рис, 1, представ-
представляет одноосный виброизолятор. Для такого виброизолятора реакции R и R' совпа-
совпадают по величине (/? = R'), причем в рассматриваемом ниже простейшем случае ре-
реакцию R можно считать пропорциональной деформации б и скорости деформации б
виброизолятора!
. A)
172
ПРИНЦИПЫ ВИБРОИЭОЛЯЦНИ
Зависимость A) описывает линейную характеристику простого безынерционного
виброизолятора; коэффициенты с и Ь называются соответственно жесткостью и коэф-
коэффициентом демпфирования. При 6 = 0A) описывает характеристику линейного иде-
идеально упругого элемента (пружины); при с = 0 — характеристику линейного вяз-
вязкого демпфера. Таким образом, модель виб-
виброизолятора с характеристикой A) можно
представить в виде параллельного соедине-
соединения пружины и демпфера (рис. 2).
Коэффициент жесткости с виброизолятора
с линейной характеристикой A) определяет
собственную частоту системы
F
К
Источник
F(t)
\
3
R
R
|—1
т,
г—1
LJ
[—|
.1
Л"
Объект
"'J
R'
X
а)
X
о)
X
~t(t)
в)
Рис.
B)
Значение с определяет также статиче-
статическую деформацию 6LT (осадку) виброизоля-
виброизолятора, связанную с
Принципиальная схема вибро-
виброзащитной системы:
а — общий случай; б — силовое воз-
возбуждение F = F ((); в — кинематиче- „ , ...
ское возбуждение % = i (о где ост — деформация под осевой статической
нагрузкой mg sin a; m — масса несомого
тела; a — угол наклона оси виброизолятора к горизонту. Зависимость со0 =
= ш0 (бст) приведена на рис. 3.
Демпфирующие свойства системы, представленной на рис. 2, характеризуются
коэффициентом демпфирования
п = Ь/Bт) C)
и относительным демпфированием
v — n/a>e = b/2}rcm. D)
При v = 1 р системе реализуется критическое демпфирование [123].
-э*
iff
Рис. 2. Расчетная модель простейшей виброзащитной
системы с одной степенью свободы; /я, х — соответст-
соответственно масса и координата несомого тела; F — сила,
приложенная к несомому телу; ? — координата основа-
основания; с, Ь — соответственно жесткость и коэффициент
демпфирования виброизолятора
Эффективность виброзащиты. Коэффициенты эффективности при гармоническом
возбуждении. Под эффективностью виброзащиты понимается степень реализации
виброзащитным устройством целей виброзащиты.
При силовом гармоническом возбуждении
F (t)=F0 sin u>t; g @ = 0,
где Fo и (о — соответственно амплитуда и частота вынуждающей силы; цель защиты
может состоять в уменьшении амплитуды Ro силы, передаваемой на неподвижный
объект,
(о)
BUBP01ALUI1THUF СИСТЕМЫ С ОДНОЙ СГРПЕНЬЮ СВОБОДЫ
173
или в уменьшении амплитуды Хо установившихся вынужденных колебаний источ-
источника:
При кинематическом гармоническом возбуждении
цель защиты может заключаться в уменьшении амплитуды абсолютного ускорения
(перегрузки) объекта
^г W
(8) 'т
sol
а также в уменьшении амплитуды его колебаний
относительно основания:
х,_ ?от2 (9)
Количественно степень реализации цели виб-
розащиты можно охарактеризовать значениями
безразмерных коэффициентов эффективности. Для
so
20
\
5 10 IS 20$сг,с/1
расчетной модели, изображенной на рис. 2, при рис. з. зависимость собствен-
силовом возбуждении ВВОДЯТ коэффициенты ной частоты ш0 простейшей виб-
виброзащитной системы от стати-
^0 сХ0 чёской осадки бст виброизоля-
fy?= ~р~\ Х== р " ' ' тора
В случае кинематического возбуждения рассматривают коэффициенты
Величины kR и /гх называют соответственно коэффициентом виброизоляции и
коэффициентом динамичности.
Зависимость k^, k^ и kx, от безразмерных параметров г — м/сп0 и V имеет вид
i/"__L±J
A2)
Условия эффективности виброзащиты по критериям к^, kx, kx,. Условия эффек-
эффективности виброзащпты по критериям kR, kx, kx, формулируют в виде неравенств
1;
A3)
Поскольку указанные коэффициенты зависят от частоты, можно говорить об
эффективности виброзащиты на данной частоте г или в заданном частотном диа-
диапазоне 2 g; г < z Анализ соотношений A3) приводит к следующим выводаад.
б k 1 б б
дущ д
1 обеспечивается при любом
ф
пазоне 2j rg; г = z2. Анализ соотношений A3)
1. Эффективность виброзащиты по критерию
Уровне демпфирования в частотном диапазоне
г ^У~2. A4)
При любом 2 из диапазона A4) эффективность тем выше, чем слабее демпфиро-
вание; наилучшей эффективностью обладает идеально упругий виброизолятор (v = 0).
74
ПРИНЦИПЫ ВИВРОИЗОЛЯЦИИ
2. Эффективность виброзащнты но критерию kx _ 1 также обеспечивается в диа-
диапазоне A4) при любых значениях V. При v> ,_ виброззщита эффективна во всей
диапазоне частот 0<2<оо; при v
p^ эффективность имеет место в диапазоне
— 2v2).
A5)
При фиксированной величине г эффективность повышается с ростом демпфиро-
демпфирования.
3. Виброзащита по критерию kx, =g 1 эффективна во всем частотном диапазоне,
1
I/O
—, а при v < —~= в диапазоне
п
0<г<:
f 2(l-2v2)
A6)
Степень эффективности па фиксированной частоте г повышается с ростом демпфи-
демпфирования; в наихудшем случае (при v = 0) диапазон эффективности соответствует
полосе
0<г<-
A7)
Зависимости k^ — kR (г, v), kx — kx (г, v), kx, = kx, (г, v) при фиксированных v
представлены на рис. 4—6. Эти зависимости можно рассматривать как амплитудно-
частотные характеристики рассматриваемой системы по соответствующим входу и
выходу. На рис. 7 и 8 изображены фазочастотные характеристики виброзащитной
системы
= arctg
2\>z
) = arctg
1 — г- A — 4\>2)'
A8)
A9)
представляющие зависимость фазовых сдвигов процессов соответственно х (t), x' (t)
[формула A8)] и R (/), х (t) [формула A9)] относительно возмущений F (t) и I (f).
1. Установившиеся колебательные процессы в виброзащитной системе
при кинематическом возбуждении
Параметр
(Г (/)
Ф @
x{t)
%okft Sin (CCif — Т))
х' (/)
R а)
Связь коэффициентов эквивалентности kR, kx, kx,, а также фазовых сдвигов е
и ri с амплитудами и фазами процессов х (i), x' (/), R (fj и их производных по вре-
времени иллюстрируется табл, 1 и 2,
ВИЬРОЗЛЩИТНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
175
2. Установившиеся колебательные процессы в виброзащитноТ системе
при силовом возбуждении
.—•— '
Параметр
dtn
х-х' (t)
/угд sin (со/ — п)
Эквивалентные коэффициенты жесткости и демпфирования. Виброизолирующее
устройство часто выполняют в виде соединения нескольких виброизоляторов, обра-
образующих сложный виброизолятор. При определенных условиях реакция R такого
соединения может аппроксимиро-
аппроксимироваться зависимостью A), где б —
деформация соединения в целом.
Тогда рассматриваемый сложный
виброизолятор эквивалентен (в
смысле воздействия на источник и
объект) простому, коэффициенты сэ
и Ьд которою называются при этом
эквивалентными коэффициентами
жесткости и демпфирования.
В табл. 3 приведены выражения
для эквивалентных коэффициентов
жесткости и демпфирования неко-
некоторых схем соединения простых
виброизоляторов, а также условия
эквивалентности соответствующих
соединений одному простому виб-
виброизолятору (звездочкой отмечены
нормирующие значения). Указан-
Указанные в табл. 3 условия приведения
справедливы для возмущений лю-
любого типа.
Эффективность виброзащитных
систем при полигармонических воз-
воздействиях. Полигармоническим на-
называется [105] процесс, представи-
мый в виде конечной тригономет-
тригонометрической суммы. Например, поли-
w
в -
о,г
гармоническое возмущение кинема-
кинематического типа задается суммой
B0)
0,1
..¦—•
(-И4
I
^"'
— у
¦1=0,01
/
0,05
W
"Иг—
[
1/1 |
1 \Л>0
Ж |
1—viN
qor\.—
0,50
\
\
w
u_
1
\
\
\
s
OJ
0,2 0,3 qt o,s qst
S S z
Рис. 4. Зависимость коэффициента виброизоля-
виброизоляции kg от расстройки z
где |/0, Шу, а./ — соответственно амплитуда, частота и начальная фаза /-й гармоники.
Совокупность чисел ?/0 (/ = 1, 2, ..., п) образует амплитудный спектр воздействия.
Условие эффективности виброзащиты может при этом отождествляться с совокуп-
совокупностью условий эффективности на каждой из гармоник воздействия. Так, если цель
виброзащиты состоит в уменьшении перегрузки max \ x (t) \ объекта, условие эффек
тивности эквивалентно выполнению п неравенств
(/=1, 2, ..., я),
B1)
176
ПРИНЦИПЫ BllbPOlIJO 1ЯЦИ11
я к
¦&
•&
-—
——-
— -
-II —
— —
— -
— —
.1 ¦
— —
^*—.
— —
^-—
¦——.
,
^С
и
<
/
\
\
/
/
N
/
/
/
1
/
/
/
/
II
\
II
J
Ж
ч\\
ч
/
«3
В11БР03АЩ11ГНЫЕ CIlClLVbl С ОДНОЙ СП ПЕНЬЮ СВОБОДЫ
177
3 Эквивалентные коэффициенты жесткости и демпфирования
сложных виброизоляторов
Счема подвеса
i en вия приведения
к эквивалентному
внброизолятору
Эквивалентный коэффициент
демгct ирорания
-VWV-
{k — \, 2, , n)
_ 1
К u bi
ck = Н =,
(i —^ 3)
А.-
(/ =1. 2)
c2t
(/•=-3, 4,
c,c,
¦ +62 +й.
=*?
—ВН
1
178
ПРИНЦИПЫ ВИБРОИЗСиЯЦИИ
что равнозначно условию ограниченности ординат амплитудно-частотной характе-
характеристики системы в заданных точках г = гу (/ = 1, 2, ..., п). Условия B1) означают
также, что эффективная по снижению перегрузки объекта виброзащитная система
трансформирует спектр входного сигнала ?.0<oJ (/ = 1, 2, ,.., п) в заданный спектр
ll0<>>]kR (z;) выходной переменной.
Рис. 7. Зависимость фазового сдвига t от
расстройки г
Рис. 8. Зависимость фазового сдвига ti от
расстройки г
571
&
гж
j
ж
г
л
3
я
6
/<
If/
к
ж
/л-
у
^——
У = оо
—1 '¦
^-—
.-—
8 —
Наряду с приведенным выше возможны определения эффективности, основанные
на иных требуемых свойствах выходною сигнала Например, одной из важных
характеристик полигармонического процесса является его дисперсия. Дисперсия
процесса B0) определяется суммой [105]
п
и не зависит от фазовых сдвигов между составляющими. Если по-прежнему считать
цель виброзащиты состоящей в снижении перегрузки объекта (по сравнению с пере-
перегрузкой источника), то в качестве условия эффективности можно принять требо-
требование
D .
?<f>=—Lscl. B3)
* D..
Здесь D.., D дисперсии абсолютного ускорения источника и объекта, определяе-
определяемые при кинематическом возмущении B0):
п \
B4)
Виброзащитная система, эффективная по снижению перегрузки объекта на ка-
каждой из гармоник воздействия, оказывается эффективной и по снижению дисперсии
ВИЬРОЗЛЩИТНЫЕ СИСТЕМЫ С ОДНОП СТСПГНЬЮ СВОБОДЫ 179
броперегрузки, но не наоборот. Аналогичным образом можно охарактеризовать
"лАективность виброзащиты для других сочетании входною и выходного сигналов.
Эффективность виброзащитных систем при случайных стационарных возмущениях.
Случайный процесс ? (t) [43] называется стационарным (в широком смысле), если
гс) математическое ожидание т^ и дисперсия Dj постоянны, а корреляционная функ-
функция Къ М зависит лишь 'от разности двух произвольных моментов времени / и
С (т = f — О-
Математическое ожидание вибрационного стационарного процесса принимается
равным нулю Дисперсия D,. и корреляционная функция К% (т) однозначно выра-
выражаются через спектральную плотность S^ (со) процесса % (t)
Idco
B5)
Kt = — \ St (to) cos ют dco.
0
В свою очередь, S^ (со) связана с /С| (т) зависимостью
S6 (со) = ~ [ Ц (т) cos сот dr. B6)
о
Зная спектральную плотность Sj процесса | (t), легко вычислить спектральные
плотности процессов | (t) и в (t) = ^ | (/) rf^; так
о
S: (со) = co2SE(co); Se («) = ш~25| (оз). B7)
Спектральная плотность 5Ч1 выходного сигнала связана со спектральной плот-
плотностью входа S» соотношением [43]
!де k- (со) — амплитудно-частотная характеристика линейной динамической си-
системы, осуществляющей преобразование % (/) в т) @.
Физический смысл функции S^ (со) состоит в том, что она описывает частотное
распределение дисперсий гармоник, составляющих процесс | @, являясь тем самым
важной энергетической характеристикой %A). С этой точки зрения снижение спект-
спектральной плотности тою или иного выходного сигнала, например пере1рузки объекта
при кинематическом возмущении, может составлять одну из целей виброзащиты.
Пусть S.. (со)—спектральная плотность ускорения основания. В соответствии
с B8)
5.. (w) = S,.(<o)^(v, г).
В качестве условия эффективности виброзащиты в этом случае можно принять
выпотнение неравенства
kR (v, г) ==? 1 B9J
в некотором заданном частотном диапазоне. Виброзащитная система, удовлетворяю-
удовлетворяющая условию B9), называется эффективной по снижению спектральной плотности
перегрузки объекта.
В других случаях вместо B9) может быть выставлено преобразование
D..
*Г= тг1^1- C°)
180
ПРИНЦИПЫ ВПБРОИЗОЛЯЦИИ
Виброзащитная система, удовлетворяющая условию C0), называется эффектив-
эффективной по снижению дисперсии перегрузки объекта. Система, эффективная по критерию
B9), будет эффективной и по критерию C0), но не наоборот.
Аналогичным образом вводятся условия эффективности виброзащитных систем,
подверженных стационарным случайным воздействиям, и для других сочетаний вход-
входных и выходных процессов.
Введенные критерии (условия) эффективности виброзащитных систем принци-
принципиально не связаны с конкретной структурой виброизолирующих устройств. Поэто-
Поэтому введенные критерии сохраняют смысл при оценке эффективности виброизо-
виброизолирующих устройств и более сложной структуры.
Одномассные виброзащитные системы с безынерционным виброизолирующим
устройством, не приводящимся к простому виброизолятору. В практике расчетов
некоторых одномассных виброзащитпых систем (например, пневматического типа)
принимают расчетные схемы, изображенные на рис. 9. Такие схемы (см. табл. 3)
т
<
X
тфм
Рис. 9. Расчетные модели одномассных виброзащитных систем с виброизоли-
виброизолирующим устройством, не приводящимся к простому
не приводятся к простейшим (см. рис. 2). Эффективность виброзащнты в этом случае
по-прежнему оценивается коэффициентами kR, kx, kx,, для которых сохраняется
физический смысл, вытекающий из A0) и (\\); необходимо лишь в выражении для
кх считать с эквивалентной статической жесткостью соединения:
Зависимость k^, kx, kx, от безразмерных параметров
^^
характеризующих схемы на рис. 9, а—в, и от параметров
, с' 1 fin b
с г с 2 у cm
в случае схемы на рис. 9, г определяется формулами
Л1/2
CD
где параметры Д, Д^, Д^, Дх, для каждой из схем рис, 9 приведены в табл. 4,
ОДНОМЕРНЫЕ ВНЕРОЗДЩИТНЫЕ СИСТЕМЫ 181
4. Параметры для расчета эффективности виброзащитных систем
рис Я
а
б
е
г
1 + 4V2Z2
X 4v2z2
« + •»• +«Ж
»л 4-' «л
л,
1
д
Д n-f. Д у/ —
1 -f 4V.2 2 A + Z{) +
n ПЧ
2. ОДНОМЕРНЫЕ ВИБРОЗАЩИТНЫЕ СИСТЕМЫ
Матрицы переноса. Повышение эффективности виброизоляции в ряде случаев
(например, при динамическом гашении колебаний) связано с использованием инер-
инерционных свойств виброизолирующего устройства. Учет этих свойств в линейных
динамических моделях, в частности в рассматри-
рассматриваемых ниже одномерных виброзащитных систе-
системах, особенно пр'осто осуществляется с помощью
метода матриц переноса.
При использовании метода матриц переноса [12,
270] рассматриваемая одномерная линейная система
(рис. 10) с помощью нормальных к ее оси сечений
разделяется на п частей, которым присваиваются
номера от 1 до п+ 1. Динамическое состояние
;-го участка характеризуется абсолютными смеще-
смещениями X] и лг/ч1 его граничных сечений и продоль-
продольными силами Pj и Р/+], возникающими в этих сече-
сечениях. Для определенности будем считать, что Р, ма одномерной линейной коле-
гл!п пРеДставляют силы, с которыми на /'-е и
V т 1)-е сечения /-го участка действуют соответ-
соответственно (/" — 1)-й и (/ + 1)-й участки; смещения х,- и х/+1 будем отсчитывать от
Равновесных положений соответствующих сечений; положительные направления
*/¦ */+i. Pj, P/+1 изображены на рис. 10.
Вследствие линейности системы величины *,-, х.+1. Pi, Р,-п связаны соотноше-
соотношениями
r"~~" V"L" P' C2)
Pj + 1 X
J -V'
Рис. 10. Принципиальная схе-
номерной линейной
бательной системы
182 ПРИНЦИПЫ ВИБРОИЗОЛЯЦИИ
эквивалентными матричному равенству
где
C4)
Матрица А'/' называется матрицей переноса участка / от сечения / к сечению
/+ 1; матрица переноса того же участка с противоположным направлением пере-
переноса — от сечения /+ 1 к сечению / — будет обратной матрице А1/'.
Элементы а$ (k, /= 1, 2) матрицы А1'' отображают динамические свойства
/-го участка и являются функциями оператора дифференцирования р = dldt. В этом
смысле соотношения C2) или C3) фактически представляют операторную запись
дифференциальных уравнений движения /-го участка. Дифференциальные уравне-
уравнения движения системы в целом представляют при этом совокупность равенств вида
C3), составленных для всей системы или отдельных ее частей, и граничных условий,
задающих закон движения граничных сечений (случай кинематического возбужде-
возбуждения) или определяющих действующие в этих сечениях внешние силы (силовое ро^-
буждение),
5. Матрицы переноса элементов виброизолирующих устройств
Участок
Жесткая невесомая вставка
Сосредоточенная масса т
Линейный упругий элемент жесткости с
Вязкий демпфер с коэффициентом демпфиро-
демпфирования Ь
Безынерционней упругодемпфированный виб-
виброизолятор
Схема у
1
1
т
j
'
А А
' V
j
1
—1
С
А А
V V V
b
-в
С
WVN
5h
ь
ча
:тка
1 X
'^'
-Г
аа! X
V
У
-1
1
Матрп
(
С
ц^ переноса
/1 0\
Vo ij
1 0«
ip' 1 /
о i;
+ |rt)
одномерные виьрозащишые системы 183
В табл. 5 приведены матрицы переноса простейших элементов, из которых обычно
мпонуются расчетные модели виброзащигных систем, трактуемых как системы
сосредоточенными параметрами.Определители матриц переноса каждого из рас-
рассматриваемых элементов равны единице:
- -А">- -Ат
ш; что построение матриц, обратных АЧ\ I I
всегда возможно (для приведенных в табл. 5 ' 2 3 п п+Г
элементов lA'J']'1 = АЧ>).
Матрица переноса совокупности последова-
последовательно соединенных участков, При последова-
последовательном соединении п участков имеем п урав-
уравнений типа C3)
1
г ==/4"г'|я' ?л==^"г Sn-l! ¦••> Ъ2~ А \ь Рис- "¦ Схема последовательного
*' " соединения п участков одномерной
откуда системы
Таким образом, матрица переноса А участка, образованного последовательным
соединением п участков (рис. 11) с матрицами переноса Аа>, А'21, ..., А'п> равна их
произведению, выполняемому в порядке, противоположном нумерации соединенных
участков'
Л = Л1Я)-Л"'-1|-...-Ла). C6)
Пример. Вычислим мафицы переноса последовательного соединения п безынерцион-
безынерционных 5пругодемп}чфованиых виброизоляторов. Согласно табл 5
Следовательно
и лф
-
Если соединяемые виброизоляторы одинаковы (с =с; b =bf, то рассматриваемое со-
соединение эквивалентно одному безынерционному виброизолятору с эквивалентными коэф-
коэффициентами жесткости и демпфирования
= -• Ь =-
поскольку n jtom случае
п
-¦ = л о -¦ =' ° ' Ъ -^~*
/='
Приведение последовательно соединенных виброизоляторов к одному эквивалентному
возможно и в том случае, когда
с, Ь
J- = /- = *. (/=1, 2 я). C7)
Действительно, при лом
¦/=> \ (/Г 2
7 = 1 / = 1
Эквивалентные жесткость и демпфирование определяются по формулам
с* 1 1 . ,. Ь, 1 1
2 с 2
V — V -i— V —
Zj \. Zj ?v,6 Zj ft.
184
ПРИНЦИПЫ ВПЬРОИЗОЛЯЦИИ
Если условия C7) не выполняются, замена последовательного соединения виброизо i
торов одним эквивалентным невозможна
Матрица переноса совокупности параллельно соединенных участков. Пусть уч i
сток, ограниченный сечениями / и /+ 1, образован параллельным соединением (
участков с матрицами переноса А^\ А{р А(^ (рис 12) Такое соединение экв
валентно одному участку с матрицей переноса А >
элементы которой afy (k, I = 1, 2) выражаются
рез элементы матриц переноса соединяемых \ час нов
по формулам
(,) А^ __(,) 1 _ ^j;) Л^Э Л] _ (,) Л,
C8)
C9)
«j',j, обозначены элементы матрицы А^ к-го из соедн-
Л'1
1 J'l
Ля'
1Де
Рис 12 Схема параллельно-
to соединения л участков
одномерной системы
причем через се^, а^,
няемых участков.
(;) '
' 3
= ] 12ft
к—]
Пример Вычислим матрицы переноса п парачжл1но соединенных безынерционных
виГроизоляюров
Для безынерционного виброизолятора в соответствии с табл 5 имеем
1
Подставляя ^ти данные в C9), получим
/ п
А = А = Л —I ^
Следоватечыю со!ласно C8), будем иметь
\ft=I
С<22=1,
где
D0)
Таким образом, парал 1ельиое соединение я безынерционных виброизолягоров эквива
лентно (при любых соотношениях мелч^у их параметрами) одному безынерционному вибро
изолятору с коэффициентами жесткости н демпфирования, вычистяемыми по форму.там AС)
Установившиеся колебания при гармоническом возмущении. В линейной демпфи
рованнои системе, подверженной гармоническому возмущению частоты со, возникает
режим установившихся вынужденных гармонических колебаний той же частоты
По гармоническому закону будут изменяться также смещения и силы во всех сече
ниях системы При этом процессы xt (t), P, (t), (j = 1,2, .. , п) удобно представить
в комплексной форме
где uj, Pj — амплитуды; ф7, ^ — фазовые сдвиги, обычно отсчитываемые от фазы
возмущения, Xj (ico) = ap^i, Pt (jco) = pye ' — комплексные амплитуды процессов
xt (t) и Pj (t). Комплексные амплитуды xs (ia>) и Р, (ш) определяются из выражений
D1)
ОДНОШ-PHLIE ВНЬРО^АЩИТПНР СНСТГМЫ
д] (/ш) — матрица переноса /го участка, в выражение элементов которой
поставлено р = ко, %t (ко), lin (ко) — столбцовые матрицы комплексных ачгиит^д
i мешен»" и сил в сечениях у и /+ I.
Соотношения D1) представляют ал[ебраическую систему уравнений относительно
коми 1ексных амплитуд смещений и сил в заданных сечениях модели, после присое
лишения соответствующих граничных условии рассмат-
рассматриваемая система становится определенной. Д. ,
Динамическое состояние элементов модели можно
оп юывать и другими величинами, например, вместо
смещений х, (I), / = 1, 2, .. , я вводить скорости к, (t),
ускорения X] (/) и т. п. Однако это не вносит принци-
пиаоьныч изменении в определение комплексных амп-
амплитуд указанных величин, поскольку комплексные
амплитуды v, (ко) и w, (ко) скорости и ускорения /-го
сечения связаны с а, (ко) зависимостями
v, (ко) = (ко) х, (ко), и, (ш) = — a>2x; (ко).
Для производной / го порядка гармонического
процесса х, (t) — х, (ко) е1И/ имеем
Am {xf}}
2
Поэтому из решения D1) легко получить выраже-
ния для амплитуд скоростей и ускорений во всех се-
чениях модели.
Рис. 13. Расчетная модель
виброзащитной системы, со-
состоящей из двух последова-
последовательно соединенных участ-
участков
а — кинематическое возму
щение б — силовое возму-
возмущение
Пример Вычислим характернгае параметры движения для модели на рис 13, а при ки-
кинематическом возбуждении
Расс\гатри\г участки / (виброизолятор) и 2 (обьект) с матрицами переноса
D2)
\as, a2,/
Граничные условия для jtoh схемы имеют вид
г, (to) =-*,„; Р, (ко) =0,
причем неличину Гщ мо кно считать вещественной
В соответствии с (<ъ) матрица переноса последовательно соединенных участков / и 2
имеет вид
Испог7ыуя граничные условия D2) потучиы
Выражения д.гя комплексных амплитуд \<корения объекта и деформации виброизоля-
виброизолятора имеют вид
Ш3(но) =—-
х' (ш) =
110 \оя — т<л*ап / '"
Пример. Вычислим характерные параметры движения для модели на рис 13, 6 при си-
силовом возбуждении
I раничные условия в jtom случае имеют вид
At (KB) =0,
D3)
тогда
Величина Я, (/а) является для рассматриваемого возмущения одним из характерных
параметров движения, другим важным параметром будет деформация виброизолятора
х' (
a,.
• / л
D4)
186
Принципы висроизоляиии
Эффективность виброзащитной системы с инерционным виброизолятором при
гармоническом возбуждении. Будем считать основной целью виброизоляции спи
жение перегрузки объекта при кинематическом возмущении и ослабление силы
передаваемой на объект, при силовом. Как и в случае безынерционного виброизоля
тора, отношение амплитуд ускорения объекта и источника при кинечатическо i
возбуждении и отношение амплитуд сил, приложенных к источнику и объекту пр
силовом возбуждении, оказываются совпадающими с коэффициентом виброилол;
ции k~, величина которого для рассматриваемой расчетной модели определяете
зависимостью
[ х2 (to) |
(ш) |
а.22 — тсо2 а121
^
Условие эффективности виброзащиты по критерию k^ имеет вид
D6)
где величина к„ определяет требуемую степень защиты. При заданной динамиче-
динамической модели виброизолирующего устройства неравенство D6) определяет частотный
диапазон, при котором рассматриваемое устройство эффективно. При аи = а22 = 1,
а21 = 0, а12 = (с + /сой) (безынерционный упругодемпфированный виброизолятор)
выражение D5) непосредственно переходит в A2).
Аналогичным образом вводятся коэффициенты эффективности k^ и k^,, Эти коэф-
коэффициенты в случае инерционного виброизолятора
**• =
1
а22 —
@)
D7)
D8)
где 0С]2 @), а22 @) — значения элементов а12 и а22 при со = 0. Условия эффектив-
эффективности kx, -g 1 и ix ^ 1 определяют частотные диапазоны, при которых виброизоля-
виброизоляция эффективна по соответствующим критериям.
Пример. Рассмотрим виброзащитную систему с промежуточной массой т' в виброизо
лирующеч устройстве (рис. 14) Демпфирование в виброизоляторе не учитывается
X Рис. 14. Расчетная модель виброзащитной системы с
промежуточной массой в виброизолирующем устройстве
Z 3
В соответствии о C6) матрица переноса виброизолятора имеет вид
1 27) / 1 0\ Г 2с
.0 1 I \—т и" 1/ \0 1
т'
1акич образом,
D9)
ОДНОМЕРНЫЕ ВИБРОЗДЩНТНЫЕ СИСТЕМЫ
Подставляя D9) в D6) —D8), получим
187
--Г 2«
kx,
E0)
Наличие сосредоточенной масса в виброизолирующем устройстве (цфО) существенно
изменяет виброзащнтные свойства системы по сравнению с отсутствием такой массы (ц = 0)
В частности, при ii-фО имеет место эффект, аналогичный динамическому гашению (см
гл. XIV) относительных (на чаатоте 2 = ztj) и абсо-
абсолютных (на частоте г = гщ) колебаний объекта, где
II'
U
+ 2: ?Ш = -.
E1)
поскольку на указанных частотах обращаются в
ноль соответственно k%i и k х- Минимальное зна-
значение кд тш отлично от нуля и достигается при
г=- г\, где
E2)
Вместе с тем на частотах
где
<53>
значения kj^, kx' и k^ получаются бесконечно
большими, что соответствует резонансным колеба-
колебаниям виброэащитной системы на этих частотах.
Общий вид зависимостей /г^= kg (г2), kx'—kx'A*)
и kx — kx (г2), представляющих соответствующие
амплитудно-частотные характеристики виброзащит-
виброзащитной системы с промежуточной массой в виброизоли-
виброизолирующем устройстве, изображен на рис 15.
Промежуточная vacca, как правило, значитель-
значительно меньше массы объекта, так что в реальных си-
ситуациях параметр ц является малым. При этом из
E!)-E3) следует
i—; гпт s —;
Ц U1 U
E4)
Рис. IS. Зависимости коэффициен-
коэффициентов эффективности *д, *^, kx' от
расстройки г
Как видно из соотношений E4) ашпирезснансные частота гц и гщ оказываются близ-
близкими к резонансной частоте г2, паэтому эффективность динамического гашения весьма
чувствительна к изменению частоты воздействия, так что получение эффекта динамического
аШения требует тщательной настройки системы на антирезонансные частоты гц или гтц.
В табл, 6 приведены выражения для элементов аи и а22 матрицы переноса АЛ)
инерционного виброизолирующего устройства для различных сочетаний упругих
и Демпфирующих элементов. Подставляя значения а12 и а22 в D5), D7) и D8), полу-
им выражения соответствующих коэффициентов эффективности как функций пара
'«ров виброзащитной системы,
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
6. К расчету эффективности инерционных виброизсы фующих систем
Схема
B)
7 /' 2' 2
a'iV (
(с, -f i'c
1 —
т'ш!
+ ¦
т'(лг
1 —
т'со2
1 J
т'и2
I 1 m'<B2
t G cur
l —
m'a2
Примечание. Верхний индекс I относится к участку A), индекс 2—к участку (J).
Глава VII
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
1. СХЕМЫ УПРУГИХ ПОДВЕСОВ И ИХ РАСЧЕТ
Общие положения. Виброизоляцию как принцип защиты оборудования, чувстви-
чувствительного к динамическим нагрузкам, широко применяют в различных областях
1ехники. При этом в одних случаях системы виброизоляции можно конструировать
в комплексе с защищаемым объектом в качестве его неотъемлемой части (например,
подвески железнодорожных вагонов и автомобилей, корабельных дизельных уста-
установок и т. п.); в других случаях, например при защите от вибрации радиоэлектрон-
радиоэлектронной аппаратуры, где одни и те же приборы и оборудование в зависимости от мест
установки подвергаются совершенно различным по форме или интенсивности воз-
возбуждениям, проектирование виброзащитных систем носит индивидуальный харак-
характер и выполняют его по результатам статического и динамического расчетов.
СХЕМЫ УПРУГИХ ПОДВЕСОВ И ИХ РАСЧЕТ
189
В простейшей модели виброзащитной системы, позволяющей изучить прост-
панственное движение источника и объекта, оба эти тела считаются абсолютно твер-
твердыми. Совокупность соединяющих их виброизоляторов образует упругий подвес
несомого тела. Подвесы различаются схемами, т. е. числом виброизоляторов, ориенти-
ориентировкой их осей, расположением точек крепления к источнику и объекту. В зависи-
зависимости от расположения осей виброизоляторов, воспринимающих статическую на-
нагрузку, подвесы делят на однонаправленные, в которых оси виброизоляторов парал-
параллельны статической нагрузке (схемы а—д, табл. 1), и пространственные (схемы е—з).
Расчет подвеса обычно состоит из двух частей: статического, который заклю-
заключается в вычислении статических реакций и статических деформаций виброизолято-
виброизоляторов, и динамического, заключающегося в определении собственных частот упруго-
подвешенного несомого тела и вычислении характерных параметров его движения.
Статические и динамические реакции виброизоляторов. Характеристикой вибро-
виброизолятора называется зависимость его реакции от деформации упругого элемента.
Если деформация обусловлена действием статических сил, то соответствующая ха-
характеристика будет статической, В случае динамических нагрузок различают дина-
динамические и ударные характеристики.
Рис. 1. Схема крепления вибро-
виброизолятора:
/ — объект; 2 — виброизоля-
виброизолятор; 3 — источник
Рис. 2. .Расчетная схема под-
подвеса
2,1
/~
У
_—--—
с
—-—_
W
и,
V ,
Всякий виброизолятор обладает тремя взаимно ортогональными главными осями
жесткости и, вин;, причем ось w проходит через точки крепления виброизолятора
к источнику и объекту и обычно совпадает с линией действия статической нагрузки
(рис. 1). Свойство главных осей состоит в том, что сила, направленная по одной из
них, вызывает деформацию только по той же оси. В соответствии с этим подвес из N
виброизоляторов можно считать эквивалентным подвесу из ЗУУ упругих элементов
каждый из которых реагирует лишь на сжатие-растяжение. Нумерацию этих эле-
элементов удобно вводить следующим' образом: номерами от 1 до N обозначать эле-
элементы, описывающие упругие свойства виброизоляторов в осевых направлениях w,
а номера от N ¦+- 1 до 3/V присвоить элементам, характеризующим работу виброизо-
виброизоляторов в поперечных направлениях и и v,
Динамическая реакция R/ /'-го упругого элемента зависит от его деформации б^
и скорости деформации б; (/ = 1, 2, .,., 3N); таким образом, уравнение динамической
характеристики имеет вид [105]
Rj = Rj(bj, bj). A)
Для металлических (пружинных) и резшюметаллических виброизоляторов стати-
статические характеристики могут быть получены из A) при су = 0:
B)
В частном случае линейных характеристик имеют место соотношения
г, R'F-Cflfi,,
гДе Cj, bj — коэффициенты жесткости и демпфирования /-го упругого элемента;
с/о — его статическая жесткость, которую в отмеченных выше случаях допустимо
отождествлять о динамической жесткостью с/.
190
Ы1РЫИИ ПОЛВЕС ГВЕ[ДОГО 1 ЕЛА
равН1
ладо
I
«я
<
с?
I I
or
° Of
I I I
a; " a;
55
+ *
о о
ft. a.
+
Я fct
В Щ
Ч О.
О С
С о
О га
+ II
I I
I I
V
23.
CXFMU i ПРИ ИХ ПОДВЕСОВ И ИХ РАСЧЕТ
191
< I
Q.
5
0.
I
s у
II X
II
a;
II
a;
Jl
ar
X
II
о
|[
oP
ar
II
to
"ii
q; ~q;
ar л
щ Ч
102
Подвес тьь^дого тела
о а.
{
<
II
"о; 0,1
ft; a;
§« =У --
о? "о;
8*
^--
СХЕМЫ УПРУГИХ ПОДВЕСОВ И ИХ PAC4FT 193
Уравнения статики виброзащитных систем. Выберем неподвижную систему
координат OXYZ, совпадающую с главными центральными осями инерции CBHZ
тела при равновесии последнего. Тогда уравнения статики пространственного под-
подвеса (рис. 2) примут вид
3N &N 3N
Г 2Г
3/V 3N
Ц Г ^ <= 0; C)
Здесь #™ — статическая реакцияу'-го упругого элемента; а,, ру, ^ — направляю-
направляющие косинусы его оси; %,, r|y, ?, — координаты точки крепления /-го виброизоля-
виброизолятора к несомому телу; Vx, Vy, V2, Мх, Му, Мг — проекции на оси OXYZ главного
вектора и главного момента сил, образующих статическую нагрузку.
Уравнения статики однонаправленного подвеса в случае, когда статической на-
нагрузкой является сила тяжести Р тела, а плоскость OXY расположена горизон-
горизонтально, получаются из C) при Vх — Vy~ 0; Мх = Му = Мг = 0, at = Eу = 0,
RMy =Ry и имеют вид
? /?;*¦-/> = <>; |] /?iOz4 = 0; SA = 0 D)
/=J ;=i ;=i
Статический расчет подвеса. Определение расчетных статических реакций. При
фиксированных точках крепления виброизоляторов к телу неизвестными в уравне-
уравнениях статики будут статические реакции R'01, число которых обычно превышает
число уравнений C) или D). Соответствующие подвесы называются статически
неопределимыми. Статическая определимость подвеса имеет место лишь в случае
N = 1 (пространственная схема), N = 2 (плоская однонаправленная схема) иЛ/ = 3
(пространственная однонаправленная схема).
Реакции R "' статически определимого подвеса вычисляют непосредственно из
уравнений статики. Если подвес статически неопределим, к уравнениям статики до-
добавляют не противоречащие им условия распределения статической нагрузки в числе,
необходимом для однозначного определения всех R10'. Как правило, дополнитель-
дополнительные условия имеют вид линейных уравнений относительно Rj01, Реакции подвеса,
удовлетворяющие уравнениям статики и дополнительным условиям распределения
статической нагрузки, называются расчетными статическими реакциями,
Пример 1, В уравнения статики подвеса, соответствующего схеме б табл 1,
^ ]
У E)
j
входят четыре неизвестные реакции Подвес статически неопределим В качестве дополни-
дополнительного условия примем равенство
Riol=«,0>, F)
не противоречащее (S) В результате получим следующие значения расчетных статических
Реакций
Выдерживание расчетных статических нагрузок. Выравнивание виброизоляторов
пРи монтаже. Определение расчетных статических реакций является лишь первым
7 п/р Фролова
194
УПРУГИЙТЮДВЕС ТВЕРДОГО ТЕЛА
этапом проектирования подвеса. Поскольку на практике виброизоляторы подбн
рают по величине приходящейся на каждый из них статической нагрузки, резуль-
результатом выполнения первого этапа расчета подвеса будет определение статических
характеристик всех виброизоляторов. Однако при реальном подвешивании несомого
тела фактические значения статических реакций не будут совпадать с расчетными
(если только подвес не является статически определимым); кроме того, независимо
от статической определимости подвеса от расчетного будет отличаться и фактическое
равновесное положение несомого тела на несущем. В связи с этим возникает задача
выдерживания расчетных нагрузок статически неопределимого подвеса и устранение
перекосов несомого тела относительно несущего. Обе эти задачи решаются путем
выравнивания виброизоляторов с помощью ком
пенсирующих прокладок.
Выравнивание виброизоляторов заключается
в определении толщин Д;- компенсирующих про
кладок из условий (рис, 3)
(/¦=!, 2, .... ЗЛО, G)
Рис. 3. Схема выравнивания упру-
гого элемента
где hj — расстояние между точками крепления
/-го упругого элемента к несущему и несомому
телам в расчетном равновесном положении; // —
осевой размер недеформированного упругого эле
мента; bj — деформация упругого тела под на-
нагрузкой R'l", Для простых элементов, описы
вающих упругие свойства виброизоляторов в осевом направлении, т. е. для /' =
= 1, 2, ..., N, величины /у определяют как расстояния между точками крепле-
крепления недеформированных виброизоляторов к несущему и несомому телам; для / —
= N -f- 1, Л' + 2, ..., 3N величины I, можно считать равными нулю. Деформации
8^- считаются положительными, если соответствующие упругие элементы сжаты.
Если для некоторого /, / = 1, 2, ..., N окажется Ду < 0, то необходимо увеличить
соответствующую величину Н/ настолько, чтобы получить к/ 3= 0.
Выполнение условий G) автома1ически исключает перекос и смещение несомого
тела относительно несущего (по отношению к их расчетному или установочному
положению), а для статически неопределимых подвесов обеспечивает, кроме того,
совпадение фактических нагрузок на виброизоляторы с их расчетными значениями.
Пример 2. Для подвеса со схемой g табл. 1, где опорные плоскости несомого и несу
щего тел в установочном положении считаются горизонтальными (ft1=ft2=As), статические
реакции R\o>, R'?", R's" удовлетворяют двум уравнениям статики:
Принимая дополнительное условие распределения втагическ©й нагрузки в виде
получим следующие значения расчетных статических реакций:
С-
г,@1 .
¦¦¦КР-
«3= Р
A-х) а.
а -\- о a -f- b
По найденным значениям R'P} подберем виброизоляторы, определив таким образом
осевые жесткости с,, осевые размерш I,, статические деформации 6= c~lR.'i" и разности
/• — 6 (/'=1, 2, 3) Последние могут оказаться неодинаковыми, так что потребуется вы-
выравнивание виброизоляторов о помощью прокладок, толщины которых hi определим из
условия
Пусть /,—6j>;8 —йг и It — 6,>г8— 63. Тогда, полагая Ai = 0, найдем
Л — / 7 Г,"' В(«> ,-1п'0П. . ; ; Г„-1п<<)> „-1d"»1
(81
Использование компенсирующих прокладок эквивалентно изменению координат
точек крепления виброизоляторсв к телу.
СХЕМЫ УПРУГИХ ПОДВЕСОВ И ИХ РАСЧЕТ
195
Основные требования к динамическим свойствам подвеса. Рационально спроекти-
спроектированный подвес должен прежде всего исключать возможность возникновения резо-
резонансных колебаний системы. По аналогии с выводами, полеченными для виброза-
виброзащитных систем с простейшей расчетной моделью (см. гл. VI), необходимо, чтобы при
относительно низком уровне демпфирования частоты доминирующих гармоник внеш-
внешнего возмущения превышали наибольшую из собственных частот системы. Подвесы,
реализующие эти условия, называют мягкими. Мягкие подвесы обеспечивают эф-
эффективную защиту не только от установившихся, но и от некоторых нестационар-
нестационарных воздействий, в том числе от интенсивных ударов, не относящихся к типу ско
постных (см. гл. XII).
Качество виброзащиты в значительной степени зависит также от взаимной бли-
близости собственных частот системы. Проектируя подвесы на основе принципа «сбли-
«сближения* собственных частот (в идеале — до их полного совпадения), можно не только
повысить степень отстройки от резонансов, но и сделать несомое тело менее чувст-
чувствительным (по перемещению) к изменению направления статической нагрузки.
Существенной характеристикой подвеса является степень связанности собствен-
собственных колебаний системы. При прочих равных условиях более предпочтительны под-
подвесы с полной развязкой частот, когда возмущение по любой из обобщенных коор-
координат вызывает колебания лишь по этой обобщенной координате; при невозможности
полной развязки следует стремиться к развязке частичной.
Собственные частоты виброзащитной системы. Собственные частоты шо/„
(k = 1,2, ..., 6) несомого тела на пространственном подвесе с линейными характери-
характеристиками виброизоляторов определяются как корни частотного уравнения, записан-
записанного в виде определителя шестого порядка,
См —
Cil
С-13
си
ci9
6 22 «i
Сзз
C42
C52
Св2
(l"o C23
Сзз —
с43
С53
с«з
си
!С0§ С34
с44
с54
С«4
С»
= й (9)
Св5 Свв— J^<?>
Выражения для коэффициентов жесткости сц, = с^, (/, k= l~, 2) имеют вид
си = 21 cjV ('ЧуV/ - S/Py); c35 =
?/аУ-i/У/У'
с« = Ц с, (т)У7/ - S/P
A0)
До
В формулах A0) суммирование проводится по всем значениям индекса / от / = 1
196
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
Если оси простых элементов в равновесном положении системы параллельны
осям OXYZ, выражения коэффициентов cik примут вид
5 = ? Cjx
6 = ? c/i/
сзв = — Е с/г?/!
= — ? 9
в = — ? С/
Здесь
CjZ — главные жесткости /-го виброизолятора в направлении осей
д y^, jy, jZ
OX, OY и OZ соответственно.
Суммирование в A1) осуществляется по индексу / от / = 1 до / = N.
Соотношения (9) — A1) отвечают выбору в качестве обобщенных координат си-
системы малых смещений qt — хс, q2 — ус, д$ = гс центра масс С несомого тела отно-
относительно осей OXYZ и его малых поворотов qt = \|), цъ = в, дв = <р относительно
осей OX, OY и OZ соответственно.
Для рассматриваемой расчетной модели частотное уравнение (9) представляет
алгебраическое уравнение шестого порядка относительно coj; корни этого урав-
уравнения, т. е. квадраты собственных частот, оказываются положительными и разыски-
разыскиваются любым из известных методов, изложенных, например, в [12].
Условия разделения собственных колебаний несомого тела. В частных случаях
частотный определитель (9) может распадаться на произведение нескольких опреде-
определителей более низкого порядка, что отвечает разделению собственных колебаний
на группы независимых колебаний по соответствующим координатам. Условием
такого разделения является обращение в ноль тех или иных недиагональных эле-
элементов частотного определителя. Необходимые условия выделения одно-, двух- и
трехсвязных колебаний несомого тела приведены в табл. 2. Условия обращения в ноль
соответствующих элементов Сц, определителя (9) в отдельных случаях могут совпа-
совпадать с уравнениями статики или иметь вид дополнительных условий распределения
статической нагрузки: в других случаях развязка колебаний может быть следствием
симметрии подвеса. Условия полного или частичного разделения колебаний тела на
подвесе с осями виброизоляторов, ориентированных параллельно осям OXYZ, при-
приведены в табл. 3.
2. Условия выделения одно-, Двух- и трехсвязных колебаний
Группы координат, по которым
выделяются связные
колебания
1**]
(к = 1, 2 ... , 6)
(к, 1— 1, 2, ... , 6)
[V "Г 1п]
(к, 1, п = \, 2 6)
Условия выделения связных колебаний
скг =0 (л ф к)
clr^0 ^фк.гф!)
clr = 0 (г фк, г ф 1, г ф п)
спг=0
СХЕМЫ УПРУГИХ ПОДВЕСОВ И ИХ РАСЧЕТ
3. Условия разделения колебаний тела на однонаправленном подвесе
197
Плоскости
симметрии
системы
ХОУ
YOZ
ZOX
XOY, YOZ
YOZ, ZOX
XOY, ZOX
XOY, YOZ,
ZOX
Группы разделяющихся
обобщенных координат
[V "с- "]. IV *• е]
[»с*- гс1' [V в- ч>]
[V 6' «с]' [«с- *• Ф]
[Ус]. [в]. [*е. Ф], [*е. Ф]
[*с]. [ф]. [*с. в]. [vc, *j
К]. [Ф]. к. ф]. [*е. в]
Ы' [»с]' 1гс]- »]• №1. [ф]
Условия разделения колебаний
0
+
+
0
+
0
0
с»
+
+
0
+
0
0
0
0
+
0
+
0
0
1
0
+
0
0
+
0
+
+
0
-г-
0
0
0
+
0
+
0
0
+
0
+
0
0
0
0
0
0
Со»
0
+
0
0
0
0
0
0
0
+
0
0
0
0
Примечание. Знак «-|-» означает наличие, а 0 — отсутствие соответствующей
жесткости.
Вынужденные колебания при гармоническом возбуждении. Дифференциальные
уравнения малых колебаний несомого тела при гармоническом возбуждении имеют
вид
Qe'< A2)
Здесь С — матрица коэффициентов жесткости подвеса Cj,v{k, 0= 1, 2, ,.., 6);
А — диагональная матрица инерции несомого тела А = diag {ап, а22, ..., ат},
где ап = а22 = ат = т, а44 = Л, я55 = Л]> аев ~ •!& В — матрица коэффициен-
коэффициентов демпфирования 6ftr (к, г = 1, 2 6); Q— вектор комплексных амплитуд обоб-
обобщенных возмущающих сил; о) — частота возбуждения.
В случае силового возбуждения обобщенные координаты хс, ус, гс, ij>, 6, ф пред-
представляют абсолютные координаты несомого тела, а обобщенные силы Q^ eial (k =
= 1, 2, ..., 6) соответствуют приложенным к телу активным возмущающим силам.
При кинематическом возбуждении жс, ус, гс, ... ф удобно рассматривать как относи-
относительные координаты несомого тела, определяющие его текущее положение относи-
относительно движущегося основания; обобщенные силы соответствуют силам инерции
несомого тела.
Обозначим через q' вектор-столбец обобщенных координат основания q[ = х'о,
•?а = {/о, ?з = го> <?4 = t', Ц'ь — в'. 4i = ф'. ГДе х'о> Уо> г'о —координаты полюса О',
совпадающего с О в равновесном положении системы, а ф', 6', ф' — углы поворота
вокруг осей OX, OY и OZ. Пусть 3 = \Slt Н2, .... Нв} — вектор комплексных ампли-
амплитуд колебаний основания по координатам q'k (k — 1, 2, ,.., 6). Тогда
Q = (s>2AS,. A3)
Цель расчета вынужденных колебаний виброзащитной системы при гармониче-
гармоническом возбуждении состоит в вычислении комплексных амплитуд проекций относи-
относительных перемещений Uj и абсолютных ускорений W/ фиксированных точек L/ не-
несомого тела на заданные направления, определяемые направляющими косинусами
198 УПРУГИЙ ПОДВЕС ТВЕРДОГО ТСЛА
а/> Р/> V/ (/ — Ь 2, .-., я). Формулы для Vi и №7 имеют вид
2+ } (И)
где \]t f\j, t/ — координаты точки L/t Ak — комплексные амплитуды колебаний не-
несомого тела по координатам q^ (k = 1, 2, ..., 6). Величины 3$ (k = 1, 2, ..., 6) пред-
предполагаются заданными, причем 34, 55, Н6 обычно полагаются равными нулю. Для
подвеса с осями виброизоляторов, параллельными осям OXYZ, амплитуды Л/, удов-
удовлетворяют системе уравнений
— ты2) Ак -f- (с15 + 1шЬп) Аъ -f- (c16 -f ico6ie) Лв == отсо2Н1;
2 + (С43 + '«643)
)
Решение системы A5) можно записать е помощью формул Крамера
где Д (гсо) — определитель системы A5); Ak (to) — определитель, полученный из
Д (ш) заменой А-го столбца столбцом свободных членов.
В случае зарезонансных колебаний (частота вынуждающих сил по крайней мере
в У2 раз превышает наибольшую из собственных частот системы) демпфирование
слабо влияет на амплитуды Ак (k = 1, 2, ..., 6), которые в этом случае можно вычис-
вычислять по A6) при bjk = 0 (/', k = 1,2, ..., 6). Наоборот, амплитуды резонансных коле-
колебаний (<в ~ ш0А, к= 1, 2 6) существенным образом зависят от демпфирования.
Демпфирование является причиной связности вынужденных колебаний даже
тогда, когда соответствующие собственные колебания разделены. Исключение со-
составляет частный случай пропорциональности коэффициентов демпфирования 6/
коэффициентам жесткости с,- для каждого из упругих элементов подвеса
b,cjl = \, (/=1, 2, .... ЗЛО- A7)
Соотношения A7) могут выполняться для виброизоляторов, демпфирующие силы
которых возникают вследствие внутреннего трения в материале упругого элемента,
описываемого гипотезой Е. С. Сорокина [151, 207J.
Пример 3. Вычислим комплексные амплитуды А^ и А^ при двухсвязных колебаниях
по координатам qk и qt.
Вынужденные колебания несомого тела по координатам q^, q& будут независимыми от
колебаний fto остальным координатам, если независимы соответствующие собствейные коле-
колебания (см табл. 2) и если, кроме того, выполняются условия
bkr—blr=O, (гфк; гф1; г, k, 1 = 1, 2, .... 6).
Выражения для комплексных амплитуд А^ и Af имеют вид
A (cll-all">! + io>bll)akk<o'Bk
»tEl - (ckl + t<obkl) ak
(cu -aumi + i@bn) - (сы
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР 199
В режиме зарезонансных колебаний модули комплексных амплитуд А. и А, могут
быть вычислены по приближенным формулам
, , ,„ I i'll-W) akka^k-cklalla"l I .
»2)aUa>*Sl-cklakk<a2ak I
В резонансном режиме частота возмущения а близка к одной из собственных частот
При со=»о=аО? или a=«0=<ao; имеем
6M6«) + 4 l>* A/ + cllbkk ~ 2oklbkl) ~ <°« (.akkbll + aUbkk)] '
(cu ~aual + l%bu) akk4Bk~ (сы + 1%ьн) aiplsi
- bhkbkl) + i% [(ckkbn + cubhk - 1сыЬы) - cog {akkbn +
2. ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
Классификация виброизоляторов. Компоновка подвеса осуществляется как пра
вило из серийно выпускаемых виброизоляторов, различающихся упругодемпфирую-
щими характеристиками, различным сочетанием виброизолирующих и удароза-
щитных свойств, долговечностью, способностью функционировать в тех или иных
климатических условиях, а также чисто конструктивными особенностями — габа-
габаритами, способом монтажа и т. д. Все перечисленные свойства в определенной сте-
степени сохраняются для виброизоляторов одного и того же вида всех типоразмеров.
Современные виброизоляторы принято классифицировать в основном по виду
или способу введения демпфирования или по материалу упругого элемента. Раз-
Различают резинометаллические, пружинные и цельнометаллические виброизоляторы
с воздушным или сухим трением, а также недемпфированные. К последним относят
виброизоляторы, демпфирующие свойства которых определяются внутренним тре-
трением в материале упругого элемента.
Резинометаллические виброизоляторы. Упругим элементом виброизоляторов
этого типа является фасонный резиновый массив, соединенный с деталями металли-
металлической арматуры с помощью вулканизации. Достоинства резинометаллических виб-
виброизоляторов заключаются в простоте их конструкции, в широком диапазоне изме-
изменения их упругих характеристик, определяющихся как маркой применяемой резины,
так и конфигурацией упругого элемента, в возможности произвольной ориентировки
виброизоляторов относительно основания. Особые свойства резины определяют,
однако, и их недостатки; изменение динамических свойств при длительной эксплуа-
эксплуатации, связанное с так называемым «старением» резины; недостаточная надежность
соединения резинового массива с металлической арматурой; ухудшение виброза
Щитных свойств в условиях, отличающихся от нормальных (например, при повы-
повышенной дли пониженной температуре и влажности); недостаточное в отдельных
случаях демпфирование; невозможность использования в атмосфере, содержащей
"ары бензина, масла и т. п.
Промышленность выпускает несколько типов резинометаллических виброизоля-
виброизоляторов, отличающихся формой резинового массива и способом крепления к объекту
и источнику [85, 211].
Виброизоляторы типа АП и АЧ. Конструкции виброизоляторов этих типов почти
Идентичны. Их основным элементом является фасонный резиновый массив, спрессо-
Банный с металлической втулкой, служащей для крепления с объектом, и пластин
Кой (АП) или чашкой (АЧ), с помощью которых осуществляется соединение с колеб
Лющимся основанием, Виброизоляторы типа АП и АЧ используют в основном для
200
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
Рис. 4, Виброизолятор типа АП:
/ _ втулка; 2 — ограничительная шайба; номиналь-
номинальный прогиб по осям и и v 0,7 dz 0,3 мм; по оси
ш 1,6 ± 0,4 мм
Тип
вибро-
виброизолятора
АП-1-0,45;
АП-1-0,9;
АП-1-1,35;
АП-М.8;
АП-1-2,25
АП-2-0,9;
АП-2-1,8;
АП-2-2,7;
АП-2-3,6;
АП-2-4,5;
АП-2-5,4
АП-3-4,5;
АП-3-6,75;
АП-3-9,0;
АП-3-11,25;
АП-3-15,75
А
25
35
45
В
32
45
57
Н
10
16
25
Л,
Л
мм
5,6
9,5
18
4
4,5
4,5
d
4,2
6,2
10,2
dt
3,2
4,2
5,2
d.
25
38
50
Примечание. В марке виброизолятора пер-
первая цифра означает номер серии, вторая номиналь-
номинальную нагрузку (кро) по ооям и, v, ш.
1
й2
т
/ к.
t
I
ш
i
Л
L
Рис. 5. Виброизолятор типа АЧ:
/ — втулка; 2 — ограничительная шайба; номиналь-
номинальный прогиб по осям и и v 0,7 ± 0,3 мм; по оси
ш 1,6 d= 0,4 мм
Тип
вибро-
виброизолятора
АЧ-1-0,45;
АЧ-1-0,9;
АЧ-1-1,35;
АЧ-1-1,8
АЧ-2-0,9;
А 4-2-1,8;
А4-2-2.7;
А 4-2-3,6;
АЧ-2-4,5;
А 4-2-5,4
А 4-3-4,5;
АЧ-3-6,75;
А 4-3-9,0;
АЧ-3-И,25;
АЧ-3-15,75
А
В
Н
ft, | ft
d
Лх \ d,
мм
35
50
64
42
60
76
18
29,5
3S
5,6
9.5
18
4
4,5
4,5
4,2
6,2
10,2
3,2
4,2
5,2
25
38
50
виброизоляций приборов, и радиоэлектронной аппаратуры сравнительно небольшой
массы. Чертежи виброизоляторов, их размеры и основные параметры приведены
на рис, 4, 5, На рис 6—8 представлены статические характеристики в осевом напра-
направлении w, на рис. 9 — амплитудно-частотные характеристики (представляющие
зависимость отношения амплитудного значения абсолютного ускорения объекта
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
201
осевом направлении от амплитуды абсолютного ускорения основания в том же
направлении) при различных значениях статической нагрузки. На рис. 10—13 изоб-
изображены силовые ударные характеристики (в осевом направлении) при различных
статических нагрузках.
Рис *•
Статические характеристики вибро-
изоляторов:
. дп-1-2,25 о ограничительной шайбой;
I Z АП-1-2,25; 3 — АП-1-1,35; 4 — АП-1-1,35
а ограничительной шайбой; 6 — АП-1-0,9;
кгс
S
\
\><
——
ДерврмациЯ
кгс
5
s *
1
У
¦
-^
—
—--
>
,
0,3 си
Деформация
а)
кгс
10
I
/
ly
5,
0,1 0,2 0,3 см
Деформация
Рис. 7. Статические характеристики виброизоляторов:
а: 1 — АП-2-2,7; 2 — АП-2-1,8; 3 — АП-2-0,9;б; 4 — АП-2-5,4; 5 — АП-2-4,5;
6 — АП-2-3,6
кгс
У
У
/
/
/
< /-
/Г
,1
3
Деформация
11
го
s
г
Л
4
rf
S^fmax
1
* V
=B—
!O 20 30 48 SO SO Гц
Частота
Рис. 8. Статические характеристики
виброизоляторов:
/ - АП-3-15,75; 2 - АП-3-11,25; 3 —
АП-3-6,75
Рис. 9. АЧХ виброизоляторов ти-
типа АП при различных статических
нагрузках
202
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
—-—.
¦
-я
'Г7
\
- —
¦ - —
Л/
—г-
г
i
V
V
\
1
О;
W &
Ш S
I
Я О
$ «
I
vifnj
Нагрузка, кгс
Тип вибро-
виброизолятора
№ кривой
Рисунок
О* — С-1
S К S
о 5 *
АП-2-0 9
АП-2-1 8
АП-2-2 7
0 38 и 5,4
2,5 и 3 6
3 15 и 4,5
АП-2-5,4
АП-2-3,6
АП-2-4,5
^J, KJ (Q
«О
*
\
i
1
1
VUTIQ
—
т
/
i
-ч
\
И
\|
\|
1
1
&
а
о
t-
к
о
rt
S
о
а
ю
о
S
о.
VUVQ
Нагрузка,
кгс
Тип вибро-
изолятора
кривой
Рисунок
Толщина
втулки, мм
0 45 и 0 62
0 62 и 0 9
0 95 и 1,35
АП 1-0 45
АП 1-0 90
АП-1-1,35
*ч (N й-э
а
ее
^ СО
<м -С
s s
^$
о
АП 1-2 25
АП-1-1 35
1,5 и 2,25
АП-1-2 25
го
о
ВИБРОИЗОЛЯТОРЫ, СГРИИНО ВЫПУСКАЕМЫЕ В СССР
203
кгс
WO
SO
SO
го
о
J
(
1
У
\/
г
S
0,2 0,<f 0,8 0,8 1,0 CM
Деформация
рис. 12. Силовые ударные характеристики виброизолято
ра серии АП-3-в,75 с втулкой 3 ми; нагрузка:
/ t,75 и 6,75 кгс; 2 — 4,75, 6 75 и 9,5 кгс
Рис. 13. Силовые ударные характеристики виброизоля-
виброизолятора серии АП-3-11,25 с втулкой 3 мм; нагрузка:
/ — 7,9 и И,2 5 кгс; 2 — 11 в 15,75 кгс
ISO
но
120
WO
з
s 80
60 -
20 -
T
/A
'-
и
/j
У
f
f
0/ 0,4 OtS CjS f,0 см
Деформация
Рис. 14 Виброизолятор типа АР
Тип
вибро-
виброизолятора
АР-2
АВ-5
Растяжение
Номинальная
нагрузка
на вибро
изолятор
pw кгс
2
5
Прогиб
номи-
наль
ный*1,
мм
2,0
Сжатие
Номинальная
нагрузка
на вибро-
виброизолятор,
PW кго
Прогиб
номй
наль-
ный*»,
кгс
3 | 1 5
7
2,0
АР-8
Тип
вибро
изоля
торэ
АР 2
АР-5
8
4,0
Сдвиг
Номинальная
нагрузка
на вибро
изолятор
Pv, Ри, кгс
2
4
Прогиб
номи-
наль
ный*>,
мм
1,5
А
10
В | JT
30
D
d
мм
24
2,5 | 32
32
32 4
40 | 42 4
28
38
36
АР-8
3 0
40 | 50 | 53 j 48 [ 4,8
нгс
15
10
I
/
j
/-
//_
/
^-
I у
у
у
I/1
к
¦
^5
-r
Допускаемое отклонение +0,5 мм
Рис. 15. Статические" характеристики вибро-
виброизоляторов
0,1 0,2 0,3
Деформация
ОМ см
кривой
2
3
4
S
6
Тип вибро-
виброизолятора
АР-8
АР-5
АР-8
АР-2-
АР-5
АР-2
Вид
деформации
Сжатие
»
Сдвиг
Сжатие
Сдвиг
*
204
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
1
1
i
/
л
1 \
\
\
\
\
\
5,0
2,0
1,0
0,5
о,г
о,ог
5 10 20 50 100200 500 1000 Гц
Частота
Рис. 16. АЧХ виброизолятора АР-5
при номинальной статической на-
нагрузке
70
SO
50
3D
20
10
/
У/
/
7,0m
4
/
A
j
С
с 0,1 о,г о,з о,ч о,5Гц
Деформация
Рис. 17. Силовые ударные
характеристики виброизоля-
виброизолятора АР-5
н 30
5 20
10
Рис. 18. Силовая ударная
характеристика виброизоля-
виброизолятора АР-8
0,1 0,2 0,3 ОЛ 0,1 СМ
Деформация
Рис. 19. Виброизолятор типа АН
Тип
вибро-
изотятора
АН-4
АН-8
АН-10
АН-15
АН-30
Прогиб
Номиналь-
Номинальный
Допускаемые
отклонения
D
d
Я
мм
1,10
Q65
1,2
1,0
1,75
±0,4
±025
±0,2
±0,4
±0,15
20
30
20
40
30
М5
М8
Мэ
М10
М8
30
40
30
Виброизоляторы типа АП (АЧ) при номинальной нагрузке имеют «собственную
частоту» (под которой понимается собственная частота вертикальных колебаний тела
на виброизоляторе с вертикально расположенной осью, причем вес тела совпадает
с величиной номинальной осевой нагрузки на виброизолятор) 10—15 Гц, а в боковом
направлении и или v — 15—25 Гц. Поэтому их рекомендуется использовать в частот-
частотном диапазоне от 22 до 2000 Гц при амплитудах вибрации основания от 1,2 мм в низ-
низкочастотном диапазоне до 0,002 мм при высоких частотах и при температуре от
—45 °С до +80 °С. Их относительный коэффициент демпфирования оказывается
практически постоянным (в рабочем диапазоне нагрузок и деформаций); v = 0,1
1211]. С понижением температуры до —30 °С жесткость виброизоляторов возрастает
на 50%, при температуре — 60 °С они полностью затвердевают,
ВИБР01ПОЛЯТОРЫ, CFPI1HH0 ВЫПУСКАЕМЫЕ В СССР
205
кгс
30
g 20
о.
10
1/
/J/
i
//
\/
у
//
Л
V
/
<
нее
0,1
информация
0,2см
Рис. 20, Статические характеристики виб-
виброизоляторов типа АН в осевом направле-
направлении:
/ - АН-30, 2 - АН-15, 3 — АН-10, 4 -
АН-8, 5 — АН-4
I
го
//'
///
/
!?
7
У
\
/
ю
о о,г о,и о,б о,в
Деформация
Рис. 21. Статические характеристики виб-
виброизоляторов типа АН в поперечном на-
направлении:
/ — АН-30, 2 — АН-15, 3 — АН 8, 4 —
АН-10, 5 — АН-4
% 12
1 10
1 %у
1
1\
10
30 50
Частота
Гц
Рис. 22. АЧХ виброизолятора АН-4 при
различных статических нагрузках:
/ — 5,6 кгс, 2 — 4 кгс
III
1
и
,/
А
г3
• ¦
аа?——1
-—-—
¦§ в
6.
10 20 30 W 50 ВО Гц
Чистота
Рис. 23. АЧХ виброизолятора АН-8 при
различных статических нагрузках:
/ — 5,6 кгс, 2 — 11,2 кгс, 3 — 8 кгс
Виброизоляторы типа АР. У виброизоляторов типа АР резиновый массив вы-
выполнен в виде монолита с десятью «рожками» с завулканизированными в них гай-
гайками (рис 14) Статические характеристики этих виброизоляторов приведены на
рис. 15. Амплитудно-частотная характеристика виброизолятора АР-5 при номи-
номинальной статической нагрузке и амплитудах колебаний основания от 0,01 до 0,1 см
(при резонансе) приведена на рис 16, силовые ударные характеристики виброизоля-
виброизоляторов АР-5 и АР-10 в осевом направлении при различных статических нагрузках
(для АР-10 — при номинальной нагрузке) — на рис. 17 и 18.
Вибронзоляторы типа АР рекомендуется применять в частотном диапазоне от
Ю до 70 Гц с амплитудами вибраций от 1 до 0,5 мм и при температурах от —45 °С
До +50 °С Преимущества виброизоляторов этого типа состоят в почти одинаковых
виброзащитных свойствах как в осевом, так и в боковых направлениях, а также
в большей по сравнению с виброизоляторами типа АП нчи АЧ долговечностью,
связанной с более равномерным распределением напряжении в упругом элементе.
206
УПРУГИЙ nORBFC ТВГРДОГО ТЕЛА
кгс
ВО
50
30
20
10
2
//
/
п
7
ч
0 0,2 0,? 0,6 0,8 1,0см
Деформация
Рис. 24. Силовые ударные характе-
характеристики виброизоляторов типа АН
при номинальных статических на-
нагрузках:
/ _ АН-8; 8 кгс; 2 — АН-4; 4 кгс
Виброизоляторы типа АН. Резиновый массив
виброизоляторов типа АН («ножка») выполнен
в виде сплошного цилиндра с двумя завулка-
низированными в его торцы гайками. Основные
размеры виброизоляторов приведены на рис. 19,
статические характеристики — на рис. 20 (в
осевом) и на рис. 21 (в боковом) направлени-
направлениях. На рис. 22 представлены амплитудно-ча-
амплитудно-частотные характеристики виброизолятора АН-4
в осевом направлении при различных статиче-
статических нагрузках и амплитудах колебаний осно-
основания от 0,025 до 0,05 см; ,на рис. 23 даны ана-
аналогичные характеристики для виброизолятора
АН-8 при амплитудах колебаний основания от
0,02 до 0,01 см. На рис. 24 приведены силовые
ударные характеристики виброизоляторов типа
АН-4 и АН-8 в осевом направлении при номи-
номинальных статических нагрузках.
Конструкции виброизоляторов типа АН по-
позволяют использовать их для работы в боковом
направлении, хотя они обладают хорошими
виброзащитными свойствами и в осевом на-
направлении. Их рекомендуется применять для
более 15 Гц (при низких температурах порядка
защиты от вибрации с частотой
—50 °С с частотой более 35 Гц),
Виброизоляторы типа AM. Резинометаллические виброизоляторы AM исполь-
используют для виброзащиты сравнительно большегрузного оборудования. Их резиновый
массив, работающий на сдвиг, привулканизирован к металлической арматуре, со-
состоящей из двух уголков (для крепления к основанию) и скобы таврового профиля
(для соединения с объектом). Чертеж, основные размеры и параметры виброизоля-
виброизоляторов этой серии, называемых также скобочными, представлены на рис. 25, ста-
статические характеристики в осевом направлении — на рис. 26. Конструкция обес-
обеспечивает ,удовлетворительную работу и в боковом направлении.
Рис. 25. Виброизолятор типа AM
Тип
вибро-
нзолятора
АМ-18
АМ-27
Номинальная на-
нагрузка на вибро-
виброизолятор, кгс
W
18
27
Pv
27
40
А
13
22
В
мм
25
38
АМ-40
АМ-60
АМ-80
40
60
80
60
90
120
18
20
27
56
84
110
АМ-120
120
180
34
165
Примечание. Номинальный прогиб 5 мм;
допускаемое отклонение + 1 мм
Виброизоляторы типа АКСС. Эти виброизоляторы предназначены для защиты
достаточно массивного оборудования; их упругий элемент выполнен из маслостойкой
резины и допускает-длительную эксплуатацию в условиях изменения температуры
от —5 °С до +70 °С. Повышенная жесткость виброизоляторов типа АКСС делает
их эффективными при защите от интенсивных ударных воздействий. Чертеж и раз-
размеры виброизоляторов приведены на рис. 27, параметры, характеризующие их
виброзащитные свойства, в табл 4.
ВНБРОИЗОЛЯТОРЫ, СЕРИПНО ВЫПУСКАЕМЫЕ В СССР
207
4. Статические и динамические характеристики виброизоляторов типа АКСС
Тип
влбро-
изолятора
Статическая
жесткость
(кгс/см)
в направле-
направлении осей
W
125
150
220
400
E40
S50
1150
2800
4/01)
5200
и
170
2R0
500
600
800
900
1200
1600
2500
3200
Динамическая
жесткость
(кгс/см) а
направлении
осей
W
550
650
1 100
1 650
2 200
3 100
3 500
7 600
0 000
1 0J0
м.
800
1150
1200
1700
1700
1900
2100
2300
3000
4200
Тип
вибро-
виброизолятора
Статическая
жесткость
(кгс/см)
в направле-
направлении осей
W
7200
250
400
650
КОИ
750
15A0
2300
280A
2900
«1
4000
550
700
1000
1200
1000
950
1800
1900
2/00
Динамическая
жесткость
(кгс/см) в
направлении
осей
W
4 500
500
650
1 000
1 360
1 200
2 600
4 000
3 950
5 300
м
5600
700
900
1200
1700
1500
1550
2700
2700
3700
V
\KCC-10M
АКСС-15М
АКСС-25М
ДКСС-40М
АКСС-60М
АКСС-85М
4КСС-120М
АКСС-160М
АКСС-220М
AKCC-300M
300
450
650
1000
900
1000
1300
1600
2800
2000
АКСС-400М
АКСС-25И
АКСС-40И
АКСС-60И
АКСС-85И
АКСС-120И
АКСС-160И
АКСС-220И
АКСС-300И
АКСС-400И
300
400
500
550
500
600
950
1100
1300
150
100
50
/
V,
/
у
.—
/
/
/
~/
у
—
/
/
х-'
»--
—^-
А
У
к
т~
.—
о
Пружинные виброизоляторы с демпфированием. Упругий элемент пружинных
виброизоляторов представляет фасонную пружину, коническую или экспонен-
экспоненциальную, назначение которой состоит в том, чтобы статическая характеристика
была нелинейной, например обладала свойством
равночастотности. По сравнению с резинометалли-
ческими виброизоляторами пружинные обладают
значительно большим ресурсом работы, их упру-
упругие характеристики гораздо меньше зависят от
внешних условий — температуры, влажности и
т. п.; они могут работать в агрессивных средах.
Вместе с тем это, как правило, виброизоляторы,
создающие эффективную виброзащиту лишь в осе-
осевом направлении. Поскольку внутреннее трение в
материале пружины весьма мало, демпфирование
в виброизоляторах этого типа создается искусст-
искусственно.
Виброизоляторы типа АД. Чертеж, основные
размеры и параметры виброизоляторов АД приве-
приведены на рис. 28, статические характеристики в
осевом направлении — на рис. 29, а и б. На
рис. 30 изображена амплитудно-частотная харак-
характеристика виброизоляторов в осевом направлении
при номинальных статических нагрузках и ампли-
амплитудах колебаний основания от 0,01 до 0,15 см (при
резонансе). Силовые ударные характеристики в
осевом направлении при различной статической
нагрузке приведены на рис. 31.
Виброизоляторы типа АД предназначены для эксплуатации при вибрациях
основания с частотой до 80 Гц с пиковыми значениями ускорения до bg или при
ударных воздействиях с длительностью импульса от 0,005 до 0,015 с и пиковом зна-
значении до 4g. Интервал их рабочих температур — от —60 °С до +70 °С.
Демпфирование в виброизоляторах типа АД создается вследствие потерь в по-
потоке воздуха, протекающего через калиброванное отверстие в резиновой оболочке,
окружающей пружину; эта оболочка представляет, таким образом, воздушный демп-
демпфер, параллельный упругому элементу. Относительный коэффициент демпфирования
в зависимости от типоразмера виброизолятора 0,06—0,5.
Виброизоляторы типа АФД. Виброизоляторы типа АФД относятся к классу
сильнодемпфированных, причем демпфирование создается силами сухого трения
между корпусом и пластмассовой диафрагмой, связанной со штоком, соединяющимся
с виброизолированным объектом. Упругий элемент виброизолятора состоит из двух
последовательно соединенных конических пружин; для лучшей защиты от ударных
0,2 0,4-
Деформаций
Рис. 26. Статические характе-
характеристики виброизоляторов:
/ _ АМ-120; 2 — АМ-80; 3 ~
АМ-60; 4 — АМ-40; 5 — АМ-27;
6 — ДМ-18
208
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
воздействий в конструкцию введена упругая ограничительная шайба, сплетенная
из проволоки.
Виброизоляторы типа АФД предназначены для эксплуатации в условиях вибра-
вибрации с частотой до 300 Гц и пиковым значением ускорения до 5g, при ударных импуль-
импульсах до \0g и линейных ускорениях той же интенсивности. Рабочий диапазон темпе-
температур — от —60 °С до +150 °С; при температуре +40 °С виброизоляторы сохраняют
работоспособность при влажности до 98 % и давлении до 7- Ю'3 кгс/см2.
ft
—»
-I
rh
1
<Pi
/
T
Рис
Тип вибро-
виброизолятора
AKCC-WM.
АКСС-15М
АКСС-25М,
АКСС-25И
АКСС-40М,
АКСС-40И
АКСС-60М,
АКСС-60И
АКСС-85М,
АКСС-85И
АКСС-120М,
АКСС-120И
АКСС-160М,
АКСС-160И
AKGC-220M,
АКСС-220И
АКСС-300М,
АКСС-300И
АКСС-400М,
А КСС-400И
27.
L
Виброизолятор типа
А
Л г
В
В,
Н
АКСС
ft |ft.
d | d,
мм
70
S5
100
120
140
145
150
155
175
54
68
80
100
112
115
120
'25
-
60
140 1 65
43
48
63
73
80
95
108
118
125
130
35
40
55
65
70
85
90
100
105
ПО
40
46
50
60
65
60
65
27
32
35
8
10
42 1 11
46
42
47
12
14
12
14
12
M8
M10
M12
7
9
M14 1 11
M16
M18
M22
№24
M27
13
15
17
Рис. 28.
Вибро-
Виброизолятор
АД-0,6
АД-1,0
АД-1,5
АД-3,0
АД-5,0
АД-7,0
АД-10
АД-15
Но°
ь я 3 •-
J2 я ? 8
Its»,
Зиброизолятор
о - S.
cSSS
0,3—0,6 | 2,5—5,5
0,6—1
1-1.5
1,5-3,0
3,0—3,0
5,0-7,0
7,0—10,0
10-15
3,0—5,0
5,5-7,5
4,0—7,0
5,0-1,5
5,5—7,5
5,5-8
А
В
типа АД
И
h
d
<*«
мм
26
36
50
35
48
65
2Ь
40
42
19,2
29,2
29,5
МЗ
Мб
3,2
5
•' Допускаемое отклонение ± 1,0 мм.
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
209
Недостатки виброизоляторов этой серии связаны с потерей демпфирующих свойств
при их запирании, что имеет место, в частности, яри низкочастотных воздействиях.
Силы сухого трения создают существенный эффект виброзащиты в резонансных ре-
режимах; на соответствующих частотах амплитудно-частотные характеристики имеют
характерный срез.
Рис. 29. Статические характеристики
виброизоляторов;
а: I — АД-3; 2 - АД-1,5; 3 т- АД-1,0:
4 - АД-0,6; б : 5 — АД-15; 6 — АД-Ю:
7 - АД-7; 8 _ АД-5
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 см
Деформация
а)
Рис. 30. АЧХ виброизоляторов типа
АД при номинальных статических на-
нагрузках
го
3, Ю
а.
-—-
».—-
———
——""
—-
Г
0,8 0,8
Деформация
1,0 Гц
10
S
г
1
0,5
Ц
0,1
0,03
0,02
0,01
I 5 10 20 50100 500 Гц
Частота
Чертеж, размеры и основные параметры виброизоляторов типа АФД приведены
на рис. 33, их статические характеристики в осевом направлении — на рис. 34.
па рис. 35 изображены амплитудно-частотные характеристики, соответствующие
различным статическим нагрузкам при колебаниях основания в осевом направлении
с амплитудами от 0,01 до 0,1 см (при резонансе). Силовые ударные характеристики
в осевом направлении при различных статических нагрузках приведены на рис. 36.
Виброизоляторы типа АПН. Виброизоляторы этого типа отличаются от вибро-
виброизоляторов типа АФД лишь тем, что верхняя пружина идентична нижней. Чертеж,
Размеры и основные параметры виброизоляторов типа АПН представлены на рис 37'
сгагитеские характеристики в осевом направлении — на рис. 38. На рис. 39 пред-
представлены амплитудно-частотные характеристики при различных статических на-
нагрузках и амплитудах колебаний основания (в осевом направлении) от 0,01 до
в °4п *ПРИ резонансе)- Осевые силовые ударные характеристики приведены на
Цельнометаллические виброизоляторы. Упругий элемент цельнометаллических
виброизоляторов может быть выполнен в виде пружины, рессорного типа или из
прессованных гофрированных лент, металлической витой проволоки или сетки
и последнем случае упругие свойства полученных таким способом элементов могут
широко варьироваться путем придания им определенной формы, за счет выбора
материала или диаметра проволоки и т. п. Этим одновременно осуществляется варь-
варьирование демпфирования. Цельнометаллические сетчатые виброизоляторы отли-
отличаются высокой надежностью и долговечностью, а при совместном использовании
а качестве упругого элемента параллельно работающих пружин и сетчатых подушек —
210
УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛ 1
стабильностью упругодемпфирующих свойств даже при интенсивных динамических
нагрузках и в тяжелых климатических условиях.
Виброизоляторы типа ДК- Упругий элемент виброизоляторов ДК («двойной ко-
колокольчик») состоит из двух сетчатых деталей, имеющих форму колокольчиков
Схема виброизолятора изображена на рис. 42, основные параметры представлены
в табл. 5.
кгс
6
5
> J
2
1
S 5
3
г
ю
О 0,2 0,4 см О
Деформация
Q-) кгс
15
i
1кга I
I 1
OfiKi.
у
4?
\\
с /\
/^
1
/
10
0,2 0,U см 0
Деформация
А
о,ь
/
/
кгс
А
J0,3k
>5кгс
гс
У
кгс
10
а
^ 5
1,25
Ф-
1,5кгс
кгс/
¦]\
-<
1кг
у
с
1
1
0,2 ОЛ 0,6 см
Деформации
в)
Зкгс
2,25к,
1
ъ
1
11
/
1
0,2 0,4 0,6
Деформаций
г)
см
Рис. 31. Силовые ударные характеристики виброизоляторов АД при различных
статических нагрузках:
а — АД-0,6; б — АД-1 0, в — АД-1,5; г — АД-3
Динамическая жесткость виброизоляторов вычисляется по формуле сдин = аА-°°,
где а — коэффициент, числовые значения которого приведены в табл. 5; Л — ампли-
амплитуда колебаний, мм. Относительный коэффициент демпфирования для виброизоля-
виброизоляторов всех типоразмеров примерно одинаков и находится в пределах 0,4 < v < 0,5
Амплитудно-частотная характеристика виброизоляторов представлена на рис. 43.
Виброизоляторы типа АРМ. Конструкция виброизоляторов АРМ, упругие эле
менты которых выполнены из стальной путанки, допускает изменение жесткости
с помощью регулировочных опорных шайб. Схема виброизолятора АРМ представлена
на рис. 44; статическая нагрузка приведена в табл. 6. Амплитудно-частотная харак-
характеристика виброизоляторов приведена на рис. 45. Виброизоляторы серии АРМ можно
эксплуатировать в диапазоне температур от —60 до +150 °С, относительной влаж-
влажности до 98 % (при +40 °С и давлении до 7-10_3 кгс/см2). Рабочий диапазон частот
от 5 до 1500 Гц при амплитудах вибрации основания до 2,5 см на низких частотах
ВИЬРОШОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАГЧИГ В СССР
211
а ускорениях до 30g на высоких частотах. Виброизоляторы воспринимают осевые
ударные нагрузки длительностью до 0,05 с с пиковым значением до 6g, а также ли-
линейные ускорения до \0g. Ресурс работы составляет 2000 ч в течение двух лет с мо-
момента установки.
15
10
5
И
5кгс
Зкгс
.
А
у/
I
у
32
16
8
А
У
У
¦у
у
у
\jOkbc
- 8,5кгс^
и
V
\
кгс
15
10
S
/
У
/
л
1
1.7кгс
5кгс
у
/
1
У
0,2 ОМ 0,6
Деформация
б)
О 0,1 0,2 0,3 0,1 0,5 0,6 0,7 0,8 см
Деформация д)
кгс
60
50
а 4-0
? 30
20
10
О 0,2 0,1 0,6
Деформации
у
/
1 1
/
к
5кгс
2,5т
Юнее
J
Рис. 32. Силовые ударные характеристики виброизоляторов при различных статически»
нагрузках:
а — АД-5; б — АД-7; в - АД-10, г — АД-П
Параметры виброизоляторов типа ДК
Тип
вибро
изолятора
ДК I 1
ДК I 2
ДК 1-3
ДК II 1
ДК-П-2
ДК-П-З
Предельная осе-
осевая статическая
нагрузка, кгс
05
2
i
5
10
lo
D
h
Н
мм
32
32
32
38
38
38
18
18
18
21
21
21
47
47
47
47
47
47
а
"i
Е
06
1,0
1,4
20
2,5
3,0
Тип
вибро
изолятора
ДК-Ш-1
ДК-Ш-2
ДК Ш-3
ДК-IV-l
ДК-1У-2
ДК-V-l
ДК-У-2
Предельная осе-
осевая статическая
нагрузка, кгс
20
30
40
50
70
100
150
D
h
И
мм
53
53
53
74
74
117
117
36
36
36
52
52
87
S7
88
88
88
108
108
177
177
а
s
у
4,5
5,0
8,4
7.5
16
20
40
212
упругий подвес твердого тела
Ри
Рис. 33. Виброизолятор АФД
Тип вибро
изолятора
АФД-1
АФД-2
АФД-3
АФД-4
АФД-5
АФД-6
АФД-7
АФД-8
АФД-9
Нагрузка на
виброизоля-
виброизолятор Pw, кгс
номи-
номинальная
0,25
ОД
0,62
1,0
1,62
2,5
4,0
7*
15
мини-
минимальная
0,2
0,3
0,5
0,75
1,25
2,0
3,0
5,0
10,0
макси-
максимальная
0,3
0,5
0,75
1,25
2,0
3,0
5,0
10,0
20,0
Сила сухо
трения в в
изоляторе
в направЛ
оси ш, кгс
0,15
0,3
0,4
0,6
0,8
1,10
2,0
32
5,0
А
В
Н
h
d
мм
38
44
52
59
67
29
35
41
47
53
41,5
42,5
47
52
56,5
28,6
30
33,2
36,7
41
3 5
3 5
4,5
5,5
5,5
hie
§!
л
/
^—¦
.—¦
^ш —
2
1
-
0,1 0,1
Деформация
a)
0
f
/
j
L
7
\
I
p
\
man
min
i 10 20 50 100 200 5001000 Гц
Частота
//
/
/ /
/
у
/
/
у
8
¦^--
/
/
у
¦
0,1 0,2 см
Деформация
Рис. 34. Статические характеристики вибро-
виброизоляторов типа АФД:
а: / - АФД-4; 2 - АФД-3; 3 — АФД-2: 4 -
АФД-1; б: 5 — АФД-9; 6 — АФД-8; 7 —
АФД-7; 8 — АФД-6; 9 — АФД-5
Рис. 35. АЧХ виброизоляторов типа АФД
при различных статических нагрузках
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
213
70
60
50
о 1H
с5 зо
20
10
/
2„^
/
/К
0,8 см
кгс кгс
70 4уЧ- 350
60 V-L т
50 77/ 25°
10 ~/У т
jo т~1Ь^- 15°
20 —7/^~— m
10 -ЛУ^ 50
О ОА 0,8 см О
Деформация
/
8
/
/
9
I
/
)
0,4 0,8 1,2 см
Рис. 36. Силовые ударные характеристики виброизоляторов типа АФД при различных ста-
статических нагрузках
№ кривой
I
2
3
4
5
Тип вибро-
виброизолятора
АФД-4
АФД-5
АФД-3
АФД-2
АФД-8
Нагрузка, *
к го
0,75 и 1,25
1,25 и 2,0
0,5 и 0,?5
0,3 и 0,5
5
№ кривой
6
7
S
9
Тип вибро-
виброизолятора
АФД-7
АФД-6
АФД-9
АФД-8
Нагрузка,
кгс
3 и 5
2 и 3
20
10
if
IS
АПН-1
АПН-2
АПН-3
АПН-4
АПН-5
Рис.
37. Виброизолятор АПН
Нагрузка на
виброизолятор
Ри- PV PW кгс
номи
нальная
0,75
1,75
3,50
5,5
8,0
мини-
минимальная
0,5
1,0
2,0
4,0
6,0
макси-
максимальная
1.0
2,5
5,0
7,0
10,0
1*3
?5* 5
Сила сухо
трения в i
изоляторе
в направл
оси w, кгс
0,2
0,4
0,8
2,0
2,2
А
38
44
52
В
29
Ж
41
Н
мм
39
47
46
56
55
h
28,6
35
40,2
d
4,2
5,2
у*
тЩ -
и
п
:
Р
!
1
?
3
'/omS.^d
АПН-6 | 12,0 | 9,0 | 15,0 | 2,3 j 59 | 47 | 60 j 44,7 | 7
214
УПРУГИЙ ПОДВЕС ТВЕРДОГО TF.4A
кгс
10
'
в
/
/
/
/
\
\
j
v-'
О 0,1 0,2 0,} 0,4 0,5 0,В см
Деформация
'J
нес
30
25
"Э- 14
10
/
к
\
5
У
\
6
//
/,
5 -
О 0,1 0,2 0,3 Q,i> 0,5 0,6см
Деформация
5)
Рис. 38. Статические характеристики виброизоляторов АПН:
а: / - АПН-3. 2 — АПН-2; 3 — АПН-1; б: 4 — АПН-6; 5 - АПН-5; 6 - АПН-4
нес
Ре
щ
1
-—ч
Ртах
'Рпот
~Ргтп
•8
II
5 10 70 50 100 200 500 1000 Гц
Частота
Рис. 89. Амплитудно-частотные характери-
характеристики виброизоляторов типа АПН при различ-
различных статических нагрузках
10
5
^—•
. '
--^
/
0,2 0,4
Деформация
0,6 СМ
Рис. 40. Силовая ударная характеристика
виброизолятора АПН при статических на-
нагрузках 0,5 — 0,75 кгс
Виброизоляторы типа АЦП. Упругий элемент виброизоляторов АЦП состоит
из цилиндрической пружины, навитой на цилиндрический массив из металличе-
металлической путанки. Схема виброизолятора представлена на рис. 46. Промышленность
выпускает шесть типоразмеров серии, рассчитанных на осевую номинальную на-
нагрузку от 0,5 до 30 кгс. «Собственные частоты» виброизоляторов АЦП находятся
в пределах от 8 до Ю Гц, коэффициент динамичности (коэффициент виброизоляции)
при резонансе может принимать значения от 3,5 до 6.
в. Статическая нагрузка на виброизоляторы типа АРМ
(в осевом направлении w)
Тип виброизолятора
АРМ-25
АРМ-40
АРМ-60
Нагрузка, кго
номинальная
2,0
3,25
5
минимальная
1,5
2,5
4,0
предельная
2,5
4,0
6,0
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
215
мс
20
10
/
??.
/
У
г.
/
У
\
f
/
У
У
У
1
/
i
j
тс
60
SO
ЦМ
30
20
W
0,25 0,5 0,75
.Деформация
а)
1,0 см
ш
80
70
60
3 t,o
0,1 0,2 0,3 ОЛ 0,5 0,6 0,7 Ofi 0,9 см 3°
Деформация 20
б) 10
•4-
.—'
У
/
/
//
//
7_
1
И
ц
1
О 0,2 0,к 0,6 0,8 см
Деформация
I)
Рис. 41, Силовые ударные характеристики виброизоляторов при различных
статических нагрузках:
а - АПН-2 и АПН-3; б — АПН-4; в — АПН-5 и АПН 6
№ кривой |
,
2
Тип вибро-
виброизолятора
АПН-3
АПН-3
Нагрузка,
кгс
3,5
2,0
№ кривой
3
4
Тип вибро-
виброизолятора
АПН-2
АПН-2
Нагрузка,
кгс
1,75
1,0
№ кривой
5
6
Тип внбрэ-
изолятора
АПН-4
АПН-4
Нагрузка,
кгс
7
4
№ кривой
7
8
Тип вибро-
виброизолятора
АПН-6
АПН-5
Нагрузка,
кгс
9 и 15
6 и 10
/«г
А
L
¦у
V?
0,5
1
\
ч,
30 50 100 Z00 500Г,Гц
Рис. 42. Виброизолятор
типа ДК
Рис. 43. АЧХ виброизоля-
виброизоляторов типа ДК
Рис. 44. Виброизолятор ти-
типа АРМ
216 УПРУГИЙ ПОДВЕС ТВЕРДОГО ТЕЛА
7 Статические характеристики резинометаллических виброизоляторов
Тип
вибро-
виброизолятора
АП, АЧ
АКСС-М
АКСС-И
AM
Номинальная на-
нагрузка (кгс) по ося\
и
0,45
0,90
1,35
1,80
2,25
0,9
1,8
2,7
3,6
4,5
5,4
4,5
6,7
9,0
11,2
15,75
10
15
25
40
60
85
ПО
150
190
210
260
25
40
60
85
ПО
150
190
27
40
60
90
120
180
V
0 45
0,90
1,35
1,80
2,25
0,90
1,80
2,70
3,60
4,50
5,40
4,50
6,70
9,0
11,25
15,75
5
10
15
25
35
50
70
w
0 45
0,90
1,35
1,80
2,25
0,9
1.8
2,7
3,6
4,5
5,4
4,5
6,70
9,0
11,25
15,75
10
15
25
40
60
85
120
160
80 | 220
90
100
10
15
25
35
50
70
80
-
300
400
25
40
60
85
120
160
220
27
40
60
80
120
Прогиб (см) от но-
номинальной нагрузки
по осям
а
0,07
0,07
0,07
0,05
0,06
0,05
0,06
0,07
0,09
0,07
006
0,045
0,057
0,06
0,07
0,11
0,16
0,105
0,5
V
0,07
0,07
0,07
0,05
0 07
0,04
0,05
0,07
0,1
0,05
0,07
0,10
0,17
0,2
0,15
-
w
0,16
0,16
0,16
0,06
0,07
0,09
0,07
0,06
0,09
0,06
0,07
0,1
0,12
0,1
0,15
0,1
0,11
0,5
Предель-
Предельная ста-
статическая
нагрузка
по оси
W, КГС
28
80,0
150
150
225
375
600
900
1275
1800
2400
3300
4500
«ЮО
375
600
900
1260
1800
2400
3300
130
200
300
450
600
900
Ход (см) вибро-
виброизолятора по осям
и
-
-
-
0,7
0,9
1.0
0,9
1,2
1,1
1,0
0,7
1,0
0,9
1,2
1,1
1,0
-
V
-
-
-
0,7
0,9
1,0
0,9
1,2
1,1
1,0
0,7
1,0
0,9
1,2
1.1
1,0
-
w
-
-
0,8
1.0
1.1
1,2
0,8
1,0
1.1
1,2
-
ВИБРОИЗОЛЯТОРЫ, СЕРИЙНО ВЫПУСКАЕМЫЕ В СССР
217
Продолжение табл. 7
__-
Тип
вибро-
виброизолятора
.— '
ДН
АР
АД
АФД
АПН
Номинальная на-
грузкг
и
4
10
8
30
15
2
4
6
—
0,5—1
1-2,5
2-5
4-7
6-10
9-15
(кго) по осям
V
4
10
8
30
15
2
4
6
—
0,5-1
1-2,5
2-5
4-7
6—10
9—15
w
4
10
8
30
15
3
7
10
0,3-0,6
0,6—1
1-1,5
1,5-3
3-5
5—7
7-10
10-15
0,2-0,3
0,3-0,5
0,5-
0,75
0 75—
1,25
1,25-2
2—3
3-5
5—10
10-20
0,5—1
1-2,5
2-5
4-7
6-10
9-15
Прогиб (см) от но-
номинальной нагпузки
и
0,175
0,34
0,125
0,44
0,18
0,15
0,25
0,30
—
0,040—
0,075
0,045-
0,110
0,050-
0,125
0,090—
п 1&А
U,1DD
0,090-
0,150
0,105—
0,175
ПО ОСЯ1.
V
0,175
0,34
0 125
0,44
0,18
0,15
0,25
0,30
—
0,040-
0,075
0,045—
0,110
0,050-
0,125
0,090—
Л 1 eft
U,lijO
0,090-
0,150
0 105-
0,175
I
w
0,072
0,12
0,09
0,175
O075
0,15
0,20
0,30
0 25-
0,55
0,30-
0,50
0,55-
0,75
0,40—
0,70
0,50-
0,75
0,55—
0,75
0,55-
0,8
0,2—0,3
0,1-
0,17
0,11—
0,17
0,085—
0,135
0,11-
0,16
0,085—
U,1т
0,095-
п о
\),л
0,15-
0,3
0.08-
и,ю
0,10—
0,25
0,08-
0,20
0,14—
А лт
0,2/
0,12-
0,2
0,18-
0,3
Предель-
Предельная ста-
статическая
нагрузка
по оси
W, КГО
30
СО
115
40
70
75
—
3
5
7,5
12,5
20
50
100
200
15
37,5
75
105
150
225
Ход (см) вибро-
виброизолятора по осям
и
_
—
V
_
—
-
W
_
0,68
1,08
1,28
-
218
упругий подвес твердого тела
8. Вибрационные характеристики резинометаллических виброизоляторов
Тип
вибро-
виброизолятора
АП, АЧ
АКСС-М
АКСС-И
AM
АН
АР
АД
АФД
Частота
возмуще-
возмущения по
ОСИ W,
Гц
До 35
50
200
600
1000
1500
2000
До 35
50
До 35
50
-
-
До 35
50
70
70
200
До 35
50
600
1000
1500
2000
До 35
50
70
200
600
1000
1500
2000
Допусти-
Допустимая
амплитуда
колебаний
объекта
по оси w,
см
0.05
0,02
0,025
-
-
0,1
0,05
0,08
0,1
-
Допу-
Допустимое
ускорение
объекта
по оси w,
м/с8
20
50
100
200
400
500
-
-
-
-
100
100
500
30
85
200
250
500
—
50
200
250
500
Частота
вибрации
основа-
основания, Гц
Коэффи-
Коэффициент
эффектив-
эффективности кд
и, v
40
44
60
90
200
250
500—2000
27
40
55
60
70
27
40
55
60
70
20
27
38
70
15
17
22
25
80
45
16
20
30
55
100
15
18
80
200
600
1500
5-20
23
28
35-600
\,Ь
0,8
0,5
0,3
0,2
0,1
0,01
0,8
0,5
03
0,2
0,1
0,8
0,5
0,3
0,2
0,1
0,3
02
0,1
0,01
1,0
0,8
0,5
0,3
0,2
0,1
1,0
0,5
0,2
0,1
0,01
7,0
3,8
0,3
0,2
0,1
0,01
2,0
0,8
0,5
0,3
Частота
вибрации
основа-
основания, Гц
Коэффи-
Коэффициент
эффектив-
эффективности кц
w
22
28
40
ЭО
200
250
500—2000
27
40
55
60
70
27
40
55
60
70
20
27
38
70
30
40
50
70
16
20
30
55
100
15
18
80
200
600
1500'
5^30
35
35—600
1000—2000
2,0
08
05
0,3
0,2
0,1
0,01
08
0,5
0,3
0,2
0,1
0,8
0,5
0,3
0,2
0,1
0,3
0,2
0,1
0,01
1,0
0,3
02
0,1
7,0
3,5
0,2
0,1
0,01
1,0
0,8
0,3
0,2
0,1
0,01
_
2,0
0,5
0,2
0.1
ВИБРОИЗОЛЯТОРЫ, СЕРИЯНО ВЫПУСКАЕМЫЕ В СССР
219
Продолжение табл 8
Тип
вибро-
изолятора
АПН
Частота
возмуще-
возмущения по
ОСИ W,
Гц
До 35
50
70
200
600
1000
1500
2000
Допу-
Допустимая
амплитуда
колебаний
объекта
по оси w,
см
0.1
Допу-
Допустимое
ускорение
объекта
по оси w ,
м/с2
-
- | 50
-
—
150
500
Частота
вибрации
основа-
основания, Гц
Коэффи-
Коэффициент
эффектив-
эффективности к%
a, v
-
3-35
50
80
100
250—1500
—
-
3,0
0,5
0,3
0,2
0,1
—
Частота
вибрации
основа-
основания, Гц
Коэффи-
Коэффициент
эффектив-
эффективности kg
w
-
3-20
30
50
100
250-1500
—
-
2,0
0,5
0,3
0,2
0,1
—
9. Противоударные характеристики резинометаллических виброизоляторов
Тип
вибро-
изоля-
изолятора
АП, АЧ
АН
Ампли-
Амплитуда
ударного
импульса
по оси w,
см
150
75
50
37
15
7,5
5
3
50
35
12
6
3
Длитель-
Длительность
ударного
импульса,
с
0,0005
0,001
0,0015
0,002
0,005
0,010
0,020
0,025
0,0015
0,002
0,005
0,010
0,020
Ускорение
виброизоли-
виброизолированного
объекта при
ударе с пре-
предельной
амплитудой,
м/с2
70-150
60-130
Тип
вибро-
изоля-
изолятора
АР
АД
АФД
АПН
Ампли-
Амплитуда
ударного
импульса
но оси w,
см
50
30
5
3
50
30
20
12
6
3
10
10
13
Длитель-
, ность
ударного
импульса,
с
0,001
0,002
0,10
0,25
0,0005
0,001
0,0015
0,002
0,005
0,010
0,010
0,005
0,010
Ускорение
внброизоли-
рованного
объекта при
ударе с пре-
предельной
амплитудой,
м/с2
90
5—15
-
40
10.
Тип
вибро-
азолчтора
АП, АЧ
АКСС-М
АКСС-И
AM
АН
АР
АД
АФД
АПН
Эксплуатационные характеристики резинометаллическия
Диапазон
оабочих
температур, °С
От -45 до -f80
» —5 j
> -5 1
. -40 «
> -40
» -45
> —60
» -60 >
» -60 >
-70
-70
-60
г50
-50
> +70
4150
+ 150
Атмосферное
давление,
мм рт. ст
Не ограничено
»
Не менее 19
Не ограничено
Не менее 5
Относитель-
Относительная влаж-
влажность (%)
при t = 40 °С
До 98
> 98
> 98
> 98
> 98
> 98
Q8
> 98
» 100
виброизоляторов
Срок
эксплуата-
эксплуатации
От 8 мес.
до 2 лет
3 года
3 года
От 6 до
12 мес
300 ч
500 ч
—
Срок
хранения,
лет
3
1
1
3
6
3
I
3
—
220
ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
5 ю пZ5 so тот те f,nt
Рис. 45. АЧХ виброизоляторов типа АРМ
Рис. 46. Виброизолятор типа АЦП
Статические, динамические и эксплуатационные характеристики резинометалли-
ческих и пружинных виброизоляторов наиболее распространенных типов приве-
приведены в табл 7—10.
Глава VIII
ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
1. ДИНАМИЧЕСКИЕ МОДЕЛИ ВИБРОЗАЩИТНЫХ СИСТЕМ,
СОДЕРЖАЩИХ УПРУГИЕ ОБЪЕКТЫ И ИСТОЧНИКИ КОЛЕБАНИЙ
В предыдущих главах предполагалось, что при решении задач виброизоляции
источник и объект виброзащиты можно рассматривать как абсолютно твердые тела,
соединенные между собой виброизоляторами В действительности вынуждающие
силы возбуждают не только перемещения источника и объекта как твердых тел, но
и их упругие деформации.
При исследовании упругих колебаний источник и объект можно в большинстве
случаев рассматривать как упруговязкие системы с конечным числом степеней сво-
свободы, малые колебания которых вблизи устойчивого положения равновесия описы-
описываются линейными дифференциальными уравнениями Лагранжа второго рода:
где Л, В, С — симметричные положительно-определенные п X л-матрицы, состав-
составленные соответственно из инерционных, диссипативных и квазиупругих коэффици-
коэффициентов; q — п мерный вектор обобщенных координат системы, Q (I) — вектор обоб-
обобщенных сил, действующих на источник или объект.
Обычно объект и источник являются системами, обладающими слабыми дисси-
пативными свойствами, и элементы матрицы В можно считать малыми величинами.
Динамическая модель виброзащитной системы с упругими источником и объектом
представлена на рис 1. В точках Alt ..., Ak к источнику Я приложены вынуж-
вынуждающие силы Flt ..., Fk. Источник соединен с объектом одноосными виброизолято-
виброизоляторами С&, ..., CSC'S, условно изображенными в виде «пружин». При этом предпола-
[ается что многоосные виброизоляторы могут быть заменены несколькими одноос-
одноосными, как указывалось в гл, VII. В точках Вх, „„ Вт, Dx D, источник и объект
ДИНАМИЧЕСКИЕ ПОДАТЛИВОСТИ И ЖЕСТКОСТИ ОБЪЕКТОВ И ИСТОЧНИКОВ 221
рис 1 Динамическая модель системы с упругими объектом и
ги источником
могут быть соединены с другими телами, в частном слу-
случае, если эти тела являются достаточно жесткими, точки
gt (/ = 1 т) ,D, (i = 1, ..., г) могут считаться непод-
неподвижными.
Если одно из тел (объект или источник) обладает
достаточно большой жесткостью и может поэтому рас-
рассматриваться как абсолютно твердое (в соответствующем
частотном диапазоне), а второе — является существенно
менее жестким, или если масса одного из тел (объекта
или источника) существенно превышает массу другого
тела, виброзащитная система может быть описана более
простыми динамическими моделями, показанными на
рис. 2 В модели, представленной на рис. 2, а, источник
обладает весьма большими массой и жесткостью, так что влияние объекта на дви-
движение точек Сх С$ источника может не учитываться, и законы движения этих
точек в направлении осей виброизоляторов
ными.
(/)
%s @) могут считаться задан-
Рис. 2. Динамические модели виброзащитных систем-
с источником большой массы, а — жестким, б — упругим, с объектом большой массы в —
жестким, г — упругим
В модели, представленной на рис. 2, б, заданными являются движения точек
Ci, ..., Cs в отсутствие объекта, при присоединении объекта законы движения этих
точек изменяются из-за податливости источника, которая в этом случае должна учи-
учитываться. В моделях на рис. 2, о и б объект в зависимости от указанных выше об-
обстоятельств может рассматриваться как абсолютно твердое или как упругое тело.
В моделях, представленных на рис. 2, в и г, весьма большой является масса объекта,
в схеме на рис. 2, г учитывается также и его податливость.
2. ДИНАМИЧЕСКИЕ ПОДАТЛИВОСТИ
И ДИНАМИЧЕСКИЕ ЖЕСТКОСТИ ОБЪЕКТОВ И ИСТОЧНИКОВ
Исследование виброзащитных свойств систем с упругими источниками и (или)
Упругими объектами связано с рассмотрением динамических характеристик этих
упругих тел — динамических жесткостей и динамических податливостей, являю-
являющихся обобщением аналогичных характеристик, введенных в гл. VI для одномерных
систем. г г к
222 ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
Пусть в некоторой точке М (рис. 3) к телу, движение которого описывается урав
нением A), в направлении, определяемом ортом т, приложена гармоническая сила
F$)(t)=F0coso>t.
В линейной системе A) под действием этой силы устанавливаются (после кратко
временного переходного процесса) гармонические колебания частоты со. В частности
перемещение некоторой точки К в направлении орта к, будет являться гармониче
ским процессом вида
где «о — амплитуда перемещения; <р — сдвиг по фазе между перемещением и при
ложенней силой.
В рассмотрение введем комплексную величину 1$% A(й)> модуль которой равен
отношению u0/F0, а аргумент — фазовому сдвигу ср (в линейной системе uo/FQ и ф
не зависят от амплитуды /"„). Эта величина, рассматриваемая как функция частоты ш
гармонического воздействия, называется динамической податливостью упругого
тела.
Рис. 3. Схема для определения динамических характеристик:
Д1 — точка приложения силы; К — точка измерения переме-
перемещения
Если ввести в рассмотрение комплексную вынуждающую силу Fffi (t) —
= Foe'w' и комплексное перемещена точки К u^ = uotl<i>t, то динамическая по-
податливость '$/(' ((-fi)) окажется равной отношению комплексных амплитуд:
/(^)('w) = «o//ro. B)
Динамические податливости 'j(i/c' (г@) могут быть выражены через параметры
системы следующим образом.
Пусть q (t) — вектор обобщенных координат системы A), характеризующий пере-
перемещение этой системы, вызванное приложением силы Fffi. Перемещение м^1' точки
приложения силы в направлении линии ее действия является (при малых колебаниях)
линейной функцией обобщенных координат:
где f^l — некоторые постоянные коэффициенты.
Аналогичным образом можно связать перемещение и^ с обобщенными коорди-
координатами:
«$> = $i)9i+-+#i9*=/?> Ч- D)
Тогда
1м8 («¦«)=/)с> • (C-Atf + Bto)->- -/Й". E)
Поскольку А, В, С — симметричные матрицы, следует, что /^'?? = 1*$$.
Изменяя точки М и К, направление ортов т и k, можно получить совокупность
динамических податливостей рассматриваемой системы.
Величина, обратная динамической податливости, называется динамической жест-
жесткостью системы,
ДИИАМИЧЕСКИГ ХАРАКТЕРИСТИКИ CI1CTFM 223
3. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ
СО СЛАБОЙ ДИССИПАЦИЕЙ
Динамические податливости и динамические жесткости систем со слабой дисси-
диссипацией обладают некоторыми общими свойствами, для рассмотрения которых целе-
целесообразно перейти от обобщенных координат системы q к главным (нормальным)
координатам 6 с помощью преобразования (см. п, 1 гл, VI)
п
q= 2 Л Д., G)
где бг —главные координаты, hr — и-мерные векторы собственных форм, опреде-
определяемые из системы линейных уравнений
(С — со'Л)йг = 0, (/¦=!, ..., п), (8)
где со,. — собственные частоты системы, удовлетворяющие уравнению
det(C-co^) -0. (9)
Выразим перемещения C) и D) через главные координаты.
Лт) _
им —I
Вектор gffi (g^') называется вектором коэффициентов собственных форм системы
в точке М (К) в направлении m (k). Если один из коэффициентов gfflr обращается
в нуль, то это означает, что при свободных колебаниях системы с собственной часто-
частотой со,, перемещение u^l) оказывается равным нулю. В этом случае говорят, что
точка М является узлом колебаний по г-н форме в направлении т.
Динамические податливости и динамические жесткости системы со слабой дисси-
диссипацией обладают следующими свойствами.
1. При со = (йг (г = 1, ..., п), т. е. при совпадении частоты воздействия с одной
из собственных частот системы, модули всех динамических податливостей /д?к A%*)
оказываются большими величинами. Частоты со = со,, называются резонансными
частотами системы. На резонансных частотах малые по амплитуде вынуждающие
силы могут возбуждать колебания большой амплитуды. Исключение составляют
те случаи, в которых g$] = 0 или gj^ = 0; в этих случаях приложение силы Fffl
(или 1%), имеющей частоту сог, не вызывает резонансных явлений. Из F) следует,
что на резонансных частотах модули динамических жесткостей являются малыми
величинами.
2. Существуют частоты со = ир (р = 1, .,., s), на которых модули динамиадских
податливостей становятся малыми по величине, такие частоты называются антирезо-
антирезонансными. Для различных динамических податливостей антирезонансные частоты,
вообще говоря, различны. Количество и расположение антирезонансных частот ди-
динамической податливости ?$? («в) зависят от количества и расположения перемен
знака в ряду чисел
Jm)a(k) ft fc
Поскольку векторы собственных форм системы определяются с точностью до про-
произвольного множителя, можно считать первое из чисел A2) положительным. Если
все эти числа положительны [число перемен знака в ряде A2) равно нулю], что имеет
место, в частности, при совпадении точки М с точкой К, а орта т с ортом k, то дина-
224
ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
мическая податливость /^' (jco) имеет п — 1 антирезонансных частот, причем они
располагаются между собственными частотами системы
«i s? Xx s? С02 «? ... s? Хл_х s? Ш„. A3)
Каждой перемене знака в ряду A2) соответствует потеря одной из антирезонанс-
антирезонансных частот, Так, если числа gffig^l и g^> r+1g^J m имеют противоположные знаки,
7(тк)
№/(,
а)
Рис. 4. Годографы:
a — динамической податливости; 6 — динамиче»
ской жесткости
Рис. 5. Годограф динамической по-
пода гливости; точка приложения си-
силы совпадает с точкой измерения
перемещения
антирезонансная частота кг «теряется». В общем случае при / переменах знака в ряду
A2) динамическая податливость Щ^ (ко) имеет л—1—/ антирезонансных частот.
Модули динамических жесткостей
Щлк ((С0) на антирезонансных частотах
(q = кг) становятся большими вели-
величинами.
3. Значения собственных частот си-
системы, количество и расположение пе-
перемен знака в ряду A2) определяют
форму годографа комплексной динами-
динамической податливости.
Годографы динамических податли-
востей для системы, не обладающей
нулевой собственной частотой, начи-
начинаются в одной из точек вещественной
положительной полуоси A^^ @) > 0)
и при малых значениях со располага-
располагаются в нижней полуплоскости. Резо-
Резонансным и анти резонансным частотам
соответствуют точки, расположенные
вблизи мнимой оси. Годограф делает
столько полных петель в нижней полу-
полуплоскости, сколько имеется положитель-
положительных чисел в ряду A2) до первой пере-
перемены знака. Если, например, g^lg^l > 0 при г = 1 s — 1, a g%\g^\ < 0, то
годограф делает s — 1 петлю в нижней полуплоскости. Затем годограф пересекает
вещественную отрицательную полуось и переходит в верхнюю полуплоскость; ча-
частота (й„> соответствующая точке пересечения годографа с вещественной осью, рас-
расположена между (x>s-i и ш^, Годограф делает столько петель в верхней полуплоскости,
Рис. в.
Годографы для системы с
собственной частотой:
а — динамической податливости;
мической жесткости
нулевой
6 — дина-
МАТРИЦЫ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК 225
сколько имеется отрицательных чисел в ряду A2) -между первой и второй переме-
переменами знака. Затем годограф вновь возвращается в нижнюю полуплоскость.
Примерная форма годографа динамической податливости приведена на рис. 4, а,
а соответствующая форма годографа динамической жесткости — на рис. 4, б. При
совпадении К с М и k с т перемен знака в ряду A2) нет, и годограф динамической
податливости полностью располагается в нижней полуплоскости (рис. 5).
Если рассматриваемая система имеет нулевую собственную частоту (указываю-
(указывающую на возможность свободного ее перемещения как твердого тела), годограф дина-
динамической податливости несколько изменяет форму. При со -*• 0 в этом случае 1$$-*-
-, оо (рис. 6, а). Годограф пересекает мнимую ось на первой антирезонансной ча-
частоте Щ @ < хх sg coj), затем начинает делать петли в нижней полуплоскости. Соот-
Соответственно изменяется и годограф динамической жесткости (рис. 6, б).
4. МАТРИЦЫ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ИСТОЧНИКА И ОБЪЕКТА
Рассмотрим объект виброзащиты, к которому в точках С[, ..., С'$ (см. рис. 1)
прикреплены одноосные виброизоляторы. При гармонических воздействиях F1 Fk,
имеющих частоту со, в точках крепления возникают гармонические силы Q[ Q's<
направленные по осям виброизоляторов и приложенные к объекту. Эти силы вызы-
вызывают гармонические колебания точек С[, ..., C's, [u[ (t) u's (t)]. Пусть Q'r =
= Qr0 eiat; тогда, используя принцип суперпозиции, для комплексной амплитуды и'р0
перемещения точки С'р можно получить следующее выражение:
. . Am тп ) ..
Здесь 1гр (ico) = i\,rrip ((со) — динамическая податливость, связывающая силу,
СгСр
приложенную в точке С'г и направленную по оси г-го виброизолятора с проекцией
перемещения точки С'р на направление оси р-го виброизолятора (т. е. орты mr и тр
направлены по осям соответствующих виброизоляторов).
Введем в рассмотрение s X s-матрицу, элементами которой являются динами-
динамические податливости lrp (tco):
Эта матрица называется матрицей динамических податливостей объекта в точ-
точках крепления виброизоляторов. Тогда выражения A4) могут быть записаны в виде
векторного соотношения
a'o = Lo (ia)Q'o, A5)
где и'о и Q'o— s-мерные векторы комплексных амплитуд перемещений точек крепле-
крепления и сил, приложенных к объекту в этих точках.
Аналогичным образом вводится матрица динамических податливостей источника
в точках крепления виброизоляторов, связывающая комплексные амплитуды пере-
перемещений точек Си ..., Cs (см. рис. 1) с комплексными амплитудами реакций вибро-
виброизоляторов, приложенных в этих точках к источнику
ИО=1И(!Ш)(?О. A6)
Матрицы, обратные Lo (to) и La (ico):
Ко («o)=Lo' (to), Ka (i(x>)=Lj (ia),
называются матрицами динамических жесткостей объекта и источника в точках
крепления.
8 п/р. Фролова
226 ВИБР0Н30ЛЯЦИЯ i ПРУГИХ ОБЪЕКТОВ
5. ЭФФЕКТИВНОСТЬ ВИБРОИЗОЛЯЦИИ
Рассмотрим динамическую модель виброзащитной системы, представленную на
рис. 1. Свойства каждого из одноосных виброизоляторов описываются его динами-
динамическими жесткостями, связывающими комплексные амплитуды гармонических сил Qm
и Q'm, возникающих в точках крепления m-го виброизолятора к источнику и к объекту
при гармонических воздействиях частоты со с комплексными амплитудами переме-
перемещений этих точек:
Mmo |
>(m=l, ..., s), A7)
Вводя диагональные s X s-матрицы
k\f}, (i, /=1, 2)
можно записать A7) в векторной форме:
Предположим, что объект соединяется с источником с помощью абсолютно жест-
жестких стержней, прикрепленных соответственно в точках Clt ...,' Cs, C[ C's с помо-
помощью шарнирных сочленений Такое соединение объекта с источником будем называть
жестким креплением. При действии сил F/ (f) в соединительных стержнях возникнут
силы, направленные по линиям СГС'Г (т, е, по осям виброизоляторов); s-мерный век-
вектор комплексных амплитуд этих сил обозначим через Qo. Очевидно, что силы, амп-
амплитуды которых образуют этот вектор, окажутся приложенными к объекту при жест-
жестком соединении. Сравнивая их с силами, возникающими при виброизоляции объекта,
можно судить об эффективности виброзащиты.
Можно показать [106], что вектор Q'oсвязан g вектором ^следующим соотноше-
соотношением:
Qo = R(i(o)Qo, A9)
где
R (to) =-{[/- Lo (Ceo) /Cu (ft»)] [La ((со) K2l (im)]-i [/ -La (ico) /CM (to)] -
-Lo (ico) Kii (ко)} [Lo (ico) + La (ia)] L~* (to). B0)
Поэтому в качестве количественной оценки эффективности виброизоляции выби-
выбирают обычно какую-либо норму матрицы R (ico) Если в качестве критерия эффек-
эффективности выбирают
1
#0(co) = sup 2 )^m(to)|, B1)
r=\
где rgm (to) — элементы матрицы B0), то условие Ro (со) < 1 означает, что при
введении виброзащитного устройства уменьшается сумма модулей амплитуд сил,
возникающих в точках крепления объекта к источнику, при любых гармонических
воздействиях частоты со.
Если виброизоляторы имеют такую конструкцию, что их реакции Qft и — Q'k
равны по величине и связаны с деформациями u'k — uk виброизоляторов передаточ-
передаточными функциями kk (p), т. е, если
Q*=-% — **</»)(«*-«*). (р = 4г)' B2)
то
R (№))=-[/.„ (i(o) + L0 (!Q)) + LB (ко)]-' [Lo (iw) + Lu (to)]. B3)
РАСЧЕТ ОДНОМЕРНЫХ СИСТЕМ
227
Здесь
LB (ко) = diag {ki' (ко),
ks'
B4)
Все введенные выше зависимости остаются в силе и для динамических моделей,
представленных на рис. 2. Если одно из тел (объект или источник) считается свобод-
свободным абсолютно твердым телом (т. е. если оно не соединено с какими-либо другими
телами, кроме виброизоляторов), то элементы v/aipnub!
его динамических податливостей в точках крепления
/ (ко) (гр = 1, .¦•, s) имеют следующий вид:
7Г
rx
B5)
Рис. 7. Схема для определе-
определения матрицы динамических
податливостей для свобод-
свободною твердого тела
Здесь т — масса тела;. рх, ру, рг — его радиусы инерции относительно главных
центральных осей х, у, г; хп уп гГ — координаты точки крепления Сг r-го виброизо-
виброизолятора; ап Рл, уг — направляющие косинусы оси этого виброизолятора (рис. 7).
Если твердое тело считается неподвижным (имеющим «бесконечную» массу), то мат-
матрица его динамических податливостей принимается нулевой.
6. РАСЧЕТ ОДНОМЕРНЫХ СИСТЕМ
Если объект и источник соединены одним одноосным виброизолятором (рис, 8),
то для оценки эффективности виброзащиты достаточно знать динамические податли-
податливости /?с = 'и' ^СС' =^0 источника и объекта в точке крепления его виброизолятора.
Рис. 8. Схема для определения
динамических характеристик од-
одномерной системы
AAAAAAAA
Матрицы Lo и L,, в этом случае имеют размерность 1 X 1. К одномерному случаю
приводится и исследование системы с несколькими одноосными виброизоляторами,
оси которых параллельны, если эти виброизоляторы связывают между собой симмет-
симметричный объект и симметричный источник.
Матрица R (ш>) [см, B0)] в одномерном случае становится комплексным числом
Г у"°' ~ [ 1 + kn (ко) /0 (/со)] [ 1 + k22 (ко) /и (ко)] — 612 (to) kn (ко) l0 (ico) /и (ко)' (
где ksm (/со) (s, т — 1, 2) —динамические жесткости виброизолятора.
Модуль /¦(ко) может служить количественной характеристикой эффективности
виброизоляции (коэффициент виброизоляции).
Если виброизолятор имеет характеристику вида B2), то
г0 (со) = | г (tea)
/0
B7)
Наиболее распространенные схемы одномерных виброизоляторов, их динамиче-
динамические жесткости и податливости приведены в табл. I.
8»
228 ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
I. Динамические жесткости и динамические податливости одномерных систем
Схема системы
Динамическая жесткость кд и динамическая
податливость I д в точке А
VS/V;
1
^*
, сггхо2
А~ с — то*
, >
>L
y. Km
кА=~
mai
, = 1 |_.
А та2 Ыа '
РАСЧЕТ ОДНОМЕРНЫХ СИСТЕМ 229
Продолжение табл.1
Схема системы
Динамическая жесткость k д и динамическая
податливость I д в точке А
U-J»
кд=с
с — bi <й
с2 -f b2®2
к а =с —
с — та'
zzv?
к д — Ы<о — та1
т(ог + 6 ('со
+ й2со2
1 L+1
с та2 Ьа
, =I_ J Lf
" с тоJ 6и
с —mm2 — bta
с — та2)' + b2ui-
230
ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
Продолжение' табл 1
Схема системы
Динамическая жесткость кд и динамическая
податливость Iд в точке А
_b(c— ты2)-ттиа
(ft2 -f m'a2) [b (с — ты2) — тс ко]
?
_
<г(т'<вг + 62) [— гаи' (с — та'
[— т@(с — та2
— та' (с — ты') -j- Ь2а>г — cbia
к А>
Ь'ы2 (с — та2) -f- iftco (с — тоJJ
4о) (с —
_ (с2 -f- 62ю2) та' [с (та1 — с) — Ьга2 + 6m@3t]
^ [с (с — moo2) + 62а2]2 + Ь'т'а"
. _ (с — та1) с 4- Ь;'
*) та2
'А =
ca)
РАСЧЕТ ОДНОМЕРНЫХ СИСТЕМ 231
Продолжение т а б л 1
Схема системы
Динамическая жесткость k& и динамическая
податливость I д в точке А
А
г — сгЫ<>)
*д
У//}/
bWc + [с2 F, + 6,) + 6i62@°] I
a"'] ко}
ь1в4 + [с2 F, + Ь.) + bibtia'V со2
Ь2(Л (с
сЬга> — i (с3
. _ (с — тсо2)Ь2ш2 — с2таг + c'bia
А 9 i Г~9 5 '
с2 -\- b (Л
1 — (с ~ ""Д2) ft2to! — c2m(o8 — c'bm
А c2m2@4 + (с — шш2J fc2ifl2
(с — шв!) 6@) — ста2
' + (с — ти') ftirn]
232
ВИБРОИЗОЛЯЦИЯ УПРУГИХ ОБЪЕКТОВ
Эффективность простейшего одноосного виброизолятора при гармонических воз-
воздействиях частоты со. Для простейшего виброизолятора, состоящего из упругого
элемента с жесткостью с и диссипативного элемента с коэффициентом сопротивления Ь,
k (ico) = с + bico; no B7)
г0 (со) =
Если в комплексном числе \l0 (ico) + 1И (ico)] выделить вещественную и мнимую
части
['о («») +l» (i")] = И («) + «v О'ш),
то
B8)
При слабой диссипации в источнике, объекте и виброизоляторе коэффициент виб-
виброизоляции принимает приблизительно наибольшее значение (т. е. виброизоляция
становится наименее эффективной) на частотах сор, опре-
определяемых из уравнения
с + ц (й}р) = 0, B9)
и называемых резонансными частотами виброзащитной
системы. Достаточное условие эффективности виброизо-
виброизолятора на этих частотах
с < v (сор). C0)
Для проверки выполнения этого условия строится
годограф функции
kc (ico) = [10 (ico) -f- la (ico)]-1 = ц (со) + iv (со).
/M
Рис. 9. Графический ме-
метод оценки эффективно-
эффективности виброизолятора v
Точки годографа сабсциссой, равной—с, должны иметь ординату, превышающую с.
На рис. 9 построен годограф kc (ico) для случая /и (ico) = 0; он совпадает с годо-
годографом динамической жесткости объекта в точке крепления виброизолятора. Точки А,
В, С, D, Е годографа соответствуют резонансным частотам (корням уравнения B9)).
На частотах, соответствующих точкам А и В, виброизолятор неэффективен, поскольку
на этих частотах v < с. На остальных резонансных частотах обеспечивается выпол-
выполнение условия C0).
Примеры определения динамических податливостей одномерных систем.
[
AVW-
AWV-
Рис. 10. Динамическая модель двух-
массной системы
Pocosut
м
т
0
X
L
Рис. 11. Однородный упругий стержень
1. Виброизолируемый объект моделируется двухмассной системой (рис. 10) с двумя сте-
степенями свободы. Для определения динамической податливости /о (to) составляем матрицы А%
д\тп 01 „
Л В
Поскольку и'.'?) = д„, К?' = 1> по E) находим
М 2 М
<C")(to)-g + v-f
м
* + (Ь + fl)
где
Д (Са>) =[е + V — Ш!Ш! + (Ь + Р) «ш] (у — тгшг f Pico) - (у
НЕЛИНЕЙНЫЕ ХАРАКТЕРИСТИКИ ВИБРОИЗОЛЯТОРОВ 233
2. Виброизолируемый объект —однородный стержень длиной L и площадью S (рис. 11).
Дифференциальное уравнение продольных колебаний стержня
dt1 дх*'
где и (х, t) — перемещение точки стержня с координатой х; C~VE/p; E, р —модуль упру-
упругости и плотность материала. Для определения динамической податливости приложим в точ-
точке М силу Pa cos (of и найдем колебания, вызванные этой силой.
Разыскивая решение уравнения движения в форме и= V {х) cos wt и учитывая гранич-
граничные условия ES -д— =— Pa, U (L) = 0, получим
1 ох \х0
Отсюда находим
Для стержня со свободными концами FU @)/дх = дС/ (/)/д#=0) аналогично находим
Пример построения операторов динамической податливости стержня G учетом внутрен-
внутреннего трения приведен в гл. IV, параграф 1.
Глава IX
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
В виброизолированных системах может происходить ряд явлений, адекватное
описание и исследование которых оказывается возможным только с помощью нели-
нелинейных динамических моделей, в которых упругие или диссипативные свойства виб-
виброизоляторов характеризуются нелинейными функциями обобщенных координат и
обобщенных скоростей.
1. НЕЛИНЕЙНЫЕ ХАРАКТЕРИСТИКИ ВИБРОИЗОЛЯТОРОВ
Нелинейные упругие характеристики. Нелинейность упругих характеристик
виброизоляторов обусловливается несколькими причинами.
1. Свойствами материала, из которого изготовляется упругий элемент. Нели-
Нелинейными упругими свойствами обладают, в частности, упругие элементы, изготов-
изготовленные из резины. Жесткость резинового элемента, работающего на сжатие или на
сдвиг, как правило, возрастает с увеличением деформации. Типичная упругая ха-
характеристика резинового элемента приведена на рис. 1, а.
2. Конструктивными особенностями упругих элементов. Нелинейными характег
ристиками обладают, например, конические пружины, используемые в конструк-
конструкциях виброизоляторов (рис. 1,6).
На рис. 1, в показана конструкция упругого элемента с начальным натягом и
приведена его упругая характеристика. При смещении стержня / относительно
корпуса 2 возникает восстанавливающая сила, равная силе начального сжатия
пружины.
3. Наличием ограничительных упоров. Область линейности упругого элемента
всегда ограничена из-за ограниченности габаритных размеров виброизолятора. При
некоторых величинах деформации упругого элемента Происходит соприкосновение
подвижного элемента виброизолятора либо с его корпусом, либо со специально пре-
предусмотренными ограничительными упорами (рис. 2, а). Если такое соприкоснове-
соприкосновение происходит при х = d и при х = —dlt упругая характеристика приобретает
форму, показанную на рис. 2, б. Расстояние 2Д = d + dx называется свободным
ходом виброизолятора,
234
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
Нелинейные диссипативные свойства виброизоляторов. Диссипативные силы,
возникающие в виброизоляторах при их деформациях, могут также носить нели-
нелинейный характер. Типичным примером нелинейной диссипативной силы является
Рис. 1. Упругие характеристики:
а — резинового элемента; 6 — конической
витой пружины; в — элемента с начальным
натягом
сухое (Кулоново) трение. Демпферы сухого трения используют в ряде конструкций
виброизоляторов (см гл. VII). Нелинейными свойствами обладает и внутреннее
трение, возникающее в упругом элементе при его деформациях (см. гл. IV).
2. НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ
В ВИБРОИЗОЛЯТОРЕ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Рассмотрим одномассную систему с нелинейным упругим элементом, подвержен-
подверженную гармоническому воздействию, силовому или кинематическому (рис. 3). Пусть
F (х) — нелинейная характеристика упругого элемента, выражающая зависимость
\aocosut
У/7/////////
IfcM/
So COtЫ t
Рис. 2. Виброизолятор с упругими упора-
упорами и его характеристика
Рис. 3. Динамические модели нелинейных
систем с одной степенью свободы:
а — силовое воздействие; б — кинемати-
кинематическое воздействие
восстанавливающей силы от деформации х, отсчитываемой от положения статического
равновесия. Диссипативную силу будем считать пропорциональной скорости дефор-
деформации
Я = М. A)
Уравнение движения систем, показанных на рис. 3, записывается в следующей
форме:
+ bx + F (*) = Go cos otf, B)
нелинейные явления в виброизоляторе 235
где т _ масса объекта; Go = Qo — в случае силового и Со = т|0ш2 в случае кине-
кинематического воздействия.
Введя обозначения
b F (х) ,. . <30
приводим уравнение B) к форме
х + 2пх + [ (х) = g0 cos cot. Ba)
Свойства системы, описываемой уравнением Bа), рассматривались подробно
В гл. V т. 2. Отметим наиболее существенные особенности поведения этой системы,
связанные с нелинейностью упругой силы.
В системе Bа) после некоторого переходного процесса, обычно кратковремен-
кратковременного, устанавливаются периодические колебания, имеющие либо период Т = 2я/ш
(основные вынужденные колебания), либо период sT, где s — целое число (субгармо-
(субгармонические вынужденные колебания порядка s). Субгармонические колебания реали-
реализуются только в нелинейных системах.
Периодическое решение уравнения Bа), имеющее период Т, обычно оказывается
близким к гармоническому процессу (высшие гармоники этого решения обычно срав-
сравнительно малы по амплитуде) и может поэтому в первом приближении разыскиваться
в форме
+(/ + ) C)
где а0 — смещение середины размаха колебаний от положения статического равно-
равновесия; а — амплитуда колебаний; q> — сдвиг по фазе между колебаниями и вынуж-
вынуждающей силой. Связь между а0 и а получается из условия равенства нулю постоянной
составляющей силы / (х), которое может быть приведено к форме
2л
f(au + a cos ф) dip = /0 (а0) а) = 0. D)
Из уравнения D) можно определить зависимость а0 (а). Амплитуда колебаний
а= , g0 E)
У [X2 (а)—ш2]2 + 4«2ш2
Здесь функция X (а) выражает зависимость частоты свободных колебаний массы т
на нелинейной пружине F (х) от амплитуды, причем
2я
1 г*
А2 (а) = — V / [а0 (а) + a cos г|з] cos
о
Зависимость X (а) называется скелетной кривой системы. Методы решения уравне-
уравнения E) рассмотрены в гл. V т. 2.
После определения амплитуды а из уравнения E) можно определить сдвиг по
фазе ф:
2псо
Определив периодическое решение C), можно найти коэффициент виброизоляции
(см. гл. VI), характеризующий в данном случае отношение амплитуд первых гармо-
гармоник соответствующих сил, ускорений или перемещений:
V [№ (а) — со2]2 + 4п2соа
236
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
При фиксированном значении со уравнение E) может иметь несколько решений
(aj, Oj, a3, ...), которым соответствует несколько различных периодических движе-
движений системы с одинаковым периодом 2я/ш. В виброизолированной системе с ограни-
ограничительными упорами (см. рис. 2) одно из этих решений соответствует колебаниям
малой амплитуды, при котором система не выходит за пределы области линейности
упругой характеристики. Только при реализации этого периодического режима
обеспечивается осуществление виброзащитных свойств системы. Остальные перио-
периодические решения соответствуют колебаниям,-сопровождающимся соударениями с
упорами. Если в системе возникает один из таких режимов, виброизоляционные
свойства системы нарушаются. Возникновение в системе того или иного периодиче-
периодического движения зависит от начальных условий, которые в реальных системах обычно
не могут быть заданы с достаточной определенностью. «Перескок» системы с одного
периодического режима на другой становится возможным в результате случайного
толчка или удара. Аналогичные явления могут возникать и в системах с «гладкими»
нелинейными характеристиками (см. рис. 1, а и б).
Для обеспечения нормального функционирования виброизолированной системы
нужно исключить возможность возникновения в ней опасных режимов. Необходимо
таким образом выбирать параметры системы, чтобы в ней оказался возможным только
один периодический режим, соответствующий колебаниям малой амплитуды.
и 0 70 ТС
и, 1/0
Рис. 4. Резонансная кривая нели»
нейнсго виброизолятора
Рис. 5. Построение скелетной и ре.
зонансной кривых при переменной
амплитуде динамического воздейст-
воздействия
Решив уравнение E) при различных значениях со, можно построить резонанс-
резонансную кривую системы а (со). Одна из возможных форм резонансной кривой показана
на рис. 4..Здесь же изображена скелетная кривая со = X (о). В точках А, В к С ре-
резонансная кривая имеет вертикальную касательную. Точки А и С практически
совпадают с точками пересечения скелетной и резонансной кривой. Как показано
в [105], участки. АВ и CD соответствуют неустойчивым, а следовательно, и нереа-
нереализуемым практически периодическим решениям. На рис. 4 приведена также кривая
со = 1^2 X (а); все точки резонансной кривой, расположенные правее этой линии,
соответствуют периодическим режимам, при которых обеспечивается условие вибро-
виброизоляции (К% < 1). Для остальных режимов условие виброизоляции не выпол-
выполняется.
При со < со! в системе возможен только один периодический режим периода Т,
поскольку любому значению со из этого диапазона соответствует одно значение а.
Однако при колебаниях, соответствующих этому решению, виброизоляция объекта
не обеспечивается. При щ sg со =g co2 имеются три периодических решения периода Т.
Одному из них соответствуют колебания малой амплитуды. Однако существование
устойчивого режима с большой амплитудой приводит к недопустимости работы си-
системы в рассматриваемом частотном диапазоне. Случайный толчок может вывести
систему на этот режим; при этом величина К^ окажется существенно больше единицы.
В диапазоне со2 =g со s? со3 существует только одно периодическое решение пе-
периода Т, при котором Kf( < 1. В этом частотном диапазоне виброизолятор эффек-
эффективен, При со > соэ вновь создается опасность выхода системы на режим большой
нелинейные явления в виьроизоляторе 237
амплитуды (резонансный режим), соответствующий точкам участка СЕ резонансной
кривой.
В зависимости от вида нелинейности / (х) и закона изменения амплитуды вынуж-
вынуждающей силы g0 при изменении частоты со резонансные кривые системы Bа) могут
иметь различную форму. Некоторые формы резонансных кривых приведены в табл. 2
гл. V т. 2. Однако для решения вопроса о возможности возникновения в системе
нежелательных резонансных периодических режимов нет необходимости строить
резонансные кривые. Для этого достаточно определить координаты точек пересече-
пересечения скелетной кривой с резонансной. В связи с этим анализ нелинейной виброизоли-
виброизолированной системы может производиться следующим образом.
1. По заданным параметрам гармонических вибрационных воздействий опреде-
определяется зависимость g0 (со).
Пример. Кинематическое воздействие на систему задано следующим образом; ?о = 0,1 см
при 0 < со < 70л 1/с; |осог = 5-103 см/са при 70я 1/с < со ^ 200я I/O.
В этом случае
go (со) = ?о@г при со ^ 70я 1/с!
go = 5-Ю3 см/сг при 70л 1/с < со s? 200я 1/с.
2. Строится скелетная кривая системы на плоскости (а, со) в соответствии с урав-
уравнением
2л
«Bt-A^-JL J/fa-facosi|>]coeiJ>A|>. (9)
о
Пример. На рио 5 построена скелетная кривая для линейного упругого элемента жест-
жесткости с с симметрично расположенными ограничительными упорами (Д — расстояние до
упора, равное половине свободного хода, соз = с/ту
3. Строится линия предельных амплитуд в соответствии с уравнением
Щ (Ю)
В рассматриваемом примере линия A0) состоит из прямой
2п ' п
на участке со ^ 70Я 1/с и гиперболы
_ go _ 2,5-103 _
~ 2nco ~ псо '
на участке 70я 1/с < со < 200л 1/с.
4. Точки пересечения линий (9) и A0) совпадают с точками пересечения скелет-
скелетной кривой с резонансной и определяют характер -последней,
В рассматриваемом примере резонансная кривая распадается на две ветви: нижнюю,
точки которой соответствуют колебаниям, не выходящим за пределы области линейности, и
верхнюю, соответствующую резонансным колебаниям, сопровождающимся «стуком об упоры».
Область гарантированной эффективности виброизоляции соответствует значениям
<в>@,, где со«_—наибольшая из абсцисс точек пересечения линий (9) и A0).
При соо ^2 ^ со ^ со* эффективность обеспечивается только в том случае, если в системе
устанавливается периодический режим, соответствующий точкам нижней ветви Возможность
возникновения в этом частотном диапазоне устойчивых периодических движений резонанс-
резонансного характера, соответствующих точкам верхней ветви, приводит к ненадежности системы
виброизоляции
Методы устранения возможности возникновения резонансных режимов. Воз-
Возможность возникновения резонансных периодических режимов на частотах, лежа-
лежащих в рабочем диапазоне виброизолятора (ев Хо0У2), может быть исключена двумя
способами.
1. Увеличением области линейности виброизолятора, т. е. увеличением его сво-
свободного хода. Свободный ход должен быть при этом увеличен с таким расчетом, чтобы
сохранилась только одна точка пересечения линий (9) и A0),
238
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОГПОЛИРОВЛННЫ\ СИСТЕМАХ
Так, в примере, приведенном на рис 5, увеличив свободный \од до величины 2Лц
можно «поднять» скелетную кривую таким образом, что она окажется выше линии A0) при
всех (В > о)о При эточ остается лишь одна точка пересечения линий (9) и A0), а следова-
следовательно, исчезает верхняя ветвь резонансной кривой
Увеличение области линейности приводит к увеличению габаритов виброизоли-
виброизолирующего устройства.
2. Увеличением коэффициента сопротивления п; при этом линия A0) опускается
ниже, что также приводит к исчезновению дополнительных ветвей резонансной кри-
кривой и уменьшению «затягивания» резонанса на основной ветви (рис. 6). Возможности
увеличения демпфирования в виброизоляторах с вязким (линейным) трением обычно
ограничены. Более эффективным оказывается использование сухого (К^лонова)
трения.
Безопасное расстояние до ограничительных упоров. В ряде случаев ограничи-
ограничительные упоры имеют большую жесткость, в десятки раз превышающую жесткость
основного упругого элемента. В этих случаях целесообразно при исследовании
возможности возникновения нелинейных явлений считать упоры абсолютно жест-
жесткими.
Рис. 6. Влияние силы сопротивле
ния на форму резонансной кривой
Рис. 7. Скелетная кривая систе-
системы с жесткими упорами
Для абсолютно жестких упоров, установленных симметрично на расстоянии А
от положения равновесия, ске!етная кривая имеет форму, показанную на рис. 7.
Резонансные режимы в зоне эффективности виброизолятора (т. е. при со>о»0}^2)
не могут возникнуть, если для любого со >ш0 К 2 выполняется условие
д>-
2ло)
Величина
4-
Jmax'
A2)
где максимум определяется для ш > <nnV2, определяет безопасное расстояние до
упора. Если Д > d, то резонансные колебания в зоне эффективности виброизолятора
не могут возникнуть; в этом случае при периодических колебаниях периода Т си-
система не выходит за пределы области линейности упругой характеристики.
Более того, поскольку скелетная кривая, построенная для упоров любой конеч-
конечной жесткости (а также для упоров, обладающих любой нелинейной упругой харак-
характеристикой) и расположенных на расстоянии, превышающем d от положения рав-
равновесия, проходит выше линии а= d (при ш > оH), резонансные колебания при
выполнении условия A1) не могут возникнуть ни при каких упругих упорах.
В рассмотренном выше примере (см рис 5) примем, что ш0 = 20л 1/с, а п = 0,05 ю0 =
= я 1/с. Тогда
/ ? л\2 \ СППП
FOOO
2псо ¦'щах" 2я 70л
= 3,6 см.
Таким образом, в этой системе безопасное расстояние до упоров существенно превы-
превышает максимальную амплитуду периодических колебаний, возникающих в системе при
выдерживании этого безопасного расстояния Действительно, максимальная амплитуда
НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ В ВИБРОИЗОЛЯТОРЕ
239
приблизительно равна амплитуде в резонансе (при (О = соо)
а
си
Если учитывать только колебания, возникающие в зоне эффективной виброизоляции, то
Зтах
' /max
И2 — <
0,1 см
Нелинейные явления в виброизоляторах с сухим трением. Уравнение движения
системы, содержащей виброизолятор с линейным упругим элементом и демпфером
сухого трения, может быть записано в следующей форме:
i' + Zisgni-f co;* = g0(cu)cosco/, A3)
где ft — Him — отношение силы сухого трения к массе объекта.
Точное решение уравнения A3) получено и исследовано в [254]. В зависимости от
соотношения между амплитудой вынуждающей силы и силой сухого трения в си-
системе могут возникнуть различные виды движений.
Если ga (со) < ft, система «заперта» сухим трением. Это означает, что при нуле-
нулевых начальных условиях объект колеблется вместе с источником и х = 0. Если при-
принять начальные условия, отличные от нулевых, то в системе возникнут затухающие
относительные колебания, при которых
система может прийти в положение рав-
равновесия, отличное от исходного. Иными
словами, система обладает зоной застоя,
ширина которой
Н!=&М1 A4)
Of
2
/
F
J4=0,S
При начальных условиях | х I = I х0 I <
< А3, х — О система остается в исходном
положении (х (t) = х0).
4
Если ft < g0 (G))<— ft, в системе про-
зх
исходят движения с остановками, кото-
которые могут быть периодическими с перио-
периодом Т = 2я/со. При движениях с оста-
остановками максимальное значение абсолют-
абсолютного ускорения движущейся массы лишь
незначительно отличается от g0 (со), т. е. виброизоляция оказывается неэффектив-
неэффективной. В ряде случаев движение с остановками может фактически не наблюдаться
из-за различия между силой трения покоя и силой трения скольжения.
Если g0 (ш) > — h, то в системе возникают непрерывные периодические колеба-
колебания периода Т. Амплитуда первой гармоники этих колебаний
Рис. 8. Резонансные кривые для системы
с сухим трением
$=&} • A5)
Если go(«0)>^^> то в системе при со = со0 возникает резонанс, при котором
амплитуда колебаний теоретически может неограниченно возрастать (так же как
в обычной линейной системе без диссипации). Чтобы резонанс не возникал, система
должна оставаться «запертой» при со = со0.
На рис. 8 построены резонансные кривые, соответствующие g0 (<в) — So1»2. Здесь
г = со/соо, а = a/g0, r| = 4h/nl0a>l. При ri > 1 амплитуда остается ограниченной.
Ее максимальное значение
достигается при г = ц.
240
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
Возможность устранить резонанс, «.заперев» систему сухим трением, привела
к появлению ряда конструкций виброизоляторов с демпферами сухого трения.
Некоторые параметры таких виброизоляторов
(серии АФД • и АПН) были приведены в
гл. VII.
Оценивая эффективность виброизоляторов с
сухим трением при со > со0, следует иметь в
виду следующее обстоятельство. С ростом со
величина g0 (со) обычно остается ограниченной,
поэтому амплитуда а относительных колебаний
уменьшается [см. A5)]. Однако при этом коэф-
коэффициент виброизоляции не убывает неограни-
неограниченно. Действительно, сила, передаваемая виб-
виброизолятором объекту в случае силового дина-
динамического воздействия, или абсолютное уско-
ускорение объекта при кинематическом воздейст-
воздействии равны сумме Л sgn x + ы^х. При увеличении со первое слагаемое остается
равным по модулю h, а амплитуда его первой гармоники стремится к —h.
При этом коэффициент виброизоляции", рассчитанный по первой гармонике,
У///////УУ// ///////////,
a) S)
Рис. 9. Динамические модели виб-
виброизоляторов с сухим трением
-Л f 1№ Г; «L
У n2g% (со) L (со2 — со
gn (w) V nagj (со)
С ростом со KR стремится к предельному значению
A6)
A7)
При этом амплитуда динамического воздействия, сообщаемого объекту, прибли-
приблизительно равна силе сухого трения. Чтобы уменьшить это динамическое воздейст-
воздействие, можно применить включение демпфера сухого трения по схемам, показанным
на рис. 9.
В схеме, показанной на рис, 9, а, демпфер сухого трения включается на частотах,
при которых
1
1 cog
4h_
A8)
где со| = cjm. При больших со неравенство A8) в силу ограниченности g0 (со) нару-
нарушается; это означает, что на высоких частотах демпфер остается запертым и масса
колеблется на верхней пружине. При этом сила сухого трения не передается на объект.
В схеме, показанной на рис. 9, б, демпфер включается при
0J
A9)
где v = cjc^. И в этом случае на высоких частотах демпфер выключается.
Виброизолятор с демпфером сухого трения и нелинейным упругим элементом.
Приближенное периодическое решение дифференциального уравнения
*-r h sgn x + f (*) =g0 (со) cos at,
B0)
описывающего движение системы с нелинейным упругим элементом и демпфером
сухого трения, можно искать в форме C). При этом сохраняется условие D), связы-
связывающее а0 и а. Амплитуда колебаний
>_-^-ft?
B1)
НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ В ВИБРОИЗОЛЯТОРЕ 241
где ^2 (а) определяется по F). Фаза колебаний ф определяется jio формуле
\_
* sgnt©s-W(a)L B2)
О формах резонансных кривых а (со) см. в [105].
Виброизолятор с внутренним трением и нелинейным упругим элементом. При
колебаниях, близких к гармоническим, сила внутреннего трения в материале упру-
упругого элемента может быть линеаризована и представлена в форме (см. гл. V):
Н(х)=^-!-х, B3)
где а и о) — амплитуда и частота колебаний; Р и ц — параметры, характеризую-
характеризующие свойства материала, из которого изготовлен упругий элемент.
' Периодическое решение уравнения движения
B4)
имеющее период 2я/ш, можно искать в форме C) при условии D). Амплитуда
g°(u)) B5)
где р\ = f>/m. Для определения формы резонансных кривых достаточно найти точки
пересечения скелетной кривой (9) с линией предельных амплитуд
. B6)
которые практически совпадают с точками пересечения резонансной и скелетной
кривой. Подробнее о форме резонансных кривых см. в [105].
Субгармонические резонансы в системе с нелинейным упругим элементом. Урав-
Уравнения Bа), A3), B4) могут иметь периодические решения с периодом ST, которым
соответствуют субгармонические колебания порядка S. Субгармонические коле-
колебания носят, как правило, резонансный характер; они могут рассматриваться как
свободные колебания консервативной системы
* + /(*) = 0, B7)
поддержанные гармонической вынуждающей силой. Для нормального функциони-
функционирования виброизоляционной системы возможность возникновения в ней субгар-
субгармонических резонансов должна быть исключена. Условия возникновения суб-
субгармонических резонансов рассматривались в гл. V т. 2. Подавление этих перио-
периодических режимов достигается увеличением диссипации в системе. Для определе-
определения уровня диссипации, необходимого для подавления в системе Bа) субгармони-
субгармонических колебаний частоты ш/S, требуется сначала определить амплитуды первой
и s-й гармоник периодического решения уравнения B7), имеющего частоту А. =
= co/S, Это решение можно разыскивать в виде ряда Фурье:
оо
х= ^ «ft cosШ. B8)
k = 0
Условия подавления субгармонических колебаний порядка s в первом прибли-
приближении записываются в следующей форме:
а) в системе с вязким трением [уравнение BаI
Чпш\ >s*\us\gt) (со); B9)
242
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
б) в системе с сухим трением [уравнение A3)]
4А , . . .
— их > s | us | go (со);
в) в системе с внутренним трением [уравнение B4)]
C1)
Определение амплитуд us. В системе с симметрично расположенными упругими
упорами
4Д (и2— 1) (cos svTxtg r1 — svsin
"J = ~ft s (s42 — 1) (s2v2 —x2) tgx,
C2)
Здесь Д — расстояние до упоров; v.2 = с'/с — отношение суммарной жесткости
основного упругого элемента и упора к жесткости основного элемента; v= к/щ —
безразмерная частота периодического решения B8); тх — фаза в момент удара об упор,
определяемая из уравнения
fl ) к. C3)
Решения этого уравнения для различных значений к и v показаны на рис. 10,
г,
111 х
x=o}sl
1
у ч
ж
ч
I
Рис. 10. Зависимость момента уда-
удара об упор от безразмерной часто-
частоты воздействия
1
Рис. 11. Области существования различ-
различных виброударных режимов в системе с
упорами:
/ — удар только о верхний упор; // —
удар только о нижний упор; /// — удар об
оба упора
В системе с жесткими упорами, координаты которых х = Д и х = —Д1; могут
возникать субгармонические резонансы с ударами об один из упоров и об оба упора,
Условие удара только о первый упор cos л/у > —Д]/Д. Условие удара только о вто-
второй упор cos зт/v Зг —Д/Дх.
При выполнении обоих условий происходят удары об оба упора. На рис. 11
построены области, в которых возникает каждый из перечисленных режимов; б =
= Дх/Д.
При ударе только о первый упор
При ударе только о второй упор
C5)
НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ ПРИ ВОЗДЕЙСТВИЯХ 243
При ударах об. оба упора
2WA — А,) . я
tg
ПРИ ЧеТН0М S!
ivtA + AA , я
—ту 5^гГ с*? ~п~ пРи нечетном s.
Пример. На систему действует вынуждающая сила, частота которой со = 5а„, а ампли-
амплитуда равна go Расстояния до упоров: Д = d, At = 0,5rf. Необходимо определить силу сухого
тречия, достаточную для подавления субгармонических ретонансов.
Поскольку г — s v = 5, в системе возможны субгармонические резонансы трех поряд-
ков. s==2; v = 2,5; s = 3; v= 1,67; s = 4; v= 1,25
По рис. 11 находим (при 6 = 0,5), что в первых двух случаях будут происходить удары
об оба упора, а в последнем — только о второй упор По C6) находим:
при §_з.
По C0)
при s = 2:
„. Л. 3«,g0 3-0,047g0
при s = 3: h> 4^=07б44.1273
Для s = 4 no C5) имеем
rf-1,25 я l,25d-
"J" Я-24 g 1,25 ~ Я-24
rf-1,25 . я l,2
1 A,252—1) B 1,25 я-0,5625
По C0)
(-0,72)= -0,0
(—0,72) = — 0,509rf.
'" я
Таким образом, для подавления всех возможных субгармонических резонансов должно
выполняться условие ft>0,l?lgo-
3. НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ
ПРИ ПОЛИГАРМОНИЧЕСКИХ И СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
При произвольном динамическом воздействии G (t) уравнение движения систем,
показанных на рис. 3, может быть записано в форме
* + 2ni + /(x) = g(/), C7)
где g (t) = G (fjlm. Рассмотрим некоторые особенности поведения этой системы
при стационарном воздействии g (t) — периодическом, полигармоническом или слу-
случайном.
Пусть периодическая функция времени периода Т — 2я/ш
оо
C8)
Тогда установившееся движение системы C7) также является периодическим (пе-
(периода t или sT). В периодическом решении периода Т обычно преобладает первая
гармоника, которая может определяться изложенными выше приближенными мето-
методами. Высшие гармоники имеют существенное значение лишь в тех случаях, когда
они могут вызвать резонансные явления. При совпадении частоты 1-й гармоники
вынуждающей силы с частотой m-й гармоники свободных колебаний в системе могут
244 НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ В ВИБРОИЗОЛИРОВАННЫХ СИСТЕМАХ
возникнуть резонансы порядка Цт (см. т. 2). Резонансы порядка 1/т совпадают с рас-
рассмотренными выше субгармоническими резонансами; резонансы порядка Ц\ назы-
называются супергармоническими В виброизолирующих системах супергармонические
резонансы обычно не встречаются, поскольку не обеспечиваются энергетические
условия их существования.
Пусть полигармоническая функция времени
N
'? C9)
Тогда в первом приближении установившееся движение системы C7) может разы-
разыскиваться как полигармонический процесс вида
N
х = а0 + 21 ak cos (akt + ak + вк). D0)
Определение этого решения может производиться различными методами; наи-
наиболее простым оказывается метод эквивалентной линеаризации нелинейной функ-
функции / (х) по функции распределения процесса D0). Этот метод подробно изложен
в гл V т. 2.
Уравнение C7) может иметь несколько приближенных решений вида D0), наи-
наибольшее их число достигает 2N+ I. Одно из этих решений соответствует малым
колебаниям системы, при которых обеспечивается выполнение условий виброизо-
виброизоляции. Остальные решения носят резонансный характер, они соответствуют резо-
резонансу одной из гармоник вынуждающей силы, в каждом из этих решений одна из
амплитуд ak преобладает над остальными Нормальное функционирование вибро-
виброзащитной системы обеспечивается только при исключении возможности возникно-
возникновения любого из резонансных режимов, что достигается такими же способами, как
и в случае гармонического воздействия (увеличение области линейности и усиле-
усиление диссипации).
Пусть g (t) стационарный нормальный случайный процесс с заданным матема-
математическим ожиданием mg и спектральной плотностью Sg (со) Тогда приближенное
решение уравнения C? ) может разыскиваться в виде стационарного случайного
процесса, также обладающего нормальным распределением [159]. При этом можно
пользоваться методом статистической линеаризации нелинейной функции / (*), В соот-
соответствии с этим методом функция / (х) заменяется линейной функцией.
f(x)^fo + q(x-mx), D0')
где тх — математическое ожидание искомого решения, а коэффициенты линеариза-
линеаризации /с и q выражаются через тх и дисперсию решения oj следующим образом:
/(u)exp t"
= q ("**' a')" D2)
Заменяя в C7) / (x), no D0') получаем «линейное» уравнение. Решая его, выра-
выражаем спектральную плотность, дисперсию и математическое ожидание решения
через коэффициенты линеаризации
Sg (со) ,
sWJ D3)
! = _L \ ILL—__,— • /44)
с 2л J | q — ш2 + 2шш |2 ' v
—00
fo*=mg. D5)
НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ В СИСТЕМЕ С УПРУГИМ ОБЪЕКТОМ 245
Уравнения D1), D2), D4) и D5) образуют систему, из которой определяются
неизвестные а?, тх, /0, q. Затем по формуле D3) определяется спектральная плот-
плотность решения.
Для виброизолятора, характеристика которого представлена на рис. 2, б, вы-
выражения D1) и D2) принимают форму
,
d-mx
d1 + mXiVf d1-j-mx\)\_ (Щ
Ох \ °х НГ
.+ 1) + к.[ф(-Л±^)-ф(^)]}, ,47,
где Ф (и) — функция Крампа,
У
ехр -
Выражения D6) и D7) позволяют рассчитывать случайные колебания в системе
с ограничительными упорами и, в частности, при нормальном стационарном воз-
воздействии оценивать среднюю частоту соударений подвижного элемента виброизоля-
виброизолятора. На эту оценку существенное влияние оказывает отличие действительных зако-
законов распределения динамического воздействия g (t) и решения х (t) от нормального
(гауссова) закона, поэтому полученная оценка должна рассматриваться как сугубо
ориентировочная.
Пример На систему с симметрично расположенными упорами (d = di) действует ста-
стационарная случайная вынуждающая сила g@. при этом т —О, S (га) = S0 = const («белый
шум») Определить дисперсию процесса х (<) Вследствие симметрии системы и поскольку
т„ = 0, должно быть т„= 0 При этом из D6) н D7) находим
S Л
q=c\l+x.*\l-2$>(~X\\ <48>
По D4), используя таблицы интегралов от дробно рациональных четных функций (см,
например, [270]), находим
0« = JL f =
х 2л J ] q — о
2л«со
D9)
¦Дисперсия вх определяется из уравнений D8) и D9), которые могут решаться, напри-
например, графическим методом
4. НЕЛИНЕЙНЫЕ ЯВЛЕНИЯ
В СИСТЕМЕ С УПРУГИМ ОБЪЕКТОМ И ИСТОЧНИКОМ
Рассмотрим колебания упругого тела на одноосном виброизоляторе с нелиней-
нелинейным упругим элементом и вязким демпфером (рис 12, а) Если kA (p) — оператор
динамической жесткости тела в точке А (точка крепления виброизолятора), то урав-
уравнение движения системы может быть приведено к виду
kA(P)x + bx + F(x) = G(t). E0)
Если G (t) = О„ (ш) cos со/, то приближенное решение E0), имеющее период
Т = 2jt/co, можно искать в форме C), при этом ай и а оказываются связанными усло-
условием D). Амплитуда колебаний
°((и) E1)
246
АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
где (X (со) = Re kA (to), v (со) = Im kA (ioa),
2л
I F [a0(
6
—
E2)
Зависимость h (а), заданная в неявной форме уравнением
E3)
определяет на плоскости переменных (а, к) модифицированную скелетную кривую
системы. Если со = Л (а), то
°(ю> E4)
v(co)-
Зависимость а (со), определяемая этим выражением, задает на плоскости (а, ш)
линию предельных амплитуд. Определив точки пересечения модифицированной
скелетной кривой и линии предельных амплитуд, можно найти точки пересечения
резонансной кривой со скелетной и оценить
возможность возникновения резонансных ко-
колебаний.
В случае виброизолятора с линейным
упругим элементом и ограничительными упо-
упорами безопасное расстояние до упоров (см.
п. 2)
A==|.6co + v(w)Jmaxt E5)
В случае кинематического возбуждения
(рис. 12, б) E0) — E5) сохраняют силу, если
в них положить
Рис, 12. Динамическая модель нели-
нелинейной системы с упругим объектом:
а — случай силового возмущения; б —
случай кинематического возмущения
Go И =
E6)
Глава X
АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
1. ПРИНЦИПЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ
Основные понятия. Вибрационная защита с помощью пассивных систем оказыва-
оказывается малоэффективной при возбуждении в области низких частот, а также при дей-
действии вибрации с широким спектром. В этих случаях все большее применение нахо-
находят управляемые системы виброизоляции, получившие название активных. Управ-
Управление в таких системах сводится к компенсации дополнительным источником энер-
энергии внешних вынуждающих сил, вызывающих вибрацию защищаемого объекта, или
относительных смещений объекта.
Активные системы виброизоляции применяют для защиты технических и био-
биологических объектов в тех областях, где предъявляются особо жесткие требования
к допустимому уровню вибрации: при виброизоляции прецизионных станков [240]
и стартовых платформ ракет [186], для защиты пилота от перегрузок [270] и повы-
повышения комфортности транспортных средств [247].
Активная виброзащитная система содержит чувствительные элементы, управ-
управляющие усилительные и исполнительные устройства. В качестве чувствительных
элементов используют датчики, регистрирующие силы возбуждения и реакций
объекта или его кинематические параметры — перемещение, скорость, ускорение.
Сигналы датчиков характеризуют качество виброзащиты и используются для фор-
ПРИНЦИПЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ 247
мирования сигналов управления, осуществляемого элементами цепи обратной связи.
После усиления сигналы подаются в исполнительное устройство, создающее управ-
управляющее воздействие.
В зависимости от вида исполнительного устройства различают гидравлические,
пневматические, электромеханические, электромагнитные системы активной вибро-
виброизоляции. Выбор типа системы определяется предъявляемыми к ней техническими
требованиями. Так, при необходимости обеспечения высокой статической жесткости
целесообразно использовать гидравлическую систему. Пневматические системы,
особенно пневмоструйные, позволяют получать малые величины статической жест-
жесткости. Электромагнитные системы обладают малой инер-
инерционностью и позволяют в широких пределах варьиро-
варьировать амплитудно-частотные характеристики.
Рассмотрим задачу активной виброзащиты на при-
примере системы, приведенной на рис. 1, где введена актив-
активная обратная связь, формирующая управление U {t) [106].
Пусть целью виброзащиты является уменьшение колеба-
колебаний объекта, имеющего массу т2, при кинематическом
возмущении 1 (/). Управление U (t) приложено к проме-
промежуточной массе щ. При этом возможны следующие ва-
варианты: управление по отклонению масс ш2 или тх и уп-
управление по возмущению ? (t). У/////////////////,'
Управление по отклонению. Пусть управление U фор-
формируется по перемещению гв массы т2: ми^дьк .Щ^^й
системы
и==—KW (р) Zn (I)
где W (р) — передаточная функция цепи, включающей датчик и исполнительное
устройство; k — коэффициент усиления.
Если через t,g М обозначить движение массы т2 до введения управления U,
то ее движение после введения управления
где /2 (р) — оператор динамической податливости, связывающий перемещение
массы 1Щ с силой, приложенной к тг.
Подставляя B) в A), получим
:о, C)
где передаточная функция замкнутой системы
K.z (р) = [ 1 -f- ф2 (р) ]-i, D)
выражающая перемещение массы т2 в системе с управлением через перемещение
той же массы в системе без управления; передаточная функция разомкнутой си-
системы
O2(p) = kl2(p)W(p). E)
Оператор Kz (/и) характеризует эффективность активной виброизоляции. Оче-
Очевидно, что система эффективна, если \Кг (у<вI < 1.
Оператор динамической податливости /2 (р) определяется из уравнения движе-
движения масс тх и пц при приложении сил Fl и F2 (zA = qy\ гв = q2Y,
2 + bp + с) Ql + (bp + Y) (<h - q2) = Ft (t);
тгр"-Цг + фр + y) (q2 -ql) = P2 (t),
решая которые, получим
<h = V (p) [(ЩР2 -f PP + V) Fi + (Pp +4-) Ft];
F)
248 АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
где
Отсюда
mlP + bp + f>p + c + y -фр + i)
Если управление формируется по перемещению гА объекта, то управляющее
воздействие
Поскольку зависимость между перемещениями объекта и промежуточного тела
не изменяется при введении управления, эффективность управления полностью
характеризуется изменением перемещения объекта щ, что соответствует передаточной
функции замкнутой системы
KAp)^U+^>i(p)]-1 (9)
и разомкнутой системы
где, в соответствии с F),
/Р2 + Р/> + У...
( '
Пусть активная виброзащитная система содержит датчик ускорений и исполни-
исполнительное пневматическое устройство в виде апериодического звена с оператором
где Т — постоянная времени исполнительного устройства.
Тогда передаточные функции разомкнутых систем будут иметь следующий вид:
при управлении по перемещению массы пг1
к(р) (Тр+\)А0(р) >
при управлении по перемещению массы гп2
Использование варианта управления по перемещению объекта пг2 ограничива-
ограничивается условием устойчивости системы [224], поэтому формирование активной силы
по перемещению промежуточной массы т1 оказывается более целесообразным,
.Управление по возмущению. Из уравнений движения системы
(га - 'в) - *
находим зависимость
СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ
249
Отсюда, используя передаточную функцию (8), получим
//_ _ *?!_. <М?)
тР+\
1+Фх(р)
(П)
Выражение A1) с учетом (9) показывает, что на частотах со, при которых I Фх (г<в)
1, высокоэффективная виброизоляция обеспечивается, управляющим воздействием
l(t), A2)
формирующимся исполнительным устройством с передаточной функцией
2. СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ
В настоящее время разработано большое число схем активных виброзащитных
систем [186, 224, 240, 247, 270].
На рис. 2 представлена схема пневмомеханической виброзащитной системы с си-
силовым цилиндром двойного действия [186]. Механическая обратная связь 2 по сме-
смещению через золотниковое устройство 3 управляет расходом газа, подаваемым внеш-
внешним источником энергии через входной 4 и выходной 5 каналы. Благодаря нали-
наличию обратной связи по смещению, перемещающей золотник, выходное усилие штока
Рис. 2. Схема пневмомеханиче-
пневмомеханической виброзащитной системы
Рис. 3. Резонансные кривые
пневмомеханической виброза-
виброзащитной системы
силового цилиндра / является функцией интеграла относительного смещения изо-
изолируемого объекта 8. Управление по интегралу от смещения может быть эффектив-
эффективным только на очень низких частотах. Поэтому обратная связь по смещению исполь-
используется лишь для позиционирования защищаемого объекта. Качество защиты от виб-
вибраций и ударов определяется жесткостью и демпфированием пассивной пневмати-
пневматической системы. Система сравнительно мало чувствительна к изменению величины
изолируемой массы.
Демпфирование пневмомеханической виброзащитной системы может быть регла-
регламентировано с помощью специальных дросселей 6, отделяющих полости силового
цилиндра от дополнительных емкостей 7. Применение дополнительных емкостей
позволяет снизить собственную частоту системы (до 0,5—2,0 Гц) и может обеспечить
надежное управление резонансными колебаниями сжимаемого газа.
Зависимость коэффициента динамичности &д по смещению от частоты для пнев-
пневмомеханической виброзащитной системы с вспомогательными емкостями представ-
представлена в логарифмической системе на рис. 3. Кривые 1, 2 соответствуют системе с ну-
нулевым и бесконечным демпфированием. Кривые 3 и 4 получаются при отсутствии
дросселирования и при полном перекрытии потока газа между силовым цилин-
цилиндром и дополнительными емкостями. Оптимальное демпфирование (кривая 5)" опре-
определяется путем минимизации резонансного коэффициента динамичности, Довольно
250
АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
большие изменения демпфирования мало влияют на резонансный коэффициент ди-
динамичности.
На рис. % приведена схема электрогидравлической виброзащитной системы с си-
силовым цилиндром двойного действия [186]. В этой схеме сигналы от датчиков уско-
ускорения 1 и относительного смещения 2 подаются в усилитель 3 с электрическим пита-
питанием 4. Усилитель вырабатывает сигнал, управляющий движением золотника 5,
который регулирует подачу через каналы 6, 7 малосжимаемой рабочей жидкости
в силовой цилиндр 8. Поток рабочей жидкости через золотник регулируется по
ускорению, относительной скорости, относительному смещению и интегралу отно-
относительного смещения. Коэффициенты усиления по каждому каналу обратной связи
настраиваются независимо.
Статическая жесткость пассивного гидравлического возбудителя высока в связи
с малой сжимаемостью рабочей жидкости. Поэтому между изолируемым объектом
и штоком гидроцилиндра устанавливают упругую прокладку 9. Динамическая
жесткость системы мала в связи с уменьшением гидравлического сопротивления по-
потоку рабочей жидкости через дросселирующие отверстия колеблющегося золот-
золотника. При замыкании цепи обратной связи можно получить собственную частоту
системы, значительно меньшую 1 Гц.
Рис. 4. Схема электрогидравли-^
ческой виброзащитной системы
Рис. 5. Резонансные кривые элек-
электрогидравлической виброзащитной
системы
Зависимость коэффициента динамичности по смещению от частоты в логариф-
логарифмической системе приведера на рис. 5 для различных сочетаний типов обратных
связей. При использовании обратной связи по ускорению (кривая 1) получают
безрезонансную виброзащитную систему с передаточной функцией типа М(Тр-\- 1),
где постоянная времени Г = -=—; fey —коэффициент усиления обратной связи по
г п
ускорению; Fn — эффективная площадь поршня.
Практически чистая обратная связь по ускорению не может быть применена,
так как чувствительность системы к дрейфу нуля напряжения или тока может вы-
вызвать большие нежелательные перемещения изолируемой массы Этот недостаток
устраняют добавлением обратной связи по относительному перемещению, что обес-
обеспечивает регулирование положения без существенного изменения характеристик
виброзащиты. Введение дополнительной обратной связи по смещению (кривая 2)
позволяет получить характеристику -обычной пассивной виброзащитной системы
с собственной частотой
и эффективным относительным коэффициентом демпфирования
Где кд — коэффициент усиления обратной связи по относительному смещению,
СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ
251
Введение дополнительной обратной связи по относительной скорости (кривая 3}
приводит к изменению демпфирования без существенного воздействия на собствен-
собственною частоту виброзащитной системы. При этом собственная частота системы оста-
остается прежней, а относительный коэффициент демпфирования
,.де k — коэффициент усиления обратной связи по скорости.
При проектировании низкочастотных виброзащитных систем важное значение
имеют статические перемещения б под действием приложенных ускорений. Для
виброзащитных систем (активных и пассивных) с низкой собственной частотой они
чрезвычайно велики (при f0 «* 0,5 Гц б «* 25 мм).
Рис. 6. Резонансные кривые
электрогидравлической виб-
виброзащитной системы
Рис. 7. Схема активной гидравли-
гидравлической виброзащитной системы
Рис. 8. Схема гидрав-
гидравлической виброзащит-
виброзащитной системы с гидро-
гидросейсмическим датчи-
датчиком
В электрогидравлическои виброзащитной системе их уменьшают введением
обратной связи по интегралу от относительного смещения. Эго несущественно изме-
изменяет амплитудно-частотную характеристику (кривая 4) виброзащитной системы,
так как обычно применяются относительно малые коэффициенты усиления по ин-
интегралу перемещения k, =— и большие значения постоянной времени т интегра-
интегратора в контуре обратной связи по относительному перемещению.
Характеристики, представленные на рис. 5, справедливы лишь в области низ-
низких частот. В области высоких частот они деформируются из-за резонансов в гидро-
гидросистеме. На рис. 6 приведены резонансные кривые виброзащитной системы. Низко-
Низкочастотный резонанс / определяется выбором коэффициентов усиления ky и kd; высо-
высокочастотный гидравлический резонанс 3 распола! ается в области частот 50—200 Гц,
Улучшение характеристики в области высоких частот может быть достигнуто вве-
введением между изолируемой массой и штоком гидроцилиндра упругой прокладки 9
(см. рис. 4). Поскольку прокладка включена последовательно с гидроцюнндром,
эффективная собственная частота подвески изолируемой массы М становится ниже
значения сос = 1/ °-~, где са — жесткость упругой прокладки. Поэтому при малой
жесткости прокладки уменьшается коэффициент усиления обратной связи по уско-
ускорению и, следовательно, достигается определенный запас устойчивости. Однако
в общем случае для достижения удовлетворительных запасов устойчивости требуется
введение электронных корректирующих цепей.
Результирующая характеристика электрогидравлической виброзащитнои си-
системы с дополнительной упругостью, являющейся пассивным виброизолятором,
показана на рис. 6 (кривая 2). В области низких частот коэффициент динамичности
упругой прокладки близок к единице, и виброзащита осуществляется только актив-
252 АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
ной системой. При больших частотах эффективная защита обеспечивается пассивным
виброизолятором.
На рис. 7 приведена схема активной гидравлической виброзащитной системы
[224]. Виброактивный объект опирается через силовой гидроцилиндр с поршнем
на изолируемую платформу, упруго опертую на фундамент. Управляющая система
виброзащитного устройства содержит датчик сейсмичэского типа в комбинации с гид-
гидроусилителем. Инерционный элемент датчика укреплен через мягкую пружину
на изолируемой платформе и шарнирно связан с заслонкой, управляющей двумя
соплами. Поршень силового гидроцилиндра связан штоком с виброактивным объ-
объектом. Внешним источником энергии служит питающая гидросистема, давление
в которой поддерживается регулируемым нагружающим дросселем.
Датчик регистрирует вибрационное перемещение изолируемой платформы и
преобразует его в колебания давления рабочей жидкости в полостях силового ги-
гидроцилиндра. Массу инерционного элемента и жесткость пружины датчика выби-
выбирают так, чтобы его собственная частота была меньше частоты с высоким уровнем
в спектре вибраций объекта. В этом случае датчик работает в зарезонансной области.
Такая виброзащитная система обеспечивает ум_еныление передачи вертикальной
вибрации объекта до минимума, определяемого чувствительностью применяемого
датчика. Приведенная схема виброизолирующей системы может быть использована
в двухкаскадной системе амортизации машин.
С целью устранения амплитудного и фазового искажения, вносимого зазорами
в шарнирных соединениях рычага заслонки, а также его деформацией на высоких
частотах в схеме гидравлической виброзащитной системы, приведенной на рис. 8,
применен «гидравлический рычаг», представляющий собой соединение двух силь-
фонов разных диаметров, заполненных несжимаемой жидкостью и закрытых с обеих
сторон.
3. МЕТОДЫ РАСЧЕТА И НАСТРОЙКИ
Виброзащитные свойства активных систем изучаются на основе анализа уравне-
уравнений движения механических звеньев под действием сил, формируемых в цепях
управления [180].
Расчет активной электрогидравлической системы виброизоляции. Приведем
методику анализа электрогидравлической виброзащитной системы (см. рис. 4) с по-
помощью преобразования по Лапласу уравнения расхода через золотник системы
^ i-Pl) A3)
и уравнения сил, создаваемых давлением рабочей жидкости в гидроцилиндре,
Fn(p^Pl)=-ca(8-x) = Mx, A4)
где Fnx — расход связанный с движением жидкости через гидроцилиндр;
— (й2—р,) —расход сжимаемости в объеме V гидроцилиндра; L (Pi — Pi) — расход
р
утечек через зазор между поршнем и цилиндром; |3 — коэффициент сжимаемости
рабочей жидкости; Pl и р% — давление рабочей жидкости в верхней и нижней по-
полости гидроцилиндра; Fn — площадь поршня; L — коэффициент утечек; х и б =
= х — а — координаты абсолютного и относительного движения поршня соответ-
соответственно; а — перемещение основания. Подставляя A4) в A3) и преобразуя получен-
полученную зависимость, найдем уравнение расхода через золотник в изображениях по
Лапласу:
где Q, X и Д — преобразованные по Лапласу переменные q, х и б; мс — собствен-
собственная частота массы М, опирающейся на упругую прокладку жесткости са; фа и Ьа —
метопы расчета и настройки
253
собственная частота и коэффициент демпфирования системы, образованной массой М
и гидроцилиндром.
Учитывая, что давление рабочей жидкости питающих систем не превышает 2—
4 кгс/см2, можно считать ее несжимаемой ф = оо, <ва = со), а утечками через
гидроцилиндр можно пренебречь (L = О, Ьа = 0). Кроме того, для частот много
меньших, чем собственные частоты гидроцилиндра, золотника и датчика обрат-
обратной связи, передаточные функции золотника и датчика обратной связи равны еди-
единице, Поскольку влияние упругости системы сказывается лишь в области высоких
частот, можно также пренебречь влиянием упругой связи между изолируемой мас-
массой и гидроцилиндром (са = оо, (ос = оо). При этих допущениях в таблице при-
приведены упрощенные уравнения и получены передаточные функции по абсолютному
перемещению: W^ (р) = п 1п[ , и по относительному перемещению: U76(s) =
А(р)
а(р)
а(р)
, электрогидравлической виброзащитной системы.
Передаточные функции электрогидравлической системы активной виброизоляции
Уравнения движения
Упрощенные
уравнения при
р = со, соа = оо,
г — оо, сос = оо
С введением
обратной связи
по интегралу от
относительного
перемещения
Q = -(kyp'X + k1)PA + kd\)
д\
Передаточные функции
По абсолютному перемещению
По относительному перемещению
— b n2
У
По абсолютному перемещению
k р3 -\- //г -f- ^п) Рг ~Ь ^//Р 'Ь ^
По относительному перемещению
- fcyP3
Приведенные в таблице передаточные функции №(р)»могут быть использованы
для расчета активных виброзащитных систем по методике, изложенной в параграфе 1.
Аналогично используются и функции №0 (р) [186].
Возможность выбора коэффициентов усиления ky и k^ в широких пределах (по
сравнению с ограниченными пределами для массы и жесткости пассивных систем)
позволяет получить достаточно низкие собственные частоты виброзащитных систем.
Поскольку масса М не фигурирует в уравнениях движения, рабочие характери-
характеристики не зависят от массы изолируемого объекта. Однако при низких собственных
частотах активные виброзащитные системы обладают большими динамическими
отклонениями при ударном возбуждении. Избавиться от этой трудности позволяет
введение обратной связи по интегралу от относительного перемещения. Передаточ-
Передаточные функции виброзащитной системы с обратной связью по интегралу от относи-
относительного перемещения также приведены в таблице.
Расчет активной гидравлической системы. Приведем методику анализа гидравли-
гидравлического виброизолятора (рис. 8) с учетом уравнения расхода через гидроцилиндр
/2(р-рс) + /пг;
A5)
254 АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
уравнения силовой системы
2 + 2n) = 6np; A6)
уравнения управляющей системы
У + буу + ЙуУ = RaoV2 sin vt; A7)
характеристики возмущения
zu = a0smv< + Zo- A8)
Здесь
_ г1. , _ гт. , _ г°1. „_ ^l. „_
h h h Уо
С2/Иу ' г
/д — ~7~' с f ~ ' 'п Г7 ' у—
та ' у СМу '
_ /шУо . . _ . , ft , .
Г7 у— 1~гТ"°2
7
/г
f _ .
f ~ ' 'п Г7 '
/1 /т'т
гЦ1 Zj и г/х — координаты движения гидроцилиндра, поршня и заслонки управляю-
управляющей системы соответственно; г01, у0 — координата гидроцилиндра и зазор между
соплом и заслонкой в стационарном режиме; plt pnl, рс1 — давление в гидроцилин-
гидроцилиндрах нагнетания и слива соответственно; fT и /т'—площадь и длина подводящего
трубопровода; /д1 — пл"ощадь дросселя; dcl—диаметр сопла; Ъг — коэффициент
демпфирования в системе цилиндр — поршень; fic и (хд — коэффициенты расхода;
са, clF c2, ba, й], Ьг — коэффициенты жесткости и демпфирования виброизолятора,
подвески сейсмической массы и заслонки соответственно; тф тъ пц — массы поршня,
сейсмического груза и заслонки соответственно; /п1, Д, /г, /0 — площади поршня,
силового, управляющего сильфонов и соединительного канала между ними длиной 10',
ах и со — амплитуда и частота колебаний изолируемого агрегата; р0, С — плотность
и скорость звука в рабочей жидкости.
В связи с тем, что на стационарный режим с параметрами р0, г0, у0 наклады-
накладываются возмущения рх, гх, ух, координаты системы могут быть записаны в форме
A9)
причем в соответствии с A7)
ух = A (v) sin v/,
где амплитудно-частотная характеристика управляющей системы
B0)
Учитывая, что р„ < р < ра, линеаризуем уравнение расхода A5) в окрестности
точки рх = 0, Ръ — ~- ^наибольшая чувствительность междроссельной камеры
наблюдается при соотношении 1:2 между давлением нагнетания ра и давлением
в гидроцилиндре р).
МЕТОДЫ РАСЧЕТА И НАСТРОЙКИ
255
После линеаризации уравнения A5) и A6) относительно возмущений A9) с уче-
учетом характеристики возбуждения A8) запишутся так:
zx-\-8z-\-Qnz~8„рх = а0 (v2 — QjU sin vt —
— Mc</o) Px — -
где 6 = 6r + 6П, или, после преобразования,
гх+г1,гх -f QnZ^ = eF sin v/.
Здесь
n cosvt;
+ 2p0) Ух — fn*x = 0,
B1)
(v) F2
1== 'v« ¦ ^-
Урш •
Пользуясь асимптотическим методом [116], решение B1) получим в виде
ef
sinV.
¦ cos ?;
B2)
В стационарном режиме при W = V = 0 с учетом B0) из B2) получим выраже-
выражение для амплитудно-частотной и фазочастотной характеристик активной гидрав-
гидравлической виброзащитной системы
W(v) = -
Q°
¦ M
1 (v) = arctg-
w
На рис, 9 приведены амплитудно-частотная W (со) и фазочастотная Ч?1 (со) харак-
характеристики системы, имеющей следующие параметры: dc— I-10 м; f» = 5-10"? м2;
da = 2,9- Ю-2 м; /„ = 1,2-10*2 м; у0 = 1,67-10~* м; dt — 2,3' 10 м; <L = 1,2- Ю-2 м;
mj^ 4,08- Ю-2 кгс-с2^-1;
т.2=5,ЬКН кгс-с2-м-х;
тп=9,4-10-2 кгс-с^м-1;
сх = 12,6-Ю2 кгс-м-1; с2= ff"
= 4,7-102 кгс-м-1; са = 10й
кгс-м; Ро = 85 кгс-м, '
С= 13,5-102 м-с-1,
где dn, d1 и d2 — диаметры 1,0
поршня, опорного и управ-
управляющего сильфонов.
д5
Рис. 9. Амплитудно-частотная
и фазочастотная характеристи
ки активного гидравлического
виброизолятора
12
го
г"
по
180
93
\П v 10s
о го
307
и, Гц
256 АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
Как видно, данная виброзащитная система эффективна при частотах ш < 410 Гц
На более высоких частотах виброзащита осуществляется подбором виброизолято-
виброизоляторов. Амплитудное искажение частотной характеристики, наблюдаемое в рабочей
области частот, объясняется применением гидравлических звеньев в системе управ-
управления; оно уменьшается, когда демпфирование в системе удовлетворяет условию
е? < 0,8Qn.
4. УСТОЙЧИВОСТЬ АКТИВНЫХ СИСТЕМ
Системы управления с обратной связью подвержены неустойчивости, которая
приводит к возбуждению автоколебаний.
Применяя критерий устойчивости Рауса — Гурвица к характеристическому
уравнению замкнутого контура с передаточными функциями W (s), We (s), нахо-
находим, что виброзащитная система устойчива при ky > 0, kd > 0, kv > —Fn. Таким
образом, можно использовать высокий коэффициент усиления цепи обратной связи
по ускорению для получения достаточно низкой собственной частоты, сохраняя
при этом устойчивость системы.
Аналогично, для виброзащитной системы с обратной связью по интегралу от
относительного перемещения условия устойчивости принимают вид ky > 0, kv >
> —Fn, kv + FB > kjti. Такое выполнение обратной связи позволяет избавиться
от больших перемещений при сохранении устойчивости виброзащитной системы.
Для выявления условий возникновения автоколебаний, связанных с нелиней-
нелинейностью виброизоляторов, требуется проведение уточненного анализа динамиче-
динамических свойств управляющей системы. В частности, учет зависимости восстанавли-
восстанавливающей силы гидравлического виброизолятора не только от жесткости подвески
датчика и заслонки, но и от давления рабочей жидкости позволяет оценить частоту
автоколебаний.
Колебания гидравлического виброизолятора в этом случае будут описываться
следующей системой уравнений:
; B3)
где
МС '
Р —
Д р ) гс~ с > гп— р, ,
' т гт 'г'г
х Fnlrp0 „о са'т
Система уравнений B3) указывает на параметрическую взаимосвязь механиче-
механических и гидравлических звеньев системы. Колебания по одной из координат, напри-
например колебания давления рабочей жидкости в силовом гидртзцилиндре р, могут вы-
вызвать колебания параметрического характера по координате у — отклонению управ-
управляющей системы. Колебания по координате силовой системы х также возбуждаются
колебаниями давления жидкости р.
Первое уравнение системы B3) обладает большим коэффициентом модуляции.
Результаты анализа системы B3) на аналоговой вычислительной машине при
начальных значениях р @) =2 ¦ 10~s кгс • м-2, у @) =3,2 • 10 м; у @) =0, г @) =
= 1 • 10 м; i @) = 0 показывают, что в силовом гидроцилиндре возбуждаются
УПРУГИЕ МУФТЫ
257
колебания давления жидкости на частоте, близкой к собственной частоте управ-
управляющей системы Так, при c1=3,S-10a кгс-м и mi = 4,44 • 10 кгс с'-м ча-
частота колебаний давления соответствует 32 Гц. Колебания давления рабочей жид-
жидкости возбуждают параметрические колебания заслонки с частотой в 2 раза ниже
частоты колебаний давления. При ^=5 102кгс-м и т1=4,4-1(Н кгс с2-кг1
частота колебаний давления соответствует 38 Гц, а колебаний заслонки 19 Гц,
Подбор на аналоговой модели зазора у0 между соплом и заслонкой и коэффи-
коэффициента демпфирования 6, позволяет устранить автоколебания. В частности, в ука-
указанном виброизоляторе это г эффект достигается при у0 = 0,167«!L, bi = 6 кгс ¦ с • м-1.
Глава XI
ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
1. УПРУГИЕ МУФТЫ И ИХ МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Механизмы, передающие вращательное движение от источников энергии (двига-
(двигателей) к исполнительным механизмам машин, подвергаются динамическим воздей-
воздействиям Эти воздействия вызываются либо переменными силами, возникающими
при выполнении рабочего процесса, либо переменными инерционными силами, воз-
возникающими при неравномерном движении рабочих органов машины.
Динамические воздействия снижают прочность и долговечность приводных
механизмов, являются причиной усталостных явлений, увеличивают шум в переда-
передачах и т. п. Для защиты приводных механизмов от ди-
динамических воздействий используют виброизоляторы
специальной конструкции — упругие муфты
Упру1ая муфта (рис 1) состоит из полумуфт 1 и 2,
жестко соединяемых с двумя соосными валами. Меж-
Между собой полумуфты соединены упругими элемента-
элементами 3, допускающими относительное угловое смещение
полумуфт. Используемые в технике конструкции уп-
упругих муфт подробно рассмотрены в [167]. Там же
приведены конструктивные параметры муфт, серийно
выпускаемых промышленностью.
Важнейшими механическими характеристиками уп-
упругих муфт являются- а) номинальный постоянный
крутящий момент Мк, передаваемый муфтой, б) уп-
упругая характеристика муфты, представляющая собой
зависимость относительного углового смещения полумуфт (деформации) от стати-
статически приложенного крутящего момента Мк; в) демпфирующая способность муфты,
характеризующая рассеяние (диссипацию) энергии в муфте при ее деформации.
При исследовании колебаний демпфирующая способность обычно характеризуется
введением диссипативной характеристики, выражающей зависимость момента сил
сопротивления от скорости деформации, При малых колебаниях эта зависимость
может считаться линейной:
Мс = 6§. A)
Упругая характеристика муфты обычно оказывается нелинейной по причинам,
отмеченным в гл. IX. При исследовании малых колебаний вблизи положения ста-
статического равновесия упр>гая характеристика может быть линеаризована. Коэф-
Коэффициент линеаризации c=dMK/dQ называется жесткостью муфты при данной
статической нагрузке, С увеличением статической нагрузки жесткость муфты обычно
увеличивается,
В муфтах о упругими элементами, изготовленными из резины, жесткость, полу-
полученную по статической упругой характеристике (т, е, при статическом нагружении),
9 п/р. Фролова
Рис. 1. Упругая муфта
258
ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
не следует использовать при проведении динамических расчетов, например для
определения собственных частот колебательной системы, содержащей муфту. В этих
случаях следует пользоваться характеристиками, полученными при динамическом
(например, циклическом) нагружении.
2. МУФТА В ОДНОМАССНОЙ СИСТЕМЕ
Простейшей динамической моделью машины является одномассная система,
показанная на рис. 2, а. Переход от реальной системы к одномассной динамиче-
динамической модели основывается на нескольких предположениях.
Входной вал приводного механизма вращается по заданному закону [ф (/)];
влияние машины на этот закон движения предполагается несущественным. Это
предположение справедливо в тех случаях, когда источник энергии (двигатель)
имеет большую мощность, незначительная часть которой потребляется рассматри-
рассматриваемым механизмом, или когда двигатель обладает рабочей характеристикой с боль-
большой крутизной (электродвигатели синхронные, асинхронные, постоянного тока).
Все звенья приводного и исполнительного механизмов могут считаться абсо-
абсолютно жесткими, поэтому они динамически эквивалентны одной массе, момент инер-
инерции которой, приведенный к входному валу, будет обозначаться J.
7
<p(t> г
\M(t)
M(t}
В)
Рис. 2. Одномассная модель машины:
о — простейшая; б — о упругой муфтой: / — привод; 2 — упругая муфта
Динамические воздействия, возникающие в системе, зависят только от закона
движения входного вала и поэтому могут считаться заданными функциями времени;
М (t) — суммарный крутящий момент, полученный приведением всех внешних
моментов, приложенных к исполнительному механизму, к входному валу.
КПД приводного механизма принимается равным единице.
Эффективность упругой муфты, имеющей жесткость с и коэффициент сопротив-
сопротивления Ь, устанавливается сравнением моментов, передаваемых приводным меха-
механизмом при отсутствии муфты и при ее установке между двигателем и приводом
(рис. 2, б).
Если 9 — угловая деформация муфты, то уравнение движения системы, пока-
показанной на рис, 2, б, запишется в форме
Л -f 66 + а = М @ — 7ф @. B)
Момент, передаваемый входным валом приводного механизма, в рассматривае-
рассматриваемом случае будет равен моменту, передаваемому муфтой:
М'@ = 68 + с8. C)
Из B) и C), используя операторную форму записи, получаем
bs-\-c
[M(t)-Jcf(t)l [s =
d
D)
Случай установившегося движения. Если входной вал вращается с постоянной
угловой скоростью ф = v, то ср = 0. При этом средняя угловая скорость выходного
вала равна v/a (a — передаточное число), а М (t) является обычно периодической
функцией времени, период которой равен времени одного оборота выходного вала'
Т = 2ли/у,
МУФТА В ОДНОЧАССНОП СИСТЕМЕ
Постоянная составляющая (среднее значение) момента М (t)
259
м^ш\ M{th
E)
образует статический момент, передаваемый системой. Разность
составляет динамический момент (динамическое воздействие).
Деформация 9 муфты в установившемся режиме также является периодической
функцией. Постоянная составляющая деформации 90 = М0!с называется стати-
статической деформацией.
Если М * (t) = Mi cos at (со = v/a), то из D)
при ср = 0 находим Л'г
W (t) =
где
С— /СО2+ 6@)
с-\-Ыа
cos
Коэффициент
К (со) =
F)
равный отношению амплитуды гармонического
крутящего момента, передаваемого системой, содер-
содержащей упругую муфту, к амплитуде момента, пере-
передаваемого той же системой при жестком соедине-
соединении двигателя с приводным механизмом, называет-
называется коэффициентом эффективности виброзащиты
на частоте а. Обозначим: c/J = cog, b/J = 2л,
со/со0 = г, л/ш0 = ?; тогда
/С (<в) = Л" (г) = ¦
/(Т
Fа)
0,2
0,1
Рис. 3. Зависимость коэффици-
коэффициента эффективности муфты от
частоты воздействия
На рис. 3 построены зависимости К' (г), соответствующие различным значе-
значениям ?. Область значений г, в которой выполняется условие виброизоляции (К' (г) <
< 1), называется областью эффективности упругой муфты. Она определяется нера-
неравенством
«~?>К2. G)
СОо
Увеличение демпфирования (увеличение ?) приводит к увеличению коэффи-
коэффициента К' в области эффективности. Вместе с тем оно полезно, поскольку уменьшает
амплитуду деформации в резонансной области (г ж 1). Резонанс может наступить
при разгоне или выбеге системы.
Если
М' (t) = Мо + 2 К' (тг) Mmcos (mat + р„
m=l
9*
(8)
260 ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
где
Varg arS
Таким образом, амплитуда каждой из гармоник периодического воздействия
умножается на соответствующий ее частоте коэффициент эффективности. Есте-
Естественно, что (8) справедлива лишь в том частотном диапазоне, в котором может счи-
считаться приемлемой одномассная модель. С ростом частоты динамического воздей-
воздействия становится необходимым учет упругости элементов системы.
Случай разгона системы. Пусть входной вал разгоняется с постоянным угловым
ускорением ф = е0 от угловой скорости ф = 0 до ф = v, Предполагается, что при
(=09=0, 6 = 0, ак выходному валу приложен статический момент Мо (при-
(приведенный к выходному валу).
Определение 6 (t) сводится к интегрированию уравнения
,_Me-Л, [а @-а (/-¦?¦)] (9)
при нулевых начальных условиях. Здесь о @ — единичная функция Хевисайда.
Определив 8 (t), находим М (/) = cQ (t) + bb {t). В результате получаем;
()
/ v \
а) во время разгона t ^ — :
\ Ч I
A0)
~- япш;<)+1], A2)
где л = ft/2/, (ol = c/J, aj = /co^ —/г2!
(v \
t > — :
Ч I
—coscoj/+4-
A5)
Анализ формул A0) — A5) показывает, что в процессе разгона М' (t) явля-
является процессом, асимптотически приближающимся к М' = Jbq + Мо. Максималь-
Максимальное значение М' @ достигается приблизительно при t = л/ш$; при этом
пп
М'тах «s(l-f-e ""о ) (M0-i-Jz0) <2 (Л10-(-У80). A6)
После окончания разгона входного вала происходит еще один переходный про-
цесо, при котором М (t) асимптотически приближается к MQ, Характерная форма
закона изменения М' if) при разгоне показана на рис, 4»
МУФТА В ОДНОМАССНОИ СИСТЕМЕ
261
При торможении с постоянным угловым ускорением — е0 можно определить 6,
§, М' по формулам A0) — A5), заменив в них е„ на —е0.
Если ускорение при разгоне не постоянно по величине, но является известной
функцией времени ср == г (t), законы изменения 0 (t), б (t), M (t) определяются
из выражений
t
8 (t) = Х— \ t-n«-c> sin wj (t — x) [M0 + Js (т)] dx; A7)
-«<'-*' j^cos coj (< - т) - ~ sin o>: (f - t) J
X
M' @ = —
A8)
A9)
Случай изменения статической нагрузки. Если при постоянной угловой скорости
вращения входного вала ф = v в момент t = 0 происходит изменение статической
Рис. 4. Изменение момента:
a — при разгоне; б — при увеличении нагрузки
нагрузки, в системе с упругой муфтой возникает переходный процесс, в котором
6, 9, М' изменяются по следующим законам (ДЛ10 — изменение статического мо-
момента);
А ЛЯ Г / ... \П
B0)
B1)
B2)
Примерный характер изменения М' (t) показан на рис. 4, б.
Удар в системе с упругой муфтой. Переходный процесс, возникающий в системе,
вращающейся с постоянной угловой скоростью и нагруженной постоянным момен-
моментом MQl при приложении ударного воздействия My {t) (рис, 5), определяется по еле-
262 ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
дующим формулам:
I
б == б0 _{—-J— С e-nd-X) sin a'o (/_T) му (т) dv,
о
-I ( е-я'И| [cos ш0' 0-т)- ~ sin со; (*-тI Му (т) Л;
B3)
B4)
X Му (т) Л.
B5)
Об определении максимальных значений 0 (/) и М' (t) при ударных воздействиях
различной формы см. гл. XII.
Во всех рассмотренных случаях предполагалось, что в процессе движения си-
системы деформация упругой муфты не выходит за пределы областей линейности ее
упругой и диссипативной характеристик. Если это условие не выполняется, в системе
могут возникать нелинейные явления, подобные рассмотренным в гл, IX,
3. ДВУХМАССНАЯ СИСТЕМА С ДВИГАТЕЛЕМ
Упругие муфты широко используются в машинных агрегатах [40, 56], где они
устанавливаются между двигателем и приводным механизмом. При исследовании
динамики машинного агрегата необходимо учитывать механическую характери-
характеристику двигателя. При этом наиболее простой моделью, описывающей динамику
агрегата, оказывается двухмассная система, показанная на рис. 6,
Рис. 5. Закон изменения
момента при ударном воз-
воздействии
•
г
м
Рис. 6. Двухмассная модель машин-
нот агрегата:
/ — привод; 2 — упругая муфта
Обобщенными координатами системы являются угол поворота вала двигателя ф
и угол поворота входного вала приводного механизма if. Деформация муфты Э =
= ф — \|), Уравнения движения системы
мо! (е = ф_ф) B6)
Здесь JD и JM — моменты инерции движущихся частей двигателя и машины, при-
приведенные к валу двигателя; МD — крутящий момент, создаваемый двигателем (дви-
(движущий момент); /Ис — сумма моментов, возникающих в машине (момент сопротив-
сопротивления), приведенных к валу двигателя,
Уравнения B6) необходимо дополнить механическими характеристиками дви-
двигателя и машины,
ДВУХМАССНАЯ СИСТЕМА С ДВИГАТЕЛЕМ 263
Механическая характеристика двигателя устанавливает связь между законом
изменения движущего момента и законом изменения угла поворота вала двигателя.
Дтя некоторых классов двигателей можно принять, что движущий момент Л1О не за-
зависит от закона движения ср (/).
Механическая характеристика машины устанавливает связь между законом
изменения момента сопротивления Mz и законом движения входного вала маши-
машины Ф (О-
Работа упругой муфты при постоянном движущем моменте в установившемся
режиме. Если MD = MD0 = const, a Мс = ML (I), B6) записываются в форме
ф+ е+ вр=
JD JD
М
¦> м jm jm !
Вычитая второе уравнение из первого, получаем
Мп М It)
D J M
B8)
Здесь соо — YcU — одна из собственных частот двухмассной системы (вторая соб-
собственная частота равна нулю), п = 6/2У; J = ^д^ (^д + ^.м)- Таким образом,
B9)
Если в установившемся режиме
00
Mmzos
где Жо = Мт, а к» = v/a, то
С J Li УШ /П2Ш2\2 1 4«2@2OT2 '
гДе Y/n = —arg (а>1 — m2co2 + 2nia>m),
Момент, передаваемый приводным механизмом
M Li УШ _ /П2Ш2\2
-
V(c—
. C1)
При жестком соединении двигателя с машиной крутящий момент Мс (f) приведет
к появлению крутящего момента на входном валу приводного механизма:
00
М @ -М0+ ^3 (^~М° ^-Мо + -/- У Mmcos(m^ + M- C2)
Сравнивая C1) и C2), легко видеть, что при введении упругой муфты ампли-
амплитуда m-ii гармоники момента, передаваемого приводом, умножается на коэффи-
коэффициент f(' (mz), определяемый формулой Fа). Неравенство G) определяет область
эффективности упругой муфты.
264 ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
Работа упругой муфты в установившемся режиме при движущем моменте, эавн
сящем от угловой скорости двигателя. При исследовании установившегося режима
близкого к равномерному вращению с угловой скоростью v, статическая характеры
стика выбирается в форме
При действии гармонического момента Мс (t) = Мо + М± cos wt получаем еле
дующие уравнения движения:
+ ce = MD(v)-u(9-v); \
Решая C3), получаем
с 1 ^
При этом
C6)
где тЛ1 = /л,/и; со* = с (JD + JM)/JD JM; 2n = b(JD + J M)!(J DJM); \i=>JM/JD;
ф1 jm
__
C8)
2n 1@
C9)
D0)
где
D1)
D2)
При жестком соединении двигателя с приводным механизмом амплитуда мо-
момента на входном валу приводного механизма
D3)
ВИБРОИЗОЛЯЦИЯ ПРИ УПРУГИХ ЗВЕНЬЯХ ПРИВОДНОГО МЕХАНИЗМА 265
Сравнивая D1) и D3), получаем коэффициент эффективности
D4)
Если b = 0, то п = 0, и тогда
*«_ «УД+о+.ч __. D5)
С ростом крутизны характеристики двигателя и величина т^1 стремится к нулю;
при этом влияние характеристики двигателя на эффективность муфты уменьша-
уменьшается. При уменьшении ц влияние двигателя на эффективность также уменьшается;
кроме того, при этом увеличивается амплитуда резонансных колебаний (при ш = соо).
Работа упругой муфты в неустановившемся режиме при постоянной нагрузке.
Исследование процесса разгона в системе, описываемой уравнениями B6) при
MD = MD (ф), Мс= M0 = const, сводится к интегрированию этой системы урав-
уравнений при начальных условиях ф @) = G @) = 0; ф @) = 6 @) = 0. В общем слу-
случае интегрирование может осуществляться с помощью ЭЦВМ или аналоговой вычис-
вычислительной машины.
Качественная оценка колебательных процессов, происходящих при разгоне,
может быть получена приближенным интегрированием, состоящим из двух этапов.
I этап — интегрирование уравнения движения-, описывающего разгон системы
с жестким соединением двигателя и машины:
(JD + JM)<p = MD(y)-M0; <p@) = 0; ф@) = 0. D6)
При этом получается приближенный закон изменения ф (t) при разгоне (в пред-
предположении, что введение упругой муфты слабо влияет на этот закон движения).
II этап — интегрирование B) при найденном ф (t) и при J = Jм, М (t) = —Мй.
Уравнение D6) интегрируется в квадратурах:
, С Ур + 'м)** «7)
J М(ф)-М0 •
Определив функцию, обратную D7), получим зависимость ф (t).
4. ВИБРОИЗОЛЯЦИЯ ПРИ УПРУГИХ ЗВЕНЬЯХ
ПРИВОДНОГО МЕХАНИЗМА И МАШИНЫ
Рассмотренные выше простые динамические модели адекватно описывают пове-
поведение системы в тех случаях, когда звенья приводного и исполнительных меха-
механизмов могут считаться абсолютно жесткими. Если жесткости этих звеньев соиз-
соизмеримы с жесткостью упругой муфты, становится необходимым использовать более
сложные модели, учитывающие упругость звеньев машины.
Одна из таких моделей показана на рис. 7, а. Предполагается, что входной вал /
движется по заданному закону ф (t), а машина представляет собой линейную си-
систему, движение которой описывается уравнениями вида A) гл. VIII.
Для суждения об эффективности упругой муфты, имеющей жесткость с и коэф-
коэффициент сопротивления Ь, необходимо определить динамическую жесткость k (ico)
или динамическую податливость / («<в) машины на валу 2 (см. гл. VIII). Динамиче-
266
ВИБРОИЗОЛЯЦИЯ ПРИВОДНЫХ МЕХАНИЗМОВ
екая податливость в рассматриваемом случае представляет собой отношение ком-
комплексной амплитуды гармонических угловых колебаний ty (t) вала 2, возникающих
при приложении к этому валу гармонического крутящего момента частоты (о, к ком-
комплексной амплитуде этого момента. Динамическая жесткость есть величина, обрат-
обратная динамической податливости.
В установившемся режиме, при вращении вала / с постоянной угловой ско-
скоростью, эффективность упругой муфты на частоте ш характеризуется коэффициен-
коэффициентом
С + 6@)
с + bi(n + k (ко)
D8)
равным отношению амплитуды гармонического крутящего момента, передаваемого
валом 2 при наличии упругой муфты, к амплитуде момента, передаваемого той же
системой при жестком соединении валов / и 2,
ip(t)
•Wl
к(Си)
3% Зц
-t
*0
UIU'JAL>
tp(t)
И
4>(t)
а)
б)
Рис. 7. Динамическая модель:
а — машины о упругими звеньями; б — цепной системы; в — машинного агрегата о упругими
Если динамической моделью машины является цепная система, показанная
на рис. 7, б, динамическая жесткость в сечении / может быть представлена в виде
цепной дроби
к (ко) =
h 0<»)
+ ¦
I
D9)
где lr (to) = (сг + ЬгЫ)-1.
Предполагая, что ротор двигателя может рассматриваться как абсолютно твер-
твердое тело с моментом инерции JD, а зависимость движущего момента от угловой ско-
скорости определяется линеаризованной статической характеристикой, получим дина-
динамическую модель системы, показанную на рис. 7, в.
При гармонических колебаниях системы вблизи установившегося режима с ча-
частотой со коэффициент эффективности упругой муфты
(/со) |
E0)
dMr
Формула E0) является частным случаем формулы B7), гл. VIII, если положить в
последней
lQ(iai) = l (ш), lB (to) = (ико — УдШ8)". E1)
Таким образом, в рассматриваемом случае можно использовать достаточное
условие эффективности в форме C0) в гл, VIII (см. рис. 9, гл. VIII),
УДАР В ВИБРОЗАЩИТПОИ СИСТЕМЕ 267
Глава XII
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
1. УДАР В ВИБРОЗАЩИТНОЙ СИСТЕМЕ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Постановка задачи о защите от ударных воздействий. В механике силовым (или
жестким) ударом называют результат воздействия на тело сил бесконечно малой
продолжительности, вызывающих мгновенное изменение его скорости на конеч-
конечную величину. В технике и, в частности, в теории виброзащитных систем понятие
удара трактуется более широко. Ударом или ударным воздействием называют сило-
силовое или кинематическое возмущение относительно малой продолжительности и отно-
относительно большой интенсивности. В качестве эталона интенсивности при этом выби-
выбирают нормативную величину, снижение или увеличение которой составляет цель
защиты; в качестве эталона длительности принимают период собственных коле-
колебаний виброизолируемого объекта. Таким образом, одно и то же воздействие в зави-
зависимости от конкретных условий может считаться и ударным, и неударным.
Анализ поведения виброзащитной системы при ударе показывает, что имеется
ряд параметров ударного воздействия, в наибольшей степени влияющих на движе-
движение виброизолированного объекта. К их числу относятся пиковое значение а0, дли-
длительность х и полный импульс So ударного воздей-
воздействия о (/), представляющего при кинематическом t(tj
возмущении закон изменения ускорения основания
(рис, 1), Эти величины связаны соотношением 6«
a (t) it.
6»
На рис. 2 приведены ударные воздействия, ° lo ?i V t
используемые при расчетах.
В реаЛЬНЫХ УСЛОВИЯХ длительность ВСЯКОГО Рис- !• Ударный импульс и его
удара ограничена; поэтому Считают a (t) = 0 при параметры
t < 0 и t > т. Вместе с тем для удобства анали-
аналитического описания формы импульса часто используют аппроксимирующие функ-
функции, не обращающиеся тождественно в нуль ни при каком конечном t. При этом
иногда вводят понятие о длительности на уровне 0%, считая этой длительностью
промежуток времени t0 < t < т„, где a (t) удовлетворяет условию | a (Q | 3* 0*
(см. рис. 1).
Если ударное воздействие имеет несколько кратковременных выбросов за уро-
уровень ii ua, целесообразно рассматривать его в виде последовательности нескольких
однонаправленных ударов.
По величине полного импульса So ударные воздействия подразделяют на удары
с приращением (см. рис. 2, а—е) и без приращения скорости.
Импульсы ударов с приращением скорости называют односторонними, если
за время удара а (/) сохраняет знак. В описании односторонних импульсов разли-
различают фронт нарастания и фронт спада (или срез) импульса с длительностями соот-
соответственно т1 и т2. Так, импульсы, приведенные на рис. 2, а, б, д, имеют вертикаль-
вертикальный фронт нарастания (тх = 0); для импульса по рис. 2, г длительность т^ равна т/2.
Уравнение движения виброизолированной системы при ударе. Расчетная мо-
модель пассивной виброзащитной системы с одной степенью свободы состоит из несо-
несомого твердого тела, движущегося поступательно в направлении оси X (рис. 3), без-
безынерционного виброизолирующего устройства (виброизолятора), условно изображен-
изображенного в виде параллельно соединенных пружины и демпфера, и несущего тела или
основания. При силовом возмущении, когда несомое тело является источником, к нему
приложена внешняя сила F (t), направленная по оси X; основание при этом счи-
считается неподвижным и является объектом защиты. При кинематическом возмуще-
возмущении основание движется по закону | @ и несомое тело, будучи объектом, подверга-
подвергается силовому воздействию со стороны виброизолятора, создающего силу R [х'г &'),
268
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
где х' = х — ? — относительная координата объекта. Таким образом, дифферен
циальное уравнение движения несомого тела при силовом возмущении имеет вид
x + r{x, x) = o(t), A)
где г(х, x) = -^R(x,x); <f@ = -^F@-
В случае кинематического возмущения уравнение движения виброизолированного
объекта имеет вид
Г + г(х', i') = o(<), B)
где о (t) =— ? @, что с точностью до обозначений совпадает с A). Таким образом,
результаты исследования A) могут быть легко интерпретированы в терминах B),
и наоборот.
В х
t О
6(t)
т t o t,
Ф)
X t О
г, г t
Рис. 2. Виды ударных
импульсов:
а — мгновенный, б —
прямоугольный; в — тре-
треугольный; г — полусину,-
соидальньш; д — экспо-
экспоненциальный; е — зату-
затухающий знакоперемен-
знакопеременный
е)
WWK
F(t)
Я(х',х')
а.) о)
Рис. 3. Расчетная схема виброзащитной системы с одной степенью свободы при ударе;
а — силовое ударное воздействие; б — кинематическое ударное воздействие
Об ударных характеристиках виброизоляторов. При ударе материал упругого
элемента виброизолятора работает в условиях, существенно отличающихся от ре-
режима статического нагружения или колебаний, вызванных нагрузкой гармониче-
гармонического типа. Поэтому ударная силовая характеристика виброизолятора, представ-
представляющая зависимость его ударной реакции от деформации, отсчитываемой от равно-
равновесного положения под статической нагрузкой, может в значительной степени отли-
отличаться от соответствующих статической или динамической характеристик. Ударные
характеристики, определяемые, как правило, на ударных стендах, приводятся
в соответствующей технической документации. Силовые ударные характеристики
некоторых серийно выпускаемых виброизоляторов приведены в гл, VII,
УДАР В ВИБРОЗАЩИТНОЙ СИСТЕМЕ 269
Из-за наличия упоров силовые ударные характеристики являются нелиней-
нелинейными функциями деформации упругого элемента; однако при относительно неболь-
небольших (по сравнению с величиной рабочего хода) деформациях допустима их линейная
апроксимация:
R(x, х) = с,х, C)
где коэффициент с*, называемый ударной жесткостью виброизолятора, в неявной
форме содержит информацию о параметрах удара, статической нагрузке, внутреннем
трении в материале упругого элемента и других параметрах, характеризующих
условия ударного нагружения. Если удар сопровождается значительной деформа-
деформацией, необходимо учитывать нелинейность характеристики R (х, х), в особенности
при вычислении максимальной перегрузки объекта.
Силовая характеристика демпфированных виброизоляторов может описываться
соотношением вида
R(x, i)=
где слагаемое ф (х) учитывает демпфирующую составляющую реакции. Например,
для виброизоляторов серий АФД, АПН (см. гл. VII) принимают
Ф (х) = Н sgn х,
где величину // силы сухого трения рекомендуется считать равной 15 — 25 % от ве-
величины статической нагрузки.
Поведение линейной недемпфированной системы при ударном воздействии. Диф-
Дифференциальное уравнение движения внброизолированного объекта при ударе можно
записать в виде
^ + (bJjc = o@, D)
где а>1 = с+пг1, a (t)—закон изменения ускорения основания; штрих в обозна-
обозначении относительной координаты для простоты опущен. Обычно предполагают, что
ударное возмущение действует на первоначально покоящийся объект, так что инте-
интегрирование D) производят при нулевых начальных условиях; соответствующее
частное решение имеет вид [123]
t
х @ = — С а F) sin со* (t — 6) dd. E)
Если ударное воздействие имеет длительность %, т. е,
0@ = 1 0(О>
то решение E) принимает вид
t
— \ а F) sin <*>„(< — 6) d6, О-.
\ а (б) sin со* (t — б) dfi, t> т,
причем при t > т происходят свободные колебания объекта. Из D) и F) вытекает
закон изменения абсолютного ускорения w (t) объекта, связанного с координатой х
соотношением
t *
со* \ а (б) sin со* (t — 6) db, 0 ^ t ^т;
о
х
со* \ а (б) sin со* (t — в) d9, f > т.
о
W(t):
(8)
270 ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИИ
Поскольку основная цель расчета на удар состоит в вычислении наибольших
значений абсолютного ускорения и относительного смещения объекта, соотноше-
соотношения G) и (8) удобно представить в виде
х (t) = -~R(t) sin [aJ-W(t)], t^O, (9)
*
@ = со # @ sin [со**-?(/)], t^O, A0)
где R @ = УлЩТЩП; V (t) = arctg В (t) {А @Г1;
\<&; В (t) = \ а F) sin со „е <Й, A1)
6 о
причем для воздействий вида F) при всех t > т
Л@ = Л(т); В@ = В(х); ?@ = ^(т); R(t)^R{%). A2)
В соответствии с (9) — A2) процессы х @ и w (t) можно рассматривать как моду-
модулированные по амплитуде колебания частоты ш„, причем функции — R (t) и a^R (t)
играют роль огибающих соответствующих процессов. Следовательно, наибольшее
отклонение объекта и его наибольшее ускорение не могут превзойти наибольших
значений функций •— R (t) и со*/? (/), превращающихся при />тв прямые — R (т)
и to^R (т), параллельные оси t.
Обозначим через /„. момент достижения наибольшего отклонения объекта отно-
относительно основания. Удар, для которого момент /„ 5= т есть одновременно момент
достижения первого максимума \x(t)\, называется коротким; в противном случае
удар будет длительным. Отклонения объекта при длительном ударе могут иметь
несколько максимумов, причем момент t = t^ может превышать или не превышать т.
Таким образом, при коротком ударе
ш, > A3)
max/ \w(t) =w = a^R (t). J
В случае длительного удара вычислению 1и» полезно предпослать исследова-
исследование функции R (t), поскольку
й)^й>* max/ R (t). I
В частности, если max Rlfy^RM, что имеет, например, место при мо-
нотонном возрастании R (t) на отрезке 0=^^=с;т, х и w определяются по A3), В про-
противном случае момент /^ принадлежит множеству корней уравнения:
, A5)
расположенных в интервале 0</<хих, и w вычисляются по G) и (8) непо-
непосредственной подстановкой в них t = t#.
Наибольшее отклонение объекта для импульсов с вертикальным фронтом сов-
совпадает с первым максимумом отклонения; для подобных импульсов момент <„. сов-
совпадает с наименьшим положительным корнем уравнения A5).
В табл. 1 приЕедены формулы, определяющие закон изменения ускорения объ-
объекта при ударах с различными формами импульсов. Для импульсов 1—4 с четко
выраженной длительностью т наряду с формулами для w (t), из которых получа-
получается значение w при длительном ударе, приводятся выражения для w (т), опреде
ляющие w при коротком ударе. Для импульсов 5—6, не имеющих четкого оконча-
окончания действия, приведены формулы для w (t).
УДАР В ВИБРОЗАЩИТНОИ СИСТЕМЕ
I. Ускорение объекта при ударе
271
№ по
пор
a U)
B(t)
б,
О '/гх г t
ct sin -
г —1
6@
во
?»А_соь2л1
о >/zt т г
I —
4Л8
ем
2о0-.
2o,
(-f
Ox,
0)*T
2 sin со» (^ — т/2)
sin!-
2a о
4
бо
nt
o cos ^
<x
__2ooCO*x_
/2ш*т\» .
/2co.»T\!
fJ
— J — 2-^-
6@
oe
.-at
-2— sin о*?*—
272
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
Продолжение т а б л I
№ по
пор.
6
6(t)i
1
0
а (О
П\
'/а
t
о @
Хе~а
w
г* cos щ^/^ —
Отметим связь между функцией R (/), фигурирующей в (9) — A2), и.спектраль-
и.спектральными характеристиками воздействия a (t).
Спектром Фурье функции а @, в частности удовлетворяющей условию F), на-
называют комплексную функцию Fa (ко), определяемую выражением
+ 00
A6)
Наряду с A6) можно ввести в рассмотрение текущий спектр Фурье Fa (t, ico)
для 0 @ B27]:
t
Fa (t, «<в) = ^ or F) e" 'a9 rf8, 0 ==s / < т. A7)
Из A6) и A7) следует
\Fa(t, «шф)|.
\о
+ И a (8) sin (о,
1
A8)
..>!=/(]
0FH05@*6
F) sin ю«
Таким образом, зная текущий амплитудный спектр I FCT (<, iw) воздействия
a (/) и собственную частоту виброи4олированного объекта, можно получить оценку
сверху для его наибольшего отклонения х и для максимальной перегрузки w при
длительном ударе, а также точные значения хат при коротком ударе.
Пример, Вычислим амплитуды послеударных колебаний объекта при ударе с прямо-
прямоугольной формой импульса (см рис 2, б).
В соответствии с A7) имеем
О
Внося A9) В (9) и учитывая A8), получим
шах/>т|дг(«| =
(I - cos сот) - i sin их | = ^ sin^\
"IT"
A9)
B0)
УДАР В ВИБРОЗАЩИТНОЙ СИСТЕМЕ
2/3
Из B0) следует, что при 0<<о*т<я
T | x (t) | совпадает с наибольшим отклоне
нием х объекта, при л< о),т < 2я амплитуда послеударных колебаний меньше х; в част-
частности, при а,х— 2л объект движется только во время удара, а после его окончания — по-
покоится.
Ударные спектры простого осциллятора. Ударный спектром колебательной
системы называют [158] зависимость пикового значения ее реакции от частоты си-
системы, периода,-отношения периода к длительности ударного импульса или какого-
нибудь иного подобного параметра.
Рис. 4. Ударные спектры
линейной недемпфиро-
недемпфированной виброзащитной
системы с одной степе-
степенью свободы для импуль-
импульсов различной формы:
/—полусинусоидальный:
2 — экспоненциальный;
3 — треугольный с вер-
вертикальным срезом; 4 —
синусоидальный; 5 —
прямоугольный
II/
р
у
s г
/ /
'1
[
1
/
/Г"
1
11
ii
Г
4
1
/,
/
•?¦
3
/
/
— '-
S
п
Аналитических выражений пиковых значений реакций даже для простейших
динамических систем не существует. Поэтому ударные спектры обычно изображают
в виде графиков или задают таблично. На рис, 4 представлены ударные спектры
коэффициента динамичности X, где
Т /т— 1Л12 С= /9 I \
Л. — О0 Ш^лГ (ZI)
для системы с расчетной моделью, изображенной на рис. 3 (при Ъ = 0) и при раз-
различных по форме ударных импульсах [186]' полусинусоидального (п. 1 табл. 1) —
кривая 1, экспоненциального (п. 6 табл. 1, при х = а) — кривая 2, треугольного
с вертикальным срезом (п. 3 табл. 1 при тх = 0) — кривая 5, синусоидального (п. 2
табл, 1) — кривая 4 и прямоугольного (см. рис. 2, б) — кривая 5.
Рис. 5. Ударные спектры
линейной демпфирован-
демпфированной системы с одной
степенью свободы при
различных уровнях демп-
демпфирования — (v — от-
Vo
носительный коэффици-
коэффициент демпфирования; v0 —
критическое значение от-
относительного коэффици-
коэффициента демпфирования);
форма импульса — полу-
полусинусоида периода т
На рис. 5 изображены ударные спектры коэффициента А, B1) для той же рас-
расчетной модели при различных уровнях демпфирования; форма ударного импульса
считается полусинусоидальной с амплитудой а0 и длительностью т [270].
Обширный материал по расчету пиковых значений реакции недемпфированной
динамической системы с одной степенью свободы содержится в [212], где в качестве
входных воздействий рассмотрены комбинации из полусинусоидальных, косинусои-
дальных, треугольных и трапецеидальных импульсов с наложенными на них сину-
синусоидальными колебаниями, а также произведения указанных импульсов на затухаю-
274 ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
щие экспоненты. Аналогичные результаты, полученные моделированием на АВМ,
содержатся в [85].
Оценки пиковых значений реакции линейного осциллятора. Воздействие малой
продолжительности. Преобразуем решение E) уравнения D) к виду
t
x(t) = xo(t)-~ ^0(e)coswt(/-6)de, B2)
о
где xQ (t) представляет квазистатическое решение, соответствующее смещению объ-
объекта в момент t от статически приложенной нагрузки та (t).
А. Н. Крыловым указана [115] оценка разности | х (t) — х0 (t) | = Ах (t) для
ударных воздействий с односторонним импульсом, имеющим единственный макси-
максимум, равный сг0. Обозначим а0 — максимальное по модулю значение Ъ {t) во фронте
нарастания импульса и Ао=—-—наибольшее возможное приращение ускорения
за полупериод колебания я/со,,. Тогда формуле А. Н. Крылова можно придать
следующий вид-
max, Д* (/) «?-?;-а„= ~.
Следовательно, для наибольшего отклонения X объекта получается оценка
Ч
Оценку B3), а также вытекающее из A8) соотношение
Х^сщ^ф B4)
используют для анализа поведения системы при длительных ударах.
При коротких ударах max/ R (f) — R (т), и оценка B4) переходит в равенство.
При этом для импульсов малой продолжительности (м^т <(! 1) значение R (т.) с боль-
большой степенью точности, как это следует, например, из A8), равно площади под кри-
кривой а = а @ в интервале 0 sg t ^ т:
т
i а (8) <й = So,
т. е. совпадает с величиной So импульса ударного воздействия.
Согласно A8) величина So импульса ударного воздействия a (f) соответствует
значению спектральной плотности Fa (iu>) на частоте и = 0. Таким образом, пико-
пиковые значения смещения и ускорения виброизолированного объекта при ударе малой
продолжительности (м^т < 1) не зависят ни от формы, ни от продолжительности
ударного импульса и определяются лишь приращением скорости So основания,
так что
Практически достаточным условием отнесения ударного воздействия к корот-
короткому удару можно считать выполнение условия 0 < ш^т < я/4. При я/4 < й)„,т <
< я/2 зависимость X и w от длительности удара становится более заметной, тогда
как зависимость от его формы остается незначительной. Для вычисления X и w можно
использовать B0), полагая
т. е. считая заданное воздействие о (t) длительности т эквивалентным удару с прямо-
прямоугольной формой импульса той же длительности: амплитудное значение о0 экви-
эквивалентного удара равно при этом среднему за время т значению a (t).
УДАР В ВИБРОЗАЩИТНОЯ СИСТЕМЕ
275
Графические способы определения наибольших смещений. Дельта-метод. Дельта-
метод [154] представляет графоаналитический способ интегрирования дифферен-
дифференциальных уравнений второго порядка вида
а с1 Iv a i\ v /1 \ „ v И \ v @К\
Л Г {X, А, I), Л yiQ)—Л0, Л \1-Qj Ag. \^*-v
Для D) этот метод заключается в замене фазовой траектории [интегральной
кривой, построенной на фазовой плоскости (х, щ1х)] непрерывной линией, состоя-
состоящей из дуг Сд, окружностей радиуса 6ft с центрами в точках 0^, расположенных
на оси х (k = 1, 2 п; рис. 6). Здесь п —
число интервалов, на которое разбивается про-
промежуток ч времени 0 ^ t sg т при ступенчатой
аппроксимации импульса a (t):
б* = ~\/~(хь-\ ~~ аА<0*2J "Ь Ч — \ш^' @6)
где ok — значение а (/) в интервале tk_x s^t^tk.
Абсцисса центра Ok равна акщ2; дуге Ck соот-
соответствует центральный угол в а>% (tk — ^t-i) pa-
диан. При t > % фазовой траекторией будет ок-
окружность радиуса бй+х с центром в начале
координат, причем xk = х (т), х^ = х (т),
0^+1 = 0.
В случае нелинейного уравнения B5) оно
предварительно преобразуется к виду
= F(x, х, t) + (o°-x, B7)
и
*K-t
и>
»к
ы
if/
W
ЧМн
1
1
1
1
о
*Jf
Рис. 6. Схема построения участка
фазовой траектории дельта-мето-
дельта-методом
екоторая положительная константа.
Роль Ok в B6) играет при этом значение правой части B7), предполагаемое
постоянным в каждом из интервалов ^-i^^=S^a (k = 1, 2, ,.., n).
Рис. 7. Фазовая траектория линейной недемпфированной системы с
одной степенью свободы при ударе с формой импульса в виде полной
волны «прямоугольного импульса»:
а) 0 < эе < я; б) я < эе ^ 2л
Пример. Определить наибольшее отклонение объекта при ударном воздействии о (О
с формой импульса типа полной волны «прямоугольного синуса»:
в (.О-
t < т; о (t) = — о0; т ^ t < 2т; ст «) = 0,
2т.
B8)
На рис. 7, а и б изображен начальный участок фазовой траектории 0MiM2 (в безраз-
безразмерных фазовых координатах Г| = ш|о-1д:, п'и-1, где т|' = dr\/dd, в = х~Ч, у. = ш»т), соответ-
соответствующий двум первым максимальным отклонениям T)i и % При 0 ^ и ^ л отклонения
i]t = 1 5 — 4 соз х — 1; Т|а = 2 A — cos х),
причем iii достигается в режиме свободных колебаний при 9>2. В случае я :? х
наибольшие отклонения
rjj = 2; ТJ = /5 — 4 cosx + I
2л
276
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИИ
достигаются во время действия импульса В обоих случаях наибольшим будет второе мак-
максимальное отклонение Таким образом,
| 2A—cos и), 0 < и < я,
\ /5—4 cos к + 1, я <; х ^ 2л.
В частном случае нелинейной упругой характеристики, когда B7) имеет вид
Я + ф (х) = 0 (t), точность построений можно повысить переходом к фазовой пло-
плоскости кусочно-постоянного масштаба [154].
Разобьем фазовую плоскость на вертикальные полосы *'_, < х < х*, где
х* (j = 1, 2, ..., /)— абсцисса вершин ломаной ф„ (х), с помощью которой произ-
производится кусочно-линейная аппроксимация гр (х). Масштаб оси ординат в полосе
x*j < х < xj примем равным iwT1, где со—угловой коэффициент отрезка cp,,(\)
в рассматриваемой полосе. Построение отрезка фазовой траектории внутри каж-
каждой из полос производится так, как это описано выше; на границах полос при х — х*
фазовые траектории терпят разрывы 1-го рода; ординаты фазовых точек при пере-
переходе из (/— 1)-й в /-ю полосу изменяются в со .«С1 раз (/= 1, 2, ,,., /),
18
-ос
/
О
У
~xj
0
fM
а)
Ml
C'/f
V
й
(
ос г
*' -*
Ч о, ц
iB(t,u)
о
\
Рис. 8. Начальный участок фазовой траек-
траектории нелинейной системы, построенный
на фазовой плоскости кусочно-постоян-
кусочно-постоянного масштаба:
а — характеристика; б — построение фа-
фазовой траектории
Рис. 9. Общий вид диаграммы И — В
(импульс — время)
Пример. Определить наибольшее отклонение объекта, опирающегося на упругий вибро-
изолятор с нелинейной характеристикой (рис. 8, а) при ударе с прямоугольной формой
импульса.
При <x>2sin-~- движение объекта происходит в зоне линейности характеристики
(Irjj <а) Если а< 2 sin |-, то фазовая точка попадет в зону | ц | > а; начальный участок
OMiM^Mi фазовой траектории, соответствующей этому случаю, изображен на рис, 8, б
Искомое значение
где щ =
Xi = 0)jT.
B9)
Определение наибольших смещений при ударе с помощью диаграммы И—В.
Рассмотрим выражение Fo (t, г'ы) текущего комплексного спектра Фурье функции
a (t), которое определяется B7) и A1). Составляя выражение для сопряженного
спектра того же воздействия, получим
F* (<, ш) = FQ (t, - ко) = Л (Лео) + IB (t, со). C0)
УДАР В ВИБРОЗАЩИТНОЙ СИСТЕМЕ 277
На комплексной плоскости {A, iB) равенство C0) при со = а>^ определит неко-
некоторую кривую L= L (со,.), называемую диаграммой импульс — время. Свойства
диаграммы И—В детально исследованы И. М. Рабиновичем, применившим ее [177]
к исследованию движения упругих систем при ударе. Укажем важнейшие из этих
свойств.
1, Параметрические уравнения кривой L (<а„.) имеют вид
t t
A(t, со„) = j о F) cos со„ 6 db\ В (t, 05*) = ^ a F) sin а „6^8.
Следовательно, при нулевых начальных условиях и для воздействий типа F)
кривая Mw*) исходит из начала координат и заканчивается в точке Мх с коорди-
координатами Ах = А (т, со»), iBx -— iB (т, ш„) (рис. 9).
2. Касательная к L (со»), проведенная в текущей ее точке М (A, iB), наклонена
к оси А под углом wj; угол наклона радиус-вектора г точки М равен ? (/, со*),
о
где 4f = arctg-T.
3, Длина дуги ОМ равна импульсу 5 (f) воздействия за время [0, /]:
t
В частности, длина полной кривой ОМХ равна полному импульсу S (т.) = So.
4. Проекции г на натуральные оси (d, v), где ¦& — ось касательной, v — ось
главной нормали, направленной в сторону выпуклости L (и,) в точке /И, равны
Из C1) следует, что максимальным отклонениям системы отвечают те точки диа-
диаграммы И—В, в которых г перпендикулярен касательной.
5, Радиус кривизны р = СМ кривой L (со*) в текущей точке М
т, е. пропорционален ординате ударного импульса в текущий момент /. Таким обра-
образом, для прямоугольного импульса кривая L (со,.) представляется дугой в со(х ра-
радиан окружности радиуса coj'a0 с центром в точке @, 1Щ1а0); при t^x, p = 0,
так что L (со*) заканчивается точкой Мх.
Мгновенному импульсу So, приложенному в момент /= f, отвечает прямоли-
прямолинейный отрезок длиной So, наклоненный к оси А под углом со**'.
Непосредственным следствием перечисленных свойств является вывод о том,
что при со^т < я/2 удар типа F) будет коротким независимо от формы импульса,
что амплитуды послеударных колебаний системы для импульса a (t) или ему сим-
симметричного импульса а' = а (т — f) будут равными и т. п.
Таким образом, с помощью диаграммы И—В можно получить достаточно полное
представление о поведении упругой системы при ударе и, в частности, определить
число ее максимальных отклонений в заданном интервале времени и вычислить
наибольшее из них.
Пример. Исследовать движение виброизолированного объекта при ударе с формой
импульса B8)
На рис 10, а изображена диаграмма И—В для случая 0 <и < л, на рис 10, б —для
случая ж V. < 2я В интервале действия удара объект имеет только одно максимальное
отклонение (точка Mi, см рис 10, а), которое не превосходит амплитуды послеударных
колебаний (точка ^х) При жх<с2я объект имеет два экстремальных отклонения во время
удара (точки Mi и М2), причем отклонение, которому отвечает точка М2, превосходит ампли-
амплитуду колебаний объекта после прекращения удара (точка М на рис. 10, 6\
278
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
О колебаниях нелинейных систем при ударе. В стационарных режимах вынужден-
вынужденных колебаний даже «малая» нелинейность характеристики ведет к возникновению
специфических нелинейных эффектов, описанных, например в [35, 153]. По-иному
обстоит дело при колебаниях нелинейных систем, вызванных ударом. Скоротечность
ударных процессов не позволяет развиться нелинейным явлениям, так что различие
в поведении нелинейной и соответствующей ей линейной системы носит чисто коли-
количественный характер. Например, при коротком ударе наибольшее отклонение объ-
объекта слабо зависит от формы ударного импульса. Распространяя этот результат
iB
Рис. 10, Диаграмма И — В для воздействия в виде полной вол-
волны «прямоугольного синусах:
а — О^ае^п, б — п^ае^2я
на системы с нелинейной силовой ударной характеристикой, приходим к рассмотре-
рассмотрению уравнения
Х + г(х) = 0 C2)
с начальными условиями х @) — х0, х @) = So, где So — полный импульс удара.
Из C2) получится следующее уравнение для определения максимального откло-
отклонения;
X
J r(x)dx=~Si
C3)
Результаты вычисления х для различных аппроксимаций силовой ударной ха-
характеристики г = г {х) приведены в табл. 2. Решение C3) можно получить и гра-
графически (рис. 11), в частности, если характеристика г (х) задана в виде графика.
Наибольшее отклонение X объекта при коротком интенсивном ударе имеет порядок Д
BД — величина рабочего хода). Вместе с тем при х > Д объект может получить
значительные перегрузки, вызванные посадкой на упор. При этом величина w будет
в большей степени зависеть от упругих свойств упоров, чем от прочих факторов,
определяющих нелинейность г (х). В этом смысле ограничительные упоры можно
считать основным источником нелинейности виброзащитной системы при ударе.
Если односторонний удар является длительным или приближающимся к тако-
таковому, его трактовка как мгновенного импульса может привести к существенной
погрешности в определении X и w. В подобных случаях более корректной оказы-
оказывается замена a (t) равновеликим по площади прямоугольным импульсом той же
длительности. При этом движение объекта в интервале O^tt^x, описываемое
уравнением
+ () @) 0 i@) 0, C4)
можно представить как свободные нелинейные колебания относительно положения
равновесия х = л;ст, где г (xtT) = а„, которые при t= т непрерывно переходят
УДАР В ВИБРОЗАШИТНОЙ СИСТЕМЕ
279
V Л
V
в
х
1
+
Т
ii
I I
r *
л з
3 -
а; з
4+
< s
313 в
\
<te о
v
280
ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ
в свободные колебания относительно исходного равновесного положения х = О,
Максимальное отклонение хтах объекта при длительном ударе будет удовлетворять
вытекающему из C4) уравнению
r(x)dx,
C5).
легко разрешаемому графически (рис. 12). Значения *тах для некоторых видов
упругих характеристик приведены в табл. 2.
Отклонение х'тах будет в точности совпадать с х, если момент /„., где х (<J =
= *max, не превышает т, т. е. если выполняется неравенство
•^тах
С dx
C6)
° j/ 2|овХ-|г(х)Л:
В противном случае х определяется из рассмотрения движения объекта при t > г,
w
Г(х)
W
О
х й х
Т/7?,
Рис. 11. Графическое решение
уравнения C3) (определение наи-
наибольшего отклонения нелинейной
недемпфированной системы с одной
степенью свободы при мгновенном
ударе)
О Них
Рис. 12. Графическое решение
уравнения C5) (определение наи-
наибольшего отклонения нелинейной
недемпфированной системы с од-
одной степенью свободы при ударе с
прямоугольной формой импульса)
Проверка C6) связана с известными затруднениями — невозможностью выра-
выражения интеграла через элементарные функции, трудностями применения квадра-
квадратурных формул из-за обращения в ноль подкоренного выражения на границах
интервала 0 s? х < *тах. В связи с этим при значениях tt, сравнимых с т, целе-
целесообразно перейти к рассмотрению линеаризованного уравнения [105]
0«?/<т;
О,
C7)
где коэффициенты линеаризации со и г0 нелинейной характеристики г (х) опреде-
определяются по формулам
2я
¦ " '1 —cos-ф)! d-ф; C8)
)==~ш \ '[«О-«»*)]<
C9)
УДАРНОЕ НАГРУЖЕНИБ ТВЕРДОГО TFJtA
281
Замена исходного нелинейного уравнения C4) линеаризованным уравнением C7)
Произведена в предположении, что колебания объекта при 0 ^ t =g x могут быть
приближенно описаны гармонической функцией
* = аA—coscoQ, D0)
где амплитуда а определяется из уравнения
ro(a) = a0l
а частота собственных колебаний — из C9).
В рассматриваемом приближении наибольшее отклонение X при длительном ударе
равно 1а, причем момент времени t= tt согласно D0) равен л/о>. Таким образом,
при сот > л удар оказывается длительным, при сот < я *— коро1ким, В последнем
случае
|
= а(\ — coscdI*)
|
— cos<o
т)],
где со/, — наименьший положительный корень уравнения
sin от
1— cos сот'
2. УДАРНОЕ НАГРУЖЕНИЕ ТВЕРДОГО ТЕЛА НА УПРУГОМ ПОДВЕСЕ
Уравнения движения твердого тела на нелинейном подвесе. В схемах простран-
пространственных подвесов расстояния между виброизоляторами, как правило, значительно
превышают их рабочие ходы. Поэтому углы поворота объекта относительно осно-
основания остаются малыми и нелинейность его колебаний обусловливается Лишь нели-
нелинейностью характеристик подвеса; таким образом, имеют место малые нелинейные
колебания объекта.
Отнесем движение основания к неподвиж-
неподвижным осям OXYZ (рис. 13). Положение осно-
основания зададим координатами х'о, у'о, г'о полю-
полюса О' осей O'X'Y'Z', жестко связанных с
основанием, и углами поворота i|/, 6', ф'
осей O'X'Y'Z' относительно осей OXYZ.
Положение объекта зададим относительными
(по отношению к подвижным осям) коорди-
координатами хс, ус, zc его центра тяжести С и уг-
углами поворота i|>, 0, ф его главных централь-
центральных осей инерции C3.HZ относительно осей
O'X'Y'Z'. Все три системы осей будем счи-
считать совпадающими в момент начала удара,
Тогда, вводя векторы
> Ус
У'о,
6, Ф},
Рис. 13. Схема определения положения
упруго подвешенного тела на подвиж-
подвижном основании (OXYZ — неподвижная
система отсчета; O'X'Y'Z' — подвиж-
подвижная система отсчета, жестко связан-
связанная с основанием; CSHZ — главные
центральные оси инерции несомого
тела)
можно записать дифференциальные уравне-
уравнения, малых нелинейных колебаний объекта
в виде
Aq=Q-Aq'(t). D1)
Здесь Q — вектор обобщенных реакций подвеса;—Aq' (t) — вектор обобщенных
сил инерции; А —диагональная матрица
4 = diag{m, m, m, Jb Jn, У^}.
Аналитическое исследование системы D1) из-за нелинейной зависимости ком-
компонентов вектора Q от обобщенных координат системы оказывается весьма затруд-
282 ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИИ
нительным, если только не происходит разделения движений объекта по коорди-
координатам q.
В некоторых случаях колебания объекта, связанные по координатам q, могут
оказаться не связанными по другим обобщенным координатам. В частности, для
частично виброизолированных объектов (где число деформирующихся упругих
элементов совпадает с числом N' ^6 степеней свободы системы) переход к обобщен
ным координатам 61F б9, ..., бд,, (где 67 — деформация /-го элемента) может при-
привести к развязке колебаний по этим координатам [105].
Пусть б = \&v 6 , ..., бдгЛ —вектор новых обобщенных координат. При малых
колебаниях системы
& = Dq. D2)
Если D ¦— неособенная матрица (что имеет место, когда подвес обеспечивает
поддержание несомого тела на несущем), дифференциальное уравнение малых коле-
колебаний объекта по координатам 6Г б2, ..., 6N, можно привести к виду
(D-l)TAD-1'6+R=-(D-1)TAq' (t).
Здесь R = {/?! Fj), R2 (S2) RN, (&fj')} — /V'-мерныи вектор реакций упру-
упругих элементов подвеса; D— матрица, обратная D; символом т обозначена опера-
операция транспонирования матрицы. Матрица D определяется лишь координатами
?/> Tl/. S/ точек крепления виброизоляторов и направляющих косинусов а,, E,, у,
их осей (/= 1, 2 N'). Поэтому при надлежащем размещении виброизоляторов
можно привести матрицу (D~^)T AD-1 к диагональному виду, что обеспечит разделе-
разделение колебаний объекта по координатам бх, 6 , ..., 6N,. Условия разделения для неко-
некоторых схем подвеса приведены в табл. 3.
Малые колебания виброзащитной системы при ударе. В отдельных случаях,
например, при не слишком интенсивных ударах или при ударах, не сопровождаю-
сопровождающихся изменением скорости, деформации виброизоляторов подвеса могут не выхо-
выходить за пределы линейности их силовых ударных характеристик. В подобных ситуа-
ситуациях поведение виброзащитной системы может изучаться на основе ее линейной
модели.
Дифференциальные уравнения колебаний объекта в координатах q = 1хс, уСг
гс, г|>, 9, ср} можно в этом случае получить из D1), представляя вектор
Q = -Cfq,
где С* — матрица ударных жесткостей подвеса с элементами cxlk, вычисляемыми
по A0) или A1) гл. VII при с, = с„7 (с*/ — ударная жесткость /-го элемента).
Таким образом, приходим к системе дифференциальных уравнений движения
несомого тела, записанных в виде
Aq+C*q = -Aq (t); ?@) = 0, q @} = 0. D3)
Поскольку А — неособенная матрица, уравнение D3) можно также предста-
представить в виде
4:,q*=0, D4)
Где w — q + q (f) — вектор обобщенных абсолютных ускорений объекта; форма
записи D4) удобна для вычисления ускорений отдельных точек тела.
Интегрирование линейной системы D3) осуществляется обычными способами.
Так, частное решение D3), удовлетворяющее нулевым начальным условиям, можно
записать в виде
q{t) = \H(t-b)'q'{b)db, D5)
о
где Н @ — весовая матрица системы D3) [176], элемент h{k @ которой представ-
представляет реакцию системы по координате qi на единичный обобщенный импульс, соот-
соответствующий координате qk (i, k = 1, 2, ,.,, 6),
УДАРНОЕ НАГРУЖЕНИЕ ТВЕРДОГО ТЕЛА 283
3 Условия разделения колебаний твердого тела на нелинейном подвесе
Схема подвеса
Связанные
обобщенные
координаты
Условия разделения колебаний по координатам
6, (/= 1, 2, .. , р)
ж
(Л" = 2)
УС- гС-
[ aft = р|
гС. -ф, 9
(Л/' = 3)
3^2 - ?г1Э) («Л ~ W + рП («з -Ь) (^1 ~ g
-1^2) + р л (К - Е
Г71 T| ТП Ъ ttl
\\ i
?-
^vwf
7
= ?, = ?. =0,
(?э -12) A! -
"О
Ф. е,
гС
! - vg EЭ*1„ - 12ч3) + Рл (i2 - у (Е8 -
284 ЗАЩИТА ОТ УДАРНЫХ ВОЗДЕЙСТВИЯ
Анализ движения объекта удобно производить в главных или нормальных коор-
координатах [12], вектор v которых в случае малых колебаний связан с вектором исход-
исходных обобщенных координат соотношением
v = Gq, D6)
причем переход к главным координатам сводится к отысканию такой матрицы G
линейного преобразования D6), в результате которого система D3) распадается
на шесть независимых уравнений второго порядка по каждой из главных коорди-
координат vs (s= I, 2, ,.., 6)
/,W- D7)
хс + Ч+С (9+§') - л (ф+Ф');
Каждое из уравнений D7) может быть проинтегрировано одним из рассмотренных
выше способов. Отыскание матрицы G не проще нахождения весовой матрицы си-
системы или непосредственного построения частного решения линейной системы D3).
Вычисление абсолютных ускорений точек объекта. Пусть дифференциальные
уравнения движения объекта проинтегрированы так, что известен закон изменения
вектора q = q (t). Тогда можно считать известным и вектор абсолютного ускоре-
ускорения любой точки объекта. Пусть, например, |, г), % — координаты некоторой точки Р
объекта в осях SHZ. При малых колебаниях системы абсолютное ускорение а точки Р
будет
а = ас + ехр, D8)
где ас—абсолютное ускорение центра масс С объекта; е — вектор его абсолют-
абсолютного углового ускорения; р — радиус-вектор точки Р в осях HHZ, Проектируя D8)
на неподвижные оси OXYZ, получим
D9)
Как видно из D8) и D9), максимальным перегрузкам подвержены точки объ-
объекта, наиболее удаленные от его центра масс.
Вычисление деформаций виброизоляторов подвеса. Связь между вектором 6
динамических составляющих деформаций подвеса и вектором q относительных
обобщенных координат объекта устанавливается соотношением D2). Для нахож-
нахождения полных деформаций к 6 необходимо добавить вектор 8СТ его статических де-
деформаций, определяемых из статического расчета подвеса. Таким образом, вектор
полных деформаций виброизоляторов
80 = 6CI + Zty, E0)
где элементы матрицы D выражаются через координаты точек крепления виброизоля-
виброизоляторов к объекту и направляющие косинусы осей упругих элементов. В однонаправ-
однонаправленных подвесах наибольшими оказываются деформации виброизоляторов, наибо-
наиболее удаленных от центра масс объекта.
Пример. Вычислим ускорения точек крепления виброизоляторов к объекту (схема 2 при
ft = 0, табл. 3) и деформации виброизоляторов при ударном воздействии вида
uUt) =0,0 0) го№ = { 1°' °>Т',<Т1 *'У) = о. г>о.
Кинетическая и потенциальная энергия еистемы определяется выражениями
4- ['А + h {"О - в*}2 + с3 (га
УНАРНОЕ НАГРУЖЕНИЕ ГВЕРДОГО ТЕЛА
285
откуда
/1 0 0\
Л = т ° ! ° I, С,-
0 0
Сз 0
О Ci + Сг
О -с,я + с
сф
Дифференциальные уравнения движения системы принимают вид
= О,
С1Й2 + С2&3 .
/ПрЕ
mpi
m
При условии ft = 0 связанными будут лишь колебания по координатам zq и i|>s колеба-
колебания по координате у^ оказываются независимыми от них и в связи с тем, что у^ (/) — О,
не будут возбуждаться (по крайней мере в случае рассматриваемой линейной расчетной
модечи [58]) Для определения движения объекта по связанным координатам zq и ф (пред-
(предполагается что р| 9^ оЬ) построим весовую матрицу
разыскивая частные решения системы
при начальных условиях zq = 0, г с = 1, ф = 0, ij) = 0 и zq = 0, г^ = 0, t|> = 0, i|)= 1. Обо-
Обозначим (Ooi и (Ооз собственные частоты, р\ и ^й — коэффициенты форм главных колебаний
где
4*
^ , Ау' — амплитуды соответствующих координат в 1-м (/=1, 2) главном колебании).
Тогда
h (t) =
~ ,T" Sln Й0
*w Р.-{
' Г 1 1 , Л
ft?ih <О = в о" 7Г- sin ш»»' ~ 7Г" sln ш°^ !
*v Pi — Pa L^oi Woa J
ft.. (/) «=з —. — sjn ami —¦— sin Ci)o«4'
** pi — P2 1.0H1 ©02 J
Учитывая, что возмущение действует только по координате zq, получим
E1)
t
f — в)i*i (9) <
286 ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБР0И30ЛЯ1ХИИ
или, принимая во внимание E1),
в Р°я | ~- A - cos «W) - А- A - cos в„2о\. О < < < т>
^*„ }—¦ [cos и01 (/ — т.) — cos aolt] — ¦?+- [cos Mo, (t — т) — cos юо«<]. < > t,
рр
°о6'е' i-4- [cos too, « - т) - cos oW] - ~ [cos oM « — x) - cos oW], t > x.
В рассматриваемом примере виброчзолятор 3 не Иеформируется; Динамические состав
ляющие деформаций виброизоляторов 1 и 2 равны
бх @ = гс @ - т|> («; б2 = гс @
Ускорения точек крепления виброизоляторов к объекту вычисляются по D9),
4Л = о;
где It = ?, = e; ?3 = 0; T|j = — a; % = b; r\, = rf (e, <2 - заданные положительные числа)
Глава XIII
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
1. ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО СИНТЕЗА
Задачи оптимального синтеза связаны с противоречивым характером требова
ний, предъявляемым к системам виброизоляции. Эти требования сводятся к сле-
следующим ограничениям.
Ограничения, связанные с требованиями желаемого качества виброизоляции.
Для силовой виброизоляции такими ограничениями являются ограничения на вели-
величины абсолютных сил, передаваемых со стороны виброактивного оборудования
на виброизолируемое основание. В общем случае они могут быть представлены
в форме
где Pk @ — сила, действующая в точке крепления /f-го виброизолятора; А'-р —
функционалы, форма которых зависит от вида динамических воздействий; А^ —
некоторые заданные числа.
Для кинематической виброизоляции ограничения накладываются на функцио-
функционалы от абсолютных ускорений, абсолютных скоростей, а также от высших про-
производных абсолютного перемещения (например, третьей) точек виброизолируемого
объекта. Чаще ограничения накладываются только на абсолютные ускорения, В об-
общем случае эти ограничения могут быть представлены в форме
Al\wx (t) ws Щ *s Л<Й (г - 1 0. B)
где Wf, (f) (m = 1, ,.,, s) — абсолютные ускорения некоторых точек виброизолируе-
виброизолируемого объекта. Форма функционалов B) выбирается в основном так же, как и в пре-
предыдущем случае.
Ограничение по относительным перемещениям. При недостаточной жесткости
виброизоляторов динамические воздействия могут вызвать их большие относитель-
ПОСТАНОВКА ЗАДАЧИ ОПТИМАЛЬНОГО СИНТЕЗА 287
ные перемещения. Система виброизоляции приобретает большие габаритные размеры
и может стать практически нереализуемой. При наличии жестких упоров, ограни-
ограничивающих относительные перемещения, удары взаимно движущихся частей системы
виброизоляции об упоры («пробой» подвески) приводят к превышению допустимых
сил или виброускорений, и эффект виброизоляции теряется. В связи с этим требо-
требования к относительным перемещениям устанавливаются в форме
в<'>{М0. •••• а5W}*?4°. ('-=1. -. 0. C)
где Ьт (т = 1, ..., s) — относительные перемещения виброизоляторов. Форма функ-
функционалов 8(п зависит от вида динамических воздействий.
В реальных условиях в системах виброизоляции всегда имеется вероятность
появления возмущений со сплошным спектром частот, область которых включает
собственные частоты системы виброизоляции, как бы низко они не находились.
Поэтому, даже если основное возмущение можно принять гармоническим или поли-
полигармоническим, беспредельное снижение собственной частоты и демпфирования
системы виброизоляции неприемлемо, так как малоустойчивым становится статиче-
статическое положение равновесия, а также существует опасность возникновения непреду-
непредусмотренных ударов, резонансных режимов при остановке и разгоне машины и т. п.
Ограничения вида А и ограничения вида В имеют противоположную тенденцию
изменения: уменьшение функционала А требует увеличения функционала В, и нао-
наоборот.
Задача оптимального синтеза сводится к определению условного экстремума,
В одномерном случае возможны следующие условия.
1. Функционал А не должен превосходить заданного значения, а функционал В
должен быть минимальным, т. е.
А^А0, B = min. D)
2. Функционал В не должен превосходить заданного значения, а функционал А
должен быть минимальным, т. е.
В^В0, А=тт. E)
Свойства функционалов А а В таковы, что если А -*¦ О, то В ->- 0, а при В -*¦ О
функционал А может приобретать недопустимо большие значения. При проектиро-
проектировании систем виброизоляции возможности уменьшения жесткости и -собственной ча-
частоты, приводящие к уменьшению функционала А, ограничиваются заданными
значениями функционала В.
Известно, что задача нахождения условного экстремума, например минимиза-
минимизация В при ограничении А ^Ап, сводится к нахождению безусловного экстремума
путем введения обобщенного критерия вида
C = B+QA, F)
где р — весовой множитель, имеющий смысл множителя Лагранжа.
Если в качестве ограничения выступает показатель В ^ В02, а минимизируется
функционал А, то
С = А + рВ. G)
Оптимальные значения Вопт1 и Лопт2—значения В и А, полученные в резуль-
результате решения задачи условного экстремума в случаях F) и G) при ограничениях
А ^АОПТ2 и бгёВопт1, будут Вопт1 =Во2 и Лоптз = Ао1. Следствием данного резуль-
результата является возможность использования единого критерия, например F), как
для задачи F), так и для задачи G). Решение задачи оптимального синтеза произво-
производится следующим образом. Задается ряд значений р, для каждого значения миними-
минимизируется обобщенный критерий F), находятся пары А опт и Вопт, строится непрерыв-
непрерывная зависимость этих величин от р. Затем.задавая, например, ограничение А —
— <401, находим B = Bourl и соответствующее значение Pj. Задавая ограничение
В = Воа, находим Л=Лопта и соответствующие значения ра.
Ш ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
2. КРИТЕРИИ ОПТИМАЛБНОГО СИНТЕЗА
Минимаксные функционалы для детерминированных воздействий. При Приложе-
Приложении ударных воздействий в виде отдельных импульсов как для силовой, так и для
кинематической виброизоляции одномерных систем возможна следующая формули-
формулировка критериев оптимального синтеза.
При ограничении по модулю функционала А | ^ Л01 найти систему виброизо-
виброизоляции, которая обеспечивает минимум функционала
В = тах|б(*)|. (8)
Альтернативная формулировка при ограничении по модулю функционала | В i -=5
г? 50 найти систему виброизоляции, которая доставляет минимум функционалу
@| (9)
для случая силовой виброизоляции;
(t)\ A0)
для случая кинематической виброизоляции.
Минимаксная постановка не накладывает на относительные перемещения условия
их исчезновения при прекращении внешнего воздействия, а также не ограничивает
время переходного процесса.
Интегральные квадратичные функционалы для детерминированных воздействий.
К минимаксным функционалам близки по физическому смыслу интегральные
квадратичные функционалы:
со
Ар=\ P2(t)dt A1)
— для силовой виброизоляции;
00
Aw=\ w*(t)dt A2)
г— для кинематической виброизоляции;
оо
в = \ б2 @* A3)
— для относительных перемещений.
Задача может быть сформулирована в виде условий D), E) или обобщенного
критерия F), в которые в качестве функционалов входят A1)—A3)
Требуя, чтобы ,эти функционалы были ограниченными или минимальными, мы
в действительности накладываем ограничения на время переходного процесса и на
максимальное отклонение Ниже, в расчетном примере, будет показано, что макси-
максимальные отклонения для минимаксных функционалов близки к максимальным откло-
отклонениям для интегральных квадратичных функционалов при равных ограничениях.
Ограниченность по величине функционала A3) автоматически обеспечивает возвра-
возвращение системы в исходное положение при снятии возмущений.
Функционалы — среднеквадратические величины случайных процессов. Задача
оптимального синтеза одномерных систем виброизоляции при случайных вибрацион-
вибрационных процессах наиболее часто встречается на практике Для стационарных центри-
центрированных вибрационных процессов в качестве функционалов используются дис-
дисперсии
Лр = ор* A4)
— дла силовой виброизоляции;
Aw = ow* A5)
КРИТЕРИИ ОПТИМАЛЬНОГО СИНТЕЗА
289
для кинематической виброизоляции;
A6)
— для относительных перемещений виброизолятора.
Как и для интегральных квадратичных функционалов, задача может быть сфор-
сформулирована в виде условий D), E) и с помощью обобщенного критерия F), в которые
в качестве функционалов входят выражения A4) — A6).
Для относительных перемещений в виброизоляторах важным требованием яв-
является ограничение вероятности выхода за допустимый уровень. Среднеквадрати-
ческое отклонение ag связывается с вероятностью вы-
выхода за доп>стимый уровень через известный закон
распределения плотности вероятности случайной ве-
величины б (t).
Для нормального закона распределения вероят-
вероятность выхода случайной величины за уровень | б |
6/а6
- 62
1
Ps
0,01
0,001
0,0001
\
\
\
\
Рис. 1. Вероятность выхода
случайной величины б за
заданный уровень | б |
и ее изменение показаны на рис. 1. При б | = 3ag эта
вероятность составляет 0,0027. «Трехсигмовый» закон
принимается за границу практически предельных зна-
значений нормально распределенной величины Поэтому
при симметричности среднего положения движущихся
частей виброизолятора относительно жестких упоров и свободном ходе, равном
±Д от среднего положения, рекомендуется выбирать сг0 sg Л/3. При минимизации
абтт по условиям D), найдя а6 тт, выбирают Д = 3a6mln.
Критерии оптимальности, совместно использующие функционалы от детермини-
детерминированных и случайных вибрационных воздействий. Для многих важных приложе-
приложений, например для задач оптимального синтеза одномерных систем виброизоляции
приборов, установленных на подвижных объектах, оптимального синтеза подвески
самоходных машин, виброизоляций сидений и кабин операторов, функционалы Ар
и Aw определяются при стационарном случайном вибрационном воздействии, а В —
при детерминированном воздействии, называемом для кинематической виброизоля-
виброизоляции «программным движением» [119]. Для подвесок транспортных машин в качестве
таких воздействий выбирают отдельные неровности — «ямы» и «бугры», при мак-
максимально возможной величине которых должно обеспечиться отсутствие «пробоя»
подвески.
Многомерные плоские и пространственные системы виброизоляции. Для много-
многомерных систем виброизоляции ограничения формируются в общей форме A)—C),
а задача минимизации ставится обычно для одного функционала. В случае необхо-
необходимости минимизации нескольких функционалов задача становится неоднознач-
неоднозначной, и в этом случае используется понятие о минимизации по множеству Парето [29].
Существо этого подхода применительно к минимизации векторной целевой функ-
функции / (и) — {fi (и), ..., fm (и)} (и — точка эвклидового или некоторого функциональ-
функционального пространства U) состоит в поиске среды точек заданной области D a U мно-
множества я всех оптимальных (по Парето) точек и°. Точка и' называется оптималь-
оптимальной по Парето, если в D не существует «лучшей точки», т. е. такой точки и1, в кото-
которой f, (и1) =S f, (u°), i = 1 т (причем хотя бы одно из этих равенств строгое).
Точками множества л и его образа / (я) с Rm описывается полная картина прин-
принципиальных возможностей оптимизации в рассматриваемой многокритериальной
задаче с целевой функцией f (и). Любая из точек и е я является «лучшим» компро-
компромиссом в том смысле, что уже нельзя найти в D другой точки и1, в которой значе-
значение какой-нибудь компоненты / (и) могло бы быть уменьшено без увеличения хотя
бы одной из остальных компонент.
Значение множеств я и / (я) позволяет разработчику системы виброизоляции
(возможно, совместно с заказчиком) решать, какая из точек и е я может быть при-
10 п/р Фролова
290
оптимальный синтез системы виброизоляции
зшна наилучшей («лучшей из лучших») при rex или иных конкретных условиях
работы проектируемой системы виброизоляции.
Задание единого комбинировешного критерия, аналогичного критериям F) и G),
имеет вид
г —\
г=\
где индекс р — для силовой виброизоляции, индекс w — для кинематической виб-
виброизоляции.
В A8) hr и рг — весовые множители. Назначение весовых множителей имеет че-
четыре аспекта. Во-первых, соотношения множителей в той группе функционалов, на
которые наложены ограничения, являются функциями этих ограничений и не могут
быть выбраны произвольно. Во-вторых, соотношения между множителями в группе
минимизируемых функционалов зависят от условий задачи. Например, если миними-
минимизировать дисперсию вектора ускорения в точке пространства, то необходимо задать
т. е. отношения множителей перед тремя функционалами равны единице. В-третьих,
абсолютные значения всех множителей зависят от абсолютного значения перед од-
одним произвольно выбранным функционалом. Предпочтительно положить это зна-
значение безразмерной единицей как, например, в F) перед В.
В-четвертых, физические размерности множителей при В(П и ^р\щ зависят от
конкретного выбора функционалов и от того, перед каким функционалом в качестве
весового множителя выбрана безразмерная единица.
3. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
ПРИ ДЕТЕРМИНИРОВАННЫХ ВОЗДЕЙСТВИЯХ
Постановка задачи об оптимальном управлении. Рассматривается одномерная
¦задача о силовой виброиэоляции абсолютно жесткого основания / от динамического
ударного воздействия на объект 2, из которого выделяется сосредоточенная масса
т — 1 (рис. 2). Перемещение этой массы
относительно основания б (f). К массе
приложены внешнее воздействие / (t) и не-
неизвестное управление Р (t). Основное уп-
управление для построения оптимального
управления имеет вид
6(t) = f(t) — P(t). О9)
Рис. 2. Динамическая схема для задачи
оптимального управления
Для кинематической виброизоляции
также рассматриваются жесткое основа-
основание 1 и точка 2 объекта, но наличие в
точке 2 массы jn= 1 необязательно. От-
Относительное перемещение основания / и точки 2 — б (t), абсолютное ускорение
точки 2 — W @; оно же и является искомым оптимальным уравнением.
Оптимальное управление строится по кинематическому уравнению, аналогич-
аналогичному A9),
б>)=и@-№@. B0)
, Начальные условия для решения A9) и B0) — нулевые, т. е. при t = 0, б = 0,
6=0. Формулировка задачи оптимального управления дается в минимаксной форме
(8), но полученное решение справедливо и для альтернативной постановки (9) и A0),
Особенность функционала (8) состоит в гом, что он не сводится к интегралу от
исходной функции. Это исключает возможность отыскания оптимального управле-
ОПТИМАЛЬНОЕ УПРАВЛ ПРИ ДЕТЕРМИР0В4ННЫХ ВОЗДЕЙСТВИЯХ 291
ния Р @ или w (f) с помощью известных методов классического вариационного ис-
исчисления [219] принципа максимума или динамического программирования [21,
132]. Однако специфика задачи и вид уравнений A9) и B0) дают возможность пред-
предложить удобный в практическом отношении графоаналитический способ построе-
построения оптимального управления [69].
Рис. 3. Внешнее импульс-
импульсное воздействие и оптималь-
оптимальное управление
Оптимальное управление будем искать на пределе ограничений | Р (t) | s? Po
и | w (t) \ г? w0. Решение сводится в основном к релейному управлению, и задача
состоит в определении точек переключения.
Из A9) и B0) определим относительную скорость
6 = S@-V@, B1)
t t
где для общности обозначено S (t) = С / (t) dt, V (t) = \ Р (t) Л—для силовой вибро-
о б
изоляции; S (t) = и (t), V (t) = v (t) —для кинематической виброизоляции. Здесь
v{t) — абсолютная скорость точки 2 (рис. 2),
Рис. 4. Функции S (() и V (t) в задаче
оптимального управления
*~t
На примере действия импульса / (t) или и (f) с обратным фронтом (рис. 3) пока-
покажем методику решения. Дадим графическую интерпретацию уравнения B1) на
рис. 4.
Если Р (t) ^ Ро (аи @ <; w0), кривая / — S (t) расположена выше прямой 2 —
V @, тангенс угла наклона которой равен Ро (или w0). Из B1) следует, что кривая
и прямая пересекутся в точке А в момент времени tlt когда 5 (t{) = V (/), бд (^i) = 0,
Точка А является первой искомой точкой пересечения. Площадь сегмента между
кривой 1 и прямой 2 представляет собой минимальное — максимальное перемещение
10*
292 оптимальный синтез системы виброизоляции
бтах ((%). Любое другое управление Р (t) ^ Ри или w (t) =g w0, показанное, напри-
например, кривой 3, приведет к увеличению 6max(fl, так как площадь между кривыми
/ и 3 будет больше, и к увеличению времени движения, так как /2 > tx, т. е. релейное
управление Р (t) = Ро или [w (t) = w0] приводит систему виброизоляции в состоя-
состояние 6шах(М за минимальное время. Далее задача оптимального управления разде-
разделяется на два варианта.
Первый вариант. Система должна быть остановлена без возвращения в исходное
положение Назовем завершившуюся фазу движения откатом. В рассматриваемом
примере обратным импульсом (рис. 3) ташенс угла наклона производной кривой /
в точке А оказался по модулю больше Ро (ш0), поэтому дальнейшее движение к точке
В осуществляется по прямой 4 с отрицательным углом наклона, тангенс которого
равен —Ро (—ш0) (рис. 4). Площадь, заключенная между кривой / и кривой 4, —
отрицательна и 6 (Г) несколько меньше 6тахМ- Скорость в точке В 6В (Т) = 0.
В дальнейшем относительное движение прекращается посредством реализации управ-
управления Р (I) — j (t) [w (t) — и (t)\, вследствие чего 5 (t) = V (/), так как тангенс угла
наклона производной в точке оказался по модулю меньше Рп (w0).
В точке С внешнее воздействие прекращается, и управление становится равным
нулю. Если бы в точке А тангенс угла наклона кривой S (t) был меньше по модулю,
чем Ро (w0), относительное движение могло быть прекращено уже в точке А обеспе-
обеспечением равенства управления возмущению.
Второй вариант. Система должна быть возвращена в исходное положение. На-
Назовем эту фазу накатом. Кратчайшим по времени (оптимальным по быстродействию)
является вариант дальнейшего движения по отрезку 5 (продолжение 2) с переключе-
переключением в точке D на прямую 6, параллельную прямой 4. Относительное движение по
прямой 6 происходит до пересечения с кривой / в точке Е, где оно прекращается.
Чтобы система вернулась в исходное положение, необходимо, чтобы площадь фигуры,
заключенной между прямыми 5, б и кривой 1, была равна площади сегмента между
кривой / и прямой 2. Условие равенства площадей определит положение точек t3
и ti на временной оси, соответствующих точкам D и Е. Если условие оптимального
быстродействия на систему не наложено, го возможны другие управления. Напри-
Например, при движении по кривой 7 | Р (t) | = Ро и j w (t) \ = ai0 только на концах участ-
участка в точках А и /(. На внутренних участках управления по модулю меньше ограни-
ограничения. Кривая 8 от точки L до точки М обеспечивает Р (t) = w (t) — 0 в конце дви-
движения к точке М; в других точках | Р (t) | ^ В [\ w (t) \ s? w0]. В этих случаях также
необходимо равенство площадей фигур, заключенных между кривыми 1 а 7 или 1
и 8, площади сегмента между кривыми J и 2. Очевидно, что эти варианты неопти-
неоптимальны по быстродействию.
Из сказанного следует, что отыскание V сводится к определению числа и распо-
расположения угловых точек, соответствующих моментам переключения оптимального
управления с ±Р0 (±w0) на +Р0 ( + ш>0) или выхода на особые участки, где V (t) =
= / @ [" @J- Общее число моментов переключения оказывается зависящим от числа
выбросов
Р (t) | (| и (t) |) на уровень Ро (ш0), т. е. от числа интервалов времени,
где \Р (t) > Ро (\w (О1 > w0). Результаты построения V (t) и вычисления мини-
минимальных смещений бтахДля некоторых видов ударных импульсов простой геометри-
геометрической формы приведены в табл. 1 на примере силовой виброизоляции; этот слу-
случай соответствует максимально быстрой остановке системы без возвращения в исход-
исходное положение.
Практически важным оказывается случай интенсивного одностороннего удара ма-
малой продолжительности т, для которого выполняется соотношение
$/(Q#-V(t)>/>.t. B2)
Соответствующая ему минимизирующая функция имеет вид
ОПТИМАЛЬНОЕ УПРАВЛ. ПРИ ДЕТЕРМИРОВАННЫХ ВОЗДЕЙСТВИЯХ 293
1. Программа оптимального движения без возвращения в исходное положение
м
t i
sA—
0
J \o,
J
J
J
1
0
-4
\
(T
J
ft,
V
0
f-l
Jo
ч
\
0
f~W,
t)
r t
0<t<t
t>r
\,
X t
l>t
t
r t
S,V
0
Jot '
0
s,v
Itfo
X
0
—f
0
J V
for
2
0
s,v
Jot
г
в
S (t), V
s
5/1 v
X
s
s,v
' 11
; tt
Ж
@
I
I
I
J
T
T
г
•f I
I I
I !
T T
I
I
I
г т
t
1
1
1
1 ,
г t
t
t
1
t
t
T
T
(v-
\
T =
I?-
1 — e~
T
= fo
T
л v
- та
я
"T
Г = 2тA—V)
6
"max ~
°max ,Л2
fi 4Яот2
"max П2
a -p
Lmax
. 2
°max- з
max
¦So
<~2Р„
„TV 1 \
2 Vv 7
Л , ' я\
4 +2V 2j
V со"а 2 /
['-v(. + f)j
2 U 3j
ЯоТгA-ГK
294
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
Продолжение т а б л 1
МО
fo
1 \
В г t
Jft)<fa t>i
S @. V (t)
s,v
0
XT t
T
S(T) =
T
= | IV) dt
0
г т
0 0
где
B4)
С учетом B1) и B2) можно получить приближенную формулу для минимаксного
перемещения объекта бтах, подвергающемуся интенсивным односторонним ударам'
0 V2 ()
из которой следует независимость бтах от формы импульса. Можно показать также,
что для интенсивных ударов, обладающих свойством симметрии, максимальное от-
относительное перемещение совпадает с величиной V, вычисленной для равновеликого
по площади прямоугольника импульса той же длительности. Для четырех форм им-
импульсов (см. табл. 1) в случаях, когда воздействие / (t) обращается в нуль до оконча-
окончания относительного движения, рассмотрены также случаи отката и наката (табл. 2),
Приведены характеристики1 оптимального управления.
Реализация оптимального управления силами, зависящими от координат состоя-
состояния. Определение оптимального управления как известной функции времени позво-
позволяет обеспечить требуемый закон движения созданием двух параллельных сил —
упругой R F) и диссипативной Q (S, б), учитывая, что Q (б, б) = 0, если 6 = 0,
Для силовой виброизоляции можно записать
@ - F @ + R [б @ ] + Q [б @, б @],
B5)
где F (t) — динамическая реакция со стороны части объекта, представленного как
механическая система с сосредоточенными параметрами, присоединенная к 1елу
т = 1 через упругие и демпфирующие связи; учитываются также и внешние силы,
приложенные к объекту.
Для кинематической виброизоляции B5) имеет упрощенный вид
Задание характеристики силы R [б @J определяется требованиями обеспечения
необходимой силы в точках б = 0 в случае наличия двух фаз отката и наката (точки
А, В, Е, а также К и М на рис. 4).
Закон изменения силы R (t) между этими точками может быть произвольным и
обеспечиваться как линейной, так и нелинейной упругими характеристиками. Можно
воспользоваться, например, винтовой цилиндрической или гидропневматической
пружинами.
В результате из B5) и B6) сила Q [.б (t), 6 (t)] определяется как функция вре-
времени, а затем как функция б и б. Конструктивная реализация такой силы с помощью
демпферов (тормозов) представляет собой специальную задачу, которая часто реша-
ОПТИМАЛЬНОЕ УПРАВЛ. ПРИ ДЕТЕРЧИРОВАННЫХ ВОЗДЕЙСТВИЯХ 295
ется с применением гидравлических устройств *. Для обеспечения закона движения
при откате и накате можно создать в одном агрегате два отдельных устройства; тор-
тормоз отката и тормоз наката. Рассмотрим несколько, примеров реализации оптималь-
оптимального управления.
2. Программа оптимального движения с возвращением в исходное положение
S «), V it)
f(t)=SeA(t),
s_0
т тA+'//г)Tft-Ыг) t
0r Г t
-f- \fa,O<t<Z
T \O,t>t
V
T TU+J3) r{1+Zfl) t
H V
/2
16п1Я v =
О Т t
, cosnt/2r,O<t<-t
2 т
п у
T(H/3)
21
T(t+2J3) t
H=vx
4v 3
1 1 '
Пример I. Рассмотрим силовую виброизоляцию от мгновенного импульса, действую-
действующего на объект с массой т= 1. При *>Г Pa(t) = O Учитывая, что F{t) и R{t) = O, из B5)
получим, что соответствующее оптимальное управление реализуется с помощью демпфера
Кулонова трения
B7)
Пример 2. Рассмотрим систему, показанную на рис. 5. Исходные уравнения движения
системы
p«) = f <о+ <?«); <281
F(« = e(8 —*); <29)
6) = 0 C0)
1 Возможны случаи реализации отрицательных значений силы Q, тогда пассивные дем»
пфирующие устройства не решают задачи и необходимо применение активных устройств.
296
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
Воспользуемся преобразованием Лапласа для решения системы B8)—C0) Исключаем
неизвестную х. Учитываем, что оптимальное решение для 6(<) имеет вид
~.
Изображение по Лапласу имеет вид
Выражение для Q(p) получает вид
р р -J-и
>де 0=1/ парциальная частота дополнительной системы. Переходя к оригиналам,
окончательно получим
Q «) = Ро - — sin at + C-^ A - cos at)
Пример 3. Рассмо1рим задачу примера 1 для кинематической виброизоляции в следую-
следующей интерпретации. Тело т—1, падая с некоторой высоты, подходит к пружине и демп-
демпферу со скоростью vo Необходимо остановить тело, не превышая ускорения | ш(<) | <ш0 на
минимальном пути. Сведем этот случай к задаче кинематической виброизоляции. Считаем
7 г
т-1
fit)
Рис. 5. Учет присоединенной системы
w(t)
Рис. в. Оптимальная виброизоляция при
торможении падающего тела
тело в начальный момент времени неподвижным. Оно опирается на пружину и демпфер,
соединенные с основанием (рив. 6). Вес не действует. О момента (=0 основание движется
со скоростью р0. Сила тяжести g, не действовавшая до начала движения, ступенчато при-
приложена к телу.
Максимальное относительное перемещение при оптимальном управлении ш(.1)—Щ раьно
Жесткооть линейной пружины выбираем исходя из равенства силы пружины при
6 весУ!
Упругая сила
Из B6) сила
где
F W =• —
C1)
Из C1) следует, что при
g; при t=— О (—) = w0; при
1 б 2
И0 \tto/ Юо
Пример 4. Рассмотрим еиловую виброизоляцию по позиции 1, табл. 2 для одной массы
т= 1. При t—So/P 6=0, и фаза отката заканчивается. Выбираем жесткость линейной
ОПТИМАЛЬНОЕ УПРАВЛ. ПРИ ДЕТЕРМИРОВАННЫХ ВОЗДЕЙСТВИЯХ 297
пружины
откуда
~° So L 1
Из уравнения B5) определяем Q (t), учитывая^ что Р (
^(g) C2)
Из уравнения C2) следует, что при * = S0/Po сила <?(() = О, а при — < t < _° ¦
Ро /2Р
она отрицательна.
о / I \
Закон C2) должен поддерживаться до момента <!==— A-1 = ). При t~^ti, учитывая,
что Р @ = — Ро> сила
S5 |_4Ро /2
Оптимальное управление в виброзащитной системе с несколькими степенями
свободы. Пусть условия защиты объекта с п степенями свободы (для определенно-
определенности рассматривается случай кинематической виброизоляции) задаются в виде m
неравенств вида
1М!*?оу. (/=1, 2, ..., т), C3)
где ц — вектор обобщенных координат объекта, а качество защиты определяется
функционалом
I = maxt\ й ¦ q-b ¦ q' (t)\, (/=1,2 m), C4)
Где q" — вектор обобщенных координат движения основания; й, Ъ, Ъ\, ..., Ът— за-
заданные постоянные векторы соответствующей размерности. Задача об оптимальном
управлении объектом защиты может быть сведена к рассмотренной выше аналогич-
аналогичной задаче для простейшей расчетной модели при п = 1.
При малых колебаниях системы приведенные ниже неравенства C5) можно трак-
трактовать как условия ограниченности составляющих ускорения заданных точек объекта,
а функционал C4) как максимальное значение относительного перемещения объекта
в заданном направлении.
Введем скалярную переменр;ую
x = a-cj-b.q'(t). C5)
Дважды дифференцируя C5) и вводя скалярные функции
u(t) = -b-q'(t), w(t) = — a-ij, C6)
приходим к уравнению вида B2). Функцию ii (t), которую можно считать заданной,
назовем приведенным возмущением, а неизвестную функцию w (t) — приведенным
управлением. Граничные значения ±w0 приведенного управления w (t) получаются
из решения вспомогательной задачи линейного программирования: найти макси-
максимум (и минимум) линейной формы й ¦ qua множестве, заданном совокупностью C5) т
линейных ограничений. Поскольку точка q = 0 является, очевидно, внутренней точ-
точкой этого множества, рассматриваемая вспомогательная задача имеет решение. В част-
частном случае, когда основание и объект считаются твердыми телами, к неравенствам
типа C3) можно привести условия ограниченности сил в виброизоляторах подвеса,
поскольку упомянутые силы в уравнениях движения объекта будут линейно свя-
связаны с составляющими вектора q [106],
298 оптимальный синтез системы виброизоляции
4. СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ
е оптимальными передаточными функциями
Оптимальный синтез одномерных систем виброизоляции. Метод основан на ис-
использовании обобщенного критерия вида F). В качестве составляющих функциона-
функционалов используются интегральные квадратичные функционалы вида A1)—A3) при
действии детерминированных возмущений и дисперсии A4)—A6) при стационар-
стационарных случайных воздействиях. Для интегрального квадратичного функционала от
функции справедлива формула Парсеваля
х (р) х (—р) dp, C7)
50
где р = ('со; х (р) — изображение функции х @ по Фурье.
Для дисперсии стационарного случайного процесса х (i) справедлив частный
случай формулы Винера—Хинчина
(со
<т»=1 J Sxx(P)dp, C8)
— ICO
где Sxx(p) — автоспектральная плотность процесса x(t).
В процессе оптимального синтеза находится оптимальная передаточная функ-
функция линейной системы виброизоляции, обеспечивающая наилучшее качество в классе
линейных систем по выСр шному квадратичному критерию. Оптимальная передаточ-
передаточная функция находится из решения уравнения Винера—Хопфа [120, 144, 235].
Уравнение Винера—Хопфа для определения неизвестной оптимальной переда-
передаточной функции W (р) может быть получено из условия равенства нулю вариации
функционала F) по W (р). Функционалы, входящие в обобщенный критерии F),
линейно связываются для этого с входными воздействиями через передаточные функ-
функции. Например, для кинематической виброизоляции при передаче вибрации между
двумя точками, когда перемещения точки / (входа) обозначены U (р), а перемещения
точки 2 (выхода) обозначены X (р), имеем
C9)
— ускорение в точке 2 и
— относительное перемещение между точками 1 к 2.
С использованием C7) и C8) образуются выражения для критерия F). С уче-
учетом C7)—D0) получим
С = у J {[l-W (-p)][l-W m + PPW (-p)W (р)\ Suu(p)dp D1)
— для стационарных случайных воздействий;
loo
{^l^-W (-p)][l-W (р)]Щ-р)и
D2)
— для комбинации стационарных случайных и детерминированных воздействий,
когда функционалы А^я В заданы в виде A3) и A5);
to
1 г>
2Я1 J
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ 249
для детерминированных воздействий, когда функционалы Awh В заданы в виде
A2) и A3).
В D1) и D2) — Suu (р) автоспектральная плотность перемещения в точке /.
Формулы D1)—D3) справедливы и для силовой виброизоляции жесткого основания;
когда объект представлен массой, необходимо заменить в этих формулах буквы if
на буквы F; F (р) — изображение по Фурье внешней силы / (f), приложенной к массе.
Обозначим в общем случае
7=1 j l(p)dp,
где / (р) — подынтегральное выражение.
Формально уравнение Винера—Хопфа образуется путем определения частной
производной подынтегрального выражения / (р) по W (—р):
91 (Р) - = Д (р) W (р) - Г (р) = R (р), D4)
0W (-р)
где Д (р) и Г (р) —дробно-рациональные функции, зависящие от входного воздей-
воздействия; А (р) — четная функция р; R (р) — произвольная функция, содержащая
полюсы только в правой полуплоскости корней.
Решение уравнения имеет вид
где Д (р) = Д+ (р) Д~(р), т. е. Д (р) разбивается на два сомножителя; Д~(р) содер-
содержит нули и полюсы только в правой полуплоскости; Д+ (р) содержит нули и полюсы
в левой полуплоскости.
Указанная операция носит название факторизации спектров.
Г Г (р) 1 Г (р)
-—у-~- —часть выражения _ , содержащая полюсы в левой полуплоскости,
Рассмотрим решение для критерия D1), когда входной спектр представлен в фак-
торизованной форме
Saa(p) = q>{-p)<p(p) D6)
Решение для оптимальной передаточной функции представляется в виде
1 Г со' ср (р)
Г со' ср
L рз-1^2 <
где <ас = р~1^— частота, связанная с множителем Лагранжа. Формула D7) приме-
применима и к критерию D3); в ней следует заменить ф (р) на U (р) или F (р).
Пример 1. Для входного воздействия типа «белого шума» по ускорению (или силе)
входная спектральная плотность
где /V!/2n — постоянная с размерностью спектральной плотности ускорения.
Выбираем факторизованные значения входного спектра в виде
D9)
Выражение в квадратных скобках формулы D7) раскладывается на простые дроби
Следующим образом:
г - VI <*СР + <*!) Р* + Р + Ра - V2o>cp + «4
Для получения выражения [Г(р)/Д~ (р)]+ необходимо оставить только два первых
члена этого выражения, так как полюсы р = 0, входящие в (р(р), относятся к левой
полуцчоскости (лолюсы р = 0, входящие в Ф(— р), относятся к правой полуплоскости).
300
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
Используя для определения At и В, вычеты, получим
р2 — Y 2@
ч
dp\ Ps -
окончательно
p=0
¦
p=0
E1)
Если объект представляегся сосредоточенной массой, оптимальная передаточная функ-
функция E0) описывает линейную пассивную систему виброизоляции, содержащую параллель-
параллельные пружину и демпфер. Величина относительного демпфирования ? = l/>^2 не зависит от
собственной частоты со — р ' . Это значение часто рекомендуется как оптимальное демп-
демпфирование в различных приложениях теории автоматического регулирования, теории
сейсмического подвеса и др
Пример 2. Для силовой виброизоляции рассмотрим случай (позиция 1 табл 2) с опти
мальным управлением и оптимальную передаточную функцию системы виброизоляции по
критерию D3) для одного и тою же воздействия —импульса силы So Сравним результаты
при обеспечении равных у<ловий по ограничению P(t)^Po Начальные условия—нулевые.
Решение уравнения Винера—Хопфа для функционала D3) приводит к той же переда-
передаточной функции E1), что и для случайного процесса типа «белого шума» силы.
Решение в изображениях н оригиналах имеет вид
Р (Р) =
) = Y2S со ехр - -f cos
0 с \ Y2J
> 2
@ = S»ехр cos -S- —sin -^
\ Y2j\ Y2 Y2
Сила Р (/) максимальная при /=
Приравняв это значение величине Рц, получим
E2)
E3)
E4)
E5)
E6)
Исследуем на экстремум функцию 6@; она максимальна при
и равна
E9)
На рис. 7 приведено сравнение оптимальных процессов, полученных двумя различными
методами. Кривые / соответствуют оптимальному управлению, кривые 2 — системе вибро-
виброизоляции с оптимальной передаточной функцией. Максимальное перемещение во втором
случае в 1,287 раза больше, чем в первом, а переходные процессы во втором случае в 2,5
раза продолжительнее, чем в первом.
Пример 3. Найти оптимальную передаточную функцию кинематической виброизоляции
по критерию F), если функционал A2) берется от воздействия
и (/) = ° sin at,
F0)
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ
я функционал A3) от воздействия
«@ = 0 при
Vat при
Обобщенный критерий F) запишется в виде
I
301
F1)
F2)
F3)
Особенность структуры этой оптимальной передаточной функции заключается в том,
что она сочетает обеспечение виброизоляции от гармонического воздействия и ограничение
относительных перемещений от ударных импульсных воздействий.
Из решения >равнения Винера—Хопфа для критерия (G2) получим
1,287
f
I ^
1
го
/s V WWW» 1
N
\
.,11
i
1
1
i
-
0 5,0 Pot/S
-
0 t,0 2,0 SO
P(t)/P0 ' '
о -
5,0 Pot/So
/
Z
-
=====
——
1,0
2,0
ар
s,o
Рис. 7. Сравнение решений для системы с оптимальным управлением и оптимальной пере-
передаточной функцией, по оси ординату верхнего графика 2Ро 6@; So = 2Р0 °U)'S2, а у средне-
среднего графика 60(Q"/S0 = P06(<)/S0
Реализация оптимальных спектральных плотностей при представлении объекта
сосредоточенной массой. Можно указать спектральные плотности входных случай-
случайных воздействий при синтезе по критерию D1) и сочетание спектральных плотно-
плотностей случайных воздействий и детерминированных программных движений основа-
основания при синтезе по критерию D2), для которых оптиматьными будут передаточные
302
оптимальный синтез системы виброизоляции
функции простейших известных пассивных и активных линейных систем виброизо-
виброизоляции.
В табл. 3 приведен ряд систе\г виброизоляции и выражения их передаточных
функций в зависимости от физических параметров. Остановимся на системе, приве-
приведенной в позиции 3 табл 3. Это система виброизоляции, содержащая дополнитель-
дополнительный инерционный элемент с механизмом преобразования движения. Возможные
конструктивные решения показаны на рис. 8 Особенность этих систем заключается
в том, что дополнительный инерционный элемент создает силу, пропорциональную
относительному ускорению.
В табл. 4 приведены внешние воздействия для кинематической виброизоляции
и оптимальные передаточные функции, которые могут быть реализованы средствами,
показанными в табт. 3.
////////А
Рис. 8 Примеры инерционных элементов с механизмами преобразования движения:
а — маятниковым, б — с горизонтально движущимися массами, в — с горизонтально рас-
расположенным диском, г — с передачей винт-гайка, 3-е реечной передачей, е — с объем-
объемным 1идромотором, ж— маятниковый в двухкаскадной системе виброизоляции
В отюшении систем, синтезированных по критерию D2), следует указать, что
при «программном движении» со ступенчатой функцией скорости со стороны основа-
основания (или дельта-импульсом силы со стороны объекта) оптимальными оказываются пас-
пассивные системы, так как при равномерном движении основания установившиеся от-
относительные перемещения отсутствуют.
Для случая «программного движения» со ступенчатой функцией ускорения (сту-
(ступенчатой функцией силы) оптимальными оказываются активные системы, получен-
полученные из пассивных систем введением воздействия по интегралу относительного пере-
перемещения для обеспечения нулевого относительного перемещения системы виброизо-
виброизоляции при постоянном ускорении (силе).
Учет динамических свойств объекта. На примере кинематической виброизоля-
шш рассмотрим методы учета динамических свойств объекта и промежуточных эле-
элементов. Если функционал Aw определяется не для точки 2, а для точки 3 (рис, 9 а),
то
ICQ
, = *•,=-J- J P*H(-p)HQ>)W{-p)WO>)SuAP)dP
F4)
— для стационарного случайною процесса;
синтез линейных систем виброизоляции
•$. Типовые схемы линейной виброизоляции
303
Система
вибро-
виброизоляции
Механическая
модель
Физическая
реализ<щия
Передаточная
функция
Р (р) Л (р)
F(p) U(p)
Примечание
Параллельные
пружина и
демпфер
m
? ?Vcln
Пневматиче
екая система
с внутренним
дросселиро-
дросселированием (или
упругоопер-
тый демпфер)
N пн
—отношение
жесткостей
последова-
последовательной и
параллельной
пружин
Параллельные
пружина,
демпфер и
инерционный
элемент с
устройством
преобразова-
преобразования движения
V =
2Vcm
m'
m ~f m'
Активная
система с
управляюпи м
воздействием
по интегралу
относитель
ного переме-
перемещения
Ь
у демпфера с = 6
Т) =
G — коэффи
циент уси-
усиления
Активная
пневматиче
екая система
с внутренним
дросселиро-
дросселированием
+ A
X 0)
у демп)ера c=S
ЧУкт
" а
1 = -^—г
N — отноше-
отношение жестко-
стей,
G — коэффи-
,-циент уси-
усиления,
/ — генератор
скорости
304 ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
4. Синтез типовых схем линейной виброизоляции
Синтез по критерию D1)
Входная спектраль-
спектральная плотность
перемещения
№ 1
2л р*
2я Р4(—Р2+«2)
Оптимальная передаточная функция
V2«c
Р3 + (/2ис + (оо)р2 + (
С00) р + (О^Ид
щ5 + 1^2и„й)п) р
V- СО/
+ »смо
Ю>с
График спек-
спектральной
плотности
ускорения
Si
't—'
К
1 v_
Синтез по критерию D3)
Входная спектраль-
спектральная плотность
перемещения
N* 1
2я р<
2я ** р2
Л/2 1
2л р'
N* Q2 1
2л "" Р2
«Программное»
движение
основания
Ступенчатая
функция скорости
То же
Ступенчатая
функция
ускорения
То же
Оптимальная передаточная функция W (s)
¦/2(оср -f- o)g
„s+f-^ + vl
2^ + и"
р3 + 2йHр2 + 2а>1р + 0)д
2(вер.+2И»р+в,г
р3 + 2соср2 + 2ш^р + и*
[ fflcP УТ^Тъ ^ s
X Гр4 + , .2 ¦¦¦ Иср' + B + /2)о>У +
L \2-УЧ
Кг-/2 сР °|
СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ ВИБРОИЗОЛЯпИИ
305
» @ dt =
—
(-р) Я (р) tt? (-/>) W (p) U(~p)U (p) dp F5)
-to
— для детерминированного процесса,
где
Я(р) =
Нр)
Х{р)
F6)
— передаточная функция между точками 2 и 5.
Функционал В выражается так же как и в критериях D1) — D3). Далее состав-
составляется функциональный критерий F) и решение производится на основе D4) и D5).
Рассмотрим случай, когда точки / и 2 находятся внутри динамической системы,
элементы которой имеют динамические жесткости Rt (p), R2 (p) и Rs (p) (рис. 9, б).
Ф>нкционал Aw рассчитывается для точки 2.
Зададим неизвестную оптимальную пере-
передаточную функцию от основания к точке 2:
X{p) = W(p)U(p). F7)
Дополнительно запишем уравнение рав-
равновесия сил в узле /:
Ri(P)W(p)-Y (р)\ =
= Ri{p)Y (p) + R3(p)X(p). F8)
Из F7) и F8) получим
F9)
Динамическая жесткость виброизолятора
Рис. 9. Схемы учета динамических ха
рактеристик:
а — объекта при определении опти-
оптимальной передаточной функции; 6 —
промежуточных элементов между ис-
источником вибрационного возбуждения
и виброизолятором
«1 (Р) - IRi (Р) + Я2 (Р)+Rs (P)] W (р) '
G0)
Выражения функционалов Aw совпадают с аналогичными выражениями в кри-
критериях D1)—D3).
Функционал
{R, (-p)-[R1(-
{R()[
(-Р) + Яа (-Р)] [Ях (Р) + Я2 (Р)]
¦5ИИ (Р) Ф
G1)
— для стационарного случайного процесса;
(СО
о —to
дтя детерминированного процесса
U(-p)U(p)dp G2)
306 оптимальный синтез системы виброизоляции
Полученные выражения включаются в критерий F); решение выполняется по
D4) и D5).
Синтез плоских и пространственных многомерных систем виброзащиты выпол-
выполняется на основе методов решения задачи квадратичной минимизации для много-
многомерных систем, включающих вывод и решение матричного уравнения Винера—
Хопфа [121] и как окончательный результат получение матрицы оптимальных пере-
передаточных функций.
При формулировке критериев виброзащиты для пространственных систем учи-
учитываются требования к минимизации пространственных вибраций точки или ряда
точек объекта наряду с ограничениями на относительные динамические перемещения
или статические перемещения систем виброизоляции. Критерии качества для пло-
плоских и пространственных многомерных систем задаются в виде A8).
Подробное решение задачи синтеза пространственной системы виброзащиты
твердого тела дано в работе [198] на основе методов теории оптимальной фильтра-
фильтрации для многомерных систем. Процедура решения включает составление функцио-
функционала в форме следа квадратичной матрицы, операции над следом для получения
матричного уравнения Винера—Хопфа и решение матричного уравнения Винера—
Хопфа [120]. П >и решении особое место занимает задача факторизации спектральных
матриц. Разработаны алгоритмы факторизации и программы на ЦВМ для опреде-
определенно положительных дробнорациональных функций и методы факторизации спект-
спектральных матриц, содержащих члены с чистым запаздыванием и опережением [248].
Особенностью получаемых решений является многосвязное управление отдель-
отдельными виброизоляторами [198]. Этот результат зависит как от корреляционной связи
между входными сигналами, так и от геометрической связанности колебаний точек
тела, оценки ускорений и перемещений которых используются в выбранном крите-
критерии качества.
Метод синтеза пространственных систем виброзащиты может быть распростра-
распространен на более сложные пространственные системы с сосредоточенными и распределен-
распределенными параметрами [146].
5. ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ
Основные положения. Применение аналитических безмашинных методов расчета
к проектированию сложных систем виброизоляции реальных машин, функционирую-
функционирующих в условиях действия случайных возмущений, в частности к проектированию
оптимальных нелинейных систем вибгоизоляции наземных машин, не дало удовлет-
удовлетворительных результатов в связи с большими трудностями вычисления. Поэтому
практически невозможно реализовать многие известные методы аналитического
конструирования линейных систем виброизоляции машин, не говоря уже о нелиней-
нелинейных системах или об условиях неполной информации. Методы численной оптимиза-
оптимизации могут быть сформулированы и развиты для широкого класса задач проектиро-
проектирования сложных систем виброизоляции с учетом реальных условий их функциони-
функционирования и проектирования.
Совокупность алгоритмов для ЭВМ, позволяющих решать задачи построения
оптимальных в определенном смысле систем виброизоляции, будем называть алго-
алгоритмическим конструированием систем виброизоляции, а совокупность программ,
обеспечивающих прямое получение оптимальных проектно-конструкторских реше-
решений — системой математического обеспечения задач алгоритмического конструи-
конструирования.
Из процедур алгоритмического конструирования наиболее простыми являются
процедуры параметрической оптимизации, позволяющие определить оптимальные
параметры систем виброизоляции при выбранной (или заданной) их структуре и на-
наличии полной информации об объекте и возмущениях, действующих на него. К наи-
наиболее сложным, самым совершенным с точки зрения функциональных возможностей,
можно отнести процедуры, позволяющие осуществить выбор принципа действия,
а затем структурный и параметрический синтез стохастических систем виброизотя-
ции при неполной информации как о самом объекте, так и об условиях его функци
онирования.
П\РЛМЕТРИЧЁСКЛЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 307
К задачам оптимального проектирования систем виброизоляции относятся па-
параметрическая оптимизация при выбранной структуре; структурная оптимизация при
выбранном принципе действия; поиск принципиально новых проектно-конструктор-
ских решений, основанных на новых идеях и принципах действия. В общем случае
необходимо одновременно оптимизировать принцип работы, структуру и параметры
систем.
Задачу синтеза оптимальных структур систем виброизоляции можно в прин-
принципе преобразовать и сформулировать как расширенную задачу параметрической
оптимизации. В этом случае в математической модели системы виброизоляции опти-
оптимизируемые параметры и ограничения будут переменными для различных струк-
структур. К структурной оптимизации систем виброизоляции наземных машин можно от-
отнести, например, выбор числа опор и вида связи (механическая, гидравлическая или
пневматическая) между подвесками опор. Оптимизацией степени связи между под-
подвесками можно выбрать наилучшую структуру. В задаче оптимизации параметров
систем виброизоляции задаются структура системы и статистические характери-
характеристики входных возмущений. Требуется определить значения параметров, при кото-
которых достигается экстремум принятого критерия эффективности. В наиболее часто
встречающихся на практике задачах оптимизации структуру систем виброизоляции
выбирают исходя из функционального назначения системы и имеющихся реальных
элементов. Кроме того, расширением пространства варьируемых параметров можно
получить эффект вариации структуры системы. Если имеется ряд конкурирующих
структур, производится параметрическая оптимизация каждой из них и после срав-
сравнения отбирается наиболее рациональная.
Оптимизация детерминированных систем виброизоляции. Решение многих тео-
теоретических и практических задач виброизоляции сводится к отысканию таких зна-
значений а}, а?> •¦•> ат некоторых параметров аь а2, ..., ат, которые обеспечивают
максимизацию или минимизацию заданной функции С fa, a2, ..., ат), называемой
критерием эффективности (функцией качества, целевой функцией, критериальной
функцией и т п.). В конкретной ситуации требуется обеспечить минимум либо мак-
максимум критерия' С (А) = min либо С (А) = max, где А = (alt аг ат)Т. Задачи
отыскания минимума и максимул а с точки зрения оптимизации эквивалентны, так как
() [
А А
Поэтому, не снижая общности, ниже будем искать минимум С (А).
Задачу отыскания значений параметров af, aj, ..., а*,, обеспечивающих минимум
функционалу С, запишем в виде
с{аи ah ••> a^) = minC(a1, av ..., am). G3)
Параметры a", aj, ..., a^ будем называть оптимальными. Смысл условия G3)
очевиден" при минимизации критерия по параметрам ах,а2, ...,ат его значение
C(al, a*, ..., а^) при оптимальных параметрах должно быть меньше, чем значение
A (alf a2, ..., ат)< вычисленное при любых других значениях параметров.
На оптимизируемые параметры А накладываются конструктивные и другие
ограничения вида
Лттг? /4s? Атак,
которые записываются в виде
А е= Л,
где Л = [Лтш, Атах]— допустимая область вариации параметров; е — символ
принадлежности.
В реальных задачах на некоторые функции, характеризующие качество опти-
оптимизируемого объекта, могут быть наложены ограничения
hu(alt a2, ..., am) = 0, (/= 1, 2, ...,«) G4)
и (или)
hj(alt a» ..., amM?0, (/=1, 2 p), G5)
'Де hXj и hj —некоторые заданные функции; п, р — число ограничений.
308 оптимальный синтез системы виброизоляции
Вид критерия С и функций G4) и G5) для конкретной задачи выбирается либо
задается. Для того чтобы учесть ограничения G4) типа «равно», можно сформировать
новую критериальную функцию, включающую ограничения:
п
аг ат) + ^ j? c/if/ (аъ а2, ..., ат) G6)
или
W (as, а2 ат) = С(а1, а, ат)+ 2 с/\ hi/(ак ач «га) I. G7)
/ = |
где Cj — константа, су > 0.
Ограничения G4) типа «не равно» можно также ввести в.исходную целевую функ-
функцию. Для этого ограничения типа G5) приводятся к виду G4). Описанный выше под-
подход, заключающийся в сведении задачи с ограничениями к задаче оптимизации без
ограничений, называют методом штрафных функций.
Введем новую функцию
р р + п
W=C-r^ 1пй/+ 2 hVr>
; = l /=p+i
где г—положительная константа, которая в процессе поиска непрерывно умень-
уменьшается по закону
r[k+\] = r[k]/s, F = 0, 1, 2, ...)
(s — константа, s > 1), если требуемая точность не достигнута. Когда величина г
становится достаточно малой, функция W приближается к исходной С.
Для ограничений типа G4) построим из первоначальной целевой функции и огра-
ограничений функцию вида
где %i и В — константы. Значения %i определяются из системы уравнений
т
La Li\ ' да, dat ) ^ \ да, да,j' >.••••>•
Величину В выбирают экспериментально. Авторы метода рекомендуют В = 30.
Когда сходимость достигнута, h\j = 0 и W = С.
Таким образом, включением ограничений в критерий эффективности задача
оптимизации сводится к задаче на безусловный экстремум: требуется определить
такое значение А* = (af, at а*г)г вектора параметров Л=(а1; а2, ,.,, ат)Т,
чтобы
W (A*)= mm_W (А),
А(=А
где Л — допустимая область вектора А.
Для минимизации W (А) могут использоваться различные алгоритмы оптимиза-
оптимизации, например итеративные алгоритмы градиентного типа
A[k+l] = A[k] — r[k+\] V W (АЩ), (k = 0, 1, 2, ...),
где Г [k]—в общем случае пересчетная матрица, определяемая по-разному для
различных методов:
Г [k] = | yV(i [k] [], (v, Ц=1, 2 m).
Значение Г [k] определяет очередной шаг и зависит в общем случае от вектора А,
значений градиента целевой функции v№ и от номера шага k, При выполнении
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИ$ОЛЯИИИ 309
соответствующих условий сходимости для начального выбора А — A [0J оказыва-
оказывается, что
lim A[k] = A*.
*->СО
Структура детерминированных алгоритмов едина. Выбирая соответствующим
образом Г [k], мы приходим к известным алгоритмам.
Сведение задачи оптимального управления к задаче параметрической оптимизации.
К сформулированной выше задаче многопараметрической оптимизации могут быть
сведены и другие задачи: аппроксимации, идентификации и оптимального
управления колебаниями объектов с активными системами виброизоляции.
Покажем это.
Пусть объект описывается векторным дифференциальным уравнением
X=F(X, U, Ат, 0, @<t^T) G8)
с начальными условиями при t=t0: X (ta) = Хо, где X, С — N-мерные векторы;
U (t) — вектор-функция управления. Для простоты изложения рассмотрим случай
U (t) = и (t) — скаляр; Ат — т — мерный вектор параметров системы; Т — время
наблюдения.
Пусть критерий эффективности активной системы виброизоляции W (X) следует
минимизировать выбором оптимальной функции и* (t), которая должна удовлетво-
удовлетворять некоторым условиям: ограниченности, гладкости, непрерывности и т. д.
Представим искомую функцию управления и* (t) в виде конечного ряда
гп + п
«л@ = I] <?Р/@-
i= m
где {ф( @} — ортогональная на интервале 0 =s: t ^ T система координатных функ-
функций.
Теперь задача оптимального управления сводится к определению оптимального
вектора параметров Ап =(amJl, .,., am+n). При конечном п получим приближенное
решение задачи. Критерий эффективности имеет вид
W[X(un)] = W(X, Am,An),
или, введя (л + т)-мерный вектор A=(alt ..., am, am+l am+n), можно записать
V [X (А), А]. G9)
Таким образом, задача оптимального управления сводится к решению на каж-
каждом шаге оптимизации системы G8) и минимизации критерия G9). Введением но-
нового вектора А мы объединили параметры а^, а2, ..., ат, подлежащие оптимизации,
и параметры управлений am+i,am+2, ..., ат+п. Как видно, в приведенной формули-
формулировке задачи производится одновременная оптимизация параметров системы Ат
и управления Ап.
Если принять Ат = const, то рассматривается только оптимальное управление,
и оценкой точности получаемых решений может служить сходимость последователь-
последовательностей Wn, полученных при различных п (пх, п2, и т. д.).
Когда на функцию управления накладываются условие гладкости и требова-
требование малости высших производных, управление можно задать в виде степенного ряда
п — 1
2
(=1
Искомую функцию управления можно аппроксимировать и интерполировать с ис-
использованием интерполяционных формул, например формулы Лагранжа для пара-
параболической интерполяции:
ип (t) = U @ и0 + МО + • • • + ?л-1 @ ип-ъ
где
.(<- tn-i)
(ft -t0)... {ft - ti-д (ti - tUl) ...(t,- tn^
310 ОПТИМАЛЬНЫЙ СИНТГЗ СИСТГМЫ ВИБРО1ПОЛЯЦИН
В этом случае параметрами, определяющими Wra+ft) будут значения и„ (^,) в узло-
узловых точках отрезке) [0, Т] и ах, а2, ..., ад..
Таким образом, задача оптимального управления сводится к применению мето-
методов прямого поиска. Если имеются граничные условия, то, применяя метод штраф-
штрафных функций, решение можно свести к решению обычной задачи поисковой оптими-
оптимизации.
Для решения сформулированной задачи оптимизации могут быть использованы
регулярные итеративные алгоритмы, если оценка критерия является неслучайной
величиной, и вероятностные итеративные алгоритмы, если оиенка критерия слу-
случайная.
Оптимизация стохастических колебательных систем. При рассмотрении нели-
нелинейных и сложных систем виброизоляции чаще всего критерий эффективности и
ограничения, наложенные на переменные, характеризующие функционирование
системы, либо функционалы от них, в явной форме неизвестны; информацию о них
мы получаем при численных расчетах на ЦВМ математической модели. При случай-
случайных возмущениях, действующих на систему виброизоляции, случайных начальных
условиях и учете случайных отклонений параметров от расчетных значений критерии
эффективности и ограничения получаются в виде реализации случайных чисел или
процессов. Для решения задач оптимизации при недостатке априорной информа-
информации применяется адаптивный подход, при котором в отличие от обычного подхода для
пополнения недостающей информации активно используется текущая информа-
информация.
Пусть динамика многомерной стохастической системы виброизоляции описы-
описывается векторным дифференциальным уравнением G8). Введем критерий
W(A) = MX{J(X, А)}, (80)
л математического ожидания,
ичения в виде равенств
H1(A) = Mx{h1(X, A)} = 0 (81)
и неравенств
H(A) = Mx{h(X, Л)} «SO, (82)
где Нх (А) и Н (А) — вектор-функции; #х (А) = (Ац (A), h12 (A), .,., h1N(A)); H{A) =
= (hx (А), Л2 (А) hM(A))\ причем вид функций Н1 (А) и Н (А) неизвестен, а из-
известны лишь реализации вектор-функции hi (X, А) и h (X, А).
К выражению (80) сводится ряд различных по своей форме показателей эффек-
эффективности. Так, показатель, определяющий вероятность того, что функционал J (X, А)
находится в заданных пределах /х (t) sg J (X, A) sg J2 (t), т. е.
W(A) = P[J1(t)^J(X, Л)^/а@. 0«?/г?Г],
введением характеристической функции
у IX A) = l l 6СЛИ Ji®^J(X' A)^J2d), m
л \ 0 в противном случае,
либо
Х№ ^) = 0,5{sgn[/(^, A)-J1(t)]-sgn[J{X, A)-J, (ft),
приводится к виду
W(A) = MX[X(X, A)]. (84)
Вид критерия (80) в каждом конкретном случае определяется назначением си-
системы виброизоляции. К критерию (80) сводится также и критерий надежности.
Пусть X (A, t) — случайный вектор, описывающий эволюцию колебательной си-
системы в момент времени t. Выделим в фазовом пространстве допустимую область
[Х_, Х+] изменения вектора X [A, t]. Если X (А, I) выходит из обласш [Х-, Х+], т, е.
где J (•) — заданный функционал; Мх — символ математического ожидания,
В общем случае в задаче присутствуют ограничения в виде равенств
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 311
Х_>Х(/4, 0 > Х+, будем считать, что произошел отказ системы. Введем харак-
характеристическую функцию надежности системы виброизоляции для интервала времени
[t0, T] вида (83). Тогда вероятность безотказной работы системы в интервале времени
[t0, T] определится как математическое ожидание характеристической функции:
Если принять, что функционал % = %2 (X (A, t)) равен длительности промежутка
времени до первого попадания траектории вектора X (f) в область Хотк,то матема-
математическое ожидание
W (А) = М[Ъ(Х(А, t))] = T-t0-
определяет среднее время безотказной работы системы.
Ограничения на оптимизируемые параметры задаются в виде неравенств
Лгшп =? А ==? Атах или ,ЛеЛ, (85)
где А=[Ат\п, Атах]—допустимая область вариации параметров.
С учетом ограничений на фазовые координаты (81), (82) и оптимизируемые пара-
параметры (85) вместо критерия (80) запишем
(- N
W(A) = MX[W(X, A)] = MXU(X, A) + 0,5 ^ ЬМ (X, А) +
{ / = 1
М т
+ 0,5 ^ скЦ(Х, A)gk(hk(X, А)) + 0,5 2 dlal[(l-s&i<at-aimln)) +
k-i ( = 1
+ (l+sgn(a(-a,max))]}( (86)
где bt, C/ц dl — константы;
С введением критерия (86) задача на условный экстремум сводится к задаче на
безусловный экстремум.
Исследование условия оптимальности вектора А сводится к анализу условия
экстремальности функционала W (А). Если W (А) дифференцируем, то он достигает
экстремума при таких значениях А, для которых градиент функционала W (А) об-
обращается в щлъ, т. е.
x/AW(A) = Mx [VAw(X, Л)] = 0, (87)
где
IV ., fdw(X, A) dw(X, A) dw(X, A)'
Х7 ,W (X Л)"= -— • —'—
А ' \ даг да2 дат
представляет grad w (X, А) по А.
Для отыскания вектора А*, удовлетворяющего условию (87), используются
алгоритмы, называемые вероятностными итеративными алгоритмами. Применяе-
Применяемые в стохастических задачах оптимизации, когда значение критерия эффективности
является случайной величиной, вероятностные итеративные алгоритмы можно раз-
разбить на три основные группы. 1) использующие детерминированный поиск; 2) исполь-
использующие случайный поиск; 3) комбинированного типа, использующие детерминиро-
детерминированный и случайный поиск.
Рассмотрим некоторые из них.
Вероятностные итеративные алгоритмы. Одним из первых алгоритмов типа
стохастической аппроксимации является алгоритм для отыскания корня уравнения
Регрессии в обстановке помех:
a[k+l]=a[k]-y[k)W (a[k]), F = 0,1,2,...), (88)
312 ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
где v Ш — некоторый член последовательности положительных чисел, удовлетво-
удовлетворяющих условиям
оо со
I'm v [А] =0, 2 V [*]¦=<». ?уЧ*]<со (89)
Кифер и Вольфовиц предложили вместо W (a [k]) ввести угловой коэффициент
[k])-W (a[k]-c[k])\, (90)
где на изменение а [к] наложены те же условия, что и в методе Робинса—Монро, а на
изменение с [k] — условия
lim c[k]=0;
(
(9!)
Алгоритмы (88) и (90) могут быть представлены в нормализованных вариантах,
в которых используется только знак функции W (A [k]):
] = a[k]-y[k]sgn{w(a[k))}
где sgn {и} = и! | и | при условии sgn {0} = 0.
В идеальной схеме стохастической аппроксимации поиск вдали от вершины дол-
должен вестись большими шагами, а вблизи — малыми. Кестен для ускорения сходи-
сходимости предложил уменьшать длину шага у [k] лишь при изменении направления
поиска.
Блюм и Сакс распространили описанные подходы на многомерный случай. Введем
обозначение векторов, компонентами которых являются функции W при измененных
значениях векторов А:
, ..., W (A [k]+ cem)};
W.(A[k], c) = \W (A[k]-ceJ, W(A[k]-ce2), ..., W (A [k]-cem)\;
где с — скаляр; et (i = 1, 2, ..., m) — базисные векторы. В простейшем случге
et= A, 0, ..., 0); е%= @, 1, ..., 0); ...; ет = @, 0 1); Wo (А Щ) -вектор, все
компоненты которого одинаковы.
Градиент можно приближенно оценивать с помощью разделенных разностей:
V, ,W (AW, c)=W+(Alklc)-W_(A[kU);
— /.С
При вычислении V^+ W (A [k], с) или VA_W (Л [k], с) вместо двух шагов произ-
производится один. При этих обозначениях метод Блюма можно записать в виде
= Alk)-ylfc]VA+W(Alk],c), (A-0, 1,-2,...).
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 313
Для улучшения сходимости метода предложена симметричная процедура
A[k+\] = A[k]-y[k]v A±W (А[к], с).
Вернемся к рассмотрению уравнения G8), описывающего динамику стохастиче-
стохастической системы виброизоляции. В общем случае существенно нелинейной многомер-
многомерной динамической системы плотность вероятности р (X) случайного вектора фазо-
фазовых координат X априорно неизвестна, и нам доступны для измерения лишь реали-
реализации критерия эффективности w (X, А), полученные при расчетах на ЭВМ. Задача
оптимизации стохастических колебательных систем виброизоляции сводится к на-
нахождению оптимального значения А* вектора А, при котором достигается экстре-
экстремальное значение критерия эффективности:
М {w(X, A*)}= min_M{w(X, A)\.
АеА
В общем случае оптимальное значение параметров А* определяется из рекуррент-
рекуррентного соотношения
] = А[к]-Г[к+\]Ф(ш(А[к], X[k+l])), (k = 0, I, 2 ...),
где Ф(-) — оператор, определяющий метод поиска; w (¦) — реализация крите-
критерия эффективности, получаемая при расчетах на ЭВМ.
Рассмотрим один из алгоритмов градиентного типа, аналогичный детерминиро-
детерминированному итеративному алгоритму градиентного поиска. В общем случае градиент
реализации Vffi) (X, А) невозможно получить, но сами реализации w (X, А) могут
быть получены, В этом случае на помощь приходят поисковые алгоритмы, Введем обо-
обозначения:
w+(X, A, c) = (w(X, А + сег) w (X, А+сет));
w_(X, A,c) = (w(X, A-cex) w(X, A-cem))-
wo(X, A) = (w(X, A) w{X, A)).
Градиент можно оценить с помощью разделенных разностей!
ъА±»{х. л. *-»+«•*:*-;-(*>*>*,
или
(X, А, С)=«М*. Л.с
О
VA_(X, л, ) ,
с
которые зависят от случайного процесса X.
С учетом выражения (92) поисковый алгоритм оптимизации в рекуррентной форме
можно записать в виде
A{k+\] = A[k}-r[k + \)VA±w{A[k]X{k + \}, c[k+\}). (93)
Как видно из выражения (92), оценка градиента V^, входящая в алгоритм (93),
может быть получена с помощью специальных поисковых шагов по каждому из оп-
оптимизируемых параметров а,- (( = 1, 2 т) и требует Bт + 1)-го вычисления ре-
реализации w(-). Если использовать оценки VА+ или Уд_, требуется т-\- 1 вычис-
вычислений функции w (•)•
Для уменьшения числа пробных шагов, необходимых для определения оценки
градиента V^+, в качестве оценки У^+ можно использовать некоторый вектор, име-
ющий случайное направление и модуль, равный, производной w (X, А) по направле-
направлению случайного вектора. В этом случае алгоритм поиска запишется в виде
А {к+ 1]= А [*]~1И±Я {w (X [к+ 1], А Щ +с [k+1] 3 [к+ 1]) -
-и>(Х[к], АШ/3[к+\], F = 0, 1, 2, ...), (94)
314 оптимальный синтез системы виброизоляции
где S = (?t, ?2, ..., ?ш) — случайный вектор, равномерно распределенный в интер-
интервале [0, 1].
Для сходимости алгоритма (94) необходимо, чтобы величина у [k] с ростом k умень
шал)сь быстрее, чем c[k], и, кроме того, последовательности у [k] и с [&] должны
удовлетворять условиям сходимости алгоритмов типа стохастической аппроксима-
аппроксимации.
Описанный выше подход достаточно подробно изложен в [226] для систем вибро-
виброизоляции в общем случае нелинейных и описываемых уравнениями высоких поряд-
порядков. В качестве входных воздействий используются детерминированные и случай-
случайные возмущения любых видов. Решение проводи гея численными методами и рассмат-
рассматривается как вычислительный эксперимент.
Автоматизация проектирования систем виброизоляции. Поиск конструктивных
путей проектирования реальных систем виброизоляции приводит к проблеме их
машинного проектирования. При использовании ЭВМ представляется возможным
формулировать и решать задачу выбора оптимальных решений в общем виде, учи-
учитывая все ограничения на фазовые координаты и оптимизируемые параметры.
В настоящее время сокращение сроков, стоимости и улучшение качества проекти-
проектирования реальных виброзащитных систем может быть достигнуто путем создания ав-
автоматизированных систем проектирования на основе использования системного
подхода и электронных вычислительных машин и систем. Для автоматизации проек-
проектирования систем виброизоляции необходимо:
1) разработать достаточно универсальные математические модели (банк моде-
моделей), из которых путем незначительных преобразований можно получить широкий
спектр моделей реальных систем виброизоляции, являющихся сложными, стохасти-
стохастическими, в общем случае существенно нелинейными;
2) разработать систему удобного представления всей исходной информации
о системе в упорядоченном виде, удобном для ввода в ЭВМ (банк данных);
3) создать комплекс алгоритмов и программ автоматизированного проектирова-
проектирования (банк прикладных программ оптимизации), моделирующих процессы функцио-
функционирования реальных систем виброизоляции и принятия решения о степени их эффек-
эффективности;
4) разработать единое математическое обеспечение проектирования оптималь-
оптимальных систем виброизоляции на основе пп. 1—3;
5) разработать систему декодирования выходной информации, т. е. решить во-
вопросы преобразования результатов проектирования на ЭВМ оптимальных систем
виброизоляции в форму проектно-конструкторской и технологической документа-
документации.
При проектировании систем виброизоляции можно выделить следующие модели:
— функционально-структурную, определяющую состав элементов системы и ло-
логику их соединений;
— математическую, описывающую количественные соотношения между пара-
параметрами и характеристиками системы;
— топологическую, определяющую конструктивные расположения элементов
с"учетом технологии их изготовления;
— рабочую, включающую рабочую документацию на изготовление системы.
Проблема автоматизации проектирования и технической подготовки производ-
производства оптимальных систем виброизоляции включает создание математического обеспе-
обеспечения: 1) для автоматического выбора оптимального принципа работы, структуры
и параметров систем виброизоляции; 2) для автоматизации конструирования систем
виброизоляции с оптимальными структурой и параметрами; этот этап завершается
разработкой чертежей, выдаваемых на графопостроители, магнитные диски и ленты,
перфоленты и перфокарты для последующего ввода в ЭВМ, 3) для автоматизации
изготовления узлов оптимальных систем виброизоляции на станках с числовым про-
программным управлением.
Задача оптимального проектирования систем виброизоляции включает, в свою
очередь:
— разработку и обоснование расчетных систем и математических моделей широ-
широкого класса систем виброизоляции, разработку требований по критериям и ограни-
ограничениям на фазовые координаты и оптимизируемые параметры;
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 315
разработку системы тестовых моделей и задач для сравнения эффективности
алгоритмов проектирования оптимальных систем виброизоляции;
— сведение реальных задач к тестовым и отработку алгоритмов оптимальною
проектирования для различных выбранных критериев останова, классов стохастиче-
стохастических возмущений;
— выбор наиболее эффективных алгоритмов проектирования систем виброизо-
виброизоляции, оптимальных по заданным критериям;
— проектирование реальных систем виброизоляции различных объектов.
Диалоговые системы автоматизированного проектирования виброзащитных си-
систем. Пакеты прикладных программ оптимизации не всегда обеспечивают эффектив-
эффективное решение задачи выбора оптимальной структуры и параметров системы вибро-
виброизоляции, требуя иногда значительных затрат машинного времени. Наиболее эффек-
эффективными являются диалоговые «человеко-машинные» системы автоматизированного
проектирования, включающие банки моделей, банки данных, пакеты программ оп-
оптимизации и средства диалога и направленного имитационного моделирования. Та-
Такие системы позволяют получать приемлемую точность решения за сравнительно не-
небольшое число итераций в результате удачного управления параметрами модели и
алгоритмов в процессе вычислений.
При автоматизированном проектировании систем виброизоляции диалоговая си-
система допускает возможность оперативного контроля и коррекции структуры и па-
параметров оптимизированной модели на любом этапе счета; запоминание предысто-
предыстории процесса; возможность диалогового формирования вектор-аргумента задачи
оптимизации из числа варьируемых параметров модели; документирование раз-
различных промежуточных и окончательных результатов; простоту общения с системой
при использовании в качестве терминального устройства графического дисплея со
световым пером и реализации гибкой логики диалога; наглядность выводимой ин-
информации о ходе процесса минимизации и о свойствах минимизируемой функции
в текущей точке в виде графиков и таблиц.
Примеры параметрической оптимизации систем виброизоляции. Пример 1. Рассмотрим
простейший случай, когда критерий эффективности виброизоляции задается в явной форме
от оптимизируемых параметров Пусть объект виброзащиты с массой т опирается на пру-
пружину жес1костью с, параллельно с которой расположен демпфер с коэффициентом сопро-
сопротивления Ь Основание испытывает моногармонические колебания с частотой <о и ампли-
амплитудой ускорения Яо- Дополнительно действует импульс силы интенсивностью V. Задача
оптимизации ставится в сиде условий E) Требуется подобрать параметры с и Ъ таким
образом, чтобы при ограничении на функционал A3) (В= V0) от действия импульса силы
амплитуда ускорений (Лео) ог действия моногармонических колебаний была минимальной.
Для моногармопических колебаний с частотой со квадрат амплитуды ускорений для
рассматриваемой системы
°2 = ао 7 Tj~?\ ?~ГГ~2 • <95>
Ь . %т
где ъ= = — относительное демпфирование; о). = (с/тI''1 —собственная частота.
lYcm
Функционал A3) выразим в алгебраической форме, воспользовавшись специальными
таблицами несобственных интегралов [144]
н
со
v f
^ J
Далее решаем задачу следующим об азом Положим В = В0 и определим из (96)
Подставив полученный результат в (95),= получим
_ „ Rv~* — v4
где R = к Vt о' ^=щ0/оо
со т'Во
Приравнивая нулю производную d(as)/dv в (97) и решая о помощью ЭВМ полученное
алгебраическое уравнение относительно v определим зависимости v от R. Далее найдем ?,
316
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
от опт При ограничении по BQ (рис. 10) отношение v = a>c/<o должно быть не
меньше найденной величины vonT. Так как v слабо зависит от безразмерной комбинации ft,
то отношение частот не может быть выбрано очень малым.
Пример 2. Проведем параметрическую оптимизацию линейной системы, рассмотрен нон
в примере 1. На основание действует виброускорение, представляющее собой стационарный
случайный процесс типа «белого шума» со спектральной плотностью Ы*12я. Задачу оптимиза-
оптимизации ставим для условий D). В качестве ограничиваемого и минимизируемого функционалов
выбраны дисперсии A6) и A5) при aj, < VFg. При расчете дисперсий воспользуемся табли-
таблицами [144] для записи выражения передаточной функции
(98)
-я
)..(?. + *„
Положим
ica
— !CQ
/§ и определим сос из A00):
и. = -
-f 4tf
Выражение A01) подставим в (99) и получим
4 =
N» (l + 4S2K
256 Wl i1
(99)
A0С)
A01)
A02)
3 (pi) ,
Приравняем нулю производную —~, откуда получим ?„„=—: окончательно имеем
_ 3/2
'опт 4— ""Ре-
""Ре4 со!
Таким образом, решение задачи параметрической оптимизации привело к тем же ре-
результатам, что и синтез оптимальной передаточной
йH/Ы
0,000f 0,001
Рис.
10. Зависимость отношения
частот от параметра R
функции E1), так как для данного воздействия си-
система виброизоляции «пружина —демпфер» является
наилучшей в классе линейных систем.
Пример 3. Рассмотрим задачу оптимизации не-
нелинейной характеристики демпферов, установленных
на всех колесах восьмиколесной машины типа
МАЗ-543 с торсионной подвеской. Оптимизации про-
производится для грунтовой дороги с дисперсией 36 см2.
Корреляционные функции и спектральные плотности
возмущений, соответствующие различным скоростям
движения по этой дороге, а также принятые при
расчетах параметры машины МАЗ-543 приведены в
работе [226].
При многопарзметрической оптимизации харак-
характеристики демпфера наземных машин в качестве кри-
критериев могут быть использованы для разных поста-
постановок задачи следующие выражения.
1. Вероятностный критерий минимума уровней х и Д.,, вероятности выбросов за кото-
которые ускорений х (i) и динамических ходов Д., A=1, 2 п, 1 = л, п) не должны превы-
превышать заданных (допустимых) значений
W (А, х, Д,-,)= min_
A03)
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 317
где *и *°2. Да;> Д0G —значения x(t) и ДG (О в выражениях
Р~ == Р [ 'х\ < х Ц) < *а для 0 < / < Т] > Р"«;
*"Д(/ ^ Р [ДСG < \l W < до,7 «ля ° < ' < П
Pin == Я [6;/ (« s? бс/7 дл
Т полное время работы системы; pi, Р&ц — весовые коэффициенты; с ,— коэффициенты
штрафа; с — константа (с >0); Р ••, Рд4р;—'заданные вероятности невыбросов соответст-
соответственно ускорений и деформаций за допустимые границы.
Вероятности выбросов определяются из соотношении
Вероятности Р^ Рд(.^, р вычисляются как математический ожидания функций не-
невыбросов Для мобильны^ машин положительные и отрицательные перегрузки можно при-
принять одинаковыми, т е. | ki | = х2 = х. Динамические ходы сжатия ДС17 и отбоя Дог;, а так-
также допустимые вероятности Рд,-/ невыбросов \-t(t) за эти пределы задаются, как правило,
при выдаче заказа на проектирование. В этом случае нет надобности введения весовых мно-
множителей, и оптимизация ведется по критерию
1КЛ')= rain Г?+22>,7A-Рдй) + ?2>/гA-Р1Г//Н> A04)
\
где Рд</ = Р (ДСG < Д,7 «) < Д0G при 0</<Г]; йG = 0,5*д {1 - sgn [РдИ (Л) - Яд17] };
(>д — константа, &д>0, а х — такое ограничение х (г), что
Р - = Р [| дГ(/) |< х при 0 < < < Т] 5г Р ^;
^•• —заданная вероятность невыбросов х Ц).
2. Критерии максимума скорости движения машины по заданному реальному профилю
А е А I г /
? i: ^ с - pt//) + 2 v о - р*/)[' A05)
где аг= 0,5а- {1-sgn^ (Л)-P^j}; e^O.S^jl -sgn ("Яф/ (Л)- P^Jj; а-, а^-кон-
станты
J. Критерий минимума дисперсий ускорений подрессоренного объекта может быть
представлен в виде
W (ЛЧ =
n_ ID ¦¦ + S ? 6;z (РД„) + ? ? в/| (P?//)
Для ряда частных ситуаций может использоваться критерий максимума вероятности
невыбросов
W (Л*) = min_ j-P.. + Pl ? ? <r/7P*/; + I _
л<=л I i / "/""<
Возмол1ны и другие формулировки задачи оптимизации параметров систем виброизо-
Представим характеристики демпферов МАЗ-543 в виде выражения
(Ри, если Д,-<ДС/,
21р^0(Ар если Ди-< Д(-< AQi,
Рд1. если Li>Loi,
Р ¦ Р .
1 С< , V _ ^01
318
ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
Рассмотрим случай, когда Pfl. = — pci~Pf А1'о»'==г1'с/~Т')Г ^ этом случае оптимизирую
мыми являются параметры Р. и ^(. (i= 1, 2, 3, 4).
Результаты оптимизации нелинейной характеристики демпфера (Я(, i^., i— I, 2, 3, }\
многоопорной машины МАЗ-543 по критерию A05) максимума скорости движения по грун.
товой дороге с дисперсией 36 см2 при вероятностях невыбросов Р", [0,75g] = 0,98, Яд(- _
= 0,9995 и Я_- = 0,98 A = 1, 2, 3, 4) приведены в табл 5. Для первоначально принятых па-
параметров демпфера и скорости нарушаются ограничения, которые не удовлетворяются так-
также и на первом удачном по сравнению с нулевым приближением шаге поиска. На шестом
удачном шаге получены оптимальные значения параметров нелинейной характеристики
P*=0,7g и ф* = 0,253, для которых обеспечивается максимальная скорость движени-.
23,9 км/ч. Дальнейшее увеличение скорости движения лимитируется ограничением, наложен
ным на вероятность отрыва колеса третьей опоры.
5. Оптимизация по критерию максимума скорости движения
Номер удачного
шага п
0
1
2
3
4
5
6
Всего шагов N
0
2
3
зо
32
35
50
85
Шаг поиска
1,50
1,50
1,50
0,75
0,75
0 75
0,75
0,375
Оптими-
Оптимизируемые
пара-
параметры
Р,.в
0,20
0,68
0,68
0,58
0,65
0,69
0,70
0,30
0,215
0,368
0,235
0,282
0,286
0,253
Критерий A05),
км/ч
30,0
24,6
20,8
21,5
22,2
23,8
23,9
Вероятности невыбросов
р1а
0,970
0,999
0,997
1,000
0,998
0,995
1,000
0,985
1,000
1,000
1,000
1,000
1,000
1,000
ЯД2
1
Р\Ъ
0,900
0,987
1,000
1,000
1,000
1,000
1,000
Рм
0,99
1,00
1,00
1,00
1,00
1,00
1,00
рт1
0,980
О,Ь95
1,000
1,000
0,996
0,996
1,000
^т2
1,000
1,000
0,998
1,000
0,994
0,996
0,994
рх3
0,980
0,980
0,989
0,987
0,987
0.980
0,984
РхА
0,98
1,00
1,00
1,00
1,00
1,00
1,00
Дисперсия уско-
ускорений D •• я, g2
хА
0,110
0,106
0,048
0,047
0,084
0,089
0,080
Примеча-
Примечание
Нарушень
ограниче-
ограничения по
ускорению
и пробою
Нарушено
ограниче-
ограничение по
пробою
третьей
опоры
-
Нарушены
ограниче-
ограничения на от-
отрыв колес
третьей
опоры
6. С птимизация по критерию минимума уровня ускорений
5и
p.3
а о
8Ц
Хх
0
1
2
со
о
era oj
се
0
2
3
S
к
о
с
я*
dp.
1,5
1,5
1,5
Оптимизи-
Оптимизируемые
параметры
Pl> g
0,20
0,26
0,68
0,300
0,214
0,267
О,
5.Я
0,750
0,632
0,543
Р •¦ .
0,995
0,993
0,994
^Д1
1
1
Вероятности иевыбросов
^Д2
1
1
1
РдЗ
0,99
0,99
0,99
^Д1
1
1
1
Р1\
0,997
0,998
0,993
р%2
1,000
1,000
0,997
рх3
0,986
0,986
0,983
^Т4
1
1
1
Дис-
Дисперсия
уско-
ускорен и-и
D'xA' ^
0,047
0,048
0,057
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ СИСТЕМ ВИБРОИЗОЛЯЦИИ 319
7. Оптимизация по критерию максимума скорости при допустимой вероятности неотрывов
;»«
&э
|§
0
1
2
3
о
ё
а
о
8
яй;
0
14
30
33
72
Шаг поиска
v [к]
1,50
1,50
1,50
1,50
0 75
Оптимизи-
Оптимизируемые
параметры
0,70
0,80
0,79
0,91
0,253
0,215
0,151
0,200
Критерий
A05), км/ч
23,9
24,2
25,6
26,7
Вероятности невыбросов
1,000
1,000
1,000
0,999
РД1
1
1
1
1
Р*1
1
1
1
1
Рдз
1,000
0,996
1,000
1,000
1
1
1
1
рт1
1,000
1,000
0,994
0,986
рт2
0,994
0,993
0,998
0,999
ртЪ
0,984
0.988
0,973
0,954
рт4
1
1
1
1
Дьс-
персия
уско-
ускорений
0,080
0,033
0 068
0,084
Оптимизация по критерию A03) минимума уровня кд = | д;_| = х+ ускорений в точке
д (I л =—514 см) для полученной по критерию A05) скорости при несколько менее жестких
ограничениях на вероятность отсутствия пробоев (Рд, =0,995) привела на втором удачном
шаге к оптимальным значениям параметров демпфера Р(- =0,68g и Ф* = 0,267 (пересчитано
для малых колебаний подрессоренной массы) и уровню *^=O,543g (табл. Ь).
малых колебаний подрессоренной массы) и уровню *^=O,543g (табл. Ь).
В результате оптимизации по критерию максимума скорости при допустимой вероятно-
вероятнонеотрывов Р . = 0,95 получена максимальная скорость 267 км/ч (табл 7) по сравнению
о 23,9 км/ч при Рту- = 0,98 (табл. 8).
ру и по критерию максимума скорости при допустимой вероятно
сти неотрывов Р . = 0,95 получена максимальная скорость 26,7 км/ч (табл. 7) по сравнению
8. Оптимизация по критерию максимума скорости при допустимой вероятности неотрывов
Р 098
Номер удач- 1
ного шага п \
0
1
2
3
4
Всего шагов Л
0
3
4
11
54
56
Шаг поиска
1.500
1,500
1,500
1,500
0,375
0,365
Оптимизи-
Оптимизируемые
параметры
0.30
0,32
0,51
0,53
0 57
0,20
0.10
0,15
О.ЗО
0 286
1«
°я ^
1+
s . ^
1,047
Ь043
0.061
0,060
Вероятности невыбросов
Р'хА
"Л,
1
1
1
1
1
РД2
РДЗ
0 990
0,989
0,991
1,000
1,000
РД4
1
1
1
1
1
рт1
1,000
1,000
1,000
0,993
0,998
Р,2
1,000
1,000
0,998
1,000
0,996
р,з
0,995
0.9S5
0,985
0,982
0,975
рт4
1
1
1
1
1
Примечание
1 Наруше-
> ны огра-
J ничения
Оптимизация по критерию минимума дисперсий ускорений подрессоренного объекта на
корме D •• с учетом допустимых вероятностей невыбросов Рд(- = 0,9995 на рассчитанной по
критерию B3) скорости 23,9 км/ч привела на четвертом удачном шаге к P* = 0,57g и ф* =
= 0,286 (/=1, 2, 3, 4) Дисперсия ускорений при этом равна 0,06s;2 (см. табл. 4). Хотя в рас-
рассмотренных примерах оптимальные нелинейные характеристики различаются сравнительно
мало, в критериях A03) и A06) скорость движения машины является параметром, который
выбирается перед началом оптимизации Поэтому более предпочтительным из рассмотренных
является критерий A05).
В рассмотренном примере точность оптимизации, выполненной методом случайного
поиска с самообучением, с целью экономии машинного времени задавалась достаточно грубо,
°лагодаря этому район экстремума достигался за сравнительно небольшое число шагов
поиска (см. табл. 5—8/.
320 ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
6. СИНТЕЗ СИСТЕМ ВИБРОИЗОЛЯЦИИ
ПО ЗАДАННОМУ СПЕКТРУ СОБСТВЕННЫХ ЧАСТОТ
Методы реализации импеданса и подвижности. Линейную механическую систему
с сосредоточенными параметрами можно характеризовать реактивными функциями
входного 0 лавного) механического импеданса Z (р) и обратной импедансу входной
(главной) механической подвижности Y (р) (см. т. 5, гл. 2).
При силовом возбуждении системы без трения входной импеданс
При кинематическом возбуждении
Z (у) с (
В A07) и A08): Q,- — резонансные частоты; со, — антирезонансные частоты; т —
масштабный коэффициент с размерностью массы; с — масштабный коэффициент
с размерностью жесткости.
Резонансные и антирезонансные частрты могут быть как полюсами, так и ну-
нулями функций Z (р) и обратных функций Y (р). На комплексной плоскости все по-
полюса и нули расположены на оси »ш ((' = у —1) и чередуются между собой, причем
антирезонансные частоты всегда заключены между резонансными частотами.
Имеются два способа получения минимальных по числу элементов механических
схем, реализующих цепь, удовлетворяющую заданным частотам резонансов и анти-
резонансов.
Первый способ заключается в разложении импеданса на простые дроби:
(Ю9)
Коэффициенты в числителях дробей определяются как вычеты функций:
(ПО)
В разложении импеданса Z2 коэффициент т^ = 0
Дроби под знаком суммы представляют собой импедансы последовательно соеди-
соединенных пружины и массы; с,- — жесткость пружин; в случае A09) масса
/П,=С,-/0)(!,
а в случае A11)
Реализация импеданса Z, (s) в виде механической цепи показана на рио. 11 [для
импеданса 1г (р) /^=0].
Второй способ заключается в последовательном выделении масс и пружин с по-
помощью разложения импеданса Zl (р) и подвижности К. (р) = 1/Za (p) в цепную
дробь.
СИНТСЗ CI1CTFW ВИБРОИЮЧЯЦИЙ
Разтожение импеданса Y^ (p) происходит по схеме
321
A12)
Разложение подвижности Y2 (p) по схеме
(ИЗ)
Выражения для цепных дробей получаются в рассматриваемых случаях следую-
следующим образом. Числитель делится на знаменатель, начиная с высших степеней. После
получения первого слагаемого степень числителя станет на два ниже, чем была, и
на единицу меньше, чем у знаменателя. Та же операция совершается над дробью,
Рис. 11. Механическая система, полеченная разло-
разложением функции импеданса на простые дроби
Рис. 12. Двухкаскадная система виброизоляции:
/ _ т, = 1, 2 — с2 = 52,75. 3 — mi = 0,1365, 4 —
с, = 50,8
/////////77777
обратной остатку, и продолжается до тех пор, пока деление не закончится. Механи-
Механическая цепь, показанная на рис. 12, может рассматриваться как реализация импе-
импеданса Zj (p) при движении сверху—вниз и подвижности К2 (р) при движении
снизу—вверх. Возможность варьирования обеспечивает сочетание обоих способов
нри выделении пружин и масс, а также неполное выделение полюсов в нуле и беско-
бесконечности, т е. реализацию только части возможной массы, жесткости или податли-
податливости. Вследствие этого одному импедансу соответствует бесчисленное множество
возможных реализаций, однако число реализаций с минимальным числом элементов
ограничено.
Методы реализации передаточных функций систем виброизоляции. Рассмотрим
линейную пассивную систему виброизоляции без трения, составленную из сосредо-
сосредоточенных масс и пружин. Если обозначить / — точку приложения внешней силы
для силовой виброизоляции, равно как и точку контроля кинематических характе-
характеристик движения виброизолируемого объекта для кинематической виброизоляции,
а 2 — жесткое основание, то имеем следующие соотношения для передаточных функ-
функций
^ 1^ М\ ОН)
(P) W, (Р)
(Р),'
11 п/р. Фролова
322 ОПТИМАЛЬНЫЙ СИНТЕЗ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
где Z± — главный импеданс со стороны точки 1 при неподвижном основании 2, Z,2 _
передаточный импеданс от точки 2 к точке 1 при неподвижной точке 1.
Импедансные характеристики Zt (р) и —Z12 (р) обладают следующими свонст-
вами:
— для пассивных механических систем с сосредоточенными параметрами числи-
числители этих функций неотрицательные, причем коэффициенты —Z]2 не превышают
соответствующих коэффициентов в Zn и Z12;
— нули импеданса Z12 совпадают с полюсами импедансов (или нулями подвиж-
ностей) параллельных ветвей и нулями импедансов (полюсами подвижностей) после-
последовательных ветвей.
На основе этих свойств передаточную функцию Н (р) и функции Zx (p) и Z,2 (p)
можно образовать как отношения полиномов:
где N (р) — полином, корни которого являются нулями передаточной функции,
полином может быть как четным, так и нечетным; я (р) — полином, корнями кото-
которого являются резонансные частоты системы; q (p) — полином, корни которого яв-
являются антирезонансными частотами; в силу того, что системы виброизоляции яв-
являются фильтрами низких частот, при р2 = О Н @) = 1, 0; это учитывается выбо-
выбором множителя полинома N (р).
Рассмотрим примеры синтеза систем виброизоляции. Предварительно укажем
способ нормализации, удобный для использования в расчетах безразмерных вели-
величин. Введем следующие нормированные значения исходя из выражения импеданса
в форме A07):
2iH = 21(p)m(o=; mH=l,0;
H
где соо — постоянная круговая частота. Переход от получаемых в процессе реализа-
реализации нормированных значений масс и жесткостей осуществляется по следующим фор-
формулам: m,- = mHim, с,- ¦= k^tnal.
В примерах использованы нормированные величины, но индекс н опущен.
Пример 1. Реализовать двухкаскрдную систему виброизоляции с передаточноЕЧ функ-
функцией
'9 600
Выбираем частоту антирезонанра coi = 27,5. Согласно A15) и A16)
W = 19 600; п(р)=(р« + 25) (р* + 784); q (р) = Р (/>« + 756,25);
7 /.л .- (Р2 + 25) (р'+ 784)
' (Р) р (р» + 756,25) '
Реализуем механическую цепь вторым способом разложения в цепную дробь;
Р1 + 809р2 + 19 600 | р' + 756,25
р' + 756,25рг ———' •
52,75р2
р» + 756,25р | 52,75р! + 19 600
р> + 370,44р о,О189р
385,81р
52,75р2 + 19 60.0 |385,81р
52,75р« 0,13675р
385,81р | 19 600 ; 1/0,0196 = 50,8.
0,0196
Схема реализации приведена на рис. 12. Пример выполнен для системы виброизолянии
лебедки пассажирского лифта; ш2 = тги = 2911 кг; 0)о = 6,23 1/с (таким образом подобраны
СИНТЕЗ СИСТЕМ ВНБРОИЗОЛЯЦИИ
323
собственные частоты 5; 27,5 и 28 Гц) Определим размерные значения масо и жесткостей.
с8 = 6062,3 кгс/см; ту — 400 кг; ct = 5838,25 кгс/см.
Определим точку минимума кривой передаточной функции вида
Н{р) =
в диапазоне
Для рассматриваемого примера
Q2)
=20,, Гц.
Значение коэффициента передачи в точке fmjn
Н B0,1)=—0,1326.
Значения коэффициента передачи на двух кратных частотах гармонического возбужде-
возбуждения /=16 Гц, /Д-р) =—0,156 и / = 32 Гц, Я (р) = 0,796.
Пример 2. Система виброизоляции с двумя нулями виброизоляции в зарезонансной
области.
Реализовать систему виброизоляции с передаточной функцией
1Р'
4,94-10-'(р'
(р'+36,0)
(р2+0,04)(р*+1,0)(р2
На основании A15) и A16) задаемся /V = 4,94-10-4(рг + 9,0) (р! + 36), я= (ра + 0,04) X
X (р! + 1,0) (ра + 4,0); ? = р (р* + 0,81) (р2 + 3,61) и образуем функцию
7 ( )- " ^
2 +0,04)
1.0) (Рг+4.0
(П7)
Начнем реализовывать импеданс A17), реализуя полюс в бесконечности, что соответст-
соответствует массе объекта то = т,= 1,0. Импеданс остатка
_
2_z, р
0,0545 , 0.2065Р
0,359р
___
Для реализации функции виброизоляции в отличие от первого примера необходимо
неполное выделение полюса в бесконечности подвижности У2 = 1//2, а именно
0,0545'
A18)
В дальнейшем в зависимости от последовательности выделения нулей возможны два
варианта реализации Положив в A18) Уа = 0, в первом варианте реализуем сначала нуль
при p = +3i Подставив это значение в A18), получим Р =0,0617 и c' — -J—5—=0,884. Опре-
Определим подвижность нереализованной части Y3=Y2— „ и выделим из импеданса Z3 =
U,o84
= 1/Уа полюс при p = ±3t:
1,81р
0,2675рг + 0,0595
Р2 + 9,О р(р! +1,0)
Реализованная при этом масса и жесткость равны в соответст-
соответствии g A09) и (ПО) са = 1,91 и т3 = 0,201 Образуем подвижность У3,
неполностью выделяя полюс в бесконечности у подвижности К4 =
Из условия
^ =0,274.
при
где
±6i определим C = 0,127 и с4
Рис. 13. Пример реализации' системы виброизоляции с двумя
нулями передаточной функции.
Первый вариант: / — еа = 0.282; 2 — т3 — 0,201; 3 — са — 1,81;
4 — щ, = т, = 1,0; 5 — сг = 0,884; в — с, = 0,274; 7 — с, = 12,3;
8 — ть = 0,342
Второй вариант: / — се = 0,096; 2 — т3 = 0,25; 3 — с3 = 9,0,
4 - т„ = /щ = 1,0; 5 — сг = 0,664; 5 - с. = 0,215; 7 — сь = 1,71;
в _ т, = 0,19
11-»
324
оптимальный синтез системы виброизоляции
'///////////////у
а)
1
1
1
пд -
3
-1
Рис. 14. Реализация передаточной функции системы
виброизоляции с нулем.
Первый вариант: / — т, = 1,0, 2 — с$ = 2,0; 3 — т3 =
= 0,194, 4 — т\ = 0,0915, 5 — с» = 2,29
Второй вариант; / — т, = 0,865, 2 — т', = 0,273,
3 — а = 6,74, 4 — т3 = 0,267; 5 — сг = I 28
Подвижность
р
'0,275
0,0058 (р2 + 36,01)
0,0731р+0,0605 '
на простые дроби,
12,3; ms = 0,342; с, =
Разложим импеданс Z5 = l/V6
откуда окончательно получим с,
= 0,282 (рио 13).
Во втором варианте применяется последовательность
выделения нулей Из условия У„ = 0 при р = + б! оп-
определяем жесткость с2 = 0,664; вшделяя полюса из импе-
импеданса Z, при р = ±6(, найдем са = 9,0 и ms = 0,25 Из
+ 3( получим с4 = 0,215. Разлагая импеданс Zh на проотше дроби,
0,19 и с. =0,096.
б
условия К5 = 0 при
определим с, = 1,71, 6 , . ,.
Пример 3. Система виброизоляции в одним нулем виброизоляции в зарезонансной
области
16 р! + 25
Выбираем
N — ? I
1,0) (р*+ 16,0);
15,0).
Образуем функцию
i(Р) =
A19)
Реализацию нуля р = + 5( в отличие от примера 2 проведем, используя инерционньи
элементы е устройствами преобразования движения (см рис 8) Для этого выделяют нули
импедансов последовательных ветвей.
Параллельные ветви цепи используют для частичного выделения полюса, а последова-
последовательные— для полнаго Еыделения полюса. В первом варианте реализуем систему разложе-
разложением на цепную дробь, полностью выделяя полюса в бесконечности;
Подвижность остатка
16 |
15р
р3 + 15,0р | 2,0р*+ 16,0
3+ 8° Ь7
3 + 15,
+ 8>
Внделим из импеданса остатка Z%(p~) »асть полюса в бесконечнооти и положим при
где
±
Простая дробь
г (Р)
, C = 0,194,
Р
° 0,0915
* + 25
0,0915 (р2 + 25)
реализует параллельное соединение инерционного элемента с механизмом преобразования
движения, приведенная масса которого т' — 9,0915, и пружину жесткостью с. = ш'оJ = 2,29
Откуда т' = 0,0915 — приведенная масса инерционного элемента, са = 2,29 — жесткость пру-
пружины Реализованная механическая схема представлена на рис. 14, а
Во втором варианте реализации начинаем с неполного выделения полюса на началь-
начальном шаге. _
Приравняем нулю Z2(p) ори р = + 5<:
:-РР=»0,
СИНТЕЗ СИСТЕМ ВИБРОИЗОЛЯЦИИ 325
где 0<Р< I, 0 = 0,865-
7 ,„, 0,135 (р' +25) (р» +4,8)
Простая дробь
Р 3,67
реализует параллельное соединение инерционного элемента с механизмом преобразования
движения, приведенная масса которого т^= 1/3,67 = 0,273, а жесткость пружины с =
Подвижность остатка
Импеданс
Y Гп)_ 7-4'(Рг + 15,0) 3,67р _ 3,74р
(
разложим в цепную дробь, выделяя массу т3 = о 374 ~ °'2^7 И пружинУ жесткостью <?, = 1,28.
Схема реализации показана на рис. 14, б.
Часть четвертая
ДИНАМИЧЕСКОЕ ГАШЕНИЕ КОЛЕБАНИЙ
Глава XIV
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ
Метод динамического гашения колебаний состоит в присоединении к объекту виб-
виброзащиты дополнительных устройств с целью изменения его вибрационного состоя-
состояния. Работа динамических гасителей основана на формировании силовых воздей-
воздействий, передаваемых на объект. Этим динамическое гашение отличается от другого
способа уменьшения вибрации, характеризуемого наложением на объект дополни-
дополнительных кинематических связей, например, закреплением отдельных его точек.
Изменение вибрационного состояния объекта при присоединении динамического
гасителя может осуществляться как путем перераспределения колебательной энер-
энергии от объекта к гасителю, так и в направлении увеличения рассеяния энергии ко-
колебаний. Первое реализуется изменением настройки системы объект—гаситель
по отношению к частотам действующих вибрационных возмущений путем коррек-
коррекции упругоинерционных свойств системы. В этом случае присоединяемые к объ-
объекту устройства называют инерционными динамическими гасителями. Инерционные
гасители применяют для подавления моногармонических или узкополосных случай-
случайных колебаний.
При действии вибрационных нагрузок более широкого частотного диапазона
предпочтительней оказывается второй способ, основанный на повышении диссипа-
тивных свойств системы путем присоединения к объекту дополнительных специ-
специально демпфируемых элементов. Динамические гасители диссипативного типа полу-
получили название поглотителей колебаний. Возможны и комбинированные способы
динамического гашения, использующие одновременную коррекцию упругоинерцион-
упругоинерционных и диссипативных свойств системы. В этом случае говорят о динамических гаси-
гасителях с трением.
При реализации динамических гасителей противодействие колебаниям объекта
осуществляется за счет реакций, передаваемых на него присоединенными телами.
По этой причине значительные усилия при ограниченных амплитудах корректирую-
корректирующих масс могут быть достигнуты лишь при относительно большой массе (моменте
инерции) присоединенных тел, составляющей обычно ~5—20 % приведенной массы
(момента инерции) исходной системы по соответствующей форме колебаний, в окрест-
окрестности частот которой выполняется гашение.
Как правило динамические гасители используют для достижения локального
эффекта: понижения виброактивности объекта в местах крепления гасителей.
Зачастую это может быть связано даже с ухудшением вибрационного состояния
объекта в других, менее ответственных, местах.
Динамические гасители могут быть конструктивно реализованы на основе пас-
пассивных элементов (масс, пружин, демпферов) и активных, имеющих собственные источ-
источники энергии. В последнем случае речь идет о применении систем автоматического
регулирования, использующих электрические, гидравлические и пневматические
ПРУЖИННЫЙ ОДНОМАССНЫЙ ИНЕРЦИОННЫЙ ГАСИТЕЛЬ
327
управляемые элементы. Удачным является их комбинирование с пассивными устрой-
устройствами. Использование активных элементов расширяет возможности динамического
виброгашения, поскольку позволяет проводить непрерывную подстройку парамет-
параметров динамического гасителя в функции действующих возмущений и, следовательно,
осуществлять гашение в условиях меняющихся вибрационных нагрузок. Аналогич-
Аналогичный результат может быть достигнут иногда и с помощью пассивных устройств, име-
имеющих нелинейные характеристики.
Динамическое гашение применимо для всех видов колебаний: продольных, из-
гибных, крутильных и т. д.; при этом вид колебаний, осуществляемых присоеди-
присоединенным устройством, как правило, аналогичен виду подавляемых колебаний.
1. ПРУЖИННЫЙ ОДНОМАССНЫЙ ИНЕРЦИОННЫЙ
ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ
Простейший динамический гаситель выполняется в виде твердого тела, упругопри-
соединяемого к демпфируемому объекту в точке, колебания которой требуется пога-
погасить, Существенное влияние на результирующие характеристики движения объекта
с гасителем оказывают диссипативные потери в гасителе.
Рис. I. Динамическое гашение колебаний пружинным гасителем:
а, б — продольных; в — крутильных; / — демпфируемый объект; 2 — гаситель
Начнем рассмотрение с простейшего случая (рис. 1, а), когда демпфируемый объ-
объект моделируется сосредоточенной массой /л, прикрепленной к основанию линей-
линейной пружиной с жесткостью с. Колебания объекта возбуждаются либо периодиче-
периодической силой G (t) = Gqeiu>t, действующей на объект, либо вибрациями основания
по закону х0 (f) = >сое'ш'. С помощью соотношения Go = сх0 можно осуществить эк-
эквивалентную замену кинематического возбуждения основания силовым возбужде-
возбуждением.
Под действием приложенного возмущения объект совершает одномерные коле-
колебания с амплитудой
Со
¦Н?)Т
где шо =
собственная частота демпфируемого объекта. При со -va>0 колеба-
колебания объекта существенно возрастают. Для их уменьшения к нему присоединяется
динамический гаситель 2 (рис. 1,6), имеющий сосредоточенную массу mr, пружину
с жесткостью сг и вязкий демпфер с коэффициентом трения 6Г.
Дифференциальные уравнения колебаний системы с гасителем имеют следую-
следующий вид:
тХ + ЬТ (х - хг) + ас + сг(х- хг) = Goefra';
где х, хг — абсолютные координаты перемещений масс.
328 ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИИ
При динамическом гашении крутильных колебаний по схеме, показанной Hd
рис. 1, в, уравнения, записанные относительно абсолютных углов поворота дисков
демпфируемого объекта и гасителя <р, <рГ) имеют аналогичный вид:
ф — фг) = Мое'а';
(Фг — ф) = 0.
Здесь У, /г — моменты инерции демпфируемого объекта и гасителя; с, сг — крутиль-
крутильные жесткости валов, Ьг — коэффициент вязких потерь при парциальных колебаниях
гасителя; Мо — амплитуда вибрационного крутящего момента, приложенного к ди
ску демпфируемой системы.
Отыскивая решения системы уравнений A) в форме
х (f) == ае<м<, хт @ = о, е'at, C)
где а, аг—комплексные числа, после преобразований получим следующие выра
жения для амплитуд колебаний объекта и гасителя.
1/2
E)
^ mr' r m M 60
При этом введены обозначения
,. Go .. » ш
с ' b coo' "" cor'
Здесь bg = 2VcTmr — критическое демпфирование парциальных колебаний дина
мического гасителя.
Из D) следует, что при
&>=1, (б)
т. е. при настройке парциальной частоты упругих колебаний гасителя ю1 на частот)
внешнего возбуждения со, «остаточные» колебания объекта оказываются пропорцио
нальными потерям в гасителе:
Таким образом, при указанной настройке при Рг -> 0 величина | а I -*¦ 0, т. е.
колебания демпфируемой системы полностью устраняются. Согласно E) реакция
гасителя при этом равна по величине внешнему возбуждению.
mrco2 I аг | = <?„ (8)
и, как легко показать, противоположна ему по знаку, что и обеспечивает отмечен-
отмеченную компенсацию колебаний.
На рис. 2 приведены амплитудно-частотные характеристики рассматриваемой
системы с гасителем (см. рис. 1, б), построенные при ?„ = 1, рг = 0. Для сравнения
на рис. 2, а штриховой линией нанесена амплитудно-частотная характеристика объ-
объекта, (см. рис. 1, а). При выбранной настройке присоединение гасителя образует
такую результирующую систему с двумя степенями свободы, у которой на частоту
возбуждения приходится антирезонанс. При этом частота антирезонанса совпадает
также с резонансной частотой исходной системы. Последнее обстоятельство не яв
ляется обязательным, поскольку настройка ?,<>= 1 обеспечивает антирезонанс на
любой фиксированной частоте возбуждения, однако эффект динамического гашения
проявляется наиболее сильно именно при сог = ш = со0, так как при со Ф щ колеба-
колебания демпфируемого объекта при отсутствии гасителя не столь значительны,
пружинный одномассный инерционный гаситель
329
При правильной настройке инерционного пружинного гасителя (сог = со) соот-
соотношение (8) обеспечивается при любой амплитуде Go внешнего возбуждения, т. е.
рассматриваемый инерционный гасители осуществляет слежение за интенсивностью
возбуждения, изменяя соответствующим образом амплитуду своих колебаний \ аг].
Если размах колебаний гасителя лимитируется прочностными или габаритными огра-
ограничениями то его уменьшение согласно (8) может быть достигнуто увеличением
массы гасителя mr.
¦
1
!
' ' /
/
/11'
"'
\
\\
н
/!
у
0,5
1,5
г,о
Рис. 2. Амплитудно-частотные характеристики системы с одной степенью свободы, снаб-
снабженной линейным пружинным гасителем:
а — демпфируемый объект, б — гаситель
Специфика инерционного динамического гашения, связанная с осуществлением
условий антирезонанса, приводит к тому, что по обе стороны от настроечной частоты
пружинного гасителя возникают резонансные частоты (рис. 2), поэтому расстройка
системы с гасителем, вызванная, например, изменением частоты возбуждения или
параметров системы, может полностью изменить ситуа-
ситуацию, приведя к опасной раскачке. Чувствительность
системы к указанной расстройке определяется зави-
зависимостью собственных частот системы с гасителем
со, (/ = 1,2) от параметров системы. Выражение для
собственных частот получается, если приравнять нулю
знаменатель в D) при рг = 0 и разрешить полученное
уравнение относительно со, обозначив со через ш,.
Щ
1'2
1,0
0,8
0,6
/
>
г
*****
•—¦—
о
0,1 0,4
Рис. 3. Влияние отношения
д масс гасителя и объекта
на собственные частоты си-
системы с гасителем:
На рис. 3 приведена эта зависимость. С увеличе-
увеличением параметра \i отмеченная чувствительность может
быть несколько понижена. Тем не менее практиче-
практическая область применения простейшего инерционного
пружинного гасителя — подавление колебаний посто-
постоянной частоты, возникающих, например, при работе
синхронных электродвигателей, генераторов перемен-
переменного тока и т. д. Согласно G) эффективность его ра-
работы при правильной настройке F) достигается мини-
минимизацией диссипативных потерь в гасителе.
Конструктивно увеличение ц может быть осуществлено, например, установкой на
объекте нескольких гасителей, настроенных одинаково на частоту возбуждения По суще-
существу аналогичную природу имеет следующий способ расширения рабочего диапазона ско-
скоростей машин [41] Простейшая динамическая модель крутильных колебаний машины пред-
представлена на рис 4, a (J — момент инерции ротора двигателя; си Ji — приведенные крутиль-
крутильная жесткость и момент инерции ведомых частей; с —эквивалентный упругий элемент,
характеризующий свойства привода, причем c<tct)
Действующий на ротор вибрационный крутящий момент Мое' (ш — угловая скорость
вращения ротора) приводит к возникновению его крутильных колебаний, амплнтудно-ча-
330
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИИ
стотная характеристика которых показана штриховой линией на рис 5 Ведомые части соз-
создают эффект динамического гашения ротора на частоте C0i = >/c^/Ji. Вместе с тем на частоте
шач=У с, (У1 + ¦/?') в системе возникают интенсивные крутильные колебания резонансного
Рис. 4. Схема использования
пружинного гасителя для
расширения рабочесо диапа-
диапазона скоростей машин
Рис. 5. Амплитудно-частотная
характеристика крутильных ко-
колебаний машины, снабженной
пружинным гасителем
типа. Для вывода резонанса за рабочий диапазон оборотов двигателя к его ротору присое-
присоединяют динамический гаситель (см рис 4, б), настроенный на частоту антирезонанса о>г —
= У сг/Уг =|Ас1/У1 Это приводит к общему увеличению момента инерции тел, осущест-
осуществляющих динамическое гашение, в результате чего резонансная частота повышается до и3^
=ьу ci{j~i-h Ji') -hcrJrl- Результирующая амплитудно-частотная характеристика системы
с гасителем принимает вид, показанный сплошной линией на рис 5 Эффективность груп-
группового динамического гашения и некоторые его особенности рассматриваются в гл. XV,
2. КАТКОВЫЕ ИНЕРЦИОННЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
Возможности использования инерционных динамических гасителей могут быть
расширены при обеспечении компенсирующей реакции гасителя вида (8) в широ-
широком диапазоне частот возбуждения Это достигается, в частности, применением в ка-
качестве гасителей неизохронных элементов, имеющих возможность подстраивать ча-
частоту своих движений к частоте возбуждения. Существенной неизохронностью обла-
обладают, например, элементы, способные осуществлять обкатку замкнутых поверхностей
цилиндр в цилиндрической полости, шар в цилиндрической или сферической поло-
полости, кольцо, надетое на стержень, и т. п.
Прикрепление таких элементов к вибрирующему объекту приводит к тому, что
осуществляемое ими движение обкатки синхронизируется с внешним возбуждением.
При этом периодическая реакция, создаваемая вращающимся элементом, противо-
противодействует вибрационной нагрузке.
В качестве примера рассмотрим демпфируемый объект с одной степенью свободы,
возбуждаемый гармонической силой G (t) = Go cos (co^+ i|>) и снабженный шаровым
или роликовым гасителем массой mr и радиусом рг, расположенным в цилиндрической
полости радиуса р (рис. 6). Рассматриваемая система описывается следующими диф-
дифференциальными уравнениями:
(т + тг) х + сх = Go cos (at +1|>) + (p—pr) mr (<p2 cos <p + qj sin q>); (9)
A0)
Здесь х—продольная координата объекта; <р — относительная угловая коорди-
координата положения гасителя, отсчитываемая or вертикальной оси.
Найдем условия стабилизации объекта. Полагая х = х = Л = 0, из A0) имеем
ср = югН-фо. (И)
т. е. гаситель совершает равномерное вращение. Соотношения для неизвестных ве-
величин шг и ф0 найдем, подставляя A1) в (9). В результате получим
mt (P — pr)co2 = G0 (cor = co),
A2)
КАТ КО ВЫЕ ИНЕРЦИОННЫЕ ГАСИТЕЛИ
331
Следовательно, центробежная реакция, передаваемая равномерно вращающимся
телом демпфируемому объекту, полностью уравновешивает внешнее возбуждение и
обеспечивает стабилизацию объекта. На практике незначительные реальные потери
энергии в гасителе компенсируются малыми колебаниями объекта, поддерживаю-
поддерживающими вращение.
Рис. в. Схема динамического
гашения продольных колебаний
Катковым гасителем
Рис. 7. Схема каткового гаси-
гасителя для компенсации колеба-
колебаний, вызванных вращением не-
неуравновешенной массы с пере-
переменным эксцентриситетом
Рис. 8. Схемы компенсации пе-
периодических возмущений со
сложным спектром:
а — катковый гаситель; б —
ударный гаситель
Согласно A2), масса гасителя и разность радиусов р — рг одинаково влияют
на компенсирующую реакцию, что обеспечивает определенную гибкость в выборе на-
настроечных параметров гасителя.
Осуществляя слежение за частотой возбуждения, катковые гасители рассматри-
рассматриваемого типа чувствительны к изменению амплитуды возбуждения на частоте на-
настройки, соответствующей A2). Однако, если изменение амплитуды и частоты воз-
возбуждения осуществляется одновременно и так, что
сохраняется равенство A2), то полное подавление
колебаний выполняется во всем диапазоне измене-
изменения. Сказанное обеспечивается, например, при
возбуждении объекта неуравновешенной вращаю-
вращающейся массой. В этом случае Go = еа>2тд, где 8 —
эксцентриситет, а тд — масса дебаланса. В резуль-
результате условие настройки гасителя A2) будет
Щ (Р — Рг) = 'Пд8- A3)
Иногда с увеличением частоты известным обра- Рис_ 9- Схема ко„пенсации 6о.
зом увеличивается эксцентриситет дебаланса со- ковых нагрузок при использова-
гласно зависимости е (со). Необходимое для компен- "ии Катковых гасителей
сации увеличение радиуса полости р (<в) может
быть осуществлено тогда при выполнении конструкции гасителя в виде, показан-
показанном на рис.7. Форма поверхности, по которой происходит обкатка, выполнена
таким образом, чтобы при увеличении частоты и, следовательно, центробежной
реакции шарик перемещался в направлении оси у вращения образующей, меняя
радиус обкатки в соответствии с A3). Характеристика пружины подбирается из
условия, позволяющего обеспечить удержание шарика на требуемом радиусе.
Выбором формы осевого сечения полости можно регулировать в некоторых преде-
пределах спектр периодической реакции гасителя. Например, вытягивая окружность
в эллипс (рис. 8, а), можно увеличить роль высших гармоник с кратными часто-
частотами в спектре реакции гасителя. Это полезно в тех случаях, когда аналогичные гар-
гармоники имеются в возбуждении. Теоретически, увеличивая эксцентриситет эллипса
До единицы, т. е. вытягивая полость в поверхность, допускающую лишь одномерные
перемещения массы гасителя (рис. 8, б), приходим к идее ударного гасителя (см,
параграф 4 гл. XV), реакция которого имеет спектр кратных гармоник близкий к рав-
равномерному,
332
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИИ
Использование одного каткового гасителя требует наличия направляющих у дем-
демпфируемого объекта, компенсирующих боковые реакции гасителя. Их применения
можно избежать при использовании двух одинаковых гасителей с половинной массой
(рис. 9), расположенных симметрично относительно линии действия возмущающей
силы. После прохождения резонансной частоты системы гасители синхронизируют
свое вращение в противоположных направлениях, компенсируя тем самым боковые
нагрузки. Таким образом, диапазон эффективности таких гасителей — область за-
резонансных частот.
Применяя в указанных гасителях сферические полости с заключенными в них
шаровыми массами, можно обеспечить гашение колебаний при изменении направле-
направления действия вибрационной нагрузки в некоторой плоскости. Для этого следует рас-
расположить полости таким образом, чтобы плоскость действия силы была перпендику-
перпендикулярна к линии, соединяющей центры полостей, пересекаясь с ней в точке прило-
приложения силы. Необходимым условием работоспособности Катковых гасителей явля-
является обеспечение неразрывности связи гасителя с поверхностью обкатки, Это дости-
достигается при соответствующих значениях центробежных сил.
3. МАЯТНИКОВЫЕ ИНЕРЦИОННЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
Поддержание равенства парциальной частоты динамического гасителя о часто-
частотой возбуждения в широком частотном диапазоне может быть обеспечено при исполь-
использовании гасителей колебаний маятникового типа, расположенных в поле центробеж-
центробежных сил, образованном вращением, являющимся причиной колебаний. На рис. 10
показаны схемы подобных гасителей, предназначенных для подавления крутиль-
крутильных (рис. 10, а) и продольных (рис. 10, б) колебаний. Рассмотрим принцип их дейст-
действия на примере маятникового гасителя крутильных колебаний.
Рис. 10. Схемы динамического гашения
колебаний маятниковым гасителем:
о — крутильные колебания, б —• про-
продольные колебания
Рис. И. Расчетная модель маятникового га-
гасителя
Пусть диск радиусом р (рис. 10, а) и с моментом инерции
лом двигателя, совершающим вращение по закону
упруго связан с ва-
вагде Q — средняя угловая скорость вала; $0 — показатель неравномерности враще-
вращения; со — частота крутильных колебаний вала, причем
co = rtQ, A4)
где п=1, 2, ... — кратность колебаний.
В результате приведенный к диску вибрационный момент М (f) = ев„е'ш' (с —
крутильная жесткость участка вала между двигателем и диском) возбуждает кру-
крутильные колебания диска.
Для подавления указанных колебаний к диску шарнирно прикреплен маятник,
имеющий массу тг, расположенную на конце невесомого стержня длиной /,
МАЯТНИКОВЫЕ ИНЕРЦИОННЫЕ ГАСИТЕЛИ 333
Рассмотрим колебания маятника относительно диска во вращающейся с угло-
угловой скоростью Q системе координат, жестка связанной с диском (рис 11, а). Прикла-
Прикладывая к центру тяжести маятника центробежную силу F — mrQ2d, где й — рассто-
расстояние от центра массы маятника до центра вращения диска, разложим ее на две со-
составляющие: FN и FT — вдоль оси маятника и перпендикулярно ей. Имеем
/7Ar = mrQ2dcos-\>; /?T = mrQ2d sin у.
Обозначая угловое отклонение маятника относительно диска через ф = <рг — ср,
где ф, фг — абсолютные угловые отклонения диска и маятника, из рассмотрения
треугольника на рис, 11, б с учетом малости острых углов найдем
В результате при малых колебаниях маятника
F г
Сила FN создает реактивный крутящий момент MN = FNP sin i|) « m Q2 (p +
+ ОрФ> которым маятник нагружает диск. Сила FT создает возвращающий момент
МТ~ FjX «mrfi2p/\|), вызывающий колебания маятника, С учетом этого" дифферен-
дифференциальные уравнения, описывающие колебания рассматриваемой системы с двумя сте-
степенями свободы, имеют следующий вид:
тг/2фг + 6г (фг — (f)-\-mtQ2pl (фг — ф) + тгфр/^=О. A5)
Здесь коэффициент вязкого трения br учитывает потери в шарнирном соединении.
При составлении второго дифференциального уравнения мы пренебрегли ма-
малыми кориолисовыми силами, учтя переносное движение диска лишь с помощью по-
последнего члена. Согласно этому уравнению парциальная собственная частота относи-
относительных колебаний маятника
сог =
т. е. она пропорциональна угловой скорости вращения вала или частоте колебаний.
Таким образом, при изменении частоты колебаний автоматически подстраивается ча-
частота гасителя.
Отыскивая решение системы уравнений A5) в виде
ф {t) = фе'; (fT(t) = '&teiat, A7)
где #, дг — комплексные числа, приходим после преобразований с учетом A4) к соот-
соотношениям типа D) и E) для амплитуд угловых колебаний диска и маятника:
1 М/
а I /2
A8)
|0Г| = ( О+0Й
со * со
Здесь, по-прежнему, ? = —; ^0=—, однако парциальная частота гасителя сог
й>о С0г
определяется теперь выражением A6), а собственная частота объекта гашения
@0 = ^^/7 Кроме этого использованы обозначения ц=—?—; А, = , ; а = —-'
Рг = г ,_., где у-п — критическое демпфирование относительных ко-
2mtmlVpl 2tniy pi
лебаний маятника.
334
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГХШГНИЯ КОЛЕБАНИЙ
Настройка ?0 = 1 опять приводит к ситуации, когда остаточные колебания объ-
объекта оказываются пропорциональными лишь потерям энергии при относительных
колебаниях гасителя и при Рг -*- О величина | <Н -»• 0.
Вместе с тем равенство частоты возбуждения со и парциальной частоты гасителя
сог удовлетворяется теперь, согласно A6), при выполнении условия
т е обеспечивается единой настройкой гасителя для любой скорости вращения
вала
Настройка A9) дает ожидаемый эффект лишь при малых углах относительных
колебаний маятника. С увеличением размаха котебаний величина Ц в A8) будет от-
отличаться от единицы, что вызовет увеличение отстаточных колебаний диска. Для
оценки результирующих колебаний может быть использована
приведенная на рис. 12 зависимость эквивалентной величины
?§ от амплитуды % относительных угловых колебаний маят-
маятника. С увеличением амплитуды колебаний маятника в
спектре создаваемого им реактивного крутящего момента MN
повышается влияние высших гармонических составляющих.
0,9
-
\
0,35 О?О
Рис. 12
Поправочная зависимость для расчета маятникового га.
сителя
Рис. 13. Маятниковые гасители крутильных колебаний:
а — простой маятник, б — маятник с бифилярным подвесом, в — роликовый маятник; г —
кольцевой маятник, д — двуплечий маятник
/ — маятник, 2 — противовес, 3 — ось качаний маятника
При гашении чисто крутильных колебаний для компенсации изгибающего дей-
действия силы FN целесообразно устанавливать два маятника в диаметрально проти-
противоположных точках диска. Создаваемый ими динамический эффект гашения коле-
колебаний имеет суммарное действие
Конструктивное обеспечение настройки A6) обладает рядом особенностей. Про-
Простейшая схема типа показанной на рис. 13, а оказывается осуществимой, как правило,
лишь при п = 1. С увеличением п длина маятников существенно уменьшается. Для
обеспечения подвеса на малом плече I используют конструкции, показанные на
рис, 13, б—д, На рис, 13, б приведена схема свободной бифилярной установки маят-
МАЯТНИКОВЫЕ ИНЕРЦИОННЫЕ ГАСИТЕЛИ
335
ника-противовеса / на выступе кривошипа 2 коленчатого вала, в котором выполнены
отверстия радиусом pt. Такой же радиус имеют круглые отверстия противовеса. Сое-
Соединение осуществляется с помощью штифтов 3 радиуса р2 меньшего, чем радиусы
отверстий Описанное крепление обеспечивает поступательное движение противо-
противовеса по окружности радиуса
/ = 2(р1-р2) B0)
Радиус крепления маятника-противовеса в данном случае
B1)
где h — расстояние от центра вращения диска до центра масс противовеса, Подстав-
Подставляя B0) и B1) в A9), получим формулу настройки маятника с бифилярным подвесом:
1
На рис 13, в гашение колебаний осуществляется роликовым маятником /, поме-
помещенным свободно в цилиндрическом отверстии противовеса кривошипа 2. Такая
схема имеет при реализации существенные габаритные ограничения, поэтому вме-
вместо ро шков испо1ьз>ют иногда кольцевые маятники / (рис 13, г и д),
Рие 14 Маятниковые гасители изгибных колебаний:
я — шариковый маятник, б — маятник с бифилярным подвесом
Выбор параметров маятниковых гасителей крутильных колебаний удобно осу-
осуществлять из условия компенсации реактивным моментом MN возбуждающего мо-
момента М (t). Приравнивая амплитуды этих величин, имеем
Задавшись допустимой амплитудой относительных колебаний маятника г|H <
< 0,35 — 0,40 и конструктивными размерами, гголучаем из B2) для любого извест-
известного возбуждения величину массы гасителя тг Поскочьку использование несколь-
нескольких маятников обеспечивает суммарный эффект, масса должна быть равномерно рас-
распределена между ними
Действие маятникового гасителя продольных котебапий (см рис 10, б) во многом
аналогично. Уравновешенная система двух маятников или более приводится во
вращение относительно вертикальной оси, синхронизированное с частотой коле-
колебаний объекта вдоль этой оси, на котором и размещаются маятники. Частота соб-
собственных колебаний маятников в поле центробежных сил интенсивностью (р + /)й2
определяется выражением со0 = Q ^(p+Z)//, где р — расстояние от центра шар-
шарнира до оси вращения, I — длина маятника Развиваемая при малых относитель-
относительных колебаниях маятников с частотой со = со0 (со = nfl) суммарная реакция с ампли-
амплитудой mr/co2pt|>0 (/ — число маятников) должна равняться амплитуде возмущающей
сипл Go И в данном случае «маятниковые» элементы зачастую конструктивно реали-
реализуются в виде шаровых или цилиндрических тел, свободно расположенных в поло-
336
ПРИНЦИПЫ ДИН \\1ПЧГСК0Г0 I ииГННЯ KOJFbVIIIFf
стях объекта Такие конструкции находят, например, применение при гашении
изгибных колебаний коленчатых валов [128] При этом одно ичи два тела / (рис 14, а)
устанавливают в пазах противовеса кривошипа 2, они способны совершать качатель-
ные движения в плоскости изгиба, обкатываясь по ограниченной цилиндрической или
тороидальной поверхности. Часто также используют установку маятника с бифитяр-
ным подвесом / (рис. 14, б) Установочные плоскости качаний маятников для гашения
изгибных и крутильных колебаний коленчатых валов оказываются взаимно пер-
перпендикулярными.
4. ИНЕРЦИОННЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
С АКТИВНЫМИ ЭЛЕМЕНТАМИ
Использование в системах динамического гашения колебаний элементов с соб-
собственными источниками энергии ргсширяет их функциональные свойства. Появ-
Появляется возможность достаточно просто и в широком диапазоне осуществлять под-
подстройку параметров гасителя в связи с изменением действующих возмущений, произ-
производить непрерывную настройку в режиме слежения, отыскивать и реализовывать
наилучшие законы для компенсирующих реакций
Рис. 15. Схема использования электромагнита дчя ре
гулирования жесткости подвеса гасителя продольных
колебаний
Рис. 16. Регулирование жесткости подвеса гасителя
крутильных колебаний
/ — ротор, 2 — статор, 3 — Taxorenepjtop
При гашении моногармоничеЛих колебаний активные этеченты могут быть
применены для регулирования параметров динамического гасителя при медленных
изменениях частоты возбуждения с целью обеспечения равенства парциальной ча-
частоты гасителя и частоты возб\ждения F)
со, = а B3)
На рис. 15 приведены схемы использования электромагнита в качестве per v ш-
тора эквивалентной жесткости динамического гасителя продольных колебаний [15].
Схемы различаются прикреплением сердечника / и корпуса с катушкой 2 к демпфи-
демпфируемому объекту или неподвижному основанию.
Аналогичные схемы мог^т быть осуществлены для управляемого динамического
гашения крутильных колебаний. В качестве исполнительного элемента удобно ис-
использовать модифицирована ю конструкцию двигатетя постоянного тока (рис 16)
устранив относительный сдвиг поносов ротора и статора и ликвидировав возможность
переключения полюсов при колебаниях [249J,
ИНЕРЦИОННЫЕ ГАСИТС1П С АКТИВНЫМИ ЭЛЕМП1ТАМИ
337
Силовое взаимодействие при относительных смещениях элементов описанных
э тктромеханических устройств носит квазиупругий характер, причем коэффициент
эквивалентной упругости сгэ пропорционален квадрату силы тока / в обмотках
где постоянная k определяется свойствами магнитопроводов и обмоток.
Рис 17 Регулирование жесткости подвеса гасителя продольных колебании перемещением
массы гасителя
Переписав соотношение B3) в виде ?гэ = ттш2 для продольных колебаний или
сгэ = ./гсо2—для крутильных, заметим, что удобным способом регулирования экви-
эквивалентной упругости подвеса электромеханического гасителя является обеспечение
силы тока в обмотках, пропорциональной частоте возбуждения. Такое регулирование
может быть осуществлено цепью обратной связи, использующей усиленный сигнал
датчика частоты возбуждения В случае крутильных колебаний, вызванных враще-
вращением, в качестве датчика частоты удобно испочьзовать тахогенератор. Для колеба-
колебаний всех видов можно использовать сигналы тензометров. В результате эффективное
гашение колебаний объекта обеспечивается во всем диапазоне регулирования. Обес-
Обеспечение значительных компенсирующих реакций в устройствах описываемого типа
достигается при существенных габаритах магнитопроводов. Лучшие резу чьтаты дает
комбинирование электромагнитного и пружинного подвеса, приводящее к соответ-
ств\ющечу суммированию их жесткостей.
Рис. 18
Схема активного динамического гашения
по отклонению
Жесткость динамического гасителя может изменяться также путем перемещения
массы гасителя / вдоль упругой балки с помощью регулируемого электродвигателя
(рис 17, а) [5] Учитывая, что в режиме наилучшего динамического гашения (аи-
гирезонанс) фазы колебаний объекта 2 и гасителя 1 сдвинуты на я/2, выработка управ-
управляющего сигнала осуществляется фазовым дискриминатором 4 (рис. 17, б) в кото-
котором сравниваются показания датчиков 5 абсолютных перемещений объекта и гасителя.
При сдвиге фаз, отличающемся от л/2, срабатывает реле, включающее электродви-
гатеть 3 в соответствии с необходимым направлением компенсирующей подстройки
Эффективность активного динамического гашения ограничивается инерцион-
инерционностью системы управления. Для снижения массы присоединяемых к объекту ча-
частей корпус 1 исполнительного устройства (рис 18) активного гасителя устанавли-
устанавливают иногда на неподвижном основании и передают силовое воздействие на какие-
либо точки упругого объекта 2 по результатам измерения колебаний других точек
(например 5), вибрации которых следует погасить [223, 269] В такой схеме легче ре-
реализовать более сложные законы управления и она может быть применена для подав-
подавления колебаний со сложным спектром. Принципы настройки подобных систем бу-
Д\т рассмотрены в параграфе 6 п XV
В тех случаях, когда осуществляется гашение колебаний движущихся объек-
объектов, например транспортных устройств, неподвижная система, относительно которой
338
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЯ
вырабатываются компенсирующие силы, передаваемые на объект, может быть органи-
организована с помощью гироскопических устройств (см. параграф 6).
Некоторые дополнительные возможности при использовании активных динамиче-
динамических гасителей с обратной связью возникают при введении в электрические цепи
корректирующих элементов. Это позволяет например, увеличить эквивалентную
массу гасителя, отфильтровать от полезного воздействия вибрационную помеху
с целью ее подавления, осуществить независимое действие группы гасителей, пред-
предназначенных для подавления колебаний различных форм, обеспечить требуемые
законы демпфирования в гасителях.
5. ПРУЖИННЫЙ ОДНОМАССНЫЙ ДИНАМИЧЕСКИЙ ГАСИТЕЛЬ С ТРЕНИЕМ
Расширение частотного диапазона, в котором осуществляется динамическое га-
гашение колебаний, может быть достигнуто также при рациональном использовании
диссипативных свойств пружинного одномассного гасителя. На рис. 19 приведены
амплитудно-частотные характеристики объекта (см. рис. 1, б), построенные по фор-
формуле D) при различных коэффициентах в'язкого трения |Jr. Характерной особенностью
этих кривых является то, что они обязательно проходят через точки А, В, положе-
положение которых, следовательно, не зависит от величины |3Г. Согласно D) независимость
амплитуды | а | от рг обеспечивается при выполнении условия
B4)
Из него определяются значения частот со, характеризующих положение точек А, В.
Нетривиальные решения уравнения B4) соответствуют следующему биквадратному
уравнению:
й)г
где v = —.
«о
Наилучшая настройка динамического гасителя с трением при подавлении мо-
моногармонических колебании, частота которых может принимать значения в широком
диапазоне, будет соответствовать такому выбору параметров, при котором ординаты
точек А, В одинаковы и соответствуют максимумам амплитудно-частотной характе-
характеристики. Найдем указанные значения параметров.
Определим прежде всего ординаты точек А, В. Поскольку их величины не зависят
от показателя затухания р\, выберем его таким образом, чтобы формулы для вычис-
вычисления ординат приняли простой вид. Наиболее удачно принять Рг-*- оо, В резуль-
результате из D)
М = 0,05
т 1 Ш
1
}f
ih
\ "гт
\A-eV 1
V
| 1
\
\
ч
0,6 0,7 Ofi 1,0 1,0 1,1 1,1 ы/ша
Приравнивая ординаты, соответст-
соответствующие двум различным значениям
? (Si, ?2), являющимся корнями урав-
уравнения B5), и учитывая, что величины
ординат имеют противоположные зна-
знаки, после преобразований имеем
и+а-те- B7)
Рис. 19. Амплитудно-частотные характе
ристики системы с одной степенью свобо-
свободы, снабженной линейным пружинным га-
гасителем с трением
ПРУЖИННЫЙ ОДНОМАССНЫЙ ГАСИТЕЛЬ С ТРЕНИЕМ
339
По теореме Виета из B5):
B8)
Приравнивая правые части равенств B7) и B8), находим оптимальную настройку
I
1+ц*
B9)
Определив соответствующее значение ? из B5) и подставив его в B6), получим
максимальное значение амплитуды остаточных колебаний, соответствующее опти-
оптимальной настройке,
\а\
Для обеспечения такой максимальной амплитуды следует подобрать затухание
fir таким образом, чтобы в точках А или В достигался экстремум амплитудно-частот-
амплитудно-частотной характеристики. Оптимальное значение, полученное как усреднение двух экстре-
экстремальных значений, которые являются
весьма близкими по величине,
C0)
На рис. 20 приведена амплитудно-ча-
амплитудно-частотная характеристика динамического
гасителя с трением, соответствующая
оптимальной настройке гасителя по B9),
C0).
Иногда гаситель с трением настраива-
настраивают на собственную частоту демпфируемой
системы, т. е. устанавливают v = 1. Со-
Согласно B9) такая настройка близка к оп-
оптимальной лишь при весьма малых вели-
величинах (х. Считая, что и в этом случае
демпфирование выбрано таким образом, чтобы обеспечить в точке А (см. рис. 19)
экстремум амплитудно-частотной характеристики, определим соответствующие вели-
величины экстремальной амплитуды и наилучшего демпфирования. Из B5) при v = 1
Ji = O,2S
I
'А
\
——'
/
\
i
Is
\
V
\
о,г
Ц6 ф 1,0
Рис. 20. Амплитудно-частотная характе-
характеристика системы с одной степенью свобо
ды, снабженной оптимально настроенным
линейным пружинным гасителем с трением
C1)
Подставляя меньшее из значений C1) в B6), найдем
\а\ 1
Величина оптимального демпфирования получается следующей:
8A+ц)
C2)
Для выяснения габаритов гасителя и напряжений в пружине следует опреде-
определить амплитуду | а0 \ колебаний массы гасителя относительно демпфируемой си-
системы. В общем случае эта величина может быть определена из системы дифферен-
дифференциальных уравнений A). На практике, однако, пользуются простым приближен-
приближенным соотношением, получаемым с помощью энергетического баланса.
340
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЯ
Работа гармонической силы G (/) при гармоническом движении демпфируемг
системы х {() с амплитудой [ о определяется соотношением
Ев = яОо | а \ sin ф =» nG0 \a\,
где ф — значение фазы, близкое к я/2. Энергия, рассеиваемая в вязком демпфер,
в результате относительного движения масс т и mt,
?д = я6[С0 | о0 2.
Приравнивая величины ?в и Ея, с учетом введенных ранее безразмерных o6o3Ha4t
ний получим
C.
б 2f,Cvpr
Конструкции динамического гасителя с трением можно создавать как с парал
лельным соединением упругого и демпфирующего элементов (рис. 21, а), так и с по
следовательным (рис. 21, б). Удачным является выполнение упругодемпфирующек
Рис, 21. Схемы гашения крутильных колеба-
колебаний динамическими гасителями с трением
Рис. 22. Динамические гасители с трени
ем, использующие резиновые детали
элемента в виде единой резиновой детали. На рис. 22 приведены примеры подоб-
подобных конструкций, предназначенных для подавления крутильных колебаний. С по-
помощью подобных деталей создаются также резино-металлические опоры с гасителем
колебаний (рис, 23) [49].
Рис. 23. Резинометаллическая опора с гаси-
гасителем колебаний
При расчете динамических гасителей с резиновыми упруговязкими элементами
следует иметь в виду, что характер осуществляемого в таких элементах внутреннего
демпфирования не зависит от частоты колебаний; поэтому эквивалентный коэффи-
коэффициент трения
где г|> — коэффициент поглощения, равный отношению энергии, поглощаемой мате-
материалом за один цикл деформации (площадь петли гистерезиса в диаграмме напря-
напряжение— деформация), к максимальной потенциальной энергии деформации (см
гл. IV). Для резины i|) гО.З-г 0,6; оптимальная настройка, по-прежнему, имеет
вид B9).
ГИРОСКОПИЧЕСКИЕ ГАСИТЕЛИ КОЛЕБАНИЙ
341
6. ГИРОСКОПИЧЕСКИЕ ГАСИТЕЛИ КОЛЕБАНИЙ
Для гашения колебаний транспортных объектов и в некоторых других специ-
специальных случаях находят применение динамические гасители, основанные на ис-
использовании гироскопов [76]. Эквивалентное действие подобных систем аналогично
работе пружинного гасителя о трением, хотя устройство и принцип функциониро-
функционирования различные.
В качестве примера на рис. 24 приведена схема успокоителя бортовой качки
судов. Ротор гироскопа / смонтирован в кожухе 2, который может качаться отно-
относительно судна вокруг оси 3, перпендикулярной продольной оси корабля. При этом
центр тяжести кожуха располагается ниже оси качаний на расстоянии /. Колебания
кожуха демпфируются с помощью тор-
тормозного барабана 4. Масса ротора ги-
гироскопа составляет обычно ~1 % мас-
массы судна. С помощью двигателя ротор
приводится во вращение с максималь-
максимально допустимой угловой скоростью Q.
Обозначая момент инерции ротора
через Jo и считая ротор вращающим-
вращающимся протаь часовой стрелки (если смот-
смотреть на него сверху), устанавливаем,
с учетом свойств гироскопа, что при
повороте корабля вокруг продольной
оси вправо (при виде с кормы) с угловой
скоростью ф кожух гироскопа начнет
отклоняться к корме с угловой ско-
Рис. 24. Гироскопический успокоитель борто-
бортовой качки с тормозным барабаном:
2 — кожух; 3 — ось кожуха;
/ — ротор;
4 — тормозной барабан
ростью фг (фг — угол поворота кожу-
кожуха) в результате действия момента
сил, равного У0Оф. При этом реактив-
реактивный момент, противодействующий бор-
бортовой качке, будет равным —/0Офг. Обозначая J — момент инерции судна относи-
относительно продольной оси; /г — момент инерции кожуха относительно поперечной оси
3; Р — вес кожуха, запишем систему дифференциальных уравнений для малых
колебаний в виде
Jгф г
Коэффициент 6Г характеризует вязкое трение в барабане; с — остойчивость судна;
М (/) — момент внешних сил, определяемый волнением моря.
Полагая М (t) = Motmf и отыскивая решение системы уравнений C4) в виде
A7), после преобразований получим следующее выражение, характеризующее ампли-
амплитуду бортовой качки, аналогичное D):
^g [I—g
C5)
Здесь б = —-:
(X)
&>=
со
Ьг
Vc/J' VPlJT/ PU" ¦ 2VPU/
Таким образом, анализ, проведенный в параграфе 5, полностью распространя-
распространяется на рассматриваемый случай. Учитывая переменную частоту волнения моря, за-
заключаем, что описываемая гироскопическая система может эффективно функциони-
функционировать лишь при рациональном выборе демпфирования в тормозном барабане 4.
Оптимальный коэффициент демпфирования определяется C2), где Рг и (.1 выражаются
через параметры системы в соответствии с C5).
Наряду с рассмотренной схемой для гашения бортовой качки нашла примене-
применение гироскопическая система с обратной связью [76]. Кожух 2 исполнительного ги-
гироскопа (рис, 25, а) установлен концентрично относительно оси 3 прецессии, Пово-
342
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ
роты кожуха осуществляются серводвигателем 4 через передачу 5, приводимым
с помощью сигналов малого направляющего гироскопа (рис. 25, б). Последний уста
новлен аналогично исполнительному гироскопу и представляет собой его сильно
уменьшенную копию. При бортовой качке в результате поворота кожуха направляю-
направляющего гироскопа замыкаются соответствующие контакты реле, включающего серво-
серводвигатель. В результате кожух исполнительного гироскопа поворачивается таким
образом, что возникающий реактив,
ный момент, действующий на опоры
кожуха, противодействует качке.
В некоторых случаях для борь-
борьбы с качкой применяли динамиче-
динамические гасители, выполненные в виде
цистерн, расположенных по бортам
частично заполненных жидкостью и
соединенных трубопроводом для ее
свободного перетекания, либо снаб-
снабженных специальными насосами
для принудительного перекачива-
перекачивания жидкости, управляемыми на-
направляющим гироскопом.
В большинстве современных су-
судов для подавления бортовой качки
используют устройства, основанные на применении управляемых или неподвиж-
неподвижных крыльев, меняющих угол атаки при крене таким образом, чтобы возникаю-
возникающая подъемная сила при их обтекании водой противодействовала качке. В отличие
от гироскопических успокоителей эти устройства осуществляют стабилизацию
лишь при движении судна.
Рис. 25. Гироскопический успокоитель (а) борто-
бортовой качки с направляющим гироскопом F):
/ — ротор; 2 — кожух: 3 — ось кожуха; 4 —
серводвигатель; 5 — зубчатая передача
7. ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С ВЯЗКИМ ТРЕНИЕМ
На рис. 26 показана схема простейшего поглотителя колебаний вязкого типа,
присоединенного к демпфируемому объекту с одной степенью свободы. Поглоти-
Поглотители широко используют для гашения как продольных, так и крутильных колеба-
колебаний; при этом они пригодны для демпфирования колебаний, изменяющихся по лю-
любым законам. При подавлении моногармонических колебаний поглотители колеба-
колебаний менее эффективны, чем динамические гасители с трением, однако даже в этом
случае зачастую им отдают предпочтение из-за конструктивной' простоты и отсут-
отсутствия упругого элемента, склонного к усталостным поломкам.
Рис. 26. Схема динамического га-
гашения продольных колебаний пог-
поглотителем с вязким трением
/ — демпфируемый объект; 2 —
поглотитель
Рис. 27. Амплитудно-частотная ха-
характеристика системы с одной сте-
степенью свободы, снабженной опти-
оптимально настроенным поглотителем
с вязким трением
л—
i
1
\\ i
И /
м i
i\i
Ж
\Л0'0
\
V
\
0,6 0,8 1,0
1,1
Рассматриваемая система также может быть описана уравнениями A) в случае
продольных колебаний либо B) в случае крутильных при условии, что сс = О,
Отыскивая для данного случая решение системы уравнений A) в виде C), полу-
получаем для демпфируемого объекта
C6)
-г-
где
ПОГЛОТИТЕЛЬ КОЛЕБАНИИ С ВЯЗКИМ ТРЕНИЕМ
343
Уравнение для определения абсцисс неподвижных точек А, В амплитудно-частот-
амплитудно-частотных характеристик (см. параграф 5) получим из B5) при v = 0:
Отсюда следует
= 0.
2 = 0; ?2 = -
C7)
При Ро~О и Ро = °° МЬ1 имеем системы с одной степенью свободы, амплитудно-ча-
амплитудно-частотные характеристики которых показаны штриховой линией на рис. 27. Наилуч-
Наилучшая настройка поглотителя дает максимум амплитуды в точке В. Подставляя вто-
второе значение ?2 из C7) в C6), найдем этот ма'ксимум:
Величина р0, обеспечивающая экстремум характеристики в точке В (сплошная
линия), определяется соотношением
Амплитуда относительных колебаний демпфируемой системы и поглотителя на-
находится по C3) с учетом того, что Ро= vfir.
Рис. 28. Поглотители колебаний с
вязким трением
Простейшая конструкция поглотителя колебаний вязкого типа приведена на
рис. 28, а. Втулка /, жестко связанная с кожухом 2, насажена на вал 3, крутильные
колебания которого требуется погасить. Внутри кожуха находится маховик 4Ъ спо-
способный проскальзывать относительно втулки благодаря вкладышу 5 с малым коэф-
коэффициентом трения. Малый зазор между кожухом и маховиком заполнен жидкостью
с большой вязкостью.
В схеме, изображенной на рис. 28, 6, демпфирующий эффект создается при ко-
колебаниях жестко насаженной на вал 3 ступицы / с лопатками, прокручивающейся
относительно маховика 2 с внутренними камерами, охватывающими лопатки с ма-
малым зазором и заполненными вязкой жидкостью,
344
ПРИНЦИПЫ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ
На рис. 28, в ведущий вал 3 вращает полумуфту /, имеющую горообразную по-
полость с внутренними перегородками 6, и скрепленный с ней кожух 2, свободно про-
прокручивающийся относительно аналогичной второй полумуфты 4, жестко соединен-
соединенной с ведомым валом 5 Полость между полумуфтами заполнена жидкостью неболь-
небольшой вязкости. Вследствие разности скоростей ведомого и ведущего вала под дейст
вием разности центробежных сил осуществляется круговая циркуляция жидкости
в направлении, показанном стрелками. Возникающие при этом кориолисовы силы
осуществляют передачу крутящего момента. При крутильных колебаниях веду-
ведущего вала на него действует тормозящий момент, подавляющий колебания [76].
В поглотителе на рис. 28, г демпфирующая сила возникает при перетекании
масла через малые отверстия при колебаниях диафрагмы / относительно заполнен-
заполненного маслом и свободно насаженного кожуха 2.
8. ПОГЛОТИТЕЛЬ КОЛЕБАНИЙ С СУХИМ ТРЕНИЕМ
Поглотители колебаний с сухим трением получили широкое распространение
благодаря простоте конструкции и обслуживания, а также относительно малым га-
габаритам. Их применяют для гашения как крутильных, так и продольных колеба-
колебаний. Рассмотрим принцип действия такого поглотителя на примере гашения крутиль-
крутильных колебаний объекта с одной
4- степенью свободы (рис. 29). В
этом случае диск с моментом
инерции /г присоединяется к
объекту с помощью пары сухого
трения, создающей при относи-
относительных колебаниях момент по-
постоянной величины 6, противо-
противодействующий относительному
смещению объекта и поглоти-
поглотителя
По аналогии с B) дифферен-
дифференциальные уравнения системы
могут быть записаны в виде
с
\
1
Рис. 29. Схема динамическо-
динамического гашения крутильных ко-
колебаний поглотителем с су-
сухим трением
Лр + б sgn (ф
Рис. 30. Поглотитель коле-
колебаний с сухим трением
Отыскивая приближенное периодическое решение методом гармонической лине-
линеаризации в виде A7), переходим к системе линеаризованных уравнений
ф,) + ар = /Иое'ю';
^ — фг) = 0.
+ Сф =
где
па [ 1р0, •
Подставляя в C8) решения вида A7), с учетом C9) получим
1
C8)
C9)
б
Itol
1 f2 1
1 —to I
2о-йI.
D0)
Здесь Я =
46
JlMn
со /г „ Мо
Vc/J J с
ПОГЛОТИТЕЛЬ KOJFBAHlIPl С CiMIW ТРГНИЁМ
345
Сопасио D0) условие отсутствия запирания поглотителя имеет вид
С увеличением ц эффективность поглотителя повышается. Вместе с тем он не
устраняет возможности неограниченной раскачки системы при Со = 1-
На рис. 30 показана конструкция поглотителя с сухим трением. Ступица / жестко
соединена с валом 2 и вовлекает во вращение через фрикционные диски 3 маховик 4,
свободно насаженный на вал. Регулировка величины сил сухого трения обеспечива-
обеспечивается степенью сжатия пружины 5 При колебаниях вала происходит относительное
проскальзывание маховика и ступицы, приводящее к рассеянию энергии вследствие
трения на фрикционных поверхностях.
¦1 »-
¦¦—¦и-
—1-1 —
А
М 1 '-
м ¦ ¦ ¦
д.
<
2
"V "
да
10
п
^*-
S 10 aOZ
/S m/mr
ч
ч
¦-I
^—.
—~~
2
—-_
¦ .
1——..
1—-—
¦
6 8 Ю 12
W m/mr
2 if В 8 Ю !2 /<¦ IS m/mr
f)
Рис. 31. Сравнение различных видов ди-
динамических гасителей, использующих эф-
эффект диссипации энергии:
a — амплитуда колебаний объекта; б-—от-
б-—относительная амплитуда колебаний объекта
и гасителя; в — показатель затухания:
/ — оптимальная настройка парциальной
частоты упругих колебаний гасителя, 2 —
настройка парциальной частоты упругих
колебаний гасителя на резонансную час-
частоту демпфируемого объекта; 3 — опти-
оптимальная настройка поглотителя с вязким
трением; 4 — оптимальная настройка по-
поглотителя с сухим трением
Оптимальный момент сил сухого трения, обеспечивающий максимальное рас-
рассеяние энергии за цикл, [214J
где в,, — амплитуда угловых колебаний вала при отсутствии демпфера.
Недостатком поглотителей сухого трения являются непостоянство момента тре-
трения вследствие износа и загрязнения трущихся поверхностей, а также возможность
перекоса и заедания дисков.
На рис. 31 приведены сравнительные характеристики рассмотренных систем
динамического гашения с использованием рассеяния энергии, соответствующие оп-
оптимальной настройке парциальной частоты упругих колебаний гасителя с трением,
настройке этой частоты на резонансную частоту демпфируемой системы, оптимальной
настройке поглотителей колебаний с вязким и сухим трением [76]. Динамические
гасители с трением оказываются более эффективными, чем поглотители колебаний,
однако простота конструкции и надежность последних делают их часто более пред-
предпочтительными.
346 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
Глава XV
РАСЧЕТ ЭФФЕКТИВНОСТИ
И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
1. ОДНОМЕРНЫЙ ЛИНЕЙНЫЙ ГАСИТЕЛЬ
ПРИ ГАРМОНИЧЕСКОМ ВОЗБУЖДЕНИИ
В практике использования динамических гасителей возможны две ситуации. Пер-
Первая соответствует случаю, когда динамическая модель демпфируемой системы пол-
полностью определена. Такая ситуация существует, как правило, при проектировании
систем с динамическими гасителями колебаний. В этом случае исследование системы
с гасителем может быть проведено обычными методами и получена полная картина
динамики системы.
Часто, однако, возникает необходимость в осуществлении динамического гаше-
гашения колебаний уже имеющейся конструкции, находящейся под действием сложных
вибрационных возмущений. В этом
&¦ i А к случае при выборе схемы и па~рамет-
I п 1 ho(t) ¦ I ? 'кг'1"* Ров гасителя приходится опираться на
т Н—| » ' экспериментальную информацию, по-
y(t) сг-^. щЬг лучаемую путем непосредственных
предварительных измерений на объ-
объекте.
Если свойства объекта и присоеди-
") 6) няемой системы укладываются в рамки
Рис. 1. Схемы динамического гашения точки линейных представлений, удобной и
конструкции достаточной информацией для решения
задачи о динамическом виброгашении
соответствующих элементов конструкции является характеристика динамической
податливости или жесткости этих элементов. Для снятия таких характеристик в
настоящее время имеется специальная аппаратура.
Определим эффективность динамического гашения в зависимости от динамиче-
динамических податливостей демпфируемого объекта и присоединяемой системы [105]. Пусть
хо @ — одномерное вибрационное перемещение точки А конструкции, колебания
которой следует уменьшить (рис. 1, а). С этой целью к ней присоединяется одно-
одномерный динамический гаситель. Действие гасителя сводится к появлению дополни-
дополнительной реактивной силы R (t), передаваемой гасителем в точку А.
Обозначая через 1Д (р) оператор динамической податливости объекта в точке А,
связывающий перемещения этой точки с приложенными к ней силами, с учетом
линейности объекта имеем
(Р) R @. A)
где х @ — перемещения точки А при наличии гасителя. Колебания точки А, как
точки крепления гасителя, могут быть выражены через динамическую податливость
/г (р) этой точки гасителя следующим образом:
х@ = -/г(р)Ж'). B)
Исключая из A), B) величину R (Y), получим
Оператор h (p), связывающий вибрационное перемещение точки Л до и после
установки гасителя, характеризует эффективность динамического гашения. Пусть
хи (t) — моногармонический процесс частоты ш:
одномерный линейный гаситель 347
тогда из C) при р = la имеем
x{t) — \a\ ехр ((at -f- ф) =; Л (mi) х0 ехр t [со('+ arg /г (г'со)].
Величина
равная отношению амплитуд гармонических процессов в точке /4 после и до уста-
установки динамического гасителя, называется коэффициентом эффективности гаше-
гашения на частоте со. Для эффективности гашения необходимо и достаточно, чтобы
М<в)<1. E)
Чем меньше величина ft0 (<*>). тем эффективнее работа гасителя. Иногда используют
логарифмическое представление этой величины
показывающее, на сколько децибел происходит уменьшение амплитуды колебаний.
Выделим действительные и мнимые части динамических податливостей:
1А (/со) = Re /д (ia>) + i Im !A (ко);
1Т (la) = Re /r (im) + « Im /r (/©).
С учетом этого выражение D) может быть записано в виде
В тех случаях, когда динамическая модель демпфируемого объекта представляет
собой голономную стационарную механическую систему с п степенями свободы,
обладающую полной слабой диссипацией, динамическая податливость системы в точ-
точке может быть представлена в виде разложения в ряды по собственным формам ко-
колебаний:
? Я2
ш; — (й2 — ?28,со,соV «)
Здесь со/ — собственные частоты нормальных форм колебаний; {5/ — малые коэф.
фнциенты демпфирования по соответствующим формам колебаний, взятые в долях
от критических значений; g/ — коэффициенты форм
Аналогичное представление существует и для многих систем с распределенными
параметрами. Согласно G) существенными при расчете динамической податливости
являются лишь формы колебаний, собственные частоты которых а/ располагаются
вблизи частоты колебаний со.
Динамическая податливость /г (/со) простейшего гасителя (рис. 1,6), возбужда-
возбуждаемого кинематическим перемещением точки его крепления по закону х0 (t) = v^fi1(ut,
определяется следующим образом. Обозначая колебания массы гасителя относи-
относительно точки крепления у (t) = aoe->at, имеем для ад уравнение
— тТ (х„ + аа) со2е<'<»' = — (сг + ibt(o) аое1®'.
Отсюда
/пгсо2
Реакция гасителя R (f) = Roel<i>t примет, таким образом, вид
Roe'«>' = —(сг+?6гсо)аое^. (9)
В результате
348 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕ.ТЕИ
или, пренебрегая квадратами малых величин коэффициента вязкого демпфирование
6Г, получим
1 со2 — w»4-t2p co2L / с
Согласно A1) при со = сог динамическая податливость гасителя в точке крепле
ния сильно уменьшается и при EГ -*¦ О стремится к нулю.
Сопоставляя G) и A1) с F) заключаем, что динамический гаситель эффективен
прежде всего на частотах колебаний со, совпадающих с его собственными парциаль
ными частотами o)rv (v = 1,2, ...) при условии малой диссипации энергии в гасителе
поскольку в этом случае его динамическая податливость становится малой вели-
величиной порядка Рг.
Кроме того, динамическое гашение эффективно на частотах колебаний, совпа-
совпадающих с собственными частотами демпфируемой системы (со = Ш() при условии ее
слабой диссипации, поскольку в этом случае динамическая податливость системы
резко возрастает и становится величиной порядка (З. Причина эффективности га-
гашения в этом случае состоит в том, что при присоединении гасителя эти частоты
перестают быть резонансными. Наиболее удачно сочетание обеих ситуаций: со =
= corv = со/.
Вводя динамические жесткости k (/со) = Н (('со), можно переписать D) в виде
A (Ш) + Im2 kA (кв) ч 1/2
) A2)
Согласно A2) наиболее сложно осуществлять динамическое гашение на частотах
со = со,, для которых
Re й^ («Чо,) + Re *г (/№,) = ().
Это резонансные частоты системы с динамическим гасителем колебаний. Для эффек-
эффективности гашения в этом случае необходимо, чтобы выполнялось условие
Отсюда находим
1/2
t Im kA (кв,) Im kl (Ш1I
т.е. величина Im kt («со,) должна иметь порядок величины Reft^(t<By). Практиче-
Практическая реализация этого условия связана с существенными трудностями. Полученные
выводы являются обобщением изложенных в параграфах 1, 5 гл. XIV результатов
анализа динамического гашения систем g одной степенью свободы о помощью про-
простейшего пружинного динамического гасителя,
2. МНОГОМЕРНЫЙ ЛИНЕЙНЫЙ ГАСИТЕЛЬ
ПРИ ГАРМОНИЧЕСКОМ ВОЗБУЖДЕНИИ
Более общая схема динамического гашения колебаний состоит в присоединений
к демпфируемому объекту в различных точках нескольких динамических гасите-
гасителей, которые могут быть как независимыми динамическими системами, так и сэя-
занными между собой.
Пусть прикрепление гасителей к объекту осуществляется в точках Ait „,, As
(рис. 2). Обозначим х0 (I) вектор вибрационного перемещения этих точек при отсут-
отсутствии гасителей; х (t) — вектор колебаний тех же точек при установке гасителей;
R(f) — вектор реакций гасителей, воспринимаемых объектом; L (р) и Lr (p) — ма-
матрицы операторов динамической податливости объекта и гасителя в точках крепле-
крепления,
МНОГОМЕРНЫЙ ЛИНЕЙНЫЙ ГАСИТЕЛЬ 349
В силу линейности рассматриваемых систем аналогично A) — B) имеем
Исключая из этих уравнений R (t), найдем
х (/) = [L (р) + Lr (р)]'Чг (р) х0 @ = Н (р) х0 @.
Матричный оператор
Hlp)~lHp) + LtQ>)]-iLT(p) A3)
размерности s X s характеризует эффективность многомерного динамического га-
гашения.
При моногармонических колебаниях объекта компоненты вектора х0 (t) имеют
вид кО?е к) ф—\ >111| 5^ в результате колебания произвольной точки креп-
крепления Ak после установки гасителей будут определяться соотношением
где hkm (р) — элементы матрицы Н (р). Согласно A4) для амплитуд колебаний этих
точек справедлива следующая оценка:
S
!flfti^2 - hkm ('») i >W- A5)
Осуществляя в A5) суммирование по индексу k, найдем
S » S
Следовательно, если для всех m
lAtaWO (m=\ .... s),
то в соответствии о A6)
1а*'<
/г=1
т. е, в результате установки гасителей сумма амплитуд колебаний точек их креп-
крепления будет уменьшена.
Таким образом, показателем эффективности га-
гашения колебаний объекта группой динамических
гасителей может быть выбрана максимальная ве-
величина суммы модулей элементов столбцов мат-
матрицы Н (ш):
A7)
Рис. 2. Схема многомерного ди»
намического гашения гармони-
гармонических колебаний
Выполнение условия ha (со) < 1 гарантирует
понижение общего уровня вибрации объекта, не
Устраняя возможности увеличения колебаний в
отдельных из рассматриваемых точек. Согласно A5) уменьшение колебаний в каж-
ДОй точке Ak достигается при выполнении более жестких требований.
В соответствии с A3) удовлетворение всем указанным требованиям может быть
осуществлена при уменьшении величин элементов матрицы Lr (<'co). Это достигается
89 резонансных частотах cofV (v = J, 2, ,„) колебаний гасителей, возбуждаемы^
350 РАСЧЕТ ЭФФЕКТИВНОСТИ И' НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
перемещениями точек крепления А^. Кроме того, и в многомерном случае благопри-
благоприятными частотами, на которых осуществление динамического гашения оказывается
эффективным, являются резонансные частоты объекта, поскольку на этих частотах
элементы матрицы L (ш) существенно возрастают, что также приводит к уменьше-
уменьшению элементов матрицы Н (/со). Аналогично одномерному случаю, физически это
соответствует изменению резонансных частот системы в результате присоединения
гасителей.
Важным обстоятельством является правильный выбор мест крепления гасителей.
Наиболее эффективной является их установка в местах приложения вибрацион-
вибрационных воздействий, либо в пучностях
соответствующих форм колебаний.
Достигаемый этими двумя способами
установки гасителей демпфирующий
эффект оказывается существенно раз-
различным.
В качестве примера рассмотрим
два способа установки одномассного
пружинного гасителя, представленных
на рис. 3. Настраивая гаситель на ча-
частоту внешнего возбуждения (сог= со),
получим, что в обоих случаях при
Ьт -*¦ 0 удается стабилизировать-массу
trij (} — 1, 2), к которой осуществля-
осуществляется прикрепление гасителя. Действи-
Действительно, уравнение равновесия сил для
массы nij в периодическом режиме ча-
Рис. 3.
стоты ш будет следующим;
Варианты установки динамических
гасителей:
а — подавление источника возмущений; б —
демпфирование заданной точки конструкции . , \т/л о/\
где F (t) и —N (t) — силы, приложенные к этой массе сверху и снизу; —R (t) —
реакция динамического гасителя. С учетом (9), (8) имеем
'
сг — /п
Подставляя это выражение в A8), получим
/П/(СГ —/
I j = F{t)-N(t).
J ' W W
Таким образом, прикрепление к телу массой т, динамического гасителя можо
трактоваться как изменение его массы до величины
1 к '[_ гп/(сТ — тгш2 + г6гш) J
При со = сог = усТ/тг модуль эквивалентной массы становится равным
В результате при 6r-> 0 эквивалентная масса неограниченно увеличивается, что со-
соответствует остановке тела. В реальной ситуации при mr «^ т./ это достигается прак-
практически при bt < тга>.
Обращаясь к рис. 3, убеждаемся, что в первом случае (рис. 3, а) стабилизация
тела массой ту приведет к успокоению всей системы, а во втором (рис. 3, б) только
части системы, расположенной ниже фиксированного тела с массой т2. Верхняя
часть будет осуществлять колебания под действием приложенного возмущения
G^'wt, соответствующие условиям закрепления тела массой т%.
ОДНОМЕРНЫЙ НЕЛИНЕЙНЫЙ ГАСИТЕЛЬ
351
Рис. 4. Схема группового динамического гашения
Таким образом, прикрепление динамических гасителей в точ-
точках приложения вибрационного возмущения подавляет его дей-
действие на систему. Прикрепление вне этих точек дает локальный
эффект успокоения точек крепления гасителей и связанных с ними
элементов. В тех случаях, когда вибрационная нагрузка сущест-
существенно распределена по системе, например при ее установке на ви-
вибрирующем основании, метод динамического гашения позволяет
достичь лишь локальных эффектов.
На практике часто используется групповое динамическое гашение отдельных
тел, либо рассматриваемого в качестве твердого тела объекта в целом (рис. 4). Для
оценки эффективности гашения в этом случае можно использовать критерии вида
D), заменив в нем величину | /r (ico) 1 суммарной динамической податливостью группы
гасителей:
ft (<¦>)=¦
где /,у (/со) — динамическая податливость /-го гасителя; 1А (/со) — динамическая
податливость демпфируемой массы.
В рассматриваемой ситуации важным является влияние расстроек отдельных
гасителей. Действительно, с учетом A1) при Рг ->- 0, считая массы гасителей оди-
одинаковыми, имеем
п
2'г/
II
v=l /=1
число гасителей; ?, =
Здесь произведение Ftv не содержит v-ro сомножителя; п ,
= (о/(огу; шгу — собственная частота гасителя.
Если расстройки отдельных гасителей Ц — 1 имеют противоположные знаки,,
т. е. часть гасителей имеет собственные частоты больше частоты возбуждения,
а часть — меньше, то происходит взаимная компенсация их действия и динамиче-
динамическая податливость группы гасителей возрастает. Это нейтрализует эффект гашения.
Таким образом, в рассматриваемом случае необходимо обеспечивать одинаковый знак
всех расстроек.
3. ОДНОМЕРНЫЙ НЕЛИНЕЙНЫЙ ГАСИТЕЛЬ
ПРИ ГАРМОНИЧЕСКОМ ВОЗБУЖДЕНИИ
Для оценки эффективности нелинейных динамических гасителей помимо информа-
информации о динамической податливости или жесткости демпфируемых элементов необ-
необходимо знать уровень их колебаний до установки гасителей. Таким образом, в слу-
случае экспериментального определения характеристик демпфируемой системы нужно
произвести соответствующие измерения колебаний в условиях нормального функ-
функционирования объекта.
Пусть колебания демпфируемой точки А объекта описываются гармонической
зависимостью х0 (t) = и0 (со) tibit. С помощью Нелинейной связи f {у, у) присоеди-
присоединим в точке А гаситель массы тГ (рис. 5). Выбор характера нелинейной связи имеет
существенние значение и позволяет обеспечить ряд дополнительных возможностей,
н<1 которых мы остановимся ниже.
352 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
y(t)
Рис. 5. Схема динамического гашения точки констржцип
нелинейным гасителем
-с
Полагая, что под действием колебаний точки А ко-
колебания гасителя будут иметь периодический характер
с тон же частотой w, обратим внимание, что-реакция
гасителя / [у ((), у GI будет полигармонической, т. е.
содержать гармоники частот, кратных со. Таким образом, нелинейный гаситель не
может, в принципе, осуществить полную компенсацию колебаний при моногар-
моногармоническом возбуждении точки А, и речь может идти только об их частичном
подавлении. Уменьшая колебания на частоте внешнего воздействия, нелинейный
гаситель возбуждает вместе с тем высокочастотные колебания системы. Эту осо-
особенность нелинейного динамического гашения следует иметь в виду в основном
при использовании гасителей существенно нелинейного типа, например, ударных.
Для гасителей пружинного типа с нелинейным упругим элементом высокочастот-
высокочастотные составляющие, как правило, незначительны.
Рассмотрим гашение осневного топа колебаний частоты со, используя метод гар-
гармонической линеаризации нелинейностей. Полагая
у @ «= еое'ш'; у (t) я» аошеш,
где а0 — амплитуда основного тона колебаний, представим нелинейную реакцию
гасителя R (t) = fly (t), у (t)] в виде
f[y(t), у(Щ^сг(ао)у + Ьг(ао)у. A9)
Здесь cr (о0), bc (о0) — коэффициенты гармонической линеаризации.
Прикладывая к массе гасителя переносную силу инерции —/лг Я (t), где х (t) —
перемещение точки А при установке гасителя, имеем следующее уравнение для ос-
основного тона относительных колебаний гасителя:
[— /7г,(о-' + сг (ae)-\-ibr (a0) со] а0е'со' = яг1оАге'ш'.
Отсюда находим
ОТ, ОJ....
я) со
Согласно A9), B0) амплитуда реакции гасителя:
#о= — [сг Ы + ibr (a0) со] ао =
^ [Су («о) + ibr (fl0) (и] т1 со2 а
cr(a0) —mrco2 + ic>r(a0)co
В результате находим динамическую податливость нелинейного гасителя по ос-
основному тону колебаний
. ,,-,.ч jOq_ _ _ cr(a0) —mrco2 + i&r(a0)co „„.
r { ' ' Ro [cT (a0) + ibT (do) со] mrco2 ' V
Подставляя B2) в C) при р = ico, имеем связь между амплитудами колебаний
точки Л до и после установки гасителя:
„ сг (а0) — /лгм2 -f ibT (a0) со
[1 —тттЧА (шЦ[сг,
При выполнении условия
-it *о («). B3)
cr(a0) = m.oK B4)
получим из B0)
|а|=АМ|До|, B5)
flGJ
т. е. аналогично линейному динамическому гасителю наилучшая настройка нели-
нелинейного гасителя соответствует равенству его эквивалентной парциальной частоты
сог = YcT (aa)lmT и частоты возбуждения со. Остаточные колебания по основному
тону пропорциональны потерям энергии в гасителе. В случае bc ~ 0 осуществля-
осуществляется полное подавление основного тона колебаний точки А,
ОДНОМЕРНЫЙ НЕЛИНЕЙНЫЙ ГАСИТЕЛЬ
353
Характерная особенность условия B4) по сравнению с аналогичными соотноше-
соотношениями для линейных гасителей [см., например, F) гл. XIV] состоит в том, что вели-
величина сг в нелинейной, системе может изменяться в зависимости от режима колеба-
колебаний, а следовательно, и возбуждения системы. Поэтому, зная закон изменения воз-
возбуждения, например, в виде зависимости и„ (to), можно в принципе так подобрать
нелинейность гасителя, чтобы условие B4) выполнялось в широком диапазоне изме-
изменения параметров возмущения. В параграфе 4 мы исследуем одну из реализаций та-
такой возможности на примере ударного виброгасителя.
Аналогичный эффект подстройки величины сг достигается более сложным путем
при использовании активных динамических гасителей с обратной связью (см. пара-
параграф 4 гл. XIV).
Подставляя B3) в B0), найдем амплитуду относительных колебаний гасителя
| [I -
(ш)] [сг (а0) + ibr (а0) <о] -
В условиях наилучшей настройки B4) эта величина при ЬТ (оо) = 0 будет следу-
следующей:
^г <26>
Учитывая, что в выражениях коэффициентов гармонической линеаризации фигу-
фигурирует абсолютное значение величины а^, и подставляя B6) в B4), получим основ-
основное настроечное соотношение
-I = ffl_m2
Г\Г
B7)
Зная динамическую податливость объекта в точке крепления гасителя 1А (гсо)
и уровень возбуждения к0 (со), с помощью B7) можно по известной структуре гаси-
гасителя, определяющей вид зависимости сг (а0), подобрать его настроечные параметры.
Пусть, например, прикрепление массн т осуществляется е помощью нелинейной пру-
пружины жесткого типа
f (У) = су + УУ*. B8)
Осуществляя гармоническую линеаризацию этой нелинейной зависимости, имеем
В результате с помощью соотношения B7) находим
_ 4 (тгоЯ - с) т-Т&'
При использовании нелинейных динамических гасителей следует иметь в виду, что
реализуемые настроечные соотношения будут справедливы лишь в том случае, если дина-
динамический режим, для которого получены эти соотношения, удовлетворяет условиям суще-
существования, устойчивости и его область притяжения в фазовом пространстве системы соот-
соответствует условиям запуска системы Свойственная нелинейным системам неоднозначность
поведения может привести к тому, что в процессе запуска или в результате случай-
случайного дополнительного толчка в системе установится
режим, отличный от расчетного, что полностью из-
менит условия функционирования гасителя
В качестве примера на рис 6 показана (сплош-
(сплошной линией) амплитудно-частотная характеристика
объекта е одной степенью свободы, снабженного
пружинным одномассным динамическим гасителем,
Упругий элемент которого имеет характеристику B8).
*ia частоте, соответствующей полному подавлению
Колебаний, возможно также существование режима
со значительными амплитудами
По указанной причине использование нелиней-
нелинейных гасителей требует тщательных расчетных или
^экспериментальных исследований, трудоемкость ко-
Т0Рых зачастую следует соразмерять с достигаемым
Эффектом, характеризующимся расширением частот-
и°го диапазона, в котором осуществляется гаше-
и улучшением качества переходных процессов
/S ш/ша
Ние,
систем о нелинейным гасителем.
V2 12 п/р. Фролова
Рис. 6. Амплитудно-частотная ха-
характеристика демпфируемого объек-
объекта с одной степенью свободы, снаб-
снабженного нелинейным гасителем
354 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
Наилучшими возможностями обладают нелинейняе гасители, для которых в широком
частотном диапазоне осуществляется единственный режим Это достигается, в частности,
в ударных гасителях некоторых типов
4. УДАРНЫЕ ГАСИТЕЛИ КОЛЕБАНИЙ
Основу ударного виброгасителя составляет тело массой тТ (рис. 7), соударяюще-
соударяющееся с элементом А демпфируемой системы, колебания которого следует уменьшить
Наибольшее распространение получили плавающие ударные гасители (рчс. 8, а—в)
выполненные в виде шара, цилиндра, кольца, установленного свободно с зазором 2Д
Плавающие гасители настраивают на режим двух поочередных соударений тела о каж-
каждый ограничитель за период движения, дающий для таких устройств наибольший
эффект.
Рис. 7. Схема удар-
ударного гашения
Рис. 8. Ударные га-
гасители колебаний
& ч
Наряду с этим используют пружинные (рис. 8, г) и маятниковые (рис. 8, д) удар
ные гасители с соответствующей подвеской гасителя. В таких устройствах реализуют,
как правило, режим односторонних соударений с одним ударом за период. Реже
применяют аналогичные устройства двустороннего действия (рис. 8, е).
На рис. 9 приведены статические упругие характеристики / (у) перемещения у
гасителя относительно емпфируемой точки А объекта для основных вариантов уста-
установки гасителей.
Непосредственная гармоническая линеаризация описанных статических харак-
характеристик невозможна, поскольку их значения при ударе неоднозначны. Удобным
приемом является гармоническая линеаризация обратных функций у — Q (R), ха-
характеризующих зависимость относительного смещения от «упругой» реакции гаси-
гасителя [214]. Например, для гасителя плавающего типа (рис. 10)
у = Д sgn R.
Осуществляя гармоническую линеаризацию функций у = Q (R) с помощь:*
обычных приемов, имеем
(R)R
где q (Ro) — коэффициент гармонической линеаризации, зависящей теперь от
плитуды Ro периодической реакции гасигеля, причем q = с~1. В частности, для
УДАРНЫЕ ГАСИТЕЛИ
355
рактеристики у — A sgn R
4А
B8)
Коэффициент гармонической линеаризации диссипативных сил в гасителе най-
найдем с помощью энергетического баланса. Потребуем, чтобы эквивалентная диссипа-
тивная сила Ьгэу вызывала такие же потери энергии, какие имеют место при ударе.
По теореме Карно находим, что потери энергии при ударе
1-
У-,
C0)
где г — коэффициент восстановления скорости при ударе; тА — масса демпфиру-
демпфируемого элемента, приведенная к точке А; у_ — относительная скорость перед ударом.
Величину Ц- определим по основному тону процесса у (t). Учитывая наилучшую
настройку нелинейных гасителей B4), можно приближенно положить, что удары
происходят при максимальной относительной скорости, т. е. у- ~ I а0 I со.
fly)
-А I О
f(y)
а)
f(y)
yXarv
ю
п
Рис. 9. Статические характеристики ударных гасителей:
а — плавающий гаситель; 6 — пружинный односторонний
гаситель; е — пружинный двусторонний гаситель
-А
Рис. 10. Обратная статиче-
статическая характеристика плава-
плавающего ударного гасителя
Определяя работу эквивалентной линейной силы 6гэу на гармоническом коле-
колебании с амплитудой I а0 [, имеем
2я/й)
Е= j bI3y2 dt =
C1)
Приравнивая величины энергии C0) и C1), найдем
I-/-2
2л
-и.
При рассмотрении режимов ударных гасителей с двусторонними соударениями эта
величина должна быть удвоена. Так как обычно д ^> mt, то
C2)
Пусть параметры ударного гасителя выбраны таким образом, что выполняется
Условие B4). Тогда из B5) с учетом C2) для амплитуды а демпфируемого элемента,
например в случае плавающего гасителя имеем
I-/-2
C3)
f- е. при г -> 1 колебания по основному тону неограниченно уменьшаются. Повыше-
Повышение коэффициента восстановления обеспечивается путем использования материа-
Л°в контактных пар с пониженными вязкопластическими свойствами, например,
Закаленных подшипниковых сталей и т. п. Кроме того, следует уменьшать сопро-
356 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
тивление при колебаниях массы гасителя относительно корпуса. Хорошие резуль-
результаты дает использование сферических тел.
Так как в соответствии с B9)
то, подставляя эту величину в C3), получаем оценку остаточных колебаний
1 " ' Я2
В наихудшем случае при г = 0 | а \ « 0,4Д.
-Определим зависимость и0 (со), для которой плавающий ударный гаситель обеспе-
обеспечивает псЬлное подавление основного тона колебаний в широком диапазоне частот
возмущения. Подставляя B3) в B1), при 6Г = О-в условиях наилучшей настройки
B4) имеем
/?и_ Мю) ) C4)
и, следовательно, согласно B9)
г~ч ~4Д|/Л((со)
Подставляя это соотношение в B4), найдем
хо(си)
\1А№\
ео«. C5)
Левая часть равенства C5) характеризует амплитуду Go приведенной к точке А
гармонической возмущающей силы. Таким образом, если Go (со) = етдш2, т. е. воз-
возбуждение колебаний вызвано разгоном или торможением вращающейся неуравнове-
неуравновешенной массы тл, установленной с эксцентриситетом е, то, подобрав параметры га-
гасителя из условия
трЛ = j ътА «= 0,78етл> C6)
можно обеспечить подавление колебании в широком частотном диапазоне существо-
существования режима с поочередными ударами об ограничители. Согласно C6) масса и за-
зазор одинаково влияют на настройку плавающего гасителя.
Условия существования и устойчивости режимов с двумя поочередными уда-
ударами за период, на которых осуществляется эффективное гашение, располагаются
в зарезонансных зонах частот возбуждения системы с гасителем [13]. На рис. 11 при-
приведена амплитудно-частотная характеристика системы с одной степенью свободы,
имеющей частоту со0 = V^clm, снабженной ударным гасителем плавающего типа и
возбуждаемой периодической силой постоянной амплитуды. Гашение колебаний
достигается лишь при переходе через собственную частоту демпфируемой системы.
В дорезонансной области возможна сильная раскачка системы на частоте со =
У l( + T)
Таким образом, благодаря существенной неизохронности плавающий ударный
гаситель способен настраиваться на частоту возбуждения в широком диапазоне ча-
частот, противодействуя колебаниям точки его крепления. Потери энергии, возникаю-
возникающие при ударах, ограничивают сверху этот диапазон. Для повышения указанной
границы ударный элемент укрепляют на пружине (см. рис. 8, е), что приводит, од-
однако, и к увеличению нижней граничной частоты, которая становится равной ycvimv-
Ударные гасители пружинного и маятникового типа с односторонними соударе-
соударениями не обладают столь сильным неизохронизмом, как гасители двустороннего дей-
действия. Действительно, рассматривая, например, скелетные кривые парциальных
колебаний пружинного гасителя (рис. 12) при различных значениях Д, убеждаемся,
УДАРНЫЕ ГАСИТЕЛИ
357
что с увеличением амплитуды колебаний гасителя его парциальная частота быстро
сходится к величине 2ксг/тг. Именно на этой частоте описываемые устройства наи-
наиболее эффективны.
Рис. 11. Амплитудно-частотная ха-
характеристика системы с одной сте-
степенью свободы, снабженной плава-
плавающим ударным гасителем
А<0
12 3 шг/ш0
Рис. 12. Скелетные кривые пру-
пружинного одностороннего удар-
ударного гасителя
На рис. 13 показаны амплитудно-частотные характеристики системы с одной сте-
степенью свободы, снабженной пружинным ударным гасителем одностороннего дей-
действия. Система возбуждается гармонической силой постоянной амплитуды [84]. При
этом выполнены условия наиболее эффективной
настройки
m
p. =0,025
i = 0,5
0,85
0,95
1,05 u_
u0
При а> = 2усг/тГ гашение оказывается наилуч-
наилучшим. Для этого следует минимизировать также
диссипацию энергии в гасителе, увеличивая ко-
коэффициент восстановления г.
При настройке зазора обычно принимают
А ж О, так как при Д > 0 эффективность хотя
и несколько повышается, но возникают трудно-
трудности запуска гасителя из-за возможности появле-
появления колебаний без соударений. Иногда исполь-
используют Д < 0, чтобы обеспечить включение гаси-
гасителя лишь при определенном уровне возбужде-
возбуждения объекта.
На частоте со =2 у сг/тГ гаситель односто-
одностороннего действия осуществляет лучшую компен-
компенсацию колебаний объекта, чем аналогичные дву-
двусторонние ударные гасители, однако он облада-
обладает существенно более узкополосным действием,
так как вносит в систему дополнительную резонансную частоту, лежащую не-
несколько выше настроечной. Попытка ее демпфирования путем уменьшения коэф-
коэффициента восстановления г повышает общий уровень колебаний. Качественная ситуа-
ситуация здесь аналогична применению линейного пружинного гасителя с трением (см,
рис. 19, гл. XIV). Сравнение оптимально настроенных пружинных линейного и
Ударного гасителя, обладающих одинаковыми массами, осуществленное для основ-
основных конструкционных материалов с учетом их внутреннего трения, свидетельст-
свидетельствует о большей эффективности линейного гасителя [109].
Воздействие ударного гасителя иа демпфируемую систему имеет вид силовых импуль-
импульсов, поэтому, осуществляя гашение гармонической составляющей колебаний системы, на
частоту которой настраивается гаситель, он способен вместе с тем возбудить в системе высшие
гармоники значительной величины. По этой причине полная оценка действия ударного гаси-
гасителя может быть получена лишь на основе анализа законов движения системы с гасителем.
12 п/р. Фролова
Рис. 13. Амплитудно-частотные ха-
характеристики системы с одной сте-
степенью свободы, снабженной пру-
пружинным односторонним ударным
гасителем
358 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
Отыскание законов движения ое>ществляегся с помощью следующей процедуры, которую мы
продемонстрируем на примере гасителя плавающего типа [13].
Представим установившуюся реакцию гасителя R (<) в режиме периода Г в виде перио-
периодической последовательности б-функций с неизвестной величиной импульса J";
R (О = J"
?).
С учетом этого перемещения демпфируемой точки А объекта и гасителя могут быть
записаны с помощью их операторов динамической податливости в виде
x(t)=*0V)+lA (p)RV),
Здесь чЦ) — координата смещения массы гасителя относительно точки А, отсчитываемая от
положения этой массы, равноудаленного от упоров. Вычитая из второго равенства первое,
имеем для относительной координаты
Vit) = -Xt(t)-Hp)R<.t), C8)
где / (р) = 1А (р) + -j~.
Установившаяся реакция линейной системы на периодическую последовательность 6-
функций с единичным импульсом носит название импульсно-частотной характеристики
обозначим ее %(<)• В рассматриваемом случае реакция гасителя представляется следующи\
рядом Фурье;
оо
т= — со
С помощью суперпозиции находим
со
>/0Х V) — * (Р) R @ == ~^F~ /j нBт—l)ico]expBm — i) iatt. C9)
m = — oo
Для линейных операторов вида
ряд C9) сворачивается в выражение
У-, s <р ) exp p t
где 0^i< Г/2; рк — простые корни уравнения d(p) = 0, причем ркф2я1Т\ штрих'означает'
дифференцирование по аргументу; x(t+ Г/2)= —%(t).
С учетом C9) уравнение C8) может быть переписано в виде
1/(О=-*о(О-/°Х(О. D 0
Пусть xo(t) — — ко cos (ш^ + ф), где <р — неизвестная фаза по отношению к моментам удара
Тогда, подчиняя D1) условиям удара
1/@)
получим
* = -<?[(
-*- (т)Г
cosq) =
где %~ — означает левое значение производной импульсно-частотной характеристики в точке
разрыва.
С помощью D3), D4) из C7) найдем закон движения точки А демпфируемой системы!
ЭФФЕКТИВНОСТЬ ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ 359
Здесь ХА'") — импульсно-частотная характеристика точки А. По известной величине У иэ
второго соотношения D2) определяем относительную скорость соударений
5. ЭФФЕКТИВНОСТЬ ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
ПРИ ПОЛИГАРМОНИЧЕСКОМ,
СЛУЧАЙНОМ И НЕСТАЦИОНАРНОМ ВОЗБУЖДЕНИЯХ
В параграфе 1 было показано, что эффект динамического гашения может быть
охарактеризован в линейном одномерном случае с помощью оператора h (p), связы-
связывающего движения демпфируемой точки до и после присоединения гасителя. С по-
помощью этого оператора удается оценить эффективность динамического гашения в слу-
случае не только моногармонических воздействий, но и вибрационных нагрузок более
сложного вида [106].
В случае полигармонической вибрации демпфируемой точки объекта по закону
т
хо @ = 2 *о/ ехР ' (ш/' + Ч>/)
/=1
имеем из B3) в силу суперпозиции
m
х (t) = 2 lh A0}/) I "о/ ехР ' t<V + ФУ + ar§ h ('«/)] •
Если
Ao = max|/i(i{o/)|<I, D5)
/
то динамический гаситель будет эффективен по каждой из гармоник.
Иногда оцениваются только среднеквадратичные характеристики полигармони-
полигармонических процессов
/и т
Гаситель считается эффективным в среднеквадратичном, если
ах0
Очевидно, что из условия D5) следует D6), но не наоборот.
Аналогичные критерии эффективности применяются и при оценке систем, возму-
возмущаемых стационарными случайными процессами. Учитывая, что спектральные плот-
плотности таких процессов преобразуются линейным оператором по закону
S^(u)) = |/!(to)|2S^((o),
где S (ш) — спектральная плотность процесса, обозначенного в индексе, анало-
аналогично D5) имеем следующее условие эффективности по всей полосе реализуемых
частот:
/го = тах|Л(ко)|<1. D7)
и
Вычисляя математические ожидания {д.-0}, (х) и дисперсии а^, а| вибрационных
процессов х0 @ и х (t) до и после установки гасителя, найдем
оо со
12*
360 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
В результате условие эффективности гашения в среднеквадратичном будет сле-
следующим:
Критерии эффективности по среднеквадратичным отклонениям зависят не только
от свойств системы, но и от параметров воздействий.
При гашении нестационарных воздействий, например ударных нагрузок, эффек-
эффективность может быть оценена либо по значениям максимальных отклонений:
max! х (t) |
t _ 1
max | х0 (t) |
либо среднеквадратичных:
dt
<I. D8)
xl @ dt
Отыскивая преобразования Фурье процессов х0 (t) и х ((), имеем
со со
Хо (to) = j х0 (t) e-'w< dt; X (to) = \ x (t) e-w dt = h (iw) Xo (to).
По формуле Парсеваля
00 00
f if С if
\ xl (t) dt = ~ \ I Xo (to) 2 dco; 1 x1 (t) dt = — \ , X (to) I2 da,
и 0 0 0
С учетом этого критерий D8) примет вид
00
h (to) Xo (to) |2 da
00
И для нестационарных воздействий система, эффективная в смысле D7), эффек-
эффективна и в среднеквадратичном.
Рассмотренные критерии обобщаются и на многомерные системы, В соответствии
с A7) условие
/ Л|() 1
о |(/)
обеспечивает эффективность гашения по каждой из гармоник, имеющихся в спектре
возмущения, а условие
max h0 (со) < 1
и
дает эффективность по среднеквадратичному.
При использовании пассивных динамических гасителей возможности обеспече-
обеспечения эффективности гашения при действии вибрационных нагрузок с широким спек-
спектром ограничены и осуществляются главным образом за счет диссипативных факто-
ЭФФЕКТИВНОСТЬ ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
361
ров. Наиболее приемлемо для этих целей использовать различные типы поглотителей
колебаний.
В качестве примера рассмотрим действие широкополосного стационарного слу-
случайного процесса G (/) типа белого шума на объект с одной степенью свободы, осна-
оснащенный линейным динамическим гасителем с трением (рис, 14).
Записывая уравнения системы в операторном виде (сравнить с A), гл, XIV)
и разрешая алгебраически эту систему уравнений относительно х, получим опера-
операторную связь м^жду действующим возмущением и перемещениями демпфируемого
объекта:
(тр*
Определяя с помощью D9) дисперсию
* (brp + сг)
процесса х (t), имеем
0A).
D9)
(cv -f brko — mr(o2J
E0)
где S = const — спектральная плотность вибрационной нагрузки.
Рассмотрим наиболее важным частные случаи. Полагая bt = 0 и используя таб.
личные значения интегралов вида E0), найдем
,= S
°'х~ 2Ьс'
Аналогичное значение дисперсии получается и при от-
отсутствии динамического гасителя. Таким образом, чисто уп-
упругое присоединение динамического гасителя не изменяет
результирующий характер широкополосных случайных ко-
колебаний объекта.
Рассмотрим действие поглотителя колебаний вязкого ти-
типа. Принимая сс = 0, пренебрегая рассеянием энергии в
объекте (Ь —. 0), малым по сравнению с рассеянием в гаси-
гасителе, находим из E0)
Рис. 14. Схема дина-
динамического гашения
случайных колебаний
E1)
Поскольку при bt-*- 0 и при 6г->- оо величина oj-x», из E1) можно найти оп-
оптимальное значение коэффициента демпфирования bt, при котором дисперсия ми-
минимальна, В результате исследования на экстремум получим
"У 4A+цГ
Здесь Рг = —/ Минимальная величина дисперсии будет следующей:
2 у стг
S/c?mr
362 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
6. АКТИВНЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
Активные динамические гасители позволяют осуществлять подавление колеба-
колебаний заданных точек объекта путем приложения управляющих силовых воздействий
в общем случае в некоторых других конструктивно удобных точках, используя для
формирования управления результаты измерения колебаний контролируемых то-
точек.
Пусть, например, требуется уменьшить колебания в заданном направлении не
которой точки А объекта (рис. 15) путем приложения одномерного силового воздей
ствия RB @ в точке В. Тогда
I (P) Rr @. E2)
где х .„ (О, хА (t) — колебания точки Л до и после введения управления; 1ВА (р) —
оператор динамической податливости, связывающий перемещения точки А с силой,
приложенной в точке В. Так как управляющее воздействие формируется по резуль-
результатам измерения колебаний в точке А, в случае ли-
линейной системы управления имеем
где W (р) — передаточная функция разомкнутой
управляющей цепи, связывающей измерительные
и исполнительные звенья; знак минус означает,
что обратная связь является отрицательной. Под-
Подставляя E3) в E2), получаем
Рис. 15. Схема активного дина-
динамического гашения с обратной
связью
Оператор h (p) характеризует эффективность активного динамического гашения.
При моногармоническом возбуждении объекта эффективность гашения на частоте и
обеспечивается при выполнении условия
lBA
(i<o)W(i<o)
E4)
При более сложных видах возмущения объекта могут быть использованы крите-
критерии, аналогичные описанным в параграфе 5. По аналогии с критериями, использо-
использованными в параграфе 2, строятся оценки и в случае многомерного активного дина-
динамического гашения.
Условие E4) гарантированно выполняется, если
lBA(t<o)W
E5)
т.е. при увеличении | W (t(o) |. Универсальным способом в данном случае может
быть общее повышение коэффициента усиления цепи обратной связи. Однако такая
возможность ограничена условиями устойчивости системы По мере расширения
частотного диапазона системы, в котором обеспечивается большое усиление, в него
могут попасть собственные частоты колебаний, у которых точки наблюдения А и
управления В колеблются в противофазе. В результате обратная связь на этой ча
стоте будет работать как положительная, т. е. отклонения точки А будут вызывать
такое направление сил в точке В, которое стремится увеличить отклонение. Это вы
зовет неустойчивость системы и приведет к возникновению автоколебаний.
Совмещение точки наблюдения и управления позволяет устранить это явление
Однако и в этом случае в силу инерционности звеньев цепи обратной связи по мере
увеличения частот отслеживаемых возмущений фазовое запаздывание увеличивается
и достигает л. При этом перемещения и сила становятся синфазными и система те-
теряет устойчивость, Соответствующая частота сотах ограничивает диапазон эффек-
АКТИВНЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
363
1тФAШ)
ИеФ(ш)
гивности активного динамического гасителя, т. е, частотный диапазон, в котором
допускается повышение коэффициента усиления для обеспечения условия E5).
При действии на объект сложных возмущений активный гаситель способен подавить
лишь компоненты возмущения, частоты которых укладываются в диапазон эффектив-
эффективности.
Согласно E5) для расчета системы с активным гасителем динамическая модель
объекта должна быть полностью идентифицирована в диапазоне эффективности,
Важно учесть также постоянные времени цепи обрат-
обратной связи, превышающие величину ю^1^. При выборе
точек наблюдения и управления следует удалить их
от узлов собственных форм колебаний, частоты кото-
которых лежат в диапазоне эффективности гасите-
гасителя.
Расчет эффективности системы с активным гасите-
гасителем удобно осуществлять путем построения годографа
частотной характеристики Ф (ico) = IBA (ico) W (ice)
(рис. 16). Условию E4) удовлетворяют все точки годо-
годографа, лежащие вне единичного круга с центром в
точке (—1,0). Обратная величина расстояния от точек
годографа до центра единичного круга определяет
коэффициент эффективности ft0 (<a).
При использовании активных динамических гасите-
гасителей для демпфирования переходных процессов объек-
объекта происходит подавление составляющих процесса,
частоты которых располагаются в диапазоне эффек-
эффективности гасителя и практически не оказывается вли-
влияние на более высокочастотные компоненты, лежащие
вне указанного диапазона. Для устойчивости системы с активным гасителем со-
согласно критерию Найквиста необходимо и достаточно, чтобы годограф не охва-
охватывал центра единичного круга.
* * *
В таблице приведены наиболее распространенные схемы динамических гасителей
колебаний, даны основные настроечные соотношения и указаны рекомендуемые об-
области их применения.
Динамические гасители колебаний
Рис. 16. Годограф частотной
характеристики разомкнутой
системы активного динами-
динамического гашения
Гаситель
Принципиальная
схема
Основные настроечные
соотношения
Область применения
Пружинный
Катковай
Инерционные динамические гасители
| it, ,„,«
V
i
— | л
%
А"
т (р — р ) = те
Подавление продоль-
продольных и крутильных
гармонических коле-
колебаний фиксированной
частоты
Подавление продоль-
продольных колебаний, выз-
вызванных вращением не-
неуравновешенной мас-
массы m а эксцентриси-
эксцентриситетом 8
364 РАСЧЕТ ЭФФЕКТИВНОСТИ И НАСТРОЙКА ДИНАМИЧЕСКИХ ГАСИТЕЛЕЙ
Продолжение
Гаситель
Принципиальная
схема
Основные настроечные
соотношения
Область применения
Маятниковый:
крутиль-
крутильных коле-
колебаний
продоль-
продольных коле-
колебаний
Плавающий
ударный
Пружинный
ударный
С активными
элементами
д-
тг-
с,-
Q
CM)
n'l
Р
: 1, "',
ли
to < 0,35 -f- 0,40
(/ — число маятников)
пЧ
¦I; mt
; C,35-f 0,40
Vi-r-
Подавление крутиль-
крутильных гармонически?;
колебаний вращаю-
вращающихся тел
Подавление продоль-
продольных гармонических
колебаний, вызван-
вызванных вращением
Подавление периоди-
периодических продольных и
крутильных колеба-
колебаний зарезонансного
типа
Подавление периоди-
периодических продольных и
крутильных резонан-
резонансных колебаний
Подавление продоль-
продольных и крутильных
гармонических коле-
колебаний меняющейся
частоты
Динамические гасители с трением
Пружинный
Гироскопиче-
Гироскопический
-¦/"jr. Vcm .
2 (m + mr)
= Ио-
14-
PU
Подавление продоль-
продольных и крутильных
гармонических коле-
колебаний произвольной
частоты
Подавление крутиль-
крутильных гармонически^
колебаний произ-
произвольной частоты
АКТИВНЫЕ ДИНАМИЧЕСКИЕ ГАСИТЕЛИ
365
Продолжение
Гаситель
Принципиальная
схема
Основные настроечные
соотношения
Область применения
Поглотители колебаний
Поглотитель.'
с вязким
трением
с сухим
трением
1 Г 2
у Bт + тг
гармоническое возбуждение
широкополосное
возбуждение
J __
случайное
т \—2
4 1 — гармоническое
возбужденнее амплитудой Со
Подавление продоль-
продольных и крутильных
колебаний с произ-
произвольным спектром
Подавление продоль-
продольных и крутильных
колебаний с произ-
произвольным спектром
Примечания: 1. В случаях, когда применение гасителя указано для продольных
и крутильных колебаний, приведенные настроечные соотношения соответствуют продольному
случаю. Соотношения для гасителей крутильных колебаний получаются заменой т на /,
mr иа Jr, в0 на Мо.
2. Если параметры возбуждения объекта заданы в виде закона колебаний демпфируемой
точки хое"°', то существует связь Go = х0 I / (to) I, где / (to) — динамическая податливость
точки крепления гасителя
Часть пятая
ВОЗДЕЙСТВИЕ ВИБРАЦИИ
И ЗАЩИТА ЧЕЛОВЕКА-ОПЕРАТОРА ОТ ВИБРАЦИИ
В большом числе случаев человеку приходится длительное время находиться под воз
действием вибрации (оператору, пассажирам транспортных средств и др ) Как правило
вибрация оказывает вредное влияние на человека • [7] Уменьшению интенсивности виб-
вибрационного воздействия на человека способствует енижение виброактивности источника
вибрации, применение систем виброизоляции и регламентирование допустимых уровней
вибрации на рабочем месте человека-оператора. Для расчета систем виброзащнты человека
используются данные о механических свойствах и частотных характеристиках тела человека
Глава XVI
ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ
И ИХ ВЛИЯНИЯ НА ЧЕЛОВЕКА
1. ТИПИЧНЫЕ СЛУЧАИ ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ
Характерные случаи передачи вибрации телу человека приведен^ в табл. 1.
Наиболее существенное влияние на человека-оператора оказывает вибрация
с частотами 1—30 Гц. В основном именно в этом диапазоне расположены спектры
частот вибрации разнообразных транспортных средств, самоходных строительно
дорожных и сельскохозяйственных машин. Возбуждение интенсивной вибрации
транспортных средств главным образом обусловлено движением по неровным (слу- ¦
чайным) поверхностям (автомобильного и рельсового транспорта, наземных строи-
строительных и сельскохозяйственных машин и др.), движением по волнам (водного тран-
транспорта), движением в турбулентных слоях атмосферы (летательных аппаратов).
Виды вибрации, возникающей при работе различных машин, приведены в табл, 2,
При описании вибрации позу человека считают фиксированной, а само тело
рассматривают как твердое деформируемое. С телом человека связывают подвиж-
подвижную систему координатных осей XYZ, ориентацию которых выбирают в зависи-
зависимости от позы человека (рис. 1). Заданная вынуждающая вибрация, а также вибрация
точек тела описываются относительно неподвижной координатной системы связан-
связанной с землей, оси которой параллельны осям XYZ, При этом заданная вибрация
* При строгой дозирввке интенсивности а длительности воздействия вибрация может
оказывать положительное влияние на организм человека; ее применяют аля лечения неко-
некоторых заболеваний.
ТИПИЧНЫЕ СЛУЧАИ ВИБРАЦИОННЫХ ВОЗДЕЙСТВИИ
1. Схемы передачи вибрации телу человека
367
Схема передачи вибрации
Источники вибрации
Пассажир
Транспортные средства
Человек-оператор
Автомобили, строительные машины, сельскохо-
сельскохозяйственные машины, трамваи, поезда, самолеты,
суда, космические аппараты
Человек-оператор
Металлообрабатывающие и деревообрабатыва-
деревообрабатывающие машины, текстильные машины, виброплат-
виброплатформы, металлургические машины
Человек-оператор
Ручные машины
2. Виды вибрации, действующей на человека
Объекты техники (машинш)
Автомобили, самолеты, суда, космические аппараты
Строительные машины, тракторы, комбайны, трамваи, желез-
железнодорожные вагоны и локомотивы
Металлообрабатывающие и деревообрабатывающие-станки,
компрессоры, Турбо- и гидроагрегаты, двигатели внутреннего
сгорания, текстильные машчны, вибровозбудители, вибро-
виброконвейеры
Буровые машини, подъемные краны, перфораторы, отбой-
отбойные молотки, землеройные машины, углеройные комбайны
Вибрации
Случайная широкополосная
Случайная узкополосная
Детерминированная поли-
рармоническая
Случайная и детерминиро-
детерминированная полигармоническая
3G8 ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ И ИХ ВЛИЯНИЯ НА ЧЕЛОВЕКА
3. Спектральные плотности виброускорений а на рабочих местах операторов
Марка машины и характеристика движения
Спектральная плотность 5 (I),
м!/с3 ускорений на рабочем
месте
Грузовые автомобили
ГАЗ-53 о грузом 4 т* при скорости, км/ч1
30
45
О г * 6 8 10 12 f Га
ИЛ-130 с грузом 5,5 т* при скорости, км/ч:
30
45
_._. 60
0,75
OS
0,?5
t
о г
МАЗ-500 с грузом 7,5 т* при скорости, км/ч!
30
45
111
\
\
\\
¦s»
\
,-—ч
3,0
10
1,0
о г * s s ю ftt
Суда
Морской катер (волнение моря — 3 балла)
Sa,
3,0
2,0
1,0
0
f)
rr
I
V
4
Ч.
6
b
1
? к
Электропоезд
Электропоезд при екорости 140 км/ч
0,15
01
0,05
О 2 f 6 8 10 12f,!u
—
—
ТИПИЧНЫЕ СЛУЧАИ ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЯ 369
Продолжение табл. 1
Марка машины и характеристика движения
Спектральная плотность S (I),
M2/cs ускорений на рабочем
месте-
Самолеты
F-4C (Фантом)
В-58
(полет на малой высоте со скоростью, близкой к скоро-
скорости звука)
t,o
0,1
0,01
<
ЧЛ
[-1
t- t
—
\
Л
i и
y-
Строительно-дорожные и сельскохозяйственные машины
Скрепер Д-357 при скорости 15 км/ч
/
/
Л
1
Ал
—
3,0
2,0
О 2 * S 8 №
Колесный трактор МТЗ-50Л (движение по стерне поперек
борозды со скоростью 9,5 км/ч)
Л
/
¦
к
и i ^
—1
—
— —
— —
6,0
2,0
О - г ч & 8 ю
Движение по булыжнику удовлетворительного качества
%
Vt:
йЛ-
Рис. 1, Система координатных осей для описания вынужденных колебаний тела человека
370
ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ И ИХ ВЛИЯНИЯ НА 4EJOBFKA
описывается виброперемещениями их, иу, и2, или виброскоростячи vx, Vy, vz, или
виброускорениями ах, ау, аг.
Спектральные плотности вибро>скорений az на рабочих местах операторов неко-
некоторых видов транспортных средств и самоходных машин приведены в табл. 3 [271],
Среднеквадратические значения виброускорений ах и ау составляют 30—40 % от
соответствующих значений виброускорения az.
2. ВЛИЯНИЕ ВИБРАЦИИ НА ЧЕЛОВЕКА
Влияние вибрации на человека зависит от ее спектрального состава, направле-
направления, места приложения, продолжительности воздействия, а также от индивидуаль-
индивидуальных особенностей человека.
и,мм
100b
100
10
1,0
Ofif
s
\
s
\
S
I
s
ч
ч
4
4
ч
\
а, с м/с1
1000
10,020W60r,ru,
)
ffu,
Рис. 2. Области равного восприятия вибрации:
а — в зависимости от виброперемещения и частоты, б — в зависимости от внброускорения я
частоты
Суммарная качественная оценка субъективных ощущений, вызванных дейст-
действием вибрации, представлена на рис. 2 в виде областей равного восприятия. Каждой
области равного восприятия вибрации соответствуют различные уровни неприят-
неприятных ощущений человека (табл. 4), границы между этими областями называют кри-
кривыми равного восприятия вибрации.
Область
на рис 2
/
2
3
4. Общая оценка ощущений человека при
Вибрация
Не ощутимая
Слабо ощутимая
Хорошо ощутимая
Область
на рис. 2
4
5
6
вибрации
Вибрация
Сильно ощутимая
Неприятная при длительном
воздействии
Неприятная при кратковре-
кратковременном воздействии
Более детальная классификация вредного влияния вибрации и симптомы, вызы-
вызываемых ею функциональных и физиологических нарушений, приведены на рис. 3,
В табл. 5 указаны частоты вибрации, соответствующие непосредственно наблюдаемым
вредным влияниям.
Тело человека, рассматриваемое как вяэкоупругая механическая система, обла-
обладает собственными частотами и достаточно выраженными резонансными свойствами,
резонансные частоты отдельных частей тела человека приведены на рис, 4,
ВЛИЯНИЕ ВИБРАЦИИ НА ЧЕЛОВЕКА
371
Пораже-
Поражение
мышечнвх
тканей и
суставов
Наруше-
Нарушения
функции
опорно-
двигатель-
двигательного
аппарата
Наруше-
Нарушения
функций
сердечно-
сердечнососудистой
системы
Развитие
нервных
заболева-
заболеваний
к
S
5
I
ного во
ы
1
"л
k В
h
о s
никновение профес
вибрацио
Воз
ЕС
ч
ю
X
ль-
S
я
372
ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ И ИХ ВТИЯНИЯ НА ЧЕЛОВЕКА
При значительных уровнях вибрации в диапазоне частот 4—10 Гц человек может
испытывать болевые ощущения и дискомфорт вследствие резонансных колебаний
системы «грудь—живот» Резонансы головы (8—27 Гц) вызывают снижение остроты
зрения вследствие смещений изображения объекта относительно сетчатки глаза.
На рис. 5 представлены предельные среднеквадратические значения виброускоре-
виброускорения az, превышение которых вызывает заметное ухудшение остроты зрения [259],
Рис. 4. Резонансные частоты
тела человека:
/ — глаза 12 — 27 Гц, 2 — горла
6 — 27 Гц, 3 — грудной клетки
2—12, 4 — ног, рук 2 — 8 Гц,
5 — головы 8 — 27 Гц, 6 — лица
и челюсти 4 — 27 Гц, 7 — пояс-
поясничной части позвоночника 4—
14 Гц, 8 — живота 4 — 12 Гц
Рис. 5. Предельные среднеквад-
среднеквадратические значения виброуско-
виброускорения ag, превышение которых
вызывает ухудшение остроты
зрения
а ,м/сг
8
6
*
3
1,0
0,8
0,6
у
А
1
J
i
5 7 10 20 30 W 5070
f,ru,
Действие вибрации на функции оператора может быть оценено с помощью стати-
статистического анализа ошибок, допускаемых оператором в процессе его деятельности,
Такой анализ позволяет рассчитать функцию надежности R (t), которая служит
обобщенной оценкой дея1елыюсти оператора [R (t) — вероятность безошибочной
работы оператора в течение времени t]. Например, на рис. 6 приведены графики функ-
функции R (t) для работы, выполняемой оператором без вибрации (кривая /), и в условиях
гармонического (кривая 2) и случайного (кривая 3) вибрационного воздействия.
В двух последних случаях длительность вибрационного воздействия составляла
120 мин [2631.
N
Длитемнос/ль dufipaqu
онного воздейстб
¦ i
ил
...
к
¦
К
о зо во зо /го mt,/iu//
Рис, 6. Функция надежности работы опе-
оператора со световой сигнализацией (гЧЬ
сигналов в течение 30 мин)
/ — без вибрации; 2 — при действии гар
монической вибрации, f = 4 Гц, а =
= 0,76 м/сг 3 — при действии узкополос-
узкополосной случайной вибрации с центральной
частотой 4 Гц; а. = 0,76 м/с2
Рис. 7. Распределение вероятности ошибок
оператора при действии вибрации с часто-
частотой 5 Гц
Другой пример (влияние вибрации на выполнение двухкоординатной задачи
слежения за точечной целью) представлен на рис. 7. При отсутствии вибрационного
воздействия распределение ошибок оператора близко к нормальному закону, С уве-
МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА
373
личением уровня вибрации дисперсия ошибок оператора возрастает, а характер
распределения становится бимодальным, что обусловлено появлением регулярной
составляющей в функции ошибки, частота которой совпадает с основной частотой
вибрационного воздействия.
5. Области частот вредного действия вибрации на человека
Действие вибрации
Укачивание
Основные резонансы тела
Затруднение дыхания
Вредное влияние на чрение
Вредное влияние на сердечно-сосудистую систему
Ухудшение координации рук, непостоянство давления
стуини на опору
Ухудшение качества работы человека-оператора
Нагревание тканей, разрушение клеток
10 ' I 10 Юг 10* Ю* Ю'Га.
щ
шш
щш
и
шш
1
i ШШ/.
Глава XVII
МЕХАНИЧЕСКИЕ СВОЙСТВА
И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
1. МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА
Для практических расчетов и теоретических исследований систем виброзащиты
оператора используют динамические модели тела человека в виде аналитических
соотношений (например, частотных характеристик) или в виде эквивалентных меха-
механических систем (как правило, с несколькими степенями свободы).
При экспериментальных исследованиях и испытаниях систем «человек—машина»
в экстремальных условиях применяют специальные имитаторы (антропоморфные ма-
манекены), заменяющие человека-испытателя в опасных для него условиях.
Расчетные динамические модели, а также антропоморфные манекены должны
быть эквивалентными телу человека по следующим основным показателям: а) гео-
геометрическим размерам и формам, б) распределению масс частей тела (в частности,
по расположению центров масс частей тела, значениям этих масс и моментов инер-
инерции), в) видам соединений отдельных звеньев, г) упругим и демпфирующим свой-
свойствам.
На рис. 1, а представлена примерная схема конструкции типичного манекена,
а на рис. 1,6 — усредненные антропометрические данные тела человека.
Усредненные инерционные характеристики отдельных частей (сегментов) тела
человека приведены на рис. 2. Значения масс т даны в процентах от общей массы
человека; значения моментов инерции / [кгс-см-с2] относительно осей, проходящих
через центр масс сегмента, расположение центра масс указано в процентах от длины
сегмента.
Положение общего центра масс зависит от позы, принимаемой человеком (рис. 3).
Соединения между отдельными звеньями тела человека (или эквивалентного ма-
манекена) представляют собой кинематические пары, обладающие различными степе-
степенями подвижности (в ограниченных пределах), Идеализированные схемы соединений
звеньев тела приведены в табл, 1.
374 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТЫ. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
1. Схемы соединений звеньев тела человека
Форма
соединения •
Схема
соединения
Примечание
Вращательная
Ось взаимного вращения параллельна осям сочлененных
костей
Блоковая
Ось взаимного вращения перпендикулярна к осям соч-
сочлененных костей
Винто-
Винтообразная
Ось взаимного вращения составляет произвольный угол
с осями сочлененных костей
Эллипсоидная
Взаимный поворот возможен вокруг двух взаимно пер-
перпендикулярных осей
Седловидная
Взаимный поворот возможен вокруг двух взаимно пер-
перпендикулярных осей
Шаровая
Взаимный поворот возможен вокруг трех взаимно пер-
перпендикулярных осей
Плоская
Возможно взаимное поступательное перемещение вдоль
двух взаимно перпендикулярных осей и вращение отно-
относительно осей сочлененных костей
• Использованы термины из области медицины.
МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА
375
o'a=zi io'm=/
376 МЕХАНИЧ, СВОЙСТВА И ЧАСТОТЫ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
2. Наибольшие значения углов поворота некоторых частей теча человека
Часть тела
1о
Сустав'
1сь, отно-
относительно
которой
происхо-
происходит дви-
движение
Поворот
в граду-
градусах •*
Характер
перемещения*'
Голова
Атлантозатылочный
,1
20
30
15
70
Сгибание
Разгибание
Боковой наклон
Скручивание
Позвоночный
столб
Суставы шейного отдела
Суставы грудного отдела
z
Суставы поясничного отдела
z
70
60
30
70
50
55
100
40
40
30
35
Сгибание
Разгибание
Боковой наклон
Скручивание
Сгибание
Разгибание
Боковой наклон
Скручивание
Сгибание
Разгибание
Боковой наклон
Скручивание
МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА 377
Продолженир табл 2
Часть тела
Плечо
Сустав••
Плечевой сустав '
Ось, отно-
относительно
которой
происхо-
происходит дви-
движение
Поворот
в граду-
градусах*2
120
30
90
5
40
Характер
перемещения ¦»
Сгибание
Разгибание
Отведение
Приведение
Скручивание
Предплечье
Локтевой *4
150
0
Сгибание
Разгибание
70"
Скручивание
Кисть
Лучезапястный и средиезапястный
30
Отведение
Приведение
85
85
Сгибание
Разгибание
70»<
Скручивание
Бедро
I50"8
15
Сгибание
Разгибание
30*1
30
Отведение
Приведение
40
Скручивание
378 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТЫ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл 2
Часть тела
Голень
Стопа
Сустав ¦»
Коленный
я
<||
Голеностопный, подтаранный
и тараннопяточноладьевидный
Ось, отно-
относительно
которой
происхо-
происходит дви-
движение
Y
Z
Y
X
Z
Поворот
в граду-
градусах*2
160
10
40"
30
30
IS*8
25
20
Характер
перемещения •«
Сгибание
Разгибание
Скручивание
Сгибание
Разгибание
Отведение
Приведение
Скручивание
*' Использована терминология из области медицины.
•2 Углы отсчитывают относительно осей X, Y, Z; для тела человека, находящегося
в положении стоя, руки свободно опущены.
*3 Сгибание и разгибание сопровождается скручиванием
** Скручивание происходит в локтевом и лучезапястном суставах.
•° Амплитуда зависит от взаимного положения сочлененных костей.
•а Углы измерены относительно среднего положения сгибания.
" При согнутом положении ноги в коленном суставе,
•8 Движения относительно осей X и Z взаимосвязана.
3. Физико-механические параметры тканей человека
Параметр
ПЛОТНОСТЬ, КГС'С2/М4
Модуль сдвига, кгс/м!
Модуль продольной упругости
(Юнга), кгс/м2
Модуль объемной упругости,
кгс/м3
Предел прочности при растяже-
растяжении, кгс/м2
Разрушающая нагрузка при
сжатии, кго
Мягкие ткани
МО*—1,2.10»
2 5-102
103—10»
2,6.10s
5.10*—5.105
Компактная коетная ткань
1.93-10»—1,98-10»
7, Ы0»
2,26-10»
1,3.10»
9,75-10»
45-10'—бедренная кость
35-10' — большеберцовая кость
2,5-10* — плечевая кость
9-102 — лучевая кость
Примечание. В действительности биологические ткани обладают сложными реоло-
реологическими свойствами, которые претерпевают значительные изменения о возрастом человека
МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА
379
4. Зависимость напряжений а (кгс/мм-) от деформации е Для костных
и мягких тканей человека
Ткани
Тип нагружения
График
Мышцы
Растяжение
о,озг
Ц016
о qb qe qs e
I — портняжная 2 — грудино-ключично-соско-
вая, 3 — бицепс плечевой; 4 — прямая брюш-
брюшная; 5 — прямая бедренная, 6 — грудная глав-
главная; 7 —гастронемиальная
I
i
f
I
S
Сухожилия
0,гг с
/ — сухожилия голени; 2 — сухожилия бедра
Нервное волокна
1—
У
j
>-3
/ — седалищный нерв; 2 — бедренннй нерв; 3-
срединный нерв
Артерии
5'кгс/мм1
0,0!
#2
7
/
J
/
/
о qt qs в
/ — в поперечном направлении! 2 — в продоль-
ном направлении
380 МЕХДНИЧ. СВОЙСТВА И ЧАСТОТН. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл. 4
Ткани
Тип нагружения
График
Растяжение
Хрящи
Сжатие
6,/iSC/MM1
0,2
1
о,г с
бкгс/пп1
о o,oas aprs с
/
Растяжение
Межпозвонковые ди-
диски
Сжатие
qsz
0,16
0,01
j
1
/
О 0,2 е
Кости
Растяжение
}
1
МЕХАНИЧЕСКИЕ СВОЙСТВА ТЕЛА ЧЕЛОВЕКА 381
Продолжение табл. 4
Ткани
Тип нагружения
График
Кости
Сжатие
о apt щ в
I — бедренная; 2 — плечевая; 3 — большебер-
цовая; 4 — локтевая
/
7
Растяжение
б^гс/нм
0,3
цг
**'
/
1
к
/
Поясничные позвонки
Сжатие
?
1
1
382 МЕХАНИЧ СВОЙСТВА И ЧАСТОТН ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
6. Зависимость крутящего момента М (кге-см) от угла взаимного поворота <р°
Элемент
График
iV,irec см
500\—
Межпозвонковые диски
О го <5°
/ — поясничные; 2 — средние грудные, 3 — шейные
М кгс см
1Ш
/200
Кости
/1
с
Is
is
О 10 20 JO tl
I — локтевая; 2— лучерая; 3 — малоберцовая; 4— плече-
плечевая, 5 — большеберцовая; 6 — бедренная
Поясничные позвонки
М,К1С СИ
2W
160
SO
/
1
1
1
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
383
Наибольшие значения углов поворота некоторых частей тела, обусловленных
подвижностью соответствующих суставов, даны в табл. 2.
Нужные для построения моделей тела человека основные физико-механические
параметры [273], характеризующие упругодемпфирующие свойства тканей человека,
триведены в табл, 3 (средние значения).
Рис. 3. Положение центра масс тела сидящего человека
Ось
Z, мм
X, мм
А
235
2J0
Б
250
245
В
300
225
Г
125
375
Д
270
210
Е
125
340
Ж
250
225
3
05
250
И
170
200
Зависимости напряжений от относительных деформаций для биологических тка-
тканей имеют нелинейный характер; в табл. 4 приведены эти зависимости, полученные
для образцов мягких и костных тканей человека [273].
Характеристики крутильной жесткости элементов скелета человека приведены
в табл. 5 в виде крутящего момента М, приложенного к торцовым сечениям эле-
элемента, в зависимости от угла <р взаимного поворота сечений [273].
2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
При малых колебаниях и достаточно малых частотах возбуждения (до 100 Гц)
тело человека можно рассматривать как линейную вязкоупругую механическую
систему. Это позволяет описывать динамические свойства тела с помощью частотных
характеристик:
— передаточной функции G (р) для описания вынужденных колебаний точки
наблюдения;
— входного механического импеданса Z (р) для описания связи между силой,
передаваемой телу, и виброскоростью точки приложения силы.
Модуль передаточной функции I G (ко) I представляет собой безразмерную амп-
амплитудно-частотную характеристику (зависимость от частоты амплитуды колебаний
точки наблюдения, отнесенной к амплитуде колебаний точки, в которой приложено
возбуждение), а аргумент передаточной функции г|> — фазочастотную харашеристику.
384 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТН ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
в Входной механический импеданс Z {р) тела сидящего человека
Схема возбуждения
и поза человека
Модуль |г| (кгс-с/м) и
аргумент ф' импеданса
Примечания
,14
-45
SO
у
3 5
t
/
г .
ш
¦ 1 !
10 20 50
ч
- ш ш
W0f,rq
Поза естественная
J i 10 20 50 WOf/ц
/
¦л
II
3 S №
50 1ЩГц
-45
i
1
)
/— поза напряженная,
2— поза расслабленная
3 5 10 20 50 100 f/ц
f
I '
3 5 10 Z0 50
-45
о
45
40
1
f'\z2
I
4
2
\
Дополнительное нагру-
жение массой т, закреп
ленной на уровне пояс-
поясничного отдела цозвоноч
ника:
1~т = 0 кгС'С2/м, 2 —
т = 08 кгС'С»/м, 3 — т =
= 1,6 кгс-cV*'
з s го го 50 тощ
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
385
Продолжение табл
Схема возбуждения
и поза человека
Модуль | Z | (кгс-с/м) и
аргумент <р° импеданса
Примечания
10* Ш
5
д
г
юг
/
i
/
-,
"^
¦ г
5 10 20 50 1001, Гц
-45 {-
J
/
1
III
/ — ноги опираются на
неподвижное основание
2 — без опоры для ног
15 10 20 50 WOf/ц
10' IU
45
i
Z 5
9°
•
10 20 50
/
4
N
Ю0Щ
Kopnye отклонен назад
5 10 20 50 WOf/it
10s Izl
-45
45
90
t
I.
3 5
f
D
л
W 20 50
>
s
WOfA
Kopnye наклонен вперед
5 10 20 50 100 f,Гц
386 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТН. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Т. Входной механический импеданс Z (р) тела стоящего человека
Схема воз-
возбуждения
и поза
человека
МОДУЛЬ \Z\ (КГС'С/м) И
аргумент ф° импеданса
Примечания
/
1
3 5 10 20 30 100 f,Гц
-90
90
t
•ч,
Horv выпрямлены
3 5 Ю 20 50
,/z/
II
-J
г
S: | —
3 5 10 20 50 100 f, Гц
-90
-«5
90
',
f
А
г \з
У
1
Ноги выпрямлены; дополнитель
иое нагружение массой т, за-
закрепленной на уровне пояснич-
поясничного отдела позвоночника:
/ — т = 0 кгс-с2/м; 2 — т =
=0,8 кгс-с!/м; J—m = li6 кгс-с2/"
3 S 10 20 SO 100 Щ
Г0>
ш
ч /
ч
л
1
II
J 5 10 20 50
-90
-1M
0
«5
7
Ноги согнуты в коленных со-
составах
J 5 W ZO SO WOf,Гц
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
387
Продолжение табл. 7
Схема воз-
возбуждения
и поза
человека
Модуль Z (кгс с/м) и
аргумент Ф* импеданса
Примечания
10s
s
3
2
-90
0
90
3 5 10 20 50
-
t
1
у
V
¦
Человек стоит на пятках
3 S 10 20 50 100 f,Гц
-90
It/
1 \
"~~
S
у
3 S 10 20 50 WOf/ц
г
1.
1
/
/
-
_
Человек стоит на «носках»
3 5 10 20 50 100Щ
1
з 5 ю го 50 wt.ru
-90
-K
0
/
у
•
Человек стоит на одной ноге
3 5 10 20 50 100Щ
388 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТЫ. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл. 7
№ по
пор.
Схема воз-
возбуждения
и Поза
человека
Модуль JZI (кгс-с/м) и
аргумент <р° импеданса
ЯТримечания
/Л.
г
V
ч
5 10 20 SO 100 f,Гц,
-ts
/
(,
4
f
4
II
Человек стоит на коленях
3 S 10 20 50 100 Щ
Модуль входного механического импеданса представляет собой отношение амп-
амплитуды силы, передаваемой телу в точке возбуждения колебаний, к амплитуде
скорости той же точки; аргумент входного импеданса описывает сдвиг фаз между
названными силой и скоростью (о методике их экспериментального определения см.
ниже).
Частотные характеристики тела человека служат исходнымш данными при рас-
расчете эффективных систем виброзащиты человека, проектировании вибробезопасных
машин, разработке гигиенических норм вибрации, определении параметров эквива-
эквивалентных механических моделей и манекенов.
Численные значения и характер частотных характеристик существенно зависят
от выбора места при^окения вынуждающей вибрации и точки, в которой измеряются
параметры вынужденных колебаний тела человека.
Изменение рабочей позы или активности различных групп мышц, а также изме-
изменение взаимодействия с опорными поверхностями (спинками сидений, подлокотни-
подлокотниками и т. д.) или дополнительными внешними системами (органами управления и др.)
могут значительно повлиять на динамические свойства тела человека.
В табл. 6—8 приведены результаты измерений [264J входных механических им
педансов тела человека для различных поз и областей приложения вибрационного
возмущения. Из анализа представленных характеристик следу/ет:
а) резонансные свойства тела человека проявляются в областях частот, лежа-
лежащих ниже 60 Гц;
б) наличие дополнительной опоры для ног сидящего человека (схема 4 табл. 6)
несущественно меняет характер частотной зависимости импеданса, однако числовые
значения модуля импеданса во всем диапазоне частот при этом уменьшаются;
в) при дополнительном нагружении человека (схема 3 табл.. 6 и схема 2 табл. 7)
максимум модуля импеданса смещается в сторону высоких частот (этот факт не может
быть объяснен с помощью линейной теории и свидетельствует о нелинейных свойст-
свойствах тела человека);
г) импеданс существенно изменяется при отклонении корпуса человека (схемы 5
и 6 табл. 6). При этом на графиках модулей импедансов появляются максимумы при
частотах ниже 5 Гц, что обусловлено изгибными колебаниями позвоночника;
д) импеданс тела стоящего человека существенно зависит от позы; уменьшение
угла сгиба коленных суставов приводит к снижению энергии вибрации, поглош.ае'
мой телом человека (схема 3 табл, 7);
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
389
е) позе «лежа на спине» соответствуют максимумы модуля импеданса при часто
тах 15 и 60 Гц (схема 1 табл. 8);
ж) для лежащего на груди человека характерны максимумы модуля импеданса
при частотах 7 и 140 Гц и глубокий минимум в области 20 Гц (схема 2 табл. 8).
Рис. 4. Амплитудмо-частотиые характеристи
ки тела человека три гармоническом возбуж-
возбуждении в направлении оси X; ихг, ихп, ихс —
амплитуды виброгиеремещений головы, плеча
и сиденья соответственно:
при
хс= 3 мм;
2 —-
при aXQ = 4 мм
Л
1
/ 1 /
\\ /
\v
Г?\
i \
А
/ \
' \
" А
\ Л—""с
\
\
, \
V \
\
* f/ч
В табл. 9 и 10 приведены амплитудно-частотные характеристики вибрации го-
головы для различных поз человека [149, 150] при заданной вибрации в направлении
оси Z; основные резонансные частоты лежат в области 4—6 Гц.
На рис. 4 изображены амплитудно-частотные характеристики при вынужденной
вибрации сидящего человека в направлении оси X [63]. По оси ординат отложены
значения максимальных виброперемещений го-
головы ахг, отнесенные к максимальным вибропе-
виброперемещениям плеча их„ и гиденья ихс.
Использование указанных частотных харак
теристик ограничено условием линейности систе-
системы. При больших уровнях возбуждения прояв-
проявляются нелинейные свойства тела человека. Гра-
Графики амплитуд вынужденных колебаний, полу-
полученные при различных уровнях гармонического
воздействия (рис. 5), показывают, что вязкоуп-
ругие свойства тела человека более точно могут
\1\,кгсс/м
610'
у*
у
о*,
Ч
г
1
о г
в ю п f,fn
Рис. 5. Амплитуды колеба-
колебаний головы при различных
уровнях гармонического воз-
возбуждения
Рис. 6. Модуль входного меха-
механического импеданса тела чело-
человека:
/ — при гармоническом воздей-
воздействии, 2 — при совместном дей-
действии вибрации и постоянного
ускорения 4g
быть описаны нелинейными характеристиками «мягкого» типа. При вибрационном
воздействии более 2 ч динамические свойства тела человека приобретают нестацио-
нестационарный характер. При совместном действии вибрации и постоянного ускорения
частотные характеристики тела человека меняются [263]; в частности, происходит
увеличение модуля вводного импеданса и повышение резонансной частоты (рис, 6).
390 МЕХАНИЧ СВОЙСТВА И ЧАСТОТН ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
8. Входной механический импеданс Z (р) при действии вибрации,
приложенной к различным частям тела человека
№ по
пор
Схема возбуждения
и поза человека
Модуль I Z | (кгс с/м) и
аргумент фв импеданса
Примечания
103
5
3
2
Ю2
111
Г ..-'
у"*
-К-
-?
in
3 5 10 20 50 WOt, Гц
-90
-15
0
90
/
1
>
ч.
-
Человек лежит на спине;
вибрация приложена к
спине
3 5 10 20 50 WOf/ц
ч.
3 5 10 20 50 WO f,Гц
90
'''
II
\
\
Человек лежит на груди;
вибрация приложена к
грудной клетке
3 5 10 20 50 WOf, Гц
,/z/
W2
^90
-45
45
SO
/\
3 5
/
10 29 50
f
WO f/u,
1,
f\
•
Человек лежит на спине;
вибрация приложена и
голове
3 5 Ю 20 50 WOf, Гц
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА 39)^
Продолжение т а б л 8
К» по
пор
xeMd возбуждения
и поза человека
Модуль | Z | (кгс с/м) и
аргумент Ф° импеданса
Примечания
10'
W
-90
-45
30
\
у
т
щ
1
III!
J 5 10 20 50 100 f/и,
ч
у
/
/ 1
•*—
Человек сидит на непод-
неподвижном основании, виб
рация приложена к ногам
3 S 10 20 50 IOOf/ц
10*
5
S
г
10
5
-к
о
45
III
90
3 5
<t°
\
ч
¦; —
S
/
И
10 20 50 !00Щ
/
-|
Человек стоит на непод-
неподвижном основании, виб-
вибрация приложена к вы-
вытянутой прямой руке
3 S 10 20 50 100 f,Гц
ill
W2
-90
-45
3 S 10 20 50 100 f, Гц
/
i
t
3 5 10 20 50 100 f, Гц
Человек стоит на непод-
неподвижном основании; виб-
вибрация приложена к cot-
нутой под прямым углом
руке
392 МЕХДИИЧ СВОЙСТВА И ЧАСТОТН ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл 8
№ по
пор
Схема возбуждения
и поза человека
Модуль | Z \ (кгс с/м) и
аргумент <р° импеданса
Примечания
-30
-«¦
о
к
90
S ¦
3 5 10 20 50 WOf/ц
.у
5 10 20 50 100 f, Гц
Человек стоит на непод-
неподвижном основании, виб-
вибрация приложена к обеим
рукам
9 Амплитудно-частотные характеристики тела сидящего человека
Л"° по
пор
Поза человека
Амплитудно-частотная характеристика
|G|= azjaza
2,5
2,0
1,5
0,5
О
161
/
V
/I
1
1
*
m zo
1,5
1,0
0,5
ICI
Л
\
\
¦
О 2 4 Ю 20 40 f/ц
.lei
',5
0,5
О 2 4 10 20 40 t, Гц
у
л
V
Л
ПАРАМЕТРЫ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕЛА ЧЕЛОВЕКА 393
10. Амплитудно-частотные характеристики тела стоящего человека
Поза человека
Амплитудно-частотная характеристика
Ю1 V
lei
г,о
to
0,5
О 2 4 10 20
у
1
/
А
\
\
\
\
lei
2,0
1,5
1,0
0,5
О 1 4 W 20 tO f/ц
/
1
/
\
\
\
Ш
1,5
1,0
0,5
О 2 4 10 20 40 ffy
/
л
\
\
lei
2,0
15
1,0
0
/
/
/
t
Л
1
Т
10 20 40 f/ц
3. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ МОДЕЛЕЙ
ТЕЛА ЧЕЛОВЕКА ПО ЧАСТОТНЫМ ХАРАКТЕРИСТИКАМ
При теоретическом моделировании и разработке манекенов тело человека пред-
представляется в виде механической системы, состоящей из некоторого числа твердых тел,
сочлененных упругими и вязкими связями, Выбор структуры механической модели
существенно определяет результаты моделирования. Структуру модели тела чело-
человека необходимо выбирать с учетом экспериментальных данных, представленных
частотными характеристиками (например, порядок системы может быть связан с чи-
13 п/р. Фролова
394 МЕХАНИЧ СВОЙСТВА И ЧАСТОТН ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
слом максимумов амплитудно-частотной характеристики), биомеханических и антро-
антропометрических характеристик тела человека.
В зависимости от целей и постановок задач виброзащиты человека в практиче-
практических расчетах используются различные модели [63, 149, 150, 257, 258], примеры ко-
которых приведены в табл. 11 и 12. В тех случаях, когда необходимо ограничить виб-
вибрации на рабочем месте в пределах норм на допустимые уровни вибрации (напри-
(например, гигиенических), целесообразно использовать модели, эквивалентные телу чело-
человека по входному механическому импедансу (см. схемы 1, 3 табл. 11 и схемы 1, 2,
7 табл. 12). Существуют задачи, в которых требуется ограничить интенсивность
колебаний отдельных частей тела человека юловы, туловища и т. п. (это особенно
важно в тех случаях, когда оператору в условиях вибрации необходимо управлять
различными системами и следить за показаниями приборов). При этом в расчетах
систем виброзащиты используют модели, эквивалентные телу человека по ампли-
амплитудно-частотным и фазочастотным характеристикам (схемы 2, 4, 5—7 табл. 11 и
схемы 3—6 табл. 12). Применимость моделей зависит также от ширины рассматри-
рассматриваемого в задаче частотного диапазона. Так, в диапазоне частот вибрации до 8 Гц
допустимо применять одномассные модели (схема 7 табл. 11 и схема 1 табл. 12);
увеличение числа масс модели (и переход в пределе к системе с распределенными
параметрами) приводит к более точной аппроксимации динамических свойств тела
человека в широком диапазоне частот.
Общий принцип моделирования состоит в том, чтобы теоретическая модель или
манекен имели те же динамические характеристики, что и тело человека. В прин-
принципе, с математической точки зрения задача определения конечного числа парамет
ров модели по известным частотным характеристикам является переопределенной.
Для того чтобы наилучшим образом приблизить свойства модели к свойствам моде-
моделируемого объекта, искомые параметры определяют из условия минимума ошибки.
За критерий ошибки принимают некоторый функционал от вектора разности Y — Y*,
где Y* — вектор функций, характеризующий динамические свойства объекта, уста-
установленные из эксперимента; Y — вектор функций, описывающий динамические
свойства модели. В качестве ошибки чаще используют классические критерии, среди
которых можно выделить минимум среднеквадратическою отклонения [245]. В этом
случае задачу ставят, например, следующим образом. Задан входной механический
импеданс тела человека в виде графиков (или таблиц) модуля I Z* (ia>) | и фазы
Ф* (со), полученных из эксперимента. Требуется построить динамическую модель
тела человека в классе линейных механических систем с сосредоточенными парамет-
параметрами.
Входной импеданс модели ищут в виде [271]
где ап = !п (mv с„ b,); gi = fi (mv ct, bj) — функции, зависящие от инерционных да,,
упругих с,- и демпфирующих 6, параметров модели; п, I — целые положительные
числа, причем п ^ /.
Значения ап и gi определяют по критерию минимума суммы среднеквадратиче-
ских отклонений модуля I Z (ico) I и фазы <р (со) частотной характеристики:
N
minK=min 2] « Z(i(o/)|-|Z*(to/)|J«+[9(<B/)-V*((D/)]»}, B)
ап, *i / = о
где ЛГ — число выбранных на частотной оси точек аппроксимации. Условие B) удо-
удовлетворяется при
а/с/а (аД1 &)=о. C)
Выражение C) после преобразований сводится к системе уравнений относительно
неизвестных а„, g{.
ПАРАМЕТРЫ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕЛА ЧЕЛОВЕКА
395
11. Механические модели тела стоящего человека (масса т, >.гс-с2/м;
коэффициент жесткости с, кгс/м; коэффициент демпфирования Ь, кгс-с/м)
№ по
пор
Схема полы
человека
Модель
Параметра
mi —6,2; т2 = 1,3; с-! = 6,2-J03?
с2=8,0-103» 6, = 140; *2 = 53
fl.S =
mi =
: 12,86-
bi.t =
¦¦ 0,68; n
10»; c2,
¦ 10,85;
it —
3 =
*. .
= 2,722; m
= 3,22-10»;
з = П2,3;
з —
Ca
ba
- 3,63;
= 3.67.
= 36,4
103J
mi = 0,68; т,—1,814; та = 5,443;
с,,3 = 13,42.10=; ^,3=9,38.10»} с3 = 17,3.10»)
bi.3 = 57> Ь,, з = 3,85; Ь, =294,3
mi = шв = 0,454; та = 1,361! т3=т4 = 1.03;
i, 2= 12,9.10», r,,s =cs, , = 10,32.10»;
= 15,49.10»; cS), = 20,65-10'
13*
396 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТН. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл. 11
№ по
пор.
Схема позы
человека
Модель
Параметры
пц = 0,476; т2 = т, = 0,0544; mt =2,31;
ть = т, = 0,747; т, = т„ = 0,304;
т„ = 0,245; ml0 = mn = 0,205;
"ii2=mi3 = 0,ll6; mu = m15 = 0,409;
mu~ 1,75-10-*; c,,lS = 17,5.10»;
с„, is =3,5-10»; c4|lB = 0,315-10»;
= св, 14 = с,,, = с,,, = с7, „ = с8,, = 35,87.103;
Ci. ie = 0,013-10»; Сю, is = Сц, и = с10,12 =
Си. 1з = с,, I, = с3, ,3 = 0,225-10»; Ьи ц = 1,75;
j,14>li = 7S,75; bt,ii = 5,25; 64,14 = 3,15;
,14=6e,l4==&5, j = 6e,8 = Sj,H=68, 9== 96,2;
ftio, is — fru,ia = Ью, 1й= bu, 13 = ^2,12 —
= 63>13 = 17,5; 6,,,, = 8,75.10-<;
^-[гA)-гA6)]; ^=0,025
mi = 0,5; m2 = 6, 5; tj, 2 = 0,54-1 Wa3-\-
+ 3,18-1дааг — 4,66- W'a + 3,34 -103;
d = 1,6- 103a2 — 4,45.10'a + 4,94- 10s;
6,, 2= — 7,35a!+26,8a+16; Ьг = 94,5a' —
— 500a2-j- 165a-(-ISO (для а = 0,785-f-3,14)
Й
7,0; <г=-3,7Ы0\ й=9
ПАРАМЕТРЫ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕЛА ЧЕЛОВЕКА
397
12. Механические модели тела сидящего человека (масса т, кгс-сг/м; коэффициент
жесткости при растяжении-сжатии с, кгс/м; коэффициент жесткости при
кручении с, кгс-м; коэффициент демпфирования при растяжении-сжатии Ъ, кгс-с/м;
коэффициент демпфирования при кручении Ь, кгс-с-м, объем легких V, м3;
площадь поперечного сечения 1-й массы Sj, м2; момент инерции массы
относительно оси Y J, кгссмс2; линейный размер /, м)
Лг° по
пор
Модель
Параметры
т — 7; с = 5,63-103; i=52,3
0,6; й-= 6,8-1
!= 154; 62 = 1
! = 0,5; т2 = 6,5; <:,.» = 11,8-10';
m, = 3,796; m2 = l,61; m, = 0,461; с,,г = 2.103;
, = 3.10s; c3 = 2,5-103; 6i,2 = 25; b,, 3 = 47,0; b3 •¦
mi = 4; тг = 0 4; т3 = 0 8; т4 = 0,1 • Ю-*;
т, = 0,1, с,,3 = 0,1, с3 = 0.6-10*; ei,, = IO<;
с4,2=0; с,, 3 = 0,8- 10s; bIi2 = 400; i>3 = 65;
6i,. = 60; й4,i = 0,0016; 62t3=l; У = 4.10-3
398 МЕХАНИЧ. СВОЙСТВА И ЧАСТОТН. ХАРАКЛЬРИСГИКИ ТЕЛА ЧЕЛОВЕКА
Продолжение табл. 12
№ по
пор.
Модель
Параметры
mi = 6,'5; m2 = 0,5; Л = 60; Jj = 10;
/„ = 0,12; /, = 0,4; /2=0,1; а, =90°; а2 = 60°;
d = 67,7-103; с2 = 28-103; с = 1,58-10а;
&i = 537; 4, = 731; 2 = 5,1
Ф центры масс
mi = 2,7; ma = 4,2; m3 = 0,3; c, = 5,8-lCJ;
, = 5,|.10'; cs = 5,3-№>; 6»= 116; 6, = 117; &3 = 14
Пример 1. Рассмотрим моделирование тела сидящего человека по известному входному
механическому импедансу (рис 7, сплошные кривые). В данном случае модель допустимо
представить в виде двухмассной колебательной системы (схема 2 табл, 12), так как график
модуля импеданса содержит два локальных максимума. Тогда выражение A) для входного
механического импеданса модели примет вид
gtp< + g3p3 + g2p2
откува
. arct
»-a. co)(g «о* — g
» —gs@sJ'
л8 — a4(Q4)(gi(o— g
D)
E)
(агю2 -«-
* —gjto2 + g0) + (ojffl3 —a
Подставляя E) в B) при фиксированных значениях частот ю =2л/ (/ равно 3, 5, 6,
8, 10, 12,5 Гц), а также соответствующие этим частотам экспериментальные значения
J Z»(ico/) |, Ф* (со/), решая систему C), получим следующие значения ап и ?;:
Cj= 122,4-10е; аа=37,4Ы0>; а3 =600,33-102; а« = 71,6;
?,= 16,32-10»; gi = 49,88-10*; g2 = 235,7-102; g3=223,5; gt = 4,14.
Этим значениям соответствуют штриховые кривые на рис. 7.
Известная структура модели однозначно определяет функциональную связь между "„
и g, и параметрами модели;
ПАРАМЕТРЫ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ТЕЛА ЧЕЛОВЕКА
399
Из системы F) определяют искомые параметры модели;
mi = 6,90 кгс сг/м; т2=0,6 кгС'С2/м:
Ci = 6,8'103 кгс/м; с3 = 2,4-108 кгс/м;
6i = 154,0 кгс-с/м; 62= 19,0 кгс-с/м.
Аналогичным образом, используя уравнения типа A) — E), можно определить
параметры модели тела человека по заданным амплитудно-частотной и фазочастот-
ной характеристикам (рис. 8 — сплошные кривые). Результаты этих вычислений
приведены на схеме 5 табл. 11. В данном случае для упрощения расчета неизвест-
неизвестных коэффициентов, входящих в A), предварительно задавались усредненные число-
числовые значения инерционных (см. рис. 2) и упругих элементов модели. Графики частот-
частотных характеристик построенной модели представлены на рис. 8 штриховыми кри-
кривыми.
А
/
/
/
\z\,/ree-c/rt
гоо
юо
so
so
9°
80
60
W ¦
го
го
а)
V
S)
5 ХЮ го^гц
Рис. 7. Входной механический импеданс
тела человека:
а — модулы б — аргумент импеданса
(сплошная кривая — экспериментальные
данные; штриховая кривая — расчетные
данные)
-90
-то
-225
-270
-36П
N
\
\
' 2 k S 10 20 f,rit
Рис. 8. Амплитудно-частотная и фазоча-
стотная характеристики тела человека
(сплошная кривая — экспериментальные
данные; штриховая кривая — расчетные
данные)
В некоторых случаях с помощью частотных характеристик можно построить
модели, учитывающие нелинейные динамические свойства тела человека. Например,
удовлетворительные результаты дает нелинейная модель, структура которой изоб-
изображена на схеме I табл. 12 с нелинейной характеристикой жесткости с (г) = сог — цг3;
при этом т = 8,5 кгс-сг/м; Ь = 9,8 кгс-с/м; с0 = 76,4-102 кгс/м; \х = 23,4- 10е кгс/ма.
Особенность нелинейных моделей заключается в том, что их параметры зависят
от уровня возбуждения. Так, для модели, изображенной на схеме 6 табл. 12, пара-
параметры могут быть представлены в виде следующих зависимостей от уровня воздейст-
воздействия: q = 3,75 е2 — 123,0 е + 68 000 кгс/м; сг = 1,9 е2 — 372,0 е + 37 500 кгс/м;
с, = 0,127 е2 — 8,76 s + 700 кгс-м; Ьх = 1,9 8 -J- 480,0 кгс-с/м; Ь2 = —0,09 е2 +
-f 10,4 8+ 500,0 кгс-с/м; Ь3 = 0,0005 е2 + 0,00079 е+ 4,65 кгс-с-м. Здесь е =
= v/v0, где ио=3,16-1О14 м/с; v — среднеквадратичное значение виброскорости.
Остальные параметры модели совпадают с приведенными в табл. 12,
400 М.ЕХАНИЧ. СВОЙСТВА И ЧАСТОТЫ. ХАРАКТЕРИСТИКИ ТЕЛА ЧЕЛОВЕКА
4. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
ЧАСТОТНЫХ ХАРАКТЕРИСТИК ТЕЛА ЧЕЛОВЕКА
При вибрационных испытаниях тело человека подвергается действию гармониче-
гармонической или случайной вибрации, что в основном соответствует реальным условиям.
Испытания на гармоническую вибрацию отличаются простотой схемы установки
для возбуждения колебаний (рис. 9). Блок непрерывного изменения частоты и авто-
автоматический регулятор уровня управляют частотой задающего генератора. Управле-
Управление вибровозбудителем 3 может производиться либо по разомкнутой, либо по замк-
замкнутой схеме. В последнем случае заданный уровень колебаний вибровозбудителя
поддерживается автоматически с помощью цепи обратной связи, которая состоит из
задающего генератора / с автоматической регулировкой входного уровня, усилителя
мощности 2 и датчика 4. Датчик и виброизмерительный прибор 5 служат для конт-
контроля и измерения колебаний вибровозбудителя,
6
—
7
Рис. 9. Структурная схема установки
для испытании тела человека на
гармоническую вибрацию
Рис. 10. Структурная схема установки для испыта-
испытаний тела человека на случайную вибрацию
Испытания на случайную вибрацию позволяют имитировать особенно часто встре-
встречающиеся реальные условия. Для возбуждения колебаний (рис. 10) применяют
генератор 1 случайного сигнала. Через блок фильтров или корректирующее устрой-
устройство 2 и усилитель мощности 3 сигнал поступает на вибровозбудитель 4, Контроль,
измерение и анализ колебаний вибровозбудителя осуществляются датчиком 5, вибро-
виброизмерительным прибором 6 и анализирующим прибором 7.
Частотные характеристики тела человека определяют при вибрации в направле-
направлении одной или нескольких осей координатной системы XYZ (рис. 1 гл. XVI). При
гармоническом вибрационном воздействии измерения производят непрерывно при
монотонном изменении частоты со скоростью, не превышающей 0,2 октавы в секунду
или на дискретных частотах следующего ряда (по ГОСТ 12090—66): 1,0; 1,25; 1,6;
2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10; 12,5; 16, 20; 25; 31,5; 40, 50; 63; 80; 100; 125;
160; 200 Гц.
Требования, предъявляемые к оборудованию и измерительной аппаратуре, при-
приведены ниже.
Рабочий диапазон частот 1—100 Гц
Для вибростенда:
амплитуда вынуждающей силы, не менее 200 кпз
среднеквадратическое значение вибрсскорости, до 0,1 vi/a
максимальная допустимая статическая нагрузка . 100 кро
нелинейные искажения при воспроизведении гармонической
вибрации, не более , . . . 10%
отклонения уровня виброскорости от заданного при монотонном
изменении частоты, не более 5%
Для измерительной аппаратуры:
динамический диапазон, не менее 50 дБ
минимальная измеряемая виброскорость 5-10—в м/а
минимальная измеряемая динамическая сила . 0.3 кгв
систематическая погрешность измерения виброскорости и вибра-
вибрационной силы, не более ... . . ... 12%
диапазон измерения разности фаз ± 180е»
погрешность измеоения фазы, не более 12%
поперечная чувствительность датчика, ие более . 15%
ОПРЕДЕЛЕНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
401
При подготовке к измерениям составляется программа испытаний, утверждаемая
в установленном порядке и содержащая необходимые сведения об основных харак-
характеристиках испытаний.
Перед проведением измерений импеданса тела человека необходимо осуществить
компенсацию массы платформы с помощью блока компенсации. Для проверки
работоспособности и оценки погрешности измерительной установки осуществ-
осуществляется тестовое измерение импеданса механической системы с известными пара-
параметрами.
При проведении измерений динамических характеристик контролируют и под-
поддерживают постоянную позу испытуемого. Динамические характеристики измеряют
не менее чем у десяти человек, при этом масса каждого человека должна составлять
60—80 кг. Все измерения повторяют не менее 3 раз на каждом испытуемом; испытуе-
испытуемых при экспериментах подвергают медицинскому контролю.
Рис. 11. Структурная схема установки для
измерения входного механического импе-
импеданса тела человека
Рис. 12. Структурная схема уста§
новки для измерения амплитудно-
частотной и фазочастотной харак-
характеристик тела человека
Для обеспечения безопасности проводимых измерений среднеквадратические зна-
значения вибрационных воздействий не должны превышать максимальные величины,
установленные гигиеническими нормами с учетом длительности вибрационных воз-
воздействий.
Измерение входного импеданса тела человека может производиться с помощью
установки, структурная схема которой приведена на рис. 11. Колебания вибровоз-
вибровозбудителя создаются по схеме испытаний на гармонические (см. рис. 9) вибрации,
Измерительное устройство вводного импеданса включает в себя датчик виброско-
виброскорости 2 и датчик силы 3, установленный на сиденье, усилители 4, 5.
Сигнал, пропорциональный силе, действующей на тело человека, через усили-
усилитель 4 поступает на блок компенсации 6. Блок 6 служит для компенсации динамиче-
динамической силы, которая обусловлена ускорением массы переходного элемента (сиденья).
Скорректированные значения модуля входного импеданса I Z (на) | и его аргу-
аргумента ф (со), измеренного с помощью фазометра 5, фиксируются на, регистраторах
7 и 9.
Амплитуды и сдвиг фаз при вибрации тела человека измеряют на установке,
примерная структурная схема которой приведена на рис. 12. Колебания вибровоз-
вибровозбудителя / задаются в соответствии со схемами, приведенными на рис. 9 или 10,
Колебания платформы вибровозбудителя / и колебания отдельных частей тела чело-
человека 2 измеряются вибродатчиками 3. Через усилитель мощности 4 сигналы посту-
поступают на регистрирующее устройство 5 и фазометр 6. Амплитудно-частотные характе-
характеристики регистрируются устройством 5, а фазочастотные характеристики — устрой-
устройством 7.
402
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
Глава XVIII
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
1. ОСНОВНЫЕ СВЕДЕНИЯ О ДОПУСТИМЫХ УРОВНЯХ ВИБРАЦИИ
С гигиенической точки зрения различные условия труда при воздействии виб-
вибрации характеризуются следующим образом:
— комфорт, когда вынуждающая вибрация не вызывает раздражающего дей-
действия;
— сохранение работоспособности, когда вызываемое вибрацией утомление (уста-
(усталость)- оператора не ведет к снижению производительности труда;
— вибрационная безопасность, когда вибрация не оказывает на организм рабо-
работающего вредного биологического действия, приводящего к заболеванию;
— вибрационная опасность, когда действие вибрации на организм может вызвать
вибрационную болезнь;
— вибрационное поражение, когда действие вибрации на организм работающих
непереносимо или создает опасность травмирования.
Гигиеническое нормирование вибрации машин, приборов, технологического обо-
оборудования, средств транспорта и т. п., действующей на человека, служит для обес-
обеспечения вибробезопасных условий тру-
труда; оно заключается в ограничениях
уровней вибрации элементов машин, с
которыми соприкасается тело человека
(сиденья, платформы, перекрытия зда-
зданий, рукоятки механизированного ин-
инструмента и т. п.).
Существующие нормативные требо-
требования допустимых вибрационных воз-
воздействий основаны на оценках субъек-
субъективною восприятия вибраций челове-
человеком, а также физиологических, функ-
функциональных, биомеханических и био-
биохимических реакций его организма.
Действие вибрации на организм чело-
человека определяется четырьмя основными
характеристиками вибрационного про-
процесса: интенсивностью, спектральным
составом, длительностью воздействия,
направлением действия.
Показателями интенсивности слу-
служат среднеквадратические или ампли-
амплитудные значения виброускорения, виб-
виброскорости, или виброперемещения,
измеренные на рабочем месте. При оценке интенсивности вибрации наряду с раз-
размерными величинами используют логарифмические уровни вибраций (дБ)
1. Перевод уровней
• Уро-
Уровень,
ДБ
80
81
82
83
84
85
86
87
88 ¦
89
90
91
92
93
94
95
виброскорости е
в значения виброскорости в м/с
Вибро-
ско
рость,
м/с
10"
0,05
0,056
0,063
0,071
0,079
0,089
0,099
0,112
0,126
0,141
0,158
0,177
0,199
0,223
0,251
0,281
Уро-
Уровень,
ДБ
96
97
98
99
100
101
102
103
104
105
106
107
108
109
ПО
111
Вибро-
ско-
скорость,
м/с
10*
0,316
0,354
0,397
0,446
0,5
0,56
0,63
0,71
0,79
0,89
1,00
1,12
1,26
1,41
1,58
1,77
Уро-
Уровень
ДБ
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
ДБ
Вибро-
ско-
скорость,
м/о
10*
1,99
2,23
2,51
2,81
3,16
3,54
3.97
4,46
5,0
5,6
6,3
7,1
7,9
8,9
10,0
11,2
12,6
14,1
где w — измеряемый кинематический параметр вибрации (виброперемещение, виб-
виброскорость, виброускорение); w0 — начальное значение соответствующего пара-
параметра («о=8-10-1- м, у0 = 5- Ю-8 м/с, а0 = 3- Ю-1 м/с2).
Соотношения между уровнями виброскорости приведены в табл. 1. Для гармо-
гармонической вибрации с частотой / логарифмические уровни виброперемещения L,,
и виброускорения La определяются через логарифмический уровень виброскорости:
ОСНОВНЫЕ СВЕДЕНИЯ О ДОПУСТИМЫХ УРОВНЯХ ВИБРАЦИИ
403
2, Среднегеометрические частоты и соответствующие им граничные значения
частотных полоо
Среднегео-
Среднегеометрические
частоты, Гц
0,8
1,0
1,25
1,6
2,а
2,5
3,15
4,0
5,0
6,3
8,0
10
Граничные значения
частотных полос, Гц
1/3 октавы
0,7—0 89
0 89-1,12
1,12-1,4
1,4-1,78
1,78-2,24
2,24-2,8
2,8-3 5
3 5-4,4
4,4-5,6
5,6-7,1
7,1-8,9
8,9—11,2
Октава
0.7 =-1,4
1,4—2 8
2,8-5,6
5,6-11,2
Среднегео-
Среднегеометрические
частоты, Гц
12,5
16
20
25
31,5
40
50
63
80
'100
125
160
Граничные значения
частотных полос, Гц
1/3 октавы
11 2—14,1
14,1 — 17 8
17,8-22,4
22,4—28,2
28,2-35,5
35,5-44,7
44,7-56,2
56,2-70,8
70,8—89 1
89,1 — 112,2
112,2—141,3
141,3-177,8
Октава
11-22
22-44
44—88
88-177
При нормировании вибрации ее спектральный состав оценивают в октавных или
1/3-октавных полосах частот.-В табл. 2 приведены среднегеометрические частоты и
соответствующие им значения граничных частот октавных и 1/3-октавных полос.
Вибрационные воздействия допустимо оценивать также на основе принципа
энергетического частотно-избирательного действия вибрации. Эта оценка может
осуществляться по энергии механических колебаний, передаваемой телу человека,
А = Т
1 = 0
либо по средней мощности, поглощаемой телом человека [178]:
2
1 = 0
где Т — длительность воздействия вибрации; v ((?>,), а (ш,) — ?-я амплитуда гармо-
гармонической составляющей виброскорости или виброускорения; I Z (и,-) | — значение
модуля входного механического импеданса; k, (со,) — коэффициент, характеризую-
характеризующий усредненные частотно-избирательные свойства человека [268].
В нормативных материалах допустимые уровни вибрации установлены при про-
продолжительности воздействия в течение восьмичасового рабочего дня. Недопустимо
применение виброопасных машин и выполнение работ, если вибрация, действующая
на человека в течение 8 ч, превышает заданные нормы. При воздействии вибрации,
превышающей установленные нормативы, продолжительность воздействия вибрации
404
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
Рис. 1. Допустимые уровни вибрации (дБ) в
октавных полосах частот (Гц); вибрация:
/ — транспортная (/а — в направлении оси Z;
16 — в направлении осей X или Y), 2 — тран-
спортно-технологическая; 3— технологическая
(За — в производственных помещениях с виб-
вибрирующим оборудованием; 36 —- в служебных
помещениях на судах, Зв — в производствен-
производственных помещениях без вибрирующих машин;
Зг — в помещениях административно-управ-
административно-управленческих служб и для работников умствен-
умственного труда)
на человека в течение рабочей смены ре-
рекомендуется уменьшать в соответствии с
данными, приведенными в табл. 3.
Параметры вибрации, действующей на
тело» человека, измеряют в направлении
осей координатной системы XYZ (рис. 1,
гл. XVI).
Перечень и краткая характеристика
основных нормативных документов [47,
48, 188—190], устанавливающих предель-
предельно допустимые уровни вибрации, дейст-
действующей по осям X, Y, Z, приведены в
табл. 4.
В табл. 5 и на рис. 1 приведены гигие-
гигиенические нормы по ограничению вибрации
на рабочих местах обслуживающего пер-
персонала всевозможного оборудования и
водителей средств транспорта [47].
В некоторых странах также разрабо-
разработаны нормы, устанавливающие допусти-
допустимую величину производственной вибра-
вибрации. На рис. 2- приведены характеристики вибраций, соответствующих нормам
различных стран [38]. Для удобства сравнения на указанных рисунках выбраны
единые условия воздействия вибраций, аналогичные установленным в отечествен-
отечественных гигиенических нормах, и приведены к единому нормируемому параметру —
виброускорению в октавных полосах частот.
1 2 <t 8 16 Ц5 63 125 250 500 f, Гц
3. Допустимая длительность вибрационного воздействия при превышении
допустимых норм
Превышение
нормативов
вибраций для
рабочих мест,
не более
ДБ
0
3
6
раз
1
1.4
2
Допустимая длительность
вибрационного воздействия,
мин, не более
при работе
на стацио-
стационарных и
транспортных
машинах
480
120
60
для вахт в
машинно-
котельных
отделениях
судов
1400
120
Превышение
нормативов
вибраций для
рабочих мест,
не более
ДБ
9
12
раз
28
4
Допустимая
длительность
вибрационного воздействия,
мин, не более
при работе
на стацио-
стационарных и
транспортных
машинах
30
15
для вахт в
машинно-
котельных
отделениях
судов
60
Международной организацией по стандартизации (ИСО) предложены нормы на
допустимый уровень вибрации, действующей на человека [48]. Стандарт ИСО уста-
устанавливает допустимые среднеквадратические значения виброускорения в диапазоне
ОСНОВНЫЕ СВЕДЕНИЯ О ДОПУСТИМЫХ УРОВНЯХ ВИБРАЦИИ
405
fillftf
Hud о
fig
1
I
If
>.
a
о
D C
'Illli
ao
in
IS
fig
Щ со Ui
406
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
со
as
(-3
о я tt
dm
о и ю
slg2.
ОСНОВНЫЕ СВЕДЕНИЯ О ДОПУСТИМЫХ УРОВНЯХ ВИБРАЦИИ
407
частот 1—80 Гц. Предельные значения вибра'ционного воздействия на человека ука-
заны в соответствии с тремя основными оценками условий работы:
1) обеспечение безопасности или здоровья (предел воздействия);
2) обеспечение производительной работы (граница снижения производительно
сти труда от усталости);
3) обеспечение комфорта (порог снижения комфорта).
5. Допустимые значения уровней вибрации на рабочем месте человека-оператора
по ГОСТ 12.1.012—78
Вид вибрации
Транспортная
Траншортно-тех/юлоги-
ческая
Технологическая
На постоянных рабочих
местах в производствен-
производственных помещениях пред-
предприятий; в машинно ко-
котельных отделениях,
центральных постах
управления, производ-
производственных помещениях на
судах
В служебных помещениях
на судах (рулевая, штур-
штурманская, радиорубка и
ДР-)
В складах, столовых,
бытовых дежурных про-
производственных помеще-
помещениях, где нет машин, ге-
генерирующих вибрации
В заводоуправлениях,
лабораториях, учебных
пунктах, конструктор-
конструкторских бюро, вычислитель-
вычислительных центрах, здравпунк-
здравпунктах, конторских помеще-
помещениях и других помеще-
помещениях для работников
умственного труда
Направ-
Направления,
по кото-
которым нор-
нормируются
вибрации
По оси Z
По осям
X и У
По осям
Z, А и У
По осям
Z, X и У
Среднеквадратические значения виброскорости,
м/с-Ю-2
их уровни, дБ
в октавных полосах со среднегеометрическими
частотами, Гц, не более
1
20
132
6.3
122
-
—
—
2
7,1
123
3,5
177
3.5
117
1,3
108
071
103
09-
100
018
41
4
2,5
114
3,2
116
1,3
108
0 45
99
0,25
94
0,18
91
0Р63
8
1,3
108
3,2
116
0 63
"Тог"
0 22
S3
0 13
~w
0,089
85
0 032
7b
16
1,1
107
3,2
116
0,56
101
02
42
0,11
87
0,079
84
0 028
75
31,5
1,1
107
3,2
ТЙГ
0,56
101
02
92
011
87
0,079
84
0,028
5"
63
1,1
107
32
116
0,56
ТоТ
0,2
92
0,11
87
0 079
~84~
0 028
75
В табл. 6 и 7 приведены предельные среднеквадратические значения виброуско-
виброускорений, соответствующие второму критерию.
Чтобы получить нормативные значения, удовлетворяющие первому критерию
(«предел воздействия»), значения виброускореиий, приведенные в табл. 6 и 7, следует
408
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
увеличить в 2 раза (на 6 дБ). Численные значения норм, удовлетворяющих третьему
критерию («порог снижения комфорта»), получаются в результате уменьшения в
3, 15 раза (на 10 дБ) значений виброускорений, приведенных в табл. 6 и 7.
В соответствии с ГОСТ 12.1.012—78 и стандартом СТ СЭВ 1932—79 «Вибрация.
Допустимые уровни общей вибрации на рабочих местах» допустимые уровни вибра-
вибрации, воздействующей на тело человека, устанавливаются для трех основных кате-
категорий:
1 — транспортная вибрация, воздействующая на рабочих местах подвижных
машин и транспортных средств при их движении по местности, агрофонам и дорогам
(в том числе при их строительстве).
Рис. 2. Допустимые средне-
квадратические уровни виб-
виброускорения, принятые в
некоторых странах:
/, 2, 3 — Великобритания,
Франция (/ — предел воздей-
воздействия; 2 — границы устало-
усталости; 3 — границы комфор-
комфорта); 4 — СН 1102—73 (СССР);
5 — ГДР; 6 — ФРГ; 7 -
ВНР; СРР; 8— НРБ; 9 —
СФРЮ; 10 — СН 245 — 71
(СССР); // — ПНР; 12 —
ЧССР; 13 — Финляндия
8 18
63
125 250 300 1000
№
2 — транспортно-технологическая вибрация, воздействующая на рабочих местах
машин с ограниченной подвижностью и при перемещении их только по специально
подготовленным поверхностям производственных помещений промышленных пло-
площадок и горных выработок.
3 — технологическая вибрация, воздействующая на рабочих местах стационар-
стационарных машин или передающаяся1 на рабочие места, не имеющие источников вибрации.
Допустимые уровни вибрации категории 1 (СТ СЭВ 1932—79) для воздействия
в течение 480 мин при частотном анализе в октавных или 1/3-октавных полосах ука-
указаны в табл. 8.
ь? о о
а о ш =f
Средне
ческая
третьо!
полосы
1.0
1,25
1.6
2,0
2,5
3,15
4,0
8,00
10,0
6. Допустимые
значения
виброускорения а.
Продолжительность воздействия,
480
0,63
0,56
0,50
0,45
0,40
0,355
0,315
0,315
0,40
240
1,06
0,95
0,85
0,75
0,67
0,60
0,53
0,53
0,67
150
1,40
1,26
1,12
1,00
0,90
0,80
0.71
0,71
0,90
мин
60
2,36
2,12
1,00
1,70
1,50
1,32
1,18
1,18
1,50
25
3,55
3,15
2,80
2,50
2,24
2,00
1,80
1,80
2,24
16
4,25
3.75
3,35
3,00
2,65
2,35
2,12
2,12
2,65
1
5,60
5,00
4,50
4,00
3,55
3,15
2,80
2,80
3,55
s
о. Я а
S о §
о та та 1ч
!Ш
12,5
16,0
20,0
25,0
31,5
40,0
50,0
63,0
80,0
м/с»)
по СТ ИСО 2631—74
Продолжительность воздействия.
480
0,50
0,63
0,80
1,0
1,25
1,60
2,0
2,50
3,15
240
0,85
1,06
1,32
1,70
2,12
2,65
3,35
4,25
5,30
150
1,12
1,40
1,80
2,24
2,80
3,55
4,50
5,60
7,10
мин
60
1,90
2,36
3,00
3,75
4,75
6,00
7,50
9,50
11,8
25
2,80
3,55
4,50
5,60
7,10
9,00
11,2
14,0
18,0
16
3,35
4,25
5,30
6,70
8,50
10,6
13,2
17,0
21,2
1
4,50
5,60
7,10
9,00
И.2
14,0
18,0
22,4
28,0
ОСНОВНЫЕ СВЕДЕНИЯ О ДОПУСТИМЫХ УРОВНЯХ ВИБРАЦИИ
409
7. Допустимые значения виброускорения i «а. (м/с2) по СТ ИСО 2631—74
Я да
¦D 3- И
-Средне
ческая
третьо
полось
1,0
1,25
1,6
2,0
2.5
3,15
4,0
5,0
6,0
8,0
Продолжительность воздействия,
мин
480
240
150
60
25
16
1
Виброускорение, м/с8
0,224
0,224
0,224
0,224
A 280
0,355
0,45
0,56
07]
0,9
0,35
0 35ft
0,355
ода
0,450
0,56
0,Л
0,90
1,12
1,4
0,50
0,50
0,50
0,50
0,6!»
0,8
1,0
1,25
1,6
2,0
0,85
0,85
A85
0,85
1,06
1,32
1.7
2 12
2,65
З.ЗЬ
1,25
1,25
1.25
1,25
1.6
2,0
2 5
3,15
4,0
5,0
1,50
1,50
1,50
1,50
1.9
2,36
3,0
3,75
4,/5
6,0
2,0
2,0
2,0
2,0
2,5
3,15
4,0
5,0
6,3
8,0
?.¦<*
О аз га ?—
V у t-
|Ш
e-se-s
10,0
12,5
16,0
20,0
25,0
31,5
40,0
50,0
63,0
80,0
Продолжительность
мин
480
240
150
60
воздействия.
25
16
1
Виброускорение, м/с2
1.12
1,4
1,8
2,24
1,8
3,55
4,5
5,6
7,1
9,0
1,8
2,24
2,8
3,55
4,5
5,6
7 1
9,0
11,2
14,0
>Ь
3,15
40
5 0
6,3
8,0
10,0
12,5
160
20
4,25
5 3П
67
8,5
106
13,2
ПО
21,2
26,5
33,5
6,3
80
10
12,5
16
20
Ъ
31,5
40
50
7 5
95
11 8
15
19
23,6
30 0
37 5
45 7
60
10
12,5
16
20
15
31,5
40
50
63
80
8. Допустимые среднеквадратические значения виброскорости и виброускорений
при длительности воздействия 480 мин (для категории 1)
Среднегео-
Среднегеометрические
частоты
полос, Гц
0,8
1,0
1,25
1,6
2,0
2,5
3,15
4,0
5,0
6,3
8,0
10,0
12,5
16,0
20,0
25
31,5
40
50
63
80
По виброускорению, м/с2
для 1/3 октавы
Z
0,71
0,63
0,56
0,50
0,45
0,40
0,355
0,315
0,315
0,315
0,315
0,40
0,50
0,63
0,80
1,00
1,25
1,60
2,00
2,50
3,15
X, У
0,224
0,224
0,224
0,224
0,224
0,280
0,355
0,450
0,560
0,710
0,900
1,12
1,40
1,80
2,24
2,80
3,55
4,50
5,60
7,10
9,00
для 1/1 октавы
Z
1,10
0,79
0,57
0,6
1,14
2,26
4,49
X, У
0,39
0,42
0,8
1,62
3,20
6,38
12,76
По виброскорости, м/с
102
для 1/3 октавы
Z
14,12
10,03
7,13
4,97
3,58
2,55
1,79
1,25
1,00
0,80
0,64
0,64
0,64
0,64
0,64
0,64
0,64
0,64
0,64
0,64
0,64
X, У
4,45
3,57
2,85
2,29
1,78
Ш
1,78
1,78
1,78
1.78
1,78
1,78
1,78
1,78
1,78
1,78
1,78
1,78
1,78
1,78
1,78
для 1/1 октавы
Z
20,0
7,10
2,50
1,30
1,10
1,10
1,10
X, У
6,30
3,50
3,20
3,20
3,20
3,20
3,20
При применении интегральной частотной оценки корректированный уровень п
измеряют с помощью специальных фильтров или вычисляют;
й =
410
НОРМИРОВАНИЕ ВИБРАЦИИ, ДЕЙСТВУЮЩЕЙ НА ЧЕЛОВЕКА
где и,- — среднеквадратичное значение нормируемого параметра в установленной
1-й частотной полосе; к{ — весовой коэффициент для t-й частотной полосы, значение
которого приведено в табл. 9.
9. Значения весовых коэффициентов
Среднегео-
Среднегеометрические
частоты
полос, Гц
0,8
1,0
1,25
1,6
2,0
2.5
3.15
4,0
5,0
6.3
8,0
10,0
12,5
16,0
20,0
25
31,5
40
50
63
80
к{ частотных фильтров (по СТ СЭВ 1932—79)
Для виброускорения
для 1/3 октавы
Z
0,45
0,5
0,56
0,63
0,71
0,8
0,9
1,0
1,0
1,0
1,0
0,8
0,63
0,50
0,40
0,315
0,25
0,2
0,16
0,125
0,1
X, У
1,0
1,0
1,0
1,0
1,0
0,8
0,63
0,5
0,4
0,315
0,25
0,2
0,16
0,125
0,1
0,08
0,013
0,05
0,04
0,0315
0,025
для 1/1 октавы
Z
0,5
0.71
-1,0
1,0
0,5
0,25
0,125
X, У
1,0
1,0
0,5
0,25
0,125
0,063
0,0315
Для виброскорости
для 1/;
Z
0,045
0,064
0,09
0,128
0,178
0,25
0,36
0,512
0,64
08
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
1,0
октавы
X, У
0,4
0,5
0,62
3,78
,0
,0
,0
,0
,0
0
,0
,0
,0
,0
,0
,0
,0
,0
,0
,0
,0
для 1/1 октавы
Z
0,05
0,16
0,45
0,9
1.0
1,0
1,0
X, Y
0,5
09
1,0
1,0
1,0
1,0
1,0
Допустимые уровни вибрации категории 2 должны определяться умножением
допустимых уровней для категории 1 на коэффициент 0,5 (уменьшением на 6 дБ).
Допустимые уровни вибрации категории 3 должны определяться умножением
допустимых уровней для категории 1 на коэффициент не более 0,18 (уменьшением
не менее чем на 15 дБ).
Допустимые уровни вибрации для рабочих мест с повышенными требованиями
должны определяться умножением допустимых уровней^для категории 1 на коэффи-
коэффициент не более 0,1 (уменьшением не менее чем на 20 дБ).
Для вибрации категорий 2 и 3 и рабочих мест с повышенными требованиями до-
допускается устанавливать одинаковые для всех направлений допустимые уровни,
определяемые по допустимым уровням для вертикального направления вибрации
категории 1.
При интегральной частотной оценке допустимые уровни вибрации категория 1
при длительности воздействия 480 мин аг = 0,54 м/с2; ax =Sy = 0,38 м/с2.
Допустимое время воздействия в зависимости от уровня вибрации в случае,
когда время экспозиции не превышает 480 мин,
-,/80
где ит — уровень для допустимого времени Т; и480 — уровень для 480 мин; Т —
время фактической ежедневной экспозиции, мин.
Максимальный уровень вибрации не должен превышать значений, определяемых
для Т = 10 мин.
КОНТРОЛЬ ВИБРАЦИИ МАШИН 411
2. КОНТРОЛЬ ВИБРАЦИИ МАШИН
Для обеспечения безопасных условий труда человека с виброактивньши машинами
установлены методы контроля вибрационных характеристик этих машин, например
среднеквадратических значений виброскорости или их уровней в октавных полосах,
измеренных на рабочих местах в диапазонах частот, регламентированных соответст-
соответствующими гигиеническими нормами (см. табл. 5).
Контроль вибрационных параметров осуществляется в процессе приемочных,
периодических и типовых испытаний машин (в соответствии с ГОСТ 20736—75) и
должен обеспечивать: 1) оценку и сравнение качества машин с точки зрения их виб-
вибрационной безопасности; 2) определение необходимости применения дополнительных
средств виброзащиты человека-оператора.
Для установления значений вибрационных характеристик режимы работы ма-
машины и условия ее испытаний должны воспроизводить или имитировать типовые
условия эксплуатации.
Представительной вибрационной характеристикой машины является максималь-
максимальное с вероятностью 0,95 значение виброскорости, измеренной в каждой октавной
полосе частот:
где vn — среднее значение виброскорости для выборки п машин; Sn — оценка
среднеквадратического значения виброскорости в ('-октавной полосе частот для п
машин.
Точность определения оценок vn и Sn должна характеризоваться доверительной
вероятностью у и доверительным интервалом среднего значения е, устанавливае-
устанавливаемыми исходя из точности определения вибрационной характеристики отдельной
машины и возможности получения необходимой выборки; рекомендуются значе-
значения у = 0,95; 8 = ±0,4.
Для исходной выборки nt среднее значение
, 1 "'
где V/ — значение виброскорости для каждой машины исходной выборки,
Среднеквадратическое отклонение
у -?=
%
/ = J
Для проверки отсутствия грубых ошибок среди значений параметра су определяют
относительное уклонение от среднего значения;
о,.
Sn,
Значения V/, для которых б/ > [б„], исключают из рассмотрения (вероятность их
появления менее 1 %). Допустимые значения [6Л] в зависимости от объема выборки п
приведены в табл. 10.
Достаточность отобранного для испытаний числа машин п проверяют из условия
обеспечения доверительного интервала ±0,4 среднего значения при доверительной
вероятности 0,45.
Если исходная выборка подвергалась сокращению путем исключения ошибок
параметров вибрационной характеристики, то следует для оставшегося объема вы-
выборки п2 < /I] провести повторное определение оценок vni и Sn2-
Квантиль распределения Стыодента tv,„для выбранной доверительной вероят-
вероятности у в зависимости от объема выборки п определяется из табл, 11»
412 СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
10. Значения относительных уклонений [6^] в зависимости от объема выборки п
п
3
4
5
6
7
8
1,41
1,72
1,96
2,13
2,27
2 37
п
9
10
11
12
13
и
2.46
2.56
2,61
2,66
2,71
2,76
а
15
16
17
18
19
20
[6п] "
2,80
2,84
2,87
2,90
2,93
2,96
21
22
23
24
25
[Ьп]
2.98
3 01
3.03
3,05
3,07
11. Квантиль распределения Стьюдента t,
•у, л
п
3
4
5
6
7
Доверительная
вероятность у
0,5
0,82
0.77
0,74
0,73
0,72
0,6
1,06
0,98
0,94
0,92
0,90
0,7
1,3
1,3
1.2
1,2
1,1
0,8
1,9
1,6
1,5
1,5
1,4
0,9
2,9
2,4
2,1
2,0
1,9
0,95
4,3
3,2
2,8
2,6
2.4
п
8
9
10
15
20
Доверительная
вероятность у
0,5
0,71
0,71
0,71
0,69
0,69
0,6
0,90
0,90
0,88
0,87
0,86
0,7
1,1
1,1
1,1
1,1
1,1
0,$
1,4
1,4
1,4
1,3
1,3
0,9
1,9
1,9
1,8
1,8
1,7
0,95
2,4
2,3
2,3
2,1
2,1
п
25
30
120
аз
Доверительная
вероятность у
0,5
0,69
0,68
0,68
0,67
0,6
0,86
0,85
0,85
0,84
0,7
1,1
1,1
1,1
1,0
0,8
1,3
1.3
1,3
1,3
0,9 10,95
1,7
1,7
1,7
1,6
2,1
2,0
2,0
2,0
Доверительный интервал среднего значения параметра вибрационной характе-
характеристики при объеме выборки л2 и доверительной вероятности у
«2
Если доверительный интервал еп., полученный при объеме выборки п2 и довери-
доверительной вероятности у, меньше выбранного доверительного интервала е, то объем
выборки обеспечивает необходимую точность определения оценок дпш и Sni, Если
8n2 > s, то необходимый объем выборки с достаточной точностью
где ty, р — квантиль распределения Стьюдента для выбранной доверительной веро-
вероятности 7 при Р — пЛ-—*
\ 8
Глава XIX
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
U ОСОБЕННОСТИ ВИБРОЗАЩИТЫ ЧЕЛОВЕКА
Для ограничения вредного действия вибрации используют специальные методы
и средства, обеспечивающие вибробезопасные условия труда и называемые вибро-
виброзащитой человека-оператора (рис. 1).
Наряду со снижением виброактивности источника возникновения вибрации и
регламентацией условий труда, целям виброзащиты служит виброизоляция — сни-
снижение параметров вибрации на путях ее распространения от источника возбуждения
к телу человека с помощью дополнительных устройств, встраиваемых между ними.
ОСОБЕННОСТИ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
413
условий
тора
Регламентация
труда опера
аокижэс! XHMDShHJoiroHxsi dooiqg
axoged я iqaredadsu Э1чнч1гэхин1гоно17
внй ojahoged
HxooHqifaxHHwotfodu иэтдо эинэгпейяоэ
s
м
О
Ж
с
(С
№
X
Е-
Stf
А
О
о
я
4)
э
3 я
ffi =
Р. о я
я
4)
я
к
к
О
S @
а
в*
о
и
я
414
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
По сравнению с виброизоляцией технических объектов виброизоляция человека
имеет ряд особенностей:
1) к системам виброизоляции человека предъявляют более высокие требования
по коэффициенту виброизоляции, так как допустимые уровни вибрации, действую-
действующей на человека, значительно ниже допустимых для технических объектов уровней
вибрации;
2) критерием эффективности виброизоляции человека может быть не только
среднеквадратическое значение виброускорения, характеризующего возбуждение,
но и различные оценки физиологического и функционального состояния человека-
оператора, а также уровни колебаний отдельных частей его тела (например, для
оператора, выполняющего операции визуального слежения, основным является
уменьшение относительных колебаний глаз человека и оптических приборов),
поэтому расчет систем виброизоляции проводят с учетом динамических свойств тела
человека (особенно в области частот, в которой проявляются основные резонансы),
3} так как основные резонансы тела человека расположены в диапазоне частот
до 20 Гц, то необходимое значение статического перемещения гст системы виброизоля-
виброизоляции оказывается довольно значительным; в то же время оно должно быть меньше
свободного хода; связь между статическим перемещением гст и нижней границей
области подавляемых частот /„: гст = 0,248//^.
2. СРЕДСТВА ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
Различают системы виброизоляции двух" видов; пассивные и активные. В пас-
пассивных системах вибройзоляция достигается в основном путем смягчения подвески
виброизолируемого объекта и соответствующего уменьшения коэффициента пере-
передачи, В активных системах, в которых используют дополнительные источники энер-
энергии, эффект виброизоляции создается действием дополнительного возбуждения, про-
противофазного по отношению к основному.
Классификация средств виброизоляции человека-оператора приведена на рис. 2,
Некоторые типы устройств для виброизоляции приведены в табл. 1.
1. Типы устройств для виброизоляции человека и области их применения
Типы устройств.
Подрессоренные сиденья
Виброизоляционные кабины
Виброизолированные платформы
(площадки)
Области применения
Тракторы, автомобили, железнодорожный транспорт,
сельскохозяйственные машины, строительно-дорожные
машины, карьерные экскаваторы, вертолеты
То же, буровые станки, пассажирские лифты
Самоходные катки, строительные вибрационные ма-
машины
Силовые приводы активных средств виброзащиты по конструктивному признаку
подразделяют на механические, пневматические, гидравлические, электромагнит-
электромагнитные и т. п. Наибольшее распространение получили электрогидравлические и гидро-
гидропневматические системы. Подробно об активных системах виброизоляции см. гл. XIII.
Элементы пассивной виброизоляции человека и их классификация приведены
на рис. 3.
Для эффективной виброизоляции в диапазоне частот 2—20 Гц собственная ча-
частота колебаний пассивной системы виброизоляции должна составлять около 1 Гц
(статическое перемещение сиденья с телом человека в этом случае может составлять
25 см). Существуют разнообразные схемы систем пассивной виброизоляции человека,
различающиеся комбинациями упругих и демпфирующих элементов, направляющих
механизмов и механизмов преобразования движения. Наибольшее распространение
получили системы виброизоляции с направляющими механизмами, обеспечивающие
СРЕДСТВА ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
415
Средства виброизоляции человека (СВ)
Простые СВ
Составные СВ
Пассивные (ПСВ)
Нерегулируемне
Регулируемые
с изменением харак-
характеристики инерцион-
инерционно/о элемента
о изменением харак-
характеристики ynpjroro
элемента
с изменением харак-
характеристики демпфи-
демпфирующего элемента
Активные (АСВ)
АСВ со статиче-
статическим положением
объекта виброза-
виброзащиты
о астатическим
АСВ с управле-
управлением
АСВ с постоянны-
постоянными параметрами
АСВ с переменны
ми параметрами
АСВ о регулиро-
регулированием
с изменением кинема-
кинематических характери-
характеристик направляющего
механизма
с параллельным
включением простых
СВ
с последовательным
включением
с комбинированным
включением
АСВ с управлением
параметрами по дина-
динамическим характери-
характеристикам источника воз-
возбуждения
по динамическим ха
рактеристикам объек-
объекта виброзащиты
по допустимым значе-
значениям динамических
характеристик объек-
объекта виброзащиты
с изменением кинема-
кинематических характери-
характеристик механизма пре
образования движе-
движения инерционного
элемента
Рис. 2. Средства виброизоляции человека
416
СИСТЕМЫ ВИБРОИЗОЛЯЦИЯ ЧЕЛОВЕКА
Составные элементы ПСЕ
Упругие
Демпфи-
Демпфирующие
Регулируемые
Нерегулируе-
Нерегулируемые
Линейные
Нелинейные
Металличе-
Металлические
Полимерные
Волокнистые
Пневматиче-
Пневматические
Гидравличе-
Гидравлические
Электромаг-
Электромагнитные
Фрикционные
Объемно-про-
Объемно-проволочные
Элементы с
сухим трением
с вязким тре-
трением
с внутренним
грением
Инерцион-
Инерционные
Жестко-
связанные
с объектом
виброза-
виброзащиты
Связанные
с объектом
через уп-
упругие эле-
элементы
через
демпфи-
демпфирующие
элементы
через на-
правляю-
правляющие меха-
механизмы
через ме-
механизм
преобра-
преобразования
движения
Направляю-
Направляющие
механизмы
Плоские
Простран-
Пространственные
Обеспечиваю-
Обеспечивающие одну,
две—пять сте-
степеней сиободы
объекта виб-
виброзащиты и
(или) инер-
инерционного эле-
элемента
с прямоли-
прямолинейной вибра-
вибрацией объекта
виброзащиты
и (или) инер-
инерционного
элемента
с угловой
со сложной
Механизмы
с поступатель-
поступательными парами
с вращатель-
вращательными парами
с рыжачно-
поступатель-
ными парами
в рычажно-
вращатель-
нымн парами
Механиз-
Механизмы преоб-
преобразования
движения
инерцион-
инерционного эле-
элемента
с поступа-
поступательной
вибрацией
с угловой
вибрацией
Механиче-
Механические
Пневмати-
Пневматические
Гидравли-
Гидравлические
Электро-
Электромагнитные
Рис. 3. Классификация составных элементов пассивных систем виброизоляции
СРЕДСТВА ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
2. Типовые схемы виброзащитных сидений
417
№ по
пор.
Схема виброзащит-
виброзащитного сиденья
Направляющий
механизм
№ по
пор
Схема виброчащит-
ного сиденья
Направляющий
механизм
Параллело-
граммный
Типа «ножни
цы»
Четырехзвен-
ный
'/77//
S
Поступатель-
Поступательная кинемати-
кинематическая пара
Маятниковый
3. Динамические характеристики виброзащитных сидений человека-оператора
Тип сиденья
Унифицированное
Унифицированное
двухместное МТЗ
КАМАЗ
КГРИ для карьер-
карьерных экскаваторов
Дормаш
(г. Минск) ВНИИ-
тройдормаш:
длинноходовое
короткоходовое
Собственная частота,
Гц
1,5—1,6
1,5—1,6
f j
1Л5 (для вертикаль-
вертикальных колебаний)
1,5 — для горизон-
горизонтальных колебаний
2,0
2,25
2.25
Относительное
демпфирование
0,3—0,35
0,20
Нелинейная характе-
характеристика; 0,2—0.5; о
увеличением ампли-
амплитуд возбуждения—0,6
и более
—
—
0,40
0,68
0,47
Свободный
ход до огра-
ограничителей, см
±6
±6
±5
±5
±5
±ю
±4
418 СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
снижение передачи вибрации в одном, как правило вертикальном, направлении
(движение механизма описывается одной обобщенной координатой). В табл. 2 при-
приведены типовые схемы виброзащитных сидений человека-оператора с направляю-
направляющими механизмами с одной степенью свободы. Некоторые сиденья изолируют чело-
человека от вибрации и в горизонтальном направлении; направляющий механизм имеет
две степени свободы и более [18].
Подрессоренные сиденья и виброизолированные платформы предназначены для
защиты человека от вибрации в диапазоне частот до 20 Гц (при частотах возбуждения,
больших 20 Гц, виброзащита человека существенно упрощается и обычно применяют
различные упругодемпфирующие прокладки, подушки, коврики и т. п.).
Широкое распространение получили параллелограммные направляющие меха-
механизмы с горизонтальным расположением рычагов (схема 1 табл. 2); упругие и демп-
демпфирующие элементы шарнирно закреплены на поворотных рычагах по диагоналям
параллелограмма.
Динамические характеристики некоторых отечественных подрессоренных сиде-
сидений приведены в табл. 3.
3. ПОВЕРОЧНЫЙ РАСЧЕТ ПАССИВНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ
ЧЕЛОВЕКА
Целью поверочного расчета систем виброизоляции является проверка параметров
вибрации рабочих мест человека-оператора, оборудованных виброизоляцией, на
соответствие требованиям действующих ГОСТов и других нормативных документов.
Исходными данными для расчета являются (ГОСТ 12.4.025—76 [201]):
— характеристики колебаний основания сиденья, установленные эксперимен-
экспериментально для машины конкретного вида при работе в характерном режиме;
— масса оператора, приходящаяся на сиденье, равная 5/7 всей его массы;
— масса подрессоренной части сиденья;
— расчетная схема колебательной системы «оператор—сиденье», определяемая
конструкцией сиденья и выбранной динамической моделью тела человека;
— характеристики сил, возникающих в колебательной системе (коэффициенты
жесткости и трения—для восстанавливающей и диссипативной сил);
— свободный ход сиденья, который не должен превышать допустимых значений,
устанавливаемых для машин конкретного вида.
Методы поверочного расчета некоторых простейших пассивных систем виброизо-
виброизоляции с одной степенью свободы (при возбуждении в диапазоне частот 0—22,4 Гц)
приведены в табл. 4.
В таблице обозначено: у — абсолютное движение основания; г — абсолютное
движение сиденья; х — относительное движение сиденья; и — угловая частота;
t — время; у (t); i/ (t)\ у (t) — соответственно абсолютные виброперемещение, вибро-
виброскорость, виброускорение основания; Sy (со), S. (со), S..(со) — спектральные плот-
плотности соответствующих функций, аппроксимируемые с помощью трех коэффициен-
коэффициентов а, р\ а0; х (t) — перемещение сиденья относительно основания; Sx (со) — спек-
спектральная плотность х (t); г (t), z (t), S (t) — соответственно абсолютные вибропереме-
виброперемещение, виброскорость, виброускорение сиденья; S. (со); S.. (со) —спектральные плот-
плотности соответствующих функций; от аа — среднеквадратические значения & (О
и S (t) соответственно; L — логарифмический уровень z (t) в октавной полосе частот;
тс — масса подрессоренной части сиденья; тч — маеса человека, приходящаяся на
сиденье; т — масса подрессоренной части сиденья с сидящим человеком; с — коэф-
коэффициент жесткости подвески сиденья; Ь — коэффициент демпфирования подвески
сиденья; соо = У с/т — собственная угловая частота системы виброизоляци; D —
относительное демпфирование; при гармонических колебаниях амплитуды величин х,
у и г обозначены теми же буквами с дополнительным индексом «нуль» (хд, </0, z0);
Тх (со) = хо/у„ — относительный коэффициент передачи при виброизоляции; Tz (со) =
= го1Уа — абсолютный коэффициент передачи при виброизоляции; FB — восстанав-
восстанавливающая сила; Fд, Fz — диссипативные силы, вызванные вязким и сухим трением
соответственно; ^о — абсолютная величина сухого трения; сч, Ьч — коэффициенты
РАСЧЕТ ПАССИВНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
419
0,2
/I
1
%
ч
ч,
1
1
1
1
\
11
:^—
ю— о
-т/л
'0,2
,05
01
¦и=
7
i—
>•
1 \/
м-
¦ ^
Л
л
\
\
Iе-
0
as
Ъ\
s
1
\
у
—
ч
\S
S
7ло
» \
[\
ч
S
ч
—
ч
ч
-
ч
0,5 Г,0 Z J 5 7 !П 20 30 V
op
to
Рис. 4. Относительный коэффициент пере-
передачи Т ("V) линейной одномассной систе-
системы виброизоляции (ц. 1 табл. 4)
Рис. 5. Абсолютный коэффициент переда-
передачи Т (V) линейной одномассной системы
виброизоляции (п. 1 табл. 4)
Рис. 6. Абсолютный коэффициент передачи T?(ui)
пневматической системы виёроизоляции с внут-
внутренним дросселированием (п. 7 табл. 4):
/ — при сопротивлении дросселя, равном 0; 2 —
при сопротивлении дросселя, равном бесконечно-
бесконечности; 3 — при оптимальном сопротивлении дрос-
дросселя
си*
ш
d
0,1
105
орз
0,02
0.01
J
1
о,1 о,г of
г зч5 т ю го warn
f,ru
Рис. 7. Относительный коэффициент
передачи Тх линейной одномассной
системы виброизоляции с динамиче-
динамической моделью тела человека (п. 8
0,1
¦ 11
\ "
...
t
ф
=
1
1
1
1абл. 4) при ¦
•= 2; D = 0,5
о,1 cj2o,j 0,71,0 г з ITjo гоя якюо
Рис. 8. Абсолютный коэффициент пе-
передачи Т линейной одномассной систе-
системы виброизоляции с динамической мо-
моделью тела человека (п. 8 табл. 4) при
ы„
= 21 D - 0i5
420
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
6
f
л;
0)
к
33
Ч)
ч
щ
ct
0J
а
С
О
-е
О
<У
Я
X
<и
ч
<1)
ь*
V
О.
с
О
с
о
«
и
X
S
CJ
ени
и
)Й ПОЛО
X
СИ
я
о
»я
о
SS
СС н
О :n
t
3 —
в S
В 3
S •
§ з
п
>>
о
S2
о
ш
0
I
у чаи
ч
J
О)
с
О
ДЛЯ
ье
**р
ь
X
о
о
ПОЛ
со
я
г
г
г
усти
II
к
ю
и
г «а я
О чо
Q 5
¦а
+
и
ч 'та
II
A
CD
1
1
V
V
¦«
к
S
а
о
ас
с
>.
V
Q _
\+г
S
+
| ;s:
.. СО
яо»
|
О
РАСЧЕТ ПАССИВНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
421
422
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
ч
ю
о
а
о
о,
С
I
«
а.
ч -•
ч
I
сз от G
s a (-
SS я
«> ш m
- 3
.г
X
I ¦
^^
РАСЧЁТ ПАССИВНЫХ СИСТЕМ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
V/
Л\
л\
^ч .
424
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
..I
V/
V/
1
1
;
... I] О
J-A
..с^ |j
СЧ in rp
С I &
W 1
je
"=С iCiC
00 00
V/
V
о
г
<и
а
о
о
к
J3
ч
§
ловие
о
.
й
о
о
¦
¦«
80'
V/
W
*¦*
V/
о
1,08
I ь
— я
V/
+
ц
g3 5
as ч&«ё-э
^ =Г хо ° и И
С 2 о -2 щ ю й>
О м ЯЙ S О Ч
к л а о о
Я и а» ео ^
-, u s а в
з •
I -
« о
I л\
i
s
с!
РАСЧЕТ ПАССИВНЫХ СИСТЕМ ВИБРСч!=ОЛЯЦИИ ЧЕЛ0ВЕ1
425
IS
3
14 "/Р. Фролова
426
СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
а.
С
о
РАСЧЕТ ПАССИВНЫХ CHQTEW ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
427
жесткости и демпфирования соответственно; ш^ — собственная частота тела чело-
человека; D4 — относительное демпфирование тела человека.
5. Вероятность удара Р об упоры
в зависимости от значений и — d/ox
и
0,1
0,2
0,4
0,6
Р
0,420
0,841
0,689
0,518
и
0,8
1,0
1,5
2,0
Р
0,424
0,317
0,134
0,045
и
25
3,0
3,5 и более
Р
0,012
0,003
0
Пример 1. Для защиты человека от случайных вибрационных воздействий используют
линейную систему виброизоляции г одной степенью свободы (п. 3 табл 4).
Пусть шс = 1,65 кгс-с2/м; с = 652,0 кгс/м; 6=70,0 кгс-с/м.; mq = 5/7-8,0 кгс-с2/м; d=0,06M
спектральная плотность ускорения основания задана аналитической аппроксимацией
где а=1,9 1/с; 3 = 18 1/с; ао = 2,7 м/с2.
Требуется определить: 1) среднеквадратические значения виброскорости и сравнить их
с допустимыми; 2) вероятность удара системы об упор.
Последовательность вычислений:
1) S- (со) = 8,76
(со> — 327,6J+ 14,4й2 '
1
3) S
8,7/ ' S8.7J
со*+ 327,6
_ 3^28
: (С° (В2 (ОJ — З27,6)*4-Н,4ш2
'"8
1 +
88,7
1 —
5„(со) =
3.28
! +327,6
38,7/
1
88,7
1— ;
4- —
+ 88,7
х 88,7 (со2 —327,6J+14,4со2
88,7/
4) среднеквадратические значения av (начиная с нижней границы первой октавной
полосы со = 4,39 1/с):
V
4,39
0,091 м7с; A,B) =
17,6
0,104 м/с;
35,2
Г S- (co)dco =0,059 м/с;
17,6 Z
/*70,3
а (8) = 1 / Г S •
V зЬ z
!ние с ;
октава
(a)da =0,003 м/с; ov.A6) =
V 70,3.
(co)d(o = 0.
Сравнение с данными, приведенными в табл. 5 гл XVIII, показывает, что во второй
и четвертой октавах параметры вибрации сиденья превышают нормы на допустимые уровни
'"оо
J S^.(co)dco = 0,012 м.
0
6) u = d/ax — 5i вероятность удара Р=0 (см. табл. 5).
Пример 2. Определить коэффициент эффективности ка^ линейной системы виброизоля
ции с одной степенью свободы, а также амплитуды и среднеквадратические значения абсо-
абсолютных виброскоростей и виброускорений сиденья оператора при гармоническом возбуж-
возбуждении у @ = 0,12 sin Bл-3« (позиция 8, табл. 4). В расчете учесть динамические овойства
14*
428 СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА
тела человека (в соответствии с моделью, представлен нон на позиции 1. табл 2, гл XVII):
тс — 1,6э кгосУм, с=652,0 кгс/м; * = 70,0 кгс-с/м, mq=y8,0 кгс-сг/м; сч = Ь270,0 kic/m, *ц =
= 107,0 кгС'С/м
Последовательность вычислений:
1O-х-1.14; Гг = 0,43; *эф= ^-L-= 2,3;
система виброизоляции снижает вибрацию в 2,3 раза;
2) го=0,43.0,12=0,52 м/с; г„ = 2я 3-0,052 = 0,98 м/с2;
хо = 1,14-0,12/Bя-3) = 0,0072 м;
3) частота f=3 Гц находится в_октавной полосе со среднегеометрической частотой 4 Гц;
0^ = 0,052/1^2 = 0,037 м/с. Gа = 1,0//2 = 0,71 м/с2.
4. АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ
ЧЕЛОВЕКА-ОПЕРАТОРА
Наиболее распространенные схемы активных систем виброизоляции человека
приведены в табл. 6. Принцип действия активных систем виброизоляции подробно
описан в гл. XIII.
Расчет активных систем виброизоляции. Выбор параметров шл, D, т), N актив-
активных систем виброизоляции в общем случае осуществляется методами оптимального
синтеза систем виброизоляции (например, в соответствии с табл. 4, гл. XIII). В слу-
случае, когда входные воздействия имеют более сложный характер, применяют методы
многопараметрической оптимизации.
Условия устойчивости для систем, приведенных в табл, 6,
2D>T).
Запасы устойчивости определяют следующим образом. В логарифмических коор-
координатах строят графики коэффициента разомкнутого контура Гр к и угла сдвига фаз (р
в зависимости от безразмерной частоты v. Система устойчива, если частота, при ко-
которой Ф = —180°, меньше частоты, при которой Трк достигает значения, равного 1,
Для систем, изображенных
в п, 1—3:
^р.к :
Т| —V3
в п, 4а:
_
/r(ti-2Dv^) +
в п. 46:
т =
= F
"V
Запас устойчивости по фазе должен составлять 30—60°, а по амплитуде 6—20 дБ
(см, примеры 3 и 4J,
АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА ОПЕРАТОРА
429
Для систем, изображенных в п. 1—3, реакция системы на ступенчатое силовое
воздействие Fo при отсутствии кинематического воздействия
mcojj
X
62 = arctg У \—pl{q — р),
где величины ряд определяют в зависимости от D и х\ на номограмме, приведенной
на рис. 9. Величину юп определяют в зависимости от со0! Р и д по номограмме,
приведенной на рис. 10.
4-2,0
V-
ЦТ
0,5-
0,3-
0,1-
0,15'
о,г
^,05
I
Ж
и
4
\
ш
1
- р
/
-П7
к
ni
С/
1
-J-
_^
/
Л
- <\
У
/л
д—=
уС
Z
~~,
/
/
¦4
<у
"
/
N
5
г—
-
1
f W tOOi;
раме
в зависимости от значений (О0. put
Рис. 9. Номограмма для определе- Рис. 10. Номограмма для определения параметра и
ния параметров р и q в зависимо-
зависимости от значений D и 1,
Пример 3. Проверить выполнение условия устойчивости активной гидромеханической
системы виброизоляции человека (п. 1 табл. 6) и построить графики коэффициента
передачи Т
Исходные данные: m = 2,0 кгс-с2/м; mq=5,35 кгс-с2/м; т = 7,35 кгО'О2/м; (Оо=4,7 1/с;
D = 0,5; ri = 0,33; iro == 3.155 м/с2.
Порядок расчета:
1. Проверяют условие устойчивости
11 < 20; 0,33 < 1.
Строят графики Г и ф (рис 11) Запас по коэффициенту усиления определяют для
Р-к
Т R
отор
которой соответствует значение Г = 1. В данном примере запасы соответственно равны
10 дБ и 93°. Е'
2. Графики Тz, построенные при ?> = 0,5 и т), равном 0; 0,16; 0,33 и 0,67, приведены
на рис. 12
Пример 4. Построить графики Тg активной пневматической системы виброизоляции
(п 4а и 46 табл 6)
Исходные данные: сос = 12,56 I/O B Гц); 7^c = l,5; T) = 0,22. Порядок расчета:
1. По табл 4 (п. 7) для пассивной пневматической системы виброизоляции определяют
¦ = 4;
J
2. Строят графики коэффициентов передач разомкнутого контура Т „(<о) и угла
сдвига фаз (см. стр. 428).
430
СИСТЕМЫ ВИЬРОИЗОЛЯЩШ ЧЕЛОВЕКА
¦&
¦&
АКТИВНЫЕ СИСТЕМЫ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА ОПЕРАТОРА
431
" I I
I I ii
в g s g i g II
flsifv
'«si a ¦ g t?
2 ч cj о о
I1: ?&sS Й g
SI SSSSS э
Oft. =f i>< ч н я p
III?
о. о
25.
If
m p.
432
СИСТЕМЫ ВИБРОНЗОЛЯНИИ ЧЕЛОВЕКА
Для п 4а табл 6 запасы устойчивости составляют по коэффициенту усиления 20 дБ;
по фазе 60°, для п 46 —соответственно 16 дБ и 67°. Графики Г к (и) и Ф (ш) показаны на
рис. 13 (для п 4а — сплошные кривые, для п 46 — штриховые).
3. Графики коэффициента передачи Т2 (п 4а табл 6), построенные при D— 0,968 и п,
равном 0; 0,16; 0,33 и 0,67, приведены на рис. 14.
—
V
J
ycu/i
---
0,2 0,3 0,5
|
' I"
'I
I
I
'II'
ноэф/риииеиту
ения 10 66
—
-¦
г 5 4 5
разе
93
ч
7
Г
— -¦
¦ ¦¦мм
10 v
¦ ¦ шин
ВО
"W
20
0
-70
V.'
-360
¦ ¦по
-180
-90
О
Рис. 11. Коэффициент усиления разомкну-
разомкнутого контура 7"р к и угла сдвига фаз ф
активной гидромеханической системы виб-
виброизоляции (п. 1 табл. в)
ч
1=0,6
'0,3.
/,0,1Ь
7- -—
>
0,3
0,2
0,1
0,05
0,03
0,02
0,10,2 0,40,6 1 2 4 6 10 20 ,, V
Рис. 12. Коэффициент передачи Т
активной гидромеханической системы
виброизоляции (п. 1 табл. 6) при раз-
различных значениях Т) и D = 0,5
Конструктивные параметры систем активной виброизоляции рассчитывают сле-
следующим образом:
I) жесткость металлических пружин и пневматических упругих элементов с =
= /ли-;
Tz
Ю :
- \\
¦ Л
\\
= N
: jg
\
T*?i,|Wj
5 10
%
k
'200
-1В0
-ПО
-120
Рис. 13. Коэффициент усиления разомкнутого
контура 7"р к и угла сдвига фаз ф активной
пневматической системы виброизоляции для
п. 4а табл. в — сплошные кривые; для схемы
46 табл. в — штриховые кривые
V
qoi
~ /
->ъ
¦fin
) ,о
г
"\
V
\
\
-ь
ю too ш,с~
Рис. 14. Коэффициент передачи Т актив-
активной пневматической системы виброизоля-
виброизоляции (п. 4а табл. 6) при различных значе-
значениях Г] и D — 0,968
2) геометрические и физические параметры металлических пружин (винтовых,
рессор) выбирают по известным методикам (см., например, т. 3);
3) геометрические и физические параметры пневматического упругого элемента
с- 1,4 pF2/V, где р — абсолютное давление в камере; F — площадь поршневого
действия пневматического упруюго элемента; V — объем газа в камере;
АКТИВНЫЕ СИСТЕМЫ ВИЬРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА
433
§Л\
Is
SV/
«о
2С
ал
g-V/
ч е
•о о.
га «j о л а
434 ЗАЩИТА ОПЕРАТОРОВ РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
4) коэффициент демпфирования гидравлического демпфера
5) геометрические и физические параметры гидравлического демпфера выбирают
по известным методикам;
6) геометрические параметры пневматических дросселей определяют в соответ-
соответствии с табл. 4; аналогично выбираются параметры гидравлических дросселей (в этом
случае |хд — коэффициент вязкости жидкости, используемой в гидросистеме);
7) геометрические размеры гидравлического золотника рекомендуется выбирать
в соответствии с табл. 8 исходя из заданного коэффициента ц;
8) геометрические размеры пневматического клапанного распределителя (п. 3,
4а и 46 табл. 6) рекомендуется выбирать в соответствии с табл. 7 исходя из заданного
коэффициента ц;
8. Геометрические размеры гидравлического золотника
Схема золотника
Формулы
Механическая
обратная соязь
г —технологический размер,
выдерживаемый с жестким
допуском, d — диаметр плун-
плунжеров; 1КП — ширина впуск-
впускного окна золотника,.'вип —
ширина выпускного окна,
Рп — статическое давление
питания, р — статическое
давление в гидроци-
гидроцилиндре: (А — коэффициент
расхода (для золотников ц =
— 0,57); с — жесткость метал-
металлического или пневматиче-
пневматического упругого элемента си-
системы виброизоляции; п —
передаточное отношение ме-
механической обратной связи
(п < 1)
Ширина впускного окна
цтаТ -, Г 7
I о__ I /
ви цеп У gp
Ширина выпускною окна
цеп У
V
9) физические и геометрические параметры электрогидравлической системы (п. 5
табл. 6) зависят от электромеханических характеристик датчиков обратной связи и
площади поршня гидроцилиндра; этими величинами определяются в основном коэф-
коэффициенты усиления операционного усилителя и электрогидравлического преобразо-
преобразователя.
Глава XX
ЗАЩИТА ОПЕРАТОРОВ РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
1. НОРМИРОВАНИЕ ВИБРАЦИИ, ПЕРЕДАВАЕМОЙ НА РУКИ ОПЕРАТОРОВ
К наиболее распространенным ручным машинам следует отнести молотки (кле-
(клепальные, рубильные, отбойные и др.), бетоноломы, шпалоподбойки, перфораторы,
трамбовки, пилы, шлифовальные, сверлильные и резьбонарезные машины, гайковерты
и шуруповерты, ножницы, рубанки, глубинные вибровозбудители, машинки для
стрижки шерсти и волос, электробритвы. При работе оператор все время поддер-
поддерживает с ручной машиной тесный контакт, необходимый для ее удержания, силового
воздействия на инструмент, надлежащей ориентации, перемещения и осуществления
иных функций управления машиной [37].
НОРМИРОВАНИЕ ВИБРАЦИИ, ПЕРЕДАВАЕМОЙ НА РУКИ ОПЕРАТОРОВ 435
Оператор непрерывно воспринимает со стороны машины вибрационные, силовые,
тепловые, шумовые и иные воздействия. Влияние вибрации на организм оператора
зависит от интенсивности перечисленных факторов.
Реализуемая в ряде современных ручных машин удельная (отнесенная к массе)
механическая мощность в 10—30 раз превышает удельную мощность стационарных
машин аналогичного назначения. Такая энерговооруженность, характеризующая
высокую интенсивность работы, при жестких ограничениях массы и размеров руч-
ручных машин предопределяет особые трудности вибрационной защиты операторов.
Одно из важнейших требований к средствам вибрационной защиты операторов руч-
ручных машин — обеспечение малой массы и объема этих средств.
Возможность снижения жесткости системы виброизоляции обычно ограничена
необходимостью поддержания должной силовой и тактильной связи оператора с об-
обрабатываемой средой. На вибрацию значительно влияет взаимодействие ручной ма-
машины с обрабатываемой средой и с руками оператора.
Человек — ручная машина — обрабатываемая среда составляют сложную не-
нелинейную систему с силовыми, тактильными, зрительными и слуховыми обратными
связями, параметры которой в значительной мере зависят от индивидуальных осо-
особенностей оператора, его физического и психического состояния, позы во время
работы, усилий, развиваемых мышцами рук, реализации волевых решений опера-
оператора и других факторов. Однако обычно систему рассматривают как линейную без
обратных связей, а механические свойства рук оператора оценивают с помощью
импеданса, определяемого экспериментально [91, 133, 255]. Согласно [82], при нажа-
нажатии прямой рукой вертикально вниз на ручную машину с замкнутой рукоятью в диа-
диапазоне частот до 200 Гц модель человека можно представить импедансом
Z=6-tOD-*, (I)
где со — угловая частота; i — мнимая единица; коэффициенты сопротивления 6 и
жесткости с выбирают по табл. 1. В этих условиях инерционная составляющая мни-
мнимой части импеданса мала.
В СССР руководящими документами по нормированию вибрации, передаваемой
ручными машинами на руки операторов, являются санитарные нормы № 626—66
[189] и ГОСТ 17770—72 [135]. В табл. 2 для девяти октавных полос частот со средне-
среднегеометрическими частотами от 8 до 2000 Гц приведены предельно допустимые сред-
неквадратические значения виброскорости и уровни в децибелах, подсчитанные для
опорной скорости 5 • Ю"в см • с.
1
Коэффициенты
сопротивления
и жесткости руки оператора
Сила, кго
ев я ь
15-20
15-20
>20
>20
а
я а
обхват
рукоят
<Ю
>20 •«
<Ю
>20 *ь
#2
Для мужчин
и
и
и
ж
28,4
28,3
45,3
36,6
36,8
S
с. кгс/
28 400
31 600
64 400
51600
35 400
Для женщин
s
—
», кгс-
24,4
23,7
46,9
32,1
22,7
а
18 800
23 800
48 500
42 500
26 100
2. Допустимые
значения
Среднегео-
метриче-
метрическая
частота
октавной
полосы,
Гц
8
16
31,5
63
125
250
500
1000
2000
среднек
задратические
виброскорости
Граничные
частоты
октавных
полос, Гц
ниж-
нижняя
5,6
11,2
22,4
45
90
180
355
710
1400
верх-
верхняя
11,2
22,4
45
90
180
355
710
1400
2800
Предельно допу-
допустимое
средне-
квадратическое
значение
см-о-»
6
5
3,5
2,5
1,8
1,2
0,9
0,63
0,45
скорости
ДБ
120
120
117
114
Ш
108
105
102
99
•• На пределе физической возможности.
•s Обхват, наиболее удобный при дли-
длительной работе.
В октавной полосе со среднегеометрической частотой 8 Гц предписан контроль
только для ручных машин с частотой ударов или вращения инструмента менее 11,2 Гц.
Для остальных восьми октав заданный уровень виброскорости убывает на 3 дБ на
октаву, Следовательно, инвариантным в этих восьми октавах остается среднеквад-
436 ЗАЩИТА ОПЕРАТОРОВ РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
ратическое значение полуторной производной виброперемещения по времени, рав-
равное 0,5 м-С,5. Квадрат этого значения 0,25 м2-сг3 представляет собой инвариант-
инвариантное значение удельной (отнесенной к массе) реактивной мощности, развиваемой
соприкасающимся с рукой оператора вибрирующим элементом машины в далеко
зарезонансном режиме.
Рекомендации [181] запрещают непрерывную работу с ручной машиной более
20 мин. Общая длительность действия вибрации за рабочую смену не должна пре-
превышать 320 мин. Допускается работа с ручными машинами, уровень вибрации ко-
которых превышает норму не более чем на 12 дБ при сокращенной длительности дей-
действия вибрации:
,_ - _ . Допустимая длительность
Превышение норм в любой октавной действия вибрации за
полосе частот, дБ рабочую смену, мин
До 3 160
3—6 S0
6—9 40
9—12 20
Приведенные значения норм вибрации и построение системы нормирования не
являются общепринятыми во всех странах. Так, в проекте руководства по измере-
измерению и оценке воздействия на человека вибрации, передаваемой через руки, рассмат-
рассматриваемом Международной организацией по стандартизации (ИСО), приведены допу-
допустимые среднеквадратичесиие значения виброускорения и виброскорости в два-
двадцати двух третьоктавных полосах со среднегеометрическими частотами от 8 до 1000 Гц
[38]. При этом в первых четырех третьоктавах инвариантны уровни виброускоре-
ни-я, а в последних девятнадцати третьоктавах инвариантны уровни виброскоростн.
Пересчет на допустимые среднеквадратические значения в октавных полосах
частот показывает, что в первой октаве со среднегеометрической частотой 8 Гц ука-
указано предельное значение 2,8 см •с1, а в остальных октавных полосах 1,4 см-с.
Эти значения меньше предписанных стандартом [135] в первых пяти октавах и
больше — в последующих трех октавах. Во второй октаве нормы различаются в
3,6 раза и в восьмой октаве — в 2,2 раза. Это свидетельствует о необходимости даль-
дальнейшей работы по гигиеническому, технико-экономическому и социальному обосно-
обоснованию норм вибрации, воспринимаемой руками работающих.
2. СНИЖЕНИЕ ВИБРАЦИОННОЙ ОПАСНОСТИ
БЕЗУДАРНЫХ РУЧНЫХ МАШИН
Жесткие ограничения массы и габаритных размеров ручных машин и высокие
значения их удельной мощности вынуждают уделять особое внимание мероприятиям
по снижению интенсивности возбуждения вибрации в ее источниках. Эти источники
можно подразделить на две группы [37]. В первой группе вибрация корпуса машины
и связанных с ним рукоятей является следствием заданного движения элементов
ручной машины, включая инструмент, и метода осуществления технологического
процесса. Такие источники специально предусмотрены в машинах вибрационного и
периодически ударного действия и при наличии звеньев механизма, совершающих
розвратно-поступательные и возвратно-угловые движения. В этих случаях стремятся
различными способами уменьшить равнодействующие переменных сил и моментов,
либо добиваются, чтобы ограниченный участок поверхности корпуса имел весьма
низкий уровень вибрации, и к этому участку присоединяют рукоять.
Ко второй группе относят источники, которые в идеальных условиях не порож-
порождают вибрации. Такие источники имеются в ручных машинах с вращательным дви-
движением инструмента или с взаимно уравновешенным синхронным движением двух
или нескольких инструментов. В этих случаях принимают меры к снижению интен-
интенсивности источников вибрации.
В ручных матпинах с вращательным движением инструмента (шлифовальные,
фрезерные, сверлильные, развертывающие, резьбонарезные и др.) источниками
вибрации являются биение поверхности инструмента, несбалансированность вра-
вращающихся частей, взаимодействие вращающегося инструмента с обрабатываемой
СНИЖЕНИЕ ВИБРАЦИОННОЙ ОПАСНОСТИ БРЗУДАРНЫХ МАШИН 437
средой. Причиной радиального биения может быть несовпадение оси вращения с
геометрической осью боковой поверхности круглого тела или отклонение формы
поперечного сечения вращающегося тела от круговой (например, овальность или
иная криволинейная огранка). В первом случае частота биения равна частоте вра-
вращения, а во втором случае частота биения в п раз больше, где п — число граней
(осесимметричных).
Радиальное биение опасно, если обработку поверхности изделия осуществляют
прижатой к ней боковой поверхностью вращающегося инструмента. Опасность
заключается в возможности отрыва инструмента от обрабатываемой среды и возбу-
возбуждении недопустимого ударно-вибрационного режима. Если подшипник вращаю-
вращающегося инструмента жестко связан с корпусом ручной машины и в соединениях от-
отсутствуют зазоры, а жесткая обрабатываемая деталь закреплена неподвижно, то
сила прижатия инструмента к обрабатываемой поверхности, необходимая для пре-
предотвращения отрыва инструмента при наименее опасном синусоидальном режиме
биения,
Q > таа2, B)
где т—масса ручной машины; а — амплитуда биения; со — угловая частота бие-
биения.
Отрывающая инерционная сила становится равной силе тяжести машины при
а=?Ш-2, C)
где g — ускорение свободного падения.
В шлифовальных машинах частота вращения может достигать 25 000 об/мин.
При частоте 15 000 об/мин подсчитанное по формуле C) значение а — 0,004 мм.
Учет податливостей снижает требуемую силу нажатия.
Снижению вибрации машин рассматриваемого типа способствует уменьшение
несбалансированности вращающихся частей. Поскольку сами машины подвер-
подвергаются балансировке, особое внимание следует уделять возможному дисбалансу
инструмента, в особенности абразивных кругов ручных шлифовальных машин.
Уменьшения центробежных сил, передаваемых на подшипники шпинделя новым
абразивным кругом, можно добиться снижением неуравновешенности' круга путем:
а) изготовления его из абразивной смеси с более равномерным распределением зерен;
б) снабжения круга металлической посадочной втулкой, обеспечивающей точное
центрирование на шпинделе; в) снижения плотности круга применением высокопо-
высокопористых и прочных абразивных материалов [137, 210].
По мере износа шлифовального круга нарушается его балансировка. Для непре-
непрерывного поддержания уравновешенности вращающихся частей шлифовальной ма-
машины в некоторых случаях используют шариковый автобалансир, представляющий
собой концентрически закрепляемое на шпинделе кольцо с тороидальной полостью,
частично заполненной шариками и смазочным маслом. Число шариков должно быть
не менее двух.
Автоматическая балансировка происходит в- зарезонансных (закритических) ре-
режимах вращения [24, 77]. При этом дисбаланс становится теоретически равным нулю.
Так, при двух шариках в полости
mr — 2m0R cos v = 0, D)
где mr — абсолютное значение дисбаланса шпинделя с шлифовальным кругом;
т0 — масса одного шарика; R — расстояние от центров шариков до оси вращения;
у — половина угла между радиус-векторами шариков. Должно быть выполнено
вытекающее из равенства D) условие
2m0R > mr. E)
Система с несколькими резонансами имеет ряд областей устойчивой работы ша-
шарикового автобалансира [77], каждая из которых расположена между соответствую-
соответствующей резонансной и последующей антирезонансной частотой. При линейном пред-
представлении поперечной вибрации шпинделя в.качестве критерия устойчивой работы
шарикового автобалансира удобно принять положительность мнимой части импе-
импеданса системы [3], Практически все ручные шлифовальные машины как на холо-
438 ЗАЩИТА ОПЕРАТОРОВ РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
стом ходу, так и при шлифовании работают в первой устойчивой области, и поэтому
шариковый автобалансир обеспечивает непрерывную балансировку.
Вибрация ручной машины может возникать в результате колебаний силы взаи-
взаимодействия вращающегося инструмента с обрабатываемой средой из-за биения или
несбалансированности вращающегося инструмента, тремора рук оператора, неодно-
неоднородности обрабатываемой среды, самовозбуждения [20, 37]. Колебания силы реза-
резания, вызванные биением или неуравновешенностью, исчезают с устранением послед-
последних. Колебания, вызванные тремором рук, при хорошей виброизоляции незначи-
незначительны. Вызванные неоднородностью среды колебания становятся значительными
лишь в исключительных случаях особо неоднородной или периодически неоднород-
неоднородной, среды.
Автоколебания в рассматриваемой системе возникают аналогично тому, как
это происходит при появлении фрикционных автоколебаний. Необходимым условием
самовозбуждения колебаний является работа на участке, где сила резания убывает
с ростом окружной скорости. Самовозбужденная вибрация корпуса ручной машины
при определенных условиях может достигнуть опасных значений.
К факторам, от которых зависят возможность возникновения и уровень автоко-
автоколебаний, относятся свойства материала и состояние поверхности инструмента, свой-
свойства обрабатываемой среды, форма, размеры и окружная скорость инструмента,
сила нажатия, наличие и свойства смазочно-охлаждающей жидкости, упругие, инер-
инерционные и диссипативные свойства системы «оператор—машина—среда». Принятие
достаточных мер на стадии расчета и конструирования машины для предотвращения
автоколебаний ручной машины возможно лишь при наличии достаточных экспери-
экспериментальных данных.
Промышленность выпускает большое число глубинных вибровозбудителей с эле-
электрическим и пневматическим приводом. Корпус глубинного вибровозбудителя
имеет форму цилиндра, высота которого в несколько раз превышает диаметр. Под
действием центробежной силы, развиваемой вращающимся дебалансом или обкаты-
обкатывающимся по беговой дорожке бегунком, корпус колеблется так, что все точки его
геометрической оси описывают окружности, причем собственное вращение корпуса
вокруг этой оси отсутствует. К верхнему концу корпуса через податливый упругий
шарнир прикреплена штанга рукояти. Корпус погружают в обрабатываемую среду
(чаще в уплотняемую вибрацией бетонную смесь).
Правильно сконструированный глубинный вибровозбудитель совершает в обра
батываемой среде колебания, аналогичные качаниям кругового маятника; центр
шарнира неподвижен, поскольку он находится в центре качаний, называемом в этом
случае нулевой точкой (т. е. точкой, амплитуда перемещения которой равна нулю).
В этом случае на руки оператора, удерживающего вибровозбудитель за рукоять,
вибрация практически не передается. Геометрическая ось корпуса описывает по-
поверхность кругового конуса с вершиной в центре шарнира.
Для того чтобы при весьма податливом упругом шарнире центр его оставался
неподвижным, необходимо выполнение двух условий. Во-первых, равнодействую-
равнодействующая сил диссипативного сопротивления обрабатываемой среды должна пересекать
геометрическую ось корпуса в той же точке, что и вынуждающая центробежная сила.
Во-вторых, расстояние I от указанной точки до центра шарнира и расстояние а от
центра массы т вибровозбудителя с присоединенной к нему массой тс среды до
центра шарнира должны быть связаны зависимостью
l = J/[(m + mJa], F)
где J — момент инерции вибровозбудителя относительно оси, проходящей через
центр шарнира и перпендикулярной геометрической оси корпуса [36, 66].
Если не выполнено первое условие, то геометрическая ось корпуса описывает
поверхность однополостного гиперболоида вращения и нулевая точка отсутствует
Если не выполнено второе условие, но выполнено первое, то нулевая точка распо-
расположена выше или ниже' центра шарнира.
В безударных ручных машинах некоторых типов, например в механизированных
ножовочных пилах, рубанках, шаберах, ножницах, инструмент и отдельные звенья
механизмов совершают возвратно-поступательные или возвратно-угловые движения
аначительного размаха. Для снижения переменных сил, передаваемых ими на кор-
СНИЖЕНИЕ ВИБРАЦИОННОЙ ОПАСНОСТИ БЕЗУДАРНЫХ МАШИН 439
пус машины, используют некоторые из способов, описанных в следующем пара-
параграфе. Снижения вибрации корпуса ручных вибрационных машин с синхронным
приводом, в частности с электромагнитным вибровозбудителем, можно добиться
применением динамических виброгасителей.
Источниками вибрации в безударных ручных машинах могут быть также транс-
трансмиссии (в частности, зубчатые передачи и гибкие валы), подшипники качения, дви-
двигатели. Вибрация может быть вызвана зазорами в подвижных соединениях, приво-
приводящими к соударениям соседних звеньев механизмов. Перечисленные источники
могут стать опасными при значительном износе, а также при неточностях изготов-
изготовления и сборки деталей машины.
3. СНИЖЕНИЕ ВИБРАЦИОННОЙ ОПАСНОСТИ
РУЧНЫХ МАШИН УДАРНОГО ДЕЙСТВИЯ
Задачи снижения вибрационной опасности ручных машин ударного действия
наиболее трудны вследствие больших сил, развиваемых при работе ударного меха-
механизма и вызывающих отдачу корпуса, высокой удельной мощности, реализуемой
в этих машинах, широкополосного спектра вибрации, возбуждаемой ударами. Руч-
Ручные машины ударного действия подразделяют на машины с поступательными уда-
ударами (молотки, перфораторы, бетоноломы, бучарды, трамбовки и др.) и машины
с угловыми ударами (гайковерты, шпильковерты, шуруповерты, сверлильные ма-
машины ударного действия и др.). Потенциально наиболее виброопасными являются
машины первой группы.
В традиционных конструкциях ручных машин с поступательными ударами во
время разгона ударника на корпус действует сила, равная по абсолютному значе-
значению и направленная противоположно силе, разгоняющей ударник. Снижение силы,
вызывающей отдачу корпуса, до силы нажатия оператора на инструмент приводит
к значительному уменьшению размаха виброперемещения корпуса. При заданном
значении ударного импульса наибольшее снижение максимума силы, разгоняющей
ударник, может быть достигнуто путем поддержания постоянства этой силы в те-
течение всего времени разгона. В таком случае коэффициент формы силовой диаграммы
(отношение среднего значения силы к максимальному) равен единице. В реальных
условиях этот коэффициент равен 0,65^0,9.
Для достижения наибольшей равномерности силовой диаграммы в пневматиче-
пневматических машинах разрабатывают специальную систему распределения воздуха. В эле-
электромагнитных машинах может быть применена система управления током в сило-
силовой катушке. Среднее значение силы, вызывающей отдачу корпуса, при заданном
значении ударного импульса можно снизить путем увеличения времени разгона удар-
ударника, но возможности этого ограничены заданными частотой ударов и временем
обратного хода ударника. Уменьшение среднего значения силы отдачи приводит
к удлинению пути разгона ударника, а этот путь также ограничен.
Эффективность работы машины ударного действия часто характеризуют энер-
энергией одного поступательного удара
? = 0,5яш2 G)
и ударной мощностью
N = Ef, (8)
где т — масса ударника; v — скорость ударника непосредственно перед ударом;
/— частота ударов.
При заданном значении энергии удара можно снизить ударный импульс / путем
повышения ударной скорости при соответственном снижении массы ударника
I = mv = 2E/v = V2Em. (9)
Однако практически повышение ударной скорости ограничено пределами проч-
прочности и выносливости деталей ударного механизма, требованиями долговечности
инструмента, а в некоторых случаях и особенностями технологического процесса,
осуществляемого ручной машиной,
440 ЗАЩИТА ОПЕРАТОРОВ РЬЧНЫХ МАШИН ОТ ВИЬРАИИИ
Значительное снижение размаха вибрации корпуса ручной машины ударного
действия может быть достигнуто введением дополнительного уравновешивающего
инерционного элемента. Он движется в сторону, противоположную движению удар-
ударника, во время разгона последнего. Торможение уравновешивающего элемента и
.его возвратное движение осуществляет упругий элемент малой жесткости [220].
В качестве упругого элемента применяют винтовую пружину или (в машинах с пнев-
пневматическим приводом) сжатый воздух, подаваемый в камеру, имеющую выпускное
отверстие. Такой элемент, обладая ма*лой жесткостью, передает на корпус мало из-
изменяющуюся силу, имеющую достаточное среднее значение. Его недостатком яв-
является некоторый дополнительный расход сжатого воздуха. У электромагнитных
молотков в качестве уравновешивающего инерционного элемента может быть исполь-
использована силовая катушка со своим каркасом [30].
Уравновешивающий инерционный элемент с устройством его торможения и воз-
возврата существенно снижает низкочастотную вибрацию корпуса, но приводит к опре-
определенному усложнению конструкции, повышению массы машины и затраты энергии.
Альтернативным решением является введение двух ударников, поочередно ударяю-
ударяющих по инструменту и обеспечивающих частичное взаимное уравновешивание. Такое
решение экономичнее по расходу энергии, но в конструктивном отношении еще слож-
сложнее.
У ручных машин ударного действия с пневматическим приводом имеется воз-
возможность компенсации силы отдачи действием на корпус реактивных сил струй
сжатого воздуха, управляемых движением ударного механизма. Такой способ может
быть эффективным, но сопряжен с дополнительным расходом воздуха и действием
вытекающих струй на операторов.
В электрических трамбовках с кривошипным приводом ударного поддона с целью
снижения размахов виброперемещения корпуса на последнем нередко устанавливают
противовесы (дебалансы), вращающиеся с частотой ударов поддона и уравновеши-
уравновешивающие первую гармонику силы, передаваемой на корпус кривошипным механизмом.
Введение противовесов приводит к заметному увеличению массы машины, что в дан-
данном случае не очень существенно, так как оператор не воспринимает силы тяжести
трамбовки, а только управляет ее передвижением с помощью рукояти.
В таких ручных машинах с угловыми ударами, как ударные гайковерты с элект-
электроприводом, с целью повышения эффективности возможно значительное увеличение
энергии одного углового удара
? = 0,5JQ2, A0)
(J — момент инерции ударника относительно оси вращения; Й — его угловая ско-
скорость непосредственно перед ударом), но недопустимо повышение ударной мощности,
поскольку это приводит к утяжелению машины. Поэтому были разработаны редко-
ударные гайковерты [59], вибрационная опасность которых сильно уменьшена в
связи с тем, что частота ударов установлена ниже диапазонов частот вибрации, рег-
регламентированной стандартом [135].
4. ОСОБЕННОСТИ ВИБРОИЗОЛЯЦИИ
И ДИНАМИЧЕСКОГО ВИБРОГАШЕНИЯ В РУЧНЫХ МАШИНАХ
Виброизоляция является существенным и широко применяемым способом вибра-
вибрационной защиты операторов ручных машин, поскольку применение иных средств,
в частности рассмотренных в предыдущих параграфах, для снижения передаваемой
на руки вибрации оказывается недостаточным. В то же время одних средств вибро-
виброизоляции обычно недостаточно. Поэтому при разработке ручной машины приходится
использовать комплекс мероприятий для уменьшения передаваемой на руки опе-
оператора вибрации ниже уровней, предписанных нормами [37].
С помощью виброизоляции наиболее трудно добиться значительного снижения
низкочастотной вибрации, поскольку для этого первая собственная частота вибро-
виброизолированной системы должна быть, по крайней мере, в несколько раз ниже ча-
частоты изолируемой вибрации. Указанное обстоятельство приводит к необходимости
ОСОБЕННОСТИ ВИБРОИЗОЛЯЦИИ И ВИБРОГАШЕНИЯ 441
использовать в системе виброизоляции упругие элементы малой жесткости, причем
их жесткость должна быть тем ниже, чем меньше масса изолируемых частей.
В ручных машинах масса указанных частей невелика, а частота имеющей наи-
наибольшую амплитуду первой гармоники виброскорости (особенно в машинах удар-
ударного действия) достаточно низка. Между тем применение упругих элементов очень
малой жесткости в системе виброизоляции во многих случаях сильно затрудняет
управление работой машины. Поэтому наиболее целесообразна виброизоляция всего
корпуса машины от воздействий приводного .механизма и инструмента. Нередко
это оказывается недостаточным, и приходится применять двухкаскадную или даже
трехкаскадную систему виброизоляции, располагая дополнительные упругие эле-
элементы между корпусом и рукоятью и между рукоятью и рукой оператора. Жесткость
этих упругих элементов может быть не слишком низкой.
При выполнении ручной машиной некоторых технологических процессов можно
допустить значительное ослабление мускульной обратной связи оператора с маши-
машиной. Тогда допустимо применение систем виброизоляции с упругими элементами,
имеющими весьма низкую жесткость. Для этой цели был разработан ряд упругих
устройств, жесткость которых снижается с увеличением статической деформации.
Когда нажатие, передаваемое оператором на ручную машину, достигает номиналь-
номинального значения, жесткость упругого устройства приближается к нулю, и оно стано-
становится идеальным упругим элементом системы виброизоляции [4]. Такие устройства
называют упругими элементами почти постоянного усилия или квазинулевой жест-
жесткости. Область их применения по указанной выше причине ограничена.
В системах виброизоляции ручных машин находят широкое применение сталь-
стальные пружины, упругие элементы из высокоэластичных материалов (резины, полиу-
полиуретана и др.) и пневматические упругие элементы (поршневого типа в проточной
металлической камере и герметизированные пневмобаллоны в резинокордной ка-
камере). Преимуществами стальных пружин являются возможность достижения ма-
малого демпфирования, слабая зависимость жесткости от температуры, стабильность
во времени, но в некоторых условиях пружины могут быть дополнительным источни-
источником шума (особенно в машинах ударного действия). Существуют металлические пру-
пружины с повышенным демпфированием.
Упругим элементам из высокоэластичных материалов можно придавать раз-
разнообразную форму, отвечающую конструктивным и эксплуатационным требованиям.
Они практически бесшумны. Кроме того, они обладают низкой теплопроводностью
и поэтому хорошо подходят для облицовки поверхности рукояти, соприкасающейся
с рукой оператора. В иных условиях при повышенной диссипации энергии низкая
теплопроводность может привести к чрезмерному нагреву упругого элемента. К не-
недостаткам высокоэластичных материалов относятся их сравнительно быстрое старе-
старение и значительная зависимость жесткости от температуры.
Пневматические упругие элементы хорошо подходят для систем виброизоляции
ручных машин, поскольку они могут обеспечить значительную несущую силу при
низкой жесткости. Однако размеры резинокордных пневмобаллонов нередко не
>дается довести до достаточно чалых .яаччшй. Поршневые упругие элементы нахо-
находят применение в некоторых машинах с пневматическим приводом.
Динамический виброгаситсль, содержащий инерционный и ynpyi ий элементы,
настроен на частоту подлежащей гашению гармоники вибрации, поэтому упругий
элемент должен иметь значительную жесткость с. Амплитуда а его деформации также
значительна. Масса тп линейно деформируемого упругого элемента пропорциональна
амплитуде П периодически запасаемой в нем потенциальной энергии:
тп = Ш = 0,5?«г2, A!)
вследствие чего эта масса, а тем более масса всего динамического виброгасителя т —
= тп ¦+ т0 (где т0 — масса инерционного элемента), может оказаться недопустимо
большой для ручной машины. Поэтому задача минимизации массы динамического
виброгасителя имеет серьезное практическое значение.
Коэффициент
A2)
442
ЗАЩИТА ОПЕРАТОРОВ РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
для упругих элементов, материал которых работает на растяжение-сжатие или
изгиб;
? Ог A3)
для упругих элементов, материал которых работает на сдвиг или кручение. Здесь
р — плотность, Е, G — модули растяжения-сжатия и сдвига; а, т — нормальные
и тангенциальные допускаемые напряжения. Безразмерный коэффициент к зависит
от характера деформации, формы упругого элемента и краевых условий на его концах.
Минимальное значение массы динамического виброгасителя
,_ \ixFVEp _
0@
для упругих элементов растяжения-сжатия или изгиба;
mm ni-
A4)
A5)
для упругих элементов сдвига или кручения. Здесь F — амплитуда развиваемой
упругим элементом силы, необходимой для полного погашения синусоидальной
вибрации защищаемого объекта.
Безразмерный коэффициент
|.i =/2A-а), A6)
где а — коэффициент приведения массы упругого элемента к инерционному эле-
элементу.
Минимальное значение массы упругого элемента
min тп = \г2
3. Параметры упругих
элементов
min т. A7)
В табл. 3 приведены значения к, \ж, [хлх для упругих элементов следующих ти-
типов: А — прямолинейный призматический стержень (деформация растяжения-
сжатия); Б — прямолинейная призматическая балка
с двумя защемленными концами при поступательном
относительном перемещении инерционного элемента
(плоская деформация изгиба); В — прямолинейная
призматическая балка, защемленная на защищаемом
объекте и -шарнирно соединенная с инерционным
элементом (плоская деформация изгиба); Г — прямо-
прямолинейный призматический элемент (плоская деформа-
деформация сдвига); Д — винтовая цилиндрическая пружи-
пружина растяжения-сжатия (деформация кручения материа-
материала пружины). Коэффициент а подсчитан для статиче-
статической деформации упругих элементов
Виброгасители с элементами типов Б, В, Г, кроме синусоидальной силы, создают
еще и синусоидальный момент. Для его компенсации такие виброгасители следует
устанавливать на защищаемом объекте зеркально симметричными парами.
Динамические виброгасители,, состоящие из упругого и инерционного элементов,
эффективно работают в ручных машинах с достаточно стабильной частотой циклов.
Однако в некоторых условиях при изменяющейся частоте могут быть применены
самоподстраивающиеся динамические виброгасители [141].
Тип
упругого
элемента
А
Б
В
Г
д
V.
?.
18
IX
2
4
ЦК
1,63
4,75
5,25
1,63
2,31
ц-'к
1,22
3,77
3.44
1,22
1,73
5. ПОЛУЧЕНИЕ И ОЦЕНКА ВИБРАЦИОННЫХ ХАРАКТЕРИСТИК
РУЧНЫХ МАШИН
Вибрационной'характеристикой ручной машины называют совокупность сведе-
сведений о вибрации подлежащих контролю точек Машины в условиях, близких к эксплуа-
эксплуатационным, дающих возможность оценить качество ручной машины применительно
к ее воздействию на оператора. Поскольку выпуск ручных машин налажен в мае-
СИСТЕМА ОБЕСПЕЧЕНИЯ ЗАЩИТЫ ОПЕРАТОРОВ ОТ ВИБРАЦИИ 443
штабах крупносерийного и массового производства стандартизация методов полу-
получения и оценки вибрационных характеристик ручных машин приобрела'большое
значение.
Вибрация точек ручной машины зависит от механической структуры машины,
фактически реализуемых энергетических параметров, реакции объекта обработки,
механических свойств рук конкретного опеоатора, его позы, физического и психи-
психического состояния, силы нажатия, прикладываемой к машине, силы обхвата рукоя-
рукоятей, температуры воздуха и т. д. Поскольку многие из перечисленных факторов под-
подвержены существенным флуктуациям, вибрация интересующих нас точек ручной
машины носит случайный характер. Поэтому полученные в результате испытания
осциллограммы, магнитограммы или ряды числовых данных следует рассматривать
как реализации случайного процесса, а не как детерминированную вибрационную
характеристику.
Стандартизация методов, получения и оценки результатов вибрационных изме-
измерений призвана минимизировать затраты времени и средств на проведение испытаний,
дать возможность обоснованно и единообразно сравнивать качество конкурирую-
конкурирующих машин применительно к их воздействию на оператора и обеспечить техническую
оценку систем защиты от вибрации.
Для получения вибрационных характеристик, воспроизводимых с достаточно
малыми разбросами, система испытаний ручных машин предусматривает поддержа-
поддержание ряда перечисленных факторов в достаточно узких пределах. Так, в нормативно-
технической документации объект обработки задают достаточно подробно и устанав-
устанавливают количественные показатели, характеризующие воздействие объекта обра-
обработки на испытуемую машину. Для рубильных молотков задают форму, размеры и
марку материала испытательного • обрабатываемого изделия, размеры срубаемой
стружки. Для строительных молотков и бетоноломов задают форму и размеры об-
обрабатываемого при испытании блока, свойства его материала, характеризуемые коэф-
коэффициентом восстановления скорости ударника при его ударах об инструмент.
В большинстве случаев в процессе испытаний ручная машина выполняет одну
из характерных для нее технологических операций, которая признана достаточно
представительной для оценки качества защиты оператора от вибрации. Иногда в про-
процессе испытаний выполняют условную операцию, которая по воздействию на машину
в определенном смысле адекватна технологической операции. Так, при испытании
ручных машин ударного действия иногда применяют поглотители энергии ударов
в качестве имитаторов реального процесса. При соблюдении регламентированных
условий такая замена технологической операции условным процессом не только
допустима, но и целесообразна, так как уменьшает разброс значений результатов
измерения вибрации, сокращает и упрощает испытания.
Нормативно-техни.ческая документация регламентирует позу оператора при
испытаниях, его массу и силу нажатия на инструмент, часть веса машины, воспри-
воспринимаемого руками, а в некоторых случаях и силу обхвата рукояти рукой оператора.
Применяют два способа контроля силы нажатия: по показаниям малогабаритного
динамометра, встраиваемого между рукоятью и рукой, и по разности показаний
динамометрической площадки, на которой стоит оператор, до и во время нажатия
на рукоять ручной машины [67]. В некоторых случаях при соблюдении определенных
условий допускается использование механических имитаторов рук оператора, что
приводит к более стабильным результатам измерений вибрации.
Технические требования к средствам испытаний пневматических и электрических
молотков изложены в [209]. Требования к средствам измерения вибрации ручных
машин, методике проведения измерений и обработке их результатов изложены в стан-
стандарте [136].
в. СИСТЕМА ОБЕСПЕЧЕНИЯ ЗАЩИТЫ ОПЕРАТОРОВ
РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
По мере роста интенсивности работы ручных машин, необходимого для повыше-
повышения производительности труда, возросли уровни передаваемой на руки операторов
вибрации, В связи с этим была разработана и начала в широких масштабах осуще-
444 ЗАЩИТА 017FPAT0P0B РУЧНЫХ МАШИН ОТ ВИБРАЦИИ
ствляться система скоординированных мероприятий по обеспечению защиты опера-
операторов ручных машин от вибрации [37, 65, 199]. Эта система включает в себя следую-
следующие подсистемы:
1) обоснование, разработку и совершенствование нормирования допустимых
уровней вибрации, передаваемой машинами на руки операторов, с учетом харак-
характера вибрации и сопутствующих факторов и регламентацией времени работы опе-
оператора с машиной в течение рабочей смены;
2) разработку и совершенствование методов и средств испытаний с целью уста-
установления вибрационных характеристик ручных машин;
3) разработку и совершенствование методов и средств виброакустической диаг-
диагностики и других способов установления конструктивных, технологических и эксп-
эксплуатационных факторов, вызывающих повышенную вибрацию деталей ручных машин;
4) разработку вибробезопасных и в то же время высококоэффективных ручных
машин, включая выполнение научно-исследовательских, опытно-конструкторских
и проектно-технологических работ и осуществление организационных мероприятий;
5) разработку и совершенствование правил и мероприятий, регламентирующих
условия вибробезопасной эксплуатации ручных машин;
6) обоснование, разработку и совершенствование методик оценки технико-эко-
технико-экономической, гигиенической и социальной эффективности мероприятий по снижению
уровней вибрации, воспринимаемой руками операторов [82, 83, 137].
Задача создания вибробезопасных ручных машин, которые одновременна были
бы высокопроизводительными, прочными, надежными, удобными в эксплуатации и
экономически конкурентоспособными, во многих случаях настолько трудна, что
для ее достижения необходимо с большим умением и искусством использовать ком-
комплекс методов и средств снижения вибрации, передаваемой на руки операторов.
В разрабатываемой машине нередко приходится одновременно предусматривать меры
для снижения интенсивности источников вибрации, уравновешивания инерционных
сил, предотвращения местных резонансов или снижения вибрационной активности
резонирующих элементов, осуществлять виброизоляцию и динамические виброга-
виброгашения При этом систему виброизоляции зачастую делают многокаскадной и парал-
параллельной,
СПИСОК ЛИТЕРАТУРЫ
1. Автоматическая балансировка роторов машин / А. А. Гусаров, В. И. Сусанин,
Л. Н. Шаталов и др. М.: Наука, 1979. 306 с.
2. Агафонов Ю. В. Исследование ручных угловых шлифовальных машин под дейст-
действием неуравновешенности шлифовальных кругов. — В кн.: Колебания и динамическая
прочность элементов машин. М.: Наука, 1976, с. 130—135.
3. Агафонов Ю. В. Исследование устойчивости шарикового автобаланса роторной
системы на упругих опорах. — Машиноведение, 1976, № 6, с. 3—7.
4. Алабужев П. М., Зуев А. К., Кирнарский М. Ш. Использование систем почти посто
янного усилия для защиты от вибрации в ручных инструментах. — В кн.: Пути сннже
ния вибрации и шума ручных машин. М.: ЦНИИТЭстроймаш, 1973, с. 70.
5. Алексеев А. М., Сборовский А. К. Судовые виброгасители. Л.: Судпромгиз, 1962
196 с.
6. Ананьев И. В., Тимофеев П. Г. Колебания упругих систем в авиационных конструк
циях и их демпфирование. М.: Машиностроение, 1965. 526 с.
7. Андреева-Галанина Е. Ц. Вибрация и ее значение в гигиене труда. Л.; Медгиз
1956. 190 с.
8. Артоболевский И. И. Теория механизмов. М.: Наука, 1965. 776 с.
9. Апархов В. И., Панченко В. И. Особенности возбуждения вибраций от пересопря
жения зубьев в планетарных зубчатых передачах. — Машиноведение, 1966, № А, с. 46—54
10. Асташев В. К. О согласовании колебательной системы с приводом и нелинейной
нагрузкой. — Машиноведение, 1978, № 3, с. 9—16.
11. Асташев В. К., Герц М. Е, К теории вибрационного перемещения. — Изв. АН СССР
МТТ, 1978, № 1, с. 40 — 44.
12. Бабаков И. М. Теория колебаний. М.: Наука, 1965. 560 с.
13. Бабицкий В. И. Теория виброударных систем. М.: Наука, 1978. 352 с.
14. Бабицкий В. И., Израилович М. Я. Обидной задаче оптимальной амортизации. —
Инженерный журнал, МТТ, 1968. № 5, с. 44—46.
15. Бабицкий В. И., Кобринский А. Е. Электродинамический демпфер — Изв. АН СССР,
ОТН, Механика и машиностроение, 1962, № 3, с. 81—84.
16. Балабанян Н. Синтез электрических цепей. М.: Госэнергоиздат 1961. 416 с.
17. Балакирев В. Я. Исследование виброзащитных систем самоходных катков с глад-
гладкими вальцами. — В кн.: Вопросы эргономики строительных и дорожных машин (Тр
ВНИИстройдормаша, вып. 69) М.: 1975. с. 60—66.
18. Бандаков Б. Ф., Сеиишин С. И. Стендовые испытания сидений машинистов самоход-
самоходных строительных и дорожных машин. — В кн.; Вопросы эргономики строительных н до-
дорожных машин (Тр. ВНИИстройдормаша, вып. 69). М.: 1975, с. 24 — 30.
19. Барц Дж. А., Джанотти К. Р. Программа вычисления на ЭЦВМ размеров и инер-
инерционных параметров человеческого тела. —¦ Тр. амер. общ инж.-мех., сер. «В», 1975, т. 97.
№ 1, с. 52 — 62.
20. Бауман В. А., Быховский И. И. Проблемы вибрационной защиты персонала строи-
строительных и дорожных машин. М.: ЦНИИТЭстроймаш, 1970. 59 с.
21. Беллман Р., Гликсберг И., Гросс О. Некоторые вопросы математической теории про-
процессов управления. М.: Изд-во иностр. лит., 1962. 336 с.
22. Беляковский Н. Г. Конструктивная амортизация механизмов, приборов и аппара-
аппаратуры на судах. Л.: Судостроение, 1965. 523 с.
23 Бессонов А. П. Основы динамики механизмов с переменной массой звеньев. М.:
Наука, 1967. 297 с.
24. Блехман И. И. Синхронизация динамических систем. М.: Наука, 1971.. 894 с.
25. Боголюбов Н. Н., Митропольский Ю. А. Асимптотические методы в теории нели-
нелинейных колебаний М.: Наука, 1974. 503 с.
26. Болотин В. В. Динамическая устойчивость упругих систем. М.: Гостехиздат, 1956
600 с.
27. Болотин В. В. Статистические методы в строительной механике. М.: Стройиэдат,
1965. 270 с.
28. Болотин В. В. Применение методов теории вероятностей и теории надежности в рас
четах сооружений. М.: Стройиздат, 1971 256 с.
446 СПИСОК ЛИТЕРАТУРЫ
29. Болычевцев Э. М., Лавровский Э. К. О построении множеств Парето в некоторых
задачах оптимизации. — Изв. АН СССР, МТТ, 1977, Jft 6, с. 44 — 53.
30. Борисов В. М., Гольдштейн Б. Г., Шерман В. Л. Ручные виброзащищенные элект-
электромагнитные молотки и перфораторы с двойной изоляцией. М.: ЦНИИТЭстроймаш, 1977,
60 с.
31. Борщанский К. Н. Рассеяние энергии при колебаниях лопаток турбин, соединенных
различными по конструкции связями. — В кн.: Рассеяние энергии при колебаниях меха-
механических систем. Киев: Наукова думка, 1976, с. 193—200.
32. Брановский М. А., Лисицин И. С. Временная инструкция по динамической балан-
балансировке роторов турбоагрегатов и других крупных энергетических машин в собственных
подшипниках. М.: Энергия, 1964. 25 с
33. Брановский М. А., Лисицин И. С, Сивков А. П. Исследование и устранение вибра-
вибраций турбоагрегатов. М.: Энергия, 1969. 232 с.
34. Брановский М. А.. Сивков А. П. Балансировка роторов турбоагрегатов. М.: Энер-
Энергия, 1968. 143 е.
35. Бутенин Н. В. Элементы теории нелинейных колебаний. Л.: Судпромгиз, 1962. 195 с.
36. Быховский И. И. Основы теории вибрационной техники. М.: Машиностроение
1969. 363 с.
37. Быховский И. И., Гольдштейн Б. Г. Принципы конструирования вибробезопасных
ручных машин. М.: ЦНИИТЭстроймаш, 1977. 58 с.
38. Васильев Ю. М., Готлиб Я- Г., Филатова Л, Е. Нормирование производственных
вибраций в СССР и за рубежом. М.: ВНИИ охраны труда, 1976. 60 с.
39. Ващенко К. И., Хильчевский В. В., Снежко А. А. Циклическая вязкость магниевого
чугуна. — Литейное производство. 1970, № 9, с. 15 — 16.
40. Вейц В. Л. Динамика машинных агрегатов. Л.: Машиностроение, 1969. 370 с.
41. Вейц В. Л., Кочура А. Е. Динамика машинных агрегатов с двигателями внутреннего
сгорания. Л.: Машиностроение, 1976. 256 с.
42. Вейц В. Л., Кочура А. Е., Мартыненко А. М. Динамические расчеты приводов ма-
машин. Л.: Машиностроение. 1971, 352 с,
43. Вентцель Е. С. Теория вероятностей. М.: Физматгиз, 1962. 564 с.
44. Вибрация. Виброизоляторы резиновые. Коврики. ГОСТ 17725 — 72, М.: Изд-во
стандартов, 1972. 9 с.
45. Вибрация. Динамические характеристики тела человека. Методы определения. ГОСТ
13701 — 72. М.: Изд-во стандартов, 1972, 9 с.
46. Вибрация^на производстве / Э. А. Дрогичина, Н, Н. Малинская, Н. Б. Метлина
и др. М.: Медицина, 1971. 243 с.
47. Вибрация. Общие требования к безопасности. ГОСТ 12.1.012—78. М.: Изд-во стан-
стандартов, 1978. 12 с.
48. Вибрация, передаваемая человеческому телу. Руководство по оценке воздейст-
воздействия на человека. Международный стандарт. Per. № ИСО 2631—74. М.: Изд-во стандартов,
1978. 17 с.
49. Вибрация энергетических машин: Справочное пособие / Под ред. Н. В. Григорьева
Л.: Машиностроение, 1974. 464 с.
50. Вудсон У., Конвер Д. Справочник по инженерной психологии для инженеров и ху-
художников-конструкторов. М.: Мир, 1968. 518 с.
51. Вульфсон И. И. Определение приведенных значений параметров диссипации при
бигармонических колебаниях. — В кн.: Вибротехника. Вильнюс: Минтис, 1968, вып.' 3 E),
с. 83—100.
52. Вульфсон И. И. Влияние высокочастотных воздействий на условия параметриче-
параметрического возбуждения механизмов. — Машиноведение, 1977, № 5, с. 35—41.
53. Вульфсон И. И. О колебаниях систем с параметрами, зависящими от времени, —
Прикладная математика и механика, 1969, т. 33, № 2, с. 331—337.
54. Вульфсон И. И. Динамические расчеты цикйовых механизмов. Л.! Машинострое-
Машиностроение, 1976. 328 с.
55. Вульфсон И. И. Типовые задачи динамики с учетом упругости звеньев. ЛПИ. 1977.
74 с.
56. Вульфсон И. И., Коловский М. 3. Нелинейные задачи динамики машин. Л.; Маши-
Машиностроение. 1968. 281 с.
57. Вульфсон И. И., Сердюков Б. В. Экспериментальное исследование демпфирующей
способности затянутых конических и резьбовых соединений. — В кн.: Рассеяние энергии
при колебаниях упругих систем. Киев: Наукова думка, 1968, с. 405—409.
58. Ганиев Р. Ф., Кононенко В. О. Колебания твердых тел. Киев: Наукова думка, 1976.
431 с.
59. Гельфанд М. Л., Гольдштейн Б. Г., Ципенюк Я. И. Вибробезопасные электриче-
электрические ударные гайковерты и эффективные способы их применения. Мл ЦНИИТЭстроймаш,
1976. 57 с.
60. Геронимус Я. Л. Динамический синтез механизмов по Чебышеву. Харьков: Изд-во
ХГУ, 1958. 134 с.
61. Гик Л. Д. Измерение вибраций. Новосибирск: Наука, 1972. 292 с.
62. Гирке X. Е., Никсон И. В., Гигнард Д. Т. Вибрационный фактор. Характеристики
параметров вибрации. — В кн.: Основы космической биологии и медицины, т. 2, кн. I, M.;
Наука, 1974. с. 396—416.
63. Глухарев К. К.> Потемкин Б. А., Сиренко В. И. О нелинейности и нестационарности
динамических характеристик тела человека. — Машиноведение, 1972, JVa 4, с. 9—14.
64. Гольдин А. С. Метод уравновешивания валопровода несколькими грузами, — Инф.
сообщ. БТИ ОРГРЭС, 1968. № Т-27, 23 с.
65. Гольдштейи Б. Г., Гоппен А. А. Система обеспечения виброзащиты операторов
ручных машин, М.; ЦНИИТЭстроймаш, 1977. 51 о.
СПИСОК ЛИТЕРАТУРЫ 447
66. Гольдштейн Б. Г., Петрунькин Л. П. Глубинные вибраторы для уплотнения бетона
М.'. Машиностроение, 1966. 172 с.
67. Гоппен А. А., Николаев И. В. Пневматические молотки и перспективы развития их
конструкций. М.: ЦНИИТЭстроймаш, 1972. 61 с.
68. Григорьев Е. Т. Расчет и конструирование резиновых амортизаторов М.: Машгиз,
1960, 281 с.
69. Турецкий В. В. Об одной задаче оптимального управления. — Изв АН СССР, Ме-
Механика, 1965. № 1, с. 159 — 162.
70. Турецкий В. В., Мазин Л. С. Об оптимальной амбртизации упругих тел. — Маши-
Машиноведение, 1970, № 3, с. 17 — 22.
71. Турецкий В. В. Об оптимизации параметров системы амортизации при стационарных
случайных воздействиях. — Машиноведение, 1971, № 5, с. 23 — 28.
72. Гусаров А. А. Балансировка гибких роторов с распределенной массой. М.: Наука,
1974, 144 с.
73. Давиденков Н. Н. О рассеянии энергии при вибрациях. — ЖТФ. 1938, т. 8, № 6,
с. 156 — 161.
74. Дебривный Н. Е. К исследованию затухания колебаний в стальных тросах. — В кн.:
Вопросы рассеяния энергии при колебаниях упругих систем. Киев: Гостехиздат УССР, 1962,
с. 218 — 222.
75. Дебривный Н. Е. Исследование затухания свободных колебаний проволочных ка-
канатов. — Труды научно-техническогосовещания по демпфированию колебаний. Киев: Изд-во
АН СССР, 1960. с. 145-150.
76. Ден-Гартог Дж. П. Механические колебания. М.: Фнэматгиз, 1960. 580 с.
77. Детитко Ф. М. Об устойчивости работы автобалансира для динамической баланси-
балансировки. — Изв. .АН СССР, ОТН, Механика и машиностроение, 1959. № 4, с. 38—45,.
78. Диментберг Ф. М., Шаталов К. Т., Гусаров А. А. Колебания машин. М.: Машино-
Машиностроение, 1964. 308 с.
79. Динамика'системы дорога — шина — автомобиль — водитель / Под ред. А. А. Ха-
чатурова. М.: Машиностроение, 1976. 536 с.
80. Дондошанский В. К. Расчет колебаний упругих систем на электронных вычисли-
вычислительных машинах. М.: Машиностроение, 1965. 388 с.
81. Житомирский В. .К. Механические колебания и практика их устранения М.: Маши-
Машиностроение. 1966. 175 с.
82. Заборов В. И., Клячко Л. Н., Росин Г. С. Защита от шума и вибрации в черной ме-
металлургии. М.: Металлургия, 1976. 248 с.
83. Заборов В. И., Росин Г. С. Экономическая эффективность снижения локальной виб-
вибрации. — В кн.: Вибрационная техника. МДН.ТП, 1978, с. 163 — 168.
84. Зевин А. А. Периодические режимы в системе с ударным гасителем колебаний. —
В кн.: Механика машин. М.: Наука, 1969, вып 17 — 18, с. 79 —85.
85. Ильинский В. С. Защита аппаратов от динамических воздействий. М.: Энергия,
1970. 320 с.
86. Инженерные методы исследования ударных процессов / Г. С. Батуев, Ю. В. Голуб-
Голубков. А. К. Ефремов и др. М.: Машиностроение. 1969. 248 с.
87. Иориш Ю. И. Защита самолетного оборудования от вибрации. М.: Оборонгиз, 1949.
223 с.
88. Иоршин Ю. И. Виброметрия. М.: Наука, 1963. 403 с.
89. Иоффе Р. Л., Панченко В. И. К исследованию влияния чисел лопастей рабочих
колес гидродинамических машин на их виброакусгические характеристики. — Машино-
Машиноведение, 1972, № 1. с. 20 — 24.
90. Исакович М. М., Клейман Л. И., Перчанок Б. X. Устранение вибрации электри-
электрических машин. Л.: Энергия. 1969. 199 с.
91. Исследование импеданса руки человека в системе оператор — инструмент / Ю. М. Ва-
Васильев, Ю. И. Матвеев. П. В. Панкин и др. — В кн.: Основные направления повышения
технического уровня механизированного инструмента (ручных машин). М.: ЦНИИТЭстрой-
ЦНИИТЭстроймаш, 1976, с. 148—150.
92. Исследование рассеяния энергии в магниевых чугунах с шаровидным графитом
при изгибно-крутильных колебаниях / Г. С. Писаренко, К. И. Ващенко. В. В. Хильчевский
и др. — В кн.: Рассеяние энергии при колебаниях упругих систем. Киев: Наукова думка,
1968, с. 156 — 170.
93. Каннингхем В. Введение в теорию нелинейных систем. М.: Госэнергоиздат, 1962. 456 с.
94. Карлин С. Математические методы в теории игр., программировании и экономике.
М.: Мир, 1977. 838 с.
95. Карни Ш. Теория цепей. Анализ и синтез. М.: Связь, 1973. 368 с.
96. Карпова Н. И. Вибрации и нервная система. Л.: Медицина, 1976. 167 с.
97. Карпушин В. Б. Вибрации и удары в аппаратуре. М.: Сов. радио, 1971. 341 с.
98. Кер-Вильсон У. Вибрационная техника. М.: Машгиз, Л963. 415 с.
99. Кобринский А. Е. Механизмы с упругими связями. М.! Наука, 1964. 390 с.
100. Когаев В. П. Расчеты на прочность при напряжениях, переменных во времени
М.: Машиностроение, 1977. 232 с.
101. Кожевников С. Н. Динамика машин с упругими звеньями. Киев: Изд-во АН УССР,
1961. 160 с.
102. Кожевников С. Н., Ткаченко А. С, Черевик Ю. И. Динамика главного привода
станка холодной прокатки труб, оснащенного пневматическим уравновешивающим устрой-
устройством. — В кн.: Теория механизмов и машин. Харьков; Изд-во ХГУ, 1969. Вып. 5, с. 18—24
103. Кожешник Я. Динамика машин. М.: Машгиэ, 1961. 424 с.
104. Коловский М. 3. О влиянии высокочастотных возмущений на резонансные колеба
ния в нелинейной системе. — В кн.: Динамика и прочность. (Труды ЛПИ, № 226). М.; Май1
гиз, 1963. с. 7—17.
448 СПИСОК ЛИТЕРАТУРЫ
105. Коловский М. 3. Нелинейная теория виброзащитных систем. М.: Наука, 1966.
318 с.
106. Коловский М. 3. Автоматическое управление виброзащитными системами. М.:
Наука, 1976 317 с.
107 Конструкционное демпфирование в неподвижных соединениях / Н. Г. Калинин,
Ю А. Лебедев, В. И. Лебедева и др. Рига: Изд-во АН Латв. ССР, 1960. 169 с.
108. Кораблев С. С. К теории электромеханического виброгасителя — Прикладная ме-
механика, 1968 т. 4. Л<5 3, с. 15—19.
109. Коренев Б. Г., Зевин А. А., Резников Л. М. Сравнительный анализ эффективно-
эффективности динамического и ударного гасителя колебаний. — Строительная механика и расчет
сооружений, 1972, № 3, с. 21—25.
ПО Користысский Я. И. Колебания в текстильных машинах. М.: Машиностроение,
1973. 320 с.
111. Коул Дж. Методы возмущений в прикладной механике. М.: Мир, 1972. 274 с.
112. Кошман В. Н. Снижение низкочастотных колебаний, действующих на трактори-
тракториста. — Тракторы и сельхозмашины, 1965, .4» 4, с. 17 — 22.
113. Кошман В. Н., Пугачев А. П. Сравнительная оценка сидений современных колес-
колесных тракторов. — В кн.: Улучшение эксплуатации качеств тракторов и автомобилей. (Науч-
(Научные тр. Бел ору сек. ин-та механизации сельского хозяйства). Горки: 1969, Вып. 13, с. 51 —58.
114. Кросли Ф. Э. Некоторые исследования нелинейных колебаний в шарнирно-рычаж-
ных механизмах с упругими элементами, — В кн.: Динамика машин. М.: Машиностроение,
1969, с. 190 — 201.
115. Крылов А. Н. Некоторые замечания о крешарах и индикаторах. Избранные труды
М.: Изд-во АН СССР, 1958. 804 с.
116. Крылов Н. М., Боголюбов Н. Н. Введение в нелинейную механику. Киев: Изд-во
АН УССР. 1937. 406 с.
117. Кузнецов А. А. Вибрационные испытания элементов и устройств автоматики. М.:
Энергия, 1976. 119" с.
118. Куинджи А. А., Колосов Ю. А., Народицкая Ю. И. Автоматическое уравновешива-
уравновешивание роторов быстроходных машин. М.: Машиностроение, 1974. 152 с.
119. Ларин В. Б. Статистические задачи виброзащиты. Киев: Наукова думка, 1974
128 с.
120. Ларин В. Б., Науиенко К. И., Сунцев В. Н. Спектральные методы синтеза линей-
линейных систем с обратной связью. Киев: Наукова думка, 1971. 151 с.
121. Лебедев А. А. Методы механических испытаний материалов при сложном напря-
напряженном состоянии. Киев: Наукова думка, 1976. 147 с.
122. Левина 3. М., Решетов Д. Н. Контактная жесткость машин. М.: Машиностроение,
1971. 264 с.
123. Лойцянский Л. Г., Лурье А. И. Курс теоретической механики. Т. 2. М.: Гостех-
издат, 1955. 596 с.
124. Лурье А. И. Аналитическая механика. М.: Физматгиз, 1961. 824 с.
125. Лурье А. И. Некоторые нелинейные задачи теории автоматического регулирова-
регулирования. М. — Л.: Гостехиздат, 1951. 216 с.
126 Льюис Р., Райфа Ж. Игры и решения. М.: Изд-во иностр. лит. 1961. 642 с.
127. Малкин И. Г. Некоторые задачи теории нелинейных колебаний. М.: Гостехиздат,
1956. 491 с.
128. Маслов Г. С. Расчеты колебаний валов: Справочное пособие. М.: Машиностроение,
1968. 271 с.
129. Матвеев В. В., Башта О. Т. О влиянии формы поперечного сечения и вида дефор-
деформации стержней на демпфирование их колебаний. — проблемы прочности, 1971, № 10,
с. 38 — 41.
130. Матвеев В. В., Яковлев А. П. О демпфирующей способности замковых соединении
турбинных лопаток. — В кн.: Рассеяние энергии при колебаниях механических систем.
Киев: Наукова дучка, 1972. с. 259 — 269.
131. Матвеев В. В., Яковлев А. П., Васинюк И. М. К определению нелинейных систем
гистерезисного типа по резонансной кривой. — Прикладная механика, 1970, т. IV, вып. 1.,
с. 7-11.
132. Математическая теория оптимальных процессов / Л. С. Понтрягин, В. Г. Болтян-
Болтянский, Р. В. Гамкрелидле и др. М.: Наука, 1976. 392 с.
133. Маточкин В. В. Входной механический импеданс руки клепалыцика-и ею имита-
имитация. — В кн.: Пути снижения вибрации и шума ручных машин. М.: ЦНИИТЭстроймаш,
1973, с. 26-27.
134. Машины самоходные сельскохозяйственные строительно-дорожные колесные. Низ-
Низкочастотные колебания. ГОСТ 16526—70. М.: Изд-во стандартов, 1970. 6_с.
135. Машины ручные. Допустимые уровни вибрации. ГОСТ 17770 — 72. — В кн.: Ма-
Машины ручные. Вибрация. М.: Изд-во стандартов. 1972, с. 3 — 4. .
136. Машины ручные. Методы измерения вибрационных параметров ГОСТ 16519 — 70. —
В кн.: Машины ручные. Вибрация. М.: Изд-во стандартов, 1972. с. 17 — 30.
137. Микулинский А. М., Стариков Г. А., Шейман Л. С. Защита от вибрации при работе
с пневматическими шлифовальными машинами. М.: Машиностроение, 1976. 85 с.
138. Митропольский Ю. А. Проблемы асимптотической теории нестационарных коле-
колебаний. М.: Наука, 1964 432 с.
139. Моисеев Н. Н. Асимптотические методы нелинейной механики. М.: Наука, 1969.
380 с.
140. Найденко О. К., Петров П. П. Амортизация судовых двигателей и механизмов.
Л.: Судпромгиз, 1962. 288 с.
141. Нефедов В. П., Петров Г. Н. Снижение уровня вибрации ручного механизирован-
механизированного инструмента типа бензомоторной пилы при помощи следящего динамического компеч-
СПИСОК ЛИТЕРАТУРЫ 449
сатора. — В кн.: Пути снижения вибрации и шума ручных машин. М.! ЦНИИТЭстроймаш
1973. с. 60 — 61.
142. Никитин Л. В. Удар жестким телом по упругому стержню с внешним сухим тре
нием. — Иженерный журнал, МТТ. 1967, № 2, с. 166 — 170.
143. Никитин Л. В. Распространение волн в упругом стержне при наличии сухого тре
ния. — Инженерный журнал. МТТ, 1968, № I, с. 124 — 129.
144. Ньютон Дж. К,. Гулд Л. А., Кайзер Дж. Ф. Теория линейных следящих систем
М.; Физматгиз, 1961. 407 с.
145. Общая вибрация и ее влияние на организм человека / И. Ю. Борщевский, М. Д. Еме
льянов, А. А. Корешков и др. М.: Медгиз, 1964. 156 с.
146. Оптимизация линейных инвариантных во времени систем управления / Ф. А. Алиев.
В. Б, Ларин, К. И. Науменко и др. Киев: Наукова думка, 1978. 328 с.
147. Основы балансировочной техники. / Под ред. В. А. Щепетильникова. М.: Машино-
Машиностроение, 1975. т. 1, 2. 527 с. 679 с.
148. Пальмов В. А. Колебания упругопластическнх тел. М.: Наука, 1976. 328 с.
149. Пановко Г. Я. Дискретная колебательная модель тела человека и определение ее
параметров. — Машиноведение, 1974, № 4, с. 16—20.
150. Пановко Г. Я., Погемкин Б. А., Фролов К. В. Определение параметров моделей тела
человека-оператора при вибрационном и ударном воздействиях. — Машиноведение, 1972,
№. 3, с. 31—37.
151. Пановко Я. Г. Внутреннее трение при колебаниях упругих систем. М.: Физматгиз,
1960. 190 с.
152. Пановко Я. Г. Проблемы теории конструкционного демпфирования в неподвиж-
неподвижных соединениях. — Труды Ш совещания по основным проблемам теории машин и меха-
механизмов, М.: Машгиз, 1963, с. 209 — 234.
153. Пановко Я. Г. Введение в теорию механических колебаний. М.: Наука, 1971. 239 с.
154. Пановко Я. Г., Губанова И. И. Устойчивость и колебания упругих систем М.:
Наука, 1967, 420 с.
J55. Панченко В, И, Снижение вибраций и шума машин и механизмов уравновешива-
уравновешиванием возбуждающих сил и их взаимной компенсацией. — Машиноведение, 1971, №5,с.35 —41
156. Панченко В, И., Северинова Т. П. К исследованию оптимальных условий возбуж-
возбуждения колебаний от пересопряжения зубьев в планетарных зубчатых передачах. — В кн.:
Механика машин. М.: Наука, 1973, вып. 42. с. 127 — 138.
157. Пейсах Э. Е. Полиномы с экстремальными свойствами и их применение в качестве
кинематических функций ведомого звена кулачкового механизма. — В кн.: Теория меха-
механизмов и машин. Харьков: Изд-во ХГУ, 1972. вып. 12, с. 3 —13.
158. Пеллинец В. С. Измерение ударных ускорений. М.: Изд-во стандартов, 1975. 288 с.
159. Первозванский А. А. Случайные процессы в нелинейных автоматических системах.
М.: Физматгиз, 1962. 347 с.
160. Писаренко Г. С. Рассеяние энергии при механических колебаниях. Киев: Изд-во
АН УССР, 1962. 436 с.
161. Писаренко Г. С. Колебания механических систем с учетом несовершенной упру-
упругости материала. Киев: Изд-во АН УССР, 1970. 379 с.
162. Писаренко Г. С. О новом подходе к описанию контура гистерезиса в теории меха-
механических колебаний. — Проблемы прочности, 1971, № 6, с. 21—22.
163. Писаренко Г. С, Василенко Н. А., Яковлев А. П. Рассеяние-энергии в стержнях
при различных видах колебаний. — В кн.: Вопросы рассеяния энергии при колебаниях уп-
упругих систем. Киев;- Гостехиздат УССР, 1962, с 15—19.
164. Писаренко Г. С, Матвеев В. В., Яковлев А. П. Методы определения характеристик
демпфирования колебаний упругих систем. Киев: Наукова думка, 1976 86 с.
165. Писаренко Г. С, Яковлев А. П., Матвеев В. В. Вибропоглощающие свойства кон-,
струкционных материалов. Киев: Наукова думка, 1971. 376 с.
166. Поляков В. С, Барбаш И. Муфты. М.: Машиностроение, 1964. 363 с.
167. Поляков В. С, Барбаш И. Д., Вяховский О. А. Справочник по муфтам Л.: Маши-
Машиностроение, 1974. 348 с.
168. Поляков В. С, Виленский Б. А. О выборе линейных упругих муфт Труды ЛПИ.
Л.: Машиностроение, 1967, № 285. с. 85—91.
169. Пономарев С. Д. Расчет и конструирование витых пружин. М.: ОНТИ, 1938. 352 с
170. Попов Н. Н. Расчет и проектирование кулачковых механизмов М.: Машинострое-
Машиностроение, 1965. 304 с.
171. Потемкин Б. А., Синев А. В. Синтез систем виброзащиты с учетом динамических
свойств объекта и основания. — Изв. АН СССР, МТТ, 1975, № 2, с. 50—57.
172. Приборы виброизмерительные. Основные параметры ГОСТ 16826 — 71. М.: Изд-bi
стандартов, 1971. 5 с.
173. Приборы виброизмерительные Термины и определения. ГОСТ 16819—71 М.: Изд-во
стандартов. 1971. 8 с.
174. Приборы и системы для измерения вибрации, шума и удара / Под ред. В. В. Клюева.
М.: Машиностроение, 1978, т. 1, 448 с.
175. Прочность, устойчивость, колебания. Справочник в 3-х т / Под ред. И. А. Биргера
и Я. Г. Пановко. М.: Машиностроение, 1968, т. 3. 567 с.
176. Пугачев В. С. Основы автоматического регулирования. М.: Наука. 1974. 400 с.
177. Рабинович И. М. Основы строительной механики стержневых систем. М.; Госстрой-
издат, 1960. 519 с.
178. Разумов И. К. Основы теории энергетического действия вибрации на человека
М.: Медицина. 1975. 206 с.
179. Растригин Л. А. Применение метода обучающейся модели для автоматической
балансировки роторов. — В кн.; Уравновешивание машин и приборов. М.; Машинострое»
ние. 1965, с. 118—122.
450 СПИСОК ЛИТЕРАТУРЫ
180. Расчеты на прочность в машиностроении / С. Д. Пономарев, В. Л. Бндерман,
К. К. Лихарев и др. М.: Машгиз. 1959, т. 3, 111 с.
181. Рекомендации к разработке положения о режиме труда работников виброопасных
профессий. — В кн.1 Научные работы института охраны труда ВЦСПС. М.; Профиздат,
1972, вып. 77, с. 79 — 81,
182. Решетов Д. Н., Левина 3. М. Демпфирование колебаний в соединениях деталей
машин. — Вестник машиностроения, 1956, № 12. с. 16—23.
183. Решетов Д. Н., Левина 3. М. Демпфирования колебаний в деталях станков. — В кн.:
Исследования колебаний металлорежущих станков. М.: Машгиз. 1958. с. 17 — 24.
184. Ротбарт Г. А. Кулачковые механизмы. М.: Судпромгиз, 1960. 336 с.
185. Ротенберг Р. В. Подвеска автомобиля. М.; Машиностроение, 1972. 392 с.
186. Ружинка Дж. Активные виброзащитные системы. — Испытательные приборы и
стенды (Экспресс-информация), 1969, № 10, с. 14—24.
187. Рунов Б. Т. Уравновешивание турбоагрегатов на электростанциях. М.: Госэнерго-
издат, 1963. 224 с.
188. Санитарные нормы допустимых вибраций в жилых домах. М.: Минздрав СССР.
1975. 9 с.
189. Санитарные нормы и правила при работе с инструментами, механизмами и обору-
оборудованием, создающим вибрации, передаваемые на руки работающих. М.: Минздрав СССР,
1966. с. 3-9.
190. Санитарные нормы по ограничению вибрации на рабочих местах для обслуживаю-
обслуживающего персонала и пассажиров в подвижном составе железнодорожного транспорта. М.
Минздрав СССР, 1975. 9 с.
191. Светлицкий В. А. Случайные колебания механических систем. М.: Машинострое-
Машиностроение. 1976. 216 с.
192. Свешников А. А. Прикладные методы теории случайных функций. М.: Физматгиз,
1968. 463 с.
193. Сергеев С. И, Демпфирование механических колебаний. М.: Физматгиз, 1959
408 с.
194. Сиденье сельскохозяйственных машин полумягкое ГОСТ 7121—72. М.: Пзд-во
стандартов, 1972. 5 с.
195. Сиденье тракторное. Технические требования. ГОСТ 20062—74*. М.: Изд-во стан-
стандартов. 1974. 5 с.
196. Силаев А. А. Спектральная теория подрессоривания транспортных машин. М/
Машгиз. 1963. 280 с.
197. Синев А. В. Выбор параметров систем виброизоляции и динамических гасителей
на основе методов теории цепей. — Машиноведение, 1972, Ш 1, с. 28—34.
198. Синев А. В. Синтез пространственной системы виброзащиты твердого тела при ста-
стационарных случайных воздействиях. — В кн.: Колебания и динамическая прочность эле
ментов машин. М.: Наука, 1976. с. 7—28.
199. Система обеспечения виброзащиты операторов ручных машин (Минстройдормаш)
М.: ЦНИИТЭстроймаш, 1975. 8 с.
200. Система стандартов безопасности труда Методы и средства вибрационной защиты
ГОСТ 12.4.046 — 78. М.: Изд-во стандартов, 1978. 36 с.
201. Система стандартов безопасности труда. Вибрация. Методы расчета виброизоляции
рабочего места операторов самоходных машин. Основные положения. ГОСТ 12.4 Q25 — 7ь
М.: Изд-во стандартов, 1976. 57 с.
202. Система стандартов безопасности труда. Вибрация. Общие требования безопас
ности. ГОСТ 12.1.012—78. М.: Изд-во стандартов, 1978. 22 о.
203. Система стандартов безопасности труда. Средства измерения и контроля вибра
ции на рабочих местах. Технические требования. ГОСТ 12.4.012 — 75. М.: Изд-во стандар-
стандартов, 1975. 5 с.
204. Система стандартов безопасности труда. Тракторы и машины самоходные сельско--
хозяйственные. Общие требования безопасности. ГОСТ 12.2.019—75. М.: Изд-во стандар
тов, 1976. 19 с.
205. Скучик К. Простые и сложные колебательные системы. М.: Мир, 1971
557 с.
206. Случайные колебания / Под ред. С. Кренделла. М.: Мир, 1967. 356 с.
207. Сорокин Е. С. К теории внутреннего трения при колебаниях упругих систем. М.:
Госстройиздат, 1960. 131 с.
208. Справочник по динамике сооружений / Под ред. Б. Г. Коренева и И. М. Рабиновича
М.; Стройиздат, 1972. 511 с.
209. Средства испытаний пневматических и электрических молотков. Технические тре-
требования. ГОСТ 16844 — 71, — В кн.; Машины ручные. Вибрация. М.: Изд-во стандартов.
1972. с. 31-35.
210. Страмцов В. Ю., Готлиб Я. Б. О влиянии абразивного круга на вибрацию ручных
шлифовальных машин. — Механизированный инструмент и отделочные машины. М.; ЦНИ-
ЦНИИТЭстроймаш, 1962, № 2, с. 44 — 58.
211. Суровцев Ю. А. Амортизация радиоэлектронной аппаратуры. М.: Сов. радио,
1974 176 с.
212. Таблицы и графики для расчетов реакции линейных систем на импульсное воз-
возбуждение / Б. А. Глаговский, А. Г. Казачок, В. С. Пеллинец и др. Новосибирск; Наука,
1971. 192 с.
213. Тартаковский И. И. Методы фазовых диаграмм при синтезе оптимальных законов
движения. — В кн.: Теория механизмов и машин. Харьков: Изд-во ХГУ. 1972, вып. 13
с. 20—26
214. Тимошенко С. П. Колебания в инженерном деле. М.: Наука, 1967. 4 14 с.
215. Тир К. В. Механизмы полиграфических автоматов, М,; Книга, 1BS5, 495 с,
СПИСОК ЛИТЕРАТУРЫ 451
216. Тир К. В., Полюдов А. Н., Петрук А. И. Еопросы теории и опыт эксперименталь
пых исследований уравновешивающих кулачковых механизмов. — В кн.: Динамика машин
М.; Машиностроение. 1969, с. 175 — 187.
217. Тондл А. Нелинейные колебания механических систем. М.: Мир, 1973. 334 с.
218. Тондл А., Шклиба Я. О некоторых особенностях вынужденных колебаний цели
ценных квазигармонических систем. — В кн.: Динамика машин. М.; Машиностроение,
1969. с. 377 — 382.
219. Троицкий В. А. Оптимальные процессы колебаний механических систем. Л.: Маши-
Машиностроение, 1976. 248 о.
220. Тупицин К. К. Вопросы динамики ручных машин с уравновешенным ударным меха-
механизмом. Новосибирск: Наука, 1974. 84 с.
221. Физиология движений I Под ред. В. С. Гурфинкеля. Л.: Наука, 1976. 375 с.
222. Фреман Н., Фреиан П. У. ВКБ — приближение. М.: Мир, 1967. 168 с.
223. Фролов К. В. Уменьшение амплитуды резонансных систем путем управляемого
изменения параметров — Машиноведение, 1965, Ш 3, с. 38—42.
224. Фурман Ф. А. Активные виброзащитные системы. — Вестник машиностроения,
1972. № 5, с. 31-34.
225. Фурман Ф. А., Фролов К. В. Резонансные характеристики активных гидравличе-
гидравлических виброзащитных систем. — В кн.! Виброзащита человека — оператора и вопросы мо-
моделирования. М.: Наука, 1973, с. 35—53.
226. Фурунжиев Р. И, Проектирование оптимальных виброзащитных систем. Минск, Вы-
шэйшая школа, 1967 318 с.
227. Харкевич А. А. Спектры и анализ. М.: Физматгиз. 1962. 236 о.
228. Хемминг Р. В. Численные методы. М.: Наука, 1968. 400 с.
229. Хильчевский В. В. О влиянии вида напряженного состояния на рассеяние энергии
а материале. — Труды научно-технического совещания по демпфированию колебаний. Киев;
Изд-во АН УССР, 1960. с. 92—97.
230. Хильчевский В. В. О рассеянии энергии при изгибно-крутильных колебаниях. —
Вестник Киевского политехнического института. Сер. Машиностроение, 1969, Ш 6, с. 23—29.
231. Хильчевский В. В. Исследование затухания независимых изгибно-крутильных ко-
колебаний. — Проблемы прочности, 1970, № 3, о. 17—22.
232. Хильчевский В. В., Дубенец В. Г. Рассеяние энергии при колебаниях тонкостенных
элементов конструкций. Киев: Внща школа, 1977. 233 с.
233. Хильчевский В. В., Петушков В. Г., Федоров В. А. Методика исследования рассея-
рассеяния энергии в особом случае плоского напряженного состояния. — Заводская лаборатория,
1969, т. 35, № 7, с. 11 — 13.
234. Хитрик В. Э. Методы динамической оптимизации механизмов машин-автоматов.
Л.| Изд-во ЛГУ, 1974, 116 с.
235. Хорунжин В. С. К методике определения приведенной жесткости пространственных
механизмов. — Изв. вузов. Машиностроение. 1977, № 1, с. 67—70.
236. Чанг Шелдон С. Л. Синтез оптимальных систем автоматического управления. М.:
Машиностроение, 1964. 440 о.
237. Черепов В. Ф., Веселое Ю. В., Кузин В. 1W. Аппаратура автоматического управле-
управления электродинамическими вибрационными установками. ЛДНТП, 1973. 15 с.
238. Чихладзе 3. В., Синев А. В. Анализ динамики виброзащитного сиденья с учетом
динамических характеристик тела человека. — В кн.: Влияние вибраций на организм чело-
человека. М.: Наука, 1977, о. 77 — 80.
239. Шитиков Б, В. Динамическая балансировка роторов. М.; Трансжелдориздат,
1951. 123 с.
240. Шмаков В. Т. Выравнивающая виброопора для прецизионных станков. — Станки
и инструмент, 1974, № 1, с. 17—18.
241. Штейнвольф Л. И. Динамические расчеты машин и механизмов. М. — Киев; Маш-
t-из, 1961. 330 с.
242. Шуберт Д. В., Ружичка Д. Теоретическое и экспериментальное исследование элект-
электрогидравлических виброзащитных систем. — Конструирование и технология машинострое-
машиностроения. М.: Мир, 1969, № 4, с. 231-234.
243. Шувалов В. Ю.,. Левина 3. М., Решетов Д. Н. Демпфирование продольных коле-
колебаний в передачах винт—гайка и опорах винтов. — Станки и инструмент, 1973, We 4, с. 4—7.
244. щепетильников в. А. Уравновешивание центральных кривошипноползунных ме-
механизмов. — В кн.: Теория и практика уравновешивания машин и приборов. М.: Машино-
Машиностроение, 1970, с. 279 — 291.
245. Эйкхофф П. Основы идентификации систем управления. M.S Мир, 1975. 683 с.
246. Юдин В. А,, Петрокас Л. В. Теория механизмов и машин. М.: Высшая школа,
1967. 528 с.
247. Янг Р., Сиге С. Система подвески сиденья для вездеходных транспортных средств, —
Тракторостроение (Экспресс-информация), 1974, № 25, с. 15—22.
248. Янушевский Р. Т. Теория линейных оптимальных многосвязных систем управле-
управления. М.; Наука. 1973. 464 о.
249. Abu-Akeel А. К. The electrodynamic vibration absorber as a passive or active de-
Vice. — Trans, of the ASME, ser. В., 1967, N4. p. 72—79.
250. Bartz J. A., Glanotty C. R. Computer programm to generate dimensional and inertlal
properties of the human body. — Trans, of the ASME, Ser. B, 1975. v. 92, N1, p. 52—62.
251. Calcaterra P. C, Schubert D.~ W. Active vibration isolation of human subjects from
severe dynamic environments. — Paper ASME, Ser. Vibr. 1969, N65, p. 28—35.
252. Crede Ch. E. Vibration and shock isolation. N. Y., John Willey and sons, 1952, 275 p.
253. Crede Ch. E. Shock and vibration consepts In engineering design. N. Y., 1965., 331 p.
254. Den Hartog J. P. Forced vibration with combined coulumb and viscous friction.
Trans. ASME, 1931, v. 53, p. 107—112.
452 СПИСОК ЛИТЕРАТУРЫ
255. Dlckmann D. Ein schwingungsmechanishes Modell fur des schwlngungserregte Hand-
Arm-System des Menschen. - VDI — Zeitschrift, 1959. 101, N1, S. 23-26.
256. Fryml В., Boruvka V, Vyvazolani rotacnich stroju v technicke praxi. Praha, SNTL
1962, 233s.
257. Gard D. R., Ross M. A. Vertical mode human body vibration transmissibility. —
Trans. IEEE, Ser. SMC, 1976, v. 6, N2, p. 102 — 112.
258. Gierke H. E. Biodynamic models and their applications. — Journ. of the accoust.
soc. of Amer., 1971, v. 50, N6, p. 1397-1413.
259. Griffin M,#J., Lewis С. Н. A review of the effects of vibration on visual acuity and
continious manual control. Part. 1. Visual acuity. — Journ. of Sound and Vibration, 1978,
v. 56. N3, p. 383 — 413.
260. Huang B. K. Digital simulation analisis of biophysical systems. — Trans. IEEE,
Ser. BME, 1972, v. 19, N2, p. 128 — 139.
261. Lewis C. H., Oriffin M. J. A review of the effects of vibration on visual acuity and
continious manual control, Part II. Continious manual control. — Journ. of Sound and Vibra-
Vibration, 1278, v. 56, N3, p. 415-457.
262 Macduff J. M. Vibrational characteristics of man. — SAE preprint N 710514, 1971,
p. 1 — 17.
263. Metz A. M., Meister A. Zusammenhang zwischen belastungdurch physikalische Umge-
bungs—faktoren und Zuverlassigkait. — Zeitschrift fur psychologie, 1976, v. 184, N1, s. 51—62.
264 Miwa U Mechanical impedance of human body in various postures. — Industrial
Health, 1975, v. 13, N5, p. 1-22.
265. Morrow Ch. Г. Shock and vibration egineering, N. Y. John Willey and sons, Ifl63.
266 Neklutin С N. Trig — type cam profiles. — Machine Design, 1959, N21, p. 175 — 187.
267 Passive dynamic mechanical properties of he human thoraxabdomen system of the
whole body system R R Coerman, G H. Ziegenruecker, A. L. Wittwer, H. E. Gierke. — Aero-
Aerospace Medicine, 1960, v 31, p 443—455.
268. Pradko F., Lee R., Kalura Y. Theory of human vibrations response. — ASME paper,
N66, WA / BHF — 15, 1966, p. 1—5.
269 Rockwell Т. Н. Investigation of structure-borne active vibration damper. — Journ of
the Acoust. Soc of Amer, 1965, v 98, N4.
270 Shock and vibration handbook New York, Me Craw — Hill, 1976, 1211 p.
271 Stikeleather L. P., Hall G. O., Radke A. O. Study of vehicle vibration spectre as rela-
related to seating dynamics. — SAE preprint N720001, 1972, 34 p.
272 Wittman T. W., Philips N. S. Human body nonlinearity and mechanical impedans
analisis. — ASME Publication, 1969, BNF — 2 (Biomechanical and human factors Division
of the ASME) p. 1—7.
873. Yamada H. Shrength of biological materials, N. Y., Me Grow Hill, 1973, 297 p.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Балансировка роторов автоматическая —
Необходимость применения 72
— Классы точности 42
— Массы корректирующие 70, 71
— Условие допустимости 43, 44
В
Вибрация — Виды, действующие на чело-
человека 366, 367
— Влияние на человека 370 — 373
— Допустимые уровни на рабочем месте
оператора 407
— Классы 43
— машин — Контроль 411, 412
— Области равного восприятия 370
— Области частот вредного действия на
человека 370, 373
— Общая оценка ощущений человека 370
— Основные сведения о допустимых уров-
уровнях действия на человека 402—410
— передаваемая на руки операторов —
Нормирование 434—436
— Схемы передачи телу человека 365, 366
— Учет полигармонического состава 42,
43
— Характеристики нормативных докумен-
документов, регламентирующих допустимые
уровни 405, 406
— Характерные особенности вредного
влияния на человека 370, 371
Виброзащита виброизоляцией 33, 34
— внутренняя объекта 33, 34
— динамическим гашением колебаний 33—
35
—¦ снижением внброактивности источника
33, 34
— Условия эффективности 172, 173—175
— человека 412—414
Виброизолятор — Безопасное расстояние
до ограничительных упоров 238, 239
— Главные оси жесткости 189
— Классификация 199
— Методы устранения возможности воз-
возникновения резонансных режимов 237,
238
— Нелинейность упругих характеристик
233. 234
— Нелинейные диссипативныв свойства 234
— одноосный 171, 172
— подвеса — Вычисление деформаций
284—286
— пружинный с демпфированием 207
— Реакции 189
— резинометаллический 199
— с внутренним трением и нелинейным
упругим элементом 241
— с демпфером сухого трения и нелиней-
нелинейным упругим элементом 240, 241
— с одной степенью свободы — Нелиней-
Нелинейные явления 234 — 237
— с сухим трением — Нелинейные явле-
явления 239, 240
— с упругими упорами 233, 234
— Схема выравнивания при монтаже 193,
194
Виброизолятор типа АД 207 — 211
— АКСС 206, 209, 216, 218, 219
— AM 206, 216, 218, 219
— АН 204, 206, 217 -219
— АП 199 — 203
— АПН 209, 213, 214, 217, 219
— АР 203, 205, 217 — 219
— АРМ 210, 220
— АФД 207, 212, 213, 218, 219
— АЦП 214, 220
— АЧ 199, 200, 216, 218, 219
— ДК 210, 215
Виброизолятор — Ударная жесткость
269
— Ударная силовая характеристика 268,
269
— цельнометаллический 209, 210
Виброизоляция кинематическая 288
— Классификация составных элементов
пассивных систем 416
— линейная — Синтез типовых схем 304 —
Типовые схемы 303
— силовая 288
— человека — Средства 414, 415 — Типы
устройств 414—418
— Эффективность 226, 227, 232, 233
Виброускорения допустимее 407, 408
— Спектральные плотности на рабочих
местах операторов 368—370
Возбуждение силовое 171
— системы кинематическое 171
Воздействия вибрационные 12—21
— динамические 11
— кинематические 12
Воздействия механические — Влияние на
различные технические объекты 22, 23
— Классификация 12
— Реакция объекта 26
Воздействия силовые, передаваемые на
объект 326
— ударные 20, 21
Возмущения гармонические — Установив^
шиеся колебания 184, 185
— кинематические 267, 268
— садовые 267
454
ПРЕДМЕТНЫЙ
Гасители колебаний гироскопические 341,
342, 364
Гасители колебаний динамические ак-
активные 362 — 365
— инерционные 326—330 — Катковые
330 — 332, 364 — Маятниковые 332 —
336, 364 — С активными элементами
336 — 338, 364
— одномассные пружинные с трением
338 — 340, 364
— при полигармоническом, случайном и
нестационарном возбуждениях — Эф
фективность 359 — 361
— с трением 326
Гасители колебаний линейные при гармо-
гармоническом возбуждении многомерные 348 —
351
— одномерное 346 — 348
Гасители колебаний нелинейные при гармо
ническом возбуждении 351—354
— ударные 354 — 359
Гистерезис систем с сосредоточенным су
хим трением 144, 145
— упругодиссипативного элемента 128
129
Годографы динамической жесткости 221
225
— податливости 224, 225
Годографы для системы с гулевой собст
венной частотой 224, 225
ГОСТ 12,1 012 — 78 407
12 4 025 — 76 418
520 — 71* 40
533 — 76 41
609 — 75* 42
3060 — 75 41
12327 — 79 40
12379-75 43
16181—70' 41
16313 — 70* 42
16921 — 71* 43
17007 — 71 41
17770 — 72* 435
20736 — 75 411
22061 — 76 37, 42, 72
Д
Дельта-метод — Графоаналитический спо-
способ интегрирования дифференциальных
уравнений 275
Демпфирование конструкционное 141
— критическое 172
— относительное 172
Диаграмма импульс — время — Определе
ние наибольших смещений при ударе 276,
277
Дисбалансы 35
— Допустимые удельные 39 — 41
— Формулы пересчета 38
— Эквивалентные системы 37'
И
Импульс — Фронт нарастания 267
— Фронт спада 267
Импульсы ударные — Виды 268
— Параметры 267
ИСО 1940^73 42
2631 — 74 408, 409
Колебания системы с одной степенью сво
боды вынужденные 131
Коэффициент виброизоляции 173
— демпфирования 131, 172, 175, 177
— динамичности 173
— жесткости 175, 177
Коэффициент поглощения 130, 131
— в елочных замковых соединениях тур
бинных лопаток 143
— в канатах 143, 144
— в подшипниках качения при изгибных
колебаниях валов 143
— в соединениях турбинных лопаток 143
— в тросах 143, 144
— в шлицевых и шпоночных соединениях
при крутильных колебаниях 143
— для строительных конструкций 144
Коэффициент поглощения при изгибных
колебаниях в стыках конусных 142
— плоских 142
— резьбовых J 42, 1 43
Коэффициент эффективности 172, 173
Критерии оптимальности, совместно ис-
использующие функционалы от детерминиро-
детерминированных и случайных вибрационных воздей-
воздействий 289
М
Материалы конструкционные — Демпфи-
Демпфирующие свойства 134 — 141
— Определение демпфирующих свойств по
экспериментальным данным 168-*-170
Матрицы динамических жесткостей объекта
225
— податливостей объекта 225, 227
Матрицы переноса совокупности парал-
параллельно соединенных участков 183, 184
— последовательно соединенных участков
183, 184
— элементов виброизолирующих устройств-
181 — 183
Матрицы ручные безударные — Снижение
вибрационной опасности 436—439
— Особенности виброизоляции 440—442
— Оценка вибрационных характеристик
442, 443
— Системы обеспечения защиты операто-
р5в от вибрации 443, 444
— ударного действия — Снижение вибра-
вибрационной способности 439, 440
Методы автоматической балансировки уда-
удалением корректирующей массы с поверх-
поверхности ротора бесконтактные 78
— лазерные 79, 80
— электронно механические 79
— электронно лучевые 79
— электроэрозионные 78
Методы динамического гашения колебаний
326
Методы реализации импеданса 320, 321
— передаточных функций систем вибро
изоляции 321—325
Механизмы — Вероятностные характери-
характеристики главного момента и главного вектора
118, 119
— Динамические модели 83—85
— Дифференциальные уравнения для оп
ределения динамических ошибок 85—89
— Общий вид расчетной модели 116, 117
— Расчетная модель геометрически сим
метричных систем 117 118
— Снижение виброактивности в зонах па
раметрического резонанса 99 —102
— Снижение виброактивности с помощью
разгружающих устройств 111 — 115
— Уравновешивание сил инерции звеньев
с помощью противовесов 108—111
Модели динамические с медленно меняющи-
меняющимися параметрами 96—99
— о постоянными параметрами 94—96
Модели объектов виброзащиты 23—26
Модель машины одномассная 258
— расчетная — Элементы 171, 172
ПРЕД\1Е]НЫИ УКАЗАТЕ 1ь
455
— упругопластического материала реоло
гическая 151
Муфты упругие 257, 258, 261—266
О
Объекты виброзащиты 11
— Вычисление абсолютных ускорений 284,
285
— Качество 26—28
— Надежность работы 28 — 33
— Ускорение при ударе" 271, 272
— Учет динамических свойств 302—306
Операторы динамической жесткости 24
Оптимизация по критерию максимума ско-
скорости движения 318
— при допустимой вероятности неотрывов
319
Оптимизация по критерию минимума уров-
уровня ускорений 318
Органы рабочие механизмов — Синтез за
конов движения с учетом условий квазиста
тического нагружения 104 — 108
— Учет динамических факторов при выборе
структуры закона движения 103 —104
П
Перегрузки линейные 12
Плотность распределения полигармониче
ского процесса 17 18
— спектральная процесса х (/) 16
— энергии спектральная 15
Поглотители колебаний 326, 365
— с вязким трением 342, 344, 365
— с сухим трением 344, 345, 365
Податливость динамическая 24 221, 222
Подвесы упругие — Основные требования
к динамическим свойствам 195
— Расчетные статические реакции 193
— статически неопределимые 193
— Типовые схемы 188 —192
Подшипники — Допустимые амплитуды
колебаний 41, 42
— Коэффициент неуравновешенности 39
Преобразование корреляционное 16, 17
— Фурье 14 — 16
Программа оптимального движения без
возвращения в исходное положение 293
294
— с возрращением в исходное положение
295
Прокладка виброизолирующая — Площадь
петчи гистерезиса 147
Процесс полигармонический 175
Распределитель клапанный пневматиче-
пневматический — Геометрические размеры 433
Резонансы супергармонические 244
Ротор — Автоматическая балансировка до
бавлением корректирующих масс 78 — 82
— Балансировка 37, 39
Ротор гибкий — Действие некоторых на
грузок 64 — 67
— Коэффициенты чувствительности и не-
нечувствительности скорости 68, 69
— Особенности балансировки 62
— Перенос корректирующих масс 65
— Практическая балансировка в собствен
ных опорах 71, 72
— Решение уравнений изгиба 62 — G4
Ротор — Измерение углов дисбаланса 56
57
— консольный 35
— межопорный 35
— Методы динамической балансировки
57-62
— Методы статистической балансировки
47, 48
— Неуравновешенность 35 36
— Типы 35
— Условия динамического равновесия 35
PC 2557 — 70 43
Сиденья виброзащитные — Динамические
характеристики 417, 418
— Типовые схемы 417
Силы диссипативные — Понятие 128
Система виброзащитная диалоговая авто
матизнрованного проектирования 3>5
— Динамические модели 220, 221 247
— Малые колебания при ударе 282, 284
— Поведение при ударе 267, 268
— с инерционным виброизолятором при
гармоническом возбуждении — Эффек
тивность 186 — 188
— Собственные частоты 145, 196
— Уравнения статиьи 193
— Эффективность при полигармонически\
воздействиях 175—179
г- Эффективность при случайных стацио
нарных возмущениях 179, 180
Система виброи^оляции — Автоматизация
проектирования 314, 315
— Алгоритмы вероятностные итеративные
311—314
— детерминированные — Оптимизация
307—309
— многомерные гпоские и пространствен
ные 289, 290
— Ограничения, связанные с требования
ми желаемого качества изоляции 286,
287
— одномассные с безынерционным вибро
изолирующим устройством 177, 180 181
— одномерные — Синтез оптимальный
298-304
— Основные положения 306 307
— Пассивные — Поверочный расчет 418 —
428
— Примеры параметрической оптимизации
315 — 319
— Сведение задачи оптимального управле
ния к задаче параметрической оптими
зации 309 — 314
Система виброизоляции активная 246, 247
249 — 252, 428 — 434
— гидравлическая — Расчет 253 — 256
— Устойчивость 256, 257
— электрогидравлическая — Расчет 252,
253
Система колебательная — Ударный спектр
273
— недемпфированная — Поведение при
ударном воздействии 269 — 273
— нелинейная с упругим объектом —Ди-
—Динамическая модель 245, 246
Система одномассная — Разгон 260, 261 —
Установившееся движение 258 — 260
— с внутренним трением — Свободные ко
лебания 161 — 167
— с нелинейным упругим элементом —
Субгармонические резонансы 241, 242
— с упругой муфтой — Удар 261, 262
Системы многопоточные — Классификация
119 — 127
— нелинейные — Колебания при ударе
278 — 281
Системы одномерные — Динамические же
сткости 228 — 232
— Динамические податливости 228—232
— Кинематическая виброизоляция 288
— Расчет 227—233
Системы со слабой диссипацией — Антире
зонансные частоты 223
— Динамические характеристики 223
456
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
— Резонансные частоты 223
Соединения болтовые — Площадь петли
гистерезиса 147, 148
— заклепочные— Площадь петли гистере-
гистерезиса 147, 148
— с распределенным трением— Рассеяние
энергии 145 —147
Спектр амплитудный 15, 272
— Фурье — Понятие 272
Станки балансировочные — Классифика-
Классификация 48 — 52
— Разделение дисбалансов двух плоско-
плоскостей коррекции в электрической цепи
55, 56
— Разделение дисбалансов ротора 52 — 54
Тела упругопластические — Случайные ко"
лебания 158—161
Тело несомое — Вынужденные колебания
при гармоническом возбуждении 197—199
— Условия разделения собственных коле-
колебаний 196, 197
Тело с внутренним трением — Амплитудно-
частотная характеристика 167, 168
Тело сидящего человека — Входной меха-
механический импеданс 384, 385, 388
— Механические модели 397, 398
— Положение центра масс 383
Тело стоящего человека — Входной меха-
механический импеданс 386—388
— Механические модели 395, 396
Тело твердое на нелинейном подвесе —
Уравнения движения 281—283
Тело человека — Входной механический
импеданс при действии вибрации, прило-
приложенной к различным частям 388, 390 — 393
— Зависимость напряжений от деформа-
деформаций 379-382
— Механические свойства 373—383
— Наибольшие углы поворота некоторых
частей 376 — 378
— Определение параметров динамических
моделей по частотным характеристикам
393—S<W
— Схемы соединения звеньев 374
— Физико-механические параметры 378
— Формы соединения 374
— Экспериментальное опоеделение частот-
частотных характеристик 400
Трение внутреннее в материалах 131—134
Удар длительный 270
— короткий 270
— силовой 267
— эквивалентный — Амплитудное значе-
значение 274
Удары без приращения скорости 267
— с приращением скорости 267
Управление оптимальное в виброзащитной
системе с несколькими степенями свободы
297
— Постановка задачи 290 — 294
— силами, зависящими от координат со-
состояния — Реализация 294—297
Устройстваавтобалансирующие — Кла^си
фпкацня 72 — 74
— принудительного центрирования 74
— с направленным перемещением коррек-
корректирующих масс 77, 78
— со свободным перемещением корректи-
корректирующих масс 74— 77
— с принудительным перемещением кор-
корректирующих масс 77
Устройства для статической балансировки
44 — 47
Ф
Фильтры частотные — Весовые коэффи-
коэффициенты 410
Функционалы квадратичные интегральные
для детерминированных воздействии 288
— среднеквадратичные величины случай-
случайных процессов 288, 289
Функция распределения процесса 17
— совместная 18, 19
Характеристики рассеяния энергии в жаро-
жаропрочных сплавах 137, 138, 141
— в композиционных материалах 140,
141
— в конструкционной стали 135—137, 141
— в цветных материалах 133—140, 141
ЗАМЕЧЕННЫЕ ОПЕЧАТКИ В СПРАВОЧНИКЕ
«ВИБРАЦИИ В ТЕХНИКЕ», ТОМ 5
Стра-
Страница
27
100
176
Строка
Формула (85)
Формула 7
21-я снизу
Формула A14)
Напечатано
Р (/<»)
Q (/«)
где р (/со)
;
Должно быть
=у=р=1г+
р (/«)
- Q(/co)
где Р (/со)
~25'("р/-ь?)+